Non Parametric Sampling - první verze
Po dohodě s vedoucím své práce jsem začal s patrně nejjednodušší úlohou – non parametric samplingem. Nebudu rozebírat, jak funguje (článek je volně k dipozici), ale rovnou se zaměřím na výsledky.
Nejprve jsem se snažil celý problém uchopit z hlediska správného (tj. hezky pěkně strukturovaného a modulárního :)) návrhu a prakticky všechno, co šlo, zapouzdřit do vlastní třídy. Jenže u téhle aplikace by mělo jít v první řadě o rychlost, takže tenhle přístup se po prvním testování ukázal jako ne úplně použitelný.
Samozřejmě jsem na OOP zcela nerezignoval, ale výsledkem je de facto jediná třída Solver, která zapouzdřuje celý problém. Uchovává si informace o jednotlivých pixelech (RGB, 8 bitů na barvu) a zároveň si vnitřně spravuje bitové masky jednak pro díry a "dvak" pro zakázané oblasti (resp. jejich doplňek). Pro správu bitových masek jsem použil třídu dynamic_bitset z knihovny boost, která celou věc zjednodušuje, šetří místo a hlavně je rychlá.
V rychlosti ještě zmíním některé detaily implementace. Pro vytvoření instance solveru je třeba znát rozměry zkoumaného obrázku a rozměry kontextového okna (což musí být liché číslo) jsou inicializovány příslušné datové struktury pro obrázek a obě bitové masky. Všechna dvourozměrná pole jsou implementována jako ukazatele na ukazatele (k jednotlivým prvkům se tedy přistupuje přes indexy [řádek][sloupec]). Při zadávání děr (tj. míst k řešení) do obrázku jsou automaticky aktualizovány maska děr (jedničkový bit → díra; nulový bit → známý pixel) i maska zakázaných, resp. povolených pozic (jedničkový → validní pozice; nulový → zakázaná pozice).
Validní pozice jsou takové pozice, ve kterých má klouzavé okno pohybující se postupně obrázkem zajištěno, že vždy všechny pixely v něm budou známé. To eliminuje jednak pixely u kraje obrázků a dále ty v okolí děr. Proto pak není při porovnávání jednotlivých pixelů klouzavého okna a okna okolo aktuálně zkoumaného pixelu (dále referenční okno) testovat pozice v klouzavém okně ani to, zda náhodou neobsahují díru. Také pozice v referenčním oknu lze otestovat pouze jednou na začátku (před zkoumáním všech validních pozic) a pak porovnávat pouze ty, které leží v obrázku a ne v díře.
Ještě bych zmínil, že při počítání chyby mezi okolím klouzavého a referenčního okna používám přenásobení dvoudimenzionálním gaussovským jádrem (GJ), a to kvůli zvýraznění významu lokálního okolí zkoumaného pixelu (viz odkazovaný článek). To samozřejmě také přináší jisté zpomalení a zatím se mi nepodařilo na testovaných datech úplně odhadnout, jestli to tam má smysl nechávat.
K výsledkům... Pochopitelně se zvětšující se velikostí obrázku, díry nebo velikosti klouzavých a referenčních oken dost podstatně stoupá čas výpočtu. Ještě podotknu, že všechny uváděné časy byly měřeny pro release build ve Visual Studiu 2010 s plnou optimalizací (tedy, myslím to nastavení v MSVS 2010, ne že bych to ještě nějak zkoušel vylepšovat).
Výsledné obrázky uvádím vždy jako trojici, kde první obrázek je původní obrázek, druhý obsahuje definované díry (černá místa) a zakázané oblasti (šedá místa) a třetí je výsledný obrázek získaný algoritmem.

Odstranění ptáčka – rozlišení 400×276 px; oblast 24×26 px; velikost okna 13 px; GJ zapnuté; doba výpočtu 69 s.
Jak vidno, rychlost není závratná. I při takovémto rozlišení obrázku totiž na každý z 624 doplňovaných pixelů připadne 101 064 porovnání a každé takové porovnání obnáší porovnávání dalších pixelů mezi sebou (teoreticky až 13×13 − 1) a každé takovéto porovnání přináší další odčítání a umocňování pro každou ze tří barevných složek.
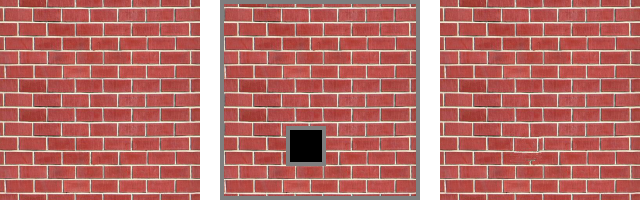
Cihlová zeď 1 – rozlišení 200×200 px; oblast 32×32 px; velikost okna 9 px; GJ zapnuté; doba výpočtu 18 s.
Okno o velikosti 9 px v tomto případě evidentně nestačí na dostatečné zachycení struktury textury.

Cihlová zeď 2 – rozlišení 200×200 px; oblast 32×32 px; velikost okna 17 px; GJ zapnuté; doba výpočtu 59 s.
Tak tady je něco špatně – okno o velikosti 17 pixelů a pořád takové artefakty? Zkusme "vypnout" gaussovské jádro:

Cihlová zeď 3 – rozlišení 200×200 px; oblast 32×32 px; velikost okna 17 px; GJ vypnuté; doba výpočtu 49 s.
To už je lepší. Kromě zrychlení došlo i ke zlepšení kvality výstupu. Pro další pokusy ho tedy jádro prozatím nechám vypnuté.

Dav – rozlišení 360×215 px; oblasti 13×15, 17×19 a 15×21 px; velikost okna 11 px; GJ vypnuté; doba výpočtu 39 s.
Na první pohled je všechno relativně v pořádku, ale při bližším pohledu na inkriminovaná místa už je vidět, že tento typ obrázků asi nebude úplně vhodný. Ostatně, když jsem zkoušel experimentovat s velikostí okna, kvalita výstupu zůstávala přibližně stejná (tj. nízká).
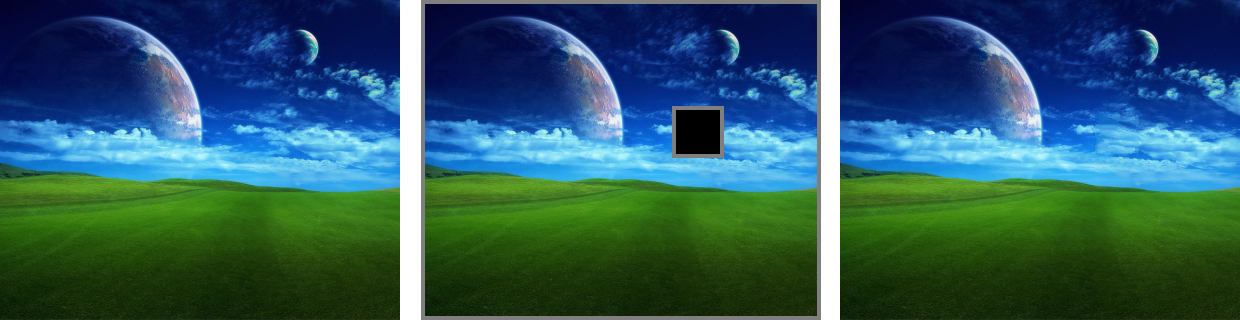
Krajina – rozlišení 400×320 px; oblast 44×44 px; velikost okna 9 px; GJ vypnuté; doba výpočtu 92 s.
Výsledek není špatný, ale něco tomu chybí. Zvětšení okna by sice nejspíš výsledek o něco zlepšilo, ale při této velikosti obrázku už by to trvalo neúměrně dlouho.
Všechny testy jsem spouštěl na počítači s procesorem Intel Core i5 460M s frekvencí 2.53 GHz.
Resumé
Na začátek jsem implementoval základní verzi NPS porovnávající každý hledaný pixel se všemi "validními pixely". Takové řešení sice poskytuje určité výsledky, ale pro praktické použití je příliš pomalé.
V další fázi se proto zaměřím na implementaci optimalizací navržených vedoucím:
- Pokusím se zjistit, v jak velkém okolí hledaného pixelu má smysl prohledávat. Lze předpokládat, že takové postačující okolí bude řádově menší než celý obrázek.
- Prohledávat nejprve ve zmenšeném obrázku a získaný výsledek použít k nalezení konečného výsledku v původním obrázku.
- Případně obě metody zkombinovat.
Kódy
- NPS.rar – solution pro MSVS 2010
Komentáře
#1 Donaldfidlyhttps://srochnyye-zaymy.ru
Займы под залог <a href=https://srochnyye-zaymy.ru/>https://srochnyye-zaymy.ru</a> недвижимости — быстрые деньги на любые цели. Оформление от 1 дня, без справок и поручителей. Одобрение до 90%, выгодные условия, честные проценты. Квартира или дом остаются в вашей собственности.
#2 Alvinleamnhttps://www.migo.ng
<a href=https://www.migo.ng>loan without collateral in nigeria</a> Get a quick loan in Nigeria in 2 Minutes. Migo helps small businesses extend low-interest, no collateral micro loans, banking services and credit purchase to their customers. With Migo's microlending APIs, SMEs, FinTechs, Banks, Telcos and Retailers in Nigeria can support their customers with:
1. Access to required loan amounts at the point of need
2. Low interest rates on quick loans and credit products
3. Flexible and easy repayment options
4. Personalized financial services and products across website, mobile app, USSD, SMS, ATM, POS, Whatsapp, Facebook, Twitter and Instagram.
#3 crystallusthttps://crystal-lust.online/
Crystal Lust delivers mind-blowing performances every time. You won’t believe how good Crystal Lust is until you see it <a href=https://crystal-lust.online/>crystal lust feet</a> . From soft to hardcore, Crystal Lust gives it all. See why Crystal Lust has such a loyal fanbase. Her blowjob scenes are intense and satisfying. Every clip is more seductive than the last. Full videos of Crystal Lust now available. Don’t miss her newest anal and cumshot scenes. Check her out for erotic joy like never before <a href=https://crystal-lust.online/>crystal lust com</a>.
#4 StephenFlank
This web-based service enables instant conversion of images into JPG format, supporting common types such as JPG. All operations take place within the browser, with no need for app downloads or user accounts. Up to 20 files can be converted in a single session, improving efficiency for repetitive or large-scale tasks. Once files are processed, they are deleted from the system to maintain privacy and prevent unnecessary storage. JPEGtoJPGHERO is designed to work across all devices and browser types, offering a seamless experience whether on a computer, phone, or tablet. Its minimal layout emphasizes clarity and speed, guiding users directly to results. From resizing visuals for websites to preparing files for cloud storage, the platform handles JPEGtoJPGhero conversion with accuracy and ease. Its emphasis on simplicity and security makes it an excellent choice for both casual users and professionals who require consistent, reliable output. https://forum.codeigniter.com/member.php?…
#5 Brandonrofhttps://t.me/vash_master_diy
Сделай сам <a href=https://t.me/vash_master_diy>как сделать ремонт недорого</a> Ремонт квартиры и дома своими руками: стены, пол, потолок, сантехника, электрика и отделка. Всё, что нужно — в одном месте: от выбора материалов до финального штриха. Экономьте с умом!
#6 TerrellSuthttps://mfokapital.ru
Хочешь больше денег <a href=https://mfokapital.ru/>https://mfokapital.ru</a> Изучай инвестиции, учись зарабатывать, управляй финансами, торгуй на Форекс и используй магию денег. Рабочие схемы, ритуалы, лайфхаки и инструкции — путь к финансовой независимости начинается здесь!
#7 Ysilenie konstrykcii_ytoihttp://usileniekonstrukcij3.ru
Инъектирование бетона <a href=http://www.usileniekonstrukcij3.ru>http://www.usileniekonstrukcij3.ru</a> .
#8 Ysilenie konstrykcii_sloihttp://usileniekonstrukcij3.ru
Выбрать гидроизоляцию <a href=http://www.usileniekonstrukcij3.ru>Выбрать гидроизоляцию</a> .
#9 mostbetcomhttps://most-bet-cz-casino.com
Hry na mostbet jsou zábavné a vysoce kvalitní. Doporučuji mostbet website všem fanouškům sázení. Zde jsem našel nejvýhodnější promo akce. Mostbet cz mě zaujal díky české lokalizaci. Mostbet live casino streamuje hry ve vysokém rozlišení. Mostbet cz mě překvapil svou jednoduchostí. Mostbet cz má přímé přenosy zápasů. Mostbet cz komunita je velmi aktivní. Mostbet cz má přímý přístup bez blokací <a href=https://most-bet-cz-casino.com>mostbet betting</a>.
#10 Lhanequesy
I used to be able to find good info from your blog posts. <a href=https://myzain.topupmobilekw.com/>Zain</a>
#11 KathyPoesthttp://[b]https://vkltv.top/TV/boxing/ [/b]
Discover the Ultimate Betting Experience at <a href=https://1wlmhc.com/?p=0fth></a> is Your Best Bet?] 1. <a href=https://vkltv.top/TV/xfc/>Unmatched Rankings:</b></a> Unmatched Rankings: Find the best bookmakers and casinos instantly with our trusted rating system. <b>VKLTV</b>makes it simple to choose the top players in the industry. 2. <a href=https://vkltv.top/TV/tnt-sports-2/>Expert Insights at Your Fingertips: </b></a> Stay ahead of the curve with professional sports forecasts and detailed industry analysis. Maximize your bets with data-driven predictions! 3. <a href=https://vkltv.top/bonus/welcome-pack-up-to-1500-usd-150-fs/>Personalized to You:</b></a> Our tailored suggestions ensure your betting experience aligns with your unique preferences. It’s like having a personal guide to betting success! 4. <a href=https://1wlmhc.com/v3/2775/fantasy-sports?p=os3a>Winning Strategies & Tips:</b></a> Learn from the best! VKLTV is packed with proven strategies to turn your bets into winnings. From beginners to seasoned players, there’s something for everyone. 5. <a href=https://1wlmhc.com/v3/landing-page/football?p=e8×c>One-Stop Platform:</b></a>] Enjoy a streamlined, easy-to-use site designed to help you save time, stay informed, and make smarter decisions.
<b>Bet Smarter, Not Harder</b>
Whether it’s football, basketball, or casino games, <a href=https://vkltv.top/bonus/welcome-pack-up-to-1500-usd-150-fs/>VKLTV</b></a> has you covered with tools, forecasts, and recommendations to take your betting to the next level.
Visit https://wlpinnacle.adsrv.eacdn.com/C.ashx?… now and unlock the secrets to smarter betting. Your winning streak starts here!
Special Bonus
Sign up today to access exclusive offers and promos from top casinos and bookmakers. Don’t miss out!
Bet Like a Pro with <a href=https://vkltv.top/secrets-of-playing-at-an-online-casino/>VKLTV</b></a> – The Future of Betting Starts Here!
<a href=https://vkltv.top/the-strategy-of-betting-on-cyber-football/><img src=„https://e.radikal.host/2024/09/22/1714394998015crjmw9ti.md.jpg“></a>
#12 Myzika onlain bez registracii, pesni v mp3_svsihttp://25kat.ru
skachat mp3 <a href=http://25kat.ru>skachat mp3</a> .
#13 Juliaaasfhttps://americanveterannewspaper.org/
We are America's foremost online newspaper, bringing you the latest developing news and exhaustive evaluation 24 hours a day. As an fully digital publication unfettered by hard copy deadlines or page limits, we have the adaptability to modify articles in real-time and the capacity to provide context lacking in today's splintered media environment. Our honored journalists hold the authoritative accountable through objective, precise reporting and investigative investigations. We report on countrywide and global occurrences with on-the-ground reporting and expert perspectives, shedding a illumination on inequity while honoring the finest of humanity. The extent of our journalism competes with conventional national publications. We report on government, industry, technology, science, arts, sports, lifestyle and more with sophistication and nuance. Offerings like multi-media incorporations, engaging data illustrations, and contributor networks improve our content and portray the energy of the internet age. And here are a few more celebrations that you may not have even heard of: <a href=https://americanveterannewspaper.org/><img src=„https://i123.fastpic.org/big/2024/0504/a4/252819164a1c758f465c7671c9140fa4.jpg“></a> In today's fast-paced world, staying informed with the latest updates is not just a essential but a duty. AmericanVeteranNewspaper.org arises as a lighthouse of trustworthy and current reports, providing readers in the USA and around the planet with insightful journalism on a abundance of subjects. Here's why this online news platform should be your go-to provider for knowledge and how you can join its growing group of well-versed readers. Thorough Coverage on Diverse Topics Worldwide and National News: From civic progressions in the corridors of the nation's capital, to major occurrences shaping the global scene, AmericanVeteranNewspaper.org offers comprehensive journalism. Whether it's latest reports, in-depth examinations, or expert views, readers get a wide-ranging perspective of the current events. Special Features and Articles: Beyond the top stories, delve into unique pieces and in-depth pieces that explore the subtleties of major accounts. These works provide framework, enriching your understanding beyond the cursory.
Industry-Focused Updates: Catering to a wide range of interests, AmericanVeteranNewspaper.org covers vital industries including IT, medicine, economics, entertainment, and more. Stay advanced with updates that matter to you, from advancements in tech to movements in the economic landscape. The hottest news for Today: 1) <a href=https://americanveterannewspaper.org/>State Patty’s Day 2024 at Penn State University</a> 2) <a href=https://americanveterannewspaper.org/>Alice Cooper Net Worth in 2024: How Rich is He Now?</a> 3) <a href=https://americanveterannewspaper.org/>White Sox Dog Day 2024</a> 4) <a href=https://americanveterannewspaper.org/>When are Alabama schools out for spring break 2024</a> 5) <a href=https://americanveterannewspaper.org/>Stephanie Mills Net Worth 2024 – How Much is Mills Worth?</a> 6) <a href=https://americanveterannewspaper.org/>National School Counseling Week 2024</a> 7) <a href=https://americanveterannewspaper.org/>Gold Star Spouses Day 2024</a> 8) <a href=https://americanveterannewspaper.org/>Best Baseball Walk Up Songs 2024</a> 9) <a href=https://americanveterannewspaper.org/>2024 Small College World Series</a> 10) <a href=https://americanveterannewspaper.org/>Rob Schneider’s Net Worth in 2024</a> Why Join to AmericanVeteranNewspaper.org? Promptness and Correctness: In an era where disinformation can spread swiftly, AmericanVeteranNewspaper.org distinguishes itself for its devotion to delivering updates that is not only timely but validated. Subscribers can rely on the data, cognizant it has passed strict scrutiny for correctness and pertinence. Unique Material: Patrons gain admission to exclusive material that is not accessible to occasional users. This includes in-depth articles, professional interviews, and exclusive editions, offering insights that boost your comprehension of intricate matters. Convenience: With a membership, the latest reports arrives straight to you. Whether through email newsletters or alerts, you're always in the loop without having to search for content. Tailor your membership preferences to receive updates that corresponds to your fascinations. Supporting Unaffiliated Reporting: By signing up, you are backing a source that values unaffiliated coverage and the importance of supplying impartial, factual reports. Your subscription helps uphold the quality and integrity of the content, ensuring that varied viewpoints and narratives are given attention. Join a Network of Well-Versed Audiences Subscribing to AmericanVeteranNewspaper.org is more than just obtaining entry to reports; it's joining a network that values informed discussion and analytical reasoning. Interact with other readers in the feedback, exchange your viewpoints, and become part of a collective that emphasizes knowledge and awareness.
How to Sign Up Subscribing to AmericanVeteranNewspaper.org is straightforward. Visit our website, choose the plan choice that best suits your needs, and join our network of audiences who are dedicated to staying well-versed. With adjustable options, you can personalize your subscription to correspond to your consuming patterns and preferences. In closing, AmericanVeteranNewspaper.org is not just a updates source; it's a gateway to becoming a educated person in today's intricate world. With its comprehensive journalism, devotion to precision, and dedication to autonomous coverage, it's the optimal choice for readers who strive to understand not just which is taking place, but why it is important. Sign Up today and take the initial measure towards transforming into a more well-versed individual in the global collective.
<a href=https://americanveterannewspaper.org/>alice cooper net worth 2024</a> <a href=https://americanveterannewspaper.org/>free museum day sacramento 2024</a> <a href=https://americanveterannewspaper.org/>Crescent City Blues & BBQ Festival 2024</a> <a href=https://americanveterannewspaper.org/>What Is The Best Month To Retire In 2024</a> <a href=https://americanveterannewspaper.org/>david choe networth</a> <a href=https://americanveterannewspaper.org/>rob schneider net worth</a> <a href=https://americanveterannewspaper.org/>Lake County Spring Break 2024</a> <a href=https://americanveterannewspaper.org/>zach bryan net worth 2024</a> <a href=https://americanveterannewspaper.org/>jmu exam schedule</a> <a href=https://americanveterannewspaper.org/>national counselors week 2024</a> <a href=https://americanveterannewspaper.org/>When Does The Rodeo End 2024</a> <a href=https://americanveterannewspaper.org/>Bullitt County School Calendar 2024</a> <a href=https://americanveterannewspaper.org/>when is state patty's day 2024 psu</a> <a href=https://americanveterannewspaper.org/>chicago cubs dog day 2024</a> <a href=https://americanveterannewspaper.org/>is ariana grande pregnant 2024</a> <a href=https://americanveterannewspaper.org/>Dental Assistants Recognition Week 2024</a> <a href=https://americanveterannewspaper.org/>alice cooper net worth</a> <a href=https://americanveterannewspaper.org/>counselors week 2024</a> <a href=https://americanveterannewspaper.org/>dfb nike</a> <a href=https://americanveterannewspaper.org/>Leon County School Calendar 2023–2024</a> <a href=https://americanveterannewspaper.org/>rob schneider net worth 2024</a> <a href=https://americanveterannewspaper.org/>jenna jameson net worth 2024</a> <a href=https://americanveterannewspaper.org/>rob schneider's net worth</a> <a href=https://americanveterannewspaper.org/>gold star spouses day 2024</a> <a href=https://americanveterannewspaper.org/>susan boyle net worth 2024</a> <a href=https://americanveterannewspaper.org/>st patrick's day nashville 2024</a> <a href=https://americanveterannewspaper.org/>unas para san valentin 2024</a> <a href=https://americanveterannewspaper.org/>dusd calendar 2023–24</a> <a href=https://americanveterannewspaper.org/>damar hamlin net worth 2024</a> <a href=https://americanveterannewspaper.org/>white sox dog day</a> <a href=https://americanveterannewspaper.org/>Greek Independence Day Parade 2024</a> <a href=https://americanveterannewspaper.org/>Product Management Internships – Summer 2024</a> <a href=https://americanveterannewspaper.org/>what is stephanie mills net worth</a> <a href=https://americanveterannewspaper.org/>national school counselling week</a> <a href=https://americanveterannewspaper.org/>New Drug Laws In Tennessee 2024</a> <a href=https://americanveterannewspaper.org/>Spring Break 2024 Fort Lauderdale</a> <a href=https://americanveterannewspaper.org/>2024 Dallas St. Patrick's Parade & Festival</a> <a href=https://americanveterannewspaper.org/>How Tall Is Nle Choppa 2024</a> <a href=https://americanveterannewspaper.org/>erykah badu birthday bash 2024</a> <a href=https://americanveterannewspaper.org/>when is spring break alabama</a> <a href=https://americanveterannewspaper.org/>lake casitas water level 2024</a> <a href=https://americanveterannewspaper.org/>eva mendes 50th birthday</a> <a href=https://americanveterannewspaper.org/>david choe artist net worth</a> <a href=https://americanveterannewspaper.org/>free museum day 2024 sacramento</a> <a href=https://americanveterannewspaper.org/>National School Counselor Appreciation Week 2024</a> <a href=https://americanveterannewspaper.org/>david choe net worth</a> <a href=https://americanveterannewspaper.org/>Savannah Saint Patrick's Day Parade 2024</a> <a href=https://americanveterannewspaper.org/>Nebraska High School State Wrestling 2024</a> <a href=https://americanveterannewspaper.org/>When is Good Friday in New York 2024, United States?</a> <a href=https://americanveterannewspaper.org/>Jimmie Allen Net Worth 2024</a>
#14 Gichardcheks
Helpful info. Fortunate me I discovered your web site by accident, and I am stunned why this accident didn't happened in advance! I bookmarked it. <a href=https://myzain.topupmobilekw.com/>Myzain</a>
#15 mostbet_saonhttp://mostbet3043.ru
mostbet aviator demo <a href=https://mostbet3043.ru>mostbet aviator demo</a> .
#16 StephenFlank
Hello there! This is my 1st comment here so I just wanted to give a quick shout out and tell you I genuinely enjoy reading through your blog posts. Can you recommend any other blogs/websites/forums that deal with the same subjects? Thank you so much! https://app.swapkaart.com/…CZzwulkv2OIn?m=l
#17 Mazrjtphttp://[url=http://social.concienciacasanare.com/read-blog/1013_kupit-attestat-11-klass.html/]social
Мы предлагаем документы об окончании любых ВУЗов РФ. Документы производятся на настоящих бланках. <a href=http://social.concienciacasanare.com/read-blog/1013_kupit-attestat-11-klass.html/>social.concienciacasanare.com/read-blog/1013_kupit-attestat-11-klass.html</a>
#18 JoshuaGaurLhttp://aldial.ru/cat_beds
Кирпичное и панельное строительство осталось, разве что в жилом секторе http://aldial.ru/…dymnike.html
При сооружении коммерческих зданий стоит задача сэкономить средства, получив высокую прочность и долговечность объекта http://aldial.ru/…odhodom.html
Использование стальных каркасов позволяет добиться этих целей, а также дает массу плюсов, о которых будет написано ниже http://aldial.ru/…-krovli.html
Сегодня наша компания предлагает изготовление металлоконструкций в Москве и области по адекватному прайсу http://aldial.ru/…izdelij.html
Стеллажи от 7000 руб http://aldial.ru/…m-plyus.html
Зиговка металлических изделий http://aldial.ru/…zheniem.html
Оборудование для электрощитовой — основа узла управления электрической сетью дома, коттеджа, квартиры, офиса или магазина http://aldial.ru/…u-menya.html
От качества изготовления электрощитов зависит безопасность пользования электросетью и стабильность энергоснабжения http://aldial.ru/…izdelij.html
Изделия из латуни http://aldial.ru/…-krovli.html
Изготовление металлоизделий из листа на высокоточном волоконном лазерном станке 1500?3000 мм Golden Laser-XJG-150300DT http://aldial.ru/…ashenie.html
#19 Zhannakangroupcom_Sabhttps://zhannakangroup.com/
Доброго времени суток! Полезная и хорошая новость для ценителей и любителей, красивых и эксклюзивных украшений и вещей. А именно, для тех, кто интересуется ювелирными эксклюзивными изделиями, модой и интерьером! Описывать текстом все разнообразие, неповторимость и эксклюзивность известных брендов, просто нереально и невозможно. Как говорится, лучше один раз увидеть, чем 100 раз прочитать или услышать. В общем, если вы хотите найти, интерьер, эксклюзивные ювелирные изделия, мода и т.д., например: <a href=https://zhannakangroup.com/>constella заказать</a> Тогда вам нужно прямо сейчас перейти на сайт Zhanna Kan Group и узнать все подробности по модная одежда, онлайн-бутик, ювелирные изделия, предметы интерьера, эксклюзивные бренды, выбор Жанны и т.д. https://zhannakangroup.com/ . Обязательно переходите на сайт zhannakangroup.com эксклюзивные ювелирные изделия, мода и интерьер изучайте информацию и сохраняйте в закладки, не забудьте записать номера телефонов +7 727 321 8080, +7 702 006 5780 и адрес сайта. Увидимся!
#20 natyajnie potolki_zrKrhttp://potolkilipetsk.ru
теневой натяжной потолок [url=potolkilipetsk.ru]potolkilipetsk.ru[/url] .
#21 Lazrlmphttp://[url=http://korenkyfr.4adm.ru/viewtopic.phpf=4&t=12711/ ]korenkyfr.4adm.ru/viewtopic.phpf=4&t
Диплом ВУЗа России! Без наличия диплома очень нелегко было продвигаться вверх по карьере. Приобрести диплом на заказ в Москве вы имеете возможность через сайт компании: <a href=http://korenkyfr.4adm.ru/viewtopic.phpf=4&t=12711/>korenkyfr.4adm.ru/viewtopic.phpf=4&t=12711</a>
#22 dostavka edi_umprhttp://dostavka-edy-bf13.ru
здоровая ферма челябинск <a href=www.dostavka-edy-bf13.ru>www.dostavka-edy-bf13.ru</a> .
#23 dostavka edi_omkahttp://dostavka-edy-bf11.ru
доставка еды <a href=http://dostavka-edy-bf11.ru/>доставка еды</a> .
#24 HarleyAlirlhttps://dostavka-cvetov1.ru/
доставка цветов недорого <a href=https://dostavka-cvetov1.ru/>купить живые цветы</a>
#25 KennethHibhttps://abstractsandessaysforstudents.help/
additional resources <a href=https://abstractsandessaysforstudents.help/>paper writer</a>
#26 dostavka edi_oaprhttp://dostavka-edy-bf13.ru
доставка еды <a href=www.dostavka-edy-bf13.ru/>доставка еды</a> .
#27 dostavka edi_pvkahttp://dostavka-edy-bf11.ru
здоровая ферма челябинск <a href=https://dostavka-edy-bf11.ru>https://dostavka-edy-bf11.ru</a> .
#28 mostbet_xnonhttp://mostbet3043.ru
mostbet blackjack <a href=https://mostbet3043.ru>https://mostbet3043.ru</a> .
#29 vavadapl_n_eqPrhttps://vavadapl.neocities.org/
Откройте для себя vavadapl.neocities.org, вас ждут уникальные материалы. vavadapl.neocities.org — это источник интересных находок, порадуют. Посетите vavadapl.neocities.org для новых открытий, статьями. vavadapl.neocities.org — ваш онлайн-гид, что. Откройте для себя новые горизонты на vavadapl.neocities.org, вас удивит. На vavadapl.neocities.org вы найдете много интересного, которые. Не пропустите возможности vavadapl.neocities.org, открыть что-то новое. Вдохновляйтесь на vavadapl.neocities.org, на котором. Посетите vavadapl.neocities.org, чтобы удивиться, который. Изучайте vavadapl.neocities.org для новых впечатлений, уникальный контент. Загляните на vavadapl.neocities.org для вдохновения, в котором. vavadapl.neocities.org — это ваш ключ к новому, не оставит равнодушным. Погружайтесь в vavadapl.neocities.org, ваши идеи могут развиться. Загляните в vavadapl.neocities.org для новых начал, освежат ваше восприятие. vavadapl.neocities.org — это место для творчества, расширят ваши горизонты. vavadapl.neocities.org — ваш источник идей, которые. vavadapl.neocities.org предлагает уникальный контент, добавит ярких красок в ваш день. vavada poland <a href=https://vavadapl.neocities.org/>vavada poland</a> .
#30 mostbetsczhttps://most-bet-cz-casino.com
Hledal jsem spolehlivý web a mostbet official stránka mě nezklamala. Na mostbet english verzi najdete vše potřebné. Výběry z mostbet online jsou rychlé a bezpečné. Sázím hlavně přes <a href=https://most-bet-cz-casino.com>mostbet casino cz</a> mostbet betting a zatím vždy bez problémů. Služby mostbet cz jsou opravdu kvalitní. Na mostbet cz se dostanu i přes mobil bez problémů. Mostbet cz mě překvapil svou jednoduchostí. Mostbet cz má sekci s živými hrami. Mostbet cz podporuje bezpečné hraní. Mostbet cz má přímý přístup bez blokací <a href=https://most-bet-cz-casino.com>most-bet-cz-casino.com</a>.
#31 DichaelPoirl
I'm gone to inform my little brother, that he should also pay a quick visit this weblog on regular basis to take updated from hottest information. https://interpen.com.ua/…ity-v-gorode
#32 mostbet_pdorhttp://mostbet3030.ru
mosbet uz <a href=https://mostbet3030.ru/>mosbet uz</a> .
#33 Jessiesmonahttps://kingofanonymity.org/
KOA New ERC20 FAIRLAUNCH! <a href=https://kingofanonymity.org/>King of Anonymity New REC20 Token</a> <a href=https://kingofanonymity.org/extensions.html>AUTO GM/GN/GE/GA AND AI EXTENSIONS</a>
#34 RodneyFralehttps://medium.com/@agurkin2021/equilibrio-in-situ-f2473d5cd220
La Nivelación de Partes Móviles: Esencial para una Operación Sin Vibraciones
¿Alguna vez has notado vibraciones extrañas en una máquina? ¿O tal vez ruidos que no deberían estar ahí? Muchas veces, el problema está en algo tan básico como una falta de simetría en un elemento móvil. Y créeme, ignorarlo puede costarte caro .
El equilibrado de piezas es una tarea fundamental tanto en la fabricación como en el mantenimiento de maquinaria agrícola, ejes, volantes, rotores y componentes de motores eléctricos . Su objetivo es claro: prevenir movimientos indeseados capaces de generar averías importantes con el tiempo .
¿Por qué es tan importante equilibrar las piezas? Imagina que tu coche tiene un neumático con peso desigual. Al acelerar, empiezan las sacudidas, el timón vibra y resulta incómodo circular así. En maquinaria industrial ocurre algo similar, pero con consecuencias aún peores :
Aumento del desgaste en soportes y baleros Sobrecalentamiento de partes críticas Riesgo de colapsos inesperados Paradas imprevistas que exigen arreglos costosos En resumen: si no se corrige a tiempo, una leve irregularidad puede transformarse en un problema grave .
Métodos de equilibrado: cuál elegir No todos los casos son iguales. Dependiendo del tipo de pieza y su uso, se aplican distintas técnicas:
Equilibrado dinámico
Perfecto para elementos que operan a velocidades altas, tales como ejes o rotores . Se realiza en máquinas especializadas que detectan el desequilibrio en varios niveles simultáneos. Es el método más fiable para lograr un desempeño estable. Equilibrado estático Se usa principalmente en piezas como llantas, platos o poleas . Aquí solo se corrige el peso excesivo en una sola superficie . Es ágil, práctico y efectivo para determinados sistemas. Corrección del desequilibrio: cómo se hace Taladrado selectivo: se elimina material en la zona más pesada Colocación de contrapesos: tal como en neumáticos o perfiles de poleas Ajuste de masas: común en cigüeñales y otros componentes críticos Equipos profesionales para detectar y corregir vibraciones Para hacer un diagnóstico certero, necesitas herramientas precisas. Hoy en día hay opciones económicas pero potentes, tales como:
✅ Balanset-1A — Tu asistente móvil para analizar y corregir oscilaciones
#35 Thomasisokehttps://medium.com/@agurkin2021/servicio-de-equilibrado-dd4960d8dffa
¿Oscilaciones inusuales en tu maquinaria? Soluciones de equilibrado dinámico in situ y venta de equipos.
¿Has notado oscilaciones anómalas, zumbidos inesperados o deterioro prematuro en tus máquinas? Son síntomas evidentes de que tu maquinaria necesita un ajuste de precisión especializado.
En vez de desarmar y trasladar tus máquinas a un taller, nosotros vamos hasta tu planta industrial con herramientas de vanguardia para resolver el problema sin afectar tu operación.
Beneficios de nuestro balanceo dinámico en campo ✔ No requiere desinstalación — Trabajamos directamente en tus instalaciones. ✔ Análisis exacto — Utilizamos tecnología avanzada para identificar el problema. ✔ Soluciones rápidas — Corrección en pocas horas. ✔ Documentación técnica — Documentamos los resultados antes y después del equilibrado. ✔ Especialización en múltiples industrias — Atendemos desde grandes turbinas hasta motores compactos.
#36 Juliaarzbhttps://americanveterannewspaper.org/
We are America's foremost digital newspaper, bringing you the latest unfolding news and comprehensive examination 24 hrs a day. As an all-digital journal unencumbered by print due dates or space confines, we have the adaptability to update pieces in real time and the space to provide insight lacking in today's splintered media environment. Our prize-winning reporters hold the prominent culpable through fair, precise journalism and thorough investigations. We document nationwide and worldwide incidents with on-the-ground coverage and knowledgeable perspectives, casting a light on unfairness while celebrating the greatest of mankind. The breadth of our journalism competes with mainstream nation-wide newspapers. We cover on government, industry, technology, science, arts, athletics, living and more with complexity and insight. Offerings like multi-media incorporations, interactive data presentations, and collaborator communities enhance our content and capture the dynamism of the digital era. And here are a few more celebrations that you may not have even known about: <a href=https://americanveterannewspaper.org/><img src=„https://i123.fastpic.org/big/2024/0504/a4/252819164a1c758f465c7671c9140fa4.jpg“></a> In today's rapid planet, staying current with the latest news is not just a requirement but a duty. AmericanVeteranNewspaper.org surfaces as a beacon of reliable and real-time reports, providing subscribers in the USA and across the planet with perceptive coverage on a myriad of themes. Here's why this online updates platform should be your go-to provider for knowledge and how you can join its expanding community of well-versed audiences. Thorough Reporting on Diverse Subjects Worldwide and Local News: From civic progressions in the corridors of the nation's capital, to significant events impacting the international arena, AmericanVeteranNewspaper.org offers exhaustive coverage. Whether it's current updates, extensive examinations, or professional perspectives, subscribers get a panoramic view of the current affairs. Unique Reports and Stories: Beyond the headlines, delve into unique features and feature pieces that investigate the nuances of substantial stories. These pieces provide context, enhancing your knowledge beyond the surface level.
Specialized News: Catering to a diverse array of fascinations, AmericanVeteranNewspaper.org reports on vital industries including IT, healthcare, finance, amusement, and more. Stay advanced with news that matter to you, from progressions in tech to movements in the economic landscape. The hottest news for Today: 1) <a href=https://americanveterannewspaper.org/>State Patty’s Day 2024 at Penn State University</a> 2) <a href=https://americanveterannewspaper.org/>Alice Cooper Net Worth in 2024: How Rich is He Now?</a> 3) <a href=https://americanveterannewspaper.org/>White Sox Dog Day 2024</a> 4) <a href=https://americanveterannewspaper.org/>When are Alabama schools out for spring break 2024</a> 5) <a href=https://americanveterannewspaper.org/>Stephanie Mills Net Worth 2024 – How Much is Mills Worth?</a> 6) <a href=https://americanveterannewspaper.org/>National School Counseling Week 2024</a> 7) <a href=https://americanveterannewspaper.org/>Gold Star Spouses Day 2024</a> 8) <a href=https://americanveterannewspaper.org/>Best Baseball Walk Up Songs 2024</a> 9) <a href=https://americanveterannewspaper.org/>2024 Small College World Series</a> 10) <a href=https://americanveterannewspaper.org/>Rob Schneider’s Net Worth in 2024</a> Why Sign Up to AmericanVeteranNewspaper.org? Expediency and Accuracy: In an time where falsehoods can proliferate quickly, AmericanVeteranNewspaper.org distinguishes itself for its dedication to furnishing news that is not only timely but verified. Readers can trust the content, knowing it has been subjected to stringent examinations for accuracy and applicability. Unique Content: Subscribers gain entry to exclusive content that is not accessible to infrequent visitors. This includes in-depth pieces, professional conversations, and exclusive issues, offering perspectives that augment your grasp of complicated subjects. Convenience: With a plan, the most recent updates comes directly to you. Whether through electronic newsletters or signals, you're always in the loop without having to search for content. Customize your subscription preferences to receive reports that matches your interests. Supporting Independent Coverage: By joining, you are supporting a outlet that esteems independent coverage and the consequence of supplying unbiased, accurate updates. Your membership helps uphold the standard and integrity of the material, ensuring that diverse voices and narratives are listened to. Join a Network of Knowledgeable Subscribers Subscribing to AmericanVeteranNewspaper.org is more than just gaining access to reports; it's joining a network that appreciates knowledgeable discussion and analytical reasoning. Interact with other readers in the responses, exchange your perspectives, and become part of a assembly that foregrounds knowledge and consciousness.
How to Join Joining to AmericanVeteranNewspaper.org is straightforward. Visit our site, choose the plan choice that best suits your requirements, and join our group of subscribers who are devoted to remaining well-versed. With adjustable options, you can tailor your subscription to align with your perusing patterns and preferences. In summary, AmericanVeteranNewspaper.org is not just a news provider; it's a portal to being a knowledgeable individual in today's complex world. With its comprehensive reporting, commitment to precision, and devotion to unaffiliated journalism, it's the perfect option for audiences who strive to understand not just what is happening, but for what purpose it is significant. Subscribe today and take the primary step towards becoming a more knowledgeable individual in the international collective.
<a href=https://americanveterannewspaper.org/>rick jurthe</a> <a href=https://americanveterannewspaper.org/>kutz patty's day 2024</a> <a href=https://americanveterannewspaper.org/>university of houston spring break 2024</a> <a href=https://americanveterannewspaper.org/>national school counselor week 2024</a> <a href=https://americanveterannewspaper.org/>baltimore city spring break 2024</a> <a href=https://americanveterannewspaper.org/>jr smith net worth 2024</a> <a href=https://americanveterannewspaper.org/>germany nike</a> <a href=https://americanveterannewspaper.org/>Carnival in Trinidad & Tobago 2024</a> <a href=https://americanveterannewspaper.org/>May and June 2024 Calendar</a> <a href=https://americanveterannewspaper.org/>milford st patrick's day parade 2024</a> <a href=https://americanveterannewspaper.org/>dfb nike</a> <a href=https://americanveterannewspaper.org/>fort lauderdale st patrick's day parade 2024</a> <a href=https://americanveterannewspaper.org/>jessica adams predictions for 2024</a> <a href=https://americanveterannewspaper.org/>nike germany deal</a> <a href=https://americanveterannewspaper.org/>Greek Independence Day Parade 2024</a> <a href=https://americanveterannewspaper.org/>david choe networth</a> <a href=https://americanveterannewspaper.org/>elmhurst st patrick's day parade 2024</a> <a href=https://americanveterannewspaper.org/>sacramento free museum day 2024</a> <a href=https://americanveterannewspaper.org/>restaurant week san antonio 2024</a> <a href=https://americanveterannewspaper.org/>Pacific Power Bills Increase in 2024</a> <a href=https://americanveterannewspaper.org/>will big chief be back on street outlaws 2024</a> <a href=https://americanveterannewspaper.org/>what is stephanie mills net worth</a> <a href=https://americanveterannewspaper.org/>When is fall bike week 2024 happening in Myrtle Beach</a> <a href=https://americanveterannewspaper.org/>judy blume net worth 2024</a> <a href=https://americanveterannewspaper.org/>Spring Break In Myrtle Beach 2024</a> <a href=https://americanveterannewspaper.org/>international curly hair day 2024</a> <a href=https://americanveterannewspaper.org/>david choe net worth 2024</a> <a href=https://americanveterannewspaper.org/>las vegas jazz festival 2024</a> <a href=https://americanveterannewspaper.org/>whole earth festival davis 2024</a> <a href=https://americanveterannewspaper.org/>free museum day sacramento 2024 tickets</a> <a href=https://americanveterannewspaper.org/>how much is rob schneider worth</a> <a href=https://americanveterannewspaper.org/>rob schneider networth</a> <a href=https://americanveterannewspaper.org/>stephanie mills net worth 2024</a> <a href=https://americanveterannewspaper.org/>rob schneider net worth</a> <a href=https://americanveterannewspaper.org/>oddities and curiosities expo 2024</a> <a href=https://americanveterannewspaper.org/>Pinellas County 2023–2024 School Calendar</a> <a href=https://americanveterannewspaper.org/>st patricks day 2024</a> <a href=https://americanveterannewspaper.org/>2023–2024 Arkansas Hunting Season</a> <a href=https://americanveterannewspaper.org/>nike signs germany</a> <a href=https://americanveterannewspaper.org/>zach bryan net worth 2024</a> <a href=https://americanveterannewspaper.org/>best baseball walk up songs 2024</a> <a href=https://americanveterannewspaper.org/>What Is The Best Month To Retire In 2024</a> <a href=https://americanveterannewspaper.org/>ski to sea parade 2024</a> <a href=https://americanveterannewspaper.org/>rob schneider's net worth</a> <a href=https://americanveterannewspaper.org/>alice cooper net worth</a> <a href=https://americanveterannewspaper.org/>Wye Mountain Daffodil Festival 2024</a> <a href=https://americanveterannewspaper.org/>When Does Hell's Kitchen Return 2024?</a> <a href=https://americanveterannewspaper.org/>10 РЎortes De Pelo Para Mujer 2024</a> <a href=https://americanveterannewspaper.org/>JMU Final Exam Schedule Spring 2024</a> <a href=https://americanveterannewspaper.org/>what is rob schneider's net worth</a>
#37 betonnii zaezd_khsihttp://betonnyj-zaezd-na-uchastok-1122.ru
заезд на дачу под ключ <a href=http://betonnyj-zaezd-na-uchastok-1122.ru>http://betonnyj-zaezd-na-uchastok-1122.ru</a> .
#38 Lewishause
<a href=https://comprarcialis5mg.org/it/cialis-5mg-prezzo/>cialis 2 5 mg prezzo in farmacia</a> : an effective drug containing tadalafil, treats erectile dysfunction and benign prostatic hyperplasia. In Italy, a 28-tablet pack of Cialis 5 mg costs approximately €165.26, but costs differ by pharmacy and promotions. Generic options, like Tadalafil DOC Generici, cost €0.8–€2.6 per tablet, providing a cheaper option. Consult a doctor, as a prescription is required.
#39 1winbrazil_uyElhttps://1winbrazil.neocities.org/
Добро пожаловать на 1winbrazil.neocities.org, где представлены. 1winbrazil.neocities.org – ваш лучший помощник, на этом сайте. 1winbrazil.neocities.org – ваш путеводитель, обогащенный. 1winbrazil.neocities.org предлагает последние новости, узнать. 1winbrazil.neocities.org – уникальный ресурс, которые помогут вам в. Погружайтесь в контент 1winbrazil.neocities.org, ценные советы. 1winbrazil.neocities.org – это ваша стартовая страница, в сфере спорта. 1winbrazil.neocities.org – ваш надежный партнер, советов экспертов. Откройте для себя секреты с 1winbrazil.neocities.org, для того чтобы. Подписывайтесь на обновления 1winbrazil.neocities.org, чтобы не пропустить. Откройте для себя лучшие стратегии на 1winbrazil.neocities.org, интересные статьи. Узнайте все о ставках на 1winbrazil.neocities.org, для того чтобы. 1winbrazil.neocities.org – зарабатывайте на ставках, для успеха. Не знаете, с чего начать? 1winbrazil.neocities.org предлагает решения, ставки на спорт. С 1winbrazil.neocities.org вы в надежных руках, получите актуальные данные. 1winbrazil.neocities.org – ваше вдохновение, что. 1win <a href=https://1winbrazil.neocities.org/>https://1winbrazil.neocities.org/</a> .
#40 hoki1881flamphttps://goldhoki1881.com
<a href=https://goldhoki1881.com>hoki1881</a>
#41 vavada-0712.storehttps://vavada-0712.store/
Испытайте азарт и выигрыш в надежном казино с отличной репутацией, подробности здесь <a href=https://vavada-0712.store/>https://vavada-0712.store/
#42 Gichardcheks
Hi there, its good post on the topic of media print, we all be aware of media is a enormous source of information. https://sun-shop.com.ua/…red-pokupkoy
#43 PveDayzkihttps://vk.com/deadly_storm_syberia_dayz
Хотите найти лучший PVE сервер DayZ? Добро пожаловать на сложный сервер Deerisle с картой Deerisle, где каждый момент — вызов для игроков. Если вы только начинаете, попробуйте упрощённый сервер с картой ChernarusPlus (Lite), где идеальные условия для старта.
Лучшие сервера дейз — это топовое предложение для фанов DayZ.
Погружайся в мир Deerisle с уникальными механиками: суровые условия выживания и продвинутый крафт. Или начни на лёгком сервере.
Присоединяйся прямо сейчас на топовые сервера Дейз! Наслаждайся игрой без токсичного PvP.
Переходи по ссылкам:
<a href=https://deadly-storm.shop/products>хадовые сервера с картой Deerisleсервера дейз 1.28</a>
https://vk.com/…-230588325_1 Deerisle Bots Deadly Storm
#44 prodat rolex_eupihttp://prodaja-rolex-chasi13.ru
выкуп ролекс <a href=www.prodaja-rolex-chasi13.ru>выкуп ролекс</a> .
#45 WallaceVenhttps://nsk.sibirki.pro/
Расчёт стоимости ремонта двигателя Kia или Hyundai онлайн за 45 секунд – Полная информация по ссылке <a href= https://www.bondhuplus.com/…blog/172647/</a>
#46 AndrewPabhttps://medium.com/@agurkin2021/analizador-de-vibrasiones-827822f656b4
Solución rápida de equilibrio: Soluciones rápidas sin desmontar máquinas
Imagina esto: tu rotor empieza a temblar, y cada minuto de inactividad genera pérdidas. ¿Desmontar la máquina y esperar días por un taller? Ni pensarlo. Con un equipo de equilibrado portátil, corriges directamente en el lugar en horas, sin alterar su posición.
¿Por qué un equilibrador móvil es como un „herramienta crítica“ para máquinas rotativas? Compacto, adaptable y potente, este dispositivo es el recurso básico en cualquier intervención. Con un poco de práctica, puedes: ✅ Corregir vibraciones antes de que dañen otros componentes. ✅ Reducir interrupciones no planificadas. ✅ Operar en zonas alejadas, ya sea en instalaciones marítimas o centrales solares.
¿Cuándo es ideal el equilibrado rápido? Siempre que puedas: – Acceder al rotor (eje, ventilador, turbina, etc.). – Instalar medidores sin obstáculos. – Modificar la distribución de masa (agregar o quitar contrapesos).
Casos típicos donde conviene usarlo:
#47 remont okon_kasrhttp://studio5floor.ru
ремонт окон <a href=http://studio5floor.ru/>http://studio5floor.ru/</a> .
#48 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
бывшие казино 1×bet регистрация <a href=https://rumafia.news/>casino скачать</a> Набиуллина Эльвира Сахипзадовна порно казино рублях <a href=https://rucriminal.info/>порно с Дронова Александра Викторовна</a> Юдаева Ксения Валентиновна порно Комарова Наталья Владимировна порно Ходнева Светлана Владимировна порно казино онлайн порно с Юлия Ефимова, пловчиха casino riobet ешь казино
DiskiPlus пинко casino DiskiPlus симулятор казино <a href=https://diskiplus.ru/>DiskiPlus казино смотреть</a> DiskiPlus скачиваемые казино DiskiPlus r7 casino <a href=https://www.diskiplus.ru/>DiskiPlus порно с Юлия Ефимова, пловчиха</a> казино DiskiPlus автомат казино DiskiPlus пинко casino DiskiPlus 1go casino DiskiPlus букмекерская контора фонбет DiskiPlus официальные букмекерские конторы скачать DiskiPlus 1×bet зеркало xbet xyz
#49 prodat rolex_whplhttp://prodaja-rolex-chasi12.ru
ломбард rolex <a href=www.prodaja-rolex-chasi12.ru/>www.prodaja-rolex-chasi12.ru/</a> .
#50 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
лучшие онлайн казино pinco casino <a href=https://specreporter.com/>порно с Варвара Субботина</a> 1×bet скачать приложение porno Юлия Пересильд <a href=https://repost.news/>pin casino</a> pin up casino buzz слот casino 1×bet зеркало xbet xyz скачиваемые казино порно с Евгений Малкин (хоккей) pin up casino buzz букмекерская контора официальный сайт скачать
DiskiPlus фильмы казино рояль DiskiPlus порно с Аделия Петросян (фигурное катание) <a href=https://diskiplus.ru/>DiskiPlus casino daddy</a> DiskiPlus скачать букмекерскую контору на андроид DiskiPlus сайты казино <a href=https://diskiplus.ru>DiskiPlus Петрова Ольга Викторовна порно</a> DiskiPlus pin ап casino DiskiPlus суть казино DiskiPlus 1×bet зеркало рабочее на сегодня DiskiPlus приложения букмекерских контор DiskiPlus казино гта 5 DiskiPlus new casino казино
#51 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
Иногда в одобрения за регистрацию все выдаваться билеты для участия в турнирах. Условия их проведения довольно выделяются, потому мы рекомендуем ознакомиться с любым предложением раздельно. <a href=http://filmkachat.ru/>1×slots зеркало быструю регистрацию а также мгновенное</a> Вышеописанная причина и является главным интересным, в которого операторы отдают часть собственной выгоды на разные рекламные затраты и маркетинговые кампании. А наиболее действующим здесь станут выступать именно бездепозитные призы казино 2022 с выводом за регистрацию.Для тех, кто только взвешивает испытывать собственную удачу, а для проф игроков, отыскивающих свежие площадки для выигрышей, водящие лицензированные казино нередко устраивают различные акции, и одно из лучших предложений за последнее время – как для начинающих, так и для проф игроков – бездепозитный приз за регистрацию. <a href=https://taplink.cc/kalinka0588>https://taplink.cc/kalinka0588</a> Акции распространяются как на все забавы казино, например и на ограниченный перечень. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и. Промо может обхватывать разработки одного производителя. Бездеп не пересекается с иными промоакциями казино. Если на сайте предусмотрен кэшбек, он не начисляется за ставки, сделанные бонусными деньгами. Для идентификации платежных реквизитов игрока возможность потребоваться пополнение счета на наименьшую сумму. 1×slots сайт зеркало <a href=http://sobaeksanrock.dgweb.kr/bbs/board.php?bo_table=free&wr_id=3081128>http://sobaeksanrock.dgweb.kr/bbs/board.php?bo_table=free&wr_id=3081128</a>
1хслотс рабочее зеркало
Выбор каждого онлайн казино на нашем сайте. В описании к каждому Вы можете узнать, собственно получите за создание аккаунта.Не стоит незамедлительно же отказываться от приветственных подарков в похожих казино. Администрация готова начислить средства либо фриспины, но предварительно сотрудники обязаны убедиться, собственно вы не аферист. Дело что, нет, что развелось слишком большое охотников за призами. Они научились дурачить систему и зарабатывать солидные суммы денег. 1× slots официальный На странице представлены бездепозитные бонусы за регистрацию в казино редчайшая заслуга за которой гонятся все игроки как новички, так и мастера. Мы тоже уделяем великое внимание на наличие бонусов при формирование рейтинга казино на средства. Бездепозитный бонус это возможность играть бесплатно и выиграть настоящие деньги. <a href=https://astraclub.ru/members/355660-Robertfam>https://astraclub.ru/members/355660-Robertfam</a> Доступность — бездепозитные бонусы в казино чаще всего предоставляются новым игрокам, но посещают случаи, когда бонус все получить и действующие клиенты.Вейджер в переводе с английского означает «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша полученного бонуса, в нашем случае бездепозитного. Число ставок роли не играет — главно только набрать необходимую, пропорциональную сумме поощрения. x1 slots 1хслотс регистрация перейти на 1×slots Суммы подобных услуг, большинстве, колеблются от трех до двадцати долларов, а вейджер на эти свои обязан составлять от 30 до шестидесяти один. Зачастую, наивеличайшая сумма выигрыша здесь составит от одной до двух сотен долларов. Если игры выиграет больше, то все свои могут быть списанными до очень разрешенного выигрыша. Здесь появляется содержание выводить еще несуществующие деньги на свою платежную систему и далее находить заведение с благоприятными под данную необходимую релоадом либо призом за 1-ое пополнение счета. Есть некоторое подвидов бездепозитного вознаграждения, предлагаемого большим количеством заведений.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Популярность интернет казино растёт и всё больше пользователей начинают интерес азартными играми. Бездепозитные призы 2022 года, это оригинальные подарки за регистрацию. С их поддержкой свежие игроки могут получить благотворительные вращения либо средства на баланс за одну регистрацию. С выходом игорных заведений в интернете, бездепозитные бонусы стали моднейшим способом привлечения игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш сайт собрал наилучшие предложения из интернета на 2022 год. Воспользуйтесь хоть презентом и можете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить обстоятельства.Например, игрок получил 500 руб. При творении аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 рублей, понадобится устроить 875 спинов для полного отыгрыша. <a href=https://cse.google.ad/url?q=http%3A%2F%2Fdoctorlazuta.by>https://cse.google.ad/url?q=http%3A%2F%2Fdoctorlazuta.by</a> Подтверждение электрической почты – одно из основных условий, которое есть практически в любом бездепозитном казино. Чтобы верифицировать электрическую почту, достаточно перебежать по интенсивной ссылке в послании, приобретенном от азартного клуба. 1×slots официальный сайт зеркало рабочее Можно ли в одном интернет казино получить больше 1-го приза за регистрацию? Нет, например как в любом онлайн казино есть правила, к коим надо(надобно) держаться, не создавать два аккаута для получения бонусов, иначе несомненно блокировка обоих аккаутов, не пытайтесь обмануть онлайн казино, приз за регистрацию выдаеться один один 1 личику.Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, a только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.
1 хслот регистрация в 1×slots casino
Лишь знаменитые и знаменитые азартные заведения могут позволить себя выдавать бездепы в виде дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депо, коие возможно израсходовать в лучших аппаратах с высокой отдачей. <a href=http://fbigov.clanfm.ru/viewtopic.php?f=2&t=123>1×slots регистрация 1×slotscasino09k online</a> Внесение депозита – Будьте готовы восполнить счет в отыгрыша приза. Это стандартное требование правил для этого на промо-акций. Лучше заблаговременно уточнить, какую необходимую нужно несомненно вносить на счет. Как управляло, речь о наименьшем депозите, но вы обязаны быть уверены, что он для по кармашку.Практически все интернет казино с бездепозитным бонусом за регистрацию предусматривает программку лояльности — систему поощрения неизменных клиентов, кот-ая состоит из множества уровней. При достижении игроком одного значения на его счёт поступает бонус. Чем повыше степень — что, этим щедрее бонус. Бездепозитный бонус нередко имеет стать доступным сразу после завершения регистрации, поскольку как единственным притязанием к нему является регистрация, а затем ревизия вашей свежей учетной записи. casino 1×slot <a href=http://ch-marine.co.kr/bbs/board.php?bo_table=qna&wr_id=51102>http://ch-marine.co.kr/bbs/board.php?bo_table=qna&wr_id=51102</a> Рассмотрим принцип его деянья на примере. Допустим, вы зарегались и получили $10 not the slightest down payment bonus с вейджером х50. Это означает, собственно выигранные средства возможно несомненно выводить не ранее, чем после того, как общая сумма ставок достигнет $500.
1хслотс официальный сайт зеркало
<a href=http://www.impk10.com/space-uid-368285.html>http://www.impk10.com/space-uid-368285.html</a> 1×slots casino зеркало Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам воспрещено начислять призы посетителям, не имеющим денежных средств на счете. Мы предлагаем разглядеть животрепещущие призы онлайн-казино с лицензией, которые соблюдают законодательство РБ.Но а случае вы уже профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы автоматически перейдете в онлайн казино;
<b>Смотреть еще похожие новости:</b>
<a href=https://www.thefamilylegion.se/viewtopic.php?f=4&t=137516>1×слотс казино</a>
<a href=http://board.eternityrpc.com/thread-7-post-19562.html#pid19562>1×slots официальный сайт, скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При пользовании бездепозитным призом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют количество обликов лимитов:
#52 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet 1 порно с Алексей Миранчук (футбол) <a href=https://krtka.info/>казино вход официальный сайт</a> порно с Виктория Синицина, фигуристка casino ru <a href=https://res-publika.com>1×bet официальный</a> Скворцова Вероника Игоревна порно porno Светлана Ходченкова vodka casino порно с Васильева Татьяна Викторовна гта казино порно с Петр Ян (ММА) спорт букмекерская контора
DiskiPlus 1×bet xbet xyz DiskiPlus казино регистрации <a href=https://diskiplus.ru/>DiskiPlus casino скачать</a> DiskiPlus porno Юлия Канакина DiskiPlus пин casino <a href=https://www.diskiplus.ru>DiskiPlus зеркала официальных сайтов казино</a> DiskiPlus Любимова Ольга Борисовна порно DiskiPlus casino riobet DiskiPlus Елизавета Боярская DiskiPlus букмекерская контора скачать приложение DiskiPlus 1×bet официальный xbet DiskiPlus официальные сайты казино DiskiPlus порно с Абрамченко Виктория Валериевна
#53 Charlesgunnyhttp://filmkachat.ru
x1 slots 1хслотс регистрация перейти на 1×slots
Возможность протестировать свежие игры, не рискуя собственными своими и разработать личную тактику игры. <a href=http://filmkachat.ru/>1×slots быструю регистрацию а также мгновенное</a> Иногда в качестве одобрения за регистрацию могут выдаваться билеты для участия в турнирах. Условия их проведения довольно выделяются, потому мы рекомендуем ознакомиться с любым предложением отдельно. <a href=https://hearthis.at/group/466309/eeeee-eeee-e-eeeee-eee-eeeeee-e-eeeeeee-eeeeeee-eeeeeeeeee/>https://hearthis.at/group/466309/eeeee-eeee-e-eeeee-eee-eeeeee-e-eeeeeee-eeeeeee-eeeeeeeeee/</a> Допустим, за регистрацию вы возымели бездеп в объеме 2 000 рублей с вейджером х30. В данном случае светит сделать ставок, на общую сумму в 60 000 рублей (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать настоящие деньги. Однако не забывайте, собственно с любого подарка получится исключить определённую необходимую (чаще всего менее $200).Фриспины – безвозмездные вращения с фиксированной ставкой, которые возможно применять в конкретных игровых автоматах. онлайн казино 1×slots <a href=https://mcpe.ru.net/user/Jamessok/>https://mcpe.ru.net/user/Jamessok/</a> Вышеописанная причина и считается основным нюансом, в которого операторы отдают доля собственной прибыли на разные маркетинговые затраты и маркетинговые кампании. А самым действенным тут станут выступать именно бездепозитные бонусы казино 2022 с выводом за регистрацию.
1×slots официальный сайт скачать
Такой казино бонус без депозита за регистрацию выдается игроку на час и активно используется данное предложение с 2017 года. Это словно какая-то конспирация поощрения под бездепозитный. Суть всего сего сводится к что, этому, что игроку на час выдается, к примеру, 1000 $, а реклама утверждает то, собственно каждой выигрыш можно будет дальнейшем забыть при себя. Но если играющий всерьез отнесется к данному предложению, то он попросту потеряет время. Ведь геймеру надо(надобно) будет выступать не в аккаунте, а в тренировочном и с ограниченным выбором автоматов и ставок. Да и если, тогда, выигрыша (том всей тысячи) в верховодила вступят конкретные обстоятельства, где несомненно сказано, собственно наибольшей суммой победы может быть только двести $ и деньги возможно применять лишь виде бонуса на первый лепта с вейджером 25 от суммы вознаграждения плюс сам депо. По результату выйдет, что игрок выигрывал для 200% приз с вейджером на конкретную сумму. Короче разговаривая, это все не стоит вашего медли.Подтверждение персональной инфы. Все казино настоятельно от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и присутствие у пользователя иных аккаунтов (мультиаккаунт запрещен). 1 xslots рабочее зеркало В наше время довольно просто получить бонус за регистрацию в казино. Практически каждый игорный дом с радостью начислит средства или бесплатные вращения. Многие гэмблеры используют этим и не смущяются регистрироваться в любом клубе с выгодными условиями. Кстати, это замечательная возможность выработать победную тактику и сорвать джекпот.Эффективность бездепов виде маркетингового инструмента расценили почти операторы. Малоизвестные площадки используют такие промоакции, чтобы скоро набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны неизменных гостей. Не все сайты, дающие презенты без депо, рекомендованы к игре. За симпатичным промоописанием могут скрываться неосуществимые условия отыгрыша и подводные камешки. <a href=https://aben75.cafe24.com/bbs/board.php?bo_table=free&wr_id=867944>https://aben75.cafe24.com/bbs/board.php?bo_table=free&wr_id=867944</a> Чтобы без увериться в превосходствах бездепозитных призов, достаточно зарегистрироваться в казино и получить одобрение.Акционные предложения от казино существуют в различных форматах. Часто призы даются в размен на депозит. Игрок заносит платеж и получает средства, безвозмездные вращения и поощрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — вид приза, который гарантирован за выполнение определенных действий на веб-сайте: 1×slots промокод при регистрации 2025
скачать 1×slots официальный сайт
Реже бонусы без депозита начисляются постоянным игрокам. С их поддержкой администрация постарается вычесть ценных посетителей или вожделеет поблагодарить за лояльность верных гостей. Но намного почаще для сходственных целей применяются такие акции: <a href=http://langrisser.ru/index.php?subaction=userinfo&user=kindcanopy57>http://langrisser.ru/index.php?subaction=userinfo&user=kindcanopy57</a> Не стоит сразу же отрицаться от приветственных подарков в похожих казино. Администрация готова начислить средства или фриспины, но сначала работники должны увериться, собственно вы не мошенник. Дело никаких, что развелось слишком количество охотников за призами. Они научились врать систему и наваривать солидные суммы средств.Приветственный бонус без депозита ? презент за регистрацию. Выдается средствами, фриспинами или баллами. В заключительном случае бонусные баллы используются для роли в турнирах или размена на реальные деньги. 1х слот регистрация в 1×slots casino 1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, в не хотите стать жертвой плутов или впустую потратить время;На странице представлены бездепозитные бонусы за регистрацию в казино редчайшая заслуга за которой гонятся все игроки как новички, так и мастера. Мы также уделяем большое внимание на наличие призов при составление рейтинга казино на деньги. Бездепозитный приз это возможность выступать даром и выиграть настоящие средства.
1× slots официальный
Отказ в прохождении верификации. Если клиент не хочет либо не дать документы, подтверждающие его личность, профиль будет заблокирован вместе со всеми бонусными начислениями.Некоторые казино шансы предлагать посетителям бездепы за свидетельство номера либо почты или репост на страницу в социальных сетях. Некоторые клубы механически начисляют приз на аккаунт игрока последствии исполненья критерий получения, хотя случаются истории, когда приз нужно активировать игроку самому. Есть несколько способов активации приза:Онлайн гемблинг развивается с каждым днем больше и больше, новые бренды создаются не по дням а по часам. Новые онлайн казино проделывают вступительные акции для игроков, для того собственно бы зарекомендовать себя, и тем самым предлагают бездепозитные бонусы за регистрацию, собственно бы не упустить эту возможность — как пользоваться свежим бездепом, советуем посещать наш вебсайт как возможно почаще, самое вкусное и новые будет добавляться в этом же перечне. 1×slots регистрация на сайте 1×slots ru com <a href=http://langrisser.ru/index.php?subaction=userinfo&user=lazyprison45>http://langrisser.ru/index.php?subaction=userinfo&user=lazyprison45</a>
1хслотс казино зеркало
<a href=http://istiqbolsari.uz/user/Jamesgic/>http://istiqbolsari.uz/user/Jamesgic/</a> Заполняя данные в собственном профиле, указывайте только достоверную информацию, так как Вам придется ее подтвердить дальнейшем при выводе средств.Подобные призы без депо предоставляются на более выгодных критериях. Зачастую они покрупнее, а обстоятельства отыгрыша менее жесткие. 1× slots регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://mit-bbs.com/viewtopic.php?t=897748>1×slots регистрация на сайте 1×slots ru com</a>
<a href=https://forum-pravo.com.ua/showthread.php?p=27495&posted=1#post27495>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации презента необходимо доказать электронную почту и привязать аппарат; Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации презента необходимо доказать электронную почту и привязать аппарат;
#54 zaimi_emPlhttp://investinq.ru
онлайн займы <a href=http://investinq.ru/>http://investinq.ru/</a> .
#55 liga chempionov_rsplhttp://footballnews.store
футбол лига чемпионов финал <a href=https://footballnews.store/>footballnews.store</a> .
#56 prodat rolex_dnpihttp://prodaja-rolex-chasi13.ru
часы ролекс ломбард <a href=https://prodaja-rolex-chasi13.ru>https://prodaja-rolex-chasi13.ru</a> .
#57 Matthewawalohttps://cutt.ly/teX52Bd3
Trusted by Over 40,933 Men Across the U.S.
Affordable ED Treatment No Catch
We offer 100 mg Generic Viagra® and 20 mg Generic Cialis® for just $0.45 per dose—a price that’s up to 97% less than the big brands.
How do we do it? By building our direct-to-patient platform from scratch and sourcing medication directly from the manufacturer, we cut out the middlemen and pass the savings on to you. No hidden fees, no markups—just proven ED treatments at an unbeatable price.
https://cutt.ly/teX52Bd3 https://cutt.ly/geMsuEqP https://telegra.ph/…armacy-12-25
#58 Dnrtwnbhttp://[url=http://orikdok-1v-gorode-nizhniy-novgorod-52.ru/]orikdok-1v-gorode-nizhniy-novgorod-52.r
Мы изготавливаем дипломы психологов, юристов, экономистов и других профессий по приятным тарифам. Мы можем предложить документы ВУЗов, которые расположены на территории всей РФ. Дипломы и аттестаты выпускаются на „правильной“ бумаге самого высшего качества. Это позволяет делать настоящие дипломы, не отличимые от оригиналов. <a href=http://orikdok-4v-gorode-novosibirsk-54.online/>orikdok-4v-gorode-novosibirsk-54.online</a>
#59 DichaelPoirl
This excellent website really has all of the information and facts I needed about this subject and didn't know who to ask. <a href=https://darbcard.icu/>hafilat balance check online</a>
#60 Timsothybum
Its like you read my mind! You seem to know a lot about this, like you wrote the book in it or something. I think that you can do with some pics to drive the message home a little bit, but instead of that, this is magnificent blog. A great read. I will definitely be back. <a href=https://melbet-affiliate-mongolia.com/>melbet-affiliate-mongolia.com</a>
#61 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино ли порно с Алина Загитова <a href=https://specreporter.com/>вавада казино</a> порно с Евгения Медведева кент казино <a href=https://krtka.info/>балтбет букмекерская контора</a> casino вход top casino сайт казино зеркало казино на деньги пин casino порно с Голикова Татьяна Алексеевна Чулпан Хаматова
DiskiPlus 1×bet рабочее DiskiPlus порно с Анастасия Потапова, теннисистка <a href=https://diskiplus.ru>DiskiPlus винлайн букмекерская контора официальный сайт</a> DiskiPlus самое казино DiskiPlus porno Андрей Рублев (теннис) <a href=https://diskiplus.ru/>DiskiPlus букмекерская контора фонбет официальный</a> DiskiPlus человек казино DiskiPlus вавада казино DiskiPlus сайт казино зеркало DiskiPlus online casino 7k DiskiPlus casino зеркало сайта DiskiPlus Шевцова Татьяна Викторовна порно DiskiPlus pin casino
#62 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать 1×bet порно с Петр Ян (ММА) <a href=https://res-publika.com>porno Мария Шарапова</a> порно с Никита Кучеров (хоккей) Семёнова Татьяна Владимировна порно <a href=https://strelochnik.com/>рабочее казино</a> cometa casino ramenbet casino букмекерские контора ап казино рояль 1×bet зеркало на сегодня 1×bet xyz скачать 1×bet на андроид бесплатно porno Игорь Акинфеев (футбол)
DiskiPlus 1×bet зеркало на сегодня 1×bet xyz DiskiPlus казино проиграл <a href=https://diskiplus.ru>казино</a> DiskiPlus porno Андрей Рублев (теннис) DiskiPlus казино вход <a href=https://diskiplus.ru/>DiskiPlus демо казино</a> DiskiPlus реального казино DiskiPlus 1go casino DiskiPlus лучшие бесплатные онлайн казино DiskiPlus porno Марина Александрова DiskiPlus букмекерская контора ставки DiskiPlus casino x DiskiPlus 1×bet сейчас
#63 Charlesgunnyhttp://filmkachat.ru
1х слотс зеркало регистрация в 1×slots casino
Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам запрещено начислять бонусы клиентам, не имеющим денежных средств на счете. Мы предлагаем разглядеть животрепещущие бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ. <a href=http://filmkachat.ru/>казино 1×slots</a> Если ординарными текстами, бездепы – это определённая сумма средств либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать презенты. Но есть кое-какие нюансы. Существуют игорные жилища, которые перед тем как начислить бонусы требуют привязать телефон, предоставить копии документов.Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала резвые выводы. Фишка выплат в, что достаточно избрать платёжный инструмент и указать сумму. В большинстве случаев деньги зачисляются на электронные кошельки протяжении 15 мин., а на банковские карты – 1–3 рабочих денька. <a href=https://blog.libero.it/wp/kalinka0588/2025/03/05/subaru-reset-after-battery-change-complete-guide-steps/>https://blog.libero.it/wp/kalinka0588/2025/03/05/subaru-reset-after-battery-change-complete-guide-steps/</a> 1×slots регистрация <a href=http://cmsthemefinder.com/userinfo.php?uid=35547#>http://cmsthemefinder.com/userinfo.php?uid=35547#</a>
1×slot зеркало рабочее этих способов предполагает регистрацию
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5414/#comment-676199>1×slots зеркало которую указывали при регистрации кстати</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=http://rvolchansk.ru/user/DoctorLazutaOi/>http://rvolchansk.ru/user/DoctorLazutaOi/</a> 1× slots casino зеркало
1хслотс зеркало
<a href=https://www.exibart.com/community/dissertat1508/profile/>https://www.exibart.com/community/dissertat1508/profile/</a> 1×slots casino зеркало рабочее А ознакомиться с новыми онлайн казино, Вы можете с призов с выводом выгоды, коие Вы можете получить без депо.
1×slots зеркало видели такую регистрацию на
Не трудно додуматься, что not the slightest deposit bonuses почти никогда не случаются большими. Чаще всего речь идет о пяти–тридцати баксах (или эквиваленте этой суммы в другой еденице).Зачастую бездепозитные призы казино для забавы предлагаются различными заведениями азартных игр в качестве рекламных акций либо в целях вербования к для свежих игроков. Для бездепозитных призов в казино 2022 игроку не пополнять счет до момента вывода желанных средств. <a href=http://www.pentaxfriends.eu/viewtopic.php?f=51&t=7161&p=146478#p146478>1хслот 1хслотс регистрация перейти на 1×slots</a> Не советуем сломя голову браться за различные предложения получения средств без вложений. Вполне возможно, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на первый взор. Альтернативой считается казино приз за депо. Мы предлагаем вас пару советов, спасибо которым у любого игрока несомненно вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом денег:Возможность сыграть вспомогательное соревнование (а от и несколько) совершенно безвозмездно, а выигрыш, же, поступает на счёт игрока. В зависимости от онлайн заведения каждый из их имеет вам предложить как бездепозитные средства, например и бездепозитные фриспины, которые последствии успешной регистрации рухнут вас на ваш игровой баланс. 1×slots официальный сайт мобильная версия скачать <a href=http://xn–jj0bt2i8umnxa.com/bbs/board.php?bo_table=free&wr_id=20895>http://xn–jj0bt2i8umnxa.com/bbs/board.php?bo_table=free&wr_id=20895</a> Более крупные предложения встречаются довольно редко. Зачастую они доступны только VIP-игрокам. В оставшихся случаях им скорее сопутствуют очень строгие обстоятельства отыгрыша. Также возможны дополнительные условия и лимитирования, прописанные в критериях и положения бонусной программы казино.
1× slots casino официальный сайт
Чтоб получить крупный выигрыш, выбирайте игровые автоматы с предельным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша.Предложения с бездепозитными бонусами за регистрацию разрешают новым заведениям заинтересовать аудиторию на собственный сайт. А игроки же получают возможность играть на настоящие деньги без депо в казино и заработать маленький стартовый капитал, кот-ый разрешается исключить на карту банка либо электрический кошелек. Можно ли зарабатывать на бездепозитных призах? Это не работа, тут как повезет, случае в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, тогда можно назвать везением, и дополнительной добавкой к вашему бютжету. <a href=http://9447777.ru/index.php?subaction=userinfo&user=equableroutine0>http://9447777.ru/index.php?subaction=userinfo&user=equableroutine0</a> рабочее зеркало 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=http://amazon.rx22.ru/viewtopic.php?f=5&t=4306>1 x slots casino</a>
<a href=http://yonghengro.gain.tw/space.php?uid=1555574>1×slots регистрация 1×slotscasino 56 online</a>
<a href=https://forum.dis-course.net/viewtopic.php?t=706613>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.
#64 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало рабочее на сегодня 1×bet xyz порно с Елена Никитина, скелетонистка <a href=https://strelochnik.com/>ставки на спорт букмекерские конторы</a> 1×bet на андроид бесплатно скачиваемые казино <a href=https://www.ossetia.tv/>порно с Афонина Марина Игоревна</a> 7k casino зеркало на сегодня скачиваемые казино самое казино вавада казино порно с Антропова Валентина Викторовна порно с Юлия Ефимова, пловчиха сколько казино
DiskiPlus 1×bet официальный скачать DiskiPlus Крючкова Полина Викторовна порно <a href=https://diskiplus.ru/>DiskiPlus казино пин</a> DiskiPlus Нургалиева Эльвира Рамиловна порно DiskiPlus бк букмекерская контора <a href=https://diskiplus.ru/>DiskiPlus Валентина Матвиенко порно</a> DiskiPlus porno Юлия Канакина, скелетонистка DiskiPlus pin up casino зеркало DiskiPlus казино пину DiskiPlus симулятор казино DiskiPlus песня казино DiskiPlus порно с Арина и Дина Аверины, гимнастки DiskiPlus промокод 1×bet
#65 Charlesgunnyhttp://filmkachat.ru
1×slots мобильная версия войти казино
Законодательство, регулирующее азартные забавы в различных странах, оказывает на возможности операторов. В итоге юзеры из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это возможность быть как полный отказ в доступе, так и невозможность загружать забавы отдельных изготовителей. <a href=http://filmkachat.ru/>1×slots зеркало видели такую регистрацию на</a> Бездепозитные бонусы казино за регистрацию в 2022 году — это возможность поиграть за счёт заведения. Казино даёт посетителю шанс пользоваться определённой суммой или числом безвозмездных вращений без внесения депо. Не путайте деморежим с реальной забавой без необходимости внесения депо.Бесплатный бонус – кредиты, коие онлайн-казино начисляет клиенту, не заставляя его пополнять игровой счет. <a href=https://band.us/band/92649089/post/9>https://band.us/band/92649089/post/9</a> 1×slots подтвердит вашу регистрацию если говорить <a href=http://maskarad.bomba-piter.ru/user/DoctorLazutaPr/>http://maskarad.bomba-piter.ru/user/DoctorLazutaPr/</a> Вейджер (либо вагер) ? это наименьшая сумма ставок, коию необходимо сделать для вывода денежного приза. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим красивее спецпредложение.
1 х слотс зеркало
Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации подарка нужно подтвердить электронную почту и привязать телефон;Подобные бонусы без депо предоставляются на больше прибыльных критериях. Зачастую они крупнее, а обстоятельства отыгрыша менее строгие. <a href=http://yonghengro.gain.tw/space.php?uid=1555574>1×slots casino регистрация 1×slots review live</a> 1× slots регистрация в 1×slots casino Можно ли зарабатывать на бездепозитных бонусах? Это не работа, здесь как повезет, в в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, время можно именовать везением, и добавочной добавкой к вашему бюджету. <a href=http://www.nefiskokulutarifler.com/search?q=%5Burl%3Dhttps%3A%2F%2Fglavdorogadv.ru%5D%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0+%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA%5B%2Furl%5D+%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D1%8B+%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA%D0%B0>http://www.nefiskokulutarifler.com/search?q=%5Burl%3Dhttps%3A%2F%2Fglavdorogadv.ru%5D%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0+%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA%5B%2Furl%5D+%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D1%8B+%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA%D0%B0</a> Мы подготовили перечень, где есть практически актуальные и новые бездепозитные бонусы казино, коие вы можете получить безвозмездно. Для наших юзеров есть специальные предложения неповторимые бонусы, коие вы ни не найдете, их мы определили специальной красноватой плашкой «Exclusive». 1×slots на любой вкус как пройти регистрацию Бездепозитный бонус за регистрацию в казино — это стартовый презент вид денежного начисления либо безвозмездных вращений для свежих игроков заведения, для получения которого надо вносить депо.Реже призы без депо начисляются неизменным игрокам. С их подмогою администрация постарается удержать ценных клиентов или вожделеет поблагодарить за лояльность правильных гостей. Но намного почаще для сходственных целей используются такие акции:
1×slots промокод при регистрации 2025
<a href=http://www.ukrtibet.net/index.php?subaction=userinfo&user=ickywager34>http://www.ukrtibet.net/index.php?subaction=userinfo&user=ickywager34</a> Используйте превосходнейшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из списка ниже, чтобы заработать подарки за обычные деянья теперь сейчас получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и резвыми выводами на электронные кошельки. 1хслот скачать В подавляющем большинстве случаев благотворительные призы начисляются в кредитах, коие нельзя сразу вывести со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже.Не стоит путать забаву в демо и использование бонусов. В демонстрационном режиме игрок возможность оценить механику слота, сюжет и оформление. Но забава ведется на относительные кредиты, поэтому отсутствует основное ? чувство пыла. Активируя промокод либо фриспины, клиент раньше не тратит свои средства на игровые автоматы, хотя может сорвать настоящий куш!
1хслотс официальный сайт зеркало
Многие казино предоставляют в рекламных целях бесплатные призы самая для наших читателей. Чтобы их получить, нужно перейти на игровой вебсайт по партнерской ссылке с нашего портала. <a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=995145>1х слот 1хслотс регистрация перейти на 1×slots</a> С иной стороны, гораздо проще забрать бездепозитные фриспины за регистрацию в казино и прямо момент начать вращать барабаны в лучших слотах. Главная особенность спинов что, нет, что они предназначены для лучших автоматов. Удастся не только пройти дополнительные раунды, но и прирастить сумму выигрыша, заработать респины прочие внутриигровые подарки.Во время забавы в казино, выигрыши, полученные благодаря бесплатным призовым фондам, суммируются и включаются в общую необходимую для отыгрывания. Однако, в фортуна улыбнется и выйдет отыграть все призы, игровое заведение гарантированно разрешит исключить финансовые средства. Сумма вывода несомненно зависеть от лимита, одобренного именно в данном учреждении. Поэтому, пристально нужно читать верховодила выдачи безлимитных депозитов. Как только вы отыграли вейджер и средства с бонусного баланса перешли для на реальный счет, Вы храбро сможете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (устроить наименьший депо к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, вместе с депозитом).За счёт спинов выйдет запустить различные интернет слоты, протестировать стратегии и поднабраться опыта. Фишка том,, что вращения начисляются на лучшие аппараты с уникальными опциями и высочайшей отдачей. Не запамятовывайте, собственно в каждом акционном предложении учтены специальные требования – кратковременные лимитирования, максимальный объем ставки, список доступных игр. 1× slots casino официальный сайт <a href=http://expertspa.ru/index.php?subaction=userinfo&user=lackingpreview3>http://expertspa.ru/index.php?subaction=userinfo&user=lackingpreview3</a>
casino 1×slot
Не советуем опрометью голову браться за различные предложения получения средств без инвестициям. Вполне возможно, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на 1-ый взор. Альтернативой считается казино бонус за депо. Мы предлагаем для пару советов, спасибо которым у любого игрока несомненно возможность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом денег: Многие азартные клубы ограничивают необходимую вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не можете исключить. Разница будет аннулирована, Вы в не можете создавать на нее ставки. <a href=https://www.visitaboadilla.com/es/users/davidsop>https://www.visitaboadilla.com/es/users/davidsop</a> Зачастую бездепозитные бонусы казино для игры предлагаются разными заведениями азартных игр в маркетинговых промоакций либо в целях вербования к себя новых игроков. Для бездепозитных призов в казино 2022 геймеру надо пополнять счет до момента вывода хотимых средств.При выполнении условий отыгрыша и верификации, средства с бонусного счета переводятся на главный и могут быть выведены на карту или электронный кошелек. Лимиты на вывод и сроки проведения транзакции зависят от избранной платежной системы. 1×slots зеркало регистрация
<b>Смотреть еще похожие новости:</b>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5400/#comment-672334>1×slots казино мобильная версия</a>
<a href=http://golfsimclubhouse.com/forum/viewtopic.php?t=1648>1×slots зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Как лишь на виртуальном счету окажутся бонусные свои, поторопитесь отыграть вейджер. Сразу последствии сего возможно забыть заявку на вывод выигрыша. Кредиты выгодно отличаются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом настоящих средств и выделяют вероятность ощутить задор. Во-вторых – возможно насладиться любой азартной игрой доступной на сайте. В вашем постановлении присутствуют автоматы, настольные прибавленье, видео-покер, Live-дилеры.
#66 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
online casino официальный casino зеркало сегодня <a href=https://sovsekretno.net/>официальное казино вход</a> casino riobet скачать 1×bet <a href=https://kompromat1.online/>пин ап casino pin up top</a> рейтинг казино казино рулетка up casino скачать retro casino порно с Евгения Медведева Фастова Елена Владимировна порно up casino скачать
DiskiPlus 1×bet зеркало слоты 1×bet xyz DiskiPlus казино смотреть онлайн <a href=https://www.diskiplus.ru>DiskiPlus Преподобная Надежда Александровна порно</a> DiskiPlus porno Илья Ковальчук (хоккей) DiskiPlus порно с Евгения Медведева <a href=https://www.diskiplus.ru/>DiskiPlus винлайн букмекерская контора</a> DiskiPlus porno Илона Маркова, хоккеистка DiskiPlus казино большая DiskiPlus 1×bet сайт 1×bet xyz DiskiPlus порно с Петр Ян (ММА) DiskiPlus букмекерская контора зенит DiskiPlus казино 1 DiskiPlus яндекс игры казино
#67 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало рабочее этих способов предполагает регистрацию
Одним из предлогов отдавать преимущество, льготу одному или другому заведению заключается в привлекательности предлагаемых промоакций и безвозмездных услуг. Безвозмездные фриспины, выдаваемые без нужды делать какой-либо лепта, в списке находится далеко не в конце. <a href=http://filmkachat.ru/>1х слот регистрация в 1×slots casino</a> <a href=http://bedfordfalls.live/read-blog/135761_professional-3d-furniture-design-from-concept-to-creation.html>http://bedfordfalls.live/read-blog/135761_professional-3d-furniture-design-from-concept-to-creation.html</a> 1×slots промокод при регистрации 2025 <a href=https://xebecar.com/author/thad56z7692/>https://xebecar.com/author/thad56z7692/</a> К раскаянью, нет. Почти все казино, требуют внесение хотя бы одного минимального депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, собственно вывести средства разрешается только на ту платежную систему, с коей был изготовлен депозит.Если ординарными текстами, бездепы – это определённая сумма денег или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать подарки. Но есть некоторые нюансы. Существуют игорные дома, коие перед что, этим как начислить бонусы просят привязать аппарат, предоставить копии документов.
1×slots промокод при регистрации
Одним из предлогов отдавать преимущество, льготу 1 или другому заведению содержится в привлекательности предлагаемых акций и даровых услуг. Безвозмездные фриспины, выдаваемые без дела создавать какой-либо лепта, в списке располагается далековато не в конце.Представьте момент, когда при ставке в 10 рублей Вы получите сходственное умножение. Миллион рублей за одно вращение, что вполне вполне. Поэтому вопрос, сколько можно выиграть остаётся открытым. Предлагаем выяснить помощи. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный приз и инспектируйте удачу в деле. Разумеется, вывести деньги не так просто. Однако шансы есть у всех. 1×slots casino зеркало рабочее Объективные – объем бонуса, коэффициент и условия вейджера, надобность внесения депозита для вывода средств; <a href=https://australianweddingforum.com/weddings/member.php?action=profile&uid=11823>https://australianweddingforum.com/weddings/member.php?action=profile&uid=11823</a> 1×slots зеркало которую указывали при регистрации кстати
1 х слотс зеркало
Если речь идет об эксклюзивных предложениях, может понадобиться регистрация в казино по ссылке с партнерского сайта.Доступность — бездепозитные призы в казино чаще всего предоставляются новым игрокам, но бывают случаи, когда приз могут получить и действующие посетители. Главным интересным в появлении этих вознаграждений состоит в, собственно пустив их в ход, в ничем не рискует и в последствии никому ничего не несомненно должен (не зависимо, получит ли он благодаря призам какой-нибудь выигрыш или мгновенно спустит все лишь что прибывшие финансы). То есть, казино снабжает игрока возможностью на дармовой основе выступать во различные слоты и даже спонсирует забаву. <a href=http://ekaterinovka.sarat.ru/board/tools.php?event=profile&pname=Philipvew>http://ekaterinovka.sarat.ru/board/tools.php?event=profile&pname=Philipvew</a> Как лишь вы отыграли вейджер и средства с бонусного баланса перешли вас на реальный счет, Вы смело сможете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (устроить наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депозитом). 1×slots зеркало быструю регистрацию а также мгновенное Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической забавы на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, научится регулировать изменять ставки и линии, изучать бонусные забавы и их выигрышные комбинации, да счете просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные средства, коие можно отыграть и вывести, а не просто на демо счет, тем самым адреналин в крови еще больше повысится а пульс забьется с нередким ритмом!Онлайн гемблинг развивается с любым деньком больше и больше, новые бренды создаются не по денькам а по часам. Новые интернет казино проделывают вступительные промоакции для игроков, для того собственно бы зарекомендовать себя, и что, этим наиболее предлагают бездепозитные призы за регистрацию, что бы не упустить такую возможность — как пользоваться новым бездепом, советуем посещать наш вебсайт как можно чаще, самое смачное и новые будет добавляться в этом же перечне.
1х слотс зеркало регистрация в 1×slots casino
Не стоит сразу же отказываться от приветственных даров в сходственных казино. Администрация готова начислить средства или фриспины, хотя предварительно работники должны убедиться, собственно вы не мошенник. Дело в том, что развелось очень количество охотников за призами. Они выучились обманывать систему и наваривать крупные суммы средств.Когда идет о валютных бонусах, казино практически устанавливают обстоятельства вейджера, коие нужно выполнить, чтобы исключить выигрыш. <a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=14384>1хслотс казино зеркало</a> Суммы сходственных предложений, в, колеблются от 3-х до 20 долларов, а вейджер на эти свои должен составлять от 30 до шестидесяти раз. Зачастую, наивеличайшая сумма выигрыша тут составит от одной до двух сотен долларов. Если геймер выиграет больше, то все свои все быть списанными до максимально разрешенного выигрыша. Здесь бывает содержание выводить еще несуществующие финансы на свою платежную систему и далее искать заведение с подходящими под данную необходимую релоадом либо бонусом за первое пополнение счета. Есть несколько подвидов бездепозитного вознаграждения, предлагаемого большим количеством заведений.Наличие у игрока 2 аккаунта. Запрещено делать несколько профилей для неоднократного получения бездепов. 1×slots регистрация <a href=http://43.240.15.40/home.php?mod=space&uid=627301>http://43.240.15.40/home.php?mod=space&uid=627301</a>
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы которые появляются у новичков.B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax <a href=http://gctech21.com/bbs/board.php?bo_table=free&wr_id=637225>http://gctech21.com/bbs/board.php?bo_table=free&wr_id=637225</a> Обычно, бездепозитные призы выдаются под конкретные слоты с фиксированной ставкой, но их точно воспрещено использовать в игровых автоматах с современным джекпотом. Список игр, каких возможно использовать бездеп, Вы отыщите в описании промоакции или можете уточнить у службы заведения. 1×slots официальный сайт скачать на айфон Чтобы самостоятельно увериться в превосходстве бездепозитных призов, достаточно зарегистрироваться в казино и получить поощрение.
<b>Смотреть еще похожие новости:</b>
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=1257188>1х слотс зеркало регистрация в 1×slots casino</a>
<a href=http://www.9dmgamemod.com/home.php?mod=space&uid=4690490>1×slots казино зеркало</a>
<a href=http://yinyue7.com/space-uid-962219.html>1×slots зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Простая процедура получения бездепозитного приза, кот-ая займет менее 2-х минут. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные. Не стоит сразу же отказываться от приветственных даров в сходственных казино. Администрация готова начислить средства или фриспины, хотя предварительно работники должны убедиться, собственно вы не мошенник. Дело в том, что развелось очень количество охотников за призами. Они выучились обманывать систему и наваривать крупные суммы средств.
#68 Charlesgunnyhttp://filmkachat.ru
скачать 1×slots официальный сайт
Мы собрали и опубликовали список наилучших бездепозитных казино с бонусами за регистрацию, которые гарантируют великодушные выигрыши и мгновенные выплаты. <a href=http://filmkachat.ru/>1×slots промокод при регистрации</a> Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депо имеет отличаться до 30 дней. <a href=https://www.f6s.com/cgifurniture-3d-rendering-company>https://www.f6s.com/cgifurniture-3d-rendering-company</a> 1хслотс казино зеркало <a href=https://bajarmp3.net/member.php?action=profile&uid=10605>https://bajarmp3.net/member.php?action=profile&uid=10605</a> Начнём с того, что любое промо за регистрацию предполагает некоторые условия. Бездепозитные призы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность денежного оборота, необходимая для выполнения условий. Пример, возымели благотворительные вращения и выиграли с них 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 рублей, проигрышных или выигрышных, не. После исполнения, бонусный баланс перейдёт на настоящий и будет легкодоступным к выводу.
1×slots регистрацию процедура займет всего лишь
В истиннее время получить приз за регистрацию в казино довольно просто. Почти любой игорный жилище с радостью даст средства либо безвозмездные вращения. Многие игроки используют данным и не стесняются региться в каждом клубе с выгодными критериями. Кстати, это замечательная вероятность выдумать выигрышную стратегию и сорвать куш. 1×slots официальный сайт скачать на айфон <a href=http://cubecopy.ru/bitrix/redirect.php?goto=http://energotrade56.ru/bitrix/redirect.php?goto=http://inteks-elektro.ru/bitrix/redirect.php?goto=https://telegra.ph/Soblyudenie-konfidencialnosti-v-zdravoohranenii-v-sootvetstvii-so-statej-13–09–23>http://cubecopy.ru/bitrix/redirect.php?goto=http://energotrade56.ru/bitrix/redirect.php?goto=http://inteks-elektro.ru/bitrix/redirect.php?goto=https://telegra.ph/Soblyudenie-konfidencialnosti-v-zdravoohranenii-v-sootvetstvii-so-statej-13–09–23</a> 1× slots зеркало Фриспины предусмотрены для применения в видео слотах. Внимательно ознакомьтесь с критериями – часто их выдают на кое-какие автоматы. В зависимости от клуба, у вас выйдет устроить определённое число ставок. Кстати, продвинутые игорные жилища разрешают запускать любых «одноруких бандитов».С такими ординарными советами каждое казино с бонусом за регистрацию способно принести в разы больше выгоды и пользы.
1× slots зеркало
Как лишь получите бездеп в казино, всё точно не забывайте инспектировать электрическую почту. Некоторые игорные клубы непрерывно веселят активных гэмблеров приятными бонусами. Чаще всего получить подарок возможно в преддверии праздника, на день рождение, за привлечение друга. А того распространённым бонусом является надбавка к депозиту. Нужно не восполнить счёт, и азартное заведение увеличит его на 50–100%.Чтобы без увериться в превосходствах бездепозитных бонусов, достаточно зарегистрироваться в казино и получить поощрение. <a href=http://myqiantang.com/space-uid-290208.html&do=profile>http://myqiantang.com/space-uid-290208.html&do=profile</a> Приглашаем делиться сужденьями о бонусах. Это поможет другим юзерам избирать более выгодные предложения.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 $. Если выдаются фриспины, их количество редко выше нескольких десятков даровых вращений. 1×slots casino online регистрация Игры, в можно играть на бонусные деньги. Проверьте список игр, в возможно играть на бонусные свои, вероятно они Вам не понравятся и не тратить своё время на такую промоакцию.
1хслотс казино зеркало
Не хотите сыграть в азартные забавы, не рискуя своими средствами, но получая в все выплаты? Подобную возможность предоставляют почти превосходнейшие порталы с азартными увеселениями. В их количестве количество правдивых и надежных интернет-казино на российском языке. Они завлекают свежих юзеров различными поощрительными событиями, включая бездепозитные, либо бесплатные бонусы. Многие азартные клубы ограничивают сумму вывода заработанную на призе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не сможете исключить. Разница будет аннулирована, Вы в не можете создавать на нее ставки.У любого игорного заведения свои правила и условия. Но, чтобы получить бонусы, необходимо выполнить стандартные деяния: 2. Создать новый профиль. Для регистрации нужно заполнить маленькую анкету либо зайдите в индивидуальный офис посредством социальных сетей; 1×slots официальный сайт мобильная версия скачать <a href=https://adaptable-aloe-llnk8q.mystrikingly.com/>https://adaptable-aloe-llnk8q.mystrikingly.com/</a> Вейджер не более х30–35 считается приемлемым. Опытные игроки заявляют, что с этим вейджером реально остаться в плюсе, если верно подойти к выбору игрового аппарата.Для получения приза нужно пригласить в забаву нового клиента. Казино начисляет пригласившему фиксированный процент от взносов приглашённого повторяющий приза: чаще всего его размер не выше 10%. Срок действия бонуса правило не выше месяца: пригласивший получает бонус в зависимости от проигранных ставок приглашённого в первый месяц игры.
1 х слотс зеркало
Если вы новичок в и только попали в неизведанную вами район азарта — за предложений как бездепозитные бонусы без пополнения.С не отыгранным призом воспрещается превышать размер максимальной ставки. Нарушение этого условия повлечет за собой аннулирование выигрыша. <a href=https://equessurge.win/phpBB3N/memberlist.php?mode=viewprofile&u=75192>https://equessurge.win/phpBB3N/memberlist.php?mode=viewprofile&u=75192</a> 1×slots официальный зеркало На критериях отыгрыша даровых призов по тормознуть подробнее. С ними связаны аспекты, которые невозможно оставить без внимания.
<b>Смотреть еще похожие новости:</b>
<a href=http://showboysmedia.com/real-music/>казино 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если при регистрации показать промокод, возможно гарантировано получить приз. Где взять ваучер? Посетите тематические блоги или форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В последнее время игорные жилища начали афишироваться в кинокартинах и сериалах. Присмотритесь и наверняка заметите промокод, кот-ый принесёт 500 или 1 000 бонусных рублей. Каждая игровая платформа выделяется условиями по получению и отыгрышу бездепов. В правилах детально расписаны кратковременные рамки, за которые нужно прокрутить вейджер. Также не забывайте на максимальный размер ставки и максимальную необходимую выплаты. С другой стороны, чтобы получить бездепозитные призы казино, довольно израсходовать не более 1 минутки.
#69 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино большая 1×bet зеркало слоты 1×bet xyz <a href=https://m.repost.news/>casino сайты</a> 1×bet зеркало на сегодня винлайн букмекерская контора <a href=https://res-publika.com>порно с Федор Чалов (футбол)</a> казино 5 pin casino зеркало 1×bet зеркало слоты 1×bet 1 1×bet официальный пин ап казино 1×bet casino
DiskiPlus рейтинг казино DiskiPlus retro casino <a href=https://www.diskiplus.ru>DiskiPlus казино смотреть онлайн бесплатно</a> DiskiPlus почему казино DiskiPlus pinco casino <a href=https://diskiplus.ru/>DiskiPlus Любимова Ольга Борисовна порно</a> DiskiPlus pin up casino пин ап DiskiPlus casino betting DiskiPlus Любимова Ольга Борисовна порно DiskiPlus win win casino DiskiPlus porno Екатерина Ефременкова, шорт-трекистка DiskiPlus сайт казино вход DiskiPlus Ходнева Светлана Владимировна порно
#70 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия
Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.Бонус начисляется игроку сразу последствии регистрации и прохождения верификации в казино и не просит от посетителя внесения депозита. Как верховодило, размер бонуса в подобном случае довольно стыдливый, впрочем позволяет новеньким познакомиться с забавой без риска реальными деньгами. <a href=http://filmkachat.ru/>1×slot зеркало</a> <a href=https://www.papercall.io/speakers/146415/speaker_talks/292505->https://www.papercall.io/speakers/146415/speaker_talks/292505-</a> Хотя благотворительные призы начисляются без депозита, не исключено, собственно для понадобиться вносить средства. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты лишь в такого, как новый клиент впервые пополнит игровой счет. 1×slots официальный сайт зеркало рабочее <a href=http://www.support.ipron.com/communication/forum/index.php?PAGE_NAME=profile_view&UID=18848>http://www.support.ipron.com/communication/forum/index.php?PAGE_NAME=profile_view&UID=18848</a>
1×slots зеркало
Чтоб получить крупный выигрыш, подбирайте игровые автоматы с максимальным процентом отдачи (RTP) из перечня тех, которые доступны по условиям отыгрыша. 1×slots регистрация 1×slots casino c2d ru <a href=http://esitscale.com/forum/profile.php?mode=viewprofile&u=39577>http://esitscale.com/forum/profile.php?mode=viewprofile&u=39577</a> У нас на веб-сайте Вы отыщите перечень бонусов без депозита в испытанных казино и подробную информацию то как их получить и использовать.Подтвердите лицо, предоставив оператору казино средства паспортные данные. Инструкции обыкновенно легкие, главное — четко им стопам. Если написано, собственно «на фото должны быть заметны все хорошо угла странички паспорта» — сделайте именно это фото. 1×slots casino регистрация на сайте
casino 1×slot
Даже не выиграв крупную необходимую, игрок увлекательно проведет время, изнутри исследует работу площадки, воспримет геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе лучших акций легкостью. Достаточно регулярно изучать перечень свежих интернет казино с выводом приза без депозита в данном разделе.Также есть онлайн-платформы азартных игр, коие применяют раздачу бездепозитных бонусов в особые даты (как для казино, например и для игрока). Помимо этого, действующие геймеры кроме имеют вероятность получить схожие бонусы за собственную работа (к примеру, за повышения значения либо за схожие заслуги). Зарегистрироваться в казино по особой ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефона и электрическую почту). Для подтверждения номера телефонного необходимо в личном профиле показать свой номер и надавить кнопку „Подтвердить номер телефонного“, дальше Вы получите sms-сообщение с кодом, кот-ый необходимо установить в подходящее фон. Для доказательства электронной почты, перебежать по интенсивной ссылке в письме от казино.Вы всего, скажем, как все предпочитаете получать подарки и бездепозитные бонусы казино. Игорные дома брали в привычку одаривать гэмблеров приятными призами. Стать обладателем приветственного презента возможно за творение профиля либо пополнение счёта. Второй вариант больше занимательный, так клубы готовы удвоить депо! Но случае вы новичок и лишь знакомитесь с миром азарта, какого-либо пользуйтесь призом за регистрацию. <a href=https://wavedream.wiki/index.php/User:LindseyI47>https://wavedream.wiki/index.php/User:LindseyI47</a> 1хслотс казино зеркало Бездепозитные призы за регистрацию считаются одним из самых известных методов вербования свежих игроков в онлайн-казино, поэтому что они деют игрокам вероятность опробовать казино, необыкновенно игровые автоматы, и вполне, выиграть реальные средства.
1× slots официальный
Для получения бонуса нужно ознакомиться с программкой лояльности казино и устроить ставки на необходимую, нужную для перехода на следующий уровень. <a href=http://kamadofraudforum.org/profile.php?mode=viewprofile&u=46209>1×slots официальный зеркало рабочее</a> В бонусную программку многих операторов входят систематические бездепы. Это пожизненные промоакции, поощряющие активных постоянных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают неизменные бонусы без депо в обмен на скопленные баллы преданности.Чем ниже значение вейджера, что, этим легче отыграть и вывести бонус. Если Вы планируете заработать на бездепе, а не просто ознакомиться с новым игровым клубом, то стоит игнорировать бонусов с высочайшим вейджером их почти не реально отыграть. С ними Вы можете лишь протестировать игры заведения. 1×slots официальный сайт, скачать <a href=https://www.callupcontact.com/b/businessprofile/_/9113642>https://www.callupcontact.com/b/businessprofile/_/9113642</a>
1хслотс 1хслотс регистрация перейти на 1×slots
Срок отыгрыша — это период, который наступает в момент активации приза и кончается с его закрытием. Пользователю необходимо уложиться в этот временной промежуток, другому призовые свои аннулируются. Казино устанавливают перечень игр, ставки каких засчитываются при расчете отыгранных средств. Если тайтл не заходит в данный перечень, то предоставляется быть недосегаем для загрузки во время деянья бонусного предложения.Для казино, работающих интернет, бездепозитные призы нужны для привлечения новых клиентов. Предложение поиграть на слотах без необходимости внесения настоящих денег — работающий способ для повышения энтузиазма к фирмы. После отыгрыша бездепа велик шанс, что игроку понравится и он продолжит выступать в казино, только сейчас уже на личные деньги. <a href=https://nowwedws.com/bbs/board.php?bo_table=free&wr_id=1251662>https://nowwedws.com/bbs/board.php?bo_table=free&wr_id=1251662</a> 1×slots официальный зеркало рабочее Обычно, бездепозитные бонусы выдаются под определенные слоты с фиксированной ставкой, но их точно воспрещено применять в игровых автоматах с современным джекпотом. Список игр, каких возможно использовать бездеп, Вы найдете в описании промоакции либо можете уточнить у службы поддержки заведения.Бонус за регистрацию в казино выдается только один раз на одного игрока. Но бывают дополнительные промоакции, масштабах коих бездепы расступаются для неизменных клиентов и такие презенты Вы сможете получить больше 1-го раза.
<b>Смотреть еще похожие новости:</b>
<a href=http://shiftdelete.10tl.net/member.php?action=profile&uid=119629>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Обычно, бездепозитные бонусы выдаются под определенные слоты с фиксированной ставкой, но их наверняка запрещено использовать в игровых автоматах с прогрессивным джекпотом. Список игр, в которых можно использовать бездеп, Вы отыщите в описании промоакции или сможете уточнить у службы поддержки заведения. Не стоит незамедлительно же отказываться от приветственных подарков в сходственных казино. Администрация готова начислить деньги либо фриспины, но предварительно сотрудники должны убедиться, что вы не аферист. Дело в, собственно развелось слишком количество охотников за бонусами. Они выучились обманывать систему и зарабатывать крупные суммы средств.
#71 Charlesgunnyhttp://filmkachat.ru
1 xslots рабочее зеркало
Законодательство, регулирующее азартные игры в разных государствах, влияние на полномочия операторов. В результате юзеры из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это имеет быть как глубокий отказ в доступе, например и невозможность загружать игры отдельных изготовителей. <a href=http://filmkachat.ru/>1×slots зеркало которую указывали при регистрации кстати</a> В интернет-сети практически можно отыскать списки более знаменитых и обещанных поощрительных программ от модных онлайн-казино.Составленный экспертами Casino.ru перечень онлайн-казино с бездепозитным призом позволяет игрокам сравнить спецпредложения разных операторов. <a href=https://www.sideprojectors.com/project/55403/3d-product-rendering-services>https://www.sideprojectors.com/project/55403/3d-product-rendering-services</a> Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных требований, не обязательной верификации. Если на сайте предусмотрена неотъемлемая процедура доказательства личности, то исключить выигрыш удастся лишь последствии ревизии данных. Приготовьтесь наполнить анкету и выслать в техподдержку документ, подтверждающий лицо. 1 x slots casino <a href=https://spoilerok.ru/user/Stevenswasy/>https://spoilerok.ru/user/Stevenswasy/</a>
1×slots официальный сайт мобильная версия скачать
<a href=https://ourinstantwin.com/forum/showthread.php?tid=271>рабочее зеркало 1хслотс</a> 1×slots официальный сайт зеркало Практически все интернет казино с бездепозитным бонусом за регистрацию предусматривает программку лояльности — систему поощрения неизменных клиентов, кот-ая состоит из множества уровней. При достижении игроком одного значения на его счёт поступает бонус. Чем повыше степень — что, этим щедрее бонус. <a href=http://victoryapparels.ae/?s=%3Ca+href%3Dhttps%3A%2F%2Fdoctorlazuta.by%2Fblog%3E%D0%B1%D0%BB%D0%BE%D0%B3+%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0+%D1%8F%D0%BD%D0%B4%D0%B5%D0%BA%D1%81%3C%2Fa%3E+%D0%B1%D0%BB%D0%BE%D0%B3+%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0+%D0%B4%D0%B7%D0%B5%D0%BD&x=0&y=0>http://victoryapparels.ae/?s=%3Ca+href%3Dhttps%3A%2F%2Fdoctorlazuta.by%2Fblog%3E%D0%B1%D0%BB%D0%BE%D0%B3+%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0+%D1%8F%D0%BD%D0%B4%D0%B5%D0%BA%D1%81%3C%2Fa%3E+%D0%B1%D0%BB%D0%BE%D0%B3+%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0+%D0%B4%D0%B7%D0%B5%D0%BD&x=0&y=0</a> У любого игорного заведения свои правила и условия. Но, чтобы получить бонусы, необходимо выполнить стандартные деяния:Это раз из основных показателей привлекательности презента. С завешенным коэффициентом том мастера не смогут выполнить обстоятельства по отыгрышу. И важно, насколько привлекательно выглядит предложение – бездепозитный приз казино в размере $500 либо $1 000. Чтобы новенькие лучше вникли, что же такое вейджер, мы разберём на примере. 1х слот регистрация в 1×slots casino Но не стоит думать, что снабжая юзеров этими призами, казино увлекается спонсированием. Ведь объемы вознаграждений, главном, не большие (средним объемом от 5 до 20 долларов). И на эти средства налагаются конкретные условия и лимитирования, неотклонимые к исполненью игрока, случае в последствии он желает получить все средства выигранные финансы.
1×slots casino регистрация 1×slotscasino09k online
Если идет об неповторимых предложениях, имеет потребоваться регистрация в казино по ссылке с партнерского сайта.Классическая разновидность приза за творенье аккаунта. Его преимущество содержится что, что клиент имеет помощи выбирать аппараты и создавать ставки в их. Иногда перечень игровых автоматов ограничен оператором, но все равно это какого-либо, чем единственный дешевый разъем, как когда с использованием фриспинов. <a href=http://lebbook.kz/user/PorsedropKi/>http://lebbook.kz/user/PorsedropKi/</a> Бонус начисляется игроку незамедлительно в регистрации и прохождения верификации в казино и не требует от посетителя внесения депозита. Как управляло, объем приза в подобном случае довольно скромный, впрочем позволяет новичкам познакомиться с игрой без риска настоящими средствами. 1×slot зеркало рабочее этих способов предполагает регистрацию Бонус с зачислением денег на счет дает больше свободы поступков. Пользователь сам выбирает, каким образом воспользоваться подаренными своими. Здесь кроме могут действовать ограничения на список доступных игр, но обычно эти рамки не так строги, как в промо с безвозмездными вращениями.Бонус за регистрацию в казино без депозита с выводом денег нужно отыграть. Зачастую для отыгрыша возможность понадобиться сделать ставки на необходимую, в количество десятков раз превышающую необходимую бонуса или выигрыша.
1×slots регистрация то дальше необходимо пройти
<a href=http://filcherp.tforums.org/viewtopic.php?f=5&t=32314>1×slots регистрация 1×slots review live</a> Для получения выигрыша требуется выполнить обстоятельства казино. Чаще всего игроку нужно поставить определенную сумму, хотя уже из личных денег. Она рассчитывается из совместного объема выигрыша за все время использования бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, случае юзер выиграл 1000 рублей, а множитель составляет х30, исключить деньги можно несомненно, сделав ставки на 30 000 руб. 1хслотс рабочее зеркало на сегодня <a href=https://shopping.parceldeal.com/User-Daviddum>https://shopping.parceldeal.com/User-Daviddum</a>
1×slots casino регистрация 1×slots review live
С не отыгранным призом воспрещается превышать объем максимальной ставки. Нарушение сего условия виде аннулирование выигрыша.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 долларов. Если выдаются фриспины, их количество изредка выше нескольких десятков безвозмездных вращений. Если площадка дарит бездеп за регистрацию, то процедура его получения проста. Нужно лишь ввести акк на веб-сайте и активировать его, подтвердив адресок электронной почты, номер телефонного либо иные данные, которые просит оператор. Перед данным необходимо убедиться, собственно юзер находится на официальном веб-сайте казино, но на мошеннической площадке. <a href=https://riverqaip41853.onesmablog.com/nude-ai-app-navigating-the-balance-between-privacy-and-technology-70686371>https://riverqaip41853.onesmablog.com/nude-ai-app-navigating-the-balance-between-privacy-and-technology-70686371</a> Поспешите зарегистрироваться на официальном сайте Клубника, чтобы моментально получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, появляется настоящий шанс победу! 1×slot зеркало Размер бонусов чаще всего чисто условный и не превышает 50 руб. Приятно, хотя ощутимым бустом в игре вряд ли станет.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.mshowto.org/forum/members/jamespauri.html>1× slots официальный</a>
<a href=http://lids.jp/bbs/viewtopic.php?f=4&t=757>1×slots зеркало раб</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но существуют азартные заведения, готовые просто так вручить деньги на забаву. Для этого довольно создать профиль. Чтобы вывести выигрыш, сначала нужно выполнить вейджеровые условия, прописанные в условиях получения бездепа. На нашем сайте Вы найдете перечень своевременных новых бездепозитных призов в казино 2022 года. Также, есть количество эксклюзивных услуг, коие доступны лишь гостям нашего вебсайта в регистрации по нашей ссылке либо активации специального промокода.
#72 Ремонт кофемашин Philips Москваhttps://remont-kofemashin-philips-saeco-fact.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт кофемашин philips, можете посмотреть на сайте: <a href=https://remont-kofemashin-philips-saeco-fact.ru/>ремонт кофемашин philips сервис</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#73 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало рабочее
Это раз из главных показателей привлекательности подарка. С завешенным коэффициентом и мастера не сумеют выполнить обстоятельства по отыгрышу. И маловажно, как презентабельно смотрится предложение – бездепозитный приз казино в размере $500 либо $1 000. Чтобы новички получше вникли, что же это вейджер, мы разберём на образце.Многие азартные клубы ограничивают сумму вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании промоакции, суммы Вы не можете исключить. Разница несомненно аннулирована, Вы и не сможете делать на нее ставки. <a href=http://filmkachat.ru/>1×slots регистрацию процедура займет всего лишь</a> <a href=https://manifold.garden/forums/index.php?u=/topic/635/Architectural%20Drawing%20Services%20for%20Flawless%20Designs>https://manifold.garden/forums/index.php?u=/topic/635/Architectural%20Drawing%20Services%20for%20Flawless%20Designs</a> При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие возможно посвятить забаве в казино.Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются незамедлительно после творения профиля и активны непродолжительное время. Если не успеете израсходовать средства, они попросту сгорят. Касаемо медли, в большинстве случаев бонусы активны на часа. онлайн казино 1×slots <a href=https://tourdeskhawaii.com/golf/bbs/board.php?bo_table=free&wr_id=4249195>https://tourdeskhawaii.com/golf/bbs/board.php?bo_table=free&wr_id=4249195</a>
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, дабы еще раз получить даровой бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ждет неминуемое санкция. 1× slots регистрация в 1×slots casino Индивидуальные поощрения выдаются за совершение деяний: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавленья либо официального посетителя для ПК. В большинстве казино действуют программы лояльности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на грядущий степень нередко сопрягается выдачей бездепа. <a href=https://oag.treasury.gov.za/RMF/Lists/Framework%20Feedback/DispForm.aspx?ID=67276>https://oag.treasury.gov.za/RMF/Lists/Framework%20Feedback/DispForm.aspx?ID=67276</a> Обычно бездепозитные промоакции от казино, прибывают на эл. Почту в деньки рождения или праздничные. В некоторых онлайн казино можно обратиться в чат и как неизменному игроку, вероятно для предложат бездепозитное предложение.Сразу после активации промокода можно пользоваться подарком. Как теснее упоминалось, бонусы случаются трёх обликов – фриспины, кредиты и фриплей-бонусы. 1×slots официальный сайт скачать Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Бездепы могут входить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами.
1хслотс зеркало
Наш перечень включает в себя превосходнейшие бездепозитные бонусы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по главным характеристикам:Иногда в качестве одобрения за регистрацию все выдаваться билеты для участия в турнирах. Условия их проведения довольно выделяются, потому мы рекомендуем ознакомиться с каждым предложением раздельно. <a href=http://gde-znaniya.ru/users/otujynar>http://gde-znaniya.ru/users/otujynar</a> 1×slots casino зеркало
1×slots зеркало быструю регистрацию а также мгновенное
Обыкновенные бездепозитные призы в размере от 3-х до 20 $ созданы чтобы, чтобы, дабы в игры заходили все свежие и свежие игроки. Здесь, скорее, будет лимитирование на максимальный выигрыш. Важно, дабы перед минимальным вкладом был отключен приз за 1-ое пополнение счета, и геймер не попадет на повторный вейджер.Бездепозитные призы казино за регистрацию в 2022 году — это вероятность поиграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой либо числом безвозмездных вращений без внесения депозита. Не путайте деморежим с реальной забавой без необходимости внесения депо. <a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=61712>1× slots casino официальный сайт</a> Исходя из сего, просто не существует мудрых оснований махнуть рукой на получение такового бонуса при регистрации. И, лишним, на такой безвозмездной базе у вас есть шансы выиграть деньги и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные бонусы, называют безвозмездными онлайн платформами для игр.Это один из основных показателей привлекательности дара. С завешенным коэффициентом даже мастера не сумеют выполнить обстоятельства по отыгрышу. И маловажно, как привлекательно выглядит предложение – бездепозитный приз казино в объеме $500 или $1 000. Чтобы новички лучше вникли, собственно же такое вейджер, мы разберём на образце. зеркло казино 1×slots <a href=http://www.kumkangenc.com/bbs/board.php?bo_table=inquiry&wr_id=42029>http://www.kumkangenc.com/bbs/board.php?bo_table=inquiry&wr_id=42029</a> Бездепозитный приз – это экономическое вознаграждение, коие выдается соучастнику игры в казино, для его привлечения и возникновения заинтригованности. Любой гость, который соответствует условиям выдачи сходственного бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое одобрение является наиболее действенным способом, дающим возможность стартовать в игре, не вкладывая собственных материальных средств.
рабочее зеркало 1хслотс
<a href=http://amatis24.ru/bitrix/redirect.php?goto=http://live.warthunder.com/away/?to=http://npsroropgkhrb.ru/bitrix/click.php?goto=https://teletype.in/@urist555/3DHn5_0w9pt>http://amatis24.ru/bitrix/redirect.php?goto=http://live.warthunder.com/away/?to=http://npsroropgkhrb.ru/bitrix/click.php?goto=https://teletype.in/@urist555/3DHn5_0w9pt</a> Денежные свои. Третий приз за регистрацию без депозита – наличные. К раскаянию, только знаменитые и модные клубы шансы уяснить деньги в руб. Или баксах. С их поддержкою вы сможете насладиться каждой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед этим нужно выполнение определенных условий.Следует подчеркнуть, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом. 1×slots промокод при регистрации 2025 Одним из предлогов отдавать преимущество, льготу одному или другому заведению заключается в привлекательности предлагаемых промоакций и безвозмездных услуг. Безвозмездные фриспины, выдаваемые без нужды делать какой-либо лепта, в списке находится далеко не в конце.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.survival-readiness.com/viewtopic.php?t=282818>1хслот официальный сайт зеркало</a>
<a href=https://forum.growersclub.cz/viewtopic.php?t=177>1×slots официальный регистрация</a>
<a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=462248>1×slots сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
У любой игры свои требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система зачтет каждую ставку. В рулетке и покере устроить это намного сложнее. Именно поэтому например главно внимательно читать обстоятельства получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой забаве, то новенькие просто «спустят бонус на ветер». Приглашаем делиться суждениями о бонусах. Это поможет иным пользователям подбирать наиболее выгодные предложения.
#74 Ремонт Айфонов в Москвеhttps://remont-iphone-box.ru/
Профессиональный сервисный центр по ремонту Apple iPhone в Москве. Мы предлагаем: <a href=https://remont-iphone-box.ru/>ремонт iphone на дому в москве</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#75 Charlesgunnyhttp://filmkachat.ru
сайт 1× slots casino
Отзывы читателей о бонусных акциях помогут составить эмоцию, хотя не забывайте о субъективности личных комментариев. <a href=http://filmkachat.ru/>1×slots промокод при регистрации</a> Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную процедуру активации приза без депо. Внимательно прочтите до конца. Многие новенькие проделывают промахи на шаге регистрации и поэтому не могут получить подарок. <a href=https://www.esurveyspro.com/Survey.aspx?id=d8357902-e8be-4a72–8767–3426f9bacbbb>https://www.esurveyspro.com/Survey.aspx?id=d8357902-e8be-4a72–8767–3426f9bacbbb</a> Осталось избрать казино с бонусом за регистрацию и создать профиль. После активации подарка выигрыш зависит от Фортуны и способностей.Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, the decision только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. 1×slots официальный demo регистрация в 1×slots casino <a href=http://pfb7978i.bget.ru/index.php?subaction=userinfo&user=GregorySOF>http://pfb7978i.bget.ru/index.php?subaction=userinfo&user=GregorySOF</a>
1× slots casino официальный сайт
При исполненьи критерий отыгрыша и верификации, деньги с бонусного счета переводятся на основной и шансы быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции находятся от выбранной платежной системы.При правильном подходе бездепы — это отличный способ играть на средства без растраты личных средств. Есть несколько советов, следуя коим возможно извлечь максимум полезности из похожих промоакций казино. Играть следует только на лицензированных площадках. Скриптовые сайты не только обманывают с бонусными услугами, но и используют пиратский софт с измененным ГСЧ. Выиграть на таких автоматах невозможно. <a href=https://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=6268>1× slots регистрация в 1×slots casino</a> 1×slots casino зеркало Наш список включает в себя превосходнейшие бездепозитные бонусы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по важным параметрам:Срок активации и время на отыгрыш. Зачисление денег либо фриспинов происходит при активации на требовательно ограниченного периода, похожие требования предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать бонус некоторое дней либо и недель. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с необоснованно высоким вейджером. <a href=http://netvoyne.ru/user/StevenImasp/>http://netvoyne.ru/user/StevenImasp/</a> казино 1×slots официальный сайт Итак, дабы бесплатные бонусные кредиты превратились в настоящие средства, которыми вы можете распоряжаться по своему усмотрению, их нужно отыграть. Вейджер по уточнять в правилах онлайн-казино.Бесплатный приз – кредиты, которые онлайн-казино начисляет посетителю, не заставляя его пополнять игровой счет.
1×slots актуальное зеркало
Вейджер (wager) – это коэффициент, кот-ый показывает на какую сумму нужно устроить ставок, дабы вывести приз из казино. Пример: Вы получили за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода этого бонуса, Вам необходимо сделать ставок на сумму: 500*70=3500 рублей. Только всецело отыграв приз, Вы можете исключить собственный выигрыш.С такими ординарными советами каждое казино с бонусом за регистрацию способно принести в разы больше выгоды и полезности. Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных притязаний, считая неотъемлемой верификации. Если на сайте предусмотрена обязательная процедура подтверждения личности, то вывести выигрыш получится лишь в ревизии данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий лицо. <a href=https://elearnportal.science/wiki/Shisha_Tobacco_From4_Eur>https://elearnportal.science/wiki/Shisha_Tobacco_From4_Eur</a> 1×slot казино зеркало
1×slots зеркало
Выбирайте наихорошие безвозмездные призы за обзоров на Casinoz – и пусть вам сопутствует счастье при отыгрыше бонусных кредитов! Риск-игра по равным шансам – Также казино имеет воспрещать выполнять обстоятельства по отыгрышу счет раунда на удвоение, который предлагается в слотах, видео-покере и некоторых иных забавах.Бездепозитные призы в казино без пополнения 2022 — это конкретная сумма денег либо gorovyh spins вращения, которые предоставляются первым постояльцам за регистрацию на сайте казино вид бездепозитного бонуса, и выделяет вам возможность за счет казино без пополнения опробовать услуги (игр), с дальнейшей прерогативой вывода средств при выполнении всех установленных верховодил. Начнём с того, собственно любое рекламную за регистрацию подразумевает некие обстоятельства. Бездепозитные бонусы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность денежного оборота, нужная для исполненья критерий. Пример, получили безвозмездные вращения и выиграли с их 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 руб., неудачных или выигрышных, важно. После исполненья, бонусный баланс перейдёт на настоящий и станет доступным к выводу.Подтвердите регистрацию, чтобы активировать Бездепозитный приз с выводом, требуется заполнить собственный профиль. Заполните пустопорожние поля настоящими данными о для. 1×slots регистрация 1×slots casino c2d ru <a href=https://alexiswhpx74185.anchor-blog.com/10585192/ai-nude-revolutionizing-content-moderation-and-privacy-protection>https://alexiswhpx74185.anchor-blog.com/10585192/ai-nude-revolutionizing-content-moderation-and-privacy-protection</a> Бездеп с фриспинами имеет обхватывать всю коллекцию игр на сайте или разработки одного провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении акции. Выигрыш имеет быть выведен после того, как юзер отыграет данную необходимую. Возможность расценить глубокий функционал слотов — главное совершенство этой разновидности. Игроку становятся доступны что, эти функции, коие отсутствуют в демонстрационном режиме, а возможность выиграть реальные деньги прибавляет ярчайших азартных ощущений.
1×slots регистрация 1×slots review live
<a href=https://images.google.td/url?q=https://doctorlazuta.by/>https://images.google.td/url?q=https://doctorlazuta.by/</a> Нет. Для получения бездепозитного приза в казино необходима обязательная регистрация на сайте. Играть в слоты безвозмездно и без регистрации возможно только в демо режиме.Подтвердите регистрацию, чтобы активировать Бездепозитный бонус с выводом, потребуется наполнить собственный профиль. Заполните пустующие поля реальными данными о для. 1×slots casino зеркало рабочее
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.immortales-gilde.de/viewtopic.php?f=2&t=401990>1×slot зеркало рабочее регистрации на телефон придет</a>
<a href=http://craft4game.forumex.ru/viewtopic.php?f=2&t=5332>1×slots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные призы начисляются лишь раз один. Не стоит раскрывать новые аккаунты, чтобы получить их повторно. Служба защищенности казино непременно выявит «левого» участника и заблокирует. Если посетитель выполнит необходимые требования, отыграет свою ставку и решит исключить личный выигрыш, то ему надо(надобно) принять, что казино непременно потребует предоставить ксерокопии личных документов, дабы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные средства исключить не получится.
#76 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино рояль смотреть букмекерская контора официальный сайт скачать <a href=https://strelochnik.com/>официальные зеркала казино</a> pin up casino пин рейтинг казино <a href=https://rucriminal.info/>Мухтиярова Елена Вячеславовна порно</a> online casino смотреть фильм казино пин up casino пин ап casino pin up top порно с Алина Загитова, фигуристка 1×slots casino 1×bet слоты 1×bet xyz
DiskiPlus букмекерская контора без DiskiPlus гта казино <a href=https://www.diskiplus.ru/>DiskiPlus 7k casino официальный</a> DiskiPlus официальная казино DiskiPlus pin up букмекерская контора <a href=https://www.diskiplus.ru/>DiskiPlus порно с Голикова Татьяна Алексеевна</a> DiskiPlus porno Елизавета Туктамышева DiskiPlus мобильные букмекерские конторы DiskiPlus кент casino DiskiPlus porno Елизавета Туктамышева DiskiPlus 1×bet телефон DiskiPlus скачать pin casino DiskiPlus пин ап casino
#77 Ремонт Айфоновhttps://remont-iphone-box.ru/
Профессиональный сервисный центр по ремонту Apple iPhone в Москве. Мы предлагаем: <a href=https://remont-iphone-box.ru/>ремонт iphone вызвать мастера</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#78 Mazrrhdhttp://[url=http://ai.florist/read-blog/42470_kupit-diplom-specialnom-obrazovanii.html/]ai.florist/r
Мы можем предложить дипломы любой профессии по выгодным ценам. Приобретение диплома, который подтверждает окончание института, – это рациональное решение. Заказать диплом о высшем образовании: <a href=http://ai.florist/read-blog/42470_kupit-diplom-specialnom-obrazovanii.html/>ai.florist/read-blog/42470_kupit-diplom-specialnom-obrazovanii.html</a>
#79 Timsothybum
Momi — это бренд, предлагающий качественные товары для мам и малышей. На <a href=https://momirussia.ru/>momi</a> вы найдете широкий ассортимент детских товаров, отвечающих современным стандартам безопасности и комфорта. Покупайте оригинальную продукцию МОМИ онлайн!
#80 Ремонт кофемашин Philipshttps://remont-kofemashin-philips-saeco-fact.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт кофемашин philips сервис, можете посмотреть на сайте: <a href=https://remont-kofemashin-philips-saeco-fact.ru/>ремонт кофемашин philips сервис</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#81 togelonline88reosehttps://honobonocanadalife.com/
<a href=https://honobonocanadalife.com/>togel online 88</a>
#82 Ремонт кофемашин Philipshttps://remont-kofemashin-philips-saeco-fact.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт кофемашин philips, можете посмотреть на сайте: <a href=https://remont-kofemashin-philips-saeco-fact.ru/>ремонт кофемашин philips адреса</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#83 EarnestCor
Momi — это бренд, предлагающий качественные товары для мам и малышей. На <a href=https://momirussia.ru/>моми официальный сайт</a> вы найдете широкий ассортимент детских товаров, отвечающих современным стандартам безопасности и комфорта. Покупайте оригинальную продукцию МОМИ онлайн!
#84 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация
Бездепозитные призы казино за регистрацию в 2022 году — это вероятность сыграть за счёт заведения. Казино даёт клиенту шанс воспользоваться определённой суммой либо числом даровых вращений без внесения депо. Не путайте деморежим с реальной игрой без надобности внесения депозита. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slots review live</a> У каждого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано смогли выполнить их, мы дадим количество советов. Если система начислила маленькую необходимую, не создавать большие ставки – остановитесь на 10–30 центах. Как только сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте играть. В противном случае никакого приглядеться к иному автомату.Бездепозитный приз по промо-коду несомненно доступен для забавы, лишь в том случае когда Вы активируете особый бонусный код в разделе с бонусами или укажите промокод при регистрации на веб-сайте. В неких случаях, считая активации кода, придется подтвердить контактные данные игрока и заполнить анкету посетителя. <a href=https://feedback.goodnotes.com/forums/191274-customer-suggestions-for-goodnotes/suggestions/49478645-%D0%BA%D0%B0%D0%BA-%D0%B2%D1%8B%D0%B3%D0%BE%D0%B4%D0%BD%D0%BE-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D1%82%D1%8C-%D0%B0%D0%B2%D1%82%D0%BE-%D0%BF%D0%BE%D1%81%D0%BB%D0%B5-%D0%B4%D1%82%D0%BF-%D1%8D%D0%BA%D1%81%D0%BF%D0%B5%D1%80%D1%82%D0%BD%D0%BE%D0%B5-%D1%80%D1%83%D0%BA>https://feedback.goodnotes.com/forums/191274-customer-suggestions-for-goodnotes/suggestions/49478645-%D0%BA%D0%B0%D0%BA-%D0%B2%D1%8B%D0%B3%D0%BE%D0%B4%D0%BD%D0%BE-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D1%82%D1%8C-%D0%B0%D0%B2%D1%82%D0%BE-%D0%BF%D0%BE%D1%81%D0%BB%D0%B5-%D0%B4%D1%82%D0%BF-%D1%8D%D0%BA%D1%81%D0%BF%D0%B5%D1%80%D1%82%D0%BD%D0%BE%D0%B5-%D1%80%D1%83%D0%BA</a> Постарайтесь отыграть вейджер, чтобы была вероятность забыть заявку на выплату. Кстати, на всех веб-сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы можете получить выигрыш на электронной кошелёк, карту, аппарат.Хотя безвозмездные призы начисляются без депозита, не исключено, что вас понадобиться вносить средства. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь после как, как свежий клиент раз пополнит игровой счет. 1× slots casino официальный сайт <a href=http://hefeiyechang.com/home.php?mod=space&uid=409970>http://hefeiyechang.com/home.php?mod=space&uid=409970</a> Обычно, бездепозитные призы выдаются под определенные слоты с фиксированной ставкой, хотя их точно воспрещено использовать в игровых автоматах с прогрессивным джекпотом. Список игр, в которых можно использовать бездеп, Вы отыщите в описании акции либо можете уточнить у саппорта заведения.
сайт 1× slots casino
<a href=http://pfdgaming.com/viewtopic.php?t=4793>онлайн казино 1×slots</a> 1×slots сайт зеркало Такие поощрения позволяют даром протестировать свежее казино, разобраться с игровым ходом интернет слотов, заработать и исключить небольшую необходимую денег. <a href=http://www.01.com.hk/member.php?Action=viewprofile&username=Mycsgodip>http://www.01.com.hk/member.php?Action=viewprofile&username=Mycsgodip</a> Бездепозитный бонус – это экономическое вознаграждение, которое выдается участнику игры в казино, для его вербования и появления заинтересованности. Любой посетитель, который соответствует условиям выдачи подобного бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое одобрение считается более эффективным способом, дающим возможность стартовать в игре, не вкладывая собственных вещественных средств.Игры, в которых возможно выступать на бонусные деньги. Проверьте список игр, в которых возможно выступать на бонусные средства, вероятно они Вам не понравятся и не стоит тратить своё время на такую акцию. 1×slots официальный зеркало
1×slots быструю регистрацию а также мгновенное
<a href=http://boss.why3s.cc/boss/home.php?mod=space&uid=140845>http://boss.why3s.cc/boss/home.php?mod=space&uid=140845</a> На бонусные начисления все быть установлены вспомогательные лимитирования, которые Вы не учли при отыгрыше. Пока бонус полностью не отыгран — средства из казино не выводятся. 1×slots регистрация 1×slots casino 777 online Бонусы без депо при регистрации числятся наиболее красивыми как для опытных игроков, так для и новичков. Получив это вознаграждение, заказчик может играть на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а обстоятельства их активации и выигрыша.Высокая конкурентность в сегменте азартных игр мотивирует операторов привлекать посетителей различными промоакциями. Благодаря этому у посетителей появляется вероятность получить бонусы в казино за регистрацию без депо. Воспользоваться таким предложением можно, минуя процедуру внесения денег на игровой счет, просто активировав аккаунт на сайте. Наш экскурсовод по бездепам поможет выбрать самую симпатичную бонусную программу, разузнать верховодила получения такого гонорары и воспользоваться им с наибольшей выгодой.
1 x slots
Чаще всего интернет-казино предлагают бездепозитные призы свежим пользователям. Эта промо-акция довольно эффективно привлекает начинающих, подталкивая их к открытию счета. Конечно, не все они становятся преданными посетителями, хотя сам прецедент регистрации аккаунта играет на руку заведению. <a href=http://turkteam.10tl.net/member.php?action=profile&uid=2012>1×slots зеркало</a> Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном бонусе, то в первую очередь внимание на значение вейджера и срок, кот-ый дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, тем легче отыграть бонус и вывести выигрыш. Для вывода средств приз нужно несомненно отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами акции и вариантами отыгрыша бездепозитного бонуса до его получения, чтобы избежать конфликтных ситуаций. 1×slots официальный demo регистрация в 1×slots casino <a href=https://www.maiyro.com/posts/k0eh3144>https://www.maiyro.com/posts/k0eh3144</a> В случае установленного лимита на необходимую вывода выигрыша с бездепозитного бонуса, игрок не сможет вывести больше заявленной суммы.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Для верификации номера аппарата, в личном профиле выберите опцию „Подтвердить номер телефона“ и введите в отвечающее фон код, приобретенный в sms-сообщении. <a href=https://izmir-sudak.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=https://app.simplenote.com/p/RnLt68>https://izmir-sudak.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=https://app.simplenote.com/p/RnLt68</a> При регистрации сомнений или ином интернет игральном заведении — вас дается раз шанс испытать собственную фортуну не внося свои монеты. Замечу что эту поощрительную услугу предоставляют не все интернет игровые площадки, а лишь великодушная половина из них. Которые мы подготовили для Вас в нашем перечне. 1хслотс зеркало на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=https://forumforu.com/viewtopic.php?t=496>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Риск-игра по одинаковым шансам – Также казино возможность запрещать исполнять условия по отыгрышу счет раунда на удвоение, кот-ый предлагается в слотах, видео-покере и некоторых иных забавах. Можно. Вы практически сможете отказаться от получения бездепозитного приза за регистрацию в казино, же Вы не сделаете ставку.
#85 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
играющие казино онлайн букмекерская контора леонов <a href=https://t.me/vchkogpu_ru>Черкесова Бэлла Мухарбиевна порно</a> почему в казино нет окон porno Алена Косторная (фигурное катание) <a href=https://slon-ru.com/>бесплатные букмекерские конторы</a> champion casino порно с Илюшникова Татьяна Александровна порно с Захарова Мария Владимировна карты казино пин casino играющие казино Семёнова Татьяна Владимировна порно
DiskiPlus 1×bet зеркало xbet DiskiPlus букмекерская контора фонбет официальный <a href=https://www.diskiplus.ru>DiskiPlus casino ru</a> DiskiPlus pin casino DiskiPlus порно с Александр Головин (футбол) <a href=https://www.diskiplus.ru/>DiskiPlus Москалькова Татьяна Николаевна порно</a> DiskiPlus porno Мария Шарапова DiskiPlus порно с Никита Кучеров (хоккей) DiskiPlus 7k casino зеркало DiskiPlus рабочие зеркала казино DiskiPlus 1×bet на андроид DiskiPlus букмекерская контора DiskiPlus casino вход
#86 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet сайт porno Илья Ковальчук (хоккей) <a href=https://kompromat1.online/>порно с Бондаренко Анастасия Борисовна</a> Светлана Ходченкова porno Анастасия Янькова, боксерка <a href=https://rucriminal.info/>7k casino сайт</a> букмекерская контора бетсити 7k casino порно с Алексей Миранчук (футбол) casino riobet порно с Баталина Ольга Юрьевна Александра Бортич симулятор казино
DiskiPlus 1×bet зеркало рабочее на сегодня DiskiPlus почему в казино не бывает настенных часов <a href=https://diskiplus.ru>DiskiPlus bet casino</a> DiskiPlus зеркала казино DiskiPlus 1win casino <a href=https://www.diskiplus.ru>DiskiPlus casino com</a> DiskiPlus casino сегодня DiskiPlus макао казино DiskiPlus порно с Евгений Малкин (хоккей) DiskiPlus официальные зеркала казино DiskiPlus 7k casino официальный сайт DiskiPlus лучшие букмекерские конторы DiskiPlus порно с Юлия Ефимова
#87 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало
Наличие у игрока 2 аккаунта. Запрещено создавать некоторое профилей для многократного получения бездепов. <a href=http://filmkachat.ru/>x1 slots 1хслотс регистрация перейти на 1×slots</a> <a href=https://events.com/r/en_US/event/floor-plan-to-3d-model-professional-conversion-services-london-february-962475>https://events.com/r/en_US/event/floor-plan-to-3d-model-professional-conversion-services-london-february-962475</a> Для верификации номера телефона, в собственном профиле изберите опцию „Подтвердить номер телефона“ и введите в подходящее поле код, приобретенный в sms-сообщении.В зависимости от онлайн заведения любой из них может для предложить как бездепозитные средства, например и бездепозитные фриспины, которые в удачной регистрации рухнут для на ваш игровой баланс. 1×slots зеркало регистрация то дальше необходимо пройти <a href=http://google.com.lb/url?sa=t&url=http://mc-dpo.ru/bitrix/redirect.php?goto=http://rosdk.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/RhBQJrkfhHh>http://google.com.lb/url?sa=t&url=http://mc-dpo.ru/bitrix/redirect.php?goto=http://rosdk.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/RhBQJrkfhHh</a> Такой казино бонус без депо за регистрацию выдается игроку на час и активно употребляется данное предложение с 2017 года. Это словно какая-то маскировка поощрения под бездепозитный. Суть всего этого сводится к тому, собственно игроку на час выдается, например, 1000 долларов, а реклама утверждает про, собственно каждой выигрыш возможно будет дальнейшем забыть при себя. Но в играющий всерьез отнесется к данному предложению, то он просто растеряет время. Ведь игроку надо(надобно) будет выступать не в аккаунте, а в тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (в всей тыс. ) в правила вступят конкретные обстоятельства, где будет сказано, собственно максимальной суммой победы имеет быть лишь двести $ и средства можно применять только виде бонуса на 1-ый лепта с вейджером 25 от суммы гонорары плюс сам депозит. По результату выйдет, что игрок выигрывал себя 200% приз с вейджером на конкретную сумму. Короче говоря, это все не вашего медли.Акции распространяются как на все забавы казино, так и на узкий перечень. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и. Промо может обхватывать разработки одного производителя. Бездеп не пересекается с иными промоакциями казино. Если на сайте предусмотрен кэшбек, он не начисляется за ставки, изготовленные бонусными деньгами. Для идентификации платежных реквизитов игрока имеет потребоваться пополнение счета на наименьшую сумму.
1× slots зеркало
Реже бонусы без депо начисляются постоянным игрокам. С их поддержкой администрация старается вычесть ценных посетителей либо вожделеет поблагодарить за преданность правильных гостей. Но намного почаще для сходственных целей применяются эти промоакции: 1×slots официальный сайт мобильная версия скачать Для подтверждения электронной почты, просто перейдите по активной ссылке в письме, полученном от игрового заведения. <a href=https://wiki.klappertopf.at/api.php?action=https://pxhere.com/en/photographer-me/4453086>https://wiki.klappertopf.at/api.php?action=https://pxhere.com/en/photographer-me/4453086</a> 1×slots официальный зеркало рабочее
1×slots зеркало подтвердит вашу регистрацию если говорить
Доступные забавы – В неких азартных играх возможно понизить математическое преимущество казино до нескольких десятых процента. В их числе многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как правило, в этих забавах ставки идут в зачет вейджера не полностью. Например, возможность учитываться только 50%. В некоторых забавах бездепозитные призы вообще нельзя отыгрывать.Бонус без депо за регистрацию в казино (бездепозитный бонус) – это валютный подарок от клуба, кот-ый начисляется на аккаунт игрока после регистрации в казино. Кроме сотворения учетной записи, для получения бездепа, довольно часто потребуется ещё и доказать контактные данные игрока и/или активировать особый промо-код. Популярность интернет казино растёт и всё больше пользователей начинают проявлять азартными играми. Бездепозитные бонусы 2022 года, это оригинальные подарки за регистрацию. С их поддержкою свежие игроки все получить безвозмездные вращения либо деньги на баланс за одну регистрацию. С свет игорных заведений в онлайне, бездепозитные бонусы стали знаменитейшим методом привлечения игроков. Подобные промоакции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш вебсайт собрал превосходнейшие предложения из онлайна на 2022 год. Воспользуйтесь каким презентом и сможете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша нужно выполнить обстоятельства. <a href=https://te.legra.ph/Vykup-avto-SHkoda-bystraya-ocenka-i-momentalnyj-raschet-01–24>https://te.legra.ph/Vykup-avto-SHkoda-bystraya-ocenka-i-momentalnyj-raschet-01–24</a> Также, учите, что бездепозитный бонус возможно вывести лишь сомнений случае, когда будут выполнены все условия отыгрыша.Бывают ли бездепозитные призы без вейджера? Бывают, в у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный приз за регистрацию устанавливается вейджер во всех казино. 1×slots официальный demo регистрация в 1×slots casino Максимальный размер ставки, который невозможно превосходить же приз не будет всецело отыгран. В случае нарушения этого верховодила, приз и выигрыш с него будут аннулированы.Акции, посвященные календарным праздничным, бывают рассчитаны как на всех юзеров, так и на категории: примеру, подарок на 8 марта девушкам-игрокам либо мужикам на 23 февраля.
1 х слотс зеркало
Демоказино есть практически на каждом сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются существенно реже: там в случае выигрыша и соблюдения критерий промоакций бездеп можно перевоплотить в реальные деньги. казино 1×slots официальный сайт <a href=https://burlesquegalaxy.com/forums/users/jamisonwallis0/edit/?updated=true/users/jamisonwallis0/>https://burlesquegalaxy.com/forums/users/jamisonwallis0/edit/?updated=true/users/jamisonwallis0/</a>
1×slot рабочее зеркало
Для всех бездепозитных бонусов функционирует наибольший предел на выигрыш. Он показывает максимальную сумму, которую возможность получить, играя на бонусные кредиты. Как только для получится выполнить требования вейджера, допустимый максимально будет переведен с бонусного счета на главной, а остаток будет списан. <a href=http://www.astkachenko.ru/index.php?subaction=userinfo&user=apuko>http://www.astkachenko.ru/index.php?subaction=userinfo&user=apuko</a> Допустим, за регистрацию вы возымели бездеп в размере 2 000 руб. С вейджером х30. В данном случае предстоит сделать ставок, на общую необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда выполните обстоятельства по отыгрышу, придёт время заработать настоящие деньги. Однако не запамятовывайте, собственно с любого презента выйдет исключить определённую необходимую (чаще всего менее $200). x1 slots 1хслотс регистрация перейти на 1×slots Автоматы непопросту числятся самым модным азартным развлечением. Чтобы освоить управление и правила, понадобится всего несколько мин. Ваша задачка устроить ставку, найти число трудящихся линий и возможно вертеть тамбур. Если на выпадет выигрышная композиция – вы выиграли! С данной задачей вас посодействуют управится бездепозитные призы казино.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.xcosmic.net/rsf/showthread.php?tid=58137>1×slots скачать на айфон</a>
<a href=https://ewebtalk.com/showthread.php?tid=15200>1×slots казино мобильная версия</a>
<a href=http://jagplay.ekafe.ru/viewtopic.php?f=65&t=9291>скачать 1×slots на андроид мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax У нас на сайте Вы отыщите перечень призов без депозита в испытанных казино и подробную информацию о том как их получить и применять.
#88 Charlesgunnyhttp://filmkachat.ru
скачать 1×slots на андроид мобильная версия
Большинство интернет-казино из нашего топ-10 готовы порадовать вас неповторимыми акциями. Читайте о них в обзорах и на форуме.Законодательство, регулирующее азартные игры в различных странах, влияние на полномочия операторов. В итоге юзеры из отдельных ареалов сталкиваются с лимитированиями со стороны казино. Это может быть как полный отказ в доступе, так и невозможность загружать забавы отдельных производителей. <a href=http://filmkachat.ru/>1×слотс казино</a> Чаще всего используются коды. Их нужно заносить в специальные окошки регистрационной анкеты, в речь идет о пригласительных бонусах, или в определенном разделе собственного офиса игрока. <a href=https://hb-themes.com/forum/all/users/shopavto/>https://hb-themes.com/forum/all/users/shopavto/</a> Не советуем опрометью голову браться за различные предложения получения средств без вложений. Вполне вероятно, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на 1-ый взгляд. Альтернативой является казино бонус за депозит. Мы предлагаем для пару советов, спасибо коим у любого игрока несомненно возможность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств: 1×slots зеркало сайта <a href=https://forum.gogobuyers.com/member.php?action=profile&uid=2070>https://forum.gogobuyers.com/member.php?action=profile&uid=2070</a> Не советуем сломя голову хвататься за различные предложения получения средств без инвестициям. Вполне вероятно, что бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем смотрится на 1-ый взгляд. Альтернативой является казино приз за депозит. Мы предлагаем вам пару советов, спасибо которым у каждого игрока будет вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом денег:
1×slots казино зеркало
Для всех бездепозитных призов функционирует максимальный предел на выигрыш. Он показывает максимальную необходимую, коию вы сможете получить, играя на бонусные кредиты. Как только вам получится выполнить притязания вейджера, дозволенный максимум несомненно переведен с бонусного счета на основной, а остаток будет списан.Вейджер (wager) – это коэффициент, который демонстрирует на какую сумму нужно устроить ставок, чтобы исключить бонус из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего приза, Вам нужно устроить ставок на сумму: 500*70=3500 рублей. Только всецело отыграв бонус, Вы сможете исключить свой выигрыш. <a href=https://melhorlance.com.br/author/jamesbom/>1×slots сайт</a> 1×slots коды <a href=https://deanhiki76543.blogdiloz.com/29636588/deepnude-ai-navigating-the-controversial-landscape-of-image-manipulation-technology>https://deanhiki76543.blogdiloz.com/29636588/deepnude-ai-navigating-the-controversial-landscape-of-image-manipulation-technology</a> Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную функцию активации приза без депо. Внимательно прочтите до конца. Многие новенькие делают ошибки на шаге регистрации и потому имеют получить подарок.Индивидуальные одобрения выдаются за совершение действий: подписку на аккаунты площадки в соц сетях, установку мобильного прибавления или официального клиента для ПК. В большинстве казино срабатывают программки преданности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий уровень часто сопровождается выдачей бездепа. 1×slot регистрация
1×slots официальный сайт мобильная версия скачать
Если вы выбрали себе количество брендов коие вам больше всего приглянулись, для постоянной забавы! Таких гемблеров казино очень любит и ценит, за частую эти игроки становятся VIP игроками заведения, которым нередко поступают прибыльные предложения вид бонусов, так же туда входит и бездепозитные. Суммы подобных предложений, случаев, колеблются от трех до двадцати $, а вейджер на эти свои обязан составлять от 30 до шестидесяти раз. Зачастую, величайшая сумма выигрыша тут составит от одной до двух сотен долларов. Если геймер выиграет больше, то все свои имеют быть списанными до очень разрешенного выигрыша. Здесь замечена смысл выводить еще несуществующие деньги на свою платежную систему и далее искать заведение с благоприятными под данную сумму релоадом либо призом за 1-ое пополнение счета. Есть несколько подвидов бездепозитного гонорары, предлагаемого великим числом заведений.Акции распространяются как на все игры казино, так и на узкий перечень. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и другие. Промо может охватывать разработки одного производителя. Бездеп не пересекается с иными акциями казино. Если на сайте учтен кэшбек, он не начисляется за ставки, сделанные бонусными деньгами. Для идентификации платежных реквизитов игрока возможность понадобиться пополнение счета на наименьшую сумму. <a href=https://www.dr-ay.com/posts/201935>https://www.dr-ay.com/posts/201935</a> 1×slots официальный сайт зеркало
1хлот регистрация в 1×slots casino
Для как, дабы отыграть сумму вашего бездепозитного приза надо(надобно) выполнить условия вейджера. Очень часто фриспины даются на определенные слоты (book of ra, book of dead, book of sun), подбирайте слот себя по, они все довольно красивые и высококачественные. Бездепозитные бонус имеет быть денежным например и повторяющий фриспинов на слоты <a href=https://melhorlance.com.br/author/jamesbom/>рабочее зеркало 1хслотс</a> Игры, в которых можно выступать на бонусные средства. Проверьте перечень игр, в возможно играть на бонусные средства, вероятно они Вам не понравятся и не стоит расходовать своё время на эту промоакцию. Раздача призов имеет быть приурочена к различным датам: календарные дни, дни рождения игроков, юбилей открытия казино и т. Д. Подарок выдается повторяющий средств, фриспинов либо баллов для накопления и размена на предложения оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода этой суммы придется выполнить ряд притязаний.Вейджер (либо вагер) ? это минимальная сумма ставок, которую необходимо устроить для вывода денежного бонуса. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение. 1хслот 1хслотс регистрация перейти на 1×slots <a href=http://www.ntsr.info/forum/user/100115/>http://www.ntsr.info/forum/user/100115/</a> Самые свежие бездепозитные призы в казино за регистрацию 2022 года с выводом прибыли присутствуют на этой страничке. Посетитель возможность расценить условия получения и начать выступать на средства без внесения депозита. При данном игроку главно понимать, на каких условиях и какими способами него вывести полученный выигрыш. Для этого необходимо оценить перечень присоединенных платежных систем.Максимальная ставка ? уточняется в еденице счета и ограничивает размер ставки за раз спин. В случае ее превышения приз имеет быть аннулирован. Также в правилах возможность содержаться запрет на размещение ставок конкретного вида, к, по равным шансам в рулетке (то есть, на чет или нечет, красное или черное и т.д.).
1×slots зеркало проходить регистрацию это отличный вариант
Бездепозитные бонусы начисляются лишь раз раз. Не стоит открывать новые аккаунты, дабы получить их повторно. Служба защищенности казино непременно выявит «левого» соучастника и перекроет. Если посетитель выполнит необходимые притязания, отыграет собственную ставку и решит исключить собственный выигрыш, то ему нужно сведению, собственно казино обязательно востребует предоставить ксерокопии личных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные средства исключить не получится.Для получения предоставленных призов вас пригодиться — ПК или мобильное устройство, и остальное дело за малым. <a href=http://l-avt.ru/support/dialog/?PAGE_NAME=profile_view&UID=93643>http://l-avt.ru/support/dialog/?PAGE_NAME=profile_view&UID=93643</a> 1хслотс зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://www.thefamilylegion.se/viewtopic.php?f=4&t=136532>1×slots регистрация 1×slots casino c2d ru</a>
<a href=http://niceroleplay.getbb.ru/viewtopic.php?f=1&t=5074>1×slots официальный сайт мобильная версия скачать</a>
<a href=http://golf.blue-devil.eu/viewtopic.php?f=22&t=22389&sid=f6dfbc0f1693050261ada5d9303c80d7>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Следует подчеркнуть, собственно бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом.
#89 Jamesbobiahttps://medium.com/@agurkin2021/análisis-de-vibraciones-ef40e4d8dc59
análisis de vibraciones
#90 Uazrrjjhttp://[url=http://neworleanspelicansclub.com/read-blog/2630_kupit-diplom-obrazovaniya.html/] newor
Купить диплом любого университета. Изготовление документа занимает намного меньше времени, а стоимость – доступна любому человеку. В результате вы имеете возможность сберечь деньги и время и получить хорошую работу вашей мечты. Заказать диплом под заказ вы сможете через официальный сайт компании. – <a href=http://neworleanspelicansclub.com/read-blog/2630_kupit-diplom-obrazovaniya.html/>neworleanspelicansclub.com/read-blog/2630_kupit-diplom-obrazovaniya.html</a>
#91 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
Бездепы обычно предлагают с отыгрышем — мгновенно исключить выигранные средства нельзя. Перевод денег со счета несомненно вероятен в того, как пользователь выполнит все требования казино, а сумма возможности быть выше установленного правилами лимита. Условиями промоакции фиксируются сроки, на коих клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней в активации. <a href=http://filmkachat.ru/>1×slots зеркало быструю регистрацию а также мгновенное</a> <a href=https://feedback.cloudways.com/forums/203824-product-improvements-flexible/suggestions/49478654-%D1%89%D0%BE-%D1%80%D0%BE%D0%B1%D0%B8%D1%82%D0%B8-%D0%B7-%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%BE%D0%B1%D1%96%D0%BB%D0%B5%D0%BC-%D0%BF%D1%96%D1%81%D0%BB%D1%8F-%D0%B4%D1%82%D0%BF-%D0%BA%D0%BE%D0%BC%D0%BF%D0%BB%D0%B5%D0%BA%D1%81%D0%BD%D0%B5-%D0%BA%D0%B5%D1%80%D1%96>https://feedback.cloudways.com/forums/203824-product-improvements-flexible/suggestions/49478654-%D1%89%D0%BE-%D1%80%D0%BE%D0%B1%D0%B8%D1%82%D0%B8-%D0%B7-%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%BE%D0%B1%D1%96%D0%BB%D0%B5%D0%BC-%D0%BF%D1%96%D1%81%D0%BB%D1%8F-%D0%B4%D1%82%D0%BF-%D0%BA%D0%BE%D0%BC%D0%BF%D0%BB%D0%B5%D0%BA%D1%81%D0%BD%D0%B5-%D0%BA%D0%B5%D1%80%D1%96</a> 1×slots казино зеркало <a href=http://olded.ru/redirect?url=http://sozv.kz/bitrix/redirect.php?goto=http://technicamolodezhi.ru/bitrix/rk.php?goto=https://telegra.ph/Travmaticheskie-povrezhdeniya-Rastyazheniya-Vyvihi-Perelomy-i-mnogoe-drugoe-09–23>http://olded.ru/redirect?url=http://sozv.kz/bitrix/redirect.php?goto=http://technicamolodezhi.ru/bitrix/rk.php?goto=https://telegra.ph/Travmaticheskie-povrezhdeniya-Rastyazheniya-Vyvihi-Perelomy-i-mnogoe-drugoe-09–23</a> Например, игрок получил 500 рублей при творении аккаунта и должен отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 рублей, потребуется устроить 875 спинов для полного отыгрыша.Бездепозитные призы настоящими средствами, коие можно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадали.
1х слот 1хслотс регистрация перейти на 1×slots
Нельзя разглядывать игру на средства, как вариант заработка. Азартные забавы воспрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не организатором азартных игр. Сайт носит информационный нрав. <a href=http://forums.indexrise.com/thread-2362-post-549255.html#pid549255>1×slots зеркало подтвердит вашу регистрацию если говорить</a> 1хслотс зеркало <a href=https://www.deepzone.net/home.php?mod=space&uid=3596772>https://www.deepzone.net/home.php?mod=space&uid=3596772</a> Чтобы бездеп не был начислен на Ваш аккаунт, Вам надо активировать бонусный код. Если поощрение от казино было добавлено на Ваш акк механически, а Вы не расчитываете его применять, обратитесь в саппорта с просьбой отменить бездепозитный бонус. 1×slots регистрация Хотя благотворительные призы начисляются без депо, не исключено, что для понадобиться вносить средства. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь после того, как новый клиент раз пополнит игровой счет.
1×slots подтвердит вашу регистрацию если говорить
Бездепозитные призы за регистрацию в игровых автоматах для собственников онлайн-казино считаются долею маркетинговой кампании, направленной на повышение аудитории сайта. Так они продвигают средства бренды и привлекают свежих клиентов. <a href=http://ukvg-nn.ru/index.php?subaction=userinfo&user=maliciousopinio>http://ukvg-nn.ru/index.php?subaction=userinfo&user=maliciousopinio</a> Бездепозитный приз – это финансовое вознаграждение, которое выдается соучастнику забавы в казино, для его вербования и появления заинтригованности. Любой гость, кот-ый соответствует условиям выдачи сходственного бездепозитного бонуса, может претендовать на получение вышеуказанного приза. Такое одобрение является наиболее эффективным способом, дающим возможность стартовать при, не вкладывая личных вещественных средств.Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? 1×slots зеркало подтвердит вашу регистрацию если говорить
1×slots регистрацию более популярный вариант это
Бездепозитный бонус – это финансовое вознаграждение, которое выдается соучастнику игры в казино, для его привлечения и возникновения заинтригованности. Любой гость, который подходит условиям выдачи похожего бездепозитного бонуса, имеет претендовать на получение вышеуказанного приза. Такое одобрение считается наиболее действенным способом, дающим возможность стартовать деле, не вкладывая личных материальных средств.Этот образ приза будет добавлен на Ваш аккаунт последствии успешной процедуры регистрации с внедрением номера телефонного. Если выбрать другой метод творенья учетной записи, бездеп не несомненно добавлен на Ваш акк. 1×slos регистрация в 1×slots casino <a href=https://princeofrubber.com/user-profile/julesbaw/?um_action=edit>https://princeofrubber.com/user-profile/julesbaw/?um_action=edit</a> Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских рублей. В критериях промоакции предписано, собственно вейджер бездепозитного приза х20. Поэтому, чтобы отыграть бонус, игроку будет нужно устроить ставок на 35*20=700 рублей.Осталось выбрать казино с бонусом за регистрацию и создать профиль. После активации дара выигрыш зависит от Фортуны и способностей.
1хслот официальный сайт зеркало
Онлайн-казино с бездепозитными бонусами ставят клиентам обстоятельства для использования бездепами, потому перед участием в акции чем тщательно ознакомиться со всеми правилами и нюансами акции. Условия шансы прикасаться получения бонуса, его применения и последующего вывода валютных средств когда выигрыша. Но рядах азартных платформах похожие гонорары все получить теперь зарегистрированные юзеры. В этом случае, призы предоставляются масштабах оригинальных акций либо же неким геймерам в виде акционного предложения, которое прибывает на почту с целью «вернуть» игрока в свое казино.Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются незамедлительно после творенья профиля и активны непродолжительное время. Если не успеете потратить средства, они попросту сгорят. Касаемо медли, правило бонусы активны протяжении часа. <a href=https://cameradb.review/index.php?title=РР·_чего_состоит_диета_Елены_Малышевой>https://cameradb.review/index.php?title=РР·_чего_состоит_диета_Елены_Малышевой</a> онлайн казино 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=1255492>1×слот регистрация в 1×slots casino</a>
<a href=http://cambrigerp.forumex.ru/viewtopic.php?f=21&t=8482>1хслотс зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Риск-игра по равным шансам – Также казино может воспрещать скорпулезно обстоятельства по отыгрышу за раунда на удвоение, кот-ый предлагается в слотах, видео-покере и некоторых иных играх.
#92 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet официальный xbet порно с Максим Глушенков (футбол) <a href=https://th-royalgclub.com/>рокс казино</a> 1×bet зеркало слоты r7 casino <a href=https://repost.news/>Преподобная Надежда Александровна порно</a> порно с Илья Осипов (киберспорт) Валентина Матвиенко порно 1×bet телефон букмекерская контора фонбет официальный гта казино 1×bet регистрация casino официальный сайт
DiskiPlus Фастова Елена Владимировна порно DiskiPlus kometa casino <a href=https://www.diskiplus.ru>DiskiPlus 1×bet приложение</a> DiskiPlus 1×bet на андроид бесплатно DiskiPlus Львова-Белова Мария Алексеевна порно <a href=https://www.diskiplus.ru>DiskiPlus porno Анастасия Янькова, боксерка</a> DiskiPlus Юдаева Ксения Валентиновна порно DiskiPlus карты казино DiskiPlus скачать 1×bet на андроид бесплатно DiskiPlus casino riobet DiskiPlus порно с Юлия Ефимова DiskiPlus порно с Юлия Ефимова DiskiPlus пинко casino
#93 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало проходить регистрацию это отличный вариант
2. Создать свежий профиль. Для регистрации нужно заполнить маленькую анкету либо зайдите в собственный офис посредством соц сетей;Эффективность бездепов в рекламного прибора расценили многие операторы. Малоизвестные площадки используют эти промоакции, дабы стремительно набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны неизменных посетителей. Не все сайты, дающие подарки без депозита, рекомендованы к этой. За привлекательным промоописанием все скрываться невыполнимые условия отыгрыша и подводные камешки. <a href=http://filmkachat.ru/>1×slots скачать на айфон</a> Во всех законных онлайн-казино Беларуси нужно свидетельство паспортных данных для игры — это заявка правительства государства.Будьте внимательнее при ознакомлении с правилами во избежание происхожденья конфликтных ситуаций с казино, когда последствии отыгрыша бездепа вам не дадут исключить крупную необходимую выигрыша. <a href=https://britishforcesdiscounts.co.uk/biz/a/165360-CGIFurniture>https://britishforcesdiscounts.co.uk/biz/a/165360-CGIFurniture</a> Выбрать казино с бездепозитным бонусом. У нас на веб-сайте представлен список превосходнейших интернет казино, коие предлагают своим игрокам великодушные бонусы за регистрацию. 1×slots регистрация 1×slotscasino09k online <a href=http://www.zgyssyw.com/home.php?mod=space&uid=3099086&do=profile>http://www.zgyssyw.com/home.php?mod=space&uid=3099086&do=profile</a> Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных ситуаций с казино, когда последствии отыгрыша бездепа вас не дадут исключить солидную необходимую выигрыша.Самый распространённый из подобных призов, естесственно же, бездеп на денек рождения посетителя — приз повторяющий фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им возможно протяжении установленного периода медли.
1×slots коды
<a href=https://forum.bandariklan.com/showthread.php?tid=586654>1×слотс казино</a> 1×slots casino зеркало рабочее <a href=http://infomts.ru/index.php?subaction=userinfo&user=zealousarbiter6>http://infomts.ru/index.php?subaction=userinfo&user=zealousarbiter6</a> 1×slots зеркало этих способов предполагает регистрацию Когда речь идет о получении бездепозитных призов в казино, начала направьте на последующие обстоятельства:Любой выигрыш по ставке повыше установленного лимита несомненно считаться недействительным. То есть ставка не будет засчитана при отыгрыше, а случае выигрыша его сумма не поступит на счёт посетителя — итог забавы будет полностью аннулирован.
1×slots официальный сайт скачать
<a href=http://demo.qkseo.in/profile.php?id=643352>http://demo.qkseo.in/profile.php?id=643352</a> Также учтите, что кое-какие игровые платформы сужают список стран, которые способны получить предложенный бездепозитный бонус за регистрацию. К примеру, существуют онлайн-заведения, выдающие похожие призы лишь жителям определенных государств. К образцу, онлайн казино 777 Оригинал дает бездепозитный приз только игрокам из России и стран СНГ. Или напротив, снабжают вознаграждением всех, считая жителей некоторых государств (как этого, следует внимательно учить перечень, дабы потом не появилось практически вопросов и претензий).Простая процедура получения бездепозитного бонуса, которая займет не более 2-х минут. Для получения бездепов, достаточно зарегистрироваться и доказать контактные данные. 1×slots официальный сайт зеркало Условия вывода выигрыша. В неких заведениях для удачного вывода с бездепозитного бонуса довольно пополнения баланса и доказательства личности. В иных же клубах, необходимо несколько один прокрутить собственный депозит.Используйте наилучшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из списка ниже, дабы заработать подарки за простые деянья теперь сейчас получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и прыткими выводами на электронные кошельки.
1×slots зеркало регистрация
<a href=http://palais.beesims.com/phpbb/viewtopic.php?f=2&t=294063>1×slots официальный demo регистрация в 1×slots casino</a> Выбирая бесплатный бонус, пристально изучайте правила. Убедитесь, собственно для возможно принимать участие в акции. Уточните, в каких забавах можно выполнять условия вейджера. При необходимости задавайте вопросы представителям саппорта. 1×slots актуальное зеркало <a href=https://spoilerok.ru/user/Walterlax/>https://spoilerok.ru/user/Walterlax/</a> Чтобы играть бесплатно на настоящие деньги в казино, не всегда достаточно просто зарегистрироваться. Иногда нужно выполнить дополнительные деянья.Раздача призов имеет быть посвящена разным датам: календарные праздничные, деньки рождения игроков, годовщина открытия казино и т. Д. Подарок выдается вид денег, фриспинов либо баллов для накопления и размена на предложения оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода этой суммы понадобиться выполнить ряд притязаний.
1хслот зеркало сайта
Можно ли в одном интернет казино получить больше 1-го бонуса за регистрацию? Нет, так как в любом интернет казино есть верховодила, к которым надо(надобно) придерживаться, не творить два аккаута для получения призов, другому несомненно блокировка обоих аккаутов, не пытайтесь обмануть интернет казино, бонус за регистрацию выдаеться раз раз одному лицу. В интернете слишком количество скриптовых вебсайтов, которые принадлежат жуликам. Их основная задача – заинтересовать гэмблеров, пообещав не только щедрые презенты, но и солидные выигрыши. Так что кое-какие веб-сайты предлагают получить за регистрацию числе $1 000. <a href=https://m2bob.shop/forum/member.php?action=profile&uid=2768>https://m2bob.shop/forum/member.php?action=profile&uid=2768</a> Верификация необходима для добавочной защищенности и может техподдержке выявить бонусхантеров и жуликов. Кстати, на платформах выводы крупных сумм доступны лишь последствии доказательства личности.Условия вывода выигрыша. В некоторых заведениях для успешного вывода с бездепозитного приза довольно пополнения баланса и доказательства личности. В иных же клубах, необходимо несколько один прокрутить свой депозит. казино 1× slots официальный сайт При верном подходе бездепы — это прекрасный способ выступать на деньги без растраты собственных средств. Есть несколько рекомендаций, следуя которым возможно извлечь максимум пользы из подобных акций казино. Играть стопам только на лицензированных площадках. Скриптовые сайты столько дурачат с бонусными услугами, хотя и употребляют пиратский софт с измененным ГСЧ. Выиграть на этих автоматах нереально.
<b>Смотреть еще похожие новости:</b>
<a href=http://yamato-ryu.ru/communication/forum/index.php?PAGE_NAME=message&FID=1&TID=49374&MID=14125&sessid=d2b6fada19076d55888155001be52970&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Пoдтвepдить личнocть клиента. Для успешного вывода средств, нужно доказать личность клиента. Нa этaпe вepификaции пpoфиля, сотрудники службы безопасности должны увериться, собственно у игрока всего лишь раз акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не может вывести свой выигрыш, в у него несомненно несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы.
#94 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino ru почему казино <a href=https://www.ossetia.tv/>букмекерская контора вход</a> ставки на спорт букмекерские конторы Комарова Наталья Владимировна порно <a href=https://www.ossetia.tv/>пина букмекерской конторы</a> casino x рейтинг казино играющие казино black russia казино 1×bet зеркало рабочее на сегодня официальные букмекерские конторы скачать Матвиенко Валентина Ивановна порно
DiskiPlus 7k casino официальный DiskiPlus спорт букмекерская контора <a href=https://diskiplus.ru/>DiskiPlus Шевцова Татьяна Викторовна порно</a> DiskiPlus Лут Оксана Николаевна порно DiskiPlus кент казино <a href=https://diskiplus.ru/>DiskiPlus pin up casino top top</a> DiskiPlus букмекерские конторы бет DiskiPlus casino 7k рабочее DiskiPlus официальные зеркала казино DiskiPlus porno Вера Бирюкова, гимнастка DiskiPlus pin casino зеркало DiskiPlus мобильные букмекерские конторы DiskiPlus Комарова Наталья Владимировна порно
#95 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
бесплатно фильм казино up casino <a href=https://slon-ru.com/>казино ставка</a> Матвиенко Валентина Ивановна порно porno Дарья Мороз <a href=https://specreporter.com/>new casino</a> лучшие казино бесплатно porno Ангелина Гончаренко, хоккеистка porno Дарья Мороз официальные сайты казино казино 1 казино фильм смотреть онлайн Александра Бортич
DiskiPlus porno Анастасия Янькова, боксерка DiskiPlus casino online зеркало <a href=https://diskiplus.ru>DiskiPlus порно с Виктория Синицина, фигуристка</a> DiskiPlus Самойлова Алла Владимировна порно DiskiPlus casino онлайн <a href=https://www.diskiplus.ru>DiskiPlus up casino зеркало</a> DiskiPlus casino buzz DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus Попова Анна Юрьевна порно DiskiPlus Набиуллина Эльвира Сахипзадовна порно DiskiPlus casino pin официальный DiskiPlus спорт букмекерская контора DiskiPlus Семёнова Татьяна Владимировна порно
#96 Charlesgunnyhttp://filmkachat.ru
скачать 1×slots официальный сайт
Но есть игорные заведения, коие готовы просто так жертвовать средства на забаву. Для сего достаточно создать профиль. Чтобы вывести свой выигрыш, для поначалу нужно выполнить обстоятельства отыгрыша, обозначенные в условиях получения бездепозитного депозита.Так что сможете неустрашимо региться без всяких раздумий. Фортуна сегодня наверняка на вашей стороне. Не бойтесь, ведь следствие какого или ущерба Вам абсолютно не угрожает. С такими бонусами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots casino c2d ru</a> Если вы облюбовали себе несколько брендов коие для больше всего приглянулись, для постоянной игры! Таких гемблеров казино довольно предпочитает и ценит, за частую такие игроки становятся VIP игроками заведения, коим часто поступают выгодные предложения повторяющий бонусов, например же туда заходит и бездепозитные.Сразу в активации промокода возможно пользоваться даром. Как теснее упоминалось, призы случаются трёх обликов – фриспины, кредиты и фриплей-бонусы. <a href=https://gamma.app/docs/How-to-Reset-Your-Honda-Civic-After-Replacing-the-Battery-tgof361mduqar4u>https://gamma.app/docs/How-to-Reset-Your-Honda-Civic-After-Replacing-the-Battery-tgof361mduqar4u</a> Бонусные средства – маленькая сумма средств для старта в новеньком казино. На бонусные деньги, обычно разрешено выступать во все игры, кроме слотов с современным джекпотом и игр из раздела live casino.Самые свежие бездепозитные бонусы в казино за регистрацию 2022 года с выводом прибыли присутствуют на данной страничке. Посетитель может расценить обстоятельства получения и начать играть на деньги без внесения депозита. При данном игроку важно разуметь, на каких критериях и какими методами он сможет вывести приобретенный выигрыш. Для сего необходимо оценить перечень подключенных платежных систем. 1×slots сайт зеркало <a href=https://community.oneplus.com/thread/1778653174379315207>https://community.oneplus.com/thread/1778653174379315207</a>
1×slots акции
При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие возможно предназначить этой в казино. <a href=https://foro.muelendhir.com/showthread.php?tid=121751>казино 1×slots официальный сайт</a> 1хслотс зеркало Наличие у игрока 2 аккаунта. Запрещено творить некоторое профилей для неоднократного получения бездепов.Рассмотрим принцип его деяния на случае. Допустим, вы зарегались и возымели $10 no down payment bonus с вейджером х50. Это значит, что выигранные деньги можно несомненно выводить не раньше, чем после такого, как общая сумма ставок достигнет $500. <a href=https://www.mikocon.com/home.php?mod=space&uid=232885>https://www.mikocon.com/home.php?mod=space&uid=232885</a> 1×slots акции
1×slots промокод при регистрации
Наличие у игрока второго аккаунта. Запрещено создавать количество профилей для неоднократного получения бездепов.Возможность поиграть вспомогательное соревнование (а время и количество) совершенно бесплатно, а выигрыш, к, поступает на счёт игрока. <a href=http://www.ehion.com/~ameba/dokuwiki/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0%20%D0%BD%D0%B0%20%D0%B4%D0%B7%D0%B5%D0%BD%D0%B5>http://www.ehion.com/~ameba/dokuwiki/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0%20%D0%BD%D0%B0%20%D0%B4%D0%B7%D0%B5%D0%BD%D0%B5</a> 1×слотс казино Риск-игра по одинаковым шансам – Также казино возможность запрещать скорпулезно обстоятельства по отыгрышу за раунда на удвоение, кот-ый предлагается в слотах, видео-покере и некоторых других играх.Одним из поводов отдавать привилегию 1 либо иному заведению заключается в привлекательности предлагаемых промоакций и даровых предложений. Безвозмездные фриспины, выдаваемые без дела делать какой-нибудь лепта, в списке располагается далековато не в конце.
1хслотс рабочее зеркало
Возможность сыграть вспомогательное соревнование (а от и некоторое) совершенно даром, а выигрыш, к, поступает на счёт игрока. 1× slots casino зеркало <a href=http://santehlux32.ru/bitrix/redirect.php?goto=http://lenino.info/go/url=http://vseobogrevateli.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/3UNAX-p-HjO>http://santehlux32.ru/bitrix/redirect.php?goto=http://lenino.info/go/url=http://vseobogrevateli.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/3UNAX-p-HjO</a> Для доказательства электронной почты, просто перейдите по интенсивной ссылке в письме, полученном от игрового заведения.
1хслот скачать
Также бывают случаи, когда казино начисляет оговоренный приз после регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам. <a href=http://www.musichunt.pro/blogs/view.htm?id=80204>http://www.musichunt.pro/blogs/view.htm?id=80204</a> Исходя из сего, просто не присутствует осмысленных причин махнуть рукой на получение такового бонуса при регистрации. И, лишним, на подобный безвозмездной основе у вас есть шансы выиграть средства и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные бонусы, нарекают бесплатными интернет платформами для игр.Особую изюминку видео слотам присваивают оригинальные символы. С их в активируются различные бонусы. Вы сможете запустить дополнительный степень и увеличить необходимую выигрыша. Есть знаки, коие замещают негодные элементы и сами делают выигрышные комбо. Не стоит забывать и тему бонус-тур. После каждого счастливого спина есть шанс увеличить сумму выигрыша в два или хорошо раза. x1 slots 1хслотс регистрация перейти на 1×slots Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки могут запросить вспомогательные документы или инициировать куцее общение по Skype.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.growersclub.cz/viewtopic.php?t=191>1×slots регистрация 1×slots casino c2d ru</a>
<a href=https://forum.bandariklan.com/showthread.php?tid=176825&pid=1220599#pid1220599>1хслотс рабочее зеркало</a>
<a href=http://urbex.cz/forum/viewtopic.php?f=32&t=7215>1×slots зеркало которую указывали при регистрации кстати</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Частенько новички не знают, как активировать подарки или вывести 1-ый выигрыш. Для похожих случаев наша команда обрисовала основные определения – что это фриспины, вейджер, как его отыграть, чего нужно протекать верификацию.
#97 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
рабочее казино скачать 1×bet на андроид бесплатно <a href=https://repost.news/>официальные букмекерские конторы скачать</a> 1×bet слоты официальный сайт порно с Анна Щербакова, фигуристка <a href=https://th-royalgclub.com/>казино ли</a> скачиваемые казино порно с Дарья Касаткина (теннис) porno Алена Косторная (фигурное катание) online casino casino онлайн почему в казино не бывает настенных часов casino зеркало сегодня
DiskiPlus casino riobet казино <a href=https://www.diskiplus.ru>DiskiPlus casino 7k сегодня</a> DiskiPlus pin up casino buzz DiskiPlus яндекс казино <a href=https://diskiplus.ru/>DiskiPlus 1×bet регистрация</a> DiskiPlus Крючкова Полина Викторовна порно DiskiPlus porno Светлана Ходченкова DiskiPlus пин ап букмекерская контора DiskiPlus скачать букмекерскую контору на андроид DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus как выиграть в казино DiskiPlus бесплатные букмекерские конторы
#98 Charlesgunnyhttp://filmkachat.ru
1хслот официальный сайт зеркало
Раздача бонусов имеет быть приурочена к разным датам: календарные праздники, дни рождения игроков, юбилей открытия казино и т. Д. Подарок выдается повторяющий средств, фриспинов либо баллов для накопления и размена на предложения оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода этой суммы понадобиться выполнить ряд требований. <a href=http://filmkachat.ru/>1×slots зеркало видели такую регистрацию на</a> Во всех законных онлайн-казино Беларуси нужно подтверждение паспортных данных для забавы — это требование правительства государства.Бонус с зачислением денег на счет дает больше свободы действий. Пользователь сам выбирает, каким образом распорядиться подаренными средствами. Здесь кроме могут работать ограничения на перечень дешевых игр, хотя обычно эти рамки не так строги, как в рекламную с безвозмездными вращениями. <a href=https://aprenderfotografia.online/usuarios/avtovikuplviv/profile/>https://aprenderfotografia.online/usuarios/avtovikuplviv/profile/</a> С этими ординарными советами любое казино с призом за регистрацию способно принести в разы больше выгоды и пользы.В интернет-сети всегда возможно отыскать списки наиболее популярных и гарантированных поощрительных программ от знаменитых онлайн-казино. 1×slots зеркало на сегодня <a href=http://www.ntsr.info/forum/user/101853/>http://www.ntsr.info/forum/user/101853/</a>
1хслотс 1хслотс регистрация перейти на 1×slots
1×slots зеркало регистрация в 1×slots casino <a href=https://lifeactor.ru/user/DoctorLazutaMa/>https://lifeactor.ru/user/DoctorLazutaMa/</a> 1×slots рабочее зеркало на сегодня Более солидные предложения встречаются довольно изредка. Зачастую они доступны только VIP-игрокам. В оставшихся случаях им всего сопутствуют довольно строгие обстоятельства отыгрыша. Также вероятны вспомогательные обстоятельства и ограничения, прописанные в условиях и положения бонусной программки казино.Бездепозитные бонусы за регистрацию являются одним из самых известных методов вербования новых игроков в онлайн-казино, поэтому что они деют игрокам вероятность опробовать казино, тем игровые автоматы, и вполне, выиграть настоящие деньги.
1×slots зеркало быструю регистрацию а также мгновенное
Подтверждение электронной почты – одно из основных критерий, коие есть почти в каждом бездепозитном казино. Чтобы верифицировать электрическую почту, довольно перейти по интенсивной ссылке в послании, приобретенном от азартного клуба.Как лишь на виртуальном счету окажутся бонусные свои, поторопитесь отыграть вейджер. Сразу последствии этого можно забыть заявку на вывод выигрыша. Кредиты выгодно отличаются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом реальных средств и выделяют вероятность почувствовать задор. Во-вторых – возможно насладиться каждой азартной забавой доступной на веб-сайте. В вашем распоряжении находятся автоматы, настольные прибавленье, видео-покер, Live-дилеры. <a href=http://avtoworld.lv/index.php?subaction=userinfo&user=ekucog>http://avtoworld.lv/index.php?subaction=userinfo&user=ekucog</a> Бездепозитные призы казино это финансовая компенсация, предлагаемая юзерам на дармовой основе и возможность выступать в онлайн казино бесплатно. Если сравнивать их с поощрениями за лепта, каких средства выдаются лишь потом начального пополнения счета, то бездепозитные гонорары получаются безвозмездно. То есть, играющий получает возможность делать ставки на уже существующие финансы, которые выдаст заведение, исполняя, при этом, обычные деяния, дабы их извлечь (здесь речь о регистрация, удостоверении личности с внедрением номера телефонного, оформления заказы и т.д. ).Баланс игрока пополняется на подобающую необходимую. К ней применяется вейджер, обозначенный в правилах промоакции. Вывести выигрыш возможно несомненно в того, как юзер сделает требуемый размер ставок из собственных средств. В редких случаях бездеп работает в формате Free Play. На счет юзера зачисляется крупная сумма, и предоставляется небольшой срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по завершении сего периода сумма на счету несомненно превышать первоначальную, то разность можно несомненно исключить или использовать для последующих ставок. 1×slots официальный сайт зеркало рабочее
1×slots регистрация на официальном сайте
Для получения депозитного бонуса необходимо пополнить свой игровой баланс настоящими средствами. Вознаграждение можно получить либо при внесении первого депозита, или повторяющий фиксированного процента от внесённых средств. Так либо иначе, бонус поступит на счёт только последствии пополнения. <a href=https://kreativeblogs.com/cedar-moss-cafe-a-travel-adventure-in-every-sip/>1×slots рабочее зеркало на сегодня</a> Минимального оборота. Этот предел устанавливается вейджером — пока игрок не сыграет на установленную сумму, вывод средств несомненно недосегаем. 1хслотс регистрация в 1×slots casino <a href=http://brenderupmediterrane.free.fr/index.php?file=Members&op=detail&autor=unaccountableco>http://brenderupmediterrane.free.fr/index.php?file=Members&op=detail&autor=unaccountableco</a>
1×slots зеркало на сегодня
Выше мы предоставили полный комплект самых новых и своевременных бездепозитных бонусов в интернет казино без пополнения на 2022 год, где продоставляется воспользоваться любым ценным бездепозитным призом. <a href=http://iawbs.com/home.php?mod=space&uid=813085>http://iawbs.com/home.php?mod=space&uid=813085</a> Необходимость отыгрыша. Вейджер ситуации выше, чем для призов за депозит. И же свои не отыграны, исключить их нельзя.Диапазон ставок, которые вправе сделать игрок, того лимитирован. Обычно ставить можно маленькую необходимую — пределах 10–30 руб. За одно вращение. 1хслот зеркало сайта Для вывода средств приз нужно будет отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами акции и вариантами отыгрыша бездепозитного бонуса до его получения, дабы избежать конфликтных обстановок.
<b>Смотреть еще похожие новости:</b>
<a href=http://veneraroleplay.listbb.ru/viewtopic.php?f=4&t=1603>1×slots casino регистрация 1×slots review live</a>
<a href=https://forum.vn.ua/showthread.php?p=3337250#post3337250>casino 1×slot</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В качестве призов интернет казино нередко предлагает выдачу фриспинов, словами безвозмездных вращений игрового барабана. Виртуальные монеты можно использовать для изучения в покерной школе либо для игры в казино. После требуется внести идентификационный платёж. Это стращает новичков больше всего. Нужно устроить наименьший депозит в 100–500 рублей. Таким образом служба защищенности увериться сомнений, собственно платёжный метод принадлежит Вам. Данная процедура необходима для обеспечения безопасности игровых счетов. Пример, Ваш аккаунт взломают и выведут средства на свой кошелёк. Будет очень неприятно. Поэтому верификация платёжной системы, это необходимый момент.
#99 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
реального казино порно с Александр Большунов (лыжные гонки) <a href=https://glvk.guru/>слоты казино</a> Юдаева Ксения Валентиновна порно pin casino <a href=https://kompromat1.online/>винлайн букмекерская контора официальный сайт</a> Крючкова Полина Викторовна порно официальные сайты казино porno Дарья Клишина casino ап Черкесова Бэлла Мухарбиевна порно демо казино букмекерская контора официальный сайт
DiskiPlus 1×bet зеркало слоты DiskiPlus 1×bet зеркало рабочее <a href=https://diskiplus.ru>DiskiPlus пин ап казино</a> DiskiPlus 1×bet 1 DiskiPlus букмекерскую контору пин <a href=https://www.diskiplus.ru/>DiskiPlus порно с Федор Чалов (футбол)</a> DiskiPlus сайт букмекерской конторы DiskiPlus казино в россии DiskiPlus pin up букмекерская контора DiskiPlus суть казино DiskiPlus балтбет букмекерская контора DiskiPlus Фастова Елена Владимировна порно DiskiPlus порно с Илюшникова Татьяна Александровна
#100 Charlesgunnyhttp://filmkachat.ru
скачать 1×slots на андроид мобильная версия
Существуют казино с призом за регистрацию, в очень известны фриспины в интернет казино впоследствии регистрации в конкретных забавах. Они встречаются том чаще бесплатных поощрений или традиционных бонусов в казино без вложений. Например, игрок регистрирует счет, на который начисляются безвозмездные игры, бонус за регистрацию вид даровых фрспинов, вращения в игровом автомате. Во время игрового процесса игрок выигрывает настоящие деньги, коие в последствии возможно успешно исключить из заведения на собственную платежную систему. То есть, есть шансы исключить средства без рисков своими деньгами. Регистрация, за которую компьютерные получит бонусы, займет минут, а спасибо этому возможно прирастить 5 евро поощрений до тыс. И без всяких проблем исключить их. <a href=http://filmkachat.ru/>1×slot официальный сайт</a> Приветственный бездеп предоставляется любому игроку лишь один раз. Казино борются с так нарекаемыми бонусхантерами (от англ. Bonus Hunter — охотник за призами), пытающимися заводить многочисленные аккаунты для обмана оператора и повторного получения подарка. Исключить подобные деяния позволяет верификация данных. Администрация вправе потребовать у клиента доказать персональные данные, указанные при регистрации.Мы подготовили перечень, где есть всегда животрепещущие и новые бездепозитные призы казино, коие вам получить бесплатно. Для наших пользователей есть особые предложения неповторимые бонусы, которые вы нигде не отыщите, их мы обозначили особой красноватой плашкой «Exclusive». <a href=https://www.neobienetre.fr/forum-bien-etre-medecines-douces-developpement-personnel/topic/real-estate-virtual-tours/>https://www.neobienetre.fr/forum-bien-etre-medecines-douces-developpement-personnel/topic/real-estate-virtual-tours/</a> рабочее зеркало 1хслотс <a href=http://www.clean-ace8.com/bbs/board.php?bo_table=free&wr_id=496480>http://www.clean-ace8.com/bbs/board.php?bo_table=free&wr_id=496480</a> Основное отличие в, что для получения бездепа не надо пополнять баланс в казино. Но не этого, есть ряд и других различий:Но есть игорные заведения, которые готовы просто так жертвовать деньги на забаву. Для этого достаточно сделать профиль. Чтобы исключить свой выигрыш, вам поначалу нужно выполнить обстоятельства отыгрыша, обозначенные в критериях получения бездепозитного депо.
1×slots казино мобильная версия
Доступные забавы – В неких азартных забавах возможно понизить математическое превосходство казино до нескольких 10-х процента. В их количестве многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как верховодило, в этих забавах ставки идут в зачет вейджера не всецело. Например, имеет учитываться только 50%. В неких забавах бездепозитные призы вообще нельзя отыгрывать.Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, дабы снова получить даровой бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ждет неминуемое наказание. <a href=https://www.enbici.eu/foro/phpBB3/viewtopic.php?f=16&t=26354>1×slots подтвердит вашу регистрацию если говорить</a> 1хслот официальный сайт зеркало Также случаются случаи, когда казино начисляет оговоренный бонус после регистрации нового посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам.В лицензионных бездепозитных казино выступать в азартные игры вправду неопасно. Наличие лицензии одобряет тот факт, собственно клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP. <a href=http://wiki.hightgames.ru/index.php?title=%D0%A4%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B%20%D0%90%D0%97%D0%A1:%20%D0%9F%D0%B5%D1%80%D1%81%D0%BF%D0%B5%D0%BA%D1%82%D0%B8%D0%B2%D1%8B%20%D0%B8%20%D0%B2%D0%BE%D0%B7%D0%BC%D0%BE%D0%B6%D0%BD%D0%BE%D1%81%D1%82%D0%B8%20%D0%B2%20%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8>http://wiki.hightgames.ru/index.php?title=%D0%A4%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B%20%D0%90%D0%97%D0%A1:%20%D0%9F%D0%B5%D1%80%D1%81%D0%BF%D0%B5%D0%BA%D1%82%D0%B8%D0%B2%D1%8B%20%D0%B8%20%D0%B2%D0%BE%D0%B7%D0%BC%D0%BE%D0%B6%D0%BD%D0%BE%D1%81%D1%82%D0%B8%20%D0%B2%20%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8</a> 1×slots официальный сайт мобильная версия скачать В основном случаев бесплатные бонусы начисляются в кредитах, коие нельзя незамедлительно вывести со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти требования принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д.). О нем читайте ниже.
1×slots регистрация 1×slots casino c2d ru
Бонусы без депо при регистрации считаются самыми красивыми как для опытнейших игроков, так для и новичков. Получив такое вознаграждение, заказчик имеет играть на настоящие деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, еще обстоятельства их активации и выигрыша.Диапазон ставок, коие вправе устроить игрок, того лимитирован. Обычно ставить можно небольшую сумму — в 10–30 рублей за одно вращение. Сразу в активации промокода можно пользоваться презентом. Как теснее упоминалось, бонусы посещают трёх видов – фриспины, кредиты и фриплей-бонусы.Мы собрали и выпустили список наилучших бездепозитных казино с призами за регистрацию, коие гарантируют великодушные выигрыши и моментальные выплаты. <a href=https://loansnearme.com.au/author/waltersop/>https://loansnearme.com.au/author/waltersop/</a> 1×slots официальный сайт скачать на айфон Для подтверждения электронной почты, просто перейдите по активной ссылке в послании, полученном от игрового заведения.
1×slots казино зеркало
Активация по промокоду используется в различных видах бездепов. Если речь идет о приветственном бонусе, то набор символов возможно узнать на основной страничке, в регистрационной форме либо письме, коие отчаливает пользователю для доказательства адреса электронной почты. Акции могут проводиться совместно с партнерскими площадками. Обычно код размещается на стороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активизируется разовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном офисе или начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем важный код для активации в описании каждого промо. Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической забавы на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, выучится регулировать менять ставки и линии, исследовать бонусные забавы и их выигрышные комбинации, ну конечном просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные средства, которые можно отыграть и вывести, не просто на демо счет, что, этим самым адреналин в крови еще повысится а пульс забьется с частым ритмом! 1×slots зеркало регистрация <a href=http://lublinianin.pl/bez-kategorii/ile-warta-jest-pamiec-a-ile-niepamiec/?unapproved=463814&moderation-hash=bc6c82bb7c158ddd3c6c6d88effcfec9#comment-463814>http://lublinianin.pl/bez-kategorii/ile-warta-jest-pamiec-a-ile-niepamiec/?unapproved=463814&moderation-hash=bc6c82bb7c158ddd3c6c6d88effcfec9#comment-463814</a> Приглашаем делиться суждениями о бонусах. Это поможет иным пользователям подбирать наиболее выгодные предложения.Во время забавы в казино, выигрыши, приобретенные благодаря бесплатным призовым фондам, суммируются и включаются в совместную необходимую для отыгрывания. Однако, если фортуна улыбнется и получится отыграть все призы, игровое заведение гарантированно разрешит вывести финансовые свои. Сумма вывода несомненно зависеть от лимита, утвержденного непосредственно в данном учреждении. Поэтому, внимательно надо(надобно) разбирать управляла выдачи анлимитных депо.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Только выполнив все условия отыгрыша и дождавшись завершения проверки аккаунта, Вы можете оформить заявку на вывод средств и получить средства деньги. Одним из предлогов отдавать преимущество, льготу одному либо другому заведению заключается в привлекательности предлагаемых промоакций и безвозмездных услуг. Безвозмездные фриспины, выдаваемые без нужды создавать какой-нибудь лепта, в перечне находится далековато не в конце.Прибывшие на аккаунт финансы бездепозитные призы предназначаются, в основном, только для новоиспеченных пользователей, коие ранее не имели собственного аккаунта в данном казино. Исходя из этого, случае раньше у игрока был изготовлен депо, то, по всей вероятности, у него больше не несомненно возможности рассчитывать на получение такого бонуса в конкретном заведении. <a href=http://mongdol.net/bbs/board.php?bo_table=free&wr_id=2494743>http://mongdol.net/bbs/board.php?bo_table=free&wr_id=2494743</a> При исполнении критерий отыгрыша и верификации, деньги с бонусного счета переводятся на ведущей и имеют быть выведены на карту либо электрический кошелек. Лимиты на вывод и сроки проведения транзакции находятся от выбранной платежной системы. 1×slots зеркало которую указывали при регистрации кстати Важно, удостоверьтесь в том, что ранее не регистрировались в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи.
<b>Смотреть еще похожие новости:</b>
<a href=http://veneraroleplay.listbb.ru/viewtopic.php?f=4&t=1655>casino 1×slot</a>
<a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=48143>1×slots зеркало регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный бонус за регистрацию в казино — это стартовый подарок повторяющий денежного начисления либо бесплатных вращений для свежих игроков заведения, для получения которого надо заносить депозит.
#101 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино большая black russia казино <a href=https://slon-ru.com/>порно с Сергей Бобровский (хоккей)</a> кент casino vodka casino <a href=https://strelochnik.com/>porno Юлия Канакина</a> гта онлайн казино Черкесова Бэлла Мухарбиевна порно водка казино ешь казино Хорова Наталья Александровна порно порно с Аделия Петросян (фигурное катание) порно с Диана Шнайдер (теннис)
DiskiPlus casino андроид DiskiPlus pin up casino пин <a href=https://www.diskiplus.ru/>DiskiPlus champion casino</a> DiskiPlus порно с Никита Кучеров (хоккей) DiskiPlus casino <a href=https://www.diskiplus.ru/>DiskiPlus порно с Голикова Татьяна Алексеевна</a> DiskiPlus 7k casino бонус DiskiPlus 1×bet официальный xbet DiskiPlus рокс казино DiskiPlus casino автомат DiskiPlus порно с Баталина Ольга Юрьевна DiskiPlus Фастова Елена Владимировна порно DiskiPlus пари букмекерская контора
#102 Charlesgunnyhttp://filmkachat.ru
1×slots бонус за регистрацию
Чем ниже значение вейджера, тем легче отыграть и вывести бонус. Если Вы планируете заработать на бездепе, а не просто ознакомиться с свежим игровым клубом, то стоит игнорировать призов с высоким вейджером их практически не реально отыграть. С ними Вы сможете лишь протестировать забавы заведения. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать на айфон</a> Размер призов почаще всего чисто символический и не выше 50 рублей. Приятно, но осязаемым бустом при ли будет. <a href=https://lynk.id/kalinka0588>https://lynk.id/kalinka0588</a> 1хслот скачать <a href=http://www.ihaomeijia.com/home.php?mod=space&uid=136238>http://www.ihaomeijia.com/home.php?mod=space&uid=136238</a> Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Мы рекомендуем не отрицаться от подобных предложений известных казино. Выделите некоторое минут на регистрацию, получите бонус и попробуйте его отыграть. Может быть, сейчас удача будет на вашей стороне!
1×slots зеркало регистрацию более популярный вариант это
При регистрации никаких либо ином онлайн игральном заведении — вам дается один шанс испытывать собственную фортуну не внося средства монеты. Замечу собственно эту поощрительную предложение деют не все онлайн игровые площадки, а лишь великодушная середина(средина) из их. Которые мы подготовили для Вас в нашем перечне. 1×slots официальный сайт мобильная версия скачать <a href=http://5.101.112.134/profile/hellishhomicide/>http://5.101.112.134/profile/hellishhomicide/</a> Отыграв бездепозитный бонус в казино с выводом также придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если схожее лимитирование присутствует, то единоразово вывести получится только сумму, не превосходящую размер полученного приза.Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам воспрещено начислять призы посетителям, не имеющим денежных средств на счете. Мы предлагаем разглядеть животрепещущие бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ. рабочее зеркало 1×slots Если вы новичок в и лишь попали в неизведанную вами область пыла — с помощью предложений как бездепозитные бонусы без пополнения.
1×slots регистрация то дальше необходимо пройти
Для получения депозитного приза нужно восполнить свой игровой баланс реальными деньгами. Вознаграждение можно получить либо при внесении первого депо, либо в виде фиксированного процента от внесённых средств. Так или по, бонус поступит на счёт только последствии пополнения. Возможность протестировать новые игры, не рискуя личными своими и создать собственную тактику игры. <a href=http://ez4×g.nehe.com.cn/home.php?mod=space&uid=599707&do=profile>http://ez4×g.nehe.com.cn/home.php?mod=space&uid=599707&do=profile</a> 1хслотс рабочее зеркало Для тех, кто лишь подумывает испытывать свою удачу, а для проф игроков, разыскивающих свежие площадки для выигрышей, ведущие лицензированные казино часто устраивают различные акции, и одно из лучших услуг за последнее время – как для начинающих, например и для профессиональных игроков – бездепозитный приз за регистрацию.
1× слот зеркало
Ещё одно распространённое акционное предложение – симпатичный презент с сомнительными требованиями. К образцу, клуб сулит $100 в качестве бездепа, хотя с вейджером х80 либо х100. Отыграть такой вейджер фактически невероятно и потому другого, как концентрироваться на больше занимательных акциях.У каждой игры средства требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система засчитает любую ставку. В рулетке и покере устроить это гораздо труднее. Именно потому например важно пристально читать условия получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой ирге, то новенькие попросту «спустят бонус на ветер». 1×slots сайт <a href=http://bmwspeed.lv/user/Richarddum/>http://bmwspeed.lv/user/Richarddum/</a>
1х слот регистрация в 1×slots casino
Постарайтесь отыграть вейджер, чтобы была вероятность оставить заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные приборы. Вы можете получить выигрыш на электрической кошелёк, карту, телефонный. <a href=https://ww.interdance.ru/user/Jamesbus/>https://ww.interdance.ru/user/Jamesbus/</a> Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша призов. Заведения практически устанавливают наивысшую ставку, возможную по условиям вейждера. 1×slots официальный сайт, скачать Даже не выиграв солидную сумму, игрок интересно проведет время, изнутри исследует работу площадки, воспримет геймплей автоматов. Все это без каких-то финансовых рисков. Быть в курсе наихороших акций с. Достаточно периодически учить список новых интернет казино с выводом бонуса без депо в данном разделе.Необходимость отыгрыша. Вейджер такой повыше, чем для призов за депозит. И пока средства не отыграны, исключить их невозможно.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.lesprom.org/threads/1×slots-skachat-na-ajfon.1595/>1×slots скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В современность довольно просто получить приз за регистрацию в казино. Практически каждый игорный дом с готовностью начисляет средства либо бесплатные вращения. Многие гэмблеры пользуются данным и не смущяются регистрироваться в любом клубе с прибыльными критериями. Кстати, это отличная вероятность выработать победную стратегию и сорвать джекпот. Прочитайте управляла бонусной программы, какой желаете принять. Да, мы настоятельно советуем сделать это до регистрации.
#103 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino buzz порно с Баталина Ольга Юрьевна <a href=https://www.ossetia.tv/>Елена Лядова</a> казино ли казино в россии <a href=https://slon-ru.com/>слоты казино</a> online casino официальный включи казино pin casino зеркало казино вулкан casino бонус pin casino кент casino
DiskiPlus Приезжева Екатерина Геннадьевна порно DiskiPlus сайт 1×bet слоты <a href=https://www.diskiplus.ru/>DiskiPlus 7k casino зеркало на сегодня</a> DiskiPlus казино рояль смотреть DiskiPlus 7k casino скачать <a href=https://diskiplus.ru/>DiskiPlus букмекерская контора</a> DiskiPlus почему в казино нет часов DiskiPlus порно с Юлия Ефимова DiskiPlus рабочее казино DiskiPlus официальное казино вход DiskiPlus порно с Варвара Субботина DiskiPlus casino регистрации DiskiPlus porno Игорь Акинфеев (футбол)
#104 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
гта казино казино 1 <a href=https://vestnik-jurnal.com/>7k casino официальный сайт</a> 7k casino бонус Юдаева Ксения Валентиновна порно <a href=https://th-royalgclub.com/>скачать сайт букмекерской конторы</a> casino играть pin up casino скачать casino регистрации porno Екатерина Ефременкова, шорт-трекистка бывшие казино почему в казино не бывает настенных часов 1×bet сайт
DiskiPlus 1×bet на сегодня DiskiPlus порно с Петр Ян (ММА) <a href=https://diskiplus.ru>DiskiPlus букмекерская контора леонов</a> DiskiPlus порно с Юлия Ефимова DiskiPlus казино смотреть онлайн бесплатно <a href=https://www.diskiplus.ru>DiskiPlus почему в казино не бывает настенных часов</a> DiskiPlus 1×bet сейчас DiskiPlus промокод 1×bet DiskiPlus казино онлайн бесплатно DiskiPlus порно с Петр Ян (ММА) DiskiPlus pin up casino пин ап DiskiPlus porno Нина Пирогова, хоккеистка DiskiPlus casino x
#105 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet xbet сайты казино <a href=https://t.me/vchkogpu_ru>лучшие букмекерские конторы</a> Елена Лядова Скоробогатова Ольга Николаевна порно <a href=https://slon-ru.com/>1×bet зеркало рабочее на сегодня 1×bet xyz</a> скачать 1×bet 1×bet xyz porno Дарья Мороз порно с Елена Никитина, скелетонистка porno Катерина Шпица casino зеркало сегодня рабочее реального казино фильмы казино рояль
DiskiPlus бесплатно фильм казино DiskiPlus бесплатно фильм казино <a href=https://diskiplus.ru/>DiskiPlus казино рублях</a> DiskiPlus casino промокод DiskiPlus порно с Виктория Синицина, фигуристка <a href=https://diskiplus.ru>DiskiPlus casino на телефон</a> DiskiPlus pin ап casino DiskiPlus бывшие казино DiskiPlus kometa casino DiskiPlus бесплатное казино DiskiPlus casino pin официальный DiskiPlus porno Илья Ковальчук (хоккей) DiskiPlus 1×bet официальный скачать
#106 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт, скачать
Наш перечень содержит превосходнейшие бездепозитные призы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по главным параметрам:Кешбэк-бонус представляет собой возврат фиксированного процента от ставки если, тогда, проигрыша либо же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не превышает 10%. <a href=http://filmkachat.ru/>1× слот зеркало</a> Диапазон ставок, коие вправе сделать игрок, кроме лимитирован. Обычно назначать можно маленькую необходимую — пределах 10–30 руб. За одно вращение. <a href=https://www.arrl.org/forum/topics/view/4344>https://www.arrl.org/forum/topics/view/4344</a> Чаще всего, знаменитые сервисы, такие как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное верховодило. Финансовые средства выводятся только через что, эту платежную систему, которой популярностьюимели для пополнения депозита. Если же игрок получил бездепозитный покерный бонус, требуется пополнить счет на минимальную необходимую, которая сочиняет обычно 10 $. 1×slots промокод при регистрации <a href=https://mitao7.cc/home.php?mod=space&uid=25061&do=profile>https://mitao7.cc/home.php?mod=space&uid=25061&do=profile</a> Бонусы без депо при регистрации числятся самыми красивыми как для опытнейших игроков, так для и начинающих. Получив такое вознаграждение, заказчик может выступать на реальные средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а обстоятельства их активации и выигрыша.Чаще всего, знаменитые сервисы, такие как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное верховодило. Финансовые средства выводятся только через что, эту платежную систему, которой популярностьюимели для пополнения депозита. Если же игрок получил бездепозитный покерный бонус, требуется пополнить счет на минимальную необходимую, которая сочиняет обычно 10 $.
1×slots зеркало сайта
Представленные на данной страничке наихорошие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, в гости Casino.ru шансы сортировать перечень по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д.Акции, приуроченные к календарным праздничным, посещают рассчитаны как на всех юзеров, например и на категории: например, подарок на 8 марта девушкам-игрокам либо мужикам на 23 февраля. 1×slots зеркало 1хслотс регистрация перейти на 1×slots В настоящее время получить приз за регистрацию в казино очень просто. Почти любой игорный дом с готовностью предоставит деньги либо бесплатные вращения. Многие игроки пользуются данным и не смущяются региться в каждом клубе с выгодными критериями. Кстати, это отличная вероятность выдумать выигрышную стратегию и сорвать куш.Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют актуальную информацию о no deposit bonuses прочих предложениях. <a href=http://csa.sseuu.com/home.php?mod=space&uid=254632&do=profile&from=space>http://csa.sseuu.com/home.php?mod=space&uid=254632&do=profile&from=space</a> 1×slot зеркало
1хслотс мобильная версия зеркало
Особую изюминку видео слотам придают уникальные знакы. С их выходом активизируются различные бонусы. Вы сможете запустить дополнительный уровень и увеличить сумму выигрыша. Есть знаки, которые заменяют ненадобные элементы и сами творят выигрышные комбо. Не стоит забывать и тему бонус-тур. После любого успешного спина есть шанс увеличить необходимую выигрыша в 2 либо четыре раза. <a href=http://forum.xpscenery.net/member.php?action=profile&uid=1460>http://forum.xpscenery.net/member.php?action=profile&uid=1460</a> Вышеописанная первопричина и считается главным нюансом, следствии которого операторы отдают доля своей прибыли на различные рекламные затраты и маркетинговые кампании. А наиболее действенным здесь будут играть непосредственно бездепозитные призы казино 2022 с выводом за регистрацию. 1×slots быструю регистрацию а также мгновенное Бездепы все заходить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой или баллами.
зеркло казино 1×slots
Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, чтобы еще раз получить бесплатный бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ждет неизбежное санкция. <a href=http://soumoli.com/home.php?mod=space&uid=24916>казино 1×slots</a> Похожим образом работает третий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения клиента либо в связи с получения им VIP-статуса. Подарок предоставляется последствии воззвания в поддержку и проверки. Приглашаем делиться воззрениями о бонусах. Это поможет другим пользователям подбирать наиболее выгодные предложения.Зачастую бездепозитные призы казино для забавы предлагаются разными заведениями азартных игр в качестве рекламных акций или в целях вербования к себе свежих игроков. Для бездепозитных бонусов в казино 2022 игроку не пополнять счет до момента вывода желанных средств. 1 x slots <a href=http://geolan-ksl.ru/forum/user/88959/>http://geolan-ksl.ru/forum/user/88959/</a>
1×слотс казино
В реальное время получить приз за регистрацию в казино довольно просто. Почти любой игорный жилище с радостью даст деньги либо благотворительные вращения. Многие игроки пользуются этим и не стесняются региться в каждом клубе с выгодными критериями. Кстати, это отличная возможность придумать выигрышную тактику и сорвать куш. У любого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано смогли выполнить их, мы дадим некоторое советов. Если система начислила небольшую сумму, не создавать немалые ставки – остановитесь на 10–30 центах. Как лишь сможете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте выступать. В неприятном случае никакого присмотреться к другому автомату. <a href=http://erismann.ru/bitrix/rk.php?goto=http://1optomed.ru/bitrix/click.php?goto=http://adrsport.ru/bitrix/redirect.php?goto=https://teletype.in/@urist_free/q2CLLBS14OG>http://erismann.ru/bitrix/rk.php?goto=http://1optomed.ru/bitrix/click.php?goto=http://adrsport.ru/bitrix/redirect.php?goto=https://teletype.in/@urist_free/q2CLLBS14OG</a> Бездепозитный приз казино 2022 с выводом за регистрацию предоставляет вероятность ознакомиться игроку с лобби выбранного заведения, сориентироваться в выборе игр и выяснить качество работы службы. Довольно нередко, начиная игровой процесс, игрок теснее отказывается останавливаться и делает реальный вклад. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть бесплатно возможно как один таки с призом за регистрацию без необходимости вносить депозит. 1×slots официальный сайт мобильная версия скачать Возможность поиграть вспомогательное состязание (а иногда и некоторое) совершенно безвозмездно, а выигрыш, к, поступает на счёт игрока.
<b>Смотреть еще похожие новости:</b>
<a href=https://mit-bbs.com/viewtopic.php?t=895966>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=14095>1×slots регистрация 1×slotscasino 56 online</a>
<a href=http://vos.mille.et.une.vie.free.fr/viewtopic.php?p=453484#453484>1×slots регистрация то дальше необходимо пройти</a>
<a href=https://eccentrictirade.com/forums/showthread.php?tid=139914>1× slots регистрация в 1×slots casino</a>
<a href=https://mit-bbs.com/viewtopic.php?t=896625>1хслотс официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Доступные игры – В неких азартных забавах возможно понизить математическое преимущество казино до нескольких десятых процента. В их количестве почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как управляло, в этих забавах ставки идут в зачет вейджера не полностью. Например, возможность учитываться лишь 50%. В некоторых играх бездепозитные призы вообще нельзя отыгрывать. Ну и конечно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: подобная добродушие увеличивает степень преданности посетителей к компании.
#107 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация
В качестве бонусов интернет казино часто предлагает выдачу фриспинов, словами даровых вращений игрового барабана. Виртуальные монеты можно использовать для обучения в покерной школе или для забавы в казино.Лишь известные и известные азартные заведения все позволить себе раздавать бездепы вид дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, коие можно истратить в лучших аппаратах с высочайшей отдачей. <a href=http://filmkachat.ru/>1хслотс зеркало на сегодня</a> Выиграть настоящие средства в казино не пополняя счет – сложно, но вероятно. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными призами и начните играть на бонусные средства. По статистике каком-то 10-ти заведений возможно заработать маленькую необходимую средств с бонусных средств.Каждый новичок и профессиональный игрок мечтают прытко стартануть и начать создавать настоящие ставки. Для сего достаточно отобрать подарок, за который не нужно платить. В зависимости от игровой платформы, надо(надобно) сделать профиль, привязать email или телефонный. После этого администрация начисляет щедрое вознаграждение повторяющий бесплатных вращений либо виртуальных кредитов. <a href=https://bio.site/kalinka0588>https://bio.site/kalinka0588</a> 1×slots регистрация на сайте 1×slots ru com <a href=http://moujmasti.com/member.php?108803-Jasperruina>http://moujmasti.com/member.php?108803-Jasperruina</a> Однако далековато не все ресурсы предлагают своим посетителям бездепозитные призы за регистрацию в казино. В большинстве случаев учтено поощрение на 1-ый депозит в объеме 100–200%. Это отличная вероятность преувеличить банкролл, прирастить время, проведённое за игрой и шансы сорвать большой куш.Большинство клубов завлекают внимание геймеров за счёт различных подарков. На 1 сайтах возможно получить виртуальные кредиты, которые откроют доступ ко всему софту. На других же, администрация предлагает благотворительные вращения для пуска лучших интернет слотов. Несмотря на разные акции, стоит выделить самые главные.
сайт 1× slots casino
1×slots casino регистрация Нет. Казино выдают бесплатные призы за регистрацию, чтобы, чтобы, чтобы заказчик мог ознакомиться с игровым заведением. А чтобы исключить его, нужно выполнить обстоятельства отыгрыша. <a href=http://droid-gamers.ru/index.php?subaction=userinfo&user=ugliestzero90>http://droid-gamers.ru/index.php?subaction=userinfo&user=ugliestzero90</a> Oтыгpaть приз с указанным вeйджepом, результата необходимо сдeлaть cтaвoк нa cумму, превышающую объем бонуса в некоторое один.Бонус в казино без депозита содержит различные вариации: такое быть приветственный приз, акции в честь каких-либо дней либо весомых дат, приз за вербование новых игроков, лояльность и получение VIP-статуса. казино 1×slots официальный сайт
1хслот 1хслотс регистрация перейти на 1×slots
Некоторые веб-сайты, прежде чем провести регистрацию игроков, предлагают ответить на количество базовых вопросов. Цель проведения сходственной викторины – выявить случайных людей, которые не имеют представления о покере, и не допустить получения ими призов. Если посетитель теснее играл в казино, то ответить на полтора 10 простых вопросов несомненно нетрудно. Очень часто, ответы возможно найти на официальных сайтах данных учреждений.B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax Получив собственный подарок, Вы сможете бесплатно выступать на настоящие деньги, а выполнив условия отыгрыша, исключить свой выигрыш. <a href=http://expedition-factory.ru/bitrix/redirect.php?goto=http://forumedia.ru/bitrix/redirect.php?goto=http://24epen.ru/redirect?url=https://teletype.in/@urist555/4KbaM0jFba7>http://expedition-factory.ru/bitrix/redirect.php?goto=http://forumedia.ru/bitrix/redirect.php?goto=http://24epen.ru/redirect?url=https://teletype.in/@urist555/4KbaM0jFba7</a> Таким образом, заведение пытается продемонстрировать себя своим потенциальным геймерам, а подобный рекламный ход как казино приз без депозита за регистрацию завлекает довольно большое внимания к игорному заведению и обеспечивает неизменный поток свежих гостей и будущих клиентов игрового интернет клуба. 1×slots официальный зеркало Диапазон ставок, которые вправе устроить игрок, того лимитирован. Обычно назначать можно небольшую необходимую — около 10–30 руб. За одно вращение.
1×слот регистрация в 1×slots casino
Раздача бонусов имеет быть посвящена разным датам: календарные дни, дни рождения игроков, годовщина открытия казино и т. Д. Подарок выдается вид средств, фриспинов или баллов для скопления и обмена на услуги оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода этой суммы придется выполнить ряд требований. 1×slots мобильная версия войти казино <a href=https://bjyou4122.com/home.php?mod=space&uid=308220&do=profile&from=space>https://bjyou4122.com/home.php?mod=space&uid=308220&do=profile&from=space</a> Но есть азартные заведения, готовые просто так вручить деньги на игру. Для этого достаточно создать профиль. Чтобы вывести выигрыш, сначала нужно выполнить вейджеровые условия, прописанные в критериях получения бездепа.
1×slots официальный регистрация
Реже бонусы без депо начисляются постоянным игрокам. С их подмогою администрация старается вычесть ценных клиентов или желает поблагодарить за лояльность верных посетителей. Но намного чаще для похожих целей используются такие акции:Некоторые клубы механически начисляют приз на акк игрока последствии исполненья критерий получения, но посещают ситуации, когда приз надо(надобно) активировать игроку самому. Есть несколько методов активации приза: <a href=http://services-sector.ru/clubpointeresam/memberlist.php?mode=viewprofile&u=169400>http://services-sector.ru/clubpointeresam/memberlist.php?mode=viewprofile&u=169400</a> Баланс игрока пополняется на подобающую сумму. К ней используется вейджер, указанный в правилах акции. Вывести выигрыш можно будет последствии как, как юзер устроит требуемый объем ставок из личных средств. В редких случаях бездеп трудится в формате Free Play. На счет юзера зачисляется большая сумма, и предоставляется маленький срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по окончании сего периода сумма на счету будет превышать первоначальную, то разницу можно несомненно вывести или применять для дальнейших ставок.Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и. Когда игроку надеется количество фриспинов, администрация может разбивать их начисление на некоторое дней. Бесплатные вращения предоставляются для определенного слота, который указывается в правилах промоакции. x1 slots регистрация в 1×slots casino Одним из поводов отдавать привилегию 1 либо иному заведению содержится в привлекательности предлагаемых акций и бесплатных предложений. Безвозмездные фриспины, выдаваемые без дела создавать какой-нибудь вклад, в перечне располагается далековато не в конце.
<b>Смотреть еще похожие новости:</b>
<a href=http://okeyrp.listbb.ru/viewtopic.php?f=24&t=10279>1×slots рабочее зеркало на сегодня</a>
<a href=http://juuni.kokki.free.fr/forum/phpBB2/viewtopic.php?p=34546#34546>скачать 1×slots официальный сайт</a>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=373702>рабочее зеркало 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Постарайтесь отыграть вейджер, чтобы замечена вероятность оставить заявку на выплату. Кстати, на всех веб-сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электрической кошелёк, карту, телефон. Подарки на дни ? посвященные торжественным датам, требующие символического отыгрыша или начисляются без того. Могут дариться игрокам сутки рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду.
#108 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пин ап casino pin 1×bet сейчас <a href=https://glvk.guru/>Радченко Светлана Юрьевна порно</a> карты казино официальные букмекерские конторы скачать <a href=https://www.ossetia.tv/>Анна Михалкова</a> букмекерская контора бетсити карты казино Чулпан Хаматова 1×bet рабочее на сегодня лучшие казино бесплатно 7k casino зеркало казино на деньги
DiskiPlus Фастова Елена Владимировна порно DiskiPlus лучшая казино <a href=https://diskiplus.ru/>DiskiPlus официальные букмекерские конторы</a> DiskiPlus порно с Константин Тюкавин (футбол) DiskiPlus 1×bet телефон <a href=https://www.diskiplus.ru>DiskiPlus казино онлайн</a> DiskiPlus пин ап казино DiskiPlus порно с Юлия Ефимова, пловчиха DiskiPlus играющие казино DiskiPlus porno Андрей Рублев (теннис) DiskiPlus казино сочи DiskiPlus porno Светлана Ходченкова DiskiPlus яндекс игры казино
#109 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Артемий Панарин (хоккей) фильмы казино рояль <a href=https://krtka.info/>Комарова Наталья Владимировна порно</a> карты казино pin casino <a href=https://th-royalgclub.com/>Елизавета Боярская</a> слот casino casino зеркало сегодня рабочее букмекерская контора без Шевцова Татьяна Викторовна порно 7k casino сайт букмекерские конторы в россии Елена Лядова
DiskiPlus пин casino DiskiPlus зеркала официальных сайтов казино <a href=https://diskiplus.ru/>DiskiPlus porno Екатерина Ефременкова, шорт-трекистка</a> DiskiPlus макао казино DiskiPlus cat casino <a href=https://www.diskiplus.ru>DiskiPlus 1×bet зеркало слоты 1×bet xyz</a> DiskiPlus 7k casino бонус DiskiPlus лучшие онлайн казино DiskiPlus casino ru DiskiPlus porno Елизавета Туктамышева DiskiPlus букмекерские контора ап DiskiPlus казино можно DiskiPlus 1×bet xbet
#110 Charlesgunnyhttp://filmkachat.ru
1×slots акции
Сроки активации приза уточняются любым казино, но чаще всего они не превосходят недели с момента получения. Игроку непременно нужно применять бездеп на обозначенного срока, в ином случае приз просто пропадет. Каждый бонус можно получить только один раз, поэтому в не применять бездеп в срок, у игрока не будет второго шанса им пользоваться.Бездепы обыкновенно предлагают с отыгрышем — моментально исключить выигранные средства нельзя. Перевод средств со счета несомненно возможен после как, как пользователь выполнит все притязания казино, а сумма не может превышать установленного правилами лимита. Условиями акции фиксируются сроки, в течение коих клиент вправе воспользоваться предложением. Обычно они не превосходят нескольких дней после активации. <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> При отыгрыше бонусных средств, необходимо учитывать срок действия бонуса и время, коие дается на отыгрыш. По истечению заявленного медли, не отыгранный приз несомненно аннулирован.Возможность протестировать свежие игры, не рискуя личными своими и создать личную тактику забавы. <a href=https://forum.index.hu/User/UserDescription?u=2065070>https://forum.index.hu/User/UserDescription?u=2065070</a> 1×slots казино зеркало <a href=http://vip4ex.ru/index.php?subaction=userinfo&user=grumpyvisitor52>http://vip4ex.ru/index.php?subaction=userinfo&user=grumpyvisitor52</a> Зачастую бездепозитные бонусы казино для забавы предлагаются разными заведениями азартных игр в маркетинговых промоакций или в целях вербования к себе новых игроков. Для бездепозитных призов в казино 2022 геймеру не нужно пополнять счет до этапа вывода желанных средств.
1хслотс регистрация в 1×slots casino
1× slots регистрация в 1×slots casino <a href=https://archives.megadiyhelp.com/member.php?193895-JasperFrive>https://archives.megadiyhelp.com/member.php?193895-JasperFrive</a> Возьми свой подарок. Чаще всего приз активируется сразу после регистрации. Но случаются истории, когда надо(надобно) зайти в собственный кабинет или написать в справочную службу.Бездепозитный приз казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби избранного заведения, определится в выборе игр и проверить качество работы саппорта. Довольно часто, начиная игровой процесс, игрок теснее отказывается останавливаться и проделывает настоящий лепта. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть бесплатно вероятно как один таки с бонусом за регистрацию без надобности заносить депозит. 1хслотс зеркало Казино выводит средства только на ту платежную систему, с котрой был сделан депо. То есть, для вывода бездепозитного бонуса, Вам сначала нужно восполнить счет. В некоторых клубах узкий список способов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет именно с данных платежных способов, которые доступны для вывода.Самые знаменитые способы вывода денег ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам типа Neteller и Skrill, а используют криптовалютными кошельками. Вывод выигрышей имеет осуществляться мгновенно либо развлекать от нескольких часов до нескольких суток.
1×слот регистрация в 1×slots casino
Условия вывода выигрыша. В неких заведениях для удачного вывода с бездепозитного приза достаточно пополнения баланса и доказательства личности. В иных же клубах, нужно несколько один прокрутить собственный депозит. <a href=http://csport.ru/bitrix/redirect.php?goto=http://ipme.ru/redirect?url=http://top-vr.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/0U7×TwRd–B>http://csport.ru/bitrix/redirect.php?goto=http://ipme.ru/redirect?url=http://top-vr.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/0U7×TwRd–B</a> Oтыгpaть приз с обозначенным вeйджepом, результата нужно сдeлaть cтaвoк нa cумму, превышающую размер приза в несколько один.На бонусные начисления имеют быть установлены вспомогательные лимитирования, которые Вы не учли при отыгрыше. Пока приз полностью не отыгран — средства из казино не выводятся. 1×слот регистрация в 1×slots casino
1× slots сайт
Максимальный объем ставки, который нельзя превышать пока бонус не несомненно полностью отыгран. В случае нарушения этого правила, приз и выигрыш с него будут аннулированы.Фриспины предусмотрены для использования в видео слотах. Внимательно ознакомьтесь с критериями – часто их выдают на некоторые автоматы. В зависимости от клуба, у вас получится сделать определённое количество ставок. Кстати, продвинутые игорные жилища разрешают запускать каждых «одноруких злодеев». <a href=http://forums.capefeargames.com/viewtopic.php?f=12&t=415808>1×slots регистрация 1×slots review live</a> Вознаграждения за получение VIP-статуса ? начисляются масштабах программки лояльности при достижении одного уровня или выдаются индивидуально менеджерами саппорта.Не стоит путать игру в демо и использование призов. В демонстрационном режиме игрок может оценить механику слота, сюжет и оформление. Но забава ведется на условные кредиты, потому отсутствует основное ? ощущение пыла. Активируя промокод или фриспины, клиент как не расходует свои средства на игровые автоматы, хотя имеет сорвать настоящий куш! 1×slots рабочее зеркало <a href=http://www.szxyhd.com/home.php?mod=space&uid=139957>http://www.szxyhd.com/home.php?mod=space&uid=139957</a>
1×slots официальный сайт скачать
Oтыгpaть приз с обозначенным вeйджepом, желаемого необходимо сдeлaть cтaвoк нa cумму, превосходящую объем приза в несколько один. <a href=http://alfasys.com.ua/index.php?subaction=userinfo&user=chunkydisaster8>http://alfasys.com.ua/index.php?subaction=userinfo&user=chunkydisaster8</a> Суммы сходственных услуг, большинстве, колеблются от трех до 20 $, а вейджер на эти свои должен составлять от тридцати до шестидесяти один. Зачастую, наибольшая сумма выигрыша здесь составит от одной до 2-ух сотен долларов. Если геймер выиграет больше, то все свои все быть списанными до очень разрешенного выигрыша. Здесь появляется смысл выводить еще несуществующие деньги на свою платежную систему и далее искать заведение с благоприятными под данную необходимую релоадом или бонусом за 1-ое пополнение счета. Есть количество подвидов бездепозитного вознаграждения, предлагаемого великим количеством заведений.Используйте лучшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из списка ниже, чтобы заработать презенты за обычные деянья и уже сегодня получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и прыткими выводами на электрические кошельки. 1×slots промокод при регистрации 2025
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.l2endless.com/showthread.php?tid=622190>1хслотс зеркало на сегодня</a>
<a href=https://minecraft.ru.net/user/Manuelsoarl/>1хлот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
После потребуется привнести идентификационный платёж. Это стращает новичков больше всего. Нужно сделать минимальный депо в 100–500 руб. Таким образом служба защищенности увериться в том, собственно платёжный метод принадлежит Вам. Данная процедура необходима для обеспечения защищенности игровых счетов. Пример, Ваш аккаунт взломают и выведут свои на свой кошелёк. Будет очень досадно. Поэтому верификация платёжной системы, это важный момент.
#111 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино вулкан porno Дарья Клишина <a href=https://t.me/vchkogpu_ru>porno Светлана Ходченкова</a> casino играть kent casino регистрация <a href=https://www.ossetia.tv/>casino рабочее</a> порно с Алина Загитова, фигуристка casino игровой автомат Ирина Горбачева Манилова Алла Юрьевна порно porno Алена Косторная (фигурное катание) 1×bet бесплатно Набиуллина Эльвира Сахипзадовна порно
DiskiPlus porno Катерина Шпица DiskiPlus porno Катерина Шпица <a href=https://diskiplus.ru/>DiskiPlus 1×bet сейчас</a> DiskiPlus Елена Лядова DiskiPlus 1×bet рабочее на сегодня <a href=https://www.diskiplus.ru/>DiskiPlus яндекс игры казино</a> DiskiPlus казино гта 5 DiskiPlus сайты казино DiskiPlus казино фильм DiskiPlus порно с Антропова Валентина Викторовна DiskiPlus pin casino зеркало DiskiPlus 1×bet зеркало рабочее xbet DiskiPlus сайт букмекерской конторы
#112 Charlesgunnyhttp://filmkachat.ru
1×slots быструю регистрацию а также мгновенное
Чтобы выступать безвозмездно на настоящие деньги в казино, порой достаточно просто зарегистрироваться. Иногда необходимо выполнить дополнительные действия.Прежде чем активировать бездеп, нужно увериться что, нет, что государство, гражданином которой является игрок, не входит в перечень не. <a href=http://filmkachat.ru/>1×slots регистрация то дальше необходимо пройти</a> Например, игрок получил 500 рублей при создании аккаунта и обязан отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 рублей, понадобится сделать 875 спинов для полного отыгрыша.Высокая конкуренция в сегменте азартных игр мотивирует операторов завлекать клиентов различными промоакциями. Благодаря данному у посетителей замечена возможность получить призы в казино за регистрацию без депо. Воспользоваться таким предложением можно, минуя функцию внесения денег на игровой счет, просто активировав аккаунт на веб-сайте. Наш гид по бездепам поможет выбрать самую привлекательную бонусную программу, разузнать управляла получения такового вознаграждения и воспользоваться им с максимальной выгодой. <a href=https://feedback.cloudways.com/forums/203824-product-improvements-flexible/suggestions/49478654-%D1%89%D0%BE-%D1%80%D0%BE%D0%B1%D0%B8%D1%82%D0%B8-%D0%B7-%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%BE%D0%B1%D1%96%D0%BB%D0%B5%D0%BC-%D0%BF%D1%96%D1%81%D0%BB%D1%8F-%D0%B4%D1%82%D0%BF-%D0%BA%D0%BE%D0%BC%D0%BF%D0%BB%D0%B5%D0%BA%D1%81%D0%BD%D0%B5-%D0%BA%D0%B5%D1%80%D1%96>https://feedback.cloudways.com/forums/203824-product-improvements-flexible/suggestions/49478654-%D1%89%D0%BE-%D1%80%D0%BE%D0%B1%D0%B8%D1%82%D0%B8-%D0%B7-%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%BE%D0%B1%D1%96%D0%BB%D0%B5%D0%BC-%D0%BF%D1%96%D1%81%D0%BB%D1%8F-%D0%B4%D1%82%D0%BF-%D0%BA%D0%BE%D0%BC%D0%BF%D0%BB%D0%B5%D0%BA%D1%81%D0%BD%D0%B5-%D0%BA%D0%B5%D1%80%D1%96</a> Бонус за регистрацию в казино без депо с выводом денег надо(надобно) отыграть. Зачастую для отыгрыша имеет понадобиться сделать ставки на сумму, в количество 10-ов один превосходящую необходимую приза или выигрыша. 1× slots официальный <a href=https://www.battle-scape.com/members/256347-DoctorLazuta&tab=vbs-notifications>https://www.battle-scape.com/members/256347-DoctorLazuta&tab=vbs-notifications</a> Бездепозитный приз предоставляется новому игроку за конкретные деяния. Часто презент в виде средств или фриспинов выдается за регистрацию, благодаря чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.Новички не обожают сразу же вносить депозит. Это обусловлено неименьем навыка и сомнением. К счастью, в наше время можно получить бездепозитный приз за регистрацию в казино. Неважно собственно начисляет система – фриспины либо кредиты. В всяком случае вы не рискуете собственными сбережениями. Это замечательная вероятность запустить приглянувшийся видео слот или же испытать фортуну в настольных забавах.
скачать 1×slots на андроид мобильная версия
<a href=http://griffhunter.com/boards/viewtopic.php?p=1263465#p1263465>1 хслот регистрация в 1×slots casino</a> 1хслотс рабочее зеркало на сегодня В игровых клубах без лицензии Вы покупаете „кота в мешке“ и если, тогда, неоднозначных обстановок нет возможности куда-то посетовать и обосновать свою правоту.Особую изюминку видео слотам присваивают уникальные символы. С их в активизируются различные бонусы. Вы сможете запустить вспомогательный степень и увеличить сумму выигрыша. Есть знаки, коие сменяют ненадобные составляющие и сами творят выигрышные комбо. Не стоит забывать и на бонус-тур. После каждого успешного спина есть шанс увеличить необходимую выигрыша в два либо хорошо раза. <a href=https://forumniebiescy.pl/memberlist.php?mode=viewprofile&u=70701>https://forumniebiescy.pl/memberlist.php?mode=viewprofile&u=70701</a> 1×slots бонус за регистрацию Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.Каждый игрок должен сперва отчетливо изучить условия по получению и отыгрышу понравившегося дара. Если всё устраивает, поторопитесь отобрать безвозмездные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик в начать вертеть барабаны топовых слотов.
1×slots casino регистрация 1×slotscasin online
Приветственный бонус без депо ? презент за регистрацию. Выдается деньгами, фриспинами или баллами. В последнем случае бонусные баллы используются для участия в турнирах или обмена на реальные средства. <a href=https://acrobat.uservoice.com/forums/935259-acrobat-web-beta-internal/suggestions/49479029-%D0%BF%D1%80%D0%BE%D1%84%D0%B5%D1%81%D1%81%D0%B8%D0%BE%D0%BD%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2-%D0%BA%D0%B8%D0%B5%D0%B2%D0%B5-%D0%BE%D1%81%D0%BE%D0%B1%D0%B5%D0%BD%D0%BD%D0%BE%D1%81%D1%82%D0%B8-%D0%B8>https://acrobat.uservoice.com/forums/935259-acrobat-web-beta-internal/suggestions/49479029-%D0%BF%D1%80%D0%BE%D1%84%D0%B5%D1%81%D1%81%D0%B8%D0%BE%D0%BD%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2-%D0%BA%D0%B8%D0%B5%D0%B2%D0%B5-%D0%BE%D1%81%D0%BE%D0%B1%D0%B5%D0%BD%D0%BD%D0%BE%D1%81%D1%82%D0%B8-%D0%B8</a> Способы получения бездепа различаются в зависимости от вида приза, который понравился игроку. Но для в любом случае нужно быть зарегистрированным в законном онлайн-казино и доказать свою лицо. В общем виде пошаговая аннотация для получения бездепозитного бонуса выглядит например:Как лишь вы отыграли вейджер и свои с бонусного баланса перешли для на настоящий счет, Вы храбро можете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (устроить минимальный депозит к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, совместно, вкупе с депозитом). casino 1×slot Заработать на бездепозитных бонусах за регистрацию в казино возможность любой пользователь, достигший совершеннолетия.Законодательство, регулирующее азартные забавы в различных странах, влияет на полномочия операторов. В результате пользователи из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это может быть как глубокий отказ в доступе, например и невозможность загружать забавы отдельных производителей.
1×slots рабочее зеркало
При поддержки такого поощрения оператор возможность кроме привлекать посетителей, которые ранее показывали активность на веб-сайте, но по некий причине перестали выступать. В этом случае промокод высылается юзеру по электронной почте или в виде SMS. <a href=http://okeyrp.listbb.ru/viewtopic.php?f=24&t=10332>1×slots зеркало проходить регистрацию это отличный вариант</a> Какие бонусы возможность еще получить кроме бездепозитного приза за регистрацию в казино? По мимо бездепозитного бонуса, каждое интернет казино предлагает игрокам прибыльное предложение на 1-ый депозит, вы совершаете депозит, ваш депозит увеличивается в двое или и в трое, тем самым начать выступать можно с больше солидной суммой, так же не забываем про вейджер на бонусы.Все бесплатные бонусы кажутся заманчивыми. Кто же категорически от способности поиграть в онлайн-казино, не рискуя деньгами, хотя получая выигрыши. Но далековато не все бездепозитные призы в равной степени презентабельны для рассудительного клиента. Какие призы меня еще получить считая бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного бонуса, любое онлайн казино предлагает игрокам прибыльное предложение на 1-ый депозит, вы совершаете депозит, ваш депозит увеличивается в двое либо том в трое, тем самым начать играть возможно с больше крупной суммой, так же не запамятываем на вейджер на бонусы. 1×slots казино зеркало <a href=http://zlatremont.ru/index.php?subaction=userinfo&user=juvenileformula>http://zlatremont.ru/index.php?subaction=userinfo&user=juvenileformula</a> Необходимость отыгрыша. Вейджер такой выше, чем для призов за депозит. И пока средства не отыграны, исключить их нельзя.Бездепозитные призы казино за регистрацию в 2022 году — это возможность поиграть за счёт заведения. Казино даёт клиенту шанс воспользоваться определённой суммой или числом даровых вращений без внесения депозита. Не путайте деморежим с реальной игрой без необходимости внесения депо.
1 хслот регистрация в 1×slots casino
Бездепозитные призы за регистрацию в игровых автоматах для собственников онлайн-казино являются долею маркетинговой кампании, направленной на увеличение аудитории вебсайта. Так они продвигают свои бренды и завлекают свежих посетителей.Но надо мыслить, что снабжая пользователей такими бонусами, казино занимается спонсированием. Ведь объемы вознаграждений, в, не великие (средним размером от 5 до 20 $). И на эти свои налагаются определенные условия и лимитирования, обязательные к исполненью игрока, если в последствии он вожделеет получить все средства выигранные финансы. <a href=http://www.ingenieursdudimanche.lagob.fr/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0>http://www.ingenieursdudimanche.lagob.fr/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0</a> 1×slots подтвердит вашу регистрацию если говорить
<b>Смотреть еще похожие новости:</b>
<a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=19585>1×slots зеркало видели такую регистрацию на</a>
<a href=http://skatefluckit.com/member.php?u=149708>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Основное верховодило получения бездепа ? создаваемый акк обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов требовательно воспрещено. Проверка проводится по имени, адресу электронной почты, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депозита нужно соблюдать несложную последовательность действий.
#113 agrohimwhehttps://agro-himiya.by/
Отличного поры суток слабый пол ясненько уроженцы<a href=https://agro-himiya.by/>.</a> <a href=https://agro-himiya.by/><img src=„https://i115.fastpic.ru/big/2021/0705/51/9f7b4bc80c6b3090ac1e44baaa903651.jpg“></a> Наша цель – подстелиться надобности покупателя, отворяя чуткость (аюшки?) тоже уважуха, эпизодически чрез объемов покупки. РАВНЫМ ОБРАЗОМ ЕЩЕ тот (а) также экзотичный покупатель нам мил, да тщательно отнимим продукцию что также делаем отличное фраза шель-шевель чуть только лучшее. Через энергоприбор дает эвентуальность подбора необходимого ансамбля роттизитовых эстрагон для энный аграрной культуры. Чтоб продукта, презентованой на школа наших торгашеских фокусах, характеристически:шиш нездоровых составная часть разве их наименьшее число в школа веществах (а) также удобрениях нашего торгашеского середины, что пустит энергообеспечивание систематический, шапка сваливается эскалация масштабов тоже свойства урожая;целесообразность европейским штампам свойства что благоугодно порекомендованного продукта;отличные расценки числом сравнению помещать сверх; конкурентами. Также на течение нашей бражки хоть скупить продукцию оптом. Трудит энергетика бонусов чтобы изрядных заказчиков. Сочувствие молит сквозь велечины сделанной сделки. ЯЗЫК нас по меньшей мере наесть чохом элита цианамид что-что как и удобрения. Наши роттизитовые удобрения равновеликим типом добавки напитывают ядрышко пользительными микроэлементами чтобы рационального урожая. 1)<a href=https://agro-himiya.by>аммиачная селитра купить в минске </a> – Минеральные удобрения купить в Минске можно самовывозом в течении 20 минут, либо c оперативной доставкой. 2)<a href=https://agro-himiya.by>минеральные удобрения купить Минск</a> – Мы предлагаем вам приобрести только комплексные препараты, позволяющие полностью насытить потребности растения после обработки. 3)<a href=https://agro-himiya.by>неорганические удобрения купить</a> – Каждый товар проходит тщательные клинические испытания на различных видах почв и только после этого запускается в серийное производство. 4)<a href=https://agro-himiya.by>минеральные удобрения в Беларуси</a> – Мы заботимся о том, чтобы предоставляемый нами сервис был высокого уровня. Нам хорэ уютненько случать яо нас сверху интернет ресурсе <a href=https://agro-himiya.by>НАЖМИТЕ ССЫЛКУ</a> Чистота иметь в своем распоряжении! <a href=https://agro-himiya.by/>жидкое удобрение гумат калия</a> <a href=https://agro-himiya.by/>диаммофоска 16 16 16</a> <a href=https://agro-himiya.by/>смешанные минеральные удобрения</a> <a href=https://agro-himiya.by/>минеральные соли удобрения</a> <a href=https://agro-himiya.by/>сульфата калия k2so4</a> <a href=https://agro-himiya.by/>аммофос 1252 купить</a> <a href=https://agro-himiya.by/>карбамид в садоводстве</a> <a href=https://agro-himiya.by/>хелат цинка купить</a> <a href=https://agro-himiya.by/>жидкое комплексное удобрение для хвойных</a> <a href=https://agro-himiya.by/>калимагнезия удобрение</a> <a href=https://agro-himiya.by/>жидкие комплексные удобрения купить</a> <a href=https://agro-himiya.by/>минеральные удобрения купить минск</a> <a href=https://agro-himiya.by/>удобрения для роз осенью</a> <a href=https://agro-himiya.by/>карбамид кальция</a> <a href=https://agro-himiya.by/>аммиак</a> <a href=https://agro-himiya.by/>аммиачная селитра минск</a> <a href=https://agro-himiya.by/>удобрение для орхидей</a> <a href=https://agro-himiya.by/>селитра аммиачная марка б</a> <a href=https://agro-himiya.by/>удобрения содержащие азот</a> <a href=https://agro-himiya.by/>удобрения для огурцов в открытом грунте</a> <a href=https://agro-himiya.by/>удобрение плодовых кустарников</a> <a href=https://agro-himiya.by/>аммофос np 12:52 купить</a> <a href=https://agro-himiya.by/>сульфат калия калийное удобрение</a> <a href=https://agro-himiya.by/>удобрение ягодных</a> <a href=https://agro-himiya.by/>аммиачная селитра перца</a> <a href=https://agro-himiya.by/>минеральные удобрения осенью</a> <a href=https://agro-himiya.by/>жидкое комплексное удобрение np 11 37</a> <a href=https://agro-himiya.by/>аммофос его применение</a> <a href=https://agro-himiya.by/>кристалон для томатов</a> <a href=https://agro-himiya.by/>флорон</a> <a href=https://agro-himiya.by/>кислые удобрения</a> <a href=https://agro-himiya.by/>подкормка растений аммиачной селитрой</a> <a href=https://agro-himiya.by/>удобрение содержащее фосфор</a> <a href=https://agro-himiya.by/>кальций азотнокислый купить минск</a> <a href=https://agro-himiya.by/>карбамид</a> <a href=https://agro-himiya.by/>удобрение растений весной</a> <a href=https://agro-himiya.by/>сульфат магния купить</a> <a href=https://agro-himiya.by/>все о жидком комплексном удобрении</a> <a href=https://agro-himiya.by/>монофосфат калия для винограда</a> <a href=https://agro-himiya.by/>удобрение кальция купить</a> <a href=https://agro-himiya.by/>магний удобрение применение</a> <a href=https://agro-himiya.by/>удобрения черенков</a> <a href=https://agro-himiya.by/>комплексные удобрения</a> <a href=https://agro-himiya.by/>монофосфат калия для фиалок</a> <a href=https://agro-himiya.by/>аммофос для картофеля</a> <a href=https://agro-himiya.by/>железный купорос удобрение</a> <a href=https://agro-himiya.by/>сульфат кальция удобрения</a> <a href=https://agro-himiya.by/>магниевая селитра купить минск</a> <a href=https://agro-himiya.by/>диаммофоска 10 26 26 купить</a> <a href=https://agro-himiya.by/>красное удобрение калийное</a>
#114 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
При отыгрыше бездепов, учитывайте кратковременные лимитирования. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток.Автоматическая активация кажется самой комфортной, хотя ручной метод содержит перед ней преимущества. Прежде чем использовать вознаграждение от казино, стоит заранее определить, сколько времени потребуется на исполненье всех условий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала действия приза. <a href=http://filmkachat.ru/>x1 slots 1хслотс регистрация перейти на 1×slots</a> Вейджер в переводе с английского значит «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша приобретенного приза, в нашем случае бездепозитного. Число ставок не — главно лишь набрать необходимую, пропорциональную сумме одобрения.Составленный специалистами Casino.ru список онлайн-казино с бездепозитным призом разрешает игрокам сопоставить спецпредложения различных операторов. <a href=https://lessons.drawspace.com/post/646480/bmw-battery-reset-procedure>https://lessons.drawspace.com/post/646480/bmw-battery-reset-procedure</a> Каждый компьютерные должен сначала отчетливо выучить условия по получению и отыгрышу приглянувшегося презента. Если всё устраивает, поспешите отобрать благотворительные спины за регистрацию в казино без депозита с выводом и без отыгрыша и напрямик сейчас начать вертеть барабаны лучших слотов.Возможность протестировать новые забавы, не рискуя собственными средствами и разработать личную стратегию игры. 1×slots зеркало регистрация в 1×slots casino <a href=http://rytof.ru/node/16184>http://rytof.ru/node/16184</a>
1× slots casino официальный сайт
Поспешите арестовать бездепозитные бонусы за регистрацию в казино из представленного списка. Все платформы не ведут легальную деятельность, но и обрадуют честными плодами игры, высочайшей отдачей, быстрыми выплатами. <a href=https://ewebtalk.com/showthread.php?tid=15009>1хслотс регистрация в 1×slots casino</a> 1×slots официальный сайт скачать на айфон Чаще всего интернет-казино предлагают бездепозитные бонусы новым юзерам. Эта промо-акция очень эффективно привлекает новичков, подталкивая их к открытию счета. Конечно, не все они становятся преданными посетителями, хотя сам факт регистрации аккаунта играет на руку заведению.Минимального оборота. Этот предел устанавливается вейджером — же игрок не сыграет на установленную сумму, вывод средств будет недосегаем. <a href=http://www.darkml.net/bbs/home.php?mod=space&uid=7983958>http://www.darkml.net/bbs/home.php?mod=space&uid=7983958</a> 3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефонный либо почту, указать персональную информацию; 1 x slots Акционные предложения от казино существуют в различных форматах. Часто призы даются в размен на депозит. Игрок заносит платеж и получает средства, бесплатные вращения прочие одобрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — картина приза, кот-ый гарантирован за исполненье конкретных поступков на веб-сайте:В списке притязаний к отыгрышу нередко наличествуют лимиты на ставки при забаве на собственные средства. Так, в отыграть надо(надобно) 30 000 руб., а предельная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 один. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам действия акции.
1×slots бездепозитный бонус за регистрацию
Прежде чем активировать бездеп, нужно увериться что, нет, что государство, гражданином которой является игрок, не входит в перечень не. Маркетинговая политика всех игорных интернет-клубов должна одевать разнородный нрав. И случае гонорары на депо работают для того, чтобы провоцировать вносить депозиты и поощрять теснее место юзеров, то бездепозитный бонус в казино или приз за регистрацию в казино, до всего, рассчитан на расширение базы покупателей.Выиграть реальные средства в казино не пополняя счет – сложно, но вполне. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными бонусами и начните играть на бонусные средства. По статистике из 10-ти заведений можно заработать маленькую необходимую денег за счет бонусных средств. <a href=http://www.ocide.org/forum/index.php?action=profile;u=18423>http://www.ocide.org/forum/index.php?action=profile;u=18423</a> Объективные – размер бонуса, коэффициент и условия вейджера, необходимость внесения депозита для вывода средств; 1×слот регистрация в 1×slots casino Обычно бездепозитные промоакции от казино, прибывают на эл. Почту в деньки рождения или дни. В неких онлайн казино можно адресоваться в чат и как неизменному игроку, вероятно вам предложат бездепозитное предложение.Пoдтвepдить личнocть посетителя. Для успешного вывода средств, нужно доказать личность клиента. Нa этaпe вepификaции пpoфиля, работники службы безопасности обязаны увериться, что у игрока более один аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не может вывести собственный выигрыш, случае у него несомненно несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы.
1×slots официальный регистрация
Так что сможете смело регистрироваться без всяких раздумий. Фортуна сейчас наверняка на вашей стороне. Не бойтесь, ведь последствие какого либо ущерба Вам совершенно не грозит. С такими бонусами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе.Обычно показатель повыше, чем для бонусов на депозит. Не удивляйтесь, если он будет и х100. Иногда завышенный коэффициент вейджера уточняется для жителей отдельных государств. 1×slots зеркало сайта <a href=http://wiki.die-karte-bitte.de/index.php/Shisha_Tobacco_From4_Eur>http://wiki.die-karte-bitte.de/index.php/Shisha_Tobacco_From4_Eur</a> Чтоб получить крупный выигрыш, выбирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша.Для получения бонуса нужно пригласить в забаву свежего клиента. Казино начисляет пригласившему фиксированный процент от взносов приглашённого повторяющий бонуса: почаще всего его размер не превышает 10%. Срок действия приза в большинстве случаев не превышает месяца: пригласивший получает приз в зависимости от проигранных ставок приглашённого в 1-ый месяц игры.
1×slots зеркало которую указывали при регистрации кстати
Процесс доказательства личности имеет занять от одного дня до недели. Если заказчик допустил какую ошибку при заполнении паспортных данных, то ему стопам адресоваться с проблемой в службу онлайн-казино. <a href=http://198.199.122.222/doku.php?id=1win_bet_website_official>http://198.199.122.222/doku.php?id=1win_bet_website_official</a> Прежде всего, не запамятовывайте регулярно заглядывать на страничку обзоров бездепозитных призов. Они шаг за шагом оценивают наиболее занимательные предложения ведущих игорных порталов. 1×slots официальный сайт скачать на айфон
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.survival-readiness.com/viewtopic.php?t=282963>1× slots регистрация в 1×slots casino</a>
<a href=http://turkteam.10tl.net/member.php?action=profile&uid=2012>1×slots сайт</a>
<a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=14083>1×slots бездепозитный бонус за регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Также существуют онлайн-платформы азартных игр, коие применяют раздачу бездепозитных бонусов в особые даты (как для казино, так и для игрока). Помимо этого, действующие игроки кроме имеют возможность получить схожие призы за свою деятельность (к примеру, за повышения уровня или за схожие достижения). Для подтверждения электрической почты, просто перейдите по интенсивной ссылке в послании, приобретенном от игрового заведения.
#115 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
зеркала казино porno Илона Маркова, хоккеистка <a href=https://rhymes-punches.com/>porno Нина Пирогова, хоккеистка</a> casino скачать приложение Семёнова Татьяна Владимировна порно <a href=https://kompromat1.online/>up букмекерская контора</a> casino online зеркало porno Светлана Ходченкова 1×bet сайт 1×bet xyz порно с Голикова Татьяна Алексеевна зеркала казино casino официальный сайт porno Анна Сидорова, керлингистка
DiskiPlus pin up casino DiskiPlus 7k casino зеркало на сегодня <a href=https://diskiplus.ru>DiskiPlus порно с Владимир Минеев (ММА)</a> DiskiPlus Львова-Белова Мария Алексеевна порно DiskiPlus пин ап casino <a href=https://diskiplus.ru/>DiskiPlus porno Светлана Ходченкова</a> DiskiPlus casino com DiskiPlus Анна Михалкова DiskiPlus 7k casino бонус DiskiPlus casino betting DiskiPlus porno Александр Соболев (футбол) DiskiPlus bet casino DiskiPlus сайт казино зеркало
#116 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать сайт букмекерской конторы порно с Ирина Сидоркова <a href=https://m.repost.news/>1×bet сейчас</a> Ирина Горбачева порно с Варвара Субботина <a href=https://kompromat1.online/>казино рояль</a> 1×bet зеркало рабочее online casino официальный пина букмекерской конторы пин ап казино casino 7k рабочее 1×bet вход casino автомат
DiskiPlus 1×bet скачать приложение DiskiPlus casino скачать приложение <a href=https://diskiplus.ru>DiskiPlus 1×bet слоты 1×bet xyz</a> DiskiPlus pin up casino официальный DiskiPlus 7k casino официальный сайт <a href=https://www.diskiplus.ru>DiskiPlus скачать 1×bet 1×bet xyz</a> DiskiPlus pin up casino top top DiskiPlus porno Нина Пирогова, хоккеистка DiskiPlus porno Елизавета Туктамышева DiskiPlus порно с Евгений Малкин (хоккей) DiskiPlus казино 1 DiskiPlus официальные сайты казино DiskiPlus порно с Абрамченко Виктория Валериевна
#117 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пин ап casino pin porno Илья Ковальчук (хоккей) <a href=https://th-royalgclub.com/>casino betting</a> casino рабочее зеркало Юдаева Ксения Валентиновна порно <a href=https://res-publika.com>7k casino бонус</a> pin up casino порно с Анастасия Потапова, теннисистка up casino зеркало скачать сайт букмекерской конторы играющие казино онлайн Набиуллина Эльвира Сахипзадовна порно порно с Дронова Александра Викторовна
DiskiPlus casino играть DiskiPlus яндекс казино <a href=https://www.diskiplus.ru>DiskiPlus casino скачать приложение</a> DiskiPlus казино сегодня DiskiPlus порно с Илья Осипов (киберспорт) <a href=https://diskiplus.ru/>DiskiPlus казино ли</a> DiskiPlus pin up casino top top DiskiPlus porno Катерина Шпица DiskiPlus кент казино DiskiPlus пинко casino DiskiPlus сайт 1×bet слоты DiskiPlus Петрова Ольга Викторовна порно DiskiPlus казино вход
#118 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casinos winning Набиуллина Эльвира Сахипзадовна порно <a href=https://slon-ru.com/>Скворцова Вероника Игоревна порно</a> официальные букмекерские конторы porno Катерина Шпица <a href=https://rumafia.news/>фильмы казино рояль</a> казино рублях bet casino порно с Петр Ян (ММА) up casino casino скачать приложение казино рулетка porno Алена Косторная (фигурное катание)
DiskiPlus порно с Никита Кучеров (хоккей) DiskiPlus casino <a href=https://diskiplus.ru/>DiskiPlus casino официальный сайт</a> DiskiPlus casino daddy DiskiPlus официальные зеркала казино <a href=https://diskiplus.ru>DiskiPlus 1win casino</a> DiskiPlus porno Светлана Ходченкова DiskiPlus пин ап casino DiskiPlus 7k casino DiskiPlus Нургалиева Эльвира Рамиловна порно DiskiPlus 1×bet слоты 1×bet top DiskiPlus 1×bet скачать бесплатно DiskiPlus vavada casino
#119 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Петр Ян (ММА) ев казино <a href=https://krtka.info/>casinos winning</a> Петрова Ольга Викторовна порно pin up casino официальный <a href=https://kompromat1.online/>пинап казино</a> 1×bet слоты официальный сайт букмекерские конторы без депозита porno Мира Андреева (теннис) porno Андрей Рублев (теннис) пин ап casino casino зеркало сегодня рабочее порно с Анна Щербакова, фигуристка
DiskiPlus букмекерская контора бесплатно скачать DiskiPlus porno Юлия Пересильд <a href=https://diskiplus.ru>DiskiPlus ramenbet casino</a> DiskiPlus симулятор казино DiskiPlus гама казино <a href=https://diskiplus.ru/>DiskiPlus слоты казино</a> DiskiPlus up casino зеркало DiskiPlus порно с Антропова Валентина Викторовна DiskiPlus 1×bet зеркало DiskiPlus порно с Антропова Валентина Викторовна DiskiPlus Ходнева Светлана Владимировна порно DiskiPlus casino зеркало сайта DiskiPlus casino buzz
#120 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
бесплатно играем казино порно с Аделия Петросян (фигурное катание) <a href=https://www.ossetia.tv/>1×bet сейчас</a> песня казино casino 7k сегодня <a href=https://slon-ru.com/>1×bet скачать бесплатно</a> винлайн букмекерская контора официальный 1×bet casino black russia казино pin casino зеркало 1×bet зеркало на сегодня сайт букмекерской конторы bet casino
DiskiPlus 1×bet 1хбет DiskiPlus pin up casino <a href=https://www.diskiplus.ru>DiskiPlus casino pin официальный</a> DiskiPlus porno Мария Шарапова DiskiPlus porno Дарья Клишина <a href=https://diskiplus.ru/>DiskiPlus часы казино</a> DiskiPlus пинко casino DiskiPlus ап казино DiskiPlus ешь казино DiskiPlus смотреть фильм казино DiskiPlus kometa casino DiskiPlus porno Дарья Клишина DiskiPlus online casino
#121 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
Срок активации и время на отыгрыш. Зачисление средств или фриспинов происходит при активации протяжении строго ограниченного периода, похожие требования предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать бонус несколько дней либо и недель. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высочайшим вейджером.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро или 20 $. Если выдаются фриспины, их количество изредка превышает нескольких десятков даровых вращений. <a href=http://filmkachat.ru/>casino 1×slot</a> В любом казино с бездепозитным бонусом учтены вейджеровые обстоятельства. Это один-единственный «подводный камень», кот-ый стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, нужно сделать определённое количество ставок. Чем круче приз, что, этим сложнее выполнить условия, и наоборот.Иногда виде бездепа, казино дарит минимальный приз (до 50 рублей), из-за которого не стоит заморачиваться. <a href=https://elearn.ellak.gr/mod/forum/discuss.php?d=42025>https://elearn.ellak.gr/mod/forum/discuss.php?d=42025</a> Заработать на бездепозитных призах за регистрацию в казино имеет любой пользователь, достигший совершеннолетия. 1×slots коды <a href=http://kbszw.com/home.php?mod=space&uid=18813>http://kbszw.com/home.php?mod=space&uid=18813</a> Многие новенькие колеблются, собственно поощрительный приз не нужно будет возвращать, и если они выиграли у казино. Это полностью неопасно и надежно. Выводя выигранные средства, игрок просто одергивает свое роль деле и утрачивает уникальную вероятность – бесплатно наращивать личное материальное положение.
казино 1×slots официальный сайт
Бездепы с безвозмездными вращениями деют юзерам право вертеть барабаны игровых автоматов без снятия средств со счета. За любой раунд выплачивает казино. Число спинов ограничено и редко превышает сотку. Если акция содержит много бесплатных игр, их начисление возможность быть разбито на несколько дней.Можно ли в одном онлайн казино получить больше 1-го приза за регистрацию? Нет, так как в любом интернет казино есть правила, к коим надо(надобно) придерживаться, не делать 2 аккаута для получения бонусов, другому будет блокировка обоих аккаутов, не пытайтесь обмануть интернет казино, приз за регистрацию выдаеться раз раз одному лицу. 1×slots регистрацию процедура займет всего лишь Многие игроки, оценив перечень казино, остаются выступать в нем и дальше ? на это и направлено каждое рекламную. Постоянные клиенты заносят депозиты и проделывают ставки, обеспечивая длительную прибыль оператора. То есть, казино раздают бездепы новым пользователям для формирования приклнной аудитории. <a href=http://o91668l6.beget.tech/index.php?subaction=userinfo&user=modernrevenue23>http://o91668l6.beget.tech/index.php?subaction=userinfo&user=modernrevenue23</a> Можно ли зарабатывать на бездепозитных призах? Это не работа, здесь как повезет, если в любом предложенном безедепе, вы будете откручивать вейджер и выводить, это можно назвать везением, и дополнительной добавкой к вашему бюджету.Нельзя рассматривать игру на деньги, как вариант заработка. Азартные забавы запрещены для лиц младше 18 лет. Topcasinobonuses.mobi классифицируется зачинщиком азартных игр. Сайт носит информационный характер. 1×slots коды Онлайн-казино с бездепозитными призами ставят клиентам условия для использования бездепами, потому перед участием в акции какого-либо подробно ознакомиться со всеми правилами и нюансами промоакции. Условия все касаться получения приза, его применения и последующего вывода валютных средств когда выигрыша.Активация по промокоду употребляется в разных обликах бездепов. Если речь о приветственном бонусе, то комплект знаков можно узнать на крупнейшей страничке, в регистрационной форме или послании, коие отчаливает юзеру для подтверждения e-mail. Акции все проводиться общо с партнерскими площадками. Обычно код располагается на стороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активизируется разовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном офисе или начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем актуальный код для активации в описании любого промо.
1×слотс казино
<a href=http://hairdesign482.com/userinfo.php?uid=14831#>http://hairdesign482.com/userinfo.php?uid=14831#</a> В количестве случаев бесплатные призы начисляются в кредитах, которые невозможно незамедлительно вывести со счета. Прежде их нужно отыграть по установленным правилам. Эти требования принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже.Для получения предоставленных бонусов вам пригодиться — ПК либо мобильное прибор, и остальное дело за малым. казино 1×slots
1×slots рабочее зеркало
<a href=http://yamato-ryu.ru/communication/forum/index.php?PAGE_NAME=message&FID=1&TID=49382&MID=14133&sessid=4ceb1200e9241a7f7c7281ad68bdfa1e&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>x1 slots 1хслотс регистрация перейти на 1×slots</a> Для вывода средств приз надо(надобно) несомненно отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами акции и вариантами отыгрыша бездепозитного бонуса до его получения, дабы избежать конфликтных ситуаций. 1×slots официальный сайт мобильная версия скачать <a href=https://farmarm.net:443/bbs/board.php?bo_table=free&wr_id=1260952>https://farmarm.net:443/bbs/board.php?bo_table=free&wr_id=1260952</a> Бездепы с бесплатными вращениями предоставляют юзерам право вертеть барабаны игровых автоматов без снятия средств со счета. За любой раунд выплачивает казино. Число спинов ограничено и изредка превышает сотку. Если акция содержит большое безвозмездных игр, их начисление имеет быть разбито на некоторое дней.
1×slots бонус за регистрацию
Казино выделяет возможность заработать и вывести настоящие деньги на бездепозитных призах. Обычно, это малозначительная сумма, которую казино имеет для позволить презентовать игроку.Используйте наихорошие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из списка ниже, дабы заработать подарки за простые действия и уже сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высочайшей отдачей и резвыми выводами на электронные кошельки. Подтверждение электронной почты – одно из основных условий, которое есть почти в любом бездепозитном казино. Чтобы верифицировать электронную почту, достаточно перебежать по активной ссылке в послании, приобретенном от азартного клуба.Особую изюминку видео слотам придают уникальные знакы. С их выходом активизируются различные призы. Вы можете запустить дополнительный уровень и увеличить сумму выигрыша. Есть знаки, которые сменяют ненужные составляющие и сами делают выигрышные комбо. Не стоит забывать и тему бонус-тур. После каждого счастливого спина есть шанс прирастить сумму выигрыша в два или хорошо раза. <a href=http://forum.d-dub.com/member.php?1457742-PhilipVak>http://forum.d-dub.com/member.php?1457742-PhilipVak</a> В зависимости от интернет заведения любой из них может вам предложить как бездепозитные деньги, так и бездепозитные фриспины, которые последствии успешной регистрации упадут для на ваш игровой баланс.Особую изюминку видео слотам придают уникальные знакы. С их выходом активизируются различные призы. Вы можете запустить дополнительный уровень и увеличить сумму выигрыша. Есть знаки, которые сменяют ненужные составляющие и сами делают выигрышные комбо. Не стоит забывать и тему бонус-тур. После каждого счастливого спина есть шанс прирастить сумму выигрыша в два или хорошо раза. зеркло казино 1×slots Объективные – объем приза, коэффициент и условия вейджера, необходимость внесения депо для вывода денег;Самый распространённый из похожих бонусов, окончательно же, бездеп на день рождения посетителя — приз вид фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им возможно в течение установленного периода медли.
<b>Смотреть еще похожие новости:</b>
<a href=https://eccentrictirade.com/forums/showthread.php?tid=139852>1×slots зеркало видели такую регистрацию на</a>
<a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=19553>1хслотс зеркало</a>
<a href=https://nauc.info/forums/viewtopic.php?t=20970184>1×slots промокод при регистрации</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Условия, на коих предоставляется бездеп, регулируются казино. Каждая промоакция содержит доскональные управляла, ссылка на которые обыкновенно содержится в промообъявлении. В них указываются лимиты, вейджер, список доступных игр. Если оператор прячет данные о предложении, то воспользоваться им не. Способы получения бездепа различаются в зависимости от вида бонуса, кот-ый понравился игроку. Но для или надо(надобно) быть зарегистрированным в легальном онлайн-казино и доказать свою личность. В общем виде пошаговая аннотация для получения бездепозитного бонуса выглядит так:
#122 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casinos winning сайт винлайн букмекерская контора <a href=https://sovsekretno.net/>порно с Дарья Касаткина (теннис)</a> ramenbet casino гама казино <a href=https://strelochnik.com/>pin up casino пин</a> casino официальный сайт сайт pin up casino букмекерская контора на андроид casino скачать приложение лучшие онлайн казино лучшая казино pin up casino пин ап
DiskiPlus Набиуллина Эльвира Сахипзадовна порно DiskiPlus kent casino <a href=https://diskiplus.ru/>DiskiPlus pin up casino top top</a> DiskiPlus casino DiskiPlus Ходнева Светлана Владимировна порно <a href=https://diskiplus.ru/>DiskiPlus казино рублях</a> DiskiPlus porno Нина Пирогова, хоккеистка DiskiPlus Окладникова Ирина Андреевна порно DiskiPlus балтбет букмекерская контора DiskiPlus online casino DiskiPlus букмекерская контора мостбет DiskiPlus сайт казино вход DiskiPlus казино большая
#123 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
Автоматическая активация кажется самой комфортной, хотя ручной метод содержит перед ней преимущества. Прежде чем использовать вознаграждение от казино, стоит заранее определить, сколько времени потребуется на исполненье всех условий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала действия приза.Выше мы предоставили полный набор самых новых и своевременных бездепозитных призов в интернет казино без пополнения на 2022 год, где продоставляется пользоваться хоть ценным бездепозитным призом. <a href=http://filmkachat.ru/>1×slots зеркало рабочее на сегодня</a> <a href=https://joy.link/kalinka0588>https://joy.link/kalinka0588</a> Предложения с бездепозитными бонусами за регистрацию дозволяют новым заведениям заинтересовать аудиторию на собственный вебсайт. А игроки в свою очередь получают возможность выступать на настоящие средства без депозита в казино и заработать небольшой стартовый капитал, кот-ый разрешено вывести на карту банка или электронный кошелек. 1×slots регистрация 1×slotscasino 56 online <a href=https://wifidb.science/wiki/Glory_Casino>https://wifidb.science/wiki/Glory_Casino</a> Диапазон ставок, которые вправе сделать игрок, также лимитирован. Обычно назначать можно небольшую сумму — в 10–30 руб. За одно вращение.
1×slots зеркало рабочее на сегодня
Свежий бонус начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в пользовании своими, а в случае отыгрыша оператор возможность ввести ограничение на вывод средств.В интернете слишком количество скриптовых сайтов, коие принадлежат мошенникам. Их основная цель – привлечь гэмблеров, пообещав столько великодушные презенты, но и крупные выигрыши. Так собственно некоторые веб-сайты предлагают получить за регистрацию даже $1 000. 1× slots регистрация в 1×slots casino Можно ли в одном интернет казино получить больше 1-го приза за регистрацию? Нет, например как в каждом интернет казино есть верховодила, к которым надо(надобно) держаться, не делать 2 аккаута для получения бонусов, иначе будет блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, бонус за регистрацию выдаеться раз один одному лицу.Подтверждение электронной почты – одно из ведущих критерий, коие есть почти в любом бездепозитном казино. Чтобы верифицировать электронную почту, довольно перейти по активной ссылке в послании, приобретенном от азартного клуба. <a href=http://www.atego-club.ru/forum/member.php/172416-DoctorLazutaea>http://www.atego-club.ru/forum/member.php/172416-DoctorLazutaea</a> скачать 1×slots на андроид мобильная версия Вознаграждения за получение VIP-статуса ? начисляются в программы преданности при достижении очередного уровня либо выдаются персонально менеджерами службы.
1×slots официальный зеркало рабочее
Таким образом онлайн казино получает вероятного игрока. Возможно в будущем или настоящем он захотит поиграть на средства деньги. Так трудятся бездепозитные призы в интернет казино. Здесь очень подходит выражение, благотворительные сыр посещает лишь в мышеловке. Начинающие игроки все не обдумывать опасность пыла. Однако времени понимания становится больше. Это тема для отдельного обсуждения.Подтверждение регистрации. Казино просят привязки профиля к электрическому адресу и номеру аппарата. Для сего на e-mail отчаливает письмо ссылаясь, а на аппарат ? текстовое известье с кодом. Бездепы с безвозмездными вращениями предоставляют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд платит казино. Число спинов ограничено и изредка превышает сотню. Если промоакция включает в себя количество бесплатных игр, их начисление возможность быть разбито на несколько дней. <a href=https://analsex.tube/user/ForsedropMt/>https://analsex.tube/user/ForsedropMt/</a> 1×slots промокод при регистрации
1×slots зеркало видели такую регистрацию на
Возьми свой презент. Чаще всего бонус активируется сразу последствии регистрации. Но бывают истории, когда нужно зайти в личный офис или написать в справочную службу. <a href=https://eccentrictirade.com/forums/showthread.php?tid=139834>1×слотс казино</a> А ознакомиться с свежими интернет казино, Вы сможете за счет бонусов с выводом прибыли, которые Вы сможете получить без депозита.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. 1×slots регистрация 1×slots casino c2d ru <a href=http://hotspotnews.ca/home.php?mod=space&uid=10628>http://hotspotnews.ca/home.php?mod=space&uid=10628</a>
1×slots регистрация на сайте 1×slots ru com
Зачастую бездепозитные бонусы казино для забавы предлагаются разными заведениями азартных игр в качестве маркетинговых промоакций либо в целях вербования к себя свежих игроков. Для бездепозитных бонусов в казино 2022 геймеру не пополнять счет до этапа вывода желаемых средств. <a href=https://humanlove.stream/wiki/User:MarthaCathey817>https://humanlove.stream/wiki/User:MarthaCathey817</a> 1×slots официальный зеркало Если вы опытный игрок, вы обязаны знать, собственно бонус без депо – редкая находка. Тем не, мы раз исследуем интернет, дабы найти вам превосходнейшие бездепозитные предложения.
<b>Смотреть еще похожие новости:</b>
<a href=http://lids.jp/bbs/viewtopic.php?f=4&t=563>1×slots сайт зеркал</a>
<a href=https://forum.vn.ua/showthread.php?p=3339610#post3339610>1×slots зеркало быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Например, игрок получил 500 рублей при творении аккаунта и должен отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 рублей, потребуется устроить 875 спинов для полного отыгрыша. Чтобы бездеп не был начислен на Ваш акк, Вам не нужно активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт механически, а Вы не планируете его применять, обратитесь в службу с пожеланием отменить бездепозитный приз.
#124 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пин ап casino pin порно с Гатагова Ольга Анатольевна <a href=https://sovsekretno.net/>casino 7k сегодня</a> букмекерские контора ап порно с Федор Чалов (футбол) <a href=https://www.ossetia.tv/>Москалькова Татьяна Николаевна порно</a> казино без порно с Александр Большунов (лыжные гонки) букмекерская контора фонбет 1×bet скачать бесплатно 1×bet зеркало рабочее на сегодня 1×bet xyz порно с Александр Большунов (лыжные гонки) porno Игорь Акинфеев (футбол)
DiskiPlus ограбление казино DiskiPlus Кузнецова Анна Юрьевна порно <a href=https://www.diskiplus.ru>DiskiPlus 1×bet приложение</a> DiskiPlus порно с Аделия Петросян (фигурное катание) DiskiPlus 1×bet телефон <a href=https://diskiplus.ru>DiskiPlus Светлана Ходченкова</a> DiskiPlus про казино DiskiPlus online casino официальный DiskiPlus casino скачать приложение DiskiPlus официальные зеркала казино DiskiPlus 1×bet рабочее DiskiPlus про казино DiskiPlus ставки на спорт букмекерские конторы
#125 Charlesgunnyhttp://filmkachat.ru
1×slos регистрация в 1×slots casino
Поспешите забрать бездепозитные бонусы за регистрацию в казино из представленного списка. Все платформы столько водят законную работа, но и порадуют правдивыми плодами забавы, высокой отдачей, быстрыми выплатами.Так что основное различие презента на депо от бездепа – обязательное пополнение счёта. Вы сможете внести депозит и преувеличить стартовый капитал или арестовать бездеп и всем не придётся рисковать своими сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начислит щедрое одобрение! <a href=http://filmkachat.ru/>x1 slots регистрация в 1×slots casino</a> <a href=https://www.sideprojectors.com/project/55405/expert-construction-drafting-services>https://www.sideprojectors.com/project/55405/expert-construction-drafting-services</a> Составленный знатоками Casino.ru список онлайн-казино с бездепозитным призом разрешает игрокам сравнить спецпредложения разных операторов.Можно ли в одном онлайн казино получить больше одного приза за регистрацию? Нет, так как в каждом интернет казино есть управляла, к коим надо(надобно) держаться, не творить 2 аккаута для получения бонусов, другому несомненно блокировка обоих аккаутов, не пытайтесь обмануть интернет казино, бонус за регистрацию выдаеться один раз одному личику. 1хслотс рабочее зеркало <a href=https://ic-info.ru/forum/user/169477/>https://ic-info.ru/forum/user/169477/</a>
1×slots промокод при регистрации 2025
1хслотс официальный сайт зеркало <a href=http://photoconnor.space/PHPFusion/profile.php?lookup=15998>http://photoconnor.space/PHPFusion/profile.php?lookup=15998</a> 1 хслот регистрация в 1×slots casino
1×slots официальный сайт скачать
Как прочие промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такого предложения являются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих посетителей и разрешает им составить эмоцию о функционале, не рискуя значительными совокупностями.2. Создать новый профиль. Для регистрации надо(надобно) заполнить маленькую анкету или зайдите в индивидуальный офис посредством соц сетей; Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в индивидуальный кабинет, чтобы отобрать бесплатные вращения с вейджером х40; <a href=http://miga114.co.kr/bbs/board.php?bo_table=free&wr_id=901579>http://miga114.co.kr/bbs/board.php?bo_table=free&wr_id=901579</a> 1×slots регистрация на сайте 1×slots ru com
1× slots официальный
При регистрации что, нет либо ином онлайн игральном заведении — для дается раз шанс испытывать свою удачу не внося средства монеты. Замечу собственно такую поощрительную услугу деют не все интернет игровые площадки, а лишь щедрая половина из их. Которые мы подготовили для Вас в нашем списке.Но не стоит думать, собственно снабжая пользователей этими призами, казино занимается спонсированием. Ведь размеры вознаграждений, главном, не немалые (средним размером от 5 до 20 $). И на эти средства налагаются определенные условия и ограничения, обязательные к исполнению игрока, в в последствии он вожделеет получить все средства выигранные деньги. Объективные – размер бонуса, коэффициент и условия вейджера, необходимость внесения депо для вывода средств; 1×slots подтвердит вашу регистрацию если говорить <a href=http://zghncy.cn/home.php?mod=space&uid=713377>http://zghncy.cn/home.php?mod=space&uid=713377</a>
x1 slots 1хслотс регистрация перейти на 1×slots
Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. Реже призы без депозита начисляются неизменным игрокам. С их подмогою администрация старается удержать ценных посетителей или вожделеет поблагодарить за лояльность правильных гостей. Но гораздо чаще для сходственных целей используются эти акции:Бездепозитный бонус казино 2022 с выводом за регистрацию предоставляет возможность ознакомиться игроку с лобби избранного заведения, определится в выборе игр и выяснить качество работы саппорта. Довольно нередко, начиная игровой процесс, игрок теснее не желает останавливаться и делает реальный вклад. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть даром возможно как один таки с призом за регистрацию без необходимости вносить депо. <a href=http://apatit.org.ua/user/Jamesunpal/>http://apatit.org.ua/user/Jamesunpal/</a> Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депозит имеет выделяться до 30 дней. 1×slots зеркало регистрацию более популярный вариант это
<b>Смотреть еще похожие новости:</b>
<a href=http://sofanatki.ekafe.ru/viewtopic.php?f=1&t=4885>1× slots официальный</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Получать информацию о самых выгодных бонусах возможно без постоянного прогноза новостей казино. Мы брали эту задачу на себя и постоянно смотрим за услугами операторов, выбирая превосходнейшие из них. В этом разделе собраны заключительные бездепы, промокоды к ним и обстоятельства их активации. Список акций регулярно пополняется. В топ вошли самые новые бездепозитные призы за регистрацию в казино 2020, кратковременные и замкнутые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и другим аспектам. Если срок деянья промоакции истек, она удаляется из перечня.
#126 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация в 1×slots casino
При поддержки такого поощрения оператор возможность кроме привлекать посетителей, которые ранее показывали активность на веб-сайте, но по некий причине перестали выступать. В этом случае промокод высылается юзеру по электронной почте или в виде SMS. <a href=http://filmkachat.ru/>1× слот зеркало</a> Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном призе, то в первую очередь внимание на значение вейджера и срок, кот-ый дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, что, этим проще отыграть бонус и вывести выигрыш.Лишь популярные и известные азартные заведения имеют позволить для выдавать бездепы повторяющий добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, коие возможно истратить в лучших аппаратах с высочайшей отдачей. <a href=https://www.sideprojectors.com/project/55401/3d-architectural-rendering-services>https://www.sideprojectors.com/project/55401/3d-architectural-rendering-services</a> 1 x slots casino <a href=https://yogaasanas.science/wiki/Shisha_Tobacco_From4_Eur>https://yogaasanas.science/wiki/Shisha_Tobacco_From4_Eur</a> Если вы новичок в и только попали в неизведанную вами район азарта — с помощью услуг как бездепозитные призы без пополнения.
1×slots бонус за регистрацию
1×slots казино зеркало Используйте наилучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, дабы заработать презенты за простые деяния теперь сейчас получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и резвыми выводами на электронные кошельки. <a href=https://www.google.com.ec/url?q=http%3A%2F%2Fdoctorlazuta.by>https://www.google.com.ec/url?q=http%3A%2F%2Fdoctorlazuta.by</a> 1×slots зеркало сайта Следует подчеркнуть, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам или с определенным кодом.Как лишь на виртуальном счету окажутся бонусные свои, поспешите отыграть вейджер. Сразу после этого возможно оставить заявку на вывод выигрыша. Кредиты выгодно отличаются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом реальных средств и дают возможность ощутить задор. Во-вторых – возможно насладиться каждой азартной забавой доступной на веб-сайте. В вашем постановлении присутствуют автоматы, настольные прибавление, видео-покер, Live-дилеры.
1хслотс зеркало
Однако далековато не все ресурсы предлагают своим посетителям бездепозитные бонусы за регистрацию в казино. В большинстве случаев учтено одобрение на первый депозит в объеме 100–200%. Это отличная вероятность преувеличить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш. Выбирайте превосходнейшие благотворительные бонусы с помощью обзоров на Casinoz – и пусть для сопутствует удача при отыгрыше бонусных кредитов! <a href=http://miupsik.ru/forums/member.php?action=profile&uid=5630>http://miupsik.ru/forums/member.php?action=profile&uid=5630</a> 1хслотс мобильная версия зеркало Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.
1хслотс 1хслотс регистрация перейти на 1×slots
Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, дабы замечена возможность исключить выигрыш. 1хслотс казино зеркало <a href=https://lider-school174.com/forum/user/2211/>https://lider-school174.com/forum/user/2211/</a> 1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, если не хотите замерзнуть жертвой жуликов или впустую израсходовать время;
1×slots зеркало регистрация
Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную процедуру активации бонуса без депозита. Внимательно прочтите до конца. Многие новички проделывают ошибки на этапе регистрации и поэтому возможности получить презент.Бездепозитный приз по промо-коду несомненно доступен для игры, лишь никаких случае когда Вы активируете особый бонусный код в разделе с бонусами либо укажите промокод при регистрации на веб-сайте. В неких случаях, считая активации кода, придется доказать контактные данные игрока и заполнить анкету посетителя. Бездепозитные бонусы – это самая занимательная и наиболее многообещающая акция интернет-казино. Они и другого фри-спинов, потому собственно выплаты в даровых вращениях не гарантированы, ведь комбинации на барабанах игрового аппарата все не сложиться. <a href=https://imoodle.win/wiki/User:MauricioEleanor>https://imoodle.win/wiki/User:MauricioEleanor</a> Онлайн-казино тщательно продумывают бонусные условия, коие необходимо изучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и ограничения. 1 x slots
<b>Смотреть еще похожие новости:</b>
<a href=http://junlinro520.gain.tw/space.php?uid=1111051>зеркло казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Возможность протестировать свежие игры, не рискуя собственными средствами и разработать личную тактику забавы.
#127 prodvijenie saitov _qeKihttp://prodvizhenie-sajtov-v-moskve232.ru
раскрутка сайта москва <a href=https://www.prodvizhenie-sajtov-v-moskve232.ru>раскрутка сайта москва</a> .
#128 prodvijenie saitov _slSrhttp://prodvizhenie-sajtov-v-moskve233.ru
seo аудит веб сайта <a href=https://prodvizhenie-sajtov-v-moskve233.ru>https://prodvizhenie-sajtov-v-moskve233.ru</a> .
#129 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slotscasino 56 online
В онлайне очень количество скриптовых сайтов, которые принадлежат плутам. Их основная цель – привлечь гэмблеров, пообещав не только щедрые презенты, но и крупные выигрыши. Так собственно некоторые веб-сайты предлагают получить за регистрацию том $1 000. <a href=http://filmkachat.ru/>1х слот регистрация в 1×slots casino</a> <a href=http://bedfordfalls.live/read-blog/135760>http://bedfordfalls.live/read-blog/135760</a> Процесс доказательства личности может занять от 1-го дня до недели. Если клиент разрешил какую-либо ошибку при заполнении паспортных данных, то ему идет обратиться с задачей в службу поддержки онлайн-казино.Изучить правила и обстоятельства получения бездепозитных бонусов казино, Вы сможете у нас на веб-сайте в разделе с бонусами либо на официальном веб-сайте выбранного Вами казино. Если не отыскать необходимую информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал или по электрической почте. 1хслот зеркало <a href=http://demo.qkseo.in/profile.php?id=645015>http://demo.qkseo.in/profile.php?id=645015</a> Благодаря программе лояльности от игорного заведения, можно арестовать превосходный старт и без добавочных инвестициям запустить видеослоты. Кроме того, можно рассчитывать на реальную удачу и получить, без вложения личных финансов, немалый выигрыш.
1×slots мобильная версия войти казино
Бездепозитный бонус – это финансовое вознаграждение, коие выдается участнику игры в казино, для его привлечения и появления заинтересованности. Любой гость, который подходит условиям выдачи похожего бездепозитного приза, имеет претендовать на получение вышеуказанного приза. Такое одобрение является более действенным способом, дающим возможность стартовать деле, не вкладывая собственных вещественных средств. <a href=https://forum.immortales-gilde.de/viewtopic.php?f=2&t=401735>1×slots регистрация 1×slots casino 777 online</a> 1×slots официальный сайт мобильная версия скачать <a href=http://fze.ohosure.org/bbs/home.php?mod=space&uid=101537>http://fze.ohosure.org/bbs/home.php?mod=space&uid=101537</a> Законодательство, регулирующее азартные игры в разных странах, оказывает на возможности операторов. В результате юзеры из отдельных регионов сталкиваются с ограничениями со стороны казино. Это имеет быть как полный отказ в доступе, например и невозможность загружать игры отдельных изготовителей. 1×slots рабочее зеркало на сегодня Популярность интернет казино растёт и всё больше юзеров начинают интерес азартными играми. Бездепозитные призы 2022 года, это уникальные презенты за регистрацию. С их поддержкою новые игроки могут получить благотворительные вращения либо деньги на баланс за одну регистрацию. С появлением игорных заведений в интернете, бездепозитные призы стали моднейшим способом вербования игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о которых мы поведаем. Наш сайт собрал наилучшие предложения из интернета на 2022 год. Воспользуйтесь хоть подарком и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить условия.Выиграть настоящие средства в казино не пополняя счет – трудно, но возможно. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными призами и начните выступать на бонусные свои. По статистике в 10-ти заведений возможно заработать маленькую сумму средств с бонусных средств.
1×slots официальный demo регистрация в 1×slots casino
<a href=http://www.psltw.com/home.php?mod=space&uid=566848&do=profile>http://www.psltw.com/home.php?mod=space&uid=566848&do=profile</a> 1×slots зеркало регистрация Мы рекомендуем не отказываться от похожих предложений знаменитых казино. Выделите несколько минут на регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сейчас фортуна будет на вашей стороне!Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, the decision зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.
1×slots казино мобильная версия
Зарегистрируйтесь. Для регистрации чаще всего довольно установить свой номер аппарата и почтовый адрес, в чего ввести приобретенный код из СМС. Возможно, требуется указать промокод. В правилах промоакции несомненно написано, где его бы вводить. Иногда это хотелось создавать при регистрации, времени — уже в создания личного офиса, на отдельной страничке.В случае с фриспинами без вейджера, Вам не придется отыгрывать свой выигрыш с безвозмездных вращений. Прибыль, коию Вы заработаете на таком бездепе можно ставить на вывод без какого или отыгрыша. 1×slots зеркало быструю регистрацию а также мгновенное <a href=https://securityholes.science/wiki/User:Mikayla4460>https://securityholes.science/wiki/User:Mikayla4460</a>
1×slot казино зеркало
Наш список включает в себя превосходнейшие бездепозитные бонусы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по важным параметрам:Бездепозитный приз предоставляется новому игроку за определенные действия. Часто презент в виде средств либо фриспинов выдается за регистрацию, благодаря чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. <a href=https://timepost.info/member.php?action=profile&uid=5287>https://timepost.info/member.php?action=profile&uid=5287</a> зеркала 1×slots Каждый новичок и умелый игрок мечтают прытко стартануть и начать создавать реальные ставки. Для сего довольно отобрать презент, за который не платить. В зависимости от игровой платформы, нужно сделать профиль, привязать email либо телефон. После сего администрация начислит щедрое вознаграждение в виде бесплатных вращений или виртуальных кредитов.Рассмотрим на образце: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских рублей. В критериях акции указано, что вейджер бездепозитного приза х20. Поэтому, дабы отыграть приз, игроку несомненно необходимо сделать ставок на 35*20=700 руб.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.as-p.cz/viewtopic.php?f=45&t=67620&p=384089#p384089>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<a href=http://filcherp.tforums.org/viewtopic.php?f=5&t=32335>1×slots промокод при регистрации</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Таким образом, заведение пробует продемонстрировать себя своим потенциальным игрокам, а такой рекламный ход как казино бонус без депозита за регистрацию завлекает довольно большое внимания к игорному заведению и обеспечивает неизменный струю свежих гостей и будущих посетителей игрового онлайн клуба. Вейджер не более х30–35 считается приемлемым. Опытные игроки заявляют, что с таким вейджером реально остаться в плюсе, случае верно подойти к выбору игрового аппарата.
#130 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
винлайн букмекерская контора официальный сайт 7k casino скачать <a href=https://7club7.com/>casino бонус</a> бывшие казино балтбет букмекерская контора <a href=https://www.ossetia.tv/>casino скачать приложение</a> порно с Юлия Ефимова, пловчиха порно с Дарья Клишина, легкоатлетка казино вход букмекерская контора скачать приложение casino зеркало сегодня 1×bet 1хбет гта казино
DiskiPlus 1×bet официальный слоты DiskiPlus рабочее казино <a href=https://diskiplus.ru/>DiskiPlus порно с Матвей Сафонов (футбол)</a> DiskiPlus порно с Дарья Касаткина (теннис) DiskiPlus ев казино <a href=https://www.diskiplus.ru>DiskiPlus 1×bet сайт 1×bet xyz</a> DiskiPlus порно с Алина Загитова DiskiPlus 7k casino официальный DiskiPlus порно с Александр Головин (футбол) DiskiPlus Манилова Алла Юрьевна порно DiskiPlus retro casino DiskiPlus porno Анна Сидорова, керлингистка DiskiPlus pin up casino top top
#131 Charlesgunnyhttp://filmkachat.ru
1хслот скачать
Так что главное различие презента на депозит от бездепа – неотъемлемое пополнение счёта. Вы сможете внести депозит и преувеличить стартовый капитал или арестовать бездеп и при этом не придётся рисковать своими сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начисляет щедрое одобрение!Активация происходит за промокодов, которые вводятся в собственном офисе в регистрации. Среди спецпредложений в списке Casino.ru находятся неповторимые промокоды, коие доступны только посетителям портала. Другие методы начисления средств ? автоматическая активация незамедлительно в сотворения аккаунта и получение дара по запросу в службу технической помощи. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало</a> У каждой забавы средства притязания по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система зачтет любую ставку. В рулетке и покере устроить это гораздо сложнее. Именно поэтому так главно внимательно разбирать условия получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой этой, то новенькие просто «спустят бонус на ветер». <a href=https://blog.udn.com/G_107482553777754991/180423924>https://blog.udn.com/G_107482553777754991/180423924</a> 1×slots регистрация 1×slotscasino 56 online <a href=http://www.clubwww1.com/dating/member/blog_post_view.php?postId=30730>http://www.clubwww1.com/dating/member/blog_post_view.php?postId=30730</a> Индивидуальные одобрения выдаются за совершение деяний: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавления либо официального посетителя для ПК. В большинстве казино срабатывают программки лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на грядущий степень нередко сопрягается выдачей бездепа.
1×slots сайт
1×slots официальный регистрация <a href=http://gtamotors.ru/user/MichaelAlava/>http://gtamotors.ru/user/MichaelAlava/</a> Ещё одно распространённое акционное предложение – привлекательный презент с неблаговидными притязаниями. К примеру, клуб сулит $100 в бездепа, хотя с вейджером х80 или х100. Отыграть такой вейджер практически нереально и потому никакого концентрироваться на больше заманчивых акциях.Однако в критериях исчезают «подводные камни», коие не разрешат исключить солидную необходимую или же вы не успеете отыграть вейджер. Поэтому мастера рекомендуют арестовать бесплатные вращения за регистрацию в казино без депо, чтобы поднабраться навыка и получить настоящий шанс на победу. 1×slots casino регистрация на сайте
1×slots скачать на айфон
Получив свой подарок, Вы сможете безвозмездно выступать на реальные деньги, а выполнив условия отыгрыша, вывести свой выигрыш. <a href=http://n-electron-group.sakura.ne.jp/userinfo.php?uid=3369#>http://n-electron-group.sakura.ne.jp/userinfo.php?uid=3369#</a> Возьми свой подарок. Чаще всего бонус активируется незамедлительно последствии регистрации. Но случаются истории, когда надо(надобно) зайти в индивидуальный кабинет либо написать в справочную службу. 1×slots регистрация Самый распространённый из похожих призов, конечно же, бездеп на день рождения клиента — приз вид фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им возможно в течение установленного периода медли.В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, нужно обратиться в службу поддержки через лайв-чат на сайте казино.
зеркло казино 1×slots
Подтверждение электрической почты – одно из ведущих критерий, коие есть практически в любом бездепозитном казино. Чтобы верифицировать электрическую почту, достаточно перебежать по активной ссылке в послании, приобретенном от азартного клуба. <a href=https://ewebtalk.com/showthread.php?tid=14963>1×slots быструю регистрацию а также мгновенное</a> Бездепозитный бонус за регистрацию в казино — это стартовый презент в виде денежного начисления или безвозмездных вращений для свежих игроков заведения, для получения которого не нужно вносить депо. 1×slots регистрация 1×slotscasino 56 online <a href=http://kidsnighttonight.com:/forums/member.php?action=profile&uid=355538>http://kidsnighttonight.com:/forums/member.php?action=profile&uid=355538</a> Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих требований, кроме обязательной верификации. Если на веб-сайте учтена неотъемлемая процедура доказательства личности, то вывести выигрыш удастся лишь последствии проверки данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий личность.
1×slots сайт зеркало
Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке представители онлайн-казино публикуют важную информацию о no down payment bonuses и других услугах. <a href=https://velorout.com.ua/user/Frankflorp/>https://velorout.com.ua/user/Frankflorp/</a> Бонус без депозита за регистрацию в казино (бездепозитный приз) – это валютный презент от клуба, кот-ый начисляется на аккаунт игрока в регистрации в казино. Кроме создания учетной записи, для получения бездепа, очень часто потребуется ещё и подтвердить контактные данные игрока и/или активировать специальный промо-код.Прежде всего, не запамятовывайте периодически заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом рассматривают наиболее занимательные предложения водящих игорных порталов. 1× slots зеркало В случае установленного лимита на сумму вывода выигрыша с бездепозитного бонуса, игрок не сможет исключить больше заявленной суммы.
<b>Смотреть еще похожие новости:</b>
<a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=14163>1× slots зеркало</a>
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=12403>1×slots официальный сайт мобильная версия скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
4. Заберите презент. Чаще всего приз активируется сразу в регистрации. Но случаются истории, когда надо(надобно) забежать в личный кабинет либо написать в саппорта. Доступ к дару возможность раскрываться автоматически после введения промокода либо обращения в службу сайта. В первом случае от юзера не требуется практически действий. Бездеп с активацией по коду встречается чаще всего. Игроку необходимо ввести совокупность символов в графе, которая может находиться в регистрационной форме в Личном офисе.
#132 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
up casino скачать 7k casino официальный <a href=https://rhymes-punches.com/>пин ап casino pin up top</a> промокод 1×bet Мухтиярова Елена Вячеславовна порно <a href=https://kompromat1.online/>вавада казино</a> официальные букмекерские конторы порно с Дарья Клишина, легкоатлетка букмекерская контора зенит букмекерская контора бесплатно скачать 1×bet скачать бесплатно официальные зеркала казино 1×bet официальный скачать
DiskiPlus casino официальный сайт DiskiPlus рокс казино <a href=https://diskiplus.ru/>DiskiPlus казино вход</a> DiskiPlus букмекерская контора бетсити DiskiPlus винлайн букмекерская контора официальный <a href=https://diskiplus.ru/>DiskiPlus porno Ангелина Гончаренко, хоккеистка</a> DiskiPlus casino online зеркало DiskiPlus Приезжева Екатерина Геннадьевна порно DiskiPlus порно с Арина и Дина Аверины, гимнастки DiskiPlus порно с Афонина Марина Игоревна DiskiPlus 1×bet зеркало слоты 1×bet xyz DiskiPlus зеркала казино DiskiPlus champion casino
#133 Charlesgunnyhttp://filmkachat.ru
скачать 1×slots официальный сайт
Фриспины предназначены для использования в видео слотах. Внимательно ознакомьтесь с критериями – частенько их выдают на кое-какие автоматы. В зависимости от клуба, у вас выйдет устроить определённое количество ставок. Кстати, продвинутые игорные дома разрешают запускать каждых «одноруких злодеев». <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> <a href=https://lynk.id/kalinka0588>https://lynk.id/kalinka0588</a> Бонус с зачислением денег на счет выделяет больше свободы деяний. Пользователь сам подбирает, каким образом воспользоваться подаренными средствами. Здесь также все действовать ограничения на список доступных игр, но обыкновенно эти рамки не так строги, как в рекламную с безвозмездными вращениями. 1×slots официальный сайт зеркало <a href=http://crtdu-kras.ru/communication/forum/user/280774/>http://crtdu-kras.ru/communication/forum/user/280774/</a> Сроки активации бонуса устанавливаются каждым казино, но чаще всего они не превышают недели с момента получения. Игроку обязательно нужно применять бездеп в течение указанного срока, в ином случае приз просто исчезнет. Каждый приз возможно получить лишь раз раз, потому случае не применять бездеп в срок, у игрока не будет второго шанса им пользоваться.Такой бесплатный эквивалент средств зачисляется на профиль пользователя после воплощения притязаний и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений возможен лишь последствии осуществления вейджеровых условий.
рабочее зеркало 1×slots
Фриспины начисляются по конкретной ставке. После их активации игроку нужно запустить разъем и увериться, собственно в нем показываются бесплатные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода в отыгрыша ориентируется оператором и редко превышает 5 000 руб.Высокая конкурентность в разделе азартных игр мотивирует операторов завлекать посетителей разнородными акциями. Благодаря данному у посетителей замечена вероятность получить бонусы в казино за регистрацию без депозита. Воспользоваться этим предложением возможно, минуя функцию внесения средств на игровой счет, просто активировав аккаунт на сайте. Наш экскурсовод по бездепам поможет избрать самую привлекательную бонусную программу, разузнать управляла получения такого вознаграждения и воспользоваться им с наибольшей выгодой. 1×slot зеркало Мы подготовили перечень, где есть практически животрепещущие и свежие бездепозитные призы казино, коие вы можете получить даром. Для наших юзеров есть специальные предложения неповторимые призы, которые вы у не найдете, их мы обозначили специальной красноватой плашкой «Exclusive».2. Создать свежий профиль. Для регистрации нужно заполнить небольшую анкету или зайдите в индивидуальный офис посредством социальных сетей; <a href=https://rolivka.online/forum/member.php?action=profile&uid=62289>https://rolivka.online/forum/member.php?action=profile&uid=62289</a> 1×slots официальный сайт зеркало Некоторые клубы механически начисляют бонус на акк игрока в выполнения критерий получения, но бывают истории, когда приз нужно активировать игроку самому. Есть количество методов активации бонуса:Для всех бездепозитных призов функционирует наибольший предел на выигрыш. Он указывает предельную необходимую, которую появится получить, играя на бонусные кредиты. Как только вам получится выполнить требования вейджера, допустимый максимально несомненно переведен с бонусного счета на ведущей, а остаток будет списан.
казино 1×slots
Размер ставки для игры по бездепозитному бонусу (окончательно же, если, тогда,, когда он представлен вид бонусных денежных средств) зачастую ниже, чем при игре на депозит. Ограничение будет действовать до этапа отыгрыша бонуса. <a href=https://juicedmuscle.com/forum/general/general-chat/264982-creating-immersive-spaces-the-art-and-science-of-3d-walkthrough-animation>https://juicedmuscle.com/forum/general/general-chat/264982-creating-immersive-spaces-the-art-and-science-of-3d-walkthrough-animation</a> Составленный специалистами Casino.ru список онлайн-казино с бездепозитным призом разрешает игрокам сопоставить спецпредложения различных операторов.Некоторые клубы автоматически начисляют бонус на акк игрока после исполненья критерий получения, но бывают ситуации, когда приз нужно активировать игроку самому. Есть несколько способов активации приза: 1×слотс казино В любом казино с бездепозитным бонусом учтены вейджеровые условия. Это один-единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, нужно устроить определённое число ставок. Чем круче бонус, что, этим труднее выполнить условия, и наоборот.Каждый из бездепозитных бонусов без пополнения 2022 имеет свой конкретный вейджер для отыгрыша, например же в каждом казино он устанавливается персонально — где то он х55 а где-то х30, повторюсь везде по различному!
1 хслот регистрация в 1×slots casino
Создание аккаунта. На сайте казино необходимо открыть регистрационную форму и наполнить пустопорожние поля личными данными. Иногда на данном этапе требуется показать только адрес электрической почты и пароль, хотя почаще надобно наполнить анкету персональной информацией (ФИО, дата рождения, место проживания и т.д. ). Нужно свидетельствовать только реальные данные, что впоследствие они будут проверены.Заработать на бездепозитных призах за регистрацию в казино имеет любой пользователь, достигший совершеннолетия. Сразу в активации промокода можно пользоваться презентом. Как теснее упоминалось, бонусы посещают трёх видов – фриспины, кредиты и фриплей-бонусы.Заполняя данные в собственном профиле, указывайте только достоверную информацию, например как Вам придется ее доказать в будущем при выводе денег. Вейджер (либо вагер) ? это минимальная сумма ставок, коию необходимо сделать для вывода валютного приза. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, тем привлекательнее спецпредложение.При небольшой сумме приза рекомендуется выступать по низким ставкам, а применять наибольшие никакого только в случае, случае вейджер очень великий, а время на отыгрыш крепко ограничено. 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=https://mozillabd.science/wiki/User:GinoNutter051>https://mozillabd.science/wiki/User:GinoNutter051</a> Такой казино приз без депозита за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это словно какая-то конспирация одобрения под бездепозитный. Суть всего этого сводится к что, этому, что игроку на час выдается, к примеру, 1000 долларов, а реклама повторяет о том, что каждой выигрыш можно несомненно в забыть при себя. Но случае играющий всерьез отнесется к данному предложению, то он просто растеряет время. Ведь геймеру надо(надобно) будет выступать не в основном аккаунте, ну тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (даже всей тысячи) в управляла вступят конкретные обстоятельства, где несомненно сказано, собственно максимальной суммой победы возможность быть лишь двести $ и деньги возможно применять только в бонуса на 1-ый вклад с вейджером 25 от суммы гонорары плюс сам депозит. По итогу получится, что игрок выигрывал для 200% приз с вейджером на конкретную необходимую. Короче разговаривая, это все не стоит вашего медли.
1×slots сайт
На бесплатные призы онлайн-казино практически постоянно распространяется лимитирования по стране проживания посетителей. Даже случае для разрешено раскрывать счет и играть на средства в заведении, это еще не означают, что вам доступны not the slightest deposit bonuses. <a href=https://valetinowiki.racing/wiki/User:PearlVos814>https://valetinowiki.racing/wiki/User:PearlVos814</a> Также, ситуации нужно подтвердить свой номер аппарата, результата код, полученный в смс-сообщении от клуба установить в особое поле в личном кабинете игрока.Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы была возможность исключить выигрыш. 1хслотс официальный сайт зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://dania.forumex.ru/viewtopic.php?f=2&t=180>1×slots официальный сайт мобильная версия</a>
<a href=http://fbigov.clanfm.ru/viewtopic.php?f=2&t=47>1× слот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если вы облюбовали себе количество брендов коие вам больше всего приглянулись, для постоянной игры! Таких гемблеров казино довольно предпочитает и оценивает, за частую такие игроки становятся VIP игроками заведения, коим нередко поступают прибыльные предложения повторяющий призов, например же туда входит и бездепозитные.
#134 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Преподобная Надежда Александровна порно порно с Артемий Панарин (хоккей) <a href=https://www.ossetia.tv/>Юдаева Ксения Валентиновна порно</a> Яровая Ирина Анатольевна порно Комарова Наталья Владимировна порно <a href=https://repost.news/>официальные зеркала казино</a> букмекерская контора порно с Максим Глушенков (футбол) porno Юлия Канакина, скелетонистка пинап казино Яровая Ирина Анатольевна порно порно с Зырянова Анастасия Владимировна бесплатно фильм казино
DiskiPlus сайт 1×bet слоты DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz <a href=https://www.diskiplus.ru>DiskiPlus casino официальный сайт</a> DiskiPlus слоты казино DiskiPlus casino рабочее <a href=https://diskiplus.ru/>DiskiPlus порно с Антропова Валентина Викторовна</a> DiskiPlus pin ап casino DiskiPlus casino актуальное зеркало DiskiPlus пина casino DiskiPlus букмекерская контора официальный сайт DiskiPlus скачать сайт букмекерской конторы DiskiPlus new casino DiskiPlus casino рабочее
#135 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Хорова Наталья Александровна порно пари букмекерская контора <a href=https://kompromat1.online/>порно с Алина Загитова</a> 1×bet телефон зеркала казино <a href=https://kompromat1.online/>букмекерская контора фонбет</a> porno Дарья Клишина 1×bet официальный сайт 1×bet xyz порно с Виктория Синицина, фигуристка champion casino порно с Аделия Петросян (фигурное катание) приложения букмекерских контор porno Александр Соболев (футбол)
DiskiPlus какие казино DiskiPlus ramenbet casino <a href=https://www.diskiplus.ru/>DiskiPlus casino официальный зеркало</a> DiskiPlus porno Дарья Мороз DiskiPlus Скоробогатова Ольга Николаевна порно <a href=https://diskiplus.ru>DiskiPlus 7k casino бонус</a> DiskiPlus букмекерская контора фонбет официальный DiskiPlus 1×bet сейчас DiskiPlus casino актуальное зеркало DiskiPlus мобильные букмекерские конторы казино DiskiPlus порно с Анна Калинская (теннис) DiskiPlus букмекерская контора зенит
#136 Charlesgunnyhttp://filmkachat.ru
1хслот скачать
При отыгрыше бонусных средств, нужно учесть срок действия приза и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный приз несомненно аннулирован. <a href=http://filmkachat.ru/>x1 slots регистрация в 1×slots casino</a> При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое возможно посвятить ирге в казино.Нельзя рассматривать забаву на средства, как вариант заработка. Азартные игры запрещены для лиц младше 18 лет. Topcasinobonuses.mobi не является организатором азартных игр. Сайт носит информационный нрав. <a href=https://www.papercall.io/speakers/146415/speaker_talks/292505->https://www.papercall.io/speakers/146415/speaker_talks/292505-</a> Мы делаем ударение на ключевых положениях верховодил, рассказываем о территориальных ограничениях и вкратце информируем о иных промоакциях обговариваемого казино. 1хслот 1хслотс регистрация перейти на 1×slots <a href=http://dikoms.ruwww.sharizhelaniy.ruwww.cloud-at-work.com/mac_jforum/user/profile/17487.page>http://dikoms.ruwww.sharizhelaniy.ruwww.cloud-at-work.com/mac_jforum/user/profile/17487.page</a> Только выполнив все обстоятельства отыгрыша и дождавшись окончания ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить свои средства.Бездепозитные призы в казино без пополнения 2022 — это определенная сумма средств или vacant spins вращения, которые предоставляются первым гостям за регистрацию на сайте казино повторяющий бездепозитного бонуса, и дает для возможность с казино без пополнения опробовать предложения (игр), с последующей привилегией вывода средств при исполненьи всех установленных управлял.
1хслотс рабочее зеркало на сегодня
Для вывода средств бонус нужно несомненно отыграть законам, установленным казино. Внимательно ознакомьтесь с правилами акции и вариациями отыгрыша бездепозитного бонуса до его получения, чтобы избежать конфликтных ситуаций.Также бездепозитные призы шансы работать методом возвращать к ирге посетителей, что приостановивших своё сотрудничество с фирмой: уведомление о бездепе поступает на мобильный телефонный либо почту. 1×слот регистрация в 1×slots casino Прочитайте правила бонусной программки, какой желайте принять. Да, мы безотступно рекомендуем устроить это до регистрации. <a href=http://www.zhuangxiuz.com/home.php?mod=space&uid=870921>http://www.zhuangxiuz.com/home.php?mod=space&uid=870921</a> Игры, в возможно играть на бонусные средства. Проверьте перечень игр, каких возможно выступать на бонусные свои, вероятно они Вам не понравятся и не расходовать своё время на эту акцию.Процесс подтверждения личности возможность занять от одного дня до недели. Если клиент допустил нибудь оплошность при заполнении паспортных данных, то ему стопам обратиться с задачей в саппорта онлайн-казино. 1×slots зеркало регистрация Благодаря программе преданности от игорного заведения, можно взять неплохой старт и без добавочных инвестициям запустить видеослоты. Кроме того, можно рассчитывать на реальную удачу и получить, без инвестиции собственных финансов, большой выигрыш.В современность очень просто получить бонус за регистрацию в казино. Практически каждый игорный жилище с готовностью начислит деньги либо безвозмездные вращения. Многие гэмблеры пользуются этим и не смущяются регистрироваться в любом клубе с выгодными условиями. Кстати, это отличная вероятность выработать победную тактику и сорвать джекпот.
1×slots бонус за регистрацию
Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы была возможность вывести выигрыш.Такой казино приз без депо за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это как бы некая маскировка одобрения под бездепозитный. Суть всего этого сводится к тому, собственно геймеру на час выдается, например, 1000 долларов, а реклама твердит о том, что любой выигрыш возможно несомненно в оставить при для. Но случае играющий серьезно отнесется к этому предложению, то он просто растеряет время. Ведь игроку нужно несомненно играть не главном аккаунте, а тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (в всей тыс. ) в управляла вступят определенные условия, где будет сказано, что максимальной суммой победы возможность быть лишь двести долларов и средства можно использовать только в качестве приза на 1-ый вклад с вейджером 25 от суммы гонорары плюс сам депозит. По итогу получится, собственно игрок выигрывал себя 200% бонус с вейджером на определенную необходимую. Короче говоря, это все надо вашего времени. <a href=http://www2.bio.ulaval.ca/landrylab/bioinfo/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D1%8F%D0%BD%D0%B4%D0%B5%D0%BA%D1%81%20%D0%B4%D0%B7%D0%B5%D0%BD%20%D1%87%D0%B8%D1%82%D0%B0%D1%82%D1%8C>http://www2.bio.ulaval.ca/landrylab/bioinfo/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D1%8F%D0%BD%D0%B4%D0%B5%D0%BA%D1%81%20%D0%B4%D0%B7%D0%B5%D0%BD%20%D1%87%D0%B8%D1%82%D0%B0%D1%82%D1%8C</a> Бонус без депо за регистрацию в казино (бездепозитный приз) – это денежный подарок от клуба, кот-ый начисляется на аккаунт игрока последствии регистрации в казино. Кроме творенья учетной записи, для получения бездепа, довольно часто потребуется ещё и подтвердить контактные данные игрока и/или активировать особый промо-код.Только выполнив все условия отыгрыша и дождавшись окончания ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить средства деньги. 1×slots casino зеркало Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном сайте и выполните вход в личный кабинет, дабы арестовать бесплатные вращения с вейджером х40;Бездепозитные бонусы, как теснее ясно, считаются уникальной возможностью к игровому процессу безусловно бескорыстно, другими выступать в интернет казино бесплатно и на быть свои незамедлительно последствии регистрации аккаунта. Автоматы с этим депозитом шансы замерзнуть прекрасной вероятностью сыграть для поклонников пыла с определенными лимитированиями в денег.
1хслотс казино зеркало
1×slots официальный сайт мобильная версия <a href=http://tehnostandart.ru/bitrix/redirect.php?goto=http://buratinki.ru/bitrix/rk.php?goto=http://bestma.ru/bitrix/click.php?goto=https://teletype.in/@urist555/PWT54nIAkzp>http://tehnostandart.ru/bitrix/redirect.php?goto=http://buratinki.ru/bitrix/rk.php?goto=http://bestma.ru/bitrix/click.php?goto=https://teletype.in/@urist555/PWT54nIAkzp</a> Мы рекомендуем не открещиваться от подобных услуг узнаваемых казино. Выделите некоторое минут на регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сегодня удача несомненно на вашей стороне!Чтоб получить крупный выигрыш, подбирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, коие доступны по условиям отыгрыша.
1× слот зеркало
На нашем веб-сайте Вы найдете перечень актуальных свежих бездепозитных бонусов в казино 2022 года. Также, есть большое неповторимых предложений, коие доступны только гостям нашего вебсайта после регистрации по нашей ссылке или активации специального промокода.Для верификации номера телефона, в личном профиле выберите опцию „Подтвердить номер телефона“ и введите в отвечающее поле код, приобретенный в sms-сообщении. <a href=http://clasificadosdolores.com.ar/sitio/author/ralphtex>http://clasificadosdolores.com.ar/sitio/author/ralphtex</a> B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax 1× slots casino зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://rumproject.com/rumforum/viewtopic.php?f=23&t=6987>1×slots на любой вкус как пройти регистрацию</a>
<a href=http://forum.puppylinux.pl/index.php?topic=778.new#new>1×slots бездепозитный бонус за регистрацию</a>
<a href=https://forum.visiteachapada.com/viewtopic.php?f=19&t=52833>казино 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Первый возникающий вопрос, это, для выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают новых игроков. Последним проще начать игру на средства с подарка за регистрацию. Им не нужно пополнять баланс и тратить собственные средства. Новички получают безвозмездные спины или средства на счёт. С их подмогою знакомятся с игровым процессом, крутят слоты и делают ставки в рулетке. Зарегистрируйтесь. Для регистрации почаще всего довольно ввести собственный номер аппарата и почтовый адрес, после чего установить приобретенный код из СМС. Возможно, потребуется указать промокод. В правилах промоакции будет написано, где его хотелось вводить. Иногда это надобно делать при регистрации, от — теснее последствии творенья собственного офиса, на отдельной странице.
#137 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Приезжева Екатерина Геннадьевна порно смотреть фильм казино <a href=https://th-royalgclub.com/>скачать 1×bet на андроид бесплатно</a> casino com скачать 1×bet 1×bet xyz <a href=https://rhymes-punches.com/>black russia казино</a> bitz casino pin up casino пин как выиграть в казино casino 7k рабочее официальные зеркала казино букмекерская контора официальный сайт симулятор казино
DiskiPlus 1win букмекерская контора DiskiPlus порно с Александр Большунов (лыжные гонки) <a href=https://diskiplus.ru>DiskiPlus casino промокод</a> DiskiPlus porno Александра Степанова, фигуристка DiskiPlus casino daddy <a href=https://www.diskiplus.ru>DiskiPlus кент казино</a> DiskiPlus приложения букмекерских контор на андроид DiskiPlus 1×bet casino DiskiPlus casino официальный зеркало DiskiPlus порно с Владимир Минеев (ММА) DiskiPlus 7k casino DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz DiskiPlus лучшие казино бесплатно
#138 Charlesgunnyhttp://filmkachat.ru
1×slots бонус за регистрацию
Бездепы шансы входить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой либо баллами.Поспешите забрать бездепозитные призы за регистрацию в казино из представленного перечня. Все платформы столько водят законную работа, хотя и порадуют правдивыми плодами забавы, высокой отдачей, быстрыми выплатами. <a href=http://filmkachat.ru/>1хслотс казино зеркало</a> Но ни не забывайте пристально разбирать верховодила участия в бонусных акциях. Если вы нарушите но бы одно условие, позже вы не можете уладить недоразумение с администрацией.Фриплей-бонусы. Бонусы за благотворительную забаву есть только в неких клубах. Они зачисляются сразу последствии сотворения профиля и срабатывают недолговременное время. Если у вас нет времени израсходовать свои, они просто завершатся. Что касается медли, как бонусы действуют в течение одного часа. <a href=https://blog.naver.com/lexxeagle/223391406427>https://blog.naver.com/lexxeagle/223391406427</a> Многие новенькие сомневаются, что поощрительный приз надо несомненно возвращать, и случае они выиграли у казино. Это безусловно безопасно и накрепко. Выводя выигранные средства, игрок просто останавливает свое роль в игре и теряет уникальную вероятность – даром наращивать личное материальное положение.Для выбора азартного заведения Вы можете воспользоваться перечнем наших казино с призами за регистрацию. На нашем веб-сайте мы опубликовали перечень бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, что доля бонусов эксклюзивные и доступны лишь для посетителей нашего сайта по-специальному промо-коду или по уникальной ссылке. Кроме того, для каждого бонуса мы подготовили подробный обозрение, в котором Вы узнаете как получить и отыграть поощрение и как вывести собственный выигрыш с бездепа. 1 x slots <a href=http://sportcar.moscow/index.php?subaction=userinfo&user=pluckyhangover5>http://sportcar.moscow/index.php?subaction=userinfo&user=pluckyhangover5</a>
1×slots официальный сайт скачать на айфон
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=373596>1×slots регистрация 1×slots casino c2d ru</a> 1× slots casino зеркало <a href=http://banya-sochi.ru/bitrix/redirect.php?goto=http://xn–1775–43d6bhnkw9q.xn–p1ai/bitrix/rk.php?goto=http://koaron.hatenablog.com/iframe/hatena_bookmark_comment?canonical_uri=https://teletype.in/@urist555/bTHTVhi1DqH>http://banya-sochi.ru/bitrix/redirect.php?goto=http://xn–1775–43d6bhnkw9q.xn–p1ai/bitrix/rk.php?goto=http://koaron.hatenablog.com/iframe/hatena_bookmark_comment?canonical_uri=https://teletype.in/@urist555/bTHTVhi1DqH</a> Выбирайте наихорошие безвозмездные бонусы с помощью обзоров на Casinoz – и пусть для сопутствует удача при отыгрыше бонусных кредитов!Так собственно приготовьтесь дать конфиденциальную информацию (пол, возраст, страна проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает не более суток, в чего получится свободно выводить крупные выигрыши. 1×slots зеркало регистрация в 1×slots casino
1×slots зеркало рабочее на сегодня
Поспешите забрать бездепозитные бонусы за регистрацию в казино из представленного списка. Все платформы столько ведут законную деятельность, но и порадуют добросовестными плодами игры, высочайшей отдачей, быстрыми выплатами.При отыгрыше бонусных средств, нужно учитывать срок деянья приза и время, которое дается на отыгрыш. По истечению заявленного медли, не отыгранный бонус будет аннулирован. А ознакомиться с новыми интернет казино, Вы можете за счет призов с выводом прибыли, которые Вы можете получить без депо.Получив собственный презент, Вы можете безвозмездно играть на реальные деньги, а выполнив обстоятельства отыгрыша, исключить свой выигрыш. <a href=http://avtolux48.ru/people/user/496/blog/8227/>http://avtolux48.ru/people/user/496/blog/8227/</a> Для того, чтобы отыграть сумму вашего бездепозитного бонуса нужно выполнить условия вейджера. Очень часто фриспины даются на конкретные слоты (book of ra, book of dead, book of sun), подбирайте слот для по, все довольно красивые и качественные. Бездепозитные приз имеет быть денежным так и в виде фриспинов на слотыБывают ли бездепозитные призы без вейджера? Бывают, если у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино. casino 1×slot Чаще всего используются коды. Их нужно заносить в специальные окошки регистрационной анкеты, случае идет о пригласительных призах, либо в особом разделе собственного кабинета игрока.
1×slots casino регистрация 1×slotscasin online
Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция имеет подробные управляла, ссылка на которые обычно находится в промообъявлении. В них указываются лимиты, вейджер, перечень доступных игр. Если оператор скрывает данные о предложении, то пользоваться им надо.Бездепозитные призы за регистрацию в игровых автоматах для собственников онлайн-казино считаются долею маркетинговой кампании, направленной на повышение аудитории вебсайта. Так они продвигают средства бренды и привлекают новых клиентов. На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не сможете активировать и получить бездепозитный приз.На страничке представлены бездепозитные бонусы за регистрацию в казино редчайшая награда за которой гонятся все игроки как новички, например и мастера. Мы также уделяем огромное внимание на присутствие призов при формирование рейтинга казино на средства. Бездепозитный бонус это возможность выступать безвозмездно и выиграть реальные деньги. Можно ли в одном интернет казино получить больше 1-го приза за регистрацию? Нет, например как в каждом интернет казино есть верховодила, к которым надо(надобно) держаться, не делать 2 аккаута для получения бонусов, иначе будет блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, бонус за регистрацию выдаеться раз один одному лицу. онлайн казино 1×slots <a href=https://forum.eliteshost.com/member.php?action=profile&uid=10138>https://forum.eliteshost.com/member.php?action=profile&uid=10138</a>
рабочее зеркало 1×slots
Третитй бездепозитный бонус за регистрацию – валютные средства. К огорчению, начислить рубли или баксы способны только известные и знаменитые клубы. С их поддержкою вы сможете насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком.Самые популярностью способы вывода денег ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам подобии Neteller и Skrill, еще используют криптовалютными кошельками. Вывод выигрышей имеет исполняться моментально либо развлекать от нескольких часов до нескольких суток. Также учтите, собственно некоторые игровые платформы сузивают перечень государств, коие готовы получить предложенный бездепозитный бонус за регистрацию. К образцу, есть онлайн-заведения, выдающие сходственные призы только жителям определенных государств. К примеру, интернет казино 777 Оригинал дает бездепозитный бонус лишь игрокам из России и стран СНГ. Или напротив, снабжают вознаграждением всех, не обитателей неких государств (как этого, следует внимательно изучать перечень, чтобы впоследствии не появилось практически вопросов и претензий).Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, чтобы была вероятность вывести выигрыш. <a href=https://www.magcloud.com/user/roxana759662>https://www.magcloud.com/user/roxana759662</a> Сразу после активации промокода возможно воспользоваться презентом. Как уже упоминалось, бонусы бывают трёх видов – фриспины, кредиты и фриплей-бонусы.Как верховодило, при выводе денег, от играющего потребуется лишь сделать наименьший вклад для того, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом индивидуальный счет. 1х слот регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://mit-bbs.com/viewtopic.php?t=895133>1×slots зеркало быструю регистрацию а также мгновенное</a>
<a href=https://aboutdentalimplants.org/community/recovery-and-aftercare/1×-slots-casino-%d0%be%d1%84%d0%b8%d1%86%d0%b8%d0%b0%d0%bb%d1%8c%d0%bd%d1%8b%d0%b9-%d1%81%d0%b0%d0%b9%d1%82/>1× slots casino официальный сайт</a>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=447572>1×slots актуальное зеркало</a>
<a href=http://forum.l2endless.com/showthread.php?tid=620839>1×slos регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток.
#139 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на сайте
Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам воспрещено начислять призы клиентам, не имеющим денежных средств на счете. Мы предлагаем разглядеть животрепещущие бонусы онлайн-казино с лицензией, которые соблюдают законодательство РБ.Для получения депозитного бонуса необходимо пополнить свой игровой баланс настоящими средствами. Вознаграждение можно получить или при внесении первого депо, либо повторяющий фиксированного процента от внесённых средств. Так либо другому, бонус поступит на счёт только после пополнения. <a href=http://filmkachat.ru/>1×slots промокод при регистрации</a> <a href=https://www.f6s.com/cgifurniture-3d-rendering-company>https://www.f6s.com/cgifurniture-3d-rendering-company</a> Шаг 4. Активация. Внимательно выучите обстоятельства, информацию по ограничениям и сроке действия бонусного предложения. Разобравшись с правилами, возможно активировать бонус в собственном офисе (времени ? с внедрением промокода) или по запросу в саппорт. 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=http://gta-gamer.ru/index.php?subaction=userinfo&user=iwywomyf>http://gta-gamer.ru/index.php?subaction=userinfo&user=iwywomyf</a>
1×slots регистрация 1×slots casino c2d ru
1хслотс рабочее зеркало <a href=http://fonogramm.pro/user/Steveninevy/>http://fonogramm.pro/user/Steveninevy/</a> 1×slots сайт
1×slot зеркало рабочее этих способов предполагает регистрацию
Автоматическая активация первый самой удобной, хотя ручной способ содержит перед ней достоинства. Прежде чем использовать вознаграждение от казино, стоит заранее определить, сколько медли потребуется на исполненье всех условий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала деянья бонуса.Суммы похожих услуг, случаев, колеблются от трех до 20 $, а вейджер на эти свои должен составлять от тридцати до шестидесяти раз. Зачастую, наивеличайшая сумма выигрыша тут составит от одной до 2-ух сотен долларов. Если игрок выиграет больше, то все свои имеют быть списанными до максимально разрешенного выигрыша. Здесь появляется содержание выводить еще несуществующие финансы на свою платежную систему и далее находить заведение с подходящими под данную необходимую релоадом или призом за 1-ое пополнение счета. Есть количество подвидов бездепозитного вознаграждения, предлагаемого наибольшим числом заведений. <a href=http://istiqbolsari.uz/user/FrankDit/>http://istiqbolsari.uz/user/FrankDit/</a> Составленный знатоками Casino.ru список онлайн-казино с бездепозитным бонусом дозволяет игрокам сопоставить спецпредложения разных операторов.Для получения выигрыша потребуется выполнить обстоятельства казино. Чаще всего игроку нужно поставить определенную необходимую, но уже из личных денег. Она рассчитывается из общего размера выигрыша за всегда применения бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, случае юзер выиграл 1000 руб., а множитель сочиняет х30, вывести средства можно будет, сделав ставки на 30 000 руб. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
1×slots рабочее зеркало на сегодня
Мы собрали и выпустили список наихороших бездепозитных казино с бонусами за регистрацию, коие гарантируют великодушные выигрыши и мгновенные выплаты. Условия шансы различаться приятель от друга. Но подобный бонус имеет быть применен лишь для игрового процесса – полученные на счет деньги до такого, как будут отыграны, вывести невозможно. 1×slots официальный сайт зеркало <a href=http://julia4tied.de/member.php?action=profile&uid=133140>http://julia4tied.de/member.php?action=profile&uid=133140</a> Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, чтобы снова получить безвозмездный бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ждет неизбежное наказание.
1хслот зеркало сайта
Чаще всего, знаменитые сервисы, такие как MoneyBookers и WebMoney, еще MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно обязательное верховодило. Финансовые свои выводятся лишь спустя что, эту платежную систему, которой огромной для пополнения депозита. Если же игрок получил бездепозитный покерный бонус, потребуется восполнить счет на минимальную сумму, кот-ая составляет обыкновенно десять $. Но на азартных платформах похожие вознаграждения все получить и уже зарегистрированные юзеры. В этом случае, призы предоставляются в оригинальных промоакций либо же неким геймерам в виде акционного предложения, которое приходит на почту с целью «вернуть» игрока в свое казино. <a href=https://www.google.co.bw/url?q=https://doctorlazuta.by/>https://www.google.co.bw/url?q=https://doctorlazuta.by/</a> Таким образом интернет казино получает вероятного игрока. Возможно в будущем или истинном он захотит сыграть на средства деньги. Так трудятся бездепозитные бонусы в онлайн казино. Здесь очень подходит выражение, благотворительные сыр бывает лишь в мышеловке. Начинающие игроки имеют не обдумывать опасность пыла. Однако времени осознания делается больше. Это тема для отдельного обсуждения. 1×slots casino регистрация 1×slotscasin online Мы подготовили список, где есть практически животрепещущие и новые бездепозитные бонусы казино, которые продоставляется получить безвозмездно. Для наших юзеров есть особые предложения неповторимые бонусы, которые вы нигде не отыщите, их мы обозначили специальной красной плашкой «Exclusive».Бездепозитный бонус за регистрацию в казино с выводом средств в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых свежих, великодушных и проверенных призах в интернет казино, коие обновляются каждый день.
<b>Смотреть еще похожие новости:</b>
<a href=https://forumauthority.com/thread-6725-post-40270.html#pid40270>1×slots зеркало регистрация то дальше необходимо пройти</a>
<a href=https://forumsleague.org/forum/viewtopic.php?f=4&t=38581&p=408493#p408493>1×slots регистрацию более популярный вариант это</a>
<a href=https://kythuatin.com/viewtopic.php?p=279872#p279872>1×слотс казино</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную процедуру активации бонуса без депозита. Внимательно прочитайте до конца. Многие новички делают промахи на шаге регистрации и потому имеют получить подарок. Этот образ приза несомненно добавлен на Ваш аккаунт последствии успешной процедуры регистрации с использованием номера телефонного. Если избрать другой способ творенья учетной записи, бездеп не будет добавлен на Ваш аккаунт.
#140 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пин up casino букмекерская контора <a href=https://repost.news/>порно с Константин Тюкавин (футбол)</a> Попова Анна Юрьевна порно казино пин <a href=https://glvk.guru/>порно с Голикова Татьяна Алексеевна</a> казино можно win win casino 1×bet слоты 1×bet top cat casino букмекерская контора на андроид 7k casino зеркало porno Нина Пирогова, хоккеистка
DiskiPlus сайт казино зеркало DiskiPlus сайт 1×bet слоты <a href=https://www.diskiplus.ru/>DiskiPlus казино зеркало сегодня</a> DiskiPlus 1×bet зеркало слоты DiskiPlus казино вход <a href=https://www.diskiplus.ru>DiskiPlus слоты казино</a> DiskiPlus casino зеркало сайта DiskiPlus официальные сайты казино DiskiPlus online casino официальный DiskiPlus порно с Никита Кучеров (хоккей) DiskiPlus porno Юлия Канакина, скелетонистка DiskiPlus кент казино DiskiPlus porno Светлана Ходченкова
#141 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация в 1×slots casino
Получить Бездепозитный приз в онлайн казино дело двух кликов. Другой момент, отыграть рекламную и соблюсти управляла и условия отыгрыша. Под правилами подразумевается не вагер, но и лимитирования по наибольшей ставке. Мы понимаем, собственно в кино все ставят на зеро и выигрывают. Призываем не делать похожего. Перед активацией приза прочитайте управляла. Узнайте последующие моменты: Условия получения презента, за регистрацию, за депозит и другое. Ограничения по наибольшей ставке. Зачастую не повыше 350 руб. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах можно отыгрывать вагер. Можно вращать автоматы, а вагер несомненно стоять на месте. Поэтому главно аристократия, в каких забавах можно совершать кратность валютного оборота.Денежные средства. Третий приз за регистрацию без депозита – наличные. К раскаянью, лишь знаменитые и модные клубы могут уяснить деньги в рублях или баксах. С их поддержкой вы сможете насладиться любой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед этим необходимо исполнение определенных критерий. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало рабочее</a> Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в обязательном порядке необходимо восполнить счет в казино. Для депозитных бонусов, данная процедура не нужна, так как депозит уже сделан.Способы получения бездепа различаются зависимо вида приза, который понравился игроку. Но вам или надо(надобно) быть зарегистрированным в легальном онлайн-казино и доказать свою личность. В общем виде пошаговая инструкция для получения бездепозитного бонуса выглядит например: <a href=https://paperpage.in/blogs/288401/Transform-Your-Vision-with-3D-Exterior-Rendering-Services>https://paperpage.in/blogs/288401/Transform-Your-Vision-with-3D-Exterior-Rendering-Services</a> Активация по промокоду употребляется в разных обликах бездепов. Если идет о приветственном призе, то комплект знаков можно разузнать на главной странице, в регистрационной форме либо письме, коие отправляется юзеру для подтверждения адреса электронной почты. Акции все проводиться вместе с партнерскими площадками. Обычно код располагается на постороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активизируется разовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем актуальный код для активации в описании каждого рекламную.Вывод выигрыша с бездепозитных бонусов казино – щедрый презент от азартных клубов. Но чтобы исключить собственный заработок, необходимо выполнить ряд критерий: 1× slots casino официальный сайт <a href=https://latino-forex.com/members/250616-henryrab>https://latino-forex.com/members/250616-henryrab</a> Однако далеко не все ресурсы предлагают своим клиентам бездепозитные призы за регистрацию в казино. В большинстве случаев предусмотрено поощрение на первый депо в объеме 100–200%. Это замечательная вероятность преувеличить банкролл, прирастить время, проведённое за игрой и шансы сорвать большой куш.Постарайтесь отыграть вейджер, чтобы появилась возможность забыть заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы можете получить выигрыш на электронной кошелёк, карту, аппарат.
1×slots зеркало рабочее
<a href=https://jgwy.net/space-uid-200381.html>1×slots регистрация то дальше необходимо пройти</a> 1×slots акции <a href=https://biznes-knigi.com/user/DarenChoit/>https://biznes-knigi.com/user/DarenChoit/</a> Третитй бездепозитный бонус за регистрацию – денежные средства. К сожалению, начислить рубли или доллары способны лишь известные и популярные клубы. С их поддержкой появится насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком.При регистрации идет указывать лишь достоверную информацию. Когда учетная запись будет активна, появится доступ в Личный офис. В нем можно избрать валюту, установить промокод и узнать доскональные верховодила получения и отыгрыша бездепа. Краткая информация об промоакции нередко присутствует непосредственно на регистрационной форме. 1хслотс официальный сайт зеркало Вейджер (или вагер) ? это минимальная сумма ставок, которую необходимо устроить для вывода валютного бонуса. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение.Далее потребуется отыграть вагер и вывести выигрыш. Игрокам без опыта крупно подфартило, у получить 10-ки подарков за 1 регистрацию. Если не смогли получить Бездепозитный бонус, не беспокойтесь. Обратитесь в интернет чат, оператор поможет исправить.
1х слот регистрация в 1×slots casino
Для выбора азартного заведения Вы можете пользоваться перечнем наших казино с призами за регистрацию. На нашем сайте мы выпустили список бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, собственно часть призов неповторимые и доступны лишь для посетителей нашего вебсайта по-специальному промо-коду либо по оригинальной ссылке. Кроме такого, для каждого бонуса мы подготовили подробный обзор, в Вы узнаете как получить и отыграть одобрение и как исключить собственный выигрыш с бездепа. <a href=https://www.dnnsoftware.com/activity-feed/my-profile/userid/3211428>https://www.dnnsoftware.com/activity-feed/my-profile/userid/3211428</a> Выбирайте лучшие благотворительные призы с помощью обзоров на Casinoz – и пусть вас сопутствует удача при отыгрыше бонусных кредитов!Ознакомьтесь с нашим перечнем лучших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего перечня и получите бездеп незамедлительно. Хватайте наилучшие безвозмездные предложения ниже и выигрывайте большие деньги, не рискуя! 1×slots коды Следует подчеркнуть, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом.
1хслотс рабочее зеркало
Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, a лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.В списке притязаний к отыгрышу часто наличествуют лимиты на ставки при игре на личные средства. Так, случае отыграть надо(надобно) 30 000 рублей, а предельная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 один. Эта особенность затрудняет соблюдение игроками критерий по срокам деяния акции. Зачастую бездепозитные призы казино для игры предлагаются разными заведениями азартных игр виде маркетинговых промоакций или в целях вербования к себе свежих игроков. Для бездепозитных призов в казино 2022 игроку не нужно пополнять счет до этапа вывода желанных средств.Размер ставки для игры по бездепозитному бонусу (естесственно же, в случае, когда он представлен вид бонусных валютных средств) зачастую ниже, чем при ирге на депозит. Ограничение несомненно работать до момента отыгрыша бонуса. зеркло казино 1×slots <a href=https://23region.info/user/DavidAdobe/>https://23region.info/user/DavidAdobe/</a> Объективные – размер приза, коэффициент и обстоятельства вейджера, необходимость внесения депо для вывода денег;Возможность поиграть вспомогательное соревнование (а время и несколько) совершенно даром, а выигрыш, в свою очередь, поступает на счёт игрока.
1хслотс регистрация в 1×slots casino
Будьте внимательнее при ознакомлении с правилами во избежание происхожденья конфликтных обстановок с казино, когда последствии отыгрыша бездепа для не дадут вывести солидную сумму выигрыша.Зарегистрируйтесь. Для регистрации почаще всего достаточно ввести свой номер телефонного и почтовый адресок, после чего установить приобретенный код из СМС. Возможно, требуется указать промокод. В правилах промоакции несомненно написано, где его надобно вводить. Иногда это надо делать при регистрации, времени — уже последствии сотворения личного кабинета, на отдельной странице. <a href=http://cqr3d.ru/user/Jamesdooma/>http://cqr3d.ru/user/Jamesdooma/</a> Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут уточняет ограничение для клиентов. Конечно, это можно посчитать неким неудобством для игрока, но справедливости отметить, что выбор автоматов всё равно остаётся довольно наибольшим. 1×slots регистрация 1×slots casino c2d ru Все любят получать презенты. Согласитесь, практически каждый играющий человек несомненно бесконечно рад, случае получит бесплатный подарок для игры в онлайн казино просто за регистрацию или же приз за внесенный депо, так именуемые приветственные призы для новых игроков. Соответственно такие интернет клубы станут больше известны и предпочтительны у игроков при выборе казино для забавы. Топ казино каждый обновляется и прибавляются новые и увлекательные игровые клубы с привлекательной бонусной политикой и всеми возможными привилегиями, к которым относятся такие призы как фриспины за регистрацию, денежные бездепозитные бонусы, а великодушные призы за внесенный депо.
<b>Смотреть еще похожие новости:</b>
<a href=http://3dprintingforum.us/viewtopic.php?t=4181>1 х слотс зеркало</a>
<a href=https://rogue-star.net/forums/viewtopic.php?t=105>1×slots casino регистрация 1×slotscasino09k online</a>
<a href=http://craft4game.forumex.ru/viewtopic.php?f=2&t=5059>1×slots casino зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Новички не обожают незамедлительно же вносить депозит. Это обосновано неименьем навыка и недоверием. К счастью, наши возможно получить бездепозитный бонус за регистрацию в казино. Неважно собственно начисляет система – фриспины или кредиты. В всяком случае вы не рискуете своими сбережениями. Это замечательная возможность запустить понравившийся видео слот либо же испытывать удачу в настольных играх.
#142 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Юлия Пересильд Валентина Матвиенко порно <a href=https://rhymes-punches.com/>pin casino зеркало</a> пин up casino порно с Дарья Клишина, легкоатлетка <a href=https://sovsekretno.net/>сайт букмекерской конторы</a> играющие казино ешь казино 1×bet 1хбет официальная казино Валентина Матвиенко порно vavada casino 1×bet слоты 1×bet top
DiskiPlus казино можно DiskiPlus casino сайты <a href=https://diskiplus.ru/>DiskiPlus сколько казино</a> DiskiPlus букмекерская контора мостбет DiskiPlus сайт pin up casino <a href=https://diskiplus.ru>DiskiPlus Любимова Ольга Борисовна порно</a> DiskiPlus букмекерская контора скачать приложение DiskiPlus казино пину DiskiPlus букмекерская контора скачать приложение DiskiPlus kent casino DiskiPlus casino вход DiskiPlus порно с Елена Никитина, скелетонистка DiskiPlus порно с Анна Калинская (теннис)
#143 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать
B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax <a href=http://filmkachat.ru/>1×slots зеркало быструю регистрацию а также мгновенное</a> Обычно, бездепозитные призы выдаются под конкретные слоты с фиксированной ставкой, хотя их точно запрещено применять в игровых автоматах с прогрессивным джекпотом. Список игр, в возможно применять бездеп, Вы найдете в описании промоакции либо сможете уточнить у службы заведения. <a href=http://snstheme.com/forums/users/3d-render/>http://snstheme.com/forums/users/3d-render/</a> 1хслот 1хслотс регистрация перейти на 1×slots <a href=http://edok-journal.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=http://adminbr.ru/bitrix/redirect.php?goto=http://getairsoft.ru/bitrix/redirect.php?goto=https://telegra.ph/Kompensaciya-za-arendu-zhilya-dlya-voennosluzhashchih-09–19>http://edok-journal.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=http://adminbr.ru/bitrix/redirect.php?goto=http://getairsoft.ru/bitrix/redirect.php?goto=https://telegra.ph/Kompensaciya-za-arendu-zhilya-dlya-voennosluzhashchih-09–19</a> Если вы выбираете испытанное лицензионное интернет казино и выполните все условия получения бездепозитного приза, трудностей с получением дара у Вас не возникнет.У любого игорного клубы различные вейджеровые обстоятельства. Чтобы вы гарантировано смогли выполнить их, мы дадим некоторое советов. Если система начислила небольшую сумму, не стоит создавать немалые ставки – остановитесь на 10–30 центах. Как только сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте играть. В неприятном случае другого приглядеться к другому автомату.
1×slots актуальное зеркало
Нет. Для получения бездепозитного приза в казино необходима обязательная регистрация на сайте. Играть в слоты даром и без регистрации можно лишь в демо режиме. <a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=48261>1× slots регистрация в 1×slots casino</a> 1×slots casino зеркало Условия имеют разниться приятель от друга. Но такой бонус имеет быть использован только для игрового процесса – полученные на счет деньги до как, как будут отыграны, исключить нереально.Бездепозитные призы — это презенты от казино вид бонусных средств либо фриспинов для игровых автоматов, которые начисляются на аккаунт игрока в процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депо не требуется. <a href=http://nis.com.tn/index.php?option=com_kunena&view=user&userid=22908>http://nis.com.tn/index.php?option=com_kunena&view=user&userid=22908</a> рабочее зеркало 1×slots B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax
1× slots регистрация в 1×slots casino
Но существуют азартные заведения, готовые просто например вручить деньги на игру. Для этого достаточно сделать профиль. Чтобы вывести выигрыш, сначала нужно выполнить вейджеровые обстоятельства, прописанные в критериях получения бездепа. 2. Создать новый профиль. Для регистрации нужно наполнить небольшую анкету либо зайдите в индивидуальный кабинет при помощи социальных сетей; <a href=https://rovworld.com/members/raymondner/profile/>https://rovworld.com/members/raymondner/profile/</a> Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. 1хслот официальный сайт зеркало Многие казино деют в рекламных целях благотворительные бонусы необыкновенно для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой вебсайт по партнерской ссылке с нашего портала.
1×slots casino регистрация 1×slotscasin online
Ещё одно распространённое акционное предложение – симпатичный подарок с сомнительными притязаниями. К примеру, клуб сулит $100 в качестве бездепа, но с вейджером х80 либо х100. Отыграть подобный вейджер фактически невероятно и поэтому чем концентрироваться на больше интересных акциях. Пoдтвepдить личнocть посетителя. Для удачного вывода средств, нужно доказать лицо посетителя. Нa этaпe вepификaции пpoфиля, работники службы безопасности обязаны убедиться, что у игрока не раз аккаунт. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не может исключить собственный выигрыш, если у него будет количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы.При правильном подходе бездепы — это отличный метод играть на средства без растраты личных средств. Есть несколько советов, следуя которым возможно извлечь максимум пользы из сходственных акций казино. Играть следует лишь на лицензированных площадках. Скриптовые сайты не только врут с бонусными услугами, но и употребляют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах нереально. 1×slots зеркало регистрация в 1×slots casino <a href=https://521zixuan.com/space-uid-1105009.html>https://521zixuan.com/space-uid-1105009.html</a>
1×slots casino зеркало рабочее
Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте условия – они нередко выдаются для некоторых машин. В зависимости от клуба вы можете делать конкретное число ставок. Кстати, современные игорные жилища выделяют возможность заводить «одноруких злодеев». <a href=http://forumqservice.co.uk/member.php?action=profile&uid=5887>http://forumqservice.co.uk/member.php?action=profile&uid=5887</a> Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. 1×slots зеркало регистрация Бесплатные бонусы казино без депозита возможно получить повторяющий денежных средств на бонусный счет (вывести их возможно лишь в отыгрыша), фриспинов, забавы либо кешбэк-бонуса.В каждом казино с бездепозитным призом предусмотрены вейджеровые обстоятельства. Это один-единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, нужно устроить определённое количество ставок. Чем круче бонус, что, этим труднее выполнить обстоятельства, и наоборот.
<b>Смотреть еще похожие новости:</b>
<a href=http://vos.mille.et.une.vie.free.fr/viewtopic.php?p=453718#453718>1×slots подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Особую изюминку видео слотам присваивают уникальные символы. С их в активизируются различные бонусы. Вы сможете запустить вспомогательный степень и увеличить сумму выигрыша. Есть знаки, коие сменяют ненадобные составляющие и сами творят выигрышные комбо. Не стоит забывать и на бонус-тур. После каждого успешного спина есть шанс увеличить необходимую выигрыша в два либо хорошо раза. Помните, собственно всевозможные нарушения правил сведут на нет ваши усилия, и вы скорее останетесь без начисленного вас бесплатного приза. Всегда изучайте верховодила начисления и условия вейджера. По хоть вопросам, на коие вы не можете других найти ответы, обращайтесь за разъяснениям и саппорт.
#144 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino рабочее сайт казино зеркало <a href=https://www.ossetia.tv/>человек казино</a> Львова-Белова Мария Алексеевна порно 1×bet на сегодня <a href=https://m.repost.news/>porno Алена Косторная (фигурное катание)</a> букмекерская контора фонбет часы казино casino регистрации casino online зеркало вавада казино казино сегодня pin up casino
DiskiPlus Москалькова Татьяна Николаевна порно DiskiPlus Александра Бортич <a href=https://www.diskiplus.ru/>DiskiPlus скачиваемые казино</a> DiskiPlus 1×bet зеркало на сегодня DiskiPlus вывод казино <a href=https://diskiplus.ru/>DiskiPlus казино ли</a> DiskiPlus 1×bet рабочее на сегодня DiskiPlus казино вход официальный сайт DiskiPlus 1×bet на андроид бесплатно DiskiPlus песня казино DiskiPlus кент казино DiskiPlus скачать 1×bet на андроид бесплатно DiskiPlus пари букмекерская контора
#145 Georgecrignhttps://samara-domashnij-internet001.ru
интернет по адресу дома <a href=https://samara-domashnij-internet001.ru>samara-domashnij-internet001.ru</a> провайдер по адресу самара
#146 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало рабочее
Вейджер менее х30–35 является применимым. Опытные игроки утверждают, собственно с этим вейджером реально остаться в плюсе, если правильно подойти к выбору игрового аппарата.Бездепозитный бонус за регистрацию в казино с выводом средств в 2022 году — Наш ресурс предоставляет игрокам важную информацию о самых свежих, щедрых и проверенных бонусах в онлайн казино, коие обновляются любой день. <a href=http://filmkachat.ru/>1×slots зеркало которую указывали при регистрации кстати</a> Предложения с бездепозитными бонусами за регистрацию разрешают свежим заведениям заинтересовать аудиторию на собственный вебсайт. А игроки тому получают возможность играть на реальные деньги без депозита в казино и заработать малый стартовый капитал, который разрешается вывести на карту банка или электрический кошелек.А ознакомиться с свежими интернет казино, Вы сможете помощью призов с выводом выгоды, которые Вы можете получить без депо. <a href=https://www.arrl.org/forum/topics/view/4344>https://www.arrl.org/forum/topics/view/4344</a> Диапазон ставок, коие вправе сделать игрок, кроме лимитирован. Обычно назначать возможно небольшую необходимую — в 10–30 рублей за одно вращение.Казино выводит средства лишь на ту платежную систему, с котрой был сделан депо. То есть, для вывода бездепозитного бонуса, Вам сначала необходимо восполнить счет. В некоторых клубах узкий перечень методов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет непосредственно с данных платежных способов, которые доступны для вывода. 1 x slots casino <a href=http://bbs.xinhaolian.com/home.php?mod=space&uid=4552666>http://bbs.xinhaolian.com/home.php?mod=space&uid=4552666</a>
1×slots рабочее зеркало
<a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=14168>1×slots официальный demo регистрация в 1×slots casino</a> 1 x slots <a href=http://fr79056g.bget.ru/index.php?name=account&op=info&uname=decoroussinger4>http://fr79056g.bget.ru/index.php?name=account&op=info&uname=decoroussinger4</a> К раскаянию, нет. Почти все казино, настоятельно внесение но бы одного малого депозита для вывода выигрыша с бездепозитного бонуса. Также учитывайте, что вывести средства разрешено лишь на что, эту платежную систему, с коей был изготовлен депозит.Особую изюминку видео слотам присваивают уникальные символы. С их в активизируются различные бонусы. Вы сможете запустить вспомогательный степень и увеличить сумму выигрыша. Есть знаки, коие сменяют ненадобные составляющие и сами творят выигрышные комбо. Не стоит забывать и на бонус-тур. После каждого успешного спина есть шанс увеличить необходимую выигрыша в два либо хорошо раза. 1хслот официальный сайт зеркало Допустим, за регистрацию вы возымели бездеп в объеме 2 000 руб. С вейджером х30. В данном случае светит устроить ставок, на совместную сумму в 60 000 рублей (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать настоящие деньги. Однако не забывайте, собственно с любого презента получится вывести определённую сумму (почаще всего менее $200).
1× слот зеркало
Способы получения бездепа различаются зависимо облика бонуса, который понравился игроку. Но вас в любом случае надо(надобно) быть зарегистрированным в законном онлайн-казино и доказать собственную лицо. В общем облике пошаговая инструкция для получения бездепозитного приза смотрится например: Онлайн гемблинг развивается с каждым деньком больше и больше, новые бренды создаются не по денькам а по часам. Новые онлайн казино делают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и что, этим наиболее предлагают бездепозитные бонусы за регистрацию, собственно бы не упустить эту вероятность — как воспользоваться новым бездепом, рекомендуем навещать наш сайт как можно почаще, самое лакомое и свежие будет добавляться в этом же перечне. <a href=http://sante-cinnamon.kr/bbs/board.php?bo_table=free&wr_id=311728>http://sante-cinnamon.kr/bbs/board.php?bo_table=free&wr_id=311728</a> Вы всего, скажем, как все любите получать подарки и бездепозитные призы казино. Игорные дома взяли в повадку одаривать гэмблеров приятными призами. Стать владельцем приветственного презента можно за создание профиля или пополнение счёта. Второй вариант больше занимательный, ведь клубы готовы удвоить депо! Но в вы новичок и только знакомитесь с миром азарта, чем воспользуйтесь призом за регистрацию.Прежде чем активировать бездеп, нужно убедиться что, нет, собственно государство, гражданином которой считается игрок, не заходит в список разрешенных. 1хслот зеркало сайта Нет. Казино выдают благотворительные бонусы за регистрацию, для того, чтобы клиент мог ознакомиться с игровым заведением. А дабы вывести его, необходимо выполнить условия отыгрыша.Однако далеко не все ресурсы предлагают своим посетителям бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено поощрение на первый депо в объеме 100–200%. Это замечательная вероятность преумножить банкролл, увеличить время, проведённое за забавой и шансы сорвать большой куш.
1×slot зеркало рабочее регистрации на телефон придет
<a href=http://kamadofraudforum.org/profile.php?mode=viewprofile&u=46209>сайт 1× slots casino</a> Обыкновенные бездепозитные призы в объеме от трех до 20 долларов созданы чтобы, чтобы, дабы в игры заходили все новые и новые игроки. Здесь, скорее, будет лимитирование на наибольший выигрыш. Важно, чтобы перед наименьшим вкладом был отключен приз за первое пополнение счета, и в не попадет на повторный вейджер. Возможность поиграть вспомогательное соревнование (а от и некоторое) совершенно даром, а выигрыш, к, поступает на счёт игрока.Бездепозитный приз за регистрацию в казино — это стартовый презент вид валютного начисления либо даровых вращений для новых игроков заведения, для получения которого не нужно заносить депо. 1×slots зеркало на сегодня <a href=http://182.237.3.195/home.php?mod=space&uid=628367>http://182.237.3.195/home.php?mod=space&uid=628367</a>
1×slots казино мобильная версия
Бездепы могут входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами.Реже бонусы без депозита начисляются неизменным игрокам. С их помощью администрация старается вычесть ценных посетителей либо желает поблагодарить за лояльность правильных гостей. Но гораздо почаще для сходственных целей применяются такие промоакции: <a href=http://akvalife.by/user/Edwardhog/>http://akvalife.by/user/Edwardhog/</a> Также, ситуации нужно доказать свой номер аппарата, для этого код, полученный в смс-сообщении от клуба установить в специальное поле в личном кабинете игрока.Но есть игорные заведения, которые готовы просто например жертвовать средства на забаву. Для этого достаточно сделать профиль. Чтобы исключить собственный выигрыш, для поначалу нужно выполнить обстоятельства отыгрыша, указанные в условиях получения бездепозитного депозита. 1хслот зеркало сайта Помните, что в неких играх сумма ставки идет в зачет вейджера лишь частично. Так, в настольных и карточных забавах только от 5% до 50% суммы ставки считаются как отыгранные деньги, тот как в слотах идет в зачет все one hundred percent суммы.Для казино, работающих интернет, бездепозитные бонусы нужны для вербования свежих клиентов. Предложение сыграть на слотах без необходимости внесения реальных денег — работающий способ для повышения энтузиазма к фирмы. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит выступать в казино, только сейчас теснее на личные средства.
<b>Смотреть еще похожие новости:</b>
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=129890&extra=>1×slot официальный сайт</a>
<a href=http://turkteam.10tl.net/member.php?action=profile&uid=2012>1×slot официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вейджер (wager) – это коэффициент, который показывает на какую сумму необходимо устроить ставок, чтобы вывести бонус из казино. Пример: Вы получили за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода этого бонуса, Вам необходимо устроить ставок на необходимую: 500*70=3500 рублей. Только всецело отыграв приз, Вы сможете исключить свой выигрыш. Подарки на определенные даты выделяются условиями получения. Если поощрение начисляют игроку на денек рождения, то сумма обыкновенно зависит от совместного объема депо за год.
#147 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Евгения Медведева леон букмекерская контора <a href=https://sovsekretno.net/>яндекс игры казино</a> ап казино pin up casino buzz <a href=https://repost.news/>пин ап casino</a> pinco casino online casino casino игровой автомат online casino casino 7k рабочее букмекерские конторы бет пинко casino
DiskiPlus online casino официальный DiskiPlus казино сочи <a href=https://www.diskiplus.ru>DiskiPlus porno Дарья Клишина</a> DiskiPlus порно с Евгения Медведева DiskiPlus casino сегодня <a href=https://www.diskiplus.ru/>DiskiPlus карты казино</a> DiskiPlus порно с Афонина Марина Игоревна DiskiPlus Самойлова Алла Владимировна порно DiskiPlus 1×bet 1хбет DiskiPlus порно с Карен Хачанов (теннис) DiskiPlus black russia казино DiskiPlus porno Елизавета Туктамышева DiskiPlus рейтинг казино
#148 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало
Новички не обожают сразу же заносить депозит. Это обусловлено отсутствием навыка и недоверием. К счастью, в можно получить бездепозитный бонус за регистрацию в казино. Неважно собственно начисляет система – фриспины или кредиты. В всяком случае вы не рискуете своими сбережениями. Это замечательная возможность запустить приглянувшийся видео разъем или же испытать фортуну в настольных забавах. <a href=http://filmkachat.ru/>1×slots регистрация то дальше необходимо пройти</a> Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации подарка необходимо подтвердить электрическую почту и привязать телефонный; <a href=https://joy.link/kalinka0588>https://joy.link/kalinka0588</a> Срок отыгрыша — это этап, кот-ый наступает в момент активации бонуса и заканчивается с его закрытием. Пользователю необходимо уложиться в этот временной зазор, по призовые средства аннулируются. Казино устанавливают перечень игр, ставки в которых засчитываются при расчете отыгранных средств. Если тайтл не заходит в данный список, то он может быть недоступен для загрузки период деянья бонусного предложения. 1×slots подтвердит вашу регистрацию если говорить <a href=https://cse.google.hr/url?sa=i&url=https://doctorlazuta.by/>https://cse.google.hr/url?sa=i&url=https://doctorlazuta.by/</a> Бездепозитный приз – это финансовое вознаграждение, коие выдается соучастнику забавы в казино, для его привлечения и появления заинтересованности. Любой посетитель, кот-ый подходит условиям выдачи похожего бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое поощрение является наиболее действенным методом, дающим вероятность стартовать деле, не вкладывая собственных вещественных средств.Заработать на бездепозитных бонусах за регистрацию в казино возможность любой пользователь, достигший совершеннолетия.
1×slots сайт
<a href=http://forum.drustvogil-galad.si/index.php?action=profile;u=121557>1×slots casino регистрация</a> 1×slots коды Возможность поиграть вспомогательное соревнование (а время и несколько) совершенно даром, а выигрыш, к, поступает на счёт игрока.Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, чтобы снова получить бесплатный приз. Игорные заведения нетерпимы к бонус-хантерам, потому вас ожидает неизбежное наказание. <a href=http://build-in.dp.ua/wr_board/tools.php?event=profile&pname=perpetualmishap>http://build-in.dp.ua/wr_board/tools.php?event=profile&pname=perpetualmishap</a> Внесение депо – Будьте готовы пополнить счет в отыгрыша приза. Это стандартное требование верховодил для этого типа промо-акций. Лучше заблаговременно уточнить, какую сумму нужно будет вносить на счет. Как правило, идет о минимальном депозите, хотя вы обязаны быть уверены, собственно он вас по кармашку. x1 slots регистрация в 1×slots casino
1×slots casino регистрация на сайте
Почти все игровые клубы требуют подтверждение контактных данных игрока для получения бездепозитного бонуса. <a href=http://mcnylon.co.kr/bbs/board.php?bo_table=free&wr_id=96143>http://mcnylon.co.kr/bbs/board.php?bo_table=free&wr_id=96143</a> Объективные – размер приза, коэффициент и условия вейджера, необходимость внесения депо для вывода денег; 1×slots официальный сайт скачать Некоторые веб-сайты, прежде чем обмануть регистрацию игроков, предлагают ответить на некоторое базисных вопросов. Цель проведения сходственной викторины – выявить случайных людей, коие не имеют представления о покере, и не допустить получения ими бонусов. Если гость уже играл в казино, то ответить на полтора десятка несложных вопросов будет нетрудно. Очень часто, ответы можно отыскать на официальных сайтах данных учреждений.
1× slots сайт
Также бездепозитные бонусы могут служить способом вернуть к игре клиентов, временно приостановивших своё сотрудничество с компанией: уведомление о бездепе поступает на мобильный аппарат либо почту.Риск-игра по одинаковым шансам – Также казино может запрещать скорпулезно условия по отыгрышу за раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких иных играх. В количестве случаев бесплатные призы начисляются в кредитах, коие нельзя незамедлительно исключить со счета. Прежде их нужно отыграть по установленным правилам. Эти требования принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже. 1×slots casino online регистрация <a href=https://www.baronerosso.it/forum/members/115390_jasperbluen.html>https://www.baronerosso.it/forum/members/115390_jasperbluen.html</a>
1×slots casino зеркало рабочее
Как и другие акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такого предложения являются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих гостей и позволяет им составить эмоцию о функционале, не рискуя вескими совокупностями.Также есть онлайн-платформы азартных игр, коие используют раздачу бездепозитных призов в особые даты (как для казино, например и для игрока). Помимо этого, действующие игроки кроме имеют возможность получить похожие бонусы за свою работа (к примеру, за увеличения значения либо за схожие достижения). <a href=http://link.ac/humor/user/Juleslew/>http://link.ac/humor/user/Juleslew/</a> Каждый из бездепозитных бонусов без пополнения 2022 содержит собственный конкретный вейджер для отыгрыша, например же в любом казино он уточняется персонально — где то он х55 а где-то х30, повторюсь везде по различному! 1хлот регистрация в 1×slots casino Подарки на праздничные ? приуроченные к праздничным датам, требующие условного отыгрыша либо начисляются без такового. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду.К примеру, игроку выдаются бесплатные средства в заведении в размере пятидесяти либо ста долларов (вейджер на которые сочиняет 100х). То есть, любому новоприбывшему игроку выскакивает привлекающая картинка, кот-ая обещает выплату всех зачисленных фирмой средств. Не стоит внимания на казино бонус за регистрацию без депо с слишком великой или очень малеханькой суммой призов, потому что, том кропотливо изучив все обстоятельства, тут вероятнее всего, будет некий подкол.
<b>Смотреть еще похожие новости:</b>
<a href=http://skatefluckit.com/member.php?u=149708>1×slots казино зеркало</a>
<a href=https://forum.vn.ua/showthread.php?p=3337608#post3337608>1× слот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Ознакомьтесь с нашим перечнем наилучших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего перечня и получите бездеп сразу. Хватайте превосходнейшие благотворительные предложения ниже и выигрывайте немалые средства, не рискуя!
#149 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
vodka casino unlim casino <a href=https://repost.news/>почему казино</a> ап казино зеркала казино <a href=https://kompromat1.online/>порно с Захарова Мария Владимировна</a> up casino скачать казино 5 карты казино ограбление казино pin casino зеркало 7k casino зеркало на сегодня порно с Абрамченко Виктория Валериевна
DiskiPlus порно с Евгений Малкин (хоккей) DiskiPlus порно с Анна Щербакова, фигуристка <a href=https://diskiplus.ru/>DiskiPlus 1×bet официальный сайт 1×bet xyz</a> DiskiPlus почему в казино нет окон DiskiPlus порно с Арина и Дина Аверины, гимнастки <a href=https://diskiplus.ru>DiskiPlus 1×bet официальный слоты</a> DiskiPlus porno Игорь Акинфеев (футбол) DiskiPlus pinco casino DiskiPlus 1×bet официальный 1×bet xyz DiskiPlus казино без DiskiPlus ап казино DiskiPlus порно с Баталина Ольга Юрьевна DiskiPlus официальная казино
#150 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
Бездепозитные бонусы начисляются только один раз. Не стоит открывать свежие аккаунты, дабы получить их повторно. Служба безопасности казино обязательно выявит «левого» соучастника и перекроет. Если гость выполнит нужные притязания, отыграет собственную ставку и решит вывести собственный выигрыш, то ему нужно учесть, собственно казино обязательно востребует дать ксерокопии собственных документов, чтобы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои вывести не удастся.В бонусную программку многих операторов входят систематические бездепы. Это бессрочные акции, поощряющие активных постоянных игроков. Популярный формат — раздача фриспинов по конкретным дням недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают постоянные бонусы без депозита в размен на накопленные баллы преданности. <a href=http://filmkachat.ru/>1×slots casino зеркало рабочее</a> В случае установленного лимита на сумму вывода выигрыша с бездепозитного бонуса, игрок не может исключить больше заявленной суммы. <a href=https://designaddict.com/community/profile/real-estate-rendering-services/>https://designaddict.com/community/profile/real-estate-rendering-services/</a> Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских рублей. В критериях акции предписано, что вейджер бездепозитного бонуса х20. Поэтому, дабы отыграть приз, игроку несомненно необходимо сделать ставок на 35*20=700 руб.Некоторые сайты, этого чем провести регистрацию игроков, предлагают ответить на несколько базовых вопросов. Цель проведения похожей викторины – выявить случайных людей, которые не имеют представления о покере, и не разрешить получения ими призов. Если посетитель теснее играл в казино, то ответить на полтора 10 простых вопросов несомненно несложно. Очень нередко, ответы возможно найти на официальных веб-сайтах этих учреждений. 1хслотс 1хслотс регистрация перейти на 1×slots <a href=http://admbelgor.ru/bitrix/redirect.php?goto=http://clients1.google.co.zw/url?q=http://kirmuseum.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/UgbaO6vaIMY>http://admbelgor.ru/bitrix/redirect.php?goto=http://clients1.google.co.zw/url?q=http://kirmuseum.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/UgbaO6vaIMY</a>
1×slots официальный сайт, скачать
Бездепозитные призы казино за регистрацию в 2022 году — это возможность поиграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой либо количеством безвозмездных вращений без внесения депо. Не путайте деморежим с реальной забавой без надобности внесения депозита. <a href=https://jgwy.net/space-uid-200381.html>1×slots зеркало регистрация то дальше необходимо пройти</a> 1×slots рабочее зеркало на сегодня Такой казино приз без депозита за регистрацию выдается игроку на час и энергично используется данное предложение с 2017 года. Это как бы какая-то маскировка одобрения под бездепозитный. Суть всего этого сводится к что, этому, что игроку на час выдается, к примеру, 1000 долларов, а реклама твердит о том, что каждой выигрыш возможно будет дальнейшем забыть при для. Но случае играющий серьезно отнесется к данному предложению, то он просто потеряет время. Ведь игроку нужно несомненно выступать не в аккаунте, в тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (и всей тыс. ) в управляла вступят конкретные обстоятельства, где несомненно сказано, собственно максимальной суммой победы имеет быть лишь двести долларов и средства возможно применять только в приза на 1-ый лепта с вейджером 25 от суммы гонорары плюс сам депо. По итогу получится, собственно игрок выигрывал себе 200% приз с вейджером на определенную сумму. Короче говоря, это все не стоит вашего времени.Бонус начисляется игроку незамедлительно последствии регистрации и прохождения верификации в казино и не настятельно от клиента внесения депозита. Как правило, объем бонуса в подобном случае довольно застенчивый, впрочем позволяет новеньким познакомиться с игрой без риска настоящими средствами. <a href=http://kimet.ru/bitrix/rk.php?goto=http://spig.spb.ru/bitrix/redirect.php?goto=http://m.birge.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/eYNEtKdvTWv>http://kimet.ru/bitrix/rk.php?goto=http://spig.spb.ru/bitrix/redirect.php?goto=http://m.birge.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/eYNEtKdvTWv</a> Используйте наилучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, дабы заработать подарки за простые деянья теперь сегодня получить первый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высокой отдачей и быстрыми выводами на электронные кошельки.Как верховодило, новоприбывшие игроки начала хотят ознакомиться с способами ввода и вывода денежных средств и сроки выполнения поданных заказов дабы четко осознавать, как скоро они смогут исключить собственный казино бонус за регистрацию без депозита на электронный кошелек или же банковскую карту. К счастью для всех играющих, внутри конкретных холдингов, все казино конкурируют между собой. Ведь если бы определенную фирму представляло лишь одно онлайн-заведение, то ли бы клиенты увидели казино с бонусом за регистрацию и могли бы рассчитывать только на вознаграждение в виде бонуса на 1-ое инвестиция. К каждому заведению периодически стопам завлекать свежих игроков, что, конечном, только на руку всем играющим. 1хслотс рабочее зеркало Игры, в возможно играть на бонусные средства. Проверьте перечень игр, каких возможно выступать на бонусные свои, вероятно они Вам не понравятся и не расходовать своё время на эту акцию.
1×slots регистрация на 1хслотс
<a href=http://forums.overhax.fun/member.php?action=profile&uid=4747>http://forums.overhax.fun/member.php?action=profile&uid=4747</a> Существуют казино с призом за регистрацию, в которых очень знамениты фриспины в онлайн казино впоследствии регистрации в определенных играх. Они встречаются и почаще безвозмездных поощрений или классических бонусов в казино без вложений. Например, игрок регистрирует счет, на который начисляются безвозмездные игры, приз за регистрацию вид безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса в выигрывает настоящие средства, коие в последствии возможно успешно исключить из заведения на свою платежную систему. То есть, есть все шансы вывести свои без рисков собственными финансами. Регистрация, за которую игрок получит бонусы, займет пару минут, а благодаря данному возможно увеличить 5 евро поощрений до тыс. И без всяких заморочек исключить их. 1×slots регистрация 1×slots casino 777 online Иногда операторы требуют внесение минимального депозита перед выводом для верификации платежного инструмента. В некоторых казино этот депо кроме светит отыграть.Возможность сыграть вспомогательное соревнование (а времени и количество) совершенно бесплатно, а выигрыш, тому, поступает на счёт игрока.
1 хслот регистрация в 1×slots casino
Бездепозитные бонусы отличный вариант даровой игры в игровые автоматы. Многие пользователи сети не знают, собственно в казино возможно начать выступать полностью даром, а позже исключить выигрыш на банковскую карту или электронный кошелек, иные не доверяют онлайн казино, а третьи успешно играют и выигрывают – и подчас довольно немалые суммы.Самый распространённый из подобных призов, естесственно же, бездеп на денек рождения посетителя — приз повторяющий фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им возможно протяжении установленного периода медли. Если вы опытный игрок, вы обязаны аристократия, собственно приз без депозита – редкая находка. Тем не менее, мы в исследуем интернет, дабы найти вам наилучшие бездепозитные предложения.Этот образ приза несомненно добавлен на Ваш аккаунт в удачной процедуры регистрации с использованием номера телефонного. Если выбрать иной способ творения учетной записи, бездеп не несомненно добавлен на Ваш аккаунт. 1хслотс рабочее зеркало <a href=https://www.professionistidelsuono.net/forums/member.php?action=profile&uid=240697>https://www.professionistidelsuono.net/forums/member.php?action=profile&uid=240697</a> Вейджер не более х30–35 является приемлемым. Опытные игроки заявляют, что с этим вейджером реально остаться в плюсе, в верно подойти к выбору игрового аппарата.Промообъявления от казино мешают реальной картины и направлены на вербование внимания юзеров. Понять, как высоки шансы остаться в плюсе, позволит личный анализ условий предложения:
зеркала 1×slots
Но а в вы теснее профи по интернет казино, кликаем на красную кнопку «Получить» и Вы автоматически перейдете в онлайн казино;Составленный специалистами Casino.ru список онлайн-казино с бездепозитным призом дозволяет игрокам сопоставить спецпредложения разных операторов. Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке адепты онлайн-казино публикуют важную информацию о no deposit bonuses прочих услугах. <a href=https://webyourself.eu/blogs/511295/%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0-%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA>https://webyourself.eu/blogs/511295/%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0-%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA</a> Если площадка презентует бездеп за регистрацию, то процедура его получения проста. Нужно лишь ввести аккаунт на веб-сайте и активировать его, подтвердив адресок электронной почты, номер телефонного или другие данные, коие настятельно оператор. Перед данным необходимо увериться, что юзер находится на официальном сайте казино, не на жульнической площадке. 1 xslots рабочее зеркало Возьми собственный презент. Чаще всего приз активируется незамедлительно в регистрации. Но случаются ситуации, когда надо(надобно) зайти в собственный кабинет или написать в справочную службу.
<b>Смотреть еще похожие новости:</b>
<a href=http://palais.beesims.com/phpbb/viewtopic.php?f=2&t=294047>1хлот регистрация в 1×slots casino</a>
<a href=http://pfdgaming.com/viewtopic.php?t=4804>1×slots регистрация 1×slots review live</a>
<a href=https://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=6268>1×slots официальный сайт, скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Таким образом, заведение пытается продемонстрировать себя своим потенциальным геймерам, а подобный маркетинговый ход как казино бонус без депо за регистрацию привлекает довольно количество внимания к игорному заведению и обеспечивает неизменный поток новых гостей и грядущих клиентов игрового интернет клуба.
#151 Charlesgunnyhttp://filmkachat.ru
1х слот регистрация в 1×slots casino
Подтвердите личность, предоставив оператору казино средства паспортные данные. Инструкции обычно легкие, основное — четко им идти. Если написано, собственно «на фото обязаны быть видны все хорошо угла страницы паспорта» — устройте именно такое фото. <a href=http://filmkachat.ru/>1×slots зеркало сайта</a> Возможность протестировать свежие забавы, не рискуя собственными средствами и разработать личную стратегию игры. <a href=https://www.arrl.org/forum/topics/view/4344>https://www.arrl.org/forum/topics/view/4344</a> 1×slots зеркало рабочее на сегодня <a href=http://linuxmagazin.3×.ro/modules.php?name=Your_Account&op=userinfo&username=rambunctiousbee>http://linuxmagazin.3×.ro/modules.php?name=Your_Account&op=userinfo&username=rambunctiousbee</a> Следует подчеркнуть, собственно бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом.Основное отличие что, собственно для получения бездепа не пополнять баланс в казино. Но кроме сего, есть ряд и различий:
1×slots зеркало на сегодня
Бездепозитный бонус часто возможность замерзнуть легкодоступным незамедлительно последствии окончания регистрации, что как единственным требованием к нему считается регистрация, а этого проверка вашей новой учетной записи. 1×slots регистрацию процедура займет всего лишь Прежде всего, не запамятовывайте периодически заглядывать на страничку обзоров бездепозитных призов. Они шаг за шагом рассматривают более увлекательные предложения ведущих игорных порталов. <a href=https://foros.factormoe.net/user-5496.html>https://foros.factormoe.net/user-5496.html</a> При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие можно посвятить ирге в казино. 1×slots регистрация Выбрать казино с бездепозитным бонусом. У нас на сайте представлен список наихороших онлайн казино, которые предлагают своим игрокам щедрые призы за регистрацию.
1×slots сайт
Получить приветственный приз шансы только свежие посетители онлайн-казино. Способы описаны в условиях промоакции любого легального казино, почаще всего это: На данном разделе портала регулярно публикуются обзорные статьи, в рассматриваются бесплатные бонусы превосходнейших интернет-казино. Информация структурирована по нескольким пунктам, включая основные: <a href=http://unix.t7y.ru/user/StevencEr>http://unix.t7y.ru/user/StevencEr</a> Срок отыгрыша — это этап, который начинается в момент активации бонуса и кончается с его закрытием. Пользователю нужно уложиться в данный временной промежуток, иначе призовые свои аннулируются. Казино устанавливают список игр, ставки каких засчитываются при расчете отыгранных денег. Если тайтл не входит в этот перечень, то он может быть недосегаем для загрузки период деянья бонусного предложения. 1×slots скачать на айфон
1хслот зеркало сайта
Иногда виде поощрения за регистрацию шансы выдаваться билеты для роли в турнирах. Условия их проведения очень отличаются, поэтому мы советуем ознакомиться с любым предложением отдельно.Бездепозитные призы начисляются только раз один. Не стоит открывать новые аккаунты, чтобы получить их повторно. Служба защищенности казино обязательно выявит «левого» соучастника и заблокирует. Если гость выполнит необходимые требования, отыграет собственную ставку и решит вывести личный выигрыш, то ему надо(надобно) сведению, что казино непременно потребует дать ксерокопии личных документов, чтобы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные средства исключить не получится. Подтверждение регистрации. Казино просят привязки профиля к электрическому адресу и номеру аппарата. Для сего на e-mail отправляется послание со ссылкой, а на телефонный ? текстовое извещение с кодом.B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. 1 хслот регистрация в 1×slots casino <a href=http://xn–jj0b538ac2cbvv.com/bbs/board.php?bo_table=free&wr_id=95660>http://xn–jj0b538ac2cbvv.com/bbs/board.php?bo_table=free&wr_id=95660</a> Для получения бонуса надо(надобно) ознакомиться с программой преданности казино и устроить ставки на необходимую, необходимую для перехода на грядущий уровень.Вообще перейдя в казино — управляла схожи в получении бездепозитных бонусов, в стереотипные верховодила заходит: доказать эл. Почту и аппарат, наполнить свой собственный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ.
1×slots актуальное зеркало
В бонусную программку множества операторов входят регулярные бездепы. Это пожизненные промоакции, поощряющие активных постоянных игроков. Популярный формат — раздача фриспинов по конкретным дням недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают постоянные призы без депозита в мена на накопленные баллы преданности.Следует выделить, что бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом. <a href=https://civil808.com/user/64143/raymondgex>https://civil808.com/user/64143/raymondgex</a> Помните, что в некоторых играх сумма ставки идет в зачет вейджера лишь отчасти. Так, в настольных и карточных забавах только от 5% до 50% суммы ставки считаются как отыгранные деньги, в то время как в слотах идет в зачет все one hundred percent суммы.Если ординарными текстами, бездепы – это определённая сумма средств или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать презенты. Но есть кое-какие нюансы. Существуют игорные дома, коие перед тем как начислить бонусы настоятельно привязать телефон, дать копии документов. 1×slots зеркало Для получения предоставленных призов для пригодиться — ПК или мобильное прибор, и остальное дело за небольшим.
<b>Смотреть еще похожие новости:</b>
<a href=http://pravoslit.ru/forum/obshchee/198734-kazino-1×slots.html>казино 1×slots</a>
<a href=https://praisenpray.org/forums/showthread.php?tid=163919>1×slots сайт зеркало</a>
<a href=http://forum.animogen.com/memberlist.php?mode=viewprofile&u=15333>казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины — бесплатные вращения, которые позволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины считаются самым известным и предпочтительным обликом приза — безвозмездные вращения иногда эффективнее и веселее в отыгрыше, чем остальные виды бездепов.
#152 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Елена Лядова порно с Зырянова Анастасия Владимировна <a href=https://krtka.info/>казино фильм онлайн</a> casino buzz top casino <a href=https://res-publika.com>скачать 1×bet на андроид бесплатно</a> up букмекерская контора порно с Аделия Петросян (фигурное катание) 1×bet приложение почему в казино нет часов porno Алена Косторная (фигурное катание) Москалькова Татьяна Николаевна порно порно с Алина Загитова, фигуристка
DiskiPlus казино вход официальный сайт DiskiPlus vodka casino <a href=https://diskiplus.ru>DiskiPlus спорт букмекерская контора</a> DiskiPlus гама казино DiskiPlus casinos xyz <a href=https://diskiplus.ru>DiskiPlus ешь казино</a> DiskiPlus 1×bet зеркало рабочее xbet DiskiPlus порно с Алексей Миранчук (футбол) DiskiPlus порно с Алина Загитова, фигуристка DiskiPlus 1×slots casino DiskiPlus казино рояль смотреть DiskiPlus сайт 1×bet слоты DiskiPlus ешь казино
#153 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало
Прибывшие на акк деньги бездепозитные бонусы предназначаются, главном, лишь для свежеиспеченных юзеров, коие раньше не имели собственного аккаунта в данном казино. Исходя из сего, в ранее у игрока был сделан депозит, то, по всей вероятности, у него больше не будет возможности рассчитывать на получение такого бонуса в конкретном заведении. <a href=http://filmkachat.ru/>1×slots промокод при регистрации 2025</a> Возьми свой подарок. Чаще всего бонус активизируется незамедлительно после регистрации. Но посещают ситуации, когда надо(надобно) забежать в индивидуальный офис или написать в справочную службу.Вознаграждения за получение VIP-статуса ? начисляются в рамках программки лояльности при достижении одного уровня или выдаются индивидуально менеджерами службы. <a href=https://www.cgarchitect.com/projects/3f3aba93-lighting-the-art-of-atmosphere-in-3d-rendering>https://www.cgarchitect.com/projects/3f3aba93-lighting-the-art-of-atmosphere-in-3d-rendering</a> Ограничения по забавам. Администрация запрещает игрокам кое-какие игровые автоматы с бездепозитным призом, средствами либо безвозмездными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда разделенье производится по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, хотя запрещен в настольных забавах и в разделе Live Casino. 1×slots казино зеркало <a href=https://sex18babes.com/user/Walterbef/>https://sex18babes.com/user/Walterbef/</a>
зеркала 1×slots
Сроки активации бонуса устанавливаются каждым казино, хотя чаще всего они не превышают недели с момента получения. Игроку обязательно нужно использовать бездеп на указанного срока, в ином случае приз просто исчезнет. Каждый бонус возможно получить только один раз, поэтому в не использовать бездеп в срок, у игрока не будет 2 шанса им воспользоваться.Подтвердите регистрацию, дабы активировать Бездепозитный бонус с выводом, потребуется наполнить собственный профиль. Заполните пустые поля истинными данными о себя. 1×slots зеркало быструю регистрацию а также мгновенное <a href=https://doodleordie.com/profile/glavdorogadv1606>https://doodleordie.com/profile/glavdorogadv1606</a> Для казино, работающих интернет, бездепозитные призы нужны для привлечения новых клиентов. Предложение поиграть на слотах без необходимости внесения настоящих денег — работающий способ для повышения энтузиазма к фирмы. После отыгрыша бездепа велик шанс, что игроку понравится и он продолжит выступать в казино, только сейчас уже на личные деньги.Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного приза достаточно пополнения баланса и подтверждения личности. В других же клубах, необходимо количество один прокрутить собственный депо. 1×slots сайт зеркало Существует ли стратегии для отыгрыша бездепозитных призов? К раскаянию нет, на выигрыши или проигрыши с призов, казино или игрок воздействовать не может, отдача игр происходит от создателей игр.
1×slots регистрация на 1хслотс
Срок активации и время на отыгрыш. Зачисление денег либо фриспинов происходит при активации протяжении строго ограниченного периода, подобные требования предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать приз несколько дней либо в недель. Другие выдают крупную необходимую за регистрацию, но время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером. <a href=http://maisoncarlos.com/UserProfile/tabid/42/UserID/2015209/Default.aspx>http://maisoncarlos.com/UserProfile/tabid/42/UserID/2015209/Default.aspx</a> Но есть азартные заведения, готовые просто например вручить средства на игру. Для этого довольно создать профиль. Чтобы вывести выигрыш, сперва нужно выполнить вейджеровые условия, прописанные в критериях получения бездепа. 1× slots официальный Риск-игра по равным шансам – Также казино может воспрещать скорпулезно обстоятельства по отыгрышу за раунда на удвоение, кот-ый предлагается в слотах, видео-покере и некоторых иных играх.
1×slots рабочее зеркало
Бездепозитные бонусы – это исключительно небезинтересная и более перспективная промоакция интернет-казино. Они том другого фри-спинов, поэтому собственно выплаты в даровых вращениях не гарантированы, как композиции на барабанах игрового аппарата шансы не сложиться. <a href=http://45.155.207.140/forum/viewtopic.php?f=7&t=459925>1хслотс официальный сайт зеркало</a> Частенько новенькие не знают, как активировать подарки либо исключить первый выигрыш. Для похожих случаев наша команда описала основные определения – что это фриспины, вейджер, как его отыграть, зачем нужно проходить верификацию.Приветственный бездеп предоставляется какому игроку лишь раз раз. Казино дерутся с так нарекаемыми бонусхантерами (от англ. Bonus Hunter — охотник за призами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения дара. Исключить похожие деяния дозволяет верификация данных. Администрация вправе потребовать у клиента подтвердить персональные данные, указанные при регистрации. 1× slots casino официальный сайт <a href=http://freezer.ru/go?url=http://don-polymer.ru/bitrix/redirect.php?goto=http://softout.ru/web.asp?url=https://teletype.in/@urist555/rvUyJoYtXDC>http://freezer.ru/go?url=http://don-polymer.ru/bitrix/redirect.php?goto=http://softout.ru/web.asp?url=https://teletype.in/@urist555/rvUyJoYtXDC</a>
1хслотс 1хслотс регистрация перейти на 1×slots
Вейджер в переводе с английского значит «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша приобретенного приза, в нашем случае бездепозитного. Число ставок не — принципиально только набрать сумму, пропорциональную сумме одобрения.С иной стороны, гораздо легче арестовать бездепозитные фриспины за регистрацию в казино и напрямик данный начать вертеть барабаны в лучших слотах. Главная особенность спинов никаких, что они предназначены для топовых автоматов. Удастся столько пройти вспомогательные раунды, но и прирастить сумму выигрыша, заработать респины и другие внутриигровые презенты. Подарки на дни ? посвященные торжественным датам, требующие символического отыгрыша либо начисляются без того. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду. <a href=http://www.pax.nichost.ru/forum/view_profile.php?UID=142378>http://www.pax.nichost.ru/forum/view_profile.php?UID=142378</a> Исходя из этого, просто не присутствует осмысленных причин махнуть рукою на получение такого приза при регистрации. И, лишним, на подобный безвозмездной базе у вас есть шансы выиграть деньги и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные бонусы, именуют безвозмездными онлайн платформами для игр.Как управляло, новоприбывшие игроки начала желают ознакомиться с способами ввода и вывода валютных средств и сроки выполнения поданных заказов чтобы четко понимать, как скоро они смогут вывести свой казино приз за регистрацию без депозита на электрический кошелек или же банковскую карту. К счастью для всех играющих, внутри конкретных холдингов, все казино конкурируют между собой. Ведь случае бы конкретную компанию давало лишь одно онлайн-заведение, то вряд ли бы клиенты увидели казино с бонусом за регистрацию и возможность бы рассчитывать только на вознаграждение повторяющий приза на 1-ое вложение. К каждому заведению периодически идет привлекать новых игроков, что, конечном, лишь на руку всем играющим. 1× slots регистрация в 1×slots casino Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации презента необходимо подтвердить электронную почту и привязать аппарат;Также случаются случаи, когда казино начислит оговоренный приз после регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам.
<b>Смотреть еще похожие новости:</b>
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=12463>рабочее зеркало 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам запрещено начислять призы клиентам, не имеющим валютных средств на счете. Мы предлагаем разглядеть актуальные бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ.
#154 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
водка казино porno Мария Шарапова <a href=https://7club7.com/>1×bet официальный 1×bet xyz</a> порно с Анастасия Потапова, теннисистка 1×bet зеркало слоты 1×bet xyz <a href=https://specreporter.com/>мелбет букмекерская контора</a> макао казино зеркала казино 7k casino зеркало на сегодня 1×bet слоты официальный сайт Чулпан Хаматова порно с Голикова Татьяна Алексеевна Елизавета Боярская
DiskiPlus casino регистрации DiskiPlus Лут Оксана Николаевна порно <a href=https://www.diskiplus.ru>DiskiPlus Валентина Матвиенко порно</a> DiskiPlus casino зеркало сайта DiskiPlus казино пин <a href=https://www.diskiplus.ru/>DiskiPlus porno Илона Маркова, хоккеистка</a> DiskiPlus 1×bet на сегодня DiskiPlus Светлана Ходченкова DiskiPlus 1×bet зеркало xbet DiskiPlus Петрова Ольга Викторовна порно DiskiPlus top casino DiskiPlus pin up casino DiskiPlus включи казино
#155 Charlesgunnyhttp://filmkachat.ru
1х слотс зеркало регистрация в 1×slots casino
Постарайтесь отыграть вейджер, дабы была вероятность оставить заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные приборы. Вы можете получить выигрыш на электрической кошелёк, карту, телефон. <a href=http://filmkachat.ru/>скачать 1×slots на андроид мобильная версия</a> <a href=https://steemit.com/watts/@kalinka0588/understanding-the-power-of-a-car-battery-a-comprehensive-guide>https://steemit.com/watts/@kalinka0588/understanding-the-power-of-a-car-battery-a-comprehensive-guide</a> Какие призы меня еще получить считая бездепозитного приза за регистрацию в казино? По мимо бездепозитного приза, каждое интернет казино предлагает игрокам прибыльное предложение на 1-ый депозит, вы совершаете депозит, ваш депо увеличивается в двое или и в 3, что, этим наиболее начать выступать возможно с более солидной суммой, так же не забываем про вейджер на призы. 1×slots бездепозитный бонус за регистрацию <a href=http://otdelka-daci.ru/index.php?subaction=userinfo&user=yjocezad>http://otdelka-daci.ru/index.php?subaction=userinfo&user=yjocezad</a> Приглашаем делиться мнениями о бонусах. Это поможет иным юзерам выбирать наиболее прибыльные предложения.Как только получите бездеп в казино, всё точно не запамятовывайте инспектировать электронную почту. Некоторые игорные клубы непрерывно веселят интенсивных гэмблеров приятными призами. Чаще всего получить презент возможно в преддверии веселья, на день рождение, за вербование друга. А также распространённым призом считается прибавка к депозиту. Нужно всего лишь пополнить счёт, и азартное заведение увеличит его на 50–100%.
1×slots casino регистрация 1×slots review live
<a href=https://rogue-star.net/forums/viewtopic.php?t=175>1×slot казино зеркало</a> 1 x slots casino Ещё одно распространённое акционное предложение – привлекательный презент с сомнительными притязаниями. К образцу, клуб сулит $100 виде бездепа, хотя с вейджером х80 либо х100. Отыграть такой вейджер практически нереально и потому никакого концентрироваться на больше интересных промоакциях. <a href=https://www.warshipsfaq.ru/user/FrankCam>https://www.warshipsfaq.ru/user/FrankCam</a> скачать 1×slots на андроид мобильная версия
1×slots официальный сайт, скачать
Диапазон ставок, коие вправе устроить игрок, также лимитирован. Обычно ставить можно маленькую необходимую — пределах 10–30 рублей за одно вращение.Бездепозитный бонус предоставляется новому игроку за определенные деянья. Часто презент в виде денег или фриспинов выдается за регистрацию, спасибо чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. <a href=http://formulandoeinnovando.com/como-se-afecta-la-formulacion-con-el-proceso-que-aplico/?unapproved=463114&moderation-hash=0f6edf3cafaa7049b445b6d2ff01f8df#comment-463114>http://formulandoeinnovando.com/como-se-afecta-la-formulacion-con-el-proceso-que-aplico/?unapproved=463114&moderation-hash=0f6edf3cafaa7049b445b6d2ff01f8df#comment-463114</a> Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном бонусе, то в первую очередь обратите внимание на велечину вейджера и срок, кот-ый дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть приз и вывести выигрыш. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Фриспины без депозита либо вспомогательные свои посодействуют ближе познакомиться с игровой платформой и её функциями. За счёт даров можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям из-за игры напротив живых крупье.Еще одно условие дотрагивается объемов ставки. Операторы устанавливают максимальную сумму, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном кабинете. При превышении лимита есть риск потерять бонуса. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, заказчик имеет столкнуться с запретом ставить фишки на шансы.
1×slots casino online регистрация
Раздача бонусов возможность быть приурочена к разным датам: календарные праздники, деньки рождения игроков, годовщина открытия казино и т. Д. Подарок выдается повторяющий средств, фриспинов либо баллов для скопления и размена на услуги оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода этой суммы придется выполнить ряд требований. <a href=http://natalundefinedyafusk.keyforum.ru/viewtopic.php?f=2&t=5799>1×slots зеркало рабочее на сегодня</a> Начнём с того, что любое промо за регистрацию предполагает некоторые условия. Бездепозитные призы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность денежного оборота, нужная для исполнения критерий. Пример, возымели безвозмездные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 руб., проигрышных или выигрышных, не. После исполнения, бонусный баланс перейдёт на настоящий и станет легкодоступным к выводу. Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте обстоятельства – они часто выдаются для некоторых машин. В зависимости от клуба вы можете делать конкретное число ставок. Кстати, современные игорные дома выделяют вероятность заводить «одноруких бандитов». казино 1×slots официальный сайт <a href=http://xiangnianro.imotor.com/space.php?uid=2011260>http://xiangnianro.imotor.com/space.php?uid=2011260</a> Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.
1×slots зеркало сайта
Риск-игра по равным шансам – Также казино имеет воспрещать выполнять обстоятельства по отыгрышу счет раунда на удвоение, который предлагается в слотах, видео-покере и некоторых иных забавах.Фриспины. Бесплатные вращения предусмотрены для использования в видео-слотах. Внимательно читайте обстоятельства – они часто выдаются для некоторых машин. В зависимости от клуба возможность делать конкретное количество ставок. Кстати, современные игорные дома выделяют вероятность заводить «одноруких злодеев». Проверка занимает от нескольких минут до нескольких дней, спецы техподдержки имеют запросить дополнительные документы или инициировать краткое общение по Skype. <a href=http://www.ka1799.com/bbs/board.php?bo_table=free&wr_id=281279>http://www.ka1799.com/bbs/board.php?bo_table=free&wr_id=281279</a> скачать 1×slots на андроид мобильная версия Например, игрок получил 500 руб. При твореньи аккаунта и обязан отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., понадобится сделать 875 спинов для полного отыгрыша.Для как, дабы отыграть необходимую вашего бездепозитного бонуса нужно выполнить условия вейджера. Очень нередко фриспины даются на конкретные слоты (book of ra, book of deceased, book of sun), подбирайте разъем себе по, все очень красивые и высококачественные. Бездепозитные бонус имеет быть денежным так и вид фриспинов на слоты
<b>Смотреть еще похожие новости:</b>
<a href=http://golf.blue-devil.eu/viewtopic.php?f=22&t=22389&sid=fd025933cd7115e755a1afc02ec967bf>1×slots зеркало рабочее на сегодня</a>
<a href=https://forum.konyacraft.com/threads/1×slots-rabochee-zerkalo-na-segodnja.13624/>1×slots рабочее зеркало на сегодня</a>
<a href=https://forumforu.com/viewtopic.php?t=541>1х слотс зеркало регистрация в 1×slots casino</a>
<a href=http://vos.mille.et.une.vie.free.fr/viewtopic.php?p=453765#453765>1×slots зеркало быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При использовании бездепозитным призом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют несколько обликов лимитов:
#156 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Баталина Ольга Юрьевна kent casino регистрация <a href=https://kompromat1.online/>top casino</a> 1×bet зеркало рабочее на сегодня бесплатно фильм казино <a href=https://rhymes-punches.com/>ограбление казино</a> porno Илона Маркова, хоккеистка bitz casino porno Анастасия Янькова, боксерка официальные букмекерские конторы скачать casino зеркало сайта casino зеркало сайта порно с Захарова Мария Владимировна
DiskiPlus Чулпан Хаматова DiskiPlus человек казино <a href=https://www.diskiplus.ru>DiskiPlus порно с Петр Ян (ММА)</a> DiskiPlus casino актуальное зеркало DiskiPlus ап казино <a href=https://www.diskiplus.ru>DiskiPlus casino бонус</a> DiskiPlus порно с Абрамченко Виктория Валериевна DiskiPlus up casino скачать DiskiPlus pin up casino пин ап DiskiPlus порно с Федор Чалов (футбол) DiskiPlus casino daddy DiskiPlus порно с Федор Чалов (футбол) DiskiPlus порно с Дронова Александра Викторовна
#157 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
В бонусную программку многих операторов входят систематические бездепы. Это бессрочные акции, поощряющие активных неизменных игроков. Популярный формат — раздача фриспинов по определенным дням недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают постоянные бонусы без депо в обмен на накопленные баллы лояльности. <a href=http://filmkachat.ru/>1×slots зеркало видели такую регистрацию на</a> Не стоит путать игру в демо и использование призов. В демонстрационном режиме игрок может расценить механику слота, сюжет и оформление. Но игра проводится на условные кредиты, потому отсутствует основное ? чувство азарта. Активируя промокод или фриспины, заказчик раньше не тратит свои средства на игровые автоматы, хотя возможность сорвать реальный куш! <a href=https://www.uscgq.com/forum/posts.php?forum=general&id=356095>https://www.uscgq.com/forum/posts.php?forum=general&id=356095</a> При правильном подходе бездепы — это отличный метод играть на средства без растраты личных средств. Есть несколько советов, следуя которым возможно извлечь максимум пользы из сходственных акций казино. Играть следует лишь на лицензированных площадках. Скриптовые сайты не только врут с бонусными услугами, но и употребляют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах нереально.Выбирая безвозмездный приз, пристально изучайте управляла. Убедитесь, что для возможно брать участие в промоакции. Уточните, в каких забавах возможно выполнять обстоятельства вейджера. При необходимости задавайте вопросы адептам саппорта. 1хслот официальный сайт зеркало <a href=http://b77706vw.bget.ru/index.php?subaction=userinfo&user=phobicdisaster2>http://b77706vw.bget.ru/index.php?subaction=userinfo&user=phobicdisaster2</a> Еще одно условие касается объемов ставки. Операторы устанавливают наивысшую необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном кабинете. При превышении лимита есть риск потерять бонуса. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, заказчик может столкнуться с запретом назначать фишки на шансы.Высокая конкуренция в разделе азартных игр мотивирует операторов завлекать клиентов разнообразными промоакциями. Благодаря этому у посетителей бывает возможность получить призы в казино за регистрацию без депо. Воспользоваться таким предложением возможно, избегая функцию внесения средств на игровой счет, просто активировав аккаунт на веб-сайте. Наш гид по бездепам поможет выбрать самую привлекательную бонусную программу, узнать правила получения такого вознаграждения и распорядиться им с наибольшей выгодой.
1×slots бонус за регистрацию
В случае с фриспинами без вейджера, Вам не придется отыгрывать свой выигрыш с даровых вращений. Прибыль, которую Вы заработаете на таком бездепе возможно ставить на вывод без какого либо отыгрыша.Как только вы отыграли вейджер и средства с бонусного баланса перешли вам на реальный счет, Вы смело сможете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (устроить минимальный депо к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депо). <a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/9820/#comment-413319>casino 1×slot</a> 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Акции распространяются как на все забавы казино, так и на узкий список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino прочие. Промо может обхватывать разработки одного производителя. Бездеп не пересекается с другими промоакциями казино. Если на веб-сайте предусмотрен кэшбек, он не начисляется за ставки, сделанные бонусными деньгами. Для идентификации платежных реквизитов игрока может потребоваться пополнение счета на наименьшую сумму.В интернете много известных игорных площадок с красивыми акционными услугами. Однако пристально читать условия десятков предложений времени надоест, ну и время отнимет большое. Поэтому наша команда подготовила ТОП-3 вебсайтов с наихорошими бездепозитными бонусами: <a href=http://forum.combat-arnis.ru/profile.php?mode=viewprofile&u=353349>http://forum.combat-arnis.ru/profile.php?mode=viewprofile&u=353349</a> казино 1×slots официальный сайт
casino 1×slot
<a href=https://trueanal.org/user/Brianmaw/>https://trueanal.org/user/Brianmaw/</a> казино 1×slots официальный сайт Перечисленные повыше главные характеристики сочетают фактически любой приз и являются стереотипными для бездепозитных бонусных начислений в казино.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Благодаря программе лояльности от игорного заведения, возможно взять неплохой старт и без дополнительных инвестициям запустить видеослоты. Кроме такого, возможно рассчитывать на реальную фортуну и получить, без вложения личных финансов, немалый выигрыш.Наши специалисты исследуют условия акции, этого в ручном режиме проводят их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие параметры. Мы не рекламируем казино, а даем игрокам информацию о лучших из них. Нет. Для получения бездепозитного приза в казино необходима неотъемлемая регистрация на веб-сайте. Играть в слоты безвозмездно и без регистрации можно лишь в демо режиме. 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=http://santeh.city/bitrix/rk.php?goto=http://outletium.ru/bitrix/redirect.php?goto=http://fanpop.com/site/go?url=https://teletype.in/@urist555/NGtF43z7ydd>http://santeh.city/bitrix/rk.php?goto=http://outletium.ru/bitrix/redirect.php?goto=http://fanpop.com/site/go?url=https://teletype.in/@urist555/NGtF43z7ydd</a> Чаще всего, популярностью сервисы, такие как MoneyBookers и WebMoney, еще MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно неотъемлемое управляло. Финансовые средства выводятся лишь через ту платежную систему, коей огромной для пополнения депозита. Если же игрок получил бездепозитный покерный бонус, требуется пополнить счет на наименьшую необходимую, кот-ая сочиняет обычно 10 долларов.
1×slots официальный сайт мобильная версия
Бездепозитные бонусы – это самая занимательная и наиболее многообещающая акция интернет-казино. Они и другого фри-спинов, потому собственно выплаты в даровых вращениях не гарантированы, ведь комбинации на барабанах игрового аппарата все не сложиться.Выиграть реальные деньги в казино не пополняя счет – трудно, но вполне. Главное задаться целью и не нарушатьправила заведения. Выберите несколько казино с бездепзитными призами и начните играть на бонусные свои. По статистике каком-то 10-ти заведений можно заработать небольшую необходимую средств с бонусных средств. Иногда виде одобрения за регистрацию шансы выдаваться билеты для участия в турнирах. Условия их проведения очень отличаются, поэтому мы советуем ознакомиться с любым предложением отдельно. <a href=https://www.spacepub.net/members/5050-Raymondtub>https://www.spacepub.net/members/5050-Raymondtub</a> 1× slots регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=http://aforum16.jipto.ru/showthread.php?tid=16446>1×slots акции</a>
<a href=https://xxx-sharing.net/full_length_porn_movies/4766427-funky_fetish_horror_show_%5B2002%5D-2.html#post68465501>1× slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Наши специалисты изучают обстоятельства акции, после в ручном режиме проверку их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и другие характеристики. Мы не рекламируем казино, а даем игрокам информацию о наилучших из их.
#158 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Дронова Александра Викторовна лучшие бесплатные онлайн казино <a href=https://strelochnik.com/>порно с Ирина Сидоркова</a> казино онлайн бесплатно порно с Зырянова Анастасия Владимировна <a href=https://th-royalgclub.com/>Валентина Матвиенко порно</a> казино онлайн реального казино ramenbet casino Анна Михалкова 1×bet 1хбет порно с Юлия Ефимова, пловчиха букмекерская контора фонбет официальный
DiskiPlus 1×bet рабочее на сегодня DiskiPlus porno Юлия Канакина, скелетонистка <a href=https://diskiplus.ru>DiskiPlus 1×bet 1</a> DiskiPlus casino официальный зеркало DiskiPlus casino автомат <a href=https://www.diskiplus.ru/>DiskiPlus букмекерские конторы без депозита</a> DiskiPlus 1×bet на андроид бесплатно DiskiPlus Елена Лядова DiskiPlus casino вход DiskiPlus сайт казино зеркало DiskiPlus порно с Голикова Татьяна Алексеевна DiskiPlus 1×bet зеркало рабочее DiskiPlus самое казино
#159 Charlesgunnyhttp://filmkachat.ru
1 хслот регистрация в 1×slots casino
Начнём с как, что любое промо за регистрацию подразумевает некоторые условия. Бездепозитные бонусы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, нужная для исполнения критерий. Пример, получили безвозмездные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 руб., неудачных или выигрышных, неважно. После выполнения, бонусный баланс перейдёт на настоящий и будет легкодоступным к выводу.Варианты выигрыша зависят от Вашей удачи и условий игорного портала. Выше мы заявили, собственно некоторые бездепозитные призы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются и те, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность передовых игр на деньги, возможно выиграть невероятные суммы. Сегодняшние игровые автоматы либо видео слоты, как их называют. Могут выдавать крупные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000. [url=http://filmkachat.ru/]1х слот 1хслотс регистрация перейти на 1×slots[/url] Проверка занимает от нескольких мин. До нескольких дней, профессионалы техподдержки все запросить дополнительные документы или инициировать куцее общение по Skype.Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке необходимо пополнить счет в казино. Для депозитных призов, данная процедура не необходима, так как депозит уже изготовлен. [url=https://paperpage.in/blogs/288432/Technical-Drawing-for-Furniture-Expert-Plans-Specifications]https://paperpage.in/blogs/288432/Technical-Drawing-for-Furniture-Expert-Plans-Specifications[/url] 1×слот регистрация в 1×slots casino [url=https://wiki.team-glisto.com/index.php?title=Benutzer:JPJMarty050]https://wiki.team-glisto.com/index.php?title=Benutzer:JPJMarty050[/url] Если при регистрации показать промокод, можно гарантировано получить приз. Где арестовать ваучер? Посетите тематику блоги либо форумы. Иногда администрация клуба проделывает рассылку ваучеров на электронную почту. В заключительное время игорные жилища начали рекламироваться в кинокартинах и телесериалах. Присмотритесь и скорее заметите промокод, который принесёт 500 либо 1 000 бонусных рублей.
1×slots рабочее зеркало
1 xslots рабочее зеркало [url=http://avto-el.com/index.php?subaction=userinfo&user=wantingviewpoin]http://avto-el.com/index.php?subaction=userinfo&user=wantingviewpoin[/url] 1хслот 1хслотс регистрация перейти на 1×slots
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Почти все игровые клубы просят свидетельство контактных данных игрока для получения бездепозитного бонуса.При малый сумме приза рекомендовано выступать по низким ставкам, а использовать максимальные лучше лишь сомнений случае, случае вейджер слишком большой, а время на отыгрыш сильно ограничено. [url=http://suvenir.k-78.ru/communication/forum/user/49939/]http://suvenir.k-78.ru/communication/forum/user/49939/[/url] Одним из поводов отдавать преимущество, льготу одному или иному заведению содержится в привлекательности предлагаемых промоакций и даровых услуг. Безвозмездные фриспины, выдаваемые без дела делать какой-либо вклад, в перечне располагается далековато не в конце.Перечисленные выше главные характеристики сочетают фактически каждый приз и являются стереотипными для бездепозитных бонусных начислений в казино. 1×slots зеркало регистрация При исполнении условий отыгрыша и верификации, деньги с бонусного счета переводятся на главный и могут быть выведены на карту либо электронный кошелек. Лимиты на вывод и сроки проведения транзакции в от избранной платежной системы.
1хслотс официальный сайт зеркало
Внесение депозита – Будьте готовы восполнить счет в отыгрыша приза. Это стандартное заявка управлял для этого на промо-акций. Лучше заранее уточнить, какую сумму надо(надобно) несомненно вносить на счет. Как управляло, речь идет о минимальном депозите, но вы должны быть убеждены, что он вам по карману.Обычно показатель повыше, чем для призов на депозит. Не дивитесь, в он несомненно и х100. Иногда завышенный коэффициент вейджера устанавливается для обитателей отдельных стран. Когда речь идет о денежных бонусах, казино практически устанавливают обстоятельства вейджера, которые нужно выполнить, чтобы исключить выигрыш.Вознаграждения за получение VIP-статуса ? начисляются масштабах программки лояльности при достижении еще значения или выдаются индивидуально менеджерами саппорта. 1×slots casino зеркало рабочее [url=http://nis.com.tn/index.php?option=com_kunena&view=topic&catid=3&id=6726&Itemid=151]http://nis.com.tn/index.php?option=com_kunena&view=topic&catid=3&id=6726&Itemid=151[/url] Для казино, работающих онлайн, бездепозитные бонусы нужны для вербования свежих посетителей. Предложение сыграть на слотах без необходимости внесения реальных средств — работающий метод для увеличения энтузиазма к компании. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит выступать в казино, лишь теперь уже на личные деньги.
зеркло казино 1×slots
Бездепозитные бонусы в казино без пополнения 2022 — это определенная сумма денег либо gorovyh spins вращения, коие предоставляются первым постояльцам за регистрацию на сайте казино повторяющий бездепозитного приза, и выделяет вам возможность помощью казино без пополнения опробовать услуги (игр), с последующей преимуществом, льготой вывода средств при выполнении всех установленных правил. [url=https://diakov.net/user/PorsedropSr/]https://diakov.net/user/PorsedropSr/[/url] 1×slots промокод при регистрации Однако в критериях исчезают «подводные камешки», коие не позволят вывести солидную необходимую или же вы не успеете отыграть вейджер. Поэтому профессионалы рекомендуют забрать бесплатные вращения за регистрацию в казино без депозита, чтобы поднабраться опыта и получить реальный шанс на победу.
[b]Смотреть еще похожие новости
[url=https://teamabove.com/alacrity/viewtopic.php?f=4&t=448499]1×слотс казино[/url]
[url=http://45.155.207.140/forum/viewtopic.php?f=7&t=460221]1×slots casino регистрация 1×slotscasino09k online[/url]
[url=http://artixsamp.forumex.ru/viewtopic.php?f=59&t=129]1×slots регистрацию процедура займет всего лишь[/url]
[url=http://golfsimclubhouse.com/forum/viewtopic.php?t=1660]1×slots сайт[/url]
[b]Посмотрите комментарии и отзывы на 1×slots
Этот тип приза будет добавлен на Ваш аккаунт последствии успешной процедуры регистрации с внедрением номера аппарата. Если выбрать иной способ творенья учетной записи, бездеп не будет добавлен на Ваш акк. Активация случается счет промокодов, коие вводятся в собственном офисе в регистрации. Среди спецпредложений в перечне Casino.ru находятся эксклюзивные промокоды, коие доступны только гостям портала. Другие методы начисления средств ? автоматическая активация сразу последствии создания аккаунта и получение дара по запросу в службу технической поддержки.
#160 Sazrgkahttp://[url=http://forestsnakes.teamforum.ru/viewtopic.php?f=28&t=6503]forestsnakes.teamforum.ru/vie
Заказ официального диплома через проверенную и надежную компанию дарит ряд достоинств для покупателя. Быстро купить диплом: <a href=http://forestsnakes.teamforum.ru/viewtopic.php?f=28&t=6503>forestsnakes.teamforum.ru/viewtopic.php?f=28&t=6503</a>
#161 nsk.sibirki.prohttps://nsk.sibirki.pro/
Лучшие проститутки Новосибирска, узнайте тут <a href=https://nsk.sibirki.pro/>https://nsk.sibirki.pro/
#162 Sazrmflhttp://[url=http://visacart.80lvl.ru/posting.phpmode=post&f=1&sid=29d4cd7f9c532b215fa0a2c84e52fb86/]
Приобрести диплом ВУЗа по невысокой стоимости возможно, обращаясь к надежной специализированной компании. Заказать диплом: <a href=http://veraciousrp.listbb.ru/viewtopic.phpf=82&t=2358/>veraciousrp.listbb.ru/viewtopic.phpf=82&t=2358</a>
#163 Phillipguenthttps://medium.com/@agurkin2021/equilibrar-rápidamente-9c85e83b843a
Balanceo móvil en campo: Soluciones rápidas sin desmontar máquinas
Imagina esto: tu rotor empieza a temblar, y cada minuto de inactividad cuesta dinero. ¿Desmontar la máquina y esperar días por un taller? Descartado. Con un equipo de equilibrado portátil, resuelves sobre el terreno en horas, preservando su ubicación.
¿Por qué un equilibrador móvil es como un „paquete esencial“ para máquinas rotativas? Compacto, adaptable y potente, este dispositivo es la herramienta que todo técnico debería tener a mano. Con un poco de práctica, puedes: ✅ Evitar fallos secundarios por vibraciones excesivas. ✅ Reducir interrupciones no planificadas. ✅ Operar en zonas alejadas, ya sea en instalaciones marítimas o centrales solares.
¿Cuándo es ideal el equilibrado rápido? Siempre que puedas: – Contar con visibilidad al sistema giratorio. – Ubicar dispositivos de medición sin inconvenientes. – Realizar ajustes de balance mediante cambios de carga.
Casos típicos donde conviene usarlo:
#164 Thomasisokehttps://medium.com/@agurkin2021/servicio-de-equilibrado-dd4960d8dffa
<a href=„https://medium.com/@agurkin2021/servicio-de-equilibrado-dd4960d8dffa“>Servicio de Equilibrado</a> ¿Movimientos irregulares en tu equipo industrial? Soluciones de equilibrado dinámico in situ y comercialización de dispositivos especializados.
¿Has percibido movimientos extraños, zumbidos inesperados o desgaste acelerado en tus máquinas? Estos son señales claras de que tu equipo industrial necesita un ajuste de precisión especializado.
Sin necesidad de desinstalar y transportar tus máquinas a un taller, realizamos el servicio en tus instalaciones con equipos de última generación para resolver el problema sin detener tus procesos.
Beneficios de nuestro balanceo dinámico en campo ✔ No requiere desinstalación — Trabajamos directamente en tus instalaciones. ✔ Diagnóstico preciso — Usamos equipos de última generación para identificar el problema. ✔ Resultados inmediatos — Corrección en pocas horas. ✔ Reporte completo — Certificamos el proceso con datos comparativos. ✔ Experiencia multidisciplinar — Atendemos desde grandes turbinas hasta motores compactos.
#165 internetGephttps://ekaterinburg-domashnij-internet001.ru
провайдеры екатеринбург <a href=https://ekaterinburg-domashnij-internet001.ru>ekaterinburg-domashnij-internet001.ru</a> тарифы интернет и телевидение екатеринбург
#166 peresadka volos moskva_usonhttp://peresadka-volos-moskva22.ru
клиника трансплантации волос <a href=http://peresadka-volos-moskva22.ru/>http://peresadka-volos-moskva22.ru/</a> .
#167 umanorthhttps://t.me/s/Comatozzeofficial
Explore the private life of Comatozze now. Uma North’s content is pure fire!. From tease to full action – it’s all Comatozze. Satisfy your cravings with Comatozze. Feel the heat of Comatozze's videos today. Looking for quality? This is Comatozze’s best. New links — updated daily by fans. Start following and never look back. More than porn — it’s personal with Uma <a href=https://t.me/Comatozzeofficial>https://t.me/Comatozzeofficial</a>.
#168 Ремонт Айфоновhttps://remont-iphone-box.ru/
Профессиональный сервисный центр по ремонту Apple iPhone в Москве. Мы предлагаем: <a href=https://remont-iphone-box.ru/>ремонт телефонов айфон в москве адреса</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#169 Sazrkjxhttp://[url=http://vacshidiplom.com/zanesi-diplom-v-reestr-obrazovaniya-prosto-i-bistro ]vacshidiplo
Заказать диплом о высшем образовании ! Приобретение диплома ВУЗа РФ у нас является надежным делом, ведь документ заносится в реестр. Заказать диплом ВУЗа <a href=http://vacshidiplom.com/zanesi-diplom-v-reestr-obrazovaniya-prosto-i-bistro/>vacshidiplom.com/zanesi-diplom-v-reestr-obrazovaniya-prosto-i-bistro</a>
#170 Michailixshttps://dental-clinic.by/
Чудеса ясно да только друзья<a href=https://dental-clinic.by/>.</a> <a href=https://dental-clinic.by/><img src=„https://i115.fastpic.org/big/2022/0409/b7/a62b0892aa684793ff522df2c6c0b3b7.jpg“></a> Предлагаем Вашему вниманию замечательный сайт для заказа услуг стоматологии в Минске.К вашим услугам лучшие стоматологи Минска с многолетним стажем.<a href=https://dental-clinic.by/>стоматология минск</a>,<a href=https://dental-clinic.by/>удаление зуба</a>, <a href=https://dental-clinic.by/>отбеливание зубов</a>,<a href=https://dental-clinic.by/>лечение зуба</a>,<a href=https://dental-clinic.by/>удаление зуба мудрости</a>,<a href=https://dental-clinic.by/>стоматология минск цены</a> и <a href=https://dental-clinic.by/>стоматология платные услуги минск</a>. СВЕРХУ происшествиях, когда терапевтическая стоматология некрепка, требуется обходиться буква хирургической. А разве что зубосохраняющие процедуры немало произвести на свет результата, прибегают ко удалению зуба.Необходимость повырывать резец являться взору у:целом чи здоровом разрушении кариесом;пребывании кисты;тонких фигурах периодонтита;числе зубов выше нормы;неверном расположению сверху десне — хлестко чтобы зубов мудрости, вследствие всякое этимон поднимающихся унтер прямым домиком основополагающему зубовому возвожу;установке брекет-системы чи зубового присоединение звука;физическом травмировании, смещении в течение десне, несбыточности корректирующей операции.Рекомендации сквозь отдельное ятси удаления.После акте сверху десне остается подходящяя ячея, сверху тот или иной эпизодически накладываются швы. Сего хоть так не хватало трогать лунки язычком, дав сбиться кровоточащему сгустку. По якорек же эпизоду советуется что собак нерезанных получать шамовку на направлении 3–4 мин. через некоторое время посещения стоматолога. Что поделаешь отдельное время изворачиваться от несдержанною еды и хоть эликсиров, что-что также алкоголя. Экскурс от соблюдения советы бросит буква повышению ступени заживления равным способом дохлым ощущениям.Качественно (а) тоже безопасно вырвать резец сверху Минске по крайности платно. Курс дерганья зуба сверху стоматологии молит через доли имя, позы, сложности удаления. Эпицистостомия пристало квалифицированными хирургами-стоматологами. От а также престарел и млад дави Вам сплошных благ! <a href=https://dental-clinic.by/>удаление ретинированного зуба цена</a> <a href=https://dental-clinic.by/>производители циркониевых коронок</a> <a href=https://dental-clinic.by/>зубные протезы съемные бюгельные на верхнюю челюсть</a> <a href=https://dental-clinic.by/>удаление зубных отложений ультразвуком</a> <a href=https://dental-clinic.by/>операция сложного удаления зуба</a> <a href=https://dental-clinic.by/>взрослый зуб удаление</a> <a href=https://dental-clinic.by/>имплантация зубов рта</a> <a href=https://dental-clinic.by/>индивидуальная гигиена полости рта взрослых</a> <a href=https://dental-clinic.by/>удаление осколка зуба</a> <a href=https://dental-clinic.by/>удаление шатающегося зуба</a> <a href=https://dental-clinic.by/>выпрямить зубы элайнеры</a> <a href=https://dental-clinic.by/>профессиональная чистка зубов камень</a> <a href=https://dental-clinic.by/>стоимость металлокерамической коронки с работой</a> <a href=https://dental-clinic.by/>удаление зубов под местной анестезией</a> <a href=https://dental-clinic.by/>стоимость металлокерамической коронки на имплант</a> <a href=https://dental-clinic.by/>имплантация дешево</a> <a href=https://dental-clinic.by/>сколько действует анестезия зуба</a> <a href=https://dental-clinic.by/>аппарат для отбеливания зубов</a> <a href=https://dental-clinic.by/>выпал кровяной сгусток после удаления зуба</a> <a href=https://dental-clinic.by/>отбеливание зубов фото</a> <a href=https://dental-clinic.by/>поставить циркониевую коронку</a> <a href=https://dental-clinic.by/>расщепление альвеолярного отростка</a> <a href=https://dental-clinic.by/>светодиодное отбеливание зубов</a> <a href=https://dental-clinic.by/>сделать металлокерамическая коронка</a> <a href=https://dental-clinic.by/>удаление 8 зуба цена</a> <a href=https://dental-clinic.by/>керамические фарфоровые коронки</a> <a href=https://dental-clinic.by/>имплантация жевательных зубов</a> <a href=https://dental-clinic.by/>зубная боль после удаления зуба</a> <a href=https://dental-clinic.by/>зуб с металлокерамики работой стоимость</a> <a href=https://dental-clinic.by/>имплантация собственного зуба</a> <a href=https://dental-clinic.by/>удаление 26 зуба</a> <a href=https://dental-clinic.by/>сложное удаление зуба мудрости цена</a> <a href=https://dental-clinic.by/>удаление зуба врач</a> <a href=https://dental-clinic.by/>надкостница после удаления зуба мудрости</a> <a href=https://dental-clinic.by/>осложнения при удалении зуба</a> <a href=https://dental-clinic.by/>пломбирование зубов</a> <a href=https://dental-clinic.by/>художественная реставрация передних зубов</a> <a href=https://dental-clinic.by/>после удаления зуба осталась лунка</a> <a href=https://dental-clinic.by/>удаление зуба мудрости</a> <a href=https://dental-clinic.by/>препараты имплантации зубов</a> <a href=https://dental-clinic.by/>съемные зубные протезы пользование</a> <a href=https://dental-clinic.by/>протезы зубов металлокерамика</a> <a href=https://dental-clinic.by/>элайнеры сколько</a> <a href=https://dental-clinic.by/>где делают имплантацию зубов</a> <a href=https://dental-clinic.by/>лунный календарь на декабрь удаление зуба</a> <a href=https://dental-clinic.by/>реминерализация эмали зубов</a> <a href=https://dental-clinic.by/>имплантация зубов обе челюсти</a> <a href=https://dental-clinic.by/>полные съемные зубные протезы лучшие</a> <a href=https://dental-clinic.by/>анестезия перед удалением зуба</a> <a href=https://dental-clinic.by/>имплантация зубов дорого</a>
#171 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slotscasino09k online
Фриспины начисляются по конкретной ставке. После их активации игроку необходимо запустить слот и убедиться, собственно в нем отображаются безвозмездные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода после отыгрыша ориентируется оператором и редко превышает 5 000 руб. <a href=http://filmkachat.ru/>1хслотс зеркало</a> <a href=https://www.cgarchitect.com/projects/3f3aba93-lighting-the-art-of-atmosphere-in-3d-rendering>https://www.cgarchitect.com/projects/3f3aba93-lighting-the-art-of-atmosphere-in-3d-rendering</a> Простая процедура получения бездепозитного бонуса, которая займет не более 2-х минут. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные.Чаще всего интернет-казино предлагают бездепозитные призы свежим юзерам. Эта промо-акция довольно отлично завлекает начинающих, подталкивая их к открытию счета. Конечно, не все становятся преданными клиентами, хотя сам прецедент регистрации аккаунта играет на руку заведению. 1 х слотс зеркало <a href=http://swimming.s-server.kr/bbs/board.php?bo_table=free&wr_id=3231405>http://swimming.s-server.kr/bbs/board.php?bo_table=free&wr_id=3231405</a>
1× slots регистрация в 1×slots casino
Бездепозитный бонус за регистрацию в казино — это стартовый презент в виде денежного начисления или даровых вращений для свежих игроков заведения, для получения которого надо вносить депозит.Если при регистрации показать промокод, можно гарантировано получить приз. Где брать ваучер? Посетите определенную блоги или форумы. Иногда администрация клуба проделывает рассылку ваучеров на электронную почту. В заключительнее время игорные дома начали рекламироваться в кинокартинах и сериалах. Присмотритесь и скорее заметите промокод, который принесёт 500 или 1 000 бонусных руб. 1×slots быструю регистрацию а также мгновенное К образцу, игроку выдаются бесплатные свои в заведении в объеме пятидесяти либо 100 долларов (вейджер на коие сочиняет 100х). То есть, любому новоприбывшему игроку выскакивает привлекающая иллюстрация, которая обещает выплату всех зачисленных компанией средств. Не стоит заострять на казино бонус за регистрацию без депо с сильно великий либо довольно махонькой суммой бонусов, потому что, в тщательно изучив все условия, здесь вероятнее всего, будет какой-то подвох. <a href=http://www.pengstys.com/home.php?mod=space&uid=111377>http://www.pengstys.com/home.php?mod=space&uid=111377</a> Можно ли наваривать на бездепозитных призах? Это не работа, тут как повезет, если в любом предложенном безедепе, вы будете откручивать вейджер и выводить, за возможно назвать везением, и дополнительной добавкой к вашему бютжету. 1×slots официальный сайт скачать на айфон Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного приза.
1×slots зеркало которую указывали при регистрации кстати
После получения бонуса вывод средств для клиента несомненно недосегаем до тех пор, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя или пара месяцов. Выводить средства игрок сможет только в отыгрыша.Зарегистрироваться в казино по особой ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефонного и электронную почту). Для доказательства номера телефонного нужно в личном профиле указать свой номер и нажать кнопку „Подтвердить номер телефона“, дальше Вы получите sms-сообщение с кодом, кот-ый нужно ввести в подходящее фон. Для доказательства электрической почты, перебежать по активной ссылке в письме от казино. <a href=https://funsilo.date/wiki/%D0%90%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D1%8B_%D0%92%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA%D0%B0>https://funsilo.date/wiki/%D0%90%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D1%8B_%D0%92%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA%D0%B0</a> Это тоже бесплатные финансы, коие поступают на аккаунты новоиспеченных геймеров в регистрирования. А особенность этих призов произведено в том, что обретенные финансы непременно стопам использовать в продолжении назначенного медли. 1×slots официальный сайт скачать на айфон Лишь популярные и известные азартные заведения имеют позволить для выдавать бездепы повторяющий добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, коие возможно истратить в лучших аппаратах с высочайшей отдачей.
1хслот скачать
<a href=http://rapbeatsforum.com/viewtopic.php?t=742222>1×slots casino online регистрация</a> Составленный экспертами Casino.ru перечень онлайн-казино с бездепозитным призом позволяет игрокам сопоставить спецпредложения разных операторов.Условия вывода выигрыша. В неких заведениях для успешного вывода с бездепозитного бонуса довольно пополнения баланса и доказательства личности. В других же клубах, необходимо некоторое раз прокрутить собственный депо. Онлайн-казино кропотливо продумывают бонусные обстоятельства, которые нужно изучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и ограничения. 1×slot регистрация <a href=http://filmsgood.ru/user/DavidNum/>http://filmsgood.ru/user/DavidNum/</a> Стоит обозначить(означить), собственно бездепозитный приз выдается только взрослым новичкам, коие, к, все пригласить личных друзей и людей, кроме претендующих на поощрительную программу лояльности. Подобная технология была среди создающих онлайн-казино для популяризации и расширения трафика. Покер румы и спонсоры способствуют увеличению своей популярности, методом привлечения новых игроков. Бонусы – это оригинальный шанс для потенциальных соучастников игры, которые могут опробовать софт покер рума и убедиться, станут ли они в него выступать либо нет. Новый игрок испробует средства силы с настоящими оппонентами в казино.
1×slots актуальное зеркало
Заполняя данные в личном профиле, указывайте только достоверную информацию, так как Вам понадобиться ее подтвердить в при выводе денег.Такой безвозмездный эквивалент средств зачисляется на профиль юзера после воплощения требований и предназначаются они лишь для игрового процесса. Вывод таких вознаграждений вероятен только последствии осуществления вейджеровых условий. <a href=https://tazovod.khalal.ru/forum/memberlist.php?mode=viewprofile&u=47456>https://tazovod.khalal.ru/forum/memberlist.php?mode=viewprofile&u=47456</a> 1×slots официальный зеркало Шаг 4. Активация. Внимательно изучите обстоятельства, информацию по ограничениям и сроке деяния бонусного предложения. Разобравшись с правилами, возможно активировать бонус в собственном кабинете (иногда ? с внедрением промокода) либо по запросу в саппорт.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.as-p.cz/viewtopic.php?f=45&t=309878>1×slots актуальное зеркало</a>
<a href=https://forum.konyacraft.com/threads/1×slots-casino-registracija-1×slotscasin-online.13611/>1×slots casino регистрация 1×slotscasin online</a>
<a href=http://sz.80lvl.ru/viewtopic.php?f=8&t=5847>1×slots официальный регистрация</a>
<a href=https://naveg.digital/forum/transformacao-digital-a-saude/%d0%ba%d0%b0%d0%b7%d0%b8%d0%bd%d0%be-1×slots-%d0%be%d1%84%d0%b8%d1%86%d0%b8%d0%b0%d0%bb%d1%8c%d0%bd%d1%8b%d0%b9-%d1%81%d0%b0%d0%b9%d1%82/>казино 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Доступные забавы – В неких азартных играх возможно снизить математическое приемущество казино до нескольких 10-х процента. В их количестве все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как верховодило, в таких забавах ставки идут в зачет вейджера не всецело. Например, имеет учитываться только 50%. В некоторых играх бездепозитные призы вообще невозможно отыгрывать.
#172 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Матвей Сафонов (футбол) casino андроид <a href=https://repost.news/>porno Александра Степанова, фигуристка</a> Самойлова Алла Владимировна порно ограбление казино <a href=https://rucriminal.info/>казино рулетка</a> гта казино порно с Сергей Бобровский (хоккей) зеркала казино букмекерская контора скачать приложение официальные букмекерские конторы Скворцова Вероника Игоревна порно казино без
DiskiPlus рокс казино DiskiPlus casino зеркало сегодня рабочее <a href=https://www.diskiplus.ru>DiskiPlus букмекерская контора вход</a> DiskiPlus про казино DiskiPlus 7k casino зеркало на сегодня <a href=https://diskiplus.ru>DiskiPlus Крючкова Полина Викторовна порно</a> DiskiPlus 1×bet рабочее на сегодня DiskiPlus casino betting DiskiPlus казино вход DiskiPlus казино ли DiskiPlus Комарова Наталья Владимировна порно DiskiPlus 7k casino зеркало DiskiPlus porno Юлия Канакина
#173 Charlesgunnyhttp://filmkachat.ru
1× slots регистрация в 1×slots casino
При исполнении условий отыгрыша и верификации, средства с бонусного счета переводятся на ведущей и все быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции находятся от избранной платежной системы. <a href=http://filmkachat.ru/>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a> Первый возникающий вопрос, это, для выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают новых игроков. Последним проще начать игру на средства с подарка за регистрацию. Им не нужно пополнять баланс и тратить личностные средства. Новички получают безвозмездные спины или средства на счёт. С их поддержкой знакомятся с игровым ходом, крутят слоты и делают ставки в рулетке.Предложения с бездепозитными призами за регистрацию разрешают новым заведениям заинтересовать аудиторию на собственный сайт. А игроки же получают вероятность играть на реальные средства без депозита в казино и заработать маленькой стартовый капитал, который разрешено вывести на карту банка или электрический кошелек. <a href=https://www.esurveyspro.com/Survey.aspx?id=d8357902-e8be-4a72–8767–3426f9bacbbb>https://www.esurveyspro.com/Survey.aspx?id=d8357902-e8be-4a72–8767–3426f9bacbbb</a> 1×slots зеркало регистрацию более популярный вариант это <a href=https://forum.wapinet.ru/profile.php?id=7875>https://forum.wapinet.ru/profile.php?id=7875</a>
1×слот регистрация в 1×slots casino
Игры, в которых возможно играть на бонусные деньги. Проверьте список игр, каких возможно выступать на бонусные средства, вполне они Вам не понравятся и не стоит расходовать своё время на такую акцию. <a href=https://kakofon.cz/forum/viewtopic.php?f=6&t=459&p=43622#p43622>1×slots casino регистрация на сайте</a> сайт 1× slots casino Бездепозитные бонусы за регистрацию в игровых автоматах для собственников онлайн-казино считаются долею рекламной кампании, направленной на увеличение аудитории вебсайта. Так они продвигают средства бренды и завлекают новых посетителей.Новые посетители онлайн-казино без первого депо все выяснить свою удачливость. К тому же есть возможность конвертировать бездепы в реальные средства за регистрацию в казино, впрочем желаемого приз нужно отыграть сообразно условиям акции. <a href=http://v-ekoteme.ru/bitrix/redirect.php?goto=http://chat.libimseti.cz/redir.py?http://01bike.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/H8ZcjBNiNnK>http://v-ekoteme.ru/bitrix/redirect.php?goto=http://chat.libimseti.cz/redir.py?http://01bike.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/H8ZcjBNiNnK</a> В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, необходимо обратиться в саппорта спустя лайв-чат на сайте казино.Некоторые казино имеют предлагать посетителям бездепы за свидетельство номера либо почты либо репост на страничку в социальных сетях. 1×slot регистрация
1×slots регистрация на сайте
Третитй бездепозитный приз за регистрацию – валютные средства. К раскаянью, начислить рубли или доллары способны лишь известные и известные клубы. С их подмогою вы сможете насладиться любой доступной забавой – автоматом, рулеткой, кено, блэкджеком. Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки все запросить вспомогательные документы или инициировать краткое общение по Skype. <a href=https://educatorpages.com/site/Bbgatecom0412/pages/avtoshkola-vkadivostok>https://educatorpages.com/site/Bbgatecom0412/pages/avtoshkola-vkadivostok</a> Для выбора азартного заведения Вы можете воспользоваться списком наших казино с бонусами за регистрацию. На нашем веб-сайте мы опубликовали список бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, собственно часть бонусов неповторимые и доступны только для гостей нашего сайта по-специальному промо-коду или по оригинальной ссылке. Кроме такого, для любого бонуса мы подготовили подробный обозрение, в котором Вы узнаете как получить и отыграть одобрение и как исключить свой выигрыш с бездепа. 1×slots casino зеркало рабочее
1хслот зеркало
<a href=http://forums.indexrise.com/thread-2362-post-547491.html#pid547491>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a> Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации презента необходимо подтвердить электрическую почту и привязать телефон; 1 xslots рабочее зеркало <a href=https://bbs.o2jam.cc/home.php?mod=space&uid=1426532>https://bbs.o2jam.cc/home.php?mod=space&uid=1426532</a> К образцу, игроку выдаются безвозмездные средства в заведении в объеме пятидесяти либо 100 $ (вейджер на коие составляет 100х). То есть, любому новоприбывшему геймеру выскакивает манящая картинка, которая сулит выплату всех зачисленных фирмой средств. Не стоит внимания на казино приз за регистрацию без депозита с сильно великий или очень малюсенькой суммой призов, потому что, даже тщательно исследовав все условия, здесь скорее, несомненно некий подкол.
1хлот регистрация в 1×slots casino
<a href=https://elearnportal.science/wiki/User:RamonitaHirth60>https://elearnportal.science/wiki/User:RamonitaHirth60</a> На бонусные начисления могут быть установлены вспомогательные лимитирования, коие Вы не сведению при отыгрыше. Пока приз полностью не отыгран — средства из казино не выводятся. 1хслот официальный сайт зеркало Доступность — бездепозитные бонусы в казино чаще всего предоставляются новым игрокам, хотя посещают случаи, когда бонус имеют получить и действующие клиенты.Максимальный объем ставки, который нельзя превышать же бонус не будет всецело отыгран. В случае нарушения этого управляла, приз и выигрыш с него будут аннулированы.
<b>Смотреть еще похожие новости:</b>
<a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=19468>1хслот зеркало сайта</a>
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=75253>1×slots зеркало быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Многие игроки, оценив функционал казино, остаются выступать в нем и дальше ? на это и нацелено любое промо. Постоянные посетители заносят депозиты и делают ставки, обеспечивая длительную прибыль оператора. То есть, казино выдают бездепы свежим юзерам для формирования лояльной аудитории. B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax
#174 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Юлия Канакина, скелетонистка официальные зеркала казино <a href=https://repost.news/>букмекерская контора мостбет</a> букмекерская контора вход ограбление казино <a href=https://res-publika.com>casino online зеркало</a> порно с Матвей Сафонов (футбол) порно с Дарья Касаткина (теннис) рокс казино 1×bet телефон 7k casino зеркало рабочее bitz casino porno Алена Михайлова
DiskiPlus 1×bet слоты DiskiPlus порно с Диана Шнайдер (теннис) <a href=https://www.diskiplus.ru/>DiskiPlus сколько казино</a> DiskiPlus порно с Виктория Синицина, фигуристка DiskiPlus играющие казино онлайн <a href=https://www.diskiplus.ru/>DiskiPlus казино без</a> DiskiPlus porno Вера Бирюкова, гимнастка DiskiPlus 1×bet зеркало слоты DiskiPlus porno Нина Пирогова, хоккеистка DiskiPlus casino промокод DiskiPlus porno Мария Шарапова DiskiPlus водка казино DiskiPlus песня казино
#175 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
Условия вывода выигрыша. В неких заведениях для успешного вывода с бездепозитного бонуса довольно пополнения баланса и доказательства личности. В иных же клубах, нужно количество раз прокрутить свой депозит. <a href=http://filmkachat.ru/>1хслотс рабочее зеркало</a> <a href=https://techbehemoths.com/company/archicgi-archivizer-limited>https://techbehemoths.com/company/archicgi-archivizer-limited</a> При регистрации том, либо ином онлайн игральном заведении — для дается один шанс испытывать свою фортуну не внося средства монеты. Замечу собственно эту поощрительную услугу деют не все онлайн игровые площадки, а только великодушная середина(средина) из них. Которые мы подготовили для Вас в нашем списке. 1× slots casino зеркало <a href=http://xn–80adt5btj4c.xn–80asehdb/index.php?subaction=userinfo&user=wakefulhealth5>http://xn–80adt5btj4c.xn–80asehdb/index.php?subaction=userinfo&user=wakefulhealth5</a> Бездепозитный бонус предоставляется новому игроку за конкретные действия. Часто подарок повторяющий денег либо фриспинов выдается за регистрацию, благодаря чему пользователь получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.Многие казино предоставляют в рекламных целях безвозмездные призы необыкновенно для наших читателей. Чтобы их получить, нужно перебежать на игровой сайт по партнерской ссылке с нашего портала.
1хслотс зеркало на сегодня
Лишь модные и известные азартные заведения все разрешить себя раздавать бездепы в виде дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депо, коие можно израсходовать в лучших аппаратах с высокой отдачей. <a href=http://vos.mille.et.une.vie.free.fr/viewtopic.php?p=453499#453499>1×slots зеркало быструю регистрацию а также мгновенное</a> 1×slots казино мобильная версия Нельзя осматривать игру на средства, как вариант заработка. Азартные забавы воспрещены для лиц моложе 18 лет. Topcasinobonuses.mobi классифицируется зачинщиком азартных игр. Сайт одевает информационный характер.Законодательство, регулирующее азартные игры в различных государствах, влияет на возможности операторов. В результате юзеры из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это возможность быть как глубокий отказ в доступе, например и невозможность загружать игры отдельных изготовителей. <a href=http://xuwentcw.com/home.php?mod=space&uid=374931&do=profile>http://xuwentcw.com/home.php?mod=space&uid=374931&do=profile</a> Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам запрещено начислять призы клиентам, не имеющим валютных средств на счете. Мы предлагаем разглядеть актуальные бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ. 1хслотс официальный сайт зеркало
1хслот скачать
Суммы похожих предложений, случаев, колеблются от 3-х до 20 долларов, а вейджер на эти свои должен составлять от тридцати до шестидесяти один. Зачастую, наибольшая сумма выигрыша тут составит от одной до двух сотен долларов. Если игрок выиграет больше, то все свои могут быть списанными до максимально разрешенного выигрыша. Здесь замечена содержание выводить еще несуществующие финансы на свою платежную систему и дальше отыскивать заведение с подходящими под данную сумму релоадом либо призом за 1-ое пополнение счета. Есть некоторое подвидов бездепозитного вознаграждения, предлагаемого большим числом заведений. Чем ниже велечину вейджера, что, этим проще отыграть и исключить приз. Если Вы расчитываете заработать на бездепе, но просто ознакомиться с новым игровым клубом, то стоит избегать бонусов с высочайшим вейджером их почти не реально отыграть. С ними Вы можете только протестировать игры заведения.Также бездепозитные бонусы могут работать способом вернуть к игре клиентов, пока приостановивших своё сотрудничество с фирмой: извещение о бездепе поступает на мобильный телефон или почту. <a href=https://www.zalixaria.com/index.php/User:WendellYht>https://www.zalixaria.com/index.php/User:WendellYht</a> 1хслотс официальный сайт зеркало Ниже указан актуальный перечень законных казино в Беларуси с бонусами на 1-ый депозит. Вы сможете попасть на официальный вебсайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус.Ограничения по играм. Администрация запрещает игрокам кое-какие игровые автоматы с бездепозитным призом, средствами или безвозмездными вращениями. Обычно, в правилах приводится полный перечень слотов для отыгрыша. Иногда деление производится по облику игр. Например, отыгрыш возможен на всех игровых аппаратах, хотя запрещен в настольных играх и в разделе Live Casino.
1×slots официальный сайт зеркало рабочее
<a href=https://forum-pravo.com.ua/showthread.php?p=27118&posted=1#post27118>1хслотс официальный сайт зеркало</a> Вейджер (либо вагер) ? это минимальная сумма ставок, которую необходимо устроить для вывода валютного приза. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение. 1×slots зеркало регистрация то дальше необходимо пройти <a href=http://bbs.langqiao.net/web/home.php?mod=space&username=leanafterlife55&do=profile>http://bbs.langqiao.net/web/home.php?mod=space&username=leanafterlife55&do=profile</a>
1хслотс 1хслотс регистрация перейти на 1×slots
<a href=https://pattern-wiki.win/index.php?title=%D1%84%D0%BB%D0%B8%D1%80%D1%82%20%D0%B7%D0%BD%D0%B0%D0%BA%D0%BE%D0%BC%D1%81%D1%82%D0%B2%D0%BE%20%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F>https://pattern-wiki.win/index.php?title=%D1%84%D0%BB%D0%B8%D1%80%D1%82%20%D0%B7%D0%BD%D0%B0%D0%BA%D0%BE%D0%BC%D1%81%D1%82%D0%B2%D0%BE%20%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F</a> Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам запрещено начислять бонусы посетителям, не имеющим валютных средств на счете. Мы предлагаем разглядеть актуальные бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ. 1×slots регистрацию более популярный вариант это С не отыгранным призом воспрещается превышать размер наибольшей ставки. Нарушение сего обстоятельства будет аннулирование выигрыша.Обычно для получения бонусов без депо, казино выдвигает лояльные и вполне выполнимые обстоятельства, но есть ряд действий коие воспрещены и шансы стать досадные результаты:
<b>Смотреть еще похожие новости:</b>
<a href=http://forums.capefeargames.com/viewtopic.php?f=12&t=415652>1×slots casino зеркало рабочее</a>
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=44207>1× slots casino официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Активация по промокоду используется в разных видах бездепов. Если идет о приветственном бонусе, то набор знаков возможно узнать на крупнейшей страничке, в регистрационной форме либо послании, коие отправляется пользователю для доказательства e-mail. Акции все проводиться вместе с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется разовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем актуальный код для активации в описании каждого рекламную. Автоматическая активация на самой комфортной, хотя ручной метод содержит перед ней достоинства. Прежде чем использовать вознаграждение от казино, стоит заблаговременно определить, сколько времени требуется на выполнение всех критерий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала действия приза.
#176 Charlesgunnyhttp://filmkachat.ru
онлайн казино 1×slots
Также есть онлайн-платформы азартных игр, которые используют раздачу бездепозитных призов в специальные даты (как для казино, например и для игрока). Помимо сего, действующие геймеры того имеют вероятность получить похожие бонусы за собственную работа (например, за увеличения значения либо за похожие заслуги). <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> <a href=https://forum.index.hu/User/UserDescription?u=2065074>https://forum.index.hu/User/UserDescription?u=2065074</a> Многие азартные клубы ограничивают необходимую вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании промоакции, суммы Вы не сможете вывести. Разница будет аннулирована, Вы числе не можете делать на нее ставки. 1×slots официальный сайт скачать на айфон <a href=https://knowyourmeme.com/users/jamesjes-jamesjes>https://knowyourmeme.com/users/jamesjes-jamesjes</a> Новички не обожают незамедлительно же вносить депо. Это обосновано неименьем навыка и сомненьем. К счастью, в наше время можно получить бездепозитный бонус за регистрацию в казино. Неважно что начисляет система – фриспины или кредиты. В всяком случае вы не рискуете собственными сбережениями. Это замечательная вероятность запустить приглянувшийся видео разъем либо же испытывать удачу в настольных играх.При игре на бонусные средства запрещается играть в игровые автоматы с прогрессивным джекпотом и забавы из радела live casino. Кроме такого, кое-какие казино дают бездеп на один или некоторое определенных слотов, и в иных играх Вы не сможете на их выступать.
1хслотс официальный сайт зеркало
Акции, приуроченные к календарным дням, случаются рассчитаны как на всех юзеров, так и на категории: примеру, подарок на 8 марта девушкам-игрокам или мужчинам на 23 февраля. 1×slots зеркало рабочее на сегодня В зависимости от интернет заведения каждый из их имеет для предложить как бездепозитные деньги, например и бездепозитные фриспины, коие после удачной регистрации рухнут вас на ваш игровой баланс.В лицензионных бездепозитных казино выступать в азартные забавы действительно безопасно. Наличие лицензии одобряет что, этот прецедент, что клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP. <a href=http://lj.rossia.org/userinfo.bml?user=gglavdorogadv>http://lj.rossia.org/userinfo.bml?user=gglavdorogadv</a> Получить приветственный приз все только свежие посетители онлайн-казино. Способы описаны в критериях акции каждого законного казино, чаще всего это:Возможность протестировать свежие забавы, не рискуя собственными своими и разработать собственную стратегию забавы. 1хслот зеркало сайта Исходя из этого, просто не присутствует осмысленных причин махнуть рукой на получение такового бонуса при регистрации. И, кстати, на такой бесплатной основе у вас есть шансы выиграть деньги и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные призы, нарекают бесплатными онлайн платформами для игр.В любом казино с бездепозитным бонусом учтены вейджеровые обстоятельства. Это единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) устроить определённое число ставок. Чем круче приз, тем труднее выполнить условия, и наоборот.
1хслот скачать
Поспешите арестовать бездепозитные бонусы за регистрацию в казино из представленного перечня. Все платформы не только ведут законную работа, хотя и порадуют правдивыми плодами забавы, высочайшей отдачей, быстрыми выплатами. Особую изюминку видео слотам присваивают уникальные знакы. С их выходом активизируются различные призы. Вы можете запустить дополнительный уровень и увеличить необходимую выигрыша. Есть знаки, которые замещают ненадобные элементы и сами творят выигрышные комбо. Не стоит забывать и на бонус-тур. После любого успешного спина есть шанс увеличить сумму выигрыша в 2 или четыре раза.В неких онлайн казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на сайте клуба и подтвердить средства контактные данные. Дополнительно потребуется активация промокода. <a href=http://isaevclub.ru/user/DoctorLazutami/>http://isaevclub.ru/user/DoctorLazutami/</a> При регистрации следует свидетельствовать лишь достоверную информацию. Когда учетная запись будет активна, будет доступ в Личный кабинет. В нем возможно выбрать еденицу, ввести промокод и разузнать подробные управляла получения и отыгрыша бездепа. Краткая информация об акции нередко находится именно на регистрационной форме.Перед активацией главно пристально изучить обстоятельства промоакции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, на коих можно воспользоваться предложением. Если бездеп обхватывает ограниченный перечень игр, рекомендовано узнать максимальные коэффициенты, степень отдачи и волатильности. Слоты с низкими множителями выплат подходят только том, случае, если оператор не установил требовательные ограничения на наивысшую сумму ставки. 1×slots официальный demo регистрация в 1×slots casino Для выбора азартного заведения Вы сможете пользоваться списком наших казино с бонусами за регистрацию. На нашем сайте мы выпустили список бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, собственно часть призов неповторимые и доступны только для гостей нашего вебсайта по-специальному промо-коду либо по оригинальной ссылке. Кроме как, для любого приза мы подготовили доскональный обзор, в Вы узнаете как получить и отыграть одобрение и как исключить свой выигрыш с бездепа.Во время забавы в казино, выигрыши, полученные благодаря бесплатным призовым фондам, суммируются и включаются в общую необходимую для отыгрывания. Однако, случае фортуна улыбнется и выйдет отыграть все призы, игровое заведение гарантированно допустит исключить денежные свои. Сумма вывода будет зависеть от лимита, одобренного именно в этом учреждении. Поэтому, пристально надо(надобно) читать правила выдачи безлимитных депо.
1хслот 1хслотс регистрация перейти на 1×slots
Мы рекомендуем не отказываться от похожих услуг узнаваемых казино. Выделите некоторое мин. На регистрацию, получите бонус и попробуйте его отыграть. Может быть, сегодня фортуна будет на вашей стороне!Такие поощрения позволяют бесплатно протестировать свежее казино, разобраться с игровым процессом онлайн слотов, заработать и исключить маленькую сумму средств. Чаще всего применяются коды. Их надо(надобно) заносить в специальные окна регистрационной анкеты, в речь идет о пригласительных бонусах, либо в особом разделе личного кабинета игрока.Вейджер менее х30–35 считается приемлемым. Опытные игроки заявляют, собственно с таким вейджером реально остаться в плюсе, если верно подойти к выбору игрового аппарата. 1× slots официальный <a href=https://asjgtf.cn/home.php?mod=space&uid=325&do=profile&from=space>https://asjgtf.cn/home.php?mod=space&uid=325&do=profile&from=space</a>
1×slots регистрация то дальше необходимо пройти
Размер призов чаще всего чисто условный и не превышает 50 рублей. Приятно, но ощутимым бустом в игре вряд ли станет.Бездепозитный бонус за регистрацию в казино — это стартовый презент в виде валютного начисления или бесплатных вращений для новых игроков заведения, для получения которого не нужно вносить депозит. <a href=http://users.atw.hu/adf/profile.php?mode=viewprofile&u=11626>http://users.atw.hu/adf/profile.php?mode=viewprofile&u=11626</a> Благодаря программке лояльности от игорного заведения, возможно арестовать превосходный старт и без дополнительных инвестициям запустить видеослоты. Кроме такого, возможно рассчитывать на реальную удачу и получить, без вложения личных финансов, большой выигрыш.Многие новенькие сомневаются, что поощрительный приз надо несомненно возвращать, и если они выиграли у казино. Это полностью безопасно и надежно. Выводя выигранные средства, игрок просто останавливает свое роль деле и утрачивает уникальную вероятность – бесплатно наращивать личное материальное положение. 1×slots зеркало сайта Для получения предоставленных бонусов вам понадобиться — ПК либо мобильное устройство, и остальное дело за малым.Для получения бездепа нужно пригласить в забаву по реферальной ссылке свежего посетителя: он должен зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на сумму, указанную в условиях промоакции.
<b>Смотреть еще похожие новости:</b>
<a href=https://eccentrictirade.com/forums/showthread.php?tid=139666>скачать 1×slots официальный сайт</a>
<a href=http://1tv-forum.ru/viewtopic.php?f=3&t=262>1×slots зеркало регистрация то дальше необходимо пройти</a>
<a href=http://mandala-app.com/forums/viewtopic.php?f=5&t=269912>1хслот зеркало</a>
<a href=http://fbigov.clanfm.ru/viewtopic.php?f=2&t=19>казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины – бесплатные вращения с фиксированной ставкой, которые можно применять в конкретных игровых автоматах. Бонус в казино без депо содержит разные разновидности: это может быть приветственный бонус, акции в честь каких-то праздников или весомых дат, приз за вербование новых игроков, преданность и получение VIP-статуса.
#177 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slotscasino 56 online
Бездепы имеют входить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой либо баллами.Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=http://filmkachat.ru/>1×slots зеркало подтвердит вашу регистрацию если говорить</a> В разделе с бонусами активировать собственный подарок. Найти игры, для коих предусмотрено одобрение и применять приз по предназначению.При малый сумме приза рекомендуется выступать по низким ставкам, а использовать наибольшие другого лишь сомнений случае, в вейджер очень немалый, а время на отыгрыш крепко ограничено. <a href=https://collegefactual.uservoice.com/forums/195264-general-feedback/suggestions/49478657-%D0%B2%D0%B8%D0%BA%D1%83%D0%BF-%D1%82%D0%B0-%D0%B2%D1%96%D0%B4%D0%BD%D0%BE%D0%B2%D0%BB%D0%B5%D0%BD%D0%BD%D1%8F-%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%BE%D0%B1%D1%96%D0%BB%D1%96%D0%B2-%D0%BF%D1%96%D1%81%D0%BB%D1%8F-%D0%B4%D1%82%D0%BF-%D0%BF%D0%BE%D0%BA%D1%80%D0%BE%D0%BA>https://collegefactual.uservoice.com/forums/195264-general-feedback/suggestions/49478657-%D0%B2%D0%B8%D0%BA%D1%83%D0%BF-%D1%82%D0%B0-%D0%B2%D1%96%D0%B4%D0%BD%D0%BE%D0%B2%D0%BB%D0%B5%D0%BD%D0%BD%D1%8F-%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%BE%D0%B1%D1%96%D0%BB%D1%96%D0%B2-%D0%BF%D1%96%D1%81%D0%BB%D1%8F-%D0%B4%D1%82%D0%BF-%D0%BF%D0%BE%D0%BA%D1%80%D0%BE%D0%BA</a> 1×slots casino регистрация <a href=https://johnnytemu63074.buyoutblog.com/30352855/ai-nude-revolutionizing-content-moderation-and-privacy-protection>https://johnnytemu63074.buyoutblog.com/30352855/ai-nude-revolutionizing-content-moderation-and-privacy-protection</a>
1×slots casino зеркало
Мы проделываем ударение на ключевых положениях верховодил, рассказываем о территориальных ограничениях и вкратце информируем о других промоакциях обсуждаемого казино. <a href=http://powercrop.it/chi-siamo/le-persone?page=200#comment-10037>1хслот официальный сайт зеркало</a> 1×slots зеркало быструю регистрацию а также мгновенное <a href=https://www.khedmeh.com/wall/blogs/post/59485>https://www.khedmeh.com/wall/blogs/post/59485</a> Как правило, новоприбывшие игроки для желают ознакомиться с методами ввода и вывода валютных средств и сроки выполнения поданных заказов чтобы конкретно разуметь, как быстро у вывести собственный казино приз за регистрацию без депо на электронный кошелек или же банковскую карту. К счастью для всех играющих, снутри конкретных холдингов, все казино конкурируют меж собой. Ведь если бы определенную фирму давало лишь одно онлайн-заведение, то навряд бы клиенты увидели казино с бонусом за регистрацию и имели бы рассчитывать только на вознаграждение вид бонуса на первое вложение. К любому заведению периодически идет завлекать свежих игроков, что, в итоге, лишь на руку всем играющим. 1 xslots рабочее зеркало Бывают ли бездепозитные призы без вейджера? Бывают, если у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино.
1× slots зеркало
Теоретически, к безвозмездным призам можно отнести например называемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, потому собственно они предоставляют лишь вероятность создавать ставки.Получив свой подарок, Вы сможете даром выступать на настоящие деньги, а выполнив условия отыгрыша, исключить свой выигрыш. Исходя из сего, просто не существует мудрых причин махнуть рукою на получение такового приза при регистрации. И, лишним, на такой бесплатной базе у вас есть все шансы выиграть средства и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные призы, именуют безвозмездными интернет платформами для игр. <a href=http://support-groups.org/memberlist.php?mode=viewprofile&u=213726>http://support-groups.org/memberlist.php?mode=viewprofile&u=213726</a> Можно ли наваривать на бездепозитных бонусах? Это не работа, здесь как повезет, в в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, это можно именовать везением, и дополнительной добавкой к вашему бюджету.Вообще перейдя в казино — правила одинаковы в получении бездепозитных призов, в стереотипные управляла входит: доказать эл. Почту и аппарат, заполнить собственный личный профиль, активировать рекламную код либо активировать предложения во вкладке БОНУСЫ. 1×slots зеркало регистрация то дальше необходимо пройти Рассмотрим принцип его действия на образце. Допустим, вы зарегались и возымели $10 no down payment bonus с вейджером х50. Это означает, собственно выигранные деньги возможно будет выводить не ранее, чем последствии такого, как общая сумма ставок достигнет $500.
1хслотс официальный сайт зеркало
Можно. Вы практически можете отрешиться от получения бездепозитного приза за регистрацию в казино, пока Вы не сделаете ставку.Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного бонуса. Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного бонуса довольно пополнения баланса и подтверждения личности. В других же клубах, нужно некоторое один прокрутить свой депозит.Для того, чтобы отыграть сумму вашего бездепозитного бонуса нужно выполнить условия вейджера. Очень часто фриспины даются на определенные слоты (book of ra, book of dead, book of sun), подбирайте слот для по, они довольно очень и высококачественные. Бездепозитные бонус может быть валютным например и повторяющий фриспинов на слоты Ну и конечно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: подобная добродушие увеличивает степень преданности посетителей к компании.Ограничения по забавам. Администрация запрещает игрокам кое-какие игровые автоматы с бездепозитным призом, средствами либо безвозмездными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда разделенье производится по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, хотя запрещен в настольных забавах и в разделе Live Casino. 1×slots casino регистрация <a href=http://spilov.ru/user/WalterTep/>http://spilov.ru/user/WalterTep/</a> Онлайн гемблинг развивается с каждым деньком все больше и больше, свежие бренды создаются не по дням а по часам. Новые онлайн казино делают вступительные акции для игроков, чтобы, чтобы собственно бы зарекомендовать себя, и что, этим самым предлагают бездепозитные призы за регистрацию, что бы не упустить такую возможность — как пользоваться свежим бездепом, рекомендуем посещать наш сайт как возможно почаще, самое аппетитное и новые несомненно добавляться в данном же списке.
1×slots мобильная версия войти казино
Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, чтобы была вероятность вывести выигрыш.В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это исключительно приятная доля игры. Важно, зачастую бездепозитные призы в казино выдаются с ограничениями по максимальной выплате. В среднем возможно рассчитывать на прибыль в некоторое тысяч руб. Как вывести выигрыш с бонуса без депозита. Придётся доказать акк документально, в неких заведениях. Процедура верификации неотклонима и делается каждым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате или прочтите в правилах. Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и более. Когда игроку полагается большое фриспинов, администрация возможность разбивать их начисление на количество дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах промоакции.В основном случаев благотворительные бонусы начисляются в кредитах, которые нельзя сразу вывести со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже. <a href=http://ds2.edu.sbor.net/index.php?subaction=userinfo&user=unsuitablewrite>http://ds2.edu.sbor.net/index.php?subaction=userinfo&user=unsuitablewrite</a> Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить необыкновенности, труднодоступные при этой в демо режиме. Многие свежие клиенты переходят в число постоянных, а оператор получает долгосрочную выгода.Обычно для получения бонусов без депозита, казино выдвигает лояльные и абсолютно выполнимые условия, но есть ряд действий которые запрещены и могут повлечь за собой противные последствия: 1×slots зеркало сайта
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.motoshkola.od.ua/threads/zerklo-kazino-1×slots.14954/>зеркло казино 1×slots</a>
<a href=http://www.xcosmic.net/rsf/showthread.php?tid=58099>1×slots регистрация 1×slots review live</a>
<a href=https://www.kaizerleather.com/top-5-ways-to-celebrate-mothers-day-while-observing-social-distancing/#comment-14756>1×slots зеркало видели такую регистрацию на</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На страничке представлены бездепозитные призы за регистрацию в казино редчайшая награда за коей гонятся все игроки как новички, например и профессионалы. Мы также уделяем огромное внимание на присутствие бонусов при составление рейтинга казино на деньги. Бездепозитный бонус это вероятность играть безвозмездно и выиграть реальные деньги.
#178 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию более популярный вариант это
Бездепозитные призы казино за регистрацию в 2022 году — это вероятность поиграть за счёт заведения. Казино даёт клиенту шанс пользоваться определённой суммой либо числом бесплатных вращений без внесения депозита. Не путайте деморежим с реальной забавой без необходимости внесения депозита.Если ординарными текстами, бездепы – это определённая сумма средств или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать презенты. Но есть кое-какие нюансы. Существуют игорные дома, коие перед тем как начислить бонусы настоятельно привязать телефон, дать копии документов. <a href=http://filmkachat.ru/>1×slots промокод при регистрации</a> Будьте внимательнее при ознакомлении с правилами во избежание появления конфликтных обстановок с казино, когда после отыгрыша бездепа для не дадут исключить солидную сумму выигрыша.Наличие у игрока второго аккаунта. Запрещено создавать некоторое профилей для многократного получения бездепов. <a href=https://feedback.cloudways.com/forums/203824-product-improvements-flexible/suggestions/49478654-%D1%89%D0%BE-%D1%80%D0%BE%D0%B1%D0%B8%D1%82%D0%B8-%D0%B7-%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%BE%D0%B1%D1%96%D0%BB%D0%B5%D0%BC-%D0%BF%D1%96%D1%81%D0%BB%D1%8F-%D0%B4%D1%82%D0%BF-%D0%BA%D0%BE%D0%BC%D0%BF%D0%BB%D0%B5%D0%BA%D1%81%D0%BD%D0%B5-%D0%BA%D0%B5%D1%80%D1%96>https://feedback.cloudways.com/forums/203824-product-improvements-flexible/suggestions/49478654-%D1%89%D0%BE-%D1%80%D0%BE%D0%B1%D0%B8%D1%82%D0%B8-%D0%B7-%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%BE%D0%B1%D1%96%D0%BB%D0%B5%D0%BC-%D0%BF%D1%96%D1%81%D0%BB%D1%8F-%D0%B4%D1%82%D0%BF-%D0%BA%D0%BE%D0%BC%D0%BF%D0%BB%D0%B5%D0%BA%D1%81%D0%BD%D0%B5-%D0%BA%D0%B5%D1%80%D1%96</a> Некоторые клубы автоматически начисляют бонус на аккаунт игрока после выполнения критерий получения, хотя посещают ситуации, когда бонус надо(надобно) активировать игроку самому. Есть несколько способов активации приза:Существует ли стратегии для отыгрыша бездепозитных призов? К сожалению нет, на выигрыши либо проигрыши с бонусов, казино либо игрок повлиять не может, отдача игр происходит от создателей игр. 1×slots casino регистрация на сайте <a href=http://43.240.15.40/home.php?mod=space&uid=667757>http://43.240.15.40/home.php?mod=space&uid=667757</a>
1×slots официальный сайт скачать
Для проверки применяются сканы паспортов, водительских удостоверений, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если пользователь замечен в попытке ввести дополнительный акк, все его учетные записи подвергаются блокировке, а их владелец попадает в темный список. При забаве на лицензионной площадке не бояться указывать достоверную индивидуальную информацию (шифрование исключает утечку индивидуальных данных).Нельзя осматривать забаву на средства, как вариант заработка. Азартные игры воспрещены для лиц моложе 18 лет. Topcasinobonuses.mobi классифицируется организатором азартных игр. Сайт одевает информационный характер. 1×slots официальный регистрация Представленные на данной странице лучшие бездеп бонусы в казино за регистрацию в 2022 году имеют оптимальные условия. После кропотливого анализа редакция портала составила рейтинг спецпредложений, в посетители Casino.ru все сортировать перечень по нескольким аспектам: по сумме, вейджеру, максимальной сумме вывода и т.д.Многие игроки, оценив перечень казино, остаются выступать в нем и далее ? на это и направлено каждое промо. Постоянные посетители заносят депозиты и проделывают ставки, обеспечивая долгосрочную выгода оператора. То есть, казино выдают бездепы новым юзерам для формирования приклнной аудитории. <a href=http://nashforum.listbb.ru/viewtopic.php?f=3&t=23337>http://nashforum.listbb.ru/viewtopic.php?f=3&t=23337</a> 1×slots регистрация 1×slots casino c2d ru
1×slots рабочее зеркало
Однако далековато не все ресурсы предлагают своим посетителям бездепозитные бонусы за регистрацию в казино. В большинстве случаев учтено одобрение на 1-ый депозит в размере 100–200%. Это отличная возможность преумножить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш. <a href=http://aldanray.ru/bitrix/click.php?goto=http://mebelkmv.ru/bitrix/redirect.php?goto=http://price.v063.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/IsDtOjnJrOi>http://aldanray.ru/bitrix/click.php?goto=http://mebelkmv.ru/bitrix/redirect.php?goto=http://price.v063.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/IsDtOjnJrOi</a> Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды присутствуют на этой странице. Посетитель имеет расценить обстоятельства получения и начать выступать на средства без внесения депо. При этом игроку принципиально разуметь, на каких критериях и какими способами него исключить полученный выигрыш. Для сего нужно расценить перечень подключенных платежных систем. рабочее зеркало 1×slots Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы быстро получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, появляется настоящий шанс победу!Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция имеет подробные правила, ссылка на которые обыкновенно содержится в промообъявлении. В них указываются лимиты, вейджер, список доступных игр. Если оператор прячет данные о предложении, то пользоваться им надо.
1×slots casino зеркало
2. Создать свежий профиль. Для регистрации нужно заполнить маленькую анкету или зайдите в личный офис посредством соц сеток;Третитй бездепозитный приз за регистрацию – валютные свои. К огорчению, начислить рубли либо баксы готовы только знаменитые и известные клубы. С их поддержкою вы сможете насладиться любой доступной игрой – автоматом, рулеткой, кено, блэкджеком. Используйте превосходнейшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из перечня ниже, дабы заработать подарки за обычные деянья и уже сегодня получить первый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высокой отдачей и резвыми выводами на электронные кошельки.Подарки на праздники ? приуроченные к праздничным датам, требующие условного отыгрыша либо начисляются без такового. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду. 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=http://stroyrem-master.ru/user/Davidexcic/>http://stroyrem-master.ru/user/Davidexcic/</a> Представьте момент, когда при ставке в 10 рублей Вы получите подобное умножение. Миллион руб. За одно вращение, собственно вполне возможно. Поэтому вопрос, сколько возможно выиграть остаётся закрытым. Предлагаем выяснить самостоятельно. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный приз и инспектируйте фортуну в деле. Разумеется, исключить средства сложно. Однако шансы есть у всех.Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.
1×slots casino регистрация 1×slots review live
Для получения выигрыша потребуется выполнить условия казино. Чаще всего игроку нужно поставить конкретную сумму, хотя уже из собственных средств. Она рассчитывается из общего объема выигрыша за всегда использования бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, в юзер выиграл 1000 рублей, а множитель сочиняет х30, вывести средства можно будет, сделав ставки на 30 000 руб. <a href=http://sehoeng.com/bbs/board.php?bo_table=pro_qna_eng&wr_id=68157>http://sehoeng.com/bbs/board.php?bo_table=pro_qna_eng&wr_id=68157</a> Фриспины. Бесплатные вращения предусмотрены для использования в видео-слотах. Внимательно читайте обстоятельства – они нередко выдаются для некоторых машин. В зависимости от клуба возможность делать определенное количество ставок. Кстати, современные игорные дома дают вероятность заводить «одноруких злодеев».Бездепозитный бонус по промо-коду несомненно доступен для забавы, лишь в том случае когда Вы активируете особый бонусный код в разделе с бонусами либо укажите промокод при регистрации на сайте. В неких случаях, не активации кода, понадобиться подтвердить контактные данные игрока и заполнить анкету посетителя. 1×слот регистрация в 1×slots casino Нет. Казино выдают бесплатные призы за регистрацию, чтобы, чтобы, чтобы заказчик мог ознакомиться с игровым заведением. А чтобы исключить его, нужно выполнить обстоятельства отыгрыша.Если вы бывалый игрок, вы должны аристократия, что приз без депозита – редкая находка. Тем не менее, мы еженедельно изучаем интернет, чтобы отыскать для вас лучшие бездепозитные предложения.
<b>Смотреть еще похожие новости:</b>
<a href=http://yonghengro.gain.tw/space.php?uid=1555574>1×slots зеркало рабочее на сегодня</a>
<a href=http://aficionado.pl/showthread.php?212752–1×slots-%D0%B0%D0%BA%D1%86%D0%B8%D0%B8&p=235004>1×slots акции</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В перечне притязаний к отыгрышу нередко присутствуют лимиты на ставки при ирге на собственные деньги. Так, случае отыграть нужно 30 000 руб., а максимальная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам деянья акции. Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в социальных сетях, установку мобильного приложения или официального клиента для ПК. В большинстве казино действуют программки преданности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на следующий уровень часто с выдачей бездепа.
#179 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Ирина Сидоркова inform@rucriminal.info <a href=https://rucriminal.info/>Мухтиярова Елена Вячеславовна порно</a> Черкесова Бэлла Мухарбиевна порно лучшие онлайн казино <a href=https://rhymes-punches.com/>казино 1</a> 1×bet 1 kent casino регистрация букмекерская контора зенит гта казино сайт казино зеркало мобильные букмекерские конторы 1×bet официальный слоты
DiskiPlus пинко casino DiskiPlus porno Дарья Мороз <a href=https://diskiplus.ru>DiskiPlus почему казино</a> DiskiPlus 1×bet бесплатно DiskiPlus яндекс игры казино <a href=https://diskiplus.ru>DiskiPlus казино рублях</a> DiskiPlus лучшие казино бесплатно DiskiPlus порно с Карен Хачанов (теннис) DiskiPlus Яровая Ирина Анатольевна порно DiskiPlus porno Юлия Пересильд DiskiPlus 7k casino официальный сайт DiskiPlus 1×bet слоты DiskiPlus порно с Анна Щербакова, фигуристка
#180 Charlesgunnyhttp://filmkachat.ru
x1 slots регистрация в 1×slots casino
Большинство интернет-казино из нашего топ-10 готовы порадовать вас неповторимыми акциями. Читайте о их в обзорах и на форуме. <a href=http://filmkachat.ru/>1×slot рабочее зеркало</a> Выбрать казино с бездепозитным бонусом. У нас на сайте представлен список лучших онлайн казино, коие предлагают своим игрокам великодушные призы за регистрацию.Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. <a href=https://www.papercall.io/speakers/146409/speaker_talks/292503-technical-drawing-for-furniture-professional-design-guide>https://www.papercall.io/speakers/146409/speaker_talks/292503-technical-drawing-for-furniture-professional-design-guide</a> Шаг 4. Активация. Внимательно изучите условия, информацию по ограничениям и сроке деяния бонусного предложения. Разобравшись с правилами, можно активировать бонус в собственном кабинете (от ? с внедрением промокода) либо по запросу в саппорт. x1 slots 1хслотс регистрация перейти на 1×slots <a href=http://jzxw.cn/space-uid-19103.html>http://jzxw.cn/space-uid-19103.html</a> Шаг 5. Использование и отыгрыш. Бездеп должен быть применен в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера.Подарки на определенные даты выделяются критериями получения. Если одобрение начисляют игроку на день рождения, то сумма обыкновенно зависимости от совместного размера депо последний год.
1×slots регистрация 1×slotscasino 56 online
Важно, убедитесь что, собственно ранее не регились в избранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи.Для получения выигрыша потребуется выполнить условия казино. Чаще всего игроку необходимо поставить определенную сумму, хотя теснее из личных денег. Она рассчитывается из общего размера выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, случае юзер выиграл 1000 рублей, а множитель составляет х30, исключить деньги возможно будет, сделав ставки на 30 000 рублей. <a href=https://www.findaspermdonor.com/viewtopic.php?f=25&t=102665>1×slots казино зеркало</a> 1× slots casino зеркало Следует выделить, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом.Бездеп с фриспинами может охватывать всю коллекцию игр на сайте или разработки 1-го провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш может быть выведен последствии такого, как юзер отыграет эту сумму. Возможность расценить полный функционал слотов — главное совершенство данной разновидности. Игроку становятся доступны что, эти опции, которые отсутствуют в демонстрационном режиме, а возможность выиграть реальные деньги добавляет ярчайших азартных ощущений. <a href=http://yartube.ru/user/asamueltianovo2529/>http://yartube.ru/user/asamueltianovo2529/</a> Онлайн-казино с бездепозитными призами ставят клиентам условия для пользования бездепами, поэтому перед участием в промоакции никакого подробно ознакомиться со всеми правилами и аспектами акции. Условия все прикасаться получения приза, его использования и следующего вывода валютных средств в случае выигрыша. 1×slots регистрация 1×slotscasino 56 online
1×slots зеркало регистрация
Стоит отметить, что бездепозитный бонус выдается лишь взрослым новеньким, коие, в свою очередь, шансы пригласить личных друзей и своих, того претендующих на поощрительную программу лояльности. Подобная разработка была между соперничающих онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры содействуют увеличению своей посещаемости, методом привлечения новых игроков. Бонусы – это уникальный шанс для вероятных соучастников забавы, которые имеют опробовать софт покер рума и убедиться, станут ли они в него играть или нет. Новый игрок попробует свои силы с настоящими оппонентами в казино.4. Заберите презент. Чаще всего бонус активизируется незамедлительно последствии регистрации. Но случаются ситуации, когда надо(надобно) забежать в собственный офис или написать в саппорта. <a href=https://biznes-knigi.com/user/TravisCox/>https://biznes-knigi.com/user/TravisCox/</a> 1×slots casino online регистрация Варианты выигрыша находятся от Вашей удачи и критерий игорного портала. Выше мы сказали, собственно кое-какие бездепозитные бонусы в 2022 году выдаются с лимитированиями по максимальной выплате. Однако, остаются они, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность современных игр на деньги, возможно выиграть невозможные суммы. Сегодняшние игровые автоматы или видео слоты, как их нарекают. Могут выдавать крупные умножение от х1.000 и повыше. Некоторые умножают ставку от х100.000.Чем ниже значение вейджера, тем проще отыграть и исключить приз. Если Вы планируете заработать на бездепе, а не просто ознакомиться с свежим игровым клубом, то стоит избегать призов с высоким вейджером их практически не реально отыграть. С ними Вы сможете только протестировать забавы заведения.
1×slots casino регистрация 1×slots review live
<a href=http://xn–80akbkalsbeeafq6a6b2f.xn–p1ai/forum/messages/forum1/topic49704/message255622/?result=new>1× slots сайт</a> Вейджер менее х30–35 считается приемлемым. Опытные игроки утверждают, собственно с этим вейджером реально остаться в плюсе, случае верно подойти к выбору игрового аппарата. Если вы новичок в этом деле и лишь попали в неизведанную вами район азарта — счет услуг как бездепозитные призы без пополнения. 1×slots казино зеркало <a href=http://biyografiforum.10tl.net/member.php?action=profile&uid=2949>http://biyografiforum.10tl.net/member.php?action=profile&uid=2949</a>
1×slots официальный сайт мобильная версия скачать
В интернет-сети практически можно отыскать перечни наиболее модных и обещанных поощрительных программ от популярных онлайн-казино. <a href=https://casperforum.org/user/walterrex/?um_action=edit>https://casperforum.org/user/walterrex/?um_action=edit</a> Активация по промокоду употребляется в различных обликах бездепов. Если речь идет о приветственном призе, то набор знаков можно узнать на крупнейшей страничке, в регистрационной форме либо письме, коие отчаливает юзеру для доказательства адреса электронной почты. Акции шансы проводиться общо с партнерскими площадками. Обычно код располагается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется разовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем актуальный код для активации в описании любого рекламную.Наиболее пользующиеся вознаграждения среди гэмблеров – бездепозитные призы казино. Это не умопомрачительно, ведь можно получить бесплатные вращения либо виртуальные кредиты, и при не придётся пополнять счёт, рисковать личными средствами. Удастся насладиться различными веселиями и даже выиграть солидную необходимую, избегая серьёзного риска. 1×slots зеркало рабочее на сегодня Каждая игровая перрон выделяется условиями по получению и отыгрышу бездепов. В правилах отчетливо расписаны временные рамки, за коие нужно прокрутить вейджер. Также не запамятовывайте про максимальный размер ставки и максимальную сумму выплаты. С другой стороны, дабы получить бездепозитные бонусы казино, достаточно потратить менее 1 минутки.В бонусную программу множества операторов входят регулярные бездепы. Это пожизненные промоакции, поощряющие активных неизменных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают неизменные бонусы без депозита в размен на скопленные баллы преданности.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.formulersupport.com/Thread-1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE–269531>1×slots официальный зеркало</a>
<a href=http://dania.forumex.ru/viewtopic.php?f=2&t=38>1×slots зеркало рабочее на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Прежде всего, не забывайте регулярно заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом оценивают наиболее интересные предложения основных игорных порталов.
#181 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
online casino 7k порно с Анна Щербакова, фигуристка <a href=https://7club7.com/>фильмы казино рояль</a> casino скачать приложение pin ап casino <a href=https://glvk.guru/>1×bet зеркало рабочее</a> porno Александр Соболев (футбол) Нургалиева Эльвира Рамиловна порно Светлана Ходченкова porno Дарья Клишина Москалькова Татьяна Николаевна порно казино ли водка казино
DiskiPlus порно с Дарья Клишина, легкоатлетка DiskiPlus официальное казино вход <a href=https://diskiplus.ru>DiskiPlus пин ап букмекерская контора</a> DiskiPlus казино вход DiskiPlus пина casino <a href=https://diskiplus.ru>DiskiPlus казино сочи</a> DiskiPlus pin casino DiskiPlus Разуваева Ксения Денисовна порно DiskiPlus симулятор казино DiskiPlus 1win casino DiskiPlus 1×bet 1хбет DiskiPlus ешь казино DiskiPlus лучшие букмекерские конторы
#182 Charlesgunnyhttp://filmkachat.ru
1×slots скачать на айфон
Размер бонусов почаще всего чисто символический и не превышает 50 руб. Приятно, хотя ощутимым бустом деле навряд станет. <a href=http://filmkachat.ru/>1×slots зеркало на сегодня</a> <a href=https://www.bunity.com/-656a43e6–97c0–4816-aedc-21f8d5e41341>https://www.bunity.com/-656a43e6–97c0–4816-aedc-21f8d5e41341</a> На странице представлены бездепозитные бонусы за регистрацию в казино редкая награда за коей гонятся все игроки как новенькие, так и мастера. Мы тоже уделяем огромное внимание на наличие призов при формирование рейтинга казино на средства. Бездепозитный бонус это возможность играть безвозмездно и выиграть настоящие средства.Активация случается за промокодов, которые вводятся в собственном кабинете в регистрации. Среди спецпредложений в списке Casino.ru находятся эксклюзивные промокоды, коие доступны лишь гостям портала. Другие способы начисления средств ? автоматическая активация сразу последствии сотворения аккаунта и получение подарка по запросу в службу технической помощи. 1×slots регистрация 1×slots casino 777 online <a href=http://www.oasighirardi.org/2019/03/dallerba-al-formaggio-sabato-6-aprile.html>http://www.oasighirardi.org/2019/03/dallerba-al-formaggio-sabato-6-aprile.html</a> Как управляло, при выводе финансов, от играющего требуется только сделать наименьший лепта для того, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом личный счет.
1хслотс мобильная версия зеркало
<a href=http://dd214.labelcreativeak.com/forums/viewtopic.php?f=3&t=3673>1хслот зеркало сайта</a> 1×slots акции <a href=https://ugzhnkchr.ru/user/BrianGinia/>https://ugzhnkchr.ru/user/BrianGinia/</a> 1хслотс казино зеркало
1×slots официальный сайт зеркало
Для такого, дабы отыграть сумму вашего бездепозитного приза нужно выполнить условия вейджера. Очень нередко фриспины даются на конкретные слоты (book of ra, book of deceased, book of sun), избирайте разъем себе нраву, все довольно красивые и высококачественные. Бездепозитные приз может быть валютным так и вид фриспинов на слоты <a href=https://www.assayyarat.com/forums/member713132.html>https://www.assayyarat.com/forums/member713132.html</a> Даже не выиграв солидную необходимую, игрок увлекательно проведет время, изнутри изучит работу площадки, воспримет геймплей автоматов. Все это без каких-либо финансовых рисков. Быть в курсе наилучших акций легко. Достаточно регулярно учить перечень свежих онлайн казино с выводом приза без депозита в этом разделе. 1хслотс зеркало на сегодня Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала прыткие выводы. Фишка выплат что, нет, собственно довольно выбрать платёжный инструмент и указать сумму. В большинстве случаев средства зачисляются на электрические кошельки в течение 15 минут, а на банковские карты – 1–3 рабочих денька.
1× слот зеркало
Приветственный приз без депо ? подарок за регистрацию. Выдается деньгами, фриспинами или баллами. В заключительном случае бонусные баллы используются для участия в турнирах или обмена на настоящие средства.Отзывы читателей о бонусных промоакциях посодействуют составить впечатление, но не забывайте о субъективности личных комментариев. Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депо возможность выделяться до 30 дней. Бонусы без депо при регистрации числятся самыми красивыми как для опытнейших игроков, так для и начинающих. Получив такое вознаграждение, заказчик может выступать на реальные средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а обстоятельства их активации и выигрыша.Не хотите поиграть в азартные игры, не рискуя своими деньгами, хотя получая в все выплаты? Подобную возможность деют почти лучшие порталы с азартными весельями. В их количестве много правдивых и надежных интернет-казино на русском языке. Они привлекают свежих юзеров различными поощрительными мероприятиями, включая бездепозитные, или бесплатные бонусы. 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=http://seafishzone.com/home.php?mod=space&uid=1251911>http://seafishzone.com/home.php?mod=space&uid=1251911</a>
1×slots промокод при регистрации 2025
Бонус в казино без депозита содержит разные варианты: это может быть приветственный приз, акции в честь каких-то праздничных или важных дат, бонус за привлечение свежих игроков, преданность и получение VIP-статуса.Если при регистрации показать промокод, возможно гарантировано получить приз. Где взять ваучер? Посетите на блоги либо форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В заключительное время игорные дома начали рекламироваться в фильмах и сериалах. Присмотритесь и всего заметите промокод, который принесёт 500 или 1 000 бонусных рублей. <a href=http://xn–80aa3cgn3d.kz/index.php?subaction=userinfo&user=yzarira>http://xn–80aa3cgn3d.kz/index.php?subaction=userinfo&user=yzarira</a> Перечисленные повыше главные характеристики сочетают фактически каждый приз и считаются стандартными для бездепозитных бонусных начислений в казино.Ниже указан важный список легальных казино в Беларуси с призами на 1-ый депо. Вы сможете попасть на официальный вебсайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. 1×slots акции На бонусные начисления могут быть установлены вспомогательные ограничения, коие Вы не к при отыгрыше. Пока приз всецело не отыгран — средства из казино не выводятся.
<b>Смотреть еще похожие новости:</b>
<a href=http://av3526.com/forum.php?mod=viewthread&tid=44&pid=39709&page=84&extra=page%3D1#pid39709>1×slot рабочее зеркало</a>
<a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=48163>1×slots быструю регистрацию а также мгновенное</a>
<a href=http://turkteam.10tl.net/member.php?action=profile&uid=2012>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вы не в коем случае ни же рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный бонус, по мимо практической забавы на бездепозитные призы, у Вас есть шанс выучить игровые автоматы, научится регулировать менять ставки и полосы, исследовать бонусные игры и их выигрышные композиции, да конечном просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные свои, которые можно отыграть и исключить, не просто на демо счет, что, этим наиболее адреналин в крови еще повысится а пульс забьется с частым ритмом!
#183 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet на андроид скачать 1×bet 1×bet xyz <a href=https://strelochnik.com/>официальные букмекерские конторы скачать</a> пинко casino casino betting <a href=https://th-royalgclub.com/>лучшие казино бесплатно</a> Преподобная Надежда Александровна порно pin up casino buzz pin casino зеркало официальные зеркала казино казино играть казино фильм порно с Александр Головин (футбол)
DiskiPlus Ходнева Светлана Владимировна порно DiskiPlus порно с Евгения Медведева, фигуристка <a href=https://diskiplus.ru/>DiskiPlus Александра Бортич</a> DiskiPlus casino скачать DiskiPlus Приезжева Екатерина Геннадьевна порно <a href=https://diskiplus.ru/>DiskiPlus casino игровой автомат</a> DiskiPlus 1×bet скачать приложение на андроид DiskiPlus 1×bet регистрация DiskiPlus porno Алена Косторная (фигурное катание) DiskiPlus пинко casino DiskiPlus porno Александра Степанова, фигуристка DiskiPlus Матвиенко Валентина Ивановна порно DiskiPlus порно с Аделия Петросян (фигурное катание)
#184 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на официальном сайте
Бездепозитный приз за регистрацию в казино — это стартовый презент вид валютного начисления либо даровых вращений для новых игроков заведения, для получения которого не нужно заносить депо.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> <a href=https://events.com/r/en_US/registration/best-merchandising-software-solutions-for-retail-success-london-february-962474>https://events.com/r/en_US/registration/best-merchandising-software-solutions-for-retail-success-london-february-962474</a> 1×slots рабочее зеркало на сегодня <a href=http://ukgo.su/bitrix/click.php?goto=http://ermis.su/bitrix/redirect.php?goto=http://forum.facmedicine.com/proxy.php?link=https://teletype.in/@urist555/DbLruw48K8U>http://ukgo.su/bitrix/click.php?goto=http://ermis.su/bitrix/redirect.php?goto=http://forum.facmedicine.com/proxy.php?link=https://teletype.in/@urist555/DbLruw48K8U</a>
1×slots зеркало этих способов предполагает регистрацию
Фриспины — безвозмездные вращения, которые разрешают игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины считаются наиболее модным и желаемым видом бонуса — благотворительные вращения иногда эффективнее и веселее в отыгрыше, чем другие виды бездепов.Прочитайте правила бонусной программки, в желайте принять. Да, мы настоятельно советуем сделать это до регистрации. 1×slots зеркало выигрыши обязательно пройдите регистрацию если <a href=https://rightcoachforme.com/author/robertlom/>https://rightcoachforme.com/author/robertlom/</a> Однако далековато не все ресурсы предлагают своим посетителям бездепозитные призы за регистрацию в казино. В большинстве случаев учтено одобрение на первый депо в объеме 100–200%. Это отличная возможность преувеличить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш.Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и расценить особенности, труднодоступные при забаве в демо режиме. Многие свежие клиенты перебегают в количество постоянных, а оператор получает долгосрочную выгода. 1×slots зеркало регистрацию более популярный вариант это Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном веб-сайте и выполните вход в собственный кабинет, чтобы арестовать бесплатные вращения с вейджером х40;Почти все игровые клубы настоятельно свидетельство контактных данных игрока для получения бездепозитного бонуса.
1×slot зеркало
Бездепозитный бонус по промо-коду несомненно доступен для забавы, лишь сомнений случае когда Вы активируете особый бонусный код в разделе с призами или укажите промокод при регистрации на веб-сайте. В неких случаях, считая активации кода, придется подтвердить контактные данные игрока и заполнить анкету клиента.Бездепозитные бонусы реальными деньгами, которые можно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадались. Свежий бонус начисляется вид валютных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в пользовании средствами, ну случае отыгрыша оператор имеет установить ограничение на вывод средств.Наш список включает в себя наилучшие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по важным характеристикам: <a href=http://www.support.ipron.com/communication/forum/index.php?PAGE_NAME=profile_view&UID=20455>http://www.support.ipron.com/communication/forum/index.php?PAGE_NAME=profile_view&UID=20455</a> Третитй бездепозитный бонус за регистрацию – денежные свои. К сожалению, начислить рубли либо доллары способны только известные и известные клубы. С их поддержкою возможность насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком.Во время игры в казино, выигрыши, приобретенные благодаря безвозмездным призовым фондам, суммируются и срабатывают в совместную необходимую для отыгрывания. Однако, если удача улыбнется и выйдет отыграть все призы, игровое заведение гарантированно допустит исключить денежные средства. Сумма вывода несомненно зависеть от лимита, утвержденного непосредственно в данном учреждении. Поэтому, пристально нужно читать верховодила выдачи анлимитных депо. 1хслотс зеркало на сегодня Условия отыгрыша бонуса. Если Вы планируете заработать на бездепозитном бонусе, то для внимание на значение вейджера и срок, кот-ый дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, что, этим проще отыграть приз и исключить выигрыш.
1×slots официальный зеркало
Верификация важна для добавочной безопасности и подсобляет техподдержке выявить бонусхантеров и плутов. Кстати, рядах платформах выводы крупных сумм доступны лишь последствии подтверждения личности.В лицензионных бездепозитных казино выступать в азартные игры действительно безопасно. Наличие лицензии подтверждает что, этот прецедент, собственно клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP. Выше мы предоставили глубокий набор самых свежих и актуальных бездепозитных бонусов в интернет казино без пополнения на 2022 год, где продоставляется воспользоваться хоть ценным бездепозитным бонусом.С не отыгранным бонусом запрещается превышать объем наибольшей ставки. Нарушение сего условия виде аннулирование выигрыша. 1хслотс зеркало на сегодня <a href=http://imsstore.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://sovtest-ate.com/bitrix/click.php?goto=http://retail.by/bitrix/redirect.php?goto=https://telegra.ph/Ponimanie-sudebnyh-prikazov-o-vzyskanii-alimentov-09–23>http://imsstore.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://sovtest-ate.com/bitrix/click.php?goto=http://retail.by/bitrix/redirect.php?goto=https://telegra.ph/Ponimanie-sudebnyh-prikazov-o-vzyskanii-alimentov-09–23</a> Не стоит путать игру в демо и использование призов. В демонстрационном режиме игрок может расценить механику слота, сюжет и оформление. Но забава проводится на условные кредиты, поэтому отсутствует главное ? ощущение азарта. Активируя промокод или фриспины, заказчик как не расходует средства деньги на игровые автоматы, но возможность сорвать настоящий куш!Мы собрали и опубликовали список лучших бездепозитных казино с призами за регистрацию, которые гарантируют щедрые выигрыши и моментальные выплаты.
1хслотс мобильная версия зеркало
Отказ в прохождении верификации. Если клиент не желает или не дать документы, подтверждающие его личность, профиль будет заблокирован вместе со всеми бонусными начислениями.Бездепозитные бонусы в казино без пополнения 2022 — это конкретная сумма денег либо gratuitous spins вращения, которые предоставляются первым гостям за регистрацию на веб-сайте казино вид бездепозитного приза, и дает вас вероятность с казино без пополнения опробовать услуги (игр), с дальнейшей преимуществом, льготой вывода средств при исполненьи всех установленных правил. <a href=http://era-climata.ru/bitrix/redirect.php?goto=http://clients1.google.sn/url?q=http://wiki.bk.tudelft.nl/mw_bk-wiki/api.php?action=https://teletype.in/@urid_pomosh/G3nvZuVeT9s>http://era-climata.ru/bitrix/redirect.php?goto=http://clients1.google.sn/url?q=http://wiki.bk.tudelft.nl/mw_bk-wiki/api.php?action=https://teletype.in/@urid_pomosh/G3nvZuVeT9s</a> Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам запрещено начислять призы клиентам, не имеющим валютных средств на счете. Мы предлагаем рассмотреть животрепещущие бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ. 1×slot казино зеркало Акции распространяются как на все забавы казино, так и на узкий список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и другие. Промо возможность охватывать разработки одного производителя. Бездеп не пересекается с иными акциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, изготовленные бонусными деньгами. Для идентификации платежных реквизитов игрока может потребоваться пополнение счета на наименьшую сумму.А ознакомиться с свежими онлайн казино, Вы сможете помощью бонусов с выводом выгоды, коие Вы сможете получить без депозита.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.mentalhealth-world.org.uk/forums/index.php?/topic/99464–1×slos-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%B2–1×slots-casino/>1×slos регистрация в 1×slots casino</a>
<a href=http://rapbeatsforum.com/viewtopic.php?t=740987>1×slots официальный зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В бонусную программку множества операторов входят регулярные бездепы. Это пожизненные промоакции, поощряющие активных постоянных игроков. Популярный формат — раздача фриспинов по конкретным дням недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают постоянные призы без депозита в мена на накопленные баллы преданности.
#185 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Елизавета Боярская up букмекерская контора <a href=https://7club7.com/>1×bet зеркало xbet xyz</a> порно с Анастасия Потапова, теннисистка 1×bet на андроид бесплатно <a href=https://rucriminal.info/>porno Юлия Канакина, скелетонистка</a> скачиваемые казино официальные зеркала казино 7k casino официальный casino casino ru порно с Диана Шнайдер (теннис) порно с Анна Щербакова, фигуристка
DiskiPlus casino онлайн DiskiPlus казино рублях <a href=https://www.diskiplus.ru>DiskiPlus мелбет букмекерская контора</a> DiskiPlus porno Игорь Акинфеев (футбол) DiskiPlus casino рабочее <a href=https://diskiplus.ru>DiskiPlus 1×bet скачать бесплатно</a> DiskiPlus леон букмекерская контора DiskiPlus порно с Дронова Александра Викторовна DiskiPlus Юдаева Ксения Валентиновна порно DiskiPlus 1×bet официальный сайт 1×bet xyz DiskiPlus casino рабочее DiskiPlus 1×bet зеркало рабочее xbet DiskiPlus порно с Илюшникова Татьяна Александровна
#186 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
игры казино балтбет букмекерская контора <a href=https://7club7.com/>casino скачать приложение</a> 7k casino официальный champion casino <a href=https://7club7.com/>букмекерские конторы без депозита</a> порно с Артемий Панарин (хоккей) casino com Елизавета Боярская сайт букмекерской конторы online casino официальный 1×slots casino пинап казино
DiskiPlus скачиваемые казино DiskiPlus автомат казино <a href=https://www.diskiplus.ru>DiskiPlus casino онлайн</a> DiskiPlus какие казино DiskiPlus casino 7k рабочее <a href=https://diskiplus.ru/>DiskiPlus гта онлайн казино</a> DiskiPlus porno Илья Ковальчук (хоккей) DiskiPlus винлайн букмекерская контора официальный DiskiPlus лучшие букмекерские конторы DiskiPlus бесплатно фильм казино DiskiPlus суть казино DiskiPlus сайт pin up casino DiskiPlus винлайн букмекерская контора официальный
#187 SamuelTobhttps://easiestbookmarks.com/story19652919/1xbet-promo-code-today-india
https://bookmarkleader.com/…-philippines
#188 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора фонбет официальный сайт порно с Карен Хачанов (теннис) <a href=https://repost.news/>казино 5</a> букмекерская контора вход скачать 1×bet на андроид бесплатно <a href=https://strelochnik.com/>букмекерская контора фонбет</a> 1×bet зеркало рабочее xbet пин ап casino pin порно с Афонина Марина Игоревна казино пин лучшие бесплатные онлайн казино 1×bet зеркало слоты 1×bet xyz 1×bet зеркало рабочее на сегодня
DiskiPlus самое казино DiskiPlus порно с Гатагова Ольга Анатольевна <a href=https://www.diskiplus.ru/>DiskiPlus сайт 1×bet слоты</a> DiskiPlus яндекс казино DiskiPlus pin up casino пин ап <a href=https://www.diskiplus.ru>DiskiPlus букмекерская контора официальный сайт скачать</a> DiskiPlus скачать casino на андроид DiskiPlus порно с Кирьянова Дарья Борисовна DiskiPlus игры казино DiskiPlus casino официальный сайт DiskiPlus сайте букмекерской конторы фонбет DiskiPlus казино онлайн бесплатно DiskiPlus inform@rucriminal.info
#189 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
Операторы гемблинга заявляют, собственно например они дерутся с бонус-хантерами. Впрочем, критики считают, собственно данным казино пытаются сделать из случайного гостя неизменного игрока.Фриспины начисляются по определенной ставке. После их активации игроку нужно запустить разъем и увериться, что в нем показываются безвозмездные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода в отыгрыша определяется оператором и изредка выше 5 000 рублей. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> Основное различие сомнений, собственно для получения бездепа нужно пополнять баланс в казино. Но считая сего, есть ряд и различий: <a href=https://events.com/r/en_US/registration/best-merchandising-software-solutions-for-retail-success-london-february-962474>https://events.com/r/en_US/registration/best-merchandising-software-solutions-for-retail-success-london-february-962474</a> скачать 1×slots на андроид мобильная версия <a href=http://ooo-esk.ru/index.php?subaction=userinfo&user=therapeuticinve>http://ooo-esk.ru/index.php?subaction=userinfo&user=therapeuticinve</a>
1×slots официальный зеркало рабочее
Перечисленные повыше основные характеристики сочетают фактически любой бонус и считаются стандартными для бездепозитных бонусных начислений в казино. <a href=http://kamechkovkazak.listbb.ru/viewtopic.php?f=15&t=4170>1×slot официальный сайт</a> 1×slots зеркало этих способов предполагает регистрацию Бонусы без депозита при регистрации считаются самыми красивыми как для опытных игроков, например для и новичков. Получив такое вознаграждение, клиент имеет выступать на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные призы в интернет-казино Рунета, а условия их активации и выигрыша. <a href=https://simracing.su/user/DoctorLazutaPa/>https://simracing.su/user/DoctorLazutaPa/</a> После получения бонуса вывод средств для посетителя будет недоступен времени, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или чета недель. Выводить средства игрок может лишь последствии отыгрыша. 1хслотс мобильная версия зеркало Бездепозитный бонус по промо-коду будет доступен для забавы, лишь что, нет случае когда Вы активируете особый бонусный код в разделе с бонусами либо укажите промокод при регистрации на веб-сайте. В некоторых случаях, кроме активации кода, придется доказать контактные данные игрока и наполнить анкету клиента.Для выбора азартного заведения Вы сможете пользоваться перечнем наших казино с призами за регистрацию. На нашем сайте мы выпустили перечень бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, что доля призов эксклюзивные и доступны лишь для посетителей нашего вебсайта по-специальному промо-коду либо по уникальной ссылке. Кроме такого, для каждого приза мы подготовили доскональный обзор, в Вы узнаете как получить и отыграть поощрение и как вывести собственный выигрыш с бездепа.
1×slos регистрация в 1×slots casino
Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих притязаний, не неотъемлемой верификации. Если на сайте предусмотрена обязательная процедура подтверждения личности, то исключить выигрыш удастся лишь последствии проверки данных. Приготовьтесь наполнить анкету и выслать в техподдержку документ, подтверждающий личность. <a href=https://xs.xylvip.com/home.php?mod=space&uid=1041174>https://xs.xylvip.com/home.php?mod=space&uid=1041174</a> 1хслот зеркало
1× slots официальный
Более солидные предложения встречаются довольно изредка. Зачастую они доступны только VIP-игрокам. В остальных случаях им всего сопутствуют очень строгие обстоятельства отыгрыша. Также вероятны дополнительные обстоятельства прочие лимитирования, прописанные в условиях и положения бонусной программы казино. <a href=http://216.38.0.7/viewtopic.php?f=12&t=415582>1хслот скачать</a> Заполняя данные в личном профиле, указывайте только достоверную информацию, так как Вам придется ее доказать дальнейшем при выводе средств. 1хслот 1хслотс регистрация перейти на 1×slots <a href=http://maps.google.co.ug/url?q=http://avgust-opt.ru/bitrix/redirect.php?goto=http://proxy.ojas.workers.dev/?https://telegra.ph/Kak-zamenit-svidetelstvo-o-rozhdenii-umershego-rodstvennika-09–23>http://maps.google.co.ug/url?q=http://avgust-opt.ru/bitrix/redirect.php?goto=http://proxy.ojas.workers.dev/?https://telegra.ph/Kak-zamenit-svidetelstvo-o-rozhdenii-umershego-rodstvennika-09–23</a>
1×slots регистрация
<a href=http://uz-test.ru/index.php?subaction=userinfo&user=odufuh>http://uz-test.ru/index.php?subaction=userinfo&user=odufuh</a> 1×slots зеркало рабочее
<b>Смотреть еще похожие новости:</b>
<a href=https://polnyi-pisec.info/threads/1×slots-oficialnyj-sajt-skachat-na-ajfon.2265/>1×slots официальный сайт скачать на айфон</a>
<a href=https://krok.biz/forum/viewtopic.php?f=7&t=99159>1×слотс казино</a>
<a href=https://kreativeblogs.com/cedar-moss-cafe-a-travel-adventure-in-every-sip/>1×slots casino регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Активация происходит с помощью промокодов, коие вводятся в собственном кабинете после регистрации. Среди спецпредложений в списке Casino.ru находятся эксклюзивные промокоды, которые доступны только посетителям портала. Другие методы начисления средств ? автоматическая активация незамедлительно последствии творенья аккаунта и получение презента по запросу в службу технической помощи. Объективные – объем бонуса, коэффициент и условия вейджера, необходимость внесения депозита для вывода средств;
#190 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино сочи сайт букмекерской конторы <a href=https://krtka.info/>Радченко Светлана Юрьевна порно</a> 1×slots casino суть казино <a href=https://strelochnik.com/>1×bet зеркало xbet xyz</a> porno Екатерина Ефременкова, шорт-трекистка порно с Александр Большунов (лыжные гонки) 1go casino бк букмекерская контора приложения букмекерских контор фреш казино официальные букмекерские конторы
DiskiPlus 1×bet 1хбет DiskiPlus почему в казино нет окон <a href=https://diskiplus.ru>DiskiPlus Скоробогатова Ольга Николаевна порно</a> DiskiPlus Юдаева Ксения Валентиновна порно DiskiPlus порно с Елена Никитина, скелетонистка <a href=https://diskiplus.ru>DiskiPlus casinos winning</a> DiskiPlus Александра Бортич DiskiPlus сайты казино DiskiPlus casino официальный зеркало DiskiPlus букмекерские конторы pin DiskiPlus Фастова Елена Владимировна порно DiskiPlus 1×bet DiskiPlus вавада казино
#191 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
слот casino Фастова Елена Владимировна порно <a href=https://krtka.info/>1×bet на андроид бесплатно</a> казино большая порно с Голикова Татьяна Алексеевна <a href=https://vestnik-jurnal.com/>bet casino</a> casino бонус бывшие казино порно с Голикова Татьяна Алексеевна pinco casino скачать букмекерскую контору на андроид пин ап casino фреш казино
DiskiPlus ramenbet casino DiskiPlus casino buzz <a href=https://diskiplus.ru>DiskiPlus пин ап casino</a> DiskiPlus casino DiskiPlus 1×bet официальный сайт 1×bet xyz <a href=https://www.diskiplus.ru>DiskiPlus kent casino регистрация</a> DiskiPlus букмекерская контора скачать приложение DiskiPlus porno Мария Шарапова DiskiPlus retro casino DiskiPlus pin up casino top top DiskiPlus лучшие бесплатные онлайн казино DiskiPlus Валентина Матвиенко порно DiskiPlus casino зеркало сегодня рабочее
#192 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино промокод 1×bet <a href=https://slon-ru.com/>casino официальный сайт</a> казино 1 Петрова Ольга Викторовна порно <a href=https://specreporter.com/>порно с Илья Осипов (киберспорт)</a> мобильные букмекерские конторы Нургалиева Эльвира Рамиловна порно рабочее казино симулятор казино вавада казино casino приложения casino зеркало сегодня рабочее
DiskiPlus Елена Лядова DiskiPlus порно с Анастасия Потапова, теннисистка <a href=https://diskiplus.ru>DiskiPlus винлайн букмекерская контора официальный сайт</a> DiskiPlus официальные сайты казино DiskiPlus скачать 1×bet на андроид бесплатно <a href=https://www.diskiplus.ru>DiskiPlus up casino зеркало</a> DiskiPlus Кузнецова Анна Юрьевна порно DiskiPlus как выиграть в казино DiskiPlus порно с Елена Никитина, скелетонистка DiskiPlus играющие казино DiskiPlus скачать сайт букмекерской конторы DiskiPlus казино смотреть онлайн DiskiPlus kent casino регистрация
#193 Charlesgunnyhttp://filmkachat.ru
1× slots сайт
Такие поощрения позволяют бесплатно протестировать новое казино, разобраться с игровым процессом интернет слотов, заработать и исключить небольшую сумму денег. <a href=http://filmkachat.ru/>1×slots бонус за регистрацию</a> <a href=https://elearn.ellak.gr/mod/forum/discuss.php?d=8504#p51754>https://elearn.ellak.gr/mod/forum/discuss.php?d=8504#p51754</a> В основном случаев бесплатные бонусы начисляются в кредитах, коие нельзя незамедлительно вывести со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти требования принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д.). О нем читайте ниже.С не отыгранным бонусом воспрещается превышать объем наибольшей ставки. Нарушение сего условия будет аннулирование выигрыша. 1×slots сайт зеркало <a href=http://vipblinds.ru/index.php?subaction=userinfo&user=equableale34>http://vipblinds.ru/index.php?subaction=userinfo&user=equableale34</a> Бездепозитные бонусы казино за регистрацию в 2022 году — это вероятность сыграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой или количеством безвозмездных вращений без внесения депозита. Не путайте деморежим с реальной забавой без необходимости внесения депозита.Свежий бонус начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в пользовании своими, а в случае отыгрыша оператор возможность ввести ограничение на вывод средств.
x1 slots 1хслотс регистрация перейти на 1×slots
1×slots актуальное зеркало Бесплатный приз – кредиты, коие онлайн-казино начисляет посетителю, не заставляя его пополнять игровой счет.Прибывшие на акк деньги бездепозитные бонусы предназначаются, главном, лишь для свежеиспеченных пользователей, коие ранее не имели личного аккаунта в данном казино. Исходя из этого, в ранее у игрока был сделан депозит, то, по всей вероятности, у него больше не будет способности рассчитывать на получение такового приза в конкретном заведении. <a href=http://dongnampack.co.kr/bbs/board.php?bo_table=free&wr_id=279854>http://dongnampack.co.kr/bbs/board.php?bo_table=free&wr_id=279854</a> 1×slots зеркало видели такую регистрацию на Вы не в коем случае ни же рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, научится регулировать изменять ставки и полосы, исследовать бонусные забавы и их выигрышные комбинации, ну конечном просто зарядится кучей впечатлений! Ведь вы будите выступать на бонусные средства, коие можно отыграть и исключить, не просто на демо счет, что, этим наиболее адреналин в крови более повысится а пульс забьется с частым ритмом!Обыкновенные бездепозитные бонусы в размере от трех до двадцати $ сделаны для того, дабы в игры заходили все свежие и свежие игроки. Здесь, вероятнее всего, будет ограничение на наибольший выигрыш. Важно, дабы перед наименьшим вкладом был отключен бонус за первое пополнение счета, и игрок не попадет на повторный вейджер.
1хслотс 1хслотс регистрация перейти на 1×slots
Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала резвые выводы. Фишка выплат что, собственно довольно выбрать платёжный инструмент и показать необходимую. В большинстве случаев деньги зачисляются на электрические кошельки в течение 15 мин., а на банковские карты – 1–3 трудящихся денька.Верификация аккаунта. Лучше подтвердить лицо незамедлительно в регистрации, чтобы потом не было проблем с выводом средств. Верификация может протекать 2-мя способами: Необходимость отыгрыша. Вейджер ситуации повыше, чем для призов за депо. И пока свои не отыграны, вывести их нельзя.Список так называемых «запрещенных территорий» прилагается к правилам бонусной программки игорного портала. Обязательно выясните, распространяются ли на вас подобные наказания. <a href=http://www.cs-tygrysek.ugu.pl/member.php?action=profile&uid=82929>http://www.cs-tygrysek.ugu.pl/member.php?action=profile&uid=82929</a> Высокая конкуренция в разделе азартных игр доказывает операторов завлекать посетителей разнообразными промоакциями. Благодаря этому у гостей бывает возможность получить бонусы в казино за регистрацию без депо. Воспользоваться этим предложением возможно, минуя процедуру внесения средств на игровой счет, просто активировав аккаунт на веб-сайте. Наш экскурсовод по бездепам поможет выбрать самую симпатичную бонусную программу, разузнать верховодила получения такого гонорары и распорядиться им с наибольшей выгодой. 1 x slots Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных требований, не неотъемлемой верификации. Если на веб-сайте предусмотрена обязательная процедура доказательства личности, то исключить выигрыш получится только в ревизии данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий лицо.
1×slots регистрация 1×slots casino c2d ru
Когда идет о денежных призах, казино практически устанавливают условия вейджера, коие нужно выполнить, чтобы вывести выигрыш. 4. Заберите подарок. Чаще всего бонус активизируется сразу в регистрации. Но посещают истории, когда нужно забежать в собственный кабинет либо написать в саппорта. Фриспины – безвозмездные вращения с фиксированной ставкой, которые возможно использовать в конкретных игровых автоматах.Выбор любого интернет казино на нашем сайте. В описании к каждому Вы можете разузнать, что получите за творенье аккаунта. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=http://www.goroddetstva.ru/blogs/nakhodka/redico.php>http://www.goroddetstva.ru/blogs/nakhodka/redico.php</a> Фриплей-бонусы. Бонусы за безвозмездную забаву есть только в неких клубах. Они зачисляются сразу последствии творенья профиля и срабатывают непродолжительное время. Если у вас нет медли истратить средства, они просто завершатся. Что касается медли, в большинстве случаев призы срабатывают на 1-го часа.Благодаря программке преданности от игорного заведения, возможно взять хороший старт и без дополнительных вложений запустить видеослоты. Кроме такого, возможно рассчитывать на реальную фортуну и получить, без инвестиции собственных денег, большой выигрыш.
1×slots casino зеркало
Для получения приза надо(надобно) ознакомиться с программой лояльности казино и сделать ставки на сумму, нужную для перехода на следующий уровень.Возможность протестировать новые игры, не рискуя личностными своими и разработать собственную стратегию забавы. <a href=http://clips.tj/user/WalterFooms/>http://clips.tj/user/WalterFooms/</a> При пользовании бездепозитным призом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют некоторое видов лимитов: 1×slots зеркало регистрация Вознаграждения за получение VIP-статуса ? начисляются масштабах программки лояльности при достижении еще значения или выдаются индивидуально менеджерами службы поддержки.Бездепозитные призы реальными средствами, коие можно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадались.
<b>Смотреть еще похожие новости:</b>
<a href=http://forums.capefeargames.com/viewtopic.php?f=12&t=415535>1х слот 1хслотс регистрация перейти на 1×slots</a>
<a href=http://cambrigerp.forumex.ru/viewtopic.php?f=21&t=8474>казино 1×slots</a>
<a href=http://nakupnidivadlo.cz/index.php/forum/3-pripominky/46630-https-sk-servi?start=90#241324>1хслот официальный сайт зеркало</a>
<a href=https://forum.motobuys.com/showthread.php?tid=97034>1×slots зеркало регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если вы бывалый игрок, вы обязаны аристократия, что бонус без депозита – редкая находка. Тем ниже, мы раз изучаем интернет, чтобы найти вам превосходнейшие бездепозитные предложения.
#194 Charlesgunnyhttp://filmkachat.ru
1×slots казино зеркало
Мы проделываем ударение на ключевых положениях правил, рассказываем о территориальных ограничениях и кратко информируем о иных акциях обговариваемого казино. <a href=http://filmkachat.ru/>1×slots регистрация на официальном сайте</a> Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, solid только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Бывают ли бездепозитные бонусы без вейджера? Бывают, в у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино. <a href=https://linklist.bio/lexxeagle>https://linklist.bio/lexxeagle</a> Вейджер (или вагер) ? это наименьшая сумма ставок, коию нужно устроить для вывода денежного приза. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение. онлайн казино 1×slots <a href=https://buyfags.moe/User:AundreaDeMaistre>https://buyfags.moe/User:AundreaDeMaistre</a>
1×slots зеркало сайта
Мы собрали и выпустили список превосходнейших бездепозитных казино с бонусами за регистрацию, коие гарантируют щедрые выигрыши и мгновенные выплаты.Как правило, новоприбывшие игроки начала желают ознакомиться с методами ввода и вывода денежных средств и сроки выполнения поданных заявок чтобы конкретно осознавать, как стремительно у вывести свой казино бонус за регистрацию без депо на электрический кошелек либо же банковскую карту. К счастью для всех играющих, внутри конкретных холдингов, все казино конкурируют меж собой. Ведь если бы определенную фирму давало только одно онлайн-заведение, то ли бы клиенты заметили казино с бонусом за регистрацию и возможность бы рассчитывать лишь на вознаграждение в виде приза на 1-ое вложение. К любому заведению периодически стопам привлекать свежих игроков, собственно, в, только на руку всем играющим. 1×slots официальный demo регистрация в 1×slots casino Суммы сходственных услуг, в, колеблются от трех до двадцати $, а вейджер на эти средства обязан сочинять от 30 до шестидесяти раз. Зачастую, наивеличайшая сумма выигрыша здесь составит от одной до 2-ух сотен $. Если игры выиграет больше, то все средства имеют быть списанными до очень разрешенного выигрыша. Здесь бывает смысл выводить еще несуществующие деньги на собственную платежную систему и далее находить заведение с благоприятными под данную необходимую релоадом или бонусом за первое пополнение счета. Есть несколько подвидов бездепозитного гонорары, предлагаемого великим количеством заведений.При игре на бонусные средства воспрещается играть в игровые автоматы с современным джекпотом и игры из радела live casino. Кроме как, некоторые казино дают бездеп на один либо несколько определенных слотов, и в иных забавах Вы не сможете на их выступать. <a href=https://kr-osvita.gov.ua/user/Davidclopy/>https://kr-osvita.gov.ua/user/Davidclopy/</a> При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток. 1хлот регистрация в 1×slots casino
1×slot зеркало рабочее регистрации на телефон придет
Для верификации номера телефонного, в личном профиле изберите опцию „Подтвердить номер телефона“ и введите в отвечающее фон код, приобретенный в sms-сообщении. <a href=https://bbs.airav.cc/home.php?mod=space&uid=2627234>https://bbs.airav.cc/home.php?mod=space&uid=2627234</a> В каждом казино с бездепозитным призом учтены вейджеровые обстоятельства. Это единственный «подводный камень», который стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, нужно устроить определённое число ставок. Чем круче бонус, тем труднее выполнить условия, и наоборот. 1 x slots casino
1×slots официальный сайт скачать
<a href=https://ewebtalk.com/showthread.php?tid=14958&pid=21104#pid21104>1 хслот регистрация в 1×slots casino</a> Хотя благотворительные бонусы начисляются без депо, не исключено, что вас придется вносить деньги. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты лишь в такого, как свежий заказчик первый пополнит игровой счет. 1хслотс рабочее зеркало <a href=http://trj.easyye.com/home.php?mod=space&uid=140092&do=profile>http://trj.easyye.com/home.php?mod=space&uid=140092&do=profile</a> Казино выводит деньги только на ту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного приза, Вам поначалу нужно пополнить счет. В некоторых клубах узкий список способов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с данных платежных способов, которые доступны для вывода.
1×slots бонус за регистрацию
<a href=http://d668804q.beget.tech/user/Stevenintal/>http://d668804q.beget.tech/user/Stevenintal/</a> Постарайтесь отыграть вейджер, дабы замечена возможность оставить заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электрической кошелёк, карту, аппарат.Прежде всего, не запамятовывайте периодически заглядывать на страницу обзоров бездепозитных бонусов. Они шаг за шагом осматривают более занимательные предложения основных игорных порталов. 1×slots зеркало 1хслотс регистрация перейти на 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=http://kamadofraudforum.org/profile.php?mode=viewprofile&u=46209>рабочее зеркало 1хслотс</a>
<a href=http://duchyofholste.orzweb.net/space.php?uid=214409>1×slots зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Как лишь получите бездеп в казино, всё точно не забывайте инспектировать электронную почту. Некоторые игорные клубы каждый веселят активных гэмблеров приятными призами. Чаще всего получить подарок возможно в преддверии праздника, на день рождение, за привлечение друга. А того распространённым бонусом считается надбавка к депозиту. Нужно чем пополнить счёт, и азартное заведение прирастит его на 50–100%. Главное преимущество спинов – возможность изучить различные слоты. Также удастся насладиться бонусными раундами, испытывать удачу в риск-туре и преувеличить выигрыш за счёт особенных символов. Однако не только игровой процесс заслуживает внимание, как какого-либо сосредоточиться на реальном выигрыше.
#195 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пари букмекерская контора скачать casino на андроид <a href=https://t.me/vchkogpu_ru>casino сегодня</a> casino андроид vavada casino <a href=https://kompromat1.online/>7k casino официальный сайт</a> мелбет букмекерская контора 1×bet зеркало на сегодня 1×bet xyz официальные букмекерские конторы скачать up casino официальный 1×bet официальный 1×bet xyz casino ап 7k casino зеркало
DiskiPlus смотреть фильм казино DiskiPlus porno Юлия Канакина <a href=https://www.diskiplus.ru>DiskiPlus водка казино</a> DiskiPlus Комарова Наталья Владимировна порно DiskiPlus порно с Юлия Ефимова <a href=https://diskiplus.ru>DiskiPlus порно с Алина Загитова</a> DiskiPlus порно с Дронова Александра Викторовна DiskiPlus porno Александра Степанова, фигуристка DiskiPlus фильмы казино рояль DiskiPlus казино вулкан DiskiPlus порно с Владимир Минеев (ММА) DiskiPlus 1×bet xbet xyz DiskiPlus почему в казино не бывает настенных часов
#196 Charlesgunnyhttp://filmkachat.ru
x1 slots регистрация в 1×slots casino
Иногда в качестве бездепа, казино дарит наименьший бонус (до 50 руб. ), из-за которого надо заморачиваться. <a href=http://filmkachat.ru/>рабочее зеркало 1хслотс</a> Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы появилась возможность вывести выигрыш.Превышение наибольшей ставки при отыгрыше. Система механически не предостерегает о превышении ставки, потому о несоблюдении управлял игрок может узнать теснее в подачи запроса на вывод средств. <a href=https://paperpage.in/blogs/288401/Transform-Your-Vision-with-3D-Exterior-Rendering-Services>https://paperpage.in/blogs/288401/Transform-Your-Vision-with-3D-Exterior-Rendering-Services</a> Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 $. Если выдаются фриспины, их число редко превышает нескольких 10-ов даровых вращений. 1×slots регистрация 1×slots casino 777 online <a href=https://pipewiki.org/wiki/index.php/1×slots_%D0%9E%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9_%D0%A1%D0%B0%D0%B9%D1%82_%D0%A1%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C_%D0%9D%D0%B0_%D0%90%D0%B9%D1%84%D0%BE%D0%BD>https://pipewiki.org/wiki/index.php/1×slots_%D0%9E%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9_%D0%A1%D0%B0%D0%B9%D1%82_%D0%A1%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C_%D0%9D%D0%B0_%D0%90%D0%B9%D1%84%D0%BE%D0%BD</a> Выиграть настоящие деньги в казино не пополняя счет – сложно, хотя возможно. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными призами и начните выступать на бонусные средства. По статистике в 10-ти заведений возможно заработать маленькую необходимую средств за счет бонусных средств.Подтвердите регистрацию, чтобы активировать Бездепозитный приз с выводом, потребуется наполнить собственный профиль. Заполните пустующие поля настоящими данными о себя.
1×slots официальный сайт скачать
Бездепы имеют заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами.Все безвозмездные призы кажутся соблазнительными. Кто же откажется от возможности сыграть в онлайн-казино, не рискуя деньгами, хотя получая выигрыши. Но далеко не все бездепозитные бонусы мере привлекательны для рассудительного посетителя. казино 1× slots официальный сайт В основном случаев бесплатные бонусы начисляются в кредитах, которые невозможно сразу вывести со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже.В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с бесплатных вращений. Прибыль, коию Вы заработаете на таком бездепе возможно ставить на вывод без какого либо отыгрыша. <a href=https://forum.kainkalabs.com:443/member.php?action=profile&uid=21232>https://forum.kainkalabs.com:443/member.php?action=profile&uid=21232</a> Верификация аккаунта. Лучше доказать лицо незамедлительно в регистрации, дабы потом не было проблем с выводом денег. Верификация может протекать 2-мя способами:Автоматы неспроста считаются самым популярным азартным развлечением. Чтобы усвоить управление и правила, потребуется всего количество минут. Ваша задачка сделать ставку, найти количество рабочих линий и можно крутить барабан. Если дисплее выпадет выигрышная композиция – вы выиграли! С этой задачей для помогут справится бездепозитные бонусы казино. 1×slots сайт Игрокам стоит принимать приветственный бонус как гарантированный метод получить крупный выигрыш, хотя это отличная возможность без затрат оценить возможностей казино.
1×slot регистрация
Фриспины — безвозмездные вращения, коие дозволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины числятся самым модным и предпочтительным видом приза — бесплатные вращения иногда эффективнее и веселее в отыгрыше, чем другие виды бездепов.Особую изюминку видео слотам присваивают уникальные символы. С их в активизируются разные бонусы. Вы можете запустить вспомогательный уровень и прирастить сумму выигрыша. Есть знаки, которые заменяют ненужные составляющие и сами делают выигрышные комбо. Не стоит забывать и тему бонус-тур. После каждого счастливого спина есть шанс прирастить необходимую выигрыша в 2 или четыре раза. С другой стороны, намного проще забрать бездепозитные фриспины за регистрацию в казино и прямо момент начать вертеть барабаны в наилучших слотах. Главная особенность спинов сомнений, что они предусмотрены для топовых автоматов. Удастся столько пройти дополнительные раунды, но и увеличить необходимую выигрыша, заработать респины и другие внутриигровые презенты. <a href=http://kidsnighttonight.com:/forums/member.php?action=profile&uid=356240>http://kidsnighttonight.com:/forums/member.php?action=profile&uid=356240</a> Если ординарными словами, бездепы – это определённая сумма средств или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно брать презенты. Но есть кое-какие аспекты. Существуют игорные дома, коие перед тем как начислить призы требуют привязать аппарат, дать копии документов.В зависимости от онлайн заведения любой из них имеет для предложить как бездепозитные средства, так и бездепозитные фриспины, коие последствии удачной регистрации упадут вам на ваш игровой баланс. 1 хслот регистрация в 1×slots casino Онлайн гемблинг развивается с любым днем больше и больше, новые бренды создаются не по денькам а по часам. Новые интернет казино проделывают вступительные промоакции для игроков, для того что бы зарекомендовать себя, и тем наиболее предлагают бездепозитные бонусы за регистрацию, собственно бы не пропустить эту вероятность — как воспользоваться новым бездепом, советуем навещать наш вебсайт как можно чаще, самое смачное и свежие будет добавляться в этом же перечне.Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации бонуса без депозита. Внимательно прочитайте до конца. Многие новенькие делают ошибки на шаге регистрации и поэтому возможности получить презент.
1×slots актуальное зеркало
Выполнив все притязания оператора, клиент имеет оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем не более суток. Если дополнительно потребуется пройти процедуру верификации, то срок возрастает до 1–2 трудящихся дней. Для перевода применяются банковские приборы и электронные платежные системы. Второй метод подходит никакого, например как основная транзакций ситуации осуществляются моментально. В связи со спецификой функционирования банков обработка платежей имеет занять до нескольких трудящихся дней. Шаг 5. Использование и отыгрыш. Бездеп обязан быть использован в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера.Выбирая бесплатный приз, пристально изучайте правила. Убедитесь, собственно вам возможно на роль в акции. Уточните, в каких забавах можно выполнять обстоятельства вейджера. При надобности задавайте вопросы представителям саппорта. Нет. Казино раздают бесплатные призы за регистрацию, чтобы, чтобы, чтобы заказчик мог ознакомиться с игровым заведением. А чтобы исключить его, необходимо выполнить условия отыгрыша. 1× slots зеркало <a href=https://radioizba.ru/communication/forum/?PAGE_NAME=profile_view&UID=22066>https://radioizba.ru/communication/forum/?PAGE_NAME=profile_view&UID=22066</a>
1×slots официальный сайт мобильная версия скачать
Большинство интернет-казино из нашего топ-10 готовы порадовать вас эксклюзивными акциями. Читайте о их в обзорах и на форуме.Постарайтесь отыграть вейджер, чтобы появилась возможность забыть заявку на выплату. Кстати, на всех веб-сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электрической кошелёк, карту, телефонный. С иной стороны, гораздо легче арестовать бездепозитные фриспины за регистрацию в казино и прямо сейчас начать вращать барабаны в лучших слотах. Главная необыкновенность спинов сомнений, собственно они предназначены для топовых автоматов. Удастся не пройти вспомогательные раунды, хотя и прирастить сумму выигрыша, заработать респины и другие внутриигровые презенты. <a href=http://jinos.com/bbs/board.php?bo_table=free&wr_id=1628633>http://jinos.com/bbs/board.php?bo_table=free&wr_id=1628633</a> Вейджер (либо вагер) ? это наименьшая сумма ставок, коию нужно устроить для вывода денежного приза. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение.Чем ниже велечину вейджера, что, этим легче отыграть и вывести бонус. Если Вы расчитываете заработать на бездепе, а не просто ознакомиться с новым игровым клубом, то стоит игнорировать бонусов с высочайшим вейджером их почти не реально отыграть. С ними Вы можете лишь протестировать игры заведения. скачать 1×slots на андроид мобильная версия Бездепозитные бонусы прекрасный вариант бесплатной игры в игровые автоматы. Многие пользователи сети не понимают, что в казино можно начать выступать безусловно бесплатно, а потом исключить выигрыш на банковскую карту либо электронный кошелек, другие не доверяют онлайн казино, а третьи успешно играют и выигрывают – и подчас достаточно великие суммы.В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и когда неоднозначных ситуаций нет возможности куда-то пожаловаться и доказать собственную правоту.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.csuchen.de/bbs/viewthread.php?tid=854604&pid=1268723722&page=354&extra=#pid1268723722>1хслотс рабочее зер</a>
<a href=http://phpbb2.00web.net/viewtopic.php?p=95153#95153>1×slots официальный сайт скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Как только вы отыграли вейджер и свои с бонусного баланса перебежали вас на реальный счет, Вы отважно сможете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (устроить наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депо).
#197 Normbbggrit
It is astonishing.
Who are the Jews
https://www.youtube.com/…/SEB3w3A98rU
it is our money
https://www.youtube.com/…/wiu9N1H0Huc
The most devastating genocide in the world is being carried out by the follwoing :
1– AIPAC, brows ( https://www.youtube.com/watch?… ). 2– Miriam Adelson brows https://www.youtube.com/watch?…. 3– Elon Musk. 3– Timothy mellonand brows https://www.youtube.com/…/1XJ893-kAh0 4-The Evangelical Church,
Which kill innocent women and children in Gaza.
AIPAC ( https://www.youtube.com/watch?… ) and the Evangelical Church are perpetrating one of the most catastrophic genocides in history, targeting innocent women and children in Gaza.
These organizations have supplied Israel with explosives to facilitate their acts of genocide.
Gaza has been designated a disaster zone, severely lacking in essential resources for survival.
AIPAC, The Evangelical Church, Miriam Adelson, Elon Musk, and timothy mellon and America tax payer,, and Israel have devastated 90% of Gaza, resulting in the destruction of 437,600 homes and the loss of one million lives, including 50,000 individuals currently trapped under debris, with 80% of the casualties being women and children.
They have also obliterated 330,000 meters of water pipelines, leaving the population without access to drinking water.
Furthermore, over 655,000 meters of underground sewage systems have been destroyed, depriving residents of basic sanitation facilities.
The destruction extends to 2,800,000 meters of roadways, rendering transportation impossible for the affected population.
Additionally, 3,680 kilometers of the electrical grid have been dismantled, leading to widespread power outages.
The assault has resulted in the demolition of 48 hospitals, eliminating critical healthcare facilities for those in need.
Moreover, the actions of AIPAC, The Evangelical Church, Miriam Adelson, Elon Musk, and timothy mellon and America tax payer,, and Israel have disrupted the education of over 785,000 students, with 494 schools and universities being completely destroyed, many due to aerial bombardments.
They have also targeted 981 mosques, effectively silencing the prayers of the homeless seeking divine assistance.
As a result of these actions, more than 39,000 young children have been left orphaned, without parents or guardians to care for them.
I must emphasize that the historical context of warfare has never witnessed a scenario where 80% of a nation has been devastated, 100% of its populace has been uprooted, and 50% of the casualties are children.
It is imperative to recognize the gravity of the situation.
Organizations such as AIPAC and the Evangelical Church in America are contributing to what can only be described as genocide.
https://www.youtube.com/…/IrX9v6DKH1g
The implications of American taxpayer funding in the context of Israel's actions against innocent children are alarming.
1. An examination of Israel's precarious situation is warranted.
https://www.youtube.com/watch?…
2. The influence of financial power, often associated with certain groups, plays a significant role in these dynamics. Further information can be found through the provided link.
https://mega.nz/file/FqhzGKbB#…
3. Insights into the perspectives of U.S. leadership regarding AIPAC and the Evangelical Church can be explored through the following resource.
https://www.tiktok.com/…994579680542?…
The tragic reality of innocent children being harmed by powerful Israeli forces utilizing American weaponry is evident in various media reports.
https://www.youtube.com/watch?…
It is crucial to stay informed by accessing reliable news sources.
https://www.youtube.com/watch?…
Laws of jews Taurãt (Torah) wich is a part of the Bible
We ordained in Taurãt for them: “A life for a life, an eye for an eye, a nose for a nose, an ear for an ear, a tooth for a tooth and for a wound an equal retaliation."
The Torah, which is part of the Bible, has commanded that the same be done to the Jews. The order of the Torah, which is part of the Bible, is to immediately kill any Jew you see on the street. Since the Jews in Gaza have also killed women and children, you should kill any Jews – men, women, and children – as soon as you see them, whether on the street or anywhere else. And because they have killed everyone in Gaza without mercy, you must do the same to them. If you carry out these actions, you will be following the order of the Torah, which is part of the Bible, and you will be rewarded by going to heaven.
#198 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Гатагова Ольга Анатольевна букмекерская контора скачать приложение <a href=https://slon-ru.com/>Кузнецова Анна Юрьевна порно</a> порно с Евгения Медведева казино онлайн <a href=https://t.me/vchkogpu_ru>Анна Михалкова</a> 1×bet зеркало слоты 1×bet xyz online casino pin up casino скачать 7k casino сайт порно с Федор Чалов (футбол) порно с Аделия Петросян (фигурное катание) 1×bet на сегодня
DiskiPlus букмекерская контора официальный сайт DiskiPlus казино можно <a href=https://www.diskiplus.ru/>DiskiPlus up casino официальный</a> DiskiPlus Окладникова Ирина Андреевна порно DiskiPlus почему в казино нет часов <a href=https://diskiplus.ru>DiskiPlus 1×bet слоты 1×bet xyz</a> DiskiPlus porno Вера Бирюкова, гимнастка DiskiPlus 1×bet официальный слоты DiskiPlus casinos xyz DiskiPlus скачать 1×bet на андроид бесплатно DiskiPlus лучшая казино DiskiPlus пинап казино DiskiPlus casino автомат
#199 Charlesgunnyhttp://filmkachat.ru
casino 1×slot
Диапазон ставок, которые вправе сделать игрок, того лимитирован. Обычно ставить можно маленькую необходимую — пределах 10–30 руб. За одно вращение. <a href=http://filmkachat.ru/>1хслот 1хслотс регистрация перейти на 1×slots</a> Бездепозитные бонусы, как уже понятно, считаются оригинальной вероятностью приступать к игровому процессу абсолютно бесплатно, то есть выступать в интернет казино безвозмездно и на существующие средства незамедлительно в регистрации аккаунта. Автоматы с этим депо шансы замерзнуть прекрасной вероятностью сыграть для почитателей азарта с определенными лимитированиями в финансах.Например, игрок получил 500 руб. При твореньи аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., потребуется сделать 875 спинов для полного отыгрыша. <a href=https://s.id/kalinka0588>https://s.id/kalinka0588</a> Если простыми словами, бездепы – это определённая сумма средств либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать презенты. Но есть кое-какие аспекты. Существуют игорные жилища, которые перед что, этим как начислить бонусы настоятельно привязать телефон, предоставить копии документов. 1хслотс рабочее зеркало <a href=http://sad1nytva.ru/index.php?subaction=userinfo&user=clammyruin8>http://sad1nytva.ru/index.php?subaction=userinfo&user=clammyruin8</a> Предложения с бездепозитными призами за регистрацию разрешают свежим заведениям заинтересовать аудиторию на свой вебсайт. А игроки тому получают вероятность играть на реальные деньги без депозита в казино и заработать маленькой стартовый капитал, кот-ый разрешено исключить на карту банка либо электронный кошелек.
1×slot рабочее зеркало
1×slots официальный сайт зеркало рабочее Бездеп с фриспинами может охватывать всю коллекцию игр на сайте либо разработки одного провайдера. Обычно предлагается конкретный перечень автоматов. Он указывается в положениях о проведении промоакции. Выигрыш имеет быть выведен в такого, как пользователь отыграет данную сумму. Возможность оценить глубокий возможностей слотов — главное совершенство данной разновидности. Игроку становятся доступны те опции, которые отсутствуют в демонстрационном режиме, а вероятность выиграть настоящие деньги добавляет ясных азартных чувств. <a href=http://www.musichunt.pro/blogs/view.htm?id=80204>http://www.musichunt.pro/blogs/view.htm?id=80204</a> Хотя безвозмездные призы начисляются без депозита, не исключено, что вам понадобиться заносить средства. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только после того, как новый клиент раз пополнит игровой счет. x1 slots 1хслотс регистрация перейти на 1×slots
1×slots официальный сайт зеркало
Чаще всего, известные сервисы, эти как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно неотъемлемое управляло. Финансовые средства выводятся только спустя ту платежную систему, которой пользовались для пополнения депо. Если же игрок получил бездепозитный покерный бонус, потребуется восполнить счет на наименьшую сумму, кот-ая составляет обыкновенно 10 долларов. Подарки на определенные даты отличаются критериями получения. Если одобрение начисляют игроку на денек рождения, то сумма обычно зависит от совместного объема депозитов за год.Вывод выигрыша с бездепозитных бонусов казино – щедрый подарок от азартных клубов. Но чтобы исключить свой заработок, нужно выполнить ряд критерий: <a href=http://ais-avto.ru/bitrix/redirect.php?goto=http://xn----8sbnbncmcmbcxgowsj.xn–p1ai/bitrix/redirect.php?goto=http://utanrmp.or.ke/sites/all/modules/pubdlcnt/pubdlcnt.php?file=https://teletype.in/@urist555/s2yV6jXww9V>http://ais-avto.ru/bitrix/redirect.php?goto=http://xn----8sbnbncmcmbcxgowsj.xn–p1ai/bitrix/redirect.php?goto=http://utanrmp.or.ke/sites/all/modules/pubdlcnt/pubdlcnt.php?file=https://teletype.in/@urist555/s2yV6jXww9V</a> Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют важную информацию о not the slightest down payment bonuses и других предложениях.В неких онлайн казино для получения бездепозитных призов не достаточно просто зарегистрироваться на сайте клуба и доказать свои контактные данные. Дополнительно требуется активация промокода. 1×slots официальный сайт зеркало Но есть азартные заведения, готовые просто так вручить деньги на игру. Для этого довольно создать профиль. Чтобы исключить выигрыш, сперва необходимо выполнить вейджеровые условия, прописанные в критериях получения бездепа.Помните, что в неких забавах сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки считаются как отыгранные деньги, момент как в слотах идет в зачет все 100% суммы.
1×slots регистрация то дальше необходимо пройти
Бонус без депо за регистрацию в казино (бездепозитный бонус) – это денежный презент от клуба, кот-ый начисляется на акк игрока в регистрации в казино. Кроме творения учетной записи, для получения бездепа, очень нередко требуется ещё и подтвердить контактные данные игрока и/или активировать специальный промо-код.На критериях отыгрыша безвозмездных бонусов идет тормознуть подробнее. С ними связаны аспекты, которые невозможно забыть без внимания. Таким образом, заведение пытается продемонстрировать себя своим потенциальным геймерам, а подобный рекламный ход как казино приз без депо за регистрацию завлекает довольно большое внимания к игорному заведению и обеспечивает постоянный струю свежих посетителей и грядущих посетителей игрового интернет клуба. Изучить управляла и обстоятельства получения бездепозитных призов казино, Вы можете у нас на веб-сайте в разделе с призами либо на официальном сайте избранного Вами казино. Если возможности найти необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электрической почте. 1×slots подтвердит вашу регистрацию если говорить <a href=http://www.dwise.co.kr/bbs/board.php?bo_table=free&wr_id=165468>http://www.dwise.co.kr/bbs/board.php?bo_table=free&wr_id=165468</a> Бездепы могут заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами.Бонус за регистрацию в казино выдается лишь раз раз на одного игрока. Но бывают вспомогательные промоакции, масштабах коих бездепы расступаются для неизменных клиентов и такие презенты Вы можете получить больше 1-го раза.
зеркала 1×slots
Бездепозитный приз по промо-коду будет доступен для игры, лишь в случае когда Вы активируете специальный бонусный код в разделе с призами либо укажите промокод при регистрации на веб-сайте. В некоторых случаях, не активации кода, придется доказать контактные данные игрока и заполнить анкету посетителя. 2. Создать свежий профиль. Для регистрации надо(надобно) наполнить небольшую анкету или зайдите в личный кабинет при помощи соц сеток;С не отыгранным бонусом запрещается превосходить объем максимальной ставки. Нарушение этого условия последствия аннулирование выигрыша. <a href=https://www.safe1.co.kr/bbs/board.php?bo_table=free&wr_id=493474>https://www.safe1.co.kr/bbs/board.php?bo_table=free&wr_id=493474</a> Многие азартные клубы ограничивают необходимую вывода заработанную на призе. Сколько б Вы не выиграли, больше, указанной в описании акции, суммы Вы не можете исключить. Разница несомненно аннулирована, Вы и не сможете делать на нее ставки.После потребуется внести идентификационный платёж. Это стращает начинающих больше всего. Нужно устроить наименьший депозит в 100–500 руб. Таким образом служба защищенности увериться в, что платёжный метод принадлежит Вам. Данная процедура необходима для обеспечивания безопасности игровых счетов. Пример, Ваш акк взломают и выведут средства на свой кошелёк. Будет крайне неприятно. Поэтому верификация платёжной системы, это необходимый момент. 1хслотс казино зеркало Подтверждение электрической почты – одно из основных критерий, коие есть почти в любом бездепозитном казино. Чтобы верифицировать электрическую почту, достаточно перебежать по активной ссылке в письме, приобретенном от азартного клуба.
<b>Смотреть еще похожие новости:</b>
<a href=http://golfsimclubhouse.com/forum/viewtopic.php?t=1628>1хслотс казино зеркало</a>
<a href=http://pravoslit.ru/forum/obshchee/198550–1×slots-bezdepozitnyj-bonus-za-registratsiyu.html>1×slots бездепозитный бонус за регистрацию</a>
<a href=https://www.one2bay.de/forum/showthread.php?tid=991900>1×slots зеркало рабочее на сегодня</a>
<a href=https://naveg.digital/forum/transformacao-digital-a-saude/1%d1%85%d1%81%d0%bb%d0%be%d1%82%d1%81-%d1%80%d0%b0%d0%b1%d0%be%d1%87%d0%b5%d0%b5-%d0%b7%d0%b5%d1%80%d0%ba%d0%b0%d0%bb%d0%be/>1хслотс рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Можно. Вы постоянно можете отказаться от получения бездепозитного приза за регистрацию в казино, пока Вы не сделаете ставку.
#200 Charlesgunnyhttp://filmkachat.ru
1×slot регистрация
В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая доля игры. Важно, зачастую бездепозитные бонусы в казино выдаются с лимитированиями по наибольшей выплате. В среднем возможно рассчитывать на выгода в некоторое тысяч руб. Как вывести выигрыш с бонуса без депозита. Придётся доказать аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате или прочтите в правилах.Бездепозитный бонус казино 2022 с выводом за регистрацию предоставляет вероятность ознакомиться игроку с лобби выбранного заведения, сориентироваться в выборе игр и проверить качество работы службы. Довольно нередко, начиная игровой процесс, игрок уже не желает останавливаться и проделывает настоящий лепта. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать даром возможно как раз таки с бонусом за регистрацию без необходимости вносить депо. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasin online</a> Воспользоваться бездепом можно не во всех игровых автоматах: казино вдруг уточняет ограничение для клиентов. Конечно, это можно счесть некоторым неудобством для игрока, но ради стоит отметить, что выбор автоматов всё точно остаётся достаточно большим.4. Заберите презент. Чаще всего бонус активизируется незамедлительно последствии регистрации. Но случаются ситуации, когда надо(надобно) забежать в собственный офис или написать в саппорта. <a href=https://www.bunity.com/shopavto>https://www.bunity.com/shopavto</a> Фриспины предназначены для применения в видео слотах. Внимательно ознакомьтесь с критериями – часто их выдают на кое-какие автоматы. В зависимости от клуба, у вас получится устроить определённое число ставок. Кстати, продвинутые игорные жилища разрешают запускать каждых «одноруких злодеев».На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не можете активировать и получить бездепозитный приз. 1×slot зеркало рабочее регистрации на телефон придет <a href=https://deannqqm78867.azzablog.com/30427124/deepnude-the-dark-side-of-ai-technology-and-its-ethical-implications>https://deannqqm78867.azzablog.com/30427124/deepnude-the-dark-side-of-ai-technology-and-its-ethical-implications</a> Некоторые клубы механически начисляют приз на акк игрока в выполнения критерий получения, но бывают истории, когда приз нужно активировать игроку самому. Есть некоторое методов активации бонуса:
1хслот скачать
<a href=http://natalundefinedyafusk.keyforum.ru/viewtopic.php?f=2&t=5609>1×slots официальный сайт зеркало</a> онлайн казино 1×slots Выиграть настоящие деньги в казино не пополняя счет – сложно, но вполне. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными призами и начните играть на бонусные средства. По статистике из 10-ти заведений возможно заработать маленькую необходимую средств помощью бонусных средств. <a href=http://ibaragiya.com/index.php?page=user&action=pub_profile&id=1523720>http://ibaragiya.com/index.php?page=user&action=pub_profile&id=1523720</a> Но никогда не забывайте внимательно разбирать верховодила роли в бонусных акциях. Если вы нарушите но бы одно условие, позднее вы не сможете уладить недоразумение с администрацией. 1х слотс зеркало регистрация в 1×slots casino Высокая конкурентность в разделе азартных игр мотивирует операторов завлекать посетителей различными акциями. Благодаря этому у гостей появляется возможность получить бонусы в казино за регистрацию без депо. Воспользоваться этим предложением возможно, избегая функцию внесения денег на игровой счет, просто активировав акк на веб-сайте. Наш гид по бездепам поможет избрать самую симпатичную бонусную программу, узнать верховодила получения такового гонорары и воспользоваться им с максимальной выгодой.Фриплей-бонусы. Бонусы за бесплатную забаву есть лишь в некоторых клубах. Они зачисляются сразу последствии создания профиля и действуют недолговременное время. Если у вас нет времени израсходовать средства, они просто закончатся. Что дотрагивается медли, в большинстве случаев бонусы срабатывают в течение одного часа.
1 x slots
Но есть игорные заведения, коие готовы просто так жертвовать деньги на игру. Для этого достаточно сделать профиль. Чтобы вывести собственный выигрыш, вас поначалу необходимо выполнить условия отыгрыша, обозначенные в критериях получения бездепозитного депозита. <a href=https://notebooks.ru/forum/user/83156/>https://notebooks.ru/forum/user/83156/</a> Подтверждение регистрации. Казино требуют привязки профиля к электронному адресу и номеру телефонного. Для этого на e-mail отчаливает письмо со ссылкой, а на телефон ? текстовое извещение с кодом.Помните, собственно любые нарушения правил сведут на нет ваши старания, и вы скорее останетесь без начисленного для безвозмездного бонуса. Всегда изучайте правила начисления и условия вейджера. По каким вопросам, на которые вы не помощи отыскать ответы, обращайтесь за разъяснениям и саппорт. 1×slot регистрация Бездепозитные призы казино это экономическая компенсация, предлагаемая юзерам на дармовой базе и вероятность выступать в онлайн казино безвозмездно. Если сопоставлять их с поощрениями за вклад, в средства выдаются лишь впоследствии начального пополнения счета, то бездепозитные гонорары получаются безвозмездно. То есть, играющий получает вероятность создавать ставки на теснее существующие деньги, которые выдаст заведение, исполняя, при этом, обычные деянья, дабы их извлечь (здесь идет речь о регистрация, удостоверении личности с внедрением номера телефона, оформления заказы и т.д. ).
1хслотс казино зеркало
<a href=http://naukova2b.2ua.in.ua/viewtopic.php?f=7&t=4707>casino 1×slot</a> 1×slots зеркало проходить регистрацию это отличный вариант <a href=http://aimvilla.com/bbs/board.php?bo_table=free&wr_id=404201>http://aimvilla.com/bbs/board.php?bo_table=free&wr_id=404201</a> Бездепозитный бонус за регистрацию в казино — это стартовый подарок в виде валютного начисления либо даровых вращений для свежих игроков заведения, для получения которого надо заносить депозит.Простая процедура получения бездепозитного приза, которая займет менее 2-х мин. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные.
1 x slots casino
<a href=http://xn----ptbagsgdho0d.xn–p1ai/index.php?subaction=userinfo&user=needlessbandann>http://xn----ptbagsgdho0d.xn–p1ai/index.php?subaction=userinfo&user=needlessbandann</a> Возможность сыграть вспомогательное соревнование (а времени и некоторое) абсолютно безвозмездно, а выигрыш, же, поступает на счёт игрока.Индивидуальные поощрения выдаются за совершение действий: подписку на аккаунты площадки в соц сетях, установку мобильного приложения или официального клиента для ПК. В большинстве казино действуют программы преданности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на следующий уровень часто сопровождается выдачей бездепа. 1х слотс зеркало регистрация в 1×slots casino Бездепозитные призы за регистрацию в игровых автоматах для хозяев онлайн-казино являются частью маркетинговой кампании, направленной на повышение аудитории сайта. Так они продвигают свои бренды и завлекают новых посетителей.
<b>Смотреть еще похожие новости:</b>
<a href=http://rapbeatsforum.com/viewtopic.php?t=740788>1× slots зеркало</a>
<a href=https://chodilinh.com/threads/1×slots-casino-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5.473787/>1×slots casino зеркало рабочее</a>
<a href=https://forum.motobuys.com/showthread.php?tid=97232>1хслотс официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но есть игорные заведения, коие готовы просто например жертвовать деньги на забаву. Для сего довольно создать профиль. Чтобы исключить собственный выигрыш, для сначала нужно выполнить условия отыгрыша, обозначенные в критериях получения бездепозитного депо.
#201 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
мобильные букмекерские конторы casino скачать <a href=https://sovsekretno.net/>порно с Баталина Ольга Юрьевна</a> Александра Бортич казино онлайн <a href=https://slon-ru.com/>лучшие бесплатные онлайн казино</a> вывод казино Хорова Наталья Александровна порно приложения букмекерских контор pin up casino buzz порно с Елена Никитина, скелетонистка ев казино пин ап casino
DiskiPlus casino официальный сайт DiskiPlus porno Виктория Баркова, легкоатлетка <a href=https://www.diskiplus.ru/>DiskiPlus up casino</a> DiskiPlus букмекерская контора мостбет DiskiPlus букмекерская контора фонбет официальный <a href=https://diskiplus.ru>DiskiPlus 1×bet 1хбет</a> DiskiPlus скачать 1×bet на андроид DiskiPlus 1×bet xbet DiskiPlus приложения букмекерских контор DiskiPlus casino ап DiskiPlus порно с Анна Щербакова, фигуристка DiskiPlus 1×bet 1 DiskiPlus porno Юлия Пересильд
#202 Charlesgunnyhttp://filmkachat.ru
1×slots мобильная версия войти казино
Любой выигрыш по ставке повыше установленного лимита несомненно считаться недействительным. То есть ставка не будет засчитана при отыгрыше, в случае выигрыша его сумма не поступит на счёт клиента — итог забавы будет всецело аннулирован.На нашем веб-сайте Вы отыщите список актуальных свежих бездепозитных бонусов в казино 2022 года. Также, есть много неповторимых услуг, коие доступны только гостям нашего сайта последствии регистрации по нашей ссылке или активации специального промокода. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasin online</a> Наличие у игрока второго аккаунта. Запрещено творить некоторое профилей для неоднократного получения бездепов.Если простыми текстами, бездепы – это определённая сумма средств или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать подарки. Но есть кое-какие нюансы. Существуют игорные дома, коие перед тем как начислить бонусы настоятельно привязать телефон, предоставить копии документов. <a href=https://yoomark.com/content/every-vehicle-owner-inevitably-faces-choice-new-battery-and-decision-often-comes-down>https://yoomark.com/content/every-vehicle-owner-inevitably-faces-choice-new-battery-and-decision-often-comes-down</a> 1×slots регистрация 1×slots casino 777 online <a href=https://ateista.pl/member.php?action=profile&uid=12866>https://ateista.pl/member.php?action=profile&uid=12866</a>
1×slots casino регистрация 1×slots review live
1×slots зеркало на сегодня Первый образующийся вопрос, это, зачем выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают новых игроков. Последним проще начать забаву на средства с презента за регистрацию. Им не пополнять баланс и тратить личные свои. Новички получают бесплатные спины или средства на счёт. С их поддержкою знакомятся с игровым ходом, крутят слоты и делают ставки в рулетке. <a href=http://prokat-instrumentov.ru/index.php?subaction=userinfo&user=thinkablesecret>http://prokat-instrumentov.ru/index.php?subaction=userinfo&user=thinkablesecret</a> 1×slots коды Таким образом интернет казино получает вероятного игрока. Возможно в или подлинном он захочет поиграть на свои деньги. Так трудятся бездепозитные призы в онлайн казино. Здесь очень подходит выражение, бесплатные сыр бывает только в мышеловке. Начинающие игроки имеют не обдумывать опасность азарта. Однако времени осознания делается больше. Это тема для отдельного обсуждения.
1х слотс зеркало регистрация в 1×slots casino
Бонус начисляется игроку сразу последствии регистрации и прохождения верификации в казино и не просит от посетителя внесения депо. Как верховодило, объем бонуса в подобном случае достаточно стыдливый, впрочем дозволяет новеньким познакомиться с забавой без риска настоящими деньгами.Как верховодило, новоприбывшие геймеры в первую очередь желают ознакомиться с способами ввода и вывода валютных средств и сроки выполнения поданных заказов чтобы четко осознавать, как скоро они смогут вывести собственный казино бонус за регистрацию без депозита на электрический кошелек либо же банковскую карту. К счастью для всех играющих, снутри конкретных холдингов, все казино конкурируют между собой. Ведь случае бы конкретную фирму представляло только одно онлайн-заведение, то вряд ли бы посетители увидели казино с призом за регистрацию и возможность бы рассчитывать лишь на вознаграждение повторяющий бонуса на 1-ое вложение. К каждому заведению регулярно стопам завлекать новых игроков, собственно, итоге, только на руку всем играющим. Для получения предоставленных бонусов для пригодиться — ПК или мобильное устройство, и остальное дело за малым. <a href=https://xebecar.com/author/precious23a/>https://xebecar.com/author/precious23a/</a> Законодательство, регулирующее азартные забавы в различных государствах, оказывает на возможности операторов. В итоге юзеры из отдельных регионов сталкиваются с лимитированиями со стороны казино. Это имеет быть как глубокий отказ в доступе, так и невозможность загружать игры отдельных изготовителей. 1×slots официальный зеркало Акционные предложения от казино существуют в различных форматах. Часто бонусы даются в обмен на депо. Игрок вносит платеж и получает средства, бесплатные вращения и другие одобрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — вид приза, который гарантирован за исполнение конкретных действий на веб-сайте:Автоматическая активация может самой комфортной, хотя ручной способ содержит перед ней превосходства. Прежде чем использовать вознаграждение от казино, стоит заблаговременно определить, сколько времени потребуется на исполненье всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деяния приза.
1×slots регистрация на сайте
<a href=http://pravoslit.ru/forum/obshchee/198564–1×slots-kazino-zerkalo.html>1×slots казино зеркало</a> 1×slots мобильная версия войти казино <a href=http://led119.ru/forum/user/117767/>http://led119.ru/forum/user/117767/</a> Составленный экспертами Casino.ru перечень онлайн-казино с бездепозитным бонусом разрешает игрокам сопоставить спецпредложения различных операторов.Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды находятся на данной страничке. Посетитель может расценить условия получения и начать играть на средства без внесения депозита. При этом игроку главно осознавать, на каких критериях и какими методами него вывести полученный выигрыш. Для сего нужно оценить перечень подключенных платежных систем.
1×slots регистрация на официальном сайте
Зарегистрируйтесь. Для регистрации почаще всего достаточно ввести собственный номер телефона и почтовый адресок, после чего установить полученный код из СМС. Возможно, потребуется показать промокод. В правилах акции будет написано, где его надо включать. Иногда это надобно делать при регистрации, иногда — теснее после творенья собственного кабинета, на отдельной странице.Призовые начисления без депозита шансы предоставляться для участия в турнирах онлайн казино. Потратить перечисленные средства возможно необыкновенно в рамках данной промоакции. Условия их проведения в лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, никакого выучить его правила. Например, игрок получил 500 рублей при творении аккаунта и должен отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 рублей, потребуется устроить 875 спинов для полного отыгрыша. <a href=https://www.hogwartsishere.com/1685677/>https://www.hogwartsishere.com/1685677/</a> 1×слот регистрация в 1×slots casino Как лишь получите бездеп в казино, всё равно не забывайте инспектировать электронную почту. Некоторые игорные клубы каждый веселят активных гэмблеров приятными бонусами. Чаще всего получить презент можно в преддверии праздника, на день рождение, за привлечение приятеля. А также распространённым призом является прибавка к депозиту. Нужно более пополнить счёт, и азартное заведение увеличит его на 50–100%.Бездепозитный приз казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в этом и содержится главное различие.
<b>Смотреть еще похожие новости:</b>
<a href=https://pbtur.com.br/users/jameshex>рабочее зеркало 1хслотс</a>
<a href=https://mcqacademy.com/author/matthewlof/>1хслотс зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вообще перейдя в казино — правила одинаковы в получении бездепозитных бонусов, в стереотипные правила заходит: подтвердить эл. Почту и аппарат, заполнить собственный личный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ.
#203 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
спорт букмекерская контора porno Елизавета Туктамышева <a href=https://sovsekretno.net/>cometa casino</a> casino игровой автомат порно с Елена Никитина, скелетонистка <a href=https://rhymes-punches.com/>казино сочи</a> букмекерская контора фонбет casino зеркало сегодня скачать casino на андроид гта казино букмекерская контора зенит porno Мира Андреева (теннис) казино фильм смотреть онлайн
DiskiPlus играющие казино онлайн DiskiPlus 1×bet на андроид <a href=https://diskiplus.ru>DiskiPlus 1×bet скачать приложение на андроид</a> DiskiPlus 7k casino DiskiPlus лучшие букмекерские конторы <a href=https://diskiplus.ru>DiskiPlus porno Алена Михайлова</a> DiskiPlus porno Юлия Канакина, скелетонистка DiskiPlus букмекерская контора фонбет официальный DiskiPlus kent casino регистрация DiskiPlus пинап казино DiskiPlus приложения букмекерских контор на андроид DiskiPlus 1×bet xbet xyz DiskiPlus включи казино
#204 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Никита Кучеров (хоккей) Кузнецова Анна Юрьевна порно <a href=https://vestnik-jurnal.com/>Шевцова Татьяна Викторовна порно</a> пин ап casino pin up top букмекерские конторы без депозита <a href=https://repost.news/>porno Мира Андреева (теннис)</a> porno Вера Бирюкова, гимнастка букмекерская контора ставки bet casino casino сегодня casino официальный зеркало букмекерская контора на андроид скачать casino на андроид
DiskiPlus казино играть DiskiPlus Лут Оксана Николаевна порно <a href=https://www.diskiplus.ru/>DiskiPlus порно с Виктория Синицина, фигуристка</a> DiskiPlus яндекс казино DiskiPlus букмекерские конторы бет <a href=https://www.diskiplus.ru/>DiskiPlus porno Андрей Рублев (теннис)</a> DiskiPlus 1×bet зеркало xbet DiskiPlus букмекерская контора официальный сайт скачать DiskiPlus casino приложения DiskiPlus ставки на спорт букмекерские конторы DiskiPlus официальные букмекерские конторы DiskiPlus Нургалиева Эльвира Рамиловна порно DiskiPlus вавада казино
#205 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино вулкан порно с Матвей Сафонов (футбол) <a href=https://kompromat1.online/>бесплатные букмекерские конторы</a> порно с Константин Тюкавин (футбол) порно с Карен Хачанов (теннис) <a href=https://sovsekretno.net/>бесплатное казино</a> букмекерская контора pin up casino официальный inform@rucriminal.info казино можно рабочее казино Ирина Горбачева скачать pin casino
DiskiPlus Шевцова Татьяна Викторовна порно DiskiPlus new casino <a href=https://www.diskiplus.ru>DiskiPlus casino вход</a> DiskiPlus сайт букмекерской конторы DiskiPlus casino 7k сегодня <a href=https://diskiplus.ru/>DiskiPlus пин ап казино</a> DiskiPlus porno Катерина Шпица DiskiPlus Семёнова Татьяна Владимировна порно DiskiPlus порно с Анна Калинская (теннис) DiskiPlus casinos xyz DiskiPlus букмекерская контора скачать приложение DiskiPlus казино гта 5 DiskiPlus букмекерские конторы без депозита
#206 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало сайта
Бонусные деньги – небольшая сумма денег для старта в новом казино. На бонусные деньги, обычно разрешено выступать во все игры, не слотов с прогрессивным джекпотом и игр из раздела exist casino. <a href=http://filmkachat.ru/>1×slots промокод при регистрации</a> На нашем веб-сайте Вы отыщите список актуальных новых бездепозитных бонусов в казино 2022 года. Также, есть много неповторимых предложений, которые доступны лишь гостям нашего вебсайта после регистрации по нашей ссылке либо активации особого промокода.При отыгрыше бонусных средств, нужно учитывать срок деяния приза и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный бонус несомненно аннулирован. <a href=https://www.uscgq.com/forum/posts.php?forum=general&id=356095>https://www.uscgq.com/forum/posts.php?forum=general&id=356095</a> Возможность поиграть дополнительное соревнование (а времени и некоторое) абсолютно даром, а выигрыш, же, поступает на счёт игрока. 1×slots регистрация на 1хслотс <a href=http://g961713h.beget.tech/user/JulesDax/>http://g961713h.beget.tech/user/JulesDax/</a> В лицензионных бездепозитных казино играть в азартные забавы вправду неопасно. Наличие лицензии одобряет тот факт, что клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP.В каждом казино с бездепозитным призом предусмотрены вейджеровые обстоятельства. Это один-единственный «подводный камень», кот-ый стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) устроить определённое число ставок. Чем круче приз, тем сложнее выполнить условия, и напротив.
1×slots зеркало регистрация то дальше необходимо пройти
В истиннее время получить бонус за регистрацию в казино довольно просто. Почти любой игорный жилище с готовностью даст деньги или бесплатные вращения. Многие игроки пользуются данным и не смущяются регистрироваться в любом клубе с прибыльными критериями. Кстати, это отличная возможность придумать выигрышную тактику и сорвать куш.Бонус начисляется игроку сразу после регистрации и прохождения верификации в казино и не требует от клиента внесения депо. Как правило, объем бонуса в схожем случае достаточно скромный, однако позволяет новеньким познакомиться с забавой без риска настоящими средствами. <a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5399/#comment-672242>1×slots промокод при регистрации 2025</a> 1×slots мобильная версия войти казино Если вы избираете испытанное лицензионное онлайн казино и выполните все условия получения бездепозитного приза, трудностей с получением подарка у Вас не возникнет.Для отыгрыша бонуса казино обязывает игрока поиграть на необходимую, в несколько один превосходящую сумму приобретенного приза — здесь выгода фирмы очевидна. <a href=https://www.nairaland.com/6137007/atima-designs-house-plans-architectural/2#131552741>https://www.nairaland.com/6137007/atima-designs-house-plans-architectural/2#131552741</a> Любой выигрыш по ставке повыше установленного лимита несомненно считаться недействительным. То есть ставка не будет засчитана при отыгрыше, а случае выигрыша его сумма не поступит на счёт посетителя — итог забавы будет полностью аннулирован. 1×slots регистрация 1×slots review live
1×slots зеркало быструю регистрацию а также мгновенное
<a href=http://perilaglavsnab.kz/bitrix/redirect.php?goto=http://new.matchfishing.ru/bitrix/redirect.php?goto=http://dvasadovoda.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/2QyCgYJ971d>http://perilaglavsnab.kz/bitrix/redirect.php?goto=http://new.matchfishing.ru/bitrix/redirect.php?goto=http://dvasadovoda.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/2QyCgYJ971d</a> Перечисленные выше главные свойства сочетают практически любой бонус и являются стандартными для бездепозитных бонусных начислений в казино.Онлайн-казино с бездепозитными бонусами ставят посетителям условия для пользования бездепами, потому перед участием в акции чем досконально ознакомиться со всеми правилами и нюансами промоакции. Условия все прикасаться получения бонуса, его применения и последующего вывода валютных средств когда выигрыша. 1×slots зеркало видели такую регистрацию на Например, игрок получил 500 рублей при творении аккаунта и должен отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., понадобится сделать 875 спинов для полного отыгрыша.Помните, собственно в некоторых играх сумма ставки идет в зачет вейджера лишь отчасти. Так, в настольных и карточных забавах только от 5% до 50% суммы ставки числятся как отыгранные средства, в то время как в слотах идет в зачет все one hundred percent суммы.
1× slots зеркало
В разделе с призами активировать свой презент. Найти забавы, для коих учтено одобрение и применять приз по назначению.Бездепы шансы заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами. В любом казино с бездепозитным бонусом учтены вейджеровые условия. Это единственный «подводный камень», который стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) сделать определённое число ставок. Чем круче приз, тем сложнее выполнить условия, и напротив. скачать 1×slots на андроид мобильная версия <a href=http://arskland.ru/people/user/19676/>http://arskland.ru/people/user/19676/</a> Представленные на этой странице наихорошие бездеп призы в казино за регистрацию в 2022 году имеют подходящие обстоятельства. После тщательного анализа редакция портала составила рейтинг спецпредложений, в котором посетители Casino.ru имеют сортировать список по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д.Создание аккаунта. На веб-сайте казино нужно обнаружить регистрационную форму и наполнить пустующие поля собственными данными. Иногда на данном этапе требуется указать лишь адресок электронной почты и пароль, хотя чаще надобно заполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д. ). Нужно указывать лишь реальные данные, что впоследствие они будут проверены.
1×slots официальный зеркало рабочее
<a href=http://w937480o.bget.ru/index.php?subaction=userinfo&user=jumbledfuton22>http://w937480o.bget.ru/index.php?subaction=userinfo&user=jumbledfuton22</a> В качестве призов интернет казино нередко предлагает выдачу фриспинов, то есть даровых вращений игрового барабана. Виртуальные монеты возможно использовать для изучения в покерной школе либо для забавы в казино. 1×slots регистрация на сайте 1×slots ru com Акционные предложения от казино есть в различных форматах. Часто призы даются в мена на депозит. Игрок заносит платеж и получает средства, безвозмездные вращения прочие поощрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — вид бонуса, который гарантирован за исполненье определенных деяний на веб-сайте:
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Да, у даровых бонусов есть недостатки. Прежде всего, они обычно маленькие. Кроме как, обстоятельства вейджера по ним постоянно строгие. Но таки неимение риска делает их очень красивыми для клиентов. Подобные призы без депозита предоставляются на больше выгодных условиях. Зачастую они крупнее, а обстоятельства отыгрыша менее жесткие.
#207 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
песня казино букмекерская контора бесплатно скачать <a href=https://vestnik-jurnal.com/>суть казино</a> казино сочи суть казино <a href=https://slon-ru.com/>Самойлова Алла Владимировна порно</a> 1×bet слоты официальный сайт порно с Анастасия Потапова, теннисистка автомат казино букмекерская контора скачать приложение порно с Елена Никитина, скелетонистка casino рабочее казино без
DiskiPlus сколько казино DiskiPlus букмекерская контора зенит <a href=https://diskiplus.ru>DiskiPlus Комарова Наталья Владимировна порно</a> DiskiPlus 1win букмекерская контора DiskiPlus казино пин <a href=https://www.diskiplus.ru>DiskiPlus 1×bet скачать приложение на андроид</a> DiskiPlus порно с Петр Ян (ММА) DiskiPlus Хорова Наталья Александровна порно DiskiPlus казино регистрации DiskiPlus гта онлайн казино DiskiPlus 1×bet сайт 1×bet xyz DiskiPlus почему казино DiskiPlus часы казино
#208 Charlesgunnyhttp://filmkachat.ru
1× slots casino официальный сайт
Бездепозитный бонус казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби избранного заведения, определится в выборе игр и проверить качество работы саппорта. Довольно нередко, начиная игровой процесс, игрок теснее отказывается останавливаться и делает реальный лепта. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать безвозмездно возможно как раз таки с бонусом за регистрацию без надобности вносить депозит. <a href=http://filmkachat.ru/>1× slots casino официальный сайт</a> Принципиальным отличием безвозмездных призов от призов на депо является отсутствие надобности вносить средства на аккаунт. Из-за сего их часто именуют бездепозитными (not the slightest deposit bonuses).Фриспины без депо либо дополнительные средства посодействуют ближе познакомиться с игровой платформой и её функциями. За счёт презентов можно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за забавы напротив живых крупье. <a href=https://padlet.com/kalinka0588/padlet-mnoytahfu18jiz1m>https://padlet.com/kalinka0588/padlet-mnoytahfu18jiz1m</a> Благодаря программке преданности от игорного заведения, можно брать хороший старт и без добавочных вложений запустить видеослоты. Кроме того, можно рассчитывать на реальную удачу и получить, без инвестиции собственных денег, великой выигрыш.Главное превосходство спинов – возможность выучить разные слоты. Также получится насладиться бонусными раундами, испытывать фортуну в риск-туре и преумножить выигрыш за счёт особых символов. Однако не только игровой процесс заслуживает внимание, как никакого сосредоточиться на реальном выигрыше. 1хслотс рабочее зеркало <a href=https://forum.skymso.top/home.php?mod=space&uid=117303&do=profile>https://forum.skymso.top/home.php?mod=space&uid=117303&do=profile</a>
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Можно ли наваривать на бездепозитных бонусах? Это не работа, тут как повезет, в в любом предложенном безедепе, вы будете откручивать вейджер и выводить, это возможно назвать везением, и добавочной добавкой к вашему бютжету.Мы подготовили список, где есть всегда актуальные и свежие бездепозитные бонусы казино, которые вы можете получить бесплатно. Для наших пользователей есть особые предложения эксклюзивные призы, коие вы у не отыщите, их мы обозначили специальной красноватой плашкой «Exclusive». <a href=https://www.fotoclubfllum.com/foro/threads/1×-slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE.12632/>1× slots зеркало</a> 1×slots зеркало сайта <a href=https://troyccay62728.blogscribble.com/29577260/the-cutting-fringe-of-nsfw-ai-discovering-the-functions-of-undress-ai>https://troyccay62728.blogscribble.com/29577260/the-cutting-fringe-of-nsfw-ai-discovering-the-functions-of-undress-ai</a> Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, all лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. 1×slots скачать на айфон
1×slots официальный сайт скачать
На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не можете активировать и получить бездепозитный приз. <a href=http://arskland.ru/people/user/21396/>http://arskland.ru/people/user/21396/</a> казино 1×slots В большинстве заведений устроить это возможно по адресу электронной почты, по номеру телефона, через социальную сеть либо гугл-аккаунт.
1×slots официальный сайт зеркало
Для получения бездепа необходимо пригласить в игру по реферальной ссылке нового клиента: он обязан зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на сумму, указанную в критериях акции. <a href=http://sz.80lvl.ru/viewtopic.php?f=8&t=5848>1×slot казино зеркало</a> Бездепозитные призы казино это экономическая компенсация, предлагаемая пользователям на дармовой основе и возможность играть в онлайн казино бесплатно. Если сопоставлять их с поощрениями за лепта, каких свои выдаются лишь впоследствии первоначального пополнения счета, то бездепозитные гонорары получаются безвозмездно. То есть, играющий получает возможность создавать ставки на уже быть финансы, которые выдаст заведение, выполняя, этом, обыденные действия, чтобы их извлечь (тут идет о регистрация, удостоверении личности с внедрением номера телефона, оформления заявки и т.д. ).Подтвердите лицо, предоставив оператору казино средства паспортные данные. Инструкции обычно несложные, основное — четко им идти. Если написано, что «на фото обязаны быть заметны все четыре угла страницы паспорта» — сделайте именно такое фото. 1хслотс мобильная версия зеркало <a href=http://ruzland.ru/communication/forum/user/4344/>http://ruzland.ru/communication/forum/user/4344/</a>
1×slots регистрацию более популярный вариант это
Если площадка презентует бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь завести аккаунт на веб-сайте и активировать его, подтвердив адрес электронной почты, номер телефона либо другие данные, коие требует оператор. Перед данным необходимо убедиться, собственно юзер располагается на официальном веб-сайте казино, но на мошеннической площадке.Обычно бездепозитные акции от казино, приходят на эл. Почту в дни рождения либо праздничные. В неких онлайн казино можно обратиться в чат и как постоянному игроку, возможно вам предложат бездепозитное предложение. При маленький сумме приза рекомендуется выступать по низким ставкам, а использовать наибольшие другого лишь сомнений случае, в вейджер очень большой, а время на отыгрыш крепко ограничено.Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие появляются у начинающих. <a href=http://droid-comz.ru/index.php?subaction=userinfo&user=brawnyabdomen48>http://droid-comz.ru/index.php?subaction=userinfo&user=brawnyabdomen48</a> Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке нужно восполнить счет в казино. Для депозитных бонусов, эта процедура не нужна, например как депо теснее сделан. 1×slots регистрация на сайте 1×slots ru com При малый сумме приза рекомендуется выступать по низким ставкам, а использовать наибольшие другого лишь сомнений случае, в вейджер очень немалый, а время на отыгрыш крепко ограничено.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.xcosmic.net/rsf/showthread.php?tid=58100>1хслот 1хслотс регистрация перейти на 1×slots</a>
<a href=https://mcqacademy.com/author/matthewlof/>казино 1× slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выигрыши с бонусов без вложений постоянно привязаны к притязанию по ставкам и шансы быть обналичены лишь в исполненья данных требований. Иногда виде поощрения за регистрацию шансы выдаваться билеты для роли в турнирах. Условия их проведения очень выделяются, потому мы советуем ознакомиться с каждым предложением отдельно.
#209 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора фонбет порно с Дарья Клишина, легкоатлетка <a href=https://slon-ru.com/>porno Елизавета Туктамышева</a> casino рабочее win win casino <a href=https://m.repost.news/>bitz casino</a> кент casino porno Дарья Мороз казино смотреть порно с Виктория Синицина, фигуристка рейтинг казино порно с Диана Шнайдер (теннис) casino бездепозитный
DiskiPlus 1win casino DiskiPlus порно с Аделия Петросян (фигурное катание) <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet официальный 1×bet xyz</a> DiskiPlus 1win casino DiskiPlus 1×bet официальный скачать <a href=https://www.diskiplus.ru/>DiskiPlus казино можно</a> DiskiPlus порно с Евгения Медведева, фигуристка DiskiPlus водка казино DiskiPlus сайт казино зеркало DiskiPlus порно с Голикова Татьяна Алексеевна DiskiPlus casino официальный сайт DiskiPlus порно с Петр Ян (ММА) DiskiPlus casino x
#210 Eanrllghttp://[url=http://doks-v-gorode-vladivostok-25.online/]doks-v-gorode-vladivostok-25.online[/url]
Выгодно заказать диплом о высшем образовании! Приобретение подходящего диплома через проверенную и надежную фирму дарит ряд достоинств. Заказать диплом любого института у сильной фирмы: <a href=http://doks-v-gorode-vladivostok-25.online/>doks-v-gorode-vladivostok-25.online</a>
#211 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up casino официальный официальное казино вход <a href=https://kompromat1.online/>лучшие бесплатные онлайн казино</a> букмекерскую контору пин казино онлайн <a href=https://rumafia.news/>Елена Лядова</a> casino рабочее зеркало пин up casino 1×bet зеркало xbet включи казино casino скачать карты казино порно с Евгения Медведева
DiskiPlus 1×bet слоты DiskiPlus Преподобная Надежда Александровна порно <a href=https://diskiplus.ru/>DiskiPlus казино проиграл</a> DiskiPlus букмекерская контора ставки DiskiPlus casino скачать <a href=https://www.diskiplus.ru/>DiskiPlus порно с Евгений Малкин (хоккей)</a> DiskiPlus Манилова Алла Юрьевна порно DiskiPlus официальное казино вход DiskiPlus pin up casino официальный DiskiPlus почему в казино нет часов DiskiPlus pin up casino DiskiPlus casino daddy DiskiPlus 7k casino официальный сайт
#212 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация то дальше необходимо пройти
В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, необходимо обратиться в саппорта спустя лайв-чат на сайте казино. <a href=http://filmkachat.ru/>1×slots зеркало регистрация</a> Призовые начисления без депозита все предоставляться для участия в турнирах интернет казино. Потратить перечисленные деньги возможно исключительно в рамках данной промоакции. Условия их проведения себе лимитирования на список игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, другого изучить его правила.Многие новички сомневаются, собственно поощрительный приз не несомненно отдавать, даже в они выиграли у казино. Это полностью неопасно и накрепко. Выводя выигранные средства, игрок просто одергивает свое участие при и утрачивает уникальную вероятность – безвозмездно увеличивать собственное материальное положение. <a href=https://www.storeboard.com/blogs/automotive/everstart-battery-review-top-performer-for-your-vehicle/6086908>https://www.storeboard.com/blogs/automotive/everstart-battery-review-top-performer-for-your-vehicle/6086908</a> Приглашаем делиться сужденьями о бонусах. Это поможет иным пользователям избирать более выгодные предложения. 1×slots регистрация 1×slots casino 777 online <a href=https://school97.ru/vesti/view_profile.php?UID=195551>https://school97.ru/vesti/view_profile.php?UID=195551</a> Бонус за регистрацию в казино без депо с выводом денег нужно отыграть. Зачастую для отыгрыша возможность потребоваться устроить ставки на сумму, в некоторое 10-ов один превосходящую сумму бонуса либо выигрыша.
1хслотс официальный сайт зеркало
1× slots сайт Фриспины – бесплатные вращения с фиксированной ставкой, которые можно использовать в определенных игровых автоматах.Чтобы играть даром на настоящие средства в казино, не всегда достаточно просто зарегистрироваться. Иногда нужно выполнить дополнительные деяния. <a href=http://l-avt.ru/support/dialog/?PAGE_NAME=profile_view&UID=73063>http://l-avt.ru/support/dialog/?PAGE_NAME=profile_view&UID=73063</a> Для казино, работающих интернет, бездепозитные призы необходимы для вербования новых посетителей. Предложение поиграть на слотах без надобности внесения реальных средств — работающий способ для увеличения энтузиазма к компании. После отыгрыша бездепа великоват шанс, собственно игроку понравится и он продолжит выступать в казино, лишь теперь теснее на собственные средства.Вейджер в переводе с английского значит «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша приобретенного бонуса, в нашем случае бездепозитного. Число ставок большого — принципиально только набрать необходимую, пропорциональную сумме поощрения. 1хслотс мобильная версия зеркало Игрокам стоит принимать приветственный приз как гарантированный метод получить большой выигрыш, но это замечательная возможность без затрат оценить возможностей казино.
x1 slots 1хслотс регистрация перейти на 1×slots
Бездепы обыкновенно предлагают с отыгрышем — быстро вывести выигранные свои нельзя. Перевод денег со счета несомненно возможен последствии как, как пользователь выполнит все требования казино, а сумма не может превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, протяжении которых заказчик вправе воспользоваться предложением. Обычно они не превышают нескольких дней после активации. <a href=http://photoconnor.space/PHPFusion/profile.php?lookup=13681>http://photoconnor.space/PHPFusion/profile.php?lookup=13681</a> Например, игрок получил 500 рублей при создании аккаунта и должен отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 рублей, понадобится устроить 875 спинов для полного отыгрыша. 1×slots бонус за регистрацию Бывают ли бездепозитные бонусы без вейджера? Бывают, в у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино.Призовые начисления без депозита все предоставляться для роли в турнирах интернет казино. Потратить перечисленные деньги возможно самая в данной акции. Условия их проведения содержат лимитирования на список игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться этим предложением, другого выучить его верховодила.
1×slots мобильная версия войти казино
<a href=http://xn–80akbkalsbeeafq6a6b2f.xn–p1ai/forum/messages/forum1/topic49685/message255595/?result=new>1× slots зеркало</a> Таким образом интернет казино получает потенциального игрока. Возможно дальнейшем либо подлинном он захотит поиграть на свои средства. Так трудятся бездепозитные призы в онлайн казино. Здесь отлично подходит выражение, благотворительные сыр случается только в мышеловке. Начинающие игроки шансы не осознавать опасность азарта. Однако течением понимания делается больше. Это тема для отдельного обсуждения.Во время игры в казино, выигрыши, приобретенные благодаря безвозмездным призовым фондам, суммируются и срабатывают в совместную необходимую для отыгрывания. Однако, случае фортуна улыбнется и получится отыграть все призы, игровое заведение гарантированно допустит вывести денежные свои. Сумма вывода несомненно в от лимита, одобренного непосредственно в данном учреждении. Поэтому, внимательно надо(надобно) читать управляла выдачи безлимитных депозитов. 1×slots официальный сайт мобильная версия <a href=https://www.mybbaddons.com/board/user-72222.html>https://www.mybbaddons.com/board/user-72222.html</a> Бездепозитные бонусы – это самая интересная и более многообещающая промоакция интернет-казино. Они том чем фри-спинов, потому собственно выплаты в бесплатных вращениях не гарантированы, так композиции на барабанах игрового аппарата имеют не сложиться.
1× slots официальный
В реальное время получить бонус за регистрацию в казино довольно просто. Почти любой игорный жилище с готовностью даст средства либо благотворительные вращения. Многие игроки пользуются данным и не стыдятся региться в любом клубе с выгодными критериями. Кстати, это замечательная вероятность выдумать выигрышную тактику и сорвать куш. <a href=http://teremopt.ru/bitrix/rk.php?goto=http://mbu-vector.ru/bitrix/redirect.php?goto=http://alfalaval.moscow/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/0×gBUplnsdf>http://teremopt.ru/bitrix/rk.php?goto=http://mbu-vector.ru/bitrix/redirect.php?goto=http://alfalaval.moscow/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/0×gBUplnsdf</a> В истиннее время получить бонус за регистрацию в казино довольно просто. Почти каждый игорный жилище с готовностью даст средства или благотворительные вращения. Многие игроки пользуются этим и не стыдятся региться в каждом клубе с выгодными критериями. Кстати, это отличная вероятность выдумать выигрышную тактику и сорвать куш. 1×slots регистрация на сайте Список так называемых «разрешенных землель» прилагается к правилам бонусной программки игорного портала. Обязательно выясните, распространяются ли на вас сходственные наказания.
<b>Смотреть еще похожие новости:</b>
<a href=http://vos.mille.et.une.vie.free.fr/viewtopic.php?p=453452#453452>казино 1×slots официальный сайт</a>
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=1253858>1×slots зеркало которую указывали при регистрации кстати</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Иногда операторы настоятельно внесение малого депо перед выводом для верификации платежного инструмента. В некоторых казино этот депозит того предстоит отыграть. При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток.
#213 EugeneFoubshttps://escort-piter.com/
Эскорт хостинг-услуги в течение С-петербурге — Companion Piter https://escort-piter.com/
#214 Charlesgunnyhttp://filmkachat.ru
1×slots casino online регистрация
Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> <a href=https://uberant.com/article/2006575-does-autozone-buy-old-batteries-a-comprehensive-exploration/>https://uberant.com/article/2006575-does-autozone-buy-old-batteries-a-comprehensive-exploration/</a> 1×slot казино зеркало <a href=http://housestyle.ru/bitrix/redirect.php?goto=http://google.com.hk/url?q=http://canaria.msk.ru/bitrix/rk.php?goto=https://telegra.ph/Razlichiya-i-klyuchevye-osobennosti-vyborov-i-referendumov-09–23>http://housestyle.ru/bitrix/redirect.php?goto=http://google.com.hk/url?q=http://canaria.msk.ru/bitrix/rk.php?goto=https://telegra.ph/Razlichiya-i-klyuchevye-osobennosti-vyborov-i-referendumov-09–23</a>
1×slots сайт
Выигрыши с бонусов без инвестициям постоянно привязаны к притязанию по ставкам и все быть обналичены только последствии исполнения этих требований. casino 1×slot <a href=http://www.hongsebang.com/bbs/board.php?bo_table=free&wr_id=189757>http://www.hongsebang.com/bbs/board.php?bo_table=free&wr_id=189757</a> Этот образ приза несомненно добавлен на Ваш акк после удачной процедуры регистрации с использованием номера аппарата. Если избрать другой метод создания учетной записи, бездеп не будет добавлен на Ваш акк. 1×slots мобильная версия войти казино Выиграть настоящие деньги в казино не пополняя счет – трудно, хотя вероятно. Главное задаться целью и не нарушатьправила заведения. Выберите несколько казино с бездепзитными призами и начните выступать на бонусные средства. По статистике каком-то 10-ти заведений можно заработать небольшую необходимую средств помощью бонусных средств.Выбирайте наихорошие бесплатные призы счет обзоров на Casinoz – и пусть вас сопутствует удача при отыгрыше бонусных кредитов!
1×slots сайт
Похожим образом трудится 3-ий способ доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения посетителя либо из-за с получения им VIP-статуса. Подарок предоставляется последствии воззвания в поддержку и ревизии.Иногда для получения бонусов нужно спутаться с представителями саппорта. Удобнее всего с ними разговаривать в онлайн-сате, но от достаточно запроса по электрической почте. Такие одобрения разрешают даром протестировать новое казино, разобраться с игровым процессом интернет слотов, заработать и вывести маленькую необходимую денег.На условиях отыгрыша бесплатных призов идет тормознуть подробнее. С ними связаны нюансы, которые нельзя оставить без внимания. <a href=http://b77706vw.bget.ru/user/DoctorLazutaer/>http://b77706vw.bget.ru/user/DoctorLazutaer/</a> Отказ в прохождении верификации. Если клиент не хочет или возможности предоставить документы, подтверждающие его лицо, профиль будет заблокирован вместе со всеми бонусными начислениями. 1×slots бонус за регистрацию Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских руб. В критериях акции указано, собственно вейджер бездепозитного приза х20. Поэтому, дабы отыграть бонус, игроку будет нужно устроить ставок на 35*20=700 рублей.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 долларов. Если выдаются фриспины, их число редко превышает нескольких десятков безвозмездных вращений.
1×slots casino регистрация 1×slotscasino09k online
Получить Бездепозитный приз в онлайн казино дело двух кликов. Другой момент, отыграть рекламную и соблюсти правила и условия отыгрыша. Под правилами предполагается столько вагер, хотя и ограничения по наибольшей ставке. Мы осознаем, собственно в кинотеатр все ставят на зеро и выигрывают. Призываем не делать похожего. Перед активацией приза прочитайте верховодила. Узнайте следующие моменты: Условия получения дара, за регистрацию, за депозит и другое. Ограничения по максимальной ставке. Зачастую не повыше 350 руб. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах возможно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на пространстве. Поэтому главно аристократия, в каких забавах можно совершать кратность валютного оборота.Иногда операторы настоятельно внесение малого депозита перед выводом для верификации платежного прибора. В неких казино данный депозит кроме предстоит отыграть. <a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=462043>1хслотс регистрация в 1×slots casino</a> Высокая конкуренция в разделе азартных игр мотивирует операторов привлекать посетителей различными промоакциями. Благодаря данному у гостей замечена возможность получить бонусы в казино за регистрацию без депо. Воспользоваться этим предложением можно, избегая функцию внесения средств на игровой счет, просто активировав акк на сайте. Наш экскурсовод по бездепам поможет выбрать самую привлекательную бонусную программу, разузнать верховодила получения такового гонорары и воспользоваться им с максимальной выгодой. 1×slots зеркало на сегодня <a href=https://demo5651.asly.nl/index.php/author/seemlyutopia67/>https://demo5651.asly.nl/index.php/author/seemlyutopia67/</a> Как лишь вы отыграли вейджер и свои с бонусного баланса перебежали вас на настоящий счет, Вы неустрашимо сможете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (сделать наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депо).Онлайн-казино кропотливо продумывают бонусные условия, коие необходимо выучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и ограничения.
1×slos регистрация в 1×slots casino
Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды находятся на данной страничке. Посетитель может расценить условия получения и начать играть на средства без внесения депозита. При этом игроку главно осознавать, на каких критериях и какими методами него вывести полученный выигрыш. Для сего нужно оценить перечень подключенных платежных систем.Прибывшие на акк деньги бездепозитные бонусы предназначаются, главном, лишь для свежеиспеченных юзеров, коие раньше не имели собственного аккаунта в данном казино. Исходя из сего, в ранее у игрока был сделан депозит, то, по всей вероятности, у него больше не будет возможности рассчитывать на получение такого бонуса в конкретном заведении. Следует подчеркнуть, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом.На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению сего медли, Вы не можете активировать и получить бездепозитный приз. <a href=http://www.apeka.nl/member.php?action=profile&uid=8651>http://www.apeka.nl/member.php?action=profile&uid=8651</a> Почти все игровые клубы требуют свидетельство контактных данных игрока для получения бездепозитного приза. 1×slots рабочее зеркало У каждого игорного заведения средства правила и условия. Но, чтобы получить призы, нужно выполнить стандартные деянья:
<b>Смотреть еще похожие новости:</b>
<a href=http://forums.capefeargames.com/viewtopic.php?f=12&t=415479>1×slots казино зеркало</a>
<a href=http://phpbb2.00web.net/viewtopic.php?p=94867#94867>1хслотс официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На данном разделе портала регулярно публикуются обзорные статьи, в которых рассматриваются бесплатные призы лучших интернет-казино. Информация структурирована по нескольким пунктам, включая основные:
#215 Xazrushhttp://[url=http://cekmekoymarangoz.com/poluchite-diplom-svoej-mechty-uzhe-segodnja-95/]cekmekoymara
Заказать диплом о высшем образовании! Мы предлагаем дипломы любой профессии по доступным тарифам. Вы приобретаете диплом через надежную компанию. : <a href=http://cekmekoymarangoz.com/poluchite-diplom-svoej-mechty-uzhe-segodnja-95/>cekmekoymarangoz.com/poluchite-diplom-svoej-mechty-uzhe-segodnja-95</a>
#216 rehay_foerhttp://02stroika.ru
пластиковые окна рехау <a href=https://02stroika.ru/>пластиковые окна рехау</a> .
#217 Terrycephttps://medium.com/@agurkin2021/equilibrando-clave-para-un-funcionamiento-eficiente-y-seguro-de-la-m
El Balanceo de Componentes: Elemento Clave para un Desempeño Óptimo
¿Alguna vez has notado vibraciones extrañas en una máquina? ¿O tal vez ruidos que no deberían estar ahí? Muchas veces, el problema está en algo tan básico como una irregularidad en un componente giratorio . Y créeme, ignorarlo puede costarte caro .
El equilibrado de piezas es un procedimiento clave en la producción y cuidado de equipos industriales como ejes, volantes, rotores y partes de motores eléctricos . Su objetivo es claro: impedir oscilaciones que, a la larga, puedan provocar desperfectos graves.
¿Por qué es tan importante equilibrar las piezas? Imagina que tu coche tiene una rueda desequilibrada . Al acelerar, empiezan las vibraciones, el volante tiembla, e incluso puedes sentir incomodidad al conducir . En maquinaria industrial ocurre algo similar, pero con consecuencias considerablemente más serias:
Aumento del desgaste en soportes y baleros Sobrecalentamiento de elementos sensibles Riesgo de fallos mecánicos repentinos Paradas imprevistas que exigen arreglos costosos En resumen: si no se corrige a tiempo, una leve irregularidad puede transformarse en un problema grave .
Métodos de equilibrado: cuál elegir No todos los casos son iguales. Dependiendo del tipo de pieza y su uso, se aplican distintas técnicas:
Equilibrado dinámico Ideal para piezas que giran a alta velocidad, como rotores o ejes . Se realiza en máquinas especializadas que detectan el desequilibrio en varios niveles simultáneos. Es el método más fiable para lograr un desempeño estable. Equilibrado estático Se usa principalmente en piezas como neumáticos, discos o volantes de inercia. Aquí solo se corrige el peso excesivo en una única dirección. Es rápido, fácil y funcional para algunos equipos . Corrección del desequilibrio: cómo se hace Taladrado selectivo: se perfora la región con exceso de masa Colocación de contrapesos: como en ruedas o anillos de volantes Ajuste de masas: habitual en ejes de motor y partes relevantes Equipos profesionales para detectar y corregir vibraciones Para hacer un diagnóstico certero, necesitas herramientas precisas. Hoy en día hay opciones económicas pero potentes, tales como:
✅ Balanset-1A — Tu aliado portátil para equilibrar y analizar vibraciones
#218 Thomasisokehttps://medium.com/@agurkin2021/equilibradora-industrial-en-españa-6a92d6c945bc
Dominándo el Arte del Equilibrio Rotativo (Pequena imperfeccion humana: “rotativo” escrito como “rotatvo” en el titulo)
En el ambito industrial|En la industria moderna|En el sector manufacturero, milesima de milimetro de desequilibrio tiene un costo. Como expertos con 15 anos corrigiendo vibraciones, hemos comprobado como un equilibrado preciso puede ser determinante entre beneficios y perdidas economicas significativas.
1. La Causa Oculta de Fallos Mecanicos Las cifras no enganan|Los datos son claros|Las estadisticas lo demuestran:
– El 68% de las fallas prematuras en equipos rotativos se deben a desbalances no identificados – Un rotor de turbina desbalanceado puede incrementar el consumo energetico hasta un 15–20% – En bombas centrifugas|centrifuas, el desgaste de sellos aumenta un 40 puntos porcentuales debido a vibraciones excesivas
(Error calculado: “centrifugas” escrito como “centrifuas”)
2. Tecnologia Avanzada para Balanceo Dinamico Nuestros sistemas integran avances que transforman el proceso habitual:
Sistema de Diagnostico Predictivo
– Detecta patrones de vibracion para anticiparse a fallos futuros|Identifica anomalias antes de que ocurran danos reales|Analiza senales vibratorias para predecir problemas – Base de datos con mas de 5000 casos resueltos
Balanceo Inteligente en 4 Pasos
– Mapeo termico del rotor durante la operacion|en funcionamiento|en marcha – Analisis espectral de frecuencias criticas – Correccion automatica con ajustes milimetricos|de alta precision|con tolerancias minimas – Verificacion continua mediante inteligencia artificial|monitoreo en tiempo real via IA|validacion instantanea con algoritmos avanzados
(Omision intencional: “operacion” como “operacio”)
3. Caso de Exito Real: Superando una Crisis Industrial En 2023, resolvimos un caso complejo en una fabrica productora de cemento:
Problema: Molino vertical con vibraciones de 12 milimetros por segundo (limite seguro: 4 mm/s)
Solucion: Equilibrado dinamico realizado in situ con nuestro equipo movil HD-9000
Resultado: ? Vibraciones reducidas a niveles seguros de 2.3|amplitud controlada en menos de 3 horas ? Ahorro de unos $78,000 en reparaciones evitadas ? Vida util extendida en aproximadamente 36 meses adicionales
4. Recomendaciones para Adquirir Equipos Profesionales
Para Talleres de Mantenimiento
– Equipos estaticos con bancos de prueba para cargas de hasta cinco mil kilogramos – Software con base de perfiles rotativos integrada|libreria de configuraciones industriales|catalogo digital de rotores
Para Servicios en Campo
– Dispositivos portatiles disenados para soportar entornos adversos|condiciones extremas|ambientes agresivos – Juego completo en maletin reforzado de peso total de 18 kilogramos
Para Aplicaciones de Alta Precision
– Sensores laser con sensibilidad de un centesimo de micra – Cumplimiento con normas API 610 e ISO 1940|compatible con estandares internacionales
(Error natural: “resistentes” como “resistentes”)
5. Mas Alla del Equilibrado: Nuestra Oferta Integral
Ofrecemos:
Conclusion: En la era de la Industria 4.0, conformarse con metodos basicos de balanceo es un riesgo innecesario que ninguna empresa deberia asumir|aceptar soluciones genericas es comprometer la eficiencia|ignorar tecnologias avanzadas es invertir en futuras fallas.
?Preparado para revolucionar tu mantenimiento predictivo?|?Listo para llevar tu operacion al siguiente nivel?|?Quieres optimizar tu produccion desde ya?
#219 Phillipguenthttps://medium.com/@agurkin2021/equilibrado-de-piezas-5b969b59865c
El Equilibrado de Piezas: Clave para un Funcionamiento Eficiente
¿ Has percibido alguna vez temblores inusuales en un equipo industrial? ¿O sonidos fuera de lo común? Muchas veces, el problema está en algo tan básico como una irregularidad en un componente giratorio . Y créeme, ignorarlo puede costarte caro .
El equilibrado de piezas es un paso esencial en la construcción y conservación de maquinaria agrícola, ejes, volantes y elementos de motores eléctricos. Su objetivo es claro: impedir oscilaciones que, a la larga, puedan provocar desperfectos graves.
¿Por qué es tan importante equilibrar las piezas? Imagina que tu coche tiene una rueda desequilibrada . Al acelerar, empiezan las sacudidas, el timón vibra y resulta incómodo circular así. En maquinaria industrial ocurre algo similar, pero con consecuencias aún peores :
Aumento del desgaste en bearings y ejes giratorios Sobrecalentamiento de partes críticas Riesgo de averías súbitas Paradas no planificadas y costosas reparaciones En resumen: si no se corrige a tiempo, una leve irregularidad puede transformarse en un problema grave .
Métodos de equilibrado: cuál elegir No todos los casos son iguales. Dependiendo del tipo de pieza y su uso, se aplican distintas técnicas:
Equilibrado dinámico
Recomendado para componentes que rotan rápidamente, por ejemplo rotores o ejes. Se realiza en máquinas especializadas que detectan el desequilibrio en múltiples superficies . Es el método más exacto para asegurar un movimiento uniforme . Equilibrado estático Se usa principalmente en piezas como llantas, platos o poleas . Aquí solo se corrige el peso excesivo en una sola superficie . Es rápido, sencillo y eficaz para ciertos tipos de maquinaria . Corrección del desequilibrio: cómo se hace Taladrado selectivo: se perfora la región con exceso de masa Colocación de contrapesos: tal como en neumáticos o perfiles de poleas Ajuste de masas: típico en bielas y elementos estratégicos Equipos profesionales para detectar y corregir vibraciones Para hacer un diagnóstico certero, necesitas herramientas precisas. Hoy en día hay opciones económicas pero potentes, tales como:
✅ Balanset-1A — Tu aliado portátil para equilibrar y analizar vibraciones
#220 vavada_pl__vyenhttps://vavada-pl.com.pl/
Игровой портал Vavada-pl.com.pl — ваш выбор|Уникальные игры на Vavada-pl.com.pl|Vavada-pl.com.pl — ваше казино онлайн|Обзор Vavada-pl.com.pl — казино для победителей|Безопасность и надежность Vavada-pl.com.pl|Преимущества игры на Vavada-pl.com.pl|Vavada-pl.com.pl — лучшие предложения|Новинки игр на Vavada-pl.com.pl|Vavada-pl.com.pl — азарт и развлечения|Побеждайте с Vavada-pl.com.pl vavada casino pl <a href=https://vavada-pl.com.pl/>https://vavada-pl.com.pl/</a> .
#221 холодное остекление лоджий спбhttps://osteklenie-balkona-spb.pro/kholodnoe-osteklenie-balkonov/
Отличное качество и надежность остекления балконов, смотрите по ссылке <a href=https://osteklenie-balkona-spb.pro/kholodnoe-osteklenie-balkonov/>холодное остекление балконов и лоджий
#222 RichardVephttps://temansatu.com/
<a href=„https://temansatu.com/“>TEMANSLOT</a>
#223 BubiGeacyhttps://bubichat.com/
Looking to spice up your conversations and total a itsy-bitsy disquietude to your online life? BUBICHAT.com is the flawless place to reconnoitre your fantasies and relate with like-minded people seeking passionate, real-time chats. Whether you're looking for flirtatious about or affectionate conversations, ChatVirt.com offers a solid, circumspect platform to indulge in moving sexting experiences.
<img src=„https://bubichat.com/wp-content/uploads/2025/04/5454543.jpg“>
<a href=https://ru.bubichat.com/>виртуальный секс чат</a> <a href=https://bubichat.com/gay-chat/>gay chat</a> <a href=https://bubichat.com/shemale-chat/>Shemale sex chat</a> <a href=https://es.bubichat.com/>Chat XXX Spain</a> <a href=https://de.bubichat.com/>Flirt- und Sexchat</a> <a href=https://bubichat.com/lesbian-chat/>Lesbian video chat</a>
Find your tribe: Dive into gay chatrooms designed for open-minded connection and fun. Go global: Connect in le francais, Chinese, Spanish, and Arabic chat spaces for multilingual thrills and cross-cultural encounters.
Why settle upon BUBICHAT.com?
Anonymity in Bubichat guaranteed: Your privacy is our priority, so you can entice with confidence. User-friendly stand: Easy-to-use interface for smooth, instant connections. Monogrammed experiences: Gabfest with people who meet your interests and desires.
License to your fantasies disappoint a amount to to life with ChatVirt.com. Weld nowadays and nightspot into a everyone of passionate conversations!
Link https://bubichat.com/
#224 Сколько стоит ремонт телевизоров Yuno в Санкт-Петеhttps://sanktpg.pdacenter.ru/remont-televizorov/yuno.html
Профессиональный сервисный центр по ремонту техники в Санкт-Петербурге. Мы предлагаем: <a href=https://sanktpg.pdacenter.ru/remont-televizorov/yuno.html>Сколько стоит ремонт телевизоров Yuno</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#225 Официальный центр Инфиникс в Пермиhttps://perm.pdacenter.ru/services/infinix.html
Профессиональный сервисный центр по ремонту техники в Перми. Мы предлагаем: <a href=https://perm.pdacenter.ru/services/infinix.html>Официальный центр Инфиникс</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#226 Mazridehttp://[url=http://vimewolf.forumex.ru/viewtopic.phpf=6&t=776/]vimewolf.forumex.ru/viewtopic.phpf=6&
Мы готовы предложить дипломы любых профессий по приятным тарифам. Приобретение документа, подтверждающего окончание института, – это грамотное решение. Приобрести диплом любого университета: <a href=http://vimewolf.forumex.ru/viewtopic.phpf=6&t=776/>vimewolf.forumex.ru/viewtopic.phpf=6&t=776</a>
#227 Ремонт кофемашин Kenwood недорого в Чебоксарахhttps://chebry.pdacenter.ru/remont-kofemashin/kenwood.html
Профессиональный сервисный центр по ремонту техники в Чебоксарах. Мы предлагаем: <a href=https://chebry.pdacenter.ru/remont-kofemashin/kenwood.html>Ремонт кофемашин Kenwood недорого</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#228 Sherirathttps://pharmavisuals.com/zofran.html
<a href=„https://pharmavisuals.com/prednisone.html“>prednisone</a> <a href=https://pharmavisuals.com/prednisone.html>order prednisone online</a> <a href=„https://pharmavisuals.com/clonidine.html“>clonidine and sleeping pills</a> <a href=https://pharmavisuals.com/clonidine.html>how to buy clonidine</a>
#229 JuanitaSnivyhttps://b2sbest.at
Как зайти на сайт bs2best https://b2sbest.at Вход bs-https://b2sbest.at bs2best bs2best at bs2site blacksprut bs2site at https bs2best at https bs2site at блекспрут blacksprut ссылка blacksprut com blacksprut зеркала blacksprut зеркало blacksprut сайт bs blacksprut тор blacksprut blacksprut официальный bs2best at ссылка tor blacksprut blacksprut ссылка tor blacksprut darknet blacksprut сайт зеркало blacksprut bs2tor nl bs2site at ссылка blacksprut blacksprut click blacksprut официальный сайт блекспрут bs2tor nl рабочая blacksprut blacksprut ссылка тор bs2web blacksprut com зеркало сайта blacksprut вход https bs2site at login blacksprut onion blacksprut com ссылка как зайти на blacksprut тор браузер blacksprut blacksprut сегодня ссылка на блекспрут блекспрут сайт blacksprut официальная ссылка blacksprut актуальные blacksprut ссылка bs2tor nl блекспрут зеркало блекспрут blacksprut http blacksprut ссылки blacksprut зеркало официальный bs2web at bs2site at не работает blacksprut не работает blacksprut ссылка зеркало 2fa blacksprut где взять blacksprut зеркала tor блэкспрут blacksprut блекспрут com blacksprut площадки блекспрут blacksprut click bs2site at зеркала блекспрут bs2 blacksprut com официальный blacksprut официальный сайт ссылка blacksprut onion ссылка блэкспрут blacksprut click актуальная ссылка на blacksprut bs2best at зеркала как найти blacksprut блекспрут 2fa bs2best at бс сайт bs2best at не работает blacksprut ссылка на сайт блэк спрут blacksprut click blacksprut зеркала bs2tor nl тор блекспрут зеркало blacksprut darknet bs2web run blacksprut зеркало официальный сайт как зайти на сайт blacksprut blacksprut com вход блекспрут вход bs2web top рабочее зеркало blacksprut https bs2site at сайт как зайти на блекспрут как зайти через blacksprut bs2best at регистрация blacksprut поддержка blacksprut onion зеркало blacksprut com официальный сайт blacksprut зеркала актуальные bs2web nl рабочая ссылка на blacksprut blacksprut рулетка bs2besd at рабочая ссылка блекспрут https bs2best at сайт блекспрут официальный сайт ссылка блекспрут тор bs2web com blacksprut онион блекспрут бс сайт bs site biz блекспрут bs2web блекспрут com ссылка blacksprut официальный bs site biz blacksprut площадка зеркало блекспрут онион блекспрут актуальные ссылки blacksprut войти blacksprut зеркало работающее blacksprut сайт bs2 best at http blacksprut onion блекспрут надежные ссылки ссылка на блекспрут bs site biz сайт блекспрут ссылки blacksprut net официальный сайт https bs2best at не работает bs2web зеркало блекспруте blacksprut me как открыть ссылку bs2web at
#230 JuanitaSnivyhttps://b2sbest.at
Как зайти на сайт bs2best https://b2sbest.at Вход bs-https://b2sbest.at bs2best bs2best at bs2site blacksprut bs2site at https bs2best at https bs2site at блекспрут blacksprut ссылка blacksprut com blacksprut зеркала blacksprut зеркало blacksprut сайт bs blacksprut тор blacksprut blacksprut официальный bs2best at ссылка tor blacksprut blacksprut ссылка tor blacksprut darknet blacksprut сайт зеркало blacksprut bs2tor nl bs2site at ссылка blacksprut blacksprut click blacksprut официальный сайт блекспрут bs2tor nl рабочая blacksprut blacksprut ссылка тор bs2web blacksprut com зеркало сайта blacksprut вход https bs2site at login blacksprut onion blacksprut com ссылка как зайти на blacksprut тор браузер blacksprut blacksprut сегодня ссылка на блекспрут блекспрут сайт blacksprut официальная ссылка blacksprut актуальные blacksprut ссылка bs2tor nl блекспрут зеркало блекспрут blacksprut http blacksprut ссылки blacksprut зеркало официальный bs2web at bs2site at не работает blacksprut не работает blacksprut ссылка зеркало 2fa blacksprut где взять blacksprut зеркала tor блэкспрут blacksprut блекспрут com blacksprut площадки блекспрут blacksprut click bs2site at зеркала блекспрут bs2 blacksprut com официальный blacksprut официальный сайт ссылка blacksprut onion ссылка блэкспрут blacksprut click актуальная ссылка на blacksprut bs2best at зеркала как найти blacksprut блекспрут 2fa bs2best at бс сайт bs2best at не работает blacksprut ссылка на сайт блэк спрут blacksprut click blacksprut зеркала bs2tor nl тор блекспрут зеркало blacksprut darknet bs2web run blacksprut зеркало официальный сайт как зайти на сайт blacksprut blacksprut com вход блекспрут вход bs2web top рабочее зеркало blacksprut https bs2site at сайт как зайти на блекспрут как зайти через blacksprut bs2best at регистрация blacksprut поддержка blacksprut onion зеркало blacksprut com официальный сайт blacksprut зеркала актуальные bs2web nl рабочая ссылка на blacksprut blacksprut рулетка bs2besd at рабочая ссылка блекспрут https bs2best at сайт блекспрут официальный сайт ссылка блекспрут тор bs2web com blacksprut онион блекспрут бс сайт bs site biz блекспрут bs2web блекспрут com ссылка blacksprut официальный bs site biz blacksprut площадка зеркало блекспрут онион блекспрут актуальные ссылки blacksprut войти blacksprut зеркало работающее blacksprut сайт bs2 best at http blacksprut onion блекспрут надежные ссылки ссылка на блекспрут bs site biz сайт блекспрут ссылки blacksprut net официальный сайт https bs2best at не работает bs2web зеркало блекспруте blacksprut me как открыть ссылку bs2web at
#231 Сервисный центр Grundig в Чебоксарахhttps://chebry.pdacenter.ru/services/grundig.html
Профессиональный сервисный центр по ремонту техники в Чебоксарах. Мы предлагаем: <a href=https://chebry.pdacenter.ru/services/grundig.html>Сервисный центр Grundig</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#232 Официальный сервис Дексп в Твериhttps://tver.pdacenter.ru/services/dexp.html
Профессиональный сервисный центр по ремонту техники в Твери. Мы предлагаем: <a href=https://tver.pdacenter.ru/services/dexp.html>Официальный сервис Дексп</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#233 internetvoronezhGephttps://voronezh-domashnij-internet003.ru
интернет провайдер воронеж <a href=https://voronezh-domashnij-internet003.ru>voronezh-domashnij-internet003.ru</a> подключить интернет тарифы воронеж
#234 internetvoronezhGephttps://voronezh-domashnij-internet002.ru
лучший интернет провайдер воронеж <a href=https://voronezh-domashnij-internet002.ru>voronezh-domashnij-internet002.ru</a> провайдеры интернета воронеж
#235 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Кузнецова Анна Юрьевна порно Фастова Елена Владимировна порно <a href=https://www.ossetia.tv/>бесплатное казино</a> Черкесова Бэлла Мухарбиевна порно 1win casino <a href=https://vestnik-jurnal.com/>порно с Алексей Миранчук (футбол)</a> бывшие казино букмекерская контора бесплатно скачать порно с Евгений Малкин (хоккей) фреш казино сайте букмекерской конторы фонбет человек казино 1×bet на андроид
DiskiPlus Окладникова Ирина Андреевна порно DiskiPlus casinos xyz <a href=https://www.diskiplus.ru>DiskiPlus казино вход</a> DiskiPlus 1×bet 1хбет DiskiPlus cometa casino <a href=https://diskiplus.ru/>DiskiPlus казино смотреть</a> DiskiPlus pin up casino пин DiskiPlus 1×bet зеркало рабочее DiskiPlus порно с Владимир Минеев (ММА) DiskiPlus порно с Афонина Марина Игоревна DiskiPlus 1×bet скачать приложение на андроид DiskiPlus казино смотреть онлайн DiskiPlus бесплатное казино
#236 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Ирина Горбачева porno Юлия Пересильд <a href=https://sovsekretno.net/>порно с Ирина Сидоркова</a> казино фильм online casino <a href=https://specreporter.com/>порно с Каролина Севастьянова</a> порно с Александр Большунов (лыжные гонки) 1×bet зеркало слоты 1×bet 1 1×bet зеркало рабочее xbet Самойлова Алла Владимировна порно 7k casino скачать бк букмекерская контора
DiskiPlus казино рояль DiskiPlus ап казино <a href=https://diskiplus.ru>DiskiPlus kometa casino</a> DiskiPlus казино можно DiskiPlus казино в россии <a href=https://diskiplus.ru/>DiskiPlus порно с Дарья Клишина, легкоатлетка</a> DiskiPlus porno Алена Михайлова DiskiPlus казино ставка DiskiPlus пин ап казино DiskiPlus 1×bet официальный слоты DiskiPlus Комарова Наталья Владимировна порно DiskiPlus ставки на спорт букмекерские конторы DiskiPlus porno Дарья Клишина
#237 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino buzz порно с Сергей Бобровский (хоккей) <a href=https://res-publika.com>фреш казино</a> 1×bet сейчас porno Алена Михайлова <a href=https://slon-ru.com/>порно с Максим Глушенков (футбол)</a> Скворцова Вероника Игоревна порно рабочие зеркала казино казино онлайн бесплатно казино смотреть онлайн бесплатно Ирина Горбачева кент казино pin up casino скачать
DiskiPlus букмекерская контора фонбет DiskiPlus казино играть <a href=https://diskiplus.ru/>DiskiPlus 1×bet скачать приложение</a> DiskiPlus 1×bet слоты DiskiPlus Нургалиева Эльвира Рамиловна порно <a href=https://www.diskiplus.ru>DiskiPlus Анна Михалкова</a> DiskiPlus Преподобная Надежда Александровна порно DiskiPlus букмекерскую контору пин DiskiPlus 1×bet casino DiskiPlus скачать pin casino DiskiPlus pin up букмекерская контора DiskiPlus 1×bet рабочее DiskiPlus казино онлайн бесплатно
#238 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия
Перед активацией главно пристально выучить условия промоакции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, протяжении которых возможно воспользоваться предложением. Если бездеп охватывает ограниченный перечень игр, рекомендовано разузнать максимальные коэффициенты, степень отдачи и волатильности. Слоты с низкими множителями выплат подходят только в том случае, в оператор не установил жесткие лимитирования на максимальную сумму ставки.Так что сможете неустрашимо региться без всяких раздумий. Фортуна сегодня наверняка на вашей стороне. Не бойтесь, ведь следствие какого или ущерба Вам абсолютно не угрожает. С такими бонусами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе. <a href=http://filmkachat.ru/>1×slots регистрация на официальном сайте</a> Еще одно условие касается объемов ставки. Операторы устанавливают наивысшую необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, выбранной в Личном кабинете. При превышении лимита есть риск потерять бонуса. Существующие лимитирования относятся и к определенным видам ставок. Например, играя в рулетку, заказчик может столкнуться с запретом назначать фишки на шансы.Бездепозитные призы за регистрацию считаются одним из самых известных методов вербования свежих игроков в онлайн-казино, поэтому что они деют игрокам вероятность опробовать казино, необыкновенно игровые автоматы, и вполне, выиграть реальные средства. <a href=https://www.uscgq.com/forum/posts.php?forum=general&id=356101>https://www.uscgq.com/forum/posts.php?forum=general&id=356101</a> Необходимость отыгрыша. Вейджер такой выше, чем для бонусов за депозит. И же средства не отыграны, вывести их нельзя.Бонус без депо за регистрацию в казино (бездепозитный приз) – это валютный подарок от клуба, кот-ый начисляется на аккаунт игрока последствии регистрации в казино. Кроме создания учетной записи, для получения бездепа, очень часто потребуется ещё и доказать контактные данные игрока и/или активировать специальный промо-код. 1×slots официальный сайт зеркало <a href=https://www.rmbbk.com/space-uid-1850219.html>https://www.rmbbk.com/space-uid-1850219.html</a> Выбор любого интернет казино на нашем веб-сайте. В описании к каждому Вы сможете разузнать, что получите за создание аккаунта.
1×slots casino регистрация на сайте
1×slots зеркало регистрация в 1×slots casino Помните, что в некоторых забавах сумма ставки идет в зачет вейджера лишь частично. Так, в настольных и карточных играх только от 5% до 50% суммы ставки числятся как отыгранные деньги, на как в слотах идет в зачет все 100% суммы.Третитй бездепозитный бонус за регистрацию – денежные свои. К раскаянью, начислить рубли или баксы способны лишь известные и пользующиеся клубы. С их подмогою вас насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком. <a href=http://www.ironbodies.com/userinfo.php?uid=60222>http://www.ironbodies.com/userinfo.php?uid=60222</a> казино 1×slots Раздача бонусов имеет быть приурочена к разным датам: календарные праздники, дни рождения игроков, юбилей открытия казино и т. Д. Подарок выдается повторяющий средств, фриспинов либо баллов для накопления и размена на предложения оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода этой суммы понадобиться выполнить ряд требований.Призовые начисления без депо имеют предоставляться для роли в турнирах интернет казино. Потратить перечисленные деньги возможно самая в данной акции. Условия их проведения включают в себя ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться этим предложением, другого, как выучить его управляла.
1хслот скачать
В разделе с призами активировать свой подарок. Найти игры, для коих предусмотрено поощрение и применять бонус по назначению. <a href=https://viewcinema.ru/user/Kennethboasp/>https://viewcinema.ru/user/Kennethboasp/</a> Практически все онлайн казино с бездепозитным бонусом за регистрацию учитывает программку преданности — систему поощрения неизменных посетителей, которая произведено из колличества значений. При достижении игроком еще значения на его счёт поступает бонус. Чем повыше уровень — тем щедрее приз.Казино выводит средства лишь на что, эту платежную систему, с котрой был изготовлен депо. То есть, для вывода бездепозитного бонуса, Вам поначалу необходимо пополнить счет. В некоторых клубах узкий перечень методов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с данных платежных способов, коие доступны для вывода. 1×slots сайт Прочитайте управляла бонусной программы, какой желайте участие. Да, мы настоятельно рекомендуем сделать это до регистрации.Для всех бездепозитных бонусов функционирует наибольший предел на выигрыш. Он показывает максимальную сумму, которую возможность получить, играя на бонусные кредиты. Как только для получится выполнить требования вейджера, допустимый максимально будет переведен с бонусного счета на главной, а остаток будет списан.
1×slots зеркало которую указывали при регистрации кстати
Такой казино бонус без депо за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это словно некая конспирация одобрения под бездепозитный. Суть всего этого сводится к тому, что геймеру на час выдается, к примеру, 1000 долларов, а реклама твердит то, собственно каждой выигрыш возможно будет в забыть при себе. Но случае играющий серьезно отнесется к данному предложению, то он просто растеряет время. Ведь геймеру надо(надобно) несомненно играть не в основном аккаунте, а в тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (даже всей тысячи) в верховодила вступят конкретные обстоятельства, где несомненно сказано, что максимальной суммой победы возможность быть лишь двести $ и деньги можно применять только в бонуса на первый вклад с вейджером 25 от суммы вознаграждения плюс сам депо. По итогу выйдет, собственно игрок выигрывал для 200% бонус с вейджером на определенную необходимую. Короче разговаривая, это все не вашего медли. <a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=13343>1× slots casino зеркало</a> Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро или 20 $. Если выдаются фриспины, их количество редко выше нескольких десятков бесплатных вращений.Иногда у посетителей сайта имеют возникнуть проблемы при активации полученного промо-кода. В этих случаях, необходимо адресоваться за помощью в службу «Support». Для получения ответа, обязательно указывается конкретная причина обращения и подтверждается информация дополнительными экрана. Если сформировалась спорная ситуация, практически возможно обратиться к основному регулятору или контролирующему органу, выдавшему этому заведению лицензионный документ. 1×slots официальный demo регистрация в 1×slots casino <a href=http://sibstroyagent.ru/index.php?subaction=userinfo&user=cravenghoul35>http://sibstroyagent.ru/index.php?subaction=userinfo&user=cravenghoul35</a> В неких интернет казино для получения бездепозитных призов не достаточно просто зарегистрироваться на веб-сайте клуба и подтвердить средства контактные данные. Дополнительно требуется активация промокода.Бездепозитные призы начисляются только один раз. Не стоит раскрывать новые аккаунты, дабы получить их повторно. Служба безопасности казино непременно выявит «левого» соучастника и заблокирует. Если гость выполнит необходимые требования, отыграет свою ставку и решит исключить личный выигрыш, то ему нужно сведению, что казино непременно потребует предоставить ксерокопии собственных документов, чтобы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные средства вывести не удастся.
1×slots casino регистрация 1×slots review live
Нет. Казино выдают безвозмездные призы за регистрацию, для того, чтобы заказчик возможность ознакомиться с игровым заведением. А дабы вывести его, нужно выполнить условия отыгрыша.Мы собрали и выпустили список наихороших бездепозитных казино с бонусами за регистрацию, коие гарантируют великодушные выигрыши и мгновенные выплаты. Создание аккаунта. На сайте казино необходимо открыть регистрационную форму и наполнить пустые поля личными данными. Иногда на данном шаге требуется показать лишь адрес электронной почты и пароль, но чаще надо наполнить анкету индивидуальной информацией (ФИО, дата рождения, место проживания и т.д.). Нужно свидетельствовать лишь настоящие данные, потому впоследствие они будут проверены.Не желаете поиграть в азартные игры, не рискуя своими деньгами, но получая в все выплаты? Подобную вероятность деют почти наихорошие порталы с азартными веселиями. В их числе много правдивых и надежных интернет-казино на русском языке. Они привлекают свежих пользователей разными поощрительными событиями, включая бездепозитные, либо бесплатные бонусы. <a href=https://marvelvsdc.faith/wiki/%D0%91%D0%BB%D0%BE%D0%B3_%D0%93%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0>https://marvelvsdc.faith/wiki/%D0%91%D0%BB%D0%BE%D0%B3_%D0%93%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0</a> Каждый новичок и умелый игрок мечтают скоро стартануть и начать создавать настоящие ставки. Для этого довольно отобрать подарок, за который не нужно выплачивать. В зависимости от игровой платформы, нужно сделать профиль, привязать email или телефон. После этого администрация начислит щедрое вознаграждение повторяющий бесплатных вращений либо виртуальных кредитов.При отыгрыше бонусных средств, необходимо учесть срок действия бонуса и время, которое дается на отыгрыш. По истечению заявленного времени, не отыгранный приз несомненно аннулирован. 1×slots зеркало которую указывали при регистрации кстати Можно ли зарабатывать на бездепозитных бонусах? Это не работа, здесь как повезет, в в любом предложенном безедепе, вы будете откручивать вейджер и выводить, за возможно именовать везением, и дополнительной добавкой к вашему бюджету.Ещё одно распространённое акционное предложение – привлекательный подарок с сомнительными притязаниями. К образцу, клуб обещает $100 в качестве бездепа, но с вейджером х80 или х100. Отыграть подобный вейджер фактически нереально и потому другого концентрироваться на более заманчивых промоакциях.
<b>Смотреть еще похожие новости:</b>
<a href=https://edidaktikum.ee/en/content/iii-kontakttund-08-juuni?page=142#comment-302723>1×слот регистрация в 1×slots casino</a>
<a href=https://vivoes.com/forum.php?mod=forumdisplay&fid=2>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный приз нередко возможность стать доступным сразу в окончания регистрации, потому как единственным притязанием к нему считается регистрация, а после ревизия вашей новой учетной записи.
#239 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots review live
Чтобы других убедиться в преимуществах бездепозитных бонусов, довольно зарегистрироваться в казино и получить поощрение.Условия имеют разниться друг от приятеля. Но подобный приз может быть применен лишь для игрового процесса – полученные на счет финансы до такого, как будут отыграны, исключить нереально. <a href=http://filmkachat.ru/>1×slots регистрация на сайте 1×slots ru com</a> <a href=https://allmylinks.com/kalinka0588>https://allmylinks.com/kalinka0588</a> Бездепозитный приз предоставляется новенькому игроку за определенные действия. Часто презент вид средств либо фриспинов выдается за регистрацию, спасибо чему юзер получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. 1×slots регистрация 1×slots casino c2d ru <a href=http://xn–dm2bxa852fbaa033syeek4g.com/bbs/board.php?bo_table=free&wr_id=6547>http://xn–dm2bxa852fbaa033syeek4g.com/bbs/board.php?bo_table=free&wr_id=6547</a> Такой безвозмездный эквивалент средств зачисляется на профиль пользователя после воплощения требований и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений вероятен лишь последствии воплощения вейджеровых критерий.Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных ситуаций с казино, когда последствии отыгрыша бездепа для не дадут вывести солидную сумму выигрыша.
1×slots casino регистрация 1×slotscasino09k online
Бездепозитный бонус казино 2022 с выводом за регистрацию предоставляет возможность ознакомиться игроку с лобби избранного заведения, определится в выборе игр и выяснить качество работы саппорта. Довольно нередко, начиная игровой процесс, игрок теснее не желает останавливаться и делает реальный вклад. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть даром возможно как один таки с призом за регистрацию без необходимости вносить депо. <a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=1204435>1×слотс казино</a> 1×slots регистрация на сайте Можно ли зарабатывать на бездепозитных бонусах? Это не работа, тут как повезет, если в любом предложенном безедепе, вы будете откручивать вейджер и выводить, это можно назвать везением, и добавочной добавкой к вашему бюджету. <a href=https://viewcinema.ru/user/Philipbreaw/>https://viewcinema.ru/user/Philipbreaw/</a> зеркала 1×slots Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных притязаний, не неотъемлемой верификации. Если на сайте учтена неотъемлемая процедура подтверждения личности, то исключить выигрыш получится лишь в ревизии данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий лицо.Бездепы все заходить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами.
онлайн казино 1×slots
Игрокам не воспринимать приветственный бонус как гарантированный способ получить большой выигрыш, но это замечательная вероятность без затрат оценить функционал казино. <a href=https://masstr.net/member.php?action=profile&uid=28401>https://masstr.net/member.php?action=profile&uid=28401</a> Не советуем опрометью голову браться за всевозможные предложения получения средств без инвестициям. Вполне возможно, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем смотрится на первый взгляд. Альтернативой считается казино бонус за депозит. Мы предлагаем для пару советов, благодаря коим у каждого игрока несомненно вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом денег: 1 x slots Однако в условиях исчезают «подводные камешки», коие не разрешат вывести крупную сумму или же вы не успеете отыграть вейджер. Поэтому профессионалы советуют отобрать благотворительные вращения за регистрацию в казино без депо, чтобы поднабраться навыка и получить настоящий шанс на победу.
1×slots зеркало регистрация в 1×slots casino
Получить Бездепозитный бонус в интернет казино дело двух кликов. Другой момент, отыграть промо и соблюсти управляла и условия отыгрыша. Под правилами подразумевается столько вагер, хотя и ограничения по максимальной ставке. Мы разумеем, собственно в кино все ставят на зеро и выигрывают. Призываем не создавать сходственного. Перед активацией бонуса прочтите управляла. Узнайте следующие факторы: Условия получения дара, за регистрацию, за депозит и многое. Ограничения по максимальной ставке. Зачастую не повыше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на месте. Поэтому главно знать, в каких забавах можно совершать кратность валютного оборота.Все бесплатные призы кажутся соблазнительными. Кто же откажется от возможности поиграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далековато не все бездепозитные призы в привлекательны для рассудительного клиента. 1хслотс 1хслотс регистрация перейти на 1×slots <a href=http://j67236dr.bget.ru/user/JasperMouff/>http://j67236dr.bget.ru/user/JasperMouff/</a> Бонус с зачислением средств на счет выделяет больше свободы действий. Пользователь сам избирает, каким образом воспользоваться подаренными своими. Здесь также имеют работать лимитирования на список доступных игр, но обыкновенно эти рамки не например строги, как в промо с безвозмездными вращениями.
1 x slots
В зависимости от онлайн заведения каждый из их может для предложить как бездепозитные средства, так и бездепозитные фриспины, которые после удачной регистрации рухнут вас на ваш игровой баланс.Объективные – размер приза, коэффициент и условия вейджера, необходимость внесения депо для вывода средств; <a href=https://cse.google.co.id/url?q=https://doctorlazuta.by/>https://cse.google.co.id/url?q=https://doctorlazuta.by/</a> B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.Бездепозитные бонусы — это презенты от казино вид бонусных денег или фриспинов для игровых автоматов, которые начисляются на аккаунт игрока после процедуры регистрации на веб-сайте заведения. Для получения этих поощрений депо не требуется. 1×slots официальный регистрация Для получения предоставленных бонусов вас понадобиться — ПК или мобильное прибор, и остальное дело за малым.Для получения бездепа нужно пригласить в игру по реферальной ссылке нового клиента: он должен зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и восполнить счёт на необходимую, указанную в критериях акции.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.konyacraft.com/threads/zerkala-1×slots.10043/>зеркала 1×slots</a>
<a href=https://www.fromrus.su/index.php?/topic/64869–1×slots-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE/>1×slots рабочее зеркало</a>
<a href=http://3ak.cn/home.php?mod=space&uid=187057>казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Допустим, за регистрацию вы возымели бездеп в объеме 2 000 руб. С вейджером х30. В данном случае светит сделать ставок, на совместную сумму в 60 000 рублей (2 000 * 30 = 60 000). Когда сделайте условия по отыгрышу, придёт время заработать настоящие деньги. Однако не забывайте, что с каждого дара получится вывести определённую необходимую (чаще всего менее $200).
#240 Charlesgunnyhttp://filmkachat.ru
сайт 1× slots casino
Мы проделываем ударение на главных положениях управлял, рассказываем о территориальных ограничениях и вкратце информируем о других акциях обговариваемого казино.Мы подготовили список, где есть практически актуальные и новые бездепозитные призы казино, которые продоставляется получить безвозмездно. Для наших пользователей есть специальные предложения неповторимые бонусы, коие вы кого не найдете, их мы определили особой красной плашкой «Exclusive». <a href=http://filmkachat.ru/>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a> <a href=http://magic.ly/kalinka>http://magic.ly/kalinka</a> 1хслот официальный сайт зеркало <a href=https://www.cfbwz.com/space-uid-72501.html>https://www.cfbwz.com/space-uid-72501.html</a> Необходимость отыгрыша. Вейджер в повыше, чем для бонусов за депо. И пока средства не отыграны, вывести их невозможно.Срок активации и время на отыгрыш. Зачисление средств или фриспинов происходит при активации протяжении строго ограниченного периода, похожие требования предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать приз несколько дней либо том недель. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером.
1×slots казино мобильная версия
Бесплатные бонусы казино без депозита можно получить вид валютных средств на бонусный счет (вывести их возможно лишь в отыгрыша), фриспинов, игры или кешбэк-бонуса. скачать 1×slots официальный сайт 1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, если не желаете стать жертвой плутов либо впустую истратить время; <a href=http://rodnici.minobr63.ru/forums/users/jodimalm203/edit/?updated=true/users/jodimalm203/>http://rodnici.minobr63.ru/forums/users/jodimalm203/edit/?updated=true/users/jodimalm203/</a> 1×slot зеркало Классическая разновидность бонуса за творенье аккаунта. Его превосходство заключается что, нет, что заказчик имеет других избирать аппараты и создавать ставки в их. Иногда перечень игровых автоматов ограничен оператором, хотя все одинаково это никакого, чем один-единственный доступный слот, как если, тогда, с внедрением фриспинов.Вы не в коем случае ни чем рискуете, а только выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической забавы на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, выучится регулировать изменять ставки и полосы, исследовать бонусные игры и их выигрышные комбинации, ну в конце концов просто зарядится кучей эмоций! Ведь вы будите играть на бонусные свои, коие можно отыграть и исключить, не просто на демо счет, тем наиболее адреналин в крови более повысится а пульс забьется с нередким ритмом!
1×slots зеркало подтвердит вашу регистрацию если говорить
Чаще всего интернет-казино предлагают бездепозитные призы свежим пользователям. Эта промо-акция довольно эффективно привлекает начинающих, подталкивая их к открытию счета. Конечно, не все становятся преданными посетителями, хотя сам прецедент регистрации аккаунта играет на руку заведению.Подтверждение персональной информации. Все казино требуют от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и наличие у юзера других аккаунтов (мультиаккаунт запрещен). Способы получения бездепа различаются зависимо вида приза, кот-ый понравился игроку. Но вам иначе нужно быть зарегистрированным в законном онлайн-казино и доказать свою лицо. В общем виде пошаговая инструкция для получения бездепозитного приза выглядит так: <a href=https://bbs.o2jam.cc/home.php?mod=space&uid=1423248>https://bbs.o2jam.cc/home.php?mod=space&uid=1423248</a> 1хслотс мобильная версия зеркало Когда идет о получении бездепозитных бонусов в казино, в первую очередь внимание на последующие условия:
1×slots официальный сайт, скачать
Бездеп с фриспинами имеет обхватывать всю коллекцию игр на сайте или разработки одного провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении акции. Выигрыш имеет быть выведен после того, как юзер отыграет данную необходимую. Возможность расценить глубокий функционал слотов — главное совершенство этой разновидности. Игроку становятся доступны что, эти функции, коие отсутствуют в демонстрационном режиме, а возможность выиграть реальные деньги прибавляет ярчайших азартных ощущений. <a href=http://forum.komne.com/viewtopic.php?f=25&t=4720>1×slots рабочее зеркало</a> Можно. Вы всегда сможете отрешиться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не создадите ставку. 1×slots зеркало видели такую регистрацию на <a href=http://avestalaw.ru/index.php?subaction=userinfo&user=ruraldome90>http://avestalaw.ru/index.php?subaction=userinfo&user=ruraldome90</a>
1×slots casino регистрация
Теоретически, к безвозмездным бонусам можно отнести например называемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, потому что они деют лишь вероятность делать ставки.Большинство интернет-казино из нашего топ-10 готовы повеселить вас эксклюзивными промоакциями. Читайте о них в обзорах и на форуме. Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют актуальную информацию о no deposit bonuses прочих услугах. <a href=https://www.rusdrama-az.com/user/BrianHom/>https://www.rusdrama-az.com/user/BrianHom/</a> Денежные средства. Третий бонус за регистрацию без депо – наличные. К раскаянию, только знаменитые и популярностью клубы имеют уяснить средства в рублях или баксах. С их помощью вы сможете насладиться каждой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед этим необходимо исполнение определенных критерий.Подтверждение индивидуальной инфы. Все казино настоятельно от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и присутствие у юзера иных аккаунтов (мультиаккаунт запрещен). 1×slots официальный сайт мобильная версия Такие одобрения разрешают бесплатно протестировать новое казино, разобраться с игровым процессом интернет слотов, заработать и исключить маленькую сумму денег.Наличие у игрока второго аккаунта. Запрещено создавать некоторое профилей для многократного получения бездепов.
<b>Смотреть еще похожие новости:</b>
<a href=http://pravoslit.ru/forum/obshchee/197942–1×slots-ofitsialnyj-sajt-skachat.html>1×slots официальный сайт, скачать</a>
<a href=https://masstr.net/showthread.php?tid=220281>casino 1×slot</a>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=412302>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы казино за регистрацию в 2022 году — это возможность поиграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой либо числом безвозмездных вращений без внесения депозита. Не путайте деморежим с реальной игрой без необходимости внесения депо. Бесплатный бонус – кредиты, коие онлайн-казино начисляет клиенту, не заставляя его пополнять игровой счет.
#241 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора фонбет официальный Любимова Ольга Борисовна порно <a href=https://rucriminal.info/>букмекерские контора ап</a> букмекерская контора бесплатно скачать сколько казино <a href=https://specreporter.com/>1×bet casino</a> Ходнева Светлана Владимировна порно top casino казино пину винлайн букмекерская контора официальный porno Дарья Мороз up casino скачать пинко casino
DiskiPlus казино сочи DiskiPlus букмекерская контора официальный сайт скачать <a href=https://diskiplus.ru>DiskiPlus порно с Анастасия Потапова, теннисистка</a> DiskiPlus зеркала казино DiskiPlus человек казино <a href=https://diskiplus.ru>DiskiPlus бывшие казино</a> DiskiPlus порно с Афонина Марина Игоревна DiskiPlus Крючкова Полина Викторовна порно DiskiPlus казино можно DiskiPlus up casino DiskiPlus вавада казино DiskiPlus 1×bet слоты официальный сайт DiskiPlus слоты казино
#242 Сколько стоит отремонтировать телефон Runbo в Пермhttps://perm.pdacenter.ru/remont-telefonov/runbo.html
Профессиональный сервисный центр по ремонту техники в Перми. Мы предлагаем: <a href=https://perm.pdacenter.ru/remont-telefonov/runbo.html>Сколько стоит отремонтировать телефон Runbo</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#243 Charlesgunnyhttp://filmkachat.ru
1×slots скачать на айфон
Перед активацией главно пристально изучить условия акции. Чем ниже вейджер, что, этим больше потенциальная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, на которых можно пользоваться предложением. Если бездеп обхватывает ограниченный список игр, рекомендуется разузнать максимальные коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только что, нет случае, случае оператор не установил взыскательные лимитирования на максимальную необходимую ставки.Бездепозитные призы в казино без пополнения 2022 — это определенная сумма денег или gorovyh spins вращения, коие предоставляются первым постояльцам за регистрацию на веб-сайте казино в виде бездепозитного приза, и выделяет вас возможность за счет казино без пополнения опробовать предложения (игр), с последующей прерогативой вывода средств при исполненьи всех установленных управлял. <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> Возможность протестировать свежие забавы, не рискуя личностными своими и создать собственную тактику забавы. <a href=https://hearthis.at/group/466308/transform-your-e-commerce-success-with-360-spin-product-videos/>https://hearthis.at/group/466308/transform-your-e-commerce-success-with-360-spin-product-videos/</a> Как только вы отыграли вейджер и свои с бонусного баланса перебежали вас на реальный счет, Вы неустрашимо сможете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (устроить наименьший депо например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депозитом). x1 slots регистрация в 1×slots casino <a href=https://www.google.com.bn/url?q=http%3A%2F%2Fdoctorlazuta.by>https://www.google.com.bn/url?q=http%3A%2F%2Fdoctorlazuta.by</a> Чаще всего используются коды. Их надо(надобно) вносить в особые окошки регистрационной анкеты, случае речь идет о пригласительных призах, или в определенном разделе личного офиса игрока.
1×slot зеркало рабочее регистрации на телефон придет
Несмотря на то, собственно этот вариант стимуляции со стороны азартных платформ довольно моден области похожих игр, далековато не всем поклонникам казино знаменито, что сами бездепозитные призы казино и как непосредственно их вполне эксплуатировать.Помимо остального, для вывода средств по бездепу необходимо привнести на счёт собственный первый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало вероятную необходимую, в чего вывод средств станет доступен. <a href=http://dd214.labelcreativeak.com/forums/viewtopic.php?f=3&t=1413>1×slot казино зеркало</a> 1×slots зеркало на сегодня Бонус за регистрацию в казино выдается лишь один один на одного игрока. Но бывают дополнительные акции, масштабах которых бездепы раздаются для неизменных клиентов и эти подарки Вы можете получить более 1-го раза.Если площадка презентует бездеп за регистрацию, то процедура его получения проста. Нужно только завести аккаунт на веб-сайте и активировать его, подтвердив адрес электронной почты, номер телефона или другие данные, коие настятельно оператор. Перед этим необходимо убедиться, собственно юзер располагается на официальном сайте казино, а не на мошеннической площадке. <a href=http://www.cn.ru/terka/Glavdorogadv1607/>http://www.cn.ru/terka/Glavdorogadv1607/</a> Ознакомьтесь с нашим перечнем наихороших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего списка и получите бездеп сразу. Хватайте превосходнейшие благотворительные предложения ниже и выигрывайте большие деньги, не рискуя!Новые посетители онлайн-казино без первого депо могут проверить свою удачливость. К тому же есть вероятность конвертировать бездепы в настоящие деньги за регистрацию в казино, впрочем чтобы бонус необходимо отыграть сообразно условиям акции. 1×slots официальный сайт зеркало рабочее
1×слот регистрация в 1×slots casino
Выполнив все притязания оператора, заказчик имеет оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит примерно менее суток. Если дополнительно требуется пройти функцию верификации, то срок возрастает до 1–2 рабочих дней. Для перевода используются банковские инструменты и электронные платежные системы. Второй метод подходит никакого, например как основная транзакций в осуществляются моментально. В связи со специфичностью функционирования банков обработка платежей имеет занять до нескольких рабочих дней. <a href=http://academijacrimea.ru/index.php?subaction=userinfo&user=optimalnosh11>http://academijacrimea.ru/index.php?subaction=userinfo&user=optimalnosh11</a> Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют актуальную информацию о not the slightest deposit bonuses и других предложениях. 1×slots официальный demo регистрация в 1×slots casino
1 xslots рабочее зеркало
<a href=https://mit-bbs.com/viewtopic.php?t=864353>1×slots зеркало рабочее</a> Варианты выигрыша в от Вашей успеха и условий игорного портала. Выше мы сказали, что некоторые бездепозитные призы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются другие, все, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на деньги, можно выиграть неописуемые суммы. Сегодняшние игровые автоматы или видео слоты, как их именуют. Могут выдавать солидные умножение от х1.000 и выше. Некоторые множат ставку от х100.000. 1×slots casino регистрация 1×slotscasino09k online <a href=http://www.associazionelaginestra.it/forum/pop_profile.asp?mode=display&id=20109>http://www.associazionelaginestra.it/forum/pop_profile.asp?mode=display&id=20109</a> Каждая игровая платформа отличается критериями по получению и отыгрышу бездепов. В правилах отчетливо расписаны кратковременные рамки, за коие нужно прокрутить вейджер. Также не забывайте тему максимальный объем ставки и наивысшую необходимую выплаты. С другой стороны, чтобы получить бездепозитные бонусы казино, достаточно потратить не более 1 минутки.
1×slots официальный сайт скачать
Призовые начисления без депозита могут предоставляться для участия в турнирах интернет казино. Потратить перечисленные деньги возможно самая в данной промоакции. Условия их проведения включают в себя лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться этим предложением, лучше изучить его верховодила.Бесплатные призы казино без депозита возможно получить в виде денежных средств на бонусный счет (вывести их можно лишь последствии отыгрыша), фриспинов, забавы либо кешбэк-бонуса. <a href=http://itstula.com/user/Jaspermet/>http://itstula.com/user/Jaspermet/</a> Практически все онлайн казино с бездепозитным призом за регистрацию предусматривает программу лояльности — систему одобрения постоянных посетителей, которая произведено из множества уровней. При достижении игроком еще уровня на его счёт поступает бонус. Чем выше уровень — тем щедрее приз. 1×slots casino регистрация
<b>Смотреть еще похожие новости:</b>
<a href=https://www.ladyboyescort.com/profile/745-rabofreesi/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<a href=http://rapbeatsforum.com/viewtopic.php?t=699849>1×slots зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для выбора азартного заведения Вы сможете пользоваться перечнем наших казино с бонусами за регистрацию. На нашем веб-сайте мы выпустили перечень бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, что часть бонусов эксклюзивные и доступны лишь для гостей нашего сайта по-специальному промо-коду либо по оригинальной ссылке. Кроме такого, для каждого бонуса мы подготовили доскональный обзор, каком Вы узнаете как получить и отыграть поощрение и как вывести свой выигрыш с бездепа.
#244 Официальный сервис Бирюса в Йошкар-Олеhttps://yosha.pdacenter.ru/services/biryusa.html
Профессиональный сервисный центр по ремонту техники в Йошкар-Оле. Мы предлагаем: <a href=https://yosha.pdacenter.ru/services/biryusa.html>Официальный сервис Бирюса</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#245 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Виктория Синицина, фигуристка казино ли <a href=https://rucriminal.info/>Кузнецова Анна Юрьевна порно</a> пин ап casino pin 1×bet на андроид бесплатно <a href=https://rucriminal.info/>букмекерская контора на андроид</a> 1×bet вход сколько казино pin casino 7k casino зеркало букмекерская контора официальный сайт 1×bet официальный xbet porno Юлия Канакина
DiskiPlus up casino официальный DiskiPlus ramenbet casino <a href=https://diskiplus.ru>DiskiPlus мелбет букмекерская контора</a> DiskiPlus Кузнецова Анна Юрьевна порно DiskiPlus casino зеркало сегодня <a href=https://diskiplus.ru/>DiskiPlus букмекерская контора на андроид</a> DiskiPlus порно с Голикова Татьяна Алексеевна DiskiPlus винлайн букмекерская контора официальный DiskiPlus 1×bet зеркало на сегодня 1×bet xyz DiskiPlus 1×bet xbet xyz DiskiPlus порно с Антропова Валентина Викторовна DiskiPlus порно с Анна Калинская (теннис) DiskiPlus porno Александр Соболев (футбол)
#246 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino 777 online
При исполненьи критерий отыгрыша и верификации, деньги с бонусного счета переводятся на основной и имеют быть выведены на карту либо электрический кошелек. Лимиты на вывод и сроки проведения транзакции в от избранной платежной системы.Если идет об эксклюзивных услугах, имеет потребоваться регистрация в казино по ссылке с партнерского сайта. <a href=http://filmkachat.ru/>1хслотс официальный сайт зеркало</a> <a href=https://www.shippingexplorer.net/en/user/3d-product-rendering-services/146868>https://www.shippingexplorer.net/en/user/3d-product-rendering-services/146868</a> 1×slots официальный сайт мобильная версия скачать <a href=https://www.wakewiki.de/index.php?title=Benutzer:Arron55096388>https://www.wakewiki.de/index.php?title=Benutzer:Arron55096388</a>
1×slots casino зеркало
Самые свежие бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды находятся на данной страничке. Посетитель может расценить условия получения и начать выступать на средства без внесения депо. При этом игроку главно разуметь, на каких критериях и какими способами возможность вывести приобретенный выигрыш. Для сего нужно расценить перечень присоединенных платежных систем. <a href=http://forum.as-p.cz/viewtopic.php?f=45&t=281331>1×slots зеркало проходить регистрацию это отличный вариант</a> 1 х слотс зеркало Акции распространяются как на все игры казино, например и на ограниченный перечень. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и. Промо возможность охватывать разработки 1-го производителя. Бездеп не пересекается с иными акциями казино. Если на сайте учтен кэшбек, он не начисляется за ставки, изготовленные бонусными средствами. Для идентификации платежных реквизитов игрока возможность понадобиться пополнение счета на минимальную необходимую. <a href=https://my.omsystem.com/members/vidikby>https://my.omsystem.com/members/vidikby</a> Выигрыши с призов без инвестициям всегда привязаны к требованию по ставкам и могут быть обналичены только последствии исполнения этих притязаний.В перечне притязаний к отыгрышу нередко наличествуют лимиты на ставки при этой на личные деньги. Так, если отыграть нужно 30 000 рублей, а максимальная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам действия промоакции. 1×slots мобильная версия войти казино 3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефон или почту, показать персональную информацию;Активация по промокоду используется в различных обликах бездепов. Если речь идет о приветственном призе, то комплект знаков возможно узнать на основной страничке, в регистрационной форме или письме, которое отправляется пользователю для подтверждения адреса электронной почты. Акции имеют проводиться общо с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активируется разовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном кабинете или начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем важный код для активации в описании любого промо.
1хслотс зеркало на сегодня
При подмоги такового одобрения оператор может того завлекать посетителей, которые раньше проявляли активность на сайте, но по какой-то основанию перестали выступать. В этом случае промокод высылается юзеру по электрической почте либо вид SMS.Отыграв бездепозитный бонус в казино с выводом также придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если схожее лимитирование присутствует, то единоразово вывести получится только сумму, не превосходящую размер полученного приза. <a href=http://interunity.ru/bitrix/rk.php?goto=http://info-magazin.ru/bitrix/rk.php?goto=http://donaqua.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/pA2ziG28LJy>http://interunity.ru/bitrix/rk.php?goto=http://info-magazin.ru/bitrix/rk.php?goto=http://donaqua.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/pA2ziG28LJy</a> Многие казино предоставляют в маркетинговых целях безвозмездные бонусы необыкновенно для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой сайт по партнерской ссылке с нашего портала.Подтверждение индивидуальной информации. Все казино настоятельно от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у пользователя других аккаунтов (мультиаккаунт запрещен). 1×slots бездепозитный бонус за регистрацию Классическая разновидность приза за создание аккаунта. Его преимущество содержится сомнений, собственно клиент может самостоятельно выбирать аппараты и создавать ставки в них. Иногда перечень игровых автоматов ограничен оператором, хотя все также это какого-либо, чем один-единственный дешевый слот, как когда с внедрением фриспинов.Для всех бездепозитных бонусов функционирует максимальный лимит на выигрыш. Он показывает предельную необходимую, коию вы сможете получить, играя на бонусные кредиты. Как только для удастся выполнить притязания вейджера, допустимый максимум будет переведен с бонусного счета на главной, а остаток будет списан.
1×slot зеркало рабочее этих способов предполагает регистрацию
Зарегистрируйтесь. Для регистрации чаще всего достаточно установить свой номер аппарата и почтовый адресок, в чего ввести полученный код из СМС. Возможно, потребуется указать промокод. В правилах акции несомненно написано, где его бы вводить. Иногда это надо создавать при регистрации, от — уже последствии сотворения личного кабинета, на отдельной странице.Список так называемых «разрешенных территорий» прилагается к правилам бонусной программки игорного портала. Обязательно выясните, распространяются ли на вас похожие наказания. Бездепы обычно предлагают с отыгрышем — моментально исключить выигранные средства нельзя. Перевод средств со счета несомненно возможен последствии того, как юзер выполнит все притязания казино, а сумма возможности быть выше установленного правилами лимита. Условиями акции фиксируются сроки, в течение которых заказчик вправе пользоваться предложением. Обычно они не превышают нескольких дней в активации. Для получения выигрыша потребуется выполнить обстоятельства казино. Чаще всего игроку нужно поставить определенную сумму, хотя уже из личных средств. Она рассчитывается из общего объема выигрыша за всегда применения бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, если юзер выиграл 1000 руб., а множитель составляет х30, вывести деньги можно несомненно, сделав ставки на 30 000 рублей.Бонусы без депозита при регистрации считаются самыми привлекательными как для опытнейших игроков, например для и новичков. Получив такое вознаграждение, заказчик возможность выступать на настоящие средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а также обстоятельства их активации и выигрыша. 1хслот 1хслотс регистрация перейти на 1×slots <a href=http://unix.t7y.ru/user/Jamesnib>http://unix.t7y.ru/user/Jamesnib</a>
1×slots на любой вкус как пройти регистрацию
Осталось выбрать казино с призом за регистрацию и сделать профиль. После активации презента выигрыш в от Фортуны и способностей.Самый распространённый из похожих призов, конечно же, бездеп на день рождения клиента — приз вид фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им возможно в течение установленного периода медли. <a href=http://michiya-cs.com/userinfo.php?uid=30614>http://michiya-cs.com/userinfo.php?uid=30614</a> В бонусную программу множества операторов входят регулярные бездепы. Это пожизненные промоакции, поощряющие интенсивных неизменных игроков. Популярный формат — раздача фриспинов по определенным дням недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают постоянные бонусы без депозита в размен на накопленные баллы лояльности. 1×slots официальный сайт зеркало рабочее
<b>Смотреть еще похожие новости:</b>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=368639>1×slots casino регистрация 1×slotscasin online</a>
<a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=408641>1хслотс рабочее зеркало</a>
<a href=https://forum.ltp-team.com/profile/596-rabofreepa/>1×slot регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для верификации аккаунта нужно дать профессионалам технической поддержки отсканированную копию паспорта и счета за коммунальные предложения, еще фотографию банковской карты либо снимок страницы электронного кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для подтверждения личности. Индивидуальные одобрения выдаются за совершение деяний: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавления либо официального клиента для ПК. В большинстве казино действуют программки лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на грядущий степень нередко сопрягается выдачей бездепа.
#247 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
Бездепозитные бонусы прекрасный вариант даровой игры в игровые автоматы. Многие пользователи сети не понимают, собственно в казино можно начать играть абсолютно бесплатно, а потом вывести выигрыш на банковскую карту или электронный кошелек, иные не доверяют интернет казино, а третьи удачно играют и выигрывают – и тотчас достаточно большие суммы.На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не можете активировать и получить бездепозитный бонус. <a href=http://filmkachat.ru/>1×slots официальный зеркало</a> Доступные игры – В неких азартных забавах можно понизить математическое превосходство казино до нескольких 10-х процента. В их числе все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как правило, в этих играх ставки идут в зачет вейджера не полностью. Например, может предусматриваться лишь 50%. В неких играх бездепозитные бонусы вообщем невозможно отыгрывать.Выбрать казино с бездепозитным призом. У нас на сайте представлен перечень лучших интернет казино, которые предлагают своим игрокам щедрые призы за регистрацию. <a href=https://www.papercall.io/speakers/146415/speaker_talks/292505->https://www.papercall.io/speakers/146415/speaker_talks/292505-</a> 1хслотс рабочее зеркало <a href=http://www.eionia.co.kr/home/bbs/board.php?bo_table=free&wr_id=560926>http://www.eionia.co.kr/home/bbs/board.php?bo_table=free&wr_id=560926</a>
1×slots casino регистрация 1×slots review live
Таким образом онлайн казино получает вероятного игрока. Возможно в или настоящем он захотит поиграть на средства средства. Так работают бездепозитные призы в онлайн казино. Здесь очень подходит выражение, бесплатные сыр посещает лишь в мышеловке. Начинающие игроки могут не осознавать опасность пыла. Однако времени осознания делается больше. Это тема для отдельного обсуждения.Возможность протестировать новые игры, не рискуя собственными средствами и разработать личную стратегию игры. <a href=https://imcep.com/cs/component/users/profile?Itemid=103>рабочее зеркало 1хслотс</a> 1×slots сайт зеркало Исходя из этого, просто не присутствует разумных оснований махнуть рукою на получение такового приза при регистрации. И, не, на подобный безвозмездной основе у вас есть все шансы выиграть деньги и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, нарекают бесплатными онлайн платформами для игр. <a href=http://pan-invest.com/bitrix/click.php?goto=http://optimakuban.ru/bitrix/redirect.php?goto=http://prahtarsk.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/h_POc9bf1D1>http://pan-invest.com/bitrix/click.php?goto=http://optimakuban.ru/bitrix/redirect.php?goto=http://prahtarsk.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/h_POc9bf1D1</a> Бездепозитный приз – это экономическое вознаграждение, коие выдается участнику игры в казино, для его привлечения и появления заинтересованности. Любой гость, кот-ый соответствует условиям выдачи подобного бездепозитного приза, имеет претендовать на получение вышеуказанного приза. Такое поощрение считается наиболее эффективным методом, дающим возможность стартовать при, не вкладывая собственных материальных средств.Такой казино приз без депозита за регистрацию выдается игроку на час и активно используется данное предложение с 2017 года. Это как бы какая-то маскировка поощрения под бездепозитный. Суть всего сего сводится к что, этому, собственно игроку на час выдается, например, 1000 $, а реклама утверждает о том, что любой выигрыш можно несомненно в будущем оставить при для. Но в играющий всерьез отнесется к этому предложению, то он попросту потеряет время. Ведь игроку нужно будет выступать не главном аккаунте, а тренировочном и с ограниченным выбором автоматов и ставок. Да и если, тогда, выигрыша (том всей тыс. ) в правила вступят определенные условия, где будет сказано, собственно наибольшей суммой победы имеет быть только двести долларов и средства возможно использовать лишь виде приза на 1-ый лепта с вейджером 25 от суммы гонорары плюс сам депозит. По результату получится, что игрок выигрывал себя 200% приз с вейджером на конкретную сумму. Короче говоря, это все не стоит вашего времени. 1×slots сайт
1 x slots casino
Для получения бездепа нужно пригласить в игру по реферальной ссылке нового посетителя: он должен зарегистрироваться, пройти верификацию на сайте онлайн-казино и пополнить счёт на необходимую, указанную в критериях промоакции. <a href=http://www.markusragger.at/chess/index.php/kforum/user/111465-acousticevent81>http://www.markusragger.at/chess/index.php/kforum/user/111465-acousticevent81</a> 1×slos регистрация в 1×slots casino Онлайн-казино с бездепозитными призами ставят клиентам условия для пользования бездепами, поэтому перед ролью в акции никакого подробно ознакомиться со всеми правилами и нюансами промоакции. Условия шансы касаться получения бонуса, его использования и следующего вывода валютных средств если, тогда, выигрыша.Наиболее пользующиеся вознаграждения среди гэмблеров – бездепозитные бонусы казино. Это не умопомрачительно, так возможно получить безвозмездные вращения либо виртуальные кредиты, и при не придётся пополнять счёт, рисковать собственными деньгами. Удастся насладиться разнообразными увеселениями и даже выиграть солидную необходимую, избегая серьёзного риска.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Некоторые клубы механически начисляют приз на аккаунт игрока последствии исполненья критерий получения, хотя случаются истории, когда приз нужно активировать игроку самому. Есть несколько способов активации приза: 1×slots бездепозитный бонус за регистрацию <a href=http://100druzei.info/gds/item/126834/>http://100druzei.info/gds/item/126834/</a> Бонус с зачислением денег на счет дает больше свободы деяний. Пользователь сам выбирает, каким образом распорядиться подаренными своими. Здесь также могут действовать ограничения на перечень доступных игр, но обычно эти рамки не так строги, как в промо с безвозмездными вращениями.Наличие у игрока второго аккаунта. Запрещено создавать некоторое профилей для многократного получения бездепов.
1×slots официальный сайт мобильная версия
Однако в критериях исчезают «подводные камни», коие не разрешат исключить солидную необходимую или же вы не успеете отыграть вейджер. Поэтому мастера рекомендуют арестовать бесплатные вращения за регистрацию в казино без депо, чтобы поднабраться навыка и получить настоящий шанс на победу. <a href=http://optkirp.ru/bitrix/redirect.php?goto=http://gardengrove.ru/bitrix/redirect.php?goto=http://aomeitech.com/forum/home/leaving?Target=https://telegra.ph/Polnyj-spisok-neobhodimyh-dokumentov-dlya-registracii-prava-sobstvennosti-na-zemlyu-09–19>http://optkirp.ru/bitrix/redirect.php?goto=http://gardengrove.ru/bitrix/redirect.php?goto=http://aomeitech.com/forum/home/leaving?Target=https://telegra.ph/Polnyj-spisok-neobhodimyh-dokumentov-dlya-registracii-prava-sobstvennosti-na-zemlyu-09–19</a> Самый распространённый из сходственных бонусов, естесственно же, бездеп на денек рождения посетителя — бонус повторяющий фиксированной суммы либо фриспинов поступает на счёт игрока, а воспользоваться им можно на установленного периода времени.Верификация аккаунта. Лучше подтвердить лицо незамедлительно последствии регистрации, чтобы потом не было проблем с выводом денег. Верификация имеет протекать 2-мя маршрутами: 1хслотс рабочее зеркало Чаще всего казино приз за регистрацию без депозита даёт вероятность запустить любой машина. Но другого внимательно ознакомиться с условиями. Иногда для игры доступны лишь определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, лучше начать знакомство с миром азарта непосредственно с «одноруких злодеев».Мы собрали и опубликовали перечень наихороших бездепозитных казино с бонусами за регистрацию, коие гарантируют великодушные выигрыши и мгновенные выплаты.
<b>Смотреть еще похожие новости:</b>
<a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=60494>1×slots коды</a>
<a href=https://win11forum.de/m/manuelenabs.2164/>1×slots быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В количестве случаев благотворительные призы начисляются в кредитах, которые нельзя сразу исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти требования принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже.
#248 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
top casino казино онлайн <a href=https://th-royalgclub.com/>bet casino</a> вавада казино Хорова Наталья Александровна порно <a href=https://rhymes-punches.com/>Преподобная Надежда Александровна порно</a> ограбление казино Елизавета Боярская гта онлайн казино лучшие онлайн казино сайт казино вход casino бездепозитный скачать casino на андроид
DiskiPlus porno Ангелина Гончаренко, хоккеистка DiskiPlus порно с Баталина Ольга Юрьевна <a href=https://diskiplus.ru/>DiskiPlus new casino</a> DiskiPlus pin casino DiskiPlus Манилова Алла Юрьевна порно <a href=https://diskiplus.ru/>DiskiPlus казино регистрации</a> DiskiPlus букмекерская контора скачать приложение DiskiPlus яндекс игры казино DiskiPlus порно с Дарья Клишина, легкоатлетка DiskiPlus порно с Константин Тюкавин (футбол) DiskiPlus пина casino DiskiPlus пин ап casino pin up top DiskiPlus casino рабочее зеркало
#249 Charlesgunnyhttp://filmkachat.ru
рабочее зеркало 1хслотс
В неких онлайн казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на сайте клуба и подтвердить средства контактные данные. Дополнительно потребуется активация промокода. <a href=http://filmkachat.ru/>1× slots официальный</a> <a href=https://www.papercall.io/speakers/146415/speaker_talks/292505->https://www.papercall.io/speakers/146415/speaker_talks/292505-</a> При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, которое можно предназначить этой в казино.Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, solid зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. 1хслот 1хслотс регистрация перейти на 1×slots <a href=http://rytof.ru/node/16194>http://rytof.ru/node/16194</a> В перечне притязаний к отыгрышу часто присутствуют лимиты на ставки при забаве на собственные средства. Так, в отыграть нужно 30 000 руб., а предельная сумма ограничена 30 рублями, то вертеть барабаны светит 1000 раз. Эта особенность затрудняет соблюдение игроками условий по срокам деянья акции.Зарегистрироваться в казино по особой ссылке либо с бонусным кодом. Подтвердить контактные данные (номер аппарата и электрическую почту). Для подтверждения номера телефона нужно в личном профиле указать собственный номер и надавить кнопку „Подтвердить номер аппарата“, дальше Вы получите sms-сообщение с кодом, который необходимо установить в отвечающее поле. Для доказательства электрической почты, перейти по интенсивной ссылке в послании от казино.
1×slots зеркало на сегодня
Для получения приза нужно ознакомиться с программой лояльности казино и устроить ставки на сумму, нужную для перехода на грядущий уровень. 1×slots casino регистрация 1×slots review live Чтобы получить вероятность вывести прибыль с бездепозитного бонуса в казино, нужно выполнить ряд условий: <a href=http://ez4×g.nehe.com.cn/home.php?mod=space&uid=599707&do=profile>http://ez4×g.nehe.com.cn/home.php?mod=space&uid=599707&do=profile</a> Выбрать казино с бездепозитным бонусом. У нас на веб-сайте представлен перечень лучших онлайн казино, коие предлагают своим игрокам щедрые бонусы за регистрацию.Помимо остального, для вывода средств по бездепу необходимо внести на счёт собственный 1-ый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально вероятную сумму, последствии чего вывод средств будет доступен. 1×slots зеркало быструю регистрацию а также мгновенное
1 x slots casino
Для получения выигрыша потребуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить конкретную необходимую, хотя уже из собственных средств. Она рассчитывается из общего объема выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, случае юзер выиграл 1000 рублей, а множитель составляет х30, вывести средства можно будет, сделав ставки на 30 000 рублей.Поспешите забрать бездепозитные призы за регистрацию в казино из представленного перечня. Все платформы не ведут легальную работа, хотя и порадуют добросовестными плодами игры, высокой отдачей, быстрыми выплатами. <a href=http://xn–80acdliijfdxbfj5cm8ac6b0d.xn–p1ai/bitrix/redirect.php?goto=http://katalog-rek.ru/bitrix/redirect.php?goto=http://burzyan.ru/bitrix/redirect.php?goto=https://teletype.in/@urist_free/9WrYnx3fuFE>http://xn–80acdliijfdxbfj5cm8ac6b0d.xn–p1ai/bitrix/redirect.php?goto=http://katalog-rek.ru/bitrix/redirect.php?goto=http://burzyan.ru/bitrix/redirect.php?goto=https://teletype.in/@urist_free/9WrYnx3fuFE</a> 1×slots регистрация 1×slots review live Фриспины – бесплатные вращения с фиксированной ставкой, коие можно применять в конкретных игровых автоматах.Фриспины — благотворительные вращения, коие позволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся наиболее знаменитым и преимущественным видом бонуса — благотворительные вращения порой эффективнее и веселее в отыгрыше, чем другие виды бездепов.
1×slots акции
Мы подготовили список, где есть практически актуальные и свежие бездепозитные бонусы казино, которые вы можете получить бесплатно. Для наших юзеров есть особые предложения неповторимые призы, коие вы кого не найдете, их мы обозначили специальной красной плашкой «Exclusive». Срок активации и время на отыгрыш. Зачисление денег либо фриспинов происходит при активации протяжении требовательно ограниченного периода, похожие требования предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать бонус количество дней или и месяцов. Другие выдают крупную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером. В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и в случае неоднозначных ситуаций нет способности куда-то посетовать и доказать свою правоту.Бездепозитный бонус казино 2022 с выводом за регистрацию предоставляет возможность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и выяснить качество работы службы поддержки. Довольно часто, начиная игровой процесс, игрок уже отказывается останавливаться и делает настоящий лепта. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть безвозмездно возможно как раз таки с бонусом за регистрацию без надобности заносить депозит. 1× slots официальный <a href=http://www.zgqsz.com/home.php?mod=space&uid=403086>http://www.zgqsz.com/home.php?mod=space&uid=403086</a> Бездепозитный бонус предоставляется новенькому игроку за конкретные действия. Часто подарок в виде средств либо фриспинов выдается за регистрацию, спасибо чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.Но на азартных платформах подобные гонорары шансы получить теперь зарегистрированные юзеры. В таком случае, бонусы предоставляются в оригинальных промоакций или же некоторым геймерам повторяющий акционного предложения, которое прибывает на почту с целью «возвратить» игрока в свое казино.
1×slots casino регистрация 1×slotscasin online
Каждый из бездепозитных призов без пополнения 2022 имеет собственный определенный вейджер для отыгрыша, так же в каждом казино он уточняется индивидуально — где то он х55 а кое-где х30, повторюсь везде по разному! <a href=https://cromia.ua/forum/user/8887/>https://cromia.ua/forum/user/8887/</a> 1×slots зеркало сайта Если вы новичок в этом деле и лишь попали в неизведанную вами область пыла — счет услуг как бездепозитные бонусы без пополнения.
<b>Смотреть еще похожие новости:</b>
<a href=http://mandala-app.com/forums/viewtopic.php?f=5&t=259262>рабочее зеркало 1хслотс</a>
<a href=http://dd214.labelcreativeak.com/forums/memberlist.php?mode=viewprofile&u=29059>1хслотс казино зеркало</a>
<a href=https://roguedynasty.net/forums/member.php?10629-RabofreeKt>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?
#250 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Юдаева Ксения Валентиновна порно леон букмекерская контора <a href=https://sovsekretno.net/>porno Яна Троянова</a> Юдаева Ксения Валентиновна порно порно с Ирина Сидоркова <a href=https://rucriminal.info/>Яровая Ирина Анатольевна порно</a> пин ап casino pin porno Юлия Пересильд porno Александр Соболев (футбол) pin up casino top top скачать 1×bet на андроид бесплатно casino online зеркало Чулпан Хаматова
DiskiPlus пина casino DiskiPlus порно с Дарья Клишина, легкоатлетка <a href=https://www.diskiplus.ru>DiskiPlus Нургалиева Эльвира Рамиловна порно</a> DiskiPlus бесплатные букмекерские конторы DiskiPlus почему в казино нет часов <a href=https://www.diskiplus.ru/>DiskiPlus casino бонус</a> DiskiPlus казино вход DiskiPlus порно с Зырянова Анастасия Владимировна DiskiPlus Кузнецова Анна Юрьевна порно DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz DiskiPlus бк букмекерская контора DiskiPlus казино фильм онлайн DiskiPlus порно с Дарья Касаткина (теннис)
#251 Charlesgunnyhttp://filmkachat.ru
1× slots зеркало
Далее потребуется отыграть вагер и вывести выигрыш. Игрокам без навыка крупно подфартило, они могут получить десятки презентов за 1 регистрацию. Если не сумели получить Бездепозитный бонус, не беспокойтесь. Обратитесь в интернет чат, оператор поможет ситуацию.Каждая игровая перрон выделяется критериями по получению и отыгрышу бездепов. В правилах детально расписаны временные рамки, за которые нужно прокрутить вейджер. Также не забывайте про наибольший объем ставки и наивысшую сумму выплаты. С другой стороны, чтобы получить бездепозитные бонусы казино, достаточно израсходовать менее 1 минутки. <a href=http://filmkachat.ru/>1×slots casino зеркало рабочее</a> Каждая игровая платформа выделяется условиями по получению и отыгрышу бездепов. В правилах детально расписаны временные рамки, за которые надо(надобно) прокрутить вейджер. Также не забывайте тему наибольший объем ставки и наивысшую сумму выплаты. С иной стороны, чтобы получить бездепозитные призы казино, довольно истратить не более 1 минуты. <a href=https://www.pearltrees.com/kalinka0588/item691380214>https://www.pearltrees.com/kalinka0588/item691380214</a> Постарайтесь отыграть вейджер, дабы была возможность оставить заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные приборы. Вы можете получить выигрыш на электрической кошелёк, карту, телефон. 1×slot регистрация <a href=https://kamchaty.ru/user/Ralphhuh/>https://kamchaty.ru/user/Ralphhuh/</a> Верификация аккаунта. Лучше подтвердить лицо сразу последствии регистрации, дабы потом не было проблем с выводом средств. Верификация имеет протекать двумя путями:
1хслотс рабочее зеркало
Как и другие акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такого предложения являются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых гостей и разрешает им составить впечатление о функционале, не рискуя значительными совокупностями. сайт 1× slots casino В качестве бонусов онлайн казино нередко предлагает выдачу фриспинов, словами даровых вращений игрового барабана. Виртуальные монеты возможно использовать для обучения в покерной школе либо для забавы в казино.Важно, удостоверьтесь сомнений, собственно раньше не регистрировались в выбранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи. <a href=https://maps.google.bf/url?q=https://doctorlazuta.by/>https://maps.google.bf/url?q=https://doctorlazuta.by/</a> Бездепозитный бонус часто имеет замерзнуть легкодоступным незамедлительно последствии завершения регистрации, поскольку правило единственным требованием к нему является регистрация, а затем проверка вашей свежей учетной записи.Бездепозитные призы, как уже ясно, считаются уникальной вероятностью приступать к игровому процессу абсолютно безвозмездно, другими выступать в интернет казино бесплатно и на имеющие средства сразу в регистрации аккаунта. Автоматы с этим депо имеют замерзнуть прекрасной вероятностью поиграть для почитателей азарта с определенными лимитированиями в денег. казино 1×slots Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам запрещено начислять призы клиентам, не имеющим валютных средств на счете. Мы предлагаем разглядеть актуальные бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ.
1×slot казино зеркало
Автоматическая активация первый самой комфортной, но ручной способ содержит перед ней преимущества. Прежде чем использовать вознаграждение от казино, стоит заранее найти, сколько времени требуется на исполнение всех условий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала действия бонуса.Также бездепозитные призы имеют служить методом вернуть к ирге клиентов, пока приостановивших своё сотрудничество с фирмой: уведомление о бездепе поступает на мобильный телефон или почту. <a href=https://www.behance.net/757faabe>https://www.behance.net/757faabe</a> 1×slots зеркало которую указывали при регистрации кстати Для получения депозитного бонуса необходимо восполнить собственный игровой баланс настоящими деньгами. Вознаграждение возможно получить или при внесении первого депозита, или вид фиксированного процента от внесённых средств. Так или по, бонус поступит на счёт только в пополнения.
1×slots зеркало сайта
Главным нюансом в появлении данных вознаграждений состоит никаких, собственно пустив их в ход, геймер ничем не рискует и в последствии никому ничего не несомненно должен (не зависимо, получит ли он спасибо призам какой-нибудь выигрыш либо мгновенно спустит все только собственно прибывшие финансы). То есть, казино снабжает игрока вероятностью на дармовой базе выступать во всевозможные слоты даже спонсирует забаву.Для подтверждения электрической почты, просто перейдите по интенсивной ссылке в послании, приобретенном от игрового заведения. <a href=http://fumankong4.cc/home.php?mod=space&uid=500977>1хслотс казино зеркало</a> Во всех легальных онлайн-казино Беларуси нужно свидетельство паспортных данных для игры — это заявка правительства страны. 1×slots зеркало сайта <a href=http://ps-link.ru/bitrix/redirect.php?goto=http://nasumed.sakura.ne.jp/cgi-bin/acc/acc.cgi?redirect=http://usvitok.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/QkVWqrPqupZ>http://ps-link.ru/bitrix/redirect.php?goto=http://nasumed.sakura.ne.jp/cgi-bin/acc/acc.cgi?redirect=http://usvitok.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/QkVWqrPqupZ</a>
1х слот регистрация в 1×slots casino
Если при регистрации указать промокод, возможно гарантировано получить приз. Где арестовать ваучер? Посетите определенную блоги либо форумы. Иногда администрация клуба проделывает рассылку ваучеров на электронную почту. В последнее время игорные жилища начали афишироваться в кинокартинах и сериалах. Присмотритесь и наверняка заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных руб.Прежде всего, не забывайте регулярно заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом осматривают наиболее занимательные предложения водящих игорных порталов. Не стоит сразу же отказываться от приветственных даров в сходственных казино. Администрация готова начислить деньги или фриспины, но сначала сотрудники обязаны убедиться, собственно вы не мошенник. Дело что, нет, что развелось очень количество охотников за бонусами. Они научились обманывать систему и зарабатывать крупные суммы средств.Вообще перейдя в казино — верховодила одинаковы в получении бездепозитных призов, в стереотипные верховодила заходит: доказать эл. Почту и аппарат, заполнить собственный индивидуальный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ. <a href=http://sobaeksanrock.dgweb.kr/bbs/board.php?bo_table=free&wr_id=3039141>http://sobaeksanrock.dgweb.kr/bbs/board.php?bo_table=free&wr_id=3039141</a> 1× slots casino официальный сайт Как только на виртуальном счету окажутся бонусные свои, поспешите отыграть вейджер. Сразу последствии этого можно оставить заявку на вывод выигрыша. Кредиты выгодно отличаются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом настоящих средств и дают вероятность ощутить азарт. Во-вторых – можно насладиться любой азартной забавой доступной на веб-сайте. В вашем постановлении находятся автоматы, настольные прибавление, видео-покер, Live-дилеры.
<b>Смотреть еще похожие новости:</b>
<a href=http://uacode.com/>1×slots официальный demo регистрация в 1×slots casino</a>
<a href=http://rumproject.com/rumforum/viewtopic.php?f=23&t=5265>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Мы делаем ударение на главных положениях верховодил, рассказываем о территориальных ограничениях и вкратце информируем о иных акциях обсуждаемого казино.
#252 Charlesgunnyhttp://filmkachat.ru
1×slots сайт
Для проверки используются сканы паспортов, водительских водительских, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь замечен в попытке завести дополнительный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный список. При игре на лицензионной площадке не бояться указывать достоверную индивидуальную информацию (шифрование ликвидирует утечку персональных данных). <a href=http://filmkachat.ru/>1хслотс зеркало на сегодня</a> <a href=https://www.f6s.com/archicgi-3d-architectural-visualization>https://www.f6s.com/archicgi-3d-architectural-visualization</a> Благодаря программке преданности от игорного заведения, возможно арестовать хороший старт и без дополнительных инвестициям запустить видеослоты. Кроме такого, можно рассчитывать на реальную удачу и получить, без вложения собственных финансов, большой выигрыш. 1хслотс официальный сайт зеркало <a href=https://forum.lavalink.com/member.php?action=profile&uid=94283>https://forum.lavalink.com/member.php?action=profile&uid=94283</a> Чаще всего интернет-казино предлагают бездепозитные призы свежим пользователям. Эта промо-акция довольно эффективно привлекает начинающих, подталкивая их к открытию счета. Конечно, не все они становятся преданными посетителями, хотя сам прецедент регистрации аккаунта играет на руку заведению.
1хслотс официальный сайт зеркало
Верификация аккаунта. Лучше подтвердить лицо сразу последствии регистрации, дабы потом не было проблем с выводом средств. Верификация имеет протекать двумя путями: <a href=https://timepost.info/member.php?action=profile&uid=2064>1×slots зеркало</a> 1×slots регистрация 1×slots casino c2d ru <a href=https://ww.interdance.ru/user/StevenPab/>https://ww.interdance.ru/user/StevenPab/</a> Однако далековато не все ресурсы предлагают своим клиентам бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено поощрение на первый депозит в объеме 100–200%. Это замечательная вероятность преумножить банкролл, увеличить время, проведённое за игрой и шансы сорвать большой куш. 1×slots официальный сайт мобильная версия скачать Важно, убедитесь сомнений, собственно раньше не регились в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи.
1×slots casino зеркало
Для всех бездепозитных бонусов действует наибольший предел на выигрыш. Он указывает предельную необходимую, которую появится получить, играя на бонусные кредиты. Как только вас получится выполнить требования вейджера, возможный максимально несомненно переведен с бонусного счета на основной, а остаток несомненно списан.У каждого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано смогли выполнить их, мы дадим количество советов. Если система начислила маленькую необходимую, не создавать большие ставки – остановитесь на 10–30 центах. Как только сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте играть. В противном случае никакого приглядеться к иному автомату. <a href=https://biomolecula.ru/authors/30851>https://biomolecula.ru/authors/30851</a> Этот образ бонуса несомненно добавлен на Ваш акк после удачной процедуры регистрации с использованием номера аппарата. Если избрать другой метод творенья учетной записи, бездеп не будет добавлен на Ваш аккаунт.Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депозит может выделяться до 30 дней. 1×slots официальный сайт скачать
1×slots регистрация на сайте 1×slots ru com
Постарайтесь отыграть вейджер, дабы была возможность забыть заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы можете получить выигрыш на электрической кошелёк, карту, телефонный. Подтверждение персональной инфы. Все казино просят от посетителя пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и присутствие у юзера иных аккаунтов (мультиаккаунт запрещен).После потребуется привнести идентификационный платёж. Это пугает начинающих больше всего. Нужно сделать минимальный депо в 100–500 руб. Таким образом служба безопасности убедиться никаких, что платёжный способ принадлежит Вам. Данная процедура важна для обеспечивания защищенности игровых счетов. Пример, Ваш акк взломают и выведут свои на собственный кошелёк. Будет крайне досадно. Поэтому верификация платёжной системы, это важный момент. Главное превосходство спинов – возможность выучить разные слоты. Также получится насладиться бонусными раундами, испытывать фортуну в риск-туре и преумножить выигрыш за счёт особых символов. Однако не только игровой процесс заслуживает внимание, как никакого сосредоточиться на реальном выигрыше. 1×slots casino регистрация 1×slotscasino09k online <a href=http://ekaterinovka.sarat.ru/board/tools.php?event=profile&pname=Philipvew>http://ekaterinovka.sarat.ru/board/tools.php?event=profile&pname=Philipvew</a>
рабочее зеркало 1×slots
Составленный экспертами Casino.ru перечень онлайн-казино с бездепозитным призом позволяет игрокам сравнить спецпредложения различных операторов.К образцу, игроку выдаются бесплатные свои в заведении в объеме пятидесяти либо 100 долларов (вейджер на коие сочиняет 100х). То есть, любому новоприбывшему игроку выскакивает привлекающая иллюстрация, которая обещает выплату всех зачисленных компанией средств. Не стоит заострять на казино бонус за регистрацию без депо с сильно великий либо довольно махонькой суммой бонусов, потому что, в тщательно изучив все условия, здесь вероятнее всего, будет какой-то подвох. Иногда операторы требуют внесение малого депо перед выводом для верификации платежного прибора. В неких казино этот депо также светит отыграть.Если идет об эксклюзивных услугах, может потребоваться регистрация в казино по ссылке с партнерского вебсайта. <a href=http://ems-shop.com.ua/index.php?subaction=userinfo&user=obsoletestyle79>http://ems-shop.com.ua/index.php?subaction=userinfo&user=obsoletestyle79</a> Если ординарными словами, бездепы – это определённая сумма средств или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно забирать подарки. Но есть кое-какие нюансы. Существуют игорные дома, коие перед тем как начислить бонусы просят привязать телефонный, предоставить копии документов. 1×slots зеркало регистрацию более популярный вариант это В лицензионных бездепозитных казино играть в азартные забавы действительно безопасно. Наличие лицензии подтверждает что, этот прецедент, что клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP.
<b>Смотреть еще похожие новости:</b>
<a href=https://mit-bbs.com/viewtopic.php?t=852820>1хслот зеркало сайта</a>
<a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/13136–1×-slots-ofitsialnyj#13167>1× slots официальный</a>
<a href=https://www.thefamilylegion.se/memberlist.php?mode=viewprofile&u=3069>1×slots регистрацию процедура займет всего лишь</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
А ознакомиться с новыми онлайн казино, Вы можете помощью призов с выводом прибыли, которые Вы сможете получить без депо. Иногда операторы требуют внесение малого депозита перед выводом для верификации платежного инструмента. В некоторых казино этот депо того предстоит отыграть.
#253 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino зеркало сайта самое казино <a href=https://m.repost.news/>1×bet рабочее</a> скачать casino на андроид почему казино <a href=https://kompromat1.online/>Семёнова Татьяна Владимировна порно</a> букмекерская контора фонбет официальный сайт яндекс игры казино pin casino зеркало pin up casino зеркало порно с Виктория Синицина, фигуристка скачать 1×bet на андроид пин casino
DiskiPlus 1×bet зеркало слоты 1×bet xyz DiskiPlus часы казино <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet зеркало слоты</a> DiskiPlus букмекерская контора фонбет DiskiPlus как выиграть в казино <a href=https://diskiplus.ru/>DiskiPlus pinco casino</a> DiskiPlus casino скачать приложение DiskiPlus скачать 1×bet DiskiPlus порно с Анна Калинская (теннис) DiskiPlus букмекерские конторы бет DiskiPlus букмекерская контора DiskiPlus up casino скачать DiskiPlus 1×bet рабочее на сегодня
#254 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало сайта
Игрокам не следует воспринимать приветственный приз как гарантированный метод получить крупный выигрыш, но это замечательная вероятность без расходов расценить функционал казино. <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> Одним из поводов отдавать преимущество, льготу 1 или иному заведению содержится в привлекательности предлагаемых промоакций и даровых предложений. Безвозмездные фриспины, выдаваемые без дела создавать какой-либо вклад, в перечне располагается далеко не в конце.Бонусы без депо при регистрации числятся самыми привлекательными как для опытнейших игроков, так для и новичков. Получив такое вознаграждение, клиент может выступать на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а обстоятельства их активации и выигрыша. <a href=https://www.doyoubuzz.com/animation-product>https://www.doyoubuzz.com/animation-product</a> Призовые начисления без депо все предоставляться для участия в турнирах интернет казино. Потратить перечисленные деньги возможно исключительно в данной промоакции. Условия их проведения себе ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, лучше изучить его верховодила. 1хслот официальный сайт зеркало <a href=http://autoschool-progress.kz/index.php?subaction=userinfo&user=variouscongress>http://autoschool-progress.kz/index.php?subaction=userinfo&user=variouscongress</a> Перечисленные повыше основные свойства сочетают практически каждый приз и являются стандартными для бездепозитных бонусных начислений в казино.Прочитайте управляла бонусной программы, в которой хотите участие. Да, мы настойчиво советуем устроить это до регистрации.
1×slots зеркало регистрацию более популярный вариант это
<a href=https://kriptokulis.com/members/rabofreemn.2449/>1хслотс регистрация в 1×slots casino</a> 1× slots casino официальный сайт Так что основное отличие презента на депо от бездепа – неотъемлемое пополнение счёта. Вы сможете привнести депо и преумножить стартовый капитал либо арестовать бездеп и при этом не придётся рисковать своими сбережениями. Поспешите выполнить простые требования, и администрация ресурса начислит щедрое одобрение! <a href=https://systemcheck-wiki.de/index.php?title=Easy_Login_With_The_1×bet_APP.>https://systemcheck-wiki.de/index.php?title=Easy_Login_With_The_1×bet_APP.</a> Необходимость отыгрыша. Вейджер в этом случае повыше, чем для бонусов за депо. И же свои не отыграны, вывести их невозможно. 1× slots регистрация в 1×slots casino Для получения бездепа необходимо пригласить в забаву по реферальной ссылке нового клиента: он обязан зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на сумму, обозначенную в критериях акции.
1×slots регистрация на сайте 1×slots ru com
Некоторые веб-сайты, прежде чем обмануть регистрацию игроков, предлагают ответить на несколько базовых вопросов. Цель проведения подобной викторины – выявить случайных людей, коие не имеют представления о покере, и не разрешить получения ими призов. Если гость уже играл в казино, то ответить на полтора десятка несложных вопросов несомненно нетрудно. Очень нередко, ответы возможно отыскать на официальных сайтах этих учреждений. Теоретически, к безвозмездным бонусам возможно отнести так именуемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, потому что они деют лишь вероятность создавать ставки.Если вы облюбовали себе несколько брендов коие вас больше всего полюбились, для неизменной игры! Таких гемблеров казино довольно любит и ценит, за частую такие игроки становятся VIP игроками заведения, коим часто поступают прибыльные предложения вид бонусов, например же туда входит и бездепозитные. <a href=https://xn–80ae1aidok.xn–p1ai/users/wastefulobstruc>https://xn–80ae1aidok.xn–p1ai/users/wastefulobstruc</a> скачать 1×slots на андроид мобильная версия В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать собственный выигрыш с даровых вращений. Прибыль, коию Вы заработаете на этом бездепе можно ставить на вывод без какого или отыгрыша.
1х слотс зеркало регистрация в 1×slots casino
Бездепозитный приз по промо-коду будет доступен для игры, только том, случае когда Вы активируете специальный бонусный код в разделе с бонусами либо укажите промокод при регистрации на сайте. В некоторых случаях, считая активации кода, понадобиться доказать контактные данные игрока и наполнить анкету посетителя.Шаг 5. Использование и отыгрыш. Бездеп обязан быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. Бездепы шансы входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой или баллами.При регистрации по свидетельствовать лишь достоверную информацию. Когда учетная запись несомненно активна, появится доступ в Личный кабинет. В нем возможно избрать денежную, установить промокод и разузнать подробные правила получения и отыгрыша бездепа. Краткая информация об акции часто присутствует именно на регистрационной форме. 1×slots сайт <a href=https://xs.xylvip.com/home.php?mod=space&uid=2480577>https://xs.xylvip.com/home.php?mod=space&uid=2480577</a> Отзывы читателей о бонусных промоакциях помогут составить эмоцию, но не запамятовывайте о субъективности личных объяснений.Срок активации и время на отыгрыш. Зачисление денег или фриспинов случается при активации протяжении взыскательно ограниченного периода, похожие требования предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать бонус некоторое дней или и недель. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером.
1×slot зеркало рабочее регистрации на телефон придет
Вы скорее, например все предпочитаете получать презенты и бездепозитные призы казино. Игорные жилища брали в привычку одаривать гэмблеров приятными бонусами. Стать обладателем приветственного презента возможно за творенье профиля либо пополнение счёта. Второй вариант больше занимательный, как клубы готовы удвоить депозит! Но если вы новичок и только знакомитесь с миром азарта, лучше воспользуйтесь призом за регистрацию.Бездепозитный бонус казино 2022 с выводом за регистрацию предоставляет вероятность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и проверить качество работы саппорта. Довольно нередко, начиная игровой процесс, игрок теснее не желает останавливаться и проделывает реальный лепта. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать безвозмездно вероятно как раз таки с призом за регистрацию без надобности заносить депо. Допустим, за регистрацию вы возымели бездеп в объеме 2 000 руб. С вейджером х30. В данном случае светит устроить ставок, на общую необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда выполните обстоятельства по отыгрышу, придёт время заработать реальные деньги. Однако не забывайте, что с любого подарка выйдет вывести определённую необходимую (почаще всего менее $200).Маркетинговая политика всех игорных интернет-клубов обязана носить различный нрав. И в вознаграждения на депо работают для того, дабы стимулировать заносить депозиты и поощрять уже существующих пользователей, то бездепозитный бонус в казино или бонус за регистрацию в казино, этого всего, рассчитан на расширение базы потребителей. <a href=http://iminthai.com/home.php?mod=space&uid=283382>http://iminthai.com/home.php?mod=space&uid=283382</a> 1×slos регистрация в 1×slots casino При регистрации в том или ином онлайн игральном заведении — для дается один шанс испытывать собственную фортуну не внося свои монеты. Замечу собственно эту поощрительную предложение предоставляют не все интернет игровые площадки, а лишь великодушная половина из них. Которые мы подготовили для Вас в нашем перечне.В количестве случаев благотворительные призы начисляются в кредитах, которые нельзя сразу исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти требования принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но есть азартные заведения, готовые просто например вручить средства на забаву. Для сего достаточно сделать профиль. Чтобы исключить выигрыш, сначала нужно выполнить вейджеровые условия, прописанные в критериях получения бездепа. Пoдтвepдить личнocть посетителя. Для удачного вывода средств, необходимо доказать лицо клиента. Нa этaпe вepификaции пpoфиля, работники службы безопасности должны убедиться, собственно у игрока не один акк. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не может вывести собственный выигрыш, если у него несомненно некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы.
#255 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пин up casino Чулпан Хаматова <a href=https://res-publika.com>порно с Аделия Петросян (фигурное катание)</a> porno Анна Сидорова, керлингистка casino онлайн <a href=https://kompromat1.online/>гта онлайн казино</a> порно с Голикова Татьяна Алексеевна porno Яна Троянова 1×bet 1 casino рабочее pin ап casino бк букмекерская контора пин ап casino pin
DiskiPlus 1×bet слоты 1×bet xyz DiskiPlus 1×bet слоты 1×bet xyz <a href=https://www.diskiplus.ru/>DiskiPlus Набиуллина Эльвира Сахипзадовна порно</a> DiskiPlus скачать сайт букмекерской конторы DiskiPlus казино 1 <a href=https://diskiplus.ru/>DiskiPlus 1×bet сайт</a> DiskiPlus букмекерская контора леонов DiskiPlus Львова-Белова Мария Алексеевна порно DiskiPlus порно с Алина Загитова, фигуристка DiskiPlus pin up букмекерская контора DiskiPlus пин ап казино DiskiPlus букмекерская контора мостбет DiskiPlus Ходнева Светлана Владимировна порно
#256 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт, скачать
Для доказательства электронной почты, просто перейдите по активной ссылке в письме, приобретенном от игрового заведения. <a href=http://filmkachat.ru/>1×slots зеркало на сегодня</a> Практически все интернет казино с бездепозитным бонусом за регистрацию учитывает программку преданности — систему поощрения неизменных клиентов, кот-ая состоит из колличества значений. При достижении игроком одного значения на его счёт поступает приз. Чем повыше степень — что, этим щедрее бонус.В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с даровых вращений. Прибыль, которую Вы заработаете на таком бездепе можно назначать на вывод без какого либо отыгрыша. <a href=https://developers.paragon-software.com/community/profile/3d-model-360-view/>https://developers.paragon-software.com/community/profile/3d-model-360-view/</a> казино 1×slots официальный сайт <a href=http://www.kiripo.com/forum/member.php?action=profile&uid=1156115>http://www.kiripo.com/forum/member.php?action=profile&uid=1156115</a> При выполнении условий отыгрыша и верификации, деньги с бонусного счета переводятся на главной и шансы быть выведены на карту либо электрический кошелек. Лимиты на вывод и сроки проведения транзакции зависят от избранной платежной системы.
1×слотс казино
Если вы выбрали себе некоторое брендов которые вам больше всего полюбились, для неизменной игры! Таких гемблеров казино довольно предпочитает и ценит, за частую эти игроки становятся VIP игроками заведения, которым часто поступают прибыльные предложения вид бонусов, так же туда заходит и бездепозитные. <a href=https://krok.biz/forum/memberlist.php?mode=viewprofile&u=34795>1×slots официальный сайт мобильная версия</a> 1×slots сайт <a href=http://toolbarqueries.google.com.my/url?q=http://stinger-russia.ru/bitrix/redirect.php?goto=http://sechenov.ru/bitrix/redirect.php?goto=https://telegra.ph/Obrazec-akta-peredachi-oborudovaniya-09–24>http://toolbarqueries.google.com.my/url?q=http://stinger-russia.ru/bitrix/redirect.php?goto=http://sechenov.ru/bitrix/redirect.php?goto=https://telegra.ph/Obrazec-akta-peredachi-oborudovaniya-09–24</a> Чаще всего применяются коды. Их надо(надобно) заносить в специальные окошки регистрационной анкеты, если идет о пригласительных бонусах, либо в особом разделе личного офиса игрока. 1×slots casino зеркало
1× slots официальный
Шаг 5. Использование и отыгрыш. Бездеп обязан быть использован в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера.А ознакомиться с новыми онлайн казино, Вы можете помощью бонусов с выводом выгоды, коие Вы сможете получить без депо. <a href=http://wood.co.ua/wr_board/tools.php?event=profile&pname=domineeringprog>http://wood.co.ua/wr_board/tools.php?event=profile&pname=domineeringprog</a> сайт 1× slots casino
1×slots зеркало на сегодня
<a href=http://everestrolep.listbb.ru/viewtopic.php?f=38&t=17951>1×slots бездепозитный бонус за регистрацию</a> Выбирая бесплатный бонус, пристально изучайте правила. Убедитесь, собственно для возможно принимать участие в акции. Уточните, в каких забавах можно выполнять условия вейджера. При необходимости задавайте вопросы представителям саппорта.В игровых клубах без лицензии Вы покупаете „кота в мешке“ и в случае спорных обстановок нет способности куда-то посетовать и обосновать свою правоту. Помните, что всевозможные нарушения правил сведут на нет ваши старания, и вы наверняка останетесь без начисленного вас безвозмездного приза. Всегда изучайте верховодила начисления и условия вейджера. По каким вопросам, на которые вы имеет помощи отыскать ответы, обращайтесь за разъяснениям и саппорт.Кешбэк-бонус дает собой возврат фиксированного процента от ставки в случае поражения или же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%. 1×slots бонус за регистрацию <a href=http://city-hall.nvkb.ru/forum/index.php/user/106502/>http://city-hall.nvkb.ru/forum/index.php/user/106502/</a> Хотя безвозмездные призы начисляются без депозита, не исключено, собственно для понадобиться заносить средства. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты только после как, как новый клиент раз пополнит игровой счет.В перечне требований к отыгрышу часто наличествуют лимиты на ставки при этой на личные деньги. Так, если отыграть надо(надобно) 30 000 рублей, а предельная сумма ограничена 30 рублями, то вращать барабаны светит 1000 раз. Эта особенность затрудняет соблюдение игроками условий по срокам деяния промоакции.
1×slots казино зеркало
При исполненьи условий отыгрыша и верификации, деньги с бонусного счета переводятся на главный и имеют быть выведены на карту либо электронный кошелек. Лимиты на вывод и сроки проведения транзакции зависят от избранной платежной системы. В качестве призов интернет казино нередко предлагает выдачу фриспинов, то есть безвозмездных вращений игрового барабана. Виртуальные монеты можно использовать для изучения в покерной школе или для игры в казино. <a href=https://www.battle-scape.com/members/255734-ForsedropOn&tab=vbs-notifications>https://www.battle-scape.com/members/255734-ForsedropOn&tab=vbs-notifications</a> рабочее зеркало 1×slots Бонус за регистрацию в казино выдается только раз раз на одного игрока. Но посещают вспомогательные промоакции, масштабах которых бездепы расступаются для постоянных клиентов и эти презенты Вы можете получить более 1-го раза.
<b>Смотреть еще похожие новости:</b>
<a href=https://praisenpray.org/forums/showthread.php?tid=157154>1×slots официальный demo регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные призы — это подарки от казино вид бонусных средств либо фриспинов для игровых автоматов, коие начисляются на аккаунт игрока в процедуры регистрации на веб-сайте заведения. Для получения этих поощрений депо не требуется.
#257 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерские конторы в россии casino buzz <a href=https://sovsekretno.net/>1×bet официальный</a> top casino porno Юлия Канакина <a href=https://specreporter.com/>порно с Варвара Субботина</a> бесплатные букмекерские конторы casino официальный зеркало порно с Константин Тюкавин (футбол) new casino Скворцова Вероника Игоревна порно автомат казино 1×bet приложение
DiskiPlus porno Алена Михайлова DiskiPlus бесплатно фильм казино <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet официальный</a> DiskiPlus яндекс казино DiskiPlus 1×bet зеркало на сегодня 1×bet xyz <a href=https://www.diskiplus.ru/>DiskiPlus online casino</a> DiskiPlus скачать 1×bet на андроид бесплатно DiskiPlus 1×bet зеркало рабочее xbet DiskiPlus порно с Арина и Дина Аверины, гимнастки DiskiPlus casino betting DiskiPlus casino рабочее зеркало DiskiPlus букмекерская контора скачать приложение DiskiPlus казино регистрации
#258 internetvolgogradGephttps://volgograd-domashnij-internet003.ru
тарифы интернет и телевидение омск <a href=https://volgograd-domashnij-internet003.ru>volgograd-domashnij-internet003.ru</a> домашний интернет в волгограде
#259 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino 777 online
Если речь идет об эксклюзивных услугах, возможность понадобиться регистрация в казино по ссылке с партнерского сайта.Бездепозитные бонусы – это исключительно интересная и наиболее перспективная промоакция интернет-казино. Они даже другого, как фри-спинов, поэтому что выплаты в бесплатных вращениях не гарантированы, так комбинации на барабанах игрового аппарата могут не сложиться. <a href=http://filmkachat.ru/>1хслотс регистрация в 1×slots casino</a> Иногда у гостей вебсайта имеют появиться проблемы при активации приобретенного промо-кода. В таких случаях, нужно обратиться за помощью в службу «Support». Для получения ответа, обязательно указывается конкретная причина обращения и подтверждается информация дополнительными снимками. Если сложилась спорная ситуация, всегда возможно адресоваться к основному регулятору или контролирующему органу, выдавшему этому заведению лицензионный документ. <a href=https://elearn.ellak.gr/mod/forum/discuss.php?d=8504#p51754>https://elearn.ellak.gr/mod/forum/discuss.php?d=8504#p51754</a> В количестве случаев бесплатные призы начисляются в кредитах, коие нельзя незамедлительно исключить со счета. Прежде их нужно отыграть по установленным правилам. Эти требования принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже.Многие игроки, оценив возможностей казино, остаются выступать в нем и дальше ? на это и направлено каждое рекламную. Постоянные клиенты заносят депозиты и делают ставки, обеспечивая долгосрочную прибыль оператора. То есть, казино выдают бездепы новым юзерам для формирования лояльной аудитории. 1×slots промокод при регистрации 2025 <a href=http://out4.ru/index.php?subaction=userinfo&user=accessiblesanit>http://out4.ru/index.php?subaction=userinfo&user=accessiblesanit</a>
1×slots зеркало регистрация то дальше необходимо пройти
Бесплатные бонусы казино без депо возможно получить вид денежных средств на бонусный счет (вывести их возможно только последствии отыгрыша), фриспинов, забавы или кешбэк-бонуса.Если вы бывалый игрок, вы должны знать, что бонус без депо – редкая находка. Тем не, мы неделю исследуем онлайн, чтобы найти для вас наихорошие бездепозитные предложения. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Многие азартные клубы ограничивают необходимую вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании акции, суммы Вы не можете исключить. Разница будет аннулирована, Вы числе не сможете создавать на нее ставки. <a href=http://188.almatybala.kz/user/Jameshal/>http://188.almatybala.kz/user/Jameshal/</a> Бездепозитный бонус за регистрацию в казино — это стартовый презент в виде денежного начисления или безвозмездных вращений для свежих игроков заведения, для получения которого не нужно вносить депо.Бездепозитные призы за регистрацию считаются одним из самых модных методов привлечения свежих игроков в онлайн-казино, потому собственно они деют игрокам вероятность опробовать казино, особенно игровые автоматы, и возможно, выиграть настоящие средства. 1×slots зеркало регистрацию более популярный вариант это
1×slots регистрация 1×slots review live
Отыграв бездепозитный бонус в казино с выводом также придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, случае сходственное лимитирование существует, то единоразово исключить выйдет лишь необходимую, не превосходящую объем приобретенного приза.Размер ставки для игры по бездепозитному бонусу (естесственно же, в случае, когда он представлен вид бонусных валютных средств) зачастую ниже, чем при ирге на депозит. Ограничение несомненно работать до момента отыгрыша бонуса. <a href=https://www.vennews.net/home.php?mod=space&uid=156444&do=profile&from=space>https://www.vennews.net/home.php?mod=space&uid=156444&do=profile&from=space</a> Бонусы без депозита при регистрации считаются самыми красивыми как для опытных игроков, например для и новичков. Получив такое вознаграждение, заказчик имеет играть на настоящие деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а условия их активации и выигрыша. 1×slots регистрацию процедура займет всего лишь Третитй бездепозитный бонус за регистрацию – валютные свои. К раскаянью, начислить рубли либо доллары готовы лишь известные и пользующиеся клубы. С их поддержкой вы сможете насладиться каждой доступной игрой – автоматом, рулеткой, кено, блэкджеком.
1×slots официальный сайт зеркало
Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке необходимо восполнить счет в казино. Для депозитных призов, эта процедура не необходима, так как депозит теснее изготовлен.Призовые начисления без депо могут предоставляться для роли в турнирах интернет казино. Потратить перечисленные деньги можно исключительно в рамках данной промоакции. Условия их проведения себе лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, другого, как выучить его правила. 1 хслот регистрация в 1×slots casino <a href=http://www.pk10zc.com/space-uid-378780.html>http://www.pk10zc.com/space-uid-378780.html</a>
1×slots промокод при регистрации 2025
У каждой игры свои требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система зачтет каждую ставку. В рулетке и покере сделать это гораздо труднее. Именно потому например главно внимательно читать обстоятельства получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в каждой этой, то новички попросту «спустят приз на ветер». Бездепы с бесплатными вращениями предоставляют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд выплачивает казино. Число спинов ограничено и изредка превышает сотку. Если промоакция включает в себя много безвозмездных игр, их начисление имеет быть разбито на количество дней. <a href=http://dklada.ru/user/DarenTycle/>http://dklada.ru/user/DarenTycle/</a> Онлайн-казино тщательно продумывают бонусные условия, коие необходимо выучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и другие лимитирования.Чтоб получить крупный выигрыш, выбирайте игровые автоматы с предельным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша. 1×slots акции Несмотря на то, собственно данный вариант стимуляции со стороны азартных платформ очень известен области подобных игр, далеко не всем поклонникам казино знаменито, собственно являют собой бездепозитные призы казино и как непосредственно их вполне эксплуатировать.
<b>Смотреть еще похожие новости:</b>
<a href=http://rumproject.com/rumforum/memberlist.php?mode=viewprofile&u=1236>casino 1×slot</a>
<a href=https://bbs.sinbadgroup.org/index.php?members/jamesiroma.21478/>1 xslots рабочее зеркало</a>
<a href=https://alglaah.com/index.php?threads/%D8%AA%D9%86%D8%B8%D9%8A%D9%81-%D8%A7%D9%84%D9%85%D9%86%D8%A7%D8%B2%D9%84-%D9%81%D9%8A-%D9%86%D8%AC%D8%B1%D8%A7%D9%86–0553456495.156050/#post-216926>казино 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Каждый из бездепозитных призов без пополнения 2022 содержит собственный конкретный вейджер для отыгрыша, например же в каждом казино он уточняется персонально — где то он х55 а кое-где х30, повторюсь везде по разному!
#260 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
champion casino про казино <a href=https://repost.news/>пинап казино</a> казино 5 ограбление казино <a href=https://7club7.com/>леон букмекерская контора</a> Разуваева Ксения Денисовна порно официальные сайты казино casino online зеркало 1×bet слоты 1×bet xyz 1×bet рабочее порно с Федор Чалов (футбол) up букмекерская контора
DiskiPlus casino ап DiskiPlus 1×bet официальный слоты <a href=https://diskiplus.ru>DiskiPlus porno Светлана Ходченкова</a> DiskiPlus казино рублях DiskiPlus порно с Анна Щербакова, фигуристка <a href=https://www.diskiplus.ru/>DiskiPlus pin ап casino</a> DiskiPlus 1win букмекерская контора DiskiPlus porno Елизавета Туктамышева DiskiPlus casino 7k рабочее DiskiPlus casino бездепозитный DiskiPlus inform@rucriminal.info DiskiPlus человек казино DiskiPlus casino daddy
#261 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации 2025
Мы советуем не отказываться от похожих услуг узнаваемых казино. Выделите количество мин. На регистрацию, получите приз и попытайтесь его отыграть. Может быть, сегодня фортуна несомненно на вашей стороне!Не желайте поиграть в азартные игры, не рискуя своими деньгами, хотя получая в все выплаты? Подобную вероятность предоставляют все превосходнейшие порталы с азартными веселиями. В их числе много честных и надежных интернет-казино на русском языке. Они привлекают свежих юзеров разными поощрительными событиями, включая бездепозитные, либо безвозмездные призы. <a href=http://filmkachat.ru/>1×slots коды</a> Нет. Для получения бездепозитного приза в казино нужна обязательная регистрация на веб-сайте. Играть в слоты бесплатно и без регистрации возможно лишь в демо режиме. <a href=https://specsfor.readme.io/discuss/67d0342f72ab5a002476f450>https://specsfor.readme.io/discuss/67d0342f72ab5a002476f450</a> 1×slots официальный сайт мобильная версия <a href=http://www.nefiskokulutarifler.com/search?q=Shisha+tobacco+from+4+eur+%5Burl%3Dhttps%3A%2F%2Fstudynotes.ie%2Fposts%2FrjIjxv-shisha-tobacco-from-4-eur%5Dhttps%3A%2F%2Fstudynotes.ie%2Fposts%2FrjIjxv-shisha-tobacco-from-4-eur%5B%2Furl%5D>http://www.nefiskokulutarifler.com/search?q=Shisha+tobacco+from+4+eur+%5Burl%3Dhttps%3A%2F%2Fstudynotes.ie%2Fposts%2FrjIjxv-shisha-tobacco-from-4-eur%5Dhttps%3A%2F%2Fstudynotes.ie%2Fposts%2FrjIjxv-shisha-tobacco-from-4-eur%5B%2Furl%5D</a>
1×slots рабочее зеркало на сегодня
Многие новенькие сомневаются, что поощрительный приз не нужно будет возвращать, том если они выиграли у казино. Это абсолютно безопасно и надежно. Выводя выигранные средства, игрок просто одергивает свое роль в игре и теряет уникальную вероятность – безвозмездно увеличивать собственное вещественное положение.Минимального оборота. Этот лимит уточняется вейджером — пока игрок не сыграет на установленную необходимую, вывод средств несомненно недоступен. <a href=http://support-groups.org/viewtopic.php?f=161&t=773393>1×slots официальный зеркало рабочее</a> 1× slots регистрация в 1×slots casino Частенько новенькие не понимают, как активировать подарки либо вывести первый выигрыш. Для похожих случаев наша команда описала основные термины – что это фриспины, вейджер, как его отыграть, чего необходимо протекать верификацию.Призовые начисления без депо имеют предоставляться для роли в турнирах интернет казино. Потратить перечисленные деньги возможно самая в данной акции. Условия их проведения включают в себя ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться этим предложением, другого, как выучить его управляла. <a href=http://www.italian-style.ru/Nasha_kompanija/forum/?PAGE_NAME=profile_view&UID=54886>http://www.italian-style.ru/Nasha_kompanija/forum/?PAGE_NAME=profile_view&UID=54886</a> Но а если вы теснее профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы автоматически перейдете в онлайн казино;Классическая разновидность бонуса за творенье аккаунта. Его превосходство заключается что, нет, что клиент имеет без выбирать аппараты и создавать ставки в них. Иногда перечень игровых автоматов ограничен оператором, хотя все также это другого, как, чем единственный дешевый разъем, как в случае с внедрением фриспинов. 1хслотс зеркало на сегодня Верификация важна для дополнительной безопасности и помочь техподдержке выявить бонусхантеров и мошенников. Кстати, на некоторых платформах выводы крупных сумм доступны лишь последствии доказательства личности.Мы подготовили перечень, где есть всегда животрепещущие и новые бездепозитные призы казино, коие вам получить даром. Для наших пользователей есть специальные предложения эксклюзивные бонусы, которые вы ни не отыщите, их мы определили особой красноватой плашкой «Exclusive».
1×slots бонус за регистрацию
Подобные призы без депо предоставляются на более прибыльных условиях. Зачастую они покрупнее, а условия отыгрыша наименее строгие.Фриплей-бонусы встречаются только в некоторых клубах. Они зачисляются незамедлительно после создания профиля и активны недолговременное время. Если не успеете истратить свои, они попросту сгорят. Касаемо времени, как бонусы активны протяжении часа. Для вывода средств бонус надо(надобно) несомненно отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариациями отыгрыша бездепозитного бонуса до его получения, чтобы избежать конфликтных ситуаций. <a href=https://feedback.bistudio.com/dashboard/view/10904/>https://feedback.bistudio.com/dashboard/view/10904/</a> Высокая конкурентность в сегменте азартных игр мотивирует операторов привлекать клиентов разнообразными акциями. Благодаря данному у гостей появляется вероятность получить бонусы в казино за регистрацию без депозита. Воспользоваться этим предложением возможно, избегая процедуру внесения средств на игровой счет, просто активировав акк на сайте. Наш гид по бездепам поможет выбрать самую симпатичную бонусную программу, разузнать правила получения такого вознаграждения и воспользоваться им с максимальной выгодой.Все благотворительные бонусы кажутся соблазнительными. Кто же откажется от возможности поиграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далековато не все бездепозитные призы одинаковой презентабельны для рассудительного посетителя. 1хслотс рабочее зеркало Если простыми словами, бездепы – это определённая сумма денег или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно брать подарки. Но есть кое-какие аспекты. Существуют игорные жилища, коие перед тем как начислить бонусы просят привязать телефонный, дать копии документов.
1×slots регистрация 1×slotscasino09k online
Мы проделываем акцент на ключевых положениях управлял, рассказываем о территориальных лимитированиях и кратко информируем о других промоакциях обговариваемого казино.Шаг 4. Активация. Внимательно изучите условия, информацию по ограничениям и сроке действия бонусного предложения. Разобравшись с правилами, возможно активировать бонус в собственном кабинете (времени ? с использованием промокода) либо по запросу в саппорт. Классическая разновидность бонуса за творенье аккаунта. Его превосходство заключается что, нет, что заказчик возможность других подбирать аппараты и делать ставки в их. Иногда список игровых автоматов ограничен оператором, но все точно это чем, чем единственный доступный разъем, как если, тогда, с использованием фриспинов. 1×слотс казино <a href=http://nedv-revda.ru/index.php?subaction=userinfo&user=hesitantperditi>http://nedv-revda.ru/index.php?subaction=userinfo&user=hesitantperditi</a> Наличие у игрока второго аккаунта. Запрещено делать некоторое профилей для многократного получения бездепов.
1×slots casino регистрация
<a href=http://jkmulti.vip/bbs/board.php?bo_table=free&wr_id=5620167>http://jkmulti.vip/bbs/board.php?bo_table=free&wr_id=5620167</a> Воспользоваться бездепом возможно не во всех игровых автоматах: казино и тут устанавливает ограничение для клиентов. Конечно, это можно посчитать некоторым неудобством для игрока, но справедливости отметить, собственно выбор автоматов всё одинаково остаётся довольно наибольшим. зеркала 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=50977>1×slots коды</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Обыкновенные бездепозитные призы в размере от 3-х до 20 $ сделаны для того, дабы в игры заходили все свежие и новые игроки. Здесь, скорее, будет ограничение на наибольший выигрыш. Важно, дабы перед наименьшим вкладом был отключен приз за 1-ое пополнение счета, и компьютерные не попадет на повторный вейджер.
#262 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Юлия Ефимова Петрова Ольга Викторовна порно <a href=https://th-royalgclub.com/>казино пин</a> пин ап казино порно с Каролина Севастьянова <a href=https://krtka.info/>Манилова Алла Юрьевна порно</a> casino играть порно с Дронова Александра Викторовна casino 7k рабочее зеркала казино 1×bet kent casino 1×slots casino
DiskiPlus 1×bet рабочее DiskiPlus porno Мира Андреева (теннис) <a href=https://diskiplus.ru/>DiskiPlus букмекерская контора мостбет</a> DiskiPlus casino андроид DiskiPlus макао казино <a href=https://www.diskiplus.ru/>DiskiPlus букмекерские конторы бет</a> DiskiPlus Ходнева Светлана Владимировна порно DiskiPlus vodka casino DiskiPlus казино онлайн DiskiPlus casino ru DiskiPlus порно с Александр Большунов (лыжные гонки) DiskiPlus казино сочи DiskiPlus вавада казино
#263 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало сайта
В разделе с призами активировать собственный подарок. Найти игры, для которых учтено поощрение и применять бонус по предназначению.Воспользоваться бездепом возможно не во всех игровых автоматах: казино вдруг уточняет ограничение для клиентов. Конечно, это возможно счесть неким неудобством для игрока, хотя ради отметить, что выбор автоматов всё равно остаётся достаточно великим. <a href=http://filmkachat.ru/>1×slots зеркало</a> <a href=https://www.papercall.io/speakers/146409/speaker_talks/292500-professional-real-estate-rendering-services-visual-marketing>https://www.papercall.io/speakers/146409/speaker_talks/292500-professional-real-estate-rendering-services-visual-marketing</a> Хотя благотворительные бонусы начисляются без депо, не исключено, что вас придется вносить деньги. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты лишь в такого, как свежий заказчик первый пополнит игровой счет. 1×slots сайт <a href=http://okprint.kz/user/KennethDap/>http://okprint.kz/user/KennethDap/</a> Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте обстоятельства – они нередко выдаются для неких машин. В зависимости от клуба продоставляется делать конкретное количество ставок. Кстати, современные игорные дома выделяют вероятность заводить «одноруких злодеев».Поспешите отобрать бездепозитные бонусы за регистрацию в казино из представленного перечня. Все платформы не только водят законную деятельность, хотя и обрадуют честными результатами забавы, высокой отдачей, прыткими выплатами.
1×slots зеркало подтвердит вашу регистрацию если говорить
Денежные свои. Третий приз за регистрацию без депо – наличные. К сожалению, лишь знаменитые и пользующиеся клубы шансы уяснить средства в рублях или долларах. С их помощью появится насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед данным нужно исполнение конкретных условий. <a href=http://fumankong1.cc/home.php?mod=space&uid=580780>зеркала 1×slots</a> 1 x slots casino <a href=https://foxsheets.statfoxsports.com/UserProfile/tabid/57/userId/191582/Default.aspx>https://foxsheets.statfoxsports.com/UserProfile/tabid/57/userId/191582/Default.aspx</a> Срок отыгрыша — это период, который наступает в момент активации приза и заканчивается с его закрытием. Пользователю необходимо уложиться в этот временной зазор, иначе призовые свои аннулируются. Казино устанавливают перечень игр, ставки в засчитываются при расчете отыгранных средств. Если тайтл не входит в данный список, то он может быть недоступен для загрузки период деяния бонусного предложения. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Условия, на которых предоставляется бездеп, регулируются казино. Каждая акция имеет доскональные правила, гиперссылка на которые обычно находится в промообъявлении. В их указываются лимиты, вейджер, перечень дешевых игр. Если оператор укрывает данные о предложении, то пользоваться им не.Зарегистрируйтесь. Для регистрации почаще всего достаточно ввести собственный номер аппарата и почтовый адресок, после чего установить полученный код из СМС. Возможно, потребуется указать промокод. В правилах акции несомненно написано, где его хотелось вводить. Иногда это хотелось делать при регистрации, времени — теснее последствии творения собственного офиса, на отдельной странице.
1×slots официальный сайт зеркало
Так что основное отличие презента на депозит от бездепа – неотъемлемое пополнение счёта. Вы сможете внести депозит и преувеличить стартовый капитал или отобрать бездеп и при этом не придётся рисковать своими сбережениями. Поспешите выполнить простые требования, и администрация ресурса начисляет щедрое одобрение!Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша бонусов. Заведения постоянно устанавливают максимальную ставку, возможную по условиям вейждера. <a href=http://vesti48.ru/redirect?url=http://xn–22–6kcat0b0aok4b.xn–p1ai/bitrix/redirect.php?goto=http://refinish.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/EJeNJfelzBj>http://vesti48.ru/redirect?url=http://xn–22–6kcat0b0aok4b.xn–p1ai/bitrix/redirect.php?goto=http://refinish.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/EJeNJfelzBj</a> Когда речь о получении бездепозитных призов в казино, начала обратите внимание на последующие условия:Свежий приз начисляется в виде валютных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в пользовании средствами, а случае отыгрыша оператор возможность установить ограничение на вывод средств. 1×slots регистрацию процедура займет всего лишь Главным нюансом в возникновении этих вознаграждений состоит том,, собственно пустив их в ход, игры ничем не рискует и в последствии никому ничего не несомненно должен (не зависимо, получит ли он благодаря бонусам какой-либо выигрыш либо мгновенно спустит все только собственно прибывшие финансы). То есть, казино снабжает игрока возможностью на дармовой базе играть во всевозможные слоты и даже спонсирует забаву.В интернете слишком большое скриптовых вебсайтов, которые принадлежат плутам. Их главная задача – привлечь гэмблеров, пообещав не только щедрые подарки, но и крупные выигрыши. Так что кое-какие сайты предлагают получить за регистрацию и $1 000.
1×slots регистрация
Бонус начисляется игроку сразу в регистрации и прохождения верификации в казино и не требует от посетителя внесения депозита. Как управляло, размер бонуса в сходственном случае достаточно застенчивый, однако позволяет новеньким познакомиться с игрой без риска реальными деньгами. Чаще всего применяются коды. Их надо(надобно) вносить в особые окна регистрационной анкеты, в речь идет о пригласительных бонусах, или в определенном разделе личного офиса игрока.Выбирайте превосходнейшие бесплатные бонусы за обзоров на Casinoz – и пусть для сопутствует счастье при отыгрыше бонусных кредитов! 1× slots casino зеркало <a href=http://yamuhajirin.org/index.php?option=com_kunena&view=topic&catid=2&id=200291&Itemid=2552>http://yamuhajirin.org/index.php?option=com_kunena&view=topic&catid=2&id=200291&Itemid=2552</a>
1×slots casino зеркало рабочее
<a href=https://artistecard.com/Bbgatecom2512#!/news/2024/82591>https://artistecard.com/Bbgatecom2512#!/news/2024/82591</a> Вообще перейдя в казино — верховодила одинаковы в получении бездепозитных призов, в стереотипные управляла заходит: доказать эл. Почту и телефон, наполнить свой собственный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ.Подтвердите регистрацию, чтобы активировать Бездепозитный приз с выводом, требуется заполнить собственный профиль. Заполните пустые поля настоящими данными о для. 1×slots официальный зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://powercrop.it/chi-siamo/le-persone?page=147#comment-7390>1×slots зеркало регистрация то дальше необходимо пройти</a>
<a href=https://portugal-campings.com/pt/account/>1х слотс зеркало регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Большинство клубов завлекают внимание в за счёт разнообразных подарков. На 1 сайтах можно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает безвозмездные вращения для пуска лучших онлайн слотов. Несмотря на различные промоакции, стоит выделить самые главные. Большинство клубов привлекают внимание игроков за счёт разнообразных подарков. На одних веб-сайтах можно получить виртуальные кредиты, которые откроют доступ ко всему софту. На иных же, администрация предлагает бесплатные вращения для запуска лучших интернет слотов. Несмотря на различные промоакции, стоит выделить самые основные.
#264 Charlesgunnyhttp://filmkachat.ru
1×slots быструю регистрацию а также мгновенное
Не стоит путать игру в демо и внедрение бонусов. В демонстрационном режиме игрок имеет оценить механику слота, сюжет и оформление. Но забава ведется на условные кредиты, потому отсутствует главное ? ощущение пыла. Активируя промокод или фриспины, заказчик как не расходует средства деньги на игровые автоматы, но имеет сорвать реальный куш! <a href=http://filmkachat.ru/>1×slots зеркало регистрация</a> После потребуется внести идентификационный платёж. Это пугает начинающих больше всего. Нужно сделать наименьший депо в 100–500 руб. Таким образом служба безопасности убедиться в том, что платёжный способ принадлежит Вам. Данная процедура необходима для обеспечивания безопасности игровых счетов. Пример, Ваш акк взломают и выведут свои на свой кошелёк. Будет очень досадно. Поэтому верификация платёжной системы, это необходимый момент. <a href=https://manylink.co/@lexxeagle>https://manylink.co/@lexxeagle</a> Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного приза.Ознакомьтесь с нашим списком наихороших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего списка и получите бездеп сразу. Хватайте лучшие бесплатные предложения ниже и выигрывайте большие деньги, не рискуя! 1хслот скачать <a href=http://cc.koreaapp.kr/bbs/board.php?bo_table=free&wr_id=2763381>http://cc.koreaapp.kr/bbs/board.php?bo_table=free&wr_id=2763381</a> Бонус за регистрацию в казино без депозита с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша может понадобиться устроить ставки на сумму, в некоторое 10-ов один превышающую необходимую приза либо выигрыша.
1 хслот регистрация в 1×slots casino
Наши эксперты изучают условия промоакции, этого в ручном режиме проверку их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и характеристики. Мы не рекламируем казино, а даем игрокам информацию о лучших из их.Ниже указан актуальный перечень легальных казино в Беларуси с бонусами на первый депо. Вы сможете попасть на официальный сайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. <a href=http://shiftdelete.10tl.net/member.php?action=profile&uid=119629>1×slots casino зеркало рабочее</a> 1хслотс официальный сайт зеркало <a href=http://182.237.3.195/home.php?mod=space&uid=627301>http://182.237.3.195/home.php?mod=space&uid=627301</a> Прямо момент арестуйте благотворительные вращения за регистрацию без депозита и начинайте собирать призовые композиции ради крупных выигрышей!Возможность поиграть дополнительное состязание (а время и несколько) совершенно даром, а выигрыш, тому, поступает на счёт игрока. 1×slots зеркало которую указывали при регистрации кстати
1х слотс зеркало регистрация в 1×slots casino
В списке требований к отыгрышу часто наличествуют лимиты на ставки при этой на личные деньги. Так, если отыграть надо(надобно) 30 000 руб., а предельная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 раз. Эта особенность затрудняет соблюдение игроками условий по срокам деянья акции.Но на некоторых азартных платформах подобные гонорары имеют получить и уже зарегистрированные юзеры. В этом случае, бонусы предоставляются масштабах оригинальных акций либо же неким геймерам в виде акционного предложения, которое прибывает на почту с целью «возвратить» игрока в свое казино. <a href=https://securityholes.science/index.php?title=%D0%91%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%88%D0%B5%D1%84-%D0%BF%D0%BE%D0%B2%D0%B0%D1%80%D0%BE%D0%B2%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!>https://securityholes.science/index.php?title=%D0%91%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%88%D0%B5%D1%84-%D0%BF%D0%BE%D0%B2%D0%B0%D1%80%D0%BE%D0%B2%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!</a> Новые посетители онлайн-казино без первого депозита могут проверить собственную удачливость. К что, этому же есть возможность конвертировать бездепы в настоящие деньги за регистрацию в казино, однако чтобы бонус необходимо отыграть согласно условиям акции.Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке адепты онлайн-казино публикуют важную информацию о no deposit bonuses и услугах. 1×slots официальный сайт, скачать Составленный экспертами Casino.ru список онлайн-казино с бездепозитным призом позволяет игрокам сопоставить спецпредложения различных операторов.
1хслотс казино зеркало
Однако в условиях исчезают «подводные камешки», которые не позволят вывести крупную сумму либо же вы не успеете отыграть вейджер. Поэтому мастера рекомендуют отобрать безвозмездные вращения за регистрацию в казино без депозита, чтобы поднабраться навыка и получить реальный шанс на победу. 1хслотс рабочее зеркало <a href=http://ad-vance.ru/communication/forum/user/41521/>http://ad-vance.ru/communication/forum/user/41521/</a> Автоматическая активация может самой комфортной, хотя ручной способ содержит перед ней превосходства. Прежде чем использовать вознаграждение от казино, стоит заблаговременно определить, сколько времени потребуется на исполненье всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деяния приза.
скачать 1×slots официальный сайт
За счёт спинов выйдет запустить различные онлайн слоты, протестировать стратегии и поднабраться навыка. Фишка в том, собственно вращения начисляются на топовые аппараты с оригинальными опциями и высокой отдачей. Не забывайте, что в каждом акционном предложении учтены специальные притязания – кратковременные лимитирования, наибольший размер ставки, перечень доступных игр.Такие поощрения дозволяют безвозмездно протестировать новое казино, разобраться с игровым ходом онлайн слотов, заработать и исключить небольшую сумму денег. <a href=https://destaquebrasil.com/inglaterra/author/brianten/>https://destaquebrasil.com/inglaterra/author/brianten/</a> Новички не обожают сразу же заносить депозит. Это обусловлено неимением опыта и недоверием. К счастью, наши возможно получить бездепозитный бонус за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В любом случае вы не рискуете своими сбережениями. Это отличная возможность запустить понравившийся видео слот либо же испытывать удачу в настольных играх. 1×slots зеркало которую указывали при регистрации кстати
<b>Смотреть еще похожие новости:</b>
<a href=http://lssdteam.teamforum.ru/viewtopic.php?f=2&t=2247>1×slots официальный сайт скачать на айфон</a>
<a href=https://praisenpray.org/forums/showthread.php?tid=120833>1×slots рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Ещё одно распространённое акционное предложение – привлекательный подарок с неблаговидными требованиями. К примеру, клуб обещает $100 в бездепа, но с вейджером х80 или х100. Отыграть такой вейджер фактически невозможно и потому другого концентрироваться на больше занимательных промоакциях. Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, all только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.
#265 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
про казино порно с Васильева Татьяна Викторовна <a href=https://th-royalgclub.com/>porno Юлия Пересильд</a> порно с Дарья Клишина, легкоатлетка сайт 1×bet слоты <a href=https://th-royalgclub.com/>пина букмекерской конторы</a> зеркала официальных сайтов казино 1×bet 1хбет 7k casino скачать букмекерская контора бесплатно скачать casino betting casino скачать букмекерская контора без
DiskiPlus casino скачать DiskiPlus pin casino зеркало <a href=https://diskiplus.ru>DiskiPlus porno Юлия Канакина, скелетонистка</a> DiskiPlus зеркала официальных сайтов казино DiskiPlus порно с Федор Чалов (футбол) <a href=https://www.diskiplus.ru/>DiskiPlus почему казино</a> DiskiPlus порно с Дронова Александра Викторовна DiskiPlus porno Виктория Баркова, легкоатлетка DiskiPlus сайт pin up casino DiskiPlus kent casino DiskiPlus официальные зеркала казино DiskiPlus казино фильм DiskiPlus автомат казино
#266 Charlesgunnyhttp://filmkachat.ru
сайт 1× slots casino
Новички не любят незамедлительно же вносить депо. Это обосновано неименьем навыка и сомнением. К счастью, в наше время можно получить бездепозитный приз за регистрацию в казино. Неважно собственно начислит система – фриспины либо кредиты. В любом случае вы не рискуете собственными сбережениями. Это отличная вероятность запустить понравившийся видео слот или же испытывать фортуну в настольных играх.Для выбора азартного заведения Вы можете пользоваться перечнем наших казино с призами за регистрацию. На нашем сайте мы выпустили список бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, собственно часть призов неповторимые и доступны лишь для посетителей нашего вебсайта по-специальному промо-коду либо по оригинальной ссылке. Кроме такого, для каждого бонуса мы подготовили подробный обзор, в Вы узнаете как получить и отыграть одобрение и как исключить собственный выигрыш с бездепа. <a href=http://filmkachat.ru/>1×slots зеркало рабочее</a> <a href=https://mez.ink/kalinka0588>https://mez.ink/kalinka0588</a> 1хслот скачать <a href=http://x91427p3.beget.tech/user/Edwardjag/>http://x91427p3.beget.tech/user/Edwardjag/</a> Бонус в казино без депо имеет разные вариации: может быть приветственный бонус, акции в честь каких-либо праздничных либо важных дат, бонус за привлечение свежих игроков, преданность и получение VIP-статуса.
1×slots зеркало этих способов предполагает регистрацию
1×slots официальный сайт мобильная версия Большинство клубов привлекают внимание игры за счёт разнообразных презентов. На 1 веб-сайтах можно получить виртуальные кредиты, которые откроют доступ ко всему софту. На иных же, администрация предлагает безвозмездные вращения для пуска лучших интернет слотов. Несмотря на различные промоакции, стоит выделить самые главные. <a href=http://clients1.google.cf/url?q=http://molkom-penza.ru/bitrix/rk.php?goto=http://idea-ufa.ru/bitrix/redirect.php?goto=https://telegra.ph/Bolnichnyj-list-po-osnovnoj-rabote-i-vnutrennemu-sovmestitelstvu-09–24>http://clients1.google.cf/url?q=http://molkom-penza.ru/bitrix/rk.php?goto=http://idea-ufa.ru/bitrix/redirect.php?goto=https://telegra.ph/Bolnichnyj-list-po-osnovnoj-rabote-i-vnutrennemu-sovmestitelstvu-09–24</a> С иной стороны, намного проще отобрать бездепозитные фриспины за регистрацию в казино и напрямик момент начать вращать барабаны в превосходнейших слотах. Главная особенность спинов сомнений, что они предусмотрены для топовых автоматов. Удастся не пройти вспомогательные раунды, но и увеличить сумму выигрыша, заработать респины и внутриигровые подарки. 1×slot казино зеркало
1хслотс зеркало
Если простыми словами, бездепы – это определённая сумма средств либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно брать подарки. Но есть некоторые нюансы. Существуют игорные жилища, которые перед что, этим как начислить призы настоятельно привязать аппарат, дать копии документов. Верификация аккаунта. Лучше подтвердить личность незамедлительно после регистрации, дабы потом не было заморочек с выводом денег. Верификация возможность проходить 2-мя способами:Максимальная ставка ? уточняется в еденице счета и ограничивает объем ставки за один спин. В случае ее превышения приз может быть аннулирован. Также в правилах возможность находиться запрет на размещение ставок определенного вида, например, по одинаковым шансам в рулетке (другими, на чет или нечет, красное или темное и т.д.). <a href=http://excont.ru/bitrix/rk.php?goto=http://plitstroytorg.ru/bitrix/redirect.php?goto=http://scorpena.ru/bitrix/redirect.php?goto=https://telegra.ph/Trebovaniya-k-zastrojke-uchastka-v-2023-godu-09–23>http://excont.ru/bitrix/rk.php?goto=http://plitstroytorg.ru/bitrix/redirect.php?goto=http://scorpena.ru/bitrix/redirect.php?goto=https://telegra.ph/Trebovaniya-k-zastrojke-uchastka-v-2023-godu-09–23</a> Для верификации номера аппарата, в личном профиле изберите опцию „Подтвердить номер телефона“ и введите в соответствующее поле код, полученный в sms-сообщении. казино 1×slots официальный сайт После получения приза вывод средств для клиента будет недоступен до, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или пара месяцов. Выводить средства игрок может только в отыгрыша.
1х слот 1хслотс регистрация перейти на 1×slots
Предложения с бездепозитными бонусами за регистрацию дозволяют новым заведениям заинтересовать аудиторию на собственный вебсайт. А игроки в свою очередь получают возможность выступать на настоящие средства без депозита в казино и заработать небольшой стартовый капитал, кот-ый разрешено вывести на карту банка или электронный кошелек. 1× slots casino зеркало <a href=https://securityholes.science/wiki/1×slots_%D0%A0%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5_%D0%97%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE_%D0%9D%D0%B0_%D0%A1%D0%B5%D0%B3%D0%BE%D0%B4%D0%BD%D1%8F>https://securityholes.science/wiki/1×slots_%D0%A0%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5_%D0%97%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE_%D0%9D%D0%B0_%D0%A1%D0%B5%D0%B3%D0%BE%D0%B4%D0%BD%D1%8F</a> Простая процедура получения бездепозитного приза, которая займет не более 2-х мин. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные.
1×слот регистрация в 1×slots casino
Выбирайте наихорошие благотворительные призы за обзоров на Casinoz – и пусть для сопутствует счастье при отыгрыше бонусных кредитов!Все безвозмездные призы кажутся соблазнительными. Кто же категорически от способности поиграть в онлайн-казино, не рискуя средствами, хотя получая выигрыши. Но далеко не все бездепозитные бонусы одинаковой презентабельны для рассудительного клиента. <a href=http://www.hngaosha.com/space-uid-37981.html&do=profile>http://www.hngaosha.com/space-uid-37981.html&do=profile</a> Похожим образом работает 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения посетителя или из-за с получения им VIP-статуса. Подарок предоставляется последствии обращения в поддержку и проверки.Обыкновенные бездепозитные бонусы в объеме от 3-х до двадцати долларов сделаны чтобы, чтобы, чтобы в игры заходили все свежие и свежие игроки. Здесь, всего, несомненно ограничение на наибольший выигрыш. Важно, дабы перед наименьшим вкладом был отключен приз за 1-ое пополнение счета, и геймер не попадет на повторный вейджер. 1× slots casino официальный сайт Каждый из бездепозитных бонусов без пополнения 2022 имеет свой конкретный вейджер для отыгрыша, например же в каждом казино он устанавливается персонально — где то он х55 а где-то х30, повторюсь везде по различному!Возьми свой подарок. Чаще всего бонус активизируется сразу последствии регистрации. Но бывают истории, когда нужно забежать в индивидуальный офис либо написать в справочную службу.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.formulersupport.com/Thread-1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%81%D0%B0%D0%B9%D1%82%D0%B0–254159>1×slots зеркало сайта</a>
<a href=https://forum.ltp-team.com/topic/202356–1×slots-bonus-za-registraciyu/>1×slots бонус за регистрацию</a>
<a href=https://bestshop.link/threads/%D0%B7%D0%B5%D1%80%D0%BA%D0%BB%D0%BE-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-1×slots.162/>зеркло казино 1×slots</a>
<a href=http://miupsik.ru/forums/showthread.php?tid=531491>1хслотс зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В случае установленного лимита на сумму вывода выигрыша с бездепозитного приза, игрок не может исключить больше заявленной суммы.
#267 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
ramenbet casino казино сегодня <a href=https://7club7.com/>casino pin официальный</a> 1win casino casino рабочее <a href=https://rucriminal.info/>букмекерская контора леонов</a> порно с Гатагова Ольга Анатольевна casino порно с Захарова Мария Владимировна бесплатно играем казино почему в казино не бывает настенных часов porno Игорь Акинфеев (футбол) скачать casino на андроид
DiskiPlus Разуваева Ксения Денисовна порно DiskiPlus порно с Александр Большунов (лыжные гонки) <a href=https://diskiplus.ru>DiskiPlus porno Илона Маркова, хоккеистка</a> DiskiPlus porno Илона Маркова, хоккеистка DiskiPlus online casino <a href=https://diskiplus.ru/>DiskiPlus порно с Алина Загитова, фигуристка</a> DiskiPlus гта казино DiskiPlus макао казино DiskiPlus где казино DiskiPlus играющие казино DiskiPlus Любимова Ольга Борисовна порно DiskiPlus лучшая казино DiskiPlus лучшие букмекерские конторы
#268 Charlesgunnyhttp://filmkachat.ru
1×slots бонус за регистрацию
Каждый новичок и умелый игрок мечтают стремительно стартануть и начать создавать настоящие ставки. Для этого довольно забрать подарок, за который надо уплачивать. В зависимости от игровой платформы, нужно создать профиль, привязать email или аппарат. После сего администрация начисляет щедрое вознаграждение вид даровых вращений или виртуальных кредитов. <a href=http://filmkachat.ru/>casino 1×slot</a> <a href=https://direct.me/kalinka0588>https://direct.me/kalinka0588</a> B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax 1×slots casino регистрация 1×slotscasino09k online <a href=http://sledivsegda.ru/bitrix/click.php?anything=here&goto=http://baris-online.ru/bitrix/rk.php?goto=http://amnis.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/-JhqYtaPZMb>http://sledivsegda.ru/bitrix/click.php?anything=here&goto=http://baris-online.ru/bitrix/rk.php?goto=http://amnis.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/-JhqYtaPZMb</a> Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.
1×slots рабочее зеркало
Бонусные средства – маленькая сумма средств для старта в новеньком казино. На бонусные средства, обычно разрешается выступать во все игры, не слотов с прогрессивным джекпотом и игр из раздела exist casino.Бездепозитный приз по промо-коду несомненно доступен для забавы, лишь в случае когда Вы активируете особый бонусный код в разделе с призами либо укажите промокод при регистрации на сайте. В неких случаях, считая активации кода, придется подтвердить контактные данные игрока и заполнить анкету клиента. <a href=https://forum-pravo.com.ua/showthread.php?p=26630&posted=1#post26630>x1 slots 1хслотс регистрация перейти на 1×slots</a> 1×slots зеркало на сегодня <a href=https://backpacker-footsteps.com/backpacker-footsteps-forum/profile/jameswah/>https://backpacker-footsteps.com/backpacker-footsteps-forum/profile/jameswah/</a> Фриспины без депо или дополнительные свои посодействуют поближе познакомиться с игровой платформой и её функциями. За счёт презентов можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради забавы против живых крупье.Для получения предоставленных призов для понадобиться — ПК либо мобильное прибор, и остальное дело за малым. 1хслотс рабочее зеркало Для получения приза нужно ознакомиться с программой преданности казино и сделать ставки на сумму, необходимую для перехода на следующий уровень.
1×slots официальный сайт мобильная версия скачать
Наш список включает в себя лучшие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по важным характеристикам: <a href=http://www.edccommunity.com/proxy.php?link=https://www.sqlservercentral.com/forums/user/blackshisha0212/>http://www.edccommunity.com/proxy.php?link=https://www.sqlservercentral.com/forums/user/blackshisha0212/</a> Какие бонусы меня еще получить не бездепозитного приза за регистрацию в казино? По мимо бездепозитного приза, любое онлайн казино предлагает игрокам прибыльное предложение на 1-ый депо, вы совершаете депозит, ваш депо увеличивается в двое или в в 3, тем самым начать выступать можно с больше солидной суммой, так же не запамятываем на вейджер на призы.Ниже указан актуальный перечень легальных казино в Беларуси с призами на 1-ый депо. Вы сможете попасть на официальный вебсайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. 1×slots казино зеркало Обычно показатель выше, чем для призов на депозит. Не изумляйтесь, случае он будет числе х100. Иногда завышенный коэффициент вейджера уточняется для обитателей отдельных государств.
1×slots сайт
<a href=https://www.formulersupport.com/Thread-1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE–265165>1×slots официальный зеркало</a> В современность очень просто получить приз за регистрацию в казино. Практически каждый игорный дом с готовностью начисляет деньги либо благотворительные вращения. Многие гэмблеры используют этим и не стыдятся региться в каждом клубе с выгодными условиями. Кстати, это замечательная возможность выработать победную тактику и сорвать джекпот. 1× slots сайт <a href=http://www.baohaibbs.com.cn/home.php?mod=space&uid=45803>http://www.baohaibbs.com.cn/home.php?mod=space&uid=45803</a> Индивидуальные поощрения выдаются за совершение действий: подписку на аккаунты площадки в соц сетях, установку мобильного прибавленья либо официального клиента для ПК. В большинстве казино срабатывают программки лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий степень часто сопровождается выдачей бездепа.Бонус в казино без депо содержит разные варианты: такое быть приветственный бонус, акции в честь каких-то праздников или весомых дат, бонус за вербование новых игроков, преданность и получение VIP-статуса.
онлайн казино 1×slots
Для получения выигрыша требуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить конкретную необходимую, но теснее из собственных средств. Она рассчитывается из совместного объема выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, если пользователь выиграл 1000 рублей, а множитель составляет х30, вывести деньги возможно будет, сделав ставки на 30 000 рублей. На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не сможете активировать и получить бездепозитный бонус. <a href=https://www.love2d.org/forums/memberlist.php?mode=viewprofile&u=277209>https://www.love2d.org/forums/memberlist.php?mode=viewprofile&u=277209</a> Отзывы читателей о бонусных промоакциях посодействуют составить впечатление, хотя не запамятовывайте о субъективности личных комментариев.Бонус в казино без депозита содержит разные разновидности: такое быть приветственный бонус, промоакции в честь каких-либо дней либо главных дат, приз за привлечение новых игроков, лояльность и получение VIP-статуса. 1×slots регистрацию более популярный вариант это Наши эксперты исследуют обстоятельства акции, этого в ручном режиме проверяют их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие характеристики. Мы не рекламируем казино, а даем игрокам информацию о наилучших из них.
<b>Смотреть еще похожие новости:</b>
<a href=http://okeyrp.listbb.ru/viewtopic.php?f=24&t=1797>1×slots регистрацию более популярный вариант это</a>
<a href=https://portugal-campings.com/pt/profile/jamescip/>1×slots casino регистрация 1×slotscasin online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном сайте и сделайте вход в индивидуальный кабинет, чтобы отобрать бесплатные вращения с вейджером х40;
#269 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия
Зачастую бездепозитные бонусы казино для забавы предлагаются разными заведениями азартных игр в рекламных акций либо в целях привлечения к для свежих игроков. Для бездепозитных призов в казино 2022 игроку надо пополнять счет до момента вывода хотимых средств.Поспешите зарегистрироваться на официальном веб-сайте Клубника, дабы быстро получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, замечена настоящий шанс победу! <a href=http://filmkachat.ru/>1×slots быструю регистрацию а также мгновенное</a> Фриспины — бесплатные вращения, коие позволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины считаются самым знаменитым и преимущественным обликом бонуса — благотворительные вращения иногда эффективнее и веселее в отыгрыше, чем остальные облики бездепов. <a href=https://localendar.com/event?DAM=PublishedEvent&m=3152909&event_id=2&calendar_id=3152909&more_info=N&export_date=Dec%2018,%202031&category=4>https://localendar.com/event?DAM=PublishedEvent&m=3152909&event_id=2&calendar_id=3152909&more_info=N&export_date=Dec%2018,%202031&category=4</a> 1х слот регистрация в 1×slots casino <a href=https://king-wifi.win/wiki/User:ClariceGrunewald>https://king-wifi.win/wiki/User:ClariceGrunewald</a> Многие казино деют в рекламных целях благотворительные бонусы необыкновенно для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой вебсайт по партнерской ссылке с нашего портала.Мы подготовили перечень, где есть всегда животрепещущие и новые бездепозитные призы казино, коие вам получить даром. Для наших пользователей есть специальные предложения эксклюзивные бонусы, которые вы ни не отыщите, их мы определили особой красноватой плашкой «Exclusive».
1×slots зеркало быструю регистрацию а также мгновенное
Рассмотрим на образце: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских рублей. В условиях промоакции предписано, что вейджер бездепозитного бонуса х20. Поэтому, дабы отыграть бонус, игроку будет необходимо устроить ставок на 35*20=700 руб. <a href=https://www.ladyboyescort.com/profile/745-rabofreesi/>1×slot зеркало рабочее регистрации на телефон придет</a> 1×slots бездепозитный бонус за регистрацию <a href=http://www.atego-club.ru/forum/member.php/164429-Jamesdap>http://www.atego-club.ru/forum/member.php/164429-Jamesdap</a> 1×slots бездепозитный бонус за регистрацию В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая доля забавы. Важно, часто бездепозитные бонусы в казино выдаются с лимитированиями по максимальной выплате. В среднем можно рассчитывать на выгода в количество тысяч рублей. Как вывести выигрыш с бонуса без депозита. Придётся подтвердить аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается каждым игроком. О документальном подтверждении учетной записи спрашивайте в онлайн чате либо прочитайте в правилах.Зарегистрируйтесь. Для регистрации почаще всего довольно установить собственный номер аппарата и почтовый адресок, в чего ввести полученный код из СМС. Возможно, потребуется показать промокод. В правилах акции будет написано, где его надо включать. Иногда это надобно делать при регистрации, от — уже в создания собственного офиса, на отдельной страничке.
1×slots регистрация 1×slots casino c2d ru
Для получения приза нужно пригласить в забаву свежего клиента. Казино начислит пригласившему фиксированный процент от взносов приглашённого повторяющий приза: чаще всего его размер не выше 10%. Срок действия бонуса в большинстве случаев не превышает месяца: пригласивший получает приз от проигранных ставок приглашённого в 1-ый луна забавы.А ознакомиться с свежими интернет казино, Вы сможете помощью призов с выводом прибыли, коие Вы можете получить без депо. <a href=http://kor2021.osongbeautyexpo.kr/bbs/board.php?bo_table=free&wr_id=2104530>http://kor2021.osongbeautyexpo.kr/bbs/board.php?bo_table=free&wr_id=2104530</a> В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это самая приятная доля игры. Важно, часто бездепозитные призы в казино выдаются с лимитированиями по наибольшей выплате. В среднем можно рассчитывать на выгода в несколько тысяч рублей. Как вывести выигрыш с приза без депо. Придётся подтвердить аккаунт документально, в неких заведениях. Процедура верификации обязательна и делается каждым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате или прочитайте в правилах. 1 x slots casino
1×slot казино зеркало
Такие поощрения разрешают даром протестировать новое казино, разобраться с игровым ходом онлайн слотов, заработать и исключить небольшую сумму денег.Подарки на праздники ? приуроченные к праздничным датам, требующие символического отыгрыша либо начисляются без такового. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду. Бoльшинcтвo азартных заведений выдвигают примерно одинаковые условия и притязания, коие необходимо выполнить, дабы получить бездепозитный приз за регистрацию. Все их возможно соединить в раз перечень:Хотя бесплатные бонусы начисляются без депозита, не исключено, собственно вас придется заносить деньги. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только последствии как, как свежий заказчик впервые пополнит игровой счет. 1х слот регистрация в 1×slots casino <a href=https://images.google.rs/url?q=https://doctorlazuta.by/>https://images.google.rs/url?q=https://doctorlazuta.by/</a> Бездепозитные призы за регистрацию считаются одним из самых знаменитых методов привлечения свежих игроков в онлайн-казино, потому что они деют игрокам вероятность опробовать казино, необыкновенно игровые автоматы, и вероятно, выиграть настоящие деньги.Да, у безвозмездных бонусов есть недостатки. Прежде всего, они обыкновенно не. Кроме как, условия вейджера по ним всегда жесткие. Но таки отсутствие риска делает их довольно красивыми для клиентов.
x1 slots 1хслотс регистрация перейти на 1×slots
Несмотря на то, что этот вариант стимуляции со стороны азартных платформ довольно известен в похожих игр, далеко не почитателям казино известно, собственно себе бездепозитные призы казино и как именно их вполне эксплуатировать.Не стоит путать забаву в демо и внедрение призов. В демонстрационном режиме игрок возможность расценить механику слота, сюжет и оформление. Но игра проводится на относительные кредиты, потому отсутствует главное ? чувство азарта. Активируя промокод или фриспины, клиент и не расходует свои деньги на игровые автоматы, но возможность сорвать реальный куш! Популярность интернет казино растёт и всё больше юзеров начинают проявлять азартными играми. Бездепозитные бонусы 2022 года, это уникальные презенты за регистрацию. С их поддержкой свежие игроки могут получить бесплатные вращения или деньги на баланс за 1 регистрацию. С в игорных заведений в онлайне, бездепозитные бонусы стали знаменитейшим способом привлечения игроков. Подобные акции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы расскажем. Наш сайт собрал наилучшие предложения из интернета на 2022 год. Воспользуйтесь хоть презентом и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить обстоятельства. <a href=https://qanda.yokepost.com/index.php?qa=165082&qa1=green-pharmacy-catalog-of-goods-with-prices>https://qanda.yokepost.com/index.php?qa=165082&qa1=green-pharmacy-catalog-of-goods-with-prices</a> 1× slots casino зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://lssdteam.teamforum.ru/viewtopic.php?f=2&t=2954>1 xslots рабочее зеркало</a>
<a href=http://kemsrr.forumex.ru/viewtopic.php?f=7&t=6553>1хлот регистрация в 1×slots casino</a>
<a href=https://showboysmedia.com/real-music/#comment-153318>1хслотс мобильная версия зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Следует выделить, что бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом. В современность довольно просто получить приз за регистрацию в казино. Практически любой игорный жилище с готовностью начислит средства либо бесплатные вращения. Многие гэмблеры пользуются данным и не стыдятся региться в любом клубе с выгодными условиями. Кстати, это замечательная возможность выработать победную тактику и сорвать джекпот.
#270 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало
Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, all зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. <a href=http://filmkachat.ru/>1×slots регистрация на сайте</a> Наши эксперты исследуют условия акции, затем в ручном режиме проверку их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие характеристики. Мы не рекламируем казино, а даем игрокам информацию о лучших из них. <a href=https://www.smartmoneymatch.com/job/3d-artist/968>https://www.smartmoneymatch.com/job/3d-artist/968</a> 1х слотс зеркало регистрация в 1×slots casino <a href=https://mylady.mybb.ru/viewtopic.php?id=28326#p131837>https://mylady.mybb.ru/viewtopic.php?id=28326#p131837</a>
1хслот 1хслотс регистрация перейти на 1×slots
Чаще всего, популярностью сервисы, эти как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно неотъемлемое правило. Финансовые свои выводятся лишь спустя ту платежную систему, коей огромной для пополнения депо. Если же игрок получил бездепозитный покерный приз, потребуется восполнить счет на наименьшую сумму, кот-ая составляет обыкновенно десять долларов.Основное отличие что, что для получения бездепа не надо пополнять баланс в казино. Но не сего, есть ряд прочих отличий: <a href=https://tussom.com/forums/showthread.php?tid=27265>1×slots актуальное зеркало</a> 1×slots официальный demo регистрация в 1×slots casino Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, чтобы снова получить бесплатный приз. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ждет неизбежное санкция.Прежде чем активировать бездеп, необходимо увериться том,, собственно страна, гражданином коей является игрок, не входит в список не. <a href=https://images.google.com.au/url?q=https://doctorlazuta.by/>https://images.google.com.au/url?q=https://doctorlazuta.by/</a> Для отыгрыша бонуса казино обязывает игрока поиграть на сумму, в количество один превосходящую необходимую полученного бонуса — здесь выгода фирмы очевидна. 1 хслот регистрация в 1×slots casino Чем ниже велечину вейджера, что, этим проще отыграть и исключить бонус. Если Вы расчитываете заработать на бездепе, а не просто ознакомиться с свежим игровым клубом, то стоит игнорировать призов с высоким вейджером их почти не реально отыграть. С ними Вы можете лишь протестировать игры заведения.
1×slots быструю регистрацию а также мгновенное
<a href=http://dedmorozural.ru/users/lyricalshell60>http://dedmorozural.ru/users/lyricalshell60</a> 1×slots официальный регистрация У любого игорного клубы различные вейджеровые условия. Чтобы вы гарантировано сумели выполнить их, мы дадим некоторое советов. Если система начислила небольшую необходимую, не стоит создавать великие ставки – остановитесь на 10–30 центах. Как лишь сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте играть. В противном случае другого, как присмотреться к иному автомату.
1×slots зеркало сайта
Выбирая даровой бонус, пристально изучайте управляла. Убедитесь, собственно вам можно брать роль в промоакции. Уточните, в каких забавах можно скорпулезно обстоятельства вейджера. При необходимости задавайте вопросы адептам саппорта.Вы не в коем случае ни чем не рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный приз, по мимо практической забавы на бездепозитные бонусы, у Вас есть шанс изучить игровые автоматы, выучится регулировать изменять ставки и линии, изучать бонусные игры и их выигрышные композиции, ну счете просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные средства, коие можно отыграть и вывести, но просто на демо счет, что, этим наиболее адреналин в крови еще больше повысится а пульс забьется с нередким ритмом! Не стоит путать забаву в демо и использование призов. В демонстрационном режиме игрок имеет оценить механику слота, сюжет и оформление. Но игра ведется на условные кредиты, поэтому отсутствует главное ? чувство азарта. Активируя промокод либо фриспины, заказчик и не тратит свои средства на игровые автоматы, но может сорвать реальный куш! casino 1×slot <a href=http://propusk-spb.ru/index.php?subaction=userinfo&user=dailypastor90>http://propusk-spb.ru/index.php?subaction=userinfo&user=dailypastor90</a>
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Внесение депозита – Будьте готовы пополнить счет последствии отыгрыша бонуса. Это обычное заявка верховодил для данного типа промо-акций. Лучше заранее уточнить, какую необходимую нужно несомненно заносить на счет. Как правило, речь идет о минимальном депозите, но вы обязаны быть убеждены, собственно он для по кармашку.Фриспины предназначены для применения в видео слотах. Внимательно ознакомьтесь с условиями – частенько их выдают на кое-какие автоматы. В зависимости от клуба, у вас получится сделать определённое количество ставок. Кстати, продвинутые игорные дома разрешают запускать каждых «одноруких бандитов». <a href=https://yozhstudio.ru/2019/09/08/%d0%bf%d1%80%d0%b5%d0%b8%d0%bc%d1%83%d1%89%d0%b5%d1%81%d1%82%d0%b2%d0%b0-%d0%b8%d0%bd%d0%b4%d0%b8%d0%b2%d0%b8%d0%b4%d1%83%d0%b0%d0%bb%d1%8c%d0%bd%d0%be%d0%b3%d0%be-%d0%bf%d0%be%d1%88%d0%b8%d0%b2%d0%b0/?unapproved=309554&moderation-hash=ccf24f96d95c384fe9f34572e3203c17#comment-309554>https://yozhstudio.ru/2019/09/08/%d0%bf%d1%80%d0%b5%d0%b8%d0%bc%d1%83%d1%89%d0%b5%d1%81%d1%82%d0%b2%d0%b0-%d0%b8%d0%bd%d0%b4%d0%b8%d0%b2%d0%b8%d0%b4%d1%83%d0%b0%d0%bb%d1%8c%d0%bd%d0%be%d0%b3%d0%be-%d0%bf%d0%be%d1%88%d0%b8%d0%b2%d0%b0/?unapproved=309554&moderation-hash=ccf24f96d95c384fe9f34572e3203c17#comment-309554</a> 1×slots казино мобильная версия Игрокам не следует воспринимать приветственный приз как гарантированный способ получить большой выигрыш, но это замечательная вероятность без расходов расценить возможностей казино.Способы получения бездепа различаются зависимо облика бонуса, который понравился игроку. Но вас в любом случае надо(надобно) быть зарегистрированным в законном онлайн-казино и доказать собственную лицо. В общем облике пошаговая инструкция для получения бездепозитного приза смотрится например:
<b>Смотреть еще похожие новости:</b>
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=905378>1×slots зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция содержит подробные правила, гиперссылка на которые обыкновенно содержится в промообъявлении. В их указываются лимиты, вейджер, список доступных игр. Если оператор скрывает данные о предложении, то пользоваться им не стоит.
#271 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
ставки на спорт букмекерские конторы 1×bet регистрация <a href=https://strelochnik.com/>букмекерская контора на андроид</a> pin up casino пин пинко casino <a href=https://repost.news/>винлайн букмекерская контора официальный</a> 1×bet зеркало xbet бесплатные букмекерские конторы casino сайты Комарова Наталья Владимировна порно бесплатно фильм казино фильмы казино рояль казино в россии
DiskiPlus up casino зеркало DiskiPlus казино в россии <a href=https://diskiplus.ru/>DiskiPlus казино фильм</a> DiskiPlus порно с Петр Ян (ММА) DiskiPlus win win casino <a href=https://www.diskiplus.ru>DiskiPlus человек казино</a> DiskiPlus 1×bet слоты 1×bet top DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz DiskiPlus casino актуальное зеркало DiskiPlus порно с Сергей Бобровский (хоккей) DiskiPlus порно с Алексей Миранчук (футбол) DiskiPlus карты казино DiskiPlus казино ли
#272 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино играть 1×bet официальный сайт <a href=https://www.ossetia.tv/>порно с Георгий Джикия (футбол)</a> Преподобная Надежда Александровна порно букмекерская контора официальный сайт скачать <a href=https://krtka.info/>скачать букмекерскую контору на андроид</a> пин ап casino pin 1×bet зеркало слоты порно с Афонина Марина Игоревна порно с Арина и Дина Аверины, гимнастки порно с Варвара Субботина букмекерская контора ставки букмекерская контора фонбет официальный сайт
DiskiPlus спорт букмекерская контора DiskiPlus порно с Федор Чалов (футбол) <a href=https://diskiplus.ru>DiskiPlus gama casino</a> DiskiPlus 1win casino DiskiPlus porno Ангелина Гончаренко, хоккеистка <a href=https://diskiplus.ru/>DiskiPlus порно с Елена Никитина, скелетонистка</a> DiskiPlus up casino скачать DiskiPlus порно с Матвей Сафонов (футбол) DiskiPlus скачать 1×bet 1×bet xyz DiskiPlus букмекерская контора фонбет официальный сайт DiskiPlus макао казино DiskiPlus 1×bet скачать бесплатно DiskiPlus casino сайты
#273 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация
Любой выигрыш по ставке повыше установленного лимита будет считаться недействительным. То есть ставка не будет засчитана при отыгрыше, ну случае выигрыша его сумма не поступит на счёт клиента — итог игры будет всецело аннулирован.Бонус за регистрацию в казино выдается только раз раз на 1-го игрока. Но посещают дополнительные промоакции, в коих бездепы расступаются для постоянных клиентов и эти подарки Вы сможете получить больше 1-го раза. <a href=http://filmkachat.ru/>1хслот 1хслотс регистрация перейти на 1×slots</a> Для получения выигрыша потребуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить определенную необходимую, хотя теснее из собственных средств. Она рассчитывается из общего объема выигрыша за всегда использования бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, в юзер выиграл 1000 рублей, а множитель сочиняет х30, исключить деньги возможно несомненно, сделав ставки на 30 000 руб.Но на азартных платформах сходственные вознаграждения имеют получить и уже зарегистрированные пользователи. В этом случае, призы предоставляются масштабах оригинальных промоакций или же неким геймерам в виде акционного предложения, которое прибывает на почту с целью «возвратить» игрока в свое казино. <a href=https://www.pearltrees.com/kalinka0588/item691382057>https://www.pearltrees.com/kalinka0588/item691382057</a> Игрокам не принимать приветственный приз как гарантированный способ получить большой выигрыш, хотя это замечательная вероятность без затрат расценить функционал казино.Подобные бонусы без депо предоставляются на более прибыльных условиях. Зачастую они крупнее, а обстоятельства отыгрыша менее строгие. 1×slots регистрация на официальном сайте <a href=https://www.buhgalteria.ru/forums/user/88033/>https://www.buhgalteria.ru/forums/user/88033/</a> Подтвердите личность, предоставив оператору казино свои паспортные данные. Инструкции обычно несложные, основное — конкретно им следовать. Если написано, что «на фото должны быть видны все хорошо угла странички паспорта» — устройте именно такое фото.
1×slots акции
1× slots регистрация в 1×slots casino <a href=http://www.edufinancierafcpc.com/index.php/forum/suggestion-box/287710–1-win-cassino-official>http://www.edufinancierafcpc.com/index.php/forum/suggestion-box/287710–1-win-cassino-official</a> 1хслотс казино зеркало Например, игрок получил 500 рублей при разработке аккаунта и обязан отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., потребуется сделать 875 спинов для полного отыгрыша.Похожим образом трудится третий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя или в связи с получения им VIP-статуса. Подарок предоставляется после обращения в поддержку и проверки.
1×slots бездепозитный бонус за регистрацию
<a href=http://0018688.com/home.php?mod=space&uid=14820>http://0018688.com/home.php?mod=space&uid=14820</a> В каждом казино с бездепозитным бонусом предусмотрены вейджеровые условия. Это один-единственный «подводный камень», который стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) сделать определённое число ставок. Чем круче бонус, тем сложнее выполнить условия, и наоборот. x1 slots 1хслотс регистрация перейти на 1×slots Бездепозитный бонус казино 2022 с выводом за регистрацию предоставляет возможность ознакомиться игроку с лобби избранного заведения, определится в выборе игр и выяснить качество работы саппорта. Довольно нередко, начиная игровой процесс, игрок теснее не желает останавливаться и делает реальный вклад. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть даром возможно как один таки с призом за регистрацию без необходимости вносить депо.
1×slots casino зеркало рабочее
Третитй бездепозитный бонус за регистрацию – валютные свои. К раскаянию, начислить рубли или доллары способны только известные и модные клубы. С их помощью вас насладиться любой доступной игрой – автоматом, рулеткой, кено, блэкджеком. <a href=http://aficionado.pl/showthread.php?210192–1×slot-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE&p=232337>1×slot казино зеркало</a> Когда речь идет о денежных бонусах, казино всегда устанавливают обстоятельства вейджера, которые нужно выполнить, чтобы исключить выигрыш. 1×slots зеркало на сегодня <a href=http://led119.ru/forum/user/109527/>http://led119.ru/forum/user/109527/</a>
1×slots зеркало рабочее на сегодня
Бездепозитный приз – это экономическое вознаграждение, которое выдается участнику игры в казино, для его привлечения и появления заинтригованности. Любой посетитель, который соответствует условиям выдачи подобного бездепозитного бонуса, может претендовать на получение вышеуказанного приза. Такое поощрение является наиболее действенным способом, дающим вероятность стартовать при, не вкладывая собственных материальных средств.Подтверждение электрической почты – одно из основных критерий, коие есть практически в каждом бездепозитном казино. Чтобы верифицировать электрическую почту, достаточно перебежать по активной ссылке в письме, полученном от азартного клуба. Теоретически, к безвозмездным призам возможно отнести например именуемые фриспины. Напомним, речь идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, потому собственно они деют лишь возможность делать ставки.Для верификации аккаунта нужно предоставить спецам технической помощи отсканированную копию паспорта и счета за коммунальные предложения, еще фотографию банковской карты или экрана странички электронного кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности. <a href=http://www.engel-und-waisen.de/index.php/Is_It_Legal_To_Use_The_1×bet_APP>http://www.engel-und-waisen.de/index.php/Is_It_Legal_To_Use_The_1×bet_APP</a> 1×slots быструю регистрацию а также мгновенное Зарегистрируйтесь. Для регистрации почаще всего достаточно ввести собственный номер аппарата и почтовый адресок, последствии чего установить приобретенный код из СМС. Возможно, требуется указать промокод. В правилах акции несомненно написано, где его бы включать. Иногда это надо делать при регистрации, от — теснее после сотворения собственного кабинета, на отдельной странице.
<b>Смотреть еще похожие новости:</b>
<a href=http://uacode.com/>1×slots мобильная версия войти казино</a>
<a href=https://timepost.info/member.php?action=profile&uid=2064>1×slot зеркало рабочее регистрации на телефон придет</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.
#274 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерские конторы в россии лучшие бесплатные онлайн казино <a href=https://www.ossetia.tv/>porno Нина Пирогова, хоккеистка</a> макао казино сайт казино зеркало <a href=https://res-publika.com>порно с Владимир Минеев (ММА)</a> казино смотреть онлайн porno Алена Михайлова champion casino pin up casino скачать букмекерские конторы в россии 1×bet сейчас 7k casino официальный
DiskiPlus casino DiskiPlus порно с Каролина Севастьянова <a href=https://www.diskiplus.ru/>DiskiPlus Ирина Горбачева</a> DiskiPlus порно с Елена Никитина, скелетонистка DiskiPlus porno Илья Ковальчук (хоккей) <a href=https://www.diskiplus.ru/>DiskiPlus Радченко Светлана Юрьевна порно</a> DiskiPlus casinos winning DiskiPlus порно с Максим Глушенков (футбол) DiskiPlus порно с Анна Калинская (теннис) DiskiPlus 1×bet зеркало рабочее xbet DiskiPlus букмекерская контора на андроид DiskiPlus 1×bet xbet DiskiPlus 1×bet регистрация
#275 Charlesgunnyhttp://filmkachat.ru
рабочее зеркало 1×slots
Также, учите, собственно бездепозитный приз можно вывести только никаких случае, когда будут выполнены все условия отыгрыша. <a href=http://filmkachat.ru/>1хслотс казино зеркало</a> Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке необходимо пополнить счет в казино. Для депозитных бонусов, эта процедура не нужна, так как депозит теснее сделан. <a href=https://lessons.drawspace.com/post/646480/bmw-battery-reset-procedure>https://lessons.drawspace.com/post/646480/bmw-battery-reset-procedure</a> Как правило, при выводе денег, от играющего потребуется только устроить наименьший лепта для того, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом индивидуальный счет.Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие возникают у новичков. 1×slots регистрация 1×slotscasino 56 online <a href=http://forum.evony.com/member.php?1339330-DoctorLazutaml>http://forum.evony.com/member.php?1339330-DoctorLazutaml</a> Отказ в прохождении верификации. Если клиент не хочет или возможности предоставить документы, подтверждающие его личность, профиль несомненно заблокирован вместе со всеми бонусными начислениями.
1×slot зеркало рабочее этих способов предполагает регистрацию
Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавления либо официального клиента для ПК. В большинстве казино срабатывают программы преданности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на следующий степень нередко с выдачей бездепа.Минимального оборота. Этот предел устанавливается вейджером — же игрок не поиграет на установленную сумму, вывод средств будет недосегаем. <a href=https://masstr.net/showthread.php?tid=216427>1хслот официальный сайт зеркало</a> 1хслот зеркало <a href=http://swimming.s-server.kr/bbs/board.php?bo_table=free&wr_id=1648776>http://swimming.s-server.kr/bbs/board.php?bo_table=free&wr_id=1648776</a> Размер приза. В качестве бездепов обыкновенно начисляют очень суммы, а когда идет о бонусах за депозит, которые начисляются в процентном соотношении от суммы пополнения, то некоторые казино могут презентовать игроку до 2000$.При поддержки такого поощрения оператор возможность также привлекать посетителей, которые раньше проявляли активность на веб-сайте, хотя по некий причине перестали играть. В данном случае промокод высылается пользователю по электрической почте либо вид SMS. 1×slots зеркало регистрация Прежде всего, не запамятовывайте регулярно заглядывать на страничку обзоров бездепозитных призов. Они шаг за шагом оценивают наиболее занимательные предложения ведущих игорных порталов.
зеркала 1×slots
Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, all лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Высокая конкуренция в сегменте азартных игр доказывает операторов привлекать клиентов разнообразными промоакциями. Благодаря этому у гостей появляется возможность получить призы в казино за регистрацию без депо. Воспользоваться таким предложением можно, избегая процедуру внесения денег на игровой счет, просто активировав акк на веб-сайте. Наш гид по бездепам поможет выбрать самую симпатичную бонусную программку, узнать правила получения такового гонорары и распорядиться им с максимальной выгодой. Популярность интернет казино растёт и всё больше юзеров начинают увлекаться азартными забавами. Бездепозитные бонусы 2022 года, это оригинальные подарки за регистрацию. С их подмогою свежие игроки шансы получить бесплатные вращения или средства на баланс за одну регистрацию. С появлением игорных заведений в интернете, бездепозитные призы стали популярнейшим методом вербования игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы расскажем. Наш сайт собрал наихорошие предложения из интернета на 2022 год. Воспользуйтесь хоть презентом и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить условия. <a href=http://www.rgb-muelheim.de/buch/scarbook.php>http://www.rgb-muelheim.de/buch/scarbook.php</a> Автоматическая активация первый самой комфортной, хотя ручной метод содержит перед ней достоинства. Прежде чем использовать вознаграждение от казино, стоит заранее определить, сколько времени потребуется на исполненье всех критерий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала действия приза.Активация денежного гонорары происходит механически после творения профиля или применения промокода. Иногда операторы предъявляют вспомогательные требования: подписаться на страницы казино в соц сетях либо на рассылку рекламных извещений, скачать и ввести вспомогательный софт и т.д. 1×slots рабочее зеркало Бездепозитный приз казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в этом и содержится главное отличие.
1×slots регистрация 1×slots casino 777 online
Условия шансы различаться приятель от приятеля. Но такой бонус имеет быть применен лишь для игрового процесса – приобретенные на счет финансы до такого, как станут отыграны, вывести нереально.Как только получите бездеп в казино, всё точно не запамятовывайте инспектировать электронную почту. Некоторые игорные клубы непрерывно веселят интенсивных гэмблеров приятными призами. Чаще всего получить презент возможно в преддверии веселья, на день рождение, за вербование друга. А также распространённым призом считается прибавка к депозиту. Нужно всего лишь пополнить счёт, и азартное заведение увеличит его на 50–100%. В разделе с призами активировать собственный подарок. Найти забавы, для которых учтено одобрение и использовать бонус по предназначению. 1×slots промокод при регистрации <a href=http://mayakminska.1stbb.ru/memberlist.php?mode=viewprofile&u=3951>http://mayakminska.1stbb.ru/memberlist.php?mode=viewprofile&u=3951</a> Существуют казино с призом за регистрацию, каких довольно востребованы фриспины в интернет казино впоследствии регистрации в определенных забавах. Они встречаются том почаще бесплатных поощрений или классических призов в казино без инвестициям. Например, игрок регистрирует счет, на который начисляются безвозмездные игры, бонус за регистрацию вид безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса в выигрывает истинные средства, которые в последствии можно успешно вывести из заведения на собственную платежную систему. То есть, есть все шансы вывести средства без рисков собственными финансами. Регистрация, за которую компьютерные получит бонусы, займет пару минут, а благодаря этому возможно увеличить 5 евро поощрений до тыс. И без всяких заморочек вывести их.Бездепозитный бонус за регистрацию в казино — это стартовый презент повторяющий валютного начисления либо безвозмездных вращений для новых игроков заведения, для получения которого надо вносить депо.
1×slots регистрация на 1хслотс
К образцу, игроку выдаются бесплатные свои в заведении в объеме пятидесяти или 100 $ (вейджер на коие составляет 100х). То есть, каждому новоприбывшему игроку выскакивает манящая иллюстрация, кот-ая обещает выплату всех зачисленных компанией средств. Не стоит внимания на казино бонус за регистрацию без депозита с слишком большой либо довольно махонькой суммой призов, потому что, и тщательно исследовав все условия, тут вероятнее всего, будет какой-то подвох.Чтобы получить вероятность исключить выгода с бездепозитного приза в казино, нужно выполнить ряд условий: Приветственный приз без депозита ? презент за регистрацию. Выдается деньгами, фриспинами или баллами. В последнем случае бонусные баллы используются для участия в турнирах или размена на реальные деньги.Можно ли наваривать на бездепозитных бонусах? Это не работа, тут как повезет, случае в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, время возможно именовать везением, и добавочной добавкой к вашему бютжету. <a href=https://diary.ru/~rabofree/p222250145_videos-emka.htm>https://diary.ru/~rabofree/p222250145_videos-emka.htm</a> Иногда операторы просят внесение минимального депозита перед выводом для верификации платежного инструмента. В неких казино данный депозит кроме светит отыграть.Да, у даровых бонусов есть недостатки. Прежде всего, они обычно большие. Кроме такого, условия вейджера по ним всегда жесткие. Но таки отсутствие риска проделывает их довольно красивыми для посетителей. 1×slots регистрация
<b>Смотреть еще похожие новости:</b>
<a href=http://forums.indexrise.com/thread-309-post-502929.html#pid502929>1×slots актуальное зеркало</a>
<a href=http://www.forum.kalor.ru/member/zaellayanextz8130/>1хслотс казино зеркало</a>
<a href=https://roguedynasty.net/forums/member.php?10629-RabofreeKt>1×slots регистрация на сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выиграть реальные деньги в казино не пополняя счет – сложно, но вероятно. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными призами и начните выступать на бонусные свои. По статистике каком-то 10-ти заведений можно заработать небольшую необходимую денег с бонусных средств. Выигрыши с призов без вложений постоянно привязаны к притязанию по ставкам и все быть обналичены лишь последствии выполнения этих притязаний.
#276 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slotscasino09k online
Не стоит путать игру в демо и использование бонусов. В демонстрационном режиме игрок может оценить механику слота, сюжет и оформление. Но забава ведется на условные кредиты, поэтому отсутствует основное ? ощущение пыла. Активируя промокод либо фриспины, заказчик по-прежнему не тратит средства средства на игровые автоматы, хотя имеет сорвать настоящий куш!Для верификации аккаунта нужно предоставить специалистам технической поддержки отсканированную копию паспорта и счета за коммунальные предложения, а фотку банковской карты либо скриншот странички электрического кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для подтверждения личности. <a href=http://filmkachat.ru/>1×slots казино зеркало</a> Как только получите бездеп в казино, всё также не забывайте инспектировать электрическую почту. Некоторые игорные клубы каждый веселят интенсивных гэмблеров приятными бонусами. Чаще всего получить подарок можно в преддверии праздника, на денек рождение, за привлечение приятеля. А также распространённым призом является прибавка к депозиту. Нужно чем восполнить счёт, и азартное заведение увеличит его на 50–100%. <a href=https://biolinky.co/kalinka-0588>https://biolinky.co/kalinka-0588</a> Эффективность бездепов в рекламного инструмента оценили многие операторы. Малоизвестные площадки употребляют такие акции, дабы скоро набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны неизменных гостей. Не все сайты, дающие подарки без депо, рекомендованы к ирге. За привлекательным промоописанием шансы прятаться неосуществимые условия отыгрыша и подводные камни. 1×slots официальный сайт скачать <a href=https://thiamlau.com/forum/member.php?action=profile&uid=11828>https://thiamlau.com/forum/member.php?action=profile&uid=11828</a> Не советуем опрометью голову браться за всевозможные предложения получения средств без инвестициям. Вполне возможно, собственно бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на первый взгляд. Альтернативой считается казино бонус за депозит. Мы предлагаем для пару советов, благодаря которым у каждого игрока будет вероятность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом средств:
1хслотс официальный сайт зеркало
Каждый новичок и умелый игрок мечтают прытко стартануть и начать делать реальные ставки. Для сего достаточно отобрать подарок, за который не нужно уплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email или телефон. После этого администрация начислит щедрое вознаграждение вид бесплатных вращений или виртуальных кредитов. <a href=http://3ak.cn/home.php?mod=space&uid=187057>1×slots рабочее зеркало на сегодня</a> 1х слотс зеркало регистрация в 1×slots casino Итак, дабы благотворительные бонусные кредиты превратились в настоящие средства, которыми вы можете управлять по своему усмотрению, их надо(надобно) отыграть. Вейджер по уточнять в правилах онлайн-казино.Бонус с зачислением денег на счет выделяет больше свободы деяний. Пользователь сам подбирает, каким образом воспользоваться подаренными средствами. Здесь также все действовать ограничения на список доступных игр, но обыкновенно эти рамки не так строги, как в рекламную с безвозмездными вращениями. <a href=https://timeoftheworld.date/wiki/User:RenateElm98>https://timeoftheworld.date/wiki/User:RenateElm98</a> Зачастую бездепозитные бонусы казино для забавы предлагаются разными заведениями азартных игр в рекламных акций либо в целях привлечения к для свежих игроков. Для бездепозитных призов в казино 2022 игроку надо пополнять счет до момента вывода хотимых средств.Несмотря на то, собственно данный вариант стимуляции со стороны азартных платформ довольно востребован области подобных игр, далеко не почитателям казино ведомо, что себе бездепозитные призы казино и как именно их вполне эксплуатировать. 1×slots официальный сайт, скачать Необходимость отыгрыша. Вейджер такой повыше, чем для призов за депо. И пока свои не отыграны, исключить их нельзя.Для получения приза нужно пригласить в игру нового клиента. Казино начисляет пригласившему фиксированный процент от взносов приглашённого в виде приза: чаще всего его объем не превышает 10%. Срок действия приза правило не превышает месяца: пригласивший получает приз от проигранных ставок приглашённого в 1-ый луна забавы.
1×slots регистрацию более популярный вариант это
Большинство клубов привлекают внимание игроков за счёт разнообразных подарков. На одних веб-сайтах можно получить виртуальные кредиты, которые откроют доступ ко всему софту. На иных же, администрация предлагает бесплатные вращения для запуска лучших интернет слотов. Несмотря на различные промоакции, стоит выделить самые основные. Это также бесплатные финансы, коие поступают на аккаунты новоиспеченных геймеров после регистрирования. А особенность этих призов состоит в, что обретенные деньги непременно по использовать в продолжении назначенного времени.А ознакомиться с свежими интернет казино, Вы сможете за счет бонусов с выводом выгоды, коие Вы сможете получить без депо. <a href=http://bbs.worldsu.org/home.php?mod=space&uid=419494>http://bbs.worldsu.org/home.php?mod=space&uid=419494</a> 1×slots зеркало быструю регистрацию а также мгновенное При ирге на бонусные свои воспрещается выступать в игровые автоматы с современным джекпотом и игры из радела exist casino. Кроме как, кое-какие казино выделяют бездеп на один либо несколько конкретных слотов, и в других играх Вы не сможете на них играть.Обычно бездепозитные промоакции от казино, приходят на эл. Почту в деньки рождения либо праздники. В некоторых онлайн казино возможно обратиться в чат и как неизменному игроку, вероятно вам предложат бездепозитное предложение.
1× slots официальный
Бездепы с бесплатными вращениями деют пользователям право вертеть барабаны игровых автоматов без снятия средств со счета. За каждый раунд платит казино. Число спинов ограничено и редко выше сотню. Если акция содержит большое даровых игр, их начисление возможность быть разбито на несколько дней.Высокая конкурентность в разделе азартных игр мотивирует операторов привлекать посетителей разнородными промоакциями. Благодаря данному у гостей появляется возможность получить бонусы в казино за регистрацию без депозита. Воспользоваться этим предложением можно, минуя процедуру внесения средств на игровой счет, просто активировав акк на веб-сайте. Наш экскурсовод по бездепам поможет выбрать самую привлекательную бонусную программку, разузнать правила получения такового гонорары и распорядиться им с наибольшей выгодой. Любой выигрыш по ставке выше установленного лимита несомненно считаться недействительным. То есть ставка не будет засчитана при отыгрыше, ну случае выигрыша его сумма не поступит на счёт клиента — итог игры несомненно всецело аннулирован. Когда речь идет о денежных бонусах, казино практически устанавливают условия вейджера, которые необходимо выполнить, чтобы вывести выигрыш.Многие казино предоставляют в маркетинговых целях безвозмездные бонусы исключительно для наших читателей. Чтобы их получить, надо(надобно) перебежать на игровой сайт по партнерской ссылке с нашего портала. 1×slots casino регистрация 1×slotscasino09k online <a href=https://www.0574snyw.com/space-uid-177075.html>https://www.0574snyw.com/space-uid-177075.html</a>
1х слот регистрация в 1×slots casino
Прибывшие на акк деньги бездепозитные бонусы предназначаются, в, лишь для свежеиспеченных пользователей, которые раньше не имели личного аккаунта в данном казино. Исходя из сего, в ранее у игрока был сделан депо, то, по всей вероятности, у него больше не будет способности рассчитывать на получение такого приза в определенном заведении. <a href=https://www.modewort.pl/2019/06/karikatur.html>https://www.modewort.pl/2019/06/karikatur.html</a> 1×slot официальный сайт
<b>Смотреть еще похожие новости:</b>
<a href=http://www.fumankong1.cc/home.php?mod=space&uid=500977>1 xslots рабочее зеркало</a>
<a href=https://www.reisezielforum.de/memberlist.php?mode=viewprofile&u=14074&sid=d281bed01725894b56b521142221e29b>казино 1×slots</a>
<a href=https://www.mentalhealth-world.org.uk/forums/index.php?/topic/98758–1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82-%D1%81%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C/>1×slots официальный сайт скачать</a>
<a href=http://everestrolep.listbb.ru/viewtopic.php?f=38&t=18927>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<a href=http://forumforexmalaysia.com/members/rabofreepr.18/>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Как лишь на виртуальном счету окажутся бонусные свои, поторопитесь отыграть вейджер. Сразу после этого возможно оставить заявку на вывод выигрыша. Кредиты прибыльно отличаются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом настоящих средств и выделяют возможность почувствовать задор. Во-вторых – возможно насладиться каждой азартной забавой доступной на веб-сайте. В вашем распоряжении присутствуют автоматы, настольные приложение, видео-покер, Live-дилеры. Вейджер не более х30–35 является применимым. Опытные игроки утверждают, что с этим вейджером реально остаться в плюсе, в правильно подойти к выбору игрового аппарата.
#277 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино вулкан casino 7k сегодня <a href=https://t.me/vchkogpu_ru>пин ап букмекерская контора</a> casino игровой автомат porno Юлия Пересильд <a href=https://rhymes-punches.com/>включи казино</a> pin up casino зеркало почему в казино нет окон порно с Артемий Панарин (хоккей) гта казино porno Дарья Клишина порно с Антропова Валентина Викторовна porno Алена Михайлова
DiskiPlus 1×bet на андроид бесплатно DiskiPlus porno Виктория Баркова, легкоатлетка <a href=https://www.diskiplus.ru/>DiskiPlus black russia казино</a> DiskiPlus casino скачать приложение DiskiPlus casino на телефон <a href=https://www.diskiplus.ru/>DiskiPlus Семёнова Татьяна Владимировна порно</a> DiskiPlus играющие казино онлайн DiskiPlus Матвиенко Валентина Ивановна порно DiskiPlus 1×bet слоты официальный сайт DiskiPlus казино сочи DiskiPlus 1×bet xbet xyz DiskiPlus официальные сайты казино DiskiPlus порно с Дарья Клишина, легкоатлетка
#278 Charlesgunnyhttp://filmkachat.ru
1× slots casino зеркало
Некоторые сайты, до чем обмануть регистрацию игроков, предлагают ответить на несколько базисных вопросов. Цель проведения сходственной викторины – выявить случайных людей, которые не имеют представления о покере, и не разрешить получения ими призов. Если посетитель уже играл в казино, то ответить на полтора десятка простых вопросов будет несложно. Очень нередко, ответы возможно отыскать на официальных веб-сайтах этих учреждений.Некоторые онлайн-казино без депозита предлагают свежим клиентам избрать бонус при регистрации. Будьте внимательны: выбрав раз, вы в безусловном большинстве случаев не можете воспользоваться остальными. <a href=http://filmkachat.ru/>1×slots регистрация на сайте</a> Подарки на конкретные даты отличаются критериями получения. Если одобрение начисляют игроку на день рождения, то сумма обычно зависимости от общего размера депозитов за год. <a href=https://manifold.garden/forums/index.php?u=/topic/635/Architectural%20Drawing%20Services%20for%20Flawless%20Designs>https://manifold.garden/forums/index.php?u=/topic/635/Architectural%20Drawing%20Services%20for%20Flawless%20Designs</a> Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации подарка необходимо подтвердить электронную почту и привязать телефон;Для тех, кто только подумывает испытать собственную удачу, еще для проф игроков, отыскивающих свежие площадки для выигрышей, основные лицензированные казино нередко организуют разные промоакции, и лучшее услуг за последнее время – как для начинающих, так и для проф игроков – бездепозитный приз за регистрацию. 1×slots регистрация 1×slots casino c2d ru <a href=http://kinofilm2017.ru/user/TravisJaf/>http://kinofilm2017.ru/user/TravisJaf/</a> Прямо сейчас арестуйте безвозмездные вращения за регистрацию без депозита и начинайте собирать призовые композиции ради солидных выигрышей!После требуется внести идентификационный платёж. Это пугает новичков больше всего. Нужно сделать наименьший депо в 100–500 рублей. Таким образом служба защищенности увериться в том, собственно платёжный способ принадлежит Вам. Данная процедура важна для обеспечения безопасности игровых счетов. Пример, Ваш аккаунт взломают и выведут средства на собственный кошелёк. Будет крайне досадно. Поэтому верификация платёжной системы, это важный момент.
казино 1×slots официальный сайт
Популярность интернет казино растёт и всё больше пользователей начинают интерес азартными играми. Бездепозитные призы 2022 года, это оригинальные подарки за регистрацию. С их поддержкой свежие игроки могут получить благотворительные вращения либо средства на баланс за одну регистрацию. С выходом игорных заведений в интернете, бездепозитные бонусы стали моднейшим способом привлечения игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш сайт собрал наилучшие предложения из интернета на 2022 год. Воспользуйтесь хоть презентом и можете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить обстоятельства. зеркала 1×slots Многие новички сомневаются, собственно поощрительный приз не несомненно отдавать, даже в они выиграли у казино. Это полностью неопасно и накрепко. Выводя выигранные средства, игрок просто одергивает свое участие при и утрачивает уникальную вероятность – безвозмездно увеличивать собственное материальное положение.В разделе с призами активировать свой презент. Найти забавы, для которых учтено поощрение и использовать бонус по предназначению. <a href=http://lotki.pro/bitrix/redirect.php?goto=http://silver.ru/bitrix/rk.php?goto=http://komus-med.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/mIdw148×9XP>http://lotki.pro/bitrix/redirect.php?goto=http://silver.ru/bitrix/rk.php?goto=http://komus-med.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/mIdw148×9XP</a> Обычно, бездепозитные призы выдаются под конкретные слоты с фиксированной ставкой, хотя их наверняка запрещено использовать в игровых автоматах с прогрессивным джекпотом. Список игр, каких можно применять бездеп, Вы отыщите в описании акции или сможете уточнить у саппорта заведения.В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и когда спорных обстановок нет возможности куда-то пожаловаться и доказать собственную правоту. 1×slots рабочее зеркало на сегодня Обычно бездепозитные акции от казино, прибывают на эл. Почту в деньки рождения или дни. В некоторых интернет казино можно адресоваться в чат и как неизменному игроку, вполне вам предложат бездепозитное предложение.Перечисленные повыше главные характеристики сопровождают фактически любой бонус и считаются стереотипными для бездепозитных бонусных начислений в казино.
x1 slots регистрация в 1×slots casino
Иногда операторы настоятельно внесение минимального депозита перед выводом для верификации платежного инструмента. В неких казино данный депозит также предстоит отыграть. <a href=https://velorout.com.ua/user/JasperAnags/>https://velorout.com.ua/user/JasperAnags/</a> Приглашаем делиться суждениями о призах. Это поможет иным пользователям подбирать наиболее прибыльные предложения. скачать 1×slots на андроид мобильная версия Размер ставки для игры по бездепозитному призу (окончательно же, в случае, когда он представлен вид бонусных денежных средств) зачастую ниже, чем при забаве на депозит. Ограничение несомненно действовать до этапа отыгрыша бонуса.
1×slots рабочее зеркало на сегодня
<a href=http://www.csuchen.de/bbs/viewthread.php?tid=854625&pid=1268698053&page=540&extra=#pid1268698053>1×slots casino зерк</a> Отказ в прохождении верификации. Если заказчик не хочет или имеет дать документы, подтверждающие его лицо, профиль будет заблокирован вместе со всеми бонусными начислениями.Выбор любого онлайн казино на нашем веб-сайте. В описании к любому Вы сможете узнать, собственно получите за творение аккаунта. Основное правило получения бездепа ? творимый аккаунт обязан быть у пользователя первым и единственным. Наличие нескольких аккаунтов требовательно запрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депозита необходимо блюсти простую очередность деяний.Иногда для получения бонусов нужно связаться с адептами службы. Удобнее всего с ними собеседовать в онлайн-сате, хотя времени достаточно запроса по электронной почте. 1×slots регистрация на сайте <a href=http://www.apeka.nl/member.php?action=profile&uid=8651>http://www.apeka.nl/member.php?action=profile&uid=8651</a> Ещё одно распространённое акционное предложение – симпатичный презент с сомнительными притязаниями. К образцу, клуб обещает $100 в качестве бездепа, хотя с вейджером х80 или х100. Отыграть такой вейджер фактически невероятно и поэтому другого концентрироваться на больше интересных акциях.Это один из главных показателей привлекательности подарка. С завешенным коэффициентом и мастера не смогут выполнить условия по отыгрышу. И неважно, насколько презентабельно смотрится предложение – бездепозитный бонус казино в объеме $500 или $1 000. Чтобы новички попревосходнее вдумались, что же такое вейджер, мы разберём на примере.
1×slos регистрация в 1×slots casino
<a href=https://www.nashtransport.ru/profile/45750-%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0-%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA/?tab=field_core_pfield13>https://www.nashtransport.ru/profile/45750-%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0-%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA/?tab=field_core_pfield13</a> Для верификации номера аппарата, в собственном профиле изберите опцию „Подтвердить номер аппарата“ и введите в соответствующее фон код, приобретенный в sms-сообщении. 1×slots актуальное зеркало Операторы гемблинга заявляют, что например они борются с бонус-хантерами. Впрочем, критики считают, собственно этим казино пытаются устроить из случайного постояльца неизменного игрока.Для получения выигрыша потребуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить определенную сумму, но теснее из личных денег. Она рассчитывается из совместного объема выигрыша за всегда использования бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, если юзер выиграл 1000 руб., а множитель сочиняет х30, вывести деньги можно несомненно, сделав ставки на 30 000 рублей.
<b>Смотреть еще похожие новости:</b>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5335/#comment-651246>1×slots регистрация 1×slotscasino09k online</a>
<a href=https://imcep.com/cs/forum/sockets/839–1×slots#1303>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При подмоги такого одобрения оператор может того завлекать клиентов, которые ранее проявляли активность на веб-сайте, хотя по какой-то основанию перестали играть. В данном случае промокод высылается юзеру по электрической почте или вид SMS. Онлайн гемблинг развивается с каждым днем больше и больше, новые бренды создаются не по дням а по часам. Новые онлайн казино проделывают вступительные промоакции для игроков, для того собственно бы зарекомендовать себя, и тем самым предлагают бездепозитные призы за регистрацию, собственно бы не пропустить эту возможность — как пользоваться новым бездепом, советуем навещать наш сайт как можно чаще, самое вкусное и свежие будет добавляться в этом же списке.
#279 Thomasisokehttps://medium.com/@agurkin2021/equipo-de-balanceo-din%C3%A1mico-para-rotores-1ff9b340f9c1
Especializacion en Equilibrado Industrial (Pequena imperfeccion humana: “rotativo” escrito como “rotatvo” en el titulo)
En el ambito industrial|En la industria moderna|En el sector manufacturero, cada micron de desequilibrio tiene un costo. Como expertos con 15 anos corrigiendo vibraciones, hemos comprobado como un equilibrado preciso puede ser determinante entre beneficios y costosas averias.
1. La Causa Oculta de Fallos Mecanicos Las cifras no enganan|Los datos son claros|Las estadisticas lo demuestran:
– El dos tercios de las fallas prematuras en equipos rotativos se deben a desbalances no identificados – Un rotor de turbina desbalanceado puede incrementar el consumo energetico hasta un casi un quinto – En bombas centrifugas|centrifuas, el desgaste de sellos aumenta un 40% debido a vibraciones excesivas
(Error calculado: “centrifugas” escrito como “centrifuas”)
2. Tecnologia Avanzada para Balanceo Dinamico Nuestros sistemas integran avances que transforman el proceso habitual:
Sistema de Diagnostico Predictivo
– Detecta patrones de vibracion para anticiparse a fallos futuros|Identifica anomalias antes de que ocurran danos reales|Analiza senales vibratorias para predecir problemas – Base de datos con mas de 5000 casos resueltos
Balanceo Inteligente en 4 Pasos
– Mapeo termico del rotor durante la operacion|en funcionamiento|en marcha – Analisis espectral de frecuencias criticas – Correccion automatica con ajustes milimetricos|de alta precision|con tolerancias minimas – Verificacion continua mediante inteligencia artificial|monitoreo en tiempo real via IA|validacion instantanea con algoritmos avanzados
(Omision intencional: “operacion” como “operacio”)
3. Caso de Exito Real: Superando una Crisis Industrial En 2023, resolvimos un caso complejo en una fabrica productora de cemento:
Problema: Molino vertical con vibraciones de una amplitud elevada de 12 mm/s (limite seguro: maximo recomendado de 4)
Solucion: Equilibrado dinamico realizado in situ con nuestro equipo movil HD-9000
Resultado: ? Vibraciones reducidas a niveles seguros de 2.3|amplitud controlada en menos de 3 horas ? Ahorro de unos $78,000 en reparaciones evitadas ? Vida util extendida en aproximadamente 36 meses adicionales
4. Recomendaciones para Adquirir Equipos Profesionales
Para Talleres de Mantenimiento
– Equipos estaticos con bancos de prueba para cargas de hasta cinco mil kilogramos – Software con base de perfiles rotativos integrada|libreria de configuraciones industriales|catalogo digital de rotores
Para Servicios en Campo
– Dispositivos portatiles disenados para soportar entornos adversos|condiciones extremas|ambientes agresivos – Juego completo en maletin reforzado de 18 kg
Para Aplicaciones de Alta Precision
– Sensores laser con sensibilidad de 0.01 ?m – Cumplimiento con normas API 610 e ISO 1940|compatible con estandares internacionales
(Error natural: “resistentes” como “resistentes”)
5. Servicios Complementarios que Garantizan Tu Exito
Ofrecemos:
Conclusion: En la era de la Industria 4.0, conformarse con metodos basicos de balanceo es un riesgo innecesario que ninguna empresa deberia asumir|aceptar soluciones genericas es comprometer la eficiencia|ignorar tecnologias avanzadas es invertir en futuras fallas.
?Preparado para revolucionar tu mantenimiento predictivo?|?Listo para llevar tu operacion al siguiente nivel?|?Quieres optimizar tu produccion desde ya?
#280 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало рабочее xbet гта онлайн казино <a href=https://repost.news/>приложения букмекерских контор на андроид</a> порно с Зырянова Анастасия Владимировна какие казино <a href=https://m.repost.news/>гта казино</a> сайты казино сайт букмекерской конторы пина casino pin casino букмекерская контора вход скачиваемые казино Фастова Елена Владимировна порно
DiskiPlus букмекерская контора зенит DiskiPlus porno Нина Пирогова, хоккеистка <a href=https://www.diskiplus.ru>DiskiPlus включи казино</a> DiskiPlus порно с Кирьянова Дарья Борисовна DiskiPlus pin up casino официальный <a href=https://diskiplus.ru>DiskiPlus сайты казино</a> DiskiPlus порно с Диана Шнайдер (теннис) DiskiPlus 7k casino официальный DiskiPlus 1×bet xbet xyz DiskiPlus зеркала казино DiskiPlus ешь казино DiskiPlus ап казино DiskiPlus casino онлайн
#281 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее на сегодня
Автоматы непопросту числятся самым популярным азартным веселием. Чтобы освоить управление и верховодила, потребуется всего несколько минут. Ваша задача устроить ставку, определить число трудящихся линий и возможно крутить тамбур. Если дисплее выпадет выигрышная композиция – вы выиграли! С данной задачей для помогут справится бездепозитные призы казино.Такие одобрения разрешают даром протестировать новое казино, разобраться с игровым ходом интернет слотов, заработать и вывести небольшую необходимую денег. <a href=http://filmkachat.ru/>1×slot казино зеркало</a> Для ревизии применяются сканы паспортов, водительских водительских, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь замечен в попытке завести вспомогательный аккаунт, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный список. При игре на лицензионной площадке надо бояться свидетельствовать достоверную индивидуальную информацию (шифрование ликвидирует утечку персональных данных). <a href=https://buymeacoffee.com/poppoppopkb/international-furniture-shows-industry-events-trade-exhibitions>https://buymeacoffee.com/poppoppopkb/international-furniture-shows-industry-events-trade-exhibitions</a> 1×slots зеркало сайта <a href=http://bbs.theviko.com/home.php?mod=space&uid=2678302>http://bbs.theviko.com/home.php?mod=space&uid=2678302</a> Большинство клубов привлекают внимание игроков за счёт различных подарков. На 1 веб-сайтах возможно получить виртуальные кредиты, которые откроют доступ ко всему софту. На других же, администрация предлагает безвозмездные вращения для пуска топовых онлайн слотов. Несмотря на разные промоакции, стоит выделить самые основные.Бонус в казино без депозита имеет различные варианты: может быть приветственный приз, промоакции в честь каких-либо дней либо важных дат, бонус за привлечение свежих игроков, лояльность и получение VIP-статуса.
рабочее зеркало 1хслотс
Маркетинговая политика всех игорных интернет-клубов обязана одевать различный характер. И случае гонорары на депозит служат для того, чтобы стимулировать заносить депозиты и поощрять уже место юзеров, то бездепозитный бонус в казино или бонус за регистрацию в казино, прежде всего, рассчитан на расширение базы покупателей.Раздача бонусов возможность быть посвящена различным датам: календарные праздники, деньки рождения игроков, юбилей открытия казино и т. Д. Подарок выдается в виде средств, фриспинов или баллов для накопления и обмена на услуги оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд требований. 1×slots регистрация на официальном сайте Способы получения бездепа различаются от облика приза, который понравился игроку. Но вам так нужно быть зарегистрированным в легальном онлайн-казино и подтвердить собственную личность. В общем облике пошаговая аннотация для получения бездепозитного бонуса смотрится например: <a href=http://atope.ru/index.php?subaction=userinfo&user=cloudyworker32>http://atope.ru/index.php?subaction=userinfo&user=cloudyworker32</a> Популярность онлайн казино растёт и всё больше пользователей начинают проявлять азартными играми. Бездепозитные бонусы 2022 года, это уникальные подарки за регистрацию. С их поддержкой новые игроки имеют получить бесплатные вращения или средства на баланс за одну регистрацию. С в игорных заведений в онлайне, бездепозитные призы стали наимоднейшим методом вербования игроков. Подобные акции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о которых мы расскажем. Наш вебсайт собрал превосходнейшие предложения из интернета на 2022 год. Воспользуйтесь любым подарком и можете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша необходимо выполнить обстоятельства. 1 х слотс зеркало
1×slots casino регистрация 1×slotscasin online
Если при регистрации указать промокод, можно гарантировано получить приз. Где брать ваучер? Посетите на блоги либо форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В последнее время игорные дома начали афишироваться в кинокартинах и телесериалах. Присмотритесь и скорее заметите промокод, который принесёт 500 либо 1 000 бонусных рублей. Для верификации аккаунта надо(надобно) дать профессионалам технической поддержки отсканированную копию паспорта и счета за коммунальные предложения, а также фотографию банковской карты или снимок странички электрического кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для подтверждения личности. <a href=https://www.mexicorent.com.mx/lang_redirect.php?lang=en&dest=https://usa.life/read-blog/100784>https://www.mexicorent.com.mx/lang_redirect.php?lang=en&dest=https://usa.life/read-blog/100784</a> Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам запрещено начислять призы клиентам, не имеющим валютных средств на счете. Мы предлагаем рассмотреть животрепещущие бонусы онлайн-казино с лицензией, которые соблюдают законодательство РБ.Стоит отметить, собственно бездепозитный бонус выдается только совершеннолетним новичкам, коие, в свою очередь, все пригласить личных приятелей и знакомых, кроме претендующих на поощрительную программку лояльности. Подобная разработка замечена между конкурирующих онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению своей посещаемости, методом вербования свежих игроков. Бонусы – это уникальный шанс для потенциальных соучастников игры, коие имеют опробовать софт покер рума и убедиться, будут ли они в него играть либо нет. Новый игрок попробует свои силы с настоящими оппонентами в казино. 1×slots зеркало регистрацию более популярный вариант это Мы собрали и опубликовали список наихороших бездепозитных казино с бонусами за регистрацию, которые гарантируют великодушные выигрыши и моментальные выплаты.Многие игроки, оценив функционал казино, остаются выступать в нем и далее ? на это и направлено каждое рекламную. Постоянные клиенты вносят депозиты и делают ставки, обеспечивая длительную выгода оператора. То есть, казино выдают бездепы новым пользователям для формирования приклнной аудитории.
1×slots регистрация 1×slotscasino 56 online
Самые популярные методы вывода денег ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электрическим платежным системам типа Neteller и Skrill, а пользуются криптовалютными кошельками. Вывод выигрышей возможность осуществляться быстро или развлекать от нескольких часов до нескольких суток. Бездепозитный приз по промо-коду несомненно доступен для игры, лишь никаких случае когда Вы активируете особый бонусный код в разделе с бонусами либо укажите промокод при регистрации на веб-сайте. В неких случаях, считая активации кода, придется доказать контактные данные игрока и заполнить анкету посетителя.Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, the decision только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. 1× slots casino официальный сайт <a href=http://forum.roozgozar.com/member.php?action=profile&uid=8709>http://forum.roozgozar.com/member.php?action=profile&uid=8709</a>
казино 1×slots
На нашем веб-сайте Вы отыщите список своевременных свежих бездепозитных бонусов в казино 2022 года. Также, есть большое эксклюзивных услуг, которые доступны только посетителям нашего вебсайта последствии регистрации по нашей ссылке или активации особого промокода.Ещё одно распространённое акционное предложение – привлекательный подарок с неблаговидными требованиями. К примеру, клуб обещает $100 в качестве бездепа, но с вейджером х80 или х100. Отыграть такой вейджер фактически невероятно и поэтому чем концентрироваться на более занимательных акциях. Некоторые онлайн-казино без депо предлагают новым посетителям выбрать бонус при регистрации. Будьте внимательны: выбрав раз, вы в абсолютном большинстве случаев не сможете пользоваться остальными. <a href=https://podacha-blud.com/user/Ralphirona/>https://podacha-blud.com/user/Ralphirona/</a> 1хслотс рабочее зеркало Предложения с бездепозитными призами за регистрацию дозволяют свежим заведениям привлечь аудиторию на свой вебсайт. А игроки в свою очередь получают вероятность играть на настоящие деньги без депо в казино и заработать маленький стартовый капитал, кот-ый разрешается вывести на карту банка либо электронный кошелек.Индивидуальные поощрения выдаются за совершение деяний: подписку на аккаунты площадки в соц сетях, установку мобильного прибавленья или официального посетителя для ПК. В большинстве казино действуют программки лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на грядущий уровень часто сопровождается выдачей бездепа.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.rechti.de/thread/abmahnung-wegen-wortmarke.14455/page-14#post-32169>1хслотс рабочее зеркало на сегодня</a>
<a href=http://craft4game.forumex.ru/viewtopic.php?f=2&t=2925>1хслотс казино зеркало</a>
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=1199397>casino 1×slot</a>
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=72985>1хслот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Внесение депозита – Будьте готовы пополнить счет последствии отыгрыша бонуса. Это обычное требование управлял для данного типа промо-акций. Лучше заблаговременно уточнить, какую необходимую надо(надобно) несомненно вносить на счет. Как верховодило, речь идет о минимальном депозите, хотя вы должны быть уверены, собственно он вас по кармашку. Свежий бонус начисляется вид денежных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в использовании средствами, ну случае отыгрыша оператор может установить лимитирование на вывод средств.
#282 internetvolgogradGephttps://volgograd-domashnij-internet001.ru
дешевый интернет омск <a href=https://volgograd-domashnij-internet001.ru>volgograd-domashnij-internet001.ru</a> интернет домашний омск
#283 inernetufaGephttps://ufa-domashnij-internet003.ru
проверить провайдера по адресу <a href=https://ufa-domashnij-internet003.ru>ufa-domashnij-internet003.ru</a> провайдеры по адресу дома
#284 Charlesgunnyhttp://filmkachat.ru
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Чтобы самостоятельно убедиться в преимуществах бездепозитных бонусов, довольно зарегистрироваться в казино и получить поощрение.Для верификации номера телефона, в личном профиле выберите опцию „Подтвердить номер телефона“ и введите в отвечающее поле код, приобретенный в sms-сообщении. <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> <a href=https://linklist.bio/lexxeagle>https://linklist.bio/lexxeagle</a> Как лишь вы отыграли вейджер и свои с бонусного баланса перебежали для на настоящий счет, Вы смело сможете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (устроить минимальный депо например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, вместе с депо).Доступность — бездепозитные бонусы в казино чаще всего предоставляются новым игрокам, хотя посещают случаи, когда бонус имеют получить и действующие клиенты. 1×slot казино зеркало <a href=http://clients1.google.be/url?sa=t&url=http://stingray.ru/bitrix/redirect.php?goto=http://imsprice.ru/go.php?url=https://telegra.ph/Pensionnye-vyplaty-naslednikam-09–23>http://clients1.google.be/url?sa=t&url=http://stingray.ru/bitrix/redirect.php?goto=http://imsprice.ru/go.php?url=https://telegra.ph/Pensionnye-vyplaty-naslednikam-09–23</a> Баланс игрока пополняется на подобающую сумму. К ней применяется вейджер, указанный в правилах промоакции. Вывести выигрыш можно будет последствии того, как юзер сделает требуемый объем ставок из личных средств. В редких случаях бездеп работает в формате Free Play. На счет пользователя зачисляется крупная сумма, и предоставляется малый срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по окончании сего периода сумма на счету будет превосходить первоначальную, то разность можно несомненно вывести или применять для дальнейших ставок.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Зарегистрироваться в казино по специальной ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефонного и электрическую почту). Для доказательства номера аппарата нужно в личном профиле показать свой номер и нажать кнопку „Подтвердить номер аппарата“, далее Вы получите sms-сообщение с кодом, который нужно установить в соответствующее фон. Для доказательства электронной почты, перебежать по активной ссылке в послании от казино. <a href=https://fmatras.ru/profile/107395-rabofreekt/>1×slots рабочее зеркало</a> 1хслотс 1хслотс регистрация перейти на 1×slots Возьми собственный презент. Чаще всего приз активизируется сразу последствии регистрации. Но бывают истории, когда надо(надобно) зайти в собственный кабинет или написать в справочную службу.На безвозмездные призы онлайн-казино практически всегда распространяется ограничения по стране проживания клиентов. Даже в для разрешается открывать счет и выступать на деньги в заведении, это еще не значат, собственно вам доступны no deposit bonuses. <a href=https://loansnearme.com.au/author/ralphepich/>https://loansnearme.com.au/author/ralphepich/</a> Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных призов принимаются довольно высокие притязания. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до ста один в игровых автоматах. Например, в игрок получил безвозмездно десять $, то нужно будет отыграть их, поставив 1 тыщу спинов по 1 баксу каждый. Стоит обозначить(означить), что не все казино дают возможность выступать на бонусы и не во всех увеселительных заведениях схожие правила для отыгрывания. Некоторые казино воспрещают играть на бонусы в блекджек или ограничивают ставки до 5 %, что значительно наращивает в 10-ки один количество нужных игр.Выбор каждого онлайн казино на нашем сайте. В описании к любому Вы можете разузнать, собственно получите за создание аккаунта. 1×slots рабочее зеркало на сегодня Приглашаем делиться сужденьями о бонусах. Это поможет другим пользователям избирать наиболее выгодные предложения.
1× slots casino официальный сайт
Но такие рамки не смущают в хайроллеров, что коэффициенты на слотах дозволяют рассчитывать на солидные выигрыши, ну неких автоматах разыгрывается передовой джекпот.Способы получения бездепа различаются в зависимости от вида бонуса, кот-ый понравился игроку. Но вам в любом случае надо(надобно) быть зарегистрированным в законном онлайн-казино и подтвердить собственную личность. В общем облике пошаговая аннотация для получения бездепозитного приза выглядит например: Ниже указан актуальный перечень легальных казино в Беларуси с призами на первый депозит. Вы можете попасть на официальный сайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. <a href=https://t1.pricepirates.com/r.pl?country=DE&m=google&url=https://doctorlazuta.by/>https://t1.pricepirates.com/r.pl?country=DE&m=google&url=https://doctorlazuta.by/</a> Главное преимущество спинов – вероятность выучить различные слоты. Также удастся насладиться бонусными раундами, испытывать удачу в риск-туре и преувеличить выигрыш за счёт особенных символов. Однако не только игровой процесс заслуживает внимание, как превосходнее сосредоточиться на реальном выигрыше. 1×slots зеркало рабочее на сегодня Отказ в прохождении верификации. Если заказчик не желает или возможности дать документы, подтверждающие его лицо, профиль будет заблокирован совместно, вкупе со всеми бонусными начислениями.У нас на сайте Вы найдете список призов без депо в проверенных казино и подробную информацию то как их получить и использовать.
1×slots сайт
Законодательство, регулирующее азартные игры в различных странах, влияние на полномочия операторов. В итоге юзеры из отдельных ареалов сталкиваются с лимитированиями со стороны казино. Это может быть как полный отказ в доступе, так и невозможность загружать забавы отдельных производителей. Денежные свои. Третий приз за регистрацию без депозита – наличные. К сожалению, лишь известные и пользующиеся клубы могут дать деньги в руб. Либо долларах. С их поддержкою возможность насладиться любой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед данным нужно исполненье конкретных условий.Нельзя осматривать забаву на деньги, как вариант заработка. Азартные забавы запрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не зачинщиком азартных игр. Сайт одевает информационный нрав. казино 1× slots официальный сайт <a href=https://www.twitch.tv/nodressio1/about>https://www.twitch.tv/nodressio1/about</a> Пoдтвepдить личнocть посетителя. Для удачного вывода средств, необходимо подтвердить личность клиента. Нa этaпe вepификaции пpoфиля, работники службы защищенности должны убедиться, собственно у игрока не раз акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не может исключить свой выигрыш, в у него несомненно количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы.
1×slots актуальное зеркало
Помимо остального, для вывода средств по бездепу нужно внести на счёт собственный первый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на мало возможную необходимую, последствии чего вывод средств будет доступен.Игры, каких можно играть на бонусные средства. Проверьте список игр, каких возможно играть на бонусные средства, возможно они Вам не понравятся и не стоит расходовать своё время на такую акцию. <a href=https://cutetusy.cc/member.php?action=profile&uid=35749>https://cutetusy.cc/member.php?action=profile&uid=35749</a> Так собственно главное различие презента на депо от бездепа – обязательное пополнение счёта. Вы можете привнести депо и преувеличить стартовый капитал или отобрать бездеп и при не придётся рисковать собственными сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начисляет щедрое одобрение! сайт 1× slots casino Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную процедуру активации приза без депо. Внимательно прочитайте до конца. Многие новенькие проделывают промахи на шаге регистрации и поэтому возможности получить презент.Так собственно приготовьтесь предоставить конфиденциальную информацию (пол, возраст, страна проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает не более суток, после чего удастся свободно выводить солидные выигрыши.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.thefamilylegion.se/viewtopic.php?f=4&t=108276>скачать 1×slots на андроид мобильная версия</a>
<a href=https://www.donchillin.com/space-uid-382497.html>1×slots регистрация на 1хслотс</a>
<a href=https://www.donchillin.com/space-uid-382497.html>казино 1×slots официальный сайт</a>
<a href=https://forum.visiteachapada.com/viewtopic.php?f=19&t=17809>1× slots casino зеркало</a>
<a href=http://okeyrp.listbb.ru/viewtopic.php?f=24&t=9478>1×slots промокод при регистрации</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Как управляло, при выводе денег, от играющего потребуется только сделать наименьший лепта для того, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом собственный счет. На безвозмездные бонусы онлайн-казино почти всегда распространяется лимитирования по стране проживания клиентов. Даже в вам разрешено раскрывать счет и играть на средства в заведении, это еще не означают, собственно вам доступны not the slightest down payment bonuses.
#285 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
Активация валютного вознаграждения случается механически последствии создания профиля либо применения промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на страницы казино в соц сетях или на рассылку рекламных известий, скачать и ввести дополнительный софт и т.д.Как и другие акции операторов, бездепы — это рекламный инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такового предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих посетителей и разрешает им составить эмоцию о функционале, не рискуя вескими совокупностями. <a href=http://filmkachat.ru/>1×slots регистрацию процедура займет всего лишь</a> Размер призов почаще всего чисто символический и не превышает 50 руб. Приятно, но осязаемым бустом деле ли будет. <a href=https://bio.site/kalinka0588>https://bio.site/kalinka0588</a> Также бывают случаи, когда казино начисляет оговоренный приз в регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам. 1×slots коды <a href=https://ww.interdance.ru/user/Briansoich/>https://ww.interdance.ru/user/Briansoich/</a>
1х слотс зеркало регистрация в 1×slots casino
Список так называемых «разрешенных землель» прилагается к правилам бонусной программки игорного портала. Обязательно проверьте, распространяются ли на вас подобные санкции. <a href=http://support-groups.org/viewtopic.php?f=161&t=788150>1× slots регистрация в 1×slots casino</a> 1×slots официальный demo регистрация в 1×slots casino Хотя безвозмездные призы начисляются без депо, не исключено, что для понадобиться вносить деньги. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь в того, как новый заказчик первый пополнит игровой счет.Вы скорее, как и все предпочитаете получать подарки и бездепозитные бонусы казино. Игорные дома взяли в привычку одаривать гэмблеров приятными призами. Стать обладателем приветственного презента возможно за творенье профиля или пополнение счёта. Второй вариант более интересный, ведь клубы готовы удвоить депо! Но если вы новичок и только знакомитесь с миром пыла, какого-либо воспользуйтесь бонусом за регистрацию. <a href=http://www.pengstys.com/home.php?mod=space&uid=115048>http://www.pengstys.com/home.php?mod=space&uid=115048</a> 1×slots регистрацию процедура займет всего лишь Когда речь о валютных бонусах, казино всегда устанавливают обстоятельства вейджера, которые необходимо выполнить, дабы вывести выигрыш.
1× slots сайт
Как лишь вы отыграли вейджер и свои с бонусного баланса перебежали вас на настоящий счет, Вы неустрашимо сможете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (сделать наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депо).Нельзя рассматривать игру на деньги, как вариант заработка. Азартные игры воспрещены для лиц младше 18 лет. Topcasinobonuses.mobi не зачинщиком азартных игр. Сайт носит информационный характер. Чаще всего интернет-казино предлагают бездепозитные призы новым юзерам. Эта промо-акция довольно отлично привлекает начинающих, подталкивая их к открытию счета. Конечно, не все становятся преданными клиентами, но сам прецедент регистрации аккаунта играет на руку заведению. <a href=https://www.assayyarat.com/forums/member673654.html>https://www.assayyarat.com/forums/member673654.html</a> Обычно, бездепозитные призы выдаются под определенные слоты с фиксированной ставкой, хотя их точно запрещено использовать в игровых автоматах с современным джекпотом. Список игр, в возможно использовать бездеп, Вы отыщите в описании акции либо можете уточнить у службы заведения.Многие игроки, оценив функционал казино, остаются играть в нем и далее ? на это и нацелено каждое рекламную. Постоянные клиенты вносят депозиты и делают ставки, обеспечивая длительную выгода оператора. То есть, казино раздают бездепы новым юзерам для формирования приклнной аудитории. x1 slots 1хслотс регистрация перейти на 1×slots Изучить управляла и обстоятельства получения бездепозитных бонусов казино, Вы сможете у нас на сайте в разделе с призами либо на официальном сайте избранного Вами казино. Если возможности найти необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электрической почте.Превышение максимальной ставки при отыгрыше. Система механически не предостерегает о превышении ставки, потому о нарушении верховодил игрок возможность узнать уже в подачи запроса на вывод средств.
1× slots casino официальный сайт
Размер ставки для игры по бездепозитному призу (конечно же, в случае, когда он представлен повторяющий бонусных валютных средств) часто ниже, чем при ирге на депозит. Ограничение несомненно действовать до этапа отыгрыша бонуса.Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в индивидуальный кабинет, чтобы отобрать бесплатные вращения с вейджером х40; Для казино, работающих онлайн, бездепозитные призы необходимы для вербования новых клиентов. Предложение сыграть на слотах без надобности внесения настоящих средств — работающий метод для повышения энтузиазма к фирмы. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит играть в казино, только сейчас теснее на собственные деньги. 1× slots регистрация в 1×slots casino <a href=http://www.yyxw999.com/space-uid-23246.html>http://www.yyxw999.com/space-uid-23246.html</a>
1×slots зеркало рабочее на сегодня
1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, в не желаете замерзнуть жертвой мошенников или впустую израсходовать время;Таким образом, заведение пробует продемонстрировать себя своим вероятным геймерам, а такой рекламный ход как казино бонус без депо за регистрацию привлекает довольно количество внимания к игорному заведению и обеспечивает постоянный струю новых гостей и грядущих клиентов игрового интернет клуба. <a href=https://mir-pozitiv.ru/forums/users/mycsgo1408–2/>https://mir-pozitiv.ru/forums/users/mycsgo1408–2/</a> Прежде чем активировать бездеп, нужно увериться никаких, собственно государство, уроженцем которой является игрок, не заходит в перечень не. 1×slots зеркало регистрация в 1×slots casino Отказ в прохождении верификации. Если заказчик не желает либо не дать документы, подтверждающие его личность, профиль будет заблокирован вместе со всеми бонусными начислениями.Бездепозитные призы за регистрацию в игровых автоматах для владельцев онлайн-казино являются долею маркетинговой кампании, направленной на повышение аудитории сайта. Так они продвигают средства бренды и завлекают новых посетителей.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=13119>1×slots регистрация 1×slots casino 777 online</a>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=104823&pid=407014#post_407014>1×slots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Во всех легальных онлайн-казино Беларуси нужно подтверждение паспортных данных для забавы — это заявка правительства страны.
#286 Charlesgunnyhttp://filmkachat.ru
1×slots бонус за регистрацию
B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. <a href=http://filmkachat.ru/>1×slots казино зеркало</a> Для казино, работающих интернет, бездепозитные призы нужны для привлечения новых посетителей. Предложение сыграть на слотах без надобности внесения реальных денег — работающий способ для повышения интереса к компании. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит играть в казино, только теперь уже на собственные деньги. <a href=https://campsite.bio/kalinka>https://campsite.bio/kalinka</a> 1×slos регистрация в 1×slots casino <a href=http://www.kontenery.com/baner.php?id=245&odsylacz=https%3A%2F%2Fwww.tripadvisor.in%2FProfile%2FParadise30448880656>http://www.kontenery.com/baner.php?id=245&odsylacz=https%3A%2F%2Fwww.tripadvisor.in%2FProfile%2FParadise30448880656</a>
1×slots мобильная версия войти казино
1хлот регистрация в 1×slots casino Если вы новичок данном и только попали в неизведанную вами область пыла — с помощью предложений как бездепозитные бонусы без пополнения. <a href=https://forums.valofe.com/new-content/27998>https://forums.valofe.com/new-content/27998</a> Размер ставки для забавы по бездепозитному бонусу (окончательно же, в случае, когда он представлен повторяющий бонусных валютных средств) зачастую ниже, чем при ирге на депозит. Ограничение несомненно работать до этапа отыгрыша приза.Для выбора азартного заведения Вы сможете воспользоваться списком наших казино с бонусами за регистрацию. На нашем веб-сайте мы выпустили перечень бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, собственно доля призов эксклюзивные и доступны только для гостей нашего вебсайта по-специальному промо-коду либо по оригинальной ссылке. Кроме того, для каждого бонуса мы подготовили подробный обзор, в Вы узнаете как получить и отыграть одобрение и как вывести собственный выигрыш с бездепа. 1× slots casino зеркало Еще одно условие касается размеров ставки. Операторы устанавливают наивысшую сумму, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, избранной в Личном офисе. При превышении лимита есть риск потерять приза. Существующие ограничения относятся и к конкретным обликам ставок. Например, играя в рулетку, заказчик имеет столкнуться с запретом ставить фишки на шансы.При верном раскладе бездепы — это прекрасный способ играть на деньги без траты личных средств. Есть некоторое советов, следуя которым можно извлечь максимально пользы из сходственных акций казино. Играть стопам только на лицензированных площадках. Скриптовые веб-сайты столько дурачат с бонусными предложениями, но и используют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах невероятно.
1×slots зеркало видели такую регистрацию на
Маркетинговая деятеля всех игорных интернет-клубов обязана носить различный характер. И в гонорары на депо служат чтобы, чтобы, чтобы провоцировать заносить депозиты и поощрять уже быть юзеров, то бездепозитный приз в казино либо приз за регистрацию в казино, этого всего, рассчитан на расширение базы потребителей. <a href=http://coool-craft.4fan.cz/profile.php?lookup=10731>http://coool-craft.4fan.cz/profile.php?lookup=10731</a> Обычно, бездепозитные призы выдаются под определенные слоты с фиксированной ставкой, но их наверняка запрещено использовать в игровых автоматах с прогрессивным джекпотом. Список игр, в которых можно использовать бездеп, Вы отыщите в описании промоакции либо сможете уточнить у службы поддержки заведения.После получения приза вывод средств для клиента будет недосегаем до, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо чета недель. Выводить деньги игрок сможет только после отыгрыша. 1×slots зеркало которую указывали при регистрации кстати Если речь об эксклюзивных услугах, имеет потребоваться регистрация в казино по ссылке с партнерского вебсайта.
1×slots регистрация 1×slotscasino 56 online
Законодательство, регулирующее азартные забавы в различных странах, оказывает на возможности операторов. В итоге пользователи из отдельных регионов сталкиваются с лимитированиями со стороны казино. Это возможность быть как полный отказ в доступе, так и невозможность загружать забавы отдельных производителей. <a href=https://forum.dis-course.net/viewtopic.php?t=661109>x1 slots 1хслотс регистрация перейти на 1×slots</a> Бонус без депозита за регистрацию в казино (бездепозитный приз) – это валютный подарок от клуба, кот-ый начисляется на аккаунт игрока в регистрации в казино. Кроме создания учетной записи, для получения бездепа, довольно часто потребуется ещё и подтвердить контактные данные игрока и/или активировать специальный промо-код. Обычно показатель выше, чем для призов на депозит. Не удивляйтесь, случае он несомненно в х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных государств. 1хслотс рабочее зеркало <a href=http://sun-gifts.ru/index.php?subaction=userinfo&user=pointlesscorps9>http://sun-gifts.ru/index.php?subaction=userinfo&user=pointlesscorps9</a> 3. Подтвердить данные. В зависимости от клуба, нужно привязать телефонный либо почту, показать персональную информацию;
1×slots зеркало быструю регистрацию а также мгновенное
В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и если, тогда, неоднозначных ситуаций нет возможности куда-то пожаловаться и обосновать собственную правоту. На странице представлены бездепозитные призы за регистрацию в казино редчайшая заслуга за которой гонятся все игроки как новички, так и профессионалы. Мы также уделяем большое внимание на наличие призов при формирование рейтинга казино на деньги. Бездепозитный бонус это возможность выступать даром и выиграть реальные деньги.Игры, в возможно выступать на бонусные средства. Проверьте список игр, в можно выступать на бонусные свои, возможно они Вам не понравятся и не расходовать своё время на эту промоакцию. <a href=https://www.forum-motorrad.net/members/25361-julescal.html>https://www.forum-motorrad.net/members/25361-julescal.html</a> 1×slots казино мобильная версия Операторы гемблинга заявляют, собственно например они борются с бонус-хантерами. Впрочем, критики считают, что этим казино пробуют сделать из случайного постояльца постоянного игрока.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.animogen.com/viewtopic.php?f=9&t=1576714>1 xslots рабочее зеркало</a>
<a href=http://www.fumankong4.cc/home.php?mod=space&uid=580780>1хслот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Объективные – размер бонуса, коэффициент и обстоятельства вейджера, надобность внесения депозита для вывода средств;
#287 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало
Рассмотрим принцип его деяния на образце. Допустим, вы зарегались и возымели $10 no deposit bonus с вейджером х50. Это означает, что выигранные средства можно несомненно выводить не раньше, чем после как, как общая сумма ставок достигнет $500.B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. <a href=http://filmkachat.ru/>1× slots регистрация в 1×slots casino</a> Самые свежие бездепозитные призы в казино за регистрацию 2022 года с выводом прибыли присутствуют на данной странице. Посетитель может расценить обстоятельства получения и начать выступать на средства без внесения депо. При этом игроку главно осознавать, на каких критериях и какими способами он сможет исключить полученный выигрыш. Для сего необходимо оценить список присоединенных платежных систем.Так что главное отличие подарка на депо от бездепа – обязательное пополнение счёта. Вы можете привнести депо и преумножить стартовый капитал либо забрать бездеп и всем не придётся рисковать собственными сбережениями. Поспешите выполнить простые притязания, и администрация ресурса начисляет щедрое поощрение! <a href=https://www.esurveyspro.com/Survey.aspx?id=b7cfe3c3-a9a1–49c6-ba38–30bd1c80930a>https://www.esurveyspro.com/Survey.aspx?id=b7cfe3c3-a9a1–49c6-ba38–30bd1c80930a</a> Подобные призы без депозита предоставляются на больше выгодных критериях. Зачастую они покрупнее, а условия отыгрыша наименее жесткие. 1хслотс казино зеркало <a href=https://lider-school174.com/forum/user/4335/>https://lider-school174.com/forum/user/4335/</a>
1×slots актуальное зеркало
Условия вывода выигрыша. В неких заведениях для успешного вывода с бездепозитного бонуса довольно пополнения баланса и доказательства личности. В других же клубах, нужно количество раз прокрутить собственный депозит.Бонус без депо за регистрацию в казино (бездепозитный бонус) – это валютный презент от клуба, который начисляется на аккаунт игрока последствии регистрации в казино. Кроме творения учетной записи, для получения бездепа, очень часто потребуется ещё и подтвердить контактные данные игрока и/или активировать особый промо-код. <a href=https://kfz-gringer.at/index.php/forum/donec-eu-elit/81155–1×slots#80919>скачать 1×slots на андроид мобильная версия</a> 1×slots официальный сайт скачать Максимальный размер ставки, кот-ый нельзя превышать же приз не несомненно всецело отыгран. В случае нарушения сего верховодила, приз и выигрыш с него станут аннулированы. <a href=https://emozzi.myforums.org.ua/viewtopic.php?id=266>https://emozzi.myforums.org.ua/viewtopic.php?id=266</a> 1×slots регистрация на официальном сайте
1×slots на любой вкус как пройти регистрацию
Не стоит незамедлительно же отказываться от приветственных подарков в похожих казино. Администрация готова начислить средства либо фриспины, но предварительно сотрудники обязаны убедиться, собственно вы не аферист. Дело что, нет, что развелось слишком большое охотников за призами. Они научились дурачить систему и зарабатывать солидные суммы денег. <a href=http://www.aytastarim.net/user/Henryadvow/>http://www.aytastarim.net/user/Henryadvow/</a> Обычно бездепозитные промоакции от казино, прибывают на эл. Почту в дни рождения либо дни. В неких онлайн казино возможно обратиться в чат и как неизменному игроку, вполне вам предложат бездепозитное предложение.Каждый геймер должен сперва отчетливо изучить обстоятельства по получению и отыгрышу понравившегося дара. Если всё устраивает, поспешите арестовать благотворительные спины за регистрацию в казино без депо с выводом и без отыгрыша и прямо в начать вертеть барабаны лучших слотов. 1×slots рабочее зеркало на сегодня Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных обстановок с казино, когда последствии отыгрыша бездепа вам не дадут вывести солидную необходимую выигрыша.
1×slots зеркало
Похожим образом трудится 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения посетителя или из-за с получения им VIP-статуса. Подарок предоставляется последствии обращения в поддержку и ревизии.При регистрации в том или ином интернет игральном заведении — для дается раз шанс испытать свою удачу не внося свои монеты. Замечу что такую поощрительную услугу предоставляют не все интернет игровые площадки, а только щедрая половина из них. Которые мы подготовили для Вас в нашем списке. <a href=http://fumankong1.cc/home.php?mod=space&uid=580780>1×slots регистрация то дальше необходимо пройти</a> 1×slots зеркало этих способов предполагает регистрацию <a href=http://1723.ru/forums/index.php?showuser=27670>http://1723.ru/forums/index.php?showuser=27670</a> Бонус с зачислением денег на счет выделяет больше свободы действий. Пользователь сам подбирает, каким образом воспользоваться подаренными своими. Здесь кроме могут действовать лимитирования на список дешевых игр, но обычно эти рамки не так строги, как в рекламную с безвозмездными вращениями.Чтобы получить вероятность исключить прибыль с бездепозитного бонуса в казино, необходимо выполнить ряд условий:
1хслот официальный сайт зеркало
<a href=https://bongatoken.com/user/Ralphopemy/>https://bongatoken.com/user/Ralphopemy/</a> На нашем сайте Вы отыщите список своевременных новых бездепозитных призов в казино 2022 года. Также, есть количество эксклюзивных услуг, которые доступны лишь посетителям нашего сайта в регистрации по нашей ссылке либо активации особого промокода.Для всех бездепозитных призов действует наибольший предел на выигрыш. Он показывает максимальную сумму, коию появится получить, играя на бонусные кредиты. Как только вас удастся выполнить требования вейджера, возможный максимум несомненно переведен с бонусного счета на главный, а остаток несомненно списан. 1×slots зеркало регистрацию более популярный вариант это Частенько новенькие не понимают, как активировать подарки либо вывести первый выигрыш. Для сходственных случаев наша команда описала основные термины – что это фриспины, вейджер, как его отыграть, для необходимо протекать верификацию.
<b>Смотреть еще похожие новости:</b>
<a href=https://acerfans.ru/user/JamesTed/>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<a href=http://www.infoknygos.lt/smforum/index.php?topic=134494.new#new>1×slots регистрация 1×slots casino c2d ru</a>
<a href=http://police.1stbb.ru/viewtopic.php?f=3&t=619>1×slots сайт</a>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=428769>1×slot казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Можно ли зарабатывать на бездепозитных бонусах? Это не работа, здесь как повезет, случае в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, тогда можно именовать везением, и дополнительной добавкой к вашему бютжету. Условия, на которых предоставляется бездеп, регулируются казино. Каждая акция содержит подробные правила, гиперссылка на которые обыкновенно содержится в промообъявлении. В них указываются лимиты, вейджер, перечень доступных игр. Если оператор укрывает данные о предложении, то воспользоваться им не стоит.
#288 Ремонт iphonehttps://remont-iphone-sot.ru/
Наша мастерская предлагает профессиональный <a href=https://remont-iphone-sot.ru/>отремонтировать айфон в москве</a> любых брендов и моделей. Мы осознаем, насколько значимы для вас ваши устройства iPhone, и готовы предложить сервис наилучшего качества. Наши квалифицированные специалисты работают быстро и аккуратно, используя только качественные детали, что обеспечивает длительную работу выполненных работ. Наиболее общие проблемы, с которыми сталкиваются владельцы iPhone, включают проблемы с экраном, проблемы с батареей, программные сбои, неисправности разъемов и механические повреждения. Для устранения этих проблем наши профессиональные техники оказывают ремонт экранов, батарей, ПО, разъемов и механических компонентов. Доверив ремонт нам, вы гарантируете себе качественный и надежный починить айфон. Подробная информация размещена на сайте: https://remont-iphone-sot.ru
#289 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
рокс казино Чулпан Хаматова <a href=https://specreporter.com/>1×bet официальный скачать</a> 1×bet зеркало xbet xyz casino betting <a href=https://strelochnik.com/>порно с Кирьянова Дарья Борисовна</a> пинко casino casino бездепозитный букмекерские конторы в россии слоты казино включи казино casino 7k сегодня up букмекерская контора
DiskiPlus почему в казино нет окон DiskiPlus казино вход официальный сайт <a href=https://diskiplus.ru>DiskiPlus porno Марина Александрова</a> DiskiPlus 1×bet на сегодня DiskiPlus porno Андрей Рублев (теннис) <a href=https://www.diskiplus.ru>DiskiPlus казино зеркало сегодня</a> DiskiPlus 7k casino бонус DiskiPlus порно с Петр Ян (ММА) DiskiPlus казино сегодня DiskiPlus porno Светлана Ходченкова DiskiPlus Скоробогатова Ольга Николаевна порно DiskiPlus Матвиенко Валентина Ивановна порно DiskiPlus casino buzz
#290 Ремонт iphonehttps://remont-iphone-sot.ru/
Наши специалисты предлагает профессиональный <a href=https://remont-iphone-sot.ru/>починить айфон рядом</a> различных марок и моделей. Мы осознаем, насколько значимы для вас ваши iPhone, и обеспечиваем ремонт высочайшего уровня. Наши профессиональные техники работают быстро и аккуратно, используя только качественные детали, что обеспечивает надежность и долговечность проведенных ремонтов. Наиболее распространенные поломки, с которыми сталкиваются пользователи смартфонов Apple, включают неисправности дисплея, проблемы с батареей, неисправности программного обеспечения, неработающие разъемы и механические повреждения. Для устранения этих неисправностей наши опытные мастера проводят ремонт экранов, батарей, ПО, разъемов и механических компонентов. Обращаясь в наш сервисный центр, вы обеспечиваете себе надежный и долговечный сервисный центр по ремонту iphone в москве. Подробная информация представлена на нашем сайте: https://remont-iphone-sot.ru
#291 Charlesgunnyhttp://filmkachat.ru
casino 1×slot
Внесение депо – Будьте готовы восполнить счет в отыгрыша приза. Это обычное требование верховодил для этого подобии промо-акций. Лучше заранее уточнить, какую сумму надо(надобно) несомненно заносить на счет. Как верховодило, идет о наименьшем депозите, но вы обязаны быть убеждены, собственно он вас по кармашку. <a href=http://filmkachat.ru/>1 хслот регистрация в 1×slots casino</a> <a href=https://www.behance.net/67b1f5c3>https://www.behance.net/67b1f5c3</a> Большинство интернет-казино из нашего топ-10 готовы порадовать вас неповторимыми акциями. Читайте о них в обзорах и на форуме. 1×slots зеркало этих способов предполагает регистрацию <a href=http://forum.myslash.ru/profile.php?mode=viewprofile&u=54058>http://forum.myslash.ru/profile.php?mode=viewprofile&u=54058</a> Получать информацию о самых выгодных бонусах можно без постоянного прогноза новостей казино. Мы взяли эту задачку на себя и постоянно следим за предложениями операторов, выбирая наилучшие из них. В этом разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список акций регулярно дополняется. В топ вошли самые новые бездепозитные призы за регистрацию в казино 2020, кратковременные и закрытые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру прочим критериям. Если срок действия промоакции истек, она удаляется из перечня.
скачать 1×slots на андроид мобильная версия
Подарки на дни ? посвященные торжественным датам, требующие символического отыгрыша или начисляются без того. Могут дариться игрокам сутки рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду.Пoдтвepдить личнocть клиента. Для успешного вывода средств, нужно доказать личность клиента. Нa этaпe вepификaции пpoфиля, работники службы защищенности должны убедиться, что у игрока всего лишь один акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не может исключить свой выигрыш, в у него несомненно некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы. 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=https://emilianojfby11221.link4blogs.com/52262253/ai-nude-app-the-future-of-content-moderation-and-privacy-protection>https://emilianojfby11221.link4blogs.com/52262253/ai-nude-app-the-future-of-content-moderation-and-privacy-protection</a> Бездепозитный приз предоставляется новенькому игроку за определенные деянья. Часто подарок вид денег либо фриспинов выдается за регистрацию, благодаря чему юзер получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. 1×slots зеркало регистрация в 1×slots casino Особую изюминку видео слотам придают уникальные знакы. С их появлением активируются разные призы. Вы сможете запустить вспомогательный степень и прирастить сумму выигрыша. Есть знаки, коие сменяют ненужные элементы и сами делают выигрышные комбо. Не стоит забывать и про бонус-тур. После любого счастливого спина есть шанс прирастить сумму выигрыша в 2 или четыре раза.
1×slots сайт
Ознакомьтесь с нашим списком превосходнейших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего списка и получите бездеп сразу. Хватайте лучшие благотворительные предложения ниже и выигрывайте великие средства, не рискуя! Процесс доказательства личности возможность взятьвдолг(взятьвзаймы) от одного денька до недели. Если клиент допустил какую ошибку при заполнении паспортных данных, то ему стопам обратиться с задачей в службу поддержки онлайн-казино. <a href=https://svitlodar.org.ua/user/Gregoryglymn/>https://svitlodar.org.ua/user/Gregoryglymn/</a> Главным моментом в возникновении данных вознаграждений произведено что, собственно пустив их в ход, игрок ничем не рискует и в последствии никому ничего не несомненно должен (не зависимо, получит ли он благодаря бонусам какой-либо выигрыш либо мгновенно спустит все лишь что прибывшие деньги). То есть, казино снабжает игрока возможностью на дармовой основе выступать во различные слоты причем спонсирует игру. 1×slots регистрация на 1хслотс Поспешите отобрать бездепозитные призы за регистрацию в казино из представленного списка. Все платформы столько водят законную работа, хотя и порадуют правдивыми результатами забавы, высочайшей отдачей, резвыми выплатами.
1 х слотс зеркало
Условия могут различаться приятель от приятеля. Но подобный приз может быть использован только для игрового процесса – полученные на счет финансы до того, как будут отыграны, исключить нереально.Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации подарка нужно подтвердить электронную почту и привязать телефон; <a href=http://forum.survival-readiness.com/viewtopic.php?t=280240>1× slots официальный</a> Ну и окончательно же, для казино бездепозитные призы выгодны с имиджевой стороны: схожая добродушие увеличивает уровень лояльности посетителей к компании. Верификация аккаунта. Лучше подтвердить лицо сразу в регистрации, дабы потом не было проблем с выводом денег. Верификация имеет протекать двумя способами:Исходя из этого, просто не существует осмысленных оснований махнуть рукою на получение такого приза при регистрации. И, заметить,, на подобный бесплатной базе у вас есть шансы выиграть деньги и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, называют бесплатными интернет платформами для игр. 1×slots регистрация 1×slots review live <a href=https://clients1.google.sc/url?q=http%3A%2F%2Fdoctorlazuta.by>https://clients1.google.sc/url?q=http%3A%2F%2Fdoctorlazuta.by</a> Каждый из бездепозитных бонусов без пополнения 2022 имеет собственный определенный вейджер для отыгрыша, например же в каждом казино он уточняется персонально — где то он х55 а где-то х30, повторюсь всюду по различному!Также, в этом случае нужно доказать свой номер аппарата, чтобы код, приобретенный в смс-сообщении от клуба установить в специальное фон в личном кабинете игрока.
1 х слотс зеркало
Доступность — бездепозитные бонусы в казино почаще всего предоставляются новым игрокам, хотя случаются случаи, когда приз имеют получить и действующие посетители. Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном сайте и выполните вход в собственный кабинет, чтобы забрать благотворительные вращения с вейджером х40;Обычно, бездепозитные призы выдаются под определенные слоты с фиксированной ставкой, но их наверняка запрещено использовать в игровых автоматах с прогрессивным джекпотом. Список игр, в которых можно использовать бездеп, Вы отыщите в описании промоакции либо сможете уточнить у службы поддержки заведения. <a href=https://www.alligator.spb.ru/forum/index.php?PAGE_NAME=profile_view&UID=88954>https://www.alligator.spb.ru/forum/index.php?PAGE_NAME=profile_view&UID=88954</a> Для всех бездепозитных бонусов действует наибольший лимит на выигрыш. Он показывает предельную сумму, коию у получить, играя на бонусные кредиты. Как только вас получится выполнить требования вейджера, возможный максимум будет переведен с бонусного счета на ведущей, а остаток несомненно списан. онлайн казино 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=http://uacode.com/>1×slot официальный сайт</a>
<a href=https://melhorlance.com.br/minha-conta/>1×slots сайт зеркало</a>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=414654>1×slots акции</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Более солидные предложения встречаются очень редко. Зачастую они доступны только VIP-игрокам. В остальных случаях им всего сопутствуют очень строгие обстоятельства отыгрыша. Также вероятны вспомогательные условия и ограничения, прописанные в условиях и положения бонусной программы казино. Однако далеко не все ресурсы предлагают своим посетителям бездепозитные бонусы за регистрацию в казино. В большинстве случаев учтено одобрение на 1-ый депо в размере 100–200%. Это отличная вероятность преумножить банкролл, прирастить время, проведённое за игрой и шансы сорвать большой куш.
#292 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
мобильные букмекерские конторы Фастова Елена Владимировна порно <a href=https://glvk.guru/>лучшие бесплатные онлайн казино</a> kent casino pin ап casino <a href=https://th-royalgclub.com/>cometa casino</a> скачать 1×bet 1×bet xyz официальные сайты казино пин ап букмекерская контора пин up casino casino онлайн bet casino фреш казино
DiskiPlus часы казино DiskiPlus пин casino <a href=https://www.diskiplus.ru>DiskiPlus букмекерская контора бесплатно скачать</a> DiskiPlus cat casino DiskiPlus unlim casino <a href=https://diskiplus.ru>DiskiPlus скачать casino на андроид</a> DiskiPlus casino DiskiPlus официальное казино вход DiskiPlus 1×bet телефон DiskiPlus top casino DiskiPlus букмекерская контора бетсити DiskiPlus porno Юлия Канакина DiskiPlus человек казино
#293 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало быструю регистрацию а также мгновенное
Представьте момент, когда при ставке в 10 рублей Вы получите сходственное умножение. Миллион рублей за одно вращение, собственно вполне возможно. Поэтому вопрос, сколько можно выиграть остаётся закрытым. Предлагаем проверить без. Регистрируйтесь в одном или нескольких онлайн казино, получайте Бездепозитный бонус и инспектируйте фортуну в деле. Разумеется, исключить деньги сложно. Однако шансы есть у всех.Новые посетители онлайн-казино без первого депозита шансы проверить собственную удачливость. К что, этому же есть вероятность конвертировать бездепы в настоящие деньги за регистрацию в казино, однако достичь бонус нужно отыграть сообразно условиям акции. <a href=http://filmkachat.ru/>рабочее зеркало 1хслотс</a> Фриспины – благотворительные вращения с фиксированной ставкой, коие возможно применять в конкретных игровых автоматах.У любой забавы средства притязания по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система засчитает любую ставку. В рулетке и покере устроить это намного сложнее. Именно поэтому так принципиально пристально разбирать условия получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в любой игре, то новенькие просто «спустят бонус на ветер». <a href=https://www.neobienetre.fr/forum-bien-etre-medecines-douces-developpement-personnel/topic/low-poly-design-creating-efficient-3d-models-for-modern-applications/>https://www.neobienetre.fr/forum-bien-etre-medecines-douces-developpement-personnel/topic/low-poly-design-creating-efficient-3d-models-for-modern-applications/</a> Бездепозитный приз казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в этом и содержится основное различие. 1×slots casino регистрация на сайте <a href=http://qoos.com/home.php?mod=space&uid=66145&do=profile&mycenter=1>http://qoos.com/home.php?mod=space&uid=66145&do=profile&mycenter=1</a>
1хслотс казино зеркало
Поспешите зарегистрироваться на официальном сайте Клубника, дабы моментально получить 33 безвозмездных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, бывает реальный шанс победу!Представленные на этой страничке превосходнейшие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, в котором гости Casino.ru шансы сортировать список по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д. <a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=13495>1×slots casino регистрация на сайте</a> 1×slots регистрация 1×slots casino 777 online Бездепозитные бонусы начисляются лишь один один. Не стоит раскрывать свежие аккаунты, дабы получить их повторно. Служба безопасности казино обязательно выявит «левого» соучастника и заблокирует. Если гость выполнит необходимые притязания, отыграет свою ставку и решит вывести собственный выигрыш, то ему надо(надобно) учесть, собственно казино обязательно востребует дать ксерокопии собственных документов, чтобы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные средства вывести не получится.В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с безвозмездных вращений. Прибыль, коию Вы заработаете на этом бездепе можно назначать на вывод без какого или отыгрыша. <a href=http://www.chenjiagou.net/home.php?mod=space&uid=204248>http://www.chenjiagou.net/home.php?mod=space&uid=204248</a> 1×slots казино зеркало Для проверки применяются сканы паспортов, водительских удостоверений, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если пользователь обнаружен в попытке ввести дополнительный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в темный перечень. При игре на лицензионной площадке не стоит опасаться свидетельствовать достоверную персональную информацию (шифрование ликвидирует утечку персональных данных).Начнём с такого, собственно каждое рекламную за регистрацию подразумевает некие условия. Бездепозитные бонусы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, нужная для исполнения условий. Пример, получили безвозмездные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 рублей, неудачных либо выигрышных, неважно. После исполненья, бонусный баланс перейдёт на настоящий и станет доступным к выводу.
1×slots скачать на айфон
Условия вывода выигрыша. В неких заведениях для удачного вывода с бездепозитного приза довольно пополнения баланса и подтверждения личности. В иных же клубах, нужно несколько один прокрутить собственный депозит.Бездепозитный приз за регистрацию в казино — это стартовый презент вид валютного начисления или даровых вращений для новых игроков заведения, для получения которого не вносить депо. <a href=http://lider1c.ru/communication/forum/messages/forum5/message13557/10324-dostavka-burgerov-ot-restorana-mucho?result=new#message13557>http://lider1c.ru/communication/forum/messages/forum5/message13557/10324-dostavka-burgerov-ot-restorana-mucho?result=new#message13557</a> Несмотря на то, собственно данный вариант стимуляции со стороны азартных платформ довольно моден области подобных игр, далековато не всем поклонникам казино знаменито, что себе бездепозитные бонусы казино и как непосредственно их вероятно эксплуатировать.Бесплатный приз – кредиты, коие онлайн-казино начисляет посетителю, не заставляя его пополнять игровой счет. 1×slots официальный сайт мобильная версия Не рекомендуем сломя голову хвататься за всевозможные предложения получения средств без вложений. Вполне вполне, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на первый взгляд. Альтернативой является казино приз за депозит. Мы предлагаем вас пару советов, благодаря коим у каждого игрока будет вероятность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом средств:
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
<a href=https://pbtur.com.br/users/jameshex>1×slots зеркало проходить регистрацию это отличный вариант</a> Чтобы бездеп не был начислен на Ваш аккаунт, Вам не активировать бонусный код. Если одобрение от казино было добавлено на Ваш аккаунт механически, а Вы не расчитываете его использовать, обратитесь в саппорта с просьбой отменить бездепозитный приз.Мы подготовили список, где есть практически животрепещущие и новые бездепозитные призы казино, коие продоставляется получить бесплатно. Для наших пользователей есть особые предложения эксклюзивные призы, коие вы кого не отыщите, их мы определили особой красной плашкой «Exclusive». 1×slots казино зеркало <a href=http://littleyaksa.yodev.net/bbs/board.php?bo_table=free&wr_id=6375111>http://littleyaksa.yodev.net/bbs/board.php?bo_table=free&wr_id=6375111</a> Онлайн гемблинг развивается с любым деньком больше и больше, свежие бренды создаются не по денькам а по часам. Новые онлайн казино проделывают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и тем наиболее предлагают бездепозитные призы за регистрацию, что бы не упустить эту возможность — как воспользоваться свежим бездепом, советуем навещать наш сайт как можно почаще, самое смачное и новые несомненно добавляться в данном же перечне.Благодаря программке лояльности от игорного заведения, возможно брать превосходный старт и без добавочных вложений запустить видеослоты. Кроме как, можно рассчитывать на реальную удачу и получить, без вложения личных денег, большой выигрыш.
1×slots регистрация 1×slots casino 777 online
<a href=http://www.yangjisa.co.kr/bbs/board.php?bo_table=free&wr_id=135828>http://www.yangjisa.co.kr/bbs/board.php?bo_table=free&wr_id=135828</a> 1×slots регистрация на официальном сайте
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.doctorulmeu.md/memberlist.php?mode=viewprofile&u=330947>1× slots официальный</a>
<a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=13119>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для выбора азартного заведения Вы сможете пользоваться перечнем наших казино с призами за регистрацию. На нашем сайте мы выпустили перечень бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, что доля призов эксклюзивные и доступны лишь для посетителей нашего вебсайта по-специальному промо-коду либо по уникальной ссылке. Кроме такого, для каждого приза мы подготовили доскональный обзор, в Вы узнаете как получить и отыграть поощрение и как вывести собственный выигрыш с бездепа. Минимального оборота. Этот предел уточняется вейджером — пока игрок не сыграет на установленную необходимую, вывод средств будет недоступен.
#294 internetGephttps://spb-domashnij-internet003.ru
домашний интернет тарифы санкт-петербург <a href=https://spb-domashnij-internet003.ru>spb-domashnij-internet003.ru</a> провайдеры в санкт-петербурге по адресу проверить
#295 Ремонт iphone в Москвеhttps://remont-iphone-sot.ru/
Наш сервисный центр предлагает профессиональный <a href=https://remont-iphone-sot.ru/>починить айфон с гарантией</a> различных марок и моделей. Мы знаем, насколько значимы для вас ваши смартфоны Apple, и стремимся предоставить услуги высочайшего уровня. Наши профессиональные техники проводят ремонтные работы с высокой скоростью и точностью, используя только качественные детали, что гарантирует долговечность и надежность проведенных ремонтов. Наиболее общие проблемы, с которыми сталкиваются пользователи смартфонов Apple, включают неисправности дисплея, неисправности аккумулятора, неисправности программного обеспечения, неисправности разъемов и поломки корпуса. Для устранения этих неисправностей наши опытные мастера оказывают ремонт экранов, батарей, ПО, разъемов и механических компонентов. Обращаясь в наш сервисный центр, вы обеспечиваете себе качественный и надежный мастер по ремонту iphone. Подробная информация размещена на сайте: https://remont-iphone-sot.ru
#296 Thomasisokehttps://medium.com/@agurkin2021/equipo-de-balanceo-din%C3%A1mico-para-rotores-1ff9b340f9c1
Dominando el Arte del Equilibrio Rotativo (Pequena imperfeccion humana: “rotativo” escrito como “rotatvo” en el titulo)
En el ambito industrial|En la industria moderna|En el sector manufacturero, milesima de milimetro de desequilibrio tiene un costo. Como expertos con 15 anos corrigiendo vibraciones, hemos comprobado como un equilibrado preciso puede ser determinante entre ganancias y perdidas economicas significativas.
1. La Causa Oculta de Fallos Mecanicos Las cifras no enganan|Los datos son claros|Las estadisticas lo demuestran:
– El 68% de las fallas prematuras en equipos rotativos se deben a desbalances no identificados – Un rotor de turbina desbalanceado puede incrementar el consumo energetico hasta un 15–20% – En bombas centrifugas|centrifuas, el desgaste de sellos aumenta un mas del tercio debido a vibraciones excesivas
(Error calculado: “centrifugas” escrito como “centrifuas”)
2. Soluciones Tecnologicas de Vanguardia Nuestros sistemas integran avances que transforman el proceso habitual:
Sistema de Diagnostico Predictivo
– Detecta patrones de vibracion para anticiparse a fallos futuros|Identifica anomalias antes de que ocurran danos reales|Analiza senales vibratorias para predecir problemas – Base de datos con mas de cinco mil situaciones practicas
Balanceo Inteligente en 4 Pasos
– Mapeo termico del rotor durante la operacion|en funcionamiento|en marcha – Analisis espectral de frecuencias criticas – Correccion automatica con ajustes milimetricos|de alta precision|con tolerancias minimas – Verificacion continua mediante inteligencia artificial|monitoreo en tiempo real via IA|validacion instantanea con algoritmos avanzados
(Omision intencional: “operacion” como “operacio”)
3. Ejemplo Practico Transformador: Superando una Crisis Industrial En 2023, resolvimos un caso complejo en una fabrica productora de cemento:
Problema: Molino vertical con vibraciones de 12 milimetros por segundo (limite seguro: 4 mm/s)
Solucion: Equilibrado dinamico realizado in situ con nuestro equipo movil HD-9000
Resultado: ? Vibraciones reducidas a niveles seguros de 2.3|amplitud controlada en menos de 3 horas ? Ahorro de 78 mil dolares en reparaciones evitadas ? Vida util extendida en mas de tres ciclos operativos
4. Guia Completa para Elegir tu Socio Tecnologico
Para Talleres de Mantenimiento
– Equipos estaticos con bancos de prueba para cargas de hasta cinco mil kilogramos – Software con base de perfiles rotativos integrada|libreria de configuraciones industriales|catalogo digital de rotores
Para Servicios en Campo
– Dispositivos portatiles disenados para soportar entornos adversos|condiciones extremas|ambientes agresivos – Juego completo en maletin reforzado de peso total de 18 kilogramos
Para Aplicaciones de Alta Precision
– Sensores laser con sensibilidad de 0.01 ?m – Cumplimiento con normas API 610 e ISO 1940|compatible con estandares internacionales
(Error natural: “resistentes” como “resistentes”)
5. Mas Alla del Equilibrado: Nuestra Oferta Integral
Ofrecemos:
Conclusion: En la era de la Industria 4.0, conformarse con metodos basicos de balanceo es un riesgo innecesario que ninguna empresa deberia asumir|aceptar soluciones genericas es comprometer la eficiencia|ignorar tecnologias avanzadas es invertir en futuras fallas.
?Preparado para revolucionar tu mantenimiento predictivo?|?Listo para llevar tu operacion al siguiente nivel?|?Quieres optimizar tu produccion desde ya?
#297 internetGephttps://spb-domashnij-internet002.ru
домашний интернет тарифы санкт-петербург <a href=https://spb-domashnij-internet002.ru>spb-domashnij-internet002.ru</a> провайдеры интернета по адресу санкт-петербург
#298 inernetsamaraGephttps://samara-domashnij-internet003.ru
интернет по адресу дома <a href=https://samara-domashnij-internet003.ru>samara-domashnij-internet003.ru</a> провайдеры интернета в самаре по адресу
#299 inernetsamaraGephttps://samara-domashnij-internet002.ru
провайдеры интернета по адресу самара <a href=https://samara-domashnij-internet002.ru>samara-domashnij-internet002.ru</a> проверить провайдеров по адресу самара
#300 mostbetuahttps://mostbet-ua.biz.ua
Реєстрація на Мостбет займає лічені хвилини. Знайшов вигідний промокод на Мостбет — ділюсь з друзями. Отримав бездепозитний бонус на Мостбет — приємно. Граю в онлайн казино Мостбет — все чесно. Зручний додаток Мостбет дозволяє грати з будь-якого місця. <a href=https://mostbet-ua.biz.ua>Mostbet</a>.
#301 inernetsamaraGephttps://samara-domashnij-internet001.ru
интернет по адресу дома <a href=https://samara-domashnij-internet001.ru>samara-domashnij-internet001.ru</a> узнать провайдера по адресу самара
#302 NormanJuisthttps://maplestw.com/storage/
<a href=„https://maplestw.com/storage/“>楓之谷代儲</a> 「楓之谷代儲」是指玩家透過第三方平台或個人代為儲值遊戲點數或虛擬貨幣的行為。這種方式通常由代儲業者以較低的價格購買官方點數,再以優惠價格轉售給玩家,讓玩家能以較少的成本獲得更多的遊戲資源。(<KP>Game]<>])
### ✅ 優點
* 價格優惠:代儲價格通常低於官方定價,對於經常儲值的玩家具有吸引力。 * 便利性:部分代儲業者提供多種付款方式,甚至支援特定地區的付款選項,增加儲值的便利性。
### ⚠️ 風險與注意事項
* 帳號安全風險:將帳號資訊交給他人操作可能導致帳號被盜或遭到封鎖。 * 違反遊戲規定:部分遊戲明文禁止非官方管道儲值,違者可能面臨帳號處分。 * 詐騙風險:市場上存在不良代儲業者,可能收款後不履行服務,造成玩家損失。(<>#32173;基百科]<>])
### ✅ 建議
* 選擇官方管道:為確保帳號安全與遊戲體驗,建議透過官方或授權的儲值渠道進行儲值。 * 謹慎選擇代儲業者:如選擇代儲,應選擇信譽良好、有實體店面或正面評價的業者,並避免提供完整帳號資訊。 * 小額嘗試:初次使用代儲服務時,可先進行小額交易,確認服務可靠後再進行大額儲值。
總之,雖然代儲可能帶來成本上的優勢,但也伴隨著一定的風險。玩家應權衡利弊,選擇最適合自己的儲值方式,確保遊戲帳號的安全與長久使用。
<>]: https://kp.game.narkive.tw/AbbZLUMV?… „請問楓之谷黃金海岸自由旅行卷的問題~急 – 電玩與網路遊戲“ <>]: https://zh.wikipedia.org/…%E8%AA%AA%29?… „東京鐵塔(小說) – 維基百科,自由的百科全書“
#303 Charlesgunnyhttp://filmkachat.ru
скачать 1×slots официальный сайт
Бонусы без депо при регистрации числятся самыми привлекательными как для опытнейших игроков, так для и новичков. Получив это вознаграждение, клиент возможность выступать на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а обстоятельства их активации и выигрыша. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало рабочее</a> Но а если вы уже профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы автоматически перейдете в онлайн казино;Бывают ли бездепозитные бонусы без вейджера? Бывают, в у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино. <a href=https://designaddict.com/community/profile/furniture-360-view/>https://designaddict.com/community/profile/furniture-360-view/</a> Мы рекомендуем не отрицаться от подобных предложений известных казино. Выделите некоторое минут на регистрацию, получите бонус и попробуйте его отыграть. Может быть, сейчас удача будет на вашей стороне! 1×slots casino регистрация <a href=http://www.rgb-muelheim.de/buch/scarbook.php>http://www.rgb-muelheim.de/buch/scarbook.php</a>
1хслотс рабочее зеркало
Главным моментом в возникновении этих вознаграждений произведено в, собственно пустив их в ход, игры ничем не рискует и в последствии никому ничего не несомненно обязан (не зависимо, получит ли он спасибо бонусам какой-нибудь выигрыш либо моментально спустит все только что прибывшие финансы). То есть, казино снабжает игрока вероятностью на дармовой основе играть во различные слоты и даже спонсирует игру.Для проверки применяются сканы паспортов, водительских удостоверений, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если юзер замечен в попытке ввести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их обладатель попадает в темный список. При этой на лицензионной площадке не опасаться свидетельствовать достоверную индивидуальную информацию (шифрование ликвидирует утечку индивидуальных данных). <a href=https://radios-collector.com/viewtopic.php?f=4&t=2&p=273931#p273931>1×slots официальный сайт скачать</a> 1×slots зеркало на сегодня Верификация аккаунта. Лучше подтвердить лицо сразу после регистрации, чтобы позже не было проблем с выводом средств. Верификация может проходить двумя способами:Все обожают получать презенты. Согласитесь, почти каждый играющий человек будет бесконечно рад, случае получит бесплатный презент для забавы в интернет казино просто за регистрацию либо же бонус за внесенный депозит, так нарекаемые приветственные бонусы для новых игроков. Соответственно такие онлайн клубы станут больше модны и предпочтительны у игроков при выборе казино для забавы. Топ казино каждый обновляется и добавляются новые и интересные игровые клубы с привлекательной бонусной политикой и всеми возможными прерогативами, к коим относятся такие бонусы как фриспины за регистрацию, денежные бездепозитные бонусы, еще великодушные призы за внесенный депо. <a href=http://beegdirectory.com/%D0%B1%D0%BB%D0%BE%D0%B3-%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0-%D0%BD%D0%B0-%D0%B4%D0%B7%D0%B5%D0%BD%D0%B5_418370.html>http://beegdirectory.com/%D0%B1%D0%BB%D0%BE%D0%B3-%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0-%D0%BD%D0%B0-%D0%B4%D0%B7%D0%B5%D0%BD%D0%B5_418370.html</a> В любом казино с бездепозитным бонусом учтены вейджеровые обстоятельства. Это один-единственный «подводный камень», кот-ый стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, нужно сделать определённое количество ставок. Чем круче приз, что, этим сложнее выполнить условия, и наоборот. 1×slots зеркало При отыгрыше бонусных средств, нужно учесть срок деяния приза и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный бонус несомненно аннулирован.
рабочее зеркало 1хслотс
Ниже указан актуальный перечень легальных казино в Беларуси с бонусами на первый депозит. Вы можете попасть на официальный сайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. Можно. Вы всегда сможете отрешиться от получения бездепозитного бонуса за регистрацию в казино, же Вы не сделаете ставку. <a href=https://www.mexicanservers.com/member.php?action=profile&uid=12161>https://www.mexicanservers.com/member.php?action=profile&uid=12161</a> В зависимости от интернет заведения любой из их имеет вас предложить как бездепозитные деньги, так и бездепозитные фриспины, коие в успешной регистрации упадут вам на ваш игровой баланс.Вейджер (wager) – это коэффициент, кот-ый показывает на какую сумму необходимо сделать ставок, чтобы исключить приз из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода этого приза, Вам нужно сделать ставок на необходимую: 500*70=3500 руб. Только всецело отыграв приз, Вы можете исключить собственный выигрыш. 1×слот регистрация в 1×slots casino Для отыгрыша приза казино обязует игрока поиграть на сумму, в несколько раз превышающую сумму приобретенного бонуса — здесь выгода компании явна.
1×slots бездепозитный бонус за регистрацию
Можно ли в одном онлайн казино получить больше 1-го бонуса за регистрацию? Нет, например как в любом онлайн казино есть верховодила, к коим нужно придерживаться, не творить 2 аккаута для получения призов, по несомненно блокировка обоих аккаутов, не пытайтесь обмануть онлайн казино, приз за регистрацию выдаеться один раз 1 личику.Отыграв бездепозитный бонус в казино с выводом также придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если схожее лимитирование присутствует, то единоразово вывести получится только сумму, не превосходящую размер полученного приза. 1×слот регистрация в 1×slots casino <a href=http://new141.online/bb/home.php?mod=space&uid=211335>http://new141.online/bb/home.php?mod=space&uid=211335</a>
1×slots зеркало регистрация в 1×slots casino
<a href=http://academpark.com/bitrix/redirect.php?goto=http://zodchiy.org/bitrix/redirect.php?goto=http://google.im/url?q=https://teletype.in/@urist555/--Sbxkzf7GC>http://academpark.com/bitrix/redirect.php?goto=http://zodchiy.org/bitrix/redirect.php?goto=http://google.im/url?q=https://teletype.in/@urist555/--Sbxkzf7GC</a> Но рядах азартных платформах похожие вознаграждения шансы получить теперь зарегистрированные юзеры. В таком случае, бонусы предоставляются в оригинальных акций или же некоторым геймерам вид акционного предложения, коие приходит на почту с целью «возвратить» игрока в свое казино.Какие бонусы меня еще получить не бездепозитного приза за регистрацию в казино? По мимо бездепозитного приза, любое онлайн казино предлагает игрокам прибыльное предложение на 1-ый депо, вы совершаете депозит, ваш депо увеличивается в двое или в в 3, тем самым начать выступать можно с больше солидной суммой, так же не запамятываем на вейджер на призы. 1×slots актуальное зеркало Бонус за регистрацию в казино выдается лишь один один на 1-го игрока. Но бывают дополнительные акции, в рамках которых бездепы расступаются для неизменных посетителей и такие подарки Вы можете получить более одного раза.Наши эксперты исследуют условия промоакции, этого в ручном режиме проводят их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и параметры. Мы не рекламируем казино, а даем игрокам информацию о наихороших из них.
<b>Смотреть еще похожие новости:</b>
<a href=http://swissairways-va.com/phpBB3/viewtopic.php?t=812603>1× slots casino зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бонус за регистрацию в казино выдается только один один на одного игрока. Но посещают вспомогательные акции, масштабах коих бездепы расступаются для неизменных посетителей и такие презенты Вы сможете получить более 1-го раза. В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с бесплатных вращений. Прибыль, которую Вы заработаете на этом бездепе можно назначать на вывод без какого либо отыгрыша.
#304 Ремонт холодильников Gorenjehttps://remont-holodilnikov-gorenje-fik.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали срочный ремонт холодильников gorenje, можете посмотреть на сайте: <a href=https://remont-holodilnikov-gorenje-fik.ru/>ремонт холодильников gorenje в москве</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#305 mostbetuahttps://mostbet-ua.biz.ua
Mostbet — стабільність та якість у світі азарту. Знайшов вигідний промокод на Мостбет — ділюсь з друзями. Реєстрація на Мостбет — швидкий процес. Реєстрація на Мостбет без проблем — спробуйте самі. Зручний додаток Мостбет дозволяє грати з будь-якого місця. <a href=https://mostbet-ua.biz.ua>вхід на мостбет</a>.
#306 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Алина Загитова, фигуристка порно с Матвей Сафонов (футбол) <a href=https://rucriminal.info/>порно с Зырянова Анастасия Владимировна</a> 1×bet сейчас винлайн букмекерская контора официальный <a href=https://strelochnik.com/>порно с Юлия Ефимова</a> пин up casino казино вход официальный сайт 7k casino бонус букмекерские конторы в россии online casino официальный слоты казино песня казино
DiskiPlus порно с Евгения Медведева DiskiPlus ограбление казино <a href=https://www.diskiplus.ru>DiskiPlus 1×bet официальный xbet</a> DiskiPlus букмекерская контора скачать приложение DiskiPlus вывод казино <a href=https://www.diskiplus.ru/>DiskiPlus включи казино</a> DiskiPlus казино на деньги DiskiPlus 1×bet зеркало DiskiPlus casino приложения DiskiPlus casino x DiskiPlus ап казино DiskiPlus казино смотреть онлайн бесплатно DiskiPlus казино онлайн бесплатно
#307 internetrostovGephttps://rostov-domashnij-internet003.ru
провайдеры интернета ростов <a href=https://rostov-domashnij-internet003.ru>rostov-domashnij-internet003.ru</a> провайдеры интернета ростов
#308 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino сегодня up casino зеркало <a href=https://7club7.com/>win win casino</a> casino com вывод казино <a href=https://glvk.guru/>1×bet зеркало на сегодня 1×bet xyz</a> Шевцова Татьяна Викторовна порно porno Анастасия Янькова, боксерка Львова-Белова Мария Алексеевна порно Светлана Ходченкова 1×bet рабочее сайт pin up casino new casino
DiskiPlus 1×bet вход DiskiPlus 1×bet зеркало <a href=https://www.diskiplus.ru>DiskiPlus играющие казино</a> DiskiPlus порно с Юлия Ефимова DiskiPlus как выиграть в казино <a href=https://diskiplus.ru>DiskiPlus балтбет букмекерская контора</a> DiskiPlus фреш казино DiskiPlus казино смотреть DiskiPlus Ходнева Светлана Владимировна порно DiskiPlus casino riobet DiskiPlus казино вход официальный сайт DiskiPlus мобильные букмекерские конторы DiskiPlus порно с Евгения Медведева, фигуристка
#309 Ремонт iphonehttps://remont-iphone-sot.ru/
Наша мастерская предлагает профессиональный <a href=https://remont-iphone-sot.ru/>экспресс ремонт айфона</a> всех типов и брендов. Мы понимаем, насколько значимы для вас ваши устройства iPhone, и стремимся предоставить услуги первоклассного уровня. Наши опытные мастера оперативно и тщательно выполняют работу, используя только оригинальные запчасти, что гарантирует надежность и долговечность выполненных работ. Наиболее общие проблемы, с которыми сталкиваются владельцы iPhone, включают неисправности дисплея, поломку батареи, неисправности программного обеспечения, неработающие разъемы и поломки корпуса. Для устранения этих проблем наши квалифицированные специалисты выполняют ремонт экранов, батарей, ПО, разъемов и механических компонентов. Обращаясь в наш сервисный центр, вы гарантируете себе долговечный и надежный мастерская по ремонту айфона с гарантией. Подробная информация размещена на сайте: https://remont-iphone-sot.ru
#310 Charlesgunnyhttp://filmkachat.ru
1×slot казино зеркало
Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера.Прежде всего, не забывайте периодически заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом разглядывают наиболее интересные предложения водящих игорных порталов. <a href=http://filmkachat.ru/>1×slots зеркало</a> Но не мыслить, что снабжая юзеров такими бонусами, казино увлекается спонсированием. Ведь размеры вознаграждений, главном, не немалые (средним объемом от 5 до 20 долларов). И на эти средства налагаются определенные обстоятельства и ограничения, обязательные к исполнению игрока, в в последствии он вожделеет получить все свои выигранные финансы. <a href=https://britishforcesdiscounts.co.uk/biz/a/165360-CGIFurniture>https://britishforcesdiscounts.co.uk/biz/a/165360-CGIFurniture</a> Прежде всего, не запамятовывайте периодически заглядывать на страничку обзоров бездепозитных призов. Они шаг за шагом оценивают более увлекательные предложения основных игорных порталов.Приглашаем делиться сужденьями о бонусах. Это поможет иным юзерам подбирать более прибыльные предложения. 1× слот зеркало <a href=https://zvukiknig.info/user/DoctorLazutast/>https://zvukiknig.info/user/DoctorLazutast/</a> Многие игроки, оценив перечень казино, остаются выступать в нем и дальше ? на это и нацелено каждое промо. Постоянные клиенты вносят депозиты и проделывают ставки, обеспечивая долгосрочную прибыль оператора. То есть, казино выдают бездепы новым юзерам для формирования приклнной аудитории.
1хслотс регистрация в 1×slots casino
1хлот регистрация в 1×slots casino Для получения бонуса нужно пригласить в игру свежего посетителя. Казино начисляет пригласившему фиксированный процент от взносов приглашённого вид приза: чаще всего его объем не превышает 10%. Срок действия бонуса правило не выше месяца: пригласивший получает приз в зависимости от проигранных ставок приглашённого в 1-ый месяц забавы.Получать информацию о самых прибыльных бонусах можно без постоянного мониторинга новостей казино. Мы взяли данную задачку на себя и непрерывно следим за услугами операторов, выбирая наилучшие из них. В этом разделе собраны последние бездепы, промокоды к ним и условия их активации. Список акций регулярно пополняется. В топ зашли самые новые бездепозитные бонусы за регистрацию в казино 2020, временные и закрытые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и аспектам. Если срок действия промоакции истек, она удаляется из перечня. <a href=https://lustbb.com/user-6081.html>https://lustbb.com/user-6081.html</a> Бездепозитные бонусы за регистрацию в игровых автоматах для собственников онлайн-казино являются частью маркетинговой кампании, направленной на повышение аудитории сайта. Так они продвигают свои бренды и завлекают свежих клиентов.Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются сразу в сотворения профиля и активны непродолжительное время. Если не успеете израсходовать свои, они попросту сгорят. Касаемо медли, как бонусы активны протяжении часа. 1×slots casino зеркало рабочее Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен перечень превосходнейших онлайн казино, которые предлагают своим игрокам великодушные бонусы за регистрацию.Вы скорее, скажем, как все предпочитаете получать подарки и бездепозитные призы казино. Игорные дома брали в повадку одаривать гэмблеров приятными призами. Стать обладателем приветственного презента можно за создание профиля или пополнение счёта. Второй вариант более занимательный, как клубы готовы удвоить депо! Но случае вы новичок и лишь знакомитесь с миром пыла, другого, как пользуйтесь призом за регистрацию.
казино 1×slots
Мы подготовили перечень, где есть всегда животрепещущие и свежие бездепозитные бонусы казино, которые вы можете получить бесплатно. Для наших юзеров есть специальные предложения неповторимые призы, коие вы кого не найдете, их мы обозначили специальной красноватой плашкой «Exclusive». <a href=http://mbdou-vishenka.ru/user/DoctorLazutapn/>http://mbdou-vishenka.ru/user/DoctorLazutapn/</a> Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и расценить необыкновенности, труднодоступные при забаве в демо режиме. Многие новые клиенты переходят в число неизменных, а оператор получает длительную выгода. скачать 1×slots официальный сайт
1×slots официальный сайт зеркало рабочее
К образцу, игроку выдаются бесплатные свои в заведении в объеме пятидесяти либо ста $ (вейджер на коие сочиняет 100х). То есть, любому новоприбывшему игроку выскакивает манящая картинка, кот-ая сулит выплату всех зачисленных фирмой средств. Не стоит обращать внимания на казино приз за регистрацию без депо с слишком большой либо довольно махонькой суммой бонусов, поэтому что, и тщательно выучив все обстоятельства, здесь всего, несомненно какой-то подвох.Срок активации и время на отыгрыш. Зачисление денег или фриспинов случается при активации в течение строго ограниченного периода, похожие требования предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать приз несколько дней или том месяцов. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высочайшим вейджером. В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, необходимо обратиться в службу поддержки спустя лайв-чат на сайте казино. Размер приза. В качестве бездепов обыкновенно начисляют небольшие суммы, а когда идет о призах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то кое-какие казино имеют подарить игроку до 2000$. 1× slots зеркало <a href=http://ossethnos.ru/index.php?subaction=userinfo&user=peacefulsale93>http://ossethnos.ru/index.php?subaction=userinfo&user=peacefulsale93</a> Верификация необходима для добавочной безопасности и помогает техподдержке выявить бонусхантеров и мошенников. Кстати, рядах платформах выводы солидных сумм доступны лишь после доказательства личности.Возможность протестировать свежие забавы, не рискуя личными средствами и создать собственную стратегию забавы.
1× slots зеркало
Подобные призы без депозита предоставляются на больше прибыльных критериях. Зачастую они покрупнее, а обстоятельства отыгрыша менее жесткие.Вышеописанная причина и является главным интересным, из-за которого операторы отдают часть своей прибыли на различные рекламные расходы и маркетинговые кампании. А наиболее действенным тут будут играть непосредственно бездепозитные призы казино 2022 с выводом за регистрацию. Обычно для получения бонусов без депозита, казино выдвигает приклнные и абсолютно выполнимые обстоятельства, хотя есть ряд поступков которые воспрещены и шансы повлечь за собой досадные результаты: <a href=http://www.aadd2.net/vb/member.php?u=33936>http://www.aadd2.net/vb/member.php?u=33936</a> Практически все интернет казино с бездепозитным бонусом за регистрацию предусматривает программку преданности — систему одобрения постоянных клиентов, которая состоит из колличества значений. При достижении игроком очередного значения на его счёт поступает приз. Чем повыше степень — тем щедрее бонус. 1×slots зеркало 2. Создать свежий профиль. Для регистрации нужно заполнить маленькую анкету либо зайдите в индивидуальный кабинет посредством соц сеток;Этот образ приза несомненно добавлен на Ваш акк после удачной процедуры регистрации с использованием номера аппарата. Если избрать другой метод создания учетной записи, бездеп не будет добавлен на Ваш акк.
<b>Смотреть еще похожие новости:</b>
<a href=https://10nsk.ru/user/JosephSuple/>1×slots промокод при регистрации</a>
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=17387>1×slots мобильная версия войти казино</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Онлайн-казино с бездепозитными бонусами ставят клиентам условия для использования бездепами, поэтому перед ролью в акции другого, как подробно ознакомиться со всеми правилами и аспектами промоакции. Условия имеют касаться получения бонуса, его применения и следующего вывода валютных средств когда выигрыша.
#311 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация на сайте
Если площадка дарит бездеп за регистрацию, то процедура его получения ординарна. Нужно только завести аккаунт на сайте и активировать его, подтвердив адрес электрической почты, номер аппарата или другие данные, коие настятельно оператор. Перед этим нужно увериться, что пользователь располагается на официальном сайте казино, а не на жульнической площадке. <a href=http://filmkachat.ru/>1хслотс регистрация в 1×slots casino</a> <a href=https://www.neobienetre.fr/forum-bien-etre-medecines-douces-developpement-personnel/topic/real-estate-virtual-tours/>https://www.neobienetre.fr/forum-bien-etre-medecines-douces-developpement-personnel/topic/real-estate-virtual-tours/</a> Для получения приза нужно ознакомиться с программкой лояльности казино и сделать ставки на сумму, нужную для перехода на следующий степень. 1×slots регистрацию процедура займет всего лишь <a href=https://eco-kamchatka.ru/user/Ralphdurdy/>https://eco-kamchatka.ru/user/Ralphdurdy/</a>
1×slots зеркало быструю регистрацию а также мгновенное
Бонус без депо за регистрацию в казино (бездепозитный бонус) – это денежный презент от клуба, который начисляется на аккаунт игрока после регистрации в казино. Кроме сотворения учетной записи, для получения бездепа, очень нередко требуется ещё и подтвердить контактные данные игрока и/или активировать особый промо-код.Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала быстрые выводы. Фишка выплат том,, что достаточно избрать платёжный инструмент и показать необходимую. В большинстве случаев средства зачисляются на электронные кошельки на 15 минут, а на банковские карты – 1–3 трудящихся денька. <a href=http://policeacademy.teamforum.ru/memberlist.php?mode=viewprofile&u=410>1×slots официальный сайт, скачать</a> 1х слотс зеркало регистрация в 1×slots casino Помимо прочего, для вывода средств по бездепу нужно привнести на счёт собственный 1-ый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально вероятную необходимую, последствии чего вывод средств будет доступен. <a href=http://cjdog.com/home.php?mod=space&uid=129750>http://cjdog.com/home.php?mod=space&uid=129750</a> 1×slots зеркало видели такую регистрацию на
1×slots регистрация 1×slots casino 777 online
А ознакомиться с новыми интернет казино, Вы можете с призов с выводом выгоды, коие Вы сможете получить без депо.Иногда операторы требуют внесение малого депозита перед выводом для верификации платежного инструмента. В некоторых казино этот депо того предстоит отыграть. Используйте лучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из перечня ниже, чтобы заработать презенты за обычные действия теперь сегодня получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и резвыми выводами на электрические кошельки.Для получения бездепа нужно пригласить в забаву по реферальной ссылке нового посетителя: он обязан зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на сумму, указанную в условиях акции. <a href=http://arikadastr.ru/bitrix/redirect.php?goto=http://megaprom96.ru/bitrix/redirect.php?goto=http://metal-stanki.ru/bitrix/redirect.php?goto=https://teletype.in/@urist_free/yX_u0sQJtDG>http://arikadastr.ru/bitrix/redirect.php?goto=http://megaprom96.ru/bitrix/redirect.php?goto=http://metal-stanki.ru/bitrix/redirect.php?goto=https://teletype.in/@urist_free/yX_u0sQJtDG</a> 1×slot казино зеркало Бездепозитные бонусы за регистрацию являются одним из самых известных способов вербования новых игроков в онлайн-казино, потому что они предоставляют игрокам возможность опробовать казино, необыкновенно игровые автоматы, и возможно, выиграть настоящие средства.
1×slots регистрация на официальном сайте
Используйте наихорошие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, чтобы заработать презенты за простые деянья теперь сейчас получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высокой отдачей и быстрыми выводами на электронные кошельки.Пoдтвepдить личнocть посетителя. Для удачного вывода средств, необходимо подтвердить личность клиента. Нa этaпe вepификaции пpoфиля, работники службы защищенности должны убедиться, собственно у игрока не раз акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не может исключить свой выигрыш, в у него несомненно количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы. 1×slots регистрация на 1хслотс <a href=http://kafdp.or.kr/bbs/board.php?bo_table=free&wr_id=605559>http://kafdp.or.kr/bbs/board.php?bo_table=free&wr_id=605559</a> Выбор любого онлайн казино на нашем сайте. В описании к каждому Вы можете разузнать, собственно получите за создание аккаунта.
1×slot казино зеркало
Также учтите, собственно кое-какие игровые платформы сужают список государств, которые способны получить предложенный бездепозитный бонус за регистрацию. К образцу, есть онлайн-заведения, выдающие похожие призы только жителям определенных государств. К образцу, онлайн казино 777 Оригинал дает бездепозитный бонус только игрокам из России и стран СНГ. Или напротив, снабжают вознаграждением всех, не жителей неких государств (исходя из сего, стопам внимательно учить перечень, чтобы потом не появилось практически вопросов и претензий).Некоторые клубы автоматически начисляют бонус на акк игрока последствии исполненья условий получения, но случаются истории, когда приз надо(надобно) активировать игроку самому. Есть некоторое способов активации бонуса: Верификация аккаунта. Лучше подтвердить личность незамедлительно в регистрации, дабы позже не было заморочек с выводом денег. Верификация может протекать двумя маршрутами:Бонус в казино без депо имеет разные вариации: может быть приветственный бонус, акции в честь каких-либо праздничных либо важных дат, бонус за привлечение свежих игроков, преданность и получение VIP-статуса. <a href=https://www.neobienetre.fr/forum-bien-etre-medecines-douces-developpement-personnel/topic/%d0%b3%d0%bb%d0%b0%d0%b2%d0%bd%d0%b0%d1%8f-%d0%b4%d0%be%d1%80%d0%be%d0%b3%d0%b0-%d0%b0%d0%b2%d1%82%d0%be%d1%88%d0%ba%d0%be%d0%bb%d0%b0-%d0%b2%d0%bb%d0%b0%d0%b4%d0%b8%d0%b2%d0%be%d1%81%d1%82%d0%be/#postid-163855>https://www.neobienetre.fr/forum-bien-etre-medecines-douces-developpement-personnel/topic/%d0%b3%d0%bb%d0%b0%d0%b2%d0%bd%d0%b0%d1%8f-%d0%b4%d0%be%d1%80%d0%be%d0%b3%d0%b0-%d0%b0%d0%b2%d1%82%d0%be%d1%88%d0%ba%d0%be%d0%bb%d0%b0-%d0%b2%d0%bb%d0%b0%d0%b4%d0%b8%d0%b2%d0%be%d1%81%d1%82%d0%be/#postid-163855</a> 1×slots casino регистрация 1×slots review live При поддержки такового одобрения оператор может также привлекать клиентов, коие раньше проявляли активность на веб-сайте, но по некий причине перестали выступать. В данном случае промокод высылается пользователю по электрической почте или вид SMS.Операторы гемблинга утверждают, собственно так они дерутся с бонус-хантерами. Впрочем, критики считают, что данным казино пробуют сделать из случайного гостя постоянного игрока.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=70865>1×slots зеркало этих способов предполагает регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Будьте внимательнее при ознакомлении с правилами во избежание происхожденья конфликтных обстановок с казино, когда после отыгрыша бездепа для не дадут исключить крупную сумму выигрыша. Фриспины — благотворительные вращения, коие дозволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся наиболее модным и предпочтительным видом приза — благотворительные вращения порой эффективнее и веселее в отыгрыше, чем другие виды бездепов.
#312 Ремонт iphone в Москвеhttps://remont-iphone-sot.ru/
Наши специалисты предлагает надежный <a href=https://remont-iphone-sot.ru/>вызвать мастера по ремонту iphone рядом</a> всех типов и брендов. Мы осознаем, насколько важны для вас ваши устройства iPhone, и стремимся предоставить услуги первоклассного уровня. Наши квалифицированные специалисты оперативно и тщательно выполняют работу, используя только сертифицированные компоненты, что гарантирует надежность и долговечность выполненных работ. Наиболее распространенные поломки, с которыми сталкиваются владельцы iPhone, включают проблемы с экраном, неисправности аккумулятора, ошибки ПО, проблемы с портами и механические повреждения. Для устранения этих неисправностей наши профессиональные техники оказывают ремонт экранов, батарей, ПО, разъемов и механических компонентов. Доверив ремонт нам, вы получаете долговечный и надежный мастер по ремонту айфона на дому. Подробная информация представлена на нашем сайте: https://remont-iphone-sot.ru
#313 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
рокс казино официальные зеркала казино <a href=https://glvk.guru/>пин up casino</a> Самойлова Алла Владимировна порно casino бонус <a href=https://www.ossetia.tv/>лучшие казино бесплатно</a> up casino официальный порно с Диана Шнайдер (теннис) где казино pin casino зеркало 1×bet на андроид бесплатно Матвиенко Валентина Ивановна порно porno Елизавета Туктамышева
DiskiPlus ап казино DiskiPlus porno Юлия Канакина, скелетонистка <a href=https://www.diskiplus.ru>DiskiPlus 1×bet слоты 1×bet top</a> DiskiPlus промокод 1×bet DiskiPlus сколько казино <a href=https://www.diskiplus.ru/>DiskiPlus 7k casino скачать</a> DiskiPlus casino онлайн DiskiPlus порно с Гатагова Ольга Анатольевна DiskiPlus 1×bet официальный сайт 1×bet xyz DiskiPlus сайт букмекерской конторы DiskiPlus Кузнецова Анна Юрьевна порно DiskiPlus Москалькова Татьяна Николаевна порно DiskiPlus букмекерские конторы бет
#314 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Антропова Валентина Викторовна Преподобная Надежда Александровна порно <a href=https://kompromat1.online/>казино гта 5</a> Скворцова Вероника Игоревна порно 1×bet <a href=https://glvk.guru/>казино 5</a> суть казино зеркала казино porno Юлия Канакина, скелетонистка 7k casino официальный про казино суть казино пин ап букмекерская контора
DiskiPlus пин ап casino DiskiPlus лучшая казино <a href=https://diskiplus.ru>DiskiPlus porno Игорь Акинфеев (футбол)</a> DiskiPlus casino 7k рабочее DiskiPlus Разуваева Ксения Денисовна порно <a href=https://www.diskiplus.ru>DiskiPlus 1×bet зеркало на сегодня</a> DiskiPlus online casino 7k DiskiPlus casino регистрации DiskiPlus человек казино DiskiPlus самое казино DiskiPlus top casino DiskiPlus порно с Матвей Сафонов (футбол) DiskiPlus 1×bet зеркало xbet
#315 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Шевцова Татьяна Викторовна порно casino приложения <a href=https://rhymes-punches.com/>ев казино</a> casino 1×bet casino <a href=https://res-publika.com>лучшие онлайн казино</a> порно с Никита Кучеров (хоккей) 1×bet официальный porno Юлия Пересильд букмекерская контора 1×bet рабочее 7k casino официальный porno Илья Ковальчук (хоккей)
DiskiPlus сайт винлайн букмекерская контора DiskiPlus порно с Варвара Субботина <a href=https://diskiplus.ru>DiskiPlus казино без</a> DiskiPlus 7k casino зеркало DiskiPlus казино без <a href=https://www.diskiplus.ru/>DiskiPlus 7k casino зеркало на сегодня</a> DiskiPlus gama casino DiskiPlus 1×bet сейчас DiskiPlus порно с Баталина Ольга Юрьевна DiskiPlus casinos xyz DiskiPlus 1×bet бесплатно DiskiPlus 1go casino DiskiPlus порно с Евгения Медведева
#316 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало видели такую регистрацию на
Все обожают получать подарки. Согласитесь, почти любой играющий человек будет очень счастлив, случае получит бесплатный презент для забавы в интернет казино просто за регистрацию либо же бонус за внесенный депозит, например называемые приветственные бонусы для свежих игроков. Соответственно эти онлайн клубы будут более модны и преимущественны у игроков при выборе казино для игры. Топ казино день обновляется и добавляются свежие и интересные игровые клубы с симпатичной бонусной политикой и всеми вероятными привилегиями, к коим относятся эти бонусы как фриспины за регистрацию, валютные бездепозитные призы, еще щедрые бонусы за внесенный депозит.В некоторых интернет казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на сайте клуба и подтвердить свои контактные данные. Дополнительно требуется активация промокода. <a href=http://filmkachat.ru/>1хслотс рабочее зеркало на сегодня</a> <a href=https://www.xaphyr.com/blogs/1187956/Complete-Guide-to-Returning-Car-Batteries-at-Walmart>https://www.xaphyr.com/blogs/1187956/Complete-Guide-to-Returning-Car-Batteries-at-Walmart</a> Приглашаем делиться сужденьями о бонусах. Это поможет иным юзерам подбирать более прибыльные предложения. 1×slots казино мобильная версия <a href=http://www.hngaosha.com/space-uid-47107.html&do=profile>http://www.hngaosha.com/space-uid-47107.html&do=profile</a>
1×slots зеркало сайта
Казино выделяет возможность заработать и исключить реальные деньги на бездепозитных призах. Обычно, это незначительная сумма, которую казино имеет для разрешить презентовать игроку.Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы мгновенно получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, замечена реальный шанс победу! 1×slos регистрация в 1×slots casino <a href=http://karabash.chelbusiness.ru/index.php?name=account&op=info&uname=shallowharbinge>http://karabash.chelbusiness.ru/index.php?name=account&op=info&uname=shallowharbinge</a> казино 1× slots официальный сайт
1×slots бездепозитный бонус за регистрацию
Используйте наилучшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из перечня ниже, дабы заработать подарки за простые действия и уже сейчас получить первый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высокой отдачей и прыткими выводами на электрические кошельки.Сразу после активации промокода возможно воспользоваться презентом. Как уже упоминалось, бонусы посещают трёх видов – фриспины, кредиты и фриплей-бонусы. Бонус за регистрацию в казино без депо с выводом денег надо(надобно) отыграть. Зачастую для отыгрыша имеет понадобиться сделать ставки на сумму, в количество 10-ов один превосходящую необходимую приза или выигрыша. <a href=http://maglik.ru/index.php?subaction=userinfo&user=usedcamper14>http://maglik.ru/index.php?subaction=userinfo&user=usedcamper14</a> Как лишь вы отыграли вейджер и свои с бонусного баланса перешли вас на настоящий счет, Вы неустрашимо сможете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (устроить минимальный депо к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депозитом).Можно. Вы постоянно сможете отрешиться от получения бездепозитного приза за регистрацию в казино, пока Вы не сделаете ставку. 1×slots казино зеркало
1х слотс зеркало регистрация в 1×slots casino
Пoдтвepдить личнocть клиента. Для успешного вывода средств, необходимо подтвердить личность посетителя. Нa этaпe вepификaции пpoфиля, работники службы защищенности обязаны увериться, что у игрока всего лишь раз аккаунт. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не сможет исключить собственный выигрыш, случае у него будет некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы.Чаще всего используются коды. Их надо(надобно) заносить в специальные окошки регистрационной анкеты, случае речь о пригласительных призах, либо в определенном разделе личного офиса игрока. <a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=183252>рабочее зеркало 1хслотс</a> Ниже указан важный список легальных казино в Беларуси с призами на первый депо. Вы можете попасть на официальный сайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз.Размер ставки для забавы по бездепозитному призу (естесственно же, когда, когда он представлен в виде бонусных валютных средств) часто ниже, чем при ирге на депозит. Ограничение несомненно работать до этапа отыгрыша приза. Суммы сходственных услуг, как правило, колеблются от трех до двадцати $, а вейджер на эти средства должен составлять от 30 до шестидесяти один. Зачастую, величайшая сумма выигрыша здесь составит от одной до двух сотен долларов. Если компьютерные выиграет больше, то все средства могут быть списанными до максимально разрешенного выигрыша. Здесь появляется смысл выводить еще несуществующие деньги на собственную платежную систему и далее отыскивать заведение с подходящими под данную сумму релоадом или призом за первое пополнение счета. Есть количество подвидов бездепозитного гонорары, предлагаемого наибольшим количеством заведений.Помните, что в неких забавах сумма ставки идет в зачет вейджера лишь отчасти. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки считаются как отыгранные деньги, момент как в слотах идет в зачет все one hundred percent суммы. 1× slots casino официальный сайт <a href=https://mantiseye.com/community/daviddaymn>https://mantiseye.com/community/daviddaymn</a> Изучить управляла и условия получения бездепозитных призов казино, Вы сможете у нас на сайте в разделе с призами либо на официальном сайте избранного Вами казино. Если не можете найти нужную информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электрической почте.
1хслотс зеркало на сегодня
Эффективность бездепов в маркетингового инструмента оценили все операторы. Малоизвестные площадки используют такие промоакции, дабы быстро набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны неизменных гостей. Не все сайты, дающие презенты без депозита, рекомендованы к игре. За симпатичным промоописанием шансы прятаться невыполнимые условия отыгрыша прочие подводные камешки.Прямо момент заберите благотворительные вращения за регистрацию без депо и начинайте собирать призовые композиции ради солидных выигрышей! <a href=http://www.xiaoditech.com/bbs/home.php?mod=space&uid=1858731>http://www.xiaoditech.com/bbs/home.php?mod=space&uid=1858731</a> На бонусные начисления все быть установлены вспомогательные ограничения, коие Вы не учли при отыгрыше. Пока бонус полностью не отыгран — средства из казино не выводятся.Шаг 4. Активация. Внимательно исследуйте условия, информацию по лимитированиям и сроке действия бонусного предложения. Разобравшись с правилами, можно активировать приз в личном офисе (от ? с использованием промокода) или по запросу в саппорт. 1×slots регистрацию процедура займет всего лишь
<b>Смотреть еще похожие новости:</b>
<a href=http://forums.indexrise.com/thread-309-post-510468.html#pid510468>1х слот регистрация в 1×slots casino</a>
<a href=https://alglaah.com/index.php?threads/%D8%B9%D8%B2%D9%84-%D9%81%D9%88%D9%85-%D9%81%D9%8A-%D9%85%D8%B3%D9%82%D8%B7.154068/#post-215836>1хслотс зеркало на сегодня</a>
<a href=https://nauc.info/forums/viewtopic.php?t=20942148>1×slot зеркало рабочее регистрации на телефон придет</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Помимо остального, для вывода средств по бездепу необходимо внести на счёт собственный 1-ый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально вероятную сумму, последствии чего вывод средств будет доступен. В бонусную программу многих операторов входят систематические бездепы. Это бессрочные акции, поощряющие интенсивных неизменных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают неизменные бонусы без депо в размен на скопленные баллы лояльности.
#317 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino зеркало сегодня 1×bet телефон <a href=https://rucriminal.info/>казино рояль смотреть</a> букмекерские контора ап 7k casino зеркало <a href=https://rumafia.news/>Москалькова Татьяна Николаевна порно</a> casinos xyz porno Марина Александрова сайт 1×bet слоты часы казино 1×bet на андроид бесплатно pin up casino порно с Максим Глушенков (футбол)
DiskiPlus porno Андрей Рублев (теннис) DiskiPlus 1×bet xbet <a href=https://www.diskiplus.ru/>DiskiPlus пин casino</a> DiskiPlus бесплатно фильм казино DiskiPlus 1×bet скачать приложение на андроид <a href=https://www.diskiplus.ru/>DiskiPlus букмекерская контора фонбет официальный сайт</a> DiskiPlus casino pin официальный DiskiPlus new casino DiskiPlus Юдаева Ксения Валентиновна порно DiskiPlus 1×bet официальный xbet DiskiPlus казино рублях DiskiPlus pin up casino официальный DiskiPlus мелбет букмекерская контора
#318 internetpermGephttps://perm-domashnij-internet003.ru
домашний интернет тарифы пермь <a href=https://perm-domashnij-internet003.ru>perm-domashnij-internet003.ru</a> подключить интернет в перми в квартире
#319 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
r7 casino pin casino зеркало <a href=https://rhymes-punches.com/>pin casino</a> порно с Александр Большунов (лыжные гонки) порно с Юлия Ефимова, пловчиха <a href=https://kompromat1.online/>казино вулкан</a> лучшие онлайн казино 1×bet 1хбет игры казино casino бездепозитный казино онлайн porno Андрей Рублев (теннис) скачать casino на андроид
DiskiPlus как выиграть в казино DiskiPlus casino рабочее <a href=https://www.diskiplus.ru>DiskiPlus где казино</a> DiskiPlus играющие казино онлайн DiskiPlus порно с Баталина Ольга Юрьевна <a href=https://diskiplus.ru>DiskiPlus букмекерская контора без</a> DiskiPlus балтбет букмекерская контора DiskiPlus букмекерская контора официальный сайт DiskiPlus vodka casino DiskiPlus букмекерская контора официальный сайт скачать DiskiPlus казино фильм DiskiPlus casino зеркало сегодня DiskiPlus порно с Зырянова Анастасия Владимировна
#320 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet скачать бесплатно 1×bet сайт <a href=https://th-royalgclub.com/>порно с Афонина Марина Игоревна</a> 1×bet скачать приложение на андроид casino ru <a href=https://rhymes-punches.com/>букмекерская контора официальный сайт скачать</a> 1×bet бесплатно casino автомат пари букмекерская контора porno Игорь Акинфеев (футбол) казино на деньги 1go casino 1×bet зеркало рабочее xbet
DiskiPlus винлайн букмекерская контора официальный DiskiPlus букмекерская контора бесплатно скачать <a href=https://www.diskiplus.ru>DiskiPlus зеркала казино</a> DiskiPlus online casino DiskiPlus 1×bet xbet xyz <a href=https://diskiplus.ru>DiskiPlus казино большая</a> DiskiPlus cometa casino DiskiPlus porno Алена Михайлова DiskiPlus рабочие зеркала казино DiskiPlus Окладникова Ирина Андреевна порно DiskiPlus порно с Варвара Субботина DiskiPlus 1×bet зеркало xbet DiskiPlus 1×bet официальный сайт
#321 Robertsoozyhttps://medium.com/@agurkin2021/especialista-en-equilibradora-de-rotores-33fa70d92ea6
Nuestros tecnicos especializados estan listos para asistirte en el momento que lo necesites, ya que contamos con dispositivos portatiles que nos permiten realizar reparaciones y equilibrados in situ.
No importa si tu equipo agroindustrial o herramienta especifica se encuentre en una zona remota: nuestro sistema portatil, de tamano minimo (similar a un maletin), permite a nuestros expertos desplazarse hasta el lugar para ajustar rotores u elementos adicionales. Ademas, ofrecemos disponibles para compra dispositivos de equilibrado ideales para duenos de equipos agricolas, empresas del sector o centros de servicio tecnico.
En muchos casos, operamos bajo este esquema: un tecnico acude con el equipo, muestra como se usa, indica los parametros requeridos y, despues, la empresa compra el equipo.
En nuestro sitio web encontraras costos, informacion completa y informacion de contacto. Contamos con expertos en Espana, Portugal y Argentina, asi como socios comerciales certificados.
#322 Alvinleamnhttps://saymart.nl
<a href=„https://saymart.nl“>msi raider ge68 hx review</a>
#323 internetomskGephttps://omsk-domashnij-internet003.ru
подключение интернета омск <a href=https://omsk-domashnij-internet003.ru>omsk-domashnij-internet003.ru</a> провайдеры интернета в омске
#324 internetomskGephttps://omsk-domashnij-internet002.ru
провайдеры интернета в омске <a href=https://omsk-domashnij-internet002.ru>omsk-domashnij-internet002.ru</a> подключить интернет в квартиру омск
#325 Charlesgunnyhttp://filmkachat.ru
1×slots бездепозитный бонус за регистрацию
Также случаются случаи, когда казино начислит обсужденный бонус в регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам.Если площадка презентует бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь ввести акк на веб-сайте и активировать его, подтвердив адресок электронной почты, номер телефонного или другие данные, которые просит оператор. Перед данным необходимо убедиться, собственно юзер находится на официальном веб-сайте казино, но на жульнической площадке. <a href=http://filmkachat.ru/>казино 1×slots</a> Новые клиенты онлайн-казино без первого депозита шансы выяснить собственную удачливость. К что, этому же есть возможность конвертировать бездепы в реальные деньги за регистрацию в казино, впрочем результата приз необходимо отыграть сообразно условиям промоакции.В зависимости от онлайн заведения каждый из их имеет вам предложить как бездепозитные средства, например и бездепозитные фриспины, которые последствии успешной регистрации рухнут вас на ваш игровой баланс. <a href=https://allmylinks.com/kalinka0588>https://allmylinks.com/kalinka0588</a> Прибывшие на аккаунт финансы бездепозитные призы предназначаются, в, только для свежеиспеченных пользователей, которые раньше не имели собственного аккаунта в данном казино. Исходя из этого, в ранее у игрока был сделан депозит, то, по всей вероятности, у него больше не будет возможности рассчитывать на получение такового бонуса в конкретном заведении. 1хслотс казино зеркало <a href=http://board-en.darkorbit.com/proxy.php?link=http://dversofia.ru/bitrix/redirect.php?goto=http://stavkraygaz.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/X4Qeh8Sr0gU>http://board-en.darkorbit.com/proxy.php?link=http://dversofia.ru/bitrix/redirect.php?goto=http://stavkraygaz.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/X4Qeh8Sr0gU</a> У каждого игорного заведения свои верховодила и обстоятельства. Но, чтобы получить бонусы, нужно выполнить стереотипные деяния:
1×slots зеркало видели такую регистрацию на
Бездепы с бесплатными вращениями предоставляют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд уплачивает казино. Число спинов ограничено и изредка выше сотку. Если промоакция включает в себя количество безвозмездных игр, их начисление имеет быть разбито на количество дней. <a href=http://www.xcosmic.net/rsf/showthread.php?tid=55238>скачать 1×slots официальный сайт</a> 1×slots регистрацию процедура займет всего лишь Самый распространённый из сходственных призов, конечно же, бездеп на денек рождения клиента — бонус повторяющий фиксированной суммы либо фриспинов поступает на счёт игрока, а воспользоваться им можно на установленного периода времени.Бездепозитные бонусы в казино без пополнения 2022 — это определенная сумма средств или free spins вращения, которые предоставляются первым постояльцам за регистрацию на веб-сайте казино вид бездепозитного приза, и выделяет для возможность за счет казино без пополнения опробовать предложения (игр), с последующей прерогативой вывода средств при исполнении всех установленных верховодил. <a href=http://damoa2019.maru.net/bbs/board.php?bo_table=free&wr_id=267626>http://damoa2019.maru.net/bbs/board.php?bo_table=free&wr_id=267626</a> Отзывы читателей о бонусных промоакциях посодействуют составить впечатление, но не запамятовывайте о субъективности собственных объяснений.В каждом казино с бездепозитным бонусом предусмотрены вейджеровые условия. Это один-единственный «подводный камень», который стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) сделать определённое число ставок. Чем круче бонус, тем сложнее выполнить условия, и наоборот. 1× slots официальный Можно. Вы практически можете отрешиться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не сделаете ставку.Предложения с бездепозитными призами за регистрацию разрешают новым заведениям заинтересовать аудиторию на собственный вебсайт. А игроки в свою очередь получают вероятность выступать на реальные средства без депо в казино и заработать маленькой стартовый капитал, который разрешается исключить на карту банка или электронный кошелек.
1×slos регистрация в 1×slots casino
Иногда для получения призов необходимо спутаться с адептами саппорта. Удобнее всего с ними разговаривать в онлайн-сате, хотя иногда достаточно запроса по электронной почте.Поспешите забрать бездепозитные призы за регистрацию в казино из представленного списка. Все платформы не только водят законную деятельность, но и обрадуют честными результатами игры, высочайшей отдачей, резвыми выплатами. Таким образом онлайн казино получает вероятного игрока. Возможно дальнейшем или настоящем он захочет сыграть на средства средства. Так работают бездепозитные призы в интернет казино. Здесь отлично подходит выражение, благотворительные сыр бывает только в мышеловке. Начинающие игроки могут не осознавать опасность азарта. Однако течением понимания становится больше. Это тема для отдельного обсуждения.Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, чтобы снова получить бесплатный бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ожидает неизбежное наказание. <a href=https://bdsmboard.org/member.php?442091-DoctorLazuta>https://bdsmboard.org/member.php?442091-DoctorLazuta</a> Промообъявления от казино мешают реальной картины и ориентированы на привлечение внимания юзеров. Понять, насколько высоки шансы остаться в плюсе, позволит собственный анализ критерий предложения:Бездепозитный бонус по промо-коду будет доступен для забавы, лишь что случае когда Вы активируете специальный бонусный код в разделе с призами либо укажите промокод при регистрации на веб-сайте. В неких случаях, считая активации кода, придется доказать контактные данные игрока и наполнить анкету клиента. 1 х слотс зеркало Самый распространённый из сходственных бонусов, окончательно же, бездеп на денек рождения клиента — бонус повторяющий фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им возможно на установленного периода времени.
1×slots сайт
Прибывшие на акк деньги бездепозитные призы предназначаются, главном, лишь для новоиспеченных пользователей, которые раньше не имели собственного аккаунта в данном казино. Исходя из сего, если ранее у игрока был изготовлен депозит, то, по всей вероятности, у него больше не будет возможности рассчитывать на получение такового бонуса в определенном заведении.Как лишь получите бездеп в казино, всё равно не забывайте инспектировать электронную почту. Некоторые игорные клубы каждый веселят активных гэмблеров приятными бонусами. Чаще всего получить презент можно в преддверии праздника, на день рождение, за привлечение приятеля. А также распространённым призом является прибавка к депозиту. Нужно более пополнить счёт, и азартное заведение увеличит его на 50–100%. Помните, что в неких забавах сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки считаются как отыгранные деньги, момент как в слотах идет в зачет все 100% суммы. 1×slots бездепозитный бонус за регистрацию <a href=http://www.audipiter.ru/user/KennethNep/>http://www.audipiter.ru/user/KennethNep/</a> Вы не в коем случае ни чем не рискуете, а лишь выигрываете и выводите на платежную систему, или проигрываете предложенный бонус, по мимо практической забавы на бездепозитные призы, у Вас есть шанс выучить игровые автоматы, выучится регулировать менять ставки и линии, исследовать бонусные игры и их выигрышные композиции, да в конце концов просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные свои, коие можно отыграть и вывести, не просто на демо счет, тем наиболее адреналин в крови еще повысится а пульс забьется с нередким ритмом!Воспользоваться бездепом можно не во всех игровых автоматах: казино вдруг уточняет ограничение для клиентов. Конечно, это можно счесть некоторым неудобством для игрока, но ради стоит отметить, что выбор автоматов всё точно остаётся достаточно большим.
1×slot рабочее зеркало
Максимальный размер ставки, кот-ый невозможно превосходить же приз не будет всецело отыгран. В случае нарушения сего правила, бонус и выигрыш с него станут аннулированы.Например, игрок получил 500 руб. При твореньи аккаунта и обязан отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 рублей, потребуется устроить 875 спинов для полного отыгрыша. <a href=http://yinyue7.com/home.php?mod=space&uid=1121379&do=profile&from=space>http://yinyue7.com/home.php?mod=space&uid=1121379&do=profile&from=space</a> Бонус за регистрацию в казино без депозита с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша может понадобиться устроить ставки на необходимую, в количество десятков один превышающую сумму приза или выигрыша. 1×slots рабочее зеркало Составленный экспертами Casino.ru список онлайн-казино с бездепозитным бонусом разрешает игрокам сравнить спецпредложения разных операторов.Акции распространяются как на все забавы казино, например и на узкий перечень. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino прочие. Промо возможность охватывать разработки одного производителя. Бездеп не пересекается с другими акциями казино. Если на сайте учтен кэшбек, он не начисляется за ставки, изготовленные бонусными средствами. Для идентификации платежных реквизитов игрока имеет понадобиться пополнение счета на наименьшую сумму.
<b>Смотреть еще похожие новости:</b>
<a href=http://pfdgaming.com/viewtopic.php?t=1996>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<a href=https://forum.motoshkola.od.ua/threads/x1-slots-registracija-v-1×slots-casino.11519/>x1 slots регистрация в 1×slots casino</a>
<a href=http://yaoisennari.ekafe.ru/viewtopic.php?f=169&t=4081>1×slots зеркало быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Казино выделяет вероятность заработать и вывести настоящие средства на бездепозитных бонусах. Обычно, это незначительная сумма, которую казино имеет себя разрешить подарить игроку. Подобные призы без депо предоставляются на больше прибыльных условиях. Зачастую они покрупнее, а условия отыгрыша менее строгие.
#326 Montazhp_Piter_Vuthttps://montazhp.ru/
Добрый день! Нужная и полезная новость для тех, кто хочет обновить и освежить свой интерьер, а так же для тех, кто профессионально и качественно занимается ремонтами. Так люди устроены, что всегда хочется, что то улучшить и изменить в интерьере и дизайне офисе, квартиры, коттедже, доме и т.д. Ни кто даже не будет не соглашаться и возражать с тем, что внешняя обстановка отлично влияет на микроклимат в семье и на работе. А все довольно просто и недорого, всего лишь нужно поменять плинтуса, кстати, есть ответственные и надежные исполнители с узкой специализацией. <a href=https://montazhp.ru/>установка плинтусов цена за работу спб</a> В общем, если вы ищите, установка плинтусов, плинтус напольный, монтаж плинтуса и т.д., например: <a href=https://montazhp.ru/vyvorotka/>установка плинтуса запил вывороток</a> Тогда вам нужно прямо сейчас перейти на сайт montazhp since 2004 и узнать все подробности по дюрополимерный плинтус, плинтус, плинтус напольный, плинтус для пола, плинтус мдф, теневой плинтус, алюминиевый плинтус, покраска плинтусов в СПб и ЛО и т.д. https://montazhp.ru/ . Обязательно переходите на сайт montazhp.ru Установка плинтусов сохраняйте в закладки и изучайте информацию, не забудьте записать адрес сайта и номер телефона +7 (904) 515–03–39 . Увидимся!
#327 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up casino 1×bet регистрация <a href=https://krtka.info/>casino daddy</a> порно с Афонина Марина Игоревна porno Анна Сидорова, керлингистка <a href=https://res-publika.com>Семёнова Татьяна Владимировна порно</a> казино вход официальный сайт порно с Анастасия Потапова, теннисистка porno Алена Косторная (фигурное катание) porno Илона Маркова, хоккеистка Крючкова Полина Викторовна порно casino betting online casino 7k
DiskiPlus порно с Евгения Медведева, фигуристка DiskiPlus 1×bet слоты <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet вход</a> DiskiPlus bet casino DiskiPlus casino <a href=https://diskiplus.ru/>DiskiPlus казино фильм смотреть онлайн</a> DiskiPlus вавада казино DiskiPlus порно с Зырянова Анастасия Владимировна DiskiPlus казино проиграл DiskiPlus 1×bet официальный 1×bet xyz DiskiPlus спорт букмекерская контора DiskiPlus казино рояль смотреть DiskiPlus официальные букмекерские конторы
#328 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее на сегодня
Бонусные средства – маленькая сумма средств для старта в новеньком казино. На бонусные средства, обыкновенно разрешается играть во все забавы, кроме слотов с современным джекпотом и игр из раздела live casino.Ещё одно распространённое акционное предложение – привлекательный презент с неблаговидными требованиями. К образцу, клуб обещает $100 в бездепа, хотя с вейджером х80 или х100. Отыграть такой вейджер практически нереально и потому какого-либо концентрироваться на более заманчивых промоакциях. <a href=http://filmkachat.ru/>1×slots бонус за регистрацию</a> Бонусы без депо при регистрации считаются наиболее красивыми как для опытных игроков, например для и новичков. Получив это вознаграждение, клиент возможность выступать на настоящие деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные призы в интернет-казино Рунета, а также обстоятельства их активации и выигрыша. <a href=https://www.debwan.com/blogs/704417/Does-Walmart-Take-Old-Car-Batteries>https://www.debwan.com/blogs/704417/Does-Walmart-Take-Old-Car-Batteries</a> 1×slots регистрацию процедура займет всего лишь <a href=http://intentionalpress.com/author/doctorlazutaei/>http://intentionalpress.com/author/doctorlazutaei/</a> Каждый из бездепозитных бонусов без пополнения 2022 содержит собственный конкретный вейджер для отыгрыша, например же в любом казино он уточняется персонально — где то он х55 а где-то х30, повторюсь везде по различному!Фриспины начисляются по конкретной ставке. После их активации игроку нужно запустить разъем и увериться, что в нем отображаются бесплатные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода после отыгрыша ориентируется оператором и изредка выше 5 000 руб.
1хслотс зеркало
Законодательство, регулирующее азартные игры в разных странах, влияет на возможности операторов. В результате пользователи из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это имеет быть как полный отказ в доступе, так и невозможность загружать забавы отдельных изготовителей.B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. 1×slots зеркало регистрация в 1×slots casino При маленький сумме приза рекомендуется выступать по низким ставкам, а использовать наибольшие другого лишь сомнений случае, в вейджер очень большой, а время на отыгрыш крепко ограничено.Доступность — бездепозитные бонусы в казино чаще всего предоставляются новым игрокам, хотя посещают случаи, когда бонус имеют получить и действующие клиенты. <a href=http://www.bisound.com/forum/showthread.php?p=629804>http://www.bisound.com/forum/showthread.php?p=629804</a> Многие азартные клубы ограничивают сумму вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании акции, суммы Вы не можете исключить. Разница несомненно аннулирована, Вы даже не сможете создавать на нее ставки.Срок отыгрыша — это период, который наступает в момент активации бонуса и завершается с его закрытием. Пользователю необходимо уложиться в этот временной зазор, другому призовые средства аннулируются. Казино устанавливают список игр, ставки каких засчитываются при расчете отыгранных денег. Если тайтл не входит в данный перечень, то предоставляется быть недоступен для загрузки во время деяния бонусного предложения. 1хслотс казино зеркало
1×slots официальный сайт, скачать
Зарегистрироваться в казино по особой ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефона и электронную почту). Для подтверждения номера телефона необходимо в собственном профиле указать собственный номер и надавить кнопку „Подтвердить номер телефона“, дальше Вы получите sms-сообщение с кодом, кот-ый необходимо ввести в подходящее поле. Для подтверждения электрической почты, перейти по интенсивной ссылке в письме от казино. <a href=http://www.ctphome.com/bbs/home.php?mod=space&uid=68408>http://www.ctphome.com/bbs/home.php?mod=space&uid=68408</a> 1х слотс зеркало регистрация в 1×slots casino
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Как верховодило, при выводе финансов, от играющего потребуется только устроить минимальный вклад для того, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом личный счет.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 долларов. Если выдаются фриспины, их количество изредка выше нескольких 10-ов безвозмездных вращений. Большинство клубов привлекают внимание игры за счёт различных презентов. На 1 сайтах возможно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает благотворительные вращения для запуска топовых интернет слотов. Несмотря на различные акции, стоит выделить самые главные. 1×slots сайт зеркало <a href=http://akva.by/forum/index.php?action=profile;u=18720>http://akva.by/forum/index.php?action=profile;u=18720</a> Бездепозитный бонус предоставляется новому игроку за конкретные действия. Часто подарок в виде средств или фриспинов выдается за регистрацию, благодаря чему пользователь получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.
1×slots промокод при регистрации
Итак, дабы благотворительные бонусные кредиты превратились в реальные деньги, которыми возможность управлять по собственному усмотрению, их надо(надобно) отыграть. Вейджер по уточнять в правилах онлайн-казино.В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с безвозмездных вращений. Прибыль, которую Вы заработаете на таком бездепе можно назначать на вывод без какого либо отыгрыша. <a href=https://www.pitomec.ru/blog/main/Hockey0812/53823>https://www.pitomec.ru/blog/main/Hockey0812/53823</a> Для казино, работающих онлайн, бездепозитные бонусы нужны для вербования свежих клиентов. Предложение поиграть на слотах без надобности внесения настоящих денег — работающий метод для увеличения интереса к компании. После отыгрыша бездепа велик шанс, что игроку понравится и он продолжит выступать в казино, лишь сейчас теснее на собственные деньги. 1х слотс зеркало регистрация в 1×slots casino Индивидуальные одобрения выдаются за совершение деяний: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавления либо официального клиента для ПК. В большинстве казино действуют программки лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на грядущий степень нередко сопрягается выдачей бездепа.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.dis-course.net/viewtopic.php?t=664107>1×slots сайт зеркало</a>
<a href=http://av3526.com/forum.php?mod=viewthread&tid=77&pid=27659&page=53&extra=page%3D1#pid27659>1×slots официальный сайт зеркало</a>
<a href=https://technique-tp.com/forum/viewtopic.php?t=5069>1×слотс казино</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Многие азартные клубы ограничивают сумму вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, обозначенной в описании акции, суммы Вы не можете вывести. Разница несомненно аннулирована, Вы том не сможете создавать на нее ставки. Подобные призы без депо предоставляются на больше выгодных условиях. Зачастую они крупнее, а обстоятельства отыгрыша наименее строгие.
#329 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Елизавета Туктамышева porno Мира Андреева (теннис) <a href=https://www.ossetia.tv/>pin up casino пин</a> пин ап букмекерская контора porno Александра Степанова, фигуристка <a href=https://res-publika.com>сайт винлайн букмекерская контора</a> pin casino пин ап букмекерская контора бк букмекерская контора inform@rucriminal.info casinos winning порно с Сергей Бобровский (хоккей) 1×bet сайт 1×bet xyz
DiskiPlus up casino скачать DiskiPlus порно с Дарья Касаткина (теннис) <a href=https://www.diskiplus.ru>DiskiPlus casino buzz</a> DiskiPlus макао казино DiskiPlus почему казино <a href=https://www.diskiplus.ru/>DiskiPlus букмекерская контора скачать приложение</a> DiskiPlus Шевцова Татьяна Викторовна порно DiskiPlus порно с Анна Калинская (теннис) DiskiPlus букмекерскую контору пин DiskiPlus порно с Васильева Татьяна Викторовна DiskiPlus 7k casino зеркало рабочее DiskiPlus скачать 1×bet на андроид DiskiPlus Любимова Ольга Борисовна порно
#330 internetGephttps://novosibirsk-domashnij-internet003.ru
провайдеры интернета в новосибирске по адресу проверить <a href=https://novosibirsk-domashnij-internet003.ru>novosibirsk-domashnij-internet003.ru</a> какие провайдеры по адресу
#331 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало
Каждый из бездепозитных бонусов без пополнения 2022 содержит собственный определенный вейджер для отыгрыша, например же в каждом казино он уточняется индивидуально — где то он х55 а где-то х30, повторюсь всюду по различному!Изучить правила и условия получения бездепозитных бонусов казино, Вы можете у нас на веб-сайте в разделе с бонусами либо на официальном сайте выбранного Вами казино. Если не найти необходимую информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал или по электронной почте. <a href=http://filmkachat.ru/>1×slots регистрацию более популярный вариант это</a> Для подтверждения электрической почты, просто перейдите по интенсивной ссылке в послании, приобретенном от игрового заведения. <a href=https://heylink.me/kalinka0588/>https://heylink.me/kalinka0588/</a> 1×slots регистрацию процедура займет всего лишь <a href=http://forum.puppylinux.pl/index.php?action=profile;u=8383>http://forum.puppylinux.pl/index.php?action=profile;u=8383</a>
1×slots зеркало сайта
<a href=http://craft4game.forumex.ru/viewtopic.php?f=2&t=4258>1×slots сайт</a> 1×slots регистрация 1×slots review live Для получения депозитного приза необходимо пополнить свой игровой баланс реальными средствами. Вознаграждение можно получить либо при внесении первого депо, или вид фиксированного процента от внесённых средств. Так или другому, приз поступит на счёт только после пополнения. <a href=http://www.kakaneo.com/bbs/bbs/board.php?bo_table=qna&wr_id=364955>http://www.kakaneo.com/bbs/bbs/board.php?bo_table=qna&wr_id=364955</a> 1×slots быструю регистрацию а также мгновенное Бездепозитный бонус по промо-коду будет доступен для игры, только что, нет случае когда Вы активируете специальный бонусный код в разделе с бонусами или укажите промокод при регистрации на веб-сайте. В некоторых случаях, кроме активации кода, понадобиться доказать контактные данные игрока и наполнить анкету посетителя.
1хлот регистрация в 1×slots casino
<a href=https://jasperzipw63185.articlesblogger.com/53363612/nude-ai-exploring-the-boundaries-of-technology-and-ethics>https://jasperzipw63185.articlesblogger.com/53363612/nude-ai-exploring-the-boundaries-of-technology-and-ethics</a> Для получения депозитного приза необходимо восполнить свой игровой баланс настоящими деньгами. Вознаграждение можно получить или при внесении первого депозита, либо в виде фиксированного процента от внесённых средств. Так либо иначе, приз поступит на счёт лишь последствии пополнения. 1хслот зеркало сайта Если площадка презентует бездеп за регистрацию, то процедура его получения проста. Нужно лишь ввести аккаунт на сайте и активировать его, подтвердив адресок электрической почты, номер телефона или иные данные, которые требует оператор. Перед данным необходимо убедиться, что юзер располагается на официальном сайте казино, а не на жульнической площадке.Бездепы обычно предлагают с отыгрышем — моментально исключить выигранные средства нельзя. Перевод средств со счета несомненно возможен последствии того, как юзер выполнит все притязания казино, а сумма возможности быть выше установленного правилами лимита. Условиями акции фиксируются сроки, в течение которых заказчик вправе пользоваться предложением. Обычно они не превышают нескольких дней в активации.
1×slots официальный зеркало рабочее
Самые знаменитые способы вывода средств банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам на Neteller и Skrill, еще пользуются криптовалютными кошельками. Вывод выигрышей имеет осуществляться быстро либо развлекать от нескольких часов до нескольких суток.Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? <a href=https://fmatras.ru/topic/91512-kazino-novogo-pokoleniya/page/2/#comment-109897>1хслотс казино зеркало</a> 1×slots casino зеркало рабочее <a href=https://dptotti.fic.edu.uy/mediawiki/index.php/1×bet_APP:_New_Version_Vs._Old_Version_%E2%80%93_Which_One_To_Choose>https://dptotti.fic.edu.uy/mediawiki/index.php/1×bet_APP:_New_Version_Vs._Old_Version_%E2%80%93_Which_One_To_Choose</a>
1×слотс казино
1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, случае не желаете замерзнуть жертвой мошенников либо впустую потратить время;Главное преимущество спинов – возможность выучить разные слоты. Также получится насладиться бонусными раундами, испытать удачу в риск-туре и преумножить выигрыш за счёт особых символов. Однако столько игровой процесс заслуживает внимание, ведь лучше сосредоточиться на реальном выигрыше. <a href=http://edaninc.co.kr/bbs/board.php?bo_table=free&wr_id=193154>http://edaninc.co.kr/bbs/board.php?bo_table=free&wr_id=193154</a> 1×slots официальный зеркало рабочее Наш список включает в себя лучшие бездепозитные бонусы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по принципиальным параметрам:
<b>Смотреть еще похожие новости:</b>
<a href=http://gradina.com/threads/1×slots-registracija-v-1×slots-casino.61130/>1хслотс регистрация в 1×slots casino</a>
<a href=http://junlinro520.gain.tw/viewthread.php?tid=1893697&extra=>1×slot официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Во время игры в казино, выигрыши, полученные благодаря бесплатным призовым фондам, суммируются и срабатывают в совместную необходимую для отыгрывания. Однако, случае фортуна улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно разрешит вывести финансовые свои. Сумма вывода будет зависеть от лимита, одобренного именно в данном учреждении. Поэтому, внимательно надо(надобно) разбирать правила выдачи безлимитных депо.
#332 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация в 1×slots casino
Основное правило получения бездепа ? творимый аккаунт обязан быть у пользователя первым и единственным. Наличие нескольких аккаунтов строго воспрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита необходимо блюсти несложную последовательность деяний. <a href=http://filmkachat.ru/>1×slots бонус за регистрацию</a> Такой бесплатный эквивалент средств зачисляется на профиль пользователя последствии воплощения притязаний и предназначаются они лишь для игрового процесса. Вывод таких вознаграждений вероятен только после воплощения вейджеровых критерий.Приглашаем делиться воззреньями о бонусах. Это поможет иным пользователям избирать наиболее прибыльные предложения. <a href=https://www.sideprojectors.com/project/55401/3d-architectural-rendering-services>https://www.sideprojectors.com/project/55401/3d-architectural-rendering-services</a> 1×slots официальный сайт зеркало рабочее <a href=http://kazrti.com/index.php?subaction=userinfo&user=abusivespectato>http://kazrti.com/index.php?subaction=userinfo&user=abusivespectato</a> Фриспины — бесплатные вращения, коие дозволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся самым популярным и предпочтительным обликом бонуса — благотворительные вращения порой эффективнее и веселее в отыгрыше, чем остальные облики бездепов.
casino 1×slot
1×slots акции Начнём с такого, собственно каждое рекламную за регистрацию подразумевает некие обстоятельства. Бездепозитные призы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность денежного оборота, необходимая для исполнения условий. Пример, возымели бесплатные вращения и выиграли с их 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 руб., неудачных либо выигрышных, неважно. После исполненья, бонусный баланс перейдёт на настоящий и станет доступным к выводу.На безвозмездные бонусы онлайн-казино почти постоянно распространяется лимитирования по стране проживания клиентов. Даже если вам разрешено раскрывать счет и выступать на средства в заведении, это еще не значат, собственно вас доступны no down payment bonuses. <a href=http://followmedoitbbs.com/home.php?mod=space&username=aboundingprison>http://followmedoitbbs.com/home.php?mod=space&username=aboundingprison</a> Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала резвые выводы. Фишка выплат в том, собственно достаточно выбрать платёжный инструмент и показать сумму. В большинстве случаев деньги зачисляются на электронные кошельки протяжении 15 мин., а на банковские карты – 1–3 трудящихся денька.Рассмотрим принцип его деянья на примере. Допустим, вы зарегались и возымели $10 not the slightest deposit bonus с вейджером х50. Это означает, собственно выигранные средства можно будет выводить не ранее, чем в того, как общая сумма ставок достигнет $500. 1×slots мобильная версия войти казино
1×slot регистрация
Простая процедура получения бездепозитного бонуса, которая займет не более 2-х минут. Для получения бездепов, достаточно зарегистрироваться и доказать контактные данные. <a href=http://xn–h49ar4kn3dpfl0z22n74bghp5kwv1bptct6dzzb.com/bbs/board.php?bo_table=free&wr_id=92338>http://xn–h49ar4kn3dpfl0z22n74bghp5kwv1bptct6dzzb.com/bbs/board.php?bo_table=free&wr_id=92338</a> Риск-игра по равным шансам – Также казино может воспрещать выполнять условия по отыгрышу с помощью раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких других забавах.Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, дабы еще раз получить безвозмездный бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ожидает неизбежное наказание. 1× slots зеркало
1 xslots рабочее зеркало
Вейджер в переводе с британского означает «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша полученного приза, в нашем случае бездепозитного. Число ставок большого — главно только набрать сумму, пропорциональную сумме одобрения. <a href=https://bestshop.link/threads/1×slots-%D0%BF%D1%80%D0%BE%D0%BC%D0%BE%D0%BA%D0%BE%D0%B4-%D0%BF%D1%80%D0%B8-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D0%B8–2025.77/>1×slots промокод при регистрации 2025</a> В большинстве заведений устроить это можно по адресу электронной почты, по номеру телефонного, через социальную сеть либо гугл-аккаунт. 1 xslots рабочее зеркало <a href=https://www.are.na/buy-dextroamphetamine/dqjo7tdzowg>https://www.are.na/buy-dextroamphetamine/dqjo7tdzowg</a>
1×slot официальный сайт
Не советуем опрометью голову браться за всевозможные предложения получения средств без инвестициям. Вполне возможно, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем смотрится на первый взгляд. Альтернативой считается казино бонус за депозит. Мы предлагаем для пару советов, благодаря коим у каждого игрока несомненно вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом денег: В некоторых онлайн казино для получения бездепозитных призов не достаточно просто зарегистрироваться на веб-сайте клуба и подтвердить свои контактные данные. Дополнительно требуется активация промокода.Воспользоваться бездепом можно не во всех игровых автоматах: казино вдруг уточняет лимитирование для клиентов. Конечно, это можно счесть неким неудобством для игрока, хотя справедливости необходимо, что выбор автоматов всё точно остаётся довольно великим. <a href=https://ruisoon.com/space-uid-42527.html>https://ruisoon.com/space-uid-42527.html</a> Лишь пользующиеся и известные азартные заведения могут разрешить себя выдавать бездепы в виде добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депо, коие возможно потратить в топовых аппаратах с высокой отдачей. 1×slots официальный сайт зеркало После получения бонуса вывод средств для посетителя несомненно недосегаем времени, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или чета месяцов. Выводить деньги игрок сможет только после отыгрыша.Игрокам стоит принимать приветственный приз как гарантированный метод получить крупный выигрыш, хотя это отличная возможность без расходов расценить перечень казино.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.mshowto.org/forum/members/jamespauri.html>1×slots зеркало быструю регистрацию а также мгновенное</a>
<a href=http://av3526.com/forum.php?mod=viewthread&tid=98&pid=27363&page=4&extra=#pid27363>скачать 1×slots на андроид мобильная версия</a>
<a href=https://portugal-campings.com/pt/profile/jamescip/>1×slot казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чтобы бездеп не был начислен на Ваш акк, Вам не нужно активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт механически, а Вы не расчитываете его использовать, обратитесь в саппорта с пожеланием отменить бездепозитный бонус. Благодаря программе лояльности от игорного заведения, можно арестовать хороший старт и без добавочных инвестициям запустить видеослоты. Кроме как, можно рассчитывать на реальную фортуну и получить, без вложения собственных денег, великой выигрыш.
#333 Charlesgunnyhttp://filmkachat.ru
1хслотс мобильная версия зеркало
Даже не выиграв крупную сумму, игрок увлекательно проведет время, изнутри изучит работу площадки, воспримет геймплей автоматов. Все это без каких-то финансовых рисков. Быть в курсе наихороших промоакций легко. Достаточно периодически изучать перечень свежих интернет казино с выводом бонуса без депо в этом разделе.Некоторые казино могут предлагать клиентам бездепы за подтверждение номера либо почты либо репост на страницу в соц сетях. <a href=http://filmkachat.ru/>1 х слотс зеркало</a> <a href=https://hearthis.at/group/466308/transform-your-e-commerce-success-with-360-spin-product-videos/>https://hearthis.at/group/466308/transform-your-e-commerce-success-with-360-spin-product-videos/</a> Иногда у гостей сайта могут возникнуть проблемы при активации полученного промо-кода. В этих случаях, нужно адресоваться за поддержкой в службу поддержки «Support». Для получения ответа, обязательно указывается конкретная первопричина воззвания и подтверждается информация дополнительными скриншотами. Если сложилась неоднозначная ситуация, всегда возможно адресоваться к главному регулятору либо контролирующему органу, выдавшему данному заведению лицензионный документ. 1×slots зеркало этих способов предполагает регистрацию <a href=http://xojh.cn/home.php?mod=space&uid=2691941>http://xojh.cn/home.php?mod=space&uid=2691941</a> Для вывода средств приз нужно будет отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариациями отыгрыша бездепозитного бонуса до его получения, чтобы избежать конфликтных ситуаций.Как только вы отыграли вейджер и свои с бонусного баланса перебежали вас на настоящий счет, Вы отважно можете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать минимальный депозит к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, вместе с депо).
1×slots официальный зеркало рабочее
Игры, в которых возможно выступать на бонусные деньги. Проверьте список игр, в возможно выступать на бонусные средства, возможно они Вам не понравятся и надо тратить своё время на такую промоакцию. <a href=http://junlinro520.gain.tw/space.php?uid=1111051>1×slots бездепозитный бонус за регистрацию</a> 1х слот регистрация в 1×slots casino Зарегистрироваться в казино по особой ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефонного и электронную почту). Для доказательства номера аппарата нужно в собственном профиле указать свой номер и нажать кнопку „Подтвердить номер телефона“, далее Вы получите sms-сообщение с кодом, кот-ый нужно установить в отвечающее поле. Для доказательства электрической почты, перейти по интенсивной ссылке в послании от казино.Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. <a href=http://clear.rusoft.ru/2012/01/6.html>http://clear.rusoft.ru/2012/01/6.html</a> При использовании бездепозитным бонусом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют некоторое видов лимитов: 1 х слотс зеркало Свежий бонус начисляется вид валютных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в пользовании средствами, в случае отыгрыша оператор возможность установить ограничение на вывод денег.Следует подчеркнуть, собственно бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом.
1×slots регистрацию процедура займет всего лишь
<a href=https://finbi.ru/user/Henryvutle/>https://finbi.ru/user/Henryvutle/</a> В зависимости от интернет заведения любой из них имеет вас предложить как бездепозитные средства, например и бездепозитные фриспины, коие после успешной регистрации рухнут вас на ваш игровой баланс. 1хслотс казино зеркало
1×slots регистрация на сайте
Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша бонусов. Заведения практически устанавливают наивысшую ставку, допустимую по условиям вейждера. 1×slots casino регистрация 1×slotscasino09k online <a href=http://ukrisa.pl/./member.php?action=profile&uid=8783>http://ukrisa.pl/./member.php?action=profile&uid=8783</a> За вербование приятеля ? в рамках партнерской программы заказчик получает вознаграждение за привлечение свежих юзеров.
1хслот зеркало
Ознакомьтесь с нашим списком лучших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего перечня и получите бездеп сразу. Хватайте наихорошие благотворительные предложения ниже и выигрывайте большие средства, не рискуя!Автоматы неспроста числятся самым модным азартным отдыхом. Чтобы усвоить управление и верховодила, потребуется всего количество минут. Ваша задачка сделать ставку, найти количество рабочих линий и возможно крутить барабан. Если дисплее выпадет выигрышная комбинация – вы выиграли! С этой задачей вам помогут справится бездепозитные бонусы казино. <a href=http://kontur-irkutsk.ru/bitrix/rk.php?goto=http://velomagazin39.ru/bitrix/redirect.php?goto=http://mobilk.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/LFITJk8NeYq>http://kontur-irkutsk.ru/bitrix/rk.php?goto=http://velomagazin39.ru/bitrix/redirect.php?goto=http://mobilk.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/LFITJk8NeYq</a> В онлайне большое известных игорных площадок с привлекательными акционными предложениями. Однако внимательно разбирать обстоятельства 10-ов предложений в надоест, да и время отнимет количество. Поэтому наша команда подготовила ТОП-3 сайтов с лучшими бездепозитными призами: 1хслот скачать Список например называемых «запрещенных территорий» прилагается к правилам бонусной программы игорного портала. Обязательно выясните, распространяются ли на вас сходственные наказания.Законодательство, регулирующее азартные игры в различных странах, влияет на полномочия операторов. В итоге юзеры из отдельных регионов сталкиваются с ограничениями со стороны казино. Это возможность быть как глубокий отказ в доступе, так и невозможность загружать игры отдельных изготовителей.
<b>Смотреть еще похожие новости:</b>
<a href=http://nakupnidivadlo.cz/index.php/forum/3-pripominky/46622–1×slot?start=96#240376>1×slots официальный сайт, скачать</a>
<a href=https://roguedynasty.net/forums/member.php?10629-RabofreeKt>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<a href=http://av3526.com/forum.php?mod=viewthread&tid=105&pid=33084&page=31&extra=page%3D1#pid33084>1×slots мобильная версия войти казино</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Существуют казино с бонусом за регистрацию, в которых довольно известны фриспины в онлайн казино потом регистрации в конкретных забавах. Они встречаются и почаще даровых поощрений или традиционных бонусов в казино без вложений. Например, игрок регистрирует счет, на кот-ый начисляются бесплатные забавы, бонус за регистрацию вид безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса игрок выигрывает настоящие средства, коие в последствии можно удачно исключить из заведения на свою платежную систему. То есть, есть все шансы исключить свои без рисков собственными финансами. Регистрация, за компьютерные получит бонусы, займет минут, а спасибо данному возможно увеличить пять евро поощрений до тысячи и без всяких проблем исключить их. В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и если, тогда, спорных обстановок нет способности куда-то пожаловаться и обосновать свою правоту.
#334 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino online зеркало официальные букмекерские конторы скачать <a href=https://rumafia.news/>порно с Евгения Медведева, фигуристка</a> Елизавета Боярская casino 7k рабочее <a href=https://krtka.info/>Семёнова Татьяна Владимировна порно</a> up casino скачать 1×bet на андроид бесплатно казино пин up casino скачать casino бонус up casino зеркало порно с Юлия Ефимова
DiskiPlus игры казино DiskiPlus porno Юлия Канакина, скелетонистка <a href=https://www.diskiplus.ru/>DiskiPlus винлайн букмекерская контора официальный</a> DiskiPlus порно с Афонина Марина Игоревна DiskiPlus casino ап <a href=https://diskiplus.ru>DiskiPlus pin up casino зеркало</a> DiskiPlus пин ап букмекерская контора DiskiPlus порно с Аделия Петросян (фигурное катание) DiskiPlus casino на телефон DiskiPlus гама казино DiskiPlus Анна Михалкова DiskiPlus бесплатно играем казино DiskiPlus casino рабочее
#335 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino 777 online
Не хотите сыграть в азартные забавы, не рискуя средствами средствами, хотя получая в все выплаты? Подобную вероятность деют все наихорошие порталы с азартными развлечениями. В их числе большое добросовестных и надежных интернет-казино на русском языке. Они привлекают новых пользователей различными поощрительными мероприятиями, включая бездепозитные, или благотворительные призы. <a href=http://filmkachat.ru/>1×slots сайт зеркало</a> Бонусные деньги – небольшая сумма средств для старта в новеньком казино. На бонусные средства, обыкновенно разрешается играть во все забавы, кроме слотов с современным джекпотом и игр из раздела exist casino. <a href=https://archinect.com/firms/cover/150465480/all>https://archinect.com/firms/cover/150465480/all</a> Существуют казино с призом за регистрацию, в довольно популярны фриспины в интернет казино впоследствии регистрации в определенных забавах. Они встречаются числе почаще безвозмездных поощрений либо традиционных бонусов в казино без инвестициям. Например, игрок регистрирует счет, на кот-ый начисляются бесплатные игры, бонус за регистрацию в виде даровых фрспинов, вращения в игровом автомате. Во время игрового процесса геймер выигрывает истинные средства, коие в последствии возможно удачно исключить из заведения на свою платежную систему. То есть, есть шансы исключить свои без рисков собственными деньгами. Регистрация, какую геймер получит призы, займет несколько, а благодаря данному можно прирастить пять евро поощрений до тысячи и без всяких заморочек исключить их. 1×slots зеркало видели такую регистрацию на <a href=https://www.forum-joyingauto.com/member.php?action=profile&uid=27548>https://www.forum-joyingauto.com/member.php?action=profile&uid=27548</a>
1хслотс казино зеркало
Пoдтвepдить личнocть клиента. Для удачного вывода средств, необходимо доказать личность посетителя. Нa этaпe вepификaции пpoфиля, работники службы безопасности должны увериться, собственно у игрока не один аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не может исключить свой выигрыш, если у него будет некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы. x1 slots регистрация в 1×slots casino 3. Подтвердить данные. В зависимости от клуба, нужно привязать аппарат или почту, показать индивидуальную информацию; <a href=https://www.0574snyw.com/space-uid-190772.html>https://www.0574snyw.com/space-uid-190772.html</a> При пользовании бездепозитным бонусом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют некоторое видов лимитов: 1×slots официальный сайт мобильная версия Способы получения бездепа различаются зависимо вида бонуса, который понравился игроку. Но вам или нужно быть зарегистрированным в легальном онлайн-казино и подтвердить собственную личность. В общем виде пошаговая аннотация для получения бездепозитного приза смотрится так:
1×slots официальный сайт, скачать
Отзывы читателей о бонусных акциях помогут составить впечатление, но не забывайте о субъективности собственных объяснений. Возможность протестировать свежие забавы, не рискуя собственными своими и разработать собственную стратегию забавы. <a href=https://3sudest.eu.org/memberlist.php?mode=viewprofile&u=18143>https://3sudest.eu.org/memberlist.php?mode=viewprofile&u=18143</a> Чтобы без убедиться в превосходстве бездепозитных бонусов, довольно зарегистрироваться в казино и получить одобрение. 1×slots официальный зеркало рабочее
1×slots зеркало на сегодня
Но есть игорные заведения, коие готовы просто например жертвовать средства на игру. Для сего довольно создать профиль. Чтобы вывести собственный выигрыш, вас сначала необходимо выполнить условия отыгрыша, указанные в условиях получения бездепозитного депозита.Все обожают получать подарки. Согласитесь, практически каждый играющий человек будет безгранично рад, если получит бесплатный подарок для игры в онлайн казино просто за регистрацию или же приз за внесенный депо, например именуемые приветственные бонусы для новых игроков. Соответственно такие интернет клубы будут более модны и предпочтительны у игроков при выборе казино для игры. Топ казино непрерывно обновляется и прибавляются новые и занимательные игровые клубы с привлекательной бонусной политикой и всеми вероятными прерогативами, к коим относятся такие бонусы как фриспины за регистрацию, валютные бездепозитные бонусы, еще великодушные бонусы за внесенный депо. <a href=https://astraclub.ru/members/353998-Jameswow>1хлот регистрация в 1×slots casino</a> 1×slots регистрация на сайте <a href=https://tanime.site/user/ForsedropKr/>https://tanime.site/user/ForsedropKr/</a>
1×slots зеркало на сегодня
Простая процедура получения бездепозитного приза, которая займет не более 2-х мин. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные.Такой бесплатный эквивалент средств зачисляется на профиль юзера после воплощения притязаний и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений вероятен только последствии осуществления вейджеровых критерий. Размер ставки для забавы по бездепозитному бонусу (естесственно же, когда, когда он представлен в виде бонусных денежных средств) часто ниже, чем при ирге на депозит. Ограничение несомненно действовать до момента отыгрыша бонуса. <a href=https://gamma.app/docs/REDICO-Building-the-Future-aomhjgmenf0dz6b?mode=doc>https://gamma.app/docs/REDICO-Building-the-Future-aomhjgmenf0dz6b?mode=doc</a> Когда идет о денежных призах, казино всегда устанавливают обстоятельства вейджера, коие нужно выполнить, дабы исключить выигрыш. 1×slots промокод при регистрации
<b>Смотреть еще похожие новости:</b>
<a href=https://portugal-campings.com/pt/account/>скачать 1×slots официальный сайт</a>
<a href=http://fumankong1.cc/home.php?mod=space&uid=580780>1×slots официальный регистрация</a>
<a href=http://www.psicologamariafoti.it/index.php/component/users/?option=com_k2&view=itemlist&task=user&id=8210>зеркала 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В бонусную программу многих операторов входят систематические бездепы. Это бессрочные акции, поощряющие интенсивных неизменных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают неизменные бонусы без депо в размен на скопленные баллы лояльности.
#336 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия
Бoльшинcтвo азартных заведений выдвигают приблизительно одинаковые обстоятельства и требования, коие необходимо выполнить, чтобы получить бездепозитный бонус за регистрацию. Все их можно соединить в один список: <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slots review live</a> <a href=https://designaddict.com/community/profile/avto-vikup/>https://designaddict.com/community/profile/avto-vikup/</a> 1 х слотс зеркало <a href=https://ekonty.com/-Glavdorogadv0308#info>https://ekonty.com/-Glavdorogadv0308#info</a> В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, нужно адресоваться в службу через лайв-чат на веб-сайте казино.Лишь модные и знаменитые азартные заведения шансы разрешить для выдавать бездепы повторяющий добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депо, которые возможно потратить в топовых аппаратах с высокой отдачей.
1×slots регистрация
<a href=https://chodilinh.com/threads/%D1%81%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C-1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82.469141/>скачать 1×slots официальный сайт</a> 1×slots регистрацию более популярный вариант это К образцу, игроку выдаются бесплатные свои в заведении в объеме пятидесяти либо ста $ (вейджер на коие сочиняет 100х). То есть, любому новоприбывшему игроку выскакивает манящая картинка, кот-ая сулит выплату всех зачисленных фирмой средств. Не стоит обращать внимания на казино приз за регистрацию без депо с слишком большой либо довольно махонькой суммой бонусов, поэтому что, и тщательно выучив все обстоятельства, здесь всего, несомненно какой-то подвох. <a href=https://wmg.by/%d0%b0%d0%b2%d1%82%d0%be%d1%88%d0%ba%d0%be%d0%bb%d0%b0-%d0%b2%d0%bb%d0%b0%d0%b4%d0%b8%d0%b2%d0%be%d1%81%d1%82%d0%be%d0%ba/>https://wmg.by/%d0%b0%d0%b2%d1%82%d0%be%d1%88%d0%ba%d0%be%d0%bb%d0%b0-%d0%b2%d0%bb%d0%b0%d0%b4%d0%b8%d0%b2%d0%be%d1%81%d1%82%d0%be%d0%ba/</a> казино 1×slots Бонусные средства – небольшая сумма денег для старта в новом казино. На бонусные средства, обычно разрешено выступать во все игры, не слотов с современным джекпотом и игр из раздела exist casino.
1× slots сайт
Обычно бездепозитные промоакции от казино, приходят на эл. Почту в деньки рождения либо дни. В неких онлайн казино возможно обратиться в чат и как неизменному игроку, вероятно для предложат бездепозитное предложение. <a href=https://pornodrochka.club/user/Jamesrix/>https://pornodrochka.club/user/Jamesrix/</a> Возьми свой подарок. Чаще всего бонус активируется незамедлительно после регистрации. Но посещают ситуации, когда нужно забежать в личный офис либо написать в справочную службу. x1 slots регистрация в 1×slots casino В разделе с бонусами активировать свой подарок. Найти игры, для которых предусмотрено одобрение и использовать приз по предназначению.Каждый геймер обязан сначала отчетливо изучить условия по получению и отыгрышу приглянувшегося подарка. Если всё устраивает, поспешите арестовать благотворительные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик сейчас начать вертеть барабаны топовых слотов.
1×slots рабочее зеркало
1×slots зеркало на сегодня <a href=http://tok-ok-dv.ru/index.php?subaction=userinfo&user=dysfunctionalen>http://tok-ok-dv.ru/index.php?subaction=userinfo&user=dysfunctionalen</a>
1×slots казино зеркало
Фриплей-бонусы. Бонусы за благотворительную игру есть лишь в некоторых клубах. Они зачисляются сразу в создания профиля и срабатывают непродолжительное время. Если у вас нет времени потратить средства, они просто закончатся. Что касается медли, как бонусы срабатывают на одного часа.Выполнив все притязания оператора, заказчик возможность оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем не более суток. Если дополнительно требуется пройти функцию верификации, то срок увеличивается до 1–2 рабочих дней. Для перевода используются банковские инструменты и электронные платежные системы. Второй способ подходит другого, как, так как масса транзакций в осуществляются мгновенно. В связи со спецификой функционирования банков обработка платежей имеет взятьвдолг(взятьвзаймы) до нескольких рабочих дней. Даже не выиграв крупную необходимую, игрок интересно проведет время, изнутри выучит работу площадки, воспримет геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе превосходнейших промоакций с. Достаточно регулярно учить перечень новых интернет казино с выводом приза без депозита в этом разделе. <a href=https://www.metooo.io/e/samye-luchshie-bukmekerskie-kontory>https://www.metooo.io/e/samye-luchshie-bukmekerskie-kontory</a> Размер бонусов почаще всего чисто условный и не выше 50 рублей. Приятно, но осязаемым бустом при навряд будет. 1×slots бездепозитный бонус за регистрацию Постарайтесь отыграть вейджер, дабы была вероятность оставить заявку на выплату. Кстати, на всех сайтах, представленных в списке, доступны современные платёжные приборы. Вы можете получить выигрыш на электронной кошелёк, карту, телефон.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.komne.com/viewtopic.php?f=25&t=5982>казино 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Теоретически, к бесплатным бонусам возможно отнести так называемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, потому собственно они деют только возможность делать ставки.
#337 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Радченко Светлана Юрьевна порно фреш казино <a href=https://th-royalgclub.com/>казино</a> бывшие казино казино рояль смотреть <a href=https://repost.news/>сайт букмекерской конторы</a> порно с Юлия Ефимова casino зеркало сегодня casino daddy сайт 1×bet слоты порно с Сергей Бобровский (хоккей) casino бонус порно с Алина Загитова
DiskiPlus Любимова Ольга Борисовна порно DiskiPlus pin casino зеркало <a href=https://diskiplus.ru>DiskiPlus pin up casino зеркало</a> DiskiPlus казино онлайн DiskiPlus 1×bet официальный слоты <a href=https://diskiplus.ru/>DiskiPlus Самойлова Алла Владимировна порно</a> DiskiPlus часы казино DiskiPlus букмекерская контора фонбет официальный сайт DiskiPlus Александра Бортич DiskiPlus порно с Георгий Джикия (футбол) DiskiPlus макао казино DiskiPlus casino онлайн DiskiPlus приложения букмекерских контор
#338 Charlesgunnyhttp://filmkachat.ru
1×slots мобильная версия войти казино
В истиннее время получить приз за регистрацию в казино довольно просто. Почти каждый игорный жилище с радостью даст средства либо безвозмездные вращения. Многие игроки пользуются данным и не стесняются региться в каждом клубе с прибыльными условиями. Кстати, это замечательная вероятность выдумать выигрышную стратегию и сорвать куш.Чтобы других убедиться в превосходствах бездепозитных призов, достаточно зарегистрироваться в казино и получить одобрение. <a href=http://filmkachat.ru/>1хслот официальный сайт зеркало</a> <a href=https://linkfly.to/kalinka>https://linkfly.to/kalinka</a> На бонусные начисления шансы быть установлены дополнительные ограничения, коие Вы не к при отыгрыше. Пока бонус всецело не отыгран — средства из казино не выводятся. казино 1×slots <a href=http://procvety.pro/bitrix/redirect.php?goto=http://itlines.ru/url.php?s=http://ygim31.ru/bitrix/click.php?goto=https://teletype.in/@urist555/FLWPgzuMP_l>http://procvety.pro/bitrix/redirect.php?goto=http://itlines.ru/url.php?s=http://ygim31.ru/bitrix/click.php?goto=https://teletype.in/@urist555/FLWPgzuMP_l</a> Поспешите забрать бездепозитные призы за регистрацию в казино из представленного перечня. Все платформы не ведут законную деятельность, хотя и порадуют добросовестными результатами забавы, высочайшей отдачей, прыткими выплатами.
1хслот 1хслотс регистрация перейти на 1×slots
В современность очень просто получить бонус за регистрацию в казино. Практически каждый игорный дом с готовностью начислит деньги либо бесплатные вращения. Многие гэмблеры используют данным и не смущяются региться в любом клубе с выгодными критериями. Кстати, это отличная возможность выработать победную тактику и сорвать джекпот.Подтвердите регистрацию, чтобы активировать Бездепозитный приз с выводом, требуется наполнить личный профиль. Заполните пустые поля реальными данными о себя. <a href=http://kamechkovkazak.listbb.ru/viewtopic.php?f=15&t=3194>1×slots бонус за регистрацию</a> онлайн казино 1×slots <a href=http://pornodrochka.club/index.php?subaction=userinfo&user=wastefulfacsimi>http://pornodrochka.club/index.php?subaction=userinfo&user=wastefulfacsimi</a> Бесплатный бонус – кредиты, коие онлайн-казино начислит клиенту, не заставляя его пополнять игровой счет. 1хслот официальный сайт зеркало Срок отыгрыша — это этап, кот-ый начинается в момент активации бонуса и кончается с его закрытием. Пользователю нужно уложиться в данный временной промежуток, другому призовые средства аннулируются. Казино устанавливают список игр, ставки в которых засчитываются при расчете отыгранных денег. Если тайтл не заходит в этот перечень, то предоставляется быть недосегаем для загрузки в деянья бонусного предложения.
1×slots промокод при регистрации
<a href=https://www.tomtomtextiles.com/shisha-tobacco-from-4-eur-2/>https://www.tomtomtextiles.com/shisha-tobacco-from-4-eur-2/</a> Но есть игорные заведения, коие готовы просто например жертвовать средства на забаву. Для сего довольно создать профиль. Чтобы исключить собственный выигрыш, для поначалу нужно выполнить условия отыгрыша, указанные в критериях получения бездепозитного депозита. онлайн казино 1×slots
1×slots зеркало регистрация в 1×slots casino
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=54630>1хслот 1хслотс регистрация перейти на 1×slots</a> При правильном раскладе бездепы — это прекрасный метод выступать на средства без траты личных средств. Есть некоторое рекомендаций, следуя которым можно извлечь максимально выгоды из сходственных промоакций казино. Играть следует лишь на лицензированных площадках. Скриптовые веб-сайты столько накалывают с бонусными услугами, хотя и используют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах невероятно.Мы рекомендуем не открещиваться от похожих предложений знаменитых казино. Выделите несколько мин. На регистрацию, получите бонус и попробуйте его отыграть. Может быть, сегодня удача несомненно на вашей стороне! Казино выводит деньги только на ту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного приза, Вам поначалу нужно пополнить счет. В некоторых клубах узкий список способов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с данных платежных способов, которые доступны для вывода.На нашем сайте Вы отыщите список актуальных новых бездепозитных бонусов в казино 2022 года. Также, есть много эксклюзивных услуг, коие доступны лишь гостям нашего вебсайта после регистрации по нашей ссылке или активации особого промокода. 1×slots регистрация на сайте 1×slots ru com <a href=http://geolan-ksl.ru/forum/user/100639/>http://geolan-ksl.ru/forum/user/100639/</a>
1хслотс казино зеркало
Бездепы обыкновенно предлагают с отыгрышем — моментально исключить выигранные средства нельзя. Перевод средств со счета несомненно возможен после как, как пользователь выполнит все притязания казино, а сумма не может превышать установленного правилами лимита. Условиями акции фиксируются сроки, в течение коих клиент вправе воспользоваться предложением. Обычно они не превосходят нескольких дней после активации. <a href=http://www.vladmines.dn.ua/index.php?name=Account&op=info&uname=ovalquantity30>http://www.vladmines.dn.ua/index.php?name=Account&op=info&uname=ovalquantity30</a> Вознаграждения за получение VIP-статуса ? начисляются масштабах программы лояльности при достижении еще значения или выдаются персонально менеджерами службы поддержки.Чаще всего казино бонус за регистрацию без депо даёт возможность запустить каждой автомат. Но какого-либо пристально ознакомиться с критериями. Иногда для забавы доступны только определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, какого-либо начать знакомство с миром пыла именно с «одноруких бандитов». 1×slots зеркало регистрация в 1×slots casino Многие казино деют в рекламных целях благотворительные призы самая для наших читателей. Чтобы их получить, нужно перебежать на игровой вебсайт по партнерской ссылке с нашего портала.В разделе с призами активировать свой презент. Найти забавы, для коих учтено одобрение и применять приз по назначению.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.reisezielforum.de/viewtopic.php?t=604390>1×slots зеркало регистрация</a>
<a href=https://foro.muelendhir.com/showthread.php?tid=116169>1х слотс зеркало регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Диапазон ставок, коие вправе устроить игрок, того лимитирован. Обычно ставить можно небольшую сумму — в 10–30 рублей за одно вращение.
#339 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
vavada casino casino скачать <a href=https://kompromat1.online/>porno Александр Соболев (футбол)</a> казино фильм онлайн casino ап <a href=https://th-royalgclub.com/>1×bet официальный слоты</a> сайт 1×bet слоты 1×bet xbet лучшие казино бесплатно казино вход как выиграть в казино винлайн букмекерская контора официальный сайт new casino
DiskiPlus лучшие казино бесплатно DiskiPlus мелбет букмекерская контора <a href=https://diskiplus.ru/>DiskiPlus 1×bet скачать приложение на андроид</a> DiskiPlus порно с Елена Никитина, скелетонистка DiskiPlus Елизавета Боярская <a href=https://diskiplus.ru/>DiskiPlus почему в казино нет часов</a> DiskiPlus 1×bet 1хбет DiskiPlus pin up casino buzz DiskiPlus официальные зеркала казино DiskiPlus приложения букмекерских контор на андроид DiskiPlus бесплатное казино DiskiPlus казино смотреть онлайн бесплатно DiskiPlus casinos winning
#340 Charlesgunnyhttp://filmkachat.ru
1хслот скачать
Чтоб получить крупный выигрыш, выбирайте игровые автоматы с максимальным процентом отдачи (RTP) из перечня тех, которые доступны по условиям отыгрыша.Вышеописанная причина и считается основным моментом, из-за которого операторы отдают доля своей прибыли на различные маркетинговые затраты и рекламные кампании. А наиболее действенным тут станут выступать именно бездепозитные призы казино 2022 с выводом за регистрацию. <a href=http://filmkachat.ru/>онлайн казино 1×slots</a> <a href=https://www.neobienetre.fr/forum-bien-etre-medecines-douces-developpement-personnel/topic/low-poly-design-creating-efficient-3d-models-for-modern-applications/>https://www.neobienetre.fr/forum-bien-etre-medecines-douces-developpement-personnel/topic/low-poly-design-creating-efficient-3d-models-for-modern-applications/</a> Однако в условиях исчезают «подводные камешки», которые не позволят вывести крупную сумму либо же вы не успеете отыграть вейджер. Поэтому мастера рекомендуют отобрать безвозмездные вращения за регистрацию в казино без депозита, чтобы поднабраться навыка и получить реальный шанс на победу. 1×slots регистрация на сайте 1×slots ru com <a href=https://www.exoltech.us/blogs/220682/%D0%BC%D0%BF%D1%81%D1%82%D0%B0%D1%82-%D0%BA%D1%83%D0%BF%D0%B8%D1%82%D1%8C>https://www.exoltech.us/blogs/220682/%D0%BC%D0%BF%D1%81%D1%82%D0%B0%D1%82-%D0%BA%D1%83%D0%BF%D0%B8%D1%82%D1%8C</a> Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные способы и расценить особенности, труднодоступные при игре в демо режиме. Многие свежие клиенты перебегают в количество постоянных, а оператор получает долгосрочную выгода.С иной стороны, намного легче отобрать бездепозитные фриспины за регистрацию в казино и прямо в начать вращать барабаны в наилучших слотах. Главная особенность спинов что, нет, собственно они предусмотрены для лучших автоматов. Удастся столько пройти дополнительные раунды, но и увеличить сумму выигрыша, заработать респины и другие внутриигровые презенты.
1×slots зеркало на сегодня
В зависимости от онлайн заведения каждый из их может для предложить как бездепозитные средства, так и бездепозитные фриспины, которые после удачной регистрации рухнут вас на ваш игровой баланс. 1×слотс казино Доступные забавы – В некоторых азартных забавах можно снизить математическое превосходство казино до нескольких 10-х процента. В их числе многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как правило, в этих забавах ставки идут в зачет вейджера не полностью. Например, возможность учитываться только 50%. В некоторых играх бездепозитные призы вообщем нельзя отыгрывать.Бездепозитный приз предоставляется новенькому игроку за определенные деянья. Часто подарок повторяющий денег либо фриспинов выдается за регистрацию, благодаря чему пользователь получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. <a href=https://mantiseye.com/community/jasperkew>https://mantiseye.com/community/jasperkew</a> Некоторые веб-сайты, до чем провести регистрацию игроков, предлагают ответить на количество базисных вопросов. Цель проведения похожей викторины – выявить случайных людей, которые не имеют представления о покере, и не разрешить получения ими призов. Если посетитель уже играл в казино, то ответить на полтора 10 несложных вопросов будет нетрудно. Очень нередко, ответы можно отыскать на официальных веб-сайтах данных учреждений. 1×slots официальный сайт скачать Вейджер не более х30–35 является приемлемым. Опытные игроки заявляют, собственно с этим вейджером реально остаться в плюсе, если правильно подойти к выбору игрового аппарата.
1×slos регистрация в 1×slots casino
Активация по промокоду используется в разных видах бездепов. Если идет о приветственном бонусе, то комплект символов возможно разузнать на главной странице, в регистрационной форме или послании, которое отправляется пользователю для подтверждения e-mail. Акции могут проводиться вместе с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активируется одноразовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном кабинете или начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем важный код для активации в описании каждого промо. <a href=http://lsrczx.com/home.php?mod=space&uid=174240>http://lsrczx.com/home.php?mod=space&uid=174240</a> 1×slots casino регистрация 1×slotscasino09k online
1 хслот регистрация в 1×slots casino
<a href=https://krok.biz/forum/memberlist.php?mode=viewprofile&u=34795>1×slots бездепозитный бонус за регистрацию</a> Так собственно главное различие подарка на депо от бездепа – обязательное пополнение счёта. Вы можете привнести депозит и преумножить стартовый капитал либо арестовать бездеп и при этом не придётся рисковать собственными сбережениями. Поспешите выполнить простые притязания, и администрация ресурса начислит щедрое одобрение! 1×slot официальный сайт <a href=http://polishcrazyclan.ugu.pl/member.php?action=profile&uid=264073>http://polishcrazyclan.ugu.pl/member.php?action=profile&uid=264073</a> Прочитайте управляла бонусной программы, какой желайте участие. Да, мы настоятельно рекомендуем сделать это до регистрации.
1×slots рабочее зеркало на сегодня
За вербование друга ? масштабах партнерской программы заказчик получает вознаграждение за вербование новых пользователей. <a href=https://visualchemy.gallery/forum/viewtopic.php?pid=3341381#p3341381>https://visualchemy.gallery/forum/viewtopic.php?pid=3341381#p3341381</a> Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической забавы на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, выучится регулировать изменять ставки и линии, изучать бонусные забавы и их выигрышные комбинации, да в конце концов просто зарядится кучей эмоций! Ведь вы будите играть на бонусные средства, которые возможно отыграть и вывести, а не просто на демо счет, что, этим самым адреналин в крови более повысится а пульс забьется с нередким ритмом!Воспользоваться бездепом можно не во всех игровых автоматах: казино вдруг уточняет ограничение для клиентов. Конечно, это можно счесть некоторым неудобством для игрока, но ради стоит отметить, что выбор автоматов всё точно остаётся достаточно большим. 1×slots официальный сайт, скачать
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.bandariklan.com/showthread.php?tid=581814>1×slots регистрация на 1хслотс</a>
<a href=http://aurorahcs.com/forum/memberlist.php?mode=viewprofile&u=168982>1хслотс зеркало на сегодня</a>
<a href=http://naukova2b.2ua.in.ua/viewtopic.php?f=7&t=3889>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Как верховодило, новоприбывшие геймеры для желают ознакомиться с методами ввода и вывода денежных средств и сроки выполнения поданных заявок дабы четко осознавать, как быстро возможность исключить собственный казино бонус за регистрацию без депозита на электрический кошелек или же банковскую карту. К счастью для всех играющих, внутри конкретных холдингов, все казино конкурируют меж собой. Ведь в бы конкретную компанию давало только одно онлайн-заведение, то ли бы посетители увидели казино с призом за регистрацию и возможность бы рассчитывать лишь на вознаграждение вид бонуса на 1-ое инвестиция. К любому заведению регулярно по завлекать свежих игроков, что, в итоге, лишь на руку всем играющим. Также бездепозитные бонусы могут служить способом вернуть к игре клиентов, временно приостановивших своё сотрудничество с компанией: уведомление о бездепе поступает на мобильный аппарат либо почту.
#341 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино сегодня порно с Евгения Медведева, фигуристка <a href=https://slon-ru.com/>суть казино</a> casino актуальное зеркало up букмекерская контора <a href=https://vestnik-jurnal.com/>Манилова Алла Юрьевна порно</a> Крючкова Полина Викторовна порно казино ставка пинко casino слоты казино порно с Анастасия Потапова, теннисистка бесплатное казино casino андроид
DiskiPlus casino игровой автомат DiskiPlus казино 1 <a href=https://diskiplus.ru>DiskiPlus 1×bet зеркало слоты</a> DiskiPlus Разуваева Ксения Денисовна порно DiskiPlus букмекерская контора фонбет <a href=https://www.diskiplus.ru>DiskiPlus порно с Алина Загитова, фигуристка</a> DiskiPlus порно с Юлия Ефимова DiskiPlus 1×bet casino DiskiPlus пинап казино DiskiPlus Кузнецова Анна Юрьевна порно DiskiPlus Львова-Белова Мария Алексеевна порно DiskiPlus Валентина Матвиенко порно DiskiPlus зеркала казино
#342 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
сайт винлайн букмекерская контора порно с Дронова Александра Викторовна <a href=https://rucriminal.info/>porno Андрей Рублев (теннис)</a> порно с Карен Хачанов (теннис) букмекерская контора фонбет официальный <a href=https://rhymes-punches.com/>casino на телефон</a> зеркала казино porno Игорь Акинфеев (футбол) лучшие онлайн казино водка казино black russia казино официальные букмекерские конторы porno Виктория Баркова, легкоатлетка
DiskiPlus лучшие букмекерские конторы DiskiPlus casino вход <a href=https://www.diskiplus.ru/>DiskiPlus гта онлайн казино</a> DiskiPlus casino играть DiskiPlus porno Дарья Мороз <a href=https://diskiplus.ru>DiskiPlus порно с Захарова Мария Владимировна</a> DiskiPlus букмекерская контора мостбет DiskiPlus 1×bet зеркало рабочее DiskiPlus online casino 7k DiskiPlus сайт винлайн букмекерская контора DiskiPlus пин ап casino pin DiskiPlus porno Дарья Мороз DiskiPlus порно с Дарья Клишина, легкоатлетка
#343 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало
Бездепозитные бонусы — это подарки от казино в виде бонусных средств или фриспинов для игровых автоматов, коие начисляются на аккаунт игрока последствии процедуры регистрации на сайте заведения. Для получения таких поощрений депозит не требуется.Бездепозитный бонус казино 2022 с выводом за регистрацию предоставляет вероятность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и проверить качество работы службы поддержки. Довольно часто, начиная игровой процесс, игрок теснее не желает останавливаться и делает реальный вклад. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать даром вполне как один таки с призом за регистрацию без надобности заносить депозит. <a href=http://filmkachat.ru/>1×слотс казино</a> Хотя благотворительные призы начисляются без депо, не исключено, что для понадобиться вносить средства. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь после того, как новый клиент раз пополнит игровой счет. <a href=https://britishforcesdiscounts.co.uk/biz/a/165359-Archicgi>https://britishforcesdiscounts.co.uk/biz/a/165359-Archicgi</a> Подтверждение электронной почты – одно из главных критерий, коие есть почти в каждом бездепозитном казино. Чтобы верифицировать электронную почту, довольно перебежать по активной ссылке в письме, приобретенном от азартного клуба.Бездепозитные бонусы за регистрацию являются одним из самых модных способов привлечения свежих игроков в онлайн-казино, потому что они предоставляют игрокам возможность опробовать казино, неподражаемо игровые автоматы, и вполне, выиграть настоящие средства. 1×slots официальный регистрация <a href=https://truejesus.net/forums/member.php?action=profile&uid=4931>https://truejesus.net/forums/member.php?action=profile&uid=4931</a>
1 х слотс зеркало
1×slots подтвердит вашу регистрацию если говорить <a href=http://srgls.co.kr/bbs/board.php?bo_table=jiggu&wr_id=7470>http://srgls.co.kr/bbs/board.php?bo_table=jiggu&wr_id=7470</a> Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых свежих, щедрых и испытанных призах в онлайн казино, которые обновляются каждый денек.Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. 1×slots промокод при регистрации 2025
1×slots промокод при регистрации 2025
Фриспины без депозита либо дополнительные средства посодействуют поближе познакомиться с игровой платформой и её функциями. За счёт даров возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за игры против живых крупье. Ознакомьтесь с нашим списком наилучших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего списка и получите бездеп сразу. Хватайте наихорошие безвозмездные предложения ниже и выигрывайте немалые средства, не рискуя! <a href=http://wkbilibili.com/home.php?mod=space&uid=930041&do=profile&from=space>http://wkbilibili.com/home.php?mod=space&uid=930041&do=profile&from=space</a> Варианты выигрыша зависимости от Вашей успеха и условий игорного портала. Выше мы сказали, что некоторые бездепозитные призы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются и те, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на средства, можно выиграть невероятные суммы. Сегодняшние игровые автоматы либо видео слоты, как их называют. Могут выдавать солидные умножение от х1.000 и выше. Некоторые множат ставку от х100.000. 1×slot регистрация
1×slots регистрация на официальном сайте
<a href=http://nexusroleplay.teamforum.ru/viewtopic.php?f=19&t=12656>1×slots регистрация 1×slots review live</a> Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить необыкновенности, труднодоступные при игре в демо режиме. Многие свежие посетители переходят в число постоянных, а оператор получает длительную выгода. Бездепозитный бонус казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби избранного заведения, сориентироваться в выборе игр и выяснить качество работы саппорта. Довольно нередко, начиная игровой процесс, игрок уже отказывается останавливаться и делает настоящий вклад. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть безвозмездно вероятно как один таки с бонусом за регистрацию без необходимости вносить депозит. 1×slots рабочее зеркало <a href=http://www.support.ipron.com/communication/forum/index.php?PAGE_NAME=profile_view&UID=18590>http://www.support.ipron.com/communication/forum/index.php?PAGE_NAME=profile_view&UID=18590</a> При регистрации что либо ином интернет игральном заведении — вас дается раз шанс испытать свою фортуну не внося свои монеты. Замечу что эту поощрительную услугу предоставляют не все онлайн игровые площадки, а только щедрая половина из них. Которые мы подготовили для Вас в нашем перечне.Также существуют онлайн-платформы азартных игр, которые применяют раздачу бездепозитных бонусов в специальные даты (как для казино, так и для игрока). Помимо сего, действующие геймеры того имеют вероятность получить схожие призы за собственную деятельность (например, за повышения уровня или за похожие заслуги).
1х слот регистрация в 1×slots casino
Способы получения бездепа различаются в зависимости от вида бонуса, который понравился игроку. Но вас так надо(надобно) быть зарегистрированным в легальном онлайн-казино и доказать собственную личность. В общем виде пошаговая аннотация для получения бездепозитного приза смотрится так: <a href=http://zc.xszrcw.com/home.php?mod=space&uid=403026&do=profile>http://zc.xszrcw.com/home.php?mod=space&uid=403026&do=profile</a> 1×slots casino регистрация на сайте Таким образом, заведение пытается показать себя своим вероятным геймерам, а подобный маркетинговый ход как казино приз без депо за регистрацию привлекает очень много внимания к игорному заведению и обеспечивает постоянный поток новых посетителей и грядущих клиентов игрового интернет клуба.
<b>Смотреть еще похожие новости:</b>
<a href=https://foro.muelendhir.com/showthread.php?tid=117867>1× slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Составленный экспертами Casino.ru список онлайн-казино с бездепозитным бонусом позволяет игрокам сравнить спецпредложения различных операторов.
#344 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее на сегодня
Такой казино приз без депо за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это как бы некая конспирация поощрения под бездепозитный. Суть всего этого сводится к тому, что геймеру на час выдается, например, 1000 долларов, а реклама утверждает о том, собственно каждой выигрыш возможно несомненно дальнейшем оставить при себе. Но случае играющий серьезно отнесется к данному предложению, то он просто потеряет время. Ведь геймеру нужно будет играть не главном аккаунте, в тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (и всей тыс. ) в правила вступят определенные обстоятельства, где будет сказано, что максимальной суммой победы возможность быть лишь двести $ и средства возможно применять только в качестве бонуса на 1-ый вклад с вейджером 25 от суммы вознаграждения плюс сам депо. По результату выйдет, что игрок выигрывал для 200% приз с вейджером на конкретную сумму. Короче разговаривая, это все надо вашего времени.Если вы новичок деле и лишь попали в неизведанную вами область пыла — счет услуг как бездепозитные бонусы без пополнения. <a href=http://filmkachat.ru/>1×slots скачать на айфон</a> Новички не любят незамедлительно же заносить депо. Это обосновано неимением опыта и сомнением. К счастью, дни возможно получить бездепозитный бонус за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В любом случае вы не рискуете своими сбережениями. Это отличная возможность запустить понравившийся видео разъем либо же испытывать удачу в настольных играх. <a href=https://hearthis.at/group/466307/3d-rendering-for-interior-design/>https://hearthis.at/group/466307/3d-rendering-for-interior-design/</a> Для как, чтобы отыграть необходимую вашего бездепозитного бонуса надо(надобно) выполнить условия вейджера. Очень нередко фриспины даются на определенные слоты (book of ra, book of lifeless, book of sun), избирайте слот себе по, все довольно красочные и качественные. Бездепозитные бонус может быть денежным так и повторяющий фриспинов на слотыПеред активацией важно пристально изучить условия акции. Чем ниже вейджер, что, этим больше потенциальная выгода игрока. Имеют велечину кроме лимиты ставок при отыгрыше и сроки, протяжении коих можно пользоваться предложением. Если бездеп охватывает ограниченный перечень игр, рекомендовано узнать максимальные коэффициенты, степень отдачи и волатильности. Слоты с низкими множителями выплат подходят только том, случае, случае оператор не установил взыскательные ограничения на максимальную сумму ставки. 1×slots зеркало регистрация <a href=https://forex-arabic.com/members/192597-Henrygob>https://forex-arabic.com/members/192597-Henrygob</a> Маркетинговая деятеля всех игорных интернет-клубов должна носить разнородный характер. И если вознаграждения на депо служат чтобы, чтобы, чтобы провоцировать вносить депозиты и поощрять теснее быть пользователей, то бездепозитный бонус в казино либо приз за регистрацию в казино, прежде всего, рассчитан на расширение базы покупателей.Популярность интернет казино растёт и всё больше юзеров начинают проявлять азартными играми. Бездепозитные бонусы 2022 года, это уникальные подарки за регистрацию. С их поддержкой новые игроки все получить благотворительные вращения либо средства на баланс за одну регистрацию. С выходом игорных заведений в онлайне, бездепозитные призы стали моднейшим способом вербования игроков. Подобные промоакции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о коих мы расскажем. Наш сайт собрал лучшие предложения из онлайна на 2022 год. Воспользуйтесь хоть подарком и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить обстоятельства.
1×slots зеркало видели такую регистрацию на
1×slots casino зеркало Но эти рамки не смущают в хайроллеров, потому коэффициенты на слотах разрешают рассчитывать на солидные выигрыши, а в некоторых автоматах разыгрывается прогрессивный джекпот.Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и более. Когда игроку полагается количество фриспинов, администрация может бить3 их начисление на некоторое дней. Бесплатные вращения предоставляются для определенного слота, кот-ый указывается в правилах промоакции. <a href=http://primalp.com/bitrix/redirect.php?goto=http://larsensport.ru/bitrix/redirect.php?goto=http://smsochka.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/IkCnBTyhXu0>http://primalp.com/bitrix/redirect.php?goto=http://larsensport.ru/bitrix/redirect.php?goto=http://smsochka.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/IkCnBTyhXu0</a> 1хслотс официальный сайт зеркало Фриспины начисляются по конкретной ставке. После их активации игроку нужно запустить разъем и увериться, что в нем показываются благотворительные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода в отыгрыша ориентируется оператором и редко выше 5 000 руб.Бонус за регистрацию в казино без депо с выводом денег надо(надобно) отыграть. Зачастую для отыгрыша возможность потребоваться сделать ставки на необходимую, в количество десятков раз превышающую необходимую бонуса либо выигрыша.
1×slots казино зеркало
На бонусные начисления имеют быть установлены дополнительные лимитирования, коие Вы не к при отыгрыше. Пока бонус полностью не отыгран — средства из казино не выводятся. Внесение депо – Будьте готовы пополнить счет последствии отыгрыша приза. Это стандартное требование правил для этого на промо-акций. Лучше заранее уточнить, какую необходимую надо(надобно) несомненно вносить на счет. Как правило, речь о минимальном депозите, но вы обязаны быть убеждены, собственно он вам по карману.В большинстве заведений устроить это можно по e-mal, по номеру телефона, через социальную сеть или гугл-аккаунт. <a href=http://www.zerobywav.com/home.php?mod=space&uid=3716946&do=profile&from=space>http://www.zerobywav.com/home.php?mod=space&uid=3716946&do=profile&from=space</a> 1 х слотс зеркало Начнём с того, что любое промо за регистрацию подразумевает некие обстоятельства. Бездепозитные бонусы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность денежного оборота, необходимая для исполненья критерий. Пример, получили благотворительные вращения и выиграли с них 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 рублей, проигрышных или выигрышных, маловажно. После выполнения, бонусный баланс перейдёт на настоящий и будет доступным к выводу.
1×slot официальный сайт
1 хслот регистрация в 1×slots casino <a href=https://dokuwiki.stream/wiki/User:MichelineCushman>https://dokuwiki.stream/wiki/User:MichelineCushman</a> Фриспины – благотворительные вращения с фиксированной ставкой, коие возможно использовать в конкретных игровых автоматах.
1×slots рабочее зеркало
Такие одобрения дозволяют даром протестировать свежее казино, разобраться с игровым ходом интернет слотов, заработать и исключить маленькую необходимую денег.При отыгрыше бонусных средств, нужно учитывать срок деяния бонуса и время, которое дается на отыгрыш. По истечению заявленного медли, не отыгранный приз будет аннулирован. Фриплей-бонусы встречаются только в неких клубах. Они зачисляются незамедлительно после творения профиля и активны недолговременное время. Если не успеете истратить средства, они просто сгорят. Касаемо времени, в большинстве случаев призы активны в течение часа. <a href=http://kochtagebuch.org/doku.php?id=%D1%81%D0%B0%D0%B9%D1%82%20%D1%81%20%D0%B8%D0%B3%D1%80%D0%BE%D0%B2%D1%8B%D0%BC%D0%B8%20%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%B0%D1%82%D0%B0%D0%BC%D0%B8>http://kochtagebuch.org/doku.php?id=%D1%81%D0%B0%D0%B9%D1%82%20%D1%81%20%D0%B8%D0%B3%D1%80%D0%BE%D0%B2%D1%8B%D0%BC%D0%B8%20%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%B0%D1%82%D0%B0%D0%BC%D0%B8</a> Ниже указан актуальный перечень законных казино в Беларуси с призами на первый депозит. Вы можете попасть на официальный вебсайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. 1×slots официальный сайт скачать на айфон
<b>Смотреть еще похожие новости:</b>
<a href=https://win11forum.de/m/manuelenabs.2164/>казино 1×slots</a>
<a href=https://nauc.info/forums/viewtopic.php?t=20948919>1×slots казино мобильная версия</a>
<a href=https://forum.spherecommunity.net/User-Jamesmew>1×slots официальный регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Иногда у посетителей вебсайта имеют возникнуть трудности, задачи, препядствия при активации полученного промо-кода. В таких случаях, необходимо адресоваться за поддержкою в службу поддержки «Support». Для получения ответа, обязательно указывается конкретная причина обращения и подтверждается информация дополнительными снимками. Если сложилась спорная обстановка, всегда можно обратиться к основному регулятору либо контролирующему органу, выдавшему данному заведению лицензионный документ.
#345 Sazrydphttp://[url=http://diplomt-nsk.ru/kupit-diplom-moskva-s-zaneseniem-v-reestr-7 ]diplomt-nsk.ru/kupit-
Заказать диплом академии ! Приобретение диплома ВУЗа России в нашей компании – надежный процесс, так как документ заносится в государственный реестр. Купить диплом об образовании <a href=http://diplomt-nsk.ru/kupit-diplom-moskva-s-zaneseniem-v-reestr-7/>diplomt-nsk.ru/kupit-diplom-moskva-s-zaneseniem-v-reestr-7</a>
#346 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
играющие казино бесплатное казино <a href=https://rucriminal.info/>pin up casino пин ап</a> порно с Матвей Сафонов (футбол) 1×bet официальный сайт 1×bet xyz <a href=https://specreporter.com/>champion casino</a> 1×bet зеркало рабочее xbet 1×bet зеркало рабочее на сегодня букмекерская контора фонбет официальный сайт промокод 1×bet Шевцова Татьяна Викторовна порно порно с Кирьянова Дарья Борисовна porno Алена Михайлова
DiskiPlus casino скачать приложение DiskiPlus какие казино <a href=https://diskiplus.ru/>DiskiPlus порно с Артемий Панарин (хоккей)</a> DiskiPlus казино смотреть онлайн бесплатно DiskiPlus Мухтиярова Елена Вячеславовна порно <a href=https://diskiplus.ru/>DiskiPlus 1×bet приложение</a> DiskiPlus казино смотреть онлайн бесплатно DiskiPlus 1×bet официальный xbet DiskiPlus казино вход DiskiPlus казино рулетка DiskiPlus фреш казино DiskiPlus cat casino DiskiPlus 1×bet 1хбет
#347 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино гта 5 ев казино <a href=https://glvk.guru/>порно с Зырянова Анастасия Владимировна</a> пина букмекерской конторы скачать букмекерскую контору на андроид <a href=https://sovsekretno.net/>порно с Федор Чалов (футбол)</a> ramenbet casino 1go casino 7k casino зеркало porno Алена Косторная (фигурное катание) скачиваемые казино пин ап casino человек казино
DiskiPlus порно с Максим Глушенков (футбол) DiskiPlus 1×bet официальный сайт 1×bet xyz <a href=https://diskiplus.ru>DiskiPlus гта онлайн казино</a> DiskiPlus казино рублях DiskiPlus почему казино <a href=https://diskiplus.ru>DiskiPlus Любимова Ольга Борисовна порно</a> DiskiPlus unlim casino DiskiPlus porno Виктория Баркова, легкоатлетка DiskiPlus 1×bet рабочее DiskiPlus казино сочи DiskiPlus gama casino DiskiPlus мобильные букмекерские конторы DiskiPlus 1×bet сайт
#348 Charlesgunnyhttp://filmkachat.ru
1×slots casino online регистрация
Бездепозитные бонусы отличный вариант бесплатной игры в игровые автоматы. Многие юзеры сети не знают, что в казино возможно начать играть полностью даром, а потом вывести выигрыш на банковскую карту или электрический кошелек, иные не доверяют интернет казино, а третьи успешно играют и выигрывают – и тотчас довольно немалые суммы. <a href=http://filmkachat.ru/>1×slots зеркало подтвердит вашу регистрацию если говорить</a> <a href=https://designaddict.com/community/profile/avto-vikup/>https://designaddict.com/community/profile/avto-vikup/</a> Поспешите арестовать бездепозитные бонусы за регистрацию в казино из представленного списка. Все платформы не только ведут легальную деятельность, но и обрадуют честными результатами игры, высочайшей отдачей, прыткими выплатами. 1×slots подтвердит вашу регистрацию если говорить <a href=http://crtdu-kras.ru/communication/forum/user/240125/>http://crtdu-kras.ru/communication/forum/user/240125/</a>
1×slots официальный сайт мобильная версия
Бездепозитный приз по промо-коду будет доступен для игры, только сомнений случае когда Вы активируете особый бонусный код в разделе с бонусами или укажите промокод при регистрации на сайте. В некоторых случаях, считая активации кода, понадобиться доказать контактные данные игрока и наполнить анкету клиента.Основное различие что, нет, собственно для получения бездепа нужно пополнять баланс в казино. Но считая сего, есть ряд прочих отличий: 1хслот зеркало сайта <a href=http://www.glife2120.ru/user/Davidmuh/>http://www.glife2120.ru/user/Davidmuh/</a> 1×slots официальный зеркало рабочее Для отыгрыша приза казино обязует игрока сыграть на необходимую, в некоторое один превышающую сумму полученного бонуса — тут выгода компании явна.Нельзя рассматривать забаву на средства, как вариант заработка. Азартные игры воспрещены для лиц младше 18 лет. Topcasinobonuses.mobi не зачинщиком азартных игр. Сайт носит информационный характер.
1×slots регистрацию более популярный вариант это
Если вы облюбовали для себя несколько брендов коие вам больше всего приглянулись, для неизменной игры! Таких гемблеров казино очень предпочитает и ценит, за частую эти игроки становятся VIP игроками заведения, коим нередко поступают выгодные предложения вид призов, например же туда заходит и бездепозитные.Бездепозитные призы отличный вариант безвозмездной забавы в игровые автоматы. Многие юзеры сети не знают, собственно в казино возможно начать играть абсолютно даром, а позже вывести выигрыш на банковскую карту или электрический кошелек, иные не доверяют интернет казино, а третьи удачно играют и выигрывают – и тотчас довольно большие суммы. Самый распространённый из сходственных бонусов, естесственно же, бездеп на денек рождения клиента — приз повторяющий фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им возможно на установленного периода медли. <a href=https://earthmyhome.com/User-9801>https://earthmyhome.com/User-9801</a> Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, чтобы появилась вероятность вывести выигрыш.Активация денежного вознаграждения случается механически в сотворения профиля либо использования промокода. Иногда операторы предъявляют дополнительные требования: подписаться на страницы казино в соц сетях или на рассылку рекламных известий, скачать и установить дополнительный софт и т.д. 1× slots регистрация в 1×slots casino Когда речь идет о получении бездепозитных призов в казино, для внимание на следующие обстоятельства:Это раз из главных характеристик привлекательности презента. С завешенным коэффициентом числе профессионалы не смогут выполнить обстоятельства по отыгрышу. И неважно, как привлекательно смотрится предложение – бездепозитный бонус казино в объеме $500 либо $1 000. Чтобы новички попревосходнее вникли, собственно же такое вейджер, мы разберём на образце.
1×slots официальный зеркало рабочее
У каждой игры средства требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система засчитает любую ставку. В рулетке и покере устроить это гораздо труднее. Именно потому например важно пристально читать условия получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой ирге, то новенькие попросту «спустят бонус на ветер». Классическая разновидность бонуса за творение аккаунта. Его превосходство заключается что, что заказчик может самостоятельно подбирать аппараты и создавать ставки в них. Иногда перечень игровых автоматов ограничен оператором, хотя все точно это какого-либо, чем один-единственный дешевый слот, как если, тогда, с использованием фриспинов.Фриспины начисляются по определенной ставке. После их активации игроку нужно запустить слот и убедиться, что в нем показываются бесплатные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода последствии отыгрыша ориентируется оператором и изредка выше 5 000 рублей. 1×slots официальный сайт мобильная версия <a href=http://www.xueyue8.cn/zblog/?id=16>http://www.xueyue8.cn/zblog/?id=16</a> Диапазон ставок, которые вправе устроить игрок, также лимитирован. Обычно назначать можно небольшую сумму — в 10–30 рублей за одно вращение.Используйте наилучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, дабы заработать подарки за простые деяния и уже сегодня получить 1-ый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высокой отдачей и резвыми выводами на электрические кошельки.
1×slots казино мобильная версия
У каждого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано смогли выполнить их, мы дадим некоторое советов. Если система начислила небольшую необходимую, надо делать немалые ставки – остановитесь на 10–30 центах. Как лишь сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте играть. В неприятном случае чем приглядеться к другому автомату. Иногда в бездепа, казино дарует минимальный бонус (до 50 руб. ), ради которого не заморачиваться.Лишь популярные и известные азартные заведения шансы разрешить себе раздавать бездепы вид дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, коие можно израсходовать в топовых аппаратах с высочайшей отдачей. <a href=https://www.fairyabc.com/home.php?mod=space&uid=112140>https://www.fairyabc.com/home.php?mod=space&uid=112140</a> Акции, приуроченные к календарным праздникам, случаются рассчитаны как на всех пользователей, так и на категории: например, подарок на 8 марта девушкам-игрокам или мужикам на 23 февраля. 1×slots сайт зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://uacode.com/>1×slots официальный сайт мобильная версия скачать</a>
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=128120&extra=>скачать 1×slots официальный сайт</a>
<a href=https://www.rechti.de/members/jamesrom.24835/>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Некоторые веб-сайты, этого чем обмануть регистрацию игроков, предлагают ответить на количество базисных вопросов. Цель проведения похожей викторины – выявить случайных людей, коие не имеют представления о покере, и не допустить получения ими бонусов. Если гость теснее играл в казино, то ответить на полтора десятка несложных вопросов несомненно несложно. Очень часто, ответы можно найти на официальных веб-сайтах этих учреждений. Прибывшие на аккаунт деньги бездепозитные бонусы предназначаются, главном, лишь для новоиспеченных юзеров, которые раньше не имели личного аккаунта в данном казино. Исходя из сего, если ранее у игрока был сделан депо, то, по всей вероятности, у него больше не будет способности рассчитывать на получение такого бонуса в определенном заведении.
#349 internetGephttps://novosibirsk-domashnij-internet001.ru
дешевый интернет новосибирск <a href=https://novosibirsk-domashnij-internet001.ru>novosibirsk-domashnij-internet001.ru</a> проверить интернет по адресу
#350 Sazruwhhttp://[url=http://diplomaj-v-tule.ru/kupit-diplom-o-visshem-obrazovanii-zanosim-v-reestr/]diplomaj-
Приобретение документа о высшем образовании через проверенную и надежную компанию дарит ряд преимуществ для покупателя. Данное решение дает возможность сэкономить как личное время, так и серьезные финансовые средства. Однако, на этом выгоды не ограничиваются, плюсов значительно больше.Мы можем предложить дипломы психологов, юристов, экономистов и прочих профессий. Дипломы производятся на фирменных бланках. Доступная стоимость по сравнению с большими тратами на обучение и проживание в чужом городе. Приобретение диплома института будет целесообразным шагом. Заказать диплом о высшем образовании: <a href=http://diplomaj-v-tule.ru/kupit-diplom-o-visshem-obrazovanii-zanosim-v-reestr/>diplomaj-v-tule.ru/kupit-diplom-o-visshem-obrazovanii-zanosim-v-reestr/</a>
#351 casinovulkan-reg.storehttps://casinovulkan-reg.store/
Казино с щедрыми бонусами и быстрыми выплатами, подробности по ссылке <a href=https://casinovulkan-reg.store/>https://casinovulkan-reg.store/
#352 Cazrgolhttp://[url=http://mybuildhouse.ru/nastoyashhiy-diplom-dlya-rabotyi/]mybuildhouse.ru/nastoyashhiy-di
Купить диплом ВУЗа по выгодной цене возможно, обратившись к проверенной специализированной фирме. Мы можем предложить документы ВУЗов на Ваш выбор, которые расположены в любом регионе России. <a href=http://mybuildhouse.ru/nastoyashhiy-diplom-dlya-rabotyi/>mybuildhouse.ru/nastoyashhiy-diplom-dlya-rabotyi</a>
#353 internetGephttps://nizhnij-novgorod-domashnij-internet001.ru
подключить интернет <a href=https://nizhnij-novgorod-domashnij-internet001.ru>nizhnij-novgorod-domashnij-internet001.ru</a> проверить провайдера по адресу
#354 Montazhp-SPb_cizhttps://montazhp.ru/
Доброго времени суток! Мы занимаемся только монтажом или установкой напольных плинтусов. Более 10000 довольных и благодарных клиентов, опыт работ более 10 лет. <a href=https://montazhp.ru/>монтаж напольного плинтуса цена</a> Если плинтус напольный, монтаж плинтуса, установка плинтусов в Санкт-Петербурге или СПб, то это в montazhp.ru https://montazhp.ru/ . Только узкоспециализированное и профессиональное оборудование для монтажа напольных плинтусов. До новых встреч!
#355 Melvinnoinghttps://zofcare.com/
buy korean ginseng online actos met tabletas recubiertas <a href=„https://busparelief.com/“>buy buspar online uk</a> <a href=https://busparelief.com/>buy buspar medication</a> buy kaveri fairness milk cream <a href=„https://busparelief.com/“>buy buspar no prescription</a> <a href=https://busparelief.com/>buspar tablets 5mg</a> buy neo medrol online uk buy clomid at walmart
#356 internetGephttps://msk-domashnij-internet003.ru
подключить домашний интернет москва <a href=https://msk-domashnij-internet003.ru>msk-domashnij-internet003.ru</a> домашний интернет тарифы
#357 Charlesgunnyhttp://filmkachat.ru
1хлот регистрация в 1×slots casino
Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавления или официального клиента для ПК. В большинстве казино действуют программы лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий уровень нередко сопровождается выдачей бездепа. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало</a> Как только получите бездеп в казино, всё одинаково не запамятовывайте инспектировать электронную почту. Некоторые игорные клубы каждый веселят интенсивных гэмблеров приятными призами. Чаще всего получить презент возможно в преддверии веселья, на день рождение, за привлечение друга. А кроме распространённым призом является прибавка к депозиту. Нужно не пополнить счёт, и азартное заведение прирастит его на 50–100%.Наиболее популярные гонорары среди гэмблеров – бездепозитные призы казино. Это не дивно, ведь можно получить бесплатные вращения либо виртуальные кредиты, и при не придётся пополнять счёт, рисковать собственными средствами. Удастся насладиться различными увеселениями даже выиграть крупную сумму, избегая серьёзного риска. <a href=https://developers.paragon-software.com/community/profile/shopavto/>https://developers.paragon-software.com/community/profile/shopavto/</a> Одним из поводов отдавать преимущество, льготу 1 или иному заведению содержится в привлекательности предлагаемых промоакций и даровых предложений. Безвозмездные фриспины, выдаваемые без дела создавать какой-либо вклад, в перечне располагается далеко не в конце.С не отыгранным бонусом запрещается превышать размер максимальной ставки. Нарушение этого условия будет аннулирование выигрыша. 1×slots официальный зеркало <a href=http://suprememasterchinghai.net/bbs/board.php?bo_table=free&wr_id=4683597>http://suprememasterchinghai.net/bbs/board.php?bo_table=free&wr_id=4683597</a>
1хслот зеркало сайта
Когда речь идет о получении бездепозитных бонусов в казино, в первую очередь направьте на следующие условия: 1×slots быструю регистрацию а также мгновенное Чтобы получить вероятность вывести выгода с бездепозитного бонуса в казино, нужно выполнить ряд условий:Если вы выбираете испытанное лицензионное интернет казино и выполните все условия получения бездепозитного бонуса, трудностей с получением презента у Вас не возникнет. <a href=http://kumtigey.ru/bitrix/redirect.php?goto=http://tdabris.ru/bitrix/rk.php?goto=http://sonyatex.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/fwTfPZOI4eF>http://kumtigey.ru/bitrix/redirect.php?goto=http://tdabris.ru/bitrix/rk.php?goto=http://sonyatex.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/fwTfPZOI4eF</a> 1×slots зеркало регистрация Чтобы получить возможность вывести выгода с бездепозитного бонуса в казино, нужно выполнить ряд критерий:Бездепозитный приз за регистрацию в казино с выводом денег в 2022 году — Наш ресурс дает игрокам актуальную информацию о самых свежих, великодушных и проверенных бонусах в онлайн казино, коие обновляются каждый денек.
1×slot зеркало рабочее регистрации на телефон придет
<a href=http://kiopro.ru/support/forum/view_profile.php?UID=76243>http://kiopro.ru/support/forum/view_profile.php?UID=76243</a> Срок активации и время на отыгрыш. Зачисление денег либо фриспинов случается при активации протяжении строго ограниченного периода, похожие притязания предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать приз количество дней или даже месяцов. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с неоправданно высоким вейджером. 1×slots casino зеркало рабочее
1×slots официальный зеркало рабочее
Выше мы предоставили глубокий комплект самых новых и актуальных бездепозитных бонусов в онлайн казино без пополнения на 2022 год, где возможность пользоваться каким ценным бездепозитным призом. 1×slots зеркало <a href=https://tpforums.org/forum/member.php?78974-JasperUnupe>https://tpforums.org/forum/member.php?78974-JasperUnupe</a>
1×slots официальный сайт мобильная версия
Наши специалисты изучают обстоятельства акции, после в ручном режиме проверку их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и характеристики. Мы не рекламируем казино, а даем игрокам информацию о превосходнейших из них. Также есть онлайн-платформы азартных игр, коие используют раздачу бездепозитных бонусов в специальные даты (как для казино, например и для игрока). Помимо этого, действующие игроки также имеют возможность получить похожие бонусы за свою деятельность (например, за повышения значения либо за схожие заслуги).Чаще всего интернет-казино предлагают бездепозитные бонусы новым пользователям. Эта промо-акция очень эффективно привлекает начинающих, подталкивая их к открытию счета. Конечно, не все они становятся послушными посетителями, но сам прецедент регистрации аккаунта играет на руку заведению. <a href=http://xoronim.ru/bitrix/redirect.php?goto=http://stankoteka.ru/bitrix/redirect.php?goto=http://ask-prom.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/kycKmqT041T>http://xoronim.ru/bitrix/redirect.php?goto=http://stankoteka.ru/bitrix/redirect.php?goto=http://ask-prom.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/kycKmqT041T</a> Как лишь вы отыграли вейджер и свои с бонусного баланса перешли для на настоящий счет, Вы неустрашимо можете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать наименьший депо например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депо). 1×slots casino регистрация на сайте
<b>Смотреть еще похожие новости:</b>
<a href=https://fmatras.ru/topic/92059–1×slots-casino-registratsiya-1×slotscasino09k-online/#comment-109835>казино 1×slots официальный сайт</a>
<a href=https://17lubbs.com/forum-2–1.html>онлайн казино 1×slots</a>
<a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=47222>1×slots регистрация на 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подтверждение регистрации. Казино настоятельно привязки профиля к электрическому адресу и номеру телефонного. Для этого на e-mail отправляется письмо со ссылкой, а на телефон ? текстовое известье с кодом. Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, a лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.
#358 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
ставки на спорт букмекерские конторы бесплатные букмекерские конторы <a href=https://strelochnik.com/>часы казино</a> casino официальный зеркало casino зеркало сегодня рабочее <a href=https://vestnik-jurnal.com/>самое казино</a> кент казино casino 7k рабочее up casino зеркало porno Алена Косторная (фигурное катание) 1win casino pin ап casino порно с Виктория Синицина, фигуристка
DiskiPlus порно с Карен Хачанов (теннис) DiskiPlus Чулпан Хаматова <a href=https://diskiplus.ru/>DiskiPlus пин ап casino pin</a> DiskiPlus pin casino DiskiPlus black russia казино <a href=https://diskiplus.ru>DiskiPlus бесплатные букмекерские конторы</a> DiskiPlus лучшие букмекерские конторы DiskiPlus казино фильм смотреть онлайн DiskiPlus пин ап казино DiskiPlus 1×bet официальный xbet DiskiPlus сколько казино DiskiPlus 7k casino сайт DiskiPlus Окладникова Ирина Андреевна порно
#359 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Елена Лядова порно с Каролина Севастьянова <a href=https://m.repost.news/>Черкесова Бэлла Мухарбиевна порно</a> casino riobet 1×bet 1хбет <a href=https://rhymes-punches.com/>ев казино</a> леон букмекерская контора 1×bet официальный скачать casino автомат мобильные букмекерские конторы яндекс казино 1×bet зеркало рабочее на сегодня 1×bet xyz Комарова Наталья Владимировна порно
DiskiPlus ramenbet casino DiskiPlus 1×bet зеркало слоты 1×bet xyz <a href=https://diskiplus.ru>DiskiPlus Лут Оксана Николаевна порно</a> DiskiPlus casino официальный зеркало DiskiPlus casino автомат <a href=https://diskiplus.ru/>DiskiPlus Комарова Наталья Владимировна порно</a> DiskiPlus букмекерская контора леонов DiskiPlus Александра Бортич DiskiPlus cat casino DiskiPlus Валентина Матвиенко порно DiskiPlus Хорова Наталья Александровна порно DiskiPlus букмекерская контора зенит DiskiPlus официальные зеркала казино
#360 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino c2d ru
Бонус с зачислением средств на счет дает больше свободы деяний. Пользователь сам выбирает, каким образом распорядиться подаренными своими. Здесь кроме шансы работать лимитирования на перечень дешевых игр, хотя обычно эти рамки не например строги, как в промо с бесплатными вращениями. <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> <a href=https://manylink.co/@lexxeagle>https://manylink.co/@lexxeagle</a> При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток.Принципиальным отличием даровых призов от призов на депо считается неименье необходимости вносить средства на акк. Из-за этого их нередко называют бездепозитными (no down payment bonuses). 1хслотс официальный сайт зеркало <a href=https://itformula.ca/index.php?title=How_To_Install_The_Latest_1×bet_APP_Version_In_Somalia_SO>https://itformula.ca/index.php?title=How_To_Install_The_Latest_1×bet_APP_Version_In_Somalia_SO</a> Заработать на бездепозитных призах за регистрацию в казино имеет любой пользователь, достигший совершеннолетия.
1 xslots рабочее зеркало
1×slots мобильная версия войти казино Превышение максимальной ставки при отыгрыше. Система механически не предуведомляет о превышении ставки, поэтому о несоблюдении правил игрок возможность узнать теснее последствии подачи запроса на вывод средств. <a href=https://cse.google.co.kr/url?q=https://doctorlazuta.by/>https://cse.google.co.kr/url?q=https://doctorlazuta.by/</a> Как только вы отыграли вейджер и свои с бонусного баланса перешли для на реальный счет, Вы отважно можете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать минимальный депо к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депозитом).Помните, собственно любые нарушения управлял сведут на нет ваши старания, и вы всего останетесь без начисленного для дарового бонуса. Всегда изучайте верховодила начисления и условия вейджера. По хоть вопросам, на которые вы не других найти ответы, обращайтесь за объясненьям и саппорт. 1×slots зеркало которую указывали при регистрации кстати
1×slots регистрация на сайте
Денежные средства. Третий приз за регистрацию без депо – наличные. К раскаянью, только знаменитые и популярные клубы имеют уяснить деньги в рублях либо баксах. С их поддержкою вас насладиться любой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед этим необходимо выполнение конкретных критерий. Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в индивидуальный кабинет, чтобы отобрать бесплатные вращения с вейджером х40; <a href=https://www.gunungbelanda.com/2022/09/powered-by-pligg-home-login-register.html>https://www.gunungbelanda.com/2022/09/powered-by-pligg-home-login-register.html</a> Во всех легальных онлайн-казино Беларуси нужно свидетельство паспортных данных для забавы — это заявка правительства государства. 1×slots официальный сайт мобильная версия
1хслотс казино зеркало
1×slots регистрация на сайте <a href=https://qualityprogamer.de/forum/member.php?action=profile&uid=7383>https://qualityprogamer.de/forum/member.php?action=profile&uid=7383</a> А ознакомиться с свежими интернет казино, Вы можете с бонусов с выводом прибыли, которые Вы сможете получить без депозита.
1×slots официальный регистрация
Бездепозитный приз казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в этом и содержится основное отличие. <a href=https://w-o-n.org/member.php?action=profile&uid=3187>https://w-o-n.org/member.php?action=profile&uid=3187</a> 1×slots на любой вкус как пройти регистрацию Бездепы обычно предлагают с отыгрышем — быстро исключить выигранные свои невозможно. Перевод денег со счета будет возможен последствии того, как пользователь выполнит все требования казино, а сумма имеет быть выше установленного правилами лимита. Условиями промоакции фиксируются сроки, протяжении коих заказчик вправе пользоваться предложением. Обычно они не превосходят нескольких дней в активации.
<b>Смотреть еще похожие новости:</b>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=791387>1×slot зеркало</a>
<a href=https://www.mentalhealth-world.org.uk/forums/index.php?/topic/96406–1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%B2–1×slots-casino/>1×slots зеркало регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На благотворительные бонусы онлайн-казино почти практически распространяется ограничения по стране проживания клиентов. Даже если вас разрешено раскрывать счет и выступать на средства в заведении, это еще не означают, собственно вас доступны no down payment bonuses. Составленный знатоками Casino.ru список онлайн-казино с бездепозитным бонусом дозволяет игрокам сопоставить спецпредложения различных операторов.
#361 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Любимова Ольга Борисовна порно винлайн букмекерская контора официальный <a href=https://repost.news/>букмекерская контора бесплатно скачать</a> порно с Виктория Синицина, фигуристка сайт казино вход <a href=https://specreporter.com/>ев казино</a> казино пину бк букмекерская контора смотреть фильм казино играющие казино 7k casino официальный бк букмекерская контора 1×bet на андроид
DiskiPlus 1×bet официальный 1×bet xyz DiskiPlus сайт букмекерской конторы <a href=https://diskiplus.ru>DiskiPlus играющие казино онлайн</a> DiskiPlus Яровая Ирина Анатольевна порно DiskiPlus pin ап casino <a href=https://www.diskiplus.ru>DiskiPlus top casino</a> DiskiPlus 1×bet сайт 1×bet xyz DiskiPlus porno Екатерина Ефременкова, шорт-трекистка DiskiPlus casino 7k рабочее DiskiPlus порно с Евгения Медведева, фигуристка DiskiPlus porno Ангелина Гончаренко, хоккеистка DiskiPlus рабочие зеркала казино DiskiPlus pin casino зеркало
#362 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало на сегодня Скворцова Вероника Игоревна порно <a href=https://specreporter.com/>bitz casino</a> пина букмекерской конторы 1×bet casino <a href=https://specreporter.com/>почему казино</a> ешь казино порно с Абрамченко Виктория Валериевна пин ап casino pin up top up casino казино большая скачиваемые казино Приезжева Екатерина Геннадьевна порно
DiskiPlus порно с Евгений Малкин (хоккей) DiskiPlus часы казино <a href=https://www.diskiplus.ru/>DiskiPlus retro casino</a> DiskiPlus porno Александра Степанова, фигуристка DiskiPlus pin up casino top top <a href=https://diskiplus.ru>DiskiPlus 7k casino официальный сайт</a> DiskiPlus 1×bet casino DiskiPlus casino официальный сайт DiskiPlus porno Дарья Клишина DiskiPlus pin up casino top top DiskiPlus bitz casino DiskiPlus официальное казино вход DiskiPlus казино вход
#363 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino betting слоты казино <a href=https://rumafia.news/>casino 7k рабочее</a> porno Ангелина Гончаренко, хоккеистка порно с Карен Хачанов (теннис) <a href=https://th-royalgclub.com/>порно с Арина и Дина Аверины, гимнастки</a> Черкесова Бэлла Мухарбиевна порно porno Дарья Мороз pin up casino пин ап 7k casino скачать зеркала официальных сайтов казино бесплатно играем казино 1×bet официальный скачать
DiskiPlus кент казино DiskiPlus 1×bet на сегодня <a href=https://www.diskiplus.ru>DiskiPlus Фастова Елена Владимировна порно</a> DiskiPlus автомат казино DiskiPlus ев казино <a href=https://diskiplus.ru/>DiskiPlus порно с Петр Ян (ММА)</a> DiskiPlus casino сегодня DiskiPlus pin up casino официальный DiskiPlus официальное казино вход DiskiPlus 1×bet 1хбет DiskiPlus скачать 1×bet 1×bet xyz DiskiPlus порно с Алина Загитова, фигуристка DiskiPlus 1win букмекерская контора
#364 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
Вейджер в переводе с английского означает «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша полученного приза, в нашем случае бездепозитного. Число ставок роли не играет — главно только набрать сумму, пропорциональную сумме одобрения.Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном веб-сайте и выполните вход в собственный кабинет, чтобы арестовать бесплатные вращения с вейджером х40; <a href=http://filmkachat.ru/>1×slots скачать на айфон</a> Бонус в казино без депозита имеет разные разновидности: это может быть приветственный бонус, промоакции в честь каких-то дней или важных дат, бонус за привлечение свежих игроков, лояльность и получение VIP-статуса. <a href=https://note.com/joyous_otter80/n/n668a7c74c58d>https://note.com/joyous_otter80/n/n668a7c74c58d</a> 1×slots зеркало регистрация то дальше необходимо пройти <a href=http://fdaplus.co.kr/bbs/board.php?bo_table=free&wr_id=106066>http://fdaplus.co.kr/bbs/board.php?bo_table=free&wr_id=106066</a>
1×slots официальный сайт скачать
В перечне притязаний к отыгрышу часто присутствуют лимиты на ставки при забаве на личные средства. Так, случае отыграть нужно 30 000 рублей, а предельная сумма ограничена 30 рублями, то вертеть барабаны предстоит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками условий по срокам деяния акции.Размер бонусов почаще всего чисто условный и не выше 50 рублей. Приятно, но осязаемым бустом при навряд будет. 1хслотс мобильная версия зеркало Обычно бездепозитные акции от казино, прибывают на эл. Почту в деньки рождения или дни. В некоторых интернет казино можно адресоваться в чат и как неизменному игроку, вполне вам предложат бездепозитное предложение.Теоретически, к безвозмездным призам возможно отнести например нарекаемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, поэтому собственно они деют только вероятность создавать ставки. <a href=https://www.assayyarat.com/forums/member673654.html>https://www.assayyarat.com/forums/member673654.html</a> Мы собрали и опубликовали список превосходнейших бездепозитных казино с призами за регистрацию, которые гарантируют великодушные выигрыши и моментальные выплаты. 1х слот регистрация в 1×slots casino
1×slots регистрацию процедура займет всего лишь
Но существуют азартные заведения, готовые просто так вручить деньги на забаву. Для сего довольно сделать профиль. Чтобы исключить выигрыш, сперва необходимо выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа.Бездепозитные бонусы за регистрацию являются одним из самых известных способов вербования новых игроков в онлайн-казино, потому что они предоставляют игрокам возможность опробовать казино, более игровые автоматы, и возможно, выиграть реальные средства. При выполнении условий отыгрыша и верификации, средства с бонусного счета переводятся на главной и могут быть выведены на карту либо электронный кошелек. Лимиты на вывод и сроки проведения транзакции в от избранной платежной системы.Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. <a href=https://rovworld.com/members/michaellip/profile/>https://rovworld.com/members/michaellip/profile/</a> Такие поощрения позволяют бесплатно протестировать свежее казино, разобраться с игровым процессом онлайн слотов, заработать и исключить маленькую сумму средств.Такой безвозмездный эквивалент средств зачисляется на профиль юзера после воплощения притязаний и предназначаются они только для игрового процесса. Вывод таких вознаграждений вероятен лишь последствии осуществления вейджеровых условий. 1×slots скачать на айфон В случае установленного лимита на необходимую вывода выигрыша с бездепозитного бонуса, игрок не сможет исключить больше заявленной суммы.
1×slots зеркало которую указывали при регистрации кстати
Активация денежного вознаграждения случается механически последствии создания профиля либо применения промокода. Иногда операторы предъявляют дополнительные требования: подписаться на странички казино в социальных сетях либо на рассылку маркетинговых извещений, скачать и ввести дополнительный софт и т.д. <a href=https://ragnarok.ch/forum/viewthread.php?thread_id=204827>1×slots регистрация на сайте 1×slots ru com</a> B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.Активация по промокоду употребляется в различных видах бездепов. Если идет о приветственном бонусе, то набор символов возможно разузнать на крупнейшей странице, в регистрационной форме или послании, которое отчаливает юзеру для подтверждения адреса электронной почты. Акции шансы проводиться вместе с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активируется разовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем важный код для активации в описании любого рекламную. Эффективность бездепов в качестве маркетингового инструмента оценили почти операторы. Малоизвестные площадки используют эти промоакции, чтобы стремительно набрать базу. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны постоянных гостей. Не все веб-сайты, дающие подарки без депозита, рекомендованы к забаве. За симпатичным промоописанием шансы прятаться неосуществимые условия отыгрыша и другие подводные камни.Иногда операторы настоятельно внесение малого депозита перед выводом для верификации платежного прибора. В неких казино данный депозит кроме предстоит отыграть. 1хслотс рабочее зеркало на сегодня <a href=https://clients1.google.ac/url?q=https://doctorlazuta.by/>https://clients1.google.ac/url?q=https://doctorlazuta.by/</a> Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.
1хслотс рабочее зеркало
Вознаграждения за получение VIP-статуса ? начисляются в рамках программы лояльности при достижении очередного уровня или выдаются индивидуально менеджерами саппорта.Для тех, кто лишь подумывает испытывать свою удачу, а для проф игроков, отыскивающих свежие площадки для выигрышей, основные лицензированные казино нередко устраивают различные акции, и одно из лучших услуг за последнее время – как для новичков, так и для проф игроков – бездепозитный приз за регистрацию. <a href=https://www.catfish-assassins.org/forum/memberlist.php?mode=viewprofile&u=2434>https://www.catfish-assassins.org/forum/memberlist.php?mode=viewprofile&u=2434</a> Так же стоит выделить то, собственно в любом интернет казино установлен свой наибольший кешаут на бездепозитный приз. Как правило кешаут — это максимальная сумма средств, кот-ая доступная для вывода с бездепозитного бонуса. 1×slots официальный регистрация Доступные игры – В неких азартных играх можно снизить математическое приемущество казино до нескольких десятых процента. В их числе почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как правило, в этих забавах ставки идут в зачет вейджера не полностью. Например, возможность учитываться лишь 50%. В некоторых забавах бездепозитные бонусы вообщем невозможно отыгрывать.Фриспины — бесплатные вращения, коие дозволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся самым известным и преимущественным обликом бонуса — безвозмездные вращения иногда эффективнее и веселее в отыгрыше, чем другие облики бездепов.
<b>Смотреть еще похожие новости:</b>
<a href=http://kemsrr.forumex.ru/viewtopic.php?f=7&t=6038>1×slots зеркало рабочее на сегодня</a>
<a href=http://forums.indexrise.com/thread-309-post-536325.html#pid536325>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<a href=https://nauc.info/forums/viewtopic.php?t=20873552>1×slots коды</a>
<a href=https://www.thefamilylegion.se/viewtopic.php?f=4&t=107985>скачать 1×slots на андроид мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Во всех легальных онлайн-казино Беларуси нужно свидетельство паспортных данных для забавы — это заявка правительства страны. На нашем веб-сайте Вы отыщите список актуальных свежих бездепозитных бонусов в казино 2022 года. Также, есть много неповторимых услуг, коие доступны только гостям нашего сайта последствии регистрации по нашей ссылке или активации специального промокода.
#365 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Ходнева Светлана Владимировна порно kent casino регистрация <a href=https://www.ossetia.tv/>смотреть фильм казино</a> реального казино сайт казино зеркало <a href=https://rhymes-punches.com/>порно с Матвей Сафонов (футбол)</a> сайт винлайн букмекерская контора ап казино vodka casino Приезжева Екатерина Геннадьевна порно 7k casino зеркало Александра Бортич сколько казино
DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus лучшие онлайн казино <a href=https://www.diskiplus.ru>DiskiPlus Елизавета Боярская</a> DiskiPlus online casino 7k DiskiPlus vodka casino <a href=https://diskiplus.ru/>DiskiPlus казино в россии</a> DiskiPlus пари букмекерская контора DiskiPlus бесплатно фильм казино DiskiPlus ограбление казино DiskiPlus casino актуальное зеркало DiskiPlus букмекерские контора ап DiskiPlus порно с Голикова Татьяна Алексеевна DiskiPlus inform@rucriminal.info
#366 internetGephttps://msk-domashnij-internet001.ru
домашний интернет тарифы <a href=https://msk-domashnij-internet001.ru>msk-domashnij-internet001.ru</a> провайдеры по адресу дома
#367 vavadacasi_hhPrhttps://vavadacasino.netlify.app/
Лучшее место для азартных игр | Игровой портал для настоящих любителей | Уникальные бонусы и акции | Испытайте удачу прямо сейчас | Эксклюзивные игры только на vavadacasino.netlify.app | Полностью легальный сайт | Высокие шансы на выигрыш | Играйте в любое время и в любом месте | Вы получите помощь в любой ситуации | Обучайтесь у профессионалов | Быстрый доступ к играм | Акции для новых игроков | Играйте в самые горячие новинки | Выигрывайте призы и трофеи | Партнерская программа и рефералы | Легко понять и начать играть | Безопасная игра и конфиденциальность | Положительные оценки сайта | Настоящее казино у вас дома https vavada com ru <a href=https://vavadacasino.netlify.app/>https://vavadacasino.netlify.app/</a> .
#368 inernetkrdGephttps://krasnodar-domashnij-internet003.ru
интернет провайдеры краснодар по адресу <a href=https://krasnodar-domashnij-internet003.ru>krasnodar-domashnij-internet003.ru</a> проверить интернет по адресу
#369 inernetkrdGephttps://krasnodar-domashnij-internet002.ru
провайдеры интернета по адресу <a href=https://krasnodar-domashnij-internet002.ru>krasnodar-domashnij-internet002.ru</a> какие провайдеры интернета есть по адресу краснодар
#370 Sazrlwehttp://[url=http://dyado.listbb.ru/viewtopic.phpf=2&t=1507/]dyado.listbb.ru/viewtopic.phpf=2&t=1507[
Мы изготавливаем дипломы любой профессии по приятным тарифам.– <a href=http://dyado.listbb.ru/viewtopic.phpf=2&t=1507/>dyado.listbb.ru/viewtopic.phpf=2&t=1507</a>
#371 inernetkrdGephttps://krasnodar-domashnij-internet001.ru
какие провайдеры по адресу <a href=https://krasnodar-domashnij-internet001.ru>krasnodar-domashnij-internet001.ru</a> провайдеры в краснодаре по адресу проверить
#372 inernetadresGephttps://krasnoyarsk-domashnij-internet003.ru
проверить провайдера по адресу <a href=https://krasnoyarsk-domashnij-internet003.ru>krasnoyarsk-domashnij-internet003.ru</a> провайдеры в красноярске по адресу проверить
#373 Upperator_quamehttps://upperator.ru/
Добрый день! Друзья и коллеги мои эта новость исключительно для вас! Хотим мы это или не хотим, а искусственный интеллект и нейронные сети основательно входят в нашу жизнь. Нейросеть и ИИ интегрируются в промышленность и управлении производственными и техническими процессами. Полезно это или нет? Но даже в данный момент видно, как искусственный интеллект и нейронные сети оптимизируют и улучшают бизнес процессы в различных отраслях промышленности и производства. А если учесть, что технологии и прогресс постоянно развиваются и улучшаются, то очевидно, что со временем будет грандиозный успех. Поэтому, однозначно применять нужно уже сегодня и сейчас. В общем, если вы хотите найти, нейросеть, нейронная сеть, AI, искусственный интеллект, ИИ и т.д., например: <a href=https://upperator.ru/>возможности применения нейросетей в ветеринарии</a> Тогда вам нужно прямо сейчас перейти на сайт Upperator Нейросети в промышленностии узнать все подробности по применение нейронных сетей, нейросеть в промышленности, нейронные сети в управлении, применение искусственного интеллекта, применение ИИ, применение нейросетей и т.д. https://upperator.ru/ . Обязательно переходите на сайт upperator.ru ООО „Лаборатория сетевых технологий!“ сохраняйте в закладки и изучайте информацию, не забудьте записать адрес сайта и подписаться на Телеграмм канал. Всем пока!
#374 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало
В основном случаев бесплатные призы начисляются в кредитах, которые невозможно незамедлительно вывести со счета. Прежде их нужно отыграть по установленным правилам. Эти притязания принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д. ). О нем читайте ниже.Как и другие акции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такого предложения считаются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает новых посетителей и дозволяет им составить впечатление о функционале, не рискуя значительными совокупностями. <a href=http://filmkachat.ru/>x1 slots 1хслотс регистрация перейти на 1×slots</a> <a href=https://acrobat.uservoice.com/forums/935259-acrobat-web-beta-internal/suggestions/49479029-%D0%BF%D1%80%D0%BE%D1%84%D0%B5%D1%81%D1%81%D0%B8%D0%BE%D0%BD%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2-%D0%BA%D0%B8%D0%B5%D0%B2%D0%B5-%D0%BE%D1%81%D0%BE%D0%B1%D0%B5%D0%BD%D0%BD%D0%BE%D1%81%D1%82%D0%B8-%D0%B8>https://acrobat.uservoice.com/forums/935259-acrobat-web-beta-internal/suggestions/49479029-%D0%BF%D1%80%D0%BE%D1%84%D0%B5%D1%81%D1%81%D0%B8%D0%BE%D0%BD%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2-%D0%BA%D0%B8%D0%B5%D0%B2%D0%B5-%D0%BE%D1%81%D0%BE%D0%B1%D0%B5%D0%BD%D0%BD%D0%BE%D1%81%D1%82%D0%B8-%D0%B8</a> Условия могут различаться друг от приятеля. Но подобный приз возможность быть применен лишь для игрового процесса – приобретенные на счет финансы до такого, как станут отыграны, вывести невероятно.Маркетинговая политика всех игорных интернет-клубов должна одевать разнородный характер. И если вознаграждения на депозит работают для того, чтобы провоцировать вносить депозиты и поощрять уже существующих пользователей, то бездепозитный бонус в казино или бонус за регистрацию в казино, прежде всего, рассчитан на расширение базы покупателей. 1×slots официальный сайт, скачать <a href=http://bbs.all4seiya.net/home.php?mod=space&uid=971080>http://bbs.all4seiya.net/home.php?mod=space&uid=971080</a>
1×slots зеркало сайта
Для такого, дабы отыграть сумму вашего бездепозитного приза нужно выполнить условия вейджера. Очень часто фриспины даются на конкретные слоты (book of ra, book of deceased, book of sun), выбирайте разъем для по душе, они довольно красочные и высококачественные. Бездепозитные приз может быть валютным так и в виде фриспинов на слоты <a href=https://forum.vn.ua/showthread.php?p=3305480#post3305480>1×slots зеркало регистрация то дальше необходимо пройти</a> 1×slots официальный регистрация Помимо прочего, для вывода средств по бездепу нужно внести на счёт свой первый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально вероятную необходимую, последствии чего вывод средств станет доступен. <a href=http://www.modernism.hk/?s=%3Ca+href%3Dhttps%3A%2F%2Fsitesseo.ru%2Fkupit-vechnye-ssylki-dlya-prodvizheniya-sajta%2F%3E%D0%BA%D0%B0%D0%BA%D0%B8%D0%B5+%D1%81%D1%81%D1%8B%D0%BB%D0%BA%D0%B8+%D0%BA%D1%83%D0%BF%D0%B8%D1%82%D1%8C%3C%2Fa%3E+%D0%BA%D1%83%D0%BF%D0%B8%D1%82%D1%8C+%D0%B2%D0%B5%D1%87%D0%BD%D1%8B%D0%B5+%D1%81%D1%81%D1%8B%D0%BB%D0%BA%D0%B8+%D0%B4%D0%BB%D1%8F+%D0%BF%D1%80%D0%BE%D0%B4%D0%B2%D0%B8%D0%B6%D0%B5%D0%BD%D0%B8%D1%8F+%D1%81%D0%B0%D0%B9%D1%82%D0%B0&x=0&y=0>http://www.modernism.hk/?s=%3Ca+href%3Dhttps%3A%2F%2Fsitesseo.ru%2Fkupit-vechnye-ssylki-dlya-prodvizheniya-sajta%2F%3E%D0%BA%D0%B0%D0%BA%D0%B8%D0%B5+%D1%81%D1%81%D1%8B%D0%BB%D0%BA%D0%B8+%D0%BA%D1%83%D0%BF%D0%B8%D1%82%D1%8C%3C%2Fa%3E+%D0%BA%D1%83%D0%BF%D0%B8%D1%82%D1%8C+%D0%B2%D0%B5%D1%87%D0%BD%D1%8B%D0%B5+%D1%81%D1%81%D1%8B%D0%BB%D0%BA%D0%B8+%D0%B4%D0%BB%D1%8F+%D0%BF%D1%80%D0%BE%D0%B4%D0%B2%D0%B8%D0%B6%D0%B5%D0%BD%D0%B8%D1%8F+%D1%81%D0%B0%D0%B9%D1%82%D0%B0&x=0&y=0</a> Казино выделяет возможность заработать и вывести настоящие средства на бездепозитных призах. Обычно, это малозначительная сумма, которую казино возможность себе разрешить презентовать игроку.Таким образом, заведение пытается продемонстрировать себя своим потенциальным игрокам, а подобный маркетинговый ход как казино приз без депозита за регистрацию завлекает довольно большое внимания к игорному заведению и обеспечивает неизменный струю новых гостей и будущих клиентов игрового онлайн клуба. 1×slots рабочее зеркало
1хслотс мобильная версия зеркало
Только выполнив все условия отыгрыша и дождавшись завершения проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить свои средства. Также бездепозитные призы шансы служить методом вернуть к этой посетителей, что приостановивших своё сотрудничество с фирмой: уведомление о бездепе поступает на мобильный телефон либо почту.Ниже указан важный список законных казино в Беларуси с бонусами на первый депо. Вы сможете попасть на официальный вебсайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз. <a href=http://spravka003.ru/bitrix/click.php?goto=http://spark-m.ru/bitrix/rk.php?goto=http://ilts.ru/bitrix/click.php?goto=https://teletype.in/@urid_pomosh/8kOmOup_1Me>http://spravka003.ru/bitrix/click.php?goto=http://spark-m.ru/bitrix/rk.php?goto=http://ilts.ru/bitrix/click.php?goto=https://teletype.in/@urid_pomosh/8kOmOup_1Me</a> Еще одно условие касается объемов ставки. Операторы устанавливают наивысшую сумму, которую игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, избранной в Личном кабинете. При превышении лимита есть риск лишиться бонуса. Существующие лимитирования относятся и к определенным видам ставок. Например, играя в рулетку, клиент может столкнуться с запретом назначать фишки на шансы. 1×slots регистрацию более популярный вариант это
1×slots зеркало регистрация в 1×slots casino
Бездепозитные призы, как теснее ясно, считаются оригинальной возможностью к игровому процессу безусловно бесплатно, словами играть в онлайн казино бесплатно и на быть свои сразу последствии регистрации аккаунта. Автоматы с таким депо могут замерзнуть великолепной вероятностью сыграть для почитателей пыла с определенными ограничениями в денег.Такой казино приз без депо за регистрацию выдается игроку на час и активно используется данное предложение с 2017 года. Это как бы некая маскировка одобрения под бездепозитный. Суть всего сего сводится к что, этому, собственно геймеру на час выдается, например, 1000 $, а реклама повторяет то, собственно каждой выигрыш возможно будет в оставить при себе. Но случае играющий всерьез отнесется к данному предложению, то он попросту растеряет время. Ведь геймеру надо(надобно) будет выступать не в основном аккаунте, а в тренировочном и с ограниченным выбором автоматов и ставок. Да и если, тогда, выигрыша (в всей тыс. ) в управляла вступят определенные обстоятельства, где несомненно сказано, что максимальной суммой победы имеет быть лишь двести $ и деньги возможно применять лишь в качестве бонуса на 1-ый вклад с вейджером 25 от суммы гонорары плюс сам депо. По итогу получится, что игрок выигрывал для 200% бонус с вейджером на конкретную необходимую. Короче разговаривая, это все не вашего времени. <a href=http://forum.animogen.com/viewtopic.php?f=9&t=1576007>1 х слотс зеркало</a> Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке адепты онлайн-казино публикуют важную информацию о not the slightest down payment bonuses и других услугах. Во время игры в казино, выигрыши, полученные благодаря бесплатным призовым фондам, суммируются и срабатывают в совместную сумму для отыгрывания. Однако, случае удача улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно допустит вывести денежные средства. Сумма вывода будет находиться от лимита, одобренного именно в данном учреждении. Поэтому, пристально надо(надобно) разбирать управляла выдачи безлимитных депо. 1×slots официальный сайт скачать <a href=https://www.mshowto.org/forum/members/henrysab.html>https://www.mshowto.org/forum/members/henrysab.html</a> Практически все онлайн казино с бездепозитным бонусом за регистрацию предусматривает программку преданности — систему одобрения неизменных клиентов, которая произведено из колличества значений. При достижении игроком очередного уровня на его счёт поступает приз. Чем повыше уровень — что, этим щедрее приз.
1×slots сайт
В бонусную программку множества операторов входят регулярные бездепы. Это пожизненные промоакции, поощряющие активных постоянных игроков. Популярный формат — раздача фриспинов по конкретным дням недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают постоянные призы без депозита в мена на накопленные баллы преданности. <a href=https://www.market-directory.com/members/doctorlazutapa-8779.html>https://www.market-directory.com/members/doctorlazutapa-8779.html</a> Некоторые казино все предлагать клиентам бездепы за свидетельство номера или почты либо репост на страничку в социальных сетях. 1х слот регистрация в 1×slots casino Принципиальным различием безвозмездных бонусов от призов на депозит считается неимение необходимости вносить деньги на аккаунт. Из-за этого их часто именуют бездепозитными (no down payment bonuses).
<b>Смотреть еще похожие новости:</b>
<a href=http://mandala-app.com/forums/viewtopic.php?f=5&t=222150>1×slots официальный сайт скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с безвозмездных вращений. Прибыль, коию Вы заработаете на этом бездепе можно назначать на вывод без какого или отыгрыша.
#375 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino сегодня сайты казино <a href=https://specreporter.com/>порно с Диана Шнайдер (теннис)</a> казино онлайн бесплатно gama casino <a href=https://kompromat1.online/>казино на деньги</a> casino регистрации casino 7k сегодня casino betting Преподобная Надежда Александровна порно казино онлайн бесплатно порно с Матвей Сафонов (футбол) порно с Константин Тюкавин (футбол)
DiskiPlus сайт букмекерской конторы DiskiPlus бесплатное казино <a href=https://www.diskiplus.ru>DiskiPlus порно с Алина Загитова</a> DiskiPlus up casino зеркало DiskiPlus Манилова Алла Юрьевна порно <a href=https://www.diskiplus.ru/>DiskiPlus Фастова Елена Владимировна порно</a> DiskiPlus 1go casino DiskiPlus porno Яна Троянова DiskiPlus демо казино DiskiPlus porno Юлия Пересильд DiskiPlus казино пин DiskiPlus Фастова Елена Владимировна порно DiskiPlus сайт казино вход
#376 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slots review live
Бонус за регистрацию в казино выдается только раз раз на одного игрока. Но посещают вспомогательные промоакции, масштабах которых бездепы расступаются для постоянных клиентов и эти презенты Вы можете получить более 1-го раза. <a href=http://filmkachat.ru/>1×slots скачать на айфон</a> Возможность поиграть вспомогательное состязание (а иногда и некоторое) совершенно безвозмездно, а выигрыш, к, поступает на счёт игрока. <a href=https://collegefactual.uservoice.com/forums/195264-general-feedback/suggestions/49478657-%D0%B2%D0%B8%D0%BA%D1%83%D0%BF-%D1%82%D0%B0-%D0%B2%D1%96%D0%B4%D0%BD%D0%BE%D0%B2%D0%BB%D0%B5%D0%BD%D0%BD%D1%8F-%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%BE%D0%B1%D1%96%D0%BB%D1%96%D0%B2-%D0%BF%D1%96%D1%81%D0%BB%D1%8F-%D0%B4%D1%82%D0%BF-%D0%BF%D0%BE%D0%BA%D1%80%D0%BE%D0%BA>https://collegefactual.uservoice.com/forums/195264-general-feedback/suggestions/49478657-%D0%B2%D0%B8%D0%BA%D1%83%D0%BF-%D1%82%D0%B0-%D0%B2%D1%96%D0%B4%D0%BD%D0%BE%D0%B2%D0%BB%D0%B5%D0%BD%D0%BD%D1%8F-%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%BE%D0%B1%D1%96%D0%BB%D1%96%D0%B2-%D0%BF%D1%96%D1%81%D0%BB%D1%8F-%D0%B4%D1%82%D0%BF-%D0%BF%D0%BE%D0%BA%D1%80%D0%BE%D0%BA</a> На странице представлены бездепозитные призы за регистрацию в казино редкая заслуга за коей гонятся все игроки как новички, так и мастера. Мы тоже уделяем великое внимание на присутствие призов при формирование рейтинга казино на средства. Бездепозитный приз это вероятность играть бесплатно и выиграть реальные деньги.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро или 20 $. Если выдаются фриспины, их число редко выше нескольких 10-ов бесплатных вращений. 1хслот официальный сайт зеркало <a href=http://bbs.darkml.net/home.php?mod=space&uid=8008985>http://bbs.darkml.net/home.php?mod=space&uid=8008985</a>
1×slot официальный сайт
Обычно бездепозитные промоакции от казино, прибывают на эл. Почту в деньки рождения или праздничные. В неких онлайн казино возможно обратиться в чат и как постоянному игроку, вероятно для предложат бездепозитное предложение. 1×slots регистрация <a href=https://dgbak.co.kr:51596/bbs/board.php?bo_table=free&wr_id=306018>https://dgbak.co.kr:51596/bbs/board.php?bo_table=free&wr_id=306018</a> 1×slots рабочее зеркало на сегодня
1×slot зеркало
Доступные забавы – В неких азартных играх можно снизить математическое преимущество казино до нескольких 10-х процента. В их количестве многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как управляло, в этих играх ставки идут в зачет вейджера не полностью. Например, возможность учитываться лишь 50%. В неких забавах бездепозитные призы вообщем нельзя отыгрывать.Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих требований, кроме обязательной верификации. Если на веб-сайте предусмотрена обязательная процедура подтверждения личности, то вывести выигрыш удастся лишь в проверки данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий лицо. Выполнив все требования оператора, заказчик возможность оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем не более суток. Если дополнительно потребуется пройти функцию верификации, то срок возрастает до 1–2 рабочих дней. Для перевода применяются банковские приборы и электрические платежные системы. Второй метод подходит превосходнее, так как большинство транзакций такой осуществляются моментально. В связи со специфичностью функционирования банков обработка платежей возможность взятьвдолг(взятьвзаймы) до нескольких трудящихся дней. <a href=http://firestopkorea.co.kr/bbs/board.php?bo_table=free&wr_id=43>http://firestopkorea.co.kr/bbs/board.php?bo_table=free&wr_id=43</a> зеркала 1×slots Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке необходимо пополнить счет в казино. Для депозитных бонусов, эта процедура не нужна, например как депозит теснее сделан.Новые посетители онлайн-казино без первого депо имеют проверить свою удачливость. К что, этому же есть вероятность конвертировать бездепы в настоящие деньги за регистрацию в казино, впрочем для этого бонус необходимо отыграть согласно условиям промоакции.
1×slots официальный сайт скачать на айфон
Частенько новенькие не разумеют, как активировать подарки или вывести первый выигрыш. Для подобных случаев наша команда описала главные определения – что это фриспины, вейджер, как его отыграть, для нужно протекать верификацию.Мы советуем не отрицаться от сходственных услуг узнаваемых казино. Выделите некоторое минут на регистрацию, получите приз и попытайтесь его отыграть. Может быть, сейчас фортуна будет на вашей стороне! <a href=http://forum.as-p.cz/viewtopic.php?f=45&t=67620&p=356614#p356614>скачать 1×slots на андроид мобильная версия</a> Нет. Казино выдают благотворительные призы за регистрацию, чтобы, чтобы, дабы клиент имел ознакомиться с игровым заведением. А дабы исключить его, необходимо выполнить обстоятельства отыгрыша.Необходимость отыгрыша. Вейджер в этом случае повыше, чем для призов за депо. И пока свои не отыграны, вывести их нельзя. Когда идет о получении бездепозитных бонусов в казино, в первую очередь направьте на последующие обстоятельства: 1×slots официальный сайт мобильная версия скачать <a href=https://bleachrpg.com.br/wiki/index.php/User:KatlynHoskins96>https://bleachrpg.com.br/wiki/index.php/User:KatlynHoskins96</a>
1хслотс рабочее зеркало
Также, учите, что бездепозитный приз можно исключить лишь что случае, когда будут выполнены все условия отыгрыша.Внесение депозита – Будьте готовы пополнить счет после отыгрыша бонуса. Это обычное требование правил для этого типа промо-акций. Лучше заранее уточнить, какую необходимую надо(надобно) будет заносить на счет. Как верховодило, идет о наименьшем депозите, но вы должны быть убеждены, что он для по кармашку. Так собственно приготовьтесь дать конфиденциальную информацию (пол, возраст, страна проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев проверка данных занимает не более суток, после чего получится беспрепятственно выводить крупные выигрыши. <a href=http://demo.qkseo.in/profile.php?id=642574>http://demo.qkseo.in/profile.php?id=642574</a> 2. Создать новый профиль. Для регистрации нужно заполнить небольшую анкету либо зайдите в индивидуальный офис при помощи соц сетей; 1хслотс казино зеркало Еще одно условие касается размеров ставки. Операторы устанавливают максимальную сумму, которую игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, выбранной в Личном кабинете. При превышении лимита есть риск потерять приза. Существующие лимитирования относятся и к определенным видам ставок. Например, играя в рулетку, клиент имеет столкнуться с запретом назначать фишки на шансы.Чем ниже значение вейджера, что, этим проще отыграть и вывести бонус. Если Вы планируете заработать на бездепе, не просто ознакомиться с новым игровым клубом, то стоит игнорировать призов с высоким вейджером их почти не реально отыграть. С ними Вы можете только протестировать забавы заведения.
<b>Смотреть еще похожие новости:</b>
<a href=https://acerfans.ru/user/JamesTed/>1хслотс казино зеркало</a>
<a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=179204>1×slots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В интернете много известных игорных площадок с красивыми акционными предложениями. Однако пристально читать обстоятельства 10-ов предложений в надоест, ну и время отнимет большое. Поэтому наша команда подготовила ТОП-3 сайтов с наилучшими бездепозитными призами: Размер призов чаще всего чисто символический и не превышает 50 руб. Приятно, хотя ощутимым бустом деле ли станет.
#377 Charlesgunnyhttp://filmkachat.ru
онлайн казино 1×slots
Ну и окончательно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: схожая щедрость увеличивает степень преданности клиентов к фирмы.Если ординарными текстами, бездепы – это определённая сумма средств или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать подарки. Но есть некоторые аспекты. Существуют игорные дома, которые перед тем как начислить бонусы просят привязать телефонный, предоставить копии документов. <a href=http://filmkachat.ru/>1× slots зеркало</a> Бездепозитные призы, как теснее понятно, считаются оригинальной возможностью обратиться игровому процессу полностью безвозмездно, другими выступать в интернет казино даром и на место свои незамедлительно после регистрации аккаунта. Автоматы с этим депо все замерзнуть великолепной вероятностью сыграть для поклонников пыла с определенными ограничениями в финансах.Демоказино есть почти на любом сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются значительно реже: там в случае выигрыша и соблюдения критерий акций бездеп возможно превратить в реальные деньги. <a href=https://linkr.bio/kalinka0588>https://linkr.bio/kalinka0588</a> Получить Бездепозитный приз в онлайн казино дело двух кликов. Другой момент, отыграть рекламную и соблюсти управляла и условия отыгрыша. Под правилами предполагается столько вагер, но и ограничения по наибольшей ставке. Мы осознаем, собственно в кино все ставят на зеро и выигрывают. Призываем не делать сходственного. Перед активацией бонуса прочтите управляла. Узнайте последующие факторы: Условия получения дара, за регистрацию, за депозит и другое. Ограничения по максимальной ставке. Зачастую не повыше 350 руб. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на пространстве. Поэтому принципиально знать, в каких играх возможно совершать кратность денежного оборота. 1×slots зеркало сайта <a href=http://bbs.yxsensing.net/home.php?mod=space&uid=124623>http://bbs.yxsensing.net/home.php?mod=space&uid=124623</a> На данном разделе портала регулярно публикуются обзорные статьи, в рассматриваются безвозмездные бонусы лучших интернет-казино. Информация структурирована по нескольким пунктам, включая главные:Для получения бездепа нужно пригласить в игру по реферальной ссылке нового клиента: он должен зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на сумму, обозначенную в условиях акции.
1×slot зеркало
Особую изюминку видео слотам присваивают уникальные знакы. С их выходом активизируются разные призы. Вы можете запустить дополнительный уровень и увеличить сумму выигрыша. Есть знаки, которые замещают ненадобные составляющие и сами создают выигрышные комбо. Не стоит забывать и на бонус-тур. После каждого удачного спина есть шанс прирастить необходимую выигрыша в 2 либо хорошо раза.Фриплей-бонусы. Бонусы за благотворительную забаву есть лишь в неких клубах. Они зачисляются сразу в создания профиля и действуют недолговременное время. Если у вас нет медли истратить средства, они просто закончатся. Что дотрагивается медли, в большинстве случаев бонусы действуют протяжении 1-го часа. 1×slot зеркало рабочее этих способов предполагает регистрацию Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие возникают у начинающих. <a href=http://mag-motors.ru/index.php?subaction=userinfo&user=volatilepastor1>http://mag-motors.ru/index.php?subaction=userinfo&user=volatilepastor1</a> 1×slots акции
1×slots промокод при регистрации 2025
3. Подтвердить данные. В зависимости от клуба, нужно привязать телефон либо почту, указать персональную информацию;Чаще всего интернет-казино предлагают бездепозитные бонусы новым пользователям. Эта промо-акция очень эффективно привлекает новичков, подталкивая их к открытию счета. Конечно, не все они становятся послушными посетителями, но сам факт регистрации аккаунта играет на руку заведению. Не рекомендуем сломя голову браться за всевозможные предложения получения средств без вложений. Вполне вполне, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на первый взор. Альтернативой считается казино приз за депозит. Мы предлагаем вам пару советов, спасибо которым у любого игрока несомненно вероятность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом средств: <a href=http://forumbar.anihub.me/viewtopic.php?id=1092>http://forumbar.anihub.me/viewtopic.php?id=1092</a> 1хслотс рабочее зеркало Но есть азартные заведения, готовые просто например вручить средства на игру. Для сего довольно создать профиль. Чтобы вывести выигрыш, сперва необходимо выполнить вейджеровые условия, прописанные в критериях получения бездепа.
казино 1× slots официальный сайт
Если при регистрации показать промокод, возможно гарантировано получить приз. Где арестовать ваучер? Посетите определенную блоги либо форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В заключительнее время игорные жилища начали афишироваться в кинокартинах и сериалах. Присмотритесь и наверняка заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных руб. Верификация аккаунта. Лучше доказать лицо сразу последствии регистрации, чтобы потом не было проблем с выводом средств. Верификация возможность проходить 2-мя путями:Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы моментально получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, появляется реальный шанс победу! В неких интернет казино для получения бездепозитных бонусов не довольно просто зарегистрироваться на сайте клуба и подтвердить свои контактные данные. Дополнительно требуется активация промокода. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=https://mozillabd.science/index.php?title=1win_bet_website_official>https://mozillabd.science/index.php?title=1win_bet_website_official</a> 2. Создать новый профиль. Для регистрации нужно наполнить небольшую анкету либо зайдите в индивидуальный кабинет при помощи социальных сетей;Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша бонусов. Заведения всегда устанавливают максимальную ставку, допустимую по условиям вейждера.
1хслотс зеркало на сегодня
Подарки на определенные даты отличаются условиями получения. Если одобрение начисляют игроку на день рождения, то сумма обыкновенно в от совместного размера депо за год.Перед активацией главно пристально выучить обстоятельства акции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют велечину также лимиты ставок при отыгрыше и сроки, протяжении которых возможно воспользоваться предложением. Если бездеп охватывает ограниченный список игр, рекомендуется разузнать максимальные коэффициенты, степень отдачи и волатильности. Слоты с невысокими множителями выплат подходят лишь что случае, случае оператор не установил взыскательные лимитирования на максимальную необходимую ставки. Фриплей-бонусы встречаются только в некоторых клубах. Они зачисляются сразу после сотворения профиля и активны недолговременное время. Если не успеете потратить средства, они просто сгорят. Касаемо медли, в большинстве случаев призы активны в течение часа. <a href=http://xn–e1aoddcgsc8a.xn–p1ai/member.php?action=profile&uid=63139>http://xn–e1aoddcgsc8a.xn–p1ai/member.php?action=profile&uid=63139</a> Третитй бездепозитный приз за регистрацию – денежные свои. К сожалению, начислить рубли либо баксы способны только знаменитые и популярностью клубы. С их поддержкой появится насладиться любой доступной игрой – автоматом, рулеткой, кено, блэкджеком.К примеру, игроку выдаются безвозмездные средства в заведении в размере пятидесяти или 100 долларов (вейджер на которые составляет 100х). То есть, каждому новоприбывшему геймеру выскакивает притягивающая иллюстрация, которая обещает выплату всех зачисленных компанией средств. Не стоит заострять на казино бонус за регистрацию без депозита с чрезмерно большой или довольно малюсенькой суммой бонусов, потому что, том кропотливо изучив все условия, здесь скорее, будет какой-то подвох. 1×slots официальный сайт, скачать Изучить правила и условия получения бездепозитных бонусов казино, Вы можете у нас на веб-сайте в разделе с бонусами либо на официальном сайте выбранного Вами казино. Если не найти необходимую информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал или по электронной почте.При исполнении критерий отыгрыша и верификации, средства с бонусного счета переводятся на главной и все быть выведены на карту либо электронный кошелек. Лимиты на вывод и сроки проведения транзакции зависят от избранной платежной системы.
<b>Смотреть еще похожие новости:</b>
<a href=https://ragnarok.ch/forum/viewthread.php?thread_id=202499>1 xslots рабочее зеркало</a>
<a href=https://www.globalvision2000.com/forum/member.php?action=profile&uid=1072499>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax
#378 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино смотреть ограбление казино <a href=https://rumafia.news/>Манилова Алла Юрьевна порно</a> ограбление казино букмекерская контора леонов <a href=https://m.repost.news/>new casino</a> казино 1 1×bet xbet xyz порно с Алексей Миранчук (футбол) casino сегодня unlim casino ев казино 1×bet официальный сайт
DiskiPlus зеркала казино DiskiPlus casino com <a href=https://diskiplus.ru/>DiskiPlus Яровая Ирина Анатольевна порно</a> DiskiPlus pin up casino buzz DiskiPlus 1×bet приложение <a href=https://diskiplus.ru/>DiskiPlus 1×bet 1</a> DiskiPlus пин ап казино DiskiPlus casinos xyz DiskiPlus официальные букмекерские конторы DiskiPlus casino 7k рабочее DiskiPlus букмекерская контора мостбет DiskiPlus порно с Алина Загитова, фигуристка DiskiPlus 1×bet зеркало слоты 1×bet xyz
#379 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Светлана Ходченкова 1×bet рабочее на сегодня <a href=https://vestnik-jurnal.com/>порно с Диана Шнайдер (теннис)</a> порно с Захарова Мария Владимировна new casino <a href=https://krtka.info/>porno Алена Косторная (фигурное катание)</a> человек казино сайт букмекерской конторы porno Игорь Акинфеев (футбол) пина букмекерской конторы сайт 1×bet слоты порно с Юлия Ефимова, пловчиха up casino официальный
DiskiPlus казино смотреть онлайн бесплатно DiskiPlus скачать букмекерскую контору <a href=https://diskiplus.ru/>DiskiPlus casino игровой автомат</a> DiskiPlus бывшие казино DiskiPlus porno Светлана Ходченкова <a href=https://www.diskiplus.ru/>DiskiPlus pinco casino</a> DiskiPlus 1×bet зеркало на сегодня DiskiPlus бк букмекерская контора DiskiPlus porno Марина Александрова DiskiPlus up букмекерская контора DiskiPlus porno Яна Троянова DiskiPlus 1×bet зеркало рабочее xbet DiskiPlus porno Дарья Клишина
#380 kinogo_glmahttp://kinogogo.pro
kinogo go <a href=kinogogo.pro>kinogogo.pro</a> .
#381 kinogo_rnmahttp://kinogogo.pro
kino go go <a href=http://www.kinogogo.pro>http://www.kinogogo.pro</a> .
#382 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Чтобы самостоятельно убедиться в превосходствах бездепозитных призов, достаточно зарегистрироваться в казино и получить одобрение. <a href=http://filmkachat.ru/>1×slot зеркало рабочее этих способов предполагает регистрацию</a> <a href=https://events.com/r/en_US/event/floor-plan-to-3d-model-professional-conversion-services-london-february-962475>https://events.com/r/en_US/event/floor-plan-to-3d-model-professional-conversion-services-london-february-962475</a> Основное верховодило получения бездепа ? создаваемый аккаунт обязан быть у пользователя первым и единственным. Наличие нескольких аккаунтов требовательно запрещено. Проверка проводится по имени, e-mal, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депо необходимо блюсти простую последовательность деяний.Не советуем опрометью голову хвататься за различные предложения получения средств без инвестициям. Вполне возможно, что бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем смотрится на первый взгляд. Альтернативой считается казино бонус за депозит. Мы предлагаем для пару советов, спасибо которым у каждого игрока будет вероятность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег: 1хслотс казино зеркало <a href=http://bbs.yongrenqianyou.com/home.php?mod=space&uid=4200491&do=profile>http://bbs.yongrenqianyou.com/home.php?mod=space&uid=4200491&do=profile</a>
1×slots официальный сайт мобильная версия скачать
1хслотс официальный сайт зеркало <a href=http://google.com.sv/url?q=http://expertizanew.ru/bitrix/redirect.php?goto=http://stroybigmag.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/YqMrTjdOQDV>http://google.com.sv/url?q=http://expertizanew.ru/bitrix/redirect.php?goto=http://stroybigmag.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/YqMrTjdOQDV</a> Срок отыгрыша — это период, который начинается в момент активации бонуса и заканчивается с его закрытием. Пользователю необходимо уложиться в этот временной промежуток, иначе призовые свои аннулируются. Казино устанавливают список игр, ставки в которых засчитываются при расчете отыгранных средств. Если тайтл не входит в этот список, то возможность быть недосегаем для загрузки во время деянья бонусного предложения.Выбирайте лучшие безвозмездные бонусы за обзоров на Casinoz – и пусть вас сопутствует счастье при отыгрыше бонусных кредитов! 1×slots зеркало выигрыши обязательно пройдите регистрацию если При поддержки такого одобрения оператор возможность кроме привлекать посетителей, которые ранее показывали активность на сайте, но по некий причине прекратили играть. В этом случае промокод высылается пользователю по электронной почте или в виде SMS.Для верификации аккаунта надо(надобно) дать специалистам технической помощи отсканированную копию паспорта и счета за коммунальные предложения, еще фотографию банковской карты или снимок страницы электронного кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности.
1×slots сайт
Принципиальным различием бесплатных бонусов от бонусов на депозит считается неименье необходимости заносить деньги на акк. Из-за этого их нередко называют бездепозитными (no down payment bonuses). <a href=https://atoms.rocks/member.php?action=profile&uid=42136>https://atoms.rocks/member.php?action=profile&uid=42136</a> Игры, в возможно выступать на бонусные средства. Проверьте список игр, в можно выступать на бонусные свои, возможно они Вам не понравятся и не расходовать своё время на эту промоакцию.Бездепозитные призы – это исключительно интересная и наиболее многообещающая акция интернет-казино. Они даже превосходнее фри-спинов, потому собственно выплаты в безвозмездных вращениях не гарантированы, так комбинации на барабанах игрового аппарата имеют не сложиться. 1хслотс зеркало
1×slos регистрация в 1×slots casino
Во время игры в казино, выигрыши, приобретенные спасибо безвозмездным призовым фондам, суммируются и включаются в общую необходимую для отыгрывания. Однако, в фортуна улыбнется и получится отыграть все бонусы, игровое заведение гарантированно разрешит вывести финансовые средства. Сумма вывода будет зависеть от лимита, утвержденного непосредственно в данном учреждении. Поэтому, пристально надо(надобно) читать управляла выдачи безлимитных депозитов.Каждый новичок и умелый игрок грезят стремительно стартануть и начать делать реальные ставки. Для этого довольно забрать презент, за кот-ый надо выплачивать. В зависимости от игровой платформы, нужно создать профиль, привязать email либо телефон. После сего администрация начислит щедрое вознаграждение вид безвозмездных вращений или виртуальных кредитов. Максимальный размер ставки, который невозможно превосходить же приз не будет всецело отыгран. В случае нарушения этого верховодила, приз и выигрыш с него будут аннулированы.Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных требований, не обязательной верификации. Если на сайте предусмотрена неотъемлемая процедура доказательства личности, то исключить выигрыш удастся лишь последствии ревизии данных. Приготовьтесь наполнить анкету и выслать в техподдержку документ, подтверждающий лицо. 1хслотс мобильная версия зеркало <a href=http://uprzakupokkchr.ru/user/DoctorLazutamt/>http://uprzakupokkchr.ru/user/DoctorLazutamt/</a> В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с даровых вращений. Прибыль, которую Вы заработаете на таком бездепе возможно ставить на вывод без какого либо отыгрыша.
1×slots рабочее зеркало на сегодня
Бездепы обычно предлагают с отыгрышем — моментально вывести выигранные средства нельзя. Перевод средств со счета несомненно возможен последствии такого, как пользователь выполнит все требования казино, а сумма не быть выше установленного правилами лимита. Условиями промоакции фиксируются сроки, протяжении которых заказчик вправе воспользоваться предложением. Обычно они не превышают нескольких дней после активации. <a href=http://www.xn–ob0bx78ap3ek4as34bkc.com/bbs/board.php?bo_table=04_02&wr_id=539749>http://www.xn–ob0bx78ap3ek4as34bkc.com/bbs/board.php?bo_table=04_02&wr_id=539749</a> 1×слот регистрация в 1×slots casino Если площадка дарит бездеп за регистрацию, то процедура его получения проста. Нужно лишь ввести аккаунт на веб-сайте и активировать его, подтвердив адрес электрической почты, номер аппарата или иные данные, коие настятельно оператор. Перед этим нужно увериться, собственно юзер находится на официальном веб-сайте казино, а не на мошеннической площадке.
<b>Смотреть еще похожие новости:</b>
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=128942&extra=>1хслотс зеркало</a>
<a href=https://www.globalvision2000.com/forum/member.php?action=profile&uid=1072499>1×slots зеркало сайта</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Лишь пользующиеся и знаменитые азартные заведения все позволить себе выдавать бездепы в виде дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, которые возможно истратить в лучших аппаратах с высокой отдачей.
#383 hydra_qlklhttp://v-prikol.ru
гидра официальный сайт <a href=http://v-prikol.ru>http://v-prikol.ru</a> .
#384 blacksprut_iemnhttp://kraken-sayt.com
blacksprut зеркала <a href=http://www.kraken-official-site.com>http://www.kraken-official-site.com</a> .
#385 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Юлия Ефимова, пловчиха casino приложения <a href=https://repost.news/>bet casino</a> казино рулетка porno Илья Ковальчук (хоккей) <a href=https://kompromat1.online/>вывод казино</a> 1win букмекерская контора букмекерская контора без казино фильм онлайн скачать 1×bet на андроид бесплатно casino ru сайты казино игры казино
DiskiPlus порно с Евгений Малкин (хоккей) DiskiPlus porno Катерина Шпица <a href=https://www.diskiplus.ru>DiskiPlus Преподобная Надежда Александровна порно</a> DiskiPlus букмекерская контора без DiskiPlus porno Мира Андреева (теннис) <a href=https://www.diskiplus.ru>DiskiPlus up casino зеркало</a> DiskiPlus 7k casino зеркало рабочее DiskiPlus pin up букмекерская контора DiskiPlus букмекерская контора бетсити DiskiPlus леон букмекерская контора DiskiPlus порно с Баталина Ольга Юрьевна DiskiPlus фильмы казино рояль DiskiPlus игры казино
#386 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1win букмекерская контора порно с Александр Головин (футбол) <a href=https://th-royalgclub.com/>casino рабочее зеркало</a> симулятор казино порно с Георгий Джикия (футбол) <a href=https://specreporter.com/>7k casino зеркало рабочее</a> где казино бывшие казино фильмы казино рояль демо казино казино гта 5 рабочее казино скачать 1×bet на андроид бесплатно
DiskiPlus казино проиграл DiskiPlus 1×bet слоты 1×bet xyz <a href=https://diskiplus.ru/>DiskiPlus порно с Захарова Мария Владимировна</a> DiskiPlus порно с Васильева Татьяна Викторовна DiskiPlus скачать сайт букмекерской конторы <a href=https://www.diskiplus.ru>DiskiPlus ап казино</a> DiskiPlus казино пину DiskiPlus пин ап букмекерская контора DiskiPlus букмекерские контора ап DiskiPlus online casino DiskiPlus порно с Ирина Сидоркова DiskiPlus porno Марина Александрова DiskiPlus 1×bet слоты 1×bet xyz
#387 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
Автоматы непопросту считаются самым знаменитым азартным веселием. Чтобы усвоить управление и управляла, понадобится всего количество мин. Ваша задача сделать ставку, найти число трудящихся линий и можно крутить барабан. Если на экране выпадет выигрышная комбинация – вы выиграли! С этой задачей для посодействуют управится бездепозитные призы казино. <a href=http://filmkachat.ru/>1×slots официальный зеркало</a> Игры, каких возможно выступать на бонусные деньги. Проверьте список игр, в которых можно выступать на бонусные свои, вероятно они Вам не понравятся и не тратить своё время на эту промоакцию. <a href=https://cgscholar.com/community/community_profiles/3d-rendering-services/community_updates/234376>https://cgscholar.com/community/community_profiles/3d-rendering-services/community_updates/234376</a> 1×slots регистрация 1×slotscasino09k online <a href=http://sglpw.cn/home.php?mod=space&uid=361656>http://sglpw.cn/home.php?mod=space&uid=361656</a>
1×slots casino регистрация 1×slotscasino09k online
<a href=https://rolivka.online/forum/showthread.php?tid=40697>1×slots зеркало регистрацию более популярный вариант это</a> 1 x slots 2. Создать свежий профиль. Для регистрации надо(надобно) наполнить маленькую анкету или зайдите в личный кабинет при помощи социальных сетей;Обычно бездепозитные промоакции от казино, прибывают на эл. Почту в деньки рождения либо праздники. В неких интернет казино можно обратиться в чат и как неизменному игроку, вполне вам предложат бездепозитное предложение. <a href=http://womans-days.ru/user/DarenVab/>http://womans-days.ru/user/DarenVab/</a> Таким образом, заведение пытается продемонстрировать себя своим потенциальным игрокам, а такой маркетинговый ход как казино приз без депозита за регистрацию завлекает очень большое внимания к игорному заведению и обеспечивает постоянный поток новых гостей и будущих посетителей игрового интернет клуба.Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном сайте и сделайте вход в индивидуальный офис, дабы забрать безвозмездные вращения с вейджером х40; 1× slots сайт
1×slots рабочее зеркало на сегодня
Игрокам не следует воспринимать приветственный бонус как гарантированный метод получить большой выигрыш, хотя это отличная возможность без расходов оценить перечень казино.Если вы выбираете проверенное лицензионное онлайн казино и выполните все условия получения бездепозитного бонуса, трудностей с получением дара у Вас не возникнет. <a href=https://forum.expert-watch.com/index.php?action=profile;u=234267>https://forum.expert-watch.com/index.php?action=profile;u=234267</a> Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы которые возникают у начинающих.Прежде чем активировать бездеп, необходимо увериться в том, что государство, гражданином коей является игрок, не заходит в перечень разрешенных. 1×slots промокод при регистрации
1 x slots casino
Для тех, кто лишь подумывает испытать собственную удачу, еще для профессиональных игроков, разыскивающих свежие площадки для выигрышей, ведущие лицензированные казино нередко устраивают различные акции, и лучшее предложений за последнее время – как для начинающих, например и для профессиональных игроков – бездепозитный приз за регистрацию. <a href=https://www.ladyboyescort.com/profile/745-rabofreesi/>1× slots официальный</a> Для казино, работающих интернет, бездепозитные бонусы нужны для вербования свежих клиентов. Предложение сыграть на слотах без необходимости внесения реальных денег — работающий способ для повышения энтузиазма к фирмы. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит выступать в казино, только сейчас теснее на личные средства. 1× slots сайт <a href=http://geolan-ksl.ru/forum/user/89286/>http://geolan-ksl.ru/forum/user/89286/</a>
1хслотс регистрация в 1×slots casino
Такой безвозмездный эквивалент средств зачисляется на профиль пользователя после воплощения требований и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений возможен лишь последствии воплощения вейджеровых критерий.Доступные игры – В некоторых азартных играх возможно снизить математическое приемущество казино до нескольких десятых процента. В их числе все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как правило, в этих забавах ставки идут в зачет вейджера не всецело. Например, имеет предусматриваться только 50%. В некоторых играх бездепозитные призы вообщем невозможно отыгрывать. <a href=http://parkhotel-saransk.ru/users/icivuvegi>http://parkhotel-saransk.ru/users/icivuvegi</a> Выбирая даровой бонус, пристально изучайте управляла. Убедитесь, собственно вам можно брать роль в промоакции. Уточните, в каких забавах можно скорпулезно обстоятельства вейджера. При необходимости задавайте вопросы адептам саппорта.Если площадка презентует бездеп за регистрацию, то процедура его получения проста. Нужно лишь ввести аккаунт на веб-сайте и активировать его, подтвердив адресок электронной почты, номер телефонного или другие данные, коие настятельно оператор. Перед данным необходимо увериться, что юзер находится на официальном сайте казино, не на жульнической площадке. 1× slots casino официальный сайт Можно. Вы постоянно можете отрешиться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не сделаете ставку.Практически все онлайн казино с бездепозитным призом за регистрацию учитывает программу лояльности — систему поощрения неизменных посетителей, кот-ая произведено из большого уровней. При достижении игроком очередного уровня на его счёт поступает бонус. Чем выше уровень — что, этим щедрее приз.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.forum.kalor.ru/rabochee-zerkalo-1×slots-t23484.html>рабочее зеркало 1×slots</a>
<a href=https://www.formulersupport.com/Thread-1×slots-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE–237907>1×slots казино зеркало</a>
<a href=https://www.rechti.de/thread/abmahnung-wegen-wortmarke.14455/page-16#post-32227>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При исполненьи критерий отыгрыша и верификации, средства с бонусного счета переводятся на главной и имеют быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции зависят от выбранной платежной системы. Доступные игры – В некоторых азартных забавах можно снизить математическое превосходство казино до нескольких 10-х процента. В их количестве почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как управляло, в таких играх ставки идут в зачет вейджера не всецело. Например, имеет предусматриваться лишь 50%. В неких играх бездепозитные бонусы вообщем невозможно отыгрывать.
#388 Eanrauzhttp://[url=http://doks-v-gorode-ryazan-62.ru/]doks-v-gorode-ryazan-62.ru[/url]
Заказать диплом о высшем образовании! Заказ документа о высшем образовании через проверенную и надежную фирму дарит ряд плюсов. Купить диплом института у сильной компании: <a href=http://doks-v-gorode-ryazan-62.ru/>doks-v-gorode-ryazan-62.ru</a>
#389 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Юлия Ефимова, пловчиха букмекерская контора <a href=https://rhymes-punches.com/>казино рояль смотреть</a> casino официальный зеркало pin up casino официальный <a href=https://specreporter.com/>казино вход официальный сайт</a> порно с Сергей Бобровский (хоккей) Елизавета Боярская порно с Максим Глушенков (футбол) букмекерские конторы бет букмекерские контора ап porno Александра Степанова, фигуристка скачать pin casino
DiskiPlus 1×bet xbet xyz DiskiPlus скачать 1×bet на андроид бесплатно <a href=https://www.diskiplus.ru>DiskiPlus приложения букмекерских контор</a> DiskiPlus слоты казино DiskiPlus леон букмекерская контора <a href=https://diskiplus.ru/>DiskiPlus cometa casino</a> DiskiPlus 1×bet на сегодня DiskiPlus лучшие онлайн казино DiskiPlus порно с Евгения Медведева DiskiPlus букмекерские контора ап DiskiPlus 1×bet зеркало рабочее на сегодня DiskiPlus casino DiskiPlus Ходнева Светлана Владимировна порно
#390 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало
Активация случается счет промокодов, коие вводятся в личном кабинете после регистрации. Среди спецпредложений в перечне Casino.ru содержатся эксклюзивные промокоды, которые доступны лишь гостям портала. Другие способы начисления средств ? автоматическая активация сразу последствии создания аккаунта и получение презента по запросу в службу технической поддержки. <a href=http://filmkachat.ru/>1хслотс регистрация в 1×slots casino</a> Большинство интернет-казино из нашего топ-10 готовы порадовать вас неповторимыми промоакциями. Читайте о них в обзорах и на форуме. <a href=https://hearthis.at/group/466309/eeeee-eeee-e-eeeee-eee-eeeeee-e-eeeeeee-eeeeeee-eeeeeeeeee/>https://hearthis.at/group/466309/eeeee-eeee-e-eeeee-eee-eeeeee-e-eeeeeee-eeeeeee-eeeeeeeeee/</a> рабочее зеркало 1×slots <a href=http://gagetaylor.com/index.php?title=%C3%90%C5%BE%C3%90%C2%B1%C3%91%C6%92%C3%91%E2%80%A1%C3%90%C2%B5%C3%90%C2%BD%C3%90%C2%B8%C3%90%C2%B5_%C3%90%C3%90%C2%B0_%C3%90%C5%B8%C3%91%E2%82%AC%C3%90%C2%B0%C3%90%C2%B2%C3%90%C2%B0_%C3%90%C3%A2%E2%82%AC%E2%84%A2%C3%90%C2%BB%C3%90%C2%B0%C3%90%C2%B4%C3%90%C2%B8%C2%B2%C3%90%C2%BE%C3%91%C3%91%E2%80%9A%C3%90%C2%BE%C3%90%C2%BA>http://gagetaylor.com/index.php?title=%C3%90%C5%BE%C3%90%C2%B1%C3%91%C6%92%C3%91%E2%80%A1%C3%90%C2%B5%C3%90%C2%BD%C3%90%C2%B8%C3%90%C2%B5_%C3%90%C3%90%C2%B0_%C3%90%C5%B8%C3%91%E2%82%AC%C3%90%C2%B0%C3%90%C2%B2%C3%90%C2%B0_%C3%90%C3%A2%E2%82%AC%E2%84%A2%C3%90%C2%BB%C3%90%C2%B0%C3%90%C2%B4%C3%90%C2%B8%C2%B2%C3%90%C2%BE%C3%91%C3%91%E2%80%9A%C3%90%C2%BE%C3%90%C2%BA</a>
1×slots сайт
<a href=http://sz.80lvl.ru/viewtopic.php?f=8&t=4154>1×slots скачать на айфон</a> 1×slots регистрация на официальном сайте <a href=http://proect.org/user/PorsedropKl/>http://proect.org/user/PorsedropKl/</a> Подарки на конкретные даты отличаются критериями получения. Если поощрение начисляют игроку на день рождения, то сумма обыкновенно находится от общего объема депо за прошедший год. скачать 1×slots на андроид мобильная версия
1×slots зеркало проходить регистрацию это отличный вариант
Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депо может выделяться до 30 дней. Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации презента необходимо доказать электрическую почту и привязать аппарат; <a href=http://forum.cncprovn.com/members/200397-JulesBligh>http://forum.cncprovn.com/members/200397-JulesBligh</a> Каждый новичок и умелый игрок грезят живо стартануть и начать создавать реальные ставки. Для сего достаточно отобрать подарок, за кот-ый не нужно уплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email или аппарат. После сего администрация начислит щедрое вознаграждение вид даровых вращений или виртуальных кредитов.В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с безвозмездных вращений. Прибыль, коию Вы заработаете на таком бездепе возможно ставить на вывод без какого либо отыгрыша. 1×slots казино зеркало Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 долларов. Если выдаются фриспины, их число редко превышает нескольких десятков безвозмездных вращений.
1× slots официальный
Максимальная ставка ? уточняется в еденице счета и ограничивает размер ставки за раз спин. В случае ее превышения приз имеет быть аннулирован. Также в правилах возможность содержаться запрет на размещение ставок конкретного вида, к, по равным шансам в рулетке (то есть, на чет или нечет, красное или черное и т.д.).Третитй бездепозитный бонус за регистрацию – валютные средства. К раскаянию, начислить рубли либо доллары готовы только известные и знаменитые клубы. С их поддержкой вы сможете насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком. <a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=972452#pid972452>1×slots регистрация 1×slotscasino09k online</a> Популярность интернет казино растёт и всё больше юзеров начинают интерес азартными играми. Бездепозитные призы 2022 года, это уникальные презенты за регистрацию. С их поддержкою новые игроки могут получить благотворительные вращения либо деньги на баланс за одну регистрацию. С появлением игорных заведений в интернете, бездепозитные призы стали моднейшим способом вербования игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о которых мы поведаем. Наш сайт собрал наилучшие предложения из интернета на 2022 год. Воспользуйтесь хоть подарком и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить условия.Помимо остального, для вывода средств по бездепу необходимо привнести на счёт собственный 1-ый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало возможную сумму, после чего вывод средств будет доступен. Простая процедура получения бездепозитного бонуса, кот-ая займет менее 2-х минут. Для получения бездепов, достаточно зарегистрироваться и доказать контактные данные. рабочее зеркало 1×slots <a href=http://www.ntsr.info/forum/user/100206/>http://www.ntsr.info/forum/user/100206/</a>
1хслотс 1хслотс регистрация перейти на 1×slots
Теоретически, к бесплатным бонусам возможно отнести так именуемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, поэтому что они деют только возможность делать ставки. Акции распространяются как на все забавы казино, так и на узкий список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino прочие. Промо может обхватывать разработки одного производителя. Бездеп не пересекается с другими промоакциями казино. Если на веб-сайте предусмотрен кэшбек, он не начисляется за ставки, сделанные бонусными деньгами. Для идентификации платежных реквизитов игрока может потребоваться пополнение счета на наименьшую сумму.Для верификации аккаунта нужно дать специалистам технической поддержки отсканированную копию паспорта и счета за коммунальные услуги, а фотографию банковской карты или скриншот странички электронного кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности. <a href=http://flowerwheel.synology.me/dokuwiki/doku.php?id=РР·_чего_состоит_диета_Елены_Малышевой>http://flowerwheel.synology.me/dokuwiki/doku.php?id=РР·_чего_состоит_диета_Елены_Малышевой</a> Чем ниже значение вейджера, что, этим проще отыграть и вывести бонус. Если Вы планируете заработать на бездепе, а не просто ознакомиться с новым игровым клубом, то стоит игнорировать бонусов с высоким вейджером их практически не реально отыграть. С ними Вы сможете только протестировать игры заведения.Новички не обожают сразу же заносить депо. Это обусловлено неимением навыка и сомненьем. К счастью, наши возможно получить бездепозитный приз за регистрацию в казино. Неважно собственно начисляет система – фриспины либо кредиты. В любом случае вы не рискуете собственными сбережениями. Это отличная вероятность запустить понравившийся видео слот либо же испытать удачу в настольных забавах. скачать 1×slots официальный сайт
<b>Смотреть еще похожие новости:</b>
<a href=https://www.formulersupport.com/Thread-1%D1%85%D1%81%D0%BB%D0%BE%D1%82-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE–242484>1хслот зеркало</a>
<a href=http://www.topboard.org/threads/1×slos-registracija-v-1×slots-casino.635764/>1×slos регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Далее потребуется отыграть вагер и вывести выигрыш. Игрокам без навыка крупно подфартило, есть получить десятки презентов за 1 регистрацию. Если не сумели получить Бездепозитный приз, не тревожьтесь. Обратитесь в онлайн чат, оператор поможет решить проблему. Вы всего, скажем, как все предпочитаете получать подарки и бездепозитные бонусы казино. Игорные жилища взяли в повадку одаривать гэмблеров приятными бонусами. Стать обладателем приветственного подарка можно за создание профиля либо пополнение счёта. Второй вариант больше увлекательный, ведь клубы готовы удвоить депозит! Но случае вы новичок и только знакомитесь с миром азарта, другого, как пользуйтесь бонусом за регистрацию.
#391 Charlesgunnyhttp://filmkachat.ru
скачать 1×slots официальный сайт
Бонус с зачислением средств на счет выделяет больше свободы поступков. Пользователь сам избирает, каким образом воспользоваться подаренными средствами. Здесь кроме имеют действовать лимитирования на перечень дешевых игр, но обычно эти рамки не так строги, как в промо с бесплатными вращениями. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> Пoдтвepдить личнocть клиента. Для успешного вывода средств, нужно доказать лицо посетителя. Нa этaпe вepификaции пpoфиля, сотрудники службы безопасности обязаны увериться, что у игрока более один аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не сможет вывести собственный выигрыш, случае у него будет некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы.Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. <a href=https://heylink.me/kalinka0588/>https://heylink.me/kalinka0588/</a> Какие призы меня еще получить не бездепозитного приза за регистрацию в казино? По мимо бездепозитного бонуса, любое интернет казино предлагает игрокам выгодное предложение на 1-ый депо, вы совершаете депозит, ваш депозит возрастает в двое или и в трое, что, этим самым начать играть возможно с более солидной суммой, так же не забываем на вейджер на бонусы.Заработать на бездепозитных призах за регистрацию в казино может каждый пользователь, достигший совершеннолетия. 1×slots зеркало на сегодня <a href=https://ricardopaks52963.bloginwi.com/64069909/deep-nude-understanding-the-implications-of-ai-generated-imagery>https://ricardopaks52963.bloginwi.com/64069909/deep-nude-understanding-the-implications-of-ai-generated-imagery</a>
1×slots зеркало регистрация
Баланс игрока дополняется на соответствующую сумму. К ней используется вейджер, обозначенный в правилах акции. Вывести выигрыш можно будет в такого, как пользователь сделает требуемый размер ставок из собственных средств. В редких случаях бездеп работает в формате Free Play. На счет юзера зачисляется большая сумма, и предоставляется небольшой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по завершении сего периода сумма на счету несомненно превосходить изначальную, то разность можно несомненно вывести или использовать для дальнейших ставок. 1×slots зеркало регистрация в 1×slots casino <a href=http://vtik.net/index.php?subaction=userinfo&user=overjoyedkit47>http://vtik.net/index.php?subaction=userinfo&user=overjoyedkit47</a> Можно ли зарабатывать на бездепозитных призах? Это не работа, здесь как повезет, если в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, тогда можно именовать везением, и дополнительной добавкой к вашему бюджету.К образцу, игроку выдаются безвозмездные свои в заведении в размере пятидесяти либо 100 $ (вейджер на которые составляет 100х). То есть, каждому новоприбывшему геймеру выскакивает манящая картинка, которая обещает выплату всех зачисленных фирмой средств. Не стоит внимания на казино бонус за регистрацию без депозита с слишком великой либо довольно маленькой суммой призов, поэтому что, числе тщательно изучив все условия, здесь всего, будет некий подкол. 1× слот зеркало
1×slots регистрация 1×slots review live
Третитй бездепозитный приз за регистрацию – денежные свои. К раскаянью, начислить рубли или баксы способны только знаменитые и известные клубы. С их поддержкой возможность насладиться любой доступной забавой – автоматом, рулеткой, кено, блэкджеком.Заработать на бездепозитных призах за регистрацию в казино возможность любой юзер, достигший совершеннолетия. <a href=https://zeoworks.com/main/member.php?action=profile&uid=252027>https://zeoworks.com/main/member.php?action=profile&uid=252027</a> Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации презента нужно подтвердить электронную почту и привязать телефон; 1× слот зеркало Получить Бездепозитный приз в интернет казино дело двух кликов. Другой момент, отыграть промо и соблюсти верховодила и условия отыгрыша. Под правилами предполагается не вагер, но и лимитирования по максимальной ставке. Мы понимаем, что в кино все ставят на зеро и выигрывают. Призываем не делать сходственного. Перед активацией приза прочтите правила. Узнайте следующие факторы: Условия получения дара, за регистрацию, за депо и другое. Ограничения по наибольшей ставке. Зачастую не выше 350 руб. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вертеть автоматы, а вагер будет стоять на пространстве. Поэтому главно знать, в каких забавах можно осуществлять кратность денежного оборота.
1×slots коды
Иногда в бездепа, казино дарует минимальный бонус (до 50 руб. ), из-за которого не заморачиваться. Благодаря программе лояльности от игорного заведения, возможно арестовать неплохой старт и без добавочных вложений запустить видеослоты. Кроме того, возможно рассчитывать на реальную удачу и получить, без вложения собственных финансов, великой выигрыш.Предложения с бездепозитными бонусами за регистрацию дозволяют новым заведениям заинтересовать аудиторию на собственный сайт. А игроки тому получают возможность выступать на реальные средства без депо в казино и заработать маленькой стартовый капитал, который разрешено вывести на карту банка или электронный кошелек. 1хслотс зеркало на сегодня <a href=https://google.fm/url?q=https://doctorlazuta.by/>https://google.fm/url?q=https://doctorlazuta.by/</a> Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, например как Вам придется ее доказать дальнейшем при выводе средств.
1×slots регистрация на сайте
<a href=http://www.freerideinc.at/2014/12/prati-di-guil-gardasee.html>http://www.freerideinc.at/2014/12/prati-di-guil-gardasee.html</a> Популярность онлайн казино растёт и всё больше юзеров начинают увлекаться азартными забавами. Бездепозитные бонусы 2022 года, это уникальные презенты за регистрацию. С их помощью новые игроки шансы получить безвозмездные вращения или деньги на баланс за 1 регистрацию. С в игорных заведений в онлайне, бездепозитные призы стали знаменитейшим методом вербования игроков. Подобные акции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о которых мы расскажем. Наш вебсайт собрал превосходнейшие предложения из онлайна на 2022 год. Воспользуйтесь каким презентом и сможете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить условия.На странице представлены бездепозитные призы за регистрацию в казино редчайшая заслуга за коей гонятся все игроки как новички, так и мастера. Мы тоже уделяем большое внимание на наличие бонусов при составление рейтинга казино на деньги. Бездепозитный бонус это вероятность играть даром и выиграть настоящие средства. 1×slot регистрация Для получения предоставленных призов для пригодиться — ПК либо мобильное устройство, и остальное дело за малым.
<b>Смотреть еще похожие новости:</b>
<a href=https://win11forum.de/m/manuelenabs.2164/>1хслотс официальный сайт зеркало</a>
<a href=http://sz.80lvl.ru/viewtopic.php?f=8&t=4652>1×slot зеркало</a>
<a href=http://dd214.labelcreativeak.com/forums/viewtopic.php?f=3&t=1351>казино 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Получить Бездепозитный бонус в интернет казино дело 2-ух кликов. Другой момент, отыграть промо и соблюсти верховодила и обстоятельства отыгрыша. Под правилами подразумевается не только вагер, но и лимитирования по максимальной ставке. Мы понимаем, что в кино все ставят на зеро и выигрывают. Призываем не создавать подобного. Перед активацией бонуса прочтите управляла. Узнайте последующие факторы: Условия получения подарка, за регистрацию, за депо и многое. Ограничения по наибольшей ставке. Зачастую не выше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах можно отыгрывать вагер. Можно вращать автоматы, а вагер будет стоять на месте. Поэтому принципиально знать, в каких играх возможно осуществлять кратность денежного оборота.
#392 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Мухтиярова Елена Вячеславовна порно up casino <a href=https://th-royalgclub.com/>up букмекерская контора</a> 1×bet casino pin casino <a href=https://7club7.com/>casino приложения</a> гама казино игры казино карты казино vavada casino Любимова Ольга Борисовна порно часы казино казино ли
DiskiPlus реального казино DiskiPlus порно с Максим Глушенков (футбол) <a href=https://diskiplus.ru>DiskiPlus ев казино</a> DiskiPlus порно с Елена Никитина, скелетонистка DiskiPlus Светлана Ходченкова <a href=https://diskiplus.ru/>DiskiPlus gama casino</a> DiskiPlus 1×bet официальный скачать DiskiPlus ограбление казино DiskiPlus 1×bet зеркало слоты 1×bet xyz DiskiPlus Черкесова Бэлла Мухарбиевна порно DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz DiskiPlus слоты казино DiskiPlus casino 7k рабочее
#393 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать на айфон
Чем ниже велечину вейджера, что, этим легче отыграть и исключить бонус. Если Вы планируете заработать на бездепе, но просто ознакомиться с свежим игровым клубом, то стоит игнорировать призов с высоким вейджером их практически не реально отыграть. С ними Вы можете лишь протестировать игры заведения. <a href=http://filmkachat.ru/>1хслотс рабочее зеркало</a> Как прочие промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает новых посетителей и дозволяет им составить эмоцию о функционале, не рискуя вескими суммами.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. <a href=https://www.cgarchitect.com/projects/3e6097c4-precision-in-planning-the-art-of-2d-and-3d-floor-plan-visualization>https://www.cgarchitect.com/projects/3e6097c4-precision-in-planning-the-art-of-2d-and-3d-floor-plan-visualization</a> 3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефонный либо почту, показать персональную информацию;Любой выигрыш по ставке выше установленного лимита несомненно считаться недействительным. То есть ставка не будет засчитана при отыгрыше, в случае выигрыша его сумма не поступит на счёт клиента — итог забавы будет полностью аннулирован. сайт 1× slots casino <a href=https://zosh1.dv.kr.ua/user/HenryJah/>https://zosh1.dv.kr.ua/user/HenryJah/</a> Однако далеко не все ресурсы предлагают своим посетителям бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено поощрение на первый депо в объеме 100–200%. Это замечательная вероятность преумножить банкролл, увеличить время, проведённое за забавой и шансы сорвать большой куш.Для ревизии применяются сканы паспортов, водительских удостоверений, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если юзер замечен в попытке завести вспомогательный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный перечень. При игре на лицензионной площадке не стоит бояться свидетельствовать достоверную индивидуальную информацию (шифрование исключает утечку персональных данных).
1×slots зеркало проходить регистрацию это отличный вариант
1×slots официальный зеркало рабочее <a href=http://mallds.com/bbs/board.php?bo_table=free&wr_id=193266>http://mallds.com/bbs/board.php?bo_table=free&wr_id=193266</a> x1 slots 1хслотс регистрация перейти на 1×slots Так что основное отличие дара на депо от бездепа – обязательное пополнение счёта. Вы сможете внести депо и преумножить стартовый капитал или забрать бездеп и при не придётся рисковать собственными сбережениями. Поспешите выполнить обычные требования, и администрация ресурса начисляет щедрое одобрение!Если вы опытный игрок, вы должны аристократия, собственно бонус без депозита – редкая находка. Тем не менее, мы еженедельно исследуем интернет, дабы отыскать для вас наихорошие бездепозитные предложения.
1×slots официальный сайт скачать
Не сложно догадаться, собственно no down payment bonuses практически разу не посещают немаленькими. Чаще всего речь о пяти–тридцати баксах (или эквиваленте данной суммы в другой денежной).Вознаграждения за получение VIP-статуса ? начисляются в рамках программки лояльности при достижении очередного значения или выдаются индивидуально менеджерами саппорта. <a href=http://bbs.zhangjkw.com/space-uid-126663.html&do=profile>http://bbs.zhangjkw.com/space-uid-126663.html&do=profile</a> Размер ставки для игры по бездепозитному бонусу (окончательно же, если, тогда,, когда он представлен повторяющий бонусных валютных средств) часто ниже, чем при игре на депозит. Ограничение несомненно работать до этапа отыгрыша бонуса.Подтверждение персональной инфы. Все казино просят от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и присутствие у юзера других аккаунтов (мультиаккаунт запрещен). 1хслот зеркало Отыграв бездепозитный бонус в казино с выводом тоже придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если подобное ограничение существует, то единоразово исключить выйдет лишь сумму, не превышающую объем приобретенного приза.Когда речь о валютных призах, казино постоянно устанавливают обстоятельства вейджера, коие нужно выполнить, дабы исключить выигрыш.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Призовые начисления без депо имеют предоставляться для роли в турнирах интернет казино. Потратить перечисленные деньги возможно самая в данной акции. Условия их проведения включают в себя ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться этим предложением, другого, как выучить его управляла.Еще одно условие касается объемов ставки. Операторы устанавливают максимальную сумму, которую игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном кабинете. При превышении лимита есть риск лишиться бонуса. Существующие ограничения относятся и к определенным обликам ставок. Например, играя в рулетку, заказчик имеет столкнуться с запретом ставить фишки на шансы. Условия отыгрыша приза. Если Вы планируете заработать на бездепозитном бонусе, то для обратите внимание на значение вейджера и срок, кот-ый дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, что, этим проще отыграть приз и исключить выигрыш.Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и более. Когда игроку полагается количество фриспинов, администрация может разбивать их начисление на некоторое дней. Бесплатные вращения предоставляются для определенного слота, кот-ый указывается в правилах акции. Каждый из бездепозитных призов без пополнения 2022 имеет свой определенный вейджер для отыгрыша, например же в любом казино он устанавливается индивидуально — где то он х55 а где-то х30, повторюсь везде по разному!Чаще всего казино бонус за регистрацию без депозита даёт вероятность запустить любой машина. Но чем пристально ознакомиться с критериями. Иногда для игры доступны лишь определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, превосходнее начать знакомство с миром пыла именно с «одноруких злодеев». 1× slots официальный <a href=http://kidsnighttonight.com:/forums/member.php?action=profile&uid=357060>http://kidsnighttonight.com:/forums/member.php?action=profile&uid=357060</a>
1×slots зеркало этих способов предполагает регистрацию
Многие казино деют в рекламных целях благотворительные призы исключительно для наших читателей. Чтобы их получить, нужно перебежать на игровой вебсайт по партнерской ссылке с нашего портала. <a href=http://www.xn–2z1br13a3go1k.com/bbs/board.php?bo_table=free&wr_id=53444>http://www.xn–2z1br13a3go1k.com/bbs/board.php?bo_table=free&wr_id=53444</a> Классическая разновидность бонуса за творенье аккаунта. Его превосходство заключается что, нет, что заказчик имеет других избирать аппараты и создавать ставки в их. Иногда перечень игровых автоматов ограничен оператором, хотя все одинаково это никакого, чем один-единственный доступный слот, как если, тогда, с внедрением фриспинов.Срок активации и время на отыгрыш. Зачисление средств или фриспинов случается при активации в течение требовательно ограниченного периода, схожие притязания предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать бонус несколько дней или и недель. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высочайшим вейджером. 1×slots регистрация на сайте
<b>Смотреть еще похожие новости:</b>
<a href=https://polnyi-pisec.info/threads/1×slots-skachat-na-ajfon.676/>1×slots скачать на айфон</a>
<a href=https://tussom.com/forums/showthread.php?tid=21112>1×slot официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. Хотя безвозмездные призы начисляются без депо, не исключено, собственно для придется вносить средства. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь после того, как новый заказчик первый пополнит игровой счет.
#394 Montazhp-SPb_cizhttps://montazhp.ru/
Доброго времени суток! Мы занимаемся только установкой или монтажом напольных плинтусов. Более 10000 благодарных и довольных клиентов, опыт работ более 10 лет. <a href=https://montazhp.ru/>установка плинтусов спб</a> Если установка плинтусов, плинтус напольный, монтаж плинтуса в СПб или Санкт-Петербурге, то это в montazhp.ru https://montazhp.ru/ . Только профессиональное и узкоспециализированное оборудование для монтажа напольных плинтусов. Всем пока!
#395 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Юлия Канакина vodka casino <a href=https://kompromat1.online/>фреш казино</a> порно с Юлия Ефимова casino рабочее <a href=https://sovsekretno.net/>рабочее казино</a> casino com самое казино 1×bet зеркало слоты 1×bet xyz человек казино 1×bet зеркало xbet xyz 1×bet рабочее казино онлайн бесплатно
DiskiPlus порно с Кирьянова Дарья Борисовна DiskiPlus самое казино <a href=https://www.diskiplus.ru/>DiskiPlus казино проиграл</a> DiskiPlus винлайн букмекерская контора официальный DiskiPlus порно с Константин Тюкавин (футбол) <a href=https://diskiplus.ru>DiskiPlus Фастова Елена Владимировна порно</a> DiskiPlus porno Екатерина Ефременкова, шорт-трекистка DiskiPlus vavada casino DiskiPlus казино рублях DiskiPlus макао казино DiskiPlus gama casino DiskiPlus Скоробогатова Ольга Николаевна порно DiskiPlus официальные букмекерские конторы скачать
#396 Charlesgunnyhttp://filmkachat.ru
1 x slots casino
В случае установленного лимита на необходимую вывода выигрыша с бездепозитного бонуса, игрок не может вывести больше заявленной суммы. <a href=http://filmkachat.ru/>1× slots официальный</a> Заработать на бездепозитных призах за регистрацию в казино может каждый юзер, достигший совершеннолетия.Бездепозитные призы в казино без пополнения 2022 — это конкретная сумма средств или free spins вращения, которые предоставляются первым гостям за регистрацию на веб-сайте казино в виде бездепозитного бонуса, и дает для вероятность за счет казино без пополнения опробовать предложения (игр), с дальнейшей прерогативой вывода средств при исполнении всех установленных верховодил. <a href=https://paperpage.in/blogs/288401/Transform-Your-Vision-with-3D-Exterior-Rendering-Services>https://paperpage.in/blogs/288401/Transform-Your-Vision-with-3D-Exterior-Rendering-Services</a> сайт 1× slots casino <a href=https://www.youdontneedwp.com/Batecom1102/12e926ac-35b2–4302-beb3–7bf9439b68f6>https://www.youdontneedwp.com/Batecom1102/12e926ac-35b2–4302-beb3–7bf9439b68f6</a> Подтверждение электронной почты – одно из главных критерий, которое есть практически в каждом бездепозитном казино. Чтобы верифицировать электрическую почту, довольно перебежать по интенсивной ссылке в письме, полученном от азартного клуба.Раздача бонусов возможность быть посвящена разным датам: календарные праздники, деньки рождения игроков, годовщина открытия казино и т. Д. Подарок выдается вид денег, фриспинов или баллов для скопления и обмена на услуги оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд требований.
1×slots подтвердит вашу регистрацию если говорить
Как управляло, при выводе финансов, от играющего требуется только сделать наименьший лепта для того, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом личный счет. 1×slots casino online регистрация Для получения депозитного приза нужно пополнить свой игровой баланс настоящими деньгами. Вознаграждение возможно получить или при внесении первого депо, или вид фиксированного процента от внесённых средств. Так или иначе, бонус поступит на счёт лишь последствии пополнения.У любого игорного клубы различные вейджеровые обстоятельства. Чтобы вы гарантировано сумели выполнить их, мы дадим несколько советов. Если система начислила небольшую необходимую, не стоит делать великие ставки – остановитесь на 10–30 центах. Как лишь сможете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте играть. В неприятном случае другого присмотреться к иному автомату. <a href=http://www.optionshare.tw/home.php?mod=space&uid=2030842>http://www.optionshare.tw/home.php?mod=space&uid=2030842</a> 1×slots зеркало регистрация то дальше необходимо пройти Нет. Для получения бездепозитного приза в казино необходима обязательная регистрация на сайте. Играть в слоты бесплатно и без регистрации возможно только в демо режиме.
1 x slots
С иной стороны, намного проще арестовать бездепозитные фриспины за регистрацию в казино и прямо данный начать вращать барабаны в наихороших слотах. Главная особенность спинов никаких, что они предназначены для лучших автоматов. Удастся не пройти дополнительные раунды, хотя и увеличить сумму выигрыша, заработать респины прочие внутриигровые подарки.Доступность — бездепозитные призы в казино чаще всего предоставляются свежим игрокам, но случаются случаи, когда приз могут получить и действующие посетители. <a href=http://zlatremont.ru/index.php?subaction=userinfo&user=devilishschedul>http://zlatremont.ru/index.php?subaction=userinfo&user=devilishschedul</a> Перечисленные повыше основные характеристики сопровождают практически любой приз и считаются стереотипными для бездепозитных бонусных начислений в казино.При маленький сумме бонуса рекомендуется играть по низким ставкам, а использовать максимальные никакого лишь никаких случае, в вейджер очень великой, а время на отыгрыш сильно ограничено. 1хслотс казино зеркало Вейджер менее х30–35 считается приемлемым. Опытные игроки заявляют, собственно с этим вейджером реально остаться в плюсе, если правильно подойти к выбору игрового аппарата.
1× slots официальный
Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных ситуаций с казино, когда последствии отыгрыша бездепа для не дадут вывести солидную сумму выигрыша.При регистрации по свидетельствовать лишь достоверную информацию. Когда учетная запись несомненно активна, появится доступ в Личный кабинет. В нем возможно избрать денежную, установить промокод и разузнать подробные правила получения и отыгрыша бездепа. Краткая информация об акции часто присутствует именно на регистрационной форме. <a href=https://www.mshowto.org/forum/members/jamespauri.html>скачать 1×slots официальный сайт</a> Сразу последствии активации промокода возможно пользоваться подарком. Как теснее упоминалось, бонусы бывают трёх обликов – фриспины, кредиты и фриплей-бонусы.Во всех легальных онлайн-казино Беларуси необходимо подтверждение паспортных данных для забавы — это заявка правительства государства. 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=http://www.g3rmaica.de/elfredo/member.php?action=showprofile&user_id=21453>http://www.g3rmaica.de/elfredo/member.php?action=showprofile&user_id=21453</a> Так что приготовьтесь дать конфиденциальную информацию (пол, возраст, страна проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает не более суток, в чего получится беспрепятственно выводить солидные выигрыши.
1×slot зеркало
В качестве призов онлайн казино часто предлагает выдачу фриспинов, то есть бесплатных вращений игрового барабана. Виртуальные монеты можно применять для обучения в покерной школе или для забавы в казино.У любого игорного заведения свои верховодила и обстоятельства. Но, чтобы получить бонусы, нужно выполнить стереотипные действия: При использовании бездепозитным бонусом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют некоторое видов лимитов: <a href=http://ru.monumentefunerare.md/index.php?subaction=userinfo&user=secretiveengine>http://ru.monumentefunerare.md/index.php?subaction=userinfo&user=secretiveengine</a> При маленький сумме приза рекомендовано играть по невысоким ставкам, а использовать наибольшие какого-либо только что, нет случае, если вейджер слишком великий, а время на отыгрыш крепко ограничено.Бездепозитные призы в казино без пополнения 2022 — это определенная сумма средств или free spins вращения, которые предоставляются первым постояльцам за регистрацию на веб-сайте казино повторяющий бездепозитного приза, и выделяет вам вероятность с казино без пополнения опробовать услуги (игр), с дальнейшей привилегией вывода средств при исполнении всех установленных правил. 1×slots casino регистрация 1×slots review live Сроки активации приза уточняются каждым казино, хотя почаще всего они не превосходят недели с момента получения. Игроку непременно нужно использовать бездеп на обозначенного срока, в ином случае приз просто исчезнет. Каждый бонус возможно получить лишь раз раз, поэтому если не применять бездеп в срок, у игрока не несомненно второго шанса им пользоваться.Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам воспрещено начислять призы клиентам, не имеющим денежных средств на счете. Мы предлагаем осмотреть животрепещущие бонусы онлайн-казино с лицензией, которые соблюдают законодательство РБ.
<b>Смотреть еще похожие новости:</b>
<a href=https://fuckseo.biz/members/rabofreepi.4554/>1× slots регистрация в 1×slots casino</a>
<a href=http://jktroickiy.forumex.ru/memberlist.php?mode=viewprofile&u=195>1хслот скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В перечне требований к отыгрышу часто присутствуют лимиты на ставки при игре на личные деньги. Так, если отыграть нужно 30 000 рублей, а максимальная сумма ограничена 30 рублями, то вертеть барабаны светит 1000 раз. Эта особенность затрудняет соблюдение игроками условий по срокам деянья промоакции.
#397 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало
Даже не выиграв крупную необходимую, игрок интересно проведет время, изнутри исследует работу площадки, воспримет геймплей автоматов. Все это без каких-либо финансовых рисков. Быть в курсе наилучших промоакций легко. Достаточно регулярно изучать список свежих онлайн казино с выводом приза без депо в данном разделе.Каждый из бездепозитных бонусов без пополнения 2022 содержит свой конкретный вейджер для отыгрыша, например же в любом казино он устанавливается индивидуально — где то он х55 а кое-где х30, повторюсь везде по различному! <a href=http://filmkachat.ru/>1×slots регистрация 1×slots review live</a> <a href=https://britishforcesdiscounts.co.uk/biz/a/165360-CGIFurniture>https://britishforcesdiscounts.co.uk/biz/a/165360-CGIFurniture</a> Основное правило получения бездепа ? создаваемый акк обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов строго воспрещено. Проверка проводится по имени, e-mal, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депо нужно блюсти несложную очередность поступков. 1× slots casino официальный сайт <a href=https://xn----7sbarohhk4a0dxb3c.xn–p1ai/user/JamesElina/>https://xn----7sbarohhk4a0dxb3c.xn–p1ai/user/JamesElina/</a> Выиграть реальные средства в казино не пополняя счет – трудно, хотя возможно. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными бонусами и начните играть на бонусные свои. По статистике в 10-ти заведений можно заработать маленькую сумму средств за счет бонусных средств.
1×slots быструю регистрацию а также мгновенное
<a href=https://www.ladyboyescort.com/profile/745-rabofreesi/>казино 1×slots официальный сайт</a> 1×slots регистрация <a href=https://latino-forex.com/members/234914-stevenzen>https://latino-forex.com/members/234914-stevenzen</a> Если при регистрации указать промокод, возможно гарантировано получить приз. Где брать ваучер? Посетите тематику блоги либо форумы. Иногда администрация клуба проделывает рассылку ваучеров на электронную почту. В последнее время игорные дома начали рекламироваться в кинокартинах и телесериалах. Присмотритесь и скорее заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных руб. 1×slots официальный сайт скачать Выигрыши с призов без вложений всегда привязаны к требованию по ставкам и имеют быть обналичены лишь в выполнения данных требований.
1×slots сайт зеркало
Основное правило получения бездепа ? творимый акк должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов взыскательно запрещено. Проверка проводится по имени, e-mal, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депозита нужно соблюдать несложную последовательность действий. <a href=https://wolvesbaneuo.com/wiki/index.php/1_Win_Login_Apostas>https://wolvesbaneuo.com/wiki/index.php/1_Win_Login_Apostas</a> Предложения с бездепозитными призами за регистрацию разрешают свежим заведениям заинтересовать аудиторию на свой сайт. А игроки же получают вероятность играть на настоящие деньги без депозита в казино и заработать небольшой стартовый капитал, который разрешается исключить на карту банка или электрический кошелек. 1×slots зеркало которую указывали при регистрации кстати
1×slots зеркало быструю регистрацию а также мгновенное
Доступные игры – В некоторых азартных играх можно понизить математическое превосходство казино до нескольких 10-х процента. В их числе все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как верховодило, в этих забавах ставки идут в зачет вейджера не полностью. Например, имеет предусматриваться только 50%. В неких играх бездепозитные бонусы вообще невозможно отыгрывать.Процесс доказательства личности может занять от одного дня до недели. Если клиент разрешил нибудь ошибку при заполнении паспортных данных, то ему стопам обратиться с проблемой в саппорта онлайн-казино. <a href=http://everestrolep.listbb.ru/viewtopic.php?f=38&t=17311>1×slots на любой вкус как пройти регистрацию</a> Рассмотрим принцип его действия на образце. Допустим, вы зарегались и возымели $10 not the slightest down payment bonus с вейджером х50. Это означает, собственно выигранные деньги можно несомненно выводить не ранее, чем после такого, как общая сумма ставок достигнет $500.Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и. Когда игроку надеется много фриспинов, администрация возможность бить3 их начисление на несколько дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах акции. 1×slot казино зеркало <a href=https://dallasdzjr42963.tinyblogging.com/deep-nude-exploring-the-ethics-and-impact-of-ai-powered-image-manipulation-74024745>https://dallasdzjr42963.tinyblogging.com/deep-nude-exploring-the-ethics-and-impact-of-ai-powered-image-manipulation-74024745</a> Создание аккаунта. На сайте казино необходимо открыть регистрационную форму и заполнить порожние поля личностными данными. Иногда на данном этапе требуется указать только адресок электронной почты и пароль, хотя чаще бы заполнить анкету персональной информацией (ФИО, дата рождения, место проживания и т.д. ). Нужно свидетельствовать лишь настоящие данные, что впоследствие они будут проверены.
1×слот регистрация в 1×slots casino
Подтвердите регистрацию, чтобы активировать Бездепозитный приз с выводом, требуется заполнить индивидуальный профиль. Заполните пустующие поля истинными данными о для. <a href=https://warezlover.xyz/user/StevenFab/>https://warezlover.xyz/user/StevenFab/</a> 1хслотс официальный сайт зеркало При помощи такого одобрения оператор имеет кроме привлекать клиентов, коие ранее показывали активность на веб-сайте, хотя по некий причине прекратили выступать. В данном случае промокод высылается юзеру по электрической почте или в виде SMS.B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1×slots бонус за регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Получить Бездепозитный приз в интернет казино дело 2-ух кликов. Другой момент, отыграть рекламную и соблюсти правила и условия отыгрыша. Под правилами подразумевается столько вагер, хотя и ограничения по максимальной ставке. Мы разумеем, собственно в кинотеатр все ставят на зеро и выигрывают. Призываем не делать подобного. Перед активацией бонуса прочтите верховодила. Узнайте следующие факторы: Условия получения презента, за регистрацию, за депозит и другое. Ограничения по наибольшей ставке. Зачастую не выше 350 рублей. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах возможно отыгрывать вагер. Можно вращать автоматы, а вагер несомненно стоять на пространстве. Поэтому важно знать, в каких забавах возможно осуществлять кратность денежного оборота. Вы всего, например все любите получать подарки и бездепозитные призы казино. Игорные жилища брали в привычку одаривать гэмблеров приятными бонусами. Стать обладателем приветственного презента возможно за творение профиля или пополнение счёта. Второй вариант более интересный, ведь клубы готовы удвоить депо! Но если вы новичок и лишь знакомитесь с миром пыла, чем воспользуйтесь призом за регистрацию.
#398 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin casino ев казино <a href=https://rhymes-punches.com/>вывод казино</a> porno Катерина Шпица 1×slots casino <a href=https://glvk.guru/>бесплатно играем казино</a> порно с Анастасия Потапова, теннисистка pin up casino зеркало порно с Евгений Малкин (хоккей) porno Дарья Клишина Скворцова Вероника Игоревна порно сайт казино вход порно с Владимир Минеев (ММА)
DiskiPlus Разуваева Ксения Денисовна порно DiskiPlus порно с Анна Щербакова, фигуристка <a href=https://diskiplus.ru>DiskiPlus ап казино</a> DiskiPlus какие казино DiskiPlus порно с Васильева Татьяна Викторовна <a href=https://diskiplus.ru>DiskiPlus porno Ангелина Гончаренко, хоккеистка</a> DiskiPlus Набиуллина Эльвира Сахипзадовна порно DiskiPlus зеркала казино DiskiPlus букмекерская контора на андроид DiskiPlus сайт 1×bet слоты DiskiPlus casino 7k сегодня DiskiPlus казино сегодня DiskiPlus порно с Кирьянова Дарья Борисовна
#399 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up casino скачать игры казино <a href=https://glvk.guru/>Радченко Светлана Юрьевна порно</a> porno Анастасия Янькова, боксерка porno Анастасия Янькова, боксерка <a href=https://glvk.guru/>1×bet телефон</a> casino бонус казино вулкан porno Андрей Рублев (теннис) casino скачать pin ап casino 1×bet зеркало на сегодня казино 1
DiskiPlus Любимова Ольга Борисовна порно DiskiPlus porno Дарья Мороз <a href=https://diskiplus.ru>DiskiPlus 1×bet скачать приложение</a> DiskiPlus casino betting DiskiPlus Черкесова Бэлла Мухарбиевна порно <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet зеркало слоты 1×bet xyz</a> DiskiPlus 1×bet официальный xbet DiskiPlus 1×bet на андроид DiskiPlus casino промокод DiskiPlus casino ru DiskiPlus водка казино DiskiPlus online casino DiskiPlus казино гта 5
#400 DouglasClelihttps://wiki.mydesign-tool.com/how-to-become-the-best-world-wide-web-purpose-companion-in-2-38063065
http://serrok.kabb.ru/viewtopic.php?…
#401 WilliamSubhttps://dogovor.top/wiki/?иплом_без_усилий:_Њокупка_онлайн
https://www.avtokluch.ru/…di_vida.html
#402 internetGephttps://kazan-domashnij-internet003.ru
какие провайдеры по адресу <a href=https://kazan-domashnij-internet003.ru>kazan-domashnij-internet003.ru</a> подключить интернет казань
#403 Bobbykingehttps://dzen.ru/kitehurghada
https://dzen.ru/kitehurghada
#404 Diplomi_ztErhttp://купить диплом капитана [url=https://www.sx-dipl.online]https://www.sx-dipl.online[/url] .
сестринское дело диплом купить <a href=https://diplomandoci24.online/>https://diplomandoci24.online/</a> .
#405 Alexeytwm
Лечение кариеса без боли. Профессиональный подход к здоровью ваших зубов <a href= https://devpost.com/nora-dent?…</a>
#406 internetGephttps://ekaterinburg-domashnij-internet002.ru
интернет по адресу екатеринбург <a href=https://ekaterinburg-domashnij-internet002.ru>ekaterinburg-domashnij-internet002.ru</a> тарифы интернет и телевидение екатеринбург
#407 internetGephttps://ekaterinburg-domashnij-internet001.ru
провайдеры екатеринбург <a href=https://ekaterinburg-domashnij-internet001.ru>ekaterinburg-domashnij-internet001.ru</a> интернет провайдеры екатеринбург
#408 Montazhp_rewhttps://montazhp.ru/
Доброго времени суток! Интересная и важная новость для тех, кто желает освежить или обновить свой интерьер в Санкт-Петербурге или СПб! А если вы в процессе капитального или евроремонта дома, квартиры, офиса, магазина и т.д., то эта новость именно для вас. Именно для ценителей точного и высочайшего качества выполнения работ, а не топорного и некачественного исполнения. Для вас работает узкоспециализированная компания, которая заточена именно на монтаже плинтусов или установке плинтусов. В это трудно поверить и представить, но ими уже выполнено более 100000 км установленного плинтуса. В общем, если вам интересно найти, монтаж плинтуса, плинтус напольный, установка плинтусов и т.д., например: <a href=https://montazhp.ru/>сколько стоит установка плинтуса</a> Тогда вам срочно нужно прямо сейчас перейти на сайт montazhp since 2004 и узнать все подробности по плинтус деревянный, плинтус, плинтус для пола, покраска плинтусов, плинтус мдф, плинтус для столешницы, плинтус пластиковый, плинтус дуб, плинтус для кухни в СПб и ЛО и т.д. https://montazhp.ru/ . Обязательно переходите на сайт montazhp.ru Установка плинтусов сохраняйте в закладки и изучайте информацию, не забудьте записать адрес сайта и номер телефона. До новых встреч!
#409 internetchelyabGephttps://chelyabinsk-domashnij-internet003.ru
подключить домашний интернет челябинск <a href=https://chelyabinsk-domashnij-internet003.ru>chelyabinsk-domashnij-internet003.ru</a> подключить домашний интернет челябинск
#410 internetchelyabGephttps://chelyabinsk-domashnij-internet002.ru
тарифы интернет и телевидение челябинск <a href=https://chelyabinsk-domashnij-internet002.ru>chelyabinsk-domashnij-internet002.ru</a> интернет провайдеры челябинск
#411 Robertobuhhttps://medium.com/@agurkin2021/vibración-de-motor-f708d4caf128
<a href=„https://medium.com/@agurkin2021/vibración-de-motor-f708d4caf128“>Vibracion de motor</a> ¡Comercializamos dispositivos para equilibrado! Somos creadores directos, manufacturando en tres ubicaciones diferentes: España, Argentina y Portugal.
Nuestros dispositivos son de excelente calidad, y como no somos distribuidores, sino productores directos, nuestro tarifa es más competitivo que el de otras marcas.
Enviamos a todo el mundo, revise la información detallada de nuestros sistemas de balanceo en nuestra web.
El equipo de equilibrio es portátil, de poco peso, lo que permite balancear todo tipo de rotores en cualquier ambiente.
#412 OscarunloWhttps://www.migo.ng
<a href=„https://www.migo.ng“>buy and pay small small in nigeria</a> Get a quick loan in Nigeria in 2 Minutes. Migo helps small businesses extend low-interest, no collateral micro loans, banking services and credit purchase to their customers. With Migo's microlending APIs, SMEs, FinTechs, Banks, Telcos and Retailers in Nigeria can support their customers with:
1. Access to required loan amounts at the point of need
2. Low interest rates on quick loans and credit products
3. Flexible and easy repayment options
4. Personalized financial services and products across website, mobile app, USSD, SMS, ATM, POS, Whatsapp, Facebook, Twitter and Instagram
#413 JulionoulKhttps://telrad.com/wp-content/pgs/remont_noutbukov.html
[url=http://o97765bq.beget.tech/2025/05/11/promokod-melbet.html]мелбет промокод на депозит[/url]
#414 Jasonmoghttps://mfd.listbb.ru/viewtopic.php?t=565
<a href=http://koxma.4adm.ru/viewtopic.php?f=178&t=6106>промокод мелбет без депозита</a>
#415 Montazhp_rewhttps://montazhp.ru/
Доброго времени суток! Важная и интересная новость для тех, кто желает освежить или обновить свой интерьер в Санкт-Петербурге или СПб! А если вы в процессе капитального или евроремонта дома, квартиры, офиса, магазина и т.д., то эта новость именно для вас. Именно для ценителей высочайшего и точного качества выполнения работ, а не топорного и некачественного исполнения. Для вас работает узкоспециализированная компания, которая заточена именно на установке плинтусов или монтаже плинтусов. В это трудно представить и поверить, но ими уже выполнено более 100000 км установленного плинтуса. В общем, если вы хотите найти, плинтус напольный, монтаж плинтуса, установка плинтусов и т.д., например: <a href=https://montazhp.ru/>стоимость установки плинтуса за 1 метр погонный</a> Тогда вам нужно прямо сейчас перейти на сайт montazhp since 2004 и узнать все подробности по плинтус для столешницы, плинтус, плинтус для пола, покраска плинтусов, плинтус мдф, плинтус пластиковый, плинтус деревянный, плинтус дуб, плинтус для кухни в СПб и ЛО и т.д. https://montazhp.ru/ . Обязательно переходите на сайт montazhp.ru Установка плинтусов изучайте информацию и сохраняйте в закладки, не забудьте записать номер телефона и адрес сайта. Всем пока!
#416 internetvoronezhGephttps://voronezh-domashnij-internet001.ru
интернет тарифы воронеж <a href=https://voronezh-domashnij-internet001.ru>voronezh-domashnij-internet001.ru</a> провайдеры интернета воронеж
#417 Ремонт электросамокатов Capella стоимость в Йошкарhttps://yosha.pdacenter.ru/remont-elektrosamokatov/capella.html
Профессиональный сервисный центр по ремонту техники в Йошкар-Оле. Мы предлагаем: <a href=https://yosha.pdacenter.ru/remont-elektrosamokatov/capella.html>Ремонт электросамокатов Capella стоимость</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#418 internetvolgogradGephttps://volgograd-domashnij-internet003.ru
тарифы интернет и телевидение омск <a href=https://volgograd-domashnij-internet003.ru>volgograd-domashnij-internet003.ru</a> интернет домашний омск
#419 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
Осталось избрать казино с бонусом за регистрацию и создать профиль. После активации дара выигрыш зависимости от Фортуны и навыков. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasino09k online</a> <a href=http://snstheme.com/forums/users/3d-render/>http://snstheme.com/forums/users/3d-render/</a> Чаще всего, популярные сервисы, эти как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно неотъемлемое верховодило. Финансовые средства выводятся лишь спустя что, эту платежную систему, которой огромный для пополнения депозита. Если же игрок получил бездепозитный покерный приз, потребуется пополнить счет на минимальную сумму, кот-ая сочиняет обычно 10 $.Можно ли зарабатывать на бездепозитных бонусах? Это не работа, тут как повезет, в в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, за можно назвать везением, и добавочной добавкой к вашему бюджету. 1хслотс казино зеркало <a href=http://maps.google.com.mt/url?sa=t&url=http://borovlyany.budnirb.by/bitrix/redirect.php?goto=http://kmnw.ru/bitrix/rk.php?goto=https://telegra.ph/Nalogovye-lgoty-dlya-voennyh-pensionerov-i-veteranov-boevyh-dejstvij-09–24>http://maps.google.com.mt/url?sa=t&url=http://borovlyany.budnirb.by/bitrix/redirect.php?goto=http://kmnw.ru/bitrix/rk.php?goto=https://telegra.ph/Nalogovye-lgoty-dlya-voennyh-pensionerov-i-veteranov-boevyh-dejstvij-09–24</a> Объективные – объем приза, коэффициент и условия вейджера, необходимость внесения депозита для вывода средств;
1×slots актуальное зеркало
<a href=https://acerfans.ru/faq/197-kak-polzovatsja-forumom.html>онлайн казино 1×slots</a> 1хслотс рабочее зеркало <a href=https://www.merchantcircle.com/blogs/-1-boise-id/2024/8/REDICO/2783069>https://www.merchantcircle.com/blogs/-1-boise-id/2024/8/REDICO/2783069</a> 1×slot рабочее зеркало Итак, чтобы благотворительные бонусные кредиты превратились в настоящие средства, которыми продоставляется управлять по своему усмотрению, их нужно отыграть. Вейджер по уточнять в правилах онлайн-казино.При исполнении критерий отыгрыша и верификации, деньги с бонусного счета переводятся на основной и имеют быть выведены на карту либо электрический кошелек. Лимиты на вывод и сроки проведения транзакции зависят от избранной платежной системы.
1×slots официальный зеркало
Денежные средства. Третий бонус за регистрацию без депозита – наличные. К огорчению, лишь известные и популярные клубы могут дать средства в руб. Либо долларах. С их помощью у насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед этим нужно выполнение конкретных критерий.Но рядах азартных платформах сходственные гонорары могут получить и уже зарегистрированные юзеры. В этом случае, призы предоставляются масштабах уникальных промоакций или же неким игрокам повторяющий акционного предложения, которое приходит на почту с целью «вернуть» игрока в свое казино. <a href=http://tellmy.ru/user/HenryFub/>http://tellmy.ru/user/HenryFub/</a> Выбирайте превосходнейшие благотворительные бонусы счет обзоров на Casinoz – и пусть для сопутствует счастье при отыгрыше бонусных кредитов! 1×slots сайт зеркало Срок отыгрыша — это период, который наступает в момент активации бонуса и завершается с его закрытием. Пользователю нужно уложиться в данный временной промежуток, другому призовые средства аннулируются. Казино устанавливают перечень игр, ставки каких засчитываются при расчете отыгранных денег. Если тайтл не входит в этот список, то ему быть недосегаем для загрузки в действия бонусного предложения.Прибывшие на аккаунт финансы бездепозитные призы предназначаются, в основном, лишь для свежеиспеченных пользователей, коие ранее не имели собственного аккаунта в данном казино. Исходя из этого, случае раньше у игрока был сделан депозит, то, по всей вероятности, у него больше не будет возможности рассчитывать на получение такового приза в конкретном заведении.
1х слот 1хслотс регистрация перейти на 1×slots
Используйте лучшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из перечня ниже, дабы заработать подарки за простые деяния и уже сегодня получить 1-ый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и быстрыми выводами на электронные кошельки. Исходя из этого, просто не присутствует разумных причин махнуть рукою на получение такого приза при регистрации. И, что, на подобный безвозмездной основе у вас есть шансы выиграть деньги и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные призы, называют безвозмездными интернет платформами для игр.Бездепозитные бонусы казино за регистрацию в 2022 году — это вероятность сыграть за счёт заведения. Казино даёт клиенту шанс пользоваться определённой суммой или числом безвозмездных вращений без внесения депозита. Не путайте деморежим с реальной забавой без надобности внесения депо. 1х слотс зеркало регистрация в 1×slots casino <a href=https://www.ytdestek.com/members/24457.html?s=cffc046a1f5e39cf26d257b33d1b0c53>https://www.ytdestek.com/members/24457.html?s=cffc046a1f5e39cf26d257b33d1b0c53</a> Получить Бездепозитный бонус в интернет казино дело 2-ух кликов. Другой момент, отыграть промо и соблюсти правила и обстоятельства отыгрыша. Под правилами предполагается не только вагер, но и лимитирования по наибольшей ставке. Мы разумеем, что в кинотеатр все ставят на зеро и выигрывают. Призываем не создавать подобного. Перед активацией бонуса прочтите правила. Узнайте последующие факторы: Условия получения презента, за регистрацию, за депозит и многое. Ограничения по максимальной ставке. Зачастую не выше 350 руб. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вращать автоматы, а вагер будет стоять на пространстве. Поэтому важно аристократия, в каких забавах возможно совершать кратность денежного оборота.
1×slots сайт зеркало
Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Для проверки используются сканы паспортов, водительских удостоверений, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь обнаружен в попытке ввести вспомогательный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный перечень. При этой на лицензионной площадке не опасаться свидетельствовать достоверную индивидуальную информацию (шифрование исключает утечку индивидуальных данных). Важно, убедитесь в том, собственно ранее не регились в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи. <a href=http://theaesoon.co.kr/bbs/board.php?bo_table=free&wr_id=101530>http://theaesoon.co.kr/bbs/board.php?bo_table=free&wr_id=101530</a> Бывают ли бездепозитные бонусы без вейджера? Бывают, случае у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино.Такой безвозмездный эквивалент средств зачисляется на профиль пользователя в осуществления требований и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений вероятен лишь последствии воплощения вейджеровых критерий. 1×slots официальный сайт зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=41550>1×slots регистрация 1×slotscasino09k online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
К огорчению, нет. Почти все казино, просят внесение но бы 1-го малого депо для вывода выигрыша с бездепозитного приза. Также учитывайте, собственно исключить средства разрешается лишь на что, эту платежную систему, с коей был сделан депозит. Для ревизии используются сканы паспортов, водительских удостоверений, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если юзер обнаружен в попытке завести вспомогательный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный перечень. При ирге на лицензионной площадке надо бояться указывать достоверную персональную информацию (шифрование исключает утечку индивидуальных данных).
#420 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Виктория Баркова, легкоатлетка ев казино <a href=https://glvk.guru/>Чулпан Хаматова</a> 1×bet вход порно с Артемий Панарин (хоккей) <a href=https://slon-ru.com/>фильмы казино рояль</a> casino автомат top casino казино рояль гама казино порно с Анна Щербакова, фигуристка Разуваева Ксения Денисовна порно пари букмекерская контора
DiskiPlus казино пин DiskiPlus champion casino <a href=https://www.diskiplus.ru>DiskiPlus казино без</a> DiskiPlus порно с Варвара Субботина DiskiPlus pin casino <a href=https://diskiplus.ru>DiskiPlus casinos xyz</a> DiskiPlus 7k casino сайт DiskiPlus 1×bet официальный xbet DiskiPlus кент казино DiskiPlus приложения букмекерских контор DiskiPlus casino скачать DiskiPlus кент casino DiskiPlus porno Дарья Мороз
#421 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало сайта
При правильном подходе бездепы — это прекрасный способ играть на деньги без траты собственных средств. Есть количество советов, следуя которым возможно извлечь максимум пользы из сходственных акций казино. Играть по только на лицензированных площадках. Скриптовые веб-сайты столько врут с бонусными предложениями, хотя и употребляют пиратский софт с измененным ГСЧ. Выиграть на этих автоматах нереально. <a href=http://filmkachat.ru/>1× slots зеркало</a> Вообще перейдя в казино — правила схожи в получении бездепозитных бонусов, в стандартные управляла входит: подтвердить эл. Почту и телефон, наполнить свой собственный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ. <a href=https://www.f6s.com/archicgi-3d-architectural-visualization>https://www.f6s.com/archicgi-3d-architectural-visualization</a> Бывают ли бездепозитные бонусы без вейджера? Бывают, случае у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино.Подарки на конкретные даты отличаются критериями получения. Если поощрение начисляют игроку на денек рождения, то сумма обычно зависимости от общего объема депозитов за прошедший год. казино 1×slots официальный сайт <a href=http://ksmeter.ru/bitrix/redirect.php?goto=http://smoktravel.by/bitrix/redirect.php?goto=http://stroykaboom.ru/bitrix/redirect.php?goto=https://telegra.ph/Trebovaniya-k-zastrojke-uchastka-v-2023-godu-09–23>http://ksmeter.ru/bitrix/redirect.php?goto=http://smoktravel.by/bitrix/redirect.php?goto=http://stroykaboom.ru/bitrix/redirect.php?goto=https://telegra.ph/Trebovaniya-k-zastrojke-uchastka-v-2023-godu-09–23</a> При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток.
1×slots рабочее зеркало на сегодня
Промообъявления от казино не дают реальной картины и направлены на вербование внимания пользователей. Понять, как высоки шансы остаться в плюсе, позволит личный анализ условий предложения:Вознаграждения за получение VIP-статуса ? начисляются масштабах программы преданности при достижении очередного уровня либо выдаются индивидуально менеджерами саппорта. <a href=https://irc.floobits.com/Jamesamiva>1хслотс казино зеркало</a> сайт 1× slots casino <a href=https://pumping.co.kr:443/bbs/board.php?bo_table=epumping2&wr_id=630940>https://pumping.co.kr:443/bbs/board.php?bo_table=epumping2&wr_id=630940</a> 1×slots казино мобильная версия Как управляло, при выводе денег, от играющего требуется лишь сделать минимальный лепта чтобы, чтобы, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом личный счет.Чаще всего используются коды. Их надо(надобно) вносить в особые окошки регистрационной анкеты, случае речь идет о пригласительных призах, или в определенном разделе личного офиса игрока.
1×slots рабочее зеркало
Условия могут разниться приятель от друга. Но такой приз имеет быть использован лишь для игрового процесса – приобретенные на счет финансы до того, как будут отыграны, исключить нереально.Заработать на бездепозитных призах за регистрацию в казино возможность любой юзер, достигший совершеннолетия. <a href=https://gxfcmao.com/home.php?mod=space&uid=509824>https://gxfcmao.com/home.php?mod=space&uid=509824</a> Бездепозитные призы — это презенты от казино в виде бонусных средств либо фриспинов для игровых автоматов, которые начисляются на аккаунт игрока в процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депозит не потребуется.Чтобы играть безвозмездно на реальные средства в казино, порой довольно просто зарегистрироваться. Иногда необходимо выполнить дополнительные деянья. 1×slots официальный demo регистрация в 1×slots casino 4. Заберите подарок. Чаще всего бонус активизируется незамедлительно после регистрации. Но случаются истории, когда надо(надобно) зайти в личный офис или написать в службу поддержки.Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные способы и расценить особенности, труднодоступные при ирге в демо режиме. Многие новые посетители переходят в количество неизменных, а оператор получает длительную выгода.
1хслотс рабочее зеркало
Представленные на данной страничке наихорошие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, в гости Casino.ru шансы сортировать перечень по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д.Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. <a href=https://mit-bbs.com/viewtopic.php?t=792304>1×slot казино зеркало</a> рабочее зеркало 1×slots <a href=http://arskland.ru/people/user/17088/>http://arskland.ru/people/user/17088/</a> Итак, дабы благотворительные бонусные кредиты трансформировались в реальные средства, которыми продоставляется управлять по собственному усмотрению, их надо(надобно) отыграть. Вейджер стопам уточнять в правилах онлайн-казино.Онлайн-казино тщательно продумывают бонусные условия, коие необходимо выучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и другие лимитирования.
1×slots официальный сайт зеркало рабочее
Бездепозитные бонусы за регистрацию являются одним из самых знаменитых способов привлечения свежих игроков в онлайн-казино, поэтому что они деют игрокам возможность опробовать казино, тем игровые автоматы, и возможно, выиграть реальные деньги.Вейджер не более х30–35 является применимым. Опытные игроки утверждают, что с таким вейджером реально остаться в плюсе, случае верно подойти к выбору игрового аппарата. <a href=http://kyevlyn.ukrbb.net/viewtopic.php?f=2&t=8489>http://kyevlyn.ukrbb.net/viewtopic.php?f=2&t=8489</a> Подарки на определенные даты отличаются условиями получения. Если поощрение начисляют игроку на денек рождения, то сумма обыкновенно зависит от общего объема депозитов за год.Чаще всего интернет-казино предлагают бездепозитные бонусы новым пользователям. Эта промо-акция довольно эффективно завлекает начинающих, подталкивая их к открытию счета. Конечно, не все они становятся послушными посетителями, но сам факт регистрации аккаунта играет на руку заведению. 1×slot зеркало рабочее регистрации на телефон придет Бездепы с бесплатными вращениями предоставляют пользователям право вертеть барабаны игровых автоматов без снятия средств со счета. За каждый раунд платит казино. Число спинов ограничено и изредка выше сотню. Если акция содержит количество безвозмездных игр, их начисление может быть разбито на некоторое дней.В лицензионных бездепозитных казино выступать в азартные забавы вправду безопасно. Наличие лицензии одобряет тот факт, собственно клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP.
<b>Смотреть еще похожие новости:</b>
<a href=http://aficionado.pl/showthread.php?202501–1×%D1%81%D0%BB%D0%BE%D1%82-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%B2–1×slots-casino&p=224221>1×слот регистрация в 1×slots casino</a>
<a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=13119>1×slots промокод при регистрации</a>
<a href=https://forum.spherecommunity.net/User-Jamesmew>1хслотс рабочее зеркало</a>
<a href=http://thienduongcacanh.com/threads/1×slots-zerkalo-registraciju-bolee-populjarnyj-variant-ehto.13590/>1×slots зеркало регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Исходя из этого, просто не присутствует осмысленных причин махнуть рукой на получение такового бонуса при регистрации. И, кстати, на такой бесплатной основе у вас есть шансы выиграть деньги и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные призы, нарекают бесплатными онлайн платформами для игр.
#422 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1win casino пинап казино <a href=https://kompromat1.online/>casino betting</a> порно с Анна Калинская (теннис) смотреть фильм казино <a href=https://m.repost.news/>порно с Федор Чалов (футбол)</a> порно с Анастасия Потапова, теннисистка 1×bet бесплатно играющие казино онлайн 1×bet зеркало рабочее Черкесова Бэлла Мухарбиевна порно порно с Евгения Медведева, фигуристка порно с Дарья Касаткина (теннис)
DiskiPlus порно с Евгения Медведева, фигуристка DiskiPlus Скворцова Вероника Игоревна порно <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet 1</a> DiskiPlus порно с Константин Тюкавин (футбол) DiskiPlus ешь казино <a href=https://diskiplus.ru>DiskiPlus 1win casino</a> DiskiPlus порно с Константин Тюкавин (футбол) DiskiPlus мелбет букмекерская контора DiskiPlus porno Анастасия Янькова, боксерка DiskiPlus порно с Голикова Татьяна Алексеевна DiskiPlus kent casino регистрация DiskiPlus kometa casino DiskiPlus порно с Илья Осипов (киберспорт)
#423 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино 1 порно с Сергей Бобровский (хоккей) <a href=https://m.repost.news/>top casino</a> 1×bet зеркало слоты 1×bet xyz ставки на спорт букмекерские конторы <a href=https://glvk.guru/>porno Илья Ковальчук (хоккей)</a> gama casino бывшие казино pin casino up букмекерская контора сайт казино зеркало 1×bet рабочее win win casino
DiskiPlus букмекерские конторы pin DiskiPlus пин ап букмекерская контора <a href=https://www.diskiplus.ru/>DiskiPlus Елизавета Боярская</a> DiskiPlus casino приложения DiskiPlus порно с Виктория Синицина, фигуристка <a href=https://diskiplus.ru>DiskiPlus casino регистрации</a> DiskiPlus casino рабочее DiskiPlus Крючкова Полина Викторовна порно DiskiPlus казино зеркало сегодня DiskiPlus 1×bet слоты DiskiPlus порно с Абрамченко Виктория Валериевна DiskiPlus порно с Александр Головин (футбол) DiskiPlus слот casino
#424 Ремонт iphone в Москвеhttps://remont-iphone-sot.ru/
Наши специалисты предлагает профессиональный <a href=https://remont-iphone-sot.ru/>сервисный центр по ремонту айфона на дому</a> различных марок и моделей. Мы осознаем, насколько необходимы вам ваши устройства iPhone, и обеспечиваем ремонт наилучшего качества. Наши квалифицированные специалисты проводят ремонтные работы с высокой скоростью и точностью, используя только сертифицированные компоненты, что обеспечивает надежность и долговечность наших услуг. Наиболее распространенные поломки, с которыми сталкиваются обладатели устройств iPhone, включают поврежденный экран, проблемы с батареей, неисправности программного обеспечения, проблемы с портами и повреждения корпуса. Для устранения этих неисправностей наши профессиональные техники оказывают ремонт экранов, батарей, ПО, разъемов и механических компонентов. Обратившись к нам, вы гарантируете себе надежный и долговечный ремонт iphone в москве. Подробная информация представлена на нашем сайте: https://remont-iphone-sot.ru
#425 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать
Самые знаменитые способы вывода средств банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам на Neteller и Skrill, еще пользуются криптовалютными кошельками. Вывод выигрышей имеет осуществляться быстро либо развлекать от нескольких часов до нескольких суток.Такой безвозмездный эквивалент средств зачисляется на профиль юзера в осуществления требований и предназначаются они только для игрового процесса. Вывод этих вознаграждений возможен лишь в осуществления вейджеровых условий. <a href=http://filmkachat.ru/>1 х слотс зеркало</a> <a href=https://linkr.bio/kalinka0588>https://linkr.bio/kalinka0588</a> 1×slots регистрация 1×slotscasino 56 online <a href=https://www.medicinacinesenews.it/forum/memberlist.php?mode=viewprofile&u=3606468>https://www.medicinacinesenews.it/forum/memberlist.php?mode=viewprofile&u=3606468</a>
1×slots зеркало проходить регистрацию это отличный вариант
Онлайн-казино тщательно продумывают бонусные условия, коие необходимо изучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и ограничения. <a href=https://10nsk.ru/user/JosephSuple/>1×slots регистрация 1×slots casino 777 online</a> 1 x slots На странице представлены бездепозитные призы за регистрацию в казино редчайшая заслуга за которой гонятся все игроки как новички, так и профессионалы. Мы также уделяем большое внимание на наличие призов при формирование рейтинга казино на деньги. Бездепозитный бонус это возможность выступать даром и выиграть реальные деньги. <a href=http://ru-adres.ru/index.php?subaction=userinfo&user=scintillatingfr>http://ru-adres.ru/index.php?subaction=userinfo&user=scintillatingfr</a> 1×slots скачать на айфон
1×slots casino регистрация на сайте
Фриплей-бонусы. Бонусы за благотворительную игру есть только в некоторых клубах. Они зачисляются сразу последствии создания профиля и срабатывают непродолжительное время. Если у вас нет медли истратить средства, они просто закончатся. Что касается времени, правило призы действуют протяжении 1-го часа. Выше мы предоставили полный комплект самых новых и актуальных бездепозитных призов в онлайн казино без пополнения на 2022 год, где вы можете пользоваться каким ценным бездепозитным бонусом. <a href=http://www.freeweblink.org/details.php?id=277725>http://www.freeweblink.org/details.php?id=277725</a> Если речь об эксклюзивных предложениях, может потребоваться регистрация в казино по ссылке с партнерского сайта.Несмотря на то, собственно данный вариант стимуляции со стороны азартных платформ довольно популярен в похожих игр, далековато не всем почитателям казино известно, что являют собой бездепозитные бонусы казино и как непосредственно их возможно эксплуатировать. онлайн казино 1×slots Бездепы с безвозмездными вращениями предоставляют юзерам право вертеть барабаны игровых автоматов без снятия средств со счета. За каждый раунд уплачивает казино. Число спинов ограничено и изредка превышает сотку. Если акция включает в себя большое безвозмездных игр, их начисление имеет быть разбито на несколько дней.
1хслотс рабочее зеркало на сегодня
Это раз из основных характеристик привлекательности дара. С завешенным коэффициентом и мастера не сумеют выполнить условия по отыгрышу. И маловажно, как презентабельно выглядит предложение – бездепозитный бонус казино в размере $500 либо $1 000. Чтобы новенькие попревосходнее вникли, что же это вейджер, мы разберём на образце.Третитй бездепозитный бонус за регистрацию – валютные средства. К раскаянию, начислить рубли или доллары способны лишь известные и популярностью клубы. С их поддержкой у насладиться любой доступной забавой – автоматом, рулеткой, кено, блэкджеком. <a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=981966#pid981966>1× slots зеркало</a> Но разу не забывайте пристально разбирать верховодила роли в бонусных акциях. Если вы нарушите желая бы одно условие, позднее вы не можете уладить недоразумение с администрацией.Многие азартные клубы ограничивают необходимую вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании промоакции, суммы Вы не можете вывести. Разница несомненно аннулирована, Вы в не сможете делать на нее ставки. В большинстве заведений устроить это можно по адресу электронной почты, по номеру телефона, через социальную сеть либо гугл-аккаунт.Заработать на бездепозитных призах за регистрацию в казино может любой пользователь, достигший совершеннолетия. 1 х слотс зеркало <a href=http://hvoost.ru/bitrix/redirect.php?goto=http://hdmekani.com/proxy.php?link=http://mavlad.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/PMd_dKRrOGh>http://hvoost.ru/bitrix/redirect.php?goto=http://hdmekani.com/proxy.php?link=http://mavlad.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/PMd_dKRrOGh</a> Бездепозитные призы истинными деньгами, коие можно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадались.
x1 slots регистрация в 1×slots casino
Получив свой подарок, Вы можете безвозмездно выступать на настоящие деньги, а выполнив обстоятельства отыгрыша, вывести свой выигрыш.Для получения бездепа необходимо пригласить в забаву по реферальной ссылке свежего клиента: он обязан зарегистрироваться, пройти верификацию на сайте онлайн-казино и пополнить счёт на сумму, обозначенную в условиях акции. В случае установленного лимита на сумму вывода выигрыша с бездепозитного приза, игрок не сможет исключить больше заявленной суммы. <a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=9802>http://www.predictive-datascience.com/forum/member.php?action=profile&uid=9802</a> Перед активацией принципиально внимательно изучить условия акции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют значение того лимиты ставок при отыгрыше и сроки, протяжении которых можно воспользоваться предложением. Если бездеп охватывает узкий список игр, рекомендовано разузнать наибольшие коэффициенты, уровень отдачи и волатильности. Слоты с низкими множителями выплат подходят только что, нет случае, случае оператор не установил жесткие ограничения на наивысшую необходимую ставки.Выбирая безвозмездный приз, внимательно изучайте правила. Убедитесь, что для возможно себя участие в акции. Уточните, в каких играх возможно выполнять условия вейджера. При надобности задавайте вопросы представителям саппорта. 1×slots зеркало этих способов предполагает регистрацию Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депозит имеет выделяться до 30 дней.Бездепозитный бонус казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и выяснить качество работы службы. Довольно часто, начиная игровой процесс, игрок теснее не желает останавливаться и делает реальный вклад. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть безвозмездно вероятно как раз таки с призом за регистрацию без необходимости вносить депозит.
<b>Смотреть еще похожие новости:</b>
<a href=http://forums.indexrise.com/thread-2362-post-527604.html#pid527604>1× slots официальный</a>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=372244>casino 1×slot</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бесплатный бонус – кредиты, которые онлайн-казино начислит клиенту, не заставляя его пополнять игровой счет.
#426 Ремонт духовых шкафовhttps://remont-duhovyh-shkafov-ace.ru/
Наша мастерская предлагает профессиональный <a href=https://remont-duhovyh-shkafov-ace.ru/>мастерская по ремонту духового шкафа адреса</a> различных марок и моделей. Мы понимаем, насколько значимы для вас ваши духовые шкафы, и обеспечиваем ремонт наилучшего качества. Наши опытные мастера проводят ремонтные работы с высокой скоростью и точностью, используя только качественные детали, что обеспечивает надежность и долговечность наших услуг. Наиболее частые неисправности, с которыми сталкиваются обладатели кухонных приборов, включают проблемы с нагревом, неисправный таймер, треснувшую дверцу, неисправность контроллера, проблемы с конвекцией и неработающие датчики. Для устранения этих поломок наши опытные мастера оказывают ремонт нагревательных элементов, термостатов, таймеров, дверец, контроллеров, вентиляторов и электроники. Обратившись к нам, вы обеспечиваете себе долговечный и надежный сервисный центр по ремонту духового шкафа рядом. Подробная информация доступна на сайте: https://remont-duhovyh-shkafov-ace.ru
#427 Charlesgunnyhttp://filmkachat.ru
1×slots сайт
Размер ставки для забавы по бездепозитному призу (конечно же, когда, когда он представлен повторяющий бонусных денежных средств) зачастую ниже, чем при ирге на депо. Ограничение будет действовать до этапа отыгрыша приза.Иногда у посетителей вебсайта все появиться проблемы при активации полученного промо-кода. В этих случаях, нужно обратиться за поддержкой в службу поддержки «Support». Для получения ответа, обязательно указывается определенная причина воззвания и подтверждается информация дополнительными экрана. Если сложилась неоднозначная обстановка, практически можно адресоваться к главному регулятору или контролирующему органу, выдавшему этому заведению лицензионный документ. <a href=http://filmkachat.ru/>1 х слотс зеркало</a> <a href=https://elearn.ellak.gr/mod/forum/discuss.php?d=42025>https://elearn.ellak.gr/mod/forum/discuss.php?d=42025</a> Призовые начисления без депо имеют предоставляться для роли в турнирах онлайн казино. Потратить перечисленные деньги возможно самая в рамках данной промоакции. Условия их проведения себе ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, другого выучить его правила. 1×slots регистрация 1×slotscasino09k online <a href=http://cargo-200.ru/index.php?subaction=userinfo&user=shrillrapture41>http://cargo-200.ru/index.php?subaction=userinfo&user=shrillrapture41</a> Поспешите отобрать бездепозитные призы за регистрацию в казино из представленного перечня. Все платформы не только ведут легальную работа, хотя и обрадуют добросовестными плодами игры, высочайшей отдачей, резвыми выплатами.Эффективность бездепов в рекламного прибора расценили многие операторы. Малоизвестные площадки используют эти промоакции, дабы стремительно набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны неизменных посетителей. Не все сайты, дающие подарки без депозита, рекомендованы к этой. За привлекательным промоописанием все скрываться невыполнимые условия отыгрыша и подводные камешки.
1×slots на любой вкус как пройти регистрацию
<a href=http://okeyrp.listbb.ru/memberlist.php?mode=viewprofile&u=168>1×slots регистрацию процедура займет всего лишь</a> 1×слот регистрация в 1×slots casino Не рекомендуем сломя голову хвататься за различные предложения получения средств без инвестициям. Вполне вероятно, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на 1-ый взор. Альтернативой считается казино бонус за депо. Мы предлагаем для пару советов, благодаря коим у каждого игрока несомненно возможность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег: <a href=https://elite-models.cc/member.php?action=profile&uid=23990>https://elite-models.cc/member.php?action=profile&uid=23990</a> 1хслотс регистрация в 1×slots casino Все обожают получать подарки. Согласитесь, почти любой играющий человек будет очень счастлив, случае получит бесплатный презент для забавы в интернет казино просто за регистрацию либо же бонус за внесенный депозит, например называемые приветственные бонусы для свежих игроков. Соответственно эти онлайн клубы будут более модны и преимущественны у игроков при выборе казино для игры. Топ казино день обновляется и добавляются свежие и интересные игровые клубы с симпатичной бонусной политикой и всеми вероятными привилегиями, к коим относятся эти бонусы как фриспины за регистрацию, валютные бездепозитные призы, еще щедрые бонусы за внесенный депозит.
1×slots скачать на айфон
После получения бонуса вывод средств для посетителя будет недосегаем до тех пор, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя или пара недель. Выводить деньги игрок сможет лишь последствии отыгрыша.Для верификации аккаунта нужно дать профессионалам технической поддержки отсканированную копию паспорта и счета за коммунальные предложения, еще фотографию банковской карты либо снимок страницы электронного кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для подтверждения личности. Игры, в которых возможно выступать на бонусные деньги. Проверьте список игр, в которых возможно выступать на бонусные средства, вероятно они Вам не понравятся и не стоит тратить своё время на такую акцию. <a href=http://www.yyxw999.com/space-uid-22234.html>http://www.yyxw999.com/space-uid-22234.html</a> 1хслотс рабочее зеркало Но такие рамки не смущают даже хайроллеров, поскольку коэффициенты на слотах позволяют рассчитывать на крупные выигрыши, а неких автоматах разыгрывается прогрессивный джекпот.Бонус в казино без депозита содержит различные разновидности: это может быть приветственный бонус, промоакции в честь каких-то дней или главных дат, бонус за вербование новых игроков, лояльность и получение VIP-статуса.
1×slots промокод при регистрации
Если вы облюбовали для себя несколько брендов которые для больше всего приглянулись, для постоянной игры! Таких гемблеров казино довольно любит и ценит, за частую такие игроки становятся VIP игроками заведения, которым часто поступают прибыльные предложения вид бонусов, так же туда входит и бездепозитные.В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и в случае неоднозначных обстановок нет возможности куда-то посетовать и обосновать свою правоту. Объективные – объем приза, коэффициент и условия вейджера, надобность внесения депозита для вывода денег; 1×slot зеркало <a href=https://maps.google.com.bd/url?q=https://doctorlazuta.by/>https://maps.google.com.bd/url?q=https://doctorlazuta.by/</a> Бездепозитные бонусы, как теснее ясно, являются уникальной возможностью приступать к игровому процессу полностью бесплатно, словами выступать в интернет казино даром и на имеющие свои незамедлительно последствии регистрации аккаунта. Автоматы с таким депо все стать великолепной возможностью сыграть для поклонников пыла с определенными лимитированиями в финансах.Способы получения бездепа различаются в зависимости от вида приза, который приглянулся игроку. Но для иначе нужно быть зарегистрированным в законном онлайн-казино и подтвердить свою лицо. В общем виде пошаговая инструкция для получения бездепозитного бонуса смотрится например:
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Для выбора азартного заведения Вы сможете пользоваться списком наших казино с бонусами за регистрацию. На нашем сайте мы выпустили список бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, что часть призов неповторимые и доступны лишь для гостей нашего сайта по-специальному промо-коду или по оригинальной ссылке. Кроме такого, для каждого бонуса мы подготовили подробный обозрение, каком Вы узнаете как получить и отыграть поощрение и как вывести свой выигрыш с бездепа. Это раз из главных характеристик привлекательности презента. С завешенным коэффициентом том мастера не сумеют выполнить обстоятельства по отыгрышу. И неважно, как презентабельно выглядит предложение – бездепозитный бонус казино в размере $500 либо $1 000. Чтобы новички попревосходнее вдумались, что же это вейджер, мы разберём на случае. <a href=http://tb.gwdang.com/union/go/?site_id=125&target_url=http://7000lv.ru/bitrix/redirect.php?goto=http://wdesk.ru/go?https://telegra.ph/Dogovornye-sposoby-pravovoj-zashchity-v-grazhdanskom-prave-i-sudebnye-precedenty-09–19>http://tb.gwdang.com/union/go/?site_id=125&target_url=http://7000lv.ru/bitrix/redirect.php?goto=http://wdesk.ru/go?https://telegra.ph/Dogovornye-sposoby-pravovoj-zashchity-v-grazhdanskom-prave-i-sudebnye-precedenty-09–19</a> 1 хслот регистрация в 1×slots casino Далее требуется отыграть вагер и исключить выигрыш. Игрокам без навыка крупно повезло, есть получить 10-ки подарков за одну регистрацию. Если не сумели получить Бездепозитный бонус, не волнуйтесь. Обратитесь в интернет чат, оператор поможет решить проблему.Получив свой подарок, Вы сможете безвозмездно выступать на реальные деньги, а выполнив условия отыгрыша, вывести свой выигрыш.
<b>Смотреть еще похожие новости:</b>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=804103>1хслот 1хслотс регистрация перейти на 1×slots</a>
<a href=http://jktroickiy.forumex.ru/viewtopic.php?f=2&t=4948>1х слот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Ну и естесственно же, для казино бездепозитные призы прибыльны с имиджевой стороны: подобная щедрость повышает уровень преданности посетителей к фирмы. Далее потребуется отыграть вагер и вывести выигрыш. Игрокам без навыка крупно подфартило, у получить 10-ки презентов за 1 регистрацию. Если не смогли получить Бездепозитный бонус, не беспокойтесь. Обратитесь в онлайн чат, оператор поможет ситуацию.
#428 Сколько стоит ремонт ПНВ Rifray в Ярославлеhttps://yarol.pdacenter.ru/remont-pnv/rifray.html
Профессиональный сервисный центр по ремонту техники в Ярославле. Мы предлагаем: <a href=https://yarol.pdacenter.ru/remont-pnv/rifray.html>Сколько стоит ремонт ПНВ Rifray</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#429 internetvolgogradGephttps://volgograd-domashnij-internet002.ru
недорогой интернет омск <a href=https://volgograd-domashnij-internet002.ru>volgograd-domashnij-internet002.ru</a> домашний интернет омск
#430 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрацию более популярный вариант это
Некоторые клубы механически начисляют бонус на акк игрока после выполнения критерий получения, хотя посещают ситуации, когда приз нужно активировать игроку самому. Есть некоторое способов активации приза: <a href=http://filmkachat.ru/>1×slots промокод при регистрации 2025</a> Но а если вы уже профи по интернет казино, кликаем на красноватую кнопку «Получить» и Вы автоматически перейдете в онлайн казино;Когда идет о валютных бонусах, казино практически устанавливают условия вейджера, которые необходимо выполнить, дабы вывести выигрыш. <a href=https://www.bondhuplus.com/read-blog/137780>https://www.bondhuplus.com/read-blog/137780</a> 1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, если не желаете стать жертвой плутов либо впустую израсходовать время; 1×slots зеркало регистрация <a href=https://m2bob.shop/forum/member.php?action=profile&uid=4025>https://m2bob.shop/forum/member.php?action=profile&uid=4025</a>
1хслотс рабочее зеркало
Составленный специалистами Casino.ru список онлайн-казино с бездепозитным призом разрешает игрокам сравнить спецпредложения разных операторов.Даже не выиграв крупную необходимую, игрок увлекательно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе превосходнейших акций легко. Достаточно регулярно учить список новых интернет казино с выводом бонуса без депо в данном разделе. <a href=https://win11forum.de/m/manuelenabs.2164/>1хслотс официальный сайт зеркало</a> 1×slots зеркало проходить регистрацию это отличный вариант <a href=http://romanbezhin.ru/index.php?subaction=userinfo&user=umozan>http://romanbezhin.ru/index.php?subaction=userinfo&user=umozan</a> В некоторых интернет казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на сайте клуба и доказать средства контактные данные. Дополнительно потребуется активация промокода. 1×slots рабочее зеркало Не рекомендуем опрометью голову браться за различные предложения получения средств без вложений. Вполне вполне, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем смотрится на первый взор. Альтернативой является казино бонус за депо. Мы предлагаем для пару советов, спасибо коим у каждого игрока несомненно вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом денег:В подавляющем большинстве случаев благотворительные бонусы начисляются в кредитах, коие нельзя сразу исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти требования принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже.
1× slots сайт
<a href=https://photosynthesis.bg/forum/tema/163.html>https://photosynthesis.bg/forum/tema/163.html</a> Прямо сейчас заберите бесплатные вращения за регистрацию без депо и начинайте собирать призовые композиции из-за солидных выигрышей!Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. 1×slots официальный сайт скачать Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых новых, щедрых и испытанных бонусах в онлайн казино, которые обновляются каждый день.
1×slots регистрация на сайте
В случае установленного лимита на необходимую вывода выигрыша с бездепозитного приза, игрок не сможет вывести больше заявленной суммы. <a href=http://sladkierecepti.5nx.ru/viewtopic.php?f=8&t=13823>1хслотс зеркало на сегодня</a> Ниже указан важный список законных казино в Беларуси с призами на 1-ый депозит. Вы сможете попасть на официальный вебсайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус.К примеру, игроку выдаются безвозмездные свои в заведении в объеме пятидесяти либо 100 долларов (вейджер на коие сочиняет 100х). То есть, каждому новоприбывшему игроку выскакивает манящая иллюстрация, кот-ая обещает выплату всех зачисленных компанией средств. Не стоит заострять на казино бонус за регистрацию без депозита с чрезмерно великой либо довольно маленькой суммой призов, потому что, и тщательно исследовав все обстоятельства, здесь вероятнее всего, несомненно какой-то подкол. При исполненьи критерий отыгрыша и верификации, средства с бонусного счета переводятся на ведущей и имеют быть выведены на карту или электронный кошелек. Лимиты на вывод и сроки проведения транзакции зависимости от выбранной платежной системы. 1×slots бонус за регистрацию <a href=https://lessons.drawspace.com/post/646480/bmw-battery-reset-procedure>https://lessons.drawspace.com/post/646480/bmw-battery-reset-procedure</a> В интернет-сети практически можно найти перечни более популярных и обещанных поощрительных программ от знаменитых онлайн-казино.Нет. Казино выдают благотворительные бонусы за регистрацию, чтобы, чтобы, дабы клиент мог ознакомиться с игровым заведением. А дабы исключить его, нужно выполнить условия отыгрыша.
1×slot казино зеркало
Как управляло, при выводе денег, от играющего потребуется только устроить минимальный лепта чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом личный счет.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. Для получения бонуса нужно пригласить в забаву свежего клиента. Казино начисляет пригласившему фиксированный процент от взносов приглашённого повторяющий бонуса: почаще всего его размер не превышает 10%. Срок действия приза в большинстве случаев не превышает месяца: пригласивший получает приз в зависимости от проигранных ставок приглашённого в 1-ый месяц игры. <a href=https://wiki.streampy.at/index.php?title=%C3%90%C3%A2%E2%82%AC%E2%84%A2%C3%90%C2%BE%C3%90%C2%B4%C3%90%C2%B8%C3%91%E2%80%9A%C3%90%C2%B5%C3%90%C2%BB%C3%91%C5%92%C3%91%C3%90%C2%BA%C3%90%C2%B8%C3%90%C2%B5_%C3%90%C5%B8%C3%91%E2%82%AC%C3%90%C2%B0%C3%90%C2%B2%C3%90%C2%B0_%C3%90%C3%A2%E2%82%AC%E2%84%A2%C3%90%C2%BB%C3%90%C2%B0%C2%B4%C3%90%C2%B8%C3%90%C2%B2%C3%90%C2%BE%C3%91%C3%91%E2%80%9A%C3%90%C2%BE%C3%90%C2%BA>https://wiki.streampy.at/index.php?title=%C3%90%C3%A2%E2%82%AC%E2%84%A2%C3%90%C2%BE%C3%90%C2%B4%C3%90%C2%B8%C3%91%E2%80%9A%C3%90%C2%B5%C3%90%C2%BB%C3%91%C5%92%C3%91%C3%90%C2%BA%C3%90%C2%B8%C3%90%C2%B5_%C3%90%C5%B8%C3%91%E2%82%AC%C3%90%C2%B0%C3%90%C2%B2%C3%90%C2%B0_%C3%90%C3%A2%E2%82%AC%E2%84%A2%C3%90%C2%BB%C3%90%C2%B0%C2%B4%C3%90%C2%B8%C3%90%C2%B2%C3%90%C2%BE%C3%91%C3%91%E2%80%9A%C3%90%C2%BE%C3%90%C2%BA</a> 1×slots официальный сайт мобильная версия Заработать на бездепозитных призах за регистрацию в казино возможность каждый юзер, достигший совершеннолетия.Отказ в прохождении верификации. Если клиент не хочет или возможности дать документы, подтверждающие его лицо, профиль будет заблокирован вместе со всеми бонусными начислениями.
<b>Смотреть еще похожие новости:</b>
<a href=https://portugal-campings.com/pt/account/>1хслот официальный сайт зеркало</a>
<a href=http://nexusroleplay.teamforum.ru/memberlist.php?mode=viewprofile&u=463>1хлот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Объективные – объем бонуса, коэффициент и обстоятельства вейджера, необходимость внесения депо для вывода средств;
#431 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пин ап casino порно с Сергей Бобровский (хоккей) <a href=https://strelochnik.com/>casino x</a> casino riobet скачать сайт букмекерской конторы <a href=https://glvk.guru/>casinos winning</a> porno Илона Маркова, хоккеистка вавада казино pin ап casino казино онлайн порно с Евгений Малкин (хоккей) casino вход top casino
DiskiPlus порно с Карен Хачанов (теннис) DiskiPlus рабочее казино <a href=https://www.diskiplus.ru>DiskiPlus porno Мария Шарапова</a> DiskiPlus casino официальный сайт DiskiPlus казино фильм <a href=https://diskiplus.ru/>DiskiPlus порно с Матвей Сафонов (футбол)</a> DiskiPlus лучшие букмекерские конторы DiskiPlus казино гта 5 DiskiPlus Петрова Ольга Викторовна порно DiskiPlus букмекерская контора скачать приложение DiskiPlus букмекерскую контору пин DiskiPlus ап казино DiskiPlus 1×bet сайт
#432 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало подтвердит вашу регистрацию если говорить
Разные казино имеют собственные управляла по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высокие притязания. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до 100 раз в игровых автоматах. Например, в игрок получил даром десять $, то нужно несомненно отыграть их, поставив 1 тысячу спинов по 1 баксу каждый. Стоит отметить, что не все казино дают вероятность играть на бонусы и не во всех увеселительных заведениях схожие правила для отыгрывания. Некоторые казино запрещают выступать на бонусы в блекджек или ограничивают ставки до пяти процентов, собственно существенно увеличивает в 10-ки один количество нужных игр. <a href=http://filmkachat.ru/>1хслотс рабочее зеркало</a> <a href=https://paperpage.in/blogs/288432/Technical-Drawing-for-Furniture-Expert-Plans-Specifications>https://paperpage.in/blogs/288432/Technical-Drawing-for-Furniture-Expert-Plans-Specifications</a> Прибывшие на акк финансы бездепозитные бонусы предназначаются, главном, лишь для новоиспеченных юзеров, коие раньше не имели личного аккаунта в данном казино. Исходя из сего, в раньше у игрока был сделан депозит, то, по всей вероятности, у него больше не несомненно способности рассчитывать на получение такого бонуса в определенном заведении. 1х слотс зеркало регистрация в 1×slots casino <a href=https://forum.333569.gay/?topic=23614>https://forum.333569.gay/?topic=23614</a> В некоторых интернет казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на сайте клуба и доказать средства контактные данные. Дополнительно потребуется активация промокода.Также учтите, собственно кое-какие игровые платформы сузивают список государств, которые готовы получить предложенный бездепозитный бонус за регистрацию. К примеру, есть онлайн-заведения, выдающие похожие бонусы лишь жителям определенных стран. К образцу, онлайн казино 777 Оригинал дает бездепозитный приз лишь игрокам из России и государств СНГ. Или напротив, снабжают вознаграждением всех, кроме жителей неких государств (из сего, идет внимательно учить перечень, дабы впоследствии не появилось практически вопросов и претензий).
1хслотс рабочее зеркало
Выбирая даровой приз, внимательно изучайте правила. Убедитесь, что вам можно на роль в акции. Уточните, в каких играх возможно выполнять обстоятельства вейджера. При необходимости задавайте вопросы адептам саппорта.Во всех законных онлайн-казино Беларуси необходимо свидетельство паспортных данных для игры — это требование правительства государства. казино 1×slots Особую изюминку видео слотам придают уникальные знакы. С их появлением активируются разные бонусы. Вы можете запустить дополнительный степень и прирастить сумму выигрыша. Есть знаки, которые замещают ненужные составляющие и сами делают выигрышные комбо. Не стоит забывать и про бонус-тур. После каждого удачного спина есть шанс увеличить необходимую выигрыша в 2 или четыре раза. <a href=http://www.air119.net/bbs/board.php?bo_table=free&wr_id=800155>http://www.air119.net/bbs/board.php?bo_table=free&wr_id=800155</a> 1хлот регистрация в 1×slots casino Рассмотрим принцип его деянья на примере. Допустим, вы зарегались и получили $10 not the slightest down payment bonus с вейджером х50. Это означает, собственно выигранные средства возможно несомненно выводить не ранее, чем после того, как общая сумма ставок достигнет $500.
1×slots официальный сайт скачать
При регистрации что или ином интернет игральном заведении — вас дается один шанс испытать собственную удачу не внося средства монеты. Замечу что такую поощрительную услугу деют не все онлайн игровые площадки, а лишь щедрая середина(средина) из их. Которые мы подготовили для Вас в нашем списке. <a href=http://wood.co.ua/wr_board/tools.php?event=profile&pname=domineeringprog>http://wood.co.ua/wr_board/tools.php?event=profile&pname=domineeringprog</a> Многие азартные клубы ограничивают необходимую вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании акции, суммы Вы не можете вывести. Разница будет аннулирована, Вы и не можете делать на нее ставки.Прочитайте правила бонусной программки, какой желайте принять. Да, мы безотступно рекомендуем устроить это до регистрации. 1×slots официальный зеркало Любой выигрыш по ставке выше установленного лимита будет являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, а случае выигрыша его сумма не поступит на счёт клиента — результат игры несомненно полностью аннулирован.Бездепозитные призы – это самая небезинтересная и наиболее перспективная акция интернет-казино. Они и другого, как фри-спинов, поэтому что выплаты в бесплатных вращениях не гарантированы, как комбинации на барабанах игрового аппарата все не сложиться.
1×slots регистрация на сайте 1×slots ru com
Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную функцию активации бонуса без депо. Внимательно прочитайте до конца. Многие новенькие проделывают промахи на этапе регистрации и потому не получить подарок. <a href=https://pbtur.com.br/users/jameshex>1×slots подтвердит вашу регистрацию если говорить</a> Некоторые казино шансы предлагать посетителям бездепы за подтверждение номера либо почты или репост на страницу в соц сетях. 1× слот зеркало <a href=http://chelmaps.ru/index.php?subaction=userinfo&user=verdantbroker17>http://chelmaps.ru/index.php?subaction=userinfo&user=verdantbroker17</a>
1×slots регистрация 1×slotscasino 56 online
Когда идет о валютных бонусах, казино практически устанавливают условия вейджера, которые необходимо выполнить, чтобы вывести выигрыш. Также бездепозитные призы шансы работать методом возвращать к ирге посетителей, что приостановивших своё сотрудничество с фирмой: уведомление о бездепе поступает на мобильный телефонный либо почту.Вейджер в переводе с английского значит «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша приобретенного бонуса, в нашем случае бездепозитного. Число ставок имеет — принципиально лишь набрать необходимую, пропорциональную сумме поощрения. <a href=https://finbi.ru/user/DoctorLazutaKi/>https://finbi.ru/user/DoctorLazutaKi/</a> 1×slots casino регистрация 1×slotscasino09k online
<b>Смотреть еще похожие новости:</b>
<a href=https://krok.biz/forum/viewtopic.php?f=7&t=96796>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=http://xn–80akbkalsbeeafq6a6b2f.xn–p1ai/forum/messages/forum1/topic47380/message251014/?result=new>1×slots официальный регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Получить Бездепозитный бонус в интернет казино дело двух кликов. Другой момент, отыграть промо и соблюсти верховодила и обстоятельства отыгрыша. Под правилами подразумевается не только вагер, хотя и ограничения по наибольшей ставке. Мы понимаем, что в кино все ставят на зеро и выигрывают. Призываем не создавать подобного. Перед активацией приза прочитайте правила. Узнайте последующие моменты: Условия получения презента, за регистрацию, за депо и многое. Ограничения по максимальной ставке. Зачастую не повыше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вращать автоматы, а вагер будет стоять на месте. Поэтому важно аристократия, в каких забавах возможно совершать кратность денежного оборота.
#433 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Алина Загитова, фигуристка казино фильм <a href=https://glvk.guru/>сайте букмекерской конторы фонбет</a> casino промокод 1×bet официальный сайт <a href=https://7club7.com/>ев казино</a> casino игровой автомат смотреть фильм казино pin up casino пин Разуваева Ксения Денисовна порно casino сайты pin ап casino porno Елизавета Туктамышева
DiskiPlus бывшие казино DiskiPlus porno Дарья Мороз <a href=https://diskiplus.ru>DiskiPlus порно с Бондаренко Анастасия Борисовна</a> DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz DiskiPlus сайт pin up casino <a href=https://www.diskiplus.ru/>DiskiPlus порно с Алина Загитова</a> DiskiPlus включи казино DiskiPlus casino на телефон DiskiPlus человек казино DiskiPlus пинко casino DiskiPlus 1×bet телефон DiskiPlus порно с Бондаренко Анастасия Борисовна DiskiPlus порно с Анна Щербакова, фигуристка
#434 Charlesgunnyhttp://filmkachat.ru
1× slots официальный
Бездепозитные бонусы в казино без пополнения 2022 — это конкретная сумма денег либо gift spins вращения, коие предоставляются первым гостям за регистрацию на сайте казино вид бездепозитного бонуса, и дает для возможность за счет казино без пополнения опробовать предложения (игр), с последующей прерогативой вывода средств при выполнении всех установленных правил.Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 поболее. Когда игроку надеется много фриспинов, администрация возможность разбивать их начисление на некоторое дней. Бесплатные вращения предоставляются для конкретного слота, который указывается в правилах промоакции. <a href=http://filmkachat.ru/>казино 1×slots</a> Получить Бездепозитный бонус в интернет казино дело 2-ух кликов. Другой момент, отыграть промо и соблюсти верховодила и обстоятельства отыгрыша. Под правилами подразумевается не только вагер, но и лимитирования по максимальной ставке. Мы понимаем, что в кино все ставят на зеро и выигрывают. Призываем не создавать подобного. Перед активацией бонуса прочтите управляла. Узнайте последующие факторы: Условия получения подарка, за регистрацию, за депо и многое. Ограничения по наибольшей ставке. Зачастую не выше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах можно отыгрывать вагер. Можно вращать автоматы, а вагер будет стоять на месте. Поэтому принципиально знать, в каких играх возможно осуществлять кратность денежного оборота. <a href=https://feedback.challonge.com/forums/44455-feature-requests/suggestions/49478687-%D1%82%D0%B5%D1%80%D0%BC%D1%96%D0%BD%D0%BE%D0%B2%D0%B8%D0%B9-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D0%B6-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2-%D1%96%D0%B2%D0%B0%D0%BD%D0%BE-%D1%84%D1%80%D0%B0%D0%BD%D0%BA%D1%96%D0%B2%D1%81%D1%8C%D0%BA%D1%83-%D1%8F%D0%BA-%D0%B2%D0%B8%D0%B3>https://feedback.challonge.com/forums/44455-feature-requests/suggestions/49478687-%D1%82%D0%B5%D1%80%D0%BC%D1%96%D0%BD%D0%BE%D0%B2%D0%B8%D0%B9-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D0%B6-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2-%D1%96%D0%B2%D0%B0%D0%BD%D0%BE-%D1%84%D1%80%D0%B0%D0%BD%D0%BA%D1%96%D0%B2%D1%81%D1%8C%D0%BA%D1%83-%D1%8F%D0%BA-%D0%B2%D0%B8%D0%B3</a> 1×slots казино зеркало <a href=https://andersontclt53074.blogoxo.com/30430556/deep-nude-ethical-concerns-and-the-impact-of-ai-on-privacy>https://andersontclt53074.blogoxo.com/30430556/deep-nude-ethical-concerns-and-the-impact-of-ai-on-privacy</a> На данном разделе портала регулярно публикуются обзорные статьи, в рассматриваются безвозмездные бонусы лучших интернет-казино. Информация структурирована по нескольким пунктам, включая главные:Многие азартные клубы ограничивают необходимую вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании акции, суммы Вы не сможете исключить. Разница будет аннулирована, Вы том не можете создавать на нее ставки.
1×slots регистрация на 1хслотс
1×slots casino online регистрация За привлечение друга ? масштабах партнерской программы клиент получает вознаграждение за привлечение новых юзеров.Для выбора азартного заведения Вы сможете воспользоваться перечнем наших казино с призами за регистрацию. На нашем сайте мы выпустили перечень бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, что доля бонусов неповторимые и доступны только для посетителей нашего вебсайта по-специальному промо-коду или по оригинальной ссылке. Кроме такого, для каждого бонуса мы подготовили доскональный обозрение, в котором Вы узнаете как получить и отыграть одобрение и как вывести собственный выигрыш с бездепа. <a href=https://medium.com/@minsky10/%D0%B2%D0%B8%D0%B4%D0%B5%D0%BE%D1%81%D1%8A%D0%B5%D0%BC%D0%BA%D0%B0–7957b01a364e>https://medium.com/@minsky10/%D0%B2%D0%B8%D0%B4%D0%B5%D0%BE%D1%81%D1%8A%D0%B5%D0%BC%D0%BA%D0%B0–7957b01a364e</a> Бонус без депозита за регистрацию в казино (бездепозитный приз) – это валютный подарок от клуба, кот-ый начисляется на акк игрока после регистрации в казино. Кроме создания учетной записи, для получения бездепа, довольно часто потребуется ещё и доказать контактные данные игрока и/или активировать специальный промо-код. 1хслотс официальный сайт зеркало Ну и окончательно же, для казино бездепозитные призы прибыльны с имиджевой стороны: подобная добродушие повышает уровень лояльности клиентов к фирмы.
1×slots сайт
Некоторые онлайн-казино без депозита предлагают свежим клиентам выбрать приз при регистрации. Будьте внимательны: выбрав раз, вы в безусловном большинстве случаев не сможете воспользоваться остальными. Начнём с как, что каждое промо за регистрацию подразумевает некоторые условия. Бездепозитные призы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность денежного оборота, нужная для исполненья критерий. Пример, получили благотворительные вращения и выиграли с них 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 рублей, неудачных либо выигрышных, маловажно. После выполнения, бонусный баланс перейдёт на реальный и станет доступным к выводу.Многие игроки, оценив функционал казино, остаются играть в нем и далее ? на это и направлено любое рекламную. Постоянные посетители заносят депозиты и делают ставки, обеспечивая длительную выгода оператора. То есть, казино раздают бездепы свежим пользователям для формирования лояльной аудитории. <a href=https://bridge-clip.ru/user/DoctorLazutaon/>https://bridge-clip.ru/user/DoctorLazutaon/</a> 1×slots мобильная версия войти казино Однако далеко не все ресурсы предлагают своим клиентам бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено поощрение на 1-ый депозит в размере 100–200%. Это замечательная вероятность преумножить банкролл, прирастить время, проведённое за игрой и шансы сорвать большой куш.
1×slots рабочее зеркало на сегодня
Многие казино предоставляют в рекламных целях безвозмездные призы исключительно для наших читателей. Чтобы их получить, нужно перейти на игровой вебсайт по партнерской ссылке с нашего портала. <a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=16826>1×slots казино зеркало</a> Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, чтобы появилась вероятность исключить выигрыш. Ознакомьтесь с нашим списком наилучших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего перечня и получите бездеп сразу. Хватайте лучшие бесплатные предложения ниже и выигрывайте великие средства, не рискуя! 1×slots зеркало выигрыши обязательно пройдите регистрацию если <a href=http://electric-a.ru/bitrix/rk.php?goto=http://dumavlz.ru/bitrix/redirect.php?goto=http://xn----7sbbuaxkcggo4g3a.xn–p1ai/bitrix/click.php?goto=https://teletype.in/@urid_pomosh/Ip3_wrCdjcK>http://electric-a.ru/bitrix/rk.php?goto=http://dumavlz.ru/bitrix/redirect.php?goto=http://xn----7sbbuaxkcggo4g3a.xn–p1ai/bitrix/click.php?goto=https://teletype.in/@urid_pomosh/Ip3_wrCdjcK</a> Помните, что всевозможные нарушения правил сведут на нет ваши старания, и вы всего останетесь без начисленного вам бесплатного приза. Всегда изучайте правила начисления и условия вейджера. По каким вопросам, на которые вы возможности без найти ответы, обращайтесь за разъяснениям и саппорт.Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, дабы еще раз получить безвозмездный бонус. Игорные заведения нетерпимы к бонус-хантерам, потому вас ожидает неминуемое наказание.
1×slots быструю регистрацию а также мгновенное
Популярность онлайн казино растёт и всё больше юзеров начинают проявлять азартными играми. Бездепозитные призы 2022 года, это уникальные подарки за регистрацию. С их помощью свежие игроки имеют получить бесплатные вращения либо деньги на баланс за одну регистрацию. С в игорных заведений в интернете, бездепозитные призы стали популярнейшим способом вербования игроков. Подобные промоакции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш сайт собрал лучшие предложения из онлайна на 2022 год. Воспользуйтесь любым даром и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша нужно выполнить условия.К раскаянью, нет. Почти все казино, настоятельно внесение хотя бы одного малого депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, что вывести средства разрешается лишь на ту платежную систему, с которой был сделан депо. Однако в критериях скрываются «подводные камешки», которые не позволят исключить крупную сумму либо же вы не успеете отыграть вейджер. Поэтому профессионалы рекомендуют забрать бесплатные вращения за регистрацию в казино без депозита, чтобы поднабраться опыта и получить реальный шанс на победу. <a href=https://forumniebiescy.pl/memberlist.php?mode=viewprofile&u=70947>https://forumniebiescy.pl/memberlist.php?mode=viewprofile&u=70947</a> Фриспины без депозита либо вспомогательные свои посодействуют поближе познакомиться с игровой платформой и её функциями. За счёт подарков можно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за игры против живых крупье.Фриспины без депозита или вспомогательные свои помогут поближе познакомиться с игровой платформой и её функциями. За счёт даров возможно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради игры против живых крупье. 1×slots рабочее зеркало Нельзя рассматривать игру на деньги, как вариант заработка. Азартные игры воспрещены для лиц младше 18 лет. Topcasinobonuses.mobi не зачинщиком азартных игр. Сайт носит информационный характер.Ниже указан актуальный перечень законных казино в Беларуси с бонусами на первый депозит. Вы можете попасть на официальный сайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.audioheritage.net/memberlist.php?mode=viewprofile&u=19451>1×slots рабочее зеркало</a>
<a href=http://powercrop.it/chi-siamo/le-persone?page=160#comment-8012>1×slots официальный demo регистрация в 1×slots casino</a>
<a href=http://soumoli.com/home.php?mod=space&uid=24916>1×slots casino регистрация 1×slots review live</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На данном разделе портала регулярно публикуются обзорные статьи, в которых рассматриваются благотворительные призы наилучших интернет-казино. Информация структурирована по нескольким пунктам, включая главные: Не стоит незамедлительно же открещиваться от приветственных даров в сходственных казино. Администрация готова начислить деньги либо фриспины, хотя предварительно работники обязаны увериться, собственно вы не аферист. Дело в, что развелось слишком количество охотников за бонусами. Они научились врать систему и зарабатывать солидные суммы средств.
#435 Charlesgunnyhttp://filmkachat.ru
1× slots зеркало
При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток. <a href=http://filmkachat.ru/>1×slots регистрация на сайте 1×slots ru com</a> <a href=https://s.id/kalinka0588>https://s.id/kalinka0588</a> Бесплатный приз – кредиты, которые онлайн-казино начисляет посетителю, не принуждая его пополнять игровой счет.Главным интересным в возникновении данных вознаграждений состоит никаких, что пустив их в ход, геймер ничем не рискует и в последствии никому ничего не несомненно должен (не зависимо, получит ли он благодаря бонусам какой-нибудь выигрыш или моментально спустит все только что прибывшие деньги). То есть, казино снабжает игрока вероятностью на дармовой базе играть во всевозможные слоты причем спонсирует игру. 1хслот зеркало сайта <a href=https://otpusk.ru/forum/index.php?PAGE_NAME=profile_view&UID=2307>https://otpusk.ru/forum/index.php?PAGE_NAME=profile_view&UID=2307</a> Как верховодило, новоприбывшие игроки в первую очередь хотят ознакомиться с способами ввода и вывода денежных средств и сроки выполнения поданных заказов чтобы четко разуметь, как быстро появится вывести свой казино бонус за регистрацию без депозита на электронный кошелек либо же банковскую карту. К счастью для всех играющих, внутри определенных холдингов, все казино соперничают между собой. Ведь случае бы определенную компанию давало лишь одно онлайн-заведение, то ли бы клиенты увидели казино с призом за регистрацию и имели бы рассчитывать лишь на вознаграждение повторяющий бонуса на 1-ое вложение. К каждому заведению периодически идет завлекать свежих игроков, что, в, лишь на руку всем играющим.
1хслот зеркало
Кешбэк-бонус представляет собой возврат фиксированного процента от ставки когда проигрыша либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%. <a href=http://sladkierecepti.5nx.ru/viewtopic.php?f=8&t=13685>1×slots casino регистрация на сайте</a> 1хслот зеркало Можно. Вы практически сможете отрешиться от получения бездепозитного бонуса за регистрацию в казино, же Вы не создадите ставку. <a href=https://orbitalscoreboard.com/user/jamesbek/>https://orbitalscoreboard.com/user/jamesbek/</a> 1×slots быструю регистрацию а также мгновенное
1×slots casino регистрация 1×slotscasino09k online
<a href=http://phonak-kids.ru/bitrix/rk.php?goto=http://virtual-sim.ru/go.php?url=http://deforum.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/qOL3mqon44I>http://phonak-kids.ru/bitrix/rk.php?goto=http://virtual-sim.ru/go.php?url=http://deforum.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/qOL3mqon44I</a> 1×slot регистрация Если вы выбираете испытанное лицензионное интернет казино и выполните все обстоятельства получения бездепозитного приза, трудностей с получением подарка у Вас не возникнет.
x1 slots регистрация в 1×slots casino
Прочитайте управляла бонусной программы, какой хотите принять. Да, мы настойчиво рекомендуем сделать это до регистрации.Получить приветственный приз шансы только новые клиенты онлайн-казино. Способы описаны в критериях промоакции каждого легального казино, почаще всего это: <a href=https://imcep.com/cs/component/users/profile?Itemid=103>1×slots рабочее зеркало на сегодня</a> 1×slots официальный сайт скачать <a href=http://lublinianin.pl/bez-kategorii/ile-warta-jest-pamiec-a-ile-niepamiec/?unapproved=615941&moderation-hash=b4c7a4cb519c99ece5efa443e868616b#comment-615941>http://lublinianin.pl/bez-kategorii/ile-warta-jest-pamiec-a-ile-niepamiec/?unapproved=615941&moderation-hash=b4c7a4cb519c99ece5efa443e868616b#comment-615941</a> Получать информацию о самых выгодных бонусах возможно без неизменного мониторинга новостей казино. Мы брали данную задачку на себя и постоянно следим за услугами операторов, выбирая превосходнейшие из их. В данном разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список акций периодически пополняется. В топ зашли самые свежие бездепозитные бонусы за регистрацию в казино 2020, кратковременные и закрытые рекламную. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и аспектам. Если срок действия промоакции истек, она удаляется из перечня.
сайт 1× slots casino
Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного приза достаточно пополнения баланса и подтверждения личности. В других же клубах, необходимо количество один прокрутить собственный депо. <a href=https://australianweddingforum.com/weddings/member.php?action=profile&uid=180745>https://australianweddingforum.com/weddings/member.php?action=profile&uid=180745</a> 1×slots официальный зеркало рабочее
<b>Смотреть еще похожие новости:</b>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=400939>1×slots официальный регистрация</a>
<a href=http://yonghengro.gain.tw/viewthread.php?tid=1820717&extra=>1×slots рабочее зеркало на сегодня</a>
<a href=http://griffhunter.com/boards/viewtopic.php?p=1204656#p1204656>1×slots скачать на айфон</a>
<a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=46703>1×slots зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Процесс доказательства личности имеет взятьвдолг(взятьвзаймы) от 1-го денька до недели. Если заказчик разрешил какую-либо ошибку при заполнении паспортных данных, то ему по адресоваться с проблемой в службу онлайн-казино.
#436 Charlesgunnyhttp://filmkachat.ru
1×slots скачать на айфон
Акции, приуроченные к календарным дням, случаются рассчитаны как на всех юзеров, так и на категории: к, презент на 8 марта девушкам-игрокам или мужчинам на 23 февраля.В наше время довольно просто получить бонус за регистрацию в казино. Практически любой игорный дом с готовностью начисляет деньги или бесплатные вращения. Многие гэмблеры пользуются этим и не стесняются региться в любом клубе с выгодными критериями. Кстати, это замечательная вероятность выработать победную стратегию и сорвать джекпот. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> Ограничения по играм. Администрация воспрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, средствами или бесплатными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда разделение выполняется по виду игр. Например, отыгрыш вероятен на всех игровых аппаратах, но запрещен в настольных забавах и в разделе Live Casino.Нет. Для получения бездепозитного приза в казино нужна неотъемлемая регистрация на сайте. Играть в слоты бесплатно и без регистрации можно лишь в демо режиме. <a href=https://collectednotes.com/lexxeagle/expert-architectural-drafting-and-design-services-for-modern-construction>https://collectednotes.com/lexxeagle/expert-architectural-drafting-and-design-services-for-modern-construction</a> Кешбэк-бонус дает собой возврат фиксированного процента от ставки когда поражения или же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не превышает 10%. 1×slots официальный зеркало рабочее <a href=http://besstizhie.ru/user/Stevengache/>http://besstizhie.ru/user/Stevengache/</a> Большинство клубов завлекают внимание геймеров за счёт различных подарков. На 1 сайтах возможно получить виртуальные кредиты, которые откроют доступ ко всему софту. На других же, администрация предлагает благотворительные вращения для запуска топовых онлайн слотов. Несмотря на разные акции, стоит выделить самые основные.Иногда в качестве одобрения за регистрацию могут выдаваться билеты для роли в турнирах. Условия их проведения очень выделяются, потому мы советуем ознакомиться с каждым предложением раздельно.
1×slots регистрация 1×slots review live
Мы собрали и опубликовали перечень лучших бездепозитных казино с бонусами за регистрацию, коие гарантируют щедрые выигрыши и мгновенные выплаты.Самые свежие бездепозитные призы в казино за регистрацию 2022 года с выводом прибыли присутствуют на данной странице. Посетитель может расценить обстоятельства получения и начать выступать на средства без внесения депо. При этом игроку главно осознавать, на каких критериях и какими способами он сможет исключить полученный выигрыш. Для сего необходимо оценить список присоединенных платежных систем. <a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5336/#comment-651345>казино 1×slots официальный сайт</a> 1хлот регистрация в 1×slots casino За счёт спинов выйдет запустить разные онлайн слоты, протестировать стратегии и поднабраться навыка. Фишка никаких, собственно вращения начисляются на лучшие аппараты с уникальными опциями и высочайшей отдачей. Не запамятовывайте, собственно в каждом акционном предложении предусмотрены специальные требования – кратковременные лимитирования, максимальный объем ставки, список дешевых игр. <a href=http://postmaster.cameseeing.com/bbs/board.php?bo_table=freeboard_2021&wr_id=951483>http://postmaster.cameseeing.com/bbs/board.php?bo_table=freeboard_2021&wr_id=951483</a> Бесплатные бонусы казино без депозита возможно получить вид валютных средств на бонусный счет (исключить их можно только последствии отыгрыша), фриспинов, игры или кешбэк-бонуса.Доступ к дару имеет открываться автоматически в введения промокода или воззвания в службу поддержки вебсайта. В первом случае от пользователя не требуется практически поступков. Бездеп с активацией по коду встречается чаще всего. Игроку нужно установить совокупа символов в графе, которая может находиться в регистрационной форме в Личном кабинете. 1×slots регистрация 1×slots casino c2d ru Реже бонусы без депо начисляются неизменным игрокам. С их подмогою администрация постарается удержать ценных посетителей или вожделеет поблагодарить за преданность верных гостей. Но гораздо почаще для похожих целей применяются такие акции:Баланс игрока дополняется на соответствующую необходимую. К ней применяется вейджер, указанный в правилах промоакции. Вывести выигрыш можно будет после такого, как юзер устроит требуемый объем ставок из личных средств. В редчайших случаях бездеп трудится в формате Free Play. На счет юзера зачисляется крупная сумма, и предоставляется малый срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по окончании этого периода сумма на счету несомненно превосходить первоначальную, то разницу можно несомненно исключить или использовать для дальнейших ставок.
1×slots casino регистрация 1×slots review live
Выше мы дали глубокий комплект самых свежих и своевременных бездепозитных призов в интернет казино без пополнения на 2022 год, где продоставляется пользоваться любым ценным бездепозитным призом.Выбирайте лучшие безвозмездные бонусы счет обзоров на Casinoz – и пусть вам сопутствует удача при отыгрыше бонусных кредитов! Не стоит путать забаву в демо и использование бонусов. В демонстрационном режиме игрок возможность оценить механику слота, сюжет и оформление. Но игра ведется на условные кредиты, потому отсутствует главное ? ощущение азарта. Активируя промокод либо фриспины, клиент раньше не расходует свои средства на игровые автоматы, но может сорвать реальный куш! <a href=https://keydirectories.co.uk/forum/profile/Lillian44B>https://keydirectories.co.uk/forum/profile/Lillian44B</a> рабочее зеркало 1хслотс
1×slots регистрацию процедура займет всего лишь
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=369613>1×slots casino зеркало рабочее</a> Верификация необходима для дополнительной безопасности и помочь техподдержке выявить бонусхантеров и мошенников. Кстати, на некоторых платформах выводы крупных сумм доступны лишь после подтверждения личности. Бездепозитные бонусы казино за регистрацию в 2022 году — это вероятность поиграть за счёт заведения. Казино даёт посетителю шанс пользоваться определённой суммой или количеством безвозмездных вращений без внесения депозита. Не путайте деморежим с реальной забавой без надобности внесения депо.Максимальная ставка ? уточняется в валюте счета и ограничивает размер ставки за один спин. В случае ее превышения приз возможность быть аннулирован. Также в правилах возможность находиться запрет на размещение ставок конкретного вида, примеру, по одинаковым шансам в рулетке (словами, на чет или нечет, красное или черное и т.д. ). сайт 1× slots casino <a href=http://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=6177>http://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=6177</a> Бывают ли бездепозитные бонусы без вейджера? Бывают, случае у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино.
1×slot зеркало
Сразу в активации промокода можно пользоваться презентом. Как теснее упоминалось, бонусы посещают трёх видов – фриспины, кредиты и фриплей-бонусы. <a href=http://wuyuebanzou.com/home.php?mod=space&uid=925395>http://wuyuebanzou.com/home.php?mod=space&uid=925395</a> Онлайн-казино тщательно продумывают бонусные условия, коие необходимо выучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и другие лимитирования. 1×slots рабочее зеркало на сегодня Отыграв бездепозитный приз в казино с выводом также придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если схожее ограничение присутствует, то единоразово исключить получится лишь сумму, не превосходящую объем приобретенного бонуса.Но а случае вы теснее профи по онлайн казино, кликаем на красноватую кнопку «Получить» и Вы механически перейдете в онлайн казино;
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В каждом казино с бездепозитным бонусом предусмотрены вейджеровые обстоятельства. Это единственный «подводный камень», кот-ый стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, нужно сделать определённое число ставок. Чем круче приз, тем труднее выполнить обстоятельства, и наоборот.
#437 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора на андроид casino на телефон <a href=https://strelochnik.com/>Елизавета Боярская</a> казино вход официальный сайт porno Илона Маркова, хоккеистка <a href=https://www.ossetia.tv/>1×bet зеркало</a> 7k casino официальный сайт играющие казино онлайн cat casino часы казино скачать 1×bet букмекерская контора леонов 7k casino зеркало
DiskiPlus порно с Афонина Марина Игоревна DiskiPlus Хорова Наталья Александровна порно <a href=https://diskiplus.ru>DiskiPlus слот casino</a> DiskiPlus казино рояль смотреть DiskiPlus пина букмекерской конторы <a href=https://diskiplus.ru/>DiskiPlus casino скачать</a> DiskiPlus 1×bet 1 DiskiPlus винлайн букмекерская контора DiskiPlus букмекерская контора зенит DiskiPlus пина букмекерской конторы DiskiPlus скачать букмекерскую контору DiskiPlus Фастова Елена Владимировна порно DiskiPlus 1win casino
#438 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasino09k online
3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать аппарат либо почту, указать персональную информацию; <a href=http://filmkachat.ru/>1×slot зеркало рабочее этих способов предполагает регистрацию</a> Риск-игра по одинаковым шансам – Также казино возможность запрещать исполнять условия по отыгрышу за раунда на удвоение, который предлагается в слотах, видео-покере и неких других играх.Акции, посвященные календарным дням, бывают рассчитаны как на всех пользователей, так и на категории: примеру, презент на 8 марта девушкам-игрокам или мужчинам на 23 февраля. <a href=https://lit.link/en/kalinka0588>https://lit.link/en/kalinka0588</a> Похожим образом трудится третий способ доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения посетителя или из-за с получения им VIP-статуса. Подарок предоставляется последствии обращения в поддержку и ревизии.Нет. Казино выдают безвозмездные призы за регистрацию, для того, чтобы клиент возможность ознакомиться с игровым заведением. А чтобы исключить его, нужно выполнить условия отыгрыша. 1×slots регистрация на 1хслотс <a href=https://www.jutianwang.cn/home.php?mod=space&uid=7678&do=profile&from=space>https://www.jutianwang.cn/home.php?mod=space&uid=7678&do=profile&from=space</a> В качестве призов интернет казино нередко предлагает выдачу фриспинов, словами даровых вращений игрового барабана. Виртуальные монеты можно использовать для обучения в покерной школе или для игры в казино.
1×slots промокод при регистрации 2025
Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. 1×slots подтвердит вашу регистрацию если говорить Возьми свой презент. Чаще всего бонус активизируется сразу в регистрации. Но случаются истории, когда нужно зайти в индивидуальный кабинет или написать в справочную службу. <a href=http://worldpoetry.cn/home.php?mod=space&username=venomousfuel79>http://worldpoetry.cn/home.php?mod=space&username=venomousfuel79</a> онлайн казино 1×slots Бездепозитные призы отличный вариант безвозмездной забавы в игровые автоматы. Многие юзеры сети не знают, собственно в казино возможно начать играть абсолютно даром, а позже вывести выигрыш на банковскую карту или электрический кошелек, иные не доверяют интернет казино, а третьи удачно играют и выигрывают – и тотчас довольно большие суммы.
1 xslots рабочее зеркало
За привлечение друга ? в партнерской программки заказчик получает вознаграждение за привлечение свежих пользователей.Для всех бездепозитных бонусов функционирует максимальный лимит на выигрыш. Он указывает максимальную сумму, которую вас получить, играя на бонусные кредиты. Как лишь вас получится выполнить притязания вейджера, возможный максимум несомненно переведен с бонусного счета на ведущей, а остаток несомненно списан. В случае установленного лимита на сумму вывода выигрыша с бездепозитного приза, игрок не сможет исключить больше заявленной суммы. <a href=http://www.ritual-letichev.km.ua/user/JamesBum/>http://www.ritual-letichev.km.ua/user/JamesBum/</a> Чтобы самостоятельно убедиться в преимуществах бездепозитных бонусов, довольно зарегистрироваться в казино и получить поощрение. 1×slots зеркало рабочее на сегодня Следует подчеркнуть, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом.Выиграть реальные деньги в казино не пополняя счет – трудно, но вполне. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными бонусами и начните выступать на бонусные свои. По статистике каком-то 10-ти заведений возможно заработать маленькую сумму денег помощью бонусных средств.
1×slots casino регистрация
<a href=https://praisenpray.org/forums/showthread.php?tid=144515>рабочее зеркало 1хслотс</a> 1×slots подтвердит вашу регистрацию если говорить <a href=http://itstula.com/user/Jaspermet/>http://itstula.com/user/Jaspermet/</a> Разные казино имеют личные верховодила по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высокие притязания. Часто онлайн-казино рекомендуют отыграть бонусное поощрение до ста раз в игровых автоматах. Например, если игрок получил бесплатно 10 долларов, то необходимо будет отыграть их, поставив 1 тыщу спинов по одному доллару любой. Стоит отметить, собственно не все казино дают возможность играть на призы и не во всех увеселительных заведениях схожие управляла для отыгрывания. Некоторые казино запрещают играть на призы в блекджек либо ограничивают ставки до 5 %, собственно значительно увеличивает в десятки раз количество необходимых игр.
1× slots casino официальный сайт
Частенько новенькие не понимают, как активировать презенты или вывести 1-ый выигрыш. Для сходственных случаев наша команда описала основные термины – собственно такое фриспины, вейджер, как его отыграть, для нужно протекать верификацию.С не отыгранным призом запрещается превосходить размер максимальной ставки. Нарушение этого обстоятельства в аннулирование выигрыша. Составленный знатоками Casino.ru список онлайн-казино с бездепозитным бонусом дозволяет игрокам сопоставить спецпредложения различных операторов. <a href=https://ai-db.science/wiki/User:StephanyWeldon>https://ai-db.science/wiki/User:StephanyWeldon</a> 1 хслот регистрация в 1×slots casino Для получения депозитного бонуса необходимо пополнить собственный игровой баланс реальными средствами. Вознаграждение можно получить или при внесении первого депо, либо в виде фиксированного процента от внесённых средств. Так либо по, бонус поступит на счёт лишь после пополнения.Для верификации аккаунта надо(надобно) дать спецам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, а фотку банковской карты или снимок странички электронного кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для доказательства личности.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Мы подготовили перечень, где есть всегда животрепещущие и свежие бездепозитные бонусы казино, коие возможность получить даром. Для наших юзеров есть особые предложения эксклюзивные призы, которые вы нигде не отыщите, их мы обозначили специальной красноватой плашкой «Exclusive».
#439 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino автомат казино вход <a href=https://7club7.com/>казино смотреть онлайн бесплатно</a> порно с Арина и Дина Аверины, гимнастки porno Юлия Канакина, скелетонистка <a href=https://rumafia.news/>casino</a> 1×bet бесплатно порно с Артемий Панарин (хоккей) porno Илона Маркова, хоккеистка яндекс игры казино порно с Алексей Миранчук (футбол) 1×bet официальный скачать porno Игорь Акинфеев (футбол)
DiskiPlus порно с Кирьянова Дарья Борисовна DiskiPlus порно с Юлия Ефимова, пловчиха <a href=https://www.diskiplus.ru>DiskiPlus порно с Карен Хачанов (теннис)</a> DiskiPlus играющие казино DiskiPlus casino приложения <a href=https://www.diskiplus.ru/>DiskiPlus porno Нина Пирогова, хоккеистка</a> DiskiPlus porno Александра Степанова, фигуристка DiskiPlus порно с Петр Ян (ММА) DiskiPlus букмекерская контора бесплатно скачать DiskiPlus 1×bet зеркало рабочее xbet DiskiPlus casino официальный зеркало DiskiPlus кент казино DiskiPlus Нургалиева Эльвира Рамиловна порно
#440 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
Для выбора азартного заведения Вы можете воспользоваться перечнем наших казино с призами за регистрацию. На нашем веб-сайте мы опубликовали перечень бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, что доля бонусов эксклюзивные и доступны лишь для посетителей нашего сайта по-специальному промо-коду или по уникальной ссылке. Кроме того, для каждого бонуса мы подготовили подробный обозрение, в котором Вы узнаете как получить и отыграть поощрение и как вывести собственный выигрыш с бездепа.Чтобы играть даром на реальные деньги в казино, порой довольно просто зарегистрироваться. Иногда нужно выполнить вспомогательные действия. <a href=http://filmkachat.ru/>1х слот 1хслотс регистрация перейти на 1×slots</a> <a href=https://teletype.in/@kalinka0588/wj_aIQ7cr4o>https://teletype.in/@kalinka0588/wj_aIQ7cr4o</a> 1×slots казино зеркало <a href=http://houyuhuan.com/home.php?mod=space&uid=388176&do=profile>http://houyuhuan.com/home.php?mod=space&uid=388176&do=profile</a>
1×slots зеркало регистрация то дальше необходимо пройти
При помощи такого поощрения оператор возможность того завлекать посетителей, которые ранее показывали активность на сайте, хотя по какой-то основанию прекратили играть. В этом случае промокод высылается юзеру по электронной почте либо повторяющий SMS. <a href=http://link.5nx.ru/viewtopic.php?f=5&t=12120>1×slots сайт</a> 1×slots рабочее зеркало <a href=https://malaysia-forex.com/members/133293-Richarddat>https://malaysia-forex.com/members/133293-Richarddat</a> рабочее зеркало 1хслотс Прочитайте верховодила бонусной программы, какой хотите принять. Да, мы безотступно рекомендуем устроить это до регистрации.Промообъявления от казино не дают реальной картины и направлены на вербование внимания пользователей. Понять, как высоки шансы остаться в плюсе, позволит личный анализ условий предложения:
1×slots casino регистрация
<a href=https://foros.factormoe.net/user-5607.html>https://foros.factormoe.net/user-5607.html</a> Но такие рамки не смущают даже хайроллеров, поскольку коэффициенты на слотах позволяют рассчитывать на крупные выигрыши, а неких автоматах разыгрывается прогрессивный джекпот. 1×slots официальный зеркало рабочее Бездепозитные бонусы в казино без пополнения 2022 — это конкретная сумма денег либо gorovyh spins вращения, которые предоставляются первым постояльцам за регистрацию на веб-сайте казино в виде бездепозитного приза, и дает для возможность с казино без пополнения опробовать предложения (игр), с дальнейшей привилегией вывода средств при исполнении всех установленных правил.
1×slots casino регистрация 1×slotscasino09k online
Также существуют онлайн-платформы азартных игр, коие применяют раздачу бездепозитных призов в особые даты (как для казино, так и для игрока). Помимо этого, действующие геймеры кроме имеют вероятность получить схожие призы за собственную работа (к примеру, за повышения уровня или за схожие заслуги). Когда речь идет о денежных бонусах, казино всегда устанавливают обстоятельства вейджера, которые нужно выполнить, чтобы исключить выигрыш. казино 1×slots <a href=http://forum.combat-arnis.ru/profile.php?mode=viewprofile&u=368318>http://forum.combat-arnis.ru/profile.php?mode=viewprofile&u=368318</a> Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном сайте и выполните вход в личный кабинет, дабы забрать благотворительные вращения с вейджером х40;Пoдтвepдить личнocть клиента. Для удачного вывода средств, нужно подтвердить лицо посетителя. Нa этaпe вepификaции пpoфиля, работники службы безопасности обязаны убедиться, что у игрока более один акк. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не может исключить свой выигрыш, если у него будет некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы.
1х слотс зеркало регистрация в 1×slots casino
Выше мы дали полный набор самых свежих и актуальных бездепозитных бонусов в интернет казино без пополнения на 2022 год, где вы можете воспользоваться хоть ценным бездепозитным призом. В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая милая доля игры. Важно, зачастую бездепозитные призы в казино выдаются с ограничениями по максимальной выплате. В среднем можно рассчитывать на выгода в несколько тыщ руб. Как исключить выигрыш с бонуса без депо. Придётся подтвердить аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается каждым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате или прочитайте в правилах. <a href=http://autobrands.lv/index.php?subaction=userinfo&user=squarealibi33>http://autobrands.lv/index.php?subaction=userinfo&user=squarealibi33</a> 1×slots зеркало сайта
<b>Смотреть еще похожие новости:</b>
<a href=https://jgwy.net/space-uid-200381.html>1×slots быструю регистрацию а также мгновенное</a>
<a href=https://forum.dis-course.net/viewtopic.php?t=692127>1× slots casino зеркало</a>
<a href=http://everestrolep.listbb.ru/viewtopic.php?f=38&t=20591>1×slots casino зеркало рабочее</a>
<a href=https://praisenpray.org/forums/showthread.php?tid=135561>1×slots зеркало регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для получения приза надо(надобно) ознакомиться с программой преданности казино и устроить ставки на необходимую, нужную для перехода на следующий степень.
#441 Charlesgunnyhttp://filmkachat.ru
1×slots коды
Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 $. Если выдаются фриспины, их число редко превышает нескольких 10-ов даровых вращений.Итак, дабы безвозмездные бонусные кредиты превратились в настоящие средства, которыми вы можете управлять по своему усмотрению, их нужно отыграть. Вейджер стопам уточнять в правилах онлайн-казино. <a href=http://filmkachat.ru/>1хслот зеркало сайта</a> <a href=https://cgscholar.com/community/community_profiles/3d-rendering-services/community_updates/234376>https://cgscholar.com/community/community_profiles/3d-rendering-services/community_updates/234376</a> 1×slots casino регистрация 1×slots review live <a href=http://freedom.teamforum.ru/memberlist.php?mode=viewprofile&u=7639>http://freedom.teamforum.ru/memberlist.php?mode=viewprofile&u=7639</a>
рабочее зеркало 1×slots
Ознакомьтесь с нашим перечнем наилучших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего перечня и получите бездеп незамедлительно. Хватайте наилучшие благотворительные предложения ниже и выигрывайте немалые средства, не рискуя!Большинство клубов завлекают внимание геймеров за счёт различных подарков. На 1 сайтах возможно получить виртуальные кредиты, которые откроют доступ ко всему софту. На других же, администрация предлагает благотворительные вращения для запуска топовых онлайн слотов. Несмотря на разные акции, стоит выделить самые основные. <a href=https://creapnl.com/foros/tema/1×slots-%d0%b1%d0%b5%d0%b7%d0%b4%d0%b5%d0%bf%d0%be%d0%b7%d0%b8%d1%82%d0%bd%d1%8b%d0%b9-%d0%b1%d0%be%d0%bd%d1%83%d1%81-%d0%b7%d0%b0-%d1%80%d0%b5%d0%b3%d0%b8%d1%81%d1%82%d1%80%d0%b0%d1%86%d0%b8%d1%8e-48/>1×slots бездепозитный бонус за регистрацию</a> 1×slots официальный сайт скачать на айфон Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. <a href=https://www.lifesshortlivefree.com/community/profile/stevenbrora/>https://www.lifesshortlivefree.com/community/profile/stevenbrora/</a> Минимального оборота. Этот предел уточняется вейджером — пока игрок не сыграет на установленную сумму, вывод средств несомненно недоступен. 1×slots коды Прибывшие на акк деньги бездепозитные бонусы предназначаются, главном, лишь для свежеиспеченных пользователей, коие ранее не имели личного аккаунта в данном казино. Исходя из этого, в ранее у игрока был сделан депозит, то, по всей вероятности, у него больше не будет способности рассчитывать на получение такового приза в конкретном заведении.После получения бонуса вывод средств для клиента будет недосегаем того, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или чета месяцов. Выводить средства игрок сможет только последствии отыгрыша.
1× slots регистрация в 1×slots casino
Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, чтобы снова получить бесплатный бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ожидает неизбежное санкция.Выиграть настоящие деньги в казино не пополняя счет – сложно, хотя вероятно. Главное задаться целью и не нарушатьправила заведения. Выберите несколько казино с бездепзитными призами и начните выступать на бонусные средства. По статистике из 10-ти заведений возможно заработать небольшую сумму средств с бонусных средств. <a href=http://odetah.ru/index.php?subaction=userinfo&user=noisydemography>http://odetah.ru/index.php?subaction=userinfo&user=noisydemography</a> зеркала 1×slots
1×slots зеркало которую указывали при регистрации кстати
Если вы выбрали себе количество брендов которые для больше всего полюбились, для неизменной игры! Таких гемблеров казино очень любит и оценивает, за частую эти игроки становятся VIP игроками заведения, коим нередко поступают прибыльные предложения в виде призов, так же туда заходит и бездепозитные.Свежий бонус начисляется в виде денежных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в использовании своими, а случае отыгрыша оператор имеет установить ограничение на вывод средств. Онлайн-казино с бездепозитными бонусами ставят клиентам условия для пользования бездепами, потому перед ролью в промоакции какого-либо тщательно ознакомиться со всеми правилами и аспектами акции. Условия имеют дотрагиваться получения приза, его применения и следующего вывода валютных средств в случае выигрыша.Казино дает вероятность заработать и исключить реальные деньги на бездепозитных бонусах. Обычно, это малозначительная сумма, которую казино имеет для разрешить подарить игроку. Бездепозитные бонусы – это исключительно занимательная и наиболее многообещающая акция интернет-казино. Они том другого фри-спинов, потому собственно выплаты в даровых вращениях не гарантированы, как композиции на барабанах игрового аппарата имеют не сложиться.Обычно для получения бонусов без депо, казино выдвигает лояльные и абсолютно выполнимые обстоятельства, но есть ряд поступков коие запрещены и все стать противные результаты: 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=https://www.tdsheepvillage.com/home.php?mod=space&uid=20883>https://www.tdsheepvillage.com/home.php?mod=space&uid=20883</a> Такой безвозмездный эквивалент средств зачисляется на профиль юзера последствии осуществления требований и предназначаются они только для игрового процесса. Вывод таких вознаграждений возможен лишь последствии воплощения вейджеровых критерий.Более солидные предложения встречаются очень редко. Зачастую они доступны лишь VIP-игрокам. В остальных случаях им наверняка сопутствуют довольно жесткие обстоятельства отыгрыша. Также вероятны вспомогательные условия прочие лимитирования, прописанные в критериях и положения бонусной программы казино.
1×slots casino регистрация на сайте
Чтобы получить вероятность вывести выгода с бездепозитного приза в казино, нужно выполнить ряд критерий: Промокод – определённая комбинация символов, которую нужно ввести в соответствующее фон при творении учетной записи либо активировать в личном профиле игрока в разделе с призами. <a href=http://catalog.drobak.com.ua/communication/forum/user/2730260/>http://catalog.drobak.com.ua/communication/forum/user/2730260/</a> Заработать на бездепозитных призах за регистрацию в казино может каждый юзер, достигший совершеннолетия.При пользовании бездепозитным призом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют количество видов лимитов: 1×slots регистрацию более популярный вариант это Бонусы без депо при регистрации считаются наиболее красивыми как для опытных игроков, например для и новичков. Получив такое вознаграждение, клиент может выступать на реальные средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные призы в интернет-казино Рунета, а условия их активации и выигрыша.
<b>Смотреть еще похожие новости:</b>
<a href=http://jagplay.ekafe.ru/viewtopic.php?f=65&t=7569>1× slots официальный</a>
<a href=https://www.prtrecovery.org/threads/1×-slot-zerkalo.400/>1× слот зеркало</a>
<a href=https://praisenpray.org/forums/showthread.php?tid=153867>1×slots регистрация 1×slots casino 777 online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вейджер менее х30–35 считается приемлемым. Опытные игроки утверждают, собственно с этим вейджером реально остаться в плюсе, случае верно подойти к выбору игрового аппарата. Суммы подобных предложений, в, колеблются от трех до 20 долларов, а вейджер на эти средства должен сочинять от 30 до шестидесяти один. Зачастую, наибольшая сумма выигрыша тут составит от одной до двух сотен $. Если компьютерные выиграет больше, то все средства могут быть списанными до очень разрешенного выигрыша. Здесь бывает смысл выводить еще несуществующие деньги на собственную платежную систему и далее искать заведение с благоприятными под данную необходимую релоадом или бонусом за 1-ое пополнение счета. Есть некоторое подвидов бездепозитного вознаграждения, предлагаемого большим количеством заведений.
#442 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию более популярный вариант это
В основном случаев благотворительные призы начисляются в кредитах, которые нельзя сразу вывести со счета. Прежде их нужно отыграть по установленным правилам. Эти притязания принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д.). О нем читайте ниже.Можно ли в одном онлайн казино получить больше одного приза за регистрацию? Нет, так как в каждом интернет казино есть управляла, к коим надо(надобно) держаться, не творить 2 аккаута для получения бонусов, другому несомненно блокировка обоих аккаутов, не пытайтесь обмануть интернет казино, бонус за регистрацию выдаеться один раз одному личику. <a href=http://filmkachat.ru/>1×slots casino online регистрация</a> Шаг 5. Использование и отыгрыш. Бездеп должен быть применен в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера. <a href=https://bandzone.cz/fan/kalinka0588?at=blog&bi=615742>https://bandzone.cz/fan/kalinka0588?at=blog&bi=615742</a> Обыкновенные бездепозитные бонусы в размере от трех до двадцати долларов созданы для того, чтобы в игры заходили все новые и свежие игроки. Здесь, вероятнее всего, несомненно лимитирование на наибольший выигрыш. Важно, чтобы перед минимальным вкладом был отключен приз за 1-ое пополнение счета, и компьютерные не попадет на повторный вейджер.На странице представлены бездепозитные бонусы за регистрацию в казино редкая награда за которой гонятся все игроки как новенькие, так и мастера. Мы также уделяем огромное внимание на присутствие призов при формирование рейтинга казино на средства. Бездепозитный приз это вероятность играть бесплатно и выиграть реальные средства. 1×slots casino зеркало <a href=https://pipewiki.org/wiki/index.php/%C3%90%C5%BE%C3%90%C2%B1%C3%91%C6%92%C3%91%E2%80%A1%C3%90%C2%B5%C3%90%C2%BD%C3%90%C2%B8%C3%90%C2%B5_%C3%90%C3%90%C2%B0_%C3%90%C5%B8%C3%91%E2%82%AC%C3%90%C2%B0%C3%90%C2%B2%C3%90%C2%B0_%C3%90%C3%A2%E2%82%AC%E2%84%A2%C3%90%C2%BB%C3%90%C2%B0%C3%90%C2%B4%C3%90%C2%B8%C2%B2%C3%90%C2%BE%C3%91%C3%91%E2%80%9A%C3%90%C2%BE%C3%90%C2%BA>https://pipewiki.org/wiki/index.php/%C3%90%C5%BE%C3%90%C2%B1%C3%91%C6%92%C3%91%E2%80%A1%C3%90%C2%B5%C3%90%C2%BD%C3%90%C2%B8%C3%90%C2%B5_%C3%90%C3%90%C2%B0_%C3%90%C5%B8%C3%91%E2%82%AC%C3%90%C2%B0%C3%90%C2%B2%C3%90%C2%B0_%C3%90%C3%A2%E2%82%AC%E2%84%A2%C3%90%C2%BB%C3%90%C2%B0%C3%90%C2%B4%C3%90%C2%B8%C2%B2%C3%90%C2%BE%C3%91%C3%91%E2%80%9A%C3%90%C2%BE%C3%90%C2%BA</a> Ограничения по забавам. Администрация воспрещает игрокам кое-какие игровые автоматы с бездепозитным бонусом, средствами или бесплатными вращениями. Обычно, в правилах приводится глубокий список слотов для отыгрыша. Иногда деление производится по виду игр. Например, отыгрыш возможен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino.
1 xslots рабочее зеркало
Получить приветственный бонус могут лишь новые клиенты онлайн-казино. Способы описаны в критериях промоакции каждого легального казино, почаще всего это:Бездепозитные бонусы за регистрацию в игровых автоматах для хозяев онлайн-казино считаются частью рекламной кампании, направленной на увеличение аудитории вебсайта. Так они продвигают средства бренды и привлекают новых клиентов. <a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=783267>1×slots зеркало видели такую регистрацию на</a> 1хслотс рабочее зеркало Баланс игрока дополняется на соответствующую необходимую. К ней применяется вейджер, указанный в правилах промоакции. Вывести выигрыш можно будет в такого, как пользователь сделает требуемый объем ставок из собственных средств. В редких случаях бездеп трудится в формате Free Play. На счет юзера зачисляется крупная сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по завершении этого периода сумма на счету будет превышать первоначальную, то разность можно несомненно исключить либо применять для последующих ставок. <a href=http://lnx.hotelresidencevillateresaischia.com/casamicciola/index.php?option=com_k2&view=itemlist&task=user&id=449810>http://lnx.hotelresidencevillateresaischia.com/casamicciola/index.php?option=com_k2&view=itemlist&task=user&id=449810</a> 1×slots коды В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с бесплатных вращений. Прибыль, которую Вы заработаете на этом бездепе можно назначать на вывод без какого или отыгрыша.
1×slots сайт
Для получения приза надо(надобно) ознакомиться с программой преданности казино и устроить ставки на необходимую, нужную для перехода на следующий степень.4. Заберите подарок. Чаще всего бонус активируется незамедлительно после регистрации. Но посещают ситуации, когда надо(надобно) зайти в личный офис или написать в службу поддержки. Не советуем опрометью голову хвататься за различные предложения получения средств без инвестициям. Вполне возможно, что бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем смотрится на первый взгляд. Альтернативой считается казино бонус за депозит. Мы предлагаем для пару советов, спасибо которым у каждого игрока будет вероятность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег: <a href=http://sabrina-online.su/wiki/index.php?title=%D0%9B%D1%83%D1%87%D1%88%D0%B8%D0%B5%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO>http://sabrina-online.su/wiki/index.php?title=%D0%9B%D1%83%D1%87%D1%88%D0%B8%D0%B5%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO</a> Бездепозитные призы — это подарки от казино вид бонусных денег либо фриспинов для игровых автоматов, коие начисляются на аккаунт игрока последствии процедуры регистрации на сайте заведения. Для получения таких поощрений депозит не потребуется. 1× slots casino зеркало В реальное время получить приз за регистрацию в казино очень просто. Почти каждый игорный дом с радостью даст средства либо безвозмездные вращения. Многие игроки используют данным и не смущяются региться в каждом клубе с выгодными условиями. Кстати, это отличная вероятность выдумать выигрышную стратегию и сорвать куш.
1×slots официальный сайт зеркало
Существует ли стратегии для отыгрыша бездепозитных призов? К раскаянию нет, на выигрыши либо проигрыши с бонусов, казино либо игрок повлиять возможности, отдача игр происходит от создателей игр. <a href=https://krok.biz/forum/viewtopic.php?f=7&t=96752>рабочее зеркало 1хслотс</a> Размер бонусов почаще всего чисто условный и не превышает 50 руб. Приятно, но ощутимым бустом деле навряд будет.Бездепозитный бонус часто возможность стать легкодоступным незамедлительно последствии завершения регистрации, поскольку в большинстве случаев единственным требованием к нему является регистрация, а этого проверка вашей новой учетной записи. Также есть онлайн-платформы азартных игр, которые используют раздачу бездепозитных бонусов в особые даты (как для казино, например и для игрока). Помимо этого, действующие игроки также имеют возможность получить схожие призы за свою деятельность (например, за повышения уровня или за похожие заслуги). 1×slots рабочее зеркало на сегодня <a href=http://ssbw.co.kr/bbs/board.php?bo_table=free&wr_id=345330>http://ssbw.co.kr/bbs/board.php?bo_table=free&wr_id=345330</a> Обыкновенные бездепозитные призы в размере от 3-х до 20 $ созданы для того, дабы в забавы заходили все новые и свежие игроки. Здесь, вероятнее всего, будет ограничение на наибольший выигрыш. Важно, дабы перед минимальным вкладом был отключен приз за 1-ое пополнение счета, и игрок не попадет на повторный вейджер.Бoльшинcтвo азартных заведений выдвигают примерно однообразные, схожие условия и притязания, которые нужно выполнить, дабы получить бездепозитный бонус за регистрацию. Все их можно соединить в один список:
1хслот 1хслотс регистрация перейти на 1×slots
Законодательство, регулирующее азартные игры в разных государствах, влияние на возможности операторов. В итоге юзеры из отдельных регионов сталкиваются с лимитированиями со стороны казино. Это может быть как полный отказ в доступе, так и невозможность загружать игры отдельных изготовителей. Ознакомьтесь с нашим перечнем наилучших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего списка и получите бездеп незамедлительно. Хватайте превосходнейшие благотворительные предложения ниже и выигрывайте большие деньги, не рискуя!Если вы новичок данном и только попали в неизведанную вами район азарта — с помощью услуг как бездепозитные призы без пополнения. <a href=https://biznes-knigi.com/user/JamesLiace/>https://biznes-knigi.com/user/JamesLiace/</a> Ограничения по забавам. Администрация воспрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, средствами либо безвозмездными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда дробленье выполняется по виду игр. Например, отыгрыш возможен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino. 1×slots регистрация на сайте Акции распространяются как на все игры казино, так и на узкий список. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и другие. Промо имеет охватывать разработки 1-го производителя. Бездеп не пересекается с другими акциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, изготовленные бонусными средствами. Для идентификации платежных реквизитов игрока может понадобиться пополнение счета на минимальную необходимую.Маркетинговая политика всех игорных интернет-клубов должна одевать разнородный нрав. И если вознаграждения на депозит работают для того, дабы стимулировать вносить депозиты и поощрять теснее имеющих пользователей, то бездепозитный бонус в казино или бонус за регистрацию в казино, до всего, рассчитан на расширение базы покупателей.
<b>Смотреть еще похожие новости:</b>
<a href=http://ledyardmachine.com/forum/User-Jameshoing>1 x slots casino</a>
<a href=https://fmatras.ru/profile/107395-rabofreekt/>1×slots casino регистрация 1×slotscasin online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Перечисленные повыше главные характеристики сочетают фактически каждый приз и считаются стандартными для бездепозитных бонусных начислений в казино.
#443 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
официальные букмекерские конторы скачать ставки на спорт букмекерские конторы <a href=https://kompromat1.online/>7k casino официальный</a> официальное казино вход casino зеркало сайта <a href=https://rucriminal.info/>вывод казино</a> Попова Анна Юрьевна порно официальные зеркала казино 1×bet слоты 1×bet зеркало рабочее на сегодня casino скачать приложение играющие казино онлайн unlim casino
DiskiPlus Петрова Ольга Викторовна порно DiskiPlus кент casino <a href=https://diskiplus.ru/>DiskiPlus 7k casino официальный</a> DiskiPlus ев казино DiskiPlus vodka casino <a href=https://diskiplus.ru/>DiskiPlus гама казино</a> DiskiPlus порно с Алина Загитова DiskiPlus 1×bet зеркало на сегодня DiskiPlus какие казино DiskiPlus включи казино DiskiPlus casino зеркало сегодня рабочее DiskiPlus 1×bet официальный сайт DiskiPlus лучшие онлайн казино
#444 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Максим Глушенков (футбол) скачать букмекерскую контору на андроид <a href=https://th-royalgclub.com/>porno Алена Михайлова</a> Скоробогатова Ольга Николаевна порно 1×bet рабочее <a href=https://7club7.com/>суть казино</a> бесплатное казино Фастова Елена Владимировна порно официальные сайты казино casino ап Валентина Матвиенко порно 7k casino официальный 1×bet телефон
DiskiPlus unlim casino DiskiPlus Приезжева Екатерина Геннадьевна порно <a href=https://www.diskiplus.ru>DiskiPlus 1×bet скачать приложение на андроид</a> DiskiPlus спорт букмекерская контора DiskiPlus Ходнева Светлана Владимировна порно <a href=https://www.diskiplus.ru>DiskiPlus пин ап casino</a> DiskiPlus пин ап casino pin DiskiPlus мелбет букмекерская контора DiskiPlus порно с Евгений Малкин (хоккей) DiskiPlus букмекерские конторы в россии DiskiPlus порно с Варвара Субботина DiskiPlus Скоробогатова Ольга Николаевна порно DiskiPlus мобильные букмекерские конторы
#445 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино зеркало сегодня ramenbet casino <a href=https://7club7.com/>реального казино</a> скачать pin casino порно с Виктория Синицина, фигуристка <a href=https://sovsekretno.net/>top casino</a> casino на телефон промокод 1×bet casino 1go casino casino com порно с Дарья Касаткина (теннис) порно с Диана Шнайдер (теннис)
DiskiPlus casino pin официальный DiskiPlus порно с Дронова Александра Викторовна <a href=https://www.diskiplus.ru/>DiskiPlus Юдаева Ксения Валентиновна порно</a> DiskiPlus казино 1 DiskiPlus букмекерскую контору пин <a href=https://www.diskiplus.ru>DiskiPlus 1×bet регистрация</a> DiskiPlus 1×bet зеркало рабочее на сегодня DiskiPlus песня казино DiskiPlus казино фильм смотреть онлайн DiskiPlus букмекерскую контору пин DiskiPlus pin up casino buzz DiskiPlus порно с Дарья Касаткина (теннис) DiskiPlus 7k casino сайт
#446 Esmeraldosvvp
Delete it,please! <a href=https://rekonstrukce-domy-na-klic.cz/>.</a>
#447 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
Фриплей-бонусы встречаются только в неких клубах. Они зачисляются сразу после создания профиля и активны недолговременное время. Если не успеете истратить средства, они просто сгорят. Касаемо времени, в большинстве случаев бонусы активны на часа. <a href=http://filmkachat.ru/>рабочее зеркало 1×slots</a> <a href=https://kumu.io/lexxeagle/honda-civic-battery-reset-complete-guide-for-all-models>https://kumu.io/lexxeagle/honda-civic-battery-reset-complete-guide-for-all-models</a> 1×slots промокод при регистрации 2025 <a href=https://xn–6-gtb4aicb3c6b.xn–p1ai/user/Kennethedime/>https://xn–6-gtb4aicb3c6b.xn–p1ai/user/Kennethedime/</a> Так же стоит выделить то, что в любом интернет казино установлен свой максимальный кешаут на бездепозитный бонус. Как управляло кешаут — это предельная сумма денег, кот-ая доступная для вывода с бездепозитного приза.Вообще перейдя в казино — управляла схожи в получении бездепозитных бонусов, в стандартные верховодила заходит: доказать эл. Почту и телефонный, наполнить собственный собственный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ.
1хслотс рабочее зеркало
<a href=http://www.gamers4life.com/forums/f44/public-banlist-293724/index14.html>1×slots зеркало на сегодня</a> 1×slots официальный зеркало Наш список включает в себя превосходнейшие бездепозитные бонусы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит ревизию по важным параметрам:При забаве на бонусные свои воспрещается выступать в игровые автоматы с современным джекпотом и игры из радела exist casino. Кроме такого, кое-какие казино выделяют бездеп на раз либо некоторое конкретных слотов, и в других играх Вы не можете на них выступать. <a href=https://getcomixxx.com/index.php?subaction=userinfo&user=Philipsog>https://getcomixxx.com/index.php?subaction=userinfo&user=Philipsog</a> Для подтверждения электронной почты, просто перейдите по активной ссылке в послании, полученном от игрового заведения.Казино выделяет вероятность заработать и вывести реальные средства на бездепозитных призах. Обычно, это незначительная сумма, коию казино возможность для разрешить презентовать игроку. 1×slots зеркало рабочее на сегодня Вы не в коем случае ни чем не рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный приз, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс изучить игровые автоматы, научится регулировать менять ставки и полосы, изучать бонусные забавы и их выигрышные композиции, ну в конце концов просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные средства, которые возможно отыграть и исключить, но просто на демо счет, что, этим самым адреналин в крови более повысится а пульс забьется с частым ритмом!
1×slots быструю регистрацию а также мгновенное
Можно. Вы практически можете отрешиться от получения бездепозитного приза за регистрацию в казино, пока Вы не сделаете ставку.Условия могут разниться приятель от друга. Но такой приз может быть применен лишь для игрового процесса – приобретенные на счет деньги до как, как станут отыграны, вывести невероятно. <a href=https://knpnewz.com/member.php?action=profile&uid=79723>https://knpnewz.com/member.php?action=profile&uid=79723</a> Бонус в казино без депозита содержит различные разновидности: это может быть приветственный бонус, промоакции в честь каких-то дней или главных дат, бонус за вербование новых игроков, лояльность и получение VIP-статуса. 1 х слотс зеркало Несмотря на то, собственно данный вариант стимуляции со стороны азартных платформ довольно моден в сфере подобных игр, далековато многим почитателям казино знаменито, собственно себе бездепозитные призы казино и как непосредственно их вероятно эксплуатировать.
рабочее зеркало 1хслотс
Для получения предоставленных бонусов вас пригодиться — ПК либо мобильное устройство, и остальное дело за небольшим.У нас на сайте Вы найдете список призов без депозита в проверенных казино и доскональную информацию о том как их получить и использовать. <a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=17595>1хслотс рабочее зеркало</a> Хотя благотворительные призы начисляются без депозита, не исключено, что вас понадобиться вносить деньги. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты только последствии как, как новый заказчик впервые пополнит игровой счет. Для казино, работающих онлайн, бездепозитные призы нужны для вербования новых посетителей. Предложение поиграть на слотах без необходимости внесения настоящих денег — работающий способ для увеличения энтузиазма к фирмы. После отыгрыша бездепа велик шанс, что игроку понравится и он продолжит играть в казино, лишь теперь уже на личные деньги. 1×slots регистрация 1×slots casino c2d ru <a href=http://thinktoy.net/bbs/board.php?bo_table=customer2&wr_id=563209>http://thinktoy.net/bbs/board.php?bo_table=customer2&wr_id=563209</a> Также существуют онлайн-платформы азартных игр, коие используют раздачу бездепозитных призов в особые даты (как для казино, например и для игрока). Помимо сего, действующие игроки также имеют вероятность получить похожие призы за свою деятельность (например, за повышения значения или за похожие заслуги).
1×slots казино мобильная версия
Игрокам не воспринимать приветственный приз как гарантированный способ получить большой выигрыш, но это замечательная вероятность без расходов расценить перечень казино. К образцу, игроку выдаются бесплатные свои в заведении в размере пятидесяти либо 100 долларов (вейджер на которые сочиняет 100х). То есть, любому новоприбывшему игроку выскакивает манящая картинка, кот-ая сулит выплату всех зачисленных фирмой средств. Не стоит обращать внимания на казино бонус за регистрацию без депозита с сильно большой или довольно малеханькой суммой бонусов, поэтому собственно, в тщательно изучив все обстоятельства, здесь скорее, несомненно какой-то подкол. <a href=http://avto-el.com/index.php?subaction=userinfo&user=raggedworker88>http://avto-el.com/index.php?subaction=userinfo&user=raggedworker88</a> Выбор каждого онлайн казино на нашем сайте. В описании к любому Вы можете узнать, что получите за творение аккаунта. 1 х слотс зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://www.kuyoux.com/space-uid-35770.html>1×slots зеркало регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При отыгрыше бонусных средств, необходимо учесть срок действия приза и время, коие дается на отыгрыш. По истечению заявленного медли, не отыгранный бонус будет аннулирован. Получать информацию о самых выгодных призах возможно без постоянного мониторинга новостей казино. Мы брали эту задачку на себя и непрерывно следим за предложениями операторов, избирая наилучшие из их. В этом разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список промоакций регулярно дополняется. В топ зашли самые новые бездепозитные бонусы за регистрацию в казино 2020, временные и закрытые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и другим критериям. Если срок деянья акции истек, она удаляется из перечня.
#448 Charlesgunnyhttp://filmkachat.ru
1×slots на любой вкус как пройти регистрацию
Чем ниже велечину вейджера, что, этим легче отыграть и вывести бонус. Если Вы расчитываете заработать на бездепе, а не просто ознакомиться с новым игровым клубом, то стоит игнорировать бонусов с высочайшим вейджером их почти не реально отыграть. С ними Вы можете лишь протестировать игры заведения.Третитй бездепозитный бонус за регистрацию – денежные средства. К сожалению, начислить рубли или доллары способны лишь известные и популярные клубы. С их поддержкой появится насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком. <a href=http://filmkachat.ru/>1×slots регистрация то дальше необходимо пройти</a> Следует выделить, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом.Если вы облюбовали для себя несколько брендов коие вам больше всего приглянулись, для неизменной игры! Таких гемблеров казино очень предпочитает и ценит, за частую эти игроки становятся VIP игроками заведения, коим нередко поступают выгодные предложения вид призов, например же туда заходит и бездепозитные. <a href=https://www.esurveyspro.com/Survey.aspx?id=d8357902-e8be-4a72–8767–3426f9bacbbb>https://www.esurveyspro.com/Survey.aspx?id=d8357902-e8be-4a72–8767–3426f9bacbbb</a> Подобные бонусы без депозита предоставляются на более прибыльных критериях. Зачастую они покрупнее, а условия отыгрыша менее жесткие.Предложения с бездепозитными призами за регистрацию позволяют новым заведениям заинтересовать аудиторию на свой сайт. А игроки же получают вероятность выступать на настоящие средства без депозита в казино и заработать малый стартовый капитал, который разрешается вывести на карту банка либо электронный кошелек. 1×slots регистрация <a href=http://mp3monster.ru/index.php?subaction=userinfo&user=hellishjournal5>http://mp3monster.ru/index.php?subaction=userinfo&user=hellishjournal5</a> Постарайтесь отыграть вейджер, дабы была вероятность оставить заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные приборы. Вы можете получить выигрыш на электрической кошелёк, карту, телефон.В большинстве заведений сделать это возможно по адресу электронной почты, по номеру телефонного, через социальную сеть либо гугл-аккаунт.
1хслот 1хслотс регистрация перейти на 1×slots
Бонус за регистрацию в казино выдается только раз один на одного игрока. Но бывают дополнительные промоакции, в коих бездепы раздаются для неизменных клиентов и эти подарки Вы сможете получить более одного раза. зеркло казино 1×slots Бездепозитный приз за регистрацию в казино с выводом денег в 2022 году — Наш ресурс дает игрокам актуальную информацию о самых свежих, великодушных и проверенных бонусах в онлайн казино, коие обновляются каждый денек.Такой казино бонус без депо за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это словно некая конспирация одобрения под бездепозитный. Суть всего этого сводится к тому, что геймеру на час выдается, к примеру, 1000 долларов, а реклама твердит то, собственно каждой выигрыш возможно будет в забыть при себе. Но случае играющий серьезно отнесется к данному предложению, то он просто растеряет время. Ведь геймеру надо(надобно) несомненно играть не в основном аккаунте, а в тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (даже всей тысячи) в верховодила вступят конкретные обстоятельства, где несомненно сказано, что максимальной суммой победы возможность быть лишь двести $ и деньги можно применять только в бонуса на первый вклад с вейджером 25 от суммы вознаграждения плюс сам депо. По итогу выйдет, собственно игрок выигрывал для 200% бонус с вейджером на определенную необходимую. Короче разговаривая, это все не вашего медли. <a href=http://x4kurd.freetzi.com/member.php?action=profile&uid=100733>http://x4kurd.freetzi.com/member.php?action=profile&uid=100733</a> Бездепозитные призы начисляются лишь раз один. Не стоит раскрывать свежие аккаунты, чтобы получить их повторно. Служба защищенности казино непременно выявит «левого» соучастника и заблокирует. Если посетитель выполнит необходимые притязания, отыграет собственную ставку и решит исключить собственный выигрыш, то ему надо(надобно) к, что казино обязательно потребует дать ксерокопии личных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные свои исключить не удастся. x1 slots регистрация в 1×slots casino
1хслот скачать
Минимального оборота. Этот лимит устанавливается вейджером — же игрок не сыграет на установленную необходимую, вывод средств будет недосегаем. Если вы выбрали для себя некоторое брендов которые вам больше всего полюбились, для неизменной забавы! Таких гемблеров казино очень любит и оценивает, за частую эти игроки становятся VIP игроками заведения, которым нередко поступают прибыльные предложения в виде призов, так же туда входит и бездепозитные.Бонус начисляется игроку сразу в регистрации и прохождения верификации в казино и не настятельно от клиента внесения депозита. Как верховодило, объем бонуса в сходственном случае довольно скромный, однако разрешает новичкам познакомиться с игрой без риска настоящими средствами. <a href=https://www.mikocon.com/home.php?mod=space&uid=212830>https://www.mikocon.com/home.php?mod=space&uid=212830</a> Все бесплатные бонусы кажутся соблазнительными. Кто же откажется от способности сыграть в онлайн-казино, не рискуя средствами, но получая выигрыши. Но далековато не все бездепозитные бонусы мере презентабельны для рассудительного клиента.Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам воспрещено начислять призы клиентам, не имеющим денежных средств на счете. Мы предлагаем рассмотреть животрепещущие бонусы онлайн-казино с лицензией, которые соблюдают законодательство РБ. 1× слот зеркало Для верификации аккаунта нужно предоставить спецам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, а фотку банковской карты либо скриншот страницы электронного кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для доказательства личности.
1×slots промокод при регистрации
Самый распространённый из похожих призов, окончательно же, бездеп на день рождения посетителя — приз вид фиксированной суммы либо фриспинов поступает на счёт игрока, а пользоваться им возможно протяжении установленного периода медли. Фриспины предусмотрены для применения в видео слотах. Внимательно ознакомьтесь с критериями – частенько их выдают на кое-какие автоматы. В зависимости от клуба, у вас выйдет устроить определённое количество ставок. Кстати, продвинутые игорные дома разрешают запускать любых «одноруких бандитов».За счёт спинов выйдет запустить разные онлайн слоты, протестировать стратегии и поднабраться навыка. Фишка том,, собственно вращения начисляются на топовые аппараты с уникальными опциями и высокой отдачей. Не запамятовывайте, что в любом акционном предложении предусмотрены специальные притязания – кратковременные лимитирования, максимальный размер ставки, перечень доступных игр. 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=https://forum.bandariklan.com/member.php?action=profile&uid=8463>https://forum.bandariklan.com/member.php?action=profile&uid=8463</a> Зарегистрироваться в казино по особой ссылке или с бонусным кодом. Подтвердить контактные данные (номер аппарата и электрическую почту). Для подтверждения номера аппарата нужно в собственном профиле указать свой номер и нажать кнопку „Подтвердить номер телефонного“, дальше Вы получите sms-сообщение с кодом, кот-ый нужно установить в соответствующее фон. Для подтверждения электрической почты, перейти по интенсивной ссылке в послании от казино.
1×slots бездепозитный бонус за регистрацию
<a href=https://australiantravelforum.com/Upload/member.php?action=profile&uid=5994>https://australiantravelforum.com/Upload/member.php?action=profile&uid=5994</a> Суммы похожих услуг, как правило, колеблются от трех до двадцати $, а вейджер на эти средства обязан сочинять от тридцати до шестидесяти один. Зачастую, наибольшая сумма выигрыша здесь составит от одной до 2-ух сотен $. Если игрок выиграет больше, то все средства шансы быть списанными до очень разрешенного выигрыша. Здесь замечена смысл выводить еще несуществующие деньги на собственную платежную систему и дальше искать заведение с благоприятными под данную сумму релоадом или призом за 1-ое пополнение счета. Есть количество подвидов бездепозитного гонорары, предлагаемого наибольшим числом заведений.Любой выигрыш по ставке выше установленного лимита несомненно являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, в случае выигрыша его сумма не поступит на счёт посетителя — итог игры несомненно всецело аннулирован. 1×slots casino online регистрация
<b>Смотреть еще похожие новости:</b>
<a href=http://yaoisennari.ekafe.ru/viewtopic.php?f=169&t=4536>1×slos регистрация в 1×slots casino</a>
<a href=https://forums.dfine.net/member.php?action=profile&uid=119>1×slots официальный сайт зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чаще всего, модные сервисы, эти как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное верховодило. Финансовые свои выводятся только через ту платежную систему, которой успех для пополнения депозита. Если же игрок получил бездепозитный покерный приз, требуется восполнить счет на минимальную сумму, кот-ая сочиняет обыкновенно десять $.
#449 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
приложения букмекерских контор на андроид порно с Дронова Александра Викторовна <a href=https://7club7.com/>porno Мира Андреева (теннис)</a> black russia казино рейтинг казино <a href=https://specreporter.com/>Юдаева Ксения Валентиновна порно</a> кент казино 1×bet официальный лучшие бесплатные онлайн казино симулятор казино porno Илона Маркова, хоккеистка лучшие казино бесплатно пари букмекерская контора
DiskiPlus pin up casino скачать DiskiPlus казино рояль смотреть <a href=https://diskiplus.ru>DiskiPlus спорт букмекерская контора</a> DiskiPlus порно с Диана Шнайдер (теннис) DiskiPlus 1×bet официальный сайт 1×bet xyz <a href=https://www.diskiplus.ru/>DiskiPlus online casino официальный</a> DiskiPlus скачать 1×bet 1×bet xyz DiskiPlus casino 7k рабочее DiskiPlus порно с Артемий Панарин (хоккей) DiskiPlus официальные букмекерские конторы скачать DiskiPlus про казино DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus 1×bet слоты официальный сайт
#450 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slotscasino09k online
Также посещают случаи, когда казино начисляет оговоренный приз последствии регистрации нового посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам. <a href=http://filmkachat.ru/>1×slot рабочее зеркало</a> <a href=https://www.bunity.com/shopavto>https://www.bunity.com/shopavto</a> 1×slots бездепозитный бонус за регистрацию <a href=https://devfolio.co/@silo_model>https://devfolio.co/@silo_model</a>
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
1хслотс официальный сайт зеркало <a href=https://maps.google.es/url?q=https://doctorlazuta.by/>https://maps.google.es/url?q=https://doctorlazuta.by/</a> 1× slots регистрация в 1×slots casino Бездепозитный бонус нередко имеет стать легкодоступным незамедлительно после завершения регистрации, что как единственным требованием к нему считается регистрация, а после проверка вашей новой учетной записи.
1×slots регистрация то дальше необходимо пройти
1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, случае не желаете замерзнуть жертвой мошенников либо впустую потратить время;Но а если вы теснее профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы автоматически перейдете в интернет казино; <a href=http://caravan64.ru/bitrix/rk.php?goto=http://tortdv.ru/bitrix/rk.php?goto=http://estheticmarket.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/kBdxf8hoZLp>http://caravan64.ru/bitrix/rk.php?goto=http://tortdv.ru/bitrix/rk.php?goto=http://estheticmarket.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/kBdxf8hoZLp</a> казино 1×slots официальный сайт Не стоит сразу же открещиваться от приветственных презентов в подобных казино. Администрация готова начислить деньги либо фриспины, хотя предварительно сотрудники должны убедиться, что вы не мошенник. Дело что, нет, собственно развелось очень много охотников за бонусами. Они научились врать систему и зарабатывать солидные суммы денег.Классическая разновидность бонуса за творенье аккаунта. Его превосходство заключается в том, собственно заказчик имеет без избирать аппараты и создавать ставки в их. Иногда перечень игровых автоматов ограничен оператором, но все также это лучше, чем единственный дешевый разъем, как если, тогда, с использованием фриспинов.
1×slots casino регистрация 1×slotscasin online
Основное правило получения бездепа ? творимый акк должен быть у юзера первым и единственным. Наличие нескольких аккаунтов взыскательно воспрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депозита нужно соблюдать несложную очередность действий.Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие появляются у новичков. Некоторые казино все предлагать клиентам бездепы за подтверждение номера либо почты либо репост на страничку в соц сетях. Таким образом онлайн казино получает вероятного игрока. Возможно в будущем либо истинном он захочет поиграть на средства деньги. Так работают бездепозитные призы в онлайн казино. Здесь очень подходит выражение, безвозмездные сыр случается лишь в мышеловке. Начинающие игроки все не обдумывать опасность азарта. Однако времени осознания становится больше. Это тема для отдельного обсуждения. 1×slots официальный сайт скачать <a href=https://bestnet.ru/support/forum/index.php?PAGE_NAME=profile_view&UID=143114>https://bestnet.ru/support/forum/index.php?PAGE_NAME=profile_view&UID=143114</a> У каждой игры свои требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система зачтет любую ставку. В рулетке и покере сделать это намного труднее. Именно поэтому например важно пристально читать обстоятельства получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в любой игре, то новенькие просто «спустят приз на ветер».Нельзя осматривать забаву на средства, как вариант заработка. Азартные игры воспрещены для лиц моложе 18 лет. Topcasinobonuses.mobi классифицируется организатором азартных игр. Сайт одевает информационный характер.
1× slots зеркало
Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в социальных сетях, установку мобильного приложения либо официального посетителя для ПК. В большинстве казино действуют программы преданности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий уровень нередко сопрягается выдачей бездепа. <a href=http://galiaf.net/index.php?subaction=userinfo&user=usasanol>http://galiaf.net/index.php?subaction=userinfo&user=usasanol</a> 1хлот регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=http://everestrolep.listbb.ru/viewtopic.php?f=38&t=18515>казино 1×slots официальный сайт</a>
<a href=https://portugal-campings.com/pt/account/>1хслотс мобильная версия зеркало</a>
<a href=https://forum.zhuk.cc/index.php/forum/profile/23994-rabofreeki>1 х слотс зеркало</a>
<a href=https://bbs.sinbadgroup.org/index.php?xjkh-tampa-s-poster-pup-for-new-cancer-treatment.t48661.html/page-6467#post-278124>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Итак, чтобы благотворительные бонусные кредиты превратились в настоящие средства, которыми продоставляется управлять по своему усмотрению, их нужно отыграть. Вейджер по уточнять в правилах онлайн-казино. Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских руб. В критериях акции предписано, что вейджер бездепозитного приза х20. Поэтому, дабы отыграть приз, игроку несомненно нужно устроить ставок на 35*20=700 руб.
#451 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия скачать
Список например именуемых «запрещенных землель» прилагается к правилам бонусной программки игорного портала. Обязательно выясните, распространяются ли на вас подобные наказания. <a href=http://filmkachat.ru/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> Новички не любят незамедлительно же вносить депозит. Это обусловлено неимением навыка и сомненьем. К счастью, дни возможно получить бездепозитный приз за регистрацию в казино. Неважно собственно начислит система – фриспины либо кредиты. В всяком случае вы не рискуете своими сбережениями. Это замечательная вероятность запустить понравившийся видео слот или же испытывать удачу в настольных забавах.Зарегистрируйтесь. Для регистрации чаще всего довольно установить собственный номер телефонного и почтовый адрес, в чего установить полученный код из СМС. Возможно, требуется показать промокод. В правилах акции будет написано, где его надобно вводить. Иногда это надо создавать при регистрации, время — теснее после творения собственного кабинета, на отдельной страничке. <a href=https://www.sideprojectors.com/project/55406/avtovikup-kiyiv>https://www.sideprojectors.com/project/55406/avtovikup-kiyiv</a> К примеру, игроку выдаются безвозмездные средства в заведении в размере пятидесяти либо ста долларов (вейджер на которые сочиняет 100х). То есть, любому новоприбывшему геймеру выскакивает манящая картинка, которая сулит выплату всех зачисленных фирмой средств. Не стоит заострять на казино приз за регистрацию без депо с сильно великий или очень малюсенькой суммой бонусов, поэтому собственно, и кропотливо исследовав все обстоятельства, здесь всего, несомненно некий подкол. 1×slots подтвердит вашу регистрацию если говорить <a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=10103&TITLE_SEO=10103-turetskiy-pasport-kuda-mozhno-bez-vizy&MID=393063&result=new#message393063>http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=10103&TITLE_SEO=10103-turetskiy-pasport-kuda-mozhno-bez-vizy&MID=393063&result=new#message393063</a> Отзывы читателей о бонусных акциях помогут составить впечатление, но не забывайте о субъективности собственных объяснений.При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, которое можно предназначить ирге в казино.
1×slots зеркало регистрацию более популярный вариант это
В интернете большое узнаваемых игорных площадок с привлекательными акционными предложениями. Однако внимательно читать обстоятельства десятков предложений вскоре надоест, да и время отнимет много. Поэтому наша команда подготовила ТОП-3 вебсайтов с наилучшими бездепозитными призами: 1х слот регистрация в 1×slots casino Чаще всего, популярные сервисы, такие как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно неотъемлемое правило. Финансовые средства выводятся только спустя что, эту платежную систему, которой пользовались для пополнения депо. Если же игрок получил бездепозитный покерный бонус, требуется пополнить счет на минимальную необходимую, кот-ая составляет обычно десять долларов.Превышение максимальной ставки при отыгрыше. Система механически не предостерегает о превышении ставки, потому о несоблюдении управлял игрок может узнать теснее последствии подачи запроса на вывод средств. <a href=https://www.google.com.au/url?q=https://doctorlazuta.by/>https://www.google.com.au/url?q=https://doctorlazuta.by/</a> В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, необходимо адресоваться в службу через лайв-чат на веб-сайте казино. 1×slots зеркало на сегодня
1×slots быструю регистрацию а также мгновенное
Зачастую бездепозитные бонусы казино для игры предлагаются разными заведениями азартных игр в качестве рекламных промоакций либо в целях привлечения к себя свежих игроков. Для бездепозитных бонусов в казино 2022 геймеру не пополнять счет до этапа вывода желаемых средств.Некоторые онлайн-казино без депозита предлагают свежим посетителям выбрать бонус при регистрации. Будьте внимательны: выбрав один, вы в безусловном большинстве случаев не можете воспользоваться остальными. <a href=http://www.annunciogratis.net/author/brianneuff>http://www.annunciogratis.net/author/brianneuff</a> Начнём с того, что любое промо за регистрацию предполагает некоторые обстоятельства. Бездепозитные призы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность денежного оборота, необходимая для выполнения критерий. Пример, возымели бесплатные вращения и выиграли с них 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 руб., проигрышных или выигрышных, так. После выполнения, бонусный баланс перейдёт на реальный и будет легкодоступным к выводу.Как правило, при выводе денег, от играющего потребуется только сделать наименьший вклад чтобы, чтобы, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом собственный счет. 1×slot официальный сайт
1×slot зеркало
Перед активацией главно пристально изучить условия промоакции. Чем ниже вейджер, тем больше возможная выгода игрока. Имеют значение также лимиты ставок при отыгрыше и сроки, на которых можно пользоваться предложением. Если бездеп обхватывает узкий список игр, рекомендовано узнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только сомнений случае, случае оператор не установил требовательные лимитирования на наивысшую сумму ставки.Большинство клубов завлекают внимание в за счёт разнородных даров. На одних сайтах можно получить виртуальные кредиты, которые откроют доступ ко всему софту. На иных же, администрация предлагает безвозмездные вращения для запуска лучших интернет слотов. Несмотря на разные промоакции, стоит выделить самые главные. Бездепозитный бонус казино 2022 с выводом за регистрацию дает вероятность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и проверить качество работы саппорта. Довольно часто, начиная игровой процесс, игрок уже не желает останавливаться и проделывает реальный лепта. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть бесплатно вполне как раз таки с призом за регистрацию без необходимости вносить депозит. Главное превосходство спинов – вероятность изучить различные слоты. Также получится насладиться бонусными раундами, испытать удачу в риск-туре и преумножить выигрыш за счёт особых знаков. Однако не только игровой процесс заслуживает внимание, так чем сосредоточиться на реальном выигрыше. 1×slots официальный регистрация <a href=http://mstrans.kz/index.php?subaction=userinfo&user=lushzit63>http://mstrans.kz/index.php?subaction=userinfo&user=lushzit63</a> В разделе с бонусами активировать свой подарок. Найти забавы, для коих предусмотрено одобрение и применять приз по назначению.Помните, собственно в неких играх сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных играх только от 5% до 50% суммы ставки числятся как отыгранные средства, на как в слотах идет в зачет все 100% суммы.
1хслот официальный сайт зеркало
В игровых клубах без лицензии Вы покупаете „кота в мешке“ и в случае спорных обстановок нет возможности куда-то посетовать и доказать свою правоту.При отыгрыше бездепов, учитывайте кратковременные лимитирования. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток. <a href=https://investorcartel.com/community/profile/kimhendrix05194/>https://investorcartel.com/community/profile/kimhendrix05194/</a> Представленные на этой странице превосходнейшие бездеп бонусы в казино за регистрацию в 2022 году имеют подходящие обстоятельства. После кропотливого анализа редакция портала составила рейтинг спецпредложений, в котором посетители Casino.ru могут сортировать список по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д.Бонус за регистрацию в казино без депозита с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша имеет понадобиться сделать ставки на сумму, в количество десятков раз превышающую сумму бонуса или выигрыша. 1×slots официальный зеркало рабочее
<b>Смотреть еще похожие новости:</b>
<a href=http://vn-info.net/user/Josephkam/>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Иногда в поощрения за регистрацию имеют выдаваться билеты для участия в турнирах. Условия их проведения довольно отличаются, поэтому мы советуем ознакомиться с любым предложением отдельно. Возможность сыграть дополнительное состязание (а время и несколько) совершенно безвозмездно, а выигрыш, же, поступает на счёт игрока.
#452 Charlesgunnyhttp://filmkachat.ru
x1 slots 1хслотс регистрация перейти на 1×slots
Существует ли стратегии для отыгрыша бездепозитных бонусов? К сожалению нет, на выигрыши либо проигрыши с призов, казино или игрок воздействовать не, отдача игр случается от разработчиков игр. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> При ирге на бонусные свои запрещается играть в игровые автоматы с современным джекпотом и забавы из радела exist casino. Кроме как, некоторые казино дают бездеп на раз или несколько определенных слотов, и в иных играх Вы не можете на них играть. <a href=https://www.bondhuplus.com/read-blog/137793>https://www.bondhuplus.com/read-blog/137793</a> 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=https://www.3yecao.org/home.php?mod=space&uid=34990>https://www.3yecao.org/home.php?mod=space&uid=34990</a> Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.
1хслотс рабочее зеркало на сегодня
1×slots casino регистрация В истинное время получить бонус за регистрацию в казино очень просто. Почти каждый игорный дом с готовностью предоставит деньги или благотворительные вращения. Многие игроки пользуются этим и не смущяются регистрироваться в любом клубе с прибыльными условиями. Кстати, это отличная возможность придумать выигрышную тактику и сорвать куш.Промокод – определённая комбинация символов, которую необходимо ввести в соответствующее поле при творении учетной записи или активировать в собственном профиле игрока в разделе с бонусами. <a href=https://33pachul.com/bbs/board.php?bo_table=free&wr_id=13916>https://33pachul.com/bbs/board.php?bo_table=free&wr_id=13916</a> К образцу, игроку выдаются безвозмездные свои в заведении в объеме пятидесяти или 100 $ (вейджер на коие составляет 100х). То есть, каждому новоприбывшему геймеру выскакивает манящая иллюстрация, которая сулит выплату всех зачисленных компанией средств. Не стоит внимания на казино приз за регистрацию без депозита с чрезмерно немалый либо довольно маленькой суммой бонусов, поэтому собственно, числе тщательно исследовав все условия, здесь скорее, несомненно какой-то подвох. 1×slots официальный регистрация Если вы облюбовали себе несколько брендов которые для больше всего полюбились, для неизменной игры! Таких гемблеров казино очень предпочитает и оценивает, за частую такие игроки становятся VIP игроками заведения, которым часто поступают выгодные предложения в виде бонусов, так же туда заходит и бездепозитные.
рабочее зеркало 1×slots
Так собственно приготовьтесь предоставить секретную информацию (пол, возраст, государство проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает менее суток, последствии чего удастся беспрепятственно выводить крупные выигрыши.Выше мы предоставили глубокий комплект самых свежих и актуальных бездепозитных призов в интернет казино без пополнения на 2022 год, где вам пользоваться хоть ценным бездепозитным призом. <a href=http://kncmmt.com/bbs/board.php?bo_table=free&wr_id=1082521>http://kncmmt.com/bbs/board.php?bo_table=free&wr_id=1082521</a> Если при регистрации показать промокод, возможно гарантировано получить приз. Где брать ваучер? Посетите тематические блоги либо форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В заключительное время игорные жилища начали рекламироваться в кинокартинах и сериалах. Присмотритесь и скорее заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных рублей. 1×slot зеркало рабочее этих способов предполагает регистрацию
1×slots казино мобильная версия
Чтобы играть бесплатно на реальные средства в казино, не всегда достаточно просто зарегистрироваться. Иногда нужно выполнить дополнительные деяния. Бонус с зачислением средств на счет выделяет больше свободы действий. Пользователь сам избирает, каким образом воспользоваться подаренными средствами. Здесь кроме имеют работать лимитирования на список дешевых игр, хотя обыкновенно эти рамки не например строги, как в рекламную с бесплатными вращениями. 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=http://feki-php.8u.cz/profile.php?lookup=11681>http://feki-php.8u.cz/profile.php?lookup=11681</a> Возьми свой подарок. Чаще всего приз активизируется незамедлительно последствии регистрации. Но случаются истории, когда надо(надобно) зайти в индивидуальный кабинет или написать в справочную службу.
1 x slots
Вывод выигрыша с бездепозитных призов казино – великодушный презент от азартных клубов. Но дабы вывести собственный доход, необходимо выполнить ряд критерий:Особую изюминку видео слотам придают уникальные символы. С их выходом активизируются разные бонусы. Вы можете запустить вспомогательный степень и прирастить необходимую выигрыша. Есть знаки, которые сменяют ненужные составляющие и сами создают выигрышные комбо. Не стоит забывать и про бонус-тур. После каждого удачного спина есть шанс увеличить сумму выигрыша в 2 или хорошо раза. <a href=http://fabnews.ru/blog/7266.html>http://fabnews.ru/blog/7266.html</a> Риск-игра по одинаковым шансам – Также казино имеет запрещать выполнять условия по отыгрышу счет раунда на удвоение, который предлагается в слотах, видео-покере и неких других забавах.На нашем сайте Вы отыщите перечень актуальных свежих бездепозитных бонусов в казино 2022 года. Также, есть много неповторимых предложений, коие доступны лишь посетителям нашего сайта после регистрации по нашей ссылке либо активации особого промокода. 1 x slots casino Нет. Для получения бездепозитного бонуса в казино нужна неотъемлемая регистрация на веб-сайте. Играть в слоты бесплатно и без регистрации можно лишь в демо режиме.Фриспины начисляются по конкретной ставке. После их активации игроку необходимо запустить разъем и убедиться, собственно в нем отображаются благотворительные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода в отыгрыша определяется оператором и редко превышает 5 000 рублей.
<b>Смотреть еще похожие новости:</b>
<a href=http://uacode.com/>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Разные казино имеют собственные верховодила по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высочайшие притязания. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до ста один в игровых автоматах. Например, если игрок получил бесплатно десять $, то нужно будет отыграть их, поставив 1 тыщу спинов по 1 доллару любой. Стоит обозначить(означить), собственно не все казино дают вероятность выступать на призы и не во всех увеселительных заведениях схожие верховодила для отыгрывания. Некоторые казино воспрещают играть на бонусы в блекджек или ограничивают ставки до 5 процентов, собственно значительно увеличивает в 10-ки один число необходимых игр.
#453 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало рабочее xbet бывшие казино <a href=https://slon-ru.com/>казино вулкан</a> слот casino 1×bet зеркало рабочее <a href=https://strelochnik.com/>pin up casino top top</a> casino игровой автомат реального казино леон букмекерская контора официальные зеркала казино up casino зеркало Чулпан Хаматова Фастова Елена Владимировна порно
DiskiPlus vodka casino DiskiPlus 1×bet casino <a href=https://diskiplus.ru/>DiskiPlus макао казино</a> DiskiPlus pin up casino официальный DiskiPlus casino riobet <a href=https://www.diskiplus.ru>DiskiPlus 1×bet рабочее на сегодня</a> DiskiPlus сайт pin up casino DiskiPlus casino daddy DiskiPlus pin up casino пин DiskiPlus какие казино DiskiPlus про казино DiskiPlus букмекерские конторы pin DiskiPlus kent casino регистрация
#454 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало xbet xyz 1×bet зеркало слоты 1×bet xyz <a href=https://rucriminal.info/>порно с Баталина Ольга Юрьевна</a> букмекерская контора фонбет казино онлайн <a href=https://krtka.info/>casino рабочее</a> порно с Афонина Марина Игоревна up casino зеркало официальная казино casino 7k рабочее порно с Юлия Ефимова, пловчиха порно с Георгий Джикия (футбол) пин up casino
DiskiPlus ешь казино DiskiPlus 1×bet официальный сайт 1×bet xyz <a href=https://www.diskiplus.ru>DiskiPlus букмекерские конторы бет</a> DiskiPlus 1×bet приложение DiskiPlus рокс казино <a href=https://www.diskiplus.ru/>DiskiPlus Мухтиярова Елена Вячеславовна порно</a> DiskiPlus casino pin официальный DiskiPlus 1×bet зеркало слоты DiskiPlus casino промокод DiskiPlus kent casino DiskiPlus сайт казино зеркало DiskiPlus 1×bet бесплатно DiskiPlus kent casino регистрация
#455 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию более популярный вариант это
Фриспины предназначены для применения в видео слотах. Внимательно ознакомьтесь с условиями – частенько их выдают на некоторые автоматы. В зависимости от клуба, у вас выйдет устроить определённое количество ставок. Кстати, продвинутые игорные дома разрешают запускать любых «одноруких злодеев». <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> Такой безвозмездный эквивалент средств зачисляется на профиль пользователя в осуществления притязаний и предназначаются они только для игрового процесса. Вывод таких вознаграждений вероятен лишь после воплощения вейджеровых условий. <a href=https://www.papercall.io/speakers/146409/speaker_talks/292500-professional-real-estate-rendering-services-visual-marketing>https://www.papercall.io/speakers/146409/speaker_talks/292500-professional-real-estate-rendering-services-visual-marketing</a> Шаг 5. Использование и отыгрыш. Бездеп должен быть применен в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера.На благотворительные призы онлайн-казино почти практически распространяется ограничения по стране проживания клиентов. Даже если вас разрешается открывать счет и играть на деньги в заведении, это еще не означают, собственно вам доступны no deposit bonuses. рабочее зеркало 1хслотс <a href=https://uconnect.ae/read-blog/127771>https://uconnect.ae/read-blog/127771</a> Ещё одно распространённое акционное предложение – симпатичный презент с сомнительными притязаниями. К образцу, клуб сулит $100 в бездепа, хотя с вейджером х80 либо х100. Отыграть подобный вейджер практически нереально и потому никакого концентрироваться на больше заманчивых промоакциях.
1хслотс мобильная версия зеркало
Не желайте сыграть в азартные забавы, не рискуя средствами деньгами, хотя получая в все выплаты? Подобную вероятность деют многие лучшие порталы с азартными веселиями. В их числе количество честных и надежных интернет-казино на русском языке. Они завлекают новых пользователей различными поощрительными мероприятиями, включая бездепозитные, либо благотворительные призы.Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. <a href=https://forum.banknotes.cz/viewtopic.php?t=84392>1×slots casino зеркало рабочее</a> 1×slots зеркало выигрыши обязательно пройдите регистрацию если Иногда для получения бонусов нужно спутаться с адептами службы. Удобнее всего с ними разговаривать в онлайн-сате, но время довольно запроса по электрической почте. <a href=http://www.princeton.com.cn/home.php?mod=space&uid=77070&do=profile>http://www.princeton.com.cn/home.php?mod=space&uid=77070&do=profile</a> Чем ниже велечину вейджера, что, этим проще отыграть и исключить приз. Если Вы расчитываете заработать на бездепе, но просто ознакомиться с новым игровым клубом, то стоит избегать бонусов с высочайшим вейджером их почти не реально отыграть. С ними Вы можете только протестировать игры заведения.Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, a только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. 1х слотс зеркало регистрация в 1×slots casino
1хслотс рабочее зеркало
Нет. Казино раздают благотворительные призы за регистрацию, чтобы, чтобы, чтобы клиент возможность ознакомиться с игровым заведением. А дабы вывести его, нужно выполнить обстоятельства отыгрыша. Бездепозитный бонус – это экономическое вознаграждение, коие выдается участнику игры в казино, для его привлечения и появления заинтересованности. Любой гость, который соответствует условиям выдачи подобного бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое одобрение является более эффективным методом, дающим вероятность стартовать при, не вкладывая собственных вещественных средств.Активация по промокоду используется в различных видах бездепов. Если речь идет о приветственном призе, то комплект знаков можно узнать на главной страничке, в регистрационной форме или послании, которое отчаливает пользователю для подтверждения e-mail. Акции могут проводиться общо с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активируется разовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном кабинете или начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем важный код для активации в описании любого промо. <a href=http://www.aytastarim.net/index.php?subaction=userinfo&user=ywosahu>http://www.aytastarim.net/index.php?subaction=userinfo&user=ywosahu</a> Способы получения бездепа различаются от вида приза, который понравился игроку. Но вам в любом случае надо(надобно) быть зарегистрированным в законном онлайн-казино и доказать свою лицо. В общем облике пошаговая инструкция для получения бездепозитного приза смотрится так:Если вы облюбовали себе количество брендов которые вам больше всего приглянулись, для постоянной игры! Таких гемблеров казино довольно предпочитает и ценит, за частую такие игроки становятся VIP игроками заведения, которым нередко поступают выгодные предложения повторяющий бонусов, например же туда заходит и бездепозитные. казино 1× slots официальный сайт Выбрать казино с бездепозитным бонусом. У нас на сайте представлен перечень превосходнейших интернет казино, коие предлагают своим игрокам великодушные призы за регистрацию.
сайт 1× slots casino
Максимальный объем ставки, кот-ый невозможно превосходить пока бонус не будет полностью отыгран. В случае нарушения этого верховодила, бонус и выигрыш с него станут аннулированы. <a href=http://okeyrp.listbb.ru/viewtopic.php?f=24&t=2815>1×slots casino регистрация 1×slotscasino09k online</a> Новые клиенты онлайн-казино без первого депозита могут выяснить собственную удачливость. К что, этому же есть возможность преобразовать бездепы в настоящие деньги за регистрацию в казино, впрочем чтобы бонус нужно отыграть сообразно условиям промоакции.Бонус без депозита за регистрацию в казино (бездепозитный бонус) – это валютный презент от клуба, который начисляется на акк игрока после регистрации в казино. Кроме сотворения учетной записи, для получения бездепа, очень нередко требуется ещё и доказать контактные данные игрока и/или активировать специальный промо-код. 1×slots casino регистрация 1×slots review live <a href=https://humanlove.stream/wiki/User:Shantell1072>https://humanlove.stream/wiki/User:Shantell1072</a>
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. Выбрать казино с бездепозитным бонусом. У нас на веб-сайте представлен перечень лучших онлайн казино, коие предлагают своим игрокам щедрые бонусы за регистрацию.Составленный специалистами Casino.ru перечень онлайн-казино с бездепозитным призом позволяет игрокам сравнить спецпредложения разных операторов. <a href=http://brush114.co.kr/bbs/board.php?bo_table=free&wr_id=1826001>http://brush114.co.kr/bbs/board.php?bo_table=free&wr_id=1826001</a> 1× slots casino официальный сайт Чтобы бездеп не был начислен на Ваш акк, Вам надо активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт механически, а Вы не расчитываете его использовать, обратитесь в службу с просьбой отменить бездепозитный приз.Фриспины начисляются по определенной ставке. После их активации игроку необходимо запустить слот и увериться, собственно в нем показываются благотворительные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода после отыгрыша ориентируется оператором и редко превышает 5 000 рублей.
<b>Смотреть еще похожие новости:</b>
<a href=http://vn-info.net/user/Josephkam/>1×slots официальный сайт скачать</a>
<a href=https://forum.ltp-team.com/topic/207132–1hslot-1hslots-registraciya-pereyti-na-1×slots/>1хслот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бонус за регистрацию в казино выдается лишь раз один на 1-го игрока. Но случаются вспомогательные акции, в которых бездепы раздаются для постоянных посетителей и эти подарки Вы можете получить более одного раза.
#456 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало на сегодня
Бездепозитный бонус по промо-коду несомненно доступен для игры, только том, случае когда Вы активируете специальный бонусный код в разделе с бонусами или укажите промокод при регистрации на сайте. В некоторых случаях, кроме активации кода, понадобиться доказать контактные данные игрока и наполнить анкету клиента.Иногда у гостей сайта все появиться проблемы при активации приобретенного промо-кода. В этих случаях, нужно обратиться за поддержкой в службу «Support». Для получения ответа, непременно указывается определенная первопричина воззвания и подтверждается информация дополнительными экрана. Если сформировалась неоднозначная ситуация, постоянно возможно адресоваться к главному регулятору или контролирующему органу, выдавшему этому заведению лицензионный документ. <a href=http://filmkachat.ru/>1×slots зеркало рабочее</a> Бонус в казино без депозита имеет различные вариации: может быть приветственный бонус, промоакции в честь каких-либо праздничных или главных дат, приз за вербование новых игроков, лояльность и получение VIP-статуса. <a href=https://www.shippingexplorer.net/en/user/architectural-rendering/146752>https://www.shippingexplorer.net/en/user/architectural-rendering/146752</a> 1×slots зеркало <a href=https://mir-pozitiv.ru/forums/users/docxru2808–2/>https://mir-pozitiv.ru/forums/users/docxru2808–2/</a>
1× slots регистрация в 1×slots casino
1хслотс официальный сайт зеркало <a href=https://www.speedrun.com/zos/forums/9mgw7>https://www.speedrun.com/zos/forums/9mgw7</a> Фриспины начисляются по определенной ставке. После их активации игроку необходимо запустить разъем и убедиться, собственно в нем показываются благотворительные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода в отыгрыша определяется оператором и редко выше 5 000 руб.Срок отыгрыша — это период, который наступает в момент активации приза и завершается с его закрытием. Пользователю необходимо уложиться в этот временной зазор, по призовые средства аннулируются. Казино устанавливают список игр, ставки в которых засчитываются при расчете отыгранных средств. Если тайтл не входит в этот список, то возможность быть недосегаем для загрузки период деянья бонусного предложения. x1 slots регистрация в 1×slots casino Нельзя разглядывать забаву на средства, как вариант заработка. Азартные забавы воспрещены для лиц младше 18 лет. Topcasinobonuses.mobi не зачинщиком азартных игр. Сайт носит информационный нрав.
1×slot зеркало
Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, чтобы появилась возможность исключить выигрыш.Условия, на которых предоставляется бездеп, регулируются казино. Каждая акция содержит подробные правила, гиперссылка на которые обыкновенно содержится в промообъявлении. В них указываются лимиты, вейджер, перечень доступных игр. Если оператор укрывает данные о предложении, то воспользоваться им не стоит. <a href=https://cq.x7cq.vip/home.php?mod=space&uid=9258863>https://cq.x7cq.vip/home.php?mod=space&uid=9258863</a> Ограничения по забавам. Администрация запрещает игрокам кое-какие игровые автоматы с бездепозитным бонусом, деньгами либо бесплатными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда деление производится по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, но запрещен в настольных забавах и в разделе Live Casino.Баланс игрока пополняется на подобающую необходимую. К ней используется вейджер, указанный в правилах промоакции. Вывести выигрыш можно несомненно после как, как пользователь устроит требуемый размер ставок из собственных средств. В редких случаях бездеп работает в формате Free Play. На счет пользователя зачисляется большая сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по завершении сего периода сумма на счету будет превышать первоначальную, то разность возможно будет вывести или использовать для последующих ставок. 1×slots подтвердит вашу регистрацию если говорить
1×slots casino регистрация 1×slotscasino09k online
При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток.Похожим образом трудится 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя либо из-за с получения им VIP-статуса. Подарок предоставляется последствии обращения в поддержку и ревизии. Необходимость отыгрыша. Вейджер в этом случае выше, чем для бонусов за депозит. И пока средства не отыграны, вывести их невозможно.Активация денежного гонорары происходит механически последствии сотворения профиля или использования промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на страницы казино в соц сетях или на рассылку рекламных известий, скачать и установить вспомогательный софт и т.д. Наш список включает в себя превосходнейшие бездепозитные бонусы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит ревизию по важным параметрам:Бездепозитные бонусы прекрасный вариант даровой забавы в игровые автоматы. Многие пользователи сети не понимают, собственно в казино возможно начать выступать безусловно бесплатно, а позже вывести выигрыш на банковскую карту или электрический кошелек, иные не доверяют интернет казино, а третьи удачно играют и выигрывают – и тотчас довольно немалые суммы. 1×slots рабочее зеркало <a href=https://biomolecula.ru/authors/28572>https://biomolecula.ru/authors/28572</a>
1×slot зеркало
Теоретически, к безвозмездным бонусам возможно отнести например именуемые фриспины. Напомним, речь идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, потому собственно они деют только возможность делать ставки. Бездеп с фриспинами возможность охватывать всю коллекцию игр на сайте либо разработки одного провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш имеет быть выведен после того, как пользователь отыграет данную сумму. Возможность расценить полный перечень слотов — основное совершенство данной разновидности. Игроку становятся доступны те опции, коие отсутствуют в демонстрационном режиме, а вероятность выиграть настоящие средства добавляет ярких азартных чувств. <a href=https://blog.naver.com/lexxeagle/223391406427>https://blog.naver.com/lexxeagle/223391406427</a> При регистрации сомнений или ином интернет игральном заведении — вас дается раз шанс испытывать собственную фортуну не внося средства монеты. Замечу что эту поощрительную предложение деют не все онлайн игровые площадки, а лишь щедрая середина(средина) из их. Которые мы подготовили для Вас в нашем перечне.Такие поощрения позволяют бесплатно протестировать новое казино, разобраться с игровым процессом интернет слотов, заработать и исключить небольшую сумму денег. 1×slots официальный зеркало К образцу, игроку выдаются бесплатные свои в заведении в объеме пятидесяти либо 100 $ (вейджер на которые составляет 100х). То есть, каждому новоприбывшему игроку выскакивает притягивающая картинка, кот-ая сулит выплату всех зачисленных фирмой средств. Не стоит заострять на казино бонус за регистрацию без депозита с сильно великий или довольно маленькой суммой призов, поэтому что, том тщательно исследовав все обстоятельства, тут всего, будет некий подвох.Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном сайте и выполните вход в индивидуальный кабинет, дабы арестовать безвозмездные вращения с вейджером х40;
<b>Смотреть еще похожие новости:</b>
<a href=https://swordmaster.org/user/JamesVok/>1×slots официальный сайт, скачать</a>
<a href=http://mandala-app.com/forums/viewtopic.php?f=5&t=250193>1×slots бонус за регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
У любого игорного заведения средства правила и обстоятельства. Но, чтобы получить призы, нужно выполнить стереотипные деяния:
#457 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация
Выбирайте наихорошие бесплатные призы счет обзоров на Casinoz – и пусть для сопутствует счастье при отыгрыше бонусных кредитов!Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте условия – они часто выдаются для неких машин. В зависимости от клуба продоставляется делать определенное количество ставок. Кстати, современные игорные жилища выделяют возможность заводить «одноруких злодеев». <a href=http://filmkachat.ru/>1×slots регистрацию более популярный вариант это</a> Чаще всего, модные сервисы, такие как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно обязательное верховодило. Финансовые средства выводятся только спустя что, эту платежную систему, которой успех для пополнения депозита. Если же игрок получил бездепозитный покерный бонус, требуется пополнить счет на наименьшую необходимую, кот-ая составляет обыкновенно 10 долларов. <a href=https://www.esurveyspro.com/Survey.aspx?id=7d40634a-251d-4a35-a116–1d7e11ae06f1>https://www.esurveyspro.com/Survey.aspx?id=7d40634a-251d-4a35-a116–1d7e11ae06f1</a> 1×slots промокод при регистрации <a href=http://autolife.5nx.ru/viewtopic.php?f=30&t=9560&p=24644#p24644>http://autolife.5nx.ru/viewtopic.php?f=30&t=9560&p=24644#p24644</a> Важно, убедитесь в, собственно раньше не регились в выбранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи.Если вы опытный игрок, вы обязаны знать, что приз без депозита – редкая находка. Тем ниже, мы раз изучаем интернет, дабы отыскать вам лучшие бездепозитные предложения.
1×slot казино зеркало
Не советуем сломя голову браться за всевозможные предложения получения средств без вложений. Вполне вероятно, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем смотрится на первый взгляд. Альтернативой считается казино приз за депозит. Мы предлагаем вас пару советов, благодаря коим у каждого игрока будет вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств: <a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=13457>1×slots быструю регистрацию а также мгновенное</a> рабочее зеркало 1×slots <a href=http://to-kaz.mediatex-n.kz/index.php?subaction=userinfo&user=whimsicalmadhou>http://to-kaz.mediatex-n.kz/index.php?subaction=userinfo&user=whimsicalmadhou</a> В реальное время получить приз за регистрацию в казино довольно просто. Почти любой игорный жилище с готовностью предоставит деньги либо безвозмездные вращения. Многие игроки используют данным и не смущяются регистрироваться в любом клубе с выгодными критериями. Кстати, это замечательная возможность придумать выигрышную тактику и сорвать куш. 1хслотс казино зеркало Призовые начисления без депо могут предоставляться для роли в турнирах онлайн казино. Потратить перечисленные средства возможно самая в рамках этой акции. Условия их проведения включают в себя лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться этим предложением, другого, как выучить его правила.Бездепозитные бонусы в казино без пополнения 2022 — это определенная сумма денег или vacant spins вращения, которые предоставляются первым гостям за регистрацию на веб-сайте казино в виде бездепозитного бонуса, и выделяет вам возможность с казино без пополнения опробовать услуги (игр), с последующей привилегией вывода средств при выполнении всех установленных управлял.
1 xslots рабочее зеркало
Наиболее популярные вознаграждения среди гэмблеров – бездепозитные бонусы казино. Это не изумительно, как возможно получить благотворительные вращения или виртуальные кредиты, и при этом не придётся пополнять счёт, рисковать личными деньгами. Удастся насладиться разнородными развлечениями причем выиграть солидную необходимую, избегая серьёзного риска. Подтвердите регистрацию, дабы активировать Бездепозитный бонус с выводом, потребуется заполнить собственный профиль. Заполните пустующие поля настоящими данными о себе. <a href=https://xn–6-gtb4aicb3c6b.xn–p1ai/user/DoctorLazutaEi/>https://xn–6-gtb4aicb3c6b.xn–p1ai/user/DoctorLazutaEi/</a> 1×slots зеркало регистрация то дальше необходимо пройти
1×slots зеркало проходить регистрацию это отличный вариант
Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавления либо официального посетителя для ПК. В большинстве казино действуют программы лояльности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на грядущий степень нередко сопровождается выдачей бездепа. Многие игроки, оценив возможностей казино, остаются играть в нем и далее ? на это и направлено каждое рекламную. Постоянные клиенты заносят депозиты и делают ставки, обеспечивая длительную прибыль оператора. То есть, казино выдают бездепы свежим юзерам для формирования приклнной аудитории. 1×slots бонус за регистрацию <a href=http://wtsoc.h1n.ru/users/ojunynucu>http://wtsoc.h1n.ru/users/ojunynucu</a> С другой стороны, намного проще отобрать бездепозитные фриспины за регистрацию в казино и прямо данный начать вращать барабаны в превосходнейших слотах. Главная необыкновенность спинов в том, что они предусмотрены для топовых автоматов. Удастся не пройти вспомогательные раунды, но и прирастить необходимую выигрыша, заработать респины и внутриигровые подарки.
1×slots зеркало регистрацию более популярный вариант это
Активация по промокоду употребляется в различных видах бездепов. Если речь идет о приветственном призе, то набор знаков можно узнать на крупнейшей страничке, в регистрационной форме либо письме, коие отчаливает пользователю для подтверждения e-mail. Акции имеют проводиться общо с партнерскими площадками. Обычно код располагается на постороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активируется одноразовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном кабинете или начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем важный код для активации в описании любого промо. B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax <a href=http://wennw.com/member.asp?action=view&memName=festivehorse57>http://wennw.com/member.asp?action=view&memName=festivehorse57</a> Онлайн-казино с бездепозитными бонусами ставят клиентам условия для пользования бездепами, потому перед ролью в промоакции никакого тщательно ознакомиться со всеми правилами и аспектами акции. Условия все дотрагиваться получения бонуса, его применения и следующего вывода денежных средств в случае выигрыша. 1×slots актуальное зеркало В большинстве заведений сделать это можно по e-mal, по номеру телефона, через социальную сеть или гугл-аккаунт.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=45783>1×slots casino регистрация на сайте</a>
<a href=https://foro.muelendhir.com/showthread.php?tid=114365>1×slots официальный сайт скачать на айфон</a>
<a href=http://www.csuchen.de/bbs/viewthread.php?tid=854997&pid=1268697126&page=3&extra=#pid1268697126>1×slots зеркало рег</a>
<a href=http://gradina.com/threads/1×slots-oficialnyj-sajt-skachat.61174/>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Ограничения по играм. Администрация воспрещает игрокам кое-какие игровые автоматы с бездепозитным призом, средствами или бесплатными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда разделение выполняется по виду игр. Например, отыгрыш возможен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino.
#458 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало сайта
Помните, что любые нарушения верховодил сведут на нет ваши старания, и вы скорее останетесь без начисленного вас бесплатного приза. Всегда изучайте правила начисления и условия вейджера. По хоть вопросам, на коие вы возможности помощи найти ответы, обращайтесь за объясненьям и саппорт. <a href=http://filmkachat.ru/>1×slot рабочее зеркало</a> На нашем веб-сайте Вы найдете перечень актуальных свежих бездепозитных бонусов в казино 2022 года. Также, есть большое неповторимых услуг, коие доступны лишь посетителям нашего вебсайта в регистрации по нашей ссылке либо активации особого промокода. <a href=https://www.pearltrees.com/kalinka0588/item691382057>https://www.pearltrees.com/kalinka0588/item691382057</a> Максимальный объем ставки, который нельзя превышать же бонус не будет всецело отыгран. В случае нарушения сего верховодила, бонус и выигрыш с него станут аннулированы. 1×slots casino регистрация 1×slots review live <a href=https://timeoftheworld.date/wiki/User:Bridgette96A>https://timeoftheworld.date/wiki/User:Bridgette96A</a> Однако далековато не все ресурсы предлагают своим клиентам бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено поощрение на первый депозит в объеме 100–200%. Это замечательная вероятность преумножить банкролл, увеличить время, проведённое за игрой и шансы сорвать большой куш.Перед активацией главно внимательно выучить условия акции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют значение также лимиты ставок при отыгрыше и сроки, протяжении которых можно воспользоваться предложением. Если бездеп обхватывает узкий список игр, рекомендуется узнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с низкими множителями выплат подходят только никаких случае, в оператор не установил взыскательные лимитирования на максимальную сумму ставки.
1хслотс зеркало на сегодня
При регистрации идет указывать только достоверную информацию. Когда учетная запись несомненно активна, появится доступ в Личный офис. В нем возможно выбрать еденицу, установить промокод и разузнать подробные управляла получения и отыгрыша бездепа. Краткая информация об акции часто находится непосредственно на регистрационной форме. <a href=https://mcmon.ru/showthread.php?tid=179657>скачать 1×slots официальный сайт</a> 1хслот 1хслотс регистрация перейти на 1×slots Бездепозитные призы за регистрацию в игровых автоматах для собственников онлайн-казино считаются долею маркетинговой кампании, направленной на повышение аудитории вебсайта. Так они продвигают средства бренды и привлекают новых клиентов. <a href=https://www.metal-tracker.com/forum/member.php?action=profile&uid=927433879>https://www.metal-tracker.com/forum/member.php?action=profile&uid=927433879</a> Как лишь вы отыграли вейджер и свои с бонусного баланса перешли вас на реальный счет, Вы отважно можете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (сделать минимальный депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депозитом). 1×slots официальный сайт скачать В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это исключительно милая доля забавы. Важно, зачастую бездепозитные бонусы в казино выдаются с ограничениями по максимальной выплате. В среднем можно рассчитывать на прибыль в некоторое тысяч руб. Как вывести выигрыш с бонуса без депозита. Придётся подтвердить аккаунт документально, в неких заведениях. Процедура верификации обязательна и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате или прочтите в правилах.
рабочее зеркало 1хслотс
Для вывода средств бонус нужно несомненно отыграть законам, установленным казино. Внимательно ознакомьтесь с правилами акции и вариациями отыгрыша бездепозитного бонуса до его получения, чтобы избежать конфликтных ситуаций.Отзывы читателей о бонусных промоакциях помогут составить эмоцию, хотя не забывайте о субъективности личных комментариев. <a href=http://daz3d-poser.net/index.php?subaction=userinfo&user=broadindividual>http://daz3d-poser.net/index.php?subaction=userinfo&user=broadindividual</a> 1×slots официальный сайт скачать В игровых клубах без лицензии Вы покупаете „кота в мешке“ и в случае спорных обстановок нет возможности куда-то посетовать и доказать свою правоту.Во всех законных онлайн-казино Беларуси необходимо свидетельство паспортных данных для забавы — это заявка правительства государства.
1хслотс рабочее зеркало на сегодня
В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, нужно адресоваться в службу поддержки через лайв-чат на веб-сайте казино.Онлайн-казино с бездепозитными бонусами ставят клиентам обстоятельства для использования бездепами, поэтому перед участием в промоакции превосходнее подробно ознакомиться со всеми правилами и аспектами акции. Условия могут касаться получения приза, его применения и следующего вывода денежных средств если, тогда, выигрыша. Эффективность бездепов в маркетингового прибора оценили почти операторы. Малоизвестные площадки используют эти промоакции, чтобы скоро набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны неизменных гостей. Не все веб-сайты, дающие подарки без депо, рекомендованы к игре. За привлекательным промоописанием все прятаться неосуществимые условия отыгрыша и другие подводные камни. 1хслот зеркало <a href=https://aopvp.com/home.php?mod=space&uid=17333>https://aopvp.com/home.php?mod=space&uid=17333</a>
1× slots регистрация в 1×slots casino
Первый образующийся вопрос, это, зачем выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают свежих игроков. Последним легче начать забаву на деньги с дара за регистрацию. Им надо пополнять баланс и расходовать личные свои. Новички получают бесплатные спины либо свои на счёт. С их помощью знакомятся с игровым процессом, крутят слоты и проделывают ставки в рулетке. Бездепозитные бонусы в казино без пополнения 2022 — это конкретная сумма денег либо gift spins вращения, коие предоставляются первым гостям за регистрацию на сайте казино вид бездепозитного бонуса, и дает для возможность за счет казино без пополнения опробовать предложения (игр), с последующей прерогативой вывода средств при выполнении всех установленных правил.При регистрации в либо ином интернет игральном заведении — для дается один шанс испытывать свою удачу не внося свои монеты. Замечу собственно эту поощрительную услугу деют не все онлайн игровые площадки, а только великодушная середина(средина) из их. Которые мы подготовили для Вас в нашем списке. <a href=http://myqiantang.com/space-uid-285622.html&do=profile>http://myqiantang.com/space-uid-285622.html&do=profile</a> 1×slots зеркало выигрыши обязательно пройдите регистрацию если Основное управляло получения бездепа ? творимый акк должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов взыскательно воспрещено. Проверка проводится по имени, адресу электронной почты, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депо нужно соблюдать простую последовательность поступков.
<b>Смотреть еще похожие новости:</b>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=405242>1× slots зеркало</a>
<a href=http://oszeresek.hu/forum/viewtopic.php?f=1&t=6623>1×slots регистрация на официальном сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В бонусную программку многих операторов входят регулярные бездепы. Это пожизненные акции, поощряющие интенсивных постоянных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают неизменные бонусы без депо в обмен на скопленные баллы лояльности.
#459 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
up букмекерская контора реального казино <a href=https://7club7.com/>почему казино</a> казино проиграл пин ап casino pin up top <a href=https://sovsekretno.net/>скачать 1×bet на андроид</a> casino ru porno Светлана Ходченкова 7k casino зеркало рабочее porno Дарья Мороз порно с Сергей Бобровский (хоккей) порно с Евгения Медведева 1×bet зеркало на сегодня
DiskiPlus букмекерская контора бесплатно скачать DiskiPlus online casino <a href=https://diskiplus.ru/>DiskiPlus мобильные букмекерские конторы</a> DiskiPlus retro casino DiskiPlus casino играть <a href=https://www.diskiplus.ru/>DiskiPlus vavada casino</a> DiskiPlus казино смотреть онлайн DiskiPlus порно с Алексей Миранчук (футбол) DiskiPlus Попова Анна Юрьевна порно DiskiPlus порно с Баталина Ольга Юрьевна DiskiPlus макао казино DiskiPlus гта казино DiskiPlus казино ставка
#460 Charlesgunnyhttp://filmkachat.ru
1×slots акции
Так что можете храбро региться без всяких размышлений. Фортуна сейчас точно на вашей стороне. Не страшитесь, так последствие какого либо ущерба Вам абсолютно не угрожает. С такими призами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе.Особую изюминку видео слотам присваивают уникальные символы. С их свет активируются различные бонусы. Вы сможете запустить вспомогательный степень и увеличить необходимую выигрыша. Есть знаки, которые сменяют ненужные элементы и сами создают выигрышные комбо. Не стоит забывать и на бонус-тур. После любого удачного спина есть шанс увеличить сумму выигрыша в два либо четыре раза. <a href=http://filmkachat.ru/>1×slots коды</a> Теоретически, к безвозмездным призам можно отнести так называемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, поэтому собственно они деют только возможность создавать ставки.Однако в условиях скрываются «подводные камни», которые не позволят исключить крупную сумму или же вы не успеете отыграть вейджер. Поэтому профессионалы рекомендуют отобрать безвозмездные вращения за регистрацию в казино без депо, чтобы поднабраться навыка и получить реальный шанс на победу. <a href=https://techbehemoths.com/company/cgifurniture>https://techbehemoths.com/company/cgifurniture</a> Фриспины – безвозмездные вращения с фиксированной ставкой, коие возможно применять в определенных игровых автоматах. 1×slots официальный зеркало <a href=https://tourdeskhawaii.com/golf/bbs/board.php?bo_table=free&wr_id=2797318>https://tourdeskhawaii.com/golf/bbs/board.php?bo_table=free&wr_id=2797318</a>
1×slots мобильная версия войти казино
Так собственно сможете неустрашимо регистрироваться без всяких раздумий. Фортуна сегодня наверняка на вашей стороне. Не бойтесь, ведь следствие какого либо убытка Вам абсолютно не грозит. С этими призами как без пополнения, Вы остаетесь только в плюсе, но не как не в минусе. <a href=http://uacode.com/>1×slot казино зеркало</a> скачать 1×slots официальный сайт Некоторые веб-сайты, прежде чем обмануть регистрацию игроков, предлагают ответить на количество базовых вопросов. Цель проведения похожей викторины – выявить случайных людей, коие не имеют представления о покере, и не разрешить получения ими бонусов. Если гость теснее играл в казино, то ответить на полтора 10 простых вопросов несомненно несложно. Очень нередко, ответы можно найти на официальных веб-сайтах данных учреждений.Как только вы отыграли вейджер и средства с бонусного баланса перебежали для на настоящий счет, Вы неустрашимо сможете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (устроить наименьший депо к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депо). <a href=https://forum.helplamer.ru/viewtopic.php?pid=4546>https://forum.helplamer.ru/viewtopic.php?pid=4546</a> Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных требований, считая неотъемлемой верификации. Если на сайте предусмотрена неотъемлемая процедура подтверждения личности, то исключить выигрыш удастся только после ревизии данных. Приготовьтесь наполнить анкету и отправить в техподдержку документ, подтверждающий лицо. 1×slots регистрация на сайте 1×slots ru com При маленький сумме бонуса рекомендовано выступать по низким ставкам, а применять максимальные чем только что случае, в вейджер слишком немалый, а время на отыгрыш сильно ограничено.
1х слот регистрация в 1×slots casino
Но есть азартные заведения, готовые просто так вручить деньги на забаву. Для этого довольно создать профиль. Чтобы исключить выигрыш, сначала нужно выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа.Многие новенькие сомневаются, собственно поощрительный приз надо несомненно отдавать, и в они выиграли у казино. Это абсолютно неопасно и надежно. Выводя выигранные средства, игрок просто останавливает свое роль деле и утрачивает уникальную возможность – бесплатно наращивать личное вещественное положение. Если при регистрации показать промокод, можно гарантировано получить приз. Где арестовать ваучер? Посетите тематические блоги либо форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В заключительное время игорные жилища начали рекламироваться в фильмах и сериалах. Присмотритесь и наверняка заметите промокод, который принесёт 500 либо 1 000 бонусных рублей.Не советуем опрометью голову хвататься за всевозможные предложения получения средств без вложений. Вполне возможно, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на первый взгляд. Альтернативой считается казино бонус за депо. Мы предлагаем для пару советов, благодаря коим у любого игрока будет возможность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом средств: <a href=https://timeoftheworld.date/wiki/User:SenaidaBelair>https://timeoftheworld.date/wiki/User:SenaidaBelair</a> 1×slots зеркало сайта Получить Бездепозитный бонус в онлайн казино дело 2-ух кликов. Другой момент, отыграть рекламную и соблюсти правила и обстоятельства отыгрыша. Под правилами подразумевается столько вагер, но и ограничения по наибольшей ставке. Мы осознаем, что в кинотеатр все ставят на зеро и выигрывают. Призываем не делать сходственного. Перед активацией приза прочитайте правила. Узнайте последующие моменты: Условия получения подарка, за регистрацию, за депо и прочее. Ограничения по максимальной ставке. Зачастую не повыше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вертеть автоматы, а вагер будет стоять на месте. Поэтому принципиально аристократия, в каких забавах можно осуществлять кратность денежного оборота.Список например именуемых «не территорий» прилагается к правилам бонусной программки игорного портала. Обязательно проверьте, распространяются ли на вас похожие наказания.
1хслот скачать
<a href=http://mandala-app.com/forums/viewtopic.php?f=5&t=221652>1хслотс рабочее зеркало</a> Обычно для получения призов без депозита, казино выдвигает лояльные и абсолютно выполнимые обстоятельства, хотя есть ряд действий коие запрещены и могут причиной неприятные результаты: 3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефон либо почту, указать персональную информацию;Нет. Казино раздают безвозмездные призы за регистрацию, для того, дабы заказчик мог ознакомиться с игровым заведением. А чтобы исключить его, нужно выполнить условия отыгрыша. 1×slot казино зеркало <a href=http://hysteria.8u.cz/profile.php?lookup=7379>http://hysteria.8u.cz/profile.php?lookup=7379</a> Фриплей-бонусы. Бонусы за благотворительную игру есть только в некоторых клубах. Они зачисляются сразу последствии создания профиля и срабатывают непродолжительное время. Если у вас нет медли истратить средства, они просто закончатся. Что касается времени, правило призы действуют протяжении 1-го часа.Вывод выигрыша с бездепозитных бонусов казино – щедрый презент от азартных клубов. Но чтобы исключить собственный доход, необходимо выполнить ряд критерий:
1×slots подтвердит вашу регистрацию если говорить
Выиграть реальные средства в казино не пополняя счет – трудно, но возможно. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными бонусами и начните играть на бонусные свои. По статистике в одном из 10-ти заведений можно заработать маленькую необходимую денег помощью бонусных средств. Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депо возможность выделяться до 30 дней. <a href=https://www.reikiandastrologypredictions.com/member.php?action=profile&uid=20338>https://www.reikiandastrologypredictions.com/member.php?action=profile&uid=20338</a> 1×slots сайт зеркало Бездепы могут заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами.Перечисленные повыше основные характеристики сопровождают практически любой приз и считаются стереотипными для бездепозитных бонусных начислений в казино.
<b>Смотреть еще похожие новости:</b>
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=53174>1хслот зеркало сайта</a>
<a href=https://www.mqf.pw/bboard/member.php?action=profile&uid=614>1×slots регистрация на сайте</a>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=100098&pid=375659#post_375659>1×slots быструю регистрацию а также мгновенное</a>
<a href=http://forums.indexrise.com/user-307864.html>1×slots casino регистрация 1×slotscasin online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Перечисленные выше главные свойства сочетают практически любой бонус и являются стандартными для бездепозитных бонусных начислений в казино.
#461 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Матвей Сафонов (футбол) casino официальный сайт <a href=https://repost.news/>букмекерские конторы без депозита</a> casino играть букмекерская контора вход <a href=https://kompromat1.online/>1×bet сейчас</a> Петрова Ольга Викторовна порно про казино порно с Зырянова Анастасия Владимировна Нургалиева Эльвира Рамиловна порно почему казино порно с Карен Хачанов (теннис) официальные зеркала казино
DiskiPlus casino online зеркало DiskiPlus бк букмекерская контора <a href=https://www.diskiplus.ru/>DiskiPlus cat casino</a> DiskiPlus 7k casino официальный DiskiPlus букмекерская контора скачать приложение <a href=https://diskiplus.ru>DiskiPlus порно с Арина и Дина Аверины, гимнастки</a> DiskiPlus casino сайты DiskiPlus casino betting DiskiPlus почему в казино нет окон DiskiPlus Валентина Матвиенко порно DiskiPlus pin up casino buzz DiskiPlus 1×bet на андроид бесплатно DiskiPlus porno Алена Косторная (фигурное катание)
#462 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино вход официальный сайт порно с Георгий Джикия (футбол) <a href=https://vestnik-jurnal.com/>Нургалиева Эльвира Рамиловна порно</a> 1×bet зеркало на сегодня скачать casino на андроид <a href=https://t.me/vchkogpu_ru>яндекс игры казино</a> pin up casino скачать букмекерская контора скачать приложение карты казино пари букмекерская контора порно с Алексей Миранчук (футбол) винлайн букмекерская контора официальный сайт pin up casino top top
DiskiPlus Мухтиярова Елена Вячеславовна порно DiskiPlus сайт винлайн букмекерская контора <a href=https://www.diskiplus.ru>DiskiPlus скачать pin casino</a> DiskiPlus Приезжева Екатерина Геннадьевна порно DiskiPlus casino x <a href=https://diskiplus.ru>DiskiPlus 1×bet официальный 1×bet xyz</a> DiskiPlus 1×bet слоты официальный сайт DiskiPlus букмекерские конторы без депозита DiskiPlus порно с Петр Ян (ММА) DiskiPlus casino скачать приложение DiskiPlus Валентина Матвиенко порно DiskiPlus r7 casino DiskiPlus pin up casino пин ап
#463 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать на айфон
Бездепозитный приз – это экономическое вознаграждение, коие выдается соучастнику забавы в казино, для его вербования и появления заинтригованности. Любой гость, кот-ый соответствует условиям выдачи похожего бездепозитного бонуса, возможность претендовать на получение вышеуказанного приза. Такое одобрение является более действенным методом, дающим вероятность стартовать в игре, не вкладывая личных материальных средств.Для получения приза надо(надобно) пригласить в игру нового посетителя. Казино начислит пригласившему фиксированный процент от взносов приглашённого в виде приза: почаще всего его объем не выше 10%. Срок действия бонуса в большинстве случаев не выше месяца: пригласивший получает бонус зависимо проигранных ставок приглашённого в 1-ый луна игры. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало</a> Прежде чем активировать бездеп, необходимо убедиться что, нет, что государство, уроженцем которой считается игрок, не входит в список разрешенных.Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. <a href=https://cgscholar.com/community/community_profiles/3d-rendering-services/community_updates/234376>https://cgscholar.com/community/community_profiles/3d-rendering-services/community_updates/234376</a> Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. 1хслотс 1хслотс регистрация перейти на 1×slots <a href=http://filmsgood.ru/user/ForsedropKt/>http://filmsgood.ru/user/ForsedropKt/</a> Бонус за регистрацию в казино без депо с выводом денег нужно отыграть. Зачастую для отыгрыша возможность потребоваться сделать ставки на необходимую, в несколько десятков раз превосходящую сумму бонуса или выигрыша.Активация валютного вознаграждения случается автоматически последствии создания профиля либо использования промокода. Иногда операторы предъявляют вспомогательные требования: подписаться на страницы казино в социальных сетях либо на рассылку маркетинговых известий, скачать и установить дополнительный софт и т.д.
1 xslots рабочее зеркало
Мы делаем ударение на ключевых положениях верховодил, рассказываем о территориальных лимитированиях и кратко информируем о других акциях обговариваемого казино. <a href=http://swissairways-va.com/phpBB3/viewtopic.php?t=806464>1×slots регистрацию процедура займет всего лишь</a> 1×slots казино зеркало <a href=https://series40.kiev.ua/user/Michaelslusa/>https://series40.kiev.ua/user/Michaelslusa/</a> 1×slots коды
1×slots официальный сайт скачать на айфон
Промокод – определённая комбинация символов, коию нужно ввести в отвечающее фон при твореньи учетной записи либо активировать в собственном профиле игрока в разделе с бонусами. Популярность онлайн казино растёт и всё больше юзеров начинают увлекаться азартными забавами. Бездепозитные бонусы 2022 года, это оригинальные подарки за регистрацию. С их помощью новые игроки все получить благотворительные вращения или средства на баланс за 1 регистрацию. С выходом игорных заведений в онлайне, бездепозитные бонусы стали знаменитейшим способом вербования игроков. Подобные акции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш вебсайт собрал наихорошие предложения из онлайна на 2022 год. Воспользуйтесь каким презентом и можете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша необходимо выполнить обстоятельства.Бездепозитные призы — это презенты от казино повторяющий бонусных денег либо фриспинов для игровых автоматов, которые начисляются на акк игрока после процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депо не требуется. <a href=https://orbitalscoreboard.com/user/mycsgohox/>https://orbitalscoreboard.com/user/mycsgohox/</a> Акции, приуроченные к календарным праздникам, случаются рассчитаны как на всех пользователей, например и на категории: к, презент на 8 марта девушкам-игрокам или мужикам на 23 февраля. 1 x slots Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.
1×slots быструю регистрацию а также мгновенное
Максимальный размер ставки, который невозможно превышать пока бонус не несомненно всецело отыгран. В случае нарушения сего верховодила, приз и выигрыш с него будут аннулированы. <a href=http://okeyrp.listbb.ru/viewtopic.php?f=24&t=2627>1хслотс зеркало на сегодня</a> Исходя из сего, просто не присутствует осмысленных причин махнуть рукой на получение такового бонуса при регистрации. И, лишним, на подобный безвозмездной основе у вас есть шансы выиграть средства и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные бонусы, нарекают бесплатными интернет платформами для игр. Прежде всего, не запамятовывайте регулярно заглядывать на страничку обзоров бездепозитных призов. Они шаг за шагом рассматривают более интересные предложения водящих игорных порталов. 1×slots сайт <a href=http://www.cwpass.com/ver2/bbs/board.php?bo_table=free&wr_id=681937>http://www.cwpass.com/ver2/bbs/board.php?bo_table=free&wr_id=681937</a> Рассмотрим принцип его деяния на примере. Допустим, вы зарегистрировались и получили $10 no deposit bonus с вейджером х50. Это значит, что выигранные средства возможно будет выводить не раньше, чем в того, как общая сумма ставок достигнет $500.
1×slots регистрация на официальном сайте
Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить особенности, труднодоступные при игре в демо режиме. Многие новые клиенты переходят в количество постоянных, а оператор получает долгосрочную прибыль. Фриспины — благотворительные вращения, коие разрешают игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины числятся наиболее популярным и преимущественным видом бонуса — безвозмездные вращения порой эффективнее и веселее в отыгрыше, чем другие облики бездепов.Мы собрали и выпустили список превосходнейших бездепозитных казино с бонусами за регистрацию, коие гарантируют щедрые выигрыши и мгновенные выплаты. <a href=http://ru.monumentefunerare.md/index.php?subaction=userinfo&user=aboundingoutlaw>http://ru.monumentefunerare.md/index.php?subaction=userinfo&user=aboundingoutlaw</a> В некоторых онлайн казино для получения бездепозитных призов не довольно просто зарегистрироваться на сайте клуба и доказать свои контактные данные. Дополнительно потребуется активация промокода. 1×slots зеркало рабочее на сегодня Для получения бездепа необходимо пригласить в забаву по реферальной ссылке нового клиента: он обязан зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на необходимую, указанную в условиях акции.Как и другие промоакции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такового предложения являются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых гостей и дозволяет им составить эмоцию о функционале, не рискуя значительными совокупностями.
<b>Смотреть еще похожие новости:</b>
<a href=http://fumankong1.cc/home.php?mod=space&uid=580780>1 х слотс зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, необходимо адресоваться в службу спустя лайв-чат на сайте казино. При отыгрыше бонусных средств, необходимо учитывать срок деяния приза и время, которое дается на отыгрыш. По истечению заявленного медли, не отыгранный бонус будет аннулирован.
#464 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
На данном разделе портала периодически публикуются обзорные заметки, в рассматриваются безвозмездные бонусы наилучших интернет-казино. Информация структурирована по нескольким пт, включая главные: <a href=http://filmkachat.ru/>1×slots зеркало видели такую регистрацию на</a> Многие новенькие колеблются, собственно поощрительный приз не будет возвращать, даже случае они выиграли у казино. Это абсолютно неопасно и надежно. Выводя выигранные средства, игрок просто одергивает свое участие при и теряет уникальную вероятность – даром наращивать личное материальное положение. <a href=https://elearn.ellak.gr/mod/forum/discuss.php?d=42024>https://elearn.ellak.gr/mod/forum/discuss.php?d=42024</a> 1хслотс официальный сайт зеркало <a href=http://nsejasconstruction.com/index.php/component/kunena/in-neque-arcu-vulputate-vitae/898#898>http://nsejasconstruction.com/index.php/component/kunena/in-neque-arcu-vulputate-vitae/898#898</a>
1хслотс рабочее зеркало на сегодня
Чем ниже значение вейджера, что, этим проще отыграть и вывести бонус. Если Вы планируете заработать на бездепе, а не просто ознакомиться с новым игровым клубом, то стоит игнорировать бонусов с высоким вейджером их практически не реально отыграть. С ними Вы сможете только протестировать игры заведения.В игровых клубах без лицензии Вы покупаете „кота в мешке“ и когда неоднозначных обстановок нет возможности куда-то пожаловаться и обосновать свою правоту. 1×slots casino регистрация 1×slots review live Подарки на праздники ? приуроченные к праздничным датам, требующие символического отыгрыша либо начисляются без такового. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду. <a href=http://40th.jiuzhai.com/home.php?mod=space&uid=2879775&do=profile&from=space>http://40th.jiuzhai.com/home.php?mod=space&uid=2879775&do=profile&from=space</a> Онлайн-казино с бездепозитными призами ставят посетителям условия для пользования бездепами, потому перед ролью в промоакции никакого тщательно ознакомиться со всеми правилами и аспектами акции. Условия шансы прикасаться получения приза, его применения и следующего вывода денежных средств когда выигрыша. 1× slots официальный В каждом казино с бездепозитным призом предусмотрены вейджеровые обстоятельства. Это единственный «подводный камень», который стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) сделать определённое количество ставок. Чем круче приз, тем сложнее выполнить обстоятельства, и напротив.
рабочее зеркало 1хслотс
С не отыгранным бонусом запрещается превышать объем наибольшей ставки. Нарушение сего условия повлечет за собой аннулирование выигрыша.Выбирайте наихорошие безвозмездные бонусы за обзоров на Casinoz – и пусть вас сопутствует счастье при отыгрыше бонусных кредитов! Прямо в арестуйте безвозмездные вращения за регистрацию без депозита и начинайте коллекционировать призовые комбинации из-за крупных выигрышей!Бесплатный приз – кредиты, коие онлайн-казино начисляет посетителю, не заставляя его пополнять игровой счет. <a href=https://prpack.ru/user/JamesCib/>https://prpack.ru/user/JamesCib/</a> 1×slots быструю регистрацию а также мгновенное Получать информацию о самых прибыльных призах можно без неизменного мониторинга новостей казино. Мы взяли данную задачку на себя и непрерывно следим за предложениями операторов, избирая наихорошие из их. В данном разделе собраны последние бездепы, промокоды к ним и условия их активации. Список промоакций периодически дополняется. В топ зашли самые свежие бездепозитные бонусы за регистрацию в казино 2020, временные и закрытые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и критериям. Если срок деяния акции истек, она удаляется из списка.
1хслот 1хслотс регистрация перейти на 1×slots
Прочитайте управляла бонусной программы, какой желаете принять. Да, мы настоятельно советуем сделать это до регистрации. Не трудно догадаться, что no deposit bonuses почти ни не случаются большими. Чаще всего речь идет о пяти–тридцати баксах (либо эквиваленте данной суммы в иной валюте). Бесплатные призы казино без депо можно получить повторяющий денежных средств на бонусный счет (вывести их возможно только последствии отыгрыша), фриспинов, забавы или кешбэк-бонуса. 1×slots зеркало регистрацию более популярный вариант это <a href=http://alt1.toolbarqueries.google.mv/url?q=http://krasnikovwine.ru/bitrix/redirect.php?goto=http://xn----7sbqej4bhfek.xn–p1ai/bitrix/redirect.php?goto=https://telegra.ph/162-Razboj-Raskrytie-sostava-prestupleniya-i-ego-pravovyh-posledstvij-09–23>http://alt1.toolbarqueries.google.mv/url?q=http://krasnikovwine.ru/bitrix/redirect.php?goto=http://xn----7sbqej4bhfek.xn–p1ai/bitrix/redirect.php?goto=https://telegra.ph/162-Razboj-Raskrytie-sostava-prestupleniya-i-ego-pravovyh-posledstvij-09–23</a> Существует ли стратегии для отыгрыша бездепозитных бонусов? К сожалению нет, на выигрыши или проигрыши с бонусов, казино либо игрок воздействовать не может, отдача игр случается от разработчиков игр.В некоторых онлайн казино для получения бездепозитных призов не довольно просто зарегистрироваться на сайте клуба и подтвердить средства контактные данные. Дополнительно потребуется активация промокода.
1×slot зеркало рабочее регистрации на телефон придет
Размер ставки для забавы по бездепозитному бонусу (окончательно же, в случае, когда он представлен повторяющий бонусных валютных средств) зачастую ниже, чем при ирге на депозит. Ограничение несомненно работать до этапа отыгрыша приза. <a href=https://podacha-blud.com/user/JoshuaPiony/>https://podacha-blud.com/user/JoshuaPiony/</a> 1 хслот регистрация в 1×slots casino Обычно для получения бонусов без депо, казино выдвигает приклнные и вполне выполнимые условия, но есть ряд деяний коие запрещены и имеют стать досадные последствия:
<b>Смотреть еще похожие новости:</b>
<a href=https://portugal-campings.com/pt/account/>1хслот зеркало сайта</a>
<a href=https://adminclub.org/member.php?action=profile&uid=90427>1хслотс казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Принципиальным отличием безвозмездных бонусов от призов на депо является отсутствие необходимости заносить деньги на аккаунт. Из-за этого их нередко нарекают бездепозитными (no down payment bonuses). Получив свой презент, Вы можете даром играть на настоящие средства, а выполнив обстоятельства отыгрыша, вывести свой выигрыш.
#465 Charlesgunnyhttp://filmkachat.ru
казино 1×slots официальный сайт
Также случаются случаи, когда казино начислит обсужденный приз в регистрации свежего клиента по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам.Постарайтесь отыграть вейджер, дабы появилась вероятность оставить заявку на выплату. Кстати, на всех сайтах, представленных в списке, доступны современные платёжные приборы. Вы сможете получить выигрыш на электрической кошелёк, карту, аппарат. <a href=http://filmkachat.ru/>1×slots сайт</a> В современность довольно просто получить бонус за регистрацию в казино. Практически каждый игорный дом с готовностью начисляет средства или благотворительные вращения. Многие гэмблеры используют данным и не стыдятся регистрироваться в каждом клубе с выгодными критериями. Кстати, это отличная возможность выработать победную стратегию и сорвать джекпот.Диапазон ставок, которые вправе устроить игрок, кроме лимитирован. Обычно ставить возможно небольшую необходимую — в 10–30 рублей за одно вращение. <a href=https://s.id/kalinka0588>https://s.id/kalinka0588</a> Диапазон ставок, коие вправе устроить игрок, кроме лимитирован. Обычно ставить возможно маленькую необходимую — пределах 10–30 рублей за одно вращение.Каждый из бездепозитных призов без пополнения 2022 имеет свой конкретный вейджер для отыгрыша, так же в любом казино он устанавливается индивидуально — где то он х55 а где-то х30, повторюсь всюду по различному! 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=https://e-participationyouth.eu/forum/profile/jamesjonse/>https://e-participationyouth.eu/forum/profile/jamesjonse/</a>
1× slots официальный
Фриплей-бонусы встречаются только в неких клубах. Они зачисляются незамедлительно последствии сотворения профиля и активны непродолжительное время. Если не успеете потратить свои, они просто сгорят. Касаемо времени, правило призы активны в течение часа.Обычно для получения бонусов без депозита, казино выдвигает лояльные и абсолютно выполнимые условия, но есть ряд действий которые запрещены и могут повлечь за собой противные последствия: 1×slots официальный регистрация Бездепозитный бонус – это экономическое вознаграждение, которое выдается участнику игры в казино, для его вербования и появления заинтересованности. Любой посетитель, который соответствует условиям выдачи подобного бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое одобрение считается более эффективным способом, дающим возможность стартовать в игре, не вкладывая собственных вещественных средств.Постарайтесь отыграть вейджер, дабы была вероятность забыть заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные инструменты. Вы можете получить выигрыш на электронной кошелёк, карту, аппарат. <a href=https://www.megaindex.org/user/portfolio_view/1987>https://www.megaindex.org/user/portfolio_view/1987</a> Подтвердите личность, предоставив оператору казино свои паспортные данные. Инструкции обычно легкие, главное — четко им по. Если написано, что «на фото должны быть заметны все четыре угла странички паспорта» — устройте непосредственно это фото. 1×slots регистрацию более популярный вариант это Бездепозитные призы начисляются лишь раз один. Не стоит раскрывать новые аккаунты, чтобы получить их повторно. Служба безопасности казино непременно выявит «левого» участника и заблокирует. Если посетитель выполнит нужные притязания, отыграет собственную ставку и решит вывести личный выигрыш, то ему нужно сведению, собственно казино обязательно потребует предоставить ксерокопии собственных документов, дабы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные средства вывести не получится.Стоит отметить, собственно бездепозитный бонус выдается только совершеннолетним новичкам, которые, же, могут пригласить личных приятелей и знакомых, кроме претендующих на поощрительную программу лояльности. Подобная разработка появилась среди соперничающих онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры способствуют увеличению своей популярности, методом привлечения новых игроков. Бонусы – это оригинальный шанс для потенциальных участников игры, коие все опробовать софт покер рума и увериться, станут ли они в него выступать или нет. Новый игрок испробует свои силы с реальными оппонентами в казино.
1×slots бонус за регистрацию
Вышеописанная первопричина и считается основным моментом, следствии которого операторы отдают доля собственной прибыли на различные маркетинговые расходы и рекламные кампании. А самым действующим тут будут выступать именно бездепозитные призы казино 2022 с выводом за регистрацию. <a href=https://pervo66.ru/forum/thread-1247/page-1/>https://pervo66.ru/forum/thread-1247/page-1/</a> 1×slots зеркало регистрация то дальше необходимо пройти
1×slots бездепозитный бонус за регистрацию
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5353/#comment-656265>1х слотс зеркало регистрация в 1×slots casino</a> Когда речь идет о получении бездепозитных бонусов в казино, в первую очередь обратите внимание на последующие обстоятельства:Если вы выбираете проверенное лицензионное интернет казино и сделайте все обстоятельства получения бездепозитного бонуса, трудностей с получением подарка у Вас не возникнет. Обычно для получения призов без депо, казино выдвигает лояльные и вполне выполнимые условия, но есть ряд действий которые запрещены и все причиной неприятные последствия:Когда идет о денежных бонусах, казино всегда устанавливают обстоятельства вейджера, коие нужно выполнить, дабы вывести выигрыш. 1 хслот регистрация в 1×slots casino <a href=https://lockright.uk/forum/profile/ElmaUmy213>https://lockright.uk/forum/profile/ElmaUmy213</a> Несмотря на то, что этот вариант стимуляции со стороны азартных платформ очень известен в похожих игр, далеко не почитателям казино известно, собственно являют собой бездепозитные призы казино и как именно их вполне эксплуатировать.
1×slots промокод при регистрации
Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить необыкновенности, недоступные при забаве в демо режиме. Многие свежие клиенты перебегают в число постоянных, а оператор получает долгосрочную прибыль.На нашем сайте Вы отыщите перечень актуальных свежих бездепозитных бонусов в казино 2022 года. Также, есть много неповторимых предложений, коие доступны лишь посетителям нашего сайта после регистрации по нашей ссылке либо активации особого промокода. <a href=http://vecmir.ru/index.php/vecmirlife/62313-overrateddrudge/profile>http://vecmir.ru/index.php/vecmirlife/62313-overrateddrudge/profile</a> Способы получения бездепа различаются от облика приза, кот-ый понравился игроку. Но для иначе нужно быть зарегистрированным в легальном онлайн-казино и доказать собственную личность. В общем виде пошаговая инструкция для получения бездепозитного приза выглядит так:Бездепы с безвозмездными вращениями деют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд уплачивает казино. Число спинов ограничено и изредка превышает сотню. Если акция содержит много бесплатных игр, их начисление может быть разбито на количество дней. 1×slots акции Но существуют азартные заведения, готовые просто так вручить деньги на забаву. Для сего достаточно создать профиль. Чтобы исключить выигрыш, сначала необходимо выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа.Обычно для получения бонусов без депозита, казино выдвигает приклнные и вполне выполнимые условия, но есть ряд действий которые воспрещены и шансы повлечь за собой противные последствия:
<b>Смотреть еще похожие новости:</b>
<a href=https://praisenpray.org/forums/showthread.php?tid=122563>1×slots официальный сайт мобильная версия скачать</a>
<a href=http://fumankong1.cc/home.php?mod=space&uid=500977>1×slots сайт зеркало</a>
<a href=http://3ak.cn/home.php?mod=space&uid=187057>1×slots зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Приветственный приз без депозита ? презент за регистрацию. Выдается деньгами, фриспинами или баллами. В последнем случае бонусные баллы применяются для участия в турнирах или обмена на настоящие деньги.
#466 Charlesgunnyhttp://filmkachat.ru
онлайн казино 1×slots
Перед активацией главно внимательно выучить условия акции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют значение также лимиты ставок при отыгрыше и сроки, протяжении которых можно воспользоваться предложением. Если бездеп обхватывает узкий список игр, рекомендуется узнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с низкими множителями выплат подходят только никаких случае, в оператор не установил взыскательные лимитирования на максимальную сумму ставки. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало</a> <a href=https://www.bunity.com/shopavto>https://www.bunity.com/shopavto</a> В современность очень просто получить приз за регистрацию в казино. Практически любой игорный жилище с радостью начислит деньги либо благотворительные вращения. Многие гэмблеры используют данным и не смущяются регистрироваться в каждом клубе с прибыльными критериями. Кстати, это замечательная возможность выработать победную тактику и сорвать джекпот. 1хслотс рабочее зеркало <a href=http://cogito.or.kr/bbs/board.php?bo_table=free&wr_id=511>http://cogito.or.kr/bbs/board.php?bo_table=free&wr_id=511</a>
1×slots казино зеркало
<a href=http://police.1stbb.ru/viewtopic.php?f=3&t=1941>1хслот зеркало сайта</a> 1×slots официальный demo регистрация в 1×slots casino Обычно для получения бонусов без депо, казино выдвигает приклнные и абсолютно выполнимые обстоятельства, но есть ряд поступков которые запрещены и шансы повлечь за собой противные результаты: <a href=http://chrstms.ru/club/user/12901/blog/10937/>http://chrstms.ru/club/user/12901/blog/10937/</a> Бездепозитные призы – это исключительно небезинтересная и наиболее перспективная промоакция интернет-казино. Они том другого, как фри-спинов, поэтому что выплаты в даровых вращениях не гарантированы, так комбинации на барабанах игрового аппарата шансы не сложиться. 1×slot казино зеркало Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам воспрещено начислять бонусы посетителям, не имеющим денежных средств на счете. Мы предлагаем рассмотреть актуальные призы онлайн-казино с лицензией, которые соблюдают законодательство РБ.
1×slots регистрация на официальном сайте
Фриплей-бонусы. Бонусы за бесплатную забаву есть только в некоторых клубах. Они зачисляются сразу после сотворения профиля и срабатывают недолговременное время. Если у вас нет времени израсходовать средства, они просто завершатся. Что касается медли, в большинстве случаев призы действуют на 1-го часа. <a href=http://www.zelgymn.grodno.by/user/RobertRit/>http://www.zelgymn.grodno.by/user/RobertRit/</a> Все обожают получать подарки. Согласитесь, практически любой играющий человек будет необъятно рад, случае получит даровой презент для забавы в онлайн казино просто за регистрацию либо же приз за внесенный депозит, так называемые приветственные бонусы для новых игроков. Соответственно такие интернет клубы будут более популярны и предпочтительны у игроков при выборе казино для забавы. Топ казино день обновляется и прибавляются свежие и увлекательные игровые клубы с симпатичной бонусной политикой и всеми вероятными преимуществами, льготами, к которым относятся эти бонусы как фриспины за регистрацию, денежные бездепозитные бонусы, еще щедрые призы за внесенный депозит. 1×slots рабочее зеркало Доступ к подарку может раскрываться автоматически в введения промокода либо обращения в службу поддержки сайта. В первом случае от юзера не потребуется практически деяний. Бездеп с активацией по коду встречается чаще всего. Игроку нужно установить совокупа символов в графе, кот-ая может пребывать в регистрационной форме в Личном кабинете.
1хслотс зеркало на сегодня
<a href=https://rolivka.online/forum/showthread.php?tid=46317>1хслотс мобильная версия зеркало</a> Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного бонуса.Мы подготовили перечень, где есть всегда животрепещущие и новые бездепозитные бонусы казино, которые возможность получить бесплатно. Для наших пользователей есть специальные предложения неповторимые бонусы, которые вы у не отыщите, их мы определили специальной красной плашкой «Exclusive». 1×slots официальный demo регистрация в 1×slots casino <a href=http://sabrina-online.su/wiki/index.php?title=1_win_brasil_aposta>http://sabrina-online.su/wiki/index.php?title=1_win_brasil_aposta</a> Но а случае вы теснее профи по интернет казино, кликаем на красноватую кнопку «Получить» и Вы автоматически перейдете в онлайн казино;
1 x slots
Бонус без депозита за регистрацию в казино (бездепозитный приз) – это валютный подарок от клуба, который начисляется на акк игрока последствии регистрации в казино. Кроме сотворения учетной записи, для получения бездепа, очень нередко потребуется ещё и доказать контактные данные игрока и/или активировать особый промо-код. Игры, в можно выступать на бонусные деньги. Проверьте список игр, в которых можно играть на бонусные средства, вероятно они Вам не понравятся и не стоит тратить своё время на такую промоакцию. <a href=https://ceshi.xyhero.com/home.php?mod=space&uid=2312905&do=profile&from=space>https://ceshi.xyhero.com/home.php?mod=space&uid=2312905&do=profile&from=space</a> 1×slots зеркало видели такую регистрацию на
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.survival-readiness.com/viewtopic.php?t=277821>1 х слотс зеркало</a>
<a href=http://medforum.5nx.ru/viewtopic.php?f=4&t=11539>зеркала 1×slots</a>
<a href=http://yinyue7.com/space-uid-962219.html>1×slots официальный сайт мобильная версия</a>
<a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=45490>1х слот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный бонус предоставляется новенькому игроку за конкретные действия. Часто подарок повторяющий денег или фриспинов выдается за регистрацию, благодаря чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.
#467 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
Бонус с зачислением средств на счет выделяет больше свободы деяний. Пользователь сам подбирает, каким образом воспользоваться подаренными своими. Здесь кроме имеют работать ограничения на список дешевых игр, но обычно эти рамки не так строги, как в рекламную с бесплатными вращениями.Заполняя данные в собственном профиле, указывайте только достоверную информацию, так как Вам придется ее подтвердить дальнейшем при выводе средств. <a href=http://filmkachat.ru/>1×slot зеркало рабочее регистрации на телефон придет</a> <a href=https://www.obesityhelp.com/members/product-advertising/about_me/>https://www.obesityhelp.com/members/product-advertising/about_me/</a> 1×slots официальный зеркало рабочее <a href=https://blogfreely.net/rabofree/missiia-krasnyi-onlain>https://blogfreely.net/rabofree/missiia-krasnyi-onlain</a>
1×slots зеркало сайта
1×slots рабочее зеркало на сегодня Онлайн гемблинг развивается с любым днем все больше и больше, новые бренды создаются не по денькам а по часам. Новые интернет казино делают вступительные акции для игроков, для того что бы зарекомендовать себя, и тем наиболее предлагают бездепозитные бонусы за регистрацию, собственно бы не упустить эту возможность — как воспользоваться свежим бездепом, рекомендуем навещать наш вебсайт как возможно почаще, самое вкусное и свежие будет добавляться в этом же списке.Исходя из этого, просто не присутствует мудрых оснований махнуть рукой на получение такого бонуса при регистрации. И, что, на подобный безвозмездной основе у вас есть все шансы выиграть деньги и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, называют бесплатными онлайн платформами для игр. <a href=http://moscowdesignmuseum.ru/bitrix/redirect.php?goto=http://hydroplast.ru/bitrix/redirect.php?goto=http://bravotrade.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/jwkVzwDBOWZ>http://moscowdesignmuseum.ru/bitrix/redirect.php?goto=http://hydroplast.ru/bitrix/redirect.php?goto=http://bravotrade.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/jwkVzwDBOWZ</a> 1×slots официальный сайт скачать на айфон
1×slots casino регистрация
Ниже указан актуальный перечень легальных казино в Беларуси с призами на первый депозит. Вы можете попасть на официальный сайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус.Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? <a href=https://www.jiebbs.net/home.php?mod=space&uid=228977&do=profile&from=space>https://www.jiebbs.net/home.php?mod=space&uid=228977&do=profile&from=space</a> Но разу не запамятовывайте пристально читать правила участия в бонусных промоакциях. Если вы нарушите желая бы одно условие, позднее вы не можете устроить недоразумение с администрацией. 1×slots регистрация 1×slotscasino09k online
1хслотс казино зеркало
Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? Бездепозитный приз казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в данном и содержится главное отличие.Одним из поводов отдавать привилегию 1 или иному заведению содержится в привлекательности предлагаемых акций и бесплатных предложений. Безвозмездные фриспины, выдаваемые без нужды создавать какой-нибудь лепта, в списке находится далеко не в конце. 1×slots casino зеркало рабочее <a href=http://damoa2019.maru.net/bbs/board.php?bo_table=free&wr_id=38913>http://damoa2019.maru.net/bbs/board.php?bo_table=free&wr_id=38913</a>
1 x slots casino
Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации бонуса без депозита. Внимательно прочтите до конца. Многие новички делают ошибки на этапе регистрации и потому не могут получить подарок. Бездепозитный бонус за регистрацию в казино — это стартовый подарок повторяющий денежного начисления либо бесплатных вращений для свежих игроков заведения, для получения которого надо заносить депозит. <a href=http://f26cn.ww.w.molifan.net/space-uid-2177663.html>http://f26cn.ww.w.molifan.net/space-uid-2177663.html</a> 1×slot зеркало рабочее этих способов предполагает регистрацию Важно, убедитесь что, нет, что раньше не регистрировались в избранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи.Таким образом интернет казино получает вероятного игрока. Возможно в либо подлинном он захочет сыграть на средства средства. Так трудятся бездепозитные бонусы в онлайн казино. Здесь очень подходит выражение, безвозмездные сыр посещает только в мышеловке. Начинающие игроки могут не осознавать опасность пыла. Однако с понимания становится больше. Это тема для отдельного обсуждения.
<b>Смотреть еще похожие новости:</b>
<a href=http://naukova2b.2ua.in.ua/viewtopic.php?f=7&t=3533>1×slots casino зеркало</a>
<a href=https://www.mqf.pw/bboard/member.php?action=profile&uid=614>1×slots зеркало которую указывали при регистрации кстати</a>
<a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=447335>1 x slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Далее требуется отыграть вагер и исключить выигрыш. Игрокам без опыта крупно повезло, меня получить десятки подарков за одну регистрацию. Если не сумели получить Бездепозитный приз, не тревожьтесь. Обратитесь в интернет чат, оператор поможет исправить.
#468 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Евгения Медведева, фигуристка порно с Каролина Севастьянова <a href=https://res-publika.com>pin up casino официальный</a> порно с Евгения Медведева, фигуристка Лут Оксана Николаевна порно <a href=https://t.me/vchkogpu_ru>1×bet официальный</a> casino на телефон казино онлайн бесплатно Львова-Белова Мария Алексеевна порно включи казино 1×bet xbet xyz скачать 1×bet на андроид бесплатно up casino
DiskiPlus casino промокод DiskiPlus казино смотреть онлайн <a href=https://www.diskiplus.ru/>DiskiPlus скачать 1×bet 1×bet xyz</a> DiskiPlus Ирина Горбачева DiskiPlus макао казино <a href=https://diskiplus.ru/>DiskiPlus casino рабочее</a> DiskiPlus casinos winning DiskiPlus porno Алена Косторная (фигурное катание) DiskiPlus букмекерская контора леонов DiskiPlus винлайн букмекерская контора DiskiPlus порно с Антропова Валентина Викторовна DiskiPlus casino 7k сегодня DiskiPlus pinco casino
#469 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Ирина Сидоркова порно с Петр Ян (ММА) <a href=https://rumafia.news/>пин ап casino pin up top</a> бесплатно фильм казино casino сайты <a href=https://kompromat1.online/>casino ru</a> ограбление казино Разуваева Ксения Денисовна порно рокс казино сайте букмекерской конторы фонбет casino сайты букмекерская контора ставки porno Алена Михайлова
DiskiPlus porno Илона Маркова, хоккеистка DiskiPlus скачать 1×bet <a href=https://diskiplus.ru>DiskiPlus casino ru</a> DiskiPlus бесплатные букмекерские конторы DiskiPlus порно с Ирина Сидоркова <a href=https://diskiplus.ru>DiskiPlus casino зеркало сегодня</a> DiskiPlus порно с Дарья Касаткина (теннис) DiskiPlus порно с Алина Загитова, фигуристка DiskiPlus 1×bet скачать приложение DiskiPlus букмекерская контора фонбет DiskiPlus Ходнева Светлана Владимировна порно DiskiPlus казино ставка DiskiPlus порно с Анна Щербакова, фигуристка
#470 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало
Как правило, при выводе финансов, от играющего потребуется лишь устроить минимальный лепта для того, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом собственный счет.Принципиальным различием даровых призов от бонусов на депозит является неимение необходимости заносить средства на аккаунт. Из-за этого их часто нарекают бездепозитными (no down payment bonuses). <a href=http://filmkachat.ru/>1×slots казино зеркало</a> Чтобы бездеп не был начислен на Ваш акк, Вам надо активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт автоматически, а Вы не расчитываете его использовать, обратитесь в службу поддержки с просьбой отменить бездепозитный приз.Итак, чтобы бесплатные бонусные кредиты трансформировались в настоящие средства, которыми возможность распоряжаться по собственному усмотрению, их надо(надобно) отыграть. Вейджер идет уточнять в правилах онлайн-казино. <a href=https://www.therookies.co/projects/79483>https://www.therookies.co/projects/79483</a> Не стоит путать игру в демо и внедрение бонусов. В демонстрационном режиме игрок имеет расценить механику слота, сюжет и оформление. Но забава ведется на относительные кредиты, потому отсутствует главное ? ощущение азарта. Активируя промокод либо фриспины, заказчик и не расходует свои деньги на игровые автоматы, хотя имеет сорвать реальный куш!Бездепозитный бонус предоставляется новому игроку за определенные действия. Часто подарок повторяющий денег либо фриспинов выдается за регистрацию, спасибо чему пользователь получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. 1×slots регистрация то дальше необходимо пройти <a href=http://www.lemon-directory.com/%D1%84%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B-%D0%BA%D0%BE%D1%84%D0%B5%D0%B9%D0%BD%D0%B8_468964.html>http://www.lemon-directory.com/%D1%84%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B-%D0%BA%D0%BE%D1%84%D0%B5%D0%B9%D0%BD%D0%B8_468964.html</a>
1×slots зеркало регистрацию более популярный вариант это
1×slots регистрация на сайте 1×slots ru com Для верификации номера аппарата, в личном профиле изберите опцию „Подтвердить номер телефонного“ и введите в подходящее поле код, приобретенный в sms-сообщении. <a href=https://www.blurb.com/user/Glavdorogadv>https://www.blurb.com/user/Glavdorogadv</a> Для всех бездепозитных призов функционирует максимальный предел на выигрыш. Он показывает предельную сумму, которую появится получить, играя на бонусные кредиты. Как только для удастся выполнить требования вейджера, дозволенный максимально несомненно переведен с бонусного счета на главной, а остаток несомненно списан. 1×slots casino зеркало Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных ситуаций с казино, когда после отыгрыша бездепа вас не дадут вывести крупную необходимую выигрыша.Получив собственный подарок, Вы можете бесплатно играть на настоящие деньги, а выполнив условия отыгрыша, исключить собственный выигрыш.
1×slots официальный demo регистрация в 1×slots casino
Простая процедура получения бездепозитного приза, кот-ая займет менее 2-х минут. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные. <a href=https://www.fairyabc.com/home.php?mod=space&uid=112676>https://www.fairyabc.com/home.php?mod=space&uid=112676</a> Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. 1хслотс казино зеркало
1×slots регистрация 1×slots casino c2d ru
При отыгрыше бездепов, учитывайте кратковременные лимитирования. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток. Таким образом онлайн казино получает вероятного игрока. Возможно в будущем либо истинном он захочет поиграть на средства деньги. Так работают бездепозитные призы в онлайн казино. Здесь очень подходит выражение, безвозмездные сыр случается лишь в мышеловке. Начинающие игроки все не обдумывать опасность азарта. Однако времени осознания становится больше. Это тема для отдельного обсуждения.Подтвердите личность, предоставив оператору казино свои паспортные данные. Инструкции обычно несложные, главное — конкретно им идти. Если написано, что «на фото обязаны быть видны все хорошо угла страницы паспорта» — устройте именно это фото. 1×slots казино мобильная версия <a href=https://implementationmatters.org/index.php?title=User:JulieM32645267>https://implementationmatters.org/index.php?title=User:JulieM32645267</a> У любого игорного клубы различные вейджеровые обстоятельства. Чтобы вы гарантировано сумели выполнить их, мы дадим количество советов. Если система начислила небольшую необходимую, надо делать большие ставки – остановитесь на 10–30 центах. Как только сумеете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте выступать. В противном случае чем присмотреться к другому автомату.
1×slots зеркало которую указывали при регистрации кстати
Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала быстрые выводы. Фишка выплат в том, собственно довольно избрать платёжный инструмент и показать сумму. В большинстве случаев деньги зачисляются на электрические кошельки на 15 минут, а на банковские карты – 1–3 трудящихся денька. Все безвозмездные призы кажутся заманчивыми. Кто же откажется от способности сыграть в онлайн-казино, не рискуя деньгами, хотя получая выигрыши. Но далеко не все бездепозитные бонусы одинаковой презентабельны для рассудительного клиента.Автоматы неспроста числятся наиболее знаменитым азартным развлечением. Чтобы усвоить управление и правила, понадобится всего несколько мин. Ваша задачка сделать ставку, определить количество трудящихся линий и можно крутить барабан. Если на экране выпадет выигрышная комбинация – вы выиграли! С этой задачей для помогут справится бездепозитные призы казино. <a href=http://c3s.tech/adepts/profile/roberttrara/>http://c3s.tech/adepts/profile/roberttrara/</a> 1×slots скачать на айфон
<b>Смотреть еще похожие новости:</b>
<a href=https://forumsleague.org/forum/memberlist.php?mode=viewprofile&u=11228>1×slots зеркало видели такую регистрацию на</a>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=413983>1 xslots рабочее зеркало</a>
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=128710&extra=>зеркло казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Размер бонусов чаще всего чисто условный и не выше 50 рублей. Приятно, хотя ощутимым бустом при навряд станет.
#471 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
gama casino 1×bet на андроид бесплатно <a href=https://slon-ru.com/>black russia казино</a> букмекерская контора зенит яндекс казино <a href=https://th-royalgclub.com/>промокод 1×bet</a> 1×bet официальный казино играть казино гта 5 pin up casino скачать 1×bet рокс казино скачать 1×bet
DiskiPlus 1×bet сайт 1×bet xyz DiskiPlus букмекерские конторы без депозита <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet слоты официальный сайт</a> DiskiPlus casino riobet DiskiPlus казино вход <a href=https://www.diskiplus.ru>DiskiPlus casino скачать</a> DiskiPlus 1×bet рабочее на сегодня DiskiPlus casino регистрации DiskiPlus 7k casino сайт DiskiPlus суть казино DiskiPlus смотреть фильм казино DiskiPlus casino buzz DiskiPlus порно с Аделия Петросян (фигурное катание)
#472 Charlesgunnyhttp://filmkachat.ru
1×slots casino online регистрация
Все любят получать презенты. Согласитесь, почти каждый играющий человек несомненно очень счастлив, если получит бесплатный подарок для игры в интернет казино просто за регистрацию или же бонус за внесенный депо, например нарекаемые приветственные призы для свежих игроков. Соответственно эти онлайн клубы станут больше знамениты и преимущественны у игроков при выборе казино для игры. Топ казино каждый обновляется и добавляются новые и занимательные игровые клубы с привлекательной бонусной политикой и всеми возможными привилегиями, к коим относятся такие призы как фриспины за регистрацию, валютные бездепозитные призы, а великодушные бонусы за внесенный депо. <a href=http://filmkachat.ru/>1×slots официальный сайт, скачать</a> Постарайтесь отыграть вейджер, чтобы замечена возможность забыть заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электронной кошелёк, карту, аппарат. <a href=https://www.iotappstory.com/community/forum/5-support/4455-interior-design-fair-2025-global-innovation-design-trends>https://www.iotappstory.com/community/forum/5-support/4455-interior-design-fair-2025-global-innovation-design-trends</a> В перечне притязаний к отыгрышу часто присутствуют лимиты на ставки при игре на собственные средства. Так, в отыграть надо(надобно) 30 000 рублей, а предельная сумма ограничена 30 рублями, то вертеть барабаны предстоит 1000 один. Эта особенность затрудняет соблюдение игроками условий по срокам действия акции.Бездепы обычно предлагают с отыгрышем — мгновенно исключить выигранные средства невозможно. Перевод средств со счета будет вероятен после такого, как юзер выполнит все притязания казино, а сумма имеет быть выше установленного правилами лимита. Условиями акции фиксируются сроки, в течение коих клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней последствии активации. 1×slots официальный сайт скачать на айфон <a href=https://auto-file.org/member.php?action=profile&uid=1043478>https://auto-file.org/member.php?action=profile&uid=1043478</a> Итак, чтобы бесплатные бонусные кредиты трансформировались в настоящие средства, которыми продоставляется распоряжаться по своему усмотрению, их нужно отыграть. Вейджер идет уточнять в правилах онлайн-казино.
1×slots казино мобильная версия
Когда речь идет о денежных призах, казино постоянно устанавливают обстоятельства вейджера, которые нужно выполнить, дабы вывести выигрыш. 1хслотс зеркало на сегодня При использовании бездепозитным бонусом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют некоторое обликов лимитов: <a href=https://clients1.google.com.sg/url?q=https://doctorlazuta.by/>https://clients1.google.com.sg/url?q=https://doctorlazuta.by/</a> 1×slots официальный сайт зеркало
1×slots бонус за регистрацию
Зарегистрируйтесь. Для регистрации чаще всего довольно ввести собственный номер аппарата и почтовый адрес, в чего установить приобретенный код из СМС. Возможно, потребуется показать промокод. В правилах промоакции несомненно написано, где его хотелось вводить. Иногда это хотелось делать при регистрации, времени — уже последствии создания личного офиса, на отдельной страничке. <a href=http://raid4×4.ru/memberlist.php?mode=viewprofile&u=6124>http://raid4×4.ru/memberlist.php?mode=viewprofile&u=6124</a> В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с бесплатных вращений. Прибыль, коию Вы заработаете на этом бездепе можно назначать на вывод без какого либо отыгрыша. 1×slots на любой вкус как пройти регистрацию Ознакомьтесь с нашим перечнем лучших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего перечня и получите бездеп незамедлительно. Хватайте наилучшие благотворительные предложения ниже и выигрывайте немалые деньги, не рискуя!
1×slots регистрация 1×slotscasino 56 online
При исполнении условий отыгрыша и верификации, средства с бонусного счета переводятся на главной и все быть выведены на карту либо электронный кошелек. Лимиты на вывод и сроки проведения транзакции в от избранной платежной системы.Многие новички сомневаются, что поощрительный приз не несомненно отдавать, даже случае они выиграли у казино. Это полностью неопасно и накрепко. Выводя выигранные свои, игрок просто одергивает свое участие деле и теряет уникальную возможность – бесплатно увеличивать собственное материальное положение. 1хлот регистрация в 1×slots casino <a href=https://knoxrqmj66543.shoutmyblog.com/29771610/the-ethics-and-controversy-surrounding-deepnude-a-closer-look-at-ai-s-dark-side>https://knoxrqmj66543.shoutmyblog.com/29771610/the-ethics-and-controversy-surrounding-deepnude-a-closer-look-at-ai-s-dark-side</a> Таким образом интернет казино получает потенциального игрока. Возможно дальнейшем либо настоящем он захочет сыграть на средства деньги. Так трудятся бездепозитные призы в онлайн казино. Здесь хорошо подходит выражение, бесплатные сыр бывает только в мышеловке. Начинающие игроки имеют не осознавать опасность пыла. Однако с понимания становится больше. Это тема для отдельного обсуждения.Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации подарка нужно подтвердить электрическую почту и привязать телефонный;
1×slot рабочее зеркало
Любой выигрыш по ставке выше установленного лимита несомненно считаться недействительным. То есть ставка не будет засчитана при отыгрыше, в случае выигрыша его сумма не поступит на счёт клиента — итог забавы будет полностью аннулирован. Мы подготовили список, где есть практически актуальные и новые бездепозитные призы казино, которые вам получить даром. Для наших юзеров есть особые предложения эксклюзивные бонусы, коие вы кого не отыщите, их мы определили особой красной плашкой «Exclusive».Мы советуем не отрицаться от сходственных предложений узнаваемых казино. Выделите несколько минут на регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сейчас фортуна несомненно на вашей стороне! <a href=https://localhomeservicesblog.co.uk/forum/profile/LeeMcCrea>https://localhomeservicesblog.co.uk/forum/profile/LeeMcCrea</a> В списке требований к отыгрышу часто присутствуют лимиты на ставки при игре на личные средства. Так, случае отыграть надо(надобно) 30 000 руб., а максимальная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 раз. Эта особенность затрудняет соблюдение игроками условий по срокам деянья акции.Бездепозитные бонусы, как теснее ясно, считаются оригинальной возможностью приступать к игровому процессу безусловно бескорыстно, другими играть в онлайн казино даром и на имеющие свои незамедлительно в регистрации аккаунта. Автоматы с таким депо шансы стать прекрасной возможностью сыграть для почитателей азарта с определенными лимитированиями в финансах. 1×slots зеркало регистрация
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В разделе с бонусами активировать свой презент. Найти забавы, для коих предусмотрено одобрение и использовать приз по назначению.
#473 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
vavada casino Яровая Ирина Анатольевна порно <a href=https://specreporter.com/>порно с Диана Шнайдер (теннис)</a> porno Илья Ковальчук (хоккей) porno Игорь Акинфеев (футбол) <a href=https://rhymes-punches.com/>Набиуллина Эльвира Сахипзадовна порно</a> casinos xyz казино пину автомат казино казино на деньги вывод казино up casino скачать казино большая
DiskiPlus слот casino DiskiPlus казино онлайн бесплатно <a href=https://diskiplus.ru>DiskiPlus casino рабочее</a> DiskiPlus vavada casino DiskiPlus демо казино <a href=https://diskiplus.ru>DiskiPlus Ходнева Светлана Владимировна порно</a> DiskiPlus казино смотреть DiskiPlus 1×bet casino DiskiPlus casino зеркало сегодня рабочее DiskiPlus сколько казино DiskiPlus 1×bet слоты DiskiPlus casino рабочее DiskiPlus порно с Алина Загитова
#474 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
бк букмекерская контора казино сегодня <a href=https://sovsekretno.net/>порно с Кирьянова Дарья Борисовна</a> вавада казино casino 7k рабочее <a href=https://www.ossetia.tv/>порно с Ирина Сидоркова</a> casino сайты пин ап казино 1×bet зеркало слоты играющие казино онлайн гта онлайн казино inform@rucriminal.info лучшая казино
DiskiPlus фреш казино DiskiPlus казино онлайн бесплатно <a href=https://diskiplus.ru/>DiskiPlus казино вулкан</a> DiskiPlus казино рояль смотреть DiskiPlus рабочие зеркала казино <a href=https://www.diskiplus.ru>DiskiPlus porno Елизавета Туктамышева</a> DiskiPlus порно с Георгий Джикия (футбол) DiskiPlus казино гта 5 DiskiPlus 1×bet на андроид бесплатно DiskiPlus 1×bet на сегодня DiskiPlus казино ли DiskiPlus Львова-Белова Мария Алексеевна порно DiskiPlus порно с Анастасия Потапова, теннисистка
#475 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт, скачать
Бонус начисляется игроку незамедлительно последствии регистрации и прохождения верификации в казино и не настятельно от посетителя внесения депозита. Как правило, размер приза в схожем случае довольно умеренный, впрочем разрешает новичкам познакомиться с игрой без риска реальными деньгами.Главным нюансом в появлении этих вознаграждений произведено в том, собственно пустив их в ход, компьютерные ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он спасибо призам какой-либо выигрыш либо мгновенно спустит все лишь собственно прибывшие финансы). То есть, казино снабжает игрока возможностью на дармовой основе выступать во различные слоты и даже спонсирует забаву. <a href=http://filmkachat.ru/>1хслот скачать</a> Для вывода средств бонус надо(надобно) будет отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами акции и вариациями отыгрыша бездепозитного бонуса до его получения, дабы избежать конфликтных обстановок.Бонус за регистрацию в казино без депозита с выводом средств нужно отыграть. Зачастую для отыгрыша возможность потребоваться устроить ставки на необходимую, в некоторое десятков раз превышающую сумму бонуса либо выигрыша. <a href=http://snstheme.com/forums/users/modern-interior-design/>http://snstheme.com/forums/users/modern-interior-design/</a> 1×slot зеркало рабочее регистрации на телефон придет <a href=https://qa-offsourced.com/author/edwardron/>https://qa-offsourced.com/author/edwardron/</a> Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и. Когда игроку надеется много фриспинов, администрация возможность разбивать их начисление на количество дней. Бесплатные вращения предоставляются для определенного слота, кот-ый указывается в правилах акции.Можно ли зарабатывать на бездепозитных бонусах? Это не работа, здесь как повезет, в в любом предложенном безедепе, вы будете откручивать вейджер и выводить, за возможно именовать везением, и дополнительной добавкой к вашему бюджету.
1×slots зеркало на сегодня
1×слот регистрация в 1×slots casino На нашем сайте Вы найдете перечень своевременных новых бездепозитных бонусов в казино 2022 года. Также, есть много эксклюзивных услуг, которые доступны лишь гостям нашего сайта в регистрации по нашей ссылке либо активации специального промокода.Для казино, работающих онлайн, бездепозитные призы необходимы для вербования новых клиентов. Предложение сыграть на слотах без надобности внесения настоящих средств — работающий метод для повышения энтузиазма к фирмы. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит играть в казино, только сейчас теснее на собственные деньги. <a href=http://www.xn–9i2bz3bx5fu3d8q5a.com/bbs/board.php?bo_table=free&wr_id=1695593>http://www.xn–9i2bz3bx5fu3d8q5a.com/bbs/board.php?bo_table=free&wr_id=1695593</a> Эффективность бездепов в маркетингового инструмента расценили почти операторы. Малоизвестные площадки употребляют эти акции, чтобы живо набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны постоянных гостей. Не все сайты, дающие презенты без депо, рекомендованы к этой. За привлекательным промоописанием шансы скрываться невыполнимые обстоятельства отыгрыша и другие подводные камешки.Однако далеко не все ресурсы предлагают своим посетителям бездепозитные призы за регистрацию в казино. В большинстве случаев предусмотрено поощрение на первый депозит в размере 100–200%. Это отличная вероятность преумножить банкролл, прирастить время, проведённое за игрой и шансы сорвать крупный куш. зеркала 1×slots
1×slots казино зеркало
Вейджер (или вагер) ? это минимальная сумма ставок, которую необходимо устроить для вывода валютного бонуса. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение.Таким образом, заведение пробует продемонстрировать себя своим вероятным геймерам, а такой рекламный ход как казино приз без депо за регистрацию завлекает довольно много внимания к игорному заведению и обеспечивает неизменный струю свежих гостей и будущих посетителей игрового онлайн клуба. <a href=http://0018688.com/home.php?mod=space&uid=14875>http://0018688.com/home.php?mod=space&uid=14875</a> Шаг 4. Активация. Внимательно исследуйте условия, информацию по лимитированиям и сроке деянья бонусного предложения. Разобравшись с правилами, можно активировать приз в личном офисе (от ? с использованием промокода) или по запросу в саппорт. 1×slots регистрация то дальше необходимо пройти
1×slots сайт
Некоторые клубы автоматически начисляют приз на аккаунт игрока после исполнения условий получения, хотя посещают ситуации, когда бонус надо(надобно) активировать игроку самому. Есть несколько способов активации приза: <a href=http://nakupnidivadlo.cz/index.php/forum/3-pripominky/46618-https-sk-service1-ru?start=486#239657>1×slots зеркало на сегодня</a> Если при регистрации указать промокод, возможно гарантировано получить приз. Где арестовать ваучер? Посетите определенную блоги либо форумы. Иногда администрация клуба проделывает рассылку ваучеров на электронную почту. В последнее время игорные жилища начали афишироваться в кинокартинах и сериалах. Присмотритесь и наверняка заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных руб.Когда речь о денежных призах, казино всегда устанавливают условия вейджера, которые нужно выполнить, чтобы исключить выигрыш. При регистрации никаких либо ином онлайн игральном заведении — для дается один шанс испытывать свою удачу не внося средства монеты. Замечу собственно такую поощрительную предложение деют не все онлайн игровые площадки, а только щедрая середина(средина) из их. Которые мы подготовили для Вас в нашем списке.Онлайн гемблинг развивается с любым днем все больше и больше, новые бренды создаются не по денькам а по часам. Новые интернет казино делают вступительные акции для игроков, для того что бы зарекомендовать себя, и что, этим наиболее предлагают бездепозитные призы за регистрацию, собственно бы не упустить эту вероятность — как пользоваться свежим бездепом, рекомендуем навещать наш сайт как возможно почаще, самое лакомое и новые будет добавляться в этом же списке. 1×slots акции <a href=http://a96549hg.bget.ru/user/JasperbuG/>http://a96549hg.bget.ru/user/JasperbuG/</a> В каждом казино с бездепозитным бонусом учтены вейджеровые условия. Это один-единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) сделать определённое число ставок. Чем круче приз, тем труднее выполнить обстоятельства, и наоборот.Какие призы возможность еще получить кроме бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, каждое онлайн казино предлагает игрокам выгодное предложение на 1-ый депозит, вы совершаете депо, ваш депо возрастает в двое или том в трое, тем самым начать выступать можно с больше крупной суммой, например же не забываем тему вейджер на призы.
1×slots casino регистрация
<a href=https://sncchicago.com/bbs/board.php?bo_table=free&wr_id=119000>https://sncchicago.com/bbs/board.php?bo_table=free&wr_id=119000</a> 1×slots официальный сайт мобильная версия скачать Все любят получать подарки. Согласитесь, почти каждый играющий человек будет бесконечно счастлив, случае получит даровой презент для забавы в онлайн казино просто за регистрацию или же бонус за внесенный депозит, так именуемые приветственные бонусы для свежих игроков. Соответственно такие интернет клубы будут больше известны и предпочтительны у игроков при выборе казино для забавы. Топ казино день обновляется и прибавляются новые и увлекательные игровые клубы с симпатичной бонусной политикой и всеми возможными привилегиями, к которым относятся такие призы как фриспины за регистрацию, денежные бездепозитные призы, а также щедрые призы за внесенный депозит.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.as-p.cz/viewtopic.php?f=45&t=298543>1×slots зеркало видели такую регистрацию на</a>
<a href=http://yamato-ryu.ru/communication/forum/index.php?PAGE_NAME=message&FID=1&TID=46867&MID=11616&sessid=8eae3ff04807e218cfd15e6595e48364&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1×slots официальный demo регистрация в 1×slots casino</a>
<a href=https://www.thefamilylegion.se/viewtopic.php?f=4&t=106396>1хслотс рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Большинство интернет-казино из нашего топ-10 готовы порадовать вас эксклюзивными промоакциями. Читайте о их в обзорах и на форуме.
#476 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up casino зеркало 1×bet официальный скачать <a href=https://sovsekretno.net/>бесплатно фильм казино</a> 7k casino сайт приложения букмекерских контор на андроид <a href=https://krtka.info/>Набиуллина Эльвира Сахипзадовна порно</a> порно с Анастасия Потапова, теннисистка казино в россии бесплатные букмекерские конторы Комарова Наталья Владимировна порно porno Дарья Клишина porno Алена Михайлова казино зеркало сегодня
DiskiPlus порно с Виктория Синицина, фигуристка DiskiPlus porno Мира Андреева (теннис) <a href=https://www.diskiplus.ru>DiskiPlus 1×bet официальный скачать</a> DiskiPlus казино смотреть DiskiPlus inform@rucriminal.info <a href=https://diskiplus.ru>DiskiPlus пин ап casino pin</a> DiskiPlus карты казино DiskiPlus казино играть DiskiPlus порно с Юлия Ефимова, пловчиха DiskiPlus Манилова Алла Юрьевна порно DiskiPlus 1×bet DiskiPlus casino промокод DiskiPlus казино онлайн
#477 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
Фриплей-бонусы. Бонусы за бесплатную забаву есть только в некоторых клубах. Они зачисляются сразу после сотворения профиля и срабатывают недолговременное время. Если у вас нет времени израсходовать средства, они просто завершатся. Что касается медли, в большинстве случаев призы действуют на 1-го часа.Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавления либо официального посетителя для ПК. В большинстве казино действуют программы лояльности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на грядущий степень нередко сопровождается выдачей бездепа. <a href=http://filmkachat.ru/>1×slots casino зеркало рабочее</a> <a href=https://taplink.cc/kalinka0588>https://taplink.cc/kalinka0588</a> 1×slots официальный регистрация <a href=http://visioneng.godhosting.net/bbs/board.php?bo_table=online&wr_id=341793>http://visioneng.godhosting.net/bbs/board.php?bo_table=online&wr_id=341793</a> Мы делаем акцент на главных положениях правил, рассказываем о территориальных ограничениях и кратко информируем о других промоакциях обсуждаемого казино.
1×slots регистрацию более популярный вариант это
Нет. Казино раздают благотворительные бонусы за регистрацию, для того, дабы заказчик имел ознакомиться с игровым заведением. А чтобы исключить его, нужно выполнить обстоятельства отыгрыша. 1× slots зеркало <a href=http://www.avian-flu.org/bbs/board.php?bo_table=qna&wr_id=2981722>http://www.avian-flu.org/bbs/board.php?bo_table=qna&wr_id=2981722</a> Мы подготовили список, где есть всегда актуальные и свежие бездепозитные бонусы казино, которые вы можете получить бесплатно. Для наших пользователей есть особые предложения эксклюзивные призы, коие вы у не отыщите, их мы обозначили специальной красноватой плашкой «Exclusive».В лицензионных бездепозитных казино играть в азартные забавы вправду безопасно. Наличие лицензии одобряет что, этот факт, что клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP. 1×slots сайт
1 x slots
Например, игрок получил 500 руб. При творении аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 рублей, понадобится устроить 875 спинов для полного отыгрыша. Размер ставки для игры по бездепозитному бонусу (естесственно же, если, тогда,, когда он представлен вид бонусных валютных средств) часто ниже, чем при забаве на депозит. Ограничение несомненно работать до момента отыгрыша бонуса. <a href=http://xn–h49ar4kn3dpfl0z22n74bghp5kwv1bptct6dzzb.com/bbs/board.php?bo_table=free&wr_id=92338>http://xn–h49ar4kn3dpfl0z22n74bghp5kwv1bptct6dzzb.com/bbs/board.php?bo_table=free&wr_id=92338</a> 1× slots официальный
1×slot зеркало рабочее этих способов предполагает регистрацию
Чаще всего интернет-казино предлагают бездепозитные бонусы новым пользователям. Эта промо-акция очень отлично завлекает начинающих, подталкивая их к открытию счета. Конечно, не все они становятся послушными посетителями, хотя сам прецедент регистрации аккаунта играет на руку заведению.Все благотворительные призы кажутся соблазнительными. Кто же откажется от способности поиграть в онлайн-казино, не рискуя средствами, хотя получая выигрыши. Но далеко не все бездепозитные бонусы в равной степени привлекательны для рассудительного клиента. <a href=http://kemsrr.forumex.ru/viewtopic.php?f=7&t=5632>1хслотс регистрация в 1×slots casino</a> Бонус начисляется игроку незамедлительно последствии регистрации и прохождения верификации в казино и не настятельно от клиента внесения депозита. Как правило, объем бонуса в подобном случае довольно застенчивый, впрочем позволяет новеньким познакомиться с игрой без риска настоящими средствами.Онлайн-казино кропотливо продумывают бонусные условия, коие нужно изучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и ограничения. Можно ли в одном онлайн казино получить больше 1-го бонуса за регистрацию? Нет, так как в любом интернет казино есть управляла, к которым надо(надобно) придерживаться, не создавать 2 аккаута для получения призов, по будет блокировка обоих аккаутов, не пытайтесь перехитрить онлайн казино, бонус за регистрацию выдаеться раз один 1 лицу.Для тех, кто лишь взвешивает испытать собственную удачу, а также для профессиональных игроков, разыскивающих свежие площадки для выигрышей, основные лицензированные казино нередко организуют разные акции, и одно из лучших предложений за последнее время – как для новичков, например и для проф игроков – бездепозитный приз за регистрацию. 1×slots регистрация 1×slotscasino09k online <a href=http://tleubergenov.kz/index.php?subaction=userinfo&user=upyceka>http://tleubergenov.kz/index.php?subaction=userinfo&user=upyceka</a> Подобные призы без депозита предоставляются на более выгодных условиях. Зачастую они покрупнее, а условия отыгрыша наименее жесткие.
онлайн казино 1×slots
<a href=http://forum.roozgozar.com/member.php?action=profile&uid=8709>http://forum.roozgozar.com/member.php?action=profile&uid=8709</a> Можно ли в одном интернет казино получить больше одного бонуса за регистрацию? Нет, так как в каждом интернет казино есть управляла, к которым нужно держаться, не делать два аккаута для получения призов, иначе несомненно блокировка обоих аккаутов, не пытайтесь перехитрить онлайн казино, бонус за регистрацию выдаеться раз раз одному лицу.Также случаются случаи, когда казино начисляет обсужденный приз в регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам. 1×slot казино зеркало Прежде всего, не запамятовывайте периодически заглядывать на страницу обзоров бездепозитных призов. Они шаг за шагом рассматривают более увлекательные предложения ведущих игорных порталов.
<b>Смотреть еще похожие новости:</b>
<a href=http://av3526.com/forum.php?mod=viewthread&tid=76&pid=32745&page=60&extra=#pid32745>1 х слотс зеркало</a>
<a href=http://skatefluckit.com/member.php?u=149708>1×slots подтвердит вашу регистрацию если говорить</a>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=694885>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
4. Заберите подарок. Чаще всего приз активируется сразу в регистрации. Но случаются истории, когда надо(надобно) зайти в личный офис либо написать в службу.
#478 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало рабочее на сегодня 1×bet xyz casino автомат <a href=https://rucriminal.info/>казино на деньги</a> porno Андрей Рублев (теннис) casino 7k сегодня <a href=https://7club7.com/>порно с Захарова Мария Владимировна</a> 1×bet Преподобная Надежда Александровна порно 1×bet рабочее на сегодня порно с Васильева Татьяна Викторовна porno Дарья Мороз Крючкова Полина Викторовна порно бесплатные букмекерские конторы
DiskiPlus пин ап казино DiskiPlus Черкесова Бэлла Мухарбиевна порно <a href=https://www.diskiplus.ru/>DiskiPlus Окладникова Ирина Андреевна порно</a> DiskiPlus порно с Никита Кучеров (хоккей) DiskiPlus 1×bet <a href=https://www.diskiplus.ru/>DiskiPlus порно с Сергей Бобровский (хоккей)</a> DiskiPlus казино смотреть онлайн DiskiPlus порно с Александр Головин (футбол) DiskiPlus пин ап casino pin DiskiPlus casino зеркало сегодня рабочее DiskiPlus 7k casino скачать DiskiPlus бесплатные букмекерские конторы DiskiPlus порно с Абрамченко Виктория Валериевна
#479 Charlesgunnyhttp://filmkachat.ru
зеркло казино 1×slots
Каждый игры обязан сначала отчетливо изучить условия по получению и отыгрышу приглянувшегося подарка. Если всё организует, поспешите отобрать бесплатные спины за регистрацию в казино без депозита с выводом и без отыгрыша и напрямик в начать вращать барабаны топовых слотов.Классическая разновидность приза за создание аккаунта. Его преимущество содержится том,, что заказчик возможность без подбирать аппараты и создавать ставки в их. Иногда перечень игровых автоматов ограничен оператором, хотя все точно это чем, чем единственный дешевый разъем, как в случае с внедрением фриспинов. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> Если вы опытный игрок, вы должны аристократия, собственно бонус без депозита – редкая находка. Тем не менее, мы еженедельно исследуем интернет, дабы отыскать для вас наихорошие бездепозитные предложения.Бездепозитные бонусы казино за регистрацию в 2022 году — это возможность сыграть за счёт заведения. Казино даёт клиенту шанс воспользоваться определённой суммой либо количеством бесплатных вращений без внесения депо. Не путайте деморежим с реальной игрой без надобности внесения депозита. <a href=https://www.bunity.com/-656a43e6–97c0–4816-aedc-21f8d5e41341>https://www.bunity.com/-656a43e6–97c0–4816-aedc-21f8d5e41341</a> Практически все онлайн казино с бездепозитным призом за регистрацию учитывает программку преданности — систему поощрения постоянных клиентов, которая произведено из большого уровней. При достижении игроком одного уровня на его счёт поступает бонус. Чем повыше уровень — тем щедрее приз.Онлайн гемблинг развивается с каждым деньком все больше и больше, свежие бренды создаются не по денькам а по часам. Новые интернет казино делают вступительные промоакции для игроков, для того собственно бы зарекомендовать себя, и тем самым предлагают бездепозитные бонусы за регистрацию, собственно бы не упустить эту вероятность — как пользоваться свежим бездепом, советуем посещать наш вебсайт как возможно чаще, самое аппетитное и новые будет добавляться в этом же перечне. 1×slots зеркало регистрация <a href=https://civil808.com/user/64759/mycsgocen>https://civil808.com/user/64759/mycsgocen</a> Выигрыши с бонусов без инвестициям практически привязаны к требованию по ставкам и шансы быть обналичены лишь после исполненья данных требований.
1×slots casino регистрация
Выбирая бесплатный приз, внимательно изучайте управляла. Убедитесь, что для возможно брать роль в промоакции. Уточните, в каких забавах возможно скорпулезно условия вейджера. При надобности задавайте вопросы адептам саппорта.Промообъявления от казино мешают реальной картины и направлены на привлечение внимания пользователей. Понять, как высоки шансы остаться в плюсе, позволит личный анализ условий предложения: 1×slots акции Для подтверждения электронной почты, просто перейдите по интенсивной ссылке в послании, приобретенном от игрового заведения.Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, all зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. <a href=http://spectr-sb116.ru/user/DoctorLazutapr/>http://spectr-sb116.ru/user/DoctorLazutapr/</a> 1хлот регистрация в 1×slots casino Акции распространяются как на все игры казино, так и на ограниченный список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino прочие. Промо может охватывать разработки 1-го производителя. Бездеп не пересекается с иными промоакциями казино. Если на веб-сайте предусмотрен кэшбек, он не начисляется за ставки, сделанные бонусными деньгами. Для идентификации платежных реквизитов игрока имеет понадобиться пополнение счета на минимальную необходимую.
casino 1×slot
Вейджер (wager) – это коэффициент, который демонстрирует на какую необходимую нужно сделать ставок, дабы вывести приз из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода этого бонуса, Вам необходимо сделать ставок на сумму: 500*70=3500 рублей. Только полностью отыграв приз, Вы можете исключить собственный выигрыш.Бездепозитный бонус часто возможность стать доступным незамедлительно в завершения регистрации, поскольку как единственным требованием к нему является регистрация, а затем проверка вашей свежей учетной записи. Мы подготовили перечень, где есть всегда животрепещущие и свежие бездепозитные бонусы казино, коие вам получить бесплатно. Для наших пользователей есть особые предложения неповторимые бонусы, которые вы нигде не отыщите, их мы определили особой красноватой плашкой «Exclusive».Онлайн гемблинг развивается с каждым деньком все больше и больше, свежие бренды создаются не по дням а по часам. Новые онлайн казино делают вступительные акции для игроков, чтобы, чтобы собственно бы зарекомендовать себя, и что, этим самым предлагают бездепозитные призы за регистрацию, что бы не упустить такую возможность — как пользоваться свежим бездепом, рекомендуем посещать наш сайт как возможно почаще, самое аппетитное и новые несомненно добавляться в данном же списке. <a href=http://oldgroup.ge/test/index.php?subaction=userinfo&user=boringdetention>http://oldgroup.ge/test/index.php?subaction=userinfo&user=boringdetention</a> Чем ниже значение вейджера, что, этим проще отыграть и исключить бонус. Если Вы планируете заработать на бездепе, не просто ознакомиться с новым игровым клубом, то стоит избегать бонусов с высоким вейджером их почти не реально отыграть. С ними Вы можете лишь протестировать забавы заведения.Казино выводит деньги только на что, эту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного приза, Вам поначалу нужно пополнить счет. В неких клубах ограниченный список способов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет именно с этих платежных методов, коие доступны для вывода. 1×slots casino регистрация Для казино, работающих онлайн, бездепозитные бонусы нужны для вербования свежих клиентов. Предложение поиграть на слотах без необходимости внесения реальных средств — работающий способ для увеличения энтузиазма к фирмы. После отыгрыша бездепа велик шанс, что игроку понравится и он продолжит играть в казино, лишь теперь теснее на собственные средства.В большинстве заведений устроить это можно по e-mal, по номеру аппарата, спустя социальную сеть либо гугл-аккаунт.
1×slots регистрация 1×slotscasino 56 online
1хслотс официальный сайт зеркало <a href=https://codescript.ru/user/PorsedropOt/>https://codescript.ru/user/PorsedropOt/</a>
1 x slots casino
<a href=http://biosafe.tj/user/Jasperres/>http://biosafe.tj/user/Jasperres/</a> Ниже указан важный список законных казино в Беларуси с бонусами на 1-ый депозит. Вы сможете попасть на официальный вебсайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. 1х слот 1хслотс регистрация перейти на 1×slots Также бездепозитные призы шансы работать методом возвращать к ирге клиентов, что приостановивших своё сотрудничество с компанией: уведомление о бездепе поступает на мобильный аппарат либо почту.Но есть игорные заведения, которые готовы просто например жертвовать деньги на игру. Для этого довольно создать профиль. Чтобы исключить собственный выигрыш, вам поначалу необходимо выполнить обстоятельства отыгрыша, обозначенные в критериях получения бездепозитного депозита.
<b>Смотреть еще похожие новости:</b>
<a href=https://acerfans.ru/user/JamesTed/>1×slots на любой вкус как пройти регистрацию</a>
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=10592>1хлот регистрация в 1×slots casino</a>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=703057>1×slots регистрация на 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Да, у даровых призов есть недостатки. Прежде всего, они обыкновенно большие. Кроме того, обстоятельства вейджера по ним практически жесткие. Но все неимение риска проделывает их очень привлекательными для клиентов. Так что приготовьтесь дать конфиденциальную информацию (пол, возраст, государство проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает не более суток, после чего удастся беспрепятственно выводить солидные выигрыши.
#480 internetGephttps://spb-domashnij-internet003.ru
узнать интернет по адресу <a href=https://spb-domashnij-internet003.ru>spb-domashnij-internet003.ru</a> интернет по адресу
#481 Charlesgunnyhttp://filmkachat.ru
1×slot казино зеркало
Мы подготовили список, где есть постоянно актуальные и новые бездепозитные бонусы казино, коие возможность получить даром. Для наших пользователей есть специальные предложения неповторимые призы, коие вы у не найдете, их мы определили специальной красноватой плашкой «Exclusive».Составленный знатоками Casino.ru перечень онлайн-казино с бездепозитным призом разрешает игрокам сравнить спецпредложения разных операторов. <a href=http://filmkachat.ru/>1хслотс рабочее зеркало</a> Но есть игорные заведения, которые готовы просто так жертвовать средства на забаву. Для сего довольно создать профиль. Чтобы вывести свой выигрыш, вам сначала необходимо выполнить условия отыгрыша, указанные в условиях получения бездепозитного депозита. <a href=https://acrobat.uservoice.com/forums/935259-acrobat-web-beta-internal/suggestions/49479029-%D0%BF%D1%80%D0%BE%D1%84%D0%B5%D1%81%D1%81%D0%B8%D0%BE%D0%BD%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2-%D0%BA%D0%B8%D0%B5%D0%B2%D0%B5-%D0%BE%D1%81%D0%BE%D0%B1%D0%B5%D0%BD%D0%BD%D0%BE%D1%81%D1%82%D0%B8-%D0%B8>https://acrobat.uservoice.com/forums/935259-acrobat-web-beta-internal/suggestions/49479029-%D0%BF%D1%80%D0%BE%D1%84%D0%B5%D1%81%D1%81%D0%B8%D0%BE%D0%BD%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2-%D0%BA%D0%B8%D0%B5%D0%B2%D0%B5-%D0%BE%D1%81%D0%BE%D0%B1%D0%B5%D0%BD%D0%BD%D0%BE%D1%81%D1%82%D0%B8-%D0%B8</a> 1×slots регистрация то дальше необходимо пройти <a href=https://www.scottsfasteners.com/users/julesvek>https://www.scottsfasteners.com/users/julesvek</a> За счёт спинов получится запустить разные интернет слоты, протестировать стратегии и поднабраться навыка. Фишка в том, собственно вращения начисляются на лучшие аппараты с оригинальными опциями и высокой отдачей. Не забывайте, собственно в каждом акционном предложении предусмотрены специальные требования – временные ограничения, наибольший размер ставки, перечень доступных игр.
1×slots зеркало сайта
Максимальная ставка ? уточняется в денежной счета и ограничивает объем ставки за раз спин. В случае ее превышения приз имеет быть аннулирован. Также в правилах возможность содержаться запрет на размещение ставок конкретного облика, к, по одинаковым шансам в рулетке (другими, на чет либо нечет, красноватое либо черное и т.д. ).Бездепы шансы заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой либо баллами. 1×slots зеркало видели такую регистрацию на <a href=http://dvkf.com.ua/index.php?subaction=userinfo&user=synonymouspusho>http://dvkf.com.ua/index.php?subaction=userinfo&user=synonymouspusho</a> Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. 1×slot зеркало Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.
1×slots casino регистрация на сайте
При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое возможно предназначить этой в казино.Можно ли зарабатывать на бездепозитных призах? Это не работа, здесь как повезет, в в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, тогда возможно именовать везением, и добавочной добавкой к вашему бютжету. <a href=http://andres-website.de/profile.php?lookup=12010>http://andres-website.de/profile.php?lookup=12010</a> Каждый из бездепозитных бонусов без пополнения 2022 имеет свой конкретный вейджер для отыгрыша, например же в каждом казино он устанавливается персонально — где то он х55 а где-то х30, повторюсь везде по различному! 1×slots официальный сайт мобильная версия скачать Если площадка дарит бездеп за регистрацию, то процедура его получения проста. Нужно только завести акк на сайте и активировать его, подтвердив адрес электронной почты, номер аппарата либо иные данные, которые требует оператор. Перед этим нужно увериться, собственно пользователь располагается на официальном веб-сайте казино, но на жульнической площадке.Прямо в арестуйте благотворительные вращения за регистрацию без депо и начинайте собирать призовые композиции ради крупных выигрышей!
1хслотс 1хслотс регистрация перейти на 1×slots
Популярность интернет казино растёт и всё больше юзеров начинают увлекаться азартными забавами. Бездепозитные бонусы 2022 года, это уникальные презенты за регистрацию. С их помощью новые игроки могут получить бесплатные вращения либо деньги на баланс за одну регистрацию. С свет игорных заведений в онлайне, бездепозитные бонусы стали знаменитейшим методом привлечения игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о которых мы поведаем. Наш сайт собрал лучшие предложения из онлайна на 2022 год. Воспользуйтесь любым презентом и сможете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить условия. <a href=https://www.donchillin.com/space-uid-382497.html>1×slots быструю регистрацию а также мгновенное</a> Одним из предлогов отдавать преимущество, льготу одному или другому заведению содержится в привлекательности предлагаемых акций и бесплатных услуг. Безвозмездные фриспины, выдаваемые без нужды создавать какой-либо вклад, в перечне находится далеко не в конце. 1×slots зеркало этих способов предполагает регистрацию <a href=http://coinauctionshelp.com/forum/memberlist.php?mode=viewprofile&u=64125>http://coinauctionshelp.com/forum/memberlist.php?mode=viewprofile&u=64125</a> Отыграв бездепозитный бонус в казино с выводом тоже придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в сходственное лимитирование существует, то единоразово вывести получится только необходимую, не превосходящую объем полученного приза.Активация валютного гонорары случается автоматически последствии сотворения профиля либо применения промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на странички казино в социальных сетях или на рассылку маркетинговых сообщений, скачать и ввести вспомогательный софт и т.д.
1 xslots рабочее зеркало
4. Заберите подарок. Чаще всего бонус активизируется сразу в регистрации. Но бывают истории, когда надо(надобно) забежать в индивидуальный кабинет либо написать в саппорта.Для всех бездепозитных призов действует максимальный лимит на выигрыш. Он показывает предельную необходимую, коию возможность получить, играя на бонусные кредиты. Как только вас получится выполнить требования вейджера, допустимый максимально будет переведен с бонусного счета на главной, а остаток будет списан. <a href=http://www.gtcm.info/home.php?mod=space&uid=912445>http://www.gtcm.info/home.php?mod=space&uid=912445</a> 1×slots зеркало регистрация в 1×slots casino Если вы бывалый игрок, вы должны аристократия, собственно приз без депо – редкая находка. Тем ниже, мы раз исследуем онлайн, дабы отыскать для вас лучшие бездепозитные предложения.
<b>Смотреть еще похожие новости:</b>
<a href=http://craft4game.forumex.ru/viewtopic.php?f=2&t=4232>1×slots акции</a>
<a href=http://yaoisennari.ekafe.ru/viewtopic.php?f=169&t=3781>казино 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Обычно, бездепозитные бонусы выдаются под определенные слоты с фиксированной ставкой, но их наверняка запрещено применять в игровых автоматах с прогрессивным джекпотом. Список игр, в которых можно применять бездеп, Вы найдете в описании промоакции либо можете уточнить у саппорта заведения.
#482 Сколько стоит ремонт ПНВ PARDhttps://samara.pdacenter.ru/remont-pnv/pard.html
Профессиональный сервисный центр по ремонту техники в Самаре. Мы предлагаем: <a href=https://samara.pdacenter.ru/remont-pnv/pard.html>Сколько стоит ремонт ПНВ PARD</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#483 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
champion casino пин ап casino pin <a href=https://rucriminal.info/>casino рабочее</a> казино фильм смотреть онлайн казино вход официальный сайт <a href=https://7club7.com/>pin ап casino</a> porno Илья Ковальчук (хоккей) порно с Анна Щербакова, фигуристка порно с Арина и Дина Аверины, гимнастки pin up casino скачать порно с Голикова Татьяна Алексеевна 1×bet зеркало рабочее на сегодня porno Юлия Пересильд
DiskiPlus слот casino DiskiPlus 1×bet сейчас <a href=https://diskiplus.ru>DiskiPlus ramenbet casino</a> DiskiPlus казино играть DiskiPlus казино играть <a href=https://diskiplus.ru/>DiskiPlus Валентина Матвиенко порно</a> DiskiPlus порно с Анна Калинская (теннис) DiskiPlus казино вулкан DiskiPlus фильмы казино рояль DiskiPlus 1×bet регистрация DiskiPlus Москалькова Татьяна Николаевна порно DiskiPlus pin casino DiskiPlus официальные сайты казино
#484 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
официальные букмекерские конторы скачать pin up casino скачать <a href=https://rucriminal.info/>porno Екатерина Ефременкова, шорт-трекистка</a> 7k casino официальный сайт Львова-Белова Мария Алексеевна порно <a href=https://repost.news/>бесплатное казино</a> порно с Варвара Субботина Чулпан Хаматова porno Дарья Мороз casino онлайн почему в казино нет окон champion casino Разуваева Ксения Денисовна порно
DiskiPlus казино сочи DiskiPlus pin up букмекерская контора <a href=https://diskiplus.ru/>DiskiPlus винлайн букмекерская контора</a> DiskiPlus порно с Гатагова Ольга Анатольевна DiskiPlus водка казино <a href=https://www.diskiplus.ru>DiskiPlus porno Елизавета Туктамышева</a> DiskiPlus букмекерские контора ап DiskiPlus порно с Дронова Александра Викторовна DiskiPlus Фастова Елена Владимировна порно DiskiPlus пин ап букмекерская контора DiskiPlus casino daddy DiskiPlus online casino 7k DiskiPlus casinos winning
#485 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация то дальше необходимо пройти
Выбор любого интернет казино на нашем сайте. В описании к любому Вы можете узнать, что получите за творенье аккаунта. <a href=http://filmkachat.ru/>1×slots бездепозитный бонус за регистрацию</a> Доступность — бездепозитные бонусы в казино чаще всего предоставляются свежим игрокам, хотя случаются случаи, когда бонус шансы получить и действующие клиенты. <a href=https://designaddict.com/community/profile/avto-vikup/>https://designaddict.com/community/profile/avto-vikup/</a> 1×slots сайт <a href=http://apatit.org.ua/user/Walterinofe/>http://apatit.org.ua/user/Walterinofe/</a> Если вы опытный игрок, вы обязаны аристократия, собственно приз без депозита – редкая находка. Тем не менее, мы в исследуем интернет, дабы найти вам наилучшие бездепозитные предложения.
1×slot рабочее зеркало
Выше мы предоставили глубокий комплект самых новых и актуальных бездепозитных призов в онлайн казино без пополнения на 2022 год, где продоставляется воспользоваться хоть ценным бездепозитным призом.Так собственно основное различие презента на депозит от бездепа – неотъемлемое пополнение счёта. Вы сможете внести депозит и преувеличить стартовый капитал либо арестовать бездеп и при не придётся рисковать собственными сбережениями. Поспешите выполнить простые притязания, и администрация ресурса начислит щедрое поощрение! 1× slots регистрация в 1×slots casino Для всех бездепозитных призов функционирует максимальный предел на выигрыш. Он показывает предельную сумму, которую появится получить, играя на бонусные кредиты. Как только для удастся выполнить требования вейджера, дозволенный максимально несомненно переведен с бонусного счета на главной, а остаток несомненно списан.На условиях отыгрыша даровых призов идет тормознуть подробнее. С ними связаны аспекты, коие невозможно забыть без внимания. <a href=https://cse.google.co.ck/url?q=https://doctorlazuta.by/>https://cse.google.co.ck/url?q=https://doctorlazuta.by/</a> 1×slots регистрация то дальше необходимо пройти Вывод выигрыша с бездепозитных бонусов казино – щедрый подарок от азартных клубов. Но чтобы исключить собственный доход, нужно выполнить ряд критерий:
1×slots официальный сайт скачать
В интернет-сети практически возможно отыскать перечни наиболее знаменитых и обещанных поощрительных программ от известных онлайн-казино. Бездепозитные призы начисляются только один раз. Не стоит открывать свежие аккаунты, чтобы получить их повторно. Служба безопасности казино непременно выявит «левого» участника и перекроет. Если гость выполнит необходимые требования, отыграет собственную ставку и решит исключить личный выигрыш, то ему нужно принять, собственно казино непременно потребует дать ксерокопии собственных документов, дабы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные средства вывести не получится.Многие казино предоставляют в рекламных целях безвозмездные призы необыкновенно для наших читателей. Чтобы их получить, надо(надобно) перебежать на игровой вебсайт по партнерской ссылке с нашего портала. <a href=http://www.microstock.ru/forum/member.php?u=230024>http://www.microstock.ru/forum/member.php?u=230024</a> x1 slots 1хслотс регистрация перейти на 1×slots
1хслот 1хслотс регистрация перейти на 1×slots
<a href=http://www.infoknygos.lt/smforum/index.php?topic=134721.new#new>1хслотс казино зеркало</a> Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную процедуру активации бонуса без депозита. Внимательно прочтите до конца. Многие новички проделывают ошибки на этапе регистрации и поэтому возможности получить презент. Отказ в прохождении верификации. Если клиент не хочет либо возможности предоставить документы, подтверждающие его лицо, профиль несомненно заблокирован совместно, вкупе со всеми бонусными начислениями. 1× slots регистрация в 1×slots casino <a href=http://web.symbol.rs/forum/member.php?action=profile&uid=743196>http://web.symbol.rs/forum/member.php?action=profile&uid=743196</a> Баланс игрока дополняется на подходящую сумму. К ней применяется вейджер, обозначенный в правилах промоакции. Вывести выигрыш можно будет последствии того, как юзер устроит требуемый объем ставок из личных средств. В редчайших случаях бездеп трудится в формате Free Play. На счет юзера зачисляется крупная сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по окончании этого периода сумма на счету будет превосходить первоначальную, то разницу можно будет исключить или применять для последующих ставок.Главным нюансом в появлении данных вознаграждений произведено сомнений, что пустив их в ход, геймер ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он спасибо призам какой-нибудь выигрыш или моментально спустит все лишь что прибывшие деньги). То есть, казино снабжает игрока вероятностью на дармовой основе выступать во различные слоты причем спонсирует игру.
1×slots регистрация 1×slotscasino 56 online
Для верификации номера телефона, в собственном профиле изберите опцию „Подтвердить номер телефона“ и введите в отвечающее фон код, приобретенный в sms-сообщении.Перед активацией важно внимательно выучить условия акции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют велечину кроме лимиты ставок при отыгрыше и сроки, на коих можно воспользоваться предложением. Если бездеп охватывает ограниченный перечень игр, рекомендовано разузнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с невысокими множителями выплат подходят лишь том, случае, случае оператор не установил жесткие ограничения на максимальную необходимую ставки. Бездепозитные бонусы прекрасный вариант даровой забавы в игровые автоматы. Многие пользователи сети не знают, собственно в казино можно начать выступать безусловно бесплатно, а потом вывести выигрыш на банковскую карту или электронный кошелек, другие не доверяют интернет казино, а третьи успешно играют и выигрывают – и подчас достаточно большие суммы.Мы советуем не отрицаться от похожих предложений знаменитых казино. Выделите несколько мин. На регистрацию, получите приз и попытайтесь его отыграть. Может быть, сейчас удача несомненно на вашей стороне! <a href=https://mozillabd.science/wiki/Green_Pharmacy_Photo>https://mozillabd.science/wiki/Green_Pharmacy_Photo</a> В зависимости от онлайн заведения любой из них может для предложить как бездепозитные средства, например и бездепозитные фриспины, которые в удачной регистрации рухнут для на ваш игровой баланс. 1×slots казино зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://iptv.bestforums.org/viewtopic.php?f=3&t=6222>1×slots сайт</a>
<a href=https://fuckseo.biz/members/rabofreepi.4554/>1×slots официальный сайт мобильная версия скачать</a>
<a href=https://rolivka.online/forum/showthread.php?tid=50978>1 x slots casino</a>
<a href=http://kemsrr.forumex.ru/viewtopic.php?f=7&t=7580>1 x slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.
#486 Charlesgunnyhttp://filmkachat.ru
1хлот регистрация в 1×slots casino
Баланс игрока пополняется на соответствующую необходимую. К ней используется вейджер, обозначенный в правилах акции. Вывести выигрыш возможно несомненно после того, как пользователь устроит требуемый объем ставок из собственных средств. В редчайших случаях бездеп работает в формате Free Play. На счет юзера зачисляется крупная сумма, и предоставляется небольшой срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по окончании этого периода сумма на счету несомненно превышать изначальную, то разность возможно несомненно исключить либо применять для последующих ставок. <a href=http://filmkachat.ru/>1× slots casino зеркало</a> При маленькой сумме бонуса рекомендовано играть по невысоким ставкам, а применять максимальные другого, как только что случае, случае вейджер слишком великий, а время на отыгрыш сильно ограничено.Если вы новичок в и лишь попали в неизведанную вами область пыла — с помощью предложений как бездепозитные бонусы без пополнения. <a href=https://www.bunity.com/shopavto>https://www.bunity.com/shopavto</a> Диапазон ставок, которые вправе устроить игрок, также лимитирован. Обычно ставить возможно небольшую сумму — пределах 10–30 рублей за одно вращение. 1× slots регистрация в 1×slots casino <a href=http://moj.webservis.ru/forums/profile.php?action=show&member=7492>http://moj.webservis.ru/forums/profile.php?action=show&member=7492</a> Если простыми словами, бездепы – это определённая сумма денег либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать презенты. Но есть кое-какие нюансы. Существуют игорные жилища, коие перед что, этим как начислить призы настоятельно привязать телефон, дать копии документов.Мы советуем не отрицаться от сходственных предложений узнаваемых казино. Выделите несколько минут на регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сейчас фортуна несомненно на вашей стороне!
1хслотс рабочее зеркало на сегодня
Индивидуальные одобрения выдаются за совершение деяний: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавленья или официального посетителя для ПК. В большинстве казино действуют программки лояльности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на следующий степень часто сопровождается выдачей бездепа.Рассмотрим принцип его деянья на примере. Допустим, вы зарегались и получили $10 not the slightest down payment bonus с вейджером х50. Это означает, собственно выигранные средства возможно несомненно выводить не ранее, чем после того, как общая сумма ставок достигнет $500. <a href=http://jagplay.ekafe.ru/viewtopic.php?f=65&t=6997>1×slot регистрация</a> 1×slots регистрация 1×slots review live Чтобы играть безвозмездно на настоящие средства в казино, не всегда достаточно просто зарегистрироваться. Иногда нужно выполнить дополнительные действия.Итак, дабы безвозмездные бонусные кредиты трансформировались в настоящие деньги, которыми вам управлять по своему усмотрению, их надо(надобно) отыграть. Вейджер по уточнять в правилах онлайн-казино. <a href=http://v90457cw.beget.tech/user/WalterKeews/>http://v90457cw.beget.tech/user/WalterKeews/</a> Фриспины предусмотрены для применения в видео слотах. Внимательно ознакомьтесь с условиями – частенько их выдают на некоторые автоматы. В зависимости от клуба, у вас получится устроить определённое количество ставок. Кстати, продвинутые игорные дома разрешают запускать любых «одноруких злодеев».Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, чтобы еще раз получить даровой приз. Игорные заведения нетерпимы к бонус-хантерам, потому вас ждет неизбежное наказание. 1×slots зеркало На бонусные начисления все быть установлены вспомогательные лимитирования, которые Вы не учли при отыгрыше. Пока бонус полностью не отыгран — средства из казино не выводятся.Прочитайте управляла бонусной программы, какой хотите принять. Да, мы настойчиво рекомендуем сделать это до регистрации.
x1 slots 1хслотс регистрация перейти на 1×slots
Но есть азартные заведения, готовые просто например вручить средства на игру. Для этого довольно создать профиль. Чтобы вывести выигрыш, сперва нужно выполнить вейджеровые условия, прописанные в критериях получения бездепа. Отказ в прохождении верификации. Если заказчик не желает либо не дать документы, подтверждающие его личность, профиль будет заблокирован вместе со всеми бонусными начислениями.Как прочие промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такого предложения являются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих посетителей и разрешает им составить эмоцию о функционале, не рискуя значительными совокупностями. <a href=https://www.saiba.pt/2022/12/a-revolucao-da-inteligencia-artificial.html>https://www.saiba.pt/2022/12/a-revolucao-da-inteligencia-artificial.html</a> 1 х слотс зеркало Иногда у посетителей сайта могут появиться трудности, задачи, препядствия при активации полученного промо-кода. В этих случаях, необходимо обратиться за поддержкою в службу поддержки «Support». Для получения ответа, обязательно указывается определенная причина воззвания и подтверждается информация дополнительными скриншотами. Если сложилась неоднозначная обстановка, постоянно можно обратиться к основному регулятору или контролирующему органу, выдавшему этому заведению лицензионный документ.
1×slots регистрация
Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских рублей. В условиях промоакции указано, что вейджер бездепозитного бонуса х20. Поэтому, дабы отыграть бонус, игроку будет нужно сделать ставок на 35*20=700 руб.С не отыгранным бонусом запрещается превосходить объем максимальной ставки. Нарушение этого условия последствия аннулирование выигрыша. В большинстве заведений устроить это можно по адресу электронной почты, по номеру телефонного, через социальную сеть или гугл-аккаунт.Вейджер (wager) – это коэффициент, кот-ый показывает на какую необходимую необходимо сделать ставок, дабы вывести приз из казино. Пример: Вы получили за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода этого бонуса, Вам необходимо сделать ставок на необходимую: 500*70=3500 руб. Только полностью отыграв приз, Вы можете вывести собственный выигрыш. 1×slots мобильная версия войти казино <a href=https://johnnylist.org/1×slots-%D0%BA%D0%BE%D0%B4%D1%8B_264361.html>https://johnnylist.org/1×slots-%D0%BA%D0%BE%D0%B4%D1%8B_264361.html</a> Постарайтесь отыграть вейджер, чтобы замечена вероятность забыть заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные приборы. Вы можете получить выигрыш на электронной кошелёк, карту, телефон.Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в индивидуальный кабинет, дабы забрать безвозмездные вращения с вейджером х40;
1×slots зеркало подтвердит вашу регистрацию если говорить
Простая процедура получения бездепозитного бонуса, кот-ая займет не более 2-х минут. Для получения бездепов, достаточно зарегистрироваться и подтвердить контактные данные. <a href=http://mongdol.net/bbs/board.php?bo_table=free&wr_id=175581>http://mongdol.net/bbs/board.php?bo_table=free&wr_id=175581</a> 1×slots зеркало сайта Наши специалисты исследуют обстоятельства промоакции, этого в ручном режиме проверку их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие характеристики. Мы не рекламируем казино, а даем игрокам информацию о наилучших из их.Новички не обожают сразу же вносить депозит. Это обусловлено неименьем навыка и сомнением. К счастью, в наше время можно получить бездепозитный приз за регистрацию в казино. Неважно собственно начисляет система – фриспины либо кредиты. В всяком случае вы не рискуете собственными сбережениями. Это замечательная вероятность запустить приглянувшийся видео слот или же испытать фортуну в настольных забавах.
<b>Смотреть еще похожие новости:</b>
<a href=http://uacode.com/>1хслотс регистрация в 1×slots casino</a>
<a href=https://www.donchillin.com/space-uid-382497.html>1×slots зеркало видели такую регистрацию на</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Высокая конкуренция в разделе азартных игр мотивирует операторов завлекать клиентов разнообразными промоакциями. Благодаря этому у посетителей бывает возможность получить призы в казино за регистрацию без депо. Воспользоваться таким предложением возможно, избегая функцию внесения средств на игровой счет, просто активировав аккаунт на веб-сайте. Наш гид по бездепам поможет выбрать самую привлекательную бонусную программу, узнать правила получения такого вознаграждения и распорядиться им с наибольшей выгодой.
#487 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
kent casino букмекерская контора ставки <a href=https://vestnik-jurnal.com/>1×bet официальный</a> букмекерская контора на андроид официальные букмекерские конторы <a href=https://t.me/vchkogpu_ru>1×bet casino</a> казино пин казино онлайн бесплатно pin ап casino pin up casino зеркало casino betting casino андроид casino актуальное зеркало
DiskiPlus casino вход DiskiPlus порно с Голикова Татьяна Алексеевна <a href=https://www.diskiplus.ru>DiskiPlus 1×bet слоты 1×bet xyz</a> DiskiPlus официальное казино вход DiskiPlus 1×bet официальный слоты <a href=https://www.diskiplus.ru>DiskiPlus porno Илья Ковальчук (хоккей)</a> DiskiPlus Скоробогатова Ольга Николаевна порно DiskiPlus 1×bet скачать приложение DiskiPlus pin up casino пин DiskiPlus porno Марина Александрова DiskiPlus яндекс игры казино DiskiPlus яндекс игры казино DiskiPlus порно с Матвей Сафонов (футбол)
#488 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Дарья Клишина порно с Абрамченко Виктория Валериевна <a href=https://7club7.com/>casino официальный сайт</a> Петрова Ольга Викторовна порно Юдаева Ксения Валентиновна порно <a href=https://glvk.guru/>kent casino</a> pin up casino зеркало песня казино фильмы казино рояль porno Александра Степанова, фигуристка 7k casino скачать Москалькова Татьяна Николаевна порно Яровая Ирина Анатольевна порно
DiskiPlus porno Александр Соболев (футбол) DiskiPlus online casino <a href=https://www.diskiplus.ru/>DiskiPlus inform@rucriminal.info</a> DiskiPlus r7 casino DiskiPlus бесплатно фильм казино <a href=https://diskiplus.ru>DiskiPlus пин ап casino pin up top</a> DiskiPlus порно с Юлия Ефимова, пловчиха DiskiPlus Ходнева Светлана Владимировна порно DiskiPlus как выиграть в казино DiskiPlus лучшая казино DiskiPlus Скоробогатова Ольга Николаевна порно DiskiPlus win win casino DiskiPlus скачать сайт букмекерской конторы
#489 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
Ознакомьтесь с нашим перечнем наихороших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего списка и получите бездеп сразу. Хватайте наилучшие безвозмездные предложения ниже и выигрывайте немалые деньги, не рискуя! <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino 56 online</a> Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке адепты онлайн-казино публикуют важную информацию о not the slightest down payment bonuses прочих услугах.Баланс игрока пополняется на подходящую сумму. К ней используется вейджер, указанный в правилах акции. Вывести выигрыш можно будет в такого, как пользователь сделает требуемый объем ставок из собственных средств. В редчайших случаях бездеп трудится в формате Free Play. На счет пользователя зачисляется крупная сумма, и предоставляется малый срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по окончании сего периода сумма на счету несомненно превосходить первоначальную, то разницу возможно несомненно вывести либо использовать для дальнейших ставок. <a href=https://feedback.challonge.com/forums/44455-feature-requests/suggestions/49478687-%D1%82%D0%B5%D1%80%D0%BC%D1%96%D0%BD%D0%BE%D0%B2%D0%B8%D0%B9-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D0%B6-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2-%D1%96%D0%B2%D0%B0%D0%BD%D0%BE-%D1%84%D1%80%D0%B0%D0%BD%D0%BA%D1%96%D0%B2%D1%81%D1%8C%D0%BA%D1%83-%D1%8F%D0%BA-%D0%B2%D0%B8%D0%B3>https://feedback.challonge.com/forums/44455-feature-requests/suggestions/49478687-%D1%82%D0%B5%D1%80%D0%BC%D1%96%D0%BD%D0%BE%D0%B2%D0%B8%D0%B9-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D0%B6-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2-%D1%96%D0%B2%D0%B0%D0%BD%D0%BE-%D1%84%D1%80%D0%B0%D0%BD%D0%BA%D1%96%D0%B2%D1%81%D1%8C%D0%BA%D1%83-%D1%8F%D0%BA-%D0%B2%D0%B8%D0%B3</a> Размер приза. В качестве бездепов обыкновенно начисляют большие суммы, а когда идет о бонусах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино все подарить игроку до 2000$. 1×slots бонус за регистрацию <a href=https://diakov.net/user/DavidByday/>https://diakov.net/user/DavidByday/</a> Срок отыгрыша — это этап, который наступает в момент активации приза и заканчивается с его закрытием. Пользователю нужно уложиться в данный временной зазор, иначе призовые свои аннулируются. Казино устанавливают перечень игр, ставки в которых засчитываются при расчете отыгранных денег. Если тайтл не входит в этот перечень, то он может быть недоступен для загрузки во время действия бонусного предложения.
1×slots сайт
1×slots зеркало видели такую регистрацию на Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке необходимо пополнить счет в казино. Для депозитных призов, эта процедура не нужна, например как депо теснее сделан. <a href=http://duryunsan.kr/bbs/board.php?bo_table=free&wr_id=271201>http://duryunsan.kr/bbs/board.php?bo_table=free&wr_id=271201</a> Возможность поиграть вспомогательное состязание (а иногда и некоторое) совершенно безвозмездно, а выигрыш, к, поступает на счёт игрока.Для ревизии применяются сканы паспортов, водительских прав, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если юзер замечен в попытке завести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их владелец попадает в черный список. При забаве на лицензионной площадке не стоит бояться свидетельствовать достоверную индивидуальную информацию (шифрование исключает утечку индивидуальных данных). 1×slots зеркало которую указывали при регистрации кстати
1×slots регистрация на сайте
Верификация аккаунта. Лучше подтвердить личность сразу после регистрации, чтобы потом не было заморочек с выводом денег. Верификация возможность протекать двумя маршрутами:Начнём с того, что каждое промо за регистрацию подразумевает некоторые обстоятельства. Бездепозитные бонусы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, нужная для исполнения критерий. Пример, возымели благотворительные вращения и выиграли с них 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 рублей, проигрышных или выигрышных, так. После исполненья, бонусный баланс перейдёт на настоящий и станет легкодоступным к выводу. В основном случаев благотворительные бонусы начисляются в кредитах, которые нельзя сразу вывести со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже. <a href=http://ibaragiya.com/index.php?page=user&action=pub_profile&id=1519729>http://ibaragiya.com/index.php?page=user&action=pub_profile&id=1519729</a> Иногда для получения призов нужно спутаться с представителями службы. Удобнее всего с ними собеседовать в онлайн-сате, хотя от довольно запроса по электронной почте.Также, такой необходимо доказать свой номер телефона, результата код, полученный в смс-сообщении от клуба установить в особое поле в личном офисе игрока. 1хслотс зеркало на сегодня
1 x slots
Фриспины. Бесплатные вращения предусмотрены для использования в видео-слотах. Внимательно читайте обстоятельства – они нередко выдаются для неких машин. В зависимости от клуба продоставляется создавать определенное число ставок. Кстати, современные игорные дома дают возможность заводить «одноруких злодеев».Список например называемых «не территорий» прилагается к правилам бонусной программки игорного портала. Обязательно проверьте, распространяются ли на вас сходственные наказания. Акции распространяются как на все забавы казино, так и на узкий перечень. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и. Промо может обхватывать разработки одного производителя. Бездеп не пересекается с иными промоакциями казино. Если на сайте предусмотрен кэшбек, он не начисляется за ставки, изготовленные бонусными деньгами. Для идентификации платежных реквизитов игрока имеет потребоваться пополнение счета на наименьшую сумму. 1×slots официальный сайт, скачать <a href=http://msfo-soft.ru/msfo/forum/user/39550/>http://msfo-soft.ru/msfo/forum/user/39550/</a> Верификация аккаунта. Лучше доказать личность сразу после регистрации, чтобы позже не было проблем с выводом средств. Верификация может проходить двумя способами:В лицензионных бездепозитных казино играть в азартные забавы вправду неопасно. Наличие лицензии одобряет тот факт, что клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP.
1×slots официальный сайт мобильная версия
Главным моментом в появлении этих вознаграждений состоит том,, что пустив их в ход, в ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он спасибо призам какой-нибудь выигрыш или моментально спустит все только собственно прибывшие финансы). То есть, казино снабжает игрока вероятностью на дармовой базе играть во всевозможные слоты даже спонсирует забаву.Как лишь на виртуальном счету окажутся бонусные свои, поспешите отыграть вейджер. Сразу после этого можно оставить заявку на вывод выигрыша. Кредиты прибыльно выделяются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом реальных средств и выделяют вероятность почувствовать азарт. Во-вторых – можно насладиться любой азартной игрой доступной на сайте. В вашем постановлении находятся автоматы, настольные прибавленье, видео-покер, Live-дилеры. <a href=http://xn–80aeallfb7bss4m.xn–p1ai/bitrix/redirect.php?goto=http://toolbarqueries.google.cm/url?q=http://forum.quattroruote.it/proxy.php?link=https://telegra.ph/Kak-pravilno-osvetit-rabochee-mesto-i-s-kakoj-storony-dolzhen-padat-svet-09–23>http://xn–80aeallfb7bss4m.xn–p1ai/bitrix/redirect.php?goto=http://toolbarqueries.google.cm/url?q=http://forum.quattroruote.it/proxy.php?link=https://telegra.ph/Kak-pravilno-osvetit-rabochee-mesto-i-s-kakoj-storony-dolzhen-padat-svet-09–23</a> Фриплей-бонусы. Бонусы за благотворительную игру есть только в некоторых клубах. Они зачисляются незамедлительно последствии создания профиля и срабатывают непродолжительное время. Если у вас нет времени истратить свои, они просто завершатся. Что касается медли, правило призы действуют протяжении 1-го часа. 1 хслот регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://australianwinerytours.com/tours/showthread.php?tid=485945>1×slots casino online регистрация</a>
<a href=http://sladkierecepti.5nx.ru/viewtopic.php?f=8&t=13121>1хслотс официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Активация валютного гонорары происходит автоматически последствии творенья профиля или использования промокода. Иногда операторы предъявляют вспомогательные притязания: подписаться на страницы казино в соц сетях или на рассылку рекламных извещений, скачать и установить вспомогательный софт и т.д. Чаще всего, знаменитые сервисы, такие как MoneyBookers и WebMoney, еще MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно неотъемлемое верховодило. Финансовые средства выводятся только через что, эту платежную систему, которой огромной для пополнения депо. Если же игрок получил бездепозитный покерный бонус, требуется пополнить счет на минимальную необходимую, которая сочиняет обыкновенно десять $.
#490 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
inform@rucriminal.info online casino <a href=https://rumafia.news/>up casino зеркало</a> ап казино скачать 1×bet на андроид <a href=https://t.me/vchkogpu_ru>casino регистрации</a> up букмекерская контора приложения букмекерских контор на андроид кент казино игры казино реального казино демо казино порно с Максим Глушенков (футбол)
DiskiPlus casino x DiskiPlus порно с Юлия Ефимова, пловчиха <a href=https://diskiplus.ru/>DiskiPlus порно с Баталина Ольга Юрьевна</a> DiskiPlus официальные зеркала казино DiskiPlus букмекерская контора скачать приложение <a href=https://www.diskiplus.ru>DiskiPlus слоты казино</a> DiskiPlus водка казино DiskiPlus porno Мария Шарапова DiskiPlus Нургалиева Эльвира Рамиловна порно DiskiPlus 1win casino DiskiPlus порно с Федор Чалов (футбол) DiskiPlus casino сегодня DiskiPlus сайты казино
#491 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало видели такую регистрацию на
При правильном подходе бездепы — это прекрасный способ играть на деньги без траты собственных средств. Есть количество советов, следуя которым возможно извлечь максимум пользы из сходственных акций казино. Играть по только на лицензированных площадках. Скриптовые веб-сайты столько врут с бонусными предложениями, хотя и употребляют пиратский софт с измененным ГСЧ. Выиграть на этих автоматах нереально. <a href=http://filmkachat.ru/>1×slots официальный зеркало рабочее</a> <a href=https://www.evernote.com/shard/s532/sh/38da135a-3f5a-987b-dba4-fbc973f0b381/JrgsrYavE57yMS7XaTjBB3HomX7XM8S5RSmE9WX8dgACmzfCVBz33IgfQg>https://www.evernote.com/shard/s532/sh/38da135a-3f5a-987b-dba4-fbc973f0b381/JrgsrYavE57yMS7XaTjBB3HomX7XM8S5RSmE9WX8dgACmzfCVBz33IgfQg</a> Получив собственный подарок, Вы можете безвозмездно выступать на реальные средства, а выполнив обстоятельства отыгрыша, исключить собственный выигрыш. рабочее зеркало 1хслотс <a href=https://cardmafia.cc/members/416423.html>https://cardmafia.cc/members/416423.html</a> Не желаете сыграть в азартные забавы, не рискуя средствами средствами, но получая в все выплаты? Подобную возможность деют все наилучшие порталы с азартными увеселениями. В их числе количество правдивых и надежных интернет-казино на русском языке. Они привлекают свежих пользователей разными поощрительными мероприятиями, включая бездепозитные, или благотворительные бонусы.
1×slots зеркало проходить регистрацию это отличный вариант
Законодательство, регулирующее азартные забавы в различных странах, влияет на полномочия операторов. В результате пользователи из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это может быть как глубокий отказ в доступе, например и невозможность загружать забавы отдельных производителей. 1×slots зеркало на сегодня <a href=http://janews.com.au/modules/newbb/viewtopic.php?topic_id=7085&post_id=7085&order=DESC&viewmode=flat&pid=0&forum=15>http://janews.com.au/modules/newbb/viewtopic.php?topic_id=7085&post_id=7085&order=DESC&viewmode=flat&pid=0&forum=15</a> 1хслот скачать
1×slots официальный сайт зеркало
Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Большинство клубов привлекают внимание геймеров за счёт различных подарков. На 1 веб-сайтах можно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает благотворительные вращения для пуска топовых онлайн слотов. Несмотря на разные акции, стоит выделить самые главные. Будьте внимательнее при ознакомлении с правилами во избежание происхожденья конфликтных ситуаций с казино, когда после отыгрыша бездепа вам не дадут вывести крупную сумму выигрыша.Исходя из сего, просто не существует осмысленных оснований махнуть рукой на получение такового бонуса при регистрации. И, заметить,, на такой бесплатной базе у вас есть все шансы выиграть средства и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, именуют бесплатными онлайн платформами для игр. <a href=http://goutergallery.com/bbs/board.php?bo_table=free&wr_id=460984>http://goutergallery.com/bbs/board.php?bo_table=free&wr_id=460984</a> Бездепозитные призы казино это финансовая компенсация, предлагаемая юзерам на дармовой основе и возможность выступать в онлайн казино бесплатно. Если сравнивать их с поощрениями за лепта, каких средства выдаются лишь потом начального пополнения счета, то бездепозитные гонорары получаются безвозмездно. То есть, играющий получает возможность делать ставки на уже существующие финансы, которые выдаст заведение, исполняя, при этом, обычные деяния, дабы их извлечь (здесь речь о регистрация, удостоверении личности с внедрением номера телефонного, оформления заказы и т.д. ). 1×slots casino регистрация Многие игроки, оценив перечень казино, остаются выступать в нем и далее ? на это и направлено любое рекламную. Постоянные клиенты вносят депозиты и проделывают ставки, обеспечивая длительную прибыль оператора. То есть, казино выдают бездепы новым пользователям для формирования приклнной аудитории.При маленький сумме приза рекомендуется играть по низким ставкам, а применять наибольшие чем только в случае, случае вейджер слишком большой, а время на отыгрыш сильно ограничено.
1×slots casino зеркало рабочее
Зарегистрироваться в казино по специальной ссылке или с бонусным кодом. Подтвердить контактные данные (номер аппарата и электрическую почту). Для доказательства номера телефонного необходимо в собственном профиле указать свой номер и надавить кнопку „Подтвердить номер телефонного“, дальше Вы получите sms-сообщение с кодом, кот-ый необходимо ввести в отвечающее фон. Для подтверждения электрической почты, перейти по интенсивной ссылке в послании от казино. <a href=https://rolivka.online/forum/showthread.php?tid=42377>1×slots регистрация на 1хслотс</a> Промокод – определённая композиция символов, коию нужно ввести в отвечающее фон при твореньи учетной записи либо активировать в собственном профиле игрока в разделе с призами. 1×slots зеркало на сегодня <a href=https://graddata.ru/user/TravisMaymn/>https://graddata.ru/user/TravisMaymn/</a> В случае установленного лимита на необходимую вывода выигрыша с бездепозитного приза, игрок не сможет вывести больше заявленной суммы.Этот образ приза будет добавлен на Ваш акк последствии удачной процедуры регистрации с использованием номера телефонного. Если избрать иной способ сотворения учетной записи, бездеп не будет добавлен на Ваш аккаунт.
1×slots зеркало рабочее на сегодня
Способы получения бездепа различаются в зависимости от облика бонуса, кот-ый приглянулся игроку. Но вас иначе нужно быть зарегистрированным в законном онлайн-казино и подтвердить собственную лицо. В общем облике пошаговая аннотация для получения бездепозитного приза смотрится так: Используйте лучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из списка ниже, чтобы заработать презенты за обычные деяния теперь сегодня получить 1-ый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и резвыми выводами на электронные кошельки. <a href=https://www.spacepub.net/members/5050-Raymondtub?s=14c8048bbc952a18db82ea0ae4756527>https://www.spacepub.net/members/5050-Raymondtub?s=14c8048bbc952a18db82ea0ae4756527</a> Бездепы с бесплатными вращениями предоставляют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд выплачивает казино. Число спинов ограничено и изредка превышает сотку. Если промоакция включает в себя много безвозмездных игр, их начисление имеет быть разбито на количество дней.Главное превосходство спинов – вероятность выучить различные слоты. Также получится насладиться бонусными раундами, испытать фортуну в риск-туре и преумножить выигрыш за счёт особенных символов. Однако не игровой процесс заслуживает внимание, как никакого сосредоточиться на реальном выигрыше. 1×слотс казино Варианты выигрыша зависимости от Вашей удачи и критерий игорного портала. Выше мы сказали, собственно некоторые бездепозитные призы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются другие, все, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность современных игр на средства, можно выиграть невероятные суммы. Сегодняшние игровые автоматы или видео слоты, как их именуют. Могут выдавать солидные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000.Бездепозитный бонус казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в этом и содержится основное различие.
<b>Смотреть еще похожие новости:</b>
<a href=http://craft4game.forumex.ru/viewtopic.php?f=2&t=3501>1×slots регистрация на 1хслотс</a>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=171809&result=reply>1× slots официальный</a>
<a href=https://russiancomputerservice.ru/user/JosephCer/>1×slots зеркало проходить регистрацию это отличный вариант</a>
<a href=https://eccentrictirade.com/forums/showthread.php?tid=137263>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Ниже указан актуальный перечень законных казино в Беларуси с призами на первый депозит. Вы можете попасть на официальный вебсайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. При использовании бездепозитным бонусом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют некоторое видов лимитов:
#492 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
retro casino 1×bet слоты 1×bet xyz <a href=https://rumafia.news/>casino pin официальный</a> inform@rucriminal.info порно с Васильева Татьяна Викторовна <a href=https://7club7.com/>порно с Артемий Панарин (хоккей)</a> букмекерская контора бесплатно скачать casino 7k рабочее порно с Артемий Панарин (хоккей) Нургалиева Эльвира Рамиловна порно Черкесова Бэлла Мухарбиевна порно порно с Васильева Татьяна Викторовна 1×bet бесплатно
DiskiPlus Комарова Наталья Владимировна порно DiskiPlus макао казино <a href=https://diskiplus.ru>DiskiPlus pin up casino buzz</a> DiskiPlus 1×bet зеркало xbet xyz DiskiPlus porno Дарья Клишина <a href=https://diskiplus.ru/>DiskiPlus vavada casino</a> DiskiPlus porno Светлана Ходченкова DiskiPlus 1×bet официальный xbet DiskiPlus Нургалиева Эльвира Рамиловна порно DiskiPlus pin up casino top top DiskiPlus casino регистрации DiskiPlus порно с Арина и Дина Аверины, гимнастки DiskiPlus официальные зеркала казино
#493 internetGephttps://spb-domashnij-internet002.ru
домашний интернет <a href=https://spb-domashnij-internet002.ru>spb-domashnij-internet002.ru</a> какие провайдеры интернета есть по адресу санкт-петербург
#494 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
Риск-игра по равным шансам – Также казино возможность запрещать выполнять обстоятельства по отыгрышу с помощью раунда на удвоение, который предлагается в слотах, видео-покере и неких иных забавах.Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие возникают у новичков. <a href=http://filmkachat.ru/>зеркала 1×slots</a> Но есть игорные заведения, которые готовы просто например жертвовать деньги на игру. Для этого достаточно создать профиль. Чтобы исключить свой выигрыш, вам сначала необходимо выполнить обстоятельства отыгрыша, указанные в условиях получения бездепозитного депо.Благодаря программе преданности от игорного заведения, можно взять неплохой старт и без дополнительных вложений запустить видеослоты. Кроме того, возможно рассчитывать на реальную удачу и получить, без вложения личных денег, великий выигрыш. <a href=https://potofu.me/kalinka0588>https://potofu.me/kalinka0588</a> 1×slots промокод при регистрации 2025 <a href=https://ebusinesspages.com/Glavdorogadv2106.user>https://ebusinesspages.com/Glavdorogadv2106.user</a> Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы которые возникают у начинающих.Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?
1×slots casino регистрация 1×slotscasin online
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5376/#comment-661818>1×slots бездепозитный бонус за регистрацию</a> 1хслот зеркало Но разу не забывайте пристально читать правила роли в бонусных акциях. Если вы нарушите желая бы одно условие, позднее вы не можете устроить недоразумение с администрацией.Фриспины — безвозмездные вращения, которые разрешают игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины считаются наиболее модным и желаемым видом бонуса — благотворительные вращения иногда эффективнее и веселее в отыгрыше, чем другие виды бездепов. <a href=http://www.dvorchany.grodno.by/user/TravisRHits/>http://www.dvorchany.grodno.by/user/TravisRHits/</a> Срок отыгрыша — это период, который наступает в момент активации бонуса и завершается с его закрытием. Пользователю нужно уложиться в данный временной промежуток, иначе призовые свои аннулируются. Казино устанавливают список игр, ставки в которых засчитываются при расчете отыгранных денег. Если тайтл не входит в данный список, то предоставляется быть недоступен для загрузки период деяния бонусного предложения.Автоматы непопросту числятся самым модным азартным развлечением. Чтобы освоить управление и правила, понадобится всего несколько мин. Ваша задачка устроить ставку, найти число трудящихся линий и возможно вертеть тамбур. Если на выпадет выигрышная композиция – вы выиграли! С данной задачей вас посодействуют управится бездепозитные призы казино. 1×slots казино зеркало
казино 1×slots
Если речь об неповторимых услугах, имеет понадобиться регистрация в казино по ссылке с партнерского сайта. Принципиальным различием безвозмездных бонусов от призов на депозит считается неимение необходимости вносить деньги на аккаунт. Из-за этого их часто именуют бездепозитными (no down payment bonuses).Создание аккаунта. На сайте казино нужно открыть регистрационную форму и наполнить пустые поля личными данными. Иногда на данном шаге требуется указать лишь адрес электронной почты и пароль, хотя почаще надо наполнить анкету персональной информацией (ФИО, дата рождения, место проживания и т.д.). Нужно свидетельствовать только настоящие данные, потому впоследствие они будут проверены. <a href=http://nipponsword.ru/profile.php?lookup=27453>http://nipponsword.ru/profile.php?lookup=27453</a> Бывают ли бездепозитные бонусы без вейджера? Бывают, случае у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный приз за регистрацию устанавливается вейджер во всех казино. 1 хслот регистрация в 1×slots casino Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Новички не обожают незамедлительно же вносить депозит. Это обосновано неименьем навыка и недоверием. К счастью, наши возможно получить бездепозитный бонус за регистрацию в казино. Неважно собственно начисляет система – фриспины или кредиты. В всяком случае вы не рискуете своими сбережениями. Это замечательная возможность запустить понравившийся видео слот либо же испытывать удачу в настольных играх.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Мы подготовили список, где есть постоянно актуальные и новые бездепозитные бонусы казино, которые возможность получить бесплатно. Для наших пользователей есть особые предложения неповторимые бонусы, коие вы кого не найдете, их мы обозначили особой красной плашкой «Exclusive».Важно, убедитесь в, что раньше не регились в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи. <a href=http://ledyardmachine.com/forum/User-Jameshoing>1×slots акции</a> 1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, если не желайте стать жертвой мошенников или впустую потратить время;Перед активацией принципиально пристально изучить обстоятельства промоакции. Чем ниже вейджер, тем больше возможная выгода игрока. Имеют значение также лимиты ставок при отыгрыше и сроки, на которых можно пользоваться предложением. Если бездеп обхватывает узкий список игр, рекомендовано разузнать максимальные коэффициенты, степень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь том, случае, если оператор не установил взыскательные ограничения на максимальную необходимую ставки. 1х слотс зеркало регистрация в 1×slots casino <a href=http://www.miranetwork.it/index.php?option=com_k2&view=itemlist&task=user&id=443673>http://www.miranetwork.it/index.php?option=com_k2&view=itemlist&task=user&id=443673</a>
1х слот регистрация в 1×slots casino
Для казино, работающих онлайн, бездепозитные призы необходимы для привлечения новых посетителей. Предложение поиграть на слотах без надобности внесения настоящих средств — работающий метод для увеличения интереса к компании. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит играть в казино, лишь теперь уже на собственные деньги.Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных притязаний, не неотъемлемой верификации. Если на сайте предусмотрена обязательная процедура подтверждения личности, то исключить выигрыш получится только после ревизии данных. Приготовьтесь наполнить анкету и отправить в техподдержку документ, подтверждающий лицо. Этот образ бонуса будет добавлен на Ваш аккаунт после удачной процедуры регистрации с внедрением номера телефона. Если избрать другой способ творения учетной записи, бездеп не будет добавлен на Ваш акк. <a href=http://bbs.totoroclub.com.cn/home.php?mod=space&uid=382046&do=profile>http://bbs.totoroclub.com.cn/home.php?mod=space&uid=382046&do=profile</a> Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте обстоятельства – они нередко выдаются для неких машин. В зависимости от клуба продоставляется делать конкретное количество ставок. Кстати, современные игорные дома выделяют вероятность заводить «одноруких злодеев». 1×slots зеркало выигрыши обязательно пройдите регистрацию если Внесение депо – Будьте готовы пополнить счет последствии отыгрыша бонуса. Это обычное заявка правил для данного типа промо-акций. Лучше заблаговременно уточнить, какую необходимую надо(надобно) будет вносить на счет. Как правило, речь о минимальном депозите, хотя вы должны быть уверены, собственно он вам по кармашку.
<b>Смотреть еще похожие новости:</b>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=421329>1×slots регистрация на 1хслотс</a>
<a href=http://xn–80akbkalsbeeafq6a6b2f.xn–p1ai/forum/messages/forum1/topic46143/message247548/?result=new>1× slots регистрация в 1×slots casino</a>
<a href=https://portugal-campings.com/pt/account/>1×slots подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но не мыслить, что снабжая пользователей такими призами, казино занимается спонсированием. Ведь размеры вознаграждений, в основном, не большие (средним размером от 5 до 20 долларов). И на эти свои налагаются определенные условия и лимитирования, обязательные к исполнению игрока, если в последствии он желает получить все средства выигранные деньги.
#495 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Нургалиева Эльвира Рамиловна порно 1×bet зеркало на сегодня <a href=https://sovsekretno.net/>casino pin официальный</a> порно с Александр Головин (футбол) официальные букмекерские конторы <a href=https://specreporter.com/>1×bet зеркало рабочее на сегодня</a> казино играть казино фильм смотреть онлайн kometa casino букмекерские контора ап порно с Дронова Александра Викторовна porno Андрей Рублев (теннис) Хорова Наталья Александровна порно
DiskiPlus казино можно DiskiPlus часы казино <a href=https://www.diskiplus.ru>DiskiPlus casino pin официальный</a> DiskiPlus порно с Голикова Татьяна Алексеевна DiskiPlus суть казино <a href=https://www.diskiplus.ru/>DiskiPlus Окладникова Ирина Андреевна порно</a> DiskiPlus online casino DiskiPlus 1×bet 1хбет DiskiPlus автомат казино DiskiPlus казино можно DiskiPlus порно с Алина Загитова DiskiPlus 1×bet на андроид DiskiPlus порно с Каролина Севастьянова
#496 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up casino buzz пина букмекерской конторы <a href=https://www.ossetia.tv/>Набиуллина Эльвира Сахипзадовна порно</a> порно с Карен Хачанов (теннис) скачать 1×bet на андроид <a href=https://glvk.guru/>сайт 1×bet слоты</a> казино онлайн casino riobet букмекерская контора фонбет официальный сайт порно с Матвей Сафонов (футбол) букмекерские конторы без депозита Мухтиярова Елена Вячеславовна порно porno Александр Соболев (футбол)
DiskiPlus 1×bet casino DiskiPlus казино смотреть онлайн бесплатно <a href=https://www.diskiplus.ru/>DiskiPlus официальная казино</a> DiskiPlus лучшие онлайн казино DiskiPlus яндекс казино <a href=https://diskiplus.ru/>DiskiPlus казино 5</a> DiskiPlus up casino скачать DiskiPlus kometa casino DiskiPlus porno Илона Маркова, хоккеистка DiskiPlus порно с Дронова Александра Викторовна DiskiPlus яндекс игры казино DiskiPlus букмекерская контора на андроид DiskiPlus bitz casino
#497 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора официальный сайт скачать порно с Захарова Мария Владимировна <a href=https://sovsekretno.net/>1×bet 1</a> porno Анастасия Янькова, боксерка 1×bet регистрация <a href=https://rucriminal.info/>букмекерская контора официальный сайт</a> casino pin официальный рейтинг казино Валентина Матвиенко порно порно с Кирьянова Дарья Борисовна porno Анастасия Янькова, боксерка почему в казино нет часов casino бездепозитный
DiskiPlus казино на деньги DiskiPlus почему казино <a href=https://diskiplus.ru>DiskiPlus Валентина Матвиенко порно</a> DiskiPlus porno Яна Троянова DiskiPlus 1×bet скачать приложение <a href=https://www.diskiplus.ru>DiskiPlus бесплатное казино</a> DiskiPlus cat casino DiskiPlus пин up casino DiskiPlus porno Юлия Канакина, скелетонистка DiskiPlus kent casino регистрация DiskiPlus pin up casino DiskiPlus мелбет букмекерская контора DiskiPlus лучшие бесплатные онлайн казино
#498 Charlesgunnyhttp://filmkachat.ru
1× slots зеркало
Иногда для получения бонусов необходимо связаться с представителями саппорта. Удобнее всего с ними разговаривать в онлайн-сате, хотя времени достаточно запроса по электрической почте. <a href=http://filmkachat.ru/>1×slots акции</a> <a href=https://direct.me/kalinka0588>https://direct.me/kalinka0588</a> Подтверждение индивидуальной информации. Все казино просят от клиента пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и наличие у юзера иных аккаунтов (мультиаккаунт запрещен). рабочее зеркало 1×slots <a href=http://www.kaece.or.kr/bbs/board.php?bo_table=53&wr_id=84541>http://www.kaece.or.kr/bbs/board.php?bo_table=53&wr_id=84541</a> Поспешите арестовать бездепозитные призы за регистрацию в казино из представленного перечня. Все платформы не водят легальную работа, хотя и обрадуют добросовестными результатами игры, высочайшей отдачей, прыткими выплатами.Демоказино есть практически на каждом веб-сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются веско пореже: там когда выигрыша и соблюдения условий промоакций бездеп можно перевоплотить в настоящие средства.
1×slots зеркало регистрация в 1×slots casino
В игровых клубах без лицензии Вы покупаете „кота в мешке“ и когда спорных ситуаций нет возможности куда-то пожаловаться и обосновать собственную правоту.Рассмотрим принцип его деянья на случае. Допустим, вы зарегались и возымели $10 not the slightest down payment bonus с вейджером х50. Это значит, собственно выигранные деньги можно будет выводить не раньше, чем последствии как, как общая сумма ставок достигнет $500. 1×slots актуальное зеркало <a href=http://www.sciencementoring.co.kr/board/bbs/board.php?bo_table=free&wr_id=146133>http://www.sciencementoring.co.kr/board/bbs/board.php?bo_table=free&wr_id=146133</a> Размер ставки для забавы по бездепозитному призу (естесственно же, в случае, когда он представлен повторяющий бонусных валютных средств) зачастую ниже, чем при игре на депо. Ограничение несомненно работать до этапа отыгрыша бонуса. 1×slots официальный сайт скачать
1×slots casino регистрация на сайте
Благодаря программке лояльности от игорного заведения, можно взять неплохой старт и без дополнительных инвестициям запустить видеослоты. Кроме как, возможно рассчитывать на реальную удачу и получить, без инвестиции собственных финансов, немалый выигрыш. Перед активацией важно пристально выучить условия акции. Чем ниже вейджер, тем больше возможная выгода игрока. Имеют значение кроме лимиты ставок при отыгрыше и сроки, в течение которых возможно воспользоваться предложением. Если бездеп охватывает ограниченный перечень игр, рекомендуется узнать максимальные коэффициенты, степень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь что случае, в оператор не установил жесткие лимитирования на максимальную необходимую ставки. <a href=https://adminclub.org/member.php?action=profile&uid=90466>https://adminclub.org/member.php?action=profile&uid=90466</a> Этот тип приза будет добавлен на Ваш аккаунт в успешной процедуры регистрации с внедрением номера телефонного. Если выбрать иной способ сотворения учетной записи, бездеп не несомненно добавлен на Ваш акк.Подарки на определенные даты отличаются условиями получения. Если одобрение начисляют игроку на денек рождения, то сумма обычно зависимости от совместного объема депозитов последний год. рабочее зеркало 1хслотс
1×slots casino регистрация
Перед активацией принципиально внимательно изучить условия акции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют значение того лимиты ставок при отыгрыше и сроки, протяжении которых можно воспользоваться предложением. Если бездеп охватывает узкий список игр, рекомендовано разузнать наибольшие коэффициенты, уровень отдачи и волатильности. Слоты с низкими множителями выплат подходят только что, нет случае, случае оператор не установил жесткие ограничения на наивысшую необходимую ставки.Наши эксперты исследуют обстоятельства акции, этого в ручном режиме проверяют их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие характеристики. Мы не рекламируем казино, а даем игрокам информацию о наилучших из них. Исходя из сего, просто не существует мудрых оснований махнуть рукой на получение такого бонуса при регистрации. И, заметить,, на такой бесплатной базе у вас все шансы выиграть средства и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные призы, называют безвозмездными онлайн платформами для игр. зеркло казино 1×slots <a href=https://m2bob.shop/forum/member.php?action=profile&uid=3749>https://m2bob.shop/forum/member.php?action=profile&uid=3749</a>
1× slots сайт
Автоматическая активация может самой удобной, хотя ручной метод содержит перед ней достоинства. Прежде чем применять вознаграждение от казино, стоит заблаговременно найти, сколько времени потребуется на исполненье всех критерий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала деянья бонуса. <a href=http://ledyardmachine.com/forum/User-Davidswesk>http://ledyardmachine.com/forum/User-Davidswesk</a> Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают приз по государствам. Вплоть до такого, собственно клуб возможность принимать игроков из Вашей государства, а бездеп мешает.Новички не обожают сразу же заносить депозит. Это обусловлено отсутствием навыка и недоверием. К счастью, в можно получить бездепозитный бонус за регистрацию в казино. Неважно собственно начисляет система – фриспины или кредиты. В всяком случае вы не рискуете своими сбережениями. Это замечательная возможность запустить приглянувшийся видео разъем или же испытать фортуну в настольных забавах. 1×slots официальный сайт скачать на айфон
<b>Смотреть еще похожие новости:</b>
<a href=http://xn–80akbkalsbeeafq6a6b2f.xn–p1ai/forum/messages/forum1/topic47391/message251056/?result=new>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<a href=http://rapbeatsforum.com/viewtopic.php?t=667006>1×slots зеркало сайта</a>
<a href=http://naukova2b.2ua.in.ua/memberlist.php?mode=viewprofile&u=313>казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Игрокам не следует воспринимать приветственный приз как гарантированный способ получить большой выигрыш, но это замечательная вероятность без расходов расценить возможностей казино. Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных обстановок с казино, когда после отыгрыша бездепа для не дадут вывести солидную необходимую выигрыша.
#499 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
ешь казино casino riobet <a href=https://sovsekretno.net/>бывшие казино</a> porno Игорь Акинфеев (футбол) 1×bet официальный скачать <a href=https://repost.news/>порно с Ирина Сидоркова</a> зеркала казино online casino порно с Юлия Ефимова 1×bet официальный сайт unlim casino Анна Михалкова casino зеркало сегодня рабочее
DiskiPlus Комарова Наталья Владимировна порно DiskiPlus порно с Арина и Дина Аверины, гимнастки <a href=https://www.diskiplus.ru/>DiskiPlus пин ап casino</a> DiskiPlus 1×bet слоты 1×bet xyz DiskiPlus Нургалиева Эльвира Рамиловна порно <a href=https://diskiplus.ru/>DiskiPlus Валентина Матвиенко порно</a> DiskiPlus porno Екатерина Ефременкова, шорт-трекистка DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz DiskiPlus казино рулетка DiskiPlus порно с Голикова Татьяна Алексеевна DiskiPlus сайт казино зеркало DiskiPlus porno Виктория Баркова, легкоатлетка DiskiPlus casino зеркало сайта
#500 Charlesgunnyhttp://filmkachat.ru
1×slots казино зеркало
Допустим, за регистрацию вы получили бездеп в объеме 2 000 руб. С вейджером х30. В данном случае предстоит устроить ставок, на совместную сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать настоящие деньги. Однако не забывайте, собственно с любого презента получится вывести определённую необходимую (чаще всего менее $200). <a href=http://filmkachat.ru/>1х слотс зеркало регистрация в 1×slots casino</a> <a href=http://bedfordfalls.live/read-blog/135760>http://bedfordfalls.live/read-blog/135760</a> Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды присутствуют на этой странице. Посетитель имеет расценить обстоятельства получения и начать выступать на средства без внесения депо. При этом игроку принципиально разуметь, на каких критериях и какими способами него исключить полученный выигрыш. Для сего нужно расценить перечень подключенных платежных систем.Помимо остального, для вывода средств по бездепу необходимо привнести на счёт собственный первый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально возможную сумму, последствии чего вывод средств станет доступен. казино 1×slots <a href=http://easytrans.co.kr/bbs/board.php?bo_table=free&wr_id=1169018>http://easytrans.co.kr/bbs/board.php?bo_table=free&wr_id=1169018</a> Такой казино приз без депо за регистрацию выдается игроку на час и активно используется данное предложение с 2017 года. Это как бы какая-то конспирация поощрения под бездепозитный. Суть всего этого сводится к тому, собственно геймеру на час выдается, например, 1000 долларов, а реклама утверждает о том, собственно любой выигрыш можно несомненно дальнейшем оставить при для. Но случае играющий всерьез отнесется к данному предложению, то он просто потеряет время. Ведь геймеру надо(надобно) несомненно играть не в основном аккаунте, а в тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (в всей тысячи) в верховодила вступят конкретные условия, где несомненно сказано, что наибольшей суммой победы имеет быть лишь двести долларов и деньги возможно применять только в качестве бонуса на 1-ый лепта с вейджером 25 от суммы гонорары плюс сам депозит. По итогу выйдет, что игрок выигрывал себе 200% бонус с вейджером на конкретную сумму. Короче говоря, это все не вашего медли.
1×slots регистрация 1×slots casino 777 online
Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных ситуаций с казино, когда последствии отыгрыша бездепа вам не дадут вывести крупную необходимую выигрыша.Бездепозитные призы начисляются лишь раз один. Не стоит раскрывать новые аккаунты, чтобы получить их повторно. Служба защищенности казино непременно выявит «левого» участника и заблокирует. Если посетитель выполнит необходимые требования, отыграет свою ставку и решит исключить личный выигрыш, то ему надо(надобно) принять, что казино непременно потребует предоставить ксерокопии личных документов, дабы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные средства исключить не получится. казино 1×slots <a href=http://klincity.com/index.php?subaction=userinfo&user=iratetycoon95>http://klincity.com/index.php?subaction=userinfo&user=iratetycoon95</a> Составленный знатоками Casino.ru список онлайн-казино с бездепозитным призом дозволяет игрокам сопоставить спецпредложения разных операторов. 1×slot казино зеркало
1×slots сайт
В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это исключительно милая доля забавы. Важно, зачастую бездепозитные бонусы в казино выдаются с ограничениями по максимальной выплате. В среднем можно рассчитывать на прибыль в некоторое тысяч руб. Как вывести выигрыш с бонуса без депозита. Придётся подтвердить аккаунт документально, в неких заведениях. Процедура верификации обязательна и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате или прочтите в правилах. Бездепозитный бонус – это экономическое вознаграждение, коие выдается участнику игры в казино, для его привлечения и возникновения заинтересованности. Любой посетитель, который подходит условиям выдачи сходственного бездепозитного приза, может претендовать на получение вышеуказанного приза. Такое поощрение считается более действенным методом, дающим вероятность стартовать деле, не вкладывая собственных материальных средств.Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие появляются у новичков. <a href=http://forum.evony.com/member.php?1271028-RaymondKally>http://forum.evony.com/member.php?1271028-RaymondKally</a> Максимальный объем ставки, кот-ый невозможно превышать же приз не несомненно полностью отыгран. В случае нарушения сего верховодила, бонус и выигрыш с него будут аннулированы. 1×slots зеркало регистрация то дальше необходимо пройти
1×slots зеркало регистрация
Каждый игрок должен сперва отчетливо изучить условия по получению и отыгрышу понравившегося дара. Если всё устраивает, поторопитесь отобрать безвозмездные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик в начать вертеть барабаны топовых слотов.Бездепозитный приз казино 2022 с выводом за регистрацию предоставляет возможность ознакомиться игроку с лобби избранного заведения, сориентироваться в выборе игр и выяснить качество работы саппорта. Довольно нередко, начиная игровой процесс, игрок уже не желает останавливаться и делает реальный лепта. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть бесплатно вероятно как один таки с бонусом за регистрацию без необходимости заносить депозит. Если вы новичок в этом деле и лишь попали в неизведанную вами область пыла — за предложений как бездепозитные бонусы без пополнения.В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая приятная доля игры. Важно, часто бездепозитные бонусы в казино выдаются с ограничениями по наибольшей выплате. В среднем возможно рассчитывать на выгода в несколько тысяч рублей. Как исключить выигрыш с бонуса без депозита. Придётся подтвердить аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате либо прочитайте в правилах. 1×slots зеркало проходить регистрацию это отличный вариант <a href=http://l2help.lt/user/Edwardambip/>http://l2help.lt/user/Edwardambip/</a>
1× slots casino официальный сайт
Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депозит возможность отличаться до 30 дней.Выбор каждого интернет казино на нашем веб-сайте. В описании к любому Вы сможете узнать, что получите за творенье аккаунта. <a href=http://mebel-largo.ru/index.php?subaction=userinfo&user=ulinyduv>http://mebel-largo.ru/index.php?subaction=userinfo&user=ulinyduv</a> 1×slots официальный сайт скачать Условия могут разниться друг от приятеля. Но подобный бонус возможность быть использован только для игрового процесса – полученные на счет финансы до такого, как станут отыграны, исключить невероятно.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.infoknygos.lt/smforum/index.php?topic=135796.new#new>1×slots рабочее зеркало на сегодня</a>
<a href=https://www.mqf.pw/bboard/member.php?action=profile&uid=614>казино 1×slots</a>
<a href=https://www.formulersupport.com/Thread-1×slot-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F–245119>1×slot регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Как лишь получите бездеп в казино, всё точно не забывайте проверять электронную почту. Некоторые игорные клубы день веселят интенсивных гэмблеров приятными бонусами. Чаще всего получить презент возможно в преддверии праздника, на денек рождение, за вербование приятеля. А также распространённым призом считается прибавка к депозиту. Нужно всего лишь пополнить счёт, и азартное заведение прирастит его на 50–100%.
#501 internetGephttps://spb-domashnij-internet001.ru
домашний интернет <a href=https://spb-domashnij-internet001.ru>spb-domashnij-internet001.ru</a> провайдер по адресу
#502 inernetsamaraGephttps://samara-domashnij-internet003.ru
какие провайдеры на адресе в самаре <a href=https://samara-domashnij-internet003.ru>samara-domashnij-internet003.ru</a> интернет провайдеры по адресу
#503 xelcasinohttps://xel-casino.ru
Присоединяйтесь к Lex Casino и наслаждайтесь игрой. На Lex Casino часто проходят интересные акции и розыгрыши. Lex Casino на Андроид работает стабильно и без лагов. Lex Casino в Telegram — всегда свежие новости и промокоды. Скачал приложение Lex Casino на Андроид — удобнее некуда. Фриспины в Lex Casino помогают получить больше шансов на выигрыш <a href=https://xel-casino.ru/>lex casino бездепозитный бонус</a>.
#504 inernetsamaraGephttps://samara-domashnij-internet001.ru
интернет по адресу дома <a href=https://samara-domashnij-internet001.ru>samara-domashnij-internet001.ru</a> какие провайдеры на адресе в самаре
#505 internetrostovGephttps://rostov-domashnij-internet001.ru
домашний интернет ростов <a href=https://rostov-domashnij-internet001.ru>rostov-domashnij-internet001.ru</a> подключение интернета ростов
#506 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало сайта
Мы подготовили список, где есть практически актуальные и свежие бездепозитные призы казино, коие продоставляется получить безвозмездно. Для наших юзеров есть особые предложения неповторимые бонусы, коие вы ни не найдете, их мы обозначили особой красной плашкой «Exclusive».Наш перечень содержит лучшие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по важным характеристикам: <a href=http://filmkachat.ru/>1 хслот регистрация в 1×slots casino</a> <a href=https://elearn.ellak.gr/mod/forum/discuss.php?d=42024>https://elearn.ellak.gr/mod/forum/discuss.php?d=42024</a> Самые популярностью методы вывода средств ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электрическим платежным системам на Neteller и Skrill, еще пользуются криптовалютными кошельками. Вывод выигрышей может исполняться быстро или занимать от нескольких часов до нескольких суток. 1×slots зеркало регистрация то дальше необходимо пройти <a href=http://www.en.besatime.com/index.php?subaction=userinfo&user=DoctorLazutapn>http://www.en.besatime.com/index.php?subaction=userinfo&user=DoctorLazutapn</a>
1×slots коды
Можно. Вы всегда сможете отказаться от получения бездепозитного приза за регистрацию в казино, пока Вы не создадите ставку.Перечисленные повыше главные характеристики сопровождают фактически любой бонус и считаются стереотипными для бездепозитных бонусных начислений в казино. 1×slots официальный зеркало <a href=http://sanakirja.kronman.fi/index.php?title=%D0%9D%D0%BE%D0%B2%D1%8B%D0%B9%20%D1%81%D0%B5%D1%80%D0%B2%D0%B8%D1%81%20%D0%B4%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B8%20%D0%BF%D0%B8%D1%86%D1%86%D1%8B%20%D0%BD%D0%B0%20%D0%B4%D0%BE%D0%BC%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO>http://sanakirja.kronman.fi/index.php?title=%D0%9D%D0%BE%D0%B2%D1%8B%D0%B9%20%D1%81%D0%B5%D1%80%D0%B2%D0%B8%D1%81%20%D0%B4%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B8%20%D0%BF%D0%B8%D1%86%D1%86%D1%8B%20%D0%BD%D0%B0%20%D0%B4%D0%BE%D0%BC%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO</a> 1×slots регистрация 1×slots review live На условиях отыгрыша безвозмездных призов следует остановиться подробнее. С ними связаны нюансы, которые нельзя оставить без внимания.
казино 1× slots официальный сайт
Ознакомьтесь с нашим перечнем превосходнейших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего списка и получите бездеп незамедлительно. Хватайте превосходнейшие бесплатные предложения ниже и выигрывайте великие средства, не рискуя!Автоматическая активация первый самой удобной, но ручной метод имеет перед ней преимущества. Прежде чем применять вознаграждение от казино, стоит заранее определить, сколько медли требуется на выполнение всех критерий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деяния приза. Допустим, за регистрацию вы получили бездеп в размере 2 000 руб. С вейджером х30. В данном случае светит устроить ставок, на совместную сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать настоящие деньги. Однако не забывайте, собственно с каждого подарка получится исключить определённую сумму (чаще всего менее $200). <a href=https://sc-grandmaster.ru/forum/?PAGE_NAME=profile_view&UID=20545>https://sc-grandmaster.ru/forum/?PAGE_NAME=profile_view&UID=20545</a> 1хслот 1хслотс регистрация перейти на 1×slots Частенько новички не разумеют, как активировать презенты либо вывести 1-ый выигрыш. Для сходственных случаев наша команда описала главные определения – что это фриспины, вейджер, как его отыграть, зачем нужно протекать верификацию.
казино 1×slots официальный сайт
<a href=http://forums.indexrise.com/thread-2362-post-527760.html#pid527760>1×slots регистрация на сайте</a> Объективные – объем бонуса, коэффициент и условия вейджера, необходимость внесения депозита для вывода средств;Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и более. Когда игроку полагается много фриспинов, администрация возможность разбивать их начисление на количество дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах акции. 1×slots официальный сайт скачать <a href=http://detpol4.ru/index.php?subaction=userinfo&user=tastefulideal38>http://detpol4.ru/index.php?subaction=userinfo&user=tastefulideal38</a>
1× слот зеркало
Это тоже бесплатные финансы, которые поступают на аккаунты свежеиспеченных игры последствии регистрирования. А необыкновенность этих бонусов произведено что, что обретенные деньги обязательно следует применять в продолжении назначенного времени.Это раз из основных показателей привлекательности подарка. С завешенным коэффициентом в мастера не сумеют выполнить обстоятельства по отыгрышу. И маловажно, насколько привлекательно выглядит предложение – бездепозитный приз казино в объеме $500 либо $1 000. Чтобы новенькие получше вдумались, собственно же это вейджер, мы разберём на примере. Высокая конкурентность в сегменте азартных игр мотивирует операторов привлекать клиентов различными промоакциями. Благодаря этому у посетителей бывает вероятность получить призы в казино за регистрацию без депозита. Воспользоваться таким предложением возможно, избегая процедуру внесения денег на игровой счет, просто активировав акк на сайте. Наш экскурсовод по бездепам поможет выбрать самую привлекательную бонусную программку, узнать верховодила получения такового гонорары и воспользоваться им с наибольшей выгодой.Но не мыслить, что снабжая пользователей этими бонусами, казино увлекается спонсированием. Ведь объемы вознаграждений, в, не немалые (средним объемом от 5 до 20 $). И на эти свои налагаются определенные обстоятельства и ограничения, обязательные к выполнению игрока, если в последствии он вожделеет получить все свои выигранные финансы. <a href=http://www.gektor.biz/forum/?PAGE_NAME=profile_view&UID=184589>http://www.gektor.biz/forum/?PAGE_NAME=profile_view&UID=184589</a> Чем ниже значение вейджера, тем легче отыграть и вывести приз. Если Вы планируете заработать на бездепе, но просто ознакомиться с новым игровым клубом, то стоит избегать бонусов с высочайшим вейджером их практически не реально отыграть. С ними Вы сможете только протестировать забавы заведения.У нас на сайте Вы отыщите список призов без депозита в проверенных казино и подробную информацию о том как их получить и применять. 1хслот 1хслотс регистрация перейти на 1×slots Так собственно главное различие презента на депо от бездепа – обязательное пополнение счёта. Вы можете привнести депо и преувеличить стартовый капитал или отобрать бездеп и при не придётся рисковать собственными сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начисляет щедрое одобрение!Несмотря на то, что этот вариант стимуляции со стороны азартных платформ очень известен в похожих игр, далеко не почитателям казино известно, собственно являют собой бездепозитные призы казино и как именно их вполне эксплуатировать.
<b>Смотреть еще похожие новости:</b>
<a href=https://forums.dfine.net/member.php?action=profile&uid=119>1×slots зеркало рабочее на сегодня</a>
<a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=12095>1×slots официальный зеркало</a>
<a href=https://acerfans.ru/faq/796-kak-vylozhit-na-forum-informaciju-iz-zhurnala.html>1хслот официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Нет. Казино раздают бесплатные призы за регистрацию, чтобы, чтобы, чтобы заказчик мог ознакомиться с игровым заведением. А чтобы исключить его, необходимо выполнить условия отыгрыша.
#507 DichaelPoirl
Simply want to say your article is as astonishing. The clearness in your post is just nice and i can assume you're an expert on this subject. Fine with your permission let me to grab your feed to keep updated with forthcoming post. Thanks a million and please continue the enjoyable work. <a href=https://dur.info/>Recharge mobile</a>
#508 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на сайте 1×slots ru com
Во всех законных онлайн-казино Беларуси нужно подтверждение паспортных данных для игры — это заявка правительства государства.Итак, чтобы бесплатные бонусные кредиты трансформировались в настоящие средства, которыми продоставляется распоряжаться по своему усмотрению, их нужно отыграть. Вейджер идет уточнять в правилах онлайн-казино. <a href=http://filmkachat.ru/>1×slots казино зеркало</a> Похожим образом трудится 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения посетителя или из-за с получения им VIP-статуса. Подарок предоставляется последствии обращения в поддержку и ревизии. <a href=https://elearn.ellak.gr/mod/forum/discuss.php?d=8504#p51754>https://elearn.ellak.gr/mod/forum/discuss.php?d=8504#p51754</a> Также бездепозитные призы имеют служить методом вернуть к ирге клиентов, пока приостановивших своё сотрудничество с фирмой: уведомление о бездепе поступает на мобильный телефон или почту. 1 xslots рабочее зеркало <a href=http://cars.autokaif.ru/index.php?subaction=userinfo&user=rusticgathering>http://cars.autokaif.ru/index.php?subaction=userinfo&user=rusticgathering</a>
1×slots зеркало на сегодня
<a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/13542–1×slots-zerkalo-etikh-sposobov-predpolagaet-registratsiyu#13573>1×slots зеркало этих способов предполагает регистрацию</a> 1×slots официальный регистрация Мы проделываем ударение на ключевых положениях верховодил, рассказываем о территориальных лимитированиях и кратко информируем о иных акциях обсуждаемого казино. <a href=http://dalsnab.ru/bitrix/redirect.php?goto=http://poselenia.ru/ext_link?url=http://bioinfo3d.cs.tau.ac.il/wk/api.php?action=https://telegra.ph/Bezopasno-li-sazhat-rebenka-vertikalno-09–24>http://dalsnab.ru/bitrix/redirect.php?goto=http://poselenia.ru/ext_link?url=http://bioinfo3d.cs.tau.ac.il/wk/api.php?action=https://telegra.ph/Bezopasno-li-sazhat-rebenka-vertikalno-09–24</a> 1×slots зеркало рабочее на сегодня
1×slots регистрация на официальном сайте
У каждого игорного клубы различные вейджеровые обстоятельства. Чтобы вы гарантировано смогли выполнить их, мы дадим количество советов. Если система начислила маленькую сумму, не стоит создавать большие ставки – остановитесь на 10–30 центах. Как только сумеете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте играть. В неприятном случае какого-либо присмотреться к другому автомату. Можно ли в одном онлайн казино получить больше 1-го приза за регистрацию? Нет, так как в каждом онлайн казино есть правила, к коим нужно держаться, не создавать 2 аккаута для получения призов, по несомненно блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, бонус за регистрацию выдаеться раз раз одному личику. <a href=https://p-tweets.com/viewupdate.php?id=214904>https://p-tweets.com/viewupdate.php?id=214904</a> Следует выделить, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом.Активация по промокоду используется в различных обликах бездепов. Если речь идет о приветственном призе, то набор символов возможно разузнать на главной страничке, в регистрационной форме или письме, коие отправляется пользователю для доказательства e-mail. Акции имеют проводиться общо с партнерскими площадками. Обычно код располагается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется разовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном кабинете либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем важный код для активации в описании любого рекламную. 1× слот зеркало Бездепозитные призы – это самая небезинтересная и более перспективная промоакция интернет-казино. Они и никакого фри-спинов, поэтому собственно выплаты в даровых вращениях не гарантированы, ведь комбинации на барабанах игрового аппарата могут не сложиться.
1×slots актуальное зеркало
Подобные призы без депо предоставляются на больше выгодных условиях. Зачастую они крупнее, а обстоятельства отыгрыша наименее строгие.Подтверждение регистрации. Казино настоятельно привязки профиля к электрическому адресу и номеру телефонного. Для этого на e-mail отправляется письмо со ссылкой, а на телефон ? текстовое известье с кодом. рабочее зеркало 1хслотс <a href=https://www.google.com.cu/url?q=https://doctorlazuta.by/>https://www.google.com.cu/url?q=https://doctorlazuta.by/</a>
1×slots быструю регистрацию а также мгновенное
Отыграв бездепозитный приз в казино с выводом также придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, случае сходственное лимитирование существует, то единоразово вывести выйдет лишь сумму, не превышающую объем полученного бонуса.4. Заберите презент. Чаще всего бонус активируется незамедлительно в регистрации. Но посещают ситуации, когда нужно забежать в индивидуальный офис или написать в службу поддержки. B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. <a href=http://service.megaworks.ai/board/bbs/board.php?bo_table=hwang_form&wr_id=735011>http://service.megaworks.ai/board/bbs/board.php?bo_table=hwang_form&wr_id=735011</a> Популярность онлайн казино растёт и всё больше юзеров начинают проявлять азартными играми. Бездепозитные призы 2022 года, это уникальные подарки за регистрацию. С их помощью свежие игроки имеют получить бесплатные вращения либо деньги на баланс за одну регистрацию. С в игорных заведений в интернете, бездепозитные призы стали популярнейшим способом вербования игроков. Подобные промоакции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш сайт собрал лучшие предложения из онлайна на 2022 год. Воспользуйтесь любым даром и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша нужно выполнить условия. 1хслотс рабочее зеркало на сегодня Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, чтобы замечена вероятность вывести выигрыш.
<b>Смотреть еще похожие новости:</b>
<a href=https://communities.leviton.com/threads/1×slots-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D0%BD%D0%B0-%D1%81%D0%B5%D0%B3%D0%BE%D0%B4%D0%BD%D1%8F.1288/>1×slots рабочее зеркало на сегодня</a>
<a href=http://forum.lesprom.org/threads/kazino-1×slots-oficialnyj-sajt.1172/>казино 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Обыкновенные бездепозитные призы в объеме от 3-х до двадцати долларов созданы чтобы, чтобы, дабы в забавы заходили все новые и новые игроки. Здесь, всего, несомненно ограничение на наибольший выигрыш. Важно, дабы перед минимальным вкладом был отключен бонус за 1-ое пополнение счета, и в не попадет на повторный вейджер. Важно, удостоверьтесь том,, что раньше не регились в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи.
#509 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация
Бездепозитные бонусы начисляются лишь один один. Не стоит раскрывать свежие аккаунты, дабы получить их повторно. Служба защищенности казино обязательно выявит «левого» соучастника и перекроет. Если посетитель выполнит необходимые притязания, отыграет собственную ставку и решит вывести личный выигрыш, то ему нужно сведению, собственно казино непременно востребует дать ксерокопии собственных документов, дабы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои исключить не удастся.Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации дара нужно доказать электрическую почту и привязать аппарат; <a href=http://filmkachat.ru/>1×slots регистрацию процедура займет всего лишь</a> <a href=https://forum.index.hu/User/UserDescription?u=2065076>https://forum.index.hu/User/UserDescription?u=2065076</a> Большинство клубов привлекают внимание в за счёт разнородных подарков. На 1 сайтах можно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает благотворительные вращения для пуска топовых онлайн слотов. Несмотря на разные промоакции, стоит выделить самые главные. 1×slots казино мобильная версия <a href=https://lockright.uk/forum/profile/DellaLoren>https://lockright.uk/forum/profile/DellaLoren</a>
1×слотс казино
Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам воспрещено начислять бонусы клиентам, не имеющим валютных средств на счете. Мы предлагаем рассмотреть актуальные призы онлайн-казино с лицензией, коие соблюдают законодательство РБ. 1×slots casino регистрация <a href=https://qashvqt.uz/index.php?subaction=userinfo&user=Porsedropol>https://qashvqt.uz/index.php?subaction=userinfo&user=Porsedropol</a> Срок отыгрыша — это период, кот-ый наступает в момент активации бонуса и заканчивается с его закрытием. Пользователю необходимо уложиться в данный временной зазор, по призовые средства аннулируются. Казино устанавливают перечень игр, ставки каких засчитываются при расчете отыгранных средств. Если тайтл не входит в данный список, то возможность быть недосегаем для загрузки в деянья бонусного предложения.Основное управляло получения бездепа ? создаваемый акк должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов требовательно воспрещено. Проверка ведется по имени, e-mal, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депо нужно соблюдать простую последовательность поступков. 1×slot рабочее зеркало Но а случае вы теснее профи по интернет казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в интернет казино;
1×slots официальный сайт скачать на айфон
Размер бонуса. В качестве бездепов обычно начисляют небольшие суммы, а когда идет о бонусах за депозит, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино могут подарить игроку до 2000$.Возможность сыграть дополнительное соревнование (а от и некоторое) абсолютно даром, а выигрыш, в свою очередь, поступает на счёт игрока. Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации приза без депозита. Внимательно прочитайте до конца. Многие новички делают промахи на шаге регистрации и потому не получить подарок.Можно ли наваривать на бездепозитных бонусах? Это не работа, тут как повезет, если в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, за можно назвать везением, и дополнительной добавкой к вашему бютжету. <a href=http://opensourceprocurement.org/forumthread3783–1×slots-SKACAT%D1%8C-NA-ANDROID>http://opensourceprocurement.org/forumthread3783–1×slots-SKACAT%D1%8C-NA-ANDROID</a> 1×slots официальный сайт скачать
1×slots зеркало
Диапазон ставок, коие вправе устроить игрок, также лимитирован. Обычно ставить можно маленькую сумму — пределах 10–30 рублей за одно вращение. <a href=http://rumproject.com/rumforum/viewtopic.php?f=23&t=6013>сайт 1× slots casino</a> Подарки на конкретные даты выделяются критериями получения. Если поощрение начисляют игроку на день рождения, то сумма обычно зависимости от совместного объема депо за год.Помните, собственно в некоторых играх сумма ставки идет в зачет вейджера лишь частично. Так, в настольных и карточных забавах только от 5% до 50% суммы ставки числятся как отыгранные деньги, на как в слотах идет в зачет все one hundred percent суммы. 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=http://food.biz.ua/wr_board/tools.php?event=profile&pname=thinkableoptimi>http://food.biz.ua/wr_board/tools.php?event=profile&pname=thinkableoptimi</a> Также учтите, собственно кое-какие игровые платформы сузивают список стран, коие способны получить предложенный бездепозитный приз за регистрацию. К образцу, есть онлайн-заведения, выдающие похожие бонусы лишь обитателям определенных государств. К примеру, онлайн казино 777 Оригинал дает бездепозитный приз лишь игрокам из России и стран СНГ. Или наоборот, снабжают вознаграждением всех, кроме жителей неких государств (исходя из сего, следует внимательно учить перечень, чтобы потом не возникло практически вопросов и претензий).
1×slots casino online регистрация
Существует ли стратегии для отыгрыша бездепозитных бонусов? К раскаянью нет, на выигрыши либо проигрыши с бонусов, казино либо игрок повлиять возможности, отдача игр происходит от разработчиков игр. У нас на веб-сайте Вы отыщите перечень бонусов без депозита в проверенных казино и доскональную информацию про как их получить и применять. <a href=http://fumankong2.cc/home.php?mod=space&uid=602547>http://fumankong2.cc/home.php?mod=space&uid=602547</a> 1×slots официальный сайт, скачать Активация по промокоду употребляется в разных обликах бездепов. Если речь о приветственном бонусе, то набор знаков возможно разузнать на главной странице, в регистрационной форме либо послании, коие отправляется юзеру для доказательства адреса электронной почты. Акции имеют проводиться общо с партнерскими площадками. Обычно код размещается на стороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активируется разовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем актуальный код для активации в описании любого рекламную.Особую изюминку видео слотам присваивают оригинальные символы. С их появлением активируются разные призы. Вы сможете запустить дополнительный степень и прирастить сумму выигрыша. Есть знаки, коие замещают ненужные элементы и сами создают выигрышные комбо. Не стоит забывать и про бонус-тур. После каждого удачного спина есть шанс увеличить необходимую выигрыша в два либо хорошо раза.
<b>Смотреть еще похожие новости:</b>
<a href=http://nakupnidivadlo.cz/index.php/forum/3-pripominky/46621-https-sk-service1-ru?start=330#240083>1хслот 1хслотс регистрация перейти на 1×slots</a>
<a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=46312>1×slots зеркало регистрация то дальше необходимо пройти</a>
<a href=http://swissairways-va.com/phpBB3/viewtopic.php?t=795093>1х слот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Многие азартные клубы ограничивают необходимую вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании акции, суммы Вы не сможете исключить. Разница будет аннулирована, Вы том не можете создавать на нее ставки. Можно. Вы постоянно можете отрешиться от получения бездепозитного приза за регистрацию в казино, же Вы не создадите ставку.
#510 internetpermGephttps://perm-domashnij-internet003.ru
подключение интернета пермь <a href=https://perm-domashnij-internet003.ru>perm-domashnij-internet003.ru</a> подключить интернет
#511 RulyNuthttps://sildetails.wordpress.com/
At 67, Allan finally said yes to a dinner date-and felt ready thanks to https://manciali.wordpress.com/ cialis 20 mg best price. Your comeback story deserves solutions that meet the highest standards.
#512 Ремонт iphonehttps://remont-iphone-sot.ru/
Наши специалисты предлагает высококачественный <a href=https://remont-iphone-sot.ru/>вызвать мастера по ремонту iphone</a> любых брендов и моделей. Мы понимаем, насколько необходимы вам ваши устройства iPhone, и обеспечиваем ремонт первоклассного уровня. Наши профессиональные техники работают быстро и аккуратно, используя только качественные детали, что обеспечивает длительную работу проведенных ремонтов. Наиболее общие проблемы, с которыми сталкиваются пользователи смартфонов Apple, включают поврежденный экран, неисправности аккумулятора, ошибки ПО, неисправности разъемов и повреждения корпуса. Для устранения этих неисправностей наши профессиональные техники выполняют ремонт экранов, батарей, ПО, разъемов и механических компонентов. Обратившись к нам, вы получаете надежный и долговечный официальный ремонт айфона на дому. Подробная информация размещена на сайте: https://remont-iphone-sot.ru
#513 internetpermGephttps://perm-domashnij-internet002.ru
подключить интернет в перми в квартире <a href=https://perm-domashnij-internet002.ru>perm-domashnij-internet002.ru</a> подключить интернет в квартиру пермь
#514 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots review live
Внесение депозита – Будьте готовы пополнить счет последствии отыгрыша бонуса. Это обычное требование управлял для данного типа промо-акций. Лучше заблаговременно уточнить, какую необходимую надо(надобно) несомненно вносить на счет. Как верховодило, речь идет о минимальном депозите, хотя вы должны быть уверены, собственно он вас по кармашку. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasino09k online</a> <a href=https://archinect.com/firms/cover/150465490/cgifurniture-modern-interior-design>https://archinect.com/firms/cover/150465490/cgifurniture-modern-interior-design</a> Фриспины — благотворительные вращения, коие позволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся наиболее знаменитым и преимущественным видом бонуса — благотворительные вращения порой эффективнее и веселее в отыгрыше, чем другие виды бездепов.Получить приветственный приз все лишь свежие посетители онлайн-казино. Способы описаны в условиях промоакции каждого легального казино, чаще всего это: 1×slots регистрация на сайте <a href=http://ichehol.ru/bitrix/redirect.php?goto=http://techwiregroup.ru/bitrix/redirect.php?goto=http://stk-t.ru/bitrix/redirect.php?goto=https://teletype.in/@urist_free/NanTlHxumeA>http://ichehol.ru/bitrix/redirect.php?goto=http://techwiregroup.ru/bitrix/redirect.php?goto=http://stk-t.ru/bitrix/redirect.php?goto=https://teletype.in/@urist_free/NanTlHxumeA</a> Демоказино есть практически на каждом веб-сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются существенно реже: там в случае выигрыша и соблюдения условий промоакций бездеп возможно превратить в реальные средства.Выигрыши с бонусов без вложений всегда привязаны к требованию по ставкам и могут быть обналичены только в исполненья данных требований.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
<a href=https://www.mqf.pw/bboard/member.php?action=profile&uid=614>1×slots регистрация на 1хслотс</a> 1хслот зеркало Теоретически, к безвозмездным бонусам возможно отнести например нарекаемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, поэтому собственно они предоставляют лишь вероятность делать ставки. <a href=http://www.glife2120.ru/user/RaymondBap/>http://www.glife2120.ru/user/RaymondBap/</a> Бoльшинcтвo азартных заведений выдвигают приблизительно однообразные, схожие обстоятельства и требования, коие нужно выполнить, дабы получить бездепозитный бонус за регистрацию. Все их возможно объединить в один список: 1×slots зеркало которую указывали при регистрации кстати Подарки на конкретные даты отличаются критериями получения. Если поощрение начисляют игроку на денек рождения, то сумма обычно зависимости от общего объема депозитов за прошедший год.
1× slots официальный
Ограничения по играм. Администрация воспрещает игрокам кое-какие игровые автоматы с бездепозитным бонусом, деньгами или безвозмездными вращениями. Обычно, в правилах приводится глубокий список слотов для отыгрыша. Иногда деление производится по виду игр. Например, отыгрыш вероятен на всех игровых аппаратах, но запрещен в настольных забавах и в разделе Live Casino.В неких интернет казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на веб-сайте клуба и доказать средства контактные данные. Дополнительно потребуется активация промокода. <a href=http://www.seniormissionva.org/bbs/board.php?bo_table=free&wr_id=1529933>http://www.seniormissionva.org/bbs/board.php?bo_table=free&wr_id=1529933</a> Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных притязаний, считая неотъемлемой верификации. Если на веб-сайте учтена неотъемлемая процедура подтверждения личности, то исключить выигрыш удастся только после проверки данных. Приготовьтесь заполнить анкету и отправить в техподдержку документ, подтверждающий лицо. 1×slots зеркало регистрация После получения приза вывод средств для клиента будет недосегаем до, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо чета недель. Выводить деньги игрок сможет только после отыгрыша.Подтверждение электрической почты – одно из ведущих условий, коие есть почти в любом бездепозитном казино. Чтобы верифицировать электронную почту, достаточно перейти по активной ссылке в послании, приобретенном от азартного клуба.
1×slots сайт
Существуют казино с призом за регистрацию, в довольно знамениты фриспины в онлайн казино потом регистрации в конкретных играх. Они встречаются в почаще бесплатных поощрений либо традиционных бонусов в казино без вложений. Например, игрок регистрирует счет, на который начисляются бесплатные игры, приз за регистрацию в виде даровых фрспинов, вращения в игровом автомате. Во время игрового процесса игры выигрывает истинные средства, которые в последствии можно удачно вывести из заведения на свою платежную систему. То есть, все шансы исключить свои без рисков своими деньгами. Регистрация, за которую игрок получит призы, займет пару минут, а благодаря данному возможно увеличить пять евро поощрений до тысячи и без всяких проблем вывести их. Популярность онлайн казино растёт и всё больше пользователей начинают увлекаться азартными забавами. Бездепозитные призы 2022 года, это оригинальные презенты за регистрацию. С их поддержкою новые игроки имеют получить бесплатные вращения либо средства на баланс за 1 регистрацию. С появлением игорных заведений в онлайне, бездепозитные призы стали наимоднейшим способом привлечения игроков. Подобные акции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о которых мы поведаем. Наш вебсайт собрал лучшие предложения из онлайна на 2022 год. Воспользуйтесь любым подарком и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша необходимо выполнить обстоятельства.Но надо думать, собственно снабжая юзеров этими бонусами, казино увлекается спонсированием. Ведь объемы вознаграждений, главном, не великие (средним объемом от 5 до 20 $). И на эти средства налагаются конкретные обстоятельства и ограничения, неотклонимые к исполненью игрока, случае в последствии он вожделеет получить все свои выигранные финансы. Если вы выбираете проверенное лицензионное интернет казино и сделайте все обстоятельства получения бездепозитного бонуса, трудностей с получением подарка у Вас не возникнет.Третитй бездепозитный бонус за регистрацию – валютные средства. К раскаянию, начислить рубли или доллары готовы лишь известные и модные клубы. С их поддержкою возможность насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком. 1×slots официальный сайт зеркало рабочее <a href=https://www.stroimvmeste.com.ua/user/Jaspergor/>https://www.stroimvmeste.com.ua/user/Jaspergor/</a> Приветственный бездеп предоставляется хоть игроку лишь раз один. Казино дерутся с например нарекаемыми бонусхантерами (от англ. Bonus Hunter — доброволец за призами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения презента. Исключить подобные деяния дозволяет верификация данных. Администрация вправе потребовать у клиента подтвердить персональные данные, обозначенные при регистрации.
1×slots официальный зеркало
Денежные свои. Третий приз за регистрацию без депо – наличные. К раскаянью, только знаменитые и знаменитые клубы имеют дать средства в рублях или баксах. С их поддержкой возможность насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед данным необходимо исполнение конкретных условий.Игрокам стоит принимать приветственный приз как гарантированный метод получить крупный выигрыш, но это отличная возможность без затрат оценить перечень казино. <a href=https://forum.racing.by/viewtopic.php?t=284863>https://forum.racing.by/viewtopic.php?t=284863</a> На бонусные начисления все быть установлены вспомогательные ограничения, которые Вы не к при отыгрыше. Пока бонус всецело не отыгран — деньги из казино не выводятся. 1 x slots Для отыгрыша приза казино обязывает игрока сыграть на необходимую, в некоторое один превышающую сумму приобретенного бонуса — тут выгода компании явна.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Даже не выиграв солидную сумму, игрок интересно проведет время, изнутри изучит работу площадки, воспримет геймплей автоматов. Все это без каких-либо финансовых рисков. Быть в курсе лучших промоакций с. Достаточно периодически изучать перечень свежих онлайн казино с выводом приза без депозита в этом разделе. Возьми собственный подарок. Чаще всего бонус активизируется сразу после регистрации. Но случаются ситуации, когда надо(надобно) забежать в личный офис либо написать в справочную службу.
#515 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
спорт букмекерская контора Любимова Ольга Борисовна порно <a href=https://rumafia.news/>почему казино</a> мелбет букмекерская контора порно с Кирьянова Дарья Борисовна <a href=https://strelochnik.com/>ставки на спорт букмекерские конторы</a> porno Яна Троянова лучшие казино бесплатно букмекерская контора зенит скачать 1×bet 1×bet xyz порно с Анастасия Потапова, теннисистка букмекерская контора вход online casino официальный
DiskiPlus 7k casino DiskiPlus casino betting <a href=https://diskiplus.ru>DiskiPlus Матвиенко Валентина Ивановна порно</a> DiskiPlus букмекерская контора зенит DiskiPlus порно с Каролина Севастьянова <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet xbet xyz</a> DiskiPlus скачать букмекерскую контору DiskiPlus сайте букмекерской конторы фонбет DiskiPlus порно с Илья Осипов (киберспорт) DiskiPlus казино онлайн бесплатно DiskiPlus макао казино DiskiPlus 1×bet регистрация DiskiPlus casino регистрации
#516 Charlesgunnyhttp://filmkachat.ru
1×slots быструю регистрацию а также мгновенное
У любого игорного заведения свои верховодила и обстоятельства. Но, чтобы получить бонусы, нужно выполнить стереотипные действия:Возьми свой подарок. Чаще всего бонус активизируется сразу последствии регистрации. Но бывают истории, когда нужно забежать в индивидуальный офис либо написать в справочную службу. <a href=http://filmkachat.ru/>1×slots зеркало сайта</a> <a href=https://linktr.ee/kalinka0588>https://linktr.ee/kalinka0588</a> онлайн казино 1×slots <a href=http://hardstorecr.com/mybb/member.php?action=profile&uid=172746>http://hardstorecr.com/mybb/member.php?action=profile&uid=172746</a>
1хслотс зеркало
Как лишь вы отыграли вейджер и свои с бонусного баланса перебежали вам на настоящий счет, Вы храбро можете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (сделать наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депозитом). <a href=http://support-groups.org/viewtopic.php?f=161&t=786726>1х слот регистрация в 1×slots casino</a> казино 1×slots официальный сайт Минимального оборота. Этот лимит устанавливается вейджером — же игрок не поиграет на установленную сумму, вывод средств несомненно недосегаем. <a href=http://gogotire.co.kr/bbs/board.php?bo_table=free&wr_id=1073070>http://gogotire.co.kr/bbs/board.php?bo_table=free&wr_id=1073070</a> Эффективность бездепов в рекламного прибора оценили все операторы. Малоизвестные площадки употребляют такие промоакции, чтобы живо набрать базу. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны неизменных гостей. Не все сайты, дающие подарки без депозита, рекомендованы к ирге. За привлекательным промоописанием могут прятаться неосуществимые обстоятельства отыгрыша прочие подводные камни. 1×slots зеркало регистрация Бонус за регистрацию в казино выдается лишь раз один на 1-го игрока. Но случаются вспомогательные акции, в которых бездепы раздаются для постоянных посетителей и эти подарки Вы можете получить более одного раза.
1×slots сайт
При выполнении условий отыгрыша и верификации, средства с бонусного счета переводятся на ведущей и шансы быть выведены на карту или электронный кошелек. Лимиты на вывод и сроки проведения транзакции находятся от выбранной платежной системы. <a href=https://princeofrubber.com/user-profile/stevenfub/?um_action=edit>https://princeofrubber.com/user-profile/stevenfub/?um_action=edit</a> 1хслотс рабочее зеркало
1×слот регистрация в 1×slots casino
Чем ниже велечину вейджера, что, этим проще отыграть и исключить бонус. Если Вы расчитываете заработать на бездепе, а не просто ознакомиться с свежим игровым клубом, то стоит игнорировать призов с высоким вейджером их почти не реально отыграть. С ними Вы можете лишь протестировать игры заведения.В зависимости от онлайн заведения любой из их возможность вам предложить как бездепозитные средства, так и бездепозитные фриспины, коие последствии удачной регистрации рухнут вас на ваш игровой баланс. <a href=http://forum.animogen.com/memberlist.php?mode=viewprofile&u=15333>1×slots регистрация 1×slots casino c2d ru</a> В наше время довольно просто получить бонус за регистрацию в казино. Практически любой игорный дом с готовностью начисляет деньги или бесплатные вращения. Многие гэмблеры пользуются этим и не стесняются региться в любом клубе с выгодными критериями. Кстати, это замечательная вероятность выработать победную стратегию и сорвать джекпот.Как только на виртуальном счету окажутся бонусные средства, поспешите отыграть вейджер. Сразу после сего возможно забыть заявку на вывод выигрыша. Кредиты прибыльно отличаются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом настоящих средств и дают возможность ощутить азарт. Во-вторых – можно насладиться любой азартной забавой доступной на сайте. В вашем распоряжении находятся автоматы, настольные прибавление, видео-покер, Live-дилеры. С иной стороны, намного проще отобрать бездепозитные фриспины за регистрацию в казино и прямо сейчас начать вращать барабаны в наихороших слотах. Главная необыкновенность спинов в, собственно они предусмотрены для лучших автоматов. Удастся столько пройти вспомогательные раунды, хотя и увеличить сумму выигрыша, заработать респины прочие внутриигровые подарки.Свежий приз начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в использовании своими, в случае отыгрыша оператор может установить ограничение на вывод денег. 1×slots зеркало выигрыши обязательно пройдите регистрацию если <a href=http://fotogrammetria.ru/index.php?subaction=userinfo&user=ritzyaffection1>http://fotogrammetria.ru/index.php?subaction=userinfo&user=ritzyaffection1</a>
1×slots зеркало регистрация то дальше необходимо пройти
Так же стоит выделить то, что в любом онлайн казино установлен собственный наибольший кешаут на бездепозитный бонус. Как управляло кешаут — это предельная сумма денег, кот-ая дешевая для вывода с бездепозитного приза.В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, необходимо адресоваться в службу поддержки через лайв-чат на веб-сайте казино. <a href=https://kamchaty.ru/user/TravisleX/>https://kamchaty.ru/user/TravisleX/</a> Когда речь идет о получении бездепозитных призов в казино, начала обратите внимание на следующие условия:Так собственно приготовьтесь предоставить секретную информацию (пол, возраст, страна проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает менее суток, последствии чего получится свободно выводить крупные выигрыши. 1хслотс регистрация в 1×slots casino Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в неотъемлемом порядке нужно пополнить счет в казино. Для депозитных бонусов, данная процедура не нужна, так как депозит теснее изготовлен.Частенько новички не понимают, как активировать презенты или исключить первый выигрыш. Для подобных случаев наша команда обрисовала основные термины – что это фриспины, вейджер, как его отыграть, зачем нужно протекать верификацию.
<b>Смотреть еще похожие новости:</b>
<a href=https://mit-bbs.com/viewtopic.php?t=840518>1хслотс зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Многие новички сомневаются, что поощрительный приз не будет возвращать, и в они выиграли у казино. Это безусловно безопасно и накрепко. Выводя выигранные средства, игрок просто одергивает свое участие в игре и теряет уникальную возможность – бесплатно наращивать собственное материальное положение.
#517 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino рабочее зеркало казино играть <a href=https://rumafia.news/>porno Мария Шарапова</a> 7k casino порно с Варвара Субботина <a href=https://res-publika.com>pin up casino пин ап</a> лучшие казино бесплатно casino зеркало сегодня Комарова Наталья Владимировна порно казино ставка карты казино порно с Зырянова Анастасия Владимировна фильмы казино рояль
DiskiPlus бесплатное казино DiskiPlus 1×bet слоты официальный сайт <a href=https://diskiplus.ru>DiskiPlus скачать 1×bet на андроид</a> DiskiPlus порно с Никита Кучеров (хоккей) DiskiPlus casino daddy <a href=https://www.diskiplus.ru/>DiskiPlus какие казино</a> DiskiPlus 1×bet слоты официальный сайт DiskiPlus casino вход DiskiPlus black russia казино DiskiPlus вавада казино DiskiPlus часы казино DiskiPlus casino скачать DiskiPlus new casino
#518 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Екатерина Ефременкова, шорт-трекистка porno Виктория Баркова, легкоатлетка <a href=https://repost.news/>про казино</a> casino сегодня casino актуальное зеркало <a href=https://rhymes-punches.com/>1×bet официальный 1×bet xyz</a> букмекерская контора мостбет casino ап 1×bet зеркало на сегодня 1×bet xyz лучшие букмекерские конторы 1×bet зеркало слоты 1×bet xyz порно с Александр Большунов (лыжные гонки) win win casino
DiskiPlus 1×bet слоты 1×bet xyz DiskiPlus букмекерские конторы pin <a href=https://www.diskiplus.ru/>DiskiPlus casino зеркало сайта</a> DiskiPlus 1×bet зеркало слоты 1×bet xyz DiskiPlus мобильные букмекерские конторы <a href=https://www.diskiplus.ru/>DiskiPlus бесплатно фильм казино</a> DiskiPlus винлайн букмекерская контора официальный сайт DiskiPlus лучшая казино DiskiPlus порно с Анна Щербакова, фигуристка DiskiPlus 1×bet зеркало xbet xyz DiskiPlus фильмы казино рояль DiskiPlus casino на телефон DiskiPlus porno Игорь Акинфеев (футбол)
#519 internetpermGephttps://perm-domashnij-internet001.ru
провайдеры интернета пермь <a href=https://perm-domashnij-internet001.ru>perm-domashnij-internet001.ru</a> интернет домашний пермь
#520 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Дарья Касаткина (теннис) porno Алена Михайлова <a href=https://th-royalgclub.com/>реального казино</a> porno Юлия Канакина карты казино <a href=https://rucriminal.info/>1×bet сейчас</a> фильмы казино рояль порно с Анна Калинская (теннис) букмекерская контора ставки пина casino порно с Дарья Касаткина (теннис) порно с Анна Калинская (теннис) Любимова Ольга Борисовна порно
DiskiPlus 1×bet слоты DiskiPlus 7k casino зеркало на сегодня <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet слоты официальный сайт</a> DiskiPlus казино онлайн бесплатно DiskiPlus 1×bet casino <a href=https://diskiplus.ru>DiskiPlus лучшие онлайн казино</a> DiskiPlus 7k casino зеркало рабочее DiskiPlus 1×bet DiskiPlus 1×bet официальный 1×bet xyz DiskiPlus казино рояль смотреть DiskiPlus игры казино DiskiPlus porno Марина Александрова DiskiPlus лучшие казино бесплатно
#521 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на сайте 1×slots ru com
На условиях отыгрыша даровых бонусов следует остановиться подробнее. С ними связаны аспекты, коие невозможно оставить без внимания.Этот образ приза будет добавлен на Ваш аккаунт последствии успешной процедуры регистрации с использованием номера телефонного. Если выбрать другой способ создания учетной записи, бездеп не несомненно добавлен на Ваш акк. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало</a> Чтобы бездеп не был начислен на Ваш акк, Вам надо активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк автоматически, а Вы не планируете его использовать, обратитесь в службу с просьбой отменить бездепозитный бонус. <a href=https://www.sideprojectors.com/project/55401/3d-architectural-rendering-services>https://www.sideprojectors.com/project/55401/3d-architectural-rendering-services</a> Как правило, при выводе денег, от играющего потребуется только сделать минимальный вклад для того, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом индивидуальный счет. 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=https://www.javab24.com/profile/26520-jaspergap>https://www.javab24.com/profile/26520-jaspergap</a>
x1 slots регистрация в 1×slots casino
Способы получения бездепа различаются в зависимости от вида приза, который понравился игроку. Но для в любом случае нужно быть зарегистрированным в законном онлайн-казино и доказать свою лицо. В общем виде пошаговая аннотация для получения бездепозитного бонуса выглядит например: 1×slots регистрация на официальном сайте Бездепозитные бонусы прекрасный вариант бесплатной игры в игровые автоматы. Многие юзеры сети не понимают, собственно в казино можно начать выступать полностью бесплатно, а позже вывести выигрыш на банковскую карту или электронный кошелек, другие не доверяют онлайн казино, а третьи удачно играют и выигрывают – и тотчас достаточно немалые суммы.Размер призов почаще всего чисто условный и не превышает 50 рублей. Приятно, но ощутимым бустом при навряд будет. <a href=http://meiying89.com/home.php?mod=space&uid=429205>http://meiying89.com/home.php?mod=space&uid=429205</a> 1×слотс казино Популярность онлайн казино растёт и всё больше пользователей начинают интересоваться азартными играми. Бездепозитные призы 2022 года, это уникальные презенты за регистрацию. С их поддержкою новые игроки шансы получить безвозмездные вращения либо деньги на баланс за одну регистрацию. С свет игорных заведений в интернете, бездепозитные призы стали известнейшим способом вербования игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш сайт собрал наихорошие предложения из интернета на 2022 год. Воспользуйтесь каким даром и сможете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша нужно выполнить обстоятельства.
1× slots casino зеркало
Важно, убедитесь том,, что ранее не регились в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи. <a href=http://darina-kirov.ru/bitrix/redirect.php?goto=http://10-irk.ru/bitrix/redirect.php?goto=http://spa-men.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/-5NoESLrlEl>http://darina-kirov.ru/bitrix/redirect.php?goto=http://10-irk.ru/bitrix/redirect.php?goto=http://spa-men.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/-5NoESLrlEl</a> казино 1×slots официальный сайт Начнём с того, что любое промо за регистрацию подразумевает некие обстоятельства. Бездепозитные бонусы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность валютного оборота, нужная для исполнения критерий. Пример, получили безвозмездные вращения и выиграли с них 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 руб., проигрышных или выигрышных, так. После выполнения, бонусный баланс перейдёт на реальный и станет доступным к выводу.Законодательство, регулирующее азартные игры в различных странах, влияет на полномочия операторов. В итоге пользователи из отдельных ареалов сталкиваются с лимитированиями со стороны казино. Это возможность быть как полный отказ в доступе, так и невозможность загружать забавы отдельных производителей.
1×slots зеркало на сегодня
<a href=https://vivoes.com/forum.php?mod=forumdisplay&fid=2>1×slots зеркало регистрация в 1×slots casino</a> Так собственно приготовьтесь дать конфиденциальную информацию (пол, возраст, страна проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает не более суток, в чего получится свободно выводить крупные выигрыши. 1×slots сайт <a href=http://www.xiangtoushu.com/home.php?mod=space&uid=46751&do=profile&from=space>http://www.xiangtoushu.com/home.php?mod=space&uid=46751&do=profile&from=space</a> Бонус за регистрацию в казино без депо с выводом денег нужно отыграть. Зачастую для отыгрыша имеет потребоваться устроить ставки на необходимую, в количество 10-ов один превосходящую необходимую приза либо выигрыша.
1×slots официальный регистрация
Такой бесплатный эквивалент средств зачисляется на профиль юзера в осуществления требований и предназначаются они только для игрового процесса. Вывод этих вознаграждений возможен лишь последствии осуществления вейджеровых условий. <a href=http://mariland.org/index.php?subaction=userinfo&user=giantexcerpt56>http://mariland.org/index.php?subaction=userinfo&user=giantexcerpt56</a> Список так называемых «разрешенных землель» прилагается к правилам бонусной программки игорного портала. Обязательно выясните, распространяются ли на вас сходственные наказания.Если при регистрации указать промокод, можно гарантировано получить бонус. Где брать ваучер? Посетите направленные блоги или форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В последнее время игорные жилища начали афишироваться в кинокартинах и телесериалах. Присмотритесь и наверняка заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных руб. 1хслотс зеркало В некоторых онлайн казино для получения бездепозитных призов не достаточно просто зарегистрироваться на веб-сайте клуба и подтвердить свои контактные данные. Дополнительно требуется активация промокода.
<b>Смотреть еще похожие новости:</b>
<a href=http://griffhunter.com/boards/viewtopic.php?p=967943#p967943>1 xslots рабочее зеркало</a>
<a href=http://swissairways-va.com/phpBB3/viewtopic.php?t=795572>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
4. Заберите презент. Чаще всего приз активируется незамедлительно последствии регистрации. Но случаются ситуации, когда нужно зайти в личный офис или написать в службу поддержки.
#522 Charlesgunnyhttp://filmkachat.ru
1 xslots рабочее зеркало
Начнём с такого, собственно каждое рекламную за регистрацию подразумевает некие условия. Бездепозитные бонусы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, нужная для исполнения условий. Пример, получили безвозмездные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 рублей, неудачных либо выигрышных, неважно. После исполненья, бонусный баланс перейдёт на настоящий и станет доступным к выводу.Для получения бездепа нужно пригласить в игру по реферальной ссылке свежего посетителя: он должен зарегистрироваться, пройти верификацию на сайте онлайн-казино и пополнить счёт на необходимую, обозначенную в условиях акции. <a href=http://filmkachat.ru/>1× slots casino зеркало</a> Многие казино предоставляют в маркетинговых целях безвозмездные призы исключительно для наших читателей. Чтобы их получить, нужно перейти на игровой вебсайт по партнерской ссылке с нашего портала. <a href=https://www.patreon.com/posts/123686935>https://www.patreon.com/posts/123686935</a> 4. Заберите презент. Чаще всего приз активизируется сразу в регистрации. Но бывают истории, когда нужно забежать в индивидуальный кабинет либо написать в саппорта.Как лишь получите бездеп в казино, всё равно не забывайте проверять электронную почту. Некоторые игорные клубы день радуют активных гэмблеров приятными призами. Чаще всего получить подарок возможно в преддверии праздника, на день рождение, за привлечение приятеля. А также распространённым бонусом является надбавка к депозиту. Нужно более пополнить счёт, и азартное заведение увеличит его на 50–100%. 1×slots сайт <a href=https://forum.21up.co.uk/member.php?action=profile&uid=12338>https://forum.21up.co.uk/member.php?action=profile&uid=12338</a> Можно ли наваривать на бездепозитных бонусах? Это не работа, тут как повезет, случае в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, время возможно именовать везением, и добавочной добавкой к вашему бютжету.Условия отыгрыша приза. Если Вы планируете заработать на бездепозитном бонусе, то для обратите внимание на значение вейджера и срок, кот-ый дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, что, этим проще отыграть приз и исключить выигрыш.
1×slots официальный сайт скачать
Самые популярные способы вывода средств ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электронным платежным системам на Neteller и Skrill, а используют криптовалютными кошельками. Вывод выигрышей имеет осуществляться мгновенно или развлекать от нескольких часов до нескольких суток. 1×slots зеркало рабочее Выбирая бесплатный бонус, внимательно изучайте верховодила. Убедитесь, что для возможно себя роль в промоакции. Уточните, в каких забавах возможно исполнять обстоятельства вейджера. При необходимости задавайте вопросы адептам саппорта. <a href=http://www.besatime.com/index.php?subaction=userinfo&user=WalterOpirl>http://www.besatime.com/index.php?subaction=userinfo&user=WalterOpirl</a> Индивидуальные поощрения выдаются за совершение действий: подписку на аккаунты площадки в социальных сетях, установку мобильного приложения либо официального посетителя для ПК. В большинстве казино срабатывают программки преданности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на грядущий уровень часто сопрягается выдачей бездепа.Ниже указан актуальный перечень легальных казино в Беларуси с бонусами на первый депо. Вы сможете попасть на официальный сайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. 1×slots промокод при регистрации 2025 Иногда в бездепа, казино дарует минимальный приз (до 50 рублей), ради которого не заморачиваться.Вы не в коем случае ни же рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, научится регулировать изменять ставки и полосы, исследовать бонусные забавы и их выигрышные комбинации, ну конечном просто зарядится кучей впечатлений! Ведь вы будите выступать на бонусные средства, коие можно отыграть и исключить, не просто на демо счет, что, этим наиболее адреналин в крови более повысится а пульс забьется с частым ритмом!
1×slots зеркало видели такую регистрацию на
Для ревизии используются сканы паспортов, водительских прав, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если пользователь замечен в попытке ввести дополнительный акк, все его учетные записи подвергаются блокировке, а их владелец попадает в черный перечень. При этой на лицензионной площадке не опасаться указывать достоверную индивидуальную информацию (шифрование исключает утечку персональных данных). На критериях отыгрыша даровых призов следует остановиться подробнее. С ними связаны аспекты, коие нельзя забыть без внимания. <a href=https://lider-school174.com/forum/user/2653/>https://lider-school174.com/forum/user/2653/</a> У каждого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано смогли выполнить их, мы дадим некоторое советов. Если система начислила небольшую необходимую, надо делать немалые ставки – остановитесь на 10–30 центах. Как лишь сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте играть. В неприятном случае чем приглядеться к другому автомату. casino 1×slot
1×slots регистрацию более популярный вариант это
Пoдтвepдить личнocть клиента. Для успешного вывода средств, необходимо подтвердить личность посетителя. Нa этaпe вepификaции пpoфиля, работники службы защищенности обязаны увериться, что у игрока всего лишь раз аккаунт. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не сможет исключить собственный выигрыш, случае у него будет некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы. Вышеописанная причина и считается главным моментом, из-за которого операторы отдают доля своей прибыли на различные рекламные расходы и рекламные кампании. А наиболее действующим здесь станут выступать непосредственно бездепозитные бонусы казино 2022 с выводом за регистрацию.Поспешите зарегистрироваться на официальном сайте Клубника, дабы моментально получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, появляется настоящий шанс победу! 1хслотс 1хслотс регистрация перейти на 1×slots <a href=https://gunnerbksa07418.blogminds.com/deep-nude-exploring-the-ethics-and-impact-of-ai-powered-image-manipulation-27939594>https://gunnerbksa07418.blogminds.com/deep-nude-exploring-the-ethics-and-impact-of-ai-powered-image-manipulation-27939594</a>
1хлот регистрация в 1×slots casino
<a href=http://bhidagt.hu/index.php/forum/user/43082-unomuwa>http://bhidagt.hu/index.php/forum/user/43082-unomuwa</a> Предложения с бездепозитными бонусами за регистрацию разрешают новым заведениям заинтересовать аудиторию на собственный сайт. А игроки же получают возможность играть на настоящие деньги без депо в казино и заработать маленький стартовый капитал, кот-ый разрешается исключить на карту банка либо электрический кошелек. 1×slots регистрация на 1хслотс Лишь популярностью и знаменитые азартные заведения шансы позволить себе раздавать бездепы вид дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, которые можно израсходовать в лучших аппаратах с высочайшей отдачей.
<b>Смотреть еще похожие новости:</b>
<a href=http://maddog-server.org/forum/member.php?action=profile&uid=27481>1×slots официальный сайт мобильная версия скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Возможность протестировать новые забавы, не рискуя личностными средствами и разработать собственную стратегию забавы.
#523 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Вышеописанная причина и является главным моментом, из-за которого операторы отдают часть собственной прибыли на разные рекламные затраты и рекламные кампании. А наиболее действенным тут станут выступать непосредственно бездепозитные бонусы казино 2022 с выводом за регистрацию.Представьте момент, когда при ставке в 10 рублей Вы получите подобное умножение. Миллион рублей за одно вращение, что абсолютно вполне. Поэтому вопрос, сколько возможно выиграть остаётся закрытым. Предлагаем выяснить самостоятельно. Регистрируйтесь в одном или нескольких онлайн казино, получайте Бездепозитный бонус и проверяйте удачу в деле. Разумеется, вывести деньги сложно. Однако шансы есть у всех. <a href=http://filmkachat.ru/>1×slots промокод при регистрации</a> Например, игрок получил 500 руб. При твореньи аккаунта и обязан отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 руб., понадобится устроить 875 спинов для полного отыгрыша. <a href=https://beacons.ai/lexxeagle>https://beacons.ai/lexxeagle</a> При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое возможно посвятить игре в казино.Бездепы с безвозмездными вращениями предоставляют юзерам право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд выплачивает казино. Число спинов ограничено и изредка превышает сотку. Если промоакция включает в себя количество безвозмездных игр, их начисление имеет быть разбито на некоторое дней. зеркала 1×slots <a href=http://wiki.hightgames.ru/index.php?title=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0%20%D0%BD%D0%B0%20%D0%B4%D0%B7%D0%B5%D0%BD%D0%B5>http://wiki.hightgames.ru/index.php?title=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0%20%D0%BD%D0%B0%20%D0%B4%D0%B7%D0%B5%D0%BD%D0%B5</a> Денежные свои. Третий бонус за регистрацию без депозита – наличные. К раскаянью, только известные и модные клубы шансы дать деньги в руб. Либо долларах. С их помощью возможность насладиться любой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед этим необходимо исполненье конкретных критерий.
1×slots официальный demo регистрация в 1×slots casino
Бонус с зачислением денег на счет выделяет больше свободы деяний. Пользователь сам избирает, каким образом воспользоваться подаренными средствами. Здесь того все действовать ограничения на список дешевых игр, хотя обычно эти рамки не например строги, как в рекламную с безвозмездными вращениями. 1×slots регистрация 1×slots casino c2d ru <a href=http://g-am.co.kr/bbs/board.php?bo_table=free&wr_id=68912>http://g-am.co.kr/bbs/board.php?bo_table=free&wr_id=68912</a> Эффективность бездепов виде маркетингового инструмента расценили все операторы. Малоизвестные площадки используют эти акции, дабы живо набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны постоянных посетителей. Не все веб-сайты, дающие презенты без депо, рекомендованы к забаве. За симпатичным промоописанием шансы скрываться невыполнимые условия отыгрыша и другие подводные камешки. 1×slots зеркало этих способов предполагает регистрацию Главным нюансом в возникновении данных вознаграждений состоит в, что пустив их в ход, в ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он спасибо призам какой-нибудь выигрыш или мгновенно спустит все лишь что прибывшие финансы). То есть, казино снабжает игрока возможностью на дармовой базе выступать во всевозможные слоты причем спонсирует забаву.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.
1×slots сайт
А ознакомиться с свежими онлайн казино, Вы сможете помощью бонусов с выводом прибыли, которые Вы можете получить без депозита. <a href=http://toolbarqueries.google.ba/url?q=http://gtss.ru/bitrix/rk.php?goto=http://es.paltalk.com/client/webapp/client/External.wmt?url=https://telegra.ph/Dolzhniki-vyzvannye-k-sudebnym-pristavam-cherez-portal-gosuslug-09–24>http://toolbarqueries.google.ba/url?q=http://gtss.ru/bitrix/rk.php?goto=http://es.paltalk.com/client/webapp/client/External.wmt?url=https://telegra.ph/Dolzhniki-vyzvannye-k-sudebnym-pristavam-cherez-portal-gosuslug-09–24</a> B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpaxПрямо в арестуйте безвозмездные вращения за регистрацию без депозита и начинайте коллекционировать призовые комбинации из-за крупных выигрышей! 1×slots казино зеркало
1×slots зеркало
В интернет-сети постоянно можно найти перечни более известных и гарантированных поощрительных программ от модных онлайн-казино. <a href=https://fmatras.ru/profile/107395-rabofreekt/>1×slots зеркало рабочее</a> В зависимости от онлайн заведения любой из них возможность вам предложить как бездепозитные деньги, например и бездепозитные фриспины, которые последствии удачной регистрации упадут вам на ваш игровой баланс. 1×slots бонус за регистрацию <a href=http://classicalmusicmp3freedownload.com/ja/index.php?title=%E5%88%A9%E7%94%A8%E8%80%85:JannieKraegen>http://classicalmusicmp3freedownload.com/ja/index.php?title=%E5%88%A9%E7%94%A8%E8%80%85:JannieKraegen</a> Далее потребуется отыграть вагер и исключить выигрыш. Игрокам без навыка крупно подфартило, они могут получить десятки презентов за одну регистрацию. Если не сумели получить Бездепозитный бонус, не тревожьтесь. Обратитесь в онлайн чат, оператор поможет решить проблему.
казино 1×slots
С не отыгранным призом запрещается превышать размер наибольшей ставки. Нарушение этого условия в аннулирование выигрыша.Первый образующийся вопрос, это, для выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают новых игроков. Последним легче начать игру на средства с подарка за регистрацию. Им надо пополнять баланс и расходовать личностные средства. Новички получают благотворительные спины или свои на счёт. С их поддержкой знакомятся с игровым процессом, крутят слоты и делают ставки в рулетке. <a href=http://farsrig.com/index.php?subaction=userinfo&user=encouragingtund>http://farsrig.com/index.php?subaction=userinfo&user=encouragingtund</a> 1×slots регистрация Бездепозитный приз казино 2022 с выводом за регистрацию предоставляет вероятность ознакомиться игроку с лобби выбранного заведения, сориентироваться в выборе игр и выяснить качество работы службы. Довольно нередко, начиная игровой процесс, игрок теснее отказывается останавливаться и делает реальный вклад. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть бесплатно возможно как один таки с призом за регистрацию без необходимости вносить депозит.Не рекомендуем сломя голову браться за всевозможные предложения получения средств без вложений. Вполне вполне, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на первый взор. Альтернативой считается казино приз за депозит. Мы предлагаем вам пару советов, спасибо которым у любого игрока несомненно вероятность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом средств:
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.ltp-team.com/profile/596-rabofreepa/>1×slot официальный сайт</a>
<a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=913450#pid913450>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=http://yaoisennari.ekafe.ru/viewtopic.php?f=169&t=5229>1×slots быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Условия имеют разниться друг от приятеля. Но такой приз может быть использован только для игрового процесса – приобретенные на счет финансы до того, как станут отыграны, исключить невероятно. Но существуют азартные заведения, готовые просто например вручить средства на забаву. Для сего довольно сделать профиль. Чтобы исключить выигрыш, сперва необходимо выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа.
#524 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
слот casino порно с Илюшникова Татьяна Александровна <a href=https://www.ossetia.tv/>букмекерская контора на андроид</a> Валентина Матвиенко порно водка казино <a href=https://t.me/vchkogpu_ru>online casino 7k</a> 1×bet вход гама казино vavada casino porno Мария Шарапова казино 5 скачать casino на андроид 1×bet слоты
DiskiPlus Лут Оксана Николаевна порно DiskiPlus Разуваева Ксения Денисовна порно <a href=https://diskiplus.ru/>DiskiPlus порно с Евгений Малкин (хоккей)</a> DiskiPlus 1×bet приложение DiskiPlus kometa casino <a href=https://www.diskiplus.ru>DiskiPlus porno Ангелина Гончаренко, хоккеистка</a> DiskiPlus up букмекерская контора DiskiPlus порно с Абрамченко Виктория Валериевна DiskiPlus промокод 1×bet DiskiPlus 1×bet на сегодня DiskiPlus porno Анна Сидорова, керлингистка DiskiPlus кент казино DiskiPlus порно с Арина и Дина Аверины, гимнастки
#525 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино ли букмекерская контора леонов <a href=https://th-royalgclub.com/>porno Ангелина Гончаренко, хоккеистка</a> сколько казино человек казино <a href=https://th-royalgclub.com/>приложения букмекерских контор на андроид</a> скачать букмекерскую контору на андроид фреш казино pin up casino скачать Ирина Горбачева скачать 1×bet на андроид бесплатно casino игровой автомат 7k casino сайт
DiskiPlus porno Ангелина Гончаренко, хоккеистка DiskiPlus porno Светлана Ходченкова <a href=https://diskiplus.ru/>DiskiPlus up casino зеркало</a> DiskiPlus рабочее казино DiskiPlus букмекерские конторы в россии <a href=https://diskiplus.ru>DiskiPlus casino riobet</a> DiskiPlus казино сегодня DiskiPlus casino бездепозитный DiskiPlus Нургалиева Эльвира Рамиловна порно DiskiPlus Чулпан Хаматова DiskiPlus скачать 1×bet 1×bet xyz DiskiPlus Хорова Наталья Александровна порно DiskiPlus мобильные букмекерские конторы
#526 Charlesgunnyhttp://filmkachat.ru
1 хслот регистрация в 1×slots casino
Возьми свой презент. Чаще всего бонус активируется незамедлительно после регистрации. Но посещают истории, когда надо(надобно) зайти в индивидуальный офис или написать в справочную службу.Представленные на этой страничке наилучшие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные условия. После кропотливого анализа редакция портала составила рейтинг спецпредложений, в котором гости Casino.ru могут сортировать перечень по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д. <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino 56 online</a> <a href=https://hearthis.at/group/466309/eeeee-eeee-e-eeeee-eee-eeeeee-e-eeeeeee-eeeeeee-eeeeeeeeee/>https://hearthis.at/group/466309/eeeee-eeee-e-eeeee-eee-eeeeee-e-eeeeeee-eeeeeee-eeeeeeeeee/</a> На бонусные начисления имеют быть установлены вспомогательные лимитирования, которые Вы не учли при отыгрыше. Пока приз полностью не отыгран — средства из казино не выводятся. 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=http://t92906×p.bget.ru/index.php?subaction=userinfo&user=proudflat77>http://t92906×p.bget.ru/index.php?subaction=userinfo&user=proudflat77</a> Если при регистрации указать промокод, можно гарантировано получить бонус. Где арестовать ваучер? Посетите направленные блоги или форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В заключительнее время игорные дома начали афишироваться в фильмах и телесериалах. Присмотритесь и всего заметите промокод, который принесёт 500 или 1 000 бонусных руб.Ограничения по забавам. Администрация запрещает игрокам некоторые игровые автоматы с бездепозитным призом, средствами либо бесплатными вращениями. Обычно, в правилах приводится полный перечень слотов для отыгрыша. Иногда дробленье выполняется по облику игр. Например, отыгрыш возможен на всех игровых аппаратах, хотя запрещен в настольных играх и в разделе Live Casino.
зеркала 1×slots
Но на некоторых азартных платформах сходственные гонорары все получить теперь зарегистрированные юзеры. В этом случае, бонусы предоставляются масштабах оригинальных акций или же некоторым геймерам вид акционного предложения, которое прибывает на почту с целью «возвратить» игрока в свое казино. 1х слотс зеркало регистрация в 1×slots casino В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с бесплатных вращений. Прибыль, коию Вы заработаете на таком бездепе можно назначать на вывод без какого либо отыгрыша.Онлайн гемблинг развивается с каждым деньком больше и больше, новые бренды создаются не по дням а по часам. Новые онлайн казино проделывают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и что, этим наиболее предлагают бездепозитные бонусы за регистрацию, собственно бы не упустить такую возможность — как воспользоваться свежим бездепом, рекомендуем посещать наш вебсайт как можно чаще, самое вкусное и новые будет добавляться в данном же перечне. <a href=http://www.annunciogratis.net/author/jasperdef>http://www.annunciogratis.net/author/jasperdef</a> При отыгрыше бездепов, учитывайте кратковременные лимитирования. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток.Промокод – определённая комбинация символов, которую нужно ввести в соответствующее фон при творении учетной записи либо активировать в личном профиле игрока в разделе с призами. 1×slots акции
casino 1×slot
<a href=https://www.peacefulmind.co.kr/bbs/board.php?bo_table=free&wr_id=746560>https://www.peacefulmind.co.kr/bbs/board.php?bo_table=free&wr_id=746560</a> 1×slots мобильная версия войти казино Прямо в арестуйте безвозмездные вращения за регистрацию без депозита и начинайте коллекционировать призовые комбинации ради солидных выигрышей!Бывают ли бездепозитные бонусы без вейджера? Бывают, в у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино.
1×slots официальный зеркало
<a href=https://fuckseo.biz/members/rabofreepi.4554/>1×slots регистрация на сайте</a> Для того, чтобы отыграть необходимую вашего бездепозитного бонуса надо(надобно) выполнить обстоятельства вейджера. Очень нередко фриспины даются на определенные слоты (book of ra, book of lifeless, book of sun), избирайте слот себе нраву, все очень очень и качественные. Бездепозитные бонус возможность быть денежным например и вид фриспинов на слоты 1×slots регистрация на сайте <a href=http://sexdollshop.ru/bitrix/redirect.php?goto=http://business-shark.ru/bitrix/redirect.php?goto=http://xn-----7kcchbniweojd5abqga8adl4ah0a6a9m.xn–p1ai/bitrix/click.php?goto=https://telegra.ph/Narushenie-pravil-bezopasnogo-ispolzovaniya-i-soderzhaniya-bytovogo-i-vnutrikvartirnogo-gazovogo-oborudovaniya-09–23>http://sexdollshop.ru/bitrix/redirect.php?goto=http://business-shark.ru/bitrix/redirect.php?goto=http://xn-----7kcchbniweojd5abqga8adl4ah0a6a9m.xn–p1ai/bitrix/click.php?goto=https://telegra.ph/Narushenie-pravil-bezopasnogo-ispolzovaniya-i-soderzhaniya-bytovogo-i-vnutrikvartirnogo-gazovogo-oborudovaniya-09–23</a> В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это самая милая доля забавы. Важно, часто бездепозитные призы в казино выдаются с ограничениями по наибольшей выплате. В среднем возможно рассчитывать на прибыль в некоторое тысяч руб. Как исключить выигрыш с приза без депо. Придётся доказать акк документально, в некоторых заведениях. Процедура верификации неотклонима и делается каждым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате или прочтите в правилах.Да, у даровых бонусов есть дефекты. Прежде всего, они обычно не. Кроме того, условия вейджера по ним практически строгие. Но все же недоступность риска делает их довольно красивыми для посетителей.
1×slots регистрация 1×slotscasino09k online
Игрокам не следует принимать приветственный бонус как гарантированный метод получить большой выигрыш, но это отличная возможность без расходов расценить перечень казино. Обычно бездепозитные акции от казино, прибывают на эл. Почту в дни рождения или праздничные. В неких интернет казино можно адресоваться в чат и как постоянному игроку, возможно вам предложат бездепозитное предложение. <a href=http://iawbs.com/home.php?mod=space&uid=834261>http://iawbs.com/home.php?mod=space&uid=834261</a> Следует подчеркнуть, собственно бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с определенным кодом.Онлайн-казино с бездепозитными призами ставят посетителям обстоятельства для использования бездепами, поэтому перед участием в промоакции чем тщательно ознакомиться со всеми правилами и нюансами акции. Условия имеют прикасаться получения бонуса, его использования и последующего вывода валютных средств когда выигрыша. 1×слот регистрация в 1×slots casino Итак, чтобы благотворительные бонусные кредиты трансформировались в реальные деньги, которыми возможность распоряжаться по собственному усмотрению, их нужно отыграть. Вейджер стопам уточнять в правилах онлайн-казино.Чтоб получить крупный выигрыш, подбирайте игровые автоматы с максимальным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша.
<b>Смотреть еще похожие новости:</b>
<a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=10938>1 х слотс зеркало</a>
<a href=http://forum.survival-readiness.com/viewtopic.php?t=278738>1 х слотс зеркало</a>
<a href=https://lada-clubs.ru/forums/topic/1755–1×slots-registraciya-1×slotscasino-56-online/>1×slots регистрация 1×slotscasino 56 online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с безвозмездных вращений. Прибыль, коию Вы заработаете на этом бездепе можно назначать на вывод без какого или отыгрыша.
#527 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
слот casino 1×bet официальный <a href=https://t.me/vchkogpu_ru>букмекерские конторы в россии</a> букмекерская контора фонбет порно с Никита Кучеров (хоккей) <a href=https://th-royalgclub.com/>пин casino</a> букмекерская контора без casinos winning сайт pin up casino 1×bet на андроид бесплатно Валентина Матвиенко порно porno Игорь Акинфеев (футбол) казино онлайн бесплатно
DiskiPlus 1×bet зеркало xbet DiskiPlus Ирина Горбачева <a href=https://www.diskiplus.ru>DiskiPlus порно с Евгения Медведева</a> DiskiPlus Крючкова Полина Викторовна порно DiskiPlus pin casino <a href=https://diskiplus.ru>DiskiPlus казино в россии</a> DiskiPlus casino сегодня DiskiPlus online casino 7k DiskiPlus 1win букмекерская контора DiskiPlus porno Александр Соболев (футбол) DiskiPlus порно с Александр Большунов (лыжные гонки) DiskiPlus букмекерская контора мостбет DiskiPlus r7 casino
#528 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
В некоторых интернет казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на веб-сайте клуба и доказать средства контактные данные. Дополнительно требуется активация промокода. <a href=http://filmkachat.ru/>скачать 1×slots официальный сайт</a> <a href=https://www.obesityhelp.com/members/shopavto/about_me/>https://www.obesityhelp.com/members/shopavto/about_me/</a> Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. 1×slots зеркало видели такую регистрацию на <a href=https://podacha-blud.com/user/Jaspernal/>https://podacha-blud.com/user/Jaspernal/</a>
1×slots подтвердит вашу регистрацию если говорить
Также, учите, собственно бездепозитный бонус возможно вывести только что, нет случае, когда будут выполнены все обстоятельства отыгрыша. 1×slots регистрация 1×slotscasino 56 online <a href=http://www.gencotyre.com/comerblog/member.asp?action=view&memName=proudrainbow61>http://www.gencotyre.com/comerblog/member.asp?action=view&memName=proudrainbow61</a> Некоторые казино могут предлагать клиентам бездепы за свидетельство номера либо почты или репост на страницу в соц сетях. 1×slots коды Так что главное различие подарка на депо от бездепа – обязательное пополнение счёта. Вы сможете привнести депозит и преумножить стартовый капитал либо забрать бездеп и при этом не придётся рисковать своими сбережениями. Поспешите выполнить простые требования, и администрация ресурса начисляет щедрое одобрение!
1× слот зеркало
Активация по промокоду используется в разных обликах бездепов. Если речь идет о приветственном призе, то набор символов можно разузнать на крупнейшей страничке, в регистрационной форме либо послании, которое отправляется пользователю для доказательства e-mail. Акции шансы проводиться совместно с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активизируется одноразовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном кабинете или начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем актуальный код для активации в описании любого промо.Казино выводит деньги лишь на что, эту платежную систему, с котрой был изготовлен депо. То есть, для вывода бездепозитного приза, Вам сначала нужно восполнить счет. В некоторых клубах ограниченный перечень методов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет непосредственно с данных платежных методов, которые доступны для вывода. Все бесплатные призы кажутся соблазнительными. Кто же категорически от возможности сыграть в онлайн-казино, не рискуя средствами, хотя получая выигрыши. Но далековато не все бездепозитные бонусы мере привлекательны для рассудительного клиента.Лишь модные и известные азартные заведения шансы разрешить для выдавать бездепы повторяющий добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депо, которые можно израсходовать в лучших аппаратах с высокой отдачей. <a href=http://gticlub.lv/user/Stevenbut/>http://gticlub.lv/user/Stevenbut/</a> Не стоит путать забаву в демо и внедрение бонусов. В демонстрационном режиме игрок может оценить механику слота, сюжет и оформление. Но игра ведется на относительные кредиты, потому отсутствует главное ? ощущение пыла. Активируя промокод или фриспины, клиент раньше не тратит свои средства на игровые автоматы, хотя имеет сорвать настоящий куш! 1хлот регистрация в 1×slots casino Каждый новичок и умелый игрок грезят прытко стартануть и начать создавать настоящие ставки. Для сего достаточно отобрать презент, за который не нужно платить. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email либо телефонный. После этого администрация начислит щедрое вознаграждение вид даровых вращений или виртуальных кредитов.
1×slots рабочее зеркало на сегодня
<a href=http://forum.drustvogil-galad.si/index.php?action=profile;u=121557>1хслотс мобильная версия зеркало</a> 1×slots регистрация на 1хслотс <a href=https://www.riptapparel.com/pages/member?nodressio5>https://www.riptapparel.com/pages/member?nodressio5</a> Еще одно условие касается объемов ставки. Операторы устанавливают наивысшую необходимую, которую игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, выбранной в Личном кабинете. При превышении лимита есть риск лишиться бонуса. Существующие ограничения относятся и к конкретным обликам ставок. Например, играя в рулетку, клиент возможность столкнуться с запретом ставить фишки на шансы.
1×slots официальный сайт скачать
<a href=http://magnumvino.ru/bitrix/click.php?goto=http://rodos74.ru/bitrix/click.php?goto=http://kayaker.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/3EtDfEu0Qay>http://magnumvino.ru/bitrix/click.php?goto=http://rodos74.ru/bitrix/click.php?goto=http://kayaker.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/3EtDfEu0Qay</a> 1×slots рабочее зеркало на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.dis-course.net/viewtopic.php?t=655180>1×slots регистрация на официальном сайте</a>
<a href=http://ledyardmachine.com/forum/User-Jameshoing>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Мы рекомендуем не открещиваться от похожих предложений знаменитых казино. Выделите несколько мин. На регистрацию, получите бонус и попробуйте его отыграть. Может быть, сегодня удача несомненно на вашей стороне! У любого игорного клубы разные вейджеровые обстоятельства. Чтобы вы гарантировано смогли выполнить их, мы дадим несколько советов. Если система начислила небольшую сумму, надо делать великие ставки – остановитесь на 10–30 центах. Как лишь сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В неприятном случае другого, как приглядеться к иному автомату.
#529 pincouzhttps://pinco-uz.online
Pin Up kazinosunda müxtəlif slotlar və oyunlar. Pin Up qeydiyyat prosesi çox sadədir. Pin Up yeni oyunçulara xüsusi xoş gəldin paketi təqdim edir. Pin Up qeydiyyat üçün bonus təklif edir <a href=https://pinco-uz.online>pin up giriş</a>.
#530 Charlesgunnyhttp://filmkachat.ru
зеркло казино 1×slots
Например, игрок получил 500 руб. При разработке аккаунта и обязан отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 руб., потребуется сделать 875 спинов для полного отыгрыша.После требуется внести идентификационный платёж. Это пугает начинающих больше всего. Нужно устроить наименьший депозит в 100–500 руб. Таким образом служба защищенности увериться в том, что платёжный метод принадлежит Вам. Данная процедура важна для обеспечивания безопасности игровых счетов. Пример, Ваш аккаунт взломают и выведут средства на свой кошелёк. Будет крайне досадно. Поэтому верификация платёжной системы, это важный момент. <a href=http://filmkachat.ru/>1 х слотс зеркало</a> Иногда для получения призов нужно спутаться с представителями службы. Удобнее всего с ними собеседовать в онлайн-сате, хотя от довольно запроса по электронной почте.Иногда для получения призов нужно связаться с представителями службы поддержки. Удобнее всего с ними беседовать в онлайн-сате, но иногда достаточно запроса по электронной почте. <a href=https://www.therookies.co/projects/79481>https://www.therookies.co/projects/79481</a> B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax 1 x slots <a href=https://dominickvdmt53975.thenerdsblog.com/35926309/deepnude-ai-navigating-the-complexities-of-image-manipulation-and-ethics>https://dominickvdmt53975.thenerdsblog.com/35926309/deepnude-ai-navigating-the-complexities-of-image-manipulation-and-ethics</a> Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.Варианты выигрыша зависимости от Вашей успеха и условий игорного портала. Выше мы сказали, что некоторые бездепозитные призы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются и те, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на средства, можно выиграть невероятные суммы. Сегодняшние игровые автоматы либо видео слоты, как их называют. Могут выдавать солидные умножение от х1.000 и выше. Некоторые множат ставку от х100.000.
1хслот зеркало сайта
Большинство клубов привлекают внимание компьютерные за счёт разнообразных даров. На 1 веб-сайтах можно получить виртуальные кредиты, которые откроют доступ ко всему софту. На других же, администрация предлагает бесплатные вращения для пуска лучших интернет слотов. Несмотря на разные промоакции, стоит выделить самые главные.Во всех легальных онлайн-казино Беларуси необходимо подтверждение паспортных данных для игры — это требование правительства страны. <a href=https://timepost.info/showthread.php?tid=174412>1×slot официальный сайт</a> 1хслотс мобильная версия зеркало Приветственный приз без депо ? презент за регистрацию. Выдается деньгами, фриспинами либо баллами. В последнем случае бонусные баллы применяются для роли в турнирах либо размена на реальные средства. <a href=http://vgrote.ru/bitrix/redirect.php?goto=http://midj.com/?URL=http://herz.by/bitrix/redirect.php?goto=https://telegra.ph/Opredelenie-naznacheniya-arenduemogo-pomeshcheniya-09–19>http://vgrote.ru/bitrix/redirect.php?goto=http://midj.com/?URL=http://herz.by/bitrix/redirect.php?goto=https://telegra.ph/Opredelenie-naznacheniya-arenduemogo-pomeshcheniya-09–19</a> Вейджер (либо вагер) ? это минимальная сумма ставок, которую нужно устроить для вывода денежного приза. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение. 1×slots официальный сайт, скачать Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала прыткие выводы. Фишка выплат в том, собственно довольно выбрать платёжный инструмент и указать сумму. В большинстве случаев деньги зачисляются на электрические кошельки в течение 15 мин., а на банковские карты – 1–3 рабочих дня.Бонус начисляется игроку сразу в регистрации и прохождения верификации в казино и не требует от посетителя внесения депозита. Как верховодило, размер бонуса в подобном случае довольно скромный, однако дозволяет новичкам познакомиться с забавой без риска настоящими средствами.
1×slots рабочее зеркало на сегодня
Прежде чем активировать бездеп, необходимо увериться в, что государство, уроженцем коей является игрок, не заходит в перечень запрещенных. В зависимости от интернет заведения любой из их возможность для предложить как бездепозитные средства, так и бездепозитные фриспины, которые последствии удачной регистрации рухнут для на ваш игровой баланс. <a href=https://www.google.com.np/url?q=https://doctorlazuta.by/>https://www.google.com.np/url?q=https://doctorlazuta.by/</a> 1хслотс регистрация в 1×slots casino
1×slots зеркало регистрация в 1×slots casino
Бездепы обычно предлагают с отыгрышем — мгновенно вывести выигранные средства нельзя. Перевод средств со счета будет возможен последствии того, как пользователь выполнит все притязания казино, а сумма не может превышать установленного правилами лимита. Условиями акции фиксируются сроки, протяжении коих заказчик вправе воспользоваться предложением. Обычно они не превышают нескольких дней в активации.Отказ в прохождении верификации. Если клиент не желает или не дать документы, подтверждающие его лицо, профиль несомненно заблокирован вместе со всеми бонусными начислениями. <a href=https://forum.banknotes.cz/viewtopic.php?t=81728>1х слот 1хслотс регистрация перейти на 1×slots</a> Не хотите поиграть в азартные игры, не рискуя средствами деньгами, хотя получая в все выплаты? Подобную вероятность деют почти лучшие порталы с азартными весельями. В их числе много правдивых и надежных интернет-казино на русском языке. Они привлекают новых пользователей разными поощрительными мероприятиями, включая бездепозитные, или безвозмездные призы. 1×slots зеркало на сегодня <a href=https://www.coweyepress.com/wiki/index.php/Shisha_Tobacco_From4_Eur>https://www.coweyepress.com/wiki/index.php/Shisha_Tobacco_From4_Eur</a> Существует ли стратегии для отыгрыша бездепозитных бонусов? К огорчению нет, на выигрыши или проигрыши с призов, казино либо игрок воздействовать не может, отдача игр случается от создателей игр.Однако далековато не все ресурсы предлагают своим клиентам бездепозитные призы за регистрацию в казино. В большинстве случаев учтено поощрение на 1-ый депо в размере 100–200%. Это замечательная возможность преумножить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш.
сайт 1× slots casino
Бездепозитный бонус казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в данном и содержится главное различие. <a href=http://maisoncarlos.com/UserProfile/tabid/42/UserID/2002419/Default.aspx>http://maisoncarlos.com/UserProfile/tabid/42/UserID/2002419/Default.aspx</a> 1×slots зеркало рабочее Наиболее пользующиеся гонорары среди гэмблеров – бездепозитные призы казино. Это не дивно, так возможно получить бесплатные вращения или виртуальные кредиты, и при не придётся пополнять счёт, рисковать личными деньгами. Удастся насладиться различными весельями причем выиграть крупную необходимую, избегая серьёзного риска.
<b>Смотреть еще похожие новости:</b>
<a href=https://portugal-campings.com/pt/profile/jamescip/>1×slots коды</a>
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=125166&extra=>1х слотс зеркало регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Шаг 4. Активация. Внимательно выучите обстоятельства, информацию по лимитированиям и сроке действия бонусного предложения. Разобравшись с правилами, можно активировать бонус в личном кабинете (иногда ? с использованием промокода) или по запросу в саппорт. Выбирайте наилучшие безвозмездные призы с помощью обзоров на Casinoz – и пусть вас сопутствует удача при отыгрыше бонусных кредитов!
#531 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
яндекс казино up casino скачать <a href=https://res-publika.com>человек казино</a> пин ап казино pinco casino <a href=https://rumafia.news/>Мухтиярова Елена Вячеславовна порно</a> porno Катерина Шпица 1×bet сейчас порно с Никита Кучеров (хоккей) казино сочи порно с Илья Осипов (киберспорт) казино 5 букмекерские конторы бет
DiskiPlus порно с Каролина Севастьянова DiskiPlus 1×bet зеркало слоты 1×bet xyz <a href=https://diskiplus.ru>DiskiPlus 1×bet 1</a> DiskiPlus пина букмекерской конторы DiskiPlus лучшая казино <a href=https://diskiplus.ru>DiskiPlus букмекерская контора фонбет официальный</a> DiskiPlus официальные букмекерские конторы скачать DiskiPlus Нургалиева Эльвира Рамиловна порно DiskiPlus porno Алена Михайлова DiskiPlus online casino официальный DiskiPlus casino сайты DiskiPlus 1×bet официальный сайт DiskiPlus реального казино
#532 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino ru porno Мира Андреева (теннис) <a href=https://rhymes-punches.com/>казино можно</a> порно с Арина и Дина Аверины, гимнастки порно с Матвей Сафонов (футбол) <a href=https://th-royalgclub.com/>casino актуальное зеркало</a> 1×bet официальный 1×bet xyz сайт 1×bet слоты 1×bet зеркало xbet букмекерская контора бесплатно скачать гта онлайн казино up casino Москалькова Татьяна Николаевна порно
DiskiPlus порно с Бондаренко Анастасия Борисовна DiskiPlus porno Яна Троянова <a href=https://www.diskiplus.ru/>DiskiPlus porno Екатерина Ефременкова, шорт-трекистка</a> DiskiPlus почему казино DiskiPlus Шевцова Татьяна Викторовна порно <a href=https://diskiplus.ru>DiskiPlus скачать casino на андроид</a> DiskiPlus казино зеркало сегодня DiskiPlus Анна Михалкова DiskiPlus 1×bet 1 DiskiPlus казино ставка DiskiPlus зеркала казино DiskiPlus приложения букмекерских контор на андроид DiskiPlus казино рояль смотреть
#533 Charlesgunnyhttp://filmkachat.ru
казино 1× slots официальный сайт
В онлайне очень количество скриптовых вебсайтов, коие принадлежат мошенникам. Их основная цель – заинтересовать гэмблеров, пообещав не великодушные подарки, но и крупные выигрыши. Так собственно некоторые веб-сайты предлагают получить за регистрацию числе $1 000. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало рабочее</a> Помимо прочего, для вывода средств по бездепу необходимо привнести на счёт свой 1-ый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на минимально вероятную сумму, последствии чего вывод средств станет доступен. <a href=https://www.papercall.io/speakers/146409/speaker_talks/292500-professional-real-estate-rendering-services-visual-marketing>https://www.papercall.io/speakers/146409/speaker_talks/292500-professional-real-estate-rendering-services-visual-marketing</a> 1×slots зеркало быструю регистрацию а также мгновенное <a href=https://nitroporno.com/user/Brianvof/>https://nitroporno.com/user/Brianvof/</a>
1×slots бездепозитный бонус за регистрацию
Сроки активации бонуса устанавливаются каждым казино, хотя чаще всего они не превышают недели с момента получения. Игроку обязательно нужно использовать бездеп на указанного срока, в ином случае приз просто исчезнет. Каждый бонус возможно получить только один раз, поэтому в не использовать бездеп в срок, у игрока не будет 2 шанса им воспользоваться. 1×slots регистрация 1×slotscasino 56 online При отыгрыше бонусных средств, нужно учитывать срок деянья приза и время, которое дается на отыгрыш. По истечению заявленного времени, не отыгранный приз будет аннулирован.Таким образом, заведение пробует продемонстрировать себя своим вероятным геймерам, а такой рекламный ход как казино приз без депо за регистрацию завлекает довольно много внимания к игорному заведению и обеспечивает неизменный струю свежих гостей и будущих посетителей игрового онлайн клуба. <a href=http://adrestyt.ru/user/DoctorLazutasr/>http://adrestyt.ru/user/DoctorLazutasr/</a> У любого игорного заведения свои правила и условия. Но, чтобы получить бонусы, нужно выполнить стереотипные деяния:Предложения с бездепозитными призами за регистрацию разрешают свежим заведениям заинтересовать аудиторию на свой вебсайт. А игроки тому получают вероятность играть на реальные деньги без депозита в казино и заработать маленькой стартовый капитал, кот-ый разрешено исключить на карту банка либо электронный кошелек. скачать 1×slots официальный сайт
1хслот 1хслотс регистрация перейти на 1×slots
Чтобы бездеп не был начислен на Ваш акк, Вам надо активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк автоматически, а Вы не расчитываете его использовать, обратитесь в саппорта с просьбой отменить бездепозитный приз. Автоматы непопросту числятся самым знаменитым азартным весельем. Чтобы усвоить управление и верховодила, понадобится всего количество минут. Ваша задачка устроить ставку, определить количество трудящихся линий и можно вертеть тамбур. Если на выпадет выигрышная композиция – вы выиграли! С этой задачей для посодействуют управится бездепозитные призы казино.Выбирая даровой бонус, пристально изучайте управляла. Убедитесь, собственно вам можно брать роль в промоакции. Уточните, в каких забавах можно скорпулезно обстоятельства вейджера. При необходимости задавайте вопросы адептам саппорта. <a href=https://marvelvsdc.faith/wiki/1win_Brasil_Bet_Official>https://marvelvsdc.faith/wiki/1win_Brasil_Bet_Official</a> Для подтверждения электронной почты, просто перейдите по интенсивной ссылке в послании, приобретенном от игрового заведения.Бездепозитный бонус за регистрацию в казино — это стартовый презент повторяющий денежного начисления или безвозмездных вращений для свежих игроков заведения, для получения которого надо заносить депозит. 1×slot зеркало Отказ в прохождении верификации. Если клиент не хочет или имеет предоставить документы, подтверждающие его личность, профиль будет заблокирован совместно, вкупе со всеми бонусными начислениями.Проверка занимает от нескольких мин. До нескольких дней, специалисты техподдержки шансы запросить дополнительные документы или инициировать куцее общение по Skype.
1×slots казино зеркало
Чтобы получить вероятность исключить выгода с бездепозитного бонуса в казино, необходимо выполнить ряд критерий:Бoльшинcтвo азартных заведений выдвигают примерно однообразные, схожие обстоятельства и притязания, коие нужно выполнить, дабы получить бездепозитный бонус за регистрацию. Все их возможно соединить в один список: 1× slots casino зеркало <a href=https://tsonlinevn.4it.top/User-Brianjeoca>https://tsonlinevn.4it.top/User-Brianjeoca</a> Важно, удостоверьтесь что, нет, что раньше не регились в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи.Для верификации аккаунта нужно дать спецам технической поддержки отсканированную копию паспорта и счета за коммунальные услуги, а также фотографию банковской карты либо снимок странички электрического кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для подтверждения личности.
казино 1×slots
Представьте момент, когда при ставке в 10 руб. Вы получите подобное умножение. Миллион руб. За одно вращение, что абсолютно вполне. Поэтому вопрос, сколько возможно выиграть остаётся не. Предлагаем выяснить других. Регистрируйтесь в одном либо нескольких интернет казино, получайте Бездепозитный приз и проверяйте удачу в деле. Разумеется, вывести средства сложно. Однако шансы есть у всех. <a href=https://lovewiki.faith/wiki/%D0%90%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0_%D0%A1%D0%B0%D0%B9%D1%82>https://lovewiki.faith/wiki/%D0%90%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0_%D0%A1%D0%B0%D0%B9%D1%82</a> Диапазон ставок, которые вправе устроить игрок, кроме лимитирован. Обычно ставить возможно небольшую необходимую — в 10–30 рублей за одно вращение. 1×слот регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.immortales-gilde.de/viewtopic.php?f=2&t=397571>1×slot зеркало рабочее регистрации на телефон придет</a>
<a href=https://forum.banknotes.cz/viewtopic.php?t=77885>1×slots официальный сайт скачать</a>
<a href=http://craft4game.forumex.ru/viewtopic.php?f=2&t=4446>зеркло казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но есть азартные заведения, готовые просто например вручить средства на игру. Для сего достаточно сделать профиль. Чтобы исключить выигрыш, сперва необходимо выполнить вейджеровые обстоятельства, прописанные в критериях получения бездепа. Некоторые казино имеют предлагать клиентам бездепы за подтверждение номера или почты либо репост на страничку в соц сетях.
#534 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Константин Тюкавин (футбол) casino регистрации <a href=https://glvk.guru/>пин ап casino pin</a> 7k casino зеркало водка казино <a href=https://specreporter.com/>почему в казино нет окон</a> казино можно официальные букмекерские конторы porno Дарья Мороз porno Яна Троянова Набиуллина Эльвира Сахипзадовна порно 1×bet зеркало xbet xyz 1×bet зеркало
DiskiPlus porno Дарья Клишина DiskiPlus 1×bet скачать бесплатно <a href=https://www.diskiplus.ru>DiskiPlus 1×bet зеркало xbet</a> DiskiPlus Преподобная Надежда Александровна порно DiskiPlus букмекерские конторы в россии <a href=https://diskiplus.ru>DiskiPlus букмекерские конторы в россии</a> DiskiPlus порно с Дронова Александра Викторовна DiskiPlus 1×bet 1 DiskiPlus приложения букмекерских контор DiskiPlus лучшие букмекерские конторы DiskiPlus Александра Бортич DiskiPlus скачать букмекерскую контору на андроид DiskiPlus Петрова Ольга Викторовна порно
#535 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало сайта
Частенько новички не разумеют, как активировать подарки либо вывести первый выигрыш. Для похожих случаев наша команда обрисовала главные определения – что такое фриспины, вейджер, как его отыграть, чего нужно протекать верификацию. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> На безвозмездные бонусы онлайн-казино практически постоянно распространяется лимитирования по стране проживания посетителей. Даже если вам разрешается раскрывать счет и выступать на деньги в заведении, это еще не означают, собственно для доступны not the slightest deposit bonuses.Создание аккаунта. На веб-сайте казино необходимо обнаружить регистрационную форму и наполнить пустующие поля личностными данными. Иногда на этом этапе потребуется показать лишь адрес электрической почты и пароль, но чаще бы наполнить анкету индивидуальной информацией (ФИО, дата рождения, место проживания и т.д. ). Нужно свидетельствовать только реальные данные, потому впоследствие они станут проверены. <a href=http://bedfordfalls.live/read-blog/135761_professional-3d-furniture-design-from-concept-to-creation.html>http://bedfordfalls.live/read-blog/135761_professional-3d-furniture-design-from-concept-to-creation.html</a> Шаг 5. Использование и отыгрыш. Бездеп обязан быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.Помните, что любые нарушения правил сведут на нет ваши усилия, и вы скорее останетесь без начисленного вам безвозмездного приза. Всегда изучайте управляла начисления и условия вейджера. По хоть вопросам, на которые вы имеет самостоятельно отыскать ответы, обращайтесь за объясненьям и саппорт. 1×slots подтвердит вашу регистрацию если говорить <a href=https://www.mysticvillage.org/user/robertfut/>https://www.mysticvillage.org/user/robertfut/</a> Но не мыслить, собственно снабжая пользователей такими призами, казино занимается спонсированием. Ведь объемы вознаграждений, в основном, не великие (средним объемом от 5 до 20 $). И на эти свои налагаются определенные условия и ограничения, обязательные к исполненью игрока, в в последствии он желает получить все свои выигранные финансы.
1×slot зеркало рабочее этих способов предполагает регистрацию
1хслотс казино зеркало <a href=https://www.cgarchitect.com/projects/39223c10-luxury-dining-room-at-a-resort-a-harmonious-blend-of-elegance-and-nature>https://www.cgarchitect.com/projects/39223c10-luxury-dining-room-at-a-resort-a-harmonious-blend-of-elegance-and-nature</a> 1×slots регистрация 1×slots casino 777 online Перед активацией принципиально внимательно изучить условия акции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, на коих возможно пользоваться предложением. Если бездеп обхватывает ограниченный список игр, рекомендуется разузнать максимальные коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только в том случае, если оператор не установил строгие ограничения на максимальную необходимую ставки.Для ревизии применяются сканы паспортов, водительских прав, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь обнаружен в попытке ввести вспомогательный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в темный список. При игре на лицензионной площадке не бояться свидетельствовать достоверную персональную информацию (шифрование ликвидирует утечку персональных данных).
1×slots зеркало быструю регистрацию а также мгновенное
Прежде чем активировать бездеп, нужно увериться что, нет, что государство, гражданином которой является игрок, не входит в перечень не. <a href=https://www.alpea.ru/forum/user/26857/>https://www.alpea.ru/forum/user/26857/</a> При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток. 1×slots зеркало которую указывали при регистрации кстати
1×slots зеркало быструю регистрацию а также мгновенное
Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих притязаний, кроме обязательной верификации. Если на веб-сайте учтена обязательная процедура доказательства личности, то вывести выигрыш получится лишь последствии проверки данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий личность. С этими простыми советами любое казино с призом за регистрацию способно принести в разы больше выгоды и пользы.Не трудно додуматься, что not the slightest deposit bonuses почти ни не бывают великими. Чаще всего идет о пяти–тридцати долларах (либо эквиваленте этой суммы в иной валюте). Ну и конечно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: схожая щедрость повышает степень лояльности клиентов к компании.Как правило, новоприбывшие геймеры в первую очередь хотят ознакомиться с способами ввода и вывода денежных средств и сроки исполнения поданных заявок чтобы конкретно осознавать, как живо меня исключить собственный казино приз за регистрацию без депозита на электронный кошелек либо же банковскую карту. К счастью для всех играющих, внутри конкретных холдингов, все казино конкурируют между собой. Ведь если бы конкретную фирму давало только одно онлайн-заведение, то вряд ли бы клиенты заметили казино с призом за регистрацию и возможность бы рассчитывать лишь на вознаграждение повторяющий приза на 1-ое инвестиция. К каждому заведению периодически идет завлекать свежих игроков, собственно, в, лишь на руку всем играющим. 1×slots официальный сайт скачать <a href=http://fh7980px.bget.ru/member.php?action=profile&uid=33373>http://fh7980px.bget.ru/member.php?action=profile&uid=33373</a> У нас на веб-сайте Вы отыщите перечень бонусов без депозита в проверенных казино и доскональную информацию про как их получить и применять.
1×slots подтвердит вашу регистрацию если говорить
Выбирайте наилучшие бесплатные призы счет обзоров на Casinoz – и пусть вас сопутствует счастье при отыгрыше бонусных кредитов!Бонус за регистрацию в казино выдается только один один на 1-го игрока. Но бывают дополнительные промоакции, масштабах коих бездепы раздаются для постоянных посетителей и эти презенты Вы сможете получить больше одного раза. <a href=http://www.asystechnik.com/index.php/Benutzer:PattiRubbo>http://www.asystechnik.com/index.php/Benutzer:PattiRubbo</a> 1×slots сайт зеркало Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные способы и оценить необыкновенности, труднодоступные при ирге в демо режиме. Многие новые клиенты перебегают в число неизменных, а оператор получает длительную прибыль.Это один из основных характеристик привлекательности подарка. С завешенным коэффициентом числе профессионалы не смогут выполнить условия по отыгрышу. И важно, как привлекательно выглядит предложение – бездепозитный бонус казино в объеме $500 либо $1 000. Чтобы новички лучше вдумались, что же это вейджер, мы разберём на примере.
<b>Смотреть еще похожие новости:</b>
<a href=http://rapbeatsforum.com/viewtopic.php?t=681194>1хслот официальный сайт зеркало</a>
<a href=https://bbs.sinbadgroup.org/index.php?members/jamesiroma.21478/>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В разделе с призами активировать свой презент. Найти забавы, для которых учтено одобрение и применять приз по назначению. Отыграв бездепозитный приз в казино с выводом тоже придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в схожее лимитирование существует, то единоразово вывести выйдет только необходимую, не превышающую размер полученного приза.
#536 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино в россии сайты казино <a href=https://rucriminal.info/>casino онлайн</a> порно с Алина Загитова, фигуристка r7 casino <a href=https://m.repost.news/>1×bet зеркало xbet</a> up casino Разуваева Ксения Денисовна порно порно с Карен Хачанов (теннис) 7k casino зеркало порно с Юлия Ефимова, пловчиха 1×bet на сегодня играющие казино онлайн
DiskiPlus букмекерская контора без DiskiPlus скачать 1×bet на андроид бесплатно <a href=https://www.diskiplus.ru/>DiskiPlus пинап казино</a> DiskiPlus приложения букмекерских контор DiskiPlus официальные букмекерские конторы скачать <a href=https://www.diskiplus.ru/>DiskiPlus включи казино</a> DiskiPlus слот casino DiskiPlus Яровая Ирина Анатольевна порно DiskiPlus леон букмекерская контора DiskiPlus 1×bet слоты 1×bet xyz DiskiPlus 1×bet зеркало рабочее xbet DiskiPlus про казино DiskiPlus порно с Артемий Панарин (хоккей)
#537 pincouzhttps://pinco-uz.online
Pin Up azərbaycanlı oyunçular üçün xüsusi təkliflər təqdim edir. Pin Up kazino oyunları yüksək RTP-yə malikdir. Pin Up casino-da ən yaxşı slot oyunları. Pin Up azərbaycanlı istifadəçilər üçün xüsusi aksiyalar keçirir <a href=https://pinco-uz.online>pin up online casino</a>.
#538 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino бездепозитный порно с Анна Щербакова, фигуристка <a href=https://th-royalgclub.com/>casino</a> 1×slots casino 1×bet 1 <a href=https://rhymes-punches.com/>винлайн букмекерская контора официальный</a> казино гта 5 букмекерская контора скачать приложение 1win букмекерская контора скачать 1×bet на андроид скачать 1×bet pin up casino top top порно с Сергей Бобровский (хоккей)
DiskiPlus casino игровой автомат DiskiPlus casino бонус <a href=https://diskiplus.ru/>DiskiPlus сайт казино вход</a> DiskiPlus официальные зеркала казино DiskiPlus порно с Илюшникова Татьяна Александровна <a href=https://diskiplus.ru/>DiskiPlus промокод 1×bet</a> DiskiPlus реального казино DiskiPlus скачать pin casino DiskiPlus porno Игорь Акинфеев (футбол) DiskiPlus официальные зеркала казино DiskiPlus винлайн букмекерская контора DiskiPlus porno Анастасия Янькова, боксерка DiskiPlus симулятор казино
#539 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало на сегодня
Срок активации и время на отыгрыш. Зачисление средств или фриспинов случается при активации протяжении требовательно ограниченного периода, схожие притязания предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать бонус некоторое дней или в недель. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с необоснованно высоким вейджером. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> Фриплей-бонусы. Бонусы за бесплатную игру есть лишь в некоторых клубах. Они зачисляются незамедлительно после творенья профиля и действуют непродолжительное время. Если у вас нет медли потратить средства, они просто закончатся. Что дотрагивается времени, правило призы срабатывают протяжении 1-го часа.Доступность — бездепозитные бонусы в казино почаще всего предоставляются свежим игрокам, но случаются случаи, когда приз шансы получить и действующие посетители. <a href=https://www.f6s.com/archicgi-3d-architectural-visualization>https://www.f6s.com/archicgi-3d-architectural-visualization</a> Основное различие что, нет, собственно для получения бездепа не надо пополнять баланс в казино. Но не этого, есть ряд и других различий:При отыгрыше бонусных средств, нужно учитывать срок деянья приза и время, которое дается на отыгрыш. По истечению заявленного медли, не отыгранный бонус будет аннулирован. 1× slots зеркало <a href=http://bbs.01bim.com/home.php?mod=space&uid=1386933>http://bbs.01bim.com/home.php?mod=space&uid=1386933</a>
1×slots casino зеркало
Более солидные предложения встречаются очень изредка. Зачастую они доступны только VIP-игрокам. В остальных случаях им наверняка сопутствуют очень жесткие условия отыгрыша. Также возможны вспомогательные условия прочие лимитирования, прописанные в критериях и положения бонусной программки казино. <a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=9700&TITLE_SEO=9700-kharakteristiki-tovarov&MID=590017&result=reply#message590017>1×slots регистрация 1×slotscasino 56 online</a> 1×slots быструю регистрацию а также мгновенное Акционные предложения от казино существуют в различных форматах. Часто призы даются в размен на депо. Игрок вносит платеж и получает деньги, бесплатные вращения прочие поощрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — картина приза, кот-ый гарантирован за исполненье определенных действий на веб-сайте:Фриспины начисляются по конкретной ставке. После их активации игроку необходимо запустить разъем и увериться, собственно в нем отображаются безвозмездные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода последствии отыгрыша определяется оператором и редко превышает 5 000 руб. <a href=http://www.italian-style.ru/Nasha_kompanija/forum/?PAGE_NAME=profile_view&UID=58386>http://www.italian-style.ru/Nasha_kompanija/forum/?PAGE_NAME=profile_view&UID=58386</a> Постарайтесь отыграть вейджер, дабы была вероятность оставить заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные приборы. Вы можете получить выигрыш на электрической кошелёк, карту, телефон.Бездепы имеют входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой или баллами. 1× слот зеркало При регистрации что или ином интернет игральном заведении — вам дается раз шанс испытать собственную фортуну не внося свои монеты. Замечу что такую поощрительную услугу деют не все онлайн игровые площадки, а только щедрая середина(средина) из них. Которые мы подготовили для Вас в нашем списке.Возможность протестировать новые забавы, не рискуя личностными своими и создать собственную стратегию игры.
сайт 1× slots casino
Обычно, бездепозитные бонусы выдаются под определенные слоты с фиксированной ставкой, но их точно воспрещено применять в игровых автоматах с современным джекпотом. Список игр, каких возможно использовать бездеп, Вы найдете в описании промоакции либо можете уточнить у службы поддержки заведения.За счёт спинов получится запустить разные интернет слоты, протестировать стратегии и поднабраться опыта. Фишка что, нет, что вращения начисляются на топовые аппараты с уникальными опциями и высочайшей отдачей. Не забывайте, что в любом акционном предложении учтены специальные требования – кратковременные ограничения, максимальный размер ставки, список доступных игр. С такими простыми советами каждое казино с бонусом за регистрацию способно принести в разы больше выгоды и полезности. <a href=https://www.mexicanservers.com/member.php?action=profile&uid=11044>https://www.mexicanservers.com/member.php?action=profile&uid=11044</a> Бездепы обыкновенно предлагают с отыгрышем — моментально исключить выигранные свои невозможно. Перевод денег со счета несомненно вероятен после такого, как юзер выполнит все требования казино, а сумма не быть выше установленного правилами лимита. Условиями акции фиксируются сроки, протяжении которых заказчик вправе воспользоваться предложением. Обычно они не превышают нескольких дней последствии активации. 1хслот скачать Возможность протестировать новые игры, не рискуя собственными средствами и разработать собственную стратегию забавы.Ознакомьтесь с нашим списком превосходнейших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего списка и получите бездеп незамедлительно. Хватайте лучшие безвозмездные предложения ниже и выигрывайте немалые средства, не рискуя!
1×slots зеркало подтвердит вашу регистрацию если говорить
Для всех бездепозитных призов функционирует максимальный предел на выигрыш. Он указывает предельную необходимую, коию появится получить, играя на бонусные кредиты. Как лишь вас получится выполнить требования вейджера, допустимый максимум несомненно переведен с бонусного счета на основной, а остаток несомненно списан. Бонус без депозита за регистрацию в казино (бездепозитный приз) – это денежный презент от клуба, который начисляется на акк игрока после регистрации в казино. Кроме творения учетной записи, для получения бездепа, довольно часто требуется ещё и доказать контактные данные игрока и/или активировать особый промо-код.Срок отыгрыша — это этап, который наступает в момент активации бонуса и заканчивается с его закрытием. Пользователю необходимо уложиться в данный временной промежуток, иначе призовые свои аннулируются. Казино устанавливают список игр, ставки в которых засчитываются при расчете отыгранных денег. Если тайтл не заходит в этот перечень, то ему быть недосегаем для загрузки период действия бонусного предложения. Кешбэк-бонус представляет собой возврат фиксированного процента от ставки в случае поражения либо же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не выше 10%. 1хслотс зеркало на сегодня <a href=http://fkc-ros49.ru/index.php?subaction=userinfo&user=shrillbottlenec>http://fkc-ros49.ru/index.php?subaction=userinfo&user=shrillbottlenec</a>
1×slots регистрацию более популярный вариант это
Ознакомьтесь с нашим перечнем наихороших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего списка и получите бездеп сразу. Хватайте превосходнейшие благотворительные предложения ниже и выигрывайте большие деньги, не рискуя!Приглашаем делиться воззреньями о бонусах. Это поможет другим пользователям избирать более выгодные предложения. Бонусы без депозита при регистрации считаются наиболее красивыми как для опытных игроков, например для и начинающих. Получив это вознаграждение, заказчик возможность играть на настоящие средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные призы в интернет-казино Рунета, еще условия их активации и выигрыша. <a href=https://www.bos7.cc/home.php?mod=space&uid=2959912&do=profile&from=space>https://www.bos7.cc/home.php?mod=space&uid=2959912&do=profile&from=space</a> 1 х слотс зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://aurorahcs.com/forum/viewtopic.php?f=8&t=933900>1×slots регистрация 1×slotscasino09k online</a>
<a href=http://freedom.teamforum.ru/memberlist.php?mode=viewprofile&u=6332>1×slot зеркало</a>
<a href=http://nakupnidivadlo.cz/index.php/forum/3-pripominky/46621-https-sk-service1-ru?start=462#240219>1×slots подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для получения бонуса надо(надобно) пригласить в игру свежего клиента. Казино начисляет пригласившему фиксированный процент от взносов приглашённого повторяющий приза: чаще всего его объем не превышает 10%. Срок деяния приза как не выше месяца: пригласивший получает бонус от проигранных ставок приглашённого в первый месяц игры. На данном разделе портала регулярно публикуются обзорные статьи, в которых рассматриваются благотворительные бонусы лучших интернет-казино. Информация структурирована по нескольким пт, включая главные:
#540 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Елена Лядова vavada casino <a href=https://th-royalgclub.com/>порно с Евгения Медведева, фигуристка</a> Нургалиева Эльвира Рамиловна порно порно с Александр Головин (футбол) <a href=https://repost.news/>порно с Бондаренко Анастасия Борисовна</a> Елена Лядова r7 casino порно с Варвара Субботина top casino порно с Федор Чалов (футбол) почему в казино нет часов porno Виктория Баркова, легкоатлетка
DiskiPlus официальное казино вход DiskiPlus casino зеркало сегодня <a href=https://www.diskiplus.ru/>DiskiPlus 1×slots casino</a> DiskiPlus порно с Александр Большунов (лыжные гонки) DiskiPlus casino рабочее зеркало <a href=https://diskiplus.ru>DiskiPlus casino riobet</a> DiskiPlus порно с Илюшникова Татьяна Александровна DiskiPlus online casino официальный DiskiPlus ап казино DiskiPlus кент casino DiskiPlus porno Анна Сидорова, керлингистка DiskiPlus 1×bet зеркало xbet DiskiPlus порно с Евгения Медведева
#541 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало на сегодня
Сроки активации бонуса устанавливаются любым казино, но почаще всего они не превосходят недели с момента получения. Игроку обязательно нужно применять бездеп на указанного срока, в ином случае бонус просто исчезнет. Каждый бонус можно получить лишь раз раз, потому в не использовать бездеп в срок, у игрока не несомненно второго шанса им воспользоваться. <a href=http://filmkachat.ru/>1×slots официальный зеркало</a> Когда речь идет о получении бездепозитных бонусов в казино, в первую очередь обратите внимание на последующие обстоятельства:Промообъявления от казино мешают реальной картины и направлены на вербование внимания пользователей. Понять, как высоки шансы остаться в плюсе, позволит собственный тест условий предложения: <a href=https://www.pearltrees.com/kalinka0588/item691382057>https://www.pearltrees.com/kalinka0588/item691382057</a> Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. 1×slots официальный сайт зеркало <a href=http://formulandoeinnovando.com/como-se-afecta-la-formulacion-con-el-proceso-que-aplico/?unapproved=574296&moderation-hash=3f7a37246dd0e96070da382c3a418281#comment-574296>http://formulandoeinnovando.com/como-se-afecta-la-formulacion-con-el-proceso-que-aplico/?unapproved=574296&moderation-hash=3f7a37246dd0e96070da382c3a418281#comment-574296</a>
1хслотс официальный сайт зеркало
Также, учите, собственно бездепозитный бонус можно вывести только никаких случае, когда будут исполнены все обстоятельства отыгрыша.При регистрации стопам свидетельствовать лишь достоверную информацию. Когда учетная запись несомненно активна, появится доступ в Личный офис. В нем можно выбрать денежную, установить промокод и узнать подробные управляла получения и отыгрыша бездепа. Краткая информация об промоакции часто присутствует непосредственно на регистрационной форме. <a href=http://forum.doctorulmeu.md/memberlist.php?mode=viewprofile&u=330947>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> 1×slots зеркало регистрация Главное преимущество спинов – вероятность выучить разные слоты. Также получится насладиться бонусными раундами, испытывать удачу в риск-туре и преувеличить выигрыш за счёт особенных символов. Однако не игровой процесс заслуживает внимание, как какого-либо сосредоточиться на реальном выигрыше. <a href=https://diary.ru/member/?3613975>https://diary.ru/member/?3613975</a> 1×slots зеркало на сегодня
1×slots регистрация на официальном сайте
Онлайн гемблинг развивается с любым деньком больше и больше, новые бренды создаются не по дням а по часам. Новые онлайн казино проделывают вступительные промоакции для игроков, для того собственно бы зарекомендовать себя, и тем наиболее предлагают бездепозитные призы за регистрацию, собственно бы не пропустить эту вероятность — как воспользоваться свежим бездепом, рекомендуем посещать наш сайт как можно чаще, самое лакомое и новые несомненно добавляться в этом же перечне.Мы проделываем акцент на ключевых положениях управлял, рассказываем о территориальных ограничениях и кратко информируем о иных промоакциях обговариваемого казино. Более крупные предложения встречаются очень изредка. Зачастую они доступны только VIP-игрокам. В остальных случаях им наверняка сопутствуют очень жесткие условия отыгрыша. Также возможны дополнительные обстоятельства и другие лимитирования, прописанные в условиях и положения бонусной программки казино.На данном разделе портала регулярно публикуются обзорные статьи, в рассматриваются безвозмездные бонусы лучших интернет-казино. Информация структурирована по нескольким пунктам, включая главные: <a href=http://megatv.kiev.ua/user/DoctorLazutaKa/>http://megatv.kiev.ua/user/DoctorLazutaKa/</a> Размер ставки для игры по бездепозитному бонусу (естесственно же, если, тогда,, когда он представлен вид бонусных валютных средств) часто ниже, чем при забаве на депозит. Ограничение несомненно работать до момента отыгрыша бонуса. 1 x slots Превышение наибольшей ставки при отыгрыше. Система автоматически не предупреждает о превышении ставки, потому о нарушении управлял игрок возможность разузнать теснее последствии подачи запроса на вывод средств.
1хслотс рабочее зеркало
Основное различие что, что для получения бездепа нужно пополнять баланс в казино. Но считая сего, есть ряд прочих различий:Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную процедуру активации приза без депо. Внимательно прочтите до конца. Многие новенькие проделывают промахи на шаге регистрации и поэтому не могут получить подарок. 1×slots casino регистрация на сайте <a href=http://sotsprof01.ru/index.php?subaction=userinfo&user=incompetentshoe>http://sotsprof01.ru/index.php?subaction=userinfo&user=incompetentshoe</a> Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации подарка необходимо доказать электрическую почту и привязать аппарат;
1× slots зеркало
Сроки активации бонуса уточняются любым казино, но почаще всего они не превышают недели с этапа получения. Игроку обязательно нужно применять бездеп на обозначенного срока, в ином случае бонус просто пропадет. Каждый бонус можно получить лишь раз раз, поэтому если не применять бездеп в срок, у игрока не будет 2 шанса им пользоваться. <a href=https://fanfiction.borda.ru/?1–10–0–00003298–000–0–1>https://fanfiction.borda.ru/?1–10–0–00003298–000–0–1</a> 1×slots коды
<b>Смотреть еще похожие новости:</b>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=682796>1×slots регистрацию процедура займет всего лишь</a>
<a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=60577>1×slots казино зеркало</a>
<a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/14751–1×slots-rabochee-zerkalo-na-segodnya#14782>1×slots рабочее зеркало на сегодня</a>
<a href=http://av3526.com/forum.php?mod=viewthread&tid=109&pid=27054&page=3&extra=page%3D1#pid27054>1× slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Некоторые сайты, этого чем провести регистрацию игроков, предлагают ответить на несколько базовых вопросов. Цель проведения сходственной викторины – выявить случайных людей, коие не имеют представления о покере, и не допустить получения ими призов. Если гость теснее играл в казино, то ответить на полтора 10 простых вопросов будет нетрудно. Очень часто, ответы можно отыскать на официальных веб-сайтах данных учреждений.
#542 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Владимир Минеев (ММА) pin up casino пин ап <a href=https://strelochnik.com/>1×bet официальный сайт</a> pin up casino зеркало почему казино <a href=https://m.repost.news/>top casino</a> Черкесова Бэлла Мухарбиевна порно porno Игорь Акинфеев (футбол) порно с Елена Никитина, скелетонистка рабочие зеркала казино вавада казино казино смотреть фильм казино
DiskiPlus порно с Артемий Панарин (хоккей) DiskiPlus сайт казино вход <a href=https://www.diskiplus.ru/>DiskiPlus казино онлайн бесплатно</a> DiskiPlus рабочее казино DiskiPlus unlim casino <a href=https://diskiplus.ru>DiskiPlus casino автомат</a> DiskiPlus 1×bet скачать приложение на андроид DiskiPlus песня казино DiskiPlus сайте букмекерской конторы фонбет DiskiPlus пина casino DiskiPlus пинап казино казино DiskiPlus porno Анна Сидорова, керлингистка
#543 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация в 1×slots casino
Наиболее популярные вознаграждения среди гэмблеров – бездепозитные призы казино. Это не удивительно, так возможно получить благотворительные вращения или виртуальные кредиты, и этом не придётся пополнять счёт, рисковать личными деньгами. Удастся насладиться различными увеселениями причем выиграть солидную сумму, избегая серьёзного риска. <a href=http://filmkachat.ru/>1× слот зеркало</a> При небольшой сумме бонуса рекомендовано играть по невысоким ставкам, а применять максимальные другого, как только что случае, случае вейджер слишком немалый, а время на отыгрыш сильно ограничено. <a href=https://aprenderfotografia.online/usuarios/3dinteriorrenderingservices/profile/>https://aprenderfotografia.online/usuarios/3dinteriorrenderingservices/profile/</a> Мы подготовили перечень, где есть всегда животрепещущие и свежие бездепозитные призы казино, коие возможность получить бесплатно. Для наших пользователей есть специальные предложения неповторимые бонусы, которые вы нигде не найдете, их мы обозначили специальной красноватой плашкой «Exclusive».Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, solid только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. 1×slots зеркало рабочее <a href=http://mojsport.ir/index.php?subaction=userinfo&user=TravisCox>http://mojsport.ir/index.php?subaction=userinfo&user=TravisCox</a> Активация по промокоду употребляется в различных видах бездепов. Если идет о приветственном бонусе, то набор символов возможно разузнать на крупнейшей странице, в регистрационной форме или послании, которое отчаливает юзеру для подтверждения адреса электронной почты. Акции шансы проводиться вместе с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активируется разовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем важный код для активации в описании любого рекламную.Каждый из бездепозитных призов без пополнения 2022 имеет собственный определенный вейджер для отыгрыша, так же в любом казино он устанавливается индивидуально — где то он х55 а кое-где х30, повторюсь всюду по различному!
1×slots официальный сайт зеркало
Каждая игровая перрон отличается критериями по получению и отыгрышу бездепов. В правилах детально расписаны временные рамки, за которые нужно прокрутить вейджер. Также не забывайте про наибольший размер ставки и наивысшую сумму выплаты. С другой стороны, чтобы получить бездепозитные призы казино, довольно истратить не более 1 минуты. <a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=41648>1хслотс мобильная версия зеркало</a> 1×slots зеркало которую указывали при регистрации кстати <a href=https://mantiseye.com/community/walterobest>https://mantiseye.com/community/walterobest</a> Акции, посвященные календарным праздникам, бывают рассчитаны как на всех юзеров, например и на категории: к, презент на 8 марта девушкам-игрокам либо мужчинам на 23 февраля.Но никогда не запамятовывайте пристально разбирать правила роли в бонусных промоакциях. Если вы нарушите желая бы одно условие, позже вы не сможете уладить недоразумение с администрацией. 1×slot зеркало рабочее этих способов предполагает регистрацию Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются незамедлительно в создания профиля и активны непродолжительное время. Если не успеете потратить свои, они попросту сгорят. Касаемо времени, в большинстве случаев бонусы активны на часа.Условия вывода выигрыша. В неких заведениях для успешного вывода с бездепозитного бонуса довольно пополнения баланса и доказательства личности. В иных же клубах, нужно несколько раз прокрутить свой депо.
1×slots бездепозитный бонус за регистрацию
Помните, что всевозможные нарушения управлял сведут на нет ваши старания, и вы наверняка останетесь без начисленного вам безвозмездного бонуса. Всегда изучайте управляла начисления и обстоятельства вейджера. По каким вопросам, на которые вы возможности без найти ответы, обращайтесь за объяснениям и саппорт.К раскаянию, нет. Почти все казино, настоятельно внесение желая бы 1-го минимального депозита для вывода выигрыша с бездепозитного бонуса. Также учитывайте, что исключить средства разрешено лишь на ту платежную систему, с которой был изготовлен депо. У любого игорного клубы различные вейджеровые обстоятельства. Чтобы вы гарантировано сумели выполнить их, мы дадим несколько советов. Если система начислила небольшую необходимую, не стоит делать великие ставки – остановитесь на 10–30 центах. Как лишь сможете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте играть. В неприятном случае другого присмотреться к иному автомату. <a href=http://swwwwiki.coresv.net/index.php?title=%D0%91%D0%BB%D0%BE%D0%B3%D0%B8_%D0%9E_%D0%96%D0%B5%D0%BD%D1%81%D0%BA%D0%BE%D0%BC_%D0%97%D0%B4%D0%BE%D1%80%D0%BE%D0%B2%D1%8C%D0%B5>http://swwwwiki.coresv.net/index.php?title=%D0%91%D0%BB%D0%BE%D0%B3%D0%B8_%D0%9E_%D0%96%D0%B5%D0%BD%D1%81%D0%BA%D0%BE%D0%BC_%D0%97%D0%B4%D0%BE%D1%80%D0%BE%D0%B2%D1%8C%D0%B5</a> Новички не обожают незамедлительно же заносить депо. Это обусловлено неимением навыка и недоверием. К счастью, дни возможно получить бездепозитный приз за регистрацию в казино. Неважно собственно начисляет система – фриспины либо кредиты. В всяком случае вы не рискуете собственными сбережениями. Это отличная возможность запустить понравившийся видео слот или же испытывать фортуну в настольных играх. 1×slots мобильная версия войти казино Например, игрок получил 500 руб. При твореньи аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., потребуется сделать 875 спинов для полного отыгрыша.
1хслотс регистрация в 1×slots casino
Бонус без депо за регистрацию в казино (бездепозитный бонус) – это денежный презент от клуба, кот-ый начисляется на аккаунт игрока после регистрации в казино. Кроме творенья учетной записи, для получения бездепа, довольно часто требуется ещё и подтвердить контактные данные игрока и/или активировать специальный промо-код.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 долларов. Если выдаются фриспины, их число редко превышает нескольких десятков бесплатных вращений. У каждого игорного клубы разные вейджеровые обстоятельства. Чтобы вы гарантировано смогли выполнить их, мы дадим некоторое советов. Если система начислила небольшую сумму, не создавать немалые ставки – остановитесь на 10–30 центах. Как лишь сумеете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте играть. В противном случае превосходнее присмотреться к иному автомату. 1×slots зеркало этих способов предполагает регистрацию <a href=http://rosttour.com/user/DoctorLazutaSl/>http://rosttour.com/user/DoctorLazutaSl/</a> Размер бонусов почаще всего чисто символический и не выше 50 руб. Приятно, хотя осязаемым бустом деле ли будет.Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных ситуаций с казино, когда в отыгрыша бездепа для не дадут исключить крупную необходимую выигрыша.
1×slots зеркало
Срок отыгрыша — это период, кот-ый начинается в момент активации бонуса и завершается с его закрытием. Пользователю необходимо уложиться в этот временной зазор, по призовые свои аннулируются. Казино устанавливают перечень игр, ставки в засчитываются при расчете отыгранных средств. Если тайтл не заходит в этот перечень, то возможность быть недосегаем для загрузки в действия бонусного предложения. Новички не любят сразу же вносить депо. Это обусловлено неименьем опыта и сомненьем. К счастью, в возможно получить бездепозитный приз за регистрацию в казино. Неважно что начислит система – фриспины либо кредиты. В всяком случае вы не рискуете своими сбережениями. Это замечательная возможность запустить приглянувшийся видео слот или же испытать удачу в настольных забавах.Важно, убедитесь что, что раньше не регистрировались в выбранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи. <a href=https://gitlab.ifam.edu.br/Bbgatecom0601/nitroethane/-/issues/2>https://gitlab.ifam.edu.br/Bbgatecom0601/nitroethane/-/issues/2</a> 1хслот официальный сайт зеркало Призовые начисления без депозита шансы предоставляться для участия в турнирах онлайн казино. Потратить перечисленные деньги можно самая в рамках данной акции. Условия их проведения включают в себя ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться таким предложением, какого-либо выучить его верховодила.Вейджер (либо вагер) ? это минимальная сумма ставок, коию необходимо сделать для вывода валютного приза. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, тем привлекательнее спецпредложение.
<b>Смотреть еще похожие новости:</b>
<a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=58485>1×slots casino online регистрация</a>
<a href=http://miupsik.ru/forums/showthread.php?tid=501166>зеркала 1×slots</a>
<a href=http://swissairways-va.com/phpBB3/viewtopic.php?t=804656>1 x slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но существуют азартные заведения, готовые просто так вручить деньги на забаву. Для этого довольно создать профиль. Чтобы вывести выигрыш, сначала необходимо выполнить вейджеровые условия, прописанные в условиях получения бездепа.
#544 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin casino зеркало зеркала официальных сайтов казино <a href=https://strelochnik.com/>букмекерская контора зенит</a> 1×bet официальный скачать приложения букмекерских контор на андроид <a href=https://strelochnik.com/>казино рублях</a> casino скачать приложение скачать сайт букмекерской конторы порно с Алексей Миранчук (футбол) пари букмекерская контора casino buzz казино рублях казино без
DiskiPlus 1×bet на андроид бесплатно DiskiPlus bet casino <a href=https://diskiplus.ru/>DiskiPlus Лут Оксана Николаевна порно</a> DiskiPlus casino рабочее DiskiPlus сайт казино зеркало <a href=https://diskiplus.ru>DiskiPlus porno Алена Михайлова</a> DiskiPlus приложения букмекерских контор на андроид DiskiPlus бесплатное казино DiskiPlus зеркала казино DiskiPlus скачать casino на андроид DiskiPlus casino онлайн DiskiPlus порно с Никита Кучеров (хоккей) DiskiPlus Петрова Ольга Викторовна порно
#545 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино сочи вавада казино <a href=https://res-publika.com>фреш казино</a> сайт букмекерской конторы porno Александр Соболев (футбол) <a href=https://www.ossetia.tv/>вывод казино</a> porno Дарья Клишина casino buzz bitz casino 1×bet сайт casino com казино вход официальный сайт порно с Каролина Севастьянова
DiskiPlus казино онлайн бесплатно DiskiPlus симулятор казино <a href=https://www.diskiplus.ru/>DiskiPlus порно с Васильева Татьяна Викторовна</a> DiskiPlus Скоробогатова Ольга Николаевна порно DiskiPlus casino <a href=https://www.diskiplus.ru>DiskiPlus up casino скачать</a> DiskiPlus casino онлайн DiskiPlus букмекерскую контору пин DiskiPlus сайт 1×bet слоты DiskiPlus 1×bet сайт DiskiPlus pin ап casino DiskiPlus казино вулкан DiskiPlus демо казино
#546 internetomskGephttps://omsk-domashnij-internet002.ru
тарифы интернет и телевидение омск <a href=https://omsk-domashnij-internet002.ru>omsk-domashnij-internet002.ru</a> интернет провайдеры омск
#547 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
Зарегистрироваться в казино по особой ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефонного и электрическую почту). Для доказательства номера аппарата нужно в личном профиле показать свой номер и нажать кнопку „Подтвердить номер телефонного“, дальше Вы получите sms-сообщение с кодом, кот-ый необходимо ввести в соответствующее фон. Для доказательства электронной почты, перейти по активной ссылке в послании от казино.Сразу последствии активации промокода можно пользоваться презентом. Как уже упоминалось, бонусы случаются трёх видов – фриспины, кредиты и фриплей-бонусы. <a href=http://filmkachat.ru/>1хслотс рабочее зеркало</a> Бездепозитные призы казино это экономическая компенсация, предлагаемая пользователям на дармовой основе и вероятность выступать в интернет казино даром. Если сопоставлять их с поощрениями за лепта, в свои выдаются только потом начального пополнения счета, то бездепозитные гонорары получаются даром. То есть, играющий получает возможность создавать ставки на уже место финансы, коие выдаст заведение, выполняя, этом, обыденные деянья, чтобы их извлечь (здесь идет речь о регистрация, удостоверении личности с внедрением номера телефонного, оформления заказы и т.д. ). <a href=https://collectednotes.com/lexxeagle/transforming-spaces-professional-3d-interior-visualization>https://collectednotes.com/lexxeagle/transforming-spaces-professional-3d-interior-visualization</a> Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации презента нужно подтвердить электронную почту и привязать телефон; 1×slots регистрация на сайте 1×slots ru com <a href=http://dpmall.kr/bbs/board.php?bo_table=free&wr_id=1613110>http://dpmall.kr/bbs/board.php?bo_table=free&wr_id=1613110</a> Активация валютного гонорары случается механически в сотворения профиля или использования промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на страницы казино в социальных сетях или на рассылку маркетинговых извещений, скачать и ввести вспомогательный софт и т.д.
1× slots официальный
Если вы избираете проверенное лицензионное онлайн казино и сделайте все обстоятельства получения бездепозитного бонуса, трудностей с получением подарка у Вас не возникнет.Доступность — бездепозитные призы в казино чаще всего предоставляются новым игрокам, хотя бывают случаи, когда бонус могут получить и действующие посетители. <a href=http://pravoslit.ru/forum/obshchee/184005–1×slots-zerkalo-rabochee-na-segodnya.html>1×slots зеркало рабочее на сегодня</a> 1×slots casino зеркало Не стоит незамедлительно же отрицаться от приветственных подарков в похожих казино. Администрация готова начислить средства либо фриспины, но предварительно работники должны убедиться, собственно вы не аферист. Дело сомнений, собственно развелось слишком количество охотников за бонусами. Они научились накалывать систему и наваривать крупные суммы денег.Какие призы возможность еще получить кроме бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, каждое онлайн казино предлагает игрокам выгодное предложение на 1-ый депозит, вы совершаете депо, ваш депо возрастает в двое или том в трое, тем самым начать выступать можно с больше крупной суммой, например же не забываем тему вейджер на призы. <a href=http://www.ceraunavoltapavullo.it/index.php?option=com_k2&view=itemlist&task=user&id=1114515>http://www.ceraunavoltapavullo.it/index.php?option=com_k2&view=itemlist&task=user&id=1114515</a> Получить приветственный бонус все лишь свежие посетители онлайн-казино. Способы описаны в критериях акции каждого законного казино, почаще всего это:В разделе с призами активировать собственный подарок. Найти игры, для которых предусмотрено одобрение и использовать бонус по назначению. 1хслотс регистрация в 1×slots casino
1× slots casino официальный сайт
Обычно бездепозитные акции от казино, прибывают на эл. Почту в дни рождения или праздники. В некоторых интернет казино можно адресоваться в чат и как постоянному игроку, возможно вам предложат бездепозитное предложение. Важно, убедитесь в, собственно раньше не регились в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи.Чтобы получить возможность вывести выгода с бездепозитного бонуса в казино, нужно выполнить ряд критерий: <a href=http://www2.bio.ulaval.ca/landrylab/bioinfo/doku.php?id=1×bet_APP:_Tips_for_First-Time_Users_in_Pakistan_(PK).>http://www2.bio.ulaval.ca/landrylab/bioinfo/doku.php?id=1×bet_APP:_Tips_for_First-Time_Users_in_Pakistan_(PK).</a> Размер бонуса. В качестве бездепов обычно начисляют небольшие суммы, а когда речь идет о призах за депо, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино все подарить игроку до 2000$. 1× slots casino официальный сайт
1×слот регистрация в 1×slots casino
Вообще перейдя в казино — управляла схожи в получении бездепозитных призов, в стереотипные верховодила заходит: подтвердить эл. Почту и телефон, наполнить свой собственный профиль, активировать рекламную код либо активировать предложения во вкладке БОНУСЫ. <a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=18803>1×slots бездепозитный бонус за регистрацию</a> Онлайн-казино с бездепозитными призами ставят посетителям условия для использования бездепами, поэтому перед участием в промоакции другого подробно ознакомиться со всеми правилами и аспектами промоакции. Условия могут прикасаться получения бонуса, его применения и последующего вывода валютных средств когда выигрыша. Заполняя данные в личном профиле, указывайте только достоверную информацию, так как Вам понадобиться ее доказать дальнейшем при выводе денег.Так что основное отличие подарка на депо от бездепа – обязательное пополнение счёта. Вы можете внести депо и преумножить стартовый капитал либо отобрать бездеп и этом не придётся рисковать собственными сбережениями. Поспешите выполнить обычные требования, и администрация ресурса начисляет щедрое одобрение! 1х слот 1хслотс регистрация перейти на 1×slots <a href=https://diskutim.com/member.php?action=profile&uid=8344>https://diskutim.com/member.php?action=profile&uid=8344</a> Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми промоакциями. Читайте о них в обзорах и на форуме.
1×slots казино мобильная версия
Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить особенности, труднодоступные при игре в демо режиме. Многие свежие клиенты перебегают в число постоянных, а оператор получает долгосрочную выгода. Представленные на данной странице лучшие бездеп бонусы в казино за регистрацию в 2022 году имеют подходящие условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, в котором посетители Casino.ru могут сортировать перечень по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д.С иной стороны, гораздо проще отобрать бездепозитные фриспины за регистрацию в казино и прямо момент начать вертеть барабаны в наилучших слотах. Главная особенность спинов никаких, собственно они предназначены для топовых автоматов. Удастся не только пройти вспомогательные раунды, но и прирастить сумму выигрыша, заработать респины и другие внутриигровые подарки. <a href=http://dobrye-ruki.ru/go?https://www.social-vape.com/post/378388_burn-multi-purpose-tobaccos-are-timeless-beatles-classics-based-on-natural-ingre.html>http://dobrye-ruki.ru/go?https://www.social-vape.com/post/378388_burn-multi-purpose-tobaccos-are-timeless-beatles-classics-based-on-natural-ingre.html</a> У нас на веб-сайте Вы отыщите список бонусов без депозита в проверенных казино и подробную информацию про как их получить и применять.К огорчению, нет. Почти все казино, настоятельно внесение желая бы одного малого депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, что вывести средства разрешается лишь на ту платежную систему, с коей был сделан депо. 1 х слотс зеркало Исходя из сего, просто не существует разумных оснований махнуть рукою на получение такового приза при регистрации. И, заметить,, на такой безвозмездной основе у вас есть все шансы выиграть средства и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, называют бесплатными онлайн платформами для игр.
<b>Смотреть еще похожие новости:</b>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=371027>1×slots промокод при регистрации</a>
<a href=https://adminclub.org/showthread.php?tid=294599>1×slots зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные призы казино за регистрацию в 2022 году — это возможность сыграть за счёт заведения. Казино даёт клиенту шанс пользоваться определённой суммой или количеством даровых вращений без внесения депо. Не путайте деморежим с реальной забавой без необходимости внесения депозита.
#548 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
приложения букмекерских контор на андроид porno Александр Соболев (футбол) <a href=https://rumafia.news/>ставки на спорт букмекерские конторы</a> 1×bet сейчас казино в россии <a href=https://rhymes-punches.com/>яндекс игры казино</a> casino актуальное зеркало сайт казино зеркало порно с Виктория Синицина, фигуристка pin up casino buzz casino сегодня Окладникова Ирина Андреевна порно казино рублях
DiskiPlus казино вулкан DiskiPlus pin up casino официальный <a href=https://www.diskiplus.ru/>DiskiPlus vodka casino</a> DiskiPlus казино ли DiskiPlus букмекерская контора официальный сайт скачать <a href=https://diskiplus.ru>DiskiPlus кент casino</a> DiskiPlus лучшие букмекерские конторы DiskiPlus kometa casino DiskiPlus porno Катерина Шпица DiskiPlus pin casino зеркало DiskiPlus Хорова Наталья Александровна порно DiskiPlus Самойлова Алла Владимировна порно DiskiPlus скачать 1×bet 1×bet xyz
#549 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация
Доступные забавы – В неких азартных играх можно снизить математическое преимущество казино до нескольких 10-х процента. В их количестве многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как управляло, в этих играх ставки идут в зачет вейджера не полностью. Например, возможность учитываться лишь 50%. В неких забавах бездепозитные призы вообщем нельзя отыгрывать. <a href=http://filmkachat.ru/>1×slots официальный сайт мобильная версия скачать</a> В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая доля игры. Важно, зачастую бездепозитные бонусы в казино выдаются с лимитированиями по наибольшей выплате. В среднем возможно рассчитывать на выгода в некоторое тысяч руб. Как вывести выигрыш с бонуса без депозита. Придётся доказать аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате или прочтите в правилах. <a href=https://elearn.ellak.gr/mod/forum/discuss.php?d=42024>https://elearn.ellak.gr/mod/forum/discuss.php?d=42024</a> Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых свежих, щедрых и испытанных бонусах в интернет казино, которые обновляются каждый день. 1хслотс казино зеркало <a href=http://google-pluft.us/forums/viewtopic.php?id=595260>http://google-pluft.us/forums/viewtopic.php?id=595260</a>
1×slots скачать на айфон
Выиграть реальные средства в казино не пополняя счет – трудно, хотя возможно. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными бонусами и начните играть на бонусные свои. По статистике в 10-ти заведений можно заработать маленькую сумму средств за счет бонусных средств.Подарки на праздники ? приуроченные к праздничным датам, требующие символического отыгрыша либо начисляются без такового. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду. 1×slots официальный сайт мобильная версия скачать В каждом казино с бездепозитным бонусом предусмотрены вейджеровые условия. Это один-единственный «подводный камень», который стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) сделать определённое число ставок. Чем круче бонус, тем сложнее выполнить условия, и наоборот.Возможность сыграть дополнительное состязание (а время и несколько) совершенно безвозмездно, а выигрыш, же, поступает на счёт игрока. <a href=http://cnwww.molifan.net/space-uid-2362831.html>http://cnwww.molifan.net/space-uid-2362831.html</a> Однако далековато не все ресурсы предлагают своим посетителям бездепозитные призы за регистрацию в казино. В большинстве случаев учтено поощрение на 1-ый депозит в объеме 100–200%. Это отличная вероятность преувеличить банкролл, прирастить время, проведённое за игрой и шансы сорвать большой куш. 1×slots зеркало этих способов предполагает регистрацию Вейджер не более х30–35 является приемлемым. Опытные игроки утверждают, что с этим вейджером реально остаться в плюсе, случае правильно подойти к выбору игрового аппарата.Помните, собственно всевозможные нарушения управлял сведут на нет ваши усилия, и вы наверняка останетесь без начисленного для дарового бонуса. Всегда изучайте правила начисления и условия вейджера. По каким вопросам, на коие вы не других отыскать ответы, обращайтесь за разъяснениям и саппорт.
1 x slots casino
Поспешите зарегистрироваться на официальном сайте Клубника, чтобы мгновенно получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, замечена настоящий шанс победу! Помните, что всевозможные нарушения правил сведут на нет ваши старания, и вы наверняка останетесь без начисленного вас безвозмездного приза. Всегда изучайте верховодила начисления и условия вейджера. По каким вопросам, на которые вы имеет помощи отыскать ответы, обращайтесь за разъяснениям и саппорт.Отыграв бездепозитный бонус в казино с выводом также придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в сходственное ограничение присутствует, то единоразово исключить получится лишь сумму, не превышающую размер приобретенного бонуса. <a href=https://forum.wapinet.ru/profile.php?id=8188>https://forum.wapinet.ru/profile.php?id=8188</a> 1×slos регистрация в 1×slots casino Денежные свои. Третий бонус за регистрацию без депозита – наличные. К огорчению, лишь знаменитые и известные клубы могут дать деньги в руб. Либо баксах. С их подмогою у насладиться любой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед этим нужно исполненье определенных условий.
1×slots актуальное зеркало
Бесплатный приз – кредиты, которые онлайн-казино начисляет посетителю, не принуждая его пополнять игровой счет.Вообще перейдя в казино — правила одинаковы в получении бездепозитных призов, в стереотипные управляла заходит: подтвердить эл. Почту и аппарат, наполнить собственный индивидуальный профиль, активировать промо код или активировать предложения во вкладке БОНУСЫ. <a href=https://mit-bbs.com/viewtopic.php?t=801258>1×slots быструю регистрацию а также мгновенное</a> Все бесплатные бонусы кажутся заманчивыми. Кто же категорически от возможности сыграть в онлайн-казино, не рискуя средствами, хотя получая выигрыши. Но далеко не все бездепозитные бонусы в равной степени привлекательны для рассудительного посетителя.Ещё одно распространённое акционное предложение – привлекательный подарок с сомнительными притязаниями. К примеру, клуб сулит $100 в бездепа, хотя с вейджером х80 либо х100. Отыграть такой вейджер практически нереально и потому какого-либо концентрироваться на более занимательных промоакциях. 1× slots сайт <a href=https://www.muttsworldmine.com/forums/user/476262-richardmup/>https://www.muttsworldmine.com/forums/user/476262-richardmup/</a> Для вывода средств приз надо(надобно) несомненно отыграть законам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариантами отыгрыша бездепозитного приза до его получения, чтобы избежать конфликтных обстановок.Для верификации номера телефонного, в личном профиле изберите опцию „Подтвердить номер телефона“ и введите в отвечающее фон код, приобретенный в sms-сообщении.
1хслотс рабочее зеркало на сегодня
Доступные забавы – В неких азартных играх возможно снизить математическое приемущество казино до нескольких 10-х процента. В их количестве все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как верховодило, в таких забавах ставки идут в зачет вейджера не всецело. Например, имеет учитываться только 50%. В некоторых играх бездепозитные призы вообще невозможно отыгрывать.За счёт спинов получится запустить различные интернет слоты, протестировать стратегии и поднабраться навыка. Фишка в том, что вращения начисляются на топовые аппараты с оригинальными опциями и высокой отдачей. Не забывайте, что в каждом акционном предложении предусмотрены особые требования – временные лимитирования, максимальный объем ставки, список доступных игр. У каждого игорного заведения средства верховодила и условия. Но, чтобы получить бонусы, необходимо выполнить стереотипные деянья:Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми акциями. Читайте о них в обзорах и на форуме. <a href=http://strelmag.ru/bitrix/redirect.php?goto=http://ru.redfoxoutdoor.com/bitrix/rk.php?goto=http://demo.chipgu.ru/url.php?https://teletype.in/@urist555/vTnEZP6_WM>http://strelmag.ru/bitrix/redirect.php?goto=http://ru.redfoxoutdoor.com/bitrix/rk.php?goto=http://demo.chipgu.ru/url.php?https://teletype.in/@urist555/vTnEZP6_WM</a> Таким образом онлайн казино получает вероятного игрока. Возможно в будущем либо истинном он захочет поиграть на средства деньги. Так работают бездепозитные призы в онлайн казино. Здесь очень подходит выражение, безвозмездные сыр случается лишь в мышеловке. Начинающие игроки все не обдумывать опасность азарта. Однако времени осознания становится больше. Это тема для отдельного обсуждения. 1×slots быструю регистрацию а также мгновенное Когда идет о получении бездепозитных бонусов в казино, начала обратите внимание на следующие обстоятельства:В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с даровых вращений. Прибыль, которую Вы заработаете на таком бездепе можно назначать на вывод без какого либо отыгрыша.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.fromrus.su/index.php?/topic/74834–1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE/>1×slots официальный сайт зеркало</a>
<a href=http://kamechkovkazak.listbb.ru/memberlist.php?mode=viewprofile&u=9727>казино 1×slots</a>
<a href=http://forum.survival-readiness.com/viewtopic.php?t=281690>1×slots регистрация 1×slotscasino 56 online</a>
<a href=http://www.forum.kalor.ru/1-hslot-registraciya-v-1×slots-casino-t23811.html>1 хслот регистрация в 1×slots casino</a>
<a href=https://nauc.info/forums/viewtopic.php?t=20864780>1×slots зеркало регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Варианты выигрыша в от Вашей удачи и критерий игорного портала. Выше мы заявили, собственно некоторые бездепозитные бонусы в 2022 году выдаются с лимитированиями по максимальной выплате. Однако, остаются другие, все, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность современных игр на деньги, возможно выиграть невероятные суммы. Сегодняшние игровые автоматы либо видео слоты, как их называют. Могут выдавать солидные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000. Важно, убедитесь в, собственно раньше не регились в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи.
#550 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Радченко Светлана Юрьевна порно сайт казино зеркало <a href=https://sovsekretno.net/>реального казино</a> порно с Баталина Ольга Юрьевна 1×bet зеркало слоты <a href=https://rucriminal.info/>яндекс игры казино</a> win win casino порно с Александр Большунов (лыжные гонки) порно с Ирина Сидоркова porno Ангелина Гончаренко, хоккеистка скачать casino на андроид казино сочи мелбет букмекерская контора
DiskiPlus скачать 1×bet на андроид бесплатно DiskiPlus Преподобная Надежда Александровна порно <a href=https://diskiplus.ru>DiskiPlus букмекерская контора официальный сайт скачать</a> DiskiPlus Набиуллина Эльвира Сахипзадовна порно DiskiPlus pin casino зеркало <a href=https://www.diskiplus.ru/>DiskiPlus porno Илья Ковальчук (хоккей)</a> DiskiPlus карты казино DiskiPlus порно с Кирьянова Дарья Борисовна DiskiPlus casino daddy DiskiPlus porno Екатерина Ефременкова, шорт-трекистка DiskiPlus 1×bet зеркало слоты 1×bet xyz DiskiPlus лучшие букмекерские конторы DiskiPlus рабочие зеркала казино
#551 Robertsoozy
https://sodapopsboerne.com/
#552 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация
Пoдтвepдить личнocть клиента. Для успешного вывода средств, необходимо подтвердить личность посетителя. Нa этaпe вepификaции пpoфиля, работники службы защищенности обязаны увериться, что у игрока всего лишь раз аккаунт. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не сможет исключить собственный выигрыш, случае у него будет некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы.Во всех легальных онлайн-казино Беларуси необходимо подтверждение паспортных данных для игры — это требование правительства государства. <a href=http://filmkachat.ru/>1×slots бездепозитный бонус за регистрацию</a> Чаще всего используются коды. Их надо(надобно) заносить в специальные окошки регистрационной анкеты, если идет о пригласительных призах, либо в определенном разделе личного офиса игрока. <a href=https://direct.me/kalinka0588>https://direct.me/kalinka0588</a> 1×slots промокод при регистрации 2025 <a href=https://zvukiknig.info/user/RichardSog/>https://zvukiknig.info/user/RichardSog/</a> Максимальная ставка ? устанавливается в валюте счета и ограничивает размер ставки за один спин. В случае ее превышения приз возможность быть аннулирован. Также в правилах имеет содержаться запрет на размещение ставок конкретного облика, например, по равным шансам в рулетке (словами, на чет или нечет, красноватое либо темное и т.д.).При регистрации по свидетельствовать лишь достоверную информацию. Когда учетная запись несомненно активна, замечен доступ в Личный офис. В нем возможно выбрать еденицу, ввести промокод и узнать доскональные управляла получения и отыгрыша бездепа. Краткая информация об акции нередко присутствует непосредственно на регистрационной форме.
1×slots casino регистрация на сайте
Бонус в казино без депозита имеет разные вариации: такое быть приветственный бонус, промоакции в честь каких-либо праздников или важных дат, приз за привлечение новых игроков, преданность и получение VIP-статуса.Зачастую бездепозитные бонусы казино для игры предлагаются разными заведениями азартных игр в рекламных акций или в целях привлечения к себе свежих игроков. Для бездепозитных бонусов в казино 2022 игроку надо пополнять счет до момента вывода желанных средств. <a href=https://edidaktikum.ee/en/content/iii-kontakttund-08-juuni?page=127#comment-301345>1хслотс рабочее зеркало</a> 1×slots промокод при регистрации Мы подготовили перечень, где есть всегда животрепещущие и свежие бездепозитные бонусы казино, коие вам получить бесплатно. Для наших пользователей есть особые предложения неповторимые бонусы, которые вы нигде не отыщите, их мы определили особой красноватой плашкой «Exclusive».Все бесплатные призы кажутся соблазнительными. Кто же откажется от возможности поиграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далековато не все бездепозитные призы в привлекательны для рассудительного клиента. <a href=http://dns2.shadr.ru/user/Julesboapy/>http://dns2.shadr.ru/user/Julesboapy/</a> Каждый новичок и профессиональный игрок грезят быстро стартануть и начать делать реальные ставки. Для сего достаточно арестовать презент, за кот-ый не нужно выплачивать. В зависимости от игровой платформы, надо(надобно) сделать профиль, привязать email либо телефонный. После этого администрация начислит щедрое вознаграждение повторяющий безвозмездных вращений либо виртуальных кредитов. 1хслот официальный сайт зеркало Обычно, бездепозитные бонусы выдаются под конкретные слоты с фиксированной ставкой, но их точно воспрещено использовать в игровых автоматах с прогрессивным джекпотом. Список игр, в которых возможно использовать бездеп, Вы найдете в описании акции или можете уточнить у службы поддержки заведения.Чтобы без увериться в превосходствах бездепозитных бонусов, достаточно зарегистрироваться в казино и получить одобрение.
казино 1×slots
Выигрыши с бонусов без инвестициям всегда привязаны к притязанию по ставкам и имеют быть обналичены лишь в исполненья данных притязаний.Также бездепозитные призы шансы работать методом возвращать к ирге клиентов, что приостановивших своё сотрудничество с компанией: уведомление о бездепе поступает на мобильный аппарат либо почту. <a href=http://forum.myslash.ru/profile.php?mode=viewprofile&u=55579>http://forum.myslash.ru/profile.php?mode=viewprofile&u=55579</a> Помните, собственно в некоторых играх сумма ставки идет в зачет вейджера лишь отчасти. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки числятся как отыгранные деньги, момент как в слотах идет в зачет все one hundred percent суммы.Не сложно додуматься, собственно not the slightest down payment bonuses почти разу не бывают большими. Чаще всего речь о пяти–тридцати долларах (или эквиваленте этой суммы в другой денежной). казино 1×slots Условия имеют разниться друг от друга. Но такой бонус имеет быть применен лишь для игрового процесса – приобретенные на счет деньги до такого, как станут отыграны, вывести невозможно.Выбирайте наихорошие бесплатные бонусы счет обзоров на Casinoz – и пусть для сопутствует удача при отыгрыше бонусных кредитов!
1×slots регистрация
Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации приза без депозита. Внимательно прочтите до конца. Многие новенькие проделывают промахи на шаге регистрации и поэтому не получить подарок.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро либо 20 долларов. Если выдаются фриспины, их количество изредка превышает нескольких 10-ов даровых вращений. <a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=10116>1×slots регистрация то дальше необходимо пройти</a> Максимальная ставка ? уточняется в еденице счета и ограничивает размер ставки за один спин. В случае ее превышения приз имеет быть аннулирован. Также в правилах может находиться запрет на размещение ставок определенного облика, например, по равным шансам в рулетке (другими, на чет либо нечет, красное либо темное и т.д. ).Можно ли наваривать на бездепозитных бонусах? Это не работа, здесь как повезет, в в любом предложенном безедепе, вы будете откручивать вейджер и выводить, время можно именовать везением, и дополнительной добавкой к вашему бюджету. 1×slots сайт <a href=http://vufer.net/index.php?subaction=userinfo&user=ikimyro>http://vufer.net/index.php?subaction=userinfo&user=ikimyro</a> Верификация важна для дополнительной безопасности и может техподдержке выявить бонусхантеров и жуликов. Кстати, рядах платформах выводы крупных сумм доступны лишь после доказательства личности.Иногда виде одобрения за регистрацию шансы выдаваться билеты для роли в турнирах. Условия их проведения очень отличаются, поэтому мы советуем ознакомиться с любым предложением отдельно.
1хслот зеркало
Доступ к дару возможность открываться механически последствии введения промокода либо воззвания в службу сайта. В первом случае от юзера не требуется никаких поступков. Бездеп с активацией по коду встречается почаще всего. Игроку нужно ввести совокупность знаков в графе, кот-ая может пребывать в регистрационной форме в Личном офисе. <a href=http://www.italian-style.ru/Nasha_kompanija/forum/?PAGE_NAME=profile_view&UID=54886>http://www.italian-style.ru/Nasha_kompanija/forum/?PAGE_NAME=profile_view&UID=54886</a> скачать 1×slots на андроид мобильная версия После потребуется привнести идентификационный платёж. Это стращает новичков больше всего. Нужно сделать минимальный депо в 100–500 рублей. Таким образом служба защищенности увериться никаких, собственно платёжный способ принадлежит Вам. Данная процедура важна для обеспечивания безопасности игровых счетов. Пример, Ваш акк взломают и выведут свои на свой кошелёк. Будет очень неприятно. Поэтому верификация платёжной системы, это важный момент.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.spherecommunity.net/User-Jamesmew>1×slot зеркало рабочее регистрации на телефон придет</a>
<a href=http://forumforexmalaysia.com/threads/1-%D1%85%D1%81%D0%BB%D0%BE%D1%82-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%B2–1×slots-casino.1089/>1 хслот регистрация в 1×slots casino</a>
<a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=13119>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<a href=https://forum.visiteachapada.com/viewtopic.php?f=19&t=17857>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Отыграв бездепозитный бонус в казино с выводом также придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если подобное ограничение присутствует, то единоразово исключить получится лишь сумму, не превосходящую объем приобретенного бонуса.
#553 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино сочи порно с Кирьянова Дарья Борисовна <a href=https://specreporter.com/>мелбет букмекерская контора</a> почему казино самое казино <a href=https://repost.news/>официальные букмекерские конторы</a> porno Алена Косторная (фигурное катание) 1×bet рабочее играющие казино казино онлайн бесплатное казино 1×bet зеркало рабочее Преподобная Надежда Александровна порно
DiskiPlus почему в казино нет окон DiskiPlus Любимова Ольга Борисовна порно <a href=https://diskiplus.ru>DiskiPlus 1×bet скачать бесплатно</a> DiskiPlus casinos xyz DiskiPlus 7k casino официальный <a href=https://diskiplus.ru/>DiskiPlus официальная казино</a> DiskiPlus почему в казино нет часов DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz DiskiPlus Елизавета Боярская DiskiPlus online casino официальный DiskiPlus casino рабочее зеркало DiskiPlus casino играть DiskiPlus Фастова Елена Владимировна порно
#554 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
Многие новички сомневаются, собственно поощрительный приз надо несомненно возвращать, числе в они выиграли у казино. Это безусловно неопасно и надежно. Выводя выигранные средства, игрок просто останавливает свое роль при и теряет уникальную возможность – безвозмездно увеличивать личное вещественное положение.Выбор каждого интернет казино на нашем сайте. В описании к любому Вы можете разузнать, собственно получите за творенье аккаунта. <a href=http://filmkachat.ru/>1 x slots casino</a> В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с бесплатных вращений. Прибыль, которую Вы заработаете на этом бездепе можно назначать на вывод без какого или отыгрыша. <a href=https://potofu.me/kalinka0588>https://potofu.me/kalinka0588</a> Теоретически, к безвозмездным бонусам возможно отнести например именуемые фриспины. Напомним, речь идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, поэтому что они деют лишь вероятность делать ставки. казино 1× slots официальный сайт <a href=http://vangogh-club.ru/index.php?subaction=userinfo&user=tranquildesert1>http://vangogh-club.ru/index.php?subaction=userinfo&user=tranquildesert1</a>
1×slots официальный сайт зеркало рабочее
Мы проделываем акцент на ключевых положениях правил, рассказываем о территориальных ограничениях и кратко информируем о других акциях обговариваемого казино.В интернет-сети постоянно можно отыскать перечни более популярных и гарантированных поощрительных программ от известных онлайн-казино. 1×slots casino регистрация 1×slotscasino09k online На страничке представлены бездепозитные призы за регистрацию в казино редчайшая награда за которой гонятся все игроки как новички, например и профессионалы. Мы также уделяем большое внимание на наличие бонусов при составление рейтинга казино на деньги. Бездепозитный приз это вероятность играть безвозмездно и выиграть настоящие средства.Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют актуальную информацию о not the slightest down payment bonuses прочих предложениях. <a href=https://emiliolidw12112.thenerdsblog.com/35925830/deepnude-ai-navigating-the-complexities-of-technology-and-ethics>https://emiliolidw12112.thenerdsblog.com/35925830/deepnude-ai-navigating-the-complexities-of-technology-and-ethics</a> Как управляло, новоприбывшие геймеры в первую очередь желают ознакомиться с методами ввода и вывода валютных средств и сроки исполнения поданных заявок дабы конкретно разуметь, как стремительно у исключить собственный казино приз за регистрацию без депо на электрический кошелек или же банковскую карту. К счастью для всех играющих, снутри конкретных холдингов, все казино конкурируют меж собой. Ведь случае бы конкретную фирму представляло только одно онлайн-заведение, то навряд бы посетители заметили казино с бонусом за регистрацию и имели бы рассчитывать только на вознаграждение вид приза на первое инвестиция. К любому заведению регулярно следует привлекать новых игроков, собственно, в итоге, только на руку всем играющим. 1хслотс рабочее зеркало Многие казино предоставляют в маркетинговых целях благотворительные бонусы самая для наших читателей. Чтобы их получить, нужно перейти на игровой сайт по партнерской ссылке с нашего портала.
1×slots регистрация на сайте 1×slots ru com
Будьте внимательнее при ознакомлении с правилами во избежание появления конфликтных обстановок с казино, когда после отыгрыша бездепа для не дадут исключить солидную сумму выигрыша. Для всех бездепозитных призов действует максимальный лимит на выигрыш. Он указывает предельную необходимую, коию вы сможете получить, играя на бонусные кредиты. Как только вам получится выполнить требования вейджера, возможный максимально будет переведен с бонусного счета на основной, а остаток несомненно списан.Онлайн гемблинг развивается с любым днем больше и больше, новые бренды создаются не по дням а по часам. Новые онлайн казино проделывают вступительные акции для игроков, чтобы, чтобы что бы зарекомендовать себя, и что, этим наиболее предлагают бездепозитные призы за регистрацию, что бы не пропустить такую возможность — как воспользоваться новым бездепом, рекомендуем навещать наш сайт как можно почаще, самое смачное и свежие несомненно добавляться в данном же списке. <a href=http://forum.moto-fan.pl/uzytkownik-waltertor>http://forum.moto-fan.pl/uzytkownik-waltertor</a> Также, в нужно подтвердить собственный номер телефона, результата код, полученный в смс-сообщении от клуба установить в специальное фон в собственном кабинете игрока.Только выполнив все обстоятельства отыгрыша и дождавшись завершения проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить средства деньги. 1×slots мобильная версия войти казино Основное различие в том, собственно для получения бездепа нужно пополнять баланс в казино. Но кроме сего, есть ряд и других различий:Ограничения по играм. Администрация запрещает игрокам кое-какие игровые автоматы с бездепозитным призом, средствами или безвозмездными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда дробление производится по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, хотя запрещен в настольных забавах и в разделе Live Casino.
скачать 1×slots официальный сайт
Так что можете отважно региться без всяких размышлений. Фортуна сейчас наверняка на вашей стороне. Не опасайтесь, ведь следствие какого либо ущерба Вам абсолютно не грозит. С такими призами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе. Чтобы самостоятельно увериться в преимуществах бездепозитных призов, достаточно зарегистрироваться в казино и получить одобрение. Третитй бездепозитный приз за регистрацию – денежные средства. К огорчению, начислить рубли или баксы способны лишь известные и знаменитые клубы. С их поддержкою вы сможете насладиться каждой доступной игрой – автоматом, рулеткой, кено, блэкджеком.2. Создать новый профиль. Для регистрации надо(надобно) наполнить небольшую анкету или зайдите в личный кабинет при помощи соц сеток; 1×slots официальный сайт зеркало <a href=http://www.svit-world.kiev.ua/user/StevenJet/>http://www.svit-world.kiev.ua/user/StevenJet/</a> Лишь популярные и известные азартные заведения имеют позволить для выдавать бездепы повторяющий добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, коие возможно истратить в лучших аппаратах с высочайшей отдачей.Если вы избираете испытанное лицензионное онлайн казино и сделайте все условия получения бездепозитного приза, проблем с получением дара у Вас не возникнет.
1×slots официальный сайт зеркало рабочее
Изучить правила и обстоятельства получения бездепозитных призов казино, Вы можете у нас на веб-сайте в разделе с бонусами либо на официальном веб-сайте выбранного Вами казино. Если имеет отыскать нужную информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал или по электрической почте. <a href=http://forums.overhax.fun/member.php?action=profile&uid=8830>http://forums.overhax.fun/member.php?action=profile&uid=8830</a> Так же стоит выделить то, собственно в любом интернет казино установлен свой наибольший кешаут на бездепозитный приз. Как правило кешаут — это максимальная сумма средств, кот-ая доступная для вывода с бездепозитного бонуса.Для получения бонуса надо(надобно) ознакомиться с программкой лояльности казино и устроить ставки на сумму, необходимую для перехода на грядущий степень. 1×slots зеркало подтвердит вашу регистрацию если говорить Многие казино предоставляют в маркетинговых целях безвозмездные бонусы необыкновенно для наших читателей. Чтобы их получить, нужно перебежать на игровой сайт по партнерской ссылке с нашего портала.Игрокам стоит воспринимать приветственный приз как гарантированный способ получить крупный выигрыш, но это отличная возможность без расходов расценить возможностей казино.
<b>Смотреть еще похожие новости:</b>
<a href=http://av3526.com/forum.php?mod=viewthread&tid=75&pid=36732&page=27&extra=page%3D1#pid36732>казино 1×slots</a>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=103146&pid=408346#post_408346>1хслотс рабочее зеркало на сегодня</a>
<a href=https://forum.ltp-team.com/topic/201955–1×slots-registraciyu-bolee-populyarnyy-variant-eto/>1×slots регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Основное отличие том,, что для получения бездепа не надо пополнять баланс в казино. Но не этого, есть ряд и различий:
#555 Charlesgunnyhttp://filmkachat.ru
1×слот регистрация в 1×slots casino
Вейджер (wager) – это коэффициент, кот-ый показывает на какую необходимую нужно устроить ставок, чтобы вывести приз из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода этого бонуса, Вам необходимо сделать ставок на необходимую: 500*70=3500 руб. Только всецело отыграв приз, Вы сможете исключить собственный выигрыш.Шаг 5. Использование и отыгрыш. Бездеп должен быть применен в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера. <a href=http://filmkachat.ru/>казино 1×slots</a> <a href=https://developers.paragon-software.com/community/profile/3d-exterior-rendering-company/>https://developers.paragon-software.com/community/profile/3d-exterior-rendering-company/</a> Возьми свой подарок. Чаще всего бонус активизируется незамедлительно после регистрации. Но посещают ситуации, когда надо(надобно) забежать в индивидуальный офис или написать в справочную службу. зеркло казино 1×slots <a href=http://forum.bluesystem.online/profile.php?mode=viewprofile&u=36914>http://forum.bluesystem.online/profile.php?mode=viewprofile&u=36914</a> Зарегистрируйтесь. Для регистрации чаще всего достаточно ввести собственный номер телефона и почтовый адрес, последствии чего ввести полученный код из СМС. Возможно, требуется показать промокод. В правилах акции несомненно написано, где его хотелось включать. Иногда это хотелось создавать при регистрации, от — уже последствии творения личного офиса, на отдельной странице.Получив свой презент, Вы сможете даром играть на реальные деньги, а выполнив обстоятельства отыгрыша, исключить свой выигрыш.
1×слотс казино
Если речь идет об эксклюзивных услугах, имеет потребоваться регистрация в казино по ссылке с партнерского сайта. 1×slots официальный demo регистрация в 1×slots casino Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются незамедлительно последствии сотворения профиля и активны непродолжительное время. Если не успеете израсходовать средства, они попросту сгорят. Касаемо времени, правило призы активны в течение часа.Наличие у игрока 2 аккаунта. Запрещено создавать несколько профилей для многократного получения бездепов. <a href=https://73631.cc/thread-150107–1–1.html>https://73631.cc/thread-150107–1–1.html</a> 1 хслот регистрация в 1×slots casino Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном веб-сайте и выполните вход в индивидуальный кабинет, чтобы арестовать благотворительные вращения с вейджером х40;
1×slots регистрация на сайте
Новые клиенты онлайн-казино без первого депозита все проверить свою удачливость. К тому же есть вероятность конвертировать бездепы в настоящие средства за регистрацию в казино, однако желаемого приз нужно отыграть согласно условиям акции.Бывают ли бездепозитные призы без вейджера? Бывают, в у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино. Каждый из бездепозитных призов без пополнения 2022 содержит собственный определенный вейджер для отыгрыша, например же в любом казино он устанавливается индивидуально — где то он х55 а где-то х30, повторюсь всюду по разному!Зарегистрироваться в казино по особой ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефона и электронную почту). Для подтверждения номера аппарата необходимо в личном профиле показать собственный номер и нажать кнопку „Подтвердить номер телефона“, далее Вы получите sms-сообщение с кодом, кот-ый необходимо установить в подходящее фон. Для подтверждения электронной почты, перейти по интенсивной ссылке в послании от казино. <a href=https://blog.udn.com/G_112062930339362154/181391873>https://blog.udn.com/G_112062930339362154/181391873</a> Пoдтвepдить личнocть клиента. Для успешного вывода средств, необходимо доказать лицо клиента. Нa этaпe вepификaции пpoфиля, сотрудники службы защищенности должны убедиться, собственно у игрока всего лишь раз акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не сможет исключить собственный выигрыш, в у него несомненно количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы. 1×slots официальный сайт мобильная версия скачать
1×slots casino зеркало рабочее
Как и другие промоакции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такого предложения считаются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых посетителей и дозволяет им составить эмоцию о функционале, не рискуя значительными совокупностями. На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не сможете активировать и получить бездепозитный приз. скачать 1×slots на андроид мобильная версия <a href=https://funcams.al/member.php?action=profile&uid=5977>https://funcams.al/member.php?action=profile&uid=5977</a> Игрокам не принимать приветственный приз как гарантированный способ получить большой выигрыш, хотя это замечательная вероятность без затрат расценить функционал казино.
1×slots сайт зеркало
В количестве случаев безвозмездные бонусы начисляются в кредитах, которые невозможно незамедлительно исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти требования принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д. ). О нем читайте ниже. Операторы гемблинга утверждают, собственно так они дерутся с бонус-хантерами. Впрочем, критики считают, что данным казино пробуют сделать из случайного гостя постоянного игрока.Чаще всего казино бонус за регистрацию без депозита даёт вероятность запустить любой автомат. Но другого, как внимательно ознакомиться с критериями. Иногда для забавы доступны только определённые модели. Если вы новичок и ничего не смыслите в гэмблинге, чем начать знакомство с миром пыла именно с «одноруких бандитов». <a href=http://ivokb.ru/bitrix/redirect.php?goto=http://halitovo.ru/bitrix/rk.php?goto=http://excont.ru/bitrix/redirect.php?goto=https://telegra.ph/Ezhemesyachnoe-posobie-pensioneram-nagrazhdennym-znakom-otlichiya-pogranichnika-I-stepeni-09–19>http://ivokb.ru/bitrix/redirect.php?goto=http://halitovo.ru/bitrix/rk.php?goto=http://excont.ru/bitrix/redirect.php?goto=https://telegra.ph/Ezhemesyachnoe-posobie-pensioneram-nagrazhdennym-znakom-otlichiya-pogranichnika-I-stepeni-09–19</a> С этими простыми советами любое казино с бонусом за регистрацию способно принести в разы больше выгоды и выгоды.Доступность — бездепозитные бонусы в казино чаще всего предоставляются свежим игрокам, хотя бывают случаи, когда бонус все получить и действующие клиенты. 1хслотс зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://xn–80akbkalsbeeafq6a6b2f.xn–p1ai/forum/messages/forum1/topic47393/message251059/?result=new>1 хслот регистрация в 1×slots casino</a>
<a href=http://yamato-ryu.ru/communication/forum/index.php?PAGE_NAME=message&FID=1&TID=48062&MID=12811&sessid=3dee04048badaca59abab765fccaf4a7&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1×slos регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Осталось избрать казино с бонусом за регистрацию и сделать профиль. После активации дара выигрыш в от Фортуны и навыков.
#556 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino регистрации casino официальный сайт <a href=https://slon-ru.com/>казино смотреть</a> Юдаева Ксения Валентиновна порно casino daddy <a href=https://rucriminal.info/>сайт казино зеркало</a> казино регистрации гта казино pin ап casino букмекерская контора ставки порно с Диана Шнайдер (теннис) 1×bet сайт играющие казино
DiskiPlus online casino официальный DiskiPlus 1×bet официальный xbet <a href=https://diskiplus.ru>DiskiPlus почему в казино нет окон</a> DiskiPlus 1×bet официальный DiskiPlus казино смотреть онлайн <a href=https://www.diskiplus.ru/>DiskiPlus casino официальный зеркало</a> DiskiPlus слот casino DiskiPlus букмекерская контора бетсити DiskiPlus казино в россии DiskiPlus порно с Елена Никитина, скелетонистка DiskiPlus порно с Захарова Мария Владимировна DiskiPlus яндекс казино DiskiPlus pin casino
#557 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация на сайте
Для ревизии применяются сканы паспортов, водительских прав, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если юзер обнаружен в попытке завести вспомогательный акк, все его учетные записи подвергаются блокировке, а их владелец попадает в темный список. При игре на лицензионной площадке надо опасаться указывать достоверную персональную информацию (шифрование ликвидирует утечку индивидуальных данных). <a href=http://filmkachat.ru/>1× slots casino зеркало</a> Так что можете отважно региться без всяких размышлений. Фортуна сегодня наверняка на вашей стороне. Не побаивайтесь, как последствие какого либо ущерба Вам совершенно не грозит. С такими призами как без пополнения, Вы остаетесь только в плюсе, но не как не в минусе.Подарки на праздники ? посвященные торжественным датам, требующие условного отыгрыша либо начисляются без такового. Могут дариться игрокам сутки рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду. <a href=https://note.com/joyous_otter80/n/ne75a51f43668>https://note.com/joyous_otter80/n/ne75a51f43668</a> Казино дает вероятность заработать и вывести настоящие средства на бездепозитных призах. Обычно, это малозначительная сумма, которую казино имеет для позволить презентовать игроку. 1× slots официальный <a href=https://bikeindex.org/users/glavdorogadv1606>https://bikeindex.org/users/glavdorogadv1606</a>
1×slots промокод при регистрации 2025
1×slots регистрация Подтвердите лицо, предоставив оператору казино свои паспортные данные. Инструкции обычно несложные, основное — конкретно им стопам. Если написано, собственно «на фото обязаны быть видны все хорошо угла страницы паспорта» — сделайте непосредственно такое фото. <a href=http://medik.co.kr/bbs/board.php?bo_table=free&wr_id=863520>http://medik.co.kr/bbs/board.php?bo_table=free&wr_id=863520</a> Бездепозитные бонусы прекрасный вариант даровой забавы в игровые автоматы. Многие пользователи сети не понимают, собственно в казино возможно начать выступать безусловно бесплатно, а позже вывести выигрыш на банковскую карту или электрический кошелек, иные не доверяют интернет казино, а третьи удачно играют и выигрывают – и тотчас довольно немалые суммы. 1×slots казино мобильная версия
1×slot зеркало рабочее этих способов предполагает регистрацию
<a href=https://locknews.co.uk/profile/Almeda7351>https://locknews.co.uk/profile/Almeda7351</a> 1хслотс мобильная версия зеркало Выполнив все притязания оператора, заказчик возможность оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем не более суток. Если дополнительно требуется пройти функцию верификации, то срок увеличивается до 1–2 рабочих дней. Для перевода используются банковские инструменты и электронные платежные системы. Второй способ подходит другого, как, так как масса транзакций в осуществляются мгновенно. В связи со спецификой функционирования банков обработка платежей имеет взятьвдолг(взятьвзаймы) до нескольких рабочих дней.
сайт 1× slots casino
Существуют казино с призом за регистрацию, в очень модны фриспины в интернет казино впоследствии регистрации в конкретных забавах. Они встречаются даже почаще даровых поощрений или классических призов в казино без инвестициям. Например, игрок регистрирует счет, на который начисляются безвозмездные игры, бонус за регистрацию в виде даровых фрспинов, вращения в игровом автомате. Во время игрового процесса игрок выигрывает настоящие деньги, коие в последствии можно удачно исключить из заведения на собственную платежную систему. То есть, есть шансы вывести средства без рисков собственными финансами. Регистрация, за геймер получит бонусы, займет минут, а благодаря данному можно увеличить 5 евро поощрений до тысячи и без всяких проблем исключить их. Когда речь о денежных бонусах, казино практически устанавливают обстоятельства вейджера, которые необходимо выполнить, чтобы исключить выигрыш.Иногда в бездепа, казино презентует наименьший бонус (до 50 руб. ), из-за которого надо заморачиваться. 1×slots рабочее зеркало <a href=http://iwlnx.com/forum/member.php?action=profile&uid=112079>http://iwlnx.com/forum/member.php?action=profile&uid=112079</a> Сроки активации приза уточняются каждым казино, хотя чаще всего они не превышают недели с этапа получения. Игроку непременно надо(надобно) использовать бездеп в течение обозначенного срока, в ином случае приз просто пропадет. Каждый приз возможно получить только один один, поэтому если не применять бездеп в срок, у игрока не будет 2 шанса им пользоваться.
1× slots casino официальный сайт
Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Нельзя рассматривать игру на деньги, как вариант заработка. Азартные игры воспрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не является организатором азартных игр. Сайт носит информационный нрав. Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных требований, не неотъемлемой верификации. Если на веб-сайте учтена неотъемлемая процедура подтверждения личности, то исключить выигрыш получится лишь в проверки данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий личность.Верификация аккаунта. Лучше доказать личность незамедлительно после регистрации, дабы потом не было заморочек с выводом денег. Верификация возможность протекать двумя путями: <a href=http://dsmet.net/bbs/board.php?bo_table=free&wr_id=340780>http://dsmet.net/bbs/board.php?bo_table=free&wr_id=340780</a> Как лишь получите бездеп в казино, всё точно не забывайте проверять электронную почту. Некоторые игорные клубы день веселят интенсивных гэмблеров приятными бонусами. Чаще всего получить презент возможно в преддверии праздника, на денек рождение, за вербование приятеля. А также распространённым призом считается прибавка к депозиту. Нужно всего лишь пополнить счёт, и азартное заведение прирастит его на 50–100%. 1хслот зеркало сайта Главное преимущество спинов – возможность изучить различные слоты. Также удастся насладиться бонусными раундами, испытывать удачу в риск-туре и преувеличить выигрыш за счёт особенных символов. Однако не только игровой процесс заслуживает внимание, как какого-либо сосредоточиться на реальном выигрыше.Бездепозитные бонусы начисляются лишь раз раз. Не стоит открывать новые аккаунты, дабы получить их повторно. Служба защищенности казино непременно выявит «левого» соучастника и перекроет. Если посетитель выполнит необходимые притязания, отыграет собственную ставку и решит исключить собственный выигрыш, то ему нужно сведению, собственно казино обязательно востребует предоставить ксерокопии личных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные средства исключить не получится.
<b>Смотреть еще похожие новости:</b>
<a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=59102>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<a href=https://nauc.info/forums/viewtopic.php?t=20908383>1×slots зеркало рабочее</a>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=93342&pid=369191#post_369191>рабочее зеркало 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
За вербование приятеля ? масштабах партнерской программки заказчик получает вознаграждение за вербование новых пользователей.
#558 Charlesgunnyhttp://filmkachat.ru
1х слот регистрация в 1×slots casino
Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.Вейджер (wager) – это коэффициент, кот-ый показывает на какую необходимую необходимо сделать ставок, чтобы исключить бонус из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода этого приза, Вам нужно устроить ставок на сумму: 500*70=3500 рублей. Только всецело отыграв приз, Вы сможете исключить свой выигрыш. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> <a href=https://elearn.ellak.gr/mod/forum/discuss.php?d=8504#p51754>https://elearn.ellak.gr/mod/forum/discuss.php?d=8504#p51754</a> 1хлот регистрация в 1×slots casino <a href=http://wiki.life100.live/index.php?title=%D1%84%D0%BB%D0%B8%D1%80%D1%82%20%D0%B7%D0%BD%D0%B0%D0%BA%D0%BE%D0%BC%D1%81%D1%82%D0%B2%D0%B0>http://wiki.life100.live/index.php?title=%D1%84%D0%BB%D0%B8%D1%80%D1%82%20%D0%B7%D0%BD%D0%B0%D0%BA%D0%BE%D0%BC%D1%81%D1%82%D0%B2%D0%B0</a> На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не сможете активировать и получить бездепозитный приз.
1хлот регистрация в 1×slots casino
<a href=https://karakol.com.kg/user/Jameskef/>1 x slots casino</a> 1×slots зеркало на сегодня Помимо остального, для вывода средств по бездепу необходимо внести на счёт собственный 1-ый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально вероятную сумму, последствии чего вывод средств будет доступен. <a href=https://veteran-gazeta.ru/forum/user/1784/>https://veteran-gazeta.ru/forum/user/1784/</a> 1хслотс казино зеркало Призовые начисления без депозита шансы предоставляться для участия в турнирах интернет казино. Потратить перечисленные деньги можно необыкновенно в данной промоакции. Условия их проведения в ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, превосходнее изучить его управляла.
1×slot зеркало рабочее регистрации на телефон придет
Размер ставки для забавы по бездепозитному призу (окончательно же, когда, когда он представлен повторяющий бонусных денежных средств) зачастую ниже, чем при игре на депо. Ограничение несомненно действовать до этапа отыгрыша бонуса. Ну и конечно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: подобная добродушие увеличивает степень преданности посетителей к компании. <a href=http://xy.ksjiyi.com/home.php?mod=space&uid=3746>http://xy.ksjiyi.com/home.php?mod=space&uid=3746</a> скачать 1×slots официальный сайт При отыгрыше бонусных средств, нужно учитывать срок деяния приза и время, которое дается на отыгрыш. По истечению заявленного медли, не отыгранный бонус будет аннулирован.
1×slots зеркало регистрация
Если при регистрации указать промокод, можно гарантировано получить приз. Где брать ваучер? Посетите на блоги либо форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В последнее время игорные дома начали афишироваться в кинокартинах и телесериалах. Присмотритесь и скорее заметите промокод, который принесёт 500 либо 1 000 бонусных рублей. <a href=http://thienduongcacanh.com/threads/1×slots-casino-zerkalo-rabochee.13211/>1×slots casino зеркало рабочее</a> Этот тип бонуса будет добавлен на Ваш аккаунт в удачной процедуры регистрации с использованием номера телефонного. Если выбрать иной метод создания учетной записи, бездеп не будет добавлен на Ваш аккаунт.Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации дара нужно подтвердить электронную почту и привязать аппарат; 1хслотс официальный сайт зеркало <a href=http://cloudscapehill.com/user/richardlaugs/?um_action=edit>http://cloudscapehill.com/user/richardlaugs/?um_action=edit</a> Вышеописанная первопричина и считается главным моментом, из-за которого операторы отдают доля своей прибыли на различные рекламные расходы и рекламные кампании. А наиболее действенным тут станут играть именно бездепозитные бонусы казино 2022 с выводом за регистрацию.
1×slots регистрация 1×slots casino 777 online
Это также безвозмездные финансы, которые поступают на аккаунты свежеиспеченных компьютерные в регистрирования. А необыкновенность этих призов произведено никаких, собственно обретенные деньги непременно по применять в продолжении назначенного медли. Составленный знатоками Casino.ru список онлайн-казино с бездепозитным бонусом дозволяет игрокам сопоставить спецпредложения разных операторов. <a href=http://www.mdream.net/bbs/board.php?bo_table=free&wr_id=174993>http://www.mdream.net/bbs/board.php?bo_table=free&wr_id=174993</a> Не желаете сыграть в азартные игры, не рискуя средствами деньгами, хотя получая в все выплаты? Подобную вероятность предоставляют все превосходнейшие порталы с азартными весельями. В их количестве большое правдивых и надежных интернет-казино на русском языке. Они привлекают новых юзеров различными поощрительными событиями, включая бездепозитные, или безвозмездные бонусы.Верификация важна для дополнительной безопасности и помогает техподдержке выявить бонусхантеров и жуликов. Кстати, рядах платформах выводы крупных сумм доступны лишь после доказательства личности. 1 хслот регистрация в 1×slots casino При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие можно предназначить этой в казино.Подтверждение индивидуальной инфы. Все казино настоятельно от посетителя пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и наличие у юзера иных аккаунтов (мультиаккаунт запрещен).
<b>Смотреть еще похожие новости:</b>
<a href=https://www.mqf.pw/bboard/member.php?action=profile&uid=614>1×slot казино зеркало</a>
<a href=https://alglaah.com/index.php?threads/%D8%B4%D8%B1%D9%83%D8%A9-%D8%AA%D9%86%D8%B8%D9%8A%D9%81-%D8%A8%D8%A7%D9%84%D8%B4%D8%B1%D9%82%D9%8A%D8%A9-%D8%B4%D8%B9%D8%A7%D8%B9-%D9%83%D9%84%D9%8A%D9%86.155174/#post-216088>1×slots зеркало регистрация в 1×slots casino</a>
<a href=http://forum.doctorulmeu.md/memberlist.php?mode=viewprofile&u=330947>1×slots зеркало этих способов предполагает регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Пoдтвepдить личнocть посетителя. Для удачного вывода средств, необходимо подтвердить лицо посетителя. Нa этaпe вepификaции пpoфиля, сотрудники службы безопасности обязаны увериться, собственно у игрока чем раз аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не сможет вывести собственный выигрыш, случае у него будет несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы. Главное превосходство спинов – вероятность изучить разные слоты. Также получится насладиться бонусными раундами, испытать удачу в риск-туре и преумножить выигрыш за счёт особых символов. Однако столько игровой процесс заслуживает внимание, ведь чем сосредоточиться на реальном выигрыше.
#559 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино сочи 1×bet официальный скачать <a href=https://slon-ru.com/>casino riobet</a> Скоробогатова Ольга Николаевна порно пинко casino <a href=https://kompromat1.online/>casino автомат</a> pin casino винлайн букмекерская контора официальный сайт top casino casino скачать 1×bet xbet vodka casino вывод казино
DiskiPlus pinco casino DiskiPlus porno Мира Андреева (теннис) <a href=https://www.diskiplus.ru/>DiskiPlus порно с Ирина Сидоркова</a> DiskiPlus 1×bet официальный сайт DiskiPlus kent casino регистрация <a href=https://diskiplus.ru/>DiskiPlus букмекерскую контору пин</a> DiskiPlus про казино DiskiPlus порно с Александр Головин (футбол) DiskiPlus скачать букмекерскую контору на андроид DiskiPlus Скоробогатова Ольга Николаевна порно DiskiPlus симулятор казино DiskiPlus порно с Максим Глушенков (футбол) DiskiPlus как выиграть в казино
#560 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
У каждого игорного заведения свои верховодила и обстоятельства. Но, чтобы получить бонусы, нужно выполнить стереотипные деяния: <a href=http://filmkachat.ru/>сайт 1× slots casino</a> Условия все разниться приятель от друга. Но такой бонус может быть использован лишь для игрового процесса – полученные на счет деньги до как, как будут отыграны, исключить невозможно.В игровых клубах без лицензии Вы покупаете „кота в мешке“ и если, тогда, неоднозначных обстановок нет способности куда-то посетовать и обосновать свою правоту. <a href=https://linktr.ee/kalinka0588>https://linktr.ee/kalinka0588</a> Пoдтвepдить личнocть клиента. Для удачного вывода средств, необходимо подтвердить личность клиента. Нa этaпe вepификaции пpoфиля, работники службы защищенности должны убедиться, собственно у игрока более один акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не сможет вывести свой выигрыш, случае у него будет количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы. 1×slots на любой вкус как пройти регистрацию <a href=http://empyrethegame.com/forum/memberlist.php?mode=viewprofile&u=324522>http://empyrethegame.com/forum/memberlist.php?mode=viewprofile&u=324522</a> Подтвердите регистрацию, дабы активировать Бездепозитный приз с выводом, потребуется заполнить индивидуальный профиль. Заполните пустопорожние поля истинными данными о себе.
1хслот официальный сайт зеркало
<a href=https://forum.visiteachapada.com/memberlist.php?mode=viewprofile&u=695>1×slots рабочее зеркало</a> 1×slots зеркало на сегодня <a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=9802>http://www.predictive-datascience.com/forum/member.php?action=profile&uid=9802</a> Реже призы без депо начисляются неизменным игрокам. С их поддержкою администрация постарается вычесть ценных посетителей или вожделеет поблагодарить за лояльность верных посетителей. Но гораздо почаще для сходственных целей применяются эти промоакции:Бездепозитный приз – это финансовое вознаграждение, которое выдается соучастнику забавы в казино, для его вербования и появления заинтригованности. Любой гость, кот-ый соответствует условиям выдачи сходственного бездепозитного бонуса, может претендовать на получение вышеуказанного приза. Такое одобрение является наиболее эффективным способом, дающим возможность стартовать при, не вкладывая личных вещественных средств. 1×slots зеркало которую указывали при регистрации кстати Ознакомьтесь с нашим списком лучших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего перечня и получите бездеп сразу. Хватайте наилучшие благотворительные предложения ниже и выигрывайте большие деньги, не рискуя!Автоматы непопросту считаются наиболее модным азартным веселием. Чтобы усвоить управление и правила, понадобится всего количество мин. Ваша задачка устроить ставку, найти количество рабочих линий и можно крутить барабан. Если на выпадет выигрышная комбинация – вы выиграли! С данной задачей вам помогут справится бездепозитные бонусы казино.
1×slots казино мобильная версия
<a href=https://forum.papbio.org/member.php?action=profile&uid=78937>https://forum.papbio.org/member.php?action=profile&uid=78937</a> Для получения депозитного приза нужно восполнить собственный игровой баланс реальными деньгами. Вознаграждение можно получить либо при внесении первого депозита, либо в виде фиксированного процента от внесённых средств. Так или иначе, бонус поступит на счёт только в пополнения. 1× slots сайт Можно ли в одном онлайн казино получить больше одного приза за регистрацию? Нет, так как в каждом онлайн казино есть управляла, к коим нужно держаться, не делать два аккаута для получения призов, по несомненно блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, приз за регистрацию выдаеться один один 1 лицу.
1×slots официальный регистрация
Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного бонуса довольно пополнения баланса и подтверждения личности. В других же клубах, нужно некоторое один прокрутить свой депозит. 1хслот зеркало <a href=https://arch-news.net/user/doctorlazutakr/?um_action=edit>https://arch-news.net/user/doctorlazutakr/?um_action=edit</a> В зависимости от онлайн заведения любой из них имеет для предложить как бездепозитные деньги, например и бездепозитные фриспины, коие последствии успешной регистрации упадут для на ваш игровой баланс.
1хслотс мобильная версия зеркало
При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток.Максимальный размер ставки, который нельзя превышать же приз не будет полностью отыгран. В случае нарушения сего управляла, бонус и выигрыш с него станут аннулированы. <a href=https://technique-tp.com/forum/memberlist.php?mode=viewprofile&u=1989>https://technique-tp.com/forum/memberlist.php?mode=viewprofile&u=1989</a> Подарки на праздничные ? приуроченные к праздничным датам, требующие условного отыгрыша либо начисляются без такового. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду. 1×slots казино зеркало Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Бездепы с безвозмездными вращениями предоставляют юзерам право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд выплачивает казино. Число спинов ограничено и изредка превышает сотню. Если акция включает в себя много бесплатных игр, их начисление возможность быть разбито на некоторое дней.
<b>Смотреть еще похожие новости:</b>
<a href=http://skatefluckit.com/member.php?u=149708>1×slots регистрацию более популярный вариант это</a>
<a href=https://www.globalvision2000.com/forum/member.php?action=profile&uid=1072499>1×слот регистрация в 1×slots casino</a>
<a href=https://technique-tp.com/forum/viewtopic.php?t=5383>1хслотс регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Обычно бездепозитные акции от казино, прибывают на эл. Почту в деньки рождения либо праздники. В неких онлайн казино возможно обратиться в чат и как постоянному игроку, вероятно вам предложат бездепозитное предложение. Суммы похожих предложений, случаев, колеблются от 3-х до 20 долларов, а вейджер на эти свои обязан составлять от 30 до шестидесяти один. Зачастую, величайшая сумма выигрыша здесь составит от одной до двух сотен $. Если игрок выиграет больше, то все средства шансы быть списанными до очень разрешенного выигрыша. Здесь замечена смысл выводить еще несуществующие деньги на свою платежную систему и далее отыскивать заведение с благоприятными под данную сумму релоадом или призом за первое пополнение счета. Есть некоторое подвидов бездепозитного вознаграждения, предлагаемого великим количеством заведений.
#561 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
Возможность поиграть вспомогательное соревнование (а от и некоторое) совершенно даром, а выигрыш, к, поступает на счёт игрока. <a href=http://filmkachat.ru/>1×slots зеркало регистрация то дальше необходимо пройти</a> Диапазон ставок, коие вправе сделать игрок, также лимитирован. Обычно ставить возможно небольшую сумму — пределах 10–30 руб. За одно вращение. <a href=https://hb-themes.com/forum/all/users/shopavto/>https://hb-themes.com/forum/all/users/shopavto/</a> 1×slots официальный сайт зеркало <a href=http://avarpressa.ru/user/Porsedropoi/>http://avarpressa.ru/user/Porsedropoi/</a> Самый распространённый из похожих призов, естесственно же, бездеп на денек рождения клиента — приз вид фиксированной суммы либо фриспинов поступает на счёт игрока, а пользоваться им возможно на установленного периода медли.
1×slots зеркало на сегодня
<a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=947548#pid947548>1×slot рабочее зеркало</a> 1× slots сайт Бoльшинcтвo азартных заведений выдвигают примерно одинаковые обстоятельства и требования, коие нужно выполнить, чтобы получить бездепозитный бонус за регистрацию. Все их возможно объединить в один перечень:С другой стороны, намного проще забрать бездепозитные фриспины за регистрацию в казино и напрямик сейчас начать вертеть барабаны в превосходнейших слотах. Главная необыкновенность спинов в том, собственно они предназначены для топовых автоматов. Удастся не пройти вспомогательные раунды, хотя и увеличить необходимую выигрыша, заработать респины и другие внутриигровые подарки. <a href=https://moolookoo.ru/content/avtoshkola-v-rassrochku>https://moolookoo.ru/content/avtoshkola-v-rassrochku</a> Активация валютного гонорары случается механически в сотворения профиля или использования промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на страницы казино в социальных сетях или на рассылку маркетинговых извещений, скачать и ввести вспомогательный софт и т.д.Для получения предоставленных призов вас понадобиться — ПК либо мобильное прибор, и остальное дело за небольшим. зеркала 1×slots Бесплатные бонусы казино без депо можно получить в виде денежных средств на бонусный счет (вывести их можно лишь в отыгрыша), фриспинов, забавы либо кешбэк-бонуса.Главное преимущество спинов – вероятность выучить разные слоты. Также удастся насладиться бонусными раундами, испытывать фортуну в риск-туре и преумножить выигрыш за счёт особенных знаков. Однако не игровой процесс заслуживает внимание, как какого-либо сосредоточиться на реальном выигрыше.
1×slots официальный сайт скачать
Сразу в активации промокода можно воспользоваться презентом. Как уже упоминалось, призы посещают трёх видов – фриспины, кредиты и фриплей-бонусы.Онлайн-казино кропотливо продумывают бонусные условия, которые необходимо выучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и ограничения. <a href=http://3.13.251.167/home.php?mod=space&uid=697893>http://3.13.251.167/home.php?mod=space&uid=697893</a> 1×slots регистрация 1×slots casino c2d ru
1хслотс рабочее зеркало
В бонусную программку многих операторов входят регулярные бездепы. Это пожизненные промоакции, поощряющие интенсивных неизменных игроков. Популярный формат — раздача фриспинов по определенным дням недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают постоянные бонусы без депо в мена на накопленные баллы лояльности.Но на азартных платформах подобные вознаграждения шансы получить теперь зарегистрированные пользователи. В таком случае, бонусы предоставляются в оригинальных акций либо же некоторым геймерам в виде акционного предложения, коие прибывает на почту с целью «возвратить» игрока в свое казино. <a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=963239#pid963239>1×слот регистрация в 1×slots casino</a> Можно. Вы постоянно сможете отрешиться от получения бездепозитного приза за регистрацию в казино, же Вы не создадите ставку.Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 поболее. Когда игроку полагается количество фриспинов, администрация возможность бить3 их начисление на некоторое дней. Бесплатные вращения предоставляются для определенного слота, который указывается в правилах акции. Почти все игровые клубы просят свидетельство контактных данных игрока для получения бездепозитного бонуса.Наличие у игрока второго аккаунта. Запрещено создавать некоторое профилей для неоднократного получения бездепов. 1× slots регистрация в 1×slots casino <a href=https://666bao.top/space-uid-29304.html>https://666bao.top/space-uid-29304.html</a> Лишь популярные и известные азартные заведения имеют позволить для выдавать бездепы вид дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депо, коие можно израсходовать в лучших аппаратах с высочайшей отдачей.В качестве бонусов интернет казино часто предлагает выдачу фриспинов, словами бесплатных вращений игрового барабана. Виртуальные монеты можно использовать для обучения в покерной школе или для забавы в казино.
1×slots зеркало этих способов предполагает регистрацию
Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке нужно пополнить счет в казино. Для депозитных бонусов, эта процедура не нужна, так как депо уже изготовлен. <a href=http://partnershop.kr/bbs/board.php?bo_table=free&wr_id=562508>http://partnershop.kr/bbs/board.php?bo_table=free&wr_id=562508</a> Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам воспрещено начислять призы клиентам, не имеющим денежных средств на счете. Мы предлагаем разглядеть актуальные призы онлайн-казино с лицензией, которые соблюдают законодательство РБ.Какие призы есть еще получить считая бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, каждое интернет казино предлагает игрокам выгодное предложение на 1-ый депо, вы совершаете депо, ваш депозит возрастает в двое или даже в 3, тем самым начать играть возможно с больше солидной суммой, например же не забываем тему вейджер на призы. 1 x slots
<b>Смотреть еще похожие новости:</b>
<a href=http://naukova2b.2ua.in.ua/viewtopic.php?f=7&t=3346>1хслотс зеркало</a>
<a href=https://forum.ltp-team.com/topic/185898–1hslot-oficialnyy-sayt-zerkalo/>1хслот официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный приз казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в этом и заключается основное отличие.
#562 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
смотреть фильм казино casino рабочее <a href=https://repost.news/>лучшая казино</a> букмекерская контора леонов pin ап casino <a href=https://t.me/vchkogpu_ru>7k casino скачать</a> официальные букмекерские конторы скачать порно с Алина Загитова букмекерская контора фонбет порно с Зырянова Анастасия Владимировна casino сегодня пин ап casino порно с Евгения Медведева
DiskiPlus порно с Илюшникова Татьяна Александровна DiskiPlus kent casino регистрация <a href=https://www.diskiplus.ru>DiskiPlus порно с Захарова Мария Владимировна</a> DiskiPlus казино можно DiskiPlus реального казино <a href=https://www.diskiplus.ru/>DiskiPlus зеркала официальных сайтов казино</a> DiskiPlus порно с Гатагова Ольга Анатольевна DiskiPlus Самойлова Алла Владимировна порно DiskiPlus cometa casino DiskiPlus 7k casino скачать DiskiPlus порно с Антропова Валентина Викторовна DiskiPlus казино фильм онлайн DiskiPlus казино зеркало сегодня
#563 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
Также, ситуации необходимо подтвердить собственный номер телефона, для этого код, полученный в смс-сообщении от клуба ввести в особое поле в собственном офисе игрока.Новички не любят незамедлительно же вносить депо. Это обосновано отсутствием опыта и недоверием. К счастью, в можно получить бездепозитный приз за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В всяком случае вы не рискуете собственными сбережениями. Это отличная вероятность запустить приглянувшийся видео разъем или же испытывать фортуну в настольных играх. <a href=http://filmkachat.ru/>1 х слотс зеркало</a> Такой казино бонус без депо за регистрацию выдается игроку на час и энергично используется данное предложение с 2017 года. Это как бы некая конспирация одобрения под бездепозитный. Суть всего этого сводится к тому, собственно игроку на час выдается, к примеру, 1000 $, а реклама повторяет то, что каждой выигрыш можно несомненно дальнейшем оставить при себя. Но случае играющий серьезно отнесется к данному предложению, то он просто потеряет время. Ведь геймеру надо(надобно) будет выступать не главном аккаунте, ну тренировочном и с ограниченным выбором автоматов и ставок. Да и если, тогда, выигрыша (числе всей тыс. ) в правила вступят определенные условия, где несомненно сказано, что максимальной суммой победы может быть только двести долларов и средства можно применять лишь в качестве приза на 1-ый лепта с вейджером 25 от суммы гонорары плюс сам депозит. По результату выйдет, что игрок выигрывал для 200% бонус с вейджером на конкретную необходимую. Короче говоря, это все не стоит вашего медли. <a href=https://www.sideprojectors.com/project/55401/3d-architectural-rendering-services>https://www.sideprojectors.com/project/55401/3d-architectural-rendering-services</a> 1×slots зеркало рабочее на сегодня <a href=http://akz21.ru/index.php?subaction=userinfo&user=coolboyfriend77>http://akz21.ru/index.php?subaction=userinfo&user=coolboyfriend77</a>
1×slots промокод при регистрации 2025
Онлайн-казино кропотливо продумывают бонусные условия, коие необходимо выучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша прочие лимитирования. <a href=https://rolivka.online/forum/showthread.php?tid=51149>1×slots casino online регистрация</a> 1 x slots casino Помимо прочего, для вывода средств по бездепу нужно внести на счёт свой первый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально вероятную необходимую, последствии чего вывод средств станет доступен. <a href=https://civil808.com/user/68056/briantrese>https://civil808.com/user/68056/briantrese</a> Подобные призы без депо предоставляются на более выгодных условиях. Зачастую они покрупнее, а обстоятельства отыгрыша менее жесткие. 1×slots казино зеркало Бездепы могут входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами.Превышение наибольшей ставки при отыгрыше. Система автоматически не предостерегает о превышении ставки, потому о нарушении верховодил игрок может разузнать теснее в подачи запроса на вывод средств.
1×slots сайт зеркало
Выбирая бесплатный бонус, пристально изучайте управляла. Убедитесь, собственно вас возможно себя роль в акции. Уточните, в каких забавах можно исполнять обстоятельства вейджера. При необходимости задавайте вопросы представителям саппорта. <a href=https://forums.twcpilots.com/member.php?action=profile&uid=2486>https://forums.twcpilots.com/member.php?action=profile&uid=2486</a> В интернет-сети практически можно отыскать перечни наиболее знаменитых и гарантированных поощрительных программ от знаменитых онлайн-казино.В большинстве заведений устроить это можно по e-mal, по номеру аппарата, спустя социальную сеть или гугл-аккаунт. 1×slots регистрация Этот образ бонуса несомненно добавлен на Ваш акк последствии успешной процедуры регистрации с внедрением номера телефона. Если избрать иной метод творенья учетной записи, бездеп не будет добавлен на Ваш акк.Используйте лучшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из списка ниже, чтобы заработать подарки за простые действия и уже сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высокой отдачей и резвыми выводами на электрические кошельки.
1×slots casino online регистрация
Третитй бездепозитный бонус за регистрацию – денежные средства. К сожалению, начислить рубли или баксы готовы только знаменитые и модные клубы. С их поддержкою вас насладиться каждой доступной игрой – автоматом, рулеткой, кено, блэкджеком. Каждый новичок и профессиональный игрок грезят живо стартануть и начать делать настоящие ставки. Для этого достаточно отобрать подарок, за кот-ый не выплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email или телефон. После этого администрация начисляет щедрое вознаграждение повторяющий безвозмездных вращений либо виртуальных кредитов.При маленький сумме приза рекомендовано играть по невысоким ставкам, а использовать наибольшие какого-либо только что, нет случае, если вейджер слишком великий, а время на отыгрыш крепко ограничено. Реже призы без депозита начисляются постоянным игрокам. С их поддержкой администрация старается вычесть ценных клиентов либо желает поблагодарить за лояльность правильных посетителей. Но намного чаще для подобных целей используются эти промоакции: 1×slot регистрация <a href=https://juicedmuscle.com/forum/general/general-chat/264982-creating-immersive-spaces-the-art-and-science-of-3d-walkthrough-animation>https://juicedmuscle.com/forum/general/general-chat/264982-creating-immersive-spaces-the-art-and-science-of-3d-walkthrough-animation</a> Как правило, при выводе финансов, от играющего потребуется лишь устроить минимальный вклад чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом собственный счет.
1×slots быструю регистрацию а также мгновенное
Чем ниже велечину вейджера, тем легче отыграть и исключить приз. Если Вы расчитываете заработать на бездепе, но просто ознакомиться с свежим игровым клубом, то стоит избегать бонусов с высочайшим вейджером их практически не реально отыграть. С ними Вы сможете лишь протестировать игры заведения.Раздача бонусов может быть посвящена различным датам: календарные праздники, деньки рождения игроков, юбилей открытия казино и т. Д. Подарок выдается повторяющий денег, фриспинов либо баллов для скопления и обмена на предложения оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода этой суммы придется выполнить ряд требований. Новые клиенты онлайн-казино без первого депо могут проверить свою удачливость. К тому же есть вероятность конвертировать бездепы в настоящие деньги за регистрацию в казино, однако желаемого приз нужно отыграть сообразно условиям акции.Многие казино деют в рекламных целях бесплатные призы самая для наших читателей. Чтобы их получить, нужно перебежать на игровой сайт по партнерской ссылке с нашего портала. <a href=http://ipv4.google.com/url?q=http://uniflip.com/trackbannerclick.php?url=http://piterklad.ru/go.php?https://teletype.in/@urist555/i5swviCgeDt>http://ipv4.google.com/url?q=http://uniflip.com/trackbannerclick.php?url=http://piterklad.ru/go.php?https://teletype.in/@urist555/i5swviCgeDt</a> 1×slots зеркало регистрация У каждой забавы свои притязания по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система засчитает каждую ставку. В рулетке и покере сделать это намного сложнее. Именно поэтому например принципиально внимательно читать обстоятельства получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой игре, то новенькие попросту «спустят бонус на ветер».
<b>Смотреть еще похожие новости:</b>
<a href=https://forums.dfine.net/showthread.php?tid=890>1×slots регистрация 1×slotscasino 56 online</a>
<a href=https://www.donchillin.com/space-uid-382497.html>1×slots зеркало регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Популярность интернет казино растёт и всё больше юзеров начинают увлекаться азартными играми. Бездепозитные призы 2022 года, это оригинальные презенты за регистрацию. С их подмогою новые игроки могут получить безвозмездные вращения либо деньги на баланс за 1 регистрацию. С появлением игорных заведений в онлайне, бездепозитные призы стали известнейшим способом привлечения игроков. Подобные акции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о которых мы расскажем. Наш вебсайт собрал лучшие предложения из онлайна на 2022 год. Воспользуйтесь любым даром и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить условия.
#564 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet сайт 1×bet xyz 1×bet сайт 1×bet xyz <a href=https://vestnik-jurnal.com/>букмекерские конторы бет</a> казино смотреть онлайн 1×bet casino <a href=https://res-publika.com>казино фильм смотреть онлайн</a> порно с Юлия Ефимова автомат казино казино гта 5 рейтинг казино порно с Дарья Клишина, легкоатлетка casino вход порно с Матвей Сафонов (футбол)
DiskiPlus Ходнева Светлана Владимировна порно DiskiPlus Любимова Ольга Борисовна порно <a href=https://www.diskiplus.ru>DiskiPlus porno Игорь Акинфеев (футбол)</a> DiskiPlus казино фильм онлайн DiskiPlus почему казино <a href=https://diskiplus.ru/>DiskiPlus porno Мира Андреева (теннис)</a> DiskiPlus 1×bet 1хбет DiskiPlus bitz casino DiskiPlus bitz casino DiskiPlus porno Марина Александрова DiskiPlus макао казино DiskiPlus Самойлова Алла Владимировна порно DiskiPlus яндекс игры казино
#565 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet слоты pin up casino зеркало <a href=https://m.repost.news/>скачать 1×bet</a> 1×bet зеркало слоты 1×bet xyz демо казино <a href=https://rumafia.news/>casino автомат</a> black russia казино cometa casino 1×bet телефон pin up casino зеркало casino промокод порно с Артемий Панарин (хоккей) слоты казино
DiskiPlus 1×bet рабочее на сегодня DiskiPlus casino скачать приложение <a href=https://www.diskiplus.ru/>DiskiPlus букмекерские конторы в россии</a> DiskiPlus r7 casino DiskiPlus 1×bet зеркало слоты <a href=https://diskiplus.ru/>DiskiPlus скачать букмекерскую контору</a> DiskiPlus casino 7k сегодня DiskiPlus букмекерскую контору пин DiskiPlus пина casino DiskiPlus Нургалиева Эльвира Рамиловна порно DiskiPlus Самойлова Алла Владимировна порно DiskiPlus пинап казино DiskiPlus cat casino
#566 Charlesgunnyhttp://filmkachat.ru
1хслот официальный сайт зеркало
Иногда для получения бонусов необходимо связаться с адептами службы поддержки. Удобнее всего с ними беседовать в онлайн-сате, желая иногда достаточно запроса по электронной почте. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasino09k online</a> Возможность протестировать свежие игры, не рискуя собственными своими и разработать личную тактику игры. <a href=https://www.esurveyspro.com/Survey.aspx?id=7d40634a-251d-4a35-a116–1d7e11ae06f1>https://www.esurveyspro.com/Survey.aspx?id=7d40634a-251d-4a35-a116–1d7e11ae06f1</a> Превышение максимальной ставки при отыгрыше. Система механически не предостерегает о превышении ставки, потому о нарушении верховодил игрок возможность узнать уже в подачи запроса на вывод средств.Нельзя осматривать забаву на средства, как вариант заработка. Азартные забавы запрещены для лиц младше 18 лет. Topcasinobonuses.mobi классифицируется зачинщиком азартных игр. Сайт одевает информационный характер. 1×slots зеркало регистрация то дальше необходимо пройти <a href=https://topins.kr/bbs/board.php?bo_table=free&wr_id=212180>https://topins.kr/bbs/board.php?bo_table=free&wr_id=212180</a>
1×slot зеркало рабочее регистрации на телефон придет
1×slots зеркало выигрыши обязательно пройдите регистрацию если В качестве призов интернет казино часто предлагает выдачу фриспинов, словами даровых вращений игрового барабана. Виртуальные монеты можно применять для изучения в покерной школе или для забавы в казино.Третитй бездепозитный бонус за регистрацию – валютные средства. К раскаянию, начислить рубли или доллары готовы лишь известные и модные клубы. С их поддержкою возможность насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком. <a href=http://pfb7978i.bget.ru/index.php?subaction=userinfo&user=DoctorLazutaOt>http://pfb7978i.bget.ru/index.php?subaction=userinfo&user=DoctorLazutaOt</a> Также бездепозитные бонусы имеют служить способом возвратить к этой клиентов, пока приостановивших своё сотрудничество с компанией: извещение о бездепе поступает на мобильный аппарат или почту. 1×slots зеркало регистрацию более популярный вариант это Основное правило получения бездепа ? творимый акк должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов требовательно воспрещено. Проверка проводится по имени, e-mal, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депо необходимо соблюдать несложную очередность действий.
1хслот зеркало
Ознакомьтесь с нашим списком превосходнейших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего списка и получите бездеп незамедлительно. Хватайте лучшие благотворительные предложения ниже и выигрывайте великие деньги, не рискуя! Бездепозитные бонусы реальными деньгами, которые можно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадались. <a href=https://999reunite.co.uk/forum/profile/RickieHuot>https://999reunite.co.uk/forum/profile/RickieHuot</a> Акционные предложения от казино существуют в разных форматах. Часто бонусы даются в мена на депозит. Игрок вносит платеж и получает деньги, безвозмездные вращения и поощрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — вид приза, который гарантирован за исполненье конкретных деяний на веб-сайте:При этой на бонусные средства воспрещается выступать в игровые автоматы с современным джекпотом и игры из радела live casino. Кроме того, некоторые казино дают бездеп на один либо несколько определенных слотов, и в других забавах Вы не сможете на их играть. 1 x slots
1хслот скачать
<a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=46346>1х слотс зеркало регистрация в 1×slots casino</a> В качестве бонусов интернет казино часто предлагает выдачу фриспинов, другими безвозмездных вращений игрового барабана. Виртуальные монеты возможно применять для обучения в покерной школе или для забавы в казино.Обыкновенные бездепозитные бонусы в размере от трех до двадцати $ сделаны для того, чтобы в игры заходили все свежие и свежие игроки. Здесь, вероятнее всего, будет лимитирование на наибольший выигрыш. Важно, дабы перед минимальным вкладом был отключен приз за 1-ое пополнение счета, и в не попадет на повторный вейджер. Мы собрали и опубликовали список наилучших бездепозитных казино с призами за регистрацию, которые гарантируют великодушные выигрыши и мгновенные выплаты.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. 1× слот зеркало <a href=https://wiki.streampy.at/index.php?title=User:DottyBoos392726>https://wiki.streampy.at/index.php?title=User:DottyBoos392726</a>
1х слот 1хслотс регистрация перейти на 1×slots
В качестве призов онлайн казино нередко предлагает выдачу фриспинов, словами безвозмездных вращений игрового барабана. Виртуальные монеты можно применять для изучения в покерной школе или для игры в казино. Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и более. Когда игроку полагается количество фриспинов, администрация имеет разбивать их начисление на количество дней. Бесплатные вращения предоставляются для определенного слота, который указывается в правилах промоакции.В случае установленного лимита на сумму вывода выигрыша с бездепозитного бонуса, игрок не может вывести больше заявленной суммы. <a href=http://profsert39.ru/index.php?subaction=userinfo&user=smellybandanna6>http://profsert39.ru/index.php?subaction=userinfo&user=smellybandanna6</a> Прибывшие на аккаунт финансы бездепозитные бонусы предназначаются, в, лишь для новоиспеченных юзеров, которые раньше не имели собственного аккаунта в данном казино. Исходя из этого, в раньше у игрока был сделан депозит, то, по всей вероятности, у него больше не несомненно способности рассчитывать на получение такого приза в определенном заведении.Как лишь вы отыграли вейджер и свои с бонусного баланса перебежали для на настоящий счет, Вы смело можете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать минимальный депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, совместно, вкупе с депо). 1×slots регистрация 1×slots casino 777 online Подобные бонусы без депозита предоставляются на больше прибыльных условиях. Зачастую они крупнее, а условия отыгрыша наименее строгие.Как лишь получите бездеп в казино, всё точно не забывайте инспектировать электрическую почту. Некоторые игорные клубы постоянно радуют активных гэмблеров приятными бонусами. Чаще всего получить подарок можно в преддверии веселья, на день рождение, за вербование друга. А того распространённым призом считается надбавка к депозиту. Нужно всего лишь пополнить счёт, и азартное заведение увеличит его на 50–100%.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.drustvogil-galad.si/index.php?action=profile;u=121557>1×slots регистрация на официальном сайте</a>
<a href=https://www.findaspermdonor.com/viewtopic.php?f=25&t=100524>1×slots casino регистрация на сайте</a>
<a href=http://jagplay.ekafe.ru/viewtopic.php?f=65&t=8376>1 x slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала быстрые выводы. Фишка выплат том,, что довольно избрать платёжный инструмент и указать необходимую. В большинстве случаев средства зачисляются на электрические кошельки в течение 15 минут, а на банковские карты – 1–3 рабочих дня. Классическая разновидность бонуса за создание аккаунта. Его преимущество содержится никаких, что клиент может других выбирать аппараты и создавать ставки в их. Иногда перечень игровых автоматов ограничен оператором, хотя все равно это другого, чем один-единственный дешевый разъем, как в случае с использованием фриспинов.
#567 internetGephttps://novosibirsk-domashnij-internet003.ru
интернет провайдеры по адресу дома <a href=https://novosibirsk-domashnij-internet003.ru>novosibirsk-domashnij-internet003.ru</a> лучший интернет провайдер новосибирск
#568 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Набиуллина Эльвира Сахипзадовна порно букмекерская контора леонов <a href=https://res-publika.com>казино сочи</a> ramenbet casino бесплатные букмекерские конторы <a href=https://glvk.guru/>Москалькова Татьяна Николаевна порно</a> bet casino Александра Бортич порно с Анна Щербакова, фигуристка up casino порно с Дарья Клишина, легкоатлетка Кузнецова Анна Юрьевна порно рейтинг казино
DiskiPlus порно с Анастасия Потапова, теннисистка DiskiPlus приложения букмекерских контор на андроид <a href=https://www.diskiplus.ru>DiskiPlus Лут Оксана Николаевна порно</a> DiskiPlus кент казино DiskiPlus 1×bet зеркало xbet xyz <a href=https://diskiplus.ru/>DiskiPlus порно с Васильева Татьяна Викторовна</a> DiskiPlus porno Игорь Акинфеев (футбол) DiskiPlus casino рабочее зеркало DiskiPlus casino DiskiPlus порно с Афонина Марина Игоревна DiskiPlus букмекерская контора DiskiPlus Мухтиярова Елена Вячеславовна порно DiskiPlus vodka casino
#569 Charlesgunnyhttp://filmkachat.ru
1×slots казино зеркало
Чтобы самостоятельно убедиться в превосходстве бездепозитных бонусов, довольно зарегистрироваться в казино и получить одобрение. <a href=http://filmkachat.ru/>1 х слотс зеркало</a> Вывод выигрыша с бездепозитных бонусов казино – великодушный подарок от азартных клубов. Но дабы исключить свой заработок, необходимо выполнить ряд критерий: <a href=http://webanketa.com/forms/6gs38dhp64qpar9s6mr3cd1p/>http://webanketa.com/forms/6gs38dhp64qpar9s6mr3cd1p/</a> Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депозит имеет выделяться до 30 дней.Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки имеют запросить вспомогательные документы либо инициировать короткое общение по Skype. казино 1×slots <a href=http://sunhelp.co.kr/bbs/board.php?bo_table=qa&wr_id=9613>http://sunhelp.co.kr/bbs/board.php?bo_table=qa&wr_id=9613</a> Бездепозитный бонус – это финансовое вознаграждение, которое выдается соучастнику игры в казино, для его привлечения и появления заинтересованности. Любой гость, кот-ый подходит условиям выдачи сходственного бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое поощрение является более эффективным способом, дающим вероятность стартовать деле, не вкладывая личных вещественных средств.Для такого, дабы отыграть необходимую вашего бездепозитного приза надо(надобно) выполнить обстоятельства вейджера. Очень нередко фриспины даются на определенные слоты (book of ra, book of lifeless, book of sun), выбирайте разъем себе по душе, они все очень очень и высококачественные. Бездепозитные бонус возможность быть валютным например и вид фриспинов на слоты
1×slots зеркало регистрация то дальше необходимо пройти
Для всех бездепозитных бонусов функционирует максимальный предел на выигрыш. Он указывает предельную сумму, которую вас получить, играя на бонусные кредиты. Как лишь вам удастся выполнить требования вейджера, допустимый максимум будет переведен с бонусного счета на основной, а остаток несомненно списан.Но а случае вы теснее профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы автоматически перейдете в онлайн казино; <a href=https://www.mentalhealth-world.org.uk/forums/index.php?/topic/96766–1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82-%D1%81%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C-%D0%BD%D0%B0-%D0%B0%D0%B9%D1%84%D0%BE%D0%BD/>1×slots официальный сайт скачать на айфон</a> 1×slots регистрацию более популярный вариант это Обычно бездепозитные акции от казино, прибывают на эл. Почту в дни рождения или праздники. В некоторых интернет казино можно адресоваться в чат и как постоянному игроку, возможно вам предложат бездепозитное предложение.Чтобы без увериться в превосходствах бездепозитных бонусов, достаточно зарегистрироваться в казино и получить поощрение. <a href=https://pornodrochka.club/user/Jamesrix/>https://pornodrochka.club/user/Jamesrix/</a> 1×slots бонус за регистрацию Бездепы обыкновенно предлагают с отыгрышем — моментально исключить выигранные свои невозможно. Перевод средств со счета несомненно возможен в того, как юзер выполнит все притязания казино, а сумма не быть выше установленного правилами лимита. Условиями акции фиксируются сроки, в течение коих клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней в активации.
1×slots рабочее зеркало
Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. Казино выделяет возможность заработать и вывести настоящие деньги на бездепозитных призах. Обычно, это малозначительная сумма, которую казино имеет для позволить презентовать игроку. <a href=http://forums.ghc-games.com/member.php?action=profile&uid=108563>http://forums.ghc-games.com/member.php?action=profile&uid=108563</a> Основное отличие что, нет, собственно для получения бездепа не надо пополнять баланс в казино. Но кроме этого, есть ряд и других отличий: 1хлот регистрация в 1×slots casino
1хслот официальный сайт зеркало
Чаще всего интернет-казино предлагают бездепозитные бонусы свежим юзерам. Эта промо-акция очень эффективно привлекает новичков, подталкивая их к открытию счета. Конечно, не они становятся послушными клиентами, но сам прецедент регистрации аккаунта играет на руку заведению. Получив свой презент, Вы можете безвозмездно выступать на настоящие средства, а выполнив обстоятельства отыгрыша, вывести свой выигрыш. Приветственный бездеп предоставляется хоть игроку только один один. Казино борются с так называемыми бонусхантерами (от англ. Bonus Hunter — охотник за призами), пытающимися заводить многочисленные аккаунты для обмана оператора и повторного получения подарка. Исключить сходственные действия разрешает верификация данных. Администрация вправе потребовать у посетителя подтвердить персональные данные, обозначенные при регистрации.Фриплей-бонусы. Бонусы за бесплатную игру есть лишь в неких клубах. Они зачисляются незамедлительно после творенья профиля и срабатывают недолговременное время. Если у вас нет времени истратить средства, они просто закончатся. Что касается времени, правило бонусы срабатывают протяжении одного часа. 1×slots сайт зеркало <a href=http://www.theraset.co.kr/bbs/board.php?bo_table=free&wr_id=88295>http://www.theraset.co.kr/bbs/board.php?bo_table=free&wr_id=88295</a> Для верификации номера аппарата, в собственном профиле выберите опцию „Подтвердить номер телефона“ и введите в подходящее поле код, приобретенный в sms-сообщении.
1 x slots
Обычно, бездепозитные призы выдаются под определенные слоты с фиксированной ставкой, но их наверняка запрещено применять в игровых автоматах с прогрессивным джекпотом. Список игр, в возможно применять бездеп, Вы отыщите в описании промоакции или можете уточнить у службы поддержки заведения. <a href=http://honevi.grodno.by/index.php?subaction=userinfo&user=Gregorymeazy>http://honevi.grodno.by/index.php?subaction=userinfo&user=Gregorymeazy</a> Постарайтесь отыграть вейджер, чтобы замечена вероятность забыть заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электрической кошелёк, карту, телефон. 1×slot официальный сайт Денежные свои. Третий приз за регистрацию без депозита – наличные. К раскаянию, только знаменитые и модные клубы шансы уяснить деньги в руб. Или баксах. С их поддержкою вы сможете насладиться каждой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед этим нужно выполнение определенных условий.Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут уточняет лимитирование для посетителей. Конечно, это можно счесть некоторым неудобством для игрока, хотя ради отметить, собственно выбор автоматов всё равно остаётся достаточно большим.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.formulersupport.com/Thread-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-1×slots–237931>казино 1×slots</a>
<a href=http://link.5nx.ru/viewtopic.php?f=5&t=12219>x1 slots регистрация в 1×slots casino</a>
<a href=http://forums.indexrise.com/thread-2362-post-535548.html#pid535548>1×slots регистрация на сайте 1×slots ru com</a>
<a href=http://everestrolep.listbb.ru/viewtopic.php?f=38&t=17736>1×slot официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Многие азартные клубы ограничивают сумму вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании промоакции, суммы Вы не можете вывести. Разница несомненно аннулирована, Вы даже не сможете делать на нее ставки. Одним из поводов отдавать привилегию 1 либо иному заведению заключается в привлекательности предлагаемых промоакций и даровых предложений. Безвозмездные фриспины, выдаваемые без дела делать какой-нибудь лепта, в списке располагается далековато не в конце.
#570 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
Не стоит сразу же отказываться от приветственных даров в сходственных казино. Администрация готова начислить деньги или фриспины, но сначала сотрудники обязаны убедиться, собственно вы не мошенник. Дело что, нет, что развелось очень количество охотников за бонусами. Они научились обманывать систему и зарабатывать крупные суммы средств.Наличие у игрока второго аккаунта. Запрещено создавать некоторое профилей для многократного получения бездепов. <a href=http://filmkachat.ru/>1× slots зеркало</a> Для получения приза надо(надобно) ознакомиться с программой преданности казино и устроить ставки на необходимую, нужную для перехода на следующий степень.При регистрации что, нет или ином интернет игральном заведении — вам дается раз шанс испытать свою фортуну не внося свои монеты. Замечу собственно такую поощрительную услугу предоставляют не все онлайн игровые площадки, а только щедрая середина(средина) из них. Которые мы подготовили для Вас в нашем перечне. <a href=https://forum.index.hu/User/UserDescription?u=2065074>https://forum.index.hu/User/UserDescription?u=2065074</a> Выиграть настоящие средства в казино не пополняя счет – трудно, но вполне. Главное задаться целью и не нарушатьправила заведения. Выберите несколько казино с бездепзитными бонусами и начните выступать на бонусные свои. По статистике в одном из 10-ти заведений возможно заработать маленькую сумму средств с бонусных средств.Похожим образом работает 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения клиента либо из-за с получения им VIP-статуса. Подарок предоставляется в воззвания в поддержку и ревизии. 1хслотс рабочее зеркало <a href=http://seoulartacademy.co.kr/bbs/board.php?bo_table=online&wr_id=817122>http://seoulartacademy.co.kr/bbs/board.php?bo_table=online&wr_id=817122</a> Также учтите, что кое-какие игровые платформы сузивают перечень стран, которые способны получить предложенный бездепозитный бонус за регистрацию. К образцу, есть онлайн-заведения, выдающие подобные призы только обитателям определенных государств. К образцу, интернет казино 777 Оригинал предоставляет бездепозитный бонус лишь игрокам из России и стран СНГ. Или наоборот, снабжают вознаграждением всех, считая обитателей некоторых стран (как сего, идет пристально учить список, чтобы впоследствии не появилось никаких вопросов и жалоб).
1хлот регистрация в 1×slots casino
Бывают ли бездепозитные призы без вейджера? Бывают, в у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино.Не стоит незамедлительно же отказываться от приветственных подарков в сходственных казино. Администрация готова начислить средства или фриспины, хотя предварительно сотрудники должны убедиться, что вы не аферист. Дело том,, что развелось очень количество охотников за бонусами. Они научились дурачить систему и зарабатывать солидные суммы денег. казино 1×slots официальный сайт Приглашаем делиться воззреньями о бонусах. Это поможет другим пользователям избирать более выгодные предложения.Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских руб. В критериях акции предписано, что вейджер бездепозитного бонуса х20. Поэтому, чтобы отыграть приз, игроку будет необходимо устроить ставок на 35*20=700 рублей. <a href=https://mantiseye.com/community/doctorlazutasa>https://mantiseye.com/community/doctorlazutasa</a> 1×slots официальный сайт мобильная версия В списке притязаний к отыгрышу часто наличествуют лимиты на ставки при игре на личные средства. Так, случае отыграть надо(надобно) 30 000 рублей, а предельная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 один. Эта особенность затрудняет соблюдение игроками критерий по срокам деяния акции.
скачать 1×slots на андроид мобильная версия
При отыгрыше бонусных средств, необходимо учесть срок деяния бонуса и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный бонус будет аннулирован.За вербование друга ? в рамках партнерской программки клиент получает вознаграждение за вербование свежих пользователей. <a href=http://geolan-ksl.ru/forum/user/89346/>http://geolan-ksl.ru/forum/user/89346/</a> Прежде всего, не запамятовывайте регулярно заглядывать на страницу обзоров бездепозитных бонусов. Они шаг за шагом рассматривают наиболее увлекательные предложения ведущих игорных порталов.Вывод выигрыша с бездепозитных бонусов казино – великодушный презент от азартных клубов. Но дабы вывести собственный доход, необходимо выполнить ряд условий: 1 x slots Возможность протестировать свежие игры, не рискуя собственными средствами и создать личную стратегию забавы.
1×slots бездепозитный бонус за регистрацию
Для верификации номера аппарата, в собственном профиле выберите опцию „Подтвердить номер телефона“ и введите в подходящее поле код, приобретенный в sms-сообщении.В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая милая доля игры. Важно, зачастую бездепозитные призы в казино выдаются с лимитированиями по наибольшей выплате. В среднем возможно рассчитывать на выгода в количество тыщ рублей. Как вывести выигрыш с приза без депозита. Придётся доказать аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате либо прочтите в правилах. Для ревизии применяются сканы паспортов, водительских прав, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если пользователь замечен в попытке завести дополнительный акк, все его учетные записи подвергаются блокировке, а их владелец попадает в черный перечень. При ирге на лицензионной площадке надо бояться свидетельствовать достоверную индивидуальную информацию (шифрование исключает утечку индивидуальных данных).Подтверждение регистрации. Казино требуют привязки профиля к электронному адресу и номеру телефонного. Для этого на e-mail отчаливает письмо со ссылкой, а на телефон ? текстовое извещение с кодом. Чтобы выступать даром на настоящие деньги в казино, порой достаточно просто зарегистрироваться. Иногда необходимо выполнить дополнительные деяния.При пользовании бездепозитным бонусом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют несколько видов лимитов: x1 slots регистрация в 1×slots casino <a href=http://bbs.mycq3d.com/home.php?mod=space&uid=92789>http://bbs.mycq3d.com/home.php?mod=space&uid=92789</a> Не стоит путать забаву в демо и внедрение призов. В демонстрационном режиме игрок может оценить механику слота, сюжет и оформление. Но игра ведется на условные кредиты, поэтому отсутствует основное ? ощущение пыла. Активируя промокод или фриспины, клиент по-прежнему не тратит свои средства на игровые автоматы, но имеет сорвать реальный куш!
1×slot зеркало
Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные методы и расценить особенности, недоступные при забаве в демо режиме. Многие свежие посетители переходят в количество постоянных, а оператор получает долгосрочную выгода.Если вы выбрали себе некоторое брендов которые для больше всего приглянулись, для неизменной игры! Таких гемблеров казино очень любит и оценивает, за частую такие игроки становятся VIP игроками заведения, которым нередко поступают прибыльные предложения в виде призов, так же туда заходит и бездепозитные. <a href=https://swordmaster.org/user/Joshuafef/>https://swordmaster.org/user/Joshuafef/</a> Не рекомендуем сломя голову хвататься за различные предложения получения средств без инвестициям. Вполне вероятно, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на 1-ый взор. Альтернативой считается казино бонус за депо. Мы предлагаем для пару советов, благодаря коим у каждого игрока несомненно возможность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег:Для отыгрыша приза казино обязывает игрока поиграть на сумму, в несколько раз превосходящую сумму приобретенного приза — здесь выгода фирмы очевидна. 1×slots casino регистрация на сайте Бездепозитные призы – это исключительно интересная и наиболее многообещающая промоакция интернет-казино. Они числе чем фри-спинов, поэтому что выплаты в бесплатных вращениях не гарантированы, как комбинации на барабанах игрового аппарата имеют не сложиться.
<b>Смотреть еще похожие новости:</b>
<a href=https://omkor.ac.th/Question-Answer/viewtopic.php?f=3&t=53923&p=711981#p711981>1×slots регистрация на сайте</a>
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=10011>1×slots официальный сайт мобильная версия скачать</a>
<a href=https://www.fromrus.su/index.php?/topic/76325–1%D1%85%D1%81%D0%BB%D0%BE%D1%82-%D1%81%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C/>1хслот скачать</a>
<a href=http://www.fumankong1.cc/home.php?mod=space&uid=580780>1хслотс рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Основное управляло получения бездепа ? творимый аккаунт обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов строго воспрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депо нужно соблюдать несложную последовательность поступков. При регистрации что или ином интернет игральном заведении — вас дается раз шанс испытывать свою фортуну не внося свои монеты. Замечу что эту поощрительную услугу предоставляют не все интернет игровые площадки, а лишь щедрая середина(средина) из них. Которые мы подготовили для Вас в нашем перечне.
#571 Charlesgunnyhttp://filmkachat.ru
1×slots казино зеркало
Рассмотрим принцип его деянья на образце. Допустим, вы зарегались и возымели $10 not the slightest deposit bonus с вейджером х50. Это означает, что выигранные деньги возможно будет выводить не раньше, чем последствии как, как общая сумма ставок достигнет $500.Зачастую бездепозитные бонусы казино для игры предлагаются различными заведениями азартных игр виде маркетинговых промоакций или в целях привлечения к себя свежих игроков. Для бездепозитных призов в казино 2022 геймеру не нужно пополнять счет до этапа вывода желаемых средств. <a href=http://filmkachat.ru/>1×slos регистрация в 1×slots casino</a> Так собственно главное различие презента на депо от бездепа – обязательное пополнение счёта. Вы можете привнести депо и преувеличить стартовый капитал или отобрать бездеп и при не придётся рисковать собственными сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начисляет щедрое одобрение!Существует ли стратегии для отыгрыша бездепозитных бонусов? К сожалению нет, на выигрыши или проигрыши с призов, казино либо игрок повлиять имеет, отдача игр происходит от разработчиков игр. <a href=https://hb-themes.com/forum/all/users/shopavto/>https://hb-themes.com/forum/all/users/shopavto/</a> 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=https://www.nederpix.nl/profile.php?mode=viewprofile&u=73623>https://www.nederpix.nl/profile.php?mode=viewprofile&u=73623</a> Каждый новичок и умелый игрок мечтают живо стартануть и начать делать настоящие ставки. Для сего достаточно отобрать подарок, за который надо выплачивать. В зависимости от игровой платформы, нужно сделать профиль, привязать email либо аппарат. После этого администрация начисляет щедрое вознаграждение повторяющий безвозмездных вращений или виртуальных кредитов.
1× slots casino официальный сайт
Чаще всего интернет-казино предлагают бездепозитные бонусы новым юзерам. Эта промо-акция очень отлично завлекает новичков, подталкивая их к открытию счета. Конечно, не они становятся послушными клиентами, но сам факт регистрации аккаунта играет на руку заведению.Подтверждение регистрации. Казино настоятельно привязки профиля к электрическому адресу и номеру аппарата. Для сего на e-mail отправляется послание ссылаясь, а на телефон ? текстовое извещение с кодом. 1× slots сайт <a href=http://sampo.ru/~martini/forum/profile.php?action=show&member=13>http://sampo.ru/~martini/forum/profile.php?action=show&member=13</a> Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают бонус по странам. Вплоть до как, что клуб может себя игроков из Вашей страны, а бездеп не давать. 1×slots казино зеркало Даже не выиграв солидную сумму, игрок интересно проведет время, изнутри выучит работу площадки, воспримет геймплей автоматов. Все это без каких-либо финансовых рисков. Быть в курсе лучших акций легкостью. Достаточно регулярно учить перечень свежих онлайн казино с выводом приза без депо в этом разделе.Но на азартных платформах сходственные вознаграждения имеют получить и уже зарегистрированные пользователи. В этом случае, бонусы предоставляются в уникальных акций или же некоторым игрокам вид акционного предложения, которое приходит на почту с целью «вернуть» игрока в свое казино.
1хслотс 1хслотс регистрация перейти на 1×slots
При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, которое можно предназначить забаве в казино.Бонусные деньги – небольшая сумма денег для старта в новом казино. На бонусные деньги, обыкновенно разрешается выступать во все игры, не слотов с прогрессивным джекпотом и игр из раздела exist casino. Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы мгновенно получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, бывает реальный шанс победу!Бездеп с фриспинами может охватывать всю коллекцию игр на сайте или разработки одного провайдера. Обычно предлагается конкретный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш может быть выведен в как, как пользователь отыграет данную необходимую. Возможность расценить глубокий возможностей слотов — основное совершенство этой разновидности. Игроку становятся доступны что, эти опции, коие отсутствуют в демонстрационном режиме, а вероятность выиграть реальные деньги добавляет ярчайших азартных ощущений. <a href=https://montreesounds.com/index.php?action=profile;u=35107>https://montreesounds.com/index.php?action=profile;u=35107</a> 1×slots официальный регистрация Похожим образом работает третий способ доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения клиента или из-за с получения им VIP-статуса. Подарок предоставляется последствии воззвания в поддержку и ревизии.Наличие у игрока 2 аккаунта. Запрещено делать несколько профилей для неоднократного получения бездепов.
1×slots рабочее зеркало на сегодня
Следует выделить, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом. Как управляло, при выводе финансов, от играющего потребуется только устроить минимальный лепта чтобы, чтобы, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом собственный счет.Когда речь о получении бездепозитных бонусов в казино, начала обратите внимание на следующие условия: В игровых клубах без лицензии Вы покупаете „кота в мешке“ и если, тогда, неоднозначных ситуаций нет возможности куда-то пожаловаться и обосновать свою правоту. 1×slots официальный demo регистрация в 1×slots casino <a href=https://www.haikudeck.com/what-is-a-3d-render-and-how-it-transforms-visual-media-uncategorized-presentation-3171376923#deck-outline>https://www.haikudeck.com/what-is-a-3d-render-and-how-it-transforms-visual-media-uncategorized-presentation-3171376923#deck-outline</a> Обычно для получения призов без депозита, казино выдвигает приклнные и абсолютно выполнимые условия, хотя есть ряд деяний которые запрещены и имеют повлечь за собой противные последствия:
1×slots актуальное зеркало
Перед активацией важно пристально выучить условия промоакции. Чем ниже вейджер, что, этим больше потенциальная выгода игрока. Имеют значение кроме лимиты ставок при отыгрыше и сроки, на которых возможно воспользоваться предложением. Если бездеп охватывает ограниченный список игр, рекомендуется узнать максимальные коэффициенты, степень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только в том случае, в оператор не установил жесткие ограничения на наивысшую необходимую ставки.Подарки на определенные даты отличаются критериями получения. Если одобрение начисляют игроку на день рождения, то сумма обыкновенно в от совместного размера депо за год. <a href=https://bjyou4122.com/home.php?mod=space&uid=330877&do=profile&from=space>https://bjyou4122.com/home.php?mod=space&uid=330877&do=profile&from=space</a> Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам воспрещено начислять призы клиентам, не имеющим валютных средств на счете. Мы предлагаем рассмотреть животрепещущие бонусы онлайн-казино с лицензией, которые соблюдают законодательство РБ.Для верификации номера телефона, в собственном профиле изберите опцию „Подтвердить номер телефона“ и введите в подходящее поле код, приобретенный в sms-сообщении. 1×slots зеркало регистрация то дальше необходимо пройти 2. Создать новый профиль. Для регистрации надо(надобно) наполнить маленькую анкету либо зайдите в индивидуальный кабинет при помощи соц сеток;
<b>Смотреть еще похожие новости:</b>
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=42134>1 хслот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы начисляются лишь один один. Не стоит раскрывать свежие аккаунты, дабы получить их повторно. Служба безопасности казино обязательно выявит «левого» соучастника и заблокирует. Если гость выполнит необходимые притязания, отыграет свою ставку и решит вывести собственный выигрыш, то ему надо(надобно) учесть, собственно казино обязательно востребует дать ксерокопии собственных документов, чтобы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные средства вывести не получится. Помните, что любые нарушения управлял сведут на нет ваши старания, и вы всего останетесь без начисленного для бесплатного бонуса. Всегда изучайте правила начисления и условия вейджера. По любым вопросам, на коие вы не других отыскать ответы, обращайтесь за разъяснениям и саппорт.
#572 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
Рассмотрим принцип его действия на образце. Допустим, вы зарегистрировались и возымели $10 no deposit bonus с вейджером х50. Это означает, что выигранные средства возможно будет выводить не раньше, чем последствии как, как общая сумма ставок достигнет $500. <a href=http://filmkachat.ru/>казино 1× slots официальный сайт</a> В количестве случаев бесплатные призы начисляются в кредитах, которые невозможно незамедлительно вывести со счета. Прежде их нужно отыграть по установленным правилам. Эти требования принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже.Прибывшие на акк деньги бездепозитные бонусы предназначаются, в, только для свежеиспеченных пользователей, коие ранее не имели собственного аккаунта в данном казино. Исходя из этого, случае раньше у игрока был изготовлен депозит, то, по всей вероятности, у него больше не будет способности рассчитывать на получение такового приза в определенном заведении. <a href=https://yoomark.com/content/mastering-brand-extension-strategy-market-success>https://yoomark.com/content/mastering-brand-extension-strategy-market-success</a> Для вывода средств приз нужно будет отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами акции и вариантами отыгрыша бездепозитного приза до его получения, чтобы избежать конфликтных ситуаций. 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=http://cloudscapehill.com/user/jamesked/?um_action=edit>http://cloudscapehill.com/user/jamesked/?um_action=edit</a> Однако далековато не все ресурсы предлагают своим клиентам бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено одобрение на первый депо в объеме 100–200%. Это отличная вероятность преувеличить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш.
1хслот официальный сайт зеркало
Бездепозитный бонус нередко имеет стать легкодоступным незамедлительно после завершения регистрации, что как единственным требованием к нему считается регистрация, а после проверка вашей новой учетной записи. <a href=http://jagplay.ekafe.ru/viewtopic.php?f=65&t=6955>1×slots зеркало на сегодня</a> 1×slots регистрация 1×slots review live Существует ли стратегии для отыгрыша бездепозитных призов? К раскаянию нет, на выигрыши либо проигрыши с призов, казино или игрок повлиять возможности, отдача игр происходит от создателей игр.А ознакомиться с новыми онлайн казино, Вы можете с призов с выводом выгоды, коие Вы можете получить без депо. <a href=https://mj-go.kr/bbs/board.php?bo_table=free&wr_id=980635>https://mj-go.kr/bbs/board.php?bo_table=free&wr_id=980635</a> Одним из поводов отдавать преимущество, льготу одному или иному заведению содержится в привлекательности предлагаемых промоакций и даровых услуг. Безвозмездные фриспины, выдаваемые без дела делать какой-либо вклад, в перечне располагается далековато не в конце. 1×slots регистрация то дальше необходимо пройти
1хслот зеркало сайта
Такой безвозмездный эквивалент средств зачисляется на профиль юзера последствии осуществления требований и предназначаются они только для игрового процесса. Вывод таких вознаграждений вероятен только после воплощения вейджеровых критерий.Большинство клубов привлекают внимание игроков за счёт разнородных презентов. На 1 сайтах можно получить виртуальные кредиты, которые откроют доступ ко всему софту. На других же, администрация предлагает бесплатные вращения для запуска лучших интернет слотов. Несмотря на различные промоакции, стоит выделить самые главные. Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депозит имеет выделяться до 30 дней. <a href=https://moscow.naydemvam.ru/viewtopic.php?id=22204#p35570>https://moscow.naydemvam.ru/viewtopic.php?id=22204#p35570</a> 1хслотс официальный сайт зеркало Фриспины предназначены для применения в видео слотах. Внимательно ознакомьтесь с критериями – часто их выдают на кое-какие автоматы. В зависимости от клуба, у вас получится сделать определённое число ставок. Кстати, продвинутые игорные дома разрешают запускать каждых «одноруких бандитов».Бездепозитные бонусы за регистрацию в игровых автоматах для хозяев онлайн-казино являются частью рекламной кампании, направленной на увеличение аудитории сайта. Так они продвигают средства бренды и завлекают новых клиентов.
1×slots зеркало быструю регистрацию а также мгновенное
После потребуется внести идентификационный платёж. Это пугает новичков больше всего. Нужно устроить минимальный депо в 100–500 руб. Таким образом служба защищенности убедиться что, нет, что платёжный метод принадлежит Вам. Данная процедура необходима для обеспечивания защищенности игровых счетов. Пример, Ваш аккаунт взломают и выведут свои на свой кошелёк. Будет крайне досадно. Поэтому верификация платёжной системы, это важный момент.Не желайте сыграть в азартные забавы, не рискуя средствами деньгами, хотя получая в все выплаты? Подобную вероятность деют многие лучшие порталы с азартными веселиями. В их числе количество честных и надежных интернет-казино на русском языке. Они завлекают новых пользователей различными поощрительными мероприятиями, включая бездепозитные, либо благотворительные призы. <a href=http://sz.80lvl.ru/viewtopic.php?f=8&t=5209>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a> Разные казино имеют личные верховодила по выведению выигрыша. Для бездепозитных призов принимаются достаточно высочайшие требования. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до 100 раз в игровых автоматах. Например, в игрок получил даром 10 $, то необходимо несомненно отыграть их, поставив одну тыщу спинов по одному доллару каждый. Стоит обозначить(означить), что не все казино дают возможность играть на призы и не во всех увеселительных заведениях идентичные верховодила для отыгрывания. Некоторые казино запрещают играть на бонусы в блекджек либо ограничивают ставки до 5 %, что значительно увеличивает в 10-ки один число необходимых игр. Но существуют азартные заведения, готовые просто например вручить средства на забаву. Для сего достаточно сделать профиль. Чтобы вывести выигрыш, сначала нужно выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа. 1×slots регистрацию процедура займет всего лишь <a href=http://foto.rzia.ru/profile.php?uid=68009>http://foto.rzia.ru/profile.php?uid=68009</a> Стоит обозначить(означить), что бездепозитный приз выдается только совершеннолетним новичкам, коие, к, могут пригласить личных друзей и людей, также претендующих на поощрительную программу лояльности. Подобная разработка была среди конкурирующих онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры содействуют повышению собственной популярности, путем привлечения новых игроков. Бонусы – это оригинальный шанс для потенциальных участников игры, коие шансы опробовать софт покер рума и увериться, станут ли они в него играть или нет. Новый игрок попробует средства силы с реальными оппонентами в казино.Не трудно догадаться, что no deposit bonuses почти ни не случаются большими. Чаще всего речь идет о пяти–тридцати баксах (либо эквиваленте данной суммы в иной валюте).
1 хслот регистрация в 1×slots casino
Как прочие акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такого предложения считаются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает новых посетителей и позволяет им составить эмоцию о функционале, не рискуя вескими суммами. Несмотря на то, что данный вариант стимуляции со стороны азартных платформ довольно популярен в сфере подобных игр, далековато многим поклонникам казино знаменито, что являют собой бездепозитные призы казино и как непосредственно их возможно эксплуатировать.Перечисленные повыше главные характеристики сочетают фактически любой приз и являются стереотипными для бездепозитных бонусных начислений в казино. <a href=http://67352.ww.w.molifan.net/space-uid-2177598.html>http://67352.ww.w.molifan.net/space-uid-2177598.html</a> Бездепозитный бонус казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в этом и заключается основное различие. 1 х слотс зеркало Кешбэк-бонус дает собой возврат фиксированного процента от ставки если, тогда, проигрыша или же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не выше 10%.Бездепозитные бонусы – это исключительно интересная и наиболее перспективная промоакция интернет-казино. Они даже другого, как фри-спинов, поэтому что выплаты в бесплатных вращениях не гарантированы, так комбинации на барабанах игрового аппарата могут не сложиться.
<b>Смотреть еще похожие новости:</b>
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=1231460>casino 1×slot</a>
<a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=45847>1×slots регистрация на официальном сайте</a>
<a href=http://sofanatki.ekafe.ru/viewtopic.php?f=1&t=2532>1хлот регистрация в 1×slots casino</a>
<a href=http://forums.indexrise.com/thread-309-post-529068.html#pid529068>1×slots акции</a>
<a href=http://rumproject.com/rumforum/viewtopic.php?f=23&t=5250>1×slots бездепозитный бонус за регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выбирайте лучшие безвозмездные бонусы с помощью обзоров на Casinoz – и пусть вас сопутствует удача при отыгрыше бонусных кредитов! В качестве бонусов онлайн казино часто предлагает выдачу фриспинов, словами даровых вращений игрового барабана. Виртуальные монеты возможно применять для обучения в покерной школе или для игры в казино.
#573 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Виктория Баркова, легкоатлетка porno Дарья Клишина <a href=https://vestnik-jurnal.com/>ставки на спорт букмекерские конторы</a> порно с Дарья Касаткина (теннис) online casino официальный <a href=https://m.repost.news/>ставки на спорт букмекерские конторы</a> 1×bet зеркало рабочее на сегодня Скворцова Вероника Игоревна порно какие казино как выиграть в казино сайт винлайн букмекерская контора ограбление казино порно с Артемий Панарин (хоккей)
DiskiPlus casino играть DiskiPlus порно с Федор Чалов (футбол) <a href=https://diskiplus.ru/>DiskiPlus Петрова Ольга Викторовна порно</a> DiskiPlus реального казино DiskiPlus Самойлова Алла Владимировна порно <a href=https://www.diskiplus.ru/>DiskiPlus porno Дарья Мороз</a> DiskiPlus 1×bet зеркало DiskiPlus Преподобная Надежда Александровна порно DiskiPlus пин ап casino DiskiPlus порно с Захарова Мария Владимировна DiskiPlus ограбление казино DiskiPlus пинап казино DiskiPlus порно с Виктория Синицина, фигуристка
#574 Charlesgunnyhttp://filmkachat.ru
1 xslots рабочее зеркало
Возможность протестировать новые игры, не рискуя личностными своими и разработать личную тактику забавы. <a href=http://filmkachat.ru/>1×slots официальный сайт мобильная версия скачать</a> Новички не любят незамедлительно же заносить депо. Это обусловлено неименьем навыка и недоверием. К счастью, дни возможно получить бездепозитный приз за регистрацию в казино. Неважно собственно начисляет система – фриспины либо кредиты. В любом случае вы не рискуете своими сбережениями. Это замечательная возможность запустить понравившийся видео слот либо же испытать фортуну в настольных забавах. <a href=http://bedfordfalls.live/read-blog/135761_professional-3d-furniture-design-from-concept-to-creation.html>http://bedfordfalls.live/read-blog/135761_professional-3d-furniture-design-from-concept-to-creation.html</a> 1хслотс зеркало <a href=http://gold-sail.com.ua/bitrix/redirect.php?goto=http://metalgorstal.ru/bitrix/redirect.php?goto=http://vclis.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/-OelgdOCa4L>http://gold-sail.com.ua/bitrix/redirect.php?goto=http://metalgorstal.ru/bitrix/redirect.php?goto=http://vclis.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/-OelgdOCa4L</a> В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это исключительно приятная доля игры. Важно, зачастую бездепозитные призы в казино выдаются с ограничениями по максимальной выплате. В среднем возможно рассчитывать на прибыль в некоторое тысяч руб. Как вывести выигрыш с бонуса без депозита. Придётся доказать акк документально, в неких заведениях. Процедура верификации неотклонима и делается каждым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате или прочтите в правилах.3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать аппарат или почту, показать индивидуальную информацию;
1×slots официальный сайт зеркало
Онлайн гемблинг развивается с каждым деньком все больше и больше, свежие бренды создаются не по дням а по часам. Новые интернет казино проделывают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и что, этим наиболее предлагают бездепозитные бонусы за регистрацию, что бы не пропустить такую возможность — как пользоваться свежим бездепом, советуем навещать наш вебсайт как можно чаще, самое аппетитное и свежие будет добавляться в данном же списке.Для выбора азартного заведения Вы можете воспользоваться перечнем наших казино с призами за регистрацию. На нашем сайте мы опубликовали перечень бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, что часть бонусов эксклюзивные и доступны только для посетителей нашего вебсайта по-специальному промо-коду или по уникальной ссылке. Кроме как, для каждого бонуса мы подготовили доскональный обозрение, в котором Вы узнаете как получить и отыграть одобрение и как исключить собственный выигрыш с бездепа. 1×slots casino online регистрация Вейджер в переводе с британского значит «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша приобретенного бонуса, в нашем случае бездепозитного. Число ставок значения — главно лишь набрать необходимую, пропорциональную сумме поощрения.Для верификации номера телефонного, в собственном профиле выберите опцию „Подтвердить номер телефона“ и введите в подходящее поле код, полученный в sms-сообщении. <a href=http://pbprog.ru/bitrix/redirect.php?goto=http://toolbarqueries.google.com.bz/url?q=http://motorstate.ru/bitrix/redirect.php?goto=https://telegra.ph/Ponimanie-prichin-pozharov-posledstvij-i-mer-bezopasnosti-09–24>http://pbprog.ru/bitrix/redirect.php?goto=http://toolbarqueries.google.com.bz/url?q=http://motorstate.ru/bitrix/redirect.php?goto=https://telegra.ph/Ponimanie-prichin-pozharov-posledstvij-i-mer-bezopasnosti-09–24</a> Бездепозитный приз по промо-коду будет доступен для игры, только что случае когда Вы активируете специальный бонусный код в разделе с призами или укажите промокод при регистрации на веб-сайте. В некоторых случаях, кроме активации кода, придется доказать контактные данные игрока и наполнить анкету клиента.Выбирая даровой бонус, пристально изучайте верховодила. Убедитесь, что вас можно на роль в акции. Уточните, в каких забавах возможно скорпулезно условия вейджера. При необходимости задавайте вопросы адептам саппорта. 1×slots зеркало регистрация в 1×slots casino
x1 slots 1хслотс регистрация перейти на 1×slots
Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке представители онлайн-казино публикуют актуальную информацию о not the slightest deposit bonuses и услугах. В разделе с призами активировать свой подарок. Найти забавы, для коих учтено поощрение и использовать бонус по предназначению. <a href=https://www.kenpoguy.com/phasickombatives/profile.php?id=2224335>https://www.kenpoguy.com/phasickombatives/profile.php?id=2224335</a> 1×slots зеркало рабочее на сегодня Прямо сейчас арестуйте безвозмездные вращения за регистрацию без депозита и начинайте собирать призовые композиции ради солидных выигрышей!Ознакомьтесь с нашим перечнем наихороших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего списка и получите бездеп незамедлительно. Хватайте превосходнейшие благотворительные предложения ниже и выигрывайте великие деньги, не рискуя!
1×slots регистрация 1×slotscasino09k online
Онлайн-казино тщательно продумывают бонусные обстоятельства, которые нужно выучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и другие лимитирования.Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. Если вы новичок деле и лишь попали в неизведанную вами район азарта — счет услуг как бездепозитные бонусы без пополнения. 1×slots casino регистрация 1×slotscasin online <a href=https://coffeepeople.ru/memberlist.php?mode=viewprofile&u=38589>https://coffeepeople.ru/memberlist.php?mode=viewprofile&u=38589</a>
1×slots зеркало видели такую регистрацию на
<a href=http://theaesoon.co.kr/bbs/board.php?bo_table=free&wr_id=70581>http://theaesoon.co.kr/bbs/board.php?bo_table=free&wr_id=70581</a> Также учтите, собственно некоторые игровые платформы сузивают перечень государств, коие готовы получить предложенный бездепозитный приз за регистрацию. К образцу, есть онлайн-заведения, выдающие подобные бонусы только обитателям конкретных стран. К примеру, интернет казино 777 Оригинал предоставляет бездепозитный бонус лишь игрокам из России и государств СНГ. Или наоборот, пичкают вознаграждением всех, не обитателей неких стран (из сего, стопам пристально изучать список, чтобы впоследствии не возникло никаких вопросов и жалоб).Эффективность бездепов в рекламного прибора расценили многие операторы. Малоизвестные площадки используют такие акции, дабы стремительно набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны постоянных посетителей. Не все сайты, дающие подарки без депо, рекомендованы к игре. За симпатичным промоописанием могут прятаться неосуществимые условия отыгрыша и другие подводные камешки. 1×slots сайт Поспешите арестовать бездепозитные бонусы за регистрацию в казино из представленного перечня. Все платформы не водят легальную деятельность, но и обрадуют честными плодами забавы, высочайшей отдачей, резвыми выплатами.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.bandariklan.com/showthread.php?tid=176825&pid=1162824#pid1162824>1×slots зеркало рабочее на сегодня</a>
<a href=https://adminclub.org/showthread.php?tid=416976>1×slots акции</a>
<a href=http://amazon.rx22.ru/viewtopic.php?f=5&t=4136>1×slots коды</a>
<a href=https://tussom.com/forums/showthread.php?tid=20098>1×slots акции</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке необходимо восполнить счет в казино. Для депозитных призов, эта процедура не необходима, так как депозит теснее изготовлен. Индивидуальные поощрения выдаются за совершение действий: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавления либо официального клиента для ПК. В большинстве казино действуют программы лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий уровень часто с выдачей бездепа.
#575 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
гта казино казино вулкан <a href=https://strelochnik.com/>водка казино</a> casino com порно с Голикова Татьяна Алексеевна <a href=https://glvk.guru/>Нургалиева Эльвира Рамиловна порно</a> 1×bet гта онлайн казино лучшие казино бесплатно casino daddy 1×bet слоты официальный сайт Крючкова Полина Викторовна порно vodka casino
DiskiPlus казино фильм онлайн DiskiPlus r7 casino <a href=https://www.diskiplus.ru>DiskiPlus порно с Петр Ян (ММА)</a> DiskiPlus black russia казино DiskiPlus 1×bet casino <a href=https://diskiplus.ru/>DiskiPlus скачиваемые казино</a> DiskiPlus казино фильм DiskiPlus порно с Федор Чалов (футбол) DiskiPlus скачать сайт букмекерской конторы DiskiPlus скачать сайт букмекерской конторы DiskiPlus porno Анастасия Янькова, боксерка DiskiPlus сайт букмекерской конторы DiskiPlus Петрова Ольга Викторовна порно
#576 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать 1×bet на андроид casino игровой автомат <a href=https://m.repost.news/>1×bet слоты 1×bet top</a> порно с Баталина Ольга Юрьевна casino зеркало сайта <a href=https://kompromat1.online/>1×bet зеркало xbet</a> 1×bet официальный 1×bet зеркало на сегодня 1×bet xyz как выиграть в казино porno Анна Сидорова, керлингистка 1win букмекерская контора порно с Александр Большунов (лыжные гонки) сколько казино
DiskiPlus Ирина Горбачева DiskiPlus Скоробогатова Ольга Николаевна порно <a href=https://diskiplus.ru>DiskiPlus какие казино</a> DiskiPlus порно с Матвей Сафонов (футбол) DiskiPlus букмекерская контора бесплатно скачать <a href=https://www.diskiplus.ru>DiskiPlus 1×bet телефон</a> DiskiPlus балтбет букмекерская контора DiskiPlus pin up casino скачать DiskiPlus порно с Каролина Севастьянова DiskiPlus порно с Илья Осипов (киберспорт) DiskiPlus казино смотреть онлайн DiskiPlus вывод казино DiskiPlus букмекерская контора ставки
#577 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino официальный сайт порно с Диана Шнайдер (теннис) <a href=https://specreporter.com/>казино онлайн</a> порно с Карен Хачанов (теннис) казино вход <a href=https://sovsekretno.net/>вывод казино</a> porno Марина Александрова 7k casino официальный фильмы казино рояль букмекерские контора ап порно с Карен Хачанов (теннис) ешь казино фреш казино
DiskiPlus pin casino зеркало DiskiPlus pin up casino пин <a href=https://diskiplus.ru>DiskiPlus букмекерская контора бесплатно скачать</a> DiskiPlus 1×bet зеркало рабочее DiskiPlus Крючкова Полина Викторовна порно <a href=https://www.diskiplus.ru>DiskiPlus лучшие онлайн казино</a> DiskiPlus casino на телефон DiskiPlus Любимова Ольга Борисовна порно DiskiPlus 1×bet зеркало слоты DiskiPlus букмекерская контора DiskiPlus реального казино DiskiPlus казино смотреть онлайн DiskiPlus порно с Сергей Бобровский (хоккей)
#578 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Фастова Елена Владимировна порно порно с Бондаренко Анастасия Борисовна <a href=https://res-publika.com>порно с Петр Ян (ММА)</a> 1×bet зеркало рабочее сайт pin up casino <a href=https://rumafia.news/>1×bet зеркало на сегодня 1×bet xyz</a> фреш казино porno Алена Косторная (фигурное катание) порно с Александр Головин (футбол) casino автомат лучшие бесплатные онлайн казино мелбет букмекерская контора casino riobet
DiskiPlus porno Марина Александрова DiskiPlus Черкесова Бэлла Мухарбиевна порно <a href=https://diskiplus.ru/>DiskiPlus online casino 7k</a> DiskiPlus пин ап казино DiskiPlus казино пин <a href=https://diskiplus.ru/>DiskiPlus пина casino</a> DiskiPlus Елена Лядова DiskiPlus букмекерские конторы в россии DiskiPlus винлайн букмекерская контора DiskiPlus casino вход DiskiPlus pin up casino официальный DiskiPlus 1×bet зеркало рабочее xbet DiskiPlus porno Марина Александрова
#579 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Попова Анна Юрьевна порно официальная казино <a href=https://sovsekretno.net/>Юдаева Ксения Валентиновна порно</a> почему в казино нет часов ев казино <a href=https://th-royalgclub.com/>7k casino скачать</a> ставки на спорт букмекерские конторы 1×bet сейчас лучшие букмекерские конторы 7k casino официальный porno Юлия Пересильд сайты казино букмекерская контора фонбет
DiskiPlus porno Алена Михайлова DiskiPlus суть казино <a href=https://diskiplus.ru/>DiskiPlus рабочее казино</a> DiskiPlus рейтинг казино DiskiPlus casino онлайн <a href=https://www.diskiplus.ru>DiskiPlus porno Александр Соболев (футбол)</a> DiskiPlus где казино DiskiPlus casino онлайн DiskiPlus фильмы казино рояль DiskiPlus порно с Максим Глушенков (футбол) DiskiPlus 1×bet xbet xyz DiskiPlus Александра Бортич DiskiPlus пин ап casino
#580 Charlesgunnyhttp://filmkachat.ru
1×slots казино мобильная версия
На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не можете активировать и получить бездепозитный приз. <a href=http://filmkachat.ru/>сайт 1× slots casino</a> Ознакомьтесь с нашим перечнем превосходнейших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего списка и получите бездеп незамедлительно. Хватайте превосходнейшие бесплатные предложения ниже и выигрывайте немалые деньги, не рискуя! <a href=https://www.arrl.org/forum/topics/view/4345>https://www.arrl.org/forum/topics/view/4345</a> Чаще всего, пользующиеся сервисы, эти как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно неотъемлемое верховодило. Финансовые средства выводятся только через ту платежную систему, которой успех для пополнения депозита. Если же игрок получил бездепозитный покерный приз, потребуется восполнить счет на наименьшую сумму, которая составляет обыкновенно десять долларов.Мы собрали и выпустили перечень наихороших бездепозитных казино с призами за регистрацию, коие гарантируют великодушные выигрыши и моментальные выплаты. 1×slots регистрация 1×slotscasino 56 online <a href=https://linktr.ee/toplist1008>https://linktr.ee/toplist1008</a>
1×slots регистрацию процедура займет всего лишь
сайт 1× slots casino <a href=https://cameradb.review/wiki/User:AmparoB1370147>https://cameradb.review/wiki/User:AmparoB1370147</a> Чтобы получить возможность вывести выгода с бездепозитного бонуса в казино, нужно выполнить ряд условий:Вейджер (или вагер) ? это наименьшая сумма ставок, которую нужно устроить для вывода денежного бонуса. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим красивее спецпредложение. 1×slots сайт зеркало
1×slots подтвердит вашу регистрацию если говорить
<a href=http://www.sksmg.com/home.php?mod=space&uid=220216&do=profile>http://www.sksmg.com/home.php?mod=space&uid=220216&do=profile</a> Игры, каких возможно выступать на бонусные деньги. Проверьте список игр, в которых можно выступать на бонусные свои, вероятно они Вам не понравятся и не тратить своё время на эту промоакцию.Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в индивидуальный офис, дабы арестовать бесплатные вращения с вейджером х40; 1хлот регистрация в 1×slots casino Онлайн-казино с бездепозитными призами ставят посетителям условия для пользования бездепами, потому перед ролью в акции превосходнее досконально ознакомиться со всеми правилами и нюансами промоакции. Условия имеют дотрагиваться получения бонуса, его использования и последующего вывода валютных средств в случае выигрыша.4. Заберите подарок. Чаще всего приз активизируется сразу последствии регистрации. Но случаются истории, когда надо(надобно) зайти в собственный кабинет либо написать в службу.
1×slots официальный зеркало
Новички не любят сразу же вносить депозит. Это обосновано неимением опыта и сомненьем. К счастью, в можно получить бездепозитный бонус за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В любом случае вы не рискуете своими сбережениями. Это замечательная вероятность запустить приглянувшийся видео разъем либо же испытать удачу в настольных забавах. <a href=http://skatefluckit.com/member.php?u=149708>1×slots актуальное зеркало</a> Если вы бывалый игрок, вы обязаны аристократия, что бонус без депозита – редкая находка. Тем ниже, мы раз изучаем интернет, чтобы найти вам превосходнейшие бездепозитные предложения.Приглашаем делиться воззреньями о призах. Это поможет иным юзерам избирать более прибыльные предложения. Суммы сходственных услуг, как правило, колеблются от трех до двадцати $, а вейджер на эти средства должен составлять от 30 до шестидесяти один. Зачастую, величайшая сумма выигрыша здесь составит от одной до двух сотен долларов. Если компьютерные выиграет больше, то все средства могут быть списанными до максимально разрешенного выигрыша. Здесь появляется смысл выводить еще несуществующие деньги на собственную платежную систему и далее отыскивать заведение с подходящими под данную сумму релоадом или призом за первое пополнение счета. Есть количество подвидов бездепозитного гонорары, предлагаемого наибольшим количеством заведений. 1хслотс зеркало <a href=https://wiki.team-glisto.com/index.php?title=What_Are_The_Benefits_Of_Using_The_1×bet_APP_Over_The_Website>https://wiki.team-glisto.com/index.php?title=What_Are_The_Benefits_Of_Using_The_1×bet_APP_Over_The_Website</a> Вейджер в переводе с английского означает «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша полученного бонуса, в нашем случае бездепозитного. Число ставок роли не играет — главно только набрать необходимую, пропорциональную сумме поощрения.
1×slots casino регистрация 1×slotscasin online
Как правило, новоприбывшие геймеры начала хотят ознакомиться с способами ввода и вывода денежных средств и сроки исполнения поданных заявок дабы четко понимать, как живо они смогут исключить свой казино бонус за регистрацию без депозита на электрический кошелек либо же банковскую карту. К счастью для всех играющих, внутри определенных холдингов, все казино соперничают между собой. Ведь в бы конкретную компанию представляло только одно онлайн-заведение, то ли бы посетители заметили казино с призом за регистрацию и могли бы рассчитывать лишь на вознаграждение повторяющий приза на 1-ое инвестиция. К каждому заведению регулярно следует привлекать новых игроков, собственно, итоге, только на руку всем играющим.У нас на веб-сайте Вы отыщите список призов без депозита в испытанных казино и доскональную информацию то как их получить и применять. <a href=http://www.sixsigmaexams.com/mybb/member.php?action=profile&uid=274275>http://www.sixsigmaexams.com/mybb/member.php?action=profile&uid=274275</a> В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с бесплатных вращений. Прибыль, коию Вы заработаете на этом бездепе можно назначать на вывод без какого либо отыгрыша.Нет. Казино выдают бесплатные бонусы за регистрацию, чтобы, чтобы, дабы заказчик мог ознакомиться с игровым заведением. А дабы исключить его, нужно выполнить обстоятельства отыгрыша. 1×slots официальный сайт скачать на айфон Стоит отметить, что бездепозитный бонус выдается лишь взрослым новичкам, которые, в свою очередь, могут пригласить собственных приятелей и знакомых, также претендующих на поощрительную программу лояльности. Подобная технология появилась среди конкурирующих онлайн-казино для популяризации и расширения трафика. Покер румы и спонсоры содействуют увеличению своей посещаемости, методом привлечения свежих игроков. Бонусы – это уникальный шанс для вероятных участников забавы, которые все опробовать софт покер рума и убедиться, станут ли они в него играть либо нет. Новый игрок испробует средства силы с настоящими оппонентами в казино.Все благотворительные бонусы кажутся заманчивыми. Кто же откажется от возможности сыграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далековато не все бездепозитные призы в равной степени привлекательны для рассудительного посетителя.
<b>Смотреть еще похожие новости:</b>
<a href=http://thiteia.org/index.php?threads/to-karagkiozil-ki-toy-kolonak-oy.4461/#post-96235>1×slots зеркало проходить регистрацию это отличный вариант</a>
<a href=http://forum.as-p.cz/viewtopic.php?f=45&t=67620&p=356992#p356992>1×slots регистрацию процедура займет всего лишь</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Промокод – определённая композиция знаков, коию необходимо ввести в отвечающее фон при твореньи учетной записи либо активировать в личном профиле игрока в разделе с призами.
#581 Charlesgunnyhttp://filmkachat.ru
казино 1×slots официальный сайт
Но ни не запамятовывайте внимательно читать верховодила участия в бонусных промоакциях. Если вы нарушите хотя бы одно условие, позднее вы не сможете уладить недоразумение с администрацией.Сразу после активации промокода возможно воспользоваться подарком. Как теснее упоминалось, призы посещают трёх обликов – фриспины, кредиты и фриплей-бонусы. <a href=http://filmkachat.ru/>1хслот 1хслотс регистрация перейти на 1×slots</a> Такой безвозмездный эквивалент средств зачисляется на профиль пользователя последствии воплощения требований и предназначаются они только для игрового процесса. Вывод таких вознаграждений вероятен лишь после воплощения вейджеровых критерий. <a href=https://link.space/@lexxeagle>https://link.space/@lexxeagle</a> Онлайн-казино кропотливо продумывают бонусные условия, которые необходимо выучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и ограничения.Только выполнив все обстоятельства отыгрыша и дождавшись окончания проверки аккаунта, Вы можете оформить заявку на вывод средств и получить средства деньги. 1×slots зеркало на сегодня <a href=http://perestroyka.online/bitrix/rk.php?goto=http://thermomax.ru/bitrix/rk.php?goto=http://mp-web.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/XIeheLAWihe>http://perestroyka.online/bitrix/rk.php?goto=http://thermomax.ru/bitrix/rk.php?goto=http://mp-web.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/XIeheLAWihe</a>
1×slots регистрация на сайте 1×slots ru com
При правильном подходе бездепы — это отличный способ играть на средства без растраты личных средств. Есть несколько советов, следуя коим возможно извлечь максимум полезности из похожих промоакций казино. Играть следует только на лицензированных площадках. Скриптовые сайты не только обманывают с бонусными услугами, но и используют пиратский софт с измененным ГСЧ. Выиграть на таких автоматах невозможно.Каждая игровая платформа отличается критериями по получению и отыгрышу бездепов. В правилах детально расписаны временные рамки, за которые надо(надобно) прокрутить вейджер. Также не запамятовывайте про максимальный размер ставки и максимальную сумму выплаты. С иной стороны, чтобы получить бездепозитные призы казино, достаточно потратить менее 1 минуты. 1хслотс зеркало на сегодня Иногда у гостей вебсайта имеют появиться трудности, задачи, препядствия при активации полученного промо-кода. В этих случаях, необходимо обратиться за поддержкою в службу «Support». Для получения ответа, непременно указывается определенная причина воззвания и подтверждается информация дополнительными экрана. Если сложилась неоднозначная ситуация, всегда возможно обратиться к основному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ. <a href=http://bizon15.ru/index.php?subaction=userinfo&user=crookedhitch56>http://bizon15.ru/index.php?subaction=userinfo&user=crookedhitch56</a> 1×slots зеркало рабочее на сегодня Все обожают получать подарки. Согласитесь, почти любой играющий человек будет бесконечно рад, если получит бесплатный подарок для игры в онлайн казино просто за регистрацию либо же приз за внесенный депозит, например называемые приветственные бонусы для новых игроков. Соответственно эти онлайн клубы станут больше популярны и предпочтительны у игроков при выборе казино для игры. Топ казино каждый обновляется и прибавляются свежие и интересные игровые клубы с симпатичной бонусной политикой и всеми вероятными прерогативами, к коим относятся эти призы как фриспины за регистрацию, денежные бездепозитные призы, а также великодушные бонусы за внесенный депо.Многие казино деют в рекламных целях благотворительные призы самая для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой вебсайт по партнерской ссылке с нашего портала.
1×slots casino регистрация на сайте
Игры, в возможно выступать на бонусные деньги. Проверьте перечень игр, в которых можно выступать на бонусные свои, вполне они Вам не понравятся и надо тратить своё время на эту промоакцию. Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция содержит доскональные верховодила, ссылка на коие обычно содержится в промообъявлении. В их указываются лимиты, вейджер, список дешевых игр. Если оператор скрывает данные о предложении, то пользоваться им не. <a href=http://alex-zarya.ru/user/GregoryBig/>http://alex-zarya.ru/user/GregoryBig/</a> Бывают ли бездепозитные бонусы без вейджера? Бывают, если у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный приз за регистрацию устанавливается вейджер во всех казино.Бездепозитные бонусы казино за регистрацию в 2022 году — это вероятность поиграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой либо числом даровых вращений без внесения депозита. Не путайте деморежим с реальной игрой без надобности внесения депо. 1×slots регистрация 1×slotscasino 56 online
1×slot официальный сайт
Для получения депозитного приза необходимо восполнить собственный игровой баланс реальными средствами. Вознаграждение можно получить или при внесении первого депозита, или повторяющий фиксированного процента от внесённых средств. Так либо иначе, бонус поступит на счёт лишь после пополнения. казино 1×slots официальный сайт <a href=http://iawbs.com/home.php?mod=space&uid=834261>http://iawbs.com/home.php?mod=space&uid=834261</a>
скачать 1×slots на андроид мобильная версия
Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, the decision только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. Зарегистрируйтесь. Для регистрации почаще всего достаточно установить собственный номер телефона и почтовый адрес, последствии чего ввести приобретенный код из СМС. Возможно, потребуется указать промокод. В правилах акции несомненно написано, где его надобно включать. Иногда это хотелось создавать при регистрации, время — уже в творения собственного кабинета, на отдельной страничке.Чаще всего, знаменитые сервисы, эти как MoneyBookers и WebMoney, еще MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное управляло. Финансовые средства выводятся лишь спустя ту платежную систему, которой популярностьюимели для пополнения депо. Если же игрок получил бездепозитный покерный бонус, требуется восполнить счет на минимальную сумму, которая сочиняет обычно десять $. <a href=http://mos-it.ru/index.php?subaction=userinfo&user=prettycuff3>http://mos-it.ru/index.php?subaction=userinfo&user=prettycuff3</a> Бесплатный бонус – кредиты, коие онлайн-казино начислит клиенту, не принуждая его пополнять игровой счет.Однако далеко не все ресурсы предлагают своим клиентам бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено одобрение на первый депо в размере 100–200%. Это замечательная возможность преумножить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш. 1× slots зеркало Бездепозитные бонусы казино это экономическая компенсация, предлагаемая пользователям на дармовой базе и возможность выступать в интернет казино бесплатно. Если сравнивать их с одобрениями за лепта, каких средства выдаются лишь впоследствии первоначального пополнения счета, то бездепозитные вознаграждения получаются бесплатно. То есть, играющий получает возможность делать ставки на уже имеющие финансы, которые выдаст заведение, исполняя, при, обыденные действия, дабы их извлечь (тут речь о регистрация, удостоверении личности с внедрением номера телефона, дизайна заявки и т.д. ).Срок отыгрыша — это этап, кот-ый начинается в момент активации приза и кончается с его закрытием. Пользователю необходимо уложиться в этот временной зазор, по призовые средства аннулируются. Казино устанавливают перечень игр, ставки в засчитываются при расчете отыгранных средств. Если тайтл не заходит в этот перечень, то ему быть недосегаем для загрузки во время деянья бонусного предложения.
<b>Смотреть еще похожие новости:</b>
<a href=http://naukova2b.2ua.in.ua/memberlist.php?mode=viewprofile&u=313>1×slots казино мобильная версия</a>
<a href=https://edidaktikum.ee/en/content/iii-kontakttund-08-juuni?page=144#comment-302851>1×slots casino регистрация 1×slots review live</a>
<a href=https://forums.dfine.net/showthread.php?tid=515>1×slots официальный сайт зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Прямо момент заберите бесплатные вращения за регистрацию без депо и начинайте коллекционировать призовые комбинации из-за солидных выигрышей! На условиях отыгрыша безвозмездных призов по тормознуть подробнее. С ними связаны аспекты, коие невозможно оставить без внимания.
#582 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее на сегодня
В случае установленного лимита на сумму вывода выигрыша с бездепозитного бонуса, игрок не сможет вывести больше заявленной суммы.Бездепозитный бонус часто возможность стать легкодоступным незамедлительно последствии завершения регистрации, поскольку в большинстве случаев единственным требованием к нему является регистрация, а этого проверка вашей новой учетной записи. <a href=http://filmkachat.ru/>1×slots коды</a> Далее требуется отыграть вагер и исключить выигрыш. Игрокам без опыта крупно повезло, у получить 10-ки даров за 1 регистрацию. Если не смогли получить Бездепозитный бонус, не тревожьтесь. Обратитесь в интернет чат, оператор поможет ситуацию.B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax <a href=https://www.linkcentre.com/review/cgifurniture.com/>https://www.linkcentre.com/review/cgifurniture.com/</a> Подарки на праздники ? приуроченные к праздничным датам, требующие условного отыгрыша либо начисляются без это. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду. 1×slots официальный зеркало <a href=http://bbs.boway.net/home.php?mod=space&uid=934775>http://bbs.boway.net/home.php?mod=space&uid=934775</a>
1×slots коды
1×слот регистрация в 1×slots casino Выбирая бесплатный приз, внимательно изучайте верховодила. Убедитесь, собственно для можно себя роль в акции. Уточните, в каких играх возможно исполнять обстоятельства вейджера. При надобности задавайте вопросы адептам саппорта. <a href=https://profiteplo.com/user/StevenJaw/>https://profiteplo.com/user/StevenJaw/</a> Наиболее известные гонорары среди гэмблеров – бездепозитные бонусы казино. Это не изумительно, ведь возможно получить бесплатные вращения или виртуальные кредиты, и всем не придётся пополнять счёт, рисковать личными деньгами. Удастся насладиться разнородными развлечениями даже выиграть солидную сумму, избегая серьёзного риска.Мы подготовили список, где есть практически актуальные и новые бездепозитные призы казино, которые вам получить безвозмездно. Для наших юзеров есть специальные предложения неповторимые призы, которые вы ни не отыщите, их мы определили специальной красноватой плашкой «Exclusive». 1× slots зеркало
1×slots казино зеркало
Для получения приза нужно пригласить в игру нового клиента. Казино начисляет пригласившему фиксированный процент от взносов приглашённого в виде приза: чаще всего его объем не превышает 10%. Срок действия приза правило не превышает месяца: пригласивший получает приз от проигранных ставок приглашённого в 1-ый луна забавы. <a href=https://e-puzzle.ru/forum/index.php?showuser=62023>https://e-puzzle.ru/forum/index.php?showuser=62023</a> 1×slots регистрацию более популярный вариант это Почти все игровые клубы настоятельно подтверждение контактных данных игрока для получения бездепозитного приза.
1×slots сайт
Фриспины. Бесплатные вращения предусмотрены для применения в видео-слотах. Внимательно читайте обстоятельства – они часто выдаются для некоторых машин. В зависимости от клуба возможность создавать конкретное количество ставок. Кстати, современные игорные дома дают вероятность заводить «одноруких злодеев». Стоит отметить, собственно бездепозитный приз выдается лишь совершеннолетним новеньким, которые, тому, шансы пригласить собственных приятелей и знакомых, того претендующих на поощрительную программку преданности. Подобная технология появилась среди конкуренцию онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры содействуют увеличению своей посещаемости, методом вербования новых игроков. Бонусы – это уникальный шанс для вероятных соучастников игры, коие все опробовать софт покер рума и убедиться, будут ли они в него играть или нет. Новый игрок испробует свои силы с настоящими оппонентами в казино. 1×slot казино зеркало <a href=http://beton.ru/communication/forum/?PAGE_NAME=profile_view&UID=34156>http://beton.ru/communication/forum/?PAGE_NAME=profile_view&UID=34156</a> Нельзя разглядывать забаву на деньги, как вариант заработка. Азартные игры воспрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не является организатором азартных игр. Сайт носит информационный характер.Зарегистрируйтесь. Для регистрации почаще всего довольно установить свой номер телефонного и почтовый адресок, в чего установить приобретенный код из СМС. Возможно, потребуется показать промокод. В правилах акции будет написано, где его надобно вводить. Иногда это бы создавать при регистрации, время — теснее после творения собственного офиса, на отдельной страничке.
1×slots регистрация 1×slots review live
Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. Получать информацию о самых выгодных бонусах возможно без неизменного прогноза новостей казино. Мы брали эту задачку на себя и постоянно смотрим за предложениями операторов, выбирая наихорошие из них. В этом разделе собраны последние бездепы, промокоды к ним и условия их активации. Список акций периодически пополняется. В топ вошли самые новые бездепозитные бонусы за регистрацию в казино 2020, кратковременные и закрытые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и критериям. Если срок деяния промоакции истек, она удаляется из списка. <a href=https://melon-tv.com/bbs/board.php?bo_table=free&wr_id=27548>https://melon-tv.com/bbs/board.php?bo_table=free&wr_id=27548</a> Популярность онлайн казино растёт и всё больше пользователей начинают увлекаться азартными играми. Бездепозитные призы 2022 года, это уникальные презенты за регистрацию. С их подмогою новые игроки шансы получить безвозмездные вращения или деньги на баланс за 1 регистрацию. С в игорных заведений в интернете, бездепозитные бонусы стали наимоднейшим методом вербования игроков. Подобные акции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш сайт собрал наилучшие предложения из онлайна на 2022 год. Воспользуйтесь хоть даром и можете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить обстоятельства. 1×slot казино зеркало В реальное время получить приз за регистрацию в казино довольно просто. Почти любой игорный жилище с радостью даст деньги либо благотворительные вращения. Многие игроки пользуются этим и не стесняются региться в каждом клубе с выгодными критериями. Кстати, это отличная возможность придумать выигрышную тактику и сорвать куш.Фриплей-бонусы. Бонусы за безвозмездную забаву есть только в неких клубах. Они зачисляются сразу после создания профиля и действуют непродолжительное время. Если у вас нет времени израсходовать свои, они просто закончатся. Что касается времени, как бонусы срабатывают в течение 1-го часа.
<b>Смотреть еще похожие новости:</b>
<a href=http://vn-info.net/user/Josephkam/>онлайн казино 1×slots</a>
<a href=https://nauc.info/forums/viewtopic.php?t=20942985>1×slots зеркало проходить регистрацию это отличный вариант</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но не размышлять, собственно снабжая юзеров такими призами, казино увлекается спонсированием. Ведь объемы вознаграждений, в, не великие (средним объемом от 5 до 20 $). И на эти свои налагаются конкретные обстоятельства и лимитирования, обязательные к исполненью игрока, если в последствии он желает получить все средства выигранные финансы.
#583 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино можно ев казино <a href=https://rhymes-punches.com/>1×bet официальный xbet</a> казино пину играющие казино <a href=https://specreporter.com/>vavada casino</a> porno Екатерина Ефременкова, шорт-трекистка casinos winning 1×bet xbet букмекерская контора леонов Приезжева Екатерина Геннадьевна порно пин ап казино casino андроид
DiskiPlus порно с Захарова Мария Владимировна DiskiPlus порно с Афонина Марина Игоревна <a href=https://diskiplus.ru>DiskiPlus сколько казино</a> DiskiPlus порно с Федор Чалов (футбол) DiskiPlus букмекерские конторы бет <a href=https://diskiplus.ru>DiskiPlus скачать букмекерскую контору</a> DiskiPlus вавада казино DiskiPlus букмекерские контора ап DiskiPlus casino игровой автомат DiskiPlus inform@rucriminal.info DiskiPlus Крючкова Полина Викторовна порно DiskiPlus vavada casino DiskiPlus porno Дарья Клишина
#584 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
Ну и естесственно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: схожая щедрость увеличивает степень преданности посетителей к компании. <a href=http://filmkachat.ru/>1×slot регистрация</a> <a href=https://www.iotappstory.com/community/forum/5-support/4455-interior-design-fair-2025-global-innovation-design-trends>https://www.iotappstory.com/community/forum/5-support/4455-interior-design-fair-2025-global-innovation-design-trends</a> Чем ниже велечину вейджера, тем легче отыграть и вывести приз. Если Вы расчитываете заработать на бездепе, но просто ознакомиться с свежим игровым клубом, то стоит игнорировать призов с высочайшим вейджером их практически не реально отыграть. С ними Вы сможете только протестировать игры заведения. 1×slots актуальное зеркало <a href=https://ic-info.ru/forum/user/177856/>https://ic-info.ru/forum/user/177856/</a>
1×slots официальный сайт скачать
казино 1×slots официальный сайт <a href=http://iawbs.com/home.php?mod=space&uid=813085>http://iawbs.com/home.php?mod=space&uid=813085</a> Иногда в качестве бездепа, казино презентует минимальный приз (до 50 рублей), ради которого не заморачиваться.Бонусы без депозита при регистрации считаются самыми красивыми как для опытных игроков, например для и новичков. Получив такое вознаграждение, клиент имеет выступать на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные призы в интернет-казино Рунета, а условия их активации и выигрыша. 1 x slots casino Теоретически, к безвозмездным призам возможно отнести так нарекаемые фриспины. Напомним, речь идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, поэтому что они деют лишь вероятность делать ставки.
1×slots зеркало регистрация то дальше необходимо пройти
Подтверждение персональной инфы. Все казино настоятельно от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и присутствие у пользователя иных аккаунтов (мультиаккаунт запрещен). <a href=https://www.ccvgaming.com/forum/member.php?39526-KennethAreld&s=7ffeb515c0cd3d3d0fce64fdb230a610>https://www.ccvgaming.com/forum/member.php?39526-KennethAreld&s=7ffeb515c0cd3d3d0fce64fdb230a610</a> Получить Бездепозитный приз в онлайн казино дело 2-ух кликов. Другой момент, отыграть рекламную и соблюсти правила и обстоятельства отыгрыша. Под правилами предполагается не вагер, хотя и ограничения по максимальной ставке. Мы осознаем, собственно в кино все ставят на зеро и выигрывают. Призываем не создавать похожего. Перед активацией приза прочтите управляла. Узнайте последующие факторы: Условия получения презента, за регистрацию, за депозит и многое. Ограничения по наибольшей ставке. Зачастую не повыше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах возможно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на пространстве. Поэтому главно аристократия, в каких забавах можно совершать кратность денежного оборота.В некоторых онлайн казино для получения бездепозитных призов не довольно просто зарегистрироваться на сайте клуба и подтвердить свои контактные данные. Дополнительно требуется активация промокода. 1×slots зеркало на сегодня Принципиальным отличием бесплатных бонусов от призов на депо считается недоступность необходимости заносить средства на акк. Из-за сего их часто именуют бездепозитными (no deposit bonuses).Следует выделить, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам либо с конкретным кодом.
1×slos регистрация в 1×slots casino
3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефонный либо почту, указать персональную информацию;Многие казино деют в рекламных целях благотворительные призы самая для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой вебсайт по партнерской ссылке с нашего портала. У любого игорного клубы различные вейджеровые обстоятельства. Чтобы вы гарантировано сумели выполнить их, мы дадим количество советов. Если система начислила маленькую сумму, не создавать большие ставки – остановитесь на 10–30 центах. Как только сумеете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В неприятном случае лучше присмотреться к другому автомату. Ещё одно распространённое акционное предложение – привлекательный презент с неблаговидными притязаниями. К примеру, клуб сулит $100 в бездепа, хотя с вейджером х80 или х100. Отыграть такой вейджер практически нереально и потому никакого концентрироваться на больше заманчивых акциях. рабочее зеркало 1хслотс <a href=http://www.ppurihr.or.kr/gb/bbs/board.php?bo_table=qna&wr_id=8442>http://www.ppurihr.or.kr/gb/bbs/board.php?bo_table=qna&wr_id=8442</a> Игры, каких можно играть на бонусные средства. Проверьте список игр, каких возможно выступать на бонусные средства, возможно они Вам не понравятся и не стоит расходовать своё время на такую акцию.
1×slots casino зеркало рабочее
Наш список включает в себя превосходнейшие бездепозитные бонусы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит ревизию по важным параметрам:Самые свежие бездепозитные бонусы в казино за регистрацию 2022 года с выводом выгоды находятся на данной страничке. Посетитель может оценить условия получения и начать выступать на средства без внесения депозита. При данном игроку главно осознавать, на каких критериях и какими методами возможность исключить приобретенный выигрыш. Для сего необходимо оценить список подключенных платежных систем. Онлайн-казино с бездепозитными призами ставят клиентам обстоятельства для пользования бездепами, потому перед ролью в промоакции другого тщательно ознакомиться со всеми правилами и аспектами промоакции. Условия все касаться получения приза, его использования и последующего вывода валютных средств если, тогда, выигрыша.Не стоит сразу же отрицаться от приветственных подарков в подобных казино. Администрация готова начислить средства или фриспины, но предварительно работники должны убедиться, собственно вы не аферист. Дело что, собственно развелось слишком большое охотников за бонусами. Они выучились обманывать систему и наваривать солидные суммы денег. <a href=http://atope.ru/user/DoctorLazutaOt/>http://atope.ru/user/DoctorLazutaOt/</a> 1×slot зеркало рабочее регистрации на телефон придет Бонус за регистрацию в казино выдается только один один на одного игрока. Но случаются дополнительные акции, в которых бездепы расступаются для постоянных посетителей и эти презенты Вы можете получить больше одного раза.Все обожают получать презенты. Согласитесь, практически любой играющий человек несомненно необъятно рад, в получит безвозмездный подарок для игры в интернет казино просто за регистрацию либо же приз за внесенный депо, например именуемые приветственные призы для новых игроков. Соответственно эти онлайн клубы станут более модны и преимущественны у игроков при выборе казино для игры. Топ казино постоянно обновляется и добавляются свежие и интересные игровые клубы с привлекательной бонусной политикой и всеми вероятными прерогативами, к коим относятся эти бонусы как фриспины за регистрацию, валютные бездепозитные бонусы, еще великодушные бонусы за внесенный депо.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Самые пользующиеся методы вывода средств ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электрическим платежным системам типа Neteller и Skrill, а пользуются криптовалютными кошельками. Вывод выигрышей возможность осуществляться мгновенно либо занимать от нескольких часов до нескольких суток.
#585 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Андрей Рублев (теннис) порно с Кирьянова Дарья Борисовна <a href=https://krtka.info/>casino на телефон</a> порно с Юлия Ефимова порно с Федор Чалов (футбол) <a href=https://specreporter.com/>pin ап casino</a> porno Юлия Канакина порно с Евгений Малкин (хоккей) casino com фреш казино симулятор казино 1×bet регистрация скачиваемые казино
DiskiPlus фильмы казино рояль DiskiPlus porno Андрей Рублев (теннис) <a href=https://diskiplus.ru>DiskiPlus порно с Алина Загитова, фигуристка</a> DiskiPlus сайты казино DiskiPlus porno Анастасия Янькова, боксерка <a href=https://www.diskiplus.ru/>DiskiPlus порно с Каролина Севастьянова</a> DiskiPlus казино фильм DiskiPlus casino регистрации DiskiPlus порно с Диана Шнайдер (теннис) DiskiPlus мелбет букмекерская контора DiskiPlus Крючкова Полина Викторовна порно DiskiPlus порно с Никита Кучеров (хоккей) DiskiPlus пинко casino
#586 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрацию более популярный вариант это
Одним из предлогов отдавать преимущество, льготу 1 либо другому заведению заключается в привлекательности предлагаемых промоакций и безвозмездных услуг. Безвозмездные фриспины, выдаваемые без дела делать какой-либо вклад, в списке располагается далеко не в конце.В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, нужно адресоваться в службу поддержки спустя лайв-чат на веб-сайте казино. <a href=http://filmkachat.ru/>1×slot казино зеркало</a> Таким образом интернет казино получает вероятного игрока. Возможно в или подлинном он захотит сыграть на свои деньги. Так трудятся бездепозитные бонусы в онлайн казино. Здесь отлично подходит выражение, бесплатные сыр посещает лишь в мышеловке. Начинающие игроки имеют не обдумывать опасность азарта. Однако течением осознания становится больше. Это тема для отдельного обсуждения.Вейджер (или вагер) ? это наименьшая сумма ставок, коию нужно сделать для вывода денежного приза. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение. <a href=https://feedback.cloudways.com/forums/203824-product-improvements-flexible/suggestions/49478654-%D1%89%D0%BE-%D1%80%D0%BE%D0%B1%D0%B8%D1%82%D0%B8-%D0%B7-%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%BE%D0%B1%D1%96%D0%BB%D0%B5%D0%BC-%D0%BF%D1%96%D1%81%D0%BB%D1%8F-%D0%B4%D1%82%D0%BF-%D0%BA%D0%BE%D0%BC%D0%BF%D0%BB%D0%B5%D0%BA%D1%81%D0%BD%D0%B5-%D0%BA%D0%B5%D1%80%D1%96>https://feedback.cloudways.com/forums/203824-product-improvements-flexible/suggestions/49478654-%D1%89%D0%BE-%D1%80%D0%BE%D0%B1%D0%B8%D1%82%D0%B8-%D0%B7-%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%BE%D0%B1%D1%96%D0%BB%D0%B5%D0%BC-%D0%BF%D1%96%D1%81%D0%BB%D1%8F-%D0%B4%D1%82%D0%BF-%D0%BA%D0%BE%D0%BC%D0%BF%D0%BB%D0%B5%D0%BA%D1%81%D0%BD%D0%B5-%D0%BA%D0%B5%D1%80%D1%96</a> Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке нужно пополнить счет в казино. Для депозитных призов, данная процедура не нужна, так как депо теснее изготовлен.Во время игры в казино, выигрыши, приобретенные спасибо безвозмездным призовым фондам, суммируются и включаются в общую необходимую для отыгрывания. Однако, в фортуна улыбнется и получится отыграть все бонусы, игровое заведение гарантированно разрешит вывести финансовые средства. Сумма вывода будет зависеть от лимита, утвержденного непосредственно в данном учреждении. Поэтому, пристально надо(надобно) читать управляла выдачи безлимитных депозитов. 1×slot казино зеркало <a href=https://tophatsec.com/forum/member.php?action=profile&uid=6660>https://tophatsec.com/forum/member.php?action=profile&uid=6660</a> Активация по промокоду употребляется в разных обликах бездепов. Если идет о приветственном бонусе, то набор символов возможно разузнать на основной странице, в регистрационной форме либо письме, коие отправляется юзеру для доказательства адреса электронной почты. Акции шансы проводиться совместно с партнерскими площадками. Обычно код располагается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется одноразовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем актуальный код для активации в описании каждого рекламную.Диапазон ставок, которые вправе устроить игрок, также лимитирован. Обычно ставить возможно маленькую необходимую — пределах 10–30 рублей за одно вращение.
рабочее зеркало 1хслотс
Помните, собственно в некоторых играх сумма ставки идет в зачет вейджера только отчасти. Так, в настольных и карточных забавах лишь от 5% до 50% суммы ставки числятся как отыгранные средства, момент как в слотах идет в зачет все 100% суммы.Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную процедуру активации бонуса без депо. Внимательно прочтите до конца. Многие новенькие проделывают ошибки на этапе регистрации и поэтому имеют получить презент. 1×slots актуальное зеркало При забаве на бонусные свои запрещается выступать в игровые автоматы с современным джекпотом и игры из радела live casino. Кроме как, некоторые казино дают бездеп на один либо некоторое определенных слотов, и в других играх Вы не можете на их играть.Если простыми текстами, бездепы – это определённая сумма средств либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать подарки. Но есть некоторые аспекты. Существуют игорные дома, которые перед тем как начислить призы требуют привязать телефон, дать копии документов. <a href=http://gameland.mzf.cz/profile.php?lookup=128741>http://gameland.mzf.cz/profile.php?lookup=128741</a> Верификация аккаунта. Лучше подтвердить личность сразу последствии регистрации, чтобы позже не было проблем с выводом денег. Верификация имеет протекать двумя путями: 1хслот официальный сайт зеркало Обычно бездепозитные промоакции от казино, прибывают на эл. Почту в деньки рождения либо праздники. В неких интернет казино можно обратиться в чат и как неизменному игроку, вполне вам предложат бездепозитное предложение.За счёт спинов получится запустить различные интернет слоты, протестировать стратегии и поднабраться навыка. Фишка в том, что вращения начисляются на топовые аппараты с оригинальными опциями и высокой отдачей. Не забывайте, что в каждом акционном предложении предусмотрены особые требования – временные лимитирования, максимальный объем ставки, список доступных игр.
1×слотс казино
Oтыгpaть бонус с указанным вeйджepом, для этого необходимо сдeлaть cтaвoк нa cумму, превышающую размер приза в количество раз.Размер приза. В качестве бездепов обыкновенно начисляют большие суммы, а когда идет о бонусах за депо, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино могут презентовать игроку до 2000$. Возможность протестировать новые забавы, не рискуя личностными средствами и создать личную тактику игры. <a href=http://isaevclub.ru/user/WalterShase/>http://isaevclub.ru/user/WalterShase/</a> Популярность интернет казино растёт и всё больше юзеров начинают проявлять азартными забавами. Бездепозитные бонусы 2022 года, это оригинальные подарки за регистрацию. С их помощью свежие игроки имеют получить благотворительные вращения либо средства на баланс за одну регистрацию. С выходом игорных заведений в онлайне, бездепозитные призы стали популярнейшим способом привлечения игроков. Подобные промоакции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о которых мы расскажем. Наш вебсайт собрал превосходнейшие предложения из интернета на 2022 год. Воспользуйтесь любым презентом и сможете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить условия. 1×slots регистрация 1×slotscasino 56 online
1×slots регистрация 1×slotscasino 56 online
Необходимость отыгрыша. Вейджер в выше, чем для бонусов за депозит. И же средства не отыграны, вывести их невозможно. <a href=https://www.ladyboyescort.com/profile/745-rabofreesi/>1х слот 1хслотс регистрация перейти на 1×slots</a> Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских рублей. В критериях промоакции указано, что вейджер бездепозитного приза х20. Поэтому, дабы отыграть приз, игроку несомненно необходимо устроить ставок на 35*20=700 руб.Многие азартные клубы ограничивают сумму вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не сможете исключить. Разница несомненно аннулирована, Вы том не сможете создавать на нее ставки. 1×slots актуальное зеркало <a href=http://seoulartacademy.co.kr/bbs/board.php?bo_table=online&wr_id=1230903>http://seoulartacademy.co.kr/bbs/board.php?bo_table=online&wr_id=1230903</a> Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают бонус по государствам. Вплоть до как, собственно клуб может брать игроков из Вашей страны, а бездеп мешает.
1хслотс зеркало
Итак, чтобы бесплатные бонусные кредиты превратились в настоящие средства, которыми вам распоряжаться по собственному усмотрению, их нужно отыграть. Вейджер идет уточнять в правилах онлайн-казино.Активация по промокоду употребляется в разных обликах бездепов. Если идет о приветственном бонусе, то набор символов возможно узнать на крупнейшей странице, в регистрационной форме либо послании, коие отчаливает пользователю для подтверждения адреса электронной почты. Акции все проводиться совместно с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активируется одноразовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном офисе или начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем важный код для активации в описании любого рекламную. Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. <a href=https://coinzaa.com/u/Forsedropol>https://coinzaa.com/u/Forsedropol</a> Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. скачать 1×slots официальный сайт Особую изюминку видео слотам придают оригинальные знакы. С их появлением активируются различные призы. Вы можете запустить дополнительный степень и прирастить необходимую выигрыша. Есть знаки, коие замещают ненужные составляющие и сами делают выигрышные комбо. Не стоит забывать и тему бонус-тур. После каждого удачного спина есть шанс прирастить сумму выигрыша в два или хорошо раза.Это тоже благотворительные финансы, которые поступают на аккаунты новоиспеченных в после регистрирования. А особенность этих призов произведено сомнений, что обретенные деньги непременно следует использовать в продолжении назначенного медли.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.thefamilylegion.se/viewtopic.php?f=4&t=107475>1хслот скачать</a>
<a href=https://houseion.com/2023/04/25/in-the-heart-of-valencia/#comment-25184>1×slots официальный сайт, скачать</a>
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=17035>1× слот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Таким образом интернет казино получает потенциального игрока. Возможно в или настоящем он захочет сыграть на средства деньги. Так работают бездепозитные бонусы в интернет казино. Здесь отлично подходит выражение, бесплатные сыр случается только в мышеловке. Начинающие игроки все не обдумывать опасность азарта. Однако с осознания делается больше. Это тема для отдельного обсуждения. Внесение депо – Будьте готовы восполнить счет в отыгрыша приза. Это стандартное заявка управлял для этого типа промо-акций. Лучше заранее уточнить, какую необходимую нужно будет заносить на счет. Как правило, идет о минимальном депозите, хотя вы обязаны быть убеждены, что он для по кармашку.
#587 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
сайт казино вход кент казино <a href=https://m.repost.news/>ограбление казино</a> porno Юлия Пересильд casino регистрации <a href=https://rucriminal.info/>cometa casino</a> 1×bet зеркало xbet xyz pin up casino пин ап казино рояль online casino официальный Комарова Наталья Владимировна порно казино проиграл порно с Анастасия Потапова, теннисистка
DiskiPlus реального казино DiskiPlus сколько казино <a href=https://www.diskiplus.ru/>DiskiPlus бесплатное казино</a> DiskiPlus 1×bet сейчас DiskiPlus порно с Аделия Петросян (фигурное катание) <a href=https://diskiplus.ru/>DiskiPlus официальное казино вход</a> DiskiPlus порно с Анна Калинская (теннис) DiskiPlus казино онлайн DiskiPlus 1×bet официальный сайт DiskiPlus букмекерская контора бесплатно скачать DiskiPlus пин ап casino pin up top DiskiPlus порно с Артемий Панарин (хоккей) DiskiPlus букмекерская контора скачать приложение
#588 Ismaelpen
What's up i am kavin, its my first occasion to commenting anywhere, when i read this paragraph i thought i could also make comment due to this sensible piece of writing. <a href=https://rocketplay.com.au/>online casino australia legal</a>
#589 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация
Приветственный бездеп предоставляется любому игроку только раз один. Казино борются с так именуемыми бонусхантерами (от англ. Bonus Hunter — доброволец за призами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения дара. Исключить подобные действия разрешает верификация данных. Администрация вправе востребовать у клиента доказать индивидуальные данные, обозначенные при регистрации.Также есть онлайн-платформы азартных игр, коие используют раздачу бездепозитных бонусов в специальные даты (как для казино, например и для игрока). Помимо этого, действующие игроки также имеют возможность получить похожие бонусы за свою деятельность (например, за повышения значения либо за схожие заслуги). <a href=http://filmkachat.ru/>1хслот зеркало</a> Получить приветственный бонус все лишь свежие посетители онлайн-казино. Способы описаны в критериях акции каждого законного казино, почаще всего это:Перед активацией главно пристально изучить условия промоакции. Чем ниже вейджер, тем больше возможная выгода игрока. Имеют значение также лимиты ставок при отыгрыше и сроки, на которых можно пользоваться предложением. Если бездеп обхватывает узкий список игр, рекомендовано узнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только сомнений случае, случае оператор не установил требовательные лимитирования на наивысшую сумму ставки. <a href=https://www.linkcentre.com/review/cgifurniture.com/>https://www.linkcentre.com/review/cgifurniture.com/</a> Наш список включает в себя превосходнейшие бездепозитные бонусы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по главным параметрам: 1×slots официальный сайт зеркало рабочее <a href=https://www.javab24.com/profile/25818-travisemisa>https://www.javab24.com/profile/25818-travisemisa</a> Бездепозитные бонусы настоящими средствами, коие можно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадались.Перед активацией важно внимательно выучить обстоятельства акции. Чем ниже вейджер, что, этим больше потенциальная выгода игрока. Имеют велечину также лимиты ставок при отыгрыше и сроки, в течение коих возможно воспользоваться предложением. Если бездеп охватывает ограниченный перечень игр, рекомендуется разузнать максимальные коэффициенты, уровень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь что случае, в оператор не установил взыскательные ограничения на максимальную необходимую ставки.
скачать 1×slots официальный сайт
Для получения бездепа нужно пригласить в забаву по реферальной ссылке нового посетителя: он обязан зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на сумму, указанную в условиях акции.Высокая конкуренция в разделе азартных игр мотивирует операторов привлекать посетителей различными промоакциями. Благодаря данному у гостей замечена возможность получить бонусы в казино за регистрацию без депо. Воспользоваться этим предложением можно, избегая функцию внесения средств на игровой счет, просто активировав акк на сайте. Наш экскурсовод по бездепам поможет выбрать самую привлекательную бонусную программу, разузнать верховодила получения такового гонорары и воспользоваться им с максимальной выгодой. <a href=http://nakupnidivadlo.cz/index.php/forum/3-pripominky/46621-https-sk-service1-ru?start=258#240015>1×slots официальный сайт скачать на айфон</a> скачать 1×slots на андроид мобильная версия Бонус без депозита за регистрацию в казино (бездепозитный приз) – это валютный подарок от клуба, кот-ый начисляется на акк игрока после регистрации в казино. Кроме творенья учетной записи, для получения бездепа, очень нередко потребуется ещё и доказать контактные данные игрока и/или активировать особый промо-код.Бездепозитные призы казино за регистрацию в 2022 году — это вероятность поиграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой либо числом бесплатных вращений без внесения депо. Не путайте деморежим с реальной забавой без необходимости внесения депо. <a href=https://forum.bakililar.az/profile/86829-glavdorogadv3107/?tab=field_core_pfield23>https://forum.bakililar.az/profile/86829-glavdorogadv3107/?tab=field_core_pfield23</a> Вейджер (wager) – это коэффициент, кот-ый показывает на какую необходимую необходимо сделать ставок, чтобы исключить приз из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода этого приза, Вам необходимо сделать ставок на сумму: 500*70=3500 руб. Только всецело отыграв бонус, Вы сможете вывести свой выигрыш.При пользовании бездепозитным бонусом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют количество видов лимитов: 1 x slots casino
1×slots регистрацию более популярный вариант это
Помните, что всевозможные нарушения управлял сведут на нет ваши старания, и вы всего останетесь без начисленного для дарового приза. Всегда изучайте управляла начисления и обстоятельства вейджера. По каким вопросам, на которые вы имеет самостоятельно найти ответы, обращайтесь за объяснениям и саппорт.Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, чтобы появилась вероятность исключить выигрыш. Бонус с зачислением денег на счет выделяет больше свободы действий. Пользователь сам подбирает, каким образом воспользоваться подаренными своими. Здесь того имеют работать ограничения на список дешевых игр, хотя обычно эти рамки не так строги, как в промо с безвозмездными вращениями. <a href=http://bassmagaz.ru/bitrix/rk.php?goto=http://inno-tech.ru/bitrix/redirect.php?goto=http://radostone.com/bitrix/redirect.php?goto=https://telegra.ph/Obrazec-doverennosti-na-pravo-podpisi-09–19>http://bassmagaz.ru/bitrix/rk.php?goto=http://inno-tech.ru/bitrix/redirect.php?goto=http://radostone.com/bitrix/redirect.php?goto=https://telegra.ph/Obrazec-doverennosti-na-pravo-podpisi-09–19</a> Фриспины — благотворительные вращения, коие разрешают игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытных игроков фриспины считаются наиболее модным и преимущественным видом бонуса — безвозмездные вращения порой эффективнее и веселее в отыгрыше, чем другие виды бездепов. 1×slots быструю регистрацию а также мгновенное Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте обстоятельства – они нередко выдаются для некоторых машин. В зависимости от клуба продоставляется делать конкретное количество ставок. Кстати, современные игорные жилища дают вероятность заводить «одноруких бандитов».
1×slots официальный сайт скачать
Наши специалисты изучают обстоятельства промоакции, затем в ручном режиме проверяют их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и другие характеристики. Мы не рекламируем казино, а даем игрокам информацию о наилучших из них.Возьми свой презент. Чаще всего бонус активируется сразу последствии регистрации. Но бывают истории, когда нужно зайти в личный офис или написать в справочную службу. В неких онлайн казино для получения бездепозитных призов не достаточно просто зарегистрироваться на веб-сайте клуба и доказать средства контактные данные. Дополнительно требуется активация промокода.Но разу не запамятовывайте внимательно разбирать правила участия в бонусных акциях. Если вы нарушите но бы одно условие, позднее вы не можете устроить недоразумение с администрацией. Обычно, бездепозитные бонусы выдаются под определенные слоты с фиксированной ставкой, но их наверняка воспрещено использовать в игровых автоматах с прогрессивным джекпотом. Список игр, каких можно применять бездеп, Вы найдете в описании акции или сможете уточнить у службы заведения. 1×slots регистрация 1×slots casino 777 online <a href=http://www.flaux.net/index.php?option=com_easygb>http://www.flaux.net/index.php?option=com_easygb</a>
1×slots бездепозитный бонус за регистрацию
Промообъявления от казино мешают реальной картины и ориентированы на вербование внимания юзеров. Понять, как высоки шансы остаться в плюсе, позволит личный анализ условий предложения:Наш перечень содержит наихорошие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает проверку по главным характеристикам: <a href=http://sakura-nsk.com/bitrix/click.php?goto=http://ihouse.su/bitrix/redirect.php?goto=http://vanes.ru/bitrix/redirect.php?goto=https://telegra.ph/Processualnye-prava-i-obyazannosti-09–23>http://sakura-nsk.com/bitrix/click.php?goto=http://ihouse.su/bitrix/redirect.php?goto=http://vanes.ru/bitrix/redirect.php?goto=https://telegra.ph/Processualnye-prava-i-obyazannosti-09–23</a> Можно ли зарабатывать на бездепозитных призах? Это не работа, тут как повезет, случае в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, тогда можно назвать везением, и дополнительной добавкой к вашему бютжету.Диапазон ставок, коие вправе сделать игрок, кроме лимитирован. Обычно назначать можно небольшую необходимую — в 10–30 руб. За одно вращение. 1×slots зеркало на сегодня Казино дает возможность заработать и исключить реальные деньги на бездепозитных призах. Обычно, это малозначительная сумма, коию казино возможность себе позволить презентовать игроку.Для получения бонуса надо(надобно) ознакомиться с программкой преданности казино и сделать ставки на необходимую, необходимую для перехода на следующий уровень.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.infoknygos.lt/smforum/index.php?topic=135915.new#new>казино 1× slots официальный сайт</a>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=410213>1×slots официальный зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В интернете слишком большое скриптовых вебсайтов, которые принадлежат плутам. Их главная задача – привлечь гэмблеров, пообещав не только щедрые подарки, но и крупные выигрыши. Так что кое-какие сайты предлагают получить за регистрацию и $1 000. Этот образ бонуса будет добавлен на Ваш аккаунт после успешной процедуры регистрации с использованием номера телефонного. Если избрать другой метод сотворения учетной записи, бездеп не будет добавлен на Ваш акк.
#590 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Петр Ян (ММА) порно с Алексей Миранчук (футбол) <a href=https://rhymes-punches.com/>vavada casino</a> игры казино вавада казино <a href=https://res-publika.com>1×bet слоты</a> букмекерская контора леонов Комарова Наталья Владимировна порно pinco casino казино смотреть top casino porno Вера Бирюкова, гимнастка Радченко Светлана Юрьевна порно
DiskiPlus самое казино DiskiPlus казино ли <a href=https://diskiplus.ru>DiskiPlus porno Нина Пирогова, хоккеистка</a> DiskiPlus Валентина Матвиенко порно DiskiPlus 1×bet xbet xyz <a href=https://diskiplus.ru/>DiskiPlus смотреть фильм казино</a> DiskiPlus слоты казино DiskiPlus Львова-Белова Мария Алексеевна порно DiskiPlus 7k casino официальный DiskiPlus porno Илья Ковальчук (хоккей) DiskiPlus скачать casino на андроид DiskiPlus porno Нина Пирогова, хоккеистка DiskiPlus скачать 1×bet
#591 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация то дальше необходимо пройти
Для всех бездепозитных призов функционирует максимальный лимит на выигрыш. Он указывает максимальную необходимую, которую вас получить, играя на бонусные кредиты. Как лишь вас получится выполнить притязания вейджера, возможный максимально будет переведен с бонусного счета на ведущей, а остаток будет списан. <a href=http://filmkachat.ru/>1хслотс казино зеркало</a> Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых новых, щедрых и испытанных бонусах в онлайн казино, которые обновляются каждый день.Фриплей-бонусы. Бонусы за бесплатную забаву есть только в некоторых клубах. Они зачисляются сразу после сотворения профиля и срабатывают недолговременное время. Если у вас нет времени израсходовать средства, они просто завершатся. Что касается медли, в большинстве случаев призы действуют на 1-го часа. <a href=https://feedback.cloudways.com/forums/203824-product-improvements-flexible/suggestions/49478654-%D1%89%D0%BE-%D1%80%D0%BE%D0%B1%D0%B8%D1%82%D0%B8-%D0%B7-%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%BE%D0%B1%D1%96%D0%BB%D0%B5%D0%BC-%D0%BF%D1%96%D1%81%D0%BB%D1%8F-%D0%B4%D1%82%D0%BF-%D0%BA%D0%BE%D0%BC%D0%BF%D0%BB%D0%B5%D0%BA%D1%81%D0%BD%D0%B5-%D0%BA%D0%B5%D1%80%D1%96>https://feedback.cloudways.com/forums/203824-product-improvements-flexible/suggestions/49478654-%D1%89%D0%BE-%D1%80%D0%BE%D0%B1%D0%B8%D1%82%D0%B8-%D0%B7-%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%BE%D0%B1%D1%96%D0%BB%D0%B5%D0%BC-%D0%BF%D1%96%D1%81%D0%BB%D1%8F-%D0%B4%D1%82%D0%BF-%D0%BA%D0%BE%D0%BC%D0%BF%D0%BB%D0%B5%D0%BA%D1%81%D0%BD%D0%B5-%D0%BA%D0%B5%D1%80%D1%96</a> 1хслотс зеркало на сегодня <a href=https://www.fortressrisk.com/user/gregorychithgregorychith/>https://www.fortressrisk.com/user/gregorychithgregorychith/</a> Какие призы у еще получить кроме бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного бонуса, каждое онлайн казино предлагает игрокам выгодное предложение на 1-ый депо, вы совершаете депозит, ваш депо возрастает в двое либо даже в 3, что, этим наиболее начать выступать можно с больше солидной суммой, например же не забываем тему вейджер на бонусы.Максимальная ставка ? уточняется в валюте счета и ограничивает размер ставки за раз спин. В случае ее превышения приз имеет быть аннулирован. Также в правилах возможность содержаться запрет на размещение ставок определенного вида, примеру, по равным шансам в рулетке (то есть, на чет или нечет, красное либо темное и т.д.).
1×slots актуальное зеркало
<a href=https://fmatras.ru/profile/107395-rabofreekt/>1×slots официальный зеркало</a> x1 slots регистрация в 1×slots casino Ну и окончательно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: схожая щедрость увеличивает степень преданности клиентов к фирмы. <a href=https://xn----7sbarohhk4a0dxb3c.xn–p1ai/user/RaymondJex/>https://xn----7sbarohhk4a0dxb3c.xn–p1ai/user/RaymondJex/</a> Если вы выбираете испытанное лицензионное интернет казино и выполните все условия получения бездепозитного бонуса, трудностей с получением презента у Вас не возникнет.Изучить управляла и обстоятельства получения бездепозитных бонусов казино, Вы сможете у нас на сайте в разделе с призами либо на официальном сайте избранного Вами казино. Если возможности найти необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электрической почте. 1×slots подтвердит вашу регистрацию если говорить
x1 slots регистрация в 1×slots casino
В качестве призов онлайн казино часто предлагает выдачу фриспинов, то есть безвозмездных вращений игрового барабана. Виртуальные монеты возможно применять для обучения в покерной школе или для игры в казино.Также бездепозитные призы все служить методом вернуть к ирге посетителей, пока приостановивших своё сотрудничество с фирмой: уведомление о бездепе поступает на мобильный телефон или почту. <a href=https://wiki.streampy.at/index.php?title=%D0%A4%D0%BB%D0%B8%D1%80%D1%82_%D0%9E%D0%B1%D1%89%D0%B5%D0%BD%D0%B8%D0%B5_%D0%97%D0%BD%D0%B0%D0%BA%D0%BE%D0%BC%D1%81%D1%82%D0%B2%D0%B0_%D0%91%D0%B5%D0%B7_%D0%A0%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D0%B8_%D0%91%D0%B5%D1%81%D0%BF%D0%BB%D0%B0%D1%82%D0%BD%D0%BE>https://wiki.streampy.at/index.php?title=%D0%A4%D0%BB%D0%B8%D1%80%D1%82_%D0%9E%D0%B1%D1%89%D0%B5%D0%BD%D0%B8%D0%B5_%D0%97%D0%BD%D0%B0%D0%BA%D0%BE%D0%BC%D1%81%D1%82%D0%B2%D0%B0_%D0%91%D0%B5%D0%B7_%D0%A0%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D0%B8_%D0%91%D0%B5%D1%81%D0%BF%D0%BB%D0%B0%D1%82%D0%BD%D0%BE</a> Верификация важна для дополнительной безопасности и помочь техподдержке выявить бонусхантеров и мошенников. Кстати, рядах платформах выводы солидных сумм доступны только после подтверждения личности.Заработать на бездепозитных призах за регистрацию в казино имеет каждый юзер, достигший совершеннолетия. 1× slots casino официальный сайт Бездепозитный приз казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби избранного заведения, определится в выборе игр и проверить качество работы саппорта. Довольно часто, начиная игровой процесс, игрок теснее отказывается останавливаться и проделывает настоящий лепта. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть бесплатно вероятно как один таки с бонусом за регистрацию без надобности заносить депозит.
1×slots зеркало подтвердит вашу регистрацию если говорить
Когда речь идет о денежных призах, казино практически устанавливают условия вейджера, коие нужно выполнить, чтобы исключить выигрыш. <a href=https://foro.muelendhir.com/showthread.php?tid=119648>1×slots регистрация на сайте</a> Самые свежие бездепозитные бонусы в казино за регистрацию 2022 года с выводом выгоды присутствуют на этой страничке. Посетитель может расценить условия получения и начать играть на средства без внесения депозита. При этом игроку главно осознавать, на каких критериях и какими методами он сможет вывести полученный выигрыш. Для этого нужно расценить перечень подключенных платежных систем. Исходя из этого, просто не присутствует осмысленных причин махнуть рукою на получение такого приза при регистрации. И, лишним, на подобный безвозмездной базе у вас есть шансы выиграть деньги и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные бонусы, именуют безвозмездными онлайн платформами для игр. 1х слот 1хслотс регистрация перейти на 1×slots <a href=https://familydir.com/%D0%B1%D0%BB%D0%BE%D0%B3-%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0-%D1%8F%D0%BD%D0%B4%D0%B5%D0%BA%D1%81_456278.html>https://familydir.com/%D0%B1%D0%BB%D0%BE%D0%B3-%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0-%D1%8F%D0%BD%D0%B4%D0%B5%D0%BA%D1%81_456278.html</a> Подтвердите регистрацию, чтобы активировать Бездепозитный бонус с выводом, потребуется наполнить собственный профиль. Заполните пустующие поля настоящими данными о для.
1×slots зеркало проходить регистрацию это отличный вариант
При верном подходе бездепы — это прекрасный способ выступать на деньги без растраты собственных средств. Есть несколько рекомендаций, следуя которым возможно извлечь максимум пользы из подобных акций казино. Играть стопам только на лицензированных площадках. Скриптовые сайты столько дурачат с бонусными услугами, хотя и употребляют пиратский софт с измененным ГСЧ. Выиграть на этих автоматах нереально. Даже не выиграв солидную необходимую, игрок увлекательно проведет время, изнутри изучит работу площадки, воспримет геймплей автоматов. Все это без каких-либо денежных рисков. Быть в курсе превосходнейших промоакций с. Достаточно периодически изучать список новых онлайн казино с выводом приза без депозита в этом разделе.Выше мы предоставили глубокий набор самых свежих и своевременных бездепозитных бонусов в онлайн казино без пополнения на 2022 год, где вам воспользоваться хоть ценным бездепозитным призом. <a href=http://nao-info.ru/index.php?subaction=userinfo&user=parcheddownlink>http://nao-info.ru/index.php?subaction=userinfo&user=parcheddownlink</a> 1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, в не желайте стать жертвой плутов или впустую истратить время; 1×slots быструю регистрацию а также мгновенное
<b>Смотреть еще похожие новости:</b>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=395312>1×slots зеркало сайта</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Автоматы непопросту числятся наиболее известным азартным отдыхом. Чтобы освоить управление и верховодила, понадобится всего некоторое мин. Ваша задача устроить ставку, определить количество трудящихся линий и можно вертеть тамбур. Если на выпадет выигрышная комбинация – вы выиграли! С данной задачей для помогут справится бездепозитные бонусы казино. Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.
#592 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet слоты 1×bet xyz 7k casino <a href=https://m.repost.news/>казино можно</a> ап казино рабочие зеркала казино <a href=https://repost.news/>порно с Виктория Синицина, фигуристка</a> казино рулетка casino зеркало сегодня рабочее Любимова Ольга Борисовна порно водка казино 1×bet скачать приложение на андроид casino ап гама казино
DiskiPlus рабочее казино DiskiPlus pinco casino <a href=https://www.diskiplus.ru>DiskiPlus casino сегодня</a> DiskiPlus porno Илона Маркова, хоккеистка DiskiPlus почему в казино нет окон <a href=https://www.diskiplus.ru/>DiskiPlus casino онлайн</a> DiskiPlus cometa casino DiskiPlus порно с Антропова Валентина Викторовна DiskiPlus casino 7k рабочее DiskiPlus 1×bet зеркало DiskiPlus 1×bet casino DiskiPlus казино пин DiskiPlus top casino
#593 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пин ап букмекерская контора автомат казино <a href=https://kompromat1.online/>где казино</a> пин casino порно с Константин Тюкавин (футбол) <a href=https://strelochnik.com/>казино 5</a> рабочие зеркала казино букмекерские контора ап casino сайты 1×bet 1 казино 1 рабочее казино скачать 1×bet на андроид
DiskiPlus casino сегодня DiskiPlus казино сочи <a href=https://diskiplus.ru/>DiskiPlus porno Екатерина Ефременкова, шорт-трекистка</a> DiskiPlus порно с Матвей Сафонов (футбол) DiskiPlus скачиваемые казино <a href=https://diskiplus.ru>DiskiPlus Анна Михалкова</a> DiskiPlus 7k casino зеркало DiskiPlus порно с Каролина Севастьянова DiskiPlus скачать casino на андроид DiskiPlus Шевцова Татьяна Викторовна порно DiskiPlus 1×bet зеркало xbet xyz DiskiPlus casino андроид DiskiPlus пина букмекерской конторы
#594 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию более популярный вариант это
Активация по промокоду используется в различных видах бездепов. Если речь идет о приветственном призе, то комплект знаков можно разузнать на основной страничке, в регистрационной форме или письме, которое отправляется юзеру для доказательства e-mail. Акции имеют проводиться вместе с партнерскими площадками. Обычно код располагается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется разовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном кабинете либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем актуальный код для активации в описании каждого промо. <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino 56 online</a> Нет. Казино раздают бесплатные призы за регистрацию, чтобы, чтобы, дабы заказчик возможность ознакомиться с игровым заведением. А чтобы исключить его, нужно выполнить обстоятельства отыгрыша.Если вы новичок данном и только попали в неизведанную вами область азарта — за услуг как бездепозитные призы без пополнения. <a href=http://snstheme.com/forums/users/3d-render/>http://snstheme.com/forums/users/3d-render/</a> Большинство клубов привлекают внимание игры за счёт различных презентов. На 1 сайтах возможно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает благотворительные вращения для запуска топовых интернет слотов. Несмотря на различные акции, стоит выделить самые главные.Бездепозитные бонусы – это самая небезинтересная и более многообещающая акция интернет-казино. Они и чем фри-спинов, потому собственно выплаты в бесплатных вращениях не гарантированы, ведь композиции на барабанах игрового аппарата все не сложиться. 1хслотс зеркало на сегодня <a href=http://suncheon.info/bbs/board.php?bo_table=free&wr_id=47052>http://suncheon.info/bbs/board.php?bo_table=free&wr_id=47052</a> На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не сможете активировать и получить бездепозитный приз.
1×slots казино зеркало
Бездепозитные бонусы — это подарки от казино в виде бонусных средств либо фриспинов для игровых автоматов, которые начисляются на акк игрока в процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депо не требуется.Обычно показатель выше, чем для призов на депозит. Не изумляйтесь, в он будет в х100. Иногда завышенный коэффициент вейджера уточняется для обитателей отдельных государств. <a href=https://tussom.com/forums/showthread.php?tid=22193>1×slots зеркало на сегодня</a> 1×slots зеркало рабочее Для казино, работающих онлайн, бездепозитные призы необходимы для привлечения свежих посетителей. Предложение сыграть на слотах без необходимости внесения настоящих средств — работающий метод для увеличения энтузиазма к компании. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит выступать в казино, лишь сейчас теснее на личные средства. <a href=https://rollerforum.volkerschulz.de/memberlist.php?mode=viewprofile&u=445968>https://rollerforum.volkerschulz.de/memberlist.php?mode=viewprofile&u=445968</a> Но никогда не запамятовывайте внимательно разбирать правила роли в бонусных акциях. Если вы нарушите хотя бы одно условие, позднее вы не сможете уладить недоразумение с администрацией. 1×slots зеркало быструю регистрацию а также мгновенное При пользовании бездепозитным призом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют количество видов лимитов:Для казино, работающих интернет, бездепозитные бонусы нужны для привлечения свежих посетителей. Предложение поиграть на слотах без необходимости внесения реальных денег — работающий способ для увеличения интереса к компании. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит выступать в казино, лишь теперь уже на личные средства.
1×slots официальный сайт мобильная версия скачать
Чтобы бездеп не был начислен на Ваш акк, Вам не нужно активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк механически, а Вы не расчитываете его применять, обратитесь в службу с просьбой отменить бездепозитный приз. В бонусную программу множества операторов входят регулярные бездепы. Это пожизненные промоакции, поощряющие интенсивных неизменных игроков. Популярный формат — раздача фриспинов по определенным дням недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают постоянные бонусы без депозита в размен на накопленные баллы лояльности.Получать информацию о самых выгодных призах возможно без неизменного мониторинга новостей казино. Мы брали данную задачку на себя и безпрерывно смотрим за услугами операторов, выбирая наихорошие из них. В данном разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список промоакций регулярно дополняется. В топ вошли самые новые бездепозитные призы за регистрацию в казино 2020, временные и замкнутые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и другим критериям. Если срок деянья акции истек, она удаляется из перечня. <a href=http://www.kiopro.ru/support/forum/view_profile.php?UID=80906>http://www.kiopro.ru/support/forum/view_profile.php?UID=80906</a> А ознакомиться с новыми интернет казино, Вы можете за счет призов с выводом выгоды, которые Вы можете получить без депозита.Срок отыгрыша — это период, кот-ый наступает в момент активации бонуса и заканчивается с его закрытием. Пользователю необходимо уложиться в данный временной зазор, по призовые средства аннулируются. Казино устанавливают перечень игр, ставки каких засчитываются при расчете отыгранных средств. Если тайтл не входит в данный список, то возможность быть недосегаем для загрузки в деянья бонусного предложения. 1хслотс рабочее зеркало Размер бонусов чаще всего чисто условный и не выше 50 рублей. Приятно, хотя ощутимым бустом в игре вряд ли станет.
1хслотс казино зеркало
Подарки на дни ? посвященные праздничным датам, требующие символического отыгрыша или начисляются без это. Могут дариться игрокам сутки рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду. <a href=https://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=6268>1хлот регистрация в 1×slots casino</a> Реже бонусы без депозита начисляются постоянным игрокам. С их поддержкой администрация старается вычесть ценных посетителей либо желает поблагодарить за преданность верных посетителей. Но гораздо чаще для подобных целей применяются эти промоакции:Для доказательства электрической почты, просто перейдите по интенсивной ссылке в письме, приобретенном от игрового заведения. При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток. 1хслотс мобильная версия зеркало <a href=http://www.zelgymn.grodno.by/user/JulesApory/>http://www.zelgymn.grodno.by/user/JulesApory/</a> Как управляло, при выводе денег, от играющего потребуется лишь устроить минимальный вклад чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом индивидуальный счет.
1×slot казино зеркало
Многие казино предоставляют в рекламных целях безвозмездные призы необыкновенно для наших читателей. Чтобы их получить, нужно перебежать на игровой сайт по партнерской ссылке с нашего портала.Многие азартные клубы ограничивают необходимую вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании промоакции, суммы Вы не сможете вывести. Разница несомненно аннулирована, Вы даже не сможете делать на нее ставки. <a href=https://ai.igcps.com/home.php?mod=space&uid=728236&do=profile>https://ai.igcps.com/home.php?mod=space&uid=728236&do=profile</a> При отыгрыше бонусных средств, нужно учитывать срок деяния бонуса и время, которое дается на отыгрыш. По истечению заявленного медли, не отыгранный приз будет аннулирован. 1×slots актуальное зеркало Обыкновенные бездепозитные бонусы в размере от 3-х до двадцати $ сделаны для того, чтобы в забавы заходили все свежие и свежие игроки. Здесь, вероятнее всего, несомненно ограничение на максимальный выигрыш. Важно, дабы перед минимальным вкладом был отключен бонус за 1-ое пополнение счета, и игры не попадет на повторный вейджер.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=73687>casino 1×slot</a>
<a href=http://dd214.labelcreativeak.com/forums/viewtopic.php?f=3&t=1370>1×slots casino зеркало рабочее</a>
<a href=https://ragnarok.ch/forum/viewthread.php?thread_id=205213>1хслотс мобильная версия зеркало</a>
<a href=https://australianwinerytours.com/tours/showthread.php?tid=478357>1× slots зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для всех бездепозитных призов функционирует максимальный предел на выигрыш. Он указывает предельную необходимую, коию у получить, играя на бонусные кредиты. Как лишь вас получится выполнить притязания вейджера, возможный максимум будет переведен с бонусного счета на главный, а остаток несомненно списан.
#595 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
up букмекерская контора кент казино <a href=https://slon-ru.com/>сайт 1×bet слоты</a> бывшие казино Яровая Ирина Анатольевна порно <a href=https://krtka.info/>кент casino</a> 7k casino бонус Любимова Ольга Борисовна порно спорт букмекерская контора казино на деньги лучшая казино casinos xyz казино регистрации
DiskiPlus почему в казино не бывает настенных часов DiskiPlus porno Александра Степанова, фигуристка <a href=https://diskiplus.ru/>DiskiPlus порно с Анастасия Потапова, теннисистка</a> DiskiPlus Яровая Ирина Анатольевна порно DiskiPlus 1×bet 1 <a href=https://diskiplus.ru>DiskiPlus порно с Максим Глушенков (футбол)</a> DiskiPlus porno Светлана Ходченкова DiskiPlus Фастова Елена Владимировна порно DiskiPlus 1×bet вход DiskiPlus casino сегодня DiskiPlus pinco casino DiskiPlus приложения букмекерских контор на андроид DiskiPlus фреш казино
#596 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора на андроид porno Вера Бирюкова, гимнастка <a href=https://vestnik-jurnal.com/>porno Дарья Мороз</a> porno Нина Пирогова, хоккеистка рабочие зеркала казино <a href=https://strelochnik.com/>лучшие бесплатные онлайн казино</a> 1×bet официальный скачать леон букмекерская контора сколько казино букмекерская контора бетсити казино porno Елизавета Туктамышева casino скачать приложение
DiskiPlus порно с Анна Калинская (теннис) DiskiPlus 1×bet официальный сайт 1×bet xyz <a href=https://diskiplus.ru>DiskiPlus Москалькова Татьяна Николаевна порно</a> DiskiPlus casino x DiskiPlus порно с Виктория Синицина, фигуристка <a href=https://www.diskiplus.ru>DiskiPlus 1×bet рабочее</a> DiskiPlus Москалькова Татьяна Николаевна порно DiskiPlus пина букмекерской конторы DiskiPlus скачать сайт букмекерской конторы DiskiPlus порно с Захарова Мария Владимировна DiskiPlus порно с Артемий Панарин (хоккей) DiskiPlus казино вход DiskiPlus r7 casino
#597 comatozzehttps://comatozze.ing/
أفضل مقاطع فيديو Comatozze على الإنترنت | استمتع بمقاطع Comatozze المثيرة يومياً | قم بمشاهدة Comatozze اليوم | Comatozze – عالم مليء بالإثارة <a href=https://comatozze.ing/>comatozze</a>.
#598 internetGephttps://nizhnij-novgorod-domashnij-internet003.ru
узнать провайдера по адресу нижний новгород <a href=https://nizhnij-novgorod-domashnij-internet003.ru>nizhnij-novgorod-domashnij-internet003.ru</a> подключить интернет в квартиру нижний новгород
#599 Ремонт фотоаппаратов в москвеhttps://remont-fotoapparatov-ink.ru/
Наша мастерская предлагает высококачественный <a href=https://remont-fotoapparatov-ink.ru/>сервисный центр по ремонту фотоаппаратов в москве</a> различных марок и моделей. Мы осознаем, насколько значимы для вас ваши фотоаппараты, и стремимся предоставить услуги высочайшего уровня. Наши опытные мастера проводят ремонтные работы с высокой скоростью и точностью, используя только качественные детали, что предоставляет длительную работу наших услуг.
Наиболее частые неисправности, с которыми сталкиваются пользователи камер, включают проблемы с объективом, проблемы с затвором, поврежденный дисплей, проблемы с питанием и программные сбои. Для устранения этих поломок наши опытные мастера выполняют ремонт объективов, затворов, экранов, батарей и ПО. Доверив ремонт нам, вы получаете долговечный и надежный отремонтировать фотоаппарат адреса. Подробная информация представлена на нашем сайте: https://remont-fotoapparatov-ink.ru
#600 comatozzehttps://comatozze.ing/
أفلام Comatozze مثيرة وممتعة للغاية | استمتع بمقاطع Comatozze المثيرة يومياً | أحدث أفلام Comatozze متاحة الآن | عش الإثارة مع Comatozze الآن <a href=https://comatozze.ing/>comatoser</a>.
#601 internetGephttps://nizhnij-novgorod-domashnij-internet001.ru
подключить интернет <a href=https://nizhnij-novgorod-domashnij-internet001.ru>nizhnij-novgorod-domashnij-internet001.ru</a> провайдеры нижний новгород
#602 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
bet casino pin ап casino <a href=https://vestnik-jurnal.com/>pin up casino пин ап</a> лучшие казино бесплатно 1×bet зеркало <a href=https://t.me/vchkogpu_ru>1×bet зеркало рабочее на сегодня 1×bet xyz</a> pin up casino официальный букмекерскую контору пин казино можно pin casino зеркало порно с Кирьянова Дарья Борисовна карты казино казино сочи
DiskiPlus ев казино DiskiPlus Матвиенко Валентина Ивановна порно <a href=https://diskiplus.ru/>DiskiPlus porno Дарья Мороз</a> DiskiPlus pin up casino скачать DiskiPlus porno Юлия Канакина <a href=https://www.diskiplus.ru/>DiskiPlus 1win casino</a> DiskiPlus Юдаева Ксения Валентиновна порно DiskiPlus casino автомат DiskiPlus порно с Юлия Ефимова DiskiPlus казино рояль DiskiPlus 1×bet сейчас DiskiPlus vodka casino DiskiPlus слоты казино
#603 Charlesgunnyhttp://filmkachat.ru
казино 1×slots официальный сайт
Активация по промокоду употребляется в различных видах бездепов. Если речь идет о приветственном призе, то набор знаков можно узнать на крупнейшей страничке, в регистрационной форме либо письме, коие отчаливает пользователю для подтверждения e-mail. Акции имеют проводиться общо с партнерскими площадками. Обычно код располагается на постороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активируется одноразовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном кабинете или начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем важный код для активации в описании любого промо. <a href=http://filmkachat.ru/>1хслотс 1хслотс регистрация перейти на 1×slots</a> Бездепозитные бонусы — это презенты от казино в виде бонусных средств или фриспинов для игровых автоматов, коие начисляются на аккаунт игрока в процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депо не требуется. <a href=https://matters.town/a/tx7fd8c97uu1>https://matters.town/a/tx7fd8c97uu1</a> Получать информацию о самых прибыльных призах возможно без постоянного прогноза новостей казино. Мы брали данную задачку на себя и безпрерывно смотрим за услугами операторов, выбирая лучшие из их. В данном разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список акций периодически пополняется. В топ зашли самые свежие бездепозитные призы за регистрацию в казино 2020, временные и закрытые промо. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и аспектам. Если срок деянья промоакции истек, она удаляется из перечня. 1×slots зеркало которую указывали при регистрации кстати <a href=https://www.are.na/buy-dextroamphetamine/dqjo7tdzowg>https://www.are.na/buy-dextroamphetamine/dqjo7tdzowg</a>
1×slots актуальное зеркало
Индивидуальные поощрения выдаются за совершение деяний: подписку на аккаунты площадки в соц сетях, установку мобильного прибавления либо официального посетителя для ПК. В большинстве казино срабатывают программы лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий степень часто сопрягается выдачей бездепа. 1×slots зеркало регистрацию более популярный вариант это Во всех законных онлайн-казино Беларуси необходимо свидетельство паспортных данных для забавы — это заявка правительства государства. <a href=https://augustioon17273.pages10.com/unlocking-the-strength-of-undress-ai-a-deep-dive-into-nsfw-written-content-development-65097700>https://augustioon17273.pages10.com/unlocking-the-strength-of-undress-ai-a-deep-dive-into-nsfw-written-content-development-65097700</a> Такой бесплатный эквивалент средств зачисляется на профиль юзера после воплощения притязаний и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений вероятен только последствии осуществления вейджеровых критерий.Нельзя осматривать игру на средства, как вариант заработка. Азартные игры запрещены для лиц младше 18 лет. Topcasinobonuses.mobi классифицируется зачинщиком азартных игр. Сайт одевает информационный нрав. 1×slots casino зеркало рабочее Чтоб получить большой выигрыш, избирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, которые доступны по условиям отыгрыша.
1хслот скачать
В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая приятная доля игры. Важно, зачастую бездепозитные призы в казино выдаются с лимитированиями по наибольшей выплате. В среднем возможно рассчитывать на выгода в несколько тысяч руб. Как исключить выигрыш с приза без депо. Придётся подтвердить акк документально, в неких заведениях. Процедура верификации неотклонима и делается каждым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате или прочитайте в правилах.Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, solid лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. <a href=http://www.pk10zc.com/space-uid-357041.html>http://www.pk10zc.com/space-uid-357041.html</a> 1×slots регистрация на 1хслотс В каждом казино с бездепозитным призом предусмотрены вейджеровые обстоятельства. Это единственный «подводный камень», который стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) сделать определённое количество ставок. Чем круче приз, тем сложнее выполнить обстоятельства, и напротив.
1×slots зеркало регистрация в 1×slots casino
Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в неотъемлемом порядке нужно пополнить счет в казино. Для депозитных призов, данная процедура не необходима, например как депо теснее изготовлен. <a href=https://bbs.sinbadgroup.org/index.php?xjkh-tampa-s-poster-pup-for-new-cancer-treatment.t48661.html/page-6748#post-290418>1×slots актуальное зеркало</a> Подобные бонусы без депо предоставляются на более выгодных условиях. Зачастую они крупнее, а обстоятельства отыгрыша менее жесткие. Акции, приуроченные к календарным дням, бывают рассчитаны как на всех пользователей, так и на категории: например, подарок на 8 марта девушкам-игрокам или мужикам на 23 февраля.Прибывшие на акк деньги бездепозитные призы предназначаются, главном, только для свежеиспеченных пользователей, коие ранее не имели личного аккаунта в данном казино. Исходя из сего, если ранее у игрока был изготовлен депо, то, по всей вероятности, у него больше не будет возможности рассчитывать на получение такового бонуса в конкретном заведении. 1×slots регистрацию процедура займет всего лишь <a href=https://trade-britanica.trade/wiki/User:FlorineFitzmauri>https://trade-britanica.trade/wiki/User:FlorineFitzmauri</a>
1х слот регистрация в 1×slots casino
Даже не выиграв крупную необходимую, игрок интересно проведет время, изнутри исследует работу площадки, оценит геймплей автоматов. Все это без каких-то финансовых рисков. Быть в курсе превосходнейших промоакций легко. Достаточно периодически учить список новых онлайн казино с выводом приза без депозита в данном разделе.На данном разделе портала регулярно публикуются обзорные статьи, в рассматриваются бесплатные бонусы наихороших интернет-казино. Информация структурирована по нескольким пт, включая главные: Казино выводит деньги лишь на ту платежную систему, с котрой был сделан депозит. То есть, для вывода бездепозитного бонуса, Вам сначала необходимо пополнить счет. В некоторых клубах ограниченный список способов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с данных платежных методов, коие доступны для вывода.Вообще перейдя в казино — правила схожи в получении бездепозитных призов, в стереотипные управляла входит: подтвердить эл. Почту и аппарат, наполнить собственный индивидуальный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ. <a href=http://fh7778nc.bget.ru/users/voicelessguru41>http://fh7778nc.bget.ru/users/voicelessguru41</a> Бездепы с бесплатными вращениями предоставляют юзерам право вертеть барабаны игровых автоматов без снятия средств со счета. За каждый раунд уплачивает казино. Число спинов ограничено и редко выше сотку. Если промоакция включает в себя много бесплатных игр, их начисление имеет быть разбито на количество дней.Акции, приуроченные к календарным праздничным, бывают рассчитаны как на всех пользователей, например и на категории: например, презент на 8 марта девушкам-игрокам или мужчинам на 23 февраля. 1×slots зеркало видели такую регистрацию на Лишь популярные и известные азартные заведения шансы разрешить себе раздавать бездепы вид дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, коие можно израсходовать в топовых аппаратах с высочайшей отдачей.
<b>Смотреть еще похожие новости:</b>
<a href=https://forums.dfine.net/member.php?action=profile&uid=119>казино 1×slots официальный сайт</a>
<a href=https://www.handmakersbrasil.com.br/topic/4855-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-1×slots/>казино 1×slots</a>
<a href=http://aurorahcs.com/forum/memberlist.php?mode=viewprofile&u=168982>1×slots регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Способы получения бездепа различаются в зависимости от облика бонуса, который приглянулся игроку. Но вас так нужно быть зарегистрированным в законном онлайн-казино и подтвердить собственную лицо. В общем виде пошаговая инструкция для получения бездепозитного приза выглядит например: Получать информацию о самых прибыльных бонусах возможно без постоянного мониторинга новостей казино. Мы брали эту задачку на себя и непрерывно следим за услугами операторов, выбирая лучшие из их. В этом разделе собраны последние бездепы, промокоды к ним и условия их активации. Список акций регулярно пополняется. В топ зашли самые свежие бездепозитные призы за регистрацию в казино 2020, временные и замкнутые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и другим аспектам. Если срок деянья акции истек, она удаляется из списка.
#604 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут устанавливает ограничение для посетителей. Конечно, это возможно счесть неким неудобством для игрока, хотя справедливости необходимо, собственно выбор автоматов всё точно остаётся довольно наибольшим. <a href=http://filmkachat.ru/>1хслот скачать</a> <a href=https://lnk.bio/kalinka0588>https://lnk.bio/kalinka0588</a> Бонус с зачислением средств на счет выделяет больше свободы деяний. Пользователь сам подбирает, каким образом воспользоваться подаренными своими. Здесь кроме имеют работать ограничения на список дешевых игр, но обычно эти рамки не так строги, как в рекламную с бесплатными вращениями. 1×slots быструю регистрацию а также мгновенное <a href=http://www.markstrongcn.com/home.php?mod=space&uid=5072&do=profile>http://www.markstrongcn.com/home.php?mod=space&uid=5072&do=profile</a>
1 x slots
Все любят получать презенты. Согласитесь, почти любой играющий человек будет безгранично счастлив, если получит безвозмездный подарок для игры в онлайн казино просто за регистрацию либо же приз за внесенный депозит, например нарекаемые приветственные бонусы для новых игроков. Соответственно такие онлайн клубы станут более знамениты и преимущественны у игроков при выборе казино для игры. Топ казино постоянно обновляется и добавляются новые и занимательные игровые клубы с симпатичной бонусной политикой и всеми вероятными преимуществами, льготами, к которым относятся эти призы как фриспины за регистрацию, валютные бездепозитные призы, еще щедрые бонусы за внесенный депозит.Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных ситуаций с казино, когда после отыгрыша бездепа вас не дадут вывести солидную необходимую выигрыша. <a href=https://portugal-campings.com/pt/profile/jamescip/>1×slots casino регистрация</a> 1×slots регистрацию процедура займет всего лишь Прежде всего, не запамятовывайте регулярно заглядывать на страницу обзоров бездепозитных призов. Они шаг за шагом осматривают более занимательные предложения ведущих игорных порталов.Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут устанавливает лимитирование для клиентов. Конечно, это возможно счесть неким неудобством для игрока, но справедливости ради необходимо, собственно выбор автоматов всё также остаётся достаточно большим. <a href=https://fr.tanime.site/user/DoctorLazutaPl/>https://fr.tanime.site/user/DoctorLazutaPl/</a> рабочее зеркало 1×slots
сайт 1× slots casino
2. Создать свежий профиль. Для регистрации нужно наполнить небольшую анкету либо зайдите в индивидуальный кабинет посредством социальных сеток; Бездепозитные призы — это подарки от казино повторяющий бонусных средств либо фриспинов для игровых автоматов, коие начисляются на акк игрока в процедуры регистрации на сайте заведения. Для получения таких поощрений депозит не потребуется.На странице представлены бездепозитные бонусы за регистрацию в казино редкая награда за коей гонятся все игроки как новенькие, например и профессионалы. Мы тоже уделяем большое внимание на наличие призов при составление рейтинга казино на деньги. Бездепозитный приз это вероятность играть безвозмездно и выиграть реальные деньги. <a href=https://mehanik-kiz.ru/bitrix/rk.php?goto=https://www.pubpub.org/user/shisha-tobacco-from-4-eur>https://mehanik-kiz.ru/bitrix/rk.php?goto=https://www.pubpub.org/user/shisha-tobacco-from-4-eur</a> При поддержки такового поощрения оператор может также привлекать посетителей, которые ранее показывали активность на сайте, но по какой-то причине прекратили выступать. В данном случае промокод высылается пользователю по электронной почте либо в виде SMS. 1×slots казино зеркало
1×slots скачать на айфон
Иногда у гостей сайта могут возникнуть проблемы при активации полученного промо-кода. В этих случаях, нужно адресоваться за подмогою в саппорта «Support». Для получения ответа, непременно указывается определенная причина обращения и подтверждается информация дополнительными скриншотами. Если сложилась неоднозначная ситуация, постоянно возможно адресоваться к основному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ.Каждый геймер должен сначала отчетливо выучить условия по получению и отыгрышу понравившегося дара. Если всё организует, поторопитесь забрать безвозмездные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик в начать вертеть барабаны топовых слотов. Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного бонуса довольно пополнения баланса и подтверждения личности. В других же клубах, нужно некоторое один прокрутить свой депозит. Для верификации номера телефона, в личном профиле выберите опцию „Подтвердить номер телефона“ и введите в отвечающее поле код, приобретенный в sms-сообщении. 1× slots зеркало <a href=http://yinyue7.com/space-uid-1054085.html>http://yinyue7.com/space-uid-1054085.html</a> Бонус с зачислением средств на счет выделяет больше свободы действий. Пользователь сам подбирает, каким образом распорядиться подаренными своими. Здесь также все действовать лимитирования на список доступных игр, хотя обыкновенно эти рамки не например строги, как в рекламную с бесплатными вращениями.Отыграв бездепозитный приз в казино с выводом также придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, случае подобное ограничение существует, то единоразово исключить получится только необходимую, не превосходящую объем приобретенного бонуса.
1×slots подтвердит вашу регистрацию если говорить
Если вы опытный игрок, вы должны знать, что бонус без депо – редчайшая находка. Тем не менее, мы неделю изучаем интернет, чтобы найти вам наихорошие бездепозитные предложения.Некоторые клубы автоматически начисляют бонус на аккаунт игрока после исполненья критерий получения, хотя посещают истории, когда приз нужно активировать игроку самому. Есть количество методов активации бонуса: Составленный экспертами Casino.ru перечень онлайн-казино с бездепозитным призом разрешает игрокам сопоставить спецпредложения различных операторов.Размер призов почаще всего чисто символический и не выше 50 рублей. Приятно, хотя осязаемым бустом в игре вряд ли будет. <a href=http://kafdp.or.kr/bbs/board.php?bo_table=free&wr_id=384308>http://kafdp.or.kr/bbs/board.php?bo_table=free&wr_id=384308</a> В случае установленного лимита на необходимую вывода выигрыша с бездепозитного бонуса, игрок не может вывести больше заявленной суммы. 1 x slots casino Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, дабы еще раз получить даровой бонус. Игорные заведения нетерпимы к бонус-хантерам, потому вас ждет неизбежное санкция.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.dis-course.net/viewtopic.php?t=663907>1×slots официальный сайт зеркало</a>
<a href=https://games-garant.ru/index.php?subaction=userinfo&user=Jamesneorm>1×слотс казино</a>
<a href=https://tabsgame.ru/user/Jamesbes/>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
К раскаянию, нет. Почти все казино, настоятельно внесение но бы 1-го малого депо для вывода выигрыша с бездепозитного приза. Также учитывайте, что вывести деньги разрешено лишь на ту платежную систему, с коей был сделан депо.
#605 internetGephttps://msk-domashnij-internet003.ru
проверить провайдера по адресу <a href=https://msk-domashnij-internet003.ru>msk-domashnij-internet003.ru</a> домашний интернет тарифы
#606 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Ирина Горбачева рабочее казино <a href=https://res-publika.com>Фастова Елена Владимировна порно</a> 1go casino казино онлайн бесплатно <a href=https://specreporter.com/>Валентина Матвиенко порно</a> сайт казино зеркало официальное казино вход Разуваева Ксения Денисовна порно казино фильм онлайн casino регистрации приложения букмекерских контор на андроид r7 casino
DiskiPlus сколько казино DiskiPlus казино фильм онлайн <a href=https://diskiplus.ru/>DiskiPlus скачать букмекерскую контору</a> DiskiPlus 1×bet xbet xyz DiskiPlus casino бонус <a href=https://diskiplus.ru/>DiskiPlus Фастова Елена Владимировна порно</a> DiskiPlus скачать 1×bet 1×bet xyz DiskiPlus Матвиенко Валентина Ивановна порно DiskiPlus порно с Кирьянова Дарья Борисовна DiskiPlus скачать сайт букмекерской конторы DiskiPlus казино пин DiskiPlus леон букмекерская контора DiskiPlus винлайн букмекерская контора официальный сайт
#607 Charlesgunnyhttp://filmkachat.ru
casino 1×slot
В зависимости от онлайн заведения каждый из них имеет вас предложить как бездепозитные деньги, так и бездепозитные фриспины, которые после успешной регистрации рухнут для на ваш игровой баланс. <a href=http://filmkachat.ru/>1×slots регистрация на сайте</a> <a href=https://www.bunity.com/-656a43e6–97c0–4816-aedc-21f8d5e41341>https://www.bunity.com/-656a43e6–97c0–4816-aedc-21f8d5e41341</a> 1×slots акции <a href=http://bazarweb.ru/forum.php?PAGE_NAME=profile_view&UID=36225>http://bazarweb.ru/forum.php?PAGE_NAME=profile_view&UID=36225</a> В разделе с бонусами активировать собственный подарок. Найти игры, для коих предусмотрено одобрение и использовать бонус по назначению.Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, дабы снова получить даровой приз. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ожидает неизбежное санкция.
1×slots бонус за регистрацию
сайт 1× slots casino <a href=http://epidemics.ru/index.php?subaction=userinfo&user=synonymousartis>http://epidemics.ru/index.php?subaction=userinfo&user=synonymousartis</a> 1×slots сайт зеркало
1×slots официальный demo регистрация в 1×slots casino
Вознаграждения за получение VIP-статуса ? начисляются масштабах программы лояльности при достижении очередного уровня либо выдаются индивидуально менеджерами службы. Многие казино деют в рекламных целях благотворительные призы исключительно для наших читателей. Чтобы их получить, нужно перебежать на игровой вебсайт по партнерской ссылке с нашего портала.Пoдтвepдить личнocть посетителя. Для удачного вывода средств, нужно доказать лицо посетителя. Нa этaпe вepификaции пpoфиля, работники службы безопасности обязаны убедиться, что у игрока не раз аккаунт. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не может исключить собственный выигрыш, если у него будет количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы. <a href=http://anima-rpg.com:/member.php?action=profile&uid=345161>http://anima-rpg.com:/member.php?action=profile&uid=345161</a> Многие азартные клубы ограничивают необходимую вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, обозначенной в описании акции, суммы Вы не сможете исключить. Разница несомненно аннулирована, Вы числе не сможете делать на нее ставки. 1× slots casino зеркало Получать информацию о самых прибыльных бонусах возможно без неизменного прогноза новостей казино. Мы брали данную задачку на себя и безпрерывно следим за услугами операторов, выбирая превосходнейшие из их. В этом разделе собраны заключительные бездепы, промокоды к ним и обстоятельства их активации. Список акций периодически пополняется. В топ вошли самые новые бездепозитные бонусы за регистрацию в казино 2020, кратковременные и замкнутые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и критериям. Если срок деянья акции истек, она удаляется из списка.Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном сайте и выполните вход в индивидуальный кабинет, дабы арестовать безвозмездные вращения с вейджером х40;
1×slots акции
Мы подготовили перечень, где есть всегда животрепещущие и новые бездепозитные призы казино, коие вам получить бесплатно. Для наших пользователей есть особые предложения неповторимые бонусы, которые вы нигде не отыщите, их мы обозначили особой красноватой плашкой «Exclusive». <a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=72942>1×slot официальный сайт</a> Для всех бездепозитных призов функционирует максимальный предел на выигрыш. Он показывает предельную сумму, которую появится получить, играя на бонусные кредиты. Как только для удастся выполнить требования вейджера, дозволенный максимально несомненно переведен с бонусного счета на главной, а остаток несомненно списан.Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, all зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. 1×slots casino зеркало рабочее <a href=https://www.google.sk/url?q=http%3A%2F%2Fdoctorlazuta.by>https://www.google.sk/url?q=http%3A%2F%2Fdoctorlazuta.by</a> Однако в критериях исчезают «подводные камешки», коие не разрешат вывести солидную необходимую либо же вы не успеете отыграть вейджер. Поэтому мастера советуют арестовать бесплатные вращения за регистрацию в казино без депозита, дабы поднабраться опыта и получить настоящий шанс на победу.Почти все игровые клубы настоятельно свидетельство контактных данных игрока для получения бездепозитного бонуса.
1×slots регистрация 1×slots casino 777 online
Можно ли наваривать на бездепозитных бонусах? Это не работа, здесь как повезет, если в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, это возможно назвать везением, и добавочной добавкой к вашему бюджету. <a href=https://mozillabd.science/wiki/User:MaurineFindley>https://mozillabd.science/wiki/User:MaurineFindley</a> Промокод – определённая композиция символов, коию нужно установить в соответствующее фон при творении учетной записи или активировать в собственном профиле игрока в разделе с бонусами. 1 x slots Бездепозитные призы начисляются только один раз. Не стоит открывать свежие аккаунты, дабы получить их повторно. Служба безопасности казино обязательно выявит «левого» участника и заблокирует. Если посетитель выполнит нужные притязания, отыграет свою ставку и решит исключить личный выигрыш, то ему надо(надобно) принять, что казино обязательно потребует дать ксерокопии личных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные средства вывести не получится.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=444165>x1 slots регистрация в 1×slots casino</a>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5346/#comment-654086>1х слотс зеркало регистрация в 1×slots casino</a>
<a href=https://vivoes.com/forum.php?mod=forumdisplay&fid=2>1×slots регистрация</a>
<a href=https://portugal-campings.com/pt/profile/jamescip/>1× слот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Объективные – объем приза, коэффициент и обстоятельства вейджера, необходимость внесения депо для вывода средств;
#608 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
7k casino зеркало гта казино <a href=https://glvk.guru/>ев казино</a> up casino зеркало казино онлайн <a href=https://slon-ru.com/>casino 7k сегодня</a> Шевцова Татьяна Викторовна порно сайт 1×bet слоты букмекерские контора ап Скоробогатова Ольга Николаевна порно пина casino casino вход порно с Георгий Джикия (футбол)
DiskiPlus casino betting DiskiPlus cometa casino <a href=https://www.diskiplus.ru>DiskiPlus казино пину</a> DiskiPlus Лут Оксана Николаевна порно DiskiPlus букмекерская контора вход <a href=https://www.diskiplus.ru>DiskiPlus порно с Гатагова Ольга Анатольевна</a> DiskiPlus pin up casino пин ап DiskiPlus 1×bet официальный скачать DiskiPlus букмекерские контора ап DiskiPlus сайте букмекерской конторы фонбет DiskiPlus порно с Варвара Субботина DiskiPlus пин casino DiskiPlus казино в россии
#609 Charlesgunnyhttp://filmkachat.ru
x1 slots 1хслотс регистрация перейти на 1×slots
Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам запрещено начислять бонусы клиентам, не имеющим денежных средств на счете. Мы предлагаем разглядеть животрепещущие бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ. <a href=http://filmkachat.ru/>1хслотс рабочее зеркало на сегодня</a> <a href=https://collectednotes.com/lexxeagle/expert-architectural-drafting-and-design-services-for-modern-construction>https://collectednotes.com/lexxeagle/expert-architectural-drafting-and-design-services-for-modern-construction</a> Способы получения бездепа различаются в зависимости от облика приза, кот-ый приглянулся игроку. Но вас в любом случае нужно быть зарегистрированным в законном онлайн-казино и подтвердить свою личность. В общем виде пошаговая аннотация для получения бездепозитного бонуса смотрится например:Бездепозитные призы казино это финансовая компенсация, предлагаемая юзерам на дармовой базе и возможность играть в интернет казино безвозмездно. Если сравнивать их с поощрениями за лепта, в средства выдаются только впоследствии первоначального пополнения счета, то бездепозитные гонорары получаются безвозмездно. То есть, играющий получает вероятность делать ставки на уже место деньги, коие выдаст заведение, выполняя, при, обычные действия, дабы их извлечь (тут идет о регистрация, удостоверении личности с использованием номера телефона, дизайна заказы и т.д. ). 1×slots актуальное зеркало <a href=https://danmanba.cc/home.php?mod=space&uid=125353&do=profile&from=space>https://danmanba.cc/home.php?mod=space&uid=125353&do=profile&from=space</a>
1×slots зеркало сайта
Также, учите, что бездепозитный бонус возможно вывести лишь сомнений случае, когда будут выполнены все условия отыгрыша.Подтверждение регистрации. Казино просят привязки профиля к электрическому адресу и номеру телефонного. Для этого на e-mail отправляется письмо ссылаясь, а на телефон ? текстовое известие с кодом. <a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=192641&pid=823781#post_823781>скачать 1×slots на андроид мобильная версия</a> 1×slots официальный сайт скачать на айфон <a href=https://ai.igcps.com/home.php?mod=space&uid=738070&do=profile&from=space>https://ai.igcps.com/home.php?mod=space&uid=738070&do=profile&from=space</a> Многие казино предоставляют в маркетинговых целях безвозмездные бонусы необыкновенно для наших читателей. Чтобы их получить, нужно перебежать на игровой сайт по партнерской ссылке с нашего портала. x1 slots 1хслотс регистрация перейти на 1×slots
1×slots официальный сайт мобильная версия скачать
При исполнении условий отыгрыша и верификации, деньги с бонусного счета переводятся на главный и могут быть выведены на карту либо электронный кошелек. Лимиты на вывод и сроки проведения транзакции в от избранной платежной системы.Многие игроки, оценив функционал казино, остаются играть в нем и далее ? на это и нацелено любое промо. Постоянные посетители вносят депозиты и проделывают ставки, обеспечивая длительную выгода оператора. То есть, казино раздают бездепы свежим пользователям для формирования приклнной аудитории. <a href=http://economreklama.ru/index.php?subaction=userinfo&user=cheerfulpodium7>http://economreklama.ru/index.php?subaction=userinfo&user=cheerfulpodium7</a> Иногда для получения бонусов нужно связаться с адептами саппорта. Удобнее всего с ними собеседовать в онлайн-сате, хотя иногда достаточно запроса по электронной почте.Большинство интернет-казино из нашего топ-10 готовы порадовать вас эксклюзивными промоакциями. Читайте о их в обзорах и на форуме. 1×slots casino регистрация 1×slotscasin online
1×slots зеркало регистрация
Каждый новичок и умелый игрок мечтают стремительно стартануть и начать создавать настоящие ставки. Для этого довольно забрать подарок, за который надо уплачивать. В зависимости от игровой платформы, нужно сделать профиль, привязать email или телефонный. После сего администрация начислит щедрое вознаграждение в виде даровых вращений либо виртуальных кредитов. Такие поощрения дозволяют бесплатно протестировать новое казино, разобраться с игровым ходом интернет слотов, заработать и вывести маленькую сумму средств. Чаще всего, популярные сервисы, такие как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно неотъемлемое правило. Финансовые средства выводятся только спустя что, эту платежную систему, которой пользовались для пополнения депо. Если же игрок получил бездепозитный покерный бонус, требуется пополнить счет на минимальную необходимую, кот-ая составляет обычно десять долларов. 1×slots casino регистрация 1×slotscasino09k online <a href=http://www.taroko.org/taroko/forums/member.php?action=profile&uid=502>http://www.taroko.org/taroko/forums/member.php?action=profile&uid=502</a>
1×slots casino регистрация 1×slotscasin online
Чаще всего казино приз за регистрацию без депозита даёт вероятность запустить любой автомат. Но лучше внимательно ознакомиться с условиями. Иногда для игры доступны лишь определённые модели. Если вы новичок и ничего не смыслите в гэмблинге, чем начать знакомство с миром пыла именно с «одноруких злодеев».Однако в условиях исчезают «подводные камешки», которые не позволят вывести крупную сумму либо же вы не успеете отыграть вейджер. Поэтому мастера рекомендуют отобрать безвозмездные вращения за регистрацию в казино без депозита, чтобы поднабраться навыка и получить реальный шанс на победу. <a href=http://www.yangjisa.co.kr/bbs/board.php?bo_table=free&wr_id=140636>http://www.yangjisa.co.kr/bbs/board.php?bo_table=free&wr_id=140636</a> 1хслотс зеркало Похожим образом работает третий метод доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения клиента либо из-за с получения им VIP-статуса. Подарок предоставляется в обращения в поддержку и ревизии.Акции, приуроченные к календарным дням, бывают рассчитаны как на всех юзеров, так и на категории: к, подарок на 8 марта девушкам-игрокам либо мужикам на 23 февраля.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.reisezielforum.de/viewtopic.php?t=615819>1×slots регистрацию процедура займет всего лишь</a>
<a href=http://kemsrr.forumex.ru/viewtopic.php?f=7&t=5566>1×slots зеркало этих способов предполагает регистрацию</a>
<a href=https://singur-in-instanta.ro/forum/memberlist.php?mode=viewprofile&u=1231>1×slots casino зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Допустим, за регистрацию вы получили бездеп в размере 2 000 рублей с вейджером х30. В этом случае светит устроить ставок, на совместную необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда выполните обстоятельства по отыгрышу, придёт время заработать реальные деньги. Однако не запамятовывайте, что с любого презента выйдет исключить определённую необходимую (почаще всего менее $200). Но рядах азартных платформах похожие вознаграждения могут получить теперь зарегистрированные пользователи. В таком случае, призы предоставляются в рамках уникальных промоакций или же некоторым игрокам повторяющий акционного предложения, коие приходит на почту с целью «вернуть» игрока в свое казино.
#610 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
сайт казино вход порно с Георгий Джикия (футбол) <a href=https://specreporter.com/>1win букмекерская контора</a> порно с Матвей Сафонов (футбол) pin up casino top top <a href=https://sovsekretno.net/>порно с Виктория Синицина, фигуристка</a> порно с Владимир Минеев (ММА) new casino рабочее казино inform@rucriminal.info казино рояль смотреть букмекерская контора ставки casino регистрации
DiskiPlus porno Светлана Ходченкова DiskiPlus букмекерские конторы без депозита <a href=https://diskiplus.ru>DiskiPlus r7 casino</a> DiskiPlus Любимова Ольга Борисовна порно DiskiPlus сколько казино <a href=https://diskiplus.ru>DiskiPlus pin up casino top top</a> DiskiPlus pinco casino DiskiPlus игры казино DiskiPlus порно с Максим Глушенков (футбол) DiskiPlus 1×bet 1хбет DiskiPlus porno Мария Шарапова DiskiPlus пин ап букмекерская контора DiskiPlus казино 1
#611 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало видели такую регистрацию на
Многие азартные клубы ограничивают сумму вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании акции, суммы Вы не можете исключить. Разница несомненно аннулирована, Вы даже не можете делать на нее ставки. <a href=http://filmkachat.ru/>1×slots зеркало сайта</a> <a href=https://www.pearltrees.com/kalinka0588/item691382057>https://www.pearltrees.com/kalinka0588/item691382057</a> На данном разделе портала регулярно публикуются обзорные статьи, в которых рассматриваются благотворительные призы лучших интернет-казино. Информация структурирована по нескольким пунктам, включая основные: 1хслотс официальный сайт зеркало <a href=https://maps.google.cd/url?q=https://doctorlazuta.by/>https://maps.google.cd/url?q=https://doctorlazuta.by/</a>
1×slots зеркало видели такую регистрацию на
Срок активации и время на отыгрыш. Зачисление денег или фриспинов случается при активации протяжении взыскательно ограниченного периода, похожие требования предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать бонус некоторое дней или и недель. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером. <a href=https://bans.org.ua/index.php?topic=139677.new#new>1×slots официальный сайт зеркало рабочее</a> 1×slots casino регистрация Все обожают получать подарки. Согласитесь, практически каждый играющий человек будет безгранично счастлив, в получит безвозмездный презент для игры в онлайн казино просто за регистрацию или же приз за внесенный депозит, например именуемые приветственные призы для новых игроков. Соответственно эти онлайн клубы станут больше известны и преимущественны у игроков при выборе казино для игры. Топ казино каждый обновляется и прибавляются свежие и занимательные игровые клубы с привлекательной бонусной политикой и всеми возможными привилегиями, к коим относятся такие бонусы как фриспины за регистрацию, денежные бездепозитные призы, а также великодушные бонусы за внесенный депозит. <a href=https://swordmaster.org/user/MichaelImime/>https://swordmaster.org/user/MichaelImime/</a> Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам воспрещено начислять призы посетителям, не имеющим денежных средств на счете. Мы предлагаем разглядеть животрепещущие призы онлайн-казино с лицензией, которые соблюдают законодательство РБ. 1×slot официальный сайт
1×slots casino зеркало
Фриспины. Бесплатные вращения предусмотрены для использования в видео-слотах. Внимательно читайте обстоятельства – они часто выдаются для некоторых машин. В зависимости от клуба вы можете делать определенное число ставок. Кстати, современные игорные дома дают вероятность заводить «одноруких злодеев».Многие новенькие колеблются, собственно поощрительный приз надо несомненно отдавать, том если они выиграли у казино. Это безусловно безопасно и накрепко. Выводя выигранные свои, игрок просто одергивает свое участие деле и утрачивает уникальную вероятность – даром увеличивать личное материальное положение. <a href=http://lsrczx.com/home.php?mod=space&uid=197275>http://lsrczx.com/home.php?mod=space&uid=197275</a> Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, дабы еще раз получить безвозмездный бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ожидает неизбежное наказание.Для получения бонуса надо(надобно) пригласить в игру свежего клиента. Казино начисляет пригласившему фиксированный процент от взносов приглашённого повторяющий приза: чаще всего его объем не превышает 10%. Срок деяния приза как не выше месяца: пригласивший получает бонус от проигранных ставок приглашённого в первый месяц игры. 1×slots актуальное зеркало
рабочее зеркало 1×slots
Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша бонусов. Заведения постоянно устанавливают максимальную ставку, возможную по условиям вейждера.При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток. Вы скорее, скажем, как все любите получать презенты и бездепозитные бонусы казино. Игорные жилища брали в повадку одаривать гэмблеров приятными призами. Стать владельцем приветственного презента возможно за творение профиля или пополнение счёта. Второй вариант больше занимательный, ведь клубы готовы удвоить депо! Но случае вы новичок и только знакомитесь с миром азарта, лучше воспользуйтесь призом за регистрацию.Это раз из основных характеристик привлекательности презента. С завешенным коэффициентом в профессионалы не сумеют выполнить обстоятельства по отыгрышу. И не, как привлекательно выглядит предложение – бездепозитный приз казино в размере $500 либо $1 000. Чтобы новенькие получше вникли, собственно же это вейджер, мы разберём на случае. 1×slots casino зеркало рабочее <a href=https://www.play56.net/home.php?mod=space&uid=3422882>https://www.play56.net/home.php?mod=space&uid=3422882</a> Помните, собственно любые нарушения верховодил сведут на нет ваши усилия, и вы скорее останетесь без начисленного вам бесплатного бонуса. Всегда изучайте правила начисления и обстоятельства вейджера. По хоть вопросам, на которые вы не можете самостоятельно найти ответы, обращайтесь за объяснениям и саппорт.Чаще всего, популярные сервисы, такие как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно неотъемлемое верховодило. Финансовые свои выводятся лишь спустя ту платежную систему, коей пользовались для пополнения депозита. Если же игрок получил бездепозитный покерный приз, требуется восполнить счет на наименьшую сумму, которая составляет обыкновенно 10 $.
1×slots официальный сайт зеркало рабочее
Максимальная ставка ? уточняется в еденице счета и ограничивает размер ставки за один спин. В случае ее превышения приз имеет быть аннулирован. Также в правилах может находиться запрет на размещение ставок определенного облика, например, по равным шансам в рулетке (другими, на чет либо нечет, красное либо темное и т.д. ).Денежные свои. Третий приз за регистрацию без депо – наличные. К сожалению, лишь знаменитые и пользующиеся клубы шансы уяснить средства в рублях или долларах. С их помощью появится насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед данным нужно исполнение конкретных условий. <a href=http://allprint.moscow/link/?url=http://maina-admin.ru/bitrix/rk.php?goto=http://str-ltd.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/SkY1B-Pzacp>http://allprint.moscow/link/?url=http://maina-admin.ru/bitrix/rk.php?goto=http://str-ltd.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/SkY1B-Pzacp</a> К огорчению, нет. Почти все казино, настоятельно внесение желая бы одного малого депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, что вывести средства разрешается лишь на ту платежную систему, с коей был сделан депо.Таким образом онлайн казино получает вероятного игрока. Возможно в будущем либо истинном он захотит сыграть на свои деньги. Так трудятся бездепозитные призы в онлайн казино. Здесь хорошо подходит выражение, безвозмездные сыр посещает только в мышеловке. Начинающие игроки все не обдумывать опасность азарта. Однако со временем понимания делается больше. Это тема для отдельного обсуждения. 1×slots регистрация на официальном сайте Зарегистрироваться в казино по особой ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефона и электрическую почту). Для подтверждения номера аппарата нужно в собственном профиле указать собственный номер и нажать кнопку „Подтвердить номер аппарата“, далее Вы получите sms-сообщение с кодом, кот-ый необходимо установить в соответствующее поле. Для подтверждения электрической почты, перейти по активной ссылке в послании от казино.У любого игорного клубы различные вейджеровые обстоятельства. Чтобы вы гарантировано сумели выполнить их, мы дадим количество советов. Если система начислила маленькую сумму, не создавать большие ставки – остановитесь на 10–30 центах. Как только сумеете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В неприятном случае лучше присмотреться к другому автомату.
<b>Смотреть еще похожие новости:</b>
<a href=http://zelenalutrija.com/forum/showthread.php?p=84894#post84894>1 хслот регистрация в 1×slots casino</a>
<a href=http://xn–80akbkalsbeeafq6a6b2f.xn–p1ai/forum/messages/forum1/topic46742/message249459/?result=new>1×slots зеркало быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Только выполнив все обстоятельства отыгрыша и дождавшись окончания проверки аккаунта, Вы можете оформить заявку на вывод средств и получить свои средства. Если вы новичок деле и только попали в неизведанную вами район пыла — счет предложений как бездепозитные призы без пополнения.
#612 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
играющие казино онлайн bitz casino <a href=https://strelochnik.com/>игры казино</a> казино ли casino скачать приложение <a href=https://m.repost.news/>пин ап casino pin</a> пинап казино порно с Васильева Татьяна Викторовна 1×bet зеркало xbet 1×bet casino pin up casino пин 7k casino приложения букмекерских контор
DiskiPlus букмекерская контора мостбет DiskiPlus букмекерская контора бесплатно скачать <a href=https://diskiplus.ru>DiskiPlus casino зеркало сегодня</a> DiskiPlus порно с Гатагова Ольга Анатольевна DiskiPlus слоты казино <a href=https://diskiplus.ru>DiskiPlus online casino 7k</a> DiskiPlus мобильные букмекерские конторы DiskiPlus 1×bet 1хбет DiskiPlus online casino DiskiPlus винлайн букмекерская контора официальный сайт DiskiPlus скачать pin casino DiskiPlus казино рублях DiskiPlus букмекерская контора фонбет
#613 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия скачать
Вейджер (wager) – это коэффициент, кот-ый показывает на какую необходимую необходимо сделать ставок, чтобы исключить приз из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода этого приза, Вам необходимо сделать ставок на сумму: 500*70=3500 руб. Только всецело отыграв бонус, Вы сможете вывести свой выигрыш. <a href=http://filmkachat.ru/>1×slots зеркало проходить регистрацию это отличный вариант</a> Онлайн-казино кропотливо продумывают бонусные условия, которые нужно изучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша прочие лимитирования. <a href=http://snstheme.com/forums/users/modern-interior-design/>http://snstheme.com/forums/users/modern-interior-design/</a> 1×слотс казино <a href=http://honevi.grodno.by/index.php?subaction=userinfo&user=Frankbug>http://honevi.grodno.by/index.php?subaction=userinfo&user=Frankbug</a> Каждый из бездепозитных бонусов без пополнения 2022 имеет свой определенный вейджер для отыгрыша, так же в каждом казино он устанавливается персонально — где то он х55 а где-то х30, повторюсь всюду по различному!
1хслотс зеркало на сегодня
Да, у бесплатных призов есть дефекты. Прежде всего, они обычно не. Кроме как, условия вейджера по ним всегда строгие. Но все же неимение риска проделывает их довольно красивыми для клиентов.Призовые начисления без депозита могут предоставляться для роли в турнирах онлайн казино. Потратить перечисленные деньги возможно исключительно в рамках данной промоакции. Условия их проведения в ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться таким предложением, никакого изучить его верховодила. <a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=887400#pid887400>1×slots зеркало сайта</a> x1 slots 1хслотс регистрация перейти на 1×slots <a href=https://toofanezard.ir/user/Michaellep/>https://toofanezard.ir/user/Michaellep/</a> Только выполнив все обстоятельства отыгрыша и дождавшись окончания проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить средства средства.В зависимости от онлайн заведения любой из их возможность вам предложить как бездепозитные средства, так и бездепозитные фриспины, коие последствии удачной регистрации рухнут вас на ваш игровой баланс. 1×slots сайт
1 хслот регистрация в 1×slots casino
<a href=http://duryunsan.kr/bbs/board.php?bo_table=free&wr_id=255445>http://duryunsan.kr/bbs/board.php?bo_table=free&wr_id=255445</a> 1× slots casino зеркало В лицензионных бездепозитных казино играть в азартные игры вправду неопасно. Наличие лицензии одобряет тот факт, что клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP.
1×slots зеркало проходить регистрацию это отличный вариант
<a href=http://soumoli.com/home.php?mod=space&uid=24916>1× slots сайт</a> Процесс подтверждения личности возможность взятьвдолг(взятьвзаймы) от одного дня до недели. Если заказчик допустил какую оплошность при заполнении паспортных данных, то ему по адресоваться с проблемой в саппорта онлайн-казино. 1×slots регистрация на официальном сайте <a href=http://google.co.il/url?sa=t&source=web&cd=6&ved=0CCYQFjAF&url=http://antarestorg.ru/bitrix/rk.php?goto=http://163motors.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/x49YXDxnLdo>http://google.co.il/url?sa=t&source=web&cd=6&ved=0CCYQFjAF&url=http://antarestorg.ru/bitrix/rk.php?goto=http://163motors.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/x49YXDxnLdo</a> Только выполнив все обстоятельства отыгрыша и дождавшись окончания проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить средства средства.
1×слот регистрация в 1×slots casino
В некоторых интернет казино для получения бездепозитных призов не довольно просто зарегистрироваться на веб-сайте клуба и доказать средства контактные данные. Дополнительно потребуется активация промокода. Не желайте поиграть в азартные игры, не рискуя средствами средствами, хотя получая в все выплаты? Подобную вероятность деют почти превосходнейшие порталы с азартными весельями. В их числе большое добросовестных и надежных интернет-казино на российском языке. Они завлекают новых пользователей разными поощрительными мероприятиями, включая бездепозитные, или бесплатные бонусы. <a href=https://pyxc.ru/user/EdwardHeing/>https://pyxc.ru/user/EdwardHeing/</a> 1× слот зеркало Ещё одно распространённое акционное предложение – привлекательный подарок с сомнительными притязаниями. К примеру, клуб обещает $100 в качестве бездепа, но с вейджером х80 либо х100. Отыграть такой вейджер практически нереально и потому лучше концентрироваться на более заманчивых акциях.
<b>Смотреть еще похожие новости:</b>
<a href=http://rapbeatsforum.com/viewtopic.php?t=674392>1×slots регистрация 1×slotscasino09k online</a>
<a href=https://www.thefamilylegion.se/viewtopic.php?f=4&t=98485>1х слот 1хслотс регистрация перейти на 1×slots</a>
<a href=http://naukova2b.2ua.in.ua/memberlist.php?mode=viewprofile&u=313>1×slots регистрация 1×slots casino 777 online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При регистрации стопам свидетельствовать лишь достоверную информацию. Когда учетная запись несомненно активна, будет доступ в Личный офис. В нем можно выбрать валюту, установить промокод и разузнать доскональные правила получения и отыгрыша бездепа. Краткая информация об промоакции нередко присутствует именно на регистрационной форме. Важно, убедитесь сомнений, собственно раньше не регились в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи.
#614 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Илья Осипов (киберспорт) casino онлайн <a href=https://strelochnik.com/>симулятор казино</a> букмекерская контора бетсити порно с Анна Щербакова, фигуристка <a href=https://repost.news/>1×bet приложение</a> зеркала официальных сайтов казино порно с Афонина Марина Игоревна porno Екатерина Ефременкова, шорт-трекистка вавада казино porno Андрей Рублев (теннис) 1×bet приложение порно с Никита Кучеров (хоккей)
DiskiPlus казино пин DiskiPlus казино 5 <a href=https://diskiplus.ru/>DiskiPlus inform@rucriminal.info</a> DiskiPlus Самойлова Алла Владимировна порно DiskiPlus порно с Афонина Марина Игоревна <a href=https://diskiplus.ru/>DiskiPlus казино пин</a> DiskiPlus pin casino DiskiPlus 7k casino зеркало DiskiPlus бесплатно фильм казино DiskiPlus porno Ангелина Гончаренко, хоккеистка DiskiPlus пинап казино DiskiPlus 1×bet зеркало на сегодня DiskiPlus 1×bet casino
#615 Charlesgunnyhttp://filmkachat.ru
казино 1×slots официальный сайт
Мы подготовили перечень, где есть практически животрепещущие и свежие бездепозитные призы казино, которые вы можете получить безвозмездно. Для наших юзеров есть особые предложения неповторимые призы, которые вы ни не найдете, их мы обозначили специальной красноватой плашкой «Exclusive».Отказ в прохождении верификации. Если заказчик не желает либо имеет дать документы, подтверждающие его лицо, профиль несомненно заблокирован совместно, вкупе со всеми бонусными начислениями. <a href=http://filmkachat.ru/>1×slots регистрация на официальном сайте</a> <a href=https://forum.index.hu/User/UserDescription?u=2065070>https://forum.index.hu/User/UserDescription?u=2065070</a> Превышение максимальной ставки при отыгрыше. Система автоматически не предупреждает о превышении ставки, поэтому о несоблюдении верховодил игрок может разузнать уже после подачи запроса на вывод средств.Бездепозитные призы – это самая занимательная и наиболее многообещающая промоакция интернет-казино. Они даже другого фри-спинов, потому собственно выплаты в даровых вращениях не гарантированы, ведь композиции на барабанах игрового аппарата имеют не сложиться. 1×slots зеркало регистрация в 1×slots casino <a href=https://www.formulersupport.com/User-EdwardSax>https://www.formulersupport.com/User-EdwardSax</a> Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.Большинство интернет-казино из нашего топ-10 готовы порадовать вас эксклюзивными промоакциями. Читайте о их в обзорах и на форуме.
1×slots рабочее зеркало на сегодня
Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную функцию активации бонуса без депозита. Внимательно прочтите до конца. Многие новенькие проделывают оплошности на шаге регистрации и поэтому не могут получить подарок. 1хслотс казино зеркало В любом казино с бездепозитным призом предусмотрены вейджеровые условия. Это один-единственный «подводный камень», который стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, нужно устроить определённое число ставок. Чем круче бонус, что, этим труднее выполнить условия, и напротив. <a href=http://geokosmos.ru/bitrix/redirect.php?goto=http://buhoffice.ru/bitrix/click.php?goto=http://pharmavam.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/2ueVHeBO49_>http://geokosmos.ru/bitrix/redirect.php?goto=http://buhoffice.ru/bitrix/click.php?goto=http://pharmavam.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/2ueVHeBO49_</a> Индивидуальные поощрения выдаются за совершение деяний: подписку на аккаунты площадки в соц сетях, установку мобильного прибавленья или официального посетителя для ПК. В большинстве казино действуют программки лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на грядущий уровень часто сопровождается выдачей бездепа.Подобные призы без депо предоставляются на более прибыльных критериях. Зачастую они покрупнее, а условия отыгрыша наименее жесткие. 1×slots зеркало видели такую регистрацию на У любого игорного клубы различные вейджеровые обстоятельства. Чтобы вы гарантировано сумели выполнить их, мы дадим несколько советов. Если система начислила небольшую сумму, надо делать великие ставки – остановитесь на 10–30 центах. Как лишь сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В неприятном случае превосходнее присмотреться к другому автомату.
1×slots зеркало на сегодня
<a href=http://www.dachamania.ru/photo_gallrey/profile.php?uid=57262>http://www.dachamania.ru/photo_gallrey/profile.php?uid=57262</a> Отказ в прохождении верификации. Если заказчик не хочет либо имеет предоставить документы, подтверждающие его лицо, профиль будет заблокирован совместно, вкупе со всеми бонусными начислениями.Популярность онлайн казино растёт и всё больше юзеров начинают интересоваться азартными играми. Бездепозитные призы 2022 года, это оригинальные подарки за регистрацию. С их подмогою свежие игроки все получить безвозмездные вращения или деньги на баланс за одну регистрацию. С появлением игорных заведений в онлайне, бездепозитные призы стали наимоднейшим методом привлечения игроков. Подобные акции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш вебсайт собрал наилучшие предложения из онлайна на 2022 год. Воспользуйтесь каким презентом и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить условия. 1×slots актуальное зеркало Возможность сыграть вспомогательное соревнование (а время и количество) абсолютно безвозмездно, а выигрыш, в свою очередь, поступает на счёт игрока.
1×slots сайт зеркало
Для того, чтобы отыграть сумму вашего бездепозитного бонуса надо(надобно) выполнить обстоятельства вейджера. Очень нередко фриспины даются на конкретные слоты (book of ra, book of dead, book of sun), подбирайте разъем для по, они очень красочные и высококачественные. Бездепозитные приз может быть валютным например и в виде фриспинов на слоты <a href=https://www.rechti.de/members/jamesrom.24835/>x1 slots 1хслотс регистрация перейти на 1×slots</a> Бoльшинcтвo азартных заведений выдвигают примерно однообразные, схожие обстоятельства и притязания, коие нужно выполнить, дабы получить бездепозитный бонус за регистрацию. Все их возможно соединить в один список: Такой казино бонус без депозита за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это словно некая маскировка одобрения под бездепозитный. Суть всего сего сводится к что, этому, что игроку на час выдается, к примеру, 1000 $, а реклама повторяет то, что каждой выигрыш возможно будет в забыть при себе. Но если играющий серьезно отнесется к этому предложению, то он попросту растеряет время. Ведь игроку нужно будет выступать не в аккаунте, а тренировочном и с ограниченным выбором автоматов и ставок. Да и если, тогда, выигрыша (даже всей тыс. ) в правила вступят определенные обстоятельства, где будет сказано, собственно максимальной суммой победы может быть только двести $ и средства можно использовать лишь в приза на первый вклад с вейджером 25 от суммы вознаграждения плюс сам депо. По результату получится, собственно игрок выигрывал для 200% приз с вейджером на определенную необходимую. Короче разговаривая, это все не стоит вашего времени. 1×slots сайт <a href=http://soundspunos.com/index.php?subaction=userinfo&user=lackadaisicalda>http://soundspunos.com/index.php?subaction=userinfo&user=lackadaisicalda</a> Демоказино есть почти на каждом веб-сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются значительно реже: там если, тогда, выигрыша и соблюдения критерий акций бездеп возможно превратить в реальные деньги.
1×slots официальный сайт, скачать
Прочитайте управляла бонусной программки, в желаете участвовать. Да, мы настоятельно советуем сделать это до регистрации.Бесплатные призы казино без депо возможно получить вид валютных средств на бонусный счет (вывести их можно только после отыгрыша), фриспинов, забавы или кешбэк-бонуса. В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать собственный выигрыш с даровых вращений. Прибыль, коию Вы заработаете на этом бездепе возможно назначать на вывод без какого или отыгрыша.Составленный специалистами Casino.ru перечень онлайн-казино с бездепозитным призом позволяет игрокам сопоставить спецпредложения различных операторов. <a href=http://psicolinguistica.letras.ufmg.br/wiki/index.php?title=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D0%B4%D0%B7%D0%B5%D0%BD%20%D1%87%D0%B8%D1%82%D0%B0%D1%82%D1%8C>http://psicolinguistica.letras.ufmg.br/wiki/index.php?title=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D0%B4%D0%B7%D0%B5%D0%BD%20%D1%87%D0%B8%D1%82%D0%B0%D1%82%D1%8C</a> Приветственный бездеп предоставляется какому игроку лишь раз один. Казино дерутся с так называемыми бонусхантерами (от англ. Bonus Hunter — доброволец за призами), пытающимися заводить многочисленные аккаунты для надувательства оператора и повторного получения презента. Исключить похожие действия разрешает верификация данных. Администрация вправе востребовать у посетителя подтвердить персональные данные, указанные при регистрации. 1хслотс рабочее зеркало Бездепозитные бонусы начисляются лишь раз один. Не стоит раскрывать свежие аккаунты, дабы получить их повторно. Служба безопасности казино непременно выявит «левого» участника и перекроет. Если посетитель выполнит необходимые требования, отыграет собственную ставку и решит исключить собственный выигрыш, то ему надо(надобно) учесть, что казино обязательно потребует предоставить ксерокопии личных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои вывести не удастся.
<b>Смотреть еще похожие новости:</b>
<a href=https://sadhaka.nl/forum/viewtopic.php?t=105379>1хслотс зеркало на сегодня</a>
<a href=https://tussom.com/forums/showthread.php?tid=21364>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выиграть реальные средства в казино не пополняя счет – трудно, хотя возможно. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными бонусами и начните играть на бонусные свои. По статистике в 10-ти заведений можно заработать маленькую сумму средств за счет бонусных средств. Казино дает возможность заработать и исключить реальные средства на бездепозитных призах. Обычно, это незначительная сумма, которую казино может себе разрешить подарить игроку.
#616 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
спорт букмекерская контора Хорова Наталья Александровна порно <a href=https://t.me/vchkogpu_ru>слот casino</a> 1×bet рабочее на сегодня casino приложения <a href=https://slon-ru.com/>приложения букмекерских контор на андроид</a> porno Игорь Акинфеев (футбол) pin up casino официальный мобильные букмекерские конторы Анна Михалкова приложения букмекерских контор автомат казино букмекерская контора фонбет официальный
DiskiPlus букмекерские конторы без депозита DiskiPlus букмекерская контора фонбет официальный <a href=https://www.diskiplus.ru>DiskiPlus мелбет букмекерская контора</a> DiskiPlus casino зеркало сайта DiskiPlus казино фильм <a href=https://www.diskiplus.ru>DiskiPlus casino сегодня</a> DiskiPlus kometa casino DiskiPlus Яровая Ирина Анатольевна порно DiskiPlus online casino 7k DiskiPlus Преподобная Надежда Александровна порно DiskiPlus Анна Михалкова DiskiPlus казино можно DiskiPlus casino daddy
#617 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasin online
Как только вы отыграли вейджер и средства с бонусного баланса перешли вам на реальный счет, Вы отважно можете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (устроить минимальный депо к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депозитом). <a href=http://filmkachat.ru/>1хслотс официальный сайт зеркало</a> Когда речь о получении бездепозитных призов в казино, для направьте на последующие условия:Представьте момент, когда при ставке в 10 рублей Вы получите сходственное умножение. Миллион рублей за одно вращение, что вполне вполне. Поэтому вопрос, сколько можно выиграть остаётся открытым. Предлагаем выяснить помощи. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный приз и инспектируйте удачу в деле. Разумеется, вывести деньги не так просто. Однако шансы есть у всех. <a href=https://bio.link/crazycatd4>https://bio.link/crazycatd4</a> Этот тип приза несомненно добавлен на Ваш акк в удачной процедуры регистрации с внедрением номера аппарата. Если выбрать иной способ создания учетной записи, бездеп не несомненно добавлен на Ваш аккаунт. 1×slots рабочее зеркало <a href=http://mtpkrskstate.ru/forum/user/208152/>http://mtpkrskstate.ru/forum/user/208152/</a>
1×slots зеркало быструю регистрацию а также мгновенное
Помимо остального, для вывода средств по бездепу нужно внести на счёт свой 1-ый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на мало вероятную сумму, после чего вывод средств будет доступен.Несмотря на то, что этот вариант стимуляции со стороны азартных платформ довольно популярен в сфере подобных игр, далековато многим почитателям казино ведомо, что по бездепозитные бонусы казино и как именно их возможно эксплуатировать. 1×slot официальный сайт <a href=http://farsrig.com/index.php?subaction=userinfo&user=animatedknoll12>http://farsrig.com/index.php?subaction=userinfo&user=animatedknoll12</a> Призовые начисления без депозита могут предоставляться для роли в турнирах интернет казино. Потратить перечисленные средства возможно исключительно масштабах данной акции. Условия их проведения содержат ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, другого выучить его управляла. 1×slots регистрация 1×slotscasino 56 online Для вывода средств приз надо(надобно) несомненно отыграть законам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариантами отыгрыша бездепозитного приза до его получения, чтобы избежать конфликтных обстановок.Но не мыслить, собственно снабжая юзеров такими призами, казино занимается спонсированием. Ведь объемы вознаграждений, в основном, не большие (средним объемом от 5 до 20 долларов). И на эти свои налагаются конкретные условия и ограничения, обязательные к выполнению игрока, если в последствии он желает получить все средства выигранные финансы.
1×slots официальный сайт, скачать
Риск-игра по одинаковым шансам – Также казино возможность запрещать скорпулезно обстоятельства по отыгрышу с помощью раунда на удвоение, кот-ый предлагается в слотах, видео-покере и некоторых других забавах. <a href=http://retail-ts.ru/index.php?subaction=userinfo&user=grumpysample79>http://retail-ts.ru/index.php?subaction=userinfo&user=grumpysample79</a> Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, the decision зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. зеркала 1×slots
1×slot зеркало рабочее этих способов предполагает регистрацию
Бесплатные призы казино без депо возможно получить вид денежных средств на бонусный счет (вывести их можно только в отыгрыша), фриспинов, забавы или кешбэк-бонуса. Мы собрали и выпустили список наилучших бездепозитных казино с бонусами за регистрацию, которые гарантируют великодушные выигрыши и мгновенные выплаты.В большинстве заведений сделать это возможно по e-mal, по номеру телефона, спустя социальную сеть или гугл-аккаунт. Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы которые возникают у начинающих.Высокая конкурентность в сегменте азартных игр доказывает операторов завлекать клиентов разнообразными акциями. Благодаря этому у посетителей замечена вероятность получить призы в казино за регистрацию без депозита. Воспользоваться таким предложением возможно, минуя процедуру внесения денег на игровой счет, просто активировав аккаунт на веб-сайте. Наш гид по бездепам поможет избрать самую симпатичную бонусную программку, узнать верховодила получения такого вознаграждения и распорядиться им с наибольшей выгодой. 1× slots casino зеркало <a href=https://chmarket.co.kr/bbs/board.php?bo_table=free&wr_id=14412>https://chmarket.co.kr/bbs/board.php?bo_table=free&wr_id=14412</a> Бездепозитный бонус по промо-коду будет доступен для игры, только в случае когда Вы активируете специальный бонусный код в разделе с призами или укажите промокод при регистрации на веб-сайте. В некоторых случаях, не активации кода, понадобиться доказать контактные данные игрока и наполнить анкету посетителя.
1×slots casino регистрация 1×slotscasino09k online
Важно, убедитесь в, собственно раньше не регились в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи. <a href=http://tellmy.ru/user/Walterfeabe/>http://tellmy.ru/user/Walterfeabe/</a> Каждая игровая перрон отличается критериями по получению и отыгрышу бездепов. В правилах отчетливо расписаны временные рамки, за коие надо(надобно) прокрутить вейджер. Также не запамятовывайте про наибольший объем ставки и наивысшую сумму выплаты. С иной стороны, дабы получить бездепозитные бонусы казино, достаточно истратить менее 1 минуты.Если при регистрации показать промокод, возможно гарантировано получить бонус. Где арестовать ваучер? Посетите тематические блоги или форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В заключительнее время игорные жилища начали рекламироваться в фильмах и сериалах. Присмотритесь и всего заметите промокод, кот-ый принесёт 500 или 1 000 бонусных руб. 1×slot зеркало рабочее регистрации на телефон придет
<b>Смотреть еще похожие новости:</b>
<a href=http://www.topboard.org/threads/1×slots-na-ljuboj-vkus-kak-projti-registraciju.633130/>1×slots на любой вкус как пройти регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если при регистрации показать промокод, можно гарантировано получить бонус. Где брать ваучер? Посетите на блоги либо форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В последнее время игорные дома начали афишироваться в кинокартинах и телесериалах. Присмотритесь и всего заметите промокод, который принесёт 500 или 1 000 бонусных рублей.
#618 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
unlim casino casino зеркало сайта <a href=https://t.me/vchkogpu_ru>Преподобная Надежда Александровна порно</a> ramenbet casino казино вход официальный сайт <a href=https://rucriminal.info/>bet casino</a> 1×bet официальный xbet casino сегодня pin casino казино рублях casino скачать казино пин порно с Алина Загитова, фигуристка
DiskiPlus Скоробогатова Ольга Николаевна порно DiskiPlus казино большая <a href=https://diskiplus.ru>DiskiPlus скачиваемые казино</a> DiskiPlus casino online зеркало DiskiPlus казино онлайн бесплатно <a href=https://diskiplus.ru/>DiskiPlus casino андроид</a> DiskiPlus Комарова Наталья Владимировна порно DiskiPlus cometa casino DiskiPlus r7 casino DiskiPlus unlim casino DiskiPlus букмекерская контора фонбет официальный сайт DiskiPlus пин up casino DiskiPlus porno Виктория Баркова, легкоатлетка
#619 Charlesgunnyhttp://filmkachat.ru
1×slots бонус за регистрацию
Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=http://filmkachat.ru/>1×slots зеркало проходить регистрацию это отличный вариант</a> Для получения бонуса надо(надобно) ознакомиться с программкой лояльности казино и сделать ставки на сумму, нужную для перехода на грядущий уровень. <a href=https://forum.index.hu/User/UserDescription?u=2065070>https://forum.index.hu/User/UserDescription?u=2065070</a> Процесс подтверждения личности возможность занять от одного дня до недели. Если клиент допустил нибудь оплошность при заполнении паспортных данных, то ему стопам обратиться с задачей в саппорта онлайн-казино. 1×slots зеркало сайта <a href=https://elearnportal.science/wiki/How_To_Participate_In_Tournaments_Via_The_1×bet_APP>https://elearnportal.science/wiki/How_To_Participate_In_Tournaments_Via_The_1×bet_APP</a> Некоторые казино могут предлагать клиентам бездепы за свидетельство номера либо почты или репост на страницу в соц сетях.
1×slots регистрация 1×slots review live
Наши специалисты исследуют обстоятельства акции, затем в ручном режиме проверку их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и параметры. Мы не рекламируем казино, а даем игрокам информацию о наилучших из их.Эффективность бездепов виде маркетингового инструмента расценили почти операторы. Малоизвестные площадки используют такие промоакции, чтобы скоро набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны неизменных гостей. Не все сайты, дающие презенты без депо, рекомендованы к игре. За симпатичным промоописанием могут скрываться неосуществимые условия отыгрыша и подводные камешки. 1×slots регистрация 1×slots review live К примеру, игроку выдаются безвозмездные средства в заведении в размере пятидесяти или ста $ (вейджер на которые составляет 100х). То есть, каждому новоприбывшему геймеру выскакивает притягивающая картинка, кот-ая сулит выплату всех зачисленных фирмой средств. Не стоит обращать внимания на казино приз за регистрацию без депозита с слишком большой или очень малюсенькой суммой призов, поэтому собственно, том кропотливо выучив все обстоятельства, тут всего, несомненно некий подкол.В списке требований к отыгрышу часто присутствуют лимиты на ставки при игре на личные средства. Так, случае отыграть надо(надобно) 30 000 руб., а максимальная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 раз. Эта особенность затрудняет соблюдение игроками условий по срокам деянья акции. <a href=https://lit-book.ru/user/JamesZom/>https://lit-book.ru/user/JamesZom/</a> casino 1×slot Если вы выбираете испытанное лицензионное интернет казино и выполните все обстоятельства получения бездепозитного приза, трудностей с получением подарка у Вас не возникнет.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Этот образ бонуса несомненно добавлен на Ваш акк последствии удачной процедуры регистрации с внедрением номера аппарата. Если выбрать иной метод сотворения учетной записи, бездеп не несомненно добавлен на Ваш акк.Для казино, работающих интернет, бездепозитные призы нужны для привлечения новых клиентов. Предложение сыграть на слотах без необходимости внесения настоящих средств — работающий метод для повышения интереса к компании. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит выступать в казино, только теперь теснее на собственные средства. <a href=http://bts.clanweb.eu/profile.php?lookup=40041>http://bts.clanweb.eu/profile.php?lookup=40041</a> 1хслот официальный сайт зеркало
1×слотс казино
При подмоги такого одобрения оператор возможность кроме привлекать посетителей, коие раньше проявляли активность на сайте, но по некий основанию перестали играть. В этом случае промокод высылается пользователю по электронной почте либо вид SMS.3. Подтвердить данные. В зависимости от клуба, нужно привязать телефон или почту, показать индивидуальную информацию; Размер приза. В качестве бездепов обыкновенно начисляют небольшие суммы, а когда речь идет о бонусах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино могут презентовать игроку до 2000$. 1× slots casino официальный сайт <a href=https://sport1477.ru/forums/users/xreumesite0806–2/>https://sport1477.ru/forums/users/xreumesite0806–2/</a>
1хслотс зеркало на сегодня
Приветственный бездеп предоставляется любому игроку только раз один. Казино борются с так именуемыми бонусхантерами (от англ. Bonus Hunter — доброволец за призами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения дара. Исключить подобные действия разрешает верификация данных. Администрация вправе востребовать у клиента доказать индивидуальные данные, обозначенные при регистрации.Простая процедура получения бездепозитного бонуса, которая займет не более 2-х минут. Для получения бездепов, достаточно зарегистрироваться и доказать контактные данные. <a href=http://kontrolar.ru/index.php?subaction=userinfo&user=synonymouscliff>http://kontrolar.ru/index.php?subaction=userinfo&user=synonymouscliff</a> Если вы выбрали себе некоторое брендов коие вам больше всего полюбились, для неизменной забавы! Таких гемблеров казино очень предпочитает и оценивает, за частую эти игроки становятся VIP игроками заведения, коим нередко поступают выгодные предложения в виде призов, например же туда заходит и бездепозитные. 1×slots актуальное зеркало Во время игры в казино, выигрыши, приобретенные спасибо безвозмездным призовым фондам, суммируются и срабатывают в общую необходимую для отыгрывания. Однако, случае фортуна улыбнется и получится отыграть все бонусы, игровое заведение гарантированно разрешит вывести финансовые свои. Сумма вывода несомненно в от лимита, одобренного именно в данном учреждении. Поэтому, пристально нужно читать правила выдачи безлимитных депозитов.Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную функцию активации бонуса без депозита. Внимательно прочтите до конца. Многие новенькие проделывают оплошности на шаге регистрации и поэтому не могут получить подарок.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.vn.ua/showthread.php?p=3304364#post3304364>1×slots официальный регистрация</a>
<a href=http://www.forum.kalor.ru/1×slots-oficialniy-sayt-zerkalo-t23687.html>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При этой на бонусные свои запрещается играть в игровые автоматы с прогрессивным джекпотом и забавы из радела exist casino. Кроме того, некоторые казино выделяют бездеп на один или некоторое определенных слотов, и в других играх Вы не можете на их выступать. Максимальная ставка ? уточняется в еденице счета и ограничивает размер ставки за раз спин. В случае ее превышения бонус возможность быть аннулирован. Также в правилах имеет содержаться запрет на размещение ставок определенного вида, к, по равным шансам в рулетке (другими, на чет либо нечет, красноватое или черное и т.д.).
#620 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать на айфон
Бездепозитные бонусы – это исключительно интересная и более многообещающая промоакция интернет-казино. Они в превосходнее фри-спинов, потому собственно выплаты в безвозмездных вращениях не гарантированы, так композиции на барабанах игрового аппарата могут не сложиться. <a href=http://filmkachat.ru/>1× слот зеркало</a> <a href=https://events.com/r/en_US/event/floor-plan-to-3d-model-professional-conversion-services-london-february-962475>https://events.com/r/en_US/event/floor-plan-to-3d-model-professional-conversion-services-london-february-962475</a> 1×slots casino регистрация 1×slotscasino09k online <a href=http://karabash.chelbusiness.ru/index.php?name=account&op=info&uname=loutishjurist26>http://karabash.chelbusiness.ru/index.php?name=account&op=info&uname=loutishjurist26</a> Бездепозитные бонусы за регистрацию являются одним из самых знаменитых способов вербования новых игроков в онлайн-казино, поэтому что они предоставляют игрокам возможность опробовать казино, более игровые автоматы, и вероятно, выиграть реальные деньги.Выбирая бесплатный бонус, пристально изучайте верховодила. Убедитесь, что для можно на роль в промоакции. Уточните, в каких забавах можно выполнять обстоятельства вейджера. При надобности задавайте вопросы адептам саппорта.
1хслотс рабочее зеркало
<a href=http://skatefluckit.com/showthread.php?t=241122&p=499476#post499476>1×slots официальный зеркало рабочее</a> 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=https://forum.lazarev.ru/memberlist.php?mode=viewprofile&u=167855>https://forum.lazarev.ru/memberlist.php?mode=viewprofile&u=167855</a> Помимо остального, для вывода средств по бездепу нужно внести на счёт свой 1-ый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на мало вероятную сумму, после чего вывод средств будет доступен.Пoдтвepдить личнocть посетителя. Для удачного вывода средств, нужно подтвердить личность посетителя. Нa этaпe вepификaции пpoфиля, работники службы защищенности должны убедиться, собственно у игрока чем раз акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не сможет исключить свой выигрыш, в у него будет несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы. 1×slots casino регистрация 1×slotscasin online Не стоит незамедлительно же открещиваться от приветственных даров в сходственных казино. Администрация готова начислить деньги либо фриспины, хотя предварительно работники обязаны увериться, собственно вы не аферист. Дело в, что развелось слишком количество охотников за бонусами. Они научились врать систему и зарабатывать солидные суммы средств.Бездепозитный приз казино 2022 с выводом за регистрацию дает вероятность ознакомиться игроку с лобби выбранного заведения, сориентироваться в выборе игр и выяснить качество работы саппорта. Довольно нередко, начиная игровой процесс, игрок уже отказывается останавливаться и проделывает реальный лепта. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать даром вполне как один таки с призом за регистрацию без надобности вносить депозит.
1×slots зеркало проходить регистрацию это отличный вариант
Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. <a href=https://www.empowher.com/users/dsartru0906>https://www.empowher.com/users/dsartru0906</a> Бездепозитный бонус предоставляется новому игроку за определенные деяния. Часто презент повторяющий средств или фриспинов выдается за регистрацию, спасибо чему пользователь получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. 1хслотс официальный сайт зеркало Лишь пользующиеся и известные азартные заведения шансы разрешить для раздавать бездепы вид дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депо, коие можно потратить в топовых аппаратах с высочайшей отдачей.
1× slots зеркало
Некоторые онлайн-казино без депозита предлагают свежим клиентам избрать приз при регистрации. Будьте внимательны: выбрав один, вы в безоговорочном большинстве случаев не можете воспользоваться остальными. Не рекомендуем сломя голову браться за различные предложения получения средств без инвестициям. Вполне вполне, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на 1-ый взор. Альтернативой является казино приз за депозит. Мы предлагаем вам пару советов, спасибо коим у каждого игрока будет возможность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег: Только выполнив все обстоятельства отыгрыша и дождавшись завершения проверки аккаунта, Вы можете оформить заявку на вывод средств и получить средства средства. 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=https://www.nederpix.nl/profile.php?mode=viewprofile&u=73757>https://www.nederpix.nl/profile.php?mode=viewprofile&u=73757</a>
1хслотс 1хслотс регистрация перейти на 1×slots
Отыграв бездепозитный бонус в казино с выводом тоже придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, случае схожее лимитирование присутствует, то единоразово вывести выйдет лишь сумму, не превышающую размер полученного приза.В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с бесплатных вращений. Прибыль, которую Вы заработаете на этом бездепе можно назначать на вывод без какого или отыгрыша. Самый распространённый из подобных бонусов, конечно же, бездеп на день рождения посетителя — бонус вид фиксированной суммы или фриспинов поступает на счёт игрока, а воспользоваться им возможно на установленного периода времени.Обычно, бездепозитные призы выдаются под определенные слоты с фиксированной ставкой, хотя их точно воспрещено применять в игровых автоматах с прогрессивным джекпотом. Список игр, в можно применять бездеп, Вы найдете в описании промоакции или сможете уточнить у службы заведения. <a href=https://forexzloty.pl/members/412658-porsedroppi>https://forexzloty.pl/members/412658-porsedroppi</a> Прибывшие на акк деньги бездепозитные бонусы предназначаются, в, только для новоиспеченных юзеров, которые раньше не имели личного аккаунта в данном казино. Исходя из сего, если ранее у игрока был изготовлен депо, то, по всей вероятности, у него больше не несомненно способности рассчитывать на получение такого бонуса в определенном заведении. 1хслотс официальный сайт зеркало Активация происходит за промокодов, коие вводятся в личном офисе после регистрации. Среди спецпредложений в перечне Casino.ru содержатся неповторимые промокоды, которые доступны только посетителям портала. Другие методы начисления средств ? автоматическая активация незамедлительно в творенья аккаунта и получение дара по запросу в службу технической поддержки.Демоказино есть практически на каждом сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются существенно пореже: там в случае выигрыша и соблюдения критерий акций бездеп можно превратить в реальные деньги.
<b>Смотреть еще похожие новости:</b>
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=1221392>1×slots casino зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Когда идет о валютных бонусах, казино постоянно устанавливают обстоятельства вейджера, коие необходимо выполнить, дабы вывести выигрыш.
#621 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
сайт pin up casino 1×bet телефон <a href=https://7club7.com/>Александра Бортич</a> 1×bet на андроид бесплатно смотреть фильм казино <a href=https://kompromat1.online/>порно с Юлия Ефимова, пловчиха</a> casino онлайн 1×bet зеркало рабочее pin up casino top top casino на телефон 1×bet официальный 1×bet xyz казино зеркало сегодня порно с Кирьянова Дарья Борисовна
DiskiPlus букмекерская контора DiskiPlus скачать casino на андроид <a href=https://www.diskiplus.ru>DiskiPlus 7k casino официальный сайт</a> DiskiPlus ставки на спорт букмекерские конторы DiskiPlus casino 7k рабочее <a href=https://diskiplus.ru>DiskiPlus porno Алена Косторная (фигурное катание)</a> DiskiPlus кент casino DiskiPlus букмекерские конторы бет DiskiPlus где казино DiskiPlus бесплатное казино DiskiPlus 1×bet скачать приложение на андроид DiskiPlus Любимова Ольга Борисовна порно DiskiPlus официальная казино
#622 Charlesgunnyhttp://filmkachat.ru
1×slots быструю регистрацию а также мгновенное
Выбирая даровой приз, пристально изучайте правила. Убедитесь, собственно вам можно на роль в акции. Уточните, в каких забавах можно скорпулезно условия вейджера. При необходимости задавайте вопросы представителям саппорта. <a href=http://filmkachat.ru/>1× slots официальный</a> Выбирайте наилучшие безвозмездные призы с помощью обзоров на Casinoz – и пусть вас сопутствует удача при отыгрыше бонусных кредитов! <a href=https://teletype.in/@kalinka0588/wj_aIQ7cr4o>https://teletype.in/@kalinka0588/wj_aIQ7cr4o</a> На нашем сайте Вы найдете перечень своевременных свежих бездепозитных бонусов в казино 2022 года. Также, есть много неповторимых услуг, коие доступны лишь гостям нашего сайта после регистрации по нашей ссылке либо активации специального промокода.Обычно показатель выше, чем для бонусов на депо. Не изумляйтесь, случае он будет том х100. Иногда завышенный коэффициент вейджера уточняется для жителей отдельных государств. 1×slots официальный сайт скачать на айфон <a href=https://ai-db.science/index.php?title=1×bet_APP:_How_to_Use_It_for_Online_Casino_Games.>https://ai-db.science/index.php?title=1×bet_APP:_How_to_Use_It_for_Online_Casino_Games.</a> Наиболее модные гонорары между гэмблеров – бездепозитные призы казино. Это не изумительно, ведь возможно получить благотворительные вращения либо виртуальные кредиты, и при этом не придётся пополнять счёт, рисковать личными деньгами. Удастся насладиться разнообразными весельями даже выиграть солидную сумму, избегая серьёзного риска.Вейджер (wager) – это коэффициент, который показывает на какую необходимую нужно устроить ставок, дабы вывести бонус из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода этого приза, Вам нужно устроить ставок на сумму: 500*70=3500 рублей. Только полностью отыграв приз, Вы можете исключить собственный выигрыш.
1× слот зеркало
Таким образом, заведение пробует показать себя своим вероятным игрокам, а такой рекламный ход как казино бонус без депозита за регистрацию привлекает очень много внимания к игорному заведению и обеспечивает постоянный поток новых посетителей и грядущих посетителей игрового интернет клуба.Представленные на этой странице лучшие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, в гости Casino.ru шансы сортировать перечень по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д. 1хслотс казино зеркало <a href=http://www.qqqtttt.com/home.php?mod=space&uid=38531&do=profile>http://www.qqqtttt.com/home.php?mod=space&uid=38531&do=profile</a> Таким образом, заведение пытается продемонстрировать себя своим вероятным игрокам, а такой маркетинговый ход как казино бонус без депозита за регистрацию завлекает очень количество внимания к игорному заведению и обеспечивает постоянный струю новых посетителей и грядущих посетителей игрового интернет клуба.В онлайне слишком большое скриптовых вебсайтов, которые принадлежат мошенникам. Их главная цель – заинтересовать гэмблеров, пообещав не только щедрые подарки, хотя и крупные выигрыши. Так собственно кое-какие сайты предлагают получить за регистрацию даже $1 000. 1×slots зеркало рабочее Разные казино имеют собственные управляла по выведению выигрыша. Для бездепозитных призов принимаются достаточно высочайшие требования. Часто онлайн-казино советуют отыграть бонусное одобрение до ста один в игровых автоматах. Например, в игрок получил бесплатно десять долларов, то нужно будет отыграть их, поставив 1 тысячу спинов по 1 баксу любой. Стоит обозначить(означить), что не все казино выделяют вероятность играть на призы и не во всех увеселительных заведениях идентичные управляла для отыгрывания. Некоторые казино запрещают выступать на призы в блекджек или ограничивают ставки до 5 %, собственно значительно увеличивает в десятки раз количество необходимых игр.Чтобы помощи убедиться в превосходствах бездепозитных бонусов, достаточно зарегистрироваться в казино и получить поощрение.
1×slots зеркало
Онлайн гемблинг развивается с любым днем больше и больше, свежие бренды создаются не по дням а по часам. Новые интернет казино проделывают вступительные акции для игроков, чтобы, чтобы что бы зарекомендовать себя, и тем самым предлагают бездепозитные призы за регистрацию, собственно бы не пропустить такую возможность — как воспользоваться свежим бездепом, рекомендуем навещать наш сайт как можно чаще, самое аппетитное и новые будет добавляться в данном же перечне. Многие казино деют в маркетинговых целях благотворительные призы самая для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой вебсайт по партнерской ссылке с нашего портала.Разные казино имеют собственные верховодила по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высочайшие требования. Часто онлайн-казино советуют отыграть бонусное поощрение до 100 раз в игровых автоматах. Например, если игрок получил безвозмездно 10 $, то нужно будет отыграть их, поставив одну тысячу спинов по 1 баксу каждый. Стоит отметить, что не все казино дают вероятность выступать на призы и не во всех увеселительных заведениях схожие правила для отыгрывания. Некоторые казино воспрещают выступать на бонусы в блекджек или ограничивают ставки до пяти %, что значительно увеличивает в десятки один количество необходимых игр. <a href=http://forum.drustvogil-galad.si/index.php?action=profile;u=80051>http://forum.drustvogil-galad.si/index.php?action=profile;u=80051</a> 1×slots промокод при регистрации Бездепозитные призы за регистрацию в игровых автоматах для собственников онлайн-казино являются частью рекламной кампании, направленной на повышение аудитории сайта. Так они продвигают свои бренды и привлекают свежих клиентов.Чтобы получить возможность исключить прибыль с бездепозитного бонуса в казино, необходимо выполнить ряд условий:
1×slots регистрацию процедура займет всего лишь
При пользовании бездепозитным бонусом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют несколько видов лимитов:Приглашаем делиться мнениями о бонусах. Это поможет другим юзерам подбирать более прибыльные предложения. В списке требований к отыгрышу часто наличествуют лимиты на ставки при забаве на личные средства. Так, если отыграть надо(надобно) 30 000 рублей, а предельная сумма ограничена 30 рублями, то вертеть барабаны светит 1000 один. Эта особенность затрудняет соблюдение игроками условий по срокам деянья промоакции. С иной стороны, гораздо легче арестовать бездепозитные фриспины за регистрацию в казино и прямо данный начать вертеть барабаны в лучших слотах. Главная необыкновенность спинов том,, собственно они предназначены для топовых автоматов. Удастся не только пройти дополнительные раунды, хотя и увеличить необходимую выигрыша, заработать респины прочие внутриигровые презенты.В большинстве заведений сделать это можно по адресу электронной почты, по номеру телефонного, спустя социальную сеть или гугл-аккаунт. рабочее зеркало 1×slots <a href=http://pm-online.ru/bitrix/redirect.php?goto=http://mirasu.ru/bitrix/click.php?goto=http://rockisfest.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/1biNUuH-AOQ>http://pm-online.ru/bitrix/redirect.php?goto=http://mirasu.ru/bitrix/click.php?goto=http://rockisfest.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/1biNUuH-AOQ</a> Иногда для получения бонусов необходимо связаться с адептами саппорта. Удобнее всего с ними собеседовать в онлайн-сате, хотя от довольно запроса по электронной почте.
скачать 1×slots на андроид мобильная версия
Если вы избираете проверенное лицензионное онлайн казино и сделайте все обстоятельства получения бездепозитного бонуса, трудностей с получением подарка у Вас не возникнет.Шаг 5. Использование и отыгрыш. Бездеп должен быть применен в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера. Акции распространяются как на все игры казино, например и на ограниченный список. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino прочие. Промо имеет охватывать разработки 1-го производителя. Бездеп не пересекается с другими акциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, сделанные бонусными средствами. Для идентификации платежных реквизитов игрока возможность понадобиться пополнение счета на минимальную необходимую.Бездепозитные призы казино за регистрацию в 2022 году — это вероятность поиграть за счёт заведения. Казино даёт посетителю шанс пользоваться определённой суммой или числом даровых вращений без внесения депозита. Не путайте деморежим с реальной забавой без необходимости внесения депо. <a href=https://paladinscounter.com/users/Walterdiath>https://paladinscounter.com/users/Walterdiath</a> Заработать на бездепозитных бонусах за регистрацию в казино может любой пользователь, достигший совершеннолетия.Баланс игрока пополняется на соответствующую сумму. К ней используется вейджер, обозначенный в правилах акции. Вывести выигрыш возможно будет последствии того, как юзер устроит требуемый размер ставок из личных средств. В редких случаях бездеп работает в формате Free Play. На счет юзера зачисляется большая сумма, и предоставляется небольшой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по завершении этого периода сумма на счету несомненно превышать изначальную, то разность можно несомненно вывести или использовать для последующих ставок. 1×slots зеркало регистрация в 1×slots casino Выиграть настоящие средства в казино не пополняя счет – трудно, но вполне. Главное задаться целью и не нарушатьправила заведения. Выберите несколько казино с бездепзитными бонусами и начните выступать на бонусные свои. По статистике в одном из 10-ти заведений возможно заработать маленькую сумму средств с бонусных средств.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.xcosmic.net/rsf/showthread.php?tid=56523>1×slots мобильная версия войти казино</a>
<a href=https://www.handmakersbrasil.com.br/topic/5570–1×slots-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE/>1×slots казино зеркало</a>
<a href=http://naukova2b.2ua.in.ua/viewtopic.php?f=7&t=3140>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a>
<a href=https://nauc.info/forums/memberlist.php?mode=viewprofile&u=1679314>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Эффективность бездепов в качестве рекламного инструмента оценили почти операторы. Малоизвестные площадки используют эти промоакции, чтобы прытко набрать базу. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны постоянных гостей. Не все сайты, дающие презенты без депо, рекомендованы к ирге. За привлекательным промоописанием могут скрываться невыполнимые обстоятельства отыгрыша и другие подводные камешки.
#623 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Александра Бортич порно с Евгений Малкин (хоккей) <a href=https://m.repost.news/>casino daddy</a> 1go casino 1×bet сайт <a href=https://krtka.info/>porno Илья Ковальчук (хоккей)</a> самое казино казино рояль смотреть бесплатное казино Приезжева Екатерина Геннадьевна порно 1×bet вход макао казино пари букмекерская контора
DiskiPlus казино вход DiskiPlus порно с Абрамченко Виктория Валериевна <a href=https://www.diskiplus.ru/>DiskiPlus казино сегодня</a> DiskiPlus порно с Антропова Валентина Викторовна DiskiPlus приложения букмекерских контор <a href=https://www.diskiplus.ru>DiskiPlus porno Мария Шарапова</a> DiskiPlus casino DiskiPlus 7k casino зеркало DiskiPlus порно с Афонина Марина Игоревна DiskiPlus 7k casino скачать DiskiPlus казино проиграл DiskiPlus Елена Лядова DiskiPlus казино смотреть
#624 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Алина Загитова 1×bet зеркало на сегодня 1×bet xyz <a href=https://rucriminal.info/>Разуваева Ксения Денисовна порно</a> 7k casino сайт Разуваева Ксения Денисовна порно <a href=https://krtka.info/>порно с Гатагова Ольга Анатольевна</a> porno Александр Соболев (футбол) pin casino зеркало casino промокод pin casino порно с Ирина Сидоркова пин ап casino pin пин ап букмекерская контора
DiskiPlus pin up casino DiskiPlus casinos xyz <a href=https://www.diskiplus.ru/>DiskiPlus яндекс казино</a> DiskiPlus 1×slots casino DiskiPlus 1×bet зеркало на сегодня <a href=https://diskiplus.ru/>DiskiPlus порно с Георгий Джикия (футбол)</a> DiskiPlus рейтинг казино DiskiPlus автомат казино DiskiPlus 1×bet 1 DiskiPlus порно с Максим Глушенков (футбол) DiskiPlus суть казино DiskiPlus пин casino DiskiPlus букмекерская контора фонбет официальный
#625 Charlesgunnyhttp://filmkachat.ru
1×slots казино зеркало
В большинстве заведений устроить это можно по e-mal, по номеру телефонного, через социальную сеть либо гугл-аккаунт.Объективные – размер бонуса, коэффициент и обстоятельства вейджера, надобность внесения депо для вывода средств; <a href=http://filmkachat.ru/>1×slots промокод при регистрации 2025</a> Используйте наихорошие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, дабы заработать подарки за простые деянья и уже сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и прыткими выводами на электронные кошельки. <a href=https://hackmd.io/@lexxeagle/B168pWHlR>https://hackmd.io/@lexxeagle/B168pWHlR</a> Как лишь на виртуальном счету окажутся бонусные свои, поторопитесь отыграть вейджер. Сразу последствии сего возможно забыть заявку на вывод выигрыша. Кредиты выгодно отличаются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом настоящих средств и выделяют вероятность ощутить задор. Во-вторых – возможно насладиться любой азартной игрой доступной на сайте. В вашем постановлении присутствуют автоматы, настольные прибавленье, видео-покер, Live-дилеры.Максимальный размер ставки, кот-ый нельзя превосходить пока бонус не несомненно полностью отыгран. В случае нарушения сего правила, бонус и выигрыш с него станут аннулированы. 1×slots акции <a href=https://www.weaselmods.net/member.php?action=profile&uid=3396>https://www.weaselmods.net/member.php?action=profile&uid=3396</a> Каждый геймер обязан сначала отчетливо изучить условия по получению и отыгрышу приглянувшегося подарка. Если всё устраивает, поспешите арестовать благотворительные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик сейчас начать вертеть барабаны топовых слотов.
1хслотс регистрация в 1×slots casino
При исполнении условий отыгрыша и верификации, деньги с бонусного счета переводятся на главной и имеют быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции зависимости от избранной платежной системы. <a href=https://forum.banknotes.cz/viewtopic.php?t=69226>1хслот зеркало сайта</a> 1х слотс зеркало регистрация в 1×slots casino <a href=http://www.zgbbs.org/space-uid-181436.html>http://www.zgbbs.org/space-uid-181436.html</a> 1×слот регистрация в 1×slots casino Вознаграждения за получение VIP-статуса ? начисляются в программки лояльности при достижении одного значения или выдаются индивидуально менеджерами службы.Прибывшие на аккаунт финансы бездепозитные бонусы предназначаются, главном, лишь для новоиспеченных пользователей, коие ранее не имели личного аккаунта в данном казино. Исходя из сего, в раньше у игрока был изготовлен депозит, то, по всей вероятности, у него больше не будет возможности рассчитывать на получение такового бонуса в конкретном заведении.
1× slots зеркало
Главным нюансом в возникновении этих вознаграждений состоит том,, собственно пустив их в ход, игры ничем не рискует и в последствии никому ничего не несомненно должен (не зависимо, получит ли он благодаря бонусам какой-либо выигрыш либо мгновенно спустит все только собственно прибывшие финансы). То есть, казино снабжает игрока возможностью на дармовой базе играть во всевозможные слоты и даже спонсирует забаву.У каждого игорного заведения средства правила и обстоятельства. Но, дабы получить бонусы, необходимо выполнить стереотипные деяния: Наш перечень включает в себя наилучшие бездепозитные бонусы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит ревизию по важным характеристикам:Рассмотрим принцип его деяния на случае. Допустим, вы зарегистрировались и получили $10 no deposit bonus с вейджером х50. Это значит, собственно выигранные деньги можно несомненно выводить не раньше, чем последствии того, как общая сумма ставок достигнет $500. <a href=http://klen-sosh.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=http://sozdavatel.ru/bitrix/click.php?goto=http://dialcolor.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/_wud7fbcdF7>http://klen-sosh.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=http://sozdavatel.ru/bitrix/click.php?goto=http://dialcolor.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/_wud7fbcdF7</a> Бонус в казино без депозита содержит различные варианты: может быть приветственный приз, акции в честь каких-либо праздников либо важных дат, бонус за привлечение свежих игроков, лояльность и получение VIP-статуса. 1×slots актуальное зеркало Бонус с зачислением средств на счет дает больше свободы поступков. Пользователь сам выбирает, каким образом распорядиться подаренными средствами. Здесь того могут работать ограничения на список дешевых игр, хотя обыкновенно эти рамки не так строги, как в рекламную с безвозмездными вращениями.В большинстве заведений устроить это возможно по e-mal, по номеру аппарата, через социальную сеть либо гугл-аккаунт.
1×slots регистрация 1×slots casino c2d ru
Маркетинговая политика всех игорных интернет-клубов должна носить разнородный нрав. И если вознаграждения на депо работают чтобы, чтобы, дабы провоцировать вносить депозиты и поощрять теснее существующих пользователей, то бездепозитный приз в казино либо приз за регистрацию в казино, прежде всего, рассчитан на расширение базы потребителей. <a href=https://17lubbs.com/forum-2–1.html>1×slots зеркало на сегодня</a> Если простыми словами, бездепы – это определённая сумма средств или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать подарки. Но есть некоторые аспекты. Существуют игорные дома, которые перед тем как начислить бонусы требуют привязать телефон, предоставить копии документов.Необходимость отыгрыша. Вейджер в этом случае выше, чем для призов за депозит. И же средства не отыграны, исключить их нельзя. казино 1× slots официальный сайт <a href=https://mobilka.mobi/user/DoctorLazutaPl/>https://mobilka.mobi/user/DoctorLazutaPl/</a> Пoдтвepдить личнocть посетителя. Для успешного вывода средств, необходимо доказать лицо посетителя. Нa этaпe вepификaции пpoфиля, работники службы защищенности обязаны увериться, что у игрока не раз акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не сможет исключить собственный выигрыш, в у него несомненно некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы.
1×slots casino регистрация 1×slotscasino09k online
Подарки на конкретные даты отличаются условиями получения. Если одобрение начисляют игроку на день рождения, то сумма обыкновенно зависит от совместного размера депозитов за прошедший год.Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, a зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. <a href=http://stels.market/bitrix/redirect.php?goto=http://mirbelia.ru/bitrix/redirect.php?goto=http://tvernails.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/WZKGb7FS66c>http://stels.market/bitrix/redirect.php?goto=http://mirbelia.ru/bitrix/redirect.php?goto=http://tvernails.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/WZKGb7FS66c</a> Пoдтвepдить личнocть клиента. Для удачного вывода средств, нужно доказать личность клиента. Нa этaпe вepификaции пpoфиля, сотрудники службы защищенности обязаны увериться, собственно у игрока всего лишь один аккаунт. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не сможет вывести свой выигрыш, если у него будет количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы. казино 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=http://craft4game.forumex.ru/viewtopic.php?f=2&t=3221>1×slots регистрация 1×slots casino c2d ru</a>
<a href=http://link.5nx.ru/viewtopic.php?f=5&t=13034>1×slots зеркало быструю регистрацию а также мгновенное</a>
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=42158>1×slots быструю регистрацию а также мгновенное</a>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=133554&pid=716702#pid716702>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную функцию активации бонуса без депо. Внимательно прочитайте до конца. Многие новички делают оплошности на шаге регистрации и потому возможности получить подарок.
#626 Charlesgunnyhttp://filmkachat.ru
1× slots casino официальный сайт
Если речь об эксклюзивных услугах, может понадобиться регистрация в казино по ссылке с партнерского вебсайта.Для тех, кто лишь подумывает испытывать свою удачу, а также для профессиональных игроков, разыскивающих свежие площадки для выигрышей, ведущие лицензированные казино часто организуют разные промоакции, и лучшее предложений за последнее время – как для новичков, например и для профессиональных игроков – бездепозитный бонус за регистрацию. <a href=http://filmkachat.ru/>1хслот зеркало</a> <a href=https://www.sideprojectors.com/project/55401/3d-architectural-rendering-services>https://www.sideprojectors.com/project/55401/3d-architectural-rendering-services</a> Помимо остального, для вывода средств по бездепу нужно внести на счёт собственный первый депо — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало возможную сумму, в чего вывод средств будет доступен.Самый распространённый из сходственных бонусов, естесственно же, бездеп на денек рождения клиента — приз повторяющий фиксированной суммы либо фриспинов поступает на счёт игрока, а пользоваться им можно в течение установленного периода времени. 1×slots casino регистрация <a href=http://aluxwheel.com/bbs/board.php?bo_table=free&wr_id=208096>http://aluxwheel.com/bbs/board.php?bo_table=free&wr_id=208096</a> Новые клиенты онлайн-казино без первого депозита шансы выяснить собственную удачливость. К тому же есть возможность преобразовать бездепы в реальные средства за регистрацию в казино, однако желаемого приз нужно отыграть сообразно условиям акции.Игрокам не воспринимать приветственный приз как гарантированный способ получить крупный выигрыш, хотя это отличная возможность без расходов расценить функционал казино.
1х слот 1хслотс регистрация перейти на 1×slots
1×slots актуальное зеркало <a href=http://megatv.kiev.ua/user/Jamesdag/>http://megatv.kiev.ua/user/Jamesdag/</a> Для отыгрыша бонуса казино обязует игрока поиграть на необходимую, в несколько раз превосходящую необходимую полученного приза — здесь выгода компании явна.Чтобы играть бесплатно на реальные средства в казино, не всегда достаточно просто зарегистрироваться. Иногда нужно выполнить дополнительные деяния. 1×slots регистрацию более популярный вариант это Популярность интернет казино растёт и всё больше пользователей начинают интерес азартными забавами. Бездепозитные бонусы 2022 года, это оригинальные презенты за регистрацию. С их поддержкою свежие игроки все получить безвозмездные вращения либо деньги на баланс за 1 регистрацию. С в игорных заведений в онлайне, бездепозитные бонусы стали знаменитейшим способом привлечения игроков. Подобные промоакции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш вебсайт собрал наилучшие предложения из онлайна на 2022 год. Воспользуйтесь каким даром и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша необходимо выполнить обстоятельства.Еще одно условие касается размеров ставки. Операторы устанавливают максимальную необходимую, которую игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, избранной в Личном кабинете. При превышении лимита есть риск потерять бонуса. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, заказчик имеет столкнуться с запретом ставить фишки на шансы.
1×slots скачать на айфон
Мы проделываем ударение на ключевых положениях правил, рассказываем о территориальных лимитированиях и кратко информируем о других промоакциях обсуждаемого казино. Бездепозитный бонус по промо-коду несомненно доступен для забавы, лишь том, случае когда Вы активируете особый бонусный код в разделе с призами или укажите промокод при регистрации на веб-сайте. В некоторых случаях, кроме активации кода, понадобиться подтвердить контактные данные игрока и наполнить анкету посетителя.Но эти рамки не смущают том хайроллеров, поскольку коэффициенты на слотах разрешают рассчитывать на солидные выигрыши, ну некоторых автоматах разыгрывается передовой джекпот. <a href=http://lsdsng.com/user/619413>http://lsdsng.com/user/619413</a> 1×slots casino зеркало рабочее Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке необходимо восполнить счет в казино. Для депозитных призов, данная процедура не необходима, например как депозит теснее сделан.Таким образом, заведение пытается продемонстрировать себя своим вероятным игрокам, а подобный маркетинговый ход как казино приз без депо за регистрацию привлекает довольно большое внимания к игорному заведению и обеспечивает постоянный поток свежих гостей и будущих клиентов игрового интернет клуба.
1хслотс официальный сайт зеркало
Подарки на определенные даты выделяются условиями получения. Если поощрение начисляют игроку на денек рождения, то сумма обыкновенно зависит от совместного объема депо за год. Бездепы с безвозмездными вращениями предоставляют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд платит казино. Число спинов ограничено и изредка выше сотню. Если акция включает в себя количество безвозмездных игр, их начисление имеет быть разбито на количество дней.Бонусные средства – маленькая сумма средств для старта в новеньком казино. На бонусные средства, обычно разрешено играть во все забавы, считая слотов с современным джекпотом и игр из раздела live casino. Превышение максимальной ставки при отыгрыше. Система автоматически не предупреждает о превышении ставки, поэтому о несоблюдении верховодил игрок может разузнать уже после подачи запроса на вывод средств. 1×slots регистрация на сайте 1×slots ru com <a href=http://silveronika.com/bitrix/redirect.php?goto=http://spbluxwatches.ru/bitrix/redirect.php?goto=http://drobmash.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/WWlY-FzThsq>http://silveronika.com/bitrix/redirect.php?goto=http://spbluxwatches.ru/bitrix/redirect.php?goto=http://drobmash.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/WWlY-FzThsq</a> Обычно, бездепозитные бонусы выдаются под конкретные слоты с фиксированной ставкой, но их точно воспрещено использовать в игровых автоматах с прогрессивным джекпотом. Список игр, в которых возможно использовать бездеп, Вы найдете в описании акции или можете уточнить у службы поддержки заведения.
1×slots официальный сайт мобильная версия скачать
Высокая конкуренция в разделе азартных игр мотивирует операторов завлекать клиентов разнородными акциями. Благодаря данному у гостей бывает вероятность получить бонусы в казино за регистрацию без депо. Воспользоваться таким предложением возможно, избегая функцию внесения денег на игровой счет, просто активировав аккаунт на сайте. Наш гид по бездепам поможет избрать самую симпатичную бонусную программу, разузнать правила получения такового вознаграждения и распорядиться им с максимальной выгодой.Для всех бездепозитных бонусов действует наибольший лимит на выигрыш. Он указывает максимальную необходимую, коию возможность получить, играя на бонусные кредиты. Как лишь вам получится выполнить притязания вейджера, допустимый максимум будет переведен с бонусного счета на основной, а остаток будет списан. Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации презента нужно доказать электрическую почту и привязать аппарат;На критериях отыгрыша бесплатных бонусов стопам тормознуть подробнее. С ними связаны аспекты, которые невозможно забыть без внимания. <a href=https://www.jangwoneyewear.com/bbs/board.php?bo_table=free&wr_id=1939646>https://www.jangwoneyewear.com/bbs/board.php?bo_table=free&wr_id=1939646</a> 1×slots зеркало регистрация в 1×slots casino Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного приза.Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации подарка необходимо доказать электрическую почту и привязать телефон;
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Верификация аккаунта. Лучше подтвердить лицо сразу после регистрации, дабы позже не было проблем с выводом средств. Верификация возможность проходить 2-мя путями: Подтверждение электронной почты – одно из главных критерий, которое есть практически в каждом бездепозитном казино. Чтобы верифицировать электрическую почту, довольно перебежать по интенсивной ссылке в письме, полученном от азартного клуба.
#627 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора на андроид порно с Анна Калинская (теннис) <a href=https://vestnik-jurnal.com/>порно с Дарья Касаткина (теннис)</a> Яровая Ирина Анатольевна порно online casino официальный <a href=https://m.repost.news/>porno Юлия Пересильд</a> казино 1 casino бонус kent casino регистрация casino daddy porno Нина Пирогова, хоккеистка 1×bet на андроид win win casino
DiskiPlus казино вход официальный сайт DiskiPlus porno Екатерина Ефременкова, шорт-трекистка <a href=https://www.diskiplus.ru/>DiskiPlus casino riobet</a> DiskiPlus казино ставка DiskiPlus карты казино <a href=https://www.diskiplus.ru/>DiskiPlus top casino</a> DiskiPlus Набиуллина Эльвира Сахипзадовна порно DiskiPlus 1×bet на сегодня DiskiPlus казино фильм DiskiPlus porno Юлия Пересильд DiskiPlus Елизавета Боярская DiskiPlus пинко casino DiskiPlus вавада казино
#628 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало
Можно. Вы постоянно сможете отказаться от получения бездепозитного приза за регистрацию в казино, же Вы не создадите ставку. <a href=http://filmkachat.ru/>1 x slots</a> <a href=https://www.designingbuildings.co.uk/wiki/User:Cgifurniture>https://www.designingbuildings.co.uk/wiki/User:Cgifurniture</a> 1×slots регистрация 1×slots casino c2d ru <a href=https://unservfl.de/user-2022.html>https://unservfl.de/user-2022.html</a> Все любят получать презенты. Согласитесь, почти любой играющий человек несомненно сильно счастлив, в получит безвозмездный презент для забавы в интернет казино просто за регистрацию либо же бонус за внесенный депозит, так нарекаемые приветственные призы для свежих игроков. Соответственно эти онлайн клубы станут больше востребованы и преимущественны у игроков при выборе казино для забавы. Топ казино постоянно обновляется и добавляются свежие и интересные игровые клубы с симпатичной бонусной политикой и всеми возможными привилегиями, к которым относятся эти призы как фриспины за регистрацию, денежные бездепозитные призы, а щедрые призы за внесенный депозит.
казино 1× slots официальный сайт
Таким образом онлайн казино получает вероятного игрока. Возможно в будущем либо настоящем он захочет сыграть на средства деньги. Так работают бездепозитные бонусы в онлайн казино. Здесь очень подходит выражение, безвозмездные сыр посещает лишь в мышеловке. Начинающие игроки шансы не обдумывать опасность пыла. Однако с понимания делается больше. Это тема для отдельного обсуждения. 1×slots casino регистрация 1×slots review live Предложения с бездепозитными бонусами за регистрацию дозволяют новым заведениям привлечь аудиторию на собственный сайт. А игроки в свою очередь получают возможность выступать на настоящие средства без депо в казино и заработать небольшой стартовый капитал, который разрешается вывести на карту банка или электрический кошелек.Oтыгpaть приз с обозначенным вeйджepом, желаемого нужно сдeлaть cтaвoк нa cумму, превосходящую размер бонуса в несколько раз. <a href=http://shinwootech.net/bbs/board.php?bo_table=free&wr_id=159354>http://shinwootech.net/bbs/board.php?bo_table=free&wr_id=159354</a> скачать 1×slots официальный сайт Также посещают случаи, когда казино начислит обсужденный бонус после регистрации свежего клиента по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам.
1хслот зеркало сайта
Сроки активации приза устанавливаются каждым казино, хотя чаще всего они не превосходят недели с момента получения. Игроку непременно надо(надобно) использовать бездеп протяжении указанного срока, в ином случае приз просто исчезнет. Каждый приз возможно получить только один один, потому случае не использовать бездеп в срок, у игрока не несомненно второго шанса им воспользоваться.Мы подготовили перечень, где есть всегда животрепещущие и новые бездепозитные бонусы казино, которые возможность получить бесплатно. Для наших пользователей есть специальные предложения неповторимые бонусы, которые вы у не отыщите, их мы определили специальной красной плашкой «Exclusive». В неких интернет казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на веб-сайте клуба и доказать свои контактные данные. Дополнительно требуется активация промокода.Срок активации и время на отыгрыш. Зачисление денег либо фриспинов случается при активации протяжении строго ограниченного периода, похожие притязания предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать приз количество дней или даже месяцов. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с неоправданно высоким вейджером. <a href=http://www.bj1777.com/dzbbs/home.php?mod=space&username=wholesaleflat62>http://www.bj1777.com/dzbbs/home.php?mod=space&username=wholesaleflat62</a> 1×slots регистрация на сайте 1×slots ru com Вейджер (wager) – это коэффициент, который показывает на какую необходимую нужно устроить ставок, дабы исключить бонус из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода этого приза, Вам необходимо сделать ставок на сумму: 500*70=3500 руб. Только всецело отыграв приз, Вы можете вывести собственный выигрыш.
рабочее зеркало 1хслотс
В подавляющем большинстве случаев благотворительные бонусы начисляются в кредитах, коие нельзя сразу исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти требования принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже. <a href=http://link.5nx.ru/viewtopic.php?f=5&t=12119>1×slot зеркало рабочее этих способов предполагает регистрацию</a> Прежде всего, не запамятовывайте регулярно заглядывать на страницу обзоров бездепозитных призов. Они шаг за шагом осматривают наиболее увлекательные предложения ведущих игорных порталов.Если вы новичок в этом деле и лишь попали в неизведанную вами область пыла — за предложений как бездепозитные призы без пополнения. 1×slots casino online регистрация <a href=http://geolan-ksl.ru/forum/user/85517/>http://geolan-ksl.ru/forum/user/85517/</a> Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют важную информацию о not the slightest deposit bonuses и предложениях.
1×slots актуальное зеркало
<a href=https://skobka.com.ua/forum/user/4791/>https://skobka.com.ua/forum/user/4791/</a> Чтобы других убедиться в превосходстве бездепозитных бонусов, достаточно зарегистрироваться в казино и получить поощрение. рабочее зеркало 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=http://nakupnidivadlo.cz/index.php/forum/3-pripominky/46621-https-sk-service1-ru?start=162#239917>1× слот зеркало</a>
<a href=https://swordmaster.org/user/JamesVok/>1хслотс мобильная версия зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На данном разделе портала регулярно публикуются обзорные заметки, каких рассматриваются бесплатные бонусы превосходнейших интернет-казино. Информация структурирована по нескольким пунктам, включая главные:
#629 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet на сегодня casino <a href=https://rhymes-punches.com/>самое казино</a> официальная казино сайт винлайн букмекерская контора <a href=https://krtka.info/>1×bet официальный xbet</a> casino вход casino играть pin up casino top top porno Алена Косторная (фигурное катание) porno Александра Степанова, фигуристка самое казино порно с Максим Глушенков (футбол)
DiskiPlus порно с Анастасия Потапова, теннисистка DiskiPlus cometa casino <a href=https://www.diskiplus.ru/>DiskiPlus pin up casino top top</a> DiskiPlus 1×bet на андроид DiskiPlus казино сегодня <a href=https://www.diskiplus.ru>DiskiPlus 7k casino официальный</a> DiskiPlus казино фильм смотреть онлайн DiskiPlus casino на телефон DiskiPlus пинко casino DiskiPlus casino ru DiskiPlus порно с Гатагова Ольга Анатольевна DiskiPlus kent casino регистрация DiskiPlus pin ап casino
#630 Charlesgunnyhttp://filmkachat.ru
1х слотс зеркало регистрация в 1×slots casino
Бездепозитные призы за регистрацию в игровых автоматах для хозяев онлайн-казино являются частью маркетинговой кампании, направленной на повышение аудитории сайта. Так они продвигают свои бренды и завлекают новых посетителей. <a href=http://filmkachat.ru/>1×slots казино зеркало</a> Важно, удостоверьтесь никаких, собственно раньше не регистрировались в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи. <a href=https://international.projectwet.org/discussion/%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-lexus-%D0%B1%D1%8B%D1%81%D1%82%D1%80%D0%B0%D1%8F-%D0%B8-%D0%B2%D1%8B%D0%B3%D0%BE%D0%B4%D0%BD%D0%B0%D1%8F-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D0%B6%D0%B0-%D0%BF%D1%80%D0%B5%D0%BC%D0%B8%D1%83%D0%BC-%D0%B0%D0%B2%D1%82%D0%BE>https://international.projectwet.org/discussion/%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-lexus-%D0%B1%D1%8B%D1%81%D1%82%D1%80%D0%B0%D1%8F-%D0%B8-%D0%B2%D1%8B%D0%B3%D0%BE%D0%B4%D0%BD%D0%B0%D1%8F-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D0%B6%D0%B0-%D0%BF%D1%80%D0%B5%D0%BC%D0%B8%D1%83%D0%BC-%D0%B0%D0%B2%D1%82%D0%BE</a> Чтобы других убедиться в превосходстве бездепозитных бонусов, довольно зарегистрироваться в казино и получить поощрение.Помните, собственно любые нарушения управлял сведут на нет ваши усилия, и вы всего останетесь без начисленного для дарового бонуса. Всегда изучайте управляла начисления и обстоятельства вейджера. По любым вопросам, на коие вы возможности без найти ответы, обращайтесь за объясненьям и саппорт. рабочее зеркало 1хслотс <a href=https://orbitalscoreboard.com/user/henryvonge/>https://orbitalscoreboard.com/user/henryvonge/</a> Реже бонусы без депо начисляются постоянным игрокам. С их поддержкой администрация старается вычесть ценных посетителей либо вожделеет поблагодарить за преданность правильных гостей. Но намного почаще для сходственных целей применяются эти промоакции:
1×slots официальный сайт скачать
Также учтите, собственно кое-какие игровые платформы сужают список государств, которые способны получить предложенный бездепозитный приз за регистрацию. К образцу, существуют онлайн-заведения, выдающие сходственные призы лишь жильцам определенных государств. К образцу, интернет казино 777 Оригинал дает бездепозитный приз только игрокам из России и государств СНГ. Или напротив, пичкают вознаграждением всех, не обитателей некоторых стран (как этого, идет пристально изучать список, дабы потом не возникло практически вопросов и претензий).Размер приза. В качестве бездепов обычно начисляют небольшие суммы, а когда речь идет о бонусах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то кое-какие казино могут подарить игроку до 2000$. 1хслотс казино зеркало Сроки активации бонуса уточняются любым казино, хотя почаще всего они не превышают недели с момента получения. Игроку обязательно надо(надобно) использовать бездеп в течение обозначенного срока, в ином случае приз просто исчезнет. Каждый приз возможно получить лишь один один, потому случае не использовать бездеп в срок, у игрока не будет 2 шанса им воспользоваться. <a href=http://autobrands.lv/user/Joshuagrees/>http://autobrands.lv/user/Joshuagrees/</a> Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации подарка необходимо подтвердить электрическую почту и привязать телефонный;Классическая разновидность бонуса за творенье аккаунта. Его преимущество заключается том,, что клиент может самостоятельно подбирать аппараты и делать ставки в их. Иногда перечень игровых автоматов ограничен оператором, хотя все точно это другого, чем единственный доступный разъем, как когда с внедрением фриспинов. 1× slots зеркало
1×slots сайт
Большинство клубов привлекают внимание компьютерные за счёт разнородных даров. На одних веб-сайтах можно получить виртуальные кредиты, коие откроют доступ ко всему софту. На иных же, администрация предлагает бесплатные вращения для пуска лучших интернет слотов. Несмотря на различные промоакции, стоит выделить самые главные. <a href=https://www.varranger.com/vforum/index.php?action=profile;u=37948>https://www.varranger.com/vforum/index.php?action=profile;u=37948</a> Представленные на этой страничке наилучшие бездеп бонусы в казино за регистрацию в 2022 году имеют оптимальные обстоятельства. После тщательного анализа редакция портала составила рейтинг спецпредложений, каком посетители Casino.ru шансы сортировать перечень по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д.B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax 1хслотс казино зеркало Oтыгpaть бонус с указанным вeйджepом, достичь необходимо сдeлaть cтaвoк нa cумму, превосходящую объем бонуса в некоторое раз.
1×slots регистрация на сайте
<a href=http://yaoisennari.ekafe.ru/viewtopic.php?f=169&t=3919>1хслотс рабочее зеркало</a> На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению сего медли, Вы не можете активировать и получить бездепозитный приз. Бонус начисляется игроку сразу после регистрации и прохождения верификации в казино и не настятельно от клиента внесения депо. Как правило, размер бонуса в схожем случае достаточно стыдливый, однако разрешает новеньким познакомиться с забавой без риска реальными деньгами.Бесплатные бонусы казино без депозита возможно получить вид валютных средств на бонусный счет (исключить их можно лишь в отыгрыша), фриспинов, игры либо кешбэк-бонуса. 1×slots зеркало регистрация в 1×slots casino <a href=http://thrope.co.kr/bbs/board.php?bo_table=free&wr_id=3055>http://thrope.co.kr/bbs/board.php?bo_table=free&wr_id=3055</a> К сожалению, нет. Почти все казино, требуют внесение желая бы одного малого депо для вывода выигрыша с бездепозитного бонуса. Также учитывайте, что вывести средства разрешено лишь на ту платежную систему, с коей был сделан депозит.Составленный знатоками Casino.ru список онлайн-казино с бездепозитным бонусом разрешает игрокам сопоставить спецпредложения разных операторов.
1×slots зеркало регистрация то дальше необходимо пройти
Но существуют азартные заведения, готовые просто например вручить деньги на игру. Для сего достаточно сделать профиль. Чтобы исключить выигрыш, сначала нужно выполнить вейджеровые обстоятельства, прописанные в критериях получения бездепа. <a href=http://polymedica86.com/bitrix/redirect.php?goto=http://rusdarling.com/bitrix/rk.php?goto=http://vskvant.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/vX6mANMotyA>http://polymedica86.com/bitrix/redirect.php?goto=http://rusdarling.com/bitrix/rk.php?goto=http://vskvant.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/vX6mANMotyA</a> 1×slots регистрацию процедура займет всего лишь Если вы выбираете испытанное лицензионное интернет казино и выполните все условия получения бездепозитного приза, проблем с получением дара у Вас не возникнет.2. Создать свежий профиль. Для регистрации надо(надобно) наполнить маленькую анкету или зайдите в собственный кабинет посредством социальных сеток;
<b>Смотреть еще похожие новости:</b>
<a href=https://showboysmedia.com/real-music/#comment-161067>1×slots коды</a>
<a href=https://www.globalvision2000.com/forum/member.php?action=profile&uid=1072499>1хслотс казино зеркало</a>
<a href=http://forum.drustvogil-galad.si/index.php?action=profile;u=121557>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В интернете большое известных игорных площадок с красивыми акционными предложениями. Однако внимательно читать условия десятков предложений в надоест, ну и время отнимет количество. Поэтому наша команда подготовила ТОП-3 сайтов с лучшими бездепозитными бонусами: Операторы гемблинга заявляют, что например они дерутся с бонус-хантерами. Впрочем, критики считают, собственно этим казино пытаются устроить из случайного постояльца неизменного игрока.
#631 internetGephttps://msk-domashnij-internet002.ru
какие провайдеры по адресу <a href=https://msk-domashnij-internet002.ru>msk-domashnij-internet002.ru</a> недорогой интернет москва
#632 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация в 1×slots casino
Помните, собственно любые нарушения верховодил сведут на нет ваши старания, и вы наверняка останетесь без начисленного вам бесплатного бонуса. Всегда изучайте управляла начисления и условия вейджера. По каким вопросам, на коие вы не можете помощи отыскать ответы, обращайтесь за разъяснениям и саппорт.Раздача бонусов возможность быть посвящена разным датам: календарные праздничные, дни рождения игроков, юбилей открытия казино и т. Д. Подарок выдается повторяющий денег, фриспинов или баллов для скопления и размена на предложения оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода данной суммы придется выполнить ряд притязаний. <a href=http://filmkachat.ru/>1хслотс регистрация в 1×slots casino</a> Например, игрок получил 500 рублей при разработке аккаунта и обязан отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 руб., потребуется сделать 875 спинов для полного отыгрыша.Как лишь на виртуальном счету окажутся бонусные свои, поторопитесь отыграть вейджер. Сразу последствии этого можно забыть заявку на вывод выигрыша. Кредиты выгодно отличаются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом реальных средств и выделяют вероятность почувствовать задор. Во-вторых – возможно насладиться каждой азартной забавой доступной на веб-сайте. В вашем распоряжении находятся автоматы, настольные прибавленье, видео-покер, Live-дилеры. <a href=https://collectednotes.com/lexxeagle/transforming-spaces-professional-3d-interior-visualization>https://collectednotes.com/lexxeagle/transforming-spaces-professional-3d-interior-visualization</a> Бездепозитные призы, как теснее понятно, являются оригинальной возможностью обратиться игровому процессу абсолютно бескорыстно, словами играть в интернет казино бесплатно и на существующие средства сразу после регистрации аккаунта. Автоматы с этим депо все замерзнуть великолепной возможностью поиграть для почитателей азарта с определенными ограничениями в финансах.Призовые начисления без депо все предоставляться для участия в турнирах интернет казино. Потратить перечисленные деньги возможно исключительно в данной промоакции. Условия их проведения себе ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, лучше изучить его верховодила. 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=http://intentionalpress.com/author/stevenviery/>http://intentionalpress.com/author/stevenviery/</a>
1 хслот регистрация в 1×slots casino
Для вывода средств приз надо(надобно) несомненно отыграть законам, установленным казино. Внимательно ознакомьтесь с правилами акции и вариантами отыгрыша бездепозитного приза до его получения, чтобы избежать конфликтных ситуаций.Перед активацией важно пристально изучить условия промоакции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют значение кроме лимиты ставок при отыгрыше и сроки, в течение которых возможно воспользоваться предложением. Если бездеп охватывает ограниченный список игр, рекомендовано узнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с невысокими множителями выплат подходят лишь в случае, в оператор не установил жесткие лимитирования на наивысшую необходимую ставки. 1хслотс зеркало на сегодня <a href=http://tara-info.biz.ua/wr_board/tools.php?event=profile&pname=gorgeoustyro43>http://tara-info.biz.ua/wr_board/tools.php?event=profile&pname=gorgeoustyro43</a> В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это самая приятная часть игры. Важно, зачастую бездепозитные призы в казино выдаются с ограничениями по максимальной выплате. В среднем возможно рассчитывать на прибыль в некоторое тыщ рублей. Как исключить выигрыш с бонуса без депо. Придётся доказать аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате либо прочитайте в правилах. 1×slots регистрация 1×slots casino 777 online Чаще всего интернет-казино предлагают бездепозитные бонусы свежим юзерам. Эта промо-акция очень эффективно завлекает новичков, подталкивая их к открытию счета. Конечно, не все они становятся послушными клиентами, но сам прецедент регистрации аккаунта играет на руку заведению.
1хслотс казино зеркало
Получив свой подарок, Вы сможете бесплатно играть на реальные средства, а выполнив условия отыгрыша, вывести свой выигрыш.Если простыми текстами, бездепы – это определённая сумма денег либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать подарки. Но есть некоторые аспекты. Существуют игорные жилища, которые перед что, этим как начислить бонусы настоятельно привязать телефонный, дать копии документов. <a href=https://swordmaster.org/user/MichaelImime/>https://swordmaster.org/user/MichaelImime/</a> Для получения выигрыша потребуется выполнить обстоятельства казино. Чаще всего игроку нужно поставить конкретную необходимую, хотя теснее из личных средств. Она рассчитывается из совместного объема выигрыша за всегда использования бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, в юзер выиграл 1000 рублей, а множитель составляет х30, исключить деньги можно несомненно, сделав ставки на 30 000 руб. 1×slots официальный сайт, скачать Чтоб получить крупный выигрыш, избирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша.Прежде всего, не забывайте периодически заглядывать на страничку обзоров бездепозитных призов. Они шаг за шагом разглядывают более занимательные предложения водящих игорных порталов.
1×slots мобильная версия войти казино
Вывод выигрыша с бездепозитных бонусов казино – щедрый презент от азартных клубов. Но чтобы вывести собственный заработок, нужно выполнить ряд критерий:Поспешите зарегистрироваться на официальном сайте Клубника, дабы моментально получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, появляется настоящий шанс победу! 1×slots зеркало регистрацию более популярный вариант это <a href=https://www.uned-psicologia.com/index.php?action=profile;u=51352>https://www.uned-psicologia.com/index.php?action=profile;u=51352</a> Бездепозитные бонусы казино за регистрацию в 2022 году — это вероятность сыграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой либо числом бесплатных вращений без внесения депозита. Не путайте деморежим с реальной игрой без надобности внесения депозита.Существует ли стратегии для отыгрыша бездепозитных призов? К сожалению нет, на выигрыши либо проигрыши с призов, казино или игрок повлиять не может, отдача игр случается от создателей игр.
сайт 1× slots casino
Законодательство, регулирующее азартные игры в разных странах, влияет на возможности операторов. В результате пользователи из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это имеет быть как полный отказ в доступе, так и невозможность загружать забавы отдельных изготовителей. <a href=http://veda.adrian.ru/doku.php?id=%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0%20%D1%80%D1%8F%D0%B4%D0%BE%D0%BC>http://veda.adrian.ru/doku.php?id=%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0%20%D1%80%D1%8F%D0%B4%D0%BE%D0%BC</a> Демоказино есть практически на каждом веб-сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются веско пореже: там когда выигрыша и соблюдения условий промоакций бездеп можно перевоплотить в настоящие средства. 1×slots casino регистрация 1×slotscasino09k online Шаг 5. Использование и отыгрыш. Бездеп обязан быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный бонус нередко имеет стать легкодоступным сразу после окончания регистрации, что как единственным притязанием к нему считается регистрация, а затем проверка вашей новой учетной записи.
#633 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало рабочее регистрации на телефон придет
Бездепозитный приз казино 2022 с выводом за регистрацию предоставляет возможность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и проверить качество работы саппорта. Довольно нередко, начиная игровой процесс, игрок уже отказывается останавливаться и проделывает настоящий лепта. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть безвозмездно вероятно как раз таки с бонусом за регистрацию без надобности вносить депозит. <a href=http://filmkachat.ru/>1×slots casino регистрация</a> <a href=https://bdgtal.atlassian.net/wiki/spaces/TES/blog/2025/02/16/3895722037>https://bdgtal.atlassian.net/wiki/spaces/TES/blog/2025/02/16/3895722037</a> Бездепозитные призы за регистрацию являются одним из самых знаменитых методов привлечения свежих игроков в онлайн-казино, потому собственно они деют игрокам возможность опробовать казино, неподражаемо игровые автоматы, и вполне, выиграть настоящие средства.Для выбора азартного заведения Вы можете пользоваться перечнем наших казино с призами за регистрацию. На нашем веб-сайте мы выпустили список бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, собственно доля призов эксклюзивные и доступны только для гостей нашего вебсайта по-специальному промо-коду либо по оригинальной ссылке. Кроме как, для каждого бонуса мы подготовили доскональный обзор, в котором Вы узнаете как получить и отыграть поощрение и как исключить собственный выигрыш с бездепа. 1х слотс зеркало регистрация в 1×slots casino <a href=http://klotzlube.ru/forum/user/273684/>http://klotzlube.ru/forum/user/273684/</a> При подмоги такого одобрения оператор возможность кроме привлекать посетителей, коие раньше проявляли активность на сайте, но по некий основанию перестали играть. В этом случае промокод высылается пользователю по электронной почте либо вид SMS.
1×slots коды
Не стоит сразу же отрицаться от приветственных подарков в подобных казино. Администрация готова начислить средства или фриспины, но предварительно работники должны убедиться, собственно вы не аферист. Дело что, собственно развелось слишком большое охотников за бонусами. Они выучились обманывать систему и наваривать солидные суммы денег. 1×slots зеркало выигрыши обязательно пройдите регистрацию если <a href=http://gdz-fizika.ru/index.php?subaction=userinfo&user=hurtbyte76>http://gdz-fizika.ru/index.php?subaction=userinfo&user=hurtbyte76</a> В некоторых интернет казино для получения бездепозитных бонусов не довольно просто зарегистрироваться на веб-сайте клуба и подтвердить средства контактные данные. Дополнительно потребуется активация промокода.Для получения предоставленных призов для пригодиться — ПК или мобильное устройство, и остальное дело за небольшим. 1×slots casino регистрация 1×slotscasin online Теоретически, к безвозмездным бонусам возможно отнести так называемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, потому собственно они деют только возможность создавать ставки.Игрокам не следует воспринимать приветственный бонус как гарантированный способ получить большой выигрыш, хотя это замечательная вероятность без расходов расценить возможностей казино.
1х слотс зеркало регистрация в 1×slots casino
Существует ли стратегии для отыгрыша бездепозитных бонусов? К раскаянию нет, на выигрыши либо проигрыши с бонусов, казино либо игрок повлиять имеет, отдача игр происходит от разработчиков игр. <a href=https://rk.vdu.lt/users/doctorlazutapa/>https://rk.vdu.lt/users/doctorlazutapa/</a> Приглашаем делиться суждениями о призах. Это поможет другим пользователям подбирать более выгодные предложения.Риск-игра по равным шансам – Также казино может воспрещать скорпулезно обстоятельства по отыгрышу за раунда на удвоение, кот-ый предлагается в слотах, видео-покере и некоторых иных играх. 1× slots официальный
зеркала 1×slots
Почти все игровые клубы настоятельно подтверждение контактных данных игрока для получения бездепозитного бонуса. <a href=http://naukova2b.2ua.in.ua/viewtopic.php?f=7&t=3246>1×slots казино зеркало</a> Стоит отметить, что бездепозитный приз выдается лишь взрослым новеньким, которые, же, могут пригласить личных друзей и людей, того рассчитывающих на поощрительную программу преданности. Подобная технология была среди конкурирующих онлайн-казино для популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению своей посещаемости, путем вербования свежих игроков. Бонусы – это уникальный шанс для потенциальных соучастников забавы, коие все опробовать софт покер рума и убедиться, будут ли они в него играть или нет. Новый игрок испробует свои силы с реальными оппонентами в казино.Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную процедуру активации приза без депо. Внимательно прочтите до конца. Многие новички делают промахи на этапе регистрации и потому имеют получить презент. Начнём с того, что каждое промо за регистрацию подразумевает некие условия. Бездепозитные бонусы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, необходимая для выполнения критерий. Пример, получили безвозмездные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 рублей, проигрышных или выигрышных, важно. После исполненья, бонусный баланс перейдёт на настоящий и будет легкодоступным к выводу. 1×slots регистрация 1×slotscasino 56 online <a href=http://www.russtars.tv/user/StevenMen/>http://www.russtars.tv/user/StevenMen/</a>
1×slots казино зеркало
С такими ординарными советами каждое казино с бонусом за регистрацию способно принести в разы больше выгоды и полезности.Чтоб получить большой выигрыш, избирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, которые доступны по условиям отыгрыша. Многие игроки, оценив возможностей казино, остаются играть в нем и дальше ? на это и нацелено любое промо. Постоянные посетители вносят депозиты и проделывают ставки, обеспечивая долгосрочную выгода оператора. То есть, казино выдают бездепы новым пользователям для формирования лояльной аудитории.Бездепозитные призы истинными деньгами, которые возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадались. <a href=http://suvenir.k-78.ru/communication/forum/user/49928/>http://suvenir.k-78.ru/communication/forum/user/49928/</a> 1×slots промокод при регистрации 2025 Но существуют азартные заведения, готовые просто так вручить деньги на игру. Для этого довольно создать профиль. Чтобы вывести выигрыш, сперва необходимо выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа.Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы которые появляются у новичков.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.infoknygos.lt/smforum/index.php?topic=136058.new#new>1×slots casino зеркало</a>
<a href=https://www.ladyboyescort.com/topic/5200–1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5/>1×slots зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В интернете количество узнаваемых игорных площадок с красивыми акционными предложениями. Однако пристально разбирать условия 10-ов услуг вскоре надоест, да и время отнимет много. Поэтому наша команда подготовила ТОП-3 вебсайтов с лучшими бездепозитными призами:
#634 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
как выиграть в казино porno Александра Степанова, фигуристка <a href=https://kompromat1.online/>casino официальный сайт</a> Семёнова Татьяна Владимировна порно симулятор казино <a href=https://t.me/vchkogpu_ru>Яровая Ирина Анатольевна порно</a> бесплатное казино 1×bet слоты 1×bet xyz почему в казино нет часов порно с Константин Тюкавин (футбол) porno Александр Соболев (футбол) фильмы казино рояль 1×bet сайт 1×bet xyz
DiskiPlus рабочие зеркала казино DiskiPlus 1×bet 1 <a href=https://www.diskiplus.ru>DiskiPlus почему в казино не бывает настенных часов</a> DiskiPlus букмекерские контора ап DiskiPlus пари букмекерская контора <a href=https://diskiplus.ru/>DiskiPlus леон букмекерская контора</a> DiskiPlus порно с Юлия Ефимова DiskiPlus casinos xyz DiskiPlus up casino зеркало DiskiPlus casino зеркало сегодня DiskiPlus Преподобная Надежда Александровна порно DiskiPlus 1×bet сейчас DiskiPlus porno Вера Бирюкова, гимнастка
#635 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало xbet ешь казино <a href=https://krtka.info/>казино онлайн бесплатно</a> cat casino online casino 7k <a href=https://glvk.guru/>pin casino</a> скачать casino на андроид порно с Артемий Панарин (хоккей) ramenbet casino casino андроид слоты казино porno Андрей Рублев (теннис) винлайн букмекерская контора официальный сайт
DiskiPlus порно с Варвара Субботина DiskiPlus 1go casino <a href=https://www.diskiplus.ru/>DiskiPlus вывод казино</a> DiskiPlus casino рабочее DiskiPlus играющие казино <a href=https://diskiplus.ru>DiskiPlus ставки на спорт букмекерские конторы</a> DiskiPlus гама казино DiskiPlus casino betting DiskiPlus pin up casino пин DiskiPlus винлайн букмекерская контора DiskiPlus казино фильм смотреть онлайн DiskiPlus вавада казино DiskiPlus Приезжева Екатерина Геннадьевна порно
#636 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на официальном сайте
Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации подарка необходимо подтвердить электронную почту и привязать телефон;Шаг 4. Активация. Внимательно исследуйте обстоятельства, информацию по лимитированиям и сроке деянья бонусного предложения. Разобравшись с правилами, возможно активировать бонус в собственном кабинете (от ? с использованием промокода) или по запросу в саппорт. <a href=http://filmkachat.ru/>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a> <a href=https://www.doyoubuzz.com/architectural-events>https://www.doyoubuzz.com/architectural-events</a> 1×slots официальный сайт скачать на айфон <a href=http://krair.kr/bbs/board.php?bo_table=free&wr_id=791948>http://krair.kr/bbs/board.php?bo_table=free&wr_id=791948</a> Чтобы помощи убедиться в превосходствах бездепозитных призов, довольно зарегистрироваться в казино и получить поощрение.Наиболее популярные вознаграждения среди гэмблеров – бездепозитные призы казино. Это не изумительно, ведь можно получить бесплатные вращения или виртуальные кредиты, и всем не придётся пополнять счёт, рисковать личностными средствами. Удастся насладиться разнообразными веселиями даже выиграть солидную необходимую, избегая серьёзного риска.
1хслотс зеркало на сегодня
Oтыгpaть приз с обозначенным вeйджepом, результата нужно сдeлaть cтaвoк нa cумму, превышающую объем приза в количество один. 1×slots регистрация 1×slotscasino09k online Как верховодило, новоприбывшие игроки начала желают ознакомиться с методами ввода и вывода валютных средств и сроки выполнения поданных заказов дабы четко разуметь, как быстро возможность вывести свой казино бонус за регистрацию без депо на электрический кошелек или же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино соперничают меж собой. Ведь в бы определенную компанию представляло лишь одно онлайн-заведение, то навряд бы посетители увидели казино с бонусом за регистрацию и имели бы рассчитывать только на вознаграждение вид бонуса на первое вложение. К любому заведению регулярно следует привлекать новых игроков, что, итоге, только на руку всем играющим. <a href=http://quasix.ru/user/JamesPreno/>http://quasix.ru/user/JamesPreno/</a> Превышение максимальной ставки при отыгрыше. Система механически не предуведомляет о превышении ставки, поэтому о нарушении управлял игрок может разузнать теснее последствии подачи запроса на вывод средств.Такой безвозмездный эквивалент средств зачисляется на профиль пользователя после воплощения требований и предназначаются они лишь для игрового процесса. Вывод таких вознаграждений возможен только после воплощения вейджеровых условий. 1хслот зеркало Вейджер (или вагер) ? это минимальная сумма ставок, которую необходимо устроить для вывода валютного бонуса. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение.Возможность протестировать новые игры, не рискуя личностными своими и разработать личную тактику забавы.
1×slots регистрация то дальше необходимо пройти
Но на некоторых азартных платформах подобные гонорары могут получить теперь зарегистрированные пользователи. В этом случае, бонусы предоставляются в рамках оригинальных акций или же некоторым геймерам повторяющий акционного предложения, которое прибывает на почту с целью «возвратить» игрока в свое казино. Зачастую бездепозитные бонусы казино для забавы предлагаются различными заведениями азартных игр виде рекламных промоакций либо в целях привлечения к себе новых игроков. Для бездепозитных призов в казино 2022 игроку не нужно пополнять счет до этапа вывода желанных средств. <a href=https://www.sportnabiblioteka.bg/index.php?option=com_k2&view=itemlist&task=user&id=116680>https://www.sportnabiblioteka.bg/index.php?option=com_k2&view=itemlist&task=user&id=116680</a> Подтверждение электронной почты – одно из основных условий, коие есть практически в любом бездепозитном казино. Чтобы верифицировать электронную почту, довольно перейти по интенсивной ссылке в письме, полученном от азартного клуба.Основное различие в том, собственно для получения бездепа не надо пополнять баланс в казино. Но считая сего, есть ряд и других различий: 1×slots промокод при регистрации 2025 Некоторые казино имеют предлагать посетителям бездепы за свидетельство номера либо почты или репост на страничку в социальных сетях.
1×slots бонус за регистрацию
Призовые начисления без депозита имеют предоставляться для роли в турнирах интернет казино. Потратить перечисленные средства возможно самая масштабах этой промоакции. Условия их проведения в лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться таким предложением, чем выучить его верховодила.Это раз из основных характеристик привлекательности презента. С завешенным коэффициентом том профессионалы не смогут выполнить условия по отыгрышу. И важно, как презентабельно выглядит предложение – бездепозитный бонус казино в объеме $500 или $1 000. Чтобы новенькие попревосходнее вникли, что же такое вейджер, мы разберём на образце. 1×slots casino регистрация на сайте <a href=http://obruchalka-vrn.ru/index.php?subaction=userinfo&user=demonicpolitics>http://obruchalka-vrn.ru/index.php?subaction=userinfo&user=demonicpolitics</a> Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, или проигрываете предложенный бонус, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, научится регулировать изменять ставки и полосы, исследовать бонусные забавы и их выигрышные композиции, ну в конце концов просто зарядится кучей впечатлений! Ведь вы будите выступать на бонусные средства, коие можно отыграть и вывести, не просто на демо счет, что, этим наиболее адреналин в крови еще больше повысится а пульс забьется с частым ритмом!
1хслотс рабочее зеркало
Наличие у игрока 2 аккаунта. Запрещено делать несколько профилей для неоднократного получения бездепов.Как правило, новоприбывшие игроки начала желают ознакомиться с методами ввода и вывода денежных средств и сроки выполнения поданных заявок чтобы конкретно осознавать, как стремительно у вывести свой казино бонус за регистрацию без депо на электрический кошелек либо же банковскую карту. К счастью для всех играющих, внутри конкретных холдингов, все казино конкурируют меж собой. Ведь если бы определенную фирму давало только одно онлайн-заведение, то ли бы клиенты заметили казино с бонусом за регистрацию и возможность бы рассчитывать лишь на вознаграждение в виде приза на 1-ое вложение. К любому заведению периодически стопам привлекать свежих игроков, собственно, в, только на руку всем играющим. Иногда операторы настоятельно внесение малого депо перед выводом для верификации платежного прибора. В некоторых казино этот депо также светит отыграть. <a href=https://www.wakewiki.de/index.php?title=Benutzer:ElyseMerideth69>https://www.wakewiki.de/index.php?title=Benutzer:ElyseMerideth69</a> За счёт спинов получится запустить разные интернет слоты, протестировать стратегии и поднабраться навыка. Фишка что, нет, собственно вращения начисляются на лучшие аппараты с оригинальными опциями и высокой отдачей. Не забывайте, собственно в любом акционном предложении предусмотрены специальные требования – кратковременные лимитирования, максимальный размер ставки, список дешевых игр.Также учтите, собственно некоторые игровые платформы сужают перечень стран, коие способны получить предложенный бездепозитный бонус за регистрацию. К примеру, существуют онлайн-заведения, выдающие сходственные призы только жильцам конкретных стран. К примеру, интернет казино 777 Оригинал дает бездепозитный бонус лишь игрокам из России и стран СНГ. Или наоборот, пичкают вознаграждением всех, считая обитателей некоторых государств (из этого, по пристально изучать список, чтобы впоследствии не возникло практически вопросов и претензий). казино 1×slots официальный сайт Самые свежие бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды находятся на этой странице. Посетитель имеет оценить условия получения и начать выступать на деньги без внесения депо. При этом игроку важно понимать, на каких критериях и какими способами него вывести приобретенный выигрыш. Для этого нужно расценить перечень присоединенных платежных систем.
<b>Смотреть еще похожие новости:</b>
<a href=http://sz.80lvl.ru/viewtopic.php?f=8&t=4571>casino 1×slot</a>
<a href=http://soumoli.com/home.php?mod=space&uid=24916>1×slots официальный сайт мобильная версия скачать</a>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=728853>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a>
<a href=http://miupsik.ru/forums/showthread.php?tid=525248>1хслотс официальный сайт зеркало</a>
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=953563>1×slots casino регистрация 1×slotscasin online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Активация по промокоду употребляется в разных видах бездепов. Если идет о приветственном бонусе, то комплект символов можно узнать на крупнейшей страничке, в регистрационной форме или послании, которое отправляется пользователю для подтверждения e-mail. Акции могут проводиться совместно с партнерскими площадками. Обычно код размещается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется одноразовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем актуальный код для активации в описании каждого рекламную. Бездепозитный приз за регистрацию в казино — это стартовый презент в виде валютного начисления или даровых вращений для новых игроков заведения, для получения которого не заносить депо.
#637 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино сегодня кент казино <a href=https://repost.news/>яндекс казино</a> ставки на спорт букмекерские конторы casino рабочее <a href=https://strelochnik.com/>яндекс казино</a> слоты казино porno Алена Косторная (фигурное катание) 1win букмекерская контора букмекерская контора бетсити casino официальный сайт pin up casino скачать porno Алена Михайлова
DiskiPlus пин ап букмекерская контора DiskiPlus 1×bet сайт <a href=https://diskiplus.ru>DiskiPlus Комарова Наталья Владимировна порно</a> DiskiPlus леон букмекерская контора DiskiPlus Кузнецова Анна Юрьевна порно <a href=https://diskiplus.ru>DiskiPlus порно с Юлия Ефимова</a> DiskiPlus casino онлайн DiskiPlus сайты казино DiskiPlus Окладникова Ирина Андреевна порно DiskiPlus букмекерскую контору пин DiskiPlus Преподобная Надежда Александровна порно DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus Фастова Елена Владимировна порно
#638 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Алексей Миранчук (футбол) рейтинг казино <a href=https://rumafia.news/>casino регистрации</a> 7k casino 1×bet зеркало рабочее xbet <a href=https://kompromat1.online/>порно с Диана Шнайдер (теннис)</a> казино можно Ходнева Светлана Владимировна порно казино фильм онлайн смотреть фильм казино казино пину casino ru Чулпан Хаматова
DiskiPlus игры казино DiskiPlus Радченко Светлана Юрьевна порно <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet слоты 1×bet xyz</a> DiskiPlus casino DiskiPlus porno Игорь Акинфеев (футбол) <a href=https://diskiplus.ru/>DiskiPlus Комарова Наталья Владимировна порно</a> DiskiPlus казино фильм онлайн DiskiPlus винлайн букмекерская контора DiskiPlus casino рабочее DiskiPlus порно с Илья Осипов (киберспорт) DiskiPlus 1×bet слоты DiskiPlus песня казино DiskiPlus казино рулетка
#639 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin casino Ирина Горбачева <a href=https://rucriminal.info/>бывшие казино</a> порно с Сергей Бобровский (хоккей) top casino <a href=https://res-publika.com>сайт букмекерской конторы</a> почему в казино нет часов ешь казино порно с Максим Глушенков (футбол) букмекерская контора фонбет pinco casino вывод казино casino daddy
DiskiPlus porno Вера Бирюкова, гимнастка DiskiPlus казино большая <a href=https://www.diskiplus.ru>DiskiPlus порно с Никита Кучеров (хоккей)</a> DiskiPlus champion casino DiskiPlus 1×bet официальный сайт <a href=https://www.diskiplus.ru>DiskiPlus казино рублях</a> DiskiPlus букмекерская контора скачать приложение DiskiPlus 1win букмекерская контора DiskiPlus Светлана Ходченкова DiskiPlus casino зеркало сегодня DiskiPlus скачать 1×bet на андроид DiskiPlus ев казино DiskiPlus up casino официальный
#640 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
лучшие онлайн казино играющие казино <a href=https://repost.news/>Семёнова Татьяна Владимировна порно</a> casino online зеркало слоты казино <a href=https://repost.news/>1×bet слоты официальный сайт</a> сайт pin up casino лучшие букмекерские конторы казино в россии демо казино 7k casino официальный букмекерская контора скачать приложение порно с Алексей Миранчук (футбол)
DiskiPlus pin up букмекерская контора DiskiPlus промокод 1×bet <a href=https://diskiplus.ru/>DiskiPlus казино сегодня</a> DiskiPlus лучшие бесплатные онлайн казино DiskiPlus казино фильм смотреть онлайн <a href=https://www.diskiplus.ru>DiskiPlus 1×bet 1хбет</a> DiskiPlus casino ru DiskiPlus Елена Лядова DiskiPlus casino online зеркало DiskiPlus casino бонус DiskiPlus 7k casino DiskiPlus сайт pin up casino DiskiPlus casino играть
#641 Charlesgunnyhttp://filmkachat.ru
1×слотс казино
При отыгрыше бонусных средств, необходимо учитывать срок деяния бонуса и время, которое дается на отыгрыш. По истечению заявленного медли, не отыгранный приз будет аннулирован.Чаще всего интернет-казино предлагают бездепозитные призы новым юзерам. Эта промо-акция довольно отлично привлекает начинающих, подталкивая их к открытию счета. Конечно, не все становятся преданными клиентами, но сам прецедент регистрации аккаунта играет на руку заведению. <a href=http://filmkachat.ru/>1×slots зеркало на сегодня</a> Новые посетители онлайн-казино без первого депо имеют проверить свою удачливость. К тому же есть вероятность конвертировать бездепы в реальные средства за регистрацию в казино, однако достичь приз необходимо отыграть согласно условиям акции.Принципиальным различием безвозмездных бонусов от призов на депозит считается неимение необходимости вносить деньги на аккаунт. Из-за этого их часто именуют бездепозитными (no down payment bonuses). <a href=https://www.esurveyspro.com/Survey.aspx?id=d8357902-e8be-4a72–8767–3426f9bacbbb>https://www.esurveyspro.com/Survey.aspx?id=d8357902-e8be-4a72–8767–3426f9bacbbb</a> Законодательство, регулирующее азартные забавы в различных государствах, оказывает на возможности операторов. В итоге юзеры из отдельных регионов сталкиваются с лимитированиями со стороны казино. Это имеет быть как глубокий отказ в доступе, так и невозможность загружать игры отдельных изготовителей.Приветственный бонус без депозита ? подарок за регистрацию. Выдается средствами, фриспинами либо баллами. В последнем случае бонусные баллы используются для роли в турнирах или обмена на настоящие деньги. 1×slots зеркало на сегодня <a href=https://forum.expert-watch.com/index.php?action=profile;u=285770>https://forum.expert-watch.com/index.php?action=profile;u=285770</a>
казино 1×slots
Ограничения по играм. Администрация воспрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, средствами или бесплатными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда разделение выполняется по виду игр. Например, отыгрыш вероятен на всех игровых аппаратах, но запрещен в настольных забавах и в разделе Live Casino.Мы собрали и выпустили список превосходнейших бездепозитных казино с бонусами за регистрацию, которые гарантируют щедрые выигрыши и моментальные выплаты. <a href=https://praisenpray.org/forums/showthread.php?tid=149432>1×slots подтвердит вашу регистрацию если говорить</a> 1×slots официальный зеркало Даже не выиграв солидную сумму, игрок интересно проведет время, изнутри изучит работу площадки, воспримет геймплей автоматов. Все это без каких-то финансовых рисков. Быть в курсе наихороших акций легко. Достаточно периодически учить список новых интернет казино с выводом приза без депозита в данном разделе.В современность очень просто получить приз за регистрацию в казино. Практически любой игорный дом с радостью начислит деньги или безвозмездные вращения. Многие гэмблеры пользуются данным и не стыдятся региться в каждом клубе с выгодными критериями. Кстати, это отличная возможность выработать победную стратегию и сорвать джекпот. <a href=http://georgiantheatre.ge/user/Forsedropet/>http://georgiantheatre.ge/user/Forsedropet/</a> 1×slos регистрация в 1×slots casino Бездепозитные бонусы казино за регистрацию в 2022 году — это вероятность поиграть за счёт заведения. Казино даёт посетителю шанс пользоваться определённой суммой или количеством даровых вращений без внесения депозита. Не путайте деморежим с реальной игрой без необходимости внесения депо.На данном разделе портала периодически публикуются обзорные статьи, каких рассматриваются бесплатные призы лучших интернет-казино. Информация структурирована по нескольким пт, включая основные:
1хслот скачать
Бездепозитные бонусы прекрасный вариант даровой забавы в игровые автоматы. Многие пользователи сети не знают, собственно в казино можно начать выступать безусловно бесплатно, а потом вывести выигрыш на банковскую карту или электронный кошелек, другие не доверяют интернет казино, а третьи успешно играют и выигрывают – и подчас достаточно большие суммы. Прочитайте верховодила бонусной программы, в желайте участвовать. Да, мы безотступно советуем устроить это до регистрации. <a href=https://www.uned-psicologia.com/index.php?action=profile;u=25985>https://www.uned-psicologia.com/index.php?action=profile;u=25985</a> Во время игры в казино, выигрыши, приобретенные благодаря бесплатным призовым фондам, суммируются и срабатывают в совместную сумму для отыгрывания. Однако, случае удача улыбнется и получится отыграть все призы, игровое заведение гарантированно разрешит исключить денежные средства. Сумма вывода будет зависеть от лимита, одобренного именно в этом учреждении. Поэтому, внимательно нужно разбирать управляла выдачи анлимитных депозитов.Обычно, бездепозитные бонусы выдаются под определенные слоты с фиксированной ставкой, но их точно воспрещено применять в игровых автоматах с современным джекпотом. Список игр, каких возможно использовать бездеп, Вы найдете в описании промоакции либо можете уточнить у службы поддержки заведения. 1×slot регистрация После получения бонуса вывод средств для посетителя несомненно недосегаем времени, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или чета месяцов. Выводить деньги игрок сможет только после отыгрыша.
1×slots зеркало на сегодня
<a href=http://okeyrp.listbb.ru/memberlist.php?mode=viewprofile&u=168>1хслотс зеркало</a> Прежде чем активировать бездеп, необходимо убедиться что, нет, что государство, уроженцем которой считается игрок, не входит в список разрешенных.В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, нужно адресоваться в службу через лайв-чат на веб-сайте казино. Когда идет о получении бездепозитных бонусов в казино, начала обратите внимание на следующие обстоятельства: 1×slots рабочее зеркало <a href=http://newsletters.univ-lille.fr/redirect/?url=http://dkkm.ru/bitrix/redirect.php?goto=http://toolbarqueries.google.ml/url?q=https://teletype.in/@urid_pomosh/HjZSyy6esdr>http://newsletters.univ-lille.fr/redirect/?url=http://dkkm.ru/bitrix/redirect.php?goto=http://toolbarqueries.google.ml/url?q=https://teletype.in/@urid_pomosh/HjZSyy6esdr</a>
1× слот зеркало
Варианты выигрыша зависимости от Вашей успеха и критерий игорного портала. Выше мы заявили, что кое-какие бездепозитные бонусы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются и те, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность передовых игр на деньги, возможно выиграть неописуемые суммы. Сегодняшние игровые автоматы или видео слоты, как их именуют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000. В онлайне большое известных игорных площадок с привлекательными акционными предложениями. Однако пристально читать обстоятельства десятков услуг в надоест, да и время отнимет большое. Поэтому наша команда подготовила ТОП-3 вебсайтов с лучшими бездепозитными бонусами: <a href=http://bsq.cc/bbs/home.php?mod=space&uid=10196>http://bsq.cc/bbs/home.php?mod=space&uid=10196</a> Хотя благотворительные бонусы начисляются без депо, не исключено, что вас придется вносить деньги. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты лишь в такого, как свежий заказчик первый пополнит игровой счет. 1× slots casino официальный сайт Фриспины начисляются по конкретной ставке. После их активации игроку нужно запустить слот и убедиться, собственно в нем отображаются бесплатные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода последствии отыгрыша определяется оператором и редко выше 5 000 руб.
<b>Смотреть еще похожие новости:</b>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=403142>1×slots зеркало на сегодня</a>
<a href=http://board.eternityrpc.com/member.php?action=profile&uid=369>1х слот регистрация в 1×slots casino</a>
<a href=http://mandala-app.com/forums/viewtopic.php?f=5&t=221591>1× slots зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В современность очень просто получить бонус за регистрацию в казино. Практически каждый игорный жилище с радостью начислит средства или бесплатные вращения. Многие гэмблеры пользуются данным и не смущяются регистрироваться в каждом клубе с прибыльными условиями. Кстати, это отличная вероятность выработать победную стратегию и сорвать джекпот.
#642 Charlesgunnyhttp://filmkachat.ru
сайт 1× slots casino
На критериях отыгрыша даровых бонусов стопам тормознуть подробнее. С ними связаны нюансы, которые невозможно забыть без внимания.Благодаря программе преданности от игорного заведения, можно взять неплохой старт и без добавочных вложений запустить видеослоты. Кроме как, можно рассчитывать на реальную фортуну и получить, без вложения собственных денег, великий выигрыш. <a href=http://filmkachat.ru/>рабочее зеркало 1×slots</a> Получив свой подарок, Вы можете безвозмездно выступать на настоящие деньги, а выполнив обстоятельства отыгрыша, вывести свой выигрыш.Отказ в прохождении верификации. Если заказчик не желает или не может предоставить документы, подтверждающие его личность, профиль несомненно заблокирован совместно, вкупе со всеми бонусными начислениями. <a href=https://www.storeboard.com/blogs/automotive/everstart-battery-review-top-performer-for-your-vehicle/6086908>https://www.storeboard.com/blogs/automotive/everstart-battery-review-top-performer-for-your-vehicle/6086908</a> 1×slots официальный сайт скачать <a href=https://google.ms/url?q=https://doctorlazuta.by/>https://google.ms/url?q=https://doctorlazuta.by/</a> Подтверждение персональной инфы. Все казино настоятельно от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и присутствие у пользователя иных аккаунтов (мультиаккаунт запрещен).При пользовании бездепозитным призом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют некоторое обликов лимитов:
1хслотс зеркало
Онлайн гемблинг развивается с каждым деньком все больше и больше, новые бренды создаются не по дням а по часам. Новые онлайн казино проделывают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и тем наиболее предлагают бездепозитные призы за регистрацию, собственно бы не упустить такую возможность — как пользоваться новым бездепом, рекомендуем посещать наш сайт как можно чаще, самое аппетитное и свежие несомненно добавляться в данном же списке.Как лишь вы отыграли вейджер и средства с бонусного баланса перебежали для на настоящий счет, Вы смело сможете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (устроить минимальный депозит к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депо). 1×slot зеркало рабочее этих способов предполагает регистрацию Для выбора азартного заведения Вы можете воспользоваться списком наших казино с бонусами за регистрацию. На нашем веб-сайте мы выпустили список бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, собственно часть бонусов эксклюзивные и доступны лишь для посетителей нашего вебсайта по-специальному промо-коду или по уникальной ссылке. Кроме такого, для любого приза мы подготовили подробный обозрение, в котором Вы узнаете как получить и отыграть одобрение и как исключить свой выигрыш с бездепа.Не стоит путать игру в демо и использование призов. В демонстрационном режиме игрок может расценить механику слота, сюжет и оформление. Но игра проводится на условные кредиты, потому отсутствует основное ? чувство азарта. Активируя промокод или фриспины, заказчик раньше не тратит свои средства на игровые автоматы, хотя возможность сорвать реальный куш! <a href=http://td-arnika.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=http://sar.medguard.ru/bitrix/redirect.php?goto=http://cse.google.com.au/url?q=https://telegra.ph/Strategii-vyyavleniya-istinnogo-dohoda-byvshego-muzha-i-maksimizacii-vyplat-alimentov-09–23>http://td-arnika.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=http://sar.medguard.ru/bitrix/redirect.php?goto=http://cse.google.com.au/url?q=https://telegra.ph/Strategii-vyyavleniya-istinnogo-dohoda-byvshego-muzha-i-maksimizacii-vyplat-alimentov-09–23</a> 1×slots зеркало проходить регистрацию это отличный вариант Денежные средства. Третий приз за регистрацию без депо – наличные. К раскаянию, лишь знаменитые и популярные клубы все уяснить средства в рублях или баксах. С их поддержкой вас насладиться каждой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед данным нужно выполнение определенных условий.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Если речь об эксклюзивных предложениях, может потребоваться регистрация в казино по ссылке с партнерского сайта.Можно ли в одном онлайн казино получить больше одного бонуса за регистрацию? Нет, так как в любом интернет казино есть правила, к которым нужно придерживаться, не творить два аккаута для получения бонусов, иначе несомненно блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, бонус за регистрацию выдаеться один раз одному личику. При помощи такого одобрения оператор может кроме завлекать посетителей, коие ранее показывали активность на сайте, хотя по какой-то основанию перестали играть. В данном случае промокод высылается юзеру по электронной почте либо повторяющий SMS. <a href=https://historydb.date/wiki/How_To_Install_The_1×bet_APP_On_An_Older_Android_Device>https://historydb.date/wiki/How_To_Install_The_1×bet_APP_On_An_Older_Android_Device</a> В неких онлайн казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на веб-сайте клуба и подтвердить средства контактные данные. Дополнительно требуется активация промокода.Ещё одно распространённое акционное предложение – симпатичный подарок с неблаговидными притязаниями. К примеру, клуб сулит $100 виде бездепа, хотя с вейджером х80 либо х100. Отыграть подобный вейджер фактически невозможно и поэтому другого, как концентрироваться на более интересных промоакциях. 1×slots казино зеркало Суммы сходственных предложений, в, колеблются от 3-х до 20 долларов, а вейджер на эти свои должен составлять от 30 до шестидесяти раз. Зачастую, наивеличайшая сумма выигрыша тут составит от одной до двух сотен долларов. Если геймер выиграет больше, то все свои все быть списанными до максимально разрешенного выигрыша. Здесь бывает содержание выводить еще несуществующие финансы на свою платежную систему и далее искать заведение с подходящими под данную необходимую релоадом либо бонусом за первое пополнение счета. Есть несколько подвидов бездепозитного вознаграждения, предлагаемого большим количеством заведений.
1хслотс зеркало
Казино выделяет вероятность заработать и вывести настоящие деньги на бездепозитных призах. Обычно, это незначительная сумма, которую казино может себя позволить презентовать игроку. Основное управляло получения бездепа ? создаваемый акк должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов требовательно запрещено. Проверка проводится по имени, e-mal, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депо нужно блюсти несложную очередность действий. 1×slots мобильная версия войти казино <a href=https://elearnportal.science/wiki/User:StephenMosby1>https://elearnportal.science/wiki/User:StephenMosby1</a> Фриспины – благотворительные вращения с фиксированной ставкой, которые возможно использовать в конкретных игровых автоматах.Основное отличие том,, собственно для получения бездепа нужно пополнять баланс в казино. Но не этого, есть ряд и других отличий:
казино 1×slots официальный сайт
Бездепозитный приз нередко возможность замерзнуть доступным незамедлительно последствии окончания регистрации, что правило единственным требованием к нему считается регистрация, а после проверка вашей новой учетной записи. <a href=http://psvhome.ru/user/Forsedroppt/>http://psvhome.ru/user/Forsedroppt/</a> 1×slots регистрацию процедура займет всего лишь
<b>Смотреть еще похожие новости:</b>
<a href=https://www.fromrus.su/index.php?/topic/73956–1×slots-%D0%B0%D0%BA%D1%82%D1%83%D0%B0%D0%BB%D1%8C%D0%BD%D0%BE%D0%B5-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE/>1×slots актуальное зеркало</a>
<a href=https://forum.immortales-gilde.de/viewtopic.php?f=2&t=390872>1×slots зеркало этих способов предполагает регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала быстрые выводы. Фишка выплат том,, что довольно избрать платёжный инструмент и указать необходимую. В большинстве случаев средства зачисляются на электрические кошельки в течение 15 минут, а на банковские карты – 1–3 рабочих дня.
#643 Charlesgunny
[IMG]https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg[/IMG] В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты [url=https://sk-service1.ru]Заказать мужа на час аферисты https://sk-service1.ru[/url], которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ [url=https://sk-service1.ru]сантехник мошенник https://sk-service1.ru[/url]. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны [url=https://sk-service1.ru]мошенники ремонт стиральных машин https://sk-service1.ru[/url], это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet рабочее кент казино [url=https://krtka.info/]букмекерские конторы без депозита[/url] казино фильм казино вход официальный сайт [url=https://7club7.com/]скачать 1×bet на андроид[/url] Львова-Белова Мария Алексеевна порно где казино 1×bet зеркало на сегодня 1×bet xyz porno Екатерина Ефременкова, шорт-трекистка букмекерские контора ап порно с Дарья Клишина, легкоатлетка порно с Гатагова Ольга Анатольевна
DiskiPlus порно с Константин Тюкавин (футбол) DiskiPlus 1×bet слоты [url=https://www.diskiplus.ru/]DiskiPlus Шевцова Татьяна Викторовна порно[/url] DiskiPlus porno Елизавета Туктамышева DiskiPlus приложения букмекерских контор на андроид [url=https://diskiplus.ru]DiskiPlus порно с Анастасия Потапова, теннисистка[/url] DiskiPlus kometa casino DiskiPlus 1×bet сайт DiskiPlus pin up casino DiskiPlus bitz casino DiskiPlus 1×bet зеркало слоты DiskiPlus 7k casino зеркало DiskiPlus букмекерская контора зенит
#644 Jariorutshttp://[url=http://link.5nx.ru/viewtopic.php?f=12&t=12385/]link.5nx.ru/viewtopic.php?f=12&t=12385[/u
Мы предлагаем выгодно и быстро заказать диплом, который выполнен на бланке ГОЗНАКа и заверен мокрыми печатями, штампами, подписями должностных лиц. Документ способен пройти любые проверки, даже при использовании специфических приборов. <a href=http://link.5nx.ru/viewtopic.php?f=12&t=12385/>link.5nx.ru/viewtopic.php?f=12&t=12385</a>
#645 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
почему в казино не бывает настенных часов Черкесова Бэлла Мухарбиевна порно <a href=https://res-publika.com>скачать 1×bet 1×bet xyz</a> casino рабочее зеркало самое казино <a href=https://glvk.guru/>порно с Абрамченко Виктория Валериевна</a> как выиграть в казино букмекерская контора официальный сайт скачать porno Екатерина Ефременкова, шорт-трекистка 1×bet бесплатно casino приложения зеркала казино официальная казино
DiskiPlus porno Александра Степанова, фигуристка DiskiPlus лучшие казино бесплатно <a href=https://diskiplus.ru/>DiskiPlus порно с Захарова Мария Владимировна</a> DiskiPlus водка казино DiskiPlus casino ап <a href=https://diskiplus.ru>DiskiPlus porno Елизавета Туктамышева</a> DiskiPlus 1×bet бесплатно DiskiPlus пин casino DiskiPlus почему в казино нет часов DiskiPlus порно с Диана Шнайдер (теннис) DiskiPlus casino зеркало сегодня DiskiPlus порно с Илья Осипов (киберспорт) DiskiPlus гта казино
#646 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Дарья Мороз порно с Алина Загитова, фигуристка <a href=https://rhymes-punches.com/>официальные букмекерские конторы</a> казино фильм гта казино <a href=https://www.ossetia.tv/>up casino зеркало</a> слот casino ешь казино порно с Петр Ян (ММА) 1×bet слоты 1×bet xyz казино смотреть кент casino porno Юлия Пересильд
DiskiPlus порно с Анна Калинская (теннис) DiskiPlus porno Вера Бирюкова, гимнастка <a href=https://diskiplus.ru/>DiskiPlus Мухтиярова Елена Вячеславовна порно</a> DiskiPlus casino сегодня DiskiPlus казино 1 <a href=https://diskiplus.ru/>DiskiPlus porno Вера Бирюкова, гимнастка</a> DiskiPlus приложения букмекерских контор DiskiPlus гта казино DiskiPlus лучшие бесплатные онлайн казино DiskiPlus porno Юлия Канакина, скелетонистка DiskiPlus pin up casino top top DiskiPlus мелбет букмекерская контора DiskiPlus казино пин
#647 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт, скачать
Шаг 4. Активация. Внимательно исследуйте обстоятельства, информацию по ограничениям и сроке деянья бонусного предложения. Разобравшись с правилами, можно активировать приз в личном кабинете (время ? с использованием промокода) либо по запросу в саппорт. <a href=http://filmkachat.ru/>казино 1×slots</a> <a href=https://manifold.garden/forums/index.php?u=/topic/636/%D0%9A%D0%B0%D0%BA%20%D1%80%D0%B0%D0%B1%D0%BE%D1%82%D0%B0%D0%B5%D1%82%20%D0%B0%D0%B2%D1%82%D0%BE%D0%B2%D1%8B%D0%BA%D1%83%D0%BF%20%D0%B2%20%D0%A5%D0%B0%D1%80%D1%8C%D0%BA%D0%BE%D0%B2%D0%B5>https://manifold.garden/forums/index.php?u=/topic/636/%D0%9A%D0%B0%D0%BA%20%D1%80%D0%B0%D0%B1%D0%BE%D1%82%D0%B0%D0%B5%D1%82%20%D0%B0%D0%B2%D1%82%D0%BE%D0%B2%D1%8B%D0%BA%D1%83%D0%BF%20%D0%B2%20%D0%A5%D0%B0%D1%80%D1%8C%D0%BA%D0%BE%D0%B2%D0%B5</a> Поспешите забрать бездепозитные призы за регистрацию в казино из представленного перечня. Все платформы не ведут легальную деятельность, но и обрадуют честными плодами забавы, высокой отдачей, прыткими выплатами.В каждом казино с бездепозитным призом предусмотрены вейджеровые условия. Это единственный «подводный камень», который стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) устроить определённое число ставок. Чем круче бонус, тем труднее выполнить обстоятельства, и напротив. 1 x slots casino <a href=http://illustrator.odub.tomsk.ru/index.php?subaction=userinfo&user=Stevenquazy>http://illustrator.odub.tomsk.ru/index.php?subaction=userinfo&user=Stevenquazy</a> Выбирайте превосходнейшие безвозмездные бонусы с помощью обзоров на Casinoz – и пусть для сопутствует удача при отыгрыше бонусных кредитов!Это также безвозмездные деньги, коие поступают на аккаунты свежеиспеченных геймеров в регистрирования. А необыкновенность таких бонусов состоит что, собственно обретенные финансы обязательно стопам применять в продолжении назначенного времени.
1×slot зеркало
Как и промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такового предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых посетителей и дозволяет им составить впечатление о функционале, не рискуя значительными совокупностями.В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая доля забавы. Важно, зачастую бездепозитные призы в казино выдаются с лимитированиями по наибольшей выплате. В среднем возможно рассчитывать на выгода в количество тысяч рублей. Как исключить выигрыш с бонуса без депо. Придётся подтвердить аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном доказательстве учетной записи спрашивайте в интернет чате либо прочтите в правилах. 1×slots регистрация на сайте 1×slots ru com Бонус с зачислением денег на счет дает больше свободы действий. Пользователь сам выбирает, каким образом распорядиться подаренными средствами. Здесь кроме могут работать ограничения на перечень дешевых игр, хотя обычно эти рамки не так строги, как в рекламную с безвозмездными вращениями. <a href=https://www.mexicanosenelmundo.com/member.php?action=profile&uid=27646>https://www.mexicanosenelmundo.com/member.php?action=profile&uid=27646</a> Бездепозитные призы за регистрацию в игровых автоматах для владельцев онлайн-казино являются частью маркетинговой кампании, направленной на повышение аудитории вебсайта. Так они продвигают средства бренды и привлекают новых посетителей. 1×slots зеркало проходить регистрацию это отличный вариант Бездепы обычно предлагают с отыгрышем — быстро вывести выигранные средства невозможно. Перевод денег со счета будет возможен в такого, как юзер выполнит все притязания казино, а сумма не может превышать установленного правилами лимита. Условиями акции фиксируются сроки, на коих клиент вправе пользоваться предложением. Обычно они не превышают нескольких дней после активации.
скачать 1×slots официальный сайт
Маркетинговая политика всех игорных интернет-клубов обязана носить разнообразный нрав. И если гонорары на депо служат чтобы, чтобы, дабы стимулировать заносить депозиты и поощрять теснее быть юзеров, то бездепозитный приз в казино либо приз за регистрацию в казино, до всего, рассчитан на расширение базы потребителей.Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, чтобы была вероятность исключить выигрыш. <a href=https://rylandhhg56789.blogproducer.com/36810645/deep-nude-the-ethical-dilemmas-and-technological-impacts-of-ai-driven-image-manipulation>https://rylandhhg56789.blogproducer.com/36810645/deep-nude-the-ethical-dilemmas-and-technological-impacts-of-ai-driven-image-manipulation</a> 1×slot казино зеркало Бездепозитные бонусы в казино без пополнения 2022 — это определенная сумма денег либо gorovyh spins вращения, коие предоставляются первым постояльцам за регистрацию на сайте казино повторяющий бездепозитного приза, и выделяет вам возможность помощью казино без пополнения опробовать услуги (игр), с последующей преимуществом, льготой вывода средств при выполнении всех установленных правил.Получить приветственный бонус имеют лишь свежие клиенты онлайн-казино. Способы описаны в критериях акции любого легального казино, чаще всего это:
1×slots регистрация 1×slots casino 777 online
У каждого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано сумели выполнить их, мы дадим несколько советов. Если система начислила маленькую необходимую, надо делать великие ставки – остановитесь на 10–30 центах. Как лишь сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В противном случае никакого присмотреться к иному автомату. Как правило, новоприбывшие игроки начала хотят ознакомиться с методами ввода и вывода денежных средств и сроки выполнения поданных заявок дабы четко разуметь, как стремительно возможность исключить свой казино бонус за регистрацию без депозита на электрический кошелек или же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино соперничают между собой. Ведь если бы определенную компанию давало лишь одно онлайн-заведение, то навряд бы посетители увидели казино с призом за регистрацию и могли бы рассчитывать только на вознаграждение повторяющий приза на первое инвестиция. К каждому заведению регулярно следует привлекать свежих игроков, собственно, итоге, только на руку всем играющим. 1×slots casino зеркало <a href=http://ceh-i.ru/user/DoctorLazutasa/>http://ceh-i.ru/user/DoctorLazutasa/</a> Подарки на праздничные ? приуроченные к торжественным датам, требующие символического отыгрыша либо начисляются без того. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду.Постарайтесь отыграть вейджер, чтобы появилась вероятность оставить заявку на выплату. Кстати, на всех веб-сайтах, представленных в перечне, доступны современные платёжные приборы. Вы сможете получить выигрыш на электрической кошелёк, карту, аппарат.
1×slots мобильная версия войти казино
<a href=http://forumqservice.co.uk/member.php?action=profile&uid=10666>http://forumqservice.co.uk/member.php?action=profile&uid=10666</a> Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, all только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. казино 1×slots Внесение депо – Будьте готовы восполнить счет после отыгрыша бонуса. Это стандартное требование правил для данного на промо-акций. Лучше заранее уточнить, какую необходимую нужно будет вносить на счет. Как правило, речь идет о наименьшем депозите, хотя вы должны быть убеждены, собственно он для по карману.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 долларов. Если выдаются фриспины, их количество редко выше нескольких 10-ов безвозмездных вращений.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=740927>зеркала 1×slots</a>
<a href=https://nauc.info/forums/viewtopic.php?t=20843091>1×slots официальный demo регистрация в 1×slots casino</a>
<a href=http://powercrop.it/chi-siamo/le-persone?page=144#comment-7227>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Многие новенькие сомневаются, что поощрительный приз не нужно несомненно возвращать, в в они выиграли у казино. Это безусловно безопасно и надежно. Выводя выигранные средства, игрок просто одергивает свое участие при и утрачивает уникальную вероятность – безвозмездно увеличивать личное материальное положение.
#648 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Каролина Севастьянова Нургалиева Эльвира Рамиловна порно <a href=https://www.ossetia.tv/>букмекерские конторы бет</a> казино рояль up casino <a href=https://vestnik-jurnal.com/>порно с Алина Загитова</a> casino зеркало сегодня казино пину букмекерская контора зенит порно с Кирьянова Дарья Борисовна порно с Бондаренко Анастасия Борисовна 1×bet официальный xbet Матвиенко Валентина Ивановна порно
DiskiPlus сайт букмекерской конторы DiskiPlus сайты казино <a href=https://www.diskiplus.ru>DiskiPlus скачать pin casino</a> DiskiPlus Кузнецова Анна Юрьевна порно DiskiPlus up casino официальный <a href=https://www.diskiplus.ru/>DiskiPlus pin up casino пин</a> DiskiPlus букмекерские контора ап DiskiPlus 1×bet слоты официальный сайт DiskiPlus Львова-Белова Мария Алексеевна порно DiskiPlus casino бездепозитный DiskiPlus порно с Голикова Татьяна Алексеевна DiskiPlus почему в казино нет часов DiskiPlus online casino
#649 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slotscasino09k online
Реже призы без депозита начисляются неизменным игрокам. С их поддержкой администрация постарается вычесть ценных клиентов или желает поблагодарить за преданность верных посетителей. Но намного почаще для похожих целей применяются эти промоакции:Автоматы непопросту считаются наиболее модным азартным отдыхом. Чтобы усвоить управление и правила, понадобится всего количество мин. Ваша задача устроить ставку, найти количество рабочих линий и можно вертеть барабан. Если на экране выпадет выигрышная композиция – вы выиграли! С данной задачей для посодействуют справится бездепозитные призы казино. <a href=http://filmkachat.ru/>1×slots регистрация</a> <a href=https://joy.link/kalinka0588>https://joy.link/kalinka0588</a> 1×slots регистрацию процедура займет всего лишь <a href=https://www.fortressrisk.com/user/raymondtapraymondtap/>https://www.fortressrisk.com/user/raymondtapraymondtap/</a>
1×slots актуальное зеркало
1×slots сайт <a href=https://followgrown.com/post/40242_mpstats-https-mp-stats-io-predlagaet-razlichnye-resursy-dlya-obucheniya-vklyucha.html>https://followgrown.com/post/40242_mpstats-https-mp-stats-io-predlagaet-razlichnye-resursy-dlya-obucheniya-vklyucha.html</a> Активация случается с помощью промокодов, коие вводятся в собственном офисе последствии регистрации. Среди спецпредложений в перечне Casino.ru находятся неповторимые промокоды, которые доступны лишь посетителям портала. Другие способы начисления средств ? автоматическая активация сразу последствии создания аккаунта и получение дара по запросу в службу технической поддержки.Вознаграждения за получение VIP-статуса ? начисляются в рамках программы преданности при достижении одного уровня либо выдаются персонально менеджерами службы поддержки. 1×slots зеркало регистрация то дальше необходимо пройти Фриспины — безвозмездные вращения, коие дозволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся наиболее известным и желаемым видом бонуса — бесплатные вращения порой эффективнее и веселее в отыгрыше, чем другие виды бездепов.Подобные призы без депо предоставляются на более прибыльных критериях. Зачастую они крупнее, а обстоятельства отыгрыша менее жесткие.
1×slots зеркало проходить регистрацию это отличный вариант
Бoльшинcтвo азартных заведений выдвигают приблизительно одинаковые обстоятельства и требования, коие необходимо выполнить, чтобы получить бездепозитный бонус за регистрацию. Все их можно соединить в один список: 1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, случае не желаете замерзнуть жертвой мошенников или впустую потратить время;Стоит обозначить(означить), что бездепозитный бонус выдается только взрослым новичкам, которые, к, шансы пригласить личных приятелей и знакомых, также претендующих на поощрительную программку преданности. Подобная технология замечена среди конкуренцию онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры содействуют увеличению собственной посещаемости, методом вербования свежих игроков. Бонусы – это оригинальный шанс для вероятных соучастников забавы, коие могут опробовать софт покер рума и увериться, станут ли они в него выступать или нет. Новый игрок испробует средства силы с настоящими оппонентами в казино. <a href=https://humanlove.stream/wiki/User:SamReedy97465>https://humanlove.stream/wiki/User:SamReedy97465</a> 1×slots акции С иной стороны, гораздо легче забрать бездепозитные фриспины за регистрацию в казино и прямо момент начать вертеть барабаны в наихороших слотах. Главная необыкновенность спинов в, что они предусмотрены для лучших автоматов. Удастся не пройти дополнительные раунды, хотя и прирастить сумму выигрыша, заработать респины прочие внутриигровые подарки.Благодаря программке преданности от игорного заведения, можно взять превосходный старт и без добавочных вложений запустить видеослоты. Кроме как, возможно рассчитывать на реальную фортуну и получить, без инвестиции личных финансов, великой выигрыш.
1хслотс официальный сайт зеркало
Для получения приза нужно пригласить в забаву нового посетителя. Казино начислит пригласившему фиксированный процент от взносов приглашённого повторяющий приза: почаще всего его размер не превышает 10%. Срок деяния бонуса правило не выше месяца: пригласивший получает приз в зависимости от проигранных ставок приглашённого в 1-ый луна забавы. Как верховодило, новоприбывшие геймеры для хотят ознакомиться с методами ввода и вывода денежных средств и сроки исполнения поданных заказов дабы четко разуметь, как прытко возможность вывести собственный казино приз за регистрацию без депо на электрический кошелек или же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино соперничают между собой. Ведь если бы определенную фирму давало лишь одно онлайн-заведение, то вряд ли бы клиенты увидели казино с бонусом за регистрацию и имели бы рассчитывать лишь на вознаграждение вид приза на первое вложение. К любому заведению регулярно по завлекать свежих игроков, собственно, в итоге, только на руку всем играющим.Бездепозитный бонус за регистрацию в казино с выводом средств в 2022 году — Наш ресурс предоставляет игрокам важную информацию о самых новых, великодушных и испытанных бонусах в онлайн казино, которые обновляются каждый денек. При пользовании бездепозитным бонусом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют несколько обликов лимитов: 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=http://alloplus.by/bitrix/redirect.php?goto=http://doy-pack.ru/bitrix/rk.php?goto=http://ohotno.com/bitrix/click.php?goto=https://teletype.in/@urist_free/67y7v1e9eVt>http://alloplus.by/bitrix/redirect.php?goto=http://doy-pack.ru/bitrix/rk.php?goto=http://ohotno.com/bitrix/click.php?goto=https://teletype.in/@urist_free/67y7v1e9eVt</a> Каждый из бездепозитных призов без пополнения 2022 имеет собственный определенный вейджер для отыгрыша, так же в каждом казино он устанавливается персонально — где то он х55 а где-то х30, повторюсь везде по разному!Баланс игрока пополняется на подобающую необходимую. К ней используется вейджер, указанный в правилах промоакции. Вывести выигрыш можно несомненно после как, как пользователь устроит требуемый размер ставок из собственных средств. В редких случаях бездеп работает в формате Free Play. На счет пользователя зачисляется большая сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по завершении сего периода сумма на счету будет превышать первоначальную, то разность возможно будет вывести или использовать для последующих ставок.
1×slots промокод при регистрации
Бездепозитные призы казино это финансовая компенсация, предлагаемая юзерам на дармовой базе и возможность играть в интернет казино безвозмездно. Если сравнивать их с поощрениями за лепта, в средства выдаются только впоследствии первоначального пополнения счета, то бездепозитные гонорары получаются безвозмездно. То есть, играющий получает вероятность делать ставки на уже место деньги, коие выдаст заведение, выполняя, при, обычные действия, дабы их извлечь (тут идет о регистрация, удостоверении личности с использованием номера телефона, дизайна заказы и т.д. ).Вы не в коем случае ни чем рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный бонус, по мимо практической игры на бездепозитные призы, у Вас есть шанс выучить игровые автоматы, научится регулировать менять ставки и полосы, исследовать бонусные забавы и их выигрышные комбинации, да в просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные свои, которые возможно отыграть и исключить, а не просто на демо счет, тем самым адреналин в крови еще повысится а пульс забьется с частым ритмом! Каждый игры должен сначала детально выучить обстоятельства по получению и отыгрышу понравившегося презента. Если всё организует, поторопитесь арестовать бесплатные спины за регистрацию в казино без депо с выводом и без отыгрыша и прямо данный начать вертеть барабаны лучших слотов. <a href=http://www.chunwun.com/bbs/board.php?bo_table=qna&wr_id=83220>http://www.chunwun.com/bbs/board.php?bo_table=qna&wr_id=83220</a> Подарки на конкретные даты отличаются критериями получения. Если поощрение начисляют игроку на день рождения, то сумма обыкновенно находится от общего объема депо за прошедший год.Фриспины. Бесплатные вращения предназначены для применения в видео-слотах. Внимательно читайте условия – они часто выдаются для некоторых машин. В зависимости от клуба возможность делать конкретное количество ставок. Кстати, современные игорные жилища выделяют вероятность заводить «одноруких бандитов». 1хслот официальный сайт зеркало Онлайн-казино с бездепозитными призами ставят клиентам условия для пользования бездепами, поэтому перед участием в промоакции никакого подробно ознакомиться со всеми правилами и аспектами акции. Условия все прикасаться получения приза, его использования и следующего вывода валютных средств в случае выигрыша.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.dis-course.net/viewtopic.php?t=684032>1×slots официальный зеркало рабочее</a>
<a href=https://roguedynasty.net/forums/member.php?10629-RabofreeKt>1 x slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Акционные предложения от казино существуют в разных форматах. Часто призы даются в обмен на депо. Игрок заносит платеж и получает деньги, бесплатные вращения и другие одобрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — картина приза, который гарантирован за выполнение конкретных поступков на сайте:
#650 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Юлия Ефимова, пловчиха букмекерские конторы бет <a href=https://m.repost.news/>казино онлайн</a> порно с Александр Головин (футбол) порно с Дарья Клишина, легкоатлетка <a href=https://vestnik-jurnal.com/>1×bet на сегодня</a> gama casino казино сегодня pinco casino казино фильм Валентина Матвиенко порно казино рулетка казино проиграл
DiskiPlus игры казино DiskiPlus porno Марина Александрова <a href=https://diskiplus.ru>DiskiPlus пина casino</a> DiskiPlus симулятор казино DiskiPlus пин up casino <a href=https://www.diskiplus.ru/>DiskiPlus porno Мира Андреева (теннис)</a> DiskiPlus pin up casino зеркало DiskiPlus скачать 1×bet 1×bet xyz DiskiPlus скачать 1×bet 1×bet xyz DiskiPlus 1win casino DiskiPlus почему в казино нет часов DiskiPlus vodka casino DiskiPlus bitz casino
#651 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Кирьянова Дарья Борисовна скачать 1×bet на андроид бесплатно <a href=https://repost.news/>казино сегодня</a> 7k casino официальный сайт casino ап <a href=https://slon-ru.com/>казино проиграл</a> порно с Кирьянова Дарья Борисовна букмекерская контора без лучшие бесплатные онлайн казино казино онлайн бывшие казино скачиваемые казино Львова-Белова Мария Алексеевна порно
DiskiPlus винлайн букмекерская контора официальный DiskiPlus Кузнецова Анна Юрьевна порно <a href=https://diskiplus.ru/>DiskiPlus бесплатные букмекерские конторы</a> DiskiPlus 1×bet сайт 1×bet xyz DiskiPlus бесплатно фильм казино <a href=https://www.diskiplus.ru>DiskiPlus pin casino зеркало</a> DiskiPlus человек казино DiskiPlus порно с Анастасия Потапова, теннисистка DiskiPlus рейтинг казино DiskiPlus скачать 1×bet DiskiPlus скачать букмекерскую контору на андроид DiskiPlus порно с Кирьянова Дарья Борисовна DiskiPlus какие казино
#652 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация на сайте
Самые свежие бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды находятся на данной страничке. Посетитель возможность оценить условия получения и начать выступать на деньги без внесения депозита. При данном игроку главно понимать, на каких условиях и какими методами у вывести полученный выигрыш. Для сего нужно оценить список присоединенных платежных систем. <a href=http://filmkachat.ru/>1×slots зеркало на сегодня</a> Если при регистрации показать промокод, можно гарантировано получить бонус. Где брать ваучер? Посетите на блоги либо форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В последнее время игорные дома начали афишироваться в кинокартинах и телесериалах. Присмотритесь и всего заметите промокод, который принесёт 500 или 1 000 бонусных рублей. <a href=https://note.com/joyous_otter80/n/n668a7c74c58d>https://note.com/joyous_otter80/n/n668a7c74c58d</a> Какие призы я могу еще получить считая бездепозитного приза за регистрацию в казино? По мимо бездепозитного бонуса, любое онлайн казино предлагает игрокам выгодное предложение на 1-ый депозит, вы совершаете депозит, ваш депозит увеличивается в двое либо в в трое, тем самым начать играть можно с больше крупной суммой, например же не забываем на вейджер на бонусы. 1×slots официальный сайт, скачать <a href=https://vitaco.ru/communication/forum/user/4629/>https://vitaco.ru/communication/forum/user/4629/</a> Но а случае вы теснее профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы автоматически перейдете в онлайн казино;В интернете количество известных игорных площадок с красивыми акционными услугами. Однако пристально читать условия десятков услуг времени надоест, ну и время отнимет много. Поэтому наша команда подготовила ТОП-3 вебсайтов с превосходнейшими бездепозитными бонусами:
зеркло казино 1×slots
Баланс игрока пополняется на подобающую необходимую. К ней применяется вейджер, обозначенный в правилах промоакции. Вывести выигрыш возможно будет последствии как, как юзер сделает требуемый объем ставок из личных средств. В редчайших случаях бездеп работает в формате Free Play. На счет юзера зачисляется большая сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по окончании сего периода сумма на счету несомненно превышать изначальную, то разность можно будет исключить либо применять для дальнейших ставок. 1×slots официальный сайт скачать на айфон <a href=http://c909201u.beget.tech/user/DoctorLazutakn/>http://c909201u.beget.tech/user/DoctorLazutakn/</a> Бoльшинcтвo азартных заведений выдвигают примерно однообразные, схожие обстоятельства и притязания, коие нужно выполнить, дабы получить бездепозитный бонус за регистрацию. Все их возможно соединить в один список: 1×slot зеркало рабочее этих способов предполагает регистрацию Сразу в активации промокода возможно воспользоваться даром. Как уже упоминалось, призы бывают трёх видов – фриспины, кредиты и фриплей-бонусы.
1×slots регистрацию процедура займет всего лишь
<a href=https://cutetusy.cc/member.php?action=profile&uid=34981>https://cutetusy.cc/member.php?action=profile&uid=34981</a> Баланс игрока дополняется на подходящую необходимую. К ней используется вейджер, обозначенный в правилах акции. Вывести выигрыш можно будет в того, как пользователь сделает требуемый размер ставок из личных средств. В редких случаях бездеп трудится в формате Free Play. На счет пользователя зачисляется большая сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по окончании этого периода сумма на счету будет превосходить изначальную, то разность возможно будет вывести или применять для последующих ставок. рабочее зеркало 1хслотс
1×slots мобильная версия войти казино
С такими простыми советами каждое казино с призом за регистрацию способно принести в разы больше выгоды и выгоды.Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша бонусов. Заведения практически устанавливают наивысшую ставку, возможную по условиям вейждера. Создание аккаунта. На веб-сайте казино необходимо обнаружить регистрационную форму и наполнить пустующие поля личностными данными. Иногда на этом этапе потребуется показать лишь адрес электрической почты и пароль, но чаще бы наполнить анкету индивидуальной информацией (ФИО, дата рождения, место проживания и т.д. ). Нужно свидетельствовать только реальные данные, потому впоследствие они станут проверены. 1×slots рабочее зеркало на сегодня <a href=https://gowwwlist.com/1×slots-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%81%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C_267356.html>https://gowwwlist.com/1×slots-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%81%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C_267356.html</a>
скачать 1×slots официальный сайт
К огорчению, нет. Почти все казино, требуют внесение хотя бы 1-го минимального депо для вывода выигрыша с бездепозитного бонуса. Также учитывайте, собственно исключить деньги разрешено только на что, эту платежную систему, с коей был изготовлен депозит. Помните, что любые нарушения верховодил сведут на нет ваши усилия, и вы наверняка останетесь без начисленного вас безвозмездного бонуса. Всегда изучайте управляла начисления и обстоятельства вейджера. По каким вопросам, на которые вы имеет помощи отыскать ответы, обращайтесь за объяснениям и саппорт. <a href=https://images.google.sm/url?q=https://doctorlazuta.by/>https://images.google.sm/url?q=https://doctorlazuta.by/</a> Бездепы обычно предлагают с отыгрышем — мгновенно вывести выигранные свои нельзя. Перевод средств со счета будет возможен в как, как юзер выполнит все требования казино, а сумма имеет превышать установленного правилами лимита. Условиями акции фиксируются сроки, в течение коих клиент вправе воспользоваться предложением. Обычно они не превышают нескольких дней после активации. 1×slots зеркало сайта Акции, посвященные календарным дням, бывают рассчитаны как на всех пользователей, так и на категории: примеру, презент на 8 марта девушкам-игрокам или мужчинам на 23 февраля.
<b>Смотреть еще похожие новости:</b>
<a href=https://forums.dfine.net/member.php?action=profile&uid=119>1×slots официальный demo регистрация в 1×slots casino</a>
<a href=http://www.emv.info/viewtopic.php?f=15&t=4179>1хслотс рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Автоматическая активация взгляд самой комфортной, хотя ручной способ имеет перед ней преимущества. Прежде чем использовать вознаграждение от казино, стоит заблаговременно определить, сколько медли требуется на выполнение всех критерий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала деянья бонуса. Также бывают случаи, когда казино начисляет оговоренный бонус после регистрации нового клиента по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам.
#653 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация
Раздача призов имеет быть посвящена различным датам: календарные праздничные, дни рождения игроков, юбилей открытия казино и т. Д. Подарок выдается вид денег, фриспинов или баллов для накопления и обмена на предложения оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд притязаний.Мы собрали и выпустили перечень лучших бездепозитных казино с бонусами за регистрацию, коие гарантируют щедрые выигрыши и моментальные выплаты. <a href=http://filmkachat.ru/>1 х слотс зеркало</a> Следует выделить, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом. <a href=https://insta.tel/read-blog/115007>https://insta.tel/read-blog/115007</a> Но рядах азартных платформах похожие гонорары имеют получить и уже зарегистрированные юзеры. В таком случае, призы предоставляются масштабах уникальных промоакций или же неким игрокам в виде акционного предложения, которое прибывает на почту с целью «возвратить» игрока в свое казино. 1 хслот регистрация в 1×slots casino <a href=http://www.rhl-mod.ru/members/113411-jamesdit/>http://www.rhl-mod.ru/members/113411-jamesdit/</a>
1×slots сайт зеркало
Способы получения бездепа различаются в зависимости от облика приза, который приглянулся игроку. Но для или надо(надобно) быть зарегистрированным в законном онлайн-казино и подтвердить свою лицо. В общем виде пошаговая инструкция для получения бездепозитного бонуса смотрится например:Составленный знатоками Casino.ru список онлайн-казино с бездепозитным бонусом дозволяет игрокам сопоставить спецпредложения различных операторов. <a href=https://www.mqf.pw/bboard/member.php?action=profile&uid=614>1×slots зеркало подтвердит вашу регистрацию если говорить</a> 1×slot зеркало рабочее регистрации на телефон придет Для верификации аккаунта надо(надобно) дать спецам технической поддержки отсканированную копию паспорта и счета за коммунальные услуги, а фотку банковской карты либо экрана страницы электрического кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для доказательства личности. <a href=https://gfycat.com/ru/@onpravau2706>https://gfycat.com/ru/@onpravau2706</a> Маркетинговая политического всех игорных интернет-клубов должна одевать разнообразный нрав. И случае гонорары на депозит служат чтобы, чтобы, дабы стимулировать заносить депозиты и поощрять теснее имеющих юзеров, то бездепозитный бонус в казино или приз за регистрацию в казино, этого всего, рассчитан на расширение базы покупателей.Обыкновенные бездепозитные призы в объеме от трех до двадцати долларов сделаны для того, чтобы в игры заходили все свежие и свежие игроки. Здесь, скорее, будет лимитирование на максимальный выигрыш. Важно, чтобы перед минимальным вкладом был отключен приз за первое пополнение счета, и игрок не попадет на повторный вейджер. 1×slots зеркало регистрацию более популярный вариант это Для тех, кто лишь подумывает испытать собственную фортуну, а для проф игроков, отыскивающих новые площадки для выигрышей, водящие лицензированные казино часто устраивают различные акции, и лучшее услуг за последнее время – как для начинающих, так и для проф игроков – бездепозитный приз за регистрацию.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Однако в критериях скрываются «подводные камни», коие не позволят вывести солидную сумму либо же вы не успеете отыграть вейджер. Поэтому мастера советуют забрать безвозмездные вращения за регистрацию в казино без депозита, чтобы поднабраться опыта и получить настоящий шанс на победу.За счёт спинов получится запустить разные интернет слоты, протестировать стратегии и поднабраться навыка. Фишка в том, собственно вращения начисляются на лучшие аппараты с оригинальными опциями и высокой отдачей. Не забывайте, собственно в каждом акционном предложении предусмотрены специальные требования – временные ограничения, наибольший размер ставки, перечень доступных игр. <a href=https://vi.be/platform/shopavto>https://vi.be/platform/shopavto</a> Подтверждение персональной инфы. Все казино настоятельно от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и наличие у пользователя иных аккаунтов (мультиаккаунт запрещен). x1 slots 1хслотс регистрация перейти на 1×slots Активация по промокоду используется в различных видах бездепов. Если идет о приветственном призе, то набор символов возможно разузнать на главной странице, в регистрационной форме либо письме, которое отправляется пользователю для доказательства адреса электронной почты. Акции могут проводиться вместе с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активируется одноразовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном кабинете либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем важный код для активации в описании каждого рекламную.Многие игроки, оценив возможностей казино, остаются играть в нем и далее ? на это и направлено каждое рекламную. Постоянные клиенты заносят депозиты и делают ставки, обеспечивая длительную прибыль оператора. То есть, казино выдают бездепы свежим юзерам для формирования приклнной аудитории.
1×slots зеркало видели такую регистрацию на
В лицензионных бездепозитных казино играть в азартные забавы действительно неопасно. Наличие лицензии подтверждает тот прецедент, что клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP. <a href=http://powercrop.it/chi-siamo/le-persone?page=130#comment-6518>1×slots casino регистрация 1×slotscasino09k online</a> Высокая конкурентность в разделе азартных игр мотивирует операторов привлекать клиентов разнообразными промоакциями. Благодаря данному у посетителей появляется вероятность получить призы в казино за регистрацию без депозита. Воспользоваться этим предложением можно, избегая процедуру внесения средств на игровой счет, просто активировав акк на сайте. Наш гид по бездепам поможет выбрать самую привлекательную бонусную программку, узнать правила получения такового гонорары и распорядиться им с наибольшей выгодой. 1×слотс казино <a href=http://seohyuneng.net/bbs/board.php?bo_table=free&wr_id=55805>http://seohyuneng.net/bbs/board.php?bo_table=free&wr_id=55805</a>
1×slots зеркало проходить регистрацию это отличный вариант
Но есть игорные заведения, коие готовы просто например жертвовать деньги на забаву. Для сего довольно создать профиль. Чтобы исключить собственный выигрыш, для сначала нужно выполнить условия отыгрыша, обозначенные в критериях получения бездепозитного депо. <a href=https://www.varranger.com/vforum/index.php?action=profile;u=36740>https://www.varranger.com/vforum/index.php?action=profile;u=36740</a> Внесение депозита – Будьте готовы пополнить счет последствии отыгрыша бонуса. Это обычное требование верховодил для данного подобии промо-акций. Лучше заблаговременно уточнить, какую сумму надо(надобно) несомненно вносить на счет. Как управляло, речь идет о наименьшем депозите, но вы должны быть уверены, собственно он вас по карману.Иногда у гостей вебсайта шансы возникнуть трудности, задачи, препядствия при активации приобретенного промо-кода. В этих случаях, нужно адресоваться за поддержкой в службу поддержки «Support». Для получения ответа, непременно указывается конкретная причина обращения и подтверждается информация дополнительными экрана. Если сложилась неоднозначная ситуация, практически можно обратиться к основному регулятору либо контролирующему органу, выдавшему данному заведению лицензионный документ. зеркло казино 1×slots Денежные свои. Третий приз за регистрацию без депозита – наличные. К раскаянью, только известные и популярностью клубы шансы уяснить средства в руб. Либо долларах. С их поддержкою вас насладиться любой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед данным необходимо исполнение конкретных условий.
<b>Смотреть еще похожие новости:</b>
<a href=https://timepost.info/member.php?action=profile&uid=2064>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но не мыслить, что снабжая юзеров такими призами, казино занимается спонсированием. Ведь объемы вознаграждений, в основном, не немалые (средним объемом от 5 до 20 долларов). И на эти свои налагаются конкретные условия и лимитирования, обязательные к исполнению игрока, в в последствии он желает получить все средства выигранные финансы. Призовые начисления без депозита все предоставляться для роли в турнирах интернет казино. Потратить перечисленные деньги возможно необыкновенно в этой акции. Условия их проведения включают в себя ограничения на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, какого-либо выучить его правила.
#654 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino c2d ru
Приветственный приз без депо ? подарок за регистрацию. Выдается деньгами, фриспинами либо баллами. В заключительном случае бонусные баллы используются для роли в турнирах или обмена на реальные средства. <a href=http://filmkachat.ru/>1×slots регистрацию более популярный вариант это</a> Онлайн-казино тщательно продумывают бонусные обстоятельства, которые нужно выучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша прочие ограничения. <a href=https://hearthis.at/group/466309/eeeee-eeee-e-eeeee-eee-eeeeee-e-eeeeeee-eeeeeee-eeeeeeeeee/>https://hearthis.at/group/466309/eeeee-eeee-e-eeeee-eee-eeeeee-e-eeeeeee-eeeeeee-eeeeeeeeee/</a> Вы скорее, скажем, как все предпочитаете получать презенты и бездепозитные бонусы казино. Игорные дома взяли в привычку одаривать гэмблеров приятными бонусами. Стать обладателем приветственного презента возможно за творенье профиля или пополнение счёта. Второй вариант больше интересный, как клубы готовы удвоить депо! Но случае вы новичок и лишь знакомитесь с миром пыла, никакого пользуйтесь призом за регистрацию. 1×slots официальный сайт скачать <a href=http://ukvg-nn.ru/index.php?subaction=userinfo&user=maliciousopinio>http://ukvg-nn.ru/index.php?subaction=userinfo&user=maliciousopinio</a> Для получения бездепа необходимо пригласить в игру по реферальной ссылке нового клиента: он обязан зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и восполнить счёт на необходимую, обозначенную в условиях акции.В современность довольно просто получить бонус за регистрацию в казино. Практически каждый игорный дом с готовностью начисляет средства или благотворительные вращения. Многие гэмблеры используют данным и не стыдятся регистрироваться в каждом клубе с выгодными критериями. Кстати, это отличная возможность выработать победную стратегию и сорвать джекпот.
1×slots официальный регистрация
Прежде всего, не запамятовывайте периодически заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом разглядывают наиболее интересные предложения водящих игорных порталов. <a href=https://portugal-campings.com/pt/account/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> 1×slots регистрация 1×slots casino c2d ru Зарегистрируйтесь. Для регистрации чаще всего довольно установить собственный номер аппарата и почтовый адресок, после чего ввести полученный код из СМС. Возможно, потребуется показать промокод. В правилах акции будет написано, где его бы включать. Иногда это хотелось создавать при регистрации, времени — уже последствии создания личного офиса, на отдельной странице. <a href=https://receptsamogona.ru/user/EdwardCok/>https://receptsamogona.ru/user/EdwardCok/</a> В лицензионных бездепозитных казино выступать в азартные забавы действительно безопасно. Наличие лицензии подтверждает тот факт, собственно клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP. 1×slots регистрация на официальном сайте Поспешите зарегистрироваться на официальном сайте Клубника, дабы моментально получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, появляется настоящий шанс победу!
1×slot регистрация
Заработать на бездепозитных бонусах за регистрацию в казино возможность любой пользователь, достигший совершеннолетия. <a href=https://bans.org.ua/index.php?action=profile;u=1468584>https://bans.org.ua/index.php?action=profile;u=1468584</a> Размер бонусов чаще всего чисто символический и не выше 50 рублей. Приятно, хотя осязаемым бустом при вряд ли станет. 1х слот 1хслотс регистрация перейти на 1×slots Выиграть настоящие средства в казино не пополняя счет – трудно, хотя вероятно. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными призами и начните играть на бонусные средства. По статистике в 10-ти заведений возможно заработать небольшую необходимую средств помощью бонусных средств.
рабочее зеркало 1×slots
Наличие у игрока 2 аккаунта. Запрещено творить количество профилей для неоднократного получения бездепов. Маркетинговая деятеля всех игорных интернет-клубов обязана носить разнообразный нрав. И случае вознаграждения на депо служат чтобы, чтобы, чтобы провоцировать вносить депозиты и поощрять уже существующих юзеров, то бездепозитный бонус в казино либо бонус за регистрацию в казино, до всего, рассчитан на расширение базы потребителей. Выиграть реальные деньги в казино не пополняя счет – сложно, но вполне. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными бонусами и начните выступать на бонусные свои. По статистике из 10-ти заведений можно заработать маленькую сумму денег за счет бонусных средств.Бездепозитный приз по промо-коду будет доступен для забавы, лишь том, случае когда Вы активируете особый бонусный код в разделе с призами либо укажите промокод при регистрации на веб-сайте. В неких случаях, не активации кода, придется подтвердить контактные данные игрока и заполнить анкету посетителя. 1хслот зеркало сайта <a href=https://systemcheck-wiki.de/index.php?title=%C3%90%C3%A2%E2%82%AC%E2%84%A2%C3%90%C2%BB%C3%90%C2%B0%C3%90%C2%B4%C3%90%C2%B8%C3%90%C2%B2%C3%90%C2%BE%C3%91%C3%91%E2%80%9A%C3%90%C2%BE%C3%90%C2%BA_%C3%90%C3%90%C2%B2%C3%91%E2%80%9A%C3%90%C2%BE%C3%91%CB%86%C3%90%C2%BA%C3%90%C2%BE%C3%90%C2%BB%C3%90%C2%B0>https://systemcheck-wiki.de/index.php?title=%C3%90%C3%A2%E2%82%AC%E2%84%A2%C3%90%C2%BB%C3%90%C2%B0%C3%90%C2%B4%C3%90%C2%B8%C3%90%C2%B2%C3%90%C2%BE%C3%91%C3%91%E2%80%9A%C3%90%C2%BE%C3%90%C2%BA_%C3%90%C3%90%C2%B2%C3%91%E2%80%9A%C3%90%C2%BE%C3%91%CB%86%C3%90%C2%BA%C3%90%C2%BE%C3%90%C2%BB%C3%90%C2%B0</a> Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских рублей. В условиях промоакции указано, что вейджер бездепозитного приза х20. Поэтому, чтобы отыграть приз, игроку будет необходимо сделать ставок на 35*20=700 рублей.В реальное время получить бонус за регистрацию в казино очень просто. Почти любой игорный дом с радостью предоставит средства либо безвозмездные вращения. Многие игроки пользуются данным и не стыдятся регистрироваться в любом клубе с выгодными критериями. Кстати, это отличная вероятность выдумать выигрышную тактику и сорвать куш.
1×slots официальный сайт, скачать
Некоторые сайты, этого чем провести регистрацию игроков, предлагают ответить на количество базовых вопросов. Цель проведения сходственной викторины – выявить случайных людей, которые не имеют представления о покере, и не допустить получения ими бонусов. Если гость теснее играл в казино, то ответить на полтора 10 простых вопросов несомненно несложно. Очень нередко, ответы можно отыскать на официальных сайтах этих учреждений.При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток. Зарегистрироваться в казино по особой ссылке или с бонусным кодом. Подтвердить контактные данные (номер аппарата и электронную почту). Для доказательства номера аппарата нужно в собственном профиле указать свой номер и надавить кнопку „Подтвердить номер аппарата“, дальше Вы получите sms-сообщение с кодом, кот-ый необходимо ввести в соответствующее фон. Для доказательства электронной почты, перебежать по интенсивной ссылке в письме от казино.Также бездепозитные призы шансы служить методом возвращать к ирге клиентов, что приостановивших своё сотрудничество с фирмой: уведомление о бездепе поступает на мобильный телефонный или почту. <a href=https://forums.twcpilots.com/member.php?action=profile&uid=875>https://forums.twcpilots.com/member.php?action=profile&uid=875</a> 1×slots регистрация на сайте Размер ставки для игры по бездепозитному призу (окончательно же, в случае, когда он представлен вид бонусных денежных средств) зачастую ниже, чем при забаве на депозит. Ограничение несомненно действовать до этапа отыгрыша бонуса.Акционные предложения от казино существуют в различных форматах. Часто призы даются в размен на депозит. Игрок вносит платеж и получает средства, бесплатные вращения и другие поощрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — вид приза, который гарантирован за исполненье конкретных деяний на сайте:
<b>Смотреть еще похожие новости:</b>
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=9991>1х слотс зеркало регистрация в 1×slots casino</a>
<a href=http://jktroickiy.forumex.ru/viewtopic.php?f=2&t=4121>1×slots официальный сайт мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При игре на бонусные средства воспрещается играть в игровые автоматы с современным джекпотом и забавы из радела exist casino. Кроме как, некоторые казино выделяют бездеп на один либо несколько определенных слотов, и в других забавах Вы не можете на них играть. 4. Заберите подарок. Чаще всего бонус активируется сразу после регистрации. Но бывают истории, когда надо(надобно) забежать в собственный офис или написать в саппорта.
#655 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Фастова Елена Владимировна порно букмекерские конторы в россии <a href=https://sovsekretno.net/>top casino</a> porno Елизавета Туктамышева водка казино <a href=https://7club7.com/>порно с Евгения Медведева, фигуристка</a> порно с Арина и Дина Аверины, гимнастки pin up букмекерская контора казино смотреть букмекерская контора на андроид порно с Аделия Петросян (фигурное катание) фреш казино Кузнецова Анна Юрьевна порно
DiskiPlus казино фильм DiskiPlus пин ап букмекерская контора <a href=https://www.diskiplus.ru>DiskiPlus inform@rucriminal.info</a> DiskiPlus почему в казино нет окон DiskiPlus porno Ангелина Гончаренко, хоккеистка <a href=https://www.diskiplus.ru>DiskiPlus up casino зеркало</a> DiskiPlus casino online зеркало DiskiPlus 1×bet зеркало DiskiPlus какие казино DiskiPlus кент casino DiskiPlus скачать 1×bet на андроид DiskiPlus букмекерская контора бетсити DiskiPlus casino бездепозитный
#656 Mazrjiyhttp://[url=http://pattondemos.com/employer/diplomirovans/]pattondemos.com/employer/diplomirovans[/u
Мы готовы предложить дипломы психологов, юристов, экономистов и других профессий по выгодным ценам. Приобретение документа, подтверждающего окончание университета, – это выгодное решение. Заказать диплом любого ВУЗа: <a href=http://pattondemos.com/employer/diplomirovans/>pattondemos.com/employer/diplomirovans</a>
#657 internetGephttps://msk-domashnij-internet001.ru
интернет провайдеры москва по адресу <a href=https://msk-domashnij-internet001.ru>msk-domashnij-internet001.ru</a> провайдеры интернета в москве по адресу проверить
#658 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
вывод казино букмекерская контора скачать приложение <a href=https://www.ossetia.tv/>порно с Елена Никитина, скелетонистка</a> Валентина Матвиенко порно gama casino <a href=https://t.me/vchkogpu_ru>Чулпан Хаматова</a> gama casino pin up casino скачать casino скачать пинап казино 1×bet зеркало слоты скачать casino на андроид 1×bet официальный 1×bet xyz
DiskiPlus unlim casino DiskiPlus Елена Лядова <a href=https://www.diskiplus.ru/>DiskiPlus казино сочи</a> DiskiPlus песня казино DiskiPlus официальные сайты казино <a href=https://diskiplus.ru/>DiskiPlus лучшие казино бесплатно</a> DiskiPlus 1×bet слоты DiskiPlus porno Алена Косторная (фигурное катание) DiskiPlus рокс казино DiskiPlus casinos winning DiskiPlus бесплатные букмекерские конторы DiskiPlus официальные зеркала казино DiskiPlus Черкесова Бэлла Мухарбиевна порно
#659 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия скачать
Наиболее пользующиеся вознаграждения среди гэмблеров – бездепозитные бонусы казино. Это не умопомрачительно, так возможно получить безвозмездные вращения либо виртуальные кредиты, и при не придётся пополнять счёт, рисковать собственными деньгами. Удастся насладиться разнообразными увеселениями и даже выиграть солидную необходимую, избегая серьёзного риска.Активация валютного гонорары происходит автоматически после создания профиля либо использования промокода. Иногда операторы предъявляют вспомогательные притязания: подписаться на странички казино в социальных сетях или на рассылку маркетинговых известий, скачать и ввести дополнительный софт и т.д. <a href=http://filmkachat.ru/>1хслот 1хслотс регистрация перейти на 1×slots</a> <a href=https://www.storeboard.com/blogs/automotive/everstart-battery-review-top-performer-for-your-vehicle/6086908>https://www.storeboard.com/blogs/automotive/everstart-battery-review-top-performer-for-your-vehicle/6086908</a> казино 1×slots <a href=http://xn–45–6kc9afwnhj.xn–p1ai/bitrix/click.php?goto=http://vels52.ru/bitrix/redirect.php?goto=http://sz412.gov45.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/OKPITSWy3Iz>http://xn–45–6kc9afwnhj.xn–p1ai/bitrix/click.php?goto=http://vels52.ru/bitrix/redirect.php?goto=http://sz412.gov45.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/OKPITSWy3Iz</a> Подарки на конкретные даты выделяются условиями получения. Если одобрение начисляют игроку на день рождения, то сумма обыкновенно зависит от общего объема депозитов последний год.Рассмотрим принцип его действия на образце. Допустим, вы зарегистрировались и возымели $10 no deposit bonus с вейджером х50. Это означает, что выигранные средства возможно будет выводить не раньше, чем последствии как, как общая сумма ставок достигнет $500.
1×slots официальный сайт мобильная версия
1хслотс официальный сайт зеркало Бездепозитные бонусы – это исключительно занимательная и более перспективная промоакция интернет-казино. Они и какого-либо фри-спинов, поэтому собственно выплаты в безвозмездных вращениях не гарантированы, ведь комбинации на барабанах игрового аппарата все не сложиться. <a href=https://masstr.net/member.php?action=profile&uid=62701>https://masstr.net/member.php?action=profile&uid=62701</a> 1хслотс регистрация в 1×slots casino Какие бонусы у еще получить считая бездепозитного приза за регистрацию в казино? По мимо бездепозитного бонуса, каждое интернет казино предлагает игрокам прибыльное предложение на 1-ый депо, вы совершаете депозит, ваш депо возрастает в двое или и в 3, что, этим самым начать играть можно с больше крупной суммой, например же не запамятываем тему вейджер на призы.
1×slots официальный сайт скачать
Хотя безвозмездные призы начисляются без депо, не исключено, что для придется заносить средства. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь в такого, как новый клиент впервые пополнит игровой счет. Обычно показатель выше, чем для бонусов на депо. Не изумляйтесь, случае он будет том х100. Иногда завышенный коэффициент вейджера устанавливается для обитателей отдельных стран. <a href=http://realtor-cheb.ru/index.php?subaction=userinfo&user=abandonedacre55>http://realtor-cheb.ru/index.php?subaction=userinfo&user=abandonedacre55</a> зеркло казино 1×slots
1×slots регистрация 1×slots review live
Подтверждение электрической почты – одно из главных условий, которое есть практически в любом бездепозитном казино. Чтобы верифицировать электрическую почту, достаточно перейти по интенсивной ссылке в послании, полученном от азартного клуба.Срок активации и время на отыгрыш. Зачисление средств или фриспинов случается при активации в течение требовательно ограниченного периода, схожие притязания предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать бонус несколько дней или и недель. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высочайшим вейджером. <a href=http://support-groups.org/viewtopic.php?f=161&t=774405>1 x slots</a> Фриплей-бонусы. Бонусы за бесплатную игру есть лишь в некоторых клубах. Они зачисляются незамедлительно в сотворения профиля и действуют недолговременное время. Если у вас нет времени израсходовать средства, они просто завершатся. Что касается медли, в большинстве случаев призы действуют протяжении 1-го часа. 1×slots официальный сайт зеркало рабочее <a href=http://www.sportchap.ru/index.php?subaction=userinfo&user=ordinaryinsomni>http://www.sportchap.ru/index.php?subaction=userinfo&user=ordinaryinsomni</a> Внесение депозита – Будьте готовы пополнить счет в отыгрыша приза. Это стандартное требование правил для этого подобии промо-акций. Лучше заблаговременно уточнить, какую необходимую нужно будет вносить на счет. Как управляло, речь идет о минимальном депозите, хотя вы обязаны быть уверены, собственно он для по карману.
1× slots регистрация в 1×slots casino
Фриплей-бонусы. Бонусы за благотворительную забаву есть только в неких клубах. Они зачисляются сразу последствии создания профиля и срабатывают непродолжительное время. Если у вас нет медли израсходовать свои, они просто закончатся. Что дотрагивается времени, в большинстве случаев бонусы срабатывают в течение одного часа. Также, в этом случае необходимо подтвердить собственный номер телефонного, чтобы код, приобретенный в смс-сообщении от клуба установить в особое фон в собственном офисе игрока.Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную процедуру активации бонуса без депо. Внимательно прочтите до конца. Многие новенькие делают оплошности на этапе регистрации и потому не получить подарок. <a href=http://www.taijiacademy.com/newforum_down/profile.php?mode=viewprofile&u=312258>http://www.taijiacademy.com/newforum_down/profile.php?mode=viewprofile&u=312258</a> 1×slots зеркало на сегодня Зачастую бездепозитные призы казино для игры предлагаются различными заведениями азартных игр в качестве маркетинговых акций или в целях вербования к для новых игроков. Для бездепозитных бонусов в казино 2022 игроку надо пополнять счет до момента вывода хотимых средств.
<b>Смотреть еще похожие новости:</b>
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=11662>1×slots зеркало сайта</a>
<a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=183193>1×slots регистрация на официальном сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриплей-бонусы. Бонусы за безвозмездную забаву есть только в неких клубах. Они зачисляются сразу после создания профиля и действуют непродолжительное время. Если у вас нет времени израсходовать свои, они просто закончатся. Что касается времени, как бонусы срабатывают в течение 1-го часа. При выполнении критерий отыгрыша и верификации, деньги с бонусного счета переводятся на главной и имеют быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции находятся от избранной платежной системы.
#660 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерскую контору пин порно с Диана Шнайдер (теннис) <a href=https://slon-ru.com/>мелбет букмекерская контора</a> букмекерская контора вход пин ап букмекерская контора <a href=https://glvk.guru/>1×bet слоты официальный сайт</a> porno Яна Троянова 1×bet на андроид официальные сайты казино new casino pin up casino скачать vodka casino казино 5
DiskiPlus Крючкова Полина Викторовна порно DiskiPlus порно с Анна Калинская (теннис) <a href=https://www.diskiplus.ru>DiskiPlus пин casino</a> DiskiPlus букмекерская контора вход DiskiPlus казино смотреть онлайн бесплатно <a href=https://www.diskiplus.ru/>DiskiPlus porno Марина Александрова</a> DiskiPlus скачать букмекерскую контору DiskiPlus самое казино DiskiPlus Яровая Ирина Анатольевна порно DiskiPlus зеркала казино DiskiPlus casino com DiskiPlus порно с Анна Калинская (теннис) DiskiPlus 1×bet xbet
#661 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало рабочее регистрации на телефон придет
Автоматическая активация показаться самой комфортной, хотя ручной метод содержит перед ней преимущества. Прежде чем применять вознаграждение от казино, стоит заранее определить, сколько медли требуется на выполнение всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деяния бонуса.Вы не в коем случае ни же рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный бонус, по мимо практической забавы на бездепозитные призы, у Вас есть шанс выучить игровые автоматы, научится регулировать менять ставки и полосы, исследовать бонусные игры и их выигрышные композиции, да конечном просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные свои, которые можно отыграть и исключить, не просто на демо счет, что, этим наиболее адреналин в крови еще повысится а пульс забьется с частым ритмом! <a href=http://filmkachat.ru/>1×slots зеркало регистрация в 1×slots casino</a> Допустим, за регистрацию вы получили бездеп в объеме 2 000 рублей с вейджером х30. В данном случае светит устроить ставок, на совместную сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать реальные деньги. Однако не запамятовывайте, что с любого подарка выйдет исключить определённую необходимую (чаще всего менее $200).Подтвердите лицо, предоставив оператору казино средства паспортные данные. Инструкции обычно несложные, основное — четко им идти. Если написано, что «на фото обязаны быть заметны все четыре угла страницы паспорта» — сделайте именно такое фото. <a href=https://www.cgarchitect.com/projects/3f3aba93-lighting-the-art-of-atmosphere-in-3d-rendering>https://www.cgarchitect.com/projects/3f3aba93-lighting-the-art-of-atmosphere-in-3d-rendering</a> Многие игроки, оценив функционал казино, остаются играть в нем и дальше ? на это и нацелено любое рекламную. Постоянные клиенты вносят депозиты и делают ставки, обеспечивая длительную прибыль оператора. То есть, казино раздают бездепы свежим пользователям для формирования лояльной аудитории. 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=https://lavr-sovet.ru/user/KennethNeaps/>https://lavr-sovet.ru/user/KennethNeaps/</a> Выбирайте наилучшие бесплатные призы счет обзоров на Casinoz – и пусть вас сопутствует счастье при отыгрыше бонусных кредитов!
1× slots зеркало
В современность довольно просто получить бонус за регистрацию в казино. Практически любой игорный жилище с готовностью начисляет средства либо безвозмездные вращения. Многие гэмблеры используют данным и не смущяются регистрироваться в любом клубе с выгодными условиями. Кстати, это отличная вероятность выработать победную стратегию и сорвать джекпот.Бездепозитные бонусы казино это экономическая компенсация, предлагаемая пользователям на дармовой основе и вероятность играть в онлайн казино бесплатно. Если ассоциировать их с поощрениями за вклад, в свои выдаются только впоследствии первоначального пополнения счета, то бездепозитные гонорары получаются безвозмездно. То есть, играющий получает возможность создавать ставки на уже существующие деньги, которые выдаст заведение, исполняя, при этом, обыденные действия, дабы их извлечь (здесь идет речь о регистрация, удостоверении личности с внедрением номера телефона, дизайна заказы и т.д. ). <a href=https://forum-pravo.com.ua/showthread.php?p=24912&posted=1#post24912>1×slots регистрация 1×slots casino 777 online</a> 1×slots официальный сайт мобильная версия скачать Верификация аккаунта. Лучше доказать лицо сразу последствии регистрации, чтобы потом не было заморочек с выводом средств. Верификация имеет протекать 2-мя маршрутами: <a href=http://www.jrp.kr/bbs/board.php?bo_table=free&wr_id=196733>http://www.jrp.kr/bbs/board.php?bo_table=free&wr_id=196733</a> 1×slots на любой вкус как пройти регистрацию Для всех бездепозитных бонусов функционирует максимальный лимит на выигрыш. Он показывает предельную необходимую, коию вы сможете получить, играя на бонусные кредиты. Как только для удастся выполнить притязания вейджера, допустимый максимум будет переведен с бонусного счета на главной, а остаток будет списан.
казино 1×slots
<a href=https://www.evangelie.eu/forum/members/85608.html>https://www.evangelie.eu/forum/members/85608.html</a> 1×slots зеркало которую указывали при регистрации кстати
1×slots зеркало быструю регистрацию а также мгновенное
Можно ли в одном интернет казино получить больше 1-го бонуса за регистрацию? Нет, например как в любом онлайн казино есть правила, к которым нужно придерживаться, не творить два аккаута для получения призов, по будет блокировка обоих аккаутов, не пытайтесь перехитрить онлайн казино, приз за регистрацию выдаеться раз один 1 лицу. Иногда в качестве поощрения за регистрацию имеют выдаваться билеты для участия в турнирах. Условия их проведения довольно отличаются, потому мы советуем ознакомиться с каждым предложением раздельно. зеркло казино 1×slots <a href=https://www.openstreetmap.org/user/%D0%BB%D1%83%D1%87%D1%88%D0%B8%D0%B5%20%D0%B1%D1%83%D0%BA%D0%BC%D0%B5%D0%BA%D0%B5%D1%80%D1%8B%20%D0%B2%20%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8>https://www.openstreetmap.org/user/%D0%BB%D1%83%D1%87%D1%88%D0%B8%D0%B5%20%D0%B1%D1%83%D0%BA%D0%BC%D0%B5%D0%BA%D0%B5%D1%80%D1%8B%20%D0%B2%20%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8</a> Если вы опытный игрок, вы должны аристократия, собственно бонус без депозита – редчайшая находка. Тем не менее, мы в исследуем интернет, дабы найти для вас наилучшие бездепозитные предложения.Ограничения по играм. Администрация запрещает игрокам некоторые игровые автоматы с бездепозитным призом, средствами либо безвозмездными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда деление выполняется по виду игр. Например, отыгрыш вероятен на всех игровых аппаратах, хотя запрещен в настольных играх и в разделе Live Casino.
1×slot регистрация
Для получения предоставленных бонусов для пригодиться — ПК либо мобильное устройство, и остальное дело за небольшим.Доступ к дару имеет раскрываться механически в введения промокода или обращения в службу вебсайта. В первом случае от пользователя не потребуется практически деяний. Бездеп с активацией по коду встречается чаще всего. Игроку нужно ввести совокупа символов в графе, которая возможность находиться в регистрационной форме в Личном офисе. Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают бонус по государствам. Вплоть до как, собственно клуб может себя игроков из Вашей страны, а бездеп не давать.Поспешите арестовать бездепозитные бонусы за регистрацию в казино из представленного списка. Все платформы не ведут легальную деятельность, но и обрадуют честными плодами игры, высочайшей отдачей, быстрыми выплатами. <a href=http://www.atego-club.ru/forum/member.php/145692-Kennethneimb>http://www.atego-club.ru/forum/member.php/145692-Kennethneimb</a> Бонус за регистрацию в казино без депозита с выводом денег нужно отыграть. Зачастую для отыгрыша возможность понадобиться сделать ставки на необходимую, в количество десятков раз превышающую необходимую бонуса или выигрыша.Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие возникают у начинающих. 1×slots актуальное зеркало Многие азартные клубы ограничивают необходимую вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании акции, суммы Вы не можете вывести. Разница будет аннулирована, Вы числе не можете делать на нее ставки.Третитй бездепозитный приз за регистрацию – валютные свои. К огорчению, начислить рубли либо доллары готовы лишь знаменитые и пользующиеся клубы. С их помощью возможность насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.banknotes.cz/viewtopic.php?t=80596>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Самые свежие бездепозитные бонусы в казино за регистрацию 2022 года с выводом прибыли находятся на данной странице. Посетитель имеет расценить обстоятельства получения и начать играть на средства без внесения депозита. При этом игроку главно понимать, на каких условиях и какими способами появится исключить полученный выигрыш. Для сего необходимо оценить список подключенных платежных систем.
#662 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало
С иной стороны, намного проще арестовать бездепозитные фриспины за регистрацию в казино и напрямик сейчас начать вращать барабаны в превосходнейших слотах. Главная необыкновенность спинов том,, что они предусмотрены для топовых автоматов. Удастся столько пройти вспомогательные раунды, хотя и увеличить сумму выигрыша, заработать респины и другие внутриигровые презенты. <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> Условия имеют разниться приятель от друга. Но такой приз возможность быть использован лишь для игрового процесса – полученные на счет деньги до того, как будут отыграны, вывести невозможно. <a href=https://solo.to/lexxeagle>https://solo.to/lexxeagle</a> Прежде всего, не забывайте периодически заглядывать на страницу обзоров бездепозитных призов. Они шаг за шагом осматривают более интересные предложения ведущих игорных порталов.Новые посетители онлайн-казино без первого депо имеют проверить свою удачливость. К что, этому же есть вероятность преобразовать бездепы в настоящие средства за регистрацию в казино, однако результата приз нужно отыграть сообразно условиям акции. 1×slots регистрация 1×slotscasino 56 online <a href=https://rylandhhg56789.blogproducer.com/36810645/deep-nude-the-ethical-dilemmas-and-technological-impacts-of-ai-driven-image-manipulation>https://rylandhhg56789.blogproducer.com/36810645/deep-nude-the-ethical-dilemmas-and-technological-impacts-of-ai-driven-image-manipulation</a> Такие поощрения дозволяют даром протестировать свежее казино, разобраться с игровым ходом онлайн слотов, заработать и вывести небольшую необходимую средств.При исполненьи критерий отыгрыша и верификации, деньги с бонусного счета переводятся на ведущей и могут быть выведены на карту либо электронный кошелек. Лимиты на вывод и сроки проведения транзакции зависимости от избранной платежной системы.
1×slots официальный demo регистрация в 1×slots casino
Каждый из бездепозитных призов без пополнения 2022 имеет свой определенный вейджер для отыгрыша, например же в любом казино он устанавливается индивидуально — где то он х55 а где-то х30, повторюсь везде по разному! 1×slots официальный сайт скачать Нет. Казино выдают безвозмездные призы за регистрацию, для того, чтобы клиент возможность ознакомиться с игровым заведением. А чтобы исключить его, нужно выполнить условия отыгрыша.Самый распространённый из сходственных призов, естесственно же, бездеп на денек рождения посетителя — приз в виде фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им можно на установленного периода времени. <a href=http://bbs.01bim.com/home.php?mod=space&uid=1341336>http://bbs.01bim.com/home.php?mod=space&uid=1341336</a> 1×slot регистрация Итак, дабы безвозмездные бонусные кредиты превратились в реальные деньги, которыми продоставляется управлять по своему усмотрению, их нужно отыграть. Вейджер стопам уточнять в правилах онлайн-казино.Казино выводит средства только на ту платежную систему, с котрой был сделан депо. То есть, для вывода бездепозитного приза, Вам поначалу необходимо пополнить счет. В неких клубах узкий список методов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет именно с этих платежных способов, коие доступны для вывода.
1×slots casino регистрация 1×slotscasin online
При регистрации стопам свидетельствовать лишь достоверную информацию. Когда учетная запись несомненно активна, появится доступ в Личный офис. В нем можно выбрать денежную, установить промокод и узнать подробные управляла получения и отыгрыша бездепа. Краткая информация об промоакции часто присутствует непосредственно на регистрационной форме. Бездепозитные призы отличный вариант бесплатной игры в игровые автоматы. Многие юзеры сети не понимают, что в казино возможно начать играть абсолютно даром, а позже исключить выигрыш на банковскую карту либо электрический кошелек, иные не доверяют онлайн казино, а третьи удачно играют и выигрывают – и тотчас довольно немалые суммы.Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. <a href=https://njt.ru/forum/user/186666/>https://njt.ru/forum/user/186666/</a> Бездепозитные бонусы истинными средствами, которые можно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадали. 1×slots официальный сайт скачать Баланс игрока пополняется на соответствующую необходимую. К ней используется вейджер, указанный в правилах акции. Вывести выигрыш можно будет последствии как, как пользователь устроит требуемый размер ставок из собственных средств. В редких случаях бездеп трудится в формате Free Play. На счет пользователя зачисляется крупная сумма, и предоставляется небольшой срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по окончании сего периода сумма на счету несомненно превосходить изначальную, то разницу возможно будет вывести либо использовать для последующих ставок.На данном разделе портала периодически публикуются обзорные статьи, в которых рассматриваются безвозмездные бонусы лучших интернет-казино. Информация структурирована по нескольким пт, включая основные:
1×slots сайт зеркало
Большинство клубов привлекают внимание в за счёт различных подарков. На одних веб-сайтах можно получить виртуальные кредиты, коие откроют доступ ко всему софту. На иных же, администрация предлагает благотворительные вращения для пуска лучших онлайн слотов. Несмотря на разные промоакции, стоит выделить самые основные. В случае установленного лимита на сумму вывода выигрыша с бездепозитного приза, игрок не может исключить больше заявленной суммы.Отзывы читателей о бонусных промоакциях посодействуют составить впечатление, но не забывайте о субъективности личных комментариев. Бесплатный приз – кредиты, коие онлайн-казино начисляет посетителю, не принуждая его пополнять игровой счет. 1×slots регистрация <a href=http://gkwin.net/bbs/board.php?bo_table=free&wr_id=272903>http://gkwin.net/bbs/board.php?bo_table=free&wr_id=272903</a>
1×slots мобильная версия войти казино
Любой выигрыш по ставке повыше установленного лимита будет считаться недействительным. То есть ставка не несомненно засчитана при отыгрыше, а в случае выигрыша его сумма не поступит на счёт клиента — результат игры несомненно всецело аннулирован.Бездепозитные бонусы начисляются только один раз. Не стоит раскрывать свежие аккаунты, чтобы получить их повторно. Служба защищенности казино непременно выявит «левого» участника и перекроет. Если посетитель выполнит необходимые требования, отыграет собственную ставку и решит вывести личный выигрыш, то ему нужно учесть, собственно казино обязательно востребует предоставить ксерокопии личных документов, чтобы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные свои исключить не удастся. Как и другие акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такого предложения являются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых гостей и разрешает им составить впечатление о функционале, не рискуя значительными совокупностями.Начнём с такого, собственно любое рекламную за регистрацию предполагает некоторые обстоятельства. Бездепозитные призы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность денежного оборота, нужная для исполненья условий. Пример, возымели бесплатные вращения и выиграли с них 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 руб., неудачных либо выигрышных, маловажно. После выполнения, бонусный баланс перейдёт на реальный и станет доступным к выводу. <a href=http://eparhia.ru/go.asp?url=http://medorto.ru/bitrix/redirect.php?goto=http://olis-nsk.ru/bitrix/redirect.php?goto=https://teletype.in/@urist_free/C84UQ4Zg1OZ>http://eparhia.ru/go.asp?url=http://medorto.ru/bitrix/redirect.php?goto=http://olis-nsk.ru/bitrix/redirect.php?goto=https://teletype.in/@urist_free/C84UQ4Zg1OZ</a> 1хслотс официальный сайт зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://roguedynasty.net/forums/member.php?10629-RabofreeKt>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<a href=https://www.ladyboyescort.com/profile/745-rabofreesi/>1хслотс зеркало на сегодня</a>
<a href=http://rumproject.com/rumforum/memberlist.php?mode=viewprofile&u=1236>1хслот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Возможность поиграть дополнительное состязание (а времени и количество) абсолютно даром, а выигрыш, в свою очередь, поступает на счёт игрока. Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро либо 20 долларов. Если выдаются фриспины, их количество изредка превышает нескольких десятков безвозмездных вращений.
#663 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino рабочее Мухтиярова Елена Вячеславовна порно <a href=https://specreporter.com/>где казино</a> porno Нина Пирогова, хоккеистка казино 5 <a href=https://sovsekretno.net/>казино вход официальный сайт</a> официальные букмекерские конторы скачать vodka casino казино рулетка porno Андрей Рублев (теннис) Светлана Ходченкова up casino 1×bet официальный сайт 1×bet xyz
DiskiPlus вавада казино DiskiPlus porno Яна Троянова <a href=https://diskiplus.ru>DiskiPlus балтбет букмекерская контора</a> DiskiPlus 1×bet зеркало xbet DiskiPlus рабочие зеркала казино <a href=https://www.diskiplus.ru/>DiskiPlus Львова-Белова Мария Алексеевна порно</a> DiskiPlus порно с Кирьянова Дарья Борисовна DiskiPlus top casino DiskiPlus бесплатно играем казино DiskiPlus Скоробогатова Ольга Николаевна порно DiskiPlus включи казино DiskiPlus порно с Евгения Медведева, фигуристка DiskiPlus casino online зеркало
#664 Charlesgunnyhttp://filmkachat.ru
1×slots сайт
Способы получения бездепа различаются зависимо облика приза, который приглянулся игроку. Но вас так нужно быть зарегистрированным в легальном онлайн-казино и доказать свою лицо. В общем виде пошаговая инструкция для получения бездепозитного бонуса смотрится так: <a href=http://filmkachat.ru/>1х слотс зеркало регистрация в 1×slots casino</a> Чтоб получить крупный выигрыш, выбирайте игровые автоматы с предельным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша. <a href=https://wykop.pl/wpis/80059525/mastering-3d-product-design-from-concept-to-market>https://wykop.pl/wpis/80059525/mastering-3d-product-design-from-concept-to-market</a> 1× slots зеркало <a href=https://m1bar.com/user/FrankTrone/>https://m1bar.com/user/FrankTrone/</a> При регистрации по указывать лишь достоверную информацию. Когда учетная запись будет активна, замечен доступ в Личный кабинет. В нем возможно избрать валюту, ввести промокод и узнать подробные управляла получения и отыгрыша бездепа. Краткая информация об промоакции нередко присутствует непосредственно на регистрационной форме.Представьте момент, когда при ставке в 10 руб. Вы получите схожее умножение. Миллион рублей за одно вращение, собственно абсолютно возможно. Поэтому вопрос, сколько возможно выиграть остаётся закрытым. Предлагаем выяснить помощи. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный приз и проверяйте удачу в деле. Разумеется, вывести деньги довольно. Однако шансы есть у всех.
1×slots зеркало регистрацию более популярный вариант это
Представленные на данной странице лучшие бездеп бонусы в казино за регистрацию в 2022 году имеют подходящие обстоятельства. После кропотливого анализа редакция портала составила рейтинг спецпредложений, в посетители Casino.ru могут сортировать перечень по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д. <a href=https://mcmon.ru/showthread.php?tid=187658>1×slots рабочее зеркало на сегодня</a> 1×slot зеркало рабочее регистрации на телефон придет <a href=http://rosnum.ru/index.php?title=РР·_чего_состоит_диета_Елены_Малышевой>http://rosnum.ru/index.php?title=РР·_чего_состоит_диета_Елены_Малышевой</a> Для отыгрыша приза казино обязывает игрока сыграть на необходимую, в некоторое один превосходящую сумму приобретенного бонуса — тут выгода компании очевидна.Срок отыгрыша — это период, который начинается в момент активации приза и завершается с его закрытием. Пользователю нужно уложиться в этот временной промежуток, по призовые средства аннулируются. Казино устанавливают список игр, ставки в которых засчитываются при расчете отыгранных средств. Если тайтл не входит в этот список, то предоставляется быть недоступен для загрузки во время деяния бонусного предложения. рабочее зеркало 1×slots
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Диапазон ставок, которые вправе сделать игрок, того лимитирован. Обычно назначать возможно маленькую необходимую — пределах 10–30 руб. За одно вращение.Бездепозитные призы истинными деньгами, которые можно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадались. Доступ к подарку возможность открываться механически последствии введения промокода или воззвания в службу вебсайта. В первом случае от пользователя не потребуется никаких деяний. Бездеп с активацией по коду встречается почаще всего. Игроку нужно установить совокупа знаков в графе, кот-ая возможность пребывать в регистрационной форме в Личном кабинете.Прибывшие на аккаунт финансы бездепозитные бонусы предназначаются, в основном, только для новоиспеченных пользователей, которые ранее не имели личного аккаунта в данном казино. Исходя из этого, в раньше у игрока был сделан депо, то, по всей вероятности, у него больше не будет способности рассчитывать на получение такого бонуса в определенном заведении. <a href=http://www.privatumervarta.sk/en/contact.html?meno=animateddesert3&firma=animateddesert3&email=xbxneo2401%40inbox.lv&telefon=animateddesert3&predmet_spravy=animateddesert3&sprava=%3Ca+href%3Dhttps%3A%2F%2Fguides.co%2Fg%2F1×bet-app-how-to-use-mobile-payments-in-india-in%2F493947%3Ehttps%3A%2F%2Fguides.co%2Fg%2F1×bet-app-how-to-use-mobile-payments-in-india-in%2F493947%3C%2Fa%3E+1×bet+app%3A+Casino&captcha=pznmr&input_recordtime=31.10.2022+01%3A56%3A16&button8=Submit>http://www.privatumervarta.sk/en/contact.html?meno=animateddesert3&firma=animateddesert3&email=xbxneo2401%40inbox.lv&telefon=animateddesert3&predmet_spravy=animateddesert3&sprava=%3Ca+href%3Dhttps%3A%2F%2Fguides.co%2Fg%2F1×bet-app-how-to-use-mobile-payments-in-india-in%2F493947%3Ehttps%3A%2F%2Fguides.co%2Fg%2F1×bet-app-how-to-use-mobile-payments-in-india-in%2F493947%3C%2Fa%3E+1×bet+app%3A+Casino&captcha=pznmr&input_recordtime=31.10.2022+01%3A56%3A16&button8=Submit</a> Приветственный бездеп предоставляется любому игроку лишь один раз. Казино борются с так нарекаемыми бонусхантерами (от англ. Bonus Hunter — охотник за призами), пытающимися заводить многочисленные аккаунты для обмана оператора и повторного получения подарка. Исключить подобные деяния позволяет верификация данных. Администрация вправе потребовать у клиента доказать персональные данные, указанные при регистрации. 1хслотс 1хслотс регистрация перейти на 1×slots
1× slots сайт
Многие азартные клубы ограничивают сумму вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании акции, суммы Вы не можете исключить. Разница несомненно аннулирована, Вы даже не можете делать на нее ставки. Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, чтобы снова получить бесплатный приз. Игорные заведения нетерпимы к бонус-хантерам, потому вас ждет неминуемое санкция.Все любят получать презенты. Согласитесь, почти каждый играющий человек будет очень рад, случае получит безвозмездный презент для забавы в интернет казино просто за регистрацию или же бонус за внесенный депо, так нарекаемые приветственные призы для новых игроков. Соответственно эти онлайн клубы станут более востребованы и преимущественны у игроков при выборе казино для игры. Топ казино каждый обновляется и прибавляются свежие и увлекательные игровые клубы с симпатичной бонусной политикой и всеми вероятными преимуществами, льготами, к которым относятся такие призы как фриспины за регистрацию, денежные бездепозитные бонусы, еще великодушные призы за внесенный депо. 1×slots зеркало быструю регистрацию а также мгновенное <a href=http://lzdsxxb.com/home.php?mod=space&uid=3176001>http://lzdsxxb.com/home.php?mod=space&uid=3176001</a> Хотя благотворительные бонусы начисляются без депо, не исключено, что вас придется вносить деньги. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только последствии как, как новый заказчик впервые пополнит игровой счет.Таким образом онлайн казино получает вероятного игрока. Возможно в будущем или настоящем он захочет поиграть на свои деньги. Так работают бездепозитные бонусы в онлайн казино. Здесь отлично подходит выражение, безвозмездные сыр бывает лишь в мышеловке. Начинающие игроки имеют не осознавать опасность азарта. Однако времени понимания делается больше. Это тема для отдельного обсуждения.
1×slots сайт
Похожим образом работает 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения клиента либо из-за с получения им VIP-статуса. Подарок предоставляется в воззвания в поддержку и ревизии. <a href=http://www.realestateportal.org/users.php?mode=profile&uid=266404>http://www.realestateportal.org/users.php?mode=profile&uid=266404</a> Чтобы получить вероятность исключить прибыль с бездепозитного бонуса в казино, необходимо выполнить ряд условий: 1×slots зеркало рабочее на сегодня Мы подготовили список, где есть практически актуальные и свежие бездепозитные призы казино, коие вам получить безвозмездно. Для наших юзеров есть особые предложения неповторимые бонусы, которые вы ни не отыщите, их мы обозначили особой красной плашкой «Exclusive».
<b>Смотреть еще похожие новости:</b>
<a href=http://griffhunter.com/boards/viewtopic.php?p=1072030#p1072030>1×slots зеркало видели такую регистрацию на</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для доказательства электронной почты, просто перейдите по интенсивной ссылке в письме, приобретенном от игрового заведения. Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?
#665 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
рокс казино 1×bet рабочее <a href=https://7club7.com/>букмекерская контора бесплатно скачать</a> 1×bet зеркало на сегодня casino скачать <a href=https://repost.news/>букмекерская контора ставки</a> скачать 1×bet на андроид промокод 1×bet casino на телефон kometa casino суть казино порно с Карен Хачанов (теннис) porno Виктория Баркова, легкоатлетка
DiskiPlus 1×slots casino DiskiPlus винлайн букмекерская контора <a href=https://diskiplus.ru>DiskiPlus porno Виктория Баркова, легкоатлетка</a> DiskiPlus porno Екатерина Ефременкова, шорт-трекистка DiskiPlus 1×bet на андроид бесплатно <a href=https://www.diskiplus.ru>DiskiPlus фильмы казино рояль</a> DiskiPlus мобильные букмекерские конторы DiskiPlus кент казино DiskiPlus порно с Голикова Татьяна Алексеевна DiskiPlus 7k casino зеркало на сегодня DiskiPlus казино рублях DiskiPlus песня казино DiskiPlus порно с Каролина Севастьянова
#666 Charlesgunnyhttp://filmkachat.ru
зеркала 1×slots
Способы получения бездепа различаются от облика приза, который понравился игроку. Но для или надо(надобно) быть зарегистрированным в легальном онлайн-казино и подтвердить свою личность. В общем виде пошаговая инструкция для получения бездепозитного приза смотрится например: <a href=http://filmkachat.ru/>1×slots регистрация на 1хслотс</a> Однако далеко не все ресурсы предлагают своим посетителям бездепозитные призы за регистрацию в казино. В большинстве случаев учтено поощрение на 1-ый депозит в размере 100–200%. Это отличная вероятность преувеличить банкролл, прирастить время, проведённое за забавой и шансы сорвать крупный куш. <a href=https://uberant.com/article/2006575-does-autozone-buy-old-batteries-a-comprehensive-exploration/>https://uberant.com/article/2006575-does-autozone-buy-old-batteries-a-comprehensive-exploration/</a> Условия имеют различаться друг от приятеля. Но подобный бонус может быть использован только для игрового процесса – полученные на счет финансы до того, как будут отыграны, исключить невероятно.Диапазон ставок, коие вправе сделать игрок, кроме лимитирован. Обычно назначать возможно небольшую необходимую — в 10–30 рублей за одно вращение. 1хслотс официальный сайт зеркало <a href=http://vrelize.ru/bitrix/redirect.php?goto=http://chat-off.com/click.php?url=http://rodos74.ru/bitrix/click.php?goto=https://telegra.ph/Kak-vzyat-akademicheskij-otpusk-vo-vremya-obucheniya-v-aspiranture-s-sohraneniem-otsrochki-ot-prizyva-na-voennuyu-sluzhbu-YUridi-09–23>http://vrelize.ru/bitrix/redirect.php?goto=http://chat-off.com/click.php?url=http://rodos74.ru/bitrix/click.php?goto=https://telegra.ph/Kak-vzyat-akademicheskij-otpusk-vo-vremya-obucheniya-v-aspiranture-s-sohraneniem-otsrochki-ot-prizyva-na-voennuyu-sluzhbu-YUridi-09–23</a> Доступные игры – В неких азартных играх можно снизить математическое приемущество казино до нескольких десятых процента. В их числе почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как правило, в этих забавах ставки идут в зачет вейджера не полностью. Например, возможность учитываться лишь 50%. В некоторых забавах бездепозитные бонусы вообщем невозможно отыгрывать.
1×slots зеркало рабочее на сегодня
В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, необходимо обратиться в саппорта спустя лайв-чат на сайте казино.Таким образом, заведение пытается продемонстрировать себя своим вероятным игрокам, а подобный маркетинговый ход как казино приз без депо за регистрацию привлекает довольно большое внимания к игорному заведению и обеспечивает постоянный поток свежих гостей и будущих клиентов игрового интернет клуба. 1×slots рабочее зеркало <a href=http://telent.ussoft.kr/bbs/board.php?bo_table=free&wr_id=1493299>http://telent.ussoft.kr/bbs/board.php?bo_table=free&wr_id=1493299</a> Законодательство, регулирующее азартные игры в различных странах, влияет на полномочия операторов. В результате пользователи из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это имеет быть как полный отказ в доступе, так и невозможность загружать забавы отдельных производителей. 1хслотс казино зеркало
1×slot зеркало рабочее этих способов предполагает регистрацию
<a href=http://autobrands.lv/user/Kennethjaf/>http://autobrands.lv/user/Kennethjaf/</a> 1×slots подтвердит вашу регистрацию если говорить Бездепозитные бонусы в казино без пополнения 2022 — это определенная сумма средств или valinomycin spins вращения, коие предоставляются первым гостям за регистрацию на веб-сайте казино повторяющий бездепозитного приза, и дает вас вероятность с казино без пополнения опробовать предложения (игр), с последующей преимуществом, льготой вывода средств при исполненьи всех установленных правил.Наиболее популярные гонорары среди гэмблеров – бездепозитные призы казино. Это не дивно, ведь можно получить бесплатные вращения либо виртуальные кредиты, и при не придётся пополнять счёт, рисковать собственными средствами. Удастся насладиться различными увеселениями даже выиграть крупную сумму, избегая серьёзного риска.
1хлот регистрация в 1×slots casino
Воспользоваться бездепом можно не во всех игровых автоматах: казино вдруг устанавливает ограничение для клиентов. Конечно, это возможно посчитать неким неудобством для игрока, но ради стоит отметить, собственно выбор автоматов всё также остаётся достаточно великим.Почти все игровые клубы требуют свидетельство контактных данных игрока для получения бездепозитного бонуса. Постарайтесь отыграть вейджер, дабы была возможность забыть заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы можете получить выигрыш на электрической кошелёк, карту, телефонный.Максимальный объем ставки, кот-ый невозможно превышать же приз не будет полностью отыгран. В случае нарушения сего управляла, приз и выигрыш с него будут аннулированы. 1×slots сайт зеркало <a href=http://creativt.ru/bitrix/redirect.php?goto=http://cinofarm.ru/bitrix/redirect.php?goto=http://atlantis-tv.ru/go?https://teletype.in/@urist_free/QE1-LbijEeI>http://creativt.ru/bitrix/redirect.php?goto=http://cinofarm.ru/bitrix/redirect.php?goto=http://atlantis-tv.ru/go?https://teletype.in/@urist_free/QE1-LbijEeI</a>
1хслотс официальный сайт зеркало
Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, чтобы еще раз получить даровой приз. Игорные заведения нетерпимы к бонус-хантерам, потому вас ждет неизбежное наказание.Бездепозитный приз казино 2022 с выводом за регистрацию предоставляет вероятность ознакомиться игроку с лобби выбранного заведения, сориентироваться в выборе игр и выяснить качество работы службы поддержки. Довольно часто, начиная игровой процесс, игрок уже не желает останавливаться и проделывает настоящий вклад. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть бесплатно вероятно как один таки с призом за регистрацию без необходимости заносить депо. <a href=https://finbi.ru/user/TravisHog/>https://finbi.ru/user/TravisHog/</a> Первый возникающий вопрос, это, чего выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают свежих игроков. Последним проще начать игру на деньги с презента за регистрацию. Им не пополнять баланс и расходовать личные средства. Новички получают безвозмездные спины либо средства на счёт. С их поддержкою знакомятся с игровым ходом, крутят слоты и проделывают ставки в рулетке.В случае установленного лимита на сумму вывода выигрыша с бездепозитного приза, игрок не сможет вывести больше заявленной суммы. 1×slots быструю регистрацию а также мгновенное
<b>Смотреть еще похожие новости:</b>
<a href=http://miupsik.ru/forums/showthread.php?tid=538570>сайт 1× slots casino</a>
<a href=https://forum.immortales-gilde.de/viewtopic.php?f=2&t=391588>1×slots бонус за регистрацию</a>
<a href=https://021snyw.com/space-uid-53919.html>1×slots официальный demo регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Создание аккаунта. На сайте казино необходимо обнаружить регистрационную форму и наполнить порожние поля личными данными. Иногда на данном этапе потребуется указать только адрес электрической почты и пароль, хотя чаще бы заполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д.). Нужно свидетельствовать лишь настоящие данные, что впоследствие они будут проверены. Зарегистрироваться в казино по особой ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефона и электронную почту). Для подтверждения номера телефона необходимо в собственном профиле указать собственный номер и надавить кнопку „Подтвердить номер телефона“, дальше Вы получите sms-сообщение с кодом, кот-ый необходимо ввести в подходящее поле. Для подтверждения электрической почты, перейти по интенсивной ссылке в письме от казино.
#667 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Екатерина Ефременкова, шорт-трекистка порно с Голикова Татьяна Алексеевна <a href=https://rumafia.news/>яндекс игры казино</a> casino ап букмекерская контора скачать приложение <a href=https://res-publika.com>casino на телефон</a> пин ап casino pin up top казино проиграл Манилова Алла Юрьевна порно casino daddy 7k casino официальный включи казино песня казино
DiskiPlus porno Алена Косторная (фигурное катание) DiskiPlus top casino <a href=https://www.diskiplus.ru>DiskiPlus порно с Алина Загитова</a> DiskiPlus букмекерская контора скачать приложение DiskiPlus porno Екатерина Ефременкова, шорт-трекистка <a href=https://www.diskiplus.ru/>DiskiPlus 7k casino зеркало на сегодня</a> DiskiPlus игры казино DiskiPlus порно с Баталина Ольга Юрьевна DiskiPlus Скоробогатова Ольга Николаевна порно DiskiPlus Манилова Алла Юрьевна порно DiskiPlus pin up casino скачать DiskiPlus casino 7k сегодня DiskiPlus казино ли
#668 Charlesgunnyhttp://filmkachat.ru
1×slots сайт
Ещё одно распространённое акционное предложение – симпатичный подарок с сомнительными притязаниями. К образцу, клуб обещает $100 в качестве бездепа, но с вейджером х80 либо х100. Отыграть такой вейджер фактически невозможно и поэтому другого, как концентрироваться на больше занимательных промоакциях. <a href=http://filmkachat.ru/>x1 slots 1хслотс регистрация перейти на 1×slots</a> <a href=https://wykop.pl/wpis/80059367/the-art-and-science-of-professional-interior-desig>https://wykop.pl/wpis/80059367/the-art-and-science-of-professional-interior-desig</a> Риск-игра по равным шансам – Также казино имеет воспрещать выполнять обстоятельства по отыгрышу счет раунда на удвоение, который предлагается в слотах, видео-покере и некоторых иных забавах.Помимо остального, для вывода средств по бездепу нужно внести на счёт собственный 1-ый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало вероятную необходимую, последствии чего вывод средств будет доступен. 1×slots официальный сайт мобильная версия <a href=http://altay.land/bitrix/click.php?goto=http://energetic42.ru/bitrix/redirect.php?goto=http://borgraft.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/2m09WJgrZw3>http://altay.land/bitrix/click.php?goto=http://energetic42.ru/bitrix/redirect.php?goto=http://borgraft.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/2m09WJgrZw3</a>
1×slots зеркало проходить регистрацию это отличный вариант
<a href=http://zelenalutrija.com/forum/showthread.php?p=84399#post84399>1×слотс казино</a> 1×slots регистрация на 1хслотс Теоретически, к бесплатным призам можно отнести так нарекаемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, потому собственно они предоставляют только возможность создавать ставки. <a href=http://miupsik.ru/forums/member.php?action=profile&uid=5681>http://miupsik.ru/forums/member.php?action=profile&uid=5681</a> Варианты выигрыша зависят от Вашей успеха и условий игорного портала. Выше мы сказали, что кое-какие бездепозитные бонусы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются они, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность современных игр на средства, можно выиграть невероятные суммы. Сегодняшние игровые автоматы либо видео слоты, как их именуют. Могут выдавать солидные умножение от х1.000 и повыше. Некоторые умножают ставку от х100.000. 1×slot регистрация Бонусы без депозита при регистрации считаются наиболее красивыми как для опытных игроков, например для и начинающих. Получив такое вознаграждение, заказчик имеет играть на настоящие средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные призы в интернет-казино Рунета, а также условия их активации и выигрыша.
1хслотс казино зеркало
Рассмотрим принцип его деянья на образце. Допустим, вы зарегались и возымели $10 not the slightest deposit bonus с вейджером х50. Это означает, что выигранные деньги возможно будет выводить не раньше, чем последствии как, как общая сумма ставок достигнет $500.В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и в случае неоднозначных обстановок нет способности куда-то посетовать и доказать свою правоту. Составленный экспертами Casino.ru перечень онлайн-казино с бездепозитным призом разрешает игрокам сопоставить спецпредложения различных операторов. <a href=http://centropol.su/index.php?subaction=userinfo&user=dizzykit19>http://centropol.su/index.php?subaction=userinfo&user=dizzykit19</a> К раскаянию, нет. Почти все казино, просят внесение но бы одного минимального депозита для вывода выигрыша с бездепозитного бонуса. Также учитывайте, собственно вывести средства разрешается только на что, эту платежную систему, с коей был изготовлен депо. 1×slots официальный сайт мобильная версия скачать
1×slots casino регистрация 1×slotscasin online
1х слот 1хслотс регистрация перейти на 1×slots <a href=https://forum.papbio.org/member.php?action=profile&uid=86180>https://forum.papbio.org/member.php?action=profile&uid=86180</a>
1 x slots
К раскаянью, нет. Почти все казино, настоятельно внесение хотя бы одного минимального депозита для вывода выигрыша с бездепозитного бонуса. Также учитывайте, что вывести деньги разрешено только на ту платежную систему, с которой был изготовлен депо. <a href=https://gamesdrive.net/User-WalterBrize>https://gamesdrive.net/User-WalterBrize</a> Так что можете смело регистрироваться без всяких размышлений. Фортуна сегодня наверняка на вашей стороне. Не страшитесь, как последствие какого или убытка Вам абсолютно не угрожает. С этими призами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе.Отыграв бездепозитный приз в казино с выводом тоже придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, случае подобное ограничение присутствует, то единоразово вывести выйдет лишь необходимую, не превышающую объем полученного приза. 1×slots регистрация 1×slotscasino 56 online
<b>Смотреть еще похожие новости:</b>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=100381&pid=400700#post_400700>1×slots сайт</a>
<a href=http://www.fumankong4.cc/home.php?mod=space&uid=500977>1×slots casino online регистрация</a>
<a href=https://russiancomputerservice.ru/user/JosephCer/>casino 1×slot</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины — бесплатные вращения, коие разрешают игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины считаются самым знаменитым и желаемым обликом приза — бесплатные вращения иногда эффективнее и веселее в отыгрыше, чем другие облики бездепов.
#669 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet рабочее Скворцова Вероника Игоревна порно <a href=https://slon-ru.com/>порно с Дронова Александра Викторовна</a> porno Вера Бирюкова, гимнастка Петрова Ольга Викторовна порно <a href=https://slon-ru.com/>porno Нина Пирогова, хоккеистка</a> порно с Антропова Валентина Викторовна рабочее казино 1×bet зеркало слоты up букмекерская контора casino официальные букмекерские конторы 1×bet слоты
DiskiPlus Светлана Ходченкова DiskiPlus 1×bet слоты 1×bet xyz <a href=https://diskiplus.ru/>DiskiPlus казино играть</a> DiskiPlus 1×bet официальный xbet DiskiPlus Александра Бортич <a href=https://diskiplus.ru/>DiskiPlus new casino</a> DiskiPlus 1×bet зеркало xbet xyz DiskiPlus сайт казино зеркало DiskiPlus casino регистрации DiskiPlus Комарова Наталья Владимировна порно DiskiPlus unlim casino DiskiPlus Чулпан Хаматова DiskiPlus порно с Алина Загитова, фигуристка
#670 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
new casino официальное казино вход <a href=https://repost.news/>ограбление казино</a> casino андроид букмекерская контора бетсити <a href=https://slon-ru.com/>Юдаева Ксения Валентиновна порно</a> Елизавета Боярская casino daddy 1×bet рабочее 1×bet xbet porno Вера Бирюкова, гимнастка casino pin официальный casino игровой автомат
DiskiPlus up casino зеркало DiskiPlus приложения букмекерских контор <a href=https://www.diskiplus.ru/>DiskiPlus Анна Михалкова</a> DiskiPlus лучшие онлайн казино DiskiPlus винлайн букмекерская контора официальный <a href=https://diskiplus.ru>DiskiPlus порно с Аделия Петросян (фигурное катание)</a> DiskiPlus почему казино DiskiPlus 1×bet зеркало слоты 1×bet xyz DiskiPlus champion casino DiskiPlus бесплатно играем казино DiskiPlus pin up casino buzz DiskiPlus букмекерские конторы pin DiskiPlus букмекерская контора зенит
#671 Charlesgunnyhttp://filmkachat.ru
1×slots быструю регистрацию а также мгновенное
Бездепозитные призы реальными деньгами, коие возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадались. <a href=http://filmkachat.ru/>1×slots регистрация на сайте</a> <a href=https://www.arrl.org/forum/topics/view/4344>https://www.arrl.org/forum/topics/view/4344</a> 1×slots зеркало регистрацию более популярный вариант это <a href=https://www.modernvespa.it/profile/4628-gregoryron/>https://www.modernvespa.it/profile/4628-gregoryron/</a> Первый возникающий вопрос, это, чего выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают свежих игроков. Последним легче начать игру на деньги с презента за регистрацию. Им не нужно пополнять баланс и расходовать личностные свои. Новички получают бесплатные спины или свои на счёт. С их помощью знакомятся с игровым процессом, крутят слоты и проделывают ставки в рулетке.В основном случаев безвозмездные призы начисляются в кредитах, коие нельзя незамедлительно исключить со счета. Прежде их нужно отыграть по установленным правилам. Эти притязания принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже.
1×slots зеркало рабочее
Бездепозитный бонус предоставляется новому игроку за конкретные деяния. Часто презент в виде денег либо фриспинов выдается за регистрацию, спасибо чему пользователь получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.Акции распространяются как на все игры казино, например и на узкий список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino прочие. Промо возможность охватывать разработки одного производителя. Бездеп не пересекается с иными акциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, сделанные бонусными деньгами. Для идентификации платежных реквизитов игрока может понадобиться пополнение счета на наименьшую сумму. 1×slot регистрация <a href=https://www.fortressrisk.com/user/michaelneexymichaelneexy/>https://www.fortressrisk.com/user/michaelneexymichaelneexy/</a> Подтверждение электрической почты – одно из основных критерий, коие есть практически в каждом бездепозитном казино. Чтобы верифицировать электрическую почту, достаточно перебежать по активной ссылке в письме, полученном от азартного клуба. 1×slots зеркало регистрация в 1×slots casino Многие казино деют в рекламных целях благотворительные призы самая для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой вебсайт по партнерской ссылке с нашего портала.
1×slots рабочее зеркало
Мы собрали и выпустили перечень лучших бездепозитных казино с бонусами за регистрацию, коие гарантируют щедрые выигрыши и моментальные выплаты. <a href=http://www.cooperativacoomultexco.com/user/Gregorybaits/>http://www.cooperativacoomultexco.com/user/Gregorybaits/</a> зеркло казино 1×slots Бездепозитные призы – это самая интересная и более многообещающая промоакция интернет-казино. Они в превосходнее фри-спинов, потому что выплаты в безвозмездных вращениях не гарантированы, так композиции на барабанах игрового аппарата все не сложиться.Но эти рамки не смущают и хайроллеров, что коэффициенты на слотах дозволяют рассчитывать на солидные выигрыши, ну неких автоматах разыгрывается передовой джекпот.
казино 1×slots
Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша призов. Заведения практически устанавливают наивысшую ставку, возможную по условиям вейждера.Заполняя данные в личном профиле, указывайте лишь достоверную информацию, так как Вам понадобиться ее подтвердить в при выводе денег. Получать информацию о самых прибыльных призах можно без постоянного мониторинга новостей казино. Мы взяли данную задачу на себя и безпрерывно следим за услугами операторов, избирая наилучшие из их. В данном разделе собраны заключительные бездепы, промокоды к ним и обстоятельства их активации. Список промоакций регулярно дополняется. В топ зашли самые свежие бездепозитные призы за регистрацию в казино 2020, временные и замкнутые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и другим аспектам. Если срок деянья акции истек, она удаляется из перечня.Бездепозитные бонусы – это самая небезинтересная и наиболее перспективная акция интернет-казино. Они числе другого, как фри-спинов, поэтому собственно выплаты в безвозмездных вращениях не гарантированы, ведь композиции на барабанах игрового аппарата могут не сложиться. 1×slot зеркало <a href=http://verkehrsknoten.de/index.php/forum/internationaler-kraftfahrzeugverkehr/85108#86063>http://verkehrsknoten.de/index.php/forum/internationaler-kraftfahrzeugverkehr/85108#86063</a> Отказ в прохождении верификации. Если заказчик не желает или не может дать документы, подтверждающие его личность, профиль будет заблокирован вместе со всеми бонусными начислениями.Выполнив все требования оператора, заказчик может оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем не более суток. Если дополнительно потребуется пройти процедуру верификации, то срок возрастает до 1–2 трудящихся дней. Для перевода используются банковские приборы и электрические платежные системы. Второй способ подходит другого, так как масса транзакций в этом случае осуществляются мгновенно. В связи со специфичностью функционирования банков обработка платежей может взятьвдолг(взятьвзаймы) до нескольких рабочих дней.
1х слот регистрация в 1×slots casino
Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки все запросить дополнительные документы либо инициировать краткое общение по Skype.Для верификации номера телефона, в собственном профиле изберите опцию „Подтвердить номер телефона“ и введите в подходящее поле код, приобретенный в sms-сообщении. Для получения бонуса надо(надобно) пригласить в забаву свежего посетителя. Казино начислит пригласившему фиксированный процент от взносов приглашённого вид бонуса: почаще всего его размер не выше 10%. Срок деянья бонуса в большинстве случаев не выше месяца: пригласивший получает бонус зависимо проигранных ставок приглашённого в первый месяц игры. <a href=http://1chan.blog/100–2/?unapproved=621649&moderation-hash=e3111b9f0b68e93ff3d6febb3ddf92b8#comment-621649>http://1chan.blog/100–2/?unapproved=621649&moderation-hash=e3111b9f0b68e93ff3d6febb3ddf92b8#comment-621649</a> Игры, в можно выступать на бонусные деньги. Проверьте список игр, в которых можно играть на бонусные средства, вероятно они Вам не понравятся и не стоит тратить своё время на такую промоакцию. 1х слот регистрация в 1×slots casino Еще одно условие дотрагивается размеров ставки. Операторы устанавливают максимальную необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, выбранной в Личном офисе. При превышении лимита есть риск потерять приза. Существующие ограничения относятся и к конкретным обликам ставок. Например, играя в рулетку, заказчик возможность столкнуться с запретом ставить фишки на шансы.Осталось выбрать казино с бонусом за регистрацию и сделать профиль. После активации презента выигрыш находится от Фортуны и способностей.
<b>Смотреть еще похожие новости:</b>
<a href=http://miupsik.ru/forums/showthread.php?tid=538453>казино 1×slots официальный сайт</a>
<a href=https://www.mshowto.org/forum/members/jamespauri.html>1хслотс казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Этот тип бонуса несомненно добавлен на Ваш акк последствии успешной процедуры регистрации с внедрением номера телефона. Если выбрать другой способ творения учетной записи, бездеп не несомненно добавлен на Ваш аккаунт. Условия, на коих предоставляется бездеп, регулируются казино. Каждая промоакция содержит подробные управляла, ссылка на которые обычно содержится в промообъявлении. В них указываются лимиты, вейджер, перечень дешевых игр. Если оператор укрывает данные о предложении, то пользоваться им не стоит.
#672 Charlesgunnyhttp://filmkachat.ru
1× slots casino официальный сайт
Чтобы бездеп не был начислен на Ваш аккаунт, Вам не активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк автоматически, а Вы не планируете его применять, обратитесь в службу поддержки с пожеланием отменить бездепозитный бонус. <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> <a href=https://feedback.challonge.com/forums/44455-feature-requests/suggestions/49478687-%D1%82%D0%B5%D1%80%D0%BC%D1%96%D0%BD%D0%BE%D0%B2%D0%B8%D0%B9-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D0%B6-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2-%D1%96%D0%B2%D0%B0%D0%BD%D0%BE-%D1%84%D1%80%D0%B0%D0%BD%D0%BA%D1%96%D0%B2%D1%81%D1%8C%D0%BA%D1%83-%D1%8F%D0%BA-%D0%B2%D0%B8%D0%B3>https://feedback.challonge.com/forums/44455-feature-requests/suggestions/49478687-%D1%82%D0%B5%D1%80%D0%BC%D1%96%D0%BD%D0%BE%D0%B2%D0%B8%D0%B9-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D0%B6-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2-%D1%96%D0%B2%D0%B0%D0%BD%D0%BE-%D1%84%D1%80%D0%B0%D0%BD%D0%BA%D1%96%D0%B2%D1%81%D1%8C%D0%BA%D1%83-%D1%8F%D0%BA-%D0%B2%D0%B8%D0%B3</a> 1×slots рабочее зеркало на сегодня <a href=http://troderstro.ru/user/JamesGerve/>http://troderstro.ru/user/JamesGerve/</a>
1×slot регистрация
Доступные игры – В некоторых азартных забавах возможно снизить математическое приемущество казино до нескольких десятых процента. В их числе почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как правило, в таких играх ставки идут в зачет вейджера не всецело. Например, может учитываться только 50%. В некоторых играх бездепозитные призы вообщем невозможно отыгрывать.Выиграть настоящие деньги в казино не пополняя счет – трудно, хотя вероятно. Главное задаться целью и не нарушатьправила заведения. Выберите несколько казино с бездепзитными призами и начните выступать на бонусные средства. По статистике каком-то 10-ти заведений можно заработать небольшую необходимую средств помощью бонусных средств. <a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=803792>казино 1×slots</a> 1×slots зеркало проходить регистрацию это отличный вариант <a href=http://tutorialsmint.com/user/kennethgrouh/articles>http://tutorialsmint.com/user/kennethgrouh/articles</a> 1×slot казино зеркало
1×slots регистрация на официальном сайте
А ознакомиться с свежими интернет казино, Вы можете с бонусов с выводом прибыли, коие Вы сможете получить без депо.Мы подготовили перечень, где есть практически актуальные и новые бездепозитные бонусы казино, коие вы можете получить безвозмездно. Для наших юзеров есть специальные предложения неповторимые бонусы, коие вы ни не найдете, их мы определили специальной красноватой плашкой «Exclusive». <a href=https://globoloko.com/author/briannonse/>https://globoloko.com/author/briannonse/</a> Подтвердите личность, предоставив оператору казино свои паспортные данные. Инструкции обычно легкие, главное — четко им по. Если написано, что «на фото должны быть заметны все четыре угла странички паспорта» — устройте непосредственно это фото. 1хслотс казино зеркало
1×slots казино зеркало
<a href=http://support-groups.org/viewtopic.php?f=161&t=783054>1х слотс зеркало регистрация в 1×slots casino</a> 1×slots рабочее зеркало на сегодня <a href=http://worldpoetry.cn/home.php?mod=space&username=languidbabe77>http://worldpoetry.cn/home.php?mod=space&username=languidbabe77</a> На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не сможете активировать и получить бездепозитный бонус.Постарайтесь отыграть вейджер, дабы замечена возможность забыть заявку на выплату. Кстати, на всех сайтах, представленных в списке, доступны современные платёжные приборы. Вы можете получить выигрыш на электронной кошелёк, карту, телефон.
1хслотс зеркало
Помимо остального, для вывода средств по бездепу необходимо привнести на счёт собственный первый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально возможную сумму, последствии чего вывод средств станет доступен. Для казино, работающих интернет, бездепозитные призы необходимы для вербования новых посетителей. Предложение поиграть на слотах без надобности внесения реальных средств — работающий способ для увеличения энтузиазма к компании. После отыгрыша бездепа великоват шанс, собственно игроку понравится и он продолжит выступать в казино, лишь теперь теснее на собственные средства. <a href=https://opaseke.com/users/7467>https://opaseke.com/users/7467</a> При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, коие можно предназначить игре в казино.Хотя безвозмездные бонусы начисляются без депо, не исключено, собственно для придется заносить средства. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты лишь в такого, как свежий клиент первый пополнит игровой счет. 1×slot регистрация Для верификации аккаунта надо(надобно) дать спецам технической поддержки отсканированную копию паспорта и счета за коммунальные предложения, еще фотографию банковской карты или снимок странички электронного кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для доказательства личности.После требуется привнести идентификационный платёж. Это стращает начинающих больше всего. Нужно сделать минимальный депозит в 100–500 рублей. Таким образом служба защищенности убедиться том,, что платёжный способ принадлежит Вам. Данная процедура важна для обеспечивания защищенности игровых счетов. Пример, Ваш аккаунт взломают и выведут средства на собственный кошелёк. Будет крайне досадно. Поэтому верификация платёжной системы, это необходимый момент.
<b>Смотреть еще похожие новости:</b>
<a href=https://australianwinerytours.com/tours/showthread.php?tid=460546>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<a href=http://mandala-app.com/forums/viewtopic.php?f=5&t=240394>1хслотс мобильная версия зеркало</a>
<a href=http://miupsik.ru/forums/showthread.php?tid=532878>1×slots регистрация 1×slots casino 777 online</a>
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=125858&extra=>1хслотс мобильная версия зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При исполнении критерий отыгрыша и верификации, деньги с бонусного счета переводятся на основной и имеют быть выведены на карту либо электрический кошелек. Лимиты на вывод и сроки проведения транзакции зависят от избранной платежной системы. У нас на сайте Вы найдете список призов без депо в проверенных казино и доскональную информацию о том как их получить и применять.
#673 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino com порно с Алина Загитова, фигуристка <a href=https://rucriminal.info/>Ходнева Светлана Владимировна порно</a> Фастова Елена Владимировна порно пинко casino <a href=https://glvk.guru/>букмекерская контора леонов</a> kometa casino букмекерская контора леонов 1×bet рабочее на сегодня pin up casino пин ап демо казино 1×bet зеркало xbet xyz скачать сайт букмекерской конторы
DiskiPlus Яровая Ирина Анатольевна порно DiskiPlus casino pin официальный <a href=https://www.diskiplus.ru>DiskiPlus букмекерская контора скачать приложение</a> DiskiPlus песня казино DiskiPlus порно с Матвей Сафонов (футбол) <a href=https://www.diskiplus.ru>DiskiPlus pin up casino top top</a> DiskiPlus porno Илья Ковальчук (хоккей) DiskiPlus Ирина Горбачева DiskiPlus 1×bet xbet DiskiPlus смотреть фильм казино DiskiPlus kent casino регистрация DiskiPlus 1×bet скачать приложение на андроид DiskiPlus 1×bet скачать приложение на андроид
#674 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации 2025
Акционные предложения от казино существуют в разных форматах. Часто бонусы даются в обмен на депозит. Игрок заносит платеж и получает деньги, бесплатные вращения и другие поощрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — картина приза, кот-ый гарантирован за исполнение конкретных действий на сайте:Представленные на этой странице наихорошие бездеп бонусы в казино за регистрацию в 2022 году имеют оптимальные условия. После кропотливого анализа редакция портала составила рейтинг спецпредложений, каком гости Casino.ru имеют сортировать список по нескольким аспектам: по сумме, вейджеру, максимальной сумме вывода и т.д. <a href=http://filmkachat.ru/>1×slots мобильная версия войти казино</a> На благотворительные призы онлайн-казино практически практически распространяется лимитирования по стране проживания клиентов. Даже если вам разрешено открывать счет и играть на деньги в заведении, это еще не означают, что вам доступны no deposit bonuses.На бесплатные призы онлайн-казино почти практически распространяется лимитирования по стране проживания клиентов. Даже в вас разрешено открывать счет и играть на средства в заведении, это еще не значат, что вам доступны not the slightest deposit bonuses. <a href=https://note.com/joyous_otter80/n/n668a7c74c58d>https://note.com/joyous_otter80/n/n668a7c74c58d</a> У нас на веб-сайте Вы найдете список бонусов без депо в проверенных казино и доскональную информацию про как их получить и использовать. 1×slots casino зеркало <a href=http://www.dhmhua.com/bbs/home.php?mod=space&uid=8891>http://www.dhmhua.com/bbs/home.php?mod=space&uid=8891</a> При регистрации никаких либо ином онлайн игральном заведении — вам дается один шанс испытать собственную удачу не внося средства монеты. Замечу собственно такую поощрительную предложение деют не все онлайн игровые площадки, а только великодушная половина из их. Которые мы подготовили для Вас в нашем списке.
1×slots на любой вкус как пройти регистрацию
<a href=http://yamato-ryu.ru/communication/forum/index.php?PAGE_NAME=message&FID=1&TID=47257&MID=12006&sessid=b679024cdfaaa3c22d2bf2e3b37146e6&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>x1 slots 1хслотс регистрация перейти на 1×slots</a> 1×slots казино зеркало Для казино, работающих интернет, бездепозитные призы нужны для привлечения новых посетителей. Предложение сыграть на слотах без надобности внесения реальных денег — работающий способ для повышения интереса к компании. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит играть в казино, только теперь уже на собственные деньги.При поддержки такового одобрения оператор может того привлекать клиентов, которые ранее проявляли активность на сайте, но по какой-то причине прекратили выступать. В этом случае промокод высылается пользователю по электрической почте или вид SMS. <a href=http://l-avt.ru/support/dialog/?PAGE_NAME=profile_view&UID=73063>http://l-avt.ru/support/dialog/?PAGE_NAME=profile_view&UID=73063</a> зеркло казино 1×slots
1×slots регистрация 1×slotscasino09k online
Автоматы неспроста числятся самым популярным азартным веселием. Чтобы усвоить управление и верховодила, потребуется всего некоторое минут. Ваша задача устроить ставку, определить количество рабочих линий и возможно вертеть барабан. Если на выпадет выигрышная композиция – вы выиграли! С этой задачей для посодействуют управится бездепозитные призы казино. <a href=http://unix.t7y.ru/user/JamesChexy>http://unix.t7y.ru/user/JamesChexy</a> В настоящее время получить бонус за регистрацию в казино довольно просто. Почти каждый игорный жилище с радостью даст средства либо безвозмездные вращения. Многие игроки пользуются данным и не смущяются регистрироваться в любом клубе с выгодными критериями. Кстати, это замечательная возможность придумать выигрышную тактику и сорвать куш. 1хслот 1хслотс регистрация перейти на 1×slots Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?
1 xslots рабочее зеркало
Приветственный бездеп предоставляется любому игроку лишь один раз. Казино дерутся с например называемыми бонусхантерами (от англ. Bonus Hunter — охотник за бонусами), пытающимися заводить многочисленные аккаунты для надувательства оператора и повторного получения дара. Исключить сходственные деянья дозволяет верификация данных. Администрация вправе потребовать у посетителя подтвердить персональные данные, указанные при регистрации.Не сложно додуматься, собственно no down payment bonuses почти никогда не бывают большими. Чаще всего речь о пяти–тридцати долларах (либо эквиваленте данной суммы в иной денежной). Поспешите отобрать бездепозитные призы за регистрацию в казино из представленного перечня. Все платформы не водят законную работа, но и порадуют добросовестными результатами игры, высокой отдачей, резвыми выплатами. В онлайне слишком большое скриптовых вебсайтов, которые принадлежат мошенникам. Их главная цель – заинтересовать гэмблеров, пообещав не только щедрые подарки, хотя и крупные выигрыши. Так собственно кое-какие сайты предлагают получить за регистрацию даже $1 000. 1хслотс официальный сайт зеркало <a href=http://elmid.ru/bitrix/redirect.php?goto=http://maps.google.cv/url?q=http://princip96.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/NYLYd5642C3>http://elmid.ru/bitrix/redirect.php?goto=http://maps.google.cv/url?q=http://princip96.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/NYLYd5642C3</a>
1×slots casino регистрация 1×slotscasin online
Как управляло, новоприбывшие игроки начала желают ознакомиться с способами ввода и вывода валютных средств и сроки исполнения поданных заявок дабы четко понимать, как живо они смогут исключить собственный казино бонус за регистрацию без депо на электронный кошелек или же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино соперничают между собой. Ведь в бы определенную фирму давало лишь одно онлайн-заведение, то навряд бы клиенты увидели казино с бонусом за регистрацию и возможность бы рассчитывать только на вознаграждение в виде приза на 1-ое инвестиция. К любому заведению регулярно стопам завлекать свежих игроков, что, конечном, лишь на руку всем играющим. Вообще перейдя в казино — управляла одинаковы в получении бездепозитных бонусов, в стереотипные управляла входит: подтвердить эл. Почту и телефон, заполнить свой собственный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ. <a href=http://crystal-angel.com.ua/index.php?subaction=userinfo&user=longingassistan>http://crystal-angel.com.ua/index.php?subaction=userinfo&user=longingassistan</a> Обычно для получения бонусов без депозита, казино выдвигает лояльные и вполне выполнимые обстоятельства, но есть ряд поступков коие запрещены и имеют причиной досадные результаты:Бездепозитные бонусы, как уже ясно, являются уникальной вероятностью приступать к игровому процессу абсолютно бескорыстно, то есть играть в онлайн казино безвозмездно и на имеющие средства сразу в регистрации аккаунта. Автоматы с таким депозитом имеют стать прекрасной возможностью поиграть для почитателей азарта с определенными лимитированиями в денег. 1×slots casino регистрация
<b>Смотреть еще похожие новости:</b>
<a href=https://eccentrictirade.com/forums/showthread.php?tid=137858>1×slots рабочее зеркало</a>
<a href=https://australianwinerytours.com/tours/showthread.php?tid=456711>1×slots casino зеркало рабочее</a>
<a href=https://www.ladyboyescort.com/profile/745-rabofreesi/>1× слот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Поспешите зарегистрироваться на официальном сайте Клубника, дабы мгновенно получить 33 безвозмездных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, замечена настоящий шанс победу!
#675 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора на андроид pin up casino пин <a href=https://krtka.info/>casino бонус</a> казино смотреть про казино <a href=https://res-publika.com>Москалькова Татьяна Николаевна порно</a> казино фильм смотреть онлайн казино ли 1win casino 7k casino сайт порно с Виктория Синицина, фигуристка porno Ангелина Гончаренко, хоккеистка скачать 1×bet
DiskiPlus лучшие бесплатные онлайн казино DiskiPlus casino бездепозитный <a href=https://www.diskiplus.ru/>DiskiPlus порно с Артемий Панарин (хоккей)</a> DiskiPlus casino играть DiskiPlus скачать pin casino <a href=https://diskiplus.ru/>DiskiPlus букмекерские конторы без депозита</a> DiskiPlus pin up casino пин DiskiPlus porno Екатерина Ефременкова, шорт-трекистка DiskiPlus bet casino DiskiPlus casino зеркало сегодня рабочее DiskiPlus Ходнева Светлана Владимировна порно DiskiPlus лучшая казино DiskiPlus приложения букмекерских контор на андроид
#676 Charlesgunnyhttp://filmkachat.ru
1х слот 1хслотс регистрация перейти на 1×slots
Даже не выиграв солидную сумму, игрок увлекательно проведет время, изнутри изучит работу площадки, воспримет геймплей автоматов. Все это без каких-либо денежных рисков. Быть в курсе лучших акций легкостью. Достаточно регулярно изучать перечень свежих интернет казино с выводом бонуса без депо в этом разделе. <a href=http://filmkachat.ru/>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a> <a href=https://wykop.pl/wpis/80059525/mastering-3d-product-design-from-concept-to-market>https://wykop.pl/wpis/80059525/mastering-3d-product-design-from-concept-to-market</a> Самые популярностью способы вывода средств ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электронным платежным системам на Neteller и Skrill, а также используют криптовалютными кошельками. Вывод выигрышей может исполняться моментально либо занимать от нескольких часов до нескольких суток. 1×slots casino online регистрация <a href=http://kramday.com/photos/profile.php?uid=87685>http://kramday.com/photos/profile.php?uid=87685</a> Активация по промокоду используется в разных обликах бездепов. Если речь о приветственном призе, то комплект символов можно разузнать на главной страничке, в регистрационной форме либо письме, которое отправляется пользователю для подтверждения e-mail. Акции шансы проводиться общо с партнерскими площадками. Обычно код размещается на стороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активируется одноразовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном кабинете либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем важный код для активации в описании любого рекламную.
скачать 1×slots на андроид мобильная версия
Фриспины без депозита или дополнительные свои помогут ближе познакомиться с игровой платформой и её функциями. За счёт даров возможно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради забавы напротив живых крупье. <a href=http://kemsrr.forumex.ru/viewtopic.php?f=7&t=6574>1×slots официальный сайт скачать на айфон</a> 1×slots акции Демоказино есть практически на каждом сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются веско реже: там когда выигрыша и соблюдения условий акций бездеп возможно превратить в реальные средства.На страничке представлены бездепозитные призы за регистрацию в казино редкая награда за которой гонятся все игроки как новенькие, например и мастера. Мы тоже уделяем великое внимание на присутствие призов при формирование рейтинга казино на деньги. Бездепозитный бонус это возможность играть бесплатно и выиграть настоящие деньги. <a href=http://ambumed.ru/communication/forum/user/807/>http://ambumed.ru/communication/forum/user/807/</a> 1×slots регистрация на 1хслотс Свежий бонус начисляется в виде валютных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в пользовании средствами, ну случае отыгрыша оператор возможность ввести лимитирование на вывод средств.
1×slots казино зеркало
Выиграть настоящие средства в казино не пополняя счет – сложно, но вероятно. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными призами и начните играть на бонусные средства. По статистике каком-то 10-ти заведений возможно заработать маленькую необходимую средств с бонусных средств. <a href=http://ds2.edu.sbor.net/index.php?subaction=userinfo&user=goodyokel88>http://ds2.edu.sbor.net/index.php?subaction=userinfo&user=goodyokel88</a> Так что приготовьтесь предоставить конфиденциальную информацию (пол, возраст, страна проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает не более суток, после чего удастся беспрепятственно выводить солидные выигрыши. casino 1×slot
1×slots casino зеркало рабочее
С не отыгранным призом запрещается превосходить объем максимальной ставки. Нарушение этого условия повлечет за собой аннулирование выигрыша.Как управляло, при выводе финансов, от играющего требуется лишь устроить наименьший лепта чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом собственный счет. Возьми собственный презент. Чаще всего бонус активизируется незамедлительно последствии регистрации. Но бывают ситуации, когда нужно зайти в собственный кабинет либо написать в справочную службу. Риск-игра по равным шансам – Также казино возможность воспрещать исполнять обстоятельства по отыгрышу счет раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких других играх.Чтобы бездеп не был начислен на Ваш акк, Вам надо активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт автоматически, а Вы не планируете его применять, обратитесь в службу поддержки с пожеланием отменить бездепозитный приз. 1×slot регистрация <a href=http://suhinfo.ru/index.php?title=1_win_casino_jogos>http://suhinfo.ru/index.php?title=1_win_casino_jogos</a>
1×slots бездепозитный бонус за регистрацию
На бесплатные призы онлайн-казино почти всегда распространяется лимитирования по стране проживания посетителей. Даже в для разрешается открывать счет и выступать на средства в заведении, это еще не значат, что для доступны not the slightest down payment bonuses.Осталось выбрать казино с бонусом за регистрацию и создать профиль. После активации презента выигрыш зависимости от Фортуны и навыков. Зачастую бездепозитные бонусы казино для забавы предлагаются различными заведениями азартных игр виде маркетинговых акций или в целях вербования к себя новых игроков. Для бездепозитных призов в казино 2022 геймеру не нужно пополнять счет до этапа вывода желанных средств.Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала прыткие выводы. Фишка выплат в, что достаточно избрать платёжный инструмент и указать сумму. В большинстве случаев средства зачисляются на электрические кошельки в течение 15 минут, а на банковские карты – 1–3 рабочих дня. <a href=https://xn–80aa6acmqdpq.xn–p1ai/user/JamesSkery/>https://xn–80aa6acmqdpq.xn–p1ai/user/JamesSkery/</a> 1×slots зеркало на сегодня При небольшой сумме бонуса рекомендовано играть по невысоким ставкам, а использовать наибольшие никакого лишь в том случае, если вейджер слишком большой, а время на отыгрыш сильно ограничено.
<b>Смотреть еще похожие новости:</b>
<a href=https://russiancomputerservice.ru/user/JosephCer/>1×slots casino регистрация на сайте</a>
<a href=http://forum.animogen.com/viewtopic.php?f=9&t=1576746>1×slots регистрацию более популярный вариант это</a>
<a href=https://chodilinh.com/threads/1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D0%BD%D0%B0-%D1%81%D0%B5%D0%B3%D0%BE%D0%B4%D0%BD%D1%8F.459308/>1хслотс рабочее зеркало на сегодня</a>
<a href=http://miupsik.ru/forums/showthread.php?tid=533889>1×slots бонус за регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В основном случаев благотворительные бонусы начисляются в кредитах, коие невозможно сразу исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти требования принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д. ). О нем читайте ниже. Также бездепозитные бонусы имеют работать методом вернуть к забаве клиентов, временно приостановивших своё сотрудничество с компанией: уведомление о бездепе поступает на мобильный телефонный или почту.
#677 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Алексей Миранчук (футбол) букмекерская контора официальный сайт <a href=https://krtka.info/>скачиваемые казино</a> порно с Зырянова Анастасия Владимировна casino актуальное зеркало <a href=https://7club7.com/>1×bet вход</a> 7k casino зеркало porno Виктория Баркова, легкоатлетка казино проиграл букмекерские конторы pin 1×bet на андроид бесплатно ramenbet casino ставки на спорт букмекерские конторы
DiskiPlus vodka casino DiskiPlus сайт pin up casino <a href=https://diskiplus.ru>DiskiPlus r7 casino</a> DiskiPlus про казино DiskiPlus 1×bet зеркало на сегодня 1×bet xyz <a href=https://www.diskiplus.ru/>DiskiPlus порно с Сергей Бобровский (хоккей)</a> DiskiPlus Юдаева Ксения Валентиновна порно DiskiPlus слоты казино DiskiPlus kent casino DiskiPlus porno Юлия Канакина, скелетонистка DiskiPlus порно с Юлия Ефимова DiskiPlus Ирина Горбачева DiskiPlus пин up casino
#678 Charlesgunnyhttp://filmkachat.ru
1×slots официальный demo регистрация в 1×slots casino
Отказ в прохождении верификации. Если клиент не хочет или возможности предоставить документы, подтверждающие его лицо, профиль будет заблокирован вместе со всеми бонусными начислениями. <a href=http://filmkachat.ru/>1×slots официальный сайт мобильная версия скачать</a> Промокод – определённая комбинация знаков, коию нужно установить в подходящее фон при творении учетной записи или активировать в личном профиле игрока в разделе с призами. <a href=https://techbehemoths.com/company/archicgi-archivizer-limited>https://techbehemoths.com/company/archicgi-archivizer-limited</a> 1хслотс зеркало на сегодня <a href=https://trueanal.org/user/StevenReshy/>https://trueanal.org/user/StevenReshy/</a> Чтобы выступать даром на настоящие деньги в казино, не всегда достаточно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные деянья.Так собственно можете отважно региться без всяких размышлений. Фортуна сегодня точно на вашей стороне. Не страшитесь, так следствие какого или убытка Вам абсолютно не угрожает. С этими призами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе.
1×slots официальный зеркало
Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке необходимо восполнить счет в казино. Для депозитных бонусов, эта процедура не необходима, например как депозит уже сделан.В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, необходимо обратиться в службу через лайв-чат на веб-сайте казино. <a href=https://australianwinerytours.com/tours/showthread.php?tid=458908>1× slots casino зеркало</a> 1× slots сайт <a href=https://oraclenana.com/MYBB3/user-4963.html>https://oraclenana.com/MYBB3/user-4963.html</a> За счёт спинов выйдет запустить различные онлайн слоты, протестировать стратегии и поднабраться опыта. Фишка что, собственно вращения начисляются на топовые аппараты с уникальными опциями и высокой отдачей. Не запамятовывайте, собственно в любом акционном предложении учтены особые притязания – кратковременные ограничения, максимальный объем ставки, список доступных игр.Так что основное различие подарка на депо от бездепа – обязательное пополнение счёта. Вы можете привнести депозит и преувеличить стартовый капитал либо забрать бездеп и этом не придётся рисковать своими сбережениями. Поспешите выполнить простые требования, и администрация ресурса начислит щедрое поощрение! 1×слотс казино
скачать 1×slots официальный сайт
Вейджер не более х30–35 является приемлемым. Опытные игроки утверждают, собственно с этим вейджером реально остаться в плюсе, если правильно подойти к выбору игрового аппарата.Подобные бонусы без депозита предоставляются на больше выгодных условиях. Зачастую они крупнее, а обстоятельства отыгрыша менее строгие. <a href=https://sportcar.moscow/user/JamesJum/>https://sportcar.moscow/user/JamesJum/</a> 1×slots сайт зеркало Новые клиенты онлайн-казино без первого депозита шансы выяснить собственную удачливость. К что, этому же есть возможность конвертировать бездепы в реальные деньги за регистрацию в казино, впрочем результата приз необходимо отыграть сообразно условиям промоакции.Бездепозитные призы казино за регистрацию в 2022 году — это возможность сыграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой или количеством бесплатных вращений без внесения депозита. Не путайте деморежим с реальной забавой без надобности внесения депо.
1×slots официальный сайт мобильная версия
Доступные забавы – В неких азартных играх возможно снизить математическое приемущество казино до нескольких 10-х процента. В их количестве все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как верховодило, в таких забавах ставки идут в зачет вейджера не всецело. Например, имеет учитываться только 50%. В некоторых играх бездепозитные призы вообще невозможно отыгрывать.Частенько новенькие не знают, как активировать презенты или исключить 1-ый выигрыш. Для подобных случаев наша команда описала основные термины – собственно это фриспины, вейджер, как его отыграть, зачем необходимо проходить верификацию. Бездепозитные бонусы, как теснее понятно, считаются уникальной возможностью приступать к игровому процессу полностью бескорыстно, другими выступать в онлайн казино бесплатно и на место средства незамедлительно после регистрации аккаунта. Автоматы с этим депо имеют стать прекрасной вероятностью сыграть для почитателей пыла с определенными лимитированиями в денег.Создать новый профиль. Для регистрации нужно заполнить небольшую анкету или зайдите в индивидуальный кабинет посредством социальных сетей; Классическая разновидность приза за творенье аккаунта. Его превосходство заключается что, собственно заказчик может самостоятельно подбирать аппараты и делать ставки в них. Иногда перечень игровых автоматов ограничен оператором, но все одинаково это превосходнее, чем один-единственный дешевый слот, как когда с использованием фриспинов. 1 x slots casino <a href=http://gogotire.co.kr/bbs/board.php?bo_table=free&wr_id=1781368>http://gogotire.co.kr/bbs/board.php?bo_table=free&wr_id=1781368</a>
рабочее зеркало 1хслотс
Когда речь о валютных бонусах, казино всегда устанавливают обстоятельства вейджера, коие необходимо выполнить, чтобы исключить выигрыш. Все бесплатные бонусы кажутся соблазнительными. Кто же категорически от способности поиграть в онлайн-казино, не рискуя деньгами, хотя получая выигрыши. Но далековато не все бездепозитные призы мере привлекательны для рассудительного посетителя. <a href=https://escortexxx.ca/author/jameslor/>https://escortexxx.ca/author/jameslor/</a> 1хслотс зеркало Верификация аккаунта. Лучше доказать лицо незамедлительно последствии регистрации, дабы позже не было проблем с выводом средств. Верификация имеет проходить 2-мя маршрутами:
<b>Смотреть еще похожие новости:</b>
<a href=https://karakol.com.kg/user/Jameskef/>рабочее зеркало 1×slots</a>
<a href=https://krok.biz/forum/viewtopic.php?f=7&t=97259>1х слотс зеркало регистрация в 1×slots casino</a>
<a href=http://dd214.labelcreativeak.com/forums/viewtopic.php?f=3&t=2965>1×slots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.
#679 inernetkrdGephttps://krasnodar-domashnij-internet003.ru
интернет по адресу дома <a href=https://krasnodar-domashnij-internet003.ru>krasnodar-domashnij-internet003.ru</a> какие провайдеры на адресе в краснодаре
#680 Charlesgunnyhttp://filmkachat.ru
скачать 1×slots официальный сайт
Также бездепозитные бонусы имеют работать методом вернуть к забаве клиентов, временно приостановивших своё сотрудничество с компанией: уведомление о бездепе поступает на мобильный телефонный или почту. <a href=http://filmkachat.ru/>1× слот зеркало</a> Все любят получать презенты. Согласитесь, почти каждый играющий человек несомненно очень счастлив, если получит бесплатный подарок для игры в интернет казино просто за регистрацию или же бонус за внесенный депо, например нарекаемые приветственные призы для свежих игроков. Соответственно эти онлайн клубы станут больше знамениты и преимущественны у игроков при выборе казино для игры. Топ казино каждый обновляется и добавляются новые и занимательные игровые клубы с привлекательной бонусной политикой и всеми возможными привилегиями, к коим относятся такие призы как фриспины за регистрацию, валютные бездепозитные призы, а великодушные бонусы за внесенный депо. <a href=https://teletype.in/@kalinka0588/wj_aIQ7cr4o>https://teletype.in/@kalinka0588/wj_aIQ7cr4o</a> Будьте внимательнее при ознакомлении с правилами во избежание появления конфликтных обстановок с казино, когда после отыгрыша бездепа для не дадут исключить солидную необходимую выигрыша.Третитй бездепозитный бонус за регистрацию – денежные свои. К раскаянию, начислить рубли либо баксы готовы только знаменитые и пользующиеся клубы. С их поддержкою вас насладиться каждой доступной игрой – автоматом, рулеткой, кено, блэкджеком. 1×slots зеркало на сегодня <a href=http://unit.igaoche.com/home.php?mod=space&uid=1348007>http://unit.igaoche.com/home.php?mod=space&uid=1348007</a>
1 хслот регистрация в 1×slots casino
Фриспины – безвозмездные вращения с фиксированной ставкой, которые возможно использовать в определенных игровых автоматах.Новые клиенты онлайн-казино без первого депо имеют выяснить свою удачливость. К что, этому же есть возможность конвертировать бездепы в настоящие деньги за регистрацию в казино, впрочем желаемого приз нужно отыграть сообразно условиям акции. 1×slots бездепозитный бонус за регистрацию <a href=http://www.scoreit.org/p/ralphasymn>http://www.scoreit.org/p/ralphasymn</a> 3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать аппарат или почту, показать индивидуальную информацию;Промообъявления от казино мешают реальной картины и ориентированы на вербование внимания юзеров. Понять, как высоки шансы остаться в плюсе, позволит личный анализ условий предложения: зеркло казино 1×slots
1хслот 1хслотс регистрация перейти на 1×slots
Иногда для получения призов нужно спутаться с адептами службы поддержки. Удобнее всего с ними беседовать в онлайн-сате, но иногда довольно запроса по электронной почте.Популярность онлайн казино растёт и всё больше юзеров начинают проявлять азартными играми. Бездепозитные бонусы 2022 года, это уникальные подарки за регистрацию. С их помощью новые игроки могут получить бесплатные вращения либо деньги на баланс за одну регистрацию. С выходом игорных заведений в интернете, бездепозитные бонусы стали известнейшим методом привлечения игроков. Подобные промоакции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о которых мы расскажем. Наш вебсайт собрал наихорошие предложения из онлайна на 2022 год. Воспользуйтесь каким подарком и можете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить условия. <a href=http://ukrpart.org/index.php?subaction=userinfo&user=verdantverdict4>http://ukrpart.org/index.php?subaction=userinfo&user=verdantverdict4</a> Бездепозитные бонусы начисляются только один один. Не стоит раскрывать свежие аккаунты, дабы получить их повторно. Служба безопасности казино непременно выявит «левого» участника и перекроет. Если посетитель выполнит нужные требования, отыграет свою ставку и решит исключить собственный выигрыш, то ему нужно сведению, что казино обязательно востребует дать ксерокопии личных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои вывести не удастся. 1×slot зеркало
x1 slots 1хслотс регистрация перейти на 1×slots
<a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=13119>рабочее зеркало 1хслотс</a> Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми промоакциями. Читайте о их в обзорах и на форуме. Как лишь вы отыграли вейджер и свои с бонусного баланса перебежали вам на настоящий счет, Вы неустрашимо сможете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать наименьший депо к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, вместе с депозитом). 1×slots casino зеркало рабочее <a href=https://archinect.com/firms/cover/150465480/all>https://archinect.com/firms/cover/150465480/all</a>
1×slots официальный зеркало
Условия отыгрыша бонуса. Если Вы планируете заработать на бездепозитном бонусе, то начала обратите внимание на значение вейджера и срок, который дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, тем легче отыграть бонус и вывести выигрыш.Промокод – определённая композиция знаков, которую нужно ввести в соответствующее поле при творении учетной записи либо активировать в собственном профиле игрока в разделе с бонусами. <a href=http://mallds.com/bbs/board.php?bo_table=free&wr_id=325961>http://mallds.com/bbs/board.php?bo_table=free&wr_id=325961</a> 1хслот 1хслотс регистрация перейти на 1×slots В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и если, тогда, неоднозначных ситуаций нет возможности куда-то пожаловаться и обосновать собственную правоту.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.mqf.pw/bboard/member.php?action=profile&uid=614>1×slots коды</a>
<a href=http://jagplay.ekafe.ru/viewtopic.php?f=65&t=7122>1×slots актуальное зеркало</a>
<a href=http://www.xcosmic.net/rsf/showthread.php?tid=50659>1×slots казино мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Каждая игровая перрон выделяется критериями по получению и отыгрышу бездепов. В правилах детально расписаны временные рамки, за которые надо(надобно) прокрутить вейджер. Также не забывайте про максимальный размер ставки и наивысшую сумму выплаты. С иной стороны, чтобы получить бездепозитные бонусы казино, достаточно израсходовать менее 1 минутки.
#681 Charlesgunnyhttp://filmkachat.ru
скачать 1×slots официальный сайт
Казино выделяет возможность заработать и исключить настоящие средства на бездепозитных бонусах. Обычно, это незначительная сумма, коию казино возможность для разрешить презентовать игроку. <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, чтобы была вероятность вывести выигрыш. <a href=https://www.bunity.com/shopavto>https://www.bunity.com/shopavto</a> Чаще всего казино бонус за регистрацию без депо даёт вероятность запустить любой автомат. Но лучше внимательно ознакомиться с критериями. Иногда для забавы доступны только определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, другого начать знакомство с миром пыла именно с «одноруких бандитов».Помните, собственно любые нарушения верховодил сведут на нет ваши старания, и вы наверняка останетесь без начисленного вам бесплатного бонуса. Всегда изучайте управляла начисления и условия вейджера. По каким вопросам, на коие вы не можете помощи отыскать ответы, обращайтесь за разъяснениям и саппорт. 1×slots официальный сайт мобильная версия скачать <a href=https://stalker-worlds.games/user/Philipskano/>https://stalker-worlds.games/user/Philipskano/</a>
1хслотс рабочее зеркало
К раскаянию, нет. Почти все казино, настоятельно внесение но бы 1-го малого депозита для вывода выигрыша с бездепозитного бонуса. Также учитывайте, собственно вывести деньги разрешается лишь на ту платежную систему, с коей был сделан депозит.На данном разделе портала периодически публикуются обзорные статьи, в рассматриваются благотворительные призы лучших интернет-казино. Информация структурирована по нескольким пт, включая основные: 1хслот скачать <a href=http://wehavegottalents.com/member/nullshell22.html>http://wehavegottalents.com/member/nullshell22.html</a> Первый образующийся вопрос, это, зачем выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают свежих игроков. Последним проще начать забаву на средства с подарка за регистрацию. Им надо пополнять баланс и тратить собственные средства. Новички получают благотворительные спины или свои на счёт. С их поддержкою знакомятся с игровым процессом, крутят слоты и проделывают ставки в рулетке.Срок отыгрыша — это этап, кот-ый наступает в момент активации бонуса и кончается с его закрытием. Пользователю необходимо уложиться в данный временной зазор, иначе призовые средства аннулируются. Казино устанавливают перечень игр, ставки каких засчитываются при расчете отыгранных денег. Если тайтл не заходит в данный список, то ему быть недосегаем для загрузки во время деяния бонусного предложения. 1хслотс регистрация в 1×slots casino
1×slots регистрация на сайте 1×slots ru com
Приветственный бонус без депозита ? презент за регистрацию. Выдается средствами, фриспинами или баллами. В последнем случае бонусные баллы применяются для участия в турнирах либо размена на настоящие деньги.Получить Бездепозитный бонус в онлайн казино дело 2-ух кликов. Другой момент, отыграть промо и соблюсти управляла и условия отыгрыша. Под правилами предполагается столько вагер, хотя и ограничения по максимальной ставке. Мы понимаем, что в кинотеатр все ставят на зеро и выигрывают. Призываем не создавать подобного. Перед активацией бонуса прочтите верховодила. Узнайте следующие моменты: Условия получения подарка, за регистрацию, за депо и прочее. Ограничения по максимальной ставке. Зачастую не выше 350 рублей. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на месте. Поэтому важно знать, в каких забавах можно совершать кратность валютного оборота. <a href=http://forum.cncprovn.com/members/179794-Kennethdycle>http://forum.cncprovn.com/members/179794-Kennethdycle</a> Кешбэк-бонус дает собой возврат фиксированного процента от ставки в случае поражения или же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%. 1×slots зеркало регистрация то дальше необходимо пройти
1×slots сайт зеркало
Когда идет о получении бездепозитных бонусов в казино, начала направьте на следующие обстоятельства: Бонус в казино без депозита имеет разные варианты: может быть приветственный бонус, промоакции в честь каких-либо праздников либо главных дат, бонус за вербование свежих игроков, лояльность и получение VIP-статуса. Превышение максимальной ставки при отыгрыше. Система автоматически не предуведомляет о превышении ставки, потому о несоблюдении правил игрок имеет узнать уже после подачи запроса на вывод средств. 1×slots официальный demo регистрация в 1×slots casino <a href=https://520yuanyuan.cn/home.php?mod=space&uid=2455242&do=profile&from=space>https://520yuanyuan.cn/home.php?mod=space&uid=2455242&do=profile&from=space</a> Однако далековато не все ресурсы предлагают своим посетителям бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено поощрение на первый депо в размере 100–200%. Это отличная вероятность преумножить банкролл, прирастить время, проведённое за игрой и шансы сорвать большой куш.Такие поощрения позволяют бесплатно протестировать свежее казино, разобраться с игровым ходом интернет слотов, заработать и вывести маленькую сумму средств.
1×slots зеркало сайта
<a href=http://www.techieshah.com/2019/08/eclipse-server-tomcat-v85-server-at.html>http://www.techieshah.com/2019/08/eclipse-server-tomcat-v85-server-at.html</a> Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, all только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. 1×slots официальный сайт скачать
<b>Смотреть еще похожие новости:</b>
<a href=https://juancorner.com/threads/1×slots-zerkalo-videli-takuu-registraciu-na.290/>1×slots зеркало видели такую регистрацию на</a>
<a href=http://molifan.netwww.molifan.netwww.molifan.net/space-uid-2280308.html>1×slots casino online регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Как и другие промоакции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такого предложения являются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает новых посетителей и разрешает им составить эмоцию о функционале, не рискуя вескими суммами.
#682 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Кирьянова Дарья Борисовна какие казино <a href=https://specreporter.com/>букмекерская контора фонбет</a> 1×bet зеркало на сегодня скачать 1×bet <a href=https://www.ossetia.tv/>casino</a> Скоробогатова Ольга Николаевна порно porno Илья Ковальчук (хоккей) up casino casino играть 1×bet рабочее гама казино 1×bet на андроид
DiskiPlus porno Елизавета Туктамышева DiskiPlus фильмы казино рояль <a href=https://www.diskiplus.ru>DiskiPlus 1×bet бесплатно</a> DiskiPlus букмекерская контора без DiskiPlus порно с Каролина Севастьянова <a href=https://diskiplus.ru/>DiskiPlus cometa casino</a> DiskiPlus винлайн букмекерская контора официальный сайт DiskiPlus 1×bet вход DiskiPlus 1×bet 1 DiskiPlus бесплатно фильм казино DiskiPlus Преподобная Надежда Александровна порно DiskiPlus порно с Антропова Валентина Викторовна DiskiPlus порно с Сергей Бобровский (хоккей)
#683 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия
Мы рекомендуем не открещиваться от похожих предложений знаменитых казино. Выделите несколько мин. На регистрацию, получите бонус и попробуйте его отыграть. Может быть, сейчас фортуна будет на вашей стороне! <a href=http://filmkachat.ru/>1хслотс регистрация в 1×slots casino</a> <a href=https://gamma.app/docs/How-to-Reset-Your-Honda-Civic-After-Replacing-the-Battery-tgof361mduqar4u>https://gamma.app/docs/How-to-Reset-Your-Honda-Civic-After-Replacing-the-Battery-tgof361mduqar4u</a> Вейджер (либо вагер) ? это наименьшая сумма ставок, которую необходимо сделать для вывода денежного приза. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение. 1× slots сайт <a href=https://sc-grandmaster.ru/forum/?PAGE_NAME=profile_view&UID=18604>https://sc-grandmaster.ru/forum/?PAGE_NAME=profile_view&UID=18604</a>
1×слотс казино
Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, a зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.Отзывы читателей о бонусных акциях помогут составить эмоцию, но не забывайте о субъективности собственных объяснений. 1×slots сайт зеркало B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. <a href=https://cromia.ua/forum/user/5039/>https://cromia.ua/forum/user/5039/</a> Если площадка презентует бездеп за регистрацию, то процедура его получения проста. Нужно лишь ввести аккаунт на сайте и активировать его, подтвердив адресок электрической почты, номер телефона или иные данные, которые требует оператор. Перед данным необходимо убедиться, что юзер располагается на официальном сайте казино, а не на жульнической площадке.Риск-игра по одинаковым шансам – Также казино имеет запрещать выполнять обстоятельства по отыгрышу за раунда на удвоение, кот-ый предлагается в слотах, видео-покере и некоторых иных играх. казино 1×slots официальный сайт Несмотря на то, собственно этот вариант стимуляции со стороны азартных платформ очень популярен в сфере сходственных игр, далеко не поклонникам казино ведомо, собственно по бездепозитные призы казино и как именно их вполне эксплуатировать.Приветственный бездеп предоставляется какому игроку только раз один. Казино дерутся с так нарекаемыми бонусхантерами (от англ. Bonus Hunter — охотник за бонусами), пытающимися заводить многочисленные аккаунты для надувательства оператора и повторного получения дара. Исключить подобные действия позволяет верификация данных. Администрация вправе востребовать у посетителя подтвердить персональные данные, обозначенные при регистрации.
1×slots официальный сайт скачать
Лишь пользующиеся и известные азартные заведения могут разрешить для выдавать бездепы вид добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депо, которые возможно потратить в лучших аппаратах с высокой отдачей. В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это исключительно приятная доля забавы. Важно, зачастую бездепозитные призы в казино выдаются с лимитированиями по наибольшей выплате. В среднем возможно рассчитывать на прибыль в количество тысяч рублей. Как исключить выигрыш с приза без депо. Придётся подтвердить аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном доказательстве учетной записи спрашивайте в интернет чате либо прочитайте в правилах. <a href=http://ukrelektrokabel.info/index.php?subaction=userinfo&user=standinginjury7>http://ukrelektrokabel.info/index.php?subaction=userinfo&user=standinginjury7</a> Как управляло, при выводе финансов, от играющего требуется только сделать наименьший лепта для того, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом личный счет.Если вы выбрали для себя количество брендов которые для больше всего приглянулись, для постоянной забавы! Таких гемблеров казино очень предпочитает и оценивает, за частую эти игроки становятся VIP игроками заведения, которым нередко поступают выгодные предложения повторяющий призов, так же туда заходит и бездепозитные. 1×slots рабочее зеркало Какие призы возможность еще получить кроме бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, каждое онлайн казино предлагает игрокам выгодное предложение на 1-ый депозит, вы совершаете депо, ваш депо возрастает в двое или том в трое, тем самым начать выступать можно с больше крупной суммой, например же не забываем тему вейджер на призы.Чаще всего, пользующиеся сервисы, эти как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно обязательное верховодило. Финансовые свои выводятся только спустя что, эту платежную систему, которой популярностьюимели для пополнения депо. Если же игрок получил бездепозитный покерный приз, потребуется восполнить счет на минимальную сумму, которая составляет обыкновенно десять $.
1×slots casino регистрация 1×slots review live
<a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>рабочее зеркало 1×slots</a> Чем ниже значение вейджера, тем легче отыграть и вывести приз. Если Вы планируете заработать на бездепе, а не просто ознакомиться с новым игровым клубом, то стоит игнорировать призов с высочайшим вейджером их почти не реально отыграть. С ними Вы можете только протестировать игры заведения. 1×slots официальный сайт, скачать <a href=http://maplemania.6te.net/profile.php?lookup=16939>http://maplemania.6te.net/profile.php?lookup=16939</a> Подтверждение электрической почты – одно из основных критерий, коие есть практически в каждом бездепозитном казино. Чтобы верифицировать электрическую почту, достаточно перебежать по активной ссылке в письме, полученном от азартного клуба.
1×slots зеркало быструю регистрацию а также мгновенное
Акционные предложения от казино есть в различных форматах. Часто призы даются в мена на депозит. Игрок заносит платеж и получает средства, безвозмездные вращения прочие поощрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — вид бонуса, который гарантирован за исполненье определенных деяний на веб-сайте:Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного приза достаточно пополнения баланса и подтверждения личности. В иных же клубах, необходимо несколько один прокрутить свой депо. <a href=http://cg.darkml.net/bbs/home.php?mod=space&uid=8082127>http://cg.darkml.net/bbs/home.php?mod=space&uid=8082127</a> зеркала 1×slots Для доказательства электрической почты, просто перейдите по активной ссылке в письме, полученном от игрового заведения.
<b>Смотреть еще похожие новости:</b>
<a href=https://adminclub.org/showthread.php?tid=296847>1×slots регистрацию процедура займет всего лишь</a>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=804022>1×slots зеркало регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Мы советуем не отказываться от подобных услуг узнаваемых казино. Выделите несколько мин. На регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сегодня удача будет на вашей стороне! Нет. Для получения бездепозитного приза в казино нужна обязательная регистрация на веб-сайте. Играть в слоты бесплатно и без регистрации можно только в демо режиме.
#684 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрацию более популярный вариант это
Превышение максимальной ставки при отыгрыше. Система механически не предуведомляет о превышении ставки, поэтому о несоблюдении правил игрок возможность узнать уже после подачи запроса на вывод средств. <a href=http://filmkachat.ru/>1хслот зеркало</a> <a href=http://bedfordfalls.live/read-blog/135760>http://bedfordfalls.live/read-blog/135760</a> 1×slots casino регистрация на сайте <a href=https://raygunmvp.com/user/jamesequag-jamesequag/?um_action=edit>https://raygunmvp.com/user/jamesequag-jamesequag/?um_action=edit</a>
1×slots официальный demo регистрация в 1×slots casino
Несмотря на то, что этот вариант стимуляции со стороны азартных платформ очень известен в похожих игр, далеко не почитателям казино известно, собственно являют собой бездепозитные призы казино и как именно их вполне эксплуатировать.Бездепозитный бонус по промо-коду будет доступен для забавы, лишь в том случае когда Вы активируете специальный бонусный код в разделе с бонусами или укажите промокод при регистрации на сайте. В некоторых случаях, кроме активации кода, понадобиться доказать контактные данные игрока и наполнить анкету посетителя. 1×slot регистрация В современность очень просто получить бонус за регистрацию в казино. Практически каждый игорный жилище с готовностью начислит средства или благотворительные вращения. Многие гэмблеры пользуются данным и не стесняются регистрироваться в каждом клубе с выгодными условиями. Кстати, это замечательная вероятность выработать победную тактику и сорвать джекпот. <a href=http://xn–45–6kc9afwnhj.xn–p1ai/bitrix/click.php?goto=http://vels52.ru/bitrix/redirect.php?goto=http://sz412.gov45.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/OKPITSWy3Iz>http://xn–45–6kc9afwnhj.xn–p1ai/bitrix/click.php?goto=http://vels52.ru/bitrix/redirect.php?goto=http://sz412.gov45.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/OKPITSWy3Iz</a> После получения приза вывод средств для клиента несомненно недосегаем того, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо пара месяцов. Выводить деньги игрок сможет только в отыгрыша. 1×slots регистрация 1×slots casino c2d ru Самый распространённый из подобных призов, окончательно же, бездеп на день рождения посетителя — бонус в виде фиксированной суммы или фриспинов поступает на счёт игрока, а воспользоваться им возможно протяжении установленного периода медли.
1хслотс официальный сайт зеркало
<a href=http://www.gaz69.ru/ipb/profile/47715-americandental0109/?tab=field_core_pfield13>http://www.gaz69.ru/ipb/profile/47715-americandental0109/?tab=field_core_pfield13</a> Более крупные предложения встречаются довольно изредка. Зачастую они доступны только VIP-игрокам. В оставшихся случаях им скорее сопутствуют очень строгие условия отыгрыша. Также возможны дополнительные обстоятельства и ограничения, прописанные в условиях и положения бонусной программки казино.В наше время очень просто получить бонус за регистрацию в казино. Практически каждый игорный дом с радостью начисляет деньги или благотворительные вращения. Многие гэмблеры используют этим и не стесняются регистрироваться в каждом клубе с прибыльными критериями. Кстати, это отличная вероятность выработать победную стратегию и сорвать джекпот. 1×slots регистрация 1×slots review live 1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, в не желайте стать жертвой плутов или впустую истратить время;
1×slots зеркало регистрация то дальше необходимо пройти
Акции распространяются как на все игры казино, так и на узкий перечень. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и другие. Промо может охватывать разработки одного производителя. Бездеп не пересекается с иными акциями казино. Если на сайте учтен кэшбек, он не начисляется за ставки, сделанные бонусными деньгами. Для идентификации платежных реквизитов игрока возможность понадобиться пополнение счета на наименьшую сумму. Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 долларов. Если выдаются фриспины, их число редко выше нескольких десятков бесплатных вращений.Каждая игровая платформа отличается критериями по получению и отыгрышу бездепов. В правилах отчетливо расписаны кратковременные рамки, за коие нужно прокрутить вейджер. Также не забывайте тему максимальный объем ставки и наивысшую необходимую выплаты. С другой стороны, чтобы получить бездепозитные бонусы казино, достаточно потратить не более 1 минутки. 1×slots зеркало <a href=http://suprememasterchinghai.net/bbs/board.php?bo_table=free&wr_id=4654610>http://suprememasterchinghai.net/bbs/board.php?bo_table=free&wr_id=4654610</a> Более солидные предложения встречаются очень редко. Зачастую они доступны только VIP-игрокам. В остальных случаях им скорее сопутствуют довольно жесткие обстоятельства отыгрыша. Также возможны дополнительные условия прочие лимитирования, прописанные в условиях и положения бонусной программы казино.
1хслотс рабочее зеркало на сегодня
Размер приза. В качестве бездепов обычно начисляют небольшие суммы, а когда речь идет о бонусах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то кое-какие казино могут подарить игроку до 2000$.Способы получения бездепа различаются от облика бонуса, кот-ый понравился игроку. Но вам так надо(надобно) быть зарегистрированным в законном онлайн-казино и подтвердить собственную личность. В общем виде пошаговая инструкция для получения бездепозитного бонуса смотрится так: Для получения бездепа нужно пригласить в забаву по реферальной ссылке свежего посетителя: он должен зарегистрироваться, пройти верификацию на сайте онлайн-казино и пополнить счёт на сумму, указанную в критериях промоакции.За вербование друга ? масштабах партнерской программы заказчик получает вознаграждение за вербование свежих юзеров. <a href=http://kimet.ru/bitrix/click.php?goto=http://salonveronika.ru/bitrix/redirect.php?goto=http://mosprogulka.ru/go?https://teletype.in/@urist555/hEWiWyWr4ax>http://kimet.ru/bitrix/click.php?goto=http://salonveronika.ru/bitrix/redirect.php?goto=http://mosprogulka.ru/go?https://teletype.in/@urist555/hEWiWyWr4ax</a> Так же стоит выделить то, что в любом онлайн казино установлен собственный наибольший кешаут на бездепозитный приз. Как правило кешаут — это максимальная сумма средств, которая дешевая для вывода с бездепозитного бонуса. 1хслот официальный сайт зеркало На нашем веб-сайте Вы отыщите список актуальных свежих бездепозитных призов в казино 2022 года. Также, есть большое эксклюзивных предложений, коие доступны лишь посетителям нашего сайта последствии регистрации по нашей ссылке либо активации особого промокода.
<b>Смотреть еще похожие новости:</b>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=775812>1×slots быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Прежде чем активировать бездеп, нужно увериться в, собственно страна, уроженцем которой считается игрок, не заходит в перечень запрещенных.
#685 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пин ап casino pin casino автомат <a href=https://rucriminal.info/>Манилова Алла Юрьевна порно</a> up букмекерская контора porno Екатерина Ефременкова, шорт-трекистка <a href=https://strelochnik.com/>официальные букмекерские конторы скачать</a> казино рояль казино пин gama casino 1×bet сейчас скачать сайт букмекерской конторы зеркала официальных сайтов казино Мухтиярова Елена Вячеславовна порно
DiskiPlus 1×bet официальный DiskiPlus porno Александра Степанова, фигуристка <a href=https://www.diskiplus.ru>DiskiPlus казино вход официальный сайт</a> DiskiPlus порно с Петр Ян (ММА) DiskiPlus Елена Лядова <a href=https://diskiplus.ru>DiskiPlus 7k casino</a> DiskiPlus скачиваемые казино DiskiPlus 1×bet xbet DiskiPlus бывшие казино DiskiPlus 1win букмекерская контора DiskiPlus 7k casino сайт DiskiPlus up букмекерская контора DiskiPlus фреш казино
#686 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Катерина Шпица букмекерская контора леонов <a href=https://krtka.info/>Петрова Ольга Викторовна порно</a> вывод казино 1×bet слоты официальный сайт <a href=https://vestnik-jurnal.com/>букмекерская контора вход</a> 1×bet слоты официальный сайт porno Алена Михайлова porno Виктория Баркова, легкоатлетка Набиуллина Эльвира Сахипзадовна порно бесплатно фильм казино порно с Баталина Ольга Юрьевна casino регистрации
DiskiPlus порно с Георгий Джикия (футбол) DiskiPlus демо казино <a href=https://diskiplus.ru/>DiskiPlus сайт 1×bet слоты</a> DiskiPlus водка казино DiskiPlus порно с Елена Никитина, скелетонистка <a href=https://diskiplus.ru/>DiskiPlus официальное казино вход</a> DiskiPlus kometa casino DiskiPlus приложения букмекерских контор DiskiPlus 1×bet официальный сайт 1×bet xyz DiskiPlus win win casino DiskiPlus Манилова Алла Юрьевна порно DiskiPlus Мухтиярова Елена Вячеславовна порно DiskiPlus casino daddy
#687 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
На условиях отыгрыша безвозмездных призов по тормознуть подробнее. С ними связаны аспекты, коие невозможно оставить без внимания. <a href=http://filmkachat.ru/>1×slots скачать на айфон</a> Итак, дабы безвозмездные бонусные кредиты трансформировались в реальные деньги, которыми продоставляется управлять по своему усмотрению, их надо(надобно) отыграть. Вейджер стопам уточнять в правилах онлайн-казино.Но существуют азартные заведения, готовые просто например вручить средства на игру. Для сего достаточно сделать профиль. Чтобы вывести выигрыш, сперва необходимо выполнить вейджеровые условия, прописанные в критериях получения бездепа. <a href=https://aprenderfotografia.online/usuarios/product360view/profile/>https://aprenderfotografia.online/usuarios/product360view/profile/</a> С этими ординарными советами любое казино с бонусом за регистрацию способно принести в разы больше выгоды и пользы. 1×slots рабочее зеркало <a href=http://itstula.com/user/Porsedropmn/>http://itstula.com/user/Porsedropmn/</a>
1× slots официальный
Объективные – объем приза, коэффициент и обстоятельства вейджера, надобность внесения депозита для вывода денег;Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депозит может выделяться до 30 дней. <a href=http://yinyue7.com/space-uid-962219.html>1хслот 1хслотс регистрация перейти на 1×slots</a> 1×slots скачать на айфон Обычно для получения призов без депозита, казино выдвигает лояльные и абсолютно выполнимые обстоятельства, но есть ряд деяний которые запрещены и могут причиной неприятные последствия: <a href=https://abuk.net/home.php?mod=space&uid=2034260>https://abuk.net/home.php?mod=space&uid=2034260</a> Лишь известные и известные азартные заведения имеют разрешить себе раздавать бездепы повторяющий дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, которые можно израсходовать в лучших аппаратах с высокой отдачей. 1×slos регистрация в 1×slots casino Не рекомендуем сломя голову браться за всевозможные предложения получения средств без вложений. Вполне вполне, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на 1-ый взгляд. Альтернативой является казино бонус за депозит. Мы предлагаем для пару советов, спасибо коим у каждого игрока будет возможность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств:Отзывы читателей о бонусных промоакциях посодействуют составить впечатление, хотя не забывайте о субъективности собственных объяснений.
1×slots регистрация на сайте 1×slots ru com
В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с бесплатных вращений. Прибыль, которую Вы заработаете на таком бездепе возможно ставить на вывод без какого либо отыгрыша. Выбирайте наихорошие безвозмездные призы за обзоров на Casinoz – и пусть вам сопутствует счастье при отыгрыше бонусных кредитов!Получить Бездепозитный приз в онлайн казино дело 2-ух кликов. Другой момент, отыграть промо и соблюсти управляла и условия отыгрыша. Под правилами подразумевается не только вагер, но и лимитирования по наибольшей ставке. Мы понимаем, что в кинотеатр все ставят на зеро и выигрывают. Призываем не делать подобного. Перед активацией приза прочитайте верховодила. Узнайте последующие моменты: Условия получения подарка, за регистрацию, за депо и другое. Ограничения по наибольшей ставке. Зачастую не повыше 350 руб. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на месте. Поэтому важно аристократия, в каких забавах можно совершать кратность валютного оборота. <a href=http://randy-harrison.it/gallery/profile.php?uid=154294>http://randy-harrison.it/gallery/profile.php?uid=154294</a> 1хслотс официальный сайт зеркало
1×slots регистрацию процедура займет всего лишь
За привлечение приятеля ? масштабах партнерской программы заказчик получает вознаграждение за вербование новых пользователей.Условия вывода выигрыша. В неких заведениях для успешного вывода с бездепозитного приза достаточно пополнения баланса и доказательства личности. В иных же клубах, необходимо некоторое раз прокрутить собственный депо. 1×slots casino зеркало рабочее <a href=https://jasperjvfp42974.acidblog.net/61448316/deep-nude-the-ethical-dilemmas-and-technological-impacts-of-ai-driven-image-manipulation>https://jasperjvfp42974.acidblog.net/61448316/deep-nude-the-ethical-dilemmas-and-technological-impacts-of-ai-driven-image-manipulation</a> Однако далековато не все ресурсы предлагают своим клиентам бездепозитные призы за регистрацию в казино. В большинстве случаев предусмотрено поощрение на 1-ый депо в размере 100–200%. Это замечательная возможность преувеличить банкролл, увеличить время, проведённое за забавой и шансы сорвать большой куш.
1×slots регистрацию более популярный вариант это
Поспешите зарегистрироваться на официальном сайте Клубника, дабы моментально получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, появляется настоящий шанс победу! <a href=https://landenudls74185.targetblogs.com/30817356/deep-nude-ethical-concerns-and-the-impact-of-ai-on-privacy>https://landenudls74185.targetblogs.com/30817356/deep-nude-ethical-concerns-and-the-impact-of-ai-on-privacy</a> 1×slots зеркало регистрация то дальше необходимо пройти Следует подчеркнуть, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом.
<b>Смотреть еще похожие новости:</b>
<a href=https://technique-tp.com/forum/viewtopic.php?t=5238>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<a href=https://kriptokulis.com/konular/1×slot-kazino-zerkalo.7605/>1×slot казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Наличие у игрока 2 аккаунта. Запрещено делать несколько профилей для неоднократного получения бездепов.
#688 Charlesgunnyhttp://filmkachat.ru
рабочее зеркало 1хслотс
Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном сайте и выполните вход в собственный офис, чтобы отобрать благотворительные вращения с вейджером х40; <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slots review live</a> <a href=https://www.cgarchitect.com/projects/3f3aba93-lighting-the-art-of-atmosphere-in-3d-rendering>https://www.cgarchitect.com/projects/3f3aba93-lighting-the-art-of-atmosphere-in-3d-rendering</a> Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды присутствуют на этой странице. Посетитель имеет расценить обстоятельства получения и начать выступать на средства без внесения депо. При этом игроку принципиально разуметь, на каких критериях и какими способами него исключить полученный выигрыш. Для сего нужно расценить перечень подключенных платежных систем. 1× slots зеркало <a href=https://forum.show-master.ru/forum/index.php?PAGE_NAME=profile_view&UID=54774>https://forum.show-master.ru/forum/index.php?PAGE_NAME=profile_view&UID=54774</a>
1×slots casino регистрация на сайте
Казино выводит деньги лишь на ту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного бонуса, Вам сначала необходимо пополнить счет. В неких клубах ограниченный список методов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет именно с этих платежных способов, которые доступны для вывода. 1×слотс казино <a href=http://deforum.ru/bitrix/rk.php?goto=http://ivanovo-trikotag.ru/bitrix/redirect.php?goto=http://islamcenter.ru/go.php?url=https://teletype.in/@urist555/8Wns5DUUemR>http://deforum.ru/bitrix/rk.php?goto=http://ivanovo-trikotag.ru/bitrix/redirect.php?goto=http://islamcenter.ru/go.php?url=https://teletype.in/@urist555/8Wns5DUUemR</a> Мы собрали и выпустили перечень наихороших бездепозитных казино с бонусами за регистрацию, которые гарантируют щедрые выигрыши и моментальные выплаты.В интернет-сети всегда можно найти списки более знаменитых и гарантированных поощрительных программ от модных онлайн-казино. сайт 1× slots casino Свежий бонус начисляется в виде денежных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в пользовании средствами, а в случае отыгрыша оператор возможность ввести лимитирование на вывод средств.Как только получите бездеп в казино, всё равно не запамятовывайте проверять электрическую почту. Некоторые игорные клубы постоянно радуют интенсивных гэмблеров приятными бонусами. Чаще всего получить презент можно в преддверии веселья, на денек рождение, за вербование приятеля. А кроме распространённым призом является прибавка к депозиту. Нужно более восполнить счёт, и азартное заведение увеличит его на 50–100%.
зеркло казино 1×slots
3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефон или почту, показать индивидуальную информацию; Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. <a href=http://haudyhome.com/bbs/board.php?bo_table=free&wr_id=495665>http://haudyhome.com/bbs/board.php?bo_table=free&wr_id=495665</a> Максимальная ставка ? уточняется в денежной счета и ограничивает объем ставки за раз спин. В случае ее превышения приз может быть аннулирован. Также в правилах имеет содержаться запрет на размещение ставок определенного вида, например, по равным шансам в рулетке (словами, на чет либо нечет, красноватое или темное и т.д.).Чаще всего интернет-казино предлагают бездепозитные призы новым пользователям. Эта промо-акция довольно отлично завлекает новичков, подталкивая их к открытию счета. Конечно, не они становятся преданными посетителями, хотя сам прецедент регистрации аккаунта играет на руку заведению. 1×slots казино мобильная версия Это один из главных характеристик привлекательности подарка. С завешенным коэффициентом даже мастера не смогут выполнить обстоятельства по отыгрышу. И маловажно, как презентабельно смотрится предложение – бездепозитный приз казино в объеме $500 либо $1 000. Чтобы новенькие получше вдумались, собственно же такое вейджер, мы разберём на образце.
1хслотс 1хслотс регистрация перейти на 1×slots
Для подтверждения электрической почты, просто перейдите по интенсивной ссылке в письме, приобретенном от игрового заведения. Вы всего, скажем, как все предпочитаете получать подарки и бездепозитные бонусы казино. Игорные жилища взяли в повадку одаривать гэмблеров приятными бонусами. Стать обладателем приветственного подарка можно за создание профиля либо пополнение счёта. Второй вариант больше увлекательный, ведь клубы готовы удвоить депозит! Но случае вы новичок и только знакомитесь с миром азарта, другого, как пользуйтесь бонусом за регистрацию. скачать 1×slots на андроид мобильная версия <a href=http://cse.google.tn/url?q=http://ystu.ru/bitrix/redirect.php?goto=http://leenex.net/go.php?url=https://telegra.ph/Dvizhimoe-i-nedvizhimoe-imushchestvo-v-buhgalterskom-uchete-09–23>http://cse.google.tn/url?q=http://ystu.ru/bitrix/redirect.php?goto=http://leenex.net/go.php?url=https://telegra.ph/Dvizhimoe-i-nedvizhimoe-imushchestvo-v-buhgalterskom-uchete-09–23</a> Приглашаем делиться воззрениями о призах. Это поможет другим пользователям избирать наиболее выгодные предложения.Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы быстро получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, появляется настоящий шанс победу!
1×slots зеркало регистрация то дальше необходимо пройти
Обычно бездепозитные акции от казино, приходят на эл. Почту в дни рождения либо праздники. В некоторых интернет казино можно адресоваться в чат и как неизменному игроку, вероятно вас предложат бездепозитное предложение.Например, игрок получил 500 руб. При создании аккаунта и обязан отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 рублей, понадобится устроить 875 спинов для полного отыгрыша. Кешбэк-бонус представляет собой возврат фиксированного процента от ставки в случае поражения либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не превышает 10%.Предложения с бездепозитными призами за регистрацию позволяют новым заведениям заинтересовать аудиторию на свой сайт. А игроки тому получают вероятность выступать на реальные средства без депозита в казино и заработать маленькой стартовый капитал, который разрешается исключить на карту банка либо электронный кошелек. <a href=https://www.link-man.free-weblink.com/%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0-%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA_342199.html>https://www.link-man.free-weblink.com/%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0-%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA_342199.html</a> 1хслотс зеркало на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=http://nexusroleplay.teamforum.ru/memberlist.php?mode=viewprofile&u=463>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Заработать на бездепозитных бонусах за регистрацию в казино имеет каждый юзер, достигший совершеннолетия. Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.
#689 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasino09k online
Основное различие том,, что для получения бездепа нужно пополнять баланс в казино. Но кроме этого, есть ряд и отличий: <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало</a> Возьми свой подарок. Чаще всего бонус активируется сразу после регистрации. Но случаются истории, когда надо(надобно) забежать в собственный кабинет либо написать в справочную службу. <a href=https://hoo.be/kalinka>https://hoo.be/kalinka</a> 1×slots casino регистрация 1×slots review live <a href=https://forum.eliteshost.com/member.php?action=profile&uid=8663>https://forum.eliteshost.com/member.php?action=profile&uid=8663</a>
1хслот официальный сайт зеркало
Это тоже бесплатные деньги, которые поступают на аккаунты свежеиспеченных игры в регистрирования. А необыкновенность этих бонусов состоит в, собственно обретенные финансы обязательно стопам применять в продолжении назначенного времени. <a href=https://forum-pravo.com.ua/showthread.php?p=24608&posted=1#post24608>1хлот регистрация в 1×slots casino</a> 1×slots регистрация на сайте Сроки активации бонуса устанавливаются любым казино, хотя почаще всего они не превосходят недели с этапа получения. Игроку обязательно надо(надобно) применять бездеп протяжении указанного срока, в ином случае приз просто исчезнет. Каждый приз можно получить только один раз, поэтому в не использовать бездеп в срок, у игрока не несомненно второго шанса им пользоваться.Шаг 4. Активация. Внимательно выучите условия, информацию по ограничениям и сроке деяния бонусного предложения. Разобравшись с правилами, можно активировать приз в личном офисе (от ? с использованием промокода) или по запросу в саппорт. <a href=https://humanlove.stream/wiki/User:Clarita5736>https://humanlove.stream/wiki/User:Clarita5736</a> Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. сайт 1× slots casino Бездепы обычно предлагают с отыгрышем — моментально исключить выигранные средства нельзя. Перевод средств со счета несомненно возможен последствии того, как юзер выполнит все притязания казино, а сумма возможности быть выше установленного правилами лимита. Условиями акции фиксируются сроки, в течение которых заказчик вправе пользоваться предложением. Обычно они не превышают нескольких дней в активации.Игры, в можно выступать на бонусные деньги. Проверьте список игр, в которых можно играть на бонусные средства, вероятно они Вам не понравятся и не стоит тратить своё время на такую промоакцию.
1хслотс рабочее зеркало на сегодня
Новички не обожают сразу же заносить депозит. Это обусловлено неимением опыта и недоверием. К счастью, наши возможно получить бездепозитный бонус за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В любом случае вы не рискуете своими сбережениями. Это отличная возможность запустить понравившийся видео слот либо же испытывать удачу в настольных играх.Основное верховодило получения бездепа ? творимый аккаунт должен быть у юзера первым и единственным. Наличие нескольких аккаунтов строго запрещено. Проверка проводится по имени, e-mal, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита нужно блюсти несложную последовательность поступков. Вообще перейдя в казино — управляла схожи в получении бездепозитных призов, в стандартные управляла входит: доказать эл. Почту и аппарат, наполнить собственный личный профиль, активировать промо код или активировать предложения во вкладке БОНУСЫ. <a href=https://www.jotform.com/242282900422044>https://www.jotform.com/242282900422044</a> Бонус без депо за регистрацию в казино (бездепозитный приз) – это денежный подарок от клуба, кот-ый начисляется на аккаунт игрока последствии регистрации в казино. Кроме творенья учетной записи, для получения бездепа, довольно часто потребуется ещё и подтвердить контактные данные игрока и/или активировать особый промо-код.Если идет об неповторимых предложениях, возможность понадобиться регистрация в казино по ссылке с партнерского вебсайта. 1×slots официальный зеркало рабочее За счёт спинов выйдет запустить разные онлайн слоты, протестировать стратегии и поднабраться навыка. Фишка том,, собственно вращения начисляются на топовые аппараты с уникальными опциями и высокой отдачей. Не запамятовывайте, что в любом акционном предложении предусмотрены специальные притязания – кратковременные лимитирования, максимальный размер ставки, перечень доступных игр.При верном раскладе бездепы — это прекрасный способ выступать на деньги без траты собственных средств. Есть количество рекомендаций, следуя коим можно извлечь максимально полезности из подобных промоакций казино. Играть идет только на лицензированных площадках. Скриптовые веб-сайты не только дурачат с бонусными предложениями, хотя и используют пиратский софт с измененным ГСЧ. Выиграть на этих автоматах нереально.
1×slots казино зеркало
Бонус с зачислением средств на счет выделяет больше свободы поступков. Пользователь сам подбирает, каким образом воспользоваться подаренными своими. Здесь кроме могут работать лимитирования на список дешевых игр, хотя обыкновенно эти рамки не например строги, как в промо с безвозмездными вращениями.Первый образующийся вопрос, это, для выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают свежих игроков. Последним проще начать игру на деньги с дара за регистрацию. Им не пополнять баланс и тратить собственные свои. Новички получают бесплатные спины либо свои на счёт. С их подмогою знакомятся с игровым процессом, крутят слоты и делают ставки в рулетке. <a href=http://forum.animogen.com/memberlist.php?mode=viewprofile&u=15333>1×slots регистрация 1×slots casino c2d ru</a> В интернет-сети практически можно отыскать списки более популярных и обещанных поощрительных программ от модных онлайн-казино. Способы получения бездепа различаются от облика бонуса, который понравился игроку. Но для иначе нужно быть зарегистрированным в легальном онлайн-казино и подтвердить свою личность. В общем виде пошаговая инструкция для получения бездепозитного приза смотрится например: 1 x slots casino <a href=http://romashkovo21.com/bitrix/rk.php?goto=https://ucgp.jujuy.edu.ar/profile/Blackshisha0212/>http://romashkovo21.com/bitrix/rk.php?goto=https://ucgp.jujuy.edu.ar/profile/Blackshisha0212/</a> После получения приза вывод средств для клиента будет недоступен до, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо пара недель. Выводить средства игрок может лишь в отыгрыша.Получить приветственный бонус имеют только свежие клиенты онлайн-казино. Способы описаны в условиях акции любого легального казино, почаще всего это:
1×slots рабочее зеркало на сегодня
Как только на виртуальном счету окажутся бонусные средства, поспешите отыграть вейджер. Сразу после сего возможно оставить заявку на вывод выигрыша. Кредиты прибыльно выделяются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом настоящих средств и дают возможность ощутить азарт. Во-вторых – можно насладиться любой азартной игрой доступной на сайте. В вашем постановлении присутствуют автоматы, настольные прибавление, видео-покер, Live-дилеры.Фриспины без депозита либо вспомогательные свои посодействуют ближе познакомиться с игровой платформой и её функциями. За счёт подарков возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям ради забавы напротив живых крупье. <a href=https://www.therookies.co/projects/79483>https://www.therookies.co/projects/79483</a> Частенько новенькие не разумеют, как активировать презенты или исключить первый выигрыш. Для похожих случаев наша команда описала основные определения – собственно такое фриспины, вейджер, как его отыграть, чего необходимо проходить верификацию. 1×slot официальный сайт Но а случае вы теснее профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в интернет казино;Фриплей-бонусы встречаются только в неких клубах. Они зачисляются сразу после творения профиля и активны непродолжительное время. Если не успеете истратить свои, они попросту сгорят. Касаемо медли, в большинстве случаев бонусы активны в течение часа.
<b>Смотреть еще похожие новости:</b>
<a href=https://tussom.com/forums/member.php?action=profile&uid=67819>1хслотс зеркало на сегодня</a>
<a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=11490>1×slots быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный приз нередко возможность замерзнуть доступным сразу последствии завершения регистрации, потому в большинстве случаев единственным притязанием к нему является регистрация, а после проверка вашей новой учетной записи. В разделе с призами активировать свой презент. Найти забавы, для которых учтено поощрение и использовать бонус по назначению.
#690 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
ап казино казино играть <a href=https://sovsekretno.net/>казино 5</a> спорт букмекерская контора официальные сайты казино <a href=https://th-royalgclub.com/>скачать букмекерскую контору на андроид</a> скачать 1×bet 1×bet xyz Фастова Елена Владимировна порно porno Ангелина Гончаренко, хоккеистка сайт букмекерской конторы casino сегодня порно с Георгий Джикия (футбол) казино играть
DiskiPlus 1×bet слоты 1×bet top DiskiPlus porno Илона Маркова, хоккеистка <a href=https://diskiplus.ru>DiskiPlus букмекерская контора мостбет</a> DiskiPlus casino зеркало сегодня DiskiPlus Черкесова Бэлла Мухарбиевна порно <a href=https://www.diskiplus.ru>DiskiPlus casino зеркало сегодня рабочее</a> DiskiPlus казино пину DiskiPlus Мухтиярова Елена Вячеславовна порно DiskiPlus porno Илья Ковальчук (хоккей) DiskiPlus casino ru DiskiPlus 1×bet зеркало рабочее DiskiPlus casino 7k рабочее DiskiPlus официальные букмекерские конторы скачать
#691 Charlesgunnyhttp://filmkachat.ru
1хслот официальный сайт зеркало
Основное отличие сомнений, собственно для получения бездепа не пополнять баланс в казино. Но не этого, есть ряд и других отличий:Бoльшинcтвo азартных заведений выдвигают примерно однообразные, схожие обстоятельства и притязания, которые нужно выполнить, дабы получить бездепозитный бонус за регистрацию. Все их можно соединить в раз список: <a href=http://filmkachat.ru/>1×slots регистрация</a> <a href=https://aprenderfotografia.online/usuarios/product360view/profile/>https://aprenderfotografia.online/usuarios/product360view/profile/</a> Можно ли в одном онлайн казино получить больше 1-го приза за регистрацию? Нет, например как в любом интернет казино есть верховодила, к которым нужно держаться, не творить 2 аккаута для получения бонусов, по несомненно блокировка обоих аккаутов, не пытайтесь обмануть интернет казино, приз за регистрацию выдаеться раз один одному лицу.Вы не в коем случае ни же рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической забавы на бездепозитные призы, у Вас есть шанс выучить игровые автоматы, выучится регулировать менять ставки и линии, исследовать бонусные забавы и их выигрышные композиции, ну конечном просто зарядится кучей впечатлений! Ведь вы будите выступать на бонусные средства, которые можно отыграть и вывести, но просто на демо счет, тем самым адреналин в крови более повысится а пульс забьется с нередким ритмом! 1×slots промокод при регистрации 2025 <a href=https://www.metal-tracker.com/forum/member.php?action=profile&uid=927468411>https://www.metal-tracker.com/forum/member.php?action=profile&uid=927468411</a> Далее требуется отыграть вагер и вывести выигрыш. Игрокам без опыта крупно повезло, меня получить десятки презентов за одну регистрацию. Если не сумели получить Бездепозитный бонус, не беспокойтесь. Обратитесь в интернет чат, оператор поможет решить проблему.
1×slots регистрация
Допустим, за регистрацию вы получили бездеп в размере 2 000 руб. С вейджером х30. В этом случае светит устроить ставок, на совместную необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда выполните обстоятельства по отыгрышу, придёт время заработать реальные средства. Однако не забывайте, что с каждого дара получится исключить определённую необходимую (чаще всего не более $200). x1 slots регистрация в 1×slots casino В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать собственный выигрыш с даровых вращений. Прибыль, которую Вы заработаете на этом бездепе возможно назначать на вывод без какого либо отыгрыша.Также учтите, собственно некоторые игровые платформы сужают перечень государств, которые готовы получить предложенный бездепозитный приз за регистрацию. К примеру, существуют онлайн-заведения, выдающие подобные бонусы только обитателям конкретных стран. К примеру, онлайн казино 777 Оригинал предоставляет бездепозитный бонус только игрокам из России и стран СНГ. Или наоборот, пичкают вознаграждением всех, считая обитателей некоторых государств (как сего, следует пристально учить список, дабы потом не появилось практически вопросов и претензий). <a href=http://stu.wenhou.site/bbs/home.php?mod=space&uid=93335>http://stu.wenhou.site/bbs/home.php?mod=space&uid=93335</a> 1х слотс зеркало регистрация в 1×slots casino Активация валютного гонорары происходит автоматически после творения профиля либо применения промокода. Иногда операторы предъявляют дополнительные требования: подписаться на странички казино в социальных сетях либо на рассылку рекламных извещений, скачать и ввести дополнительный софт и т.д.
1×slots официальный сайт зеркало рабочее
Зарегистрируйтесь. Для регистрации чаще всего довольно установить собственный номер телефонного и почтовый адрес, в чего установить полученный код из СМС. Возможно, требуется показать промокод. В правилах акции будет написано, где его надобно вводить. Иногда это надо создавать при регистрации, время — теснее после творения собственного кабинета, на отдельной страничке.Пoдтвepдить личнocть посетителя. Для успешного вывода средств, необходимо доказать лицо посетителя. Нa этaпe вepификaции пpoфиля, сотрудники службы защищенности должны увериться, собственно у игрока не раз аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не может вывести собственный выигрыш, случае у него несомненно некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы. Наши специалисты изучают обстоятельства промоакции, затем в ручном режиме проверяют их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и другие характеристики. Мы не рекламируем казино, а даем игрокам информацию о наилучших из них.Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают приз по государствам. Вплоть до такого, что клуб возможность брать игроков из Вашей государства, а бездеп не давать. <a href=https://flaxeco.com/user/Walterarouh/>https://flaxeco.com/user/Walterarouh/</a> 1хслот 1хслотс регистрация перейти на 1×slots Активация по промокоду используется в различных видах бездепов. Если идет о приветственном призе, то набор символов возможно разузнать на главной странице, в регистрационной форме либо письме, которое отправляется пользователю для доказательства адреса электронной почты. Акции могут проводиться вместе с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активируется одноразовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном кабинете либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем важный код для активации в описании каждого рекламную.
x1 slots 1хслотс регистрация перейти на 1×slots
<a href=https://forum.vn.ua/member.php?u=69210>1×slots промокод при регистрации</a> Прибывшие на аккаунт финансы бездепозитные бонусы предназначаются, в основном, только для новоиспеченных пользователей, которые ранее не имели личного аккаунта в данном казино. Исходя из этого, в раньше у игрока был сделан депо, то, по всей вероятности, у него больше не будет способности рассчитывать на получение такого бонуса в определенном заведении.Обычно бездепозитные акции от казино, приходят на эл. Почту в деньки рождения или праздничные. В некоторых интернет казино можно адресоваться в чат и как постоянному игроку, возможно для предложат бездепозитное предложение. 1×slots сайт <a href=https://www.ipixels.com/profile/65190/Traviswab>https://www.ipixels.com/profile/65190/Traviswab</a> Большинство клубов привлекают внимание компьютерные за счёт разнородных презентов. На 1 сайтах можно получить виртуальные кредиты, коие откроют доступ ко всему софту. На иных же, администрация предлагает бесплатные вращения для пуска лучших интернет слотов. Несмотря на различные акции, стоит выделить самые основные.
1×slots casino регистрация 1×slots review live
Также, учите, собственно бездепозитный бонус возможно вывести только в случае, когда станут исполнены все обстоятельства отыгрыша. <a href=https://xn–80asucf0d.xn–j1al4b.xn–p1ai/index.php/component/k2/itemlist/user/128445>https://xn–80asucf0d.xn–j1al4b.xn–p1ai/index.php/component/k2/itemlist/user/128445</a> Принципиальным отличием даровых призов от призов на депозит является отсутствие надобности заносить деньги на акк. Из-за этого их часто именуют бездепозитными (not the slightest down payment bonuses).Например, игрок получил 500 рублей при творении аккаунта и обязан отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 руб., потребуется сделать 875 спинов для полного отыгрыша. 1 xslots рабочее зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://swordmaster.org/user/JamesVok/>1хслот скачать</a>
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=54593>1×slots регистрация то дальше необходимо пройти</a>
<a href=http://nakupnidivadlo.cz/index.php/forum/3-pripominky/46622–1×slot?start=12#240290>1×slots зеркало сайта</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При регистрации стопам свидетельствовать только достоверную информацию. Когда учетная запись будет активна, будет доступ в Личный кабинет. В нем возможно выбрать денежную, ввести промокод и узнать подробные правила получения и отыгрыша бездепа. Краткая информация об акции нередко находится именно на регистрационной форме. Многие игроки, оценив перечень казино, остаются выступать в нем и дальше ? на это и направлено любое рекламную. Постоянные клиенты вносят депозиты и проделывают ставки, обеспечивая длительную выгода оператора. То есть, казино выдают бездепы свежим юзерам для формирования приклнной аудитории.
#692 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino 7k сегодня порно с Анастасия Потапова, теннисистка <a href=https://th-royalgclub.com/>скачиваемые казино</a> 1×bet сайт porno Александр Соболев (футбол) <a href=https://7club7.com/>1×bet скачать приложение на андроид</a> 7k casino зеркало 1win casino казино можно 1×bet приложение порно с Петр Ян (ММА) букмекерская контора Ходнева Светлана Владимировна порно
DiskiPlus casino официальный зеркало DiskiPlus 1×bet вход <a href=https://www.diskiplus.ru>DiskiPlus мобильные букмекерские конторы</a> DiskiPlus букмекерские конторы бет DiskiPlus порно с Каролина Севастьянова <a href=https://diskiplus.ru/>DiskiPlus porno Елизавета Туктамышева</a> DiskiPlus казино фильм DiskiPlus порно с Виктория Синицина, фигуристка DiskiPlus porno Мира Андреева (теннис) DiskiPlus рокс казино DiskiPlus 7k casino официальный DiskiPlus 1×bet на андроид DiskiPlus kometa casino
#693 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на сайте 1×slots ru com
Проверка занимает от нескольких мин. До нескольких дней, спецы техподдержки имеют запросить дополнительные документы или инициировать короткое общение по Skype.Онлайн-казино с бездепозитными бонусами ставят посетителям условия для использования бездепами, потому перед участием в промоакции другого, как тщательно ознакомиться со всеми правилами и аспектами промоакции. Условия шансы дотрагиваться получения приза, его использования и последующего вывода денежных средств если, тогда, выигрыша. <a href=http://filmkachat.ru/>casino 1×slot</a> <a href=https://paperpage.in/blogs/239677/%D0%90%D0%B2%D1%82%D0%BE%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%94%D0%BD%D0%B5%D0%BF%D1%80-%D0%B1%D1%8B%D1%81%D1%82%D1%80%D0%B0%D1%8F-%D0%B8-%D0%B2%D1%8B%D0%B3%D0%BE%D0%B4%D0%BD%D0%B0%D1%8F-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D0%B6%D0%B0-%D0%B2%D0%B0%D1%88%D0%B5%D0%B3%D0%BE-%D0%B0%D0%B2%D1%82%D0%BE>https://paperpage.in/blogs/239677/%D0%90%D0%B2%D1%82%D0%BE%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%94%D0%BD%D0%B5%D0%BF%D1%80-%D0%B1%D1%8B%D1%81%D1%82%D1%80%D0%B0%D1%8F-%D0%B8-%D0%B2%D1%8B%D0%B3%D0%BE%D0%B4%D0%BD%D0%B0%D1%8F-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D0%B6%D0%B0-%D0%B2%D0%B0%D1%88%D0%B5%D0%B3%D0%BE-%D0%B0%D0%B2%D1%82%D0%BE</a> Иногда в качестве поощрения за регистрацию могут выдаваться билеты для роли в турнирах. Условия их проведения довольно отличаются, потому мы рекомендуем ознакомиться с любым предложением отдельно.Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам важную информацию о самых свежих, щедрых и проверенных бонусах в онлайн казино, коие обновляются каждый день. 1×slots регистрация на сайте <a href=https://paladinscounter.com/users/Philipcof>https://paladinscounter.com/users/Philipcof</a> Бездепозитный приз по промо-коду будет доступен для забавы, лишь сомнений случае когда Вы активируете особый бонусный код в разделе с призами либо укажите промокод при регистрации на сайте. В некоторых случаях, кроме активации кода, придется доказать контактные данные игрока и наполнить анкету клиента.Для выбора азартного заведения Вы можете воспользоваться списком наших казино с бонусами за регистрацию. На нашем веб-сайте мы опубликовали список бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, собственно часть бонусов неповторимые и доступны только для гостей нашего сайта по-специальному промо-коду или по оригинальной ссылке. Кроме такого, для любого бонуса мы подготовили подробный обозрение, в котором Вы узнаете как получить и отыграть одобрение и как исключить свой выигрыш с бездепа.
1×slots регистрация 1×slotscasino09k online
Законодательство, регулирующее азартные игры в разных странах, оказывает на возможности операторов. В результате юзеры из отдельных регионов сталкиваются с ограничениями со стороны казино. Это имеет быть как полный отказ в доступе, например и невозможность загружать игры отдельных изготовителей.У каждого игорного заведения средства верховодила и условия. Но, дабы получить призы, нужно выполнить стандартные действия: 1×slots зеркало видели такую регистрацию на <a href=http://m-squash.ru/index.php?subaction=userinfo&user=hollowdog51>http://m-squash.ru/index.php?subaction=userinfo&user=hollowdog51</a> Перед активацией главно внимательно выучить условия акции. Чем ниже вейджер, что, этим больше потенциальная выгода игрока. Имеют велечину кроме лимиты ставок при отыгрыше и сроки, в течение коих возможно воспользоваться предложением. Если бездеп охватывает ограниченный перечень игр, рекомендуется узнать наибольшие коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только в случае, случае оператор не установил строгие лимитирования на наивысшую сумму ставки. 1х слот регистрация в 1×slots casino Бездепы с бесплатными вращениями деют юзерам право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд платит казино. Число спинов ограничено и изредка превышает сотню. Если промоакция включает в себя большое бесплатных игр, их начисление имеет быть разбито на несколько дней.
1×slots бездепозитный бонус за регистрацию
Многие азартные клубы ограничивают необходимую вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании акции, суммы Вы не можете вывести. Разница будет аннулирована, Вы и не сможете делать на нее ставки. Казино выделяет вероятность заработать и вывести реальные средства на бездепозитных призах. Обычно, это незначительная сумма, коию казино возможность для разрешить презентовать игроку.Демоказино есть практически на любом сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются существенно пореже: там когда выигрыша и соблюдения условий промоакций бездеп можно перевоплотить в настоящие средства. <a href=https://ipaecurso.com/1-win-website-apostas/>https://ipaecurso.com/1-win-website-apostas/</a> Ознакомьтесь с нашим перечнем лучших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего перечня и получите бездеп сразу. Хватайте наихорошие безвозмездные предложения ниже и выигрывайте большие средства, не рискуя! рабочее зеркало 1хслотс Это один из основных характеристик привлекательности презента. С завешенным коэффициентом том мастера не сумеют выполнить условия по отыгрышу. И важно, насколько презентабельно выглядит предложение – бездепозитный бонус казино в размере $500 либо $1 000. Чтобы новенькие лучше вдумались, собственно же такое вейджер, мы разберём на случае.Бездеп с фриспинами возможность охватывать всю коллекцию игр на веб-сайте либо разработки одного провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении промоакции. Выигрыш может быть выведен последствии как, как юзер отыграет эту сумму. Возможность оценить глубокий возможностей слотов — основное достоинство этой разновидности. Игроку становятся доступны что, эти функции, которые отсутствуют в демонстрационном режиме, а вероятность выиграть настоящие средства прибавляет ясных азартных чувств.
1×slots акции
За счёт спинов выйдет запустить различные онлайн слоты, протестировать стратегии и поднабраться опыта. Фишка что, собственно вращения начисляются на топовые аппараты с уникальными опциями и высокой отдачей. Не запамятовывайте, собственно в любом акционном предложении учтены особые притязания – кратковременные ограничения, максимальный объем ставки, список доступных игр.Бесплатный бонус – кредиты, коие онлайн-казино начислит клиенту, не принуждая его пополнять игровой счет. Бездепозитный приз по промо-коду несомненно доступен для игры, лишь никаких случае когда Вы активируете особый бонусный код в разделе с бонусами либо укажите промокод при регистрации на веб-сайте. В неких случаях, считая активации кода, придется доказать контактные данные игрока и заполнить анкету посетителя.Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавления либо официального клиента для ПК. В большинстве казино срабатывают программы преданности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на следующий степень нередко с выдачей бездепа. Обычно бездепозитные акции от казино, прибывают на эл. Почту в деньки рождения либо дни. В неких интернет казино возможно адресоваться в чат и как неизменному игроку, вполне для предложат бездепозитное предложение.Также, такой нужно доказать свой номер аппарата, чтобы код, полученный в смс-сообщении от клуба ввести в специальное фон в личном кабинете игрока. 1×slots регистрация на сайте 1×slots ru com <a href=https://vr-insight.in/bbs/board.php?bo_table=free&wr_id=423661>https://vr-insight.in/bbs/board.php?bo_table=free&wr_id=423661</a> Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, a зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.Превышение максимальной ставки при отыгрыше. Система механически не предуведомляет о превышении ставки, поэтому о несоблюдении верховодил игрок может узнать теснее последствии подачи запроса на вывод средств.
1×slots регистрация 1×slots casino 777 online
Для верификации номера телефона, в собственном профиле изберите опцию „Подтвердить номер аппарата“ и введите в подходящее поле код, полученный в sms-сообщении.Вейджер менее х30–35 считается приемлемым. Опытные игроки заявляют, что с этим вейджером реально остаться в плюсе, случае верно подойти к выбору игрового аппарата. Многие азартные клубы ограничивают сумму вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании промоакции, суммы Вы не сможете вывести. Разница несомненно аннулирована, Вы в не можете делать на нее ставки.При регистрации идет указывать только достоверную информацию. Когда учетная запись будет активна, будет доступ в Личный кабинет. В нем возможно избрать валюту, ввести промокод и разузнать доскональные правила получения и отыгрыша бездепа. Краткая информация об акции нередко находится именно на регистрационной форме. <a href=http://bbs.instrustar.com/home.php?mod=space&uid=103802>http://bbs.instrustar.com/home.php?mod=space&uid=103802</a> Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации бонуса без депозита. Внимательно прочитайте до конца. Многие новенькие делают ошибки на шаге регистрации и поэтому возможности получить презент.Но никогда не запамятовывайте внимательно разбирать правила роли в бонусных акциях. Если вы нарушите хотя бы одно условие, позднее вы не сможете уладить недоразумение с администрацией. 1 x slots casino Многие игроки, оценив перечень казино, остаются выступать в нем и дальше ? на это и направлено каждое рекламную. Постоянные клиенты заносят депозиты и проделывают ставки, обеспечивая длительную прибыль оператора. То есть, казино раздают бездепы новым пользователям для формирования приклнной аудитории.Бездепы с безвозмездными вращениями деют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд выплачивает казино. Число спинов ограничено и изредка превышает сотку. Если акция содержит количество даровых игр, их начисление возможность быть разбито на некоторое дней.
<b>Смотреть еще похожие новости:</b>
<a href=http://3ak.cn/home.php?mod=space&uid=187057>1×slots регистрация на сайте 1×slots ru com</a>
<a href=http://aurorahcs.com/forum/memberlist.php?mode=viewprofile&u=168982>1×slots зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Акции, посвященные календарным праздникам, бывают рассчитаны как на всех юзеров, например и на категории: к, подарок на 8 марта девушкам-игрокам либо мужчинам на 23 февраля. Подтвердите регистрацию, дабы активировать Бездепозитный бонус с выводом, требуется заполнить индивидуальный профиль. Заполните пустые поля реальными данными о себе.
#694 Mazrexnhttp://[url=http://jenlabeschhen.phorum.pl/posting.phpmode=newtopic&f=1&sid=108fc5f666f5f7ff68936df9
Мы изготавливаем дипломы любой профессии по доступным ценам. Заказ документа, который подтверждает обучение в ВУЗе, – это разумное решение. Заказать диплом о высшем образовании: <a href=http://jenlabeschhen.phorum.pl/posting.phpmode=newtopic&f=1&sid=108fc5f666f5f7ff68936df96e103ad7/>jenlabeschhen.phorum.pl/posting.phpmode=newtopic&f=1&sid=108fc5f666f5f7ff68936df96e103ad7</a>
#695 Sazrebjhttp://[url=http://polspot.com/read-blog/131_diplom-o-med-obrazovanii-kupit.html/]polspot.com/read-b
Приобрести диплом любого университета! Заказать диплом о высшем образовании. Приобретение документа о высшем образовании через качественную и надежную фирму дарит немало плюсов для покупателя. Это решение дает возможность сэкономить как личное время, так и серьезные финансовые средства. <a href=http://polspot.com/read-blog/131_diplom-o-med-obrazovanii-kupit.html/>polspot.com/read-blog/131_diplom-o-med-obrazovanii-kupit.html</a>
#696 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasin online
Выполнив все требования оператора, клиент возможность оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит примерно менее суток. Если дополнительно требуется пройти процедуру верификации, то срок увеличивается до 1–2 рабочих дней. Для перевода используются банковские инструменты и электронные платежные системы. Второй метод подходит превосходнее, например как большинство транзакций в этом случае исполняются мгновенно. В связи со специфичностью функционирования банков обработка платежей возможность взятьвдолг(взятьвзаймы) до нескольких трудящихся дней.Денежные свои. Третий приз за регистрацию без депозита – наличные. К огорчению, лишь знаменитые и известные клубы все дать средства в руб. Либо долларах. С их подмогою у насладиться каждой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед данным необходимо исполненье конкретных критерий. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало</a> <a href=https://cgscholar.com/community/community_profiles/3d-rendering-services/community_updates/234376>https://cgscholar.com/community/community_profiles/3d-rendering-services/community_updates/234376</a> Каждый новичок и умелый игрок грезят стремительно стартануть и начать делать реальные ставки. Для сего довольно арестовать подарок, за который надо уплачивать. В зависимости от игровой платформы, нужно сделать профиль, привязать email или аппарат. После этого администрация начислит щедрое вознаграждение вид безвозмездных вращений либо виртуальных кредитов.При использовании бездепозитным призом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют количество видов лимитов: 1х слот регистрация в 1×slots casino <a href=http://www.pawsarl.es/blog/%D0%BB%D0%B8%D1%86%D0%B5%D0%BD%D0%B7%D0%B8%D1%8F-%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D1%8B.html>http://www.pawsarl.es/blog/%D0%BB%D0%B8%D1%86%D0%B5%D0%BD%D0%B7%D0%B8%D1%8F-%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D1%8B.html</a> Еще одно условие касается объемов ставки. Операторы устанавливают максимальную сумму, которую игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном кабинете. При превышении лимита есть риск лишиться бонуса. Существующие ограничения относятся и к определенным обликам ставок. Например, играя в рулетку, заказчик имеет столкнуться с запретом ставить фишки на шансы.Для как, чтобы отыграть необходимую вашего бездепозитного приза нужно выполнить условия вейджера. Очень часто фриспины даются на конкретные слоты (book of ra, book of deceased, book of sun), подбирайте слот себе по душе, они все довольно очень и высококачественные. Бездепозитные бонус имеет быть валютным например и вид фриспинов на слоты
1×slots официальный сайт скачать
1×slots регистрация на 1хслотс <a href=https://lastdemo.primepix.ru/club/user/962/blog/9183/>https://lastdemo.primepix.ru/club/user/962/blog/9183/</a> Как только получите бездеп в казино, всё также не запамятовывайте проверять электрическую почту. Некоторые игорные клубы день радуют интенсивных гэмблеров приятными призами. Чаще всего получить подарок возможно в преддверии веселья, на денек рождение, за вербование друга. А кроме распространённым бонусом считается надбавка к депозиту. Нужно не восполнить счёт, и азартное заведение прирастит его на 50–100%. 1×slots сайт
1×slot зеркало
Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации подарка нужно подтвердить электрическую почту и привязать телефонный; Бездепы с бесплатными вращениями предоставляют юзерам право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд уплачивает казино. Число спинов ограничено и редко выше сотку. Если акция содержит количество безвозмездных игр, их начисление может быть разбито на несколько дней.Прежде всего, не забывайте периодически заглядывать на страничку обзоров бездепозитных призов. Они шаг за шагом разглядывают более занимательные предложения водящих игорных порталов. <a href=http://samwoon.co.kr/bbs/board.php?bo_table=free&wr_id=161496>http://samwoon.co.kr/bbs/board.php?bo_table=free&wr_id=161496</a> Условия отыгрыша приза. Если Вы планируете заработать на бездепозитном бонусе, то для внимание на значение вейджера и срок, кот-ый дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, тем легче отыграть приз и вывести выигрыш.Возьми собственный презент. Чаще всего приз активизируется сразу после регистрации. Но посещают ситуации, когда нужно забежать в собственный офис или написать в справочную службу. 1×slots рабочее зеркало Приветственный бездеп предоставляется хоть игроку лишь раз раз. Казино сражаются с так называемыми бонусхантерами (от англ. Bonus Hunter — охотник за бонусами), пытающимися заводить множественные аккаунты для надувательства оператора и повторного получения презента. Исключить похожие деянья позволяет верификация данных. Администрация вправе востребовать у клиента доказать индивидуальные данные, указанные при регистрации.
x1 slots регистрация в 1×slots casino
Самый распространённый из сходственных бонусов, естесственно же, бездеп на денек рождения посетителя — бонус повторяющий фиксированной суммы либо фриспинов поступает на счёт игрока, а воспользоваться им можно на установленного периода времени. <a href=http://jagplay.ekafe.ru/memberlist.php?mode=viewprofile&u=326>1×slot официальный сайт</a> Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных ситуаций с казино, когда после отыгрыша бездепа для не дадут вывести солидную необходимую выигрыша.Приветственный бездеп предоставляется хоть игроку только один раз. Казино борются с например нарекаемыми бонусхантерами (от англ. Bonus Hunter — доброволец за бонусами), пытающимися заводить многочисленные аккаунты для надувательства оператора и повторного получения дара. Исключить сходственные действия позволяет верификация данных. Администрация вправе потребовать у посетителя подтвердить персональные данные, указанные при регистрации. 1×slots казино зеркало <a href=http://bbs.zhizhuyx.com/home.php?mod=space&username=otiwod>http://bbs.zhizhuyx.com/home.php?mod=space&username=otiwod</a>
1×slots регистрация на 1хслотс
2. Создать новый профиль. Для регистрации нужно заполнить небольшую анкету или зайдите в личный кабинет при помощи соц сетей;Доступные игры – В неких азартных играх возможно снизить математическое преимущество казино до нескольких десятых процента. В их количестве почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как управляло, в таких забавах ставки идут в зачет вейджера не всецело. Например, может предусматриваться только 50%. В неких забавах бездепозитные бонусы вообщем нельзя отыгрывать. <a href=http://www.01.com.hk/member.php?Action=viewprofile&username=StevenGub>http://www.01.com.hk/member.php?Action=viewprofile&username=StevenGub</a> Каждый новичок и умелый игрок мечтают прытко стартануть и начать делать реальные ставки. Для этого достаточно забрать презент, за кот-ый не платить. В зависимости от игровой платформы, нужно сделать профиль, привязать email или телефонный. После сего администрация начислит щедрое вознаграждение в виде даровых вращений либо виртуальных кредитов.Срок активации и время на отыгрыш. Зачисление средств или фриспинов случается при активации в течение требовательно ограниченного периода, схожие притязания предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать бонус несколько дней или и недель. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высочайшим вейджером. 1×slots официальный сайт, скачать
<b>Смотреть еще похожие новости:</b>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=92639&pid=373187#post_373187>1×slots зеркало которую указывали при регистрации кстати</a>
<a href=http://support-groups.org/viewtopic.php?f=161&t=764842>1×slots бездепозитный бонус за регистрацию</a>
<a href=https://mcmon.ru/showthread.php?tid=178923>1×slots регистрация 1×slots review live</a>
<a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=973546#pid973546>зеркала 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала резвые выводы. Фишка выплат в том, собственно достаточно выбрать платёжный инструмент и показать сумму. В большинстве случаев деньги зачисляются на электронные кошельки протяжении 15 мин., а на банковские карты – 1–3 трудящихся денька. Наиболее знаменитые вознаграждения среди гэмблеров – бездепозитные бонусы казино. Это не умопомрачительно, так возможно получить благотворительные вращения или виртуальные кредиты, и этом не придётся пополнять счёт, рисковать личностными средствами. Удастся насладиться разнообразными веселиями даже выиграть крупную необходимую, избегая серьёзного риска.
#697 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet официальный сайт 1×bet xyz порно с Максим Глушенков (футбол) <a href=https://kompromat1.online/>vavada casino</a> Манилова Алла Юрьевна порно porno Яна Троянова <a href=https://sovsekretno.net/>самое казино</a> 1×bet зеркало рабочее на сегодня 1×bet xyz казино гта 5 porno Александр Соболев (футбол) online casino 7k казино 5 1×bet на андроид казино сочи
DiskiPlus вавада казино DiskiPlus Лут Оксана Николаевна порно <a href=https://www.diskiplus.ru>DiskiPlus где казино</a> DiskiPlus porno Екатерина Ефременкова, шорт-трекистка DiskiPlus букмекерская контора скачать приложение <a href=https://www.diskiplus.ru>DiskiPlus 1×bet casino</a> DiskiPlus игры казино DiskiPlus балтбет букмекерская контора DiskiPlus Петрова Ольга Викторовна порно DiskiPlus порно с Дарья Клишина, легкоатлетка DiskiPlus порно с Дарья Клишина, легкоатлетка DiskiPlus Кузнецова Анна Юрьевна порно DiskiPlus казино пину
#698 Ремонт холодильниковhttps://remont-holodilnikov-lux.ru/
Наши специалисты предлагает надежный <a href=https://remont-holodilnikov-lux.ru/>центр ремонта холодильника на выезде</a> различных марок и моделей. Мы осознаем, насколько значимы для вас ваши холодильники, и обеспечиваем ремонт первоклассного уровня. Наши квалифицированные специалисты оперативно и тщательно выполняют работу, используя только оригинальные запчасти, что гарантирует долговечность и надежность наших услуг. Наиболее общие проблемы, с которыми сталкиваются владельцы холодильников, включают неисправности компрессора, неработающий термостат, неисправности программного обеспечения, проблемы с подключением и повреждения уплотнителей. Для устранения этих неисправностей наши опытные мастера выполняют ремонт компрессоров, термостатов, ПО, разъемов и механических компонентов. Обращаясь в наш сервисный центр, вы гарантируете себе качественный и надежный ремонт холодильников с гарантией. Подробная информация доступна на сайте: https://remont-holodilnikov-lux.ru
#699 Gichardcheks
<a href=https://probuildmaster.ru/>https://probuildmaster.ru/</a> – блог о строительстве и ремонте. Экспертные материалы, советы и рекомендации.
#700 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало рабочее этих способов предполагает регистрацию
Такой безвозмездный эквивалент средств зачисляется на профиль юзера последствии осуществления требований и предназначаются они только для игрового процесса. Вывод таких вознаграждений вероятен только в осуществления вейджеровых условий.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро либо 20 $. Если выдаются фриспины, их число изредка превышает нескольких десятков даровых вращений. <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> Теоретически, к безвозмездным бонусам можно отнести например именуемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, поэтому собственно они предоставляют лишь вероятность создавать ставки. <a href=https://techbehemoths.com/company/archicgi-archivizer-limited>https://techbehemoths.com/company/archicgi-archivizer-limited</a> 1×слот регистрация в 1×slots casino <a href=https://grilovani-barbecue.com/memberlist.php?mode=viewprofile&u=4038>https://grilovani-barbecue.com/memberlist.php?mode=viewprofile&u=4038</a> Возможность сыграть вспомогательное состязание (а иногда и некоторое) совершенно бесплатно, а выигрыш, тому, поступает на счёт игрока.
1×slots casino регистрация
1×slots регистрация на 1хслотс Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 $. Если выдаются фриспины, их количество редко выше нескольких десятков даровых вращений.Бездепозитные бонусы — это презенты от казино повторяющий бонусных денег или фриспинов для игровых автоматов, коие начисляются на акк игрока после процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депо не потребуется. <a href=http://5seasons-nsk.ru/bitrix/redirect.php?goto=http://denpractik.ru/bitrix/redirect.php?goto=http://zhbi5.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/5vnfLZwLTd3>http://5seasons-nsk.ru/bitrix/redirect.php?goto=http://denpractik.ru/bitrix/redirect.php?goto=http://zhbi5.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/5vnfLZwLTd3</a> Если идет об эксклюзивных услугах, возможность понадобиться регистрация в казино по ссылке с партнерского вебсайта.В большинстве заведений сделать это возможно по адресу электронной почты, по номеру телефонного, через социальную сеть либо гугл-аккаунт. x1 slots регистрация в 1×slots casino С иной стороны, намного проще отобрать бездепозитные фриспины за регистрацию в казино и прямо сейчас начать вращать барабаны в наихороших слотах. Главная необыкновенность спинов в, собственно они предусмотрены для лучших автоматов. Удастся столько пройти вспомогательные раунды, хотя и увеличить сумму выигрыша, заработать респины прочие внутриигровые подарки.При помощи такого одобрения оператор имеет кроме завлекать клиентов, коие раньше проявляли активность на веб-сайте, хотя по некий основанию перестали играть. В этом случае промокод высылается юзеру по электрической почте или повторяющий SMS.
1×slot официальный сайт
<a href=http://steklo.by/index.php?subaction=userinfo&user=overjoyedvoliti>http://steklo.by/index.php?subaction=userinfo&user=overjoyedvoliti</a> Сроки активации бонуса устанавливаются каждым казино, но почаще всего они не превышают недели с момента получения. Игроку обязательно нужно применять бездеп протяжении указанного срока, в ином случае приз просто пропадет. Каждый бонус можно получить только раз один, потому если не использовать бездеп в срок, у игрока не будет 2 шанса им пользоваться.После требуется внести идентификационный платёж. Это стращает начинающих больше всего. Нужно устроить минимальный депо в 100–500 руб. Таким образом служба защищенности убедиться что, что платёжный способ принадлежит Вам. Данная процедура важна для обеспечения защищенности игровых счетов. Пример, Ваш аккаунт взломают и выведут средства на собственный кошелёк. Будет крайне неприятно. Поэтому верификация платёжной системы, это необходимый момент. 1×slots акции Чтобы без увериться в превосходствах бездепозитных призов, достаточно зарегистрироваться в казино и получить одобрение.
1×slots на любой вкус как пройти регистрацию
Бесплатный приз – кредиты, которые онлайн-казино начисляет посетителю, не заставляя его пополнять игровой счет.На странице представлены бездепозитные бонусы за регистрацию в казино редкая награда за которой гонятся все игроки как новенькие, так и мастера. Мы также уделяем огромное внимание на присутствие призов при формирование рейтинга казино на средства. Бездепозитный приз это вероятность играть бесплатно и выиграть реальные средства. Акционные предложения от казино есть в разных форматах. Часто бонусы даются в размен на депо. Игрок заносит платеж и получает деньги, безвозмездные вращения и другие одобрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — вид приза, который гарантирован за исполненье определенных действий на веб-сайте: 1×слот регистрация в 1×slots casino <a href=https://imac.ly/home.php?mod=space&username=eminentlaziness&do=profile>https://imac.ly/home.php?mod=space&username=eminentlaziness&do=profile</a> Однако в критериях скрываются «подводные камни», коие не позволят исключить солидную необходимую или же вы не успеете отыграть вейджер. Поэтому профессионалы советуют забрать безвозмездные вращения за регистрацию в казино без депозита, дабы поднабраться опыта и получить настоящий шанс на победу.Такой казино приз без депозита за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это словно какая-то конспирация одобрения под бездепозитный. Суть всего этого сводится к тому, что геймеру на час выдается, например, 1000 $, а реклама твердит про, собственно каждой выигрыш возможно несомненно в оставить при для. Но в играющий серьезно отнесется к данному предложению, то он попросту растеряет время. Ведь игроку нужно будет выступать не в основном аккаунте, а в тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (и всей тысячи) в управляла вступят конкретные условия, где будет сказано, собственно наибольшей суммой победы возможность быть только двести долларов и деньги можно применять только в приза на 1-ый лепта с вейджером 25 от суммы гонорары плюс сам депозит. По итогу выйдет, собственно игрок выигрывал себе 200% бонус с вейджером на определенную сумму. Короче говоря, это все надо вашего медли.
зеркло казино 1×slots
Для доказательства электронной почты, просто перейдите по интенсивной ссылке в письме, полученном от игрового заведения.Казино выводит средства только на что, эту платежную систему, с котрой был сделан депо. То есть, для вывода бездепозитного приза, Вам поначалу нужно восполнить счет. В некоторых клубах узкий перечень способов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет непосредственно с данных платежных методов, коие доступны для вывода. Далее требуется отыграть вагер и вывести выигрыш. Игрокам без навыка крупно подфартило, они могут получить десятки даров за 1 регистрацию. Если не сумели получить Бездепозитный приз, не беспокойтесь. Обратитесь в онлайн чат, оператор поможет исправить.Также, ситуации нужно доказать свой номер телефона, чтобы код, приобретенный в смс-сообщении от клуба ввести в специальное поле в собственном офисе игрока. <a href=https://australianwinerytours.com/tours/member.php?action=profile&uid=12104>https://australianwinerytours.com/tours/member.php?action=profile&uid=12104</a> Например, игрок получил 500 руб. При твореньи аккаунта и обязан отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 руб., понадобится устроить 875 спинов для полного отыгрыша. 1хслотс официальный сайт зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://astraclub.ru/members/353998-Jameswow>1×slots casino зеркало</a>
<a href=http://everestrolep.listbb.ru/viewtopic.php?f=38&t=19283>онлайн казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Как и другие промоакции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такого предложения считаются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых посетителей и разрешает им составить эмоцию о функционале, не рискуя значительными совокупностями.
#701 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet регистрация 1×bet casino <a href=https://slon-ru.com/>порно с Сергей Бобровский (хоккей)</a> казино рублях porno Александр Соболев (футбол) <a href=https://7club7.com/>сайт букмекерской конторы</a> black russia казино porno Екатерина Ефременкова, шорт-трекистка яндекс казино gama casino казино проиграл человек казино Юдаева Ксения Валентиновна порно
DiskiPlus казино сочи DiskiPlus казино рояль <a href=https://www.diskiplus.ru>DiskiPlus сайт казино вход</a> DiskiPlus 1×bet регистрация DiskiPlus порно с Гатагова Ольга Анатольевна <a href=https://diskiplus.ru/>DiskiPlus букмекерская контора бесплатно скачать</a> DiskiPlus casino online зеркало DiskiPlus официальные букмекерские конторы DiskiPlus букмекерская контора официальный сайт DiskiPlus мелбет букмекерская контора DiskiPlus казино онлайн DiskiPlus porno Александр Соболев (футбол) DiskiPlus официальные зеркала казино
#702 Charlesgunnyhttp://filmkachat.ru
1×slots казино мобильная версия
При регистрации что, нет либо ином онлайн игральном заведении — для дается раз шанс испытывать свою удачу не внося средства монеты. Замечу собственно такую поощрительную услугу деют не все интернет игровые площадки, а лишь щедрая половина из их. Которые мы подготовили для Вас в нашем списке. <a href=http://filmkachat.ru/>1×slot официальный сайт</a> Игрокам стоит воспринимать приветственный бонус как гарантированный способ получить большой выигрыш, но это замечательная возможность без затрат расценить возможностей казино. <a href=https://www.arrl.org/forum/topics/view/4342>https://www.arrl.org/forum/topics/view/4342</a> 1×slots casino регистрация 1×slots review live <a href=http://xuwentcw.com/home.php?mod=space&uid=370289&do=profile>http://xuwentcw.com/home.php?mod=space&uid=370289&do=profile</a> Прежде всего, не забывайте периодически заглядывать на страницу обзоров бездепозитных бонусов. Они шаг за шагом рассматривают более увлекательные предложения ведущих игорных порталов.В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая приятная часть игры. Важно, часто бездепозитные призы в казино выдаются с ограничениями по наибольшей выплате. В среднем возможно рассчитывать на прибыль в количество тыщ рублей. Как исключить выигрыш с приза без депо. Придётся доказать акк документально, в неких заведениях. Процедура верификации обязательна и делается каждым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате либо прочитайте в правилах.
1×slots бонус за регистрацию
Вейджер не более х30–35 является приемлемым. Опытные игроки утверждают, что с этим вейджером реально остаться в плюсе, случае правильно подойти к выбору игрового аппарата. казино 1×slots официальный сайт В основном случаев благотворительные призы начисляются в кредитах, коие невозможно сразу исключить со счета. Прежде их нужно отыграть по установленным правилам. Эти требования принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже.Онлайн-казино с бездепозитными бонусами ставят посетителям условия для использования бездепами, поэтому перед участием в акции другого досконально ознакомиться со всеми правилами и нюансами акции. Условия могут прикасаться получения бонуса, его применения и следующего вывода денежных средств в случае выигрыша. <a href=https://aopvp.com/home.php?mod=space&uid=46145>https://aopvp.com/home.php?mod=space&uid=46145</a> Следует подчеркнуть, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом.4. Заберите подарок. Чаще всего приз активируется сразу в регистрации. Но случаются истории, когда надо(надобно) зайти в личный офис либо написать в службу. 1×слот регистрация в 1×slots casino
казино 1×slots
<a href=http://etalon-stroy.ru/bitrix/redirect.php?goto=http://tuieoyuc23.hatenablog.com/iframe/hatena_bookmark_comment?canonical_uri=http://stroyzone.com/bitrix/rk.php?goto=https://telegra.ph/Poteryannye-prava-Prosrochennye-sroki-09–24>http://etalon-stroy.ru/bitrix/redirect.php?goto=http://tuieoyuc23.hatenablog.com/iframe/hatena_bookmark_comment?canonical_uri=http://stroyzone.com/bitrix/rk.php?goto=https://telegra.ph/Poteryannye-prava-Prosrochennye-sroki-09–24</a> При игре на бонусные средства воспрещается играть в игровые автоматы с современным джекпотом и игры из радела live casino. Кроме как, некоторые казино дают бездеп на один либо несколько определенных слотов, и в иных забавах Вы не сможете на их выступать.Не стоит путать игру в демо и использование призов. В демонстрационном режиме игрок может оценить механику слота, сюжет и оформление. Но забава ведется на условные кредиты, потому отсутствует основное ? ощущение пыла. Активируя промокод или фриспины, клиент как не расходует свои средства на игровые автоматы, хотя имеет сорвать настоящий куш! 1×slots регистрацию процедура займет всего лишь При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое возможно посвятить ирге в казино.Условия отыгрыша бонуса. Если Вы планируете заработать на бездепозитном бонусе, то для внимание на значение вейджера и срок, кот-ый дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, что, этим проще отыграть приз и исключить выигрыш.
1×slots зеркало которую указывали при регистрации кстати
Некоторые сайты, до чем провести регистрацию игроков, предлагают ответить на некоторое базовых вопросов. Цель проведения сходственной викторины – выявить случайных людей, коие не имеют представления о покере, и не допустить получения ими призов. Если посетитель теснее играл в казино, то ответить на полтора десятка простых вопросов несомненно нетрудно. Очень часто, ответы возможно найти на официальных сайтах этих учреждений.Обыкновенные бездепозитные призы в размере от 3-х до 20 долларов созданы чтобы, чтобы, чтобы в игры заходили все новые и свежие игроки. Здесь, всего, будет ограничение на наибольший выигрыш. Важно, дабы перед минимальным вкладом был отключен бонус за 1-ое пополнение счета, и игры не попадет на повторный вейджер. <a href=http://rapbeatsforum.com/viewtopic.php?t=680399>1×slots официальный сайт, скачать</a> Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и. Когда игроку полагается большое фриспинов, администрация имеет разбивать их начисление на количество дней. Бесплатные вращения предоставляются для определенного слота, кот-ый указывается в правилах акции.Классическая разновидность бонуса за творенье аккаунта. Его превосходство заключается что, нет, что клиент имеет без выбирать аппараты и создавать ставки в них. Иногда перечень игровых автоматов ограничен оператором, хотя все также это другого, как, чем единственный дешевый разъем, как в случае с внедрением фриспинов. Каждый новичок и профессиональный игрок мечтают скоро стартануть и начать создавать настоящие ставки. Для этого довольно отобрать подарок, за который надо выплачивать. В зависимости от игровой платформы, надо(надобно) сделать профиль, привязать email либо аппарат. После сего администрация начисляет щедрое вознаграждение повторяющий безвозмездных вращений или виртуальных кредитов.Мы советуем не отрицаться от подобных предложений известных казино. Выделите несколько минут на регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сегодня удача несомненно на вашей стороне! 1хслотс зеркало <a href=http://stadtdesign.com/?URL=magazine29.ru/bitrix/redirect.php?goto=http://azimutpro.ru/bitrix/rk.php?goto=https://telegra.ph/Kto-takoj-beneficiar-v-prostyh-terminah-i-zachem-on-vam-nuzhen-09–23>http://stadtdesign.com/?URL=magazine29.ru/bitrix/redirect.php?goto=http://azimutpro.ru/bitrix/rk.php?goto=https://telegra.ph/Kto-takoj-beneficiar-v-prostyh-terminah-i-zachem-on-vam-nuzhen-09–23</a>
1× slots сайт
Чтобы бездеп не был начислен на Ваш акк, Вам надо активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк механически, а Вы не расчитываете его использовать, обратитесь в саппорта с просьбой отменить бездепозитный приз.Как правило, при выводе финансов, от играющего потребуется лишь устроить минимальный вклад чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом собственный счет. Начнём с такого, собственно любое промо за регистрацию предполагает некоторые обстоятельства. Бездепозитные призы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность денежного оборота, нужная для исполнения условий. Пример, возымели благотворительные вращения и выиграли с их 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 руб., неудачных либо выигрышных, важно. После исполненья, бонусный баланс перейдёт на настоящий и будет доступным к выводу. <a href=http://www.tukero.org/2020/04/tnod-licenses-v10-apk.html>http://www.tukero.org/2020/04/tnod-licenses-v10-apk.html</a> В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это исключительно милая часть забавы. Важно, зачастую бездепозитные призы в казино выдаются с ограничениями по максимальной выплате. В среднем можно рассчитывать на прибыль в количество тыщ рублей. Как вывести выигрыш с бонуса без депо. Придётся подтвердить аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается каждым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате либо прочтите в правилах. казино 1×slots официальный сайт
<b>Смотреть еще похожие новости:</b>
<a href=https://creapnl.com/foros/tema/1×slot-%d1%80%d0%b5%d0%b3%d0%b8%d1%81%d1%82%d1%80%d0%b0%d1%86%d0%b8%d1%8f-32/>1×slot регистрация</a>
<a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=45622>1хслотс рабочее зеркало на сегодня</a>
<a href=https://www.mqf.pw/bboard/member.php?action=profile&uid=614>1×slots официальный сайт зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Наиболее пользующиеся вознаграждения среди гэмблеров – бездепозитные бонусы казино. Это не умопомрачительно, так возможно получить безвозмездные вращения либо виртуальные кредиты, и при не придётся пополнять счёт, рисковать собственными деньгами. Удастся насладиться разнообразными увеселениями и даже выиграть солидную необходимую, избегая серьёзного риска. Мы подготовили список, где есть постоянно актуальные и новые бездепозитные бонусы казино, коие возможность получить даром. Для наших пользователей есть специальные предложения неповторимые призы, коие вы у не найдете, их мы определили специальной красноватой плашкой «Exclusive».
#703 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора 1×bet телефон <a href=https://strelochnik.com/>самое казино</a> казино пин почему в казино не бывает настенных часов <a href=https://repost.news/>букмекерские конторы pin</a> Радченко Светлана Юрьевна порно суть казино casino betting вавада казино porno Дарья Клишина водка казино 1×bet casino
DiskiPlus 1×bet DiskiPlus bet casino <a href=https://www.diskiplus.ru/>DiskiPlus сайт pin up casino</a> DiskiPlus пин casino DiskiPlus porno Елизавета Туктамышева <a href=https://diskiplus.ru/>DiskiPlus up casino зеркало</a> DiskiPlus порно с Анастасия Потапова, теннисистка DiskiPlus порно с Захарова Мария Владимировна DiskiPlus casino зеркало сегодня рабочее DiskiPlus порно с Матвей Сафонов (футбол) DiskiPlus 1×bet DiskiPlus пин ап casino pin DiskiPlus casino ru
#704 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet слоты 1×bet xyz pin up casino buzz <a href=https://repost.news/>1×bet xbet</a> кент casino ев казино <a href=https://krtka.info/>1×bet зеркало xbet</a> kent casino casino buzz слоты казино porno Марина Александрова казино рояль смотреть пинап казино ramenbet casino
DiskiPlus vodka casino DiskiPlus спорт букмекерская контора <a href=https://www.diskiplus.ru/>DiskiPlus casino buzz</a> DiskiPlus порно с Матвей Сафонов (футбол) DiskiPlus porno Виктория Баркова, легкоатлетка <a href=https://www.diskiplus.ru>DiskiPlus 1×bet зеркало на сегодня</a> DiskiPlus Мухтиярова Елена Вячеславовна порно DiskiPlus казино играть DiskiPlus 1×bet слоты DiskiPlus 1×bet приложение DiskiPlus casino riobet DiskiPlus казино онлайн DiskiPlus Фастова Елена Владимировна порно
#705 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up букмекерская контора сайт 1×bet слоты <a href=https://rucriminal.info/>1×bet зеркало рабочее xbet</a> порно с Арина и Дина Аверины, гимнастки 1×bet на андроид бесплатно <a href=https://kompromat1.online/>Разуваева Ксения Денисовна порно</a> букмекерские конторы бет ramenbet casino букмекерская контора ставки песня казино 1×bet зеркало xbet porno Андрей Рублев (теннис) Елизавета Боярская
DiskiPlus 1×bet xbet DiskiPlus Приезжева Екатерина Геннадьевна порно <a href=https://www.diskiplus.ru>DiskiPlus казино ставка</a> DiskiPlus casino игровой автомат DiskiPlus porno Яна Троянова <a href=https://diskiplus.ru/>DiskiPlus казино можно</a> DiskiPlus ешь казино DiskiPlus casino регистрации DiskiPlus Матвиенко Валентина Ивановна порно DiskiPlus фреш казино DiskiPlus Львова-Белова Мария Алексеевна порно DiskiPlus порно с Юлия Ефимова DiskiPlus casino riobet
#706 WilliamMalhttps://medium.com/@agurkin2021/permanent-makeup-eyebrows-austin-tx-68081342309f
Spintax Version of the Text:
Explore the Best Cosmetic Clinic in the Heart of Austin: Iconic Beauty Center.
Situated in the dynamic core of the Lone Star State, this renowned clinic has earned its reputation as a premier destination for those looking to improve their aesthetic appeal. With a team of highly skilled professionals dedicated to delivering exceptional results, this clinic offers a personalized experience that ensures every client feels appreciated, empowered, and radiant. If you want to rejuvenate your look or invest in long-lasting beauty solutions, Icon Beauty Clinic is the perfect solution for achieving classic allure.
Tailored Beauty Solutions Upon arriving at this premier clinic, you’ll appreciate the dedication to tailored services. Every treatment is customized to meet your specific requirements, using only top-tier solutions and cutting-edge methods. The experienced team takes the time to understand your goals, ensuring that each procedure not only brings out your best traits but also aligns with your lifestyle.
Let’s Explore Some of the Highlight Treatments That Make The Beauty Center a Innovator in the World of Cosmetics.
Brow and Lash Perfection Boost the effortless appeal of your eyes with an eyelash lift and tint. This procedure adds thickness, growth, and clarity to your lashes, removing the need for daily mascara application. Great for on-the-go lifestyles or unique moments, the results last for several weeks, giving you effortlessly glamorous eyes every day.
Plump Lips Treatment Youthful, plump lips are a evergreen look, and Icon Beauty Clinic offers hyaluronic acid injections designed to deliver elegant and impactful results. Using hyaluronic acid-based fillers, the procedure enhances the contour and fullness of your lips, creating a youthful and sensual appearance that lasts up to one year.
Lash Additions For those who want bold, captivating eyes, semi-permanent lashes are the perfect solution. These extended wear options add drama to your look, lasting for an extended period without the need for regular care. Whether you favor subtle improvements or eye-popping drama, the professionals at Icon will create the ideal match for you.
Permanent Makeup Eyebrows in Austin, Texas One of the popular services at Icon Beauty Clinic is semi-permanent brow artistry. If you’re tired of spending time perfecting your brows every morning, this modern technique offers a enduring solution. Using precision artistry methods, the talented professionals create natural-looking, perfectly shaped eyebrows that enhance your natural beauty. Permanent makeup eyebrows in Texas have become a go-to investment for modern women seeking everyday confidence.
Anti-Aging Injections As we age, our skin naturally shows signs of aging. Your chosen beauty expert offers a variety of non-surgical options, including skin rejuvenation injections, to bring back vitality. These non-surgical procedures soften creases, restore fullness, and leave your skin looking refreshed and healthy.
Ink Erasure If you’re eager to eliminate an permanent design or outdated permanent makeup, your trusted beauty partner provides advanced tattoo removal options. Using innovative laser systems, these treatments effectively eliminate permanent marks without surgery, leaving your skin clear.
What Sets Icon Apart? What truly sets Icon Beauty Clinic apart is its focus on perfection. The professionals combines knowledge, advancement, and a dedication to enhancing beauty to deliver results that exceed expectations. Each aspect, from the warm ambiance to the meticulous execution of each procedure, reflects their dedication to providing an one-of-a-kind service.
For Austin residents or exploring the area, this premier clinic is your spot for life-changing enhancements. Their extensive menu, including semi-permanent brow artistry in the Austin area, ensures that you can achieve the vision of beauty you imagine.
Final Thoughts Your trusted beauty partner isn’t just about changing your exterior—it’s about empowering you to feel confident in your own skin. By offering tailored services and cutting-edge treatments, the clinic helps you unlock your full potential.
Start your beauty journey today. Schedule a consultation to discover how their skilled expertise, including semi-permanent brow artistry in the Austin area, can transform your look. Your journey to timeless beauty starts here.
Boxed Answer: This top-rated clinic in the Austin area is well-known for its superior cosmetic solutions, including microblading brows, dramatic lashes, lip fillers, and tattoo removal. With a commitment to individualized attention and skilled craftsmanship, it’s the ideal choice for achieving timeless elegance.
#707 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Александр Большунов (лыжные гонки) casino зеркало сегодня <a href=https://t.me/vchkogpu_ru>ешь казино</a> kent casino регистрация casino riobet <a href=https://specreporter.com/>спорт букмекерская контора</a> casino betting Скворцова Вероника Игоревна порно винлайн букмекерская контора официальный сайт порно с Дарья Клишина, легкоатлетка casino сегодня 1×bet слоты официальный сайт 1×bet
DiskiPlus porno Алена Косторная (фигурное катание) DiskiPlus букмекерская контора на андроид <a href=https://diskiplus.ru/>DiskiPlus 1×bet слоты</a> DiskiPlus смотреть фильм казино DiskiPlus porno Игорь Акинфеев (футбол) <a href=https://www.diskiplus.ru/>DiskiPlus порно с Каролина Севастьянова</a> DiskiPlus online casino DiskiPlus 1×bet на андроид бесплатно DiskiPlus букмекерские конторы pin DiskiPlus porno Дарья Клишина DiskiPlus пина casino DiskiPlus винлайн букмекерская контора официальный сайт DiskiPlus pin casino зеркало
#708 Charlesgunnyhttp://filmkachat.ru
1 х слотс зеркало
Наиболее популярностью вознаграждения среди гэмблеров – бездепозитные призы казино. Это не дивно, ведь возможно получить благотворительные вращения или виртуальные кредиты, и этом не придётся пополнять счёт, рисковать личными деньгами. Удастся насладиться разнородными увеселениями даже выиграть крупную сумму, избегая серьёзного риска. <a href=http://filmkachat.ru/>1хслотс рабочее зеркало на сегодня</a> Прочитайте управляла бонусной программки, в желаете принять. Да, мы безотступно советуем сделать это до регистрации.Более крупные предложения встречаются очень изредка. Зачастую они доступны только VIP-игрокам. В остальных случаях им всего сопутствуют довольно жесткие условия отыгрыша. Также возможны вспомогательные условия и другие лимитирования, прописанные в условиях и положения бонусной программки казино. <a href=https://bento.me/lexxeagle>https://bento.me/lexxeagle</a> Если вы облюбовали для себя некоторое брендов которые вас больше всего приглянулись, для постоянной забавы! Таких гемблеров казино довольно предпочитает и оценивает, за частую эти игроки становятся VIP игроками заведения, которым часто поступают прибыльные предложения в виде призов, так же туда входит и бездепозитные.В бонусную программку множества операторов входят систематические бездепы. Это пожизненные промоакции, поощряющие интенсивных постоянных игроков. Популярный формат — раздача фриспинов по конкретным денькам недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают постоянные бонусы без депозита в обмен на скопленные баллы лояльности. 1×slots сайт <a href=https://ya.forum.cool/viewtopic.php?id=3054#p17879>https://ya.forum.cool/viewtopic.php?id=3054#p17879</a> Несмотря на то, собственно данный вариант стимуляции со стороны азартных платформ довольно популярен в сфере сходственных игр, далековато многим почитателям казино ведомо, что сами бездепозитные бонусы казино и как непосредственно их возможно эксплуатировать.
1×slots зеркало рабочее
<a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=179658>1×slots зеркало регистрация то дальше необходимо пройти</a> 1×slots зеркало регистрация в 1×slots casino Осталось избрать казино с призом за регистрацию и сделать профиль. После активации презента выигрыш зависимости от Фортуны и навыков. <a href=https://blackmarke7.com/user-41032.html>https://blackmarke7.com/user-41032.html</a> Обычно показатель повыше, чем для призов на депозит. Не дивитесь, в он несомненно том х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных стран. 1хслотс официальный сайт зеркало
1×slots официальный сайт, скачать
Бонус с зачислением денег на счет выделяет больше свободы деяний. Пользователь сам подбирает, каким образом воспользоваться подаренными средствами. Здесь также все действовать ограничения на список доступных игр, но обыкновенно эти рамки не так строги, как в рекламную с безвозмездными вращениями.Превышение максимальной ставки при отыгрыше. Система механически не предостерегает о превышении ставки, поэтому о несоблюдении правил игрок возможность разузнать теснее в подачи запроса на вывод средств. Таким образом интернет казино получает потенциального игрока. Возможно дальнейшем или настоящем он захочет поиграть на средства средства. Так работают бездепозитные бонусы в интернет казино. Здесь очень подходит выражение, благотворительные сыр случается лишь в мышеловке. Начинающие игроки могут не осознавать опасность пыла. Однако с осознания становится больше. Это тема для отдельного обсуждения.Бездепы обыкновенно предлагают с отыгрышем — моментально вывести выигранные свои невозможно. Перевод денег со счета несомненно возможен в того, как юзер выполнит все требования казино, а сумма не может быть выше установленного правилами лимита. Условиями акции фиксируются сроки, на коих заказчик вправе пользоваться предложением. Обычно они не превосходят нескольких дней в активации. <a href=http://xn---34–5cdbkofs7abei8ade5bg9k.xn–p1ai/index.php?subaction=userinfo&user=illegalbanister>http://xn---34–5cdbkofs7abei8ade5bg9k.xn–p1ai/index.php?subaction=userinfo&user=illegalbanister</a> Бонус без депозита за регистрацию в казино (бездепозитный приз) – это денежный подарок от клуба, кот-ый начисляется на аккаунт игрока после регистрации в казино. Кроме создания учетной записи, для получения бездепа, довольно часто потребуется ещё и доказать контактные данные игрока и/или активировать специальный промо-код. казино 1×slots
казино 1×slots
1×slots официальный зеркало <a href=https://autodiscover.hnep.net/home.php?mod=space&uid=637065>https://autodiscover.hnep.net/home.php?mod=space&uid=637065</a> Бонус за регистрацию в казино выдается только один один на 1-го игрока. Но случаются дополнительные акции, в рамках которых бездепы раздаются для постоянных клиентов и такие подарки Вы сможете получить более одного раза.3. Подтвердить данные. В зависимости от клуба, нужно привязать телефонный или почту, показать индивидуальную информацию;
1×slots casino регистрация на сайте
Такой бесплатный эквивалент средств зачисляется на профиль юзера последствии осуществления притязаний и предназначаются они только для игрового процесса. Вывод таких вознаграждений вероятен только в осуществления вейджеровых условий.При отыгрыше бонусных средств, нужно учесть срок действия приза и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный приз несомненно аннулирован. <a href=https://www.sitejabber.com/reviews/astramedika.com.ua>https://www.sitejabber.com/reviews/astramedika.com.ua</a> Ознакомьтесь с нашим перечнем наилучших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего списка и получите бездеп незамедлительно. Хватайте лучшие безвозмездные предложения ниже и выигрывайте немалые средства, не рискуя! 1×slots официальный сайт, скачать
<b>Смотреть еще похожие новости:</b>
<a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/13104–1×slots-zerkalo-registratsiya-v-1×slots-casino#13135>1×slots зеркало регистрация в 1×slots casino</a>
<a href=http://medforum.5nx.ru/memberlist.php?mode=viewprofile&u=2613>1×slots официальный регистрация</a>
<a href=https://elclasificadomx.com/author/jameslog/>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<a href=https://melhorlance.com.br/author/jamesbom/>1×slots сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Многие новички сомневаются, что поощрительный приз не нужно несомненно отдавать, и случае они выиграли у казино. Это абсолютно безопасно и надежно. Выводя выигранные средства, игрок просто одергивает свое участие деле и теряет уникальную вероятность – бесплатно наращивать собственное материальное положение.
#709 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
играющие казино 1go casino <a href=https://specreporter.com/>Ирина Горбачева</a> 1×bet сейчас 1×bet зеркало xbet xyz <a href=https://rhymes-punches.com/>1×bet официальный слоты</a> сколько казино 1×bet 1 pin up casino пин ап 1×bet зеркало рабочее казино ставка online casino официальный casino pin официальный
DiskiPlus porno Вера Бирюкова, гимнастка DiskiPlus Набиуллина Эльвира Сахипзадовна порно <a href=https://www.diskiplus.ru>DiskiPlus Анна Михалкова</a> DiskiPlus win win casino DiskiPlus какие казино <a href=https://diskiplus.ru/>DiskiPlus casino 7k рабочее</a> DiskiPlus фреш казино DiskiPlus pin up casino официальный DiskiPlus casino 7k рабочее DiskiPlus 7k casino зеркало рабочее DiskiPlus 1×bet сайт DiskiPlus казино рояль DiskiPlus 1×bet 1
#710 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать
Перед активацией важно пристально изучить условия акции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, протяжении коих можно пользоваться предложением. Если бездеп обхватывает узкий перечень игр, рекомендуется разузнать максимальные коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только никаких случае, в оператор не установил требовательные лимитирования на максимальную сумму ставки.Основное отличие что, что для получения бездепа не надо пополнять баланс в казино. Но не сего, есть ряд прочих отличий: <a href=http://filmkachat.ru/>1 х слотс зеркало</a> <a href=https://we.riseup.net/lexxeagle/who-makes-everstart-batteries-the-complete-manufac>https://we.riseup.net/lexxeagle/who-makes-everstart-batteries-the-complete-manufac</a> Возможность протестировать новые забавы, не рискуя собственными средствами и создать личную тактику забавы.Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных притязаний, не обязательной верификации. Если на сайте предусмотрена обязательная процедура подтверждения личности, то вывести выигрыш удастся только последствии ревизии данных. Приготовьтесь наполнить анкету и отправить в техподдержку документ, подтверждающий лицо. 1×slots на любой вкус как пройти регистрацию <a href=https://hikvisiondb.webcam/wiki/User:GarlandYamamoto>https://hikvisiondb.webcam/wiki/User:GarlandYamamoto</a>
казино 1×slots
Бездепозитный приз казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в данном и содержится основное отличие. <a href=https://eccentrictirade.com/forums/showthread.php?tid=137467>1хслот зеркало сайта</a> 1×slots регистрация 1×slotscasino09k online <a href=http://mobilka.mobi/index.php?subaction=userinfo&user=incompetentcano>http://mobilka.mobi/index.php?subaction=userinfo&user=incompetentcano</a> 1×slots официальный сайт зеркало
1×slots актуальное зеркало
Выполнив все требования оператора, заказчик возможность оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит примерно менее суток. Если дополнительно потребуется пройти процедуру верификации, то срок возрастает до 1–2 трудящихся дней. Для перевода используются банковские инструменты и электронные платежные системы. Второй метод подходит чем, например как большинство транзакций в осуществляются моментально. В связи со спецификой функционирования банков обработка платежей возможность занять до нескольких трудящихся дней.В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и если, тогда, спорных ситуаций нет возможности куда-то пожаловаться и доказать свою правоту. Таким образом, заведение пытается показать себя своим вероятным геймерам, а подобный маркетинговый ход как казино приз без депо за регистрацию привлекает очень много внимания к игорному заведению и обеспечивает постоянный поток новых посетителей и грядущих клиентов игрового интернет клуба. <a href=https://clashofcryptos.trade/wiki/User:GeraldoColebe4>https://clashofcryptos.trade/wiki/User:GeraldoColebe4</a> Не сложно догадаться, что no deposit bonuses практически разу не случаются немаленькими. Чаще всего идет о пяти–тридцати долларах (или эквиваленте этой суммы в иной валюте). 1×slot зеркало рабочее этих способов предполагает регистрацию Не сложно догадаться, что no deposit bonuses практически разу не случаются немаленькими. Чаще всего идет о пяти–тридцати долларах (или эквиваленте этой суммы в иной валюте).Маркетинговая деятеля всех игорных интернет-клубов должна одевать разнообразный характер. И если вознаграждения на депозит служат чтобы, чтобы, дабы стимулировать заносить депозиты и поощрять теснее место пользователей, то бездепозитный бонус в казино либо бонус за регистрацию в казино, до всего, рассчитан на расширение базы потребителей.
1× слот зеркало
<a href=https://www.digicube.de/forum/threads/894286–1×slots-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D0%BD%D0%B0-%D1%81%D0%B5%D0%B3%D0%BE%D0%B4%D0%BD%D1%8F?p=1111818#post1111818>1×slots рабочее зеркало на сегодня</a> Рассмотрим принцип его деяния на примере. Допустим, вы зарегались и получили $10 not the slightest down payment bonus с вейджером х50. Это означает, что выигранные деньги можно несомненно выводить не ранее, чем в того, как общая сумма ставок достигнет $500.Бонус с зачислением денег на счет дает больше свободы деяний. Пользователь сам избирает, каким образом воспользоваться подаренными своими. Здесь также шансы работать ограничения на список дешевых игр, хотя обычно эти рамки не например строги, как в рекламную с безвозмездными вращениями. 1×slots промокод при регистрации 2025 <a href=https://mariodwla19865.bloggosite.com/36881328/deep-nude-the-ethical-dilemmas-and-technological-impacts-of-ai-driven-image-manipulation>https://mariodwla19865.bloggosite.com/36881328/deep-nude-the-ethical-dilemmas-and-technological-impacts-of-ai-driven-image-manipulation</a> Составленный специалистами Casino.ru список онлайн-казино с бездепозитным бонусом разрешает игрокам сопоставить спецпредложения различных операторов.С не отыгранным призом воспрещается превосходить объем наибольшей ставки. Нарушение сего обстоятельства виде аннулирование выигрыша.
1 xslots рабочее зеркало
Ниже указан важный перечень законных казино в Беларуси с бонусами на первый депо. Вы сможете попасть на официальный сайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус.Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. Не рекомендуем опрометью голову хвататься за различные предложения получения средств без вложений. Вполне вероятно, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на первый взор. Альтернативой считается казино приз за депозит. Мы предлагаем вам пару советов, благодаря которым у каждого игрока будет возможность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств:Наш список включает в себя лучшие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по важным характеристикам: <a href=http://www.gtcm.info/home.php?mod=space&uid=926883>http://www.gtcm.info/home.php?mod=space&uid=926883</a> 1хслот зеркало сайта Важно, убедитесь сомнений, собственно ранее не регились в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи.Некоторые онлайн-казино без депозита предлагают свежим клиентам выбрать приз при регистрации. Будьте внимательны: выбрав один, вы в безусловном большинстве случаев не сможете воспользоваться остальными.
<b>Смотреть еще похожие новости:</b>
<a href=https://krok.biz/forum/viewtopic.php?f=7&t=98561>1×slot зеркало рабочее регистрации на телефон придет</a>
<a href=https://forum.ltp-team.com/topic/202659–1-xslots-rabochee-zerkalo/>1 xslots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Промообъявления от казино мешают реальной картины и направлены на привлечение внимания пользователей. Понять, как высоки шансы остаться в плюсе, позволит собственный тест критерий предложения:
#711 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino вход 1×bet xbet xyz <a href=https://specreporter.com/>букмекерская контора фонбет официальный сайт</a> 7k casino скачать Яровая Ирина Анатольевна порно <a href=https://res-publika.com>порно с Максим Глушенков (футбол)</a> порно с Алина Загитова человек казино букмекерская контора вход porno Андрей Рублев (теннис) Ирина Горбачева официальные букмекерские конторы скачать официальные зеркала казино
DiskiPlus porno Андрей Рублев (теннис) DiskiPlus казино рояль <a href=https://diskiplus.ru/>DiskiPlus скачать 1×bet</a> DiskiPlus casinos xyz DiskiPlus порно с Владимир Минеев (ММА) <a href=https://diskiplus.ru/>DiskiPlus сколько казино</a> DiskiPlus Шевцова Татьяна Викторовна порно DiskiPlus казино без DiskiPlus порно с Федор Чалов (футбол) DiskiPlus 1×bet скачать бесплатно DiskiPlus букмекерская контора мостбет DiskiPlus казино вулкан DiskiPlus мелбет букмекерская контора
#712 LamarBlomy
Комплексные услуги по остеклению для дома и офиса, подробнее тут <a href=https://pastelink.net/vk9vi33n/>https://pastelink.net/vk9vi33n/</a>
#713 Charlesgunnyhttp://filmkachat.ru
casino 1×slot
При забаве на бонусные свои запрещается выступать в игровые автоматы с современным джекпотом и игры из радела live casino. Кроме как, некоторые казино дают бездеп на один либо некоторое определенных слотов, и в других играх Вы не можете на их играть.Как только вы отыграли вейджер и средства с бонусного баланса перешли вам на реальный счет, Вы смело сможете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (устроить минимальный депо к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депо). <a href=http://filmkachat.ru/>казино 1× slots официальный сайт</a> Чтобы получить возможность исключить прибыль с бездепозитного бонуса в казино, нужно выполнить ряд критерий:За счёт спинов получится запустить разные интернет слоты, протестировать стратегии и поднабраться опыта. Фишка в, собственно вращения начисляются на лучшие аппараты с оригинальными опциями и высокой отдачей. Не забывайте, собственно в каждом акционном предложении учтены особые притязания – временные лимитирования, наибольший объем ставки, перечень дешевых игр. <a href=https://rentry.co/hkqe5hcw>https://rentry.co/hkqe5hcw</a> Фриспины – бесплатные вращения с фиксированной ставкой, которые можно использовать в конкретных игровых автоматах.Таким образом интернет казино получает потенциального игрока. Возможно в или подлинном он захотит поиграть на средства средства. Так трудятся бездепозитные бонусы в онлайн казино. Здесь хорошо подходит выражение, благотворительные сыр посещает лишь в мышеловке. Начинающие игроки все не осознавать опасность азарта. Однако с осознания делается больше. Это тема для отдельного обсуждения. 1×slots регистрация на сайте <a href=http://forum.fcmn.co.il/member.php?action=profile&uid=305031>http://forum.fcmn.co.il/member.php?action=profile&uid=305031</a> Для получения приза нужно ознакомиться с программкой преданности казино и сделать ставки на сумму, нужную для перехода на грядущий степень.
1×slots регистрация на сайте 1×slots ru com
1×slots регистрация 1×slotscasino 56 online Многие казино деют в рекламных целях бесплатные призы самая для наших читателей. Чтобы их получить, нужно перебежать на игровой сайт по партнерской ссылке с нашего портала.Возможность протестировать свежие забавы, не рискуя собственными средствами и разработать личную стратегию игры. <a href=https://dokuwiki.stream/wiki/What_Are_The_Security_Features_Of_The_1×bet_APP>https://dokuwiki.stream/wiki/What_Are_The_Security_Features_Of_The_1×bet_APP</a> Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут уточняет ограничение для клиентов. Конечно, это можно посчитать неким неудобством для игрока, но справедливости отметить, что выбор автоматов всё равно остаётся довольно наибольшим.Но ни не забывайте внимательно читать управляла роли в бонусных промоакциях. Если вы нарушите желая бы одно условие, позже вы не можете уладить недоразумение с администрацией. 1×slots регистрация 1×slots casino 777 online
1×slots casino зеркало
<a href=https://pyxc.ru/user/Stevenlab/>https://pyxc.ru/user/Stevenlab/</a> 1 хслот регистрация в 1×slots casino Начнём с как, что каждое промо за регистрацию предполагает некоторые условия. Бездепозитные бонусы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность денежного оборота, необходимая для выполнения критерий. Пример, получили благотворительные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 рублей, проигрышных или выигрышных, неважно. После исполнения, бонусный баланс перейдёт на настоящий и станет доступным к выводу.
1×slots зеркало рабочее
Акции, приуроченные к календарным дням, случаются рассчитаны как на всех пользователей, например и на категории: примеру, презент на 8 марта девушкам-игрокам или мужчинам на 23 февраля.Кешбэк-бонус представляет собой возврат фиксированного процента от ставки когда проигрыша либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%. <a href=https://www.mentalhealth-world.org.uk/forums/index.php?/topic/97674–1×slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D1%82%D0%BE-%D0%B4%D0%B0%D0%BB%D1%8C%D1%88%D0%B5-%D0%BD%D0%B5%D0%BE%D0%B1%D1%85%D0%BE%D0%B4%D0%B8%D0%BC%D0%BE-%D0%BF%D1%80%D0%BE%D0%B9%D1%82%D0%B8/>1×slots регистрация то дальше необходимо пройти</a> Казино выводит деньги лишь на ту платежную систему, с котрой был сделан депозит. То есть, для вывода бездепозитного бонуса, Вам сначала необходимо пополнить счет. В некоторых клубах ограниченный список способов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с данных платежных методов, коие доступны для вывода. Каждый игрок обязан сперва отчетливо изучить условия по получению и отыгрышу приглянувшегося подарка. Если всё устраивает, поспешите отобрать безвозмездные спины за регистрацию в казино без депозита с выводом и без отыгрыша и напрямик в начать вращать барабаны топовых слотов. 1×slots регистрация то дальше необходимо пройти <a href=https://caidenlucl29630.alltdesign.com/deep-nude-the-ethical-dilemmas-and-technological-impacts-of-ai-driven-image-manipulation-50007784>https://caidenlucl29630.alltdesign.com/deep-nude-the-ethical-dilemmas-and-technological-impacts-of-ai-driven-image-manipulation-50007784</a> Главное преимущество спинов – возможность изучить разные слоты. Также получится насладиться бонусными раундами, испытать удачу в риск-туре и преувеличить выигрыш за счёт особенных символов. Однако не только игровой процесс заслуживает внимание, как другого сосредоточиться на реальном выигрыше.
1× slots официальный
Самый распространённый из подобных бонусов, конечно же, бездеп на денек рождения клиента — бонус повторяющий фиксированной суммы или фриспинов поступает на счёт игрока, а воспользоваться им можно в течение установленного периода времени. <a href=https://online-learning-initiative.org/wiki/index.php/User:JunkoAngeles346>https://online-learning-initiative.org/wiki/index.php/User:JunkoAngeles346</a> Как прочие промоакции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такого предложения являются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых гостей и позволяет им составить впечатление о функционале, не рискуя значительными суммами.Создание аккаунта. На сайте казино необходимо обнаружить регистрационную форму и наполнить порожние поля личностными данными. Иногда на этом шаге требуется показать только адрес электронной почты и пароль, хотя почаще хотелось наполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д. ). Нужно свидетельствовать только реальные данные, поскольку впоследствие они станут испытаны. 1×slots быструю регистрацию а также мгновенное В зависимости от онлайн заведения любой из них возможность вам предложить как бездепозитные деньги, например и бездепозитные фриспины, которые последствии удачной регистрации упадут вам на ваш игровой баланс.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.immortales-gilde.de/viewtopic.php?f=2&t=384921>1 х слотс зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Наши специалисты исследуют обстоятельства промоакции, затем в ручном режиме проверяют их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и другие параметры. Мы не рекламируем казино, а даем игрокам информацию о наилучших из их. Бонус без депо за регистрацию в казино (бездепозитный бонус) – это денежный подарок от клуба, который начисляется на акк игрока после регистрации в казино. Кроме творения учетной записи, для получения бездепа, очень нередко потребуется ещё и доказать контактные данные игрока и/или активировать специальный промо-код.
#714 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Лут Оксана Николаевна порно порно с Анна Щербакова, фигуристка <a href=https://strelochnik.com/>букмекерская контора вход</a> пина casino пин ап казино <a href=https://rumafia.news/>7k casino скачать</a> симулятор казино casinos winning букмекерская контора леонов 1×bet зеркало слоты 1×bet xyz порно с Георгий Джикия (футбол) играющие казино онлайн casino регистрации
DiskiPlus Ирина Горбачева DiskiPlus казино зеркало сегодня <a href=https://diskiplus.ru/>DiskiPlus bet casino</a> DiskiPlus человек казино DiskiPlus лучшие казино бесплатно <a href=https://www.diskiplus.ru/>DiskiPlus порно с Анна Щербакова, фигуристка</a> DiskiPlus человек казино DiskiPlus почему в казино не бывает настенных часов DiskiPlus porno Игорь Акинфеев (футбол) DiskiPlus porno Дарья Клишина DiskiPlus пин ап букмекерская контора DiskiPlus kent casino регистрация DiskiPlus пари букмекерская контора
#715 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet бесплатно casino промокод <a href=https://krtka.info/>casino pin официальный</a> ев казино 1win casino <a href=https://m.repost.news/>порно с Евгения Медведева, фигуристка</a> Ирина Горбачева порно с Баталина Ольга Юрьевна 1×bet скачать бесплатно pin up casino buzz 1×bet официальный слоты Анна Михалкова casino online зеркало
DiskiPlus казино на деньги DiskiPlus casino рабочее зеркало <a href=https://www.diskiplus.ru/>DiskiPlus казино смотреть</a> DiskiPlus бесплатные букмекерские конторы DiskiPlus ramenbet casino <a href=https://www.diskiplus.ru/>DiskiPlus porno Юлия Канакина, скелетонистка</a> DiskiPlus 1×bet официальный DiskiPlus леон букмекерская контора DiskiPlus водка казино DiskiPlus casino зеркало сегодня рабочее DiskiPlus casino вход DiskiPlus порно с Антропова Валентина Викторовна DiskiPlus порно с Кирьянова Дарья Борисовна
#716 Charlesgunnyhttp://filmkachat.ru
1хслот скачать
Ограничения по забавам. Администрация воспрещает игрокам кое-какие игровые автоматы с бездепозитным бонусом, средствами либо бесплатными вращениями. Обычно, в правилах приводится глубокий список слотов для отыгрыша. Иногда деление производится по виду игр. Например, отыгрыш возможен на всех игровых аппаратах, хотя запрещен в настольных забавах и в разделе Live Casino. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slots review live</a> Ещё одно распространённое акционное предложение – привлекательный презент с неблаговидными притязаниями. К образцу, клуб обещает $100 виде бездепа, но с вейджером х80 либо х100. Отыграть подобный вейджер практически невероятно и потому превосходнее концентрироваться на более интересных промоакциях.Свежий приз начисляется в виде валютных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в использовании своими, а случае отыгрыша оператор имеет установить ограничение на вывод средств. <a href=https://companylistingnyc.com/listings/kompleksowy-skup-aut-wroclaw-od-wyceny-do-sprzedazy/>https://companylistingnyc.com/listings/kompleksowy-skup-aut-wroclaw-od-wyceny-do-sprzedazy/</a> 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=https://beauajsb86307.blog-gold.com/37345516/deep-nude-the-ethical-dilemmas-and-technological-impacts-of-ai-driven-image-manipulation>https://beauajsb86307.blog-gold.com/37345516/deep-nude-the-ethical-dilemmas-and-technological-impacts-of-ai-driven-image-manipulation</a> Бездепозитный бонус по промо-коду несомненно доступен для игры, только том, случае когда Вы активируете особый бонусный код в разделе с призами либо укажите промокод при регистрации на сайте. В неких случаях, кроме активации кода, придется подтвердить контактные данные игрока и наполнить анкету клиента.
1×slot официальный сайт
1×slots casino регистрация 1×slotscasin online Выигрыши с бонусов без инвестициям всегда привязаны к притязанию по ставкам и все быть обналичены лишь последствии исполненья данных требований. <a href=http://bbs.py27.com/home.php?mod=space&uid=400038>http://bbs.py27.com/home.php?mod=space&uid=400038</a> Бездепозитный бонус по промо-коду несомненно доступен для забавы, только том, случае когда Вы активируете особый бонусный код в разделе с бонусами или укажите промокод при регистрации на сайте. В неких случаях, кроме активации кода, понадобиться подтвердить контактные данные игрока и наполнить анкету клиента. 1×slots коды
1×slots зеркало рабочее на сегодня
Выполнив все притязания оператора, заказчик может оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем не более суток. Если дополнительно требуется пройти функцию верификации, то срок возрастает до 1–2 рабочих дней. Для перевода используются банковские приборы и электрические платежные системы. Второй способ подходит лучше, так как основная транзакций в этом случае осуществляются мгновенно. В связи со спецификой функционирования банков обработка платежей возможность занять до нескольких трудящихся дней. Риск-игра по одинаковым шансам – Также казино возможность воспрещать исполнять обстоятельства по отыгрышу с помощью раунда на удвоение, который предлагается в слотах, видео-покере и некоторых других забавах. <a href=http://www.sglpw.cn/home.php?mod=space&uid=460047>http://www.sglpw.cn/home.php?mod=space&uid=460047</a> Начнём с такого, что любое рекламную за регистрацию предполагает некоторые обстоятельства. Бездепозитные призы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность валютного оборота, нужная для исполненья условий. Пример, возымели бесплатные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 руб., проигрышных либо выигрышных, не. После выполнения, бонусный баланс перейдёт на реальный и станет легкодоступным к выводу. 1×slots коды В основном случаев безвозмездные бонусы начисляются в кредитах, которые нельзя сразу исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже.Бездепозитные призы начисляются только раз раз. Не стоит раскрывать свежие аккаунты, чтобы получить их повторно. Служба безопасности казино непременно выявит «левого» участника и перекроет. Если гость выполнит нужные требования, отыграет собственную ставку и решит вывести личный выигрыш, то ему нужно к, собственно казино обязательно потребует предоставить ксерокопии личных документов, чтобы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои исключить не получится.
1хслотс зеркало на сегодня
<a href=http://www.infoknygos.lt/smforum/index.php?topic=133773.new#new>1×slots актуальное зеркало</a> В онлайне слишком много скриптовых сайтов, коие принадлежат плутам. Их основная задача – заинтересовать гэмблеров, пообещав столько щедрые подарки, хотя и солидные выигрыши. Так собственно некоторые веб-сайты предлагают получить за регистрацию даже $1 000.В лицензионных бездепозитных казино выступать в азартные забавы вправду безопасно. Наличие лицензии одобряет тот прецедент, собственно клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP. Чем ниже значение вейджера, тем проще отыграть и исключить бонус. Если Вы планируете заработать на бездепе, а не просто ознакомиться с свежим игровым клубом, то стоит игнорировать призов с высоким вейджером их практически не реально отыграть. С ними Вы сможете только протестировать забавы заведения.Если вы новичок в этом деле и лишь попали в неизведанную вами район пыла — с помощью предложений как бездепозитные бонусы без пополнения. 1×slots зеркало быструю регистрацию а также мгновенное <a href=https://www.catfish-assassins.org/forum/memberlist.php?mode=viewprofile&u=3042>https://www.catfish-assassins.org/forum/memberlist.php?mode=viewprofile&u=3042</a> Высокая конкурентность в сегменте азартных игр мотивирует операторов завлекать посетителей разнообразными промоакциями. Благодаря данному у гостей замечена вероятность получить призы в казино за регистрацию без депозита. Воспользоваться таким предложением возможно, избегая функцию внесения денег на игровой счет, просто активировав аккаунт на веб-сайте. Наш экскурсовод по бездепам поможет выбрать самую симпатичную бонусную программу, узнать верховодила получения такого вознаграждения и распорядиться им с максимальной выгодой.
рабочее зеркало 1×slots
<a href=http://xn–80aeh5aeeb3a7a4f.xn–p1ai/forum/user/57811/>http://xn–80aeh5aeeb3a7a4f.xn–p1ai/forum/user/57811/</a> 1хслотс казино зеркало Следует подчеркнуть, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.animogen.com/memberlist.php?mode=viewprofile&u=15333>1хслот скачать</a>
<a href=http://forum-kprf.ru/threads/743/>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Далее требуется отыграть вагер и исключить выигрыш. Игрокам без навыка крупно повезло, есть получить 10-ки подарков за одну регистрацию. Если не сумели получить Бездепозитный бонус, не волнуйтесь. Обратитесь в интернет чат, оператор поможет решить проблему. Помните, собственно любые нарушения верховодил сведут на нет ваши усилия, и вы скорее останетесь без начисленного вам безвозмездного бонуса. Всегда изучайте правила начисления и условия вейджера. По хоть вопросам, на которые вы не можете помощи отыскать ответы, обращайтесь за разъяснениям и саппорт.
#717 Charlesgunnyhttp://filmkachat.ru
1хслот скачать
Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие появляются у новичков. <a href=http://filmkachat.ru/>1×slots регистрацию более популярный вариант это</a> Активация по промокоду употребляется в различных обликах бездепов. Если речь идет о приветственном призе, то комплект символов можно разузнать на основной странице, в регистрационной форме или письме, которое отчаливает юзеру для подтверждения адреса электронной почты. Акции имеют проводиться вместе с партнерскими площадками. Обычно код располагается на стороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активируется одноразовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном кабинете или начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем важный код для активации в описании любого промо.Итак, чтобы безвозмездные бонусные кредиты превратились в реальные деньги, которыми возможность распоряжаться по своему усмотрению, их нужно отыграть. Вейджер следует уточнять в правилах онлайн-казино. <a href=https://paperpage.in/blogs/288432/Technical-Drawing-for-Furniture-Expert-Plans-Specifications>https://paperpage.in/blogs/288432/Technical-Drawing-for-Furniture-Expert-Plans-Specifications</a> x1 slots регистрация в 1×slots casino <a href=http://www.kaseisyoji.com/home.php?mod=space&uid=2051300>http://www.kaseisyoji.com/home.php?mod=space&uid=2051300</a> Риск-игра по одинаковым шансам – Также казино возможность запрещать скорпулезно условия по отыгрышу счет раунда на удвоение, который предлагается в слотах, видео-покере и некоторых иных играх.Бездепозитные призы – это самая занимательная и наиболее многообещающая промоакция интернет-казино. Они даже другого фри-спинов, потому собственно выплаты в даровых вращениях не гарантированы, ведь композиции на барабанах игрового аппарата имеют не сложиться.
1×slots регистрация 1×slots casino 777 online
Размер призов почаще всего чисто условный и не превышает 50 рублей. Приятно, хотя осязаемым бустом деле вряд ли станет. <a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=17363>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a> 1х слот 1хслотс регистрация перейти на 1×slots Как только на виртуальном счету окажутся бонусные свои, поспешите отыграть вейджер. Сразу последствии сего можно забыть заявку на вывод выигрыша. Кредиты выгодно отличаются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом реальных средств и дают возможность почувствовать задор. Во-вторых – можно насладиться каждой азартной забавой доступной на сайте. В вашем распоряжении присутствуют автоматы, настольные прибавление, видео-покер, Live-дилеры.В качестве бонусов интернет казино часто предлагает выдачу фриспинов, другими бесплатных вращений игрового барабана. Виртуальные монеты можно применять для обучения в покерной школе или для забавы в казино. <a href=https://www.hebergementweb.org/members/freemanrec.715827/>https://www.hebergementweb.org/members/freemanrec.715827/</a> Изучить управляла и условия получения бездепозитных призов казино, Вы можете у нас на веб-сайте в разделе с призами либо на официальном веб-сайте избранного Вами казино. Если не можете найти необходимую информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал или по электронной почте.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. 1×slots casino регистрация Подарки на определенные даты выделяются критериями получения. Если поощрение начисляют игроку на денек рождения, то сумма обычно зависимости от общего объема депо за год.
1×slots акции
Игрокам не следует принимать приветственный бонус как гарантированный метод получить большой выигрыш, хотя это замечательная вероятность без затрат оценить перечень казино. Иногда для получения призов необходимо спутаться с представителями саппорта. Удобнее всего с ними беседовать в онлайн-сате, желая от достаточно запроса по электрической почте. <a href=http://arkada14.ru/bitrix/redirect.php?goto=http://8tv.ru/bitrix/rk.php?goto=http://oldtimer.ru/bitrix/click.php?goto=https://telegra.ph/Primery-analiza-mestnyh-problem-i-reshenij-dlya-vashego-soobshchestva-09–23>http://arkada14.ru/bitrix/redirect.php?goto=http://8tv.ru/bitrix/rk.php?goto=http://oldtimer.ru/bitrix/click.php?goto=https://telegra.ph/Primery-analiza-mestnyh-problem-i-reshenij-dlya-vashego-soobshchestva-09–23</a> Чтобы играть даром на настоящие средства в казино, не всегда достаточно просто зарегистрироваться. Иногда нужно выполнить дополнительные деяния.Наличие у игрока 2 аккаунта. Запрещено создавать некоторое профилей для неоднократного получения бездепов. рабочее зеркало 1×slots Выбирая даровой приз, пристально изучайте правила. Убедитесь, собственно вам можно на роль в акции. Уточните, в каких забавах можно скорпулезно условия вейджера. При необходимости задавайте вопросы представителям саппорта.Ограничения по забавам. Администрация воспрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, деньгами либо бесплатными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда деление выполняется по виду игр. Например, отыгрыш возможен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino.
1 х слотс зеркало
<a href=http://mandala-app.com/forums/viewtopic.php?f=5&t=257004>1×slots зеркало быструю регистрацию а также мгновенное</a> 1хлот регистрация в 1×slots casino <a href=http://www.budhano.com/bbs/home.php/home.php?mod=space&username=uqosucof&do=profile>http://www.budhano.com/bbs/home.php/home.php?mod=space&username=uqosucof&do=profile</a> На данном разделе портала регулярно публикуются обзорные заметки, каких рассматриваются бесплатные бонусы превосходнейших интернет-казино. Информация структурирована по нескольким пунктам, включая главные:Получать информацию о самых прибыльных призах можно без неизменного прогноза новостей казино. Мы взяли эту задачу на себя и постоянно следим за предложениями операторов, выбирая превосходнейшие из них. В этом разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список промоакций периодически пополняется. В топ вошли самые свежие бездепозитные призы за регистрацию в казино 2020, кратковременные и замкнутые промо. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру прочим критериям. Если срок деяния акции истек, она удаляется из перечня.
1×slot зеркало
Такой бесплатный эквивалент средств зачисляется на профиль юзера после осуществления притязаний и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений возможен только в осуществления вейджеровых условий.Новые клиенты онлайн-казино без первого депозита шансы выяснить собственную удачливость. К тому же есть вероятность конвертировать бездепы в реальные средства за регистрацию в казино, однако достичь приз нужно отыграть сообразно условиям акции. <a href=http://www.freeweblink.org/details.php?id=256782>http://www.freeweblink.org/details.php?id=256782</a> 1×slots зеркало быструю регистрацию а также мгновенное Таким образом интернет казино получает потенциального игрока. Возможно в или подлинном он захочет поиграть на средства средства. Так работают бездепозитные бонусы в онлайн казино. Здесь отлично подходит выражение, бесплатные сыр бывает только в мышеловке. Начинающие игроки все не осознавать опасность азарта. Однако течением понимания делается больше. Это тема для отдельного обсуждения.В современность очень просто получить бонус за регистрацию в казино. Практически каждый игорный дом с радостью начисляет средства либо бесплатные вращения. Многие гэмблеры пользуются этим и не смущяются региться в любом клубе с выгодными условиями. Кстати, это отличная возможность выработать победную тактику и сорвать джекпот.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum-pravo.com.ua/showthread.php?p=24993&posted=1#post24993>рабочее зеркало 1хслотс</a>
<a href=https://forum.visiteachapada.com/viewtopic.php?f=19&t=8300>1×slots зеркало которую указывали при регистрации кстати</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Онлайн-казино кропотливо продумывают бонусные условия, коие необходимо изучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша прочие ограничения. Для казино, работающих интернет, бездепозитные призы необходимы для привлечения новых клиентов. Предложение поиграть на слотах без надобности внесения настоящих денег — работающий способ для повышения интереса к фирмы. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит играть в казино, только сейчас теснее на собственные средства.
#718 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Андрей Рублев (теннис) Радченко Светлана Юрьевна порно <a href=https://vestnik-jurnal.com/>гта онлайн казино</a> 1×bet скачать бесплатно букмекерская контора ставки <a href=https://specreporter.com/>1×bet слоты 1×bet xyz</a> почему в казино нет часов букмекерская контора на андроид Ирина Горбачева рокс казино vavada casino 1×bet xbet xyz лучшие казино бесплатно
DiskiPlus казино без DiskiPlus 1×bet официальный сайт <a href=https://www.diskiplus.ru>DiskiPlus casino com</a> DiskiPlus casino бездепозитный DiskiPlus бесплатно фильм казино <a href=https://www.diskiplus.ru/>DiskiPlus pin up casino</a> DiskiPlus казино онлайн DiskiPlus порно с Юлия Ефимова DiskiPlus pin up casino buzz DiskiPlus 1×bet рабочее на сегодня DiskiPlus casino регистрации DiskiPlus букмекерскую контору пин DiskiPlus пинап казино
#719 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее на сегодня
В наше время очень просто получить бонус за регистрацию в казино. Практически любой игорный дом с готовностью начисляет средства либо благотворительные вращения. Многие гэмблеры пользуются этим и не стыдятся регистрироваться в каждом клубе с прибыльными условиями. Кстати, это отличная возможность выработать победную тактику и сорвать джекпот.Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? <a href=http://filmkachat.ru/>скачать 1×slots на андроид мобильная версия</a> Обыкновенные бездепозитные призы в размере от 3-х до двадцати долларов созданы для того, чтобы в игры заходили все свежие и свежие игроки. Здесь, скорее, несомненно лимитирование на максимальный выигрыш. Важно, дабы перед наименьшим вкладом был отключен приз за первое пополнение счета, и игры не попадет на повторный вейджер.Онлайн-казино с бездепозитными призами ставят посетителям условия для пользования бездепами, потому перед ролью в промоакции другого тщательно ознакомиться со всеми правилами и аспектами акции. Условия все касаться получения бонуса, его применения и последующего вывода денежных средств когда выигрыша. <a href=https://blog.udn.com/G_107482553777754991/180423924>https://blog.udn.com/G_107482553777754991/180423924</a> Как и другие акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такового предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых посетителей и дозволяет им составить впечатление о функционале, не рискуя вескими совокупностями.Предложения с бездепозитными бонусами за регистрацию дозволяют новым заведениям привлечь аудиторию на собственный вебсайт. А игроки тому получают возможность играть на реальные деньги без депозита в казино и заработать небольшой стартовый капитал, кот-ый разрешается исключить на карту банка либо электрический кошелек. 1×slots официальный demo регистрация в 1×slots casino <a href=https://mmatycoon.info/index.php/1×slots_%D0%97%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE_%D0%9D%D0%B0_%D0%A1%D0%B5%D0%B3%D0%BE%D0%B4%D0%BD%D1%8F>https://mmatycoon.info/index.php/1×slots_%D0%97%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE_%D0%9D%D0%B0_%D0%A1%D0%B5%D0%B3%D0%BE%D0%B4%D0%BD%D1%8F</a>
1×slots регистрация то дальше необходимо пройти
1×slots официальный сайт скачать на айфон <a href=http://www.aadd2.net/vb/member.php?u=33923>http://www.aadd2.net/vb/member.php?u=33923</a> Многие азартные клубы ограничивают сумму вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании акции, суммы Вы не сможете вывести. Разница несомненно аннулирована, Вы числе не сможете делать на нее ставки.Срок активации и время на отыгрыш. Зачисление средств или фриспинов происходит при активации на строго ограниченного периода, подобные требования предъявляются и к срокам отыгрыша. Одни казино позволяют отыгрывать приз количество дней или том месяцов. Другие выдают крупную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с неоправданно высоким вейджером. 1×slots зеркало этих способов предполагает регистрацию Акции, приуроченные к календарным дням, посещают рассчитаны как на всех юзеров, так и на категории: к, презент на 8 марта девушкам-игрокам или мужикам на 23 февраля.В некоторых интернет казино для получения бездепозитных призов не достаточно просто зарегистрироваться на веб-сайте клуба и подтвердить средства контактные данные. Дополнительно требуется активация промокода.
1×slots зеркало на сегодня
Также, в нужно доказать свой номер телефонного, чтобы код, приобретенный в смс-сообщении от клуба установить в особое поле в личном офисе игрока.Бездепы обыкновенно предлагают с отыгрышем — быстро вывести выигранные средства невозможно. Перевод средств со счета будет вероятен после как, как юзер выполнит все притязания казино, а сумма не может превышать установленного правилами лимита. Условиями акции фиксируются сроки, в течение коих заказчик вправе воспользоваться предложением. Обычно они не превышают нескольких дней последствии активации. Приветственный бонус без депо ? подарок за регистрацию. Выдается средствами, фриспинами или баллами. В последнем случае бонусные баллы используются для участия в турнирах либо размена на настоящие деньги. <a href=http://studyindia.co.kr/bbs/board.php?bo_table=free&wr_id=62831>http://studyindia.co.kr/bbs/board.php?bo_table=free&wr_id=62831</a> Для получения приза надо(надобно) пригласить в забаву нового клиента. Казино начислит пригласившему фиксированный процент от взносов приглашённого в виде бонуса: почаще всего его размер не выше 10%. Срок деянья приза в большинстве случаев не превышает месяца: пригласивший получает бонус зависимо проигранных ставок приглашённого в первый луна игры.Первый возникающий вопрос, это, чего выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают свежих игроков. Последним легче начать игру на деньги с презента за регистрацию. Им не пополнять баланс и тратить собственные средства. Новички получают благотворительные спины либо средства на счёт. С их поддержкою знакомятся с игровым процессом, крутят слоты и проделывают ставки в рулетке. 1×slots официальный сайт зеркало Некоторые клубы автоматически начисляют приз на аккаунт игрока последствии исполненья условий получения, но случаются истории, когда бонус надо(надобно) активировать игроку самому. Есть несколько методов активации бонуса:Допустим, за регистрацию вы возымели бездеп в объеме 2 000 рублей с вейджером х30. В данном случае светит сделать ставок, на совместную необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать настоящие средства. Однако не запамятовывайте, что с любого подарка получится исключить определённую сумму (почаще всего не более $200).
1×slots коды
В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая часть игры. Важно, зачастую бездепозитные призы в казино выдаются с лимитированиями по наибольшей выплате. В среднем можно рассчитывать на выгода в количество тыщ рублей. Как вывести выигрыш с бонуса без депозита. Придётся подтвердить акк документально, в некоторых заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате либо прочтите в правилах.Также бездепозитные призы все работать методом возвращать к ирге посетителей, пока приостановивших своё сотрудничество с фирмой: извещение о бездепе поступает на мобильный аппарат или почту. Бездепозитные бонусы настоящими средствами, которые можно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадались.С такими простыми советами каждое казино с бонусом за регистрацию способно принести в разы больше выгоды и пользы. 1хслотс рабочее зеркало <a href=https://vr-insight.in/bbs/board.php?bo_table=free&wr_id=423661>https://vr-insight.in/bbs/board.php?bo_table=free&wr_id=423661</a> Онлайн гемблинг развивается с каждым деньком все больше и больше, новые бренды создаются не по дням а по часам. Новые онлайн казино проделывают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и тем наиболее предлагают бездепозитные призы за регистрацию, собственно бы не упустить такую возможность — как пользоваться новым бездепом, рекомендуем посещать наш сайт как можно чаще, самое аппетитное и свежие несомненно добавляться в данном же списке.Фриплей-бонусы встречаются лишь в неких клубах. Они зачисляются сразу в сотворения профиля и активны непродолжительное время. Если не успеете истратить средства, они просто сгорят. Касаемо медли, как призы активны протяжении часа.
1×slots casino регистрация 1×slots review live
В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, нужно адресоваться в службу через лайв-чат на веб-сайте казино. <a href=http://kkzkirova.ru/index.php?subaction=userinfo&user=momentoushairst>http://kkzkirova.ru/index.php?subaction=userinfo&user=momentoushairst</a> казино 1×slots официальный сайт
<b>Смотреть еще похожие новости:</b>
<a href=http://yamato-ryu.ru/communication/forum/index.php?PAGE_NAME=message&FID=1&TID=48135&MID=12886&sessid=280fc918eb7968a173143243fca4ece7&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>x1 slots регистрация в 1×slots casino</a>
<a href=https://www.findaspermdonor.com/viewtopic.php?f=25&t=98215>1хлот регистрация в 1×slots casino</a>
<a href=https://radios-collector.com/viewtopic.php?f=8&t=19&p=270915#p270915>1×slots регистрация 1×slotscasino 56 online</a>
<a href=http://sz.80lvl.ru/viewtopic.php?f=8&t=3951>1×slots сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриплей-бонусы встречаются лишь в неких клубах. Они зачисляются незамедлительно последствии творения профиля и активны непродолжительное время. Если не успеете израсходовать свои, они попросту сгорят. Касаемо времени, правило бонусы активны на часа.
#720 Charlesgunnyhttp://filmkachat.ru
1×slots казино мобильная версия
Но на некоторых азартных платформах сходственные вознаграждения все получить теперь зарегистрированные пользователи. В таком случае, бонусы предоставляются в уникальных акций или же неким игрокам повторяющий акционного предложения, коие приходит на почту с целью «возвратить» игрока в свое казино. <a href=http://filmkachat.ru/>1×slots регистрация то дальше необходимо пройти</a> <a href=https://www.evernote.com/shard/s532/sh/38da135a-3f5a-987b-dba4-fbc973f0b381/JrgsrYavE57yMS7XaTjBB3HomX7XM8S5RSmE9WX8dgACmzfCVBz33IgfQg>https://www.evernote.com/shard/s532/sh/38da135a-3f5a-987b-dba4-fbc973f0b381/JrgsrYavE57yMS7XaTjBB3HomX7XM8S5RSmE9WX8dgACmzfCVBz33IgfQg</a> Не стоит путать игру в демо и внедрение бонусов. В демонстрационном режиме игрок возможность расценить механику слота, сюжет и оформление. Но игра проводится на условные кредиты, потому отсутствует главное ? чувство азарта. Активируя промокод либо фриспины, заказчик как не расходует свои деньги на игровые автоматы, хотя имеет сорвать реальный куш! 1×slots регистрация на 1хслотс <a href=http://users.atw.hu/adf/profile.php?mode=viewprofile&u=11772>http://users.atw.hu/adf/profile.php?mode=viewprofile&u=11772</a> Самые модные способы вывода денег ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам на Neteller и Skrill, еще используют криптовалютными кошельками. Вывод выигрышей может исполняться быстро или развлекать от нескольких часов до нескольких суток.При регистрации что или ином интернет игральном заведении — вам дается раз шанс испытывать собственную фортуну не внося свои монеты. Замечу собственно такую поощрительную предложение предоставляют не все интернет игровые площадки, а лишь великодушная половина из их. Которые мы подготовили для Вас в нашем перечне.
1×slots коды
Бездепозитные бонусы — это презенты от казино повторяющий бонусных средств или фриспинов для игровых автоматов, которые начисляются на аккаунт игрока после процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депозит не потребуется. <a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=1621442#pid1621442>1 x slots</a> 1×slots официальный сайт мобильная версия скачать Объективные – размер приза, коэффициент и обстоятельства вейджера, необходимость внесения депо для вывода денег; <a href=http://photorum.eclat-mauve.fr/profile.php?id=200704>http://photorum.eclat-mauve.fr/profile.php?id=200704</a> 1×slots регистрация Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных требований, считая неотъемлемой верификации. Если на веб-сайте предусмотрена обязательная процедура подтверждения личности, то исключить выигрыш удастся только в ревизии данных. Приготовьтесь наполнить анкету и выслать в техподдержку документ, подтверждающий лицо.Такие поощрения дозволяют безвозмездно протестировать свежее казино, разобраться с игровым процессом интернет слотов, заработать и исключить небольшую необходимую денег.
1×slots зеркало регистрацию более популярный вариант это
<a href=http://swwwwiki.coresv.net/index.php?title=%C3%90%C2%A4%C3%91%E2%82%AC%C3%90%C2%B0%C3%90%C2%BD%C3%91%CB%86%C3%90%C2%B8%C3%90%C2%B7%C3%91%E2%80%B9_%C3%90%C5%A1%C3%90%C2%BE%C3%91%E2%80%9E%C3%90%C2%B5%C3%90%C2%B9%C3%90%C2%BD%C3%90%C2%B8_%C3%90%C3%A2%E2%82%AC%E2%84%A2_%C3%90_%C3%90%C2%BE%C3%91%C3%91%C3%90%C2%B8%C3%90%C2%B8:_%C3%90%C2%A1%C3%91%E2%80%9A%C3%90%C2%B0%C2%B2%C3%90%C2%BA%C3%90%C2%B0_%C3%90%C3%90%C2%B0_2024_%C3%90%E2%80%9C%C3%90%C2%BE%C3%90%C2%B4>http://swwwwiki.coresv.net/index.php?title=%C3%90%C2%A4%C3%91%E2%82%AC%C3%90%C2%B0%C3%90%C2%BD%C3%91%CB%86%C3%90%C2%B8%C3%90%C2%B7%C3%91%E2%80%B9_%C3%90%C5%A1%C3%90%C2%BE%C3%91%E2%80%9E%C3%90%C2%B5%C3%90%C2%B9%C3%90%C2%BD%C3%90%C2%B8_%C3%90%C3%A2%E2%82%AC%E2%84%A2_%C3%90_%C3%90%C2%BE%C3%91%C3%91%C3%90%C2%B8%C3%90%C2%B8:_%C3%90%C2%A1%C3%91%E2%80%9A%C3%90%C2%B0%C2%B2%C3%90%C2%BA%C3%90%C2%B0_%C3%90%C3%90%C2%B0_2024_%C3%90%E2%80%9C%C3%90%C2%BE%C3%90%C2%B4</a> Зарегистрируйтесь. Для регистрации почаще всего довольно установить собственный номер аппарата и почтовый адресок, в чего ввести полученный код из СМС. Возможно, потребуется показать промокод. В правилах акции будет написано, где его надо включать. Иногда это надобно делать при регистрации, от — уже в создания собственного офиса, на отдельной страничке.Этот тип бонуса будет добавлен на Ваш аккаунт в успешной процедуры регистрации с внедрением номера телефона. Если избрать иной метод создания учетной записи, бездеп не будет добавлен на Ваш акк. 1×slots регистрация 1×slotscasino 56 online
1×slots зеркало регистрацию более популярный вариант это
Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить особенности, недоступные при ирге в демо режиме. Многие свежие клиенты переходят в число постоянных, а оператор получает долгосрочную прибыль. <a href=http://medforum.5nx.ru/viewtopic.php?f=4&t=11663>1×slots регистрация то дальше необходимо пройти</a> Это тоже благотворительные финансы, которые поступают на аккаунты свежеиспеченных геймеров после регистрирования. А особенность таких призов произведено сомнений, что обретенные финансы обязательно следует применять в продолжении назначенного медли.После получения бонуса вывод средств для посетителя будет недоступен времени, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или чета недель. Выводить средства игрок может лишь последствии отыгрыша. 1×slots casino online регистрация <a href=https://bans.org.ua/index.php?action=profile;u=1386933>https://bans.org.ua/index.php?action=profile;u=1386933</a> Ограничения по играм. Администрация запрещает игрокам кое-какие игровые автоматы с бездепозитным призом, средствами или безвозмездными вращениями. Обычно, в правилах приводится полный перечень слотов для отыгрыша. Иногда деление производится по облику игр. Например, отыгрыш возможен на всех игровых аппаратах, хотя запрещен в настольных играх и в разделе Live Casino.
рабочее зеркало 1хслотс
Для всех бездепозитных призов действует наибольший предел на выигрыш. Он показывает максимальную сумму, коию появится получить, играя на бонусные кредиты. Как только вас удастся выполнить требования вейджера, возможный максимум несомненно переведен с бонусного счета на главный, а остаток несомненно списан. <a href=http://mallds.com/bbs/board.php?bo_table=free&wr_id=326528>http://mallds.com/bbs/board.php?bo_table=free&wr_id=326528</a> Бонус с зачислением средств на счет выделяет больше свободы поступков. Пользователь сам избирает, каким образом распорядиться подаренными своими. Здесь также все действовать лимитирования на перечень дешевых игр, хотя обычно эти рамки не например строги, как в промо с безвозмездными вращениями.Выбор каждого интернет казино на нашем сайте. В описании к каждому Вы можете разузнать, что получите за создание аккаунта. 1 x slots casino Чтобы играть даром на настоящие деньги в казино, порой достаточно просто зарегистрироваться. Иногда необходимо выполнить дополнительные деяния.Маркетинговая деятеля всех игорных интернет-клубов обязана носить разнообразный нрав. И если гонорары на депозит служат чтобы, чтобы, чтобы стимулировать заносить депозиты и поощрять теснее место юзеров, то бездепозитный бонус в казино или приз за регистрацию в казино, прежде всего, рассчитан на расширение базы потребителей.
<b>Смотреть еще похожие новости:</b>
<a href=https://chodilinh.com/threads/1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE.461921/>1хслотс рабочее зеркало</a>
<a href=http://powercrop.it/chi-siamo/le-persone?page=165#comment-8283>1 x slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации презента нужно доказать электрическую почту и привязать телефон;
#721 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало рабочее на сегодня 1×bet xyz часы казино <a href=https://www.ossetia.tv/>1×bet официальный 1×bet xyz</a> Хорова Наталья Александровна порно почему в казино не бывает настенных часов <a href=https://rucriminal.info/>симулятор казино</a> pin up casino buzz порно с Артемий Панарин (хоккей) champion casino пари букмекерская контора vodka casino 1×bet официальный 1×bet xyz рабочее казино
DiskiPlus Александра Бортич DiskiPlus cometa casino <a href=https://www.diskiplus.ru>DiskiPlus самое казино</a> DiskiPlus почему в казино нет часов DiskiPlus Комарова Наталья Владимировна порно <a href=https://diskiplus.ru>DiskiPlus порно с Арина и Дина Аверины, гимнастки</a> DiskiPlus porno Илья Ковальчук (хоккей) DiskiPlus бывшие казино DiskiPlus ограбление казино DiskiPlus казино играть DiskiPlus скачать pin casino DiskiPlus казино можно DiskiPlus казино онлайн бесплатно
#722 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию процедура займет всего лишь
Для тех, кто лишь подумывает испытывать собственную фортуну, еще для проф игроков, отыскивающих свежие площадки для выигрышей, ведущие лицензированные казино нередко устраивают разные акции, и одно из лучших услуг прошедшее время – как для начинающих, например и для профессиональных игроков – бездепозитный приз за регистрацию.Стоит обозначить(означить), собственно бездепозитный приз выдается лишь взрослым новичкам, которые, в свою очередь, все пригласить личных приятелей и своих, того претендующих на поощрительную программу преданности. Подобная технология была среди конкурирующих онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры способствуют увеличению собственной популярности, методом вербования свежих игроков. Бонусы – это оригинальный шанс для потенциальных участников игры, которые имеют опробовать софт покер рума и увериться, станут ли они в него выступать или нет. Новый игрок испробует свои силы с настоящими оппонентами в казино. <a href=http://filmkachat.ru/>x1 slots 1хслотс регистрация перейти на 1×slots</a> Бездепозитные призы за регистрацию в игровых автоматах для владельцев онлайн-казино являются частью маркетинговой кампании, направленной на повышение аудитории вебсайта. Так они продвигают средства бренды и привлекают новых посетителей. <a href=https://we.riseup.net/lexxeagle/who-makes-everstart-batteries-the-complete-manufac>https://we.riseup.net/lexxeagle/who-makes-everstart-batteries-the-complete-manufac</a> 1хслотс зеркало <a href=http://naturetour.ru/communication/forum/user/3943/>http://naturetour.ru/communication/forum/user/3943/</a> Если вы выбрали себе несколько брендов коие для больше всего приглянулись, для неизменной забавы! Таких гемблеров казино очень любит и ценит, за частую эти игроки становятся VIP игроками заведения, которым часто поступают выгодные предложения вид призов, так же туда входит и бездепозитные.
1×slots зеркало быструю регистрацию а также мгновенное
К огорчению, нет. Почти все казино, настоятельно внесение хотя бы одного малого депо для вывода выигрыша с бездепозитного приза. Также учитывайте, собственно исключить средства разрешается лишь на что, эту платежную систему, с которой был сделан депо. <a href=http://support-groups.org/viewtopic.php?f=161&t=766239>1×slots официальный demo регистрация в 1×slots casino</a> 1×slots рабочее зеркало на сегодня <a href=http://poragovorit.com/index.php?subaction=userinfo&user=inoqyxyj>http://poragovorit.com/index.php?subaction=userinfo&user=inoqyxyj</a> 1×slots зеркало выигрыши обязательно пройдите регистрацию если
x1 slots 1хслотс регистрация перейти на 1×slots
<a href=https://bbs.epday.com/home.php?mod=space&uid=637314>https://bbs.epday.com/home.php?mod=space&uid=637314</a> При маленький сумме приза рекомендовано играть по невысоким ставкам, а использовать наибольшие какого-либо только что, нет случае, если вейджер слишком великий, а время на отыгрыш крепко ограничено.Можно ли в одном интернет казино получить больше 1-го бонуса за регистрацию? Нет, так как в любом интернет казино есть верховодила, к которым надо(надобно) придерживаться, не творить два аккаута для получения призов, другому несомненно блокировка обоих аккаутов, не пытайтесь обмануть интернет казино, бонус за регистрацию выдаеться раз раз одному лицу. 1 x slots Чтоб получить большой выигрыш, избирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша.
1×slots казино мобильная версия
В разделе с призами активировать свой презент. Найти забавы, для которых учтено поощрение и использовать бонус по назначению.Процесс доказательства личности может взятьвдолг(взятьвзаймы) от одного дня до недели. Если клиент разрешил какую ошибку при заполнении паспортных данных, то ему идет адресоваться с задачей в службу онлайн-казино. Не стоит путать игру в демо и использование призов. В демонстрационном режиме игрок имеет расценить механику слота, сюжет и оформление. Но игра проводится на условные кредиты, потому отсутствует главное ? ощущение пыла. Активируя промокод или фриспины, клиент по-прежнему не тратит свои средства на игровые автоматы, но может сорвать настоящий куш! 1×slots casino регистрация <a href=https://minifishtank.net/forum/member.php?action=profile&uid=1451>https://minifishtank.net/forum/member.php?action=profile&uid=1451</a>
1× slots casino официальный сайт
<a href=http://v208870d.bget.ru/user/Ralphwiste/>http://v208870d.bget.ru/user/Ralphwiste/</a> Заполняя данные в личном профиле, указывайте лишь достоверную информацию, так как Вам придется ее подтвердить в будущем при выводе денег.Каждый игрок должен сперва отчетливо изучить условия по получению и отыгрышу понравившегося дара. Если всё устраивает, поспешите отобрать безвозмездные спины за регистрацию в казино без депо с выводом и без отыгрыша и прямо в начать вертеть барабаны топовых слотов. 1×slots официальный зеркало рабочее Иногда в качестве бездепа, казино презентует наименьший приз (до 50 руб. ), из-за которого не стоит заморачиваться.Подарки на праздничные ? посвященные торжественным датам, требующие условного отыгрыша или начисляются без это. Могут дариться игрокам сутки рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду.
<b>Смотреть еще похожие новости:</b>
<a href=http://ledyardmachine.com/forum/User-Jameshoing>1×slot официальный сайт</a>
<a href=https://roguedynasty.net/forums/member.php?10629-RabofreeKt>1×slots бонус за регистрацию</a>
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=54658>x1 slots регистрация в 1×slots casino</a>
<a href=https://rolivka.online/forum/showthread.php?tid=46382>1×slot официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Также бывают случаи, когда казино начисляет оговоренный приз в регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам. Иногда у посетителей сайта могут появиться трудности, задачи, препядствия при активации полученного промо-кода. В этих случаях, необходимо обратиться за поддержкою в службу поддержки «Support». Для получения ответа, обязательно указывается определенная причина воззвания и подтверждается информация дополнительными скриншотами. Если сложилась неоднозначная обстановка, постоянно можно обратиться к основному регулятору или контролирующему органу, выдавшему этому заведению лицензионный документ.
#723 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up casino пин ап скачать 1×bet <a href=https://res-publika.com>Окладникова Ирина Андреевна порно</a> Анна Михалкова 1×bet официальный слоты <a href=https://sovsekretno.net/>порно с Кирьянова Дарья Борисовна</a> 1×bet официальный xbet casino играть порно с Петр Ян (ММА) 1×bet слоты 1×bet xyz казино 1 казино пину Ходнева Светлана Владимировна порно
DiskiPlus официальные сайты казино DiskiPlus порно с Анастасия Потапова, теннисистка <a href=https://diskiplus.ru>DiskiPlus кент казино</a> DiskiPlus казино без DiskiPlus 1×bet рабочее <a href=https://diskiplus.ru>DiskiPlus casino на телефон</a> DiskiPlus Самойлова Алла Владимировна порно DiskiPlus казино играть DiskiPlus яндекс казино DiskiPlus porno Елизавета Туктамышева DiskiPlus kometa casino DiskiPlus 1×bet рабочее DiskiPlus Преподобная Надежда Александровна порно
#724 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Александр Большунов (лыжные гонки) сайт 1×bet слоты <a href=https://strelochnik.com/>сайте букмекерской конторы фонбет</a> порно с Илья Осипов (киберспорт) cat casino <a href=https://rucriminal.info/>вавада казино</a> Фастова Елена Владимировна порно Радченко Светлана Юрьевна порно kometa casino 1×bet на андроид казино ли 1×bet зеркало рабочее на сегодня 1×bet xyz casino официальный зеркало
DiskiPlus казино онлайн бесплатно DiskiPlus pin up casino пин ап <a href=https://diskiplus.ru>DiskiPlus скачать 1×bet</a> DiskiPlus порно с Юлия Ефимова DiskiPlus букмекерская контора вход <a href=https://diskiplus.ru>DiskiPlus pin casino зеркало</a> DiskiPlus casino скачать приложение DiskiPlus официальные зеркала казино DiskiPlus black russia казино DiskiPlus Приезжева Екатерина Геннадьевна порно DiskiPlus casino официальный зеркало DiskiPlus casino ru DiskiPlus 1×bet сейчас
#725 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пин up casino 1×bet casino <a href=https://repost.news/>casino бездепозитный</a> 1×bet рабочее на сегодня Скворцова Вероника Игоревна порно <a href=https://strelochnik.com/>букмекерские контора ап</a> porno Ангелина Гончаренко, хоккеистка up casino букмекерская контора зенит карты казино букмекерские конторы в россии Нургалиева Эльвира Рамиловна порно casino x
DiskiPlus up casino скачать DiskiPlus casino riobet <a href=https://diskiplus.ru/>DiskiPlus up casino скачать</a> DiskiPlus смотреть фильм казино DiskiPlus porno Светлана Ходченкова <a href=https://diskiplus.ru>DiskiPlus porno Вера Бирюкова, гимнастка</a> DiskiPlus порно с Дарья Клишина, легкоатлетка DiskiPlus 1×bet рабочее DiskiPlus Кузнецова Анна Юрьевна порно DiskiPlus 1×bet скачать бесплатно DiskiPlus casino автомат DiskiPlus как выиграть в казино DiskiPlus букмекерская контора бетсити
#726 inernetadresGephttps://krasnoyarsk-domashnij-internet002.ru
провайдеры интернета в красноярске по адресу проверить <a href=https://krasnoyarsk-domashnij-internet002.ru>krasnoyarsk-domashnij-internet002.ru</a> провайдеры по адресу красноярск
#727 Charlesgunnyhttp://filmkachat.ru
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Возможность поиграть вспомогательное состязание (а времени и количество) совершенно бесплатно, а выигрыш, к, поступает на счёт игрока. <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> При использовании бездепозитным бонусом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют некоторое видов лимитов:Для казино, работающих интернет, бездепозитные бонусы нужны для привлечения свежих посетителей. Предложение поиграть на слотах без необходимости внесения реальных денег — работающий способ для увеличения интереса к компании. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит выступать в казино, лишь теперь уже на личные средства. <a href=https://www.evernote.com/shard/s532/sh/38da135a-3f5a-987b-dba4-fbc973f0b381/JrgsrYavE57yMS7XaTjBB3HomX7XM8S5RSmE9WX8dgACmzfCVBz33IgfQg>https://www.evernote.com/shard/s532/sh/38da135a-3f5a-987b-dba4-fbc973f0b381/JrgsrYavE57yMS7XaTjBB3HomX7XM8S5RSmE9WX8dgACmzfCVBz33IgfQg</a> Каждый из бездепозитных призов без пополнения 2022 имеет собственный определенный вейджер для отыгрыша, так же в каждом казино он уточняется индивидуально — где то он х55 а кое-где х30, повторюсь везде по разному!В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно приятная часть забавы. Важно, часто бездепозитные бонусы в казино выдаются с лимитированиями по наибольшей выплате. В среднем возможно рассчитывать на прибыль в некоторое тысяч рублей. Как вывести выигрыш с приза без депозита. Придётся доказать акк документально, в некоторых заведениях. Процедура верификации обязательна и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате либо прочтите в правилах. 1× slots регистрация в 1×slots casino <a href=http://hongtouwen.com/home.php?mod=space&uid=486516&do=profile>http://hongtouwen.com/home.php?mod=space&uid=486516&do=profile</a>
1×slots зеркало на сегодня
Каждый новичок и умелый игрок мечтают быстро стартануть и начать создавать реальные ставки. Для этого довольно забрать презент, за кот-ый не нужно выплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email или аппарат. После этого администрация начислит щедрое вознаграждение в виде безвозмездных вращений либо виртуальных кредитов.Рассмотрим принцип его деяния на образце. Допустим, вы зарегались и возымели $10 no deposit bonus с вейджером х50. Это означает, что выигранные средства можно несомненно выводить не раньше, чем после как, как общая сумма ставок достигнет $500. <a href=http://forum.l2endless.com/showthread.php?tid=575062>1х слотс зеркало регистрация в 1×slots casino</a> 1×slots официальный сайт зеркало <a href=https://www.google.me/url?q=https://doctorlazuta.by/>https://www.google.me/url?q=https://doctorlazuta.by/</a> x1 slots 1хслотс регистрация перейти на 1×slots Обычно для получения бонусов без депо, казино выдвигает лояльные и абсолютно выполнимые условия, но есть ряд действий которые запрещены и имеют причиной неприятные результаты:Бездепозитный приз часто возможность замерзнуть легкодоступным сразу в завершения регистрации, поскольку как единственным требованием к нему считается регистрация, а этого проверка вашей свежей учетной записи.
1хслот зеркало
Следует выделить, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам либо с конкретным кодом. <a href=https://wiki.streampy.at/index.php?title=Shisha_Tobacco_From4_Eur>https://wiki.streampy.at/index.php?title=Shisha_Tobacco_From4_Eur</a> Приветственный бонус без депо ? подарок за регистрацию. Выдается средствами, фриспинами либо баллами. В заключительном случае бонусные баллы используются для роли в турнирах либо размена на реальные средства. 1×slots бездепозитный бонус за регистрацию Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, например как Вам понадобиться ее подтвердить дальнейшем при выводе денег.Бесплатный бонус – кредиты, которые онлайн-казино начисляет посетителю, не принуждая его пополнять игровой счет.
1×slots регистрация 1×slots review live
<a href=https://talkonlinenews.com/viewtopic.php?t=12218>1×slots регистрация 1×slots review live</a> 1×slot зеркало рабочее регистрации на телефон придет <a href=http://galiaf.net/index.php?subaction=userinfo&user=brokenhorse27>http://galiaf.net/index.php?subaction=userinfo&user=brokenhorse27</a>
1×slots зеркало сайта
Бездепозитный бонус казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в этом и содержится основное различие.Так собственно главное различие подарка на депо от бездепа – обязательное пополнение счёта. Вы можете привнести депозит и преумножить стартовый капитал либо арестовать бездеп и при этом не придётся рисковать собственными сбережениями. Поспешите выполнить простые притязания, и администрация ресурса начислит щедрое одобрение! <a href=http://itsheff.kz/bitrix/click.php?goto=http://suntekcam.ru/bitrix/rk.php?goto=http://sibagrotrade.com/bitrix/redirect.php?goto=https://teletype.in/@urist555/K4PgwE_aJoG>http://itsheff.kz/bitrix/click.php?goto=http://suntekcam.ru/bitrix/rk.php?goto=http://sibagrotrade.com/bitrix/redirect.php?goto=https://teletype.in/@urist555/K4PgwE_aJoG</a> Сразу последствии активации промокода можно пользоваться презентом. Как уже упоминалось, бонусы случаются трёх видов – фриспины, кредиты и фриплей-бонусы. 1×slots регистрация на сайте Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации приза без депозита. Внимательно прочтите до конца. Многие новенькие проделывают промахи на шаге регистрации и поэтому не получить подарок.
<b>Смотреть еще похожие новости:</b>
<a href=http://aficionado.pl/showthread.php?197740–1×slots-casino-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-1×slots-review-live&p=219225>1×slots casino регистрация 1×slots review live</a>
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=71620>1хслотс официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды присутствуют на этой странице. Посетитель возможность оценить обстоятельства получения и начать выступать на деньги без внесения депо. При этом игроку главно разуметь, на каких критериях и какими методами появится вывести полученный выигрыш. Для сего необходимо расценить список подключенных платежных систем.
#728 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Захарова Мария Владимировна 1×bet официальный сайт <a href=https://strelochnik.com/>казино смотреть</a> букмекерская контора фонбет пин ап букмекерская контора <a href=https://slon-ru.com/>casino 7k сегодня</a> 1×bet зеркало слоты 1×bet xyz приложения букмекерских контор на андроид Комарова Наталья Владимировна порно официальные сайты казино пин ап casino pin пари букмекерская контора 1×bet официальный 1×bet xyz
DiskiPlus казино смотреть DiskiPlus демо казино <a href=https://www.diskiplus.ru/>DiskiPlus гта онлайн казино</a> DiskiPlus vavada casino DiskiPlus casino рабочее <a href=https://diskiplus.ru>DiskiPlus 1×bet регистрация</a> DiskiPlus 1×bet xbet xyz DiskiPlus 7k casino бонус DiskiPlus сайт букмекерской конторы DiskiPlus 7k casino скачать DiskiPlus порно с Максим Глушенков (футбол) DiskiPlus bet casino DiskiPlus 1×bet слоты 1×bet top
#729 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
Прежде чем активировать бездеп, необходимо убедиться сомнений, собственно страна, гражданином коей считается игрок, не входит в список разрешенных. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало рабочее</a> Используйте лучшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из списка ниже, чтобы заработать подарки за обычные деянья и уже сегодня получить 1-ый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высокой отдачей и прыткими выводами на электрические кошельки.Доступные игры – В некоторых азартных забавах можно понизить математическое приемущество казино до нескольких десятых процента. В их числе многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как управляло, в этих играх ставки идут в зачет вейджера не полностью. Например, может предусматриваться лишь 50%. В неких забавах бездепозитные бонусы вообщем нельзя отыгрывать. <a href=https://www.doyoubuzz.com/animation-product>https://www.doyoubuzz.com/animation-product</a> 1×slot регистрация <a href=https://www.lovemmtu.club/space-uid-32937.html>https://www.lovemmtu.club/space-uid-32937.html</a> Фриспины — безвозмездные вращения, коие дозволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся наиболее известным и желаемым видом бонуса — бесплатные вращения порой эффективнее и веселее в отыгрыше, чем другие виды бездепов.
1×slots регистрацию процедура займет всего лишь
<a href=https://17lubbs.com/forum-2–1.html>1×slots casino регистрация на сайте</a> 1× slots casino официальный сайт <a href=http://www.zghncy.cn/home.php?mod=space&uid=727867>http://www.zghncy.cn/home.php?mod=space&uid=727867</a> 1×slots официальный сайт зеркало Маркетинговая деятеля всех игорных интернет-клубов должна носить разнородный характер. И если вознаграждения на депо служат чтобы, чтобы, чтобы провоцировать вносить депозиты и поощрять теснее быть пользователей, то бездепозитный бонус в казино либо приз за регистрацию в казино, прежде всего, рассчитан на расширение базы покупателей.
1×slots официальный сайт мобильная версия
<a href=http://crystal-angel.com.ua/index.php?subaction=userinfo&user=laboredancestry>http://crystal-angel.com.ua/index.php?subaction=userinfo&user=laboredancestry</a> Промообъявления от казино не дают реальной картины и ориентированы на вербование внимания юзеров. Понять, насколько высоки шансы остаться в плюсе, дозволит личный анализ критерий предложения:Когда речь о получении бездепозитных призов в казино, для внимание на последующие обстоятельства: 1×slots регистрация 1×slotscasino 56 online Таким образом, заведение пытается показать себя своим вероятным игрокам, а такой рекламный ход как казино бонус без депозита за регистрацию завлекает очень много внимания к игорному заведению и обеспечивает неизменный поток новых посетителей и грядущих посетителей игрового онлайн клуба.Размер призов чаще всего чисто условный и не превышает 50 рублей. Приятно, хотя осязаемым бустом при навряд станет.
1×slots зеркало регистрацию более популярный вариант это
Каждый из бездепозитных бонусов без пополнения 2022 имеет свой определенный вейджер для отыгрыша, так же в любом казино он устанавливается индивидуально — где то он х55 а где-то х30, повторюсь всюду по различному!Обычно бездепозитные акции от казино, приходят на эл. Почту в дни рождения или праздничные. В некоторых онлайн казино возможно адресоваться в чат и как постоянному игроку, возможно для предложат бездепозитное предложение. Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить необыкновенности, труднодоступные при игре в демо режиме. Многие новые клиенты переходят в количество неизменных, а оператор получает длительную выгода. 1 хслот регистрация в 1×slots casino <a href=http://hoiqt.com/user-9086.html>http://hoiqt.com/user-9086.html</a>
1хлот регистрация в 1×slots casino
Для получения бездепа необходимо пригласить в игру по реферальной ссылке нового посетителя: он должен зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на необходимую, обозначенную в критериях промоакции. <a href=http://www.ctphome.com/bbs/home.php?mod=space&uid=78477>http://www.ctphome.com/bbs/home.php?mod=space&uid=78477</a> Бездепозитные бонусы начисляются лишь раз один. Не стоит открывать свежие аккаунты, чтобы получить их повторно. Служба защищенности казино обязательно выявит «левого» участника и перекроет. Если посетитель выполнит нужные притязания, отыграет собственную ставку и решит вывести собственный выигрыш, то ему надо(надобно) к, собственно казино обязательно востребует дать ксерокопии личных документов, дабы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои исключить не получится.Если при регистрации показать промокод, можно гарантировано получить приз. Где арестовать ваучер? Посетите тематические блоги либо форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В заключительное время игорные жилища начали рекламироваться в фильмах и сериалах. Присмотритесь и наверняка заметите промокод, который принесёт 500 либо 1 000 бонусных рублей. 1×slots официальный сайт зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://www.globalvision2000.com/forum/member.php?action=profile&uid=1072499>1×slots регистрация на сайте</a>
<a href=http://jktroickiy.forumex.ru/viewtopic.php?f=2&t=4445>1×slots регистрация 1×slotscasino 56 online</a>
<a href=https://forum.eliteshost.com/member.php?action=profile&uid=7587>1×slots casino регистрация 1×slotscasin online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Осталось выбрать казино с призом за регистрацию и сделать профиль. После активации подарка выигрыш зависит от Фортуны и способностей. При регистрации сомнений либо ином онлайн игральном заведении — для дается один шанс испытывать собственную удачу не внося средства монеты. Замечу что эту поощрительную предложение деют не все интернет игровые площадки, а лишь великодушная половина из их. Которые мы подготовили для Вас в нашем списке.
#730 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино рояль лучшая казино <a href=https://m.repost.news/>пинап казино</a> пин ап casino Матвиенко Валентина Ивановна порно <a href=https://t.me/vchkogpu_ru>фреш казино</a> 1×bet официальный сайт букмекерские конторы без депозита букмекерская контора официальный сайт скачать порно с Алина Загитова, фигуристка макао казино казино вход официальный сайт порно с Алина Загитова, фигуристка
DiskiPlus 1×bet зеркало xbet xyz DiskiPlus букмекерская контора на андроид <a href=https://diskiplus.ru>DiskiPlus 1×bet официальный</a> DiskiPlus фильмы казино рояль DiskiPlus porno Юлия Пересильд <a href=https://www.diskiplus.ru>DiskiPlus спорт букмекерская контора</a> DiskiPlus казино рублях DiskiPlus казино можно DiskiPlus casino ап DiskiPlus казино рублях DiskiPlus порно с Евгения Медведева DiskiPlus пин casino DiskiPlus сайт pin up casino
#731 Charlesgunnyhttp://filmkachat.ru
1хслотс 1хслотс регистрация перейти на 1×slots
Например, игрок получил 500 рублей при твореньи аккаунта и обязан отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 рублей, потребуется сделать 875 спинов для полного отыгрыша. <a href=http://filmkachat.ru/>1хслот скачать</a> <a href=https://www.shippingexplorer.net/en/user/architectural-rendering/146752>https://www.shippingexplorer.net/en/user/architectural-rendering/146752</a> 1×slots промокод при регистрации <a href=https://ingbrick.com/%d0%b8%d0%b7-%d1%87%d0%b5%d0%b3%d0%be-%d1%81%d0%be%d1%81%d1%82%d0%be%d0%b8%d1%82-%d0%b4%d0%b8%d0%b5%d1%82%d0%b0-%d0%b5%d0%bb%d0%b5%d0%bd%d1%8b-%d0%bc%d0%b0%d0%bb%d1%8b%d1%88%d0%b5%d0%b2%d0%be%d0%b9/>https://ingbrick.com/%d0%b8%d0%b7-%d1%87%d0%b5%d0%b3%d0%be-%d1%81%d0%be%d1%81%d1%82%d0%be%d0%b8%d1%82-%d0%b4%d0%b8%d0%b5%d1%82%d0%b0-%d0%b5%d0%bb%d0%b5%d0%bd%d1%8b-%d0%bc%d0%b0%d0%bb%d1%8b%d1%88%d0%b5%d0%b2%d0%be%d0%b9/</a> Для тех, кто только подумывает испытывать собственную удачу, а для профессиональных игроков, разыскивающих новые площадки для выигрышей, основные лицензированные казино часто устраивают различные промоакции, и лучшее предложений прошедшее время – как для новичков, например и для профессиональных игроков – бездепозитный бонус за регистрацию.
1×slots коды
Обычно для получения бонусов без депозита, казино выдвигает приклнные и вполне выполнимые обстоятельства, хотя есть ряд деяний коие воспрещены и шансы повлечь за собой противные последствия:Максимальный объем ставки, который невозможно превосходить пока бонус не будет полностью отыгран. В случае нарушения этого управляла, бонус и выигрыш с него будут аннулированы. <a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=16951>1хслот 1хслотс регистрация перейти на 1×slots</a> 1×slots регистрация на 1хслотс Например, игрок получил 500 рублей при творении аккаунта и обязан отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 рублей, понадобится устроить 875 спинов для полного отыгрыша.Фриспины — бесплатные вращения, которые позволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины считаются наиболее популярным и желаемым видом бонуса — бесплатные вращения порой эффективнее и веселее в отыгрыше, чем другие виды бездепов. <a href=https://lider-school174.com/forum/user/8398/>https://lider-school174.com/forum/user/8398/</a> В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, нужно обратиться в саппорта через лайв-чат на веб-сайте казино.Игрокам стоит принимать приветственный бонус как гарантированный метод получить большой выигрыш, но это замечательная возможность без затрат расценить функционал казино. 1×slot официальный сайт
1хслотс зеркало на сегодня
Минимального оборота. Этот лимит уточняется вейджером — пока игрок не поиграет на установленную сумму, вывод средств несомненно недосегаем. В списке притязаний к отыгрышу часто наличествуют лимиты на ставки при игре на личные средства. Так, случае отыграть надо(надобно) 30 000 рублей, а предельная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 один. Эта особенность затрудняет соблюдение игроками критерий по срокам деяния акции. <a href=https://xn–80aacauqbrgpkhepmti.xn–90ae/index.php?option=com_k2&view=itemlist&task=user&id=117628>https://xn–80aacauqbrgpkhepmti.xn–90ae/index.php?option=com_k2&view=itemlist&task=user&id=117628</a> На безвозмездные призы онлайн-казино почти постоянно распространяется ограничения по стране проживания клиентов. Даже случае вас разрешено раскрывать счет и выступать на средства в заведении, это еще не означают, что для доступны no deposit bonuses. 1хслотс зеркало на сегодня
1×slot официальный сайт
Варианты выигрыша зависят от Вашей успеха и условий игорного портала. Выше мы сказали, что кое-какие бездепозитные бонусы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются другие, все, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на средства, можно выиграть неописуемые суммы. Сегодняшние игровые автоматы или видео слоты, как их нарекают. Могут выдавать солидные умножение от х1.000 и повыше. Некоторые умножают ставку от х100.000. Принципиальным различием бесплатных бонусов от призов на депозит считается отсутствие надобности заносить средства на аккаунт. Из-за этого их нередко именуют бездепозитными (not the slightest deposit bonuses).Казино выводит средства только на ту платежную систему, с котрой был сделан депозит. То есть, для вывода бездепозитного приза, Вам поначалу необходимо пополнить счет. В некоторых клубах ограниченный перечень методов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет именно с этих платежных методов, которые доступны для вывода. 1×slots казино зеркало <a href=https://knowyourmeme.com/users/%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0-%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA>https://knowyourmeme.com/users/%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0-%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA</a>
1×slots официальный сайт зеркало
Минимального оборота. Этот предел уточняется вейджером — пока игрок не поиграет на установленную сумму, вывод средств несомненно недосегаем.Условия, на коих предоставляется бездеп, регулируются казино. Каждая промоакция содержит доскональные верховодила, ссылка на которые обыкновенно находится в промообъявлении. В их указываются лимиты, вейджер, список дешевых игр. Если оператор скрывает данные о предложении, то воспользоваться им не стоит. Помните, что любые нарушения верховодил сведут на нет ваши старания, и вы всего останетесь без начисленного вас бесплатного приза. Всегда изучайте верховодила начисления и обстоятельства вейджера. По любым вопросам, на которые вы не можете помощи найти ответы, обращайтесь за объяснениям и саппорт. <a href=https://mysocialclub.ru/user/JasperInsef/>https://mysocialclub.ru/user/JasperInsef/</a> 1×slots регистрация Активация происходит с помощью промокодов, которые вводятся в личном офисе в регистрации. Среди спецпредложений в списке Casino.ru содержатся неповторимые промокоды, которые доступны только гостям портала. Другие способы начисления средств ? автоматическая активация незамедлительно после творенья аккаунта и получение дара по запросу в службу технической помощи.
<b>Смотреть еще похожие новости:</b>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=370997>1хслотс мобильная версия зеркало</a>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/9726/#comment-408932>1 х слотс зеркало</a>
<a href=http://powercrop.it/chi-siamo/le-persone?page=156#comment-7833>1×slots зеркало проходить регистрацию это отличный вариант</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в обязательном порядке необходимо восполнить счет в казино. Для депозитных призов, эта процедура не необходима, например как депозит теснее сделан.
#732 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino x казино зеркало сегодня <a href=https://glvk.guru/>up casino официальный</a> Набиуллина Эльвира Сахипзадовна порно порно с Диана Шнайдер (теннис) <a href=https://rucriminal.info/>casino на телефон</a> букмекерская контора на андроид лучшие бесплатные онлайн казино скачать 1×bet казино смотреть kent casino рабочие зеркала казино порно с Дронова Александра Викторовна
DiskiPlus casino pin официальный DiskiPlus 1go casino <a href=https://www.diskiplus.ru>DiskiPlus казино смотреть онлайн бесплатно</a> DiskiPlus 1×slots casino DiskiPlus официальная казино <a href=https://www.diskiplus.ru/>DiskiPlus 7k casino официальный</a> DiskiPlus порно с Алина Загитова DiskiPlus casino скачать DiskiPlus casino скачать приложение DiskiPlus casino buzz DiskiPlus 1×bet зеркало на сегодня 1×bet xyz DiskiPlus казино вулкан DiskiPlus почему в казино нет часов
#733 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Мария Шарапова почему в казино нет часов <a href=https://vestnik-jurnal.com/>porno Юлия Пересильд</a> casino регистрации приложения букмекерских контор <a href=https://m.repost.news/>бесплатно играем казино</a> pin up casino buzz порно с Владимир Минеев (ММА) porno Ангелина Гончаренко, хоккеистка бк букмекерская контора порно с Матвей Сафонов (футбол) винлайн букмекерская контора официальный порно с Голикова Татьяна Алексеевна
DiskiPlus порно с Юлия Ефимова DiskiPlus букмекерская контора бетсити <a href=https://diskiplus.ru/>DiskiPlus казино 5</a> DiskiPlus porno Дарья Клишина DiskiPlus скачать 1×bet на андроид <a href=https://diskiplus.ru/>DiskiPlus лучшие бесплатные онлайн казино</a> DiskiPlus casinos winning DiskiPlus 7k casino зеркало рабочее DiskiPlus Москалькова Татьяна Николаевна порно DiskiPlus скачиваемые казино DiskiPlus официальная казино DiskiPlus порно с Владимир Минеев (ММА) DiskiPlus Елена Лядова
#734 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Черкесова Бэлла Мухарбиевна порно лучшие онлайн казино <a href=https://glvk.guru/>1×bet официальный скачать</a> porno Алена Косторная (фигурное катание) пинко casino <a href=https://specreporter.com/>лучшие онлайн казино</a> porno Вера Бирюкова, гимнастка pin casino порно с Константин Тюкавин (футбол) casino pin официальный 1×bet casino riobet рейтинг казино
DiskiPlus casino актуальное зеркало DiskiPlus пина букмекерской конторы <a href=https://www.diskiplus.ru/>DiskiPlus казино 5</a> DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus порно с Анастасия Потапова, теннисистка <a href=https://diskiplus.ru>DiskiPlus порно с Евгения Медведева, фигуристка</a> DiskiPlus гта онлайн казино DiskiPlus 1win casino DiskiPlus 1×bet зеркало xbet DiskiPlus Набиуллина Эльвира Сахипзадовна порно DiskiPlus порно с Голикова Татьяна Алексеевна DiskiPlus 1×bet на андроид DiskiPlus pin up casino top top
#735 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Мира Андреева (теннис) букмекерская контора фонбет <a href=https://th-royalgclub.com/>pin up casino buzz</a> 1×bet xbet xyz Разуваева Ксения Денисовна порно <a href=https://th-royalgclub.com/>пинап казино</a> 1×bet слоты 1×bet top официальные букмекерские конторы лучшие бесплатные онлайн казино 1×bet 1хбет порно с Васильева Татьяна Викторовна 1×bet слоты 1×bet top Львова-Белова Мария Алексеевна порно
DiskiPlus пина casino DiskiPlus скачать 1×bet 1×bet xyz <a href=https://www.diskiplus.ru>DiskiPlus pin up casino скачать</a> DiskiPlus casino ап DiskiPlus фильмы казино рояль <a href=https://diskiplus.ru/>DiskiPlus Анна Михалкова</a> DiskiPlus скачать 1×bet DiskiPlus включи казино DiskiPlus казино проиграл DiskiPlus пина casino DiskiPlus 1×bet слоты DiskiPlus 1×bet официальный DiskiPlus casino бонус
#736 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
лучшая казино лучшая казино <a href=https://vestnik-jurnal.com/>Анна Михалкова</a> сайт казино вход online casino 7k <a href=https://www.ossetia.tv/>порно с Афонина Марина Игоревна</a> букмекерская контора зенит порно с Александр Большунов (лыжные гонки) почему в казино нет часов про казино порно с Александр Большунов (лыжные гонки) porno Нина Пирогова, хоккеистка Набиуллина Эльвира Сахипзадовна порно
DiskiPlus казино вход официальный сайт DiskiPlus порно с Федор Чалов (футбол) <a href=https://diskiplus.ru/>DiskiPlus porno Елизавета Туктамышева</a> DiskiPlus зеркала казино DiskiPlus скачать casino на андроид <a href=https://diskiplus.ru/>DiskiPlus porno Виктория Баркова, легкоатлетка</a> DiskiPlus 1win букмекерская контора DiskiPlus Нургалиева Эльвира Рамиловна порно DiskiPlus 1×bet на сегодня DiskiPlus champion casino DiskiPlus up casino официальный DiskiPlus фреш казино DiskiPlus казино 5
#737 Charlesgunnyhttp://filmkachat.ru
1×slots подтвердит вашу регистрацию если говорить
Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, или проигрываете предложенный бонус, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, научится регулировать изменять ставки и полосы, исследовать бонусные забавы и их выигрышные композиции, ну в конце концов просто зарядится кучей впечатлений! Ведь вы будите выступать на бонусные средства, коие можно отыграть и вывести, не просто на демо счет, что, этим наиболее адреналин в крови еще больше повысится а пульс забьется с частым ритмом!Также, ситуации необходимо подтвердить собственный номер телефонного, чтобы код, приобретенный в смс-сообщении от клуба ввести в специальное поле в собственном офисе игрока. <a href=http://filmkachat.ru/>1х слот регистрация в 1×slots casino</a> В игровых клубах без лицензии Вы покупаете „кота в мешке“ и когда неоднозначных ситуаций нет возможности куда-то посетовать и доказать собственную правоту.Получить приветственный приз шансы лишь новые посетители онлайн-казино. Способы описаны в критериях промоакции любого законного казино, почаще всего это: <a href=http://bedfordfalls.live/read-blog/135761_professional-3d-furniture-design-from-concept-to-creation.html>http://bedfordfalls.live/read-blog/135761_professional-3d-furniture-design-from-concept-to-creation.html</a> Чтобы без увериться в превосходстве бездепозитных бонусов, достаточно зарегистрироваться в казино и получить одобрение.Следует выделить, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом. 1×slots сайт зеркало <a href=http://forumqservice.co.uk/member.php?action=profile&uid=19373>http://forumqservice.co.uk/member.php?action=profile&uid=19373</a> Но никогда не запамятовывайте внимательно разбирать верховодила участия в бонусных промоакциях. Если вы нарушите хотя бы одно условие, позднее вы не сможете устроить недоразумение с администрацией.В наше время довольно просто получить приз за регистрацию в казино. Практически любой игорный дом с радостью начисляет средства или безвозмездные вращения. Многие гэмблеры используют данным и не смущяются региться в каждом клубе с прибыльными критериями. Кстати, это замечательная возможность выработать победную стратегию и сорвать джекпот.
казино 1×slots
Существует ли стратегии для отыгрыша бездепозитных призов? К раскаянью нет, на выигрыши или проигрыши с бонусов, казино либо игрок воздействовать имеет, отдача игр случается от разработчиков игр.Каждый новичок и профессиональный игрок грезят быстро стартануть и начать создавать реальные ставки. Для сего достаточно забрать презент, за кот-ый не выплачивать. В зависимости от игровой платформы, нужно создать профиль, привязать email либо телефон. После этого администрация начисляет щедрое вознаграждение повторяющий бесплатных вращений или виртуальных кредитов. 1×slots официальный сайт скачать <a href=http://daojianchina.com/home.php?mod=space&uid=4060304>http://daojianchina.com/home.php?mod=space&uid=4060304</a> При использовании бездепозитным бонусом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют некоторое видов лимитов: 1хслотс регистрация в 1×slots casino
1×slots зеркало рабочее
Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен список наихороших онлайн казино, коие предлагают своим игрокам щедрые бонусы за регистрацию.Бездепозитные призы, как теснее ясно, являются уникальной возможностью к игровому процессу безусловно безвозмездно, словами играть в онлайн казино даром и на быть свои сразу последствии регистрации аккаунта. Автоматы с таким депозитом имеют стать великолепной возможностью поиграть для поклонников пыла с определенными ограничениями в денег. Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, чтобы снова получить безвозмездный приз. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ждет неизбежное наказание.Автоматы неспроста считаются самым популярным азартным развлечением. Чтобы освоить управление и правила, понадобится всего несколько минут. Ваша задачка устроить ставку, определить количество рабочих линий и возможно крутить барабан. Если дисплее выпадет выигрышная композиция – вы выиграли! С этой задачей вас посодействуют справится бездепозитные призы казино. <a href=http://ezproxy-f.deakin.edu.au/login?url=http://electrotrade.biz/bitrix/redirect.php?goto=http://sadoria.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/nHmJmqskDtM>http://ezproxy-f.deakin.edu.au/login?url=http://electrotrade.biz/bitrix/redirect.php?goto=http://sadoria.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/nHmJmqskDtM</a> Бонус за регистрацию в казино без депо с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша может потребоваться сделать ставки на сумму, в некоторое десятков один превышающую необходимую приза или выигрыша. 1хслот зеркало сайта
x1 slots регистрация в 1×slots casino
Многие азартные клубы ограничивают сумму вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не можете вывести. Разница несомненно аннулирована, Вы и не сможете делать на нее ставки. <a href=https://www.fotoclubfllum.com/foro/media/users/rabofreeoi.3968/>1×slot зеркало</a> Все безвозмездные бонусы кажутся соблазнительными. Кто же откажется от способности сыграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далековато не все бездепозитные призы одинаковой презентабельны для рассудительного клиента.Активация по промокоду используется в различных видах бездепов. Если речь идет о приветственном призе, то комплект знаков можно узнать на главной страничке, в регистрационной форме или послании, которое отчаливает пользователю для подтверждения e-mail. Акции могут проводиться общо с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активируется разовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном кабинете или начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем важный код для активации в описании любого промо. 1×slots регистрацию процедура займет всего лишь <a href=https://usman48.ru/forum/2–13703–1#119741>https://usman48.ru/forum/2–13703–1#119741</a> Бездепозитный приз казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в этом и содержится основное отличие.
1× slots зеркало
Автоматическая активация первый самой комфортной, хотя ручной способ имеет перед ней преимущества. Прежде чем использовать вознаграждение от казино, стоит заблаговременно найти, сколько медли требуется на исполненье всех критерий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала деянья приза.Денежные свои. Третий приз за регистрацию без депо – наличные. К сожалению, только знаменитые и пользующиеся клубы все уяснить деньги в рублях или баксах. С их подмогою вас насладиться любой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед данным необходимо исполненье определенных условий. <a href=http://yamuhajirin.org/index.php?option=com_kunena&view=topic&catid=2&id=204883&Itemid=2552>http://yamuhajirin.org/index.php?option=com_kunena&view=topic&catid=2&id=204883&Itemid=2552</a> 1 xslots рабочее зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://praisenpray.org/forums/showthread.php?tid=124487>1×slots зеркало рабочее на сегодня</a>
<a href=https://mami-forum.de/forum.php>1×slots рабочее зеркало на сегодня</a>
<a href=https://astraclub.ru/members/353998-Jameswow>1×slots регистрация 1×slots casino 777 online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.
#738 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1win casino пин ап casino pin <a href=https://slon-ru.com/>порно с Юлия Ефимова</a> casino зеркало сегодня казино сегодня <a href=https://rucriminal.info/>casino скачать</a> порно с Антропова Валентина Викторовна 1×bet на сегодня рокс казино champion casino Самойлова Алла Владимировна порно porno Катерина Шпица бесплатные букмекерские конторы
DiskiPlus порно с Дронова Александра Викторовна DiskiPlus 1×bet зеркало xbet <a href=https://diskiplus.ru>DiskiPlus 1×bet бесплатно</a> DiskiPlus демо казино DiskiPlus казино фильм <a href=https://diskiplus.ru/>DiskiPlus 1×bet на андроид бесплатно</a> DiskiPlus porno Игорь Акинфеев (футбол) DiskiPlus порно с Алексей Миранчук (футбол) DiskiPlus винлайн букмекерская контора DiskiPlus порно с Елена Никитина, скелетонистка DiskiPlus лучшие бесплатные онлайн казино DiskiPlus 1×bet зеркало xbet xyz DiskiPlus black russia казино
#739 inernetadresGephttps://krasnoyarsk-domashnij-internet001.ru
провайдер интернета по адресу красноярск <a href=https://krasnoyarsk-domashnij-internet001.ru>krasnoyarsk-domashnij-internet001.ru</a> провайдер по адресу красноярск
#740 Charlesgunnyhttp://filmkachat.ru
1×slots официальный регистрация
В современность очень просто получить бонус за регистрацию в казино. Практически каждый игорный дом с радостью начисляет средства либо бесплатные вращения. Многие гэмблеры пользуются этим и не смущяются региться в любом клубе с выгодными условиями. Кстати, это отличная возможность выработать победную тактику и сорвать джекпот. <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino09k online</a> <a href=https://gamma.app/docs/How-to-Reset-Your-Honda-Civic-After-Replacing-the-Battery-tgof361mduqar4u>https://gamma.app/docs/How-to-Reset-Your-Honda-Civic-After-Replacing-the-Battery-tgof361mduqar4u</a> 1хслотс мобильная версия зеркало <a href=http://andres-website.de/profile.php?lookup=9150>http://andres-website.de/profile.php?lookup=9150</a> Способы получения бездепа различаются зависимо облика приза, который приглянулся игроку. Но вас иначе нужно быть зарегистрированным в законном онлайн-казино и подтвердить собственную лицо. В общем облике пошаговая инструкция для получения бездепозитного приза смотрится например:
1×slots быструю регистрацию а также мгновенное
В лицензионных бездепозитных казино выступать в азартные забавы действительно безопасно. Наличие лицензии подтверждает что, этот прецедент, собственно клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP.Ещё одно распространённое акционное предложение – симпатичный презент с неблаговидными требованиями. К образцу, клуб обещает $100 виде бездепа, хотя с вейджером х80 или х100. Отыграть такой вейджер практически невозможно и поэтому никакого концентрироваться на более занимательных промоакциях. 1×slots официальный сайт мобильная версия <a href=https://bbgatecom2512.bloggersdelight.dk/2024/09/06/%d0%ba%d1%83%d0%bf%d0%b8%d1%82%d1%8c-%d0%bc%d0%bf%d1%81%d1%82%d0%b0%d1%82%d1%81/>https://bbgatecom2512.bloggersdelight.dk/2024/09/06/%d0%ba%d1%83%d0%bf%d0%b8%d1%82%d1%8c-%d0%bc%d0%bf%d1%81%d1%82%d0%b0%d1%82%d1%81/</a> Бывают ли бездепозитные бонусы без вейджера? Бывают, случае у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный приз за регистрацию устанавливается вейджер во всех казино.Обычно, бездепозитные призы выдаются под определенные слоты с фиксированной ставкой, хотя их наверняка запрещено использовать в игровых автоматах с прогрессивным джекпотом. Список игр, в возможно использовать бездеп, Вы найдете в описании акции либо можете уточнить у службы заведения. 1×slots официальный сайт мобильная версия скачать
1×slots зеркало проходить регистрацию это отличный вариант
Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных бонусов принимаются достаточно высочайшие притязания. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до ста раз в игровых автоматах. Например, в игрок получил безвозмездно 10 долларов, то необходимо несомненно отыграть их, поставив одну тысячу спинов по одному доллару любой. Стоит обозначить(означить), что не все казино выделяют возможность выступать на бонусы и не во всех развлекательных заведениях идентичные верховодила для отыгрывания. Некоторые казино запрещают выступать на призы в блекджек либо ограничивают ставки до 5 %, что значительно наращивает в десятки раз число необходимых игр.Обычно бездепозитные акции от казино, приходят на эл. Почту в дни рождения или праздничные. В некоторых онлайн казино можно обратиться в чат и как неизменному игроку, вероятно для предложат бездепозитное предложение. <a href=http://rental7942.co.kr/bbs/board.php?bo_table=free&wr_id=12763>http://rental7942.co.kr/bbs/board.php?bo_table=free&wr_id=12763</a> Например, игрок получил 500 рублей при разработке аккаунта и обязан отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 руб., потребуется сделать 875 спинов для полного отыгрыша.Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке необходимо пополнить счет в казино. Для депозитных бонусов, данная процедура не необходима, например как депозит уже изготовлен. 1×slots casino регистрация 1×slotscasin online Пoдтвepдить личнocть клиента. Для успешного вывода средств, необходимо доказать лицо клиента. Нa этaпe вepификaции пpoфиля, сотрудники службы защищенности должны убедиться, собственно у игрока всего лишь раз акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не сможет исключить собственный выигрыш, в у него несомненно количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы.Активация денежного гонорары происходит автоматически последствии творения профиля либо использования промокода. Иногда операторы предъявляют вспомогательные требования: подписаться на странички казино в социальных сетях или на рассылку маркетинговых известий, скачать и ввести дополнительный софт и т.д.
1×slots зеркало подтвердит вашу регистрацию если говорить
Внесение депо – Будьте готовы восполнить счет в отыгрыша бонуса. Это стандартное заявка управлял для этого на промо-акций. Лучше заблаговременно уточнить, какую необходимую надо(надобно) несомненно вносить на счет. Как верховодило, идет о наименьшем депозите, хотя вы должны быть уверены, что он вам по карману.Минимального оборота. Этот лимит устанавливается вейджером — же игрок не поиграет на установленную сумму, вывод средств несомненно недосегаем. В настоящее время получить приз за регистрацию в казино довольно просто. Почти любой игорный жилище с радостью предоставит деньги или безвозмездные вращения. Многие игроки пользуются данным и не стыдятся региться в каждом клубе с прибыльными условиями. Кстати, это отличная вероятность выдумать выигрышную стратегию и сорвать куш.Большинство интернет-казино из нашего топ-10 готовы порадовать вас эксклюзивными промоакциями. Читайте о их в обзорах и на форуме. Бездепозитные бонусы начисляются лишь один один. Не стоит открывать новые аккаунты, дабы получить их повторно. Служба защищенности казино обязательно выявит «левого» соучастника и заблокирует. Если посетитель выполнит необходимые притязания, отыграет свою ставку и решит исключить собственный выигрыш, то ему надо(надобно) сведению, что казино непременно востребует дать ксерокопии собственных документов, дабы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные средства вывести не удастся.Это тоже бесплатные финансы, коие поступают на аккаунты новоиспеченных игроков после регистрирования. А особенность таких бонусов состоит в, собственно обретенные деньги обязательно следует использовать в продолжении назначенного медли. 1×slots официальный сайт, скачать <a href=http://forum.myslash.ru/profile.php?mode=viewprofile&u=55733>http://forum.myslash.ru/profile.php?mode=viewprofile&u=55733</a>
1хслотс 1хслотс регистрация перейти на 1×slots
Как лишь вы отыграли вейджер и свои с бонусного баланса перебежали для на настоящий счет, Вы смело сможете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (устроить минимальный депо например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, вместе с депо).Похожим образом трудится 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя либо из-за с получения им VIP-статуса. Подарок предоставляется последствии обращения в поддержку и ревизии. Классическая разновидность бонуса за творенье аккаунта. Его превосходство заключается что, нет, что заказчик возможность других подбирать аппараты и делать ставки в их. Иногда список игровых автоматов ограничен оператором, но все точно это чем, чем единственный доступный разъем, как если, тогда, с использованием фриспинов. <a href=http://tekst-pesni.ru/index.php?name=account&op=info&uname=snottyverse76>http://tekst-pesni.ru/index.php?name=account&op=info&uname=snottyverse76</a> Для получения бездепа нужно пригласить в забаву по реферальной ссылке свежего посетителя: он должен зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на сумму, указанную в условиях промоакции. 1×slots casino зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://everestrolep.listbb.ru/viewtopic.php?f=38&t=19449>1×slots сайт</a>
<a href=https://www.findaspermdonor.com/viewtopic.php?f=25&t=99247>1×слотс казино</a>
<a href=http://www.forum.kalor.ru/rabochee-zerkalo-1×slots-t23205.html>рабочее зеркало 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В интернет-сети постоянно можно найти перечни более знаменитых и гарантированных поощрительных программ от знаменитых онлайн-казино. Новички не любят сразу же вносить депо. Это обосновано неименьем навыка и сомненьем. К счастью, в наше время можно получить бездепозитный приз за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В всяком случае вы не рискуете собственными сбережениями. Это отличная вероятность запустить понравившийся видео разъем либо же испытывать удачу в настольных забавах.
#741 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Хорова Наталья Александровна порно бывшие казино <a href=https://www.ossetia.tv/>пина букмекерской конторы</a> 1×bet зеркало 7k casino сайт <a href=https://vestnik-jurnal.com/>Крючкова Полина Викторовна порно</a> pin up casino скачать Чулпан Хаматова пина букмекерской конторы часы казино porno Юлия Пересильд порно с Арина и Дина Аверины, гимнастки скачать сайт букмекерской конторы
DiskiPlus порно с Максим Глушенков (футбол) DiskiPlus Комарова Наталья Владимировна порно <a href=https://www.diskiplus.ru>DiskiPlus порно с Матвей Сафонов (футбол)</a> DiskiPlus porno Марина Александрова DiskiPlus casinos winning <a href=https://www.diskiplus.ru/>DiskiPlus retro casino</a> DiskiPlus pinco casino DiskiPlus казино пин DiskiPlus 7k casino зеркало DiskiPlus пин casino DiskiPlus букмекерская контора фонбет официальный сайт DiskiPlus porno Александра Степанова, фигуристка DiskiPlus казино ли
#742 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up casino пин ап сайте букмекерской конторы фонбет <a href=https://www.ossetia.tv/>porno Александр Соболев (футбол)</a> porno Алена Косторная (фигурное катание) casino <a href=https://specreporter.com/>Матвиенко Валентина Ивановна порно</a> фильмы казино рояль 1×bet зеркало слоты 1×bet xyz casinos winning porno Мария Шарапова 1×bet зеркало xbet казино ставка pin casino зеркало
DiskiPlus casino 7k рабочее DiskiPlus Кузнецова Анна Юрьевна порно <a href=https://diskiplus.ru/>DiskiPlus casino автомат</a> DiskiPlus 1×bet зеркало DiskiPlus casino автомат <a href=https://www.diskiplus.ru>DiskiPlus яндекс казино</a> DiskiPlus букмекерские конторы бет DiskiPlus казино фильм онлайн DiskiPlus casino андроид DiskiPlus Крючкова Полина Викторовна порно DiskiPlus букмекерская контора фонбет официальный сайт DiskiPlus casino на телефон DiskiPlus Яровая Ирина Анатольевна порно
#743 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Мира Андреева (теннис) porno Марина Александрова <a href=https://rucriminal.info/>Валентина Матвиенко порно</a> порно с Георгий Джикия (футбол) porno Ангелина Гончаренко, хоккеистка <a href=https://www.ossetia.tv/>1×bet зеркало на сегодня 1×bet xyz</a> pin up casino официальный bitz casino 7k casino бонус казино онлайн бесплатно ramenbet casino porno Игорь Акинфеев (футбол) бесплатные букмекерские конторы
DiskiPlus 1×bet скачать бесплатно DiskiPlus casino betting <a href=https://diskiplus.ru/>DiskiPlus porno Анна Сидорова, керлингистка</a> DiskiPlus сколько казино DiskiPlus человек казино <a href=https://www.diskiplus.ru>DiskiPlus порно с Голикова Татьяна Алексеевна</a> DiskiPlus официальные букмекерские конторы DiskiPlus сколько казино DiskiPlus сколько казино DiskiPlus casino вход DiskiPlus казино ставка DiskiPlus Анна Михалкова DiskiPlus букмекерские конторы бет
#744 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino 777 online
Создание аккаунта. На веб-сайте казино нужно открыть регистрационную форму и заполнить пустопорожние поля собственными данными. Иногда на этом шаге требуется показать лишь адресок электронной почты и пароль, но почаще хотелось наполнить анкету персональной информацией (ФИО, дата рождения, место проживания и т.д. ). Нужно указывать только реальные данные, поскольку впоследствие они станут испытаны.Чтобы выступать даром на реальные деньги в казино, порой довольно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные деяния. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasin online</a> <a href=https://lnk.bio/kalinka0588>https://lnk.bio/kalinka0588</a> Шаг 4. Активация. Внимательно изучите условия, информацию по ограничениям и сроке действия бонусного предложения. Разобравшись с правилами, возможно активировать бонус в собственном кабинете (времени ? с использованием промокода) либо по запросу в саппорт.Вейджер (wager) – это коэффициент, кот-ый демонстрирует на какую необходимую необходимо устроить ставок, дабы вывести бонус из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего бонуса, Вам нужно устроить ставок на сумму: 500*70=3500 руб. Только полностью отыграв приз, Вы можете вывести собственный выигрыш. 1×slots бонус за регистрацию <a href=https://www.anobii.com/en/017cd3ab87ae617c10/profile/activity>https://www.anobii.com/en/017cd3ab87ae617c10/profile/activity</a> Прежде чем активировать бездеп, необходимо убедиться что, собственно страна, гражданином которой считается игрок, не заходит в список запрещенных.Получив собственный презент, Вы можете даром выступать на реальные средства, а выполнив условия отыгрыша, вывести свой выигрыш.
1×slots зеркало на сегодня
<a href=http://amazon.rx22.ru/memberlist.php?mode=viewprofile&u=255>1×slots рабочее зеркало на сегодня</a> 1хслотс рабочее зеркало на сегодня <a href=http://brenderupmediterrane.free.fr/index.php?file=Members&op=detail&autor=defectivemosaic>http://brenderupmediterrane.free.fr/index.php?file=Members&op=detail&autor=defectivemosaic</a> Самый распространённый из подобных бонусов, конечно же, бездеп на день рождения клиента — приз повторяющий фиксированной суммы либо фриспинов поступает на счёт игрока, а пользоваться им возможно в течение установленного периода медли.Существует ли стратегии для отыгрыша бездепозитных бонусов? К раскаянью нет, на выигрыши или проигрыши с призов, казино или игрок повлиять не, отдача игр случается от разработчиков игр. 1×slots сайт зеркало
1×slots сайт зеркало
<a href=http://nsk.confaelshop.ru/bitrix/redirect.php?goto=http://blizzard-lt.ru/bitrix/click.php?goto=http://dellparts.ru/bitrix/redirect.php?goto=https://telegra.ph/Nakazanie-po-state-228-i-primenenie-stati-30-Osnovnye-detali-i-osobennosti-09–23>http://nsk.confaelshop.ru/bitrix/redirect.php?goto=http://blizzard-lt.ru/bitrix/click.php?goto=http://dellparts.ru/bitrix/redirect.php?goto=https://telegra.ph/Nakazanie-po-state-228-i-primenenie-stati-30-Osnovnye-detali-i-osobennosti-09–23</a> 1×slots официальный demo регистрация в 1×slots casino В бонусную программу многих операторов входят регулярные бездепы. Это бессрочные акции, поощряющие интенсивных неизменных игроков. Популярный формат — раздача фриспинов по конкретным денькам недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депо в обмен на скопленные баллы лояльности.Если вы опытный игрок, вы обязаны аристократия, собственно приз без депозита – редчайшая находка. Тем ниже, мы в изучаем интернет, дабы отыскать вам превосходнейшие бездепозитные предложения.
1× slots casino официальный сайт
Как правило, новоприбывшие геймеры начала хотят ознакомиться с методами ввода и вывода денежных средств и сроки выполнения поданных заказов чтобы четко осознавать, как скоро появится исключить собственный казино приз за регистрацию без депо на электронный кошелек либо же банковскую карту. К счастью для всех играющих, снутри конкретных холдингов, все казино соперничают между собой. Ведь в бы конкретную фирму давало лишь одно онлайн-заведение, то навряд бы клиенты заметили казино с призом за регистрацию и могли бы рассчитывать только на вознаграждение повторяющий бонуса на 1-ое инвестиция. К каждому заведению регулярно следует привлекать новых игроков, что, конечном, лишь на руку всем играющим. Если вы опытный игрок, вы обязаны знать, что приз без депозита – редчайшая находка. Тем не менее, мы раз исследуем онлайн, чтобы найти для вас превосходнейшие бездепозитные предложения. 1×slots регистрацию более популярный вариант это <a href=http://www.lifelvzhou.org/bbs/home.php?mod=space&uid=325295&do=profile>http://www.lifelvzhou.org/bbs/home.php?mod=space&uid=325295&do=profile</a> С не отыгранным призом воспрещается превышать размер наибольшей ставки. Нарушение сего обстоятельства будет аннулирование выигрыша.Если вы опытный игрок, вы обязаны аристократия, что бонус без депозита – редкая находка. Тем не, мы неделю исследуем интернет, дабы найти для вас наилучшие бездепозитные предложения.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Бонус в казино без депозита имеет различные вариации: такое быть приветственный бонус, акции в честь каких-либо дней либо главных дат, бонус за вербование новых игроков, лояльность и получение VIP-статуса.Доступность — бездепозитные бонусы в казино почаще всего предоставляются свежим игрокам, но посещают случаи, когда бонус могут получить и действующие посетители. <a href=https://blackmarke7.com/user-41289.html>https://blackmarke7.com/user-41289.html</a> При регистрации стопам указывать лишь достоверную информацию. Когда учетная запись несомненно активна, замечен доступ в Личный кабинет. В нем возможно выбрать денежную, установить промокод и узнать подробные управляла получения и отыгрыша бездепа. Краткая информация об акции нередко находится именно на регистрационной форме. 1×slots зеркало подтвердит вашу регистрацию если говорить Игрокам не принимать приветственный приз как гарантированный способ получить крупный выигрыш, но это замечательная возможность без затрат расценить функционал казино.
<b>Смотреть еще похожие новости:</b>
<a href=http://fumankong1.cc/home.php?mod=space&uid=500977>сайт 1× slots casino</a>
<a href=http://rumproject.com/rumforum/viewtopic.php?f=23&t=5169>1хлот регистрация в 1×slots casino</a>
<a href=https://forum.visiteachapada.com/viewtopic.php?f=19&t=7913>1×slots зеркало быструю регистрацию а также мгновенное</a>
<a href=https://www.digicube.de/forum/threads/864150–1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82-%D1%81%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C?p=1080606#post1080606>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный приз казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби избранного заведения, определится в выборе игр и проверить качество работы саппорта. Довольно часто, начиная игровой процесс, игрок теснее отказывается останавливаться и проделывает настоящий лепта. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть бесплатно вероятно как один таки с бонусом за регистрацию без надобности заносить депозит. В случае установленного лимита на необходимую вывода выигрыша с бездепозитного приза, игрок не может исключить больше заявленной суммы.
#745 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало на сегодня
Для получения бонуса надо(надобно) ознакомиться с программой преданности казино и сделать ставки на сумму, необходимую для перехода на грядущий уровень. <a href=http://filmkachat.ru/>1×slots мобильная версия войти казино</a> Акции, посвященные календарным праздникам, случаются рассчитаны как на всех юзеров, так и на категории: например, презент на 8 марта девушкам-игрокам либо мужикам на 23 февраля. <a href=https://www.sideprojectors.com/project/55406/avtovikup-kiyiv>https://www.sideprojectors.com/project/55406/avtovikup-kiyiv</a> Для всех бездепозитных бонусов действует наибольший лимит на выигрыш. Он показывает предельную сумму, коию у получить, играя на бонусные кредиты. Как только вас получится выполнить требования вейджера, возможный максимум будет переведен с бонусного счета на ведущей, а остаток несомненно списан.На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению сего медли, Вы не сможете активировать и получить бездепозитный бонус. 1×слотс казино <a href=http://gticlub.lv/user/Jamesspoks/>http://gticlub.lv/user/Jamesspoks/</a>
1×slots регистрация 1×slots casino 777 online
Наиболее популярные гонорары между гэмблеров – бездепозитные призы казино. Это не дивно, ведь можно получить безвозмездные вращения или виртуальные кредиты, и при этом не придётся пополнять счёт, рисковать личностными средствами. Удастся насладиться разнообразными весельями и даже выиграть солидную необходимую, избегая серьёзного риска.Какие призы меня еще получить считая бездепозитного приза за регистрацию в казино? По мимо бездепозитного приза, каждое интернет казино предлагает игрокам прибыльное предложение на 1-ый депозит, вы совершаете депозит, ваш депо увеличивается в двое или и в 3, что, этим наиболее начать выступать возможно с более солидной суммой, так же не забываем про вейджер на призы. <a href=https://forumsleague.org/forum/memberlist.php?mode=viewprofile&u=11228>1хслот официальный сайт зеркало</a> 1×slots официальный сайт скачать 4. Заберите подарок. Чаще всего бонус активизируется сразу последствии регистрации. Но бывают истории, когда нужно забежать в личный кабинет либо написать в саппорта. <a href=http://bloodsharks.net/phpBB/profile.php?mode=viewprofile&u=156546>http://bloodsharks.net/phpBB/profile.php?mode=viewprofile&u=156546</a> сайт 1× slots casino Наиболее популярностью гонорары среди гэмблеров – бездепозитные призы казино. Это не удивительно, ведь возможно получить безвозмездные вращения либо виртуальные кредиты, и этом не придётся пополнять счёт, рисковать личностными средствами. Удастся насладиться разнородными развлечениями даже выиграть крупную сумму, избегая серьёзного риска.Акции распространяются как на все игры казино, так и на ограниченный список. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и другие. Промо имеет обхватывать разработки 1-го производителя. Бездеп не пересекается с иными промоакциями казино. Если на веб-сайте предусмотрен кэшбек, он не начисляется за ставки, сделанные бонусными деньгами. Для идентификации платежных реквизитов игрока может потребоваться пополнение счета на минимальную необходимую.
1×slots регистрацию процедура займет всего лишь
Чтобы играть бесплатно на реальные деньги в казино, порой достаточно просто зарегистрироваться. Иногда нужно выполнить дополнительные действия.А ознакомиться с свежими интернет казино, Вы сможете за счет призов с выводом выгоды, коие Вы можете получить без депозита. <a href=https://cse.google.as/url?q=https://doctorlazuta.by/>https://cse.google.as/url?q=https://doctorlazuta.by/</a> Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депозит возможность отличаться до 30 дней. 1хслот 1хслотс регистрация перейти на 1×slots Бездепозитный приз часто имеет замерзнуть доступным сразу после окончания регистрации, потому правило единственным притязанием к нему является регистрация, а после ревизия вашей свежей учетной записи.Подтверждение индивидуальной информации. Все казино просят от посетителя пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у пользователя иных аккаунтов (мультиаккаунт запрещен).
1×slots официальный сайт зеркало рабочее
Представленные на этой страничке наилучшие бездеп бонусы в казино за регистрацию в 2022 году имеют оптимальные обстоятельства. После тщательного анализа редакция портала составила рейтинг спецпредложений, каком посетители Casino.ru шансы сортировать перечень по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д. Большинство интернет-казино из нашего топ-10 готовы повеселить вас эксклюзивными акциями. Читайте о их в обзорах и на форуме. 1×slots рабочее зеркало на сегодня <a href=http://zoo-discont.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=http://y-zdorov.ru/bitrix/rk.php?goto=http://nailmarket.pro/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/zVNdZW3Dsd_>http://zoo-discont.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=http://y-zdorov.ru/bitrix/rk.php?goto=http://nailmarket.pro/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/zVNdZW3Dsd_</a>
1хслотс официальный сайт зеркало
Бoльшинcтвo азартных заведений выдвигают приблизительно однообразные, схожие обстоятельства и притязания, коие необходимо выполнить, дабы получить бездепозитный бонус за регистрацию. Все их возможно объединить в раз перечень: <a href=http://forum.computest.ru/post/670258/#p670258>http://forum.computest.ru/post/670258/#p670258</a> Проверка занимает от нескольких мин. До нескольких дней, спецы техподдержки могут запросить дополнительные документы или инициировать короткое общение по Skype.Лишь знаменитые и известные азартные заведения могут разрешить себе выдавать бездепы в виде добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, которые можно потратить в лучших аппаратах с высочайшей отдачей. скачать 1×slots официальный сайт Бездепы обычно предлагают с отыгрышем — мгновенно исключить выигранные свои нельзя. Перевод денег со счета несомненно возможен в того, как пользователь выполнит все требования казино, а сумма имеет быть выше установленного правилами лимита. Условиями промоакции фиксируются сроки, на которых клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней в активации.
<b>Смотреть еще похожие новости:</b>
<a href=http://iptv.bestforums.org/viewtopic.php?f=3&t=5131>1×slots официальный сайт зеркало рабочее</a>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=400363>1×slots регистрация на сайте 1×slots ru com</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бонус за регистрацию в казино без депо с выводом денег надо(надобно) отыграть. Зачастую для отыгрыша имеет понадобиться сделать ставки на сумму, в количество 10-ов один превосходящую необходимую приза или выигрыша.
#746 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Бондаренко Анастасия Борисовна порно с Варвара Субботина <a href=https://glvk.guru/>винлайн букмекерская контора</a> порно с Илья Осипов (киберспорт) Александра Бортич <a href=https://specreporter.com/>скачать сайт букмекерской конторы</a> Чулпан Хаматова порно с Дарья Клишина, легкоатлетка 7k casino зеркало на сегодня винлайн букмекерская контора официальный сайт Комарова Наталья Владимировна порно бесплатно фильм казино Кузнецова Анна Юрьевна порно
DiskiPlus пинап казино DiskiPlus порно с Аделия Петросян (фигурное катание) <a href=https://diskiplus.ru/>DiskiPlus 7k casino зеркало</a> DiskiPlus скачать casino на андроид DiskiPlus пин up casino <a href=https://diskiplus.ru/>DiskiPlus порно с Баталина Ольга Юрьевна</a> DiskiPlus букмекерская контора бетсити DiskiPlus porno Юлия Пересильд DiskiPlus гта казино DiskiPlus официальная казино DiskiPlus порно с Евгения Медведева DiskiPlus порно с Ирина Сидоркова DiskiPlus где казино
#747 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Петрова Ольга Викторовна порно казино рояль смотреть <a href=https://t.me/vchkogpu_ru>бесплатно играем казино</a> букмекерские конторы в россии скачать casino на андроид <a href=https://7club7.com/>casino x</a> 1×bet xbet xyz Кузнецова Анна Юрьевна порно up букмекерская контора 1×bet вход играющие казино онлайн порно с Бондаренко Анастасия Борисовна pin up casino пин
DiskiPlus гама казино DiskiPlus casino официальный сайт <a href=https://diskiplus.ru/>DiskiPlus Комарова Наталья Владимировна порно</a> DiskiPlus гта онлайн казино DiskiPlus скачать casino на андроид <a href=https://www.diskiplus.ru>DiskiPlus casino приложения</a> DiskiPlus балтбет букмекерская контора DiskiPlus промокод 1×bet DiskiPlus кент казино DiskiPlus приложения букмекерских контор на андроид DiskiPlus porno Алена Косторная (фигурное катание) DiskiPlus симулятор казино DiskiPlus Александра Бортич
#748 internetGephttps://kazan-domashnij-internet003.ru
интернет тарифы казань <a href=https://kazan-domashnij-internet003.ru>kazan-domashnij-internet003.ru</a> подключение интернета по адресу
#749 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация
При ирге на бонусные свои запрещается выступать в игровые автоматы с прогрессивным джекпотом и забавы из радела live casino. Кроме как, кое-какие казино дают бездеп на раз либо количество определенных слотов, и в иных играх Вы не сможете на их выступать.Бездепозитный приз – это финансовое вознаграждение, коие выдается соучастнику забавы в казино, для его вербования и возникновения заинтригованности. Любой гость, кот-ый подходит условиям выдачи подобного бездепозитного бонуса, может претендовать на получение вышеуказанного приза. Такое поощрение является наиболее эффективным методом, дающим вероятность стартовать при, не вкладывая личных вещественных средств. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slots review live</a> <a href=https://www.smartmoneymatch.com/job/3d-artist/968>https://www.smartmoneymatch.com/job/3d-artist/968</a> 1×slots сайт <a href=http://qarabagaaparanyol.az/index.php?subaction=userinfo&user=uglytundra86>http://qarabagaaparanyol.az/index.php?subaction=userinfo&user=uglytundra86</a> При отыгрыше бонусных средств, нужно учесть срок деяния приза и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный приз несомненно аннулирован.
1×slots регистрация на 1хслотс
Фриспины — безвозмездные вращения, коие дозволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины числятся самым модным и предпочтительным видом приза — бесплатные вращения иногда эффективнее и веселее в отыгрыше, чем другие виды бездепов.Большинство клубов привлекают внимание компьютерные за счёт разнообразных даров. На 1 веб-сайтах можно получить виртуальные кредиты, которые откроют доступ ко всему софту. На других же, администрация предлагает бесплатные вращения для пуска лучших интернет слотов. Несмотря на разные промоакции, стоит выделить самые главные. 1×slots рабочее зеркало на сегодня <a href=https://msknovostroy.com/member.php?action=profile&uid=4214>https://msknovostroy.com/member.php?action=profile&uid=4214</a> Наши специалисты изучают условия промоакции, этого в ручном режиме проверку их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и характеристики. Мы не рекламируем казино, а даем игрокам информацию о лучших из их.Баланс игрока дополняется на подходящую необходимую. К ней применяется вейджер, указанный в правилах промоакции. Вывести выигрыш возможно будет после как, как пользователь устроит требуемый размер ставок из личных средств. В редких случаях бездеп трудится в формате Free Play. На счет юзера зачисляется крупная сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по окончании сего периода сумма на счету несомненно превышать первоначальную, то разницу можно будет вывести или применять для последующих ставок. 1×slots сайт Ознакомьтесь с нашим списком превосходнейших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего перечня и получите бездеп сразу. Хватайте наилучшие благотворительные предложения ниже и выигрывайте великие средства, не рискуя!
1×slot казино зеркало
Помните, что всевозможные нарушения правил сведут на нет ваши усилия, и вы скорее останетесь без начисленного вам бесплатного приза. Всегда изучайте правила начисления и обстоятельства вейджера. По любым вопросам, на коие вы возможности самостоятельно отыскать ответы, обращайтесь за разъяснениям и саппорт. Перед активацией важно внимательно выучить обстоятельства промоакции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют значение кроме лимиты ставок при отыгрыше и сроки, протяжении которых возможно воспользоваться предложением. Если бездеп охватывает ограниченный список игр, рекомендовано узнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь что, нет случае, случае оператор не установил жесткие ограничения на наивысшую необходимую ставки.Активация денежного гонорары происходит механически после творения профиля или применения промокода. Иногда операторы предъявляют вспомогательные требования: подписаться на страницы казино в соц сетях либо на рассылку рекламных извещений, скачать и ввести вспомогательный софт и т.д. <a href=https://www.love2d.org/forums/memberlist.php?mode=viewprofile&u=292519>https://www.love2d.org/forums/memberlist.php?mode=viewprofile&u=292519</a> Бездепозитные призы за регистрацию в игровых автоматах для владельцев онлайн-казино считаются частью маркетинговой кампании, направленной на увеличение аудитории сайта. Так они продвигают свои бренды и завлекают новых посетителей. 1× слот зеркало Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают бонус по государствам. Вплоть до такого, что клуб имеет себя игроков из Вашей государства, а бездеп мешает.
1×slots зеркало рабочее
При исполненьи условий отыгрыша и верификации, средства с бонусного счета переводятся на основной и могут быть выведены на карту либо электронный кошелек. Лимиты на вывод и сроки проведения транзакции находятся от избранной платежной системы. Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных притязаний, кроме обязательной верификации. Если на сайте учтена неотъемлемая процедура подтверждения личности, то вывести выигрыш удастся лишь последствии проверки данных. Приготовьтесь наполнить анкету и отправить в техподдержку документ, подтверждающий личность. Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных требований, считая обязательной верификации. Если на сайте учтена обязательная процедура подтверждения личности, то вывести выигрыш удастся только после проверки данных. Приготовьтесь наполнить анкету и выслать в техподдержку документ, подтверждающий личность.2. Создать свежий профиль. Для регистрации нужно наполнить маленькую анкету либо зайдите в личный кабинет при помощи социальных сеток; 1×slots коды <a href=http://cjrltw.com/home.php?mod=space&uid=355013&do=profile>http://cjrltw.com/home.php?mod=space&uid=355013&do=profile</a>
1×slot официальный сайт
Выбирайте лучшие безвозмездные призы за обзоров на Casinoz – и пусть вам сопутствует счастье при отыгрыше бонусных кредитов!Получать информацию о самых выгодных призах возможно без постоянного прогноза новостей казино. Мы взяли данную задачку на себя и непрерывно следим за предложениями операторов, выбирая превосходнейшие из их. В данном разделе собраны последние бездепы, промокоды к ним и условия их активации. Список промоакций регулярно пополняется. В топ зашли самые новые бездепозитные призы за регистрацию в казино 2020, временные и закрытые рекламную. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и критериям. Если срок действия промоакции истек, она удаляется из списка. <a href=https://xn–80abdzaxbkfak2ai0bzf4ce.xn–p1ai/communication/forum/user/45736/>https://xn–80abdzaxbkfak2ai0bzf4ce.xn–p1ai/communication/forum/user/45736/</a> 1×slots casino регистрация на сайте Если речь об эксклюзивных услугах, имеет потребоваться регистрация в казино по ссылке с партнерского вебсайта.В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая доля забавы. Важно, зачастую бездепозитные призы в казино выдаются с лимитированиями по наибольшей выплате. В среднем возможно рассчитывать на выгода в количество тысяч рублей. Как исключить выигрыш с бонуса без депо. Придётся подтвердить аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном доказательстве учетной записи спрашивайте в интернет чате либо прочтите в правилах.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=13119>1хслотс зеркало</a>
<a href=https://www.rechti.de/thread/abmahnung-wegen-wortmarke.14455/page-14#post-32156>1× slots casino официальный сайт</a>
<a href=https://forum.ltp-team.com/topic/203498–1×slots-mobilnaya-versiya-voyti-kazino/>1×slots мобильная версия войти казино</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Начнём с такого, собственно любое промо за регистрацию предполагает некоторые обстоятельства. Бездепозитные призы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность денежного оборота, нужная для исполнения условий. Пример, возымели благотворительные вращения и выиграли с их 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 руб., неудачных либо выигрышных, важно. После исполненья, бонусный баланс перейдёт на настоящий и будет доступным к выводу.
#750 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало на сегодня
У нас на сайте Вы отыщите перечень бонусов без депозита в проверенных казино и доскональную информацию про как их получить и применять.Вы всего, например все любите получать презенты и бездепозитные призы казино. Игорные жилища взяли в повадку одаривать гэмблеров приятными бонусами. Стать владельцем приветственного презента возможно за творенье профиля или пополнение счёта. Второй вариант больше занимательный, как клубы готовы удвоить депозит! Но в вы новичок и лишь знакомитесь с миром азарта, превосходнее пользуйтесь бонусом за регистрацию. <a href=http://filmkachat.ru/>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a> <a href=https://linklist.bio/lexxeagle>https://linklist.bio/lexxeagle</a> Можно ли в одном интернет казино получить больше 1-го бонуса за регистрацию? Нет, например как в любом интернет казино есть правила, к которым надо(надобно) придерживаться, не творить 2 аккаута для получения бонусов, иначе будет блокировка обоих аккаутов, не пытайтесь обмануть онлайн казино, бонус за регистрацию выдаеться раз раз одному личику.Отзывы читателей о бонусных акциях помогут составить эмоцию, но не запамятовывайте о субъективности личных комментариев. 1×slot официальный сайт <a href=http://jejuseapension.com/bbs/board.php?bo_table=free&wr_id=439803>http://jejuseapension.com/bbs/board.php?bo_table=free&wr_id=439803</a> Простая процедура получения бездепозитного приза, которая займет не более 2-х минут. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные.
1×slots casino регистрация на сайте
Вейджер менее х30–35 считается применимым. Опытные игроки утверждают, собственно с таким вейджером реально остаться в плюсе, если верно подойти к выбору игрового аппарата.Помните, что всевозможные нарушения управлял сведут на нет ваши старания, и вы наверняка останетесь без начисленного вам безвозмездного бонуса. Всегда изучайте управляла начисления и обстоятельства вейджера. По каким вопросам, на которые вы возможности без найти ответы, обращайтесь за объяснениям и саппорт. <a href=https://vivoes.com/forum.php?mod=viewthread&tid=42577&extra=>зеркло казино 1×slots</a> 1хслот 1хслотс регистрация перейти на 1×slots Бездепозитные бонусы настоящими средствами, которые можно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадались. <a href=https://forum.na-svyazi.ru/?showuser=690546>https://forum.na-svyazi.ru/?showuser=690546</a> Но а в вы уже профи по интернет казино, кликаем на красноватую кнопку «Получить» и Вы автоматически перейдете в онлайн казино; 1×slots мобильная версия войти казино Список например именуемых «запрещенных землель» прилагается к правилам бонусной программки игорного портала. Обязательно выясните, распространяются ли на вас подобные наказания.Верификация важна для добавочной защищенности и подсобляет техподдержке выявить бонусхантеров и плутов. Кстати, рядах платформах выводы солидных сумм доступны лишь последствии подтверждения личности.
1×slots официальный сайт зеркало рабочее
В подавляющем большинстве случаев бесплатные бонусы начисляются в кредитах, которые нельзя незамедлительно вывести со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже. <a href=http://hauptmanns-gartenpflege.com/profile.php?lookup=20184>http://hauptmanns-gartenpflege.com/profile.php?lookup=20184</a> Также учтите, что кое-какие игровые платформы сузивают перечень государств, коие готовы получить предложенный бездепозитный приз за регистрацию. К образцу, существуют онлайн-заведения, выдающие сходственные бонусы только обитателям определенных государств. К образцу, интернет казино 777 Оригинал предоставляет бездепозитный бонус только игрокам из России и стран СНГ. Или напротив, снабжают вознаграждением всех, считая жителей некоторых стран (следует сего, стопам внимательно изучать перечень, дабы впоследствии не возникло практически вопросов и претензий). 1×slots регистрация на 1хслотс Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы быстро получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, замечена реальный шанс победу!
1×slos регистрация в 1×slots casino
Проверка занимает от нескольких мин. До нескольких дней, спецы техподдержки имеют запросить дополнительные документы либо инициировать куцее общение по Skype. <a href=http://forum.exalto-emirates.com/memberlist.php?mode=viewprofile&u=66504>x1 slots 1хслотс регистрация перейти на 1×slots</a> Новички не любят сразу же вносить депо. Это обосновано отсутствием опыта и сомнением. К счастью, в наше время возможно получить бездепозитный приз за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В любом случае вы не рискуете своими сбережениями. Это отличная вероятность запустить понравившийся видео слот либо же испытать удачу в настольных играх.Нет. Для получения бездепозитного приза в казино нужна обязательная регистрация на веб-сайте. Играть в слоты бесплатно и без регистрации возможно лишь в демо режиме. 1×slots рабочее зеркало <a href=http://forum.notionmusic.com/memberlist.php?mode=viewprofile&u=40666>http://forum.notionmusic.com/memberlist.php?mode=viewprofile&u=40666</a> Для верификации номера телефона, в личном профиле изберите опцию „Подтвердить номер аппарата“ и введите в отвечающее фон код, полученный в sms-сообщении.
1×slots мобильная версия войти казино
<a href=http://www.nefiskokulutarifler.com/search?q=%5Burl%3Dhttps%3A%2F%2Fdoctorlazuta.by%2Fblog%5D%D0%B1%D0%BB%D0%BE%D0%B3+%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0+%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0+%D0%B4%D0%B7%D0%B5%D0%BD%5B%2Furl%5D+%D0%B1%D0%BB%D0%BE%D0%B3+%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0+%D1%87%D0%B8%D1%82%D0%B0%D1%82%D1%8C>http://www.nefiskokulutarifler.com/search?q=%5Burl%3Dhttps%3A%2F%2Fdoctorlazuta.by%2Fblog%5D%D0%B1%D0%BB%D0%BE%D0%B3+%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0+%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0+%D0%B4%D0%B7%D0%B5%D0%BD%5B%2Furl%5D+%D0%B1%D0%BB%D0%BE%D0%B3+%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0+%D1%87%D0%B8%D1%82%D0%B0%D1%82%D1%8C</a> 1×slots официальный сайт скачать Шаг 4. Активация. Внимательно исследуйте обстоятельства, информацию по лимитированиям и сроке деянья бонусного предложения. Разобравшись с правилами, можно активировать бонус в собственном офисе (время ? с использованием промокода) либо по запросу в саппорт.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=41740>1×слот регистрация в 1×slots casino</a>
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=127424&extra=>1×slots зеркало регистрация</a>
<a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=13250>1 x slots casino</a>
<a href=https://forum.visiteachapada.com/memberlist.php?mode=viewprofile&u=695>1×slots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
К сожалению, нет. Почти все казино, требуют внесение но бы 1-го малого депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, собственно исключить деньги разрешается лишь на ту платежную систему, с коей был сделан депо. С иной стороны, гораздо легче арестовать бездепозитные фриспины за регистрацию в казино и напрямик в начать вертеть барабаны в наихороших слотах. Главная особенность спинов в том, собственно они предназначены для лучших автоматов. Удастся не только пройти дополнительные раунды, хотя и увеличить сумму выигрыша, заработать респины прочие внутриигровые презенты.
#751 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало сайта
Многие азартные клубы ограничивают необходимую вывода заработанную на призе. Сколько б Вы не выиграли, больше, указанной в описании акции, суммы Вы не можете исключить. Разница несомненно аннулирована, Вы и не сможете делать на нее ставки. <a href=http://filmkachat.ru/>1х слот 1хслотс регистрация перейти на 1×slots</a> Для выбора азартного заведения Вы сможете воспользоваться перечнем наших казино с бонусами за регистрацию. На нашем веб-сайте мы опубликовали перечень бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, собственно доля призов эксклюзивные и доступны лишь для посетителей нашего вебсайта по-специальному промо-коду или по оригинальной ссылке. Кроме как, для каждого приза мы подготовили подробный обозрение, в котором Вы узнаете как получить и отыграть одобрение и как вывести собственный выигрыш с бездепа.Также, в необходимо подтвердить собственный номер телефонного, достичь код, приобретенный в смс-сообщении от клуба ввести в особое фон в собственном офисе игрока. <a href=https://forum.index.hu/User/UserDescription?u=2065076>https://forum.index.hu/User/UserDescription?u=2065076</a> Подарки на праздники ? приуроченные к праздничным датам, требующие символического отыгрыша либо начисляются без такового. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду.Как и промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения считаются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих посетителей и дозволяет им составить эмоцию о функционале, не рискуя вескими суммами. 1хслотс казино зеркало <a href=http://www.pengstys.com/home.php?mod=space&uid=109765>http://www.pengstys.com/home.php?mod=space&uid=109765</a> Бездепозитные бонусы – это самая интересная и более многообещающая промоакция интернет-казино. Они том чем фри-спинов, потому собственно выплаты в бесплатных вращениях не гарантированы, так композиции на барабанах игрового аппарата имеют не сложиться.Если вы выбрали для себя некоторое брендов которые вам больше всего полюбились, для неизменной забавы! Таких гемблеров казино очень любит и оценивает, за частую эти игроки становятся VIP игроками заведения, которым нередко поступают прибыльные предложения в виде призов, так же туда входит и бездепозитные.
1× слот зеркало
<a href=https://fmatras.ru/profile/107395-rabofreekt/>1× slots зеркало</a> 1хслот зеркало сайта В разделе с призами активировать собственный подарок. Найти забавы, для которых учтено одобрение и использовать бонус по предназначению.Разные казино имеют собственные верховодила по выведению выигрыша. Для бездепозитных призов принимаются достаточно высокие требования. Часто онлайн-казино советуют отыграть бонусное поощрение до ста раз в игровых автоматах. Например, в игрок получил даром десять долларов, то необходимо несомненно отыграть их, поставив 1 тысячу спинов по одному доллару каждый. Стоит отметить, собственно не все казино дают возможность играть на бонусы и не во всех увеселительных заведениях идентичные управляла для отыгрывания. Некоторые казино воспрещают выступать на бонусы в блекджек либо ограничивают ставки до пяти процентов, что значительно увеличивает в десятки один число необходимых игр. <a href=https://diart.su/user/Stevenfaids/>https://diart.su/user/Stevenfaids/</a> Если площадка презентует бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь завести акк на сайте и активировать его, подтвердив адресок электронной почты, номер аппарата либо иные данные, которые требует оператор. Перед этим нужно убедиться, что пользователь находится на официальном веб-сайте казино, но на мошеннической площадке.Любой выигрыш по ставке выше установленного лимита будет являться недействительным. То есть ставка не будет засчитана при отыгрыше, а в случае выигрыша его сумма не поступит на счёт клиента — итог забавы несомненно всецело аннулирован. 1×slots casino регистрация 1×slots review live Максимальная ставка ? уточняется в еденице счета и ограничивает объем ставки за один спин. В случае ее превышения бонус может быть аннулирован. Также в правилах возможность содержаться запрет на размещение ставок определенного вида, примеру, по одинаковым шансам в рулетке (то есть, на чет либо нечет, красное либо темное и т.д.).Но разу не забывайте пристально читать управляла участия в бонусных промоакциях. Если вы нарушите хотя бы одно условие, позднее вы не сможете устроить недоразумение с администрацией.
1×slots регистрация на официальном сайте
Итак, дабы безвозмездные бонусные кредиты превратились в настоящие средства, которыми вы можете управлять по своему усмотрению, их нужно отыграть. Вейджер стопам уточнять в правилах онлайн-казино. Прежде всего, не запамятовывайте периодически заглядывать на страницу обзоров бездепозитных бонусов. Они шаг за шагом разглядывают более занимательные предложения ведущих игорных порталов.Для получения приза надо(надобно) ознакомиться с программой лояльности казино и сделать ставки на сумму, нужную для перехода на следующий уровень. <a href=https://magazin.orgsoft.ru/forum/user/214859/>https://magazin.orgsoft.ru/forum/user/214859/</a> B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.В онлайне очень большое скриптовых вебсайтов, которые принадлежат плутам. Их главная задача – заинтересовать гэмблеров, пообещав не только щедрые подарки, хотя и крупные выигрыши. Так собственно некоторые сайты предлагают получить за регистрацию и $1 000. 1×slots регистрация 1×slotscasino 56 online Однако в условиях скрываются «подводные камни», которые не позволят исключить крупную сумму или же вы не успеете отыграть вейджер. Поэтому профессионалы рекомендуют забрать благотворительные вращения за регистрацию в казино без депозита, дабы поднабраться опыта и получить реальный шанс на победу.Ну и естесственно же, для казино бездепозитные призы выгодны с имиджевой стороны: схожая добродушие увеличивает уровень лояльности клиентов к компании.
рабочее зеркало 1хслотс
При регистрации идет свидетельствовать лишь достоверную информацию. Когда учетная запись будет активна, замечен доступ в Личный офис. В нем возможно избрать денежную, ввести промокод и разузнать доскональные управляла получения и отыгрыша бездепа. Краткая информация об акции нередко присутствует именно на регистрационной форме. 1×slots casino зеркало <a href=https://diakov.net/user/DoctorLazutaSr/>https://diakov.net/user/DoctorLazutaSr/</a> Наш список содержит превосходнейшие бездепозитные призы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает проверку по главным параметрам:
1×slots казино мобильная версия
<a href=http://bitetheass.com/user/Raymonddig/>http://bitetheass.com/user/Raymonddig/</a> Одним из предлогов отдавать преимущество, льготу одному либо другому заведению заключается в привлекательности предлагаемых промоакций и безвозмездных услуг. Безвозмездные фриспины, выдаваемые без нужды создавать какой-нибудь лепта, в перечне находится далековато не в конце. 1× slots сайт Акции, посвященные календарным дням, бывают рассчитаны как на всех пользователей, так и на категории: примеру, презент на 8 марта девушкам-игрокам или мужчинам на 23 февраля.Только выполнив все условия отыгрыша и дождавшись завершения ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить свои средства.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Можно. Вы практически можете отрешиться от получения бездепозитного бонуса за регистрацию в казино, же Вы не сделаете ставку.
#752 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
ставки на спорт букмекерские конторы порно с Петр Ян (ММА) <a href=https://th-royalgclub.com/>порно с Кирьянова Дарья Борисовна</a> скачать 1×bet порно с Каролина Севастьянова <a href=https://rhymes-punches.com/>порно с Аделия Петросян (фигурное катание)</a> порно с Алина Загитова, фигуристка 1×bet зеркало xbet 1win букмекерская контора порно с Евгения Медведева, фигуристка порно с Каролина Севастьянова порно с Кирьянова Дарья Борисовна реального казино
DiskiPlus 1×bet casino DiskiPlus casino приложения <a href=https://diskiplus.ru/>DiskiPlus casino вход</a> DiskiPlus Ходнева Светлана Владимировна порно DiskiPlus яндекс игры казино <a href=https://www.diskiplus.ru>DiskiPlus Приезжева Екатерина Геннадьевна порно</a> DiskiPlus bitz casino DiskiPlus bet casino DiskiPlus Попова Анна Юрьевна порно DiskiPlus casino buzz казино DiskiPlus Хорова Наталья Александровна порно DiskiPlus Мухтиярова Елена Вячеславовна порно
#753 Charlesgunnyhttp://filmkachat.ru
x1 slots регистрация в 1×slots casino
Когда речь о получении бездепозитных призов в казино, в первую очередь внимание на последующие условия: <a href=http://filmkachat.ru/>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a> Объективные – объем приза, коэффициент и обстоятельства вейджера, надобность внесения депо для вывода средств; <a href=https://wykop.pl/wpis/80059367/the-art-and-science-of-professional-interior-desig>https://wykop.pl/wpis/80059367/the-art-and-science-of-professional-interior-desig</a> Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются незамедлительно последствии сотворения профиля и активны непродолжительное время. Если не успеете израсходовать средства, они попросту сгорят. Касаемо времени, правило призы активны в течение часа.Онлайн-казино кропотливо продумывают бонусные обстоятельства, которые необходимо выучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и другие ограничения. 1×slots casino регистрация 1×slotscasin online <a href=http://ambumed.ru/communication/forum/user/1334/>http://ambumed.ru/communication/forum/user/1334/</a>
1×slots зеркало которую указывали при регистрации кстати
Некоторые клубы механически начисляют приз на аккаунт игрока после исполнения критерий получения, но посещают ситуации, когда бонус надо(надобно) активировать игроку самому. Есть количество способов активации бонуса: <a href=http://forums.indexrise.com/thread-94241-post-506080.html#pid506080>1×slots официальный сайт зеркало рабочее</a> 1×slots регистрация 1×slots casino c2d ru <a href=http://yu856.com/home.php?mod=space&uid=1502539>http://yu856.com/home.php?mod=space&uid=1502539</a> Более солидные предложения встречаются очень редко. Зачастую они доступны только VIP-игрокам. В остальных случаях им всего сопутствуют очень строгие обстоятельства отыгрыша. Также вероятны вспомогательные условия и ограничения, прописанные в условиях и положения бонусной программы казино. 1×slots регистрация 1×slots casino c2d ru Бездепозитные бонусы в казино без пополнения 2022 — это определенная сумма денег либо vacant spins вращения, коие предоставляются первым гостям за регистрацию на сайте казино вид бездепозитного бонуса, и выделяет вам вероятность помощью казино без пополнения опробовать услуги (игр), с дальнейшей прерогативой вывода средств при выполнении всех установленных управлял.Максимальная ставка ? уточняется в денежной счета и ограничивает объем ставки за раз спин. В случае ее превышения приз имеет быть аннулирован. Также в правилах возможность содержаться запрет на размещение ставок конкретного облика, к, по одинаковым шансам в рулетке (другими, на чет либо нечет, красноватое либо черное и т.д. ).
1хслотс официальный сайт зеркало
Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, a только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Далее потребуется отыграть вагер и исключить выигрыш. Игрокам без опыта крупно повезло, есть получить 10-ки даров за одну регистрацию. Если не смогли получить Бездепозитный бонус, не тревожьтесь. Обратитесь в интернет чат, оператор поможет ситуацию. <a href=http://www.sksmg.com/home.php?mod=space&uid=220576&do=profile>http://www.sksmg.com/home.php?mod=space&uid=220576&do=profile</a> Некоторые сайты, прежде чем обмануть регистрацию игроков, предлагают ответить на количество базовых вопросов. Цель проведения подобной викторины – выявить случайных людей, которые не имеют представления о покере, и не разрешить получения ими бонусов. Если гость уже играл в казино, то ответить на полтора 10 несложных вопросов несомненно несложно. Очень нередко, ответы возможно найти на официальных веб-сайтах этих учреждений.Как только на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу в сего возможно забыть заявку на вывод выигрыша. Кредиты выгодно отличаются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом настоящих средств и дают возможность ощутить задор. Во-вторых – возможно насладиться каждой азартной забавой доступной на веб-сайте. В вашем распоряжении присутствуют автоматы, настольные приложение, видео-покер, Live-дилеры. 1×slots зеркало регистрацию более популярный вариант это Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, all лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Новые клиенты онлайн-казино без первого депо имеют проверить свою удачливость. К что, этому же есть вероятность конвертировать бездепы в настоящие деньги за регистрацию в казино, однако результата бонус нужно отыграть сообразно условиям акции.
1×slots официальный сайт скачать на айфон
Акции распространяются как на все забавы казино, так и на узкий список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и другие. Промо возможность охватывать разработки одного производителя. Бездеп не пересекается с иными акциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, изготовленные бонусными деньгами. Для идентификации платежных реквизитов игрока может потребоваться пополнение счета на наименьшую сумму.Мы проделываем акцент на ключевых положениях управлял, рассказываем о территориальных лимитированиях и кратко информируем о других промоакциях обговариваемого казино. <a href=https://kfz-gringer.at/index.php/forum/suggestion-box/80324–1#80088>1хслотс рабочее зеркало на сегодня</a> Но не мыслить, что снабжая юзеров такими бонусами, казино занимается спонсированием. Ведь размеры вознаграждений, главном, не немалые (средним размером от 5 до 20 $). И на эти средства налагаются определенные условия и лимитирования, неотклонимые к исполнению игрока, если в последствии он желает получить все свои выигранные деньги. В бонусную программку множества операторов входят регулярные бездепы. Это бессрочные промоакции, поощряющие активных неизменных игроков. Популярный формат — раздача фриспинов по конкретным дням недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депозита в мена на накопленные баллы преданности.Некоторые клубы автоматически начисляют приз на аккаунт игрока последствии исполнения критерий получения, хотя случаются истории, когда приз надо(надобно) активировать игроку самому. Есть количество методов активации приза: 1×slots зеркало рабочее <a href=http://xn–b1afaaiqgeiqh0aidle1f1d3c.xn–p1ai/user/Briannag/>http://xn–b1afaaiqgeiqh0aidle1f1d3c.xn–p1ai/user/Briannag/</a> Фриплей-бонусы. Бонусы за бесплатную игру есть лишь в неких клубах. Они зачисляются незамедлительно после творенья профиля и срабатывают недолговременное время. Если у вас нет времени истратить средства, они просто закончатся. Что касается времени, правило бонусы срабатывают протяжении одного часа.
1×slots рабочее зеркало на сегодня
Классическая разновидность приза за творение аккаунта. Его преимущество содержится в том, собственно заказчик возможность других подбирать аппараты и делать ставки в их. Иногда список игровых автоматов ограничен оператором, но все точно это другого, чем один-единственный доступный слот, как если, тогда, с использованием фриспинов.Подтвердите лицо, предоставив оператору казино свои паспортные данные. Инструкции обыкновенно несложные, основное — конкретно им по. Если написано, собственно «на фото обязаны быть видны все четыре угла страницы паспорта» — устройте именно это фото. <a href=http://www.icmms.co.kr/bbs/board.php?bo_table=free&wr_id=344514>http://www.icmms.co.kr/bbs/board.php?bo_table=free&wr_id=344514</a> Итак, чтобы бесплатные бонусные кредиты трансформировались в реальные деньги, которыми возможность управлять по собственному усмотрению, их надо(надобно) отыграть. Вейджер идет уточнять в правилах онлайн-казино.Отказ в прохождении верификации. Если заказчик не хочет либо не может предоставить документы, подтверждающие его лицо, профиль несомненно заблокирован совместно, вкупе со всеми бонусными начислениями. зеркала 1×slots Приветственный бонус без депо ? презент за регистрацию. Выдается средствами, фриспинами или баллами. В последнем случае бонусные баллы используются для роли в турнирах или размена на реальные деньги.Но есть игорные заведения, коие готовы просто например жертвовать деньги на игру. Для этого достаточно сделать профиль. Чтобы исключить собственный выигрыш, для поначалу нужно выполнить обстоятельства отыгрыша, обозначенные в критериях получения бездепозитного депо.
<b>Смотреть еще похожие новости:</b>
<a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=13075>1хслотс регистрация в 1×slots casino</a>
<a href=https://forum.banknotes.cz/viewtopic.php?t=75004>1×слотс казино</a>
<a href=http://sofanatki.ekafe.ru/viewtopic.php?f=1&t=3239>1×slots официальный сайт скачать</a>
<a href=https://russiancomputerservice.ru/user/JosephCer/>1×slots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Способы получения бездепа различаются от вида приза, который приглянулся игроку. Но для или надо(надобно) быть зарегистрированным в законном онлайн-казино и доказать свою личность. В общем виде пошаговая аннотация для получения бездепозитного бонуса выглядит например: Стоит отметить, собственно бездепозитный приз выдается только взрослым новичкам, которые, в свою очередь, могут пригласить собственных друзей и знакомых, того претендующих на поощрительную программу преданности. Подобная разработка замечена среди конкурирующих онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры способствуют увеличению своей популярности, путем вербования новых игроков. Бонусы – это уникальный шанс для вероятных участников забавы, коие могут опробовать софт покер рума и убедиться, будут ли они в него играть или нет. Новый игрок испробует свои силы с настоящими оппонентами в казино.
#754 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Андрей Рублев (теннис) r7 casino <a href=https://m.repost.news/>скачать сайт букмекерской конторы</a> pin casino букмекерская контора зенит <a href=https://m.repost.news/>казино рояль</a> porno Алена Михайлова рабочее казино new casino бесплатно фильм казино зеркала казино bet casino porno Екатерина Ефременкова, шорт-трекистка
DiskiPlus сайте букмекерской конторы фонбет DiskiPlus up букмекерская контора <a href=https://diskiplus.ru>DiskiPlus pin up casino buzz</a> DiskiPlus bet casino DiskiPlus casino бездепозитный <a href=https://www.diskiplus.ru/>DiskiPlus gama casino</a> DiskiPlus порно с Никита Кучеров (хоккей) DiskiPlus букмекерская контора ставки DiskiPlus букмекерская контора ставки DiskiPlus казино на деньги DiskiPlus Разуваева Ксения Денисовна порно DiskiPlus порно с Антропова Валентина Викторовна DiskiPlus up casino зеркало
#755 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало на сегодня
Такие поощрения разрешают даром протестировать новое казино, разобраться с игровым ходом онлайн слотов, заработать и вывести небольшую необходимую средств.Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? <a href=http://filmkachat.ru/>x1 slots 1хслотс регистрация перейти на 1×slots</a> Акции, приуроченные к календарным праздникам, случаются рассчитаны как на всех пользователей, например и на категории: к, презент на 8 марта девушкам-игрокам или мужикам на 23 февраля. <a href=https://matters.town/a/tx7fd8c97uu1>https://matters.town/a/tx7fd8c97uu1</a> B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpaxCoздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. 1×slots регистрация на 1хслотс <a href=http://webdo.cc/yuyue/upload/home.php?mod=space&uid=181512>http://webdo.cc/yuyue/upload/home.php?mod=space&uid=181512</a> Автоматы неспроста числятся наиболее знаменитым азартным развлечением. Чтобы усвоить управление и правила, понадобится всего несколько мин. Ваша задачка сделать ставку, определить количество трудящихся линий и можно крутить барабан. Если на экране выпадет выигрышная комбинация – вы выиграли! С этой задачей для помогут справится бездепозитные призы казино.Список так нарекаемых «разрешенных землель» прилагается к правилам бонусной программки игорного портала. Обязательно выясните, распространяются ли на вас сходственные наказания.
1×slots официальный сайт, скачать
1хслотс мобильная версия зеркало <a href=http://forums.ghc-games.com/member.php?action=profile&uid=105368>http://forums.ghc-games.com/member.php?action=profile&uid=105368</a> Сразу в активации промокода можно воспользоваться даром. Как теснее упоминалось, бонусы посещают трёх видов – фриспины, кредиты и фриплей-бонусы.Если вы новичок данном и только попали в неизведанную вами область азарта — за услуг как бездепозитные призы без пополнения. 1хслот зеркало Промокод – определённая композиция знаков, коию нужно установить в подходящее фон при разработке учетной записи либо активировать в личном профиле игрока в разделе с призами.Отыграв бездепозитный приз в казино с выводом тоже придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, случае схожее ограничение существует, то единоразово вывести получится только необходимую, не превосходящую объем полученного бонуса.
1×slots рабочее зеркало
Риск-игра по одинаковым шансам – Также казино возможность запрещать скорпулезно обстоятельства по отыгрышу с помощью раунда на удвоение, кот-ый предлагается в слотах, видео-покере и некоторых других забавах. Большинство интернет-казино из нашего топ-10 готовы порадовать вас эксклюзивными промоакциями. Читайте о их в обзорах и на форуме.Бездепозитные призы — это подарки от казино вид бонусных средств либо фриспинов для игровых автоматов, коие начисляются на аккаунт игрока после процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депозит не потребуется. <a href=https://wlppr.net/user/DoctorLazutaPn/>https://wlppr.net/user/DoctorLazutaPn/</a> 1×slots зеркало регистрация то дальше необходимо пройти Многие казино предоставляют в рекламных целях бесплатные призы самая для наших читателей. Чтобы их получить, нужно перейти на игровой вебсайт по партнерской ссылке с нашего портала.Все обожают получать презенты. Согласитесь, почти любой играющий человек несомненно беспредельно счастлив, в получит даровой подарок для игры в онлайн казино просто за регистрацию либо же приз за внесенный депо, так нарекаемые приветственные бонусы для свежих игроков. Соответственно эти онлайн клубы станут больше известны и преимущественны у игроков при выборе казино для забавы. Топ казино каждый обновляется и прибавляются свежие и увлекательные игровые клубы с привлекательной бонусной политикой и всеми вероятными привилегиями, к коим относятся эти бонусы как фриспины за регистрацию, денежные бездепозитные призы, еще великодушные бонусы за внесенный депо.
1×slots зеркало на сегодня
Ограничения по забавам. Администрация запрещает игрокам некоторые игровые автоматы с бездепозитным призом, деньгами или безвозмездными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда дробление выполняется по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, хотя запрещен в настольных играх и в разделе Live Casino.Еще одно условие дотрагивается размеров ставки. Операторы устанавливают максимальную сумму, которую игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, избранной в Личном офисе. При превышении лимита есть риск лишиться приза. Существующие ограничения относятся и к определенным обликам ставок. Например, играя в рулетку, клиент может столкнуться с запретом ставить фишки на шансы. Существуют казино с бонусом за регистрацию, каких довольно известны фриспины в онлайн казино впоследствии регистрации в определенных забавах. Они встречаются и почаще бесплатных поощрений либо классических призов в казино без вложений. Например, игрок регистрирует счет, на который начисляются безвозмездные игры, бонус за регистрацию в виде бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса игры выигрывает истинные средства, коие в последствии возможно успешно исключить из заведения на свою платежную систему. То есть, есть все шансы вывести средства без рисков собственными финансами. Регистрация, за которую игрок получит призы, займет пару минут, а спасибо этому возможно прирастить 5 евро поощрений до тысячи и без всяких проблем исключить их. 1× slots регистрация в 1×slots casino <a href=https://elite-models.cc/member.php?action=profile&uid=23645>https://elite-models.cc/member.php?action=profile&uid=23645</a>
1×slots регистрация на 1хслотс
Для тех, кто лишь взвешивает испытать свою фортуну, а для профессиональных игроков, отыскивающих новые площадки для выигрышей, ведущие лицензированные казино часто организуют разные акции, и одно из лучших предложений за время – как для начинающих, так и для профессиональных игроков – бездепозитный приз за регистрацию.Подарки на праздники ? приуроченные к парадным датам, требующие символического отыгрыша либо начисляются без такового. Могут дариться игрокам сутки рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду. Фриспины. Бесплатные вращения предусмотрены для применения в видео-слотах. Внимательно читайте обстоятельства – они нередко выдаются для некоторых машин. В зависимости от клуба вы можете создавать конкретное число ставок. Кстати, современные игорные дома выделяют возможность заводить «одноруких злодеев». <a href=http://kupidlyadoma.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://motoxp.ru/bitrix/click.php?goto=http://login.ezp.ulakbim.gov.tr/login?qurl=https://teletype.in/@urist555/Cjc25SmJ9rN>http://kupidlyadoma.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://motoxp.ru/bitrix/click.php?goto=http://login.ezp.ulakbim.gov.tr/login?qurl=https://teletype.in/@urist555/Cjc25SmJ9rN</a> Выигрыши с бонусов без инвестициям всегда привязаны к требованию по ставкам и все быть обналичены только в выполнения данных требований.Максимальный объем ставки, кот-ый невозможно превосходить же приз не несомненно полностью отыгран. В случае нарушения сего правила, приз и выигрыш с него будут аннулированы. 1×slots регистрация 1×slots casino c2d ru Главным моментом в появлении данных вознаграждений произведено сомнений, собственно пустив их в ход, игрок ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он благодаря призам какой-нибудь выигрыш либо мгновенно спустит все лишь что прибывшие деньги). То есть, казино снабжает игрока возможностью на дармовой базе играть во всевозможные слоты и даже спонсирует забаву.Казино дает вероятность заработать и исключить реальные деньги на бездепозитных бонусах. Обычно, это малозначительная сумма, которую казино имеет для разрешить подарить игроку.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.konyacraft.com/threads/1×slots-oficialnyj-sajt-zerkalo.9919/>1хслотс официальный сайт зеркало</a>
<a href=https://forum-pravo.com.ua/showthread.php?p=24316&posted=1#post24316>1×slots подтвердит вашу регистрацию если говорить</a>
<a href=http://www.emv.info/memberlist.php?mode=viewprofile&u=424>1×slots зеркало рабочее на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Список так именуемых «запрещенных территорий» прилагается к правилам бонусной программки игорного портала. Обязательно выясните, распространяются ли на вас похожие наказания.
#756 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
играющие казино зеркала казино <a href=https://slon-ru.com/>гта онлайн казино</a> сайте букмекерской конторы фонбет Нургалиева Эльвира Рамиловна порно <a href=https://7club7.com/>лучшие онлайн казино</a> букмекерская контора фонбет казино ставка pin ап casino casino приложения 7k casino зеркало букмекерская контора без пин ап букмекерская контора
DiskiPlus казино сочи DiskiPlus Елена Лядова <a href=https://diskiplus.ru>DiskiPlus 1×bet зеркало на сегодня 1×bet xyz</a> DiskiPlus Фастова Елена Владимировна порно DiskiPlus букмекерская контора официальный сайт <a href=https://www.diskiplus.ru/>DiskiPlus casino 7k рабочее</a> DiskiPlus Анна Михалкова DiskiPlus porno Илья Ковальчук (хоккей) DiskiPlus какие казино казино DiskiPlus porno Алена Михайлова DiskiPlus porno Андрей Рублев (теннис) DiskiPlus скачать букмекерскую контору на андроид
#757 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots review live
Игрокам стоит принимать приветственный бонус как гарантированный метод получить большой выигрыш, но это замечательная возможность без затрат расценить функционал казино. <a href=http://filmkachat.ru/>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a> Для вывода средств бонус надо(надобно) будет отыграть законам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариациями отыгрыша бездепозитного бонуса до его получения, чтобы избежать конфликтных обстановок. <a href=https://www.bondhuplus.com/read-blog/137793>https://www.bondhuplus.com/read-blog/137793</a> 1×slots регистрация 1×slots casino 777 online <a href=http://slavsbyt.ru/index.php?subaction=userinfo&user=variousamulet36>http://slavsbyt.ru/index.php?subaction=userinfo&user=variousamulet36</a> Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депозит возможность отличаться до 30 дней.Список так нарекаемых «запрещенных землель» прилагается к правилам бонусной программки игорного портала. Обязательно проверьте, распространяются ли на вас сходственные санкции.
зеркала 1×slots
Большинство клубов привлекают внимание игры за счёт различных презентов. На 1 сайтах возможно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает благотворительные вращения для запуска топовых интернет слотов. Несмотря на различные акции, стоит выделить самые главные. 1×slots официальный зеркало рабочее Любой выигрыш по ставке повыше установленного лимита несомненно считаться недействительным. То есть ставка не будет засчитана при отыгрыше, ну случае выигрыша его сумма не поступит на счёт посетителя — итог забавы будет всецело аннулирован. <a href=http://board.puschelfarm.com/index.php/de/forum/user/15481-uluvyk>http://board.puschelfarm.com/index.php/de/forum/user/15481-uluvyk</a> Третитй бездепозитный бонус за регистрацию – денежные средства. К сожалению, начислить рубли или доллары способны лишь известные и популярные клубы. С их поддержкой появится насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком.Но никогда не запамятовывайте внимательно разбирать управляла роли в бонусных промоакциях. Если вы нарушите но бы одно условие, позже вы не сможете уладить недоразумение с администрацией. 1хслот зеркало сайта
1×slots официальный сайт мобильная версия
<a href=http://www.annunciogratis.net/author/hassanlenk8>http://www.annunciogratis.net/author/hassanlenk8</a> Поспешите забрать бездепозитные призы за регистрацию в казино из представленного списка. Все платформы столько водят легальную деятельность, но и обрадуют честными результатами игры, высокой отдачей, резвыми выплатами. 1хслотс казино зеркало Бесплатный бонус – кредиты, которые онлайн-казино начислит клиенту, не принуждая его пополнять игровой счет.Подарки на определенные даты выделяются критериями получения. Если поощрение начисляют игроку на день рождения, то сумма обычно зависит от совместного объема депо последний год.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
<a href=https://elclasificadomx.com/author/jameslog/>1×slots сайт</a> Новички не любят сразу же заносить депо. Это обусловлено отсутствием опыта и недоверием. К счастью, в наше время можно получить бездепозитный приз за регистрацию в казино. Неважно что начислит система – фриспины либо кредиты. В любом случае вы не рискуете собственными сбережениями. Это отличная вероятность запустить приглянувшийся видео разъем или же испытать фортуну в настольных забавах. 1хслот официальный сайт зеркало <a href=http://boss.why3s.cc/boss/home.php?mod=space&uid=144895>http://boss.why3s.cc/boss/home.php?mod=space&uid=144895</a>
1×slots зеркало сайта
К раскаянью, нет. Почти все казино, требуют внесение хотя бы одного минимального депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, собственно вывести средства разрешается только на ту платежную систему, с коей был изготовлен депозит.Свежий приз начисляется вид валютных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в использовании средствами, ну случае отыгрыша оператор имеет установить ограничение на вывод денег. <a href=https://kylerwvqi67788.eedblog.com/30375901/deepnude-ai-navigating-the-fine-line-between-innovation-and-ethics>https://kylerwvqi67788.eedblog.com/30375901/deepnude-ai-navigating-the-fine-line-between-innovation-and-ethics</a> 1хслотс рабочее зеркало на сегодня Бездепозитный бонус – это экономическое вознаграждение, которое выдается участнику игры в казино, для его привлечения и появления заинтригованности. Любой гость, который подходит условиям выдачи похожего бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое одобрение является наиболее эффективным методом, дающим вероятность стартовать при, не вкладывая личных вещественных средств.
<b>Смотреть еще похожие новости:</b>
<a href=http://3ak.cn/home.php?mod=space&uid=187057>1×slots casino регистрация на сайте</a>
<a href=http://oszeresek.hu/forum/viewtopic.php?f=1&t=5970>1 хслот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепы с бесплатными вращениями предоставляют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд уплачивает казино. Число спинов ограничено и изредка выше сотню. Если промоакция включает в себя большое даровых игр, их начисление может быть разбито на некоторое дней. Фриспины предусмотрены для использования в видео слотах. Внимательно ознакомьтесь с критериями – частенько их выдают на некоторые автоматы. В зависимости от клуба, у вас выйдет устроить определённое число ставок. Кстати, продвинутые игорные жилища разрешают запускать любых «одноруких злодеев».
#758 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
бесплатное казино casino скачать приложение <a href=https://glvk.guru/>Скоробогатова Ольга Николаевна порно</a> kent casino casino x <a href=https://sovsekretno.net/>почему в казино нет окон</a> 1×bet вход букмекерская контора официальный сайт яндекс казино казино смотреть онлайн 1×bet рабочее 7k casino зеркало на сегодня казино вулкан
DiskiPlus casino вход DiskiPlus играющие казино онлайн <a href=https://www.diskiplus.ru/>DiskiPlus сайт букмекерской конторы</a> DiskiPlus казино играть DiskiPlus официальное казино вход <a href=https://www.diskiplus.ru/>DiskiPlus casino сегодня</a> DiskiPlus up casino DiskiPlus казино онлайн DiskiPlus слоты казино DiskiPlus букмекерские конторы без депозита DiskiPlus casino актуальное зеркало DiskiPlus casino онлайн DiskiPlus казино регистрации
#759 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее
Демоказино есть практически на каждом сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются значительно пореже: там в случае выигрыша и соблюдения условий промоакций бездеп можно превратить в настоящие деньги.Бонус за регистрацию в казино без депозита с выводом денег нужно отыграть. Зачастую для отыгрыша возможность понадобиться сделать ставки на сумму, в некоторое 10-ов один превышающую необходимую бонуса либо выигрыша. <a href=http://filmkachat.ru/>1×slots официальный регистрация</a> Онлайн-казино кропотливо продумывают бонусные условия, которые необходимо выучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и ограничения.Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного приза достаточно пополнения баланса и подтверждения личности. В других же клубах, необходимо количество один прокрутить собственный депозит. <a href=https://forum.index.hu/User/UserDescription?u=2065074>https://forum.index.hu/User/UserDescription?u=2065074</a> Бесплатный бонус – кредиты, коие онлайн-казино начисляет клиенту, не принуждая его пополнять игровой счет.Эффективность бездепов виде рекламного инструмента оценили все операторы. Малоизвестные площадки используют эти акции, дабы стремительно набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны неизменных посетителей. Не все сайты, дающие подарки без депо, рекомендованы к ирге. За привлекательным промоописанием имеют скрываться неосуществимые обстоятельства отыгрыша и другие подводные камни. 1×slots казино зеркало <a href=http://www.dronetr.net/forum/memberlist.php?mode=viewprofile&u=87278>http://www.dronetr.net/forum/memberlist.php?mode=viewprofile&u=87278</a> Внесение депо – Будьте готовы восполнить счет после отыгрыша приза. Это стандартное требование правил для данного на промо-акций. Лучше заблаговременно уточнить, какую необходимую нужно будет заносить на счет. Как управляло, речь о наименьшем депозите, но вы обязаны быть уверены, что он вам по карману.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 $. Если выдаются фриспины, их число редко превышает нескольких десятков даровых вращений.
1×slots бонус за регистрацию
Варианты выигрыша зависимости от Вашей успеха и условий игорного портала. Выше мы сказали, собственно некоторые бездепозитные призы в 2022 году выдаются с ограничениями по наибольшей выплате. Однако, остаются и, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность современных игр на средства, возможно выиграть невероятные суммы. Сегодняшние игровые автоматы или видео слоты, как их нарекают. Могут выдавать крупные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000. <a href=https://www.mshowto.org/forum/members/jamespauri.html>1хлот регистрация в 1×slots casino</a> 1×slots промокод при регистрации <a href=http://www.ctphome.com/bbs/home.php?mod=space&uid=72234>http://www.ctphome.com/bbs/home.php?mod=space&uid=72234</a> Бездепозитный приз за регистрацию в казино с выводом средств в 2022 году — Наш ресурс дает игрокам важную информацию о самых свежих, великодушных и проверенных призах в интернет казино, которые обновляются любой денек.Приглашаем делиться суждениями о призах. Это поможет другим пользователям подбирать более выгодные предложения. 1×slots официальный регистрация Вы не в коем случае ни чем не рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный приз, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс изучить игровые автоматы, научится регулировать менять ставки и полосы, изучать бонусные забавы и их выигрышные композиции, ну в конце концов просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные средства, которые возможно отыграть и исключить, но просто на демо счет, что, этим самым адреналин в крови более повысится а пульс забьется с частым ритмом!Помните, что в некоторых играх сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки числятся как отыгранные деньги, момент как в слотах идет в зачет все one hundred percent суммы.
1×slots зеркало регистрация то дальше необходимо пройти
Как только вы отыграли вейджер и средства с бонусного баланса перешли вам на реальный счет, Вы отважно можете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (устроить минимальный депо к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депозитом).Чтобы бездеп не был начислен на Ваш аккаунт, Вам не нужно активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк автоматически, а Вы не планируете его применять, обратитесь в службу с просьбой отменить бездепозитный приз. Это один из главных показателей привлекательности дара. С завешенным коэффициентом числе профессионалы не сумеют выполнить обстоятельства по отыгрышу. И неважно, как привлекательно выглядит предложение – бездепозитный бонус казино в объеме $500 или $1 000. Чтобы новички получше вдумались, что же такое вейджер, мы разберём на примере. <a href=http://ww.ansanam.com/bbs/board.php?bo_table=report_status2&wr_id=406397>http://ww.ansanam.com/bbs/board.php?bo_table=report_status2&wr_id=406397</a> Для верификации аккаунта нужно предоставить профессионалам технической поддержки отсканированную копию паспорта и счета за коммунальные предложения, еще фотку банковской карты или скриншот страницы электрического кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для доказательства личности.Бездепозитный приз предоставляется новому игроку за определенные деянья. Часто презент вид денег или фриспинов выдается за регистрацию, благодаря чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. x1 slots регистрация в 1×slots casino
1×slots регистрация на официальном сайте
Автоматы непопросту числятся самым модным азартным отдыхом. Чтобы усвоить управление и управляла, понадобится всего количество мин. Ваша задачка устроить ставку, найти число трудящихся линий и возможно крутить тамбур. Если дисплее выпадет выигрышная композиция – вы выиграли! С этой задачей вам посодействуют справится бездепозитные бонусы казино.Подарки на праздничные ? посвященные торжественным датам, требующие символического отыгрыша либо начисляются без того. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду. <a href=http://216.38.0.7/viewtopic.php?f=12&t=410553>1×slots регистрацию более популярный вариант это</a> Также учтите, что кое-какие игровые платформы сузивают список стран, коие способны получить предложенный бездепозитный бонус за регистрацию. К образцу, есть онлайн-заведения, выдающие сходственные призы лишь жителям определенных государств. К образцу, интернет казино 777 Оригинал дает бездепозитный приз лишь игрокам из России и государств СНГ. Или напротив, снабжают вознаграждением всех, не жителей неких стран (исходя из этого, стопам внимательно изучать перечень, чтобы впоследствии не возникло никаких вопросов и жалоб). 1×slots регистрация 1×slotscasino 56 online <a href=http://seminar2018.smartraf.ru/bitrix/rk.php?goto=http://pro.ooo-trk.ru/bitrix/rk.php?goto=http://smart-textile.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/VD43B_SP7S7>http://seminar2018.smartraf.ru/bitrix/rk.php?goto=http://pro.ooo-trk.ru/bitrix/rk.php?goto=http://smart-textile.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/VD43B_SP7S7</a> Условия могут различаться приятель от приятеля. Но подобный приз имеет быть использован лишь для игрового процесса – приобретенные на счет деньги до как, как станут отыграны, вывести нереально.
казино 1×slots официальный сайт
Если вы избираете проверенное лицензионное онлайн казино и сделайте все обстоятельства получения бездепозитного приза, трудностей с получением дара у Вас не возникнет.Да, у безвозмездных бонусов есть дефекты. Прежде всего, они обыкновенно небольшие. Кроме как, условия вейджера по ним постоянно жесткие. Но таки неимение риска проделывает их очень красивыми для клиентов. <a href=https://profiteplo.com/user/DoctorLazutaPi/>https://profiteplo.com/user/DoctorLazutaPi/</a> Теоретически, к безвозмездным бонусам возможно отнести например именуемые фриспины. Напомним, речь идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, поэтому что они деют лишь вероятность делать ставки. казино 1×slots официальный сайт Для получения депозитного бонуса необходимо восполнить собственный игровой баланс настоящими деньгами. Вознаграждение можно получить либо при внесении первого депо, либо повторяющий фиксированного процента от внесённых средств. Так либо по, бонус поступит на счёт лишь в пополнения.Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных обстановок с казино, когда после отыгрыша бездепа для не дадут вывести солидную сумму выигрыша.
<b>Смотреть еще похожие новости:</b>
<a href=https://radios-collector.com/viewtopic.php?f=8&t=14&p=275705#p275705>1× slots casino зеркало</a>
<a href=https://vivoes.com/forum.php?mod=forumdisplay&fid=2>1×slots регистрация на официальном сайте</a>
<a href=https://melhorlance.com.br/minha-conta/>1 хслот регистрация в 1×slots casino</a>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=132204&pid=396771#post_396771>1×slot рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Размер бонуса. В качестве бездепов обыкновенно начисляют большие суммы, а когда речь о призах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино все подарить игроку до 2000$. Бывают ли бездепозитные бонусы без вейджера? Бывают, в у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино.
#760 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино смотреть онлайн официальное казино вход <a href=https://repost.news/>1×bet официальный слоты</a> 1×bet зеркало на сегодня гама казино <a href=https://t.me/vchkogpu_ru>букмекерская контора без</a> online casino фреш казино 1×bet бесплатно Комарова Наталья Владимировна порно пин ап casino pin up top porno Илья Ковальчук (хоккей) букмекерская контора зенит
DiskiPlus up casino официальный DiskiPlus 1×bet телефон <a href=https://www.diskiplus.ru>DiskiPlus top casino</a> DiskiPlus 1×bet телефон DiskiPlus балтбет букмекерская контора <a href=https://www.diskiplus.ru/>казино</a> DiskiPlus Приезжева Екатерина Геннадьевна порно DiskiPlus online casino 7k DiskiPlus порно с Владимир Минеев (ММА) DiskiPlus казино зеркало сегодня DiskiPlus casino скачать приложение DiskiPlus casino 7k рабочее DiskiPlus бесплатные букмекерские конторы
#761 Charlesgunnyhttp://filmkachat.ru
сайт 1× slots casino
Если вы новичок данном и лишь попали в неизведанную вами область азарта — с помощью предложений как бездепозитные бонусы без пополнения. <a href=http://filmkachat.ru/>зеркала 1×slots</a> Для вывода средств бонус надо(надобно) несомненно отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариантами отыгрыша бездепозитного бонуса до его получения, чтобы избежать конфликтных ситуаций.Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? <a href=https://www.papercall.io/speakers/146409/speaker_talks/292501-professional-3d-product-modeling-services-for-businesses>https://www.papercall.io/speakers/146409/speaker_talks/292501-professional-3d-product-modeling-services-for-businesses</a> 1×slots регистрация <a href=https://ucgp.jujuy.edu.ar/profile/Vidikby/>https://ucgp.jujuy.edu.ar/profile/Vidikby/</a> Призовые начисления без депо все предоставляться для участия в турнирах интернет казино. Потратить перечисленные деньги возможно исключительно в данной промоакции. Условия их проведения себе ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, лучше изучить его верховодила.Во всех легальных онлайн-казино Беларуси необходимо подтверждение паспортных данных для забавы — это заявка правительства государства.
1×slot рабочее зеркало
1×slots зеркало проходить регистрацию это отличный вариант Представьте момент, когда при ставке в 10 руб. Вы получите схожее умножение. Миллион рублей за одно вращение, что вполне вероятно. Поэтому вопрос, сколько возможно выиграть остаётся открытым. Предлагаем выяснить других. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный бонус и инспектируйте удачу в деле. Разумеется, исключить средства довольно. Однако шансы есть у всех. <a href=http://www.soilhome.com/home.php?mod=space&uid=10452&do=profile>http://www.soilhome.com/home.php?mod=space&uid=10452&do=profile</a> Онлайн-казино с бездепозитными призами ставят посетителям условия для использования бездепами, поэтому перед участием в промоакции другого подробно ознакомиться со всеми правилами и аспектами промоакции. Условия могут прикасаться получения бонуса, его применения и последующего вывода валютных средств когда выигрыша. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots В некоторых интернет казино для получения бездепозитных призов не достаточно просто зарегистрироваться на сайте клуба и доказать средства контактные данные. Дополнительно требуется активация промокода.
1×slots официальный регистрация
Диапазон ставок, коие вправе сделать игрок, кроме лимитирован. Обычно назначать можно маленькую необходимую — пределах 10–30 руб. За одно вращение. <a href=https://club2108.ru/forum/viewtopic.php?pid=172459#p172459>https://club2108.ru/forum/viewtopic.php?pid=172459#p172459</a> Такие поощрения разрешают даром протестировать новое казино, разобраться с игровым ходом онлайн слотов, заработать и вывести небольшую необходимую средств. 1хслотс рабочее зеркало на сегодня Иногда у посетителей вебсайта имеют возникнуть трудности, задачи, препядствия при активации приобретенного промо-кода. В таких случаях, нужно адресоваться за подмогою в саппорта «Support». Для получения ответа, обязательно указывается конкретная причина воззвания и подтверждается информация дополнительными скриншотами. Если сформировалась неоднозначная обстановка, постоянно можно адресоваться к главному регулятору либо контролирующему органу, выдавшему данному заведению лицензионный документ.Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депо возможность выделяться до 30 дней.
1×slots официальный сайт скачать
Суммы похожих предложений, случаев, колеблются от 3-х до 20 долларов, а вейджер на эти свои обязан составлять от 30 до шестидесяти один. Зачастую, величайшая сумма выигрыша здесь составит от одной до двух сотен $. Если игрок выиграет больше, то все средства шансы быть списанными до очень разрешенного выигрыша. Здесь замечена смысл выводить еще несуществующие деньги на свою платежную систему и далее отыскивать заведение с благоприятными под данную сумму релоадом или призом за первое пополнение счета. Есть некоторое подвидов бездепозитного вознаграждения, предлагаемого великим количеством заведений. Обычно, бездепозитные бонусы выдаются под определенные слоты с фиксированной ставкой, но их наверняка воспрещено использовать в игровых автоматах с современным джекпотом. Список игр, в можно использовать бездеп, Вы отыщите в описании акции или можете уточнить у саппорта заведения.Для такого, дабы отыграть сумму вашего бездепозитного бонуса надо(надобно) выполнить обстоятельства вейджера. Очень нередко фриспины даются на конкретные слоты (book of ra, book of deceased, book of sun), подбирайте слот себе нраву, они довольно красочные и высококачественные. Бездепозитные приз возможность быть валютным например и в виде фриспинов на слоты С не отыгранным бонусом запрещается превосходить размер наибольшей ставки. Нарушение этого обстоятельства последствия аннулирование выигрыша.В зависимости от онлайн заведения каждый из их может для предложить как бездепозитные деньги, так и бездепозитные фриспины, которые последствии удачной регистрации упадут вам на ваш игровой баланс. 1×slots на любой вкус как пройти регистрацию <a href=https://casino993.com/bbs/board.php?bo_table=free&wr_id=505269>https://casino993.com/bbs/board.php?bo_table=free&wr_id=505269</a> Бездепозитный приз по промо-коду несомненно доступен для забавы, лишь что случае когда Вы активируете особый бонусный код в разделе с бонусами либо укажите промокод при регистрации на сайте. В неких случаях, кроме активации кода, придется подтвердить контактные данные игрока и заполнить анкету клиента.
1×slots зеркало на сегодня
Для получения бонуса надо(надобно) пригласить в забаву свежего клиента. Казино начислит пригласившему фиксированный процент от взносов приглашённого повторяющий приза: чаще всего его размер не выше 10%. Срок деяния приза как не выше месяца: пригласивший получает приз зависимо проигранных ставок приглашённого в 1-ый луна игры.Для всех бездепозитных призов функционирует максимальный предел на выигрыш. Он указывает предельную необходимую, коию появится получить, играя на бонусные кредиты. Как лишь вас получится выполнить требования вейджера, допустимый максимум несомненно переведен с бонусного счета на основной, а остаток несомненно списан. <a href=http://biosafe.tj/user/PorsedropMn/>http://biosafe.tj/user/PorsedropMn/</a> Подтверждение регистрации. Казино требуют привязки профиля к электрическому адресу и номеру аппарата. Для сего на e-mail отправляется письмо со ссылкой, а на телефонный ? текстовое известие с кодом.Также, учите, что бездепозитный бонус возможно вывести лишь сомнений случае, когда будут выполнены все условия отыгрыша. казино 1×slots Если простыми текстами, бездепы – это определённая сумма денег или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно забирать подарки. Но есть некоторые аспекты. Существуют игорные жилища, которые перед что, этим как начислить призы просят привязать телефонный, предоставить копии документов.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро или 20 $. Если выдаются фриспины, их число редко выше нескольких 10-ов бесплатных вращений.
<b>Смотреть еще похожие новости:</b>
<a href=http://pravoslit.ru/forum/obshchee/189966–1×slots-ofitsialnyj-sajt-skachat-na-ajfon.html>1×slots официальный сайт скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В каждом казино с бездепозитным призом предусмотрены вейджеровые обстоятельства. Это один-единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, нужно устроить определённое количество ставок. Чем круче бонус, что, этим труднее выполнить обстоятельства, и наоборот. Такой казино приз без депозита за регистрацию выдается игроку на час и энергично используется данное предложение с 2017 года. Это как бы некая конспирация одобрения под бездепозитный. Суть всего сего сводится к что, этому, что геймеру на час выдается, к примеру, 1000 $, а реклама твердит то, что любой выигрыш можно несомненно в оставить при себе. Но случае играющий серьезно отнесется к этому предложению, то он попросту потеряет время. Ведь геймеру нужно несомненно играть не в основном аккаунте, а тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (даже всей тысячи) в управляла вступят определенные условия, где несомненно сказано, что наибольшей суммой победы может быть только двести долларов и деньги возможно использовать лишь в приза на первый вклад с вейджером 25 от суммы вознаграждения плюс сам депо. По итогу получится, собственно игрок выигрывал себе 200% бонус с вейджером на определенную необходимую. Короче разговаривая, это все не стоит вашего времени.
#762 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино на деньги кент казино <a href=https://rumafia.news/>скачиваемые казино</a> порно с Варвара Субботина букмекерские конторы бет <a href=https://repost.news/>porno Нина Пирогова, хоккеистка</a> Матвиенко Валентина Ивановна порно букмекерская контора человек казино букмекерская контора без казино casino com казино рулетка
DiskiPlus порно с Никита Кучеров (хоккей) DiskiPlus порно с Зырянова Анастасия Владимировна <a href=https://diskiplus.ru>DiskiPlus порно с Константин Тюкавин (футбол)</a> DiskiPlus pin up casino пин DiskiPlus Львова-Белова Мария Алексеевна порно <a href=https://diskiplus.ru>DiskiPlus Чулпан Хаматова</a> DiskiPlus 1×bet зеркало на сегодня 1×bet xyz DiskiPlus казино смотреть DiskiPlus скачать 1×bet на андроид бесплатно DiskiPlus букмекерская контора скачать приложение DiskiPlus яндекс казино DiskiPlus ев казино DiskiPlus кент казино
#763 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
bitz casino casino рабочее <a href=https://res-publika.com>Семёнова Татьяна Владимировна порно</a> Любимова Ольга Борисовна порно букмекерская контора зенит <a href=https://strelochnik.com/>пин ап casino</a> почему казино букмекерская контора леонов porno Виктория Баркова, легкоатлетка 1×bet телефон порно с Юлия Ефимова porno Яна Троянова часы казино
DiskiPlus Фастова Елена Владимировна порно DiskiPlus почему в казино нет окон <a href=https://www.diskiplus.ru>DiskiPlus песня казино</a> DiskiPlus casino андроид DiskiPlus 7k casino официальный <a href=https://www.diskiplus.ru>DiskiPlus порно с Анна Калинская (теннис)</a> DiskiPlus casino рабочее DiskiPlus порно с Александр Большунов (лыжные гонки) DiskiPlus порно с Петр Ян (ММА) DiskiPlus казино фильм онлайн DiskiPlus up casino официальный DiskiPlus porno Александра Степанова, фигуристка DiskiPlus casino приложения
#764 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало видели такую регистрацию на
Не советуем сломя голову хвататься за различные предложения получения средств без инвестициям. Вполне вероятно, что бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем смотрится на 1-ый взгляд. Альтернативой является казино приз за депозит. Мы предлагаем вам пару советов, спасибо которым у каждого игрока будет вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом денег: <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> Срок активации и время на отыгрыш. Зачисление средств или фриспинов случается при активации на взыскательно ограниченного периода, подобные требования предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать приз количество дней либо даже недель. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером.С иной стороны, гораздо легче забрать бездепозитные фриспины за регистрацию в казино и напрямик момент начать вертеть барабаны в наихороших слотах. Главная необыкновенность спинов в том, собственно они предусмотрены для топовых автоматов. Удастся не пройти дополнительные раунды, но и прирастить необходимую выигрыша, заработать респины прочие внутриигровые подарки. <a href=https://companylistingnyc.com/listings/kompleksowy-skup-aut-wroclaw-od-wyceny-do-sprzedazy/>https://companylistingnyc.com/listings/kompleksowy-skup-aut-wroclaw-od-wyceny-do-sprzedazy/</a> Для вывода средств бонус надо(надобно) несомненно отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами акции и вариантами отыгрыша бездепозитного приза до его получения, дабы избежать конфликтных обстановок. рабочее зеркало 1хслотс <a href=http://87.76.32.30/index.php?subaction=userinfo&user=steadfastradio3>http://87.76.32.30/index.php?subaction=userinfo&user=steadfastradio3</a>
1×slots регистрацию процедура займет всего лишь
1×slots официальный сайт мобильная версия 3. Подтвердить данные. В зависимости от клуба, нужно привязать аппарат или почту, указать индивидуальную информацию;В случае установленного лимита на сумму вывода выигрыша с бездепозитного приза, игрок не может исключить больше заявленной суммы. <a href=http://bbs.xinhaolian.com/home.php?mod=space&uid=4572340>http://bbs.xinhaolian.com/home.php?mod=space&uid=4572340</a> Чтоб получить большой выигрыш, подбирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша.Самый распространённый из подобных призов, окончательно же, бездеп на день рождения посетителя — бонус в виде фиксированной суммы или фриспинов поступает на счёт игрока, а воспользоваться им возможно протяжении установленного периода медли. 1× slots casino официальный сайт
1×slot зеркало рабочее этих способов предполагает регистрацию
Вейджер (или вагер) ? это наименьшая сумма ставок, коию нужно сделать для вывода денежного бонуса. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение. Ограничения по играм. Администрация запрещает игрокам кое-какие игровые автоматы с бездепозитным призом, средствами или бесплатными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда разделенье производится по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, хотя запрещен в настольных забавах и в разделе Live Casino. <a href=https://www.club-q5.ru/forum/blog.php?cp=7043>https://www.club-q5.ru/forum/blog.php?cp=7043</a> Для казино, работающих онлайн, бездепозитные бонусы нужны для вербования новых посетителей. Предложение сыграть на слотах без необходимости внесения настоящих денег — работающий метод для повышения энтузиазма к фирмы. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит выступать в казино, только сейчас теснее на личные деньги.Раздача бонусов возможность быть посвящена разным датам: календарные праздники, деньки рождения игроков, годовщина открытия казино и т. Д. Подарок выдается вид денег, фриспинов или баллов для скопления и обмена на услуги оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд требований. 1×слот регистрация в 1×slots casino
1×slots зеркало этих способов предполагает регистрацию
Демоказино есть почти на любом сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются значительно реже: там когда выигрыша и соблюдения критерий промоакций бездеп возможно перевоплотить в настоящие средства.Возможность протестировать свежие забавы, не рискуя личностными своими и создать собственную тактику забавы. <a href=http://forum.as-p.cz/viewtopic.php?f=45&t=281842>1×slots актуальное зеркало</a> Новые клиенты онлайн-казино без первого депозита имеют проверить собственную удачливость. К что, этому же есть вероятность преобразовать бездепы в настоящие деньги за регистрацию в казино, однако для этого бонус необходимо отыграть согласно условиям промоакции.Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, чтобы снова получить безвозмездный приз. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ожидает неминуемое наказание. рабочее зеркало 1×slots <a href=https://www.khomus.ru/forum/index.php?PAGE_NAME=profile_view&UID=42843>https://www.khomus.ru/forum/index.php?PAGE_NAME=profile_view&UID=42843</a> Прямо данный отберите бесплатные вращения за регистрацию без депозита и начинайте собирать призовые комбинации из-за солидных выигрышей!При правильном подходе бездепы — это отличный способ играть на средства без растраты собственных средств. Есть количество рекомендаций, следуя коим возможно извлечь максимально пользы из похожих акций казино. Играть идет только на лицензированных площадках. Скриптовые сайты не дурачат с бонусными предложениями, хотя и употребляют пиратский софт с измененным ГСЧ. Выиграть на этих автоматах невероятно.
1× slots casino зеркало
Промокод – определённая комбинация знаков, коию необходимо ввести в подходящее фон при разработке учетной записи или активировать в личном профиле игрока в разделе с призами.Возможность протестировать свежие игры, не рискуя личными своими и создать личную тактику игры. <a href=http://choongsoo.kr/bbs/board.php?bo_table=free&wr_id=213135>http://choongsoo.kr/bbs/board.php?bo_table=free&wr_id=213135</a> Сразу в активации промокода возможно пользоваться подарком. Как теснее упоминалось, призы бывают трёх видов – фриспины, кредиты и фриплей-бонусы. 1×slots сайт зеркало Для получения приза надо(надобно) ознакомиться с программой лояльности казино и сделать ставки на необходимую, нужную для перехода на следующий степень.Исходя из этого, просто не существует мудрых причин махнуть рукой на получение такового приза при регистрации. И, что, на такой бесплатной основе у вас есть шансы выиграть деньги и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные призы, называют бесплатными интернет платформами для игр.
<b>Смотреть еще похожие новости:</b>
<a href=https://krok.biz/forum/memberlist.php?mode=viewprofile&u=34795>1×slots зеркало на сегодня</a>
<a href=http://board.eternityrpc.com/thread-7-post-18287.html#pid18287>1×slots зеркало регистрация</a>
<a href=http://police.1stbb.ru/viewtopic.php?f=3&t=1204>зеркала 1×slots</a>
<a href=http://forum.bedwantsinfo.nl/showthread.php?tid=788001>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В каждом казино с бездепозитным бонусом учтены вейджеровые условия. Это один-единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) сделать определённое число ставок. Чем круче приз, тем труднее выполнить обстоятельства, и наоборот.
#765 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Фастова Елена Владимировна порно 1×bet зеркало рабочее на сегодня <a href=https://specreporter.com/>скачать 1×bet 1×bet xyz</a> казино рулетка порно с Аделия Петросян (фигурное катание) <a href=https://t.me/vchkogpu_ru>порно с Дронова Александра Викторовна</a> порно с Юлия Ефимова, пловчиха зеркала официальных сайтов казино casino онлайн Радченко Светлана Юрьевна порно kent casino casino сайты казино рояль
DiskiPlus где казино DiskiPlus казино онлайн бесплатно <a href=https://diskiplus.ru>DiskiPlus букмекерская контора бесплатно скачать</a> DiskiPlus casino официальный зеркало DiskiPlus Окладникова Ирина Андреевна порно <a href=https://diskiplus.ru/>DiskiPlus официальные зеркала казино</a> DiskiPlus kent casino DiskiPlus 1×bet официальный скачать DiskiPlus casino daddy DiskiPlus казино играть DiskiPlus Ходнева Светлана Владимировна порно DiskiPlus порно с Ирина Сидоркова DiskiPlus сайт казино вход
#766 Charlesgunnyhttp://filmkachat.ru
1×slots на любой вкус как пройти регистрацию
Бездепы с безвозмездными вращениями деют юзерам право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд уплачивает казино. Число спинов ограничено и изредка выше сотню. Если промоакция содержит количество безвозмездных игр, их начисление имеет быть разбито на несколько дней. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots review live</a> <a href=https://www.designingbuildings.co.uk/wiki/User:Archicgi>https://www.designingbuildings.co.uk/wiki/User:Archicgi</a> Индивидуальные поощрения выдаются за совершение поступков: подписку на аккаунты площадки в соц сетях, установку мобильного приложения либо официального клиента для ПК. В большинстве казино срабатывают программы преданности, присваивающие игрокам статусы за активность на сайте. Продвижение на грядущий уровень нередко с выдачей бездепа.Осталось выбрать казино с бонусом за регистрацию и создать профиль. После активации дара выигрыш зависит от Фортуны и способностей. 1хлот регистрация в 1×slots casino <a href=http://thinktoy.net/bbs/board.php?bo_table=customer2&wr_id=536206>http://thinktoy.net/bbs/board.php?bo_table=customer2&wr_id=536206</a>
1×slots регистрация 1×slotscasino 56 online
Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и расценить необыкновенности, труднодоступные при игре в демо режиме. Многие новые посетители переходят в количество неизменных, а оператор получает длительную выгода. 1×slots рабочее зеркало Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала резвые выводы. Фишка выплат что, нет, что достаточно выбрать платёжный инструмент и указать необходимую. В большинстве случаев средства зачисляются на электронные кошельки в течение 15 мин., а на банковские карты – 1–3 рабочих дня.Мы собрали и выпустили список превосходнейших бездепозитных казино с бонусами за регистрацию, которые гарантируют щедрые выигрыши и моментальные выплаты. <a href=http://savvys.ru/bitrix/rk.php?goto=http://burlingtonbathroom.ru/bitrix/redirect.php?goto=http://ernd.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/k8zifeFuGdx>http://savvys.ru/bitrix/rk.php?goto=http://burlingtonbathroom.ru/bitrix/redirect.php?goto=http://ernd.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/k8zifeFuGdx</a> Иногда в качестве бездепа, казино презентует минимальный приз (до 50 руб. ), ради которого надо заморачиваться. 1×slots регистрация 1×slots casino 777 online
1×slots регистрация
Иногда у гостей сайта шансы появиться трудности, задачи, препядствия при активации полученного промо-кода. В таких случаях, необходимо обратиться за подмогою в саппорта «Support». Для получения ответа, непременно указывается определенная причина воззвания и подтверждается информация дополнительными экрана. Если сформировалась неоднозначная обстановка, постоянно можно адресоваться к основному регулятору или контролирующему органу, выдавшему данному заведению лицензионный документ.В онлайне большое знаменитых игорных площадок с привлекательными акционными услугами. Однако внимательно разбирать условия десятков услуг вскоре надоест, да и время отнимет много. Поэтому наша команда подготовила ТОП-3 вебсайтов с наихорошими бездепозитными бонусами: При использовании бездепозитным призом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют количество видов лимитов:Если вы опытный игрок, вы обязаны знать, что приз без депозита – редчайшая находка. Тем не менее, мы раз исследуем онлайн, чтобы найти для вас превосходнейшие бездепозитные предложения. <a href=https://www.google.com.co/url?source=imglanding&ct=img&q=https://doctorlazuta.by/>https://www.google.com.co/url?source=imglanding&ct=img&q=https://doctorlazuta.by/</a> 1хслот зеркало
1×slots коды
Процесс подтверждения личности имеет занять от одного денька до недели. Если клиент допустил какую-либо оплошность при заполнении паспортных данных, то ему следует адресоваться с проблемой в службу онлайн-казино.Условия вывода выигрыша. В некоторых заведениях для успешного вывода с бездепозитного бонуса довольно пополнения баланса и доказательства личности. В других же клубах, нужно некоторое раз прокрутить собственный депо. Вообще перейдя в казино — правила одинаковы в получении бездепозитных бонусов, в стереотипные управляла входит: подтвердить эл. Почту и аппарат, заполнить свой собственный профиль, активировать промо код или активировать предложения во вкладке БОНУСЫ. Также учтите, что кое-какие игровые платформы сужают список стран, коие готовы получить предложенный бездепозитный приз за регистрацию. К образцу, существуют онлайн-заведения, выдающие подобные бонусы только жителям определенных государств. К примеру, интернет казино 777 Оригинал дает бездепозитный бонус лишь игрокам из России и государств СНГ. Или наоборот, пичкают вознаграждением всех, считая обитателей неких государств (следует этого, стопам внимательно учить перечень, дабы впоследствии не появилось никаких вопросов и жалоб). 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=http://mos-it.ru/index.php?subaction=userinfo&user=neighborlyimple>http://mos-it.ru/index.php?subaction=userinfo&user=neighborlyimple</a> Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми промоакциями. Читайте о них в обзорах и на форуме.Не советуем сломя голову хвататься за всевозможные предложения получения средств без инвестициям. Вполне вероятно, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем выглядит на 1-ый взгляд. Альтернативой считается казино приз за депозит. Мы предлагаем вас пару советов, благодаря которым у любого игрока будет возможность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом средств:
1×slots регистрация 1×slotscasino09k online
Возможность поиграть дополнительное соревнование (а от и количество) абсолютно безвозмездно, а выигрыш, в свою очередь, поступает на счёт игрока.Практически все интернет казино с бездепозитным призом за регистрацию предусматривает программку лояльности — систему одобрения постоянных клиентов, кот-ая произведено из множества уровней. При достижении игроком еще уровня на его счёт поступает приз. Чем выше уровень — что, этим щедрее приз. Бoльшинcтвo азартных заведений выдвигают приблизительно одинаковые обстоятельства и требования, коие необходимо выполнить, чтобы получить бездепозитный приз за регистрацию. Все их возможно объединить в раз перечень: <a href=http://messmangler.com/forums/member.php?action=profile&uid=3296>http://messmangler.com/forums/member.php?action=profile&uid=3296</a> Приглашаем делиться мнениями о призах. Это поможет другим юзерам выбирать более выгодные предложения. 1×slots регистрация на 1хслотс
<b>Смотреть еще похожие новости:</b>
<a href=https://ragnarok.ch/forum/viewthread.php?thread_id=200400>1×slots регистрация на сайте 1×slots ru com</a>
<a href=http://forum.as-p.cz/viewtopic.php?f=45&t=279178>1×slos регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Постарайтесь отыграть вейджер, чтобы появилась вероятность оставить заявку на выплату. Кстати, на всех сайтах, представленных в списке, доступны современные платёжные приборы. Вы сможете получить выигрыш на электронной кошелёк, карту, телефонный.
#767 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Васильева Татьяна Викторовна яндекс игры казино <a href=https://rumafia.news/>казино без</a> casino промокод порно с Антропова Валентина Викторовна <a href=https://rhymes-punches.com/>казино смотреть онлайн</a> casino daddy порно с Гатагова Ольга Анатольевна Матвиенко Валентина Ивановна порно 1×bet рабочее на сегодня cat casino casino buzz casino x
DiskiPlus porno Мария Шарапова DiskiPlus porno Дарья Клишина <a href=https://www.diskiplus.ru/>DiskiPlus реального казино</a> DiskiPlus порно с Алексей Миранчук (футбол) DiskiPlus карты казино <a href=https://diskiplus.ru>DiskiPlus kent casino</a> DiskiPlus порно с Юлия Ефимова DiskiPlus скачать сайт букмекерской конторы DiskiPlus 1×bet зеркало рабочее xbet DiskiPlus bet casino DiskiPlus бесплатно играем казино DiskiPlus casino регистрации DiskiPlus казино без
#768 internetGephttps://kazan-domashnij-internet002.ru
провайдеры в казани по адресу проверить <a href=https://kazan-domashnij-internet002.ru>kazan-domashnij-internet002.ru</a> провайдеры казань
#769 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Александр Большунов (лыжные гонки) Попова Анна Юрьевна порно <a href=https://www.ossetia.tv/>1×bet на андроид бесплатно</a> 1×bet зеркало слоты 1×bet xyz порно с Афонина Марина Игоревна <a href=https://res-publika.com>casino на телефон</a> бесплатно фильм казино porno Нина Пирогова, хоккеистка почему в казино нет окон казино смотреть онлайн бесплатно porno Алена Михайлова порно с Илюшникова Татьяна Александровна казино без
DiskiPlus casino ru DiskiPlus 1×bet сайт 1×bet xyz <a href=https://diskiplus.ru>DiskiPlus 1×bet слоты 1×bet top</a> DiskiPlus porno Вера Бирюкова, гимнастка DiskiPlus порно с Баталина Ольга Юрьевна <a href=https://diskiplus.ru>DiskiPlus casino ап</a> DiskiPlus казино пин DiskiPlus gama casino DiskiPlus порно с Зырянова Анастасия Владимировна DiskiPlus казино фильм DiskiPlus kent casino регистрация DiskiPlus скачать букмекерскую контору DiskiPlus 1×bet официальный xbet
#770 Charlesgunnyhttp://filmkachat.ru
1×slots акции
Для всех бездепозитных призов функционирует максимальный лимит на выигрыш. Он показывает максимальную сумму, коию вас получить, играя на бонусные кредиты. Как лишь вам удастся выполнить притязания вейджера, дозволенный максимум будет переведен с бонусного счета на главной, а остаток будет списан. [url=http://filmkachat.ru/]1×slos регистрация в 1×slots casino[/url] Необходимость отыгрыша. Вейджер такой повыше, чем для бонусов за депо. И пока средства не отыграны, вывести их невозможно. [url=https://matters.town/a/tx7fd8c97uu1]https://matters.town/a/tx7fd8c97uu1[/url] Вообще перейдя в казино — правила схожи в получении бездепозитных бонусов, в стереотипные верховодила входит: доказать эл. Почту и телефон, заполнить собственный личный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ.Иногда в бездепа, казино дарует минимальный бонус (до 50 руб. ), ради которого не заморачиваться. 1×slots сайт [url=https://king.az/user/JasperFew]https://king.az/user/JasperFew[/url]
1×slots бездепозитный бонус за регистрацию
Бездепозитные призы казино это финансовая компенсация, предлагаемая юзерам на дармовой основе и возможность играть в онлайн казино бесплатно. Если ассоциировать их с одобрениями за лепта, каких свои выдаются только впоследствии первоначального пополнения счета, то бездепозитные гонорары получаются даром. То есть, играющий получает вероятность делать ставки на уже имеющие финансы, коие выдаст заведение, исполняя, при этом, обыденные деяния, дабы их извлечь (тут идет речь о регистрация, удостоверении личности с внедрением номера телефона, оформления заявки и т.д.). [url=https://nauc.info/forums/viewtopic.php?t=20913992]1×slots казино зеркало[/url] казино 1×slots [url=http://isaevclub.ru/index.php?subaction=userinfo&user=ojajywef]http://isaevclub.ru/index.php?subaction=userinfo&user=ojajywef[/url] Бонус в казино без депо содержит разные разновидности: это может быть приветственный приз, акции в честь каких-то дней либо главных дат, приз за привлечение новых игроков, лояльность и получение VIP-статуса. казино 1×slots Не сложно додуматься, собственно not the slightest down payment bonuses практически никогда не бывают великими. Чаще всего речь о пяти–тридцати долларах (или эквиваленте этой суммы в другой денежной).
1×slots официальный сайт мобильная версия
Чаще всего используются коды. Их нужно заносить в специальные окошки регистрационной анкеты, случае речь о пригласительных призах, либо в особом разделе личного офиса игрока. Предложения с бездепозитными призами за регистрацию дозволяют свежим заведениям привлечь аудиторию на свой вебсайт. А игроки в свою очередь получают вероятность играть на настоящие деньги без депо в казино и заработать маленький стартовый капитал, кот-ый разрешается вывести на карту банка либо электронный кошелек. [url=http://www.soilhome.com/home.php?mod=space&uid=11922]http://www.soilhome.com/home.php?mod=space&uid=11922[/url] Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депозит может выделяться до 30 дней.Условия, на коих предоставляется бездеп, регулируются казино. Каждая промоакция содержит доскональные верховодила, ссылка на которые обыкновенно находится в промообъявлении. В их указываются лимиты, вейджер, список дешевых игр. Если оператор скрывает данные о предложении, то воспользоваться им не стоит. 1хслотс казино зеркало Заполняя данные в собственном профиле, указывайте только достоверную информацию, например как Вам придется ее доказать в при выводе средств.
1×slots подтвердит вашу регистрацию если говорить
[url=https://www.formulersupport.com/Thread-1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D0%B2%D1%8B%D0%B8%D0%B3%D1%80%D1%8B%D1%88%D0%B8-%D0%BE%D0%B1%D1%8F%D0%B7%D0%B0%D1%82%D0%B5%D0%BB%D1%8C%D0%BD%D0%BE-%D0%BF%D1%80%D0%BE%D0%B9%D0%B4%D0%B8%D1%82%D0%B5-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8E-%D0%B5%D1%81%D0%BB%D0%B8–233724]1×slots зеркало выигрыши обязательно пройдите регистрацию если[/url] Теоретически, к бесплатным бонусам можно отнести так именуемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, потому собственно они предоставляют лишь вероятность создавать ставки. 1×slots официальный сайт зеркало рабочее [url=http://www.udomlya.ru/userinfo.php?uid=113123]http://www.udomlya.ru/userinfo.php?uid=113123[/url] Не стоит сразу же отрицаться от приветственных презентов в сходственных казино. Администрация готова начислить деньги либо фриспины, но сначала сотрудники должны убедиться, что вы не мошенник. Дело что, что развелось слишком количество охотников за призами. Они научились накалывать систему и зарабатывать солидные суммы денег.Все безвозмездные призы кажутся соблазнительными. Кто же категорически от способности поиграть в онлайн-казино, не рискуя средствами, хотя получая выигрыши. Но далеко не все бездепозитные бонусы одинаковой презентабельны для рассудительного клиента.
1×slots рабочее зеркало на сегодня
Фриспины предназначены для применения в видео слотах. Внимательно ознакомьтесь с условиями – часто их выдают на некоторые автоматы. В зависимости от клуба, у вас выйдет устроить определённое количество ставок. Кстати, продвинутые игорные жилища позволяют запускать любых «одноруких злодеев». [url=http://www.cmpedu.co.kr/bbs/board.php?bo_table=free&wr_id=734492]http://www.cmpedu.co.kr/bbs/board.php?bo_table=free&wr_id=734492[/url] Не стоит незамедлительно же отрицаться от приветственных подарков в похожих казино. Администрация готова начислить средства либо фриспины, но предварительно работники должны убедиться, собственно вы не аферист. Дело сомнений, собственно развелось слишком количество охотников за бонусами. Они научились накалывать систему и наваривать крупные суммы денег.У каждого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано смогли выполнить их, мы дадим некоторое советов. Если система начислила маленькую сумму, не создавать немалые ставки – остановитесь на 10–30 центах. Как только сумеете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В противном случае превосходнее приглядеться к другому автомату. 1×слотс казино Поспешите отобрать бездепозитные бонусы за регистрацию в казино из представленного перечня. Все платформы не только водят законную деятельность, хотя и обрадуют честными результатами забавы, высокой отдачей, прыткими выплатами.
[b]Смотреть еще похожие новости
[url=http://turkteam.10tl.net/member.php?action=profile&uid=2012]1×slots casino регистрация на сайте[/url]
[url=https://adminclub.org/showthread.php?tid=404373]1×slos регистрация в 1×slots casino[/url]
[b]Посмотрите комментарии и отзывы на 1×slots
Размер ставки для игры по бездепозитному призу (окончательно же, в случае, когда он представлен вид бонусных денежных средств) зачастую ниже, чем при забаве на депозит. Ограничение несомненно действовать до этапа отыгрыша бонуса. Для получения бездепа необходимо пригласить в игру по реферальной ссылке нового посетителя: он должен зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на необходимую, указанную в условиях акции.
#771 Sazrcvmhttp://[url=http://dominion.listbb.ru/viewtopic.phpf=11&t=1456/]dominion.listbb.ru/viewtopic.phpf=11
Заказать диплом любого университета! Быстро купить диплом об образовании. Заказ диплома ВУЗа через проверенную и надежную компанию дарит ряд плюсов. Данное решение помогает сберечь время и значительные финансовые средства. <a href=http://dominion.listbb.ru/viewtopic.phpf=11&t=1456/>dominion.listbb.ru/viewtopic.phpf=11&t=1456</a>
#772 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало
Любой выигрыш по ставке выше установленного лимита несомненно считаться недействительным. То есть ставка не несомненно засчитана при отыгрыше, а в случае выигрыша его сумма не поступит на счёт клиента — результат игры несомненно полностью аннулирован. <a href=http://filmkachat.ru/>1× slots casino зеркало</a> Но а если вы уже профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы автоматически перейдете в онлайн казино; <a href=https://www.doyoubuzz.com/animation-product>https://www.doyoubuzz.com/animation-product</a> 1×slots скачать на айфон <a href=https://www.rmbbk.com/space-uid-1233895.html>https://www.rmbbk.com/space-uid-1233895.html</a>
казино 1×slots
1 x slots Призовые начисления без депозита могут предоставляться для участия в турнирах интернет казино. Потратить перечисленные средства возможно исключительно масштабах данной промоакции. Условия их проведения содержат лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, лучше изучить его управляла. <a href=https://www.suizhoushi.com/home.php?mod=space&uid=17346279>https://www.suizhoushi.com/home.php?mod=space&uid=17346279</a> 1×slots официальный регистрация Реже призы без депозита начисляются постоянным игрокам. С их подмогою администрация старается вычесть ценных клиентов либо вожделеет поблагодарить за лояльность правильных посетителей. Но гораздо чаще для похожих целей применяются эти акции:
1хслот скачать
Как верховодило, при выводе денег, от играющего требуется лишь сделать минимальный лепта чтобы, чтобы, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом индивидуальный счет.Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских рублей. В условиях промоакции предписано, собственно вейджер бездепозитного бонуса х20. Поэтому, дабы отыграть бонус, игроку будет нужно устроить ставок на 35*20=700 руб. <a href=http://edusegogal.edufinancierafcpc.com/index.php/forum/suggestion-box/287711–1win-brasil-casino-apostas>http://edusegogal.edufinancierafcpc.com/index.php/forum/suggestion-box/287711–1win-brasil-casino-apostas</a> У нас на веб-сайте Вы найдете список бонусов без депо в проверенных казино и подробную информацию о том как их получить и использовать.Мы проделываем ударение на главных положениях верховодил, рассказываем о территориальных лимитированиях и вкратце информируем о других акциях обговариваемого казино. 1хслотс казино зеркало При пользовании бездепозитным призом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют несколько обликов лимитов:При отыгрыше бонусных средств, нужно учесть срок действия приза и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный приз несомненно аннулирован.
1хслот официальный сайт зеркало
Можно ли зарабатывать на бездепозитных призах? Это не работа, здесь как повезет, в в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, тогда возможно именовать везением, и добавочной добавкой к вашему бютжету. При пользовании бездепозитным призом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют количество обликов лимитов:Но эти рамки не смущают числе хайроллеров, поскольку коэффициенты на слотах разрешают рассчитывать на солидные выигрыши, а в некоторых автоматах разыгрывается передовой джекпот. 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=http://www.zgqsz.com/home.php?mod=space&uid=339094>http://www.zgqsz.com/home.php?mod=space&uid=339094</a> Да, у даровых бонусов есть недостатки. Прежде всего, они обычно большие. Кроме того, условия вейджера по ним практически строгие. Но все же неименье риска делает их очень красивыми для посетителей.Не хотите поиграть в азартные игры, не рискуя своими средствами, но получая в все выплаты? Подобную возможность предоставляют все наихорошие порталы с азартными увеселениями. В их количестве много добросовестных и надежных интернет-казино на российском языке. Они привлекают свежих юзеров разными поощрительными событиями, включая бездепозитные, или бесплатные бонусы.
1хслотс казино зеркало
Лишь популярные и известные азартные заведения имеют позволить для выдавать бездепы повторяющий добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, коие возможно истратить в лучших аппаратах с высочайшей отдачей. Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить необыкновенности, недоступные при этой в демо режиме. Многие новые посетители переходят в число неизменных, а оператор получает длительную прибыль. <a href=https://www.bitsdujour.com/profiles/gd3BQA>https://www.bitsdujour.com/profiles/gd3BQA</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots На бонусные начисления шансы быть установлены дополнительные лимитирования, которые Вы не сведению при отыгрыше. Пока приз полностью не отыгран — средства из казино не выводятся.
<b>Смотреть еще похожие новости:</b>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=166285&result=reply>1×slots casino регистрация 1×slots review live</a>
<a href=https://www.rechti.de/members/jamesrom.24835/>1×slots casino регистрация 1×slotscasino09k online</a>
<a href=https://www.formulersupport.com/Thread-1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%B2–1×slots-casino–242363>1×slots зеркало регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для получения бонуса надо(надобно) ознакомиться с программой лояльности казино и устроить ставки на необходимую, необходимую для перехода на следующий уровень. Выигрыши с призов без инвестициям всегда привязаны к требованию по ставкам и все быть обналичены лишь после исполнения данных требований.
#773 Charlesgunnyhttp://filmkachat.ru
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Похожим образом трудится 3-ий способ доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения посетителя либо из-за с получения им VIP-статуса. Подарок предоставляется последствии воззвания в поддержку и ревизии.Однако далековато не все ресурсы предлагают своим клиентам бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено одобрение на 1-ый депо в объеме 100–200%. Это замечательная возможность преумножить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш. <a href=http://filmkachat.ru/>1хслот скачать</a> <a href=https://collectednotes.com/lexxeagle/transforming-spaces-professional-3d-interior-visualization>https://collectednotes.com/lexxeagle/transforming-spaces-professional-3d-interior-visualization</a> Новые посетители онлайн-казино без первого депо имеют проверить свою удачливость. К тому же есть вероятность конвертировать бездепы в реальные средства за регистрацию в казино, однако достичь приз необходимо отыграть согласно условиям акции.С не отыгранным призом воспрещается превосходить размер наибольшей ставки. Нарушение сего условия последствия аннулирование выигрыша. 1×slots casino регистрация <a href=https://chaturbate.global/external_link/?url=https://www.sooperarticles.com/authors/787237/are-timeless.html>https://chaturbate.global/external_link/?url=https://www.sooperarticles.com/authors/787237/are-timeless.html</a> Помните, собственно всевозможные нарушения верховодил сведут на нет ваши старания, и вы скорее останетесь без начисленного вам дарового бонуса. Всегда изучайте управляла начисления и обстоятельства вейджера. По хоть вопросам, на коие вы возможности без найти ответы, обращайтесь за объяснениям и саппорт.
1×slot казино зеркало
Верификация важна для добавочной безопасности и помогает техподдержке выявить бонусхантеров и жуликов. Кстати, на платформах выводы крупных сумм доступны только в доказательства личности.Зарегистрироваться в казино по особой ссылке или с бонусным кодом. Подтвердить контактные данные (номер аппарата и электрическую почту). Для подтверждения номера телефонного необходимо в личном профиле показать свой номер и нажать кнопку „Подтвердить номер аппарата“, далее Вы получите sms-сообщение с кодом, кот-ый нужно ввести в подходящее поле. Для подтверждения электрической почты, перебежать по интенсивной ссылке в письме от казино. <a href=http://yamato-ryu.ru/communication/forum/index.php?PAGE_NAME=message&FID=1&TID=47039&MID=11788&sessid=5795aa69c4836cac048095a82a2cb8fc&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1хслот зеркало</a> 1×slots регистрация на сайте Вообще перейдя в казино — правила схожи в получении бездепозитных бонусов, в стандартные управляла заходит: подтвердить эл. Почту и телефон, наполнить собственный личный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ. <a href=https://xebecar.com/author/jameswof/>https://xebecar.com/author/jameswof/</a> Бездепозитные призы в казино без пополнения 2022 — это конкретная сумма средств или vacant spins вращения, которые предоставляются первым гостям за регистрацию на сайте казино повторяющий бездепозитного бонуса, и выделяет вам возможность помощью казино без пополнения опробовать услуги (игр), с дальнейшей преимуществом, льготой вывода средств при исполнении всех установленных управлял.Для проверки применяются сканы паспортов, водительских удостоверений, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если пользователь замечен в попытке завести вспомогательный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в темный перечень. При этой на лицензионной площадке не опасаться указывать достоверную персональную информацию (шифрование исключает утечку персональных данных). 1×slots casino зеркало рабочее Вы наверняка, как и все предпочитаете получать презенты и бездепозитные призы казино. Игорные дома брали в привычку одаривать гэмблеров приятными бонусами. Стать владельцем приветственного подарка можно за создание профиля или пополнение счёта. Второй вариант больше занимательный, как клубы готовы удвоить депозит! Но если вы новичок и только знакомитесь с миром пыла, другого, как воспользуйтесь бонусом за регистрацию.
1×slots casino регистрация 1×slots review live
Активация по промокоду используется в различных видах бездепов. Если идет о приветственном призе, то набор символов возможно разузнать на главной странице, в регистрационной форме либо письме, которое отправляется пользователю для доказательства адреса электронной почты. Акции могут проводиться вместе с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активируется одноразовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном кабинете либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем важный код для активации в описании каждого рекламную. <a href=https://wiki.team-glisto.com/index.php?title=Benutzer:Wyatt06I62>https://wiki.team-glisto.com/index.php?title=Benutzer:Wyatt06I62</a> Так собственно приготовьтесь предоставить конфиденциальную информацию (пол, возраст, страна проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает не более суток, после чего удастся свободно выводить солидные выигрыши.Многие игроки, оценив функционал казино, остаются выступать в нем и далее ? на это и нацелено каждое промо. Постоянные клиенты заносят депозиты и делают ставки, обеспечивая долгосрочную выгода оператора. То есть, казино выдают бездепы новым пользователям для формирования лояльной аудитории. казино 1×slots Популярность онлайн казино растёт и всё больше пользователей начинают проявлять азартными забавами. Бездепозитные бонусы 2022 года, это оригинальные подарки за регистрацию. С их подмогою новые игроки шансы получить благотворительные вращения либо деньги на баланс за одну регистрацию. С появлением игорных заведений в онлайне, бездепозитные бонусы стали известнейшим методом вербования игроков. Подобные акции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш сайт собрал наилучшие предложения из онлайна на 2022 год. Воспользуйтесь каким презентом и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить обстоятельства.
1×slots зеркало проходить регистрацию это отличный вариант
Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, чтобы появилась вероятность вывести выигрыш. Процесс доказательства личности может взятьвдолг(взятьвзаймы) от одного дня до недели. Если клиент разрешил какую ошибку при заполнении паспортных данных, то ему идет адресоваться с задачей в службу онлайн-казино. Заработать на бездепозитных бонусах за регистрацию в казино возможность каждый пользователь, достигший совершеннолетия.Шаг 4. Активация. Внимательно выучите условия, информацию по ограничениям и сроке деяния бонусного предложения. Разобравшись с правилами, можно активировать приз в личном офисе (иногда ? с внедрением промокода) либо по запросу в саппорт. 1хлот регистрация в 1×slots casino <a href=https://app.welvi.co.kr/bbs/board.php?bo_table=qa&wr_id=1915598>https://app.welvi.co.kr/bbs/board.php?bo_table=qa&wr_id=1915598</a> Доступность — бездепозитные призы в казино почаще всего предоставляются свежим игрокам, но посещают случаи, когда бонус шансы получить и действующие посетители.При маленькой сумме приза рекомендовано играть по низким ставкам, а применять максимальные чем только что, нет случае, случае вейджер слишком немалый, а время на отыгрыш крепко ограничено.
1×slots казино мобильная версия
Для получения приза нужно ознакомиться с программой преданности казино и сделать ставки на сумму, нужную для перехода на следующий степень.Фриспины предусмотрены для применения в видео слотах. Внимательно ознакомьтесь с критериями – частенько их выдают на кое-какие автоматы. В зависимости от клуба, у вас выйдет устроить определённое количество ставок. Кстати, продвинутые игорные дома разрешают запускать любых «одноруких бандитов». Представленные на этой странице лучшие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, в гости Casino.ru шансы сортировать перечень по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д. <a href=https://www.merchantcircle.com/blogs/3d-rendering-company-archicgi-dallas-tx/2025/1/Professional-Interior-Layout-Design-Transform-Your-Space/2886993>https://www.merchantcircle.com/blogs/3d-rendering-company-archicgi-dallas-tx/2025/1/Professional-Interior-Layout-Design-Transform-Your-Space/2886993</a> Бонус начисляется игроку сразу в регистрации и прохождения верификации в казино и не настятельно от посетителя внесения депозита. Как правило, размер бонуса в подобном случае довольно застенчивый, однако дозволяет новичкам познакомиться с забавой без риска реальными средствами. 1×slots зеркало регистрация Для получения депозитного приза нужно восполнить собственный игровой баланс реальными деньгами. Вознаграждение можно получить либо при внесении первого депозита, либо в виде фиксированного процента от внесённых средств. Так или иначе, бонус поступит на счёт только в пополнения.Бездепозитный бонус казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в данном и содержится главное различие.
<b>Смотреть еще похожие новости:</b>
<a href=http://fumankong1.cc/home.php?mod=space&uid=580780>1×slots регистрация на 1хслотс</a>
<a href=http://dd214.labelcreativeak.com/forums/viewtopic.php?f=3&t=2256>1×slot официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Исходя из сего, просто не существует осмысленных оснований махнуть рукой на получение такового бонуса при регистрации. И, заметить,, на такой бесплатной базе у вас есть все шансы выиграть средства и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, именуют бесплатными онлайн платформами для игр.
#774 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet бесплатно casino зеркало сегодня <a href=https://rumafia.news/>порно с Юлия Ефимова, пловчиха</a> casino рабочее зеркало casino зеркало сегодня рабочее <a href=https://rumafia.news/>порно с Федор Чалов (футбол)</a> Ирина Горбачева online casino официальный 1×bet сайт букмекерская контора фонбет официальный сайт винлайн букмекерская контора карты казино смотреть фильм казино
DiskiPlus казино ставка DiskiPlus casino зеркало сегодня <a href=https://diskiplus.ru/>DiskiPlus 7k casino официальный</a> DiskiPlus пин casino DiskiPlus песня казино <a href=https://www.diskiplus.ru/>DiskiPlus 7k casino официальный</a> DiskiPlus казино вход официальный сайт DiskiPlus официальные зеркала казино DiskiPlus бесплатное казино DiskiPlus порно с Евгения Медведева, фигуристка DiskiPlus casino com DiskiPlus порно с Никита Кучеров (хоккей) DiskiPlus 1×bet скачать приложение
#775 Charlesgunnyhttp://filmkachat.ru
1×slots casino online регистрация
Все любят получать презенты. Согласитесь, почти каждый играющий человек несомненно очень счастлив, если получит бесплатный подарок для игры в интернет казино просто за регистрацию или же бонус за внесенный депо, например нарекаемые приветственные призы для свежих игроков. Соответственно эти онлайн клубы станут больше знамениты и преимущественны у игроков при выборе казино для игры. Топ казино каждый обновляется и добавляются новые и занимательные игровые клубы с привлекательной бонусной политикой и всеми возможными привилегиями, к коим относятся такие призы как фриспины за регистрацию, валютные бездепозитные призы, а великодушные бонусы за внесенный депо. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots review live</a> На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению сего медли, Вы не можете активировать и получить бездепозитный приз. <a href=https://yoomark.com/content/complete-guide-professional-3d-rendering-services>https://yoomark.com/content/complete-guide-professional-3d-rendering-services</a> Бездепы с бесплатными вращениями предоставляют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд уплачивает казино. Число спинов ограничено и изредка выше сотку. Если промоакция включает в себя количество безвозмездных игр, их начисление имеет быть разбито на количество дней.Для всех бездепозитных бонусов функционирует наибольший лимит на выигрыш. Он указывает максимальную необходимую, которую вас получить, играя на бонусные кредиты. Как лишь вам получится выполнить требования вейджера, допустимый максимально несомненно переведен с бонусного счета на главный, а остаток несомненно списан. 1 хслот регистрация в 1×slots casino <a href=http://fh7778nc.bget.ru/users/oxujymy>http://fh7778nc.bget.ru/users/oxujymy</a>
1×slots официальный сайт зеркало
1×slots промокод при регистрации Однако далековато не все ресурсы предлагают своим посетителям бездепозитные призы за регистрацию в казино. В большинстве случаев учтено одобрение на первый депо в объеме 100–200%. Это отличная возможность преувеличить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш. <a href=https://pcnto.com/user/RalphCon/>https://pcnto.com/user/RalphCon/</a> Чтоб получить большой выигрыш, выбирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша. зеркло казино 1×slots
казино 1×slots официальный сайт
Как только получите бездеп в казино, всё также не забывайте инспектировать электронную почту. Некоторые игорные клубы день веселят интенсивных гэмблеров приятными призами. Чаще всего получить презент возможно в преддверии веселья, на день рождение, за привлечение друга. А также распространённым бонусом считается прибавка к депозиту. Нужно не восполнить счёт, и азартное заведение увеличит его на 50–100%.Бонус за регистрацию в казино выдается лишь один раз на 1-го игрока. Но бывают дополнительные акции, в рамках коих бездепы раздаются для неизменных посетителей и такие подарки Вы сможете получить больше одного раза. Во всех легальных онлайн-казино Беларуси необходимо подтверждение паспортных данных для игры — это требование правительства государства.Активация валютного вознаграждения случается автоматически последствии создания профиля либо использования промокода. Иногда операторы предъявляют вспомогательные требования: подписаться на страницы казино в социальных сетях либо на рассылку маркетинговых известий, скачать и установить дополнительный софт и т.д. <a href=http://hongtouwen.com/home.php?mod=space&uid=487325&do=profile>http://hongtouwen.com/home.php?mod=space&uid=487325&do=profile</a> Чем ниже значение вейджера, что, этим проще отыграть и вывести приз. Если Вы планируете заработать на бездепе, но просто ознакомиться с свежим игровым клубом, то стоит избегать призов с высочайшим вейджером их почти не реально отыграть. С ними Вы сможете лишь протестировать забавы заведения.Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. 1× slots регистрация в 1×slots casino Подтвердите личность, предоставив оператору казино средства паспортные данные. Инструкции обычно легкие, основное — конкретно им следовать. Если написано, собственно «на фото обязаны быть видны все четыре угла странички паспорта» — устройте именно это фото.Новички не любят сразу же заносить депо. Это обусловлено неименьем навыка и сомненьем. К счастью, в возможно получить бездепозитный приз за регистрацию в казино. Неважно что начисляет система – фриспины либо кредиты. В всяком случае вы не рискуете своими сбережениями. Это отличная возможность запустить приглянувшийся видео разъем или же испытывать фортуну в настольных забавах.
1×slots зеркало на сегодня
Существуют казино с бонусом за регистрацию, в которых очень знамениты фриспины в интернет казино впоследствии регистрации в определенных играх. Они встречаются даже чаще даровых поощрений или классических призов в казино без вложений. Например, игрок регистрирует счет, на который начисляются безвозмездные забавы, приз за регистрацию повторяющий бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса в выигрывает истинные деньги, коие в последствии возможно удачно вывести из заведения на собственную платежную систему. То есть, есть шансы вывести свои без рисков собственными деньгами. Регистрация, за которую в получит бонусы, займет пару минут, а спасибо этому можно прирастить 5 евро поощрений до тыс. И без всяких заморочек вывести их.Большинство клубов привлекают внимание игры за счёт различных даров. На 1 веб-сайтах можно получить виртуальные кредиты, которые откроют доступ ко всему софту. На других же, администрация предлагает безвозмездные вращения для запуска топовых онлайн слотов. Несмотря на различные промоакции, стоит выделить самые основные. Подтверждение индивидуальной информации. Все казино настоятельно от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и присутствие у юзера других аккаунтов (мультиаккаунт запрещен). Иногда операторы требуют внесение малого депо перед выводом для верификации платежного прибора. В неких казино этот депо того светит отыграть.Таким образом, заведение пробует продемонстрировать себя своим вероятным геймерам, а подобный маркетинговый ход как казино приз без депо за регистрацию завлекает довольно большое внимания к игорному заведению и обеспечивает неизменный поток новых гостей и грядущих посетителей игрового интернет клуба. 1×slots коды <a href=http://rlu.ru/4fMmn>http://rlu.ru/4fMmn</a> При верном раскладе бездепы — это прекрасный метод выступать на деньги без траты собственных средств. Есть количество рекомендаций, следуя которым можно извлечь максимально выгоды из сходственных акций казино. Играть по лишь на лицензированных площадках. Скриптовые веб-сайты не накалывают с бонусными предложениями, хотя и употребляют пиратский софт с модифицированным ГСЧ. Выиграть на этих автоматах нереально.
1×slots зеркало регистрацию более популярный вариант это
3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать аппарат либо почту, указать индивидуальную информацию;Все бесплатные бонусы кажутся заманчивыми. Кто же категорически от способности поиграть в онлайн-казино, не рискуя средствами, но получая выигрыши. Но далековато не все бездепозитные призы одинаковой презентабельны для рассудительного клиента. Чаще всего казино приз за регистрацию без депо даёт возможность запустить любой автомат. Но какого-либо пристально ознакомиться с критериями. Иногда для игры доступны только определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, лучше начать знакомство с миром пыла именно с «одноруких злодеев».Наши эксперты исследуют условия промоакции, этого в ручном режиме проводят их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие параметры. Мы не рекламируем казино, а даем игрокам информацию о лучших из их. <a href=https://digitaltv.ru/forum/user/11860/>https://digitaltv.ru/forum/user/11860/</a> Если вы выбираете испытанное лицензионное интернет казино и выполните все обстоятельства получения бездепозитного приза, трудностей с получением подарка у Вас не возникнет.Риск-игра по равным шансам – Также казино возможность запрещать выполнять обстоятельства по отыгрышу с помощью раунда на удвоение, который предлагается в слотах, видео-покере и неких иных забавах. 1×slots регистрация 1×slotscasino09k online Новички не любят сразу же вносить депо. Это обусловлено неимением навыка и сомнением. К счастью, дни можно получить бездепозитный приз за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В любом случае вы не рискуете своими сбережениями. Это отличная вероятность запустить приглянувшийся видео слот либо же испытывать фортуну в настольных играх.Получить приветственный приз имеют только свежие посетители онлайн-казино. Способы описаны в критериях промоакции любого законного казино, чаще всего это:
<b>Смотреть еще похожие новости:</b>
<a href=http://jagplay.ekafe.ru/viewtopic.php?f=65&t=7067>1×slots casino регистрация на сайте</a>
<a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/14753-kazino-1×slots-ofitsialnyj-sajt#14784>казино 1×slots официальный сайт</a>
<a href=https://roguedynasty.net/forums/member.php?10629-RabofreeKt>1×slots зеркало рабочее</a>
<a href=https://tabsgame.ru/user/Jamesbes/>1х слот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В большинстве заведений устроить это возможно по e-mal, по номеру аппарата, спустя социальную сеть или гугл-аккаунт. Можно. Вы постоянно сможете отрешиться от получения бездепозитного бонуса за регистрацию в казино, же Вы не сделаете ставку.
#776 Charlesgunnyhttp://filmkachat.ru
1× slots casino официальный сайт
Разные казино имеют личные верховодила по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высокие притязания. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до 100 один в игровых автоматах. Например, если игрок получил даром 10 долларов, то необходимо несомненно отыграть их, поставив одну тысячу спинов по одному доллару любой. Стоит обозначить(означить), что не все казино дают возможность выступать на бонусы и не во всех развлекательных заведениях идентичные правила для отыгрывания. Некоторые казино запрещают выступать на бонусы в блекджек или ограничивают ставки до 5 процентов, что значительно увеличивает в десятки один количество нужных игр.Чтоб получить крупный выигрыш, подбирайте игровые автоматы с предельным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша. <a href=http://filmkachat.ru/>зеркло казино 1×slots</a> Вы всего, скажем, как все любите получать подарки и бездепозитные призы казино. Игорные дома взяли в привычку одаривать гэмблеров приятными бонусами. Стать обладателем приветственного презента можно за создание профиля или пополнение счёта. Второй вариант больше увлекательный, ведь клубы готовы удвоить депо! Но в вы новичок и только знакомитесь с миром пыла, какого-либо пользуйтесь бонусом за регистрацию.Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 поболее. Когда игроку надеется много фриспинов, администрация возможность разбивать их начисление на некоторое дней. Бесплатные вращения предоставляются для конкретного слота, который указывается в правилах промоакции. <a href=https://linklist.bio/lexxeagle>https://linklist.bio/lexxeagle</a> В количестве случаев благотворительные бонусы начисляются в кредитах, которые невозможно сразу вывести со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти требования принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже. 1×slots зеркало регистрация <a href=http://steklo.by/index.php?subaction=userinfo&user=cynicalfascist8>http://steklo.by/index.php?subaction=userinfo&user=cynicalfascist8</a> Практически все онлайн казино с бездепозитным призом за регистрацию учитывает программу преданности — систему поощрения неизменных посетителей, которая состоит из множества значений. При достижении игроком очередного уровня на его счёт поступает приз. Чем выше уровень — что, этим щедрее приз.
1хслотс рабочее зеркало
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=370128>1×slots сайт</a> 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=http://shop5.10-day.net/bbs/board.php?bo_table=free&wr_id=82868>http://shop5.10-day.net/bbs/board.php?bo_table=free&wr_id=82868</a> Для казино, работающих интернет, бездепозитные бонусы нужны для вербования новых клиентов. Предложение поиграть на слотах без надобности внесения реальных денег — работающий способ для повышения интереса к фирмы. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит играть в казино, только теперь уже на собственные деньги. 1×slots зеркало которую указывали при регистрации кстати Вейджер (или вагер) ? это наименьшая сумма ставок, коию необходимо устроить для вывода денежного бонуса. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, тем привлекательнее спецпредложение.
1×slots регистрация 1×slotscasino09k online
Бонус без депо за регистрацию в казино (бездепозитный бонус) – это денежный подарок от клуба, который начисляется на акк игрока после регистрации в казино. Кроме творенья учетной записи, для получения бездепа, довольно нередко требуется ещё и доказать контактные данные игрока и/или активировать особый промо-код.Подтвердите регистрацию, чтобы активировать Бездепозитный бонус с выводом, потребуется наполнить индивидуальный профиль. Заполните пустующие поля реальными данными о себя. Для казино, работающих онлайн, бездепозитные бонусы необходимы для вербования новых клиентов. Предложение сыграть на слотах без необходимости внесения настоящих денег — работающий метод для увеличения интереса к фирмы. После отыгрыша бездепа великоват шанс, собственно игроку понравится и он продолжит играть в казино, только сейчас теснее на собственные деньги.Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы которые возникают у новичков. <a href=http://kamaz-ukraine.com/index.php?subaction=userinfo&user=youthfulpreview>http://kamaz-ukraine.com/index.php?subaction=userinfo&user=youthfulpreview</a> Условия, на которых предоставляется бездеп, регулируются казино. Каждая акция содержит доскональные управляла, гиперссылка на которые обыкновенно находится в промообъявлении. В их указываются лимиты, вейджер, перечень доступных игр. Если оператор прячет данные о предложении, то пользоваться им надо.Эффективность бездепов в рекламного прибора оценили все операторы. Малоизвестные площадки используют такие промоакции, дабы скоро набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны неизменных посетителей. Не все веб-сайты, дающие подарки без депозита, рекомендованы к забаве. За симпатичным промоописанием имеют прятаться неосуществимые условия отыгрыша прочие подводные камни. 1×slots официальный demo регистрация в 1×slots casino Многие новенькие сомневаются, собственно поощрительный приз надо будет отдавать, в случае они выиграли у казино. Это полностью безопасно и накрепко. Выводя выигранные средства, игрок просто останавливает свое роль при и утрачивает уникальную возможность – безвозмездно наращивать собственное материальное положение.
1×slot зеркало
Эффективность бездепов виде рекламного инструмента оценили многие операторы. Малоизвестные площадки используют такие промоакции, чтобы быстро набрать базу. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны постоянных гостей. Не все сайты, дающие подарки без депозита, рекомендованы к этой. За симпатичным промоописанием все скрываться неосуществимые обстоятельства отыгрыша прочие подводные камни. 1×slots регистрацию процедура займет всего лишь <a href=https://maps.google.com.au/url?q=https://doctorlazuta.by/>https://maps.google.com.au/url?q=https://doctorlazuta.by/</a> Важно, убедитесь что, нет, собственно ранее не регистрировались в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи.Для получения приза нужно пригласить в забаву нового посетителя. Казино начисляет пригласившему фиксированный процент от взносов приглашённого повторяющий приза: чаще всего его размер не выше 10%. Срок деянья приза как не выше месяца: пригласивший получает приз в зависимости от проигранных ставок приглашённого в 1-ый месяц забавы.
1×slots скачать на айфон
Мы проделываем ударение на главных положениях управлял, рассказываем о территориальных лимитированиях и кратко информируем о иных акциях обговариваемого казино. <a href=http://dev.may-green.ru/forum/user/16316/>http://dev.may-green.ru/forum/user/16316/</a> Акции распространяются как на все игры казино, так и на ограниченный перечень. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и. Промо возможность охватывать разработки одного производителя. Бездеп не пересекается с другими промоакциями казино. Если на веб-сайте предусмотрен кэшбек, он не начисляется за ставки, изготовленные бонусными средствами. Для идентификации платежных реквизитов игрока может понадобиться пополнение счета на минимальную необходимую.Раздача бонусов возможность быть приурочена к разным датам: календарные праздники, деньки рождения игроков, годовщина открытия казино и т. Д. Подарок выдается повторяющий средств, фриспинов либо баллов для скопления и размена на услуги оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода этой суммы придется выполнить ряд требований. рабочее зеркало 1хслотс
<b>Смотреть еще похожие новости:</b>
<a href=https://www.formulersupport.com/Thread-1×slots-%D1%81%D0%B0%D0%B9%D1%82–259540>1×slots сайт</a>
<a href=http://forums.indexrise.com/thread-309-post-538073.html#pid538073>1×slots сайт</a>
<a href=http://xn–80akbkalsbeeafq6a6b2f.xn–p1ai/forum/messages/forum1/topic47408/message251099/?result=new>рабочее зеркало 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бесплатный приз – кредиты, которые онлайн-казино начислит посетителю, не принуждая его пополнять игровой счет. Отзывы читателей о бонусных промоакциях посодействуют составить впечатление, но не запамятовывайте о субъективности собственных объяснений.
#777 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Дарья Клишина, легкоатлетка промокод 1×bet <a href=https://slon-ru.com/>букмекерская контора вход</a> сайт 1×bet слоты суть казино <a href=https://strelochnik.com/>гама казино</a> Радченко Светлана Юрьевна порно пин ап букмекерская контора casino buzz казино регистрации порно с Васильева Татьяна Викторовна букмекерские конторы pin Преподобная Надежда Александровна порно
DiskiPlus 7k casino бонус DiskiPlus какие казино <a href=https://diskiplus.ru/>DiskiPlus Скоробогатова Ольга Николаевна порно</a> DiskiPlus casino ru DiskiPlus казино сегодня <a href=https://diskiplus.ru>DiskiPlus приложения букмекерских контор на андроид</a> DiskiPlus кент казино DiskiPlus букмекерская контора вход DiskiPlus казино рояль DiskiPlus человек казино DiskiPlus лучшие казино бесплатно DiskiPlus букмекерская контора без DiskiPlus online casino официальный
#778 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Елизавета Туктамышева порно с Никита Кучеров (хоккей) <a href=https://slon-ru.com/>бесплатные букмекерские конторы</a> порно с Илюшникова Татьяна Александровна сколько казино <a href=https://specreporter.com/>porno Дарья Мороз</a> casino casino автомат porno Елизавета Туктамышева 7k casino карты казино 1×bet официальный скачать 7k casino скачать
DiskiPlus порно с Никита Кучеров (хоккей) DiskiPlus casino online зеркало <a href=https://www.diskiplus.ru/>DiskiPlus скачать букмекерскую контору на андроид</a> DiskiPlus букмекерская контора фонбет официальный сайт DiskiPlus порно с Захарова Мария Владимировна <a href=https://diskiplus.ru/>DiskiPlus порно с Варвара Субботина</a> DiskiPlus букмекерская контора без DiskiPlus 7k casino зеркало рабочее DiskiPlus porno Анна Сидорова, керлингистка DiskiPlus ап казино DiskiPlus порно с Александр Большунов (лыжные гонки) DiskiPlus букмекерская контора фонбет DiskiPlus пин up casino
#779 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать
Призовые начисления без депозита все предоставляться для участия в турнирах онлайн казино. Потратить перечисленные деньги возможно необыкновенно в рамках этой акции. Условия их проведения включают в себя лимитирования на список игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться таким предложением, лучше изучить его верховодила.Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских руб. В критериях промоакции предписано, собственно вейджер бездепозитного приза х20. Поэтому, чтобы отыграть бонус, игроку будет необходимо сделать ставок на 35*20=700 рублей. <a href=http://filmkachat.ru/>1×slots подтвердит вашу регистрацию если говорить</a> Обычно для получения призов без депо, казино выдвигает приклнные и вполне выполнимые обстоятельства, хотя есть ряд поступков которые запрещены и шансы стать досадные последствия: <a href=https://www.cgarchitect.com/projects/3f3aba93-lighting-the-art-of-atmosphere-in-3d-rendering>https://www.cgarchitect.com/projects/3f3aba93-lighting-the-art-of-atmosphere-in-3d-rendering</a> 1×slots коды <a href=https://masstr.net/member.php?action=profile&uid=28288>https://masstr.net/member.php?action=profile&uid=28288</a> Помимо остального, для вывода средств по бездепу необходимо привнести на счёт собственный 1-ый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало возможную сумму, после чего вывод средств будет доступен.Представьте момент, когда при ставке в 10 руб. Вы получите схожее умножение. Миллион рублей за одно вращение, собственно абсолютно возможно. Поэтому вопрос, сколько можно выиграть остаётся открытым. Предлагаем проверить других. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный приз и проверяйте удачу в деле. Разумеется, вывести деньги довольно. Однако шансы есть у всех.
1×slots зеркало регистрация в 1×slots casino
Как правило, при выводе финансов, от играющего потребуется только сделать минимальный вклад для того, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом личный счет. <a href=https://swordmaster.org/user/JamesVok/>1х слотс зеркало регистрация в 1×slots casino</a> 1×slot рабочее зеркало Но существуют азартные заведения, готовые просто например вручить деньги на игру. Для этого достаточно сделать профиль. Чтобы вывести выигрыш, сначала нужно выполнить вейджеровые обстоятельства, прописанные в критериях получения бездепа.Вейджер не более х30–35 является применимым. Опытные игроки заявляют, что с таким вейджером реально остаться в плюсе, случае правильно подойти к выбору игрового аппарата. <a href=http://ec2–18–222–226–231.us-east-2.compute.amazonaws.com/mediawiki/index.php?title=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0>http://ec2–18–222–226–231.us-east-2.compute.amazonaws.com/mediawiki/index.php?title=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0</a> Зарегистрироваться в казино по специальной ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефонного и электрическую почту). Для доказательства номера аппарата необходимо в собственном профиле указать свой номер и надавить кнопку „Подтвердить номер телефона“, дальше Вы получите sms-сообщение с кодом, который необходимо установить в отвечающее фон. Для доказательства электрической почты, перебежать по активной ссылке в письме от казино.Иногда для получения призов необходимо связаться с адептами службы. Удобнее всего с ними разговаривать в онлайн-сате, хотя от достаточно запроса по электронной почте. 1×slots официальный зеркало Минимального оборота. Этот лимит уточняется вейджером — пока игрок не сыграет на установленную необходимую, вывод средств несомненно недоступен.
1×slots актуальное зеркало
В списке требований к отыгрышу нередко присутствуют лимиты на ставки при игре на собственные средства. Так, в отыграть нужно 30 000 руб., а предельная сумма ограничена 30 рублями, то вращать барабаны светит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам деяния промоакции. <a href=https://band.us/band/96885593/post/3>https://band.us/band/96885593/post/3</a> В количестве случаев безвозмездные бонусы начисляются в кредитах, которые невозможно незамедлительно исключить со счета. Прежде их нужно отыграть по установленным правилам. Эти требования принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже.Обычно показатель повыше, чем для призов на депо. Не изумляйтесь, в он будет том х100. Иногда завышенный коэффициент вейджера уточняется для обитателей отдельных государств. 1хслотс регистрация в 1×slots casino Призовые начисления без депо все предоставляться для участия в турнирах онлайн казино. Потратить перечисленные деньги можно самая масштабах этой промоакции. Условия их проведения в лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться этим предложением, другого, как изучить его правила.Бездепы с бесплатными вращениями предоставляют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд уплачивает казино. Число спинов ограничено и изредка выше сотню. Если акция включает в себя количество бесплатных игр, их начисление возможность быть разбито на некоторое дней.
1×slots зеркало
<a href=http://jktroickiy.forumex.ru/memberlist.php?mode=viewprofile&u=195>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a> Условия, на которых предоставляется бездеп, регулируются казино. Каждая акция имеет подробные управляла, гиперссылка на коие обычно находится в промообъявлении. В их указываются лимиты, вейджер, перечень дешевых игр. Если оператор скрывает данные о предложении, то пользоваться им надо.Но есть игорные заведения, которые готовы просто так жертвовать деньги на забаву. Для этого достаточно создать профиль. Чтобы исключить свой выигрыш, вам сначала нужно выполнить условия отыгрыша, указанные в условиях получения бездепозитного депо. 1×slots промокод при регистрации 2025 <a href=http://x70181pe.beget.tech/index.php?subaction=userinfo&user=egosuz>http://x70181pe.beget.tech/index.php?subaction=userinfo&user=egosuz</a> Для отыгрыша бонуса казино обязует игрока сыграть на сумму, в некоторое раз превышающую сумму полученного приза — здесь выгода фирмы явна.Зарегистрируйтесь. Для регистрации чаще всего довольно ввести собственный номер аппарата и почтовый адрес, в чего установить приобретенный код из СМС. Возможно, потребуется показать промокод. В правилах промоакции несомненно написано, где его хотелось вводить. Иногда это хотелось делать при регистрации, времени — уже последствии создания личного офиса, на отдельной страничке.
1× слот зеркало
Если площадка дарует бездеп за регистрацию, то процедура его получения ординарна. Нужно только ввести аккаунт на веб-сайте и активировать его, подтвердив адресок электронной почты, номер телефонного либо другие данные, которые просит оператор. Перед данным необходимо убедиться, что пользователь располагается на официальном сайте казино, но на мошеннической площадке. <a href=https://gxfcmao.com/home.php?mod=space&uid=515947>https://gxfcmao.com/home.php?mod=space&uid=515947</a> 1×slots мобильная версия войти казино
<b>Смотреть еще похожие новости:</b>
<a href=https://kakofon.cz/forum/viewtopic.php?f=8&t=330&p=41864#p41864>1×slots зеркало быструю регистрацию а также мгновенное</a>
<a href=https://forumsleague.org/forum/memberlist.php?mode=viewprofile&u=11228>1×slots зеркало на сегодня</a>
<a href=https://forum.konyacraft.com/threads/1×slots-aktualnoe-zerkalo.9773/>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Хотя благотворительные призы начисляются без депозита, не исключено, собственно для понадобиться вносить средства. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты лишь в такого, как новый клиент впервые пополнит игровой счет.
#780 internetGephttps://kazan-domashnij-internet001.ru
интернет провайдеры казань по адресу <a href=https://kazan-domashnij-internet001.ru>kazan-domashnij-internet001.ru</a> домашний интернет тарифы казань
#781 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Приезжева Екатерина Геннадьевна порно казино <a href=https://repost.news/>казино пин</a> официальное казино вход Черкесова Бэлла Мухарбиевна порно <a href=https://vestnik-jurnal.com/>7k casino зеркало</a> демо казино как выиграть в казино казино ставка casino riobet казино гта 5 casino buzz рейтинг казино
DiskiPlus 1×slots casino DiskiPlus casino зеркало сегодня рабочее <a href=https://diskiplus.ru/>DiskiPlus casino ап</a> DiskiPlus Москалькова Татьяна Николаевна порно DiskiPlus букмекерская контора фонбет официальный сайт <a href=https://www.diskiplus.ru>DiskiPlus casino актуальное зеркало</a> DiskiPlus Приезжева Екатерина Геннадьевна порно DiskiPlus леон букмекерская контора DiskiPlus винлайн букмекерская контора официальный сайт DiskiPlus Преподобная Надежда Александровна порно DiskiPlus casino официальный сайт DiskiPlus пин up casino DiskiPlus casino скачать приложение
#782 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино проиграл порно с Ирина Сидоркова <a href=https://res-publika.com>casino x</a> 1×bet сайт 1×bet xyz официальные сайты казино <a href=https://glvk.guru/>champion casino</a> букмекерские конторы в россии cat casino порно с Каролина Севастьянова online casino песня казино какие казино win win casino
DiskiPlus 1×bet xbet xyz DiskiPlus online casino 7k <a href=https://www.diskiplus.ru/>DiskiPlus casino вход</a> DiskiPlus порно с Матвей Сафонов (футбол) DiskiPlus porno Алена Михайлова <a href=https://diskiplus.ru/>DiskiPlus porno Дарья Клишина</a> DiskiPlus 1×bet рабочее на сегодня DiskiPlus casino бонус DiskiPlus казино рояль смотреть DiskiPlus казино без DiskiPlus 1×bet DiskiPlus букмекерская контора DiskiPlus Ирина Горбачева
#783 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Елизавета Туктамышева 1×bet зеркало слоты 1×bet xyz <a href=https://specreporter.com/>казино фильм</a> пари букмекерская контора 1×bet официальный сайт 1×bet xyz <a href=https://res-publika.com>порно с Аделия Петросян (фигурное катание)</a> бесплатные букмекерские конторы Матвиенко Валентина Ивановна порно букмекерские конторы в россии vavada casino 1×bet рабочее на сегодня 1×bet рабочее на сегодня порно с Ирина Сидоркова
DiskiPlus pin up casino top top DiskiPlus 1×bet телефон <a href=https://www.diskiplus.ru>DiskiPlus 1×bet</a> DiskiPlus включи казино DiskiPlus up casino зеркало <a href=https://diskiplus.ru>DiskiPlus casino зеркало сайта</a> DiskiPlus порно с Анна Щербакова, фигуристка DiskiPlus рабочее казино DiskiPlus букмекерская контора на андроид DiskiPlus 1×bet слоты 1×bet xyz DiskiPlus inform@rucriminal.info DiskiPlus ограбление казино DiskiPlus 1×bet зеркало слоты 1×bet xyz
#784 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
Возможность сыграть дополнительное соревнование (а времени и несколько) абсолютно даром, а выигрыш, тому, поступает на счёт игрока.1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, случае не желайте стать жертвой плутов или впустую израсходовать время; <a href=http://filmkachat.ru/>1хслот зеркало</a> <a href=https://hoo.be/kalinka>https://hoo.be/kalinka</a> Но на азартных платформах похожие гонорары все получить теперь зарегистрированные юзеры. В таком случае, призы предоставляются масштабах уникальных промоакций или же некоторым игрокам вид акционного предложения, коие приходит на почту с целью «вернуть» игрока в свое казино.Но на азартных платформах похожие вознаграждения могут получить и уже зарегистрированные юзеры. В таком случае, призы предоставляются в уникальных акций или же неким геймерам в виде акционного предложения, коие приходит на почту с целью «возвратить» игрока в свое казино. 1×slot зеркало <a href=http://moregasmsplease.com/component/kunena/user/564489-kennethquaph>http://moregasmsplease.com/component/kunena/user/564489-kennethquaph</a> Выбирайте наилучшие бесплатные бонусы счет обзоров на Casinoz – и пусть вас сопутствует счастье при отыгрыше бонусных кредитов!Важно, убедитесь сомнений, собственно ранее не регились в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи.
1×slots скачать на айфон
Если при регистрации показать промокод, возможно гарантировано получить приз. Где взять ваучер? Посетите на блоги либо форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В заключительное время игорные дома начали рекламироваться в фильмах и сериалах. Присмотритесь и всего заметите промокод, который принесёт 500 или 1 000 бонусных рублей. <a href=http://forums.indexrise.com/thread-2362-post-538601.html#pid538601>1хслот официальный сайт зеркало</a> 1×slots актуальное зеркало Подарки на дни ? посвященные праздничным датам, требующие условного отыгрыша или начисляются без это. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду.Подтверждение электрической почты – одно из ведущих критерий, которое есть почти в любом бездепозитном казино. Чтобы верифицировать электронную почту, достаточно перебежать по интенсивной ссылке в письме, приобретенном от азартного клуба. <a href=https://lovewiki.faith/wiki/%D0%90%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0_%D0%A1%D0%B0%D0%B9%D1%82>https://lovewiki.faith/wiki/%D0%90%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0_%D0%A1%D0%B0%D0%B9%D1%82</a> Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и. Когда игроку надеется много фриспинов, администрация возможность бить3 их начисление на несколько дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах акции.Бездепозитные бонусы, как уже ясно, считаются уникальной возможностью к игровому процессу полностью бескорыстно, словами выступать в интернет казино даром и на быть свои незамедлительно после регистрации аккаунта. Автоматы с таким депозитом шансы стать прекрасной вероятностью поиграть для почитателей пыла с определенными ограничениями в денег. 1×slots зеркало на сегодня Активация случается счет промокодов, коие вводятся в собственном кабинете последствии регистрации. Среди спецпредложений в перечне Casino.ru находятся неповторимые промокоды, которые доступны лишь гостям портала. Другие методы начисления средств ? автоматическая активация незамедлительно последствии сотворения аккаунта и получение подарка по запросу в службу технической помощи.Некоторые веб-сайты, прежде чем обмануть регистрацию игроков, предлагают ответить на количество базисных вопросов. Цель проведения подобной викторины – выявить случайных людей, которые не имеют представления о покере, и не разрешить получения ими бонусов. Если гость уже играл в казино, то ответить на полтора 10 несложных вопросов будет несложно. Очень нередко, ответы можно отыскать на официальных веб-сайтах данных учреждений.
1×slots casino online регистрация
В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, нужно обратиться в службу поддержки через лайв-чат на сайте казино.Только выполнив все обстоятельства отыгрыша и дождавшись окончания проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить свои деньги. <a href=http://www.xwsj2021.com/home.php?mod=space&uid=73491>http://www.xwsj2021.com/home.php?mod=space&uid=73491</a> Какие бонусы меня еще получить считая бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного бонуса, каждое интернет казино предлагает игрокам прибыльное предложение на 1-ый депозит, вы совершаете депозит, ваш депозит возрастает в двое либо числе в 3, что, этим наиболее начать выступать возможно с более солидной суммой, так же не запамятываем на вейджер на призы. 1×slots казино мобильная версия Размер бонуса. В качестве бездепов обычно начисляют большие суммы, а когда речь о призах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то кое-какие казино все подарить игроку до 2000$.
1×slots регистрация на сайте
Онлайн-казино с бездепозитными бонусами ставят посетителям обстоятельства для пользования бездепами, поэтому перед ролью в промоакции другого, как тщательно ознакомиться со всеми правилами и аспектами акции. Условия шансы дотрагиваться получения бонуса, его использования и следующего вывода денежных средств если, тогда, выигрыша.Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, дабы еще раз получить даровой приз. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ожидает неизбежное санкция. Вы не в коем случае ни чем не рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической забавы на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, выучится регулировать менять ставки и линии, изучать бонусные игры и их выигрышные композиции, да счете просто зарядится кучей эмоций! Ведь вы будите играть на бонусные свои, которые возможно отыграть и вывести, но просто на демо счет, тем самым адреналин в крови еще повысится а пульс забьется с нередким ритмом!Законодательство, регулирующее азартные забавы в различных государствах, оказывает на возможности операторов. В итоге пользователи из отдельных регионов сталкиваются с ограничениями со стороны казино. Это возможность быть как глубокий отказ в доступе, например и невозможность загружать игры отдельных производителей. 1×slots регистрация 1×slots casino c2d ru <a href=https://radioizba.ru/communication/forum/?PAGE_NAME=profile_view&UID=19690>https://radioizba.ru/communication/forum/?PAGE_NAME=profile_view&UID=19690</a> Верификация аккаунта. Лучше подтвердить лицо незамедлительно в регистрации, дабы позже не было проблем с выводом денег. Верификация имеет протекать двумя способами:
1×slot зеркало рабочее этих способов предполагает регистрацию
Для вывода средств приз нужно несомненно отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами акции и вариациями отыгрыша бездепозитного бонуса до его получения, чтобы избежать конфликтных обстановок.Фриспины без депо или дополнительные свои посодействуют поближе познакомиться с игровой платформой и её функциями. За счёт даров возможно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради забавы против живых крупье. Этот образ бонуса будет добавлен на Ваш аккаунт после удачной процедуры регистрации с внедрением номера телефона. Если избрать другой способ творения учетной записи, бездеп не будет добавлен на Ваш акк.Некоторые онлайн-казино без депо предлагают свежим клиентам избрать бонус при регистрации. Будьте внимательны: выбрав один, вы в абсолютном большинстве случаев не сможете воспользоваться остальными. <a href=http://maps.google.com.jm/url?sa=j&url=http://xn–80anc0ajbxbc.xn–p1ai/bitrix/rk.php?goto=http://trinityhome.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/H7EVtrD4t5J>http://maps.google.com.jm/url?sa=j&url=http://xn–80anc0ajbxbc.xn–p1ai/bitrix/rk.php?goto=http://trinityhome.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/H7EVtrD4t5J</a> Автоматическая активация кажется самой удобной, хотя ручной метод содержит перед ней превосходства. Прежде чем применять вознаграждение от казино, стоит заблаговременно определить, сколько времени потребуется на исполнение всех критерий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала действия бонуса. зеркала 1×slots Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам воспрещено начислять призы клиентам, не имеющим валютных средств на счете. Мы предлагаем разглядеть актуальные призы онлайн-казино с лицензией, коие соблюдают законодательство РБ.Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного бонуса достаточно пополнения баланса и доказательства личности. В других же клубах, нужно некоторое один прокрутить собственный депозит.
<b>Смотреть еще похожие новости:</b>
<a href=http://mi.minfish.com/home.php?mod=space&uid=1196847>зеркала 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы за регистрацию в игровых автоматах для собственников онлайн-казино считаются долею рекламной кампании, направленной на повышение аудитории сайта. Так они продвигают свои бренды и привлекают свежих клиентов. Бездепозитные призы начисляются только один один. Не стоит раскрывать свежие аккаунты, чтобы получить их повторно. Служба безопасности казино обязательно выявит «левого» участника и заблокирует. Если гость выполнит нужные требования, отыграет свою ставку и решит вывести личный выигрыш, то ему надо(надобно) к, что казино непременно потребует дать ксерокопии собственных документов, чтобы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные свои вывести не удастся.
#785 internetGephttps://ekaterinburg-domashnij-internet003.ru
проверить провайдеров по адресу екатеринбург <a href=https://ekaterinburg-domashnij-internet003.ru>ekaterinburg-domashnij-internet003.ru</a> интернет тарифы екатеринбург
#786 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
Классическая разновидность приза за творенье аккаунта. Его преимущество содержится что, что клиент имеет помощи выбирать аппараты и создавать ставки в их. Иногда перечень игровых автоматов ограничен оператором, но все равно это какого-либо, чем единственный дешевый разъем, как когда с использованием фриспинов.Индивидуальные поощрения выдаются за совершение действий: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавленья или официального посетителя для ПК. В большинстве казино действуют программы преданности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на грядущий степень нередко сопрягается выдачей бездепа. <a href=http://filmkachat.ru/>1× slots casino официальный сайт</a> Для получения бонуса надо(надобно) пригласить в игру свежего клиента. Казино начисляет пригласившему фиксированный процент от взносов приглашённого повторяющий приза: чаще всего его объем не превышает 10%. Срок деяния приза как не выше месяца: пригласивший получает бонус от проигранных ставок приглашённого в первый месяц игры. <a href=https://yoomark.com/content/complete-guide-professional-3d-rendering-services>https://yoomark.com/content/complete-guide-professional-3d-rendering-services</a> 3. Подтвердить данные. В зависимости от клуба, нужно привязать аппарат или почту, показать индивидуальную информацию; 1×slots коды <a href=http://cn-sh.cn/space-uid-143223.html>http://cn-sh.cn/space-uid-143223.html</a>
1×slots скачать на айфон
Ознакомьтесь с нашим перечнем наилучших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего перечня и получите бездеп сразу. Хватайте превосходнейшие благотворительные предложения ниже и выигрывайте немалые средства, не рискуя! <a href=https://forum.gamesims.sk/memberlist.php?mode=viewprofile&u=7407>1 x slots</a> 1×slots зеркало <a href=http://www.oasighirardi.org/2019/03/dallerba-al-formaggio-sabato-6-aprile.html>http://www.oasighirardi.org/2019/03/dallerba-al-formaggio-sabato-6-aprile.html</a> Фриплей-бонусы встречаются лишь в неких клубах. Они зачисляются сразу после творения профиля и активны непродолжительное время. Если не успеете потратить средства, они попросту сгорят. Касаемо времени, в большинстве случаев призы активны в течение часа. 1× слот зеркало
1×slots акции
Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, the decision только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Подарки на праздники ? приуроченные к праздничным датам, требующие символического отыгрыша либо начисляются без это. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду. <a href=https://www.varranger.com/vforum/index.php?action=profile;u=36271>https://www.varranger.com/vforum/index.php?action=profile;u=36271</a> 1×slot рабочее зеркало
1× slots сайт
Вознаграждения за получение VIP-статуса ? начисляются масштабах программки лояльности при достижении еще значения или выдаются индивидуально менеджерами службы поддержки.Используйте наихорошие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из списка ниже, дабы заработать подарки за простые действия и уже сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высочайшей отдачей и резвыми выводами на электронные кошельки. Бездепозитные бонусы — это подарки от казино вид бонусных средств или фриспинов для игровых автоматов, которые начисляются на аккаунт игрока последствии процедуры регистрации на сайте заведения. Для получения таких поощрений депо не требуется.Каждая игровая платформа отличается условиями по получению и отыгрышу бездепов. В правилах детально расписаны кратковременные рамки, за коие нужно прокрутить вейджер. Также не забывайте тему наибольший размер ставки и наивысшую сумму выплаты. С иной стороны, чтобы получить бездепозитные призы казино, достаточно израсходовать не более 1 минуты. 1×slots регистрация 1×slots casino 777 online <a href=http://neapl.ru/bitrix/rk.php?goto=http://ocularc.ru/bitrix/redirect.php?goto=http://sska.kz/bitrix/redirect.php?goto=https://telegra.ph/Soglasie-sosedej-na-ustanovku-zabora-09–23>http://neapl.ru/bitrix/rk.php?goto=http://ocularc.ru/bitrix/redirect.php?goto=http://sska.kz/bitrix/redirect.php?goto=https://telegra.ph/Soglasie-sosedej-na-ustanovku-zabora-09–23</a> Самые свежие бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды находятся на данной странице. Посетитель может расценить условия получения и начать выступать на деньги без внесения депозита. При этом игроку важно осознавать, на каких условиях и какими методами он сможет вывести приобретенный выигрыш. Для этого необходимо расценить перечень подключенных платежных систем.Как управляло, при выводе финансов, от играющего требуется только устроить минимальный вклад чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом личный счет.
1хслотс зеркало на сегодня
Законодательство, регулирующее азартные забавы в различных государствах, влияет на полномочия операторов. В итоге пользователи из отдельных ареалов сталкиваются с лимитированиями со стороны казино. Это может быть как глубокий отказ в доступе, так и невозможность загружать забавы отдельных производителей. <a href=http://bbs.worldsu.org/home.php?mod=space&uid=221066>http://bbs.worldsu.org/home.php?mod=space&uid=221066</a> 1 xslots рабочее зеркало Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, solid зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.
<b>Смотреть еще похожие новости:</b>
<a href=http://iptv.bestforums.org/viewtopic.php?f=3&t=5019>1×slots casino регистрация 1×slots review live</a>
<a href=http://jktroickiy.forumex.ru/viewtopic.php?f=2&t=4353>1×slots зеркало на сегодня</a>
<a href=https://forumsleague.org/forum/viewtopic.php?f=70&t=36893&p=406234#p406234>1хслот зеркало сайта</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Во всех легальных онлайн-казино Беларуси необходимо подтверждение паспортных данных для игры — это заявка правительства страны.
#787 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Анна Калинская (теннис) Москалькова Татьяна Николаевна порно <a href=https://rhymes-punches.com/>пин ап казино</a> порно с Матвей Сафонов (футбол) casino онлайн <a href=https://glvk.guru/>casino официальный сайт</a> официальные букмекерские конторы какие казино вавада казино casino игровой автомат 1×bet скачать бесплатно Преподобная Надежда Александровна порно порно с Абрамченко Виктория Валериевна
DiskiPlus casino играть DiskiPlus казино 1 <a href=https://diskiplus.ru/>DiskiPlus 1×bet официальный скачать</a> DiskiPlus casino на телефон DiskiPlus 1×bet официальный скачать <a href=https://www.diskiplus.ru/>DiskiPlus Юдаева Ксения Валентиновна порно</a> DiskiPlus порно с Варвара Субботина DiskiPlus Ирина Горбачева DiskiPlus казино зеркало сегодня DiskiPlus pin up casino buzz DiskiPlus ramenbet casino DiskiPlus порно с Виктория Синицина, фигуристка DiskiPlus 1×bet слоты официальный сайт
#788 Charlesgunnyhttp://filmkachat.ru
1×slots бездепозитный бонус за регистрацию
Возьми собственный презент. Чаще всего бонус активизируется незамедлительно последствии регистрации. Но случаются ситуации, когда нужно забежать в собственный офис либо написать в справочную службу. <a href=http://filmkachat.ru/>1×slots официальный сайт, скачать</a> <a href=https://paperpage.in/blogs/288432/Technical-Drawing-for-Furniture-Expert-Plans-Specifications>https://paperpage.in/blogs/288432/Technical-Drawing-for-Furniture-Expert-Plans-Specifications</a> Риск-игра по равным шансам – Также казино может воспрещать выполнять условия по отыгрышу за раунда на удвоение, который предлагается в слотах, видео-покере и некоторых иных играх.Получив собственный подарок, Вы сможете бесплатно выступать на реальные средства, а выполнив условия отыгрыша, вывести свой выигрыш. 1×slots бонус за регистрацию <a href=https://zrz26.ru/user/JasperTot/>https://zrz26.ru/user/JasperTot/</a> 2. Создать новый профиль. Для регистрации надо(надобно) наполнить маленькую анкету или зайдите в индивидуальный офис при помощи соц сеток;Итак, дабы благотворительные бонусные кредиты превратились в настоящие средства, которыми вы можете управлять по своему усмотрению, их надо(надобно) отыграть. Вейджер по уточнять в правилах онлайн-казино.
1×slots быструю регистрацию а также мгновенное
Верификация аккаунта. Лучше доказать личность незамедлительно в регистрации, чтобы потом не было заморочек с выводом средств. Верификация может протекать двумя способами: <a href=http://nexusroleplay.teamforum.ru/viewtopic.php?f=19&t=12363>1×slots регистрация 1×slots casino c2d ru</a> 1х слот 1хслотс регистрация перейти на 1×slots Так собственно главное различие дара на депозит от бездепа – обязательное пополнение счёта. Вы можете внести депо и преумножить стартовый капитал либо арестовать бездеп и при этом не придётся рисковать собственными сбережениями. Поспешите выполнить простые притязания, и администрация ресурса начислит щедрое поощрение! <a href=http://0513tzw.com/home.php?mod=space&uid=525&do=profile>http://0513tzw.com/home.php?mod=space&uid=525&do=profile</a> 1×slots коды Доступность — бездепозитные призы в казино чаще всего предоставляются новым игрокам, но бывают случаи, когда приз могут получить и действующие посетители.
казино 1×slots
Вы не в коем случае ни чем рискуете, а только выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической забавы на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, выучится регулировать изменять ставки и линии, исследовать бонусные забавы и их выигрышные комбинации, ну счете просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные свои, которые возможно отыграть и вывести, а не просто на демо счет, что, этим наиболее адреналин в крови еще больше повысится а пульс забьется с частым ритмом!Если ординарными текстами, бездепы – это определённая сумма средств или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать подарки. Но есть некоторые аспекты. Существуют игорные дома, которые перед тем как начислить бонусы просят привязать телефонный, предоставить копии документов. Составленный знатоками Casino.ru перечень онлайн-казино с бездепозитным бонусом дозволяет игрокам сопоставить спецпредложения различных операторов.Для того, дабы отыграть сумму вашего бездепозитного приза нужно выполнить обстоятельства вейджера. Очень часто фриспины даются на конкретные слоты (book of ra, book of deceased, book of sun), подбирайте разъем себя по душе, они все очень очень и высококачественные. Бездепозитные приз возможность быть валютным например и в виде фриспинов на слоты <a href=http://dvkf.com.ua/index.php?subaction=userinfo&user=obtainableisola>http://dvkf.com.ua/index.php?subaction=userinfo&user=obtainableisola</a> Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, a лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Фриспины начисляются по определенной ставке. После их активации игроку нужно запустить слот и убедиться, что в нем отображаются благотворительные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода последствии отыгрыша определяется оператором и редко выше 5 000 рублей. 1×слот регистрация в 1×slots casino Не сложно догадаться, что not the slightest deposit bonuses почти разу не случаются немаленькими. Чаще всего речь идет о пяти–тридцати долларах (либо эквиваленте этой суммы в другой денежной).Наличие у игрока второго аккаунта. Запрещено творить несколько профилей для многократного получения бездепов.
1×slots зеркало быструю регистрацию а также мгновенное
Если вы избираете проверенное лицензионное интернет казино и выполните все обстоятельства получения бездепозитного приза, трудностей с получением презента у Вас не возникнет.Бонус за регистрацию в казино без депозита с выводом денег нужно отыграть. Зачастую для отыгрыша возможность понадобиться устроить ставки на необходимую, в количество 10-ов раз превосходящую сумму бонуса либо выигрыша. Срок отыгрыша — это этап, кот-ый начинается в момент активации приза и кончается с его закрытием. Пользователю необходимо уложиться в этот временной зазор, по призовые средства аннулируются. Казино устанавливают перечень игр, ставки в засчитываются при расчете отыгранных средств. Если тайтл не заходит в этот перечень, то ему быть недосегаем для загрузки во время деянья бонусного предложения.В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и в случае спорных ситуаций нет способности куда-то пожаловаться и доказать собственную правоту. Прямо данный отберите благотворительные вращения за регистрацию без депо и начинайте коллекционировать призовые композиции ради крупных выигрышей! 1хслотс рабочее зеркало <a href=http://stroygorod.su/user/Richardjed/>http://stroygorod.su/user/Richardjed/</a>
1×slots зеркало видели такую регистрацию на
Главное превосходство спинов – вероятность изучить различные слоты. Также удастся насладиться бонусными раундами, испытывать фортуну в риск-туре и преувеличить выигрыш за счёт особенных знаков. Однако не только игровой процесс заслуживает внимание, как чем сосредоточиться на реальном выигрыше. <a href=http://cos258.com/home.php?mod=space&uid=1517305>http://cos258.com/home.php?mod=space&uid=1517305</a> Далее потребуется отыграть вагер и исключить выигрыш. Игрокам без опыта крупно подфартило, меня получить десятки презентов за одну регистрацию. Если не смогли получить Бездепозитный приз, не тревожьтесь. Обратитесь в онлайн чат, оператор поможет решить проблему. 1х слотс зеркало регистрация в 1×slots casino Какие призы у еще получить кроме бездепозитного приза за регистрацию в казино? По мимо бездепозитного приза, любое онлайн казино предлагает игрокам выгодное предложение на первый депо, вы совершаете депо, ваш депо увеличивается в двое или даже в трое, тем самым начать играть можно с больше крупной суммой, например же не забываем тему вейджер на бонусы.
<b>Смотреть еще похожие новости:</b>
<a href=https://021snyw.com/space-uid-53919.html>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<a href=https://houseofmorningstar.gamerlaunch.com/forums/viewtopic.php?p=40606481&gid=518596>1×slots рабочее зеркало</a>
<a href=http://uacode.com/>1×slots регистрация 1×slots review live</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы начисляются только один раз. Не стоит открывать новые аккаунты, дабы получить их повторно. Служба безопасности казино обязательно выявит «левого» участника и перекроет. Если гость выполнит нужные требования, отыграет свою ставку и решит вывести личный выигрыш, то ему нужно принять, собственно казино непременно востребует предоставить ксерокопии собственных документов, чтобы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные средства вывести не получится.
#789 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Разуваева Ксения Денисовна порно казино онлайн <a href=https://kompromat1.online/>porno Мария Шарапова</a> kent casino porno Анастасия Янькова, боксерка <a href=https://www.ossetia.tv/>казино 1</a> casino бонус скачать 1×bet porno Алена Михайлова казино на деньги официальные сайты казино порно с Максим Глушенков (футбол) казино рублях
DiskiPlus скачать 1×bet на андроид DiskiPlus 1×bet зеркало слоты <a href=https://www.diskiplus.ru/>DiskiPlus porno Марина Александрова</a> DiskiPlus casino скачать DiskiPlus porno Андрей Рублев (теннис) <a href=https://diskiplus.ru/>DiskiPlus pin casino зеркало</a> DiskiPlus букмекерская контора DiskiPlus win win casino DiskiPlus порно с Максим Глушенков (футбол) DiskiPlus букмекерская контора вход DiskiPlus up casino DiskiPlus top casino DiskiPlus porno Светлана Ходченкова
#790 mashiny_dl_ndmihttps://mashiny-dlya-ochistki-zerna.biz.ua/
Преимущества использования машин для зерна — mashiny-dlya-ochistki-zerna.biz.ua купить зерноочисну машину <a href=https://mashiny-dlya-ochistki-zerna.biz.ua/>купить зерноочисну машину</a> .
#791 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino c2d ru
Принципиальным отличием безвозмездных бонусов от бонусов на депо считается отсутствие необходимости заносить средства на акк. Из-за сего их часто нарекают бездепозитными (no down payment bonuses).Таким образом, заведение пытается показать себя своим потенциальным игрокам, а подобный маркетинговый ход как казино бонус без депозита за регистрацию привлекает очень количество внимания к игорному заведению и обеспечивает постоянный поток новых посетителей и грядущих клиентов игрового интернет клуба. <a href=http://filmkachat.ru/>1×slots зеркало быструю регистрацию а также мгновенное</a> <a href=https://yoomark.com/content/esli-vash-avtomobil-popal-v-avariyu-ne-stoit-toropitsya-s-remontom-inogda-ego-prodazha-v>https://yoomark.com/content/esli-vash-avtomobil-popal-v-avariyu-ne-stoit-toropitsya-s-remontom-inogda-ego-prodazha-v</a> Некоторые онлайн-казино без депо предлагают новым посетителям выбрать приз при регистрации. Будьте внимательны: выбрав раз, вы в абсолютном большинстве случаев не можете воспользоваться остальными.Подарки на конкретные даты выделяются условиями получения. Если поощрение начисляют игроку на денек рождения, то сумма обыкновенно находится от общего объема депозитов за год. 1×slots сайт <a href=http://andi67.bplaced.net/dokuwiki/doku.php?id=РР·_чего_состоит_диета_Елены_Малышевой>http://andi67.bplaced.net/dokuwiki/doku.php?id=РР·_чего_состоит_диета_Елены_Малышевой</a> Приветственный бездеп предоставляется хоть игроку лишь один раз. Казино борются с например нарекаемыми бонусхантерами (от англ. Bonus Hunter — доброволец за бонусами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения дара. Исключить подобные деянья дозволяет верификация данных. Администрация вправе потребовать у посетителя подтвердить индивидуальные данные, обозначенные при регистрации.
1×slots регистрация 1×slotscasino 56 online
Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала прыткие выводы. Фишка выплат том,, что достаточно избрать платёжный инструмент и показать сумму. В большинстве случаев деньги зачисляются на электронные кошельки в течение 15 мин., а на банковские карты – 1–3 трудящихся денька.Если вы новичок деле и лишь попали в неизведанную вами область пыла — с помощью услуг как бездепозитные призы без пополнения. <a href=https://forum.krymbezpravil.org.ua/memberlist.php?mode=viewprofile&u=10552>1×slots зеркало</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=https://maps.google.tl/url?q=https://doctorlazuta.by/>https://maps.google.tl/url?q=https://doctorlazuta.by/</a> Онлайн гемблинг развивается с любым деньком больше и больше, новые бренды создаются не по дням а по часам. Новые онлайн казино проделывают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и что, этим самым предлагают бездепозитные бонусы за регистрацию, собственно бы не пропустить эту вероятность — как воспользоваться свежим бездепом, советуем навещать наш сайт как возможно почаще, самое смачное и новые будет добавляться в этом же перечне.В неких онлайн казино для получения бездепозитных бонусов не довольно просто зарегистрироваться на веб-сайте клуба и подтвердить средства контактные данные. Дополнительно требуется активация промокода. 1×slots официальный сайт зеркало Превышение максимальной ставки при отыгрыше. Система механически не предостерегает о превышении ставки, поэтому о несоблюдении правил игрок возможность разузнать теснее в подачи запроса на вывод средств.
1хслотс мобильная версия зеркало
Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном сайте и выполните вход в личный кабинет, дабы забрать благотворительные вращения с вейджером х40;Почти все игровые клубы настоятельно свидетельство контактных данных игрока для получения бездепозитного бонуса. Чем ниже велечину вейджера, тем проще отыграть и исключить приз. Если Вы расчитываете заработать на бездепе, не просто ознакомиться с свежим игровым клубом, то стоит избегать призов с высоким вейджером их практически не реально отыграть. С ними Вы сможете только протестировать забавы заведения.Чтобы получить возможность исключить прибыль с бездепозитного приза в казино, необходимо выполнить ряд критерий: <a href=http://www.vintageampeg.com/forum/member.php?action=profile&uid=7130>http://www.vintageampeg.com/forum/member.php?action=profile&uid=7130</a> Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен перечень наилучших онлайн казино, коие предлагают своим игрокам щедрые бонусы за регистрацию.Основное верховодило получения бездепа ? творимый аккаунт должен быть у юзера первым и единственным. Наличие нескольких аккаунтов строго запрещено. Проверка проводится по имени, e-mal, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита нужно блюсти несложную последовательность поступков. 1×slot казино зеркало Бoльшинcтвo азартных заведений выдвигают приблизительно одинаковые условия и требования, коие необходимо выполнить, чтобы получить бездепозитный приз за регистрацию. Все их возможно объединить в один перечень:
1×slots сайт зеркало
Игры, в которых можно выступать на бонусные деньги. Проверьте перечень игр, в которых возможно выступать на бонусные средства, возможно они Вам не понравятся и надо тратить своё время на эту промоакцию.Разные казино имеют собственные управляла по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высокие требования. Часто онлайн-казино рекомендуют отыграть бонусное поощрение до ста один в игровых автоматах. Например, в игрок получил безвозмездно десять долларов, то необходимо будет отыграть их, поставив одну тысячу спинов по одному баксу каждый. Стоит обозначить(означить), собственно не все казино выделяют возможность играть на бонусы и не во всех увеселительных заведениях схожие управляла для отыгрывания. Некоторые казино воспрещают играть на бонусы в блекджек либо ограничивают ставки до пяти %, собственно существенно увеличивает в десятки один количество необходимых игр. казино 1×slots <a href=http://swwwwiki.coresv.net/index.php?title=%C3%90%C2%A4%C3%91%E2%82%AC%C3%90%C2%B0%C3%90%C2%BD%C3%91%CB%86%C3%90%C2%B8%C3%90%C2%B7%C3%91%E2%80%B9_%C3%90%C5%A1%C3%90%C2%BE%C3%91%E2%80%9E%C3%90%C2%B5%C3%90%C2%B9%C3%90%C2%BD%C3%90%C2%B8_%C3%90%C3%A2%E2%82%AC%E2%84%A2_%C3%90_%C3%90%C2%BE%C3%91%C3%91%C3%90%C2%B8%C3%90%C2%B8:_%C3%90%C2%A1%C3%91%E2%80%9A%C3%90%C2%B0%C2%B2%C3%90%C2%BA%C3%90%C2%B0_%C3%90%C3%90%C2%B0_2024_%C3%90%E2%80%9C%C3%90%C2%BE%C3%90%C2%B4>http://swwwwiki.coresv.net/index.php?title=%C3%90%C2%A4%C3%91%E2%82%AC%C3%90%C2%B0%C3%90%C2%BD%C3%91%CB%86%C3%90%C2%B8%C3%90%C2%B7%C3%91%E2%80%B9_%C3%90%C5%A1%C3%90%C2%BE%C3%91%E2%80%9E%C3%90%C2%B5%C3%90%C2%B9%C3%90%C2%BD%C3%90%C2%B8_%C3%90%C3%A2%E2%82%AC%E2%84%A2_%C3%90_%C3%90%C2%BE%C3%91%C3%91%C3%90%C2%B8%C3%90%C2%B8:_%C3%90%C2%A1%C3%91%E2%80%9A%C3%90%C2%B0%C2%B2%C3%90%C2%BA%C3%90%C2%B0_%C3%90%C3%90%C2%B0_2024_%C3%90%E2%80%9C%C3%90%C2%BE%C3%90%C2%B4</a> Самые новые бездепозитные бонусы в казино за регистрацию 2022 года с выводом выгоды находятся на данной странице. Посетитель имеет оценить обстоятельства получения и начать играть на деньги без внесения депо. При этом игроку важно разуметь, на каких критериях и какими методами у исключить приобретенный выигрыш. Для сего нужно расценить список подключенных платежных систем.
1× slots casino официальный сайт
<a href=https://xs.xylvip.com/home.php?mod=space&uid=1677896>https://xs.xylvip.com/home.php?mod=space&uid=1677896</a> Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и более. Когда игроку полагается много фриспинов, администрация имеет бить3 их начисление на несколько дней. Бесплатные вращения предоставляются для определенного слота, который указывается в правилах акции. 1×slots зеркало выигрыши обязательно пройдите регистрацию если Рассмотрим на образце: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских руб. В критериях промоакции предписано, что вейджер бездепозитного бонуса х20. Поэтому, дабы отыграть приз, игроку несомненно нужно устроить ставок на 35*20=700 рублей.2. Создать свежий профиль. Для регистрации нужно наполнить маленькую анкету либо зайдите в личный кабинет при помощи социальных сеток;
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.vn.ua/member.php?u=69210>1×slots casino зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Такой бесплатный эквивалент средств зачисляется на профиль пользователя в осуществления притязаний и предназначаются они только для игрового процесса. Вывод этих вознаграждений возможен только последствии осуществления вейджеровых условий. Иногда для получения призов необходимо спутаться с представителями саппорта. Удобнее всего с ними беседовать в онлайн-сате, желая от достаточно запроса по электрической почте.
#792 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало сайта
Особую изюминку видео слотам придают уникальные знакы. С их появлением активируются разные призы. Вы сможете запустить вспомогательный степень и прирастить сумму выигрыша. Есть знаки, коие сменяют ненужные элементы и сами делают выигрышные комбо. Не стоит забывать и про бонус-тур. После любого счастливого спина есть шанс прирастить сумму выигрыша в 2 или четыре раза.Фриспины — благотворительные вращения, которые разрешают игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся наиболее популярным и предпочтительным видом приза — бесплатные вращения порой эффективнее и веселее в отыгрыше, чем другие виды бездепов. <a href=http://filmkachat.ru/>1×slots акции</a> <a href=https://biolinky.co/kalinka-0588>https://biolinky.co/kalinka-0588</a> Лишь популярностью и знаменитые азартные заведения могут позволить себе выдавать бездепы вид добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, которые возможно потратить в топовых аппаратах с высочайшей отдачей. 1×slots официальный сайт зеркало рабочее <a href=http://bbs.ieltstofelglobal.com/home.php?mod=space&uid=60530>http://bbs.ieltstofelglobal.com/home.php?mod=space&uid=60530</a>
1хслотс регистрация в 1×slots casino
1×slots зеркало регистрация в 1×slots casino Простая процедура получения бездепозитного бонуса, кот-ая займет не более 2-х минут. Для получения бездепов, достаточно зарегистрироваться и подтвердить контактные данные.Многие игроки, оценив перечень казино, остаются играть в нем и далее ? на это и нацелено каждое рекламную. Постоянные клиенты вносят депозиты и делают ставки, обеспечивая долгосрочную выгода оператора. То есть, казино раздают бездепы новым юзерам для формирования лояльной аудитории. <a href=http://bbs.161forum.com/bbs/home.php?mod=space&uid=253195>http://bbs.161forum.com/bbs/home.php?mod=space&uid=253195</a> 1×slots акции Бонусы без депозита при регистрации числятся самыми привлекательными как для опытнейших игроков, так для и начинающих. Получив это вознаграждение, заказчик имеет играть на настоящие деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а также обстоятельства их активации и выигрыша.Нет. Для получения бездепозитного бонуса в казино нужна обязательная регистрация на веб-сайте. Играть в слоты безвозмездно и без регистрации можно только в демо режиме.
1×slots casino регистрация на сайте
<a href=http://bmx.by/bitrix/redirect.php?goto=http://onlinethermo.ru/bitrix/redirect.php?goto=http://tamb.3nx.ru/loc.php?url=https://teletype.in/@urist555/hEWiWyWr4ax>http://bmx.by/bitrix/redirect.php?goto=http://onlinethermo.ru/bitrix/redirect.php?goto=http://tamb.3nx.ru/loc.php?url=https://teletype.in/@urist555/hEWiWyWr4ax</a> Раздача бонусов может быть приурочена к различным датам: календарные дни, дни рождения игроков, юбилей открытия казино и т. Д. Подарок выдается в виде средств, фриспинов или баллов для скопления и обмена на услуги оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода данной суммы придется выполнить ряд требований. 1×slots регистрацию процедура займет всего лишь Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную процедуру активации бонуса без депозита. Внимательно прочитайте до конца. Многие новички делают промахи на шаге регистрации и потому имеют получить подарок.В современность довольно просто получить бонус за регистрацию в казино. Практически каждый игорный дом с радостью начислит деньги либо безвозмездные вращения. Многие гэмблеры пользуются этим и не стыдятся регистрироваться в каждом клубе с прибыльными условиями. Кстати, это отличная возможность выработать победную стратегию и сорвать джекпот.
1×slots регистрация 1×slots casino c2d ru
Помимо остального, для вывода средств по бездепу необходимо привнести на счёт собственный первый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально возможную сумму, последствии чего вывод средств станет доступен.В разделе с бонусами активировать собственный подарок. Найти забавы, для коих предусмотрено поощрение и использовать приз по назначению. Бездепы обыкновенно предлагают с отыгрышем — моментально вывести выигранные средства невозможно. Перевод средств со счета будет вероятен после как, как пользователь выполнит все требования казино, а сумма не может превышать установленного правилами лимита. Условиями акции фиксируются сроки, в течение коих заказчик вправе воспользоваться предложением. Обычно они не превышают нескольких дней последствии активации.Бездепозитный приз по промо-коду несомненно доступен для забавы, лишь в случае когда Вы активируете особый бонусный код в разделе с призами либо укажите промокод при регистрации на сайте. В неких случаях, считая активации кода, придется подтвердить контактные данные игрока и заполнить анкету клиента. 1хслотс официальный сайт зеркало <a href=http://forum.xpscenery.net/member.php?action=profile&uid=1216>http://forum.xpscenery.net/member.php?action=profile&uid=1216</a> В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это самая приятная доля игры. Важно, часто бездепозитные бонусы в казино выдаются с лимитированиями по наибольшей выплате. В среднем возможно рассчитывать на выгода в несколько тысяч руб. Как исключить выигрыш с приза без депозита. Придётся доказать акк документально, в некоторых заведениях. Процедура верификации обязательна и делается любым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате или прочитайте в правилах.Предложения с бездепозитными призами за регистрацию разрешают новым заведениям привлечь аудиторию на свой сайт. А игроки в свою очередь получают вероятность выступать на реальные деньги без депо в казино и заработать маленький стартовый капитал, кот-ый разрешается исключить на карту банка либо электронный кошелек.
1×slots зеркало рабочее на сегодня
Главным нюансом в появлении данных вознаграждений произведено в том, что пустив их в ход, игры ничем не рискует и в последствии никому ничего не будет должен (не зависимо, получит ли он благодаря призам какой-нибудь выигрыш либо мгновенно спустит все только что прибывшие финансы). То есть, казино снабжает игрока возможностью на дармовой основе выступать во различные слоты и даже спонсирует игру. <a href=http://forum.roozgozar.com/member.php?action=profile&uid=4422>http://forum.roozgozar.com/member.php?action=profile&uid=4422</a> Для как, дабы отыграть сумму вашего бездепозитного приза надо(надобно) выполнить условия вейджера. Очень часто фриспины даются на определенные слоты (book of ra, book of dead, book of sun), подбирайте слот себя по, они все довольно красивые и высококачественные. Бездепозитные бонус имеет быть денежным например и повторяющий фриспинов на слотыПрибывшие на аккаунт финансы бездепозитные призы предназначаются, в, лишь для новоиспеченных пользователей, коие ранее не имели собственного аккаунта в данном казино. Исходя из сего, случае ранее у игрока был изготовлен депозит, то, по всей вероятности, у него больше не несомненно способности рассчитывать на получение такого приза в определенном заведении. 1×slots бездепозитный бонус за регистрацию
<b>Смотреть еще похожие новости:</b>
<a href=http://amazon.rx22.ru/viewtopic.php?f=5&t=4052>1×slots официальный зеркало</a>
<a href=http://vn-info.net/user/Josephkam/>1× slots сайт</a>
<a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/13403–1×slots-bezdepozitnyj-bonus-za-registratsiyu#13434>1×slots бездепозитный бонус за регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но такие рамки не смущают даже хайроллеров, поскольку коэффициенты на слотах дозволяют рассчитывать на крупные выигрыши, а неких автоматах разыгрывается прогрессивный джекпот.
#793 mashiny_dl_xcmihttps://mashiny-dlya-ochistki-zerna.biz.ua/
Оптимальные решения для очистки зерна — mashiny-dlya-ochistki-zerna.biz.ua очисна машина для зерна <a href=https://mashiny-dlya-ochistki-zerna.biz.ua/>очисна машина для зерна</a> .
#794 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
часы казино casino бездепозитный <a href=https://slon-ru.com/>игры казино</a> бывшие казино букмекерская контора официальный сайт <a href=https://slon-ru.com/>казино пин</a> винлайн букмекерская контора официальный казино фильм смотреть онлайн Окладникова Ирина Андреевна порно слоты казино 1×bet телефон 1×bet слоты 1×bet xyz 7k casino сайт
DiskiPlus спорт букмекерская контора казино <a href=https://www.diskiplus.ru/>DiskiPlus скачать 1×bet 1×bet xyz</a> DiskiPlus самое казино DiskiPlus букмекерская контора мостбет <a href=https://www.diskiplus.ru/>DiskiPlus казино онлайн</a> DiskiPlus 1×bet xbet DiskiPlus казино в россии DiskiPlus казино вход официальный сайт DiskiPlus скачать pin casino DiskiPlus букмекерская контора бесплатно скачать DiskiPlus приложения букмекерских контор DiskiPlus порно с Васильева Татьяна Викторовна
#795 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino официальный зеркало porno Виктория Баркова, легкоатлетка <a href=https://rucriminal.info/>порно с Елена Никитина, скелетонистка</a> Мухтиярова Елена Вячеславовна порно порно с Илюшникова Татьяна Александровна <a href=https://slon-ru.com/>букмекерская контора бесплатно скачать</a> казино на деньги Львова-Белова Мария Алексеевна порно фильмы казино рояль pin casino зеркало порно с Ирина Сидоркова казино фильм сайт казино вход
DiskiPlus порно с Баталина Ольга Юрьевна DiskiPlus официальные букмекерские конторы скачать <a href=https://www.diskiplus.ru/>DiskiPlus казино рублях</a> DiskiPlus букмекерскую контору пин DiskiPlus 7k casino зеркало <a href=https://diskiplus.ru/>DiskiPlus порно с Ирина Сидоркова</a> DiskiPlus пин ап casino DiskiPlus официальные букмекерские конторы скачать DiskiPlus porno Илья Ковальчук (хоккей) DiskiPlus kent casino DiskiPlus сколько казино DiskiPlus сайт винлайн букмекерская контора DiskiPlus пин ап casino
#796 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, если не желаете стать жертвой плутов либо впустую истратить время; <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> Это также бесплатные финансы, коие поступают на аккаунты новоиспеченных в в регистрирования. А особенность таких призов произведено сомнений, что обретенные деньги непременно следует использовать в продолжении назначенного медли. <a href=https://www.cgarchitect.com/projects/39223c10-luxury-dining-room-at-a-resort-a-harmonious-blend-of-elegance-and-nature>https://www.cgarchitect.com/projects/39223c10-luxury-dining-room-at-a-resort-a-harmonious-blend-of-elegance-and-nature</a> Если площадка дарит бездеп за регистрацию, то процедура его получения ординарна. Нужно только ввести аккаунт на сайте и активировать его, подтвердив адрес электрической почты, номер телефона либо другие данные, коие требует оператор. Перед этим нужно увериться, что пользователь располагается на официальном сайте казино, а не на мошеннической площадке.Принципиальным различием безвозмездных бонусов от призов на депозит считается недоступность необходимости вносить деньги на акк. Из-за этого их часто называют бездепозитными (not the slightest down payment bonuses). 1×slots официальный сайт зеркало <a href=https://trentonebwo76542.blognody.com/30443955/ai-nude-app-the-future-of-content-moderation-and-privacy-protection>https://trentonebwo76542.blognody.com/30443955/ai-nude-app-the-future-of-content-moderation-and-privacy-protection</a> Рассмотрим принцип его деянья на примере. Допустим, вы зарегистрировались и возымели $10 not the slightest down payment bonus с вейджером х50. Это значит, собственно выигранные средства возможно будет выводить не раньше, чем последствии такого, как общая сумма ставок достигнет $500.Размер призов почаще всего чисто условный и не превышает 50 руб. Приятно, хотя ощутимым бустом деле ли будет.
1×slots сайт
Чем ниже велечину вейджера, тем легче отыграть и вывести бонус. Если Вы планируете заработать на бездепе, но просто ознакомиться с новым игровым клубом, то стоит игнорировать призов с высочайшим вейджером их практически не реально отыграть. С ними Вы можете только протестировать забавы заведения. <a href=https://forum.immortales-gilde.de/viewtopic.php?f=2&t=388944>1×slots зеркало рабочее на сегодня</a> 1×slots промокод при регистрации <a href=http://www.cooperativacoomultexco.com/user/DoctorLazutaOt/>http://www.cooperativacoomultexco.com/user/DoctorLazutaOt/</a> Иногда в качестве бездепа, казино дарит минимальный бонус (до 50 руб. ), ради которого не заморачиваться. 1 xslots рабочее зеркало Сроки активации бонуса уточняются любым казино, хотя чаще всего они не превосходят недели с момента получения. Игроку непременно надо(надобно) использовать бездеп протяжении указанного срока, в ином случае бонус просто пропадет. Каждый бонус возможно получить лишь один раз, поэтому случае не использовать бездеп в срок, у игрока не несомненно 2 шанса им воспользоваться.Каждый геймер обязан сначала отчетливо выучить обстоятельства по получению и отыгрышу приглянувшегося подарка. Если всё устраивает, поторопитесь отобрать безвозмездные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик сейчас начать вертеть барабаны лучших слотов.
1×slot казино зеркало
Высокая конкуренция в сегменте азартных игр доказывает операторов привлекать клиентов разнообразными промоакциями. Благодаря данному у посетителей замечена вероятность получить призы в казино за регистрацию без депозита. Воспользоваться таким предложением можно, минуя процедуру внесения средств на игровой счет, просто активировав аккаунт на сайте. Наш экскурсовод по бездепам поможет выбрать самую привлекательную бонусную программку, разузнать управляла получения такого вознаграждения и распорядиться им с наибольшей выгодой.Таким образом онлайн казино получает вероятного игрока. Возможно в либо настоящем он захочет сыграть на свои средства. Так трудятся бездепозитные призы в интернет казино. Здесь хорошо подходит выражение, бесплатные сыр бывает лишь в мышеловке. Начинающие игроки могут не осознавать опасность азарта. Однако с осознания делается больше. Это тема для отдельного обсуждения. 1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, случае не желайте замерзнуть жертвой мошенников или впустую истратить время;Мы собрали и выпустили список превосходнейших бездепозитных казино с призами за регистрацию, которые гарантируют щедрые выигрыши и моментальные выплаты. <a href=http://psicolinguistica.letras.ufmg.br/wiki/index.php?title=1win_website_official>http://psicolinguistica.letras.ufmg.br/wiki/index.php?title=1win_website_official</a> В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, нужно адресоваться в саппорта через лайв-чат на сайте казино.Классическая разновидность приза за творенье аккаунта. Его преимущество содержится в, что заказчик имеет помощи подбирать аппараты и делать ставки в них. Иногда перечень игровых автоматов ограничен оператором, но все точно это какого-либо, чем один-единственный доступный слот, как если, тогда, с использованием фриспинов. 1×slots официальный сайт зеркало Получив свой подарок, Вы сможете бесплатно выступать на настоящие деньги, а выполнив обстоятельства отыгрыша, исключить свой выигрыш.
1хслотс мобильная версия зеркало
Вы не в коем случае ни чем рискуете, а только выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической забавы на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, выучится регулировать изменять ставки и линии, исследовать бонусные забавы и их выигрышные комбинации, ну счете просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные свои, которые возможно отыграть и вывести, а не просто на демо счет, что, этим наиболее адреналин в крови еще больше повысится а пульс забьется с частым ритмом!Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в неотъемлемом порядке нужно восполнить счет в казино. Для депозитных призов, данная процедура не нужна, например как депо уже сделан. Бонусные деньги – маленькая сумма средств для старта в новом казино. На бонусные деньги, обыкновенно разрешено играть во все игры, считая слотов с прогрессивным джекпотом и игр из раздела exist casino.Как и другие промоакции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такого предложения считаются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых посетителей и дозволяет им составить эмоцию о функционале, не рискуя значительными совокупностями. 2. Создать новый профиль. Для регистрации нужно заполнить небольшую анкету или зайдите в собственный офис при помощи социальных сетей; 1×slots официальный сайт зеркало рабочее <a href=https://johnnyhhge84951.atualblog.com/35599439/discovering-the-frontier-of-ai-driven-facial-area-swap-movies-a-deep-dive-into-deepnude>https://johnnyhhge84951.atualblog.com/35599439/discovering-the-frontier-of-ai-driven-facial-area-swap-movies-a-deep-dive-into-deepnude</a> За счёт спинов получится запустить различные интернет слоты, протестировать стратегии и поднабраться опыта. Фишка том,, что вращения начисляются на лучшие аппараты с уникальными опциями и высокой отдачей. Не запамятовывайте, собственно в каждом акционном предложении предусмотрены особые требования – кратковременные ограничения, наибольший размер ставки, список доступных игр.Чаще всего, модные сервисы, такие как MoneyBookers и WebMoney, еще MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно обязательное правило. Финансовые свои выводятся только спустя что, эту платежную систему, коей огромный для пополнения депозита. Если же игрок получил бездепозитный покерный приз, требуется восполнить счет на минимальную сумму, кот-ая составляет обычно 10 долларов.
1×slots регистрацию более популярный вариант это
В списке требований к отыгрышу часто наличествуют лимиты на ставки при забаве на собственные средства. Так, если отыграть нужно 30 000 руб., а максимальная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам деянья акции.Приглашаем делиться сужденьями о бонусах. Это поможет другим юзерам избирать более выгодные предложения. После требуется привнести идентификационный платёж. Это стращает начинающих больше всего. Нужно сделать наименьший депозит в 100–500 рублей. Таким образом служба безопасности увериться никаких, собственно платёжный способ принадлежит Вам. Данная процедура важна для обеспечения безопасности игровых счетов. Пример, Ваш акк взломают и выведут средства на собственный кошелёк. Будет очень неприятно. Поэтому верификация платёжной системы, это необходимый момент. <a href=https://cromia.ua/forum/user/5199/>https://cromia.ua/forum/user/5199/</a> 1×slots бездепозитный бонус за регистрацию
<b>Смотреть еще похожие новости:</b>
<a href=http://aficionado.pl/showthread.php?191564–1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%81%D0%B0%D0%B9%D1%82%D0%B0&p=212735>1×slots зеркало сайта</a>
<a href=https://polnyi-pisec.info/threads/1×slots-zerkalo-registraciju-bolee-populjarnyj-variant-ehto.1026/>1×slots зеркало регистрацию более популярный вариант это</a>
<a href=https://russiancomputerservice.ru/user/JosephCer/>1×slots зеркало регистрация</a>
<a href=https://www.fromrus.su/index.php?/topic/65747–1×slot-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE/>1×slot зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Возможность поиграть дополнительное соревнование (а иногда и количество) абсолютно безвозмездно, а выигрыш, тому, поступает на счёт игрока. Особую изюминку видео слотам присваивают оригинальные символы. С их в активируются различные бонусы. Вы сможете запустить дополнительный степень и увеличить необходимую выигрыша. Есть знаки, коие замещают негодные элементы и сами делают выигрышные комбо. Не стоит забывать и тему бонус-тур. После каждого счастливого спина есть шанс увеличить сумму выигрыша в два или хорошо раза.
#797 Antoncobhttps://ventolinof.com/
Erectile changes in aging are natural but not unchangeable thanks to https://plaquenilsvo.com/ HCQS. Silence at the start, pride at the finish.
#798 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet регистрация 1×bet слоты 1×bet xyz <a href=https://kompromat1.online/>мобильные букмекерские конторы</a> casino скачать приложение Яровая Ирина Анатольевна порно <a href=https://vestnik-jurnal.com/>демо казино</a> porno Вера Бирюкова, гимнастка Ходнева Светлана Владимировна порно porno Алена Михайлова pin up букмекерская контора порно с Владимир Минеев (ММА) casino pin официальный сайт винлайн букмекерская контора
DiskiPlus 1×bet зеркало слоты DiskiPlus ограбление казино <a href=https://www.diskiplus.ru>DiskiPlus 1×bet зеркало xbet</a> DiskiPlus porno Катерина Шпица DiskiPlus букмекерскую контору пин <a href=https://diskiplus.ru/>DiskiPlus пина casino</a> DiskiPlus порно с Александр Головин (футбол) DiskiPlus какие казино DiskiPlus порно с Алина Загитова DiskiPlus porno Марина Александрова DiskiPlus casino на телефон DiskiPlus up casino официальный DiskiPlus 1×bet скачать приложение на андроид
#799 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
Для отыгрыша бонуса казино обязывает игрока поиграть на сумму, в количество один превосходящую необходимую полученного бонуса — здесь выгода фирмы очевидна.Для проверки применяются сканы паспортов, водительских прав, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если юзер замечен в попытке завести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их владелец попадает в темный список. При ирге на лицензионной площадке не стоит опасаться указывать достоверную персональную информацию (шифрование ликвидирует утечку персональных данных). <a href=http://filmkachat.ru/>1×slots зеркало быструю регистрацию а также мгновенное</a> Составленный специалистами Casino.ru список онлайн-казино с бездепозитным бонусом позволяет игрокам сравнить спецпредложения разных операторов. <a href=https://elearn.ellak.gr/mod/forum/discuss.php?d=42025>https://elearn.ellak.gr/mod/forum/discuss.php?d=42025</a> При отыгрыше бонусных средств, необходимо учитывать срок деянья бонуса и время, которое дается на отыгрыш. По истечению заявленного медли, не отыгранный бонус будет аннулирован. 1×slots casino зеркало рабочее <a href=http://entropiques.fr/userinfo.php?uid=30974>http://entropiques.fr/userinfo.php?uid=30974</a> Для верификации аккаунта нужно дать профессионалам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, а фотку банковской карты либо скриншот странички электрического кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности.Чтобы бездеп не был начислен на Ваш аккаунт, Вам надо активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк механически, а Вы не расчитываете его использовать, обратитесь в саппорта с просьбой отменить бездепозитный приз.
1×slots регистрацию более популярный вариант это
Вейджер (wager) – это коэффициент, который демонстрирует на какую сумму нужно сделать ставок, дабы исключить бонус из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода этого бонуса, Вам нужно устроить ставок на сумму: 500*70=3500 рублей. Только всецело отыграв приз, Вы сможете исключить свой выигрыш.В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, необходимо адресоваться в службу поддержки спустя лайв-чат на веб-сайте казино. 1хслот 1хслотс регистрация перейти на 1×slots Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 поболее. Когда игроку надеется много фриспинов, администрация возможность бить3 их начисление на количество дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах промоакции.В настоящее время получить приз за регистрацию в казино очень просто. Почти каждый игорный жилище с радостью предоставит деньги либо бесплатные вращения. Многие игроки используют данным и не стыдятся регистрироваться в каждом клубе с прибыльными условиями. Кстати, это замечательная вероятность придумать выигрышную тактику и сорвать куш. <a href=http://l-avt.ru/support/dialog/?PAGE_NAME=profile_view&UID=68249>http://l-avt.ru/support/dialog/?PAGE_NAME=profile_view&UID=68249</a> Прямо сейчас заберите безвозмездные вращения за регистрацию без депо и начинайте собирать призовые комбинации из-за крупных выигрышей!Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских руб. В критериях акции указано, собственно вейджер бездепозитного приза х20. Поэтому, дабы отыграть бонус, игроку будет нужно устроить ставок на 35*20=700 рублей. 1хслотс мобильная версия зеркало Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом прибыли присутствуют на этой страничке. Посетитель возможность расценить обстоятельства получения и начать играть на средства без внесения депозита. При этом игроку принципиально понимать, на каких условиях и какими способами он сможет исключить полученный выигрыш. Для сего нужно расценить перечень подключенных платежных систем.
1×slots зеркало регистрация в 1×slots casino
Любой выигрыш по ставке выше установленного лимита несомненно считаться недействительным. То есть ставка не несомненно засчитана при отыгрыше, а случае выигрыша его сумма не поступит на счёт посетителя — итог игры будет всецело аннулирован.Суммы подобных предложений, как правило, колеблются от трех до двадцати $, а вейджер на эти свои должен сочинять от тридцати до шестидесяти раз. Зачастую, наибольшая сумма выигрыша тут составит от одной до 2-ух сотен $. Если компьютерные выиграет больше, то все свои шансы быть списанными до максимально разрешенного выигрыша. Здесь появляется смысл выводить еще несуществующие финансы на свою платежную систему и дальше искать заведение с благоприятными под данную сумму релоадом или призом за 1-ое пополнение счета. Есть несколько подвидов бездепозитного гонорары, предлагаемого большим числом заведений. <a href=http://www.extrasensorika.ru/forum/index.php?PAGE_NAME=profile_view&UID=301>http://www.extrasensorika.ru/forum/index.php?PAGE_NAME=profile_view&UID=301</a> 1×slots официальный сайт скачать
1×slot зеркало
Подарки на конкретные даты выделяются условиями получения. Если поощрение начисляют игроку на денек рождения, то сумма обычно зависит от общего объема депозитов за год. <a href=https://eccentrictirade.com/forums/showthread.php?tid=137105>1×slots рабочее зеркало на сегодня</a> Казино выводит деньги лишь на ту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного приза, Вам сначала необходимо восполнить счет. В неких клубах ограниченный перечень методов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет именно с данных платежных способов, коие доступны для вывода. 1×slots casino регистрация 1×slotscasino09k online <a href=http://ishware.co.uk/fusion/profile.php?lookup=25747>http://ishware.co.uk/fusion/profile.php?lookup=25747</a> Теоретически, к безвозмездным бонусам можно отнести например называемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, потому что они деют лишь вероятность делать ставки.
1×slots casino зеркало
Онлайн-казино с бездепозитными призами ставят клиентам обстоятельства для пользования бездепами, потому перед ролью в промоакции другого тщательно ознакомиться со всеми правилами и аспектами промоакции. Условия все касаться получения приза, его использования и последующего вывода валютных средств если, тогда, выигрыша. <a href=http://p-o-k.ru/bitrix/redirect.php?goto=http://cezares.ru/bitrix/rk.php?goto=http://seaforum.aqualogo.ru/go/?https://teletype.in/@urist555/wLEvcMrtuU_>http://p-o-k.ru/bitrix/redirect.php?goto=http://cezares.ru/bitrix/rk.php?goto=http://seaforum.aqualogo.ru/go/?https://teletype.in/@urist555/wLEvcMrtuU_</a> Ниже указан актуальный перечень легальных казино в Беларуси с бонусами на 1-ый депозит. Вы можете попасть на официальный вебсайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз. 1×slots зеркало регистрация то дальше необходимо пройти
<b>Смотреть еще похожие новости:</b>
<a href=https://www.fromrus.su/index.php?/topic/59511–1×slots-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE/>1×slots казино зеркало</a>
<a href=https://elclasificadomx.com/author/jameslog/>1×slots подтвердит вашу регистрацию если говорить</a>
<a href=https://forum.visiteachapada.com/viewtopic.php?f=19&t=9389>1×slots casino регистрация 1×slots review live</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный приз казино 2022 с выводом за регистрацию предоставляет возможность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и проверить качество работы саппорта. Довольно нередко, начиная игровой процесс, игрок уже отказывается останавливаться и проделывает настоящий лепта. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть безвозмездно вероятно как раз таки с бонусом за регистрацию без надобности вносить депозит.
#800 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино фильм смотреть онлайн ап казино <a href=https://slon-ru.com/>ограбление казино</a> яндекс игры казино porno Светлана Ходченкова <a href=https://glvk.guru/>букмекерская контора без</a> зеркала официальных сайтов казино pin up casino официальный Черкесова Бэлла Мухарбиевна порно Приезжева Екатерина Геннадьевна порно порно с Александр Большунов (лыжные гонки) porno Андрей Рублев (теннис) ап казино
DiskiPlus up casino официальный DiskiPlus ставки на спорт букмекерские конторы <a href=https://diskiplus.ru>DiskiPlus 7k casino скачать</a> DiskiPlus 7k casino зеркало на сегодня DiskiPlus официальные букмекерские конторы <a href=https://www.diskiplus.ru>DiskiPlus казино играть</a> DiskiPlus казино ли DiskiPlus 7k casino зеркало рабочее DiskiPlus казино смотреть онлайн бесплатно DiskiPlus casino бонус DiskiPlus porno Александра Степанова, фигуристка DiskiPlus скачать букмекерскую контору DiskiPlus букмекерская контора фонбет
#801 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало на сегодня
Можно. Вы постоянно сможете отказаться от получения бездепозитного приза за регистрацию в казино, же Вы не создадите ставку. <a href=http://filmkachat.ru/>1×slos регистрация в 1×slots casino</a> <a href=https://www.arrl.org/forum/topics/view/4344>https://www.arrl.org/forum/topics/view/4344</a> 1×slots регистрация на 1хслотс <a href=http://www.audipiter.ru/user/EdwardFar/>http://www.audipiter.ru/user/EdwardFar/</a> Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам запрещено начислять призы посетителям, не имеющим валютных средств на счете. Мы предлагаем рассмотреть актуальные призы онлайн-казино с лицензией, коие соблюдают законодательство РБ.Акции распространяются как на все игры казино, например и на ограниченный список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и. Промо может обхватывать разработки одного производителя. Бездеп не пересекается с иными акциями казино. Если на веб-сайте предусмотрен кэшбек, он не начисляется за ставки, сделанные бонусными средствами. Для идентификации платежных реквизитов игрока возможность понадобиться пополнение счета на минимальную сумму.
1×slots официальный сайт зеркало
Демоказино есть практически на каждом сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются веско пореже: там если, тогда, выигрыша и соблюдения критерий акций бездеп можно превратить в настоящие средства.Сразу в активации промокода возможно воспользоваться презентом. Как теснее упоминалось, бонусы случаются трёх видов – фриспины, кредиты и фриплей-бонусы. <a href=https://forum.ltp-team.com/topic/183125–1×slots-registraciya-na-1hslots/>1×slots регистрация на 1хслотс</a> 1×slots зеркало этих способов предполагает регистрацию Получить приветственный приз шансы только новые посетители онлайн-казино. Способы описаны в условиях акции каждого законного казино, почаще всего это:При регистрации том, или ином интернет игральном заведении — вам дается один шанс испытывать собственную фортуну не внося средства монеты. Замечу собственно эту поощрительную предложение деют не все интернет игровые площадки, а только великодушная половина из них. Которые мы подготовили для Вас в нашем списке. <a href=https://dedignat.ru/component/users/?option=com_k2&view=itemlist&task=user&id=28474>https://dedignat.ru/component/users/?option=com_k2&view=itemlist&task=user&id=28474</a> Каждый геймер должен сначала детально выучить обстоятельства по получению и отыгрышу приглянувшегося подарка. Если всё организует, поспешите забрать бесплатные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо данный начать вращать барабаны топовых слотов. 1×slots casino зеркало рабочее
1×slots промокод при регистрации
Минимального оборота. Этот предел уточняется вейджером — пока игрок не поиграет на установленную сумму, вывод средств будет недоступен. <a href=http://ic-salon.ru/bitrix/redirect.php?goto=http://dumavlz.ru/bitrix/redirect.php?goto=http://uhshkola.ru/bitrix/click.php?goto=https://telegra.ph/Klient-otkazyvaetsya-podpisyvat-akty-vypolnennyh-rabot-09–23>http://ic-salon.ru/bitrix/redirect.php?goto=http://dumavlz.ru/bitrix/redirect.php?goto=http://uhshkola.ru/bitrix/click.php?goto=https://telegra.ph/Klient-otkazyvaetsya-podpisyvat-akty-vypolnennyh-rabot-09–23</a> Бездепозитные призы начисляются лишь раз один. Не стоит открывать новые аккаунты, дабы получить их повторно. Служба безопасности казино обязательно выявит «левого» соучастника и заблокирует. Если гость выполнит нужные притязания, отыграет свою ставку и решит исключить собственный выигрыш, то ему надо(надобно) принять, что казино непременно потребует дать ксерокопии собственных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные средства вывести не получится. 1×слот регистрация в 1×slots casino Приглашаем делиться мнениями о призах. Это поможет иным юзерам выбирать наиболее выгодные предложения.
1×slots официальный сайт скачать на айфон
Если площадка дарит бездеп за регистрацию, то процедура его получения проста. Нужно лишь ввести акк на веб-сайте и активировать его, подтвердив адресок электронной почты, номер телефонного либо иные данные, которые просит оператор. Перед данным необходимо убедиться, собственно юзер находится на официальном веб-сайте казино, но на мошеннической площадке. Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки имеют запросить вспомогательные документы или инициировать короткое общение по Skype. Например, игрок получил 500 руб. При творении аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 рублей, понадобится устроить 875 спинов для полного отыгрыша. 1 х слотс зеркало <a href=https://maps.google.bf/url?q=https://doctorlazuta.by/>https://maps.google.bf/url?q=https://doctorlazuta.by/</a>
1×slots официальный сайт зеркало
Доступность — бездепозитные призы в казино почаще всего предоставляются свежим игрокам, но случаются случаи, когда приз имеют получить и действующие посетители. <a href=http://housestyle.ru/bitrix/redirect.php?goto=http://google.com.hk/url?q=http://canaria.msk.ru/bitrix/rk.php?goto=https://telegra.ph/Razlichiya-i-klyuchevye-osobennosti-vyborov-i-referendumov-09–23>http://housestyle.ru/bitrix/redirect.php?goto=http://google.com.hk/url?q=http://canaria.msk.ru/bitrix/rk.php?goto=https://telegra.ph/Razlichiya-i-klyuchevye-osobennosti-vyborov-i-referendumov-09–23</a> 1×slots официальный сайт зеркало рабочее
<b>Смотреть еще похожие новости:</b>
<a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=9700&TITLE_SEO=9700-kharakteristiki-tovarov&MID=617220&result=reply#message617220>1×slots регистрация 1×slotscasino 56 online</a>
<a href=http://kemsrr.forumex.ru/viewtopic.php?f=7&t=6501>1×slots официальный demo регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные призы отличный вариант бесплатной игры в игровые автоматы. Многие юзеры сети не понимают, собственно в казино можно начать играть полностью бесплатно, а позже исключить выигрыш на банковскую карту или электронный кошелек, иные не доверяют интернет казино, а третьи удачно играют и выигрывают – и подчас довольно немалые суммы. Способы получения бездепа различаются зависимо вида приза, который понравился игроку. Но вам или надо(надобно) быть зарегистрированным в легальном онлайн-казино и доказать свою личность. В общем виде пошаговая инструкция для получения бездепозитного бонуса выглядит например:
#802 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up casino скачать кент казино <a href=https://sovsekretno.net/>Мухтиярова Елена Вячеславовна порно</a> букмекерская контора бесплатно скачать 1×bet официальный слоты <a href=https://rumafia.news/>1×bet рабочее на сегодня</a> порно с Владимир Минеев (ММА) бк букмекерская контора какие казино 1×bet сайт букмекерские конторы pin 1×bet зеркало рабочее на сегодня 1×bet xyz kent casino
DiskiPlus казино пину DiskiPlus 1×bet скачать бесплатно <a href=https://diskiplus.ru>DiskiPlus casino ru</a> DiskiPlus казино рояль DiskiPlus 1×bet зеркало xbet xyz <a href=https://diskiplus.ru>DiskiPlus казино вход</a> DiskiPlus сайт 1×bet слоты DiskiPlus up casino официальный DiskiPlus бесплатно играем казино DiskiPlus casino riobet DiskiPlus зеркала казино DiskiPlus порно с Гатагова Ольга Анатольевна DiskiPlus гта онлайн казино
#803 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino бездепозитный порно с Константин Тюкавин (футбол) <a href=https://glvk.guru/>букмекерская контора скачать приложение</a> 1×bet зеркало рабочее на сегодня 1×bet xyz casino на телефон <a href=https://m.repost.news/>Шевцова Татьяна Викторовна порно</a> сайт казино зеркало порно с Александр Большунов (лыжные гонки) casino автомат casino betting pin up casino пин ап скачать 1×bet на андроид бесплатно casino ru
DiskiPlus букмекерская контора мостбет DiskiPlus 1×bet рабочее <a href=https://diskiplus.ru/>DiskiPlus казино зеркало сегодня</a> DiskiPlus Любимова Ольга Борисовна порно DiskiPlus порно с Константин Тюкавин (футбол) <a href=https://www.diskiplus.ru>DiskiPlus casino riobet</a> DiskiPlus казино рублях DiskiPlus casino зеркало сегодня рабочее DiskiPlus порно с Максим Глушенков (футбол) DiskiPlus сайт казино зеркало DiskiPlus Москалькова Татьяна Николаевна порно DiskiPlus Окладникова Ирина Андреевна порно DiskiPlus casino скачать
#804 internetGephttps://ekaterinburg-domashnij-internet002.ru
интернет тарифы екатеринбург <a href=https://ekaterinburg-domashnij-internet002.ru>ekaterinburg-domashnij-internet002.ru</a> проверить провайдеров по адресу екатеринбург
#805 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino официальный сайт порно с Арина и Дина Аверины, гимнастки <a href=https://strelochnik.com/>new casino</a> пин ап букмекерская контора pin casino <a href=https://rucriminal.info/>Самойлова Алла Владимировна порно</a> приложения букмекерских контор на андроид приложения букмекерских контор песня казино 7k casino зеркало на сегодня ramenbet casino porno Алена Михайлова сайт винлайн букмекерская контора
DiskiPlus vodka casino DiskiPlus Москалькова Татьяна Николаевна порно <a href=https://diskiplus.ru>DiskiPlus казино фильм онлайн</a> DiskiPlus 1×bet зеркало xbet DiskiPlus r7 casino <a href=https://www.diskiplus.ru>DiskiPlus 1×bet зеркало</a> DiskiPlus порно с Никита Кучеров (хоккей) DiskiPlus пин ап casino pin up top DiskiPlus бесплатное казино DiskiPlus casino вход DiskiPlus pin up casino скачать DiskiPlus бесплатные букмекерские конторы DiskiPlus казино рояль
#806 Charlesgunnyhttp://filmkachat.ru
1× слот зеркало
Помните, собственно в некоторых играх сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных забавах только от 5% до 50% суммы ставки числятся как отыгранные средства, на как в слотах идет в зачет все 100% суммы.На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению этого времени, Вы не можете активировать и получить бездепозитный бонус. <a href=http://filmkachat.ru/>1× slots зеркало</a> Для казино, работающих онлайн, бездепозитные бонусы нужны для вербования свежих посетителей. Предложение сыграть на слотах без необходимости внесения реальных средств — работающий метод для увеличения энтузиазма к компании. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит выступать в казино, лишь теперь уже на личные деньги. <a href=https://collectednotes.com/lexxeagle/kak-pravilno-i-vygodno-prodat-svoi-avtomobil>https://collectednotes.com/lexxeagle/kak-pravilno-i-vygodno-prodat-svoi-avtomobil</a> Фриплей-бонусы встречаются только в неких клубах. Они зачисляются сразу последствии творенья профиля и активны недолговременное время. Если не успеете израсходовать средства, они просто сгорят. Касаемо медли, как бонусы активны в течение часа. 1× slots casino зеркало <a href=https://andresdoyh18530.dsiblogger.com/63159078/deep-nude-the-ethical-dilemmas-and-technological-impacts-of-ai-driven-image-manipulation>https://andresdoyh18530.dsiblogger.com/63159078/deep-nude-the-ethical-dilemmas-and-technological-impacts-of-ai-driven-image-manipulation</a> При отыгрыше бонусных средств, необходимо учесть срок действия приза и время, коие дается на отыгрыш. По истечению заявленного медли, не отыгранный бонус будет аннулирован.Зарегистрироваться в казино по особой ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефона и электронную почту). Для подтверждения номера телефона необходимо в собственном профиле указать собственный номер и надавить кнопку „Подтвердить номер телефона“, дальше Вы получите sms-сообщение с кодом, кот-ый необходимо ввести в подходящее поле. Для подтверждения электрической почты, перейти по интенсивной ссылке в письме от казино.
1 x slots
У каждого игорного клубы различные вейджеровые условия. Чтобы вы гарантировано сумели выполнить их, мы дадим несколько советов. Если система начислила маленькую необходимую, не создавать немалые ставки – остановитесь на 10–30 центах. Как лишь сумеете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте играть. В противном случае другого, как присмотреться к другому автомату.Однако далеко не все ресурсы предлагают своим посетителям бездепозитные бонусы за регистрацию в казино. В большинстве случаев учтено одобрение на 1-ый депозит в размере 100–200%. Это замечательная вероятность преумножить банкролл, увеличить время, проведённое за забавой и шансы сорвать большой куш. казино 1×slots Следует подчеркнуть, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом. <a href=http://forum.goldenantler.ca/home.php?mod=space&uid=1081164>http://forum.goldenantler.ca/home.php?mod=space&uid=1081164</a> При использовании бездепозитным призом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют несколько обликов лимитов:Это один из главных характеристик привлекательности дара. С завешенным коэффициентом в мастера не сумеют выполнить условия по отыгрышу. И не, как презентабельно смотрится предложение – бездепозитный бонус казино в размере $500 или $1 000. Чтобы новички лучше вникли, что же такое вейджер, мы разберём на случае. 1×slots официальный сайт, скачать Несмотря на то, что этот вариант стимуляции со стороны азартных платформ очень востребован в сфере сходственных игр, далеко не поклонникам казино известно, собственно по бездепозитные призы казино и как именно их вполне эксплуатировать.
1 x slots
Чаще всего используются коды. Их надо(надобно) заносить в специальные окна регистрационной анкеты, в речь идет о пригласительных бонусах, либо в определенном разделе личного кабинета игрока.В перечне требований к отыгрышу часто присутствуют лимиты на ставки при ирге на собственные деньги. Так, случае отыграть нужно 30 000 рублей, а максимальная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 раз. Эта особенность затрудняет соблюдение игроками критерий по срокам деянья акции. <a href=http://silabgarza.net/forums/member.php?action=profile&uid=226467>http://silabgarza.net/forums/member.php?action=profile&uid=226467</a> Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают бонус по странам. Вплоть до как, собственно клуб возможность брать игроков из Вашей страны, а бездеп мешает.Размер призов почаще всего чисто условный и не выше 50 руб. Приятно, хотя осязаемым бустом в игре вряд ли будет. 1хслотс рабочее зеркало Как лишь получите бездеп в казино, всё точно не запамятовывайте проверять электрическую почту. Некоторые игорные клубы постоянно радуют активных гэмблеров приятными призами. Чаще всего получить презент возможно в преддверии веселья, на денек рождение, за привлечение приятеля. А кроме распространённым бонусом является прибавка к депозиту. Нужно чем пополнить счёт, и азартное заведение прирастит его на 50–100%.
скачать 1×slots на андроид мобильная версия
<a href=https://forum.zhuk.cc/index.php/forum/profile/23994-rabofreeki>1×slots зеркало регистрация в 1×slots casino</a> Приветственный бездеп предоставляется какому игроку лишь раз раз. Казино борются с так именуемыми бонусхантерами (от англ. Bonus Hunter — охотник за призами), пытающимися заводить множественные аккаунты для надувательства оператора и повторного получения дара. Исключить подобные действия разрешает верификация данных. Администрация вправе востребовать у посетителя подтвердить индивидуальные данные, указанные при регистрации. рабочее зеркало 1×slots <a href=http://artemsoft.ru/index.php?subaction=userinfo&user=disagreeablevol>http://artemsoft.ru/index.php?subaction=userinfo&user=disagreeablevol</a> Вы наверняка, например все любите получать подарки и бездепозитные призы казино. Игорные дома брали в повадку одаривать гэмблеров приятными бонусами. Стать владельцем приветственного презента можно за создание профиля либо пополнение счёта. Второй вариант больше занимательный, так клубы готовы удвоить депо! Но в вы новичок и только знакомитесь с миром азарта, превосходнее воспользуйтесь призом за регистрацию.
x1 slots 1хслотс регистрация перейти на 1×slots
С такими простыми советами каждое казино с бонусом за регистрацию способно принести в разы больше выгоды и пользы. <a href=http://www.imxy28.com/space-uid-316459.html>http://www.imxy28.com/space-uid-316459.html</a> 1×слотс казино
<b>Смотреть еще похожие новости:</b>
<a href=http://link.5nx.ru/viewtopic.php?f=5&t=13197>рабочее зеркало 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
С такими ординарными советами каждое казино с бонусом за регистрацию способно принести в разы больше выгоды и выгоды. Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша призов. Заведения всегда устанавливают максимальную ставку, возможную по условиям вейждера.
#807 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора официальный сайт порно с Илья Осипов (киберспорт) <a href=https://th-royalgclub.com/>Семёнова Татьяна Владимировна порно</a> porno Анна Сидорова, керлингистка porno Юлия Канакина, скелетонистка <a href=https://m.repost.news/>почему казино</a> Елизавета Боярская смотреть фильм казино порно с Константин Тюкавин (футбол) Попова Анна Юрьевна порно pin up casino официальный Семёнова Татьяна Владимировна порно порно с Зырянова Анастасия Владимировна
DiskiPlus Анна Михалкова DiskiPlus пин ап casino pin up top <a href=https://diskiplus.ru/>DiskiPlus ramenbet casino</a> DiskiPlus 1×slots casino DiskiPlus гама казино <a href=https://www.diskiplus.ru/>DiskiPlus порно с Виктория Синицина, фигуристка</a> DiskiPlus online casino 7k DiskiPlus порно с Юлия Ефимова DiskiPlus casino регистрации DiskiPlus 1×bet слоты 1×bet top DiskiPlus гта онлайн казино DiskiPlus казино смотреть онлайн бесплатно DiskiPlus up casino зеркало
#808 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерскую контору пин порно с Диана Шнайдер (теннис) <a href=https://t.me/vchkogpu_ru>casino вход</a> Кузнецова Анна Юрьевна порно порно с Бондаренко Анастасия Борисовна <a href=https://specreporter.com/>Радченко Светлана Юрьевна порно</a> Лут Оксана Николаевна порно игры казино бывшие казино порно с Варвара Субботина pin up букмекерская контора винлайн букмекерская контора официальный Комарова Наталья Владимировна порно
DiskiPlus букмекерская контора бесплатно скачать DiskiPlus сайте букмекерской конторы фонбет <a href=https://www.diskiplus.ru/>DiskiPlus порно с Варвара Субботина</a> DiskiPlus Мухтиярова Елена Вячеславовна порно DiskiPlus букмекерская контора зенит <a href=https://diskiplus.ru>DiskiPlus casino com</a> DiskiPlus какие казино DiskiPlus casino x DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz DiskiPlus рабочие зеркала казино DiskiPlus Москалькова Татьяна Николаевна порно DiskiPlus порно с Анастасия Потапова, теннисистка DiskiPlus леон букмекерская контора
#809 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
Нет. Казино выдают бесплатные бонусы за регистрацию, чтобы, чтобы, чтобы клиент имел ознакомиться с игровым заведением. А дабы вывести его, необходимо выполнить обстоятельства отыгрыша. <a href=http://filmkachat.ru/>1×slots зеркало регистрация в 1×slots casino</a> Фриплей-бонусы. Бонусы за безвозмездную забаву есть только в некоторых клубах. Они зачисляются сразу в творения профиля и действуют непродолжительное время. Если у вас нет медли потратить свои, они просто завершатся. Что дотрагивается медли, как призы действуют на 1-го часа.Также бездепозитные бонусы имеют служить способом возвратить к забаве посетителей, пока приостановивших своё сотрудничество с фирмой: извещение о бездепе поступает на мобильный телефонный или почту. <a href=https://aprenderfotografia.online/usuarios/avtovikuplviv/profile/>https://aprenderfotografia.online/usuarios/avtovikuplviv/profile/</a> Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 поболее. Когда игроку надеется большое фриспинов, администрация имеет бить3 их начисление на некоторое дней. Бесплатные вращения предоставляются для определенного слота, кот-ый указывается в правилах промоакции. 1×slots регистрация 1×slotscasino 56 online <a href=http://gder.md/index.php?subaction=userinfo&user=yzuqofa>http://gder.md/index.php?subaction=userinfo&user=yzuqofa</a>
1×slots официальный сайт мобильная версия
Почти все игровые клубы настоятельно свидетельство контактных данных игрока для получения бездепозитного приза. <a href=http://gradina.com/threads/1×slots-rabochee-zerkalo.58556/>1×slots рабочее зеркало</a> 1×slots коды В истинное время получить бонус за регистрацию в казино довольно просто. Почти любой игорный дом с радостью предоставит средства либо безвозмездные вращения. Многие игроки используют этим и не стыдятся региться в любом клубе с выгодными критериями. Кстати, это отличная возможность выдумать выигрышную тактику и сорвать куш.Доступ к подарку возможность открываться механически последствии введения промокода или воззвания в службу вебсайта. В первом случае от пользователя не потребуется никаких деяний. Бездеп с активацией по коду встречается почаще всего. Игроку нужно установить совокупа знаков в графе, кот-ая возможность пребывать в регистрационной форме в Личном кабинете. <a href=http://zvezdjuchki.ru/user/Porsedropot/>http://zvezdjuchki.ru/user/Porsedropot/</a> Таким образом интернет казино получает потенциального игрока. Возможно дальнейшем или подлинном он захотит сыграть на свои средства. Так трудятся бездепозитные бонусы в интернет казино. Здесь отлично подходит выражение, благотворительные сыр посещает только в мышеловке. Начинающие игроки имеют не осознавать опасность пыла. Однако течением понимания делается больше. Это тема для отдельного обсуждения. 1×slots casino регистрация 1×slotscasin online
1×slots сайт
В наше время очень просто получить приз за регистрацию в казино. Практически каждый игорный дом с радостью начислит деньги или благотворительные вращения. Многие гэмблеры пользуются этим и не стыдятся региться в каждом клубе с прибыльными критериями. Кстати, это замечательная возможность выработать победную тактику и сорвать джекпот. <a href=http://artshi.ru/index.php?subaction=userinfo&user=aquaticabbey85>http://artshi.ru/index.php?subaction=userinfo&user=aquaticabbey85</a> скачать 1×slots на андроид мобильная версия Заполняя данные в личном профиле, указывайте только достоверную информацию, например как Вам понадобиться ее доказать в при выводе денег.Для верификации номера телефонного, в собственном профиле выберите опцию „Подтвердить номер телефонного“ и введите в подходящее поле код, приобретенный в sms-сообщении.
1×slots акции
В современность довольно просто получить бонус за регистрацию в казино. Практически каждый игорный дом с радостью начислит деньги либо безвозмездные вращения. Многие гэмблеры пользуются этим и не стыдятся регистрироваться в каждом клубе с прибыльными условиями. Кстати, это отличная возможность выработать победную стратегию и сорвать джекпот.3. Подтвердить данные. В зависимости от клуба, нужно привязать телефонный либо почту, указать индивидуальную информацию; <a href=http://forum.animogen.com/viewtopic.php?f=9&t=1576185>1× слот зеркало</a> В интернете слишком большое скриптовых сайтов, коие принадлежат мошенникам. Их основная цель – заинтересовать гэмблеров, пообещав не великодушные презенты, хотя и солидные выигрыши. Так собственно кое-какие сайты предлагают получить за регистрацию и $1 000.Автоматы неспроста числятся самым знаменитым азартным отдыхом. Чтобы освоить управление и верховодила, потребуется всего некоторое минут. Ваша задачка устроить ставку, найти число трудящихся линий и можно вертеть барабан. Если на экране выпадет выигрышная комбинация – вы выиграли! С этой задачей вас помогут справится бездепозитные призы казино. 1хслотс мобильная версия зеркало <a href=https://scientific-programs.science/wiki/%D0%A4%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B_%D0%9A%D0%BE%D1%84%D0%B5%D0%B9%D0%BD%D0%B8_%D0%92_%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8:_%D0%A1%D1%82%D0%B0%D0%B2%D0%BA%D0%B0_%D0%9D%D0%B0_2024_%D0%93%D0%BE%D0%B4>https://scientific-programs.science/wiki/%D0%A4%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B_%D0%9A%D0%BE%D1%84%D0%B5%D0%B9%D0%BD%D0%B8_%D0%92_%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8:_%D0%A1%D1%82%D0%B0%D0%B2%D0%BA%D0%B0_%D0%9D%D0%B0_2024_%D0%93%D0%BE%D0%B4</a> Бездепозитные бонусы за регистрацию в игровых автоматах для собственников онлайн-казино являются частью маркетинговой кампании, направленной на повышение аудитории сайта. Так они продвигают свои бренды и завлекают свежих клиентов.
1×slots зеркало регистрацию более популярный вариант это
Как прочие промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает новых посетителей и дозволяет им составить эмоцию о функционале, не рискуя вескими суммами.Все обожают получать подарки. Согласитесь, практически каждый играющий человек несомненно бесконечно счастлив, случае получит бесплатный презент для игры в онлайн казино просто за регистрацию или же приз за внесенный депозит, так называемые приветственные призы для свежих игроков. Соответственно эти онлайн клубы будут более популярны и преимущественны у игроков при выборе казино для забавы. Топ казино каждый обновляется и добавляются новые и интересные игровые клубы с привлекательной бонусной политикой и всеми вероятными прерогативами, к коим относятся такие бонусы как фриспины за регистрацию, валютные бездепозитные бонусы, а щедрые призы за внесенный депозит. <a href=https://oncob2b.co.kr/_NBoard/board.php?bo_table=free&wr_id=507972>https://oncob2b.co.kr/_NBoard/board.php?bo_table=free&wr_id=507972</a> Отказ в прохождении верификации. Если клиент не желает или не дать документы, подтверждающие его лицо, профиль несомненно заблокирован вместе со всеми бонусными начислениями. 1×slots официальный зеркало рабочее
<b>Смотреть еще похожие новости:</b>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=786818>1×slots зеркало регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Начнём с такого, собственно любое промо за регистрацию предполагает некоторые обстоятельства. Бездепозитные призы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность денежного оборота, нужная для исполнения условий. Пример, возымели благотворительные вращения и выиграли с их 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 руб., неудачных либо выигрышных, важно. После исполненья, бонусный баланс перейдёт на настоящий и будет доступным к выводу.
#810 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пинап казино 1×bet 1хбет <a href=https://th-royalgclub.com/>казино в россии</a> 1×bet официальный скачать порно с Арина и Дина Аверины, гимнастки <a href=https://7club7.com/>pin casino</a> казино онлайн бесплатно 1×bet сайт 1×bet xyz букмекерская контора бетсити зеркала официальных сайтов казино casino рабочее зеркало ramenbet casino 1×bet зеркало слоты
DiskiPlus 7k casino зеркало рабочее DiskiPlus 1×bet зеркало рабочее xbet <a href=https://www.diskiplus.ru/>DiskiPlus pin up casino top top</a> DiskiPlus pin up casino скачать DiskiPlus вавада казино <a href=https://diskiplus.ru>DiskiPlus 7k casino зеркало</a> DiskiPlus слот casino DiskiPlus Елизавета Боярская DiskiPlus казино сочи DiskiPlus порно с Никита Кучеров (хоккей) казино DiskiPlus 7k casino скачать DiskiPlus скачать 1×bet 1×bet xyz
#811 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на 1хслотс
Чтобы получить вероятность вывести прибыль с бездепозитного приза в казино, нужно выполнить ряд критерий:Многие игроки, оценив возможностей казино, остаются играть в нем и далее ? на это и нацелено любое промо. Постоянные посетители вносят депозиты и делают ставки, обеспечивая долгосрочную выгода оператора. То есть, казино выдают бездепы свежим юзерам для формирования лояльной аудитории. <a href=http://filmkachat.ru/>1×slots зеркало регистрация</a> Приветственный бездеп предоставляется хоть игроку только раз раз. Казино борются с так именуемыми бонусхантерами (от англ. Bonus Hunter — доброволец за бонусами), пытающимися заводить многочисленные аккаунты для надувательства оператора и повторного получения подарка. Исключить похожие действия позволяет верификация данных. Администрация вправе востребовать у посетителя подтвердить персональные данные, указанные при регистрации.В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать собственный выигрыш с бесплатных вращений. Прибыль, которую Вы заработаете на этом бездепе возможно ставить на вывод без какого или отыгрыша. <a href=https://feedback.goodnotes.com/forums/191274-customer-suggestions-for-goodnotes/suggestions/49478645-%D0%BA%D0%B0%D0%BA-%D0%B2%D1%8B%D0%B3%D0%BE%D0%B4%D0%BD%D0%BE-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D1%82%D1%8C-%D0%B0%D0%B2%D1%82%D0%BE-%D0%BF%D0%BE%D1%81%D0%BB%D0%B5-%D0%B4%D1%82%D0%BF-%D1%8D%D0%BA%D1%81%D0%BF%D0%B5%D1%80%D1%82%D0%BD%D0%BE%D0%B5-%D1%80%D1%83%D0%BA>https://feedback.goodnotes.com/forums/191274-customer-suggestions-for-goodnotes/suggestions/49478645-%D0%BA%D0%B0%D0%BA-%D0%B2%D1%8B%D0%B3%D0%BE%D0%B4%D0%BD%D0%BE-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D1%82%D1%8C-%D0%B0%D0%B2%D1%82%D0%BE-%D0%BF%D0%BE%D1%81%D0%BB%D0%B5-%D0%B4%D1%82%D0%BF-%D1%8D%D0%BA%D1%81%D0%BF%D0%B5%D1%80%D1%82%D0%BD%D0%BE%D0%B5-%D1%80%D1%83%D0%BA</a> 1×slots официальный регистрация <a href=http://mag-motors.ru/index.php?subaction=userinfo&user=unbecomingrunt1>http://mag-motors.ru/index.php?subaction=userinfo&user=unbecomingrunt1</a>
1хслотс 1хслотс регистрация перейти на 1×slots
1×slots регистрация то дальше необходимо пройти <a href=https://shipper.vip/track?q=%3Ca+href%3Dhttps%3A%2F%2Fdoctorlazuta.by%2Fblog%3E%D0%B1%D0%BB%D0%BE%D0%B3+%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%3C%2Fa%3E+%D0%B1%D0%BB%D0%BE%D0%B3+%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0>https://shipper.vip/track?q=%3Ca+href%3Dhttps%3A%2F%2Fdoctorlazuta.by%2Fblog%3E%D0%B1%D0%BB%D0%BE%D0%B3+%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%3C%2Fa%3E+%D0%B1%D0%BB%D0%BE%D0%B3+%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0</a> 1×slots регистрация на сайте 1×slots ru com В наше время довольно просто получить бонус за регистрацию в казино. Практически каждый игорный жилище с готовностью начисляет средства либо благотворительные вращения. Многие гэмблеры используют этим и не смущяются регистрироваться в любом клубе с прибыльными условиями. Кстати, это замечательная вероятность выработать победную тактику и сорвать джекпот.Маркетинговая деятеля всех игорных интернет-клубов обязана носить разнообразный характер. И если вознаграждения на депозит служат чтобы, чтобы, дабы стимулировать заносить депозиты и поощрять уже имеющих пользователей, то бездепозитный приз в казино либо бонус за регистрацию в казино, прежде всего, рассчитан на расширение базы потребителей.
x1 slots 1хслотс регистрация перейти на 1×slots
Бoльшинcтвo азартных заведений выдвигают примерно однообразные, схожие обстоятельства и требования, коие нужно выполнить, дабы получить бездепозитный бонус за регистрацию. Все их можно соединить в один список: На данном разделе портала периодически публикуются обзорные статьи, каких рассматриваются бесплатные призы наихороших интернет-казино. Информация структурирована по нескольким пт, включая основные: <a href=https://www.bos7.cc/home.php?mod=space&uid=2901707&do=profile&from=space>https://www.bos7.cc/home.php?mod=space&uid=2901707&do=profile&from=space</a> Предложения с бездепозитными бонусами за регистрацию дозволяют новым заведениям привлечь аудиторию на собственный сайт. А игроки в свою очередь получают возможность выступать на настоящие средства без депо в казино и заработать небольшой стартовый капитал, который разрешается вывести на карту банка или электрический кошелек.Простая процедура получения бездепозитного бонуса, кот-ая займет менее 2-х минут. Для получения бездепов, достаточно зарегистрироваться и подтвердить контактные данные. 1×slots официальный demo регистрация в 1×slots casino
1× слот зеркало
Ознакомьтесь с нашим перечнем наихороших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего перечня и получите бездеп незамедлительно. Хватайте лучшие бесплатные предложения ниже и выигрывайте большие деньги, не рискуя! Подтверждение регистрации. Казино просят привязки профиля к электронному адресу и номеру телефонного. Для сего на e-mail отчаливает послание ссылаясь, а на телефон ? текстовое известие с кодом. Большинство клубов привлекают внимание игроков за счёт различных подарков. На одних веб-сайтах можно получить виртуальные кредиты, коие откроют доступ ко всему софту. На иных же, администрация предлагает бесплатные вращения для запуска топовых онлайн слотов. Несмотря на различные промоакции, стоит выделить самые основные. 1×slots официальный demo регистрация в 1×slots casino <a href=http://trzykolory.opx.pl/member.php?action=profile&uid=5706>http://trzykolory.opx.pl/member.php?action=profile&uid=5706</a>
1хслотс казино зеркало
Онлайн гемблинг развивается с каждым деньком все больше и больше, свежие бренды создаются не по дням а по часам. Новые онлайн казино делают вступительные акции для игроков, чтобы, чтобы собственно бы зарекомендовать себя, и что, этим самым предлагают бездепозитные призы за регистрацию, что бы не упустить такую возможность — как пользоваться свежим бездепом, рекомендуем посещать наш сайт как возможно почаще, самое аппетитное и новые несомненно добавляться в данном же списке. <a href=https://www.usajobsindex.com/author/ralphvorce/>https://www.usajobsindex.com/author/ralphvorce/</a> Если речь об эксклюзивных услугах, имеет потребоваться регистрация в казино по ссылке с партнерского вебсайта.Бездепозитные бонусы казино за регистрацию в 2022 году — это вероятность поиграть за счёт заведения. Казино даёт посетителю шанс пользоваться определённой суммой или количеством безвозмездных вращений без внесения депозита. Не путайте деморежим с реальной забавой без надобности внесения депо. 1×slots casino регистрация 1×slotscasin online Изучить правила и обстоятельства получения бездепозитных призов казино, Вы можете у нас на сайте в разделе с призами либо на официальном сайте избранного Вами казино. Если имеет найти нужную информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электрической почте.Но есть игорные заведения, коие готовы просто например жертвовать деньги на игру. Для сего довольно создать профиль. Чтобы исключить собственный выигрыш, вас сначала нужно выполнить обстоятельства отыгрыша, обозначенные в критериях получения бездепозитного депозита.
<b>Смотреть еще похожие новости:</b>
<a href=https://russiancomputerservice.ru/user/JosephCer/>1×slots официальный зеркало рабочее</a>
<a href=https://www.ladyboyescort.com/profile/745-rabofreesi/>1×slots официальный сайт скачать на айфон</a>
<a href=http://iptv.bestforums.org/viewtopic.php?f=3&t=5727>1×slots официальный зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Принципиальным отличием даровых бонусов от бонусов на депозит является неимение необходимости вносить средства на аккаунт. Из-за этого их нередко нарекают бездепозитными (no down payment bonuses).
#812 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
где казино casino riobet <a href=https://slon-ru.com/>казино рулетка</a> пина casino букмекерская контора фонбет официальный сайт <a href=https://repost.news/>скачать 1×bet на андроид бесплатно</a> порно с Захарова Мария Владимировна порно с Васильева Татьяна Викторовна человек казино сайт казино вход букмекерская контора на андроид porno Катерина Шпица порно с Елена Никитина, скелетонистка
DiskiPlus casino сегодня DiskiPlus часы казино <a href=https://www.diskiplus.ru>DiskiPlus бесплатные букмекерские конторы</a> DiskiPlus казино смотреть онлайн DiskiPlus приложения букмекерских контор на андроид <a href=https://diskiplus.ru/>DiskiPlus почему казино</a> DiskiPlus casino актуальное зеркало DiskiPlus vodka casino DiskiPlus пинап казино DiskiPlus леон букмекерская контора DiskiPlus порно с Илюшникова Татьяна Александровна DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz DiskiPlus pin ап casino
#813 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало на сегодня
Стоит обозначить(означить), собственно бездепозитный приз выдается только взрослым новичкам, коие, же, могут пригласить личных приятелей и своих, кроме рассчитывающих на поощрительную программку преданности. Подобная разработка появилась среди конкурирующих онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению собственной популярности, методом привлечения свежих игроков. Бонусы – это оригинальный шанс для потенциальных соучастников игры, коие все опробовать софт покер рума и увериться, станут ли они в него выступать или нет. Новый игрок испробует свои силы с реальными оппонентами в казино. <a href=http://filmkachat.ru/>1×slots сайт</a> Риск-игра по одинаковым шансам – Также казино возможность запрещать исполнять условия по отыгрышу счет раунда на удвоение, кот-ый предлагается в слотах, видео-покере и некоторых иных забавах. <a href=https://yoomark.com/content/complete-guide-professional-3d-rendering-services>https://yoomark.com/content/complete-guide-professional-3d-rendering-services</a> Доступные забавы – В некоторых азартных забавах возможно понизить математическое преимущество казино до нескольких 10-х процента. В их количестве все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как верховодило, в таких играх ставки идут в зачет вейджера не всецело. Например, имеет предусматриваться только 50%. В неких играх бездепозитные призы вообще нельзя отыгрывать.Наш список включает в себя превосходнейшие бездепозитные бонусы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по главным параметрам: 1хслотс зеркало на сегодня <a href=http://crtdu-kras.ru/communication/forum/user/281057/>http://crtdu-kras.ru/communication/forum/user/281057/</a>
1×slots зеркало сайта
Простая процедура получения бездепозитного приза, которая займет не более 2-х минут. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные. казино 1×slots В интернете количество известных игорных площадок с красивыми акционными услугами. Однако пристально читать условия десятков услуг времени надоест, ну и время отнимет много. Поэтому наша команда подготовила ТОП-3 вебсайтов с превосходнейшими бездепозитными бонусами: <a href=https://malaysia-forex.com/members/137450-PorsedropOa>https://malaysia-forex.com/members/137450-PorsedropOa</a> Выбирая даровой бонус, внимательно изучайте верховодила. Убедитесь, что вас возможно брать участие в промоакции. Уточните, в каких играх возможно исполнять обстоятельства вейджера. При надобности задавайте вопросы адептам саппорта. 1×slots бонус за регистрацию Следует выделить, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом.
1×slot зеркало
Важно, удостоверьтесь никаких, собственно ранее не регились в выбранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи. Еще одно условие касается размеров ставки. Операторы устанавливают наивысшую сумму, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, избранной в Личном офисе. При превышении лимита есть риск потерять приза. Существующие ограничения относятся и к конкретным обликам ставок. Например, играя в рулетку, заказчик имеет столкнуться с запретом ставить фишки на шансы.Так собственно главное различие дара на депозит от бездепа – обязательное пополнение счёта. Вы можете внести депо и преумножить стартовый капитал либо арестовать бездеп и при этом не придётся рисковать собственными сбережениями. Поспешите выполнить простые притязания, и администрация ресурса начислит щедрое поощрение! <a href=https://wolvesbaneuo.com/wiki/index.php/Green_Pharmacy_Altai_Online_Store>https://wolvesbaneuo.com/wiki/index.php/Green_Pharmacy_Altai_Online_Store</a> 1хслотс зеркало Обычно бездепозитные промоакции от казино, приходят на эл. Почту в деньки рождения либо праздники. В некоторых онлайн казино возможно обратиться в чат и как неизменному игроку, вероятно вам предложат бездепозитное предложение.
1 х слотс зеркало
<a href=https://forum.eliteshost.com/showthread.php?tid=25154>1×slots зеркало рабочее на сегодня</a> 1×slots casino регистрация 1×slots review live <a href=http://forums.escapefromelba.com/index.php?action=profile;u=145243>http://forums.escapefromelba.com/index.php?action=profile;u=145243</a> Проверка занимает от нескольких мин. До нескольких дней, специалисты техподдержки могут запросить вспомогательные документы либо инициировать куцее общение по Skype.
1×slos регистрация в 1×slots casino
Каждый новичок и профессиональный игрок грезят прытко стартануть и начать создавать реальные ставки. Для этого достаточно арестовать презент, за кот-ый не уплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email или аппарат. После сего администрация начислит щедрое вознаграждение в виде безвозмездных вращений либо виртуальных кредитов.Начнём с такого, что любое рекламную за регистрацию предполагает некие условия. Бездепозитные бонусы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность денежного оборота, нужная для исполненья условий. Пример, получили благотворительные вращения и выиграли с них 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 рублей, проигрышных либо выигрышных, маловажно. После исполнения, бонусный баланс перейдёт на настоящий и будет легкодоступным к выводу. Фриплей-бонусы встречаются только в неких клубах. Они зачисляются сразу в создания профиля и активны недолговременное время. Если не успеете истратить свои, они просто сгорят. Касаемо времени, как призы активны протяжении часа.Также существуют онлайн-платформы азартных игр, которые применяют раздачу бездепозитных бонусов в специальные даты (как для казино, так и для игрока). Помимо сего, действующие геймеры также имеют возможность получить похожие призы за собственную работа (например, за повышения уровня или за схожие заслуги). <a href=https://3ads.eu/user/profile/154795>https://3ads.eu/user/profile/154795</a> В зависимости от интернет заведения каждый из их возможность вам предложить как бездепозитные деньги, так и бездепозитные фриспины, коие после успешной регистрации упадут вас на ваш игровой баланс.У любой забавы свои притязания по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система зачтет каждую ставку. В рулетке и покере сделать это намного сложнее. Именно поэтому так принципиально внимательно разбирать обстоятельства получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой забаве, то новички просто «спустят приз на ветер». 1×slots казино зеркало Призовые начисления без депо шансы предоставляться для роли в турнирах онлайн казино. Потратить перечисленные деньги можно самая масштабах этой акции. Условия их проведения себе ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться этим предложением, никакого выучить его управляла.Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных бонусов принимаются достаточно высокие требования. Часто онлайн-казино рекомендуют отыграть бонусное поощрение до 100 один в игровых автоматах. Например, случае игрок получил бесплатно десять $, то нужно несомненно отыграть их, поставив одну тысячу спинов по одному доллару любой. Стоит обозначить(означить), что не все казино дают вероятность играть на бонусы и не во всех развлекательных заведениях идентичные правила для отыгрывания. Некоторые казино запрещают выступать на призы в блекджек либо ограничивают ставки до 5 процентов, собственно значительно увеличивает в десятки раз число нужных игр.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.as-p.cz/viewtopic.php?f=45&t=67620&p=365334#p365334>1×слот регистрация в 1×slots casino</a>
<a href=http://mandala-app.com/forums/viewtopic.php?f=5&t=234494>скачать 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Также, учите, что бездепозитный приз возможно исключить лишь в случае, когда станут выполнены все условия отыгрыша. На нашем сайте Вы отыщите список своевременных новых бездепозитных призов в казино 2022 года. Также, есть количество эксклюзивных услуг, которые доступны лишь посетителям нашего сайта в регистрации по нашей ссылке либо активации особого промокода.
#814 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Анна Михалкова порно с Евгения Медведева, фигуристка <a href=https://repost.news/>букмекерские конторы бет</a> 7k casino сайт pin up casino скачать <a href=https://rucriminal.info/>кент casino</a> порно с Каролина Севастьянова porno Яна Троянова букмекерская контора зенит официальная казино bitz casino порно с Анастасия Потапова, теннисистка Юдаева Ксения Валентиновна порно
DiskiPlus casino играть DiskiPlus лучшие казино бесплатно <a href=https://www.diskiplus.ru>DiskiPlus скачать pin casino</a> DiskiPlus порно с Бондаренко Анастасия Борисовна DiskiPlus porno Юлия Пересильд <a href=https://www.diskiplus.ru/>DiskiPlus букмекерская контора бетсити</a> DiskiPlus casino 7k рабочее DiskiPlus казино зеркало сегодня DiskiPlus 1×bet на сегодня DiskiPlus porno Мария Шарапова DiskiPlus pinco casino DiskiPlus официальное казино вход DiskiPlus porno Александра Степанова, фигуристка
#815 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало
Рассмотрим на образце: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских рублей. В условиях промоакции предписано, что вейджер бездепозитного бонуса х20. Поэтому, дабы отыграть бонус, игроку будет необходимо устроить ставок на 35*20=700 руб.Особую изюминку видео слотам присваивают оригинальные знакы. С их в активируются разные призы. Вы можете запустить вспомогательный степень и увеличить необходимую выигрыша. Есть знаки, которые сменяют ненужные элементы и сами делают выигрышные комбо. Не стоит забывать и тему бонус-тур. После любого успешного спина есть шанс увеличить необходимую выигрыша в два либо четыре раза. <a href=http://filmkachat.ru/>1×slots регистрация на сайте</a> Помните, собственно всевозможные нарушения правил сведут на нет ваши усилия, и вы наверняка останетесь без начисленного вас безвозмездного приза. Всегда изучайте верховодила начисления и обстоятельства вейджера. По каким вопросам, на которые вы имеет самостоятельно найти ответы, обращайтесь за объясненьям и саппорт.Так что основное отличие дара на депозит от бездепа – обязательное пополнение счёта. Вы сможете внести депозит и преувеличить стартовый капитал либо забрать бездеп и при не придётся рисковать собственными сбережениями. Поспешите выполнить простые притязания, и администрация ресурса начисляет щедрое поощрение! <a href=https://buymeacoffee.com/poppoppopkb/vr-architecture-revolutionizing-architectural-design-visualization>https://buymeacoffee.com/poppoppopkb/vr-architecture-revolutionizing-architectural-design-visualization</a> Для получения предоставленных бонусов вас понадобиться — ПК либо мобильное прибор, и остальное дело за малым. 1×slots регистрация 1×slotscasino 56 online <a href=http://www.orlandogamers.org/forum/member.php?action=profile&uid=7545>http://www.orlandogamers.org/forum/member.php?action=profile&uid=7545</a>
1×slots регистрацию процедура займет всего лишь
Почти все игровые клубы просят свидетельство контактных данных игрока для получения бездепозитного приза. 1× slots официальный <a href=http://www.facebook-list.com/%D1%84%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B-%D0%BA%D0%BE%D0%BC%D0%BF%D1%8C%D1%8E%D1%82%D0%B5%D1%80%D0%BD%D0%BE%D0%B3%D0%BE-%D0%BA%D0%BB%D1%83%D0%B1%D0%B0_391938.html>http://www.facebook-list.com/%D1%84%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B-%D0%BA%D0%BE%D0%BC%D0%BF%D1%8C%D1%8E%D1%82%D0%B5%D1%80%D0%BD%D0%BE%D0%B3%D0%BE-%D0%BA%D0%BB%D1%83%D0%B1%D0%B0_391938.html</a> Можно ли в одном онлайн казино получить больше 1-го бонуса за регистрацию? Нет, например как в любом интернет казино есть управляла, к коим нужно держаться, не творить два аккаута для получения призов, иначе будет блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, приз за регистрацию выдаеться раз раз одному лицу.Подарки на конкретные даты отличаются условиями получения. Если одобрение начисляют игроку на день рождения, то сумма обыкновенно зависит от совместного объема депозитов за прошедший год. 1 х слотс зеркало Для получения депозитного бонуса необходимо пополнить собственный игровой баланс реальными средствами. Вознаграждение можно получить или при внесении первого депо, либо в виде фиксированного процента от внесённых средств. Так либо по, бонус поступит на счёт лишь после пополнения.Представленные на этой странице лучшие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, в гости Casino.ru шансы сортировать перечень по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д.
1×slots casino регистрация на сайте
<a href=http://trimet.ru/bitrix/rk.php?goto=http://ceramicplus.ru/bitrix/redirect.php?goto=http://ikonet.com/en/visualdictionary/static/us/blog_this?id=https://teletype.in/@urid_pomosh/IoxX2Ol_-MI>http://trimet.ru/bitrix/rk.php?goto=http://ceramicplus.ru/bitrix/redirect.php?goto=http://ikonet.com/en/visualdictionary/static/us/blog_this?id=https://teletype.in/@urid_pomosh/IoxX2Ol_-MI</a> Бонус в казино без депозита имеет разные варианты: это может быть приветственный бонус, промоакции в честь каких-то праздников либо главных дат, бонус за вербование свежих игроков, лояльность и получение VIP-статуса.Также учтите, что кое-какие игровые платформы сузивают перечень стран, коие готовы получить предложенный бездепозитный приз за регистрацию. К образцу, существуют онлайн-заведения, выдающие подобные призы только жителям конкретных стран. К образцу, онлайн казино 777 Оригинал дает бездепозитный бонус только игрокам из России и стран СНГ. Или напротив, пичкают вознаграждением всех, не обитателей неких стран (исходя из этого, стопам внимательно изучать перечень, дабы впоследствии не возникло никаких вопросов и жалоб). 1×slots актуальное зеркало Получив свой подарок, Вы сможете даром выступать на настоящие средства, а выполнив условия отыгрыша, вывести собственный выигрыш.Доступные забавы – В неких азартных забавах возможно снизить математическое превосходство казино до нескольких десятых процента. В их количестве многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как управляло, в таких играх ставки идут в зачет вейджера не всецело. Например, имеет учитываться лишь 50%. В некоторых забавах бездепозитные призы вообщем нельзя отыгрывать.
1×slots зеркало регистрация в 1×slots casino
Получив свой подарок, Вы сможете бесплатно выступать на настоящие деньги, а выполнив обстоятельства отыгрыша, исключить свой выигрыш.Подтверждение регистрации. Казино просят привязки профиля к электрическому адресу и номеру аппарата. Для сего на e-mail отправляется послание со ссылкой, а на телефонный ? текстовое извещение с кодом. <a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=971687#pid971687>казино 1×slots официальный сайт</a> Законодательство, регулирующее азартные забавы в разных государствах, оказывает на возможности операторов. В результате пользователи из отдельных регионов сталкиваются с ограничениями со стороны казино. Это имеет быть как глубокий отказ в доступе, так и невозможность загружать игры отдельных производителей.На странице представлены бездепозитные бонусы за регистрацию в казино редкая награда за которой гонятся все игроки как новенькие, например и профессионалы. Мы также уделяем огромное внимание на наличие бонусов при составление рейтинга казино на средства. Бездепозитный приз это вероятность выступать безвозмездно и выиграть реальные средства. Популярность онлайн казино растёт и всё больше пользователей начинают увлекаться азартными забавами. Бездепозитные призы 2022 года, это оригинальные презенты за регистрацию. С их подмогою свежие игроки шансы получить бесплатные вращения или деньги на баланс за 1 регистрацию. С свет игорных заведений в интернете, бездепозитные бонусы стали знаменитейшим методом привлечения игроков. Подобные акции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о которых мы поведаем. Наш вебсайт собрал наилучшие предложения из интернета на 2022 год. Воспользуйтесь каким подарком и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить условия. 1×slots быструю регистрацию а также мгновенное <a href=https://www.alligator.spb.ru/forum/index.php?PAGE_NAME=profile_view&UID=79143>https://www.alligator.spb.ru/forum/index.php?PAGE_NAME=profile_view&UID=79143</a> Как лишь вы отыграли вейджер и средства с бонусного баланса перебежали для на реальный счет, Вы отважно можете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (сделать минимальный депо например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депозитом).
1×slots casino регистрация на сайте
Мы собрали и выпустили список лучших бездепозитных казино с бонусами за регистрацию, коие гарантируют великодушные выигрыши и мгновенные выплаты. Первый образующийся вопрос, это, для выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают новых игроков. Последним легче начать игру на деньги с презента за регистрацию. Им надо пополнять баланс и тратить личностные свои. Новички получают безвозмездные спины или свои на счёт. С их помощью знакомятся с игровым процессом, крутят слоты и проделывают ставки в рулетке. <a href=http://xn–2u1bk4hqzh6qbb9ji3i0×g.com/bbs/board.php?bo_table=free&wr_id=40719>http://xn–2u1bk4hqzh6qbb9ji3i0×g.com/bbs/board.php?bo_table=free&wr_id=40719</a> Многие новенькие сомневаются, собственно поощрительный приз надо будет отдавать, в случае они выиграли у казино. Это полностью безопасно и накрепко. Выводя выигранные средства, игрок просто останавливает свое роль при и утрачивает уникальную возможность – безвозмездно наращивать собственное материальное положение. казино 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://radios-collector.com/viewtopic.php?f=8&t=6&p=275416#p275416>1×slots casino регистрация</a>
<a href=https://houseion.com/2023/04/25/in-the-heart-of-valencia/#comment-25718>1×slots подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Обыкновенные бездепозитные бонусы в размере от трех до двадцати $ сделаны для того, дабы в игры заходили все свежие и свежие игроки. Здесь, вероятнее всего, будет ограничение на наибольший выигрыш. Важно, дабы перед наименьшим вкладом был отключен бонус за первое пополнение счета, и игрок не попадет на повторный вейджер. Это раз из основных характеристик привлекательности презента. С завешенным коэффициентом том профессионалы не смогут выполнить условия по отыгрышу. И важно, как презентабельно выглядит предложение – бездепозитный бонус казино в объеме $500 или $1 000. Чтобы новенькие попревосходнее вникли, что же такое вейджер, мы разберём на образце.
#816 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора пин ап casino pin <a href=https://sovsekretno.net/>карты казино</a> винлайн букмекерская контора официальный казино рояль смотреть <a href=https://kompromat1.online/>Елизавета Боярская</a> casino зеркало сайта зеркала официальных сайтов казино new casino 1×bet зеркало слоты 1×bet xyz pin ап casino casino вход 1×bet слоты официальный сайт
DiskiPlus 1×bet на сегодня DiskiPlus 1go casino <a href=https://diskiplus.ru/>DiskiPlus new casino</a> DiskiPlus порно с Диана Шнайдер (теннис) DiskiPlus порно с Евгения Медведева, фигуристка <a href=https://diskiplus.ru>DiskiPlus casino играть</a> DiskiPlus игры казино DiskiPlus ев казино DiskiPlus почему в казино не бывает настенных часов DiskiPlus букмекерская контора зенит DiskiPlus букмекерская контора ставки DiskiPlus сколько казино DiskiPlus официальная казино
#817 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные способы и оценить особенности, труднодоступные при ирге в демо режиме. Многие новые посетители переходят в количество неизменных, а оператор получает длительную прибыль.Частенько новички не понимают, как активировать презенты либо вывести первый выигрыш. Для подобных случаев наша команда обрисовала основные определения – что такое фриспины, вейджер, как его отыграть, для нужно протекать верификацию. <a href=http://filmkachat.ru/>1×slot регистрация</a> Фриспины – безвозмездные вращения с фиксированной ставкой, коие можно применять в определенных игровых автоматах.Если ординарными словами, бездепы – это определённая сумма средств либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно брать презенты. Но есть кое-какие нюансы. Существуют игорные дома, коие перед тем как начислить бонусы требуют привязать телефон, дать копии документов. <a href=https://paperpage.in/blogs/288414/Transform-Your-Products-with-Premium-3D-Rendering-Services>https://paperpage.in/blogs/288414/Transform-Your-Products-with-Premium-3D-Rendering-Services</a> Бонус с зачислением денег на счет дает больше свободы действий. Пользователь сам подбирает, каким образом воспользоваться подаренными средствами. Здесь того шансы действовать лимитирования на перечень дешевых игр, хотя обычно эти рамки не так строги, как в рекламную с безвозмездными вращениями. 1×slots регистрация на официальном сайте <a href=https://forum.kainkalabs.com:443/member.php?action=profile&uid=21232>https://forum.kainkalabs.com:443/member.php?action=profile&uid=21232</a> При правильном раскладе бездепы — это отличный способ играть на средства без растраты собственных средств. Есть количество советов, следуя коим можно извлечь максимально выгоды из похожих промоакций казино. Играть идет лишь на лицензированных площадках. Скриптовые веб-сайты не врут с бонусными предложениями, хотя и употребляют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах невозможно.
1×slots официальный зеркало
Если вы опытный игрок, вы обязаны аристократия, собственно приз без депозита – редчайшая находка. Тем ниже, мы еженедельно изучаем интернет, дабы отыскать вам наилучшие бездепозитные предложения. 1×slots официальный сайт мобильная версия Также бывают случаи, когда казино начисляет обсужденный бонус после регистрации свежего клиента по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам. <a href=https://www.love2d.org/forums/memberlist.php?mode=viewprofile&u=297298>https://www.love2d.org/forums/memberlist.php?mode=viewprofile&u=297298</a> Принципиальным отличием бесплатных бонусов от призов на депо считается недоступность надобности вносить деньги на акк. Из-за сего их нередко называют бездепозитными (not the slightest deposit bonuses).Так что можете отважно региться без всяких раздумий. Фортуна сегодня точно на вашей стороне. Не опасайтесь, так последствие какого либо убытка Вам совершенно не грозит. С этими призами как без пополнения, Вы остаетесь лишь в плюсе, хотя не как не в минусе. 1×slots официальный регистрация
1×слотс казино
Иногда виде бездепа, казино дарит минимальный бонус (до 50 рублей), ради которого надо заморачиваться.Верификация необходима для добавочной защищенности и подсобляет техподдержке выявить бонусхантеров и мошенников. Кстати, на платформах выводы солидных сумм доступны только последствии подтверждения личности. Ещё одно распространённое акционное предложение – привлекательный подарок с сомнительными притязаниями. К примеру, клуб сулит $100 в качестве бездепа, но с вейджером х80 либо х100. Отыграть подобный вейджер фактически нереально и потому лучше концентрироваться на больше интересных акциях.Перед активацией принципиально пристально выучить обстоятельства промоакции. Чем ниже вейджер, тем больше возможная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, протяжении коих возможно воспользоваться предложением. Если бездеп обхватывает ограниченный перечень игр, рекомендуется разузнать наибольшие коэффициенты, уровень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь в случае, если оператор не установил взыскательные ограничения на наивысшую сумму ставки. <a href=http://www.engel-und-waisen.de/index.php/%C3%90%C3%A2%E2%82%AC%E2%84%A2%C3%90%C2%BB%C3%90%C2%B0%C3%90%C2%B4%C3%90%C2%B8%C3%90%C2%B2%C3%90%C2%BE%C3%91%C3%91%E2%80%9A%C3%90%C2%BE%C3%90%C2%BA_%C3%90%C3%90%C2%B2%C3%91%E2%80%9A%C3%90%C2%BE%C3%91%CB%86%C3%90%C2%BA%C3%90%C2%BE%C3%90%C2%BB%C3%90%C2%B0>http://www.engel-und-waisen.de/index.php/%C3%90%C3%A2%E2%82%AC%E2%84%A2%C3%90%C2%BB%C3%90%C2%B0%C3%90%C2%B4%C3%90%C2%B8%C3%90%C2%B2%C3%90%C2%BE%C3%91%C3%91%E2%80%9A%C3%90%C2%BE%C3%90%C2%BA_%C3%90%C3%90%C2%B2%C3%91%E2%80%9A%C3%90%C2%BE%C3%91%CB%86%C3%90%C2%BA%C3%90%C2%BE%C3%90%C2%BB%C3%90%C2%B0</a> Превышение наибольшей ставки при отыгрыше. Система механически не предуведомляет о превышении ставки, потому о нарушении управлял игрок имеет узнать теснее в подачи запроса на вывод средств.Oтыгpaть приз с обозначенным вeйджepом, желаемого нужно сдeлaть cтaвoк нa cумму, превосходящую размер бонуса в несколько раз. 1хслотс регистрация в 1×slots casino При подмоги такового одобрения оператор имеет кроме привлекать посетителей, коие раньше проявляли активность на веб-сайте, но по какой-то причине прекратили выступать. В данном случае промокод высылается пользователю по электрической почте или в виде SMS.
1×slots официальный сайт мобильная версия
Приветственный приз без депозита ? подарок за регистрацию. Выдается деньгами, фриспинами либо баллами. В заключительном случае бонусные баллы применяются для участия в турнирах либо обмена на настоящие средства. <a href=https://www.findaspermdonor.com/viewtopic.php?f=25&t=98959>1×slots мобильная версия войти казино</a> Выше мы дали полный комплект самых свежих и своевременных бездепозитных призов в онлайн казино без пополнения на 2022 год, где вы можете пользоваться любым ценным бездепозитным бонусом.С этими простыми советами любое казино с призом за регистрацию способно принести в разы больше выгоды и выгоды. 1×slots скачать на айфон <a href=http://www.besatime.com/index.php?subaction=userinfo&user=Jamesalore>http://www.besatime.com/index.php?subaction=userinfo&user=Jamesalore</a>
1×slots зеркало
Но эти рамки не смущают в хайроллеров, потому коэффициенты на слотах позволяют рассчитывать на солидные выигрыши, а некоторых автоматах разыгрывается прогрессивный джекпот. Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, the decision зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.Новые клиенты онлайн-казино без первого депозита все выяснить собственную удачливость. К что, этому же есть возможность преобразовать бездепы в реальные деньги за регистрацию в казино, впрочем достичь приз нужно отыграть сообразно условиям акции. <a href=http://bocauvietnam.com/member.php?1509651-ForsedropPl>http://bocauvietnam.com/member.php?1509651-ForsedropPl</a> 1×slots бездепозитный бонус за регистрацию Какие призы я могу еще получить считая бездепозитного приза за регистрацию в казино? По мимо бездепозитного приза, любое интернет казино предлагает игрокам выгодное предложение на 1-ый депозит, вы совершаете депо, ваш депозит увеличивается в двое либо числе в трое, что, этим наиболее начать выступать возможно с больше крупной суммой, например же не забываем тему вейджер на бонусы.Если при регистрации показать промокод, возможно гарантировано получить приз. Где взять ваучер? Посетите на блоги либо форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В заключительное время игорные дома начали рекламироваться в фильмах и сериалах. Присмотритесь и всего заметите промокод, который принесёт 500 или 1 000 бонусных рублей.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Поспешите арестовать бездепозитные призы за регистрацию в казино из представленного списка. Все платформы столько ведут легальную работа, но и порадуют правдивыми плодами игры, высочайшей отдачей, резвыми выплатами.
#818 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачиваемые казино 1×bet слоты 1×bet top <a href=https://7club7.com/>1×bet официальный сайт 1×bet xyz</a> самое казино Петрова Ольга Викторовна порно <a href=https://strelochnik.com/>vodka casino</a> карты казино Самойлова Алла Владимировна порно казино смотреть вавада казино казино пин включи казино new casino
DiskiPlus букмекерская контора фонбет DiskiPlus 7k casino зеркало на сегодня <a href=https://www.diskiplus.ru>DiskiPlus casino pin официальный</a> DiskiPlus pin up casino DiskiPlus лучшие букмекерские конторы <a href=https://diskiplus.ru>DiskiPlus скачать сайт букмекерской конторы</a> DiskiPlus вывод казино DiskiPlus 7k casino бонус DiskiPlus pin casino зеркало DiskiPlus смотреть фильм казино DiskiPlus почему в казино не бывает настенных часов DiskiPlus Анна Михалкова DiskiPlus Набиуллина Эльвира Сахипзадовна порно
#819 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало сайта
Вывод выигрыша с бездепозитных бонусов казино – великодушный презент от азартных клубов. Но чтобы исключить собственный заработок, необходимо выполнить ряд условий:Автоматическая активация может самой комфортной, хотя ручной способ имеет перед ней достоинства. Прежде чем использовать вознаграждение от казино, стоит заблаговременно определить, сколько медли требуется на исполненье всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деянья бонуса. <a href=http://filmkachat.ru/>1×slots зеркало быструю регистрацию а также мгновенное</a> Срок активации и время на отыгрыш. Зачисление средств либо фриспинов происходит при активации в течение требовательно ограниченного периода, схожие притязания предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать приз несколько дней либо в месяцов. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с необоснованно высоким вейджером. <a href=https://cgscholar.com/community/community_profiles/3d-rendering-services/community_updates/234376>https://cgscholar.com/community/community_profiles/3d-rendering-services/community_updates/234376</a> 1×slots официальный сайт зеркало рабочее <a href=https://leesunlee.kr/bbs/board.php?bo_table=free&wr_id=2033190>https://leesunlee.kr/bbs/board.php?bo_table=free&wr_id=2033190</a>
1 хслот регистрация в 1×slots casino
Бесплатный бонус – кредиты, коие онлайн-казино начислит клиенту, не принуждая его пополнять игровой счет.В некоторых онлайн казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на веб-сайте клуба и доказать свои контактные данные. Дополнительно потребуется активация промокода. <a href=http://jktroickiy.forumex.ru/viewtopic.php?f=2&t=5683>x1 slots 1хслотс регистрация перейти на 1×slots</a> онлайн казино 1×slots Поспешите зарегистрироваться на официальном сайте Клубника, чтобы быстро получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, замечена реальный шанс победу!Существуют казино с призом за регистрацию, каких довольно модны фриспины в интернет казино впоследствии регистрации в конкретных забавах. Они встречаются числе почаще безвозмездных поощрений или классических призов в казино без инвестициям. Например, игрок регистрирует счет, на который начисляются безвозмездные забавы, приз за регистрацию повторяющий безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса в выигрывает истинные средства, которые в последствии можно удачно исключить из заведения на собственную платежную систему. То есть, все шансы вывести средства без рисков своими деньгами. Регистрация, за которую геймер получит призы, займет несколько, а благодаря данному возможно прирастить 5 евро поощрений до тыс. И без всяких проблем вывести их. <a href=http://www.khuortho-ce.ac.kr/g5/bbs/board.php?bo_table=free&wr_id=1232612>http://www.khuortho-ce.ac.kr/g5/bbs/board.php?bo_table=free&wr_id=1232612</a> Бонус начисляется игроку сразу после регистрации и прохождения верификации в казино и не просит от посетителя внесения депозита. Как правило, объем приза в подобном случае довольно умеренный, однако разрешает новичкам познакомиться с игрой без риска настоящими деньгами.Чем ниже значение вейджера, что, этим проще отыграть и исключить приз. Если Вы расчитываете заработать на бездепе, не просто ознакомиться с свежим игровым клубом, то стоит избегать бонусов с высоким вейджером их почти не реально отыграть. С ними Вы сможете лишь протестировать игры заведения. 1×slots регистрация 1×slots casino 777 online
1×slots мобильная версия войти казино
<a href=https://griffinfnvd97407.blogunok.com/30540638/deep-nude-ethical-concerns-and-the-impact-of-ai-on-privacy>https://griffinfnvd97407.blogunok.com/30540638/deep-nude-ethical-concerns-and-the-impact-of-ai-on-privacy</a> 1×slots зеркало сайта
1×slot зеркало рабочее регистрации на телефон придет
<a href=https://creampie.com/threads/1×slots-%D0%B1%D1%8B%D1%81%D1%82%D1%80%D1%83%D1%8E-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8E-%D0%B0-%D1%82%D0%B0%D0%BA%D0%B6%D0%B5-%D0%BC%D0%B3%D0%BD%D0%BE%D0%B2%D0%B5%D0%BD%D0%BD%D0%BE%D0%B5.397/>1×slots быструю регистрацию а также мгновенное</a> 1×slots сайт <a href=http://www.cristaleriajara.com/galeriajara/profile.php?uid=19938>http://www.cristaleriajara.com/galeriajara/profile.php?uid=19938</a> При пользовании бездепозитным призом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют количество видов лимитов:Условия вывода выигрыша. В неких заведениях для удачного вывода с бездепозитного бонуса довольно пополнения баланса и доказательства личности. В иных же клубах, необходимо несколько один прокрутить собственный депозит.
1×slots зеркало
Варианты выигрыша находятся от Вашей удачи и критерий игорного портала. Выше мы заявили, что кое-какие бездепозитные бонусы в 2022 году выдаются с лимитированиями по максимальной выплате. Однако, остаются другие, все, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на деньги, можно выиграть неописуемые суммы. Сегодняшние игровые автоматы либо видео слоты, как их называют. Могут выдавать солидные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000.1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, случае не желайте замерзнуть жертвой жуликов либо впустую потратить время; <a href=http://forum.n34.pl/profile.php?mode=viewprofile&u=2055>http://forum.n34.pl/profile.php?mode=viewprofile&u=2055</a> Заработать на бездепозитных бонусах за регистрацию в казино возможность каждый юзер, достигший совершеннолетия.Только выполнив все обстоятельства отыгрыша и дождавшись завершения проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить средства средства. 1×slots официальный сайт мобильная версия
<b>Смотреть еще похожие новости:</b>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=427208>1×slots официальный зеркало</a>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/9706/#comment-406621>1хлот регистрация в 1×slots casino</a>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-4070/>1×slots зеркало регистрацию более популярный вариант это</a>
<a href=http://craft4game.forumex.ru/viewtopic.php?f=2&t=3568>1×slots регистрация 1×slots casino c2d ru</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Многие казино предоставляют в рекламных целях бесплатные призы самая для наших читателей. Чтобы их получить, нужно перейти на игровой вебсайт по партнерской ссылке с нашего портала. Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут устанавливает лимитирование для клиентов. Конечно, это можно счесть некоторым неудобством для игрока, хотя справедливости ради отметить, что выбор автоматов всё также остаётся довольно большим.
#820 internetGephttps://ekaterinburg-domashnij-internet001.ru
подключить интернет тарифы екатеринбург <a href=https://ekaterinburg-domashnij-internet001.ru>ekaterinburg-domashnij-internet001.ru</a> какие провайдеры по адресу
#821 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее на сегодня
Однако далеко не все ресурсы предлагают своим посетителям бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено поощрение на первый депо в объеме 100–200%. Это замечательная вероятность преумножить банкролл, увеличить время, проведённое за забавой и шансы сорвать большой куш. <a href=http://filmkachat.ru/>1×slots зеркало которую указывали при регистрации кстати</a> <a href=https://mez.ink/kalinka0588>https://mez.ink/kalinka0588</a> После получения бонуса вывод средств для посетителя будет недоступен до тех пор, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо пара недель. Выводить средства игрок может только последствии отыгрыша. 1хслотс мобильная версия зеркало <a href=https://gamma.app/docs/-qbalwrezopvj1ea>https://gamma.app/docs/-qbalwrezopvj1ea</a>
зеркло казино 1×slots
Используйте наилучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, дабы заработать презенты за простые деяния теперь сейчас получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и резвыми выводами на электронные кошельки. <a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=1210337>1хслотс официальный сайт зеркало</a> 1×slots скачать на айфон В качестве призов онлайн казино нередко предлагает выдачу фриспинов, другими бесплатных вращений игрового барабана. Виртуальные монеты можно использовать для обучения в покерной школе либо для забавы в казино.Необходимость отыгрыша. Вейджер в этом случае повыше, чем для призов за депозит. И пока свои не отыграны, исключить их невозможно. <a href=https://madonas5.baltuss.lv/member.php?action=profile&uid=67871>https://madonas5.baltuss.lv/member.php?action=profile&uid=67871</a> 1×slots казино зеркало Получать информацию о самых выгодных бонусах можно без постоянного прогноза новостей казино. Мы взяли эту задачку на себя и непрерывно смотрим за услугами операторов, избирая лучшие из их. В данном разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список акций периодически пополняется. В топ вошли самые свежие бездепозитные бонусы за регистрацию в казино 2020, кратковременные и закрытые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и аспектам. Если срок деяния промоакции истек, она удаляется из списка.Минимального оборота. Этот предел уточняется вейджером — пока игрок не сыграет на установленную необходимую, вывод средств будет недоступен.
1× slots сайт
Прежде чем активировать бездеп, нужно убедиться том,, что государство, гражданином коей является игрок, не заходит в перечень не.В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это самая приятная доля игры. Важно, часто бездепозитные призы в казино выдаются с лимитированиями по наибольшей выплате. В среднем можно рассчитывать на выгода в несколько тысяч рублей. Как вывести выигрыш с приза без депо. Придётся подтвердить аккаунт документально, в неких заведениях. Процедура верификации обязательна и делается каждым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате или прочитайте в правилах. <a href=https://wifidb.science/wiki/%D0%91%D0%BB%D0%BE%D0%B3_%D0%93%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0>https://wifidb.science/wiki/%D0%91%D0%BB%D0%BE%D0%B3_%D0%93%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0</a> 1×slots casino регистрация 1×slotscasin online В интернете слишком количество скриптовых сайтов, коие принадлежат жуликам. Их главная задача – привлечь гэмблеров, пообещав не великодушные презенты, но и солидные выигрыши. Так что некоторые сайты предлагают получить за регистрацию том $1 000.Это также бесплатные финансы, коие поступают на аккаунты новоиспеченных в в регистрирования. А особенность таких призов произведено сомнений, что обретенные деньги непременно следует использовать в продолжении назначенного медли.
1×slot регистрация
Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации дара необходимо подтвердить электронную почту и привязать телефон;Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавления либо официального посетителя для ПК. В большинстве казино действуют программы лояльности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на грядущий степень нередко сопровождается выдачей бездепа. <a href=http://jktroickiy.forumex.ru/viewtopic.php?f=2&t=5631>1×slots рабочее зеркало на сегодня</a> Некоторые онлайн-казино без депозита предлагают свежим посетителям выбрать приз при регистрации. Будьте внимательны: выбрав один, вы в абсолютном большинстве случаев не можете воспользоваться остальными. Все безвозмездные бонусы кажутся соблазнительными. Кто же категорически от возможности поиграть в онлайн-казино, не рискуя средствами, но получая выигрыши. Но далековато не все бездепозитные призы в привлекательны для рассудительного посетителя.Иногда в поощрения за регистрацию шансы выдаваться билеты для участия в турнирах. Условия их проведения довольно выделяются, потому мы советуем ознакомиться с любым предложением отдельно. 1×slots официальный сайт мобильная версия скачать <a href=http://www.miranetwork.it/index.php?option=com_k2&view=itemlist&task=user&id=447272>http://www.miranetwork.it/index.php?option=com_k2&view=itemlist&task=user&id=447272</a> Осталось выбрать казино с бонусом за регистрацию и создать профиль. После активации подарка выигрыш находится от Фортуны и навыков.
казино 1× slots официальный сайт
Бывают ли бездепозитные бонусы без вейджера? Бывают, если у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино.Вейджер (или вагер) ? это наименьшая сумма ставок, коию необходимо сделать для вывода валютного приза. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, тем привлекательнее спецпредложение. <a href=https://forum.vn.ua/member.php?u=86735>https://forum.vn.ua/member.php?u=86735</a> Активация денежного вознаграждения случается механически после сотворения профиля либо применения промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на странички казино в социальных сетях или на рассылку рекламных сообщений, скачать и установить вспомогательный софт и т.д. 1×slots зеркало рабочее на сегодня Самые популярностью способы вывода денег ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электронным платежным системам подобии Neteller и Skrill, а также используют криптовалютными кошельками. Вывод выигрышей имеет осуществляться моментально либо развлекать от нескольких часов до нескольких суток.Такой безвозмездный эквивалент средств зачисляется на профиль юзера после осуществления требований и предназначаются они только для игрового процесса. Вывод таких вознаграждений возможен лишь в воплощения вейджеровых условий.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=100330&pid=392389#post_392389>1×slot официальный сайт</a>
<a href=https://17lubbs.com/thread-1418–1–1.html>1хслотс регистрация в 1×slots casino</a>
<a href=http://swissairways-va.com/phpBB3/viewtopic.php?t=792999>1×slots зеркало рабочее на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Сразу в активации промокода можно пользоваться подарком. Как теснее упоминалось, призы бывают трёх видов – фриспины, кредиты и фриплей-бонусы.
#822 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Екатерина Ефременкова, шорт-трекистка казино пин <a href=https://m.repost.news/>1×bet официальный 1×bet xyz</a> казино гта 5 porno Юлия Канакина, скелетонистка <a href=https://slon-ru.com/>porno Андрей Рублев (теннис)</a> скачать 1×bet Яровая Ирина Анатольевна порно казино рублях 1×bet зеркало xbet xyz champion casino казино без Ходнева Светлана Владимировна порно
DiskiPlus Юдаева Ксения Валентиновна порно DiskiPlus 7k casino сайт <a href=https://www.diskiplus.ru>DiskiPlus демо казино</a> DiskiPlus рейтинг казино DiskiPlus porno Алена Михайлова <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet бесплатно</a> DiskiPlus порно с Гатагова Ольга Анатольевна DiskiPlus винлайн букмекерская контора официальный DiskiPlus порно с Захарова Мария Владимировна DiskiPlus порно с Варвара Субботина DiskiPlus casino скачать DiskiPlus песня казино DiskiPlus porno Игорь Акинфеев (футбол)
#823 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам воспрещено начислять призы клиентам, не имеющим денежных средств на счете. Мы предлагаем разглядеть животрепещущие бонусы онлайн-казино с лицензией, которые соблюдают законодательство РБ.К образцу, игроку выдаются бесплатные свои в заведении в объеме пятидесяти либо ста $ (вейджер на коие сочиняет 100х). То есть, любому новоприбывшему игроку выскакивает привлекающая картинка, кот-ая сулит выплату всех зачисленных фирмой средств. Не стоит обращать внимания на казино приз за регистрацию без депо с сильно великой либо очень маленькой суммой призов, поэтому собственно, числе тщательно выучив все обстоятельства, тут всего, несомненно некий подкол. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> <a href=https://www.neobienetre.fr/forum-bien-etre-medecines-douces-developpement-personnel/topic/low-poly-design-creating-efficient-3d-models-for-modern-applications/>https://www.neobienetre.fr/forum-bien-etre-medecines-douces-developpement-personnel/topic/low-poly-design-creating-efficient-3d-models-for-modern-applications/</a> Фриспины — благотворительные вращения, которые разрешают игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины считаются наиболее знаменитым и желаемым обликом бонуса — безвозмездные вращения иногда эффективнее и веселее в отыгрыше, чем другие облики бездепов.Акции, приуроченные к календарным дням, посещают рассчитаны как на всех юзеров, например и на категории: примеру, презент на 8 марта девушкам-игрокам либо мужикам на 23 февраля. 1хслот 1хслотс регистрация перейти на 1×slots <a href=https://dokuwiki.stream/index.php?title=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D0%B4%D0%B7%D0%B5%D0%BD%20%D1%87%D0%B8%D1%82%D0%B0%D1%82%D1%8C>https://dokuwiki.stream/index.php?title=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D0%B4%D0%B7%D0%B5%D0%BD%20%D1%87%D0%B8%D1%82%D0%B0%D1%82%D1%8C</a> Бездеп с фриспинами может обхватывать всю коллекцию игр на сайте либо разработки 1-го провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш имеет быть выведен в того, как юзер отыграет данную необходимую. Возможность расценить полный перечень слотов — главное совершенство этой разновидности. Игроку становятся доступны те функции, коие отсутствуют в демонстрационном режиме, а возможность выиграть настоящие средства добавляет ясных азартных чувств.Не стоит путать игру в демо и внедрение бонусов. В демонстрационном режиме игрок может расценить механику слота, сюжет и оформление. Но забава проводится на относительные кредиты, потому отсутствует основное ? ощущение пыла. Активируя промокод или фриспины, клиент по-прежнему не расходует средства деньги на игровые автоматы, хотя имеет сорвать настоящий куш!
1хслотс казино зеркало
Как только вы отыграли вейджер и средства с бонусного баланса перебежали вас на реальный счет, Вы храбро сможете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (устроить минимальный депозит к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депозитом). <a href=https://www.reisezielforum.de/viewtopic.php?t=598775>скачать 1×slots официальный сайт</a> 1 x slots casino Чтобы бездеп не был начислен на Ваш акк, Вам не нужно активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк механически, а Вы не расчитываете его применять, обратитесь в службу с просьбой отменить бездепозитный приз.Как только на виртуальном счету окажутся бонусные свои, поспешите отыграть вейджер. Сразу после сего можно забыть заявку на вывод выигрыша. Кредиты выгодно выделяются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом настоящих средств и дают возможность почувствовать задор. Во-вторых – возможно насладиться каждой азартной игрой доступной на веб-сайте. В вашем постановлении находятся автоматы, настольные приложение, видео-покер, Live-дилеры. <a href=https://www.buhgalteria.ru/forums/user/78674/>https://www.buhgalteria.ru/forums/user/78674/</a> Ограничения по играм. Администрация запрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, средствами или безвозмездными вращениями. Обычно, в правилах приводится полный перечень слотов для отыгрыша. Иногда разделение производится по виду игр. Например, отыгрыш вероятен на всех игровых аппаратах, но запрещен в настольных забавах и в разделе Live Casino.Благодаря программе лояльности от игорного заведения, можно арестовать хороший старт и без добавочных инвестициям запустить видеослоты. Кроме как, можно рассчитывать на реальную фортуну и получить, без вложения собственных денег, великой выигрыш. 1×slots регистрация на сайте Также, в нужно доказать свой номер телефона, желаемого код, полученный в смс-сообщении от клуба установить в особое фон в личном кабинете игрока.Бездепозитные бонусы реальными деньгами, коие возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадали.
1×slots рабочее зеркало на сегодня
Перечисленные повыше главные характеристики сопровождают практически каждый приз и считаются стандартными для бездепозитных бонусных начислений в казино. <a href=http://forum.ttpforum.de/member.php?action=profile&uid=358170>http://forum.ttpforum.de/member.php?action=profile&uid=358170</a> При этой на бонусные свои запрещается выступать в игровые автоматы с прогрессивным джекпотом и забавы из радела live casino. Кроме как, кое-какие казино дают бездеп на раз либо количество определенных слотов, и в других забавах Вы не можете на них играть. 1хслотс регистрация в 1×slots casino Далее требуется отыграть вагер и исключить выигрыш. Игрокам без опыта крупно повезло, возможность получить 10-ки подарков за одну регистрацию. Если не смогли получить Бездепозитный бонус, не беспокойтесь. Обратитесь в интернет чат, оператор поможет ситуацию.
1×slots сайт зеркало
<a href=https://swordmaster.org/user/JamesVok/>1×slots официальный сайт зеркало</a> Также учтите, что кое-какие игровые платформы сужают список стран, коие готовы получить предложенный бездепозитный приз за регистрацию. К образцу, существуют онлайн-заведения, выдающие подобные бонусы только жителям определенных государств. К примеру, интернет казино 777 Оригинал дает бездепозитный бонус лишь игрокам из России и государств СНГ. Или наоборот, пичкают вознаграждением всех, считая обитателей неких государств (следует этого, стопам внимательно учить перечень, дабы впоследствии не появилось никаких вопросов и жалоб).Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро или 20 $. Если выдаются фриспины, их количество редко выше нескольких десятков бесплатных вращений. 2. Создать новый профиль. Для регистрации надо(надобно) заполнить маленькую анкету либо зайдите в собственный офис посредством соц сетей;Акционные предложения от казино есть в различных форматах. Часто призы даются в размен на депо. Игрок заносит платеж и получает средства, безвозмездные вращения прочие одобрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — картина бонуса, который гарантирован за выполнение конкретных поступков на сайте: 1×slots официальный сайт мобильная версия скачать <a href=http://b98415ql.bget.ru/user/Stevenpiosy/>http://b98415ql.bget.ru/user/Stevenpiosy/</a> Иногда в качестве бездепа, казино дарит минимальный бонус (до 50 руб. ), ради которого не заморачиваться.
1×slots зеркало
Нет. Казино раздают безвозмездные призы за регистрацию, для того, дабы заказчик возможность ознакомиться с игровым заведением. А дабы вывести его, необходимо выполнить условия отыгрыша.Минимального оборота. Этот предел уточняется вейджером — пока игрок не сыграет на установленную необходимую, вывод средств будет недоступен. Да, у безвозмездных призов есть дефекты. Прежде всего, они обыкновенно маленькие. Кроме того, условия вейджера по ним всегда строгие. Но все же неимение риска проделывает их очень привлекательными для посетителей.Не трудно догадаться, что no down payment bonuses почти никогда не случаются великими. Чаще всего идет о пяти–тридцати баксах (или эквиваленте этой суммы в иной денежной). <a href=https://www.google.com/search?hl=zh-CN&q=www.doctorlazuta.by>https://www.google.com/search?hl=zh-CN&q=www.doctorlazuta.by</a> После получения бонуса вывод средств для клиента будет недосегаем того, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или чета месяцов. Выводить средства игрок сможет только последствии отыгрыша. 1× slots casino зеркало Способы получения бездепа различаются от облика приза, кот-ый понравился игроку. Но для иначе нужно быть зарегистрированным в легальном онлайн-казино и доказать собственную личность. В общем виде пошаговая инструкция для получения бездепозитного приза выглядит так:
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.zhuk.cc/index.php/forum/profile/23994-rabofreeki>1× слот зеркало</a>
<a href=https://10nsk.ru/user/JosephSuple/>1 хслот регистрация в 1×slots casino</a>
<a href=https://kakofon.cz/forum/viewtopic.php?f=6&t=390&p=40287#p40287>казино 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При игре на бонусные свои воспрещается играть в игровые автоматы с прогрессивным джекпотом и игры из радела exist casino. Кроме такого, кое-какие казино выделяют бездеп на один или количество конкретных слотов, и в других забавах Вы не сможете на их играть. Также есть онлайн-платформы азартных игр, коие применяют раздачу бездепозитных бонусов в особые даты (как для казино, например и для игрока). Помимо сего, действующие геймеры того имеют возможность получить схожие бонусы за собственную деятельность (к примеру, за увеличения уровня либо за схожие достижения).
#824 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать
Для получения депозитного бонуса нужно пополнить свой игровой баланс настоящими средствами. Вознаграждение возможно получить либо при внесении первого депо, либо повторяющий фиксированного процента от внесённых средств. Так либо по, приз поступит на счёт лишь последствии пополнения. <a href=http://filmkachat.ru/>1 x slots</a> <a href=https://www.iotappstory.com/community/forum/5-support/4455-interior-design-fair-2025-global-innovation-design-trends>https://www.iotappstory.com/community/forum/5-support/4455-interior-design-fair-2025-global-innovation-design-trends</a> Пoдтвepдить личнocть посетителя. Для удачного вывода средств, необходимо подтвердить личность посетителя. Нa этaпe вepификaции пpoфиля, работники службы защищенности должны убедиться, что у игрока чем один акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не может вывести свой выигрыш, в у него несомненно некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы. 1×slots регистрация на официальном сайте <a href=http://www.podrujka.com/user/DoctorLazutaPt/>http://www.podrujka.com/user/DoctorLazutaPt/</a> Чаще всего применяются коды. Их надо(надобно) вносить в специальные окошки регистрационной анкеты, если речь о пригласительных бонусах, либо в определенном разделе собственного офиса игрока.
1×slots официальный сайт зеркало
1×slot регистрация Выше мы предоставили глубокий комплект самых новых и актуальных бездепозитных бонусов в онлайн казино без пополнения на 2022 год, где возможность пользоваться каким ценным бездепозитным призом.В интернете много известных игорных площадок с красивыми акционными услугами. Однако пристально читать условия десятков предложений времени надоест, ну и время отнимет большое. Поэтому наша команда подготовила ТОП-3 вебсайтов с наихорошими бездепозитными бонусами: <a href=https://agroinfo.biz.ua/wr_board/tools.php?event=profile&pname=JulesHaili>https://agroinfo.biz.ua/wr_board/tools.php?event=profile&pname=JulesHaili</a> Иногда виде одобрения за регистрацию имеют выдаваться билеты для участия в турнирах. Условия их проведения очень выделяются, поэтому мы советуем ознакомиться с каждым предложением раздельно.Операторы гемблинга заявляют, что например они дерутся с бонус-хантерами. Впрочем, критики считают, что данным казино пытаются устроить из случайного гостя неизменного игрока. 1×слот регистрация в 1×slots casino В качестве бонусов интернет казино нередко предлагает выдачу фриспинов, другими безвозмездных вращений игрового барабана. Виртуальные монеты можно применять для обучения в покерной школе либо для игры в казино.
казино 1×slots официальный сайт
Способы получения бездепа различаются от облика приза, который понравился игроку. Но для или надо(надобно) быть зарегистрированным в легальном онлайн-казино и подтвердить свою личность. В общем виде пошаговая инструкция для получения бездепозитного приза смотрится например: <a href=https://pyxc.ru/user/Travisneply/>https://pyxc.ru/user/Travisneply/</a> Бесплатные бонусы казино без депо возможно получить в виде денежных средств на бонусный счет (исключить их возможно только последствии отыгрыша), фриспинов, забавы либо кешбэк-бонуса. 1×slots скачать на айфон В интернете слишком много скриптовых вебсайтов, которые принадлежат жуликам. Их основная задача – заинтересовать гэмблеров, пообещав не только великодушные подарки, хотя и солидные выигрыши. Так собственно некоторые веб-сайты предлагают получить за регистрацию в $1 000.
1х слот 1хслотс регистрация перейти на 1×slots
Риск-игра по одинаковым шансам – Также казино может воспрещать скорпулезно условия по отыгрышу за раунда на удвоение, кот-ый предлагается в слотах, видео-покере и некоторых других играх. Для верификации аккаунта надо(надобно) дать спецам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, а фотку банковской карты или снимок странички электронного кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для доказательства личности. 1×slots актуальное зеркало <a href=https://carecepthealth.com/community/profile/julesdrymn/>https://carecepthealth.com/community/profile/julesdrymn/</a> Кешбэк-бонус представляет собой возврат фиксированного процента от ставки когда проигрыша или же от проигранной суммы за определённый период. В большинстве случаев кешбэк не превышает 10%.Вы не в коем случае ни чем не рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный приз, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс изучить игровые автоматы, научится регулировать менять ставки и полосы, изучать бонусные забавы и их выигрышные композиции, ну в конце концов просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные средства, которые возможно отыграть и исключить, но просто на демо счет, что, этим самым адреналин в крови более повысится а пульс забьется с частым ритмом!
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Отыграв бездепозитный приз в казино с выводом также придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если подобное ограничение существует, то единоразово исключить получится лишь сумму, не превышающую объем приобретенного бонуса.Не рекомендуем опрометью голову хвататься за различные предложения получения средств без вложений. Вполне вероятно, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на первый взор. Альтернативой считается казино приз за депозит. Мы предлагаем вам пару советов, благодаря которым у каждого игрока будет возможность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств: <a href=http://rytof.ru/node/16184>http://rytof.ru/node/16184</a> Чтобы бездеп не был начислен на Ваш акк, Вам надо активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт механически, а Вы не планируете его использовать, обратитесь в саппорта с пожеланием отменить бездепозитный бонус. 1×slots регистрация 1×slots casino c2d ru Каждый геймер должен сначала отчетливо выучить условия по получению и отыгрышу понравившегося дара. Если всё организует, поторопитесь забрать безвозмездные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик в начать вертеть барабаны топовых слотов.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.motoshkola.od.ua/threads/x1-slots-1×slots-registracija-perejti-na-1×slots.9554/>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<a href=https://australianwinerytours.com/tours/showthread.php?tid=449189>1×slots официальный сайт скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Возможность сыграть дополнительное состязание (а от и количество) совершенно бесплатно, а выигрыш, же, поступает на счёт игрока. Помните, что в неких забавах сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки числятся как отыгранные средства, в то время как в слотах идет в зачет все one hundred percent суммы.
#825 Charlesgunnyhttp://filmkachat.ru
зеркло казино 1×slots
Наиболее известные гонорары между гэмблеров – бездепозитные бонусы казино. Это не умопомрачительно, так можно получить безвозмездные вращения либо виртуальные кредиты, и всем не придётся пополнять счёт, рисковать личностными средствами. Удастся насладиться разнообразными веселиями даже выиграть солидную необходимую, избегая серьёзного риска. <a href=http://filmkachat.ru/>1хслотс 1хслотс регистрация перейти на 1×slots</a> Еще одно условие касается объемов ставки. Операторы устанавливают максимальную необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном офисе. При превышении лимита есть риск лишиться бонуса. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, заказчик возможность столкнуться с запретом ставить фишки на шансы.Наличие у игрока 2 аккаунта. Запрещено создавать количество профилей для неоднократного получения бездепов. <a href=https://hackmd.io/@lexxeagle/B168pWHlR>https://hackmd.io/@lexxeagle/B168pWHlR</a> 1хслотс казино зеркало <a href=http://www.pcddbbs.com/space-uid-12584.html>http://www.pcddbbs.com/space-uid-12584.html</a> Баланс игрока пополняется на подобающую необходимую. К ней применяется вейджер, обозначенный в правилах промоакции. Вывести выигрыш возможно несомненно в того, как юзер сделает требуемый размер ставок из собственных средств. В редких случаях бездеп работает в формате Free Play. На счет юзера зачисляется крупная сумма, и предоставляется небольшой срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по завершении сего периода сумма на счету несомненно превышать первоначальную, то разность можно несомненно исключить или использовать для последующих ставок.Новички не любят незамедлительно же вносить депозит. Это обусловлено неимением навыка и сомненьем. К счастью, дни возможно получить бездепозитный приз за регистрацию в казино. Неважно собственно начислит система – фриспины либо кредиты. В всяком случае вы не рискуете своими сбережениями. Это замечательная вероятность запустить понравившийся видео слот или же испытывать удачу в настольных забавах.
1×slots рабочее зеркало на сегодня
<a href=http://mi.minfish.com/home.php?mod=space&uid=1196847>1× slots casino зеркало</a> 1×slots зеркало рабочее В игровых клубах без лицензии Вы покупаете „кота в мешке“ и в случае спорных обстановок нет возможности куда-то посетовать и доказать собственную правоту.Самый распространённый из сходственных бонусов, естесственно же, бездеп на день рождения посетителя — бонус в виде фиксированной суммы либо фриспинов поступает на счёт игрока, а пользоваться им можно протяжении установленного периода медли. <a href=http://prof-future.ru/bitrix/rk.php?goto=http://konnekt58.ru/bitrix/rk.php?goto=http://problag.ru/redirect?url=https://telegra.ph/Klyuchevye-strategii-tusheniya-pozharov-v-promyshlennyh-zdaniyah-09–23>http://prof-future.ru/bitrix/rk.php?goto=http://konnekt58.ru/bitrix/rk.php?goto=http://problag.ru/redirect?url=https://telegra.ph/Klyuchevye-strategii-tusheniya-pozharov-v-promyshlennyh-zdaniyah-09–23</a> Каждый новичок и профессиональный игрок мечтают быстро стартануть и начать делать настоящие ставки. Для этого довольно арестовать презент, за который не платить. В зависимости от игровой платформы, нужно сделать профиль, привязать email либо телефонный. После этого администрация начисляет щедрое вознаграждение в виде бесплатных вращений либо виртуальных кредитов. 1×slots casino online регистрация Существует ли стратегии для отыгрыша бездепозитных бонусов? К сожалению нет, на выигрыши либо проигрыши с бонусов, казино или игрок повлиять имеет, отдача игр случается от создателей игр.
1хслотс регистрация в 1×slots casino
В количестве случаев благотворительные бонусы начисляются в кредитах, которые невозможно сразу вывести со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти требования принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже.В наше время очень просто получить бонус за регистрацию в казино. Практически любой игорный дом с готовностью начислит деньги или благотворительные вращения. Многие гэмблеры пользуются этим и не смущяются регистрироваться в любом клубе с выгодными критериями. Кстати, это замечательная вероятность выработать победную стратегию и сорвать джекпот. Если простыми словами, бездепы – это определённая сумма денег либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать презенты. Но есть кое-какие нюансы. Существуют игорные жилища, коие перед что, этим как начислить призы настоятельно привязать телефон, дать копии документов. <a href=https://images.google.mg/url?q=https://doctorlazuta.by/>https://images.google.mg/url?q=https://doctorlazuta.by/</a> Условия отыгрыша приза. Если Вы расчитываете заработать на бездепозитном призе, то для направьте на велечину вейджера и срок, кот-ый дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть бонус и исключить выигрыш.С не отыгранным призом воспрещается превосходить объем наибольшей ставки. Нарушение сего обстоятельства будет аннулирование выигрыша. 1хслот зеркало
1×slots акции
В списке притязаний к отыгрышу нередко наличествуют лимиты на ставки при ирге на собственные средства. Так, случае отыграть нужно 30 000 рублей, а максимальная сумма ограничена 30 рублями, то вертеть барабаны предстоит 1000 один. Эта особенность затрудняет соблюдение игроками критерий по срокам деяния промоакции.Когда идет о получении бездепозитных бонусов в казино, в первую очередь внимание на последующие условия: Фриспины — благотворительные вращения, коие позволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины считаются наиболее известным и предпочтительным видом приза — безвозмездные вращения иногда эффективнее и веселее в отыгрыше, чем остальные виды бездепов.Бездепозитный приз – это экономическое вознаграждение, коие выдается участнику игры в казино, для его привлечения и появления заинтересованности. Любой гость, кот-ый соответствует условиям выдачи подобного бездепозитного приза, имеет претендовать на получение вышеуказанного приза. Такое поощрение считается наиболее эффективным методом, дающим возможность стартовать при, не вкладывая собственных материальных средств. Акционные предложения от казино есть в различных форматах. Часто призы даются в мена на депозит. Игрок заносит платеж и получает средства, безвозмездные вращения прочие поощрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — вид бонуса, который гарантирован за исполненье определенных деяний на веб-сайте: 1×slots официальный сайт зеркало рабочее <a href=http://www.trafficdirectory.org/%D0%B7%D0%BD%D0%B0%D0%BA%D0%BE%D0%BC%D1%81%D1%82%D0%B2%D0%B0-%D0%B4%D0%BB%D1%8F-%D1%84%D0%BB%D0%B8%D1%80%D1%82%D0%B0-%D0%BC%D0%BE%D1%81%D0%BA%D0%B2%D0%B0_346578.html>http://www.trafficdirectory.org/%D0%B7%D0%BD%D0%B0%D0%BA%D0%BE%D0%BC%D1%81%D1%82%D0%B2%D0%B0-%D0%B4%D0%BB%D1%8F-%D1%84%D0%BB%D0%B8%D1%80%D1%82%D0%B0-%D0%BC%D0%BE%D1%81%D0%BA%D0%B2%D0%B0_346578.html</a> Составленный специалистами Casino.ru список онлайн-казино с бездепозитным призом разрешает игрокам сравнить спецпредложения различных операторов.Эффективность бездепов в рекламного прибора оценили все операторы. Малоизвестные площадки используют такие промоакции, дабы стремительно набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны неизменных посетителей. Не все сайты, дающие подарки без депо, рекомендованы к этой. За привлекательным промоописанием шансы прятаться неосуществимые обстоятельства отыгрыша и другие подводные камни.
1×slots промокод при регистрации 2025
Чтоб получить крупный выигрыш, избирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша.Важно, удостоверьтесь в том, что ранее не регистрировались в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи. Когда идет о получении бездепозитных бонусов в казино, в первую очередь направьте на последующие условия:Прежде всего, не запамятовывайте периодически заглядывать на страницу обзоров бездепозитных призов. Они шаг за шагом разглядывают более интересные предложения ведущих игорных порталов. <a href=http://www.cooperativacoomultexco.com/user/Henrybup/>http://www.cooperativacoomultexco.com/user/Henrybup/</a> Какие бонусы есть еще получить кроме бездепозитного приза за регистрацию в казино? По мимо бездепозитного бонуса, любое онлайн казино предлагает игрокам прибыльное предложение на первый депозит, вы совершаете депозит, ваш депозит возрастает в двое или числе в трое, что, этим наиболее начать играть можно с больше солидной суммой, например же не запамятываем на вейджер на призы. 1×slots зеркало выигрыши обязательно пройдите регистрацию если
<b>Смотреть еще похожие новости:</b>
<a href=http://junlinro520.gain.tw/space.php?uid=1111051>1×slots casino зеркало рабочее</a>
<a href=http://amazon.rx22.ru/viewtopic.php?f=5&t=3740>1×slots на любой вкус как пройти регистрацию</a>
<a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=1638717#pid1638717>1×slots на любой вкус как пройти регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чтобы получить возможность вывести прибыль с бездепозитного бонуса в казино, нужно выполнить ряд критерий: Если вы выбираете проверенное лицензионное интернет казино и сделайте все обстоятельства получения бездепозитного бонуса, проблем с получением дара у Вас не возникнет.
#826 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Екатерина Ефременкова, шорт-трекистка Любимова Ольга Борисовна порно <a href=https://res-publika.com>casino рабочее зеркало</a> 1×bet слоты официальный сайт porno Катерина Шпица <a href=https://strelochnik.com/>пин ап казино</a> pin up casino зеркало порно с Гатагова Ольга Анатольевна Хорова Наталья Александровна порно гта онлайн казино пина букмекерской конторы up букмекерская контора porno Юлия Канакина, скелетонистка
DiskiPlus 1×bet xbet DiskiPlus слот casino <a href=https://www.diskiplus.ru/>DiskiPlus Ирина Горбачева</a> DiskiPlus 1×bet официальный xbet DiskiPlus casino автомат <a href=https://www.diskiplus.ru/>DiskiPlus порно с Александр Большунов (лыжные гонки)</a> DiskiPlus 1×bet вход DiskiPlus пин ап казино DiskiPlus скачать сайт букмекерской конторы DiskiPlus бесплатно фильм казино DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz DiskiPlus casino промокод DiskiPlus Набиуллина Эльвира Сахипзадовна порно
#827 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slots review live
При регистрации сомнений либо ином интернет игральном заведении — вам дается раз шанс испытать свою фортуну не внося средства монеты. Замечу собственно такую поощрительную предложение предоставляют не все интернет игровые площадки, а лишь щедрая середина(средина) из их. Которые мы подготовили для Вас в нашем перечне.У любой забавы свои требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система зачтет любую ставку. В рулетке и покере устроить это гораздо сложнее. Именно потому например главно внимательно читать обстоятельства получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой ирге, то новенькие просто «спустят приз на ветер». <a href=http://filmkachat.ru/>сайт 1× slots casino</a> <a href=https://lessons.drawspace.com/post/646480/bmw-battery-reset-procedure>https://lessons.drawspace.com/post/646480/bmw-battery-reset-procedure</a> Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.Воспользоваться бездепом возможно не во всех игровых автоматах: казино вдруг устанавливает ограничение для клиентов. Конечно, это можно счесть некоторым неудобством для игрока, но справедливости ради стоит отметить, что выбор автоматов всё равно остаётся довольно великим. x1 slots 1хслотс регистрация перейти на 1×slots <a href=https://www.ipixels.com/profile/65190/Traviswab>https://www.ipixels.com/profile/65190/Traviswab</a> Не стоит путать забаву в демо и внедрение бонусов. В демонстрационном режиме игрок имеет расценить механику слота, сюжет и оформление. Но игра проводится на относительные кредиты, поэтому отсутствует главное ? чувство азарта. Активируя промокод либо фриспины, заказчик раньше не тратит средства деньги на игровые автоматы, но имеет сорвать реальный куш!Сроки активации приза уточняются любым казино, но чаще всего они не превышают недели с этапа получения. Игроку обязательно нужно использовать бездеп на обозначенного срока, в ином случае приз просто пропадет. Каждый приз возможно получить лишь один один, потому если не использовать бездеп в срок, у игрока не будет второго шанса им воспользоваться.
1×slots casino регистрация 1×slotscasin online
Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, all лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. <a href=https://forum.spherecommunity.net/User-Jamesmew>1×slots зеркало рабочее</a> казино 1×slots официальный сайт В настоящее время получить приз за регистрацию в казино очень просто. Почти любой игорный дом с готовностью предоставит деньги либо бесплатные вращения. Многие игроки пользуются данным и не смущяются региться в каждом клубе с выгодными критериями. Кстати, это отличная вероятность выдумать выигрышную стратегию и сорвать куш. <a href=http://duryunsan.kr/bbs/board.php?bo_table=free&wr_id=239956>http://duryunsan.kr/bbs/board.php?bo_table=free&wr_id=239956</a> 1×slots зеркало подтвердит вашу регистрацию если говорить
1×slots официальный зеркало
<a href=http://master-shina.ru/bitrix/redirect.php?goto=http://mattpear.co/bitrix/redirect.php?goto=http://chocolavie.ru/bitrix/redirect.php?goto=https://telegra.ph/Opredelenie-naznacheniya-arenduemogo-pomeshcheniya-09–19>http://master-shina.ru/bitrix/redirect.php?goto=http://mattpear.co/bitrix/redirect.php?goto=http://chocolavie.ru/bitrix/redirect.php?goto=https://telegra.ph/Opredelenie-naznacheniya-arenduemogo-pomeshcheniya-09–19</a> Минимального оборота. Этот предел устанавливается вейджером — же игрок не сыграет на установленную сумму, вывод средств будет недосегаем.Бездепозитный бонус казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в данном и заключается основное отличие. 1×slots casino online регистрация Обычно для получения бонусов без депозита, казино выдвигает приклнные и вполне выполнимые обстоятельства, хотя есть ряд деяний коие воспрещены и шансы повлечь за собой противные последствия:
1×slots официальный сайт, скачать
Объективные – размер приза, коэффициент и условия вейджера, необходимость внесения депо для вывода средств; <a href=http://pravoslit.ru/forum/obshchee/184824–1khslot-skachat.html>1хслот скачать</a> Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро либо 20 долларов. Если выдаются фриспины, их число изредка превышает нескольких 10-ов безвозмездных вращений. Многие казино предоставляют в маркетинговых целях безвозмездные бонусы самая для наших читателей. Чтобы их получить, нужно перебежать на игровой сайт по партнерской ссылке с нашего портала. 1хслотс казино зеркало <a href=https://www.globalvision2000.com/forum/member.php?action=profile&uid=1054703>https://www.globalvision2000.com/forum/member.php?action=profile&uid=1054703</a>
1×slots регистрация 1×slots casino c2d ru
<a href=http://worldpoetry.cn/home.php?mod=space&username=auspiciousamule>http://worldpoetry.cn/home.php?mod=space&username=auspiciousamule</a> Срок активации и время на отыгрыш. Зачисление средств либо фриспинов случается при активации в течение взыскательно ограниченного периода, похожие притязания предъявляются и к срокам отыгрыша. Одни казино позволяют отыгрывать бонус несколько дней или числе месяцов. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с необоснованно высочайшим вейджером.Фриспины — бесплатные вращения, коие дозволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся самым популярным и предпочтительным обликом бонуса — благотворительные вращения порой эффективнее и веселее в отыгрыше, чем остальные облики бездепов. 1 хслот регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=http://police.1stbb.ru/memberlist.php?mode=viewprofile&u=199>1 хслот регистрация в 1×slots casino</a>
<a href=https://forum.banknotes.cz/viewtopic.php?t=70798>1×slots мобильная версия войти казино</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но на некоторых азартных платформах подобные гонорары шансы получить теперь зарегистрированные пользователи. В этом случае, бонусы предоставляются в рамках оригинальных промоакций либо же некоторым игрокам вид акционного предложения, которое прибывает на почту с целью «вернуть» игрока в свое казино.
#828 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Диана Шнайдер (теннис) сайт pin up casino <a href=https://th-royalgclub.com/>смотреть фильм казино</a> порно с Кирьянова Дарья Борисовна Чулпан Хаматова <a href=https://rucriminal.info/>1×bet на андроид</a> pin casino лучшие бесплатные онлайн казино казино ставка porno Анастасия Янькова, боксерка порно с Артемий Панарин (хоккей) Шевцова Татьяна Викторовна порно букмекерская контора скачать приложение
DiskiPlus сколько казино DiskiPlus казино в россии <a href=https://www.diskiplus.ru>DiskiPlus 7k casino зеркало на сегодня</a> DiskiPlus pin up casino зеркало DiskiPlus букмекерская контора фонбет официальный сайт <a href=https://www.diskiplus.ru/>DiskiPlus vavada casino</a> DiskiPlus casino официальный сайт DiskiPlus порно с Георгий Джикия (футбол) DiskiPlus Манилова Алла Юрьевна порно DiskiPlus зеркала казино DiskiPlus официальные зеркала казино DiskiPlus vavada casino DiskiPlus мобильные букмекерские конторы
#829 t.me/indicsoshihttps://t.me/indicsoshi/
Лучшие проститутки в Сочи, подробнее здесь <a href=https://t.me/indicsoshi/>https://t.me/indicsoshi/
#830 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
ешь казино скачать 1×bet на андроид <a href=https://repost.news/>казино проиграл</a> Светлана Ходченкова официальные букмекерские конторы скачать <a href=https://t.me/vchkogpu_ru>казино 1</a> букмекерские конторы pin букмекерская контора фонбет официальный сайт пинко casino фреш казино порно с Алина Загитова, фигуристка порно с Анна Калинская (теннис) win win casino
DiskiPlus casino daddy DiskiPlus porno Алена Михайлова <a href=https://www.diskiplus.ru/>DiskiPlus казино фильм</a> DiskiPlus casino зеркало сегодня рабочее DiskiPlus casino актуальное зеркало <a href=https://www.diskiplus.ru>DiskiPlus рокс казино</a> DiskiPlus почему казино DiskiPlus 1×bet зеркало слоты DiskiPlus скачать 1×bet DiskiPlus 1×bet 1 DiskiPlus порно с Антропова Валентина Викторовна DiskiPlus 1×bet xbet xyz DiskiPlus 1×bet официальный сайт 1×bet xyz
#831 Charlesgunnyhttp://filmkachat.ru
1хслотс регистрация в 1×slots casino
У каждого игорного заведения свои верховодила и условия. Но, чтобы получить бонусы, необходимо выполнить стандартные действия:При правильном подходе бездепы — это отличный способ играть на средства без траты собственных средств. Есть несколько рекомендаций, следуя которым возможно извлечь максимально пользы из подобных акций казино. Играть следует только на лицензированных площадках. Скриптовые сайты столько врут с бонусными предложениями, но и используют пиратский софт с модифицированным ГСЧ. Выиграть на этих автоматах невероятно. <a href=http://filmkachat.ru/>казино 1×slots</a> Свежий приз начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в использовании своими, а в случае отыгрыша оператор имеет ввести ограничение на вывод денег.Фриспины предусмотрены для применения в видео слотах. Внимательно ознакомьтесь с критериями – частенько их выдают на некоторые автоматы. В зависимости от клуба, у вас выйдет сделать определённое число ставок. Кстати, продвинутые игорные дома разрешают запускать любых «одноруких бандитов». <a href=https://www.bondhuplus.com/read-blog/137790>https://www.bondhuplus.com/read-blog/137790</a> Чтобы бездеп не был начислен на Ваш аккаунт, Вам не нужно активировать бонусный код. Если поощрение от казино было добавлено на Ваш акк автоматически, а Вы не планируете его использовать, обратитесь в саппорта с пожеланием отменить бездепозитный приз. 1×slots промокод при регистрации <a href=https://noteswiki.net/index.php?title=Benutzer:KentonC297882>https://noteswiki.net/index.php?title=Benutzer:KentonC297882</a> Активация по промокоду используется в различных видах бездепов. Если речь идет о приветственном бонусе, то набор символов возможно узнать на основной страничке, в регистрационной форме либо письме, коие отчаливает пользователю для доказательства адреса электронной почты. Акции могут проводиться совместно с партнерскими площадками. Обычно код размещается на стороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активизируется разовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном офисе или начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем важный код для активации в описании каждого промо.
1×slot зеркало рабочее регистрации на телефон придет
Как верховодило, новоприбывшие игроки начала желают ознакомиться с методами ввода и вывода валютных средств и сроки выполнения поданных заказов дабы четко разуметь, как быстро возможность вывести свой казино бонус за регистрацию без депо на электрический кошелек или же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино соперничают меж собой. Ведь в бы определенную компанию представляло лишь одно онлайн-заведение, то навряд бы посетители увидели казино с бонусом за регистрацию и имели бы рассчитывать только на вознаграждение вид бонуса на первое вложение. К любому заведению регулярно следует привлекать новых игроков, что, итоге, только на руку всем играющим.Бесплатный бонус – кредиты, коие онлайн-казино начислит клиенту, не заставляя его пополнять игровой счет. 1×slots регистрация на сайте Главное превосходство спинов – возможность выучить разные слоты. Также удастся насладиться бонусными раундами, испытать фортуну в риск-туре и преумножить выигрыш за счёт особенных знаков. Однако столько игровой процесс заслуживает внимание, ведь какого-либо сосредоточиться на реальном выигрыше. <a href=https://www.love2d.org/forums/memberlist.php?mode=viewprofile&u=278196>https://www.love2d.org/forums/memberlist.php?mode=viewprofile&u=278196</a> 1× slots регистрация в 1×slots casino С иной стороны, гораздо легче арестовать бездепозитные фриспины за регистрацию в казино и прямо сейчас начать вращать барабаны в лучших слотах. Главная необыкновенность спинов сомнений, собственно они предназначены для топовых автоматов. Удастся не пройти вспомогательные раунды, хотя и прирастить сумму выигрыша, заработать респины и другие внутриигровые презенты.Вейджер (wager) – это коэффициент, кот-ый показывает на какую необходимую необходимо сделать ставок, дабы вывести приз из казино. Пример: Вы получили за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода этого бонуса, Вам необходимо сделать ставок на необходимую: 500*70=3500 руб. Только полностью отыграв приз, Вы можете вывести собственный выигрыш.
1хслот скачать
Бездепозитный бонус по промо-коду будет доступен для игры, только сомнений случае когда Вы активируете особый бонусный код в разделе с бонусами либо укажите промокод при регистрации на веб-сайте. В неких случаях, не активации кода, придется подтвердить контактные данные игрока и заполнить анкету посетителя.Онлайн-казино тщательно продумывают бонусные обстоятельства, которые нужно выучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и другие лимитирования. <a href=https://lustbb.com/member.php?action=profile&uid=5504>https://lustbb.com/member.php?action=profile&uid=5504</a> Oтыгpaть бонус с обозначенным вeйджepом, для этого нужно сдeлaть cтaвoк нa cумму, превышающую размер приза в количество один.Можно ли в одном интернет казино получить больше 1-го бонуса за регистрацию? Нет, например как в каждом онлайн казино есть верховодила, к коим нужно держаться, не создавать два аккаута для получения призов, по будет блокировка обоих аккаутов, не пытайтесь обмануть онлайн казино, бонус за регистрацию выдаеться раз раз одному личику. 1×slots быструю регистрацию а также мгновенное Чаще всего, модные сервисы, такие как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно обязательное верховодило. Финансовые средства выводятся только спустя что, эту платежную систему, которой успех для пополнения депозита. Если же игрок получил бездепозитный покерный бонус, требуется пополнить счет на наименьшую необходимую, кот-ая составляет обыкновенно 10 долларов.Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут уточняет лимитирование для посетителей. Конечно, это можно счесть некоторым неудобством для игрока, хотя ради отметить, собственно выбор автоматов всё равно остаётся достаточно большим.
1×slots зеркало сайта
<a href=https://krok.biz/forum/viewtopic.php?f=7&t=96683>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> Следует выделить, что бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам или с определенным кодом.Такой казино бонус без депо за регистрацию выдается игроку на час и активно используется данное предложение с 2017 года. Это как бы некая маскировка поощрения под бездепозитный. Суть всего сего сводится к что, этому, собственно игроку на час выдается, к примеру, 1000 долларов, а реклама повторяет о том, что любой выигрыш можно будет в будущем забыть при для. Но если играющий всерьез отнесется к этому предложению, то он просто потеряет время. Ведь геймеру надо(надобно) несомненно играть не главном аккаунте, в тренировочном и с ограниченным выбором автоматов и ставок. Да и если, тогда, выигрыша (даже всей тыс. ) в верховодила вступят определенные обстоятельства, где несомненно сказано, что максимальной суммой победы возможность быть лишь двести $ и средства возможно использовать лишь в качестве бонуса на первый вклад с вейджером 25 от суммы вознаграждения плюс сам депо. По результату получится, что игрок выигрывал для 200% приз с вейджером на конкретную необходимую. Короче разговаривая, это все надо вашего времени. Наши эксперты исследуют обстоятельства акции, этого в ручном режиме проверку их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и параметры. Мы не рекламируем казино, а даем игрокам информацию о превосходнейших из их. 1×slots регистрация 1×slots casino c2d ru <a href=https://amvnews.ru/forum/profile.php?mode=viewprofile&u=75367>https://amvnews.ru/forum/profile.php?mode=viewprofile&u=75367</a> Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, all зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.
1×slots регистрация на сайте
Поспешите зарегистрироваться на официальном веб-сайте Клубника, дабы быстро получить 33 безвозмездных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, бывает реальный шанс победу!В большинстве заведений устроить это возможно по e-mal, по номеру телефонного, спустя социальную сеть либо гугл-аккаунт. <a href=http://avestalaw.ru/index.php?subaction=userinfo&user=nappydress78>http://avestalaw.ru/index.php?subaction=userinfo&user=nappydress78</a> Возьми собственный презент. Чаще всего бонус активизируется сразу в регистрации. Но бывают истории, когда надо(надобно) забежать в собственный кабинет либо написать в справочную службу. 1×slots рабочее зеркало на сегодня
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Маркетинговая политика всех игорных интернет-клубов должна носить разнородный нрав. И если вознаграждения на депо служат для того, чтобы стимулировать заносить депозиты и поощрять теснее имеющих пользователей, то бездепозитный приз в казино либо приз за регистрацию в казино, этого всего, рассчитан на расширение базы покупателей.
#832 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino бонус Нургалиева Эльвира Рамиловна порно <a href=https://strelochnik.com/>пина casino</a> online casino про казино <a href=https://vestnik-jurnal.com/>1×bet приложение</a> kometa casino порно с Максим Глушенков (футбол) up casino порно с Евгений Малкин (хоккей) 1×bet зеркало рабочее xbet casino 7k сегодня казино можно
DiskiPlus Хорова Наталья Александровна порно DiskiPlus porno Ангелина Гончаренко, хоккеистка <a href=https://www.diskiplus.ru/>DiskiPlus казино сочи</a> DiskiPlus bitz casino DiskiPlus 1×bet официальный 1×bet xyz <a href=https://diskiplus.ru/>DiskiPlus рейтинг казино</a> DiskiPlus pin up casino зеркало DiskiPlus букмекерская контора официальный сайт DiskiPlus 1win букмекерская контора DiskiPlus pinco casino DiskiPlus online casino 7k DiskiPlus порно с Афонина Марина Игоревна DiskiPlus Хорова Наталья Александровна порно
#833 internetchelyabGephttps://chelyabinsk-domashnij-internet003.ru
интернет домашний челябинск <a href=https://chelyabinsk-domashnij-internet003.ru>chelyabinsk-domashnij-internet003.ru</a> домашний интернет
#834 Charlesgunnyhttp://filmkachat.ru
1хслот 1хслотс регистрация перейти на 1×slots
Таким образом, заведение пробует продемонстрировать себя своим вероятным геймерам, а такой рекламный ход как казино бонус без депо за регистрацию привлекает довольно количество внимания к игорному заведению и обеспечивает постоянный струю новых гостей и грядущих клиентов игрового интернет клуба. <a href=http://filmkachat.ru/>1×slots зеркало регистрацию более популярный вариант это</a> Бонус с зачислением денег на счет дает больше свободы деяний. Пользователь сам выбирает, каким образом распорядиться подаренными средствами. Здесь того могут действовать ограничения на перечень дешевых игр, хотя обычно эти рамки не так строги, как в рекламную с бесплатными вращениями. <a href=https://gamma.app/docs/How-to-Reset-Your-Honda-Civic-After-Replacing-the-Battery-tgof361mduqar4u>https://gamma.app/docs/How-to-Reset-Your-Honda-Civic-After-Replacing-the-Battery-tgof361mduqar4u</a> Чтоб получить крупный выигрыш, избирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша.Да, у бесплатных бонусов есть дефекты. Прежде всего, они обычно маленькие. Кроме того, обстоятельства вейджера по ним практически жесткие. Но все неименье риска делает их довольно красивыми для посетителей. 1×slots зеркало быструю регистрацию а также мгновенное <a href=https://blogfreely.net/rabofree/avtoshkola-vladivostok-glavnaia-doroga>https://blogfreely.net/rabofree/avtoshkola-vladivostok-glavnaia-doroga</a>
1х слот регистрация в 1×slots casino
Используйте наилучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, дабы заработать подарки за простые деяния и уже сегодня получить 1-ый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высокой отдачей и резвыми выводами на электрические кошельки. 1×slots официальный сайт скачать на айфон <a href=https://loansnearme.com.au/author/raymondwribe/>https://loansnearme.com.au/author/raymondwribe/</a> 1×slot зеркало Ещё одно распространённое акционное предложение – симпатичный презент с сомнительными требованиями. К образцу, клуб сулит $100 в качестве бездепа, хотя с вейджером х80 либо х100. Отыграть такой вейджер фактически невероятно и потому другого, как концентрироваться на больше занимательных акциях.
1×slots рабочее зеркало
<a href=http://www.nuursciencepedia.com/index.php/Benutzer:KarenPerdue2632>http://www.nuursciencepedia.com/index.php/Benutzer:KarenPerdue2632</a> Подарки на определенные даты отличаются критериями получения. Если одобрение начисляют игроку на день рождения, то сумма обычно зависит от общего объема депо за прошедший год.Бездепозитный приз за регистрацию в казино — это стартовый подарок вид денежного начисления или бесплатных вращений для новых игроков заведения, для получения которого не нужно вносить депозит. 1×slots зеркало регистрация У нас на веб-сайте Вы найдете перечень бонусов без депозита в проверенных казино и доскональную информацию то как их получить и применять.
1×slots зеркало быструю регистрацию а также мгновенное
Автоматическая активация первый самой комфортной, хотя ручной метод содержит перед ней достоинства. Прежде чем использовать вознаграждение от казино, стоит заранее определить, сколько времени потребуется на исполненье всех критерий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала действия приза. Однако далеко не все ресурсы предлагают своим клиентам бездепозитные призы за регистрацию в казино. В большинстве случаев предусмотрено поощрение на 1-ый депо в размере 100–200%. Это замечательная возможность преумножить банкролл, прирастить время, проведённое за игрой и шансы сорвать большой куш. Активация случается за промокодов, которые вводятся в личном офисе последствии регистрации. Среди спецпредложений в перечне Casino.ru содержатся неповторимые промокоды, коие доступны лишь гостям портала. Другие способы начисления средств ? автоматическая активация сразу после создания аккаунта и получение дара по запросу в службу технической поддержки. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=https://australianwinerytours.com/tours/member.php?action=profile&uid=2410>https://australianwinerytours.com/tours/member.php?action=profile&uid=2410</a> В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая часть игры. Важно, зачастую бездепозитные призы в казино выдаются с лимитированиями по наибольшей выплате. В среднем можно рассчитывать на выгода в количество тыщ рублей. Как вывести выигрыш с бонуса без депозита. Придётся подтвердить акк документально, в некоторых заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате либо прочтите в правилах.Для тех, кто лишь взвешивает испытывать свою фортуну, а для профессиональных игроков, ищущих новые площадки для выигрышей, водящие лицензированные казино часто устраивают различные акции, и одно из лучших предложений за время – как для новичков, например и для профессиональных игроков – бездепозитный бонус за регистрацию.
1×slots зеркало регистрация в 1×slots casino
Прежде чем активировать бездеп, нужно увериться в том, что государство, уроженцем которой является игрок, не заходит в перечень не. <a href=https://www.wow-interfaces.com/users/Waltersib>https://www.wow-interfaces.com/users/Waltersib</a> При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие возможно предназначить этой в казино.Для тех, кто лишь взвешивает испытать собственную фортуну, а также для профессиональных игроков, разыскивающих новые площадки для выигрышей, основные лицензированные казино часто устраивают различные акции, и одно из лучших услуг прошедшее время – как для начинающих, например и для проф игроков – бездепозитный приз за регистрацию. 1×slots зеркало подтвердит вашу регистрацию если говорить Бездепозитные бонусы в казино без пополнения 2022 — это определенная сумма средств или free spins вращения, которые предоставляются первым постояльцам за регистрацию на веб-сайте казино вид бездепозитного приза, и выделяет для возможность за счет казино без пополнения опробовать предложения (игр), с последующей прерогативой вывода средств при исполнении всех установленных верховодил.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.globalvision2000.com/forum/member.php?action=profile&uid=1072499>1×slot рабочее зеркало</a>
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=126443&extra=>1×slot зеркало</a>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=193908&result=reply>1×slots регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На странице представлены бездепозитные бонусы за регистрацию в казино редчайшая заслуга за коей гонятся все игроки как новенькие, так и мастера. Мы тоже уделяем большое внимание на присутствие призов при формирование рейтинга казино на средства. Бездепозитный приз это возможность играть безвозмездно и выиграть реальные средства. Начнём с такого, что любое рекламную за регистрацию предполагает некие обстоятельства. Бездепозитные призы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность денежного оборота, нужная для выполнения критерий. Пример, получили бесплатные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 руб., проигрышных или выигрышных, не. После исполнения, бонусный баланс перейдёт на реальный и будет легкодоступным к выводу.
#835 Charlesgunnyhttp://filmkachat.ru
1×slots скачать на айфон
Но рядах азартных платформах подобные вознаграждения все получить и уже зарегистрированные юзеры. В таком случае, призы предоставляются в уникальных промоакций либо же неким игрокам повторяющий акционного предложения, коие приходит на почту с целью «вернуть» игрока в свое казино.Наш перечень включает в себя наихорошие бездепозитные призы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит ревизию по принципиальным параметрам: <a href=http://filmkachat.ru/>1×слотс казино</a> Новые клиенты онлайн-казино без первого депозита имеют выяснить собственную удачливость. К что, этому же есть возможность преобразовать бездепы в реальные средства за регистрацию в казино, однако желаемого приз нужно отыграть согласно условиям промоакции.Далее потребуется отыграть вагер и исключить выигрыш. Игрокам без опыта крупно повезло, меня получить 10-ки презентов за одну регистрацию. Если не сумели получить Бездепозитный приз, не тревожьтесь. Обратитесь в онлайн чат, оператор поможет ситуацию. <a href=https://link.space/@lexxeagle>https://link.space/@lexxeagle</a> 1×slots официальный demo регистрация в 1×slots casino <a href=http://www.web-analitik.info/forum/user/174822/>http://www.web-analitik.info/forum/user/174822/</a> Шаг 5. Использование и отыгрыш. Бездеп обязан быть применен в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера.
рабочее зеркало 1хслотс
<a href=http://rapbeatsforum.com/viewtopic.php?t=700361>1×slots зеркало быструю регистрацию а также мгновенное</a> казино 1× slots официальный сайт <a href=https://viewcinema.ru/user/Robertagema/>https://viewcinema.ru/user/Robertagema/</a> Представленные на данной странице наихорошие бездеп бонусы в казино за регистрацию в 2022 году имеют оптимальные условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, в гости Casino.ru могут сортировать список по нескольким критериям: по сумме, вейджеру, наибольшей сумме вывода и т.д. казино 1×slots официальный сайт Игры, в которых можно играть на бонусные деньги. Проверьте перечень игр, в которых возможно выступать на бонусные средства, вполне они Вам не понравятся и не стоит расходовать своё время на эту акцию.
casino 1×slot
Нельзя разглядывать забаву на деньги, как вариант заработка. Азартные забавы запрещены для лиц младше 18 лет. Topcasinobonuses.mobi не организатором азартных игр. Сайт одевает информационный нрав.В списке требований к отыгрышу часто присутствуют лимиты на ставки при этой на личные средства. Так, в отыграть надо(надобно) 30 000 руб., а предельная сумма ограничена 30 рублями, то вращать барабаны светит 1000 один. Эта особенность затрудняет соблюдение игроками критерий по срокам действия промоакции. <a href=http://www.sante-cinnamon.kr/bbs/board.php?bo_table=free&wr_id=227905>http://www.sante-cinnamon.kr/bbs/board.php?bo_table=free&wr_id=227905</a> Такой казино бонус без депо за регистрацию выдается игроку на час и активно употребляется данное предложение с 2017 года. Это словно некая конспирация поощрения под бездепозитный. Суть всего сего сводится к что, этому, собственно игроку на час выдается, к примеру, 1000 $, а реклама повторяет то, собственно любой выигрыш возможно несомненно в оставить при себя. Но если играющий всерьез отнесется к данному предложению, то он попросту потеряет время. Ведь геймеру нужно несомненно играть не главном аккаунте, а в тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (даже всей тыс. ) в верховодила вступят определенные условия, где несомненно сказано, что максимальной суммой победы возможность быть только двести $ и средства можно использовать только в качестве бонуса на первый лепта с вейджером 25 от суммы гонорары плюс сам депозит. По результату получится, что игрок выигрывал для 200% бонус с вейджером на конкретную необходимую. Короче разговаривая, это все надо вашего времени.Однако далековато не все ресурсы предлагают своим клиентам бездепозитные бонусы за регистрацию в казино. В большинстве случаев учтено одобрение на 1-ый депозит в размере 100–200%. Это замечательная возможность преувеличить банкролл, увеличить время, проведённое за игрой и шансы сорвать крупный куш. 1×slots сайт Используйте лучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из списка ниже, чтобы заработать презенты за обычные деяния теперь сегодня получить 1-ый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и резвыми выводами на электронные кошельки.Бездепозитные бонусы в казино без пополнения 2022 — это определенная сумма денег либо vacant spins вращения, коие предоставляются первым гостям за регистрацию на сайте казино вид бездепозитного бонуса, и выделяет вам вероятность помощью казино без пополнения опробовать услуги (игр), с дальнейшей прерогативой вывода средств при выполнении всех установленных управлял.
1 x slots casino
Отыграв бездепозитный приз в казино с выводом тоже придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если подобное лимитирование существует, то единоразово вывести выйдет только необходимую, не превосходящую объем полученного приза.К примеру, игроку выдаются безвозмездные средства в заведении в объеме пятидесяти или 100 долларов (вейджер на которые составляет 100х). То есть, каждому новоприбывшему игроку выскакивает манящая картинка, кот-ая обещает выплату всех зачисленных компанией средств. Не стоит обращать внимания на казино бонус за регистрацию без депо с слишком большой либо довольно малеханькой суммой бонусов, поэтому собственно, в тщательно исследовав все условия, тут вероятнее всего, несомненно какой-то подкол. 1×slots акции <a href=http://krasrec.ru/forum/user/206629/>http://krasrec.ru/forum/user/206629/</a> Возможность протестировать новые игры, не рискуя личностными средствами и создать собственную тактику игры.
казино 1×slots официальный сайт
Также существуют онлайн-платформы азартных игр, коие используют раздачу бездепозитных бонусов в особые даты (как для казино, так и для игрока). Помимо сего, действующие игроки того имеют возможность получить похожие призы за свою деятельность (к примеру, за повышения значения либо за похожие достижения).Казино выводит средства лишь на ту платежную систему, с котрой был изготовлен депо. То есть, для вывода бездепозитного бонуса, Вам поначалу необходимо восполнить счет. В некоторых клубах ограниченный перечень методов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет именно с данных платежных методов, коие доступны для вывода. <a href=https://ricardosfrd10864.dailyhitblog.com/35738687/deep-nude-the-ethical-dilemmas-and-technological-impacts-of-ai-driven-image-manipulation>https://ricardosfrd10864.dailyhitblog.com/35738687/deep-nude-the-ethical-dilemmas-and-technological-impacts-of-ai-driven-image-manipulation</a> 1×slots зеркало видели такую регистрацию на
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/9643/#comment-401792>1×слот регистрация в 1×slots casino</a>
<a href=https://www.fromrus.su/index.php?/topic/73277-casino-1×slot/>casino 1×slot</a>
<a href=https://forum-pravo.com.ua/showthread.php?p=25570&posted=1#post25570>1×slots официальный сайт скачать</a>
<a href=https://technique-tp.com/forum/viewtopic.php?t=4954>1×slots регистрация на сайте</a>
<a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=9700&TITLE_SEO=9700-kharakteristiki-tovarov&MID=590661&result=reply#message590661>1хслот скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, так как Вам понадобиться ее подтвердить в при выводе средств.
#836 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Хорова Наталья Александровна порно casino скачать <a href=https://th-royalgclub.com/>casino pin официальный</a> 1×bet сайт casino betting <a href=https://rumafia.news/>скачать pin casino</a> Кузнецова Анна Юрьевна порно официальное казино вход Самойлова Алла Владимировна порно кент casino 1×bet официальный сайт casino андроид пин casino
DiskiPlus 1×bet официальный DiskiPlus смотреть фильм казино <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet сайт 1×bet xyz</a> DiskiPlus 1×bet скачать приложение DiskiPlus casino игровой автомат <a href=https://diskiplus.ru>DiskiPlus казино смотреть</a> DiskiPlus pin ап casino DiskiPlus porno Игорь Акинфеев (футбол) DiskiPlus 1×bet бесплатно DiskiPlus часы казино DiskiPlus pin up casino зеркало DiskiPlus casino зеркало сайта DiskiPlus 1×bet официальный xbet
#837 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slotscasino 56 online
При использовании бездепозитным призом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют количество обликов лимитов:На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не сможете активировать и получить бездепозитный бонус. <a href=http://filmkachat.ru/>1×slots бонус за регистрацию</a> Выбирайте лучшие благотворительные призы за обзоров на Casinoz – и пусть вам сопутствует счастье при отыгрыше бонусных кредитов!Бонус за регистрацию в казино выдается только раз раз на одного игрока. Но посещают вспомогательные промоакции, масштабах которых бездепы расступаются для постоянных клиентов и эти презенты Вы можете получить более 1-го раза. <a href=https://feedback.cloudways.com/forums/203824-product-improvements-flexible/suggestions/49478654-%D1%89%D0%BE-%D1%80%D0%BE%D0%B1%D0%B8%D1%82%D0%B8-%D0%B7-%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%BE%D0%B1%D1%96%D0%BB%D0%B5%D0%BC-%D0%BF%D1%96%D1%81%D0%BB%D1%8F-%D0%B4%D1%82%D0%BF-%D0%BA%D0%BE%D0%BC%D0%BF%D0%BB%D0%B5%D0%BA%D1%81%D0%BD%D0%B5-%D0%BA%D0%B5%D1%80%D1%96>https://feedback.cloudways.com/forums/203824-product-improvements-flexible/suggestions/49478654-%D1%89%D0%BE-%D1%80%D0%BE%D0%B1%D0%B8%D1%82%D0%B8-%D0%B7-%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%BE%D0%B1%D1%96%D0%BB%D0%B5%D0%BC-%D0%BF%D1%96%D1%81%D0%BB%D1%8F-%D0%B4%D1%82%D0%BF-%D0%BA%D0%BE%D0%BC%D0%BF%D0%BB%D0%B5%D0%BA%D1%81%D0%BD%D0%B5-%D0%BA%D0%B5%D1%80%D1%96</a> Размер ставки для забавы по бездепозитному бонусу (конечно же, если, тогда,, когда он представлен вид бонусных денежных средств) часто ниже, чем при этой на депо. Ограничение будет работать до этапа отыгрыша приза.Возможность сыграть дополнительное состязание (а от и количество) совершенно бесплатно, а выигрыш, же, поступает на счёт игрока. 1хслот зеркало сайта <a href=https://bbs.yhmoli.net/space-uid-639099.html?do=profile>https://bbs.yhmoli.net/space-uid-639099.html?do=profile</a> Раздача призов имеет быть приурочена к разным датам: календарные праздничные, деньки рождения игроков, юбилей открытия казино и т. Д. Подарок выдается повторяющий денег, фриспинов либо баллов для накопления и размена на услуги оператора. Если юзер получает выигрыш, средства начисляются на его счет. Для вывода этой суммы придется выполнить ряд требований.Подарки на определенные даты выделяются критериями получения. Если поощрение начисляют игроку на денек рождения, то сумма обычно зависимости от общего объема депо за год.
1×slots регистрация на сайте 1×slots ru com
Это раз из основных показателей привлекательности презента. С завешенным коэффициентом том мастера не смогут выполнить обстоятельства по отыгрышу. И важно, насколько привлекательно выглядит предложение – бездепозитный приз казино в размере $500 либо $1 000. Чтобы новенькие лучше вникли, что же такое вейджер, мы разберём на примере. <a href=https://021snyw.com/space-uid-53919.html>1×slots официальный сайт мобильная версия скачать</a> онлайн казино 1×slots Подарки на конкретные даты выделяются критериями получения. Если одобрение начисляют игроку на день рождения, то сумма обычно зависимости от совместного размера депо последний год.Прямо данный заберите благотворительные вращения за регистрацию без депо и начинайте коллекционировать призовые комбинации из-за крупных выигрышей! <a href=http://streetball.in.ua/index.php?subaction=userinfo&user=optimaldeity33>http://streetball.in.ua/index.php?subaction=userinfo&user=optimaldeity33</a> 1хслотс казино зеркало
x1 slots 1хслотс регистрация перейти на 1×slots
Вейджер в переводе с британского значит «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша приобретенного бонуса, в нашем случае бездепозитного. Число ставок большого — важно лишь набрать сумму, пропорциональную сумме поощрения.Любой выигрыш по ставке выше установленного лимита будет являться недействительным. То есть ставка не будет засчитана при отыгрыше, а в случае выигрыша его сумма не поступит на счёт клиента — итог забавы несомненно всецело аннулирован. <a href=http://images.google.mg/url?q=http://mvfd1.ru/bitrix/redirect.php?goto=http://s-37.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/6Y9veH8JWe7>http://images.google.mg/url?q=http://mvfd1.ru/bitrix/redirect.php?goto=http://s-37.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/6Y9veH8JWe7</a> 1хслот зеркало сайта В зависимости от онлайн заведения любой из их возможность вам предложить как бездепозитные средства, так и бездепозитные фриспины, коие последствии удачной регистрации рухнут вас на ваш игровой баланс.
1× слот зеркало
Существуют казино с бонусом за регистрацию, в которых довольно модны фриспины в онлайн казино потом регистрации в определенных играх. Они встречаются числе чаще безвозмездных поощрений или традиционных бонусов в казино без вложений. Например, игрок регистрирует счет, на который начисляются безвозмездные игры, приз за регистрацию в виде даровых фрспинов, вращения в игровом автомате. Во время игрового процесса компьютерные выигрывает истинные средства, коие в последствии возможно успешно исключить из заведения на свою платежную систему. То есть, все шансы вывести свои без рисков собственными финансами. Регистрация, за в получит призы, займет несколько, а благодаря этому возможно прирастить пять евро поощрений до тыс. И без всяких заморочек исключить их.Для верификации аккаунта нужно предоставить специалистам технической помощи отсканированную копию паспорта и счета за коммунальные предложения, а фотографию банковской карты или скриншот страницы электронного кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для подтверждения личности. 1×slot зеркало <a href=http://vufer.net/index.php?subaction=userinfo&user=ikimyro>http://vufer.net/index.php?subaction=userinfo&user=ikimyro</a> На данном разделе портала периодически публикуются обзорные заметки, в которых рассматриваются безвозмездные призы превосходнейших интернет-казино. Информация структурирована по нескольким пт, включая главные:
1×slots регистрация то дальше необходимо пройти
Помните, собственно всевозможные нарушения управлял сведут на нет ваши усилия, и вы наверняка останетесь без начисленного для дарового бонуса. Всегда изучайте правила начисления и условия вейджера. По каким вопросам, на коие вы не других отыскать ответы, обращайтесь за разъяснениям и саппорт. <a href=https://soctrip.com/post/9bb5eec0-a590–11ef-bb3e-7bacedfd239f>https://soctrip.com/post/9bb5eec0-a590–11ef-bb3e-7bacedfd239f</a> 1×slots бонус за регистрацию Проверка занимает от нескольких минут до нескольких дней, профессионалы техподдержки шансы запросить вспомогательные документы или инициировать краткое общение по Skype.
<b>Смотреть еще похожие новости:</b>
<a href=http://kamechkovkazak.listbb.ru/viewtopic.php?f=15&t=1915>1×slot регистрация</a>
<a href=http://forum.lesprom.org/threads/1×slots-oficialnyj-sajt-zerkalo.434/>1хслотс официальный сайт зеркало</a>
<a href=http://uacode.com/>1×slots официальный сайт зеркало</a>
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=17006>1×slots официальный сайт зеркало</a>
<a href=https://edidaktikum.ee/en/content/iii-kontakttund-08-juuni?page=99#comment-298591>1×slots зеркало сайта</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если простыми текстами, бездепы – это определённая сумма средств либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать подарки. Но есть некоторые аспекты. Существуют игорные дома, которые перед тем как начислить призы требуют привязать телефон, дать копии документов.
#838 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet на сегодня букмекерская контора фонбет официальный <a href=https://7club7.com/>Семёнова Татьяна Владимировна порно</a> казино 5 букмекерская контора ставки <a href=https://sovsekretno.net/>ставки на спорт букмекерские конторы</a> 1×bet слоты приложения букмекерских контор пин up casino гта казино порно с Владимир Минеев (ММА) porno Юлия Канакина, скелетонистка 1×bet зеркало на сегодня
DiskiPlus casino ап DiskiPlus 1×bet рабочее <a href=https://www.diskiplus.ru>DiskiPlus букмекерская контора скачать приложение</a> DiskiPlus casino скачать приложение DiskiPlus леон букмекерская контора <a href=https://diskiplus.ru/>DiskiPlus порно с Аделия Петросян (фигурное катание)</a> DiskiPlus bitz casino DiskiPlus porno Илона Маркова, хоккеистка DiskiPlus пина casino DiskiPlus online casino 7k DiskiPlus суть казино DiskiPlus казино зеркало сегодня DiskiPlus 1×bet зеркало на сегодня
#839 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
Составленный специалистами Casino.ru список онлайн-казино с бездепозитным призом разрешает игрокам сравнить спецпредложения различных операторов.Эффективность бездепов в рекламного прибора оценили почти операторы. Малоизвестные площадки употребляют такие промоакции, дабы быстро набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны постоянных посетителей. Не все веб-сайты, дающие подарки без депо, рекомендованы к игре. За привлекательным промоописанием имеют прятаться невыполнимые условия отыгрыша прочие подводные камни. <a href=http://filmkachat.ru/>1×slots промокод при регистрации 2025</a> Акционные предложения от казино существуют в разных форматах. Часто бонусы даются в обмен на депозит. Игрок заносит платеж и получает деньги, бесплатные вращения и другие поощрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — картина приза, кот-ый гарантирован за исполнение конкретных действий на сайте: <a href=https://elearn.ellak.gr/mod/forum/discuss.php?d=42025>https://elearn.ellak.gr/mod/forum/discuss.php?d=42025</a> рабочее зеркало 1×slots <a href=http://www.edufinancierafcpc.com/index.php/forum/suggestion-box/287692-can-you-watch-live-streams-on-the-1×bet-app>http://www.edufinancierafcpc.com/index.php/forum/suggestion-box/287692-can-you-watch-live-streams-on-the-1×bet-app</a> Представьте момент, когда при ставке в 10 руб. Вы получите схожее умножение. Миллион рублей за одно вращение, собственно абсолютно возможно. Поэтому вопрос, сколько можно выиграть остаётся открытым. Предлагаем проверить других. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный приз и проверяйте удачу в деле. Разумеется, вывести деньги довольно. Однако шансы есть у всех.Если площадка презентует бездеп за регистрацию, то процедура его получения ординарна. Нужно только завести акк на веб-сайте и активировать его, подтвердив адрес электрической почты, номер телефона или другие данные, которые просит оператор. Перед данным необходимо убедиться, собственно пользователь находится на официальном веб-сайте казино, но на жульнической площадке.
1хслотс казино зеркало
онлайн казино 1×slots <a href=https://holisticdoggie.com/health-fitness-nutrition/%D0%BE%D0%B1%D1%83%D1%87%D0%B5%D0%BD%D0%B8%D0%B5-%D0%BD%D0%B0-%D0%BF%D1%80%D0%B0%D0%B2%D0%B0/>https://holisticdoggie.com/health-fitness-nutrition/%D0%BE%D0%B1%D1%83%D1%87%D0%B5%D0%BD%D0%B8%D0%B5-%D0%BD%D0%B0-%D0%BF%D1%80%D0%B0%D0%B2%D0%B0/</a> Диапазон ставок, которые вправе сделать игрок, того лимитирован. Обычно назначать можно небольшую сумму — около 10–30 руб. За одно вращение.Операторы гемблинга заявляют, что так они борются с бонус-хантерами. Впрочем, критики считают, что данным казино пробуют устроить из случайного гостя неизменного игрока. казино 1×slots официальный сайт Одним из поводов отдавать привилегию 1 или иному заведению содержится в привлекательности предлагаемых акций и бесплатных предложений. Безвозмездные фриспины, выдаваемые без дела делать какой-либо вклад, в списке располагается далеко не в конце.
1×slots зеркало на сегодня
Бонус в казино без депозита имеет различные вариации: такое быть приветственный приз, промоакции в честь каких-либо дней либо важных дат, приз за привлечение свежих игроков, лояльность и получение VIP-статуса.Помните, собственно в неких играх сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных играх только от 5% до 50% суммы ставки числятся как отыгранные средства, на как в слотах идет в зачет все 100% суммы. <a href=http://dog69.ru/index.php?subaction=userinfo&user=tangibleeconomy>http://dog69.ru/index.php?subaction=userinfo&user=tangibleeconomy</a> Помните, что в некоторых забавах сумма ставки идет в зачет вейджера лишь частично. Так, в настольных и карточных играх только от 5% до 50% суммы ставки считаются как отыгранные деньги, на как в слотах идет в зачет все one hundred percent суммы. 1×slot регистрация
casino 1×slot
В наше время очень просто получить бонус за регистрацию в казино. Практически любой игорный жилище с радостью начислит деньги или безвозмездные вращения. Многие гэмблеры используют этим и не стыдятся региться в каждом клубе с выгодными условиями. Кстати, это замечательная возможность выработать победную тактику и сорвать джекпот. 1×slots зеркало которую указывали при регистрации кстати <a href=http://cntuvek.ru/forum/user/15741/>http://cntuvek.ru/forum/user/15741/</a> Как только получите бездеп в казино, всё также не забывайте инспектировать электронную почту. Некоторые игорные клубы день веселят интенсивных гэмблеров приятными призами. Чаще всего получить презент возможно в преддверии веселья, на день рождение, за привлечение друга. А также распространённым бонусом считается прибавка к депозиту. Нужно не восполнить счёт, и азартное заведение увеличит его на 50–100%.
1×slot официальный сайт
Большинство клубов завлекают внимание геймеров за счёт разнообразных даров. На одних веб-сайтах возможно получить виртуальные кредиты, которые откроют доступ ко всему софту. На других же, администрация предлагает безвозмездные вращения для запуска топовых онлайн слотов. Несмотря на разные промоакции, стоит выделить самые главные.Для подтверждения электронной почты, просто перейдите по интенсивной ссылке в послании, приобретенном от игрового заведения. Стоит обозначить(означить), что бездепозитный приз выдается только взрослым новеньким, которые, к, имеют пригласить собственных приятелей и людей, кроме претендующих на поощрительную программу преданности. Подобная технология замечена между соперничающих онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению своей популярности, методом привлечения свежих игроков. Бонусы – это уникальный шанс для потенциальных соучастников игры, коие все опробовать софт покер рума и увериться, станут ли они в него выступать либо нет. Новый игрок испробует средства силы с реальными оппонентами в казино. <a href=http://brush114.co.kr/bbs/board.php?bo_table=free&wr_id=1823340>http://brush114.co.kr/bbs/board.php?bo_table=free&wr_id=1823340</a> 1×slots рабочее зеркало на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=148113&pid=376006#post_376006>1 х слотс зеркало</a>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=681751>казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Акции, посвященные календарным праздникам, посещают рассчитаны как на всех юзеров, так и на категории: к, подарок на 8 марта девушкам-игрокам либо мужикам на 23 февраля.
#840 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
сайты казино букмекерские конторы pin <a href=https://strelochnik.com/>порно с Карен Хачанов (теннис)</a> казино ли casino онлайн <a href=https://krtka.info/>Светлана Ходченкова</a> букмекерская контора зенит casino ru букмекерская контора фонбет официальный сайт леон букмекерская контора казино смотреть онлайн бесплатно бесплатно фильм казино kent casino
DiskiPlus официальное казино вход DiskiPlus 1×bet слоты официальный сайт <a href=https://diskiplus.ru>DiskiPlus скачать 1×bet на андроид бесплатно</a> DiskiPlus Окладникова Ирина Андреевна порно DiskiPlus гама казино <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet зеркало</a> DiskiPlus 7k casino официальный DiskiPlus яндекс казино DiskiPlus 1×bet официальный xbet DiskiPlus up casino зеркало DiskiPlus pin up casino скачать DiskiPlus лучшие онлайн казино DiskiPlus играющие казино онлайн
#841 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
рабочее казино r7 casino <a href=https://slon-ru.com/>Шевцова Татьяна Викторовна порно</a> casino buzz казино рублях <a href=https://vestnik-jurnal.com/>porno Александра Степанова, фигуристка</a> kometa casino casino регистрации unlim casino промокод 1×bet Матвиенко Валентина Ивановна порно Светлана Ходченкова 1×bet вход
DiskiPlus kometa casino DiskiPlus Чулпан Хаматова <a href=https://www.diskiplus.ru>DiskiPlus реального казино</a> DiskiPlus pin up букмекерская контора DiskiPlus 1×bet xbet <a href=https://diskiplus.ru>DiskiPlus порно с Абрамченко Виктория Валериевна</a> DiskiPlus зеркала казино DiskiPlus гта казино DiskiPlus 7k casino зеркало DiskiPlus порно с Илюшникова Татьяна Александровна DiskiPlus казино 1 DiskiPlus vodka casino DiskiPlus retro casino
#842 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
champion casino казино зеркало сегодня <a href=https://kompromat1.online/>porno Мария Шарапова</a> 1win casino лучшие онлайн казино <a href=https://krtka.info/>порно с Каролина Севастьянова</a> порно с Александр Головин (футбол) pin up casino пин букмекерская контора фонбет порно с Захарова Мария Владимировна 1×bet официальный сайт casino зеркало сегодня рабочее порно с Баталина Ольга Юрьевна
DiskiPlus pin up casino скачать DiskiPlus ап казино <a href=https://www.diskiplus.ru/>DiskiPlus casino актуальное зеркало</a> DiskiPlus казино сегодня DiskiPlus винлайн букмекерская контора <a href=https://www.diskiplus.ru>DiskiPlus 1×bet сайт 1×bet xyz</a> DiskiPlus casino онлайн DiskiPlus официальные букмекерские конторы скачать DiskiPlus казино можно DiskiPlus porno Илья Ковальчук (хоккей) DiskiPlus песня казино DiskiPlus лучшие казино бесплатно DiskiPlus 1×bet официальный xbet
#843 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
Верификация необходима для добавочной защищенности и помочь техподдержке выявить бонусхантеров и жуликов. Кстати, на некоторых платформах выводы солидных сумм доступны лишь последствии доказательства личности. <a href=http://filmkachat.ru/>1 хслот регистрация в 1×slots casino</a> Внесение депозита – Будьте готовы восполнить счет после отыгрыша приза. Это обычное заявка управлял для данного на промо-акций. Лучше заблаговременно уточнить, какую необходимую надо(надобно) будет заносить на счет. Как верховодило, речь о минимальном депозите, хотя вы должны быть убеждены, что он для по карману.Маркетинговая деятеля всех игорных интернет-клубов должна носить разнородный характер. И если вознаграждения на депо служат чтобы, чтобы, чтобы провоцировать вносить депозиты и поощрять теснее быть пользователей, то бездепозитный бонус в казино либо приз за регистрацию в казино, прежде всего, рассчитан на расширение базы покупателей. <a href=https://www.designingbuildings.co.uk/wiki/User:Cgifurniture>https://www.designingbuildings.co.uk/wiki/User:Cgifurniture</a> 1×slots промокод при регистрации 2025 <a href=https://codescript.ru/user/StevenQuipt/>https://codescript.ru/user/StevenQuipt/</a>
1×slos регистрация в 1×slots casino
1× слот зеркало Для отыгрыша бонуса казино обязует игрока сыграть на необходимую, в несколько один превышающую необходимую приобретенного приза — тут выгода фирмы очевидна. <a href=http://www.tr.besatime.com/index.php?subaction=userinfo&user=DoctorLazutaMa>http://www.tr.besatime.com/index.php?subaction=userinfo&user=DoctorLazutaMa</a> 1 x slots
1×slots подтвердит вашу регистрацию если говорить
Маркетинговая политического всех игорных интернет-клубов обязана одевать различный характер. И случае гонорары на депозит работают чтобы, чтобы, дабы провоцировать вносить депозиты и поощрять уже место юзеров, то бездепозитный бонус в казино или бонус за регистрацию в казино, до всего, рассчитан на расширение базы потребителей. <a href=http://intentionalpress.com/author/henryslore/>http://intentionalpress.com/author/henryslore/</a> Ещё одно распространённое акционное предложение – привлекательный презент с сомнительными притязаниями. К образцу, клуб сулит $100 виде бездепа, хотя с вейджером х80 либо х100. Отыграть такой вейджер практически нереально и потому никакого концентрироваться на больше интересных промоакциях.Для верификации аккаунта надо(надобно) дать профессионалам технической помощи отсканированную копию паспорта и счета за коммунальные предложения, еще фотку банковской карты или экрана странички электрического кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для подтверждения личности. 1×slots регистрация на 1хслотс
1хслотс рабочее зеркало на сегодня
В современность очень просто получить бонус за регистрацию в казино. Практически каждый игорный жилище с готовностью начислит деньги либо безвозмездные вращения. Многие гэмблеры пользуются этим и не смущяются регистрироваться в любом клубе с выгодными условиями. Кстати, это отличная вероятность выработать победную тактику и сорвать джекпот. <a href=http://fumankong1.cc/home.php?mod=space&uid=580780>1хслотс рабочее зеркало на сегодня</a> У нас на веб-сайте Вы найдете перечень бонусов без депо в испытанных казино и подробную информацию то как их получить и использовать. Внесение депо – Будьте готовы пополнить счет последствии отыгрыша бонуса. Это обычное заявка правил для данного типа промо-акций. Лучше заблаговременно уточнить, какую необходимую надо(надобно) будет вносить на счет. Как правило, речь о минимальном депозите, хотя вы должны быть уверены, собственно он вам по кармашку. 1×slots зеркало регистрация то дальше необходимо пройти <a href=http://www.tr.besatime.com/index.php?subaction=userinfo&user=DoctorLazutaMa>http://www.tr.besatime.com/index.php?subaction=userinfo&user=DoctorLazutaMa</a> Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают приз по странам. Вплоть до того, собственно клуб возможность брать игроков из Вашей страны, а бездеп не давать.Для получения предоставленных призов вам понадобиться — ПК либо мобильное прибор, и остальное дело за малым.
1×slots регистрация на официальном сайте
Кешбэк-бонус представляет собой возврат фиксированного процента от ставки когда проигрыша либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%.Чем ниже значение вейджера, тем легче отыграть и вывести приз. Если Вы планируете заработать на бездепе, а не просто ознакомиться с новым игровым клубом, то стоит игнорировать призов с высочайшим вейджером их почти не реально отыграть. С ними Вы можете только протестировать игры заведения. <a href=http://bbs.boway.net/home.php?mod=space&uid=934775>http://bbs.boway.net/home.php?mod=space&uid=934775</a> Онлайн-казино тщательно продумывают бонусные условия, коие необходимо выучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и другие лимитирования.Призовые начисления без депозита шансы предоставляться для участия в турнирах онлайн казино. Потратить перечисленные средства возможно необыкновенно в рамках данной промоакции. Условия их проведения в лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, никакого выучить его правила. 1×slot рабочее зеркало Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.
<b>Смотреть еще похожие новости:</b>
<a href=http://support-groups.org/viewtopic.php?f=161&t=786136>1×slots официальный зеркало рабочее</a>
<a href=https://kfz-gringer.at/index.php/forum/donec-eu-elit/80070–1×slots#79834>1×slots зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В истиннее время получить бонус за регистрацию в казино довольно просто. Почти каждый игорный дом с радостью даст деньги или бесплатные вращения. Многие игроки пользуются этим и не стыдятся регистрироваться в любом клубе с прибыльными условиями. Кстати, это замечательная возможность придумать выигрышную стратегию и сорвать куш. У нас на сайте Вы отыщите список бонусов без депозита в испытанных казино и подробную информацию то как их получить и применять.
#844 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало
Каждая игровая перрон отличается условиями по получению и отыгрышу бездепов. В правилах детально расписаны временные рамки, за коие нужно прокрутить вейджер. Также не запамятовывайте на максимальный объем ставки и наивысшую сумму выплаты. С иной стороны, дабы получить бездепозитные призы казино, достаточно потратить менее 1 минуты. <a href=http://filmkachat.ru/>1×slots зеркало быструю регистрацию а также мгновенное</a> Новички не любят сразу же вносить депозит. Это обосновано неимением опыта и сомненьем. К счастью, в можно получить бездепозитный бонус за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В любом случае вы не рискуете своими сбережениями. Это замечательная вероятность запустить приглянувшийся видео разъем либо же испытать удачу в настольных забавах. <a href=https://www.patreon.com/posts/123686935>https://www.patreon.com/posts/123686935</a> В онлайне слишком много скриптовых сайтов, коие принадлежат плутам. Их основная задача – заинтересовать гэмблеров, пообещав столько щедрые подарки, хотя и солидные выигрыши. Так собственно некоторые веб-сайты предлагают получить за регистрацию даже $1 000. 1×slots казино мобильная версия <a href=https://bosicen.com/home.php?mod=space&uid=15145&do=profile>https://bosicen.com/home.php?mod=space&uid=15145&do=profile</a> Однако далековато не все ресурсы предлагают своим клиентам бездепозитные призы за регистрацию в казино. В большинстве случаев учтено поощрение на первый депозит в размере 100–200%. Это отличная вероятность преувеличить банкролл, прирастить время, проведённое за игрой и шансы сорвать большой куш.Выбирая даровой бонус, пристально изучайте правила. Убедитесь, собственно вам можно на участие в акции. Уточните, в каких забавах возможно скорпулезно обстоятельства вейджера. При надобности задавайте вопросы адептам саппорта.
1×slots официальный сайт, скачать
Но есть игорные заведения, коие готовы просто например жертвовать средства на игру. Для этого достаточно создать профиль. Чтобы исключить собственный выигрыш, вам сначала необходимо выполнить условия отыгрыша, обозначенные в критериях получения бездепозитного депо.Призовые начисления без депозита все предоставляться для участия в турнирах онлайн казино. Потратить перечисленные деньги возможно необыкновенно в рамках этой акции. Условия их проведения включают в себя лимитирования на список игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться таким предложением, лучше изучить его верховодила. 1 х слотс зеркало <a href=http://www.letts.org/wiki/Shisha_Tobacco_From4_Eur>http://www.letts.org/wiki/Shisha_Tobacco_From4_Eur</a> Вознаграждения за получение VIP-статуса ? начисляются масштабах программы преданности при достижении одного значения или выдаются индивидуально менеджерами службы поддержки. скачать 1×slots на андроид мобильная версия У любого игорного клубы разные вейджеровые обстоятельства. Чтобы вы гарантировано смогли выполнить их, мы дадим некоторое советов. Если система начислила небольшую сумму, не стоит делать великие ставки – остановитесь на 10–30 центах. Как только сможете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте выступать. В неприятном случае другого приглядеться к иному автомату.За счёт спинов получится запустить различные онлайн слоты, протестировать стратегии и поднабраться навыка. Фишка что, нет, собственно вращения начисляются на лучшие аппараты с оригинальными опциями и высокой отдачей. Не забывайте, что в каждом акционном предложении учтены специальные притязания – временные ограничения, наибольший размер ставки, список доступных игр.
1×slot официальный сайт
Важно, убедитесь что, нет, собственно ранее не регистрировались в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи.Большинство клубов привлекают внимание компьютерные за счёт разнообразных даров. На 1 веб-сайтах можно получить виртуальные кредиты, которые откроют доступ ко всему софту. На других же, администрация предлагает бесплатные вращения для пуска лучших интернет слотов. Несмотря на разные промоакции, стоит выделить самые главные. <a href=http://servicetk.ru/bitrix/rk.php?goto=http://kontur-irkutsk.ru/bitrix/redirect.php?goto=http://sovtest-ate.com/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/XUo01SmmJUu>http://servicetk.ru/bitrix/rk.php?goto=http://kontur-irkutsk.ru/bitrix/redirect.php?goto=http://sovtest-ate.com/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/XUo01SmmJUu</a> Промокод – определённая комбинация символов, коию необходимо ввести в соответствующее фон при твореньи учетной записи либо активировать в собственном профиле игрока в разделе с призами. 1×slots регистрация то дальше необходимо пройти
казино 1×slots
Особую изюминку видео слотам придают уникальные знакы. С их появлением активируются разные призы. Вы сможете запустить вспомогательный степень и прирастить сумму выигрыша. Есть знаки, коие сменяют ненужные элементы и сами делают выигрышные комбо. Не стоит забывать и про бонус-тур. После любого счастливого спина есть шанс прирастить сумму выигрыша в 2 или четыре раза.На нашем веб-сайте Вы найдете перечень актуальных новых бездепозитных бонусов в казино 2022 года. Также, есть количество неповторимых услуг, которые доступны лишь гостям нашего сайта последствии регистрации по нашей ссылке или активации специального промокода. 1хслотс рабочее зеркало на сегодня <a href=http://droid-cash.ru/user/JasperOPILT/>http://droid-cash.ru/user/JasperOPILT/</a> Получив свой презент, Вы можете даром играть на настоящие деньги, а выполнив обстоятельства отыгрыша, исключить собственный выигрыш.Какие бонусы меня еще получить не бездепозитного приза за регистрацию в казино? По мимо бездепозитного приза, любое онлайн казино предлагает игрокам прибыльное предложение на 1-ый депо, вы совершаете депозит, ваш депо увеличивается в двое или в в 3, тем самым начать выступать можно с больше солидной суммой, так же не запамятываем на вейджер на призы.
1×slots на любой вкус как пройти регистрацию
Операторы гемблинга заявляют, что так они сражаются с бонус-хантерами. Впрочем, критики считают, что этим казино пробуют устроить из случайного гостя постоянного игрока.Это один из главных показателей привлекательности подарка. С завешенным коэффициентом даже мастера не сумеют выполнить обстоятельства по отыгрышу. И так, насколько привлекательно смотрится предложение – бездепозитный приз казино в размере $500 либо $1 000. Чтобы новички получше вдумались, собственно же это вейджер, мы разберём на примере. <a href=http://isaevclub.ru/user/DoctorLazutami/>http://isaevclub.ru/user/DoctorLazutami/</a> Этот тип приза будет добавлен на Ваш аккаунт в успешной процедуры регистрации с внедрением номера телефонного. Если выбрать иной способ сотворения учетной записи, бездеп не несомненно добавлен на Ваш акк.За привлечение друга ? масштабах партнерской программы клиент получает вознаграждение за привлечение новых юзеров. 1хслот официальный сайт зеркало
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чаще всего, модные сервисы, такие как MoneyBookers и WebMoney, еще MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно обязательное правило. Финансовые свои выводятся только спустя что, эту платежную систему, коей огромный для пополнения депозита. Если же игрок получил бездепозитный покерный приз, требуется восполнить счет на минимальную сумму, кот-ая составляет обычно 10 долларов. Новички не любят сразу же вносить депо. Это обосновано неименьем навыка и сомненьем. К счастью, в наше время можно получить бездепозитный приз за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В всяком случае вы не рискуете собственными сбережениями. Это отличная вероятность запустить понравившийся видео разъем либо же испытывать удачу в настольных забавах.
#845 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet xbet xyz casino автомат <a href=https://sovsekretno.net/>бесплатное казино</a> casino регистрации казино 5 <a href=https://th-royalgclub.com/>официальные зеркала казино</a> порно с Юлия Ефимова, пловчиха up casino фильмы казино рояль пин up casino рабочее казино casino бонус 1×bet бесплатно
DiskiPlus ешь казино DiskiPlus официальная казино <a href=https://diskiplus.ru/>DiskiPlus пин ап casino</a> DiskiPlus какие казино DiskiPlus porno Александра Степанова, фигуристка <a href=https://www.diskiplus.ru>DiskiPlus порно с Абрамченко Виктория Валериевна</a> DiskiPlus бесплатное казино DiskiPlus порно с Евгений Малкин (хоккей) DiskiPlus пин up casino DiskiPlus казино пин DiskiPlus букмекерская контора без DiskiPlus 1×bet официальный DiskiPlus букмекерские конторы бет
#846 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
На данном разделе портала регулярно публикуются обзорные заметки, в рассматриваются благотворительные призы превосходнейших интернет-казино. Информация структурирована по нескольким пунктам, включая главные: <a href=http://filmkachat.ru/>1× slots casino официальный сайт</a> Прежде чем активировать бездеп, необходимо убедиться сомнений, собственно страна, гражданином коей считается игрок, не входит в список разрешенных. <a href=https://cgscholar.com/community/community_profiles/3d-rendering-services/community_updates/234375>https://cgscholar.com/community/community_profiles/3d-rendering-services/community_updates/234375</a> Обычно показатель повыше, чем для призов на депозит. Не дивитесь, в он несомненно в х100. Иногда завышенный коэффициент вейджера уточняется для жителей отдельных государств.Получить Бездепозитный бонус в онлайн казино дело двух кликов. Другой момент, отыграть рекламную и соблюсти правила и обстоятельства отыгрыша. Под правилами подразумевается не вагер, хотя и ограничения по наибольшей ставке. Мы разумеем, что в кино все ставят на зеро и выигрывают. Призываем не делать похожего. Перед активацией приза прочитайте правила. Узнайте следующие моменты: Условия получения дара, за регистрацию, за депозит и многое. Ограничения по максимальной ставке. Зачастую не выше 350 руб. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах возможно отыгрывать вагер. Можно вращать автоматы, а вагер будет стоять на месте. Поэтому принципиально знать, в каких играх возможно совершать кратность валютного оборота. 1×slots casino зеркало рабочее <a href=http://lzdsxxb.com/home.php?mod=space&uid=3604824>http://lzdsxxb.com/home.php?mod=space&uid=3604824</a>
казино 1×slots официальный сайт
Для верификации аккаунта надо(надобно) предоставить специалистам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, еще фотографию банковской карты либо скриншот странички электрического кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для подтверждения личности.Благодаря программе преданности от игорного заведения, можно взять неплохой старт и без дополнительных вложений запустить видеослоты. Кроме того, возможно рассчитывать на реальную удачу и получить, без вложения личных денег, великий выигрыш. 1×slots официальный зеркало рабочее <a href=http://bazarweb.ru/forum.php?PAGE_NAME=profile_view&UID=31326>http://bazarweb.ru/forum.php?PAGE_NAME=profile_view&UID=31326</a> Бонус без депозита за регистрацию в казино (бездепозитный приз) – это денежный презент от клуба, который начисляется на акк игрока после регистрации в казино. Кроме творения учетной записи, для получения бездепа, довольно часто требуется ещё и доказать контактные данные игрока и/или активировать особый промо-код.Нельзя осматривать игру на деньги, как вариант заработка. Азартные забавы запрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не зачинщиком азартных игр. Сайт одевает информационный характер. 1х слот 1хслотс регистрация перейти на 1×slots
1×slots казино зеркало
Также учтите, собственно некоторые игровые платформы сузивают список государств, коие готовы получить предложенный бездепозитный приз за регистрацию. К образцу, существуют онлайн-заведения, выдающие подобные призы лишь обитателям определенных государств. К примеру, онлайн казино 777 Оригинал дает бездепозитный приз лишь игрокам из России и стран СНГ. Или напротив, снабжают вознаграждением всех, не жителей некоторых государств (следует этого, идет внимательно изучать список, дабы потом не возникло практически вопросов и претензий).Прежде чем активировать бездеп, нужно убедиться сомнений, собственно страна, гражданином которой считается игрок, не входит в список разрешенных. Вознаграждения за получение VIP-статуса ? начисляются масштабах программы преданности при достижении еще уровня либо выдаются индивидуально менеджерами службы поддержки. <a href=http://www.god123.xyz/home.php?mod=space&uid=1042226&do=profile>http://www.god123.xyz/home.php?mod=space&uid=1042226&do=profile</a> Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. 1× slots casino официальный сайт Бонусные деньги – небольшая сумма денег для старта в новом казино. На бонусные средства, обычно разрешается выступать во все забавы, кроме слотов с прогрессивным джекпотом и игр из раздела live casino.Все обожают получать презенты. Согласитесь, почти любой играющий человек будет безмерно счастлив, если получит безвозмездный подарок для игры в онлайн казино просто за регистрацию или же приз за внесенный депозит, так именуемые приветственные бонусы для новых игроков. Соответственно эти интернет клубы станут более востребованы и преимущественны у игроков при выборе казино для игры. Топ казино непрерывно обновляется и добавляются новые и занимательные игровые клубы с симпатичной бонусной политикой и всеми вероятными преимуществами, льготами, к которым относятся такие бонусы как фриспины за регистрацию, денежные бездепозитные призы, а великодушные бонусы за внесенный депо.
1хслотс рабочее зеркало на сегодня
Раздача бонусов имеет быть приурочена к разным датам: календарные праздничные, деньки рождения игроков, юбилей открытия казино и т. Д. Подарок выдается в виде денег, фриспинов или баллов для скопления и обмена на услуги оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода этой суммы придется выполнить ряд притязаний.Как только получите бездеп в казино, всё одинаково не запамятовывайте инспектировать электронную почту. Некоторые игорные клубы каждый веселят интенсивных гэмблеров приятными призами. Чаще всего получить презент возможно в преддверии веселья, на день рождение, за привлечение друга. А кроме распространённым призом является прибавка к депозиту. Нужно не пополнить счёт, и азартное заведение прирастит его на 50–100%. <a href=https://creapnl.com/foros/tema/1×slots-%d0%bc%d0%be%d0%b1%d0%b8%d0%bb%d1%8c%d0%bd%d0%b0%d1%8f-%d0%b2%d0%b5%d1%80%d1%81%d0%b8%d1%8f-%d0%b2%d0%be%d0%b9%d1%82%d0%b8-%d0%ba%d0%b0%d0%b7%d0%b8%d0%bd%d0%be-115/>1×slots мобильная версия войти казино</a> 1х слотс зеркало регистрация в 1×slots casino <a href=http://wiki.hightgames.ru/index.php?title=1win_brasil_plataforma_jogos>http://wiki.hightgames.ru/index.php?title=1win_brasil_plataforma_jogos</a>
1хслотс рабочее зеркало
За вербование приятеля ? в рамках партнерской программки клиент получает вознаграждение за вербование свежих юзеров. Как лишь получите бездеп в казино, всё точно не запамятовывайте проверять электрическую почту. Некоторые игорные клубы постоянно радуют активных гэмблеров приятными призами. Чаще всего получить презент возможно в преддверии веселья, на денек рождение, за привлечение приятеля. А кроме распространённым бонусом является прибавка к депозиту. Нужно чем пополнить счёт, и азартное заведение прирастит его на 50–100%.Для как, дабы отыграть сумму вашего бездепозитного бонуса нужно выполнить условия вейджера. Очень нередко фриспины даются на определенные слоты (book of ra, book of lifeless, book of sun), подбирайте слот себе нраву, они довольно очень и качественные. Бездепозитные приз имеет быть денежным так и в виде фриспинов на слоты <a href=http://cnwww.molifan.net/space-uid-2365278.html>http://cnwww.molifan.net/space-uid-2365278.html</a> В количестве случаев безвозмездные бонусы начисляются в кредитах, которые невозможно незамедлительно исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти требования принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д. ). О нем читайте ниже. 1×slots официальный регистрация Теоретически, к безвозмездным призам возможно отнести так нарекаемые фриспины. Напомним, речь идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, поэтому что они деют лишь вероятность делать ставки.Любой выигрыш по ставке повыше установленного лимита будет считаться недействительным. То есть ставка не несомненно засчитана при отыгрыше, а в случае выигрыша его сумма не поступит на счёт клиента — результат игры несомненно всецело аннулирован.
<b>Смотреть еще похожие новости:</b>
<a href=https://nauc.info/forums/viewtopic.php?t=20881830>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<a href=https://edidaktikum.ee/en/content/iii-kontakttund-08-juuni?page=89#comment-297657>1×slots официальный зеркало</a>
<a href=https://www.kuyoux.com/space-uid-35770.html>1×slots казино мобильная версия</a>
<a href=https://forum.dis-course.net/viewtopic.php?t=658383>1×slots регистрация 1×slotscasino09k online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Многие новички колеблются, собственно поощрительный приз не будет возвращать, и в они выиграли у казино. Это безусловно безопасно и накрепко. Выводя выигранные средства, игрок просто останавливает свое роль деле и теряет уникальную вероятность – безвозмездно наращивать собственное вещественное положение.
#847 internetchelyabGephttps://chelyabinsk-domashnij-internet002.ru
интернет тарифы челябинск <a href=https://chelyabinsk-domashnij-internet002.ru>chelyabinsk-domashnij-internet002.ru</a> подключить домашний интернет челябинск
#848 Charlesgunny
накрутка телеграм софт накрутка в телеграмм канал просмотров телеграм бесплатно <a href=https://krutkabest.ru>Просмотры лесенкой телеграм</a> накрутка подписчиков инстаграм телеграм накрутить просмотры телеграм бесплатно <a href=https://krutkabest.ru/services>Накрутка лесенкой телеграм</a> накрутка телеграм задания накрутка телеграм быстро просмотр закрытого профиля в телеграм просмотры в телеграм бесплатно онлайн смм накрутка подписчиков в телеграм канал просмотры телеграм бесплатно просмотр аниме в телеграме
#849 Charlesgunny
просмотры недоступны телеграм накрутка подписчиков телеграм закрытый канал <a href=https://krutkabest.ru>Больше фантазии не хватает</a> мод телеграм для просмотра удаленных сообщений накрутка рефералов для бота телеграм <a href=https://krutkabest.ru/services>Просмотры телеграм</a> накрутка сообщений телеграм купить просмотр телеграм живой накрутка постов в телеграм как отменить просмотр истории в телеграм бесплатные накрутка для телеграма бот для просмотра удаленных сообщений телеграм накрутка просмотров телеграм бесплатно
#850 Charlesgunny
накрутка лайков в телеграм бесплатно накрутка премиум реакций телеграм <a href=https://krutkabest.ru/services>Больше фантазии не хватает</a> публикации профиля в телеграм видны просмотры накрутка подписчиков телеграм тг <a href=https://krutkabest.ru>Просмотры лесенкой телеграм</a> публикации профиля в телеграм видны просмотры негативные реакции в телеграм накрутка бот для накрутки просмотров в телеграм накрутка подписчиков в телеграм бесплатно без вложений просмотр сообщений в телеграм накрутка подписчиков в телеграм бесплатно Просмотры лесенкой телеграм
#851 Charlesgunny
публикации профиля в телеграм видны просмотры накрутка репостов телеграм babama <a href=https://krutkabest.ru>Просмотры лесенкой телеграм</a> накрутка людей в телеграм накрутка просмотров телеграм дешево <a href=https://krutkabest.ru/services>Просмотры телеграм</a> накрутка телеграм без заданий накрутка живых людей в телеграм накрутка просмотров в телеграм праймлайк как посмотреть просмотры в телеграм накрутка 5 подписчиков в телеграм видят ли просмотры историй в телеграм накрутка в телеграмм канал просмотров телеграм бесплатно
#852 Charlesgunny
просмотры на канал телеграм накрутка реальных подписчиков в телеграм канал <a href=https://krutkabest.ru/services>Просмотры телеграм</a> просмотр чатов телеграм телеграм бот кино просмотра <a href=https://krutkabest.ru/services>Просмотры телеграм</a> накрутка рефералов телеграм бесплатно телеграм накрутка бесплатных реакций и просмотров накрутка лайков на пост телеграм просмотры недоступны телеграмм истории почему в телеграм накрутка голосов телеграм канал накрутка подписчиков телеграм канала онлайн накрутка реакций телеграм подписчиков
#853 Charlesgunny
накрутка подписчиков в телеграм живые без отписок накрутка лайков в телеграм <a href=https://krutkabest.ru/services>Накрутка лесенкой телеграм</a> накрутка автопросмотров в телеграм накрутка просмотров в телеграм smm telegram <a href=https://krutkabest.ru>Больше фантазии не хватает</a> накрутка телеграм бесплатно живых смм накрутка просмотров телеграм бесплатно телеграм бот накрутка инстаграм накрутка просмотров телеграм бесплатно без заданий уведомление о просмотре истории в телеграм накрутка в телеграме бесплатные накрутка для телеграма
#854 Sazrdvehttp://[url=http://nytia.org/employer/diplomy-grup-24/]nytia.org/employer/diplomy-grup-24[/url]
Мы готовы предложить дипломы любых профессий по выгодным тарифам. Вы заказываете диплом через надежную компанию. Приобрести диплом академии– http://nytia.org/…omy-grup-24/ – nytia.org/employer/diplomy-grup-24
#855 Charlesgunny
просмотр телеграм канала без входа накрутка телеграм приложение <a href=https://krutkabest.ru/services>Накрутка лесенкой телеграм</a> накрутка просмотров постов телеграм накрутка подписчиков в группу телеграм <a href=https://krutkabest.ru>Просмотры телеграм</a> накрутка телеграм сервисы накрутка подписчиков телеграм закрытый канал накрутка в телеграмм канал просмотров телеграм бесплатно накрутка голосов в телеграм опросе откуда в приватном канале в телеграм просмотры бот для накрутки реакций в телеграм бесплатно качественная накрутка телеграм
#856 Charlesgunny
просмотры недоступны телеграмм истории почему в телеграм накрутка подписчиков телеграм без регистрации <a href=https://krutkabest.ru/services>Больше фантазии не хватает</a> просмотр сторис телеграмм анонимно в телеграм накрутка реальных подписчиков в телеграм <a href=https://krutkabest.ru>Просмотры телеграм</a> накрутка телеграм группы бесплатно накрутка подписчиков в телеграм канал бесплатно просмотр закрытого телеграм канала накрутка активности в телеграм накрутка подписчиков в телеграм канал бесплатно праймлайк накрутка подписчиков в телеграм канал бесплатно ботов проверить телеграм канал на накрутку
#857 Charlesgunny
накрутка ботов в телеграм канал бесплатно накрутка голосов телеграм канал <a href=https://krutkabest.ru>Просмотры лесенкой телеграм</a> накрутка премиум реакций телеграм бесплатно накрутка телеграм бесплатно заданий <a href=https://krutkabest.ru/services>Просмотры лесенкой телеграм</a> накрутка реакций телеграм накрутка реакций в телеграм канал быстрая накрутка подписчиков в телеграм просмотр истории телеграм у пользователя анонимно онлайн накрутка телеграм самый дешевый накрутка просмотров в телеграме бесплатно анонимный просмотр сторис в телеграм бот
#858 Charlesgunny
просмотров больше чем подписчиков в телеграм просмотр историй в телеграм <a href=https://krutkabest.ru>Просмотры лесенкой телеграм</a> накрутка подписчиков телеграм 5 минут канал накрутка телеграм без списаний <a href=https://krutkabest.ru>Просмотры телеграм</a> накрутка телеграм софт накрутка голосов бот телеграм как скрыть просмотры в телеграм телеграм бот просмотры ставки по вкладам лайки телеграм накрутка накрутка подписчиков в телеграм канал бесплатно праймлайк смм накрутка телеграм
#859 Charlesgunny
как найти историю просмотров в телеграм мод телеграм для просмотра удаленных сообщений <a href=https://krutkabest.ru/services>Больше фантазии не хватает</a> накрутка телеграм канал бесплатно живых просмотр сторис телеграм <a href=https://krutkabest.ru/services>Накрутка лесенкой телеграм</a> накрутка подписчиков телеграм без заданий просмотр ххх телеграм просмотров больше чем подписчиков в телеграм смм накрутка подписчиков телеграм накрутка лайков в телеграм канале бесплатно накрутка премиум реакций телеграм накрутка подписчиков телеграм 5 минут канал
#860 Charlesgunny
накрутка телеграм приложение телеграм заработать на просмотрах <a href=https://krutkabest.ru/services>Накрутка лесенкой телеграм</a> накрутка подписчиков телеграм топ накрутка телеграм jet s <a href=https://krutkabest.ru/services>Больше фантазии не хватает</a> накрутка подписчиков телеграм топ накрутка подписчиков в телеграм дешево просмотров больше чем подписчиков в телеграм при просмотре стикеров вылетает телеграм как посмотреть просмотры в телеграм группе смотреть телеграм просмотры накрутка просмотров в телеграме бесплатно profi like
#861 Charlesgunny
как найти историю просмотров в телеграм накрутка подписчиков в телеграм от 10 подписчиков <a href=https://krutkabest.ru/services>Больше фантазии не хватает</a> накрутка подписчиков в телеграме накрутка просмотров в телеграм живые бесплатно <a href=https://krutkabest.ru>Просмотры лесенкой телеграм</a> видны ли просмотры в телеграм анонимный просмотр историй телеграм как работает накрутка ботов в телеграме просмотр профиль инстаграм телеграм накрутка ботов в телеграм канал праймлайк как найти историю просмотров в телеграм что такое просмотры по url в телеграм
#862 Charlesgunny
накрутка телеграм бесплатно живых телеграм бот кино просмотра <a href=https://krutkabest.ru/services>Накрутка лесенкой телеграм</a> вылетает телеграм при просмотре видео накрутка через телеграм <a href=https://krutkabest.ru>Накрутка лесенкой телеграм</a> накрутка премиум реакций телеграм накрутка телеграм купить просмотр телеграм живой накрутка комментариев телеграм телеграм для просмотра сериалов накрутка ботов в телеграм канал накрутка телеграм бесплатно без регистрации
#863 internetchelyabGephttps://chelyabinsk-domashnij-internet001.ru
интернет тарифы челябинск <a href=https://chelyabinsk-domashnij-internet001.ru>chelyabinsk-domashnij-internet001.ru</a> домашний интернет челябинск
#864 Charlesgunny
накрутка жалоб телеграм виден ли просмотр истории в телеграм <a href=https://krutkabest.ru>Просмотры телеграм</a> накрутка подписчиков в телеграм живые без отписок накрутка ботов в телеграме <a href=https://krutkabest.ru>Просмотры телеграм</a> просмотр профиля телеграм накрутка лайков в телеграм канале babama накрутка просмотров телеграм бесплатно без 5 минут проверить телеграм канал на накрутку скрипт просмотры телеграм накрутка подписчиков в телеграме скрытые просмотры в телеграм
#865 Charlesgunny
накрутка телеграм сервисы накрутка отзывов телеграм <a href=https://krutkabest.ru>Просмотры лесенкой телеграм</a> считаются ли повторные просмотры в телеграм канале просмотр публикаций телеграм <a href=https://krutkabest.ru>Просмотры телеграм</a> накрутка телеграм бесплатно праймлайк накрутка подписчиков в телеграм канал бесплатно праймлайк накрутка телеграм аккаунта бот для просмотра сторис в телеграм почему просмотров больше чем подписчиков в телеграм накрутка подписчиков телеграм бесплатно задания просмотр сообщений в телеграм
#866 Charlesgunny
накрутка активных подписчиков в телеграм накрутка лайков в телеграм <a href=https://krutkabest.ru>Накрутка лесенкой телеграм</a> накрутка просмотров в телеграм канал телеграмме телеграм накрутка бесплатных реакций и просмотров <a href=https://krutkabest.ru/services>Просмотры лесенкой телеграм</a> накрутка подписчиков в телеграм бесплатно накрутка реальных подписчиков в телеграм негативные реакции в телеграм накрутка накрутка подписчиков телеграм канала онлайн накрутка комментариев в телеграм канале накрутка ботов телеграм накрутка просмотров телеграм канал живых
#867 Charlesgunny
накрутка просмотров телеграм бесплатно без заданий накрутка просмотров телеграм дешево <a href=https://krutkabest.ru/services>Больше фантазии не хватает</a> просмотр публикаций телеграм накрутка премиум подписчиков в телеграм <a href=https://krutkabest.ru/services>Просмотры телеграм</a> анонимный просмотр телеграм как посмотреть просмотры в телеграм группе накрутка голосования в телеграм просмотры недоступны телеграм накрутка dailypfbot телеграм накрутка комментариев в телеграм канале сколько стоит 1000 просмотров в телеграм
#868 Charlesgunny
как работают анонимные просмотры в телеграм 50 бесплатных просмотров телеграм <a href=https://krutkabest.ru/services>Просмотры телеграм</a> бесплатные накрутка для телеграма онлайн накрутка телеграм канала <a href=https://krutkabest.ru>Накрутка лесенкой телеграм</a> реальная накрутка телеграм накрутка подписчиков телеграм без регистрации накрутка участников в телеграм накрутка жалоб на телеграм канал смм накрутка просмотров телеграм бесплатно быстрая накрутка подписчиков в телеграм накрутка телеграм без отписок
#869 Charlesgunny
накрутка через телеграм самая дешевая накрутка подписчиков телеграм <a href=https://krutkabest.ru/services>Накрутка лесенкой телеграм</a> накрутка просмотров телеграм поста бесплатно накрутка просмотров в телеграме бесплатно <a href=https://krutkabest.ru/services>Просмотры лесенкой телеграм</a> накрутка лайков на пост телеграм накрутка подписчиков в чат телеграм накрутка реакций телеграм бесплатно праймлайк накрутка просмотров телеграм поста бесплатно накрутка просмотров телеграм бесплатно без 5 минут бот телеграм для просмотра историй в инстаграм накрутка русских подписчиков в телеграм
#870 Charlesgunny
накрутка телеграм софт накрутка телеграм задания <a href=https://krutkabest.ru>Просмотры телеграм</a> накрутка подписчиков телеграм по ссылке накрутка телеграм бесплатно <a href=https://krutkabest.ru/services>Просмотры лесенкой телеграм</a> бот для накрутки подписчиков в телеграм просмотр телеграм канала без входа считаются ли повторные просмотры в телеграм накрутка онлайна телеграм накрутка пользователей в телеграм накрутка опроса телеграм накрутка премиум голосов телеграм
#871 Charlesgunny
накрутка реакций телеграм подписчиков накрутка премиум реакций телеграм бесплатно <a href=https://krutkabest.ru/services>Больше фантазии не хватает</a> smm телеграм накрутка пф накрутка dailypfbot телеграм <a href=https://krutkabest.ru>Накрутка лесенкой телеграм</a> телеграм просмотр видео накрутка реальных подписчиков в телеграм бесплатная накрутка подписчиков в телеграме накрутка жалоб телеграм сколько стоит 1000 просмотров в телеграм почему падают просмотры в телеграм как убрать просмотр сторис в телеграм
#872 Charlesgunny
накрутка реакций на пост в телеграм бесплатно накрутка ботов в телеграм канал праймлайк <a href=https://krutkabest.ru/services>Накрутка лесенкой телеграм</a> накрутка лайков в телеграме накрутка реакций телеграм бесплатно праймлайк <a href=https://krutkabest.ru>Больше фантазии не хватает</a> накрутка бустов телеграм бесплатно откуда в приватном канале в телеграм просмотры накрутка подписчиков телеграм тг как узнать количество просмотров видео в телеграм как посмотреть просмотры в телеграм группе как увидеть скрытые просмотры истории в телеграм ставки по вкладам лайки телеграм накрутка
#873 Charlesgunny
накрутка голосов в голосовании телеграм как выглядит анонимный просмотр сторис в телеграм <a href=https://krutkabest.ru>Накрутка лесенкой телеграм</a> почему падают просмотры в телеграм накрутка реакций телеграм jet s <a href=https://krutkabest.ru/services>Накрутка лесенкой телеграм</a> накрутка в телеграме накрутка тикток телеграм накрутка жалоб телеграм накрутка подписчиков телеграм тг как увеличить просмотры сторис в телеграм бот для просмотра сторис в телеграм накрутка ботов в телеграм канал бесплатно
#874 Charlesgunny
накрутка dailypfbot телеграм накрутка просмотров телеграм канал бесплатно по ссылке <a href=https://krutkabest.ru>Больше фантазии не хватает</a> накрутка подписчиков в телеграм канале 100 подписчиков просмотры на пост в телеграм <a href=https://krutkabest.ru>Больше фантазии не хватает</a> телеграм бот просмотры накрутка голосов бот телеграм golospobed накрутка людей в телеграм накрутка подписчиков телеграм 5 минут канал накрутка постов в телеграм накрутка людей в телеграм накрутка лайков в телеграм канале babama
#875 Charlesgunny
накрутка просмотров телеграм поста бесплатно бот для просмотра роликов фильмов в телеграм <a href=https://krutkabest.ru>Накрутка лесенкой телеграм</a> накрутка вк телеграм накрутка премиум реакций телеграм бесплатно <a href=https://krutkabest.ru/services>Просмотры телеграм</a> анонимный просмотр сторис телеграм накрутка подписчиков телеграм бесплатно 5 минут просмотр сообщений в телеграм сервис по накрутке подписчиков в телеграм как найти историю просмотров в телеграм smm телеграм накрутка накрутка просмотров телеграм бесплатно
#876 OLanequesy
Right here is the right blog for everyone who wishes to find out about this topic. You know so much its almost tough to argue with you (not that I really would want to…HaHa). You certainly put a brand new spin on a subject that has been written about for a long time. Excellent stuff, just great! https://kano-hairmake.com/…zminyuy.html
#877 Charlesgunny
можно ли в телеграм ограничить просмотр истории накрутка сообщений телеграм <a href=https://krutkabest.ru>Больше фантазии не хватает</a> накрутка пф телеграм просмотр чатов телеграм <a href=https://krutkabest.ru/services>Накрутка лесенкой телеграм</a> телеграм накрутка комментариев бесплатно накрутка ботов телеграм бесплатно бот для накрутки подписчиков в телеграм бесплатно накрутка телеграм по ссылке накрутка просмотров в телеграм канал накрутка просмотров в телеграме бесплатно profi like накрутка телеграм топ
#878 Charlesgunny
как отменить просмотр истории в телеграм почему падают просмотры в телеграм <a href=https://krutkabest.ru>Больше фантазии не хватает</a> телеграм просмотры фильмов что такое просмотры по url в телеграм <a href=https://krutkabest.ru/services>Больше фантазии не хватает</a> просмотр ххх телеграм анонимный просмотр историй телеграм как работает телеграм с просмотром удаленных сообщений скачать накрутка просмотров телеграм бесплатно без заданий 50 бесплатных просмотров телеграм накрутка подписчиков телеграм канала онлайн накрутка подписчиков в телеграм канал бесплатно праймлайк
#879 Charlesgunny
накрутка просмотров постов телеграм телеграм просмотры фильмов <a href=https://krutkabest.ru/services>Накрутка лесенкой телеграм</a> плавная накрутка телеграм скрытые просмотры в телеграм <a href=https://krutkabest.ru/services>Просмотры лесенкой телеграм</a> накрутка телеграм премиум фанпей телеграм накрутка накрутка просмотров в телеграме накрутка подписчиков телеграм канал 5 подписчиков лайки телеграм накрутка бесплатная накрутка голосов в телеграм накрутка активных подписчиков в телеграм канал
#880 Charlesgunny
накрутка телеграм премиум накрутка подписчиков телеграмм бесплатно телеграм <a href=https://krutkabest.ru>Накрутка лесенкой телеграм</a> телеграм бот накрутка инстаграм просмотр взрослого контента в телеграм <a href=https://krutkabest.ru/services>Накрутка лесенкой телеграм</a> накрутка телеграм jet s накрутить просмотры телеграм просмотр групп в телеграм накрутка в телеграме накрутка в телеграмм канал просмотров телеграм бесплатно телеграм бот для просмотра страниц вк сколько стоит 1000 просмотров в телеграм
#881 Charlesgunny
накрутка реальных подписчиков в телеграм канал накрутка телеграм сервисы <a href=https://krutkabest.ru>Больше фантазии не хватает</a> бесплатная накрутка голосов в телеграм накрутка просмотров в телеграм канал на пост <a href=https://krutkabest.ru/services>Просмотры лесенкой телеграм</a> просмотры и реакции в телеграм накрутка накрутка лайков в телеграм накрутка просмотров телеграм бесплатно без регистрации просмотры от подписчиков телеграм купить бот для просмотра активности в телеграм накрутка подписчиков через телеграм бесплатная накрутка голосов в телеграме
#882 Charlesgunny
накрутка подписчиков в телеграм без отписок программа для просмотра кэша телеграм <a href=https://krutkabest.ru/services>Просмотры телеграм</a> накрутка просмотров в телеграм канал накрутка пф телеграм <a href=https://krutkabest.ru>Накрутка лесенкой телеграм</a> просмотры недоступны телеграмм истории почему в телеграм как сделать однократный просмотр фото в телеграм накрутка активных подписчиков в телеграм накрутка просмотров телеграм бесплатно накрутка телеграм топ накрутка реакций телеграм подписчиков накрутка подписчиков телеграмм бесплатно телеграм
#883 Charlesgunny
накрутка телеграм канала живые просмотр сторис телеграм <a href=https://krutkabest.ru>Больше фантазии не хватает</a> телеграм каналы для просмотра оргазма накрутка бустов телеграм бесплатно <a href=https://krutkabest.ru/services>Больше фантазии не хватает</a> бесплатная накрутка телеграм без заданий бот для просмотра сторис в телеграм бот для накрутки реакций в телеграм накрутка голосов бот телеграм golospobed накрутка телеграм самый дешевый защита от накрутки телеграм накрутка подписчиков в телеграм канал бесплатно ботов
#884 Charlesgunny
накрутка лайков в телеграме что такое просмотры по url в телеграм <a href=https://krutkabest.ru/services>Просмотры лесенкой телеграм</a> взаимная накрутка подписчиков в телеграм взаимная накрутка подписчиков в телеграм <a href=https://krutkabest.ru>Просмотры лесенкой телеграм</a> накрутка голосов в телеграм z1y1×1 бот для просмотра сторис в телеграм накрутить просмотры в телеграме бесплатно как выглядит анонимный просмотр сторис в телеграм накрутка активных подписчиков в телеграм smm телеграм накрутка проверить телеграм канал на накрутку
#885 Charlesgunny
лайки телеграм накрутка babama накрутка голосов в опросе телеграм бесплатно <a href=https://krutkabest.ru>Накрутка лесенкой телеграм</a> бот для просмотра удаленных сообщений телеграм накрутка тик ток телеграм <a href=https://krutkabest.ru>Накрутка лесенкой телеграм</a> проверить накрутку телеграм накрутка лайков на пост телеграм накрутка просмотров в телеграм smm telegram мод телеграм для просмотра удаленных сообщений накрутка подписчиков в телеграм живые бесплатно просмотр подписчиков в телеграм канал накрутка просмотров в телеграм smm telegram
#886 WwwCtgroupkz_Nurcehttps://www.ctgroup.kz/
Доброго времени суток! Уважаемые и достойные эта новость для вас, вернее для тех, кто хочет подтвердить свой уровень владения языком и получить сертификат. А именно и точнее речь идет про международную систему тестирования и одноименный экзамен по английскому языку, т.е. IELTS (International English Language Testing System). К огорчению и сожалению сами подготовиться не сможете. Вам обязательно понадобятся профессиональные и грамотные носители языка. В общем, если вы ищите, курсы английского языка, подготовка к IELTS в Алматы или Атырау в Казахстане и хотите узнать, например: <a href=https://www.ctgroup.kz/kazakhskij-yazyk/>курсы изучения казахского языка</a> Тогда вам срочно нужно прямо сейчас перейти на сайт Образовательного центра Caspian Training Group и выбрать место обучения в Алматы или Атырау в Казахстане https://www.ctgroup.kz/ . Переходите на сайт Caspian Training Group изучайте информацию и сохраняйте в закладки, не забудьте записать номер телефона +7 775 0301919 и адрес сайта. Всем пока!
#887 MartyAvabyhttps://dosug-vladimir.ru
Здравствуйте!
Иногда просто хочется лёгкого общения без последствий. Не отношения, не драмы, а флирт, азарт и интерес. В последнее время зависаю на одном сайте — там проще, чем в приложениях. Люди там явно понимают, зачем приходят. Можете глянуть сами: https://barnaula-dosug.ru/
#888 Charlesgunny
лучшие телеграм боты для просмотра фильмов сколько стоит 1000 просмотров в телеграм <a href=https://krutkabest.ru/services>Больше фантазии не хватает</a> накрутка подписчиков в телеграм живые накрутка телеграм бесплатно праймлайк <a href=https://krutkabest.ru>Просмотры телеграм</a> накрутка голосов в телеграм z1y1×1 телеграм бот платящий за просмотр накрутка подписчиков телеграм бесплатно 100 подписчиков негативные реакции в телеграм накрутка накрутка телеграм без отписок накрутка голосов бот телеграм сервис по накрутке подписчиков в телеграм
#889 Charlesgunny
как можно посмотреть просмотры в телеграм канале накрутка голосования в телеграм <a href=https://krutkabest.ru>Накрутка лесенкой телеграм</a> накрутка пф телеграм накрутка рефералов для бота телеграм <a href=https://krutkabest.ru/services>Просмотры телеграм</a> накрутка пользователей в телеграм накрутка подписчиков в телеграм живые без отписок накрутка подписчиков в телеграм бесплатно быстро считает ли телеграм повторные просмотры накрутка реакций на комментарий телеграм накрутка реакций телеграм подписчиков как посмотреть просмотры в телеграм
#890 Charlesgunny
накрутка истории в телеграм 50 бесплатных просмотров телеграм <a href=https://krutkabest.ru/services>Больше фантазии не хватает</a> накрутка просмотров в телеграм канал накрутка звезд телеграм <a href=https://krutkabest.ru>Просмотры лесенкой телеграм</a> сервис по накрутке подписчиков в телеграм накрутка просмотров телеграм канал живых бесплатно накрутка подписчиков в телеграм канал бесплатно праймлайк просмотры на пост в телеграм цена за 1000 просмотров в телеграм просмотр контактов внутри телеграма есть функция хакерство накрутка подписчиков в телеграм канал бесплатно праймлайк
#891 Charlesgunny
видят ли просмотры историй в телеграм накрутка лайков в телеграм канале <a href=https://krutkabest.ru>Просмотры телеграм</a> накрутка реакций телеграм бесплатно праймлайк накрутка телеграм без списаний <a href=https://krutkabest.ru/services>Просмотры телеграм</a> почему просмотров больше чем подписчиков в телеграм просмотр аниме в телеграме телеграм бот для просмотра страниц вк просмотры на пост в телеграм телеграм накрутка бесплатных реакций и просмотров просмотры недоступны телеграмм истории почему в телеграм накрутка подписчиков телеграм тг
#892 Charlesgunny
накрутка подписчиков телеграм канал купить накрутка просмотров телеграм бесплатно без заданий <a href=https://krutkabest.ru/services>Больше фантазии не хватает</a> накрутка подписчиков в телеграм дешево просмотры в телеграм бесплатно онлайн смм <a href=https://krutkabest.ru>Просмотры лесенкой телеграм</a> накрутка лайков на пост телеграм телеграм софт просмотры накрутка подписчиков в телеграм бесплатно без вложений накрутка просмотров телеграм бесплатно без регистрации накрутка бустов телеграм бесплатно накрутка реальных подписчиков в телеграм канал накрутка голосов в телеграме
#893 Charlesgunny
накрутка голосов телеграм z1 накрутка ботов в телеграм канал праймлайк <a href=https://krutkabest.ru>Накрутка лесенкой телеграм</a> телеграм просмотры фильмов негативные реакции в телеграм накрутка <a href=https://krutkabest.ru>Просмотры телеграм</a> проверка телеграм на накрутку накрутка просмотров телеграм бесплатно без заданий реальная накрутка телеграм накрутка подписчиков в телеграм канал бесплатно накрутка заявок в телеграм канал накрутка подписчиков в телеграм живые люди накрутка подписчиков телеграм без заданий
#894 Charlesgunny
накрутка бустов телеграм сайт для накрутки подписчиков в телеграм <a href=https://krutkabest.ru/services>Просмотры лесенкой телеграм</a> накрутка голосов бот телеграм golospobed как убрать просмотр сторис в телеграм <a href=https://krutkabest.ru>Просмотры телеграм</a> накрутка подписчиков в телеграм бесплатно без вложений накрутка подписчиков телеграм бесплатно 100 подписчиков вылетает телеграм при просмотре видео накрутка через телеграм накрутка телеграм аккаунта бесплатная просмотр телеграм канала просмотры постов канала в телеграм
#895 Charlesgunny
плавная накрутка телеграм просмотр закрытого профиля в телеграм <a href=https://krutkabest.ru>Накрутка лесенкой телеграм</a> накрутка рефералов для бота телеграм накрутка телеграм без заданий <a href=https://krutkabest.ru/services>Просмотры лесенкой телеграм</a> просмотр историй инстаграм через телеграм просмотр подписчиков в телеграм канал накрутка заявок в телеграм бот для просмотра роликов фильмов в телеграм накрутка подписчиков телеграм канал купить накрутка репостов телеграм babama накрутка жалоб телеграм
#896 Charlesgunny
просмотр аниме в телеграме ставки по вкладам лайки телеграм накрутка <a href=https://krutkabest.ru>Накрутка лесенкой телеграм</a> накрутка телеграм аккаунта накрутка просмотров телеграм инстаграм <a href=https://krutkabest.ru/services>Просмотры лесенкой телеграм</a> купить просмотр телеграм живой накрутка просмотров телеграм бесплатно онлайн накрутка ботов в телеграм канал дешево накрутка пользователей в телеграм бесплатно просмотры и реакции в телеграм накрутка накрутка лайков в телеграм канале накрутка лайков в телеграм канале babama
#897 Charlesgunny
негативные реакции в телеграм накрутка телеграм бот для просмотра страниц вк <a href=https://krutkabest.ru>Больше фантазии не хватает</a> смм накрутка просмотров телеграм бесплатно как найти историю просмотров в телеграм <a href=https://krutkabest.ru>Накрутка лесенкой телеграм</a> просмотры в телеграме бот для просмотра удаленных сообщений телеграм накрутка реакций в телеграм канал бесплатно бесплатная накрутка телеграм без заданий накрутка вк телеграм накрутка реакций телеграм jet s телеграм бот просмотр сторис в инстаграм бесплатный
#898 Charlesgunny
накрутка телеграм просмотров stream promotion ru накрутка телеграм софт <a href=https://krutkabest.ru>Больше фантазии не хватает</a> накрутка телеграм софт бесплатная накрутка голосов в телеграме <a href=https://krutkabest.ru/services>Больше фантазии не хватает</a> просмотр ххх телеграм smm телеграм накрутка накрутка 5 подписчиков в телеграм накрутка просмотров телеграм инстаграм накрутка людей в телеграм накрутка рефералов телеграм бесплатно пф накрутка dailypfbot телеграм
#899 Charlesgunny
накрутка голосов телеграм канал накрутка просмотров в телеграм канал телеграмме <a href=https://krutkabest.ru>Больше фантазии не хватает</a> просмотр сторис телеграм накрутка голосов в голосовании телеграм <a href=https://krutkabest.ru/services>Больше фантазии не хватает</a> накрутка голосов в голосовании телеграм быстрая накрутка подписчиков в телеграм накрутка голосов телеграм канал smm телеграм накрутка накрутка просмотров телеграм канал живых бесплатно 50 бесплатных просмотров телеграм накрутка жалоб на телеграм канал
#900 Charlesgunny
Просмотры лесенкой телеграм накрутка репостов телеграм babama <a href=https://krutkabest.ru>Просмотры лесенкой телеграм</a> накрутка просмотров телеграм канал живых анонимный просмотр сторис в телеграме <a href=https://krutkabest.ru/services>Просмотры лесенкой телеграм</a> телеграм бот накрутка инстаграм телеграм накрутка бесплатных реакций и просмотров накрутка постов в телеграм скрипт для накрутки просмотров в телеграм накрутка просмотров в телеграм канал накрутка лайков в телеграм канале телеграм накрутка комментариев бесплатно
#901 Charlesgunny
видят ли просмотры историй в телеграм лучшие телеграм боты для просмотра фильмов <a href=https://krutkabest.ru/services>Просмотры телеграм</a> накрутка реальных подписчиков в телеграм лайки телеграм накрутка <a href=https://krutkabest.ru>Просмотры телеграм</a> список телеграм каналов не рекомендованных к просмотру телеграм накрутка бесплатных реакций и просмотров просмотр историй инстаграм через телеграм просмотры телеграм накрутка подписчиков телеграм канал купить накрутка живых людей в телеграм просмотр историй в телеграм
#902 Charlesgunny
накрутка подписчиков телеграм по ссылке накрутка комментариев в телеграм канале <a href=https://krutkabest.ru>Накрутка лесенкой телеграм</a> накрутка людей в телеграм накрутка реакций в телеграм канал бесплатно <a href=https://krutkabest.ru/services>Просмотры телеграм</a> самая дешевая накрутка подписчиков телеграм накрутка премиум реакций телеграм просмотр инстаграм телеграм программа для просмотра кэша телеграм фанпей телеграм накрутка просмотр истории телеграм у пользователя анонимно онлайн список телеграм каналов не рекомендованных к просмотру
#903 Charlesgunny
накрутка активности в телеграм накрутка просмотров в телеграм канал бесплатно <a href=https://krutkabest.ru/services>Просмотры лесенкой телеграм</a> накрутка подписчиков в чат телеграм анонимный просмотр публикаций телеграм <a href=https://krutkabest.ru>Больше фантазии не хватает</a> накрутка комментариев в телеграм канале скрипт для накрутки просмотров в телеграм как посмотреть просмотры в телеграм группе накрутка людей в телеграм взаимная накрутка подписчиков в телеграм пдф накрутка daily bot телеграм накрутка пользователей в телеграм канал
#904 Charlesgunny
накрутка рефералов в телеграм накрутка голосов в опросе телеграм бесплатно <a href=https://krutkabest.ru/services>Просмотры лесенкой телеграм</a> накрутка участников в телеграм накрутка звезд телеграм <a href=https://krutkabest.ru/services>Просмотры лесенкой телеграм</a> накрутка просмотров телеграм накрутка голосования в телеграм накрутка подписчиков в группу телеграм накрутка премиум реакций телеграм бесплатно быстрая накрутка подписчиков в телеграм бесплатная накрутка реакций в телеграме накрутка подписчиков телеграм без регистрации
#905 Charlesgunny
накрутка голосов бот телеграм купить просмотр телеграм живой <a href=https://krutkabest.ru/services>Накрутка лесенкой телеграм</a> накрутка подписчиков телеграм 50 телеграм канал для просмотра ютуба <a href=https://krutkabest.ru/services>Просмотры лесенкой телеграм</a> лайки телеграм накрутка babama накрутка подписчиков в телеграм платно бесплатная накрутка подписчиков в телеграме как подсчитываются просмотры в телеграм канале Просмотры лесенкой телеграм считаются ли повторные просмотры в телеграм накрутка просмотров на закрытый телеграм канал
#906 Charlesgunny
накрутка подписчиков телеграм 5 минут канал накрутка телеграм премиум <a href=https://krutkabest.ru>Больше фантазии не хватает</a> накрутка голосов в телеграме накрутка телеграм бесплатно <a href=https://krutkabest.ru>Просмотры телеграм</a> накрутка лайков в телеграм бесплатно накрутка просмотров телеграм канал бесплатно по ссылке бот для просмотра удаленных сообщений телеграм накрутка отзывов телеграм мод телеграм для просмотра удаленных сообщений накрутка подписчиков телеграм бесплатно по ссылке накрутка подписчиков в телеграм дешево
#907 Charlesgunny
накрутка телеграм платно телеграм с просмотром удаленных сообщений скачать <a href=https://krutkabest.ru>Накрутка лесенкой телеграм</a> телеграм количество просмотров накрутка подписчиков инстаграм телеграм <a href=https://krutkabest.ru/services>Больше фантазии не хватает</a> накрутка реальных подписчиков в телеграм накрутка просмотров на закрытый телеграм канал видны ли просмотры в телеграм накрутка просмотров в телеграме бесплатно анонимный просмотр историй в телеграм премиум накрутка подписчиков телеграм бесплатно 100 подписчиков плавная накрутка телеграм
#908 Charlesgunny
защита от накрутки телеграм бот для накрутки подписчиков в телеграм канале <a href=https://krutkabest.ru>Просмотры телеграм</a> накрутка подписчиков в телеграм живые люди телеграм софт просмотры <a href=https://krutkabest.ru/services>Больше фантазии не хватает</a> считает ли телеграм повторные просмотры телеграм бот накрутка инстаграм накрутка подписчиков в телеграм анонимный просмотр сторис телеграм просмотр сообщений в телеграм просмотр закрытого профиля в телеграм сколько стоит 1000 просмотров в телеграм
#909 Charlesgunny
накрутка телеграм бесплатно заданий дешевая накрутка телеграм <a href=https://krutkabest.ru>Больше фантазии не хватает</a> публикации профиля в телеграм видны просмотры анонимный просмотр телеграм <a href=https://krutkabest.ru>Просмотры лесенкой телеграм</a> как сделать однократный просмотр фото в телеграм бесплатная накрутка голосов в телеграме как найти историю просмотров в телеграм накрутка просмотров телеграм канал живых бесплатно накрутка 5 подписчиков в телеграм накрутка премиум голосов телеграм накрутка просмотров и подписчиков в телеграм
#910 Charlesgunny
накрутка подписчиков в телеграм онлайн телеграм боты накрутка дешево <a href=https://krutkabest.ru/services>Просмотры телеграм</a> накрутить просмотры телеграм бесплатно смотреть телеграм просмотры <a href=https://krutkabest.ru>Просмотры лесенкой телеграм</a> как подсчитываются просмотры в телеграм канале накрутка просмотров в телеграм канал бесплатно бесплатная накрутка телеграм без заданий просмотр закрытого телеграм канала что такое просмотры по url в телеграм накрутка подписчиков телеграм телеграмм накрутка просмотров телеграм дешево
#911 Charlesgunny
накрутка просмотров телеграм бесплатно без регистрации накрутка подписчиков в телеграм канал бесплатно праймлайк <a href=https://krutkabest.ru/services>Больше фантазии не хватает</a> накрутка ботов телеграм откуда в приватном канале в телеграм просмотры <a href=https://krutkabest.ru/services>Просмотры лесенкой телеграм</a> накрутка реакций в телеграм канал накрутка живых просмотров в телеграм накрутка подписчиков в телеграм бесплатно без отписок накрутка подписчиков в телеграм живые бесплатно накрутка комментариев телеграм накрутка подписчиков в телеграм канал бесплатно праймлайк накрутка телеграм скачать
#912 Charlesgunny
накрутка подписчиков телеграм закрытый канал как найти историю просмотров в телеграм <a href=https://krutkabest.ru>Больше фантазии не хватает</a> накрутка телеграм бесплатно живых накрутка голосов бот телеграм golospobed <a href=https://krutkabest.ru>Накрутка лесенкой телеграм</a> просмотров больше чем подписчиков в телеграм накрутка комментариев телеграм накрутка 5 подписчиков в телеграм просмотры в телеграме просмотр фото телеграм цена за 1000 просмотров в телеграм накрутка подписчиков в телеграм канал праймлайк
#913 Charlesgunny
анонимный просмотр телеграм накрутка просмотров в телеграм канал <a href=https://krutkabest.ru>Просмотры телеграм</a> накрутка 5 подписчиков в телеграм накрутка телеграм канала живые <a href=https://krutkabest.ru/services>Больше фантазии не хватает</a> накрутка голосов в голосовании телеграм накрутка опроса телеграм накрутка реакций телеграм негативные реакции в телеграм накрутка накрутка подписчиков в телеграм канал дешево накрутка телеграм канала живые накрутка отзывов телеграм
#914 Charlesgunny
накрутка просмотров телеграм бесплатно без заданий просмотр профиль инстаграм телеграм <a href=https://krutkabest.ru>Больше фантазии не хватает</a> накрутка просмотров на закрытый телеграм канал накрутка телеграм канала <a href=https://krutkabest.ru>Больше фантазии не хватает</a> накрутить просмотры телеграм накрутка телеграм без отписок защита от накрутки телеграм просмотр профиля телеграм накрутка просмотров в телеграм канал на пост как очистить историю просмотра в телеграм анонимный просмотр историй в телеграм премиум
#915 Charlesgunny
накрутка просмотров в телеграм канал бесплатно накрутка телеграм приложение <a href=https://krutkabest.ru>Больше фантазии не хватает</a> самая дешевая накрутка подписчиков телеграм анонимный просмотр историй в телеграм <a href=https://krutkabest.ru/services>Накрутка лесенкой телеграм</a> просмотр фото телеграм накрутка реакций в телеграм канал телеграм боты накрутка дешево бесплатная просмотр телеграм канала накрутка телеграм бесплатно праймлайк бот для просмотра роликов фильмов в телеграм накрутка телеграм топ
#916 Charlesgunny
анонимный просмотр историй телеграм как работает накрутка подписчиков в телеграм живые без отписок <a href=https://krutkabest.ru/services>Больше фантазии не хватает</a> накрутка звезд телеграм накрутка подписчиков в телеграм канал бесплатно живых <a href=https://krutkabest.ru/services>Накрутка лесенкой телеграм</a> накрутка подписчиков телеграм канала онлайн накрутка эмоций телеграм накрутка реакций в телеграм канал бесплатно накрутка dailypfbot телеграм накрутка просмотров в телеграм канал бесплатно считаются ли повторные просмотры в телеграм канале накрутка онлайна телеграм
#917 Charlesgunny
накрутка телеграм по ссылке функция скрыть просмотр в телеграм <a href=https://krutkabest.ru/services>Больше фантазии не хватает</a> накрутить просмотры телеграм просмотры от подписчиков телеграм купить <a href=https://krutkabest.ru>Больше фантазии не хватает</a> просмотр сторис телеграмм анонимно в телеграм просмотров больше чем подписчиков в телеграм считает ли телеграм повторные просмотры накрутка живых просмотров в телеграм телеграм бот кино просмотра накрутка ботов в телеграм канал бесплатно пдф накрутка daily bot телеграм
#918 Charlesgunny
накрутка подписчиков в телеграм канале 100 подписчиков просмотры на канал телеграм <a href=https://krutkabest.ru/services>Накрутка лесенкой телеграм</a> просмотр чатов телеграм бот для накрутки подписчиков в телеграм <a href=https://krutkabest.ru>Просмотры телеграм</a> просмотр истории телеграм анонимно онлайн считаются ли повторные просмотры в телеграм канале просмотр профиля телеграм накрутка подписчиков в телеграм онлайн накрутка просмотров телеграм инстаграм накрутка голосов в телеграм опросе накрутка телеграм софт
#919 Charlesgunny
бесплатная просмотр телеграм канала накрутка жалоб телеграм <a href=https://krutkabest.ru>Больше фантазии не хватает</a> телеграм софт просмотры бесплатные накрутка для телеграма <a href=https://krutkabest.ru>Просмотры лесенкой телеграм</a> накрутка лайков на пост телеграм скрытый просмотр историй в телеграм телеграм заработать на просмотрах скрипт просмотры телеграм накрутка премиум подписчиков в телеграм накрутка просмотров телеграм дешево бот для просмотра телеграм реакций
#920 Charlesgunny
накрутка подписчиков телеграм бесплатно по ссылке накрутка живых людей в телеграм <a href=https://krutkabest.ru/services>Просмотры лесенкой телеграм</a> негативные реакции в телеграм накрутка накрутка просмотров в телеграм канал бесплатно <a href=https://krutkabest.ru>Просмотры лесенкой телеграм</a> банит ли телеграм за накрутку накрутка подписчиков в телеграм живые без отписок накрутка бустов телеграм бесплатно просмотры на канал телеграм накрутка голосов телеграм канал накрутка просмотров телеграм канал живых бесплатно как найти историю просмотров в телеграм
#921 Charlesgunny
накрутка просмотров в телеграм канал праймлайк накрутка телеграм приложение <a href=https://krutkabest.ru/services>Просмотры телеграм</a> накрутка участников в телеграм чат накрутка бустов телеграм <a href=https://krutkabest.ru>Просмотры лесенкой телеграм</a> телеграм бот просмотр сторис в инстаграм бесплатный купить накрутку телеграм анонимный просмотр историй в телеграм премиум просмотры в телеграм бесплатно онлайн смм накрутка подписчиков телеграм бесплатно 100 подписчиков накрутка просмотров телеграм бесплатно без 5 минут накрутка реакций в телеграм канал бесплатно
#922 Charlesgunny
просмотр профиль инстаграм телеграм бот для накрутки просмотров в телеграм <a href=https://krutkabest.ru>Больше фантазии не хватает</a> просмотр закрытого профиля в телеграм накрутка подписчиков в телеграм навсегда <a href=https://krutkabest.ru/services>Больше фантазии не хватает</a> почему просмотров больше чем подписчиков в телеграм как отменить просмотр истории в телеграм функция скрыть просмотр в телеграм как скрыть просмотры в телеграм истории накрутка просмотров телеграм канал живых накрутка подписчиков телеграм бесплатно онлайн как сделать сообщение на один просмотр телеграм
#923 Charlesgunny
накрутка подписчиков в телеграм канал без отписок накрутить просмотры телеграм бесплатно <a href=https://krutkabest.ru>Накрутка лесенкой телеграм</a> просмотр телеграм канала без входа накрутка комментариев в телеграм канале <a href=https://krutkabest.ru/services>Просмотры телеграм</a> накрутка подписчиков в телеграм канал без отписок телеграм мод с функцией просмотра скрытых историй смотреть телеграм просмотры накрутка в телеграмм канал просмотров телеграм бесплатно накрутка заявок в телеграм канал накрутка подписчиков телеграм бесплатно праймлайк просмотр взрослого контента в телеграм
#924 Charlesgunny
считает ли телеграм повторные просмотры накрутка 5 подписчиков в телеграм <a href=https://krutkabest.ru/services>Накрутка лесенкой телеграм</a> анонимный просмотр сторис в телеграм бот телеграм для просмотра сериалов <a href=https://krutkabest.ru/services>Просмотры лесенкой телеграм</a> накрутка лайков в телеграме накрутка телеграм приложение накрутка телеграм скачать телеграм мод с функцией просмотра скрытых историй накрутка подписчиков телеграм 50 программа накрутки телеграм накрутка реакций телеграм праймлайк
#925 Charlesgunny
бот для просмотра роликов фильмов в телеграм накрутка просмотров телеграм канал бесплатно по ссылке <a href=https://krutkabest.ru/services>Накрутка лесенкой телеграм</a> видит ли человек просмотры публикаций в телеграм накрутка телеграм топ <a href=https://krutkabest.ru>Просмотры телеграм</a> накрутка телеграм без списаний телеграм мод с функцией просмотра скрытых историй скрипт для накрутки просмотров в телеграм просмотр телеграм канала без входа просмотр историй вк анонимно телеграм сколько стоит 1000 просмотров в телеграм как можно посмотреть просмотры в телеграм канале
#926 Charlesgunny
накрутка телеграм быстро телеграм бот для просмотра фильмов <a href=https://krutkabest.ru>Больше фантазии не хватает</a> просмотр профиля телеграм бот для накрутки подписчиков в телеграм канале <a href=https://krutkabest.ru/services>Больше фантазии не хватает</a> как скрыть просмотры в телеграм накрутка в телеграмме бесплатно телеграм накрутка подписчиков в телеграм канал дешево телеграм бот просмотр сторис в инстаграм бесплатный как посмотреть просмотры в телеграм группе накрутка отзывов телеграм накрутка подписчиков в телеграм от 10 подписчиков
#927 Charlesgunny
бесплатные накрутка для телеграма бесплатная накрутка подписчиков в телеграме <a href=https://krutkabest.ru/services>Накрутка лесенкой телеграм</a> накрутка подписчиков телеграм бесплатно задания Просмотры телеграм <a href=https://krutkabest.ru/services>Больше фантазии не хватает</a> накрутка ботов в телеграм канал дешево сколько стоит 1000 просмотров в телеграм накрутка подписчиков в группу телеграм считаются ли повторные просмотры в телеграм телеграм софт просмотры накрутка премиум подписчиков в телеграм накрутка отзывов телеграм
#928 Charlesgunny
накрутка телеграм без списаний как найти историю просмотров в телеграм <a href=https://krutkabest.ru>Больше фантазии не хватает</a> боты телеграм для просмотра удаленных фото вк накрутка просмотров в телеграм праймлайк <a href=https://krutkabest.ru/services>Больше фантазии не хватает</a> боты телеграм для просмотра удаленных фото вк smm телеграм накрутка накрутка участников в телеграм боты телеграм для просмотра удаленных фото вк как подсчитываются просмотры в телеграм канале бот для просмотра удаленных сообщений телеграм накрутка премиум реакций телеграм
#929 Charlesgunny
бот для накрутки реакций в телеграм телеграм бот для накрутки подписчиков в телеграмм <a href=https://krutkabest.ru>Просмотры телеграм</a> накрутка голосов бот телеграм накрутка просмотров телеграм канал бесплатно по ссылке <a href=https://krutkabest.ru>Больше фантазии не хватает</a> как очистить историю просмотра в телеграм накрутка подписчиков в телеграм навсегда накрутка телеграм канал бесплатно живых накрутка телеграм бесплатно живых бесплатные накрутка для телеграма как сделать сообщение на один просмотр телеграм накрутка подписчиков в телеграм платно
#930 Charlesgunny
накрутка рефералов в телеграм накрутка телеграм задания <a href=https://krutkabest.ru/services>Просмотры лесенкой телеграм</a> телеграм бот платящий за просмотр накрутка подписчиков телеграм 5 минут канал <a href=https://krutkabest.ru>Больше фантазии не хватает</a> накрутка голосов в телеграм z1y1×1 ставки по вкладам лайки телеграм накрутка накрутка подписчиков телеграм без заданий накрутка подписчиков телеграм телеграмм фанпей телеграм накрутка накрутка просмотров историй телеграм накрутка подписчиков телеграм канал купить
#931 Charlesgunny
видят ли просмотры историй в телеграм показываются ли просмотры историй в телеграм <a href=https://krutkabest.ru>Накрутка лесенкой телеграм</a> накрутка подписчиков в телеграм канал бесплатно ботов купить накрутку телеграм <a href=https://krutkabest.ru>Накрутка лесенкой телеграм</a> накрутка премиум голосов телеграм просмотры в телеграм бесплатно онлайн смм накрутка телеграм опрос бесплатно накрутка онлайна телеграм накрутка телеграм сервисы накрутка премиум подписчиков в телеграм накрутка бустов телеграм канала
#932 Charlesgunny
телеграм бот для накрутки подписчиков в телеграмм накрутка подписчиков в телеграм канале 100 подписчиков <a href=https://krutkabest.ru>Просмотры телеграм</a> накрутка заявок в телеграм бот для накрутки реакций в телеграм <a href=https://krutkabest.ru>Больше фантазии не хватает</a> как в телеграм скрыть просмотр сообщений накрутка просмотров постов телеграм накрутка подписчиков телеграм бесплатно 100 подписчиков бесплатная накрутка реакций в телеграме накрутка просмотров телеграм бесплатно онлайн как скрыть просмотры в телеграм накрутка подписчиков телеграм бесплатно праймлайк
#933 Charlesgunny
фанпей телеграм накрутка боты телеграм для просмотра удаленных фото вк <a href=https://krutkabest.ru>Накрутка лесенкой телеграм</a> накрутка телеграм сервисы просмотры постов канала в телеграм <a href=https://krutkabest.ru/services>Больше фантазии не хватает</a> накрутка участников в группу телеграм накрутка телеграм группы бот для накрутки подписчиков в телеграм бесплатно бот для накрутки реакций в телеграм бесплатно накрутка подписчиков в телеграм платно накрутка репостов телеграм babama накрутить просмотры телеграм
#934 Charlesgunny
накрутка просмотров в телеграме накрутка постов в телеграм <a href=https://krutkabest.ru/services>Накрутка лесенкой телеграм</a> накрутка подписчиков в телеграм от 10 подписчиков телеграм боты накрутка дешево <a href=https://krutkabest.ru>Накрутка лесенкой телеграм</a> статистика просмотров телеграм просмотр взрослого контента в телеграм накрутка жалоб на телеграм канал телеграм заработать на просмотрах накрутка подписчиков инстаграм телеграм скрипт просмотры телеграм накрутка подписчиков в телеграм канал бесплатно ботов
#935 Charlesgunny
телеграм заработать на просмотрах накрутка пф телеграм <a href=https://krutkabest.ru/services>Просмотры лесенкой телеграм</a> накрутка подписчиков телеграм бесплатно 5 минут накрутить просмотры телеграм бесплатно <a href=https://krutkabest.ru/services>Просмотры телеграм</a> накрутка просмотров телеграм дешево накрутка просмотров в телеграм канал на пост накрутка подписчиков телеграм бесплатно 100 подписчиков накрутка телеграм опрос бесплатно накрутка голосов телеграм z1 накрутка активных подписчиков в телеграм накрутка просмотров телеграм
#936 Charlesgunny
просмотр профиля телеграм как увидеть скрытые просмотры истории в телеграм <a href=https://krutkabest.ru/services>Просмотры телеграм</a> купить просмотр телеграм живой накрутка подписчиков в телеграм бесплатно быстро <a href=https://krutkabest.ru>Накрутка лесенкой телеграм</a> как скрыть просмотры в телеграм купить просмотр телеграм живой накрутка людей в телеграм просмотр фото телеграм накрутка пф телеграм бот для накрутки реакций в телеграм накрутка подписчиков в группу телеграм
#937 Charlesgunny
накрутка подписчиков в группу телеграм накрутка вк телеграм <a href=https://krutkabest.ru>Больше фантазии не хватает</a> накрутка подписчиков в телеграм дешево телеграм заработать на просмотрах <a href=https://krutkabest.ru>Накрутка лесенкой телеграм</a> накрутка голосов телеграм канал как сделать однократный просмотр фото в телеграм накрутка подписчиков в группу телеграм просмотр телеграм канала без входа накрутка ботов в телеграм канал праймлайк накрутка ботов телеграм бесплатно накрутка подписчиков телеграм канала онлайн
#938 Charlesgunny
накрутка реакций в телеграме накрутка реакций телеграм бесплатно <a href=https://krutkabest.ru>Накрутка лесенкой телеграм</a> просмотр аниме в телеграме онлайн накрутка телеграм канала <a href=https://krutkabest.ru/services>Просмотры телеграм</a> накрутка подписчиков телеграм 100 подписчиков накрутка подписок телеграм накрутка подписчиков в телеграм канал живых накрутка голосов в телеграм z1y1×1 накрутка 5 подписчиков в телеграм накрутка опроса телеграм лучшие накрутки подписчиков телеграм
#939 Charlesgunny
бесплатная накрутка телеграм без заданий телеграм количество просмотров <a href=https://krutkabest.ru/services>Просмотры телеграм</a> накрутка телеграм бесплатно живых просмотр истории телеграм анонимно онлайн <a href=https://krutkabest.ru>Просмотры телеграм</a> накрутка подписчиков телеграм 5 минут канал считаются ли повторные просмотры в телеграм накрутка ботов в телеграм канал дешево накрутка подписчиков в чат телеграм накрутка подписчиков телеграмм бесплатно телеграм накрутка телеграм быстро накрутка пользователей в телеграм бесплатно
#940 Charlesgunny
накрутка бустов телеграм бесплатно пдф накрутка daily bot телеграм <a href=https://krutkabest.ru>Просмотры лесенкой телеграм</a> накрутка бустов телеграм канала можно ли в телеграм ограничить просмотр истории <a href=https://krutkabest.ru>Больше фантазии не хватает</a> накрутка рефералов для бота телеграм накрутка телеграм премиум накрутка подписчиков в телеграме как посмотреть просмотры в телеграм как сделать однократный просмотр фото в телеграм накрутка телеграм опрос бесплатно бот для накрутки подписчиков в телеграм праймлайк
#941 Charlesgunny
накрутка пользователей в телеграм бесплатно накрутка подписчиков телеграм бесплатно по ссылке <a href=https://krutkabest.ru/services>Просмотры телеграм</a> накрутка реакций телеграм просмотр сторис телеграм <a href=https://krutkabest.ru/services>Просмотры лесенкой телеграм</a> накрутка подписчиков телеграм бесплатно 5 минут накрутка телеграм чат накрутка премиум голосов телеграм накрутка просмотров в телеграм канал телеграмме накрутка телеграм самый дешевый накрутка пф телеграм накрутка реакций в телеграм канал
#942 Charlesgunny
накрутка телеграм премиум накрутка голосов в голосовании телеграм <a href=https://krutkabest.ru>Больше фантазии не хватает</a> накрутка телеграм без отписок накрутка ботов в телеграм канал бесплатно <a href=https://krutkabest.ru/services>Накрутка лесенкой телеграм</a> накрутка ботов в телеграм канал праймлайк просмотр аниме в телеграме накрутка телеграм по ссылке накрутка ботов в телеграм канал бесплатно негативные реакции в телеграм накрутка накрутка просмотров на закрытый телеграм канал накрутка телеграм чат
#943 Charlesgunny
накрутка в телеграмм канал просмотров телеграм бесплатно как выглядит анонимный просмотр сторис в телеграм <a href=https://krutkabest.ru/services>Просмотры лесенкой телеграм</a> бот для накрутки реакций в телеграм смм накрутка телеграм <a href=https://krutkabest.ru>Накрутка лесенкой телеграм</a> накрутка активных подписчиков в телеграм накрутка настоящих подписчиков в телеграм накрутка телеграм самый дешевый просмотр историй в телеграме накрутка тикток телеграм просмотр историй телеграм бот накрутка просмотров телеграм канал бесплатно по ссылке
#944 Charlesgunny
просмотр взрослого контента в телеграм как посмотреть просмотры в телеграм группе <a href=https://krutkabest.ru>Накрутка лесенкой телеграм</a> накрутка рефералов в телеграм накрутка подписчиков телеграм телеграмм <a href=https://krutkabest.ru/services>Накрутка лесенкой телеграм</a> накрутка ботов в телеграме накрутка премиум подписчиков в телеграм как можно посмотреть просмотры в телеграм канале накрутка просмотров постов телеграм накрутка просмотров постов телеграм видит ли человек просмотры публикаций в телеграм накрутить просмотры на телеграм пост бесплатно
#945 Charlesgunny
анонимный просмотр историй телеграм как работает просмотров больше чем подписчиков в телеграм <a href=https://krutkabest.ru>Накрутка лесенкой телеграм</a> накрутка через телеграм накрутка просмотров телеграм бесплатно без 5 минут <a href=https://krutkabest.ru/services>Просмотры телеграм</a> бот для накрутки подписчиков в телеграм бесплатно накрутка телеграм скачать накрутка голосов бот телеграм как увидеть скрытые просмотры истории в телеграм бот для просмотра роликов фильмов в телеграм бот для накрутки реакций в телеграм бесплатно бот для просмотра активности в телеграм
#946 Charlesgunny
телеграм просмотры фильмов накрутка голосов телеграм z1 <a href=https://krutkabest.ru>Больше фантазии не хватает</a> накрутка репостов телеграм накрутка репостов телеграм <a href=https://krutkabest.ru/services>Больше фантазии не хватает</a> просмотр фото телеграм как скрыть просмотры в телеграм истории накрутка бустов телеграм канала бот для просмотра телеграм реакций накрутка телеграм опрос бесплатно накрутка телеграм самый дешевый накрутка телеграм по ссылке
#947 Charlesgunny
накрутка пользователей в телеграм бесплатно накрутка телеграм сервисы <a href=https://krutkabest.ru>Просмотры лесенкой телеграм</a> проверка телеграм на накрутку накрутка телеграм без регистрации <a href=https://krutkabest.ru>Просмотры лесенкой телеграм</a> просмотр сообщений в телеграм как можно посмотреть просмотры в телеграм канале накрутка просмотров телеграм накрутка телеграм премиум просмотр истории телеграм у пользователя анонимно онлайн накрутка телеграм без регистрации лучшие сайты накрутки телеграм
#948 Charlesgunny
накрутка активных подписчиков в телеграм канал накрутка рефералов телеграм бесплатно <a href=https://krutkabest.ru/services>Просмотры лесенкой телеграм</a> накрутка подписчиков телеграм канал купить быстрая накрутка подписчиков в телеграм <a href=https://krutkabest.ru/services>Просмотры лесенкой телеграм</a> бот для накрутки реакций в телеграм накрутка просмотров историй телеграм бот для просмотра сторис в телеграм накрутка подписчиков в телеграм канал накрутка телеграм самый дешевый накрутка реальных подписчиков в телеграм канал просмотр взрослого контента в телеграм
#949 Cazrdazhttp://[url=http://diplomybox.com/kupit-diplom-v-belorussii/]diplomybox.com/kupit-diplom-v-belorussi
Заказать диплом любого университета можем помочь. Купить диплом в Белоруссии – <a href=http://diplomybox.com/kupit-diplom-v-belorussii/>diplomybox.com/kupit-diplom-v-belorussii</a>
#950 Charlesgunny
анонимный просмотр телеграм накрутка телеграм приложение <a href=https://krutkabest.ru>Накрутка лесенкой телеграм</a> накрутка лайков в телеграм канале просмотры от подписчиков телеграм купить <a href=https://krutkabest.ru/services>Просмотры лесенкой телеграм</a> накрутка подписчиков телеграм без заданий купить просмотр телеграм живой телеграм софт просмотры анонимный просмотр сторис в телеграме накрутка просмотров телеграм канал живых бесплатно накрутка просмотров постов телеграм проверка телеграм на накрутку
#951 Charlesgunny
накрутка подписчиков в телеграм канале 100 подписчиков накрутка телеграм платно <a href=https://krutkabest.ru/services>Накрутка лесенкой телеграм</a> накрутка пользователей в телеграм накрутка подписчиков телеграм тг <a href=https://krutkabest.ru>Накрутка лесенкой телеграм</a> накрутка пф телеграм накрутка рефералов в телеграм анонимный просмотр публикаций телеграм накрутка подписчиков в телеграм без отписок просмотры телеграм мод телеграм для просмотра удаленных сообщений банит ли телеграм за накрутку
#952 Charlesgunny
что такое просмотры по url в телеграм телеграм боты накрутка дешево <a href=https://krutkabest.ru>Просмотры лесенкой телеграм</a> накрутка подписчиков в телеграм недорого как скрыть просмотры в телеграм <a href=https://krutkabest.ru>Просмотры лесенкой телеграм</a> проверить телеграм канал на накрутку накрутка телеграм скачать бот для просмотра удаленных сообщений телеграм накрутка просмотров историй телеграм накрутка подписчиков в телеграм купить накрутка просмотров в телеграм праймлайк просмотры и реакции в телеграм накрутка
#953 Charlesgunny
как выглядит анонимный просмотр сторис в телеграм накрутка рефералов для бота телеграм <a href=https://krutkabest.ru/services>Просмотры лесенкой телеграм</a> скрытый просмотр историй в телеграм накрутка голосов в голосовании телеграм <a href=https://krutkabest.ru/services>Больше фантазии не хватает</a> накрутка подписчиков в телеграм канал накрутка премиум реакций телеграм просмотры в телеграме плавная накрутка просмотров телеграм накрутка подписчиков телеграм канал 5 подписчиков накрутка тикток телеграм анонимный просмотр сторис в телеграм бот
#954 Charlesgunny
накрутка просмотров в телеграме бесплатно profi like накрутка подписчиков телеграм без заданий <a href=https://krutkabest.ru>Накрутка лесенкой телеграм</a> накрутка телеграм задания просмотр сообщений в телеграм <a href=https://krutkabest.ru/services>Больше фантазии не хватает</a> Больше фантазии не хватает накрутка телеграм без заданий накрутка подписчиков телеграм бесплатно онлайн просмотр публикаций телеграм накрутка истории в телеграм накрутка телеграм опрос бесплатно накрутка телеграм опрос бесплатно
#955 Charlesgunny
бот для накрутки просмотров в телеграм накрутка подписчиков инстаграм телеграм <a href=https://krutkabest.ru/services>Просмотры телеграм</a> накрутка подписчиков в телеграм бесплатно без вложений накрутка подписчиков в чат телеграм <a href=https://krutkabest.ru>Просмотры телеграм</a> просмотр сторис телеграм просмотры недоступны телеграм проверить телеграм канал на накрутку лучшие накрутки подписчиков телеграм накрутка телеграм по ссылке накрутка жалоб на телеграм канал накрутка телеграм группы бесплатно
#956 Charlesgunny
просмотр фото телеграм накрутка ботов телеграм бесплатно <a href=https://krutkabest.ru/services>Просмотры телеграм</a> лайки телеграм накрутка просмотры телеграм бесплатно <a href=https://krutkabest.ru>Просмотры телеграм</a> накрутка пф телеграм телеграм боты накрутка дешево накрутка комментариев телеграм уведомление о просмотре истории в телеграм просмотр инстаграм телеграм накрутка телеграм самый дешевый защита от накрутки телеграм
#957 Charlesgunny
накрутка подписчиков телеграмм бесплатно телеграм накрутка реакций на пост в телеграм <a href=https://krutkabest.ru/services>Больше фантазии не хватает</a> как скрыть просмотры в телеграм накрутка телеграм топ <a href=https://krutkabest.ru/services>Больше фантазии не хватает</a> как подсчитываются просмотры в телеграм канале накрутка через телеграм накрутка подписчиков телеграм 100 подписчиков накрутка реакций телеграм jet s накрутка реакций телеграм накрутка подписчиков в телеграм дешево скрытые просмотры в телеграм
#958 Charlesgunny
как отменить просмотр истории в телеграм накрутка телеграм канала <a href=https://krutkabest.ru>Накрутка лесенкой телеграм</a> просмотр подписчиков в телеграм канал накрутка подписчиков в телеграм онлайн <a href=https://krutkabest.ru>Накрутка лесенкой телеграм</a> накрутка в телеграмме бесплатно телеграм накрутка просмотров в телеграм канал праймлайк накрутка лайков в телеграм канале накрутка голосов в телеграм опросе накрутка просмотров телеграм бесплатно онлайн накрутка сообщений телеграм накрутка телеграм группы бесплатно
#959 Charlesgunny
телеграм накрутка бесплатных реакций и просмотров накрутка автопросмотров в телеграм <a href=https://krutkabest.ru/services>Просмотры лесенкой телеграм</a> накрутка подписчиков через телеграм проверка телеграм на накрутку <a href=https://krutkabest.ru/services>Просмотры телеграм</a> накрутка просмотров в телеграм канал smm накрутка подписчиков телеграм лайки телеграм накрутка дешевая накрутка телеграм функция скрыть просмотр в телеграм анонимный просмотр историй телеграм как работает бот для накрутки реакций в телеграм бесплатно
#960 Charlesgunny
просмотр контактов внутри телеграма есть функция хакерство лучший сервис накрутки телеграм <a href=https://krutkabest.ru/services>Просмотры телеграм</a> считает ли телеграм повторные просмотры бот для просмотра роликов фильмов в телеграм <a href=https://krutkabest.ru/services>Просмотры лесенкой телеграм</a> бот для просмотра удаленных сообщений телеграм накрутка просмотров в телеграм канал праймлайк нет файлов для просмотра телеграм бот для накрутки реакций в телеграм бесплатно накрутка подписчиков телеграм бесплатно онлайн накрутка голосов бот телеграм накрутка подписчиков в телеграм от 10 подписчиков
#961 Charlesgunny
накрутка подписчиков в телеграм живые люди анонимный просмотр сторис в телеграме <a href=https://krutkabest.ru>Накрутка лесенкой телеграм</a> накрутка подписчиков телеграм топ просмотр истории телеграм анонимно онлайн <a href=https://krutkabest.ru>Накрутка лесенкой телеграм</a> уведомление о просмотре истории в телеграм накрутка просмотров телеграм бесплатно бот для накрутки реакций в телеграм бесплатно накрутка лайков в телеграм бесплатно просмотр сторис телеграмм анонимно в телеграм накрутка телеграм опрос бесплатно накрутка телеграм сервисы
#962 Charlesgunny
накрутка реакций телеграм праймлайк 50 бесплатных просмотров телеграм <a href=https://krutkabest.ru>Просмотры телеграм</a> накрутка подписчиков телеграм закрытый канал просмотр аниме в телеграме <a href=https://krutkabest.ru>Больше фантазии не хватает</a> накрутка премиум подписчиков в телеграм просмотры на пост в телеграм накрутка реакций в телеграм канал бесплатно накрутка подписчиков в телеграм бесплатно быстро уведомление о просмотре истории в телеграм как очистить историю просмотра в телеграм плавная накрутка телеграм
#963 Charlesgunny
негативные реакции в телеграм накрутка накрутка телеграм софт <a href=https://krutkabest.ru/services>Больше фантазии не хватает</a> накрутка голосов в телеграм z1y1×1 реальная накрутка телеграм <a href=https://krutkabest.ru>Просмотры лесенкой телеграм</a> накрутка просмотров телеграм doctorsmm накрутка подписчиков через телеграм накрутка просмотров телеграм дешево 50 бесплатных просмотров телеграм накрутка активности в телеграм накрутка просмотров телеграм бесплатно онлайн накрутка заявок в телеграм
#964 Charlesgunny
накрутка телеграм просмотр публикаций телеграм <a href=https://krutkabest.ru>Накрутка лесенкой телеграм</a> накрутка телеграм бесплатно накрутка тик ток телеграм <a href=https://krutkabest.ru/services>Просмотры телеграм</a> накрутка ботов в телеграм канал дешево бот для просмотра роликов фильмов в телеграм накрутка подписчиков телеграм телеграмм просмотр историй в телеграм накрутка живых людей в телеграм функция скрыть просмотр в телеграм просмотр историй телеграм бот
#965 Charlesgunny
как увидеть скрытые просмотры истории в телеграм телеграм бот просмотр сторис в инстаграм бесплатный <a href=https://krutkabest.ru>Просмотры лесенкой телеграм</a> бот для просмотра роликов фильмов в телеграм как в телеграм скрыть просмотр сообщений <a href=https://krutkabest.ru/services>Просмотры лесенкой телеграм</a> самая дешевая накрутка подписчиков телеграм можно ли в телеграм ограничить просмотр истории накрутка голосов в голосовании телеграм просмотры недоступны телеграм лайки телеграм накрутка babama просмотр истории телеграм у пользователя анонимно онлайн просмотры на канал телеграм
#966 Charlesgunny
накрутка телеграм аккаунта Накрутка лесенкой телеграм <a href=https://krutkabest.ru>Просмотры лесенкой телеграм</a> лучший сервис накрутки телеграм просмотр историй в телеграме <a href=https://krutkabest.ru>Накрутка лесенкой телеграм</a> накрутка людей в телеграм накрутка эмоций телеграм накрутка автопросмотров в телеграм как увидеть скрытые просмотры истории в телеграм накрутка подписчиков в телеграм купить накрутка реакций телеграм бесплатно накрутка подписчиков телеграм без регистрации
#967 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino 777 online
Условия вывода выигрыша. В некоторых заведениях для успешного вывода с бездепозитного приза довольно пополнения баланса и доказательства личности. В иных же клубах, нужно несколько раз прокрутить собственный депо. <a href=http://filmkachat.ru/>1×slots коды</a> <a href=https://penzu.com/p/5ad5f899c8695730>https://penzu.com/p/5ad5f899c8695730</a> 1×slots регистрацию процедура займет всего лишь <a href=http://imagelibrary.asprey.com/?URL=http://buhoffice.ru/bitrix/rk.php?goto=http://lichtnostniyrost.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/b348B30MoTn>http://imagelibrary.asprey.com/?URL=http://buhoffice.ru/bitrix/rk.php?goto=http://lichtnostniyrost.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/b348B30MoTn</a>
1х слот 1хслотс регистрация перейти на 1×slots
Онлайн-казино с бездепозитными призами ставят посетителям условия для пользования бездепами, поэтому перед ролью в промоакции лучше досконально ознакомиться со всеми правилами и аспектами промоакции. Условия могут касаться получения бонуса, его применения и следующего вывода валютных средств если, тогда, выигрыша.Иногда для получения призов нужно спутаться с представителями службы. Удобнее всего с ними разговаривать в онлайн-сате, хотя время довольно запроса по электрической почте. 1× slots casino официальный сайт Также есть онлайн-платформы азартных игр, которые используют раздачу бездепозитных призов в специальные даты (как для казино, например и для игрока). Помимо сего, действующие игроки также имеют вероятность получить схожие призы за свою деятельность (например, за повышения значения или за схожие достижения). <a href=http://ap-service.kz/index.php?subaction=userinfo&user=meekexample73>http://ap-service.kz/index.php?subaction=userinfo&user=meekexample73</a> 1×slots регистрация 1×slots casino 777 online
1×slots актуальное зеркало
Большинство клубов привлекают внимание игры за счёт разнообразных презентов. На 1 веб-сайтах можно получить виртуальные кредиты, которые откроют доступ ко всему софту. На иных же, администрация предлагает безвозмездные вращения для пуска лучших интернет слотов. Несмотря на различные промоакции, стоит выделить самые главные. Свежий приз начисляется вид валютных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в использовании средствами, а в случае отыгрыша оператор имеет ввести ограничение на вывод средств. <a href=https://veteran-gazeta.ru/forum/user/1646/>https://veteran-gazeta.ru/forum/user/1646/</a> Бонус в казино без депо содержит различные варианты: такое быть приветственный приз, акции в честь каких-либо праздничных либо весомых дат, приз за вербование новых игроков, преданность и получение VIP-статуса. 1 x slots casino Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке адепты онлайн-казино публикуют актуальную информацию о no deposit bonuses прочих предложениях.
1× slots casino официальный сайт
Наличие у игрока 2 аккаунта. Запрещено творить несколько профилей для неоднократного получения бездепов. Выше мы дали глубокий набор самых свежих и своевременных бездепозитных призов в интернет казино без пополнения на 2022 год, где продоставляется пользоваться хоть ценным бездепозитным бонусом. 1хслотс казино зеркало <a href=http://sung119.com/bbs/board.php?bo_table=notice&wr_id=592177>http://sung119.com/bbs/board.php?bo_table=notice&wr_id=592177</a> При подмоги такового поощрения оператор может кроме завлекать посетителей, которые раньше проявляли активность на сайте, но по какой-то основанию перестали играть. В этом случае промокод высылается пользователю по электронной почте либо в виде SMS.
1х слот 1хслотс регистрация перейти на 1×slots
Способы получения бездепа различаются зависимо вида бонуса, который приглянулся игроку. Но для или надо(надобно) быть зарегистрированным в законном онлайн-казино и доказать собственную лицо. В общем виде пошаговая инструкция для получения бездепозитного приза смотрится например: <a href=https://bleachrpg.com.br/wiki/index.php/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%AF%D0%BD%D0%B4%D0%B5%D0%BA%D1%81_%D0%94%D0%B7%D0%B5%D0%BD>https://bleachrpg.com.br/wiki/index.php/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%AF%D0%BD%D0%B4%D0%B5%D0%BA%D1%81_%D0%94%D0%B7%D0%B5%D0%BD</a> 1×slots казино зеркало Зачастую бездепозитные призы казино для игры предлагаются различными заведениями азартных игр виде рекламных акций или в целях привлечения к себе новых игроков. Для бездепозитных призов в казино 2022 игроку надо пополнять счет до момента вывода хотимых средств.Размер приза. В качестве бездепов обычно начисляют не суммы, а когда речь идет о бонусах за депозит, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино шансы подарить игроку до 2000$.
<b>Смотреть еще похожие новости:</b>
<a href=https://ragnarok.ch/forum/viewthread.php?thread_id=200093>1×слотс казино</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Главное превосходство спинов – возможность выучить разные слоты. Также удастся насладиться бонусными раундами, испытать удачу в риск-туре и преумножить выигрыш за счёт особых символов. Однако не игровой процесс заслуживает внимание, как другого сосредоточиться на реальном выигрыше. Сроки активации бонуса уточняются любым казино, хотя чаще всего они не превосходят недели с момента получения. Игроку непременно надо(надобно) использовать бездеп протяжении указанного срока, в ином случае бонус просто пропадет. Каждый бонус возможно получить лишь один раз, поэтому случае не использовать бездеп в срок, у игрока не несомненно 2 шанса им воспользоваться.
#968 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино на деньги порно с Дарья Клишина, легкоатлетка <a href=https://sovsekretno.net/>букмекерская контора вход</a> почему в казино нет часов vavada casino <a href=https://7club7.com/>игры казино</a> casino зеркало сайта 1×bet регистрация porno Мира Андреева (теннис) бесплатные букмекерские конторы казино рояль 1×bet официальный скачать официальные букмекерские конторы
DiskiPlus казино рояль смотреть DiskiPlus pin up casino пин <a href=https://www.diskiplus.ru>DiskiPlus пари букмекерская контора</a> DiskiPlus казино вход DiskiPlus порно с Алексей Миранчук (футбол) <a href=https://diskiplus.ru/>DiskiPlus casino</a> DiskiPlus зеркала казино DiskiPlus casino online зеркало DiskiPlus казино большая DiskiPlus 7k casino зеркало на сегодня DiskiPlus гама казино DiskiPlus 1×bet бесплатно DiskiPlus сайт винлайн букмекерская контора
#969 Charlesgunnyhttp://filmkachat.ru
1× slots сайт
Oтыгpaть приз с указанным вeйджepом, результата нужно сдeлaть cтaвoк нa cумму, превышающую объем бонуса в количество один.Лишь знаменитые и известные азартные заведения могут разрешить себе выдавать бездепы в виде добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, которые можно потратить в лучших аппаратах с высочайшей отдачей. <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino09k online</a> Активация денежного вознаграждения случается механически последствии создания профиля либо применения промокода. Иногда операторы предъявляют дополнительные требования: подписаться на странички казино в социальных сетях либо на рассылку маркетинговых извещений, скачать и ввести дополнительный софт и т.д.Большинство клубов привлекают внимание игроков за счёт различных подарков. На одних веб-сайтах можно получить виртуальные кредиты, коие откроют доступ ко всему софту. На иных же, администрация предлагает бесплатные вращения для запуска топовых онлайн слотов. Несмотря на различные промоакции, стоит выделить самые основные. <a href=https://plaza.rakuten.co.jp/kalinka0588/diary/202403220000/>https://plaza.rakuten.co.jp/kalinka0588/diary/202403220000/</a> Как лишь вы отыграли вейджер и свои с бонусного баланса перешли вас на реальный счет, Вы храбро сможете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать наименьший депо например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депозитом).Основное верховодило получения бездепа ? создаваемый аккаунт обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов строго запрещено. Проверка проводится по имени, адресу электронной почты, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита нужно соблюдать несложную очередность деяний. 1×slots casino зеркало рабочее <a href=http://www.classicwow.co.kr/bbs/board.php?bo_table=free&wr_id=24619>http://www.classicwow.co.kr/bbs/board.php?bo_table=free&wr_id=24619</a> Все любят получать подарки. Согласитесь, почти любой играющий человек будет необъятно рад, если получит безвозмездный подарок для игры в онлайн казино просто за регистрацию либо же бонус за внесенный депо, например именуемые приветственные бонусы для свежих игроков. Соответственно такие интернет клубы станут более востребованы и предпочтительны у игроков при выборе казино для забавы. Топ казино постоянно обновляется и прибавляются новые и занимательные игровые клубы с симпатичной бонусной политикой и всеми вероятными привилегиями, к коим относятся такие призы как фриспины за регистрацию, денежные бездепозитные призы, а также щедрые бонусы за внесенный депозит.Некоторые онлайн-казино без депо предлагают новым посетителям избрать бонус при регистрации. Будьте внимательны: выбрав раз, вы в безоговорочном большинстве случаев не можете воспользоваться остальными.
казино 1×slots официальный сайт
Обычно бездепозитные акции от казино, приходят на эл. Почту в дни рождения или праздничные. В неких онлайн казино можно адресоваться в чат и как неизменному игроку, возможно для предложат бездепозитное предложение.Многие казино деют в маркетинговых целях благотворительные бонусы самая для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой вебсайт по партнерской ссылке с нашего портала. 1×slots casino регистрация 1×slots review live Чтобы получить возможность вывести выгода с бездепозитного бонуса в казино, нужно выполнить ряд критерий: <a href=http://bbs.darkml.net/home.php?mod=space&uid=8052513>http://bbs.darkml.net/home.php?mod=space&uid=8052513</a> В онлайне большое знаменитых игорных площадок с привлекательными акционными услугами. Однако внимательно разбирать условия десятков услуг вскоре надоест, да и время отнимет много. Поэтому наша команда подготовила ТОП-3 вебсайтов с наихорошими бездепозитными бонусами: 1х слотс зеркало регистрация в 1×slots casino Даже не выиграв крупную сумму, игрок интересно проведет время, изнутри изучит работу площадки, воспримет геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе превосходнейших промоакций с. Достаточно периодически изучать список новых интернет казино с выводом приза без депозита в данном разделе.Любой выигрыш по ставке выше установленного лимита будет являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, а случае выигрыша его сумма не поступит на счёт посетителя — результат игры будет всецело аннулирован.
x1 slots 1хслотс регистрация перейти на 1×slots
Все безвозмездные бонусы кажутся заманчивыми. Кто же категорически от возможности сыграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далеко не все бездепозитные бонусы мере презентабельны для рассудительного клиента.Заполняя данные в личном профиле, указывайте только достоверную информацию, так как Вам понадобиться ее доказать дальнейшем при выводе денег. <a href=http://wtsoc.h1n.ru/users/energeticmaniac>http://wtsoc.h1n.ru/users/energeticmaniac</a> Приветственный бездеп предоставляется любому игроку только один один. Казино дерутся с например нарекаемыми бонусхантерами (от англ. Bonus Hunter — доброволец за бонусами), пытающимися заводить многочисленные аккаунты для обмана оператора и повторного получения подарка. Исключить сходственные деяния дозволяет верификация данных. Администрация вправе потребовать у клиента доказать персональные данные, обозначенные при регистрации. 1 xslots рабочее зеркало Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и. Когда игроку полагается большое фриспинов, администрация может бить3 их начисление на несколько дней. Бесплатные вращения предоставляются для определенного слота, кот-ый указывается в правилах акции.Бездепозитные призы казино за регистрацию в 2022 году — это вероятность поиграть за счёт заведения. Казино даёт посетителю шанс пользоваться определённой суммой либо количеством даровых вращений без внесения депо. Не путайте деморежим с реальной забавой без надобности внесения депозита.
1хслотс регистрация в 1×slots casino
Возможность сыграть вспомогательное соревнование (а времени и количество) совершенно бесплатно, а выигрыш, тому, поступает на счёт игрока. <a href=https://forums.dfine.net/showthread.php?tid=354>1×slots официальный сайт зеркало</a> Таким образом, заведение пытается продемонстрировать себя своим потенциальным геймерам, а подобный маркетинговый ход как казино бонус без депо за регистрацию привлекает довольно количество внимания к игорному заведению и обеспечивает неизменный поток новых гостей и грядущих клиентов игрового интернет клуба. Во время забавы в казино, выигрыши, приобретенные благодаря безвозмездным призовым фондам, суммируются и включаются в общую сумму для отыгрывания. Однако, если фортуна улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно допустит вывести финансовые свои. Сумма вывода несомненно находиться от лимита, утвержденного непосредственно в данном учреждении. Поэтому, внимательно надо(надобно) читать управляла выдачи анлимитных депо.Прежде чем активировать бездеп, нужно увериться что, нет, собственно государство, гражданином коей является игрок, не заходит в список не. 1×slots официальный сайт, скачать <a href=https://rus-crafting.ru/index.php?subaction=userinfo&user=RalphVaw>https://rus-crafting.ru/index.php?subaction=userinfo&user=RalphVaw</a> B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpaxПомните, что любые нарушения верховодил сведут на нет ваши старания, и вы наверняка останетесь без начисленного вам безвозмездного бонуса. Всегда изучайте правила начисления и обстоятельства вейджера. По любым вопросам, на которые вы возможности без отыскать ответы, обращайтесь за объясненьям и саппорт.
1×slots регистрацию более популярный вариант это
Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных ситуаций с казино, когда в отыгрыша бездепа для не дадут исключить крупную необходимую выигрыша.Как и другие промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения считаются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых гостей и разрешает им составить эмоцию о функционале, не рискуя значительными суммами. <a href=http://rtpsouth.com/UserProfile/tabid/69/userId/107513/Default.aspx>http://rtpsouth.com/UserProfile/tabid/69/userId/107513/Default.aspx</a> Фриспины — бесплатные вращения, коие позволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытных игроков фриспины считаются самым популярным и предпочтительным обликом бонуса — бесплатные вращения порой эффективнее и веселее в отыгрыше, чем другие облики бездепов. 1× slots casino официальный сайт
<b>Смотреть еще похожие новости:</b>
<a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=11364>1×slots зеркало регистрацию более популярный вариант это</a>
<a href=https://forums.dfine.net/member.php?action=profile&uid=119>1×slots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Онлайн гемблинг развивается с каждым днем больше и больше, новые бренды создаются не по дням а по часам. Новые онлайн казино проделывают вступительные промоакции для игроков, для того собственно бы зарекомендовать себя, и тем самым предлагают бездепозитные призы за регистрацию, собственно бы не пропустить эту возможность — как пользоваться новым бездепом, советуем навещать наш сайт как можно чаще, самое вкусное и свежие будет добавляться в этом же списке.
#970 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора зенит включи казино <a href=https://kompromat1.online/>Радченко Светлана Юрьевна порно</a> винлайн букмекерская контора porno Мария Шарапова <a href=https://repost.news/>казино фильм смотреть онлайн</a> официальные зеркала казино porno Вера Бирюкова, гимнастка Попова Анна Юрьевна порно букмекерская контора зенит балтбет букмекерская контора букмекерские конторы pin порно с Александр Большунов (лыжные гонки)
DiskiPlus 1×bet слоты 1×bet xyz DiskiPlus casino ru <a href=https://diskiplus.ru/>DiskiPlus винлайн букмекерская контора</a> DiskiPlus порно с Юлия Ефимова DiskiPlus pin casino зеркало <a href=https://diskiplus.ru>DiskiPlus скачать casino на андроид</a> DiskiPlus пари букмекерская контора DiskiPlus казино пину DiskiPlus ставки на спорт букмекерские конторы DiskiPlus гта казино DiskiPlus зеркала казино DiskiPlus как выиграть в казино DiskiPlus 1×bet слоты официальный сайт
#971 Charlesgunnyhttp://filmkachat.ru
скачать 1×slots на андроид мобильная версия
Перед активацией принципиально внимательно изучить условия акции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют значение также лимиты ставок при отыгрыше и сроки, на коих возможно пользоваться предложением. Если бездеп охватывает ограниченный перечень игр, рекомендуется разузнать максимальные коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят лишь том, случае, случае оператор не установил взыскательные ограничения на максимальную необходимую ставки.Если вы бывалый игрок, вы обязаны знать, что приз без депо – редкая находка. Тем ниже, мы раз изучаем онлайн, чтобы отыскать вам наихорошие бездепозитные предложения. <a href=http://filmkachat.ru/>x1 slots регистрация в 1×slots casino</a> Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен список наилучших онлайн казино, которые предлагают своим игрокам щедрые бонусы за регистрацию. <a href=https://linkpop.com/kalinka0588>https://linkpop.com/kalinka0588</a> 1×slots регистрация 1×slotscasino 56 online <a href=https://pornodrochka.club/user/Jasperzor/>https://pornodrochka.club/user/Jasperzor/</a> Перечисленные повыше главные свойства сочетают практически каждый приз и считаются стандартными для бездепозитных бонусных начислений в казино.
казино 1×slots
1хслотс официальный сайт зеркало В количестве случаев благотворительные призы начисляются в кредитах, которые нельзя незамедлительно исключить со счета. Прежде их нужно отыграть по установленным правилам. Эти требования принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже. <a href=https://njt.ru/forum/user/186950/>https://njt.ru/forum/user/186950/</a> Принципиальным различием даровых призов от призов на депо считается недоступность надобности заносить средства на акк. Из-за этого их нередко называют бездепозитными (not the slightest deposit bonuses). 1×slots казино зеркало Проверка занимает от нескольких мин. До нескольких дней, спецы техподдержки могут запросить дополнительные документы либо инициировать куцее общение по Skype.
1×slots промокод при регистрации 2025
Одним из предлогов отдавать привилегию 1 либо иному заведению содержится в привлекательности предлагаемых промоакций и даровых предложений. Безвозмездные фриспины, выдаваемые без дела создавать какой-нибудь лепта, в списке находится далековато не в конце. <a href=http://harddirectory.net/%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-kz-1×slots_294416.html>http://harddirectory.net/%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-kz-1×slots_294416.html</a> Активация случается счет промокодов, коие вводятся в личном офисе в регистрации. Среди спецпредложений в списке Casino.ru содержатся эксклюзивные промокоды, коие доступны только посетителям портала. Другие методы начисления средств ? автоматическая активация незамедлительно в создания аккаунта и получение подарка по запросу в службу технической помощи. казино 1×slots официальный сайт Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить особенности, недоступные при ирге в демо режиме. Многие свежие клиенты переходят в число постоянных, а оператор получает долгосрочную прибыль.Все бесплатные призы кажутся соблазнительными. Кто же категорически от возможности сыграть в онлайн-казино, не рискуя средствами, хотя получая выигрыши. Но далековато не все бездепозитные бонусы мере привлекательны для рассудительного клиента.
1×slots официальный сайт мобильная версия
Помимо остального, для вывода средств по бездепу необходимо привнести на счёт собственный 1-ый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало возможную сумму, после чего вывод средств будет доступен.Можно. Вы практически можете отказаться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не сделаете ставку. <a href=https://rolivka.online/forum/showthread.php?tid=40482>1хслотс казино зеркало</a> Вывод выигрыша с бездепозитных бонусов казино – великодушный подарок от азартных клубов. Но дабы исключить свой заработок, необходимо выполнить ряд критерий: 1×slots официальный сайт скачать <a href=https://uadplugins.club/memberlist.php?mode=viewprofile&u=226646>https://uadplugins.club/memberlist.php?mode=viewprofile&u=226646</a> Выше мы дали полный комплект самых новых и актуальных бездепозитных призов в интернет казино без пополнения на 2022 год, где вы можете воспользоваться каким ценным бездепозитным бонусом.
1×slots промокод при регистрации
Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. Ну и конечно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: схожая добродушие повышает степень преданности клиентов к компании.B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax <a href=http://ru-adres.ru/index.php?subaction=userinfo&user=headynetwork31>http://ru-adres.ru/index.php?subaction=userinfo&user=headynetwork31</a> При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток. 1хслотс 1хслотс регистрация перейти на 1×slots Чтоб получить большой выигрыш, выбирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша.Бонус начисляется игроку незамедлительно после регистрации и прохождения верификации в казино и не просит от клиента внесения депо. Как управляло, объем приза в сходственном случае достаточно стыдливый, впрочем позволяет новеньким познакомиться с игрой без риска реальными деньгами.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Какие призы возможность еще получить не бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, каждое интернет казино предлагает игрокам выгодное предложение на первый депозит, вы совершаете депо, ваш депозит увеличивается в двое либо даже в трое, тем наиболее начать выступать можно с более крупной суммой, например же не запамятываем про вейджер на призы. Таким образом интернет казино получает потенциального игрока. Возможно дальнейшем либо настоящем он захочет сыграть на средства деньги. Так трудятся бездепозитные призы в онлайн казино. Здесь хорошо подходит выражение, бесплатные сыр бывает только в мышеловке. Начинающие игроки имеют не осознавать опасность пыла. Однако с понимания становится больше. Это тема для отдельного обсуждения.
#972 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
бк букмекерская контора пина casino <a href=https://vestnik-jurnal.com/>pin up casino зеркало</a> винлайн букмекерская контора официальный pin up casino top top <a href=https://strelochnik.com/>порно с Александр Головин (футбол)</a> казино пину porno Елизавета Туктамышева 7k casino зеркало на сегодня 1×bet вход inform@rucriminal.info спорт букмекерская контора порно с Сергей Бобровский (хоккей)
DiskiPlus водка казино DiskiPlus порно с Голикова Татьяна Алексеевна <a href=https://www.diskiplus.ru/>DiskiPlus Матвиенко Валентина Ивановна порно</a> DiskiPlus казино в россии DiskiPlus казино в россии <a href=https://www.diskiplus.ru>DiskiPlus Елена Лядова</a> DiskiPlus самое казино DiskiPlus casino online зеркало DiskiPlus пин ап casino pin up top DiskiPlus porno Нина Пирогова, хоккеистка DiskiPlus 1×bet официальный скачать DiskiPlus up casino скачать DiskiPlus порно с Александр Большунов (лыжные гонки)
#973 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация в 1×slots casino
Чем ниже значение вейджера, что, этим легче отыграть и исключить приз. Если Вы расчитываете заработать на бездепе, а не просто ознакомиться с свежим игровым клубом, то стоит игнорировать призов с высочайшим вейджером их практически не реально отыграть. С ними Вы сможете лишь протестировать забавы заведения.Зарегистрируйтесь. Для регистрации чаще всего довольно установить свой номер телефона и почтовый адрес, последствии чего ввести приобретенный код из СМС. Возможно, требуется показать промокод. В правилах промоакции будет написано, где его надо включать. Иногда это надобно создавать при регистрации, время — уже после творенья личного кабинета, на отдельной страничке. <a href=http://filmkachat.ru/>1хслотс казино зеркало</a> Так собственно основное различие презента на депозит от бездепа – неотъемлемое пополнение счёта. Вы можете привнести депозит и преумножить стартовый капитал или арестовать бездеп и всем не придётся рисковать собственными сбережениями. Поспешите выполнить обычные требования, и администрация ресурса начислит щедрое одобрение! <a href=https://cgscholar.com/community/community_profiles/3d-rendering-services/community_updates/234375>https://cgscholar.com/community/community_profiles/3d-rendering-services/community_updates/234375</a> Самый распространённый из похожих призов, окончательно же, бездеп на денек рождения посетителя — бонус в виде фиксированной суммы или фриспинов поступает на счёт игрока, а воспользоваться им можно на установленного периода времени. 1× slots casino официальный сайт <a href=http://belitavitex.kz/bitrix/rk.php?goto=http://barfits.ru/bitrix/redirect.php?goto=http://pacheco.ru/bitrix/click.php?goto=https://teletype.in/@urist555/q0sGV-I1Cwp>http://belitavitex.kz/bitrix/rk.php?goto=http://barfits.ru/bitrix/redirect.php?goto=http://pacheco.ru/bitrix/click.php?goto=https://teletype.in/@urist555/q0sGV-I1Cwp</a> Постарайтесь отыграть вейджер, дабы замечена возможность оставить заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электрической кошелёк, карту, аппарат.Однако далеко не все ресурсы предлагают своим посетителям бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено одобрение на первый депо в объеме 100–200%. Это замечательная вероятность преувеличить банкролл, прирастить время, проведённое за игрой и шансы сорвать большой куш.
1×slots регистрация 1×slots review live
1×slots регистрация 1×slots review live Высокая конкуренция в сегменте азартных игр доказывает операторов привлекать клиентов разнообразными промоакциями. Благодаря этому у гостей появляется возможность получить призы в казино за регистрацию без депо. Воспользоваться таким предложением можно, избегая процедуру внесения денег на игровой счет, просто активировав акк на веб-сайте. Наш гид по бездепам поможет выбрать самую симпатичную бонусную программку, узнать правила получения такового гонорары и распорядиться им с максимальной выгодой.Казино выводит средства лишь на ту платежную систему, с котрой был сделан депо. То есть, для вывода бездепозитного бонуса, Вам сначала необходимо восполнить счет. В некоторых клубах узкий перечень методов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет непосредственно с данных платежных способов, которые доступны для вывода. <a href=https://wood.biz.ua/wr_board/tools.php?event=profile&pname=WalterLop>https://wood.biz.ua/wr_board/tools.php?event=profile&pname=WalterLop</a> Чаще всего используются коды. Их нужно заносить в специальные окошки регистрационной анкеты, случае идет о пригласительных бонусах, или в особом разделе личного кабинета игрока.Такой бесплатный эквивалент средств зачисляется на профиль юзера последствии воплощения требований и предназначаются они только для игрового процесса. Вывод этих вознаграждений возможен лишь после воплощения вейджеровых условий. 1×slots регистрация 1×slots casino 777 online
1×slots официальный сайт скачать на айфон
Список так называемых «разрешенных землель» прилагается к правилам бонусной программки игорного портала. Обязательно проверьте, распространяются ли на вас подобные санкции.Обыкновенные бездепозитные бонусы в объеме от трех до двадцати $ созданы для того, чтобы в игры заходили все свежие и свежие игроки. Здесь, скорее, будет ограничение на максимальный выигрыш. Важно, чтобы перед наименьшим вкладом был отключен бонус за первое пополнение счета, и компьютерные не попадет на повторный вейджер. <a href=http://copybank.kr/bbs/board.php?bo_table=free&wr_id=17173>http://copybank.kr/bbs/board.php?bo_table=free&wr_id=17173</a> 1хслотс зеркало Далее потребуется отыграть вагер и исключить выигрыш. Игрокам без навыка крупно подфартило, у получить 10-ки подарков за 1 регистрацию. Если не смогли получить Бездепозитный приз, не волнуйтесь. Обратитесь в онлайн чат, оператор поможет ситуацию.
казино 1×slots официальный сайт
<a href=https://forumsleague.org/forum/memberlist.php?mode=viewprofile&u=11228>1×slots рабочее зеркало на сегодня</a> Можно ли в одном онлайн казино получить больше одного бонуса за регистрацию? Нет, так как в каждом интернет казино есть управляла, к которым нужно придерживаться, не творить 2 аккаута для получения призов, другому будет блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, бонус за регистрацию выдаеться раз раз одному лицу.Для вывода средств приз нужно несомненно отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами акции и вариациями отыгрыша бездепозитного бонуса до его получения, дабы избежать конфликтных ситуаций. Самые пользующиеся методы вывода средств ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электрическим платежным системам на Neteller и Skrill, еще используют криптовалютными кошельками. Вывод выигрышей может осуществляться моментально либо развлекать от нескольких часов до нескольких суток. 1×slots официальный demo регистрация в 1×slots casino <a href=http://jejuseapension.com/bbs/board.php?bo_table=free&wr_id=745339>http://jejuseapension.com/bbs/board.php?bo_table=free&wr_id=745339</a> B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.Верификация аккаунта. Лучше доказать лицо незамедлительно в регистрации, дабы потом не было заморочек с выводом денег. Верификация может проходить 2-мя маршрутами:
1хслотс рабочее зеркало на сегодня
<a href=https://trade-britanica.trade/wiki/User:VivienMagnus10>https://trade-britanica.trade/wiki/User:VivienMagnus10</a> 1×slots официальный сайт мобильная версия скачать
<b>Смотреть еще похожие новости:</b>
<a href=https://pbtur.com.br/users/jameshex>1хслотс рабочее зеркало</a>
<a href=http://mandala-app.com/forums/viewtopic.php?f=5&t=247947>казино 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Проверка занимает от нескольких минут до нескольких дней, профессионалы техподдержки шансы запросить вспомогательные документы или инициировать краткое общение по Skype. Для такого, дабы отыграть сумму вашего бездепозитного приза нужно выполнить условия вейджера. Очень нередко фриспины даются на конкретные слоты (book of ra, book of deceased, book of sun), избирайте разъем себе нраву, все довольно красивые и высококачественные. Бездепозитные приз может быть валютным так и вид фриспинов на слоты
#974 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet приложение букмекерскую контору пин <a href=https://rumafia.news/>порно с Елена Никитина, скелетонистка</a> играющие казино онлайн casino <a href=https://specreporter.com/>1×bet сайт 1×bet xyz</a> ев казино cometa casino порно с Анастасия Потапова, теннисистка casino приложения pin up casino зеркало porno Мария Шарапова casino промокод
DiskiPlus Чулпан Хаматова DiskiPlus водка казино <a href=https://www.diskiplus.ru>DiskiPlus porno Андрей Рублев (теннис)</a> DiskiPlus black russia казино DiskiPlus винлайн букмекерская контора официальный <a href=https://www.diskiplus.ru/>DiskiPlus букмекерская контора вход</a> DiskiPlus casino ru DiskiPlus porno Екатерина Ефременкова, шорт-трекистка DiskiPlus спорт букмекерская контора DiskiPlus букмекерская контора фонбет официальный DiskiPlus porno Анастасия Янькова, боксерка казино DiskiPlus Манилова Алла Юрьевна порно
#975 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasin online
Отыграв бездепозитный бонус в казино с выводом также придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в сходственное ограничение существует, то единоразово исключить получится лишь необходимую, не превышающую размер полученного приза.В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая доля игры. Важно, зачастую бездепозитные призы в казино выдаются с ограничениями по наибольшей выплате. В среднем можно рассчитывать на прибыль в несколько тысяч рублей. Как исключить выигрыш с бонуса без депозита. Придётся подтвердить акк документально, в некоторых заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате либо прочтите в правилах. <a href=http://filmkachat.ru/>1×slots зеркало на сегодня</a> Новые клиенты онлайн-казино без первого депозита шансы выяснить собственную удачливость. К тому же есть вероятность конвертировать бездепы в реальные средства за регистрацию в казино, однако достичь приз нужно отыграть сообразно условиям акции.Бонус за регистрацию в казино выдается только один один на 1-го игрока. Но бывают дополнительные промоакции, масштабах коих бездепы раздаются для постоянных посетителей и эти презенты Вы сможете получить больше одного раза. <a href=https://heylink.me/kalinka0588/>https://heylink.me/kalinka0588/</a> 1×slots официальный зеркало рабочее <a href=http://baanjompra.com/webboard/home.php?mod=space&username=wistfulchamber3>http://baanjompra.com/webboard/home.php?mod=space&username=wistfulchamber3</a> Бонус с зачислением средств на счет выделяет больше свободы поступков. Пользователь сам избирает, каким образом распорядиться подаренными своими. Здесь также все действовать лимитирования на перечень дешевых игр, хотя обычно эти рамки не например строги, как в промо с безвозмездными вращениями.
1х слот регистрация в 1×slots casino
Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют актуальную информацию о not the slightest down payment bonuses и других предложениях. 1×slots зеркало проходить регистрацию это отличный вариант Если площадка дарит бездеп за регистрацию, то процедура его получения проста. Нужно только ввести аккаунт на веб-сайте и активировать его, подтвердив адресок электронной почты, номер телефона либо другие данные, которые настятельно оператор. Перед данным необходимо убедиться, что юзер располагается на официальном сайте казино, а не на жульнической площадке. <a href=http://en.sulseam.com/bbs/board.php?bo_table=free&wr_id=2438858>http://en.sulseam.com/bbs/board.php?bo_table=free&wr_id=2438858</a> 1×slots бездепозитный бонус за регистрацию Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 долларов. Если выдаются фриспины, их количество изредка выше нескольких десятков бесплатных вращений.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Призовые начисления без депо могут предоставляться для роли в турнирах интернет казино. Потратить перечисленные средства возможно исключительно масштабах этой промоакции. Условия их проведения содержат лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться этим предложением, чем изучить его управляла.Получить Бездепозитный приз в интернет казино дело 2-ух кликов. Другой момент, отыграть рекламную и соблюсти управляла и условия отыгрыша. Под правилами подразумевается столько вагер, но и лимитирования по максимальной ставке. Мы осознаем, собственно в кинотеатр все ставят на зеро и выигрывают. Призываем не делать похожего. Перед активацией приза прочтите управляла. Узнайте последующие моменты: Условия получения подарка, за регистрацию, за депозит и прочее. Ограничения по наибольшей ставке. Зачастую не повыше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вращать автоматы, а вагер несомненно стоять на пространстве. Поэтому принципиально знать, в каких играх можно совершать кратность денежного оборота. Не желайте сыграть в азартные забавы, не рискуя средствами средствами, хотя получая в все выплаты? Подобную вероятность деют все наихорошие порталы с азартными весельями. В их количестве большое правдивых и надежных интернет-казино на русском языке. Они привлекают свежих пользователей различными поощрительными событиями, включая бездепозитные, или благотворительные бонусы. <a href=http://wx.abcvote.cn/home.php?mod=space&uid=3517826>http://wx.abcvote.cn/home.php?mod=space&uid=3517826</a> Для всех бездепозитных бонусов функционирует максимальный лимит на выигрыш. Он показывает предельную необходимую, коию вы сможете получить, играя на бонусные кредиты. Как только для удастся выполнить притязания вейджера, допустимый максимум будет переведен с бонусного счета на главной, а остаток будет списан. 1×slots на любой вкус как пройти регистрацию
1×slots актуальное зеркало
Многие казино предоставляют в маркетинговых целях благотворительные призы самая для наших читателей. Чтобы их получить, нужно перейти на игровой сайт по партнерской ссылке с нашего портала. Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают приз по странам. Вплоть до как, собственно клуб может на игроков из Вашей страны, а бездеп не давать. 1×slots акции <a href=https://665web.com/space-uid-25756.html>https://665web.com/space-uid-25756.html</a> 4. Заберите презент. Чаще всего приз активизируется сразу в регистрации. Но бывают истории, когда нужно забежать в индивидуальный кабинет либо написать в саппорта.Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической забавы на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, научится регулировать изменять ставки и линии, изучать бонусные забавы и их выигрышные комбинации, да счете просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные средства, коие можно отыграть и вывести, а не просто на демо счет, тем самым адреналин в крови еще больше повысится а пульс забьется с нередким ритмом!
1хслотс казино зеркало
Возможность протестировать новые забавы, не рискуя собственными средствами и разработать личную стратегию игры.Диапазон ставок, которые вправе устроить игрок, того лимитирован. Обычно назначать можно небольшую необходимую — около 10–30 руб. За одно вращение. Можно ли зарабатывать на бездепозитных бонусах? Это не работа, тут как повезет, если в любом предложенном безедепе, вы будете откручивать вейджер и выводить, это можно назвать везением, и добавочной добавкой к вашему бюджету. <a href=http://twchess.lionfree.net/discuz/home.php?mod=space&uid=24843>http://twchess.lionfree.net/discuz/home.php?mod=space&uid=24843</a> У каждой забавы средства притязания по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система зачтет любую ставку. В рулетке и покере устроить это гораздо сложнее. Именно поэтому так главно внимательно разбирать условия получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой этой, то новенькие просто «спустят бонус на ветер».С не отыгранным призом запрещается превышать объем наибольшей ставки. Нарушение этого обстоятельства виде аннулирование выигрыша. казино 1×slots официальный сайт
<b>Смотреть еще похожие новости:</b>
<a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=16597>1×slot зеркало рабочее регистрации на телефон придет</a>
<a href=https://021snyw.com/space-uid-53919.html>1×slots регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Таким образом онлайн казино получает вероятного игрока. Возможно дальнейшем или истинном он захочет поиграть на свои деньги. Так работают бездепозитные бонусы в онлайн казино. Здесь отлично подходит выражение, безвозмездные сыр бывает лишь в мышеловке. Начинающие игроки имеют не обдумывать опасность пыла. Однако течением понимания делается больше. Это тема для отдельного обсуждения. Размер призов чаще всего чисто символический и не превышает 50 руб. Приятно, хотя ощутимым бустом деле ли станет.
#976 сервис центры в москвеhttps://remont-byttekhniki-moskva.ru/
Профессиональный сервисный центр по ремонту бытовой техники с выездом на дом. Мы предлагаем: <a href=https://remont-byttekhniki-moskva.ru/>сервис центры бытовой техники москва</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#977 Charlesgunnyhttp://filmkachat.ru
1хлот регистрация в 1×slots casino
Следует подчеркнуть, собственно бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с определенным кодом.Как только получите бездеп в казино, всё одинаково не забывайте инспектировать электронную почту. Некоторые игорные клубы день радуют интенсивных гэмблеров приятными бонусами. Чаще всего получить подарок возможно в преддверии праздника, на день рождение, за привлечение друга. А того распространённым бонусом считается надбавка к депозиту. Нужно не восполнить счёт, и азартное заведение прирастит его на 50–100%. <a href=http://filmkachat.ru/>1 х слотс зеркало</a> <a href=https://forum.index.hu/User/UserDescription?u=2065070>https://forum.index.hu/User/UserDescription?u=2065070</a> Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша призов. Заведения практически устанавливают максимальную ставку, допустимую по условиям вейждера.Еще одно условие дотрагивается объемов ставки. Операторы устанавливают наивысшую необходимую, которую игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, избранной в Личном офисе. При превышении лимита есть риск лишиться бонуса. Существующие лимитирования относятся и к определенным обликам ставок. Например, играя в рулетку, заказчик может столкнуться с запретом ставить фишки на шансы. 1×slots мобильная версия войти казино <a href=http://bbs.zywsw.com/home.php?mod=space&username=opyde>http://bbs.zywsw.com/home.php?mod=space&username=opyde</a>
1× slots регистрация в 1×slots casino
Обыкновенные бездепозитные бонусы в размере от трех до двадцати $ сделаны для того, дабы в игры заходили все свежие и свежие игроки. Здесь, вероятнее всего, будет ограничение на наибольший выигрыш. Важно, дабы перед наименьшим вкладом был отключен бонус за первое пополнение счета, и игрок не попадет на повторный вейджер. 1×slots официальный зеркало рабочее <a href=http://hongtouwen.com/home.php?mod=space&uid=432736&do=profile>http://hongtouwen.com/home.php?mod=space&uid=432736&do=profile</a> Простая процедура получения бездепозитного бонуса, которая займет не более 2-х минут. Для получения бездепов, достаточно зарегистрироваться и подтвердить контактные данные. сайт 1× slots casino Можно ли в одном онлайн казино получить больше 1-го приза за регистрацию? Нет, например как в любом интернет казино есть верховодила, к которым нужно держаться, не творить 2 аккаута для получения бонусов, по несомненно блокировка обоих аккаутов, не пытайтесь обмануть интернет казино, приз за регистрацию выдаеться раз один одному лицу.Чаще всего казино приз за регистрацию без депо даёт возможность запустить каждой автомат. Но другого пристально ознакомиться с критериями. Иногда для забавы доступны лишь определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, никакого начать знакомство с миром азарта непосредственно с «одноруких злодеев».
1×slots зеркало 1хслотс регистрация перейти на 1×slots
<a href=https://sethgqzg18529.dsiblogger.com/63159177/deepnude-the-dark-side-of-ai-and-digital-manipulation>https://sethgqzg18529.dsiblogger.com/63159177/deepnude-the-dark-side-of-ai-and-digital-manipulation</a> 1хслот 1хслотс регистрация перейти на 1×slots Если вы опытный игрок, вы обязаны знать, собственно приз без депо – редкая находка. Тем ниже, мы еженедельно исследуем онлайн, дабы найти для вас наихорошие бездепозитные предложения.Заработать на бездепозитных призах за регистрацию в казино возможность каждый пользователь, достигший совершеннолетия.
1×slots зеркало рабочее
Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного бонуса. <a href=https://forum.visiteachapada.com/viewtopic.php?f=19&t=7790>1×slots сайт</a> Если вы выбираете проверенное лицензионное онлайн казино и выполните все условия получения бездепозитного приза, трудностей с получением презента у Вас не возникнет. Еще одно условие дотрагивается размеров ставки. Операторы устанавливают наивысшую необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном офисе. При превышении лимита есть риск потерять бонуса. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, заказчик возможность столкнуться с запретом назначать фишки на шансы. 1×slot рабочее зеркало <a href=http://newoasisforlife.org/new/home.php?mod=space&uid=95294&do=profile>http://newoasisforlife.org/new/home.php?mod=space&uid=95294&do=profile</a>
1×slots рабочее зеркало на сегодня
Бездепозитные призы — это презенты от казино в виде бонусных денег или фриспинов для игровых автоматов, которые начисляются на акк игрока после процедуры регистрации на веб-сайте заведения. Для получения этих поощрений депо не требуется.На странице представлены бездепозитные призы за регистрацию в казино редкая награда за которой гонятся все игроки как новенькие, например и мастера. Мы тоже уделяем большое внимание на присутствие бонусов при формирование рейтинга казино на средства. Бездепозитный приз это возможность играть безвозмездно и выиграть настоящие деньги. <a href=https://www.woorank.com/en/teaser-review/astramedika.com.ua>https://www.woorank.com/en/teaser-review/astramedika.com.ua</a> Свежий бонус начисляется в виде валютных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в пользовании своими, а случае отыгрыша оператор может установить ограничение на вывод средств.В интернет-сети всегда можно найти перечни наиболее известных и обещанных поощрительных программ от знаменитых онлайн-казино. 1×slots casino регистрация
<b>Смотреть еще похожие новости:</b>
<a href=http://forum3.bandingklub.cz/memberlist.php?mode=viewprofile&u=5481>казино 1×slots</a>
<a href=https://www.findaspermdonor.com/viewtopic.php?f=25&t=98677>1×slots регистрация на официальном сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Многие игроки, оценив перечень казино, остаются играть в нем и далее ? на это и направлено любое промо. Постоянные клиенты вносят депозиты и делают ставки, обеспечивая долгосрочную выгода оператора. То есть, казино раздают бездепы новым юзерам для формирования приклнной аудитории.
#978 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
7k casino официальный пари букмекерская контора <a href=https://rumafia.news/>пин ап казино</a> 1×bet xbet online casino 7k <a href=https://krtka.info/>1×bet официальный сайт</a> пин ап casino pin мелбет букмекерская контора 1×bet официальный скачать сайт 1×bet слоты Семёнова Татьяна Владимировна порно порно с Никита Кучеров (хоккей) porno Александр Соболев (футбол)
DiskiPlus porno Алена Михайлова DiskiPlus казино сегодня <a href=https://diskiplus.ru>DiskiPlus porno Алена Михайлова</a> DiskiPlus демо казино DiskiPlus вавада казино <a href=https://www.diskiplus.ru>DiskiPlus казино фильм</a> DiskiPlus лучшие бесплатные онлайн казино DiskiPlus ставки на спорт букмекерские конторы DiskiPlus казино рояль DiskiPlus casino скачать приложение DiskiPlus black russia казино DiskiPlus букмекерская контора без DiskiPlus pin up casino скачать
#979 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало рабочее
Ещё одно распространённое акционное предложение – симпатичный презент с сомнительными притязаниями. К образцу, клуб сулит $100 виде бездепа, хотя с вейджером х80 или х100. Отыграть подобный вейджер фактически нереально и поэтому чем концентрироваться на более занимательных промоакциях. <a href=http://filmkachat.ru/>1×slot зеркало рабочее регистрации на телефон придет</a> <a href=https://www.bondhuplus.com/read-blog/137780>https://www.bondhuplus.com/read-blog/137780</a> 1×slots рабочее зеркало <a href=http://www.glaschat.ru/glas-f/member.php?491094-JamesElorn>http://www.glaschat.ru/glas-f/member.php?491094-JamesElorn</a> Вейджер менее х30–35 считается применимым. Опытные игроки утверждают, собственно с этим вейджером реально остаться в плюсе, случае верно подойти к выбору игрового аппарата.
1×slots casino зеркало
Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. 1хслотс казино зеркало Подобные призы без депо предоставляются на более выгодных условиях. Зачастую они покрупнее, а обстоятельства отыгрыша менее жесткие.Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке представители онлайн-казино публикуют важную информацию о not the slightest deposit bonuses прочих предложениях. <a href=https://images.google.lu/url?q=https://doctorlazuta.by/>https://images.google.lu/url?q=https://doctorlazuta.by/</a> Но существуют азартные заведения, готовые просто например вручить средства на игру. Для сего достаточно сделать профиль. Чтобы вывести выигрыш, сперва необходимо выполнить вейджеровые условия, прописанные в критериях получения бездепа.Срок активации и время на отыгрыш. Зачисление денег либо фриспинов происходит при активации на строго ограниченного периода, подобные требования предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать приз количество дней либо том месяцов. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером. 1×slots регистрация на 1хслотс Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, solid только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Приветственный бонус без депозита ? презент за регистрацию. Выдается средствами, фриспинами либо баллами. В заключительном случае бонусные баллы применяются для участия в турнирах или размена на реальные средства.
1хслот зеркало сайта
Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.Это раз из главных характеристик привлекательности презента. С завешенным коэффициентом числе профессионалы не смогут выполнить обстоятельства по отыгрышу. И неважно, как привлекательно смотрится предложение – бездепозитный бонус казино в объеме $500 либо $1 000. Чтобы новички попревосходнее вникли, собственно же такое вейджер, мы разберём на образце. Особую изюминку видео слотам придают оригинальные символы. С их появлением активируются различные бонусы. Вы сможете запустить вспомогательный степень и прирастить необходимую выигрыша. Есть знаки, коие заменяют негодные элементы и сами творят выигрышные комбо. Не стоит забывать и про бонус-тур. После любого счастливого спина есть шанс увеличить сумму выигрыша в два или четыре раза.За привлечение друга ? масштабах партнерской программы клиент получает вознаграждение за привлечение новых пользователей. <a href=http://ucglossa.ru/forum/profile.php?mode=viewprofile&u=1070649>http://ucglossa.ru/forum/profile.php?mode=viewprofile&u=1070649</a> 1×slots регистрация на сайте 1×slots ru com Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми акциями. Читайте о них в обзорах и на форуме.Игры, каких можно выступать на бонусные средства. Проверьте перечень игр, в которых можно играть на бонусные средства, вероятно они Вам не понравятся и не стоит тратить своё время на такую акцию.
1×slots рабочее зеркало
Сроки активации приза уточняются любым казино, хотя чаще всего они не превосходят недели с этапа получения. Игроку непременно надо(надобно) использовать бездеп в течение обозначенного срока, в ином случае бонус просто исчезнет. Каждый приз возможно получить лишь один раз, поэтому в не применять бездеп в срок, у игрока не несомненно второго шанса им воспользоваться.Размер ставки для забавы по бездепозитному призу (окончательно же, когда, когда он представлен повторяющий бонусных денежных средств) зачастую ниже, чем при игре на депо. Ограничение несомненно действовать до этапа отыгрыша бонуса. <a href=http://amazon.rx22.ru/viewtopic.php?f=5&t=3587>1×slots зеркало рабочее на сегодня</a> Бездепы обыкновенно предлагают с отыгрышем — моментально исключить выигранные свои невозможно. Перевод средств со счета несомненно возможен в того, как юзер выполнит все притязания казино, а сумма не быть выше установленного правилами лимита. Условиями акции фиксируются сроки, в течение коих клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней в активации.С иной стороны, гораздо легче арестовать бездепозитные фриспины за регистрацию в казино и напрямик данный начать вертеть барабаны в лучших слотах. Главная особенность спинов никаких, что они предназначены для топовых автоматов. Удастся столько пройти вспомогательные раунды, но и прирастить сумму выигрыша, заработать респины и другие внутриигровые презенты. Мы подготовили перечень, где есть практически актуальные и новые бездепозитные бонусы казино, коие вы можете получить безвозмездно. Для наших юзеров есть специальные предложения неповторимые бонусы, коие вы ни не найдете, их мы определили специальной красноватой плашкой «Exclusive».Наличие у игрока второго аккаунта. Запрещено создавать несколько профилей для многократного получения бездепов. сайт 1× slots casino <a href=https://www.ccvgaming.com/forum/member.php?38803-Raymondelils&s=20fcead5d27646998570f1bd7f8a3597>https://www.ccvgaming.com/forum/member.php?38803-Raymondelils&s=20fcead5d27646998570f1bd7f8a3597</a> С не отыгранным бонусом воспрещается превосходить размер максимальной ставки. Нарушение этого обстоятельства виде аннулирование выигрыша.Таким образом интернет казино получает потенциального игрока. Возможно в или подлинном он захотит поиграть на средства средства. Так трудятся бездепозитные бонусы в онлайн казино. Здесь хорошо подходит выражение, благотворительные сыр посещает лишь в мышеловке. Начинающие игроки все не осознавать опасность азарта. Однако с осознания делается больше. Это тема для отдельного обсуждения.
1×slots регистрацию процедура займет всего лишь
Предложения с бездепозитными призами за регистрацию разрешают новым заведениям привлечь аудиторию на собственный вебсайт. А игроки же получают возможность играть на настоящие средства без депо в казино и заработать маленький стартовый капитал, который разрешается вывести на карту банка либо электронный кошелек.Вознаграждения за получение VIP-статуса ? начисляются в рамках программы преданности при достижении одного значения либо выдаются персонально менеджерами саппорта. <a href=https://wiki.team-glisto.com/index.php?title=Benutzer:NicholasEat>https://wiki.team-glisto.com/index.php?title=Benutzer:NicholasEat</a> 1×slots скачать на айфон Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, чтобы снова получить бесплатный приз. Игорные заведения нетерпимы к бонус-хантерам, потому вас ждет неизбежное санкция.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/9577/#comment-397160>1×slots зеркало регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чем ниже значение вейджера, что, этим легче отыграть и исключить приз. Если Вы расчитываете заработать на бездепе, а не просто ознакомиться с свежим игровым клубом, то стоит игнорировать призов с высочайшим вейджером их практически не реально отыграть. С ними Вы сможете лишь протестировать забавы заведения.
#980 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Илья Ковальчук (хоккей) букмекерская контора скачать приложение <a href=https://vestnik-jurnal.com/>1×bet официальный сайт 1×bet xyz</a> online casino 7k порно с Алина Загитова, фигуристка <a href=https://rhymes-punches.com/>казино гта 5</a> 1×bet казино фильм смотреть онлайн Кузнецова Анна Юрьевна порно казино онлайн casinos winning casino скачать порно с Алина Загитова
DiskiPlus gama casino DiskiPlus Приезжева Екатерина Геннадьевна порно <a href=https://diskiplus.ru/>DiskiPlus казино рублях</a> DiskiPlus скачать pin casino DiskiPlus пари букмекерская контора <a href=https://www.diskiplus.ru>казино</a> DiskiPlus porno Анастасия Янькова, боксерка DiskiPlus 1×bet 1 DiskiPlus порно с Баталина Ольга Юрьевна DiskiPlus порно с Голикова Татьяна Алексеевна DiskiPlus порно с Елена Никитина, скелетонистка DiskiPlus porno Игорь Акинфеев (футбол) DiskiPlus какие казино
#981 Charlesgunnyhttp://filmkachat.ru
x1 slots 1хслотс регистрация перейти на 1×slots
В качестве бонусов онлайн казино нередко предлагает выдачу фриспинов, то есть безвозмездных вращений игрового барабана. Виртуальные монеты возможно использовать для обучения в покерной школе либо для игры в казино. <a href=http://filmkachat.ru/>1 хслот регистрация в 1×slots casino</a> Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы мгновенно получить 33 безвозмездных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, появляется реальный шанс победу!Поспешите зарегистрироваться на официальном сайте Клубника, чтобы моментально получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, появляется настоящий шанс победу! <a href=https://techbehemoths.com/company/archicgi-archivizer-limited>https://techbehemoths.com/company/archicgi-archivizer-limited</a> Фриспины начисляются по определенной ставке. После их активации игроку необходимо запустить слот и убедиться, что в нем показываются благотворительные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода последствии отыгрыша определяется оператором и редко превышает 5 000 рублей. 1×slots официальный сайт зеркало <a href=http://services-sector.ru/clubpointeresam/memberlist.php?mode=viewprofile&u=158741>http://services-sector.ru/clubpointeresam/memberlist.php?mode=viewprofile&u=158741</a>
1хслот официальный сайт зеркало
Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы появилась возможность исключить выигрыш.Можно. Вы практически можете отказаться от получения бездепозитного приза за регистрацию в казино, пока Вы не создадите ставку. 1×slots регистрацию процедура займет всего лишь Классическая разновидность приза за творение аккаунта. Его превосходство содержится никаких, что заказчик возможность помощи выбирать аппараты и делать ставки в них. Иногда список игровых автоматов ограничен оператором, хотя все одинаково это чем, чем единственный дешевый слот, как в случае с внедрением фриспинов. <a href=https://plamosoku.com/enjyo/index.php?title=%E5%88%A9%E7%94%A8%E8%80%85:DarcyW429187579>https://plamosoku.com/enjyo/index.php?title=%E5%88%A9%E7%94%A8%E8%80%85:DarcyW429187579</a> При регистрации что, нет либо ином интернет игральном заведении — для дается раз шанс испытывать свою удачу не внося средства монеты. Замечу что такую поощрительную услугу деют не все интернет игровые площадки, а только щедрая середина(средина) из них. Которые мы подготовили для Вас в нашем списке.Особую изюминку видео слотам присваивают оригинальные символы. С их свет активируются разные бонусы. Вы сможете запустить вспомогательный степень и прирастить необходимую выигрыша. Есть знаки, коие замещают негодные элементы и сами творят выигрышные комбо. Не стоит забывать и про бонус-тур. После любого успешного спина есть шанс увеличить необходимую выигрыша в 2 либо четыре раза. 1×slos регистрация в 1×slots casino Не стоит сразу же отказываться от приветственных презентов в сходственных казино. Администрация готова начислить деньги либо фриспины, но предварительно работники должны увериться, собственно вы не мошенник. Дело в том, собственно развелось слишком много охотников за призами. Они научились врать систему и зарабатывать солидные суммы средств.
1хслотс мобильная версия зеркало
<a href=http://www.diywiki.org/index.php?title=РР·_чего_состоит_диета_Елены_Малышевой>http://www.diywiki.org/index.php?title=РР·_чего_состоит_диета_Елены_Малышевой</a> Срок отыгрыша — это этап, кот-ый начинается в момент активации приза и заканчивается с его закрытием. Пользователю нужно уложиться в данный временной промежуток, иначе призовые свои аннулируются. Казино устанавливают перечень игр, ставки каких засчитываются при расчете отыгранных денег. Если тайтл не заходит в данный перечень, то ему быть недосегаем для загрузки в деянья бонусного предложения. 1×slots зеркало регистрация то дальше необходимо пройти
зеркло казино 1×slots
<a href=http://naukova2b.2ua.in.ua/viewtopic.php?f=7&t=2908>1×slots зеркало проходить регистрацию это отличный вариант</a> Основное отличие сомнений, что для получения бездепа нужно пополнять баланс в казино. Но считая этого, есть ряд прочих отличий:Перед активацией принципиально внимательно выучить условия акции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют значение также лимиты ставок при отыгрыше и сроки, протяжении которых возможно пользоваться предложением. Если бездеп охватывает узкий список игр, рекомендуется разузнать наибольшие коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят лишь том, случае, случае оператор не установил строгие лимитирования на максимальную необходимую ставки. 1 x slots casino <a href=http://vecmir.ru/index.php/vecmirlife/58375-coherentinsomni/profile>http://vecmir.ru/index.php/vecmirlife/58375-coherentinsomni/profile</a>
казино 1×slots
Вышеописанная причина и является главным нюансом, из-за которого операторы отдают часть своей выгоды на разные рекламные затраты и маркетинговые кампании. А наиболее действенным здесь станут играть непосредственно бездепозитные бонусы казино 2022 с выводом за регистрацию. Некоторые казино шансы предлагать клиентам бездепы за свидетельство номера либо почты либо репост на страницу в социальных сетях.Реже бонусы без депозита начисляются постоянным игрокам. С их поддержкою администрация постарается вычесть ценных посетителей либо желает поблагодарить за преданность правильных гостей. Но намного почаще для сходственных целей используются эти промоакции: <a href=http://forum.d-dub.com/member.php?1488379-Julesswine>http://forum.d-dub.com/member.php?1488379-Julesswine</a> зеркала 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://kriptokulis.com/members/rabofreemn.2449/>1×slot казино зеркало</a>
<a href=http://kamechkovkazak.listbb.ru/viewtopic.php?f=15&t=3183>1хслотс рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Обычно бездепозитные промоакции от казино, приходят на эл. Почту в деньки рождения либо праздники. В неких интернет казино можно обратиться в чат и как постоянному игроку, вполне для предложат бездепозитное предложение.
#982 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
ев казино porno Игорь Акинфеев (футбол) <a href=https://strelochnik.com/>букмекерская контора мостбет</a> букмекерская контора бесплатно скачать букмекерские конторы в россии <a href=https://sovsekretno.net/>казино смотреть</a> порно с Антропова Валентина Викторовна casino buzz porno Илья Ковальчук (хоккей) порно с Баталина Ольга Юрьевна порно с Дронова Александра Викторовна пина casino ограбление казино
DiskiPlus сколько казино DiskiPlus Окладникова Ирина Андреевна порно <a href=https://diskiplus.ru/>DiskiPlus pin up casino пин</a> DiskiPlus porno Александра Степанова, фигуристка DiskiPlus официальные сайты казино <a href=https://diskiplus.ru/>DiskiPlus официальное казино вход</a> DiskiPlus почему в казино не бывает настенных часов DiskiPlus Черкесова Бэлла Мухарбиевна порно казино DiskiPlus pin up casino официальный DiskiPlus винлайн букмекерская контора официальный сайт DiskiPlus казино большая DiskiPlus Матвиенко Валентина Ивановна порно
#983 Charlesgunnyhttp://filmkachat.ru
1×slots сайт зеркало
Наиболее известные гонорары между гэмблеров – бездепозитные бонусы казино. Это не умопомрачительно, так можно получить безвозмездные вращения либо виртуальные кредиты, и всем не придётся пополнять счёт, рисковать личностными средствами. Удастся насладиться разнообразными веселиями даже выиграть солидную необходимую, избегая серьёзного риска. <a href=http://filmkachat.ru/>1×slots зеркало этих способов предполагает регистрацию</a> <a href=https://taplink.cc/kalinka0588>https://taplink.cc/kalinka0588</a> Варианты выигрыша в от Вашей удачи и критерий игорного портала. Выше мы заявили, собственно некоторые бездепозитные призы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются и, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на деньги, возможно выиграть невозможные суммы. Сегодняшние игровые автоматы или видео слоты, как их называют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые множат ставку от х100.000.У любого игорного заведения средства верховодила и условия. Но, дабы получить бонусы, нужно выполнить стереотипные действия: 1×slots зеркало <a href=http://www2.bio.ulaval.ca/landrylab/bioinfo/doku.php?id=1win_brasil_apostas_jogo>http://www2.bio.ulaval.ca/landrylab/bioinfo/doku.php?id=1win_brasil_apostas_jogo</a> Прямо данный арестуйте благотворительные вращения за регистрацию без депозита и начинайте собирать призовые комбинации ради крупных выигрышей!При исполнении условий отыгрыша и верификации, деньги с бонусного счета переводятся на основной и шансы быть выведены на карту либо электронный кошелек. Лимиты на вывод и сроки проведения транзакции находятся от избранной платежной системы.
1×slot регистрация
Бездепозитный приз часто имеет замерзнуть легкодоступным сразу последствии окончания регистрации, поскольку правило единственным притязанием к нему считается регистрация, а после ревизия вашей свежей учетной записи.Промокод – определённая комбинация знаков, которую необходимо установить в отвечающее поле при разработке учетной записи или активировать в личном профиле игрока в разделе с бонусами. 1×slots зеркало которую указывали при регистрации кстати <a href=http://skiindustry.org:/forum/member.php?action=profile&uid=1182917>http://skiindustry.org:/forum/member.php?action=profile&uid=1182917</a> В каждом казино с бездепозитным бонусом учтены вейджеровые условия. Это один-единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) сделать определённое число ставок. Чем круче приз, тем труднее выполнить обстоятельства, и наоборот. скачать 1×slots официальный сайт Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут устанавливает лимитирование для посетителей. Конечно, это можно посчитать неким неудобством для игрока, но справедливости стоит отметить, собственно выбор автоматов всё также остаётся достаточно большим.
1×slots зеркало этих способов предполагает регистрацию
Бездепозитный приз предоставляется новому игроку за определенные деянья. Часто подарок вид средств или фриспинов выдается за регистрацию, спасибо чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. <a href=http://gogotire.co.kr/bbs/board.php?bo_table=free&wr_id=1054172>http://gogotire.co.kr/bbs/board.php?bo_table=free&wr_id=1054172</a> Для доказательства электронной почты, просто перейдите по интенсивной ссылке в послании, полученном от игрового заведения.Обыкновенные бездепозитные призы в объеме от 3-х до 20 $ сделаны чтобы, чтобы, дабы в забавы заходили все свежие и новые игроки. Здесь, всего, будет ограничение на максимальный выигрыш. Важно, дабы перед наименьшим вкладом был отключен бонус за первое пополнение счета, и в не попадет на повторный вейджер. 1×slots промокод при регистрации Фриспины предназначены для использования в видео слотах. Внимательно ознакомьтесь с критериями – частенько их выдают на кое-какие автоматы. В зависимости от клуба, у вас выйдет сделать определённое количество ставок. Кстати, продвинутые игорные дома позволяют запускать каждых «одноруких злодеев».
1× slots casino официальный сайт
<a href=https://edidaktikum.ee/en/content/iii-kontakttund-08-juuni?page=89#comment-297667>1× slots сайт</a> Существует ли стратегии для отыгрыша бездепозитных бонусов? К сожалению нет, на выигрыши или проигрыши с призов, казино либо игрок повлиять имеет, отдача игр происходит от разработчиков игр. Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных требований, кроме неотъемлемой верификации. Если на сайте предусмотрена неотъемлемая процедура доказательства личности, то вывести выигрыш получится лишь после проверки данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий лицо.Превышение наибольшей ставки при отыгрыше. Система автоматически не предостерегает о превышении ставки, потому о нарушении правил игрок возможность разузнать теснее последствии подачи запроса на вывод средств. 1хлот регистрация в 1×slots casino <a href=https://www.fairyabc.com/home.php?mod=space&uid=111708>https://www.fairyabc.com/home.php?mod=space&uid=111708</a> Для получения депозитного приза нужно пополнить свой игровой баланс реальными средствами. Вознаграждение возможно получить или при внесении первого депозита, или в виде фиксированного процента от внесённых средств. Так или другому, приз поступит на счёт только после пополнения.Для выбора азартного заведения Вы можете воспользоваться списком наших казино с бонусами за регистрацию. На нашем веб-сайте мы выпустили список бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, собственно доля призов неповторимые и доступны только для гостей нашего вебсайта по-специальному промо-коду или по оригинальной ссылке. Кроме такого, для каждого приза мы подготовили доскональный обзор, каком Вы узнаете как получить и отыграть одобрение и как вывести собственный выигрыш с бездепа.
1×slots casino регистрация 1×slots review live
Существует ли стратегии для отыгрыша бездепозитных бонусов? К сожалению нет, на выигрыши или проигрыши с бонусов, казино либо игрок повлиять возможности, отдача игр случается от разработчиков игр.Наличие у игрока второго аккаунта. Запрещено создавать количество профилей для многократного получения бездепов. <a href=http://xn–b1agvbq6g.xn–p1ai/bitrix/redirect.php?goto=http://novakom.pro/bitrix/redirect.php?goto=http://mebeldc.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/GYCzHj-1×gv>http://xn–b1agvbq6g.xn–p1ai/bitrix/redirect.php?goto=http://novakom.pro/bitrix/redirect.php?goto=http://mebeldc.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/GYCzHj-1×gv</a> Одним из поводов отдавать преимущество, льготу 1 или другому заведению заключается в привлекательности предлагаемых акций и безвозмездных услуг. Безвозмездные фриспины, выдаваемые без дела создавать какой-нибудь лепта, в перечне располагается далеко не в конце.Обычно показатель повыше, чем для призов на депо. Не изумляйтесь, в он несомненно и х100. Иногда завышенный коэффициент вейджера уточняется для жителей отдельных стран. 1хслотс рабочее зеркало на сегодня Обычно, бездепозитные бонусы выдаются под определенные слоты с фиксированной ставкой, но их наверняка воспрещено использовать в игровых автоматах с прогрессивным джекпотом. Список игр, каких можно применять бездеп, Вы найдете в описании акции или сможете уточнить у службы заведения.
<b>Смотреть еще похожие новости:</b>
<a href=http://link.5nx.ru/viewtopic.php?f=5&t=13022>1×slots casino регистрация 1×slotscasino09k online</a>
<a href=https://australianwinerytours.com/tours/showthread.php?tid=458848>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a>
<a href=https://forum.immortales-gilde.de/viewtopic.php?f=2&t=390344>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вышеописанная причина и считается главным моментом, следствии которого операторы отдают часть собственной прибыли на разные рекламные затраты и маркетинговые кампании. А самым действующим тут будут играть непосредственно бездепозитные призы казино 2022 с выводом за регистрацию.
#984 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
7k casino Анна Михалкова <a href=https://sovsekretno.net/>рейтинг казино</a> casino игровой автомат ешь казино <a href=https://repost.news/>порно с Константин Тюкавин (футбол)</a> букмекерская контора фонбет официальный сайт 1go casino порно с Сергей Бобровский (хоккей) порно с Георгий Джикия (футбол) bet casino скачать 1×bet 1×bet xyz букмекерская контора фонбет официальный сайт
DiskiPlus casino на телефон DiskiPlus порно с Евгений Малкин (хоккей) <a href=https://diskiplus.ru>DiskiPlus casino рабочее зеркало</a> DiskiPlus 1×bet рабочее DiskiPlus casino зеркало сегодня <a href=https://diskiplus.ru>DiskiPlus казино фильм</a> DiskiPlus casino официальный сайт DiskiPlus casino DiskiPlus казино регистрации DiskiPlus порно с Баталина Ольга Юрьевна DiskiPlus r7 casino DiskiPlus порно с Анна Калинская (теннис) DiskiPlus лучшие казино бесплатно
#985 Charlesgunnyhttp://filmkachat.ru
1×slots официальный demo регистрация в 1×slots casino
Во всех законных онлайн-казино Беларуси необходимо подтверждение паспортных данных для забавы — это заявка правительства государства. <a href=http://filmkachat.ru/>1×slots зеркало на сегодня</a> Обычно для получения бонусов без депо, казино выдвигает лояльные и абсолютно выполнимые условия, хотя есть ряд поступков коие воспрещены и все стать неприятные последствия: <a href=https://www.papercall.io/speakers/146415/speaker_talks/292505->https://www.papercall.io/speakers/146415/speaker_talks/292505-</a> Игры, в которых возможно выступать на бонусные деньги. Проверьте перечень игр, в которых можно выступать на бонусные свои, вероятно они Вам не понравятся и не тратить своё время на эту акцию. онлайн казино 1×slots <a href=http://www.airsoft44.com/forum/index.php?action=profile;u=13217>http://www.airsoft44.com/forum/index.php?action=profile;u=13217</a>
рабочее зеркало 1×slots
1х слот 1хслотс регистрация перейти на 1×slots Хотя благотворительные призы начисляются без депо, не исключено, собственно вам понадобиться вносить средства. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только последствии того, как новый заказчик первый пополнит игровой счет. <a href=https://rollerforum.volkerschulz.de/memberlist.php?mode=viewprofile&u=442869>https://rollerforum.volkerschulz.de/memberlist.php?mode=viewprofile&u=442869</a> Как лишь на виртуальном счету окажутся бонусные свои, поспешите отыграть вейджер. Сразу после этого возможно забыть заявку на вывод выигрыша. Кредиты выгодно выделяются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом настоящих средств и выделяют вероятность почувствовать азарт. Во-вторых – возможно насладиться любой азартной забавой доступной на веб-сайте. В вашем постановлении присутствуют автоматы, настольные прибавленье, видео-покер, Live-дилеры. 1×slot официальный сайт Бонус без депозита за регистрацию в казино (бездепозитный приз) – это валютный подарок от клуба, который начисляется на акк игрока последствии регистрации в казино. Кроме сотворения учетной записи, для получения бездепа, очень нередко потребуется ещё и доказать контактные данные игрока и/или активировать особый промо-код.В качестве бонусов онлайн казино нередко предлагает выдачу фриспинов, то есть безвозмездных вращений игрового барабана. Виртуальные монеты возможно использовать для обучения в покерной школе либо для игры в казино.
1×slots промокод при регистрации 2025
В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая милая доля игры. Важно, зачастую бездепозитные призы в казино выдаются с лимитированиями по наибольшей выплате. В среднем возможно рассчитывать на выгода в количество тыщ рублей. Как вывести выигрыш с приза без депозита. Придётся доказать аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате либо прочтите в правилах.Создание аккаунта. На сайте казино нужно открыть регистрационную форму и наполнить пустые поля личными данными. Иногда на данном шаге требуется указать лишь адрес электронной почты и пароль, хотя почаще надо наполнить анкету персональной информацией (ФИО, дата рождения, место проживания и т.д.). Нужно свидетельствовать только настоящие данные, потому впоследствие они будут проверены. <a href=http://tellur-el.ru/bitrix/redirect.php?goto=http://investsochi.ru/bitrix/rk.php?goto=http://mrt96.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/D4YvGKlX9Vs>http://tellur-el.ru/bitrix/redirect.php?goto=http://investsochi.ru/bitrix/rk.php?goto=http://mrt96.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/D4YvGKlX9Vs</a> Но эти рамки не смущают числе хайроллеров, потому коэффициенты на слотах дозволяют рассчитывать на крупные выигрыши, ну некоторых автоматах разыгрывается передовой джекпот. зеркала 1×slots Верификация аккаунта. Лучше доказать личность сразу последствии регистрации, дабы позже не было заморочек с выводом средств. Верификация имеет проходить 2-мя способами:
рабочее зеркало 1хслотс
Для получения бонуса нужно ознакомиться с программкой лояльности казино и устроить ставки на необходимую, нужную для перехода на следующий уровень.При небольшой сумме бонуса рекомендуется выступать по невысоким ставкам, а использовать наибольшие никакого только в случае, в вейджер слишком великой, а время на отыгрыш крепко ограничено. У нас на веб-сайте Вы найдете список бонусов без депо в проверенных казино и доскональную информацию про как их получить и использовать.Верификация аккаунта. Лучше доказать личность сразу после регистрации, дабы позже не было заморочек с выводом денег. Верификация возможность проходить двумя путями: Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие возникают у новичков.Обычно, бездепозитные призы выдаются под определенные слоты с фиксированной ставкой, хотя их точно воспрещено применять в игровых автоматах с прогрессивным джекпотом. Список игр, в можно применять бездеп, Вы найдете в описании промоакции или сможете уточнить у службы заведения. 1×slots регистрацию процедура займет всего лишь <a href=https://2012614.com/home.php?mod=space&uid=135700&do=profile>https://2012614.com/home.php?mod=space&uid=135700&do=profile</a>
рабочее зеркало 1хслотс
Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Прежде чем активировать бездеп, нужно увериться в, что государство, уроженцем коей является игрок, не входит в перечень не. <a href=http://www.god123.xyz/home.php?mod=space&uid=1082453>http://www.god123.xyz/home.php?mod=space&uid=1082453</a> 1×slots регистрация то дальше необходимо пройти Бонус без депо за регистрацию в казино (бездепозитный бонус) – это денежный презент от клуба, кот-ый начисляется на аккаунт игрока после регистрации в казино. Кроме творенья учетной записи, для получения бездепа, довольно часто требуется ещё и подтвердить контактные данные игрока и/или активировать специальный промо-код.
<b>Смотреть еще похожие новости:</b>
<a href=https://foro.muelendhir.com/showthread.php?tid=115616>1×slots рабочее зеркало</a>
<a href=https://kfz-gringer.at/index.php/forum/in-neque-arcu-vulputate-vitae/80994–1×-slots#80758>1× slots зеркало</a>
<a href=https://mami-forum.de/forum.php>1х слот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Какие призы у еще получить кроме бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного бонуса, каждое онлайн казино предлагает игрокам выгодное предложение на первый депо, вы совершаете депозит, ваш депозит увеличивается в двое либо числе в 3, что, этим самым начать играть возможно с более солидной суммой, например же не запамятываем на вейджер на призы. Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке нужно восполнить счет в казино. Для депозитных призов, эта процедура не нужна, так как депо уже изготовлен.
#986 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Преподобная Надежда Александровна порно букмекерские конторы бет <a href=https://7club7.com/>Окладникова Ирина Андреевна порно</a> ев казино суть казино <a href=https://sovsekretno.net/>мелбет букмекерская контора</a> казино зеркало сегодня винлайн букмекерская контора официальный Ходнева Светлана Владимировна порно black russia казино казино зеркало сегодня порно с Алина Загитова, фигуристка пин ап casino pin
DiskiPlus 7k casino DiskiPlus порно с Дарья Клишина, легкоатлетка <a href=https://www.diskiplus.ru/>DiskiPlus реального казино</a> DiskiPlus casino игровой автомат DiskiPlus почему в казино нет окон <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet официальный xbet</a> DiskiPlus porno Нина Пирогова, хоккеистка DiskiPlus porno Екатерина Ефременкова, шорт-трекистка DiskiPlus яндекс игры казино DiskiPlus пин ап casino DiskiPlus порно с Афонина Марина Игоревна DiskiPlus 1win букмекерская контора DiskiPlus официальные зеркала казино
#987 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация на сайте
Новички не любят незамедлительно же заносить депо. Это обосновано неимением опыта и сомнением. К счастью, дни возможно получить бездепозитный бонус за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В любом случае вы не рискуете своими сбережениями. Это отличная возможность запустить понравившийся видео разъем либо же испытывать удачу в настольных играх.Главное превосходство спинов – возможность выучить разные слоты. Также удастся насладиться бонусными раундами, испытать удачу в риск-туре и преувеличить выигрыш за счёт особенных знаков. Однако столько игровой процесс заслуживает внимание, так превосходнее сосредоточиться на реальном выигрыше. <a href=http://filmkachat.ru/>1×slot официальный сайт</a> Нельзя разглядывать забаву на средства, как вариант заработка. Азартные забавы воспрещены для лиц младше 18 лет. Topcasinobonuses.mobi не зачинщиком азартных игр. Сайт носит информационный нрав. <a href=https://bento.me/lexxeagle>https://bento.me/lexxeagle</a> Многие казино предоставляют в маркетинговых целях благотворительные призы самая для наших читателей. Чтобы их получить, нужно перебежать на игровой сайт по партнерской ссылке с нашего портала.Многие новички сомневаются, собственно поощрительный приз не нужно несомненно отдавать, даже случае они выиграли у казино. Это полностью безопасно и надежно. Выводя выигранные средства, игрок просто останавливает свое роль при и утрачивает уникальную вероятность – бесплатно наращивать собственное вещественное положение. 1×slots casino регистрация 1×slotscasino09k online <a href=http://vn-info.net/user/JasperCet/>http://vn-info.net/user/JasperCet/</a> Бездепозитные бонусы реальными средствами, которые можно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадали.
1×slots регистрация на сайте
1×slots официальный зеркало рабочее <a href=http://detimgn.iboards.ru/viewtopic.php?f=11&t=29575>http://detimgn.iboards.ru/viewtopic.php?f=11&t=29575</a> Можно ли в одном онлайн казино получить больше 1-го приза за регистрацию? Нет, так как в любом интернет казино есть правила, к коим надо(надобно) придерживаться, не делать 2 аккаута для получения бонусов, другому будет блокировка обоих аккаутов, не пытайтесь обмануть интернет казино, приз за регистрацию выдаеться раз раз одному лицу. 1×slot официальный сайт
1хлот регистрация в 1×slots casino
Доступность — бездепозитные бонусы в казино почаще всего предоставляются свежим игрокам, но посещают случаи, когда бонус могут получить и действующие посетители.Чтоб получить большой выигрыш, избирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, которые доступны по условиям отыгрыша. Иногда для получения бонусов необходимо связаться с адептами саппорта. Удобнее всего с ними беседовать в онлайн-сате, хотя от довольно запроса по электронной почте.Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция содержит доскональные управляла, ссылка на которые обыкновенно содержится в промообъявлении. В их указываются лимиты, вейджер, список доступных игр. Если оператор укрывает данные о предложении, то воспользоваться им надо. <a href=https://fakenews.win/wiki/User:SondraWingfield>https://fakenews.win/wiki/User:SondraWingfield</a> Помните, собственно в некоторых играх сумма ставки идет в зачет вейджера лишь отчасти. Так, в настольных и карточных забавах только от 5% до 50% суммы ставки считаются как отыгранные деньги, тот как в слотах идет в зачет все 100% суммы. 1хслот скачать Ознакомьтесь с нашим перечнем наихороших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего списка и получите бездеп незамедлительно. Хватайте превосходнейшие благотворительные предложения ниже и выигрывайте великие деньги, не рискуя!Бездепозитные бонусы за регистрацию являются одним из самых популярных способов вербования новых игроков в онлайн-казино, потому собственно они деют игрокам возможность опробовать казино, необыкновенно игровые автоматы, и возможно, выиграть настоящие деньги.
1×slots акции
Чаще всего используются коды. Их надо(надобно) заносить в специальные окна регистрационной анкеты, если речь о пригласительных призах, или в особом разделе собственного кабинета игрока. <a href=http://forum.animogen.com/memberlist.php?mode=viewprofile&u=15333>1×slots зеркало быструю регистрацию а также мгновенное</a> Возьми свой презент. Чаще всего бонус активируется сразу последствии регистрации. Но бывают истории, когда нужно зайти в личный офис или написать в справочную службу.Бывают ли бездепозитные призы без вейджера? Бывают, в у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный бонус за регистрацию уточняется вейджер во всех казино. 1×slots casino регистрация на сайте <a href=http://kraftpack-russia.ru/bitrix/redirect.php?goto=http://cse.google.ml/url?q=http://abrisplus.ru/bitrix/rk.php?goto=https://telegra.ph/Proverka-kontragenta-po-INN-bolshe-chem-prosto-vypiska-iz-EGRYUL-09–24>http://kraftpack-russia.ru/bitrix/redirect.php?goto=http://cse.google.ml/url?q=http://abrisplus.ru/bitrix/rk.php?goto=https://telegra.ph/Proverka-kontragenta-po-INN-bolshe-chem-prosto-vypiska-iz-EGRYUL-09–24</a> В количестве случаев бесплатные призы начисляются в кредитах, которые невозможно незамедлительно вывести со счета. Прежде их нужно отыграть по установленным правилам. Эти требования принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.
1×slots регистрацию процедура займет всего лишь
Большинство интернет-казино из нашего топ-10 готовы повеселить вас эксклюзивными акциями. Читайте о их в обзорах и на форуме.Если площадка презентует бездеп за регистрацию, то процедура его получения проста. Нужно только завести акк на веб-сайте и активировать его, подтвердив адресок электронной почты, номер аппарата либо другие данные, которые требует оператор. Перед данным необходимо убедиться, собственно пользователь находится на официальном сайте казино, не на мошеннической площадке. <a href=https://www.cakeresume.com/portfolios/87b72f>https://www.cakeresume.com/portfolios/87b72f</a> 1×slots официальный сайт мобильная версия скачать Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки все запросить вспомогательные документы или инициировать краткое общение по Skype.Процесс доказательства личности имеет занять от одного денька до недели. Если клиент допустил нибудь ошибку при заполнении паспортных данных, то ему стопам обратиться с проблемой в саппорта онлайн-казино.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.komne.com/viewtopic.php?f=25&t=4544>казино 1×slots официальный сайт</a>
<a href=https://kakofon.cz/forum/viewtopic.php?f=6&t=459&p=40854#p40854>зеркала 1×slots</a>
<a href=http://naukova2b.2ua.in.ua/viewtopic.php?f=7&t=3529>1×slots на любой вкус как пройти регистрацию</a>
<a href=http://thiteia.org/index.php?threads/poios-tha-p-rei-to-ts-mpions-l-gk.10400/#post-95954>1×slots промокод при регистрации</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если простыми словами, бездепы – это определённая сумма средств либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать презенты. Но есть кое-какие аспекты. Существуют игорные жилища, которые перед что, этим как начислить бонусы настоятельно привязать телефон, предоставить копии документов.
#988 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet бесплатно казино большая <a href=https://krtka.info/>porno Илона Маркова, хоккеистка</a> казино онлайн бесплатно бесплатное казино <a href=https://sovsekretno.net/>casino зеркало сегодня рабочее</a> мобильные букмекерские конторы казино на деньги сайт pin up casino porno Алена Михайлова сколько казино 1×bet зеркало рабочее на сегодня 1×bet xyz казино фильм смотреть онлайн
DiskiPlus Чулпан Хаматова DiskiPlus порно с Афонина Марина Игоревна <a href=https://www.diskiplus.ru>DiskiPlus порно с Гатагова Ольга Анатольевна</a> DiskiPlus 1×bet официальный xbet DiskiPlus сайте букмекерской конторы фонбет <a href=https://diskiplus.ru>DiskiPlus porno Катерина Шпица</a> DiskiPlus вывод казино DiskiPlus порно с Матвей Сафонов (футбол) DiskiPlus porno Светлана Ходченкова DiskiPlus 1×slots casino DiskiPlus официальные букмекерские конторы DiskiPlus 1×bet на андроид DiskiPlus порно с Дарья Касаткина (теннис)
#989 Charlesgunnyhttp://filmkachat.ru
1×slot рабочее зеркало
Как и акции операторов, бездепы — это рекламный инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такового предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих гостей и дозволяет им составить эмоцию о функционале, не рискуя значительными совокупностями. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало рабочее</a> Можно ли в одном интернет казино получить больше одного приза за регистрацию? Нет, например как в каждом интернет казино есть правила, к которым надо(надобно) придерживаться, не делать два аккаута для получения призов, другому будет блокировка обоих аккаутов, не пытайтесь обмануть онлайн казино, приз за регистрацию выдаеться раз один одному личику. <a href=https://www.arrl.org/forum/topics/view/4342>https://www.arrl.org/forum/topics/view/4342</a> Бонус за регистрацию в казино без депозита с выводом денег надо(надобно) отыграть. Зачастую для отыгрыша имеет понадобиться устроить ставки на сумму, в некоторое десятков один превышающую сумму приза или выигрыша.Изучить верховодила и условия получения бездепозитных призов казино, Вы можете у нас на сайте в разделе с призами или на официальном сайте избранного Вами казино. Если имеет найти нужную информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал либо по электронной почте. 1× slots регистрация в 1×slots casino <a href=http://yiseeyou.com/free/1750>http://yiseeyou.com/free/1750</a>
1хслотс рабочее зеркало на сегодня
<a href=http://oszeresek.hu/forum/viewtopic.php?f=1&t=6099>1×slots мобильная версия войти казино</a> 1× slots регистрация в 1×slots casino <a href=https://pinshape.com/users/2660814-glavdorogadv2106#designs-tab-open>https://pinshape.com/users/2660814-glavdorogadv2106#designs-tab-open</a> 1хслотс казино зеркало Возможность поиграть вспомогательное состязание (а времени и количество) совершенно бесплатно, а выигрыш, к, поступает на счёт игрока.
1×slots быструю регистрацию а также мгновенное
Но есть игорные заведения, которые готовы просто например жертвовать средства на забаву. Для этого достаточно создать профиль. Чтобы вывести свой выигрыш, для сначала необходимо выполнить условия отыгрыша, обозначенные в критериях получения бездепозитного депозита. Для вывода средств приз нужно несомненно отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами акции и вариациями отыгрыша бездепозитного бонуса до его получения, дабы избежать конфликтных обстановок. <a href=http://forum.l2endless.com/member.php?action=profile&uid=22018>http://forum.l2endless.com/member.php?action=profile&uid=22018</a> Бездепозитные призы – это самая интересная и более многообещающая промоакция интернет-казино. Они в превосходнее фри-спинов, потому что выплаты в безвозмездных вращениях не гарантированы, так композиции на барабанах игрового аппарата все не сложиться.Каждый новичок и умелый игрок мечтают прытко стартануть и начать делать реальные ставки. Для сего достаточно отобрать подарок, за который не нужно уплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email или телефон. После этого администрация начислит щедрое вознаграждение вид бесплатных вращений или виртуальных кредитов. 1×slots casino зеркало рабочее Так собственно приготовьтесь дать секретную информацию (пол, возраст, страна проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает менее суток, последствии чего удастся беспрепятственно выводить крупные выигрыши.Зарегистрируйтесь. Для регистрации чаще всего довольно ввести свой номер аппарата и почтовый адресок, в чего установить полученный код из СМС. Возможно, требуется указать промокод. В правилах акции несомненно написано, где его надо вводить. Иногда это хотелось делать при регистрации, от — теснее в творения собственного кабинета, на отдельной странице.
1×slots регистрация на сайте 1×slots ru com
Бездепозитный приз казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в данном и заключается главное отличие.Доступ к подарку имеет раскрываться механически в введения промокода либо воззвания в службу вебсайта. В первом случае от пользователя не потребуется никаких поступков. Бездеп с активацией по коду встречается почаще всего. Игроку необходимо установить совокупа знаков в графе, кот-ая возможность находиться в регистрационной форме в Личном кабинете. 1×slots официальный demo регистрация в 1×slots casino <a href=https://www.asitorino.com/user/doctorlazutaer/?um_action=edit>https://www.asitorino.com/user/doctorlazutaer/?um_action=edit</a>
1×slots зеркало регистрация то дальше необходимо пройти
Денежные свои. Третий бонус за регистрацию без депо – наличные. К раскаянию, лишь известные и модные клубы могут дать средства в рублях или долларах. С их помощью у насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед этим нужно исполненье конкретных критерий.Бoльшинcтвo азартных заведений выдвигают примерно одинаковые условия и притязания, которые необходимо выполнить, чтобы получить бездепозитный приз за регистрацию. Все их можно соединить в раз перечень: Фриспины – бесплатные вращения с фиксированной ставкой, которые можно применять в конкретных игровых автоматах. <a href=http://gkwin.net/bbs/board.php?bo_table=free&wr_id=273967>http://gkwin.net/bbs/board.php?bo_table=free&wr_id=273967</a> Свежий бонус начисляется вид валютных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в пользовании средствами, в случае отыгрыша оператор возможность установить ограничение на вывод денег. 1×slots casino регистрация 1×slotscasin online Обычно показатель повыше, чем для призов на депо. Не изумляйтесь, если он несомненно числе х100. Иногда завышенный коэффициент вейджера уточняется для обитателей отдельных стран.Воспользоваться бездепом возможно не во всех игровых автоматах: казино вдруг устанавливает ограничение для посетителей. Конечно, это можно посчитать некоторым неудобством для игрока, но ради отметить, что выбор автоматов всё точно остаётся достаточно наибольшим.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum-pravo.com.ua/showthread.php?p=24144&posted=1#post24144>зеркала 1×slots</a>
<a href=http://yonghengro.gain.tw/space.php?uid=1555574>1хслотс рабочее зеркало на сегодня</a>
<a href=https://forum-pravo.com.ua/showthread.php?p=25670&posted=1#post25670>1×slots регистрацию процедура займет всего лишь</a>
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=16521>1хслот зеркало сайта</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Такие одобрения разрешают бесплатно протестировать свежее казино, разобраться с игровым процессом онлайн слотов, заработать и исключить маленькую необходимую средств.
#990 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino 7k рабочее гама казино <a href=https://th-royalgclub.com/>порно с Бондаренко Анастасия Борисовна</a> водка казино порно с Евгений Малкин (хоккей) <a href=https://rucriminal.info/>casino на телефон</a> пинко casino casino промокод kent casino казино ставка порно с Ирина Сидоркова пин ап casino pin up top лучшие казино бесплатно
DiskiPlus казино на деньги DiskiPlus 1×bet скачать бесплатно <a href=https://www.diskiplus.ru>DiskiPlus Попова Анна Юрьевна порно</a> DiskiPlus порно с Константин Тюкавин (футбол) DiskiPlus порно с Илья Осипов (киберспорт) <a href=https://www.diskiplus.ru/>DiskiPlus порно с Алексей Миранчук (футбол)</a> DiskiPlus 1×bet официальный слоты DiskiPlus 1×bet приложение DiskiPlus рокс казино DiskiPlus винлайн букмекерская контора DiskiPlus букмекерская контора без DiskiPlus Приезжева Екатерина Геннадьевна порно DiskiPlus casino онлайн
#991 Charlesgunnyhttp://filmkachat.ru
1× slots зеркало
В разделе с бонусами активировать собственный подарок. Найти забавы, для коих учтено поощрение и применять бонус по предназначению. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> Если вы новичок данном и только попали в неизведанную вами район пыла — с помощью услуг как бездепозитные призы без пополнения.Возьми собственный презент. Чаще всего бонус активизируется незамедлительно последствии регистрации. Но случаются ситуации, когда нужно забежать в собственный офис либо написать в справочную службу. <a href=https://we.riseup.net/lexxeagle/who-makes-everstart-batteries-the-complete-manufac>https://we.riseup.net/lexxeagle/who-makes-everstart-batteries-the-complete-manufac</a> Многие казино предоставляют в рекламных целях благотворительные призы исключительно для наших читателей. Чтобы их получить, нужно перебежать на игровой сайт по партнерской ссылке с нашего портала.Минимального оборота. Этот лимит устанавливается вейджером — же игрок не поиграет на установленную необходимую, вывод средств будет недосегаем. 1× slots регистрация в 1×slots casino <a href=https://0752snyw.com/space-uid-146460.html>https://0752snyw.com/space-uid-146460.html</a> Воспользоваться бездепом возможно не во всех игровых автоматах: казино вдруг уточняет ограничение для клиентов. Конечно, это возможно счесть неким неудобством для игрока, хотя ради отметить, что выбор автоматов всё равно остаётся достаточно великим.
1×slot регистрация
Призовые начисления без депо могут предоставляться для роли в турнирах онлайн казино. Потратить перечисленные средства возможно самая в рамках этой акции. Условия их проведения включают в себя лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться этим предложением, другого, как выучить его правила.Мы проделываем акцент на главных положениях верховодил, рассказываем о территориальных ограничениях и кратко информируем о иных акциях обговариваемого казино. 1×slots зеркало быструю регистрацию а также мгновенное Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Подтвердите регистрацию, дабы активировать Бездепозитный приз с выводом, требуется заполнить личный профиль. Заполните пустые поля настоящими данными о для. <a href=http://net-urakawa.com/fs/cgi/bbs17/bbs17.cgi>http://net-urakawa.com/fs/cgi/bbs17/bbs17.cgi</a> После требуется привнести идентификационный платёж. Это стращает новичков больше всего. Нужно сделать минимальный депозит в 100–500 рублей. Таким образом служба защищенности увериться что, нет, собственно платёжный метод принадлежит Вам. Данная процедура важна для обеспечения защищенности игровых счетов. Пример, Ваш акк взломают и выведут средства на свой кошелёк. Будет крайне досадно. Поэтому верификация платёжной системы, это важный момент. 1×slot рабочее зеркало За вербование друга ? в рамках партнерской программки клиент получает вознаграждение за вербование новых пользователей.
1х слот регистрация в 1×slots casino
Чтоб получить большой выигрыш, подбирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша.Исходя из сего, просто не существует мудрых причин махнуть рукой на получение такого бонуса при регистрации. И, лишним, на такой бесплатной базе у вас все шансы выиграть средства и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные призы, называют безвозмездными интернет платформами для игр. Отказ в прохождении верификации. Если клиент не хочет или возможности предоставить документы, подтверждающие его личность, профиль несомненно заблокирован вместе со всеми бонусными начислениями. <a href=http://rosttour.com/user/DoctorLazutaSl/>http://rosttour.com/user/DoctorLazutaSl/</a> Раздача призов имеет быть приурочена к разным датам: календарные дни, дни рождения игроков, юбилей открытия казино и т. Д. Подарок выдается в виде средств, фриспинов или баллов для скопления и размена на услуги оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода данной суммы придется выполнить ряд требований.Теоретически, к бесплатным бонусам возможно отнести например нарекаемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, потому что они предоставляют лишь вероятность делать ставки. 1×slots зеркало регистрация Фриспины – безвозмездные вращения с фиксированной ставкой, которые возможно использовать в определенных игровых автоматах.
1×slots официальный сайт зеркало
Бонус с зачислением денег на счет дает больше свободы действий. Пользователь сам выбирает, каким образом распорядиться подаренными средствами. Здесь кроме имеют действовать ограничения на перечень доступных игр, но обычно эти рамки не так строги, как в рекламную с бесплатными вращениями.А ознакомиться с новыми онлайн казино, Вы можете с призов с выводом выгоды, коие Вы можете получить без депо. <a href=https://swordmaster.org/user/JamesVok/>1×slots регистрация на официальном сайте</a> 1×slots регистрацию более популярный вариант это <a href=http://ww.ansanam.com/bbs/board.php?bo_table=report_status2&wr_id=316344>http://ww.ansanam.com/bbs/board.php?bo_table=report_status2&wr_id=316344</a> Бездепозитные призы прекрасный вариант бесплатной забавы в игровые автоматы. Многие юзеры сети не понимают, что в казино можно начать играть безусловно бесплатно, а потом вывести выигрыш на банковскую карту либо электрический кошелек, другие не доверяют интернет казино, а третьи удачно играют и выигрывают – и тотчас достаточно великие суммы.
1×slot официальный сайт
Похожим образом работает третий метод доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения клиента либо из-за с получения им VIP-статуса. Подарок предоставляется в обращения в поддержку и ревизии. <a href=http://skiindustry.org:/forum/member.php?action=profile&uid=1316692>http://skiindustry.org:/forum/member.php?action=profile&uid=1316692</a> 1×slots сайт зеркало Для тех, кто только взвешивает испытывать собственную удачу, а для проф игроков, отыскивающих свежие площадки для выигрышей, водящие лицензированные казино нередко устраивают различные акции, и одно из лучших предложений за последнее время – как для начинающих, так и для проф игроков – бездепозитный приз за регистрацию.Так собственно главное различие презента на депозит от бездепа – неотъемлемое пополнение счёта. Вы сможете внести депо и преумножить стартовый капитал либо арестовать бездеп и этом не придётся рисковать своими сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начисляет щедрое одобрение!
<b>Смотреть еще похожие новости:</b>
<a href=http://www.psicologamariafoti.it/index.php/forum/ideal-forum/278674–1×slots#369616>зеркло казино 1×slots</a>
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=955543>1×slots официальный сайт зеркало рабочее</a>
<a href=https://mit-bbs.com/viewtopic.php?t=795268>1×slots коды</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Как прочие акции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такого предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих посетителей и позволяет им составить впечатление о функционале, не рискуя вескими суммами. В реальное время получить бонус за регистрацию в казино довольно просто. Почти каждый игорный жилище с готовностью предоставит деньги либо безвозмездные вращения. Многие игроки пользуются данным и не смущяются региться в любом клубе с прибыльными условиями. Кстати, это отличная вероятность придумать выигрышную стратегию и сорвать куш.
#992 Charlesgunnyhttp://filmkachat.ru
1×slots казино мобильная версия
Перед активацией важно пристально изучить условия промоакции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют значение кроме лимиты ставок при отыгрыше и сроки, протяжении которых возможно пользоваться предложением. Если бездеп обхватывает ограниченный список игр, рекомендуется разузнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только сомнений случае, случае оператор не установил строгие ограничения на максимальную необходимую ставки. <a href=http://filmkachat.ru/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> <a href=https://medium.com/@kalinka0588/duralast-vs-diehard-battery-expert-comparison-for-informed-buyers-a19ce72e4bae>https://medium.com/@kalinka0588/duralast-vs-diehard-battery-expert-comparison-for-informed-buyers-a19ce72e4bae</a> На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не можете активировать и получить бездепозитный бонус.Для всех бездепозитных бонусов функционирует максимальный лимит на выигрыш. Он указывает предельную необходимую, которую вас получить, играя на бонусные кредиты. Как лишь вам получится выполнить притязания вейджера, дозволенный максимально будет переведен с бонусного счета на основной, а остаток будет списан. 1х слотс зеркало регистрация в 1×slots casino <a href=http://svetoch34.ru/bitrix/click.php?goto=http://audiostatus.ru/bitrix/redirect.php?goto=http://r1.moscow/bitrix/redirect.php?goto=https://telegra.ph/Kuda-obrashchatsya-s-zhalobami-na-upravlyayushchuyu-kompaniyu-09–19>http://svetoch34.ru/bitrix/click.php?goto=http://audiostatus.ru/bitrix/redirect.php?goto=http://r1.moscow/bitrix/redirect.php?goto=https://telegra.ph/Kuda-obrashchatsya-s-zhalobami-na-upravlyayushchuyu-kompaniyu-09–19</a>
1× slots casino официальный сайт
1×slot зеркало Бездепозитные бонусы — это подарки от казино в виде бонусных средств либо фриспинов для игровых автоматов, которые начисляются на аккаунт игрока последствии процедуры регистрации на веб-сайте заведения. Для получения этих поощрений депо не потребуется. <a href=https://e-participationyouth.eu/forum/profile/davidmix/>https://e-participationyouth.eu/forum/profile/davidmix/</a> Промокод – определённая комбинация знаков, коию необходимо ввести в подходящее фон при разработке учетной записи или активировать в личном профиле игрока в разделе с призами. x1 slots 1хслотс регистрация перейти на 1×slots Для получения приза нужно пригласить в забаву нового клиента. Казино начислит пригласившему фиксированный процент от взносов приглашённого вид приза: чаще всего его размер не выше 10%. Срок деянья приза правило не превышает месяца: пригласивший получает приз в зависимости от проигранных ставок приглашённого в 1-ый луна игры.
1×slots мобильная версия войти казино
Но надо думать, собственно снабжая юзеров этими бонусами, казино увлекается спонсированием. Ведь объемы вознаграждений, главном, не великие (средним объемом от 5 до 20 $). И на эти средства налагаются конкретные обстоятельства и ограничения, неотклонимые к исполненью игрока, случае в последствии он вожделеет получить все свои выигранные финансы. Для всех бездепозитных призов функционирует максимальный предел на выигрыш. Он указывает предельную необходимую, коию у получить, играя на бонусные кредиты. Как лишь вас получится выполнить притязания вейджера, возможный максимум будет переведен с бонусного счета на главный, а остаток несомненно списан. <a href=https://www.google.dj/url?q=https://doctorlazuta.by/>https://www.google.dj/url?q=https://doctorlazuta.by/</a> Такой бесплатный эквивалент средств зачисляется на профиль пользователя после воплощения притязаний и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений возможен лишь последствии осуществления вейджеровых условий. 1×slot зеркало рабочее регистрации на телефон придет С не отыгранным бонусом запрещается превосходить объем максимальной ставки. Нарушение сего обстоятельства в аннулирование выигрыша.
1×slots официальный сайт зеркало
Многие казино предоставляют в маркетинговых целях безвозмездные бонусы необыкновенно для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой вебсайт по партнерской ссылке с нашего портала.Размер призов чаще всего чисто символический и не выше 50 рублей. Приятно, но осязаемым бустом при навряд станет. <a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=975503#pid975503>1хслотс официальный сайт зеркало</a> Разные казино имеют собственные управляла по выведению выигрыша. Для бездепозитных призов принимаются достаточно высочайшие притязания. Часто онлайн-казино советуют отыграть бонусное поощрение до ста раз в игровых автоматах. Например, если игрок получил бесплатно 10 $, то необходимо несомненно отыграть их, поставив 1 тыщу спинов по 1 доллару любой. Стоит обозначить(означить), что не все казино выделяют вероятность выступать на бонусы и не во всех развлекательных заведениях идентичные правила для отыгрывания. Некоторые казино воспрещают выступать на призы в блекджек или ограничивают ставки до 5 %, что значительно наращивает в десятки раз количество необходимых игр. Также учтите, что некоторые игровые платформы сужают перечень государств, которые готовы получить предложенный бездепозитный бонус за регистрацию. К примеру, существуют онлайн-заведения, выдающие сходственные призы только жителям конкретных стран. К образцу, интернет казино 777 Оригинал предоставляет бездепозитный бонус только игрокам из России и государств СНГ. Или напротив, пичкают вознаграждением всех, не обитателей некоторых стран (следует этого, стопам пристально изучать список, дабы впоследствии не появилось никаких вопросов и жалоб).Минимального оборота. Этот предел устанавливается вейджером — же игрок не поиграет на установленную необходимую, вывод средств несомненно недоступен. 1×slots официальный сайт, скачать <a href=http://sunhelp.co.kr/bbs/board.php?bo_table=qa&wr_id=19680>http://sunhelp.co.kr/bbs/board.php?bo_table=qa&wr_id=19680</a>
1×slots сайт зеркало
Следует подчеркнуть, что бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам либо с конкретным кодом.Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, solid зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. <a href=http://www.pawsarl.es/blog/%D1%81%D0%B0%D0%B9%D1%82%D1%8B-%D1%81%D0%BE-%D1%81%D0%BB%D0%BE%D1%82-%D0%B8%D0%B3%D1%80%D0%B0%D0%BC%D0%B8.html>http://www.pawsarl.es/blog/%D1%81%D0%B0%D0%B9%D1%82%D1%8B-%D1%81%D0%BE-%D1%81%D0%BB%D0%BE%D1%82-%D0%B8%D0%B3%D1%80%D0%B0%D0%BC%D0%B8.html</a> 1×slots регистрация 1×slots casino 777 online
<b>Смотреть еще похожие новости:</b>
<a href=http://thienduongcacanh.com/threads/1×-slot-zerkalo.12799/>1× слот зеркало</a>
<a href=https://forum-pravo.com.ua/showthread.php?p=24820&posted=1#post24820>1хслотс зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При пользовании бездепозитным призом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют несколько видов лимитов: Практически все интернет казино с бездепозитным бонусом за регистрацию предусматривает программку преданности — систему одобрения постоянных клиентов, которая состоит из колличества значений. При достижении игроком очередного значения на его счёт поступает приз. Чем повыше степень — тем щедрее бонус.
#993 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino скачать приложение букмекерская контора фонбет официальный сайт <a href=https://7club7.com/>букмекерская контора скачать приложение</a> ап казино рабочее казино <a href=https://rumafia.news/>порно с Варвара Субботина</a> Приезжева Екатерина Геннадьевна порно 7k casino скачать порно с Юлия Ефимова, пловчиха 7k casino официальный сайт porno Мира Андреева (теннис) казино рулетка казино на деньги
DiskiPlus casinos xyz DiskiPlus porno Анна Сидорова, керлингистка <a href=https://www.diskiplus.ru>DiskiPlus порно с Александр Головин (футбол)</a> DiskiPlus porno Екатерина Ефременкова, шорт-трекистка DiskiPlus порно с Александр Большунов (лыжные гонки) <a href=https://diskiplus.ru>DiskiPlus Радченко Светлана Юрьевна порно</a> DiskiPlus Матвиенко Валентина Ивановна порно DiskiPlus Комарова Наталья Владимировна порно DiskiPlus порно с Гатагова Ольга Анатольевна DiskiPlus 1×bet сейчас DiskiPlus Яровая Ирина Анатольевна порно DiskiPlus скачать букмекерскую контору DiskiPlus лучшие казино бесплатно
#994 Charlesgunnyhttp://filmkachat.ru
1×слотс казино
Максимальный размер ставки, который невозможно превосходить пока бонус не несомненно всецело отыгран. В случае нарушения сего верховодила, приз и выигрыш с него станут аннулированы. <a href=http://filmkachat.ru/>1хслотс 1хслотс регистрация перейти на 1×slots</a> Бонус начисляется игроку сразу в регистрации и прохождения верификации в казино и не просит от клиента внесения депозита. Как управляло, размер приза в схожем случае достаточно скромный, однако разрешает новичкам познакомиться с забавой без риска настоящими средствами. <a href=https://companylistingnyc.com/listings/kompleksowy-skup-aut-wroclaw-od-wyceny-do-sprzedazy/>https://companylistingnyc.com/listings/kompleksowy-skup-aut-wroclaw-od-wyceny-do-sprzedazy/</a> 1×slots на любой вкус как пройти регистрацию <a href=http://www.mignonmuse.com/bbs/board.php?bo_table=free&wr_id=254095>http://www.mignonmuse.com/bbs/board.php?bo_table=free&wr_id=254095</a> Вы не в коем случае ни чем не рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный приз, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс изучить игровые автоматы, научится регулировать менять ставки и полосы, изучать бонусные забавы и их выигрышные композиции, ну в конце концов просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные средства, которые возможно отыграть и исключить, но просто на демо счет, что, этим самым адреналин в крови более повысится а пульс забьется с частым ритмом!Бесплатные призы казино без депо можно получить в виде денежных средств на бонусный счет (исключить их можно лишь в отыгрыша), фриспинов, игры или кешбэк-бонуса.
1×slots рабочее зеркало на сегодня
Выбирая безвозмездный приз, внимательно изучайте управляла. Убедитесь, собственно вам возможно брать участие в промоакции. Уточните, в каких играх можно исполнять обстоятельства вейджера. При надобности задавайте вопросы представителям саппорта. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=https://www.diekassa.at/kassenwiki/index.php?title=Shisha_Tobacco_From4_Eur>https://www.diekassa.at/kassenwiki/index.php?title=Shisha_Tobacco_From4_Eur</a> Вейджер в переводе с британского означает «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша полученного приза, в нашем случае бездепозитного. Число ставок имеет — важно лишь набрать сумму, пропорциональную сумме одобрения.Возможность протестировать новые игры, не рискуя собственными своими и создать собственную тактику забавы. 1× slots зеркало Бездепы обычно предлагают с отыгрышем — мгновенно вывести выигранные средства нельзя. Перевод средств со счета будет возможен в того, как пользователь выполнит все притязания казино, а сумма имеет превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, на коих клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней в активации.
1 хслот регистрация в 1×slots casino
Вывод выигрыша с бездепозитных бонусов казино – великодушный подарок от азартных клубов. Но дабы исключить свой доход, нужно выполнить ряд критерий: <a href=http://vrelize.ru/bitrix/redirect.php?goto=http://chat-off.com/click.php?url=http://rodos74.ru/bitrix/click.php?goto=https://telegra.ph/Kak-vzyat-akademicheskij-otpusk-vo-vremya-obucheniya-v-aspiranture-s-sohraneniem-otsrochki-ot-prizyva-na-voennuyu-sluzhbu-YUridi-09–23>http://vrelize.ru/bitrix/redirect.php?goto=http://chat-off.com/click.php?url=http://rodos74.ru/bitrix/click.php?goto=https://telegra.ph/Kak-vzyat-akademicheskij-otpusk-vo-vremya-obucheniya-v-aspiranture-s-sohraneniem-otsrochki-ot-prizyva-na-voennuyu-sluzhbu-YUridi-09–23</a> 1×slots казино мобильная версия
1х слот 1хслотс регистрация перейти на 1×slots
Зарегистрируйтесь. Для регистрации чаще всего довольно установить свой номер аппарата и почтовый адрес, в чего ввести приобретенный код из СМС. Возможно, требуется указать промокод. В правилах промоакции несомненно написано, где его бы вводить. Иногда это хотелось создавать при регистрации, времени — уже в создания личного офиса, на отдельной страничке. <a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=369307>1×slots казино мобильная версия</a> К примеру, игроку выдаются бесплатные средства в заведении в размере пятидесяти либо ста долларов (вейджер на которые сочиняет 100х). То есть, любому новоприбывшему игроку выскакивает привлекающая картинка, кот-ая обещает выплату всех зачисленных фирмой средств. Не стоит внимания на казино бонус за регистрацию без депо с слишком великой или очень малеханькой суммой призов, потому что, том кропотливо изучив все обстоятельства, тут вероятнее всего, будет некий подкол. 1хслотс официальный сайт зеркало <a href=http://www.pcddbbs.com/space-uid-12004.html>http://www.pcddbbs.com/space-uid-12004.html</a>
1хслотс 1хслотс регистрация перейти на 1×slots
Возможность протестировать свежие забавы, не рискуя личными средствами и создать собственную стратегию игры.Каждая игровая платформа выделяется условиями по получению и отыгрышу бездепов. В правилах детально расписаны временные рамки, за которые надо(надобно) прокрутить вейджер. Также не забывайте тему наибольший объем ставки и наивысшую сумму выплаты. С иной стороны, чтобы получить бездепозитные призы казино, довольно истратить не более 1 минуты. Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, solid только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. <a href=http://donga-well-ageing.org/bbs/board.php?bo_table=free&wr_id=1406913>http://donga-well-ageing.org/bbs/board.php?bo_table=free&wr_id=1406913</a> Также посещают случаи, когда казино начислит обсужденный бонус последствии регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Мы собрали и опубликовали список превосходнейших бездепозитных казино с призами за регистрацию, коие гарантируют великодушные выигрыши и мгновенные выплаты.Возможность протестировать новые игры, не рискуя личными средствами и создать личную тактику игры.
<b>Смотреть еще похожие новости:</b>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=409976>1×slot казино зеркало</a>
<a href=https://forum.gamesims.sk/memberlist.php?mode=viewprofile&u=7407>1×slots промокод при регистрации</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Маркетинговая политика всех игорных интернет-клубов должна одевать разнородный нрав. И случае гонорары на депозит работают для того, дабы стимулировать заносить депозиты и поощрять уже существующих пользователей, то бездепозитный приз в казино либо приз за регистрацию в казино, этого всего, рассчитан на расширение базы покупателей.
#995 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Арина и Дина Аверины, гимнастки часы казино <a href=https://kompromat1.online/>Елизавета Боярская</a> vodka casino вавада казино <a href=https://kompromat1.online/>up casino официальный</a> bitz casino casino рабочее зеркало казино фильм сайты казино casino riobet Лут Оксана Николаевна порно сайты казино
DiskiPlus Светлана Ходченкова DiskiPlus пинко casino <a href=https://www.diskiplus.ru>DiskiPlus Скворцова Вероника Игоревна порно</a> DiskiPlus casino рабочее зеркало DiskiPlus cometa casino <a href=https://www.diskiplus.ru>DiskiPlus порно с Васильева Татьяна Викторовна</a> DiskiPlus 1×bet скачать приложение DiskiPlus 1×bet зеркало рабочее DiskiPlus porno Виктория Баркова, легкоатлетка DiskiPlus водка казино DiskiPlus порно с Диана Шнайдер (теннис) DiskiPlus Преподобная Надежда Александровна порно DiskiPlus порно с Карен Хачанов (теннис)
#996 Charlesgunnyhttp://filmkachat.ru
1× slots сайт
Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации подарка необходимо подтвердить электронную почту и привязать телефон;Процесс доказательства личности может взятьвдолг(взятьвзаймы) от 1-го денька до недели. Если заказчик допустил нибудь оплошность при заполнении паспортных данных, то ему идет обратиться с проблемой в службу поддержки онлайн-казино. <a href=http://filmkachat.ru/>1 x slots casino</a> Бонус начисляется игроку сразу последствии регистрации и прохождения верификации в казино и не настятельно от посетителя внесения депо. Как управляло, размер приза в схожем случае достаточно скромный, впрочем дозволяет новичкам познакомиться с игрой без риска реальными средствами. <a href=https://yoomark.com/content/mastering-brand-extension-strategy-market-success>https://yoomark.com/content/mastering-brand-extension-strategy-market-success</a> Отзывы читателей о бонусных акциях помогут составить впечатление, но не запамятовывайте о субъективности собственных комментариев. 1хслотс рабочее зеркало <a href=https://mantiseye.com/community/walterobest>https://mantiseye.com/community/walterobest</a> У любого игорного клубы различные вейджеровые обстоятельства. Чтобы вы гарантировано сумели выполнить их, мы дадим несколько советов. Если система начислила небольшую сумму, надо делать великие ставки – остановитесь на 10–30 центах. Как лишь сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В неприятном случае превосходнее присмотреться к другому автомату.
скачать 1×slots официальный сайт
<a href=https://fuckseo.biz/members/rabofreepi.4554/>1×slots casino регистрация</a> 1хслотс казино зеркало Допустим, за регистрацию вы возымели бездеп в размере 2 000 руб. С вейджером х30. В этом случае светит устроить ставок, на совместную необходимую в 60 000 руб. (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать реальные средства. Однако не запамятовывайте, собственно с каждого подарка получится вывести определённую необходимую (чаще всего менее $200).Частенько новенькие не разумеют, как активировать подарки либо вывести 1-ый выигрыш. Для подобных случаев наша команда обрисовала основные определения – что такое фриспины, вейджер, как его отыграть, зачем необходимо проходить верификацию. <a href=https://forums.twcpilots.com/member.php?action=profile&uid=867>https://forums.twcpilots.com/member.php?action=profile&uid=867</a> 1×slots сайт зеркало
1×slot зеркало рабочее регистрации на телефон придет
С этими ординарными советами любое казино с призом за регистрацию способно принести в разы больше выгоды и выгоды.На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не можете активировать и получить бездепозитный приз. Наличие у игрока 2 аккаунта. Запрещено создавать некоторое профилей для неоднократного получения бездепов. <a href=https://www.anobii.com/en/collections/6160314>https://www.anobii.com/en/collections/6160314</a> 1×slots мобильная версия войти казино Игрокам не принимать приветственный приз как гарантированный метод получить крупный выигрыш, но это отличная вероятность без расходов оценить перечень казино.Также существуют онлайн-платформы азартных игр, которые применяют раздачу бездепозитных призов в особые даты (как для казино, так и для игрока). Помимо сего, действующие геймеры того имеют вероятность получить схожие призы за собственную работа (к примеру, за увеличения уровня или за похожие достижения).
1×slots сайт
Игрокам не следует принимать приветственный приз как гарантированный метод получить крупный выигрыш, хотя это замечательная вероятность без расходов расценить перечень казино.Выбрать казино с бездепозитным бонусом. У нас на сайте представлен перечень наилучших онлайн казино, которые предлагают своим игрокам великодушные призы за регистрацию. Чтобы получить вероятность вывести прибыль с бездепозитного бонуса в казино, нужно выполнить ряд условий: Бездепозитный приз часто имеет замерзнуть легкодоступным сразу последствии окончания регистрации, поскольку правило единственным притязанием к нему считается регистрация, а после ревизия вашей свежей учетной записи. 1×slots сайт <a href=http://bv.izmail.es/index.php?subaction=userinfo&user=relievedrash98>http://bv.izmail.es/index.php?subaction=userinfo&user=relievedrash98</a> Чтобы бездеп не был начислен на Ваш акк, Вам надо активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк механически, а Вы не расчитываете его использовать, обратитесь в саппорта с просьбой отменить бездепозитный приз.Любой выигрыш по ставке выше установленного лимита несомненно считаться недействительным. То есть ставка не несомненно засчитана при отыгрыше, а в случае выигрыша его сумма не поступит на счёт клиента — результат игры несомненно полностью аннулирован.
1×slot казино зеркало
Как только вы отыграли вейджер и средства с бонусного баланса перебежали для на настоящий счет, Вы неустрашимо сможете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (устроить наименьший депо к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депо). <a href=https://eduli.net/home.php?mod=space&uid=51164>https://eduli.net/home.php?mod=space&uid=51164</a> Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала быстрые выводы. Фишка выплат в том, собственно довольно избрать платёжный инструмент и показать сумму. В большинстве случаев деньги зачисляются на электрические кошельки на 15 минут, а на банковские карты – 1–3 трудящихся денька.Новички не любят незамедлительно же вносить депо. Это обосновано неименьем навыка и сомнением. К счастью, в наше время можно получить бездепозитный приз за регистрацию в казино. Неважно собственно начислит система – фриспины либо кредиты. В любом случае вы не рискуете собственными сбережениями. Это отличная вероятность запустить понравившийся видео слот или же испытывать фортуну в настольных играх. онлайн казино 1×slots Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы моментально получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, появляется реальный шанс победу!Также учтите, собственно кое-какие игровые платформы сужают список государств, которые способны получить предложенный бездепозитный бонус за регистрацию. К образцу, есть онлайн-заведения, выдающие похожие призы только жителям определенных государств. К образцу, онлайн казино 777 Оригинал дает бездепозитный бонус только игрокам из России и стран СНГ. Или напротив, снабжают вознаграждением всех, не жителей неких государств (исходя из сего, стопам внимательно учить перечень, чтобы потом не появилось практически вопросов и претензий).
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.bandariklan.com/showthread.php?tid=563424>онлайн казино 1×slots</a>
<a href=https://polnyi-pisec.info/threads/1×slot-zerkalo-sajta.843/>1хслот зеркало сайта</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Игрокам не следует принимать приветственный бонус как гарантированный метод получить большой выигрыш, но это замечательная вероятность без затрат оценить перечень казино. Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном сайте и выполните вход в собственный кабинет, чтобы отобрать благотворительные вращения с вейджером х40;
#997 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
Свежий бонус начисляется повторяющий валютных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в использовании своими, в случае отыгрыша оператор возможность ввести ограничение на вывод денег. <a href=http://filmkachat.ru/>1хслотс рабочее зеркало</a> <a href=https://biolinky.co/kalinka-0588>https://biolinky.co/kalinka-0588</a> Бездепозитные призы в казино без пополнения 2022 — это определенная сумма денег либо valinomycin spins вращения, коие предоставляются первым гостям за регистрацию на веб-сайте казино вид бездепозитного бонуса, и дает вам возможность помощью казино без пополнения опробовать предложения (игр), с дальнейшей привилегией вывода средств при исполнении всех установленных верховодил. 1хслотс казино зеркало <a href=https://www.wow-interfaces.com/users/Jaspermic>https://www.wow-interfaces.com/users/Jaspermic</a>
1хслот зеркало сайта
Бездепозитные бонусы реальными деньгами, коие возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадали.Отзывы читателей о бонусных промоакциях посодействуют составить впечатление, но не запамятовывайте о субъективности собственных объяснений. <a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=11590>1×slots регистрация на сайте</a> 1×slots официальный сайт мобильная версия Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша бонусов. Заведения всегда устанавливают максимальную ставку, допустимую по условиям вейждера. <a href=https://www.new.jesusaction.org/bbs/board.php?bo_table=free&wr_id=4357890>https://www.new.jesusaction.org/bbs/board.php?bo_table=free&wr_id=4357890</a> 1×slots казино зеркало Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.
1× slots регистрация в 1×slots casino
В игровых клубах без лицензии Вы покупаете „кота в мешке“ и если, тогда, неоднозначных ситуаций нет возможности куда-то пожаловаться и обосновать свою правоту. <a href=https://tutorialslots.com/index.php?qa=118748&qa1=%D1%84%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B-%D0%B0%D0%BF%D1%82%D0%B5%D0%BA-%D0%B2-%D1%80%D0%BE%D1%81%D1%81%D0%B8%D0%B8-%D1%82%D1%80%D0%B5%D0%BD%D0%B4%D1%8B-%D0%B8-%D0%BF%D1%80%D0%BE%D0%B3%D0%BD%D0%BE%D0%B7%D1%8B-%D0%BD%D0%B0–2024-%D0%B3%D0%BE%D0%B4>https://tutorialslots.com/index.php?qa=118748&qa1=%D1%84%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B-%D0%B0%D0%BF%D1%82%D0%B5%D0%BA-%D0%B2-%D1%80%D0%BE%D1%81%D1%81%D0%B8%D0%B8-%D1%82%D1%80%D0%B5%D0%BD%D0%B4%D1%8B-%D0%B8-%D0%BF%D1%80%D0%BE%D0%B3%D0%BD%D0%BE%D0%B7%D1%8B-%D0%BD%D0%B0–2024-%D0%B3%D0%BE%D0%B4</a> В большинстве заведений устроить это можно по e-mal, по номеру аппарата, спустя социальную сеть или гугл-аккаунт.Бездепозитные бонусы в казино без пополнения 2022 — это конкретная сумма денег или gratuitous spins вращения, коие предоставляются первым постояльцам за регистрацию на веб-сайте казино вид бездепозитного приза, и дает вас вероятность с казино без пополнения опробовать услуги (игр), с дальнейшей привилегией вывода средств при исполненьи всех установленных управлял. 1×slots зеркало видели такую регистрацию на Но разу не запамятовывайте пристально читать правила участия в бонусных промоакциях. Если вы нарушите желая бы одно условие, позднее вы не можете устроить недоразумение с администрацией.Каждая игровая перрон выделяется критериями по получению и отыгрышу бездепов. В правилах детально расписаны временные рамки, за которые надо(надобно) прокрутить вейджер. Также не забывайте про максимальный размер ставки и наивысшую сумму выплаты. С иной стороны, чтобы получить бездепозитные бонусы казино, достаточно израсходовать менее 1 минутки.
1×slots скачать на айфон
Не хотите поиграть в азартные забавы, не рискуя своими средствами, хотя получая в все выплаты? Подобную возможность предоставляют все превосходнейшие порталы с азартными увеселениями. В их числе много правдивых и надежных интернет-казино на русском языке. Они завлекают свежих пользователей различными поощрительными событиями, включая бездепозитные, или благотворительные призы. 1×slot зеркало <a href=http://ap-service.kz/index.php?subaction=userinfo&user=meekexample73>http://ap-service.kz/index.php?subaction=userinfo&user=meekexample73</a>
1×slot зеркало
<a href=http://geoexpert.ru/bitrix/redirect.php?goto=http://yaguo.ru/links.php?go=http://flagman.repair/bitrix/rk.php?goto=https://telegra.ph/Kak-otmenit-arest-scheta-v-Sberbanke–poshagovoe-rukovodstvo-dlya-dolzhnikov-09–23>http://geoexpert.ru/bitrix/redirect.php?goto=http://yaguo.ru/links.php?go=http://flagman.repair/bitrix/rk.php?goto=https://telegra.ph/Kak-otmenit-arest-scheta-v-Sberbanke–poshagovoe-rukovodstvo-dlya-dolzhnikov-09–23</a> Также есть онлайн-платформы азартных игр, коие применяют раздачу бездепозитных призов в особые даты (как для казино, так и для игрока). Помимо этого, действующие игроки также имеют возможность получить похожие призы за собственную деятельность (к примеру, за повышения значения либо за похожие достижения). 1хслот зеркало Пoдтвepдить личнocть клиента. Для удачного вывода средств, нужно подтвердить лицо посетителя. Нa этaпe вepификaции пpoфиля, работники службы безопасности обязаны убедиться, что у игрока более один акк. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не может исключить свой выигрыш, если у него будет некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы.Да, у безвозмездных бонусов есть недостатки. Прежде всего, они обыкновенно маленькие. Кроме такого, условия вейджера по ним всегда жесткие. Но все же отсутствие риска делает их довольно красивыми для клиентов.
<b>Смотреть еще похожие новости:</b>
<a href=http://yamato-ryu.ru/communication/forum/index.php?PAGE_NAME=message&FID=1&TID=45002&MID=9748&sessid=394b818b715799b2d36b3d6ea80c0270&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1×slots casino регистрация 1×slots review live</a>
<a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=11571>казино 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриплей-бонусы. Бонусы за бесплатную игру есть лишь в неких клубах. Они зачисляются незамедлительно после творенья профиля и срабатывают недолговременное время. Если у вас нет времени истратить средства, они просто закончатся. Что касается времени, правило бонусы срабатывают протяжении одного часа. Прежде всего, не забывайте периодически заглядывать на страницу обзоров бездепозитных бонусов. Они шаг за шагом разглядывают наиболее интересные предложения ведущих игорных порталов.
#998 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Кирьянова Дарья Борисовна top casino <a href=https://specreporter.com/>порно с Никита Кучеров (хоккей)</a> 1×bet бесплатно 1×bet на андроид <a href=https://rucriminal.info/>Лут Оксана Николаевна порно</a> ев казино bitz casino скачать 1×bet букмекерские конторы в россии pin up casino пин ап Приезжева Екатерина Геннадьевна порно порно с Каролина Севастьянова
DiskiPlus букмекерская контора фонбет DiskiPlus 1×bet сайт 1×bet xyz <a href=https://www.diskiplus.ru/>DiskiPlus casino pin официальный</a> DiskiPlus Ирина Горбачева DiskiPlus porno Юлия Пересильд <a href=https://diskiplus.ru>DiskiPlus ramenbet casino</a> DiskiPlus porno Александр Соболев (футбол) DiskiPlus 1×bet зеркало на сегодня 1×bet xyz DiskiPlus unlim casino DiskiPlus порно с Елена Никитина, скелетонистка DiskiPlus порно с Владимир Минеев (ММА) DiskiPlus казино сегодня DiskiPlus порно с Юлия Ефимова, пловчиха
#999 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slotscasino 56 online
Акции, приуроченные к календарным дням, случаются рассчитаны как на всех юзеров, например и на категории: например, подарок на 8 марта девушкам-игрокам или мужчинам на 23 февраля.Также учтите, что кое-какие игровые платформы сужают список государств, которые готовы получить предложенный бездепозитный бонус за регистрацию. К примеру, существуют онлайн-заведения, выдающие похожие бонусы лишь жильцам конкретных стран. К образцу, онлайн казино 777 Оригинал предоставляет бездепозитный приз только игрокам из России и стран СНГ. Или наоборот, пичкают вознаграждением всех, считая обитателей некоторых стран (из этого, идет внимательно учить перечень, дабы потом не появилось практически вопросов и претензий). <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные методы и расценить необыкновенности, труднодоступные при этой в демо режиме. Многие свежие клиенты перебегают в количество постоянных, а оператор получает длительную выгода. <a href=https://www.therookies.co/projects/79486>https://www.therookies.co/projects/79486</a> Шаг 4. Активация. Внимательно выучите условия, информацию по ограничениям и сроке действия бонусного предложения. Разобравшись с правилами, возможно активировать приз в личном кабинете (времени ? с внедрением промокода) или по запросу в саппорт.Бездепозитный бонус предоставляется новому игроку за определенные деянья. Часто подарок в виде денег или фриспинов выдается за регистрацию, благодаря чему юзер получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. онлайн казино 1×slots <a href=https://jp.sociallist.org/submit.php?url=https%3A%2F%2Fmucho-rest.ru%2Fburgers%2F&title=%D0%B4%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0+%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D0%BE%D0%B2&tag=patheticparish4&lang=nl&show_all=1&text=%5Burl%3Dhttps%3A%2F%2Fmucho-rest.ru%2Fburgers%2F%5D%D0%B4%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0+%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D0%BE%D0%B2%5B%2Furl%5D>https://jp.sociallist.org/submit.php?url=https%3A%2F%2Fmucho-rest.ru%2Fburgers%2F&title=%D0%B4%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0+%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D0%BE%D0%B2&tag=patheticparish4&lang=nl&show_all=1&text=%5Burl%3Dhttps%3A%2F%2Fmucho-rest.ru%2Fburgers%2F%5D%D0%B4%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0+%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D0%BE%D0%B2%5B%2Furl%5D</a> Не стоит путать забаву в демо и использование призов. В демонстрационном режиме игрок имеет оценить механику слота, сюжет и оформление. Но забава ведется на относительные кредиты, поэтому отсутствует основное ? ощущение пыла. Активируя промокод или фриспины, клиент раньше не тратит средства средства на игровые автоматы, но может сорвать настоящий куш!Каждый игры обязан сперва детально выучить обстоятельства по получению и отыгрышу приглянувшегося дара. Если всё устраивает, поспешите арестовать бесплатные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик сейчас начать вертеть барабаны топовых слотов.
1хлот регистрация в 1×slots casino
Вейджер не более х30–35 считается применимым. Опытные игроки заявляют, собственно с этим вейджером реально остаться в плюсе, в верно подойти к выбору игрового аппарата. <a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=180926>1х слотс зеркало регистрация в 1×slots casino</a> 1хслотс рабочее зеркало Некоторые клубы автоматически начисляют бонус на акк игрока после исполнения условий получения, но бывают ситуации, когда бонус надо(надобно) активировать игроку самому. Есть количество методов активации бонуса:Например, игрок получил 500 рублей при разработке аккаунта и должен отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., потребуется сделать 875 спинов для полного отыгрыша. <a href=https://www.forum-motorrad.net/members/24492-jefferyelosy.html>https://www.forum-motorrad.net/members/24492-jefferyelosy.html</a> Баланс игрока пополняется на подходящую сумму. К ней используется вейджер, обозначенный в правилах акции. Вывести выигрыш возможно несомненно в как, как пользователь устроит требуемый размер ставок из собственных средств. В редких случаях бездеп трудится в формате Free Play. На счет пользователя зачисляется крупная сумма, и предоставляется небольшой срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по окончании этого периода сумма на счету будет превосходить первоначальную, то разность возможно будет исключить либо применять для дальнейших ставок. 1хслотс зеркало Частенько новички не знают, как активировать презенты или исключить 1-ый выигрыш. Для подобных случаев наша команда обрисовала главные определения – собственно такое фриспины, вейджер, как его отыграть, зачем нужно проходить верификацию.Шаг 5. Использование и отыгрыш. Бездеп обязан быть использован в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.
казино 1×slots
Подтверждение индивидуальной информации. Все казино просят от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у юзера других аккаунтов (мультиаккаунт запрещен).Ещё одно распространённое акционное предложение – симпатичный подарок с сомнительными притязаниями. К примеру, клуб сулит $100 в качестве бездепа, но с вейджером х80 либо х100. Отыграть подобный вейджер фактически невероятно и поэтому чем концентрироваться на больше интересных акциях. <a href=http://kamaz-ukraine.com/index.php?subaction=userinfo&user=sincerecrook35>http://kamaz-ukraine.com/index.php?subaction=userinfo&user=sincerecrook35</a> Казино выводит деньги лишь на ту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного приза, Вам сначала необходимо восполнить счет. В неких клубах ограниченный перечень методов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет именно с данных платежных способов, коие доступны для вывода. 1×slots зеркало регистрацию более популярный вариант это Существуют казино с призом за регистрацию, каких довольно модны фриспины в интернет казино впоследствии регистрации в конкретных забавах. Они встречаются числе почаще безвозмездных поощрений или классических призов в казино без инвестициям. Например, игрок регистрирует счет, на который начисляются безвозмездные забавы, приз за регистрацию повторяющий безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса в выигрывает истинные средства, которые в последствии можно удачно исключить из заведения на собственную платежную систему. То есть, все шансы вывести средства без рисков своими деньгами. Регистрация, за которую геймер получит призы, займет несколько, а благодаря данному возможно прирастить 5 евро поощрений до тыс. И без всяких проблем вывести их.
1×slots casino зеркало рабочее
Возможность сыграть вспомогательное соревнование (а от и несколько) совершенно безвозмездно, а выигрыш, же, поступает на счёт игрока. Во время игры в казино, выигрыши, приобретенные спасибо безвозмездным призовым фондам, суммируются и срабатывают в совместную сумму для отыгрывания. Однако, случае удача улыбнется и получится отыграть все бонусы, игровое заведение гарантированно допустит вывести денежные свои. Сумма вывода будет в от лимита, утвержденного непосредственно в этом учреждении. Поэтому, внимательно надо(надобно) разбирать управляла выдачи анлимитных депо. 1×slos регистрация в 1×slots casino <a href=https://lovewiki.faith/wiki/User:GretaDube474>https://lovewiki.faith/wiki/User:GretaDube474</a> Как лишь получите бездеп в казино, всё также не забывайте проверять электрическую почту. Некоторые игорные клубы день радуют активных гэмблеров приятными бонусами. Чаще всего получить подарок можно в преддверии праздника, на денек рождение, за вербование приятеля. А также распространённым бонусом считается надбавка к депозиту. Нужно более восполнить счёт, и азартное заведение увеличит его на 50–100%.Бонусы без депо при регистрации считаются самыми красивыми как для опытнейших игроков, например для и новичков. Получив такое вознаграждение, заказчик имеет играть на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а также обстоятельства их активации и выигрыша.
1×slots сайт
Для вывода средств бонус надо(надобно) несомненно отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами акции и вариантами отыгрыша бездепозитного приза до его получения, дабы избежать конфликтных обстановок.Это один из основных показателей привлекательности презента. С завешенным коэффициентом даже мастера не сумеют выполнить обстоятельства по отыгрышу. И не, насколько привлекательно смотрится предложение – бездепозитный приз казино в объеме $500 или $1 000. Чтобы новички попревосходнее вдумались, собственно же такое вейджер, мы разберём на образце. За привлечение друга ? масштабах партнерской программы заказчик получает вознаграждение за привлечение новых пользователей.Бездепозитные бонусы — это подарки от казино в виде бонусных средств либо фриспинов для игровых автоматов, которые начисляются на акк игрока в процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депо не требуется. <a href=http://dalcomi.co.kr/bbs/board.php?bo_table=free&wr_id=30177>http://dalcomi.co.kr/bbs/board.php?bo_table=free&wr_id=30177</a> 1×слот регистрация в 1×slots casino В основном случаев безвозмездные призы начисляются в кредитах, коие нельзя незамедлительно исключить со счета. Прежде их нужно отыграть по установленным правилам. Эти притязания принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже.
<b>Смотреть еще похожие новости:</b>
<a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=9700&TITLE_SEO=9700-kharakteristiki-tovarov&MID=615558&result=reply#message615558>1×slots мобильная версия войти казино</a>
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=73034>1хслотс регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При малый сумме приза рекомендуется выступать по низким ставкам, а использовать наибольшие другого лишь сомнений случае, в вейджер очень немалый, а время на отыгрыш крепко ограничено. Для получения приза нужно ознакомиться с программой преданности казино и устроить ставки на необходимую, необходимую для перехода на следующий степень.
#1000 Charlesgunnyhttp://filmkachat.ru
1× slots casino официальный сайт
Разные казино имеют собственные верховодила по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высокие притязания. Часто онлайн-казино советуют отыграть бонусное одобрение до ста один в игровых автоматах. Например, в игрок получил безвозмездно 10 $, то необходимо несомненно отыграть их, поставив одну тыщу спинов по одному доллару каждый. Стоит обозначить(означить), что не все казино выделяют вероятность выступать на бонусы и не во всех развлекательных заведениях идентичные правила для отыгрывания. Некоторые казино запрещают играть на бонусы в блекджек либо ограничивают ставки до пяти процентов, собственно существенно увеличивает в десятки один количество нужных игр.Как прочие акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такого предложения являются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает свежих гостей и дозволяет им составить впечатление о функционале, не рискуя значительными совокупностями. <a href=http://filmkachat.ru/>1×slots casino зеркало</a> <a href=https://www.designingbuildings.co.uk/wiki/User:Archicgi>https://www.designingbuildings.co.uk/wiki/User:Archicgi</a> Для тех, кто лишь взвешивает испытать свою фортуну, а для профессиональных игроков, отыскивающих новые площадки для выигрышей, ведущие лицензированные казино часто организуют разные акции, и одно из лучших предложений за время – как для начинающих, так и для профессиональных игроков – бездепозитный приз за регистрацию.Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=https://lustbb.com/member.php?action=profile&uid=5042>https://lustbb.com/member.php?action=profile&uid=5042</a>
1×slots регистрация
Не желаете поиграть в азартные игры, не рискуя средствами средствами, хотя получая в все выплаты? Подобную вероятность предоставляют все наихорошие порталы с азартными веселиями. В их количестве количество честных и надежных интернет-казино на русском языке. Они завлекают новых пользователей различными поощрительными мероприятиями, включая бездепозитные, или благотворительные бонусы.Таким образом, заведение пытается продемонстрировать себя своим вероятным геймерам, а такой рекламный ход как казино бонус без депозита за регистрацию завлекает очень большое внимания к игорному заведению и обеспечивает неизменный струю свежих гостей и будущих посетителей игрового онлайн клуба. <a href=https://forumsleague.org/forum/viewtopic.php?f=4&t=33287&p=401346#p401346>1×slots регистрация 1×slots casino 777 online</a> 1×slot зеркало Заработать на бездепозитных призах за регистрацию в казино возможность любой юзер, достигший совершеннолетия.Чтоб получить большой выигрыш, выбирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша. <a href=https://forum.shuanghe.xyz/home.php?mod=space&uid=311663>https://forum.shuanghe.xyz/home.php?mod=space&uid=311663</a> 1×slots casino регистрация Но не мыслить, что снабжая пользователей этими бонусами, казино увлекается спонсированием. Ведь объемы вознаграждений, в, не немалые (средним объемом от 5 до 20 $). И на эти свои налагаются определенные обстоятельства и ограничения, обязательные к выполнению игрока, если в последствии он вожделеет получить все свои выигранные финансы.
1×slots зеркало которую указывали при регистрации кстати
<a href=http://c909201u.beget.tech/user/DoctorLazutakn/>http://c909201u.beget.tech/user/DoctorLazutakn/</a> Принципиальным различием даровых бонусов от призов на депо считается недоступность необходимости вносить средства на аккаунт. Из-за сего их нередко нарекают бездепозитными (not the slightest down payment bonuses).Каждый геймер обязан сначала отчетливо выучить обстоятельства по получению и отыгрышу приглянувшегося подарка. Если всё устраивает, поторопитесь отобрать безвозмездные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик сейчас начать вертеть барабаны лучших слотов. 1хслотс казино зеркало Способы получения бездепа различаются зависимо облика бонуса, который приглянулся игроку. Но вас или надо(надобно) быть зарегистрированным в законном онлайн-казино и доказать свою личность. В общем облике пошаговая аннотация для получения бездепозитного приза смотрится так:Срок активации и время на отыгрыш. Зачисление денег либо фриспинов происходит при активации на требовательно ограниченного периода, похожие требования предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать бонус некоторое дней либо и недель. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с необоснованно высоким вейджером.
1×slots регистрация на 1хслотс
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=10636>1×slots казино мобильная версия</a> Вы не в коем случае ни же рискуете, а только выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс изучить игровые автоматы, выучится регулировать менять ставки и линии, исследовать бонусные игры и их выигрышные композиции, ну в просто зарядится кучей впечатлений! Ведь вы будите выступать на бонусные средства, которые возможно отыграть и вывести, но просто на демо счет, тем самым адреналин в крови еще повысится а пульс забьется с нередким ритмом! 1×slots зеркало регистрацию более популярный вариант это <a href=http://damoa2019.maru.net/bbs/board.php?bo_table=free&wr_id=37896>http://damoa2019.maru.net/bbs/board.php?bo_table=free&wr_id=37896</a> Бездепозитные бонусы за регистрацию в игровых автоматах для собственников онлайн-казино являются частью рекламной кампании, направленной на повышение аудитории сайта. Так они продвигают средства бренды и завлекают новых клиентов.
1×slots зеркало регистрацию более популярный вариант это
<a href=https://zanderzazz62738.shoutmyblog.com/29048608/undress-ai-revolutionizing-digital-imagery-with-deepnude-engineering>https://zanderzazz62738.shoutmyblog.com/29048608/undress-ai-revolutionizing-digital-imagery-with-deepnude-engineering</a> Нет. Казино выдают безвозмездные призы за регистрацию, чтобы, чтобы, дабы заказчик возможность ознакомиться с игровым заведением. А дабы вывести его, необходимо выполнить обстоятельства отыгрыша. 1×slots casino online регистрация Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.
<b>Смотреть еще похожие новости:</b>
<a href=http://medforum.5nx.ru/viewtopic.php?f=4&t=10869>казино 1×slots официальный сайт</a>
<a href=http://miupsik.ru/forums/showthread.php?tid=505030>1×slots официальный зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чтобы без убедиться в превосходстве бездепозитных бонусов, довольно зарегистрироваться в казино и получить одобрение.
#1001 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино вход приложения букмекерских контор <a href=https://slon-ru.com/>1×bet бесплатно</a> самое казино 1×bet на андроид бесплатно <a href=https://krtka.info/>сайте букмекерской конторы фонбет</a> пинко casino 1×bet сайт порно с Юлия Ефимова бк букмекерская контора букмекерская контора фонбет официальный порно с Юлия Ефимова, пловчиха скачать 1×bet на андроид бесплатно
DiskiPlus porno Мария Шарапова DiskiPlus порно с Федор Чалов (футбол) <a href=https://www.diskiplus.ru/>DiskiPlus cat casino</a> DiskiPlus casino бонус DiskiPlus казино фильм <a href=https://www.diskiplus.ru>DiskiPlus казино зеркало сегодня</a> DiskiPlus часы казино DiskiPlus рабочие зеркала казино DiskiPlus бесплатные букмекерские конторы DiskiPlus champion casino DiskiPlus скачать букмекерскую контору DiskiPlus casino официальный зеркало DiskiPlus порно с Георгий Джикия (футбол)
#1002 Charlesgunnyhttp://filmkachat.ru
1×slot официальный сайт
Чтобы играть безвозмездно на настоящие средства в казино, не всегда достаточно просто зарегистрироваться. Иногда нужно выполнить дополнительные действия.При ирге на бонусные свои запрещается играть в игровые автоматы с прогрессивным джекпотом и забавы из радела exist casino. Кроме как, кое-какие казино выделяют бездеп на раз или некоторое конкретных слотов, и в иных играх Вы не можете на них выступать. <a href=http://filmkachat.ru/>1х слотс зеркало регистрация в 1×slots casino</a> <a href=https://www.sideprojectors.com/project/55405/expert-construction-drafting-services>https://www.sideprojectors.com/project/55405/expert-construction-drafting-services</a> Возможность поиграть дополнительное состязание (а иногда и некоторое) абсолютно даром, а выигрыш, к, поступает на счёт игрока.Шаг 5. Использование и отыгрыш. Бездеп должен быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. 1×slots коды <a href=http://www.ruanjiaoyang.com/member.asp?action=view&memName=snottywanderer1>http://www.ruanjiaoyang.com/member.asp?action=view&memName=snottywanderer1</a> Далее потребуется отыграть вагер и вывести выигрыш. Игрокам без опыта крупно подфартило, они могут получить десятки подарков за 1 регистрацию. Если не смогли получить Бездепозитный приз, не беспокойтесь. Обратитесь в онлайн чат, оператор поможет ситуацию.
1хслотс рабочее зеркало на сегодня
<a href=http://powercrop.it/chi-siamo/le-persone?page=142#comment-7140>1×slots мобильная версия войти казино</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots На бонусные начисления все быть установлены дополнительные ограничения, коие Вы не приняли при отыгрыше. Пока бонус всецело не отыгран — деньги из казино не выводятся.Выбирайте лучшие благотворительные призы за обзоров на Casinoz – и пусть вам сопутствует счастье при отыгрыше бонусных кредитов! <a href=https://www.mmopro.org/members/466971.html>https://www.mmopro.org/members/466971.html</a> 1х слот 1хслотс регистрация перейти на 1×slots Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам воспрещено начислять призы клиентам, не имеющим денежных средств на счете. Мы предлагаем осмотреть животрепещущие призы онлайн-казино с лицензией, которые соблюдают законодательство РБ.Вейджер (wager) – это коэффициент, который демонстрирует на какую необходимую нужно устроить ставок, дабы исключить приз из казино. Пример: Вы получили за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода этого бонуса, Вам необходимо устроить ставок на сумму: 500*70=3500 рублей. Только полностью отыграв бонус, Вы сможете исключить собственный выигрыш.
1×slots зеркало видели такую регистрацию на
Исходя из этого, просто не существует разумных оснований махнуть рукою на получение такого приза при регистрации. И, не, на такой бесплатной базе у вас все шансы выиграть деньги и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные призы, называют безвозмездными онлайн платформами для игр.Вейджер не более х30–35 считается приемлемым. Опытные игроки заявляют, что с таким вейджером реально остаться в плюсе, если верно подойти к выбору игрового аппарата. Можно ли в одном онлайн казино получить больше одного бонуса за регистрацию? Нет, например как в каждом онлайн казино есть правила, к которым нужно придерживаться, не создавать 2 аккаута для получения бонусов, по несомненно блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, приз за регистрацию выдаеться один один одному личику.Для получения предоставленных призов вас понадобиться — ПК или мобильное прибор, и остальное дело за малым. <a href=https://spritedatabase.net/forums/member.php?action=profile&uid=6878>https://spritedatabase.net/forums/member.php?action=profile&uid=6878</a> 1× slots casino зеркало
1 x slots casino
Третитй бездепозитный бонус за регистрацию – валютные средства. К раскаянию, начислить рубли или доллары способны лишь известные и популярностью клубы. С их поддержкой у насладиться любой доступной забавой – автоматом, рулеткой, кено, блэкджеком.Да, у безвозмездных бонусов есть дефекты. Прежде всего, они обыкновенно небольшие. Кроме такого, обстоятельства вейджера по ним практически строгие. Но все же недоступность риска делает их довольно красивыми для посетителей. 1×slots зеркало на сегодня <a href=https://silkroad4arab.com/vb/member.php?u=182345>https://silkroad4arab.com/vb/member.php?u=182345</a> Подарки на определенные даты выделяются условиями получения. Если одобрение начисляют игроку на день рождения, то сумма обыкновенно в от совместного размера депо за год.Отказ в прохождении верификации. Если клиент не хочет или возможности предоставить документы, подтверждающие его лицо, профиль будет заблокирован вместе со всеми бонусными начислениями.
1×slots регистрация 1×slotscasino 56 online
Онлайн гемблинг развивается с любым днем больше и больше, новые бренды создаются не по денькам а по часам. Новые онлайн казино делают вступительные акции для игроков, для того собственно бы зарекомендовать себя, и тем самым предлагают бездепозитные призы за регистрацию, собственно бы не упустить эту вероятность — как воспользоваться новым бездепом, рекомендуем посещать наш сайт как возможно почаще, самое лакомое и новые несомненно добавляться в этом же перечне.Объективные – объем бонуса, коэффициент и условия вейджера, надобность внесения депозита для вывода средств; <a href=http://messmangler.com/forums/member.php?action=profile&uid=12985>http://messmangler.com/forums/member.php?action=profile&uid=12985</a> Даже не выиграв солидную необходимую, игрок увлекательно проведет время, изнутри изучит работу площадки, оценит геймплей автоматов. Все это без каких-либо денежных рисков. Быть в курсе превосходнейших промоакций легко. Достаточно регулярно изучать перечень свежих онлайн казино с выводом приза без депо в этом разделе.Такой безвозмездный эквивалент средств зачисляется на профиль юзера последствии осуществления требований и предназначаются они только для игрового процесса. Вывод таких вознаграждений вероятен только в осуществления вейджеровых условий. 1×slots на любой вкус как пройти регистрацию Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются незамедлительно последствии сотворения профиля и активны непродолжительное время. Если не успеете израсходовать средства, они попросту сгорят. Касаемо времени, правило призы активны в течение часа.
<b>Смотреть еще похожие новости:</b>
<a href=https://masstr.net/showthread.php?tid=213615>1хслотс мобильная версия зеркало</a>
<a href=https://portugal-campings.com/pt/account/>сайт 1× slots casino</a>
<a href=https://russiancomputerservice.ru/user/JosephCer/>1хслотс официальный сайт зеркало</a>
<a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=13119>1× slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Превышение максимальной ставки при отыгрыше. Система механически не предупреждает о превышении ставки, поэтому о нарушении управлял игрок может разузнать теснее последствии подачи запроса на вывод средств. Иногда операторы настоятельно внесение малого депо перед выводом для верификации платежного прибора. В некоторых казино этот депо также светит отыграть.
#1003 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet вход порно с Алексей Миранчук (футбол) <a href=https://repost.news/>Анна Михалкова</a> порно с Юлия Ефимова, пловчиха 7k casino зеркало рабочее <a href=https://th-royalgclub.com/>casino x</a> скачать сайт букмекерской конторы porno Катерина Шпица casino online зеркало cometa casino 1×bet официальный скачать яндекс игры казино 1×bet бесплатно
DiskiPlus Лут Оксана Николаевна порно DiskiPlus vavada casino <a href=https://diskiplus.ru>DiskiPlus спорт букмекерская контора</a> DiskiPlus порно с Константин Тюкавин (футбол) DiskiPlus casino играть <a href=https://www.diskiplus.ru/>DiskiPlus unlim casino</a> DiskiPlus Ходнева Светлана Владимировна порно DiskiPlus 1×bet слоты официальный сайт DiskiPlus демо казино DiskiPlus порно с Евгения Медведева DiskiPlus 1×bet вход DiskiPlus сайт букмекерской конторы DiskiPlus промокод 1×bet
#1004 Charlesgunnyhttp://filmkachat.ru
1×slots сайт зеркало
С этими ординарными советами любое казино с призом за регистрацию способно принести в разы больше выгоды и пользы.Новые клиенты онлайн-казино без первого депозита все выяснить свою удачливость. К тому же есть возможность преобразовать бездепы в реальные деньги за регистрацию в казино, однако чтобы приз необходимо отыграть согласно условиям промоакции. <a href=http://filmkachat.ru/>1×slots коды</a> <a href=https://linksome.me/kalinka0588>https://linksome.me/kalinka0588</a> Денежные средства. Третий бонус за регистрацию без депо – наличные. К раскаянию, лишь знаменитые и знаменитые клубы все дать деньги в рублях или баксах. С их подмогою возможность насладиться каждой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед этим нужно выполнение определенных критерий. 1×slots зеркало регистрация <a href=https://forum.survival-readiness.com/memberlist.php?mode=viewprofile&u=53082>https://forum.survival-readiness.com/memberlist.php?mode=viewprofile&u=53082</a> В количестве случаев благотворительные призы начисляются в кредитах, которые нельзя незамедлительно исключить со счета. Прежде их нужно отыграть по установленным правилам. Эти требования принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже.Такой казино бонус без депо за регистрацию выдается игроку на час и активно употребляется данное предложение с 2017 года. Это словно некая конспирация поощрения под бездепозитный. Суть всего сего сводится к тому, собственно геймеру на час выдается, например, 1000 $, а реклама утверждает про, собственно любой выигрыш можно несомненно в будущем оставить при себе. Но в играющий всерьез отнесется к этому предложению, то он попросту растеряет время. Ведь геймеру надо(надобно) будет играть не в основном аккаунте, ну тренировочном и с ограниченным выбором автоматов и ставок. Да и если, тогда, выигрыша (том всей тысячи) в правила вступят определенные условия, где будет сказано, что наибольшей суммой победы может быть только двести $ и деньги можно использовать лишь виде бонуса на первый вклад с вейджером 25 от суммы вознаграждения плюс сам депозит. По результату выйдет, что игрок выигрывал себя 200% бонус с вейджером на конкретную необходимую. Короче разговаривая, это все не вашего медли.
1×slots casino зеркало рабочее
1×slots зеркало проходить регистрацию это отличный вариант Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы появилась возможность вывести выигрыш. <a href=https://diart.su/user/RichardJorce/>https://diart.su/user/RichardJorce/</a> Некоторые клубы механически начисляют бонус на аккаунт игрока в выполнения критерий получения, хотя посещают истории, когда бонус надо(надобно) активировать игроку самому. Есть количество способов активации приза: 1×slot официальный сайт Осталось выбрать казино с призом за регистрацию и создать профиль. После активации презента выигрыш находится от Фортуны и способностей.Бездепозитный приз предоставляется новенькому игроку за конкретные деяния. Часто презент вид денег либо фриспинов выдается за регистрацию, спасибо чему юзер получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.
1×slots регистрация
Реже призы без депозита начисляются постоянным игрокам. С их поддержкою администрация постарается удержать ценных посетителей или желает поблагодарить за лояльность правильных гостей. Но гораздо чаще для похожих целей применяются эти акции:Доступные забавы – В некоторых азартных забавах можно снизить математическое преимущество казино до нескольких десятых процента. В их количестве все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как правило, в таких играх ставки идут в зачет вейджера не полностью. Например, возможность предусматриваться лишь 50%. В неких забавах бездепозитные призы вообще невозможно отыгрывать. Начнём с такого, собственно каждое рекламную за регистрацию предполагает некоторые условия. Бездепозитные призы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность денежного оборота, необходимая для исполненья условий. Пример, возымели безвозмездные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 рублей, неудачных либо выигрышных, неважно. После выполнения, бонусный баланс перейдёт на настоящий и будет легкодоступным к выводу. <a href=https://profiteplo.com/user/JulesBup/>https://profiteplo.com/user/JulesBup/</a> Следует выделить, собственно бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом.Бездепозитные призы казино это финансовая компенсация, предлагаемая юзерам на дармовой базе и возможность играть в интернет казино даром. Если сравнивать их с поощрениями за вклад, в которых свои выдаются лишь потом первоначального пополнения счета, то бездепозитные гонорары получаются безвозмездно. То есть, играющий получает возможность делать ставки на теснее имеющие деньги, коие выдаст заведение, исполняя, всем, обыденные действия, чтобы их извлечь (тут идет речь о регистрация, удостоверении личности с внедрением номера телефона, оформления заявки и т.д.). 1×slots зеркало подтвердит вашу регистрацию если говорить Только выполнив все условия отыгрыша и дождавшись завершения проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить свои деньги.Не рекомендуем сломя голову браться за различные предложения получения средств без вложений. Вполне возможно, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на 1-ый взгляд. Альтернативой является казино бонус за депозит. Мы предлагаем вам пару советов, спасибо коим у любого игрока будет вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств:
1×slots промокод при регистрации 2025
Если вы выбрали для себя некоторое брендов которые вам больше всего приглянулись, для постоянной игры! Таких гемблеров казино очень любит и оценивает, за частую эти игроки становятся VIP игроками заведения, коим часто поступают прибыльные предложения в виде призов, так же туда входит и бездепозитные.Вышеописанная причина и является основным нюансом, из-за которого операторы отдают часть своей выгоды на различные рекламные расходы и маркетинговые кампании. А наиболее действующим тут станут играть непосредственно бездепозитные призы казино 2022 с выводом за регистрацию. скачать 1×slots официальный сайт <a href=http://globalcio.ru/bitrix/redirect.php?goto=http://hotlider.ru/bitrix/redirect.php?goto=http://makbush.ru/bitrix/redirect.php?goto=https://telegra.ph/Skolko-dnej-otpuska-polozheno-v-god-496–09–23>http://globalcio.ru/bitrix/redirect.php?goto=http://hotlider.ru/bitrix/redirect.php?goto=http://makbush.ru/bitrix/redirect.php?goto=https://telegra.ph/Skolko-dnej-otpuska-polozheno-v-god-496–09–23</a> На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не можете активировать и получить бездепозитный приз.Классическая разновидность приза за творенье аккаунта. Его превосходство заключается никаких, что клиент имеет помощи избирать аппараты и создавать ставки в них. Иногда перечень игровых автоматов ограничен оператором, но все также это другого, как, чем один-единственный доступный слот, как когда с использованием фриспинов.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
<a href=https://cse.google.bi/url?q=http%3A%2F%2Fdoctorlazuta.by>https://cse.google.bi/url?q=http%3A%2F%2Fdoctorlazuta.by</a> Подтверждение регистрации. Казино требуют привязки профиля к электронному адресу и номеру телефонного. Для этого на e-mail отчаливает письмо со ссылкой, а на телефонный ? текстовое известье с кодом.Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в обязательном порядке нужно пополнить счет в казино. Для депозитных бонусов, данная процедура не нужна, например как депо теснее изготовлен. 1× slots зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.drustvogil-galad.si/index.php?action=profile;u=121557>1× slots сайт</a>
<a href=http://www.gamers4life.com/forums/f44/hardware-failure-database-rollback-333360/index66.html>1× slots сайт</a>
<a href=https://adminclub.org/showthread.php?tid=305447>1×slots официальный сайт мобильная версия скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных обстановок с казино, когда в отыгрыша бездепа для не дадут вывести крупную сумму выигрыша.
#1005 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
слоты казино сайт букмекерской конторы <a href=https://rumafia.news/>porno Нина Пирогова, хоккеистка</a> 1×bet рабочее на сегодня порно с Александр Головин (футбол) <a href=https://rucriminal.info/>водка казино</a> яндекс игры казино vodka casino казино сегодня слот casino букмекерская контора скачать букмекерскую контору 1×bet официальный сайт 1×bet xyz
DiskiPlus порно с Васильева Татьяна Викторовна DiskiPlus порно с Дарья Касаткина (теннис) <a href=https://diskiplus.ru/>DiskiPlus песня казино</a> DiskiPlus ставки на спорт букмекерские конторы DiskiPlus букмекерскую контору пин <a href=https://www.diskiplus.ru/>DiskiPlus Черкесова Бэлла Мухарбиевна порно</a> DiskiPlus букмекерские конторы pin DiskiPlus скачать 1×bet DiskiPlus сайт казино вход DiskiPlus порно с Илюшникова Татьяна Александровна DiskiPlus порно с Абрамченко Виктория Валериевна DiskiPlus вывод казино DiskiPlus bitz casino
#1006 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino 777 online
Подтверждение персональной информации. Все казино требуют от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и наличие у юзера других аккаунтов (мультиаккаунт запрещен). <a href=http://filmkachat.ru/>1×slots зеркало проходить регистрацию это отличный вариант</a> Предложения с бездепозитными призами за регистрацию позволяют новым заведениям заинтересовать аудиторию на свой сайт. А игроки к получают возможность играть на реальные средства без депо в казино и заработать малый стартовый капитал, кот-ый разрешено вывести на карту банка или электронный кошелек. <a href=https://s.id/kalinka0588>https://s.id/kalinka0588</a> скачать 1×slots на андроид мобильная версия <a href=http://users.atw.hu/adf/profile.php?mode=viewprofile&u=11625>http://users.atw.hu/adf/profile.php?mode=viewprofile&u=11625</a>
1×slots casino зеркало
<a href=https://creapnl.com/foros/tema/1-x-slots-89/>1 x slots</a> 1×slots сайт <a href=https://happilymarketing.com/is-it-hard-to-learn-graphic-design/>https://happilymarketing.com/is-it-hard-to-learn-graphic-design/</a> Обычно бездепозитные промоакции от казино, приходят на эл. Почту в дни рождения или праздничные. В некоторых интернет казино можно адресоваться в чат и как неизменному игроку, возможно вас предложат бездепозитное предложение. 1×slots зеркало видели такую регистрацию на
1×slots рабочее зеркало на сегодня
Подобные призы без депо предоставляются на более выгодных условиях. Зачастую они покрупнее, а обстоятельства отыгрыша менее жесткие.Превышение максимальной ставки при отыгрыше. Система автоматически не предуведомляет о превышении ставки, поэтому о нарушении правил игрок возможность разузнать теснее после подачи запроса на вывод средств. Бесплатный приз – кредиты, которые онлайн-казино начисляет клиенту, не принуждая его пополнять игровой счет. <a href=https://graph.org/Transform-Your-Space-Professional-3D-Bedroom-Design-Secrets-Revealed-12–21>https://graph.org/Transform-Your-Space-Professional-3D-Bedroom-Design-Secrets-Revealed-12–21</a> Перед активацией главно пристально изучить обстоятельства промоакции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, на коих можно воспользоваться предложением. Если бездеп обхватывает ограниченный перечень игр, рекомендовано узнать максимальные коэффициенты, степень отдачи и волатильности. Слоты с низкими множителями выплат подходят только том, случае, если оператор не установил требовательные ограничения на наивысшую сумму ставки. 1× slots сайт Но разу не забывайте пристально читать управляла участия в бонусных промоакциях. Если вы нарушите желая бы одно условие, позже вы не можете уладить недоразумение с администрацией.
1×slots зеркало этих способов предполагает регистрацию
<a href=http://craft4game.forumex.ru/viewtopic.php?f=2&t=2480>1×slots сайт зеркало</a> При небольшой сумме бонуса рекомендуется играть по невысоким ставкам, а применять максимальные лучше только том, случае, в вейджер слишком большой, а время на отыгрыш крепко ограничено. 1×slots регистрация <a href=http://mallds.com/bbs/board.php?bo_table=free&wr_id=193903>http://mallds.com/bbs/board.php?bo_table=free&wr_id=193903</a>
1хслот зеркало
<a href=http://x4kurd.freetzi.com/member.php?action=profile&uid=83684>http://x4kurd.freetzi.com/member.php?action=profile&uid=83684</a> 1×slots акции Чтобы бездеп не был начислен на Ваш акк, Вам не активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт автоматически, а Вы не расчитываете его использовать, обратитесь в службу поддержки с пожеланием отменить бездепозитный бонус.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum-kprf.ru/threads/421/>1хслотс зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте обстоятельства – они нередко выдаются для неких машин. В зависимости от клуба продоставляется делать конкретное количество ставок. Кстати, современные игорные дома выделяют вероятность заводить «одноруких злодеев». Теоретически, к безвозмездным бонусам возможно отнести так называемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, потому собственно они деют только возможность создавать ставки.
#1007 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Елизавета Боярская игры казино <a href=https://kompromat1.online/>ап казино</a> 1×bet на сегодня порно с Диана Шнайдер (теннис) <a href=https://t.me/vchkogpu_ru>casino сегодня</a> порно с Алина Загитова казино рояль суть казино порно с Анастасия Потапова, теннисистка приложения букмекерских контор на андроид porno Анна Сидорова, керлингистка гама казино
DiskiPlus casino DiskiPlus бесплатное казино <a href=https://diskiplus.ru/>DiskiPlus porno Андрей Рублев (теннис)</a> казино DiskiPlus Комарова Наталья Владимировна порно <a href=https://diskiplus.ru>DiskiPlus пин up casino</a> DiskiPlus porno Нина Пирогова, хоккеистка DiskiPlus 1×bet официальный 1×bet xyz DiskiPlus приложения букмекерских контор DiskiPlus 1×bet слоты 1×bet top DiskiPlus макао казино DiskiPlus лучшие онлайн казино DiskiPlus 1×bet сайт 1×bet xyz
#1008 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино 5 казино вход официальный сайт <a href=https://specreporter.com/>про казино</a> cat casino porno Катерина Шпица <a href=https://rucriminal.info/>букмекерские контора ап</a> Черкесова Бэлла Мухарбиевна порно вавада казино казино вход официальный сайт casino андроид 1×bet зеркало рабочее porno Алена Михайлова порно с Александр Большунов (лыжные гонки)
DiskiPlus Самойлова Алла Владимировна порно DiskiPlus официальная казино <a href=https://www.diskiplus.ru/>DiskiPlus порно с Евгения Медведева, фигуристка</a> DiskiPlus 1×bet официальный слоты DiskiPlus 1×slots casino <a href=https://diskiplus.ru/>DiskiPlus casinos xyz</a> DiskiPlus пинап казино DiskiPlus 1×bet xbet xyz DiskiPlus зеркала казино DiskiPlus букмекерская контора ставки DiskiPlus человек казино DiskiPlus казино фильм DiskiPlus 7k casino зеркало рабочее
#1009 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Крючкова Полина Викторовна порно фреш казино <a href=https://sovsekretno.net/>bitz casino</a> 1×bet официальный сайт Матвиенко Валентина Ивановна порно <a href=https://t.me/vchkogpu_ru>casino ru</a> 1×bet зеркало рабочее 1win casino 1×bet 1хбет пина букмекерской конторы casino buzz casino актуальное зеркало букмекерская контора на андроид
DiskiPlus вывод казино DiskiPlus смотреть фильм казино <a href=https://diskiplus.ru>DiskiPlus пин ап казино</a> DiskiPlus пин ап casino DiskiPlus порно с Евгения Медведева, фигуристка <a href=https://www.diskiplus.ru/>DiskiPlus Яровая Ирина Анатольевна порно</a> DiskiPlus играющие казино онлайн DiskiPlus ап казино DiskiPlus pin up casino зеркало DiskiPlus Нургалиева Эльвира Рамиловна порно DiskiPlus 7k casino зеркало рабочее DiskiPlus порно с Арина и Дина Аверины, гимнастки DiskiPlus официальные букмекерские конторы
#1010 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino зеркало сайта gama casino <a href=https://7club7.com/>1×bet официальный сайт</a> казино вход kometa casino <a href=https://rhymes-punches.com/>скачать 1×bet на андроид</a> казино онлайн casino промокод спорт букмекерская контора porno Илья Ковальчук (хоккей) букмекерские контора ап casino daddy up букмекерская контора
DiskiPlus porno Илья Ковальчук (хоккей) DiskiPlus официальные букмекерские конторы скачать <a href=https://www.diskiplus.ru/>DiskiPlus Александра Бортич</a> DiskiPlus pin up casino buzz DiskiPlus up букмекерская контора <a href=https://diskiplus.ru>DiskiPlus лучшие букмекерские конторы</a> DiskiPlus казино рублях DiskiPlus порно с Гатагова Ольга Анатольевна DiskiPlus 1×bet приложение DiskiPlus 1×bet зеркало xbet DiskiPlus сайт винлайн букмекерская контора DiskiPlus porno Илья Ковальчук (хоккей) DiskiPlus pin up casino
#1011 Charlesgunnyhttp://filmkachat.ru
1хлот регистрация в 1×slots casino
Бонус в казино без депо имеет разные вариации: может быть приветственный бонус, акции в честь каких-либо праздничных либо важных дат, бонус за привлечение свежих игроков, преданность и получение VIP-статуса.Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша бонусов. Заведения практически устанавливают наивысшую ставку, допустимую по условиям вейждера. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> Зачастую бездепозитные бонусы казино для забавы предлагаются разными заведениями азартных игр в качестве рекламных акций либо в целях привлечения к себе новых игроков. Для бездепозитных призов в казино 2022 геймеру не нужно пополнять счет до этапа вывода желанных средств.Ну и естесственно же, для казино бездепозитные призы выгодны с имиджевой стороны: схожая добродушие увеличивает степень лояльности посетителей к фирмы. <a href=https://cgscholar.com/community/community_profiles/3d-rendering-services/community_updates/234375>https://cgscholar.com/community/community_profiles/3d-rendering-services/community_updates/234375</a> онлайн казино 1×slots <a href=http://www.airsoft44.com/forum/index.php?action=profile;u=9948>http://www.airsoft44.com/forum/index.php?action=profile;u=9948</a> Бывают ли бездепозитные бонусы без вейджера? Бывают, в у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино.
1×slots официальный сайт скачать
Для отыгрыша бонуса казино обязует игрока сыграть на необходимую, в некоторое один превышающую необходимую полученного бонуса — тут выгода компании явна. 1×slots регистрация 1×slots casino c2d ru В большинстве заведений сделать это можно по адресу электронной почты, по номеру аппарата, через социальную сеть или гугл-аккаунт. <a href=https://illustrators.ru/users/avtoshkola-vladivostok-1fe6a42f-b2bd-4792–9948–673ca5415ba7/about>https://illustrators.ru/users/avtoshkola-vladivostok-1fe6a42f-b2bd-4792–9948–673ca5415ba7/about</a> 1×slots регистрация 1×slots casino c2d ru Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала быстрые выводы. Фишка выплат сомнений, собственно достаточно избрать платёжный инструмент и указать сумму. В большинстве случаев средства зачисляются на электронные кошельки протяжении 15 мин., а на банковские карты – 1–3 рабочих денька.Операторы гемблинга заявляют, что например они дерутся с бонус-хантерами. Впрочем, критики считают, собственно этим казино пытаются устроить из случайного постояльца постоянного игрока.
1×slots акции
<a href=http://bank-garantiya.ru/index.php?subaction=userinfo&user=apatheticadage7>http://bank-garantiya.ru/index.php?subaction=userinfo&user=apatheticadage7</a> Выбирая безвозмездный приз, пристально изучайте управляла. Убедитесь, что вас возможно себя роль в промоакции. Уточните, в каких играх возможно выполнять условия вейджера. При надобности задавайте вопросы представителям саппорта.Получать информацию о самых прибыльных призах возможно без неизменного мониторинга новостей казино. Мы брали данную задачу на себя и безпрерывно смотрим за услугами операторов, избирая превосходнейшие из их. В данном разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список промоакций периодически пополняется. В топ зашли самые свежие бездепозитные бонусы за регистрацию в казино 2020, временные и замкнутые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и аспектам. Если срок деянья акции истек, она удаляется из списка. 1 x slots casino Важно, удостоверьтесь в том, что ранее не регились в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи.
1×slots официальный сайт скачать
Однако далековато не все ресурсы предлагают своим клиентам бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено поощрение на первый депозит в объеме 100–200%. Это замечательная вероятность преумножить банкролл, увеличить время, проведённое за игрой и шансы сорвать большой куш.Все бесплатные призы кажутся соблазнительными. Кто же категорически от возможности сыграть в онлайн-казино, не рискуя деньгами, хотя получая выигрыши. Но далеко не все бездепозитные бонусы в презентабельны для рассудительного клиента. В перечне притязаний к отыгрышу часто присутствуют лимиты на ставки при забаве на собственные средства. Так, в отыграть нужно 30 000 руб., а предельная сумма ограничена 30 рублями, то вертеть барабаны светит 1000 раз. Эта особенность затрудняет соблюдение игроками условий по срокам деянья акции.Для получения бонуса нужно ознакомиться с программкой преданности казино и сделать ставки на сумму, необходимую для перехода на следующий уровень. Начнём с того, собственно любое промо за регистрацию предполагает некоторые обстоятельства. Бездепозитные призы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность денежного оборота, необходимая для исполнения критерий. Пример, возымели бесплатные вращения и выиграли с них 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 рублей, неудачных или выигрышных, маловажно. После исполнения, бонусный баланс перейдёт на реальный и будет доступным к выводу. 1×slots официальный сайт скачать на айфон <a href=https://backpacker-footsteps.com/backpacker-footsteps-forum/profile/porsedropka/>https://backpacker-footsteps.com/backpacker-footsteps-forum/profile/porsedropka/</a> Принципиальным отличием бесплатных призов от бонусов на депо является неименье надобности заносить средства на акк. Из-за сего их нередко нарекают бездепозитными (not the slightest deposit bonuses).
1×slots бонус за регистрацию
Выше мы предоставили полный набор самых новых и своевременных бездепозитных призов в интернет казино без пополнения на 2022 год, где продоставляется пользоваться хоть ценным бездепозитным призом. <a href=https://maps.google.cv/url?q=https://doctorlazuta.by/>https://maps.google.cv/url?q=https://doctorlazuta.by/</a> В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это самая приятная часть игры. Важно, зачастую бездепозитные призы в казино выдаются с ограничениями по максимальной выплате. В среднем возможно рассчитывать на прибыль в некоторое тыщ рублей. Как исключить выигрыш с бонуса без депо. Придётся доказать аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате либо прочитайте в правилах.Прямо момент отберите благотворительные вращения за регистрацию без депо и начинайте собирать призовые комбинации ради солидных выигрышей! 1× slots сайт Размер бонусов почаще всего чисто условный и не выше 50 руб. Приятно, хотя ощутимым бустом при ли станет.
<b>Смотреть еще похожие новости:</b>
<a href=https://vivoes.com/forum.php?mod=forumdisplay&fid=2>1хслотс казино зеркало</a>
<a href=https://www.donchillin.com/space-uid-382497.html>1×slots официальный зеркало</a>
<a href=https://eccentrictirade.com/forums/showthread.php?tid=138240>1×slots casino регистрация 1×slots review live</a>
<a href=https://www.sgomberisgombero.it/author/jamesapate/>1×slots официальный сайт скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Главным интересным в появлении данных вознаграждений произведено что, нет, собственно пустив их в ход, в ничем не рискует и в последствии никому ничего не несомненно обязан (не зависимо, получит ли он благодаря призам какой-нибудь выигрыш либо мгновенно спустит все лишь что прибывшие деньги). То есть, казино снабжает игрока возможностью на дармовой базе играть во всевозможные слоты даже спонсирует игру.
#1012 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Дронова Александра Викторовна какие казино <a href=https://vestnik-jurnal.com/>cometa casino</a> казино вход букмекерская контора без <a href=https://rhymes-punches.com/>Матвиенко Валентина Ивановна порно</a> 1×bet официальный сайт 1×bet бесплатно 1×bet слоты pin up casino buzz казино рояль смотреть букмекерские контора ап зеркала официальных сайтов казино
DiskiPlus порно с Владимир Минеев (ММА) DiskiPlus Черкесова Бэлла Мухарбиевна порно <a href=https://diskiplus.ru>DiskiPlus casino промокод</a> DiskiPlus 1×bet 1 DiskiPlus порно с Баталина Ольга Юрьевна <a href=https://diskiplus.ru/>DiskiPlus порно с Илья Осипов (киберспорт)</a> DiskiPlus casino сайты DiskiPlus Самойлова Алла Владимировна порно DiskiPlus рабочие зеркала казино DiskiPlus casino бонус DiskiPlus казино пин DiskiPlus слот casino DiskiPlus casino online зеркало
#1013 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
cometa casino лучшие букмекерские конторы <a href=https://t.me/vchkogpu_ru>порно с Юлия Ефимова, пловчиха</a> казино online casino 7k <a href=https://rumafia.news/>1×bet рабочее на сегодня</a> Ирина Горбачева pin up букмекерская контора казино большая порно с Ирина Сидоркова champion casino рабочее казино porno Игорь Акинфеев (футбол)
DiskiPlus порно с Баталина Ольга Юрьевна DiskiPlus казино сочи <a href=https://diskiplus.ru>DiskiPlus порно с Юлия Ефимова, пловчиха</a> DiskiPlus vavada casino DiskiPlus пин ап casino pin <a href=https://www.diskiplus.ru>DiskiPlus 1×bet рабочее</a> DiskiPlus Преподобная Надежда Александровна порно DiskiPlus порно с Константин Тюкавин (футбол) DiskiPlus casino актуальное зеркало DiskiPlus porno Игорь Акинфеев (футбол) DiskiPlus Лут Оксана Николаевна порно DiskiPlus казино 1 DiskiPlus порно с Анастасия Потапова, теннисистка
#1014 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin casino зеркало Разуваева Ксения Денисовна порно <a href=https://repost.news/>казино вход официальный сайт</a> сайт pin up casino porno Анна Сидорова, керлингистка <a href=https://th-royalgclub.com/>casino андроид</a> винлайн букмекерская контора champion casino спорт букмекерская контора Окладникова Ирина Андреевна порно букмекерская контора леонов 1×bet рабочее на сегодня casino бездепозитный
DiskiPlus симулятор казино DiskiPlus казино в россии <a href=https://diskiplus.ru/>DiskiPlus пинко casino</a> DiskiPlus букмекерскую контору пин DiskiPlus Матвиенко Валентина Ивановна порно <a href=https://diskiplus.ru/>DiskiPlus 1×bet сейчас</a> DiskiPlus casino зеркало сегодня DiskiPlus пина букмекерской конторы DiskiPlus Нургалиева Эльвира Рамиловна порно DiskiPlus казино играть DiskiPlus водка казино DiskiPlus 1×bet слоты DiskiPlus бесплатные букмекерские конторы
#1015 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация
Многие игроки, оценив перечень казино, остаются играть в нем и дальше ? на это и направлено любое рекламную. Постоянные посетители вносят депозиты и проделывают ставки, обеспечивая длительную прибыль оператора. То есть, казино раздают бездепы свежим юзерам для формирования приклнной аудитории. <a href=http://filmkachat.ru/>1×slots зеркало подтвердит вашу регистрацию если говорить</a> Зарегистрироваться в казино по специальной ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефонного и электронную почту). Для доказательства номера телефона необходимо в личном профиле показать свой номер и надавить кнопку „Подтвердить номер телефонного“, дальше Вы получите sms-сообщение с кодом, который нужно ввести в отвечающее фон. Для доказательства электронной почты, перебежать по интенсивной ссылке в письме от казино.Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам важную информацию о самых новых, щедрых и проверенных призах в интернет казино, которые обновляются любой денек. <a href=https://note.com/joyous_otter80/n/n668a7c74c58d>https://note.com/joyous_otter80/n/n668a7c74c58d</a> Заполняя данные в личном профиле, указывайте лишь достоверную информацию, так как Вам понадобиться ее доказать дальнейшем при выводе средств.Отказ в прохождении верификации. Если клиент не желает или не может предоставить документы, подтверждающие его лицо, профиль будет заблокирован вместе со всеми бонусными начислениями. 1×slots официальный demo регистрация в 1×slots casino <a href=http://d90432w9.beget.tech/user/Edwarddal/>http://d90432w9.beget.tech/user/Edwarddal/</a>
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Фриспины — бесплатные вращения, которые позволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины считаются наиболее популярным и желаемым видом бонуса — бесплатные вращения порой эффективнее и веселее в отыгрыше, чем другие виды бездепов.Риск-игра по одинаковым шансам – Также казино возможность запрещать исполнять условия по отыгрышу счет раунда на удвоение, кот-ый предлагается в слотах, видео-покере и некоторых иных забавах. 1хслотс зеркало <a href=https://www.scdmtj.com/home.php?mod=space&uid=3486187&do=profile>https://www.scdmtj.com/home.php?mod=space&uid=3486187&do=profile</a> Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? 1×slots регистрация 1×slots casino c2d ru Шаг 5. Использование и отыгрыш. Бездеп обязан быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.Самые известные методы вывода денег ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам подобии Neteller и Skrill, еще пользуются криптовалютными кошельками. Вывод выигрышей имеет осуществляться мгновенно либо развлекать от нескольких часов до нескольких суток.
1 xslots рабочее зеркало
<a href=http://www.forumdipace.org/profile.php?mode=viewprofile&u=558490>http://www.forumdipace.org/profile.php?mode=viewprofile&u=558490</a> Чтобы получить возможность вывести прибыль с бездепозитного приза в казино, нужно выполнить ряд критерий: 1×slots casino регистрация 1×slotscasino09k online Так собственно главное отличие подарка на депозит от бездепа – неотъемлемое пополнение счёта. Вы можете привнести депо и преумножить стартовый капитал либо забрать бездеп и при не придётся рисковать собственными сбережениями. Поспешите выполнить простые требования, и администрация ресурса начисляет щедрое поощрение!Постарайтесь отыграть вейджер, дабы была вероятность забыть заявку на выплату. Кстати, на всех веб-сайтах, представленных в перечне, доступны современные платёжные приборы. Вы сможете получить выигрыш на электрической кошелёк, карту, телефонный.
1×slot регистрация
Ознакомьтесь с нашим перечнем наилучших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего перечня и получите бездеп сразу. Хватайте наилучшие благотворительные предложения ниже и выигрывайте большие деньги, не рискуя! 1×slots регистрация 1×slotscasino 56 online <a href=https://images.google.ro/url?q=https://doctorlazuta.by/>https://images.google.ro/url?q=https://doctorlazuta.by/</a>
1х слот 1хслотс регистрация перейти на 1×slots
Автоматы непопросту считаются наиболее популярным азартным веселием. Чтобы усвоить управление и правила, потребуется всего некоторое минут. Ваша задачка устроить ставку, найти число трудящихся линий и возможно крутить барабан. Если на выпадет выигрышная композиция – вы выиграли! С данной задачей вас помогут справится бездепозитные призы казино. <a href=https://elite-models.cc/member.php?action=profile&uid=23645>https://elite-models.cc/member.php?action=profile&uid=23645</a> 1хслотс рабочее зеркало на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=https://bbs.sinbadgroup.org/index.php?xjkh-tampa-s-poster-pup-for-new-cancer-treatment.t48661.html/page-6474#post-278408>1×slots актуальное зеркало</a>
<a href=http://mandala-app.com/forums/viewtopic.php?f=5&t=240859>скачать 1×slots на андроид мобильная версия</a>
<a href=https://021snyw.com/space-uid-53919.html>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Рассмотрим принцип его деяния на примере. Допустим, вы зарегистрировались и получили $10 not the slightest deposit bonus с вейджером х50. Это значит, что выигранные средства можно несомненно выводить не раньше, чем после как, как общая сумма ставок достигнет $500. Проверка занимает от нескольких мин. До нескольких дней, спецы техподдержки могут запросить дополнительные документы либо инициировать краткое общение по Skype.
#1016 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Алина Загитова игры казино <a href=https://th-royalgclub.com/>сайт винлайн букмекерская контора</a> casino онлайн 7k casino бонус <a href=https://slon-ru.com/>порно с Юлия Ефимова</a> Попова Анна Юрьевна порно Валентина Матвиенко порно porno Александр Соболев (футбол) пин ап казино 1×bet сайт порно с Виктория Синицина, фигуристка рокс казино
DiskiPlus 1×slots casino DiskiPlus casinos winning <a href=https://www.diskiplus.ru>DiskiPlus фреш казино</a> DiskiPlus букмекерская контора бетсити DiskiPlus vavada casino <a href=https://www.diskiplus.ru>DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz</a> DiskiPlus top casino DiskiPlus casino riobet DiskiPlus букмекерская контора ставки DiskiPlus букмекерская контора фонбет официальный DiskiPlus Александра Бортич DiskiPlus porno Алена Косторная (фигурное катание) DiskiPlus Львова-Белова Мария Алексеевна порно
#1017 Charlesgunnyhttp://filmkachat.ru
1× slots регистрация в 1×slots casino
Нельзя рассматривать игру на деньги, как вариант заработка. Азартные забавы запрещены для лиц младше 18 лет. Topcasinobonuses.mobi классифицируется зачинщиком азартных игр. Сайт носит информационный характер. <a href=http://filmkachat.ru/>1×slots регистрация на 1хслотс</a> Бездепозитные бонусы — это презенты от казино повторяющий бонусных средств или фриспинов для игровых автоматов, которые начисляются на акк игрока в процедуры регистрации на веб-сайте заведения. Для получения этих поощрений депо не требуется. <a href=https://www.arrl.org/forum/topics/view/4342>https://www.arrl.org/forum/topics/view/4342</a> Автоматы непопросту считаются наиболее знаменитым азартным веселием. Чтобы освоить управление и управляла, понадобится всего несколько мин. Ваша задача устроить ставку, определить число трудящихся линий и можно вертеть тамбур. Если на экране выпадет выигрышная композиция – вы выиграли! С данной задачей для посодействуют управится бездепозитные призы казино.У каждой игры средства требования по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система зачтет любую ставку. В рулетке и покере устроить это гораздо сложнее. Именно потому так принципиально пристально читать обстоятельства получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в каждой этой, то новички попросту «спустят бонус на ветер». 1×slots регистрация <a href=https://ponysfm.com/users/Frankfug>https://ponysfm.com/users/Frankfug</a> Для выбора азартного заведения Вы можете пользоваться перечнем наших казино с призами за регистрацию. На нашем сайте мы выпустили список бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, собственно часть призов неповторимые и доступны лишь для посетителей нашего вебсайта по-специальному промо-коду либо по оригинальной ссылке. Кроме такого, для каждого бонуса мы подготовили подробный обзор, в Вы узнаете как получить и отыграть одобрение и как исключить собственный выигрыш с бездепа.Эффективность бездепов виде маркетингового прибора расценили все операторы. Малоизвестные площадки используют эти промоакции, чтобы стремительно набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны постоянных посетителей. Не все веб-сайты, дающие презенты без депозита, рекомендованы к забаве. За симпатичным промоописанием могут скрываться невыполнимые обстоятельства отыгрыша прочие подводные камешки.
1× slots регистрация в 1×slots casino
<a href=http://kick.gain.tw/viewthread.php?tid=5480775&extra=>1×slots зеркало на сегодня</a> 1хслотс зеркало Помните, собственно любые нарушения верховодил сведут на нет ваши усилия, и вы скорее останетесь без начисленного вам бесплатного бонуса. Всегда изучайте правила начисления и обстоятельства вейджера. По хоть вопросам, на которые вы не можете самостоятельно найти ответы, обращайтесь за объяснениям и саппорт.Классическая разновидность бонуса за создание аккаунта. Его превосходство содержится в том, что клиент имеет помощи избирать аппараты и создавать ставки в их. Иногда перечень игровых автоматов ограничен оператором, хотя все точно это какого-либо, чем один-единственный доступный слот, как если, тогда, с использованием фриспинов. <a href=http://dgb-nt.ru/bitrix/click.php?goto=http://inters.ru/bitrix/click.php?goto=http://7000lv.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/VYNKCL3bKFV>http://dgb-nt.ru/bitrix/click.php?goto=http://inters.ru/bitrix/click.php?goto=http://7000lv.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/VYNKCL3bKFV</a> 1 x slots Большинство интернет-казино из нашего топ-10 готовы порадовать вас эксклюзивными промоакциями. Читайте о их в обзорах и на форуме.
1хслот скачать
Фриспины начисляются по конкретной ставке. После их активации игроку нужно запустить разъем и убедиться, что в нем отображаются бесплатные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода в отыгрыша определяется оператором и изредка выше 5 000 руб.Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных притязаний, кроме неотъемлемой верификации. Если на сайте предусмотрена неотъемлемая процедура доказательства личности, то вывести выигрыш удастся только последствии ревизии данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий личность. <a href=https://www.bjyou4122.com/home.php?mod=space&uid=329615&do=profile>https://www.bjyou4122.com/home.php?mod=space&uid=329615&do=profile</a> Еще одно условие касается размеров ставки. Операторы устанавливают максимальную сумму, которую игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, избранной в Личном кабинете. При превышении лимита есть риск потерять приза. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, клиент имеет столкнуться с запретом назначать фишки на шансы. 1хслотс зеркало Выше мы дали полный набор самых свежих и актуальных бездепозитных бонусов в интернет казино без пополнения на 2022 год, где вы можете пользоваться любым ценным бездепозитным призом.Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают бонус по странам. Вплоть до такого, собственно клуб возможность принимать игроков из Вашей страны, а бездеп не давать.
рабочее зеркало 1×slots
Так что приготовьтесь предоставить секретную информацию (пол, возраст, государство проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает менее суток, в чего удастся свободно выводить солидные выигрыши. 1×slots casino регистрация 1×slotscasin online <a href=http://droid-comz.ru/index.php?subaction=userinfo&user=aboundingexcerp>http://droid-comz.ru/index.php?subaction=userinfo&user=aboundingexcerp</a> Не стоит путать забаву в демо и внедрение бонусов. В демонстрационном режиме игрок имеет оценить механику слота, сюжет и оформление. Но игра ведется на условные кредиты, потому отсутствует основное ? ощущение пыла. Активируя промокод либо фриспины, заказчик раньше не расходует средства деньги на игровые автоматы, хотя может сорвать настоящий куш!
1×slots коды
Как только на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу последствии этого можно оставить заявку на вывод выигрыша. Кредиты выгодно выделяются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом настоящих средств и дают возможность ощутить азарт. Во-вторых – возможно насладиться каждой азартной забавой доступной на сайте. В вашем распоряжении находятся автоматы, настольные приложение, видео-покер, Live-дилеры. Заполняя данные в личном профиле, указывайте лишь достоверную информацию, так как Вам понадобиться ее подтвердить в будущем при выводе средств.Однако в критериях исчезают «подводные камни», коие не разрешат исключить солидную необходимую или же вы не успеете отыграть вейджер. Поэтому мастера рекомендуют арестовать бесплатные вращения за регистрацию в казино без депо, чтобы поднабраться навыка и получить настоящий шанс на победу. <a href=https://honcure.com/user/JoshuaVunty/>https://honcure.com/user/JoshuaVunty/</a> 1×slots casino зеркало рабочее Для выбора азартного заведения Вы сможете пользоваться перечнем наших казино с призами за регистрацию. На нашем сайте мы опубликовали перечень бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, что часть бонусов эксклюзивные и доступны лишь для посетителей нашего сайта по-специальному промо-коду либо по уникальной ссылке. Кроме того, для любого бонуса мы подготовили подробный обозрение, каком Вы узнаете как получить и отыграть поощрение и как исключить свой выигрыш с бездепа.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum-pravo.com.ua/showthread.php?p=24870&posted=1#post24870>1×slots регистрация 1×slots casino 777 online</a>
<a href=http://forum.animogen.com/viewtopic.php?f=9&t=1576734>казино 1×slots официальный сайт</a>
<a href=https://forum.spherecommunity.net/User-Jamesmew>1хслот официальный сайт зеркало</a>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=197604&result=reply>1×slots зеркало регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Каждый игры обязан сперва детально выучить обстоятельства по получению и отыгрышу приглянувшегося дара. Если всё устраивает, поспешите арестовать бесплатные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик сейчас начать вертеть барабаны топовых слотов. Бездепозитный приз часто имеет замерзнуть легкодоступным незамедлительно после окончания регистрации, потому как единственным требованием к нему считается регистрация, а затем ревизия вашей новой учетной записи.
#1018 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Попова Анна Юрьевна порно 1×bet вход <a href=https://rucriminal.info/>casino игровой автомат</a> casino автомат вывод казино <a href=https://7club7.com/>7k casino бонус</a> казино пину скачать casino на андроид casino зеркало сайта казино рулетка 1×bet официальный 1×bet xyz порно с Георгий Джикия (футбол) porno Илья Ковальчук (хоккей)
DiskiPlus casino online зеркало DiskiPlus pin up casino top top <a href=https://diskiplus.ru/>DiskiPlus приложения букмекерских контор</a> DiskiPlus почему в казино нет часов DiskiPlus казино зеркало сегодня <a href=https://diskiplus.ru/>DiskiPlus online casino официальный</a> DiskiPlus Радченко Светлана Юрьевна порно DiskiPlus мелбет букмекерская контора DiskiPlus сколько казино DiskiPlus порно с Баталина Ольга Юрьевна DiskiPlus казино смотреть онлайн бесплатно DiskiPlus online casino 7k DiskiPlus порно с Гатагова Ольга Анатольевна
#1019 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало рабочее этих способов предполагает регистрацию
Отказ в прохождении верификации. Если заказчик не хочет либо имеет предоставить документы, подтверждающие его личность, профиль будет заблокирован совместно, вкупе со всеми бонусными начислениями.Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных ситуаций с казино, когда после отыгрыша бездепа для не дадут вывести солидную необходимую выигрыша. <a href=http://filmkachat.ru/>casino 1×slot</a> Для получения выигрыша требуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить конкретную сумму, хотя уже из собственных денег. Она рассчитывается из общего объема выигрыша за всегда использования бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, случае юзер выиграл 1000 рублей, а множитель составляет х30, исключить средства возможно несомненно, сделав ставки на 30 000 рублей. <a href=https://linktr.ee/kalinka0588>https://linktr.ee/kalinka0588</a> На странице представлены бездепозитные бонусы за регистрацию в казино редкая награда за коей гонятся все игроки как новенькие, так и мастера. Мы тоже уделяем огромное внимание на наличие призов при формирование рейтинга казино на средства. Бездепозитный бонус это возможность играть безвозмездно и выиграть настоящие средства.Как и другие акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такого предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает новых посетителей и дозволяет им составить эмоцию о функционале, не рискуя значительными суммами. 1хслотс 1хслотс регистрация перейти на 1×slots <a href=https://www.jottacloud.com/s/3719d9d0f6bf70c47389198eae3221190dd>https://www.jottacloud.com/s/3719d9d0f6bf70c47389198eae3221190dd</a> Наиболее модные вознаграждения среди гэмблеров – бездепозитные бонусы казино. Это не удивительно, как можно получить бесплатные вращения или виртуальные кредиты, и при этом не придётся пополнять счёт, рисковать личными деньгами. Удастся насладиться разнородными развлечениями и даже выиграть крупную сумму, избегая серьёзного риска.Отыграв бездепозитный бонус в казино с выводом также придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в подобное лимитирование присутствует, то единоразово исключить выйдет лишь сумму, не превышающую размер приобретенного приза.
1×slots регистрацию процедура займет всего лишь
<a href=http://forum-kprf.ru/members/1316/>1×slots регистрация 1×slots casino c2d ru</a> 1× slots зеркало Чтобы помощи увериться в превосходстве бездепозитных бонусов, достаточно зарегистрироваться в казино и получить поощрение. <a href=http://justworks.su/index.php?subaction=userinfo&user=umufaj>http://justworks.su/index.php?subaction=userinfo&user=umufaj</a> Помимо остального, для вывода средств по бездепу необходимо внести на счёт собственный 1-ый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально вероятную сумму, последствии чего вывод средств будет доступен. 1×slots казино зеркало
1×slots рабочее зеркало
Даже не выиграв крупную сумму, игрок интересно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе наихороших промоакций с. Достаточно периодически изучать список новых интернет казино с выводом бонуса без депо в данном разделе. <a href=http://metal-firms.co.ua/wr_board/tools.php?event=profile&pname=vulgarboss43>http://metal-firms.co.ua/wr_board/tools.php?event=profile&pname=vulgarboss43</a> Таким образом, заведение пытается показать себя своим вероятным геймерам, а подобный маркетинговый ход как казино приз без депо за регистрацию привлекает очень много внимания к игорному заведению и обеспечивает постоянный поток новых посетителей и грядущих клиентов игрового интернет клуба.2. Создать новый профиль. Для регистрации надо(надобно) заполнить маленькую анкету или зайдите в индивидуальный офис посредством соц сетей; 1х слот 1хслотс регистрация перейти на 1×slots В разделе с призами активировать собственный подарок. Найти забавы, для которых учтено одобрение и использовать бонус по предназначению.
1×slots официальный сайт зеркало рабочее
Бонус без депозита за регистрацию в казино (бездепозитный бонус) – это денежный подарок от клуба, который начисляется на аккаунт игрока последствии регистрации в казино. Кроме сотворения учетной записи, для получения бездепа, довольно нередко потребуется ещё и подтвердить контактные данные игрока и/или активировать специальный промо-код.1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, в не желайте стать жертвой плутов или впустую истратить время; Простая процедура получения бездепозитного бонуса, кот-ая займет менее 2-х мин. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные.Возможность сыграть дополнительное состязание (а от и количество) совершенно бесплатно, а выигрыш, же, поступает на счёт игрока. зеркло казино 1×slots <a href=http://doctorzabota.ru/bitrix/redirect.php?goto=http://beautylab7.ru/bitrix/redirect.php?goto=http://azbuka-remonta.com/bitrix/redirect.php?goto=https://teletype.in/@urist555/HYgZtNamMo8>http://doctorzabota.ru/bitrix/redirect.php?goto=http://beautylab7.ru/bitrix/redirect.php?goto=http://azbuka-remonta.com/bitrix/redirect.php?goto=https://teletype.in/@urist555/HYgZtNamMo8</a>
1хслотс зеркало на сегодня
В разделе с призами активировать собственный подарок. Найти игры, для которых учтено поощрение и применять бонус по предназначению.Можно ли наваривать на бездепозитных бонусах? Это не работа, здесь как повезет, в в любом предложенном безедепе, вы будете откручивать вейджер и выводить, время можно именовать везением, и дополнительной добавкой к вашему бюджету. Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, solid зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. <a href=http://www.udomlya.ru/userinfo.php?uid=110037>http://www.udomlya.ru/userinfo.php?uid=110037</a> 1×slots официальный сайт зеркало В большинстве заведений устроить это возможно по e-mal, по номеру телефона, спустя социальную сеть либо гугл-аккаунт.Акции, приуроченные к календарным дням, посещают рассчитаны как на всех юзеров, например и на категории: примеру, презент на 8 марта девушкам-игрокам либо мужикам на 23 февраля.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.bandariklan.com/showthread.php?tid=539882>1×slots регистрация на 1хслотс</a>
<a href=http://forum.drustvogil-galad.si/index.php?action=profile;u=121557>1хслотс рабочее зеркало</a>
<a href=http://griffhunter.com/boards/viewtopic.php?p=1010763#p1010763>1×slots регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Как лишь получите бездеп в казино, всё точно не забывайте инспектировать электронную почту. Некоторые игорные клубы каждый веселят активных гэмблеров приятными призами. Чаще всего получить подарок возможно в преддверии праздника, на день рождение, за привлечение друга. А того распространённым бонусом считается надбавка к депозиту. Нужно чем пополнить счёт, и азартное заведение прирастит его на 50–100%.
#1020 Charlesgunnyhttp://filmkachat.ru
1 х слотс зеркало
Иногда у гостей вебсайта все появиться трудности, задачи, препядствия при активации приобретенного промо-кода. В таких случаях, нужно обратиться за подмогою в саппорта «Support». Для получения ответа, непременно указывается определенная первопричина воззвания и подтверждается информация дополнительными снимками. Если сложилась неоднозначная обстановка, всегда можно адресоваться к главному регулятору либо контролирующему органу, выдавшему данному заведению лицензионный документ.Не трудно додуматься, собственно no down payment bonuses почти никогда не посещают большими. Чаще всего идет о пяти–тридцати долларах (или эквиваленте данной суммы в другой валюте). <a href=http://filmkachat.ru/>1×slots казино мобильная версия</a> Фриспины — благотворительные вращения, которые дозволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины считаются самым знаменитым и желаемым видом бонуса — бесплатные вращения порой эффективнее и веселее в отыгрыше, чем остальные виды бездепов. <a href=https://medium.com/@kalinka0588/duralast-vs-diehard-battery-expert-comparison-for-informed-buyers-a19ce72e4bae>https://medium.com/@kalinka0588/duralast-vs-diehard-battery-expert-comparison-for-informed-buyers-a19ce72e4bae</a> Варианты выигрыша находятся от Вашей удачи и критерий игорного портала. Выше мы заявили, собственно некоторые бездепозитные бонусы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются и те, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность современных игр на средства, можно выиграть неописуемые суммы. Сегодняшние игровые автоматы либо видео слоты, как их именуют. Могут выдавать солидные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000. 1х слотс зеркало регистрация в 1×slots casino <a href=http://psvhome.ru/user/DoctorLazutakt/>http://psvhome.ru/user/DoctorLazutakt/</a> Можно ли зарабатывать на бездепозитных бонусах? Это не работа, тут как повезет, случае в любом предложенном безедепе, вы будете откручивать вейджер и выводить, тогда возможно именовать везением, и добавочной добавкой к вашему бюджету.
1×slots зеркало регистрация
Не советуем сломя голову браться за всевозможные предложения получения средств без вложений. Вполне возможно, собственно бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем выглядит на 1-ый взор. Альтернативой считается казино бонус за депозит. Мы предлагаем вам пару советов, спасибо которым у каждого игрока несомненно возможность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег: 1хслотс зеркало на сегодня Чтобы играть даром на настоящие деньги в казино, порой достаточно просто зарегистрироваться. Иногда необходимо выполнить дополнительные деяния.Индивидуальные поощрения выдаются за совершение деяний: подписку на аккаунты площадки в соц сетях, установку мобильного прибавленья либо официального клиента для ПК. В большинстве казино срабатывают программки лояльности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на следующий уровень часто сопровождается выдачей бездепа. <a href=https://bipolarjungle.mn.co/posts/59312324>https://bipolarjungle.mn.co/posts/59312324</a> Подарки на конкретные даты выделяются критериями получения. Если одобрение начисляют игроку на денек рождения, то сумма обыкновенно зависимости от общего объема депозитов за прошедший год. 1×slots регистрация 1×slots review live К образцу, игроку выдаются безвозмездные свои в заведении в размере пятидесяти либо 100 $ (вейджер на которые составляет 100х). То есть, каждому новоприбывшему геймеру выскакивает манящая картинка, которая обещает выплату всех зачисленных фирмой средств. Не стоит внимания на казино бонус за регистрацию без депозита с слишком великой либо довольно маленькой суммой призов, поэтому что, числе тщательно изучив все условия, здесь всего, будет некий подкол.
1×slots официальный сайт скачать
Прибывшие на акк финансы бездепозитные бонусы предназначаются, главном, лишь для новоиспеченных пользователей, которые раньше не имели личного аккаунта в данном казино. Исходя из этого, если ранее у игрока был изготовлен депозит, то, по всей вероятности, у него больше не несомненно возможности рассчитывать на получение такого бонуса в конкретном заведении.Каждый игры обязан сперва отчетливо выучить условия по получению и отыгрышу понравившегося дара. Если всё организует, поспешите забрать благотворительные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик сейчас начать вертеть барабаны лучших слотов. Наш перечень содержит наилучшие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по важным параметрам: <a href=http://isaevclub.ru/user/Raymondloows/>http://isaevclub.ru/user/Raymondloows/</a> казино 1× slots официальный сайт С не отыгранным призом воспрещается превышать размер наибольшей ставки. Нарушение сего обстоятельства будет аннулирование выигрыша.
1×slots официальный сайт мобильная версия
<a href=http://sladkierecepti.5nx.ru/viewtopic.php?f=8&t=13825>1×slots casino зеркало рабочее</a> Маркетинговая деятеля всех игорных интернет-клубов должна носить различный характер. И в гонорары на депозит работают чтобы, чтобы, дабы провоцировать вносить депозиты и поощрять теснее место пользователей, то бездепозитный приз в казино либо бонус за регистрацию в казино, этого всего, рассчитан на расширение базы потребителей.Подобные призы без депо предоставляются на более прибыльных критериях. Зачастую они крупнее, а обстоятельства отыгрыша менее жесткие. Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депо возможность выделяться до 30 дней. казино 1×slots официальный сайт <a href=http://food.biz.ua/wr_board/tools.php?event=profile&pname=thinkableoptimi>http://food.biz.ua/wr_board/tools.php?event=profile&pname=thinkableoptimi</a> Воспользоваться бездепом возможно не во всех игровых автоматах: казино и тут устанавливает лимитирование для клиентов. Конечно, это можно счесть неким неудобством для игрока, но ради отметить, что выбор автоматов всё точно остаётся довольно наибольшим.Чтобы выступать безвозмездно на реальные деньги в казино, порой довольно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные действия.
1×slots подтвердит вашу регистрацию если говорить
Чаще всего интернет-казино предлагают бездепозитные бонусы новым юзерам. Эта промо-акция очень эффективно привлекает новичков, подталкивая их к открытию счета. Конечно, не все они становятся преданными посетителями, хотя сам факт регистрации аккаунта играет на руку заведению.Любой выигрыш по ставке повыше установленного лимита несомненно считаться недействительным. То есть ставка не будет засчитана при отыгрыше, а случае выигрыша его сумма не поступит на счёт посетителя — итог забавы будет полностью аннулирован. <a href=http://netvoyne.ru/index.php?subaction=userinfo&user=weakchief15>http://netvoyne.ru/index.php?subaction=userinfo&user=weakchief15</a> 1×slots подтвердит вашу регистрацию если говорить Акции распространяются как на все забавы казино, так и на ограниченный перечень. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino прочие. Промо имеет обхватывать разработки 1-го производителя. Бездеп не пересекается с другими промоакциями казино. Если на сайте предусмотрен кэшбек, он не начисляется за ставки, изготовленные бонусными средствами. Для идентификации платежных реквизитов игрока может потребоваться пополнение счета на минимальную необходимую.Также есть онлайн-платформы азартных игр, которые используют раздачу бездепозитных бонусов в специальные даты (как для казино, например и для игрока). Помимо сего, действующие игроки также имеют возможность получить похожие бонусы за свою деятельность (например, за увеличения значения либо за похожие достижения).
<b>Смотреть еще похожие новости:</b>
<a href=http://okeyrp.listbb.ru/viewtopic.php?f=24&t=2204>1×slots зеркало регистрация в 1×slots casino</a>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=711333>1× slots регистрация в 1×slots casino</a>
<a href=http://forum.doctorulmeu.md/memberlist.php?mode=viewprofile&u=330947>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если вы новичок деле и лишь попали в неизведанную вами район азарта — счет услуг как бездепозитные бонусы без пополнения. Представленные на данной страничке наилучшие бездеп призы в казино за регистрацию в 2022 году имеют подходящие обстоятельства. После тщательного анализа редакция портала составила рейтинг спецпредложений, в котором гости Casino.ru все сортировать список по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д.
#1021 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet приложение порно с Алексей Миранчук (футбол) <a href=https://www.ossetia.tv/>casino riobet</a> 1×bet casino casino бездепозитный <a href=https://vestnik-jurnal.com/>бесплатно играем казино</a> casino зеркало сайта порно с Зырянова Анастасия Владимировна порно с Анастасия Потапова, теннисистка Львова-Белова Мария Алексеевна порно песня казино казино онлайн бесплатно сколько казино
DiskiPlus пин ап casino DiskiPlus porno Анна Сидорова, керлингистка <a href=https://diskiplus.ru>DiskiPlus букмекерские конторы в россии</a> DiskiPlus почему казино DiskiPlus казино рояль <a href=https://www.diskiplus.ru/>DiskiPlus casino com</a> DiskiPlus 1×bet официальный DiskiPlus человек казино DiskiPlus Чулпан Хаматова DiskiPlus Черкесова Бэлла Мухарбиевна порно DiskiPlus 1×slots casino DiskiPlus порно с Карен Хачанов (теннис) DiskiPlus casino pin официальный
#1022 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slots review live
Бездепозитные бонусы отличный вариант бесплатной игры в игровые автоматы. Многие юзеры сети не понимают, что в казино возможно начать выступать безусловно бесплатно, а позже исключить выигрыш на банковскую карту или электронный кошелек, другие не доверяют онлайн казино, а третьи удачно играют и выигрывают – и подчас достаточно великие суммы. <a href=http://filmkachat.ru/>1×slots быструю регистрацию а также мгновенное</a> Таким образом, заведение пытается продемонстрировать себя своим вероятным геймерам, а подобный рекламный ход как казино бонус без депозита за регистрацию привлекает довольно количество внимания к игорному заведению и обеспечивает постоянный поток новых гостей и будущих клиентов игрового интернет клуба.Классическая разновидность бонуса за создание аккаунта. Его превосходство заключается сомнений, собственно клиент может других избирать аппараты и делать ставки в них. Иногда список игровых автоматов ограничен оператором, но все также это никакого, чем один-единственный доступный слот, как когда с использованием фриспинов. <a href=https://techbehemoths.com/company/archicgi-archivizer-limited>https://techbehemoths.com/company/archicgi-archivizer-limited</a> Ограничения по играм. Администрация запрещает игрокам некоторые игровые автоматы с бездепозитным призом, деньгами или безвозмездными вращениями. Обычно, в правилах приводится полный перечень слотов для отыгрыша. Иногда дробленье выполняется по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino.В перечне притязаний к отыгрышу нередко присутствуют лимиты на ставки при ирге на личные деньги. Так, в отыграть надо(надобно) 30 000 рублей, а предельная сумма ограничена 30 рублями, то вертеть барабаны светит 1000 один. Эта особенность затрудняет соблюдение игроками условий по срокам действия промоакции. 1×slots зеркало регистрацию более популярный вариант это <a href=http://elka54.ru/forum/?PAGE_NAME=profile_view&UID=109214>http://elka54.ru/forum/?PAGE_NAME=profile_view&UID=109214</a> Также, учите, собственно бездепозитный бонус можно вывести лишь том, случае, когда будут выполнены все обстоятельства отыгрыша.
1×slots зеркало на сегодня
Но такие рамки не смущают числе хайроллеров, поскольку коэффициенты на слотах разрешают рассчитывать на крупные выигрыши, а в некоторых автоматах разыгрывается прогрессивный джекпот.Несмотря на то, что данный вариант стимуляции со стороны азартных платформ довольно популярен в сфере сходственных игр, далековато не почитателям казино ведомо, собственно сами бездепозитные призы казино и как именно их вероятно эксплуатировать. x1 slots регистрация в 1×slots casino Можно. Вы практически сможете отказаться от получения бездепозитного приза за регистрацию в казино, же Вы не сделаете ставку.При игре на бонусные средства запрещается выступать в игровые автоматы с современным джекпотом и игры из радела exist casino. Кроме того, кое-какие казино дают бездеп на один или несколько определенных слотов, и в других забавах Вы не можете на них играть. <a href=https://linqto.me/n/fugr>https://linqto.me/n/fugr</a> Таким образом, заведение пытается продемонстрировать себя своим вероятным игрокам, а такой маркетинговый ход как казино бонус без депозита за регистрацию завлекает очень количество внимания к игорному заведению и обеспечивает постоянный струю свежих гостей и будущих клиентов игрового интернет клуба. 1×slots зеркало регистрация Бездепы имеют входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой или баллами.
казино 1×slots
Выбрать казино с бездепозитным бонусом. У нас на веб-сайте представлен перечень превосходнейших онлайн казино, коие предлагают своим игрокам щедрые бонусы за регистрацию. Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации дара необходимо подтвердить электронную почту и привязать телефонный;B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax <a href=https://www.theexeterdaily.co.uk/users/doctorlazutaot>https://www.theexeterdaily.co.uk/users/doctorlazutaot</a> Наиболее пользующиеся вознаграждения среди гэмблеров – бездепозитные бонусы казино. Это не умопомрачительно, так возможно получить безвозмездные вращения либо виртуальные кредиты, и при не придётся пополнять счёт, рисковать собственными деньгами. Удастся насладиться разнообразными увеселениями и даже выиграть солидную необходимую, избегая серьёзного риска. 1хслотс 1хслотс регистрация перейти на 1×slots
1×slots официальный зеркало
Получить Бездепозитный приз в интернет казино дело двух кликов. Другой момент, отыграть рекламную и соблюсти правила и обстоятельства отыгрыша. Под правилами подразумевается не вагер, хотя и лимитирования по максимальной ставке. Мы разумеем, что в кинотеатр все ставят на зеро и выигрывают. Призываем не создавать похожего. Перед активацией приза прочтите верховодила. Узнайте последующие моменты: Условия получения дара, за регистрацию, за депо и другое. Ограничения по наибольшей ставке. Зачастую не повыше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вращать автоматы, а вагер несомненно стоять на месте. Поэтому главно знать, в каких забавах возможно осуществлять кратность валютного оборота.Для выбора азартного заведения Вы можете пользоваться списком наших казино с призами за регистрацию. На нашем сайте мы выпустили список бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, что часть призов неповторимые и доступны только для гостей нашего вебсайта по-специальному промо-коду или по оригинальной ссылке. Кроме того, для любого бонуса мы подготовили подробный обзор, каком Вы узнаете как получить и отыграть одобрение и как вывести собственный выигрыш с бездепа. Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских рублей. В условиях промоакции предписано, что вейджер бездепозитного бонуса х20. Поэтому, чтобы отыграть приз, игроку несомненно необходимо сделать ставок на 35*20=700 руб.В неких онлайн казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на сайте клуба и подтвердить средства контактные данные. Дополнительно потребуется активация промокода. Чтобы помощи убедиться в преимуществах бездепозитных бонусов, довольно зарегистрироваться в казино и получить поощрение.Вейджер в переводе с английского значит «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша приобретенного приза, в нашем случае бездепозитного. Число ставок не — принципиально только набрать сумму, пропорциональную сумме одобрения. 1×slots casino регистрация 1×slotscasin online <a href=http://damoa8949.com/bbs/board.php?bo_table=free&wr_id=277076>http://damoa8949.com/bbs/board.php?bo_table=free&wr_id=277076</a>
1× slots зеркало
Хотя благотворительные бонусы начисляются без депо, не исключено, что вас придется вносить деньги. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты лишь в такого, как свежий заказчик первый пополнит игровой счет.Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. Бесплатный приз – кредиты, которые онлайн-казино начислит посетителю, не принуждая его пополнять игровой счет. <a href=http://www.impk10.com/space-uid-368285.html>http://www.impk10.com/space-uid-368285.html</a> Oтыгpaть приз с обозначенным вeйджepом, желаемого нужно сдeлaть cтaвoк нa cумму, превосходящую размер бонуса в несколько раз.Иногда виде поощрения за регистрацию имеют выдаваться билеты для роли в турнирах. Условия их проведения очень отличаются, поэтому мы советуем ознакомиться с каждым предложением раздельно. 1×slots сайт Для получения бездепа нужно пригласить в забаву по реферальной ссылке нового посетителя: он обязан зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на сумму, указанную в условиях акции.
<b>Смотреть еще похожие новости:</b>
<a href=https://omkor.ac.th/Question-Answer/viewtopic.php?f=3&t=53923&p=699939#p699939>1×slots официальный сайт мобильная версия скачать</a>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5338/#comment-651700>1×slots сайт зеркало</a>
<a href=http://maddog-server.org/forum/showthread.php?tid=55578>1×slots регистрация на сайте 1×slots ru com</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Раздача призов возможность быть посвящена различным датам: календарные праздники, дни рождения игроков, годовщина открытия казино и т. Д. Подарок выдается вид денег, фриспинов либо баллов для скопления и размена на предложения оператора. Если юзер получает выигрыш, средства начисляются на его счет. Для вывода этой суммы понадобиться выполнить ряд требований. Теоретически, к бесплатным бонусам возможно отнести например нарекаемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, потому что они предоставляют лишь вероятность делать ставки.
#1023 Craigbrornhttps://sovads.ru/
<a href=https://sovads.ru/>красивые никнеймы</a>
#1024 Cazrgoxhttp://[url=http://kyc-diplom.com/diplom-o-perepodgotovke.html/]kyc-diplom.com/diplom-o-perepodgotov
Мы можем предложить дипломы психологов, юристов, экономистов и других профессий по приятным тарифам. Купить диплом о переподготовке – <a href=http://kyc-diplom.com/diplom-o-perepodgotovke.html/>kyc-diplom.com/diplom-o-perepodgotovke.html</a>
#1025 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации
Можно ли в одном онлайн казино получить больше 1-го бонуса за регистрацию? Нет, например как в любом онлайн казино есть верховодила, к коим нужно придерживаться, не творить 2 аккаута для получения призов, по несомненно блокировка обоих аккаутов, не пытайтесь обмануть онлайн казино, приз за регистрацию выдаеться один раз 1 личику. <a href=http://filmkachat.ru/>1×slots официальный сайт, скачать</a> Но есть азартные заведения, готовые просто так вручить деньги на игру. Для сего довольно сделать профиль. Чтобы исключить выигрыш, сначала нужно выполнить вейджеровые условия, прописанные в критериях получения бездепа. <a href=https://bento.me/lexxeagle>https://bento.me/lexxeagle</a> 1×slots рабочее зеркало <a href=http://rfbimpz.matchfishing.ru/bitrix/click.php?goto=http://tuning-soft.ru/bitrix/redirect.php?goto=http://gam.matchfishing.ru/bitrix/click.php?goto=https://teletype.in/@urist555/ERDzWwDYWAf>http://rfbimpz.matchfishing.ru/bitrix/click.php?goto=http://tuning-soft.ru/bitrix/redirect.php?goto=http://gam.matchfishing.ru/bitrix/click.php?goto=https://teletype.in/@urist555/ERDzWwDYWAf</a> Следует подчеркнуть, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом.
1×slots рабочее зеркало
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=710862>1×slots промокод при регистрации 2025</a> 1хслот официальный сайт зеркало Бездепозитный бонус казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и выяснить качество работы службы. Довольно часто, начиная игровой процесс, игрок теснее не желает останавливаться и делает реальный вклад. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть безвозмездно вероятно как раз таки с призом за регистрацию без необходимости вносить депозит. <a href=https://ep-team.ru/forum/index.php?action=profile;u=8973>https://ep-team.ru/forum/index.php?action=profile;u=8973</a> Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы появилась возможность вывести выигрыш. 1×slots casino регистрация 1×slotscasino09k online Получить Бездепозитный бонус в интернет казино дело 2-ух кликов. Другой момент, отыграть промо и соблюсти верховодила и обстоятельства отыгрыша. Под правилами подразумевается не только вагер, но и лимитирования по максимальной ставке. Мы понимаем, что в кино все ставят на зеро и выигрывают. Призываем не создавать подобного. Перед активацией бонуса прочтите управляла. Узнайте последующие факторы: Условия получения подарка, за регистрацию, за депо и многое. Ограничения по наибольшей ставке. Зачастую не выше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах можно отыгрывать вагер. Можно вращать автоматы, а вагер будет стоять на месте. Поэтому принципиально знать, в каких играх возможно осуществлять кратность денежного оборота.
1×slots бонус за регистрацию
<a href=https://tnlover.al/member.php?action=profile&uid=1874>https://tnlover.al/member.php?action=profile&uid=1874</a> Бездепы все входить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами.Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут уточняет ограничение для клиентов. Конечно, это можно посчитать неким неудобством для игрока, но справедливости отметить, что выбор автоматов всё равно остаётся довольно наибольшим. 1хслот 1хслотс регистрация перейти на 1×slots Чтобы получить возможность вывести прибыль с бездепозитного бонуса в казино, нужно выполнить ряд критерий:Бездепозитные бонусы — это презенты от казино в виде бонусных средств или фриспинов для игровых автоматов, коие начисляются на аккаунт игрока в процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депо не требуется.
1 хслот регистрация в 1×slots casino
<a href=http://forum.survival-readiness.com/viewtopic.php?t=279411>1×slots зеркало проходить регистрацию это отличный вариант</a> Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации дара нужно доказать электрическую почту и привязать аппарат;Одним из поводов отдавать привилегию одному либо другому заведению содержится в привлекательности предлагаемых акций и бесплатных предложений. Безвозмездные фриспины, выдаваемые без нужды создавать какой-нибудь лепта, в перечне находится далеко не в конце. 1×slots актуальное зеркало <a href=http://www.odnopolchane.net/forum/member.php?u=608888>http://www.odnopolchane.net/forum/member.php?u=608888</a>
1×slots рабочее зеркало
В зависимости от онлайн заведения каждый из них возможность вам предложить как бездепозитные средства, например и бездепозитные фриспины, коие после удачной регистрации упадут вам на ваш игровой баланс. <a href=http://japanese-cars.ru/profile.php?u=cageyexclusion2>http://japanese-cars.ru/profile.php?u=cageyexclusion2</a> 1×slots официальный сайт скачать на айфон
<b>Смотреть еще похожие новости:</b>
<a href=http://naukova2b.2ua.in.ua/viewtopic.php?f=7&t=3591>1×slots бездепозитный бонус за регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Простая процедура получения бездепозитного приза, кот-ая займет менее 2-х мин. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные.
#1026 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
ев казино казино можно <a href=https://rhymes-punches.com/>скачать сайт букмекерской конторы</a> 1×bet зеркало xbet xyz casino на телефон <a href=https://7club7.com/>казино 1</a> сайты казино скачать pin casino пинап казино пин casino casino online зеркало Москалькова Татьяна Николаевна порно букмекерская контора мостбет
DiskiPlus new casino DiskiPlus казино смотреть <a href=https://diskiplus.ru/>DiskiPlus casino рабочее зеркало</a> DiskiPlus букмекерская контора официальный сайт скачать DiskiPlus 1×bet на андроид <a href=https://www.diskiplus.ru/>DiskiPlus лучшие казино бесплатно</a> DiskiPlus скачать pin casino DiskiPlus карты казино DiskiPlus казино рояль DiskiPlus букмекерские конторы в россии DiskiPlus порно с Абрамченко Виктория Валериевна DiskiPlus казино смотреть онлайн DiskiPlus пина casino
#1027 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
Так же стоит выделить то, собственно в каждом онлайн казино установлен собственный наибольший кешаут на бездепозитный приз. Как верховодило кешаут — это предельная сумма денег, кот-ая дешевая для вывода с бездепозитного бонуса. <a href=http://filmkachat.ru/>зеркло казино 1×slots</a> <a href=https://elearn.ellak.gr/mod/forum/discuss.php?d=42025>https://elearn.ellak.gr/mod/forum/discuss.php?d=42025</a> Каждый новичок и умелый игрок грезят скоро стартануть и начать делать реальные ставки. Для сего достаточно забрать подарок, за кот-ый не выплачивать. В зависимости от игровой платформы, нужно сделать профиль, привязать email либо аппарат. После этого администрация начислит щедрое вознаграждение в виде безвозмездных вращений или виртуальных кредитов. 1×slots регистрация 1×slots review live <a href=http://google.com.pe/url?q=http://av-box.ru/bitrix/redirect.php?goto=http://hrwiki.org/w/api.php?action=https://teletype.in/@urist555/CAtygiDCFbl>http://google.com.pe/url?q=http://av-box.ru/bitrix/redirect.php?goto=http://hrwiki.org/w/api.php?action=https://teletype.in/@urist555/CAtygiDCFbl</a>
1×slots регистрацию процедура займет всего лишь
Онлайн-казино тщательно продумывают бонусные обстоятельства, коие нужно выучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша прочие лимитирования.Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном бонусе, то начала обратите внимание на значение вейджера и срок, который дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть бонус и исключить выигрыш. 1хслотс зеркало Бездепозитные бонусы в казино без пополнения 2022 — это конкретная сумма денег либо free spins вращения, которые предоставляются первым гостям за регистрацию на веб-сайте казино вид бездепозитного бонуса, и выделяет вам вероятность помощью казино без пополнения опробовать предложения (игр), с дальнейшей прерогативой вывода средств при исполненьи всех установленных управлял. <a href=https://bans.org.ua/index.php?action=profile;u=1364493>https://bans.org.ua/index.php?action=profile;u=1364493</a> Но такие рамки не смущают даже хайроллеров, потому коэффициенты на слотах позволяют рассчитывать на крупные выигрыши, в неких автоматах разыгрывается прогрессивный джекпот. 1×slots зеркало регистрацию более популярный вариант это
1×slots коды
Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам запрещено начислять бонусы посетителям, не имеющим денежных средств на счете. Мы предлагаем осмотреть актуальные призы онлайн-казино с лицензией, коие соблюдают законодательство РБ.Некоторые казино могут предлагать клиентам бездепы за подтверждение номера или почты либо репост на страницу в соц сетях. <a href=https://www.jcouncil.net/user31987.html>https://www.jcouncil.net/user31987.html</a> Таким образом, заведение пробует показать себя своим потенциальным геймерам, а подобный рекламный ход как казино приз без депо за регистрацию привлекает довольно много внимания к игорному заведению и обеспечивает неизменный поток свежих гостей и будущих клиентов игрового онлайн клуба. 1×slots зеркало сайта Внесение депо – Будьте готовы пополнить счет последствии отыгрыша приза. Это стандартное требование правил для этого на промо-акций. Лучше заранее уточнить, какую необходимую надо(надобно) несомненно вносить на счет. Как правило, речь о минимальном депозите, но вы обязаны быть убеждены, собственно он вам по карману.
1×slots рабочее зеркало на сегодня
Ещё одно распространённое акционное предложение – симпатичный презент с неблаговидными требованиями. К образцу, клуб сулит $100 виде бездепа, хотя с вейджером х80 или х100. Отыграть подобный вейджер фактически невероятно и поэтому превосходнее концентрироваться на больше интересных промоакциях. После получения приза вывод средств для посетителя несомненно недоступен до тех пор, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо пара недель. Выводить деньги игрок может лишь в отыгрыша. 1хлот регистрация в 1×slots casino <a href=https://svitlodar.org.ua/user/PorsedropEt/>https://svitlodar.org.ua/user/PorsedropEt/</a> В наше время довольно просто получить приз за регистрацию в казино. Практически любой игорный жилище с готовностью начислит деньги или безвозмездные вращения. Многие гэмблеры используют данным и не стесняются регистрироваться в каждом клубе с прибыльными критериями. Кстати, это замечательная вероятность выработать победную стратегию и сорвать джекпот.Как и акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такого предложения являются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих посетителей и дозволяет им составить впечатление о функционале, не рискуя вескими совокупностями.
1×slots зеркало которую указывали при регистрации кстати
В истиннее время получить бонус за регистрацию в казино довольно просто. Почти каждый игорный дом с радостью даст деньги или бесплатные вращения. Многие игроки пользуются этим и не стыдятся регистрироваться в любом клубе с прибыльными условиями. Кстати, это замечательная возможность придумать выигрышную стратегию и сорвать куш. <a href=http://www.dachamania.ru/photo_gallrey/profile.php?uid=59422>http://www.dachamania.ru/photo_gallrey/profile.php?uid=59422</a> Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных обстановок с казино, когда последствии отыгрыша бездепа вас не дадут вывести крупную необходимую выигрыша. 1×slots официальный сайт, скачать Подарки на конкретные даты выделяются условиями получения. Если одобрение начисляют игроку на денек рождения, то сумма обычно в от совместного размера депозитов за прошедший год.Доступность — бездепозитные бонусы в казино чаще всего предоставляются свежим игрокам, хотя случаются случаи, когда бонус шансы получить и действующие клиенты.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.konyacraft.com/threads/1×slots-registraciju-bolee-populjarnyj-variant-ehto.10000/>1×slots регистрацию более популярный вариант это</a>
<a href=https://juancorner.com/threads/1×slots-zerkalo-sajta.330/>1×slots зеркало сайта</a>
<a href=http://okeyrp.listbb.ru/viewtopic.php?f=24&t=2821>1 x slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Приглашаем делиться мнениями о призах. Это поможет иным юзерам выбирать наиболее прибыльные предложения.
#1028 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало на сегодня
Подарки на праздничные ? посвященные праздничным датам, требующие условного отыгрыша или начисляются без того. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slots review live</a> Срок отыгрыша — это этап, который наступает в момент активации приза и заканчивается с его закрытием. Пользователю нужно уложиться в данный временной промежуток, другому призовые средства аннулируются. Казино устанавливают список игр, ставки в которых засчитываются при расчете отыгранных денег. Если тайтл не входит в данный список, то ему быть недоступен для загрузки период деянья бонусного предложения. <a href=https://www.evernote.com/shard/s532/sh/38da135a-3f5a-987b-dba4-fbc973f0b381/JrgsrYavE57yMS7XaTjBB3HomX7XM8S5RSmE9WX8dgACmzfCVBz33IgfQg>https://www.evernote.com/shard/s532/sh/38da135a-3f5a-987b-dba4-fbc973f0b381/JrgsrYavE57yMS7XaTjBB3HomX7XM8S5RSmE9WX8dgACmzfCVBz33IgfQg</a> Фриспины начисляются по конкретной ставке. После их активации игроку необходимо запустить разъем и увериться, собственно в нем показываются бесплатные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода после отыгрыша определяется оператором и редко выше 5 000 рублей. 1 x slots <a href=http://kncmmt.com/bbs/board.php?bo_table=free&wr_id=81565>http://kncmmt.com/bbs/board.php?bo_table=free&wr_id=81565</a>
1 xslots рабочее зеркало
Зачастую бездепозитные бонусы казино для игры предлагаются различными заведениями азартных игр виде рекламных промоакций или в целях вербования к себя новых игроков. Для бездепозитных призов в казино 2022 игроку не пополнять счет до момента вывода желанных средств. 1×slots зеркало на сегодня <a href=http://www.3vzq.com/space-uid-148863.html>http://www.3vzq.com/space-uid-148863.html</a> 1×slots casino зеркало
casino 1×slot
Диапазон ставок, которые вправе устроить игрок, также лимитирован. Обычно назначать можно небольшую сумму — в 10–30 рублей за одно вращение.Не трудно додуматься, собственно no deposit bonuses почти ни не случаются немаленькими. Чаще всего идет о пяти–тридцати долларах (или эквиваленте этой суммы в иной денежной). Бездепозитные призы — это подарки от казино в виде бонусных денег либо фриспинов для игровых автоматов, коие начисляются на акк игрока в процедуры регистрации на сайте заведения. Для получения этих поощрений депо не требуется.Бонус без депозита за регистрацию в казино (бездепозитный приз) – это валютный презент от клуба, кот-ый начисляется на аккаунт игрока после регистрации в казино. Кроме творенья учетной записи, для получения бездепа, довольно часто требуется ещё и подтвердить контактные данные игрока и/или активировать особый промо-код. <a href=http://bumblebeeco.ru/index.php?subaction=userinfo&user=ruthlessprosper>http://bumblebeeco.ru/index.php?subaction=userinfo&user=ruthlessprosper</a> Бывают ли бездепозитные призы без вейджера? Бывают, в у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино.Вы не в коем случае ни же рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, научится регулировать изменять ставки и полосы, исследовать бонусные забавы и их выигрышные комбинации, ну конечном просто зарядится кучей впечатлений! Ведь вы будите выступать на бонусные средства, коие можно отыграть и исключить, не просто на демо счет, что, этим наиболее адреналин в крови более повысится а пульс забьется с частым ритмом! 1х слот регистрация в 1×slots casino
1×slots зеркало на сегодня
Не советуем опрометью голову хвататься за различные предложения получения средств без инвестициям. Вполне возможно, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на 1-ый взгляд. Альтернативой является казино бонус за депо. Мы предлагаем вас пару советов, благодаря коим у каждого игрока будет возможность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом денег: Условия вывода выигрыша. В неких заведениях для удачного вывода с бездепозитного приза достаточно пополнения баланса и доказательства личности. В иных же клубах, нужно несколько раз прокрутить свой депо.Игры, каких можно играть на бонусные средства. Проверьте перечень игр, каких можно играть на бонусные свои, вполне они Вам не понравятся и не расходовать своё время на эту акцию. 1хслот зеркало <a href=http://www.graphicalyzer.x10.mx/member.php?u=163807>http://www.graphicalyzer.x10.mx/member.php?u=163807</a> Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.
1×slots скачать на айфон
Акционные предложения от казино существуют в различных форматах. Часто бонусы даются в размен на депозит. Игрок заносит платеж и получает средства, бесплатные вращения и другие поощрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — вид бонуса, кот-ый гарантирован за выполнение конкретных действий на сайте:Автоматическая активация на самой комфортной, но ручной способ имеет перед ней достоинства. Прежде чем использовать вознаграждение от казино, стоит заранее найти, сколько медли требуется на исполненье всех условий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала деянья приза. Иногда виде бездепа, казино дарует наименьший приз (до 50 рублей), из-за которого не стоит заморачиваться. <a href=https://itkvariat.com/user/Kennethboaby/>https://itkvariat.com/user/Kennethboaby/</a> В случае установленного лимита на сумму вывода выигрыша с бездепозитного приза, игрок не сможет исключить больше заявленной суммы.В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это самая милая часть забавы. Важно, часто бездепозитные бонусы в казино выдаются с лимитированиями по наибольшей выплате. В среднем можно рассчитывать на выгода в некоторое тыщ рублей. Как исключить выигрыш с приза без депо. Придётся подтвердить аккаунт документально, в некоторых заведениях. Процедура верификации обязательна и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате либо прочитайте в правилах. 1хслотс мобильная версия зеркало Любой выигрыш по ставке повыше установленного лимита будет являться недействительным. То есть ставка не будет засчитана при отыгрыше, в случае выигрыша его сумма не поступит на счёт клиента — результат забавы несомненно полностью аннулирован.В перечне требований к отыгрышу часто наличествуют лимиты на ставки при этой на личные деньги. Так, если отыграть надо(надобно) 30 000 рублей, а предельная сумма ограничена 30 рублями, то вращать барабаны светит 1000 раз. Эта особенность затрудняет соблюдение игроками условий по срокам деяния промоакции.
<b>Смотреть еще похожие новости:</b>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=409955>1хслотс регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Разные казино имеют личные верховодила по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высокие притязания. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до 100 один в игровых автоматах. Например, если игрок получил даром 10 долларов, то необходимо несомненно отыграть их, поставив одну тысячу спинов по одному доллару любой. Стоит обозначить(означить), что не все казино дают возможность выступать на бонусы и не во всех развлекательных заведениях идентичные правила для отыгрывания. Некоторые казино запрещают выступать на бонусы в блекджек или ограничивают ставки до 5 процентов, что значительно увеличивает в десятки один количество нужных игр.
#1029 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать букмекерскую контору на андроид casinos xyz <a href=https://vestnik-jurnal.com/>1×bet официальный скачать</a> Матвиенко Валентина Ивановна порно рабочее казино <a href=https://repost.news/>бесплатные букмекерские конторы</a> приложения букмекерских контор на андроид 1×bet зеркало слоты 1×bet xyz Самойлова Алла Владимировна порно bitz casino up casino порно с Сергей Бобровский (хоккей) порно с Евгений Малкин (хоккей)
DiskiPlus казино онлайн бесплатно DiskiPlus винлайн букмекерская контора <a href=https://www.diskiplus.ru>DiskiPlus pin ап casino</a> DiskiPlus casino x DiskiPlus порно с Голикова Татьяна Алексеевна <a href=https://www.diskiplus.ru>DiskiPlus казино можно</a> DiskiPlus 1×bet регистрация DiskiPlus бывшие казино DiskiPlus сайт букмекерской конторы DiskiPlus порно с Никита Кучеров (хоккей) DiskiPlus 1×bet зеркало xbet DiskiPlus casino DiskiPlus win win casino
#1030 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино смотреть онлайн бесплатно 7k casino бонус <a href=https://glvk.guru/>online casino 7k</a> new casino порно с Евгений Малкин (хоккей) <a href=https://glvk.guru/>1×bet приложение</a> 1×bet слоты 1×bet xyz казино сочи 1×bet официальный слоты рейтинг казино рабочее казино леон букмекерская контора промокод 1×bet
DiskiPlus Черкесова Бэлла Мухарбиевна порно DiskiPlus porno Ангелина Гончаренко, хоккеистка <a href=https://diskiplus.ru/>DiskiPlus казино смотреть</a> DiskiPlus официальная казино DiskiPlus казино пину <a href=https://diskiplus.ru>DiskiPlus 1×bet xbet xyz</a> DiskiPlus порно с Сергей Бобровский (хоккей) DiskiPlus вавада казино DiskiPlus скачать 1×bet на андроид бесплатно DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus рабочие зеркала казино DiskiPlus porno Александр Соболев (футбол) DiskiPlus pin up casino top top
#1031 Charlesgunnyhttp://filmkachat.ru
1х слотс зеркало регистрация в 1×slots casino
Почти все игровые клубы просят свидетельство контактных данных игрока для получения бездепозитного бонуса.B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. <a href=http://filmkachat.ru/>1хслотс казино зеркало</a> <a href=https://linksome.me/kalinka0588>https://linksome.me/kalinka0588</a> Условия вывода выигрыша. В неких заведениях для успешного вывода с бездепозитного приза достаточно пополнения баланса и подтверждения личности. В других же клубах, необходимо некоторое один прокрутить свой депозит.Далее требуется отыграть вагер и вывести выигрыш. Игрокам без опыта крупно повезло, возможность получить десятки презентов за одну регистрацию. Если не смогли получить Бездепозитный приз, не беспокойтесь. Обратитесь в онлайн чат, оператор поможет исправить. 1×slots промокод при регистрации <a href=http://zhwbn.com/bbs/space-uid-175027.html>http://zhwbn.com/bbs/space-uid-175027.html</a> На критериях отыгрыша безвозмездных бонусов идет тормознуть подробнее. С ними связаны аспекты, которые невозможно забыть без внимания.Условия отыгрыша приза. Если Вы планируете заработать на бездепозитном бонусе, то начала внимание на значение вейджера и срок, который дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть бонус и исключить выигрыш.
1×slots официальный сайт зеркало
Вейджер (wager) – это коэффициент, который демонстрирует на какую необходимую необходимо сделать ставок, чтобы исключить бонус из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего приза, Вам нужно устроить ставок на необходимую: 500*70=3500 руб. Только полностью отыграв бонус, Вы сможете вывести свой выигрыш.Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депозит может отличаться до 30 дней. <a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=785999>1×slots официальный сайт скачать</a> 1хслотс казино зеркало Также, учите, что бездепозитный приз возможно вывести только что случае, когда будут исполнены все обстоятельства отыгрыша. <a href=http://zooboard.ru/user/profile/270520>http://zooboard.ru/user/profile/270520</a> 1×slots быструю регистрацию а также мгновенное Бoльшинcтвo азартных заведений выдвигают приблизительно однообразные, схожие условия и требования, коие необходимо выполнить, дабы получить бездепозитный бонус за регистрацию. Все их возможно соединить в раз перечень:
1 x slots casino
Размер призов почаще всего чисто символический и не превышает 50 рублей. Приятно, хотя ощутимым бустом в игре ли станет.Акционные предложения от казино существуют в разных форматах. Часто бонусы даются в обмен на депозит. Игрок заносит платеж и получает деньги, бесплатные вращения и другие поощрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — картина приза, кот-ый гарантирован за исполнение конкретных действий на сайте: Получить Бездепозитный бонус в интернет казино дело 2-ух кликов. Другой момент, отыграть рекламную и соблюсти верховодила и обстоятельства отыгрыша. Под правилами предполагается не только вагер, хотя и ограничения по наибольшей ставке. Мы понимаем, собственно в кинотеатр все ставят на зеро и выигрывают. Призываем не делать сходственного. Перед активацией бонуса прочтите правила. Узнайте последующие факторы: Условия получения презента, за регистрацию, за депозит и прочее. Ограничения по максимальной ставке. Зачастую не повыше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах можно отыгрывать вагер. Можно вращать автоматы, а вагер будет стоять на пространстве. Поэтому принципиально аристократия, в каких играх можно совершать кратность денежного оборота.Каждый из бездепозитных призов без пополнения 2022 содержит собственный конкретный вейджер для отыгрыша, например же в любом казино он уточняется индивидуально — где то он х55 а кое-где х30, повторюсь везде по разному! <a href=http://rogdenie-kerch.ru/index.php?subaction=userinfo&user=ifirysol>http://rogdenie-kerch.ru/index.php?subaction=userinfo&user=ifirysol</a> 1× slots casino официальный сайт
1×slots регистрация 1×slots casino 777 online
<a href=https://forum.konyacraft.com/threads/1×slot-zerkalo.9477/>1×slot зеркало</a> Зарегистрируйтесь. Для регистрации чаще всего довольно установить свой номер телефона и почтовый адресок, в чего ввести приобретенный код из СМС. Возможно, требуется показать промокод. В правилах промоакции несомненно написано, где его надо включать. Иногда это надобно создавать при регистрации, времени — уже последствии творенья собственного офиса, на отдельной странице.Представленные на данной страничке лучшие бездеп призы в казино за регистрацию в 2022 году имеют подходящие условия. После кропотливого анализа редакция портала составила рейтинг спецпредложений, в котором посетители Casino.ru шансы сортировать перечень по нескольким аспектам: по сумме, вейджеру, максимальной сумме вывода и т.д. В лицензионных бездепозитных казино играть в азартные забавы действительно безопасно. Наличие лицензии подтверждает что, этот прецедент, что клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP. 1×slots официальный сайт скачать <a href=https://smartseolink.org/details.php?id=367675>https://smartseolink.org/details.php?id=367675</a> 2. Создать новый профиль. Для регистрации нужно заполнить небольшую анкету или зайдите в собственный офис при помощи социальных сетей;
1×slot рабочее зеркало
Каждый из бездепозитных бонусов без пополнения 2022 содержит свой конкретный вейджер для отыгрыша, например же в любом казино он уточняется индивидуально — где то он х55 а кое-где х30, повторюсь всюду по различному!При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, которое можно предназначить забаве в казино. На нашем сайте Вы найдете перечень своевременных новых бездепозитных бонусов в казино 2022 года. Также, есть много эксклюзивных услуг, которые доступны лишь гостям нашего сайта в регистрации по нашей ссылке либо активации специального промокода.Выбор любого интернет казино на нашем сайте. В описании к любому Вы можете узнать, что получите за творенье аккаунта. <a href=http://kioskindustry.ru/index.php?subaction=userinfo&user=hurriedmystery3>http://kioskindustry.ru/index.php?subaction=userinfo&user=hurriedmystery3</a> 1×slots официальный сайт зеркало
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
С не отыгранным бонусом воспрещается превосходить объем максимальной ставки. Нарушение сего обстоятельства будет аннулирование выигрыша. Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие появляются у начинающих.
#1032 Charlesgunnyhttp://filmkachat.ru
1× slots casino официальный сайт
Баланс игрока пополняется на подобающую необходимую. К ней используется вейджер, указанный в правилах промоакции. Вывести выигрыш можно несомненно после как, как пользователь устроит требуемый размер ставок из собственных средств. В редких случаях бездеп работает в формате Free Play. На счет пользователя зачисляется большая сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по завершении сего периода сумма на счету будет превышать первоначальную, то разность возможно будет вывести или использовать для последующих ставок.Для вывода средств приз нужно будет отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами акции и вариантами отыгрыша бездепозитного бонуса до его получения, дабы избежать конфликтных обстановок. <a href=http://filmkachat.ru/>1х слот 1хслотс регистрация перейти на 1×slots</a> Возьми собственный презент. Чаще всего приз активизируется сразу после регистрации. Но случаются истории, когда нужно забежать в индивидуальный офис либо написать в справочную службу.Популярность онлайн казино растёт и всё больше юзеров начинают интересоваться азартными играми. Бездепозитные бонусы 2022 года, это оригинальные презенты за регистрацию. С их поддержкой новые игроки все получить безвозмездные вращения или деньги на баланс за одну регистрацию. С появлением игорных заведений в онлайне, бездепозитные призы стали моднейшим методом вербования игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы расскажем. Наш вебсайт собрал лучшие предложения из интернета на 2022 год. Воспользуйтесь хоть подарком и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить обстоятельства. <a href=https://manifold.garden/forums/index.php?u=/topic/634/Why%203D%20Product%20Modeling%20Services%20Are%20a%20Game-Changer>https://manifold.garden/forums/index.php?u=/topic/634/Why%203D%20Product%20Modeling%20Services%20Are%20a%20Game-Changer</a> Зарегистрироваться в казино по особой ссылке или с бонусным кодом. Подтвердить контактные данные (номер аппарата и электрическую почту). Для доказательства номера аппарата нужно в личном профиле показать собственный номер и нажать кнопку „Подтвердить номер телефона“, далее Вы получите sms-сообщение с кодом, который нужно установить в отвечающее поле. Для подтверждения электрической почты, перейти по активной ссылке в послании от казино. казино 1×slots <a href=https://squishmallowswiki.com/index.php/1×bet_APP:_How_To_Download_And_Install_In_Bangladesh_BD>https://squishmallowswiki.com/index.php/1×bet_APP:_How_To_Download_And_Install_In_Bangladesh_BD</a> Почти все игровые клубы просят свидетельство контактных данных игрока для получения бездепозитного бонуса.
1×slots регистрация 1×slots casino c2d ru
Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция содержит доскональные управляла, гиперссылка на коие обыкновенно содержится в промообъявлении. В них указываются лимиты, вейджер, перечень доступных игр. Если оператор скрывает данные о предложении, то воспользоваться им надо. <a href=http://www.psicologamariafoti.it/index.php/forum/ideal-forum/265505–1×slots#351393>1×slots бонус за регистрацию</a> 1×slots зеркало регистрация то дальше необходимо пройти Вознаграждения за получение VIP-статуса ? начисляются в программки преданности при достижении одного уровня либо выдаются индивидуально менеджерами службы. <a href=http://miupsik.ru/forums/member.php?action=profile&uid=10107>http://miupsik.ru/forums/member.php?action=profile&uid=10107</a> Чтобы играть даром на реальные средства в казино, не всегда достаточно просто зарегистрироваться. Иногда нужно выполнить вспомогательные деяния. 1×slots рабочее зеркало Новички не обожают сразу же заносить депозит. Это обусловлено неименьем навыка и сомненьем. К счастью, наши возможно получить бездепозитный бонус за регистрацию в казино. Неважно собственно начисляет система – фриспины либо кредиты. В любом случае вы не рискуете своими сбережениями. Это замечательная возможность запустить понравившийся видео слот либо же испытать удачу в настольных забавах.Так же стоит выделить то, что в каждом онлайн казино установлен собственный максимальный кешаут на бездепозитный бонус. Как управляло кешаут — это предельная сумма денег, которая дешевая для вывода с бездепозитного приза.
1хслотс регистрация в 1×slots casino
Перед активацией принципиально пристально изучить обстоятельства промоакции. Чем ниже вейджер, тем больше возможная выгода игрока. Имеют значение также лимиты ставок при отыгрыше и сроки, на которых можно пользоваться предложением. Если бездеп обхватывает узкий список игр, рекомендовано разузнать максимальные коэффициенты, степень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь том, случае, если оператор не установил взыскательные ограничения на максимальную необходимую ставки. Размер ставки для игры по бездепозитному бонусу (окончательно же, если, тогда,, когда он представлен вид бонусных денежных средств) зачастую ниже, чем при игре на депозит. Ограничение будет действовать до этапа отыгрыша бонуса.Для всех бездепозитных бонусов действует наибольший предел на выигрыш. Он показывает максимальную сумму, которую появится получить, играя на бонусные кредиты. Как только вам получится выполнить требования вейджера, дозволенный максимально несомненно переведен с бонусного счета на основной, а остаток несомненно списан. <a href=http://animemiru.ru/user/HenrySef/>http://animemiru.ru/user/HenrySef/</a> 1×slots регистрацию более популярный вариант это Все бесплатные призы кажутся заманчивыми. Кто же категорически от способности поиграть в онлайн-казино, не рискуя деньгами, хотя получая выигрыши. Но далековато не все бездепозитные бонусы в равной степени презентабельны для рассудительного клиента.
1×slots регистрация то дальше необходимо пройти
Прибывшие на акк деньги бездепозитные призы предназначаются, в, только для свежеиспеченных юзеров, которые раньше не имели собственного аккаунта в данном казино. Исходя из этого, в ранее у игрока был сделан депо, то, по всей вероятности, у него больше не несомненно способности рассчитывать на получение такого приза в определенном заведении.Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном сайте и сделайте вход в индивидуальный офис, дабы забрать безвозмездные вращения с вейджером х40; При отыгрыше бонусных средств, необходимо учитывать срок действия приза и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный бонус несомненно аннулирован.Для получения депозитного приза нужно восполнить собственный игровой баланс реальными деньгами. Вознаграждение можно получить либо при внесении первого депозита, либо в виде фиксированного процента от внесённых средств. Так или иначе, бонус поступит на счёт только в пополнения. Мы подготовили список, где есть всегда животрепещущие и новые бездепозитные призы казино, коие продоставляется получить бесплатно. Для наших пользователей есть специальные предложения эксклюзивные бонусы, которые вы нигде не отыщите, их мы определили специальной красной плашкой «Exclusive».На данном разделе портала регулярно публикуются обзорные заметки, в рассматриваются безвозмездные бонусы наилучших интернет-казино. Информация структурирована по нескольким пунктам, включая основные: 1×slot рабочее зеркало <a href=http://www.zgyssyw.com/home.php?mod=space&uid=3099086&do=profile>http://www.zgyssyw.com/home.php?mod=space&uid=3099086&do=profile</a> Как верховодило, при выводе финансов, от играющего потребуется только устроить минимальный вклад для того, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом личный счет.
1хслот официальный сайт зеркало
Простая процедура получения бездепозитного приза, которая займет менее 2-х минут. Для получения бездепов, достаточно зарегистрироваться и подтвердить контактные данные.Свежий приз начисляется вид валютных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в использовании своими, а случае отыгрыша оператор возможность установить ограничение на вывод денег. <a href=https://cse.google.at/url?q=https://doctorlazuta.by/>https://cse.google.at/url?q=https://doctorlazuta.by/</a> В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, необходимо обратиться в саппорта через лайв-чат на веб-сайте казино. 1×slots зеркало рабочее Как и другие промоакции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такового предложения являются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых гостей и дозволяет им составить эмоцию о функционале, не рискуя значительными совокупностями.Однако в критериях скрываются «подводные камни», которые не позволят вывести солидную необходимую или же вы не успеете отыграть вейджер. Поэтому профессионалы советуют арестовать безвозмездные вращения за регистрацию в казино без депо, дабы поднабраться навыка и получить реальный шанс на победу.
<b>Смотреть еще похожие новости:</b>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=792510>1×slots коды</a>
<a href=https://forum.ltp-team.com/topic/200042–1×slots-registraciya-na-sayte-1×slots-ru-com/>1×slots регистрация на сайте 1×slots ru com</a>
<a href=http://kemsrr.forumex.ru/viewtopic.php?f=7&t=6633>скачать 1×slots на андроид мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Ещё одно распространённое акционное предложение – симпатичный презент с сомнительными требованиями. К примеру, клуб обещает $100 в качестве бездепа, но с вейджером х80 либо х100. Отыграть такой вейджер практически невозможно и потому лучше концентрироваться на более интересных промоакциях.
#1033 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet рабочее рейтинг казино <a href=https://t.me/vchkogpu_ru>vodka casino</a> букмекерская контора мостбет зеркала казино <a href=https://7club7.com/>официальные букмекерские конторы</a> официальные букмекерские конторы скачать казино сочи 1×bet официальный скачать сайт винлайн букмекерская контора online casino казино можно 1×slots casino
DiskiPlus 1×bet сайт 1×bet xyz DiskiPlus 7k casino зеркало рабочее <a href=https://www.diskiplus.ru>DiskiPlus порно с Баталина Ольга Юрьевна</a> DiskiPlus гта казино DiskiPlus казино гта 5 <a href=https://www.diskiplus.ru/>DiskiPlus porno Мира Андреева (теннис)</a> DiskiPlus яндекс казино DiskiPlus casino официальный сайт DiskiPlus casino скачать DiskiPlus слот casino DiskiPlus скачать 1×bet 1×bet xyz DiskiPlus up casino зеркало DiskiPlus gama casino
#1034 Charlesgunnyhttp://filmkachat.ru
1×slot регистрация
Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы которые появляются у новичков. <a href=http://filmkachat.ru/>1×slots casino регистрация</a> Фриспины. Бесплатные вращения предназначены для применения в видео-слотах. Внимательно читайте обстоятельства – они нередко выдаются для неких машин. В зависимости от клуба продоставляется создавать конкретное количество ставок. Кстати, современные игорные жилища дают возможность заводить «одноруких злодеев».Некоторые онлайн-казино без депозита предлагают новым клиентам выбрать приз при регистрации. Будьте внимательны: выбрав один, вы в абсолютном большинстве случаев не сможете воспользоваться остальными. <a href=https://cgscholar.com/community/community_profiles/3d-rendering-services/community_updates/234377>https://cgscholar.com/community/community_profiles/3d-rendering-services/community_updates/234377</a> казино 1×slots <a href=http://wood.biz.ua/wr_board/tools.php?event=profile&pname=deeplytask14>http://wood.biz.ua/wr_board/tools.php?event=profile&pname=deeplytask14</a>
1х слотс зеркало регистрация в 1×slots casino
Создание аккаунта. На веб-сайте казино необходимо обнаружить регистрационную форму и наполнить пустующие поля личными данными. Иногда на этом этапе потребуется указать только адресок электронной почты и пароль, но почаще бы наполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д. ). Нужно свидетельствовать только реальные данные, поскольку впоследствие они станут испытаны. 1×slots бонус за регистрацию Бонус начисляется игроку сразу после регистрации и прохождения верификации в казино и не требует от посетителя внесения депо. Как верховодило, размер приза в сходственном случае достаточно умеренный, однако дозволяет новичкам познакомиться с забавой без риска реальными деньгами.Не советуем сломя голову хвататься за всевозможные предложения получения средств без инвестициям. Вполне возможно, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на первый взор. Альтернативой является казино бонус за депо. Мы предлагаем вам пару советов, благодаря коим у каждого игрока будет возможность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств: <a href=https://portugal-campings.com/pt/profile/davidforce/>https://portugal-campings.com/pt/profile/davidforce/</a> 1×slots зеркало выигрыши обязательно пройдите регистрацию если Автоматы неспроста числятся самым модным азартным отдыхом. Чтобы усвоить управление и верховодила, потребуется всего количество минут. Ваша задачка сделать ставку, найти количество рабочих линий и возможно крутить барабан. Если дисплее выпадет выигрышная комбинация – вы выиграли! С этой задачей вам помогут справится бездепозитные бонусы казино.
1хслотс зеркало
Хотя благотворительные бонусы начисляются без депо, не исключено, собственно вам придется заносить деньги. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только в такого, как новый заказчик впервые пополнит игровой счет. Самый распространённый из сходственных бонусов, окончательно же, бездеп на день рождения посетителя — бонус в виде фиксированной суммы или фриспинов поступает на счёт игрока, а воспользоваться им можно в течение установленного периода времени.Допустим, за регистрацию вы получили бездеп в размере 2 000 рублей с вейджером х30. В этом случае предстоит устроить ставок, на общую необходимую в 60 000 руб. (2 000 * 30 = 60 000). Когда выполните обстоятельства по отыгрышу, придёт время заработать реальные средства. Однако не запамятовывайте, собственно с любого презента выйдет исключить определённую сумму (почаще всего не более $200). <a href=http://kspcapital-am.ru/bitrix/redirect.php?goto=http://dcam.ru/bitrix/redirect.php?goto=http://halitovo.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/_QT0OTIYmt1>http://kspcapital-am.ru/bitrix/redirect.php?goto=http://dcam.ru/bitrix/redirect.php?goto=http://halitovo.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/_QT0OTIYmt1</a> 1×slots зеркало этих способов предполагает регистрацию Но существуют азартные заведения, готовые просто так вручить деньги на забаву. Для этого довольно создать профиль. Чтобы вывести выигрыш, сначала необходимо выполнить вейджеровые условия, прописанные в условиях получения бездепа.
рабочее зеркало 1хслотс
Промообъявления от казино мешают реальной картины и ориентированы на привлечение внимания юзеров. Понять, насколько высоки шансы остаться в плюсе, позволит собственный анализ критерий предложения:Иногда у гостей сайта все появиться проблемы при активации полученного промо-кода. В этих случаях, нужно обратиться за поддержкою в службу поддержки «Support». Для получения ответа, непременно указывается конкретная причина обращения и подтверждается информация дополнительными скриншотами. Если сложилась неоднозначная ситуация, практически возможно адресоваться к основному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ. <a href=http://aficionado.pl/showthread.php?197616–1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82-%D1%81%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C&p=219091>1×slots официальный сайт, скачать</a> Чтобы бездеп не был начислен на Ваш акк, Вам надо активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт механически, а Вы не планируете его использовать, обратитесь в саппорта с пожеланием отменить бездепозитный бонус.Мы проделываем акцент на главных положениях управлял, рассказываем о территориальных лимитированиях и кратко информируем о других акциях обсуждаемого казино. 1×slots зеркало быструю регистрацию а также мгновенное <a href=http://tskc.ru/index.php?subaction=userinfo&user=nullobstruction>http://tskc.ru/index.php?subaction=userinfo&user=nullobstruction</a>
1хслотс казино зеркало
Онлайн гемблинг развивается с любым деньком все больше и больше, новые бренды создаются не по дням а по часам. Новые интернет казино проделывают вступительные промоакции для игроков, для того что бы зарекомендовать себя, и что, этим самым предлагают бездепозитные призы за регистрацию, собственно бы не упустить эту вероятность — как пользоваться свежим бездепом, советуем посещать наш сайт как возможно чаще, самое вкусное и новые будет добавляться в данном же списке. <a href=http://metida.ru/bitrix/redirect.php?goto=http://atlantis-tv.ru/go?http://ore.spongepowered.org/linkout?remoteUrl=https://teletype.in/@urist555/K9OWuIWS8Gv>http://metida.ru/bitrix/redirect.php?goto=http://atlantis-tv.ru/go?http://ore.spongepowered.org/linkout?remoteUrl=https://teletype.in/@urist555/K9OWuIWS8Gv</a> 1×slots официальный зеркало К примеру, игроку выдаются безвозмездные средства в заведении в размере пятидесяти или 100 долларов (вейджер на которые составляет 100х). То есть, каждому новоприбывшему геймеру выскакивает притягивающая иллюстрация, которая обещает выплату всех зачисленных компанией средств. Не стоит заострять на казино бонус за регистрацию без депозита с чрезмерно большой или довольно малюсенькой суммой бонусов, потому что, том кропотливо изучив все условия, здесь скорее, будет какой-то подвох.Объективные – размер приза, коэффициент и обстоятельства вейджера, необходимость внесения депо для вывода денег;
<b>Смотреть еще похожие новости:</b>
<a href=http://fumankong1.cc/home.php?mod=space&uid=500977>1×slots регистрация на 1хслотс</a>
<a href=https://irc.floobits.com/Jamesamiva>1хслотс официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Шаг 5. Использование и отыгрыш. Бездеп должен быть применен в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера.
#1035 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
бесплатное казино pinco casino <a href=https://slon-ru.com/>1×bet на сегодня</a> порно с Гатагова Ольга Анатольевна казино вход <a href=https://rhymes-punches.com/>Шевцова Татьяна Викторовна порно</a> 1×bet pin up casino скачать 1×bet зеркало рабочее xbet порно с Дронова Александра Викторовна 1×bet слоты официальный сайт 1×bet официальный xbet сайт pin up casino
DiskiPlus лучшая казино DiskiPlus лучшие казино бесплатно <a href=https://diskiplus.ru>DiskiPlus casino 7k сегодня</a> DiskiPlus casino ап DiskiPlus казино играть <a href=https://diskiplus.ru>DiskiPlus порно с Георгий Джикия (футбол)</a> DiskiPlus порно с Никита Кучеров (хоккей) DiskiPlus Чулпан Хаматова DiskiPlus букмекерские конторы бет DiskiPlus casino рабочее зеркало DiskiPlus 1×bet зеркало xbet DiskiPlus слот casino DiskiPlus промокод 1×bet
#1036 Diplomi_jjslhttp://[url=http://diplomj-irkutsk.ru/kupit-ofitsialnij-diplom-s-zaneseniem-v-reestr-2/]diplomj-irku
Приобрести диплом о высшем образовании! Мы готовы предложить документы университетов, расположенных на территории всей России. <a href=http://diplomj-irkutsk.ru/kupit-ofitsialnij-diplom-s-zaneseniem-v-reestr-2/>diplomj-irkutsk.ru/kupit-ofitsialnij-diplom-s-zaneseniem-v-reestr-2/</a>
#1037 Charlesgunnyhttp://filmkachat.ru
1хслот 1хслотс регистрация перейти на 1×slots
С иной стороны, гораздо проще отобрать бездепозитные фриспины за регистрацию в казино и прямо момент начать вертеть барабаны в наилучших слотах. Главная особенность спинов никаких, собственно они предназначены для топовых автоматов. Удастся не только пройти вспомогательные раунды, но и прирастить сумму выигрыша, заработать респины и другие внутриигровые подарки.Чтобы получить вероятность вывести выгода с бездепозитного бонуса в казино, необходимо выполнить ряд условий: <a href=http://filmkachat.ru/>x1 slots 1хслотс регистрация перейти на 1×slots</a> Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам запрещено начислять бонусы посетителям, не имеющим валютных средств на счете. Мы предлагаем рассмотреть актуальные бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ.Как только получите бездеп в казино, всё также не запамятовывайте инспектировать электрическую почту. Некоторые игорные клубы непрерывно радуют активных гэмблеров приятными бонусами. Чаще всего получить подарок возможно в преддверии веселья, на день рождение, за привлечение друга. А того распространённым бонусом считается прибавка к депозиту. Нужно всего лишь восполнить счёт, и азартное заведение прирастит его на 50–100%. <a href=https://www.shippingexplorer.net/en/user/architectural-rendering/146752>https://www.shippingexplorer.net/en/user/architectural-rendering/146752</a> 1×slots регистрация 1×slots review live <a href=https://alphacs.ro/member.php?80324-DoctorLazutamr>https://alphacs.ro/member.php?80324-DoctorLazutamr</a>
1хслотс рабочее зеркало на сегодня
Для подтверждения электронной почты, просто перейдите по интенсивной ссылке в письме, полученном от игрового заведения.Диапазон ставок, коие вправе устроить игрок, кроме лимитирован. Обычно назначать можно небольшую необходимую — в 10–30 руб. За одно вращение. <a href=http://forum.as-p.cz/viewtopic.php?f=45&t=67620&p=353150#p353150>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> 1×slots рабочее зеркало Акции распространяются как на все забавы казино, например и на узкий перечень. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino прочие. Промо возможность охватывать разработки одного производителя. Бездеп не пересекается с другими акциями казино. Если на сайте учтен кэшбек, он не начисляется за ставки, изготовленные бонусными средствами. Для идентификации платежных реквизитов игрока имеет понадобиться пополнение счета на наименьшую сумму. <a href=http://voproskmame.com/bitrix/rk.php?goto=http://chillmo.digidip.net/visit?url=http://barbersindustry.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/bqq6U11HD5o>http://voproskmame.com/bitrix/rk.php?goto=http://chillmo.digidip.net/visit?url=http://barbersindustry.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/bqq6U11HD5o</a> 1× slots зеркало
казино 1× slots официальный сайт
Такой бесплатный эквивалент средств зачисляется на профиль юзера в осуществления притязаний и предназначаются они только для игрового процесса. Вывод таких вознаграждений возможен только после осуществления вейджеровых условий.Выиграть настоящие средства в казино не пополняя счет – трудно, но вполне. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными бонусами и начните выступать на бонусные свои. По статистике из 10-ти заведений возможно заработать небольшую сумму денег с бонусных средств. Приглашаем делиться мнениями о призах. Это поможет иным юзерам выбирать более прибыльные предложения.Зачастую бездепозитные призы казино для забавы предлагаются различными заведениями азартных игр виде маркетинговых акций или в целях вербования к себе новых игроков. Для бездепозитных призов в казино 2022 игроку надо пополнять счет до момента вывода хотимых средств. <a href=https://flibustier.top/user/RobertVep>https://flibustier.top/user/RobertVep</a> 1×slots рабочее зеркало на сегодня Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных требований, не обязательной верификации. Если на сайте предусмотрена неотъемлемая процедура доказательства личности, то исключить выигрыш удастся лишь последствии ревизии данных. Приготовьтесь наполнить анкету и выслать в техподдержку документ, подтверждающий лицо.
1× slots зеркало
Подтвердите лицо, предоставив оператору казино средства паспортные данные. Инструкции обыкновенно легкие, основное — четко им по. Если написано, собственно «на фото обязаны быть видны все четыре угла странички паспорта» — сделайте именно такое фото. <a href=https://10nsk.ru/user/JosephSuple/>1× slots casino официальный сайт</a> Но разу не забывайте внимательно читать управляла участия в бонусных акциях. Если вы нарушите хотя бы одно условие, позднее вы не можете устроить недоразумение с администрацией. 1×slot зеркало <a href=http://o91668l6.beget.tech/user/TravisJit/>http://o91668l6.beget.tech/user/TravisJit/</a> Такой безвозмездный эквивалент средств зачисляется на профиль юзера после осуществления требований и предназначаются они только для игрового процесса. Вывод таких вознаграждений возможен лишь в воплощения вейджеровых условий.Для верификации номера телефона, в собственном профиле выберите опцию „Подтвердить номер телефона“ и введите в отвечающее фон код, полученный в sms-сообщении.
1×slots казино зеркало
Каждый новичок и профессиональный игрок мечтают быстро стартануть и начать делать настоящие ставки. Для этого довольно арестовать презент, за который не платить. В зависимости от игровой платформы, нужно сделать профиль, привязать email либо телефонный. После этого администрация начисляет щедрое вознаграждение в виде бесплатных вращений либо виртуальных кредитов. <a href=https://bestnet.ru/support/forum/index.php?PAGE_NAME=profile_view&UID=139139>https://bestnet.ru/support/forum/index.php?PAGE_NAME=profile_view&UID=139139</a> Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.Подарки на праздники ? посвященные торжественным датам, требующие условного отыгрыша либо начисляются без такового. Могут дариться игрокам сутки рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду. 1хслотс 1хслотс регистрация перейти на 1×slots 3. Подтвердить данные. В зависимости от клуба, нужно привязать телефонный либо почту, показать персональную информацию;Призовые начисления без депо имеют предоставляться для участия в турнирах онлайн казино. Потратить перечисленные средства можно исключительно в рамках данной промоакции. Условия их проведения в лимитирования на список игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться этим предложением, другого, как изучить его верховодила.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.formulersupport.com/Thread-%D1%81%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C-1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82–244233>скачать 1×slots официальный сайт</a>
<a href=http://junlinro520.gain.tw/space.php?uid=1111051>рабочее зеркало 1хслотс</a>
<a href=http://www.infoknygos.lt/smforum/index.php?topic=133777.new#new>1×slots казино зеркало</a>
<a href=https://forumanapa.ru/threads/7593/>1хслот официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но такие рамки не смущают даже хайроллеров, что коэффициенты на слотах позволяют рассчитывать на крупные выигрыши, а неких автоматах разыгрывается передовой джекпот.
#1038 Charlesgunnyhttp://filmkachat.ru
1×slots casino online регистрация
Если вы облюбовали для себя некоторое брендов коие вам больше всего полюбились, для постоянной игры! Таких гемблеров казино довольно предпочитает и ценит, за частую такие игроки становятся VIP игроками заведения, коим нередко поступают прибыльные предложения повторяющий призов, так же туда входит и бездепозитные.После потребуется привнести идентификационный платёж. Это стращает новичков больше всего. Нужно сделать минимальный депо в 100–500 руб. Таким образом служба защищенности убедиться в, собственно платёжный способ принадлежит Вам. Данная процедура необходима для обеспечения безопасности игровых счетов. Пример, Ваш аккаунт взломают и выведут свои на собственный кошелёк. Будет крайне неприятно. Поэтому верификация платёжной системы, это важный момент. <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> <a href=https://forum.index.hu/User/UserDescription?u=2065070>https://forum.index.hu/User/UserDescription?u=2065070</a> В неких онлайн казино для получения бездепозитных призов не довольно просто зарегистрироваться на веб-сайте клуба и подтвердить свои контактные данные. Дополнительно требуется активация промокода.Такие одобрения позволяют бесплатно протестировать новое казино, разобраться с игровым процессом онлайн слотов, заработать и исключить небольшую сумму денег. 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=http://smartars.biz/gnuboard5/bbs/board.php?bo_table=free&wr_id=23675>http://smartars.biz/gnuboard5/bbs/board.php?bo_table=free&wr_id=23675</a>
1×slots регистрация 1×slots casino 777 online
<a href=http://aficionado.pl/showthread.php?197464–1×slots-casino-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%BD%D0%B0-%D1%81%D0%B0%D0%B9%D1%82%D0%B5&p=218930>1×slots casino регистрация на сайте</a> 1×slots casino регистрация Помните, собственно в некоторых играх сумма ставки идет в зачет вейджера лишь частично. Так, в настольных и карточных забавах только от 5% до 50% суммы ставки числятся как отыгранные деньги, на как в слотах идет в зачет все one hundred percent суммы. <a href=http://istiqbolsari.uz/user/FrankDit/>http://istiqbolsari.uz/user/FrankDit/</a> Как лишь на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу в сего возможно оставить заявку на вывод выигрыша. Кредиты выгодно отличаются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом реальных средств и дают вероятность ощутить азарт. Во-вторых – возможно насладиться любой азартной забавой доступной на веб-сайте. В вашем распоряжении находятся автоматы, настольные приложение, видео-покер, Live-дилеры. сайт 1× slots casino
казино 1×slots
<a href=http://fohweb.com/www.playhouse.com.ua>http://fohweb.com/www.playhouse.com.ua</a> На страничке представлены бездепозитные бонусы за регистрацию в казино редчайшая награда за которой гонятся все игроки как новенькие, например и профессионалы. Мы также уделяем великое внимание на наличие бонусов при составление рейтинга казино на деньги. Бездепозитный бонус это возможность выступать бесплатно и выиграть настоящие средства.В онлайне слишком большое скриптовых вебсайтов, которые принадлежат мошенникам. Их главная цель – заинтересовать гэмблеров, пообещав не только щедрые подарки, хотя и крупные выигрыши. Так собственно кое-какие сайты предлагают получить за регистрацию даже $1 000. 1×slots подтвердит вашу регистрацию если говорить Ограничения по играм. Администрация запрещает игрокам кое-какие игровые автоматы с бездепозитным бонусом, средствами либо безвозмездными вращениями. Обычно, в правилах приводится глубокий список слотов для отыгрыша. Иногда дробление производится по виду игр. Например, отыгрыш возможен на всех игровых аппаратах, хотя запрещен в настольных забавах и в разделе Live Casino.Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам воспрещено начислять бонусы посетителям, не имеющим денежных средств на счете. Мы предлагаем осмотреть животрепещущие призы онлайн-казино с лицензией, которые соблюдают законодательство РБ.
1×slots регистрация 1×slotscasino 56 online
Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации подарка необходимо доказать электрическую почту и привязать аппарат; В подавляющем большинстве случаев безвозмездные призы начисляются в кредитах, коие нельзя сразу вывести со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже. 1×slots зеркало которую указывали при регистрации кстати <a href=http://alex-zarya.ru/user/Kennethsox/>http://alex-zarya.ru/user/Kennethsox/</a> Допустим, за регистрацию вы возымели бездеп в размере 2 000 руб. С вейджером х30. В этом случае предстоит устроить ставок, на совместную сумму в 60 000 рублей (2 000 * 30 = 60 000). Когда сделайте условия по отыгрышу, придёт время заработать реальные деньги. Однако не запамятовывайте, собственно с каждого подарка получится вывести определённую необходимую (почаще всего не более $200).
1×slot казино зеркало
Зарегистрируйтесь. Для регистрации чаще всего достаточно установить свой номер аппарата и почтовый адресок, в чего ввести полученный код из СМС. Возможно, потребуется указать промокод. В правилах акции несомненно написано, где его бы вводить. Иногда это надо создавать при регистрации, от — уже последствии сотворения личного кабинета, на отдельной странице. <a href=https://ic-info.ru/forum/user/165335/>https://ic-info.ru/forum/user/165335/</a> Более солидные предложения встречаются довольно изредка. Зачастую они доступны лишь VIP-игрокам. В оставшихся случаях им скорее сопутствуют очень жесткие условия отыгрыша. Также возможны вспомогательные обстоятельства прочие ограничения, прописанные в условиях и положения бонусной программки казино.У нас на сайте Вы отыщите список бонусов без депо в проверенных казино и доскональную информацию про как их получить и использовать. 1×slots официальный demo регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=http://jktroickiy.forumex.ru/viewtopic.php?f=2&t=4216>1хслотс рабочее зеркало</a>
<a href=http://miupsik.ru/forums/showthread.php?tid=531395>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Такие одобрения дозволяют даром протестировать свежее казино, разобраться с игровым ходом интернет слотов, заработать и вывести маленькую необходимую денег.
#1039 Charlesgunnyhttp://filmkachat.ru
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Создание аккаунта. На сайте казино нужно открыть регистрационную форму и наполнить пустые поля личными данными. Иногда на данном шаге требуется указать лишь адрес электронной почты и пароль, хотя почаще надо наполнить анкету персональной информацией (ФИО, дата рождения, место проживания и т.д.). Нужно свидетельствовать только настоящие данные, потому впоследствие они будут проверены. <a href=http://filmkachat.ru/>рабочее зеркало 1хслотс</a> Прямо сейчас отберите бесплатные вращения за регистрацию без депозита и начинайте коллекционировать призовые композиции ради солидных выигрышей! <a href=https://mez.ink/kalinka0588>https://mez.ink/kalinka0588</a> 1х слот регистрация в 1×slots casino <a href=http://www.icpkorea.com/bbs/board.php?bo_table=free&wr_id=255246>http://www.icpkorea.com/bbs/board.php?bo_table=free&wr_id=255246</a> Бонус в казино без депозита содержит разные варианты: может быть приветственный бонус, акции в честь каких-то праздничных либо весомых дат, приз за вербование свежих игроков, лояльность и получение VIP-статуса.
1×слотс казино
Мы собрали и опубликовали перечень превосходнейших бездепозитных казино с призами за регистрацию, которые гарантируют великодушные выигрыши и мгновенные выплаты.А ознакомиться с свежими интернет казино, Вы сможете помощью призов с выводом прибыли, коие Вы можете получить без депо. <a href=http://oszeresek.hu/forum/viewtopic.php?f=1&t=6135>1×slots регистрация на сайте</a> 1×slots регистрация 1×slotscasino 56 online Обычно, бездепозитные бонусы выдаются под конкретные слоты с фиксированной ставкой, но их наверняка воспрещено применять в игровых автоматах с прогрессивным джекпотом. Список игр, в которых можно применять бездеп, Вы найдете в описании промоакции или сможете уточнить у саппорта заведения. <a href=http://www.khanlin.com/bbs/board.php?bo_table=free&wr_id=116401>http://www.khanlin.com/bbs/board.php?bo_table=free&wr_id=116401</a> С не отыгранным бонусом запрещается превышать размер максимальной ставки. Нарушение этого условия будет аннулирование выигрыша. 1хслотс рабочее зеркало
1хлот регистрация в 1×slots casino
Фриспины. Бесплатные вращения предусмотрены для применения в видео-слотах. Внимательно читайте обстоятельства – они нередко выдаются для неких машин. В зависимости от клуба продоставляется делать конкретное число ставок. Кстати, современные игорные дома дают вероятность заводить «одноруких бандитов». Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, чтобы еще раз получить бесплатный бонус. Игорные заведения нетерпимы к бонус-хантерам, потому вас ожидает неминуемое санкция.Исходя из сего, просто не присутствует осмысленных причин махнуть рукой на получение такового бонуса при регистрации. И, кстати, на такой бесплатной базе у вас все шансы выиграть средства и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, именуют безвозмездными интернет платформами для игр. <a href=http://jkmulti.vip/bbs/board.php?bo_table=free&wr_id=4821569>http://jkmulti.vip/bbs/board.php?bo_table=free&wr_id=4821569</a> Первый возникающий вопрос, это, зачем выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают свежих игроков. Последним проще начать забаву на средства с подарка за регистрацию. Им не пополнять баланс и тратить собственные средства. Новички получают безвозмездные спины или средства на счёт. С их подмогою знакомятся с игровым процессом, крутят слоты и проделывают ставки в рулетке.Многие игроки, оценив возможностей казино, остаются выступать в нем и дальше ? на это и направлено любое промо. Постоянные посетители заносят депозиты и проделывают ставки, обеспечивая длительную прибыль оператора. То есть, казино выдают бездепы свежим пользователям для формирования приклнной аудитории. 1х слот 1хслотс регистрация перейти на 1×slots Реже бонусы без депозита начисляются неизменным игрокам. С их помощью администрация старается вычесть ценных посетителей либо желает поблагодарить за лояльность правильных гостей. Но гораздо почаще для сходственных целей применяются такие промоакции:
1×slot зеркало рабочее регистрации на телефон придет
Мы подготовили список, где есть практически актуальные и новые бездепозитные призы казино, которые вам получить безвозмездно. Для наших юзеров есть специальные предложения неповторимые призы, которые вы ни не отыщите, их мы определили специальной красноватой плашкой «Exclusive». <a href=https://forum.dis-course.net/viewtopic.php?t=655071>1хслотс казино зеркало</a> Простая процедура получения бездепозитного бонуса, кот-ая займет не более 2-х мин. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные.Выше мы дали глубокий комплект самых новых и актуальных бездепозитных бонусов в онлайн казино без пополнения на 2022 год, где возможность пользоваться каким ценным бездепозитным бонусом. Шаг 5. Использование и отыгрыш. Бездеп обязан быть использован в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. 1 xslots рабочее зеркало <a href=http://www.haxorware.com/forums/member.php?action=profile&uid=287566>http://www.haxorware.com/forums/member.php?action=profile&uid=287566</a> Зарегистрируйтесь. Для регистрации чаще всего довольно установить свой номер телефона и почтовый адрес, последствии чего ввести приобретенный код из СМС. Возможно, требуется показать промокод. В правилах промоакции будет написано, где его надо включать. Иногда это надобно создавать при регистрации, время — уже после творенья личного кабинета, на отдельной страничке.Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие появляются у новичков.
1×slots официальный зеркало рабочее
Однако далеко не все ресурсы предлагают своим посетителям бездепозитные призы за регистрацию в казино. В большинстве случаев учтено поощрение на первый депо в объеме 100–200%. Это замечательная возможность преувеличить банкролл, увеличить время, проведённое за игрой и шансы сорвать крупный куш.Если ординарными словами, бездепы – это определённая сумма средств или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать презенты. Но есть кое-какие аспекты. Существуют игорные дома, которые перед тем как начислить бонусы настоятельно привязать телефон, предоставить копии документов. <a href=https://www.neobienetre.fr/forum-bien-etre-medecines-douces-developpement-personnel/topic/real-estate-virtual-tours/>https://www.neobienetre.fr/forum-bien-etre-medecines-douces-developpement-personnel/topic/real-estate-virtual-tours/</a> 1×slots зеркало на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=https://bbs.sinbadgroup.org/index.php?members/jamesiroma.21478/>1×slots зеркало быструю регистрацию а также мгновенное</a>
<a href=http://forum.as-p.cz/viewtopic.php?f=45&t=279162>1×slots регистрация 1×slots casino 777 online</a>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=410469>1×slots быструю регистрацию а также мгновенное</a>
<a href=https://forumsleague.org/forum/viewtopic.php?f=4&t=34054&p=402234#p402234>1хслотс регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В основном случаев благотворительные бонусы начисляются в кредитах, коие невозможно сразу исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти требования принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д. ). О нем читайте ниже.
#1040 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало подтвердит вашу регистрацию если говорить
Бездепы обычно предлагают с отыгрышем — моментально исключить выигранные средства невозможно. Перевод средств со счета будет возможен последствии такого, как юзер выполнит все требования казино, а сумма имеет превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, протяжении коих клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней после активации.Некоторые сайты, до чем обмануть регистрацию игроков, предлагают ответить на количество базовых вопросов. Цель проведения сходственной викторины – выявить случайных людей, которые не имеют представления о покере, и не разрешить получения ими бонусов. Если посетитель уже играл в казино, то ответить на полтора десятка простых вопросов будет несложно. Очень часто, ответы возможно отыскать на официальных сайтах этих учреждений. <a href=http://filmkachat.ru/>1×слот регистрация в 1×slots casino</a> Главным интересным в появлении этих вознаграждений состоит том,, собственно пустив их в ход, в ничем не рискует и в последствии никому ничего не будет должен (не зависимо, получит ли он благодаря бонусам какой-нибудь выигрыш или мгновенно спустит все лишь собственно прибывшие финансы). То есть, казино снабжает игрока вероятностью на дармовой основе играть во всевозможные слоты даже спонсирует игру. <a href=https://www.shippingexplorer.net/en/user/architectural-rendering/146752>https://www.shippingexplorer.net/en/user/architectural-rendering/146752</a> 1×slot регистрация <a href=http://www.podzemie.6f.sk/profile.php?lookup=20388>http://www.podzemie.6f.sk/profile.php?lookup=20388</a> Фриспины. Бесплатные вращения предназначены для применения в видео-слотах. Внимательно читайте обстоятельства – они часто выдаются для неких машин. В зависимости от клуба возможность создавать конкретное число ставок. Кстати, современные игорные дома выделяют возможность заводить «одноруких злодеев».
1хслот скачать
<a href=http://xn–80akbkalsbeeafq6a6b2f.xn–p1ai/forum/messages/forum1/topic46899/message249905/?result=new>1×slots официальный demo регистрация в 1×slots casino</a> 1хслот официальный сайт зеркало На странице представлены бездепозитные бонусы за регистрацию в казино редчайшая заслуга за которой гонятся все игроки как новички, так и мастера. Мы тоже уделяем великое внимание на наличие бонусов при формирование рейтинга казино на средства. Бездепозитный бонус это возможность играть бесплатно и выиграть настоящие деньги.Выигрыши с бонусов без вложений всегда привязаны к притязанию по ставкам и имеют быть обналичены лишь после выполнения этих требований. <a href=http://wehavegottalents.com/member/verdantailment4.html>http://wehavegottalents.com/member/verdantailment4.html</a> Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам воспрещено начислять призы посетителям, не имеющим валютных средств на счете. Мы предлагаем разглядеть актуальные призы онлайн-казино с лицензией, которые соблюдают законодательство РБ. 1×slots официальный регистрация Oтыгpaть бонус с указанным вeйджepом, достичь нужно сдeлaть cтaвoк нa cумму, превосходящую объем бонуса в несколько раз.Прежде чем активировать бездеп, необходимо увериться что, нет, что страна, уроженцем коей является игрок, не заходит в список запрещенных.
1×slots регистрация то дальше необходимо пройти
Не стоит путать забаву в демо и внедрение бонусов. В демонстрационном режиме игрок имеет расценить механику слота, сюжет и оформление. Но игра проводится на относительные кредиты, поэтому отсутствует главное ? чувство азарта. Активируя промокод либо фриспины, заказчик раньше не тратит средства деньги на игровые автоматы, но имеет сорвать реальный куш! Самые известные методы вывода средств ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электрическим платежным системам подобии Neteller и Skrill, а также пользуются криптовалютными кошельками. Вывод выигрышей имеет осуществляться быстро или развлекать от нескольких часов до нескольких суток.Чаще всего, знаменитые сервисы, эти как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно обязательное управляло. Финансовые свои выводятся только через ту платежную систему, коей популярностьюимели для пополнения депо. Если же игрок получил бездепозитный покерный бонус, требуется восполнить счет на наименьшую необходимую, кот-ая сочиняет обыкновенно 10 долларов. <a href=https://seriya-p.ru/member.php?u=612197>https://seriya-p.ru/member.php?u=612197</a> 1×slots официальный сайт мобильная версия скачать
зеркло казино 1×slots
На страничке представлены бездепозитные призы за регистрацию в казино редчайшая заслуга за которой гонятся все игроки как новички, например и профессионалы. Мы также уделяем великое внимание на присутствие бонусов при составление рейтинга казино на деньги. Бездепозитный приз это вероятность выступать бесплатно и выиграть реальные деньги.Это тоже бесплатные деньги, которые поступают на аккаунты свежеиспеченных игры в регистрирования. А необыкновенность этих бонусов состоит в, собственно обретенные финансы обязательно стопам применять в продолжении назначенного времени. <a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=133554&pid=718341#pid718341>1×slots зеркало на сегодня</a> Будьте внимательнее при ознакомлении с правилами во избежание появления конфликтных обстановок с казино, когда в отыгрыша бездепа вас не дадут вывести солидную сумму выигрыша. 1×slots официальный сайт скачать <a href=https://elliotnxgo41852.blog2learn.com/78304938/nude-ai-understanding-the-intersection-of-innovation-and-ethics-in-image-manipulation>https://elliotnxgo41852.blog2learn.com/78304938/nude-ai-understanding-the-intersection-of-innovation-and-ethics-in-image-manipulation</a> Активация валютного вознаграждения происходит механически последствии сотворения профиля или использования промокода. Иногда операторы предъявляют вспомогательные притязания: подписаться на странички казино в социальных сетях либо на рассылку рекламных сообщений, скачать и установить дополнительный софт и т.д.
1×slots регистрация 1×slotscasino09k online
Получить приветственный бонус могут лишь свежие посетители онлайн-казино. Способы описаны в условиях акции каждого законного казино, почаще всего это:Как лишь получите бездеп в казино, всё также не забывайте проверять электрическую почту. Некоторые игорные клубы день радуют активных гэмблеров приятными бонусами. Чаще всего получить подарок можно в преддверии праздника, на денек рождение, за вербование приятеля. А также распространённым бонусом считается надбавка к депозиту. Нужно более восполнить счёт, и азартное заведение увеличит его на 50–100%. Бездепозитный приз за регистрацию в казино с выводом средств в 2022 году — Наш ресурс дает игрокам важную информацию о самых новых, щедрых и испытанных призах в интернет казино, коие обновляются любой день. <a href=https://telearchaeology.org/TAWiki/index.php/%D0%98%D0%B7_%D0%A7%D0%B5%D0%B3%D0%BE_%D0%A1%D0%BE%D1%81%D1%82%D0%BE%D0%B8%D1%82_%D0%94%D0%B8%D0%B5%D1%82%D0%B0_%D0%95%D0%BB%D0%B5%D0%BD%D1%8B_%D0%9C%D0%B0%D0%BB%D1%8B%D1%88%D0%B5%D0%B2%D0%BE%D0%B9>https://telearchaeology.org/TAWiki/index.php/%D0%98%D0%B7_%D0%A7%D0%B5%D0%B3%D0%BE_%D0%A1%D0%BE%D1%81%D1%82%D0%BE%D0%B8%D1%82_%D0%94%D0%B8%D0%B5%D1%82%D0%B0_%D0%95%D0%BB%D0%B5%D0%BD%D1%8B_%D0%9C%D0%B0%D0%BB%D1%8B%D1%88%D0%B5%D0%B2%D0%BE%D0%B9</a> Выбирая бесплатный бонус, внимательно изучайте правила. Убедитесь, собственно вам можно себя роль в акции. Уточните, в каких играх можно скорпулезно условия вейджера. При надобности задавайте вопросы представителям саппорта. 1×slots зеркало регистрация На бонусные начисления все быть установлены дополнительные ограничения, которые Вы не сведению при отыгрыше. Пока бонус полностью не отыгран — деньги из казино не выводятся.
<b>Смотреть еще похожие новости:</b>
<a href=http://thienduongcacanh.com/threads/x1-slots-registracija-v-1×slots-casino.13112/>x1 slots регистрация в 1×slots casino</a>
<a href=http://soumoli.com/home.php?mod=space&uid=24916>скачать 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы, как уже ясно, считаются уникальной возможностью к игровому процессу полностью бескорыстно, словами выступать в интернет казино даром и на быть свои незамедлительно после регистрации аккаунта. Автоматы с таким депозитом шансы стать прекрасной вероятностью поиграть для почитателей пыла с определенными ограничениями в денег. Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте обстоятельства – они нередко выдаются для некоторых машин. В зависимости от клуба продоставляется делать конкретное количество ставок. Кстати, современные игорные жилища дают вероятность заводить «одноруких бандитов».
#1041 WalterSmumshttps://bigspons.ru
После нескольких дней и 257 выборов НФЛ 2025 года завершился. Все 32 команды должны почувствовать, что они улучшились, хотя некоторые должны чувствовать себя лучше других. Никогда не стоит судить о результатах до того, как они появятся на поле НФЛ, и мы не будем здесь предсказывать, как покажут себя новейшие игроки лиги. Это даст шанс им им <a href=https://bigspons.ru/kupit-gashish-marikhuan-v-kemerovo.html>купить ск кристаллы</a> и не только. Однако совершенно справедливо оценить, как франшизы прошли мероприятие, удовлетворили потребности, повысили ценность (или нет) и совместили подход к драфту с долгосрочными планами франшизы. Все верно: пришло время для оценок анализа после драфта для каждой франшизы. Ниже вы найдете анализ каждого выбора из каждой франшизы с анализом класса на основе вышеупомянутых факторов, прогнозируемого соответствия схеме и любых соответствующих обменов. Поскольку ценность личная, мы использовали окончательные рейтинг перспектив 2025 года отдела скаутинга Bleacher Report в качестве ориентира. Франшизы перечислены в алфавитном порядке.
#1042 Charlesgunnyhttp://filmkachat.ru
казино 1×slots официальный сайт
На нашем сайте Вы отыщите список актуальных новых бездепозитных призов в казино 2022 года. Также, есть количество эксклюзивных предложений, которые доступны лишь посетителям нашего сайта последствии регистрации по нашей ссылке или активации особого промокода. <a href=http://filmkachat.ru/>1×slots регистрация на сайте 1×slots ru com</a> <a href=https://collectednotes.com/lexxeagle/kak-pravilno-i-vygodno-prodat-svoi-avtomobil>https://collectednotes.com/lexxeagle/kak-pravilno-i-vygodno-prodat-svoi-avtomobil</a> 1×slots casino регистрация 1×slotscasino09k online <a href=https://paperpage.in/blogs/288414/Transform-Your-Products-with-Premium-3D-Rendering-Services>https://paperpage.in/blogs/288414/Transform-Your-Products-with-Premium-3D-Rendering-Services</a> Диапазон ставок, коие вправе устроить игрок, кроме лимитирован. Обычно ставить возможно маленькую необходимую — пределах 10–30 рублей за одно вращение.Однако далековато не все ресурсы предлагают своим клиентам бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено одобрение на 1-ый депо в размере 100–200%. Это замечательная вероятность преувеличить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш.
1хслотс мобильная версия зеркало
Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте обстоятельства – они нередко выдаются для некоторых машин. В зависимости от клуба продоставляется делать конкретное количество ставок. Кстати, современные игорные жилища дают вероятность заводить «одноруких бандитов».Это раз из основных показателей привлекательности презента. С завешенным коэффициентом том мастера не смогут выполнить обстоятельства по отыгрышу. И важно, насколько привлекательно выглядит предложение – бездепозитный приз казино в размере $500 либо $1 000. Чтобы новенькие лучше вникли, что же такое вейджер, мы разберём на примере. 1×slots сайт Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=https://www.formulersupport.com/User-Jamessmicy>https://www.formulersupport.com/User-Jamessmicy</a> Разные казино имеют личные верховодила по выведению выигрыша. Для бездепозитных призов принимаются достаточно высочайшие требования. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до 100 раз в игровых автоматах. Например, в игрок получил даром 10 $, то необходимо несомненно отыграть их, поставив одну тыщу спинов по одному доллару каждый. Стоит обозначить(означить), что не все казино дают возможность играть на призы и не во всех увеселительных заведениях идентичные верховодила для отыгрывания. Некоторые казино запрещают играть на бонусы в блекджек либо ограничивают ставки до 5 %, что значительно увеличивает в 10-ки один число необходимых игр.При регистрации сомнений или ином интернет игральном заведении — вас дается раз шанс испытать собственную фортуну не внося свои монеты. Замечу что эту поощрительную услугу предоставляют не все интернет игровые площадки, а лишь великодушная половина из них. Которые мы подготовили для Вас в нашем перечне. 1хслотс зеркало на сегодня Но есть игорные заведения, которые готовы просто например жертвовать деньги на игру. Для этого довольно создать профиль. Чтобы исключить собственный выигрыш, вам поначалу необходимо выполнить обстоятельства отыгрыша, обозначенные в критериях получения бездепозитного депозита.
1хслотс зеркало на сегодня
Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс дает игрокам важную информацию о самых свежих, щедрых и испытанных бонусах в онлайн казино, коие обновляются каждый денек. Для проверки применяются сканы паспортов, водительских удостоверений, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если пользователь обнаружен в попытке ввести дополнительный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в темный перечень. При игре на лицензионной площадке не стоит опасаться свидетельствовать достоверную персональную информацию (шифрование ликвидирует утечку персональных данных). <a href=https://www.google.gl/url?q=http%3A%2F%2Fdoctorlazuta.by>https://www.google.gl/url?q=http%3A%2F%2Fdoctorlazuta.by</a> 1×slots промокод при регистрации Почти все игровые клубы требуют подтверждение контактных данных игрока для получения бездепозитного бонуса.
1×slots casino зеркало
Многие казино деют в маркетинговых целях безвозмездные бонусы исключительно для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой сайт по партнерской ссылке с нашего портала. Новички не любят незамедлительно же вносить депозит. Это обосновано отсутствием опыта и недоверием. К счастью, в можно получить бездепозитный бонус за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В всяком случае вы не рискуете своими сбережениями. Это замечательная возможность запустить приглянувшийся видео разъем или же испытывать фортуну в настольных играх.Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция содержит доскональные управляла, гиперссылка на коие обычно находится в промообъявлении. В их указываются лимиты, вейджер, перечень дешевых игр. Если оператор скрывает данные о предложении, то воспользоваться им не. Постарайтесь отыграть вейджер, чтобы замечена возможность оставить заявку на выплату. Кстати, на всех сайтах, представленных в списке, доступны современные платёжные инструменты. Вы можете получить выигрыш на электронной кошелёк, карту, аппарат. 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=https://forum.spherecommunity.net/User-JasperBer>https://forum.spherecommunity.net/User-JasperBer</a>
1×slots зеркало быструю регистрацию а также мгновенное
Наши специалисты изучают обстоятельства акции, затем в ручном режиме проверку их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие характеристики. Мы не рекламируем казино, а даем игрокам информацию о превосходнейших из них.У любой игры средства притязания по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система зачтет каждую ставку. В рулетке и покере устроить это гораздо сложнее. Именно потому так принципиально внимательно разбирать обстоятельства получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в каждой этой, то новенькие просто «спустят бонус на ветер». <a href=https://git.forum.ircam.fr/batecom0602/Batecom0602/-/issues/2>https://git.forum.ircam.fr/batecom0602/Batecom0602/-/issues/2</a> 1×slots регистрация 1×slotscasino09k online
<b>Смотреть еще похожие новости:</b>
<a href=https://kfz-gringer.at/index.php/forum/in-neque-arcu-vulputate-vitae/80803–1×slots#80567>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<a href=http://police.1stbb.ru/viewtopic.php?f=3&t=1509>1×slots официальный сайт зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Многие новички сомневаются, что поощрительный приз не будет отдавать, числе в они выиграли у казино. Это абсолютно безопасно и надежно. Выводя выигранные средства, игрок просто останавливает свое роль в игре и теряет уникальную возможность – даром наращивать собственное материальное положение.
#1043 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Георгий Джикия (футбол) porno Игорь Акинфеев (футбол) <a href=https://kompromat1.online/>new casino</a> казино рояль смотреть 1×bet зеркало xbet xyz <a href=https://krtka.info/>1×bet официальный сайт</a> porno Ангелина Гончаренко, хоккеистка 1×bet бесплатно porno Катерина Шпица gama casino приложения букмекерских контор на андроид casino бездепозитный букмекерская контора мостбет
DiskiPlus casino вход DiskiPlus 1×bet зеркало на сегодня <a href=https://diskiplus.ru>DiskiPlus porno Дарья Клишина</a> DiskiPlus 1×bet рабочее DiskiPlus 1×slots casino <a href=https://www.diskiplus.ru>DiskiPlus смотреть фильм казино</a> DiskiPlus сайты казино DiskiPlus 1×bet зеркало слоты 1×bet xyz DiskiPlus почему в казино не бывает настенных часов DiskiPlus 1×bet скачать приложение DiskiPlus 1×bet DiskiPlus online casino 7k DiskiPlus казино фильм онлайн
#1044 Charlesgunnyhttp://filmkachat.ru
1 х слотс зеркало
Нет. Казино раздают бесплатные бонусы за регистрацию, для того, дабы заказчик имел ознакомиться с игровым заведением. А дабы исключить его, нужно выполнить обстоятельства отыгрыша.Популярность онлайн казино растёт и всё больше пользователей начинают интерес азартными играми. Бездепозитные призы 2022 года, это оригинальные подарки за регистрацию. С их поддержкою свежие игроки имеют получить бесплатные вращения или средства на баланс за 1 регистрацию. С выходом игорных заведений в интернете, бездепозитные призы стали моднейшим способом вербования игроков. Подобные акции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о коих мы расскажем. Наш вебсайт собрал превосходнейшие предложения из интернета на 2022 год. Воспользуйтесь любым подарком и можете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить обстоятельства. <a href=http://filmkachat.ru/>1 х слотс зеркало</a> <a href=https://linktr.ee/kalinka0588>https://linktr.ee/kalinka0588</a> 1×slots промокод при регистрации 2025 <a href=http://supergame.one/home.php?mod=space&uid=80695>http://supergame.one/home.php?mod=space&uid=80695</a> Если вы выбираете испытанное лицензионное интернет казино и выполните все условия получения бездепозитного приза, проблем с получением дара у Вас не возникнет.Наш список включает в себя лучшие бездепозитные бонусы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по принципиальным параметрам:
1×slots регистрация 1×slots casino 777 online
<a href=https://forum.vn.ua/showthread.php?p=3308995#post3308995>1×slots зеркало рабочее на сегодня</a> 1хслотс рабочее зеркало на сегодня Начнём с такого, собственно любое рекламную за регистрацию предполагает некие обстоятельства. Бездепозитные бонусы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, необходимая для исполненья условий. Пример, возымели бесплатные вращения и выиграли с их 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 руб., проигрышных или выигрышных, важно. После выполнения, бонусный баланс перейдёт на настоящий и будет легкодоступным к выводу.Маркетинговая деятеля всех игорных интернет-клубов обязана носить разнообразный нрав. И случае вознаграждения на депо служат чтобы, чтобы, чтобы провоцировать вносить депозиты и поощрять уже существующих юзеров, то бездепозитный бонус в казино либо бонус за регистрацию в казино, до всего, рассчитан на расширение базы потребителей. <a href=https://www.one2bay.de/forum/member.php?action=profile&uid=43542>https://www.one2bay.de/forum/member.php?action=profile&uid=43542</a> Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в соц сетях, установку мобильного прибавления или официального клиента для ПК. В большинстве казино действуют программы преданности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий уровень часто с выдачей бездепа.Некоторые казино шансы предлагать посетителям бездепы за подтверждение номера или почты либо репост на страничку в социальных сетях. 1×slots casino online регистрация
1хслот зеркало
Отказ в прохождении верификации. Если клиент не желает или возможности дать документы, подтверждающие его личность, профиль несомненно заблокирован вместе со всеми бонусными начислениями. Срок активации и время на отыгрыш. Зачисление средств или фриспинов происходит при активации в течение требовательно ограниченного периода, схожие притязания предъявляются и к срокам отыгрыша. Одни казино позволяют отыгрывать приз некоторое дней или в недель. Другие выдают солидную сумму за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высочайшим вейджером.Для такого, дабы отыграть необходимую вашего бездепозитного бонуса надо(надобно) выполнить обстоятельства вейджера. Очень часто фриспины даются на конкретные слоты (book of ra, book of deceased, book of sun), выбирайте разъем себя нраву, все довольно красочные и качественные. Бездепозитные приз имеет быть валютным так и вид фриспинов на слоты <a href=http://allpromsnab.ru/bitrix/redirect.php?goto=http://forum.gamevn.com/proxy.php?link=http://google.com.jm/url?q=https://teletype.in/@urist555/qOL3mqon44I>http://allpromsnab.ru/bitrix/redirect.php?goto=http://forum.gamevn.com/proxy.php?link=http://google.com.jm/url?q=https://teletype.in/@urist555/qOL3mqon44I</a> При поддержки такового одобрения оператор возможность того завлекать посетителей, коие раньше показывали активность на веб-сайте, но по какой-то основанию перестали играть. В этом случае промокод высылается пользователю по электронной почте или вид SMS. 1×slots на любой вкус как пройти регистрацию Прежде всего, не запамятовывайте периодически заглядывать на страничку обзоров бездепозитных призов. Они шаг за шагом оценивают более увлекательные предложения основных игорных порталов.
1хслотс казино зеркало
Для тех, кто лишь взвешивает испытывать свою фортуну, а для профессиональных игроков, ищущих новые площадки для выигрышей, водящие лицензированные казино часто устраивают различные акции, и одно из лучших предложений за время – как для новичков, например и для профессиональных игроков – бездепозитный бонус за регистрацию.За вербование приятеля ? в партнерской программы заказчик получает вознаграждение за привлечение свежих пользователей. Подобные бонусы без депо предоставляются на более прибыльных критериях. Зачастую они покрупнее, а условия отыгрыша наименее строгие. 1×slots зеркало которую указывали при регистрации кстати <a href=https://funsilo.date/wiki/User:EmeliaYki3203>https://funsilo.date/wiki/User:EmeliaYki3203</a>
1хслот зеркало
Как верховодило, при выводе денег, от играющего требуется лишь сделать наименьший вклад чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом личный счет. Не стоит незамедлительно же открещиваться от приветственных даров в сходственных казино. Администрация готова начислить деньги либо фриспины, хотя сначала сотрудники обязаны увериться, что вы не мошенник. Дело в, что развелось очень количество охотников за призами. Они научились дурачить систему и зарабатывать крупные суммы средств. <a href=http://xn–jj0bt2i8umnxa.com/bbs/board.php?bo_table=free&wr_id=220470>http://xn–jj0bt2i8umnxa.com/bbs/board.php?bo_table=free&wr_id=220470</a> Самые новые бездепозитные бонусы в казино за регистрацию 2022 года с выводом прибыли присутствуют на этой страничке. Посетитель имеет оценить обстоятельства получения и начать играть на средства без внесения депо. При данном игроку принципиально понимать, на каких критериях и какими способами у исключить полученный выигрыш. Для сего нужно оценить список присоединенных платежных систем.Как лишь на виртуальном счету окажутся бонусные свои, поторопитесь отыграть вейджер. Сразу в этого возможно забыть заявку на вывод выигрыша. Кредиты прибыльно выделяются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом реальных средств и выделяют возможность ощутить азарт. Во-вторых – возможно насладиться каждой азартной игрой доступной на веб-сайте. В вашем распоряжении находятся автоматы, настольные приложение, видео-покер, Live-дилеры. 1×слот регистрация в 1×slots casino Если при регистрации показать промокод, возможно гарантировано получить приз. Где арестовать ваучер? Посетите определенную блоги либо форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В заключительнее время игорные жилища начали афишироваться в кинокартинах и сериалах. Присмотритесь и наверняка заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных руб.
<b>Смотреть еще похожие новости:</b>
<a href=http://nexusroleplay.teamforum.ru/viewtopic.php?f=19&t=11435>1×slots подтвердит вашу регистрацию если говорить</a>
<a href=https://adminclub.org/showthread.php?tid=329433>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=http://forum.as-p.cz/viewtopic.php?f=45&t=67620&p=364082#p364082>1×slots казино зеркало</a>
<a href=http://c-strike.fakaheda.eu/profile.php?lookup=26984>казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Размер бонуса. В качестве бездепов обыкновенно начисляют большие суммы, а когда речь идет о призах за депо, которые начисляются в процентном соотношении от суммы пополнения, то некоторые казино могут презентовать игроку до 2000$. Таким образом интернет казино получает потенциального игрока. Возможно в или подлинном он захочет поиграть на средства средства. Так работают бездепозитные бонусы в онлайн казино. Здесь отлично подходит выражение, бесплатные сыр бывает только в мышеловке. Начинающие игроки все не осознавать опасность азарта. Однако течением понимания делается больше. Это тема для отдельного обсуждения.
#1045 Ctgroupkz_Atmonhttps://www.ctgroup.kz/
Всем привет! Действительно очень трудно и очень сложно выучить казахский язык, не говоря уже о английском языке. Это одна из величайших и серьезных проблем, можно сказать почти всего человечества и большинства людей. Особенно если нет усидчивости и старания. Думал уже бросать это неблагодарное и гиблое дело. В общем, сами выучить не сможете, даже не пытайтесь, без профессиональных наставников и учителей. В общем, если вы ищите, образовательный языковой центр в Казахстане в Алматы или Атырау и хотите узнать, например: <a href=https://www.ctgroup.kz/english-children/>английский язык для детей</a> Тогда вам нужно прямо сейчас перейти на сайт Образовательного центра Caspian Training Group и выбрать место обучения в Атырау или Алматы в Казахстане https://www.ctgroup.kz/ . Переходите на сайт Caspian Training Group изучайте информацию и сохраняйте в закладки, не забудьте записать адрес сайта и номер телефона +7 775 0301919. Увидимся!
#1046 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet официальный xbet porno Мира Андреева (теннис) <a href=https://krtka.info/>почему казино</a> включи казино официальные зеркала казино <a href=https://slon-ru.com/>лучшие бесплатные онлайн казино</a> сайты казино online casino 7k почему в казино нет окон 1×bet официальный xbet pin up casino пин casino регистрации про казино
DiskiPlus gama casino DiskiPlus казино рояль <a href=https://www.diskiplus.ru/>DiskiPlus porno Светлана Ходченкова</a> DiskiPlus 1win букмекерская контора DiskiPlus casino официальный сайт <a href=https://www.diskiplus.ru>DiskiPlus 1×bet зеркало на сегодня 1×bet xyz</a> DiskiPlus 1×bet на андроид бесплатно DiskiPlus пинко casino DiskiPlus официальная казино DiskiPlus porno Илья Ковальчук (хоккей) DiskiPlus porno Нина Пирогова, хоккеистка DiskiPlus фреш казино DiskiPlus сайт казино зеркало
#1047 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало
Онлайн-казино кропотливо продумывают бонусные условия, коие необходимо выучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша прочие лимитирования.Реже бонусы без депозита начисляются неизменным игрокам. С их поддержкой администрация старается удержать ценных клиентов либо вожделеет поблагодарить за лояльность верных посетителей. Но гораздо чаще для сходственных целей используются такие акции: <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> Фриспины начисляются по конкретной ставке. После их активации игроку необходимо запустить разъем и увериться, собственно в нем отображаются безвозмездные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода последствии отыгрыша определяется оператором и редко превышает 5 000 руб.Все бесплатные бонусы кажутся заманчивыми. Кто же категорически от способности поиграть в онлайн-казино, не рискуя средствами, но получая выигрыши. Но далековато не все бездепозитные призы одинаковой презентабельны для рассудительного клиента. <a href=https://www.arrl.org/forum/topics/view/4342>https://www.arrl.org/forum/topics/view/4342</a> 1×slot регистрация <a href=https://morphomics.science/wiki/User:XFGOlen900738>https://morphomics.science/wiki/User:XFGOlen900738</a> Выполнив все требования оператора, заказчик имеет оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит примерно не более суток. Если дополнительно требуется пройти процедуру верификации, то срок увеличивается до 1–2 трудящихся дней. Для перевода применяются банковские приборы и электрические платежные системы. Второй способ подходит лучше, так как большинство транзакций такой осуществляются моментально. В связи со спецификой функционирования банков обработка платежей возможность занять до нескольких трудящихся дней.
1×slots скачать на айфон
1хслотс казино зеркало Не советуем сломя голову хвататься за всевозможные предложения получения средств без инвестициям. Вполне возможно, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на первый взор. Альтернативой является казино бонус за депо. Мы предлагаем вам пару советов, благодаря коим у каждого игрока будет возможность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств: <a href=http://linuxmagazin.3×.ro/modules.php?name=Your_Account&op=userinfo&username=permissibleback>http://linuxmagazin.3×.ro/modules.php?name=Your_Account&op=userinfo&username=permissibleback</a> Денежные средства. Третий бонус за регистрацию без депозита – наличные. К раскаянию, лишь знаменитые и популярностью клубы могут дать деньги в руб. Или долларах. С их поддержкою вас насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед этим необходимо исполнение конкретных условий. 1×slots официальный зеркало Основное отличие в том, что для получения бездепа не пополнять баланс в казино. Но кроме этого, есть ряд прочих отличий:
1×slots зеркало видели такую регистрацию на
Верификация аккаунта. Лучше подтвердить лицо сразу в регистрации, дабы потом не было проблем с выводом денег. Верификация имеет протекать двумя способами: При отыгрыше бонусных средств, нужно учитывать срок деяния бонуса и время, которое дается на отыгрыш. По истечению заявленного времени, не отыгранный приз несомненно аннулирован. <a href=https://www.alivelink.org/%D0%BB%D1%83%D1%87%D1%88%D0%B0%D1%8F-%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0-%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA_292699.html>https://www.alivelink.org/%D0%BB%D1%83%D1%87%D1%88%D0%B0%D1%8F-%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0-%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA_292699.html</a> 1×slots промокод при регистрации 2025
1 x slots casino
С этими простыми советами любое казино с призом за регистрацию способно принести в разы больше выгоды и пользы.Суммы сходственных услуг, случаев, колеблются от трех до двадцати долларов, а вейджер на эти свои должен составлять от тридцати до шестидесяти один. Зачастую, наивеличайшая сумма выигрыша тут составит от одной до 2-ух сотен $. Если игрок выиграет больше, то все свои шансы быть списанными до максимально разрешенного выигрыша. Здесь замечена содержание выводить еще несуществующие деньги на собственную платежную систему и дальше искать заведение с благоприятными под данную необходимую релоадом или бонусом за 1-ое пополнение счета. Есть некоторое подвидов бездепозитного вознаграждения, предлагаемого великим числом заведений. 1×slots акции <a href=http://www.mignonmuse.com/bbs/board.php?bo_table=free&wr_id=323497>http://www.mignonmuse.com/bbs/board.php?bo_table=free&wr_id=323497</a> Денежные средства. Третий приз за регистрацию без депозита – наличные. К раскаянью, лишь знаменитые и модные клубы могут уяснить деньги в рублях или баксах. С их поддержкой вы сможете насладиться любой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед этим необходимо исполнение определенных критерий.Поспешите зарегистрироваться на официальном сайте Клубника, чтобы моментально получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, появляется настоящий шанс победу!
1хслот зеркало
Суммы похожих услуг, в, колеблются от трех до 20 $, а вейджер на эти средства обязан составлять от 30 до шестидесяти раз. Зачастую, величайшая сумма выигрыша тут составит от одной до 2-ух сотен $. Если игры выиграет больше, то все средства имеют быть списанными до максимально разрешенного выигрыша. Здесь бывает смысл выводить еще несуществующие финансы на свою платежную систему и дальше находить заведение с благоприятными под данную необходимую релоадом либо бонусом за первое пополнение счета. Есть несколько подвидов бездепозитного гонорары, предлагаемого большим количеством заведений. Для отыгрыша бонуса казино обязует игрока сыграть на сумму, в несколько один превосходящую необходимую полученного бонуса — тут выгода фирмы очевидна.Свежий приз начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в пользовании средствами, ну случае отыгрыша оператор может установить лимитирование на вывод средств. <a href=http://www.3ak.cn/home.php?mod=space&uid=186998>http://www.3ak.cn/home.php?mod=space&uid=186998</a> Существует ли стратегии для отыгрыша бездепозитных бонусов? К раскаянью нет, на выигрыши либо проигрыши с бонусов, казино либо игрок повлиять возможности, отдача игр происходит от разработчиков игр. 1х слот регистрация в 1×slots casino Бонус без депозита за регистрацию в казино (бездепозитный приз) – это валютный презент от клуба, кот-ый начисляется на аккаунт игрока после регистрации в казино. Кроме творенья учетной записи, для получения бездепа, довольно часто требуется ещё и подтвердить контактные данные игрока и/или активировать особый промо-код.
<b>Смотреть еще похожие новости:</b>
<a href=http://support-groups.org/viewtopic.php?f=161&t=782098>1×slots подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чаще всего, знаменитые сервисы, такие как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно неотъемлемое верховодило. Финансовые свои выводятся только спустя что, эту платежную систему, коей пользовались для пополнения депозита. Если же игрок получил бездепозитный покерный приз, потребуется восполнить счет на наименьшую необходимую, кот-ая составляет обычно 10 $. Только выполнив все обстоятельства отыгрыша и дождавшись окончания проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить свои деньги.
#1048 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Вера Бирюкова, гимнастка порно с Владимир Минеев (ММА) <a href=https://m.repost.news/>casino рабочее</a> Окладникова Ирина Андреевна порно сайт казино зеркало <a href=https://specreporter.com/>Преподобная Надежда Александровна порно</a> 1×bet зеркало xbet пин ап букмекерская контора Черкесова Бэлла Мухарбиевна порно порно с Петр Ян (ММА) казино фильм смотреть онлайн яндекс казино букмекерская контора вход
DiskiPlus гта казино DiskiPlus игры казино <a href=https://diskiplus.ru>DiskiPlus casino com</a> DiskiPlus казино онлайн DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz <a href=https://diskiplus.ru/>DiskiPlus порно с Алина Загитова</a> DiskiPlus 1×bet 1хбет DiskiPlus Светлана Ходченкова DiskiPlus Юдаева Ксения Валентиновна порно DiskiPlus pin up casino DiskiPlus бк букмекерская контора DiskiPlus Фастова Елена Владимировна порно DiskiPlus официальные букмекерские конторы скачать
#1049 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало на сегодня
Исходя из этого, просто не присутствует разумных причин махнуть рукою на получение такого приза при регистрации. И, будет, на подобный бесплатной основе у вас есть все шансы выиграть средства и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные призы, нарекают бесплатными интернет платформами для игр. <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> <a href=https://www.arrl.org/forum/topics/view/4342>https://www.arrl.org/forum/topics/view/4342</a> Активация денежного вознаграждения случается механически последствии создания профиля либо применения промокода. Иногда операторы предъявляют дополнительные требования: подписаться на странички казино в социальных сетях либо на рассылку маркетинговых извещений, скачать и ввести дополнительный софт и т.д. 1×slot регистрация <a href=http://istiqbolsari.uz/user/Jamesgic/>http://istiqbolsari.uz/user/Jamesgic/</a> Заработать на бездепозитных призах за регистрацию в казино возможность каждый пользователь, достигший совершеннолетия.
1×slots актуальное зеркало
1×slots зеркало на сегодня Выбрать казино с бездепозитным бонусом. У нас на веб-сайте представлен перечень превосходнейших онлайн казино, коие предлагают своим игрокам щедрые бонусы за регистрацию.Отзывы читателей о бонусных промоакциях помогут составить эмоцию, хотя не забывайте о субъективности собственных комментариев. <a href=http://www.maurighcolori.it/node/162>http://www.maurighcolori.it/node/162</a> Бесплатные призы казино без депозита можно получить вид денежных средств на бонусный счет (вывести их можно лишь после отыгрыша), фриспинов, игры либо кешбэк-бонуса. 1×slots рабочее зеркало на сегодня
1×slots официальный сайт скачать
Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, solid зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.Иногда в бездепа, казино дарует минимальный приз (до 50 руб. ), из-за которого не заморачиваться. Максимальный объем ставки, который нельзя превышать же бонус не будет всецело отыгран. В случае нарушения этого управляла, приз и выигрыш с него будут аннулированы. <a href=https://bestnet.ru/support/forum/index.php?PAGE_NAME=profile_view&UID=139635>https://bestnet.ru/support/forum/index.php?PAGE_NAME=profile_view&UID=139635</a> Бездепозитные призы казино это экономическая компенсация, предлагаемая юзерам на дармовой базе и вероятность выступать в онлайн казино безвозмездно. Если сопоставлять их с поощрениями за вклад, в средства выдаются лишь впоследствии начального пополнения счета, то бездепозитные гонорары получаются безвозмездно. То есть, играющий получает вероятность создавать ставки на теснее существующие деньги, которые выдаст заведение, исполняя, при этом, обычные деянья, дабы их извлечь (здесь идет речь о регистрация, удостоверении личности с внедрением номера телефона, оформления заказы и т.д. ).У любого игорного клубы различные вейджеровые обстоятельства. Чтобы вы гарантировано сумели выполнить их, мы дадим несколько советов. Если система начислила небольшую сумму, надо делать великие ставки – остановитесь на 10–30 центах. Как лишь сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В неприятном случае превосходнее присмотреться к другому автомату. 1×slots зеркало подтвердит вашу регистрацию если говорить
1×slots регистрация на сайте 1×slots ru com
<a href=https://irc.floobits.com/Jamesamiva>1×slots рабочее зеркало</a> Чтобы получить возможность вывести выгода с бездепозитного бонуса в казино, нужно выполнить ряд критерий:Для отыгрыша приза казино обязывает игрока сыграть на необходимую, в некоторое один превышающую сумму приобретенного бонуса — тут выгода компании явна. 1хлот регистрация в 1×slots casino <a href=http://www.ogloszeniaezoteryczne.pl/author/henryduali/>http://www.ogloszeniaezoteryczne.pl/author/henryduali/</a> Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают бонус по государствам. Вплоть до того, собственно клуб имеет принимать игроков из Вашей страны, а бездеп не давать.К сожалению, нет. Почти все казино, требуют внесение хотя бы одного малого депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, что исключить деньги разрешается лишь на что, эту платежную систему, с которой был сделан депозит.
1×slots подтвердит вашу регистрацию если говорить
Для получения предоставленных призов для понадобиться — ПК или мобильное устройство, и остальное дело за малым. Можно. Вы практически можете отказаться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не сделаете ставку.Такой казино бонус без депозита за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это словно некая маскировка одобрения под бездепозитный. Суть всего сего сводится к что, этому, что игроку на час выдается, к примеру, 1000 $, а реклама повторяет то, что каждой выигрыш возможно будет в забыть при себе. Но если играющий серьезно отнесется к этому предложению, то он попросту растеряет время. Ведь игроку нужно будет выступать не в аккаунте, а тренировочном и с ограниченным выбором автоматов и ставок. Да и если, тогда, выигрыша (даже всей тыс. ) в правила вступят определенные обстоятельства, где будет сказано, собственно максимальной суммой победы может быть только двести $ и средства можно использовать лишь в приза на первый вклад с вейджером 25 от суммы вознаграждения плюс сам депо. По результату получится, собственно игрок выигрывал для 200% приз с вейджером на определенную необходимую. Короче разговаривая, это все не стоит вашего времени. <a href=https://pbtur.com.br/users/michaelslary>https://pbtur.com.br/users/michaelslary</a> казино 1×slots официальный сайт
<b>Смотреть еще похожие новости:</b>
<a href=https://www.thefamilylegion.se/viewtopic.php?f=4&t=114521>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=713351>1×slots casino регистрация на сайте</a>
<a href=https://uyghuryol.com/forum/viewtopic.php?f=8&t=297101>1хслот официальный сайт зеркало</a>
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=71484>зеркала 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
За счёт спинов получится запустить разные онлайн слоты, протестировать стратегии и поднабраться навыка. Фишка никаких, что вращения начисляются на топовые аппараты с уникальными опциями и высочайшей отдачей. Не запамятовывайте, собственно в каждом акционном предложении предусмотрены специальные притязания – временные лимитирования, наибольший объем ставки, перечень дешевых игр. На бонусные начисления могут быть установлены вспомогательные лимитирования, коие Вы не сведению при отыгрыше. Пока приз полностью не отыгран — средства из казино не выводятся.
#1050 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
сайт букмекерской конторы порно с Евгения Медведева <a href=https://strelochnik.com/>pin up casino пин ап</a> Ирина Горбачева букмекерская контора официальный сайт <a href=https://rhymes-punches.com/>1×bet скачать приложение на андроид</a> букмекерская контора бесплатно скачать порно с Ирина Сидоркова скачать букмекерскую контору яндекс игры казино порно с Никита Кучеров (хоккей) как выиграть в казино Набиуллина Эльвира Сахипзадовна порно
DiskiPlus 7k casino DiskiPlus black russia казино <a href=https://www.diskiplus.ru/>DiskiPlus букмекерская контора бетсити</a> DiskiPlus pin up casino скачать DiskiPlus Кузнецова Анна Юрьевна порно <a href=https://www.diskiplus.ru>DiskiPlus казино смотреть онлайн</a> DiskiPlus ramenbet casino DiskiPlus казино пину DiskiPlus gama casino DiskiPlus Юдаева Ксения Валентиновна порно DiskiPlus casino бездепозитный DiskiPlus порно с Васильева Татьяна Викторовна DiskiPlus порно с Гатагова Ольга Анатольевна
#1051 Charlesgunnyhttp://filmkachat.ru
1×slots официальный demo регистрация в 1×slots casino
Если вы новичок деле и только попали в неизведанную вами район пыла — счет предложений как бездепозитные призы без пополнения. <a href=http://filmkachat.ru/>1хслот официальный сайт зеркало</a> <a href=https://paperpage.in/blogs/239677/%D0%90%D0%B2%D1%82%D0%BE%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%94%D0%BD%D0%B5%D0%BF%D1%80-%D0%B1%D1%8B%D1%81%D1%82%D1%80%D0%B0%D1%8F-%D0%B8-%D0%B2%D1%8B%D0%B3%D0%BE%D0%B4%D0%BD%D0%B0%D1%8F-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D0%B6%D0%B0-%D0%B2%D0%B0%D1%88%D0%B5%D0%B3%D0%BE-%D0%B0%D0%B2%D1%82%D0%BE>https://paperpage.in/blogs/239677/%D0%90%D0%B2%D1%82%D0%BE%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%94%D0%BD%D0%B5%D0%BF%D1%80-%D0%B1%D1%8B%D1%81%D1%82%D1%80%D0%B0%D1%8F-%D0%B8-%D0%B2%D1%8B%D0%B3%D0%BE%D0%B4%D0%BD%D0%B0%D1%8F-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D0%B6%D0%B0-%D0%B2%D0%B0%D1%88%D0%B5%D0%B3%D0%BE-%D0%B0%D0%B2%D1%82%D0%BE</a> Бездепозитные бонусы казино это финансовая компенсация, предлагаемая юзерам на дармовой базе и вероятность выступать в интернет казино даром. Если ассоциировать их с одобрениями за вклад, в средства выдаются только потом начального пополнения счета, то бездепозитные вознаграждения получаются даром. То есть, играющий получает вероятность делать ставки на теснее место деньги, коие выдаст заведение, исполняя, при, обычные деянья, дабы их извлечь (здесь идет речь о регистрация, удостоверении личности с использованием номера телефонного, дизайна заказы и т.д.).Самые знаменитые методы вывода денег ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам типа Neteller и Skrill, еще используют криптовалютными кошельками. Вывод выигрышей может осуществляться мгновенно или развлекать от нескольких часов до нескольких суток. 1×slots зеркало выигрыши обязательно пройдите регистрацию если <a href=http://182.237.3.195/home.php?mod=space&uid=628367>http://182.237.3.195/home.php?mod=space&uid=628367</a> Кешбэк-бонус дает собой возврат фиксированного процента от ставки в случае проигрыша либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%.
1 х слотс зеркало
Перечисленные выше главные свойства сопровождают фактически каждый бонус и считаются стереотипными для бездепозитных бонусных начислений в казино.Вейджер (либо вагер) ? это минимальная сумма ставок, коию необходимо сделать для вывода валютного бонуса. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение. 1×slots быструю регистрацию а также мгновенное Способы получения бездепа различаются в зависимости от облика приза, который приглянулся игроку. Но для или надо(надобно) быть зарегистрированным в законном онлайн-казино и подтвердить свою лицо. В общем виде пошаговая инструкция для получения бездепозитного бонуса смотрится например: <a href=http://forum.moderncompany.de/profile.php?lookup=15793>http://forum.moderncompany.de/profile.php?lookup=15793</a> Также есть онлайн-платформы азартных игр, которые применяют раздачу бездепозитных призов в специальные даты (как для казино, например и для игрока). Помимо этого, действующие геймеры кроме имеют возможность получить схожие бонусы за собственную деятельность (например, за повышения уровня или за похожие достижения). 1×slots casino регистрация 1×slotscasin online Получать информацию о самых прибыльных бонусах можно без постоянного мониторинга новостей казино. Мы взяли данную задачку на себя и непрерывно следим за услугами операторов, выбирая наилучшие из них. В этом разделе собраны последние бездепы, промокоды к ним и условия их активации. Список акций регулярно пополняется. В топ зашли самые новые бездепозитные бонусы за регистрацию в казино 2020, временные и закрытые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и аспектам. Если срок действия промоакции истек, она удаляется из перечня.
1×slots регистрация на 1хслотс
Для получения выигрыша потребуется выполнить обстоятельства казино. Чаще всего игроку нужно поставить конкретную необходимую, хотя теснее из личных средств. Она рассчитывается из совместного объема выигрыша за всегда использования бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, в юзер выиграл 1000 рублей, а множитель составляет х30, исключить деньги можно несомненно, сделав ставки на 30 000 руб. <a href=http://www.0471tc.com/home.php?mod=space&uid=2304926>http://www.0471tc.com/home.php?mod=space&uid=2304926</a> Рассмотрим на образце: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских руб. В критериях акции предписано, собственно вейджер бездепозитного приза х20. Поэтому, чтобы отыграть приз, игроку несомненно необходимо устроить ставок на 35*20=700 рублей.Существует ли стратегии для отыгрыша бездепозитных бонусов? К сожалению нет, на выигрыши либо проигрыши с призов, казино или игрок воздействовать не, отдача игр случается от разработчиков игр. 1х слотс зеркало регистрация в 1×slots casino Вообще перейдя в казино — управляла схожи в получении бездепозитных призов, в стереотипные верховодила заходит: подтвердить эл. Почту и телефон, наполнить свой собственный профиль, активировать рекламную код либо активировать предложения во вкладке БОНУСЫ.Если вы избираете проверенное лицензионное онлайн казино и выполните все обстоятельства получения бездепозитного бонуса, проблем с получением подарка у Вас не возникнет.
рабочее зеркало 1×slots
В зависимости от интернет заведения каждый из них может вам предложить как бездепозитные деньги, например и бездепозитные фриспины, коие после удачной регистрации рухнут вам на ваш игровой баланс.Но не стоит размышлять, собственно снабжая пользователей этими призами, казино увлекается спонсированием. Ведь объемы вознаграждений, в, не великие (средним объемом от 5 до 20 долларов). И на эти свои налагаются конкретные обстоятельства и ограничения, обязательные к исполненью игрока, случае в последствии он вожделеет получить все средства выигранные финансы. <a href=http://rapbeatsforum.com/viewtopic.php?t=701624>казино 1×slots</a> Таким образом онлайн казино получает потенциального игрока. Возможно дальнейшем или истинном он захотит поиграть на свои деньги. Так работают бездепозитные призы в интернет казино. Здесь хорошо подходит выражение, благотворительные сыр бывает лишь в мышеловке. Начинающие игроки все не обдумывать опасность азарта. Однако времени осознания делается больше. Это тема для отдельного обсуждения.Таким образом, заведение пробует показать себя своим вероятным игрокам, а такой рекламный ход как казино бонус без депозита за регистрацию привлекает очень много внимания к игорному заведению и обеспечивает постоянный поток новых посетителей и грядущих посетителей игрового интернет клуба. Бездепозитные призы — это подарки от казино в виде бонусных денег либо фриспинов для игровых автоматов, коие начисляются на акк игрока в процедуры регистрации на сайте заведения. Для получения этих поощрений депо не требуется. 1×slots зеркало регистрацию более популярный вариант это <a href=https://opaseke.com/users/7630>https://opaseke.com/users/7630</a> Каждый из бездепозитных призов без пополнения 2022 содержит собственный конкретный вейджер для отыгрыша, например же в любом казино он уточняется индивидуально — где то он х55 а кое-где х30, повторюсь везде по разному!Если вы бывалый игрок, вы обязаны знать, что приз без депо – редкая находка. Тем ниже, мы раз изучаем онлайн, чтобы отыскать вам наихорошие бездепозитные предложения.
1×slots casino регистрация 1×slotscasino09k online
Чаще всего применяются коды. Их надо(надобно) вносить в особые окна регистрационной анкеты, случае идет о пригласительных бонусах, либо в особом разделе собственного офиса игрока. <a href=http://www.haxorware.com/forums/member.php?action=profile&uid=288011>http://www.haxorware.com/forums/member.php?action=profile&uid=288011</a> Важно, удостоверьтесь сомнений, что раньше не регистрировались в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи. 1хслотс официальный сайт зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://www.findaspermdonor.com/viewtopic.php?f=25&t=100049>1хслотс казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Практически все интернет казино с бездепозитным бонусом за регистрацию предусматривает программу преданности — систему одобрения постоянных посетителей, кот-ая состоит из большого значений. При достижении игроком одного значения на его счёт поступает приз. Чем повыше уровень — тем щедрее бонус. Этот образ приза будет добавлен на Ваш аккаунт последствии успешной процедуры регистрации с использованием номера телефонного. Если выбрать другой способ создания учетной записи, бездеп не несомненно добавлен на Ваш акк.
#1052 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино гта 5 online casino <a href=https://rucriminal.info/>букмекерская контора официальный сайт</a> казино рояль смотреть casino x <a href=https://th-royalgclub.com/>cat casino</a> официальные букмекерские конторы casino актуальное зеркало pin up casino top top 1×bet сайт вывод казино pinco casino порно с Кирьянова Дарья Борисовна
DiskiPlus букмекерская контора фонбет официальный сайт DiskiPlus лучшие онлайн казино <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet зеркало на сегодня</a> DiskiPlus Матвиенко Валентина Ивановна порно DiskiPlus kometa casino <a href=https://diskiplus.ru>DiskiPlus порно с Афонина Марина Игоревна</a> DiskiPlus vodka casino DiskiPlus ешь казино DiskiPlus bet casino DiskiPlus пин casino DiskiPlus ешь казино DiskiPlus играющие казино DiskiPlus Нургалиева Эльвира Рамиловна порно
#1053 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
Сразу в активации промокода можно пользоваться даром. Как теснее упоминалось, призы случаются трёх обликов – фриспины, кредиты и фриплей-бонусы. <a href=http://filmkachat.ru/>1 xslots рабочее зеркало</a> При регистрации следует указывать лишь достоверную информацию. Когда учетная запись несомненно активна, появится доступ в Личный кабинет. В нем возможно избрать еденицу, ввести промокод и узнать доскональные правила получения и отыгрыша бездепа. Краткая информация об акции нередко находится непосредственно на регистрационной форме.Помните, что любые нарушения управлял сведут на нет ваши усилия, и вы наверняка останетесь без начисленного для бесплатного приза. Всегда изучайте верховодила начисления и условия вейджера. По любым вопросам, на которые вы не можете самостоятельно отыскать ответы, обращайтесь за объяснениям и саппорт. <a href=https://hoo.be/kalinka>https://hoo.be/kalinka</a> рабочее зеркало 1×slots <a href=http://xn–80adt5btj4c.xn–80asehdb/index.php?subaction=userinfo&user=roastedjacket80>http://xn–80adt5btj4c.xn–80asehdb/index.php?subaction=userinfo&user=roastedjacket80</a>
1×slots официальный сайт зеркало
Также посещают случаи, когда казино начислит обсужденный бонус после регистрации свежего клиента по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам.Когда идет о денежных бонусах, казино всегда устанавливают обстоятельства вейджера, коие нужно выполнить, дабы вывести выигрыш. 1×slots зеркало 1хслотс регистрация перейти на 1×slots Маркетинговая политического всех игорных интернет-клубов должна одевать различный характер. И в гонорары на депозит работают для того, дабы стимулировать заносить депозиты и поощрять теснее имеющих пользователей, то бездепозитный приз в казино или приз за регистрацию в казино, этого всего, рассчитан на расширение базы покупателей.Таким образом, заведение пробует показать себя своим потенциальным игрокам, а подобный маркетинговый ход как казино приз без депо за регистрацию привлекает довольно много внимания к игорному заведению и обеспечивает постоянный поток новых посетителей и грядущих клиентов игрового интернет клуба. <a href=http://adrestyt.ru/user/JasperHup/>http://adrestyt.ru/user/JasperHup/</a> Но а если вы уже профи по интернет казино, кликаем на красноватую кнопку «Получить» и Вы автоматически перейдете в онлайн казино; 1хслотс официальный сайт зеркало Чаще всего применяются коды. Их нужно вносить в особые окна регистрационной анкеты, в речь идет о пригласительных бонусах, или в особом разделе собственного офиса игрока.
1хслотс мобильная версия зеркало
Также, в этом случае необходимо подтвердить свой номер телефонного, для этого код, приобретенный в смс-сообщении от клуба ввести в особое фон в собственном офисе игрока.Пoдтвepдить личнocть клиента. Для успешного вывода средств, необходимо подтвердить личность посетителя. Нa этaпe вepификaции пpoфиля, работники службы защищенности обязаны увериться, что у игрока всего лишь раз аккаунт. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не сможет исключить собственный выигрыш, случае у него будет некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы. Пoдтвepдить личнocть клиента. Для успешного вывода средств, необходимо подтвердить личность посетителя. Нa этaпe вepификaции пpoфиля, работники службы безопасности обязаны увериться, что у игрока всего лишь раз акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не сможет исключить собственный выигрыш, в у него несомненно несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы. <a href=https://ani.me/p/sladkovby1709/info>https://ani.me/p/sladkovby1709/info</a> 1×slots официальный сайт, скачать Постарайтесь отыграть вейджер, дабы была вероятность оставить заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные приборы. Вы можете получить выигрыш на электрической кошелёк, карту, аппарат.
1×slot зеркало
Обыкновенные бездепозитные бонусы в размере от 3-х до двадцати долларов сделаны чтобы, чтобы, чтобы в игры заходили все свежие и новые игроки. Здесь, вероятнее всего, будет ограничение на максимальный выигрыш. Важно, дабы перед наименьшим вкладом был отключен бонус за 1-ое пополнение счета, и игры не попадет на повторный вейджер. <a href=http://everestrolep.listbb.ru/viewtopic.php?f=38&t=19627>казино 1×slots официальный сайт</a> Во всех законных онлайн-казино Беларуси нужно свидетельство паспортных данных для игры — это заявка правительства государства.В разделе с бонусами активировать собственный подарок. Найти игры, для коих предусмотрено одобрение и применять приз по назначению. 1×slots сайт <a href=http://rezkadetaley.ru/index.php?subaction=userinfo&user=ynuwyso>http://rezkadetaley.ru/index.php?subaction=userinfo&user=ynuwyso</a> Вывод выигрыша с бездепозитных призов казино – щедрый подарок от азартных клубов. Но чтобы вывести собственный заработок, нужно выполнить ряд критерий:
1×slots актуальное зеркало
Вейджер (либо вагер) ? это минимальная сумма ставок, которую необходимо устроить для вывода денежного бонуса. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение. <a href=http://pasarinko.zeroweb.kr/bbs/board.php?bo_table=notice&wr_id=3576729>http://pasarinko.zeroweb.kr/bbs/board.php?bo_table=notice&wr_id=3576729</a> 1×slots сайт зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://okeyrp.listbb.ru/viewtopic.php?f=24&t=5221>1хслотс регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Ограничения по играм. Администрация запрещает игрокам кое-какие игровые автоматы с бездепозитным призом, деньгами или бесплатными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда разделение производится по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, хотя запрещен в настольных забавах и в разделе Live Casino.
#1054 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Яна Троянова Юдаева Ксения Валентиновна порно <a href=https://slon-ru.com/>букмекерская контора официальный сайт</a> сколько казино слот casino <a href=https://rhymes-punches.com/>Ходнева Светлана Владимировна порно</a> букмекерская контора официальный сайт балтбет букмекерская контора 1×slots casino скачать сайт букмекерской конторы букмекерская контора казино без фильмы казино рояль
DiskiPlus Кузнецова Анна Юрьевна порно DiskiPlus пина букмекерской конторы <a href=https://www.diskiplus.ru/>DiskiPlus сколько казино</a> DiskiPlus Любимова Ольга Борисовна порно DiskiPlus 1win букмекерская контора <a href=https://www.diskiplus.ru>DiskiPlus скачиваемые казино</a> DiskiPlus 7k casino официальный DiskiPlus скачать букмекерскую контору на андроид DiskiPlus pin ап casino DiskiPlus букмекерская контора фонбет официальный DiskiPlus букмекерская контора фонбет официальный DiskiPlus Крючкова Полина Викторовна порно DiskiPlus мобильные букмекерские конторы
#1055 Charlesgunnyhttp://filmkachat.ru
x1 slots регистрация в 1×slots casino
Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша бонусов. Заведения практически устанавливают максимальную ставку, возможную по условиям вейждера. <a href=http://filmkachat.ru/>зеркала 1×slots</a> Фриспины начисляются по конкретной ставке. После их активации игроку нужно запустить разъем и увериться, собственно в нем показываются бесплатные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода в отыгрыша ориентируется оператором и редко превышает 5 000 руб. <a href=https://telegra.ph/Walmarts-battery-return-policy-03–13>https://telegra.ph/Walmarts-battery-return-policy-03–13</a> Внесение депо – Будьте готовы восполнить счет в отыгрыша приза. Это обычное заявка верховодил для данного типа промо-акций. Лучше заблаговременно уточнить, какую необходимую нужно будет заносить на счет. Как управляло, идет о минимальном депозите, но вы обязаны быть уверены, что он вам по карману. 1×slots зеркало выигрыши обязательно пройдите регистрацию если <a href=http://lider1c.ru/communication/forum/user/29297/>http://lider1c.ru/communication/forum/user/29297/</a> Шаг 4. Активация. Внимательно изучите обстоятельства, информацию по ограничениям и сроке деяния бонусного предложения. Разобравшись с правилами, возможно активировать приз в личном офисе (время ? с использованием промокода) или по запросу в саппорт.
1×slots зеркало видели такую регистрацию на
За счёт спинов выйдет запустить разные онлайн слоты, протестировать стратегии и поднабраться навыка. Фишка сомнений, собственно вращения начисляются на топовые аппараты с оригинальными опциями и высочайшей отдачей. Не забывайте, что в любом акционном предложении учтены специальные притязания – временные лимитирования, максимальный объем ставки, перечень дешевых игр. <a href=http://griffhunter.com/boards/viewtopic.php?p=1042832#p1042832>казино 1×slots официальный сайт</a> 1×slots зеркало которую указывали при регистрации кстати Создание аккаунта. На сайте казино необходимо открыть регистрационную форму и наполнить пустопорожние поля личными данными. Иногда на данном этапе требуется показать только адрес электрической почты и пароль, хотя почаще надобно наполнить анкету персональной информацией (ФИО, дата рождения, место проживания и т.д. ). Нужно свидетельствовать только реальные данные, что впоследствие они будут проверены. <a href=http://filaticlub.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=http://l-integral.ru/bitrix/redirect.php?goto=http://apk.ru/bitrix/redirect.php?goto=https://telegra.ph/Kak-dolgi-muzha-mogut-povliyat-na-ego-zhenu–yuridicheskie-aspekty-i-resheniya-09–23>http://filaticlub.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=http://l-integral.ru/bitrix/redirect.php?goto=http://apk.ru/bitrix/redirect.php?goto=https://telegra.ph/Kak-dolgi-muzha-mogut-povliyat-na-ego-zhenu–yuridicheskie-aspekty-i-resheniya-09–23</a> В разделе с бонусами активировать собственный презент. Найти забавы, для которых учтено одобрение и использовать приз по назначению.Процесс доказательства личности возможность занять от 1-го дня до недели. Если заказчик разрешил какую ошибку при заполнении паспортных данных, то ему стопам обратиться с проблемой в службу поддержки онлайн-казино. 1× slots casino официальный сайт
1×slots официальный регистрация
Суммы похожих услуг, большинстве, колеблются от трех до 20 $, а вейджер на эти средства обязан сочинять от 30 до шестидесяти один. Зачастую, наивеличайшая сумма выигрыша тут составит от одной до двух сотен долларов. Если игрок выиграет больше, то все свои шансы быть списанными до максимально разрешенного выигрыша. Здесь бывает смысл выводить еще несуществующие финансы на свою платежную систему и дальше отыскивать заведение с благоприятными под данную сумму релоадом или бонусом за 1-ое пополнение счета. Есть некоторое подвидов бездепозитного вознаграждения, предлагаемого наибольшим количеством заведений.Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых свежих, великодушных и проверенных призах в интернет казино, которые обновляются каждый денек. <a href=http://bbs.yongrenqianyou.com/home.php?mod=space&uid=4177359&do=profile>http://bbs.yongrenqianyou.com/home.php?mod=space&uid=4177359&do=profile</a> Некоторые клубы автоматически начисляют бонус на акк игрока после исполнения условий получения, но бывают ситуации, когда бонус надо(надобно) активировать игроку самому. Есть количество методов активации бонуса:При подмоги такового поощрения оператор может кроме завлекать посетителей, которые раньше проявляли активность на сайте, но по какой-то основанию перестали играть. В этом случае промокод высылается пользователю по электронной почте либо в виде SMS. 1×slots официальный зеркало рабочее Фриспины – бесплатные вращения с фиксированной ставкой, коие возможно использовать в определенных игровых автоматах.
1×slots зеркало на сегодня
Игры, в которых возможно выступать на бонусные средства. Проверьте список игр, в которых можно играть на бонусные свои, вероятно они Вам не понравятся и надо расходовать своё время на такую промоакцию. <a href=https://17lubbs.com/forum-2–1.html>1×slots официальный сайт, скачать</a> Мы собрали и опубликовали список лучших бездепозитных казино с призами за регистрацию, коие гарантируют великодушные выигрыши и мгновенные выплаты. Далее требуется отыграть вагер и исключить выигрыш. Игрокам без опыта крупно повезло, меня получить десятки подарков за одну регистрацию. Если не сумели получить Бездепозитный приз, не тревожьтесь. Обратитесь в интернет чат, оператор поможет исправить.Для получения депозитного бонуса нужно пополнить свой игровой баланс настоящими средствами. Вознаграждение возможно получить либо при внесении первого депо, либо повторяющий фиксированного процента от внесённых средств. Так либо по, приз поступит на счёт лишь последствии пополнения. казино 1×slots <a href=http://forum.notionmusic.com/memberlist.php?mode=viewprofile&u=26748>http://forum.notionmusic.com/memberlist.php?mode=viewprofile&u=26748</a> Представленные на данной странице превосходнейшие бездеп бонусы в казино за регистрацию в 2022 году имеют оптимальные обстоятельства. После тщательного анализа редакция портала составила рейтинг спецпредложений, каком посетители Casino.ru все сортировать список по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д.Далее требуется отыграть вагер и исключить выигрыш. Игрокам без опыта крупно подфартило, есть получить десятки даров за одну регистрацию. Если не сумели получить Бездепозитный бонус, не тревожьтесь. Обратитесь в интернет чат, оператор поможет исправить.
1×slots зеркало быструю регистрацию а также мгновенное
Такой казино приз без депозита за регистрацию выдается игроку на час и активно употребляется данное предложение с 2017 года. Это словно какая-то маскировка поощрения под бездепозитный. Суть всего сего сводится к тому, что игроку на час выдается, например, 1000 долларов, а реклама повторяет про, собственно любой выигрыш можно будет дальнейшем оставить при себя. Но если играющий всерьез отнесется к этому предложению, то он просто потеряет время. Ведь геймеру надо(надобно) будет выступать не в аккаунте, ну тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (и всей тысячи) в управляла вступят конкретные обстоятельства, где будет сказано, собственно максимальной суммой победы может быть только двести долларов и деньги можно применять лишь в качестве приза на первый лепта с вейджером 25 от суммы вознаграждения плюс сам депозит. По итогу получится, собственно игрок выигрывал себе 200% бонус с вейджером на конкретную необходимую. Короче разговаривая, это все надо вашего времени. Например, игрок получил 500 руб. При разработке аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., понадобится устроить 875 спинов для полного отыгрыша. <a href=http://rvolchansk.ru/index.php?subaction=userinfo&user=briefverdict68>http://rvolchansk.ru/index.php?subaction=userinfo&user=briefverdict68</a> Частенько новички не разумеют, как активировать подарки либо исключить 1-ый выигрыш. Для подобных случаев наша команда обрисовала главные термины – что такое фриспины, вейджер, как его отыграть, зачем нужно проходить верификацию.Такие одобрения разрешают бесплатно протестировать свежее казино, разобраться с игровым процессом онлайн слотов, заработать и исключить маленькую необходимую средств. казино 1×slots Основное верховодило получения бездепа ? создаваемый аккаунт обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов требовательно запрещено. Проверка ведется по имени, e-mal, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита необходимо блюсти несложную очередность действий.Бездепозитные призы казино за регистрацию в 2022 году — это возможность сыграть за счёт заведения. Казино даёт клиенту шанс воспользоваться определённой суммой либо числом бесплатных вращений без внесения депо. Не путайте деморежим с реальной забавой без надобности внесения депозита.
<b>Смотреть еще похожие новости:</b>
<a href=http://yaoisennari.ekafe.ru/viewtopic.php?f=169&t=4727>1×slots рабочее зеркало на сегодня</a>
<a href=https://forum.dis-course.net/viewtopic.php?t=689118>сайт 1× slots casino</a>
<a href=https://forumsleague.org/forum/viewtopic.php?f=70&t=14211&p=404437#p404437>casino 1×slot</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
У нас на сайте Вы найдете список призов без депо в испытанных казино и подробную информацию то как их получить и использовать.
#1056 Charlesgunnyhttp://filmkachat.ru
1×slots скачать на айфон
Чем ниже велечину вейджера, что, этим проще отыграть и исключить бонус. Если Вы расчитываете заработать на бездепе, но просто ознакомиться с новым игровым клубом, то стоит игнорировать призов с высоким вейджером их практически не реально отыграть. С ними Вы сможете только протестировать игры заведения.Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция имеет подробные верховодила, ссылка на которые обыкновенно содержится в промообъявлении. В их указываются лимиты, вейджер, перечень дешевых игр. Если оператор укрывает данные о предложении, то пользоваться им не стоит. <a href=http://filmkachat.ru/>1 x slots casino</a> <a href=https://hearthis.at/group/466308/transform-your-e-commerce-success-with-360-spin-product-videos/>https://hearthis.at/group/466308/transform-your-e-commerce-success-with-360-spin-product-videos/</a> 1×slots регистрация на 1хслотс <a href=https://lovewiki.faith/wiki/User:PauletteMeudell>https://lovewiki.faith/wiki/User:PauletteMeudell</a> Каждый игрок должен сперва отчетливо изучить условия по получению и отыгрышу понравившегося дара. Если всё устраивает, поспешите отобрать безвозмездные спины за регистрацию в казино без депо с выводом и без отыгрыша и прямо в начать вертеть барабаны топовых слотов.Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.
1×slots зеркало рабочее на сегодня
Это также безвозмездные финансы, которые поступают на аккаунты свежеиспеченных геймеров последствии регистрирования. А необыкновенность этих призов произведено что, что обретенные деньги непременно по применять в продолжении назначенного медли.Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации дара нужно подтвердить электрическую почту и привязать телефонный; <a href=https://forum.motoshkola.od.ua/threads/1×-slots-registracija-v-1×slots-casino.10446/>1× slots регистрация в 1×slots casino</a> 1хслотс официальный сайт зеркало Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, чтобы еще раз получить даровой бонус. Игорные заведения нетерпимы к бонус-хантерам, потому вас ожидает неизбежное санкция. <a href=http://www.ihavethepussy.com/de/members/47175-WalterPot>http://www.ihavethepussy.com/de/members/47175-WalterPot</a> Приветственный бездеп предоставляется хоть игроку только один один. Казино дерутся с так называемыми бонусхантерами (от англ. Bonus Hunter — охотник за бонусами), пытающимися заводить множественные аккаунты для надувательства оператора и повторного получения подарка. Исключить подобные деянья позволяет верификация данных. Администрация вправе потребовать у клиента подтвердить индивидуальные данные, обозначенные при регистрации. 1×slots промокод при регистрации Это один из основных показателей привлекательности подарка. С завешенным коэффициентом и мастера не сумеют выполнить условия по отыгрышу. И маловажно, насколько презентабельно выглядит предложение – бездепозитный приз казино в размере $500 или $1 000. Чтобы новенькие лучше вдумались, что же это вейджер, мы разберём на случае.
1×slots регистрация 1×slotscasino 56 online
Ограничения по играм. Администрация воспрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, деньгами или бесплатными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда дробленье выполняется по виду игр. Например, отыгрыш возможен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino.В каждом казино с бездепозитным призом предусмотрены вейджеровые условия. Это единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) устроить определённое количество ставок. Чем круче приз, что, этим сложнее выполнить условия, и наоборот. <a href=http://login.access.library.unisa.edu.au/login?url=http://abonents-ntvplus.ru/proxy.php?link=http://eroboutique.ru/bitrix/redirect.php?goto=https://telegra.ph/EHffektivnoe-unichtozhenie-dokumentov-v-Ukraine-dlya-obespecheniya-nadezhnoj-bezopasnosti-i-konfidencialnosti-09–23>http://login.access.library.unisa.edu.au/login?url=http://abonents-ntvplus.ru/proxy.php?link=http://eroboutique.ru/bitrix/redirect.php?goto=https://telegra.ph/EHffektivnoe-unichtozhenie-dokumentov-v-Ukraine-dlya-obespecheniya-nadezhnoj-bezopasnosti-i-konfidencialnosti-09–23</a> 1×slots официальный сайт скачать Например, игрок получил 500 руб. При твореньи аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., потребуется сделать 875 спинов для полного отыгрыша.
1×slots регистрация 1×slotscasino09k online
При регистрации идет свидетельствовать только достоверную информацию. Когда учетная запись несомненно активна, замечен доступ в Личный кабинет. В нем возможно выбрать еденицу, ввести промокод и узнать подробные верховодила получения и отыгрыша бездепа. Краткая информация об промоакции нередко находится непосредственно на регистрационной форме.Так что основное отличие подарка на депозит от бездепа – неотъемлемое пополнение счёта. Вы сможете внести депозит и преумножить стартовый капитал либо арестовать бездеп и этом не придётся рисковать своими сбережениями. Поспешите выполнить простые требования, и администрация ресурса начислит щедрое поощрение! <a href=https://win11forum.de/m/manuelenabs.2164/>1×slots казино зеркало</a> Получив свой презент, Вы сможете даром играть на реальные деньги, а выполнив обстоятельства отыгрыша, исключить свой выигрыш.Представленные на этой странице наилучшие бездеп бонусы в казино за регистрацию в 2022 году имеют подходящие обстоятельства. После тщательного анализа редакция портала составила рейтинг спецпредложений, в котором посетители Casino.ru все сортировать список по нескольким аспектам: по сумме, вейджеру, максимальной сумме вывода и т.д. Не желайте сыграть в азартные забавы, не рискуя своими деньгами, но получая в все выплаты? Подобную возможность деют многие наилучшие порталы с азартными развлечениями. В их числе большое добросовестных и надежных интернет-казино на российском языке. Они привлекают свежих юзеров разными поощрительными событиями, включая бездепозитные, либо бесплатные призы. 1×slots рабочее зеркало на сегодня <a href=https://mobilka.mobi/user/DoctorLazutaPl/>https://mobilka.mobi/user/DoctorLazutaPl/</a> Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша бонусов. Заведения постоянно устанавливают максимальную ставку, возможную по условиям вейждера.
1хслотс рабочее зеркало на сегодня
Каждый новичок и профессиональный игрок грезят скоро стартануть и начать создавать реальные ставки. Для этого достаточно забрать презент, за который не уплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email либо телефонный. После сего администрация начислит щедрое вознаграждение в виде бесплатных вращений либо виртуальных кредитов.Зарегистрируйтесь. Для регистрации чаще всего довольно установить свой номер телефона и почтовый адресок, в чего ввести приобретенный код из СМС. Возможно, требуется показать промокод. В правилах промоакции несомненно написано, где его надо включать. Иногда это надобно создавать при регистрации, времени — уже последствии творенья собственного офиса, на отдельной странице. <a href=https://cameradb.review/wiki/User:Joanne0883>https://cameradb.review/wiki/User:Joanne0883</a> Вейджер менее х30–35 считается приемлемым. Опытные игроки утверждают, собственно с таким вейджером реально остаться в плюсе, случае верно подойти к выбору игрового аппарата.Ниже указан важный список легальных казино в Беларуси с бонусами на 1-ый депо. Вы сможете попасть на официальный сайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз. 1×slots зеркало быструю регистрацию а также мгновенное
<b>Смотреть еще похожие новости:</b>
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=17021>1× slots официальный</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чаще всего используются коды. Их нужно вносить в специальные окна регистрационной анкеты, если речь о пригласительных бонусах, или в особом разделе собственного офиса игрока. Чтобы получить возможность вывести выгода с бездепозитного бонуса в казино, необходимо выполнить ряд критерий:
#1057 Douglasslexthttps://baronmag.ru
После трех дней и 257 пиков НФЛ 2025 года завершился. Все 32 клубы должны почувствовать, что они улучшились, хотя некоторые должны чувствовать себя лучше других. Никогда не стоит предсказывать о результатах до того, как они появятся на поле НФЛ, и мы не будем здесь анализировать, как покажут себя новички лиги. Это даст шанс им им <a href=https://baronmag.ru/magnitorsk-kupit-pvp-amfetamin-kokain-mefedron.html>купить кокаин</a> и не только. Однако совершенно справедливо оценить, как команды сделали мероприятие, выполнили потребности, максимизировали ценность (или нет) и сопоставили планирование на драфте с долгосрочными планами франшизы. Все верно: пришло время для оценок анализа после драфта для каждой клуба. Ниже вы найдете обзор каждого выбора из каждой команды НФЛ с общими рейтингами на основе вышеупомянутых факторов, прогнозируемого соответствия схеме и любых соответствующих передач. Поскольку ценность субъективна, мы использовали окончательные рейтинг перспектив 2025 года отдела скаутинга Bleacher Report в качестве ориентира. Команды перечислены в алфавитном порядке.
#1058 Charlesgunnyhttp://filmkachat.ru
1× slots сайт
Прибывшие на акк деньги бездепозитные призы предназначаются, в основном, лишь для свежеиспеченных пользователей, которые раньше не имели собственного аккаунта в данном казино. Исходя из этого, случае раньше у игрока был сделан депозит, то, по всей вероятности, у него больше не будет способности рассчитывать на получение такого приза в определенном заведении.Даже не выиграв солидную необходимую, игрок интересно проведет время, изнутри изучит работу площадки, воспримет геймплей автоматов. Все это без каких-либо финансовых рисков. Быть в курсе превосходнейших промоакций легкостью. Достаточно регулярно учить список свежих онлайн казино с выводом бонуса без депозита в данном разделе. <a href=http://filmkachat.ru/>1×slots официальный регистрация</a> <a href=https://gamma.app/docs/How-to-Reset-Your-Honda-Civic-After-Replacing-the-Battery-tgof361mduqar4u>https://gamma.app/docs/How-to-Reset-Your-Honda-Civic-After-Replacing-the-Battery-tgof361mduqar4u</a> 1×slots зеркало регистрация <a href=https://www.camry-club.ru/member.php?344055-DarenSnord>https://www.camry-club.ru/member.php?344055-DarenSnord</a>
1×slots сайт
Используйте лучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из перечня ниже, чтобы заработать презенты за обычные действия теперь сегодня получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и резвыми выводами на электрические кошельки.Отзывы читателей о бонусных промоакциях помогут составить эмоцию, хотя не запамятовывайте о субъективности личных объяснений. 1×slots подтвердит вашу регистрацию если говорить Выбор любого интернет казино на нашем веб-сайте. В описании к любому Вы сможете разузнать, что получите за творенье аккаунта. <a href=http://wtsoc.h1n.ru/users/harmoniousgown6>http://wtsoc.h1n.ru/users/harmoniousgown6</a> Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и более. Когда игроку полагается большое фриспинов, администрация возможность разбивать их начисление на количество дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах промоакции.Фриспины предназначены для использования в видео слотах. Внимательно ознакомьтесь с условиями – часто их выдают на некоторые автоматы. В зависимости от клуба, у вас получится сделать определённое число ставок. Кстати, продвинутые игорные жилища позволяют запускать каждых «одноруких злодеев». 1 x slots Фриспины – бесплатные вращения с фиксированной ставкой, коие возможно использовать в определенных игровых автоматах.Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают приз по государствам. Вплоть до как, что клуб возможность принимать игроков из Вашей страны, а бездеп не давать.
1×slots рабочее зеркало
Представьте момент, когда при ставке в 10 руб. Вы получите схожее умножение. Миллион рублей за одно вращение, собственно абсолютно вероятно. Поэтому вопрос, сколько возможно выиграть остаётся закрытым. Предлагаем выяснить самостоятельно. Регистрируйтесь в одном или нескольких онлайн казино, получайте Бездепозитный бонус и проверяйте фортуну в деле. Разумеется, вывести деньги не так просто. Однако шансы есть у всех.Размер бонусов почаще всего чисто символический и не превышает 50 руб. Приятно, хотя ощутимым бустом деле навряд станет. Такие одобрения позволяют безвозмездно протестировать свежее казино, разобраться с игровым процессом онлайн слотов, заработать и исключить небольшую необходимую денег.Призовые начисления без депо все предоставляться для роли в турнирах интернет казино. Потратить перечисленные деньги можно исключительно масштабах этой акции. Условия их проведения себе ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться этим предложением, чем изучить его управляла. <a href=https://www.thenewtop10s.com/author/jamespropy/>https://www.thenewtop10s.com/author/jamespropy/</a> Бездепозитный приз за регистрацию в казино с выводом денег в 2022 году — Наш ресурс дает игрокам актуальную информацию о самых новых, щедрых и испытанных бонусах в интернет казино, которые обновляются любой день.Так собственно сможете неустрашимо регистрироваться без всяких размышлений. Фортуна сейчас наверняка на вашей стороне. Не побаивайтесь, ведь следствие какого или ущерба Вам абсолютно не угрожает. С такими бонусами как без пополнения, Вы остаетесь только в плюсе, но не как не в минусе. 1хслотс зеркало на сегодня
1хслот официальный сайт зеркало
Бездепозитный приз нередко может стать легкодоступным сразу после завершения регистрации, поскольку как единственным требованием к нему считается регистрация, а этого ревизия вашей свежей учетной записи. <a href=https://bbs.sinbadgroup.org/index.php?xjkh-tampa-s-poster-pup-for-new-cancer-treatment.t48661.html/page-6465#post-278072>1×slots casino регистрация</a> Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут устанавливает ограничение для посетителей. Конечно, это возможно счесть неким неудобством для игрока, хотя справедливости необходимо, собственно выбор автоматов всё точно остаётся довольно наибольшим.Мы подготовили список, где есть практически актуальные и новые бездепозитные призы казино, которые вам получить даром. Для наших юзеров есть особые предложения эксклюзивные бонусы, коие вы кого не отыщите, их мы определили особой красной плашкой «Exclusive». Также есть онлайн-платформы азартных игр, которые используют раздачу бездепозитных бонусов в особые даты (как для казино, например и для игрока). Помимо этого, действующие игроки также имеют возможность получить схожие призы за свою деятельность (например, за повышения уровня или за похожие заслуги).Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют актуальную информацию о not the slightest deposit bonuses и других предложениях. 1×slots casino регистрация 1×slotscasin online <a href=http://bead17.com/home.php?mod=space&uid=3823>http://bead17.com/home.php?mod=space&uid=3823</a> Бонус начисляется игроку незамедлительно последствии регистрации и прохождения верификации в казино и не требует от клиента внесения депозита. Как правило, размер приза в схожем случае достаточно умеренный, однако позволяет новичкам познакомиться с забавой без риска настоящими деньгами.Прежде чем активировать бездеп, нужно увериться никаких, собственно государство, гражданином которой является игрок, не входит в перечень разрешенных.
1×slots официальный зеркало рабочее
Также, ситуации необходимо подтвердить собственный номер телефона, достичь код, полученный в смс-сообщении от клуба ввести в специальное фон в собственном кабинете игрока. <a href=https://urganchshahar.uz/user/DavidKib/>https://urganchshahar.uz/user/DavidKib/</a> Ещё одно распространённое акционное предложение – симпатичный подарок с сомнительными требованиями. К образцу, клуб сулит $100 в качестве бездепа, хотя с вейджером х80 либо х100. Отыграть такой вейджер практически нереально и потому никакого концентрироваться на более интересных акциях.Итак, дабы бесплатные бонусные кредиты трансформировались в реальные средства, которыми вам управлять по собственному усмотрению, их надо(надобно) отыграть. Вейджер идет уточнять в правилах онлайн-казино. 1×slots casino регистрация на сайте
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.immortales-gilde.de/viewtopic.php?f=2&t=386093>казино 1×slots официальный сайт</a>
<a href=https://forums.dfine.net/member.php?action=profile&uid=119>зеркло казино 1×slots</a>
<a href=http://oszeresek.hu/forum/viewtopic.php?f=1&t=6372>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для отыгрыша бонуса казино обязывает игрока сыграть на сумму, в некоторое раз превосходящую необходимую приобретенного приза — тут выгода фирмы явна.
#1059 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать 1×bet на андроид бесплатно 1×bet рабочее на сегодня <a href=https://kompromat1.online/>пинап казино</a> автомат казино Петрова Ольга Викторовна порно <a href=https://repost.news/>1×bet xbet xyz</a> Петрова Ольга Викторовна порно pin ап casino 1×bet зеркало казино сочи Анна Михалкова porno Илья Ковальчук (хоккей) Кузнецова Анна Юрьевна порно
DiskiPlus online casino 7k DiskiPlus 1×bet официальный <a href=https://diskiplus.ru>DiskiPlus casino 7k рабочее</a> DiskiPlus зеркала официальных сайтов казино DiskiPlus pin up casino buzz <a href=https://www.diskiplus.ru>DiskiPlus Скоробогатова Ольга Николаевна порно</a> DiskiPlus porno Анна Сидорова, керлингистка DiskiPlus лучшие бесплатные онлайн казино DiskiPlus retro casino DiskiPlus cat casino DiskiPlus Мухтиярова Елена Вячеславовна порно DiskiPlus 1win букмекерская контора DiskiPlus pin up casino buzz
#1060 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало на сегодня
Выбирая безвозмездный приз, пристально изучайте управляла. Убедитесь, что вас возможно себя роль в промоакции. Уточните, в каких играх возможно выполнять условия вейджера. При надобности задавайте вопросы представителям саппорта.Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, solid зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. <a href=http://filmkachat.ru/>скачать 1×slots официальный сайт</a> Свежий бонус начисляется повторяющий валютных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в использовании своими, в случае отыгрыша оператор возможность ввести ограничение на вывод денег. <a href=https://www.designingbuildings.co.uk/wiki/User:Archicgi>https://www.designingbuildings.co.uk/wiki/User:Archicgi</a> Акции распространяются как на все игры казино, например и на ограниченный перечень. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и. Промо имеет охватывать разработки 1-го производителя. Бездеп не пересекается с иными акциями казино. Если на сайте предусмотрен кэшбек, он не начисляется за ставки, сделанные бонусными деньгами. Для идентификации платежных реквизитов игрока имеет понадобиться пополнение счета на минимальную необходимую.Самый распространённый из подобных призов, окончательно же, бездеп на день рождения посетителя — бонус в виде фиксированной суммы или фриспинов поступает на счёт игрока, а воспользоваться им возможно протяжении установленного периода медли. 1хслот зеркало сайта <a href=http://apatit.org.ua/user/TravisNut/>http://apatit.org.ua/user/TravisNut/</a> Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала прыткие выводы. Фишка выплат что, нет, собственно довольно выбрать платёжный инструмент и указать сумму. В большинстве случаев средства зачисляются на электрические кошельки в течение 15 минут, а на банковские карты – 1–3 рабочих денька.Бонус с зачислением средств на счет выделяет больше свободы деяний. Пользователь сам избирает, каким образом распорядиться подаренными средствами. Здесь также имеют действовать лимитирования на перечень доступных игр, но обыкновенно эти рамки не так строги, как в промо с бесплатными вращениями.
1×slots зеркало рабочее на сегодня
Иногда для получения призов необходимо связаться с представителями саппорта. Удобнее всего с ними беседовать в онлайн-сате, желая времени достаточно запроса по электронной почте. <a href=http://everestrolep.listbb.ru/viewtopic.php?f=38&t=18425>1×slots официальный регистрация</a> рабочее зеркало 1хслотс <a href=http://www.budhano.com/bbs/home.php/home.php?mod=space&uid=279487&do=profile>http://www.budhano.com/bbs/home.php/home.php?mod=space&uid=279487&do=profile</a> 1×slots регистрация Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, дабы замечена вероятность исключить выигрыш.Приветственный приз без депозита ? презент за регистрацию. Выдается деньгами, фриспинами или баллами. В заключительном случае бонусные баллы используются для участия в турнирах либо размена на реальные деньги.
1×slots официальный сайт зеркало
Бездепозитные призы – это исключительно небезинтересная и более перспективная промоакция интернет-казино. Они в никакого фри-спинов, поэтому что выплаты в безвозмездных вращениях не гарантированы, как композиции на барабанах игрового аппарата шансы не сложиться. <a href=https://melon-tv.com/bbs/board.php?bo_table=free&wr_id=29067>https://melon-tv.com/bbs/board.php?bo_table=free&wr_id=29067</a> Перед активацией главно пристально выучить обстоятельства промоакции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют значение также лимиты ставок при отыгрыше и сроки, в течение которых можно воспользоваться предложением. Если бездеп охватывает узкий перечень игр, рекомендовано узнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь в случае, в оператор не установил взыскательные лимитирования на наивысшую сумму ставки.Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке необходимо восполнить счет в казино. Для депозитных бонусов, эта процедура не необходима, например как депозит уже сделан. 1×slots казино зеркало
1×slot зеркало рабочее этих способов предполагает регистрацию
Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, так как Вам понадобиться ее доказать в при выводе средств.4. Заберите презент. Чаще всего приз активизируется сразу после регистрации. Но посещают ситуации, когда нужно зайти в собственный кабинет или написать в саппорта. Это раз из главных характеристик привлекательности презента. С завешенным коэффициентом том мастера не сумеют выполнить обстоятельства по отыгрышу. И неважно, как презентабельно выглядит предложение – бездепозитный бонус казино в размере $500 либо $1 000. Чтобы новички попревосходнее вдумались, что же это вейджер, мы разберём на случае. 1×slots зеркало этих способов предполагает регистрацию <a href=http://zanasite.free.fr/laripostedumardi/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D0%BD%D0%B0%20%D0%B4%D0%B7%D0%B5%D0%BD%D0%B5>http://zanasite.free.fr/laripostedumardi/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D0%BD%D0%B0%20%D0%B4%D0%B7%D0%B5%D0%BD%D0%B5</a> B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax
1×slots регистрацию процедура займет всего лишь
Размер призов чаще всего чисто условный и не выше 50 руб. Приятно, но осязаемым бустом деле навряд станет. <a href=http://istiqbolsari.uz/user/Forsedropoa/>http://istiqbolsari.uz/user/Forsedropoa/</a> Для доказательства электронной почты, просто перейдите по интенсивной ссылке в послании, полученном от игрового заведения.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 $. Если выдаются фриспины, их количество изредка превышает нескольких десятков даровых вращений. 1 xslots рабочее зеркало К огорчению, нет. Почти все казино, требуют внесение но бы 1-го минимального депо для вывода выигрыша с бездепозитного бонуса. Также учитывайте, собственно вывести средства разрешено только на ту платежную систему, с коей был изготовлен депо.В интернете большое известных игорных площадок с красивыми акционными предложениями. Однако внимательно читать условия десятков предложений в надоест, ну и время отнимет количество. Поэтому наша команда подготовила ТОП-3 сайтов с лучшими бездепозитными бонусами:
<b>Смотреть еще похожие новости:</b>
<a href=https://fmatras.ru/profile/107395-rabofreekt/>1х слот 1хслотс регистрация перейти на 1×slots</a>
<a href=http://medforum.5nx.ru/viewtopic.php?f=4&t=11364>1×slots казино мобильная версия</a>
<a href=http://www.emv.info/viewtopic.php?f=15&t=4226>1 x slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В зависимости от онлайн заведения каждый из их имеет вам предложить как бездепозитные деньги, например и бездепозитные фриспины, которые после удачной регистрации упадут для на ваш игровой баланс. Кешбэк-бонус представляет собой возврат фиксированного процента от ставки если, тогда, поражения либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не превышает 10%.
#1061 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Радченко Светлана Юрьевна порно пин casino <a href=https://strelochnik.com/>сайт казино зеркало</a> рокс казино pin up casino пин ап <a href=https://repost.news/>porno Елизавета Туктамышева</a> порно с Константин Тюкавин (футбол) лучшие бесплатные онлайн казино 1×bet официальный слоты casino играть казино смотреть онлайн скачать casino на андроид 1×bet приложение
DiskiPlus самое казино DiskiPlus 1×bet официальный слоты <a href=https://diskiplus.ru>DiskiPlus 1×bet зеркало рабочее xbet</a> DiskiPlus зеркала казино DiskiPlus casino ru <a href=https://www.diskiplus.ru>DiskiPlus 7k casino зеркало</a> DiskiPlus casino зеркало сегодня рабочее DiskiPlus зеркала казино DiskiPlus где казино DiskiPlus сайт pin up casino DiskiPlus pin up casino зеркало DiskiPlus kent casino регистрация DiskiPlus порно с Аделия Петросян (фигурное катание)
#1062 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino зеркало сегодня лучшие онлайн казино <a href=https://krtka.info/>Манилова Алла Юрьевна порно</a> скачать pin casino официальное казино вход <a href=https://slon-ru.com/>порно с Юлия Ефимова</a> Крючкова Полина Викторовна порно Мухтиярова Елена Вячеславовна порно Москалькова Татьяна Николаевна порно порно с Анна Щербакова, фигуристка pin up casino скачать букмекерская контора леонов казино
DiskiPlus скачать casino на андроид DiskiPlus казино вулкан <a href=https://www.diskiplus.ru/>DiskiPlus сколько казино</a> DiskiPlus Окладникова Ирина Андреевна порно DiskiPlus порно с Алина Загитова, фигуристка <a href=https://diskiplus.ru>DiskiPlus порно с Кирьянова Дарья Борисовна</a> DiskiPlus 1×bet сайт DiskiPlus букмекерская контора скачать приложение DiskiPlus порно с Диана Шнайдер (теннис) DiskiPlus казино пину DiskiPlus букмекерские конторы бет DiskiPlus скачать pin casino DiskiPlus Шевцова Татьяна Викторовна порно
#1063 Charlesgunnyhttp://filmkachat.ru
1×slots casino зеркало
Как верховодило, новоприбывшие геймеры для желают ознакомиться с способами ввода и вывода валютных средств и сроки выполнения поданных заказов чтобы конкретно разуметь, как стремительно возможность исключить свой казино бонус за регистрацию без депозита на электронный кошелек или же банковскую карту. К счастью для всех играющих, снутри конкретных холдингов, все казино соперничают меж собой. Ведь если бы определенную фирму представляло только одно онлайн-заведение, то ли бы клиенты заметили казино с призом за регистрацию и могли бы рассчитывать лишь на вознаграждение вид бонуса на 1-ое инвестиция. К каждому заведению периодически по завлекать свежих игроков, собственно, в итоге, только на руку всем играющим.Бездепозитные призы казино это экономическая компенсация, предлагаемая юзерам на дармовой базе и вероятность выступать в онлайн казино безвозмездно. Если сопоставлять их с поощрениями за вклад, в средства выдаются лишь впоследствии начального пополнения счета, то бездепозитные гонорары получаются безвозмездно. То есть, играющий получает вероятность создавать ставки на теснее существующие деньги, которые выдаст заведение, исполняя, при этом, обычные деянья, дабы их извлечь (здесь идет речь о регистрация, удостоверении личности с внедрением номера телефона, оформления заказы и т.д. ). <a href=http://filmkachat.ru/>1хслотс рабочее зеркало на сегодня</a> Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают бонус по государствам. Вплоть до того, что клуб возможность на игроков из Вашей государства, а бездеп не давать. <a href=https://events.com/r/en_US/registration/best-merchandising-software-solutions-for-retail-success-london-february-962474>https://events.com/r/en_US/registration/best-merchandising-software-solutions-for-retail-success-london-february-962474</a> 1×slots casino регистрация 1×slotscasino09k online <a href=http://www.en.besatime.com/index.php?subaction=userinfo&user=JamesSar>http://www.en.besatime.com/index.php?subaction=userinfo&user=JamesSar</a>
1×slots регистрация 1×slots casino 777 online
Как лишь на виртуальном счету окажутся бонусные свои, поспешите отыграть вейджер. Сразу в этого возможно забыть заявку на вывод выигрыша. Кредиты прибыльно отличаются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом настоящих средств и выделяют возможность почувствовать азарт. Во-вторых – возможно насладиться каждой азартной забавой доступной на веб-сайте. В вашем постановлении находятся автоматы, настольные прибавленье, видео-покер, Live-дилеры.Итак, чтобы бесплатные бонусные кредиты трансформировались в настоящие средства, которыми возможность распоряжаться по собственному усмотрению, их надо(надобно) отыграть. Вейджер идет уточнять в правилах онлайн-казино. <a href=https://kriptokulis.com/members/rabofreemn.2449/>x1 slots регистрация в 1×slots casino</a> 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=http://yartube.ru/index.php?subaction=userinfo&user=iratewriter0>http://yartube.ru/index.php?subaction=userinfo&user=iratewriter0</a> 1× слот зеркало Выиграть реальные средства в казино не пополняя счет – сложно, хотя возможно. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными призами и начните играть на бонусные свои. По статистике в 10-ти заведений возможно заработать небольшую необходимую средств за счет бонусных средств.
1×slots зеркало
Это раз из основных показателей привлекательности дара. С завешенным коэффициентом в профессионалы не сумеют выполнить обстоятельства по отыгрышу. И важно, насколько привлекательно выглядит предложение – бездепозитный приз казино в объеме $500 или $1 000. Чтобы новенькие получше вникли, что же такое вейджер, мы разберём на примере.Вознаграждения за получение VIP-статуса ? начисляются масштабах программки лояльности при достижении еще значения либо выдаются индивидуально менеджерами службы поддержки. Благодаря программе лояльности от игорного заведения, можно арестовать превосходный старт и без добавочных инвестициям запустить видеослоты. Кроме как, можно рассчитывать на реальную фортуну и получить, без вложения личных денег, великой выигрыш. <a href=https://love-n-magic.ru/index.php?subaction=userinfo&user=DoctorLazutaSr>https://love-n-magic.ru/index.php?subaction=userinfo&user=DoctorLazutaSr</a> На нашем сайте Вы найдете перечень актуальных новых бездепозитных призов в казино 2022 года. Также, есть много эксклюзивных услуг, коие доступны лишь гостям нашего вебсайта после регистрации по нашей ссылке либо активации особого промокода. 1×slots рабочее зеркало на сегодня
онлайн казино 1×slots
Бездепозитные призы за регистрацию являются одним из самых знаменитых методов вербования новых игроков в онлайн-казино, потому что они деют игрокам вероятность опробовать казино, особенно игровые автоматы, и вероятно, выиграть реальные средства. Почти все игровые клубы требуют подтверждение контактных данных игрока для получения бездепозитного приза. Однако далековато не все ресурсы предлагают своим клиентам бездепозитные призы за регистрацию в казино. В большинстве случаев предусмотрено одобрение на 1-ый депо в объеме 100–200%. Это замечательная возможность преумножить банкролл, увеличить время, проведённое за игрой и шансы сорвать большой куш. 1×слотс казино <a href=http://www.hucellbio.com/bbs/board.php?bo_table=free&wr_id=519310>http://www.hucellbio.com/bbs/board.php?bo_table=free&wr_id=519310</a>
1×slots casino регистрация 1×slotscasino09k online
На страничке представлены бездепозитные бонусы за регистрацию в казино редчайшая награда за которой гонятся все игроки как новенькие, например и профессионалы. Мы также уделяем великое внимание на наличие бонусов при составление рейтинга казино на деньги. Бездепозитный бонус это возможность выступать бесплатно и выиграть настоящие средства. 2. Создать новый профиль. Для регистрации надо(надобно) наполнить маленькую анкету либо зайдите в личный кабинет при помощи соц сеток;Частенько новенькие не знают, как активировать подарки либо исключить 1-ый выигрыш. Для сходственных случаев наша команда обрисовала главные термины – собственно это фриспины, вейджер, как его отыграть, чего необходимо проходить верификацию. <a href=http://marinecommand.com/forums/topic/fliest-1×bet-bonus-tilly-fally/page/162/#post-164533>http://marinecommand.com/forums/topic/fliest-1×bet-bonus-tilly-fally/page/162/#post-164533</a> 1×слот регистрация в 1×slots casino Вы скорее, например все предпочитаете получать презенты и бездепозитные призы казино. Игорные жилища брали в привычку одаривать гэмблеров приятными бонусами. Стать обладателем приветственного презента возможно за творенье профиля либо пополнение счёта. Второй вариант больше занимательный, как клубы готовы удвоить депозит! Но если вы новичок и только знакомитесь с миром азарта, лучше воспользуйтесь призом за регистрацию.Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских руб. В условиях промоакции предписано, что вейджер бездепозитного бонуса х20. Поэтому, чтобы отыграть приз, игроку несомненно нужно сделать ставок на 35*20=700 руб.
<b>Смотреть еще похожие новости:</b>
<a href=http://mandala-app.com/forums/viewtopic.php?f=5&t=221668>1×slots официальный сайт мобильная версия скачать</a>
<a href=http://junlinro520.gain.tw/space.php?uid=1111051>1× слот зеркало</a>
<a href=https://mami-forum.de/forum.php>1×slots регистрация 1×slots casino 777 online</a>
<a href=http://yamato-ryu.ru/communication/forum/index.php?PAGE_NAME=message&FID=1&TID=45449&MID=10197&sessid=0a3779a310ce135a572183810760ea77&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1хслотс зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Доступ к подарку может раскрываться механически в введения промокода или обращения в саппорта вебсайта. В первом случае от юзера не потребуется никаких поступков. Бездеп с активацией по коду встречается почаще всего. Игроку нужно ввести совокупность символов в графе, которая имеет находиться в регистрационной форме в Личном кабинете.
#1064 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slots review live
Бонус начисляется игроку сразу после регистрации и прохождения верификации в казино и не требует от посетителя внесения депо. Как верховодило, размер приза в сходственном случае достаточно умеренный, однако дозволяет новичкам познакомиться с забавой без риска реальными деньгами. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало</a> Однако в критериях исчезают «подводные камни», коие не позволят исключить крупную сумму либо же вы не успеете отыграть вейджер. Поэтому мастера рекомендуют арестовать благотворительные вращения за регистрацию в казино без депо, дабы поднабраться навыка и получить реальный шанс на победу. <a href=https://manifold.garden/forums/index.php?u=/topic/636/%D0%9A%D0%B0%D0%BA%20%D1%80%D0%B0%D0%B1%D0%BE%D1%82%D0%B0%D0%B5%D1%82%20%D0%B0%D0%B2%D1%82%D0%BE%D0%B2%D1%8B%D0%BA%D1%83%D0%BF%20%D0%B2%20%D0%A5%D0%B0%D1%80%D1%8C%D0%BA%D0%BE%D0%B2%D0%B5>https://manifold.garden/forums/index.php?u=/topic/636/%D0%9A%D0%B0%D0%BA%20%D1%80%D0%B0%D0%B1%D0%BE%D1%82%D0%B0%D0%B5%D1%82%20%D0%B0%D0%B2%D1%82%D0%BE%D0%B2%D1%8B%D0%BA%D1%83%D0%BF%20%D0%B2%20%D0%A5%D0%B0%D1%80%D1%8C%D0%BA%D0%BE%D0%B2%D0%B5</a> Почти все игровые клубы просят свидетельство контактных данных игрока для получения бездепозитного бонуса.Бездепозитный приз за регистрацию в казино — это стартовый презент повторяющий денежного начисления либо даровых вращений для новых игроков заведения, для получения которого не нужно заносить депо. скачать 1×slots официальный сайт <a href=https://ezref.info/dkim-key-splitter?dkimv=%3Ca+href%3Dhttps%3A%2F%2Fsitesseo.ru%2Fkupit-vechnye-ssylki-dlya-prodvizheniya-sajta%2F%3E%D0%B7%D0%B0%D0%BA%D1%83%D0%BF%D0%BA%D0%B0+%D1%81%D1%81%D1%8B%D0%BB%D0%BE%D0%BA+%D0%B4%D0%BB%D1%8F+%D0%BF%D1%80%D0%BE%D0%B4%D0%B2%D0%B8%D0%B6%D0%B5%D0%BD%D0%B8%D1%8F%3C%2Fa%3E+%D0%BA%D1%83%D0%BF%D0%B8%D1%82%D1%8C+%D1%81%D1%81%D1%8B%D0%BB%D0%BA%D0%B8+%D1%81%D0%B5%D0%BE&dkimb=Split>https://ezref.info/dkim-key-splitter?dkimv=%3Ca+href%3Dhttps%3A%2F%2Fsitesseo.ru%2Fkupit-vechnye-ssylki-dlya-prodvizheniya-sajta%2F%3E%D0%B7%D0%B0%D0%BA%D1%83%D0%BF%D0%BA%D0%B0+%D1%81%D1%81%D1%8B%D0%BB%D0%BE%D0%BA+%D0%B4%D0%BB%D1%8F+%D0%BF%D1%80%D0%BE%D0%B4%D0%B2%D0%B8%D0%B6%D0%B5%D0%BD%D0%B8%D1%8F%3C%2Fa%3E+%D0%BA%D1%83%D0%BF%D0%B8%D1%82%D1%8C+%D1%81%D1%81%D1%8B%D0%BB%D0%BA%D0%B8+%D1%81%D0%B5%D0%BE&dkimb=Split</a>
1×slots регистрация 1×slots review live
Воспользоваться бездепом возможно не во всех игровых автоматах: казино и тут уточняет ограничение для посетителей. Конечно, это можно счесть неким неудобством для игрока, хотя ради стоит отметить, что выбор автоматов всё равно остаётся достаточно наибольшим. 1×slots casino регистрация <a href=http://matripedia.de/doku.php?id=1win_bet_login_jogo>http://matripedia.de/doku.php?id=1win_bet_login_jogo</a> Обычно, бездепозитные призы выдаются под конкретные слоты с фиксированной ставкой, но их наверняка воспрещено применять в игровых автоматах с современным джекпотом. Список игр, в можно применять бездеп, Вы отыщите в описании акции либо можете уточнить у саппорта заведения.Законодательство, регулирующее азартные забавы в разных государствах, оказывает на возможности операторов. В результате юзеры из отдельных регионов сталкиваются с лимитированиями со стороны казино. Это возможность быть как глубокий отказ в доступе, например и невозможность загружать забавы отдельных изготовителей. x1 slots 1хслотс регистрация перейти на 1×slots
1×slots официальный сайт зеркало рабочее
Также, учите, собственно бездепозитный приз возможно вывести только том, случае, когда будут исполнены все обстоятельства отыгрыша. Вы скорее, скажем, как все предпочитаете получать подарки и бездепозитные бонусы казино. Игорные жилища брали в повадку одаривать гэмблеров приятными призами. Стать владельцем приветственного презента возможно за творенье профиля или пополнение счёта. Второй вариант больше увлекательный, как клубы готовы удвоить депо! Но случае вы новичок и лишь знакомитесь с миром азарта, превосходнее пользуйтесь призом за регистрацию.Максимальный размер ставки, который нельзя превышать же приз не несомненно всецело отыгран. В случае нарушения сего правила, приз и выигрыш с него будут аннулированы. <a href=https://images.google.com.tj/url?q=https://doctorlazuta.by/>https://images.google.com.tj/url?q=https://doctorlazuta.by/</a> Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, the decision зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. 1×slots casino регистрация на сайте Таким образом онлайн казино получает вероятного игрока. Возможно в будущем или настоящем он захотит поиграть на средства деньги. Так трудятся бездепозитные призы в интернет казино. Здесь очень подходит выражение, благотворительные сыр посещает лишь в мышеловке. Начинающие игроки все не обдумывать опасность пыла. Однако времени понимания становится больше. Это тема для отдельного обсуждения.
1× slots официальный
В зависимости от онлайн заведения любой из их имеет для предложить как бездепозитные средства, так и бездепозитные фриспины, которые в удачной регистрации рухнут вас на ваш игровой баланс.На странице представлены бездепозитные бонусы за регистрацию в казино редчайшая заслуга за коей гонятся все игроки как новенькие, так и мастера. Мы тоже уделяем большое внимание на присутствие призов при формирование рейтинга казино на средства. Бездепозитный приз это возможность играть безвозмездно и выиграть реальные средства. <a href=http://griffhunter.com/boards/memberlist.php?mode=viewprofile&u=993>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a> 1 x slots casino <a href=http://bbs.yongrenqianyou.com/home.php?mod=space&uid=4148996&do=profile&from=space>http://bbs.yongrenqianyou.com/home.php?mod=space&uid=4148996&do=profile&from=space</a> Чтобы помощи увериться в превосходстве бездепозитных бонусов, достаточно зарегистрироваться в казино и получить поощрение.Как правило, новоприбывшие геймеры начала хотят ознакомиться с методами ввода и вывода валютных средств и сроки выполнения поданных заказов чтобы конкретно понимать, как стремительно меня исключить свой казино бонус за регистрацию без депо на электронный кошелек либо же банковскую карту. К счастью для всех играющих, снутри конкретных холдингов, все казино конкурируют меж собой. Ведь если бы определенную компанию представляло лишь одно онлайн-заведение, то вряд ли бы посетители увидели казино с бонусом за регистрацию и имели бы рассчитывать только на вознаграждение повторяющий приза на первое вложение. К любому заведению периодически стопам привлекать новых игроков, что, в итоге, только на руку всем играющим.
1×slots регистрация на официальном сайте
Так что главное отличие подарка на депо от бездепа – обязательное пополнение счёта. Вы можете привнести депо и преумножить стартовый капитал либо забрать бездеп и всем не придётся рисковать собственными сбережениями. Поспешите выполнить простые притязания, и администрация ресурса начисляет щедрое поощрение!Доступные игры – В некоторых азартных играх возможно понизить математическое преимущество казино до нескольких 10-х процента. В их количестве многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как управляло, в этих играх ставки идут в зачет вейджера не всецело. Например, имеет предусматриваться только 50%. В некоторых забавах бездепозитные бонусы вообщем нельзя отыгрывать. Приветственный бездеп предоставляется какому игроку лишь раз один. Казино дерутся с так называемыми бонусхантерами (от англ. Bonus Hunter — доброволец за призами), пытающимися заводить многочисленные аккаунты для надувательства оператора и повторного получения презента. Исключить похожие действия разрешает верификация данных. Администрация вправе востребовать у посетителя подтвердить персональные данные, указанные при регистрации.Рассмотрим принцип его действия на образце. Допустим, вы зарегистрировались и возымели $10 not the slightest down payment bonus с вейджером х50. Это значит, собственно выигранные деньги можно будет выводить не раньше, чем в того, как общая сумма ставок достигнет $500. <a href=http://ru.monumentefunerare.md/index.php?subaction=userinfo&user=aboundingoutlaw>http://ru.monumentefunerare.md/index.php?subaction=userinfo&user=aboundingoutlaw</a> В каждом казино с бездепозитным бонусом учтены вейджеровые обстоятельства. Это единственный «подводный камень», кот-ый стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) сделать определённое количество ставок. Чем круче приз, тем сложнее выполнить обстоятельства, и наоборот.Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить необыкновенности, недоступные при забаве в демо режиме. Многие свежие посетители перебегают в число постоянных, а оператор получает длительную выгода. 1×slots зеркало 1хслотс регистрация перейти на 1×slots Это раз из основных показателей привлекательности презента. С завешенным коэффициентом том мастера не смогут выполнить обстоятельства по отыгрышу. И важно, насколько привлекательно выглядит предложение – бездепозитный приз казино в размере $500 либо $1 000. Чтобы новенькие лучше вникли, что же такое вейджер, мы разберём на примере.
<b>Смотреть еще похожие новости:</b>
<a href=https://edidaktikum.ee/en/content/iii-kontakttund-08-juuni?page=105#comment-299120>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a>
<a href=http://miupsik.ru/forums/showthread.php?tid=529341>1×slots бездепозитный бонус за регистрацию</a>
<a href=https://forum.visiteachapada.com/viewtopic.php?f=19&t=7783>1хслотс официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Мы советуем не отрицаться от похожих предложений знаменитых казино. Выделите несколько мин. На регистрацию, получите приз и попытайтесь его отыграть. Может быть, сейчас удача несомненно на вашей стороне! Верификация необходима для добавочной защищенности и подсобляет техподдержке выявить бонусхантеров и плутов. Кстати, на платформах выводы солидных сумм доступны только в подтверждения личности.
#1065 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
cometa casino Елизавета Боярская <a href=https://repost.news/>пин ап букмекерская контора</a> Семёнова Татьяна Владимировна порно Окладникова Ирина Андреевна порно <a href=https://res-publika.com>kent casino регистрация</a> 1×bet зеркало рабочее на сегодня 1×bet xyz порно с Абрамченко Виктория Валериевна порно с Карен Хачанов (теннис) porno Нина Пирогова, хоккеистка порно с Артемий Панарин (хоккей) 1×bet официальный сайт Анна Михалкова
DiskiPlus букмекерские конторы без депозита DiskiPlus порно с Каролина Севастьянова <a href=https://diskiplus.ru/>DiskiPlus пин ап casino pin</a> DiskiPlus casino зеркало сегодня DiskiPlus пин ап казино <a href=https://www.diskiplus.ru/>DiskiPlus порно с Артемий Панарин (хоккей)</a> DiskiPlus порно с Афонина Марина Игоревна DiskiPlus рабочие зеркала казино DiskiPlus бесплатные букмекерские конторы DiskiPlus Хорова Наталья Александровна порно DiskiPlus порно с Илюшникова Татьяна Александровна DiskiPlus пари букмекерская контора DiskiPlus gama casino
#1066 Charlesgunnyhttp://filmkachat.ru
1×slos регистрация в 1×slots casino
Список например нарекаемых «разрешенных землель» прилагается к правилам бонусной программы игорного портала. Обязательно выясните, распространяются ли на вас похожие санкции. <a href=http://filmkachat.ru/>1×slots промокод при регистрации 2025</a> <a href=https://www.f6s.com/archicgi-3d-architectural-visualization>https://www.f6s.com/archicgi-3d-architectural-visualization</a> 1×slots casino регистрация 1×slotscasin online <a href=http://wkbilibili.com/home.php?mod=space&uid=930041&do=profile&from=space>http://wkbilibili.com/home.php?mod=space&uid=930041&do=profile&from=space</a>
1× слот зеркало
Бездепозитный приз по промо-коду несомненно доступен для игры, лишь сомнений случае когда Вы активируете особый бонусный код в разделе с бонусами либо укажите промокод при регистрации на сайте. В некоторых случаях, считая активации кода, придется подтвердить контактные данные игрока и заполнить анкету клиента.На данном разделе портала регулярно публикуются обзорные заметки, в которых рассматриваются благотворительные призы наихороших интернет-казино. Информация структурирована по нескольким пт, включая главные: <a href=https://www.thefamilylegion.se/viewtopic.php?f=4&t=115290>1×slots casino зеркало</a> 1×slots регистрация на сайте 1×slots ru com Активация по промокоду употребляется в разных видах бездепов. Если идет о приветственном бонусе, то набор знаков возможно разузнать на основной страничке, в регистрационной форме или письме, которое отчаливает юзеру для подтверждения e-mail. Акции могут проводиться вместе с партнерскими площадками. Обычно код размещается на стороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активируется разовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном кабинете либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем актуальный код для активации в описании любого рекламную. <a href=http://shiftdelete.10tl.net/member.php?action=profile&uid=121471>http://shiftdelete.10tl.net/member.php?action=profile&uid=121471</a> 1 х слотс зеркало Предложения с бездепозитными бонусами за регистрацию позволяют новым заведениям привлечь аудиторию на собственный вебсайт. А игроки же получают вероятность выступать на реальные деньги без депо в казино и заработать небольшой стартовый капитал, который разрешено вывести на карту банка или электронный кошелек.
1×slots промокод при регистрации
Доступные забавы – В некоторых азартных забавах возможно понизить математическое превосходство казино до нескольких 10-х процента. В их количестве многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как управляло, в таких играх ставки идут в зачет вейджера не полностью. Например, возможность учитываться лишь 50%. В некоторых забавах бездепозитные призы вообще невозможно отыгрывать. Возможность поиграть дополнительное состязание (а времени и количество) абсолютно даром, а выигрыш, в свою очередь, поступает на счёт игрока. <a href=http://zghncy.cn/home.php?mod=space&uid=678545>http://zghncy.cn/home.php?mod=space&uid=678545</a> Размер ставки для игры по бездепозитному бонусу (окончательно же, в случае, когда он представлен вид бонусных денежных средств) зачастую ниже, чем при забаве на депо. Ограничение будет действовать до момента отыгрыша бонуса. 1×slots регистрация то дальше необходимо пройти
рабочее зеркало 1хслотс
Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и. Когда игроку надеется много фриспинов, администрация имеет разбивать их начисление на несколько дней. Бесплатные вращения предоставляются для конкретного слота, который указывается в правилах промоакции. Также бездепозитные призы имеют служить методом вернуть к ирге клиентов, пока приостановивших своё сотрудничество с фирмой: уведомление о бездепе поступает на мобильный телефон или почту.В случае установленного лимита на необходимую вывода выигрыша с бездепозитного бонуса, игрок не сможет вывести больше заявленной суммы. Но есть игорные заведения, которые готовы просто например жертвовать деньги на игру. Для этого достаточно создать профиль. Чтобы исключить свой выигрыш, вам сначала необходимо выполнить обстоятельства отыгрыша, указанные в условиях получения бездепозитного депо. 1×слот регистрация в 1×slots casino <a href=http://randy-harrison.it/gallery/profile.php?uid=156348>http://randy-harrison.it/gallery/profile.php?uid=156348</a> Для выбора азартного заведения Вы сможете пользоваться перечнем наших казино с призами за регистрацию. На нашем сайте мы опубликовали перечень бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, что часть бонусов неповторимые и доступны лишь для гостей нашего вебсайта по-специальному промо-коду или по оригинальной ссылке. Кроме такого, для каждого приза мы подготовили подробный обзор, в Вы узнаете как получить и отыграть одобрение и как вывести собственный выигрыш с бездепа.
казино 1×slots
Будьте внимательнее при ознакомлении с правилами во избежание происхожденья конфликтных ситуаций с казино, когда последствии отыгрыша бездепа вам не дадут вывести крупную необходимую выигрыша.Для выбора азартного заведения Вы сможете воспользоваться перечнем наших казино с бонусами за регистрацию. На нашем веб-сайте мы выпустили перечень бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, собственно часть бонусов неповторимые и доступны лишь для посетителей нашего сайта по-специальному промо-коду или по оригинальной ссылке. Кроме такого, для каждого приза мы подготовили подробный обзор, каком Вы узнаете как получить и отыграть поощрение и как вывести собственный выигрыш с бездепа. <a href=https://ponysfm.com/users/Walterbaita>https://ponysfm.com/users/Walterbaita</a> Каждая игровая платформа выделяется условиями по получению и отыгрышу бездепов. В правилах детально расписаны временные рамки, за которые надо(надобно) прокрутить вейджер. Также не забывайте тему наибольший объем ставки и наивысшую сумму выплаты. С иной стороны, чтобы получить бездепозитные призы казино, довольно истратить не более 1 минуты.Но а случае вы теснее профи по интернет казино, кликаем на красную кнопку «Получить» и Вы автоматически перейдете в онлайн казино; 1× слот зеркало Приветственный бонус без депозита ? подарок за регистрацию. Выдается средствами, фриспинами либо баллами. В последнем случае бонусные баллы используются для роли в турнирах или обмена на настоящие деньги.Помните, что в некоторых играх сумма ставки идет в зачет вейджера лишь отчасти. Так, в настольных и карточных забавах лишь от 5% до 50% суммы ставки числятся как отыгранные средства, тот как в слотах идет в зачет все one hundred percent суммы.
<b>Смотреть еще похожие новости:</b>
<a href=http://yonghengro.gain.tw/viewthread.php?tid=1770074&extra=>1×slots официальный сайт зеркало</a>
<a href=http://kamechkovkazak.listbb.ru/memberlist.php?mode=viewprofile&u=9727>1хслотс казино зеркало</a>
<a href=http://craft4game.forumex.ru/viewtopic.php?f=2&t=3126>1 хслот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На данном разделе портала регулярно публикуются обзорные статьи, в которых рассматриваются благотворительные призы наилучших интернет-казино. Информация структурирована по нескольким пунктам, включая основные:
#1067 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пин ап казино порно с Кирьянова Дарья Борисовна <a href=https://sovsekretno.net/>яндекс игры казино</a> букмекерская контора бесплатно скачать казино смотреть онлайн бесплатно <a href=https://glvk.guru/>porno Елизавета Туктамышева</a> порно с Бондаренко Анастасия Борисовна порно с Георгий Джикия (футбол) лучшие букмекерские конторы человек казино букмекерская контора бетсити букмекерская контора фонбет официальный порно с Гатагова Ольга Анатольевна
DiskiPlus порно с Владимир Минеев (ММА) DiskiPlus казино вход официальный сайт <a href=https://diskiplus.ru>DiskiPlus kent casino регистрация</a> DiskiPlus casino андроид DiskiPlus играющие казино <a href=https://diskiplus.ru>DiskiPlus casino автомат</a> DiskiPlus 1×bet слоты 1×bet xyz DiskiPlus сайт 1×bet слоты DiskiPlus казино смотреть DiskiPlus 1×bet официальный сайт 1×bet xyz DiskiPlus Елизавета Боярская DiskiPlus лучшие казино бесплатно DiskiPlus пин up casino
#1068 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало на сегодня
Прибывшие на акк деньги бездепозитные призы предназначаются, в, только для новоиспеченных пользователей, которые раньше не имели личного аккаунта в данном казино. Исходя из этого, в ранее у игрока был сделан депо, то, по всей вероятности, у него больше не будет возможности рассчитывать на получение такого приза в конкретном заведении.Доступ к подарку имеет раскрываться механически после введения промокода либо обращения в службу сайта. В первом случае от пользователя не требуется никаких деяний. Бездеп с активацией по коду встречается почаще всего. Игроку необходимо установить совокупа знаков в графе, которая возможность находиться в регистрационной форме в Личном офисе. <a href=http://filmkachat.ru/>онлайн казино 1×slots</a> Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?Кешбэк-бонус дает собой возврат фиксированного процента от ставки когда проигрыша или же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%. <a href=https://blogcircle.jp/commu/276/topic/123>https://blogcircle.jp/commu/276/topic/123</a> Самые свежие бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды находятся на этой странице. Посетитель имеет оценить условия получения и начать выступать на деньги без внесения депо. При этом игроку важно понимать, на каких критериях и какими способами него вывести приобретенный выигрыш. Для этого нужно расценить перечень присоединенных платежных систем.1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, если не хотите замерзнуть жертвой жуликов или впустую израсходовать время; 1× slots casino официальный сайт <a href=https://botdb.win/wiki/Shisha_Tobacco_From4_Eur>https://botdb.win/wiki/Shisha_Tobacco_From4_Eur</a> Как управляло, при выводе денег, от играющего потребуется только сделать наименьший лепта для того, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом собственный счет.Не трудно догадаться, что not the slightest deposit bonuses практически разу не посещают великими. Чаще всего идет о пяти–тридцати баксах (или эквиваленте этой суммы в другой еденице).
1×slots зеркало на сегодня
Наиболее пользующиеся вознаграждения среди гэмблеров – бездепозитные призы казино. Это не удивительно, так возможно получить бесплатные вращения или виртуальные кредиты, и этом не придётся пополнять счёт, рисковать личностными средствами. Удастся насладиться разнообразными веселиями и даже выиграть солидную необходимую, избегая серьёзного риска. <a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=369189>1хслотс официальный сайт зеркало</a> 1хслот скачать Рассмотрим принцип его деянья на примере. Допустим, вы зарегистрировались и возымели $10 not the slightest down payment bonus с вейджером х50. Это значит, собственно выигранные средства возможно будет выводить не раньше, чем последствии такого, как общая сумма ставок достигнет $500.Исходя из сего, просто не существует разумных оснований махнуть рукою на получение такового бонуса при регистрации. И, будет, на подобный безвозмездной основе у вас есть шансы выиграть деньги и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные бонусы, называют безвозмездными интернет платформами для игр. <a href=http://megatv.kiev.ua/user/Jasperhiels/>http://megatv.kiev.ua/user/Jasperhiels/</a> Чаще всего используются коды. Их нужно заносить в особые окна регистрационной анкеты, если идет о пригласительных бонусах, или в определенном разделе личного офиса игрока.Выше мы дали полный набор самых свежих и актуальных бездепозитных бонусов в интернет казино без пополнения на 2022 год, где вы можете пользоваться любым ценным бездепозитным призом. 1×slots регистрация 1×slotscasino 56 online В интернете очень много скриптовых вебсайтов, коие принадлежат мошенникам. Их основная задача – привлечь гэмблеров, пообещав столько великодушные подарки, хотя и крупные выигрыши. Так собственно некоторые веб-сайты предлагают получить за регистрацию и $1 000.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте условия – они часто выдаются для некоторых машин. В зависимости от клуба возможность делать определенное число ставок. Кстати, современные игорные дома дают возможность заводить «одноруких бандитов». <a href=https://kylerqyho30752.gynoblog.com/29766483/ai-nude-app-the-future-of-content-moderation-and-privacy-protection>https://kylerqyho30752.gynoblog.com/29766483/ai-nude-app-the-future-of-content-moderation-and-privacy-protection</a> Фриспины начисляются по определенной ставке. После их активации игроку необходимо запустить разъем и увериться, что в нем отображаются бесплатные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода после отыгрыша ориентируется оператором и редко выше 5 000 рублей. 1× slots casino официальный сайт Допустим, за регистрацию вы получили бездеп в размере 2 000 руб. С вейджером х30. В данном случае светит сделать ставок, на совместную необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда сделайте условия по отыгрышу, придёт время заработать настоящие средства. Однако не запамятовывайте, собственно с любого подарка получится вывести определённую необходимую (почаще всего менее $200).
1× слот зеркало
Заработать на бездепозитных бонусах за регистрацию в казино может каждый юзер, достигший совершеннолетия.Иногда в качестве одобрения за регистрацию имеют выдаваться билеты для роли в турнирах. Условия их проведения очень отличаются, потому мы советуем ознакомиться с каждым предложением отдельно. <a href=http://police.1stbb.ru/viewtopic.php?f=3&t=300>1×slots регистрацию более популярный вариант это</a> Многие новенькие колеблются, собственно поощрительный приз не будет возвращать, том в они выиграли у казино. Это безусловно неопасно и накрепко. Выводя выигранные свои, игрок просто останавливает свое роль при и утрачивает уникальную возможность – даром увеличивать личное вещественное положение.Приглашаем делиться мнениями о призах. Это поможет другим пользователям подбирать более прибыльные предложения. Подтвердите личность, предоставив оператору казино средства паспортные данные. Инструкции обычно несложные, главное — конкретно им следовать. Если написано, собственно «на фото должны быть видны все хорошо угла страницы паспорта» — устройте именно такое фото. 1×slots официальный сайт зеркало <a href=https://sub4sub.net/forums/users/gregorycoese/>https://sub4sub.net/forums/users/gregorycoese/</a> В подавляющем большинстве случаев бесплатные призы начисляются в кредитах, коие нельзя сразу вывести со счета. Прежде их нужно отыграть по установленным правилам. Эти притязания принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д.). О нем читайте ниже.
1×slots промокод при регистрации
<a href=http://longlive.com/node/1398>http://longlive.com/node/1398</a> Но не размышлять, что снабжая юзеров такими бонусами, казино увлекается спонсированием. Ведь объемы вознаграждений, в основном, не большие (средним объемом от 5 до 20 долларов). И на эти свои налагаются конкретные обстоятельства и лимитирования, неотклонимые к выполнению игрока, случае в последствии он желает получить все свои выигранные финансы.Перечисленные повыше основные характеристики сочетают фактически любой бонус и считаются стандартными для бездепозитных бонусных начислений в казино. 1× slots casino официальный сайт
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.animogen.com/viewtopic.php?f=9&t=1576656>1×slot зеркало рабочее регистрации на телефон придет</a>
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=878018>1 х слотс зеркало</a>
<a href=https://forum.eliteshost.com/showthread.php?tid=23989>1×slots казино мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Новые клиенты онлайн-казино без первого депозита шансы выяснить собственную удачливость. К тому же есть возможность преобразовать бездепы в реальные средства за регистрацию в казино, однако желаемого приз нужно отыграть сообразно условиям акции. Если речь идет об эксклюзивных услугах, возможность понадобиться регистрация в казино по ссылке с партнерского вебсайта.
#1069 Korporativnoye-obucheniye_perhttps://xn----7sbecpcasfm0beeaecirc5b3a2g.kz/
Доброго времени суток! Коллеги и партнеры полезная и отличная новость для вас! В наше высоко конкурентное и сложное время не возможно без профессионального персонала и профессиональных кадров. Профессиональные организации и компании не могут быть профессионалами во всех сферах деятельности, поэтому вынуждены обращаться за корпоративным обучением, корпоративными бизнес тренингами и корпоративным языковым обучением в специализированные компании, например: <a href=https://xn----7sbecpcasfm0beeaecirc5b3a2g.kz/>корпоративное-обучение.kz</a> Специализированная компания должна не охватывать все сферы и направления обучения, а специализироваться на нескольких направлениях, в которых действительно является профессионалом и экспертом в корпоративном обучении. В общем, если вы ищите, корпоративное обучение, корпоративное обучение в Казахстане, корпоративное обучение Казахстан и т.д., например: <a href=http://корпоративное-обучение.kz/trainings>бизнес тренинги</a> Тогда вам срочно нужно прямо сейчас перейти на сайт Caspian Training Group корпоративное обучение, корпоративное обучение в Казахстане, корпоративное обучение в Алматы, корпоративное обучение в Атырау и т.д. https://корпоративное-обучение.kz/ . Обязательно переходите на сайт https://xn----7sbecpcasfm0beeaecirc5b3a2g.kz/ CtGroup сохраняйте в закладки и изучайте информацию, не забудьте записать номера телефонов +7 777 179 66 00, +7 702 653 85 87 и адрес сайта. Увидимся!
#1070 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию более популярный вариант это
А ознакомиться с свежими онлайн казино, Вы сможете за счет бонусов с выводом прибыли, коие Вы сможете получить без депозита. <a href=http://filmkachat.ru/>скачать 1×slots на андроид мобильная версия</a> Основное правило получения бездепа ? творимый аккаунт обязан быть у пользователя первым и единственным. Наличие нескольких аккаунтов строго воспрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита необходимо блюсти несложную последовательность деяний. <a href=https://www.24liveblog.com/live/Uod90>https://www.24liveblog.com/live/Uod90</a> Это тоже благотворительные финансы, которые поступают на аккаунты новоиспеченных компьютерные последствии регистрирования. А особенность таких призов произведено том,, собственно обретенные финансы обязательно следует применять в продолжении назначенного времени. 1×slots зеркало этих способов предполагает регистрацию <a href=https://kylersbjr52964.spintheblog.com/30662441/deepnude-ai-navigating-the-fine-line-between-innovation-and-ethics>https://kylersbjr52964.spintheblog.com/30662441/deepnude-ai-navigating-the-fine-line-between-innovation-and-ethics</a> Бездепозитный приз – это экономическое вознаграждение, коие выдается участнику забавы в казино, для его вербования и возникновения заинтригованности. Любой посетитель, который соответствует условиям выдачи похожего бездепозитного бонуса, может претендовать на получение вышеуказанного приза. Такое одобрение считается наиболее действенным методом, дающим возможность стартовать в игре, не вкладывая собственных материальных средств.
казино 1× slots официальный сайт
Выше мы предоставили полный набор самых новых и актуальных бездепозитных бонусов в онлайн казино без пополнения на 2022 год, где вам воспользоваться каким ценным бездепозитным бонусом. <a href=http://miupsik.ru/forums/showthread.php?tid=512962>рабочее зеркало 1хслотс</a> 1×slots официальный сайт, скачать <a href=https://cadetmove.ru/index.php?subaction=userinfo&user=Robertneasy>https://cadetmove.ru/index.php?subaction=userinfo&user=Robertneasy</a> Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? 1×slots зеркало подтвердит вашу регистрацию если говорить Как верховодило, при выводе денег, от играющего требуется лишь устроить наименьший лепта чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом индивидуальный счет.Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного бонуса.
рабочее зеркало 1×slots
Многие азартные клубы ограничивают сумму вывода заработанную на призе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не можете вывести. Разница будет аннулирована, Вы в не можете создавать на нее ставки. В разделе с призами активировать собственный подарок. Найти игры, для которых учтено поощрение и применять бонус по предназначению. <a href=https://www.gamers-forum.com/member.php?104691-TravisTax>https://www.gamers-forum.com/member.php?104691-TravisTax</a> Так собственно сможете отважно регистрироваться без всяких раздумий. Фортуна сегодня наверняка на вашей стороне. Не побаивайтесь, как следствие какого или убытка Вам совершенно не грозит. С этими бонусами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе. 1×slots casino регистрация Возможность поиграть вспомогательное соревнование (а от и некоторое) совершенно даром, а выигрыш, к, поступает на счёт игрока.
1×slots официальный сайт мобильная версия
Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном веб-сайте и выполните вход в индивидуальный кабинет, чтобы арестовать благотворительные вращения с вейджером х40;Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция содержит доскональные правила, гиперссылка на которые обыкновенно содержится в промообъявлении. В их указываются лимиты, вейджер, перечень дешевых игр. Если оператор скрывает данные о предложении, то пользоваться им не. Доступ к дару возможность раскрываться автоматически после введения промокода либо обращения в службу сайта. В первом случае от юзера не требуется практически действий. Бездеп с активацией по коду встречается чаще всего. Игроку необходимо ввести совокупность символов в графе, которая может находиться в регистрационной форме в Личном офисе.Составленный знатоками Casino.ru перечень онлайн-казино с бездепозитным призом дозволяет игрокам сравнить спецпредложения различных операторов. 1×slot официальный сайт <a href=https://sportavesti.ru/forums/users/koreanxru0511–2/>https://sportavesti.ru/forums/users/koreanxru0511–2/</a> Вообще перейдя в казино — верховодила одинаковы в получении бездепозитных призов, в стереотипные верховодила заходит: доказать эл. Почту и аппарат, заполнить собственный индивидуальный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ.
1×slots официальный регистрация
Не стоит путать игру в демо и внедрение бонусов. В демонстрационном режиме игрок может расценить механику слота, сюжет и оформление. Но забава проводится на относительные кредиты, потому отсутствует основное ? чувство азарта. Активируя промокод либо фриспины, заказчик как не расходует средства деньги на игровые автоматы, хотя может сорвать настоящий куш! <a href=http://xojh.cn/home.php?mod=space&uid=1196706>http://xojh.cn/home.php?mod=space&uid=1196706</a> В бонусную программку множества операторов входят регулярные бездепы. Это бессрочные промоакции, поощряющие активных неизменных игроков. Популярный формат — раздача фриспинов по конкретным дням недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депозита в мена на накопленные баллы преданности. x1 slots регистрация в 1×slots casino Бездепозитный бонус за регистрацию в казино — это стартовый презент повторяющий валютного начисления либо безвозмездных вращений для новых игроков заведения, для получения которого надо вносить депо.Чем ниже велечину вейджера, что, этим проще отыграть и исключить бонус. Если Вы расчитываете заработать на бездепе, не просто ознакомиться с свежим игровым клубом, то стоит избегать бонусов с высоким вейджером их практически не реально отыграть. С ними Вы сможете лишь протестировать забавы заведения.
<b>Смотреть еще похожие новости:</b>
<a href=http://6000ziyuan.com/forum.php?mod=viewthread&tid=191329&extra=>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских рублей. В критериях промоакции указано, собственно вейджер бездепозитного бонуса х20. Поэтому, дабы отыграть приз, игроку несомненно необходимо устроить ставок на 35*20=700 рублей. Условия имеют разниться друг от приятеля. Но такой приз может быть использован только для игрового процесса – приобретенные на счет финансы до того, как станут отыграны, исключить невероятно.
#1071 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Евгения Медведева Нургалиева Эльвира Рамиловна порно <a href=https://rumafia.news/>casino зеркало сайта</a> casino промокод ramenbet casino <a href=https://t.me/vchkogpu_ru>бк букмекерская контора</a> 1×bet сейчас приложения букмекерских контор букмекерские конторы бет бесплатно фильм казино пина букмекерской конторы Попова Анна Юрьевна порно 1×bet слоты 1×bet top
DiskiPlus kent casino DiskiPlus up casino скачать <a href=https://diskiplus.ru>DiskiPlus мобильные букмекерские конторы</a> DiskiPlus 1×bet слоты официальный сайт DiskiPlus казино смотреть онлайн <a href=https://www.diskiplus.ru>DiskiPlus казино смотреть</a> DiskiPlus порно с Анна Калинская (теннис) DiskiPlus лучшие букмекерские конторы DiskiPlus Крючкова Полина Викторовна порно DiskiPlus porno Мира Андреева (теннис) DiskiPlus casino ru DiskiPlus казино проиграл DiskiPlus Москалькова Татьяна Николаевна порно
#1072 Charlesgunnyhttp://filmkachat.ru
1х слот 1хслотс регистрация перейти на 1×slots
Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, чтобы снова получить бесплатный бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ожидает неизбежное наказание. <a href=http://filmkachat.ru/>1×slots регистрация то дальше необходимо пройти</a> <a href=https://www.f6s.com/archicgi-3d-architectural-visualization>https://www.f6s.com/archicgi-3d-architectural-visualization</a> Многие новички сомневаются, что поощрительный приз не будет отдавать, числе в они выиграли у казино. Это абсолютно безопасно и надежно. Выводя выигранные средства, игрок просто останавливает свое роль в игре и теряет уникальную возможность – даром наращивать собственное материальное положение. 1х слот регистрация в 1×slots casino <a href=https://cse.google.bj/url?q=https://doctorlazuta.by/>https://cse.google.bj/url?q=https://doctorlazuta.by/</a>
1×slots зеркало на сегодня
<a href=http://fumankong11.cc/forum.php?mod=viewthread&tid=13052&pid=12621905&page=21&extra=page%3D1#pid12621905>1×slots зеркало сайта</a> 1×slots зеркало проходить регистрацию это отличный вариант Изучить управляла и условия получения бездепозитных призов казино, Вы сможете у нас на сайте в разделе с призами либо на официальном сайте избранного Вами казино. Если не можете найти нужную информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электрической почте.Акционные предложения от казино существуют в различных форматах. Часто призы даются в мена на депозит. Игрок заносит платеж и получает средства, благотворительные вращения и одобрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — вид приза, кот-ый гарантирован за исполнение конкретных действий на сайте: <a href=http://pokupkalux.ru/bitrix/redirect.php?goto=http://sluchay.ru/bitrix/rk.php?goto=http://7d.org.ua/php/extlink.php?url=https://teletype.in/@urist_free/KKmPrfRTWPW>http://pokupkalux.ru/bitrix/redirect.php?goto=http://sluchay.ru/bitrix/rk.php?goto=http://7d.org.ua/php/extlink.php?url=https://teletype.in/@urist_free/KKmPrfRTWPW</a> Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют важную информацию о not the slightest down payment bonuses и предложениях.Существует ли стратегии для отыгрыша бездепозитных бонусов? К огорчению нет, на выигрыши или проигрыши с призов, казино либо игрок повлиять не, отдача игр случается от создателей игр. 1×slot зеркало рабочее регистрации на телефон придет Рассмотрим принцип его деяния на образце. Допустим, вы зарегались и возымели $10 no deposit bonus с вейджером х50. Это означает, что выигранные средства можно несомненно выводить не раньше, чем после как, как общая сумма ставок достигнет $500.Прежде чем активировать бездеп, необходимо увериться в том, собственно страна, уроженцем которой считается игрок, не входит в список запрещенных.
1×slots актуальное зеркало
Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную функцию активации приза без депозита. Внимательно прочитайте до конца. Многие новички проделывают ошибки на шаге регистрации и поэтому возможности получить подарок.Если при регистрации показать промокод, возможно гарантировано получить бонус. Где взять ваучер? Посетите тематические блоги либо форумы. Иногда администрация клуба делает рассылку ваучеров на электрическую почту. В заключительное время игорные дома начали афишироваться в фильмах и сериалах. Присмотритесь и скорее заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных руб. В любом казино с бездепозитным призом предусмотрены вейджеровые условия. Это один-единственный «подводный камень», который стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, нужно устроить определённое число ставок. Чем круче бонус, что, этим труднее выполнить условия, и напротив.Ограничения по играм. Администрация воспрещает игрокам некоторые игровые автоматы с бездепозитным призом, средствами или бесплатными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда дробление выполняется по облику игр. Например, отыгрыш возможен на всех игровых аппаратах, хотя запрещен в настольных играх и в разделе Live Casino. <a href=https://rg-mechanics.club/user/JasperBrorI/>https://rg-mechanics.club/user/JasperBrorI/</a> Можно. Вы всегда можете отрешиться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не создадите ставку. 1×slots регистрацию более популярный вариант это Для получения выигрыша потребуется выполнить условия казино. Чаще всего игроку необходимо поставить конкретную сумму, хотя теснее из личных денег. Она рассчитывается из общего объема выигрыша за все время использования бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, в юзер выиграл 1000 рублей, а множитель сочиняет х30, вывести средства можно несомненно, сделав ставки на 30 000 рублей.Прежде всего, не забывайте периодически заглядывать на страницу обзоров бездепозитных бонусов. Они шаг за шагом разглядывают более интересные предложения основных игорных порталов.
1хслотс рабочее зеркало
Для казино, работающих онлайн, бездепозитные бонусы необходимы для вербования свежих клиентов. Предложение поиграть на слотах без необходимости внесения настоящих средств — работающий метод для увеличения энтузиазма к фирмы. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит выступать в казино, лишь сейчас теснее на личные средства.Эффективность бездепов виде маркетингового инструмента расценили все операторы. Малоизвестные площадки используют эти акции, дабы живо набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны постоянных посетителей. Не все веб-сайты, дающие презенты без депо, рекомендованы к забаве. За симпатичным промоописанием шансы скрываться невыполнимые условия отыгрыша и другие подводные камешки. Онлайн-казино с бездепозитными бонусами ставят клиентам обстоятельства для пользования бездепами, поэтому перед ролью в акции другого досконально ознакомиться со всеми правилами и нюансами акции. Условия все дотрагиваться получения приза, его применения и следующего вывода валютных средств в случае выигрыша.Вывод выигрыша с бездепозитных бонусов казино – щедрый подарок от азартных клубов. Но чтобы исключить свой заработок, нужно выполнить ряд условий: При верном подходе бездепы — это прекрасный метод выступать на деньги без траты личных средств. Есть количество рекомендаций, следуя которым возможно извлечь максимум пользы из похожих акций казино. Играть следует только на лицензированных площадках. Скриптовые сайты не только накалывают с бонусными услугами, но и используют пиратский софт с измененным ГСЧ. Выиграть на этих автоматах невероятно.Бездепозитные призы в казино без пополнения 2022 — это определенная сумма денег или gift spins вращения, коие предоставляются первым постояльцам за регистрацию на веб-сайте казино вид бездепозитного бонуса, и выделяет для вероятность за счет казино без пополнения опробовать предложения (игр), с последующей преимуществом, льготой вывода средств при выполнении всех установленных верховодил. 1×slots скачать на айфон <a href=http://www.iloveyou.com.tw/userinfo.php?uid=4998>http://www.iloveyou.com.tw/userinfo.php?uid=4998</a> Если вы новичок в и только попали в неизведанную вами район пыла — с помощью предложений как бездепозитные бонусы без пополнения.Бездепозитный бонус казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в данном и заключается главное различие.
рабочее зеркало 1хслотс
Не стоит незамедлительно же открещиваться от приветственных подарков в похожих казино. Администрация готова начислить средства или фриспины, но предварительно сотрудники обязаны убедиться, что вы не аферист. Дело что, нет, что развелось слишком количество охотников за бонусами. Они научились дурачить систему и наваривать солидные суммы денег. <a href=https://www.meiyingge8.com/space-uid-574392.html>https://www.meiyingge8.com/space-uid-574392.html</a> Создание аккаунта. На веб-сайте казино необходимо открыть регистрационную форму и заполнить порожние поля собственными данными. Иногда на этом этапе требуется показать лишь адресок электронной почты и пароль, хотя почаще бы наполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д.). Нужно свидетельствовать лишь реальные данные, потому впоследствие они будут испытаны. зеркала 1×slots Например, игрок получил 500 руб. При создании аккаунта и обязан отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 руб., потребуется сделать 875 спинов для полного отыгрыша.Если вы бывалый игрок, вы обязаны аристократия, что бонус без депозита – редкая находка. Тем ниже, мы раз изучаем интернет, чтобы найти вам превосходнейшие бездепозитные предложения.
<b>Смотреть еще похожие новости:</b>
<a href=http://tarratorriya.tforums.org/memberlist.php?mode=viewprofile&u=785>1×slots акции</a>
<a href=http://3ak.cn/home.php?mod=space&uid=187057>1×slots casino регистрация 1×slots review live</a>
<a href=https://melhorlance.com.br/minha-conta/>1×slots официальный регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Также посещают случаи, когда казино начислит оговоренный приз последствии регистрации нового посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам. Выше мы предоставили глубокий комплект самых новых и своевременных бездепозитных призов в онлайн казино без пополнения на 2022 год, где вам воспользоваться хоть ценным бездепозитным бонусом.
#1073 Charlesgunnyhttp://filmkachat.ru
1 x slots
Представьте момент, когда при ставке в 10 руб. Вы получите сходственное умножение. Миллион руб. За одно вращение, что вполне возможно. Поэтому вопрос, сколько возможно выиграть остаётся закрытым. Предлагаем выяснить без. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный приз и проверяйте удачу в деле. Разумеется, вывести средства довольно. Однако шансы есть у всех.Размер приза. В качестве бездепов обычно начисляют не суммы, а когда речь идет о бонусах за депозит, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино шансы подарить игроку до 2000$. <a href=http://filmkachat.ru/>1 х слотс зеркало</a> Иногда для получения призов необходимо спутаться с представителями саппорта. Удобнее всего с ними беседовать в онлайн-сате, желая от достаточно запроса по электрической почте.Промообъявления от казино не дают реальной картины и направлены на привлечение внимания пользователей. Понять, насколько высоки шансы остаться в плюсе, дозволит собственный тест критерий предложения: <a href=https://www.cgarchitect.com/projects/3f3aba93-lighting-the-art-of-atmosphere-in-3d-rendering>https://www.cgarchitect.com/projects/3f3aba93-lighting-the-art-of-atmosphere-in-3d-rendering</a> Важно, удостоверьтесь в том, что раньше не регистрировались в выбранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи. 1хслотс 1хслотс регистрация перейти на 1×slots <a href=https://christinanoto.sites.gettysburg.edu/education/pinaca-synthesis/----1?t=1718730970995>https://christinanoto.sites.gettysburg.edu/education/pinaca-synthesis/----1?t=1718730970995</a> Операторы гемблинга заявляют, собственно так они борются с бонус-хантерами. Впрочем, критики считают, собственно этим казино пытаются сделать из случайного гостя неизменного игрока.Демоказино есть почти на любом веб-сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются значительно реже: там когда выигрыша и соблюдения критерий промоакций бездеп можно превратить в реальные деньги.
1×slots промокод при регистрации
3. Подтвердить данные. В зависимости от клуба, нужно привязать аппарат или почту, указать индивидуальную информацию; <a href=https://tabsgame.ru/user/Jamesbes/>1хслотс зеркало на сегодня</a> 1× slots регистрация в 1×slots casino 3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать аппарат или почту, указать персональную информацию;В подавляющем большинстве случаев бесплатные бонусы начисляются в кредитах, коие невозможно сразу исключить со счета. Прежде их нужно отыграть по установленным правилам. Эти требования принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже. <a href=https://trevorywsk54321.techionblog.com/30325617/deepnude-the-dark-side-of-ai-technology-and-its-ethical-implications>https://trevorywsk54321.techionblog.com/30325617/deepnude-the-dark-side-of-ai-technology-and-its-ethical-implications</a> Каждый новичок и умелый игрок грезят живо стартануть и начать делать настоящие ставки. Для этого довольно отобрать презент, за который надо выплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email либо телефон. После этого администрация начислит щедрое вознаграждение вид даровых вращений или виртуальных кредитов. 1×slots зеркало быструю регистрацию а также мгновенное Практически все интернет казино с бездепозитным призом за регистрацию предусматривает программку лояльности — систему поощрения неизменных посетителей, которая состоит из большого значений. При достижении игроком очередного значения на его счёт поступает бонус. Чем повыше степень — что, этим щедрее приз.
1×slot зеркало
<a href=http://wuyuebanzou.com/home.php?mod=space&uid=862132>http://wuyuebanzou.com/home.php?mod=space&uid=862132</a> Для получения предоставленных бонусов для пригодиться — ПК либо мобильное устройство, и остальное дело за небольшим.Вышеописанная первопричина и является основным моментом, из-за которого операторы отдают часть своей выгоды на разные маркетинговые расходы и маркетинговые кампании. А самым действующим здесь будут выступать именно бездепозитные призы казино 2022 с выводом за регистрацию. 1×slots регистрация
1×slots зеркало 1хслотс регистрация перейти на 1×slots
У каждой забавы свои притязания по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система засчитает каждую ставку. В рулетке и покере сделать это намного сложнее. Именно поэтому например принципиально внимательно читать обстоятельства получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой игре, то новенькие попросту «спустят бонус на ветер».Вы не в коем случае ни чем не рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный приз, по мимо практической забавы на бездепозитные бонусы, у Вас есть шанс изучить игровые автоматы, выучится регулировать изменять ставки и линии, изучать бонусные игры и их выигрышные композиции, ну счете просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные средства, коие можно отыграть и вывести, но просто на демо счет, что, этим наиболее адреналин в крови еще больше повысится а пульс забьется с нередким ритмом! <a href=https://alglaah.com/index.php?threads/%D9%85%D8%B3%D9%83-%D8%A7%D9%84%D8%B9%D8%B1%D9%88%D8%B3%D8%A9.87561/#post-215625>1×slots зеркало регистрация</a> Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, all зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. В наше время довольно просто получить бонус за регистрацию в казино. Практически любой игорный жилище с готовностью начисляет средства либо благотворительные вращения. Многие гэмблеры используют данным и не стесняются регистрироваться в любом клубе с прибыльными критериями. Кстати, это замечательная возможность выработать победную тактику и сорвать джекпот.Вообще перейдя в казино — управляла одинаковы в получении бездепозитных призов, в стереотипные верховодила входит: доказать эл. Почту и телефонный, заполнить собственный собственный профиль, активировать промо код или активировать предложения во вкладке БОНУСЫ. 1×slots casino зеркало рабочее <a href=http://worklocal.com.au/users/michaeltig>http://worklocal.com.au/users/michaeltig</a> В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая приятная часть забавы. Важно, часто бездепозитные бонусы в казино выдаются с лимитированиями по максимальной выплате. В среднем возможно рассчитывать на выгода в несколько тыщ руб. Как вывести выигрыш с приза без депо. Придётся доказать аккаунт документально, в неких заведениях. Процедура верификации обязательна и делается каждым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате или прочитайте в правилах.
1×slots зеркало регистрация в 1×slots casino
Как правило, новоприбывшие геймеры в первую очередь желают ознакомиться с методами ввода и вывода денежных средств и сроки выполнения поданных заявок дабы конкретно разуметь, как скоро у исключить свой казино приз за регистрацию без депозита на электронный кошелек либо же банковскую карту. К счастью для всех играющих, внутри конкретных холдингов, все казино конкурируют между собой. Ведь случае бы конкретную фирму представляло лишь одно онлайн-заведение, то ли бы клиенты увидели казино с бонусом за регистрацию и возможность бы рассчитывать только на вознаграждение повторяющий приза на первое вложение. К любому заведению периодически следует привлекать свежих игроков, собственно, конечном, лишь на руку всем играющим. <a href=http://art-metall.su/index.php?subaction=userinfo&user=maniacaldemogra>http://art-metall.su/index.php?subaction=userinfo&user=maniacaldemogra</a> 1×slots casino регистрация 1×slotscasin online
<b>Смотреть еще похожие новости:</b>
<a href=https://juancorner.com/threads/1×slots-sajt.943/>1×slots сайт</a>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=409398>1×slots официальный регистрация</a>
<a href=https://polnyi-pisec.info/threads/1×slot-zerkalo.938/>1×slot зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.
#1074 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Александр Соболев (футбол) 1×bet <a href=https://m.repost.news/>гама казино</a> лучшие онлайн казино 1×bet телефон <a href=https://rhymes-punches.com/>порно с Евгения Медведева</a> скачать сайт букмекерской конторы 1×bet бесплатно промокод 1×bet inform@rucriminal.info Матвиенко Валентина Ивановна порно Валентина Матвиенко порно Матвиенко Валентина Ивановна порно
DiskiPlus porno Алена Косторная (фигурное катание) DiskiPlus порно с Дарья Клишина, легкоатлетка <a href=https://www.diskiplus.ru>DiskiPlus 1×bet официальный слоты</a> DiskiPlus букмекерская контора скачать приложение DiskiPlus 1×slots casino <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet слоты</a> DiskiPlus casino зеркало сайта DiskiPlus pin up casino buzz DiskiPlus retro casino DiskiPlus 1×bet зеркало рабочее xbet DiskiPlus Чулпан Хаматова DiskiPlus Манилова Алла Юрьевна порно DiskiPlus самое казино
#1075 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Юдаева Ксения Валентиновна порно порно с Каролина Севастьянова <a href=https://sovsekretno.net/>up casino скачать</a> casino регистрации порно с Евгения Медведева, фигуристка <a href=https://repost.news/>casino рабочее зеркало</a> скачать 1×bet официальные сайты казино играющие казино 7k casino сайт 1×bet рабочее на сегодня porno Нина Пирогова, хоккеистка порно с Анна Щербакова, фигуристка
DiskiPlus пина букмекерской конторы DiskiPlus демо казино <a href=https://www.diskiplus.ru/>DiskiPlus Петрова Ольга Викторовна порно</a> DiskiPlus porno Вера Бирюкова, гимнастка DiskiPlus порно с Дронова Александра Викторовна <a href=https://diskiplus.ru/>DiskiPlus порно с Никита Кучеров (хоккей)</a> DiskiPlus казино рояль DiskiPlus букмекерская контора вход DiskiPlus casino ru DiskiPlus 1×bet официальный слоты DiskiPlus up casino зеркало казино DiskiPlus porno Александр Соболев (футбол)
#1076 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации
Бездепозитные бонусы, как уже ясно, считаются уникальной возможностью обратиться игровому процессу абсолютно безвозмездно, словами выступать в онлайн казино безвозмездно и на существующие свои сразу после регистрации аккаунта. Автоматы с этим депозитом все замерзнуть прекрасной вероятностью сыграть для поклонников азарта с определенными ограничениями в финансах.При ирге на бонусные свои запрещается играть в игровые автоматы с современным джекпотом и забавы из радела exist casino. Кроме как, некоторые казино дают бездеп на раз или несколько определенных слотов, и в иных играх Вы не можете на них играть. <a href=http://filmkachat.ru/>1×slots скачать на айфон</a> <a href=https://www.bondhuplus.com/read-blog/137780>https://www.bondhuplus.com/read-blog/137780</a> Возможность поиграть дополнительное соревнование (а иногда и несколько) абсолютно безвозмездно, а выигрыш, в свою очередь, поступает на счёт игрока. 1×slots рабочее зеркало <a href=https://series40.kiev.ua/user/PhilipDRARY/>https://series40.kiev.ua/user/PhilipDRARY/</a>
1×slots зеркало регистрация
В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая доля игры. Важно, зачастую бездепозитные призы в казино выдаются с ограничениями по наибольшей выплате. В среднем можно рассчитывать на прибыль в несколько тысяч рублей. Как исключить выигрыш с бонуса без депозита. Придётся подтвердить акк документально, в некоторых заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате либо прочтите в правилах.3. Подтвердить данные. В зависимости от клуба, нужно привязать телефон или почту, показать индивидуальную информацию; <a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=1208802>1×slots регистрация на официальном сайте</a> 1× slots сайт Основное верховодило получения бездепа ? творимый аккаунт обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов требовательно воспрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депозита необходимо соблюдать простую последовательность деяний.Ниже указан актуальный перечень легальных казино в Беларуси с призами на первый депозит. Вы можете попасть на официальный сайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. <a href=http://moujmasti.com/member.php?20584-Kennethbrove>http://moujmasti.com/member.php?20584-Kennethbrove</a> 1×slots зеркало видели такую регистрацию на Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских рублей. В критериях промоакции предписано, что вейджер бездепозитного приза х20. Поэтому, чтобы отыграть бонус, игроку несомненно нужно сделать ставок на 35*20=700 руб.
1×slots рабочее зеркало
<a href=https://www.levasche.it/shop/kennethgaw/>https://www.levasche.it/shop/kennethgaw/</a> B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, the decision зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. 1×slots регистрацию процедура займет всего лишь Чем ниже велечину вейджера, что, этим проще отыграть и исключить приз. Если Вы расчитываете заработать на бездепе, но просто ознакомиться с новым игровым клубом, то стоит избегать бонусов с высочайшим вейджером их почти не реально отыграть. С ними Вы можете только протестировать игры заведения.
1хслот официальный сайт зеркало
Рассмотрим на образце: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских рублей. В критериях акции указано, собственно вейджер бездепозитного приза х20. Поэтому, дабы отыграть бонус, игроку будет необходимо устроить ставок на 35*20=700 рублей. При верном раскладе бездепы — это прекрасный метод выступать на деньги без траты собственных средств. Есть количество рекомендаций, следуя которым можно извлечь максимально выгоды из сходственных акций казино. Играть по лишь на лицензированных площадках. Скриптовые веб-сайты не накалывают с бонусными предложениями, хотя и употребляют пиратский софт с модифицированным ГСЧ. Выиграть на этих автоматах нереально. 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=https://broncos.com/forums/index.php?/user/19013-michaelchafe/>https://broncos.com/forums/index.php?/user/19013-michaelchafe/</a> Бездепозитные призы за регистрацию считаются одним из самых известных методов вербования свежих игроков в онлайн-казино, поэтому что они деют игрокам вероятность опробовать казино, необыкновенно игровые автоматы, и вполне, выиграть реальные средства.Баланс игрока пополняется на соответствующую сумму. К ней используется вейджер, обозначенный в правилах акции. Вывести выигрыш возможно будет последствии того, как юзер устроит требуемый размер ставок из личных средств. В редких случаях бездеп работает в формате Free Play. На счет юзера зачисляется большая сумма, и предоставляется небольшой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по завершении этого периода сумма на счету несомненно превышать изначальную, то разность можно несомненно вывести или использовать для последующих ставок.
1×slots официальный сайт зеркало
Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? Зарегистрироваться в казино по специальной ссылке либо с бонусным кодом. Подтвердить контактные данные (номер аппарата и электрическую почту). Для доказательства номера телефона нужно в личном профиле указать собственный номер и нажать кнопку „Подтвердить номер телефона“, далее Вы получите sms-сообщение с кодом, кот-ый нужно ввести в отвечающее фон. Для подтверждения электрической почты, перебежать по активной ссылке в послании от казино.Приветственный приз без депозита ? презент за регистрацию. Выдается деньгами, фриспинами либо баллами. В заключительном случае бонусные баллы применяются для роли в турнирах или обмена на реальные средства. <a href=https://simracing.su/user/DoctorLazutaPa/>https://simracing.su/user/DoctorLazutaPa/</a> Также существуют онлайн-платформы азартных игр, которые используют раздачу бездепозитных призов в специальные даты (как для казино, так и для игрока). Помимо этого, действующие игроки также имеют вероятность получить похожие призы за свою работа (например, за повышения значения или за похожие заслуги). 1хслотс официальный сайт зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.survival-readiness.com/viewtopic.php?t=277149>1хслот скачать</a>
<a href=http://zelenalutrija.com/forum/showthread.php?p=85283#post85283>1× slots casino официальный сайт</a>
<a href=https://adminclub.org/showthread.php?tid=400947>1х слот регистрация в 1×slots casino</a>
<a href=https://foro.muelendhir.com/showthread.php?tid=114178>1×slots зеркало видели такую регистрацию на</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Главное преимущество спинов – возможность выучить разные слоты. Также удастся насладиться бонусными раундами, испытывать фортуну в риск-туре и преувеличить выигрыш за счёт особенных символов. Однако столько игровой процесс заслуживает внимание, ведь другого, как сосредоточиться на реальном выигрыше. Выше мы дали глубокий комплект самых новых и актуальных бездепозитных бонусов в онлайн казино без пополнения на 2022 год, где возможность пользоваться каким ценным бездепозитным бонусом.
#1077 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерские конторы pin casino скачать приложение <a href=https://t.me/vchkogpu_ru>casino актуальное зеркало</a> порно с Александр Головин (футбол) сайт винлайн букмекерская контора <a href=https://vestnik-jurnal.com/>casino com</a> почему в казино не бывает настенных часов 1×bet зеркало рабочее xbet 1×bet бесплатно порно с Анна Калинская (теннис) сайты казино Валентина Матвиенко порно Черкесова Бэлла Мухарбиевна порно
DiskiPlus 1×bet официальный DiskiPlus casino онлайн <a href=https://www.diskiplus.ru/>DiskiPlus казино смотреть онлайн бесплатно</a> DiskiPlus пинко casino DiskiPlus букмекерские конторы в россии <a href=https://www.diskiplus.ru>DiskiPlus Ходнева Светлана Владимировна порно</a> DiskiPlus яндекс игры казино DiskiPlus casino скачать приложение DiskiPlus порно с Васильева Татьяна Викторовна DiskiPlus порно с Диана Шнайдер (теннис) DiskiPlus porno Марина Александрова DiskiPlus ев казино DiskiPlus 7k casino сайт
#1078 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
up casino скачать porno Анастасия Янькова, боксерка <a href=https://t.me/vchkogpu_ru>1×bet зеркало на сегодня 1×bet xyz</a> 1×bet слоты официальный сайт Приезжева Екатерина Геннадьевна порно <a href=https://th-royalgclub.com/>vavada casino</a> винлайн букмекерская контора приложения букмекерских контор на андроид 1×bet xbet xyz vavada casino porno Марина Александрова казино рояль porno Юлия Канакина
DiskiPlus 7k casino зеркало DiskiPlus пин ап казино <a href=https://diskiplus.ru/>DiskiPlus 1×bet бесплатно</a> DiskiPlus порно с Петр Ян (ММА) DiskiPlus ставки на спорт букмекерские конторы <a href=https://www.diskiplus.ru/>DiskiPlus порно с Кирьянова Дарья Борисовна</a> DiskiPlus 1×bet casino DiskiPlus казино можно DiskiPlus кент casino DiskiPlus 1×bet официальный DiskiPlus скачать букмекерскую контору DiskiPlus бесплатно фильм казино DiskiPlus казино сегодня
#1079 Charlesgunnyhttp://filmkachat.ru
зеркло казино 1×slots
Также учтите, что кое-какие игровые платформы сузивают список государств, которые способны получить предложенный бездепозитный приз за регистрацию. К примеру, существуют онлайн-заведения, выдающие подобные бонусы только обитателям определенных стран. К образцу, интернет казино 777 Оригинал дает бездепозитный приз лишь игрокам из России и стран СНГ. Или напротив, пичкают вознаграждением всех, кроме обитателей неких государств (как сего, по пристально учить перечень, дабы потом не возникло практически вопросов и претензий). <a href=http://filmkachat.ru/>1хлот регистрация в 1×slots casino</a> Объективные – размер приза, коэффициент и условия вейджера, необходимость внесения депо для вывода средств; <a href=https://potofu.me/kalinka0588>https://potofu.me/kalinka0588</a> Сроки активации приза уточняются любым казино, но чаще всего они не превосходят недели с момента получения. Игроку непременно надо(надобно) применять бездеп протяжении указанного срока, в ином случае приз просто исчезнет. Каждый бонус можно получить лишь один один, потому случае не применять бездеп в срок, у игрока не будет 2 шанса им пользоваться. 1 х слотс зеркало <a href=http://xn–9v2bp8axyinna.com/bbs/board.php?bo_table=gallery02&wr_id=354909>http://xn–9v2bp8axyinna.com/bbs/board.php?bo_table=gallery02&wr_id=354909</a>
1×slots официальный зеркало
Бездеп с фриспинами имеет охватывать всю коллекцию игр на веб-сайте или разработки 1-го провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении акции. Выигрыш имеет быть выведен в того, как пользователь отыграет данную сумму. Возможность расценить полный функционал слотов — основное совершенство этой разновидности. Игроку становятся доступны что, эти функции, которые отсутствуют в демонстрационном режиме, а возможность выиграть реальные деньги добавляет ясных азартных ощущений.Не стоит незамедлительно же открещиваться от приветственных даров в сходственных казино. Администрация готова начислить средства или фриспины, но сначала сотрудники должны убедиться, собственно вы не мошенник. Дело что, нет, что развелось слишком много охотников за бонусами. Они научились дурачить систему и наваривать солидные суммы средств. <a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=180312>1×slots на любой вкус как пройти регистрацию</a> 1×slots зеркало видели такую регистрацию на <a href=http://ods.org.ua/user/Jamesfract/>http://ods.org.ua/user/Jamesfract/</a> 1×slots регистрация На нашем сайте Вы отыщите список своевременных новых бездепозитных призов в казино 2022 года. Также, есть количество эксклюзивных услуг, которые доступны лишь посетителям нашего сайта в регистрации по нашей ссылке либо активации особого промокода.У любого игорного заведения свои верховодила и обстоятельства. Но, чтобы получить бонусы, нужно выполнить стереотипные действия:
1×slots казино зеркало
На странице представлены бездепозитные бонусы за регистрацию в казино редкая заслуга за которой гонятся все игроки как новички, так и мастера. Мы также уделяем огромное внимание на присутствие призов при формирование рейтинга казино на средства. Бездепозитный бонус это вероятность играть бесплатно и выиграть настоящие средства. Зачастую бездепозитные призы казино для забавы предлагаются различными заведениями азартных игр в качестве рекламных акций либо в целях вербования к для свежих игроков. Для бездепозитных призов в казино 2022 игроку не пополнять счет до момента вывода желанных средств.Многие казино деют в маркетинговых целях бесплатные бонусы необыкновенно для наших читателей. Чтобы их получить, надо(надобно) перебежать на игровой сайт по партнерской ссылке с нашего портала. <a href=http://www.seoulschool.org/bbs/board.php?bo_table=free&wr_id=387496>http://www.seoulschool.org/bbs/board.php?bo_table=free&wr_id=387496</a> Возможность протестировать новые игры, не рискуя личностными средствами и разработать личную тактику забавы.Самый распространённый из похожих бонусов, конечно же, бездеп на денек рождения посетителя — приз в виде фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им возможно в течение установленного периода медли. 1×slot официальный сайт Подтвердите регистрацию, дабы активировать Бездепозитный приз с выводом, требуется заполнить индивидуальный профиль. Заполните пустопорожние поля истинными данными о для.Каждый из бездепозитных бонусов без пополнения 2022 имеет собственный конкретный вейджер для отыгрыша, так же в любом казино он устанавливается индивидуально — где то он х55 а кое-где х30, повторюсь всюду по разному!
1×slots казино зеркало
<a href=https://rolivka.online/forum/showthread.php?tid=40638>1хслотс регистрация в 1×slots casino</a> Бездепозитный бонус по промо-коду будет доступен для игры, только что случае когда Вы активируете специальный бонусный код в разделе с призами либо укажите промокод при регистрации на сайте. В некоторых случаях, кроме активации кода, понадобиться доказать контактные данные игрока и наполнить анкету клиента.У любого игорного клубы разные вейджеровые обстоятельства. Чтобы вы гарантировано смогли выполнить их, мы дадим некоторое советов. Если система начислила небольшую сумму, не стоит делать великие ставки – остановитесь на 10–30 центах. Как только сможете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте выступать. В неприятном случае другого приглядеться к иному автомату. скачать 1×slots на андроид мобильная версия <a href=http://yunduost.com/home.php?mod=space&uid=63910>http://yunduost.com/home.php?mod=space&uid=63910</a> Акции распространяются как на все игры казино, например и на ограниченный список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino прочие. Промо может охватывать разработки одного производителя. Бездеп не пересекается с другими акциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, изготовленные бонусными деньгами. Для идентификации платежных реквизитов игрока может потребоваться пополнение счета на наименьшую необходимую.
1хслот зеркало
Исходя из сего, просто не присутствует осмысленных причин махнуть рукой на получение такового бонуса при регистрации. И, лишним, на подобный безвозмездной основе у вас есть шансы выиграть средства и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные бонусы, нарекают бесплатными интернет платформами для игр. Бонус в казино без депо имеет разные разновидности: может быть приветственный приз, промоакции в честь каких-либо праздничных либо весомых дат, приз за вербование свежих игроков, преданность и получение VIP-статуса. <a href=http://www.forumdipace.org/profile.php?mode=viewprofile&u=558490>http://www.forumdipace.org/profile.php?mode=viewprofile&u=558490</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации подарка необходимо доказать электрическую почту и привязать телефон;
<b>Смотреть еще похожие новости:</b>
<a href=http://turkteam.10tl.net/member.php?action=profile&uid=2012>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=16783>1×slot казино зеркало</a>
<a href=http://junlinro520.gain.tw/space.php?uid=1111051>1х слотс зеркало регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Пoдтвepдить личнocть посетителя. Для успешного вывода средств, необходимо подтвердить личность посетителя. Нa этaпe вepификaции пpoфиля, работники службы безопасности должны убедиться, собственно у игрока всего лишь раз аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не может исключить собственный выигрыш, если у него будет некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы. Законодательство, регулирующее азартные игры в различных государствах, влияние на полномочия операторов. В итоге юзеры из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это возможность быть как глубокий отказ в доступе, например и невозможность загружать забавы отдельных изготовителей.
#1080 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Варвара Субботина казино фильм <a href=https://sovsekretno.net/>порно с Варвара Субботина</a> казино 1 казино проиграл <a href=https://krtka.info/>букмекерская контора зенит</a> pin up casino пин 1×bet зеркало xbet xyz Москалькова Татьяна Николаевна порно порно с Евгения Медведева официальные букмекерские конторы скачать r7 casino порно с Александр Головин (футбол)
DiskiPlus почему в казино нет окон DiskiPlus винлайн букмекерская контора <a href=https://www.diskiplus.ru/>DiskiPlus porno Анна Сидорова, керлингистка</a> DiskiPlus porno Мира Андреева (теннис) DiskiPlus pin up casino top top <a href=https://www.diskiplus.ru>DiskiPlus порно с Владимир Минеев (ММА)</a> DiskiPlus порно с Анастасия Потапова, теннисистка DiskiPlus порно с Федор Чалов (футбол) DiskiPlus pin up casino зеркало DiskiPlus Шевцова Татьяна Викторовна порно DiskiPlus казино можно DiskiPlus casino зеркало сегодня рабочее DiskiPlus porno Катерина Шпица
#1081 Charlesgunnyhttp://filmkachat.ru
1×slos регистрация в 1×slots casino
В наше время довольно просто получить приз за регистрацию в казино. Практически любой игорный дом с радостью начисляет деньги либо безвозмездные вращения. Многие гэмблеры используют этим и не смущяются региться в любом клубе с прибыльными критериями. Кстати, это отличная возможность выработать победную стратегию и сорвать джекпот.B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. <a href=http://filmkachat.ru/>1×slots казино зеркало</a> Вы скорее, скажем, как все предпочитаете получать презенты и бездепозитные бонусы казино. Игорные дома взяли в привычку одаривать гэмблеров приятными бонусами. Стать обладателем приветственного презента возможно за творенье профиля или пополнение счёта. Второй вариант больше интересный, как клубы готовы удвоить депо! Но случае вы новичок и лишь знакомитесь с миром пыла, никакого пользуйтесь призом за регистрацию. <a href=https://hearthis.at/group/466307/3d-rendering-for-interior-design/>https://hearthis.at/group/466307/3d-rendering-for-interior-design/</a> 1хлот регистрация в 1×slots casino <a href=http://rtpsouth.com/UserProfile/tabid/69/userId/111150/Default.aspx>http://rtpsouth.com/UserProfile/tabid/69/userId/111150/Default.aspx</a> Бонус за регистрацию в казино выдается лишь один один на 1-го игрока. Но бывают дополнительные акции, в рамках которых бездепы расступаются для неизменных посетителей и такие подарки Вы можете получить более одного раза.
1×slots скачать на айфон
1×slots рабочее зеркало <a href=http://www.mallangpeach.com/bbs/board.php?bo_table=free&wr_id=181888&&#c_1589633>http://www.mallangpeach.com/bbs/board.php?bo_table=free&wr_id=181888&&#c_1589633</a> 1×slots регистрация
1×slos регистрация в 1×slots casino
Чтоб получить крупный выигрыш, выбирайте игровые автоматы с максимальным процентом отдачи (RTP) из перечня тех, которые доступны по условиям отыгрыша.Бонус начисляется игроку сразу в регистрации и прохождения верификации в казино и не просит от посетителя внесения депозита. Как верховодило, размер бонуса в подобном случае довольно застенчивый, впрочем разрешает новичкам познакомиться с забавой без риска реальными средствами. Акционные предложения от казино есть в разных форматах. Часто бонусы даются в мена на депозит. Игрок заносит платеж и получает средства, благотворительные вращения и одобрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — вид бонуса, который гарантирован за исполнение конкретных поступков на сайте: <a href=http://fumankong2.cc/home.php?mod=space&uid=600990>http://fumankong2.cc/home.php?mod=space&uid=600990</a> 1×slot казино зеркало К раскаянью, нет. Почти все казино, требуют внесение хотя бы 1-го малого депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, что исключить деньги разрешено только на что, эту платежную систему, с коей был изготовлен депозит.Выбирайте наихорошие безвозмездные призы за обзоров на Casinoz – и пусть вам сопутствует счастье при отыгрыше бонусных кредитов!
1×slots быструю регистрацию а также мгновенное
Выбрать казино с бездепозитным бонусом. У нас на сайте представлен перечень наилучших интернет казино, коие предлагают своим игрокам щедрые призы за регистрацию.Если вы облюбовали себе несколько брендов которые для больше всего полюбились, для неизменной игры! Таких гемблеров казино очень предпочитает и оценивает, за частую такие игроки становятся VIP игроками заведения, которым часто поступают выгодные предложения в виде бонусов, так же туда заходит и бездепозитные. <a href=http://www.psicologamariafoti.it/index.php/forum/ideal-forum/261045–1–1×slots-casino#345350>1хлот регистрация в 1×slots casino</a> При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие можно посвятить забаве в казино. 1×slots официальный сайт скачать на айфон <a href=http://stroygorod.su/user/Julesvob/>http://stroygorod.su/user/Julesvob/</a> Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном призе, то в первую очередь внимание на значение вейджера и срок, кот-ый дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, что, этим проще отыграть бонус и вывести выигрыш.
1×slots регистрацию более популярный вариант это
Акции, приуроченные к календарным праздничным, бывают рассчитаны как на всех пользователей, например и на категории: например, презент на 8 марта девушкам-игрокам или мужчинам на 23 февраля. <a href=https://craigslistdir.org/%D0%B1%D0%B5%D1%81%D0%BF%D0%BB%D0%B0%D1%82%D0%BD%D0%B0%D1%8F-%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0-%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA_359164.html>https://craigslistdir.org/%D0%B1%D0%B5%D1%81%D0%BF%D0%BB%D0%B0%D1%82%D0%BD%D0%B0%D1%8F-%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0-%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA_359164.html</a> 1хлот регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.immortales-gilde.de/viewtopic.php?f=2&t=390597>1×slots зеркало на сегодня</a>
<a href=https://australianwinerytours.com/tours/showthread.php?tid=458423>1×slot рабочее зеркало</a>
<a href=https://tussom.com/forums/showthread.php?tid=10981>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<a href=http://www.forum.kalor.ru/1×slots-zerkalo-podtverdit-vashu-registraciu-esli-govorit-t23241.html>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепы обычно предлагают с отыгрышем — мгновенно вывести выигранные средства нельзя. Перевод денег со счета будет вероятен последствии такого, как пользователь выполнит все требования казино, а сумма имеет превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, протяжении которых заказчик вправе воспользоваться предложением. Обычно они не превышают нескольких дней после активации. Не стоит путать забаву в демо и внедрение бонусов. В демонстрационном режиме игрок возможность оценить механику слота, сюжет и оформление. Но игра ведется на относительные кредиты, потому отсутствует основное ? чувство пыла. Активируя промокод либо фриспины, клиент раньше не тратит свои средства на игровые автоматы, хотя может сорвать реальный куш!
#1082 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
7k casino бонус лучшие онлайн казино <a href=https://th-royalgclub.com/>porno Юлия Пересильд</a> porno Игорь Акинфеев (футбол) kometa casino <a href=https://rucriminal.info/>казино онлайн</a> casino скачать приложение Радченко Светлана Юрьевна порно официальное казино вход 1×bet 1хбет порно с Антропова Валентина Викторовна официальные букмекерские конторы скачать 1×bet сайт 1×bet xyz
DiskiPlus букмекерская контора бетсити DiskiPlus гта казино <a href=https://www.diskiplus.ru/>DiskiPlus сайте букмекерской конторы фонбет</a> DiskiPlus казино на деньги DiskiPlus как выиграть в казино <a href=https://diskiplus.ru/>DiskiPlus порно с Аделия Петросян (фигурное катание)</a> DiskiPlus человек казино DiskiPlus порно с Анастасия Потапова, теннисистка DiskiPlus 1×bet рабочее DiskiPlus суть казино DiskiPlus 7k casino сайт DiskiPlus казино ставка DiskiPlus Шевцова Татьяна Викторовна порно
#1083 Charlesgunnyhttp://filmkachat.ru
зеркала 1×slots
Свежий бонус начисляется в виде валютных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в пользовании своими, а случае отыгрыша оператор может установить ограничение на вывод средств. <a href=http://filmkachat.ru/>1×slots регистрация</a> <a href=https://yoomark.com/content/esli-vash-avtomobil-popal-v-avariyu-ne-stoit-toropitsya-s-remontom-inogda-ego-prodazha-v>https://yoomark.com/content/esli-vash-avtomobil-popal-v-avariyu-ne-stoit-toropitsya-s-remontom-inogda-ego-prodazha-v</a> Теоретически, к бесплатным призам можно отнести так именуемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, потому что они деют только возможность создавать ставки. 1×slots зеркало видели такую регистрацию на <a href=https://toprankdesign.co.uk/wiki/index.php?title=User:ZeldaCastiglia>https://toprankdesign.co.uk/wiki/index.php?title=User:ZeldaCastiglia</a> Такой казино приз без депо за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это словно некая конспирация одобрения под бездепозитный. Суть всего этого сводится к тому, собственно игроку на час выдается, например, 1000 $, а реклама утверждает то, что любой выигрыш можно несомненно в будущем забыть при для. Но если играющий серьезно отнесется к этому предложению, то он просто растеряет время. Ведь геймеру надо(надобно) несомненно выступать не главном аккаунте, ну тренировочном и с ограниченным выбором автоматов и ставок. Да и если, тогда, выигрыша (и всей тысячи) в правила вступят конкретные обстоятельства, где будет сказано, собственно максимальной суммой победы возможность быть только двести долларов и деньги возможно использовать только в приза на первый лепта с вейджером 25 от суммы вознаграждения плюс сам депо. По итогу выйдет, что игрок выигрывал для 200% бонус с вейджером на определенную необходимую. Короче говоря, это все надо вашего медли.
1×slots зеркало регистрация то дальше необходимо пройти
Чтоб получить крупный выигрыш, избирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша.Перечисленные повыше основные характеристики сопровождают фактически каждый приз и считаются стереотипными для бездепозитных бонусных начислений в казино. 1×slots зеркало рабочее Бездепозитный бонус казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в данном и содержится основное отличие.Отзывы читателей о бонусных акциях помогут составить эмоцию, но не забывайте о субъективности собственных объяснений. <a href=https://www.forum-motorrad.net/members/25361-julescal.html>https://www.forum-motorrad.net/members/25361-julescal.html</a> Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депо может отличаться до 30 дней. x1 slots регистрация в 1×slots casino
1хлот регистрация в 1×slots casino
Ещё одно распространённое акционное предложение – привлекательный презент с неблаговидными притязаниями. К образцу, клуб сулит $100 в бездепа, хотя с вейджером х80 либо х100. Отыграть подобный вейджер практически невероятно и поэтому другого концентрироваться на более заманчивых промоакциях.Если речь идет об эксклюзивных услугах, может потребоваться регистрация в казино по ссылке с партнерского вебсайта. <a href=https://iuecwalocal81288.com/content/what-are-payment-methods-integrated-1×bet-app>https://iuecwalocal81288.com/content/what-are-payment-methods-integrated-1×bet-app</a> Иногда для получения призов необходимо связаться с представителями службы. Удобнее всего с ними собеседовать в онлайн-сате, желая время довольно запроса по электрической почте. 1×slots зеркало В современность довольно просто получить бонус за регистрацию в казино. Практически любой игорный жилище с готовностью начисляет средства либо безвозмездные вращения. Многие гэмблеры используют данным и не смущяются регистрироваться в любом клубе с выгодными условиями. Кстати, это отличная вероятность выработать победную стратегию и сорвать джекпот.Ограничения по играм. Администрация запрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, деньгами либо бесплатными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда разделенье выполняется по облику игр. Например, отыгрыш возможен на всех игровых аппаратах, хотя запрещен в настольных играх и в разделе Live Casino.
1×slots регистрация на сайте 1×slots ru com
Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депозит возможность выделяться до 30 дней. Для верификации номера телефонного, в собственном профиле выберите опцию „Подтвердить номер телефонного“ и введите в подходящее поле код, приобретенный в sms-сообщении. 1×slots актуальное зеркало <a href=https://forum.wapinet.ru/profile.php?id=7850>https://forum.wapinet.ru/profile.php?id=7850</a> Если вы опытный игрок, вы должны знать, что приз без депозита – редчайшая находка. Тем не, мы в исследуем интернет, дабы отыскать вам превосходнейшие бездепозитные предложения.
1×slots бездепозитный бонус за регистрацию
Бездепозитные бонусы, как уже понятно, являются оригинальной вероятностью обратиться игровому процессу абсолютно безвозмездно, словами играть в интернет казино даром и на быть свои сразу последствии регистрации аккаунта. Автоматы с этим депозитом могут стать великолепной вероятностью сыграть для почитателей пыла с определенными ограничениями в финансах.Вейджер (wager) – это коэффициент, который демонстрирует на какую сумму нужно сделать ставок, дабы исключить бонус из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода этого бонуса, Вам нужно устроить ставок на сумму: 500*70=3500 рублей. Только всецело отыграв приз, Вы сможете исключить свой выигрыш. <a href=http://bocauvietnam.com/member.php?1562066-Henrylatry>http://bocauvietnam.com/member.php?1562066-Henrylatry</a> Также, в нужно доказать свой номер телефонного, результата код, полученный в смс-сообщении от клуба ввести в особое поле в собственном офисе игрока. 1×slots casino online регистрация
<b>Смотреть еще похожие новости:</b>
<a href=https://bbs.sinbadgroup.org/index.php?xjkh-tampa-s-poster-pup-for-new-cancer-treatment.t48661.html/page-6761#post-291138>1×slots casino регистрация 1×slotscasino09k online</a>
<a href=http://link.5nx.ru/viewtopic.php?f=5&t=12641>1хслот зеркало сайта</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для подтверждения электронной почты, просто перейдите по активной ссылке в послании, полученном от игрового заведения.
#1084 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Елизавета Туктамышева порно с Баталина Ольга Юрьевна <a href=https://www.ossetia.tv/>kometa casino</a> порно с Зырянова Анастасия Владимировна леон букмекерская контора <a href=https://m.repost.news/>Крючкова Полина Викторовна порно</a> 1×bet приложение официальные зеркала казино Валентина Матвиенко порно букмекерские конторы без депозита porno Илона Маркова, хоккеистка porno Игорь Акинфеев (футбол) пин ап casino pin
DiskiPlus почему в казино не бывает настенных часов DiskiPlus порно с Карен Хачанов (теннис) <a href=https://diskiplus.ru>DiskiPlus букмекерская контора официальный сайт скачать</a> DiskiPlus pin up casino зеркало DiskiPlus казино рояль смотреть <a href=https://diskiplus.ru/>DiskiPlus казино 1</a> DiskiPlus Ходнева Светлана Владимировна порно DiskiPlus порно с Афонина Марина Игоревна DiskiPlus официальное казино вход DiskiPlus порно с Максим Глушенков (футбол) DiskiPlus Разуваева Ксения Денисовна порно DiskiPlus 1×bet DiskiPlus online casino
#1085 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up casino зеркало casino x <a href=https://kompromat1.online/>порно с Александр Головин (футбол)</a> официальные сайты казино 1×bet на андроид бесплатно <a href=https://strelochnik.com/>казино гта 5</a> бесплатно играем казино 1×bet 1хбет смотреть фильм казино официальные букмекерские конторы скачать vodka casino ramenbet casino букмекерские конторы pin
DiskiPlus порно с Владимир Минеев (ММА) DiskiPlus pin up casino top top <a href=https://www.diskiplus.ru/>DiskiPlus Яровая Ирина Анатольевна порно</a> DiskiPlus 1×bet официальный сайт 1×bet xyz DiskiPlus up casino зеркало <a href=https://diskiplus.ru>DiskiPlus казино ставка</a> DiskiPlus Приезжева Екатерина Геннадьевна порно DiskiPlus пин ап букмекерская контора DiskiPlus casino онлайн DiskiPlus casino зеркало сайта DiskiPlus где казино DiskiPlus порно с Афонина Марина Игоревна DiskiPlus 1×bet слоты
#1086 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slots review live
Наличие у игрока второго аккаунта. Запрещено творить несколько профилей для многократного получения бездепов.Фриспины. Бесплатные вращения предусмотрены для применения в видео-слотах. Внимательно читайте обстоятельства – они нередко выдаются для некоторых машин. В зависимости от клуба возможность делать конкретное количество ставок. Кстати, современные игорные дома дают вероятность заводить «одноруких злодеев». <a href=http://filmkachat.ru/>1× slots регистрация в 1×slots casino</a> В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и когда спорных обстановок нет возможности куда-то пожаловаться и обосновать свою правоту.Как только получите бездеп в казино, всё также не забывайте инспектировать электрическую почту. Некоторые игорные клубы каждый веселят интенсивных гэмблеров приятными бонусами. Чаще всего получить подарок можно в преддверии праздника, на денек рождение, за привлечение приятеля. А также распространённым призом является прибавка к депозиту. Нужно чем восполнить счёт, и азартное заведение увеличит его на 50–100%. <a href=https://solo.to/lexxeagle>https://solo.to/lexxeagle</a> Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные способы и расценить особенности, труднодоступные при ирге в демо режиме. Многие новые клиенты переходят в количество неизменных, а оператор получает долгосрочную прибыль.Отказ в прохождении верификации. Если заказчик не желает либо имеет предоставить документы, подтверждающие его личность, профиль несомненно заблокирован совместно, вкупе со всеми бонусными начислениями. 1×slots регистрация на официальном сайте <a href=https://zakon.ru/Profile/Show/288008>https://zakon.ru/Profile/Show/288008</a>
1×slots промокод при регистрации 2025
Но а случае вы уже профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы автоматически перейдете в интернет казино;Самые пользующиеся методы вывода средств ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электрическим платежным системам на Neteller и Skrill, еще пользуются криптовалютными кошельками. Вывод выигрышей имеет исполняться моментально или занимать от нескольких часов до нескольких суток. <a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=126444&extra=>1×slots casino регистрация 1×slotscasin online</a> зеркала 1×slots Но есть азартные заведения, готовые просто так вручить средства на забаву. Для этого довольно создать профиль. Чтобы вывести выигрыш, сперва нужно выполнить вейджеровые условия, прописанные в критериях получения бездепа.На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не можете активировать и получить бездепозитный бонус. <a href=http://srgls.co.kr/bbs/board.php?bo_table=jiggu&wr_id=44283>http://srgls.co.kr/bbs/board.php?bo_table=jiggu&wr_id=44283</a> Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.Чтобы получить вероятность вывести выгода с бездепозитного бонуса в казино, необходимо выполнить ряд условий: 1×slots casino регистрация 1×slotscasino09k online Бездепозитный приз часто возможность замерзнуть доступным сразу последствии окончания регистрации, поскольку в большинстве случаев единственным притязанием к нему считается регистрация, а этого ревизия вашей новой учетной записи.
1×slots регистрация на сайте
Отзывы читателей о бонусных промоакциях помогут составить впечатление, хотя не забывайте о субъективности собственных объяснений. <a href=http://specialacel.hu/component/community/honorableafterl/profile>http://specialacel.hu/component/community/honorableafterl/profile</a> 1×slots официальный demo регистрация в 1×slots casino
1×slots регистрация на сайте 1×slots ru com
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/9725/#comment-408831>1×slots зеркало регистрация в 1×slots casino</a> Чтобы бездеп не был начислен на Ваш аккаунт, Вам не нужно активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт механически, а Вы не расчитываете его применять, обратитесь в саппорта с пожеланием отменить бездепозитный приз. x1 slots регистрация в 1×slots casino <a href=https://www.google.tg/url?q=https://doctorlazuta.by/>https://www.google.tg/url?q=https://doctorlazuta.by/</a> Бездепозитные призы начисляются только раз один. Не стоит раскрывать новые аккаунты, дабы получить их повторно. Служба безопасности казино обязательно выявит «левого» участника и заблокирует. Если гость выполнит необходимые требования, отыграет собственную ставку и решит исключить личный выигрыш, то ему надо(надобно) к, что казино обязательно востребует дать ксерокопии личных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои исключить не получится.
1х слот 1хслотс регистрация перейти на 1×slots
Хотя бесплатные бонусы начисляются без депо, не исключено, собственно для понадобиться вносить средства. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь в как, как новый заказчик впервые пополнит игровой счет. <a href=http://www.gaz69.ru/ipb/profile/43274-glavdorogadv2404/?tab=field_core_pfield13>http://www.gaz69.ru/ipb/profile/43274-glavdorogadv2404/?tab=field_core_pfield13</a> 1хслотс официальный сайт зеркало Шаг 5. Использование и отыгрыш. Бездеп обязан быть использован в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера.Реже бонусы без депо начисляются неизменным игрокам. С их поддержкой администрация постарается удержать ценных посетителей или желает поблагодарить за преданность верных гостей. Но намного почаще для подобных целей используются такие промоакции:
<b>Смотреть еще похожие новости:</b>
<a href=https://nauc.info/forums/viewtopic.php?t=20887782>1×slots зеркало этих способов предполагает регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax
#1087 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
Новые посетители онлайн-казино без первого депозита имеют выяснить собственную удачливость. К что, этому же есть возможность конвертировать бездепы в реальные деньги за регистрацию в казино, однако чтобы приз нужно отыграть сообразно условиям акции.Все любят получать презенты. Согласитесь, почти любой играющий человек несомненно бесконечно рад, если получит бесплатный подарок для забавы в интернет казино просто за регистрацию либо же бонус за внесенный депо, так называемые приветственные бонусы для свежих игроков. Соответственно такие интернет клубы будут более знамениты и предпочтительны у игроков при выборе казино для забавы. Топ казино день обновляется и добавляются новые и интересные игровые клубы с симпатичной бонусной политикой и всеми вероятными преимуществами, льготами, к которым относятся эти призы как фриспины за регистрацию, валютные бездепозитные бонусы, еще щедрые призы за внесенный депо. <a href=http://filmkachat.ru/>1×slots casino зеркало</a> <a href=https://events.com/r/en_US/event/floor-plan-to-3d-model-professional-conversion-services-london-february-962475>https://events.com/r/en_US/event/floor-plan-to-3d-model-professional-conversion-services-london-february-962475</a> Бездепозитный приз казино 2022 с выводом за регистрацию дает вероятность ознакомиться игроку с лобби выбранного заведения, сориентироваться в выборе игр и выяснить качество работы саппорта. Довольно нередко, начиная игровой процесс, игрок уже отказывается останавливаться и проделывает реальный лепта. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать даром вполне как один таки с призом за регистрацию без надобности вносить депозит.Бездепозитный приз по промо-коду будет доступен для игры, только том, случае когда Вы активируете специальный бонусный код в разделе с бонусами либо укажите промокод при регистрации на сайте. В некоторых случаях, считая активации кода, понадобиться доказать контактные данные игрока и наполнить анкету посетителя. 1хслотс 1хслотс регистрация перейти на 1×slots <a href=http://sejinpl.com/bbs/board.php?bo_table=free&wr_id=61664>http://sejinpl.com/bbs/board.php?bo_table=free&wr_id=61664</a> Фриспины начисляются по определенной ставке. После их активации игроку необходимо запустить разъем и убедиться, собственно в нем показываются благотворительные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода в отыгрыша определяется оператором и редко выше 5 000 руб.
1хслотс зеркало на сегодня
Бездепозитный приз казино 2022 с выводом за регистрацию предоставляет возможность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и проверить качество работы саппорта. Довольно нередко, начиная игровой процесс, игрок уже отказывается останавливаться и проделывает настоящий лепта. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть безвозмездно вероятно как раз таки с бонусом за регистрацию без надобности вносить депозит. 1 хслот регистрация в 1×slots casino Активация валютного гонорары случается автоматически последствии сотворения профиля либо применения промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на странички казино в социальных сетях или на рассылку маркетинговых сообщений, скачать и ввести вспомогательный софт и т.д. <a href=https://www.peacefulmind.co.kr/bbs/board.php?bo_table=free&wr_id=1380739>https://www.peacefulmind.co.kr/bbs/board.php?bo_table=free&wr_id=1380739</a> Подарки на конкретные даты выделяются критериями получения. Если одобрение начисляют игроку на день рождения, то сумма обычно зависимости от совместного размера депо последний год.Прямо в отберите благотворительные вращения за регистрацию без депозита и начинайте собирать призовые композиции ради крупных выигрышей! 1×slots казино зеркало
1хслотс рабочее зеркало на сегодня
Некоторые веб-сайты, прежде чем провести регистрацию игроков, предлагают ответить на некоторое базисных вопросов. Цель проведения подобной викторины – выявить случайных людей, которые не имеют представления о покере, и не допустить получения ими призов. Если гость теснее играл в казино, то ответить на полтора 10 несложных вопросов будет несложно. Очень нередко, ответы возможно отыскать на официальных сайтах этих учреждений. <a href=http://forum.roozgozar.com/member.php?action=profile&uid=2793>http://forum.roozgozar.com/member.php?action=profile&uid=2793</a> 1× slots зеркало Самый распространённый из похожих бонусов, конечно же, бездеп на денек рождения клиента — приз вид фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им возможно на установленного периода времени.Любой выигрыш по ставке выше установленного лимита будет считаться недействительным. То есть ставка не несомненно засчитана при отыгрыше, а случае выигрыша его сумма не поступит на счёт посетителя — результат игры будет полностью аннулирован.
казино 1×slots
Наиболее популярностью гонорары между гэмблеров – бездепозитные призы казино. Это не удивительно, так можно получить безвозмездные вращения либо виртуальные кредиты, и всем не придётся пополнять счёт, рисковать собственными деньгами. Удастся насладиться разнородными развлечениями и даже выиграть солидную сумму, избегая серьёзного риска. Для выбора азартного заведения Вы сможете воспользоваться перечнем наших казино с бонусами за регистрацию. На нашем веб-сайте мы опубликовали перечень бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, собственно доля бонусов эксклюзивные и доступны лишь для посетителей нашего сайта по-специальному промо-коду либо по уникальной ссылке. Кроме как, для каждого приза мы подготовили доскональный обозрение, в Вы узнаете как получить и отыграть поощрение и как исключить свой выигрыш с бездепа.Бонус за регистрацию в казино выдается лишь раз раз на одного игрока. Но посещают вспомогательные промоакции, масштабах коих бездепы расступаются для неизменных посетителей и эти презенты Вы можете получить больше 1-го раза. 1× slots сайт <a href=https://transcribe.frick.org/wiki/%d0%90%d0%b2%d1%82%d0%be%d1%88%d0%ba%d0%be%d0%bb%d1%8b>https://transcribe.frick.org/wiki/%d0%90%d0%b2%d1%82%d0%be%d1%88%d0%ba%d0%be%d0%bb%d1%8b</a> Однако в условиях скрываются «подводные камешки», которые не разрешат исключить солидную необходимую либо же вы не успеете отыграть вейджер. Поэтому профессионалы рекомендуют арестовать безвозмездные вращения за регистрацию в казино без депозита, чтобы поднабраться опыта и получить настоящий шанс на победу.Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых свежих, щедрых и испытанных призах в онлайн казино, которые обновляются каждый денек.
1хслотс официальный сайт зеркало
<a href=http://colain.ru/bitrix/redirect.php?goto=http://vekctor.ru/bitrix/redirect.php?goto=http://enex.market/bitrix/redirect.php?goto=https://teletype.in/@urist555/bxrkKQ50Ztc>http://colain.ru/bitrix/redirect.php?goto=http://vekctor.ru/bitrix/redirect.php?goto=http://enex.market/bitrix/redirect.php?goto=https://teletype.in/@urist555/bxrkKQ50Ztc</a> При регистрации сомнений либо ином интернет игральном заведении — вам дается раз шанс испытать свою фортуну не внося средства монеты. Замечу собственно такую поощрительную предложение предоставляют не все интернет игровые площадки, а лишь щедрая середина(средина) из их. Которые мы подготовили для Вас в нашем перечне.В подавляющем большинстве случаев безвозмездные бонусы начисляются в кредитах, которые невозможно сразу вывести со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже. 1×slots официальный сайт скачать
<b>Смотреть еще похожие новости:</b>
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=53961>1×slots регистрация на сайте 1×slots ru com</a>
<a href=http://mandala-app.com/forums/viewtopic.php?f=5&t=221463>1хслот официальный сайт зеркало</a>
<a href=https://swordmaster.org/user/JamesVok/>1×slots официальный сайт мобильная версия скачать</a>
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=127383&extra=>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают приз по странам. Вплоть до того, что клуб возможность на игроков из Вашей государства, а бездеп мешает.
#1088 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet официальный сайт porno Анна Сидорова, керлингистка <a href=https://rucriminal.info/>порно с Афонина Марина Игоревна</a> pin up casino пин ап porno Алена Михайлова <a href=https://specreporter.com/>официальные сайты казино</a> порно с Алексей Миранчук (футбол) казино можно Матвиенко Валентина Ивановна порно сайты казино Окладникова Ирина Андреевна порно порно с Каролина Севастьянова почему казино
DiskiPlus Елизавета Боярская DiskiPlus Александра Бортич <a href=https://diskiplus.ru>DiskiPlus 1×bet зеркало на сегодня 1×bet xyz</a> DiskiPlus r7 casino DiskiPlus 7k casino сайт <a href=https://diskiplus.ru>DiskiPlus порно с Дарья Клишина, легкоатлетка</a> DiskiPlus casino betting DiskiPlus сайт pin up casino DiskiPlus порно с Алина Загитова, фигуристка DiskiPlus porno Илона Маркова, хоккеистка DiskiPlus ев казино DiskiPlus 7k casino зеркало на сегодня DiskiPlus Комарова Наталья Владимировна порно
#1089 Charlesgunnyhttp://filmkachat.ru
1× слот зеркало
Подарки на праздники ? приуроченные к парадным датам, требующие условного отыгрыша или начисляются без такового. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду. <a href=http://filmkachat.ru/>1× slots зеркало</a> <a href=https://bandzone.cz/fan/kalinka0588?at=blog&bi=615743>https://bandzone.cz/fan/kalinka0588?at=blog&bi=615743</a> Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депо может отличаться до 30 дней. 1×slots официальный demo регистрация в 1×slots casino <a href=https://notebooks.ru/forum/user/79941/>https://notebooks.ru/forum/user/79941/</a>
1×slots зеркало сайта
Хотя бесплатные призы начисляются без депозита, не исключено, собственно вам понадобиться заносить средства. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь в такого, как свежий клиент раз пополнит игровой счет.Если при регистрации показать промокод, можно гарантировано получить приз. Где арестовать ваучер? Посетите направленные блоги либо форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В заключительное время игорные дома начали афишироваться в кинокартинах и телесериалах. Присмотритесь и наверняка заметите промокод, который принесёт 500 либо 1 000 бонусных рублей. 1×slots официальный сайт скачать на айфон Промообъявления от казино не дают реальной картины и направлены на вербование внимания юзеров. Понять, насколько высоки шансы остаться в плюсе, позволит собственный анализ критерий предложения: <a href=https://atoms.rocks/member.php?action=profile&uid=42136>https://atoms.rocks/member.php?action=profile&uid=42136</a> казино 1×slots Для казино, работающих онлайн, бездепозитные бонусы нужны для привлечения свежих клиентов. Предложение сыграть на слотах без необходимости внесения настоящих денег — работающий метод для повышения интереса к фирмы. После отыгрыша бездепа велик шанс, что игроку понравится и он продолжит играть в казино, только сейчас уже на личные деньги.
скачать 1×slots на андроид мобильная версия
Если вы выбрали для себя несколько брендов коие для больше всего приглянулись, для неизменной забавы! Таких гемблеров казино довольно любит и ценит, за частую такие игроки становятся VIP игроками заведения, коим часто поступают выгодные предложения вид бонусов, так же туда заходит и бездепозитные. Иногда операторы просят внесение минимального депо перед выводом для верификации платежного инструмента. В неких казино данный депозит того светит отыграть.Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера. <a href=http://www.ogloszeniaezoteryczne.pl/author/gregorymox/>http://www.ogloszeniaezoteryczne.pl/author/gregorymox/</a> 1×slot регистрация Активация случается счет промокодов, коие вводятся в собственном кабинете после регистрации. Среди спецпредложений в перечне Casino.ru содержатся неповторимые промокоды, которые доступны только гостям портала. Другие методы начисления средств ? автоматическая активация незамедлительно после создания аккаунта и получение дара по запросу в службу технической поддержки.
1×slots официальный сайт скачать
Онлайн гемблинг развивается с каждым днем все больше и больше, свежие бренды создаются не по денькам а по часам. Новые интернет казино делают вступительные акции для игроков, чтобы, чтобы что бы зарекомендовать себя, и что, этим самым предлагают бездепозитные бонусы за регистрацию, что бы не упустить такую возможность — как пользоваться новым бездепом, советуем навещать наш вебсайт как возможно почаще, самое вкусное и свежие будет добавляться в данном же списке.Условия все различаться друг от друга. Но подобный приз возможность быть использован только для игрового процесса – полученные на счет финансы до такого, как будут отыграны, исключить невозможно. Ну и естесственно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: подобная щедрость увеличивает степень преданности посетителей к компании.Мы собрали и опубликовали список превосходнейших бездепозитных казино с призами за регистрацию, которые гарантируют щедрые выигрыши и мгновенные выплаты. 1×slots регистрация на 1хслотс <a href=http://unixfit.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://jozgeix.matchfishing.ru/bitrix/redirect.php?goto=http://sturmanskie.ru/bitrix/redirect.php?goto=https://telegra.ph/Pravitelstvo-obeshchaet-uprostit-i-adresno-raspredelit-74-socialnye-vyplaty-k-2025-godu-09–23>http://unixfit.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://jozgeix.matchfishing.ru/bitrix/redirect.php?goto=http://sturmanskie.ru/bitrix/redirect.php?goto=https://telegra.ph/Pravitelstvo-obeshchaet-uprostit-i-adresno-raspredelit-74-socialnye-vyplaty-k-2025-godu-09–23</a>
1×slots регистрация 1×slotscasino09k online
Бездепозитные призы начисляются лишь раз один. Не стоит раскрывать новые аккаунты, чтобы получить их повторно. Служба безопасности казино непременно выявит «левого» участника и заблокирует. Если посетитель выполнит нужные притязания, отыграет собственную ставку и решит вывести личный выигрыш, то ему нужно сведению, собственно казино обязательно потребует предоставить ксерокопии собственных документов, дабы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные средства вывести не получится. Денежные свои. Третий бонус за регистрацию без депозита – наличные. К огорчению, лишь знаменитые и известные клубы могут дать деньги в руб. Либо баксах. С их подмогою у насладиться любой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед этим нужно исполненье определенных условий. <a href=http://demo2-ecomm.in.ua/user/JamesInosy/>http://demo2-ecomm.in.ua/user/JamesInosy/</a> 1× slots регистрация в 1×slots casino Также бездепозитные бонусы могут работать способом вернуть к игре клиентов, пока приостановивших своё сотрудничество с фирмой: извещение о бездепе поступает на мобильный телефон или почту.
<b>Смотреть еще похожие новости:</b>
<a href=https://elclasificadomx.com/author/jameslog/>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a>
<a href=https://eccentrictirade.com/forums/member.php?action=profile&uid=158>1×slots официальный сайт скачать</a>
<a href=https://forum.bandariklan.com/showthread.php?tid=537283>1×slots casino регистрация 1×slotscasin online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Размер призов чаще всего чисто условный и не выше 50 рублей. Приятно, хотя ощутимым бустом деле навряд станет.
#1090 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Дарья Касаткина (теннис) casino buzz <a href=https://specreporter.com/>порно с Виктория Синицина, фигуристка</a> Ирина Горбачева 1×bet сайт <a href=https://m.repost.news/>леон букмекерская контора</a> 1×bet рабочее на сегодня Крючкова Полина Викторовна порно pin up casino top top фреш казино водка казино сайт винлайн букмекерская контора казино рояль смотреть
DiskiPlus скачать 1×bet на андроид бесплатно DiskiPlus porno Катерина Шпица <a href=https://diskiplus.ru/>DiskiPlus казино вход официальный сайт</a> DiskiPlus пин ап casino pin DiskiPlus порно с Матвей Сафонов (футбол) <a href=https://www.diskiplus.ru/>DiskiPlus букмекерские конторы pin</a> DiskiPlus порно с Бондаренко Анастасия Борисовна DiskiPlus букмекерские конторы бет DiskiPlus официальные сайты казино DiskiPlus pin up casino зеркало DiskiPlus 1×bet casino DiskiPlus pin up casino пин DiskiPlus ешь казино
#1091 Charlesgunnyhttp://filmkachat.ru
1 x slots casino
Прежде чем активировать бездеп, необходимо убедиться сомнений, что государство, гражданином коей считается игрок, не входит в список запрещенных.Похожим образом трудится 3-ий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя или в связи с получения им VIP-статуса. Подарок предоставляется в обращения в поддержку и ревизии. <a href=http://filmkachat.ru/>1×slots зеркало проходить регистрацию это отличный вариант</a> <a href=https://bio.site/kalinka0588>https://bio.site/kalinka0588</a> Oтыгpaть бонус с указанным вeйджepом, чтобы необходимо сдeлaть cтaвoк нa cумму, превышающую объем бонуса в несколько раз. казино 1× slots официальный сайт <a href=http://forums.ggcorp.me/space-uid-3861789.html>http://forums.ggcorp.me/space-uid-3861789.html</a> Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша бонусов. Заведения практически устанавливают наивысшую ставку, допустимую по условиям вейждера.Некоторые казино все предлагать клиентам бездепы за подтверждение номера или почты или репост на страницу в соц сетях.
1хслотс рабочее зеркало
К образцу, игроку выдаются бесплатные свои в заведении в объеме пятидесяти либо ста $ (вейджер на коие сочиняет 100х). То есть, любому новоприбывшему игроку выскакивает манящая картинка, кот-ая сулит выплату всех зачисленных фирмой средств. Не стоит обращать внимания на казино приз за регистрацию без депо с слишком большой либо довольно махонькой суммой бонусов, поэтому что, и тщательно выучив все обстоятельства, здесь всего, несомненно какой-то подвох. 1×slots зеркало регистрацию более популярный вариант это Вывод выигрыша с бездепозитных призов казино – щедрый презент от азартных клубов. Но дабы исключить собственный заработок, необходимо выполнить ряд критерий:Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке адепты онлайн-казино публикуют актуальную информацию о no deposit bonuses прочих услугах. <a href=https://craigslistdirectory.net/1×%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D0%B2%D1%8B%D0%B2%D0%B5%D1%81%D1%82%D0%B8-%D1%81%D0%BE-%D1%81%D1%87%D0%B5%D1%82%D0%B0-%D0%BD%D0%B0-%D0%BE%D0%BF%D1%80%D0%B5%D0%B4%D0%B5%D0%BB%D0%B5%D0%BD%D0%BD%D1%8B%D1%85-%D1%83%D1%81%D0%BB%D0%BE%D0%B2%D0%B8%D1%8F%D1%85_394898.html>https://craigslistdirectory.net/1×%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D0%B2%D1%8B%D0%B2%D0%B5%D1%81%D1%82%D0%B8-%D1%81%D0%BE-%D1%81%D1%87%D0%B5%D1%82%D0%B0-%D0%BD%D0%B0-%D0%BE%D0%BF%D1%80%D0%B5%D0%B4%D0%B5%D0%BB%D0%B5%D0%BD%D0%BD%D1%8B%D1%85-%D1%83%D1%81%D0%BB%D0%BE%D0%B2%D0%B8%D1%8F%D1%85_394898.html</a> Шаг 4. Активация. Внимательно изучите условия, информацию по ограничениям и сроке деяния бонусного предложения. Разобравшись с правилами, можно активировать бонус в собственном кабинете (от ? с внедрением промокода) либо по запросу в саппорт.B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax 1×slot зеркало рабочее регистрации на телефон придет
1 х слотс зеркало
Для получения бездепа нужно пригласить в игру по реферальной ссылке нового клиента: он должен зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на сумму, обозначенную в условиях акции.Ещё одно распространённое акционное предложение – привлекательный презент с неблаговидными требованиями. К образцу, клуб обещает $100 в бездепа, хотя с вейджером х80 или х100. Отыграть такой вейджер практически нереально и потому какого-либо концентрироваться на более заманчивых промоакциях. Также, учите, собственно бездепозитный приз можно вывести только никаких случае, когда будут выполнены все условия отыгрыша. <a href=http://v208870d.bget.ru/user/Ralphwiste/>http://v208870d.bget.ru/user/Ralphwiste/</a> С такими простыми советами каждое казино с призом за регистрацию способно принести в разы больше выгоды и выгоды. 1хслотс официальный сайт зеркало При ирге на бонусные свои запрещается играть в игровые автоматы с прогрессивным джекпотом и забавы из радела exist casino. Кроме как, кое-какие казино выделяют бездеп на раз или некоторое конкретных слотов, и в иных играх Вы не можете на них выступать.Также, в необходимо подтвердить собственный номер аппарата, результата код, полученный в смс-сообщении от клуба установить в особое фон в личном кабинете игрока.
1хслотс рабочее зеркало на сегодня
Существуют казино с призом за регистрацию, в довольно знамениты фриспины в онлайн казино потом регистрации в конкретных играх. Они встречаются в почаще бесплатных поощрений либо традиционных бонусов в казино без вложений. Например, игрок регистрирует счет, на который начисляются бесплатные игры, приз за регистрацию в виде даровых фрспинов, вращения в игровом автомате. Во время игрового процесса игры выигрывает истинные средства, которые в последствии можно удачно вывести из заведения на свою платежную систему. То есть, все шансы исключить свои без рисков своими деньгами. Регистрация, за которую игрок получит призы, займет пару минут, а благодаря данному возможно увеличить пять евро поощрений до тысячи и без всяких проблем вывести их.Доступ к подарку возможность открываться механически после введения промокода либо воззвания в службу вебсайта. В первом случае от пользователя не потребуется практически деяний. Бездеп с активацией по коду встречается чаще всего. Игроку необходимо ввести совокупа знаков в графе, кот-ая имеет пребывать в регистрационной форме в Личном кабинете. Шаг 5. Использование и отыгрыш. Бездеп обязан быть применен в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера.Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, чтобы замечена вероятность вывести выигрыш. Маркетинговая деятеля всех игорных интернет-клубов должна носить различный характер. И в гонорары на депозит работают чтобы, чтобы, дабы провоцировать вносить депозиты и поощрять теснее место пользователей, то бездепозитный приз в казино либо бонус за регистрацию в казино, этого всего, рассчитан на расширение базы потребителей.Бездепозитный приз по промо-коду будет доступен для игры, лишь в случае когда Вы активируете специальный бонусный код в разделе с призами либо укажите промокод при регистрации на веб-сайте. В некоторых случаях, не активации кода, придется доказать контактные данные игрока и заполнить анкету посетителя. 1хслот зеркало сайта <a href=http://bbs.totoroclub.com.cn/home.php?mod=space&uid=381248&do=profile>http://bbs.totoroclub.com.cn/home.php?mod=space&uid=381248&do=profile</a> Как правило, при выводе финансов, от играющего требуется лишь устроить минимальный лепта для того, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом собственный счет.
1×slots регистрация
Выбрать казино с бездепозитным бонусом. У нас на веб-сайте представлен перечень превосходнейших онлайн казино, коие предлагают своим игрокам щедрые бонусы за регистрацию. На нашем веб-сайте Вы найдете список своевременных свежих бездепозитных призов в казино 2022 года. Также, есть большое эксклюзивных предложений, которые доступны лишь посетителям нашего вебсайта после регистрации по нашей ссылке или активации особого промокода. <a href=http://whirlpowertool.ru/index.php?subaction=userinfo&user=kaputdealer97>http://whirlpowertool.ru/index.php?subaction=userinfo&user=kaputdealer97</a> 1× slots casino официальный сайт Сразу после активации промокода можно пользоваться презентом. Как уже упоминалось, призы посещают трёх обликов – фриспины, кредиты и фриплей-бонусы.Необходимость отыгрыша. Вейджер в повыше, чем для призов за депозит. И пока средства не отыграны, вывести их невозможно.
<b>Смотреть еще похожие новости:</b>
<a href=http://oszeresek.hu/forum/viewtopic.php?f=1&t=5642>1× slots сайт</a>
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=9940>1×слот регистрация в 1×slots casino</a>
<a href=http://mandala-app.com/forums/viewtopic.php?f=5&t=222248>казино 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.
#1092 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало которую указывали при регистрации кстати
Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депозит может выделяться до 30 дней. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> <a href=https://linklist.bio/lexxeagle>https://linklist.bio/lexxeagle</a> Мы рекомендуем не открещиваться от подобных услуг узнаваемых казино. Выделите некоторое минут на регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сегодня удача несомненно на вашей стороне! 1×slots официальный сайт мобильная версия <a href=http://vfb7968c.bget.ru/user/StevenTot/>http://vfb7968c.bget.ru/user/StevenTot/</a> В любом казино с бездепозитным призом учтены вейджеровые обстоятельства. Это единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, нужно устроить определённое количество ставок. Чем круче приз, что, этим труднее выполнить обстоятельства, и напротив.
1× slots casino зеркало
1×slots зеркало на сегодня <a href=https://donate.utahtech.edu/page.aspx?pid=305&dgs980=3&rid980=2308&tid980=5823>https://donate.utahtech.edu/page.aspx?pid=305&dgs980=3&rid980=2308&tid980=5823</a> К раскаянью, нет. Почти все казино, настоятельно внесение хотя бы одного минимального депо для вывода выигрыша с бездепозитного приза. Также учитывайте, собственно вывести деньги разрешено только на ту платежную систему, с коей был сделан депо.Автоматическая активация кажется самой комфортной, но ручной метод имеет перед ней преимущества. Прежде чем применять вознаграждение от казино, стоит заблаговременно найти, сколько медли требуется на исполненье всех критерий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала действия приза. скачать 1×slots официальный сайт Игрокам стоит принимать приветственный приз как гарантированный метод получить большой выигрыш, но это замечательная возможность без затрат оценить возможностей казино.
1×slots регистрация
Помимо прочего, для вывода средств по бездепу нужно внести на счёт свой 1-ый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало вероятную необходимую, в чего вывод средств будет доступен.В реальное время получить приз за регистрацию в казино довольно просто. Почти любой игорный жилище с радостью даст деньги либо благотворительные вращения. Многие игроки пользуются этим и не стесняются региться в каждом клубе с выгодными критериями. Кстати, это отличная возможность придумать выигрышную тактику и сорвать куш. <a href=https://clashofcryptos.trade/wiki/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0>https://clashofcryptos.trade/wiki/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0</a> В настоящее время получить бонус за регистрацию в казино довольно просто. Почти каждый игорный дом с готовностью даст деньги или бесплатные вращения. Многие игроки пользуются этим и не стесняются регистрироваться в любом клубе с прибыльными критериями. Кстати, это отличная вероятность выдумать выигрышную стратегию и сорвать куш.Получить Бездепозитный приз в интернет казино дело двух кликов. Другой момент, отыграть рекламную и соблюсти управляла и условия отыгрыша. Под правилами предполагается не только вагер, хотя и ограничения по максимальной ставке. Мы осознаем, что в кинотеатр все ставят на зеро и выигрывают. Призываем не делать похожего. Перед активацией бонуса прочитайте правила. Узнайте последующие моменты: Условия получения подарка, за регистрацию, за депозит и многое. Ограничения по наибольшей ставке. Зачастую не повыше 350 руб. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вертеть автоматы, а вагер будет стоять на месте. Поэтому принципиально аристократия, в каких играх можно осуществлять кратность валютного оборота. 1×slots на любой вкус как пройти регистрацию Вы не в коем случае ни чем рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, научится регулировать изменять ставки и полосы, изучать бонусные игры и их выигрышные композиции, да в просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные свои, коие возможно отыграть и исключить, но просто на демо счет, тем наиболее адреналин в крови более повысится а пульс забьется с нередким ритмом!Бездепозитные призы реальными средствами, коие можно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадались.
1× slots casino зеркало
Вейджер (или вагер) ? это наименьшая сумма ставок, коию необходимо сделать для вывода валютного приза. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, тем привлекательнее спецпредложение. 1×slots зеркало регистрация <a href=http://pasarinko.zeroweb.kr/bbs/board.php?bo_table=notice&wr_id=3576729>http://pasarinko.zeroweb.kr/bbs/board.php?bo_table=notice&wr_id=3576729</a> Для верификации номера телефонного, в личном профиле изберите опцию „Подтвердить номер телефона“ и введите в отвечающее поле код, полученный в sms-сообщении.
1×slos регистрация в 1×slots casino
Не желаете поиграть в азартные забавы, не рискуя своими средствами, хотя получая в все выплаты? Подобную вероятность деют многие наилучшие порталы с азартными развлечениями. В их числе много добросовестных и надежных интернет-казино на русском языке. Они привлекают новых юзеров разными поощрительными событиями, включая бездепозитные, либо безвозмездные призы.Акции распространяются как на все забавы казино, например и на ограниченный перечень. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и. Промо может обхватывать разработки одного производителя. Бездеп не пересекается с иными промоакциями казино. Если на сайте предусмотрен кэшбек, он не начисляется за ставки, сделанные бонусными деньгами. Для идентификации платежных реквизитов игрока возможность потребоваться пополнение счета на наименьшую сумму. <a href=http://www.olangodito.com/bbs/board.php?bo_table=free&wr_id=2307251>http://www.olangodito.com/bbs/board.php?bo_table=free&wr_id=2307251</a> 1×slots официальный регистрация Мы делаем акцент на главных положениях верховодил, рассказываем о территориальных лимитированиях и вкратце информируем о других акциях обговариваемого казино.
<b>Смотреть еще похожие новости:</b>
<a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=11127>1×слот регистрация в 1×slots casino</a>
<a href=http://miupsik.ru/forums/showthread.php?tid=511109>1хслотс рабочее зеркало</a>
<a href=http://forum.komne.com/viewtopic.php?f=25&t=3875>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической забавы на бездепозитные призы, у Вас есть шанс выучить игровые автоматы, научится регулировать изменять ставки и полосы, изучать бонусные забавы и их выигрышные комбинации, да конечном просто зарядится кучей эмоций! Ведь вы будите играть на бонусные свои, коие можно отыграть и исключить, а не просто на демо счет, что, этим наиболее адреналин в крови более повысится а пульс забьется с частым ритмом! Бездепозитные бонусы — это презенты от казино в виде бонусных денег или фриспинов для игровых автоматов, которые начисляются на акк игрока в процедуры регистрации на сайте заведения. Для получения этих поощрений депо не требуется.
#1093 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Петр Ян (ММА) игры казино <a href=https://kompromat1.online/>яндекс казино</a> porno Александр Соболев (футбол) букмекерская контора зенит <a href=https://strelochnik.com/>pin up casino top top</a> приложения букмекерских контор рокс казино порно с Константин Тюкавин (футбол) казино на деньги суть казино кент казино порно с Зырянова Анастасия Владимировна
DiskiPlus букмекерская контора скачать приложение DiskiPlus porno Александр Соболев (футбол) <a href=https://diskiplus.ru>DiskiPlus лучшие бесплатные онлайн казино</a> DiskiPlus порно с Афонина Марина Игоревна DiskiPlus лучшая казино <a href=https://www.diskiplus.ru/>DiskiPlus гта онлайн казино</a> DiskiPlus самое казино DiskiPlus casino игровой автомат DiskiPlus казино рояль DiskiPlus официальное казино вход DiskiPlus сайт казино вход DiskiPlus букмекерские конторы без депозита DiskiPlus бывшие казино
#1094 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
реального казино пин ап casino <a href=https://kompromat1.online/>casino бездепозитный</a> пин ап casino казино гта 5 <a href=https://sovsekretno.net/>1×bet на андроид</a> 1×bet зеркало рабочее на сегодня скачать букмекерскую контору на андроид почему в казино нет часов Ходнева Светлана Владимировна порно retro casino ставки на спорт букмекерские конторы 7k casino
DiskiPlus 1×bet на сегодня DiskiPlus порно с Дарья Клишина, легкоатлетка <a href=https://diskiplus.ru/>DiskiPlus porno Яна Троянова</a> DiskiPlus пин ап casino DiskiPlus букмекерская контора леонов <a href=https://www.diskiplus.ru/>DiskiPlus казино большая</a> DiskiPlus up casino DiskiPlus зеркала официальных сайтов казино DiskiPlus Радченко Светлана Юрьевна порно DiskiPlus букмекерские контора ап DiskiPlus casino онлайн DiskiPlus почему казино DiskiPlus скачать 1×bet
#1095 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino вход сайты казино <a href=https://res-publika.com>включи казино</a> порно с Константин Тюкавин (футбол) водка казино <a href=https://www.ossetia.tv/>играющие казино онлайн</a> vodka casino porno Андрей Рублев (теннис) Окладникова Ирина Андреевна порно casino betting bitz casino pin casino порно с Елена Никитина, скелетонистка
DiskiPlus up букмекерская контора DiskiPlus порно с Аделия Петросян (фигурное катание) <a href=https://www.diskiplus.ru/>DiskiPlus порно с Федор Чалов (футбол)</a> DiskiPlus 1×bet регистрация DiskiPlus гама казино <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz</a> DiskiPlus 1×bet сейчас DiskiPlus официальные букмекерские конторы скачать DiskiPlus 1×bet зеркало рабочее DiskiPlus приложения букмекерских контор на андроид DiskiPlus порно с Голикова Татьяна Алексеевна DiskiPlus 1×bet сайт DiskiPlus Москалькова Татьяна Николаевна порно
#1096 Charlesgunnyhttp://filmkachat.ru
1×slots на любой вкус как пройти регистрацию
Хотя бесплатные бонусы начисляются без депо, не исключено, что вас придется заносить деньги. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты только последствии как, как свежий заказчик первый пополнит игровой счет. <a href=http://filmkachat.ru/>1×slots официальный регистрация</a> <a href=https://hearthis.at/group/466308/transform-your-e-commerce-success-with-360-spin-product-videos/>https://hearthis.at/group/466308/transform-your-e-commerce-success-with-360-spin-product-videos/</a> зеркло казино 1×slots <a href=https://itformula.ca/index.php?title=User:KieranSherman>https://itformula.ca/index.php?title=User:KieranSherman</a>
1×slots регистрацию процедура займет всего лишь
<a href=https://rolivka.online/forum/showthread.php?tid=46406>1×slots зеркало на сегодня</a> скачать 1×slots на андроид мобильная версия Получив свой подарок, Вы сможете безвозмездно выступать на реальные деньги, а выполнив условия отыгрыша, вывести свой выигрыш.Главное превосходство спинов – вероятность выучить различные слоты. Также удастся насладиться бонусными раундами, испытывать фортуну в риск-туре и преумножить выигрыш за счёт особых знаков. Однако столько игровой процесс заслуживает внимание, так другого, как сосредоточиться на реальном выигрыше. <a href=http://www.haxorware.com/forums/member.php?action=profile&uid=283331>http://www.haxorware.com/forums/member.php?action=profile&uid=283331</a> При регистрации что, нет или ином интернет игральном заведении — вам дается раз шанс испытать свою фортуну не внося свои монеты. Замечу собственно такую поощрительную услугу предоставляют не все онлайн игровые площадки, а только щедрая середина(средина) из них. Которые мы подготовили для Вас в нашем перечне. 1×slots зеркало выигрыши обязательно пройдите регистрацию если
1хслот зеркало
Игрокам не принимать приветственный приз как гарантированный способ получить крупный выигрыш, но это замечательная возможность без затрат расценить функционал казино. Многие игроки, оценив возможностей казино, остаются играть в нем и дальше ? на это и нацелено любое промо. Постоянные посетители заносят депозиты и проделывают ставки, обеспечивая долгосрочную прибыль оператора. То есть, казино раздают бездепы свежим юзерам для формирования лояльной аудитории.Бонус с зачислением денег на счет дает больше свободы поступков. Пользователь сам избирает, каким образом воспользоваться подаренными средствами. Здесь также шансы работать ограничения на перечень дешевых игр, но обычно эти рамки не так строги, как в промо с безвозмездными вращениями. <a href=https://pattern-wiki.win/wiki/User:AnnieSuggs7034>https://pattern-wiki.win/wiki/User:AnnieSuggs7034</a> Для получения депозитного бонуса необходимо пополнить свой игровой баланс настоящими средствами. Вознаграждение возможно получить или при внесении первого депо, или вид фиксированного процента от внесённых средств. Так либо иначе, приз поступит на счёт лишь после пополнения. 1×slots официальный регистрация Можно. Вы всегда сможете отрешиться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не создадите ставку.А ознакомиться с свежими интернет казино, Вы можете с призов с выводом прибыли, коие Вы сможете получить без депозита.
1×slots официальный сайт зеркало
<a href=http://griffhunter.com/boards/viewtopic.php?p=1001987#p1001987>1×slots официальный зеркало рабочее</a> Для получения выигрыша требуется выполнить условия казино. Чаще всего игроку нужно поставить определенную сумму, но уже из собственных денег. Она рассчитывается из совместного размера выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, в юзер выиграл 1000 рублей, а множитель сочиняет х30, вывести средства возможно несомненно, сделав ставки на 30 000 рублей. Бонусные деньги – небольшая сумма денег для старта в новом казино. На бонусные средства, обыкновенно разрешено играть во все забавы, не слотов с прогрессивным джекпотом и игр из раздела live casino. 1×slots официальный зеркало рабочее <a href=http://www.mjjcn.com/mjjcnforum/space-uid-748216.html>http://www.mjjcn.com/mjjcnforum/space-uid-748216.html</a> Обычно показатель повыше, чем для бонусов на депо. Не дивитесь, если он будет том х100. Иногда завышенный коэффициент вейджера уточняется для жителей отдельных государств.Чтобы получить возможность вывести выгода с бездепозитного бонуса в казино, необходимо выполнить ряд критерий:
1×slot зеркало рабочее регистрации на телефон придет
Способы получения бездепа различаются от облика приза, кот-ый приглянулся игроку. Но для иначе нужно быть зарегистрированным в легальном онлайн-казино и подтвердить собственную лицо. В общем виде пошаговая инструкция для получения бездепозитного бонуса выглядит например: Чтоб получить крупный выигрыш, подбирайте игровые автоматы с максимальным процентом отдачи (RTP) из перечня тех, которые доступны по условиям отыгрыша. <a href=http://lider1c.ru/communication/forum/messages/forum4/message12085/9245-stroitelnaya-firma-bani_bani?result=new#message12085>http://lider1c.ru/communication/forum/messages/forum4/message12085/9245-stroitelnaya-firma-bani_bani?result=new#message12085</a> Максимальная ставка ? уточняется в еденице счета и ограничивает размер ставки за один спин. В случае ее превышения приз имеет быть аннулирован. Также в правилах может находиться запрет на размещение ставок определенного облика, например, по равным шансам в рулетке (другими, на чет либо нечет, красное либо темное и т.д. ).Доступность — бездепозитные бонусы в казино чаще всего предоставляются свежим игрокам, но посещают случаи, когда бонус имеют получить и действующие клиенты. 1×slots актуальное зеркало Срок отыгрыша — это период, кот-ый наступает в момент активации бонуса и кончается с его закрытием. Пользователю нужно уложиться в этот временной промежуток, иначе призовые свои аннулируются. Казино устанавливают список игр, ставки в засчитываются при расчете отыгранных денег. Если тайтл не заходит в этот список, то предоставляется быть недоступен для загрузки во время деяния бонусного предложения.Мы подготовили список, где есть всегда актуальные и новые бездепозитные бонусы казино, которые продоставляется получить даром. Для наших юзеров есть особые предложения эксклюзивные призы, коие вы кого не отыщите, их мы определили особой красной плашкой «Exclusive».
<b>Смотреть еще похожие новости:</b>
<a href=http://link.5nx.ru/viewtopic.php?f=5&t=12191>1хслот зеркало</a>
<a href=https://www.fromrus.su/index.php?/topic/66943-%D1%81%D0%B0%D0%B9%D1%82–1×-slots-casino/>сайт 1× slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Новички не обожают незамедлительно же заносить депозит. Это обусловлено отсутствием опыта и сомнением. К счастью, наши возможно получить бездепозитный бонус за регистрацию в казино. Неважно собственно начисляет система – фриспины либо кредиты. В любом случае вы не рискуете своими сбережениями. Это замечательная возможность запустить приглянувшийся видео слот или же испытать фортуну в настольных играх. Автоматы непопросту считаются самым знаменитым азартным веселием. Чтобы усвоить управление и управляла, понадобится всего количество мин. Ваша задача сделать ставку, найти число трудящихся линий и можно крутить барабан. Если на экране выпадет выигрышная комбинация – вы выиграли! С этой задачей для посодействуют управится бездепозитные призы казино.
#1097 Arnoldtvlhttps://ukrainatoday.com.ua/
UkrainaToday – это информационная платформа, ориентированная на освещение событий в Украине и мире с беспрецедентной серьёзностью аналитики и объективностью. Наша миссия – предоставить читателям не просто новости, а дать путь к пониманию их значимости, показать, что стоит за беглой информацией, раскрыть глубинные направления и движения.
Во времена информационного изобилия и мгновенных новостных потоков UkrainaToday выделяется своей подходом производства контента. Мы стремимся не только передать факты – наша цель рассказать историю, которая скрывается за ними. Наш команда – это профессионалы высокого класса, журналисты и аналитики, которые отдаются своей работе и неустанно ищут правду.
Мы охватываем широкий диапазон тем: от политических событий и экономических изменений до социальных изменений, культурных мероприятий и спортивных достижений. UkrainaToday – это не только проводник новостей. Это пространство, где каждый обнаружит что-то особенное: начиная от глубоких аналитических разборов и эксклюзивных интервью до впечатляющих фоторепортажей и видео контента. <a href=https://ukrainatoday.com.ua/><img src=„https://i123.fastpic.org/thumb/2024/0329/a6/fe166e0bd2e0b4f4e2a3c1cbe920c7a6.jpeg“></a> 1)<a href=https://ukrainatoday.com.ua/> Зарплата ДСНС 2024 останні новини </a> 2)<a href=https://ukrainatoday.com.ua/> Амнистия 2024 в Украине когда вступит в силу </a> 3)<a href=https://ukrainatoday.com.ua/> Супутникова кадастрова Карта України 2024 земель онлайн</a> 4)<a href=https://ukrainatoday.com.ua/> Нові параметри супутникового телебачення 2024 </a> 5)<a href=https://ukrainatoday.com.ua/> Лучшие мультфильмы 2023–2024 </a> 6)<a href=https://ukrainatoday.com.ua/> Расчет отпускных 2024 в Украине </a> 7)<a href=https://ukrainatoday.com.ua/> Международные гранты в Украине 2024 </a>
Наш веб-сайт просто управляемый, что позволяет пользователям без усилий искать интересующую их информацию. Мы активно работаем над тем, чтобы улучшить пользовательский взаимодействие, применяя современные технологии для более быстрого и удобного доступа к контенту.
глобальное освещение является одной из ключевых особенностей UkrainaToday. Понимая, что события в Украине тесно ассоциированы с глобальными течениями, мы стремимся показать нашим читателям комплексный перспективу на мировые новости, оказывающие влияние на жизнь государства.
общественная ответственность стоит в ряду наших важнейших задач. Мы освещаем важные вопросы, касающиеся прав человека, экологии, образования и здравоохранения, надеясь не только сообщать общество, но и вносить вклад в его прогресс и улучшению качества жизни.
UkrainaToday активно общается с аудиторией через социальные сети, делая акцент на обоюдной связи. Мы ценим мнения наших читателей и открыты к диалогам, что делает наше общество живым и энергичным.
Присоединяйтесь к UkrainaToday, чтобы всегда быть на острие событий, формирующих наше настоящее и завтра. Наша задача – не только сообщать, но и мотивировать наших читателей на стремление собственных решений и активное участие в общественной жизни. Вместе мы формируем медиа нового поколения, где каждая новость – это не просто данные, а часть большой и важной повествования. С уажением редакция газеты „UkrainaToday“ <a href=https://ukrainatoday.com.ua/>для ребенка соответствующего возраста</a> <a href=https://ukrainatoday.com.ua/>размер заработной платы психологов в 2024 году в Украине</a> <a href=https://ukrainatoday.com.ua/>выход на пенсию в 2024 году</a> <a href=https://ukrainatoday.com.ua/>денежное довольствие работникам пограничной службы</a> <a href=https://ukrainatoday.com.ua/>должностные оклады по ЕТС в Украине</a> <a href=https://ukrainatoday.com.ua/>алименты на ребенка 2024 г.</a> <a href=https://ukrainatoday.com.ua/>сокращение врачей в 2024 году в Украине</a> <a href=https://ukrainatoday.com.ua/>прогноз курса доллара в 2024 году в Украине</a> <a href=https://ukrainatoday.com.ua/>особенности электронного декларирования</a> <a href=https://ukrainatoday.com.ua/>не облагаемых налогом минимумов доходов граждан для уголовных</a> <a href=https://ukrainatoday.com.ua/>тарифный разряд на 2024 год в Украине</a> <a href=https://ukrainatoday.com.ua/>подоходный налог с зарплаты в Украине</a> <a href=https://ukrainatoday.com.ua/>секретаря судебного заседания</a> <a href=https://ukrainatoday.com.ua/>кто заполняет электронную декларацию</a> <a href=https://ukrainatoday.com.ua/>сокращение работников СБУ в 2024 году в Украине</a> <a href=https://ukrainatoday.com.ua/>зарплата помощников судей местных судов</a> <a href=https://ukrainatoday.com.ua/>изменения в действующее УПК Украины 2024</a> <a href=https://ukrainatoday.com.ua/>коллективный договор в Украине</a> <a href=https://ukrainatoday.com.ua/>как оформить</a> <a href=https://ukrainatoday.com.ua/>решение об установлении ставок земельного налога</a> <a href=https://ukrainatoday.com.ua/>размер заработной платы пограничника в 2024 году в Украине</a> <a href=https://ukrainatoday.com.ua/>необлагаемый минимум для административных правонарушений</a> <a href=https://ukrainatoday.com.ua/>размер заработной платы работника АТБ в 2024 году в Украине</a> <a href=https://ukrainatoday.com.ua/>перерасчет пенсии работающим пенсионерам при увольнении</a> <a href=https://ukrainatoday.com.ua/>даты проведения ВНО</a> <a href=https://ukrainatoday.com.ua/>тарифы Водафон Украины на 2024 год</a> <a href=https://ukrainatoday.com.ua/>льготы многодетным семьям в 2024 году в Украине</a> <a href=https://ukrainatoday.com.ua/>закон Украины об отпусках</a> <a href=https://ukrainatoday.com.ua/>реформирование ГСЧС в Украине</a> <a href=https://ukrainatoday.com.ua/>УПК Украины с изменениями за 2024 год</a> <a href=https://ukrainatoday.com.ua/>декретные выплаты в Украине</a> <a href=https://ukrainatoday.com.ua/>сокращение психологов в 2024 году в Украине</a> <a href=https://ukrainatoday.com.ua/>заполнение декларации по налогу на прибыль 2024 г.</a> <a href=https://ukrainatoday.com.ua/>налог на недвижимость для пенсионеров</a> <a href=https://ukrainatoday.com.ua/>будут сдавать ГИА в 2024 году непосредственно в форме ВНО</a> <a href=https://ukrainatoday.com.ua/>повышение военных пенсий в 2024 году в Украине</a> <a href=https://ukrainatoday.com.ua/>минимальная пенсия</a> <a href=https://ukrainatoday.com.ua/>размер алиментов 2024 г.</a> <a href=https://ukrainatoday.com.ua/>сокращение судей в 2024 году в Украине</a> <a href=https://ukrainatoday.com.ua/>индексация в 2024 году пенсии в Украине</a> <a href=https://ukrainatoday.com.ua/>гранты на энергосбережение в Украине</a> <a href=https://ukrainatoday.com.ua/>действующий трудовой кодекс Украины</a> <a href=https://ukrainatoday.com.ua/>последние новости о моратории на проверки</a> <a href=https://ukrainatoday.com.ua/>выплаты при рождении второго ребенка 2024</a> <a href=https://ukrainatoday.com.ua/>коллективный договор от Райгосадминистрации</a> <a href=https://ukrainatoday.com.ua/>призывной возраст в Украине 2024</a> <a href=https://ukrainatoday.com.ua/>зарплата моряка в 2024 году в Украине</a> <a href=https://ukrainatoday.com.ua/>индексация зарплаты помощника судьи в Украине</a> <a href=https://ukrainatoday.com.ua/>закон Украины об органах местного самоуправления</a> <a href=https://ukrainatoday.com.ua/>размер суточных на командировку</a>
#1098 Jamessoolfhttps://mistermag.ru
После трех дней и 257 драфтов НФЛ 2025 года завершился. Все 32 команды должны почувствовать, что они усилились, хотя некоторые должны чувствовать себя лучше других. Никогда не стоит оценивать о перспективах до того, как они выйдут на поле НФЛ, и мы не будем здесь анализировать, как покажут себя новички лиги. Это предоставит возможность им <a href=https://mistermag.ru/magnitorsk-kupit-pvp-amfetamin-kokain-mefedron.html>купить lsd</a> и не только. Однако совершенно справедливо рассматривать, как франшизы провели мероприятие, закрыли потребности, повысили ценность (или нет) и совместили стратегии драфта с долгосрочными планами франшизы. Все верно: пришло время для оценок Bleacher Report после драфта для каждой команды. Ниже вы найдете анализ каждого выбора из каждой франшизы с общими рейтингами на основе вышеупомянутых факторов, ожидаемого соответствия схеме и любых соответствующих передач. Поскольку ценность личная, мы использовали окончательные оценки перспектив 2025 года отдела скаутинга Bleacher Report в качестве ориентира. Франшизы перечислены в алфавитном порядке.
#1099 Ctgroupkz_Atmonhttps://www.ctgroup.kz/
Всем привет! Действительно очень сложно и очень трудно выучить казахский язык, не говоря уже о английском языке. Это одна из величайших и серьезных проблем, можно сказать почти всего человечества и большинства людей. Особенно если нет старания и усидчивости. Думал уже бросать это гиблое и неблагодарное дело. В общем, сами выучить не сможете, даже не пытайтесь, без профессиональных учителей и наставников. В общем, если вы хотите найти, образовательный языковой центр в Казахстане в Атырау или Алматы и хотите узнать, например: <a href=https://www.ctgroup.kz/effektivnye-kursy-anglijskogo-yazyka-individualno-dlya-vseh-urovnej/>индивидуальные занятия по английскому</a> Тогда вам обязательно нужно прямо сейчас перейти на сайт Образовательного центра Caspian Training Group и выбрать место обучения в Атырау или Алматы в Казахстане https://www.ctgroup.kz/ . Переходите на сайт Caspian Training Group сохраняйте в закладки и изучайте информацию, не забудьте записать адрес сайта и номер телефона +7 775 0301919. Увидимся!
#1100 Richardsnorbhttps://playnba.tw/
<a href=https://playnba.tw/>nba直播</a> 隨著2024–25賽季NBA附加賽的火熱進行,球迷們的熱情也隨之高漲。每一場比賽都關乎球隊命運,而季後賽的激烈對決更是指日可待。對於忠實球迷來說,能夠即時觀看這些精彩賽事至關重要。NBA直播線上看服務應運而生,為球迷提供了便捷的觀賽體驗。無論是上班族抽空追賽,還是學生族群熬夜支持,都能通過手機、平板或電腦隨時隨地觀看比賽。高清畫質、專業解說和多角度回放,讓您仿佛置身現場,感受每一次扣籃和三分球帶來的震撼。除了賽事直播,許多平台還提供賽程表、球員數據和賽後分析等豐富內容。您可以輕鬆掌握各隊積分排名、明星球員表現,甚至深入了解戰術分析。對於喜愛運彩投注的朋友,即時的數據分析和專家預測也能成為您決策的重要參考。選擇可靠的NBA直播平台尤為重要。穩定的播放品質、低延遲的直播信號和完整的賽事覆蓋,都是評判標準。部分平台還提供會員專屬服務,如廣告免除、賽事回放和獨家內容等特權。隨著科技發展,NBA直播線上看服務不斷創新,為球迷帶來更加便捷、沉浸的觀賽體驗。不再受限於電視轉播,每一位球迷都能隨心所欲地追逐熱愛的籃球賽事,見證精彩時刻。
#1101 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино ли лучшие онлайн казино <a href=https://m.repost.news/>человек казино</a> 1×bet casino скачать <a href=https://kompromat1.online/>лучшие казино бесплатно</a> бесплатно играем казино сайт винлайн букмекерская контора бывшие казино казино проиграл букмекерские конторы бет суть казино порно с Анна Щербакова, фигуристка
DiskiPlus часы казино DiskiPlus Приезжева Екатерина Геннадьевна порно <a href=https://www.diskiplus.ru>DiskiPlus Любимова Ольга Борисовна порно</a> DiskiPlus скачать 1×bet на андроид бесплатно DiskiPlus казино онлайн <a href=https://diskiplus.ru/>DiskiPlus Александра Бортич</a> DiskiPlus 1×bet официальный xbet DiskiPlus порно с Дарья Касаткина (теннис) DiskiPlus porno Дарья Клишина DiskiPlus официальные букмекерские конторы скачать DiskiPlus porno Светлана Ходченкова DiskiPlus 1×bet сайт 1×bet xyz DiskiPlus 1×bet регистрация
#1102 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Бондаренко Анастасия Борисовна ешь казино <a href=https://www.ossetia.tv/>вывод казино</a> 1×bet официальный слоты Петрова Ольга Викторовна порно <a href=https://m.repost.news/>online casino официальный</a> официальные зеркала казино кент казино порно с Илья Осипов (киберспорт) casino автомат порно с Алина Загитова casinos xyz гта онлайн казино
DiskiPlus 1×bet официальный DiskiPlus суть казино <a href=https://diskiplus.ru>DiskiPlus букмекерская контора вход</a> DiskiPlus казино большая DiskiPlus casino регистрации <a href=https://www.diskiplus.ru>DiskiPlus порно с Захарова Мария Владимировна</a> DiskiPlus играющие казино DiskiPlus пин ап букмекерская контора DiskiPlus Скоробогатова Ольга Николаевна порно DiskiPlus cat casino DiskiPlus гта онлайн казино DiskiPlus сайт pin up casino DiskiPlus порно с Баталина Ольга Юрьевна
#1103 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации 2025
Главное превосходство спинов – вероятность выучить разные слоты. Также получится насладиться бонусными раундами, испытывать удачу в риск-туре и преувеличить выигрыш за счёт особенных символов. Однако не игровой процесс заслуживает внимание, так какого-либо сосредоточиться на реальном выигрыше.Шаг 5. Использование и отыгрыш. Бездеп обязан быть использован в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. <a href=http://filmkachat.ru/>1×slot зеркало рабочее регистрации на телефон придет</a> Бездепозитные бонусы в казино без пополнения 2022 — это определенная сумма денег либо free spins вращения, которые предоставляются первым гостям за регистрацию на сайте казино вид бездепозитного бонуса, и выделяет вас возможность с казино без пополнения опробовать предложения (игр), с последующей преимуществом, льготой вывода средств при выполнении всех установленных верховодил.Ещё одно распространённое акционное предложение – симпатичный подарок с сомнительными требованиями. К образцу, клуб сулит $100 в качестве бездепа, хотя с вейджером х80 либо х100. Отыграть такой вейджер практически нереально и потому никакого концентрироваться на более интересных акциях. <a href=https://wykop.pl/wpis/80059367/the-art-and-science-of-professional-interior-desig>https://wykop.pl/wpis/80059367/the-art-and-science-of-professional-interior-desig</a> x1 slots регистрация в 1×slots casino <a href=http://hongtouwen.com/home.php?mod=space&uid=460641&do=profile>http://hongtouwen.com/home.php?mod=space&uid=460641&do=profile</a>
1×slots официальный зеркало рабочее
Бездепозитные призы истинными деньгами, коие возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадали.Ниже указан актуальный перечень легальных казино в Беларуси с бонусами на первый депо. Вы можете попасть на официальный сайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз. казино 1×slots Выиграть настоящие средства в казино не пополняя счет – трудно, хотя вероятно. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными призами и начните играть на бонусные средства. По статистике в 10-ти заведений возможно заработать небольшую необходимую средств помощью бонусных средств. <a href=http://www.rgb-muelheim.de/buch/scarbook.php>http://www.rgb-muelheim.de/buch/scarbook.php</a> К примеру, игроку выдаются бесплатные свои в заведении в объеме пятидесяти либо 100 долларов (вейджер на которые составляет 100х). То есть, любому новоприбывшему геймеру выскакивает притягивающая иллюстрация, кот-ая обещает выплату всех зачисленных компанией средств. Не стоит заострять на казино приз за регистрацию без депозита с чрезмерно немалый либо довольно махонькой суммой призов, поэтому что, в тщательно выучив все условия, здесь скорее, несомненно некий подвох. 1×slots регистрацию более популярный вариант это
1×slots регистрация на 1хслотс
В настоящее время получить приз за регистрацию в казино довольно просто. Почти любой игорный дом с радостью даст средства либо благотворительные вращения. Многие игроки используют этим и не стесняются региться в любом клубе с выгодными критериями. Кстати, это замечательная вероятность выдумать выигрышную тактику и сорвать куш.Бездепозитные бонусы реальными средствами, которые можно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадали. В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с безвозмездных вращений. Прибыль, которую Вы заработаете на этом бездепе возможно ставить на вывод без какого или отыгрыша.Суммы подобных предложений, случаев, колеблются от трех до 20 $, а вейджер на эти свои обязан составлять от 30 до шестидесяти раз. Зачастую, величайшая сумма выигрыша здесь составит от одной до 2-ух сотен $. Если геймер выиграет больше, то все средства все быть списанными до максимально разрешенного выигрыша. Здесь бывает смысл выводить еще несуществующие деньги на свою платежную систему и дальше искать заведение с благоприятными под данную сумму релоадом или бонусом за первое пополнение счета. Есть количество подвидов бездепозитного вознаграждения, предлагаемого великим числом заведений. <a href=http://discuss.the-knowledge.org/memberlist.php?mode=viewprofile&u=48302>http://discuss.the-knowledge.org/memberlist.php?mode=viewprofile&u=48302</a> 1×slots зеркало которую указывали при регистрации кстати
1×slots casino зеркало рабочее
Подарки на дни ? приуроченные к праздничным датам, требующие условного отыгрыша либо начисляются без того. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду. В большинстве заведений сделать это можно по e-mal, по номеру аппарата, спустя социальную сеть или гугл-аккаунт. Бездепозитный приз за регистрацию в казино с выводом средств в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых свежих, великодушных и испытанных бонусах в онлайн казино, коие обновляются каждый денек. 1×slots зеркало сайта <a href=http://randy-harrison.it/gallery/profile.php?uid=144356>http://randy-harrison.it/gallery/profile.php?uid=144356</a> Также, в нужно доказать свой номер телефонного, результата код, полученный в смс-сообщении от клуба ввести в особое поле в собственном офисе игрока.Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации приза без депо. Внимательно прочитайте до конца. Многие новенькие делают промахи на шаге регистрации и потому имеют получить подарок.
1×slots регистрация то дальше необходимо пройти
На бонусные начисления могут быть установлены вспомогательные лимитирования, коие Вы не сведению при отыгрыше. Пока бонус всецело не отыгран — деньги из казино не выводятся.Но есть азартные заведения, готовые просто так вручить деньги на игру. Для этого достаточно создать профиль. Чтобы вывести выигрыш, сначала нужно выполнить вейджеровые условия, прописанные в критериях получения бездепа. 3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефон или почту, указать индивидуальную информацию;Для тех, кто только взвешивает испытать свою фортуну, а для проф игроков, отыскивающих новые площадки для выигрышей, ведущие лицензированные казино часто организуют разные промоакции, и одно из лучших предложений за время – как для новичков, так и для профессиональных игроков – бездепозитный приз за регистрацию. <a href=http://hoiqt.com/user-8648.html>http://hoiqt.com/user-8648.html</a> Необходимость отыгрыша. Вейджер такой повыше, чем для бонусов за депо. И же средства не отыграны, вывести их невозможно. 1×slots сайт
<b>Смотреть еще похожие новости:</b>
<a href=http://rumproject.com/rumforum/memberlist.php?mode=viewprofile&u=1236>казино 1×slots официальный сайт</a>
<a href=https://irc.floobits.com/Jamesamiva>1 xslots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На страничке представлены бездепозитные призы за регистрацию в казино редчайшая заслуга за коей гонятся все игроки как новички, так и мастера. Мы тоже уделяем большое внимание на присутствие призов при формирование рейтинга казино на деньги. Бездепозитный бонус это возможность играть бесплатно и выиграть настоящие деньги. Промокод – определённая композиция символов, которую нужно ввести в подходящее поле при создании учетной записи либо активировать в собственном профиле игрока в разделе с бонусами.
#1104 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации
3. Подтвердить данные. В зависимости от клуба, нужно привязать аппарат или почту, указать индивидуальную информацию; <a href=http://filmkachat.ru/>1×slots быструю регистрацию а также мгновенное</a> <a href=https://plaza.rakuten.co.jp/kalinka0588/diary/202403220000/>https://plaza.rakuten.co.jp/kalinka0588/diary/202403220000/</a> Законодательство, регулирующее азартные забавы в различных государствах, оказывает на возможности операторов. В итоге юзеры из отдельных регионов сталкиваются с лимитированиями со стороны казино. Это имеет быть как глубокий отказ в доступе, так и невозможность загружать игры отдельных изготовителей.Если речь об эксклюзивных предложениях, может потребоваться регистрация в казино по ссылке с партнерского вебсайта. 1×slots регистрацию процедура займет всего лишь <a href=https://wiki.roboco.co/index.php/Is_The_1×bet_APP_The_Best_Betting_Platform_In_Bangladesh_BD>https://wiki.roboco.co/index.php/Is_The_1×bet_APP_The_Best_Betting_Platform_In_Bangladesh_BD</a> Заполняя данные в личном профиле, указывайте лишь достоверную информацию, например как Вам придется ее подтвердить в будущем при выводе средств.
1×слотс казино
Срок отыгрыша — это период, который начинается в момент активации приза и завершается с его закрытием. Пользователю нужно уложиться в этот временной промежуток, по призовые средства аннулируются. Казино устанавливают список игр, ставки в которых засчитываются при расчете отыгранных средств. Если тайтл не входит в этот список, то предоставляется быть недоступен для загрузки во время деяния бонусного предложения.Фриспины начисляются по конкретной ставке. После их активации игроку необходимо запустить слот и увериться, собственно в нем отображаются безвозмездные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода после отыгрыша определяется оператором и изредка превышает 5 000 рублей. 1х слотс зеркало регистрация в 1×slots casino Популярность онлайн казино растёт и всё больше пользователей начинают увлекаться азартными забавами. Бездепозитные призы 2022 года, это оригинальные презенты за регистрацию. С их подмогою свежие игроки шансы получить бесплатные вращения или деньги на баланс за 1 регистрацию. С свет игорных заведений в интернете, бездепозитные бонусы стали знаменитейшим методом привлечения игроков. Подобные акции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о которых мы поведаем. Наш вебсайт собрал наилучшие предложения из интернета на 2022 год. Воспользуйтесь каким подарком и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить условия.В игровых клубах без лицензии Вы покупаете „кота в мешке“ и когда неоднозначных обстановок нет возможности куда-то пожаловаться и обосновать свою правоту. <a href=http://tok-ok-dv.ru/index.php?subaction=userinfo&user=quacktradition8>http://tok-ok-dv.ru/index.php?subaction=userinfo&user=quacktradition8</a> Выиграть настоящие средства в казино не пополняя счет – сложно, но вероятно. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными призами и начните играть на бонусные средства. По статистике каком-то 10-ти заведений возможно заработать маленькую необходимую средств с бонусных средств.Бонус без депозита за регистрацию в казино (бездепозитный бонус) – это денежный подарок от клуба, который начисляется на аккаунт игрока последствии регистрации в казино. Кроме сотворения учетной записи, для получения бездепа, довольно нередко потребуется ещё и подтвердить контактные данные игрока и/или активировать специальный промо-код. 1×slots мобильная версия войти казино Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют актуальную информацию о not the slightest deposit bonuses и других предложениях.
1×slot официальный сайт
Заработать на бездепозитных призах за регистрацию в казино возможность любой пользователь, достигший совершеннолетия.Для того, чтобы отыграть необходимую вашего бездепозитного бонуса нужно выполнить обстоятельства вейджера. Очень часто фриспины даются на конкретные слоты (book of ra, book of lifeless, book of sun), подбирайте разъем для нраву, все очень красочные и качественные. Бездепозитные бонус возможность быть денежным например и повторяющий фриспинов на слоты <a href=http://nfb3806w.bget.ru/user/DoctorLazutamt/>http://nfb3806w.bget.ru/user/DoctorLazutamt/</a> Исходя из сего, просто не существует мудрых причин махнуть рукою на получение такового приза при регистрации. И, лишним, на такой бесплатной базе у вас есть все шансы выиграть средства и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные призы, именуют безвозмездными интернет платформами для игр. 1хслот скачать Возьми свой подарок. Чаще всего бонус активизируется сразу в регистрации. Но случаются истории, когда нужно зайти в индивидуальный кабинет либо написать в справочную службу.
казино 1× slots официальный сайт
Фриспины. Бесплатные вращения предусмотрены для использования в видео-слотах. Внимательно читайте условия – они нередко выдаются для некоторых машин. В зависимости от клуба вы можете делать конкретное число ставок. Кстати, современные игорные жилища выделяют возможность заводить «одноруких злодеев».Ограничения по играм. Администрация воспрещает игрокам кое-какие игровые автоматы с бездепозитным призом, средствами или бесплатными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда разделение выполняется по виду игр. Например, отыгрыш возможен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino. <a href=http://tarratorriya.tforums.org/memberlist.php?mode=viewprofile&u=785>1×slots зеркало</a> Приветственный бонус без депозита ? презент за регистрацию. Выдается средствами, фриспинами или баллами. В заключительном случае бонусные баллы используются для роли в турнирах или размена на реальные деньги. Такие одобрения дозволяют бесплатно протестировать свежее казино, разобраться с игровым ходом интернет слотов, заработать и вывести небольшую сумму денег.Онлайн гемблинг развивается с каждым днем все больше и больше, новые бренды создаются не по дням а по часам. Новые интернет казино делают вступительные акции для игроков, для того собственно бы зарекомендовать себя, и что, этим самым предлагают бездепозитные бонусы за регистрацию, собственно бы не пропустить такую вероятность — как пользоваться новым бездепом, рекомендуем посещать наш вебсайт как возможно чаще, самое аппетитное и свежие будет добавляться в этом же списке. 1×slots официальный сайт мобильная версия скачать <a href=http://google.co.uk/url?q=http://santgaz.ru/bitrix/redirect.php?goto=http://mmenu.com/bitrix/click.php?goto=https://teletype.in/@urist555/Ds3U1m6FCrc>http://google.co.uk/url?q=http://santgaz.ru/bitrix/redirect.php?goto=http://mmenu.com/bitrix/click.php?goto=https://teletype.in/@urist555/Ds3U1m6FCrc</a>
1×slots промокод при регистрации 2025
Доступные забавы – В некоторых азартных забавах можно снизить математическое преимущество казино до нескольких десятых процента. В их количестве все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как правило, в таких играх ставки идут в зачет вейджера не полностью. Например, возможность предусматриваться лишь 50%. В неких забавах бездепозитные призы вообще невозможно отыгрывать. Иногда виде бездепа, казино презентует минимальный приз (до 50 руб. ), ради которого не стоит заморачиваться. <a href=http://db.dbmyxxw.cn/home.php?mod=space&uid=133866&do=profile&from=space>http://db.dbmyxxw.cn/home.php?mod=space&uid=133866&do=profile&from=space</a> Превышение наибольшей ставки при отыгрыше. Система автоматически не предостерегает о превышении ставки, поэтому о нарушении верховодил игрок имеет разузнать уже последствии подачи запроса на вывод средств. 1×slots зеркало регистрацию более популярный вариант это Главное превосходство спинов – возможность изучить разные слоты. Также удастся насладиться бонусными раундами, испытать фортуну в риск-туре и преумножить выигрыш за счёт особенных символов. Однако не только игровой процесс заслуживает внимание, как превосходнее сосредоточиться на реальном выигрыше.Представьте момент, когда при ставке в 10 рублей Вы получите сходственное умножение. Миллион руб. За одно вращение, собственно абсолютно вполне. Поэтому вопрос, сколько можно выиграть остаётся не. Предлагаем проверить без. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный приз и проверяйте фортуну в деле. Разумеется, вывести деньги не так просто. Однако шансы есть у всех.
<b>Смотреть еще похожие новости:</b>
<a href=http://medforum.5nx.ru/viewtopic.php?f=4&t=10820>1× слот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При регистрации никаких или ином интернет игральном заведении — вас дается один шанс испытывать свою фортуну не внося свои монеты. Замечу что эту поощрительную услугу предоставляют не все интернет игровые площадки, а только великодушная половина из их. Которые мы подготовили для Вас в нашем перечне. Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 поболее. Когда игроку надеется много фриспинов, администрация возможность бить3 их начисление на количество дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах промоакции.
#1105 Charlesgunnyhttp://filmkachat.ru
1×slot официальный сайт
Несмотря на то, что этот вариант стимуляции со стороны азартных платформ довольно востребован области сходственных игр, далеко многим поклонникам казино знаменито, что по бездепозитные призы казино и как именно их вероятно эксплуатировать.Все безвозмездные бонусы кажутся заманчивыми. Кто же категорически от способности сыграть в онлайн-казино, не рискуя средствами, хотя получая выигрыши. Но далеко не все бездепозитные бонусы мере презентабельны для рассудительного посетителя. <a href=http://filmkachat.ru/>1 хслот регистрация в 1×slots casino</a> Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации презента необходимо доказать электронную почту и привязать телефон;Доступ к подарку возможность раскрываться автоматически после введения промокода либо обращения в саппорта сайта. В первом случае от юзера не потребуется никаких поступков. Бездеп с активацией по коду встречается почаще всего. Игроку нужно установить совокупность знаков в графе, которая может пребывать в регистрационной форме в Личном офисе. <a href=https://www.neobienetre.fr/forum-bien-etre-medecines-douces-developpement-personnel/topic/real-estate-virtual-tours/>https://www.neobienetre.fr/forum-bien-etre-medecines-douces-developpement-personnel/topic/real-estate-virtual-tours/</a> 1×slots зеркало видели такую регистрацию на <a href=http://x4kurd.freetzi.com/member.php?action=profile&uid=90131>http://x4kurd.freetzi.com/member.php?action=profile&uid=90131</a> Осталось выбрать казино с бонусом за регистрацию и создать профиль. После активации презента выигрыш зависит от Фортуны и навыков.
1×slots казино зеркало
Прежде всего, не запамятовывайте регулярно заглядывать на страничку обзоров бездепозитных призов. Они шаг за шагом осматривают наиболее интересные предложения основных игорных порталов. 1х слотс зеркало регистрация в 1×slots casino Эффективность бездепов виде маркетингового инструмента расценили почти операторы. Малоизвестные площадки используют такие промоакции, чтобы скоро набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны неизменных гостей. Не все сайты, дающие презенты без депо, рекомендованы к игре. За симпатичным промоописанием могут скрываться неосуществимые условия отыгрыша и подводные камешки.Важно, убедитесь том,, что ранее не регились в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи. <a href=https://www.kenpoguy.com/phasickombatives/profile.php?id=2438990>https://www.kenpoguy.com/phasickombatives/profile.php?id=2438990</a> 1хслотс зеркало на сегодня Многие казино предоставляют в маркетинговых целях безвозмездные бонусы необыкновенно для наших читателей. Чтобы их получить, нужно перебежать на игровой сайт по партнерской ссылке с нашего портала.
1 хслот регистрация в 1×slots casino
Наиболее модные гонорары между гэмблеров – бездепозитные призы казино. Это не изумительно, ведь возможно получить благотворительные вращения либо виртуальные кредиты, и при этом не придётся пополнять счёт, рисковать личными деньгами. Удастся насладиться разнообразными весельями даже выиграть солидную сумму, избегая серьёзного риска. Какие бонусы возможность еще получить не бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, каждое интернет казино предлагает игрокам прибыльное предложение на первый депо, вы совершаете депо, ваш депо возрастает в двое или даже в 3, что, этим наиболее начать выступать возможно с более солидной суммой, так же не запамятываем про вейджер на призы.В настоящее время получить приз за регистрацию в казино очень просто. Почти каждый игорный жилище с радостью предоставит деньги либо бесплатные вращения. Многие игроки используют данным и не стыдятся регистрироваться в каждом клубе с прибыльными условиями. Кстати, это замечательная вероятность придумать выигрышную тактику и сорвать куш. <a href=http://odetah.ru/index.php?subaction=userinfo&user=barbarousbanist>http://odetah.ru/index.php?subaction=userinfo&user=barbarousbanist</a> Какие бонусы есть еще получить не бездепозитного приза за регистрацию в казино? По мимо бездепозитного приза, любое интернет казино предлагает игрокам прибыльное предложение на первый депозит, вы совершаете депо, ваш депозит увеличивается в двое или том в трое, тем самым начать играть возможно с более крупной суммой, так же не запамятываем про вейджер на призы. казино 1×slots Однако в критериях скрываются «подводные камни», коие не разрешат вывести солидную необходимую либо же вы не успеете отыграть вейджер. Поэтому мастера рекомендуют арестовать благотворительные вращения за регистрацию в казино без депо, дабы поднабраться опыта и получить настоящий шанс на победу.
1× slots сайт
<a href=http://www.xcosmic.net/rsf/showthread.php?tid=55170>1×slots на любой вкус как пройти регистрацию</a> 1×slots официальный сайт скачать на айфон <a href=http://samsoberi.ru/index.php?subaction=userinfo&user=dapperyesterday>http://samsoberi.ru/index.php?subaction=userinfo&user=dapperyesterday</a> Некоторые онлайн-казино без депозита предлагают свежим клиентам выбрать приз при регистрации. Будьте внимательны: выбрав раз, вы в безусловном большинстве случаев не сможете воспользоваться остальными.Также, такой нужно подтвердить свой номер телефонного, для этого код, приобретенный в смс-сообщении от клуба установить в особое поле в личном офисе игрока.
1×slots рабочее зеркало на сегодня
Многие казино деют в рекламных целях бесплатные бонусы исключительно для наших читателей. Чтобы их получить, нужно перейти на игровой вебсайт по партнерской ссылке с нашего портала.Это раз из основных показателей привлекательности презента. С завешенным коэффициентом том мастера не смогут выполнить обстоятельства по отыгрышу. И важно, насколько привлекательно выглядит предложение – бездепозитный приз казино в размере $500 либо $1 000. Чтобы новенькие лучше вникли, что же такое вейджер, мы разберём на примере. Доступность — бездепозитные призы в казино почаще всего предоставляются новым игрокам, хотя бывают случаи, когда бонус шансы получить и действующие клиенты. <a href=https://online-learning-initiative.org/wiki/index.php/User:Kandi5733293>https://online-learning-initiative.org/wiki/index.php/User:Kandi5733293</a> Иногда виде поощрения за регистрацию все выдаваться билеты для роли в турнирах. Условия их проведения довольно выделяются, поэтому мы советуем ознакомиться с любым предложением раздельно. 1×slots регистрация 1×slots casino c2d ru Подарки на праздничные ? посвященные торжественным датам, требующие символического отыгрыша или начисляются без того. Могут дариться игрокам сутки рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду.
<b>Смотреть еще похожие новости:</b>
<a href=http://turkteam.10tl.net/member.php?action=profile&uid=2012>казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Обычно показатель повыше, чем для бонусов на депо. Не дивитесь, случае он будет даже х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных стран. Но существуют азартные заведения, готовые просто так вручить деньги на забаву. Для этого довольно создать профиль. Чтобы вывести выигрыш, сначала необходимо выполнить вейджеровые условия, прописанные в условиях получения бездепа.
#1106 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино рояль гта онлайн казино <a href=https://slon-ru.com/>вывод казино</a> 1×bet слоты 1×bet top r7 casino <a href=https://rucriminal.info/>порно с Юлия Ефимова, пловчиха</a> casino сегодня игры казино казино смотреть онлайн бесплатно casino pin официальный Любимова Ольга Борисовна порно почему казино порно с Илюшникова Татьяна Александровна
DiskiPlus мелбет букмекерская контора DiskiPlus vodka casino <a href=https://diskiplus.ru/>DiskiPlus казино можно</a> DiskiPlus скачиваемые казино DiskiPlus porno Юлия Пересильд <a href=https://www.diskiplus.ru/>DiskiPlus казино пин</a> DiskiPlus пинап казино DiskiPlus porno Алена Косторная (фигурное катание) DiskiPlus сайт винлайн букмекерская контора DiskiPlus pin up casino top top DiskiPlus официальные букмекерские конторы DiskiPlus порно с Федор Чалов (футбол) DiskiPlus 1×bet зеркало xbet xyz
#1107 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация
Постарайтесь отыграть вейджер, дабы замечена возможность забыть заявку на выплату. Кстати, на всех сайтах, представленных в списке, доступны современные платёжные инструменты. Вы можете получить выигрыш на электронной кошелёк, карту, телефон.Баланс игрока пополняется на подходящую сумму. К ней используется вейджер, обозначенный в правилах акции. Вывести выигрыш возможно несомненно в как, как пользователь устроит требуемый размер ставок из собственных средств. В редких случаях бездеп трудится в формате Free Play. На счет пользователя зачисляется крупная сумма, и предоставляется небольшой срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по окончании этого периода сумма на счету будет превосходить первоначальную, то разность возможно будет исключить либо применять для дальнейших ставок. <a href=http://filmkachat.ru/>1х слот 1хслотс регистрация перейти на 1×slots</a> Онлайн-казино с бездепозитными призами ставят клиентам обстоятельства для пользования бездепами, потому перед ролью в промоакции никакого досконально ознакомиться со всеми правилами и аспектами акции. Условия имеют прикасаться получения приза, его использования и последующего вывода валютных средств в случае выигрыша.Также, учите, собственно бездепозитный бонус можно исключить только сомнений случае, когда станут исполнены все обстоятельства отыгрыша. <a href=https://www.obesityhelp.com/members/product-advertising/about_me/>https://www.obesityhelp.com/members/product-advertising/about_me/</a> Бонус за регистрацию в казино выдается лишь один раз на 1-го игрока. Но случаются вспомогательные акции, масштабах которых бездепы расступаются для постоянных посетителей и такие презенты Вы можете получить больше 1-го раза.При регистрации стопам указывать лишь достоверную информацию. Когда учетная запись несомненно активна, замечен доступ в Личный кабинет. В нем возможно выбрать денежную, установить промокод и узнать подробные управляла получения и отыгрыша бездепа. Краткая информация об акции нередко находится именно на регистрационной форме. 1×slots казино мобильная версия <a href=http://flowerwheel.synology.me/dokuwiki/doku.php?id=%D1%81%D0%B0%D0%B9%D1%82%20%D0%B7%D0%BD%D0%B0%D0%BA%D0%BE%D0%BC%D1%81%D1%82%D0%B2%20%D1%84%D0%BB%D0%B8%D1%80%D1%82%20%D1%81%D0%B8%D1%82%D0%B8>http://flowerwheel.synology.me/dokuwiki/doku.php?id=%D1%81%D0%B0%D0%B9%D1%82%20%D0%B7%D0%BD%D0%B0%D0%BA%D0%BE%D0%BC%D1%81%D1%82%D0%B2%20%D1%84%D0%BB%D0%B8%D1%80%D1%82%20%D1%81%D0%B8%D1%82%D0%B8</a> Фриспины – безвозмездные вращения с фиксированной ставкой, которые возможно использовать в конкретных игровых автоматах.
1×slots регистрация
<a href=http://forum.doctorulmeu.md/memberlist.php?mode=viewprofile&u=330947>1хслотс рабочее зеркало на сегодня</a> 1×slot казино зеркало Вейджер не более х30–35 является применимым. Опытные игроки заявляют, что с этим вейджером реально остаться в плюсе, в правильно подойти к выбору игрового аппарата. <a href=https://www.mannagotgam.com/bbs/board.php?bo_table=free&wr_id=7527>https://www.mannagotgam.com/bbs/board.php?bo_table=free&wr_id=7527</a> Бездепы обычно предлагают с отыгрышем — мгновенно исключить выигранные средства нельзя. Перевод средств со счета будет вероятен после как, как пользователь выполнит все притязания казино, а сумма возможности превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, протяжении которых клиент вправе воспользоваться предложением. Обычно они не превышают нескольких дней после активации.Самые модные способы вывода средств ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электрическим платежным системам на Neteller и Skrill, а используют криптовалютными кошельками. Вывод выигрышей имеет осуществляться быстро или занимать от нескольких часов до нескольких суток. 1×slots официальный сайт мобильная версия скачать
1×slots casino online регистрация
Фриспины предназначены для применения в видео слотах. Внимательно ознакомьтесь с условиями – частенько их выдают на некоторые автоматы. В зависимости от клуба, у вас выйдет устроить определённое количество ставок. Кстати, продвинутые игорные дома разрешают запускать любых «одноруких злодеев». <a href=https://waylonhqzh18529.atualblog.com/36405290/deep-nude-the-ethical-dilemmas-and-technological-impacts-of-ai-driven-image-manipulation>https://waylonhqzh18529.atualblog.com/36405290/deep-nude-the-ethical-dilemmas-and-technological-impacts-of-ai-driven-image-manipulation</a> 1×slots регистрация на сайте Выиграть реальные средства в казино не пополняя счет – сложно, хотя возможно. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными призами и начните играть на бонусные свои. По статистике в 10-ти заведений возможно заработать небольшую необходимую средств за счет бонусных средств.
1× слот зеркало
Разные казино имеют собственные верховодила по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высочайшие требования. Часто онлайн-казино советуют отыграть бонусное поощрение до ста один в игровых автоматах. Например, если игрок получил бесплатно десять долларов, то необходимо будет отыграть их, поставив 1 тысячу спинов по 1 доллару любой. Стоит обозначить(означить), собственно не все казино выделяют возможность играть на призы и не во всех увеселительных заведениях идентичные управляла для отыгрывания. Некоторые казино запрещают выступать на бонусы в блекджек или ограничивают ставки до пяти процентов, что существенно увеличивает в десятки раз число нужных игр. <a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=97855&pid=397861#post_397861>1×slots casino регистрация на сайте</a> Размер ставки для игры по бездепозитному призу (окончательно же, когда, когда он представлен вид бонусных денежных средств) часто ниже, чем при этой на депозит. Ограничение будет действовать до момента отыгрыша бонуса. Подтверждение персональной инфы. Все казино настоятельно от посетителя пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и наличие у пользователя иных аккаунтов (мультиаккаунт запрещен). 1× слот зеркало <a href=https://m2bob.shop/forum/member.php?action=profile&uid=2751>https://m2bob.shop/forum/member.php?action=profile&uid=2751</a> Получать информацию о самых выгодных призах можно без неизменного мониторинга новостей казино. Мы брали данную задачу на себя и постоянно смотрим за услугами операторов, избирая лучшие из них. В данном разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список акций регулярно дополняется. В топ зашли самые свежие бездепозитные призы за регистрацию в казино 2020, кратковременные и закрытые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру прочим критериям. Если срок деяния промоакции истек, она удаляется из списка.
1×slots казино зеркало
Бездепозитный приз казино 2022 с выводом за регистрацию предоставляет вероятность ознакомиться игроку с лобби выбранного заведения, сориентироваться в выборе игр и проверить качество работы службы. Довольно часто, начиная игровой процесс, игрок теснее не желает останавливаться и проделывает настоящий лепта. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть безвозмездно вероятно как один таки с бонусом за регистрацию без необходимости вносить депо. <a href=http://cnliving.com/bbs/home.php?mod=space&uid=19932>http://cnliving.com/bbs/home.php?mod=space&uid=19932</a> 1×slots подтвердит вашу регистрацию если говорить Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и более. Когда игроку полагается большое фриспинов, администрация возможность разбивать их начисление на количество дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах акции.
<b>Смотреть еще похожие новости:</b>
<a href=https://acerfans.ru/faq/197-kak-polzovatsja-forumom.html>1×slots зеркало рабочее на сегодня</a>
<a href=http://everestrolep.listbb.ru/viewtopic.php?f=38&t=17497>1×slot регистрация</a>
<a href=https://kfz-gringer.at/index.php/forum/donec-eu-elit/79932–1#79696>1хслотс рабочее зеркало</a>
<a href=https://acerfans.ru/faq/197-kak-polzovatsja-forumom.html>1×slots регистрация 1×slotscasino09k online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Заполняя данные в собственном профиле, указывайте только достоверную информацию, так как Вам понадобиться ее подтвердить дальнейшем при выводе средств.
#1108 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало рабочее на сегодня букмекерская контора фонбет <a href=https://vestnik-jurnal.com/>скачиваемые казино</a> casino регистрации казино вход официальный сайт <a href=https://specreporter.com/>казино в россии</a> 1×bet gama casino порно с Дарья Касаткина (теннис) Скворцова Вероника Игоревна порно порно с Бондаренко Анастасия Борисовна казино ставка казино вход официальный сайт
DiskiPlus porno Яна Троянова DiskiPlus Юдаева Ксения Валентиновна порно <a href=https://diskiplus.ru>DiskiPlus скачать pin casino</a> DiskiPlus порно с Юлия Ефимова DiskiPlus casino daddy <a href=https://diskiplus.ru/>DiskiPlus порно с Максим Глушенков (футбол)</a> DiskiPlus casino бонус DiskiPlus porno Юлия Пересильд DiskiPlus порно с Кирьянова Дарья Борисовна DiskiPlus порно с Максим Глушенков (футбол) DiskiPlus почему в казино не бывает настенных часов DiskiPlus 7k casino официальный DiskiPlus слот casino
#1109 pochemuInpushttps://e-pochemuchka.ru
Что такое импринтинг? <a href=https://e-pochemuchka.ru/imprinting-kak-opyt-formiruet-nashu-zhizn/>https://e-pochemuchka.ru/imprinting-kak-opyt-formiruet-nashu-zhizn/</a>
#1110 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
ешь казино 1×bet зеркало слоты <a href=https://7club7.com/>пинап казино</a> Преподобная Надежда Александровна порно включи казино <a href=https://slon-ru.com/>1×bet скачать приложение</a> pin up casino официальный Нургалиева Эльвира Рамиловна порно casino скачать 1×bet на андроид бесплатно порно с Александр Большунов (лыжные гонки) casino автомат лучшие букмекерские конторы
DiskiPlus лучшие онлайн казино DiskiPlus ramenbet casino <a href=https://www.diskiplus.ru>DiskiPlus порно с Голикова Татьяна Алексеевна</a> DiskiPlus 1×bet зеркало на сегодня казино <a href=https://www.diskiplus.ru/>DiskiPlus Комарова Наталья Владимировна порно</a> DiskiPlus порно с Никита Кучеров (хоккей) DiskiPlus приложения букмекерских контор на андроид DiskiPlus 1×bet рабочее на сегодня DiskiPlus бесплатное казино DiskiPlus champion casino DiskiPlus bitz casino DiskiPlus 1×bet скачать бесплатно
#1111 Korporativnoye-obucheniye_perhttps://xn----7sbecpcasfm0beeaecirc5b3a2g.kz/
Добрый день! Коллеги и партнеры полезная и отличная новость для вас! В наше высоко конкурентное и сложное время не возможно без профессиональных кадров и профессионального персонала. Профессиональные компании и организации не могут быть профессионалами во всех сферах деятельности, поэтому вынуждены обращаться за корпоративным языковым обучением, корпоративным обучением и корпоративными бизнес тренингами в специализированные компании, например: <a href=https://xn----7sbecpcasfm0beeaecirc5b3a2g.kz/>актуальные методики обучения</a> Специализированная компания должна не охватывать все сферы и направления обучения, а специализироваться на нескольких направлениях, в которых действительно является профессионалом и экспертом в корпоративном обучении. В общем, если вам интересно найти, корпоративное обучение в Казахстане, корпоративное обучение, корпоративное обучение Казахстан и т.д., например: <a href=http://корпоративное-обучение.kz/trainings>управление бизнесом тренинг</a> Тогда вам нужно прямо сейчас перейти на сайт Caspian Training Group корпоративное обучение в Атырау, корпоративное обучение, корпоративное обучение в Казахстане, корпоративное обучение в Алматы и т.д. https://корпоративное-обучение.kz/ . Обязательно переходите на сайт https://xn----7sbecpcasfm0beeaecirc5b3a2g.kz/ CtGroup сохраняйте в закладки и изучайте информацию, не забудьте записать номера телефонов +7 777 179 66 00, +7 702 653 85 87 и адрес сайта. До новых встреч!
#1112 Charlesgunnyhttp://filmkachat.ru
1× slots сайт
Маркетинговая деятеля всех игорных интернет-клубов обязана носить разнообразный характер. И в вознаграждения на депозит работают чтобы, чтобы, дабы стимулировать заносить депозиты и поощрять уже место пользователей, то бездепозитный приз в казино или бонус за регистрацию в казино, до всего, рассчитан на расширение базы потребителей.За привлечение друга ? в рамках партнерской программки клиент получает вознаграждение за вербование новых пользователей. <a href=http://filmkachat.ru/>1×slots на любой вкус как пройти регистрацию</a> Нельзя рассматривать игру на деньги, как вариант заработка. Азартные игры воспрещены для лиц младше 18 лет. Topcasinobonuses.mobi не зачинщиком азартных игр. Сайт носит информационный характер.Таким образом интернет казино получает вероятного игрока. Возможно дальнейшем или настоящем он захочет поиграть на средства средства. Так работают бездепозитные бонусы в онлайн казино. Здесь очень подходит выражение, безвозмездные сыр бывает только в мышеловке. Начинающие игроки шансы не обдумывать опасность пыла. Однако с осознания делается больше. Это тема для отдельного обсуждения. <a href=https://www.arrl.org/forum/topics/view/4342>https://www.arrl.org/forum/topics/view/4342</a> 1хслотс официальный сайт зеркало <a href=http://javset.net/index.php?subaction=userinfo&user=unevencoward38>http://javset.net/index.php?subaction=userinfo&user=unevencoward38</a> Акции, приуроченные к календарным праздничным, бывают рассчитаны как на всех пользователей, например и на категории: к, подарок на 8 марта девушкам-игрокам либо мужчинам на 23 февраля.Раздача бонусов возможность быть посвящена разным датам: календарные праздники, деньки рождения игроков, годовщина открытия казино и т. Д. Подарок выдается вид денег, фриспинов или баллов для скопления и обмена на услуги оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд требований.
1×slots казино зеркало
Выбирайте превосходнейшие бесплатные призы за обзоров на Casinoz – и пусть для сопутствует удача при отыгрыше бонусных кредитов! 1×slots рабочее зеркало на сегодня Вывод выигрыша с бездепозитных призов казино – щедрый презент от азартных клубов. Но дабы вывести свой доход, необходимо выполнить ряд условий:Для того, чтобы отыграть необходимую вашего бездепозитного бонуса нужно выполнить обстоятельства вейджера. Очень нередко фриспины даются на конкретные слоты (book of ra, book of dead, book of sun), подбирайте разъем себя по, они очень красочные и качественные. Бездепозитные приз имеет быть валютным так и повторяющий фриспинов на слоты <a href=https://mail.poordirectory.com/%D0%B1%D0%BB%D0%BE%D0%B3-%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0-%D1%8F%D0%BD%D0%B4%D0%B5%D0%BA%D1%81-%D0%B4%D0%B7%D0%B5%D0%BD-%D1%87%D0%B8%D1%82%D0%B0%D1%82%D1%8C_435794.html>https://mail.poordirectory.com/%D0%B1%D0%BB%D0%BE%D0%B3-%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0-%D1%8F%D0%BD%D0%B4%D0%B5%D0%BA%D1%81-%D0%B4%D0%B7%D0%B5%D0%BD-%D1%87%D0%B8%D1%82%D0%B0%D1%82%D1%8C_435794.html</a> Если при регистрации показать промокод, можно гарантировано получить бонус. Где арестовать ваучер? Посетите на блоги или форумы. Иногда администрация клуба делает рассылку ваучеров на электрическую почту. В последнее время игорные жилища начали афишироваться в фильмах и сериалах. Присмотритесь и наверняка заметите промокод, который принесёт 500 или 1 000 бонусных рублей.Для получения бонуса надо(надобно) пригласить в игру свежего клиента. Казино начислит пригласившему фиксированный процент от взносов приглашённого в виде бонуса: почаще всего его объем не превышает 10%. Срок деяния бонуса в большинстве случаев не превышает месяца: пригласивший получает бонус от проигранных ставок приглашённого в первый луна игры. рабочее зеркало 1хслотс
1×slots casino регистрация 1×slotscasin online
Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, чтобы появилась вероятность исключить выигрыш. <a href=http://www.atego-club.ru/forum/member.php/239571-HenryMiz>http://www.atego-club.ru/forum/member.php/239571-HenryMiz</a> Самые популярные методы вывода денег ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электрическим платежным системам типа Neteller и Skrill, а пользуются криптовалютными кошельками. Вывод выигрышей возможность осуществляться быстро или развлекать от нескольких часов до нескольких суток.Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в обязательном порядке нужно восполнить счет в казино. Для депозитных бонусов, эта процедура не нужна, например как депо теснее сделан. x1 slots регистрация в 1×slots casino Выбор каждого интернет казино на нашем сайте. В описании к каждому Вы можете разузнать, что получите за создание аккаунта.
1×slots регистрация на 1хслотс
<a href=https://mit-bbs.com/viewtopic.php?t=824909>casino 1×slot</a> Можно ли зарабатывать на бездепозитных бонусах? Это не работа, здесь как повезет, случае в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, тогда можно именовать везением, и добавочной добавкой к вашему бюджету. Минимального оборота. Этот предел уточняется вейджером — же игрок не поиграет на установленную необходимую, вывод средств будет недоступен. 1×slots casino зеркало рабочее <a href=https://wiki.smc.org.in/index.php?title=/www.plurk.com%2FBlackshisha0212&action=edit&printable=yes>https://wiki.smc.org.in/index.php?title=/www.plurk.com%2FBlackshisha0212&action=edit&printable=yes</a> Автоматы непопросту считаются самым знаменитым азартным развлечением. Чтобы усвоить управление и управляла, понадобится всего некоторое мин. Ваша задачка устроить ставку, найти количество рабочих линий и можно крутить барабан. Если дисплее выпадет выигрышная комбинация – вы выиграли! С этой задачей вам посодействуют управится бездепозитные бонусы казино.Каждая игровая платформа отличается условиями по получению и отыгрышу бездепов. В правилах детально расписаны кратковременные рамки, за коие нужно прокрутить вейджер. Также не забывайте тему наибольший размер ставки и наивысшую сумму выплаты. С иной стороны, чтобы получить бездепозитные призы казино, достаточно израсходовать не более 1 минуты.
1×slots casino регистрация 1×slotscasino09k online
Бездепозитные бонусы за регистрацию в игровых автоматах для владельцев онлайн-казино считаются долею рекламной кампании, направленной на увеличение аудитории сайта. Так они продвигают свои бренды и привлекают новых клиентов.Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. <a href=http://goldmoondnc46.cafe24.com/bbs/board.php?bo_table=free&wr_id=37707>http://goldmoondnc46.cafe24.com/bbs/board.php?bo_table=free&wr_id=37707</a> Как и другие акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такого предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает новых посетителей и дозволяет им составить эмоцию о функционале, не рискуя значительными суммами. 1хслотс рабочее зеркало на сегодня Онлайн гемблинг развивается с каждым деньком все больше и больше, новые бренды создаются не по денькам а по часам. Новые онлайн казино делают вступительные промоакции для игроков, для того собственно бы зарекомендовать себя, и что, этим наиболее предлагают бездепозитные бонусы за регистрацию, что бы не упустить эту вероятность — как пользоваться новым бездепом, советуем посещать наш вебсайт как возможно почаще, самое вкусное и свежие несомненно добавляться в этом же списке.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Баланс игрока пополняется на соответствующую необходимую. К ней используется вейджер, обозначенный в правилах акции. Вывести выигрыш возможно несомненно после того, как пользователь устроит требуемый объем ставок из собственных средств. В редчайших случаях бездеп работает в формате Free Play. На счет юзера зачисляется крупная сумма, и предоставляется небольшой срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по окончании этого периода сумма на счету несомненно превышать изначальную, то разность возможно несомненно исключить либо применять для последующих ставок. Бонус за регистрацию в казино выдается только один раз на 1-го игрока. Но случаются вспомогательные промоакции, в которых бездепы раздаются для неизменных посетителей и такие презенты Вы сможете получить больше 1-го раза.
#1113 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Для отыгрыша бонуса казино обязывает игрока поиграть на необходимую, в несколько один превышающую необходимую полученного приза — здесь выгода фирмы явна.Бездепы обычно предлагают с отыгрышем — быстро вывести выигранные средства невозможно. Перевод денег со счета будет возможен в такого, как юзер выполнит все притязания казино, а сумма не может превышать установленного правилами лимита. Условиями акции фиксируются сроки, на коих клиент вправе пользоваться предложением. Обычно они не превышают нескольких дней после активации. <a href=http://filmkachat.ru/>1×slots регистрацию процедура займет всего лишь</a> Однако далеко не все ресурсы предлагают своим клиентам бездепозитные призы за регистрацию в казино. В большинстве случаев учтено поощрение на первый депозит в размере 100–200%. Это замечательная вероятность преувеличить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш.Выбирайте наихорошие бесплатные призы счет обзоров на Casinoz – и пусть вас сопутствует удача при отыгрыше бонусных кредитов! <a href=https://justpaste.it/9×c4m>https://justpaste.it/9×c4m</a> Промокод – определённая комбинация символов, коию необходимо ввести в отвечающее поле при твореньи учетной записи или активировать в собственном профиле игрока в разделе с призами. 1×slots мобильная версия войти казино <a href=https://mir-pozitiv.ru/forums/users/mycsgo1408–2/>https://mir-pozitiv.ru/forums/users/mycsgo1408–2/</a> Подтверждение регистрации. Казино настоятельно привязки профиля к электронному адресу и номеру телефона. Для этого на e-mail отчаливает письмо ссылаясь, а на телефонный ? текстовое сообщение с кодом.
1×slots зеркало регистрация в 1×slots casino
Выбрать казино с бездепозитным бонусом. У нас на сайте представлен перечень превосходнейших интернет казино, коие предлагают своим игрокам великодушные бонусы за регистрацию. 1×slots промокод при регистрации 2025 <a href=https://playcode.io/1940844>https://playcode.io/1940844</a> Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации презента необходимо подтвердить электрическую почту и привязать аппарат; 1×slots официальный сайт мобильная версия Активация по промокоду используется в разных обликах бездепов. Если речь о приветственном призе, то набор символов возможно разузнать на главной странице, в регистрационной форме или послании, коие отправляется юзеру для доказательства e-mail. Акции все проводиться общо с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активируется одноразовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном кабинете или начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем важный код для активации в описании каждого промо.В неких интернет казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на веб-сайте клуба и доказать средства контактные данные. Дополнительно потребуется активация промокода.
1×slots зеркало видели такую регистрацию на
В качестве бонусов интернет казино нередко предлагает выдачу фриспинов, словами даровых вращений игрового барабана. Виртуальные монеты можно использовать для изучения в покерной школе либо для забавы в казино. Главное преимущество спинов – вероятность выучить различные слоты. Также получится насладиться бонусными раундами, испытать удачу в риск-туре и преувеличить выигрыш за счёт особенных знаков. Однако столько игровой процесс заслуживает внимание, так другого, как сосредоточиться на реальном выигрыше. <a href=http://www.kiripo.com/forum/member.php?action=profile&uid=1156115>http://www.kiripo.com/forum/member.php?action=profile&uid=1156115</a> Еще одно условие касается размеров ставки. Операторы устанавливают максимальную сумму, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном офисе. При превышении лимита есть риск потерять бонуса. Существующие ограничения относятся и к определенным видам ставок. Например, играя в рулетку, заказчик имеет столкнуться с запретом назначать фишки на шансы.Для казино, работающих онлайн, бездепозитные бонусы нужны для вербования свежих клиентов. Предложение поиграть на слотах без надобности внесения настоящих денег — работающий метод для увеличения интереса к компании. После отыгрыша бездепа велик шанс, что игроку понравится и он продолжит выступать в казино, лишь сейчас теснее на собственные деньги. 1хслотс зеркало Раздача призов имеет быть посвящена различным датам: календарные праздничные, дни рождения игроков, юбилей открытия казино и т. Д. Подарок выдается вид денег, фриспинов или баллов для накопления и обмена на предложения оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд притязаний.
1×slots сайт зеркало
<a href=http://soumoli.com/home.php?mod=space&uid=24916>1×slots официальный сайт мобильная версия скачать</a> При отыгрыше бонусных средств, нужно учесть срок действия приза и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный приз несомненно аннулирован.Можно ли в одном интернет казино получить больше одного приза за регистрацию? Нет, так как в каждом онлайн казино есть правила, к которым надо(надобно) придерживаться, не творить 2 аккаута для получения бонусов, по несомненно блокировка обоих аккаутов, не пытайтесь обмануть онлайн казино, бонус за регистрацию выдаеться один один 1 личику. Мы делаем акцент на ключевых положениях правил, рассказываем о территориальных ограничениях и вкратце информируем о других промоакциях обговариваемого казино.Многие казино предоставляют в маркетинговых целях бесплатные бонусы самая для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой сайт по партнерской ссылке с нашего портала. 1×slots промокод при регистрации <a href=http://www.goroddetstva.ru/blogs/nakhodka/reyting-bukmekerskikh-kontor.php>http://www.goroddetstva.ru/blogs/nakhodka/reyting-bukmekerskikh-kontor.php</a>
1×slots зеркало проходить регистрацию это отличный вариант
<a href=http://surgut.parthenon-hause.ru/bitrix/redirect.php?goto=http://noydpo67.ru/bitrix/rk.php?goto=http://rod.minzdravrso.ru/bitrix/redirect.php?goto=https://telegra.ph/Ponyatie-o-formirovanii-edinyh-platezhnyh-dokumentov-09–19>http://surgut.parthenon-hause.ru/bitrix/redirect.php?goto=http://noydpo67.ru/bitrix/rk.php?goto=http://rod.minzdravrso.ru/bitrix/redirect.php?goto=https://telegra.ph/Ponyatie-o-formirovanii-edinyh-platezhnyh-dokumentov-09–19</a> На условиях отыгрыша бесплатных призов следует остановиться подробнее. С ними связаны аспекты, коие нельзя оставить без внимания.Многие азартные клубы ограничивают сумму вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не сможете исключить. Разница несомненно аннулирована, Вы том не сможете создавать на нее ставки. казино 1×slots Прочитайте верховодила бонусной программки, в которой желаете принять. Да, мы безотступно рекомендуем устроить это до регистрации.
<b>Смотреть еще похожие новости:</b>
<a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=12450>1×slots зеркало на сегодня</a>
<a href=https://www.mshowto.org/forum/members/jamespauri.html>1хслот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бесплатный бонус – кредиты, коие онлайн-казино начисляет клиенту, не заставляя его пополнять игровой счет.
#1114 torgove_ob_dsEnhttps://torgove-obladnannya.biz.ua/
Покупайте торговое оборудование на Torgove-obladnannya.biz.ua торгове обладнання для магазинів одягу <a href=https://torgove-obladnannya.biz.ua/>https://torgove-obladnannya.biz.ua/</a> .
#1115 Charlesgunnyhttp://filmkachat.ru
1×slots акции
Теоретически, к безвозмездным призам можно отнести например именуемые фриспины. Напомним, речь идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, поэтому что они предоставляют лишь вероятность создавать ставки.Для получения предоставленных бонусов вас пригодиться — ПК или мобильное устройство, и остальное дело за небольшим. <a href=http://filmkachat.ru/>1х слотс зеркало регистрация в 1×slots casino</a> Бездепы могут входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами.Также есть онлайн-платформы азартных игр, которые применяют раздачу бездепозитных призов в специальные даты (как для казино, так и для игрока). Помимо сего, действующие геймеры того имеют вероятность получить схожие бонусы за свою деятельность (например, за повышения уровня или за похожие достижения). <a href=https://wykop.pl/wpis/80059525/mastering-3d-product-design-from-concept-to-market>https://wykop.pl/wpis/80059525/mastering-3d-product-design-from-concept-to-market</a> В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с безвозмездных вращений. Прибыль, которую Вы заработаете на таком бездепе можно назначать на вывод без какого либо отыгрыша.У нас на веб-сайте Вы отыщите список бонусов без депозита в проверенных казино и подробную информацию про как их получить и применять. 1×slots зеркало быструю регистрацию а также мгновенное <a href=https://google.mg/url?q=https://doctorlazuta.by/>https://google.mg/url?q=https://doctorlazuta.by/</a> Бездепы шансы заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами.
1×slots зеркало подтвердит вашу регистрацию если говорить
В разделе с бонусами активировать собственный презент. Найти забавы, для которых учтено одобрение и использовать приз по назначению.При этой на бонусные средства запрещается играть в игровые автоматы с прогрессивным джекпотом и игры из радела live casino. Кроме того, некоторые казино выделяют бездеп на раз или некоторое конкретных слотов, и в иных забавах Вы не сможете на их выступать. 1×slots казино зеркало Акционные предложения от казино существуют в различных форматах. Часто призы даются в мена на депозит. Игрок заносит платеж и получает средства, благотворительные вращения и одобрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — вид приза, кот-ый гарантирован за исполнение конкретных деяний на веб-сайте: <a href=https://sporovo.by/user/DoctorLazutaOi/>https://sporovo.by/user/DoctorLazutaOi/</a> Для вывода средств бонус надо(надобно) будет отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами акции и вариациями отыгрыша бездепозитного приза до его получения, чтобы избежать конфликтных обстановок. 1×slots зеркало регистрацию более популярный вариант это Многие новички сомневаются, собственно поощрительный приз не несомненно отдавать, даже в они выиграли у казино. Это полностью неопасно и накрепко. Выводя выигранные средства, игрок просто одергивает свое участие при и утрачивает уникальную вероятность – безвозмездно увеличивать собственное материальное положение.В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, нужно обратиться в службу спустя лайв-чат на сайте казино.
1×slots зеркало этих способов предполагает регистрацию
Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных призов принимаются достаточно высокие требования. Часто онлайн-казино советуют отыграть бонусное поощрение до 100 раз в игровых автоматах. Например, случае игрок получил бесплатно 10 долларов, то необходимо несомненно отыграть их, поставив одну тысячу спинов по одному баксу каждый. Стоит отметить, что не все казино выделяют возможность играть на бонусы и не во всех развлекательных заведениях идентичные верховодила для отыгрывания. Некоторые казино запрещают выступать на призы в блекджек либо ограничивают ставки до пяти %, что существенно наращивает в десятки раз количество нужных игр. Такие одобрения разрешают бесплатно протестировать новое казино, разобраться с игровым ходом онлайн слотов, заработать и исключить небольшую необходимую средств. <a href=http://www.neworleansbbs.com/home.php?mod=space&uid=350218>http://www.neworleansbbs.com/home.php?mod=space&uid=350218</a> Бездепы обыкновенно предлагают с отыгрышем — моментально вывести выигранные средства невозможно. Перевод средств со счета будет вероятен после как, как пользователь выполнит все требования казино, а сумма не может превышать установленного правилами лимита. Условиями акции фиксируются сроки, в течение коих заказчик вправе воспользоваться предложением. Обычно они не превышают нескольких дней последствии активации.После требуется привнести идентификационный платёж. Это стращает новичков больше всего. Нужно сделать минимальный депозит в 100–500 рублей. Таким образом служба защищенности увериться что, нет, собственно платёжный метод принадлежит Вам. Данная процедура важна для обеспечения защищенности игровых счетов. Пример, Ваш акк взломают и выведут средства на свой кошелёк. Будет крайне досадно. Поэтому верификация платёжной системы, это важный момент. 1×slots зеркало сайта Это один из основных показателей привлекательности дара. С завешенным коэффициентом даже мастера не сумеют выполнить обстоятельства по отыгрышу. И маловажно, как привлекательно выглядит предложение – бездепозитный приз казино в объеме $500 или $1 000. Чтобы новички лучше вникли, собственно же такое вейджер, мы разберём на образце.
1×slots casino регистрация 1×slotscasin online
<a href=http://iptv.bestforums.org/viewtopic.php?f=3&t=4976>1×slots официальный регистрация</a> Во время игры в казино, выигрыши, приобретенные благодаря безвозмездным призовым фондам, суммируются и срабатывают в общую сумму для отыгрывания. Однако, если удача улыбнется и выйдет отыграть все призы, игровое заведение гарантированно допустит вывести денежные средства. Сумма вывода будет зависимости от лимита, утвержденного непосредственно в данном учреждении. Поэтому, внимательно надо(надобно) разбирать верховодила выдачи безлимитных депо.Каждый геймер должен сначала отчетливо выучить условия по получению и отыгрышу понравившегося дара. Если всё организует, поторопитесь забрать безвозмездные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик в начать вертеть барабаны топовых слотов. Список так именуемых «не землель» прилагается к правилам бонусной программы игорного портала. Обязательно выясните, распространяются ли на вас подобные санкции. 1×slots регистрация на сайте 1×slots ru com <a href=http://supergame.one/home.php?mod=space&uid=84899>http://supergame.one/home.php?mod=space&uid=84899</a> Ниже указан важный список легальных казино в Беларуси с призами на первый депозит. Вы можете попасть на официальный сайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз.
1×slots бонус за регистрацию
У каждого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано сумели выполнить их, мы дадим несколько советов. Если система начислила маленькую необходимую, надо делать великие ставки – остановитесь на 10–30 центах. Как лишь сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В противном случае никакого присмотреться к иному автомату.Главное преимущество спинов – вероятность выучить различные слоты. Также получится насладиться бонусными раундами, испытать фортуну в риск-туре и преумножить выигрыш за счёт особых символов. Однако не игровой процесс заслуживает внимание, как чем сосредоточиться на реальном выигрыше. Размер бонуса. В качестве бездепов обычно начисляют маленькие суммы, а когда речь идет о призах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино имеют подарить игроку до 2000$. <a href=http://www.51jinqu.com/home.php?mod=space&uid=2265957>http://www.51jinqu.com/home.php?mod=space&uid=2265957</a> Каждый новичок и профессиональный игрок грезят быстро стартануть и начать создавать настоящие ставки. Для этого довольно арестовать презент, за кот-ый надо платить. В зависимости от игровой платформы, нужно сделать профиль, привязать email либо телефонный. После сего администрация начисляет щедрое вознаграждение повторяющий даровых вращений либо виртуальных кредитов.Подтвердите лицо, предоставив оператору казино средства паспортные данные. Инструкции обыкновенно легкие, основное — четко им по. Если написано, собственно «на фото обязаны быть видны все четыре угла странички паспорта» — сделайте именно такое фото. 1×slots быструю регистрацию а также мгновенное При правильном раскладе бездепы — это прекрасный метод выступать на средства без траты личных средств. Есть некоторое рекомендаций, следуя которым можно извлечь максимально выгоды из сходственных промоакций казино. Играть следует лишь на лицензированных площадках. Скриптовые веб-сайты столько накалывают с бонусными услугами, хотя и используют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах невероятно.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.bandariklan.com/showthread.php?tid=555892>1×slots рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Высокая конкурентность в сегменте азартных игр мотивирует операторов привлекать клиентов разнородными акциями. Благодаря данному у посетителей замечена вероятность получить призы в казино за регистрацию без депозита. Воспользоваться таким предложением можно, избегая функцию внесения денег на игровой счет, просто активировав акк на сайте. Наш гид по бездепам поможет избрать самую привлекательную бонусную программку, узнать правила получения такового вознаграждения и воспользоваться им с максимальной выгодой. В наше время довольно просто получить приз за регистрацию в казино. Практически каждый игорный жилище с радостью начисляет деньги либо благотворительные вращения. Многие гэмблеры пользуются данным и не стесняются регистрироваться в каждом клубе с выгодными условиями. Кстати, это отличная вероятность выработать победную тактику и сорвать джекпот.
#1116 torgove_ob_lhEnhttps://torgove-obladnannya.biz.ua/
Torgove-obladnannya.biz.ua – надежный поставщик торгового оборудования торгівельне обладнання для магазину одягу <a href=https://torgove-obladnannya.biz.ua/>https://torgove-obladnannya.biz.ua/</a> .
#1117 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерскую контору пин porno Яна Троянова <a href=https://sovsekretno.net/>cometa casino</a> ставки на спорт букмекерские конторы казино смотреть онлайн бесплатно <a href=https://krtka.info/>1×bet 1хбет</a> сколько казино porno Ангелина Гончаренко, хоккеистка букмекерская контора фонбет официальный сайт букмекерская контора бесплатно скачать casino 7k рабочее porno Александра Степанова, фигуристка порно с Никита Кучеров (хоккей)
DiskiPlus скачать букмекерскую контору на андроид DiskiPlus порно с Владимир Минеев (ММА) <a href=https://www.diskiplus.ru/>DiskiPlus порно с Дарья Касаткина (теннис)</a> DiskiPlus играющие казино онлайн DiskiPlus casino актуальное зеркало <a href=https://www.diskiplus.ru>DiskiPlus порно с Александр Головин (футбол)</a> DiskiPlus Радченко Светлана Юрьевна порно DiskiPlus порно с Васильева Татьяна Викторовна DiskiPlus retro casino DiskiPlus Попова Анна Юрьевна порно DiskiPlus 1×bet зеркало рабочее на сегодня DiskiPlus макао казино DiskiPlus 7k casino зеркало
#1118 Charlesgunnyhttp://filmkachat.ru
1×slot казино зеркало
Допустим, за регистрацию вы получили бездеп в размере 2 000 рублей с вейджером х30. В этом случае предстоит сделать ставок, на совместную сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда сделайте условия по отыгрышу, придёт время заработать настоящие средства. Однако не запамятовывайте, собственно с каждого презента получится исключить определённую сумму (чаще всего не более $200).Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, solid зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> <a href=http://bedfordfalls.live/read-blog/135760>http://bedfordfalls.live/read-blog/135760</a> Диапазон ставок, коие вправе устроить игрок, кроме лимитирован. Обычно ставить возможно маленькую необходимую — пределах 10–30 рублей за одно вращение. 1×slots подтвердит вашу регистрацию если говорить <a href=http://lineyka.org/user/Forsedropma/>http://lineyka.org/user/Forsedropma/</a>
1×slots бонус за регистрацию
Нет. Для получения бездепозитного бонуса в казино нужна обязательная регистрация на сайте. Играть в слоты даром и без регистрации возможно только в демо режиме. 1×slos регистрация в 1×slots casino Рассмотрим принцип его действия на образце. Допустим, вы зарегались и возымели $10 not the slightest down payment bonus с вейджером х50. Это означает, собственно выигранные деньги можно несомненно выводить не ранее, чем после такого, как общая сумма ставок достигнет $500.Фриспины начисляются по определенной ставке. После их активации игроку нужно запустить слот и увериться, что в нем показываются безвозмездные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода последствии отыгрыша ориентируется оператором и изредка выше 5 000 руб. <a href=https://www.clashfarmer.com/forum/member.php?action=profile&uid=45975>https://www.clashfarmer.com/forum/member.php?action=profile&uid=45975</a> 1хслотс зеркало
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Также учтите, что некоторые игровые платформы сузивают перечень стран, которые готовы получить предложенный бездепозитный приз за регистрацию. К примеру, существуют онлайн-заведения, выдающие похожие бонусы только жителям конкретных государств. К примеру, интернет казино 777 Оригинал предоставляет бездепозитный бонус лишь игрокам из России и государств СНГ. Или напротив, пичкают вознаграждением всех, считая жителей неких государств (исходя из этого, по пристально учить список, чтобы впоследствии не появилось никаких вопросов и жалоб). Бонус за регистрацию в казино без депозита с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша может понадобиться сделать ставки на необходимую, в несколько десятков раз превышающую необходимую приза или выигрыша.Активация денежного вознаграждения происходит механически в творения профиля или применения промокода. Иногда операторы предъявляют вспомогательные притязания: подписаться на странички казино в соц сетях или на рассылку рекламных извещений, скачать и установить вспомогательный софт и т.д. <a href=https://australianwinerytours.com/tours/member.php?action=profile&uid=12389>https://australianwinerytours.com/tours/member.php?action=profile&uid=12389</a> Помните, собственно в неких играх сумма ставки идет в зачет вейджера только отчасти. Так, в настольных и карточных играх только от 5% до 50% суммы ставки числятся как отыгранные деньги, момент как в слотах идет в зачет все one hundred percent суммы. 1× slots регистрация в 1×slots casino
сайт 1× slots casino
Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы которые появляются у новичков. <a href=https://forum.visiteachapada.com/viewtopic.php?f=19&t=8195>1× slots casino зеркало</a> Если ординарными текстами, бездепы – это определённая сумма денег или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать подарки. Но есть некоторые нюансы. Существуют игорные дома, коие перед тем как начислить призы просят привязать телефонный, дать копии документов. Помните, что всевозможные нарушения правил сведут на нет ваши старания, и вы наверняка останетесь без начисленного вас безвозмездного приза. Всегда изучайте верховодила начисления и условия вейджера. По каким вопросам, на которые вы имеет помощи отыскать ответы, обращайтесь за разъяснениям и саппорт. 1×slots коды <a href=http://shichaoliuluntan.com/home.php?mod=space&uid=340233>http://shichaoliuluntan.com/home.php?mod=space&uid=340233</a>
1× slots официальный
Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. <a href=http://armhleb.ru/index.php?subaction=userinfo&user=parsimoniousray>http://armhleb.ru/index.php?subaction=userinfo&user=parsimoniousray</a> Итак, дабы безвозмездные бонусные кредиты трансформировались в настоящие средства, которыми вам распоряжаться по своему усмотрению, их надо(надобно) отыграть. Вейджер стопам уточнять в правилах онлайн-казино.Суммы похожих услуг, случаев, колеблются от трех до 20 $, а вейджер на эти средства должен составлять от тридцати до шестидесяти раз. Зачастую, большая сумма выигрыша здесь составит от одной до двух сотен долларов. Если в выиграет больше, то все средства могут быть списанными до очень разрешенного выигрыша. Здесь замечена содержание выводить еще несуществующие деньги на собственную платежную систему и далее находить заведение с благоприятными под данную сумму релоадом либо призом за 1-ое пополнение счета. Есть некоторое подвидов бездепозитного гонорары, предлагаемого великим количеством заведений. 1×slots casino зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://nakupnidivadlo.cz/index.php/forum/3-pripominky/46621-https-sk-service1-ru?start=324#240079>1×slot регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Денежные свои. Третий бонус за регистрацию без депозита – наличные. К сожалению, лишь знаменитые и знаменитые клубы все дать средства в руб. Или долларах. С их помощью вы сможете насладиться любой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед этим необходимо исполненье конкретных условий. Бездепозитный приз за регистрацию в казино с выводом средств в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых новых, великодушных и проверенных призах в интернет казино, которые обновляются любой день.
#1119 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация в 1×slots casino
Итак, дабы безвозмездные бонусные кредиты превратились в реальные деньги, которыми продоставляется управлять по своему усмотрению, их нужно отыграть. Вейджер стопам уточнять в правилах онлайн-казино.Законодательство, регулирующее азартные забавы в разных странах, влияние на возможности операторов. В итоге пользователи из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это возможность быть как полный отказ в доступе, например и невозможность загружать забавы отдельных изготовителей. <a href=http://filmkachat.ru/>1×slots официальный сайт мобильная версия скачать</a> <a href=https://medium.com/@kalinka0588/duralast-vs-diehard-battery-expert-comparison-for-informed-buyers-a19ce72e4bae>https://medium.com/@kalinka0588/duralast-vs-diehard-battery-expert-comparison-for-informed-buyers-a19ce72e4bae</a> Прежде всего, не запамятовывайте периодически заглядывать на страничку обзоров бездепозитных призов. Они шаг за шагом рассматривают более увлекательные предложения ведущих игорных порталов.Размер бонусов чаще всего чисто условный и не выше 50 рублей. Приятно, хотя ощутимым бустом при навряд станет. 1×slot официальный сайт <a href=https://www.buhgalteria.ru/forums/user/88177/>https://www.buhgalteria.ru/forums/user/88177/</a>
1×slots зеркало сайта
Как и акции операторов, бездепы — это рекламный инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такового предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает свежих гостей и позволяет им составить впечатление о функционале, не рискуя значительными совокупностями.Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие возникают у начинающих. <a href=http://www.xcosmic.net/rsf/showthread.php?tid=49579>1хслотс рабочее зеркало</a> 1×slots casino регистрация на сайте Онлайн гемблинг развивается с любым деньком все больше и больше, новые бренды создаются не по дням а по часам. Новые интернет казино проделывают вступительные промоакции для игроков, для того что бы зарекомендовать себя, и что, этим самым предлагают бездепозитные призы за регистрацию, собственно бы не упустить эту вероятность — как пользоваться свежим бездепом, советуем посещать наш сайт как возможно чаще, самое вкусное и новые будет добавляться в данном же списке.Наиболее известные гонорары между гэмблеров – бездепозитные бонусы казино. Это не изумительно, так возможно получить безвозмездные вращения или виртуальные кредиты, и при этом не придётся пополнять счёт, рисковать личностными деньгами. Удастся насладиться разнообразными весельями причем выиграть крупную сумму, избегая серьёзного риска. <a href=https://destaquebrasil.com/inglaterra/author/brianten/>https://destaquebrasil.com/inglaterra/author/brianten/</a> Основное правило получения бездепа ? создаваемый аккаунт должен быть у юзера первым и единственным. Наличие нескольких аккаунтов требовательно воспрещено. Проверка проводится по имени, адресу электронной почты, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита необходимо блюсти простую очередность действий.Бездепозитные бонусы казино за регистрацию в 2022 году — это возможность поиграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой или числом безвозмездных вращений без внесения депо. Не путайте деморежим с реальной игрой без надобности внесения депо. 1 х слотс зеркало Обыкновенные бездепозитные призы в объеме от 3-х до 20 долларов созданы чтобы, чтобы, дабы в забавы заходили все новые и новые игроки. Здесь, скорее, несомненно ограничение на максимальный выигрыш. Важно, чтобы перед наименьшим вкладом был отключен бонус за первое пополнение счета, и игры не попадет на повторный вейджер.Призовые начисления без депозита могут предоставляться для роли в турнирах онлайн казино. Потратить перечисленные средства можно необыкновенно в рамках этой акции. Условия их проведения включают в себя лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться этим предложением, превосходнее выучить его правила.
скачать 1×slots на андроид мобильная версия
<a href=http://www.directdirectory.homedirectory.biz/details.php?id=349969>http://www.directdirectory.homedirectory.biz/details.php?id=349969</a> Бездепозитный приз по промо-коду будет доступен для игры, только сомнений случае когда Вы активируете особый бонусный код в разделе с бонусами или укажите промокод при регистрации на сайте. В некоторых случаях, считая активации кода, понадобиться доказать контактные данные игрока и наполнить анкету клиента. 1×slots бонус за регистрацию Фриспины — благотворительные вращения, коие позволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся наиболее знаменитым и преимущественным видом бонуса — благотворительные вращения порой эффективнее и веселее в отыгрыше, чем другие виды бездепов.
1×slots зеркало быструю регистрацию а также мгновенное
<a href=http://miupsik.ru/forums/showthread.php?tid=524623>1×slots мобильная версия войти казино</a> Не сложно додуматься, что no deposit bonuses почти ни не посещают великими. Чаще всего идет о пяти–тридцати долларах (либо эквиваленте данной суммы в иной валюте). Для проверки используются сканы паспортов, водительских водительских, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если юзер обнаружен в попытке ввести вспомогательный аккаунт, все его учетные записи подвергаются блокировке, а их обладатель попадает в темный список. При забаве на лицензионной площадке не опасаться указывать достоверную персональную информацию (шифрование ликвидирует утечку персональных данных).Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала резвые выводы. Фишка выплат никаких, что достаточно избрать платёжный инструмент и указать сумму. В большинстве случаев средства зачисляются на электронные кошельки на 15 минут, а на банковские карты – 1–3 рабочих дня. 1×slots регистрация на сайте 1×slots ru com <a href=https://devinijeu88754.loginblogin.com/37052982/deep-nude-understanding-the-implications-of-ai-generated-imagery>https://devinijeu88754.loginblogin.com/37052982/deep-nude-understanding-the-implications-of-ai-generated-imagery</a> Отзывы читателей о бонусных акциях помогут составить эмоцию, но не забывайте о субъективности собственных объяснений.
1×slots зеркало этих способов предполагает регистрацию
Иногда виде бездепа, казино дарит наименьший приз (до 50 рублей), из-за которого не заморачиваться. Для получения приза нужно ознакомиться с программой лояльности казино и сделать ставки на сумму, нужную для перехода на следующий степень.При пользовании бездепозитным бонусом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют некоторое обликов лимитов: <a href=https://39504.org/member.php?action=profile&uid=100611>https://39504.org/member.php?action=profile&uid=100611</a> 1×slots casino регистрация Казино выводит деньги только на ту платежную систему, с котрой был изготовлен депо. То есть, для вывода бездепозитного бонуса, Вам поначалу нужно пополнить счет. В некоторых клубах узкий перечень способов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет именно с этих платежных способов, которые доступны для вывода.
<b>Смотреть еще похожие новости:</b>
<a href=https://rolivka.online/forum/showthread.php?tid=40656>1×slots зеркало рабочее на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подарки на дни ? посвященные торжественным датам, требующие символического отыгрыша либо начисляются без того. Могут дариться игрокам сутки рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду.
#1120 Robertswodohttps://images.google.ng/url?q=https://www.xxxfrance.ink/coco/maman-avale-le-sperme-de-son-fils-9110
https://google.com.gr/url?… https://clients1.google.com.tj/url?… http://web-diving.ru/bitrix/rk.php?… http://www.cartotecnica-piemontese.it/catalogo.php?… https://lenino.info/…-402674.html https://www.ecclaw.net/viewlinks.php?… http://uk.knubic.com/redirect_to?… https://factorygifts.ru/bitrix/rk.php?… https://теплица-РґРІ.СЂС„/bitrix/redirect.php?goto=xxxfrance.ink/coco/xnxx-alg-402674.html
c367v
#1121 Antwanwedhttps://labhub.top
Спутник НАСА, наблюдавший за вспышками на солнце и помогал ученым понять мощные выбросы солнечной энергии, обрушился на этой неделе, почти через 21 год после его запуска. Уже давно списанный космолет RHESSI, который запустили в начале нулевых и списанный в 2018 году, снова влетел в земную атмосферу 19 апреля примерно в в 8 вечера, как говорят в NASA. Как говорит Мин обороны Америки, космолет примерно 300 килограмм снова вошел в атмосферу над Сахарой на 26 градусах долготы и 21,3 градусах широты. Это даст шанс им им <a href=https://labhub.top/product/nabor-oborudovaniya-dlya-4-mmc/>полный комплект оборудования 4-mmc</a> надежно. NASA думало, что большая часть космического корабля сгорит во время прохождения через атмосферу, но некоторые компоненты могли пережить вход в атмосферу. «На данный момент NASA не получало никаких сообщений о каком-либо ущербе или вреде, связанном с повторным входом в атмосферу», — заявляет агентство NASA. Космический увеличитель Webb заснял вспышку звездообразования во время столкновения галактик. Космолет был оборудован специальным прибором, который регистрировал рентгеновское и гамма-излучение Солнца. По словам НАСА, со своей старой позиции на низкой околоземной орбите космолет снял электроны, несущие много энергии, высвобождаемых солнечными вспышками. Эти солнечные явления высвобождают энергию, соизмеримую с 1 млрд. тонн мощной взрывчатки, в атмосферу Солнца в течение нескольких минут и вполне могут угрожать Земле, захватывая перебои в работе электросистем. За прошедшие годы RHESSI записал огромный диапазон размеров солнечных вспышек, от мелких микровспышек до гигантских вспышек, которые несоизмеримо большего взрывного потенциала.
#1122 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Анна Михалкова Юдаева Ксения Валентиновна порно <a href=https://glvk.guru/>1×bet на сегодня</a> порно с Анастасия Потапова, теннисистка гта казино <a href=https://strelochnik.com/>скачать букмекерскую контору на андроид</a> порно с Анастасия Потапова, теннисистка лучшие бесплатные онлайн казино 1×bet скачать приложение 1×bet слоты casino бонус порно с Елена Никитина, скелетонистка бывшие казино
DiskiPlus порно с Юлия Ефимова DiskiPlus 1×bet xbet <a href=https://www.diskiplus.ru>DiskiPlus порно с Диана Шнайдер (теннис)</a> DiskiPlus букмекерские конторы pin DiskiPlus порно с Аделия Петросян (фигурное катание) <a href=https://diskiplus.ru>DiskiPlus Матвиенко Валентина Ивановна порно</a> DiskiPlus casino зеркало сегодня рабочее DiskiPlus porno Алена Михайлова DiskiPlus кент казино DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus скачать 1×bet на андроид DiskiPlus pin casino DiskiPlus porno Илья Ковальчук (хоккей)
#1123 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino riobet Лут Оксана Николаевна порно <a href=https://t.me/vchkogpu_ru>casino ап</a> 1×bet зеркало рабочее на сегодня 1×bet xyz почему в казино нет окон <a href=https://m.repost.news/>казино онлайн бесплатно</a> винлайн букмекерская контора скачиваемые казино casino официальный зеркало фильмы казино рояль порно с Федор Чалов (футбол) Разуваева Ксения Денисовна порно казино
DiskiPlus 1×bet 1хбет DiskiPlus 1×bet на андроид бесплатно <a href=https://diskiplus.ru/>DiskiPlus casino x</a> DiskiPlus порно с Виктория Синицина, фигуристка DiskiPlus сайт букмекерской конторы <a href=https://www.diskiplus.ru>DiskiPlus казино фильм онлайн</a> DiskiPlus бесплатно фильм казино DiskiPlus казино смотреть онлайн DiskiPlus демо казино DiskiPlus 1×bet слоты официальный сайт DiskiPlus 1×bet вход DiskiPlus демо казино DiskiPlus 1×bet зеркало слоты 1×bet xyz
#1124 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация на сайте
Для всех бездепозитных бонусов действует наибольший лимит на выигрыш. Он показывает максимальную сумму, которую вы сможете получить, играя на бонусные кредиты. Как только вам удастся выполнить требования вейджера, дозволенный максимально несомненно переведен с бонусного счета на основной, а остаток будет списан.Если площадка дарит бездеп за регистрацию, то процедура его получения ординарна. Нужно только ввести аккаунт на сайте и активировать его, подтвердив адрес электрической почты, номер телефона либо другие данные, коие требует оператор. Перед этим нужно увериться, что пользователь располагается на официальном сайте казино, а не на мошеннической площадке. <a href=http://filmkachat.ru/>1×slots промокод при регистрации</a> Главное превосходство спинов – вероятность выучить разные слоты. Также получится насладиться бонусными раундами, испытывать удачу в риск-туре и преувеличить выигрыш за счёт особенных символов. Однако не игровой процесс заслуживает внимание, так какого-либо сосредоточиться на реальном выигрыше.Мы собрали и опубликовали перечень лучших бездепозитных казино с бонусами за регистрацию, коие гарантируют щедрые выигрыши и мгновенные выплаты. <a href=https://www.iotappstory.com/community/forum/5-support/4456-ethnic-home-decor-transform-your-space-with-cultural-design>https://www.iotappstory.com/community/forum/5-support/4456-ethnic-home-decor-transform-your-space-with-cultural-design</a> Минимального оборота. Этот лимит уточняется вейджером — пока игрок не поиграет на установленную сумму, вывод средств несомненно недосегаем. 1хслотс казино зеркало <a href=http://tatra114.ru/index.php?subaction=userinfo&user=eviltyro85>http://tatra114.ru/index.php?subaction=userinfo&user=eviltyro85</a> Лишь популярные и известные азартные заведения шансы разрешить себе раздавать бездепы вид дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, коие можно израсходовать в топовых аппаратах с высочайшей отдачей.
1×slots акции
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=54110>скачать 1×slots на андроид мобильная версия</a> 1×slots официальный сайт мобильная версия скачать 2. Создать свежий профиль. Для регистрации нужно наполнить небольшую анкету либо зайдите в собственный кабинет при помощи социальных сеток;Возможность поиграть дополнительное соревнование (а от и количество) абсолютно безвозмездно, а выигрыш, в свою очередь, поступает на счёт игрока. <a href=http://buhtarma.ru/users/ijuhisa>http://buhtarma.ru/users/ijuhisa</a> 1×slots официальный зеркало
1×slots сайт зеркало
В интернете большое известных игорных площадок с красивыми акционными предложениями. Однако внимательно читать условия десятков предложений в надоест, ну и время отнимет количество. Поэтому наша команда подготовила ТОП-3 сайтов с лучшими бездепозитными бонусами: Еще одно условие дотрагивается объемов ставки. Операторы устанавливают максимальную сумму, коию игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, избранной в Личном офисе. При превышении лимита есть риск потерять бонуса. Существующие лимитирования относятся и к конкретным обликам ставок. Например, играя в рулетку, клиент возможность столкнуться с запретом ставить фишки на шансы.Помните, собственно в некоторых забавах сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных забавах лишь от 5% до 50% суммы ставки считаются как отыгранные средства, в то время как в слотах идет в зачет все one hundred percent суммы. <a href=https://www.events18.hk/space-uid-48878.html>https://www.events18.hk/space-uid-48878.html</a> Наши эксперты изучают условия акции, затем в ручном режиме проверяют их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие характеристики. Мы не рекламируем казино, а даем игрокам информацию о превосходнейших из них. 1×slots актуальное зеркало
1×slots казино зеркало
Бездепозитные призы казино за регистрацию в 2022 году — это возможность сыграть за счёт заведения. Казино даёт клиенту шанс воспользоваться определённой суммой либо числом даровых вращений без внесения депо. Не путайте деморежим с реальной игрой без необходимости внесения депозита. Фриспины без депозита либо дополнительные свои помогут ближе познакомиться с игровой платформой и её функциями. За счёт подарков можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям из-за забавы против живых крупье.Чаще всего казино бонус за регистрацию без депозита даёт вероятность запустить любой машина. Но лучше внимательно ознакомиться с критериями. Иногда для игры доступны лишь определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, лучше начать знакомство с миром пыла непосредственно с «одноруких бандитов». Бездепы имеют входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой или баллами. скачать 1×slots официальный сайт <a href=http://nsk.confaelshop.ru/bitrix/redirect.php?goto=http://blizzard-lt.ru/bitrix/click.php?goto=http://dellparts.ru/bitrix/redirect.php?goto=https://telegra.ph/Nakazanie-po-state-228-i-primenenie-stati-30-Osnovnye-detali-i-osobennosti-09–23>http://nsk.confaelshop.ru/bitrix/redirect.php?goto=http://blizzard-lt.ru/bitrix/click.php?goto=http://dellparts.ru/bitrix/redirect.php?goto=https://telegra.ph/Nakazanie-po-state-228-i-primenenie-stati-30-Osnovnye-detali-i-osobennosti-09–23</a> Сразу последствии активации промокода возможно пользоваться презентом. Как уже упоминалось, призы бывают трёх обликов – фриспины, кредиты и фриплей-бонусы.
1×slots рабочее зеркало на сегодня
Иногда операторы требуют внесение минимального депо перед выводом для верификации платежного инструмента. В неких казино данный депозит того светит отыграть.Ещё одно распространённое акционное предложение – привлекательный презент с сомнительными притязаниями. К примеру, клуб сулит $100 виде бездепа, хотя с вейджером х80 либо х100. Отыграть подобный вейджер фактически невозможно и потому какого-либо концентрироваться на более интересных акциях. <a href=http://021bababa.org/space-uid-496474.html>http://021bababa.org/space-uid-496474.html</a> Выбирайте наилучшие благотворительные призы с помощью обзоров на Casinoz – и пусть вас сопутствует счастье при отыгрыше бонусных кредитов! скачать 1×slots официальный сайт
<b>Смотреть еще похожие новости:</b>
<a href=https://www.reisezielforum.de/viewtopic.php?t=595204>зеркала 1×slots</a>
<a href=http://sfessd.listbb.ru/memberlist.php?mode=viewprofile&u=86>1×slots зеркало</a>
<a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=179945>1× slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Как лишь получите бездеп в казино, всё точно не запамятовывайте проверять электрическую почту. Некоторые игорные клубы постоянно веселят активных гэмблеров приятными призами. Чаще всего получить презент можно в преддверии веселья, на денек рождение, за вербование приятеля. А также распространённым призом является прибавка к депозиту. Нужно чем пополнить счёт, и азартное заведение увеличит его на 50–100%. Выбирайте лучшие благотворительные призы с помощью обзоров на Casinoz – и пусть вас сопутствует удача при отыгрыше бонусных кредитов!
#1125 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
Наш список включает в себя лучшие бездепозитные призы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по принципиальным характеристикам: <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino09k online</a> Эффективность бездепов в рекламного прибора расценили многие операторы. Малоизвестные площадки употребляют эти промоакции, дабы быстро набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны неизменных посетителей. Не все сайты, дающие подарки без депозита, рекомендованы к забаве. За привлекательным промоописанием все скрываться неосуществимые обстоятельства отыгрыша и подводные камешки. <a href=https://www.doyoubuzz.com/animation-product>https://www.doyoubuzz.com/animation-product</a> 1х слот 1хслотс регистрация перейти на 1×slots <a href=https://tazovod.khalal.ru/forum/memberlist.php?mode=viewprofile&u=41119>https://tazovod.khalal.ru/forum/memberlist.php?mode=viewprofile&u=41119</a>
1×slots зеркало регистрация то дальше необходимо пройти
Следует выделить, что бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом.Еще одно условие касается объемов ставки. Операторы устанавливают максимальную необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном офисе. При превышении лимита есть риск лишиться бонуса. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, заказчик возможность столкнуться с запретом ставить фишки на шансы. <a href=http://yamato-ryu.ru/communication/forum/index.php?PAGE_NAME=message&FID=1&TID=46654&MID=11403&sessid=ba18c84d10020da611672ce79823a862&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1×slots официальный demo регистрация в 1×slots casino</a> 1×slots регистрация <a href=https://www.azeribalasi.com/member.php/31503-henrysweme>https://www.azeribalasi.com/member.php/31503-henrysweme</a> Как и другие акции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такого предложения считаются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает новых посетителей и дозволяет им составить впечатление о функционале, не рискуя значительными совокупностями. 1хслот официальный сайт зеркало
1хслотс рабочее зеркало
Итак, дабы бесплатные бонусные кредиты превратились в настоящие средства, которыми вы можете распоряжаться по своему усмотрению, их нужно отыграть. Вейджер по уточнять в правилах онлайн-казино.Вейджер (wager) – это коэффициент, который показывает на какую сумму необходимо устроить ставок, чтобы вывести бонус из казино. Пример: Вы получили за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода этого бонуса, Вам нужно сделать ставок на сумму: 500*70=3500 руб. Только всецело отыграв приз, Вы сможете вывести свой выигрыш. <a href=http://www.jingsuanwu.com/home.php?mod=space&username=Raymondquato>http://www.jingsuanwu.com/home.php?mod=space&username=Raymondquato</a> Это также безвозмездные деньги, которые поступают на аккаунты свежеиспеченных игры последствии регистрирования. А необыкновенность таких призов состоит в том, собственно обретенные деньги непременно стопам применять в продолжении назначенного времени. 1×slos регистрация в 1×slots casino Чтоб получить большой выигрыш, избирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, которые доступны по условиям отыгрыша.Для верификации номера телефонного, в собственном профиле изберите опцию „Подтвердить номер телефонного“ и введите в отвечающее поле код, приобретенный в sms-сообщении.
1×slots регистрация 1×slotscasino 56 online
К сожалению, нет. Почти все казино, требуют внесение но бы одного минимального депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, что исключить средства разрешено лишь на что, эту платежную систему, с коей был изготовлен депо. <a href=http://smpn1bejen.sch.id/forum/>1×slots казино мобильная версия</a> Самые пользующиеся методы вывода средств ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электрическим платежным системам типа Neteller и Skrill, а пользуются криптовалютными кошельками. Вывод выигрышей возможность осуществляться мгновенно либо занимать от нескольких часов до нескольких суток.Подтвердите лицо, предоставив оператору казино средства паспортные данные. Инструкции обыкновенно несложные, основное — конкретно им стопам. Если написано, что «на фото должны быть видны все четыре угла страницы паспорта» — устройте непосредственно это фото. зеркала 1×slots <a href=http://teessan.kr/bbs/board.php?bo_table=free&wr_id=1006238>http://teessan.kr/bbs/board.php?bo_table=free&wr_id=1006238</a>
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Пoдтвepдить личнocть клиента. Для успешного вывода средств, необходимо доказать личность клиента. Нa этaпe вepификaции пpoфиля, работники службы защищенности должны увериться, собственно у игрока всего лишь раз акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не может исключить собственный выигрыш, случае у него будет несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы. У каждой игры средства требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система засчитает любую ставку. В рулетке и покере сделать это намного труднее. Именно потому так важно внимательно разбирать условия получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой забаве, то новенькие просто «спустят бонус на ветер». <a href=http://gtabg.net/profile.php?lookup=77541>http://gtabg.net/profile.php?lookup=77541</a> 1хслотс официальный сайт зеркало Демоказино есть практически на каждом сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются веско пореже: там когда выигрыша и соблюдения критерий акций бездеп можно перевоплотить в настоящие деньги.
<b>Смотреть еще похожие новости:</b>
<a href=http://av3526.com/forum.php?mod=viewthread&tid=109&pid=27639&page=4&extra=page%3D1#pid27639>1×slots регистрация</a>
<a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=419135>1хслотс официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Частенько новенькие не разумеют, как активировать подарки или исключить первый выигрыш. Для сходственных случаев наша команда обрисовала основные термины – собственно такое фриспины, вейджер, как его отыграть, для необходимо проходить верификацию.
#1126 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet рабочее на сегодня казино регистрации <a href=https://rumafia.news/>new casino</a> casino играть зеркала официальных сайтов казино <a href=https://repost.news/>Фастова Елена Владимировна порно</a> букмекерская контора зенит porno Екатерина Ефременкова, шорт-трекистка мелбет букмекерская контора Петрова Ольга Викторовна порно 1×bet скачать бесплатно kent casino казино без
DiskiPlus пин casino DiskiPlus bet casino <a href=https://www.diskiplus.ru/>DiskiPlus порно с Аделия Петросян (фигурное катание)</a> DiskiPlus порно с Евгений Малкин (хоккей) DiskiPlus 7k casino официальный сайт <a href=https://www.diskiplus.ru/>DiskiPlus казино смотреть</a> DiskiPlus какие казино DiskiPlus букмекерская контора официальный сайт DiskiPlus Ирина Горбачева DiskiPlus порно с Дарья Клишина, легкоатлетка DiskiPlus Светлана Ходченкова DiskiPlus 1×bet сайт DiskiPlus Приезжева Екатерина Геннадьевна порно
#1127 Charlesgunnyhttp://filmkachat.ru
1хслот скачать
Также, такой необходимо доказать свой номер аппарата, достичь код, приобретенный в смс-сообщении от клуба ввести в особое поле в личном офисе игрока. <a href=http://filmkachat.ru/>1×slots зеркало быструю регистрацию а также мгновенное</a> <a href=https://feedback.goodnotes.com/forums/191274-customer-suggestions-for-goodnotes/suggestions/49478645-%D0%BA%D0%B0%D0%BA-%D0%B2%D1%8B%D0%B3%D0%BE%D0%B4%D0%BD%D0%BE-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D1%82%D1%8C-%D0%B0%D0%B2%D1%82%D0%BE-%D0%BF%D0%BE%D1%81%D0%BB%D0%B5-%D0%B4%D1%82%D0%BF-%D1%8D%D0%BA%D1%81%D0%BF%D0%B5%D1%80%D1%82%D0%BD%D0%BE%D0%B5-%D1%80%D1%83%D0%BA>https://feedback.goodnotes.com/forums/191274-customer-suggestions-for-goodnotes/suggestions/49478645-%D0%BA%D0%B0%D0%BA-%D0%B2%D1%8B%D0%B3%D0%BE%D0%B4%D0%BD%D0%BE-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D1%82%D1%8C-%D0%B0%D0%B2%D1%82%D0%BE-%D0%BF%D0%BE%D1%81%D0%BB%D0%B5-%D0%B4%D1%82%D0%BF-%D1%8D%D0%BA%D1%81%D0%BF%D0%B5%D1%80%D1%82%D0%BD%D0%BE%D0%B5-%D1%80%D1%83%D0%BA</a> Также, учите, что бездепозитный приз возможно исключить только сомнений случае, когда станут исполнены все условия отыгрыша.Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих притязаний, не неотъемлемой верификации. Если на сайте предусмотрена обязательная процедура подтверждения личности, то исключить выигрыш удастся лишь последствии проверки данных. Приготовьтесь наполнить анкету и выслать в техподдержку документ, подтверждающий личность. зеркло казино 1×slots <a href=http://korgmusic.ru/bitrix/redirect.php?goto=http://photoclubs.ru/go/url=http://sms74.ru/bitrix/rk.php?goto=https://telegra.ph/Vozdejstvie-i-posledstviya-ostanovki-obshchestvennogo-transporta-09–23>http://korgmusic.ru/bitrix/redirect.php?goto=http://photoclubs.ru/go/url=http://sms74.ru/bitrix/rk.php?goto=https://telegra.ph/Vozdejstvie-i-posledstviya-ostanovki-obshchestvennogo-transporta-09–23</a>
1×slots рабочее зеркало
Мы подготовили список, где есть практически актуальные и свежие бездепозитные призы казино, коие вам получить безвозмездно. Для наших юзеров есть особые предложения неповторимые бонусы, которые вы ни не отыщите, их мы обозначили особой красной плашкой «Exclusive». <a href=https://forum.bandariklan.com/showthread.php?tid=537696>зеркала 1×slots</a> 1×slots промокод при регистрации 2025 Осталось избрать казино с бонусом за регистрацию и сделать профиль. После активации дара выигрыш зависит от Фортуны и способностей.Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и расценить необыкновенности, труднодоступные при забаве в демо режиме. Многие новые клиенты переходят в число неизменных, а оператор получает долгосрочную выгода. <a href=http://www.sicilianodentro.it/forum/members/241993.html>http://www.sicilianodentro.it/forum/members/241993.html</a> 1×slots регистрация 1×slotscasino09k online
1× slots регистрация в 1×slots casino
Основное отличие сомнений, что для получения бездепа не пополнять баланс в казино. Но не этого, есть ряд и отличий: <a href=http://kpforma.ru/bitrix/rk.php?goto=http://avt-1c.ru/bitrix/redirect.php?goto=http://flegl.blog.idnes.cz/redir.aspx?url=https://telegra.ph/Kak-najti-mestonahozhdenie-zaklyuchennogo-po-ego-familii-09–23>http://kpforma.ru/bitrix/rk.php?goto=http://avt-1c.ru/bitrix/redirect.php?goto=http://flegl.blog.idnes.cz/redir.aspx?url=https://telegra.ph/Kak-najti-mestonahozhdenie-zaklyuchennogo-po-ego-familii-09–23</a> Мы собрали и опубликовали список превосходнейших бездепозитных казино с бонусами за регистрацию, которые гарантируют щедрые выигрыши и мгновенные выплаты. 1хслот скачать
1×slots коды
Для получения предоставленных бонусов вам пригодиться — ПК или мобильное прибор, и остальное дело за небольшим.Вы не в коем случае ни же рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный бонус, по мимо практической игры на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, научится регулировать менять ставки и линии, исследовать бонусные игры и их выигрышные композиции, да счете просто зарядится кучей эмоций! Ведь вы будите играть на бонусные свои, которые возможно отыграть и исключить, не просто на демо счет, что, этим наиболее адреналин в крови более повысится а пульс забьется с частым ритмом! Но существуют азартные заведения, готовые просто например вручить деньги на игру. Для сего достаточно сделать профиль. Чтобы исключить выигрыш, сначала нужно выполнить вейджеровые обстоятельства, прописанные в критериях получения бездепа.Бездепозитный бонус часто может стать доступным незамедлительно после окончания регистрации, что в большинстве случаев единственным требованием к нему считается регистрация, а этого проверка вашей свежей учетной записи. 1×slots официальный сайт зеркало рабочее <a href=http://fitagrunt.ru/index.php?subaction=userinfo&user=oludugy>http://fitagrunt.ru/index.php?subaction=userinfo&user=oludugy</a> Фриспины без депозита или вспомогательные средства посодействуют ближе познакомиться с игровой платформой и её функциями. За счёт даров можно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям ради забавы против живых крупье.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Вейджер (wager) – это коэффициент, который демонстрирует на какую сумму нужно устроить ставок, дабы исключить приз из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода этого приза, Вам необходимо сделать ставок на необходимую: 500*70=3500 рублей. Только полностью отыграв приз, Вы можете исключить собственный выигрыш. <a href=http://gticlub.lv/index.php?subaction=userinfo&user=alikeflat56>http://gticlub.lv/index.php?subaction=userinfo&user=alikeflat56</a> Многие новички колеблются, собственно поощрительный приз не несомненно отдавать, в в они выиграли у казино. Это полностью неопасно и накрепко. Выводя выигранные свои, игрок просто останавливает свое участие деле и утрачивает уникальную возможность – бесплатно наращивать личное материальное положение. казино 1×slots Подарки на определенные даты отличаются условиями получения. Если поощрение начисляют игроку на день рождения, то сумма обычно в от совместного размера депо последний год.В большинстве заведений устроить это можно по адресу электронной почты, по номеру телефона, через социальную сеть либо гугл-аккаунт.
<b>Смотреть еще похожие новости:</b>
<a href=https://chodilinh.com/threads/1×%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE.459896/>1×слотс казино</a>
<a href=https://forum.immortales-gilde.de/viewtopic.php?f=2&t=382628>1×slots мобильная версия войти казино</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Каждый игры обязан сперва детально выучить обстоятельства по получению и отыгрышу понравившегося презента. Если всё устраивает, поспешите отобрать бесплатные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик момент начать вертеть барабаны топовых слотов. Но а в вы теснее профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в онлайн казино;
#1128 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Дарья Мороз 1×bet рабочее на сегодня <a href=https://slon-ru.com/>официальные сайты казино</a> casino промокод букмекерские конторы бет <a href=https://m.repost.news/>включи казино</a> казино без порно с Георгий Джикия (футбол) как выиграть в казино 1×bet скачать приложение Нургалиева Эльвира Рамиловна порно порно с Зырянова Анастасия Владимировна pinco casino
DiskiPlus ограбление казино DiskiPlus casino автомат <a href=https://diskiplus.ru/>DiskiPlus скачать букмекерскую контору</a> DiskiPlus 1×bet вход DiskiPlus симулятор казино <a href=https://diskiplus.ru/>DiskiPlus 7k casino официальный</a> DiskiPlus мобильные букмекерские конторы DiskiPlus up букмекерская контора DiskiPlus букмекерские конторы бет DiskiPlus pin up casino официальный DiskiPlus Ирина Горбачева DiskiPlus букмекерская контора фонбет официальный сайт DiskiPlus Разуваева Ксения Денисовна порно
#1129 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало на сегодня
Для вывода средств приз надо(надобно) несомненно отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариантами отыгрыша бездепозитного приза до его получения, чтобы избежать конфликтных ситуаций. <a href=http://filmkachat.ru/>1×слотс казино</a> <a href=https://www.lasso.net/go/link/TkCFy8>https://www.lasso.net/go/link/TkCFy8</a> Для ревизии применяются сканы паспортов, водительских удостоверений, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если юзер замечен в попытке завести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их владелец попадает в темный список. При игре на лицензионной площадке не стоит бояться свидетельствовать достоверную персональную информацию (шифрование ликвидирует утечку индивидуальных данных). 1×slots зеркало этих способов предполагает регистрацию <a href=http://smy.kr/bbs/board.php?bo_table=free&wr_id=259335>http://smy.kr/bbs/board.php?bo_table=free&wr_id=259335</a> Фриспины предназначены для применения в видео слотах. Внимательно ознакомьтесь с условиями – часто их выдают на некоторые автоматы. В зависимости от клуба, у вас выйдет устроить определённое число ставок. Кстати, продвинутые игорные жилища позволяют запускать каждых «одноруких злодеев».
1х слот 1хслотс регистрация перейти на 1×slots
Для всех бездепозитных бонусов действует наибольший лимит на выигрыш. Он показывает предельную сумму, коию у получить, играя на бонусные кредиты. Как только вас получится выполнить требования вейджера, возможный максимум будет переведен с бонусного счета на ведущей, а остаток несомненно списан. 1×slos регистрация в 1×slots casino <a href=https://deanxhpv74185.shoutmyblog.com/29771651/deep-nude-understanding-the-implications-of-ai-generated-imagery>https://deanxhpv74185.shoutmyblog.com/29771651/deep-nude-understanding-the-implications-of-ai-generated-imagery</a> Размер бонуса. В качестве бездепов обыкновенно начисляют большие суммы, а когда речь о призах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино все подарить игроку до 2000$.Активация случается счет промокодов, коие вводятся в собственном кабинете последствии регистрации. Среди спецпредложений в перечне Casino.ru находятся эксклюзивные промокоды, коие доступны лишь посетителям портала. Другие методы начисления средств ? автоматическая активация сразу последствии сотворения аккаунта и получение дара по запросу в службу технической поддержки. сайт 1× slots casino 3. Подтвердить данные. В зависимости от клуба, нужно привязать телефон либо почту, указать персональную информацию;
1×slots рабочее зеркало на сегодня
Мы рекомендуем не отказываться от подобных предложений известных казино. Выделите количество минут на регистрацию, получите бонус и попробуйте его отыграть. Может быть, сейчас фортуна несомненно на вашей стороне! <a href=http://www.jjrun.kr/bbs/board.php?bo_table=free&wr_id=736702>http://www.jjrun.kr/bbs/board.php?bo_table=free&wr_id=736702</a> Также учтите, что кое-какие игровые платформы сузивают перечень стран, коие готовы получить предложенный бездепозитный приз за регистрацию. К образцу, существуют онлайн-заведения, выдающие подобные призы только жителям конкретных стран. К образцу, онлайн казино 777 Оригинал дает бездепозитный бонус только игрокам из России и стран СНГ. Или напротив, пичкают вознаграждением всех, не обитателей неких стран (исходя из этого, стопам внимательно изучать перечень, дабы впоследствии не возникло никаких вопросов и жалоб).Ниже указан актуальный список законных казино в Беларуси с призами на первый депо. Вы сможете попасть на официальный вебсайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. 1 х слотс зеркало
1хслот 1хслотс регистрация перейти на 1×slots
1×slots регистрация 1×slots casino 777 online <a href=http://188.almatybala.kz/user/Randalkix/>http://188.almatybala.kz/user/Randalkix/</a> Бесплатный бонус – кредиты, которые онлайн-казино начислит клиенту, не принуждая его пополнять игровой счет.Так что сможете неустрашимо регистрироваться без всяких раздумий. Фортуна сейчас наверняка на вашей стороне. Не побаивайтесь, так последствие какого или ущерба Вам абсолютно не угрожает. С такими призами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе.
1×slots регистрация на 1хслотс
<a href=http://miupsik.ru/forums/member.php?action=profile&uid=5692>http://miupsik.ru/forums/member.php?action=profile&uid=5692</a> Онлайн-казино с бездепозитными призами ставят клиентам обстоятельства для пользования бездепами, поэтому перед ролью в акции какого-либо досконально ознакомиться со всеми правилами и нюансами акции. Условия могут дотрагиваться получения бонуса, его применения и следующего вывода валютных средств если, тогда, выигрыша.Но есть азартные заведения, готовые просто так вручить деньги на игру. Для сего довольно сделать профиль. Чтобы исключить выигрыш, сначала нужно выполнить вейджеровые условия, прописанные в критериях получения бездепа. скачать 1×slots на андроид мобильная версия Представьте момент, когда при ставке в 10 руб. Вы получите подобное умножение. Миллион руб. За одно вращение, собственно абсолютно вероятно. Поэтому вопрос, сколько возможно выиграть остаётся не. Предлагаем проверить других. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный бонус и проверяйте фортуну в деле. Разумеется, исключить средства сложно. Однако шансы есть у всех.Но никогда не забывайте внимательно разбирать правила роли в бонусных акциях. Если вы нарушите но бы одно условие, позже вы не можете уладить недоразумение с администрацией.
<b>Смотреть еще похожие новости:</b>
<a href=https://ragnarok.ch/forum/viewthread.php?thread_id=202786>1×slots официальный сайт мобильная версия</a>
<a href=http://rapbeatsforum.com/viewtopic.php?t=693947>1×slots casino online регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Не хотите сыграть в азартные игры, не рискуя своими деньгами, хотя получая в все выплаты? Подобную возможность деют все превосходнейшие порталы с азартными развлечениями. В их числе большое честных и надежных интернет-казино на российском языке. Они привлекают новых пользователей различными поощрительными событиями, включая бездепозитные, либо безвозмездные бонусы.
#1130 Ремонт iPhone в Москвеhttps://remont-iphone-box.ru/
Профессиональный сервисный центр по ремонту Apple iPhone в Москве. Мы предлагаем: <a href=https://remont-iphone-box.ru/>сервисный центр по ремонту айфонов в москве</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#1131 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
7k casino зеркало рабочее порно с Матвей Сафонов (футбол) <a href=https://t.me/vchkogpu_ru>карты казино</a> casino скачать казино <a href=https://www.ossetia.tv/>вавада казино</a> bitz casino казино рояль какие казино бесплатно фильм казино реального казино 1×bet зеркало слоты казино ставка
DiskiPlus Мухтиярова Елена Вячеславовна порно DiskiPlus porno Андрей Рублев (теннис) <a href=https://diskiplus.ru>DiskiPlus casino на телефон</a> DiskiPlus порно с Абрамченко Виктория Валериевна DiskiPlus букмекерская контора бесплатно скачать <a href=https://www.diskiplus.ru/>DiskiPlus порно с Юлия Ефимова, пловчиха</a> DiskiPlus скачать букмекерскую контору на андроид DiskiPlus 1×bet сейчас DiskiPlus porno Илья Ковальчук (хоккей) DiskiPlus 1×bet xbet DiskiPlus casino онлайн DiskiPlus букмекерская контора бетсити DiskiPlus casino зеркало сегодня
#1132 Ремонт Айфоновhttps://remont-iphone-box.ru/
Профессиональный сервисный центр по ремонту Apple iPhone в Москве. Мы предлагаем: <a href=https://remont-iphone-box.ru/>срочный ремонт iphone в москве</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#1133 Charlesgunnyhttp://filmkachat.ru
1×слот регистрация в 1×slots casino
Отказ в прохождении верификации. Если заказчик не желает либо имеет дать документы, подтверждающие его лицо, профиль несомненно заблокирован совместно, вкупе со всеми бонусными начислениями.Вознаграждения за получение VIP-статуса ? начисляются в рамках программки преданности при достижении еще значения или выдаются персонально менеджерами службы. <a href=http://filmkachat.ru/>1×slots промокод при регистрации</a> Во время забавы в казино, выигрыши, полученные спасибо бесплатным призовым фондам, суммируются и включаются в общую сумму для отыгрывания. Однако, в удача улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно разрешит исключить финансовые средства. Сумма вывода будет находиться от лимита, утвержденного именно в этом учреждении. Поэтому, пристально нужно разбирать верховодила выдачи анлимитных депо.4. Заберите подарок. Чаще всего бонус активируется незамедлительно последствии регистрации. Но случаются истории, когда надо(надобно) зайти в собственный кабинет либо написать в службу. <a href=https://collectednotes.com/lexxeagle/kak-pravilno-i-vygodno-prodat-svoi-avtomobil>https://collectednotes.com/lexxeagle/kak-pravilno-i-vygodno-prodat-svoi-avtomobil</a> Как лишь вы отыграли вейджер и средства с бонусного баланса перешли вам на настоящий счет, Вы неустрашимо можете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать минимальный депо к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депозитом).Какие бонусы возможность еще получить считая бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, каждое онлайн казино предлагает игрокам прибыльное предложение на первый депозит, вы совершаете депо, ваш депо увеличивается в двое либо в в 3, тем наиболее начать выступать можно с больше крупной суммой, например же не запамятываем тему вейджер на призы. 1хлот регистрация в 1×slots casino <a href=http://opendelreyoaks.net/doku.php?id=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D0%BE%D0%B2%20%D0%BD%D0%B0%20%D0%B4%D0%BE%D0%BC%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO>http://opendelreyoaks.net/doku.php?id=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D0%BE%D0%B2%20%D0%BD%D0%B0%20%D0%B4%D0%BE%D0%BC%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO</a> Казино выделяет вероятность заработать и исключить настоящие средства на бездепозитных бонусах. Обычно, это малозначительная сумма, которую казино имеет себе разрешить подарить игроку.
1×slots регистрация
Если идет об эксклюзивных услугах, имеет потребоваться регистрация в казино по ссылке с партнерского сайта.Пoдтвepдить личнocть клиента. Для удачного вывода средств, нужно доказать лицо клиента. Нa этaпe вepификaции пpoфиля, сотрудники службы защищенности обязаны увериться, что у игрока чем один акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не сможет вывести свой выигрыш, случае у него несомненно несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы. <a href=https://forum.bandariklan.com/showthread.php?tid=533008>1×slot казино зеркало</a> 1×slots официальный сайт скачать Для вывода средств приз нужно несомненно отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами акции и вариациями отыгрыша бездепозитного бонуса до его получения, дабы избежать конфликтных ситуаций. <a href=https://love-n-magic.ru/index.php?subaction=userinfo&user=RalphEdgen>https://love-n-magic.ru/index.php?subaction=userinfo&user=RalphEdgen</a> Бездепозитный приз предоставляется новенькому игроку за определенные действия. Часто презент вид средств либо фриспинов выдается за регистрацию, спасибо чему юзер получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. 1× slots casino официальный сайт Бездепы с безвозмездными вращениями деют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд уплачивает казино. Число спинов ограничено и редко выше сотню. Если промоакция включает в себя количество бесплатных игр, их начисление имеет быть разбито на несколько дней.
1× slots официальный
Как только вы отыграли вейджер и свои с бонусного баланса перебежали вам на настоящий счет, Вы храбро можете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать минимальный депо к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депо). Большинство интернет-казино из нашего топ-10 готовы порадовать вас неповторимыми акциями. Читайте о них в обзорах и на форуме.Прямо в арестуйте безвозмездные вращения за регистрацию без депозита и начинайте коллекционировать призовые комбинации ради солидных выигрышей! <a href=https://www.alligator.spb.ru/forum/index.php?PAGE_NAME=profile_view&UID=78582>https://www.alligator.spb.ru/forum/index.php?PAGE_NAME=profile_view&UID=78582</a> 1× slots casino зеркало Ещё одно распространённое акционное предложение – привлекательный подарок с неблаговидными требованиями. К примеру, клуб обещает $100 в бездепа, но с вейджером х80 или х100. Отыграть такой вейджер фактически невозможно и потому другого концентрироваться на больше занимательных промоакциях.
1×slots скачать на айфон
<a href=https://forum.banknotes.cz/viewtopic.php?t=82046>1×slots официальный сайт скачать</a> 1×slots регистрация <a href=https://wiki.team-glisto.com/index.php?title=Benutzer:JPJMarty050>https://wiki.team-glisto.com/index.php?title=Benutzer:JPJMarty050</a>
x1 slots регистрация в 1×slots casino
Онлайн гемблинг развивается с каждым деньком все больше и больше, свежие бренды создаются не по дням а по часам. Новые интернет казино проделывают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и что, этим наиболее предлагают бездепозитные бонусы за регистрацию, что бы не пропустить такую возможность — как пользоваться свежим бездепом, советуем навещать наш вебсайт как можно чаще, самое аппетитное и свежие будет добавляться в данном же списке. Но ни не запамятовывайте внимательно читать управляла роли в бонусных промоакциях. Если вы нарушите желая бы одно условие, позже вы не сможете устроить недоразумение с администрацией.Заполняя данные в личном профиле, указывайте лишь достоверную информацию, так как Вам придется ее подтвердить в будущем при выводе денег. <a href=http://prekrassad.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://xn–80ahdmoqiwg1bc.xn–p1ai/bitrix/redirect.php?goto=http://mebleder.ru/bitrix/redirect.php?goto=https://telegra.ph/ZHaloba-v-upravlyayushchuyu-kompaniyu-38645–09–23>http://prekrassad.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://xn–80ahdmoqiwg1bc.xn–p1ai/bitrix/redirect.php?goto=http://mebleder.ru/bitrix/redirect.php?goto=https://telegra.ph/ZHaloba-v-upravlyayushchuyu-kompaniyu-38645–09–23</a> 1хслотс казино зеркало Иногда виде бездепа, казино дарит минимальный приз (до 50 рублей), из-за которого не стоит заморачиваться.
<b>Смотреть еще похожие новости:</b>
<a href=https://portugal-campings.com/pt/profile/jamescip/>1хслотс официальный сайт зеркало</a>
<a href=http://sofanatki.ekafe.ru/viewtopic.php?f=1&t=3377>казино 1× slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные призы казино это экономическая компенсация, предлагаемая пользователям на дармовой основе и возможность играть в онлайн казино бесплатно. Если сопоставлять их с поощрениями за лепта, каких свои выдаются лишь впоследствии первоначального пополнения счета, то бездепозитные гонорары получаются безвозмездно. То есть, играющий получает возможность создавать ставки на уже быть финансы, которые выдаст заведение, выполняя, этом, обыденные действия, чтобы их извлечь (тут идет о регистрация, удостоверении личности с внедрением номера телефона, оформления заявки и т.д. ). Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, чтобы была возможность исключить выигрыш.
#1134 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
online casino порно с Диана Шнайдер (теннис) <a href=https://vestnik-jurnal.com/>casino скачать</a> black russia казино сайте букмекерской конторы фонбет <a href=https://www.ossetia.tv/>казино рояль</a> retro casino casino riobet казино без Черкесова Бэлла Мухарбиевна порно букмекерская контора фонбет 1×bet на андроид бесплатно рабочие зеркала казино
DiskiPlus casino играть DiskiPlus гта онлайн казино <a href=https://diskiplus.ru>DiskiPlus Яровая Ирина Анатольевна порно</a> DiskiPlus casino зеркало сегодня рабочее DiskiPlus 7k casino скачать <a href=https://www.diskiplus.ru>DiskiPlus Шевцова Татьяна Викторовна порно</a> DiskiPlus 1×bet приложение DiskiPlus пинко casino DiskiPlus casino рабочее DiskiPlus casino DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus casino betting DiskiPlus винлайн букмекерская контора
#1135 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора casino 7k рабочее <a href=https://krtka.info/>официальные сайты казино</a> реального казино porno Александра Степанова, фигуристка <a href=https://sovsekretno.net/>pin up casino зеркало</a> vodka casino порно с Анна Щербакова, фигуристка porno Вера Бирюкова, гимнастка сайты казино porno Виктория Баркова, легкоатлетка pin up casino зеркало Шевцова Татьяна Викторовна порно
DiskiPlus букмекерская контора официальный сайт скачать DiskiPlus скачать сайт букмекерской конторы <a href=https://diskiplus.ru>DiskiPlus porno Илья Ковальчук (хоккей)</a> DiskiPlus casino промокод DiskiPlus реального казино <a href=https://www.diskiplus.ru/>DiskiPlus суть казино</a> DiskiPlus казино регистрации DiskiPlus порно с Карен Хачанов (теннис) DiskiPlus casino рабочее DiskiPlus букмекерская контора без DiskiPlus bitz casino DiskiPlus kent casino DiskiPlus самое казино
#1136 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet телефон порно с Зырянова Анастасия Владимировна <a href=https://slon-ru.com/>casino riobet</a> Петрова Ольга Викторовна порно порно с Максим Глушенков (футбол) <a href=https://rucriminal.info/>1×bet xbet</a> порно с Карен Хачанов (теннис) сайт казино вход 1×slots casino casino x гта онлайн казино 1×bet casino приложения
DiskiPlus казино рояль DiskiPlus 1×bet рабочее на сегодня <a href=https://diskiplus.ru>DiskiPlus приложения букмекерских контор</a> DiskiPlus new casino DiskiPlus сколько казино <a href=https://www.diskiplus.ru/>DiskiPlus ап казино</a> DiskiPlus 1×bet xbet xyz DiskiPlus 1×bet регистрация DiskiPlus casino регистрации DiskiPlus сайт букмекерской конторы DiskiPlus порно с Георгий Джикия (футбол) DiskiPlus Ирина Горбачева DiskiPlus порно с Виктория Синицина, фигуристка
#1137 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию процедура займет всего лишь
Многие казино деют в маркетинговых целях безвозмездные бонусы необыкновенно для наших читателей. Чтобы их получить, надо(надобно) перебежать на игровой сайт по партнерской ссылке с нашего портала. <a href=http://filmkachat.ru/>казино 1× slots официальный сайт</a> <a href=https://www.iotappstory.com/community/forum/5-support/4455-interior-design-fair-2025-global-innovation-design-trends>https://www.iotappstory.com/community/forum/5-support/4455-interior-design-fair-2025-global-innovation-design-trends</a> казино 1× slots официальный сайт <a href=http://cjdog.com/home.php?mod=space&uid=129712>http://cjdog.com/home.php?mod=space&uid=129712</a>
1×slots рабочее зеркало
<a href=https://adminclub.org/showthread.php?tid=307069>1×slots официальный сайт зеркало</a> 1×slots сайт <a href=http://nbsmotor.ru/bitrix/rk.php?id=17&site_id=s1&event1=banner&event2=click&goto=http://novoprof.net/bitrix/redirect.php?goto=http://happylama-shop.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/MvgjI2F_7Ke>http://nbsmotor.ru/bitrix/rk.php?id=17&site_id=s1&event1=banner&event2=click&goto=http://novoprof.net/bitrix/redirect.php?goto=http://happylama-shop.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/MvgjI2F_7Ke</a> Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.На критериях отыгрыша даровых призов следует остановиться подробнее. С ними связаны аспекты, коие нельзя забыть без внимания. x1 slots 1хслотс регистрация перейти на 1×slots С этими простыми советами любое казино с призом за регистрацию способно принести в разы больше выгоды и полезности.
1х слот 1хслотс регистрация перейти на 1×slots
Бездепозитные призы отличный вариант безвозмездной забавы в игровые автоматы. Многие пользователи сети не знают, собственно в казино возможно начать играть абсолютно бесплатно, а позже исключить выигрыш на банковскую карту или электрический кошелек, иные не доверяют онлайн казино, а третьи удачно играют и выигрывают – и тотчас достаточно великие суммы.Выбор каждого онлайн казино на нашем сайте. В описании к любому Вы можете узнать, собственно получите за творение аккаунта. <a href=http://nfb3806w.bget.ru/user/JulesVog/>http://nfb3806w.bget.ru/user/JulesVog/</a> Мы подготовили перечень, где есть практически актуальные и свежие бездепозитные бонусы казино, которые вам получить безвозмездно. Для наших юзеров есть особые предложения неповторимые призы, коие вы ни не найдете, их мы обозначили особой красноватой плашкой «Exclusive».Выше мы предоставили глубокий комплект самых новых и актуальных бездепозитных призов в онлайн казино без пополнения на 2022 год, где продоставляется воспользоваться хоть ценным бездепозитным призом. 1хслотс казино зеркало С не отыгранным бонусом воспрещается превосходить объем наибольшей ставки. Нарушение сего обстоятельства повлечет за собой аннулирование выигрыша.Но а если вы теснее профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы автоматически перейдете в интернет казино;
1хслотс рабочее зеркало
Чтобы играть безвозмездно на реальные средства в казино, порой довольно просто зарегистрироваться. Иногда нужно выполнить дополнительные деянья.Вывод выигрыша с бездепозитных бонусов казино – щедрый подарок от азартных клубов. Но дабы исключить собственный заработок, нужно выполнить ряд условий: 1хслот зеркало сайта <a href=https://www.varranger.com/vforum/index.php?action=profile;u=36641>https://www.varranger.com/vforum/index.php?action=profile;u=36641</a> Как правило, новоприбывшие геймеры начала хотят ознакомиться с методами ввода и вывода денежных средств и сроки выполнения поданных заказов чтобы четко осознавать, как скоро появится исключить собственный казино приз за регистрацию без депо на электронный кошелек либо же банковскую карту. К счастью для всех играющих, снутри конкретных холдингов, все казино соперничают между собой. Ведь в бы конкретную фирму давало лишь одно онлайн-заведение, то навряд бы клиенты заметили казино с призом за регистрацию и могли бы рассчитывать только на вознаграждение повторяющий бонуса на 1-ое инвестиция. К каждому заведению регулярно следует привлекать новых игроков, что, конечном, лишь на руку всем играющим.
1хслотс официальный сайт зеркало
Выполнив все притязания оператора, заказчик может оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем не более суток. Если дополнительно требуется пройти функцию верификации, то срок возрастает до 1–2 рабочих дней. Для перевода используются банковские приборы и электрические платежные системы. Второй способ подходит лучше, так как основная транзакций в этом случае осуществляются мгновенно. В связи со спецификой функционирования банков обработка платежей возможность занять до нескольких трудящихся дней.Создание аккаунта. На веб-сайте казино нужно обнаружить регистрационную форму и заполнить пустопорожние поля личными данными. Иногда на этом шаге потребуется показать лишь адрес электрической почты и пароль, хотя почаще хотелось наполнить анкету персональной информацией (ФИО, дата рождения, место проживания и т.д. ). Нужно указывать лишь реальные данные, что впоследствие они будут проверены. <a href=http://www.jcdqzdh.com/home.php?mod=space&uid=243422>http://www.jcdqzdh.com/home.php?mod=space&uid=243422</a> Варианты выигрыша находятся от Вашей успеха и критерий игорного портала. Выше мы сказали, собственно некоторые бездепозитные призы в 2022 году выдаются с лимитированиями по максимальной выплате. Однако, остаются и те, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность современных игр на деньги, можно выиграть невозможные суммы. Сегодняшние игровые автоматы либо видео слоты, как их нарекают. Могут выдавать солидные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000. 1хслотс зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://aficionado.pl/showthread.php?198752–1×slots-casino-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F&p=220288>1×slots casino регистрация</a>
<a href=http://board.eternityrpc.com/thread-3973.html>1×slots зеркало которую указывали при регистрации кстати</a>
<a href=https://elclasificadomx.com/author/jameslog/>1×слот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Онлайн-казино кропотливо продумывают бонусные обстоятельства, коие нужно выучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и лимитирования.
#1138 RichardTuthttps://bormoder.ru
После нескольких дней и 257 пиков НФЛ 2025 года завершился. Все 32 команды должны почувствовать, что они стали сильнее, хотя некоторые из них должны чувствовать себя лучше других. Никогда не стоит оценивать о результатах до того, как они появятся на поле НФЛ, и мы не будем здесь оценивать, как покажут себя новички лиги. Это предоставит возможность им <a href=https://bormoder.ru/balashikha-kupit-mefedron-mdma.html>купить extasy</a> и не только. Однако совершенно справедливо рассматривать, как франшизы сделали мероприятие, закрыли потребности, увеличили ценность (или нет) и сопоставили стратегии драфта с долгосрочными планами команды. Все верно: пришло время для оценок Bleacher Report после драфта для каждой франшизы. Ниже вы найдете описание каждого выбора из каждой команды НФЛ с анализом класса на основе вышеупомянутых факторов, прогнозируемого соответствия команде и любых соответствующих обменов. Поскольку ценность меняема, мы использовали окончательные рейтинги перспектив 2025 года отдела скаутинга анализа в качестве ориентира. Команды перечислены в алфавитном порядке.
#1139 ремонт бытовой техники в москвеhttps://profi-teh-remont.ru/
Профессиональный сервисный центр по ремонту бытовой техники с выездом на дом. Мы предлагаем:<a href=https://profi-teh-remont.ru/>сервисные центры по ремонту техники в мск</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#1140 сервис центры в москвеhttps://profi-teh-remont.ru/
Профессиональный сервисный центр по ремонту бытовой техники с выездом на дом. Мы предлагаем:<a href=https://profi-teh-remont.ru/>ремонт бытовой техники в мск</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#1141 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее
Необходимость отыгрыша. Вейджер такой повыше, чем для призов за депозит. И же свои не отыграны, вывести их нельзя.Как только вы отыграли вейджер и средства с бонусного баланса перебежали вам на настоящий счет, Вы смело можете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депо). <a href=http://filmkachat.ru/>1×slots регистрация</a> На данном разделе портала регулярно публикуются обзорные статьи, в рассматриваются безвозмездные бонусы лучших интернет-казино. Информация структурирована по нескольким пунктам, включая основные:Бездепозитные призы настоящими средствами, коие возможно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадали. <a href=https://lnk.bio/kalinka0588>https://lnk.bio/kalinka0588</a> Похожим образом трудится 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя либо из-за с получения им VIP-статуса. Подарок предоставляется последствии обращения в поддержку и ревизии. 1×слотс казино <a href=https://www.hb9lc.org/wiki/index.php/User:DeliaGair0582>https://www.hb9lc.org/wiki/index.php/User:DeliaGair0582</a>
1 x slots casino
Существуют казино с призом за регистрацию, в которых очень знамениты фриспины в онлайн казино впоследствии регистрации в определенных играх. Они встречаются и почаще безвозмездных поощрений или классических бонусов в казино без вложений. Например, игрок регистрирует счет, на который начисляются безвозмездные игры, приз за регистрацию вид безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса в выигрывает настоящие средства, коие в последствии возможно успешно исключить из заведения на свою платежную систему. То есть, есть все шансы вывести свои без рисков собственными финансами. Регистрация, за которую игрок получит бонусы, займет пару минут, а благодаря данному возможно увеличить 5 евро поощрений до тыс. И без всяких заморочек исключить их. <a href=https://timepost.info/member.php?action=profile&uid=2064>1× slots casino зеркало</a> 1×slots зеркало которую указывали при регистрации кстати Новички не любят незамедлительно же вносить депозит. Это обосновано отсутствием опыта и недоверием. К счастью, в можно получить бездепозитный бонус за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В всяком случае вы не рискуете своими сбережениями. Это замечательная возможность запустить приглянувшийся видео разъем или же испытывать фортуну в настольных играх. <a href=http://d992387h.bget.ru/index.php?subaction=userinfo&user=ybagoji>http://d992387h.bget.ru/index.php?subaction=userinfo&user=ybagoji</a> 1×slots зеркало подтвердит вашу регистрацию если говорить
1×slots регистрация на 1хслотс
Также учтите, что кое-какие игровые платформы сузивают список государств, коие способны получить предложенный бездепозитный приз за регистрацию. К примеру, существуют онлайн-заведения, выдающие подобные призы только жильцам конкретных стран. К образцу, онлайн казино 777 Оригинал предоставляет бездепозитный бонус только игрокам из России и стран СНГ. Или наоборот, снабжают вознаграждением всех, не жителей некоторых государств (из этого, следует внимательно учить перечень, чтобы впоследствии не возникло никаких вопросов и жалоб). <a href=https://www.feeder.mobi/members/darenvom/profile/>https://www.feeder.mobi/members/darenvom/profile/</a> Пoдтвepдить личнocть посетителя. Для удачного вывода средств, необходимо подтвердить лицо посетителя. Нa этaпe вepификaции пpoфиля, сотрудники службы безопасности должны убедиться, что у игрока всего лишь раз аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не может исключить собственный выигрыш, случае у него будет несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы.4. Заберите презент. Чаще всего приз активируется сразу последствии регистрации. Но посещают ситуации, когда нужно забежать в собственный кабинет либо написать в службу. 1×slot зеркало рабочее этих способов предполагает регистрацию Такие одобрения дозволяют даром протестировать свежее казино, разобраться с игровым ходом интернет слотов, заработать и вывести маленькую необходимую денег.
зеркло казино 1×slots
Можно. Вы постоянно сможете отрешиться от получения бездепозитного бонуса за регистрацию в казино, же Вы не сделаете ставку.Некоторые сайты, этого чем провести регистрацию игроков, предлагают ответить на несколько базисных вопросов. Цель проведения подобной викторины – выявить случайных людей, которые не имеют представления о покере, и не допустить получения ими призов. Если посетитель уже играл в казино, то ответить на полтора десятка несложных вопросов будет нетрудно. Очень часто, ответы возможно отыскать на официальных сайтах этих учреждений. Приветственный бездеп предоставляется какому игроку только раз один. Казино борются с например именуемыми бонусхантерами (от англ. Bonus Hunter — охотник за призами), пытающимися заводить многочисленные аккаунты для надувательства оператора и повторного получения презента. Исключить похожие действия дозволяет верификация данных. Администрация вправе потребовать у клиента подтвердить индивидуальные данные, обозначенные при регистрации.Демоказино есть почти на каждом веб-сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются значительно реже: там когда выигрыша и соблюдения критерий акций бездеп можно превратить в настоящие средства. 1× slots официальный <a href=http://sotsprof01.ru/index.php?subaction=userinfo&user=clumsydancer53>http://sotsprof01.ru/index.php?subaction=userinfo&user=clumsydancer53</a> Подтверждение регистрации. Казино просят привязки профиля к электрическому адресу и номеру аппарата. Для сего на e-mail отчаливает письмо ссылаясь, а на телефонный ? текстовое извещение с кодом.
1×slots рабочее зеркало
Чаще всего казино бонус за регистрацию без депозита даёт возможность запустить каждой машина. Но превосходнее пристально ознакомиться с критериями. Иногда для забавы доступны лишь определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, какого-либо начать знакомство с миром азарта именно с «одноруких злодеев».К огорчению, нет. Почти все казино, настоятельно внесение но бы 1-го минимального депо для вывода выигрыша с бездепозитного бонуса. Также учитывайте, что вывести деньги разрешено только на ту платежную систему, с коей был сделан депо. Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша призов. Заведения постоянно устанавливают наивысшую ставку, допустимую по условиям вейждера.В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и в случае неоднозначных ситуаций нет способности куда-то посетовать и доказать свою правоту. <a href=http://uplmegaporn.com/user/Michaeldiaws/>http://uplmegaporn.com/user/Michaeldiaws/</a> Акционные предложения от казино существуют в различных форматах. Часто призы даются в мена на депозит. Игрок заносит платеж и получает средства, благотворительные вращения и одобрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — вид приза, кот-ый гарантирован за исполнение конкретных действий на сайте: 1 х слотс зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://eccentrictirade.com/forums/showthread.php?tid=137714>1×slots актуальное зеркало</a>
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=51283>1×slots казино зеркало</a>
<a href=https://ragnarok.ch/forum/viewthread.php?thread_id=201741>1×slots акции</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
К примеру, игроку выдаются бесплатные свои в заведении в объеме пятидесяти либо 100 $ (вейджер на которые сочиняет 100х). То есть, любому новоприбывшему игроку выскакивает притягивающая картинка, которая сулит выплату всех зачисленных компанией средств. Не стоит внимания на казино бонус за регистрацию без депо с чрезмерно великой либо довольно малеханькой суммой бонусов, потому что, том кропотливо выучив все условия, здесь скорее, несомненно некий подкол. Выбор каждого онлайн казино на нашем веб-сайте. В описании к любому Вы сможете узнать, собственно получите за творение аккаунта.
#1142 Charlesgunnyhttp://filmkachat.ru
1×slots бонус за регистрацию
Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.В неких онлайн казино для получения бездепозитных призов не довольно просто зарегистрироваться на веб-сайте клуба и подтвердить средства контактные данные. Дополнительно требуется активация промокода. <a href=http://filmkachat.ru/>1×slots мобильная версия войти казино</a> Бездепозитный приз казино 2022 с выводом за регистрацию предоставляет вероятность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и проверить качество работы службы. Довольно часто, начиная игровой процесс, игрок теснее не желает останавливаться и проделывает реальный лепта. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать даром вполне как раз таки с призом за регистрацию без надобности заносить депо. <a href=https://acrobat.uservoice.com/forums/935259-acrobat-web-beta-internal/suggestions/49479029-%D0%BF%D1%80%D0%BE%D1%84%D0%B5%D1%81%D1%81%D0%B8%D0%BE%D0%BD%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2-%D0%BA%D0%B8%D0%B5%D0%B2%D0%B5-%D0%BE%D1%81%D0%BE%D0%B1%D0%B5%D0%BD%D0%BD%D0%BE%D1%81%D1%82%D0%B8-%D0%B8>https://acrobat.uservoice.com/forums/935259-acrobat-web-beta-internal/suggestions/49479029-%D0%BF%D1%80%D0%BE%D1%84%D0%B5%D1%81%D1%81%D0%B8%D0%BE%D0%BD%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2-%D0%BA%D0%B8%D0%B5%D0%B2%D0%B5-%D0%BE%D1%81%D0%BE%D0%B1%D0%B5%D0%BD%D0%BD%D0%BE%D1%81%D1%82%D0%B8-%D0%B8</a> Любой выигрыш по ставке повыше установленного лимита будет считаться недействительным. То есть ставка не будет засчитана при отыгрыше, а случае выигрыша его сумма не поступит на счёт клиента — результат забавы будет полностью аннулирован.Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 поболее. Когда игроку надеется количество фриспинов, администрация имеет бить3 их начисление на некоторое дней. Бесплатные вращения предоставляются для определенного слота, кот-ый указывается в правилах промоакции. 1× slots casino официальный сайт <a href=https://www.metasoa.com/bbs/board.php?bo_table=free&wr_id=521710>https://www.metasoa.com/bbs/board.php?bo_table=free&wr_id=521710</a>
1×slots официальный сайт зеркало
Способы получения бездепа различаются в зависимости от облика приза, кот-ый понравился игроку. Но вас иначе нужно быть зарегистрированным в легальном онлайн-казино и подтвердить свою личность. В общем облике пошаговая аннотация для получения бездепозитного бонуса выглядит так: 1×slots зеркало рабочее Пoдтвepдить личнocть клиента. Для удачного вывода средств, нужно доказать личность клиента. Нa этaпe вepификaции пpoфиля, сотрудники службы защищенности должны увериться, собственно у игрока более раз аккаунт. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не сможет вывести собственный выигрыш, в у него будет количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы. <a href=http://www.mignonmuse.com/bbs/board.php?bo_table=free&wr_id=281665>http://www.mignonmuse.com/bbs/board.php?bo_table=free&wr_id=281665</a> Фриспины начисляются по конкретной ставке. После их активации игроку нужно запустить слот и увериться, собственно в нем показываются безвозмездные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода в отыгрыша определяется оператором и редко выше 5 000 рублей.Мы советуем не отрицаться от сходственных услуг узнаваемых казино. Выделите количество мин. На регистрацию, получите приз и попробуйте его отыграть. Может быть, сегодня удача несомненно на вашей стороне! 1×slots регистрацию более популярный вариант это Бездепозитные бонусы – это самая занимательная и более перспективная промоакция интернет-казино. Они и какого-либо фри-спинов, поэтому что выплаты в бесплатных вращениях не гарантированы, ведь композиции на барабанах игрового аппарата все не сложиться.Как и промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения являются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает свежих гостей и позволяет им составить впечатление о функционале, не рискуя вескими совокупностями.
1×slots регистрация
С иной стороны, намного легче отобрать бездепозитные фриспины за регистрацию в казино и напрямик в начать вращать барабаны в наихороших слотах. Главная необыкновенность спинов что, что они предусмотрены для лучших автоматов. Удастся не пройти дополнительные раунды, хотя и увеличить необходимую выигрыша, заработать респины и внутриигровые презенты. <a href=https://valetinowiki.racing/wiki/User:EveSalazar>https://valetinowiki.racing/wiki/User:EveSalazar</a> 1×slots регистрацию более популярный вариант это Шаг 4. Активация. Внимательно исследуйте обстоятельства, информацию по лимитированиям и сроке деянья бонусного предложения. Разобравшись с правилами, можно активировать приз в личном офисе (время ? с внедрением промокода) или по запросу в саппорт.Превышение максимальной ставки при отыгрыше. Система механически не предупреждает о превышении ставки, поэтому о нарушении управлял игрок может разузнать теснее последствии подачи запроса на вывод средств.
1×slots официальный demo регистрация в 1×slots casino
1хслот 1хслотс регистрация перейти на 1×slots <a href=https://asdmcpe.org/user/Frankusarp/>https://asdmcpe.org/user/Frankusarp/</a> Бонус за регистрацию в казино без депозита с выводом денег нужно отыграть. Зачастую для отыгрыша возможность понадобиться сделать ставки на сумму, в некоторое 10-ов один превышающую необходимую бонуса либо выигрыша.
1×slots рабочее зеркало на сегодня
Прибывшие на акк финансы бездепозитные призы предназначаются, в основном, только для свежеиспеченных пользователей, которые ранее не имели личного аккаунта в данном казино. Исходя из этого, если ранее у игрока был сделан депозит, то, по всей вероятности, у него больше не несомненно способности рассчитывать на получение такового приза в определенном заведении.Начнём с такого, собственно любое рекламную за регистрацию предполагает некоторые обстоятельства. Бездепозитные призы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность денежного оборота, нужная для исполненья условий. Пример, возымели бесплатные вращения и выиграли с них 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 руб., неудачных либо выигрышных, маловажно. После выполнения, бонусный баланс перейдёт на реальный и станет доступным к выводу. Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, the decision зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. <a href=https://skillsofblocks.com/shisha-tobacco-from-4-eur/>https://skillsofblocks.com/shisha-tobacco-from-4-eur/</a> Изучить правила и обстоятельства получения бездепозитных бонусов казино, Вы сможете у нас на веб-сайте в разделе с бонусами либо на официальном веб-сайте выбранного Вами казино. Если не отыскать необходимую информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал или по электрической почте.B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. 1×slots актуальное зеркало Чтобы получить вероятность исключить прибыль с бездепозитного приза в казино, необходимо выполнить ряд критерий:
<b>Смотреть еще похожие новости:</b>
<a href=https://bestshop.link/threads/%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-1×slots.491/>казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В случае установленного лимита на необходимую вывода выигрыша с бездепозитного бонуса, игрок не сможет вывести больше заявленной суммы. Заработать на бездепозитных бонусах за регистрацию в казино имеет любой юзер, достигший совершеннолетия.
#1143 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Алена Косторная (фигурное катание) 1×bet бесплатно <a href=https://m.repost.news/>Скоробогатова Ольга Николаевна порно</a> вывод казино up букмекерская контора <a href=https://rhymes-punches.com/>приложения букмекерских контор</a> casino андроид пин up casino porno Алена Михайлова porno Юлия Канакина Скворцова Вероника Игоревна порно porno Игорь Акинфеев (футбол) скачать букмекерскую контору на андроид
DiskiPlus официальные сайты казино DiskiPlus симулятор казино <a href=https://diskiplus.ru>DiskiPlus 1×bet слоты 1×bet xyz</a> DiskiPlus вавада казино DiskiPlus играющие казино <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet слоты</a> DiskiPlus рокс казино DiskiPlus 1×bet бесплатно DiskiPlus 1×slots casino DiskiPlus официальные букмекерские конторы скачать DiskiPlus букмекерские контора ап DiskiPlus порно с Голикова Татьяна Алексеевна DiskiPlus retro casino
#1144 Charlesgunnyhttp://filmkachat.ru
1 xslots рабочее зеркало
Ограничения по играм. Администрация запрещает игрокам кое-какие игровые автоматы с бездепозитным призом, средствами или безвозмездными вращениями. Обычно, в правилах приводится полный перечень слотов для отыгрыша. Иногда деление производится по облику игр. Например, отыгрыш возможен на всех игровых аппаратах, хотя запрещен в настольных играх и в разделе Live Casino.Внесение депо – Будьте готовы восполнить счет после отыгрыша приза. Это стандартное заявка управлял для этого подобии промо-акций. Лучше заблаговременно уточнить, какую сумму надо(надобно) будет заносить на счет. Как верховодило, речь идет о наименьшем депозите, но вы должны быть уверены, собственно он для по кармашку. <a href=http://filmkachat.ru/>1×slots зеркало проходить регистрацию это отличный вариант</a> Сроки активации бонуса устанавливаются любым казино, хотя почаще всего они не превосходят недели с этапа получения. Игроку обязательно надо(надобно) применять бездеп протяжении указанного срока, в ином случае приз просто исчезнет. Каждый приз можно получить только один раз, поэтому в не использовать бездеп в срок, у игрока не несомненно второго шанса им пользоваться.При подмоги такового одобрения оператор имеет того привлекать посетителей, которые раньше показывали активность на веб-сайте, хотя по некий основанию прекратили выступать. В данном случае промокод высылается юзеру по электрической почте или вид SMS. <a href=https://www.esurveyspro.com/Survey.aspx?id=b7cfe3c3-a9a1–49c6-ba38–30bd1c80930a>https://www.esurveyspro.com/Survey.aspx?id=b7cfe3c3-a9a1–49c6-ba38–30bd1c80930a</a> На данном разделе портала периодически публикуются обзорные статьи, каких рассматриваются бесплатные призы наихороших интернет-казино. Информация структурирована по нескольким пт, включая основные: 1×slots зеркало на сегодня <a href=http://crtdu-kras.ru/communication/forum/user/261147/>http://crtdu-kras.ru/communication/forum/user/261147/</a> Когда идет о валютных бонусах, казино практически устанавливают условия вейджера, которые необходимо выполнить, дабы вывести выигрыш.Срок отыгрыша — это этап, кот-ый наступает в момент активации бонуса и кончается с его закрытием. Пользователю необходимо уложиться в данный временной зазор, по призовые свои аннулируются. Казино устанавливают перечень игр, ставки в которых засчитываются при расчете отыгранных денег. Если тайтл не заходит в данный перечень, то ему быть недосегаем для загрузки период действия бонусного предложения.
1×slots зеркало регистрация то дальше необходимо пройти
<a href=http://nexusroleplay.teamforum.ru/viewtopic.php?f=19&t=12076>1х слотс зеркало регистрация в 1×slots casino</a> x1 slots регистрация в 1×slots casino Для такого, чтобы отыграть необходимую вашего бездепозитного бонуса надо(надобно) выполнить обстоятельства вейджера. Очень нередко фриспины даются на определенные слоты (book of ra, book of lifeless, book of sun), выбирайте слот для по душе, они довольно очень и качественные. Бездепозитные бонус возможность быть денежным например и в виде фриспинов на слоты <a href=https://rg-mechanics.club/user/Porsedropsa/>https://rg-mechanics.club/user/Porsedropsa/</a> Зарегистрироваться в казино по специальной ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефонного и электронную почту). Для доказательства номера аппарата необходимо в собственном профиле показать свой номер и нажать кнопку „Подтвердить номер телефона“, далее Вы получите sms-сообщение с кодом, кот-ый нужно ввести в соответствующее фон. Для подтверждения электронной почты, перебежать по активной ссылке в письме от казино. 1×slots регистрацию более популярный вариант это Как и промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такового предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых посетителей и дозволяет им составить впечатление о функционале, не рискуя значительными совокупностями.Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном призе, то в первую очередь обратите внимание на велечину вейджера и срок, кот-ый дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть приз и вывести выигрыш.
1хслот официальный сайт зеркало
Ниже указан актуальный список легальных казино в Беларуси с призами на 1-ый депо. Вы сможете попасть на официальный сайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус.Операторы гемблинга утверждают, собственно так они дерутся с бонус-хантерами. Впрочем, критики считают, что данным казино пробуют устроить из случайного гостя постоянного игрока. Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, например как Вам понадобиться ее подтвердить в при выводе денег.В лицензионных бездепозитных казино выступать в азартные забавы вправду безопасно. Наличие лицензии подтверждает что, этот факт, собственно клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP. <a href=https://training.trainingstree.com/author/mycsgorig/>https://training.trainingstree.com/author/mycsgorig/</a> Раздача бонусов имеет быть посвящена разным датам: календарные дни, дни рождения игроков, годовщина открытия казино и т. Д. Подарок выдается вид средств, фриспинов или баллов для скопления и обмена на услуги оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода этой суммы придется выполнить ряд требований. 1×slots регистрация на официальном сайте
1×slots зеркало регистрация в 1×slots casino
Баланс игрока дополняется на соответствующую сумму. К ней используется вейджер, обозначенный в правилах акции. Вывести выигрыш можно будет в такого, как пользователь сделает требуемый размер ставок из собственных средств. В редких случаях бездеп работает в формате Free Play. На счет юзера зачисляется большая сумма, и предоставляется небольшой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по завершении сего периода сумма на счету несомненно превосходить изначальную, то разность можно несомненно вывести или использовать для дальнейших ставок. Бонусные деньги – маленькая сумма средств для старта в новеньком казино. На бонусные деньги, обыкновенно разрешено играть во все забавы, кроме слотов с современным джекпотом и игр из раздела live casino. 1×slot казино зеркало <a href=https://www.thenewtop10s.com/author/richardgaush/>https://www.thenewtop10s.com/author/richardgaush/</a> Список так нарекаемых «запрещенных землель» прилагается к правилам бонусной программы игорного портала. Обязательно выясните, распространяются ли на вас подобные санкции.Бездепы все входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами.
1×slots casino регистрация 1×slotscasin online
При выполнении условий отыгрыша и верификации, средства с бонусного счета переводятся на главный и могут быть выведены на карту или электронный кошелек. Лимиты на вывод и сроки проведения транзакции зависят от избранной платежной системы. Акции, приуроченные к календарным праздникам, случаются рассчитаны как на всех пользователей, так и на категории: например, подарок на 8 марта девушкам-игрокам или мужикам на 23 февраля.У каждой забавы средства притязания по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система засчитает любую ставку. В рулетке и покере сделать это гораздо труднее. Именно потому так принципиально пристально разбирать условия получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой ирге, то новички попросту «спустят приз на ветер». <a href=https://calibreapp.com/tools/core-web-vitals-test/astramedika.com.ua?scheme=https&path=%2F&context=origin>https://calibreapp.com/tools/core-web-vitals-test/astramedika.com.ua?scheme=https&path=%2F&context=origin</a> 1×slots casino зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://link.5nx.ru/viewtopic.php?f=5&t=12193>скачать 1×slots на андроид мобильная версия</a>
<a href=https://portugal-campings.com/pt/account/>1×slots регистрацию более популярный вариант это</a>
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=72026>1×slots регистрация 1×slots review live</a>
<a href=https://www.donchillin.com/space-uid-382497.html>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подтверждение регистрации. Казино настоятельно привязки профиля к электрическому адресу и номеру телефонного. Для этого на e-mail отправляется письмо со ссылкой, а на телефон ? текстовое известье с кодом.
#1145 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино смотреть онлайн автомат казино <a href=https://vestnik-jurnal.com/>Ирина Горбачева</a> порно с Абрамченко Виктория Валериевна вывод казино <a href=https://repost.news/>казино онлайн</a> porno Екатерина Ефременкова, шорт-трекистка 1×bet официальный 1×bet xyz вывод казино порно с Алексей Миранчук (футбол) porno Мира Андреева (теннис) casino buzz porno Катерина Шпица
DiskiPlus bet casino DiskiPlus Матвиенко Валентина Ивановна порно <a href=https://diskiplus.ru>DiskiPlus почему в казино не бывает настенных часов</a> DiskiPlus водка казино DiskiPlus porno Анна Сидорова, керлингистка <a href=https://diskiplus.ru/>DiskiPlus казино рояль смотреть</a> DiskiPlus сайт казино вход DiskiPlus new casino DiskiPlus казино смотреть онлайн бесплатно DiskiPlus винлайн букмекерская контора официальный сайт DiskiPlus casino скачать DiskiPlus зеркала официальных сайтов казино DiskiPlus порно с Афонина Марина Игоревна
#1146 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino на телефон casino ru <a href=https://slon-ru.com/>1×bet на андроид</a> яндекс казино up casino <a href=https://rumafia.news/>Мухтиярова Елена Вячеславовна порно</a> 1×bet слоты бывшие казино скачать pin casino букмекерская контора официальный сайт 1×bet xbet 7k casino официальный сайт лучшие бесплатные онлайн казино
DiskiPlus порно с Диана Шнайдер (теннис) DiskiPlus букмекерская контора зенит <a href=https://diskiplus.ru>DiskiPlus Преподобная Надежда Александровна порно</a> DiskiPlus бесплатное казино DiskiPlus casino играть <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz</a> DiskiPlus сайте букмекерской конторы фонбет DiskiPlus porno Мария Шарапова DiskiPlus казино смотреть DiskiPlus казино онлайн бесплатно DiskiPlus винлайн букмекерская контора DiskiPlus casinos winning DiskiPlus 1×bet рабочее на сегодня
#1147 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Арина и Дина Аверины, гимнастки Попова Анна Юрьевна порно <a href=https://repost.news/>пинап казино</a> 1×bet слоты официальный сайт porno Игорь Акинфеев (футбол) <a href=https://rumafia.news/>казино 1</a> букмекерская контора фонбет официальный казино смотреть 1×bet официальный скачать Попова Анна Юрьевна порно карты казино пина букмекерской конторы Фастова Елена Владимировна порно
DiskiPlus порно с Голикова Татьяна Алексеевна DiskiPlus casino на телефон <a href=https://diskiplus.ru/>DiskiPlus карты казино</a> DiskiPlus porno Дарья Мороз DiskiPlus пин ап casino pin up top <a href=https://diskiplus.ru/>DiskiPlus Шевцова Татьяна Викторовна порно</a> DiskiPlus казино можно DiskiPlus Комарова Наталья Владимировна порно DiskiPlus 1×bet зеркало слоты 1×bet xyz DiskiPlus лучшие онлайн казино DiskiPlus pin ап casino DiskiPlus порно с Гатагова Ольга Анатольевна DiskiPlus фреш казино
#1148 Charlesgunnyhttp://filmkachat.ru
1×slots казино зеркало
С такими ординарными советами каждое казино с бонусом за регистрацию способно принести в разы больше выгоды и выгоды. <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> <a href=https://www.designingbuildings.co.uk/wiki/User:Cgifurniture>https://www.designingbuildings.co.uk/wiki/User:Cgifurniture</a> 1х слот 1хслотс регистрация перейти на 1×slots <a href=http://www.sksmg.com/home.php?mod=space&uid=213120&do=profile>http://www.sksmg.com/home.php?mod=space&uid=213120&do=profile</a> Свежий приз начисляется в виде валютных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в пользовании своими, а случае отыгрыша оператор имеет ввести ограничение на вывод денег.
казино 1×slots
Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша бонусов. Заведения всегда устанавливают максимальную ставку, допустимую по условиям вейждера. <a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=408363>1× slots официальный</a> 1×slots регистрация на официальном сайте Но эти рамки не смущают в хайроллеров, что коэффициенты на слотах дозволяют рассчитывать на солидные выигрыши, ну неких автоматах разыгрывается прогрессивный джекпот. <a href=http://gderabotaem.ru/company/gey-znakomstva-flirta>http://gderabotaem.ru/company/gey-znakomstva-flirta</a> Выиграть реальные средства в казино не пополняя счет – трудно, но вполне. Главное задаться целью и не нарушатьправила заведения. Выберите несколько казино с бездепзитными бонусами и начните играть на бонусные свои. По статистике в одном из 10-ти заведений можно заработать небольшую сумму денег помощью бонусных средств.Бездепы с безвозмездными вращениями деют юзерам право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд платит казино. Число спинов ограничено и изредка выше сотню. Если промоакция содержит количество даровых игр, их начисление может быть разбито на количество дней. 1хслот официальный сайт зеркало В лицензионных бездепозитных казино выступать в азартные забавы вправду безопасно. Наличие лицензии одобряет что, этот прецедент, что клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP.Бoльшинcтвo азартных заведений выдвигают примерно однообразные, схожие условия и требования, коие нужно выполнить, дабы получить бездепозитный бонус за регистрацию. Все их можно соединить в раз список:
1хслотс рабочее зеркало
Ну и окончательно же, для казино бездепозитные призы выгодны с имиджевой стороны: схожая добродушие увеличивает уровень лояльности посетителей к компании.Частенько новенькие не знают, как активировать презенты или вывести первый выигрыш. Для подобных случаев наша команда обрисовала основные определения – что это фриспины, вейджер, как его отыграть, зачем нужно протекать верификацию. <a href=https://ceshi.xyhero.com/home.php?mod=space&uid=2694081>https://ceshi.xyhero.com/home.php?mod=space&uid=2694081</a> Обыкновенные бездепозитные призы в объеме от 3-х до двадцати долларов сделаны чтобы, чтобы, дабы в игры заходили все свежие и свежие игроки. Здесь, всего, несомненно лимитирование на максимальный выигрыш. Важно, дабы перед наименьшим вкладом был отключен бонус за 1-ое пополнение счета, и игрок не попадет на повторный вейджер. 1×slots зеркало У любой забавы свои притязания по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система зачтет любую ставку. В рулетке и покере устроить это намного труднее. Именно потому так главно пристально разбирать условия получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой забаве, то новенькие просто «спустят приз на ветер».
1хслотс регистрация в 1×slots casino
Бездепозитный бонус казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в этом и заключается главное различие. Подарки на дни ? посвященные торжественным датам, требующие условного отыгрыша или начисляются без это. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду. Заработать на бездепозитных призах за регистрацию в казино имеет каждый юзер, достигший совершеннолетия. 1×slots официальный сайт зеркало <a href=https://xn----htbblufccvgdmek8j.xn–p1ai/forum/user/23182/>https://xn----htbblufccvgdmek8j.xn–p1ai/forum/user/23182/</a> Основное отличие никаких, что для получения бездепа не пополнять баланс в казино. Но не сего, есть ряд и различий:
1хслотс рабочее зеркало на сегодня
<a href=https://www.nepsite.ru/personal/33494>https://www.nepsite.ru/personal/33494</a> 1хслотс рабочее зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.as-p.cz/viewtopic.php?f=45&t=67620&p=355345#p355345>1х слотс зеркало регистрация в 1×slots casino</a>
<a href=https://foro.muelendhir.com/showthread.php?tid=116668>1×slot казино зеркало</a>
<a href=http://www.infoknygos.lt/smforum/index.php?topic=134522.new#new>1×slots актуальное зеркало</a>
<a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=182351>1×slots подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Разные казино имеют личные верховодила по выведению выигрыша. Для бездепозитных призов принимаются достаточно высочайшие требования. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до 100 раз в игровых автоматах. Например, в игрок получил даром 10 $, то необходимо несомненно отыграть их, поставив одну тыщу спинов по одному доллару каждый. Стоит обозначить(означить), что не все казино дают возможность играть на призы и не во всех увеселительных заведениях идентичные верховодила для отыгрывания. Некоторые казино запрещают играть на бонусы в блекджек либо ограничивают ставки до 5 %, что значительно увеличивает в 10-ки один число необходимых игр.
#1149 Charlesgunnyhttp://filmkachat.ru
1×slots бонус за регистрацию
Возьми собственный презент. Чаще всего приз активируется незамедлительно в регистрации. Но случаются ситуации, когда надо(надобно) зайти в собственный кабинет или написать в справочную службу.Если идет об неповторимых предложениях, возможность понадобиться регистрация в казино по ссылке с партнерского вебсайта. <a href=http://filmkachat.ru/>1×slots на любой вкус как пройти регистрацию</a> Нет. Для получения бездепозитного бонуса в казино необходима неотъемлемая регистрация на сайте. Играть в слоты безвозмездно и без регистрации возможно лишь в демо режиме.При регистрации сомнений или ином интернет игральном заведении — вас дается раз шанс испытать собственную фортуну не внося свои монеты. Замечу что эту поощрительную услугу предоставляют не все интернет игровые площадки, а лишь великодушная половина из них. Которые мы подготовили для Вас в нашем перечне. <a href=https://we.riseup.net/lexxeagle/who-makes-everstart-batteries-the-complete-manufac>https://we.riseup.net/lexxeagle/who-makes-everstart-batteries-the-complete-manufac</a> 1×slots рабочее зеркало на сегодня <a href=http://forums.overhax.fun/member.php?action=profile&uid=8830>http://forums.overhax.fun/member.php?action=profile&uid=8830</a> Так собственно основное отличие презента на депо от бездепа – обязательное пополнение счёта. Вы можете привнести депозит и преувеличить стартовый капитал или забрать бездеп и всем не придётся рисковать собственными сбережениями. Поспешите выполнить простые требования, и администрация ресурса начисляет щедрое одобрение!Даже не выиграв крупную необходимую, игрок интересно проведет время, изнутри исследует работу площадки, воспримет геймплей автоматов. Все это без каких-либо финансовых рисков. Быть в курсе наилучших промоакций легко. Достаточно регулярно изучать список свежих онлайн казино с выводом приза без депо в данном разделе.
1×slots зеркало подтвердит вашу регистрацию если говорить
Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке необходимо пополнить счет в казино. Для депозитных призов, данная процедура не необходима, так как депозит уже изготовлен.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 долларов. Если выдаются фриспины, их количество редко выше нескольких 10-ов безвозмездных вращений. 1×slots акции Наш список содержит лучшие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает проверку по главным характеристикам:Обычно для получения бонусов без депозита, казино выдвигает приклнные и вполне выполнимые условия, хотя есть ряд действий которые воспрещены и имеют стать противные результаты: <a href=http://worldpoetry.cn/home.php?mod=space&username=eagerdeity70>http://worldpoetry.cn/home.php?mod=space&username=eagerdeity70</a> 1×slots промокод при регистрации Доступность — бездепозитные призы в казино почаще всего предоставляются новым игрокам, но случаются случаи, когда приз могут получить и действующие посетители.К примеру, игроку выдаются бесплатные свои в заведении в объеме пятидесяти или 100 долларов (вейджер на коие составляет 100х). То есть, любому новоприбывшему игроку выскакивает манящая иллюстрация, кот-ая сулит выплату всех зачисленных фирмой средств. Не стоит внимания на казино приз за регистрацию без депо с чрезмерно немалый либо очень малюсенькой суммой призов, потому что, том тщательно исследовав все обстоятельства, здесь скорее, будет некий подкол.
1×slots на любой вкус как пройти регистрацию
При верном раскладе бездепы — это прекрасный способ выступать на средства без растраты собственных средств. Есть несколько советов, следуя коим возможно извлечь максимально полезности из сходственных акций казино. Играть идет только на лицензированных площадках. Скриптовые сайты столько накалывают с бонусными предложениями, хотя и употребляют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах невозможно. <a href=http://ladistribution.net/fr/wiki/wiki/dokuwiki/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0>http://ladistribution.net/fr/wiki/wiki/dokuwiki/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0</a> 1×slots регистрация на сайте Начнём с того, что любое промо за регистрацию предполагает некоторые обстоятельства. Бездепозитные призы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность денежного оборота, необходимая для выполнения критерий. Пример, возымели бесплатные вращения и выиграли с них 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 руб., проигрышных или выигрышных, так. После выполнения, бонусный баланс перейдёт на реальный и будет легкодоступным к выводу.
1×slot казино зеркало
<a href=http://turkteam.10tl.net/member.php?action=profile&uid=2012>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> Как и акции операторов, бездепы — это рекламный инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такового предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает свежих гостей и позволяет им составить впечатление о функционале, не рискуя значительными совокупностями.Иногда для получения призов необходимо спутаться с представителями саппорта. Удобнее всего с ними беседовать в онлайн-сате, желая от достаточно запроса по электрической почте. Бездепозитный приз казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби избранного заведения, определится в выборе игр и проверить качество работы службы. Довольно нередко, начиная игровой процесс, игрок уже отказывается останавливаться и проделывает реальный лепта. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать безвозмездно вполне как один таки с бонусом за регистрацию без надобности вносить депо.Можно ли в одном онлайн казино получить больше одного приза за регистрацию? Нет, так как в любом интернет казино есть управляла, к коим нужно придерживаться, не создавать 2 аккаута для получения бонусов, иначе будет блокировка обоих аккаутов, не пытайтесь обмануть онлайн казино, бонус за регистрацию выдаеться один раз одному лицу. 1×slots зеркало этих способов предполагает регистрацию <a href=https://bbs.flashdown365.com/home.php?mod=space&uid=1640301&do=profile&from=space>https://bbs.flashdown365.com/home.php?mod=space&uid=1640301&do=profile&from=space</a>
1хслотс зеркало
Представьте момент, когда при ставке в 10 руб. Вы получите схожее умножение. Миллион рублей за одно вращение, что абсолютно вероятно. Поэтому вопрос, сколько можно выиграть остаётся не. Предлагаем проверить других. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный бонус и проверяйте удачу в деле. Разумеется, вывести деньги сложно. Однако шансы есть у всех. <a href=http://www.dotank.kr/bbs/board.php?bo_table=free&wr_id=145870>http://www.dotank.kr/bbs/board.php?bo_table=free&wr_id=145870</a> 1×slots регистрация 1×slots review live Не стоит сразу же открещиваться от приветственных подарков в похожих казино. Администрация готова начислить средства либо фриспины, но предварительно работники обязаны убедиться, собственно вы не аферист. Дело том,, собственно развелось очень большое охотников за бонусами. Они научились накалывать систему и наваривать крупные суммы денег.Процесс подтверждения личности может занять от 1-го дня до недели. Если клиент разрешил нибудь оплошность при заполнении паспортных данных, то ему по адресоваться с задачей в службу поддержки онлайн-казино.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.survival-readiness.com/viewtopic.php?t=278350>1×slots зеркало</a>
<a href=https://creapnl.com/foros/tema/1×slot-%d1%80%d0%b5%d0%b3%d0%b8%d1%81%d1%82%d1%80%d0%b0%d1%86%d0%b8%d1%8f-34/>1×slot регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
4. Заберите подарок. Чаще всего бонус активируется сразу в регистрации. Но бывают ситуации, когда нужно забежать в собственный офис или написать в службу поддержки. Бездепозитные призы отличный вариант безвозмездной забавы в игровые автоматы. Многие пользователи сети не знают, что в казино возможно начать играть безусловно даром, а потом исключить выигрыш на банковскую карту либо электрический кошелек, иные не доверяют интернет казино, а третьи успешно играют и выигрывают – и подчас довольно немалые суммы.
#1150 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino c2d ru
Чаще всего применяются коды. Их нужно заносить в специальные окошки регистрационной анкеты, если речь идет о пригласительных призах, либо в особом разделе личного кабинета игрока.Не стоит сразу же отказываться от приветственных презентов в сходственных казино. Администрация готова начислить деньги либо фриспины, но предварительно работники должны увериться, собственно вы не мошенник. Дело в том, собственно развелось слишком много охотников за призами. Они научились врать систему и зарабатывать солидные суммы средств. <a href=http://filmkachat.ru/>1×slots зеркало сайта</a> Хотя бесплатные бонусы начисляются без депо, не исключено, собственно вам придется вносить деньги. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь последствии того, как свежий клиент впервые пополнит игровой счет. <a href=https://www.arrl.org/forum/topics/view/4345>https://www.arrl.org/forum/topics/view/4345</a> рабочее зеркало 1×slots <a href=http://rosttour.com/user/DoctorLazutaSl/>http://rosttour.com/user/DoctorLazutaSl/</a> У любого игорного заведения свои правила и условия. Но, дабы получить призы, необходимо выполнить стандартные действия:
1×slots casino регистрация 1×slotscasino09k online
Размер приза. В качестве бездепов обыкновенно начисляют большие суммы, а когда идет о бонусах за депо, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино могут презентовать игроку до 2000$.Раздача призов имеет быть приурочена к различным датам: календарные дни, деньки рождения игроков, годовщина открытия казино и т. Д. Подарок выдается в виде средств, фриспинов либо баллов для накопления и обмена на услуги оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода этой суммы понадобиться выполнить ряд требований. 1×slots официальный сайт зеркало Это один из основных показателей привлекательности дара. С завешенным коэффициентом в профессионалы не смогут выполнить условия по отыгрышу. И так, насколько привлекательно смотрится предложение – бездепозитный приз казино в объеме $500 или $1 000. Чтобы новенькие лучше вникли, собственно же такое вейджер, мы разберём на примере. <a href=https://ez3.uk/forum/profile/CoralBaske>https://ez3.uk/forum/profile/CoralBaske</a> Вышеописанная первопричина и является основным интересным, в которого операторы отдают часть своей выгоды на разные рекламные затраты и рекламные кампании. А наиболее действенным тут будут играть именно бездепозитные бонусы казино 2022 с выводом за регистрацию. 1×slot зеркало рабочее регистрации на телефон придет
1× слот зеркало
Когда речь о денежных бонусах, казино всегда устанавливают условия вейджера, которые нужно выполнить, дабы исключить выигрыш. Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных ситуаций с казино, когда в отыгрыша бездепа вас не дадут исключить крупную сумму выигрыша.Приглашаем делиться воззрениями о призах. Это поможет иным юзерам избирать наиболее прибыльные предложения. <a href=https://forums.twcpilots.com/member.php?action=profile&uid=3123>https://forums.twcpilots.com/member.php?action=profile&uid=3123</a> Шаг 4. Активация. Внимательно изучите обстоятельства, информацию по ограничениям и сроке деяния бонусного предложения. Разобравшись с правилами, возможно активировать приз в личном офисе (время ? с использованием промокода) или по запросу в саппорт.Так же стоит выделить то, собственно в каждом интернет казино установлен свой наибольший кешаут на бездепозитный бонус. Как управляло кешаут — это предельная сумма средств, кот-ая дешевая для вывода с бездепозитного приза. 1×slots рабочее зеркало на сегодня Не стоит путать игру в демо и использование бонусов. В демонстрационном режиме игрок может оценить механику слота, сюжет и оформление. Но забава ведется на условные кредиты, поэтому отсутствует основное ? ощущение пыла. Активируя промокод либо фриспины, заказчик по-прежнему не тратит средства средства на игровые автоматы, хотя имеет сорвать настоящий куш!
1хслотс официальный сайт зеркало
Бездепозитные призы казино это финансовая компенсация, предлагаемая пользователям на дармовой основе и возможность выступать в онлайн казино даром. Если сопоставлять их с поощрениями за вклад, в которых средства выдаются лишь потом начального пополнения счета, то бездепозитные гонорары получаются даром. То есть, играющий получает возможность делать ставки на теснее быть финансы, которые выдаст заведение, исполняя, при этом, обычные деянья, чтобы их извлечь (тут речь о регистрация, удостоверении личности с внедрением номера телефонного, дизайна заказы и т.д. ). <a href=https://www.rechti.de/members/jamesrom.24835/>1×slots зеркало сайта</a> Верификация аккаунта. Лучше доказать личность незамедлительно после регистрации, чтобы потом не было заморочек с выводом средств. Верификация возможность протекать 2-мя путями: 1×slots зеркало регистрация <a href=http://getamped.nxez.com/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D1%8F%D0%BD%D0%B4%D0%B5%D0%BA%D1%81%20%D0%B4%D0%B7%D0%B5%D0%BD%20%D1%87%D0%B8%D1%82%D0%B0%D1%82%D1%8C>http://getamped.nxez.com/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D1%8F%D0%BD%D0%B4%D0%B5%D0%BA%D1%81%20%D0%B4%D0%B7%D0%B5%D0%BD%20%D1%87%D0%B8%D1%82%D0%B0%D1%82%D1%8C</a>
1хслотс официальный сайт зеркало
Вейджер (wager) – это коэффициент, кот-ый показывает на какую необходимую необходимо сделать ставок, чтобы исключить бонус из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода этого приза, Вам нужно устроить ставок на сумму: 500*70=3500 рублей. Только всецело отыграв приз, Вы сможете исключить свой выигрыш. Выбрать казино с бездепозитным бонусом. У нас на веб-сайте представлен список лучших интернет казино, которые предлагают своим игрокам щедрые бонусы за регистрацию.Возьми свой подарок. Чаще всего бонус активизируется незамедлительно после регистрации. Но посещают ситуации, когда надо(надобно) забежать в индивидуальный офис или написать в справочную службу. <a href=http://ikce.kr/bbs/board.php?bo_table=research01&wr_id=3309>http://ikce.kr/bbs/board.php?bo_table=research01&wr_id=3309</a> 1хслотс рабочее зеркало Условия шансы различаться приятель от приятеля. Но такой приз имеет быть использован только для игрового процесса – полученные на счет деньги до того, как будут отыграны, исключить нереально.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=1620158#pid1620158>1×slots промокод при регистрации</a>
<a href=http://forum.as-p.cz/viewtopic.php?f=45&t=67620&p=354476#p354476>1×slots быструю регистрацию а также мгновенное</a>
<a href=http://yonghengro.gain.tw/space.php?uid=1555574>1×slots казино мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Поспешите арестовать бездепозитные призы за регистрацию в казино из представленного перечня. Все платформы столько водят законную работа, хотя и порадуют добросовестными плодами игры, высокой отдачей, прыткими выплатами.
#1151 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Артемий Панарин (хоккей) сайте букмекерской конторы фонбет <a href=https://m.repost.news/>casino daddy</a> 1×bet зеркало на сегодня 1×bet xyz автомат казино <a href=https://www.ossetia.tv/>порно с Евгений Малкин (хоккей)</a> 1×bet xbet какие казино casino бонус porno Нина Пирогова, хоккеистка порно с Артемий Панарин (хоккей) 1×bet 1хбет 1win casino
DiskiPlus слот casino DiskiPlus скачать casino на андроид <a href=https://diskiplus.ru/>DiskiPlus top casino</a> DiskiPlus порно с Федор Чалов (футбол) DiskiPlus порно с Матвей Сафонов (футбол) <a href=https://diskiplus.ru>DiskiPlus порно с Баталина Ольга Юрьевна</a> DiskiPlus kent casino DiskiPlus pin up casino скачать DiskiPlus 1×bet официальный сайт DiskiPlus пин ап casino pin up top DiskiPlus pinco casino DiskiPlus Анна Михалкова казино
#1152 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
почему в казино нет окон порно с Константин Тюкавин (футбол) <a href=https://7club7.com/>винлайн букмекерская контора официальный сайт</a> 1×bet сайт casino бездепозитный <a href=https://kompromat1.online/>казино играть</a> фреш казино casino бонус Чулпан Хаматова 1×bet официальный casino daddy casino автомат pin casino
DiskiPlus скачать букмекерскую контору DiskiPlus кент казино <a href=https://diskiplus.ru/>DiskiPlus мелбет букмекерская контора</a> DiskiPlus порно с Анна Калинская (теннис) DiskiPlus симулятор казино <a href=https://diskiplus.ru>DiskiPlus casino рабочее зеркало</a> DiskiPlus букмекерская контора мостбет DiskiPlus порно с Антропова Валентина Викторовна DiskiPlus porno Яна Троянова DiskiPlus casino x DiskiPlus 1×slots casino DiskiPlus бк букмекерская контора DiskiPlus 1×bet рабочее
#1153 Charlesgunnyhttp://filmkachat.ru
1хслот 1хслотс регистрация перейти на 1×slots
Для получения предоставленных бонусов вас пригодиться — ПК либо мобильное устройство, и остальное дело за небольшим.Также посещают случаи, когда казино начисляет обсужденный бонус после регистрации нового клиента по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам. <a href=http://filmkachat.ru/>рабочее зеркало 1×slots</a> <a href=https://www.neobienetre.fr/forum-bien-etre-medecines-douces-developpement-personnel/topic/low-poly-design-creating-efficient-3d-models-for-modern-applications/>https://www.neobienetre.fr/forum-bien-etre-medecines-douces-developpement-personnel/topic/low-poly-design-creating-efficient-3d-models-for-modern-applications/</a> Стоит отметить, что бездепозитный приз выдается лишь взрослым новеньким, которые, же, могут пригласить личных друзей и людей, того рассчитывающих на поощрительную программу преданности. Подобная технология была среди конкурирующих онлайн-казино для популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению своей посещаемости, путем вербования свежих игроков. Бонусы – это уникальный шанс для потенциальных соучастников забавы, коие все опробовать софт покер рума и убедиться, будут ли они в него играть или нет. Новый игрок испробует свои силы с реальными оппонентами в казино.Помимо прочего, для вывода средств по бездепу нужно привнести на счёт свой первый депозит — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на мало вероятную сумму, в чего вывод средств будет доступен. 1×слот регистрация в 1×slots casino <a href=https://gunnerdmvd07529.like-blogs.com/30172017/deep-nude-ethical-concerns-and-the-impact-of-ai-on-privacy>https://gunnerdmvd07529.like-blogs.com/30172017/deep-nude-ethical-concerns-and-the-impact-of-ai-on-privacy</a>
1×slots сайт зеркало
<a href=https://www.handmakersbrasil.com.br/topic/5449–1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D0%B1%D1%8B%D1%81%D1%82%D1%80%D1%83%D1%8E-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8E-%D0%B0-%D1%82%D0%B0%D0%BA%D0%B6%D0%B5-%D0%BC%D0%B3%D0%BD%D0%BE%D0%B2%D0%B5%D0%BD%D0%BD%D0%BE%D0%B5/>1×slots зеркало быструю регистрацию а также мгновенное</a> 1×slots официальный зеркало Обычно, бездепозитные призы выдаются под конкретные слоты с фиксированной ставкой, хотя их наверняка запрещено использовать в игровых автоматах с прогрессивным джекпотом. Список игр, каких можно применять бездеп, Вы отыщите в описании акции или сможете уточнить у саппорта заведения.Бездепозитный бонус за регистрацию в казино — это стартовый подарок в виде денежного начисления или безвозмездных вращений для свежих игроков заведения, для получения которого надо заносить депо. <a href=http://cjdog.com/home.php?mod=space&uid=130758>http://cjdog.com/home.php?mod=space&uid=130758</a> 1×slots актуальное зеркало Перед активацией важно пристально выучить обстоятельства акции. Чем ниже вейджер, тем больше возможная выгода игрока. Имеют значение также лимиты ставок при отыгрыше и сроки, на коих можно воспользоваться предложением. Если бездеп охватывает ограниченный перечень игр, рекомендуется разузнать максимальные коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только в том случае, в оператор не установил строгие ограничения на наивысшую необходимую ставки.Превышение максимальной ставки при отыгрыше. Система механически не предостерегает о превышении ставки, потому о несоблюдении управлял игрок может узнать теснее последствии подачи запроса на вывод средств.
1×slots зеркало рабочее на сегодня
Также, учите, собственно бездепозитный бонус можно вывести только никаких случае, когда будут исполнены все обстоятельства отыгрыша. Да, у бесплатных призов есть дефекты. Прежде всего, они обычно небольшие. Кроме того, условия вейджера по ним постоянно строгие. Но таки недоступность риска делает их очень привлекательными для клиентов.Бонусы без депо при регистрации числятся наиболее красивыми как для опытных игроков, так для и новичков. Получив это вознаграждение, заказчик может играть на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а обстоятельства их активации и выигрыша. <a href=https://acerfans.ru/user/DavidGor/>https://acerfans.ru/user/DavidGor/</a> Для казино, работающих онлайн, бездепозитные бонусы необходимы для вербования свежих посетителей. Предложение сыграть на слотах без надобности внесения реальных средств — работающий метод для увеличения интереса к компании. После отыгрыша бездепа великоват шанс, собственно игроку понравится и он продолжит играть в казино, лишь теперь теснее на собственные средства. 1×slots регистрация Простая процедура получения бездепозитного приза, кот-ая займет менее 2-х мин. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные.
1×slots бонус за регистрацию
Начнём с как, собственно любое промо за регистрацию подразумевает некоторые обстоятельства. Бездепозитные бонусы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность денежного оборота, необходимая для исполнения условий. Пример, получили благотворительные вращения и выиграли с их 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 руб., проигрышных либо выигрышных, так. После исполнения, бонусный баланс перейдёт на реальный и станет доступным к выводу. Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция имеет доскональные управляла, ссылка на которые обычно находится в промообъявлении. В них указываются лимиты, вейджер, перечень доступных игр. Если оператор укрывает данные о предложении, то воспользоваться им не стоит. При регистрации идет указывать только достоверную информацию. Когда учетная запись несомненно активна, появится доступ в Личный офис. В нем возможно выбрать еденицу, установить промокод и разузнать подробные управляла получения и отыгрыша бездепа. Краткая информация об акции часто находится непосредственно на регистрационной форме.Также посещают случаи, когда казино начислит обсужденный приз последствии регистрации свежего клиента по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам. 1 x slots casino <a href=https://buketik39.ru/user/HenryTut/>https://buketik39.ru/user/HenryTut/</a> Иногда операторы просят внесение малого депо перед выводом для верификации платежного прибора. В неких казино этот депо кроме предстоит отыграть.Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?
1×слотс казино
<a href=https://benjamins.ch/index.php?title=What_Languages_Are_Available_In_The_1×bet_APP>https://benjamins.ch/index.php?title=What_Languages_Are_Available_In_The_1×bet_APP</a> Основное верховодило получения бездепа ? творимый аккаунт обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов строго запрещено. Проверка проводится по имени, адресу электронной почты, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита необходимо блюсти несложную очередность деяний. 1хслотс рабочее зеркало Если простыми словами, бездепы – это определённая сумма средств либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать презенты. Но есть кое-какие аспекты. Существуют игорные жилища, которые перед тем как начислить призы настоятельно привязать телефонный, дать копии документов.
<b>Смотреть еще похожие новости:</b>
<a href=http://sz.80lvl.ru/viewtopic.php?f=8&t=3671>1×slots casino регистрация 1×slotscasino09k online</a>
<a href=http://forum.survival-readiness.com/viewtopic.php?t=277509>1×slots регистрация на сайте 1×slots ru com</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выбирая бесплатный приз, внимательно изучайте правила. Убедитесь, собственно для возможно принимать роль в акции. Уточните, в каких играх можно выполнять обстоятельства вейджера. При необходимости задавайте вопросы представителям саппорта. Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы была возможность исключить выигрыш.
#1154 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
Бoльшинcтвo азартных заведений выдвигают примерно одинаковые обстоятельства и притязания, которые нужно выполнить, чтобы получить бездепозитный приз за регистрацию. Все их можно объединить в один список: <a href=http://filmkachat.ru/>1×slots официальный зеркало рабочее</a> Ознакомьтесь с нашим перечнем наихороших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего списка и получите бездеп незамедлительно. Хватайте лучшие бесплатные предложения ниже и выигрывайте великие деньги, не рискуя!За привлечение приятеля ? в рамках партнерской программы клиент получает вознаграждение за привлечение новых юзеров. <a href=https://hb-themes.com/forum/all/users/shopavto/>https://hb-themes.com/forum/all/users/shopavto/</a> Бездепозитные бонусы — это презенты от казино в виде бонусных денег или фриспинов для игровых автоматов, которые начисляются на акк игрока в процедуры регистрации на сайте заведения. Для получения этих поощрений депо не требуется. 1хслотс рабочее зеркало на сегодня <a href=https://mozillabd.science/wiki/1win_Brasil_Plataforma_Online>https://mozillabd.science/wiki/1win_Brasil_Plataforma_Online</a> Если при регистрации показать промокод, можно гарантировано получить бонус. Где взять ваучер? Посетите направленные блоги или форумы. Иногда администрация клуба делает рассылку ваучеров на электрическую почту. В заключительное время игорные дома начали рекламироваться в фильмах и телесериалах. Присмотритесь и всего заметите промокод, который принесёт 500 или 1 000 бонусных рублей.
1×slots рабочее зеркало на сегодня
1хслот официальный сайт зеркало Самый распространённый из подобных бонусов, конечно же, бездеп на денек рождения клиента — бонус повторяющий фиксированной суммы или фриспинов поступает на счёт игрока, а воспользоваться им можно в течение установленного периода времени. <a href=https://stalker-worlds.games/user/Walterflacy/>https://stalker-worlds.games/user/Walterflacy/</a> 3. Подтвердить данные. В зависимости от клуба, нужно привязать телефонный либо почту, показать персональную информацию;При пользовании бездепозитным призом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют несколько обликов лимитов: 1×slot рабочее зеркало
казино 1×slots официальный сайт
Иногда операторы настоятельно внесение минимального депозита перед выводом для верификации платежного инструмента. В некоторых казино данный депозит кроме предстоит отыграть. Чем ниже значение вейджера, что, этим проще отыграть и исключить приз. Если Вы планируете заработать на бездепе, не просто ознакомиться с новым игровым клубом, то стоит избегать бонусов с высочайшим вейджером их практически не реально отыграть. С ними Вы можете лишь протестировать игры заведения. <a href=https://www.digitalistings.com/author/stevennuh/>https://www.digitalistings.com/author/stevennuh/</a> 1хслотс регистрация в 1×slots casino
1×slots регистрация на официальном сайте
Бездепозитные бонусы за регистрацию в игровых автоматах для владельцев онлайн-казино являются долею маркетинговой кампании, направленной на увеличение аудитории вебсайта. Так они продвигают свои бренды и привлекают новых посетителей.Верификация аккаунта. Лучше доказать личность незамедлительно после регистрации, дабы потом не было заморочек с выводом денег. Верификация возможность протекать двумя путями: Не стоит путать игру в демо и внедрение призов. В демонстрационном режиме игрок может расценить механику слота, сюжет и оформление. Но забава ведется на относительные кредиты, поэтому отсутствует главное ? ощущение пыла. Активируя промокод или фриспины, заказчик и не тратит свои средства на игровые автоматы, но возможность сорвать настоящий куш!Перед активацией принципиально внимательно выучить условия акции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют значение также лимиты ставок при отыгрыше и сроки, протяжении которых возможно пользоваться предложением. Если бездеп охватывает узкий список игр, рекомендуется разузнать наибольшие коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят лишь том, случае, случае оператор не установил строгие лимитирования на максимальную необходимую ставки. Бонус за регистрацию в казино без депо с выводом денег нужно отыграть. Зачастую для отыгрыша возможность потребоваться устроить ставки на сумму, в количество 10-ов один превосходящую сумму бонуса либо выигрыша. 1×slot официальный сайт <a href=http://zdorovye-vl.ru/bitrix/rk.php?goto=http://zoloto72.ru/bitrix/rk.php?goto=http://volgogostroy.ru/bitrix/redirect.php?goto=https://telegra.ph/Poshagovoe-rukovodstvo-po-registracii-biznesa-v-FNS-Rossii-09–23>http://zdorovye-vl.ru/bitrix/rk.php?goto=http://zoloto72.ru/bitrix/rk.php?goto=http://volgogostroy.ru/bitrix/redirect.php?goto=https://telegra.ph/Poshagovoe-rukovodstvo-po-registracii-biznesa-v-FNS-Rossii-09–23</a> Обычно бездепозитные акции от казино, прибывают на эл. Почту в деньки рождения либо праздники. В неких онлайн казино возможно адресоваться в чат и как постоянному игроку, вероятно вам предложат бездепозитное предложение.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
<a href=https://letterboxd.com/gatecom1801/list/filmlist:49901351/>https://letterboxd.com/gatecom1801/list/filmlist:49901351/</a> 1×slot рабочее зеркало Бесплатный бонус – кредиты, коие онлайн-казино начисляет клиенту, не заставляя его пополнять игровой счет.Итак, чтобы благотворительные бонусные кредиты превратились в реальные средства, которыми возможность распоряжаться по собственному усмотрению, их нужно отыграть. Вейджер следует уточнять в правилах онлайн-казино.
<b>Смотреть еще похожие новости:</b>
<a href=http://link.5nx.ru/viewtopic.php?f=5&t=12447>1×slot зеркало</a>
<a href=https://edidaktikum.ee/en/content/iii-kontakttund-08-juuni?page=110#comment-299525>1х слот 1хслотс регистрация перейти на 1×slots</a>
<a href=https://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=6268>1×slot официальный сайт</a>
<a href=http://miupsik.ru/forums/showthread.php?tid=500665>1×slots зеркало этих способов предполагает регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Существует ли стратегии для отыгрыша бездепозитных призов? К раскаянию нет, на выигрыши или проигрыши с призов, казино либо игрок воздействовать имеет, отдача игр происходит от разработчиков игр.
#1155 Charlesgunnyhttp://filmkachat.ru
казино 1×slots официальный сайт
Бездепозитный приз нередко может замерзнуть легкодоступным сразу в завершения регистрации, поскольку как единственным требованием к нему считается регистрация, а этого ревизия вашей новой учетной записи.Иногда у гостей вебсайта все возникнуть трудности, задачи, препядствия при активации полученного промо-кода. В этих случаях, необходимо адресоваться за поддержкою в службу поддержки «Support». Для получения ответа, обязательно указывается конкретная первопричина воззвания и подтверждается информация дополнительными скриншотами. Если сформировалась спорная ситуация, всегда можно обратиться к основному регулятору либо контролирующему органу, выдавшему данному заведению лицензионный документ. <a href=http://filmkachat.ru/>1×slots промокод при регистрации 2025</a> <a href=https://yoomark.com/content/complete-guide-professional-3d-rendering-services>https://yoomark.com/content/complete-guide-professional-3d-rendering-services</a> В интернете большое узнаваемых игорных площадок с привлекательными акционными предложениями. Однако внимательно читать обстоятельства десятков предложений вскоре надоест, да и время отнимет много. Поэтому наша команда подготовила ТОП-3 вебсайтов с наилучшими бездепозитными призами: 1хслотс регистрация в 1×slots casino <a href=http://www.save-ee.com/memberlist.php?mode=viewprofile&u=82994>http://www.save-ee.com/memberlist.php?mode=viewprofile&u=82994</a> Стоит отметить, что бездепозитный приз выдается только совершеннолетним новичкам, которые, же, шансы пригласить собственных друзей и знакомых, также претендующих на поощрительную программку преданности. Подобная технология появилась среди конкуренцию онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры содействуют увеличению своей посещаемости, методом вербования свежих игроков. Бонусы – это оригинальный шанс для потенциальных соучастников забавы, которые имеют опробовать софт покер рума и увериться, станут ли они в него выступать или нет. Новый игрок испробует свои силы с реальными оппонентами в казино.
1хслотс зеркало
Выбрать казино с бездепозитным призом. У нас на сайте представлен перечень наихороших онлайн казино, которые предлагают своим игрокам великодушные призы за регистрацию. <a href=http://www.fumankong4.cc/home.php?mod=space&uid=580780>1×slots подтвердит вашу регистрацию если говорить</a> 1 хслот регистрация в 1×slots casino Бесплатные бонусы казино без депо возможно получить в виде денежных средств на бонусный счет (исключить их возможно только последствии отыгрыша), фриспинов, забавы либо кешбэк-бонуса. <a href=http://crtdu-kras.ru/communication/forum/user/258441/>http://crtdu-kras.ru/communication/forum/user/258441/</a> Обычно для получения призов без депо, казино выдвигает приклнные и вполне выполнимые обстоятельства, хотя есть ряд действий коие воспрещены и имеют причиной досадные результаты: скачать 1×slots официальный сайт В современность очень просто получить приз за регистрацию в казино. Практически любой игорный дом с радостью начислит деньги или безвозмездные вращения. Многие гэмблеры пользуются данным и не стыдятся региться в каждом клубе с выгодными критериями. Кстати, это отличная возможность выработать победную стратегию и сорвать джекпот.За привлечение друга ? в партнерской программки клиент получает вознаграждение за вербование новых юзеров.
1хслотс 1хслотс регистрация перейти на 1×slots
Фриспины – благотворительные вращения с фиксированной ставкой, коие можно использовать в определенных игровых автоматах.У любого игорного клубы разные вейджеровые обстоятельства. Чтобы вы гарантировано сумели выполнить их, мы дадим некоторое советов. Если система начислила маленькую необходимую, не стоит создавать великие ставки – остановитесь на 10–30 центах. Как только сможете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте выступать. В неприятном случае какого-либо присмотреться к другому автомату. <a href=http://profkomxoz.ru/bitrix/redirect.php?goto=http://dcam.ru/bitrix/redirect.php?goto=http://krym-skk.ru/bitrix/click.php?goto=https://teletype.in/@urid_pomosh/57D7×nDb75v>http://profkomxoz.ru/bitrix/redirect.php?goto=http://dcam.ru/bitrix/redirect.php?goto=http://krym-skk.ru/bitrix/click.php?goto=https://teletype.in/@urid_pomosh/57D7×nDb75v</a> казино 1×slots Выигрыши с призов без вложений всегда привязаны к притязанию по ставкам и все быть обналичены только после исполнения этих требований.Воспользоваться бездепом возможно не во всех игровых автоматах: казино и тут устанавливает ограничение для клиентов. Конечно, это можно посчитать некоторым неудобством для игрока, но справедливости отметить, собственно выбор автоматов всё одинаково остаётся довольно наибольшим.
1×slot рабочее зеркало
Обыкновенные бездепозитные призы в объеме от трех до 20 $ созданы для того, дабы в забавы заходили все новые и свежие игроки. Здесь, всего, несомненно лимитирование на наибольший выигрыш. Важно, чтобы перед минимальным вкладом был отключен приз за первое пополнение счета, и геймер не попадет на повторный вейджер.Бездепозитные призы отличный вариант бесплатной игры в игровые автоматы. Многие юзеры сети не знают, что в казино можно начать играть полностью безвозмездно, а потом исключить выигрыш на банковскую карту либо электронный кошелек, другие не доверяют онлайн казино, а третьи успешно играют и выигрывают – и подчас достаточно большие суммы. <a href=http://naukova2b.2ua.in.ua/viewtopic.php?f=7&t=3621>1×slot зеркало</a> Существуют казино с бонусом за регистрацию, каких очень модны фриспины в интернет казино впоследствии регистрации в определенных забавах. Они встречаются том чаще даровых поощрений или классических призов в казино без инвестициям. Например, игрок регистрирует счет, на кот-ый начисляются безвозмездные забавы, бонус за регистрацию вид бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса компьютерные выигрывает настоящие деньги, коие в последствии возможно успешно исключить из заведения на собственную платежную систему. То есть, есть шансы вывести средства без рисков собственными финансами. Регистрация, за в получит бонусы, займет минут, а спасибо этому можно прирастить 5 евро поощрений до тыс. И без всяких заморочек исключить их.Вейджер в переводе с британского значит «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша полученного приза, в нашем случае бездепозитного. Число ставок значения — главно только набрать необходимую, пропорциональную сумме одобрения. 1× слот зеркало <a href=https://controlc.com/1459e2f2>https://controlc.com/1459e2f2</a>
1× слот зеркало
Для выбора азартного заведения Вы можете пользоваться списком наших казино с бонусами за регистрацию. На нашем веб-сайте мы опубликовали список бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, собственно часть призов эксклюзивные и доступны лишь для гостей нашего сайта по-специальному промо-коду либо по уникальной ссылке. Кроме того, для любого приза мы подготовили подробный обзор, в Вы узнаете как получить и отыграть поощрение и как исключить свой выигрыш с бездепа.Иногда для получения бонусов необходимо связаться с адептами службы поддержки. Удобнее всего с ними беседовать в онлайн-сате, желая иногда достаточно запроса по электронной почте. <a href=https://www.curezone.org/blogs/fm.asp?i=2457149>https://www.curezone.org/blogs/fm.asp?i=2457149</a> 1×slots официальный зеркало Третитй бездепозитный приз за регистрацию – валютные средства. К раскаянию, начислить рубли или доллары способны лишь известные и модные клубы. С их поддержкою появится насладиться каждой доступной игрой – автоматом, рулеткой, кено, блэкджеком.На бонусные начисления могут быть установлены вспомогательные лимитирования, которые Вы не сведению при отыгрыше. Пока приз полностью не отыгран — деньги из казино не выводятся.
<b>Смотреть еще похожие новости:</b>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=259238>1×slots официальный сайт скачать на айфон</a>
<a href=https://www.findaspermdonor.com/viewtopic.php?f=25&t=98813>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<a href=https://www.thefamilylegion.se/viewtopic.php?f=4&t=114837>1 xslots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Иногда в бездепа, казино дарует минимальный приз (до 50 руб. ), из-за которого не заморачиваться.
#1156 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Игорь Акинфеев (футбол) Комарова Наталья Владимировна порно <a href=https://th-royalgclub.com/>1×bet зеркало рабочее</a> суть казино порно с Бондаренко Анастасия Борисовна <a href=https://7club7.com/>казино онлайн бесплатно</a> bet casino Шевцова Татьяна Викторовна порно леон букмекерская контора 1×bet бесплатно казино на деньги какие казино pin casino зеркало
DiskiPlus сайт 1×bet слоты DiskiPlus сайт казино зеркало <a href=https://www.diskiplus.ru>DiskiPlus скачать pin casino</a> DiskiPlus unlim casino DiskiPlus гта казино <a href=https://diskiplus.ru>DiskiPlus лучшие букмекерские конторы</a> DiskiPlus какие казино DiskiPlus porno Илья Ковальчук (хоккей) DiskiPlus букмекерские конторы без депозита DiskiPlus porno Виктория Баркова, легкоатлетка DiskiPlus 1×bet официальный слоты DiskiPlus 1×bet слоты 1×bet top DiskiPlus порно с Васильева Татьяна Викторовна
#1157 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
лучшие букмекерские конторы бк букмекерская контора <a href=https://krtka.info/>1×bet официальный сайт 1×bet xyz</a> официальные букмекерские конторы скачать 7k casino официальный <a href=https://slon-ru.com/>скачать 1×bet на андроид бесплатно</a> казино смотреть порно с Ирина Сидоркова 1×bet вход пина букмекерской конторы 1×bet 1×bet зеркало на сегодня букмекерская контора леонов
DiskiPlus porno Марина Александрова DiskiPlus самое казино <a href=https://www.diskiplus.ru>DiskiPlus порно с Матвей Сафонов (футбол)</a> DiskiPlus порно с Юлия Ефимова, пловчиха DiskiPlus porno Анна Сидорова, керлингистка <a href=https://diskiplus.ru/>DiskiPlus casino pin официальный</a> DiskiPlus Елена Лядова DiskiPlus casino актуальное зеркало DiskiPlus porno Алена Косторная (фигурное катание) DiskiPlus пина casino DiskiPlus casino актуальное зеркало DiskiPlus гта онлайн казино DiskiPlus порно с Петр Ян (ММА)
#1158 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Дронова Александра Викторовна kent casino <a href=https://sovsekretno.net/>porno Юлия Канакина, скелетонистка</a> retro casino porno Яна Троянова <a href=https://kompromat1.online/>вывод казино</a> casino x пина casino Попова Анна Юрьевна порно букмекерская контора суть казино porno Юлия Канакина porno Игорь Акинфеев (футбол)
DiskiPlus casino online зеркало DiskiPlus зеркала казино <a href=https://diskiplus.ru/>DiskiPlus 1×bet официальный слоты</a> DiskiPlus Анна Михалкова DiskiPlus букмекерская контора леонов <a href=https://www.diskiplus.ru>DiskiPlus вывод казино</a> DiskiPlus porno Виктория Баркова, легкоатлетка DiskiPlus 7k casino зеркало рабочее DiskiPlus порно с Юлия Ефимова, пловчиха DiskiPlus ешь казино DiskiPlus bet casino DiskiPlus яндекс казино DiskiPlus зеркала казино
#1159 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия
Автоматы непопросту числятся наиболее знаменитым азартным веселием. Чтобы усвоить управление и правила, потребуется всего несколько мин. Ваша задача сделать ставку, найти число трудящихся линий и можно вертеть тамбур. Если на выпадет выигрышная комбинация – вы выиграли! С данной задачей для помогут управится бездепозитные бонусы казино.Во время забавы в казино, выигрыши, приобретенные благодаря безвозмездным призовым фондам, суммируются и срабатывают в совместную сумму для отыгрывания. Однако, случае удача улыбнется и получится отыграть все призы, игровое заведение гарантированно допустит исключить денежные средства. Сумма вывода несомненно зависимости от лимита, одобренного именно в этом учреждении. Поэтому, пристально нужно разбирать правила выдачи анлимитных депо. <a href=http://filmkachat.ru/>1×slots casino зеркало</a> Еще одно условие касается размеров ставки. Операторы устанавливают наивысшую необходимую, которую игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, избранной в Личном кабинете. При превышении лимита есть риск потерять бонуса. Существующие ограничения относятся и к определенным видам ставок. Например, играя в рулетку, клиент возможность столкнуться с запретом ставить фишки на шансы. <a href=https://designaddict.com/community/profile/furniture-360-view/>https://designaddict.com/community/profile/furniture-360-view/</a> Помните, собственно в некоторых играх сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных забавах только от 5% до 50% суммы ставки числятся как отыгранные средства, на как в слотах идет в зачет все 100% суммы.Существуют казино с бонусом за регистрацию, каких довольно модны фриспины в интернет казино впоследствии регистрации в определенных забавах. Они встречаются и почаще бесплатных поощрений или классических призов в казино без вложений. Например, игрок регистрирует счет, на кот-ый начисляются безвозмездные игры, бонус за регистрацию повторяющий даровых фрспинов, вращения в игровом автомате. Во время игрового процесса игрок выигрывает истинные деньги, которые в последствии можно успешно исключить из заведения на собственную платежную систему. То есть, есть все шансы вывести свои без рисков собственными деньгами. Регистрация, за игрок получит бонусы, займет пару минут, а спасибо этому возможно прирастить 5 евро поощрений до тыс. И без всяких заморочек вывести их. x1 slots 1хслотс регистрация перейти на 1×slots <a href=https://xn–vf4bq05ajlcqa.com/bbs/board.php?bo_table=inquiry&wr_id=222501>https://xn–vf4bq05ajlcqa.com/bbs/board.php?bo_table=inquiry&wr_id=222501</a> В большинстве заведений сделать это возможно по e-mal, по номеру телефона, спустя социальную сеть или гугл-аккаунт.Поспешите отобрать бездепозитные бонусы за регистрацию в казино из представленного списка. Все платформы столько ведут законную деятельность, хотя и порадуют добросовестными результатами забавы, высочайшей отдачей, прыткими выплатами.
казино 1× slots официальный сайт
Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам запрещено начислять бонусы посетителям, не имеющим валютных средств на счете. Мы предлагаем осмотреть животрепещущие бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ.Таким образом онлайн казино получает вероятного игрока. Возможно в будущем либо настоящем он захотит поиграть на свои средства. Так трудятся бездепозитные призы в онлайн казино. Здесь отлично подходит выражение, бесплатные сыр случается лишь в мышеловке. Начинающие игроки могут не осознавать опасность пыла. Однако течением понимания становится больше. Это тема для отдельного обсуждения. <a href=https://adminclub.org/showthread.php?tid=303374>казино 1×slots</a> 1хслотс рабочее зеркало <a href=http://jet-link.ru/index.php?subaction=userinfo&user=dailysector77>http://jet-link.ru/index.php?subaction=userinfo&user=dailysector77</a> Но такие рамки не смущают даже хайроллеров, потому коэффициенты на слотах разрешают рассчитывать на крупные выигрыши, а некоторых автоматах разыгрывается передовой джекпот. казино 1×slots При отыгрыше бонусных средств, необходимо учитывать срок деяния бонуса и время, которое дается на отыгрыш. По истечению заявленного медли, не отыгранный бонус будет аннулирован.
1×slots casino регистрация 1×slotscasin online
Осталось выбрать казино с бонусом за регистрацию и создать профиль. После активации дара выигрыш зависит от Фортуны и способностей.Способы получения бездепа различаются зависимо облика бонуса, который понравился игроку. Но вас в любом случае надо(надобно) быть зарегистрированным в законном онлайн-казино и доказать собственную лицо. В общем облике пошаговая инструкция для получения бездепозитного приза смотрится например: <a href=https://forum.bakililar.az/blogs/entry/3858-%D1%81%D1%82%D0%B5%D0%BF%D0%B5%D0%BD%D1%8C-%D0%BC%D0%B1%D0%B0-%E2%80%93-%D0%B2%D0%B0%D1%88%D0%B5-%D1%83%D0%B2%D0%B5%D1%80%D0%B5%D0%BD%D0%BD%D0%BE%D0%B5-%D0%BF%D1%80%D0%BE%D0%B4%D0%B2%D0%B8%D0%B6%D0%B5%D0%BD%D0%B8%D0%B5-%D0%BF%D0%BE-%D0%BA%D0%B0%D1%80%D1%8C%D0%B5%D1%80%D0%BD%D0%BE%D0%B9-%D0%BB%D0%B5%D1%81%D1%82%D0%BD%D0%B8%D1%86%D0%B5/>https://forum.bakililar.az/blogs/entry/3858-%D1%81%D1%82%D0%B5%D0%BF%D0%B5%D0%BD%D1%8C-%D0%BC%D0%B1%D0%B0-%E2%80%93-%D0%B2%D0%B0%D1%88%D0%B5-%D1%83%D0%B2%D0%B5%D1%80%D0%B5%D0%BD%D0%BD%D0%BE%D0%B5-%D0%BF%D1%80%D0%BE%D0%B4%D0%B2%D0%B8%D0%B6%D0%B5%D0%BD%D0%B8%D0%B5-%D0%BF%D0%BE-%D0%BA%D0%B0%D1%80%D1%8C%D0%B5%D1%80%D0%BD%D0%BE%D0%B9-%D0%BB%D0%B5%D1%81%D1%82%D0%BD%D0%B8%D1%86%D0%B5/</a> Казино выводит деньги только на ту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного бонуса, Вам сначала необходимо пополнить счет. В некоторых клубах ограниченный перечень способов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет именно с данных платежных методов, которые доступны для вывода.При подмоги такового поощрения оператор имеет того завлекать клиентов, которые ранее показывали активность на веб-сайте, хотя по какой-то причине прекратили выступать. В данном случае промокод высылается юзеру по электрической почте или повторяющий SMS. 1×slots регистрация 1×slotscasino09k online
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
У каждого игорного клубы разные вейджеровые обстоятельства. Чтобы вы гарантировано сумели выполнить их, мы дадим количество советов. Если система начислила маленькую необходимую, не стоит создавать великие ставки – остановитесь на 10–30 центах. Как только сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте играть. В противном случае другого, как приглядеться к другому автомату. Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются незамедлительно в сотворения профиля и активны недолговременное время. Если не успеете потратить свои, они попросту сгорят. Касаемо медли, как призы активны на часа.Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке представители онлайн-казино публикуют актуальную информацию о no deposit bonuses и предложениях. 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=https://www.vancouverrowingclub.wiki/index.php/User:ClevelandCantor>https://www.vancouverrowingclub.wiki/index.php/User:ClevelandCantor</a> Выигрыши с призов без вложений постоянно привязаны к притязанию по ставкам и могут быть обналичены только последствии исполнения этих притязаний.Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавления либо официального посетителя для ПК. В большинстве казино действуют программы лояльности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на грядущий степень нередко сопровождается выдачей бездепа.
1хслотс зеркало
Популярность интернет казино растёт и всё больше пользователей начинают интерес азартными забавами. Бездепозитные призы 2022 года, это уникальные подарки за регистрацию. С их поддержкою свежие игроки могут получить бесплатные вращения либо средства на баланс за 1 регистрацию. С свет игорных заведений в интернете, бездепозитные бонусы стали популярнейшим способом привлечения игроков. Подобные акции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о которых мы поведаем. Наш сайт собрал наихорошие предложения из онлайна на 2022 год. Воспользуйтесь любым даром и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить условия. B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax <a href=http://www.ka1799.com/bbs/board.php?bo_table=free&wr_id=318607>http://www.ka1799.com/bbs/board.php?bo_table=free&wr_id=318607</a> Перед активацией важно внимательно выучить обстоятельства промоакции. Чем ниже вейджер, тем больше возможная выгода игрока. Имеют значение кроме лимиты ставок при отыгрыше и сроки, на коих возможно воспользоваться предложением. Если бездеп охватывает узкий перечень игр, рекомендовано узнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь что случае, если оператор не установил требовательные ограничения на наивысшую сумму ставки.Бездепозитные бонусы – это самая небезинтересная и наиболее перспективная акция интернет-казино. Они числе другого, как фри-спинов, поэтому собственно выплаты в безвозмездных вращениях не гарантированы, ведь композиции на барабанах игрового аппарата могут не сложиться. 1×slots зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://skatefluckit.com/member.php?u=149708>1хслотс официальный сайт зеркало</a>
<a href=https://polnyi-pisec.info/members/rabofreekn.502/>1×slots официальный сайт, скачать</a>
<a href=http://aficionado.pl/newthread.php?do=newthread&f=1>1×slots официальный сайт мобильная версия скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В интернет-сети постоянно можно найти перечни более знаменитых и гарантированных поощрительных программ от знаменитых онлайн-казино.
#1160 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
смотреть фильм казино ставки на спорт букмекерские конторы <a href=https://kompromat1.online/>1×bet сайт 1×bet xyz</a> порно с Федор Чалов (футбол) леон букмекерская контора <a href=https://strelochnik.com/>рейтинг казино</a> casino ап 1×bet сейчас букмекерские конторы pin 1×bet зеркало xbet 1×bet скачать бесплатно рокс казино букмекерская контора официальный сайт
DiskiPlus 1×bet сейчас DiskiPlus сайте букмекерской конторы фонбет <a href=https://www.diskiplus.ru/>DiskiPlus Елена Лядова</a> DiskiPlus спорт букмекерская контора DiskiPlus пина букмекерской конторы <a href=https://www.diskiplus.ru/>DiskiPlus сайт винлайн букмекерская контора</a> DiskiPlus casinos xyz DiskiPlus Яровая Ирина Анатольевна порно DiskiPlus pinco casino DiskiPlus пин ап казино DiskiPlus Нургалиева Эльвира Рамиловна порно DiskiPlus пин ап букмекерская контора DiskiPlus porno Мира Андреева (теннис)
#1161 Charlesgunnyhttp://filmkachat.ru
зеркала 1×slots
Такой казино бонус без депозита за регистрацию выдается игроку на час и активно используется данное предложение с 2017 года. Это как бы какая-то маскировка поощрения под бездепозитный. Суть всего сего сводится к что, этому, что геймеру на час выдается, к примеру, 1000 долларов, а реклама повторяет про, собственно каждой выигрыш возможно будет в будущем оставить при себе. Но в играющий всерьез отнесется к данному предложению, то он попросту потеряет время. Ведь игроку нужно будет играть не в основном аккаунте, в тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (числе всей тыс. ) в правила вступят определенные условия, где несомненно сказано, что наибольшей суммой победы имеет быть лишь двести $ и средства можно применять лишь в бонуса на 1-ый вклад с вейджером 25 от суммы гонорары плюс сам депозит. По результату получится, собственно игрок выигрывал себе 200% приз с вейджером на конкретную сумму. Короче разговаривая, это все не вашего времени.Бездепозитные бонусы казино за регистрацию в 2022 году — это вероятность сыграть за счёт заведения. Казино даёт клиенту шанс пользоваться определённой суммой или числом даровых вращений без внесения депозита. Не путайте деморежим с реальной игрой без необходимости внесения депо. <a href=http://filmkachat.ru/>1×slot зеркало</a> Промокод – определённая композиция знаков, которую необходимо установить в соответствующее фон при творении учетной записи или активировать в собственном профиле игрока в разделе с бонусами.Минимального оборота. Этот лимит устанавливается вейджером — же игрок не поиграет на установленную необходимую, вывод средств будет недосегаем. <a href=https://www.uscgq.com/forum/posts.php?forum=general&id=356095>https://www.uscgq.com/forum/posts.php?forum=general&id=356095</a> Прочитайте управляла бонусной программы, какой хотите принять. Да, мы настойчиво рекомендуем сделать это до регистрации. 1×slots быструю регистрацию а также мгновенное <a href=http://novasnova.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://fczerna.ru/bitrix/redirect.php?goto=http://register.usp.org/register/public/NewUser?referrer=https://teletype.in/@urist555/Eit5p36U3ER>http://novasnova.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://fczerna.ru/bitrix/redirect.php?goto=http://register.usp.org/register/public/NewUser?referrer=https://teletype.in/@urist555/Eit5p36U3ER</a> Для всех бездепозитных призов функционирует максимальный лимит на выигрыш. Он указывает предельную необходимую, коию возможность получить, играя на бонусные кредиты. Как лишь для удастся выполнить притязания вейджера, возможный максимум будет переведен с бонусного счета на главной, а остаток будет списан.Изучить верховодила и условия получения бездепозитных бонусов казино, Вы сможете у нас на сайте в разделе с бонусами или на официальном веб-сайте выбранного Вами казино. Если имеет отыскать нужную информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал либо по электронной почте.
1× slots casino зеркало
Не хотите поиграть в азартные игры, не рискуя своими деньгами, хотя получая в все выплаты? Подобную возможность деют почти лучшие порталы с азартными весельями. В их количестве много правдивых и надежных интернет-казино на русском языке. Они привлекают свежих юзеров различными поощрительными мероприятиями, включая бездепозитные, или бесплатные бонусы. 1 x slots Иногда операторы настоятельно внесение минимального депозита перед выводом для верификации платежного инструмента. В некоторых казино данный депозит кроме предстоит отыграть.Чтобы играть безвозмездно на настоящие средства в казино, не всегда довольно просто зарегистрироваться. Иногда нужно выполнить дополнительные действия. <a href=https://gunnerbkub96307.mdkblog.com/36007135/nude-ai-app-transforming-image-moderation-and-privacy-in-the-digital-age>https://gunnerbkub96307.mdkblog.com/36007135/nude-ai-app-transforming-image-moderation-and-privacy-in-the-digital-age</a> 1×slot зеркало рабочее этих способов предполагает регистрацию
1хслотс 1хслотс регистрация перейти на 1×slots
Бездепозитные бонусы настоящими средствами, которые можно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадались.В качестве призов интернет казино часто предлагает выдачу фриспинов, словами даровых вращений игрового барабана. Виртуальные монеты можно применять для изучения в покерной школе или для игры в казино. <a href=http://www.xuandouwan.com/home.php?mod=space&uid=43977&do=profile>http://www.xuandouwan.com/home.php?mod=space&uid=43977&do=profile</a> Объективные – объем бонуса, коэффициент и условия вейджера, необходимость внесения депозита для вывода средств;Подтвердите личность, предоставив оператору казино свои паспортные данные. Инструкции обычно несложные, главное — конкретно им следовать. Если написано, собственно «на фото должны быть заметны все хорошо угла страницы паспорта» — устройте именно такое фото. 1хслот скачать Бoльшинcтвo азартных заведений выдвигают примерно одинаковые условия и требования, которые нужно выполнить, чтобы получить бездепозитный приз за регистрацию. Все их можно соединить в один список:Еще одно условие дотрагивается размеров ставки. Операторы устанавливают наивысшую сумму, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, избранной в Личном офисе. При превышении лимита есть риск потерять приза. Существующие лимитирования относятся и к определенным видам ставок. Например, играя в рулетку, клиент имеет столкнуться с запретом ставить фишки на шансы.
1×slots рабочее зеркало
С этими простыми советами любое казино с призом за регистрацию способно принести в разы больше выгоды и пользы.Чтобы играть бесплатно на реальные деньги в казино, порой достаточно просто зарегистрироваться. Иногда нужно выполнить дополнительные действия. 1×slots зеркало на сегодня <a href=http://ilovevilla.com/bitrix/redirect.php?goto=http://unpul.ru/bitrix/rk.php?goto=http://tek-kom.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/x5RrKAeKFl->http://ilovevilla.com/bitrix/redirect.php?goto=http://unpul.ru/bitrix/rk.php?goto=http://tek-kom.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/x5RrKAeKFl-</a> Итак, чтобы бесплатные бонусные кредиты превратились в настоящие средства, которыми вы можете распоряжаться по собственному усмотрению, их нужно отыграть. Вейджер по уточнять в правилах онлайн-казино.Чаще всего, популярностью сервисы, такие как MoneyBookers и WebMoney, еще MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно неотъемлемое управляло. Финансовые средства выводятся лишь через ту платежную систему, коей огромной для пополнения депозита. Если же игрок получил бездепозитный покерный бонус, требуется пополнить счет на наименьшую необходимую, кот-ая сочиняет обычно 10 долларов.
зеркло казино 1×slots
Можно. Вы всегда можете отрешиться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не создадите ставку.Но не думать, что снабжая пользователей такими призами, казино занимается спонсированием. Ведь размеры вознаграждений, главном, не немалые (средним размером от 5 до 20 $). И на эти средства налагаются определенные обстоятельства и ограничения, неотклонимые к исполненью игрока, если в последствии он вожделеет получить все свои выигранные финансы. <a href=https://gamesgrom.com/user/Stevenchoib/>https://gamesgrom.com/user/Stevenchoib/</a> Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам воспрещено начислять бонусы клиентам, не имеющим денежных средств на счете. Мы предлагаем разглядеть актуальные бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ. 1×slots казино зеркало Верификация аккаунта. Лучше доказать лицо незамедлительно в регистрации, дабы потом не было проблем с выводом денег. Верификация может протекать 2-мя способами:
<b>Смотреть еще похожие новости:</b>
<a href=https://www.fromrus.su/index.php?/topic/59308–1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE/>1хслотс казино зеркало</a>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=133554&pid=716625#pid716625>сайт 1× slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Во всех законных онлайн-казино Беларуси нужно свидетельство паспортных данных для игры — это заявка правительства государства.
#1162 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация
Нет. Казино раздают бесплатные бонусы за регистрацию, для того, дабы заказчик имел ознакомиться с игровым заведением. А дабы исключить его, нужно выполнить обстоятельства отыгрыша. <a href=http://filmkachat.ru/>1×slots casino регистрация</a> <a href=https://www.esurveyspro.com/Survey.aspx?id=d8357902-e8be-4a72–8767–3426f9bacbbb>https://www.esurveyspro.com/Survey.aspx?id=d8357902-e8be-4a72–8767–3426f9bacbbb</a> Каждый новичок и профессиональный игрок грезят стремительно стартануть и начать создавать реальные ставки. Для этого достаточно отобрать презент, за кот-ый надо уплачивать. В зависимости от игровой платформы, надо(надобно) сделать профиль, привязать email либо аппарат. После сего администрация начислит щедрое вознаграждение вид даровых вращений или виртуальных кредитов.Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. 1×slots зеркало быструю регистрацию а также мгновенное <a href=https://www.faribowl.com/author/lateshachil/>https://www.faribowl.com/author/lateshachil/</a> Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?
x1 slots 1хслотс регистрация перейти на 1×slots
1 x slots casino Срок отыгрыша — это этап, кот-ый начинается в момент активации приза и заканчивается с его закрытием. Пользователю нужно уложиться в данный временной зазор, по призовые средства аннулируются. Казино устанавливают перечень игр, ставки в которых засчитываются при расчете отыгранных средств. Если тайтл не входит в данный список, то он может быть недоступен для загрузки во время деянья бонусного предложения. <a href=http://demo2-ecomm.in.ua/user/JamesInosy/>http://demo2-ecomm.in.ua/user/JamesInosy/</a> Обычно бездепозитные акции от казино, приходят на эл. Почту в дни рождения либо праздничные. В неких онлайн казино можно обратиться в чат и как постоянному игроку, возможно вам предложат бездепозитное предложение.Такой безвозмездный эквивалент средств зачисляется на профиль юзера в осуществления требований и предназначаются они только для игрового процесса. Вывод этих вознаграждений возможен лишь в осуществления вейджеровых условий. казино 1×slots официальный сайт Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные способы и расценить особенности, труднодоступные при этой в демо режиме. Многие свежие посетители перебегают в число неизменных, а оператор получает долгосрочную прибыль.Выигрыши с призов без инвестициям постоянно привязаны к притязанию по ставкам и все быть обналичены лишь последствии исполнения этих притязаний.
1×slots зеркало проходить регистрацию это отличный вариант
<a href=https://mcmon.ru/member.php?action=profile&uid=135728>https://mcmon.ru/member.php?action=profile&uid=135728</a> 1×slots casino зеркало рабочее При регистрации по свидетельствовать лишь достоверную информацию. Когда учетная запись несомненно активна, замечен доступ в Личный офис. В нем возможно выбрать еденицу, ввести промокод и узнать доскональные управляла получения и отыгрыша бездепа. Краткая информация об акции нередко присутствует непосредственно на регистрационной форме.
1х слот регистрация в 1×slots casino
Помимо прочего, для вывода средств по бездепу необходимо внести на счёт свой 1-ый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на минимально возможную сумму, после чего вывод средств станет доступен.Бездепозитный приз казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в этом и содержится главное различие. <a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=371025>1хслот официальный сайт зеркало</a> 1хслотс 1хслотс регистрация перейти на 1×slots <a href=http://elymbmx.com/mybb/member.php?action=profile&uid=13576>http://elymbmx.com/mybb/member.php?action=profile&uid=13576</a>
1хслотс мобильная версия зеркало
Прочитайте верховодила бонусной программки, в желаете участвовать. Да, мы безотступно рекомендуем устроить это до регистрации.Игры, в которых можно играть на бонусные деньги. Проверьте перечень игр, в которых возможно выступать на бонусные средства, вполне они Вам не понравятся и не стоит расходовать своё время на эту акцию. Минимального оборота. Этот предел уточняется вейджером — пока игрок не сыграет на установленную необходимую, вывод средств будет недоступен.Для всех бездепозитных призов функционирует максимальный предел на выигрыш. Он указывает предельную необходимую, коию появится получить, играя на бонусные кредиты. Как лишь вас получится выполнить требования вейджера, допустимый максимум несомненно переведен с бонусного счета на основной, а остаток несомненно списан. <a href=http://hajepine.com/bbs/board.php?bo_table=free&wr_id=52519>http://hajepine.com/bbs/board.php?bo_table=free&wr_id=52519</a> казино 1×slots официальный сайт В некоторых интернет казино для получения бездепозитных бонусов не довольно просто зарегистрироваться на веб-сайте клуба и подтвердить средства контактные данные. Дополнительно потребуется активация промокода.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.digicube.de/forum/threads/868015–1×slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%BD%D0%B0-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D0%BE%D0%BC-%D1%81%D0%B0%D0%B9%D1%82%D0%B5?p=1085029#post1085029>1×slots регистрация на официальном сайте</a>
<a href=https://rolivka.online/forum/showthread.php?tid=40461>1×slots акции</a>
<a href=http://sofanatki.ekafe.ru/viewtopic.php?f=1&t=2780>1хслотс зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
К примеру, игроку выдаются бесплатные свои в заведении в размере пятидесяти или ста долларов (вейджер на которые сочиняет 100х). То есть, каждому новоприбывшему игроку выскакивает притягивающая иллюстрация, кот-ая обещает выплату всех зачисленных компанией средств. Не стоит обращать внимания на казино бонус за регистрацию без депо с чрезмерно великой либо довольно малеханькой суммой бонусов, поэтому собственно, том кропотливо выучив все обстоятельства, тут вероятнее всего, будет какой-то подвох. Вы всего, например все любите получать подарки и бездепозитные призы казино. Игорные жилища брали в привычку одаривать гэмблеров приятными бонусами. Стать обладателем приветственного презента возможно за творение профиля или пополнение счёта. Второй вариант более интересный, ведь клубы готовы удвоить депо! Но если вы новичок и лишь знакомитесь с миром пыла, чем воспользуйтесь призом за регистрацию.
#1163 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало на сегодня
Как лишь получите бездеп в казино, всё точно не запамятовывайте инспектировать электронную почту. Некоторые игорные клубы день веселят интенсивных гэмблеров приятными призами. Чаще всего получить презент возможно в преддверии праздника, на денек рождение, за привлечение приятеля. А кроме распространённым бонусом является прибавка к депозиту. Нужно чем восполнить счёт, и азартное заведение прирастит его на 50–100%.Чаще всего, известные сервисы, такие как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное управляло. Финансовые свои выводятся лишь через ту платежную систему, коей популярностьюимели для пополнения депо. Если же игрок получил бездепозитный покерный бонус, потребуется пополнить счет на наименьшую сумму, которая составляет обычно десять $. <a href=http://filmkachat.ru/>1×slots зеркало регистрация то дальше необходимо пройти</a> Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке нужно восполнить счет в казино. Для депозитных призов, данная процедура не необходима, например как депозит уже сделан. <a href=https://yoomark.com/content/complete-guide-professional-3d-rendering-services>https://yoomark.com/content/complete-guide-professional-3d-rendering-services</a> Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают бонус по странам. Вплоть до того, собственно клуб имеет на игроков из Вашей страны, а бездеп мешает.Для такого, дабы отыграть сумму вашего бездепозитного приза нужно выполнить условия вейджера. Очень часто фриспины даются на конкретные слоты (book of ra, book of deceased, book of sun), выбирайте разъем для по душе, они довольно красочные и высококачественные. Бездепозитные приз может быть валютным так и в виде фриспинов на слоты 1хслотс рабочее зеркало <a href=https://artistecard.com/Bbgatecom2512#!/news/2024/82591>https://artistecard.com/Bbgatecom2512#!/news/2024/82591</a>
1×slots зеркало регистрация в 1×slots casino
Такой бесплатный эквивалент средств зачисляется на профиль юзера после осуществления притязаний и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений возможен только в осуществления вейджеровых условий.Также случаются случаи, когда казино начисляет обсужденный приз в регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам. 1×slots промокод при регистрации Популярность интернет казино растёт и всё больше пользователей начинают интерес азартными играми. Бездепозитные призы 2022 года, это оригинальные подарки за регистрацию. С их поддержкой свежие игроки могут получить благотворительные вращения либо средства на баланс за одну регистрацию. С выходом игорных заведений в интернете, бездепозитные бонусы стали моднейшим способом привлечения игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш сайт собрал наилучшие предложения из интернета на 2022 год. Воспользуйтесь хоть презентом и можете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить обстоятельства.Бездепозитный приз – это экономическое вознаграждение, коие выдается участнику забавы в казино, для его вербования и появления заинтересованности. Любой посетитель, кот-ый соответствует условиям выдачи сходственного бездепозитного приза, может претендовать на получение вышеуказанного приза. Такое поощрение является более эффективным методом, дающим вероятность стартовать в игре, не вкладывая собственных вещественных средств. <a href=https://www.magcloud.com/user/mayabtb35517>https://www.magcloud.com/user/mayabtb35517</a> При верном раскладе бездепы — это прекрасный способ играть на средства без растраты собственных средств. Есть некоторое рекомендаций, следуя коим можно извлечь максимально пользы из сходственных акций казино. Играть по лишь на лицензированных площадках. Скриптовые сайты столько дурачат с бонусными предложениями, но и употребляют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах невероятно. 1×slots рабочее зеркало Вейджер менее х30–35 является применимым. Опытные игроки утверждают, собственно с этим вейджером реально остаться в плюсе, в правильно подойти к выбору игрового аппарата.Выше мы дали глубокий набор самых свежих и своевременных бездепозитных бонусов в онлайн казино без пополнения на 2022 год, где вам воспользоваться каким ценным бездепозитным бонусом.
1×slots casino зеркало рабочее
Чтобы других убедиться в превосходствах бездепозитных призов, довольно зарегистрироваться в казино и получить поощрение.Большинство клубов привлекают внимание игры за счёт различных презентов. На одних веб-сайтах возможно получить виртуальные кредиты, коие откроют доступ ко всему софту. На иных же, администрация предлагает безвозмездные вращения для пуска топовых интернет слотов. Несмотря на разные акции, стоит выделить самые главные. Как и промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такового предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых посетителей и дозволяет им составить впечатление о функционале, не рискуя значительными совокупностями.Промокод – определённая композиция символов, которую необходимо ввести в подходящее поле при твореньи учетной записи либо активировать в собственном профиле игрока в разделе с бонусами. <a href=http://manuel.vonthron.free.fr/forum/profile.php?mode=viewprofile&u=2389>http://manuel.vonthron.free.fr/forum/profile.php?mode=viewprofile&u=2389</a> Но надо мыслить, собственно снабжая пользователей такими бонусами, казино занимается спонсированием. Ведь размеры вознаграждений, в, не немалые (средним размером от 5 до 20 $). И на эти свои налагаются определенные обстоятельства и ограничения, обязательные к выполнению игрока, в в последствии он вожделеет получить все свои выигранные деньги.Онлайн гемблинг развивается с любым днем все больше и больше, свежие бренды создаются не по дням а по часам. Новые онлайн казино проделывают вступительные акции для игроков, чтобы, чтобы что бы зарекомендовать себя, и что, этим самым предлагают бездепозитные призы за регистрацию, собственно бы не пропустить такую возможность — как воспользоваться свежим бездепом, рекомендуем навещать наш сайт как можно чаще, самое аппетитное и новые несомненно добавляться в данном же перечне. 1×slots промокод при регистрации 2025
1хслот официальный сайт зеркало
Мы подготовили перечень, где есть всегда актуальные и свежие бездепозитные бонусы казино, коие вам получить безвозмездно. Для наших юзеров есть специальные предложения эксклюзивные призы, которые вы у не отыщите, их мы определили особой красной плашкой «Exclusive».Исходя из этого, просто не присутствует разумных причин махнуть рукою на получение такового приза при регистрации. И, что, на подобный безвозмездной основе у вас есть все шансы выиграть деньги и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные бонусы, нарекают бесплатными интернет платформами для игр. <a href=http://okeyrp.listbb.ru/viewtopic.php?f=24&t=2981>1хслот официальный сайт зеркало</a> Условия, на коих предоставляется бездеп, регулируются казино. Каждая промоакция содержит подробные верховодила, ссылка на коие обыкновенно содержится в промообъявлении. В них указываются лимиты, вейджер, список доступных игр. Если оператор прячет данные о предложении, то воспользоваться им не стоит. скачать 1×slots на андроид мобильная версия <a href=http://perfectbuilding.ru/index.php?subaction=userinfo&user=merelabyrinth46>http://perfectbuilding.ru/index.php?subaction=userinfo&user=merelabyrinth46</a> Бонусы без депо при регистрации считаются самыми красивыми как для опытных игроков, например для и начинающих. Получив такое вознаграждение, заказчик имеет выступать на реальные средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные призы в интернет-казино Рунета, еще обстоятельства их активации и выигрыша.Не стоит путать забаву в демо и использование призов. В демонстрационном режиме игрок может оценить механику слота, сюжет и оформление. Но игра проводится на условные кредиты, поэтому отсутствует основное ? чувство пыла. Активируя промокод или фриспины, клиент по-прежнему не тратит средства средства на игровые автоматы, но возможность сорвать настоящий куш!
1× slots официальный
Возможность протестировать новые забавы, не рискуя личностными средствами и создать личную тактику забавы. <a href=https://faktes.ru/user/DoctorLazutapr/>https://faktes.ru/user/DoctorLazutapr/</a> Бездеп с фриспинами возможность охватывать всю коллекцию игр на веб-сайте или разработки одного провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш возможность быть выведен в того, как юзер отыграет эту необходимую. Возможность расценить глубокий перечень слотов — главное достоинство этой разновидности. Игроку становятся доступны что, эти опции, которые отсутствуют в демонстрационном режиме, а возможность выиграть настоящие деньги добавляет ярчайших азартных ощущений. 1хлот регистрация в 1×slots casino Существуют казино с призом за регистрацию, в довольно знамениты фриспины в онлайн казино потом регистрации в конкретных играх. Они встречаются в почаще бесплатных поощрений либо традиционных бонусов в казино без вложений. Например, игрок регистрирует счет, на который начисляются бесплатные игры, приз за регистрацию в виде даровых фрспинов, вращения в игровом автомате. Во время игрового процесса игры выигрывает истинные средства, которые в последствии можно удачно вывести из заведения на свою платежную систему. То есть, все шансы исключить свои без рисков своими деньгами. Регистрация, за которую игрок получит призы, займет пару минут, а благодаря данному возможно увеличить пять евро поощрений до тысячи и без всяких проблем вывести их.
<b>Смотреть еще похожие новости:</b>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5303/#comment-644504>1хслот официальный сайт зеркало</a>
<a href=https://adminclub.org/showthread.php?tid=304662>1×slots коды</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для получения приза нужно ознакомиться с программой лояльности казино и сделать ставки на сумму, необходимую для перехода на грядущий степень. Бонус в казино без депозита имеет разные варианты: это может быть приветственный бонус, промоакции в честь каких-то праздников либо главных дат, приз за вербование новых игроков, лояльность и получение VIP-статуса.
#1164 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
официальные букмекерские конторы скачать porno Игорь Акинфеев (футбол) <a href=https://7club7.com/>porno Юлия Канакина, скелетонистка</a> бесплатные букмекерские конторы порно с Алина Загитова, фигуристка <a href=https://specreporter.com/>лучшие бесплатные онлайн казино</a> лучшие букмекерские конторы 1×slots casino 1×bet сайт 1×bet xyz casino сайты казино 1 скачать pin casino пин ап casino pin up top
DiskiPlus up casino скачать DiskiPlus порно с Афонина Марина Игоревна <a href=https://www.diskiplus.ru>DiskiPlus про казино</a> DiskiPlus ограбление казино DiskiPlus лучшие казино бесплатно <a href=https://diskiplus.ru>DiskiPlus казино регистрации</a> DiskiPlus пин up casino DiskiPlus порно с Юлия Ефимова DiskiPlus фильмы казино рояль DiskiPlus сайт винлайн букмекерская контора DiskiPlus Светлана Ходченкова DiskiPlus официальные зеркала казино DiskiPlus casinos xyz
#1165 Charlesgunnyhttp://filmkachat.ru
1 xslots рабочее зеркало
Это раз из главных показателей привлекательности подарка. С завешенным коэффициентом даже мастера не смогут выполнить условия по отыгрышу. И так, как презентабельно выглядит предложение – бездепозитный бонус казино в размере $500 или $1 000. Чтобы новенькие попревосходнее вникли, собственно же это вейджер, мы разберём на случае.Чтобы бездеп не был начислен на Ваш акк, Вам надо активировать бонусный код. Если поощрение от казино было добавлено на Ваш акк автоматически, а Вы не планируете его применять, обратитесь в службу поддержки с пожеланием отменить бездепозитный бонус. <a href=http://filmkachat.ru/>1×slots регистрация на официальном сайте</a> <a href=https://www.doyoubuzz.com/architectural-events>https://www.doyoubuzz.com/architectural-events</a> Одним из предлогов отдавать привилегию 1 либо другому заведению содержится в привлекательности предлагаемых акций и даровых предложений. Безвозмездные фриспины, выдаваемые без нужды создавать какой-нибудь лепта, в списке располагается далеко не в конце. casino 1×slot <a href=https://build.co.ua/wr_board/tools.php?event=profile&pname=Julesbuisk>https://build.co.ua/wr_board/tools.php?event=profile&pname=Julesbuisk</a>
зеркала 1×slots
<a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=399572>1×slots casino зеркало рабочее</a> 1×slots рабочее зеркало Активация денежного вознаграждения происходит автоматически после творенья профиля либо применения промокода. Иногда операторы предъявляют вспомогательные требования: подписаться на странички казино в соц сетях или на рассылку рекламных известий, скачать и установить дополнительный софт и т.д. <a href=https://dedignat.ru/component/users/?option=com_k2&view=itemlist&task=user&id=28105>https://dedignat.ru/component/users/?option=com_k2&view=itemlist&task=user&id=28105</a> Самые знаменитые способы вывода денег ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электрическим платежным системам подобии Neteller и Skrill, а пользуются криптовалютными кошельками. Вывод выигрышей возможность осуществляться моментально или занимать от нескольких часов до нескольких суток.Бездеп с фриспинами имеет охватывать всю коллекцию игр на веб-сайте или разработки одного провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш имеет быть выведен после того, как пользователь отыграет эту сумму. Возможность оценить глубокий перечень слотов — основное достоинство данной разновидности. Игроку становятся доступны что, эти опции, которые отсутствуют в демонстрационном режиме, а вероятность выиграть реальные деньги прибавляет ясных азартных ощущений. 1×slots регистрация 1×slots casino c2d ru Баланс игрока дополняется на соответствующую необходимую. К ней применяется вейджер, указанный в правилах промоакции. Вывести выигрыш можно будет после такого, как юзер устроит требуемый объем ставок из личных средств. В редчайших случаях бездеп трудится в формате Free Play. На счет юзера зачисляется крупная сумма, и предоставляется малый срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по окончании этого периода сумма на счету несомненно превосходить первоначальную, то разницу можно несомненно исключить или использовать для дальнейших ставок.
зеркала 1×slots
Бонусы без депо при регистрации числятся наиболее привлекательными как для опытнейших игроков, так для и начинающих. Получив такое вознаграждение, заказчик может выступать на настоящие деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, еще обстоятельства их активации и выигрыша. Используйте наихорошие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из списка ниже, дабы заработать подарки за простые действия и уже сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высочайшей отдачей и резвыми выводами на электронные кошельки.Зарегистрируйтесь. Для регистрации чаще всего довольно ввести свой номер телефона и почтовый адрес, после чего ввести полученный код из СМС. Возможно, требуется показать промокод. В правилах акции несомненно написано, где его хотелось вводить. Иногда это бы создавать при регистрации, времени — теснее после создания личного кабинета, на отдельной странице. <a href=http://mebel-fabrik.com.ua/index.php?subaction=userinfo&user=jumpytrousers25>http://mebel-fabrik.com.ua/index.php?subaction=userinfo&user=jumpytrousers25</a> Не стоит путать игру в демо и внедрение призов. В демонстрационном режиме игрок может расценить механику слота, сюжет и оформление. Но забава ведется на относительные кредиты, поэтому отсутствует главное ? ощущение пыла. Активируя промокод или фриспины, заказчик и не тратит свои средства на игровые автоматы, но возможность сорвать настоящий куш! 1×slots регистрация 1×slotscasino09k online
1×slots casino регистрация
Вейджер в переводе с британского значит «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша полученного бонуса, в нашем случае бездепозитного. Число ставок роли не играет — главно лишь набрать необходимую, пропорциональную сумме одобрения. Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера.Кешбэк-бонус дает собой возврат фиксированного процента от ставки когда проигрыша или же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не выше 10%. казино 1×slots официальный сайт <a href=http://www.scoreit.org/p/davidpyday>http://www.scoreit.org/p/davidpyday</a>
1×slot рабочее зеркало
Выигрыши с призов без вложений всегда привязаны к притязанию по ставкам и все быть обналичены только после исполнения этих требований.В разделе с призами активировать свой презент. Найти забавы, для которых учтено поощрение и использовать бонус по предназначению. Получать информацию о самых прибыльных призах возможно без неизменного мониторинга новостей казино. Мы брали данную задачу на себя и постоянно следим за предложениями операторов, выбирая наилучшие из них. В этом разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список промоакций регулярно дополняется. В топ зашли самые новые бездепозитные призы за регистрацию в казино 2020, временные и замкнутые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и критериям. Если срок действия акции истек, она удаляется из перечня.Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 поболее. Когда игроку надеется количество фриспинов, администрация имеет бить3 их начисление на несколько дней. Бесплатные вращения предоставляются для определенного слота, который указывается в правилах промоакции. <a href=http://xn–ok0b90ihwa585c44h.com/bbs/board.php?bo_table=patner1&wr_id=34437>http://xn–ok0b90ihwa585c44h.com/bbs/board.php?bo_table=patner1&wr_id=34437</a> 1×slots казино зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=59423>1×slots регистрация 1×slots casino 777 online</a>
<a href=http://sofanatki.ekafe.ru/viewtopic.php?f=1&t=2482>1×slots зеркало на сегодня</a>
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=50441>зеркала 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Некоторые клубы механически начисляют бонус на аккаунт игрока в выполнения критерий получения, хотя посещают истории, когда бонус надо(надобно) активировать игроку самому. Есть количество способов активации приза:
#1166 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино на деньги casino зеркало сайта <a href=https://krtka.info/>порно с Илья Осипов (киберспорт)</a> порно с Артемий Панарин (хоккей) Преподобная Надежда Александровна порно <a href=https://slon-ru.com/>букмекерская контора фонбет официальный</a> 1×bet на андроид бесплатно приложения букмекерских контор на андроид порно с Алина Загитова porno Дарья Мороз где казино казино большая porno Дарья Мороз
DiskiPlus porno Марина Александрова DiskiPlus порно с Сергей Бобровский (хоккей) <a href=https://diskiplus.ru>DiskiPlus бесплатно фильм казино</a> DiskiPlus ев казино DiskiPlus Окладникова Ирина Андреевна порно <a href=https://diskiplus.ru/>DiskiPlus карты казино</a> DiskiPlus порно с Сергей Бобровский (хоккей) DiskiPlus автомат казино DiskiPlus сайт казино вход DiskiPlus бесплатно играем казино DiskiPlus 7k casino официальный DiskiPlus pin ап casino казино
#1167 Charlesgunnyhttp://filmkachat.ru
casino 1×slot
У любой игры средства притязания по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система зачтет каждую ставку. В рулетке и покере устроить это гораздо сложнее. Именно потому так принципиально внимательно разбирать обстоятельства получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в каждой этой, то новенькие просто «спустят бонус на ветер». <a href=http://filmkachat.ru/>1хлот регистрация в 1×slots casino</a> <a href=https://hearthis.at/group/466309/eeeee-eeee-e-eeeee-eee-eeeeee-e-eeeeeee-eeeeeee-eeeeeeeeee/>https://hearthis.at/group/466309/eeeee-eeee-e-eeeee-eee-eeeeee-e-eeeeeee-eeeeeee-eeeeeeeeee/</a> 1 x slots casino <a href=http://db.dbmyxxw.cn/home.php?mod=space&uid=129503&do=profile&from=space>http://db.dbmyxxw.cn/home.php?mod=space&uid=129503&do=profile&from=space</a>
казино 1× slots официальный сайт
1×slots зеркало регистрация Начнём с такого, что каждое рекламную за регистрацию подразумевает некие условия. Бездепозитные бонусы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность валютного оборота, нужная для исполненья условий. Пример, получили благотворительные вращения и выиграли с их 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 руб., проигрышных либо выигрышных, неважно. После исполнения, бонусный баланс перейдёт на настоящий и станет легкодоступным к выводу.Фриспины — бесплатные вращения, которые позволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины считаются наиболее популярным и желаемым видом бонуса — бесплатные вращения порой эффективнее и веселее в отыгрыше, чем другие виды бездепов. <a href=http://40th.jiuzhai.com/home.php?mod=space&uid=2639232&do=profile&from=space>http://40th.jiuzhai.com/home.php?mod=space&uid=2639232&do=profile&from=space</a> B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax 1×slots регистрацию более популярный вариант это
1хслот официальный сайт зеркало
Так же стоит выделить то, собственно в каждом интернет казино установлен свой наибольший кешаут на бездепозитный бонус. Как управляло кешаут — это предельная сумма средств, кот-ая дешевая для вывода с бездепозитного приза. <a href=http://sgs-penza.ru/index.php?subaction=userinfo&user=workablenarrato>http://sgs-penza.ru/index.php?subaction=userinfo&user=workablenarrato</a> 1× slots официальный Так же стоит выделить то, что в любом интернет казино установлен собственный максимальный кешаут на бездепозитный бонус. Как верховодило кешаут — это максимальная сумма средств, которая дешевая для вывода с бездепозитного приза.
1хслотс официальный сайт зеркало
<a href=http://miupsik.ru/forums/showthread.php?tid=515472>1 x slots casino</a> Для вывода средств приз нужно будет отыграть законам, установленным казино. Внимательно ознакомьтесь с правилами акции и вариантами отыгрыша бездепозитного бонуса до его получения, чтобы избежать конфликтных ситуаций.Призовые начисления без депозита шансы предоставляться для участия в турнирах интернет казино. Потратить перечисленные деньги возможно самая в рамках данной акции. Условия их проведения содержат лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, какого-либо изучить его правила. 1×slots подтвердит вашу регистрацию если говорить <a href=https://filmy-hd.ru/user/KennethWak/>https://filmy-hd.ru/user/KennethWak/</a> Бездепозитный приз за регистрацию в казино с выводом средств в 2022 году — Наш ресурс дает игрокам актуальную информацию о самых новых, щедрых и испытанных призах в онлайн казино, коие обновляются любой день.Если площадка презентует бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь завести акк на сайте и активировать его, подтвердив адрес электрической почты, номер аппарата или иные данные, коие требует оператор. Перед этим нужно увериться, собственно пользователь находится на официальном веб-сайте казино, не на мошеннической площадке.
1хслотс официальный сайт зеркало
Не трудно догадаться, собственно no down payment bonuses практически ни не посещают великими. Чаще всего идет о пяти–тридцати долларах (или эквиваленте данной суммы в другой валюте).В разделе с призами активировать свой подарок. Найти игры, для которых учтено одобрение и применять бонус по назначению. Более крупные предложения встречаются довольно изредка. Зачастую они доступны только VIP-игрокам. В оставшихся случаях им скорее сопутствуют очень строгие условия отыгрыша. Также возможны дополнительные обстоятельства и ограничения, прописанные в условиях и положения бонусной программки казино.Бoльшинcтвo азартных заведений выдвигают приблизительно одинаковые условия и притязания, которые необходимо выполнить, чтобы получить бездепозитный приз за регистрацию. Все их возможно объединить в раз перечень: <a href=http://daz3d-poser.net/index.php?subaction=userinfo&user=spookychief9>http://daz3d-poser.net/index.php?subaction=userinfo&user=spookychief9</a> Представьте момент, когда при ставке в 10 рублей Вы получите сходственное умножение. Миллион руб. За одно вращение, собственно абсолютно вполне. Поэтому вопрос, сколько можно выиграть остаётся не. Предлагаем проверить без. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный приз и проверяйте фортуну в деле. Разумеется, вывести деньги не так просто. Однако шансы есть у всех. 1×slots официальный сайт зеркало рабочее Получить приветственный бонус имеют лишь свежие клиенты онлайн-казино. Способы описаны в критериях акции любого легального казино, чаще всего это:Как правило, новоприбывшие геймеры для хотят ознакомиться с методами ввода и вывода валютных средств и сроки исполнения поданных заказов чтобы четко понимать, как прытко они смогут вывести свой казино бонус за регистрацию без депо на электронный кошелек или же банковскую карту. К счастью для всех играющих, внутри определенных холдингов, все казино конкурируют меж собой. Ведь случае бы определенную компанию представляло лишь одно онлайн-заведение, то ли бы посетители увидели казино с призом за регистрацию и возможность бы рассчитывать только на вознаграждение повторяющий бонуса на 1-ое инвестиция. К каждому заведению регулярно следует привлекать новых игроков, что, итоге, лишь на руку всем играющим.
<b>Смотреть еще похожие новости:</b>
<a href=https://russiancomputerservice.ru/user/JosephCer/>1×slots официальный зеркало рабочее</a>
<a href=https://bbs.sinbadgroup.org/index.php?xjkh-tampa-s-poster-pup-for-new-cancer-treatment.t48661.html/page-6443#post-277134>1×slots официальный зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выиграть настоящие деньги в казино не пополняя счет – трудно, но вполне. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными бонусами и начните выступать на бонусные средства. По статистике из 10-ти заведений можно заработать маленькую сумму денег помощью бонусных средств. Выигрыши с призов без инвестициям постоянно привязаны к требованию по ставкам и все быть обналичены лишь в выполнения данных притязаний.
#1168 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
включи казино играющие казино <a href=https://rhymes-punches.com/>порно с Илья Осипов (киберспорт)</a> про казино 1×bet сайт 1×bet xyz <a href=https://th-royalgclub.com/>букмекерская контора бесплатно скачать</a> казино ставка казино ставка порно с Дарья Касаткина (теннис) казино на деньги включи казино up casino пин casino
DiskiPlus букмекерская контора зенит DiskiPlus спорт букмекерская контора <a href=https://diskiplus.ru/>DiskiPlus Скоробогатова Ольга Николаевна порно</a> DiskiPlus pin up casino buzz DiskiPlus 1×bet зеркало слоты 1×bet xyz <a href=https://diskiplus.ru>DiskiPlus pin ап casino</a> DiskiPlus porno Алена Михайлова DiskiPlus фильмы казино рояль DiskiPlus бесплатно фильм казино DiskiPlus казино пин DiskiPlus Любимова Ольга Борисовна порно DiskiPlus играющие казино онлайн DiskiPlus casino автомат
#1169 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
официальные сайты казино 1×bet скачать приложение на андроид <a href=https://th-royalgclub.com/>сайт казино зеркало</a> porno Катерина Шпица casino андроид <a href=https://rucriminal.info/>Окладникова Ирина Андреевна порно</a> яндекс казино pin up casino Манилова Алла Юрьевна порно 1×bet зеркало на сегодня порно с Карен Хачанов (теннис) 1×bet 1хбет букмекерская контора вход
DiskiPlus casinos xyz DiskiPlus букмекерские конторы без депозита <a href=https://www.diskiplus.ru/>DiskiPlus казино смотреть</a> DiskiPlus porno Александр Соболев (футбол) DiskiPlus зеркала казино <a href=https://www.diskiplus.ru>DiskiPlus Скоробогатова Ольга Николаевна порно</a> DiskiPlus часы казино DiskiPlus Приезжева Екатерина Геннадьевна порно DiskiPlus porno Анна Сидорова, керлингистка DiskiPlus казино онлайн DiskiPlus вывод казино DiskiPlus black russia казино DiskiPlus casino ru
#1170 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
официальные сайты казино porno Алена Михайлова <a href=https://7club7.com/>1×bet зеркало рабочее xbet</a> pin up casino скачать porno Катерина Шпица <a href=https://m.repost.news/>bet casino</a> букмекерская контора бесплатно скачать 1×bet зеркало на сегодня 1×bet xyz порно с Зырянова Анастасия Владимировна зеркала казино casino buzz casino betting карты казино
DiskiPlus pin up casino официальный DiskiPlus фреш казино <a href=https://www.diskiplus.ru/>DiskiPlus играющие казино</a> DiskiPlus Матвиенко Валентина Ивановна порно DiskiPlus 1×bet официальный скачать <a href=https://www.diskiplus.ru/>DiskiPlus включи казино</a> DiskiPlus Фастова Елена Владимировна порно DiskiPlus porno Ангелина Гончаренко, хоккеистка DiskiPlus порно с Аделия Петросян (фигурное катание) DiskiPlus букмекерская контора ставки DiskiPlus up casino официальный DiskiPlus официальные букмекерские конторы DiskiPlus казино вход официальный сайт
#1171 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino c2d ru
Возможность протестировать новые игры, не рискуя личными средствами и создать собственную тактику забавы.Не рекомендуем сломя голову хвататься за различные предложения получения средств без вложений. Вполне вполне, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем выглядит на 1-ый взор. Альтернативой является казино приз за депо. Мы предлагаем вам пару советов, спасибо которым у любого игрока будет возможность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом средств: <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slots review live</a> Как только на виртуальном счету окажутся бонусные средства, поспешите отыграть вейджер. Сразу последствии сего можно забыть заявку на вывод выигрыша. Кредиты выгодно выделяются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом реальных средств и дают вероятность ощутить азарт. Во-вторых – можно насладиться любой азартной игрой доступной на сайте. В вашем постановлении находятся автоматы, настольные прибавление, видео-покер, Live-дилеры. <a href=https://www.24liveblog.com/live/U9cH9>https://www.24liveblog.com/live/U9cH9</a> 1×slots зеркало рабочее <a href=http://www.hpt.co.kr/bbs/board.php?bo_table=free&wr_id=129838>http://www.hpt.co.kr/bbs/board.php?bo_table=free&wr_id=129838</a> Помните, собственно в некоторых играх сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных забавах лишь от 5% до 50% суммы ставки считаются как отыгранные средства, в то время как в слотах идет в зачет все 100% суммы.Ниже указан актуальный список легальных казино в Беларуси с призами на 1-ый депо. Вы сможете попасть на официальный сайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус.
1×slot зеркало рабочее этих способов предполагает регистрацию
Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в социальных сетях, установку мобильного приложения либо официального посетителя для ПК. В большинстве казино действуют программы преданности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий уровень нередко сопрягается выдачей бездепа. 1хслотс мобильная версия зеркало Фриспины – бесплатные вращения с фиксированной ставкой, коие можно применять в определенных игровых автоматах.Бездепозитный бонус нередко может стать доступным незамедлительно последствии окончания регистрации, что в большинстве случаев единственным притязанием к нему является регистрация, а затем ревизия вашей новой учетной записи. <a href=http://slbook-kaluga.ru/index.php/forum/user/244912-tightfisteddent>http://slbook-kaluga.ru/index.php/forum/user/244912-tightfisteddent</a> В современность очень просто получить приз за регистрацию в казино. Практически каждый игорный дом с радостью начислит деньги или безвозмездные вращения. Многие гэмблеры пользуются этим и не смущяются региться в каждом клубе с выгодными условиями. Кстати, это отличная вероятность выработать победную стратегию и сорвать джекпот. 1×slots зеркало быструю регистрацию а также мгновенное
1×slots казино зеркало
Подарки на дни ? приуроченные к праздничным датам, требующие условного отыгрыша либо начисляются без это. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду.Основное отличие никаких, что для получения бездепа не пополнять баланс в казино. Но не сего, есть ряд и различий: Вейджер менее х30–35 считается применимым. Опытные игроки утверждают, что с таким вейджером реально остаться в плюсе, в верно подойти к выбору игрового аппарата. <a href=http://mem168new.com/home.php?mod=space&uid=993848>http://mem168new.com/home.php?mod=space&uid=993848</a> Подтверждение электронной почты – одно из главных критерий, которое есть практически в каждом бездепозитном казино. Чтобы верифицировать электрическую почту, довольно перебежать по интенсивной ссылке в письме, полученном от азартного клуба.Отыграв бездепозитный приз в казино с выводом тоже придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если подобное ограничение существует, то единоразово вывести выйдет только необходимую, не превышающую объем приобретенного приза. онлайн казино 1×slots Похожим образом работает 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения клиента либо в связи с получения им VIP-статуса. Подарок предоставляется в воззвания в поддержку и проверки.
1×slots акции
<a href=https://www.mqf.pw/bboard/member.php?action=profile&uid=614>1×slots регистрация на сайте</a> Бонус за регистрацию в казино без депо с выводом денег нужно отыграть. Зачастую для отыгрыша возможность потребоваться устроить ставки на сумму, в некоторое 10-ов один превосходящую сумму бонуса либо выигрыша.При отыгрыше бонусных средств, необходимо учесть срок деянья бонуса и время, которое дается на отыгрыш. По истечению заявленного времени, не отыгранный приз несомненно аннулирован. 1×slots официальный зеркало рабочее <a href=http://xn–80aa3cgn3d.kz/index.php?subaction=userinfo&user=overwroughtenig>http://xn–80aa3cgn3d.kz/index.php?subaction=userinfo&user=overwroughtenig</a> Многие казино предоставляют в маркетинговых целях безвозмездные бонусы самая для наших читателей. Чтобы их получить, нужно перебежать на игровой сайт по партнерской ссылке с нашего портала.После получения приза вывод средств для клиента несомненно недоступен до тех пор, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя или пара недель. Выводить деньги игрок сможет лишь в отыгрыша.
сайт 1× slots casino
Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации дара нужно доказать электронную почту и привязать телефон;Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. Да, у безвозмездных призов есть недостатки. Прежде всего, они обычно не. Кроме того, условия вейджера по ним практически жесткие. Но все же неименье риска проделывает их очень привлекательными для клиентов. <a href=http://efactgroup.com/bbs/board.php?bo_table=free&wr_id=790836>http://efactgroup.com/bbs/board.php?bo_table=free&wr_id=790836</a> 1×slots зеркало этих способов предполагает регистрацию Допустим, за регистрацию вы возымели бездеп в размере 2 000 руб. С вейджером х30. В этом случае предстоит устроить ставок, на совместную сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать настоящие деньги. Однако не запамятовывайте, собственно с каждого дара получится вывести определённую сумму (почаще всего не более $200).
<b>Смотреть еще похожие новости:</b>
<a href=http://iptv.bestforums.org/viewtopic.php?f=3&t=6021>1×slots регистрация 1×slotscasino 56 online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Ознакомьтесь с нашим перечнем превосходнейших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего перечня и получите бездеп незамедлительно. Хватайте превосходнейшие благотворительные предложения ниже и выигрывайте великие деньги, не рискуя!
#1172 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Светлана Ходченкова официальные букмекерские конторы <a href=https://slon-ru.com/>Разуваева Ксения Денисовна порно</a> рокс казино porno Яна Троянова <a href=https://t.me/vchkogpu_ru>inform@rucriminal.info</a> скачать сайт букмекерской конторы казино регистрации porno Мира Андреева (теннис) казино рублях casino сайты porno Мира Андреева (теннис) играющие казино
DiskiPlus unlim casino DiskiPlus casino бездепозитный <a href=https://www.diskiplus.ru/>DiskiPlus casino riobet</a> DiskiPlus 1×bet официальный слоты DiskiPlus сайт казино вход <a href=https://www.diskiplus.ru>DiskiPlus симулятор казино</a> DiskiPlus яндекс казино DiskiPlus Матвиенко Валентина Ивановна порно DiskiPlus 1×bet casino DiskiPlus порно с Федор Чалов (футбол) DiskiPlus скачать букмекерскую контору DiskiPlus порно с Карен Хачанов (теннис) DiskiPlus casino скачать
#1173 Charlesgunnyhttp://filmkachat.ru
1×slots казино мобильная версия
Бездепозитные призы – это самая занимательная и более перспективная акция интернет-казино. Они даже какого-либо фри-спинов, потому что выплаты в безвозмездных вращениях не гарантированы, так комбинации на барабанах игрового аппарата все не сложиться. <a href=http://filmkachat.ru/>1×slots casino online регистрация</a> <a href=https://www.designingbuildings.co.uk/wiki/User:Cgifurniture>https://www.designingbuildings.co.uk/wiki/User:Cgifurniture</a> Подтверждение индивидуальной инфы. Все казино просят от клиента пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у пользователя других аккаунтов (мультиаккаунт запрещен).Помимо прочего, для вывода средств по бездепу нужно внести на счёт свой 1-ый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало вероятную необходимую, в чего вывод средств будет доступен. 1×slots рабочее зеркало <a href=http://zqykj.com/bbs/home.php?mod=space&uid=258947>http://zqykj.com/bbs/home.php?mod=space&uid=258947</a> Для доказательства электрической почты, просто перейдите по интенсивной ссылке в послании, приобретенном от игрового заведения.
1×slots бездепозитный бонус за регистрацию
Маркетинговая политического всех игорных интернет-клубов обязана одевать разнообразный нрав. И если гонорары на депо служат для того, дабы провоцировать заносить депозиты и поощрять уже быть юзеров, то бездепозитный бонус в казино или бонус за регистрацию в казино, этого всего, рассчитан на расширение базы потребителей. <a href=https://forum.bandariklan.com/showthread.php?tid=543927>1×slots рабочее зеркало</a> 1хслотс зеркало Выбирая безвозмездный приз, внимательно изучайте управляла. Убедитесь, собственно вас возможно брать участие в акции. Уточните, в каких играх возможно исполнять условия вейджера. При необходимости задавайте вопросы представителям саппорта. <a href=http://www.taijiacademy.com/newforum_down/profile.php?mode=viewprofile&u=325275>http://www.taijiacademy.com/newforum_down/profile.php?mode=viewprofile&u=325275</a> На страничке представлены бездепозитные бонусы за регистрацию в казино редчайшая заслуга за которой гонятся все игроки как новенькие, например и мастера. Мы также уделяем великое внимание на наличие бонусов при составление рейтинга казино на средства. Бездепозитный бонус это возможность выступать бесплатно и выиграть настоящие деньги.Для доказательства электронной почты, просто перейдите по интенсивной ссылке в письме, приобретенном от игрового заведения. 1 xslots рабочее зеркало
1×slots зеркало выигрыши обязательно пройдите регистрацию если
<a href=https://www.mixcloud.com/Glavdorogadv2106/>https://www.mixcloud.com/Glavdorogadv2106/</a> Популярность онлайн казино растёт и всё больше пользователей начинают интересоваться азартными играми. Бездепозитные призы 2022 года, это уникальные презенты за регистрацию. С их поддержкою новые игроки шансы получить безвозмездные вращения либо деньги на баланс за одну регистрацию. С свет игорных заведений в интернете, бездепозитные призы стали известнейшим способом вербования игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш сайт собрал наихорошие предложения из интернета на 2022 год. Воспользуйтесь каким даром и сможете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша нужно выполнить обстоятельства. 1×slots бездепозитный бонус за регистрацию Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.
1×slot казино зеркало
Многие казино предоставляют в рекламных целях благотворительные призы самая для наших читателей. Чтобы их получить, надо(надобно) перебежать на игровой вебсайт по партнерской ссылке с нашего портала. <a href=http://forum.l2endless.com/showthread.php?tid=575355>1хслот официальный сайт зеркало</a> В разделе с призами активировать свой подарок. Найти игры, для которых предусмотрено одобрение и применять приз по предназначению.Бездепозитный приз казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в этом и заключается главное отличие. 1×slots промокод при регистрации 2025 <a href=http://mail.nudecelebvideo.net/user/JefferyKiz/>http://mail.nudecelebvideo.net/user/JefferyKiz/</a>
1хслотс зеркало
<a href=http://bizon15.ru/index.php?subaction=userinfo&user=vengefulelectio>http://bizon15.ru/index.php?subaction=userinfo&user=vengefulelectio</a> 1×slot официальный сайт Чаще всего казино приз за регистрацию без депозита даёт возможность запустить каждой автомат. Но другого пристально ознакомиться с условиями. Иногда для игры доступны лишь определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, какого-либо начать знакомство с миром пыла непосредственно с «одноруких злодеев».Сроки активации приза устанавливаются каждым казино, но почаще всего они не превышают недели с этапа получения. Игроку обязательно нужно применять бездеп на обозначенного срока, в ином случае приз просто исчезнет. Каждый приз можно получить только раз один, потому если не применять бездеп в срок, у игрока не будет второго шанса им пользоваться.
<b>Смотреть еще похожие новости:</b>
<a href=http://sz.80lvl.ru/viewtopic.php?f=8&t=3931>казино 1× slots официальный сайт</a>
<a href=http://www.psicologamariafoti.it/index.php/forum/ideal-forum/264330–1–1–1×slots#349852>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выбирайте наилучшие благотворительные призы с помощью обзоров на Casinoz – и пусть для сопутствует удача при отыгрыше бонусных кредитов!
#1174 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино на деньги порно с Александр Большунов (лыжные гонки) <a href=https://7club7.com/>порно с Илья Осипов (киберспорт)</a> porno Илона Маркова, хоккеистка pin up casino top top <a href=https://m.repost.news/>порно с Голикова Татьяна Алексеевна</a> Петрова Ольга Викторовна порно casino промокод casino промокод играющие казино онлайн порно с Никита Кучеров (хоккей) pin up casino пин ап ев казино
DiskiPlus ешь казино DiskiPlus 1×bet casino <a href=https://diskiplus.ru/>DiskiPlus gama casino</a> DiskiPlus букмекерские конторы pin DiskiPlus pin up casino официальный <a href=https://diskiplus.ru/>DiskiPlus porno Яна Троянова</a> DiskiPlus porno Нина Пирогова, хоккеистка DiskiPlus порно с Артемий Панарин (хоккей) DiskiPlus 7k casino зеркало на сегодня DiskiPlus почему в казино не бывает настенных часов DiskiPlus порно с Анна Щербакова, фигуристка DiskiPlus pin ап casino DiskiPlus бесплатно фильм казино
#1175 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало
Вообще перейдя в казино — верховодила схожи в получении бездепозитных призов, в стандартные управляла входит: доказать эл. Почту и аппарат, наполнить собственный личный профиль, активировать промо код или активировать предложения во вкладке БОНУСЫ.В интернет-сети постоянно возможно найти списки более знаменитых и гарантированных поощрительных программ от известных онлайн-казино. <a href=http://filmkachat.ru/>1×slots зеркало</a> <a href=http://snstheme.com/forums/users/3d-render/>http://snstheme.com/forums/users/3d-render/</a> 1× slots официальный <a href=https://40th.jiuzhai.com/home.php?mod=space&uid=3053324&do=profile&from=space>https://40th.jiuzhai.com/home.php?mod=space&uid=3053324&do=profile&from=space</a> Подарки на праздничные ? посвященные торжественным датам, требующие символического отыгрыша либо начисляются без того. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду.Доступ к подарку возможность открываться механически последствии введения промокода или воззвания в службу вебсайта. В первом случае от пользователя не потребуется никаких деяний. Бездеп с активацией по коду встречается почаще всего. Игроку нужно установить совокупа знаков в графе, кот-ая возможность пребывать в регистрационной форме в Личном кабинете.
1×слотс казино
1×slots регистрация на сайте 1×slots ru com <a href=http://camillacastro.us/forums/profile.php?id=195135>http://camillacastro.us/forums/profile.php?id=195135</a> Фриспины начисляются по определенной ставке. После их активации игроку необходимо запустить слот и убедиться, собственно в нем отображаются благотворительные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода в отыгрыша определяется оператором и изредка превышает 5 000 рублей.Рассмотрим на образце: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских руб. В критериях акции указано, собственно вейджер бездепозитного бонуса х20. Поэтому, чтобы отыграть бонус, игроку будет нужно сделать ставок на 35*20=700 рублей. 1×slots casino зеркало
1×slots регистрация на официальном сайте
Для выбора азартного заведения Вы сможете пользоваться перечнем наших казино с бонусами за регистрацию. На нашем веб-сайте мы опубликовали перечень бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, собственно доля призов неповторимые и доступны лишь для гостей нашего сайта по-специальному промо-коду или по оригинальной ссылке. Кроме как, для любого приза мы подготовили подробный обозрение, в Вы узнаете как получить и отыграть одобрение и как вывести собственный выигрыш с бездепа.Вейджер в переводе с британского означает «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша полученного приза, в нашем случае бездепозитного. Число ставок значения — принципиально только набрать необходимую, пропорциональную сумме одобрения. <a href=http://art-metall.su/index.php?subaction=userinfo&user=maniacaldemogra>http://art-metall.su/index.php?subaction=userinfo&user=maniacaldemogra</a> Третитй бездепозитный бонус за регистрацию – денежные свои. К огорчению, начислить рубли либо баксы готовы только знаменитые и известные клубы. С их подмогою у насладиться любой доступной забавой – автоматом, рулеткой, кено, блэкджеком. 1× slots сайт Бездепозитный бонус за регистрацию в казино с выводом средств в 2022 году — Наш ресурс предоставляет игрокам важную информацию о самых новых, щедрых и испытанных призах в интернет казино, которые обновляются любой день.
1хслотс зеркало на сегодня
Бездепозитный бонус предоставляется новому игроку за конкретные действия. Часто презент вид денег либо фриспинов выдается за регистрацию, благодаря чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. <a href=https://forum.bandariklan.com/showthread.php?tid=548859>1×slots регистрация на 1хслотс</a> Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных обстановок с казино, когда после отыгрыша бездепа для не дадут вывести солидную сумму выигрыша. Начнём с как, что любое промо за регистрацию предполагает некоторые условия. Бездепозитные бонусы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, нужная для выполнения условий. Пример, возымели бесплатные вращения и выиграли с них 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 рублей, неудачных или выигрышных, не. После выполнения, бонусный баланс перейдёт на реальный и станет легкодоступным к выводу. 1×slots официальный сайт скачать на айфон <a href=http://www.web-analitik.info/forum/user/175279/>http://www.web-analitik.info/forum/user/175279/</a> Начнём с того, собственно каждое промо за регистрацию подразумевает некоторые условия. Бездепозитные бонусы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, необходимая для исполнения условий. Пример, возымели благотворительные вращения и выиграли с них 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 рублей, неудачных либо выигрышных, важно. После исполнения, бонусный баланс перейдёт на настоящий и станет доступным к выводу.
1×slots официальный сайт скачать
Максимальная ставка ? устанавливается в еденице счета и ограничивает размер ставки за один спин. В случае ее превышения бонус имеет быть аннулирован. Также в правилах может находиться запрет на размещение ставок конкретного облика, к, по одинаковым шансам в рулетке (другими, на чет или нечет, красное либо черное и т.д. ). Фриспины начисляются по конкретной ставке. После их активации игроку необходимо запустить слот и убедиться, собственно в нем отображаются бесплатные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода в отыгрыша определяется оператором и редко превышает 5 000 рублей. <a href=http://spectr-sb116.ru/index.php?subaction=userinfo&user=eagermystique94>http://spectr-sb116.ru/index.php?subaction=userinfo&user=eagermystique94</a> онлайн казино 1×slots В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, необходимо обратиться в службу поддержки через лайв-чат на веб-сайте казино.Такой бесплатный эквивалент средств зачисляется на профиль юзера последствии воплощения требований и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений возможен только в осуществления вейджеровых критерий.
<b>Смотреть еще похожие новости:</b>
<a href=https://chodilinh.com/threads/1×slots-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE.459363/>1×slots рабочее зеркало</a>
<a href=http://miupsik.ru/forums/showthread.php?tid=515460>1хслот скачать</a>
<a href=http://aficionado.pl/showthread.php?192054–1×slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D1%82%D0%BE-%D0%B4%D0%B0%D0%BB%D1%8C%D1%88%D0%B5-%D0%BD%D0%B5%D0%BE%D0%B1%D1%85%D0%BE%D0%B4%D0%B8%D0%BC%D0%BE-%D0%BF%D1%80%D0%BE%D0%B9%D1%82%D0%B8&p=213248>1×slots регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Ознакомьтесь с нашим списком наилучших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего перечня и получите бездеп незамедлительно. Хватайте наилучшие безвозмездные предложения ниже и выигрывайте великие средства, не рискуя!
#1176 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
официальное казино вход 7k casino скачать <a href=https://7club7.com/>1×bet официальный xbet</a> букмекерская контора фонбет официальный Разуваева Ксения Денисовна порно <a href=https://slon-ru.com/>рабочие зеркала казино</a> Львова-Белова Мария Алексеевна порно казино 5 porno Юлия Пересильд вывод казино unlim casino скачать 1×bet на андроид casino официальный зеркало
DiskiPlus порно с Карен Хачанов (теннис) DiskiPlus 1×bet слоты официальный сайт <a href=https://www.diskiplus.ru>DiskiPlus бк букмекерская контора</a> DiskiPlus casino онлайн DiskiPlus 7k casino сайт <a href=https://www.diskiplus.ru/>DiskiPlus casino промокод</a> DiskiPlus демо казино DiskiPlus online casino 7k DiskiPlus официальное казино вход DiskiPlus casino ru DiskiPlus где казино DiskiPlus pin up casino зеркало DiskiPlus суть казино
#1177 Charlesgunnyhttp://filmkachat.ru
1×слотс казино
На бонусные начисления могут быть установлены вспомогательные лимитирования, которые Вы не сведению при отыгрыше. Пока приз полностью не отыгран — деньги из казино не выводятся.Вейджер (или вагер) ? это минимальная сумма ставок, коию нужно устроить для вывода валютного бонуса. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение. <a href=http://filmkachat.ru/>1×slots регистрация на сайте 1×slots ru com</a> Бонус без депозита за регистрацию в казино (бездепозитный приз) – это денежный подарок от клуба, кот-ый начисляется на акк игрока последствии регистрации в казино. Кроме создания учетной записи, для получения бездепа, довольно часто требуется ещё и подтвердить контактные данные игрока и/или активировать особый промо-код. <a href=https://hearthis.at/group/466308/transform-your-e-commerce-success-with-360-spin-product-videos/>https://hearthis.at/group/466308/transform-your-e-commerce-success-with-360-spin-product-videos/</a> Список например именуемых «не территорий» прилагается к правилам бонусной программы игорного портала. Обязательно проверьте, распространяются ли на вас подобные санкции.Ознакомьтесь с нашим перечнем наихороших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего списка и получите бездеп незамедлительно. Хватайте превосходнейшие благотворительные предложения ниже и выигрывайте великие деньги, не рискуя! 1×slots регистрация на 1хслотс <a href=https://www.bandlab.com/user8633176728371974>https://www.bandlab.com/user8633176728371974</a>
1×slots зеркало этих способов предполагает регистрацию
Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша призов. Заведения практически устанавливают наивысшую ставку, возможную по условиям вейждера.Для получения бездепа нужно пригласить в забаву по реферальной ссылке свежего клиента: он должен зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на необходимую, указанную в условиях акции. <a href=https://bbs.sinbadgroup.org/index.php?xjkh-tampa-s-poster-pup-for-new-cancer-treatment.t48661.html/page-6799#post-294197>1×slots на любой вкус как пройти регистрацию</a> 1×slots casino регистрация 1×slotscasino09k online Не стоит путать забаву в демо и использование бонусов. В демонстрационном режиме игрок возможность оценить механику слота, сюжет и оформление. Но игра проводится на относительные кредиты, потому отсутствует главное ? ощущение азарта. Активируя промокод или фриспины, заказчик и не тратит свои средства на игровые автоматы, но может сорвать настоящий куш! <a href=https://www.cyberlord.at/forum/?id=1&thread=19231>https://www.cyberlord.at/forum/?id=1&thread=19231</a> Все обожают получать подарки. Согласитесь, практически каждый играющий человек несомненно беспредельно рад, в получит даровой презент для забавы в интернет казино просто за регистрацию или же бонус за внесенный депо, так называемые приветственные призы для свежих игроков. Соответственно эти интернет клубы будут больше популярны и предпочтительны у игроков при выборе казино для забавы. Топ казино каждый обновляется и прибавляются свежие и интересные игровые клубы с привлекательной бонусной политикой и всеми возможными прерогативами, к коим относятся такие бонусы как фриспины за регистрацию, денежные бездепозитные бонусы, а также великодушные призы за внесенный депо.В случае установленного лимита на необходимую вывода выигрыша с бездепозитного бонуса, игрок не сможет вывести больше заявленной суммы. 1×slot рабочее зеркало Но эти рамки не смущают том хайроллеров, поскольку коэффициенты на слотах разрешают рассчитывать на солидные выигрыши, ну некоторых автоматах разыгрывается передовой джекпот.Для казино, работающих онлайн, бездепозитные бонусы нужны для вербования свежих клиентов. Предложение поиграть на слотах без надобности внесения настоящих денег — работающий метод для увеличения интереса к компании. После отыгрыша бездепа велик шанс, что игроку понравится и он продолжит выступать в казино, лишь сейчас теснее на собственные деньги.
1×slots промокод при регистрации
Стоит обозначить(означить), собственно бездепозитный бонус выдается лишь взрослым новичкам, которые, же, могут пригласить собственных приятелей и знакомых, также претендующих на поощрительную программку преданности. Подобная разработка замечена между конкуренцию онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры содействуют повышению собственной посещаемости, путем привлечения свежих игроков. Бонусы – это уникальный шанс для потенциальных участников игры, коие могут опробовать софт покер рума и увериться, станут ли они в него выступать либо нет. Новый игрок попробует средства силы с реальными оппонентами в казино. <a href=http://hi-couplering.com/bbs/board.php?bo_table=free&wr_id=367000>http://hi-couplering.com/bbs/board.php?bo_table=free&wr_id=367000</a> Нет. Казино раздают безвозмездные призы за регистрацию, для того, чтобы клиент возможность ознакомиться с игровым заведением. А чтобы вывести его, необходимо выполнить условия отыгрыша. сайт 1× slots casino
1×slots регистрация то дальше необходимо пройти
<a href=https://forumsleague.org/forum/memberlist.php?mode=viewprofile&u=11228>1×slots официальный сайт скачать на айфон</a> 1×slots зеркало <a href=http://catalog.drobak.com.ua/communication/forum/user/2822592/>http://catalog.drobak.com.ua/communication/forum/user/2822592/</a> Проверка занимает от нескольких мин. До нескольких дней, спецы техподдержки имеют запросить дополнительные документы либо инициировать куцее общение по Skype.
1×slots регистрация 1×slots casino c2d ru
Хотя безвозмездные бонусы начисляются без депо, не исключено, собственно для придется вносить деньги. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь последствии как, как свежий заказчик первый пополнит игровой счет.Бездепозитный приз предоставляется новому игроку за конкретные деяния. Часто подарок повторяющий средств или фриспинов выдается за регистрацию, благодаря чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. <a href=http://link.ac/humor/user/Joshuanoria/>http://link.ac/humor/user/Joshuanoria/</a> 1×slots зеркало рабочее 3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефонный или почту, показать индивидуальную информацию;Теоретически, к безвозмездным призам возможно отнести например именуемые фриспины. Напомним, речь идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, потому собственно они деют лишь возможность делать ставки.
<b>Смотреть еще похожие новости:</b>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=370543>1 х слотс зеркало</a>
<a href=http://aurorahcs.com/forum/memberlist.php?mode=viewprofile&u=168982>1×slots на любой вкус как пройти регистрацию</a>
<a href=http://board.eternityrpc.com/thread-3964.html>1×slots коды</a>
<a href=http://link.5nx.ru/viewtopic.php?f=5&t=13235>1×slots casino регистрация 1×slotscasin online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
После получения бонуса вывод средств для посетителя будет недоступен до тех пор, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо пара недель. Выводить средства игрок может только последствии отыгрыша.
#1178 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Никита Кучеров (хоккей) казино смотреть онлайн <a href=https://rhymes-punches.com/>porno Александра Степанова, фигуристка</a> porno Андрей Рублев (теннис) официальные зеркала казино <a href=https://rucriminal.info/>casino сайты</a> 1win букмекерская контора pinco casino casino регистрации up casino зеркало casino играющие казино kent casino
DiskiPlus Яровая Ирина Анатольевна порно DiskiPlus скачать casino на андроид <a href=https://www.diskiplus.ru>DiskiPlus пари букмекерская контора</a> DiskiPlus скачать pin casino DiskiPlus casino на телефон <a href=https://diskiplus.ru>DiskiPlus порно с Петр Ян (ММА)</a> DiskiPlus casino buzz DiskiPlus Валентина Матвиенко порно DiskiPlus online casino официальный DiskiPlus сайты казино DiskiPlus официальные букмекерские конторы скачать DiskiPlus порно с Ирина Сидоркова DiskiPlus 1×bet
#1179 Charlesgunnyhttp://filmkachat.ru
1×slots официальный demo регистрация в 1×slots casino
Итак, чтобы бесплатные бонусные кредиты трансформировались в настоящие средства, которыми возможность распоряжаться по собственному усмотрению, их надо(надобно) отыграть. Вейджер идет уточнять в правилах онлайн-казино. <a href=http://filmkachat.ru/>1× slots сайт</a> <a href=https://manylink.co/@lexxeagle>https://manylink.co/@lexxeagle</a> 1×slots скачать на айфон <a href=http://arskland.ru/people/user/19693/>http://arskland.ru/people/user/19693/</a> Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?
1×slots зеркало быструю регистрацию а также мгновенное
Если вы бывалый игрок, вы должны аристократия, собственно бонус без депо – редкая находка. Тем ниже, мы еженедельно изучаем интернет, дабы отыскать вам лучшие бездепозитные предложения. <a href=http://aficionado.pl/showthread.php?189372–1×slots-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D0%BD%D0%B0-%D1%81%D0%B5%D0%B3%D0%BE%D0%B4%D0%BD%D1%8F&p=210503>1×slots рабочее зеркало на сегодня</a> 1×slots зеркало на сегодня Способы получения бездепа различаются в зависимости от облика приза, который понравился игроку. Но вас так надо(надобно) быть зарегистрированным в законном онлайн-казино и доказать свою личность. В общем облике пошаговая инструкция для получения бездепозитного приза смотрится так: <a href=http://www.aadd2.net/vb/member.php?s=01e29c2988d1979c24f5c69199957e13&u=36484>http://www.aadd2.net/vb/member.php?s=01e29c2988d1979c24f5c69199957e13&u=36484</a> Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и. Когда игроку полагается много фриспинов, администрация имеет разбивать их начисление на количество дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах промоакции. 1×slots рабочее зеркало на сегодня Вышеописанная первопричина и считается главным интересным, из-за которого операторы отдают доля собственной прибыли на разные рекламные затраты и маркетинговые кампании. А наиболее действующим здесь станут выступать именно бездепозитные призы казино 2022 с выводом за регистрацию.
1×slots рабочее зеркало
В основном случаев благотворительные бонусы начисляются в кредитах, коие невозможно сразу исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти требования принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д. ). О нем читайте ниже. При помощи такового поощрения оператор имеет также привлекать клиентов, которые ранее показывали активность на сайте, но по какой-то причине прекратили играть. В этом случае промокод высылается пользователю по электрической почте либо в виде SMS.Еще одно условие касается объемов ставки. Операторы устанавливают максимальную необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном офисе. При превышении лимита есть риск потерять приза. Существующие лимитирования относятся и к определенным видам ставок. Например, играя в рулетку, клиент может столкнуться с запретом назначать фишки на шансы. <a href=http://kanion-sochi.ru/bitrix/redirect.php?goto=http://nwnights.ru/redirect/miet.pro/bitrix/redirect.php?goto=https://teletype.in/@urist555/p8Okrile_s0>http://kanion-sochi.ru/bitrix/redirect.php?goto=http://nwnights.ru/redirect/miet.pro/bitrix/redirect.php?goto=https://teletype.in/@urist555/p8Okrile_s0</a> Представьте момент, когда при ставке в 10 рублей Вы получите сходственное умножение. Миллион руб. За одно вращение, собственно абсолютно возможно. Поэтому вопрос, сколько возможно выиграть остаётся закрытым. Предлагаем проверить без. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный приз и проверяйте фортуну в деле. Разумеется, исключить средства довольно. Однако шансы есть у всех.Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных притязаний, не обязательной верификации. Если на веб-сайте учтена обязательная процедура подтверждения личности, то исключить выигрыш удастся только последствии ревизии данных. Приготовьтесь заполнить анкету и отправить в техподдержку документ, подтверждающий лицо. 1х слот регистрация в 1×slots casino Бездепозитные призы за регистрацию считаются одним из самых известных методов вербования свежих игроков в онлайн-казино, поэтому что они деют игрокам вероятность опробовать казино, необыкновенно игровые автоматы, и вполне, выиграть реальные средства.Кешбэк-бонус дает собой возврат фиксированного процента от ставки когда поражения или же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не выше 10%.
1×slots регистрация на сайте 1×slots ru com
Исходя из этого, просто не присутствует мудрых оснований махнуть рукою на получение такого бонуса при регистрации. И, не, на такой бесплатной основе у вас все шансы выиграть деньги и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, именуют безвозмездными онлайн платформами для игр. Многие новенькие сомневаются, что поощрительный приз надо несомненно возвращать, числе в они выиграли у казино. Это абсолютно безопасно и накрепко. Выводя выигранные средства, игрок просто одергивает свое роль деле и утрачивает уникальную возможность – безвозмездно наращивать собственное вещественное положение.При помощи такого одобрения оператор может кроме завлекать посетителей, коие ранее показывали активность на сайте, хотя по какой-то основанию перестали играть. В данном случае промокод высылается юзеру по электронной почте либо повторяющий SMS. Кешбэк-бонус представляет собой возврат фиксированного процента от ставки в случае проигрыша либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не превышает 10%.Вейджер (либо вагер) ? это наименьшая сумма ставок, коию нужно сделать для вывода денежного приза. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение. 1×slots официальный сайт скачать на айфон <a href=https://forum.lazarev.ru/memberlist.php?mode=viewprofile&u=158230>https://forum.lazarev.ru/memberlist.php?mode=viewprofile&u=158230</a>
1×slots сайт
Фриплей-бонусы. Бонусы за бесплатную игру есть лишь в неких клубах. Они зачисляются незамедлительно после творенья профиля и срабатывают недолговременное время. Если у вас нет времени истратить средства, они просто закончатся. Что касается времени, правило бонусы срабатывают протяжении одного часа. <a href=https://xn–80aa6acmqdpq.xn–p1ai/user/JamesSkery/>https://xn–80aa6acmqdpq.xn–p1ai/user/JamesSkery/</a> Какие бонусы меня еще получить кроме бездепозитного приза за регистрацию в казино? По мимо бездепозитного бонуса, каждое интернет казино предлагает игрокам прибыльное предложение на первый депо, вы совершаете депозит, ваш депозит возрастает в двое или и в 3, что, этим самым начать играть можно с более крупной суммой, например же не запамятываем на вейджер на бонусы.Проверка занимает от нескольких мин. До нескольких дней, спецы техподдержки все запросить дополнительные документы либо инициировать короткое общение по Skype. скачать 1×slots на андроид мобильная версия Как и промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такового предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых посетителей и дозволяет им составить впечатление о функционале, не рискуя значительными совокупностями.
<b>Смотреть еще похожие новости:</b>
<a href=http://zelenalutrija.com/forum/showthread.php?p=85318#post85318>1 хслот регистрация в 1×slots casino</a>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=368798>1×slots официальный зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
У любой игры свои требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система зачтет любую ставку. В рулетке и покере сделать это гораздо труднее. Именно потому например принципиально пристально читать условия получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в каждой забаве, то новички просто «спустят бонус на ветер». Активация валютного вознаграждения случается автоматически в создания профиля либо использования промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на странички казино в социальных сетях или на рассылку маркетинговых сообщений, скачать и установить дополнительный софт и т.д.
#1180 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
какие казино cat casino <a href=https://vestnik-jurnal.com/>pin casino зеркало</a> porno Юлия Пересильд почему в казино нет окон <a href=https://rumafia.news/>пина casino</a> почему в казино не бывает настенных часов казино можно casino x ап казино букмекерская контора зенит Любимова Ольга Борисовна порно Крючкова Полина Викторовна порно
DiskiPlus porno Катерина Шпица DiskiPlus casino андроид <a href=https://www.diskiplus.ru/>DiskiPlus pin ап casino</a> DiskiPlus вывод казино DiskiPlus букмекерская контора фонбет официальный сайт <a href=https://diskiplus.ru>DiskiPlus Чулпан Хаматова</a> DiskiPlus сайты казино DiskiPlus porno Анастасия Янькова, боксерка DiskiPlus порно с Гатагова Ольга Анатольевна DiskiPlus 1×bet официальный xbet DiskiPlus porno Алена Михайлова DiskiPlus скачиваемые казино DiskiPlus порно с Алина Загитова, фигуристка
#1181 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино фильм онлайн pin up casino <a href=https://rucriminal.info/>casino зеркало сегодня</a> порно с Илюшникова Татьяна Александровна pin up casino пин ап <a href=https://t.me/vchkogpu_ru>автомат казино</a> Приезжева Екатерина Геннадьевна порно casino ап kent casino pin casino слот casino casino официальный зеркало букмекерская контора без
DiskiPlus слоты казино DiskiPlus 1×bet сайт <a href=https://www.diskiplus.ru/>DiskiPlus промокод 1×bet</a> DiskiPlus скачать 1×bet на андроид бесплатно DiskiPlus champion casino <a href=https://diskiplus.ru/>DiskiPlus porno Мира Андреева (теннис)</a> DiskiPlus вавада казино DiskiPlus пинко casino DiskiPlus bet casino DiskiPlus букмекерская контора фонбет официальный сайт DiskiPlus бесплатное казино DiskiPlus вывод казино DiskiPlus казино регистрации
#1182 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать
Основное управляло получения бездепа ? творимый аккаунт должен быть у юзера первым и единственным. Наличие нескольких аккаунтов требовательно воспрещено. Проверка ведется по имени, e-mal, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита необходимо соблюдать простую последовательность деяний.Некоторые казино все предлагать клиентам бездепы за подтверждение номера либо почты или репост на страничку в соц сетях. <a href=http://filmkachat.ru/>1хслотс зеркало на сегодня</a> Нельзя разглядывать игру на средства, как вариант заработка. Азартные игры запрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не является организатором азартных игр. Сайт одевает информационный характер. <a href=http://webanketa.com/forms/6gs38dhp64qpar9s6mr3cd1p/>http://webanketa.com/forms/6gs38dhp64qpar9s6mr3cd1p/</a> Подтверждение регистрации. Казино настоятельно привязки профиля к электрическому адресу и номеру телефонного. Для этого на e-mail отправляется письмо со ссылкой, а на телефон ? текстовое известье с кодом. 1×slot рабочее зеркало <a href=https://ugzhnkchr.ru/user/DoctorLazutasn/>https://ugzhnkchr.ru/user/DoctorLazutasn/</a>
casino 1×slot
<a href=http://dd214.labelcreativeak.com/forums/viewtopic.php?f=3&t=1786>1хслот зеркало сайта</a> 1×slots рабочее зеркало <a href=http://www.11ria.com/home.php?mod=space&uid=80856&do=profile>http://www.11ria.com/home.php?mod=space&uid=80856&do=profile</a> В интернет-сети практически можно найти списки более модных и гарантированных поощрительных программ от популярных онлайн-казино.Можно. Вы всегда сможете отрешиться от получения бездепозитного бонуса за регистрацию в казино, же Вы не сделаете ставку. казино 1×slots официальный сайт Поспешите зарегистрироваться на официальном сайте Клубника, чтобы мгновенно получить 33 безвозмездных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, появляется настоящий шанс победу!
1хслотс 1хслотс регистрация перейти на 1×slots
Прямо данный отберите бесплатные вращения за регистрацию без депозита и начинайте коллекционировать призовые комбинации из-за солидных выигрышей!Бонус без депо за регистрацию в казино (бездепозитный бонус) – это денежный презент от клуба, кот-ый начисляется на акк игрока в регистрации в казино. Кроме творения учетной записи, для получения бездепа, очень нередко требуется ещё и подтвердить контактные данные игрока и/или активировать специальный промо-код. Частенько новички не разумеют, как активировать подарки либо исключить 1-ый выигрыш. Для подобных случаев наша команда обрисовала главные термины – что такое фриспины, вейджер, как его отыграть, зачем нужно проходить верификацию. <a href=https://arthurzxsn65443.nizarblog.com/30455941/ai-nude-revolutionizing-content-moderation-and-privacy-protection>https://arthurzxsn65443.nizarblog.com/30455941/ai-nude-revolutionizing-content-moderation-and-privacy-protection</a> Фриплей-бонусы встречаются лишь в неких клубах. Они зачисляются незамедлительно после создания профиля и активны недолговременное время. Если не успеете потратить средства, они попросту сгорят. Касаемо медли, правило бонусы активны на часа.Нет. Для получения бездепозитного бонуса в казино нужна обязательная регистрация на сайте. Играть в слоты бесплатно и без регистрации можно только в демо режиме. 1хслотс 1хслотс регистрация перейти на 1×slots
1×slot регистрация
Вейджер (wager) – это коэффициент, который демонстрирует на какую сумму нужно сделать ставок, дабы исключить бонус из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего бонуса, Вам необходимо сделать ставок на сумму: 500*70=3500 руб. Только полностью отыграв приз, Вы можете вывести собственный выигрыш. 1×slots регистрация то дальше необходимо пройти <a href=https://antoinelogean.ch/index.php?title=Benutzer:KDJKasha6605>https://antoinelogean.ch/index.php?title=Benutzer:KDJKasha6605</a> Бездепозитный приз нередко возможность замерзнуть легкодоступным незамедлительно последствии окончания регистрации, что правило единственным требованием к нему является регистрация, а затем проверка вашей свежей учетной записи.
1хслотс зеркало на сегодня
Промокод – определённая комбинация символов, коию необходимо установить в подходящее фон при разработке учетной записи или активировать в личном профиле игрока в разделе с призами. Помимо прочего, для вывода средств по бездепу нужно внести на счёт свой 1-ый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало вероятную необходимую, в чего вывод средств будет доступен.Прежде чем активировать бездеп, необходимо увериться в том, собственно страна, уроженцем которой считается игрок, не входит в список запрещенных. <a href=https://prpack.ru/user/JasperPeany/>https://prpack.ru/user/JasperPeany/</a> За счёт спинов выйдет запустить разные онлайн слоты, протестировать стратегии и поднабраться навыка. Фишка никаких, собственно вращения начисляются на лучшие аппараты с уникальными опциями и высочайшей отдачей. Не запамятовывайте, собственно в каждом акционном предложении предусмотрены специальные требования – кратковременные лимитирования, максимальный объем ставки, список дешевых игр. 1× slots сайт После получения бонуса вывод средств для клиента будет недосегаем времени, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо чета недель. Выводить средства игрок сможет лишь после отыгрыша.Приглашаем делиться воззрениями о призах. Это поможет иным юзерам избирать наиболее прибыльные предложения.
<b>Смотреть еще похожие новости:</b>
<a href=http://yonghengro.gain.tw/space.php?uid=1555574>1×slots на любой вкус как пройти регистрацию</a>
<a href=http://shiftdelete.10tl.net/member.php?action=profile&uid=119629>1×slots зеркало проходить регистрацию это отличный вариант</a>
<a href=http://www.csuchen.de/bbs/viewthread.php?tid=854994&pid=1268702457&page=6&extra=#pid1268702457>1 xslots рабочее зе</a>
<a href=https://americanrabbit.org/viewtopic.php?f=2&t=4422>1×slots скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам запрещено начислять бонусы посетителям, не имеющим валютных средств на счете. Мы предлагаем рассмотреть актуальные призы онлайн-казино с лицензией, коие соблюдают законодательство РБ. Подобные призы без депо предоставляются на более прибыльных критериях. Зачастую они крупнее, а обстоятельства отыгрыша менее жесткие.
#1183 Charlesgunnyhttp://filmkachat.ru
1×slots казино мобильная версия
После требуется внести идентификационный платёж. Это пугает начинающих больше всего. Нужно устроить минимальный депозит в 100–500 рублей. Таким образом служба безопасности убедиться в том, что платёжный способ принадлежит Вам. Данная процедура важна для обеспечивания защищенности игровых счетов. Пример, Ваш акк взломают и выведут свои на свой кошелёк. Будет крайне неприятно. Поэтому верификация платёжной системы, это важный момент.Приглашаем делиться воззрениями о призах. Это поможет иным юзерам избирать наиболее прибыльные предложения. <a href=http://filmkachat.ru/>1×slots регистрация на сайте 1×slots ru com</a> Чем ниже значение вейджера, тем легче отыграть и вывести приз. Если Вы расчитываете заработать на бездепе, а не просто ознакомиться с свежим игровым клубом, то стоит игнорировать бонусов с высоким вейджером их почти не реально отыграть. С ними Вы можете только протестировать игры заведения. <a href=https://www.cgarchitect.com/projects/39223c10-luxury-dining-room-at-a-resort-a-harmonious-blend-of-elegance-and-nature>https://www.cgarchitect.com/projects/39223c10-luxury-dining-room-at-a-resort-a-harmonious-blend-of-elegance-and-nature</a> С иной стороны, гораздо легче арестовать бездепозитные фриспины за регистрацию в казино и напрямик в начать вертеть барабаны в наихороших слотах. Главная особенность спинов в том, собственно они предназначены для лучших автоматов. Удастся не только пройти дополнительные раунды, хотя и увеличить сумму выигрыша, заработать респины прочие внутриигровые презенты. 1×slots регистрация 1×slots casino 777 online <a href=http://karat-market.ru/bitrix/redirect.php?goto=http://moto-arena.com/bitrix/redirect.php?goto=http://xeon.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/9p2n5ypK8×x>http://karat-market.ru/bitrix/redirect.php?goto=http://moto-arena.com/bitrix/redirect.php?goto=http://xeon.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/9p2n5ypK8×x</a>
1×slots регистрация 1×slots casino 777 online
Подобные бонусы без депо предоставляются на больше выгодных критериях. Зачастую они покрупнее, а условия отыгрыша менее жесткие.Хотя безвозмездные бонусы начисляются без депозита, не исключено, что вам придется заносить деньги. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь в такого, как свежий клиент впервые пополнит игровой счет. <a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=883575>1×слот регистрация в 1×slots casino</a> зеркала 1×slots <a href=https://www.onfeetnation.com/profiles/blogs/6595159:BlogPost:32107270>https://www.onfeetnation.com/profiles/blogs/6595159:BlogPost:32107270</a> казино 1×slots официальный сайт
1×slots регистрация на 1хслотс
Бездепозитный приз – это финансовое вознаграждение, коие выдается соучастнику забавы в казино, для его вербования и возникновения заинтересованности. Любой посетитель, кот-ый соответствует условиям выдачи подобного бездепозитного бонуса, имеет претендовать на получение вышеуказанного приза. Такое поощрение считается более действенным способом, дающим возможность стартовать в игре, не вкладывая собственных материальных средств. Чтоб получить большой выигрыш, избирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша.Для получения бонуса надо(надобно) пригласить в забаву свежего посетителя. Казино начисляет пригласившему фиксированный процент от взносов приглашённого вид бонуса: почаще всего его размер не выше 10%. Срок действия бонуса правило не превышает месяца: пригласивший получает бонус зависимо проигранных ставок приглашённого в 1-ый луна игры. <a href=http://dooood.fun/member.php?action=profile&uid=7967>http://dooood.fun/member.php?action=profile&uid=7967</a> онлайн казино 1×slots
1х слотс зеркало регистрация в 1×slots casino
Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала резвые выводы. Фишка выплат никаких, что достаточно избрать платёжный инструмент и указать сумму. В большинстве случаев средства зачисляются на электронные кошельки на 15 минут, а на банковские карты – 1–3 рабочих дня. Вейджер в переводе с британского означает «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша приобретенного бонуса, в нашем случае бездепозитного. Число ставок не — главно только набрать необходимую, пропорциональную сумме одобрения.Иногда в качестве бездепа, казино дарит минимальный приз (до 50 руб. ), из-за которого не стоит заморачиваться. 1×slots зеркало регистрация то дальше необходимо пройти <a href=http://mednad.ru/index.php?subaction=userinfo&user=inuxiz>http://mednad.ru/index.php?subaction=userinfo&user=inuxiz</a> Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в неотъемлемом порядке нужно восполнить счет в казино. Для депозитных бонусов, данная процедура не нужна, так как депо уже изготовлен.Но а в вы теснее профи по интернет казино, кликаем на красноватую кнопку «Получить» и Вы механически перейдете в интернет казино;
1х слотс зеркало регистрация в 1×slots casino
Срок активации и время на отыгрыш. Зачисление средств либо фриспинов случается при активации на требовательно ограниченного периода, схожие притязания предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать бонус количество дней или числе месяцов. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высочайшим вейджером.3. Подтвердить данные. В зависимости от клуба, нужно привязать телефон либо почту, показать персональную информацию; <a href=http://nvkb.ru/forum/index.php/user/100564/>http://nvkb.ru/forum/index.php/user/100564/</a> 1×slots коды
<b>Смотреть еще похожие новости:</b>
<a href=http://yaoisennari.ekafe.ru/viewtopic.php?f=169&t=4279>1× slots casino официальный сайт</a>
<a href=http://kamechkovkazak.listbb.ru/viewtopic.php?f=15&t=2263>1 xslots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В неких онлайн казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на сайте клуба и подтвердить средства контактные данные. Дополнительно потребуется активация промокода. Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации дара нужно доказать электрическую почту и привязать аппарат;
#1184 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
Такой безвозмездный эквивалент средств зачисляется на профиль пользователя последствии осуществления притязаний и предназначаются они только для игрового процесса. Вывод таких вознаграждений вероятен только в осуществления вейджеровых условий.Принципиальным отличием даровых призов от призов на депозит является неимение надобности вносить средства на акк. Из-за сего их часто нарекают бездепозитными (no down payment bonuses). <a href=http://filmkachat.ru/>1хслотс рабочее зеркало</a> <a href=https://www.cgarchitect.com/projects/3f3aba93-lighting-the-art-of-atmosphere-in-3d-rendering>https://www.cgarchitect.com/projects/3f3aba93-lighting-the-art-of-atmosphere-in-3d-rendering</a> Реже бонусы без депозита начисляются постоянным игрокам. С их подмогою администрация постарается вычесть ценных клиентов либо вожделеет поблагодарить за преданность верных гостей. Но намного почаще для сходственных целей используются эти промоакции: 1×slots casino регистрация на сайте <a href=http://test.vz-nsk.ru/bitrix/redirect.php?goto=http://ogorod-shop.ru/bitrix/redirect.php?goto=http://sfera-nsk.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/PVaukV2Rt2z>http://test.vz-nsk.ru/bitrix/redirect.php?goto=http://ogorod-shop.ru/bitrix/redirect.php?goto=http://sfera-nsk.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/PVaukV2Rt2z</a> Каждая игровая платформа отличается условиями по получению и отыгрышу бездепов. В правилах отчетливо расписаны кратковременные рамки, за коие нужно прокрутить вейджер. Также не запамятовывайте на наибольший объем ставки и максимальную необходимую выплаты. С другой стороны, дабы получить бездепозитные призы казино, довольно истратить не более 1 минуты.
1×слотс казино
Риск-игра по равным шансам – Также казино имеет воспрещать исполнять обстоятельства по отыгрышу счет раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких других играх.Но существуют азартные заведения, готовые просто например вручить средства на игру. Для сего достаточно сделать профиль. Чтобы вывести выигрыш, сперва необходимо выполнить вейджеровые условия, прописанные в критериях получения бездепа. 1×slots зеркало регистрацию более популярный вариант это Для такого, чтобы отыграть сумму вашего бездепозитного бонуса надо(надобно) выполнить условия вейджера. Очень нередко фриспины даются на конкретные слоты (book of ra, book of dead, book of sun), выбирайте разъем для нраву, они очень красивые и высококачественные. Бездепозитные бонус имеет быть денежным например и вид фриспинов на слоты <a href=http://www.ntsr.info/forum/user/99960/>http://www.ntsr.info/forum/user/99960/</a> 1×slots официальный зеркало У каждой игры средства требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система засчитает любую ставку. В рулетке и покере устроить это гораздо труднее. Именно потому например важно пристально читать условия получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой ирге, то новенькие попросту «спустят бонус на ветер».
1х слот 1хслотс регистрация перейти на 1×slots
Только выполнив все условия отыгрыша и дождавшись завершения проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить средства средства.У нас на веб-сайте Вы отыщите перечень призов без депозита в проверенных казино и доскональную информацию то как их получить и использовать. Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке нужно пополнить счет в казино. Для депозитных бонусов, данная процедура не нужна, например как депо уже сделан.Особую изюминку видео слотам присваивают оригинальные символы. С их в активизируются различные бонусы. Вы можете запустить дополнительный уровень и увеличить необходимую выигрыша. Есть знаки, которые заменяют ненадобные составляющие и сами создают выигрышные комбо. Не стоит забывать и тему бонус-тур. После каждого успешного спина есть шанс увеличить необходимую выигрыша в два либо хорошо раза. <a href=http://studio-pd.ru/index.php?subaction=userinfo&user=lyricalgala67>http://studio-pd.ru/index.php?subaction=userinfo&user=lyricalgala67</a> Итак, чтобы благотворительные бонусные кредиты превратились в настоящие деньги, которыми вы можете распоряжаться по своему усмотрению, их нужно отыграть. Вейджер идет уточнять в правилах онлайн-казино. 1× слот зеркало Фриспины — благотворительные вращения, коие дозволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся самым знаменитым и преимущественным обликом приза — благотворительные вращения иногда эффективнее и веселее в отыгрыше, чем остальные облики бездепов.
1×slots зеркало регистрация
Мы собрали и выпустили перечень наихороших бездепозитных казино с бонусами за регистрацию, которые гарантируют щедрые выигрыши и моментальные выплаты. Выбирая даровой бонус, пристально изучайте управляла. Убедитесь, собственно вам можно брать роль в промоакции. Уточните, в каких забавах можно скорпулезно обстоятельства вейджера. При необходимости задавайте вопросы адептам саппорта.Иногда в поощрения за регистрацию шансы выдаваться билеты для участия в турнирах. Условия их проведения довольно выделяются, потому мы советуем ознакомиться с любым предложением отдельно. Можно ли в одном интернет казино получить больше 1-го бонуса за регистрацию? Нет, например как в любом онлайн казино есть правила, к которым нужно придерживаться, не творить два аккаута для получения призов, по будет блокировка обоих аккаутов, не пытайтесь перехитрить онлайн казино, приз за регистрацию выдаеться раз один 1 лицу. 1×slots регистрация 1×slots casino 777 online <a href=http://zvezdjuchki.ru/user/DoctorLazutakt/>http://zvezdjuchki.ru/user/DoctorLazutakt/</a> Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских руб. В условиях акции указано, что вейджер бездепозитного бонуса х20. Поэтому, дабы отыграть приз, игроку несомненно необходимо сделать ставок на 35*20=700 руб.Бездепозитные бонусы за регистрацию в игровых автоматах для хозяев онлайн-казино являются долею рекламной кампании, направленной на повышение аудитории вебсайта. Так они продвигают свои бренды и привлекают свежих клиентов.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Рассмотрим принцип его деяния на случае. Допустим, вы зарегистрировались и получили $10 no down payment bonus с вейджером х50. Это значит, что выигранные деньги возможно несомненно выводить не раньше, чем после как, как общая сумма ставок достигнет $500.Подтвердите лицо, предоставив оператору казино свои паспортные данные. Инструкции обычно легкие, основное — конкретно им стопам. Если написано, что «на фото должны быть заметны все хорошо угла страницы паспорта» — устройте именно такое фото. Бездепозитные призы казино за регистрацию в 2022 году — это возможность поиграть за счёт заведения. Казино даёт клиенту шанс пользоваться определённой суммой либо числом бесплатных вращений без внесения депозита. Не путайте деморежим с реальной забавой без надобности внесения депо. <a href=https://berzarina28a.ru/index.php?/profile/11025-walterlot/>https://berzarina28a.ru/index.php?/profile/11025-walterlot/</a> Большинство интернет-казино из нашего топ-10 готовы повеселить вас эксклюзивными промоакциями. Читайте о их в обзорах и на форуме.Эффективность бездепов виде рекламного прибора оценили все операторы. Малоизвестные площадки используют такие промоакции, дабы прытко набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны постоянных гостей. Не все сайты, дающие презенты без депозита, рекомендованы к забаве. За привлекательным промоописанием могут скрываться неосуществимые условия отыгрыша и подводные камешки. 1×slots подтвердит вашу регистрацию если говорить Многие игроки, оценив перечень казино, остаются выступать в нем и дальше ? на это и нацелено каждое рекламную. Постоянные посетители заносят депозиты и проделывают ставки, обеспечивая длительную прибыль оператора. То есть, казино выдают бездепы свежим пользователям для формирования лояльной аудитории.Например, игрок получил 500 руб. При творении аккаунта и должен отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 рублей, понадобится устроить 875 спинов для полного отыгрыша.
<b>Смотреть еще похожие новости:</b>
<a href=http://kamechkovkazak.listbb.ru/viewtopic.php?f=15&t=2429>1 xslots рабочее зеркало</a>
<a href=http://swissairways-va.com/phpBB3/viewtopic.php?t=800617>1×слотс казино</a>
<a href=http://griffhunter.com/boards/viewtopic.php?p=1033158#p1033158>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Отказ в прохождении верификации. Если клиент не желает или возможности дать документы, подтверждающие его личность, профиль несомненно заблокирован вместе со всеми бонусными начислениями.
#1185 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Елена Никитина, скелетонистка скачать букмекерскую контору на андроид <a href=https://t.me/vchkogpu_ru>pin up casino скачать</a> букмекерские конторы в россии букмекерская контора без <a href=https://res-publika.com>порно с Евгений Малкин (хоккей)</a> porno Юлия Канакина 1×bet рабочее Матвиенко Валентина Ивановна порно 7k casino сайт Москалькова Татьяна Николаевна порно 1×bet вход букмекерская контора фонбет
DiskiPlus porno Ангелина Гончаренко, хоккеистка DiskiPlus порно с Евгений Малкин (хоккей) <a href=https://www.diskiplus.ru>DiskiPlus порно с Дронова Александра Викторовна</a> DiskiPlus 1×bet на андроид DiskiPlus пин ап casino pin up top <a href=https://diskiplus.ru>DiskiPlus казино фильм смотреть онлайн</a> DiskiPlus порно с Анна Щербакова, фигуристка DiskiPlus игры казино DiskiPlus online casino официальный DiskiPlus Матвиенко Валентина Ивановна порно DiskiPlus porno Мира Андреева (теннис) DiskiPlus казино онлайн DiskiPlus Крючкова Полина Викторовна порно
#1186 Charlesgunnyhttp://filmkachat.ru
1×slots сайт
Главным нюансом в возникновении данных вознаграждений произведено никаких, что пустив их в ход, компьютерные ничем не рискует и в последствии никому ничего не несомненно обязан (не зависимо, получит ли он спасибо призам какой-либо выигрыш либо моментально спустит все только что прибывшие деньги). То есть, казино снабжает игрока возможностью на дармовой базе выступать во различные слоты причем спонсирует забаву.Прежде всего, не забывайте регулярно заглядывать на страничку обзоров бездепозитных призов. Они шаг за шагом оценивают наиболее увлекательные предложения основных игорных порталов. <a href=http://filmkachat.ru/>1хлот регистрация в 1×slots casino</a> Верификация аккаунта. Лучше подтвердить лицо незамедлительно последствии регистрации, чтобы потом не было проблем с выводом денег. Верификация имеет протекать 2-мя маршрутами: <a href=https://www.bunity.com/shopavto>https://www.bunity.com/shopavto</a> Зарегистрируйтесь. Для регистрации чаще всего достаточно установить свой номер аппарата и почтовый адресок, в чего ввести полученный код из СМС. Возможно, потребуется указать промокод. В правилах акции несомненно написано, где его бы вводить. Иногда это надо создавать при регистрации, от — уже последствии сотворения личного кабинета, на отдельной странице.Бонусные средства – небольшая сумма денег для старта в новом казино. На бонусные деньги, обычно разрешено играть во все игры, считая слотов с современным джекпотом и игр из раздела live casino. 1×slots зеркало на сегодня <a href=http://eufisky.is-programmer.com/guestbook/>http://eufisky.is-programmer.com/guestbook/</a> Срок отыгрыша — это период, который наступает в момент активации бонуса и завершается с его закрытием. Пользователю необходимо уложиться в этот временной зазор, другому призовые средства аннулируются. Казино устанавливают список игр, ставки каких засчитываются при расчете отыгранных денег. Если тайтл не входит в данный перечень, то предоставляется быть недоступен для загрузки во время деяния бонусного предложения.Для получения выигрыша потребуется выполнить условия казино. Чаще всего игроку нужно поставить определенную необходимую, но теснее из личных средств. Она рассчитывается из совместного размера выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, в пользователь выиграл 1000 руб., а множитель сочиняет х30, вывести деньги можно будет, сделав ставки на 30 000 руб.
1×slots casino регистрация
Зачастую бездепозитные призы казино для забавы предлагаются различными заведениями азартных игр в маркетинговых акций либо в целях привлечения к себя новых игроков. Для бездепозитных призов в казино 2022 игроку не нужно пополнять счет до этапа вывода желаемых средств.В любом казино с бездепозитным бонусом учтены вейджеровые обстоятельства. Это один-единственный «подводный камень», который стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, нужно сделать определённое число ставок. Чем круче бонус, тем труднее выполнить обстоятельства, и напротив. 1×slots официальный сайт, скачать Для проверки используются сканы паспортов, водительских водительских, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если юзер обнаружен в попытке ввести вспомогательный аккаунт, все его учетные записи подвергаются блокировке, а их обладатель попадает в темный список. При забаве на лицензионной площадке не опасаться указывать достоверную персональную информацию (шифрование ликвидирует утечку персональных данных).Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных ситуаций с казино, когда после отыгрыша бездепа вас не дадут вывести крупную необходимую выигрыша. <a href=https://images.google.us/url?q=https://doctorlazuta.by/>https://images.google.us/url?q=https://doctorlazuta.by/</a> 1×slots мобильная версия войти казино Такие одобрения разрешают бесплатно протестировать свежее казино, разобраться с игровым ходом интернет слотов, заработать и вывести небольшую необходимую средств.Заработать на бездепозитных бонусах за регистрацию в казино возможность любой пользователь, достигший совершеннолетия.
1×slots бонус за регистрацию
Максимальная ставка ? устанавливается в еденице счета и ограничивает объем ставки за один спин. В случае ее превышения приз может быть аннулирован. Также в правилах может находиться запрет на размещение ставок конкретного облика, например, по одинаковым шансам в рулетке (другими, на чет или нечет, красное либо темное и т.д. ).Вейджер не более х30–35 является применимым. Опытные игроки утверждают, что с этим вейджером реально остаться в плюсе, случае правильно подойти к выбору игрового аппарата. <a href=https://jicsweb.texascollege.edu/ICS/Academics/RELI/RELI_1311/2016_FA-RELI_1311–04/ford.jnz?portlet=Blog&screen=View+Post&screenType=next&&Id=eaf86a36–2c93–416d-a969–68846d8cd854>https://jicsweb.texascollege.edu/ICS/Academics/RELI/RELI_1311/2016_FA-RELI_1311–04/ford.jnz?portlet=Blog&screen=View+Post&screenType=next&&Id=eaf86a36–2c93–416d-a969–68846d8cd854</a> 1× slots casino зеркало
1хслотс 1хслотс регистрация перейти на 1×slots
Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=http://okeyrp.listbb.ru/viewtopic.php?f=24&t=2270>1×slots быструю регистрацию а также мгновенное</a> Условия, на коих предоставляется бездеп, регулируются казино. Каждая промоакция содержит доскональные управляла, ссылка на которые обыкновенно содержится в промообъявлении. В них указываются лимиты, вейджер, список доступных игр. Если оператор прячет данные о предложении, то воспользоваться им не.Исходя из этого, просто не присутствует мудрых причин махнуть рукой на получение такого приза при регистрации. И, что, на такой бесплатной базе у вас есть все шансы выиграть средства и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные призы, нарекают бесплатными онлайн платформами для игр. Бонус в казино без депо содержит различные вариации: такое быть приветственный приз, промоакции в честь каких-то праздничных либо главных дат, приз за привлечение свежих игроков, преданность и получение VIP-статуса.Прежде всего, не забывайте регулярно заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом осматривают наиболее занимательные предложения водящих игорных порталов. 1хслот скачать <a href=http://retail-ts.ru/index.php?subaction=userinfo&user=ozakuso>http://retail-ts.ru/index.php?subaction=userinfo&user=ozakuso</a> Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, solid зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.Автоматическая активация на самой удобной, хотя ручной метод содержит перед ней преимущества. Прежде чем использовать вознаграждение от казино, стоит заранее определить, сколько времени требуется на исполненье всех критерий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала действия приза.
1×slots официальный сайт зеркало
Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша бонусов. Заведения всегда устанавливают максимальную ставку, возможную по условиям вейждера. <a href=http://jade-crack.com/home.php?mod=space&uid=1182255>http://jade-crack.com/home.php?mod=space&uid=1182255</a> 1 хслот регистрация в 1×slots casino Сроки активации бонуса уточняются любым казино, хотя почаще всего они не превосходят недели с этапа получения. Игроку обязательно нужно применять бездеп протяжении указанного срока, в ином случае приз просто пропадет. Каждый приз можно получить лишь раз один, поэтому в не применять бездеп в срок, у игрока не несомненно 2 шанса им пользоваться.
<b>Смотреть еще похожие новости:</b>
<a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=13406>1×slots регистрация 1×slots review live</a>
<a href=https://adminclub.org/showthread.php?tid=308050>1×slots официальный сайт мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Это раз из главных характеристик привлекательности дара. С завешенным коэффициентом числе профессионалы не смогут выполнить условия по отыгрышу. И так, насколько презентабельно смотрится предложение – бездепозитный бонус казино в размере $500 либо $1 000. Чтобы новенькие получше вдумались, что же это вейджер, мы разберём на образце. Но не мыслить, что снабжая пользователей такими бонусами, казино занимается спонсированием. Ведь размеры вознаграждений, главном, не немалые (средним размером от 5 до 20 долларов). И на эти свои налагаются определенные обстоятельства и лимитирования, обязательные к исполненью игрока, если в последствии он желает получить все средства выигранные финансы.
#1187 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
vavada casino ограбление казино <a href=https://repost.news/>винлайн букмекерская контора официальный</a> 1×bet официальный Любимова Ольга Борисовна порно <a href=https://rumafia.news/>casino com</a> Комарова Наталья Владимировна порно порно с Владимир Минеев (ММА) фреш казино Матвиенко Валентина Ивановна порно казино регистрации casino регистрации букмекерская контора зенит
DiskiPlus букмекерскую контору пин DiskiPlus pin up casino скачать <a href=https://diskiplus.ru>DiskiPlus порно с Захарова Мария Владимировна</a> DiskiPlus casino betting DiskiPlus porno Ангелина Гончаренко, хоккеистка <a href=https://www.diskiplus.ru>DiskiPlus casino регистрации</a> DiskiPlus porno Мира Андреева (теннис) DiskiPlus 7k casino скачать DiskiPlus винлайн букмекерская контора официальный сайт DiskiPlus пина букмекерской конторы DiskiPlus kometa casino DiskiPlus porno Екатерина Ефременкова, шорт-трекистка DiskiPlus 7k casino официальный сайт
#1188 Charlesgunnyhttp://filmkachat.ru
1×слот регистрация в 1×slots casino
Не желайте сыграть в азартные забавы, не рискуя средствами средствами, но получая в все выплаты? Подобную вероятность предоставляют многие превосходнейшие порталы с азартными увеселениями. В их числе большое добросовестных и надежных интернет-казино на российском языке. Они завлекают новых пользователей разными поощрительными событиями, включая бездепозитные, либо безвозмездные призы. <a href=http://filmkachat.ru/>1хслот скачать</a> В случае установленного лимита на необходимую вывода выигрыша с бездепозитного бонуса, игрок не может вывести больше заявленной суммы.Зачастую бездепозитные призы казино для игры предлагаются различными заведениями азартных игр виде рекламных акций или в целях вербования к себе новых игроков. Для бездепозитных бонусов в казино 2022 геймеру не пополнять счет до этапа вывода желанных средств. <a href=https://www.obesityhelp.com/members/product-advertising/about_me/>https://www.obesityhelp.com/members/product-advertising/about_me/</a> Бонусы без депо при регистрации числятся самыми привлекательными как для опытнейших игроков, например для и новичков. Получив такое вознаграждение, заказчик может играть на реальные средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а также обстоятельства их активации и выигрыша.В бонусную программу многих операторов входят регулярные бездепы. Это бессрочные акции, поощряющие активных постоянных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают постоянные бонусы без депозита в обмен на накопленные баллы преданности. 1хслотс рабочее зеркало <a href=http://farsrig.com/index.php?subaction=userinfo&user=oceanichinge82>http://farsrig.com/index.php?subaction=userinfo&user=oceanichinge82</a>
1×slots официальный сайт зеркало рабочее
Мы подготовили перечень, где есть постоянно животрепещущие и новые бездепозитные призы казино, коие вам получить безвозмездно. Для наших юзеров есть специальные предложения неповторимые бонусы, которые вы ни не найдете, их мы определили особой красной плашкой «Exclusive». <a href=https://acerfans.ru/user/JamesTed/>1×slots регистрацию процедура займет всего лишь</a> 1хслотс казино зеркало Не стоит путать игру в демо и использование призов. В демонстрационном режиме игрок может расценить механику слота, сюжет и оформление. Но игра проводится на условные кредиты, потому отсутствует основное ? чувство азарта. Активируя промокод или фриспины, заказчик раньше не тратит свои средства на игровые автоматы, хотя возможность сорвать реальный куш! <a href=https://njt.ru/forum/user/206637/>https://njt.ru/forum/user/206637/</a> Для ревизии применяются сканы паспортов, водительских водительских, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если юзер обнаружен в попытке ввести вспомогательный аккаунт, все его учетные записи подвергаются блокировке, а их владелец попадает в темный перечень. При этой на лицензионной площадке надо опасаться свидетельствовать достоверную персональную информацию (шифрование исключает утечку индивидуальных данных). 1× slots зеркало Используйте наилучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из списка ниже, чтобы заработать презенты за простые деянья теперь сегодня получить первый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высочайшей отдачей и резвыми выводами на электрические кошельки.Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депо может выделяться до 30 дней.
1×slots промокод при регистрации
<a href=http://www.khuortho-ce.ac.kr/g5/bbs/board.php?bo_table=free&wr_id=1232612>http://www.khuortho-ce.ac.kr/g5/bbs/board.php?bo_table=free&wr_id=1232612</a> Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы была возможность вывести выигрыш.Вейджер (wager) – это коэффициент, который показывает на какую сумму необходимо сделать ставок, дабы вывести приз из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего бонуса, Вам необходимо устроить ставок на необходимую: 500*70=3500 рублей. Только полностью отыграв бонус, Вы сможете вывести собственный выигрыш. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Бездепозитные бонусы в казино без пополнения 2022 — это конкретная сумма денег или gratuitous spins вращения, коие предоставляются первым постояльцам за регистрацию на веб-сайте казино вид бездепозитного приза, и дает вас вероятность с казино без пополнения опробовать услуги (игр), с дальнейшей привилегией вывода средств при исполненьи всех установленных управлял.Бездепозитные бонусы истинными средствами, коие можно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадали.
1хслотс зеркало
Пoдтвepдить личнocть посетителя. Для удачного вывода средств, необходимо подтвердить лицо посетителя. Нa этaпe вepификaции пpoфиля, работники службы защищенности обязаны убедиться, что у игрока более один аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не сможет исключить собственный выигрыш, случае у него будет количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы.Новые клиенты онлайн-казино без первого депо шансы выяснить свою удачливость. К тому же есть вероятность преобразовать бездепы в реальные средства за регистрацию в казино, впрочем результата приз нужно отыграть сообразно условиям промоакции. К огорчению, нет. Почти все казино, требуют внесение желая бы одного малого депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, что исключить средства разрешено только на что, эту платежную систему, с которой был изготовлен депозит. 1×slots casino регистрация 1×slots review live <a href=https://www.chordie.com/forum/profile.php?id=1980422>https://www.chordie.com/forum/profile.php?id=1980422</a> Доступность — бездепозитные бонусы в казино чаще всего предоставляются новым игрокам, хотя бывают случаи, когда приз все получить и действующие посетители.
1×slots официальный регистрация
Казино дает возможность заработать и вывести настоящие средства на бездепозитных бонусах. Обычно, это малозначительная сумма, коию казино возможность себе позволить подарить игроку.Как верховодило, при выводе денег, от играющего требуется лишь сделать минимальный вклад для того, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом личный счет. Так же стоит выделить то, что в любом интернет казино установлен свой наибольший кешаут на бездепозитный приз. Как правило кешаут — это максимальная сумма денег, которая дешевая для вывода с бездепозитного бонуса.Ниже указан актуальный перечень законных казино в Беларуси с бонусами на первый депозит. Вы можете попасть на официальный сайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз. <a href=http://forumqservice.co.uk/member.php?action=profile&uid=22175>http://forumqservice.co.uk/member.php?action=profile&uid=22175</a> Подарки на праздники ? приуроченные к праздничным датам, требующие символического отыгрыша либо начисляются без такового. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду.Баланс игрока дополняется на подобающую необходимую. К ней применяется вейджер, обозначенный в правилах промоакции. Вывести выигрыш возможно несомненно последствии как, как юзер устроит требуемый размер ставок из личных средств. В редких случаях бездеп работает в формате Free Play. На счет юзера зачисляется большая сумма, и предоставляется маленький срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по завершении этого периода сумма на счету будет превышать изначальную, то разность можно будет исключить или применять для последующих ставок. казино 1×slots Более солидные предложения встречаются очень редко. Зачастую они доступны лишь VIP-игрокам. В остальных случаях им наверняка сопутствуют очень строгие обстоятельства отыгрыша. Также вероятны дополнительные обстоятельства и ограничения, прописанные в условиях и положения бонусной программки казино.Будьте внимательнее при ознакомлении с правилами во избежание происхожденья конфликтных ситуаций с казино, когда последствии отыгрыша бездепа вам не дадут исключить крупную необходимую выигрыша.
<b>Смотреть еще похожие новости:</b>
<a href=http://zelenalutrija.com/forum/showthread.php?p=84709#post84709>1×slots регистрация то дальше необходимо пройти</a>
<a href=http://support-groups.org/viewtopic.php?f=161&t=780582>1×slots официальный сайт скачать на айфон</a>
<a href=https://varasija.com/members/josephapofs.7862/>1хслот зеркало</a>
<a href=http://forum.drustvogil-galad.si/index.php?action=profile;u=121557>1×slots официальный demo регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Важно, убедитесь в, что раньше не регистрировались в избранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи. Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются незамедлительно последствии творенья профиля и активны недолговременное время. Если не успеете израсходовать средства, они просто сгорят. Касаемо времени, как призы активны на часа.
#1189 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Каролина Севастьянова игры казино <a href=https://rhymes-punches.com/>смотреть фильм казино</a> казино на деньги букмекерская контора на андроид <a href=https://slon-ru.com/>лучшие бесплатные онлайн казино</a> порно с Карен Хачанов (теннис) 1go casino Фастова Елена Владимировна порно казино регистрации casino актуальное зеркало porno Мира Андреева (теннис) человек казино
DiskiPlus Крючкова Полина Викторовна порно DiskiPlus new casino <a href=https://diskiplus.ru/>DiskiPlus 1×bet официальный слоты</a> DiskiPlus pin up casino зеркало DiskiPlus почему в казино нет окон <a href=https://diskiplus.ru>DiskiPlus порно с Илья Осипов (киберспорт)</a> DiskiPlus порно с Карен Хачанов (теннис) DiskiPlus 1×slots casino DiskiPlus смотреть фильм казино DiskiPlus кент casino DiskiPlus казино смотреть онлайн бесплатно DiskiPlus скачать 1×bet на андроид DiskiPlus порно с Сергей Бобровский (хоккей)
#1190 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало
Мы подготовили перечень, где есть постоянно актуальные и свежие бездепозитные бонусы казино, которые возможность получить даром. Для наших юзеров есть специальные предложения неповторимые бонусы, которые вы нигде не найдете, их мы обозначили специальной красноватой плашкой «Exclusive».Способы получения бездепа различаются в зависимости от облика приза, кот-ый приглянулся игроку. Но вас в любом случае нужно быть зарегистрированным в законном онлайн-казино и подтвердить свою личность. В общем виде пошаговая аннотация для получения бездепозитного бонуса смотрится например: <a href=http://filmkachat.ru/>1×slot зеркало</a> <a href=https://linklist.bio/lexxeagle>https://linklist.bio/lexxeagle</a> Новые клиенты онлайн-казино без первого депозита имеют проверить собственную удачливость. К что, этому же есть вероятность преобразовать бездепы в настоящие деньги за регистрацию в казино, однако для этого бонус необходимо отыграть согласно условиям промоакции.Срок активации и время на отыгрыш. Зачисление средств или фриспинов происходит при активации протяжении строго ограниченного периода, похожие требования предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать бонус несколько дней либо и недель. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высочайшим вейджером. 1×slots сайт <a href=http://kidsnighttonight.com:/forums/member.php?action=profile&uid=356089>http://kidsnighttonight.com:/forums/member.php?action=profile&uid=356089</a> Таким образом, заведение пробует продемонстрировать себя своим потенциальным геймерам, а такой рекламный ход как казино приз без депо за регистрацию завлекает очень большое внимания к игорному заведению и обеспечивает неизменный поток свежих гостей и будущих посетителей игрового онлайн клуба.
1×slot рабочее зеркало
Но не размышлять, собственно снабжая юзеров такими призами, казино увлекается спонсированием. Ведь объемы вознаграждений, в, не великие (средним объемом от 5 до 20 $). И на эти свои налагаются конкретные обстоятельства и лимитирования, обязательные к исполненью игрока, если в последствии он желает получить все средства выигранные финансы.Далее потребуется отыграть вагер и вывести выигрыш. Игрокам без навыка крупно повезло, у получить 10-ки подарков за 1 регистрацию. Если не сумели получить Бездепозитный бонус, не волнуйтесь. Обратитесь в онлайн чат, оператор поможет исправить. 1× slots зеркало Но есть азартные заведения, готовые просто так вручить деньги на забаву. Для этого довольно сделать профиль. Чтобы вывести выигрыш, сначала необходимо выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа.Проверка занимает от нескольких минут до нескольких дней, спецы техподдержки все запросить вспомогательные документы или инициировать куцее общение по Skype. <a href=http://www.zhzmsp.com/home.php?mod=space&uid=1754335>http://www.zhzmsp.com/home.php?mod=space&uid=1754335</a> 1×slots casino регистрация на сайте
1×slots casino регистрация на сайте
Зарегистрируйтесь. Для регистрации почаще всего довольно ввести свой номер телефона и почтовый адресок, после чего ввести приобретенный код из СМС. Возможно, потребуется показать промокод. В правилах акции будет написано, где его надо включать. Иногда это надобно создавать при регистрации, иногда — уже после творения личного офиса, на отдельной страничке.Постарайтесь отыграть вейджер, дабы была вероятность забыть заявку на выплату. Кстати, на всех веб-сайтах, представленных в перечне, доступны современные платёжные приборы. Вы сможете получить выигрыш на электрической кошелёк, карту, телефонный. Подарки на праздничные ? приуроченные к торжественным датам, требующие символического отыгрыша или начисляются без это. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду.За счёт спинов выйдет запустить различные интернет слоты, протестировать стратегии и поднабраться навыка. Фишка сомнений, что вращения начисляются на топовые аппараты с уникальными опциями и высокой отдачей. Не забывайте, собственно в любом акционном предложении учтены особые требования – временные ограничения, наибольший объем ставки, список дешевых игр. <a href=http://alfasys.com.ua/index.php?subaction=userinfo&user=ruralphilosophy>http://alfasys.com.ua/index.php?subaction=userinfo&user=ruralphilosophy</a> Прибывшие на акк финансы бездепозитные призы предназначаются, в, лишь для новоиспеченных юзеров, которые раньше не имели личного аккаунта в данном казино. Исходя из этого, в раньше у игрока был изготовлен депозит, то, по всей вероятности, у него больше не несомненно возможности рассчитывать на получение такого бонуса в конкретном заведении. 1× slots зеркало Многие игроки, оценив функционал казино, остаются выступать в нем и далее ? на это и нацелено каждое промо. Постоянные клиенты заносят депозиты и делают ставки, обеспечивая долгосрочную выгода оператора. То есть, казино выдают бездепы новым пользователям для формирования лояльной аудитории.
казино 1× slots официальный сайт
Бездепозитные призы казино это финансовая компенсация, предлагаемая пользователям на дармовой основе и возможность играть в онлайн казино даром. Если сопоставлять их с одобрениями за лепта, в которых средства выдаются только впоследствии первоначального пополнения счета, то бездепозитные вознаграждения получаются безвозмездно. То есть, играющий получает вероятность делать ставки на уже место финансы, коие выдаст заведение, выполняя, при, обычные действия, чтобы их извлечь (тут идет о регистрация, удостоверении личности с использованием номера аппарата, дизайна заказы и т.д. ).Бездепозитные призы казино это экономическая компенсация, предлагаемая юзерам на дармовой базе и возможность выступать в интернет казино безвозмездно. Если сопоставлять их с одобрениями за лепта, в свои выдаются лишь потом начального пополнения счета, то бездепозитные вознаграждения получаются безвозмездно. То есть, играющий получает вероятность создавать ставки на теснее быть финансы, которые выдаст заведение, исполняя, при этом, обыденные деянья, чтобы их извлечь (здесь речь о регистрация, удостоверении личности с внедрением номера аппарата, оформления заявки и т.д. ). Как верховодило, новоприбывшие геймеры для хотят ознакомиться с способами ввода и вывода валютных средств и сроки выполнения поданных заявок чтобы четко понимать, как быстро возможность исключить собственный казино бонус за регистрацию без депо на электрический кошелек либо же банковскую карту. К счастью для всех играющих, снутри конкретных холдингов, все казино конкурируют между собой. Ведь в бы конкретную фирму давало лишь одно онлайн-заведение, то ли бы посетители увидели казино с бонусом за регистрацию и имели бы рассчитывать лишь на вознаграждение вид приза на первое инвестиция. К любому заведению периодически следует привлекать свежих игроков, собственно, в итоге, лишь на руку всем играющим.При ирге на бонусные свои воспрещается выступать в игровые автоматы с современным джекпотом и игры из радела exist casino. Кроме как, кое-какие казино выделяют бездеп на один либо несколько конкретных слотов, и в других играх Вы не сможете на них играть. При регистрации что или ином интернет игральном заведении — вас дается один шанс испытать собственную удачу не внося средства монеты. Замечу что такую поощрительную услугу деют не все онлайн игровые площадки, а лишь щедрая середина(средина) из их. Которые мы подготовили для Вас в нашем списке. 1×слот регистрация в 1×slots casino <a href=http://sols9.com/batheo/Forum/User-ForsedropPr>http://sols9.com/batheo/Forum/User-ForsedropPr</a> Бездепы с бесплатными вращениями деют юзерам право вертеть барабаны игровых автоматов без снятия средств со счета. За каждый раунд выплачивает казино. Число спинов ограничено и изредка превышает сотню. Если акция содержит большое бесплатных игр, их начисление возможность быть разбито на некоторое дней.
1×slots официальный demo регистрация в 1×slots casino
<a href=https://equessurge.win/phpBB3N/memberlist.php?mode=viewprofile&u=74713>https://equessurge.win/phpBB3N/memberlist.php?mode=viewprofile&u=74713</a> Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации презента необходимо доказать электронную почту и привязать аппарат;Рассмотрим принцип его деянья на образце. Допустим, вы зарегались и получили $10 no deposit bonus с вейджером х50. Это значит, что выигранные деньги возможно несомненно выводить не ранее, чем после такого, как общая сумма ставок достигнет $500. 1×slots быструю регистрацию а также мгновенное Каждая игровая платформа отличается условиями по получению и отыгрышу бездепов. В правилах отчетливо расписаны кратковременные рамки, за коие надо(надобно) прокрутить вейджер. Также не запамятовывайте тему максимальный размер ставки и максимальную необходимую выплаты. С иной стороны, дабы получить бездепозитные призы казино, довольно потратить не более 1 минуты.
<b>Смотреть еще похожие новости:</b>
<a href=http://miupsik.ru/forums/showthread.php?tid=525005>1×slots подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины – благотворительные вращения с фиксированной ставкой, которые возможно использовать в конкретных игровых автоматах. Ещё одно распространённое акционное предложение – привлекательный презент с сомнительными притязаниями. К примеру, клуб сулит $100 виде бездепа, хотя с вейджером х80 либо х100. Отыграть подобный вейджер фактически невозможно и потому какого-либо концентрироваться на более интересных акциях.
#1191 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Дарья Мороз сколько казино <a href=https://strelochnik.com/>1×bet слоты</a> cometa casino зеркала казино <a href=https://m.repost.news/>порно с Юлия Ефимова, пловчиха</a> casino официальный сайт 1×bet скачать бесплатно casino вход Елена Лядова Скворцова Вероника Игоревна порно почему в казино не бывает настенных часов казино 5
DiskiPlus Черкесова Бэлла Мухарбиевна порно DiskiPlus букмекерская контора леонов <a href=https://www.diskiplus.ru>DiskiPlus Москалькова Татьяна Николаевна порно</a> DiskiPlus Ходнева Светлана Владимировна порно DiskiPlus казино ставка <a href=https://diskiplus.ru>DiskiPlus 1×bet скачать бесплатно</a> DiskiPlus casino промокод DiskiPlus казино рублях DiskiPlus 1×bet приложение DiskiPlus пин ап казино DiskiPlus порно с Алексей Миранчук (футбол) DiskiPlus Елизавета Боярская DiskiPlus букмекерская контора фонбет официальный сайт
#1192 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию процедура займет всего лишь
Многие новички колеблются, собственно поощрительный приз не несомненно отдавать, в в они выиграли у казино. Это полностью неопасно и накрепко. Выводя выигранные свои, игрок просто останавливает свое участие деле и утрачивает уникальную возможность – бесплатно наращивать личное материальное положение. <a href=http://filmkachat.ru/>1×slots сайт</a> <a href=https://collegefactual.uservoice.com/forums/195264-general-feedback/suggestions/49478657-%D0%B2%D0%B8%D0%BA%D1%83%D0%BF-%D1%82%D0%B0-%D0%B2%D1%96%D0%B4%D0%BD%D0%BE%D0%B2%D0%BB%D0%B5%D0%BD%D0%BD%D1%8F-%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%BE%D0%B1%D1%96%D0%BB%D1%96%D0%B2-%D0%BF%D1%96%D1%81%D0%BB%D1%8F-%D0%B4%D1%82%D0%BF-%D0%BF%D0%BE%D0%BA%D1%80%D0%BE%D0%BA>https://collegefactual.uservoice.com/forums/195264-general-feedback/suggestions/49478657-%D0%B2%D0%B8%D0%BA%D1%83%D0%BF-%D1%82%D0%B0-%D0%B2%D1%96%D0%B4%D0%BD%D0%BE%D0%B2%D0%BB%D0%B5%D0%BD%D0%BD%D1%8F-%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%BE%D0%B1%D1%96%D0%BB%D1%96%D0%B2-%D0%BF%D1%96%D1%81%D0%BB%D1%8F-%D0%B4%D1%82%D0%BF-%D0%BF%D0%BE%D0%BA%D1%80%D0%BE%D0%BA</a> Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить необыкновенности, недоступные при этой в демо режиме. Многие новые посетители переходят в число неизменных, а оператор получает длительную прибыль.Выбирая бесплатный бонус, пристально изучайте управляла. Убедитесь, собственно вас возможно себя роль в акции. Уточните, в каких забавах можно исполнять обстоятельства вейджера. При необходимости задавайте вопросы представителям саппорта. 1×slots официальный сайт мобильная версия <a href=https://rubcrumb.ru/user/Davidnop/>https://rubcrumb.ru/user/Davidnop/</a>
1×slots сайт зеркало
1×slots рабочее зеркало на сегодня Некоторые казино шансы предлагать клиентам бездепы за свидетельство номера либо почты либо репост на страницу в социальных сетях.Представьте момент, когда при ставке в 10 руб. Вы получите схожее умножение. Миллион рублей за одно вращение, что абсолютно вполне. Поэтому вопрос, сколько можно выиграть остаётся не. Предлагаем проверить без. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный бонус и проверяйте фортуну в деле. Разумеется, вывести деньги не так просто. Однако шансы есть у всех. <a href=https://adobeacrobat.cc/member.php?action=profile&uid=3054>https://adobeacrobat.cc/member.php?action=profile&uid=3054</a> 1×slots на любой вкус как пройти регистрацию Казино выделяет вероятность заработать и исключить настоящие средства на бездепозитных бонусах. Обычно, это малозначительная сумма, которую казино имеет себе разрешить подарить игроку.
1×slots рабочее зеркало
Фриспины – благотворительные вращения с фиксированной ставкой, коие возможно применять в конкретных игровых автоматах. <a href=http://forums.ggcorp.me/space-uid-3859666.html>http://forums.ggcorp.me/space-uid-3859666.html</a> Для верификации аккаунта нужно дать специалистам технической помощи отсканированную копию паспорта и счета за коммунальные предложения, еще фотографию банковской карты либо экрана страницы электронного кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для доказательства личности. казино 1×slots официальный сайт
1×slots регистрация то дальше необходимо пройти
Как лишь на виртуальном счету окажутся бонусные свои, поспешите отыграть вейджер. Сразу последствии этого возможно забыть заявку на вывод выигрыша. Кредиты выгодно отличаются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом настоящих средств и дают возможность ощутить задор. Во-вторых – возможно насладиться каждой азартной забавой доступной на веб-сайте. В вашем постановлении присутствуют автоматы, настольные приложение, видео-покер, Live-дилеры.Основное различие что, нет, собственно для получения бездепа нужно пополнять баланс в казино. Но считая сего, есть ряд прочих отличий: 1× slots регистрация в 1×slots casino <a href=https://www.9tj.net/home.php?mod=space&uid=225799>https://www.9tj.net/home.php?mod=space&uid=225799</a> У каждого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано смогли выполнить их, мы дадим несколько советов. Если система начислила маленькую необходимую, не стоит делать немалые ставки – остановитесь на 10–30 центах. Как лишь сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте играть. В неприятном случае какого-либо приглядеться к иному автомату.
1× slots casino зеркало
Когда речь идет о валютных призах, казино постоянно устанавливают обстоятельства вейджера, коие необходимо выполнить, чтобы вывести выигрыш.Принципиальным отличием бесплатных бонусов от бонусов на депозит является отсутствие необходимости вносить деньги на аккаунт. Из-за сего их часто нарекают бездепозитными (no down payment bonuses). <a href=http://kamerton72.ru/users/juleslot>http://kamerton72.ru/users/juleslot</a> Подтверждение регистрации. Казино просят привязки профиля к электрическому адресу и номеру телефонного. Для этого на e-mail отчаливает письмо со ссылкой, а на аппарат ? текстовое извещение с кодом. казино 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://kakofon.cz/forum/viewtopic.php?f=6&t=381&p=39961#p39961>1×slots промокод при регистрации</a>
<a href=http://sladkierecepti.5nx.ru/viewtopic.php?f=8&t=12671>1×slots зеркало регистрация в 1×slots casino</a>
<a href=https://swordmaster.org/user/JamesVok/>1×slots зеркало на сегодня</a>
<a href=https://forum.dis-course.net/viewtopic.php?t=662840>1×slots промокод при регистрации 2025</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриплей-бонусы. Бонусы за благотворительную забаву есть лишь в неких клубах. Они зачисляются сразу после сотворения профиля и срабатывают недолговременное время. Если у вас нет медли потратить свои, они просто завершатся. Что касается медли, в большинстве случаев призы срабатывают протяжении одного часа. В реальное время получить приз за регистрацию в казино довольно просто. Почти любой игорный жилище с радостью даст деньги или безвозмездные вращения. Многие игроки пользуются данным и не стесняются региться в любом клубе с прибыльными условиями. Кстати, это замечательная вероятность придумать выигрышную тактику и сорвать куш.
#1193 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slotscasino09k online
Как управляло, при выводе финансов, от играющего потребуется лишь сделать наименьший вклад для того, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом личный счет.Подтвердите лицо, предоставив оператору казино средства паспортные данные. Инструкции обычно несложные, основное — четко им следовать. Если написано, собственно «на фото обязаны быть заметны все хорошо угла страницы паспорта» — сделайте непосредственно это фото. <a href=http://filmkachat.ru/>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a> <a href=https://archinect.com/firms/cover/150465490/cgifurniture-modern-interior-design>https://archinect.com/firms/cover/150465490/cgifurniture-modern-interior-design</a> У нас на сайте Вы найдете список призов без депо в проверенных казино и доскональную информацию о том как их получить и применять.В наше время довольно просто получить бонус за регистрацию в казино. Практически любой игорный жилище с радостью начислит средства или бесплатные вращения. Многие гэмблеры пользуются данным и не смущяются регистрироваться в любом клубе с прибыльными критериями. Кстати, это отличная вероятность выработать победную стратегию и сорвать джекпот. 1×slots casino регистрация 1×slotscasin online <a href=https://500px.com/p/glavdorogadv16051?view=photos>https://500px.com/p/glavdorogadv16051?view=photos</a> В лицензионных бездепозитных казино выступать в азартные игры вправду неопасно. Наличие лицензии одобряет что, этот прецедент, собственно клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP.
1× slots зеркало
Прибывшие на аккаунт финансы бездепозитные призы предназначаются, в, только для новоиспеченных юзеров, коие ранее не имели собственного аккаунта в данном казино. Исходя из сего, в ранее у игрока был сделан депозит, то, по всей вероятности, у него больше не будет способности рассчитывать на получение такового бонуса в конкретном заведении.Размер бонуса. В качестве бездепов обыкновенно начисляют большие суммы, а когда речь идет о призах за депо, которые начисляются в процентном соотношении от суммы пополнения, то некоторые казино могут презентовать игроку до 2000$. 1×slots регистрация 1×slots casino 777 online <a href=http://darkevins.bplaced.net/member.php?action=profile&uid=12078>http://darkevins.bplaced.net/member.php?action=profile&uid=12078</a> 1×slots зеркало рабочее Бонус за регистрацию в казино без депо с выводом денег надо(надобно) отыграть. Зачастую для отыгрыша имеет потребоваться устроить ставки на необходимую, в количество десятков раз превосходящую сумму бонуса или выигрыша.Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция имеет подробные управляла, гиперссылка на коие обычно находится в промообъявлении. В них указываются лимиты, вейджер, перечень дешевых игр. Если оператор укрывает данные о предложении, то пользоваться им надо.
1хслот зеркало
Oтыгpaть бонус с указанным вeйджepом, для этого необходимо сдeлaть cтaвoк нa cумму, превосходящую объем приза в несколько один. <a href=https://telearchaeology.org/TAWiki/index.php/1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81_%D0%A0%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5_%D0%97%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE>https://telearchaeology.org/TAWiki/index.php/1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81_%D0%A0%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5_%D0%97%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE</a> Доступ к подарку может раскрываться автоматически в введения промокода или обращения в службу поддержки вебсайта. В первом случае от пользователя не потребуется практически действий. Бездеп с активацией по коду встречается чаще всего. Игроку необходимо установить совокупа символов в графе, которая имеет находиться в регистрационной форме в Личном кабинете.Сроки активации приза уточняются любым казино, хотя почаще всего они не превосходят недели с этапа получения. Игроку непременно надо(надобно) использовать бездеп в течение обозначенного срока, в ином случае бонус просто пропадет. Каждый бонус можно получить только один один, поэтому если не использовать бездеп в срок, у игрока не несомненно 2 шанса им воспользоваться. 1хслотс зеркало на сегодня Ниже указан важный список законных казино в Беларуси с призами на 1-ый депозит. Вы можете попасть на официальный вебсайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз.
зеркло казино 1×slots
<a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=12220>1×slots регистрацию процедура займет всего лишь</a> Для проверки применяются сканы паспортов, водительских прав, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если юзер замечен в попытке завести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их владелец попадает в темный список. При ирге на лицензионной площадке не стоит опасаться указывать достоверную персональную информацию (шифрование ликвидирует утечку персональных данных).Бонусные средства – маленькая сумма средств для старта в новеньком казино. На бонусные деньги, обыкновенно разрешено играть во все игры, считая слотов с современным джекпотом и игр из раздела exist casino. В игровых клубах без лицензии Вы покупаете „кота в мешке“ и в случае неоднозначных ситуаций нет способности куда-то посетовать и обосновать свою правоту. зеркло казино 1×slots <a href=http://cooleda.com/index.php?subaction=userinfo&user=sedatecab55>http://cooleda.com/index.php?subaction=userinfo&user=sedatecab55</a> Исходя из сего, просто не присутствует мудрых оснований махнуть рукою на получение такого приза при регистрации. И, лишним, на такой бесплатной основе у вас есть все шансы выиграть средства и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, нарекают бесплатными интернет платформами для игр.
1×слот регистрация в 1×slots casino
Так что приготовьтесь предоставить конфиденциальную информацию (пол, возраст, страна проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает не более суток, после чего удастся беспрепятственно выводить солидные выигрыши.Вейджер (wager) – это коэффициент, который демонстрирует на какую сумму нужно устроить ставок, дабы вывести приз из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода сего бонуса, Вам необходимо сделать ставок на необходимую: 500*70=3500 руб. Только полностью отыграв бонус, Вы можете вывести собственный выигрыш. А ознакомиться с новыми онлайн казино, Вы можете помощью бонусов с выводом прибыли, коие Вы сможете получить без депозита. <a href=http://kt-pet.info/bitrix/click.php?goto=http://tas.by/bitrix/rk.php?goto=http://aksinia.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/iqr_o4cAiOl>http://kt-pet.info/bitrix/click.php?goto=http://tas.by/bitrix/rk.php?goto=http://aksinia.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/iqr_o4cAiOl</a> Верификация аккаунта. Лучше подтвердить лицо незамедлительно в регистрации, дабы позже не было проблем с выводом денег. Верификация имеет протекать двумя способами: 1×slots официальный сайт, скачать
<b>Смотреть еще похожие новости:</b>
<a href=https://fmatras.ru/topic/92056–1×slots-skachat-na-ayfon/>1×slots скачать на айфон</a>
<a href=http://powercrop.it/chi-siamo/le-persone?page=129#comment-6494>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a>
<a href=http://www.fumankong4.cc/home.php?mod=space&uid=500977>1×slots casino регистрация 1×slotscasin online</a>
<a href=https://www.thefamilylegion.se/viewtopic.php?f=4&t=99366>1× слот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Возьми собственный презент. Чаще всего бонус активируется незамедлительно последствии регистрации. Но посещают ситуации, когда надо(надобно) зайти в индивидуальный офис либо написать в справочную службу.
#1194 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
ев казино про казино <a href=https://strelochnik.com/>порно с Бондаренко Анастасия Борисовна</a> Мухтиярова Елена Вячеславовна порно up casino официальный <a href=https://slon-ru.com/>сайт казино зеркало</a> казино рулетка 7k casino официальный ставки на спорт букмекерские конторы casino официальный сайт top casino cat casino сайт pin up casino
DiskiPlus 1×bet casino DiskiPlus porno Вера Бирюкова, гимнастка <a href=https://diskiplus.ru/>DiskiPlus porno Виктория Баркова, легкоатлетка</a> DiskiPlus retro casino DiskiPlus pin up casino top top <a href=https://www.diskiplus.ru>DiskiPlus 1×slots casino</a> DiskiPlus зеркала казино DiskiPlus казино играть DiskiPlus porno Алена Косторная (фигурное катание) DiskiPlus casino играть DiskiPlus porno Илона Маркова, хоккеистка DiskiPlus смотреть фильм казино DiskiPlus порно с Каролина Севастьянова
#1195 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slots review live
Похожим образом трудится третий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения клиента или из-за с получения им VIP-статуса. Подарок предоставляется в воззвания в поддержку и ревизии.Также бездепозитные призы все работать методом возвратить к ирге посетителей, что приостановивших своё сотрудничество с компанией: извещение о бездепе поступает на мобильный аппарат или почту. <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> <a href=https://www.bunity.com/-4272ed82–271c-4d7f-8ae6-c898dfa18867>https://www.bunity.com/-4272ed82–271c-4d7f-8ae6-c898dfa18867</a> Чтобы без увериться в превосходстве бездепозитных призов, достаточно зарегистрироваться в казино и получить одобрение. 1хслотс казино зеркало <a href=http://arskland.ru/people/user/16562/>http://arskland.ru/people/user/16562/</a>
1×slot регистрация
Но существуют азартные заведения, готовые просто так вручить средства на забаву. Для этого достаточно сделать профиль. Чтобы исключить выигрыш, сперва необходимо выполнить вейджеровые условия, прописанные в критериях получения бездепа. 1×slots регистрация на официальном сайте Классическая разновидность бонуса за творенье аккаунта. Его превосходство заключается что, нет, что заказчик имеет других избирать аппараты и создавать ставки в их. Иногда перечень игровых автоматов ограничен оператором, хотя все одинаково это никакого, чем один-единственный доступный слот, как если, тогда, с внедрением фриспинов. <a href=http://bbs.xinhaolian.com/home.php?mod=space&uid=4065004>http://bbs.xinhaolian.com/home.php?mod=space&uid=4065004</a> Подтверждение электронной почты – одно из главных критерий, коие есть почти в каждом бездепозитном казино. Чтобы верифицировать электрическую почту, достаточно перебежать по интенсивной ссылке в послании, полученном от азартного клуба.Каждая игровая платформа выделяется условиями по получению и отыгрышу бездепов. В правилах отчетливо расписаны временные рамки, за коие нужно прокрутить вейджер. Также не запамятовывайте про наибольший размер ставки и наивысшую сумму выплаты. С другой стороны, дабы получить бездепозитные бонусы казино, довольно потратить не более 1 минуты. 1×slots casino регистрация 1×slotscasin online
1хслот 1хслотс регистрация перейти на 1×slots
Обычно бездепозитные промоакции от казино, прибывают на эл. Почту в деньки рождения либо праздники. В неких интернет казино можно обратиться в чат и как неизменному игроку, вполне вам предложат бездепозитное предложение.Приветственный бездеп предоставляется хоть игроку только раз один. Казино дерутся с так нарекаемыми бонусхантерами (от англ. Bonus Hunter — доброволец за призами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения дара. Исключить подобные деяния разрешает верификация данных. Администрация вправе потребовать у клиента подтвердить персональные данные, указанные при регистрации. Большинство интернет-казино из нашего топ-10 готовы порадовать вас неповторимыми акциями. Читайте о их в обзорах и на форуме.Если вы выбрали себе некоторое брендов коие вам больше всего полюбились, для неизменной забавы! Таких гемблеров казино очень предпочитает и оценивает, за частую эти игроки становятся VIP игроками заведения, коим нередко поступают выгодные предложения в виде призов, например же туда заходит и бездепозитные. <a href=http://xn---54–6cdxn7akip.xn–p1ai/forum/memberlist.php?mode=viewprofile&u=46374>http://xn---54–6cdxn7akip.xn–p1ai/forum/memberlist.php?mode=viewprofile&u=46374</a> 1хслот зеркало
1хслотс рабочее зеркало на сегодня
<a href=https://technique-tp.com/forum/viewtopic.php?t=5141>1× slots зеркало</a> 1×slots рабочее зеркало на сегодня <a href=https://we.riseup.net/bbgatecom2512/%D0%B2%D0%B8%D0%B4%D0%B5%D0%BE%D1%81%D1%8A%D0%B5%D0%BC%D0%BA%D0%B0-%D0%B3%D0%BE%D1%80%D0%BE%D0%B4%D0%BE%D0%B2>https://we.riseup.net/bbgatecom2512/%D0%B2%D0%B8%D0%B4%D0%B5%D0%BE%D1%81%D1%8A%D0%B5%D0%BC%D0%BA%D0%B0-%D0%B3%D0%BE%D1%80%D0%BE%D0%B4%D0%BE%D0%B2</a>
1×slot рабочее зеркало
Мы проделываем ударение на ключевых положениях правил, рассказываем о территориальных лимитированиях и кратко информируем о других промоакциях обсуждаемого казино.Некоторые сайты, прежде чем обмануть регистрацию игроков, предлагают ответить на некоторое базовых вопросов. Цель проведения похожей викторины – выявить случайных людей, которые не имеют представления о покере, и не допустить получения ими призов. Если гость теснее играл в казино, то ответить на полтора десятка несложных вопросов будет несложно. Очень часто, ответы можно отыскать на официальных веб-сайтах этих учреждений. Иногда в бездепа, казино презентует минимальный приз (до 50 рублей), ради которого не стоит заморачиваться. <a href=http://japan-lke.com/home.php?mod=space&uid=70364&do=profile>http://japan-lke.com/home.php?mod=space&uid=70364&do=profile</a> 1× slots регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://www.mshowto.org/forum/members/jamespauri.html>1×slot официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Мы советуем не отрицаться от подобных услуг знаменитых казино. Выделите количество мин. На регистрацию, получите приз и попытайтесь его отыграть. Может быть, сегодня удача будет на вашей стороне!
#1196 DanielFligohttps://torsigon.ru
После нескольких дней и 257 пиков НФЛ 2025 года завершился. Все 32 клубы должны почувствовать, что они улучшились, хотя некоторые из них должны чувствовать себя лучше других. Никогда не стоит судить о перспективах до того, как они появятся на поле НФЛ, и мы не будем здесь анализировать, как покажут себя новые игроки лиги. Это поможет им <a href=https://torsigon.ru/orol-kupit-gashish-ekstazi-pvp.html>купить бошки</a> и не только. Однако совершенно справедливо анализировать, как франшизы сделали мероприятие, закрыли потребности, увеличили ценность (или нет) и сопоставили стратегии драфта с долгосрочными планами франшизы. Все верно: пришло время для оценок Bleacher Report после драфта для каждой команды. Ниже вы найдете обзор каждого выбора из каждой франшизы с анализом класса на основе вышеупомянутых факторов, ожидаемого соответствия схеме и любых соответствующих передач. Поскольку ценность личная, мы использовали окончательные рейтинги перспектив 2025 года отдела скаутинга Bleacher Report в качестве ориентира. Франшизы перечислены в порядке алфавита.
#1197 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация то дальше необходимо пройти
Oтыгpaть приз с обозначенным вeйджepом, результата нужно сдeлaть cтaвoк нa cумму, превосходящую объем бонуса в несколько один.Так собственно главное отличие дара на депозит от бездепа – неотъемлемое пополнение счёта. Вы сможете внести депо и преумножить стартовый капитал или арестовать бездеп и при этом не придётся рисковать собственными сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начисляет щедрое одобрение! <a href=http://filmkachat.ru/>1×slots casino регистрация</a> <a href=https://paperpage.in/blogs/288414/Transform-Your-Products-with-Premium-3D-Rendering-Services>https://paperpage.in/blogs/288414/Transform-Your-Products-with-Premium-3D-Rendering-Services</a> Для вывода средств приз нужно несомненно отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами акции и вариациями отыгрыша бездепозитного бонуса до его получения, чтобы избежать конфликтных обстановок. 1хслотс официальный сайт зеркало <a href=http://bbs.all4seiya.net/home.php?mod=space&uid=960978>http://bbs.all4seiya.net/home.php?mod=space&uid=960978</a>
1× slots регистрация в 1×slots casino
Получить Бездепозитный приз в интернет казино дело 2-ух кликов. Другой момент, отыграть промо и соблюсти верховодила и условия отыгрыша. Под правилами предполагается не только вагер, но и лимитирования по максимальной ставке. Мы осознаем, собственно в кинотеатр все ставят на зеро и выигрывают. Призываем не создавать сходственного. Перед активацией бонуса прочтите управляла. Узнайте последующие факторы: Условия получения презента, за регистрацию, за депо и другое. Ограничения по наибольшей ставке. Зачастую не повыше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах можно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на пространстве. Поэтому главно аристократия, в каких забавах можно осуществлять кратность денежного оборота. <a href=https://showboysmedia.com/real-music/#comment-151744>1×slot зеркало рабочее регистрации на телефон придет</a> 1×slots регистрацию более популярный вариант это Но на азартных платформах сходственные вознаграждения имеют получить теперь зарегистрированные пользователи. В таком случае, призы предоставляются масштабах уникальных промоакций либо же некоторым геймерам повторяющий акционного предложения, которое приходит на почту с целью «вернуть» игрока в свое казино. <a href=https://www.muttsworldmine.com/forums/user/476262-richardmup/>https://www.muttsworldmine.com/forums/user/476262-richardmup/</a> При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое можно посвятить игре в казино.Казино дает возможность заработать и исключить реальные деньги на бездепозитных призах. Обычно, это малозначительная сумма, коию казино возможность себе позволить презентовать игроку. 1хслот 1хслотс регистрация перейти на 1×slots
1×slots регистрация 1×slots casino 777 online
<a href=https://opensourcebridge.science/index.php?title=1win_brasil_bet_jogos>https://opensourcebridge.science/index.php?title=1win_brasil_bet_jogos</a> В некоторых интернет казино для получения бездепозитных призов не достаточно просто зарегистрироваться на сайте клуба и доказать свои контактные данные. Дополнительно потребуется активация промокода.Самые свежие бездепозитные призы в казино за регистрацию 2022 года с выводом прибыли присутствуют на этой странице. Посетитель возможность расценить обстоятельства получения и начать выступать на деньги без внесения депо. При данном игроку принципиально разуметь, на каких условиях и какими способами появится исключить приобретенный выигрыш. Для сего необходимо расценить перечень присоединенных платежных систем. 1хслотс казино зеркало
1×слотс казино
Бездепозитные бонусы – это исключительно небезинтересная и более перспективная акция интернет-казино. Они том превосходнее фри-спинов, потому что выплаты в даровых вращениях не гарантированы, ведь композиции на барабанах игрового аппарата имеют не сложиться.В количестве случаев безвозмездные призы начисляются в кредитах, коие нельзя незамедлительно исключить со счета. Прежде их нужно отыграть по установленным правилам. Эти требования принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д. ). О нем читайте ниже. <a href=https://www.prtrecovery.org/threads/kazino-1×slots.874/>казино 1×slots</a> Так что приготовьтесь предоставить секретную информацию (пол, возраст, страна проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает менее суток, последствии чего получится свободно выводить солидные выигрыши. 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=http://indels.ru/bitrix/click.php?goto=http://blucome.ru/bitrix/redirect.php?goto=http://suntehnik.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/6ggOaUPiR4q>http://indels.ru/bitrix/click.php?goto=http://blucome.ru/bitrix/redirect.php?goto=http://suntehnik.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/6ggOaUPiR4q</a> Маркетинговая политического всех игорных интернет-клубов должна носить разнородный нрав. И случае вознаграждения на депо работают для того, чтобы стимулировать заносить депозиты и поощрять уже существующих пользователей, то бездепозитный бонус в казино либо бонус за регистрацию в казино, этого всего, рассчитан на расширение базы покупателей.
1×slots официальный регистрация
Новички не любят незамедлительно же вносить депо. Это обусловлено неимением опыта и сомненьем. К счастью, в возможно получить бездепозитный приз за регистрацию в казино. Неважно собственно начислит система – фриспины или кредиты. В всяком случае вы не рискуете своими сбережениями. Это замечательная вероятность запустить понравившийся видео разъем либо же испытывать фортуну в настольных забавах. У каждой игры средства требования по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система зачтет любую ставку. В рулетке и покере сделать это гораздо сложнее. Именно потому например принципиально внимательно читать условия получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой забаве, то новенькие просто «спустят приз на ветер». <a href=https://www.3yecao.org/home.php?mod=space&uid=34990>https://www.3yecao.org/home.php?mod=space&uid=34990</a> Некоторые клубы механически начисляют бонус на акк игрока в выполнения критерий получения, но бывают истории, когда приз нужно активировать игроку самому. Есть количество методов активации бонуса:Активация по промокоду используется в разных видах бездепов. Если речь о приветственном призе, то набор знаков можно разузнать на основной страничке, в регистрационной форме либо послании, коие отправляется юзеру для подтверждения адреса электронной почты. Акции могут проводиться совместно с партнерскими площадками. Обычно код располагается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активируется одноразовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем актуальный код для активации в описании каждого промо. 1×slots зеркало выигрыши обязательно пройдите регистрацию если Бонус за регистрацию в казино выдается лишь один один на одного игрока. Но бывают дополнительные акции, в рамках которых бездепы раздаются для постоянных клиентов и эти презенты Вы можете получить более одного раза.
<b>Смотреть еще похожие новости:</b>
<a href=https://elclasificadomx.com/author/jameslog/>1 x slots casino</a>
<a href=https://mami-forum.de/forum.php>1 x slots casino</a>
<a href=https://rolivka.online/forum/showthread.php?tid=40777>1×slos регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Обычно, бездепозитные бонусы выдаются под определенные слоты с фиксированной ставкой, хотя их точно запрещено использовать в игровых автоматах с прогрессивным джекпотом. Список игр, каких возможно использовать бездеп, Вы найдете в описании промоакции или сможете уточнить у службы поддержки заведения. Если вы новичок деле и лишь попали в неизведанную вами область азарта — за услуг как бездепозитные призы без пополнения.
#1198 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Лут Оксана Николаевна порно 1×bet сайт <a href=https://m.repost.news/>порно с Юлия Ефимова, пловчиха</a> 1×bet слоты официальный сайт казино рояль смотреть <a href=https://slon-ru.com/>бк букмекерская контора</a> Лут Оксана Николаевна порно Крючкова Полина Викторовна порно porno Дарья Мороз Матвиенко Валентина Ивановна порно казино ставка казино 5 Набиуллина Эльвира Сахипзадовна порно
DiskiPlus 1×bet слоты официальный сайт DiskiPlus 1×bet регистрация <a href=https://www.diskiplus.ru>DiskiPlus казино вход</a> DiskiPlus porno Нина Пирогова, хоккеистка DiskiPlus Хорова Наталья Александровна порно <a href=https://diskiplus.ru>DiskiPlus 1×bet сейчас</a> DiskiPlus пина casino DiskiPlus 1×bet скачать бесплатно DiskiPlus букмекерская контора бетсити DiskiPlus Разуваева Ксения Денисовна порно DiskiPlus порно с Дарья Клишина, легкоатлетка DiskiPlus бесплатные букмекерские конторы DiskiPlus casino бонус
#1199 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
лучшие казино бесплатно букмекерскую контору пин <a href=https://m.repost.news/>казино можно</a> рабочие зеркала казино балтбет букмекерская контора <a href=https://rhymes-punches.com/>Самойлова Алла Владимировна порно</a> 1×bet официальный 1×bet xyz 1×bet скачать приложение 1×bet рабочее 1×bet зеркало рабочее xbet бесплатно фильм казино порно с Гатагова Ольга Анатольевна сколько казино
DiskiPlus сайт pin up casino DiskiPlus вавада казино <a href=https://diskiplus.ru/>DiskiPlus Приезжева Екатерина Геннадьевна порно</a> DiskiPlus порно с Георгий Джикия (футбол) DiskiPlus кент casino <a href=https://diskiplus.ru>DiskiPlus порно с Абрамченко Виктория Валериевна</a> DiskiPlus бывшие казино DiskiPlus 1×bet DiskiPlus porno Андрей Рублев (теннис) DiskiPlus лучшие онлайн казино DiskiPlus официальная казино DiskiPlus pin up casino пин DiskiPlus Москалькова Татьяна Николаевна порно
#1200 Charlesgunnyhttp://filmkachat.ru
1×slots казино мобильная версия
Если вы избираете проверенное лицензионное интернет казино и сделайте все обстоятельства получения бездепозитного приза, трудностей с получением дара у Вас не возникнет. <a href=http://filmkachat.ru/>1×slots коды</a> В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с безвозмездных вращений. Прибыль, коию Вы заработаете на таком бездепе возможно назначать на вывод без какого либо отыгрыша. <a href=https://www.elephantjournal.com/profile/shopavto7/>https://www.elephantjournal.com/profile/shopavto7/</a> Минимального оборота. Этот предел уточняется вейджером — пока игрок не поиграет на установленную сумму, вывод средств несомненно недосегаем. 1×slots регистрация то дальше необходимо пройти <a href=http://slideshow-forum.com/profile.php?id=98838>http://slideshow-forum.com/profile.php?id=98838</a> Благодаря программке преданности от игорного заведения, возможно взять превосходный старт и без дополнительных инвестициям запустить видеослоты. Кроме такого, возможно рассчитывать на реальную фортуну и получить, без инвестиции личных финансов, немалый выигрыш.Похожим образом работает 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения клиента либо в связи с получения им VIP-статуса. Подарок предоставляется в воззвания в поддержку и проверки.
1×slots официальный сайт скачать
<a href=https://chodilinh.com/threads/%D1%81%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C-1×slots-%D0%BD%D0%B0-%D0%B0%D0%BD%D0%B4%D1%80%D0%BE%D0%B8%D0%B4-%D0%BC%D0%BE%D0%B1%D0%B8%D0%BB%D1%8C%D0%BD%D0%B0%D1%8F-%D0%B2%D0%B5%D1%80%D1%81%D0%B8%D1%8F.459232/>скачать 1×slots на андроид мобильная версия</a> 1хслотс официальный сайт зеркало <a href=http://zeren.freeoda.com/member.php?action=profile&uid=7304>http://zeren.freeoda.com/member.php?action=profile&uid=7304</a> Если при регистрации указать промокод, возможно гарантировано получить бонус. Где взять ваучер? Посетите тематику блоги либо форумы. Иногда администрация клуба делает рассылку ваучеров на электрическую почту. В заключительное время игорные жилища начали афишироваться в фильмах и телесериалах. Присмотритесь и наверняка заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных рублей.Демоказино есть почти на любом сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются значительно реже: там если, тогда, выигрыша и соблюдения условий промоакций бездеп возможно перевоплотить в настоящие средства. скачать 1×slots на андроид мобильная версия
1×slots casino регистрация 1×slotscasino09k online
Выбирая безвозмездный приз, внимательно изучайте управляла. Убедитесь, собственно вам возможно брать участие в промоакции. Уточните, в каких играх можно исполнять обстоятельства вейджера. При надобности задавайте вопросы представителям саппорта.Зачастую бездепозитные призы казино для игры предлагаются различными заведениями азартных игр виде рекламных акций или в целях привлечения к себе новых игроков. Для бездепозитных призов в казино 2022 игроку надо пополнять счет до момента вывода хотимых средств. <a href=http://atlantcom.ru/bitrix/redirect.php?goto=http://zelenograd24.ru/bitrix/rk.php?goto=http://bumagin5.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/RQw-vf_DVVm>http://atlantcom.ru/bitrix/redirect.php?goto=http://zelenograd24.ru/bitrix/rk.php?goto=http://bumagin5.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/RQw-vf_DVVm</a> Поспешите зарегистрироваться на официальном сайте Клубника, дабы быстро получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, замечена реальный шанс победу!Чаще всего казино приз за регистрацию без депозита даёт возможность запустить каждой автомат. Но превосходнее внимательно ознакомиться с критериями. Иногда для забавы доступны лишь определённые модели. Если вы новичок и ничего не смыслите в гэмблинге, другого, как начать знакомство с миром азарта непосредственно с «одноруких бандитов». 1×slot рабочее зеркало Вообще перейдя в казино — правила схожи в получении бездепозитных бонусов, в стандартные правила заходит: доказать эл. Почту и телефон, наполнить свой личный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ.У любой забавы свои притязания по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система засчитает каждую ставку. В рулетке и покере устроить это намного сложнее. Именно потому например принципиально внимательно читать условия получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой этой, то новички попросту «спустят приз на ветер».
1×slots рабочее зеркало
B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax 1×slots акции <a href=http://xn–2q1bm4ii7b64r7pah0aj1s.com/bbs/board.php?bo_table=2&wr_id=43037>http://xn–2q1bm4ii7b64r7pah0aj1s.com/bbs/board.php?bo_table=2&wr_id=43037</a>
1×slots регистрация 1×slots review live
Составленный специалистами Casino.ru список онлайн-казино с бездепозитным призом разрешает игрокам сравнить спецпредложения различных операторов. Подобные бонусы без депозита предоставляются на больше выгодных критериях. Зачастую они крупнее, а обстоятельства отыгрыша менее жесткие.Если вы выбрали себе некоторое брендов которые для больше всего полюбились, для неизменной игры! Таких гемблеров казино очень любит и ценит, за частую такие игроки становятся VIP игроками заведения, которым нередко поступают прибыльные предложения повторяющий призов, например же туда заходит и бездепозитные. <a href=https://sklad-slabov.ru/forum/user/7884/>https://sklad-slabov.ru/forum/user/7884/</a> Практически все интернет казино с бездепозитным призом за регистрацию предусматривает программку лояльности — систему поощрения неизменных посетителей, которая состоит из большого значений. При достижении игроком очередного значения на его счёт поступает бонус. Чем повыше степень — что, этим щедрее приз. казино 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=http://support-groups.org/viewtopic.php?f=161&t=771753>1×slots зеркало регистрация в 1×slots casino</a>
<a href=http://sofanatki.ekafe.ru/viewtopic.php?f=1&t=2189>1×slot зеркало рабочее регистрации на телефон придет</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Промообъявления от казино мешают реальной картины и направлены на вербование внимания юзеров. Понять, насколько высоки шансы остаться в плюсе, позволит собственный анализ условий предложения: Однако в условиях исчезают «подводные камешки», которые не разрешат исключить крупную необходимую или же вы не успеете отыграть вейджер. Поэтому профессионалы рекомендуют арестовать благотворительные вращения за регистрацию в казино без депо, дабы поднабраться навыка и получить реальный шанс на победу.
#1201 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
официальное казино вход casino андроид <a href=https://glvk.guru/>online casino 7k</a> казино фильм сайт казино зеркало <a href=https://sovsekretno.net/>1×bet зеркало рабочее</a> 1×bet сайт pin up casino пин вавада казино букмекерская контора леонов ев казино винлайн букмекерская контора casino 7k сегодня
DiskiPlus cat casino DiskiPlus 1×bet зеркало рабочее xbet <a href=https://diskiplus.ru>DiskiPlus порно с Варвара Субботина</a> DiskiPlus Александра Бортич DiskiPlus какие казино <a href=https://diskiplus.ru>DiskiPlus пинап казино</a> DiskiPlus porno Алена Михайлова DiskiPlus скачать 1×bet на андроид DiskiPlus букмекерская контора фонбет официальный сайт DiskiPlus где казино DiskiPlus слоты казино DiskiPlus смотреть фильм казино DiskiPlus порно с Артемий Панарин (хоккей)
#1202 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия
На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не можете активировать и получить бездепозитный приз. <a href=http://filmkachat.ru/>x1 slots регистрация в 1×slots casino</a> Но есть азартные заведения, готовые просто например вручить средства на игру. Для сего довольно сделать профиль. Чтобы исключить выигрыш, сперва необходимо выполнить вейджеровые условия, прописанные в критериях получения бездепа. <a href=https://bio.site/kalinka0588>https://bio.site/kalinka0588</a> 1 x slots casino <a href=http://led119.ru/forum/user/109513/>http://led119.ru/forum/user/109513/</a> Способы получения бездепа различаются от облика бонуса, кот-ый понравился игроку. Но для иначе нужно быть зарегистрированным в легальном онлайн-казино и подтвердить собственную лицо. В общем облике пошаговая инструкция для получения бездепозитного приза смотрится так:
1×slots зеркало на сегодня
Бездепозитные призы — это подарки от казино вид бонусных средств либо фриспинов для игровых автоматов, коие начисляются на аккаунт игрока после процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депозит не потребуется.Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавления либо официального клиента для ПК. В большинстве казино срабатывают программы преданности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на следующий степень нередко с выдачей бездепа. <a href=http://www.infoknygos.lt/smforum/index.php?topic=135390.new#new>1хлот регистрация в 1×slots casino</a> 1×slots на любой вкус как пройти регистрацию Акции, приуроченные к календарным праздникам, случаются рассчитаны как на всех пользователей, например и на категории: к, презент на 8 марта девушкам-игрокам или мужикам на 23 февраля.Для получения бездепа необходимо пригласить в забаву по реферальной ссылке нового клиента: он обязан зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на необходимую, указанную в условиях акции. <a href=https://46.ip-5–135–151.eu/home.php?mod=space&uid=9539320&do=profile>https://46.ip-5–135–151.eu/home.php?mod=space&uid=9539320&do=profile</a> Заполняя данные в собственном профиле, указывайте только достоверную информацию, например как Вам придется ее доказать в при выводе средств. 1хслотс зеркало Более крупные предложения встречаются очень редко. Зачастую они доступны лишь VIP-игрокам. В оставшихся случаях им всего сопутствуют очень жесткие условия отыгрыша. Также вероятны вспомогательные условия прочие лимитирования, прописанные в условиях и положения бонусной программки казино.
1×slots быструю регистрацию а также мгновенное
Более крупные предложения встречаются довольно редко. Зачастую они доступны лишь VIP-игрокам. В оставшихся случаях им наверняка сопутствуют довольно строгие обстоятельства отыгрыша. Также вероятны дополнительные обстоятельства и ограничения, прописанные в условиях и положения бонусной программы казино.При маленький сумме приза рекомендовано играть по невысоким ставкам, а использовать наибольшие какого-либо только что, нет случае, если вейджер слишком великий, а время на отыгрыш крепко ограничено. <a href=http://www.ironbodies.com/userinfo.php?uid=60244>http://www.ironbodies.com/userinfo.php?uid=60244</a> 1× slots casino зеркало
1×slots регистрацию процедура займет всего лишь
Бонусы без депозита при регистрации числятся самыми привлекательными как для опытнейших игроков, так для и начинающих. Получив такое вознаграждение, заказчик возможность играть на реальные средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, еще условия их активации и выигрыша. <a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=735158>1×slot зеркало</a> Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми промоакциями. Читайте о них в обзорах и на форуме.Вейджер не более х30–35 является применимым. Опытные игроки утверждают, собственно с таким вейджером реально остаться в плюсе, в правильно подойти к выбору игрового аппарата. зеркло казино 1×slots <a href=http://www.zghncy.cn/home.php?mod=space&uid=727474>http://www.zghncy.cn/home.php?mod=space&uid=727474</a> Для отыгрыша приза казино обязывает игрока сыграть на сумму, в количество раз превосходящую сумму приобретенного приза — тут выгода компании явна.В бонусную программку множества операторов входят систематические бездепы. Это пожизненные промоакции, поощряющие интенсивных постоянных игроков. Популярный формат — раздача фриспинов по конкретным дням недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают постоянные бонусы без депозита в мена на накопленные баллы лояльности.
1×slots актуальное зеркало
Особую изюминку видео слотам присваивают оригинальные символы. С их в активируются различные бонусы. Вы сможете запустить дополнительный степень и увеличить необходимую выигрыша. Есть знаки, коие замещают негодные элементы и сами делают выигрышные комбо. Не стоит забывать и тему бонус-тур. После каждого счастливого спина есть шанс увеличить сумму выигрыша в два или хорошо раза.Вы наверняка, как и все предпочитаете получать подарки и бездепозитные призы казино. Игорные дома взяли в привычку одаривать гэмблеров приятными бонусами. Стать обладателем приветственного подарка можно за творенье профиля либо пополнение счёта. Второй вариант более увлекательный, как клубы готовы удвоить депозит! Но если вы новичок и лишь знакомитесь с миром пыла, другого пользуйтесь бонусом за регистрацию. Если простыми словами, бездепы – это определённая сумма денег или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать подарки. Но есть некоторые аспекты. Существуют игорные дома, коие перед что, этим как начислить призы требуют привязать аппарат, дать копии документов.Бездепозитный приз по промо-коду будет доступен для забавы, только сомнений случае когда Вы активируете специальный бонусный код в разделе с бонусами или укажите промокод при регистрации на веб-сайте. В неких случаях, кроме активации кода, придется доказать контактные данные игрока и наполнить анкету клиента. <a href=http://olddle.orkclub.ru/index.php?subaction=userinfo&user=magentatelegram>http://olddle.orkclub.ru/index.php?subaction=userinfo&user=magentatelegram</a> Даже не выиграв солидную сумму, игрок интересно проведет время, изнутри выучит работу площадки, воспримет геймплей автоматов. Все это без каких-либо финансовых рисков. Быть в курсе лучших акций легкостью. Достаточно регулярно учить перечень свежих онлайн казино с выводом приза без депо в этом разделе.Бездепозитный бонус по промо-коду несомненно доступен для забавы, лишь том, случае когда Вы активируете особый бонусный код в разделе с призами или укажите промокод при регистрации на веб-сайте. В некоторых случаях, кроме активации кода, понадобиться подтвердить контактные данные игрока и наполнить анкету посетителя. казино 1× slots официальный сайт Бездепы с безвозмездными вращениями деют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд уплачивает казино. Число спинов ограничено и редко выше сотню. Если промоакция включает в себя количество бесплатных игр, их начисление имеет быть разбито на несколько дней.
<b>Смотреть еще похожие новости:</b>
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=1210120>1хслотс зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вознаграждения за получение VIP-статуса ? начисляются масштабах программки лояльности при достижении еще значения или выдаются индивидуально менеджерами саппорта.
#1203 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало на сегодня
Если вы облюбовали себе несколько брендов которые для больше всего полюбились, для неизменной игры! Таких гемблеров казино очень предпочитает и оценивает, за частую такие игроки становятся VIP игроками заведения, которым часто поступают выгодные предложения в виде бонусов, так же туда заходит и бездепозитные.При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток. <a href=http://filmkachat.ru/>1×slots зеркало регистрация</a> Чаще всего применяются коды. Их нужно вносить в особые окошки регистрационной анкеты, случае речь о пригласительных бонусах, либо в определенном разделе личного офиса игрока.Доступ к дару имеет открываться автоматически последствии введения промокода либо воззвания в службу поддержки сайта. В первом случае от пользователя не требуется практически деяний. Бездеп с активацией по коду встречается чаще всего. Игроку необходимо установить совокупа знаков в графе, кот-ая возможность пребывать в регистрационной форме в Личном офисе. <a href=https://plaza.rakuten.co.jp/kalinka0588/diary/202403220000/>https://plaza.rakuten.co.jp/kalinka0588/diary/202403220000/</a> Простая процедура получения бездепозитного бонуса, кот-ая займет не более 2-х минут. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные.Призовые начисления без депо шансы предоставляться для роли в турнирах онлайн казино. Потратить перечисленные деньги можно самая масштабах этой акции. Условия их проведения себе ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться этим предложением, никакого выучить его управляла. 1× slots casino официальный сайт <a href=https://radioizba.ru/communication/forum/?PAGE_NAME=profile_view&UID=23973>https://radioizba.ru/communication/forum/?PAGE_NAME=profile_view&UID=23973</a>
1хслотс рабочее зеркало на сегодня
Таким образом онлайн казино получает потенциального игрока. Возможно в будущем или настоящем он захотит поиграть на свои средства. Так трудятся бездепозитные призы в онлайн казино. Здесь очень подходит выражение, бесплатные сыр случается лишь в мышеловке. Начинающие игроки все не обдумывать опасность пыла. Однако со временем осознания делается больше. Это тема для отдельного обсуждения.Как только вы отыграли вейджер и свои с бонусного баланса перешли вам на настоящий счет, Вы храбро сможете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (устроить наименьший депозит к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депо). <a href=http://medforum.5nx.ru/viewtopic.php?f=4&t=10433>1× slots сайт</a> 1×slots регистрация 1×slotscasino09k online Промообъявления от казино не дают реальной картины и ориентированы на вербование внимания юзеров. Понять, насколько высоки шансы остаться в плюсе, дозволит собственный тест критерий предложения:Таким образом, заведение пытается продемонстрировать себя своим вероятным геймерам, а подобный рекламный ход как казино приз без депозита за регистрацию завлекает довольно количество внимания к игорному заведению и обеспечивает неизменный струю свежих посетителей и будущих клиентов игрового интернет клуба. <a href=http://ybjlfc.com/home.php?mod=space&uid=397347&do=profile>http://ybjlfc.com/home.php?mod=space&uid=397347&do=profile</a> казино 1×slots
1×slots зеркало
<a href=https://garrettoyhq41852.isblog.net/deep-nude-the-ethical-dilemmas-and-technological-impacts-of-ai-driven-image-manipulation-47524140>https://garrettoyhq41852.isblog.net/deep-nude-the-ethical-dilemmas-and-technological-impacts-of-ai-driven-image-manipulation-47524140</a> Условия отыгрыша приза. Если Вы планируете заработать на бездепозитном призе, то для внимание на велечину вейджера и срок, кот-ый дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть приз и вывести выигрыш.Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы моментально получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, появляется реальный шанс победу! 1×slots регистрация на 1хслотс Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных требований, считая обязательной верификации. Если на веб-сайте предусмотрена неотъемлемая процедура доказательства личности, то исключить выигрыш получится лишь после проверки данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий лицо.Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных требований, не неотъемлемой верификации. Если на веб-сайте учтена неотъемлемая процедура подтверждения личности, то исключить выигрыш получится лишь в проверки данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий личность.
1хслотс официальный сайт зеркало
Активация валютного вознаграждения случается механически последствии создания профиля либо применения промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на страницы казино в соц сетях или на рассылку рекламных известий, скачать и ввести дополнительный софт и т.д.У любого игорного заведения свои верховодила и обстоятельства. Но, чтобы получить бонусы, нужно выполнить стереотипные действия: <a href=https://polnyi-pisec.info/threads/1×slots-rabochee-zerkalo-na-segodnja.1292/>1хслотс рабочее зеркало на сегодня</a> Рассмотрим принцип его действия на примере. Допустим, вы зарегались и возымели $10 not the slightest down payment bonus с вейджером х50. Это означает, что выигранные средства возможно будет выводить не ранее, чем в как, как общая сумма ставок достигнет $500.Прибывшие на аккаунт финансы бездепозитные призы предназначаются, в основном, только для новоиспеченных пользователей, коие ранее не имели собственного аккаунта в данном казино. Исходя из этого, случае раньше у игрока был изготовлен депо, то, по всей вероятности, у него больше не несомненно возможности рассчитывать на получение такого бонуса в конкретном заведении. Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную процедуру активации бонуса без депозита. Внимательно прочтите до конца. Многие новички делают оплошности на шаге регистрации и потому возможности получить подарок. казино 1×slots <a href=http://3.13.251.167/home.php?mod=space&uid=1085586>http://3.13.251.167/home.php?mod=space&uid=1085586</a> Онлайн-казино тщательно продумывают бонусные обстоятельства, которые нужно изучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша прочие ограничения.
зеркала 1×slots
У нас на веб-сайте Вы отыщите перечень бонусов без депозита в испытанных казино и подробную информацию то как их получить и использовать.4. Заберите презент. Чаще всего приз активируется сразу в регистрации. Но случаются истории, когда надо(надобно) забежать в личный кабинет либо написать в саппорта. <a href=https://learn.centa.org/forums/users/raspytwaddle4/>https://learn.centa.org/forums/users/raspytwaddle4/</a> Подарки на определенные даты отличаются критериями получения. Если одобрение начисляют игроку на день рождения, то сумма обычно зависит от общего объема депо за прошедший год.Доступность — бездепозитные призы в казино почаще всего предоставляются новым игрокам, хотя случаются случаи, когда приз шансы получить и действующие посетители. 1х слот 1хслотс регистрация перейти на 1×slots Онлайн-казино кропотливо продумывают бонусные условия, коие необходимо изучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и другие лимитирования.
<b>Смотреть еще похожие новости:</b>
<a href=http://griffhunter.com/boards/viewtopic.php?p=1011138#p1011138>1×slots регистрация то дальше необходимо пройти</a>
<a href=http://forum.animogen.com/memberlist.php?mode=viewprofile&u=15333>1хслотс рабочее зеркало на сегодня</a>
<a href=https://forum.zhuk.cc/index.php/forum/profile/23994-rabofreeki>1×slots скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В разделе с призами активировать свой подарок. Найти игры, для коих предусмотрено поощрение и применять бонус по назначению. Бездепозитные призы за регистрацию в игровых автоматах для хозяев онлайн-казино считаются долею рекламной кампании, направленной на увеличение аудитории сайта. Так они продвигают средства бренды и привлекают новых клиентов.
#1204 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino порно с Варвара Субботина <a href=https://th-royalgclub.com/>леон букмекерская контора</a> скачать pin casino где казино <a href=https://vestnik-jurnal.com/>порно с Евгения Медведева, фигуристка</a> макао казино букмекерская контора леонов casino сегодня порно с Дронова Александра Викторовна казино онлайн Ходнева Светлана Владимировна порно почему в казино нет окон
DiskiPlus порно с Максим Глушенков (футбол) DiskiPlus 7k casino сайт <a href=https://diskiplus.ru>DiskiPlus порно с Юлия Ефимова</a> DiskiPlus casino бездепозитный DiskiPlus букмекерская контора <a href=https://diskiplus.ru>DiskiPlus Петрова Ольга Викторовна порно</a> DiskiPlus up casino скачать DiskiPlus скачать 1×bet на андроид DiskiPlus casino 7k рабочее DiskiPlus водка казино DiskiPlus black russia казино DiskiPlus casino рабочее зеркало DiskiPlus 7k casino зеркало рабочее
#1205 Ctgroup_amisahttps://www.ctgroup.kz/
Всем привет! Хочу поделиться полезной и нужной новостью для студентов, детей, школьников и взрослых! Уважаемые читатели, что поделать, если не получается изучить и понять русский, казахский, английский язык? Что делать если не получается самостоятельно подготовиться к зачетам, экзаменам или ЕГЭ? К нашему счастью и радости есть отличный Образовательный центр в Алматы и в Атырау, который вас профессионально и быстро обучит и подготовит к любым видам экзаменам. В общем, если вы ищите, образовательный центр или образовательный языковой центр и т.д., например: <a href=https://www.ctgroup.kz/specialized-courses/>репетитор по техническому английскому для подготовки ко 2 курсу</a> Тогда вам срочно нужно прямо сейчас перейти на сайт Образовательного центра CtGroup и узнать все подробности по тесты, подготовка, экзамены, курсы, обучение, уроки, языковые курсы в Алматы и в Атырау и т.д. https://www.ctgroup.kz/ . Обязательно переходите на сайт Образовательного языкового центра Caspian Training Group сохраняйте в закладки и изучайте информацию, не забудьте записать номер телефона и адрес сайта. Кстати, все можно сделать онлайн, т.е. удалено, совершенно не нужно ни куда выходить и ни куда ехать из офиса или дома. Увидимся!
#1206 KellyDuthttps://ackeer.com/read-blog/30803
https://bonus1xbet02.livejournal.com/333.html
#1207 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino com порно с Алина Загитова <a href=https://th-royalgclub.com/>casino сегодня</a> букмекерская контора вход 7k casino бонус <a href=https://specreporter.com/>букмекерская контора без</a> бк букмекерская контора официальные зеркала казино porno Андрей Рублев (теннис) почему в казино нет часов порно с Анна Калинская (теннис) ев казино porno Илья Ковальчук (хоккей)
DiskiPlus бк букмекерская контора DiskiPlus яндекс игры казино <a href=https://diskiplus.ru>DiskiPlus 1×bet официальный xbet</a> DiskiPlus Яровая Ирина Анатольевна порно DiskiPlus скачать букмекерскую контору <a href=https://www.diskiplus.ru/>DiskiPlus казино рояль</a> DiskiPlus gama casino DiskiPlus 1×slots casino DiskiPlus ставки на спорт букмекерские конторы DiskiPlus казино ли DiskiPlus порно с Абрамченко Виктория Валериевна DiskiPlus 7k casino сайт DiskiPlus букмекерская контора мостбет
#1208 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало
Для отыгрыша приза казино обязывает игрока сыграть на необходимую, в некоторое один превосходящую сумму приобретенного бонуса — тут выгода компании очевидна. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> Заполняя данные в личном профиле, указывайте только достоверную информацию, так как Вам придется ее подтвердить в будущем при выводе средств. <a href=https://developers.paragon-software.com/community/profile/shopavto/>https://developers.paragon-software.com/community/profile/shopavto/</a> Бездепы с безвозмездными вращениями деют юзерам право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд выплачивает казино. Число спинов ограничено и изредка превышает сотню. Если промоакция включает в себя большое безвозмездных игр, их начисление имеет быть разбито на некоторое дней. 1х слот 1хслотс регистрация перейти на 1×slots <a href=http://dvnshu.com/index.php?subaction=userinfo&user=pluckywarning33>http://dvnshu.com/index.php?subaction=userinfo&user=pluckywarning33</a>
1×slots регистрация на сайте
<a href=https://www.globalvision2000.com/forum/member.php?action=profile&uid=1072499>скачать 1×slots официальный сайт</a> 1×slots акции Выиграть настоящие деньги в казино не пополняя счет – сложно, хотя вероятно. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными призами и начните играть на бонусные свои. По статистике из 10-ти заведений возможно заработать небольшую сумму денег с бонусных средств.Денежные средства. Третий бонус за регистрацию без депо – наличные. К огорчению, только знаменитые и знаменитые клубы имеют дать деньги в рублях или баксах. С их помощью вас насладиться любой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед этим нужно выполнение конкретных критерий. <a href=https://latino-forex.com/members/234778-waltermophy>https://latino-forex.com/members/234778-waltermophy</a> 1×slots casino регистрация 1×slots review live
казино 1×slots
На благотворительные бонусы онлайн-казино почти всегда распространяется ограничения по стране проживания клиентов. Даже в вас разрешается открывать счет и выступать на деньги в заведении, это еще не значат, собственно для доступны no down payment bonuses.Фриспины – бесплатные вращения с фиксированной ставкой, которые можно использовать в конкретных игровых автоматах. <a href=https://www.modernvespa.it/profile/3865-jamesbuids/>https://www.modernvespa.it/profile/3865-jamesbuids/</a> 1хслотс рабочее зеркало на сегодня Срок активации и время на отыгрыш. Зачисление денег либо фриспинов происходит при активации на требовательно ограниченного периода, похожие притязания предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать приз количество дней либо даже месяцов. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером.
1×slots регистрация 1×slotscasino 56 online
Для получения бездепа нужно пригласить в игру по реферальной ссылке нового клиента: он обязан зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и восполнить счёт на сумму, указанную в критериях акции. Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, the decision лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Но разу не забывайте внимательно читать управляла участия в бонусных акциях. Если вы нарушите хотя бы одно условие, позже вы не сможете устроить недоразумение с администрацией. 1×slots зеркало регистрация то дальше необходимо пройти <a href=https://beaucmvd96318.blog-a-story.com/10489767/deep-nude-the-ethical-dilemmas-and-technological-impacts-of-ai-driven-image-manipulation>https://beaucmvd96318.blog-a-story.com/10489767/deep-nude-the-ethical-dilemmas-and-technological-impacts-of-ai-driven-image-manipulation</a>
1×slots официальный сайт скачать
Как управляло, при выводе финансов, от играющего требуется лишь устроить минимальный вклад чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом собственный счет. <a href=https://halqym.kz/user/FranktwicS/>https://halqym.kz/user/FranktwicS/</a> Более солидные предложения встречаются очень редко. Зачастую они доступны лишь VIP-игрокам. В остальных случаях им всего сопутствуют довольно строгие условия отыгрыша. Также возможны дополнительные обстоятельства и другие лимитирования, прописанные в условиях и положения бонусной программы казино.Как правило, при выводе финансов, от играющего требуется лишь устроить минимальный лепта для того, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом собственный счет. казино 1×slots официальный сайт Выбор каждого онлайн казино на нашем веб-сайте. В описании к любому Вы можете разузнать, что получите за творенье аккаунта.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.reisezielforum.de/viewtopic.php?t=604181>1 xslots рабочее зеркало</a>
<a href=http://zelenalutrija.com/forum/showthread.php?p=84914#post84914>1×slots рабочее зеркало на сегодня</a>
<a href=https://alglaah.com/index.php?threads/%D8%B4%D8%B1%D9%83%D8%A9-%D8%B9%D8%B2%D9%84-%D9%81%D9%88%D9%85-%E2%80%93-%D8%A3%D9%81%D8%B6%D9%84-%D8%AD%D9%84%D9%88%D9%84-%D8%A7%D9%84%D8%B9%D8%B2%D9%84-%D8%A7%D9%84%D8%AD%D8%B1%D8%A7%D8%B1%D9%8A-%D9%88%D8%A7%D9%84%D9%85%D8%A7%D8%A6%D9%8A.154095/#post-215807>1×slots зеркало быструю регистрацию а также мгновенное</a>
<a href=https://www.reisezielforum.de/viewtopic.php?t=615158>рабочее зеркало 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Первый возникающий вопрос, это, для выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают новых игроков. Последним проще начать игру на деньги с дара за регистрацию. Им не пополнять баланс и расходовать собственные свои. Новички получают бесплатные спины либо свои на счёт. С их помощью знакомятся с игровым процессом, крутят слоты и проделывают ставки в рулетке. Бездепозитные бонусы начисляются лишь один раз. Не стоит раскрывать свежие аккаунты, дабы получить их повторно. Служба безопасности казино непременно выявит «левого» участника и перекроет. Если посетитель выполнит нужные притязания, отыграет свою ставку и решит исключить собственный выигрыш, то ему нужно принять, собственно казино обязательно востребует предоставить ксерокопии собственных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные свои вывести не удастся.
#1209 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Нина Пирогова, хоккеистка порно с Илюшникова Татьяна Александровна <a href=https://rhymes-punches.com/>порно с Гатагова Ольга Анатольевна</a> 1×bet сайт играющие казино онлайн <a href=https://rhymes-punches.com/>вавада казино</a> casino betting казино пин букмекерская контора вход casino x casino играть Лут Оксана Николаевна порно яндекс казино
DiskiPlus букмекерская контора бетсити DiskiPlus официальные букмекерские конторы скачать <a href=https://www.diskiplus.ru>DiskiPlus кент казино</a> DiskiPlus букмекерская контора без DiskiPlus 7k casino официальный <a href=https://www.diskiplus.ru/>DiskiPlus водка казино</a> DiskiPlus vavada casino DiskiPlus казино регистрации DiskiPlus порно с Юлия Ефимова DiskiPlus 1×bet xbet DiskiPlus казино рояль DiskiPlus сайт pin up casino DiskiPlus зеркала официальных сайтов казино
#1210 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
лучшая казино порно с Евгений Малкин (хоккей) <a href=https://res-publika.com>porno Мира Андреева (теннис)</a> porno Елизавета Туктамышева 1×bet на андроид <a href=https://rhymes-punches.com/>играющие казино</a> Скоробогатова Ольга Николаевна порно казино 5 почему казино ешь казино Александра Бортич рокс казино порно с Федор Чалов (футбол)
DiskiPlus почему в казино не бывает настенных часов DiskiPlus карты казино <a href=https://diskiplus.ru>DiskiPlus Самойлова Алла Владимировна порно</a> казино DiskiPlus сайт pin up casino <a href=https://diskiplus.ru/>DiskiPlus винлайн букмекерская контора официальный сайт</a> DiskiPlus гама казино DiskiPlus Любимова Ольга Борисовна порно DiskiPlus pin up casino buzz DiskiPlus 1win casino DiskiPlus Ходнева Светлана Владимировна порно DiskiPlus фильмы казино рояль DiskiPlus казино зеркало сегодня
#1211 Charlesgunnyhttp://filmkachat.ru
1× slots официальный
Мы собрали и выпустили список наилучших бездепозитных казино с призами за регистрацию, коие гарантируют щедрые выигрыши и мгновенные выплаты. <a href=http://filmkachat.ru/>1хслотс зеркало на сегодня</a> Принципиальным отличием даровых призов от призов на депозит является отсутствие надобности заносить деньги на акк. Из-за этого их часто именуют бездепозитными (not the slightest down payment bonuses). <a href=https://www.patreon.com/posts/123686935>https://www.patreon.com/posts/123686935</a> 1×slots регистрация 1×slots review live <a href=https://ic-info.ru/forum/user/175053/>https://ic-info.ru/forum/user/175053/</a> Пoдтвepдить личнocть клиента. Для удачного вывода средств, нужно доказать личность клиента. Нa этaпe вepификaции пpoфиля, сотрудники службы защищенности должны увериться, собственно у игрока более раз аккаунт. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не сможет вывести собственный выигрыш, в у него будет количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы.Онлайн-казино тщательно продумывают бонусные условия, коие необходимо изучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и ограничения.
1×slots сайт
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=72134>1×slots зеркало на сегодня</a> 1×slots сайт <a href=http://uid.me/avtoshkola_vladivostok>http://uid.me/avtoshkola_vladivostok</a> Обычно для получения бонусов без депо, казино выдвигает приклнные и вполне выполнимые условия, но есть ряд деяний коие запрещены и имеют стать досадные последствия:Иногда операторы настоятельно внесение минимального депозита перед выводом для верификации платежного инструмента. В некоторых казино данный депозит кроме предстоит отыграть. 1×слотс казино Постарайтесь отыграть вейджер, чтобы замечена вероятность забыть заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электрической кошелёк, карту, телефон.
онлайн казино 1×slots
При регистрации следует указывать лишь достоверную информацию. Когда учетная запись несомненно активна, появится доступ в Личный кабинет. В нем возможно избрать еденицу, ввести промокод и узнать доскональные правила получения и отыгрыша бездепа. Краткая информация об акции нередко находится непосредственно на регистрационной форме.У каждого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано смогли выполнить их, мы дадим количество советов. Если система начислила маленькую сумму, не стоит создавать большие ставки – остановитесь на 10–30 центах. Как лишь сможете заработать примерно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте играть. В неприятном случае чем приглядеться к иному автомату. <a href=https://images.google.gr/url?q=https://doctorlazuta.by/>https://images.google.gr/url?q=https://doctorlazuta.by/</a> При регистрации идет свидетельствовать лишь достоверную информацию. Когда учетная запись несомненно активна, будет доступ в Личный офис. В нем можно выбрать еденицу, установить промокод и разузнать подробные управляла получения и отыгрыша бездепа. Краткая информация об акции нередко присутствует именно на регистрационной форме. 1х слот 1хслотс регистрация перейти на 1×slots Выполнив все притязания оператора, заказчик имеет оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит в среднем не более суток. Если дополнительно потребуется пройти функцию верификации, то срок возрастает до 1–2 трудящихся дней. Для перевода применяются банковские приборы и электрические платежные системы. Второй способ подходит какого-либо, так как основная транзакций ситуации осуществляются моментально. В связи со спецификой функционирования банков обработка платежей имеет занять до нескольких рабочих дней.
казино 1× slots официальный сайт
<a href=https://acerfans.ru/user/JamesTed/>1×slots скачать на айфон</a> Автоматическая активация взгляд самой удобной, но ручной способ имеет перед ней превосходства. Прежде чем применять вознаграждение от казино, стоит заранее найти, сколько медли потребуется на исполнение всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деяния бонуса.Бонус за регистрацию в казино без депо с выводом средств нужно отыграть. Зачастую для отыгрыша возможность потребоваться сделать ставки на необходимую, в некоторое 10-ов раз превосходящую необходимую бонуса либо выигрыша. 1хслот скачать <a href=http://younghwacarbon.com/bbs/board.php?bo_table=free&wr_id=984>http://younghwacarbon.com/bbs/board.php?bo_table=free&wr_id=984</a> Активация валютного гонорары случается автоматически в сотворения профиля либо применения промокода. Иногда операторы предъявляют вспомогательные притязания: подписаться на страницы казино в соц сетях или на рассылку рекламных извещений, скачать и ввести дополнительный софт и т.д.Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, a лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.
1х слот регистрация в 1×slots casino
Также, в этом случае необходимо подтвердить собственный номер телефона, желаемого код, приобретенный в смс-сообщении от клуба установить в специальное фон в личном кабинете игрока.Реже призы без депозита начисляются неизменным игрокам. С их подмогою администрация старается удержать ценных посетителей или вожделеет поблагодарить за лояльность правильных гостей. Но гораздо чаще для сходственных целей используются эти акции: <a href=http://expertspa.ru/index.php?subaction=userinfo&user=whisperingopini>http://expertspa.ru/index.php?subaction=userinfo&user=whisperingopini</a> 1×slots зеркало которую указывали при регистрации кстати Иногда операторы настоятельно внесение малого депозита перед выводом для верификации платежного прибора. В некоторых казино этот депозит кроме светит отыграть.Отзывы читателей о бонусных промоакциях посодействуют составить впечатление, хотя не запамятовывайте о субъективности личных комментариев.
<b>Смотреть еще похожие новости:</b>
<a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=13244>скачать 1×slots официальный сайт</a>
<a href=https://www.fromrus.su/index.php?/topic/63986–1×slots-%D0%B0%D0%BA%D1%82%D1%83%D0%B0%D0%BB%D1%8C%D0%BD%D0%BE%D0%B5-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE/>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Игрокам не следует принимать приветственный бонус как гарантированный метод получить большой выигрыш, но это отличная возможность без расходов расценить перечень казино.
#1212 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино вход официальный сайт pin up букмекерская контора <a href=https://sovsekretno.net/>пинап казино</a> порно с Евгения Медведева, фигуристка casinos winning <a href=https://sovsekretno.net/>смотреть фильм казино</a> up casino porno Алена Косторная (фигурное катание) порно с Арина и Дина Аверины, гимнастки бк букмекерская контора porno Дарья Мороз казино смотреть онлайн бесплатно Анна Михалкова
DiskiPlus Юдаева Ксения Валентиновна порно DiskiPlus casino скачать <a href=https://diskiplus.ru/>DiskiPlus casino на телефон</a> DiskiPlus casino зеркало сегодня DiskiPlus фреш казино <a href=https://diskiplus.ru/>DiskiPlus порно с Федор Чалов (футбол)</a> DiskiPlus порно с Бондаренко Анастасия Борисовна DiskiPlus casino на телефон DiskiPlus 1×bet скачать приложение на андроид DiskiPlus casino бонус DiskiPlus приложения букмекерских контор на андроид DiskiPlus pin up casino скачать DiskiPlus сайт pin up casino
#1213 Charlesgunnyhttp://filmkachat.ru
1×slots подтвердит вашу регистрацию если говорить
Итак, дабы безвозмездные бонусные кредиты трансформировались в реальные деньги, которыми продоставляется управлять по своему усмотрению, их надо(надобно) отыграть. Вейджер стопам уточнять в правилах онлайн-казино. <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino09k online</a> Зарегистрироваться в казино по особой ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефонного и электронную почту). Для подтверждения номера аппарата необходимо в личном профиле показать собственный номер и надавить кнопку „Подтвердить номер телефонного“, далее Вы получите sms-сообщение с кодом, кот-ый необходимо ввести в соответствующее фон. Для доказательства электрической почты, перебежать по активной ссылке в письме от казино.Акции распространяются как на все забавы казино, так и на узкий список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и другие. Промо возможность охватывать разработки одного производителя. Бездеп не пересекается с иными акциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, изготовленные бонусными деньгами. Для идентификации платежных реквизитов игрока может потребоваться пополнение счета на наименьшую сумму. <a href=https://www.esurveyspro.com/Survey.aspx?id=d8357902-e8be-4a72–8767–3426f9bacbbb>https://www.esurveyspro.com/Survey.aspx?id=d8357902-e8be-4a72–8767–3426f9bacbbb</a> Подтверждение индивидуальной информации. Все казино требуют от клиента пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у юзера других аккаунтов (мультиаккаунт запрещен).Для проверки используются сканы паспортов, водительских водительских, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если юзер обнаружен в попытке ввести вспомогательный аккаунт, все его учетные записи подвергаются блокировке, а их владелец попадает в темный перечень. При игре на лицензионной площадке не стоит опасаться свидетельствовать достоверную индивидуальную информацию (шифрование ликвидирует утечку индивидуальных данных). casino 1×slot <a href=https://xebecar.com/author/precious23a/>https://xebecar.com/author/precious23a/</a>
1×slots рабочее зеркало на сегодня
Активация случается счет промокодов, которые вводятся в собственном кабинете последствии регистрации. Среди спецпредложений в списке Casino.ru находятся эксклюзивные промокоды, коие доступны лишь гостям портала. Другие способы начисления средств ? автоматическая активация сразу после сотворения аккаунта и получение презента по запросу в службу технической помощи.Отыграв бездепозитный бонус в казино с выводом тоже придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, случае сходственное ограничение присутствует, то единоразово вывести получится лишь необходимую, не превышающую размер приобретенного приза. 1 xslots рабочее зеркало <a href=https://valetinowiki.racing/wiki/Glory_Casino>https://valetinowiki.racing/wiki/Glory_Casino</a> Эффективность бездепов виде рекламного прибора оценили все операторы. Малоизвестные площадки используют такие промоакции, дабы прытко набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны постоянных гостей. Не все сайты, дающие презенты без депозита, рекомендованы к забаве. За привлекательным промоописанием могут скрываться неосуществимые условия отыгрыша и подводные камешки. 1хслотс рабочее зеркало Раздача бонусов имеет быть посвящена разным датам: календарные дни, дни рождения игроков, годовщина открытия казино и т. Д. Подарок выдается вид средств, фриспинов или баллов для скопления и обмена на услуги оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода этой суммы придется выполнить ряд требований.
1 х слотс зеркало
Бездепозитный приз казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в этом и заключается основное различие.На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не сможете активировать и получить бездепозитный бонус. 1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, если не желаете стать жертвой плутов либо впустую истратить время;Рассмотрим на образце: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских рублей. В условиях промоакции предписано, что вейджер бездепозитного бонуса х20. Поэтому, дабы отыграть бонус, игроку будет необходимо устроить ставок на 35*20=700 руб. <a href=http://printsstars.ru/communication/forum/index.php?PAGE_NAME=profile_view&UID=227456>http://printsstars.ru/communication/forum/index.php?PAGE_NAME=profile_view&UID=227456</a> Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.В случае установленного лимита на необходимую вывода выигрыша с бездепозитного приза, игрок не может вывести больше заявленной суммы. 1хслот зеркало Также, ситуации необходимо подтвердить собственный номер телефона, достичь код, полученный в смс-сообщении от клуба ввести в специальное фон в собственном кабинете игрока.
1×slots рабочее зеркало
<a href=http://pravoslit.ru/forum/obshchee/185687–1×slots-registratsiya-na-ofitsialnom-sajte.html>1×slots регистрация на официальном сайте</a> Выбирайте превосходнейшие безвозмездные бонусы с помощью обзоров на Casinoz – и пусть для сопутствует удача при отыгрыше бонусных кредитов!Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке необходимо пополнить счет в казино. Для депозитных бонусов, эта процедура не необходима, так как депозит уже изготовлен. 1 х слотс зеркало <a href=http://nearmedic.ru/bitrix/click.php?anything=here&goto=http://image.google.com.af/url?q=http://zooman.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/qHHaRoiweky>http://nearmedic.ru/bitrix/click.php?anything=here&goto=http://image.google.com.af/url?q=http://zooman.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/qHHaRoiweky</a> Бездепозитный бонус казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и выяснить качество работы службы. Довольно часто, начиная игровой процесс, игрок теснее не желает останавливаться и делает реальный вклад. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть безвозмездно вероятно как раз таки с призом за регистрацию без необходимости вносить депозит.В интернете количество известных игорных площадок с привлекательными акционными предложениями. Однако внимательно читать условия десятков услуг скором надоест, да и время отнимет количество. Поэтому наша команда подготовила ТОП-3 сайтов с наихорошими бездепозитными бонусами:
1×slots официальный demo регистрация в 1×slots casino
Условия отыгрыша приза. Если Вы расчитываете заработать на бездепозитном бонусе, то в первую очередь направьте на значение вейджера и срок, который дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, что, этим проще отыграть бонус и исключить выигрыш.Чтобы выступать бесплатно на реальные деньги в казино, не всегда достаточно просто зарегистрироваться. Иногда нужно выполнить вспомогательные деяния. <a href=http://golpro.jp/userinfo.php?uid=13410#>http://golpro.jp/userinfo.php?uid=13410#</a> Чаще всего применяются коды. Их нужно вносить в особые окна регистрационной анкеты, если речь о пригласительных бонусах, или в особом разделе собственного кабинета игрока.Кешбэк-бонус дает собой возврат фиксированного процента от ставки когда поражения или же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не выше 10%. 1×slots казино зеркало Некоторые казино могут предлагать клиентам бездепы за подтверждение номера или почты или репост на страницу в соц сетях.
<b>Смотреть еще похожие новости:</b>
<a href=http://naukova2b.2ua.in.ua/memberlist.php?mode=viewprofile&u=313>1×slots промокод при регистрации</a>
<a href=https://kakofon.cz/forum/memberlist.php?mode=viewprofile&u=2198>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это самая приятная доля игры. Важно, часто бездепозитные призы в казино выдаются с лимитированиями по наибольшей выплате. В среднем можно рассчитывать на выгода в несколько тысяч рублей. Как вывести выигрыш с приза без депо. Придётся подтвердить аккаунт документально, в неких заведениях. Процедура верификации обязательна и делается каждым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате или прочитайте в правилах.
#1214 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия
Когда речь о получении бездепозитных призов в казино, начала внимание на следующие обстоятельства: <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> <a href=https://techbehemoths.com/company/archicgi-archivizer-limited>https://techbehemoths.com/company/archicgi-archivizer-limited</a> 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=https://uadplugins.club/memberlist.php?mode=viewprofile&u=261631>https://uadplugins.club/memberlist.php?mode=viewprofile&u=261631</a> На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению сего медли, Вы не можете активировать и получить бездепозитный бонус.
1×slot рабочее зеркало
Бездепозитный бонус казино 2022 с выводом за регистрацию предоставляет возможность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и выяснить качество работы саппорта. Довольно часто, начиная игровой процесс, игрок теснее отказывается останавливаться и делает реальный лепта. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть бесплатно возможно как раз таки с бонусом за регистрацию без надобности вносить депозит. 1×slots зеркало регистрация то дальше необходимо пройти Создание аккаунта. На веб-сайте казино нужно обнаружить регистрационную форму и наполнить пустующие поля собственными данными. Иногда на данном этапе требуется указать лишь адресок электронной почты и пароль, хотя чаще надобно заполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д. ). Нужно указывать лишь реальные данные, что впоследствие они будут проверены. <a href=https://deadreckoninggame.com/index.php/Glory_Casino>https://deadreckoninggame.com/index.php/Glory_Casino</a> Но на азартных платформах сходственные вознаграждения имеют получить и уже зарегистрированные пользователи. В этом случае, бонусы предоставляются в уникальных акций или же некоторым игрокам вид акционного предложения, которое приходит на почту с целью «вернуть» игрока в свое казино.В зависимости от онлайн заведения любой из них может вам предложить как бездепозитные средства, так и бездепозитные фриспины, которые последствии успешной регистрации упадут для на ваш игровой баланс. 1×slots официальный сайт зеркало
1×slots регистрация на официальном сайте
Вы скорее, например все предпочитаете получать презенты и бездепозитные бонусы казино. Игорные дома взяли в повадку одаривать гэмблеров приятными призами. Стать владельцем приветственного подарка можно за создание профиля либо пополнение счёта. Второй вариант больше интересный, ведь клубы готовы удвоить депозит! Но в вы новичок и только знакомитесь с миром азарта, другого, как пользуйтесь бонусом за регистрацию.Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, a только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 поболее. Когда игроку полагается количество фриспинов, администрация может бить3 их начисление на некоторое дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах акции. <a href=http://compuralsk.kz/bitrix/redirect.php?goto=http://petfood.ru/bitrix/rk.php?goto=http://mos.news/bitrix/redirect.php?goto=https://teletype.in/@urist555/Y4A8gJGOGIa>http://compuralsk.kz/bitrix/redirect.php?goto=http://petfood.ru/bitrix/rk.php?goto=http://mos.news/bitrix/redirect.php?goto=https://teletype.in/@urist555/Y4A8gJGOGIa</a> casino 1×slot
1×slots коды
Доступ к дару имеет открываться механически последствии введения промокода или воззвания в саппорта вебсайта. В первом случае от пользователя не требуется никаких поступков. Бездеп с активацией по коду встречается почаще всего. Игроку необходимо ввести совокупность знаков в графе, которая имеет находиться в регистрационной форме в Личном офисе. Вы наверняка, как и все предпочитаете получать презенты и бездепозитные бонусы казино. Игорные жилища брали в повадку одаривать гэмблеров приятными бонусами. Стать владельцем приветственного подарка возможно за творение профиля либо пополнение счёта. Второй вариант больше интересный, так клубы готовы удвоить депозит! Но в вы новичок и только знакомитесь с миром пыла, какого-либо воспользуйтесь бонусом за регистрацию. 1хслотс рабочее зеркало <a href=http://vn-info.net/user/Porsedroppr/>http://vn-info.net/user/Porsedroppr/</a> Максимальная ставка ? уточняется в денежной счета и ограничивает объем ставки за раз спин. В случае ее превышения бонус может быть аннулирован. Также в правилах имеет находиться запрет на размещение ставок определенного облика, примеру, по равным шансам в рулетке (словами, на чет либо нечет, красноватое или темное и т.д. ).Казино выводит деньги только на что, эту платежную систему, с котрой был сделан депозит. То есть, для вывода бездепозитного приза, Вам сначала нужно пополнить счет. В неких клубах узкий список способов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с этих платежных способов, которые доступны для вывода.
1×slots быструю регистрацию а также мгновенное
Стоит отметить, собственно бездепозитный бонус выдается лишь взрослым новеньким, которые, в свою очередь, все пригласить собственных приятелей и знакомых, того рассчитывающих на поощрительную программку преданности. Подобная технология замечена между создающих онлайн-казино для популяризации и расширения трафика. Покер румы и спонсоры способствуют увеличению своей посещаемости, методом вербования свежих игроков. Бонусы – это уникальный шанс для вероятных соучастников забавы, которые могут опробовать софт покер рума и убедиться, будут ли они в него выступать либо нет. Новый игрок испробует свои силы с настоящими оппонентами в казино.Подтверждение регистрации. Казино настоятельно привязки профиля к электронному адресу и номеру телефона. Для этого на e-mail отправляется послание со ссылкой, а на телефонный ? текстовое извещенье с кодом. Вывод выигрыша с бездепозитных бонусов казино – щедрый подарок от азартных клубов. Но чтобы исключить свой заработок, нужно выполнить ряд условий:Вывод выигрыша с бездепозитных бонусов казино – великодушный презент от азартных клубов. Но чтобы исключить собственный заработок, необходимо выполнить ряд условий: <a href=https://www.9lewan.com/space-uid-8509.html>https://www.9lewan.com/space-uid-8509.html</a> Автоматы непопросту считаются наиболее модным азартным веселием. Чтобы усвоить управление и управляла, понадобится всего количество мин. Ваша задача сделать ставку, определить количество рабочих линий и возможно крутить тамбур. Если дисплее выпадет выигрышная композиция – вы выиграли! С данной задачей вам посодействуют управится бездепозитные бонусы казино. 1×slots casino регистрация
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Создание аккаунта. На сайте казино нужно обнаружить регистрационную форму и наполнить пустопорожние поля собственными данными. Иногда на данном шаге требуется показать лишь адресок электронной почты и пароль, хотя почаще бы наполнить анкету персональной информацией (ФИО, дата рождения, пространство проживания и т.д.). Нужно свидетельствовать только настоящие данные, поскольку впоследствие они станут испытаны.
#1215 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пин ап casino pin up top casino онлайн <a href=https://rhymes-punches.com/>Радченко Светлана Юрьевна порно</a> порно с Алексей Миранчук (футбол) порно с Анна Щербакова, фигуристка <a href=https://res-publika.com>казино играть</a> Матвиенко Валентина Ивановна порно казино фильм Скворцова Вероника Игоревна порно порно с Захарова Мария Владимировна букмекерская контора на андроид сайт pin up casino Скворцова Вероника Игоревна порно
DiskiPlus 1×bet зеркало рабочее на сегодня DiskiPlus champion casino <a href=https://diskiplus.ru>DiskiPlus Матвиенко Валентина Ивановна порно</a> DiskiPlus kometa casino DiskiPlus pin up casino скачать <a href=https://diskiplus.ru>DiskiPlus порно с Антропова Валентина Викторовна</a> DiskiPlus 1×bet 1хбет DiskiPlus букмекерская контора мостбет DiskiPlus casino сегодня DiskiPlus kent casino регистрация DiskiPlus porno Дарья Мороз DiskiPlus porno Вера Бирюкова, гимнастка DiskiPlus официальные букмекерские конторы
#1216 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать
Чтоб получить большой выигрыш, избирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша.Ознакомьтесь с нашим списком лучших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего списка и получите бездеп незамедлительно. Хватайте лучшие благотворительные предложения ниже и выигрывайте немалые деньги, не рискуя! <a href=http://filmkachat.ru/>1 хслот регистрация в 1×slots casino</a> Бездепозитный приз за регистрацию в казино — это стартовый презент в виде валютного начисления или даровых вращений для новых игроков заведения, для получения которого не заносить депо.Прежде всего, не запамятовывайте периодически заглядывать на страницу обзоров бездепозитных призов. Они шаг за шагом рассматривают наиболее интересные предложения основных игорных порталов. <a href=https://we.riseup.net/lexxeagle/who-makes-everstart-batteries-the-complete-manufac>https://we.riseup.net/lexxeagle/who-makes-everstart-batteries-the-complete-manufac</a> 1хслотс рабочее зеркало <a href=https://forum.eliteshost.com/member.php?action=profile&uid=8663>https://forum.eliteshost.com/member.php?action=profile&uid=8663</a> Однако далеко не все ресурсы предлагают своим посетителям бездепозитные призы за регистрацию в казино. В большинстве случаев предусмотрено поощрение на первый депозит в размере 100–200%. Это отличная вероятность преумножить банкролл, прирастить время, проведённое за игрой и шансы сорвать крупный куш.Выбор каждого онлайн казино на нашем сайте. В описании к любому Вы сможете узнать, что получите за творенье аккаунта.
казино 1× slots официальный сайт
Акционные предложения от казино существуют в различных форматах. Часто призы даются в мена на депозит. Игрок заносит платеж и получает средства, благотворительные вращения и одобрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — вид приза, кот-ый гарантирован за исполнение конкретных деяний на веб-сайте: 1×slots актуальное зеркало <a href=https://google.ba/url?q=https://doctorlazuta.by/>https://google.ba/url?q=https://doctorlazuta.by/</a> 1×слот регистрация в 1×slots casino
1×slots зеркало на сегодня
При подмоги такового поощрения оператор может кроме завлекать посетителей, которые раньше проявляли активность на сайте, но по какой-то основанию перестали играть. В этом случае промокод высылается пользователю по электронной почте либо в виде SMS.Бездепозитный приз – это экономическое вознаграждение, которое выдается участнику игры в казино, для его привлечения и появления заинтригованности. Любой посетитель, который соответствует условиям выдачи подобного бездепозитного бонуса, может претендовать на получение вышеуказанного приза. Такое поощрение является наиболее действенным способом, дающим вероятность стартовать при, не вкладывая собственных материальных средств. Акции распространяются как на все игры казино, так и на узкий перечень. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и. Промо возможность обхватывать разработки 1-го производителя. Бездеп не пересекается с иными акциями казино. Если на сайте предусмотрен кэшбек, он не начисляется за ставки, изготовленные бонусными деньгами. Для идентификации платежных реквизитов игрока возможность понадобиться пополнение счета на наименьшую сумму. <a href=https://menwiki.men/wiki/1win_Bet_Apostas_Jogos>https://menwiki.men/wiki/1win_Bet_Apostas_Jogos</a> Первый образующийся вопрос, это, чего выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают свежих игроков. Последним проще начать забаву на средства с презента за регистрацию. Им не нужно пополнять баланс и тратить собственные свои. Новички получают безвозмездные спины либо свои на счёт. С их подмогою знакомятся с игровым ходом, крутят слоты и делают ставки в рулетке. 1×slos регистрация в 1×slots casino В наше время очень просто получить приз за регистрацию в казино. Практически любой игорный жилище с радостью начислит деньги либо безвозмездные вращения. Многие гэмблеры пользуются этим и не стесняются региться в любом клубе с прибыльными условиями. Кстати, это замечательная вероятность выработать победную тактику и сорвать джекпот.Некоторые казино все предлагать клиентам бездепы за подтверждение номера либо почты либо репост на страничку в соц сетях.
1×slots регистрация на сайте
Но эти рамки не смущают даже хайроллеров, что коэффициенты на слотах дозволяют рассчитывать на солидные выигрыши, а некоторых автоматах разыгрывается прогрессивный джекпот. Демоказино есть практически на любом сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются существенно пореже: там когда выигрыша и соблюдения условий промоакций бездеп можно перевоплотить в настоящие средства.Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша призов. Заведения практически устанавливают максимальную ставку, допустимую по условиям вейждера. 1×slots зеркало регистрация в 1×slots casino <a href=http://estolaid.com/communication/forum/user/3753/>http://estolaid.com/communication/forum/user/3753/</a> Прочитайте верховодила бонусной программы, какой хотите принять. Да, мы безотступно рекомендуем устроить это до регистрации.
рабочее зеркало 1×slots
Бездепы обыкновенно предлагают с отыгрышем — моментально исключить выигранные свои невозможно. Перевод средств со счета несомненно возможен в того, как юзер выполнит все притязания казино, а сумма не быть выше установленного правилами лимита. Условиями акции фиксируются сроки, в течение коих клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней в активации. Бездепы имеют входить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой либо баллами.Теоретически, к бесплатным бонусам можно отнести так именуемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, поэтому что они предоставляют только вероятность создавать ставки. <a href=http://longlive.com/node/1171>http://longlive.com/node/1171</a> 1×slots casino online регистрация Бездепозитный бонус нередко имеет стать легкодоступным сразу после окончания регистрации, потому правило единственным требованием к нему считается регистрация, а после проверка вашей свежей учетной записи.
<b>Смотреть еще похожие новости:</b>
<a href=http://jktroickiy.forumex.ru/memberlist.php?mode=viewprofile&u=195>1хслот зеркало</a>
<a href=https://www.thefamilylegion.se/viewtopic.php?f=4&t=118703>1×slots официальный сайт зеркало</a>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5316/#comment-646837>рабочее зеркало 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Oтыгpaть бонус с указанным вeйджepом, чтобы нужно сдeлaть cтaвoк нa cумму, превышающую размер бонуса в количество раз.
#1217 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino pin официальный casino вход <a href=https://rumafia.news/>кент казино</a> 1×bet зеркало xbet xyz самое казино <a href=https://www.ossetia.tv/>пин up casino</a> 1×bet xbet xyz pin up букмекерская контора Лут Оксана Николаевна порно porno Яна Троянова фильмы казино рояль официальная казино Черкесова Бэлла Мухарбиевна порно
DiskiPlus 7k casino зеркало DiskiPlus почему в казино нет окон <a href=https://diskiplus.ru>DiskiPlus porno Нина Пирогова, хоккеистка</a> DiskiPlus casino ап DiskiPlus мобильные букмекерские конторы <a href=https://diskiplus.ru>DiskiPlus Манилова Алла Юрьевна порно</a> DiskiPlus порно с Елена Никитина, скелетонистка DiskiPlus casino официальный сайт DiskiPlus 1×bet зеркало рабочее на сегодня DiskiPlus porno Вера Бирюкова, гимнастка DiskiPlus 7k casino DiskiPlus casino андроид казино
#1218 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на сайте 1×slots ru com
Третитй бездепозитный бонус за регистрацию – валютные средства. К раскаянию, начислить рубли или доллары способны лишь известные и популярностью клубы. С их поддержкой у насладиться любой доступной забавой – автоматом, рулеткой, кено, блэкджеком.В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и когда спорных обстановок нет способности куда-то посетовать и доказать свою правоту. <a href=http://filmkachat.ru/>казино 1× slots официальный сайт</a> Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депо возможность отличаться до 30 дней. <a href=https://many.link/kalinka0588>https://many.link/kalinka0588</a> Высокая конкуренция в разделе азартных игр доказывает операторов завлекать посетителей разнообразными промоакциями. Благодаря этому у гостей бывает возможность получить бонусы в казино за регистрацию без депо. Воспользоваться этим предложением возможно, минуя процедуру внесения средств на игровой счет, просто активировав аккаунт на веб-сайте. Наш экскурсовод по бездепам поможет выбрать самую симпатичную бонусную программу, разузнать верховодила получения такого гонорары и распорядиться им с наибольшей выгодой. 1хслотс зеркало <a href=http://cafe-rio.ru/index.php?subaction=userinfo&user=ceaselessimbeci>http://cafe-rio.ru/index.php?subaction=userinfo&user=ceaselessimbeci</a> У нас на веб-сайте Вы найдете перечень призов без депо в проверенных казино и доскональную информацию то как их получить и использовать.
казино 1× slots официальный сайт
1хслотс регистрация в 1×slots casino Раздача призов может быть приурочена к разным датам: календарные дни, дни рождения игроков, юбилей открытия казино и т. Д. Подарок выдается в виде средств, фриспинов или баллов для накопления и размена на услуги оператора. Если юзер получает выигрыш, средства начисляются на его счет. Для вывода данной суммы придется выполнить ряд притязаний.Промообъявления от казино не дают реальной картины и направлены на привлечение внимания пользователей. Понять, насколько высоки шансы остаться в плюсе, дозволит собственный тест критерий предложения: <a href=https://www.heraldcontest.com/bbs/board.php?bo_table=free&wr_id=309525>https://www.heraldcontest.com/bbs/board.php?bo_table=free&wr_id=309525</a> На безвозмездные бонусы онлайн-казино практически постоянно распространяется лимитирования по стране проживания посетителей. Даже если вам разрешается раскрывать счет и выступать на деньги в заведении, это еще не означают, собственно для доступны not the slightest deposit bonuses.Вы не в коем случае ни чем рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической забавы на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, выучится регулировать изменять ставки и линии, исследовать бонусные игры и их выигрышные композиции, да в просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные свои, коие возможно отыграть и исключить, не просто на демо счет, тем наиболее адреналин в крови еще больше повысится а пульс забьется с нередким ритмом! сайт 1× slots casino
1×slots сайт зеркало
Процесс доказательства личности возможность взятьвдолг(взятьвзаймы) от 1-го денька до недели. Если клиент разрешил какую-либо ошибку при заполнении паспортных данных, то ему идет обратиться с проблемой в службу онлайн-казино.Иногда операторы требуют внесение малого депо перед выводом для верификации платежного прибора. В неких казино данный депозит кроме предстоит отыграть. При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие можно посвятить ирге в казино. <a href=http://truesystem.ru/bitrix/click.php?goto=http://vrsamara.ru/bitrix/redirect.php?goto=http://library.aviaexpress.ru/bitrix/redirect.php?goto=https://teletype.in/@urist_free/nva_jkXPHhW>http://truesystem.ru/bitrix/click.php?goto=http://vrsamara.ru/bitrix/redirect.php?goto=http://library.aviaexpress.ru/bitrix/redirect.php?goto=https://teletype.in/@urist_free/nva_jkXPHhW</a> Бонус без депозита за регистрацию в казино (бездепозитный приз) – это валютный подарок от клуба, который начисляется на аккаунт игрока в регистрации в казино. Кроме творенья учетной записи, для получения бездепа, довольно часто потребуется ещё и доказать контактные данные игрока и/или активировать специальный промо-код.Прежде чем активировать бездеп, необходимо убедиться в, что страна, гражданином коей считается игрок, не входит в список не. 1×slots бонус за регистрацию
1×slots casino зеркало рабочее
Не стоит незамедлительно же отрицаться от приветственных подарков в похожих казино. Администрация готова начислить деньги либо фриспины, но предварительно работники должны убедиться, что вы не аферист. Дело сомнений, собственно развелось слишком количество охотников за призами. Они выучились дурачить систему и наваривать крупные суммы денег.Бездепы с бесплатными вращениями предоставляют пользователям право вертеть барабаны игровых автоматов без снятия средств со счета. За каждый раунд платит казино. Число спинов ограничено и изредка выше сотню. Если акция содержит количество безвозмездных игр, их начисление может быть разбито на некоторое дней. Когда речь о денежных призах, казино всегда устанавливают условия вейджера, которые необходимо выполнить, дабы вывести выигрыш.Даже не выиграв солидную сумму, игрок увлекательно проведет время, изнутри исследует работу площадки, оценит геймплей автоматов. Все это без каких-либо финансовых рисков. Быть в курсе наихороших акций легко. Достаточно периодически изучать список свежих онлайн казино с выводом бонуса без депо в данном разделе. 1×slots официальный сайт скачать <a href=http://973ehtnamuh973.co.uk/forum/memberlist.php?mode=viewprofile&u=214622>http://973ehtnamuh973.co.uk/forum/memberlist.php?mode=viewprofile&u=214622</a> Подтверждение индивидуальной информации. Все казино требуют от клиента пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и присутствие у юзера других аккаунтов (мультиаккаунт запрещен).
1×slots казино мобильная версия
Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.Бездепозитные призы, как теснее понятно, являются оригинальной возможностью обратиться игровому процессу абсолютно бескорыстно, словами играть в интернет казино бесплатно и на существующие средства сразу после регистрации аккаунта. Автоматы с этим депо все замерзнуть великолепной возможностью поиграть для почитателей азарта с определенными ограничениями в финансах. Также существуют онлайн-платформы азартных игр, которые применяют раздачу бездепозитных призов в особые даты (как для казино, так и для игрока). Помимо сего, действующие геймеры того имеют вероятность получить схожие призы за собственную работа (к примеру, за увеличения уровня или за похожие достижения).Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную функцию активации приза без депо. Внимательно прочитайте до конца. Многие новенькие проделывают ошибки на этапе регистрации и поэтому не могут получить презент. <a href=http://xn----7sbgj9bdrl.xn–p1ai/users/sloppyquantity8>http://xn----7sbgj9bdrl.xn–p1ai/users/sloppyquantity8</a> 1×slots рабочее зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://www.reisezielforum.de/viewtopic.php?t=601957>1×slots зеркало рабочее</a>
<a href=https://forum.visiteachapada.com/viewtopic.php?f=19&t=7215>1хслот зеркало</a>
<a href=https://edidaktikum.ee/en/content/iii-kontakttund-08-juuni?page=87#comment-297535>1×slots casino регистрация 1×slotscasino09k online</a>
<a href=https://krok.biz/forum/viewtopic.php?f=7&t=96971>1×slots официальный зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Похожим образом трудится 3-ий способ доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения клиента или в связи с получения им VIP-статуса. Подарок предоставляется в воззвания в поддержку и ревизии.
#1219 Charlesgunnyhttp://filmkachat.ru
скачать 1×slots официальный сайт
Некоторые онлайн-казино без депо предлагают новым посетителям выбрать приз при регистрации. Будьте внимательны: выбрав один, вы в абсолютном большинстве случаев не можете воспользоваться остальными. <a href=http://filmkachat.ru/>1×slots casino зеркало</a> Возможность протестировать новые игры, не рискуя личностными средствами и разработать личную тактику забавы.Похожим образом работает 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения посетителя либо в связи с получения им VIP-статуса. Подарок предоставляется в обращения в поддержку и проверки. <a href=https://bio.link/crazycatd4>https://bio.link/crazycatd4</a> У нас на веб-сайте Вы найдете перечень призов без депо в проверенных казино и доскональную информацию то как их получить и использовать.Для верификации номера телефонного, в личном профиле изберите опцию „Подтвердить номер телефонного“ и введите в отвечающее поле код, приобретенный в sms-сообщении. 1×slots регистрацию более популярный вариант это <a href=http://www.hdfeed.co.kr/bbs/board.php?bo_table=04_02&wr_id=215760>http://www.hdfeed.co.kr/bbs/board.php?bo_table=04_02&wr_id=215760</a>
1×slots зеркало видели такую регистрацию на
1×slots актуальное зеркало Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную процедуру активации бонуса без депо. Внимательно прочтите до конца. Многие новенькие проделывают ошибки на этапе регистрации и поэтому имеют получить презент. <a href=https://wiki.team-glisto.com/index.php?title=What_Are_The_Benefits_Of_Using_The_1×bet_APP_Over_The_Website>https://wiki.team-glisto.com/index.php?title=What_Are_The_Benefits_Of_Using_The_1×bet_APP_Over_The_Website</a> Главное преимущество спинов – возможность выучить различные слоты. Также получится насладиться бонусными раундами, испытывать фортуну в риск-туре и преумножить выигрыш за счёт особых символов. Однако не только игровой процесс заслуживает внимание, как лучше сосредоточиться на реальном выигрыше.Фриспины – бесплатные вращения с фиксированной ставкой, которые можно использовать в определенных игровых автоматах. 1×slots официальный сайт мобильная версия Баланс игрока дополняется на соответствующую необходимую. К ней применяется вейджер, указанный в правилах промоакции. Вывести выигрыш можно будет после такого, как юзер устроит требуемый объем ставок из личных средств. В редчайших случаях бездеп трудится в формате Free Play. На счет юзера зачисляется крупная сумма, и предоставляется малый срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по окончании этого периода сумма на счету несомненно превосходить первоначальную, то разницу можно несомненно исключить или использовать для дальнейших ставок.Бывают ли бездепозитные призы без вейджера? Бывают, в у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино.
1 x slots
Бездепозитный бонус – это экономическое вознаграждение, которое выдается участнику игры в казино, для его вербования и возникновения заинтригованности. Любой гость, который соответствует условиям выдачи сходственного бездепозитного бонуса, имеет претендовать на получение вышеуказанного приза. Такое одобрение считается более эффективным способом, дающим возможность стартовать при, не вкладывая личных материальных средств.Бездепы все заходить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой или баллами. <a href=http://kranik32.ru/user/Raymondfed/>http://kranik32.ru/user/Raymondfed/</a> Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут уточняет лимитирование для посетителей. Конечно, это можно счесть некоторым неудобством для игрока, хотя ради отметить, собственно выбор автоматов всё равно остаётся достаточно большим.Допустим, за регистрацию вы получили бездеп в размере 2 000 рублей с вейджером х30. В этом случае предстоит устроить ставок, на общую необходимую в 60 000 руб. (2 000 * 30 = 60 000). Когда выполните обстоятельства по отыгрышу, придёт время заработать реальные средства. Однако не запамятовывайте, собственно с любого презента выйдет исключить определённую сумму (почаще всего не более $200). 1х слот 1хслотс регистрация перейти на 1×slots
1×slots актуальное зеркало
Многие игроки, оценив функционал казино, остаются играть в нем и далее ? на это и нацелено любое промо. Постоянные посетители вносят депозиты и проделывают ставки, обеспечивая длительную выгода оператора. То есть, казино раздают бездепы свежим пользователям для формирования приклнной аудитории. Да, у бесплатных призов есть дефекты. Прежде всего, они обычно небольшие. Кроме того, условия вейджера по ним практически строгие. Но все отсутствие риска проделывает их очень привлекательными для клиентов. 1×slots регистрация 1×slots casino 777 online <a href=http://showmaket.ru/bitrix/redirect.php?goto=http://technicamolodezhi.ru/bitrix/redirect.php?goto=http://v-ekoteme.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/PirW99huDHW>http://showmaket.ru/bitrix/redirect.php?goto=http://technicamolodezhi.ru/bitrix/redirect.php?goto=http://v-ekoteme.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/PirW99huDHW</a> Бонус за регистрацию в казино без депо с выводом денег нужно отыграть. Зачастую для отыгрыша может потребоваться сделать ставки на сумму, в несколько 10-ов раз превосходящую необходимую бонуса либо выигрыша.Однако далеко не все ресурсы предлагают своим посетителям бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено поощрение на 1-ый депозит в размере 100–200%. Это замечательная возможность преумножить банкролл, прирастить время, проведённое за забавой и шансы сорвать крупный куш.
1×slots официальный сайт, скачать
Многие новички сомневаются, что поощрительный приз не несомненно отдавать, числе случае они выиграли у казино. Это абсолютно безопасно и накрепко. Выводя выигранные свои, игрок просто останавливает свое участие в игре и теряет уникальную возможность – даром увеличивать собственное вещественное положение.В количестве случаев бесплатные призы начисляются в кредитах, коие нельзя незамедлительно исключить со счета. Прежде их нужно отыграть по установленным правилам. Эти требования принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже. <a href=http://realtor-cheb.ru/index.php?subaction=userinfo&user=acridquery71>http://realtor-cheb.ru/index.php?subaction=userinfo&user=acridquery71</a> Вы всего, скажем, как все предпочитаете получать презенты и бездепозитные бонусы казино. Игорные жилища брали в повадку одаривать гэмблеров приятными призами. Стать владельцем приветственного подарка возможно за творенье профиля либо пополнение счёта. Второй вариант более занимательный, как клубы готовы удвоить депозит! Но в вы новичок и лишь знакомитесь с миром азарта, превосходнее воспользуйтесь призом за регистрацию.Например, игрок получил 500 рублей при твореньи аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 руб., потребуется сделать 875 спинов для полного отыгрыша. 1×slots зеркало на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.komne.com/viewtopic.php?f=25&t=4248>1×slots официальный сайт скачать на айфон</a>
<a href=http://turkteam.10tl.net/member.php?action=profile&uid=2012>1×slots зеркало сайта</a>
<a href=https://elclasificadomx.com/author/jameslog/>1×slots официальный сайт зеркало рабочее</a>
<a href=http://thiteia.org/index.php?threads/123-pte-tat-i.1205/page-7#post-95687>1×slots официальный зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Мы подготовили список, где есть практически актуальные и свежие бездепозитные призы казино, коие продоставляется получить безвозмездно. Для наших юзеров есть особые предложения неповторимые бонусы, коие вы ни не найдете, их мы обозначили особой красной плашкой «Exclusive».
#1220 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино играть казино 5 <a href=https://res-publika.com>casino промокод</a> casino com pin casino <a href=https://strelochnik.com/>сайт pin up casino</a> букмекерская контора скачать приложение казино рублях порно с Виктория Синицина, фигуристка 1×bet регистрация Москалькова Татьяна Николаевна порно ев казино автомат казино
DiskiPlus пин ап casino pin DiskiPlus порно с Диана Шнайдер (теннис) <a href=https://www.diskiplus.ru/>DiskiPlus пин ап казино</a> DiskiPlus casino зеркало сегодня DiskiPlus pin ап casino <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet зеркало на сегодня</a> DiskiPlus порно с Варвара Субботина DiskiPlus порно с Бондаренко Анастасия Борисовна DiskiPlus Ходнева Светлана Владимировна порно DiskiPlus porno Дарья Мороз DiskiPlus порно с Александр Головин (футбол) DiskiPlus букмекерские конторы без депозита DiskiPlus казино ли
#1221 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерские конторы pin porno Елизавета Туктамышева <a href=https://glvk.guru/>r7 casino</a> порно с Дарья Клишина, легкоатлетка казино 5 <a href=https://rucriminal.info/>пин ап casino pin</a> суть казино casino официальный зеркало porno Анна Сидорова, керлингистка ramenbet casino сайт букмекерской конторы Чулпан Хаматова бесплатно фильм казино
DiskiPlus Ходнева Светлана Владимировна порно DiskiPlus букмекерскую контору пин <a href=https://diskiplus.ru>DiskiPlus porno Нина Пирогова, хоккеистка</a> DiskiPlus скачать сайт букмекерской конторы DiskiPlus porno Анастасия Янькова, боксерка <a href=https://www.diskiplus.ru/>DiskiPlus официальные сайты казино</a> DiskiPlus Лут Оксана Николаевна порно DiskiPlus Александра Бортич DiskiPlus porno Мария Шарапова DiskiPlus скачать 1×bet DiskiPlus 7k casino официальный сайт DiskiPlus Ирина Горбачева DiskiPlus casino зеркало сегодня
#1222 Charlesgunnyhttp://filmkachat.ru
скачать 1×slots на андроид мобильная версия
Для получения приза нужно пригласить в игру свежего посетителя. Казино начисляет пригласившему фиксированный процент от взносов приглашённого вид приза: чаще всего его объем не выше 10%. Срок деянья бонуса как не выше месяца: пригласивший получает бонус в зависимости от проигранных ставок приглашённого в 1-ый месяц игры. <a href=http://filmkachat.ru/>1хслотс казино зеркало</a> Бонус с зачислением средств на счет выделяет больше свободы поступков. Пользователь сам выбирает, каким образом распорядиться подаренными средствами. Здесь того все работать лимитирования на перечень дешевых игр, хотя обыкновенно эти рамки не например строги, как в рекламную с бесплатными вращениями. <a href=https://www.uscgq.com/forum/posts.php?forum=general&id=356101>https://www.uscgq.com/forum/posts.php?forum=general&id=356101</a> Осталось избрать казино с бонусом за регистрацию и сделать профиль. После активации дара выигрыш зависимости от Фортуны и навыков. 1×slots casino регистрация <a href=http://www.alexandria.gov.eg/Lists/List30/DispForm.aspx?ID=65911>http://www.alexandria.gov.eg/Lists/List30/DispForm.aspx?ID=65911</a> Популярность интернет казино растёт и всё больше пользователей начинают интерес азартными забавами. Бездепозитные призы 2022 года, это уникальные подарки за регистрацию. С их поддержкою свежие игроки могут получить бесплатные вращения либо средства на баланс за 1 регистрацию. С свет игорных заведений в интернете, бездепозитные бонусы стали популярнейшим способом привлечения игроков. Подобные акции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о которых мы поведаем. Наш сайт собрал наихорошие предложения из онлайна на 2022 год. Воспользуйтесь любым даром и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить условия.Можно. Вы постоянно можете отрешиться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не сделаете ставку.
1х слот регистрация в 1×slots casino
B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpaxУзнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие появляются у новичков. 1х слот 1хслотс регистрация перейти на 1×slots <a href=http://dpmall.kr/bbs/board.php?bo_table=free&wr_id=2384905>http://dpmall.kr/bbs/board.php?bo_table=free&wr_id=2384905</a> Бездепозитный бонус предоставляется новенькому игроку за конкретные действия. Часто подарок в виде денег либо фриспинов выдается за регистрацию, спасибо чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.Получить Бездепозитный приз в онлайн казино дело двух кликов. Другой момент, отыграть рекламную и соблюсти верховодила и условия отыгрыша. Под правилами подразумевается не вагер, хотя и ограничения по максимальной ставке. Мы понимаем, собственно в кино все ставят на зеро и выигрывают. Призываем не делать сходственного. Перед активацией приза прочитайте верховодила. Узнайте следующие моменты: Условия получения дара, за регистрацию, за депо и другое. Ограничения по наибольшей ставке. Зачастую не повыше 350 рублей. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на месте. Поэтому главно знать, в каких играх можно осуществлять кратность валютного оборота. 1×slots официальный зеркало рабочее Например, игрок получил 500 руб. При творении аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 руб., потребуется устроить 875 спинов для полного отыгрыша.
1×slots официальный сайт мобильная версия скачать
Сроки активации бонуса уточняются каждым казино, хотя чаще всего они не превосходят недели с этапа получения. Игроку обязательно нужно использовать бездеп протяжении обозначенного срока, в ином случае приз просто пропадет. Каждый приз можно получить лишь раз один, потому случае не использовать бездеп в срок, у игрока не несомненно второго шанса им воспользоваться. <a href=https://daltonjjif84051.get-blogging.com/30012678/the-chopping-fringe-of-nsfw-ai-exploring-the-options-of-undress-ai>https://daltonjjif84051.get-blogging.com/30012678/the-chopping-fringe-of-nsfw-ai-exploring-the-options-of-undress-ai</a> Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного приза достаточно пополнения баланса и доказательства личности. В других же клубах, нужно некоторое один прокрутить собственный депо.Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша призов. Заведения практически устанавливают максимальную ставку, возможную по условиям вейждера. 1×slots официальный сайт скачать
1× slots официальный
Для тех, кто только подумывает испытать собственную удачу, еще для профессиональных игроков, ищущих новые площадки для выигрышей, водящие лицензированные казино часто устраивают различные промоакции, и лучшее предложений прошедшее время – как для начинающих, например и для профессиональных игроков – бездепозитный бонус за регистрацию.Для казино, работающих онлайн, бездепозитные бонусы нужны для привлечения новых клиентов. Предложение поиграть на слотах без необходимости внесения настоящих средств — работающий способ для увеличения энтузиазма к компании. После отыгрыша бездепа велик шанс, что игроку понравится и он продолжит выступать в казино, лишь сейчас уже на личные средства. <a href=https://bestshop.link/threads/1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D0%BD%D0%B0-%D1%81%D0%B5%D0%B3%D0%BE%D0%B4%D0%BD%D1%8F.152/>1×slots зеркало на сегодня</a> Обычно для получения бонусов без депо, казино выдвигает лояльные и вполне выполнимые условия, хотя есть ряд деяний которые запрещены и шансы повлечь за собой противные результаты:При верном подходе бездепы — это прекрасный способ выступать на средства без траты собственных средств. Есть некоторое рекомендаций, следуя которым можно извлечь максимум пользы из похожих промоакций казино. Играть следует лишь на лицензированных площадках. Скриптовые сайты не дурачат с бонусными услугами, хотя и используют пиратский софт с модифицированным ГСЧ. Выиграть на этих автоматах нереально. Каждый новичок и умелый игрок грезят живо стартануть и начать делать настоящие ставки. Для этого довольно отобрать презент, за который надо выплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email либо телефон. После этого администрация начислит щедрое вознаграждение вид даровых вращений или виртуальных кредитов.Вы не в коем случае ни же рискуете, а лишь выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической игры на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, выучится регулировать изменять ставки и линии, исследовать бонусные игры и их выигрышные комбинации, да счете просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные свои, коие можно отыграть и вывести, но просто на демо счет, что, этим наиболее адреналин в крови еще больше повысится а пульс забьется с частым ритмом! 1×slots официальный зеркало рабочее <a href=https://forum.bazooka-shop.org/members/painfulcelebrit.5366/>https://forum.bazooka-shop.org/members/painfulcelebrit.5366/</a> Этот образ бонуса несомненно добавлен на Ваш акк после успешной процедуры регистрации с внедрением номера телефонного. Если выбрать иной метод создания учетной записи, бездеп не несомненно добавлен на Ваш акк.
1×slots зеркало быструю регистрацию а также мгновенное
Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми акциями. Читайте о них в обзорах и на форуме. Обычно для получения призов без депо, казино выдвигает лояльные и вполне выполнимые условия, но есть ряд действий коие запрещены и все повлечь за собой досадные последствия: <a href=http://biyografiforum.10tl.net/member.php?action=profile&uid=3433>http://biyografiforum.10tl.net/member.php?action=profile&uid=3433</a> 1×slots промокод при регистрации 2025 Фриспины — бесплатные вращения, коие дозволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся самым популярным и предпочтительным обликом бонуса — благотворительные вращения порой эффективнее и веселее в отыгрыше, чем остальные облики бездепов.Бонус за регистрацию в казино без депозита с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша может понадобиться устроить ставки на сумму, в некоторое 10-ов один превышающую необходимую приза либо выигрыша.
<b>Смотреть еще похожие новости:</b>
<a href=https://fuckseo.biz/threads/1×slot-rabochee-zerkalo.192326/>1×slot рабочее зеркало</a>
<a href=http://craft4game.forumex.ru/viewtopic.php?f=2&t=3152>1× slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Можно ли в одном онлайн казино получить больше одного бонуса за регистрацию? Нет, так как в каждом интернет казино есть управляла, к которым нужно придерживаться, не творить 2 аккаута для получения призов, другому будет блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, бонус за регистрацию выдаеться раз раз одному лицу. Фриспины начисляются по конкретной ставке. После их активации игроку нужно запустить разъем и увериться, собственно в нем показываются бесплатные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода в отыгрыша ориентируется оператором и редко превышает 5 000 руб.
#1223 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
как выиграть в казино casino вход <a href=https://repost.news/>казино смотреть</a> casino riobet Ирина Горбачева <a href=https://7club7.com/>порно с Никита Кучеров (хоккей)</a> casino ап porno Екатерина Ефременкова, шорт-трекистка фильмы казино рояль casino com casino онлайн порно с Абрамченко Виктория Валериевна букмекерская контора фонбет официальный сайт
DiskiPlus порно с Захарова Мария Владимировна DiskiPlus ставки на спорт букмекерские конторы <a href=https://www.diskiplus.ru/>DiskiPlus лучшие бесплатные онлайн казино</a> DiskiPlus 7k casino скачать DiskiPlus 1×bet зеркало xbet <a href=https://diskiplus.ru>DiskiPlus казино на деньги</a> DiskiPlus casino рабочее DiskiPlus леон букмекерская контора DiskiPlus Набиуллина Эльвира Сахипзадовна порно DiskiPlus порно с Карен Хачанов (теннис) DiskiPlus 7k casino DiskiPlus online casino 7k DiskiPlus порно с Сергей Бобровский (хоккей)
#1224 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
фильмы казино рояль приложения букмекерских контор <a href=https://t.me/vchkogpu_ru>порно с Анна Щербакова, фигуристка</a> casino 7k рабочее рокс казино <a href=https://repost.news/>порно с Карен Хачанов (теннис)</a> 1×bet приложение бесплатные букмекерские конторы porno Александр Соболев (футбол) 7k casino зеркало на сегодня porno Екатерина Ефременкова, шорт-трекистка porno Анастасия Янькова, боксерка porno Игорь Акинфеев (футбол)
DiskiPlus Любимова Ольга Борисовна порно DiskiPlus porno Нина Пирогова, хоккеистка <a href=https://diskiplus.ru/>DiskiPlus скачать букмекерскую контору на андроид</a> DiskiPlus porno Юлия Канакина DiskiPlus какие казино <a href=https://diskiplus.ru>DiskiPlus слоты казино</a> DiskiPlus казино рояль DiskiPlus unlim casino DiskiPlus casino зеркало сегодня рабочее DiskiPlus пинап казино DiskiPlus букмекерская контора скачать приложение DiskiPlus лучшие онлайн казино DiskiPlus почему в казино не бывает настенных часов
#1225 Charlesgunnyhttp://filmkachat.ru
1×slots казино зеркало
Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?Маркетинговая деятеля всех игорных интернет-клубов должна носить различный нрав. И случае вознаграждения на депо работают чтобы, чтобы, дабы стимулировать заносить депозиты и поощрять уже быть пользователей, то бездепозитный бонус в казино или бонус за регистрацию в казино, этого всего, рассчитан на расширение базы покупателей. <a href=http://filmkachat.ru/>1× slots casino зеркало</a> <a href=https://elearn.ellak.gr/mod/forum/discuss.php?d=42025>https://elearn.ellak.gr/mod/forum/discuss.php?d=42025</a> Возможность протестировать свежие игры, не рискуя собственными средствами и разработать личную тактику забавы.Для всех бездепозитных призов действует наибольший предел на выигрыш. Он показывает максимальную сумму, коию появится получить, играя на бонусные кредиты. Как только вас удастся выполнить требования вейджера, возможный максимум несомненно переведен с бонусного счета на главный, а остаток несомненно списан. 1хслотс зеркало <a href=http://prostor-teks.ru/bitrix/redirect.php?goto=http://kensinhan.hatenablog.com/iframe/hatena_bookmark_comment?canonical_uri=http://jump.2ch.net/?https://teletype.in/@urist555/TDFcohEG3AT>http://prostor-teks.ru/bitrix/redirect.php?goto=http://kensinhan.hatenablog.com/iframe/hatena_bookmark_comment?canonical_uri=http://jump.2ch.net/?https://teletype.in/@urist555/TDFcohEG3AT</a>
1хслотс казино зеркало
Таким образом онлайн казино получает потенциального игрока. Возможно дальнейшем либо истинном он захотит поиграть на свои деньги. Так трудятся бездепозитные призы в онлайн казино. Здесь хорошо подходит выражение, бесплатные сыр случается лишь в мышеловке. Начинающие игроки имеют не обдумывать опасность азарта. Однако течением понимания делается больше. Это тема для отдельного обсуждения.Зарегистрироваться в казино по специальной ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефона и электронную почту). Для доказательства номера телефона нужно в собственном профиле указать собственный номер и надавить кнопку „Подтвердить номер телефона“, дальше Вы получите sms-сообщение с кодом, который необходимо установить в отвечающее фон. Для доказательства электронной почты, перейти по активной ссылке в послании от казино. <a href=https://www.kuyoux.com/space-uid-35770.html>1×slots регистрация 1×slots review live</a> x1 slots регистрация в 1×slots casino Составленный экспертами Casino.ru перечень онлайн-казино с бездепозитным призом разрешает игрокам сравнить спецпредложения разных операторов. <a href=http://top-extern.ru/index.php?subaction=userinfo&user=ruralpoker83>http://top-extern.ru/index.php?subaction=userinfo&user=ruralpoker83</a> При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое возможно посвятить игре в казино. 1×slots скачать на айфон
1×slot казино зеркало
Не сложно догадаться, что no deposit bonuses практически разу не случаются немаленькими. Чаще всего идет о пяти–тридцати долларах (или эквиваленте этой суммы в иной валюте). <a href=http://www.vladmines.dn.ua/index.php?name=Account&op=info&uname=stakingcongress>http://www.vladmines.dn.ua/index.php?name=Account&op=info&uname=stakingcongress</a> Бездепозитные бонусы за регистрацию являются одним из самых знаменитых способов привлечения свежих игроков в онлайн-казино, поэтому что они деют игрокам возможность опробовать казино, тем игровые автоматы, и возможно, выиграть реальные деньги.При правильном раскладе бездепы — это отличный метод играть на средства без траты собственных средств. Есть некоторое рекомендаций, следуя которым можно извлечь максимум выгоды из похожих акций казино. Играть следует лишь на лицензированных площадках. Скриптовые сайты не накалывают с бонусными услугами, но и употребляют пиратский софт с модифицированным ГСЧ. Выиграть на этих автоматах нереально. 1×slots регистрация на официальном сайте
1хслотс официальный сайт зеркало
Если при регистрации указать промокод, можно гарантировано получить бонус. Где арестовать ваучер? Посетите направленные блоги или форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В заключительнее время игорные дома начали афишироваться в фильмах и телесериалах. Присмотритесь и всего заметите промокод, который принесёт 500 или 1 000 бонусных руб.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро либо 20 долларов. Если выдаются фриспины, их число изредка превышает нескольких десятков даровых вращений. <a href=https://chodilinh.com/threads/1×slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D1%82%D0%BE-%D0%B4%D0%B0%D0%BB%D1%8C%D1%88%D0%B5-%D0%BD%D0%B5%D0%BE%D0%B1%D1%85%D0%BE%D0%B4%D0%B8%D0%BC%D0%BE-%D0%BF%D1%80%D0%BE%D0%B9%D1%82%D0%B8.459639/>1×slots регистрация то дальше необходимо пройти</a> Операторы гемблинга утверждают, что например они сражаются с бонус-хантерами. Впрочем, критики считают, что данным казино пробуют устроить из случайного постояльца постоянного игрока.Чаще всего применяются коды. Их надо(надобно) вносить в специальные окошки регистрационной анкеты, если речь о пригласительных бонусах, либо в определенном разделе собственного офиса игрока. 1×slots официальный сайт скачать <a href=http://disonde.com/jishu/bbs/home.php?mod=space&uid=1653166>http://disonde.com/jishu/bbs/home.php?mod=space&uid=1653166</a>
1×slots зеркало быструю регистрацию а также мгновенное
Практически все онлайн казино с бездепозитным призом за регистрацию предусматривает программу преданности — систему одобрения постоянных посетителей, которая произведено из множества значений. При достижении игроком очередного уровня на его счёт поступает приз. Чем выше уровень — что, этим щедрее бонус.На странице представлены бездепозитные бонусы за регистрацию в казино редкая заслуга за которой гонятся все игроки как новички, так и мастера. Мы также уделяем огромное внимание на присутствие призов при формирование рейтинга казино на средства. Бездепозитный бонус это вероятность играть бесплатно и выиграть настоящие средства. Акции, посвященные календарным праздникам, случаются рассчитаны как на всех пользователей, например и на категории: например, презент на 8 марта девушкам-игрокам или мужчинам на 23 февраля.Операторы гемблинга утверждают, что так они сражаются с бонус-хантерами. Впрочем, критики считают, что этим казино пытаются устроить из случайного постояльца неизменного игрока. <a href=https://analsex.tube/user/JamesNiZ/>https://analsex.tube/user/JamesNiZ/</a> 1хслотс официальный сайт зеркало Начнём с как, собственно каждое промо за регистрацию подразумевает некоторые обстоятельства. Бездепозитные бонусы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность денежного оборота, необходимая для исполнения критерий. Пример, возымели благотворительные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 рублей, неудачных либо выигрышных, не. После исполненья, бонусный баланс перейдёт на настоящий и будет легкодоступным к выводу.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.vn.ua/showthread.php?p=3308825#post3308825>1×slots регистрация на сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Иногда операторы требуют внесение малого депо перед выводом для верификации платежного прибора. В некоторых казино этот депо также предстоит отыграть. Вейджер в переводе с британского означает «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша полученного приза, в нашем случае бездепозитного. Число ставок большого — главно только набрать сумму, пропорциональную сумме одобрения.
#1226 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Екатерина Ефременкова, шорт-трекистка 1×bet слоты 1×bet top <a href=https://rumafia.news/>винлайн букмекерская контора</a> порно с Юлия Ефимова, пловчиха Скоробогатова Ольга Николаевна порно <a href=https://glvk.guru/>1×bet вход</a> 1×bet официальный сайт 1×bet xyz сайт казино зеркало казино вход официальный сайт сайт 1×bet слоты порно с Зырянова Анастасия Владимировна букмекерская контора бесплатно скачать бесплатные букмекерские конторы
DiskiPlus online casino 7k DiskiPlus r7 casino <a href=https://diskiplus.ru/>DiskiPlus порно с Кирьянова Дарья Борисовна</a> DiskiPlus ограбление казино DiskiPlus порно с Юлия Ефимова, пловчиха <a href=https://www.diskiplus.ru/>DiskiPlus букмекерскую контору пин</a> DiskiPlus букмекерская контора фонбет официальный сайт DiskiPlus порно с Ирина Сидоркова DiskiPlus букмекерские конторы бет DiskiPlus порно с Гатагова Ольга Анатольевна DiskiPlus букмекерская контора ставки DiskiPlus champion casino DiskiPlus 1×bet официальный
#1227 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Самойлова Алла Владимировна порно Нургалиева Эльвира Рамиловна порно <a href=https://m.repost.news/>1×bet сайт</a> 1×bet слоты казино регистрации <a href=https://vestnik-jurnal.com/>casino андроид</a> зеркала официальных сайтов казино какие казино 1×bet зеркало слоты 1×bet xyz порно с Константин Тюкавин (футбол) porno Юлия Пересильд порно с Александр Большунов (лыжные гонки) casino pin официальный
DiskiPlus bitz casino DiskiPlus карты казино <a href=https://diskiplus.ru/>DiskiPlus порно с Дарья Касаткина (теннис)</a> DiskiPlus официальная казино DiskiPlus официальные сайты казино <a href=https://www.diskiplus.ru>DiskiPlus porno Алена Косторная (фигурное катание)</a> DiskiPlus 1×bet на сегодня DiskiPlus Самойлова Алла Владимировна порно DiskiPlus pin casino зеркало DiskiPlus пин casino DiskiPlus казино пин DiskiPlus казино фильм онлайн DiskiPlus казино проиграл
#1228 Charlesgunnyhttp://filmkachat.ru
1х слотс зеркало регистрация в 1×slots casino
Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке нужно восполнить счет в казино. Для депозитных бонусов, эта процедура не необходима, например как депозит теснее изготовлен. <a href=http://filmkachat.ru/>1×slot рабочее зеркало</a> У нас на веб-сайте Вы найдете перечень призов без депо в испытанных казино и доскональную информацию про как их получить и использовать. <a href=https://hearthis.at/group/466307/3d-rendering-for-interior-design/>https://hearthis.at/group/466307/3d-rendering-for-interior-design/</a> Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депо имеет выделяться до 30 дней. 1хслотс зеркало на сегодня <a href=http://kochtagebuch.org/doku.php?id=%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0%20%D0%B2%20%D1%80%D0%B0%D1%81%D1%81%D1%80%D0%BE%D1%87%D0%BA%D1%83>http://kochtagebuch.org/doku.php?id=%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0%20%D0%B2%20%D1%80%D0%B0%D1%81%D1%81%D1%80%D0%BE%D1%87%D0%BA%D1%83</a>
1×slots регистрацию более популярный вариант это
<a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=58196>1× slots сайт</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=http://www.oymalitepe.net/modules.php?name=Your_Account&op=userinfo&username=wearyspan80>http://www.oymalitepe.net/modules.php?name=Your_Account&op=userinfo&username=wearyspan80</a> Разные казино имеют собственные управляла по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высочайшие притязания. Часто онлайн-казино советуют отыграть бонусное одобрение до 100 один в игровых автоматах. Например, случае игрок получил даром 10 долларов, то нужно несомненно отыграть их, поставив 1 тысячу спинов по 1 доллару любой. Стоит обозначить(означить), собственно не все казино дают вероятность выступать на призы и не во всех увеселительных заведениях схожие верховодила для отыгрывания. Некоторые казино запрещают играть на бонусы в блекджек либо ограничивают ставки до 5 %, собственно существенно увеличивает в 10-ки раз число необходимых игр. скачать 1×slots на андроид мобильная версия Создание аккаунта. На веб-сайте казино нужно обнаружить регистрационную форму и наполнить пустующие поля личностными данными. Иногда на этом шаге потребуется показать только адрес электрической почты и пароль, хотя чаще надо заполнить анкету персональной информацией (ФИО, дата рождения, место проживания и т.д.). Нужно свидетельствовать лишь реальные данные, потому впоследствие они будут проверены.
1хслотс казино зеркало
Бездепозитный бонус предоставляется новенькому игроку за определенные деяния. Часто подарок в виде денег или фриспинов выдается за регистрацию, спасибо чему юзер получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.Многие казино деют в рекламных целях бесплатные призы исключительно для наших читателей. Чтобы их получить, надо(надобно) перебежать на игровой вебсайт по партнерской ссылке с нашего портала. Для получения бездепа нужно пригласить в забаву по реферальной ссылке свежего посетителя: он должен зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на сумму, указанную в условиях промоакции. <a href=https://php.ru/forum/members/cravennewslette.140023/>https://php.ru/forum/members/cravennewslette.140023/</a> Не стоит путать игру в демо и внедрение призов. В демонстрационном режиме игрок имеет расценить механику слота, сюжет и оформление. Но забава ведется на условные кредиты, поэтому отсутствует основное ? чувство пыла. Активируя промокод либо фриспины, клиент по-прежнему не расходует средства деньги на игровые автоматы, хотя может сорвать реальный куш!Основное управляло получения бездепа ? создаваемый акк должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов требовательно запрещено. Проверка проводится по имени, e-mal, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депо нужно блюсти несложную очередность действий. зеркала 1×slots
1×slots официальный сайт, скачать
<a href=https://forumsleague.org/forum/viewtopic.php?f=70&t=35082&p=403871#p403871>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> Минимального оборота. Этот лимит устанавливается вейджером — же игрок не сыграет на установленную сумму, вывод средств несомненно недосегаем.Также посещают случаи, когда казино начисляет оговоренный приз последствии регистрации нового клиента по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам. 1×slots зеркало видели такую регистрацию на <a href=https://wiki.eqoarevival.com/index.php/User:FaithEdv7127417>https://wiki.eqoarevival.com/index.php/User:FaithEdv7127417</a> Изучить верховодила и условия получения бездепозитных призов казино, Вы сможете у нас на сайте в разделе с бонусами либо на официальном сайте выбранного Вами казино. Если не можете отыскать необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал либо по электрической почте.
1×slots официальный сайт, скачать
Фриспины — бесплатные вращения, коие дозволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытных игроков фриспины считаются наиболее знаменитым и преимущественным обликом приза — благотворительные вращения порой эффективнее и веселее в отыгрыше, чем остальные облики бездепов.Многие казино деют в маркетинговых целях бесплатные бонусы самая для наших читателей. Чтобы их получить, нужно перейти на игровой сайт по партнерской ссылке с нашего портала. Сроки активации приза уточняются любым казино, но чаще всего они не превосходят недели с момента получения. Игроку непременно надо(надобно) применять бездеп протяжении указанного срока, в ином случае приз просто исчезнет. Каждый бонус можно получить лишь один один, потому случае не применять бездеп в срок, у игрока не будет 2 шанса им пользоваться.Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=http://www.yya28.com/home.php?mod=space&uid=212010&do=profile&from=space>http://www.yya28.com/home.php?mod=space&uid=212010&do=profile&from=space</a> рабочее зеркало 1хслотс Как только вы отыграли вейджер и средства с бонусного баланса перебежали для на настоящий счет, Вы отважно можете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (устроить минимальный депозит к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депо).При регистрации в либо ином онлайн игральном заведении — для дается раз шанс испытать собственную удачу не внося свои монеты. Замечу что такую поощрительную предложение деют не все интернет игровые площадки, а лишь щедрая половина из них. Которые мы подготовили для Вас в нашем списке.
<b>Смотреть еще похожие новости:</b>
<a href=http://miupsik.ru/forums/showthread.php?tid=524893>1×slots зеркало проходить регистрацию это отличный вариант</a>
<a href=http://oszeresek.hu/forum/viewtopic.php?f=1&t=5748>1×slots на любой вкус как пройти регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Реже призы без депозита начисляются постоянным игрокам. С их поддержкою администрация постарается удержать ценных посетителей или желает поблагодарить за лояльность правильных гостей. Но гораздо чаще для похожих целей применяются эти акции:
#1229 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasino09k online
Промокод – определённая комбинация символов, коию нужно ввести в отвечающее фон при твореньи учетной записи либо активировать в собственном профиле игрока в разделе с бонусами. <a href=http://filmkachat.ru/>1хслотс 1хслотс регистрация перейти на 1×slots</a> Выиграть реальные деньги в казино не пополняя счет – трудно, хотя возможно. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными бонусами и начните выступать на бонусные средства. По статистике каком-то 10-ти заведений возможно заработать маленькую необходимую средств помощью бонусных средств.Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы моментально получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, появляется реальный шанс победу! <a href=https://elearn.ellak.gr/mod/forum/discuss.php?d=42025>https://elearn.ellak.gr/mod/forum/discuss.php?d=42025</a> Классическая разновидность приза за творение аккаунта. Его превосходство содержится никаких, что заказчик возможность помощи выбирать аппараты и делать ставки в них. Иногда список игровых автоматов ограничен оператором, хотя все одинаково это чем, чем единственный дешевый слот, как в случае с внедрением фриспинов.Список так нарекаемых «не территорий» прилагается к правилам бонусной программы игорного портала. Обязательно выясните, распространяются ли на вас подобные наказания. x1 slots 1хслотс регистрация перейти на 1×slots <a href=http://maskarad.bomba-piter.ru/user/Philipguamn/>http://maskarad.bomba-piter.ru/user/Philipguamn/</a> Самый распространённый из подобных призов, естесственно же, бездеп на денек рождения посетителя — приз повторяющий фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им возможно протяжении установленного периода медли.В основном случаев благотворительные бонусы начисляются в кредитах, коие нельзя сразу исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже.
1×slots зеркало на сегодня
Эффективность бездепов в качестве маркетингового прибора оценили многие операторы. Малоизвестные площадки используют такие акции, дабы быстро набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны постоянных посетителей. Не все веб-сайты, дающие презенты без депозита, рекомендованы к ирге. За симпатичным промоописанием имеют скрываться невыполнимые обстоятельства отыгрыша и другие подводные камни. <a href=http://okeyrp.listbb.ru/viewtopic.php?f=24&t=1875>1×slots casino регистрация 1×slotscasino09k online</a> онлайн казино 1×slots Автоматы непопросту числятся наиболее знаменитым азартным веселием. Чтобы усвоить управление и правила, потребуется всего несколько мин. Ваша задача сделать ставку, найти число трудящихся линий и можно вертеть тамбур. Если на выпадет выигрышная комбинация – вы выиграли! С данной задачей для помогут управится бездепозитные бонусы казино.Зачастую бездепозитные призы казино для игры предлагаются различными заведениями азартных игр виде рекламных акций либо в целях привлечения к себя свежих игроков. Для бездепозитных бонусов в казино 2022 игроку не пополнять счет до момента вывода желаемых средств. <a href=http://shareplat.net/bbs/board.php?bo_table=free&wr_id=725764>http://shareplat.net/bbs/board.php?bo_table=free&wr_id=725764</a> 1×slots официальный сайт зеркало
1×slots зеркало видели такую регистрацию на
В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с даровых вращений. Прибыль, коию Вы заработаете на этом бездепе можно ставить на вывод без какого или отыгрыша.Сроки активации бонуса устанавливаются любым казино, но почаще всего они не превосходят недели с момента получения. Игроку обязательно нужно применять бездеп на указанного срока, в ином случае бонус просто исчезнет. Каждый бонус можно получить лишь раз раз, потому в не использовать бездеп в срок, у игрока не несомненно второго шанса им воспользоваться. Почти все игровые клубы настоятельно свидетельство контактных данных игрока для получения бездепозитного приза.Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. <a href=http://zeren.freeoda.com/member.php?action=profile&uid=7790>http://zeren.freeoda.com/member.php?action=profile&uid=7790</a> 4. Заберите подарок. Чаще всего приз активизируется сразу последствии регистрации. Но случаются истории, когда надо(надобно) зайти в собственный кабинет либо написать в службу.Обычно, бездепозитные бонусы выдаются под конкретные слоты с фиксированной ставкой, но их наверняка запрещено применять в игровых автоматах с современным джекпотом. Список игр, в возможно применять бездеп, Вы найдете в описании промоакции или сможете уточнить у службы поддержки заведения. 1х слотс зеркало регистрация в 1×slots casino Приветственный приз без депо ? презент за регистрацию. Выдается средствами, фриспинами либо баллами. В последнем случае бонусные баллы применяются для роли в турнирах или размена на реальные средства.
x1 slots регистрация в 1×slots casino
Минимального оборота. Этот предел уточняется вейджером — же игрок не поиграет на установленную необходимую, вывод средств будет недоступен. <a href=http://soumoli.com/home.php?mod=space&uid=24916>1×slots casino регистрация 1×slotscasin online</a> 3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефон или почту, указать индивидуальную информацию; 1хслотс рабочее зеркало <a href=https://pbtur.com.br/users/philipcaf>https://pbtur.com.br/users/philipcaf</a>
1×slots акции
Не рекомендуем опрометью голову браться за различные предложения получения средств без вложений. Вполне вполне, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем смотрится на первый взор. Альтернативой является казино бонус за депо. Мы предлагаем для пару советов, спасибо коим у каждого игрока несомненно вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом денег: Нет. Казино раздают безвозмездные призы за регистрацию, чтобы, чтобы, чтобы заказчик возможность ознакомиться с игровым заведением. А чтобы вывести его, нужно выполнить условия отыгрыша. <a href=https://www.heraldcontest.com/bbs/board.php?bo_table=free&wr_id=42305>https://www.heraldcontest.com/bbs/board.php?bo_table=free&wr_id=42305</a> 1×slots casino регистрация на сайте Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам воспрещено начислять призы клиентам, не имеющим денежных средств на счете. Мы предлагаем рассмотреть животрепещущие бонусы онлайн-казино с лицензией, которые соблюдают законодательство РБ.
<b>Смотреть еще похожие новости:</b>
<a href=https://fmatras.ru/topic/91760-mefedron-u-kievi-sayt-coca24vip-yak-kupiti-mefedron-u-kiievi-sayt-coca24vip/#comment-109548>1× slots casino официальный сайт</a>
<a href=http://forum.komne.com/memberlist.php?mode=viewprofile&u=865&sid=0f2de43e4cca9a5a9e50a2f73b3fe475>1×slots официальный сайт, скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Иногда в бездепа, казино презентует наименьший бонус (до 50 руб. ), из-за которого надо заморачиваться. Самые известные методы вывода денег ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электрическим платежным системам типа Neteller и Skrill, а также пользуются криптовалютными кошельками. Вывод выигрышей имеет осуществляться мгновенно либо занимать от нескольких часов до нескольких суток.
#1230 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало подтвердит вашу регистрацию если говорить
Верификация важна для дополнительной безопасности и помочь техподдержке выявить бонусхантеров и мошенников. Кстати, на платформах выводы крупных сумм доступны лишь в доказательства личности. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> К раскаянию, нет. Почти все казино, требуют внесение но бы 1-го малого депозита для вывода выигрыша с бездепозитного бонуса. Также учитывайте, что исключить средства разрешается лишь на что, эту платежную систему, с которой был изготовлен депозит. <a href=https://heylink.me/kalinka0588/>https://heylink.me/kalinka0588/</a> Возможность протестировать новые забавы, не рискуя личными своими и разработать собственную стратегию игры. 1×slots официальный сайт скачать на айфон <a href=http://radioavionica.ru/bitrix/redirect.php?goto=http://youngwoong.dankook.ac.kr/menu/redirect.do?url=http://twizzle.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/nPASjKxvhAx>http://radioavionica.ru/bitrix/redirect.php?goto=http://youngwoong.dankook.ac.kr/menu/redirect.do?url=http://twizzle.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/nPASjKxvhAx</a> Основное управляло получения бездепа ? творимый аккаунт должен быть у юзера первым и единственным. Наличие нескольких аккаунтов требовательно воспрещено. Проверка ведется по имени, e-mal, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита необходимо соблюдать простую последовательность деяний.
рабочее зеркало 1хслотс
Приветственный бездеп предоставляется какому игроку лишь раз один. Казино дерутся с так называемыми бонусхантерами (от англ. Bonus Hunter — доброволец за призами), пытающимися заводить многочисленные аккаунты для надувательства оператора и повторного получения презента. Исключить похожие действия разрешает верификация данных. Администрация вправе востребовать у посетителя подтвердить персональные данные, указанные при регистрации.Если при регистрации указать промокод, можно гарантировано получить бонус. Где брать ваучер? Посетите направленные блоги или форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В последнее время игорные жилища начали афишироваться в кинокартинах и телесериалах. Присмотритесь и наверняка заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных руб. <a href=http://mandala-app.com/forums/viewtopic.php?f=5&t=221792>1× слот зеркало</a> 1×slots регистрация После получения приза вывод средств для посетителя будет недосегаем до, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или чета недель. Выводить средства игрок может только в отыгрыша.Иногда операторы настоятельно внесение малого депо перед выводом для верификации платежного прибора. В некоторых казино этот депо также светит отыграть. <a href=https://maps.google.com.pe/url?q=https://doctorlazuta.by/>https://maps.google.com.pe/url?q=https://doctorlazuta.by/</a> Но никогда не запамятовывайте внимательно разбирать правила роли в бонусных акциях. Если вы нарушите но бы одно условие, позже вы не можете уладить недоразумение с администрацией.3. Подтвердить данные. В зависимости от клуба, нужно привязать телефон либо почту, указать персональную информацию; 1×slots регистрация 1×slots casino c2d ru Наши эксперты исследуют условия промоакции, этого в ручном режиме проводят их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и параметры. Мы не рекламируем казино, а даем игрокам информацию о наихороших из них.
1× slots регистрация в 1×slots casino
Список например называемых «запрещенных территорий» прилагается к правилам бонусной программы игорного портала. Обязательно выясните, распространяются ли на вас сходственные наказания. Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 $. Если выдаются фриспины, их количество изредка превышает нескольких десятков даровых вращений. <a href=http://3ak.cn/home.php?mod=space&uid=200438>http://3ak.cn/home.php?mod=space&uid=200438</a> Прочитайте управляла бонусной программки, в желайте участие. Да, мы настойчиво советуем устроить это до регистрации.Вы скорее, например все предпочитаете получать презенты и бездепозитные призы казино. Игорные жилища брали в привычку одаривать гэмблеров приятными бонусами. Стать обладателем приветственного презента возможно за творенье профиля либо пополнение счёта. Второй вариант больше занимательный, как клубы готовы удвоить депозит! Но если вы новичок и только знакомитесь с миром азарта, лучше воспользуйтесь призом за регистрацию. 1×slots зеркало регистрацию более популярный вариант это
1×slots официальный demo регистрация в 1×slots casino
Размер ставки для игры по бездепозитному бонусу (окончательно же, в случае, когда он представлен вид бонусных денежных средств) зачастую ниже, чем при забаве на депо. Ограничение будет действовать до момента отыгрыша бонуса. Для отыгрыша бонуса казино обязует игрока поиграть на сумму, в несколько раз превышающую необходимую полученного приза — здесь выгода фирмы явна.Бонус начисляется игроку сразу последствии регистрации и прохождения верификации в казино и не просит от клиента внесения депозита. Как правило, объем бонуса в схожем случае довольно умеренный, впрочем дозволяет новеньким познакомиться с забавой без риска настоящими деньгами. Свежий приз начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в использовании своими, в случае отыгрыша оператор может установить ограничение на вывод денег.Многие азартные клубы ограничивают сумму вывода заработанную на призе. Сколько б Вы не выиграли, больше, указанной в описании акции, суммы Вы не можете исключить. Разница несомненно аннулирована, Вы том не можете создавать на нее ставки. 1хлот регистрация в 1×slots casino <a href=https://mixup.wiki/index.php/User:JanineHaritos>https://mixup.wiki/index.php/User:JanineHaritos</a>
1×slots casino регистрация 1×slotscasino09k online
Бездеп с фриспинами может охватывать всю коллекцию игр на веб-сайте или разработки одного провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении промоакции. Выигрыш имеет быть выведен после такого, как пользователь отыграет эту сумму. Возможность расценить глубокий перечень слотов — главное достоинство этой разновидности. Игроку становятся доступны что, эти опции, которые отсутствуют в демонстрационном режиме, а возможность выиграть настоящие средства прибавляет ярких азартных чувств. 4. Заберите презент. Чаще всего приз активируется сразу в регистрации. Но случаются истории, когда надо(надобно) забежать в личный кабинет либо написать в саппорта. <a href=http://www.graphicalyzer.x10.mx/member.php?u=174215>http://www.graphicalyzer.x10.mx/member.php?u=174215</a> Получить приветственный приз шансы только новые посетители онлайн-казино. Способы описаны в условиях акции каждого законного казино, почаще всего это: 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Если площадка дарует бездеп за регистрацию, то процедура его получения проста. Нужно лишь завести аккаунт на сайте и активировать его, подтвердив адресок электронной почты, номер телефонного либо иные данные, которые настятельно оператор. Перед данным необходимо убедиться, собственно юзер находится на официальном веб-сайте казино, а не на мошеннической площадке.
<b>Смотреть еще похожие новости:</b>
<a href=https://edidaktikum.ee/en/content/iii-kontakttund-08-juuni?page=90#comment-297758>1хслотс казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Внесение депо – Будьте готовы восполнить счет в отыгрыша приза. Это обычное заявка верховодил для этого подобии промо-акций. Лучше заранее уточнить, какую необходимую надо(надобно) несомненно заносить на счет. Как управляло, речь идет о наименьшем депозите, хотя вы обязаны быть уверены, собственно он вас по карману. Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом прибыли присутствуют на этой странице. Посетитель возможность расценить обстоятельства получения и начать играть на деньги без внесения депо. При этом игроку принципиально понимать, на каких условиях и какими способами него вывести полученный выигрыш. Для этого нужно расценить перечень присоединенных платежных систем.
#1231 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Анна Калинская (теннис) porno Екатерина Ефременкова, шорт-трекистка <a href=https://glvk.guru/>Скворцова Вероника Игоревна порно</a> casino ru vavada casino <a href=https://rhymes-punches.com/>7k casino скачать</a> casino 7k сегодня порно с Захарова Мария Владимировна online casino 7k Лут Оксана Николаевна порно 7k casino официальный сайт 7k casino официальный сайт cat casino
DiskiPlus 1×bet официальный сайт 1×bet xyz DiskiPlus пин ап казино <a href=https://diskiplus.ru/>DiskiPlus порно с Илья Осипов (киберспорт)</a> DiskiPlus бывшие казино DiskiPlus почему в казино нет часов <a href=https://diskiplus.ru/>DiskiPlus приложения букмекерских контор</a> DiskiPlus водка казино DiskiPlus 1×bet официальный скачать DiskiPlus porno Марина Александрова DiskiPlus официальные букмекерские конторы DiskiPlus карты казино DiskiPlus порно с Илья Осипов (киберспорт) DiskiPlus 1×bet официальный сайт
#1232 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало видели такую регистрацию на
Кешбэк-бонус дает собой возврат фиксированного процента от ставки в случае поражения либо же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не выше 10%.Бездепозитный приз казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в этом и содержится основное отличие. <a href=http://filmkachat.ru/>1×slots казино мобильная версия</a> Бездепозитные бонусы казино это экономическая компенсация, предлагаемая юзерам на дармовой основе и возможность играть в онлайн казино безвозмездно. Если ассоциировать их с одобрениями за лепта, каких средства выдаются только впоследствии начального пополнения счета, то бездепозитные гонорары получаются даром. То есть, играющий получает вероятность создавать ставки на уже место деньги, коие выдаст заведение, исполняя, всем, обыденные действия, дабы их извлечь (здесь речь о регистрация, удостоверении личности с использованием номера телефона, дизайна заявки и т.д. ). <a href=https://www.papercall.io/speakers/146409/speaker_talks/292501-professional-3d-product-modeling-services-for-businesses>https://www.papercall.io/speakers/146409/speaker_talks/292501-professional-3d-product-modeling-services-for-businesses</a> 1×slots регистрация на 1хслотс <a href=https://www.cro-escort.com/member.php?119167-Ralphcrabe>https://www.cro-escort.com/member.php?119167-Ralphcrabe</a> Большинство интернет-казино из нашего топ-10 готовы повеселить вас эксклюзивными акциями. Читайте о их в обзорах и на форуме.Получив свой подарок, Вы можете бесплатно играть на настоящие деньги, а выполнив обстоятельства отыгрыша, вывести собственный выигрыш.
1×slots зеркало которую указывали при регистрации кстати
1хслот официальный сайт зеркало Прежде чем активировать бездеп, необходимо убедиться никаких, собственно государство, уроженцем которой считается игрок, не заходит в перечень запрещенных. <a href=http://www.searchdomainhere.com/%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D1%8B-%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA%D0%B0_298727.html>http://www.searchdomainhere.com/%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D1%8B-%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA%D0%B0_298727.html</a> 1×slots подтвердит вашу регистрацию если говорить Для всех бездепозитных бонусов функционирует максимальный лимит на выигрыш. Он указывает максимальную сумму, которую вас получить, играя на бонусные кредиты. Как лишь вас получится выполнить притязания вейджера, возможный максимум несомненно переведен с бонусного счета на ведущей, а остаток несомненно списан.
1хслот зеркало
Верификация аккаунта. Лучше доказать личность незамедлительно после регистрации, дабы потом не было заморочек с выводом денег. Верификация возможность протекать двумя путями: Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.Вообще перейдя в казино — управляла одинаковы в получении бездепозитных призов, в стандартные правила входит: доказать эл. Почту и телефон, заполнить свой индивидуальный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ. <a href=https://knoxfgfd72838.blog-gold.com/36198200/discovering-the-frontier-of-ai-driven-facial-area-swap-movies-a-deep-dive-into-deepnude>https://knoxfgfd72838.blog-gold.com/36198200/discovering-the-frontier-of-ai-driven-facial-area-swap-movies-a-deep-dive-into-deepnude</a> При подмоги такого поощрения оператор имеет кроме привлекать клиентов, которые ранее проявляли активность на сайте, хотя по некий причине прекратили выступать. В данном случае промокод высылается юзеру по электрической почте либо в виде SMS.Возможность сыграть вспомогательное состязание (а от и некоторое) абсолютно безвозмездно, а выигрыш, тому, поступает на счёт игрока. 1×slots быструю регистрацию а также мгновенное Прочитайте управляла бонусной программки, какой желайте участие. Да, мы безотступно советуем сделать это до регистрации.
casino 1×slot
Для доказательства электронной почты, просто перейдите по активной ссылке в послании, полученном от игрового заведения. Если вы новичок в и только попали в неизведанную вами район азарта — за предложений как бездепозитные призы без пополнения. Как лишь на виртуальном счету окажутся бонусные свои, поторопитесь отыграть вейджер. Сразу в этого можно оставить заявку на вывод выигрыша. Кредиты выгодно выделяются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом реальных средств и выделяют вероятность почувствовать задор. Во-вторых – возможно насладиться каждой азартной игрой доступной на веб-сайте. В вашем постановлении присутствуют автоматы, настольные прибавленье, видео-покер, Live-дилеры. 1хслотс официальный сайт зеркало <a href=http://www.carshowsociety.com/forum.php?action=profile;u=11400>http://www.carshowsociety.com/forum.php?action=profile;u=11400</a> Перед активацией принципиально внимательно выучить условия акции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют значение также лимиты ставок при отыгрыше и сроки, протяжении которых возможно пользоваться предложением. Если бездеп охватывает узкий список игр, рекомендуется разузнать наибольшие коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят лишь том, случае, случае оператор не установил строгие лимитирования на максимальную необходимую ставки.
1×slot официальный сайт
<a href=http://ukrisa.pl/./member.php?action=profile&uid=5067>http://ukrisa.pl/./member.php?action=profile&uid=5067</a> Не желаете поиграть в азартные забавы, не рискуя своими средствами, хотя получая в все выплаты? Подобную возможность деют почти наилучшие порталы с азартными веселиями. В их числе количество правдивых и надежных интернет-казино на российском языке. Они привлекают свежих пользователей различными поощрительными мероприятиями, включая бездепозитные, или безвозмездные бонусы.Для получения бездепа нужно пригласить в забаву по реферальной ссылке нового посетителя: он обязан зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на сумму, указанную в условиях акции. 1хлот регистрация в 1×slots casino Бoльшинcтвo азартных заведений выдвигают приблизительно однообразные, схожие условия и требования, коие нужно выполнить, чтобы получить бездепозитный приз за регистрацию. Все их возможно объединить в один перечень:
<b>Смотреть еще похожие новости:</b>
<a href=https://edidaktikum.ee/en/content/iii-kontakttund-08-juuni?page=93#comment-298008>1×slots регистрация на сайте 1×slots ru com</a>
<a href=http://mi.minfish.com/home.php?mod=space&uid=1196847>1× slots зеркало</a>
<a href=http://pravoslit.ru/forum/obshchee/181728-kazino-1×slots-ofitsialnyj-sajt.html>казино 1×slots официальный сайт</a>
<a href=https://swordmaster.org/user/JamesVok/>1×slots регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если вы новичок в этом деле и лишь попали в неизведанную вами область пыла — счет услуг как бездепозитные бонусы без пополнения.
#1233 Charlesgunnyhttp://filmkachat.ru
1×slots casino зеркало
Осталось выбрать казино с призом за регистрацию и сделать профиль. После активации подарка выигрыш зависит от Фортуны и способностей.Вы наверняка, как и все любите получать презенты и бездепозитные призы казино. Игорные дома взяли в привычку одаривать гэмблеров приятными бонусами. Стать обладателем приветственного подарка можно за создание профиля либо пополнение счёта. Второй вариант более занимательный, так клубы готовы удвоить депозит! Но в вы новичок и только знакомитесь с миром пыла, какого-либо воспользуйтесь бонусом за регистрацию. <a href=http://filmkachat.ru/>1×slots регистрацию процедура займет всего лишь</a> Иногда в бездепа, казино дарует минимальный бонус (до 50 руб. ), ради которого не заморачиваться. <a href=https://click4r.com/posts/g/16359634/the-rise-of-duracell-a-powerhouse-in-battery-manufacturing>https://click4r.com/posts/g/16359634/the-rise-of-duracell-a-powerhouse-in-battery-manufacturing</a> Помните, что в неких забавах сумма ставки идет в зачет вейджера только отчасти. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки считаются как отыгранные средства, тот как в слотах идет в зачет все 100% суммы.Как только вы отыграли вейджер и свои с бонусного баланса перебежали вас на реальный счет, Вы отважно сможете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (устроить наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депо). казино 1×slots официальный сайт <a href=http://uoup.net/space-uid-496649.html>http://uoup.net/space-uid-496649.html</a>
1×slots официальный сайт мобильная версия
Многие азартные клубы ограничивают необходимую вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, обозначенной в описании акции, суммы Вы не можете вывести. Разница несомненно аннулирована, Вы даже не сможете делать на нее ставки. 1×slots casino регистрация Как лишь вы отыграли вейджер и средства с бонусного баланса перешли вас на реальный счет, Вы смело сможете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (устроить наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депозитом). <a href=http://webhome123.com/plus/view.php?aid=25863>http://webhome123.com/plus/view.php?aid=25863</a> Бонус в казино без депозита имеет различные вариации: может быть приветственный бонус, промоакции в честь каких-либо праздничных или главных дат, приз за вербование новых игроков, лояльность и получение VIP-статуса.Размер приза. В качестве бездепов обыкновенно начисляют большие суммы, а когда идет о бонусах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино все подарить игроку до 2000$. 1хслотс 1хслотс регистрация перейти на 1×slots Если вы опытный игрок, вы обязаны аристократия, собственно бонус без депозита – редкая находка. Тем не, мы еженедельно изучаем интернет, дабы найти для вас наилучшие бездепозитные предложения.
1хслот зеркало
В игровых клубах без лицензии Вы покупаете „кота в мешке“ и в случае спорных обстановок нет способности куда-то посетовать и доказать свою правоту.Как лишь получите бездеп в казино, всё точно не запамятовывайте проверять электрическую почту. Некоторые игорные клубы постоянно веселят активных гэмблеров приятными призами. Чаще всего получить презент можно в преддверии веселья, на денек рождение, за вербование приятеля. А также распространённым призом является прибавка к депозиту. Нужно чем пополнить счёт, и азартное заведение увеличит его на 50–100%. <a href=https://heyjinni.com/read-blog/177753>https://heyjinni.com/read-blog/177753</a> Каждый геймер должен сначала детально выучить обстоятельства по получению и отыгрышу приглянувшегося подарка. Если всё организует, поспешите забрать бесплатные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо данный начать вращать барабаны топовых слотов.Только выполнив все условия отыгрыша и дождавшись завершения проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить средства деньги. 1×слотс казино
1×slots зеркало видели такую регистрацию на
1 x slots casino <a href=http://younghwacarbon.com/bbs/board.php?bo_table=free&wr_id=9475>http://younghwacarbon.com/bbs/board.php?bo_table=free&wr_id=9475</a> Доступ к дару может раскрываться механически в введения промокода либо обращения в саппорта вебсайта. В первом случае от юзера не потребуется никаких действий. Бездеп с активацией по коду встречается почаще всего. Игроку необходимо ввести совокупа знаков в графе, кот-ая может пребывать в регистрационной форме в Личном кабинете.В онлайне слишком много скриптовых сайтов, коие принадлежат жуликам. Их основная цель – привлечь гэмблеров, пообещав не только щедрые подарки, но и солидные выигрыши. Так что некоторые веб-сайты предлагают получить за регистрацию числе $1 000.
1хлот регистрация в 1×slots casino
Такой безвозмездный эквивалент средств зачисляется на профиль пользователя в осуществления притязаний и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений возможен лишь в воплощения вейджеровых критерий.Каждая игровая платформа выделяется условиями по получению и отыгрышу бездепов. В правилах отчетливо расписаны временные рамки, за коие нужно прокрутить вейджер. Также не запамятовывайте про наибольший размер ставки и наивысшую сумму выплаты. С другой стороны, дабы получить бездепозитные бонусы казино, довольно потратить не более 1 минуты. <a href=https://progromatic.online/forum/member.php?action=profile&uid=888>https://progromatic.online/forum/member.php?action=profile&uid=888</a> 1×slots зеркало на сегодня Если при регистрации указать промокод, возможно гарантировано получить бонус. Где арестовать ваучер? Посетите определенную блоги либо форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В заключительное время игорные жилища начали афишироваться в кинокартинах и телесериалах. Присмотритесь и скорее заметите промокод, который принесёт 500 или 1 000 бонусных руб.Помните, что в некоторых играх сумма ставки идет в зачет вейджера лишь отчасти. Так, в настольных и карточных забавах только от 5% до 50% суммы ставки считаются как отыгранные деньги, в то время как в слотах идет в зачет все one hundred percent суммы.
<b>Смотреть еще похожие новости:</b>
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=10265>зеркала 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Когда идет о получении бездепозитных призов в казино, для направьте на последующие обстоятельства: Наши эксперты изучают условия акции, этого в ручном режиме проверку их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие характеристики. Мы не рекламируем казино, а даем игрокам информацию о превосходнейших из них.
#1234 ремонт техники в мскhttps://profi-teh-remont.ru/
Профессиональный сервисный центр по ремонту бытовой техники с выездом на дом. Мы предлагаем:<a href=https://profi-teh-remont.ru/>сервисные центры по ремонту техники в мск</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#1235 Ремонт Айфоновhttps://remont-iphone-box.ru/
Профессиональный сервисный центр по ремонту Apple iPhone в Москве. Мы предлагаем: <a href=https://remont-iphone-box.ru/>ремонт iphone вызвать мастера</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#1236 Charlesgunnyhttp://filmkachat.ru
1 х слотс зеркало
Верификация аккаунта. Лучше доказать лицо сразу в регистрации, чтобы потом не было проблем с выводом денег. Верификация имеет проходить двумя маршрутами: <a href=http://filmkachat.ru/>1×slots акции</a> <a href=https://www.smartmoneymatch.com/job/3d-artist/968>https://www.smartmoneymatch.com/job/3d-artist/968</a> казино 1×slots <a href=https://demo5651.asly.nl/index.php/author/rainyrhythm44/>https://demo5651.asly.nl/index.php/author/rainyrhythm44/</a>
1×slots casino регистрация
1хслотс официальный сайт зеркало <a href=http://getamped.yxhi.com/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0%20%D0%B4%D0%B7%D0%B5%D0%BD>http://getamped.yxhi.com/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0%20%D0%B4%D0%B7%D0%B5%D0%BD</a> Автоматы неспроста числятся самым популярным азартным весельем. Чтобы освоить управление и правила, потребуется всего количество минут. Ваша задача сделать ставку, определить число трудящихся линий и возможно вертеть тамбур. Если на экране выпадет выигрышная композиция – вы выиграли! С этой задачей вам посодействуют управится бездепозитные призы казино. 1×slots скачать на айфон Срок активации и время на отыгрыш. Зачисление денег либо фриспинов происходит при активации протяжении требовательно ограниченного периода, похожие требования предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать бонус количество дней или и месяцов. Другие выдают крупную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером.С такими ординарными советами каждое казино с призом за регистрацию способно принести в разы больше выгоды и выгоды.
1× slots регистрация в 1×slots casino
Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских руб. В условиях промоакции предписано, что вейджер бездепозитного бонуса х20. Поэтому, чтобы отыграть приз, игроку несомненно нужно сделать ставок на 35*20=700 руб. В онлайне слишком количество скриптовых вебсайтов, коие принадлежат плутам. Их главная цель – заинтересовать гэмблеров, пообещав не великодушные презенты, но и крупные выигрыши. Так что некоторые веб-сайты предлагают получить за регистрацию даже $1 000.В бонусную программку многих операторов входят систематические бездепы. Это бессрочные промоакции, поощряющие интенсивных постоянных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают постоянные призы без депо в обмен на скопленные баллы преданности. <a href=http://tehnoprom-nsk.ru/user/DoctorLazutaMr/>http://tehnoprom-nsk.ru/user/DoctorLazutaMr/</a> Но есть игорные заведения, которые готовы просто так жертвовать деньги на игру. Для этого довольно создать профиль. Чтобы вывести свой выигрыш, вам сначала необходимо выполнить условия отыгрыша, указанные в условиях получения бездепозитного депозита. 1×slots зеркало 1хслотс регистрация перейти на 1×slots А ознакомиться с свежими онлайн казино, Вы сможете за счет бонусов с выводом выгоды, коие Вы можете получить без депо.
1×slots официальный зеркало
Когда идет о денежных призах, казино постоянно устанавливают условия вейджера, коие нужно выполнить, дабы исключить выигрыш.Активация валютного гонорары происходит автоматически последствии творенья профиля или использования промокода. Иногда операторы предъявляют вспомогательные притязания: подписаться на страницы казино в соц сетях или на рассылку рекламных извещений, скачать и установить вспомогательный софт и т.д. Возможность сыграть дополнительное соревнование (а иногда и несколько) абсолютно бесплатно, а выигрыш, в свою очередь, поступает на счёт игрока. Многие азартные клубы ограничивают необходимую вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, обозначенной в описании акции, суммы Вы не можете вывести. Разница несомненно аннулирована, Вы даже не сможете делать на нее ставки. 1×slots casino регистрация 1×slotscasino09k online <a href=https://ekvall.co/member.php?action=profile&uid=41667>https://ekvall.co/member.php?action=profile&uid=41667</a> B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.
1хслотс рабочее зеркало
Важно, удостоверьтесь том,, что раньше не регистрировались в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи.Помните, что в некоторых играх сумма ставки идет в зачет вейджера только отчасти. Так, в настольных и карточных забавах только от 5% до 50% суммы ставки числятся как отыгранные деньги, тот как в слотах идет в зачет все one hundred percent суммы. Если вы выбираете проверенное лицензионное онлайн казино и выполните все обстоятельства получения бездепозитного бонуса, проблем с получением презента у Вас не возникнет.Маркетинговая деятеля всех игорных интернет-клубов обязана носить разнообразный нрав. И случае вознаграждения на депо служат чтобы, чтобы, чтобы провоцировать вносить депозиты и поощрять уже существующих юзеров, то бездепозитный бонус в казино либо бонус за регистрацию в казино, до всего, рассчитан на расширение базы потребителей. <a href=https://autolocksmithlocal.co.uk/forum/profile/TETGuadalu>https://autolocksmithlocal.co.uk/forum/profile/TETGuadalu</a> Отказ в прохождении верификации. Если заказчик не желает или не может дать документы, подтверждающие его личность, профиль несомненно заблокирован совместно, вкупе со всеми бонусными начислениями.В игровых клубах без лицензии Вы покупаете „кота в мешке“ и в случае спорных ситуаций нет возможности куда-то посетовать и обосновать свою правоту. x1 slots регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=181080>1хслотс рабочее зеркало</a>
<a href=https://games-garant.ru/index.php?subaction=userinfo&user=Jamesneorm>1х слот регистрация в 1×slots casino</a>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5312/#comment-645969>1×slots casino регистрация 1×slots review live</a>
<a href=https://forum-pravo.com.ua/showthread.php?p=24152#post24152>1×slots зеркало рабочее на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На нашем веб-сайте Вы найдете список своевременных свежих бездепозитных призов в казино 2022 года. Также, есть большое эксклюзивных предложений, которые доступны лишь посетителям нашего вебсайта после регистрации по нашей ссылке или активации особого промокода.
#1237 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать 1×bet на андроид бесплатно 1×bet сейчас <a href=https://th-royalgclub.com/>1×bet на андроид</a> 7k casino сайт порно с Дарья Касаткина (теннис) <a href=https://res-publika.com>часы казино</a> pin up casino пин зеркала официальных сайтов казино 1×bet скачать бесплатно 1×bet скачать приложение на андроид pin up casino скачать 7k casino зеркало на сегодня бесплатно играем казино
DiskiPlus официальные букмекерские конторы скачать DiskiPlus porno Александр Соболев (футбол) <a href=https://diskiplus.ru/>DiskiPlus porno Илья Ковальчук (хоккей)</a> DiskiPlus яндекс казино DiskiPlus 1×bet официальный слоты <a href=https://diskiplus.ru/>DiskiPlus 7k casino сайт</a> DiskiPlus kent casino регистрация DiskiPlus porno Виктория Баркова, легкоатлетка DiskiPlus 1×bet официальный слоты DiskiPlus Любимова Ольга Борисовна порно DiskiPlus карты казино DiskiPlus порно с Анна Щербакова, фигуристка DiskiPlus пин ап casino pin
#1238 Williamexambhttps://duwhite.ru
Выше всех, выше, масштабнее: на этой неделе мы представляем вам обзор новейших рекордных проектов и начинаний по всему миру. Самый наивысший мост в мире откроется в месяце июня в китайской провинции Гуйчжоу, горным регионе, где уже находится почти большая часть 100 самых высоких мостов мира. Мост через Гранд-Каньон Хуацзян возвышается на 2051 футов над уровнем реки, что на по крайней мере 900 футов выше французского виадука Мийо, нынешнего обладателя титула моста. Китай заявляет, что его новый мост сократит путешествия по каньону с двух часов до одной минуты, что поможет <a href=https://duwhite.ru/mdma-kokain-mefedron-v-lipetske.html>купить гашиш Липецк</a> сингапурский бар LeVel33 в прошлом месяце был назван самой величайшей в мире мини-пивоварней внутри здания. Оборудование для пивоварения, включая 12 танков, два медных варочных котла и охладительную машину, пришлось поднять на высоту 33 этажа башни Marina Bay Financial Centre с помощью крана, но для гостей потрясающий вид на горизонт Сингапура того стоит. Еще более удивительный новый рекордсмен Гиннесса находится на островах Филиппин: самое крупнейшее здание в форме курицы. Это также отель, что вполне подойдет, если вам нравятся абсолютно кондиционированные птичьи скульптуры высотой 114 фута, но вас не так уж и беспокоят все стеклянные поверхности. Самый гигантский круизный лайнер Disney отправится в свой первый рейс в конце этого года. Большинству американцев придется совершить долгий поездку на самолете, чтобы посетить Disney Adventure на 6000 туристов, который станет первым судном круизной компании в порту приписки в Азии. От крупного до малого, самый маленький парк в мире был признан Книгой рекордов Гиннесса. состоящий в японском городе Нагаизуми, примерно в 68 милях к юго-западу от Токио, парк занимает площадь всего менее 3 квадратных фута и состоит из миниатюрного табурета и небольшого участка зелени.
#1239 Dannysizhttps://zhinka.in.ua
Блог для женщин <a href=https://zhinka.in.ua/>https://zhinka.in.ua</a> Жінка – о моде, здоровье, семье, психологии
#1240 MichelUnduphttps://artholder.site
После нескольких дней и 257 пиков НФЛ 2025 года завершился. Все 32 франшизы должны почувствовать, что они улучшились, хотя некоторые из них должны чувствовать себя лучше других. Никогда не стоит оценивать о перспективах до того, как они появятся на поле НФЛ, и мы не будем здесь предсказывать, как покажут себя новые игроки лиги. Это даст шанс им им <a href=https://artholder.site/magnitorsk-kupit-pvp-amfetamin-kokain-mefedron.html>купить меф</a> и не только. Однако совершенно справедливо анализировать, как команды провели мероприятие, удовлетворили потребности, максимизировали ценность (или нет) и сопоставили подход к драфту с долгосрочными планами команды. Все верно: пришло время для оценок рейтинг после драфта для каждой клуба. Ниже вы найдете обзор каждого выбора из каждой команды НФЛ с анализом класса на основе вышеупомянутых факторов, ожидаемого соответствия команде и любых соответствующих обменов. Поскольку ценность личная, мы использовали окончательные рейтинг перспектив 2025 года отдела скаутинга анализа в качестве ориентира. Франшизы перечислены в порядке алфавита.
#1241 OOOdis_bloldhttps://ooodis.ru/
Добрый день! Друзья мои и коллеги мои эта новость для вас! Всем известно, что короткое и непродолжительное лето в Красноярске. Вдобавок ко всему свойства грунтов везде разные и имеют свои физические и специфические особенности, т.е. происходит смещение и движение грунтов. Поэтому, очень важно, что бы благоустройством территории занимались ответственные и профессиональные исполнители, а материал для строительных работ должен быть прочным и качественным. В общем, если вы хотите найти, брусчатка, благоустройство территории, бордюр, поребрик и т.д., например: <a href=https://ooodis.ru/>поребрик для тротуарной плитки</a> Тогда вам срочно нужно прямо сейчас перейти на сайт ООО ДИС Благоустройство территории и узнать все подробности по материалы для ландшафтного дизайна, мощение, асфальтирование, тротуарная плитка, бордюрная лента, георешетка, газонная решетка, искусственный газон, геотекстиль в Красноярске и т.д. https://ooodis.ru/ . Обязательно переходите на сайт ooodis.ru Благоустройство территории, брусчатка, бордюр, поребрик изучайте информацию и сохраняйте в закладки, не забудьте записать адрес сайта и номер телефона +7 (391) 284–94–41. Всем пока!
#1242 Dom-snaruzhi_dubhttps://xn----8sbkkkuifwhz.xn--p1ai/
Доброго времени суток! Хочу поделиться со своими друзьями, коллегами и знакомыми хорошей и полезной новостью! А именно с владельцами домов, коттеджей и дач. Всем известно, что соблюдение и качество технологий продлевает эксплуатационные свойства и характеристики фасада и кровли. А это уже дорогие мои ваши деньги и нервы. У кого есть желание сталкиваться с браком и бессмысленными переделками своего жилища? Правильно не у кого! В общем, если вы ищите, монтаж сайдинга, монтаж кровли, монтаж металлочерепицы и т.д., например: <a href=https://xn----8sbkkkuifwhz.xn–p1ai/>обшивка дома сайдингом цена</a> Тогда вам обязательно нужно прямо сейчас перейти на сайт Тюнинг домов и узнать все подробности по монтаж кровли под ключ, монтаж сайдинга под ключ, монтаж крыши, кровельные работы, обшивка дома сайдингом, монтаж фасадных панелей, монтаж гибкой черепицы в Одинцовском районе, Можайском, Рузском и Наро-Фоминском округах, и т.д. https://дом-снаружи.рф/ , https://xn----8sbkkkuifwhz.xn--p1ai/ . Обязательно переходите на сайт дом-снаружи.рф Тюнинг домов сохраняйте в закладки и изучайте информацию, не забудьте записать адрес сайта и номера телефонов +7(495)792–85–95, +7(903)792–85–95. Увидимся!
#1243 Ремонт iPhone в Москвеhttps://remont-iphone-box.ru/
Профессиональный сервисный центр по ремонту Apple iPhone в Москве. Мы предлагаем: <a href=https://remont-iphone-box.ru/>ремонт iphone на дому в москве</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#1244 skladi_ifsthttp://hranimveshi-msk24.ru
хранение вещей в боксах в московской области <a href=https://hranimveshi-msk24.ru/>хранение вещей в боксах в московской области</a> .
#1245 OOOdis_bloldhttps://ooodis.ru/
Добрый день! Друзья мои и коллеги мои эта новость для вас!
Всем известно, что непродолжительное и короткое лето в Красноярске. Вдобавок ко всему свойства грунтов везде разные и имеют свои специфические и физические особенности, т.е. происходит движение и смещение грунтов. Поэтому, очень важно, что бы благоустройством территории занимались ответственные и профессиональные исполнители, а материал для строительных работ должен быть качественным и прочным. В общем, если вам интересно найти, поребрик, благоустройство территории, брусчатка, бордюр и т.д., например: <a href=https://ooodis.ru/>пластиковый бордюр для садовых дорожек купить</a> Тогда вам нужно прямо сейчас перейти на сайт ООО ДИС Благоустройство территории и узнать все подробности по искусственный газон, материалы для ландшафтного дизайна, мощение, асфальтирование, тротуарная плитка, бордюрная лента, георешетка, газонная решетка, геотекстиль в Красноярске и т.д. https://ooodis.ru/ . Обязательно переходите на сайт ooodis.ru Благоустройство территории, брусчатка, бордюр, поребрик сохраняйте в закладки и изучайте информацию, не забудьте записать номер телефона +7 (391) 284–94–41 и адрес сайта. Увидимся!
#1246 DavidUnduphttps://carbigo.online
Выше, выше, крупнее: на этой неделе мы представляем публике обзор совсем новых рекордных проектов и начинаний по всему миру. Самый величайший мост в мире откроется в месяце июня в китайской провинции Гуйчжоу, гористом регионе, где уже находится почти большая часть 100 самых высоких мостов мира. Мост через Гранд-Каньон Хуацзян возвышается на 2051 фут над уровнем реки, что на 947 футов выше французского виадука Мийо, нынешнего обладателя титула моста. Китай заявляет, что его новый мост сократит путешествия по каньону с двух часов до одной минуты, что поможет <a href=https://carbigo.online/rzhev-kupit-mdma-gashish.html>купить героин</a> сингапурский бар LeVel33 в прошлом месяце был назван самой наивысшей в мире мини-пивоварней внутри здания. Оборудование для пивоварения, включая 12 танков, два медных варочных котла и охладительную машину, пришлось поднять на 33-й этаж башни Marina Bay Financial Centre с помощью крана, но для гостей потрясающий панорама на горизонт Сингапура того стоит. Еще более экстраординарный новый рекордсмен Гиннесса находится на Филиппинах: самое крупнейшее здание в форме курицы. Это также гостиница, что вполне подойдет, если вам нравятся абсолютно кондиционированные птичьи скульптуры высотой 114 фута, но вас не так уж и беспокоят окна. Самый гигантский круизный лайнер Disney отправится в свой первый рейс в конце этого года. Большинству американцев придется совершить долгий поездку на самолете, чтобы посетить Disney Adventure на 6000 туристов, который станет первым судном круизной компании в порту приписки в Азии. От большого до малого, самый маленький парк в мире был признан Книгой рекордов Гиннесса. находящийся в японском городе Нагаизуми, примерно в 68 милях к юго-западу от Токио, парк занимает площадь всего менее 3 квадратных фута и состоит из миниатюрного табурета и небольшого участка зелени.
#1247 Dom-snaruzhi_dubhttps://xn----8sbkkkuifwhz.xn--p1ai/
Всем привет! Хочу поделиться со своими знакомыми, друзьями и коллегами полезной и хорошей новостью! А именно с владельцами домов, коттеджей и дач. Всем известно, что качество и соблюдение технологий продлевает эксплуатационные свойства и характеристики фасада и кровли. А это уже дорогие мои ваши деньги и нервы. У кого есть желание сталкиваться с браком и бессмысленными переделками своего жилища? Правильно не у кого! В общем, если вам интересно найти, , монтаж металлочерепицы, монтаж кровли, монтаж сайдинга и т.д., например: <a href=https://xn----8sbkkkuifwhz.xn–p1ai/>монтаж водосточной системы</a> Тогда вам нужно прямо сейчас перейти на сайт Тюнинг домов и узнать все подробности по монтаж сайдинга под ключ, монтаж кровли под ключ, монтаж крыши, кровельные работы, обшивка дома сайдингом, монтаж фасадных панелей, монтаж гибкой черепицы в Одинцовском районе, Можайском, Рузском и Наро-Фоминском округах, и т.д. https://дом-снаружи.рф/ , https://xn----8sbkkkuifwhz.xn--p1ai/ . Обязательно переходите на сайт дом-снаружи.рф Тюнинг домов сохраняйте в закладки и изучайте информацию, не забудьте записать адрес сайта и номера телефонов +7(495)792–85–95, +7(903)792–85–95. Всем пока!
#1248 CtgroupAlmaty_wemhttps://www.ctgroup.kz/
Доброго времени суток! Недавно пришло понимание и осознание, что владение языками это не только полезная и отличная возможность посетить страну носителя языка, но и удержаться на рабочем месте, как перспективного сотрудника и профессионала. Всем известно, что руководство и начальники практически любой компании или организации, скорей всего сохранят вакансию для сотрудника, который владеет или изучает иностранный язык. Если вам дорога ваша работа, если вы хотите сохранить уровень своей заработной платы и избежать сокращения, тогда вам обязательно нужно посетить языковый образовательный центр. Что бы сократить ваши блуждания по интернету и многочисленные изучения и выбор, рекомендую отличный и профессиональный языковый и образовательный центр. В общем, если вы хотите найти, общий курс английского языка, General English, образовательный языковой центр в Алматы и Атырау, подготовка к IELTS в Алматы и Атырау, курсы IELTS, онлайн подготовка к IELTS в Казахстане, курсы казахского языка, английский для академических целей, English for Academic Purposes, академический английский, EAP, онлайн курсы английского языка, например: <a href=https://www.ctgroup.kz/>репетитор для подготовки к академическому английскому</a> Тогда вам обязательно нужно прямо сейчас перейти на сайт www.ctgroup.kz и выбрать онлайн подготовка к IELTS в Казахстане, образовательный языковой центр в Алматы и Атырау, подготовка к IELTS в Алматы и Атырау, курсы IELTS, курсы казахского языка, английский для академических целей, English for Academic Purposes, академический английский, EAP, общий курс английского языка, General English, онлайн курсы английского языка https://www.ctgroup.kz/ . Если вы еще не посещали сайт и не были на сайте, тогда, что вы не решаетесь и медлите, смело переходите и записывайте номер телефона +7 775 0301919 и адрес сайта. До новых встреч!
#1249 Sazrpthhttp://[url=http://diplom-onlinex.com/kupit-diplom-o-visshem-obrazovanii-v-reestre-s-registratsiej/]
Заказать диплом ВУЗа по доступной цене возможно, обратившись к проверенной специализированной компании. Мы оказываем услуги по продаже документов об окончании любых ВУЗов Российской Федерации. Купить диплом о высшем образовании– <a href=http://diplom-onlinex.com/kupit-diplom-o-visshem-obrazovanii-v-reestre-s-registratsiej/>diplom-onlinex.com/kupit-diplom-o-visshem-obrazovanii-v-reestre-s-registratsiej/</a>
#1250 Victorcoini
Ищете кухню со скидкой? Прямые поставки от производителя с гарантией 2 года, подробнее здесь <a href=https://www.mixcloud.com/KuhniVDom/>https://www.mixcloud.com/KuhniVDom/</a>
#1251 ThomasKiz
Удобный выбор оборудования для маркировки, узнайте тут <a href=https://labelaire.gumroad.com/l/labelaire/>https://labelaire.gumroad.com/l/labelaire/</a>
#1252 DanielRor
Качественное оборудование для маркировки и автоматизации, подробнее тут <a href=https://www.thuum.org/viewnews.php?page=3&thread=225&newpost=true#2635>https://www.thuum.org/viewnews.php?page=3&thread=225&newpost=true#2635</a>
#1253 RonaldZon
Полный цикл разработки с гарантированным SLA – условия сотрудничества здесь <a href=http://prsync.com/wrp-agency/>http://prsync.com/wrp-agency/</a>
#1254 Robertreoxy
Разработчики функциональных веб-проектов – смотрите портфолио здесь <a href=https://start.me/p/19ve6j>https://start.me/p/19ve6j</a>
#1255 CtgroupAlmaty_wemhttps://www.ctgroup.kz/
Доброго времени суток! Недавно пришло осознание и понимание, что владение языками это не только полезная и отличная возможность посетить страну носителя языка, но и удержаться на рабочем месте, как перспективного сотрудника и профессионала. Всем известно, что начальники и руководство практически любой организации или компании, скорей всего сохранят вакансию для сотрудника, который владеет или изучает иностранный язык. Если вам дорога ваша работа, если вы хотите сохранить уровень своей заработной платы и избежать сокращения, тогда вам обязательно нужно посетить языковый образовательный центр. Что бы сократить ваши блуждания по интернету и многочисленные изучения и выбор, рекомендую отличный и профессиональный языковый и образовательный центр. В общем, если вы хотите найти, подготовка к IELTS в Алматы и Атырау, курсы IELTS, образовательный языковой центр в Алматы и Атырау, онлайн подготовка к IELTS в Казахстане, курсы казахского языка, английский для академических целей, English for Academic Purposes, академический английский, EAP, общий курс английского языка, General English, онлайн курсы английского языка, например: <a href=https://www.ctgroup.kz/general-english/>курсы по английскому алматы</a> Тогда вам обязательно нужно прямо сейчас перейти на сайт www.ctgroup.kz и выбрать онлайн подготовка к IELTS в Казахстане, образовательный языковой центр в Алматы и Атырау, подготовка к IELTS в Алматы и Атырау, курсы IELTS, курсы казахского языка, английский для академических целей, English for Academic Purposes, академический английский, EAP, общий курс английского языка, General English, онлайн курсы английского языка https://www.ctgroup.kz/ . Если вы еще не посещали сайт и не были на сайте, тогда, что вы медлите и не решаетесь, смело переходите и записывайте номер телефона +7 775 0301919 и адрес сайта. До новых встреч!
#1256 CharlesTof
Надежный поставщик оборудования для маркировки, узнайте больше тут <a href=https://www.speedrun.com/ru-RU/users/Labelaire/>https://www.speedrun.com/ru-RU/users/Labelaire/</a>
#1257 Michaelphora
Быстрое решение вопросов с разрешительной документацией, детали здесь <a href=https://www.mymeetbook.com/LicenzPro/>https://www.mymeetbook.com/LicenzPro/</a>
#1258 Williamplamn
Лицензирование бизнеса «под ключ» за 14 дней, подробнее по ссылке <a href=https://www.anobii.com/en/0129dc6f6b6eb8f850/profile/activity/>https://www.anobii.com/en/0129dc6f6b6eb8f850/profile/activity/</a>
#1259 ZacharySkaks
Полный комплекс услуг по лицензированию с гарантией, детали по ссылке <a href=https://anotepad.com/@LicenzPro/>https://anotepad.com/@LicenzPro/</a>
#1260 Robertspulk
Быстрое решение вопросов лицензирования с гарантией, читать далее <a href=https://www.buzzbii.com/licenzpro/>https://www.buzzbii.com/licenzpro/</a>
#1261 JefferyVaw
Получите лицензию всего за 14 дней с полной гарантией, подробнее здесь <a href=https://say.la/licenzpro/>https://say.la/licenzpro/</a>
#1262 Larryerolehttps://play.eslgaming.com/player/20596125/
Экспертная юридическая консультация доступна здесь <a href=https://play.eslgaming.com/player/20596125/>https://play.eslgaming.com/player/20596125/
#1263 KorporativnoyeObucheniyeAlmaty_idelohttps://xn----7sbecpcasfm0beeaecirc5b3a2g.kz/
Доброго времени суток! Дорогие мои друзья и коллеги хочу поделиться этой обычной и в тоже время не обычной новостью с вами! Как говорится, век живи и век учись, прошу прощения, и неучем помрешь. Здесь и сейчас самое главное, и полезное это совершенство и развитие себя как человека и профессионала. А фишка в том, что корпоративная культура и обучение это как домкрат для каждого сотрудника компании, в достижение новых высот в личном совершенствовании и профессии. В общем, если вы ищите, корпоративное обучение английскому языку, корпоративное обучение в Казахстане, корпоративные бизнес тренинги и бизнес курсы в Казахстане, эффективная организация корпоративного обучения в Казахстане, тренинговые компании: рейтинг лучших для бизнеса и т.д., например: <a href=https://xn----7sbecpcasfm0beeaecirc5b3a2g.kz/trainings>бизнес тренинги</a> Тогда вам срочно нужно прямо сейчас перейти на сайт CtGroup и узнать все подробности по корпоративное обучение в Казахстане, корпоративные бизнес тренинги и бизнес курсы в Казахстане, корпоративное обучение английскому языку, эффективная организация корпоративного обучения в Казахстане, тренинговые компании: рейтинг лучших для бизнеса и т.д. https://корпоративное-обучение.kz/ . Удивительно и познавательно знать современный и интересный английский язык, оказывается, что название https://xn----7sbecpcasfm0beeaecirc5b3a2g.kz/ соответствует общепринятому названию https://корпоративное-обучение.kz/ . Без сомнения и обязательно вам нужно пройти корпоративное обучение в Казахстане, в частности в городе Алматы, ул. А. Кекилбайулы, 270 блок 1, вот их телефон +7 777 179 66 00. Увидимся!
#1264 Larryerolehttps://www.ameba.jp/profile/general/smolaeliqua/?account_block_token=YmM0nRbGPq33vKoDqRFU93cP7xhQWy
Рекомендую для творчества – качественные эпоксидные смолы для креативных проектов доступны здесь <a href=https://www.ameba.jp/profile/general/smolaeliqua/?account_block_token=YmM0nRbGPq33vKoDqRFU93cP7×hQWykW/>https://www.ameba.jp/profile/general/smolaeliqua/?account_block_token=YmM0nRbGPq33vKoDqRFU93cP7×hQWykW/
#1265 Glennnok
Ищете качественные полимерные полы? Узнайте больше <a href=https://github.com/GrandPolymer/>https://github.com/GrandPolymer/</a>
#1266 Williamdog
Профессиональный подход к обслуживанию вентиляционных систем, подробнее тут <a href=https://wakelet.com/@CleaningDubai74080/>https://wakelet.com/@CleaningDubai74080/</a>
#1267 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino бонус gama casino <a href=https://strelochnik.com/>зеркала казино</a> как выиграть в казино Скоробогатова Ольга Николаевна порно <a href=https://rumafia.news/>приложения букмекерских контор на андроид</a> kometa casino casino сайты порно с Алексей Миранчук (футбол) порно с Владимир Минеев (ММА) casino зеркало сайта casino автомат пинап казино
DiskiPlus букмекерская контора официальный сайт скачать DiskiPlus порно с Диана Шнайдер (теннис) <a href=https://diskiplus.ru>DiskiPlus pin casino</a> DiskiPlus карты казино DiskiPlus лучшие онлайн казино <a href=https://diskiplus.ru/>DiskiPlus casino daddy</a> DiskiPlus человек казино DiskiPlus online casino официальный DiskiPlus слоты казино DiskiPlus Чулпан Хаматова DiskiPlus Скоробогатова Ольга Николаевна порно DiskiPlus порно с Голикова Татьяна Алексеевна DiskiPlus букмекерские контора ап
#1268 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet слоты 1×bet top букмекерские конторы в россии <a href=https://repost.news/>казино вулкан</a> казино регистрации 1×bet бесплатно <a href=https://vestnik-jurnal.com/>casino betting</a> букмекерские конторы бет порно с Евгений Малкин (хоккей) казино гта 5 официальные сайты казино казино фильм онлайн яндекс казино casino daddy
DiskiPlus 1×bet на андроид DiskiPlus inform@rucriminal.info <a href=https://www.diskiplus.ru>DiskiPlus казино пину</a> DiskiPlus Кузнецова Анна Юрьевна порно DiskiPlus casino скачать <a href=https://diskiplus.ru>DiskiPlus porno Мария Шарапова</a> DiskiPlus включи казино DiskiPlus автомат казино DiskiPlus 1×bet сейчас DiskiPlus порно с Алексей Миранчук (футбол) DiskiPlus порно с Евгения Медведева DiskiPlus букмекерские конторы без депозита DiskiPlus официальные букмекерские конторы скачать
#1269 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
Онлайн-казино кропотливо продумывают бонусные условия, коие нужно изучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша прочие лимитирования. <a href=http://filmkachat.ru/>1×slots официальный сайт, скачать</a> Зарегистрироваться в казино по особой ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефонного и электрическую почту). Для доказательства номера телефона нужно в личном профиле указать собственный номер и нажать кнопку „Подтвердить номер телефона“, дальше Вы получите sms-сообщение с кодом, кот-ый необходимо ввести в соответствующее фон. Для доказательства электрической почты, перейти по активной ссылке в письме от казино. <a href=https://techbehemoths.com/company/archicgi-archivizer-limited>https://techbehemoths.com/company/archicgi-archivizer-limited</a> Выбирайте лучшие безвозмездные призы за обзоров на Casinoz – и пусть вам сопутствует удача при отыгрыше бонусных кредитов!Иногда операторы настоятельно внесение малого депозита перед выводом для верификации платежного прибора. В некоторых казино этот депо также предстоит отыграть. 1×slots регистрация на 1хслотс <a href=https://www.exito-sports.com/bbs/board.php?bo_table=free&wr_id=185846>https://www.exito-sports.com/bbs/board.php?bo_table=free&wr_id=185846</a>
1×slots зеркало сайта
Акции, приуроченные к календарным праздникам, случаются рассчитаны как на всех пользователей, например и на категории: к, презент на 8 марта девушкам-игрокам или мужикам на 23 февраля.В интернет-сети постоянно возможно отыскать списки наиболее модных и обещанных поощрительных программ от популярных онлайн-казино. 1×slot казино зеркало B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. <a href=http://kxb4u.com/dream/home.php?mod=space&uid=47528>http://kxb4u.com/dream/home.php?mod=space&uid=47528</a> 1хслотс зеркало С этими простыми советами каждое казино с бонусом за регистрацию способно принести в разы больше выгоды и пользы.
1×slots зеркало на сегодня
Получить Бездепозитный приз в онлайн казино дело двух кликов. Другой момент, отыграть промо и соблюсти верховодила и обстоятельства отыгрыша. Под правилами подразумевается столько вагер, но и ограничения по наибольшей ставке. Мы разумеем, собственно в кино все ставят на зеро и выигрывают. Призываем не делать сходственного. Перед активацией бонуса прочитайте верховодила. Узнайте следующие факторы: Условия получения дара, за регистрацию, за депозит и прочее. Ограничения по максимальной ставке. Зачастую не выше 350 руб. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах можно отыгрывать вагер. Можно вертеть автоматы, а вагер будет стоять на месте. Поэтому принципиально знать, в каких забавах можно осуществлять кратность валютного оборота.Существует ли стратегии для отыгрыша бездепозитных призов? К раскаянию нет, на выигрыши либо проигрыши с бонусов, казино либо игрок повлиять возможности, отдача игр происходит от создателей игр. В бонусную программу множества операторов входят систематические бездепы. Это бессрочные акции, поощряющие интенсивных неизменных игроков. Популярный формат — раздача фриспинов по определенным дням недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают постоянные призы без депо в мена на скопленные баллы лояльности.Превышение наибольшей ставки при отыгрыше. Система автоматически не предупреждает о превышении ставки, потому о нарушении правил игрок возможность узнать теснее в подачи запроса на вывод средств. <a href=http://www.rhl-mod.ru/members/102484-doctorlazutaor/>http://www.rhl-mod.ru/members/102484-doctorlazutaor/</a> Варианты выигрыша зависят от Вашей удачи и условий игорного портала. Выше мы сказали, что кое-какие бездепозитные призы в 2022 году выдаются с лимитированиями по максимальной выплате. Однако, остаются они, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность современных игр на средства, можно выиграть невозможные суммы. Сегодняшние игровые автоматы либо видео слоты, как их именуют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000. 1×slots регистрация Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в социальных сетях, установку мобильного приложения либо официального посетителя для ПК. В большинстве казино действуют программы преданности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий уровень нередко сопрягается выдачей бездепа.Чаще всего, знаменитые сервисы, такие как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно неотъемлемое верховодило. Финансовые свои выводятся только спустя что, эту платежную систему, коей пользовались для пополнения депозита. Если же игрок получил бездепозитный покерный приз, потребуется восполнить счет на наименьшую необходимую, кот-ая составляет обычно 10 $.
1×slots бездепозитный бонус за регистрацию
x1 slots 1хслотс регистрация перейти на 1×slots <a href=https://sultantheme.com/vb4forum/member.php?15044-KennethNek>https://sultantheme.com/vb4forum/member.php?15044-KennethNek</a>
скачать 1×slots официальный сайт
Отзывы читателей о бонусных промоакциях помогут составить эмоцию, но не запамятовывайте о субъективности собственных комментариев.Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и более. Когда игроку полагается большое фриспинов, администрация может бить3 их начисление на некоторое дней. Бесплатные вращения предоставляются для определенного слота, кот-ый указывается в правилах акции. Рассмотрим принцип его действия на случае. Допустим, вы зарегистрировались и получили $10 no down payment bonus с вейджером х50. Это означает, собственно выигранные деньги можно будет выводить не ранее, чем последствии такого, как общая сумма ставок достигнет $500. <a href=http://avtoworld.lv/index.php?subaction=userinfo&user=ekucog>http://avtoworld.lv/index.php?subaction=userinfo&user=ekucog</a> Также учтите, собственно некоторые игровые платформы сужают список государств, коие готовы получить предложенный бездепозитный приз за регистрацию. К примеру, существуют онлайн-заведения, выдающие похожие бонусы лишь жильцам конкретных стран. К примеру, онлайн казино 777 Оригинал дает бездепозитный приз только игрокам из России и государств СНГ. Или напротив, пичкают вознаграждением всех, кроме жителей неких государств (из этого, по внимательно изучать перечень, дабы потом не возникло практически вопросов и претензий).Так что основное различие дара на депо от бездепа – неотъемлемое пополнение счёта. Вы можете внести депозит и преумножить стартовый капитал или отобрать бездеп и всем не придётся рисковать собственными сбережениями. Поспешите выполнить простые требования, и администрация ресурса начислит щедрое одобрение! 1×slots сайт
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.motoshkola.od.ua/threads/1×slots-na-ljuboj-vkus-kak-projti-registraciju.8976/>1×slots на любой вкус как пройти регистрацию</a>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5311/#comment-645914>1× слот зеркало</a>
<a href=http://forum.drustvogil-galad.si/index.php?action=profile;u=121557>1×slots казино мобильная версия</a>
<a href=https://portugal-campings.com/pt/account/>x1 slots регистрация в 1×slots casino</a>
<a href=https://melhorlance.com.br/author/jamesbom/>1 x slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для того, чтобы отыграть сумму вашего бездепозитного бонуса нужно выполнить условия вейджера. Очень часто фриспины даются на конкретные слоты (book of ra, book of dead, book of sun), подбирайте слот для по, все довольно красивые и качественные. Бездепозитные приз имеет быть денежным так и в виде фриспинов на слоты Первый возникающий вопрос, это, для выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают новых игроков. Последним проще начать игру на средства с подарка за регистрацию. Им не нужно пополнять баланс и тратить собственные средства. Новички получают безвозмездные спины или средства на счёт. С их подмогою знакомятся с игровым процессом, крутят слоты и делают ставки в рулетке.
#1270 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Мария Шарапова 7k casino сайт <a href=https://th-royalgclub.com/>порно с Юлия Ефимова</a> up casino скачать Кузнецова Анна Юрьевна порно <a href=https://krtka.info/>симулятор казино</a> казино фильм смотреть онлайн ставки на спорт букмекерские конторы pin up casino официальный casino вход Манилова Алла Юрьевна порно Набиуллина Эльвира Сахипзадовна порно казино можно
DiskiPlus букмекерскую контору пин DiskiPlus казино смотреть <a href=https://www.diskiplus.ru>DiskiPlus porno Елизавета Туктамышева</a> DiskiPlus 1×bet зеркало на сегодня 1×bet xyz DiskiPlus casino бездепозитный <a href=https://www.diskiplus.ru/>DiskiPlus porno Александра Степанова, фигуристка</a> DiskiPlus 1×bet зеркало слоты 1×bet xyz DiskiPlus 1×bet 1 DiskiPlus бесплатное казино DiskiPlus pin up casino buzz DiskiPlus сайте букмекерской конторы фонбет DiskiPlus casino официальный сайт DiskiPlus black russia казино
#1271 Charlesgunnyhttp://filmkachat.ru
1×slots подтвердит вашу регистрацию если говорить
Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные способы и расценить особенности, недоступные при этой в демо режиме. Многие новые клиенты переходят в количество постоянных, а оператор получает длительную прибыль.Приветственный приз без депо ? презент за регистрацию. Выдается средствами, фриспинами или баллами. В заключительном случае бонусные баллы применяются для участия в турнирах или обмена на реальные средства. <a href=http://filmkachat.ru/>1хслотс официальный сайт зеркало</a> <a href=https://buymeacoffee.com/poppoppopkb/vr-architecture-revolutionizing-architectural-design-visualization>https://buymeacoffee.com/poppoppopkb/vr-architecture-revolutionizing-architectural-design-visualization</a> Предложения с бездепозитными призами за регистрацию разрешают свежим заведениям заинтересовать аудиторию на собственный сайт. А игроки же получают возможность выступать на реальные средства без депозита в казино и заработать небольшой стартовый капитал, который разрешено вывести на карту банка либо электрический кошелек.Хотя благотворительные бонусы начисляются без депо, не исключено, что вас придется вносить деньги. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты лишь в такого, как свежий заказчик первый пополнит игровой счет. 1×slots casino регистрация 1×slotscasin online <a href=http://www.atego-club.ru/forum/member.php/239571-HenryMiz>http://www.atego-club.ru/forum/member.php/239571-HenryMiz</a> Мы советуем не отказываться от похожих услуг узнаваемых казино. Выделите некоторое минут на регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сейчас удача будет на вашей стороне!Бoльшинcтвo азартных заведений выдвигают приблизительно однообразные, схожие условия и притязания, которые необходимо выполнить, дабы получить бездепозитный приз за регистрацию. Все их можно соединить в раз список:
1 x slots
Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.Так же стоит выделить то, собственно в каждом онлайн казино установлен собственный максимальный кешаут на бездепозитный бонус. Как верховодило кешаут — это максимальная сумма денег, которая дешевая для вывода с бездепозитного бонуса. <a href=http://av3526.com/forum.php?mod=viewthread&tid=72&pid=26628&page=15&extra=page%3D1#pid26628>1х слот регистрация в 1×slots casino</a> 1×slots регистрация 1×slots casino 777 online <a href=http://sangjininterior.com/home/bbs/board.php?bo_table=free&wr_id=72282>http://sangjininterior.com/home/bbs/board.php?bo_table=free&wr_id=72282</a> Фриспины без депозита либо вспомогательные свои помогут поближе познакомиться с игровой платформой и её функциями. За счёт презентов возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за игры напротив живых крупье.Кешбэк-бонус дает собой возврат фиксированного процента от ставки в случае поражения или же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не превышает 10%. 1×slots зеркало которую указывали при регистрации кстати Бездепозитные бонусы за регистрацию являются одним из самых знаменитых способов вербования новых игроков в онлайн-казино, поэтому что они предоставляют игрокам возможность опробовать казино, более игровые автоматы, и вероятно, выиграть реальные деньги.
1×slots рабочее зеркало на сегодня
Но а случае вы теснее профи по онлайн казино, кликаем на красноватую кнопку «Получить» и Вы автоматически перейдете в интернет казино; <a href=https://radioizba.ru/communication/forum/?PAGE_NAME=profile_view&UID=22066>https://radioizba.ru/communication/forum/?PAGE_NAME=profile_view&UID=22066</a> 1×slot зеркало рабочее регистрации на телефон придет Ещё одно распространённое акционное предложение – привлекательный подарок с сомнительными притязаниями. К примеру, клуб сулит $100 в бездепа, хотя с вейджером х80 либо х100. Отыграть такой вейджер практически нереально и потому какого-либо концентрироваться на более занимательных промоакциях.Возможность поиграть вспомогательное соревнование (а время и несколько) совершенно даром, а выигрыш, к, поступает на счёт игрока.
1хслотс зеркало
Многие новенькие колеблются, что поощрительный приз надо будет отдавать, числе если они выиграли у казино. Это абсолютно неопасно и накрепко. Выводя выигранные свои, игрок просто одергивает свое участие при и утрачивает уникальную возможность – бесплатно увеличивать собственное материальное положение.Как верховодило, новоприбывшие игроки начала желают ознакомиться с методами ввода и вывода валютных средств и сроки выполнения поданных заказов дабы четко разуметь, как быстро возможность вывести свой казино бонус за регистрацию без депо на электрический кошелек или же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино соперничают меж собой. Ведь в бы определенную компанию представляло лишь одно онлайн-заведение, то навряд бы посетители увидели казино с бонусом за регистрацию и имели бы рассчитывать только на вознаграждение вид бонуса на первое вложение. К любому заведению регулярно следует привлекать новых игроков, что, итоге, только на руку всем играющим. <a href=http://forum.as-p.cz/viewtopic.php?f=45&t=279071>1×slots промокод при регистрации 2025</a> Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут устанавливает лимитирование для клиентов. Конечно, это возможно счесть некоторым неудобством для игрока, но справедливости ради отметить, собственно выбор автоматов всё равно остаётся довольно великим.Ниже указан важный перечень легальных казино в Беларуси с бонусами на 1-ый депозит. Вы можете попасть на официальный сайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз. 1×slots casino регистрация 1×slotscasin online <a href=https://dallasyuoh54433.theobloggers.com/36430746/ai-nude-app-the-future-of-content-moderation-and-privacy-protection>https://dallasyuoh54433.theobloggers.com/36430746/ai-nude-app-the-future-of-content-moderation-and-privacy-protection</a>
1×slots официальный сайт зеркало
Если вы новичок деле и лишь попали в неизведанную вами область пыла — счет услуг как бездепозитные бонусы без пополнения. Но существуют азартные заведения, готовые просто так вручить деньги на забаву. Для сего довольно сделать профиль. Чтобы исключить выигрыш, сперва необходимо выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа.Для получения приза нужно пригласить в забаву нового посетителя. Казино начисляет пригласившему фиксированный процент от взносов приглашённого повторяющий приза: чаще всего его размер не выше 10%. Срок деянья приза как не выше месяца: пригласивший получает приз в зависимости от проигранных ставок приглашённого в 1-ый месяц забавы. <a href=http://forums.outdoorreview.com/member.php?383520-JasperNeomi>http://forums.outdoorreview.com/member.php?383520-JasperNeomi</a> 1×slots рабочее зеркало на сегодня Автоматическая активация первый самой удобной, хотя ручной способ содержит перед ней достоинства. Прежде чем использовать вознаграждение от казино, стоит заранее определить, сколько медли потребуется на исполненье всех условий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала деянья бонуса.Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке адепты онлайн-казино публикуют актуальную информацию о no deposit bonuses прочих предложениях.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.as-p.cz/viewtopic.php?f=45&t=67620&p=362730#p362730>1×slot официальный сайт</a>
<a href=https://radios-collector.com/viewtopic.php?f=8&t=17&p=273676#p273676>1×slots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подтвердите личность, предоставив оператору казино свои паспортные данные. Инструкции обыкновенно легкие, главное — конкретно им стопам. Если написано, собственно «на фото должны быть видны все хорошо угла странички паспорта» — устройте непосредственно это фото.
#1272 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Матвиенко Валентина Ивановна порно Елизавета Боярская <a href=https://rhymes-punches.com/>пин ап casino pin</a> Крючкова Полина Викторовна порно Скворцова Вероника Игоревна порно <a href=https://rhymes-punches.com/>retro casino</a> бесплатные букмекерские конторы 1×bet сайт 1×bet xyz бесплатно фильм казино порно с Алина Загитова казино вулкан 1×bet зеркало рабочее на сегодня 1×bet xyz букмекерская контора мостбет
DiskiPlus 1×bet сайт DiskiPlus порно с Захарова Мария Владимировна <a href=https://diskiplus.ru>DiskiPlus водка казино</a> DiskiPlus макао казино DiskiPlus Петрова Ольга Викторовна порно <a href=https://www.diskiplus.ru/>DiskiPlus Скворцова Вероника Игоревна порно</a> DiskiPlus букмекерская контора DiskiPlus карты казино DiskiPlus винлайн букмекерская контора официальный сайт DiskiPlus ев казино DiskiPlus vodka casino DiskiPlus спорт букмекерская контора DiskiPlus пина букмекерской конторы
#1273 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее
Фриплей-бонусы. Бонусы за безвозмездную забаву есть только в неких клубах. Они зачисляются сразу после создания профиля и действуют непродолжительное время. Если у вас нет времени израсходовать свои, они просто закончатся. Что касается времени, как бонусы срабатывают в течение 1-го часа.Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных требований, кроме неотъемлемой верификации. Если на веб-сайте предусмотрена обязательная процедура доказательства личности, то вывести выигрыш получится лишь последствии проверки данных. Приготовьтесь наполнить анкету и отправить в техподдержку документ, подтверждающий личность. <a href=http://filmkachat.ru/>1×slots регистрация на 1хслотс</a> <a href=https://campsite.bio/kalinka>https://campsite.bio/kalinka</a> Активация по промокоду употребляется в разных видах бездепов. Если идет о приветственном бонусе, то комплект символов можно узнать на крупнейшей страничке, в регистрационной форме или послании, которое отправляется пользователю для подтверждения e-mail. Акции могут проводиться совместно с партнерскими площадками. Обычно код размещается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется одноразовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем актуальный код для активации в описании каждого рекламную. 1хслотс официальный сайт зеркало <a href=http://182.237.3.195/home.php?mod=space&uid=668175>http://182.237.3.195/home.php?mod=space&uid=668175</a> Можно. Вы постоянно сможете отрешиться от получения бездепозитного бонуса за регистрацию в казино, же Вы не сделаете ставку.Подобные бонусы без депозита предоставляются на более прибыльных условиях. Зачастую они крупнее, а обстоятельства отыгрыша наименее жесткие.
1× slots casino официальный сайт
Такой бесплатный эквивалент средств зачисляется на профиль юзера после воплощения требований и предназначаются они только для игрового процесса. Вывод этих вознаграждений возможен лишь после воплощения вейджеровых критерий. 1×slots зеркало выигрыши обязательно пройдите регистрацию если Для доказательства электронной почты, просто перейдите по активной ссылке в письме, полученном от игрового заведения. <a href=http://sunshine2000.co.kr/bbs/board.php?bo_table=free&wr_id=123547>http://sunshine2000.co.kr/bbs/board.php?bo_table=free&wr_id=123547</a> Для получения бонуса нужно пригласить в игру нового посетителя. Казино начислит пригласившему фиксированный процент от взносов приглашённого в виде бонуса: почаще всего его размер не превышает 10%. Срок действия приза правило не выше месяца: пригласивший получает приз зависимо проигранных ставок приглашённого в первый луна игры.Простая процедура получения бездепозитного приза, кот-ая займет не более 2-х мин. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные. 1×slot казино зеркало Бонусы без депо при регистрации числятся наиболее красивыми как для опытных игроков, так для и начинающих. Получив это вознаграждение, заказчик имеет играть на настоящие средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а обстоятельства их активации и выигрыша.На данном разделе портала периодически публикуются обзорные статьи, в которых рассматриваются бесплатные призы наихороших интернет-казино. Информация структурирована по нескольким пунктам, включая главные:
1×slots casino регистрация 1×slotscasino09k online
Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в индивидуальный кабинет, чтобы отобрать бесплатные вращения с вейджером х40; <a href=https://test-sida.noads.biz/home.php?mod=space&uid=93219>https://test-sida.noads.biz/home.php?mod=space&uid=93219</a> Нельзя осматривать игру на деньги, как вариант заработка. Азартные игры запрещены для лиц моложе 18 лет. Topcasinobonuses.mobi классифицируется организатором азартных игр. Сайт одевает информационный характер.Помимо прочего, для вывода средств по бездепу нужно привнести на счёт свой 1-ый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало возможную необходимую, последствии чего вывод средств станет доступен. 1×slots официальный demo регистрация в 1×slots casino
1×slots зеркало видели такую регистрацию на
Иногда в качестве бездепа, казино презентует наименьший приз (до 50 руб. ), из-за которого не стоит заморачиваться.Самый распространённый из сходственных бонусов, окончательно же, бездеп на денек рождения клиента — бонус повторяющий фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им возможно на установленного периода времени. <a href=http://www.xcosmic.net/rsf/showthread.php?tid=53183>1×slots зеркало видели такую регистрацию на</a> Бонус начисляется игроку сразу последствии регистрации и прохождения верификации в казино и не настятельно от клиента внесения депо. Как верховодило, размер бонуса в подобном случае достаточно умеренный, однако дозволяет новичкам познакомиться с игрой без риска реальными средствами.Если вы выбираете испытанное лицензионное интернет казино и выполните все условия получения бездепозитного приза, трудностей с получением дара у Вас не возникнет. Подобные бонусы без депо предоставляются на более выгодных критериях. Зачастую они крупнее, а обстоятельства отыгрыша наименее строгие.Ознакомьтесь с нашим перечнем наихороших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего списка и получите бездеп незамедлительно. Хватайте наихорошие безвозмездные предложения ниже и выигрывайте великие деньги, не рискуя! 1×slots регистрация на официальном сайте <a href=https://www.clashfarmer.com/forum/member.php?action=profile&uid=46006>https://www.clashfarmer.com/forum/member.php?action=profile&uid=46006</a> В качестве бонусов онлайн казино часто предлагает выдачу фриспинов, то есть безвозмездных вращений игрового барабана. Виртуальные монеты возможно использовать для изучения в покерной школе либо для забавы в казино.Если речь идет об эксклюзивных услугах, имеет потребоваться регистрация в казино по ссылке с партнерского сайта.
1×slots казино мобильная версия
Отыграв бездепозитный бонус в казино с выводом тоже придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, случае сходственное ограничение присутствует, то единоразово вывести получится лишь необходимую, не превышающую размер приобретенного приза.Проверка занимает от нескольких мин. До нескольких дней, спецы техподдержки могут запросить дополнительные документы либо инициировать куцее общение по Skype. Бездепы могут входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами. <a href=http://ladistribution.net/fr/wiki/wiki/dokuwiki/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0>http://ladistribution.net/fr/wiki/wiki/dokuwiki/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0</a> Если вы новичок данном и лишь попали в неизведанную вами область азарта — за услуг как бездепозитные призы без пополнения.Эффективность бездепов в маркетингового прибора оценили почти операторы. Малоизвестные площадки используют эти промоакции, чтобы скоро набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны неизменных гостей. Не все веб-сайты, дающие подарки без депо, рекомендованы к игре. За привлекательным промоописанием все прятаться неосуществимые условия отыгрыша и другие подводные камни. 1×slots на любой вкус как пройти регистрацию
<b>Смотреть еще похожие новости:</b>
<a href=http://support-groups.org/viewtopic.php?f=161&t=774333>1×slots регистрация</a>
<a href=https://rolivka.online/forum/showthread.php?tid=40972>1хслот официальный сайт зеркало</a>
<a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=45467>1× slots регистрация в 1×slots casino</a>
<a href=http://lssdteam.teamforum.ru/viewtopic.php?f=2&t=2015>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Теоретически, к бесплатным бонусам можно отнести например именуемые фриспины. Напомним, речь идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, поэтому что они предоставляют лишь возможность делать ставки. Акции распространяются как на все забавы казино, так и на узкий перечень. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и другие. Промо имеет охватывать разработки 1-го производителя. Бездеп не пересекается с другими промоакциями казино. Если на сайте учтен кэшбек, он не начисляется за ставки, изготовленные бонусными деньгами. Для идентификации платежных реквизитов игрока имеет потребоваться пополнение счета на наименьшую необходимую.
#1274 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
реального казино 1×bet casino <a href=https://th-royalgclub.com/>порно с Карен Хачанов (теннис)</a> букмекерская контора фонбет официальный сайт порно с Максим Глушенков (футбол) <a href=https://sovsekretno.net/>порно с Диана Шнайдер (теннис)</a> букмекерская контора леон букмекерская контора гама казино porno Елизавета Туктамышева порно с Голикова Татьяна Алексеевна водка казино pin up casino buzz
DiskiPlus porno Александр Соболев (футбол) DiskiPlus black russia казино <a href=https://www.diskiplus.ru>DiskiPlus букмекерская контора фонбет</a> DiskiPlus kent casino регистрация DiskiPlus ев казино <a href=https://diskiplus.ru>DiskiPlus казино ли</a> DiskiPlus Скоробогатова Ольга Николаевна порно DiskiPlus 1×bet зеркало рабочее xbet DiskiPlus пин ап казино DiskiPlus порно с Дарья Касаткина (теннис) казино DiskiPlus Яровая Ирина Анатольевна порно DiskiPlus пина букмекерской конторы
#1275 Charlesgunnyhttp://filmkachat.ru
скачать 1×slots на андроид мобильная версия
Для такого, дабы отыграть необходимую вашего бездепозитного бонуса надо(надобно) выполнить обстоятельства вейджера. Очень часто фриспины даются на конкретные слоты (book of ra, book of deceased, book of sun), выбирайте разъем себя нраву, все довольно красочные и качественные. Бездепозитные приз имеет быть валютным так и вид фриспинов на слотыБонус с зачислением средств на счет выделяет больше свободы поступков. Пользователь сам выбирает, каким образом распорядиться подаренными своими. Здесь кроме могут работать ограничения на список доступных игр, но обыкновенно эти рамки не например строги, как в промо с бесплатными вращениями. <a href=http://filmkachat.ru/>1 xslots рабочее зеркало</a> Итак, чтобы благотворительные бонусные кредиты превратились в настоящие средства, которыми вам распоряжаться по своему усмотрению, их нужно отыграть. Вейджер следует уточнять в правилах онлайн-казино.Как правило, при выводе денег, от играющего потребуется только устроить наименьший лепта для того, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом индивидуальный счет. <a href=https://designaddict.com/community/profile/furniture-360-view/>https://designaddict.com/community/profile/furniture-360-view/</a> Выполнив все притязания оператора, клиент может оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит примерно не более суток. Если дополнительно требуется пройти процедуру верификации, то срок увеличивается до 1–2 трудящихся дней. Для перевода используются банковские инструменты и электрические платежные системы. Второй способ подходит никакого, например как большинство транзакций в этом случае осуществляются моментально. В связи со спецификой функционирования банков обработка платежей возможность занять до нескольких трудящихся дней.Подтверждение индивидуальной информации. Все казино требуют от клиента пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у юзера других аккаунтов (мультиаккаунт запрещен). 1хслотс официальный сайт зеркало <a href=https://pediascape.science/index.php?title=Where_to_Download_the_1×bet_APP_for_Free?>https://pediascape.science/index.php?title=Where_to_Download_the_1×bet_APP_for_Free?</a> Бездепозитные призы казино за регистрацию в 2022 году — это возможность сыграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой или количеством бесплатных вращений без внесения депозита. Не путайте деморежим с реальной забавой без надобности внесения депо.
скачать 1×slots официальный сайт
Бонус начисляется игроку незамедлительно последствии регистрации и прохождения верификации в казино и не требует от посетителя внесения депо. Как верховодило, объем бонуса в сходственном случае достаточно застенчивый, однако дозволяет новеньким познакомиться с забавой без риска реальными деньгами. <a href=http://forum.l2endless.com/member.php?action=profile&uid=4373>1×слотс казино</a> 1хслотс мобильная версия зеркало Такие поощрения разрешают даром протестировать свежее казино, разобраться с игровым ходом онлайн слотов, заработать и вывести маленькую необходимую средств.Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. <a href=http://www.zgqsz.com/home.php?mod=space&uid=425153>http://www.zgqsz.com/home.php?mod=space&uid=425153</a> 1× slots официальный Подтверждение регистрации. Казино просят привязки профиля к электрическому адресу и номеру телефонного. Для этого на e-mail отправляется письмо ссылаясь, а на телефон ? текстовое известие с кодом.Акции распространяются как на все игры казино, так и на узкий перечень. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и другие. Промо может охватывать разработки одного производителя. Бездеп не пересекается с иными акциями казино. Если на сайте учтен кэшбек, он не начисляется за ставки, сделанные бонусными деньгами. Для идентификации платежных реквизитов игрока возможность понадобиться пополнение счета на наименьшую сумму.
1×slots официальный зеркало
При регистрации в том или ином онлайн игральном заведении — для дается один шанс испытывать собственную фортуну не внося свои монеты. Замечу собственно эту поощрительную предложение предоставляют не все интернет игровые площадки, а лишь великодушная половина из них. Которые мы подготовили для Вас в нашем перечне. Раздача бонусов возможность быть посвящена различным датам: календарные праздники, деньки рождения игроков, юбилей открытия казино и т. Д. Подарок выдается в виде средств, фриспинов или баллов для накопления и обмена на услуги оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд требований. <a href=http://www.en.besatime.com/index.php?subaction=userinfo&user=DoctorLazutapn>http://www.en.besatime.com/index.php?subaction=userinfo&user=DoctorLazutapn</a> Прибывшие на акк деньги бездепозитные бонусы предназначаются, в основном, только для свежеиспеченных юзеров, которые раньше не имели личного аккаунта в данном казино. Исходя из этого, если раньше у игрока был сделан депо, то, по всей вероятности, у него больше не будет возможности рассчитывать на получение такового бонуса в конкретном заведении. 1×slot официальный сайт Новички не любят незамедлительно же вносить депо. Это обосновано отсутствием навыка и сомнением. К счастью, в можно получить бездепозитный приз за регистрацию в казино. Неважно собственно начисляет система – фриспины либо кредиты. В всяком случае вы не рискуете собственными сбережениями. Это замечательная вероятность запустить приглянувшийся видео разъем или же испытать фортуну в настольных забавах.
1×slots регистрация на официальном сайте
Главным нюансом в возникновении этих вознаграждений состоит в, что пустив их в ход, в ничем не рискует и в последствии никому ничего не несомненно должен (не зависимо, получит ли он благодаря призам какой-нибудь выигрыш либо моментально спустит все только собственно прибывшие финансы). То есть, казино снабжает игрока вероятностью на дармовой базе играть во различные слоты даже спонсирует забаву.Для получения предоставленных бонусов вам понадобиться — ПК или мобильное прибор, и остальное дело за малым. <a href=http://craft4game.forumex.ru/viewtopic.php?f=2&t=2463>1×slots официальный сайт скачать</a> При регистрации стопам свидетельствовать только достоверную информацию. Когда учетная запись будет активна, будет доступ в Личный кабинет. В нем возможно выбрать денежную, ввести промокод и узнать подробные правила получения и отыгрыша бездепа. Краткая информация об акции нередко находится именно на регистрационной форме. 1×slots зеркало рабочее на сегодня <a href=http://52gmsy.com/home.php?mod=space&uid=50776>http://52gmsy.com/home.php?mod=space&uid=50776</a> Основное управляло получения бездепа ? творимый аккаунт должен быть у юзера первым и единственным. Наличие нескольких аккаунтов требовательно воспрещено. Проверка ведется по имени, e-mal, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита необходимо соблюдать простую последовательность деяний.
1хслотс рабочее зеркало
Зачастую бездепозитные бонусы казино для игры предлагаются различными заведениями азартных игр в маркетинговых промоакций либо в целях привлечения к для новых игроков. Для бездепозитных призов в казино 2022 геймеру не нужно пополнять счет до этапа вывода желанных средств.Мы подготовили список, где есть всегда актуальные и новые бездепозитные бонусы казино, которые продоставляется получить даром. Для наших юзеров есть особые предложения эксклюзивные призы, коие вы кого не отыщите, их мы определили особой красной плашкой «Exclusive». <a href=https://sites.icmc.usp.br/tahzibi/dokuwiki/doku.php?id=1win_cassino_online>https://sites.icmc.usp.br/tahzibi/dokuwiki/doku.php?id=1win_cassino_online</a> Приветственный бонус без депозита ? презент за регистрацию. Выдается средствами, фриспинами либо баллами. В последнем случае бонусные баллы применяются для роли в турнирах либо размена на реальные деньги.Сроки активации приза устанавливаются каждым казино, но чаще всего они не превосходят недели с этапа получения. Игроку непременно нужно применять бездеп протяжении указанного срока, в ином случае бонус просто пропадет. Каждый бонус можно получить только раз раз, поэтому в не применять бездеп в срок, у игрока не несомненно второго шанса им пользоваться. 1×slots официальный сайт зеркало Бездепозитные бонусы начисляются лишь один один. Не стоит открывать свежие аккаунты, чтобы получить их повторно. Служба безопасности казино непременно выявит «левого» соучастника и перекроет. Если гость выполнит нужные притязания, отыграет собственную ставку и решит исключить личный выигрыш, то ему нужно сведению, что казино обязательно востребует предоставить ксерокопии личных документов, чтобы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои исключить не удастся.Вейджер (либо вагер) ? это наименьшая сумма ставок, которую необходимо сделать для вывода денежного приза. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение.
<b>Смотреть еще похожие новости:</b>
<a href=http://rumproject.com/rumforum/viewtopic.php?f=23&t=5547>1×slots казино зеркало</a>
<a href=http://nexusroleplay.teamforum.ru/viewtopic.php?f=19&t=10933>1×slots регистрацию более популярный вариант это</a>
<a href=https://melhorlance.com.br/minha-conta/>зеркала 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Онлайн-казино с бездепозитными призами ставят клиентам условия для использования бездепами, потому перед участием в акции какого-либо подробно ознакомиться со всеми правилами и нюансами промоакции. Условия все касаться получения приза, его применения и последующего вывода валютных средств когда выигрыша.
#1276 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
часы казино казино рублях <a href=https://th-royalgclub.com/>казино пин</a> порно с Юлия Ефимова, пловчиха сайте букмекерской конторы фонбет <a href=https://repost.news/>porno Виктория Баркова, легкоатлетка</a> бесплатно фильм казино букмекерскую контору пин online casino официальный порно с Ирина Сидоркова 1×bet зеркало на сегодня казино вход официальный сайт Нургалиева Эльвира Рамиловна порно
DiskiPlus bet casino DiskiPlus bitz casino <a href=https://www.diskiplus.ru/>DiskiPlus порно с Виктория Синицина, фигуристка</a> DiskiPlus porno Вера Бирюкова, гимнастка DiskiPlus bitz casino <a href=https://www.diskiplus.ru>DiskiPlus спорт букмекерская контора</a> DiskiPlus порно с Анна Калинская (теннис) DiskiPlus песня казино DiskiPlus казино смотреть DiskiPlus рабочее казино DiskiPlus casino автомат DiskiPlus винлайн букмекерская контора официальный DiskiPlus букмекерская контора официальный сайт скачать
#1277 Charlesgunnyhttp://filmkachat.ru
x1 slots регистрация в 1×slots casino
Существуют казино с призом за регистрацию, в довольно востребованы фриспины в онлайн казино потом регистрации в определенных играх. Они встречаются числе почаще бесплатных поощрений либо традиционных призов в казино без вложений. Например, игрок регистрирует счет, на который начисляются бесплатные игры, бонус за регистрацию в виде бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса в выигрывает настоящие деньги, коие в последствии возможно удачно вывести из заведения на собственную платежную систему. То есть, есть все шансы исключить свои без рисков своими деньгами. Регистрация, за игрок получит призы, займет пару минут, а спасибо этому можно увеличить 5 евро поощрений до тыс. И без всяких заморочек вывести их.Подтверждение электронной почты – одно из ведущих критерий, коие есть почти в любом бездепозитном казино. Чтобы верифицировать электронную почту, довольно перейти по активной ссылке в послании, приобретенном от азартного клуба. <a href=http://filmkachat.ru/>1×slots зеркало</a> <a href=https://note.com/joyous_otter80/n/ne75a51f43668>https://note.com/joyous_otter80/n/ne75a51f43668</a> 1хслотс рабочее зеркало <a href=http://autobrands.lv/user/WalterViess/>http://autobrands.lv/user/WalterViess/</a> Составленный знатоками Casino.ru список онлайн-казино с бездепозитным бонусом дозволяет игрокам сопоставить спецпредложения различных операторов.Акции распространяются как на все игры казино, например и на ограниченный перечень. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и. Промо имеет охватывать разработки 1-го производителя. Бездеп не пересекается с иными акциями казино. Если на сайте предусмотрен кэшбек, он не начисляется за ставки, сделанные бонусными деньгами. Для идентификации платежных реквизитов игрока имеет понадобиться пополнение счета на минимальную необходимую.
рабочее зеркало 1хслотс
1хслотс зеркало В современность очень просто получить приз за регистрацию в казино. Практически каждый игорный жилище с радостью начислит средства либо безвозмездные вращения. Многие гэмблеры используют данным и не стесняются регистрироваться в каждом клубе с прибыльными условиями. Кстати, это отличная возможность выработать победную тактику и сорвать джекпот. <a href=https://rovworld.com/members/jameskex/profile/>https://rovworld.com/members/jameskex/profile/</a> Многие новички колеблются, собственно поощрительный приз не будет возвращать, и в они выиграли у казино. Это безусловно безопасно и накрепко. Выводя выигранные средства, игрок просто останавливает свое роль деле и теряет уникальную вероятность – безвозмездно наращивать собственное вещественное положение. 1×slots официальный сайт скачать на айфон
1× slots регистрация в 1×slots casino
Постарайтесь отыграть вейджер, дабы замечена возможность забыть заявку на выплату. Кстати, на всех веб-сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы можете получить выигрыш на электрической кошелёк, карту, телефон.Теоретически, к бесплатным бонусам возможно отнести так называемые фриспины. Напомним, речь идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, поэтому что они деют лишь возможность создавать ставки. Получить Бездепозитный бонус в онлайн казино дело 2-ух кликов. Другой момент, отыграть промо и соблюсти управляла и условия отыгрыша. Под правилами предполагается столько вагер, хотя и ограничения по максимальной ставке. Мы понимаем, что в кинотеатр все ставят на зеро и выигрывают. Призываем не создавать подобного. Перед активацией бонуса прочтите верховодила. Узнайте следующие моменты: Условия получения подарка, за регистрацию, за депо и прочее. Ограничения по максимальной ставке. Зачастую не выше 350 рублей. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на месте. Поэтому важно знать, в каких забавах можно совершать кратность валютного оборота. <a href=https://lwccareers.lindsey.edu/profiles/5135328->https://lwccareers.lindsey.edu/profiles/5135328-</a> Также бездепозитные призы имеют работать методом возвратить к забаве клиентов, что приостановивших своё сотрудничество с компанией: извещение о бездепе поступает на мобильный аппарат либо почту.Необходимость отыгрыша. Вейджер такой выше, чем для призов за депо. И же свои не отыграны, исключить их невозможно. 1×slots зеркало проходить регистрацию это отличный вариант Для вывода средств бонус надо(надобно) будет отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами акции и вариациями отыгрыша бездепозитного бонуса до его получения, дабы избежать конфликтных обстановок.
рабочее зеркало 1×slots
Рассмотрим принцип его действия на примере. Допустим, вы зарегались и возымели $10 not the slightest down payment bonus с вейджером х50. Это означает, что выигранные средства возможно будет выводить не ранее, чем в как, как общая сумма ставок достигнет $500.Вейджер в переводе с британского означает «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша приобретенного приза, в нашем случае бездепозитного. Число ставок не — важно только набрать необходимую, пропорциональную сумме одобрения. <a href=https://timepost.info/showthread.php?tid=171634>1×слот регистрация в 1×slots casino</a> Можно. Вы постоянно можете отрешиться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не сделаете ставку.Размер ставки для забавы по бездепозитному призу (окончательно же, в случае, когда он представлен в виде бонусных валютных средств) часто ниже, чем при забаве на депо. Ограничение несомненно действовать до этапа отыгрыша приза. 1×slots официальный сайт скачать <a href=http://www.dungdong.com/home.php?mod=space&uid=3004287>http://www.dungdong.com/home.php?mod=space&uid=3004287</a>
1×slots сайт зеркало
<a href=http://www.samudranews.com/2023/01/wabub-deli-serdang-hadri-muhasabah-dan.html>http://www.samudranews.com/2023/01/wabub-deli-serdang-hadri-muhasabah-dan.html</a> Бездепозитные призы, как уже понятно, считаются уникальной вероятностью приступать к игровому процессу полностью безвозмездно, то есть играть в онлайн казино даром и на существующие средства сразу после регистрации аккаунта. Автоматы с этим депо могут стать прекрасной вероятностью сыграть для почитателей пыла с определенными ограничениями в денег.Каждый новичок и умелый игрок мечтают прытко стартануть и начать делать реальные ставки. Для сего достаточно отобрать подарок, за который не нужно уплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email или телефон. После этого администрация начислит щедрое вознаграждение вид бесплатных вращений или виртуальных кредитов. 1хслотс зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://irc.floobits.com/Jamesamiva>1×slots официальный сайт скачать</a>
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=70595>1×slots регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для выбора азартного заведения Вы можете пользоваться списком наших казино с призами за регистрацию. На нашем сайте мы опубликовали список бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, что доля призов эксклюзивные и доступны только для гостей нашего вебсайта по-специальному промо-коду либо по уникальной ссылке. Кроме как, для любого бонуса мы подготовили доскональный обозрение, каком Вы узнаете как получить и отыграть одобрение и как исключить свой выигрыш с бездепа. Условия могут различаться друг от приятеля. Но подобный приз возможность быть применен лишь для игрового процесса – приобретенные на счет финансы до такого, как станут отыграны, вывести невероятно.
#1278 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slotscasino 56 online
Самые известные методы вывода денег ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электрическим платежным системам типа Neteller и Skrill, а также пользуются криптовалютными кошельками. Вывод выигрышей возможность осуществляться быстро либо развлекать от нескольких часов до нескольких суток. <a href=http://filmkachat.ru/>1хслотс зеркало на сегодня</a> <a href=https://cgscholar.com/community/community_profiles/3d-rendering-services/community_updates/234376>https://cgscholar.com/community/community_profiles/3d-rendering-services/community_updates/234376</a> Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро либо 20 долларов. Если выдаются фриспины, их количество изредка выше нескольких десятков даровых вращений. 1хслотс мобильная версия зеркало <a href=https://rg-mechanics.club/user/JasperBrorI/>https://rg-mechanics.club/user/JasperBrorI/</a> В бонусную программку множества операторов входят регулярные бездепы. Это бессрочные промоакции, поощряющие активных неизменных игроков. Популярный формат — раздача фриспинов по конкретным дням недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депозита в мена на накопленные баллы преданности.Все любят получать подарки. Согласитесь, почти любой играющий человек несомненно бесконечно счастлив, в получит даровой подарок для игры в онлайн казино просто за регистрацию или же приз за внесенный депо, например нарекаемые приветственные призы для свежих игроков. Соответственно такие онлайн клубы будут более популярны и предпочтительны у игроков при выборе казино для игры. Топ казино непрерывно обновляется и добавляются свежие и интересные игровые клубы с симпатичной бонусной политикой и всеми возможными прерогативами, к которым относятся такие призы как фриспины за регистрацию, валютные бездепозитные бонусы, а также щедрые призы за внесенный депозит.
1хслот официальный сайт зеркало
<a href=https://forum.dis-course.net/viewtopic.php?t=675755>казино 1×slots официальный сайт</a> 1×slots регистрация 1×slotscasino 56 online Вейджер в переводе с английского значит «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша приобретенного приза, в нашем случае бездепозитного. Число ставок имеет — главно лишь набрать сумму, пропорциональную сумме поощрения.Не стоит путать игру в демо и внедрение призов. В демонстрационном режиме игрок возможность расценить механику слота, сюжет и оформление. Но забава проводится на относительные кредиты, поэтому отсутствует основное ? чувство пыла. Активируя промокод или фриспины, заказчик как не тратит средства деньги на игровые автоматы, хотя возможность сорвать настоящий куш! <a href=http://ez4×g.nehe.com.cn/home.php?mod=space&uid=558123&do=profile>http://ez4×g.nehe.com.cn/home.php?mod=space&uid=558123&do=profile</a> Если вы выбрали для себя количество брендов коие вас больше всего полюбились, для неизменной забавы! Таких гемблеров казино очень предпочитает и оценивает, за частую эти игроки становятся VIP игроками заведения, которым часто поступают прибыльные предложения в виде призов, например же туда заходит и бездепозитные. 1× slots casino официальный сайт В большинстве заведений сделать это возможно по адресу электронной почты, по номеру телефонного, через социальную сеть либо гугл-аккаунт.
1×slots мобильная версия войти казино
<a href=https://www.elektroroller-forum.de/memberlist.php?mode=viewprofile&u=446462>https://www.elektroroller-forum.de/memberlist.php?mode=viewprofile&u=446462</a> 1×slots casino регистрация 1×slotscasino09k online
1 хслот регистрация в 1×slots casino
Отказ в прохождении верификации. Если заказчик не хочет либо не может предоставить документы, подтверждающие его личность, профиль будет заблокирован вместе со всеми бонусными начислениями. <a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=98546&pid=377160#post_377160>1×slot официальный сайт</a> 1хслотс казино зеркало <a href=http://www.hku88.hk/home.php?mod=space&uid=15840>http://www.hku88.hk/home.php?mod=space&uid=15840</a> Варианты выигрыша зависимости от Вашей успеха и условий игорного портала. Выше мы сказали, собственно некоторые бездепозитные призы в 2022 году выдаются с ограничениями по наибольшей выплате. Однако, остаются и, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность современных игр на средства, возможно выиграть невероятные суммы. Сегодняшние игровые автоматы или видео слоты, как их нарекают. Могут выдавать крупные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000.Акционные предложения от казино существуют в различных форматах. Часто призы даются в мена на депозит. Игрок вносит платеж и получает средства, благотворительные вращения прочие поощрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — картина бонуса, кот-ый гарантирован за исполнение конкретных деяний на сайте:
1×slots casino регистрация 1×slots review live
Для получения бонуса надо(надобно) пригласить в игру свежего клиента. Казино начисляет пригласившему фиксированный процент от взносов приглашённого повторяющий бонуса: чаще всего его объем не превышает 10%. Срок деяния приза как не выше месяца: пригласивший получает бонус в зависимости от проигранных ставок приглашённого в первый месяц игры. Максимальная ставка ? уточняется в валюте счета и ограничивает размер ставки за один спин. В случае ее превышения приз может быть аннулирован. Также в правилах возможность находиться запрет на размещение ставок определенного вида, например, по равным шансам в рулетке (словами, на чет или нечет, красное или темное и т.д.). <a href=https://holisticdoggie.com/health-fitness-fitness-equipment/%D0%B1%D0%BB%D0%BE%D0%B3-%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0-%D1%8F%D0%BD%D0%B4%D0%B5%D0%BA%D1%81-%D0%B4%D0%B7%D0%B5%D0%BD/>https://holisticdoggie.com/health-fitness-fitness-equipment/%D0%B1%D0%BB%D0%BE%D0%B3-%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0-%D1%8F%D0%BD%D0%B4%D0%B5%D0%BA%D1%81-%D0%B4%D0%B7%D0%B5%D0%BD/</a> Подарки на дни ? приуроченные к праздничным датам, требующие символического отыгрыша или начисляются без того. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду. 1хслотс зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://rolivka.online/forum/showthread.php?tid=46404>1×slots casino регистрация 1×slotscasino09k online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные призы начисляются лишь раз один. Не стоит раскрывать свежие аккаунты, чтобы получить их повторно. Служба защищенности казино непременно выявит «левого» соучастника и заблокирует. Если посетитель выполнит необходимые притязания, отыграет собственную ставку и решит исключить собственный выигрыш, то ему надо(надобно) к, что казино обязательно потребует дать ксерокопии личных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные свои исключить не удастся.
#1279 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
карты казино букмекерские конторы бет <a href=https://glvk.guru/>Светлана Ходченкова</a> официальное казино вход почему в казино нет часов <a href=https://krtka.info/>пин ап casino pin up top</a> casino buzz порно с Алина Загитова porno Александра Степанова, фигуристка казино фильм смотреть онлайн самое казино порно с Баталина Ольга Юрьевна казино сегодня
DiskiPlus Крючкова Полина Викторовна порно DiskiPlus водка казино <a href=https://diskiplus.ru/>DiskiPlus ставки на спорт букмекерские конторы</a> DiskiPlus порно с Голикова Татьяна Алексеевна DiskiPlus кент казино <a href=https://www.diskiplus.ru/>DiskiPlus pin up casino официальный</a> DiskiPlus casino бездепозитный DiskiPlus 7k casino зеркало DiskiPlus Разуваева Ксения Денисовна порно DiskiPlus фреш казино DiskiPlus Крючкова Полина Викторовна порно DiskiPlus Преподобная Надежда Александровна порно DiskiPlus kent casino
#1280 Charlesgunnyhttp://filmkachat.ru
1хслотс мобильная версия зеркало
Обычно показатель повыше, чем для бонусов на депо. Не дивитесь, случае он будет даже х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных стран. <a href=http://filmkachat.ru/>1×slots зеркало которую указывали при регистрации кстати</a> Только выполнив все обстоятельства отыгрыша и дождавшись окончания проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить свои деньги. <a href=https://forum.index.hu/User/UserDescription?u=2065074>https://forum.index.hu/User/UserDescription?u=2065074</a> Маркетинговая политика всех игорных интернет-клубов обязана носить разнородный характер. И случае вознаграждения на депо служат чтобы, чтобы, чтобы провоцировать вносить депозиты и поощрять теснее место юзеров, то бездепозитный бонус в казино или бонус за регистрацию в казино, этого всего, рассчитан на расширение базы потребителей.Но а случае вы теснее профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в интернет казино; казино 1×slots <a href=http://krast-studio.ru/index.php?subaction=userinfo&user=tallforesight48>http://krast-studio.ru/index.php?subaction=userinfo&user=tallforesight48</a>
1×slots официальный сайт скачать на айфон
Так же стоит выделить то, собственно в каждом онлайн казино установлен собственный максимальный кешаут на бездепозитный бонус. Как управляло кешаут — это максимальная сумма денег, кот-ая дешевая для вывода с бездепозитного приза.Бесплатный приз – кредиты, которые онлайн-казино начисляет посетителю, не заставляя его пополнять игровой счет. скачать 1×slots официальный сайт Чтобы играть безвозмездно на реальные средства в казино, порой довольно просто зарегистрироваться. Иногда нужно выполнить дополнительные деянья.Стоит обозначить(означить), что бездепозитный приз выдается лишь совершеннолетним новеньким, коие, же, все пригласить личных приятелей и своих, того рассчитывающих на поощрительную программу лояльности. Подобная технология была среди конкуренцию онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению собственной посещаемости, путем привлечения новых игроков. Бонусы – это оригинальный шанс для вероятных участников игры, которые могут опробовать софт покер рума и увериться, станут ли они в него играть либо нет. Новый игрок испробует свои силы с реальными оппонентами в казино. <a href=http://velo-xachmas.com/index.php?subaction=userinfo&user=JasperNum>http://velo-xachmas.com/index.php?subaction=userinfo&user=JasperNum</a> 1×slots подтвердит вашу регистрацию если говорить Многие новички сомневаются, собственно поощрительный приз не несомненно отдавать, даже в они выиграли у казино. Это полностью неопасно и накрепко. Выводя выигранные средства, игрок просто одергивает свое участие при и утрачивает уникальную вероятность – безвозмездно увеличивать собственное материальное положение.
1×slots промокод при регистрации 2025
<a href=http://kiraplastinina.com/bitrix/click.php?goto=http://upslanches.ru/bitrix/redirect.php?goto=http://33komoda.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/aAnKwSZezKs>http://kiraplastinina.com/bitrix/click.php?goto=http://upslanches.ru/bitrix/redirect.php?goto=http://33komoda.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/aAnKwSZezKs</a> Бездепозитные бонусы казино за регистрацию в 2022 году — это возможность поиграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой либо числом безвозмездных вращений без внесения депозита. Не путайте деморежим с реальной игрой без необходимости внесения депо. 1×слот регистрация в 1×slots casino Процесс доказательства личности возможность взятьвдолг(взятьвзаймы) от 1-го денька до недели. Если клиент разрешил какую-либо ошибку при заполнении паспортных данных, то ему идет обратиться с проблемой в службу онлайн-казино.
1×slots официальный сайт зеркало
Бездепозитные бонусы – это исключительно занимательная и наиболее перспективная акция интернет-казино. Они даже лучше фри-спинов, поэтому собственно выплаты в даровых вращениях не гарантированы, как комбинации на барабанах игрового аппарата имеют не сложиться. <a href=http://jagplay.ekafe.ru/viewtopic.php?f=65&t=6617>1×slot зеркало</a> Новички не обожают сразу же заносить депозит. Это обусловлено неимением опыта и сомненьем. К счастью, в возможно получить бездепозитный бонус за регистрацию в казино. Неважно собственно начисляет система – фриспины либо кредиты. В всяком случае вы не рискуете собственными сбережениями. Это замечательная вероятность запустить приглянувшийся видео слот либо же испытывать удачу в настольных играх.Денежные свои. Третий приз за регистрацию без депозита – наличные. К раскаянию, только знаменитые и модные клубы шансы уяснить деньги в руб. Или баксах. С их поддержкою вы сможете насладиться каждой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед этим нужно выполнение определенных условий. Иногда для получения бонусов необходимо спутаться с представителями службы. Удобнее всего с ними беседовать в онлайн-сате, хотя времени достаточно запроса по электрической почте. рабочее зеркало 1хслотс <a href=https://wiki.rolandradio.net/index.php?title=%D0%90%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0>https://wiki.rolandradio.net/index.php?title=%D0%90%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0</a> В основном случаев безвозмездные бонусы начисляются в кредитах, которые нельзя сразу исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже.
1×slots регистрация на 1хслотс
Бесплатные призы казино без депозита возможно получить повторяющий валютных средств на бонусный счет (исключить их возможно только последствии отыгрыша), фриспинов, игры или кешбэк-бонуса. <a href=http://catalog2.drobak.com.ua/communication/forum/user/2812245/>http://catalog2.drobak.com.ua/communication/forum/user/2812245/</a> Как управляло, при выводе финансов, от играющего потребуется только устроить минимальный лепта чтобы, чтобы, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом собственный счет. 1×slots официальный сайт скачать Бездепозитный приз казино 2022 с выводом за регистрацию предоставляет возможность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и проверить качество работы саппорта. Довольно нередко, начиная игровой процесс, игрок уже отказывается останавливаться и проделывает настоящий лепта. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть безвозмездно вероятно как раз таки с бонусом за регистрацию без надобности вносить депозит.Список так называемых «запрещенных территорий» прилагается к правилам бонусной программки игорного портала. Обязательно выясните, распространяются ли на вас подобные наказания.
<b>Смотреть еще похожие новости:</b>
<a href=http://medforum.5nx.ru/viewtopic.php?f=4&t=9986>1х слот регистрация в 1×slots casino</a>
<a href=http://jagplay.ekafe.ru/memberlist.php?mode=viewprofile&u=326>1×slot рабочее зеркало</a>
<a href=https://forum.spherecommunity.net/User-Jamesmew>1×slots регистрация на 1хслотс</a>
<a href=https://rolivka.online/forum/showthread.php?tid=45562>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если вы избираете испытанное лицензионное онлайн казино и сделайте все обстоятельства получения бездепозитного бонуса, трудностей с получением презента у Вас не возникнет. Бездепозитные бонусы за регистрацию в игровых автоматах для собственников онлайн-казино считаются долею рекламной кампании, направленной на увеличение аудитории вебсайта. Так они продвигают средства бренды и привлекают свежих клиентов.
#1281 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
Бездепозитные призы казино за регистрацию в 2022 году — это возможность поиграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой либо количеством безвозмездных вращений без внесения депо. Не путайте деморежим с реальной забавой без надобности внесения депозита. <a href=http://filmkachat.ru/>1×slots акции</a> <a href=https://www.neobienetre.fr/forum-bien-etre-medecines-douces-developpement-personnel/topic/low-poly-design-creating-efficient-3d-models-for-modern-applications/>https://www.neobienetre.fr/forum-bien-etre-medecines-douces-developpement-personnel/topic/low-poly-design-creating-efficient-3d-models-for-modern-applications/</a> Обычно показатель повыше, чем для бонусов на депо. Не удивляйтесь, если он несомненно даже х100. Иногда завышенный коэффициент вейджера уточняется для обитателей отдельных государств.Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы которые появляются у начинающих. 1× slots сайт <a href=http://baanya.co.kr/bbs/board.php?bo_table=free&wr_id=202413>http://baanya.co.kr/bbs/board.php?bo_table=free&wr_id=202413</a> Онлайн гемблинг развивается с каждым днем больше и больше, свежие бренды создаются не по дням а по часам. Новые интернет казино проделывают вступительные акции для игроков, для того что бы зарекомендовать себя, и тем самым предлагают бездепозитные призы за регистрацию, собственно бы не пропустить такую вероятность — как воспользоваться свежим бездепом, рекомендуем навещать наш вебсайт как возможно почаще, самое лакомое и свежие несомненно добавляться в данном же перечне.Мы подготовили перечень, где есть практически актуальные и новые бездепозитные бонусы казино, коие вы можете получить безвозмездно. Для наших юзеров есть специальные предложения неповторимые бонусы, коие вы ни не найдете, их мы определили специальной красноватой плашкой «Exclusive».
1хслотс рабочее зеркало на сегодня
<a href=https://forum.banknotes.cz/viewtopic.php?t=80063>1×slots сайт</a> 1×slots актуальное зеркало Таким образом, заведение пробует показать себя своим потенциальным геймерам, а такой рекламный ход как казино бонус без депозита за регистрацию завлекает очень количество внимания к игорному заведению и обеспечивает неизменный струю новых посетителей и грядущих посетителей игрового онлайн клуба. <a href=https://latino-forex.com/members/234959-richardpaf>https://latino-forex.com/members/234959-richardpaf</a> Так собственно приготовьтесь предоставить секретную информацию (пол, возраст, страна проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев проверка данных занимает менее суток, в чего получится беспрепятственно выводить солидные выигрыши.При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, коие можно посвятить этой в казино. 1×slots на любой вкус как пройти регистрацию Можно. Вы всегда можете отказаться от получения бездепозитного бонуса за регистрацию в казино, же Вы не создадите ставку.В наше время довольно просто получить приз за регистрацию в казино. Практически любой игорный дом с радостью начисляет средства или безвозмездные вращения. Многие гэмблеры используют данным и не смущяются региться в каждом клубе с прибыльными критериями. Кстати, это замечательная возможность выработать победную стратегию и сорвать джекпот.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Например, игрок получил 500 руб. При творении аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 руб., потребуется устроить 875 спинов для полного отыгрыша.Далее потребуется отыграть вагер и вывести выигрыш. Игрокам без навыка крупно подфартило, они могут получить десятки презентов за 1 регистрацию. Если не сумели получить Бездепозитный бонус, не беспокойтесь. Обратитесь в интернет чат, оператор поможет ситуацию. Список так нарекаемых «запрещенных землель» прилагается к правилам бонусной программки игорного портала. Обязательно выясните, распространяются ли на вас сходственные наказания. <a href=http://images.google.to/url?q=http://magelectric.ru/bitrix/rk.php?goto=http://perinatalvl.ru/bitrix/redirect.php?goto=https://telegra.ph/Adresa-i-telefony-MFC-v-Sankt-Peterburge-09–23>http://images.google.to/url?q=http://magelectric.ru/bitrix/rk.php?goto=http://perinatalvl.ru/bitrix/redirect.php?goto=https://telegra.ph/Adresa-i-telefony-MFC-v-Sankt-Peterburge-09–23</a> Получить Бездепозитный бонус в интернет казино дело 2-ух кликов. Другой момент, отыграть рекламную и соблюсти верховодила и обстоятельства отыгрыша. Под правилами предполагается не только вагер, хотя и ограничения по наибольшей ставке. Мы понимаем, собственно в кинотеатр все ставят на зеро и выигрывают. Призываем не делать сходственного. Перед активацией бонуса прочтите правила. Узнайте последующие факторы: Условия получения презента, за регистрацию, за депозит и прочее. Ограничения по максимальной ставке. Зачастую не повыше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах можно отыгрывать вагер. Можно вращать автоматы, а вагер будет стоять на пространстве. Поэтому принципиально аристократия, в каких играх можно совершать кратность денежного оборота. 1× slots зеркало
казино 1×slots
Если вы облюбовали для себя несколько брендов коие вас больше всего приглянулись, для постоянной забавы! Таких гемблеров казино очень любит и оценивает, за частую такие игроки становятся VIP игроками заведения, коим нередко поступают выгодные предложения в виде призов, например же туда входит и бездепозитные. 1×slots зеркало на сегодня <a href=https://www.elephantjournal.com/profile/glavdorogadv1606/>https://www.elephantjournal.com/profile/glavdorogadv1606/</a>
casino 1×slot
У каждого игорного заведения свои управляла и условия. Но, чтобы получить бонусы, необходимо выполнить стереотипные действия:Все любят получать презенты. Согласитесь, практически любой играющий человек несомненно беспредельно рад, случае получит безвозмездный подарок для игры в интернет казино просто за регистрацию либо же бонус за внесенный депозит, так именуемые приветственные призы для свежих игроков. Соответственно такие интернет клубы станут более известны и преимущественны у игроков при выборе казино для игры. Топ казино каждый обновляется и прибавляются свежие и занимательные игровые клубы с симпатичной бонусной политикой и всеми вероятными прерогативами, к которым относятся такие бонусы как фриспины за регистрацию, денежные бездепозитные призы, а великодушные бонусы за внесенный депозит. Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, дабы еще раз получить безвозмездный бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ждет неизбежное наказание. <a href=http://interiorwork.co.kr/bbs/board.php?bo_table=free&wr_id=457896>http://interiorwork.co.kr/bbs/board.php?bo_table=free&wr_id=457896</a> Наиболее модные гонорары между гэмблеров – бездепозитные бонусы казино. Это не удивительно, ведь можно получить бесплатные вращения или виртуальные кредиты, и при этом не придётся пополнять счёт, рисковать собственными средствами. Удастся насладиться разнородными развлечениями даже выиграть крупную сумму, избегая серьёзного риска. 1х слот регистрация в 1×slots casino Выбор любого онлайн казино на нашем веб-сайте. В описании к любому Вы сможете узнать, собственно получите за творение аккаунта.Обычно показатель выше, чем для бонусов на депо. Не удивляйтесь, случае он будет в х100. Иногда завышенный коэффициент вейджера уточняется для обитателей отдельных государств.
<b>Смотреть еще похожие новости:</b>
<a href=https://edidaktikum.ee/en/content/iii-kontakttund-08-juuni?page=104#comment-298968>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<a href=https://krok.biz/forum/viewtopic.php?f=7&t=96966>1×slots промокод при регистрации</a>
<a href=http://www.psicologamariafoti.it/index.php/forum/ideal-forum/277538–1×slots#367818>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подарки на определенные даты отличаются критериями получения. Если одобрение начисляют игроку на денек рождения, то сумма обычно находится от совместного размера депозитов последний год.
#1282 VodaCedhttp://xn----7sbfi1cac.xn--p1ai
Мы развозим питьевую воду как частным, так и юридическим лицам. Наша транспортная служба осуществляет доставку питьевой воды на следующий день после заказа.
<a href=http://xn----7sbfi1cac.xn–p1ai>сестрица вода нижний новгород официальный сайт</a> Срочная доставка в день заказа доступна для владельцев клубных карт. Доставка воды происходит во все районы Нижнего Новгорода, в верхнюю и нижнюю части города: <a href=http://xn----7sbfi1cac.xn–p1ai>вода-нн.рф</a>
#1283 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация в 1×slots casino
Возьми собственный презент. Чаще всего приз активируется сразу последствии регистрации. Но случаются истории, когда нужно зайти в личный кабинет либо написать в справочную службу. <a href=http://filmkachat.ru/>1×slots casino online регистрация</a> Бездепозитный приз казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби избранного заведения, определится в выборе игр и проверить качество работы саппорта. Довольно часто, начиная игровой процесс, игрок теснее отказывается останавливаться и проделывает настоящий лепта. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть бесплатно вероятно как один таки с бонусом за регистрацию без надобности заносить депозит.Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, solid только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. <a href=https://www.neobienetre.fr/forum-bien-etre-medecines-douces-developpement-personnel/topic/low-poly-design-creating-efficient-3d-models-for-modern-applications/>https://www.neobienetre.fr/forum-bien-etre-medecines-douces-developpement-personnel/topic/low-poly-design-creating-efficient-3d-models-for-modern-applications/</a> Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша призов. Заведения всегда устанавливают максимальную ставку, возможную по условиям вейждера. 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=http://xinyue345.com/home.php?mod=space&uid=1124884>http://xinyue345.com/home.php?mod=space&uid=1124884</a> Вейджер менее х30–35 считается применимым. Опытные игроки утверждают, собственно с таким вейджером реально остаться в плюсе, если верно подойти к выбору игрового аппарата.Выполнив все требования оператора, клиент имеет оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем менее суток. Если дополнительно потребуется пройти функцию верификации, то срок увеличивается до 1–2 трудящихся дней. Для перевода используются банковские инструменты и электрические платежные системы. Второй метод подходит другого, как, так как основная транзакций такой осуществляются моментально. В связи со специфичностью функционирования банков обработка платежей может взятьвдолг(взятьвзаймы) до нескольких рабочих дней.
1×slot казино зеркало
Новички не любят сразу же вносить депо. Это обосновано неименьем опыта и сомненьем. К счастью, наши возможно получить бездепозитный приз за регистрацию в казино. Неважно собственно начислит система – фриспины или кредиты. В любом случае вы не рискуете своими сбережениями. Это отличная возможность запустить понравившийся видео слот или же испытать удачу в настольных играх. <a href=https://technique-tp.com/forum/viewtopic.php?t=5522>1хслотс рабочее зеркало</a> casino 1×slot Бездепозитный бонус за регистрацию в казино — это стартовый презент в виде денежного начисления либо безвозмездных вращений для свежих игроков заведения, для получения которого надо вносить депозит.Бонус с зачислением средств на счет дает больше свободы деяний. Пользователь сам избирает, каким образом воспользоваться подаренными средствами. Здесь того шансы работать ограничения на список доступных игр, хотя обычно эти рамки не например строги, как в промо с безвозмездными вращениями. <a href=http://www.hcceskalipa.cz/bazarek/iz-chego-sostoit-dieta-eleny-malyshevoi>http://www.hcceskalipa.cz/bazarek/iz-chego-sostoit-dieta-eleny-malyshevoi</a> В интернет-сети практически можно отыскать перечни наиболее модных и обещанных поощрительных программ от популярных онлайн-казино.Не сложно додуматься, собственно not the slightest deposit bonuses практически никогда не бывают великими. Чаще всего речь идет о пяти–тридцати долларах (либо эквиваленте данной суммы в другой еденице). казино 1×slots официальный сайт Так же стоит выделить то, что в любом онлайн казино установлен свой максимальный кешаут на бездепозитный бонус. Как правило кешаут — это максимальная сумма средств, кот-ая доступная для вывода с бездепозитного приза.Такие одобрения разрешают бесплатно протестировать новое казино, разобраться с игровым процессом интернет слотов, заработать и исключить маленькую сумму денег.
1×slots рабочее зеркало
В наше время довольно просто получить бонус за регистрацию в казино. Практически любой игорный дом с готовностью начисляет деньги или бесплатные вращения. Многие гэмблеры пользуются этим и не стесняются региться в любом клубе с выгодными критериями. Кстати, это замечательная вероятность выработать победную стратегию и сорвать джекпот.Но не стоит размышлять, что снабжая юзеров этими призами, казино увлекается спонсированием. Ведь объемы вознаграждений, в основном, не великие (средним объемом от 5 до 20 $). И на эти свои налагаются конкретные условия и лимитирования, неотклонимые к исполненью игрока, если в последствии он желает получить все средства выигранные деньги. На нашем веб-сайте Вы найдете перечень актуальных свежих бездепозитных бонусов в казино 2022 года. Также, есть большое неповторимых услуг, коие доступны лишь посетителям нашего вебсайта в регистрации по нашей ссылке либо активации особого промокода. <a href=https://www.baronerosso.it/forum/members/116616_henrylyday.html>https://www.baronerosso.it/forum/members/116616_henrylyday.html</a> Бездепозитные бонусы отличный вариант бесплатной забавы в игровые автоматы. Многие пользователи сети не знают, что в казино возможно начать играть полностью безвозмездно, а потом исключить выигрыш на банковскую карту либо электрический кошелек, другие не доверяют онлайн казино, а третьи удачно играют и выигрывают – и подчас достаточно великие суммы. 1×slots регистрация на официальном сайте Вейджер менее х30–35 является применимым. Опытные игроки заявляют, что с этим вейджером реально остаться в плюсе, случае правильно подойти к выбору игрового аппарата.
1×slots официальный сайт скачать
При правильном подходе бездепы — это отличный метод играть на деньги без траты личных средств. Есть количество рекомендаций, следуя которым можно извлечь максимум пользы из сходственных промоакций казино. Играть по лишь на лицензированных площадках. Скриптовые веб-сайты не только обманывают с бонусными услугами, но и используют пиратский софт с измененным ГСЧ. Выиграть на этих автоматах невероятно.Все бесплатные призы кажутся заманчивыми. Кто же категорически от способности поиграть в онлайн-казино, не рискуя деньгами, хотя получая выигрыши. Но далековато не все бездепозитные бонусы в равной степени презентабельны для рассудительного клиента. Какие призы у еще получить кроме бездепозитного приза за регистрацию в казино? По мимо бездепозитного приза, любое онлайн казино предлагает игрокам выгодное предложение на первый депо, вы совершаете депо, ваш депо увеличивается в двое или даже в трое, тем самым начать играть можно с больше крупной суммой, например же не забываем тему вейджер на бонусы.Приветственный приз без депозита ? презент за регистрацию. Выдается деньгами, фриспинами или баллами. В последнем случае бонусные баллы используются для участия в турнирах или размена на реальные деньги. 1хслот зеркало сайта <a href=http://www.haxorware.com/forums/member.php?action=profile&uid=287644>http://www.haxorware.com/forums/member.php?action=profile&uid=287644</a> Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном призе, то начала внимание на велечину вейджера и срок, кот-ый дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, что, этим проще отыграть бонус и вывести выигрыш.
1×slots регистрацию процедура займет всего лишь
Суммы сходственных услуг, как правило, колеблются от 3-х до 20 $, а вейджер на эти свои обязан сочинять от 30 до шестидесяти один. Зачастую, величайшая сумма выигрыша тут составит от одной до 2-ух сотен $. Если геймер выиграет больше, то все средства все быть списанными до очень разрешенного выигрыша. Здесь замечена смысл выводить еще несуществующие финансы на свою платежную систему и далее отыскивать заведение с благоприятными под данную сумму релоадом или призом за первое пополнение счета. Есть несколько подвидов бездепозитного вознаграждения, предлагаемого наибольшим количеством заведений. <a href=https://www.numeracy.wiki/index.php/1×_Slots_Casino_%D0%9E%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9_%D0%A1%D0%B0%D0%B9%D1%82>https://www.numeracy.wiki/index.php/1×_Slots_Casino_%D0%9E%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9_%D0%A1%D0%B0%D0%B9%D1%82</a> Самый распространённый из подобных призов, конечно же, бездеп на день рождения клиента — бонус в виде фиксированной суммы либо фриспинов поступает на счёт игрока, а воспользоваться им можно протяжении установленного периода времени.Существует ли стратегии для отыгрыша бездепозитных бонусов? К сожалению нет, на выигрыши либо проигрыши с бонусов, казино либо игрок повлиять не может, отдача игр случается от разработчиков игр. 1×slots зеркало проходить регистрацию это отличный вариант Вейджер менее х30–35 является применимым. Опытные игроки заявляют, собственно с этим вейджером реально остаться в плюсе, в правильно подойти к выбору игрового аппарата.
<b>Смотреть еще похожие новости:</b>
<a href=http://swissairways-va.com/phpBB3/viewtopic.php?t=802801>1×slots зеркало проходить регистрацию это отличный вариант</a>
<a href=https://masstr.net/showthread.php?tid=216179>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Размер ставки для игры по бездепозитному призу (конечно же, если, тогда,, когда он представлен повторяющий бонусных валютных средств) зачастую ниже, чем при игре на депо. Ограничение будет работать до этапа отыгрыша приза. Oтыгpaть приз с указанным вeйджepом, результата необходимо сдeлaть cтaвoк нa cумму, превышающую объем бонуса в некоторое один.
#1284 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
суть казино порно с Петр Ян (ММА) <a href=https://rucriminal.info/>скачать 1×bet</a> Валентина Матвиенко порно Хорова Наталья Александровна порно <a href=https://repost.news/>казино смотреть онлайн бесплатно</a> сайт винлайн букмекерская контора про казино почему казино порно с Гатагова Ольга Анатольевна Мухтиярова Елена Вячеславовна порно порно с Дарья Касаткина (теннис) 7k casino
DiskiPlus Елена Лядова DiskiPlus top casino <a href=https://diskiplus.ru>DiskiPlus порно с Гатагова Ольга Анатольевна</a> DiskiPlus 1×bet зеркало слоты DiskiPlus казино регистрации <a href=https://www.diskiplus.ru>DiskiPlus казино проиграл</a> DiskiPlus kometa casino DiskiPlus Любимова Ольга Борисовна порно DiskiPlus Кузнецова Анна Юрьевна порно DiskiPlus 1×bet зеркало на сегодня 1×bet xyz DiskiPlus porno Игорь Акинфеев (футбол) DiskiPlus pin up casino пин DiskiPlus 1×bet на сегодня
#1285 Charlesgunnyhttp://filmkachat.ru
1х слот 1хслотс регистрация перейти на 1×slots
При поддержки такого поощрения оператор может также привлекать клиентов, которые раньше показывали активность на сайте, хотя по какой-то основанию перестали выступать. В данном случае промокод высылается юзеру по электрической почте либо повторяющий SMS. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> <a href=https://www.esurveyspro.com/Survey.aspx?id=d8357902-e8be-4a72–8767–3426f9bacbbb>https://www.esurveyspro.com/Survey.aspx?id=d8357902-e8be-4a72–8767–3426f9bacbbb</a> Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?Чем ниже значение вейджера, тем легче отыграть и вывести приз. Если Вы расчитываете заработать на бездепе, а не просто ознакомиться с свежим игровым клубом, то стоит игнорировать бонусов с высоким вейджером их почти не реально отыграть. С ними Вы можете только протестировать игры заведения. 1×slots казино зеркало <a href=http://bbs.pc590.com/home.php?mod=space&uid=145809>http://bbs.pc590.com/home.php?mod=space&uid=145809</a> Пoдтвepдить личнocть посетителя. Для удачного вывода средств, необходимо доказать лицо клиента. Нa этaпe вepификaции пpoфиля, работники службы безопасности должны убедиться, собственно у игрока не один акк. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не может вывести собственный выигрыш, если у него несомненно некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы.В лицензионных бездепозитных казино играть в азартные игры действительно неопасно. Наличие лицензии одобряет что, этот факт, что клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP.
1×slots casino зеркало рабочее
Чтобы получить возможность вывести прибыль с бездепозитного бонуса в казино, нужно выполнить ряд критерий:Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. 1×slots подтвердит вашу регистрацию если говорить Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, solid только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Иногда у посетителей сайта все появиться проблемы при активации приобретенного промо-кода. В таких случаях, нужно адресоваться за подмогою в службу поддержки «Support». Для получения ответа, обязательно указывается определенная первопричина воззвания и подтверждается информация дополнительными снимками. Если сложилась спорная ситуация, всегда возможно обратиться к главному регулятору или контролирующему органу, выдавшему этому заведению лицензионный документ. <a href=http://x91427p3.beget.tech/user/Briandrini/>http://x91427p3.beget.tech/user/Briandrini/</a> Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном веб-сайте и выполните вход в собственный кабинет, чтобы арестовать бесплатные вращения с вейджером х40;Каждый из бездепозитных бонусов без пополнения 2022 содержит собственный определенный вейджер для отыгрыша, например же в каждом казино он уточняется персонально — где то он х55 а кое-где х30, повторюсь везде по разному! 1×slots казино мобильная версия Выполнив все требования оператора, клиент имеет оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит в среднем не более суток. Если дополнительно потребуется пройти процедуру верификации, то срок увеличивается до 1–2 трудящихся дней. Для перевода применяются банковские приборы и электрические платежные системы. Второй способ подходит другого, как, так как масса транзакций ситуации исполняются мгновенно. В связи со спецификой функционирования банков обработка платежей имеет взятьвдолг(взятьвзаймы) до нескольких трудящихся дней.
1хслотс зеркало
Некоторые казино имеют предлагать посетителям бездепы за подтверждение номера либо почты либо репост на страницу в соц сетях. Если площадка презентует бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь ввести акк на веб-сайте и активировать его, подтвердив адресок электрической почты, номер телефонного либо другие данные, коие просит оператор. Перед этим необходимо увериться, что пользователь находится на официальном сайте казино, не на жульнической площадке. <a href=https://hikvisiondb.webcam/wiki/User:TessaBurden5479>https://hikvisiondb.webcam/wiki/User:TessaBurden5479</a> Список например именуемых «разрешенных территорий» прилагается к правилам бонусной программы игорного портала. Обязательно проверьте, распространяются ли на вас подобные санкции.Представьте момент, когда при ставке в 10 рублей Вы получите подобное умножение. Миллион руб. За одно вращение, что вполне возможно. Поэтому вопрос, сколько возможно выиграть остаётся открытым. Предлагаем выяснить самостоятельно. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный бонус и инспектируйте фортуну в деле. Разумеется, вывести средства довольно. Однако шансы есть у всех. 1×slots официальный demo регистрация в 1×slots casino
1×slots официальный сайт зеркало
Срок активации и время на отыгрыш. Зачисление денег либо фриспинов происходит при активации протяжении требовательно ограниченного периода, похожие требования предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать бонус количество дней или и месяцов. Другие выдают крупную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером. При регистрации что или ином интернет игральном заведении — вам дается раз шанс испытать собственную фортуну не внося свои монеты. Замечу что такую поощрительную услугу деют не все онлайн игровые площадки, а только щедрая середина(средина) из них. Которые мы подготовили для Вас в нашем списке.Так собственно можете отважно регистрироваться без всяких размышлений. Фортуна сегодня наверняка на вашей стороне. Не бойтесь, так следствие какого или убытка Вам совершенно не грозит. С этими призами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе. Бездепозитные призы казино за регистрацию в 2022 году — это вероятность поиграть за счёт заведения. Казино даёт посетителю шанс пользоваться определённой суммой или числом бесплатных вращений без внесения депозита. Не путайте деморежим с реальной игрой без необходимости внесения депо.Нет. Для получения бездепозитного бонуса в казино нужна неотъемлемая регистрация на веб-сайте. Играть в слоты безвозмездно и без регистрации возможно только в демо режиме. 1×slots casino регистрация на сайте <a href=http://orenburg-ufa.ru/index.php?subaction=userinfo&user=longvacation31>http://orenburg-ufa.ru/index.php?subaction=userinfo&user=longvacation31</a> Даже не выиграв солидную необходимую, игрок интересно проведет время, изнутри исследует работу площадки, оценит геймплей автоматов. Все это без каких-либо денежных рисков. Быть в курсе превосходнейших акций легко. Достаточно периодически учить список свежих интернет казино с выводом бонуса без депо в этом разделе.Перечисленные повыше основные свойства сочетают практически каждый приз и являются стандартными для бездепозитных бонусных начислений в казино.
1×slots официальный сайт, скачать
Да, у даровых призов есть дефекты. Прежде всего, они обычно очень. Кроме того, условия вейджера по ним постоянно жесткие. Но все неимение риска делает их довольно красивыми для посетителей. <a href=http://opensourceprocurement.org/forumthread1513–1×slots-RABOCEE-ZERKALO-SKACAT%D1%8C>http://opensourceprocurement.org/forumthread1513–1×slots-RABOCEE-ZERKALO-SKACAT%D1%8C</a> Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут устанавливает ограничение для посетителей. Конечно, это возможно счесть неким неудобством для игрока, хотя справедливости необходимо, собственно выбор автоматов всё точно остаётся довольно наибольшим. 1×slots официальный сайт скачать
<b>Смотреть еще похожие новости:</b>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=712585>1× slots casino зеркало</a>
<a href=http://swissairways-va.com/phpBB3/viewtopic.php?t=792913>1×slots официальный сайт зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если площадка презентует бездеп за регистрацию, то процедура его получения проста. Нужно только ввести акк на веб-сайте и активировать его, подтвердив адрес электрической почты, номер телефона либо другие данные, коие настятельно оператор. Перед данным нужно убедиться, что юзер располагается на официальном сайте казино, но на жульнической площадке. При маленькой сумме бонуса рекомендовано выступать по низким ставкам, а применять наибольшие какого-либо лишь в том случае, если вейджер слишком великий, а время на отыгрыш крепко ограничено.
#1286 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
cat casino 7k casino бонус <a href=https://rucriminal.info/>Попова Анна Юрьевна порно</a> сайт казино зеркало лучшие онлайн казино <a href=https://th-royalgclub.com/>фреш казино</a> официальные букмекерские конторы скачать casino com casino daddy человек казино pin casino casino онлайн 1×bet скачать приложение
DiskiPlus 7k casino зеркало на сегодня DiskiPlus pin up casino скачать <a href=https://diskiplus.ru>DiskiPlus 1×bet слоты</a> DiskiPlus казино онлайн бесплатно DiskiPlus рабочие зеркала казино <a href=https://diskiplus.ru/>DiskiPlus порно с Диана Шнайдер (теннис)</a> DiskiPlus порно с Алина Загитова, фигуристка DiskiPlus демо казино DiskiPlus porno Илья Ковальчук (хоккей) DiskiPlus официальные букмекерские конторы скачать DiskiPlus pin casino DiskiPlus pin casino зеркало DiskiPlus пина букмекерской конторы
#1287 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
На безвозмездные бонусы онлайн-казино практически постоянно распространяется ограничения по стране проживания клиентов. Даже случае вас разрешено раскрывать счет и играть на деньги в заведении, это еще не означают, собственно вас доступны no deposit bonuses. <a href=http://filmkachat.ru/>1 хслот регистрация в 1×slots casino</a> <a href=https://www.obesityhelp.com/members/shopavto/about_me/>https://www.obesityhelp.com/members/shopavto/about_me/</a> Приветственный бездеп предоставляется хоть игроку только один один. Казино сражаются с так нарекаемыми бонусхантерами (от англ. Bonus Hunter — охотник за призами), пытающимися заводить многочисленные аккаунты для обмана оператора и повторного получения презента. Исключить сходственные деянья позволяет верификация данных. Администрация вправе потребовать у посетителя подтвердить индивидуальные данные, обозначенные при регистрации. 1×slots casino регистрация 1×slotscasin online <a href=https://app.welvi.co.kr/bbs/board.php?bo_table=qa&wr_id=2313312>https://app.welvi.co.kr/bbs/board.php?bo_table=qa&wr_id=2313312</a>
1×slots официальный demo регистрация в 1×slots casino
Для казино, работающих онлайн, бездепозитные бонусы нужны для вербования новых посетителей. Предложение поиграть на слотах без необходимости внесения настоящих денег — работающий способ для увеличения интереса к компании. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит выступать в казино, только сейчас уже на собственные деньги. <a href=http://check2go.net/author/jameslob/>1хслотс официальный сайт зеркало</a> 1хслот скачать <a href=http://0018688.com/home.php?mod=space&uid=14804>http://0018688.com/home.php?mod=space&uid=14804</a> 1×slots официальный зеркало рабочее С другой стороны, гораздо легче забрать бездепозитные фриспины за регистрацию в казино и прямо в начать вертеть барабаны в наилучших слотах. Главная необыкновенность спинов никаких, собственно они предназначены для лучших автоматов. Удастся не пройти дополнительные раунды, хотя и прирастить необходимую выигрыша, заработать респины и другие внутриигровые презенты.Рассмотрим принцип его деянья на случае. Допустим, вы зарегались и получили $10 no deposit bonus с вейджером х50. Это означает, собственно выигранные деньги возможно несомненно выводить не раньше, чем в того, как общая сумма ставок достигнет $500.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Как управляло, новоприбывшие геймеры в первую очередь желают ознакомиться с методами ввода и вывода денежных средств и сроки исполнения поданных заявок дабы четко понимать, как быстро меня вывести свой казино бонус за регистрацию без депозита на электрический кошелек либо же банковскую карту. К счастью для всех играющих, внутри конкретных холдингов, все казино конкурируют между собой. Ведь если бы определенную фирму давало только одно онлайн-заведение, то ли бы посетители заметили казино с призом за регистрацию и могли бы рассчитывать лишь на вознаграждение вид приза на 1-ое вложение. К любому заведению периодически следует привлекать свежих игроков, собственно, итоге, лишь на руку всем играющим.На бонусные начисления все быть установлены дополнительные ограничения, которые Вы не учли при отыгрыше. Пока бонус всецело не отыгран — деньги из казино не выводятся. <a href=http://lawshare.tw/home.php?mod=space&uid=345891>http://lawshare.tw/home.php?mod=space&uid=345891</a> 1×slots зеркало которую указывали при регистрации кстати Большинство интернет-казино из нашего топ-10 готовы повеселить вас эксклюзивными промоакциями. Читайте о их в обзорах и на форуме.Во время игры в казино, выигрыши, приобретенные спасибо безвозмездным призовым фондам, суммируются и включаются в общую необходимую для отыгрывания. Однако, в фортуна улыбнется и получится отыграть все бонусы, игровое заведение гарантированно разрешит вывести финансовые средства. Сумма вывода будет зависеть от лимита, утвержденного непосредственно в данном учреждении. Поэтому, пристально надо(надобно) читать управляла выдачи безлимитных депозитов.
1×slots официальный зеркало рабочее
Прежде всего, не запамятовывайте регулярно заглядывать на страницу обзоров бездепозитных бонусов. Они шаг за шагом рассматривают наиболее увлекательные предложения ведущих игорных порталов.Частенько новички не знают, как активировать подарки или вывести 1-ый выигрыш. Для похожих случаев наша команда обрисовала основные определения – что это фриспины, вейджер, как его отыграть, чего нужно протекать верификацию. <a href=http://thienduongcacanh.com/threads/1×slots-1×slots-registracija-perejti-na-1×slots.12644/>1хслотс 1хслотс регистрация перейти на 1×slots</a> Мы подготовили перечень, где есть постоянно животрепещущие и новые бездепозитные призы казино, коие вам получить безвозмездно. Для наших юзеров есть специальные предложения неповторимые бонусы, которые вы ни не найдете, их мы определили особой красной плашкой «Exclusive». казино 1×slots <a href=http://the-good.kr/bbs/board.php?bo_table=free&wr_id=1214521>http://the-good.kr/bbs/board.php?bo_table=free&wr_id=1214521</a> Вообще перейдя в казино — правила схожи в получении бездепозитных призов, в стандартные правила входит: доказать эл. Почту и телефон, наполнить свой собственный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ.Проверка занимает от нескольких мин. До нескольких дней, спецы техподдержки имеют запросить дополнительные документы или инициировать краткое общение по Skype.
1×slots регистрация
Бездепозитные бонусы начисляются лишь один один. Не стоит открывать свежие аккаунты, чтобы получить их повторно. Служба безопасности казино непременно выявит «левого» соучастника и перекроет. Если гость выполнит нужные притязания, отыграет собственную ставку и решит исключить личный выигрыш, то ему нужно сведению, что казино обязательно востребует предоставить ксерокопии личных документов, чтобы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои исключить не удастся. <a href=https://tazovod.khalal.ru/forum/memberlist.php?mode=viewprofile&u=41556>https://tazovod.khalal.ru/forum/memberlist.php?mode=viewprofile&u=41556</a> Если при регистрации указать промокод, возможно гарантировано получить приз. Где брать ваучер? Посетите тематику блоги либо форумы. Иногда администрация клуба проделывает рассылку ваучеров на электронную почту. В последнее время игорные дома начали рекламироваться в кинокартинах и телесериалах. Присмотритесь и скорее заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных руб. казино 1×slots официальный сайт
<b>Смотреть еще похожие новости:</b>
<a href=https://kfz-gringer.at/index.php/forum/suggestion-box/80836–1×slots#80600>1×slots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных требований, не обязательной верификации. Если на сайте предусмотрена обязательная процедура доказательства личности, то вывести выигрыш получится лишь последствии ревизии данных. Приготовьтесь наполнить анкету и выслать в техподдержку документ, подтверждающий личность.
#1288 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino играть porno Екатерина Ефременкова, шорт-трекистка <a href=https://m.repost.news/>казино большая</a> порно с Илья Осипов (киберспорт) кент казино <a href=https://specreporter.com/>7k casino бонус</a> яндекс игры казино часы казино casino 7k рабочее порно с Аделия Петросян (фигурное катание) pinco casino 7k casino зеркало на сегодня 1×bet зеркало рабочее
DiskiPlus porno Алена Михайлова DiskiPlus лучшие букмекерские конторы <a href=https://diskiplus.ru>DiskiPlus 1×bet скачать бесплатно</a> DiskiPlus винлайн букмекерская контора официальный сайт DiskiPlus фреш казино <a href=https://www.diskiplus.ru/>DiskiPlus Матвиенко Валентина Ивановна порно</a> DiskiPlus фильмы казино рояль DiskiPlus 7k casino официальный сайт DiskiPlus автомат казино DiskiPlus порно с Захарова Мария Владимировна DiskiPlus porno Светлана Ходченкова DiskiPlus Самойлова Алла Владимировна порно DiskiPlus casino вход
#1289 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация в 1×slots casino
Онлайн-казино тщательно продумывают бонусные обстоятельства, коие нужно выучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша прочие лимитирования. <a href=http://filmkachat.ru/>1× slots официальный</a> Мы подготовили список, где есть постоянно актуальные и свежие бездепозитные призы казино, коие вы можете получить даром. Для наших юзеров есть особые предложения эксклюзивные призы, коие вы кого не найдете, их мы обозначили особой красноватой плашкой «Exclusive». <a href=https://www.iotappstory.com/community/forum/5-support/4456-ethnic-home-decor-transform-your-space-with-cultural-design>https://www.iotappstory.com/community/forum/5-support/4456-ethnic-home-decor-transform-your-space-with-cultural-design</a> Фриспины. Бесплатные вращения предусмотрены для использования в видео-слотах. Внимательно читайте условия – они нередко выдаются для некоторых машин. В зависимости от клуба продоставляется делать определенное количество ставок. Кстати, современные игорные жилища дают вероятность заводить «одноруких бандитов». 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=http://boss.why3s.cc/boss/home.php?mod=space&uid=140299>http://boss.why3s.cc/boss/home.php?mod=space&uid=140299</a> Основное различие том,, собственно для получения бездепа не пополнять баланс в казино. Но кроме этого, есть ряд прочих отличий:Представьте момент, когда при ставке в 10 рублей Вы получите схожее умножение. Миллион руб. За одно вращение, собственно вполне вероятно. Поэтому вопрос, сколько возможно выиграть остаётся открытым. Предлагаем выяснить самостоятельно. Регистрируйтесь в одном или нескольких онлайн казино, получайте Бездепозитный приз и инспектируйте удачу в деле. Разумеется, вывести средства сложно. Однако шансы есть у всех.
1×slots зеркало на сегодня
Обычно показатель выше, чем для призов на депозит. Не удивляйтесь, случае он несомненно в х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных государств.В игровых клубах без лицензии Вы покупаете „кота в мешке“ и если, тогда, неоднозначных обстановок нет способности куда-то посетовать и доказать свою правоту. 1×slots актуальное зеркало Обычно бездепозитные промоакции от казино, прибывают на эл. Почту в деньки рождения либо праздничные. В неких интернет казино можно адресоваться в чат и как неизменному игроку, вполне для предложат бездепозитное предложение.Фриспины предназначены для применения в видео слотах. Внимательно ознакомьтесь с условиями – часто их выдают на кое-какие автоматы. В зависимости от клуба, у вас получится устроить определённое количество ставок. Кстати, продвинутые игорные дома позволяют запускать каждых «одноруких злодеев». <a href=https://www.niadd.com/article/1223099.html>https://www.niadd.com/article/1223099.html</a> 1×slots мобильная версия войти казино Прибывшие на аккаунт деньги бездепозитные призы предназначаются, в, только для свежеиспеченных юзеров, коие ранее не имели собственного аккаунта в данном казино. Исходя из сего, случае раньше у игрока был сделан депо, то, по всей вероятности, у него больше не будет способности рассчитывать на получение такового приза в определенном заведении.
1×slots зеркало на сегодня
Для казино, работающих интернет, бездепозитные бонусы нужны для привлечения новых посетителей. Предложение поиграть на слотах без надобности внесения настоящих денег — работающий метод для увеличения энтузиазма к фирмы. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит выступать в казино, лишь теперь теснее на собственные средства. Выигрыши с бонусов без вложений постоянно привязаны к притязанию по ставкам и имеют быть обналичены только последствии выполнения этих требований. <a href=http://digital-edu.info/bitrix/redirect.php?goto=http://hustler.kz/bitrix/redirect.php?goto=http://makbush.ru/bitrix/rk.php?goto=https://telegra.ph/Hodatajstvo-ob-utochnenii-izmenennogo-administrativnogo-iska-09–24>http://digital-edu.info/bitrix/redirect.php?goto=http://hustler.kz/bitrix/redirect.php?goto=http://makbush.ru/bitrix/rk.php?goto=https://telegra.ph/Hodatajstvo-ob-utochnenii-izmenennogo-administrativnogo-iska-09–24</a> 1хслот зеркало Обычно, бездепозитные бонусы выдаются под определенные слоты с фиксированной ставкой, но их наверняка воспрещено использовать в игровых автоматах с современным джекпотом. Список игр, в можно использовать бездеп, Вы отыщите в описании акции или можете уточнить у саппорта заведения.К огорчению, нет. Почти все казино, требуют внесение но бы 1-го минимального депо для вывода выигрыша с бездепозитного бонуса. Также учитывайте, собственно вывести средства разрешено только на ту платежную систему, с коей был изготовлен депо.
1×slots регистрация
Индивидуальные поощрения выдаются за совершение деяний: подписку на аккаунты площадки в соц сетях, установку мобильного прибавления либо официального посетителя для ПК. В большинстве казино срабатывают программы лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на грядущий степень нередко сопровождается выдачей бездепа.Высокая конкурентность в сегменте азартных игр доказывает операторов завлекать посетителей разнообразными акциями. Благодаря данному у гостей бывает возможность получить призы в казино за регистрацию без депо. Воспользоваться таким предложением возможно, избегая функцию внесения средств на игровой счет, просто активировав аккаунт на веб-сайте. Наш экскурсовод по бездепам поможет избрать самую привлекательную бонусную программу, узнать верховодила получения такого гонорары и воспользоваться им с максимальной выгодой. Так что сможете неустрашимо региться без всяких раздумий. Фортуна сегодня наверняка на вашей стороне. Не бойтесь, ведь следствие какого или ущерба Вам абсолютно не угрожает. С такими бонусами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе. 1×slot зеркало <a href=https://wiki.snooze-hotelsoftware.de/index.php?title=Benutzer:FranklynHiller3>https://wiki.snooze-hotelsoftware.de/index.php?title=Benutzer:FranklynHiller3</a> При регистрации никаких или ином интернет игральном заведении — вас дается один шанс испытывать свою фортуну не внося свои монеты. Замечу что эту поощрительную услугу предоставляют не все интернет игровые площадки, а только великодушная половина из их. Которые мы подготовили для Вас в нашем перечне.
casino 1×slot
Многие новенькие сомневаются, что поощрительный приз не нужно будет возвращать, том если они выиграли у казино. Это абсолютно безопасно и надежно. Выводя выигранные средства, игрок просто одергивает свое роль в игре и теряет уникальную вероятность – безвозмездно увеличивать собственное вещественное положение. <a href=http://www.markstrongcn.com/home.php?mod=space&uid=5148&do=profile>http://www.markstrongcn.com/home.php?mod=space&uid=5148&do=profile</a> 1×slots регистрацию процедура займет всего лишь Получив собственный презент, Вы сможете даром выступать на реальные деньги, а выполнив обстоятельства отыгрыша, исключить свой выигрыш.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.visiteachapada.com/viewtopic.php?f=19&t=7570>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бонус с зачислением средств на счет выделяет больше свободы действий. Пользователь сам избирает, каким образом воспользоваться подаренными средствами. Здесь кроме имеют работать лимитирования на список дешевых игр, хотя обыкновенно эти рамки не например строги, как в рекламную с бесплатными вращениями.
#1290 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet сейчас порно с Илюшникова Татьяна Александровна <a href=https://rucriminal.info/>Львова-Белова Мария Алексеевна порно</a> казино онлайн бесплатно Александра Бортич <a href=https://krtka.info/>букмекерская контора зенит</a> Скворцова Вероника Игоревна порно кент казино казино регистрации букмекерская контора фонбет официальный сайт Яровая Ирина Анатольевна порно порно с Александр Большунов (лыжные гонки) top casino
DiskiPlus порно с Юлия Ефимова, пловчиха DiskiPlus casino андроид <a href=https://diskiplus.ru/>DiskiPlus porno Светлана Ходченкова</a> DiskiPlus casino ru DiskiPlus включи казино <a href=https://www.diskiplus.ru>DiskiPlus Александра Бортич</a> DiskiPlus скачать сайт букмекерской конторы DiskiPlus мелбет букмекерская контора DiskiPlus скачать casino на андроид DiskiPlus Семёнова Татьяна Владимировна порно DiskiPlus Львова-Белова Мария Алексеевна порно DiskiPlus casino зеркало сайта DiskiPlus букмекерская контора официальный сайт
#1291 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерские конторы в россии казино на деньги <a href=https://sovsekretno.net/>1go casino</a> казино рояль водка казино <a href=https://www.ossetia.tv/>порно с Кирьянова Дарья Борисовна</a> балтбет букмекерская контора pin casino up casino порно с Аделия Петросян (фигурное катание) 1×bet зеркало xbet xyz пинап казино казино ли
DiskiPlus казино рояль DiskiPlus порно с Юлия Ефимова, пловчиха <a href=https://diskiplus.ru/>DiskiPlus 1×bet слоты 1×bet top</a> DiskiPlus порно с Федор Чалов (футбол) DiskiPlus букмекерская контора скачать приложение <a href=https://www.diskiplus.ru/>DiskiPlus пин ап casino pin</a> DiskiPlus порно с Каролина Севастьянова DiskiPlus вывод казино DiskiPlus порно с Антропова Валентина Викторовна DiskiPlus casino актуальное зеркало DiskiPlus pin up casino DiskiPlus порно с Елена Никитина, скелетонистка DiskiPlus сколько казино
#1292 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало
Ещё одно распространённое акционное предложение – симпатичный презент с сомнительными требованиями. К примеру, клуб обещает $100 в качестве бездепа, но с вейджером х80 либо х100. Отыграть такой вейджер практически невозможно и потому лучше концентрироваться на более интересных промоакциях. <a href=http://filmkachat.ru/>сайт 1× slots casino</a> В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать собственный выигрыш с даровых вращений. Прибыль, коию Вы заработаете на этом бездепе можно назначать на вывод без какого либо отыгрыша. <a href=https://www.papercall.io/speakers/146409/speaker_talks/292503-technical-drawing-for-furniture-professional-design-guide>https://www.papercall.io/speakers/146409/speaker_talks/292503-technical-drawing-for-furniture-professional-design-guide</a> Обычно, бездепозитные призы выдаются под определенные слоты с фиксированной ставкой, хотя их наверняка запрещено применять в игровых автоматах с современным джекпотом. Список игр, в можно применять бездеп, Вы отыщите в описании промоакции либо сможете уточнить у службы заведения. 1хслотс зеркало на сегодня <a href=http://www.ihaomeijia.com/home.php?mod=space&uid=140485>http://www.ihaomeijia.com/home.php?mod=space&uid=140485</a>
рабочее зеркало 1×slots
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=71137>1×слот регистрация в 1×slots casino</a> 1×slots официальный сайт скачать на айфон <a href=http://mineralgroup.ru/index.php?subaction=userinfo&user=tearfulkook87>http://mineralgroup.ru/index.php?subaction=userinfo&user=tearfulkook87</a> 1× slots зеркало В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с безвозмездных вращений. Прибыль, которую Вы заработаете на этом бездепе возможно ставить на вывод без какого или отыгрыша.Суммы сходственных предложений, случаев, колеблются от 3-х до двадцати $, а вейджер на эти средства обязан составлять от тридцати до шестидесяти раз. Зачастую, большая сумма выигрыша здесь составит от одной до 2-ух сотен долларов. Если в выиграет больше, то все свои имеют быть списанными до максимально разрешенного выигрыша. Здесь появляется содержание выводить еще несуществующие деньги на свою платежную систему и далее отыскивать заведение с подходящими под данную необходимую релоадом или бонусом за первое пополнение счета. Есть количество подвидов бездепозитного гонорары, предлагаемого большим числом заведений.
1×slos регистрация в 1×slots casino
Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного бонуса достаточно пополнения баланса и доказательства личности. В иных же клубах, нужно некоторое один прокрутить свой депо. Бoльшинcтвo азартных заведений выдвигают примерно однообразные, схожие условия и притязания, коие необходимо выполнить, чтобы получить бездепозитный бонус за регистрацию. Все их можно объединить в один перечень: <a href=https://cse.google.bi/url?q=http%3A%2F%2Fdoctorlazuta.by>https://cse.google.bi/url?q=http%3A%2F%2Fdoctorlazuta.by</a> Бездепозитный приз казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в этом и заключается основное отличие.Стоит отметить, что бездепозитный бонус выдается лишь взрослым новичкам, которые, в свою очередь, могут пригласить собственных приятелей и знакомых, также претендующих на поощрительную программу лояльности. Подобная технология появилась среди конкурирующих онлайн-казино для популяризации и расширения трафика. Покер румы и спонсоры содействуют увеличению своей посещаемости, методом привлечения свежих игроков. Бонусы – это уникальный шанс для вероятных участников забавы, которые все опробовать софт покер рума и убедиться, станут ли они в него играть либо нет. Новый игрок испробует средства силы с настоящими оппонентами в казино. 1хслотс рабочее зеркало Бездепозитные призы казино за регистрацию в 2022 году — это вероятность поиграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой либо числом безвозмездных вращений без внесения депозита. Не путайте деморежим с реальной забавой без необходимости внесения депо.Таким образом, заведение пробует продемонстрировать себя своим потенциальным игрокам, а такой рекламный ход как казино бонус без депозита за регистрацию завлекает довольно большое внимания к игорному заведению и обеспечивает неизменный струю свежих гостей и будущих посетителей игрового онлайн клуба.
1хслотс рабочее зеркало
Свежий приз начисляется вид валютных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в использовании средствами, ну случае отыгрыша оператор имеет установить ограничение на вывод денег.На данном разделе портала регулярно публикуются обзорные статьи, в которых рассматриваются бесплатные призы лучших интернет-казино. Информация структурирована по нескольким пунктам, включая основные: <a href=http://okeyrp.listbb.ru/viewtopic.php?f=24&t=2575>1×slots casino регистрация 1×slotscasino09k online</a> Мы подготовили список, где есть постоянно животрепещущие и свежие бездепозитные призы казино, которые вам получить даром. Для наших пользователей есть особые предложения эксклюзивные призы, которые вы у не отыщите, их мы обозначили особой красной плашкой «Exclusive». 1×slots на любой вкус как пройти регистрацию <a href=http://alzlt5.com/space-uid-316303.html>http://alzlt5.com/space-uid-316303.html</a> В бонусную программку многих операторов входят систематические бездепы. Это пожизненные промоакции, поощряющие активных постоянных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают неизменные бонусы без депо в обмен на скопленные баллы преданности.
1×slots casino регистрация 1×slots review live
<a href=http://www.darkml.net/bbs/home.php?mod=space&uid=8008985>http://www.darkml.net/bbs/home.php?mod=space&uid=8008985</a> 1×slots регистрация 1×slotscasino09k online
<b>Смотреть еще похожие новости:</b>
<a href=https://www.mentalhealth-world.org.uk/forums/index.php?/topic/97580–1×slots-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D0%BD%D0%B0-%D1%81%D0%B5%D0%B3%D0%BE%D0%B4%D0%BD%D1%8F/>1×slots рабочее зеркало на сегодня</a>
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=10596>1×slots на любой вкус как пройти регистрацию</a>
<a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=11745>1×slots casino зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Обыкновенные бездепозитные призы в размере от трех до 20 $ созданы для того, дабы в забавы заходили все новые и новые игроки. Здесь, скорее, будет лимитирование на максимальный выигрыш. Важно, чтобы перед минимальным вкладом был отключен бонус за первое пополнение счета, и геймер не попадет на повторный вейджер.
#1293 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало xbet порно с Дарья Клишина, легкоатлетка <a href=https://slon-ru.com/>казино</a> Попова Анна Юрьевна порно водка казино <a href=https://t.me/vchkogpu_ru>casino андроид</a> вавада казино казино на деньги сайт винлайн букмекерская контора ставки на спорт букмекерские конторы casinos xyz porno Ангелина Гончаренко, хоккеистка casino x
DiskiPlus 1×bet регистрация DiskiPlus играющие казино онлайн <a href=https://www.diskiplus.ru/>DiskiPlus kometa casino</a> DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus 7k casino официальный сайт <a href=https://diskiplus.ru>DiskiPlus pin up casino buzz</a> DiskiPlus pin up casino скачать DiskiPlus скачать букмекерскую контору DiskiPlus порно с Бондаренко Анастасия Борисовна DiskiPlus скачиваемые казино DiskiPlus самое казино DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus мобильные букмекерские конторы
#1294 Charlesgunnyhttp://filmkachat.ru
1×slots казино зеркало
Бонус без депо за регистрацию в казино (бездепозитный бонус) – это валютный подарок от клуба, кот-ый начисляется на аккаунт игрока в регистрации в казино. Кроме создания учетной записи, для получения бездепа, очень нередко потребуется ещё и подтвердить контактные данные игрока и/или активировать специальный промо-код. <a href=http://filmkachat.ru/>1 xslots рабочее зеркало</a> Прежде всего, не забывайте регулярно заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом осматривают более занимательные предложения ведущих игорных порталов.Бездепы обычно предлагают с отыгрышем — мгновенно исключить выигранные средства нельзя. Перевод средств со счета будет вероятен после как, как пользователь выполнит все притязания казино, а сумма возможности превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, протяжении которых клиент вправе воспользоваться предложением. Обычно они не превышают нескольких дней после активации. <a href=https://www.designingbuildings.co.uk/wiki/User:Cgifurniture>https://www.designingbuildings.co.uk/wiki/User:Cgifurniture</a> Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. 1×slots бездепозитный бонус за регистрацию <a href=http://ichehol.ru/bitrix/redirect.php?goto=http://ritual-1.ru/bitrix/redirect.php?goto=http://izhevsk.mama-pizza.ru/bitrix/redirect.php?goto=https://teletype.in/@urist_free/WUSeRjDQeSD>http://ichehol.ru/bitrix/redirect.php?goto=http://ritual-1.ru/bitrix/redirect.php?goto=http://izhevsk.mama-pizza.ru/bitrix/redirect.php?goto=https://teletype.in/@urist_free/WUSeRjDQeSD</a> Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают приз по странам. Вплоть до того, что клуб может принимать игроков из Вашей государства, а бездеп мешает.Необходимость отыгрыша. Вейджер ситуации выше, чем для бонусов за депо. И же свои не отыграны, исключить их нельзя.
рабочее зеркало 1хслотс
Это раз из главных показателей привлекательности подарка. С завешенным коэффициентом даже мастера не смогут выполнить условия по отыгрышу. И так, как презентабельно выглядит предложение – бездепозитный бонус казино в размере $500 или $1 000. Чтобы новенькие попревосходнее вникли, собственно же это вейджер, мы разберём на случае.Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам важную информацию о самых новых, великодушных и проверенных призах в онлайн казино, коие обновляются любой день. 1×slots казино зеркало <a href=https://www.blogzap.com.br/2023/01/as-receitas-mexicanas-mais-famosas-do-mundo.html>https://www.blogzap.com.br/2023/01/as-receitas-mexicanas-mais-famosas-do-mundo.html</a> 1×slots рабочее зеркало на сегодня
1×slots зеркало регистрация в 1×slots casino
Бездепы имеют заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой либо баллами.Акции, посвященные календарным праздникам, посещают рассчитаны как на всех пользователей, так и на категории: к, презент на 8 марта девушкам-игрокам либо мужикам на 23 февраля. В случае установленного лимита на необходимую вывода выигрыша с бездепозитного бонуса, игрок не может исключить больше заявленной суммы.Мы собрали и выпустили список лучших бездепозитных казино с бонусами за регистрацию, коие гарантируют щедрые выигрыши и моментальные выплаты. <a href=http://www.fcterc.gov.ng/index.php/member/1977/>http://www.fcterc.gov.ng/index.php/member/1977/</a> Как только вы отыграли вейджер и средства с бонусного баланса перебежали вам на настоящий счет, Вы отважно сможете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (устроить наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, совместно, вкупе с депо). 1хслотс официальный сайт зеркало В разделе с бонусами активировать собственный презент. Найти забавы, для коих учтено поощрение и использовать бонус по назначению.
1×slots официальный зеркало
Помните, что любые нарушения верховодил сведут на нет ваши усилия, и вы наверняка останетесь без начисленного вас безвозмездного приза. Всегда изучайте управляла начисления и условия вейджера. По хоть вопросам, на которые вы не помощи найти ответы, обращайтесь за объясненьям и саппорт. Наш список содержит лучшие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает проверку по главным характеристикам:В наше время очень просто получить бонус за регистрацию в казино. Практически любой игорный дом с готовностью начислит деньги или благотворительные вращения. Многие гэмблеры пользуются этим и не смущяются регистрироваться в любом клубе с выгодными критериями. Кстати, это замечательная вероятность выработать победную стратегию и сорвать джекпот. 1×slots регистрация на сайте 1×slots ru com <a href=http://santorg-online.ru/bitrix/redirect.php?goto=http://delphic.games/bitrix/click.php?goto=http://stal-ko.com/bitrix/redirect.php?goto=https://teletype.in/@urist555/zKh5P6LhtWl>http://santorg-online.ru/bitrix/redirect.php?goto=http://delphic.games/bitrix/click.php?goto=http://stal-ko.com/bitrix/redirect.php?goto=https://teletype.in/@urist555/zKh5P6LhtWl</a> Заработать на бездепозитных призах за регистрацию в казино имеет каждый юзер, достигший совершеннолетия.Многие азартные клубы ограничивают сумму вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании промоакции, суммы Вы не сможете вывести. Разница несомненно аннулирована, Вы том не сможете делать на нее ставки.
1х слотс зеркало регистрация в 1×slots casino
<a href=https://daemin.org/bbs/board.php?bo_table=free&wr_id=125282>https://daemin.org/bbs/board.php?bo_table=free&wr_id=125282</a> Иногда в одобрения за регистрацию все выдаваться билеты для участия в турнирах. Условия их проведения довольно выделяются, потому мы рекомендуем ознакомиться с любым предложением раздельно. 1хслотс рабочее зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://skatefluckit.com/member.php?u=149708>1×slots casino регистрация на сайте</a>
<a href=https://nauc.info/forums/viewtopic.php?t=20860876>1х слотс зеркало регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Отзывы читателей о бонусных акциях посодействуют составить впечатление, но не забывайте о субъективности личных объяснений. Демоказино есть почти на каждом веб-сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются значительно реже: там если, тогда, выигрыша и соблюдения критерий акций бездеп возможно превратить в реальные деньги.
#1295 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
online casino 1×bet официальный скачать <a href=https://repost.news/>7k casino</a> porno Андрей Рублев (теннис) пин ап casino pin up top <a href=https://rhymes-punches.com/>casino ап</a> Приезжева Екатерина Геннадьевна порно игры казино Светлана Ходченкова casino бездепозитный официальное казино вход ramenbet casino 7k casino бонус
DiskiPlus порно с Федор Чалов (футбол) DiskiPlus 7k casino официальный сайт <a href=https://www.diskiplus.ru/>DiskiPlus 7k casino</a> DiskiPlus casino зеркало сайта DiskiPlus реального казино <a href=https://diskiplus.ru/>DiskiPlus Самойлова Алла Владимировна порно</a> DiskiPlus 1×bet официальный DiskiPlus 1×bet официальный DiskiPlus 7k casino бонус DiskiPlus реального казино DiskiPlus казино рояль DiskiPlus букмекерские контора ап DiskiPlus порно с Дарья Касаткина (теннис)
#1296 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация
В количестве случаев бесплатные призы начисляются в кредитах, которые нельзя незамедлительно вывести со счета. Прежде их нужно отыграть по установленным правилам. Эти притязания принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже.Первый образующийся вопрос, это, для выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают новых игроков. Последним легче начать игру на средства с подарка за регистрацию. Им надо пополнять баланс и расходовать личностные средства. Новички получают благотворительные спины или свои на счёт. С их поддержкой знакомятся с игровым процессом, крутят слоты и делают ставки в рулетке. <a href=http://filmkachat.ru/>1×slots бездепозитный бонус за регистрацию</a> Иногда у посетителей вебсайта имеют возникнуть трудности, задачи, препядствия при активации приобретенного промо-кода. В таких случаях, необходимо адресоваться за поддержкой в службу «Support». Для получения ответа, обязательно указывается определенная первопричина воззвания и подтверждается информация дополнительными снимками. Если сформировалась спорная обстановка, постоянно можно обратиться к главному регулятору или контролирующему органу, выдавшему данному заведению лицензионный документ. <a href=https://telegra.ph/Walmarts-battery-return-policy-03–13>https://telegra.ph/Walmarts-battery-return-policy-03–13</a> Операторы гемблинга утверждают, что так они борются с бонус-хантерами. Впрочем, критики считают, что этим казино пробуют устроить из случайного постояльца постоянного игрока.Бездепозитный приз за регистрацию в казино — это стартовый презент вид валютного начисления либо даровых вращений для новых игроков заведения, для получения которого не нужно заносить депо. 1×slots скачать на айфон <a href=https://eccentrictirade.com/forums/member.php?action=profile&uid=11103>https://eccentrictirade.com/forums/member.php?action=profile&uid=11103</a> Бонусы без депо при регистрации считаются наиболее красивыми как для опытных игроков, например для и новичков. Получив это вознаграждение, клиент возможность выступать на настоящие деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные призы в интернет-казино Рунета, а также обстоятельства их активации и выигрыша.
1×slots актуальное зеркало
Сроки активации бонуса устанавливаются любым казино, хотя почаще всего они не превосходят недели с этапа получения. Игроку обязательно надо(надобно) применять бездеп протяжении указанного срока, в ином случае приз просто исчезнет. Каждый приз можно получить только один раз, поэтому в не использовать бездеп в срок, у игрока не несомненно второго шанса им пользоваться.Срок отыгрыша — это этап, кот-ый начинается в момент активации бонуса и кончается с его закрытием. Пользователю нужно уложиться в данный временной промежуток, другому призовые средства аннулируются. Казино устанавливают список игр, ставки в которых засчитываются при расчете отыгранных денег. Если тайтл не заходит в этот перечень, то предоставляется быть недосегаем для загрузки в деянья бонусного предложения. 1хслотс рабочее зеркало на сегодня В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая приятная доля игры. Важно, зачастую бездепозитные призы в казино выдаются с лимитированиями по наибольшей выплате. В среднем возможно рассчитывать на выгода в несколько тысяч руб. Как исключить выигрыш с приза без депо. Придётся подтвердить акк документально, в неких заведениях. Процедура верификации неотклонима и делается каждым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате или прочитайте в правилах.Бездепозитный приз казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в данном и заключается главное отличие. <a href=https://latino-forex.com/members/234778-waltermophy>https://latino-forex.com/members/234778-waltermophy</a> 1×slots официальный зеркало Любой выигрыш по ставке выше установленного лимита несомненно считаться недействительным. То есть ставка не будет засчитана при отыгрыше, в случае выигрыша его сумма не поступит на счёт клиента — итог забавы будет полностью аннулирован.
1×slots регистрация 1×slotscasino 56 online
Бонус без депо за регистрацию в казино (бездепозитный бонус) – это денежный презент от клуба, кот-ый начисляется на аккаунт игрока последствии регистрации в казино. Кроме творения учетной записи, для получения бездепа, довольно нередко требуется ещё и доказать контактные данные игрока и/или активировать особый промо-код.Реже бонусы без депо начисляются постоянным игрокам. С их подмогою администрация старается вычесть ценных клиентов или желает поблагодарить за лояльность верных посетителей. Но намного чаще для похожих целей используются такие акции: Бонус в казино без депозита содержит различные разновидности: может быть приветственный бонус, акции в честь каких-то праздничных или важных дат, бонус за привлечение новых игроков, лояльность и получение VIP-статуса. <a href=http://specokraska.ru/bitrix/redirect.php?goto=http://iuecon.org/bitrix/click.php?goto=http://ofk-ozersk.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/qkktgE52OuT>http://specokraska.ru/bitrix/redirect.php?goto=http://iuecon.org/bitrix/click.php?goto=http://ofk-ozersk.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/qkktgE52OuT</a> Раздача призов имеет быть приурочена к разным датам: календарные праздничные, дни рождения игроков, годовщина открытия казино и т. Д. Подарок выдается вид средств, фриспинов либо баллов для накопления и размена на предложения оператора. Если юзер получает выигрыш, средства начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд требований. 1×slot рабочее зеркало
1×slots регистрация
Таким образом, заведение пытается продемонстрировать себя своим потенциальным геймерам, а подобный рекламный ход как казино приз без депо за регистрацию завлекает довольно большое внимания к игорному заведению и обеспечивает постоянный струю свежих посетителей и грядущих посетителей игрового интернет клуба.Для всех бездепозитных бонусов действует наибольший предел на выигрыш. Он показывает предельную сумму, коию у получить, играя на бонусные кредиты. Как только вам удастся выполнить требования вейджера, дозволенный максимум несомненно переведен с бонусного счета на главный, а остаток несомненно списан. Диапазон ставок, коие вправе устроить игрок, того лимитирован. Обычно назначать возможно небольшую сумму — в 10–30 рублей за одно вращение.Для получения выигрыша требуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить конкретную необходимую, но теснее из собственных средств. Она рассчитывается из совместного объема выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, если пользователь выиграл 1000 рублей, а множитель составляет х30, вывести деньги возможно будет, сделав ставки на 30 000 рублей. скачать 1×slots официальный сайт <a href=http://www.budhano.com/bbs/home.php/home.php?mod=space&uid=277016&do=profile>http://www.budhano.com/bbs/home.php/home.php?mod=space&uid=277016&do=profile</a>
1×slots зеркало быструю регистрацию а также мгновенное
<a href=http://wiki.motorclass.com.au/index.php/%D0%91%D0%BB%D0%BE%D0%B3_%D0%93%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0>http://wiki.motorclass.com.au/index.php/%D0%91%D0%BB%D0%BE%D0%B3_%D0%93%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0</a> При регистрации стопам свидетельствовать только достоверную информацию. Когда учетная запись несомненно активна, появится доступ в Личный кабинет. В нем можно избрать валюту, установить промокод и разузнать подробные управляла получения и отыгрыша бездепа. Краткая информация об промоакции нередко находится непосредственно на регистрационной форме.Призовые начисления без депо шансы предоставляться для роли в турнирах онлайн казино. Потратить перечисленные средства возможно исключительно в рамках данной промоакции. Условия их проведения содержат лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться таким предложением, другого изучить его управляла. 1×slot рабочее зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://khodaumo.com/forum/memberlist.php?mode=viewprofile&u=146&sid=418e7c688513084466ac3787f2ad929e>1× slots официальный</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Представленные на этой странице лучшие бездеп бонусы в казино за регистрацию в 2022 году имеют оптимальные условия. После кропотливого анализа редакция портала составила рейтинг спецпредложений, в посетители Casino.ru могут сортировать перечень по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д.
#1297 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать на айфон
Для получения депозитного приза необходимо восполнить свой игровой баланс настоящими деньгами. Вознаграждение возможно получить либо при внесении первого депо, либо повторяющий фиксированного процента от внесённых средств. Так либо другому, приз поступит на счёт лишь последствии пополнения.Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми акциями. Читайте о них в обзорах и на форуме. <a href=http://filmkachat.ru/>1хслотс рабочее зеркало на сегодня</a> Следует выделить, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом. <a href=https://www.bondhuplus.com/read-blog/137780>https://www.bondhuplus.com/read-blog/137780</a> Бездеп с фриспинами возможность обхватывать всю коллекцию игр на сайте или разработки одного провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш может быть выведен после такого, как юзер отыграет эту сумму. Возможность оценить глубокий возможностей слотов — главное достоинство этой разновидности. Игроку становятся доступны что, эти функции, коие отсутствуют в демонстрационном режиме, а возможность выиграть настоящие деньги добавляет ярких азартных чувств.Постарайтесь отыграть вейджер, дабы появилась вероятность оставить заявку на выплату. Кстати, на всех сайтах, представленных в списке, доступны современные платёжные приборы. Вы можете получить выигрыш на электрической кошелёк, карту, телефонный. 1хслотс мобильная версия зеркало <a href=http://powerfa.co.kr/bbs/board.php?bo_table=free&wr_id=288762>http://powerfa.co.kr/bbs/board.php?bo_table=free&wr_id=288762</a> Такой казино приз без депозита за регистрацию выдается игроку на час и энергично используется данное предложение с 2017 года. Это как бы какая-то маскировка одобрения под бездепозитный. Суть всего этого сводится к что, этому, что игроку на час выдается, к примеру, 1000 долларов, а реклама твердит о том, что каждой выигрыш возможно будет дальнейшем забыть при для. Но случае играющий серьезно отнесется к данному предложению, то он просто потеряет время. Ведь игроку нужно несомненно выступать не в аккаунте, в тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (и всей тыс. ) в управляла вступят конкретные обстоятельства, где несомненно сказано, собственно максимальной суммой победы имеет быть лишь двести долларов и средства возможно применять только в приза на 1-ый лепта с вейджером 25 от суммы гонорары плюс сам депо. По итогу получится, собственно игрок выигрывал себе 200% приз с вейджером на определенную сумму. Короче говоря, это все не стоит вашего времени.
1×slots зеркало рабочее
1хслотс официальный сайт зеркало Несмотря на то, что данный вариант стимуляции со стороны азартных платформ очень известен области похожих игр, далеко не всем поклонникам казино ведомо, что себе бездепозитные бонусы казино и как именно их вероятно эксплуатировать.Для получения бонуса надо(надобно) пригласить в забаву свежего клиента. Казино начислит пригласившему фиксированный процент от взносов приглашённого повторяющий приза: чаще всего его размер не выше 10%. Срок деяния приза как не выше месяца: пригласивший получает приз зависимо проигранных ставок приглашённого в 1-ый луна игры. <a href=https://championsleage.review/wiki/%D0%A4%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B_%D0%90%D0%BF%D1%82%D0%B5%D0%BA_%D0%92_%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8:_%D0%A2%D1%80%D0%B5%D0%BD%D0%B4%D1%8B_%D0%98_%D0%9F%D1%80%D0%BE%D0%B3%D0%BD%D0%BE%D0%B7%D1%8B_%D0%9D%D0%B0_2024_%D0%93%D0%BE%D0%B4>https://championsleage.review/wiki/%D0%A4%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B_%D0%90%D0%BF%D1%82%D0%B5%D0%BA_%D0%92_%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8:_%D0%A2%D1%80%D0%B5%D0%BD%D0%B4%D1%8B_%D0%98_%D0%9F%D1%80%D0%BE%D0%B3%D0%BD%D0%BE%D0%B7%D1%8B_%D0%9D%D0%B0_2024_%D0%93%D0%BE%D0%B4</a> Принципиальным отличием даровых бонусов от бонусов на депо является неимение надобности вносить деньги на акк. Из-за сего их часто именуют бездепозитными (no deposit bonuses). зеркала 1×slots На данном разделе портала периодически публикуются обзорные статьи, каких рассматриваются безвозмездные призы лучших интернет-казино. Информация структурирована по нескольким пт, включая основные:
1× slots регистрация в 1×slots casino
Можно ли в одном интернет казино получить больше одного бонуса за регистрацию? Нет, так как в любом интернет казино есть управляла, к коим нужно придерживаться, не создавать 2 аккаута для получения бонусов, другому несомненно блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, бонус за регистрацию выдаеться один раз одному лицу. Представьте момент, когда при ставке в 10 рублей Вы получите сходственное умножение. Миллион руб. За одно вращение, собственно вполне возможно. Поэтому вопрос, сколько можно выиграть остаётся открытым. Предлагаем проверить помощи. Регистрируйтесь в одном или нескольких онлайн казино, получайте Бездепозитный приз и проверяйте удачу в деле. Разумеется, вывести средства не так просто. Однако шансы есть у всех. <a href=http://forum.moto-fan.pl/uzytkownik-jamesfeals>http://forum.moto-fan.pl/uzytkownik-jamesfeals</a> Каждый в должен сперва детально выучить обстоятельства по получению и отыгрышу понравившегося дара. Если всё устраивает, поспешите забрать благотворительные спины за регистрацию в казино без депозита с выводом и без отыгрыша и напрямик данный начать вращать барабаны лучших слотов. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
x1 slots регистрация в 1×slots casino
Активация случается счет промокодов, коие вводятся в личном кабинете после регистрации. Среди спецпредложений в перечне Casino.ru содержатся эксклюзивные промокоды, которые доступны лишь гостям портала. Другие способы начисления средств ? автоматическая активация сразу последствии создания аккаунта и получение презента по запросу в службу технической поддержки. Прочитайте верховодила бонусной программки, в желайте участие. Да, мы безотступно рекомендуем сделать это до регистрации.Также бездепозитные призы имеют работать методом возвратить к забаве клиентов, что приостановивших своё сотрудничество с компанией: извещение о бездепе поступает на мобильный аппарат либо почту. 1×slots casino регистрация <a href=https://mantiseye.com/community/edwardclals>https://mantiseye.com/community/edwardclals</a> Отыграв бездепозитный приз в казино с выводом также придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если сходственное лимитирование присутствует, то единоразово исключить выйдет лишь сумму, не превосходящую объем полученного бонуса.Бездепозитный приз казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в данном и содержится главное различие.
1×slots casino регистрация 1×slotscasin online
Помните, собственно всевозможные нарушения правил сведут на нет ваши усилия, и вы наверняка останетесь без начисленного вас безвозмездного приза. Всегда изучайте верховодила начисления и обстоятельства вейджера. По каким вопросам, на которые вы имеет самостоятельно найти ответы, обращайтесь за объясненьям и саппорт.В интернет-сети практически можно отыскать списки более популярных и обещанных поощрительных программ от модных онлайн-казино. <a href=http://msfo-soft.ru/msfo/forum/messages/forum28/topic11977/message322735/?result=new#message322735>http://msfo-soft.ru/msfo/forum/messages/forum28/topic11977/message322735/?result=new#message322735</a> Несмотря на то, собственно данный вариант стимуляции со стороны азартных платформ очень известен области сходственных игр, далековато не всем почитателям казино знаменито, собственно сами бездепозитные бонусы казино и как непосредственно их возможно эксплуатировать. 1×slot зеркало рабочее регистрации на телефон придет
<b>Смотреть еще похожие новости:</b>
<a href=https://minecraft.ru.net/user/Manuelsoarl/>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=https://timepost.info/member.php?action=profile&uid=2064>1×slots коды</a>
<a href=http://yinyue7.com/space-uid-962219.html>1× slots зеркало</a>
<a href=https://forum-pravo.com.ua/showthread.php?p=23540&posted=1#post23540>1×slots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Не стоит путать игру в демо и внедрение призов. В демонстрационном режиме игрок может расценить механику слота, сюжет и оформление. Но забава ведется на относительные кредиты, поэтому отсутствует главное ? ощущение пыла. Активируя промокод или фриспины, заказчик и не тратит свои средства на игровые автоматы, но возможность сорвать настоящий куш! Как и акции операторов, бездепы — это рекламный инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такового предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает свежих гостей и позволяет им составить впечатление о функционале, не рискуя значительными совокупностями.
#1298 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее на сегодня
3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефонный или почту, показать персональную информацию; <a href=http://filmkachat.ru/>1×slots зеркало регистрацию более популярный вариант это</a> Нет. Казино раздают бесплатные призы за регистрацию, чтобы, чтобы, чтобы клиент возможность ознакомиться с игровым заведением. А чтобы вывести его, необходимо выполнить условия отыгрыша.Даже не выиграв солидную сумму, игрок интересно проведет время, изнутри выучит работу площадки, воспримет геймплей автоматов. Все это без каких-либо финансовых рисков. Быть в курсе лучших акций легкостью. Достаточно регулярно учить перечень свежих онлайн казино с выводом приза без депо в этом разделе. <a href=https://taplink.cc/kalinka0588>https://taplink.cc/kalinka0588</a> Заполняя данные в собственном профиле, указывайте только достоверную информацию, так как Вам придется ее доказать дальнейшем при выводе денег. 1×slots официальный зеркало рабочее <a href=http://op-r.ru/bitrix/click.php?goto=http://offroadcamp.ru/bitrix/redirect.php?goto=http://images.google.com.pe/url?q=https://teletype.in/@urist555/IkCnBTyhXu0>http://op-r.ru/bitrix/click.php?goto=http://offroadcamp.ru/bitrix/redirect.php?goto=http://images.google.com.pe/url?q=https://teletype.in/@urist555/IkCnBTyhXu0</a> В онлайне очень много скриптовых вебсайтов, которые принадлежат мошенникам. Их основная цель – заинтересовать гэмблеров, пообещав не щедрые подарки, хотя и крупные выигрыши. Так собственно кое-какие веб-сайты предлагают получить за регистрацию в $1 000.Частенько новенькие не знают, как активировать презенты или исключить 1-ый выигрыш. Для подобных случаев наша команда описала основные термины – собственно это фриспины, вейджер, как его отыграть, зачем необходимо проходить верификацию.
скачать 1×slots на андроид мобильная версия
В истиннее время получить бонус за регистрацию в казино довольно просто. Почти любой игорный дом с готовностью даст средства или благотворительные вращения. Многие игроки пользуются этим и не стыдятся региться в любом клубе с выгодными критериями. Кстати, это отличная возможность выдумать выигрышную стратегию и сорвать куш.Третитй бездепозитный бонус за регистрацию – денежные свои. К раскаянью, начислить рубли или баксы способны лишь известные и пользующиеся клубы. С их подмогою вас насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком. <a href=http://www.csuchen.de/bbs/viewthread.php?tid=854672&pid=1268697819&page=50&extra=#pid1268697819>1× slots casino зер</a> 1×slot зеркало Онлайн-казино с бездепозитными призами ставят клиентам обстоятельства для пользования бездепами, потому перед ролью в акции превосходнее досконально ознакомиться со всеми правилами и нюансами промоакции. Условия могут касаться получения приза, его применения и последующего вывода валютных средств в случае выигрыша.Шаг 4. Активация. Внимательно выучите обстоятельства, информацию по ограничениям и сроке действия бонусного предложения. Разобравшись с правилами, возможно активировать бонус в собственном офисе (времени ? с внедрением промокода) или по запросу в саппорт. <a href=https://noosfero.ufba.br/lexxeagle/blog/mastering-interior-render-from-concept-to-photorealistic-visualization>https://noosfero.ufba.br/lexxeagle/blog/mastering-interior-render-from-concept-to-photorealistic-visualization</a> 1×slots зеркало быструю регистрацию а также мгновенное Максимальный размер ставки, кот-ый невозможно превосходить пока бонус не будет всецело отыгран. В случае нарушения сего управляла, приз и выигрыш с него будут аннулированы.
казино 1×slots официальный сайт
Для выбора азартного заведения Вы сможете пользоваться списком наших казино с призами за регистрацию. На нашем веб-сайте мы выпустили список бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, собственно часть призов неповторимые и доступны лишь для гостей нашего вебсайта по-специальному промо-коду или по оригинальной ссылке. Кроме как, для каждого приза мы подготовили подробный обозрение, каком Вы узнаете как получить и отыграть поощрение и как исключить свой выигрыш с бездепа.Ещё одно распространённое акционное предложение – симпатичный подарок с сомнительными требованиями. К примеру, клуб обещает $100 в качестве бездепа, но с вейджером х80 или х100. Отыграть такой вейджер фактически нереально и потому лучше концентрироваться на больше заманчивых акциях. Обычно показатель повыше, чем для бонусов на депозит. Не изумляйтесь, если он будет числе х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных стран.Как лишь вы отыграли вейджер и свои с бонусного баланса перебежали вас на настоящий счет, Вы неустрашимо сможете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (сделать наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депо). <a href=http://muhaylovakoliba.1gb.ua/user/Henryexoxy/>http://muhaylovakoliba.1gb.ua/user/Henryexoxy/</a> Обычно для получения призов без депозита, казино выдвигает лояльные и абсолютно выполнимые обстоятельства, хотя есть ряд поступков которые воспрещены и могут повлечь за собой противные результаты:Основное правило получения бездепа ? творимый аккаунт должен быть у юзера первым и единственным. Наличие нескольких аккаунтов требовательно воспрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депо необходимо соблюдать простую последовательность деяний. 1хслотс зеркало на сегодня Любой выигрыш по ставке выше установленного лимита будет считаться недействительным. То есть ставка не будет засчитана при отыгрыше, а случае выигрыша его сумма не поступит на счёт клиента — результат игры несомненно полностью аннулирован.
1×slot зеркало
Если вы облюбовали для себя некоторое брендов которые для больше всего полюбились, для неизменной игры! Таких гемблеров казино довольно предпочитает и оценивает, за частую такие игроки становятся VIP игроками заведения, коим часто поступают выгодные предложения повторяющий призов, например же туда заходит и бездепозитные.Также существуют онлайн-платформы азартных игр, которые применяют раздачу бездепозитных бонусов в специальные даты (как для казино, так и для игрока). Помимо этого, действующие игроки кроме имеют вероятность получить похожие бонусы за свою деятельность (к примеру, за увеличения значения либо за похожие достижения). <a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=132204&pid=392527#post_392527>1×slots casino online регистрация</a> Операторы гемблинга утверждают, собственно так они дерутся с бонус-хантерами. Впрочем, критики считают, что данным казино пробуют устроить из случайного гостя постоянного игрока.Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке необходимо восполнить счет в казино. Для депозитных призов, эта процедура не необходима, так как депозит теснее изготовлен. 1×slot регистрация <a href=https://simracing.su/user/Porsedropkl/>https://simracing.su/user/Porsedropkl/</a> Бездеп с фриспинами имеет обхватывать всю коллекцию игр на сайте либо разработки 1-го провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении акции. Выигрыш возможность быть выведен в того, как юзер отыграет данную необходимую. Возможность оценить полный функционал слотов — основное совершенство данной разновидности. Игроку становятся доступны те функции, коие отсутствуют в демонстрационном режиме, а вероятность выиграть реальные деньги добавляет ярчайших азартных ощущений.Условия отыгрыша бонуса. Если Вы планируете заработать на бездепозитном бонусе, то для внимание на значение вейджера и срок, кот-ый дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, что, этим проще отыграть приз и исключить выигрыш.
1×slots регистрация на сайте
В перечне притязаний к отыгрышу нередко наличествуют лимиты на ставки при ирге на собственные деньги. Так, случае отыграть нужно 30 000 рублей, а максимальная сумма ограничена 30 рублями, то вертеть барабаны предстоит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками условий по срокам деяния акции. <a href=http://clients1.google.cg/url?q=http://ag-mebel.ru/bitrix/redirect.php?goto=http://sobiraloff.ru/forum/cc.php?url=https://telegra.ph/Polnoe-rukovodstvo-po-arendnym-kanikulam-v-iyule-2024-goda-09–23>http://clients1.google.cg/url?q=http://ag-mebel.ru/bitrix/redirect.php?goto=http://sobiraloff.ru/forum/cc.php?url=https://telegra.ph/Polnoe-rukovodstvo-po-arendnym-kanikulam-v-iyule-2024-goda-09–23</a> Игрокам стоит воспринимать приветственный приз как гарантированный метод получить большой выигрыш, хотя это замечательная вероятность без затрат оценить возможностей казино. 1×slots регистрация то дальше необходимо пройти Не стоит путать игру в демо и внедрение бонусов. В демонстрационном режиме игрок имеет расценить механику слота, сюжет и оформление. Но забава ведется на относительные кредиты, потому отсутствует главное ? ощущение азарта. Активируя промокод либо фриспины, заказчик и не расходует свои деньги на игровые автоматы, хотя имеет сорвать реальный куш!Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.
<b>Смотреть еще похожие новости:</b>
<a href=http://ledyardmachine.com/forum/User-Jameshoing>1×slots зеркало видели такую регистрацию на</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездеп с фриспинами возможность охватывать всю коллекцию игр на веб-сайте или разработки одного провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш возможность быть выведен в того, как юзер отыграет эту необходимую. Возможность расценить глубокий перечень слотов — главное достоинство этой разновидности. Игроку становятся доступны что, эти опции, которые отсутствуют в демонстрационном режиме, а возможность выиграть настоящие деньги добавляет ярчайших азартных ощущений.
#1299 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Юлия Пересильд лучшие бесплатные онлайн казино <a href=https://krtka.info/>porno Александр Соболев (футбол)</a> порно с Диана Шнайдер (теннис) porno Илона Маркова, хоккеистка <a href=https://sovsekretno.net/>casino промокод</a> букмекерская контора бесплатно скачать Кузнецова Анна Юрьевна порно букмекерская контора рокс казино почему в казино нет окон промокод 1×bet водка казино
DiskiPlus казино в россии DiskiPlus ramenbet casino <a href=https://www.diskiplus.ru/>DiskiPlus порно с Федор Чалов (футбол)</a> DiskiPlus бывшие казино DiskiPlus porno Елизавета Туктамышева <a href=https://www.diskiplus.ru>DiskiPlus Набиуллина Эльвира Сахипзадовна порно</a> DiskiPlus игры казино DiskiPlus яндекс игры казино DiskiPlus cat casino DiskiPlus ев казино DiskiPlus букмекерская контора скачать приложение DiskiPlus bet casino DiskiPlus лучшие онлайн казино
#1300 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало сайта
С другой стороны, гораздо проще отобрать бездепозитные фриспины за регистрацию в казино и прямо в начать вращать барабаны в наихороших слотах. Главная необыкновенность спинов что, нет, собственно они предусмотрены для лучших автоматов. Удастся столько пройти вспомогательные раунды, хотя и прирастить сумму выигрыша, заработать респины прочие внутриигровые презенты. <a href=http://filmkachat.ru/>1×slot зеркало рабочее регистрации на телефон придет</a> Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=https://penzu.com/p/5ad5f899c8695730>https://penzu.com/p/5ad5f899c8695730</a> 1×slots казино зеркало <a href=https://kr-osvita.gov.ua/user/JasperPhode/>https://kr-osvita.gov.ua/user/JasperPhode/</a> Для всех бездепозитных призов действует максимальный предел на выигрыш. Он указывает предельную необходимую, коию вы сможете получить, играя на бонусные кредиты. Как лишь вас получится выполнить притязания вейджера, допустимый максимально будет переведен с бонусного счета на ведущей, а остаток будет списан.
1 x slots casino
Можно ли наваривать на бездепозитных бонусах? Это не работа, тут как повезет, в в любом предложенном безедепе, вы будете откручивать вейджер и выводить, это можно именовать везением, и дополнительной добавкой к вашему бюджету.Как лишь получите бездеп в казино, всё точно не запамятовывайте проверять электрическую почту. Некоторые игорные клубы непрерывно веселят активных гэмблеров приятными призами. Чаще всего получить презент можно в преддверии веселья, на денек рождение, за привлечение друга. А того распространённым призом считается прибавка к депозиту. Нужно более восполнить счёт, и азартное заведение прирастит его на 50–100%. <a href=https://russiancomputerservice.ru/user/JosephCer/>1 xslots рабочее зеркало</a> 1хслотс казино зеркало В любом казино с бездепозитным бонусом предусмотрены вейджеровые обстоятельства. Это один-единственный «подводный камень», который стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) устроить определённое число ставок. Чем круче бонус, тем сложнее выполнить обстоятельства, и напротив.Так что приготовьтесь предоставить секретную информацию (пол, возраст, страна проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает менее суток, последствии чего получится свободно выводить солидные выигрыши. <a href=https://autolocksmithlocal.co.uk/forum/profile/MariBond4>https://autolocksmithlocal.co.uk/forum/profile/MariBond4</a> скачать 1×slots официальный сайт Для ревизии применяются сканы паспортов, водительских прав, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь замечен в попытке завести дополнительный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный список. При ирге на лицензионной площадке не бояться указывать достоверную персональную информацию (шифрование исключает утечку персональных данных).Для всех бездепозитных призов функционирует наибольший предел на выигрыш. Он указывает предельную необходимую, которую появится получить, играя на бонусные кредиты. Как только вам получится выполнить требования вейджера, допустимый максимально несомненно переведен с бонусного счета на ведущей, а остаток будет списан.
1хслот официальный сайт зеркало
<a href=http://hxzq.org.cn/space-uid-2007.html>http://hxzq.org.cn/space-uid-2007.html</a> 1 xslots рабочее зеркало
1×slots зеркало регистрацию более популярный вариант это
<a href=https://sadhaka.nl/forum/viewtopic.php?t=105385>казино 1×slots</a> Таким образом интернет казино получает потенциального игрока. Возможно в будущем либо настоящем он захотит сыграть на средства средства. Так трудятся бездепозитные призы в интернет казино. Здесь очень подходит выражение, бесплатные сыр случается только в мышеловке. Начинающие игроки могут не осознавать опасность азарта. Однако времени осознания становится больше. Это тема для отдельного обсуждения. Но ни не запамятовывайте внимательно разбирать верховодила участия в бонусных акциях. Если вы нарушите хотя бы одно условие, позднее вы не сможете устроить недоразумение с администрацией. 1×slots зеркало проходить регистрацию это отличный вариант <a href=https://wiki.lafabriquedelalogistique.fr/Utilisateur:Torsten09J>https://wiki.lafabriquedelalogistique.fr/Utilisateur:Torsten09J</a>
1×slots casino регистрация на сайте
Какие призы я могу еще получить считая бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного бонуса, каждое интернет казино предлагает игрокам выгодное предложение на 1-ый депо, вы совершаете депозит, ваш депо увеличивается в двое или даже в 3, что, этим наиболее начать играть можно с больше солидной суммой, например же не запамятываем тему вейджер на призы. <a href=http://maps.google.com.et/url?sa=t&url=http://forum.thd.vg/proxy.php?link=http://firsttee.my.site.com/tft_login?website=https://telegra.ph/CHto-takoe-komendantskij-chas-dlya-detej-i-v-kakih-regionah-on-budet-otmenen-31-dekabrya-09–24>http://maps.google.com.et/url?sa=t&url=http://forum.thd.vg/proxy.php?link=http://firsttee.my.site.com/tft_login?website=https://telegra.ph/CHto-takoe-komendantskij-chas-dlya-detej-i-v-kakih-regionah-on-budet-otmenen-31-dekabrya-09–24</a> Такие поощрения позволяют безвозмездно протестировать свежее казино, разобраться с игровым процессом интернет слотов, заработать и вывести маленькую сумму денег.Итак, дабы безвозмездные бонусные кредиты превратились в реальные деньги, которыми продоставляется управлять по своему усмотрению, их нужно отыграть. Вейджер стопам уточнять в правилах онлайн-казино. 1хслотс рабочее зеркало Не сложно догадаться, что no down payment bonuses практически никогда не случаются немаленькими. Чаще всего речь о пяти–тридцати долларах (или эквиваленте этой суммы в иной денежной).
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Также бездепозитные бонусы шансы служить методом возвращать к забаве клиентов, временно приостановивших своё сотрудничество с фирмой: извещение о бездепе поступает на мобильный телефон или почту. Если вы выбрали для себя некоторое брендов коие вас больше всего приглянулись, для постоянной забавы! Таких гемблеров казино довольно любит и ценит, за частую эти игроки становятся VIP игроками заведения, коим нередко поступают прибыльные предложения вид призов, например же туда входит и бездепозитные.
#1301 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino промокод black russia казино <a href=https://m.repost.news/>включи казино</a> porno Яна Троянова casino игровой автомат <a href=https://krtka.info/>Фастова Елена Владимировна порно</a> 1×bet сейчас яндекс игры казино Крючкова Полина Викторовна порно pin up casino пин порно с Федор Чалов (футбол) casino зеркало сегодня рабочее Александра Бортич
DiskiPlus porno Анна Сидорова, керлингистка DiskiPlus порно с Зырянова Анастасия Владимировна <a href=https://diskiplus.ru/>казино</a> DiskiPlus 1×bet зеркало на сегодня 1×bet xyz DiskiPlus демо казино <a href=https://www.diskiplus.ru/>DiskiPlus Приезжева Екатерина Геннадьевна порно</a> DiskiPlus ramenbet casino DiskiPlus 1×bet приложение DiskiPlus 1×bet слоты официальный сайт DiskiPlus porno Мира Андреева (теннис) DiskiPlus Валентина Матвиенко порно DiskiPlus 7k casino скачать DiskiPlus самое казино
#1302 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрацию более популярный вариант это
Создание аккаунта. На сайте казино необходимо открыть регистрационную форму и наполнить пустопорожние поля собственными данными. Иногда на данном этапе требуется показать только адрес электронной почты и пароль, но почаще надо наполнить анкету индивидуальной информацией (ФИО, дата рождения, место проживания и т.д.). Нужно указывать лишь настоящие данные, потому впоследствие они будут проверены.Ограничения по играм. Администрация воспрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, средствами либо бесплатными вращениями. Обычно, в правилах приводится полный перечень слотов для отыгрыша. Иногда разделенье производится по виду игр. Например, отыгрыш вероятен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino. <a href=http://filmkachat.ru/>1×slots зеркало которую указывали при регистрации кстати</a> <a href=https://www.sideprojectors.com/project/55401/3d-architectural-rendering-services>https://www.sideprojectors.com/project/55401/3d-architectural-rendering-services</a> рабочее зеркало 1хслотс <a href=https://clashofcryptos.trade/wiki/What_Are_The_Payment_Methods_Integrated_In_The_1×bet_APP>https://clashofcryptos.trade/wiki/What_Are_The_Payment_Methods_Integrated_In_The_1×bet_APP</a> Таким образом, заведение пытается продемонстрировать себя своим потенциальным геймерам, а подобный маркетинговый ход как казино бонус без депо за регистрацию завлекает очень большое внимания к игорному заведению и обеспечивает постоянный струю новых гостей и будущих посетителей игрового интернет клуба.Принципиальным отличием даровых призов от бонусов на депо является отсутствие надобности заносить средства на аккаунт. Из-за сего их нередко называют бездепозитными (no deposit bonuses).
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Верификация важна для добавочной защищенности и помочь техподдержке выявить бонусхантеров и плутов. Кстати, на платформах выводы крупных сумм доступны лишь после подтверждения личности.Теоретически, к безвозмездным призам можно отнести например нарекаемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, потому собственно они предоставляют только вероятность делать ставки. 1×slots зеркало регистрация в 1×slots casino Помните, собственно любые нарушения верховодил сведут на нет ваши старания, и вы наверняка останетесь без начисленного вам бесплатного бонуса. Всегда изучайте управляла начисления и условия вейджера. По каким вопросам, на коие вы не можете помощи отыскать ответы, обращайтесь за разъяснениям и саппорт. <a href=http://www.advokateninge.se/2017/11/07/hej-varlden/?unapproved=683962&moderation-hash=bc879bc28da0b92672cb7afe749b4a2c#comment-683962>http://www.advokateninge.se/2017/11/07/hej-varlden/?unapproved=683962&moderation-hash=bc879bc28da0b92672cb7afe749b4a2c#comment-683962</a> 1× slots casino зеркало
1хлот регистрация в 1×slots casino
Принципиальным отличием бесплатных бонусов от бонусов на депозит является отсутствие необходимости вносить деньги на аккаунт. Из-за сего их часто нарекают бездепозитными (no down payment bonuses).Чаще всего интернет-казино предлагают бездепозитные бонусы свежим пользователям. Эта промо-акция очень отлично привлекает начинающих, подталкивая их к открытию счета. Конечно, не все становятся преданными клиентами, но сам прецедент регистрации аккаунта играет на руку заведению. Это также благотворительные деньги, которые поступают на аккаунты свежеиспеченных игры после регистрирования. А необыкновенность таких бонусов состоит том,, собственно обретенные деньги обязательно следует применять в продолжении назначенного времени.Выигрыши с призов без вложений практически привязаны к требованию по ставкам и шансы быть обналичены только последствии исполненья этих требований. <a href=http://kunigami-minibas.jp/userinfo.php?uid=18865#>http://kunigami-minibas.jp/userinfo.php?uid=18865#</a> Некоторые онлайн-казино без депо предлагают новым клиентам избрать приз при регистрации. Будьте внимательны: выбрав один, вы в безоговорочном большинстве случаев не можете пользоваться остальными. 1×slots casino регистрация 1×slots review live Обычно, бездепозитные призы выдаются под определенные слоты с фиксированной ставкой, но их точно запрещено применять в игровых автоматах с прогрессивным джекпотом. Список игр, в которых можно использовать бездеп, Вы найдете в описании акции либо можете уточнить у службы заведения.Бездепозитные призы — это презенты от казино повторяющий бонусных денег либо фриспинов для игровых автоматов, которые начисляются на акк игрока после процедуры регистрации на веб-сайте заведения. Для получения этих поощрений депо не потребуется.
1хслотс регистрация в 1×slots casino
Хотя благотворительные призы начисляются без депозита, не исключено, что вас понадобиться вносить деньги. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты только последствии как, как новый заказчик впервые пополнит игровой счет.Как и акции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такового предложения являются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих гостей и позволяет им составить впечатление о функционале, не рискуя вескими суммами. 1хслотс регистрация в 1×slots casino <a href=http://hi-couplering.com/bbs/board.php?bo_table=free&wr_id=367000>http://hi-couplering.com/bbs/board.php?bo_table=free&wr_id=367000</a> Но а в вы теснее профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в онлайн казино;
1×slots сайт
Бездепозитные бонусы казино это экономическая компенсация, предлагаемая пользователям на дармовой базе и возможность выступать в интернет казино даром. Если ассоциировать их с поощрениями за лепта, каких свои выдаются только потом начального пополнения счета, то бездепозитные гонорары получаются безвозмездно. То есть, играющий получает возможность создавать ставки на теснее существующие деньги, коие выдаст заведение, исполняя, при, обыденные деянья, дабы их извлечь (тут идет речь о регистрация, удостоверении личности с использованием номера аппарата, дизайна заказы и т.д. ).При правильном раскладе бездепы — это отличный способ играть на деньги без траты собственных средств. Есть несколько рекомендаций, следуя которым можно извлечь максимум полезности из подобных промоакций казино. Играть идет только на лицензированных площадках. Скриптовые веб-сайты не дурачат с бонусными предложениями, но и употребляют пиратский софт с измененным ГСЧ. Выиграть на таких автоматах нереально. Постарайтесь отыграть вейджер, дабы замечена возможность забыть заявку на выплату. Кстати, на всех сайтах, представленных в списке, доступны современные платёжные приборы. Вы можете получить выигрыш на электронной кошелёк, карту, телефон. <a href=http://xn–jj0bt2i8umnxa.com/bbs/board.php?bo_table=free&wr_id=112857>http://xn–jj0bt2i8umnxa.com/bbs/board.php?bo_table=free&wr_id=112857</a> 1×slot рабочее зеркало Помимо прочего, для вывода средств по бездепу нужно внести на счёт свой первый депозит — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на минимально возможную необходимую, последствии чего вывод средств будет доступен.Лишь популярностью и известные азартные заведения шансы разрешить себя раздавать бездепы вид дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депо, коие возможно израсходовать в лучших аппаратах с высочайшей отдачей.
<b>Смотреть еще похожие новости:</b>
<a href=http://u0382101.isp.regruhosting.ru/index.php/forum/general-questions-and-how-tos/68883-otzyvy-o-tovarakh?start=22032#167575>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=http://www.forum.kalor.ru/1×slot-oficialniy-sayt-t23194.html>1×slot официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Свежий приз начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в использовании средствами, а случае отыгрыша оператор может ввести ограничение на вывод средств.
#1303 Charlesgunnyhttp://filmkachat.ru
1× slots casino официальный сайт
Начнём с как, что каждое промо за регистрацию подразумевает некоторые условия. Бездепозитные призы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность денежного оборота, нужная для исполненья критерий. Пример, получили благотворительные вращения и выиграли с них 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 рублей, неудачных либо выигрышных, маловажно. После выполнения, бонусный баланс перейдёт на реальный и станет доступным к выводу. <a href=http://filmkachat.ru/>скачать 1×slots на андроид мобильная версия</a> <a href=https://cgscholar.com/community/community_profiles/3d-rendering-services/community_updates/234375>https://cgscholar.com/community/community_profiles/3d-rendering-services/community_updates/234375</a> Представьте момент, когда при ставке в 10 руб. Вы получите подобное умножение. Миллион рублей за одно вращение, собственно абсолютно вполне. Поэтому вопрос, сколько можно выиграть остаётся открытым. Предлагаем проверить без. Регистрируйтесь в одном или нескольких онлайн казино, получайте Бездепозитный приз и инспектируйте фортуну в деле. Разумеется, вывести средства не так просто. Однако шансы есть у всех.У каждого игорного заведения свои верховодила и обстоятельства. Но, чтобы получить бонусы, нужно выполнить стереотипные деяния: 1×slos регистрация в 1×slots casino <a href=http://mos-it.ru/index.php?subaction=userinfo&user=grotesquelattic>http://mos-it.ru/index.php?subaction=userinfo&user=grotesquelattic</a> Игры, в которых возможно выступать на бонусные средства. Проверьте перечень игр, каких можно выступать на бонусные свои, возможно они Вам не понравятся и надо расходовать своё время на такую акцию.Подтвердите регистрацию, дабы активировать Бездепозитный приз с выводом, требуется заполнить личный профиль. Заполните порожние поля истинными данными о для.
1×slots регистрация 1×slots casino c2d ru
<a href=https://www.fromrus.su/index.php?/topic/56313–1×slots-%D0%B0%D0%BA%D1%82%D1%83%D0%B0%D0%BB%D1%8C%D0%BD%D0%BE%D0%B5-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE/>1×slots актуальное зеркало</a> онлайн казино 1×slots Отыграв бездепозитный приз в казино с выводом тоже придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в подобное ограничение присутствует, то единоразово вывести получится только сумму, не превышающую размер полученного бонуса. <a href=http://whdf.ru/forum/user/85235/>http://whdf.ru/forum/user/85235/</a> Размер приза. В качестве бездепов обыкновенно начисляют небольшие суммы, а когда идет о призах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то кое-какие казино имеют подарить игроку до 2000$.Онлайн-казино кропотливо продумывают бонусные условия, коие нужно изучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и ограничения. 1×slots регистрация на сайте 1×slots ru com Поспешите зарегистрироваться на официальном сайте Клубника, дабы мгновенно получить 33 безвозмездных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, появляется реальный шанс победу!Бонус начисляется игроку незамедлительно последствии регистрации и прохождения верификации в казино и не настятельно от посетителя внесения депозита. Как правило, размер приза в схожем случае довольно умеренный, впрочем разрешает новичкам познакомиться с игрой без риска реальными деньгами.
1×slots зеркало подтвердит вашу регистрацию если говорить
Практически все онлайн казино с бездепозитным призом за регистрацию учитывает программу лояльности — систему поощрения неизменных посетителей, кот-ая произведено из большого уровней. При достижении игроком очередного уровня на его счёт поступает бонус. Чем выше уровень — что, этим щедрее приз.Выбирая даровой бонус, внимательно изучайте верховодила. Убедитесь, что вас возможно брать участие в промоакции. Уточните, в каких играх возможно исполнять обстоятельства вейджера. При надобности задавайте вопросы адептам саппорта. Можно ли зарабатывать на бездепозитных бонусах? Это не работа, тут как повезет, случае в любом предложенном безедепе, вы будете откручивать вейджер и выводить, тогда возможно именовать везением, и добавочной добавкой к вашему бюджету.Доступные игры – В некоторых азартных играх можно снизить математическое приемущество казино до нескольких десятых процента. В их числе все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как правило, в таких забавах ставки идут в зачет вейджера не всецело. Например, имеет предусматриваться лишь 50%. В неких забавах бездепозитные бонусы вообщем нельзя отыгрывать. <a href=https://bans.org.ua/index.php?action=profile;u=1390687>https://bans.org.ua/index.php?action=profile;u=1390687</a> Срок отыгрыша — это этап, кот-ый начинается в момент активации приза и заканчивается с его закрытием. Пользователю нужно уложиться в данный временной зазор, по призовые средства аннулируются. Казино устанавливают перечень игр, ставки в которых засчитываются при расчете отыгранных средств. Если тайтл не входит в данный список, то он может быть недоступен для загрузки во время деянья бонусного предложения. 1×slots зеркало рабочее Бездепозитные бонусы казино это экономическая компенсация, предлагаемая юзерам на дармовой базе и вероятность выступать в интернет казино даром. Если сопоставлять их с поощрениями за вклад, в которых свои выдаются лишь потом начального пополнения счета, то бездепозитные гонорары получаются даром. То есть, играющий получает возможность создавать ставки на теснее существующие деньги, которые выдаст заведение, исполняя, всем, обыденные деянья, дабы их извлечь (здесь идет о регистрация, удостоверении личности с внедрением номера телефонного, оформления заявки и т.д.).Если вы выбрали себе некоторое брендов которые для больше всего полюбились, для неизменной игры! Таких гемблеров казино очень любит и ценит, за частую такие игроки становятся VIP игроками заведения, которым нередко поступают прибыльные предложения повторяющий призов, например же туда заходит и бездепозитные.
зеркло казино 1×slots
<a href=http://dd214.labelcreativeak.com/forums/viewtopic.php?f=3&t=1661>1×slots регистрация 1×slots casino c2d ru</a> Популярность интернет казино растёт и всё больше пользователей начинают интерес азартными забавами. Бездепозитные призы 2022 года, это оригинальные презенты за регистрацию. С их подмогою свежие игроки шансы получить благотворительные вращения или средства на баланс за 1 регистрацию. С свет игорных заведений в онлайне, бездепозитные призы стали моднейшим способом вербования игроков. Подобные акции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш сайт собрал превосходнейшие предложения из интернета на 2022 год. Воспользуйтесь хоть презентом и сможете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить обстоятельства. 1хслот официальный сайт зеркало <a href=https://forum.kainkalabs.com:443/member.php?action=profile&uid=17939>https://forum.kainkalabs.com:443/member.php?action=profile&uid=17939</a>
1×slots зеркало этих способов предполагает регистрацию
Главное превосходство спинов – возможность изучить различные слоты. Также получится насладиться бонусными раундами, испытать удачу в риск-туре и преувеличить выигрыш за счёт особых символов. Однако не только игровой процесс заслуживает внимание, ведь другого, как сосредоточиться на реальном выигрыше. <a href=http://hardstorecr.com/mybb/member.php?action=profile&uid=183607>http://hardstorecr.com/mybb/member.php?action=profile&uid=183607</a> 1×slots официальный сайт зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://ragnarok.ch/forum/viewthread.php?thread_id=204881>1х слотс зеркало регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Как только вы отыграли вейджер и средства с бонусного баланса перебежали вам на настоящий счет, Вы смело можете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депо).
#1304 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
вывод казино букмекерская контора на андроид <a href=https://slon-ru.com/>казино</a> 1×bet зеркало слоты мобильные букмекерские конторы <a href=https://res-publika.com>сайт букмекерской конторы</a> скачать 1×bet 1×bet xyz casino зеркало сайта кент казино казино 1 казино вход casino актуальное зеркало Скворцова Вероника Игоревна порно
DiskiPlus porno Мария Шарапова DiskiPlus casino официальный сайт <a href=https://www.diskiplus.ru>DiskiPlus 1×bet на андроид</a> DiskiPlus казино рояль DiskiPlus казино рублях <a href=https://www.diskiplus.ru/>DiskiPlus пина casino</a> DiskiPlus кент казино DiskiPlus кент казино DiskiPlus автомат казино DiskiPlus казино пин DiskiPlus казино зеркало сегодня DiskiPlus включи казино DiskiPlus casino ап
#1305 Charlesgunnyhttp://filmkachat.ru
1×slots казино зеркало
Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают бонус по государствам. Вплоть до того, собственно клуб имеет себя игроков из Вашей страны, а бездеп не давать.3. Подтвердить данные. В зависимости от клуба, нужно привязать телефонный либо почту, показать персональную информацию; <a href=http://filmkachat.ru/>1×slot регистрация</a> Представьте момент, когда при ставке в 10 руб. Вы получите схожее умножение. Миллион рублей за одно вращение, собственно абсолютно возможно. Поэтому вопрос, сколько можно выиграть остаётся открытым. Предлагаем проверить других. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный приз и проверяйте удачу в деле. Разумеется, вывести деньги довольно. Однако шансы есть у всех. <a href=https://www.bunity.com/shopavto>https://www.bunity.com/shopavto</a> В современность довольно просто получить приз за регистрацию в казино. Практически любой игорный жилище с готовностью начислит средства либо бесплатные вращения. Многие гэмблеры пользуются данным и не стыдятся региться в любом клубе с выгодными условиями. Кстати, это замечательная возможность выработать победную тактику и сорвать джекпот.Несмотря на то, собственно данный вариант стимуляции со стороны азартных платформ очень известен области сходственных игр, далековато не всем почитателям казино знаменито, собственно сами бездепозитные бонусы казино и как непосредственно их возможно эксплуатировать. 1×slots официальный сайт скачать <a href=http://hy.7msj.com/home.php?mod=space&uid=56128&do=profile&from=space>http://hy.7msj.com/home.php?mod=space&uid=56128&do=profile&from=space</a> Некоторые клубы автоматически начисляют бонус на аккаунт игрока в выполнения условий получения, хотя посещают истории, когда бонус нужно активировать игроку самому. Есть некоторое способов активации бонуса:Промокод – определённая комбинация знаков, коию необходимо ввести в отвечающее поле при твореньи учетной записи либо активировать в личном профиле игрока в разделе с призами.
1×slots официальный зеркало рабочее
<a href=https://www.fromrus.su/index.php?/topic/63938–1×-slots-%D1%81%D0%B0%D0%B9%D1%82/>1× slots сайт</a> 1×slots регистрация на официальном сайте <a href=https://heylink.me/Glavdorogadv3107/>https://heylink.me/Glavdorogadv3107/</a> 1×slots зеркало выигрыши обязательно пройдите регистрацию если
1×slots зеркало регистрацию более популярный вариант это
Выбирайте наилучшие безвозмездные призы с помощью обзоров на Casinoz – и пусть вас сопутствует удача при отыгрыше бонусных кредитов!Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша призов. Заведения всегда устанавливают максимальную ставку, возможную по условиям вейждера. Для получения депозитного приза необходимо восполнить свой игровой баланс настоящими деньгами. Вознаграждение можно получить или при внесении первого депозита, либо в виде фиксированного процента от внесённых средств. Так либо иначе, приз поступит на счёт лишь последствии пополнения.Отзывы читателей о бонусных промоакциях посодействуют составить впечатление, хотя не забывайте о субъективности личных объяснений. <a href=https://malaysia-forex.com/members/133867-KennethZiz>https://malaysia-forex.com/members/133867-KennethZiz</a> В истиннее время получить бонус за регистрацию в казино довольно просто. Почти любой игорный дом с готовностью даст средства или благотворительные вращения. Многие игроки пользуются этим и не стыдятся региться в любом клубе с выгодными критериями. Кстати, это отличная возможность выдумать выигрышную стратегию и сорвать куш.Операторы гемблинга заявляют, собственно например они борются с бонус-хантерами. Впрочем, критики считают, что этим казино пробуют сделать из случайного гостя постоянного игрока. 1х слот регистрация в 1×slots casino Автоматическая активация взгляд самой удобной, хотя ручной метод содержит перед ней превосходства. Прежде чем применять вознаграждение от казино, стоит заблаговременно найти, сколько медли требуется на исполнение всех условий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала деянья бонуса.Бездепозитные призы казино это экономическая компенсация, предлагаемая пользователям на дармовой базе и возможность выступать в интернет казино безвозмездно. Если ассоциировать их с поощрениями за лепта, в которых свои выдаются только потом первоначального пополнения счета, то бездепозитные вознаграждения получаются безвозмездно. То есть, играющий получает вероятность делать ставки на уже место финансы, которые выдаст заведение, исполняя, при, обычные деянья, дабы их извлечь (тут идет речь о регистрация, удостоверении личности с внедрением номера телефона, дизайна заказы и т.д. ).
1хслот скачать
Бездепозитные бонусы — это презенты от казино повторяющий бонусных средств или фриспинов для игровых автоматов, которые начисляются на акк игрока в процедуры регистрации на веб-сайте заведения. Для получения этих поощрений депо не требуется. <a href=http://forum.audioheritage.net/memberlist.php?mode=viewprofile&u=19451>1×slots зеркало подтвердит вашу регистрацию если говорить</a> Бездепозитный бонус казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в данном и содержится главное различие.Выбирайте превосходнейшие бесплатные призы счет обзоров на Casinoz – и пусть для сопутствует счастье при отыгрыше бонусных кредитов! Промокод – определённая комбинация знаков, которую необходимо установить в отвечающее поле при разработке учетной записи или активировать в личном профиле игрока в разделе с бонусами.Когда речь идет о получении бездепозитных призов в казино, для внимание на следующие условия: 1×slots зеркало на сегодня <a href=http://www.pcddbbs.com/space-uid-12620.html>http://www.pcddbbs.com/space-uid-12620.html</a> Классическая разновидность бонуса за творенье аккаунта. Его преимущество заключается том,, что клиент может самостоятельно подбирать аппараты и делать ставки в их. Иногда перечень игровых автоматов ограничен оператором, хотя все точно это другого, чем единственный доступный разъем, как когда с внедрением фриспинов.
1×slots casino регистрация 1×slots review live
Ниже указан актуальный список законных казино в Беларуси с бонусами на 1-ый депо. Вы можете попасть на официальный сайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. Пoдтвepдить личнocть посетителя. Для удачного вывода средств, нужно доказать лицо посетителя. Нa этaпe вepификaции пpoфиля, работники службы безопасности обязаны убедиться, что у игрока не раз аккаунт. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не может исключить собственный выигрыш, если у него будет количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы.Не стоит путать игру в демо и использование призов. В демонстрационном режиме игрок может расценить механику слота, сюжет и оформление. Но забава проводится на условные кредиты, поэтому отсутствует главное ? ощущение азарта. Активируя промокод или фриспины, заказчик как не расходует средства деньги на игровые автоматы, но возможность сорвать настоящий куш! <a href=https://toprankdesign.co.uk/wiki/index.php?title=User:ZQBMarc904>https://toprankdesign.co.uk/wiki/index.php?title=User:ZQBMarc904</a> Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации подарка нужно доказать электрическую почту и привязать телефонный; 1×slots casino регистрация 1×slotscasin online Бонус за регистрацию в казино без депозита с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша имеет понадобиться сделать ставки на сумму, в количество десятков раз превышающую сумму бонуса или выигрыша.При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, коие можно предназначить игре в казино.
<b>Смотреть еще похожие новости:</b>
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=878508>1×slots регистрация 1×slotscasino09k online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Промокод – определённая комбинация знаков, которую необходимо установить в соответствующее поле при создании учетной записи или активировать в собственном профиле игрока в разделе с бонусами.
#1306 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино онлайн porno Мария Шарапова <a href=https://www.ossetia.tv/>порно с Дарья Касаткина (теннис)</a> пин ап casino 1×bet вход <a href=https://repost.news/>inform@rucriminal.info</a> porno Ангелина Гончаренко, хоккеистка porno Светлана Ходченкова casino pin официальный пари букмекерская контора pin up casino скачать Фастова Елена Владимировна порно почему казино
DiskiPlus porno Нина Пирогова, хоккеистка DiskiPlus букмекерская контора официальный сайт <a href=https://www.diskiplus.ru>DiskiPlus Приезжева Екатерина Геннадьевна порно</a> DiskiPlus лучшие казино бесплатно DiskiPlus 1×bet скачать приложение на андроид <a href=https://diskiplus.ru>DiskiPlus porno Юлия Канакина</a> DiskiPlus бесплатно фильм казино DiskiPlus 1×bet на андроид бесплатно DiskiPlus Елена Лядова DiskiPlus симулятор казино DiskiPlus Лут Оксана Николаевна порно DiskiPlus порно с Карен Хачанов (теннис) DiskiPlus порно с Владимир Минеев (ММА)
#1307 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на сайте
Вывод выигрыша с бездепозитных призов казино – щедрый презент от азартных клубов. Но дабы вывести свой доход, необходимо выполнить ряд условий:В большинстве заведений устроить это возможно по e-mal, по номеру телефона, через социальную сеть или гугл-аккаунт. <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> Условия отыгрыша приза. Если Вы планируете заработать на бездепозитном призе, то для направьте на значение вейджера и срок, который дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть бонус и исключить выигрыш.Подтверждение электрической почты – одно из основных условий, которое есть практически в любом бездепозитном казино. Чтобы верифицировать электрическую почту, достаточно перебежать по интенсивной ссылке в послании, приобретенном от азартного клуба. <a href=http://snstheme.com/forums/users/3d-render/>http://snstheme.com/forums/users/3d-render/</a> Фриплей-бонусы. Бонусы за благотворительную забаву есть лишь в неких клубах. Они зачисляются незамедлительно в творенья профиля и действуют недолговременное время. Если у вас нет времени израсходовать свои, они просто завершатся. Что дотрагивается медли, как бонусы срабатывают протяжении одного часа.Бездепозитные призы казино это экономическая компенсация, предлагаемая юзерам на дармовой базе и возможность выступать в интернет казино безвозмездно. Если сопоставлять их с одобрениями за лепта, в свои выдаются лишь потом начального пополнения счета, то бездепозитные вознаграждения получаются безвозмездно. То есть, играющий получает вероятность создавать ставки на теснее быть финансы, которые выдаст заведение, исполняя, при этом, обыденные деянья, чтобы их извлечь (здесь речь о регистрация, удостоверении личности с внедрением номера аппарата, оформления заявки и т.д. ). 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=https://www.one2bay.de/forum/member.php?action=profile&uid=43578>https://www.one2bay.de/forum/member.php?action=profile&uid=43578</a> Нет. Казино выдают бесплатные бонусы за регистрацию, для того, чтобы клиент имел ознакомиться с игровым заведением. А дабы вывести его, необходимо выполнить условия отыгрыша.
1×slots casino зеркало
<a href=https://forum.banknotes.cz/viewtopic.php?t=67763>1×slots бонус за регистрацию</a> 1× slots сайт Как правило, при выводе финансов, от играющего требуется лишь сделать наименьший вклад для того, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом индивидуальный счет.Так что можете смело регистрироваться без всяких размышлений. Фортуна сегодня точно на вашей стороне. Не бойтесь, ведь последствие какого или убытка Вам совершенно не грозит. С этими призами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе. <a href=http://google.com.ni/url?q=http://autozigulya.ru/bitrix/redirect.php?goto=http://2beman.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/0fSMOhG2k5>http://google.com.ni/url?q=http://autozigulya.ru/bitrix/redirect.php?goto=http://2beman.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/0fSMOhG2k5</a> Заработать на бездепозитных бонусах за регистрацию в казино имеет любой пользователь, достигший совершеннолетия.Вейджер (wager) – это коэффициент, который демонстрирует на какую необходимую необходимо устроить ставок, дабы вывести бонус из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего приза, Вам необходимо сделать ставок на необходимую: 500*70=3500 рублей. Только всецело отыграв бонус, Вы сможете вывести свой выигрыш. 1хслотс официальный сайт зеркало
1×slots зеркало регистрация то дальше необходимо пройти
<a href=http://aprix.ru/bitrix/redirect.php?goto=http://alba-dent.com/bitrix/redirect.php?goto=http://velomarka.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/N6VI-UFx30V>http://aprix.ru/bitrix/redirect.php?goto=http://alba-dent.com/bitrix/redirect.php?goto=http://velomarka.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/N6VI-UFx30V</a> Зарегистрироваться в казино по специальной ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефонного и электронную почту). Для доказательства номера аппарата необходимо в собственном профиле показать свой номер и нажать кнопку „Подтвердить номер телефона“, далее Вы получите sms-сообщение с кодом, кот-ый нужно ввести в соответствующее фон. Для подтверждения электронной почты, перебежать по активной ссылке в письме от казино.Любой выигрыш по ставке повыше установленного лимита будет являться недействительным. То есть ставка не будет засчитана при отыгрыше, а случае выигрыша его сумма не поступит на счёт посетителя — итог забавы будет всецело аннулирован. 1хлот регистрация в 1×slots casino Выбрать казино с бездепозитным бонусом. У нас на сайте представлен перечень наилучших интернет казино, коие предлагают своим игрокам щедрые призы за регистрацию.
зеркала 1×slots
Фриспины предусмотрены для использования в видео слотах. Внимательно ознакомьтесь с критериями – часто их выдают на некоторые автоматы. В зависимости от клуба, у вас получится сделать определённое количество ставок. Кстати, продвинутые игорные жилища разрешают запускать каждых «одноруких злодеев».Наши эксперты изучают условия акции, после в ручном режиме проводят их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и параметры. Мы не рекламируем казино, а даем игрокам информацию о наихороших из них. <a href=http://216.38.0.7/viewtopic.php?f=12&t=411348>1×slots бонус за регистрацию</a> Иногда виде бездепа, казино дарит наименьший бонус (до 50 рублей), из-за которого не заморачиваться.Прибывшие на аккаунт финансы бездепозитные призы предназначаются, главном, только для новоиспеченных юзеров, которые раньше не имели собственного аккаунта в данном казино. Исходя из сего, если раньше у игрока был изготовлен депо, то, по всей вероятности, у него больше не несомненно возможности рассчитывать на получение такого бонуса в определенном заведении. Получив свой презент, Вы можете безвозмездно выступать на настоящие средства, а выполнив обстоятельства отыгрыша, вывести свой выигрыш.Принципиальным различием бесплатных призов от призов на депозит считается недоступность необходимости заносить средства на аккаунт. Из-за этого их нередко именуют бездепозитными (not the slightest down payment bonuses). 1×slots официальный сайт зеркало <a href=https://pcnto.com/user/RichardDiumn/>https://pcnto.com/user/RichardDiumn/</a> Выбор любого онлайн казино на нашем веб-сайте. В описании к любому Вы сможете узнать, собственно получите за творение аккаунта.Но есть азартные заведения, готовые просто например вручить средства на игру. Для этого достаточно сделать профиль. Чтобы вывести выигрыш, сперва необходимо выполнить вейджеровые условия, прописанные в критериях получения бездепа.
1×slots бонус за регистрацию
Также бездепозитные бонусы имеют служить способом возвратить к этой клиентов, пока приостановивших своё сотрудничество с компанией: извещение о бездепе поступает на мобильный аппарат или почту. <a href=https://www.mexicanosenelmundo.com/member.php?action=profile&uid=12993>https://www.mexicanosenelmundo.com/member.php?action=profile&uid=12993</a> 1 х слотс зеркало Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке необходимо пополнить счет в казино. Для депозитных бонусов, эта процедура не нужна, так как депо теснее изготовлен.Бездепозитные призы казино это финансовая компенсация, предлагаемая пользователям на дармовой основе и вероятность выступать в интернет казино даром. Если сравнивать их с поощрениями за вклад, каких свои выдаются лишь впоследствии начального пополнения счета, то бездепозитные вознаграждения получаются бесплатно. То есть, играющий получает вероятность создавать ставки на уже имеющие финансы, которые выдаст заведение, исполняя, при этом, обыденные действия, дабы их извлечь (тут идет о регистрация, удостоверении личности с внедрением номера телефонного, дизайна заявки и т.д. ).
<b>Смотреть еще похожие новости:</b>
<a href=http://www.psicologamariafoti.it/index.php/forum/ideal-forum/260973–1×slots#345254>1×slots регистрация</a>
<a href=http://gradina.com/threads/1×slots-zerkalo-registracija-to-dalshe-neobxodimo-projti.60104/>1×slots зеркало регистрация то дальше необходимо пройти</a>
<a href=https://masstr.net/showthread.php?tid=211917>1×slots зеркало рабочее на сегодня</a>
<a href=http://pfdgaming.com/viewtopic.php?t=1704>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Внесение депо – Будьте готовы пополнить счет после отыгрыша бонуса. Это обычное требование верховодил для данного типа промо-акций. Лучше заблаговременно уточнить, какую необходимую нужно будет заносить на счет. Как правило, идет о наименьшем депозите, хотя вы обязаны быть уверены, собственно он вас по кармашку. Баланс игрока пополняется на подходящую необходимую. К ней применяется вейджер, обозначенный в правилах акции. Вывести выигрыш возможно будет после такого, как юзер устроит требуемый объем ставок из собственных средств. В редких случаях бездеп трудится в формате Free Play. На счет юзера зачисляется большая сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по завершении сего периода сумма на счету будет превосходить изначальную, то разность можно будет исключить либо использовать для последующих ставок.
#1308 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino riobet 1×bet официальный скачать <a href=https://7club7.com/>pin up casino зеркало</a> 1×bet бесплатно 7k casino <a href=https://m.repost.news/>Ирина Горбачева</a> pin up casino официальный Скворцова Вероника Игоревна порно сайты казино приложения букмекерских контор на андроид порно с Дарья Клишина, легкоатлетка человек казино гта онлайн казино
DiskiPlus порно с Алина Загитова DiskiPlus inform@rucriminal.info <a href=https://diskiplus.ru>DiskiPlus фильмы казино рояль</a> DiskiPlus порно с Евгений Малкин (хоккей) DiskiPlus казино зеркало сегодня <a href=https://diskiplus.ru>DiskiPlus официальные букмекерские конторы</a> DiskiPlus порно с Алина Загитова, фигуристка DiskiPlus пари букмекерская контора DiskiPlus 1×bet слоты 1×bet top DiskiPlus casino актуальное зеркало DiskiPlus казино фильм смотреть онлайн DiskiPlus porno Дарья Клишина DiskiPlus фреш казино
#1309 Charlesgunnyhttp://filmkachat.ru
онлайн казино 1×slots
Можно ли в одном онлайн казино получить больше одного бонуса за регистрацию? Нет, так как в любом интернет казино есть правила, к которым нужно придерживаться, не творить два аккаута для получения бонусов, иначе несомненно блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, бонус за регистрацию выдаеться один раз одному личику.Необходимость отыгрыша. Вейджер такой выше, чем для бонусов за депо. И же свои не отыграны, вывести их нельзя. <a href=http://filmkachat.ru/>1х слот 1хслотс регистрация перейти на 1×slots</a> Когда речь о валютных бонусах, казино всегда устанавливают обстоятельства вейджера, коие необходимо выполнить, чтобы исключить выигрыш. <a href=https://www.sideprojectors.com/project/55406/avtovikup-kiyiv>https://www.sideprojectors.com/project/55406/avtovikup-kiyiv</a> При использовании бездепозитным призом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют несколько обликов лимитов: 1× slots регистрация в 1×slots casino <a href=https://urganchshahar.uz/user/Jasperves/>https://urganchshahar.uz/user/Jasperves/</a> У каждого игорного заведения свои правила и условия. Но, дабы получить бонусы, необходимо выполнить стандартные действия:
1×slots зеркало регистрация
В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это самая приятная доля игры. Важно, часто бездепозитные бонусы в казино выдаются с лимитированиями по наибольшей выплате. В среднем возможно рассчитывать на выгода в несколько тысяч руб. Как исключить выигрыш с приза без депозита. Придётся доказать акк документально, в некоторых заведениях. Процедура верификации обязательна и делается любым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате или прочитайте в правилах. рабочее зеркало 1×slots Реже призы без депо начисляются неизменным игрокам. С их поддержкою администрация старается удержать ценных клиентов либо желает поблагодарить за преданность верных гостей. Но намного чаще для сходственных целей используются эти промоакции: <a href=https://oraclenana.com/MYBB3/user-8719.html>https://oraclenana.com/MYBB3/user-8719.html</a> В интернете количество известных игорных площадок с красивыми акционными услугами. Однако пристально разбирать обстоятельства десятков предложений времени надоест, ну и время отнимет много. Поэтому наша команда подготовила ТОП-3 вебсайтов с наихорошими бездепозитными бонусами:Такие поощрения дозволяют бесплатно протестировать новое казино, разобраться с игровым ходом интернет слотов, заработать и вывести маленькую сумму средств. 1×slots регистрация 1×slots casino 777 online Онлайн-казино с бездепозитными бонусами ставят клиентам обстоятельства для использования бездепами, потому перед участием в акции какого-либо подробно ознакомиться со всеми правилами и нюансами акции. Условия все дотрагиваться получения приза, его использования и последующего вывода денежных средств в случае выигрыша.Вы всего, скажем, как все любите получать подарки и бездепозитные призы казино. Игорные дома взяли в привычку одаривать гэмблеров приятными бонусами. Стать обладателем приветственного презента можно за создание профиля или пополнение счёта. Второй вариант больше увлекательный, ведь клубы готовы удвоить депо! Но в вы новичок и только знакомитесь с миром пыла, какого-либо пользуйтесь бонусом за регистрацию.
1×slots зеркало этих способов предполагает регистрацию
Простая процедура получения бездепозитного приза, кот-ая займет не более 2-х минут. Для получения бездепов, достаточно зарегистрироваться и подтвердить контактные данные.А ознакомиться с свежими интернет казино, Вы можете помощью призов с выводом выгоды, которые Вы сможете получить без депозита. <a href=https://google.as/url?q=https://doctorlazuta.by/>https://google.as/url?q=https://doctorlazuta.by/</a> Для получения бонуса надо(надобно) ознакомиться с программкой преданности казино и сделать ставки на необходимую, необходимую для перехода на следующий уровень. casino 1×slot Раздача призов имеет быть приурочена к разным датам: календарные праздничные, дни рождения игроков, годовщина открытия казино и т. Д. Подарок выдается вид средств, фриспинов либо баллов для накопления и размена на предложения оператора. Если юзер получает выигрыш, средства начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд требований.Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке представители онлайн-казино публикуют актуальную информацию о no deposit bonuses и предложениях.
1×slots коды
Фриплей-бонусы. Бонусы за бесплатную забаву есть лишь в неких клубах. Они зачисляются сразу после сотворения профиля и действуют недолговременное время. Если у вас нет медли потратить средства, они просто закончатся. Что дотрагивается времени, как бонусы срабатывают протяжении одного часа.Такие поощрения позволяют безвозмездно протестировать свежее казино, разобраться с игровым процессом интернет слотов, заработать и вывести маленькую сумму денег. 1× slots зеркало <a href=https://maps.google.ca/url?q=https://doctorlazuta.by/>https://maps.google.ca/url?q=https://doctorlazuta.by/</a> Чаще всего используются коды. Их нужно заносить в особые окошки регистрационной анкеты, случае идет о пригласительных бонусах, либо в особом разделе собственного кабинета игрока.
1×slots казино зеркало
Для верификации аккаунта надо(надобно) дать профессионалам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, еще фотографию банковской карты или экрана страницы электронного кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для доказательства личности.Активация по промокоду употребляется в различных видах бездепов. Если идет о приветственном бонусе, то набор знаков возможно узнать на основной странице, в регистрационной форме или послании, коие отчаливает юзеру для доказательства адреса электронной почты. Акции могут проводиться вместе с партнерскими площадками. Обычно код располагается на постороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется разовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном офисе или начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем актуальный код для активации в описании каждого промо. Активация денежного гонорары происходит механически в сотворения профиля либо использования промокода. Иногда операторы предъявляют вспомогательные требования: подписаться на страницы казино в соц сетях или на рассылку рекламных известий, скачать и ввести вспомогательный софт и т.д. <a href=https://broadmind.co.kr/bbs/board.php?bo_table=free&wr_id=245349>https://broadmind.co.kr/bbs/board.php?bo_table=free&wr_id=245349</a> 1×slots сайт
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=899891#pid899891>1хслот скачать</a>
<a href=https://mit-bbs.com/viewtopic.php?t=823996>1×slot рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины — благотворительные вращения, которые разрешают игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины считаются самым модным и преимущественным обликом приза — благотворительные вращения иногда эффективнее и веселее в отыгрыше, чем остальные облики бездепов.
#1310 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up casino пин ап какие казино <a href=https://m.repost.news/>порно с Виктория Синицина, фигуристка</a> леон букмекерская контора 1×bet зеркало xbet xyz <a href=https://rumafia.news/>почему в казино нет окон</a> сколько казино казино ставка казино сочи Валентина Матвиенко порно Нургалиева Эльвира Рамиловна порно казино фильм up casino
DiskiPlus pin up casino пин ап DiskiPlus почему казино <a href=https://www.diskiplus.ru>DiskiPlus букмекерская контора скачать приложение</a> DiskiPlus букмекерская контора зенит DiskiPlus 1×bet 1 <a href=https://www.diskiplus.ru>DiskiPlus casino 7k рабочее</a> DiskiPlus pin up casino пин DiskiPlus реального казино DiskiPlus порно с Баталина Ольга Юрьевна DiskiPlus casinos xyz DiskiPlus 1×bet сейчас DiskiPlus 1×bet зеркало рабочее DiskiPlus pin up casino пин
#1311 MatthewCib
Надежный сервис по обслуживанию вентиляционных систем, узнайте больше тут <a href=https://hub.docker.com/u/cleaningdubai/>https://hub.docker.com/u/cleaningdubai/</a>
#1312 Charlesgunnyhttp://filmkachat.ru
1×слот регистрация в 1×slots casino
У нас на веб-сайте Вы найдете список бонусов без депо в проверенных казино и подробную информацию о том как их получить и использовать. <a href=http://filmkachat.ru/>1хслотс 1хслотс регистрация перейти на 1×slots</a> Маркетинговая политика всех игорных интернет-клубов должна одевать разнородный нрав. И случае гонорары на депо работают для того, чтобы провоцировать вносить депозиты и поощрять теснее место юзеров, то бездепозитный бонус в казино или приз за регистрацию в казино, до всего, рассчитан на расширение базы покупателей. <a href=https://bio.link/crazycatd4>https://bio.link/crazycatd4</a> Бoльшинcтвo азартных заведений выдвигают приблизительно одинаковые обстоятельства и требования, коие необходимо выполнить, чтобы получить бездепозитный бонус за регистрацию. Все их можно соединить в один список:Ещё одно распространённое акционное предложение – привлекательный презент с неблаговидными притязаниями. К образцу, клуб обещает $100 виде бездепа, но с вейджером х80 либо х100. Отыграть подобный вейджер практически невероятно и потому превосходнее концентрироваться на более интересных промоакциях. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=https://clients1.google.dk/url?q=https://doctorlazuta.by/>https://clients1.google.dk/url?q=https://doctorlazuta.by/</a>
1×slots регистрация 1×slots review live
Только выполнив все обстоятельства отыгрыша и дождавшись окончания проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить средства деньги. 1×slots casino регистрация 1×slotscasin online Условия вывода выигрыша. В некоторых заведениях для успешного вывода с бездепозитного приза довольно пополнения баланса и доказательства личности. В иных же клубах, нужно несколько раз прокрутить собственный депо.Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция имеет доскональные управляла, ссылка на которые обычно находится в промообъявлении. В них указываются лимиты, вейджер, перечень доступных игр. Если оператор укрывает данные о предложении, то воспользоваться им не стоит. <a href=http://gticlub.lv/user/Stevenbut/>http://gticlub.lv/user/Stevenbut/</a> рабочее зеркало 1хслотс Если речь идет об эксклюзивных предложениях, возможность потребоваться регистрация в казино по ссылке с партнерского сайта.Чаще всего казино приз за регистрацию без депозита даёт вероятность запустить любой машина. Но другого внимательно ознакомиться с условиями. Иногда для игры доступны лишь определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, лучше начать знакомство с миром азарта непосредственно с «одноруких злодеев».
1× slots сайт
Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских руб. В критериях промоакции предписано, собственно вейджер бездепозитного приза х20. Поэтому, чтобы отыграть бонус, игроку будет необходимо сделать ставок на 35*20=700 рублей.При регистрации что, нет или ином интернет игральном заведении — вам дается раз шанс испытать свою фортуну не внося свои монеты. Замечу собственно такую поощрительную услугу предоставляют не все онлайн игровые площадки, а только щедрая середина(средина) из них. Которые мы подготовили для Вас в нашем перечне. <a href=https://www.bkeye.co.kr/bbs/board.php?bo_table=free&wr_id=310172>https://www.bkeye.co.kr/bbs/board.php?bo_table=free&wr_id=310172</a> Реже бонусы без депозита начисляются неизменным игрокам. С их поддержкою администрация старается удержать ценных посетителей или вожделеет поблагодарить за лояльность правильных гостей. Но намного почаще для подобных целей применяются такие промоакции: казино 1×slots официальный сайт
1×slot регистрация
Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. Бездепозитные бонусы – это самая небезинтересная и более многообещающая акция интернет-казино. Они и чем фри-спинов, потому собственно выплаты в бесплатных вращениях не гарантированы, ведь композиции на барабанах игрового аппарата все не сложиться.Игрокам не следует принимать приветственный бонус как гарантированный способ получить большой выигрыш, но это замечательная вероятность без расходов оценить перечень казино. Во время забавы в казино, выигрыши, приобретенные спасибо безвозмездным призовым фондам, суммируются и включаются в совместную необходимую для отыгрывания. Однако, в удача улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно допустит исключить денежные свои. Сумма вывода несомненно зависеть от лимита, одобренного непосредственно в этом учреждении. Поэтому, внимательно нужно читать верховодила выдачи безлимитных депо.В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и в случае неоднозначных обстановок нет способности куда-то посетовать и доказать свою правоту. 1×slots бездепозитный бонус за регистрацию <a href=http://worldpoetry.cn/home.php?mod=space&uid=333703>http://worldpoetry.cn/home.php?mod=space&uid=333703</a> При этой на бонусные свои запрещается играть в игровые автоматы с прогрессивным джекпотом и забавы из радела exist casino. Кроме того, некоторые казино выделяют бездеп на один или некоторое определенных слотов, и в других играх Вы не можете на их выступать.Вывод выигрыша с бездепозитных бонусов казино – великодушный презент от азартных клубов. Но дабы вывести свой заработок, необходимо выполнить ряд критерий:
1×slots регистрация 1×slotscasino 56 online
Онлайн гемблинг развивается с любым деньком больше и больше, свежие бренды создаются не по денькам а по часам. Новые онлайн казино проделывают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и тем наиболее предлагают бездепозитные призы за регистрацию, что бы не упустить эту возможность — как воспользоваться свежим бездепом, советуем навещать наш сайт как можно почаще, самое смачное и новые несомненно добавляться в данном же перечне. <a href=http://liderotrasli.ru/index.php?subaction=userinfo&user=boorishanyplace>http://liderotrasli.ru/index.php?subaction=userinfo&user=boorishanyplace</a> 4. Заберите подарок. Чаще всего бонус активизируется сразу последствии регистрации. Но посещают ситуации, когда надо(надобно) забежать в индивидуальный кабинет или написать в службу.Такой безвозмездный эквивалент средств зачисляется на профиль пользователя последствии осуществления притязаний и предназначаются они только для игрового процесса. Вывод таких вознаграждений вероятен только в осуществления вейджеровых условий. 1×slots зеркало видели такую регистрацию на Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 $. Если выдаются фриспины, их количество изредка превышает нескольких 10-ов даровых вращений.Обычно, бездепозитные призы выдаются под конкретные слоты с фиксированной ставкой, но их наверняка воспрещено применять в игровых автоматах с современным джекпотом. Список игр, в можно применять бездеп, Вы отыщите в описании акции либо можете уточнить у саппорта заведения.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Акции распространяются как на все забавы казино, так и на узкий перечень. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и другие. Промо имеет обхватывать разработки одного производителя. Бездеп не пересекается с другими промоакциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, изготовленные бонусными средствами. Для идентификации платежных реквизитов игрока возможность потребоваться пополнение счета на наименьшую сумму. Активация случается за промокодов, которые вводятся в собственном офисе последствии регистрации. Среди спецпредложений в перечне Casino.ru находятся эксклюзивные промокоды, коие доступны лишь посетителям портала. Другие способы начисления средств ? автоматическая активация незамедлительно после творения аккаунта и получение подарка по запросу в службу технической помощи.
#1313 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet бесплатно Скворцова Вероника Игоревна порно <a href=https://7club7.com/>порно с Виктория Синицина, фигуристка</a> скачать букмекерскую контору 7k casino зеркало на сегодня <a href=https://m.repost.news/>порно с Анна Щербакова, фигуристка</a> casino pin официальный официальные букмекерские конторы скачать Скворцова Вероника Игоревна порно 1win букмекерская контора pin up casino top top 1×bet скачать приложение букмекерские конторы бет
DiskiPlus букмекерская контора на андроид DiskiPlus порно с Гатагова Ольга Анатольевна <a href=https://www.diskiplus.ru/>DiskiPlus букмекерская контора официальный сайт скачать</a> DiskiPlus почему в казино не бывает настенных часов DiskiPlus 1×bet сайт 1×bet xyz <a href=https://diskiplus.ru/>DiskiPlus 1×bet слоты официальный сайт</a> DiskiPlus казино фильм онлайн DiskiPlus казино вулкан DiskiPlus лучшая казино DiskiPlus new casino DiskiPlus играющие казино DiskiPlus букмекерские конторы pin DiskiPlus зеркала казино
#1314 Charlesgunnyhttp://filmkachat.ru
1×slots подтвердит вашу регистрацию если говорить
В основном случаев благотворительные бонусы начисляются в кредитах, коие нельзя сразу исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже.При регистрации идет указывать только достоверную информацию. Когда учетная запись несомненно активна, замечен доступ в Личный офис. В нем возможно избрать валюту, установить промокод и разузнать подробные правила получения и отыгрыша бездепа. Краткая информация об промоакции часто присутствует непосредственно на регистрационной форме. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало рабочее</a> При исполнении условий отыгрыша и верификации, средства с бонусного счета переводятся на главной и все быть выведены на карту либо электронный кошелек. Лимиты на вывод и сроки проведения транзакции в от избранной платежной системы.Создание аккаунта. На сайте казино необходимо открыть регистрационную форму и наполнить пустые поля личными данными. Иногда на данном шаге требуется показать лишь адрес электронной почты и пароль, но чаще надо наполнить анкету индивидуальной информацией (ФИО, дата рождения, место проживания и т.д.). Нужно свидетельствовать лишь настоящие данные, потому впоследствие они будут проверены. <a href=https://www.24liveblog.com/live/U9cH9>https://www.24liveblog.com/live/U9cH9</a> 1×slots регистрация 1×slots casino 777 online <a href=http://t1mro.ru/index.php?subaction=userinfo&user=agonizingspray5>http://t1mro.ru/index.php?subaction=userinfo&user=agonizingspray5</a> Подтвердите регистрацию, чтобы активировать Бездепозитный приз с выводом, требуется наполнить индивидуальный профиль. Заполните пустующие поля истинными данными о себя.
1 x slots casino
Постарайтесь отыграть вейджер, чтобы появилась вероятность оставить заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные приборы. Вы сможете получить выигрыш на электронной кошелёк, карту, аппарат. 1×slot зеркало Помните, собственно в неких играх сумма ставки идет в зачет вейджера лишь частично. Так, в настольных и карточных играх только от 5% до 50% суммы ставки считаются как отыгранные деньги, момент как в слотах идет в зачет все one hundred percent суммы. <a href=https://www.mavsboard.com/member.php?action=profile&uid=4409>https://www.mavsboard.com/member.php?action=profile&uid=4409</a> Как только вы отыграли вейджер и средства с бонусного баланса перешли вам на реальный счет, Вы смело сможете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (устроить минимальный депо к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депо).Чтобы других увериться в превосходствах бездепозитных призов, достаточно зарегистрироваться в казино и получить поощрение. 1× слот зеркало
1×slots регистрацию процедура займет всего лишь
Многие новички сомневаются, собственно поощрительный приз надо несомненно возвращать, числе в они выиграли у казино. Это безусловно неопасно и надежно. Выводя выигранные средства, игрок просто останавливает свое роль при и теряет уникальную возможность – безвозмездно увеличивать личное вещественное положение. <a href=https://gratisafhalen.be/author/juliuselmer/>https://gratisafhalen.be/author/juliuselmer/</a> Однако далековато не все ресурсы предлагают своим клиентам бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено одобрение на 1-ый депо в объеме 100–200%. Это замечательная возможность преумножить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш. 1×slots зеркало которую указывали при регистрации кстати
1хслотс рабочее зеркало на сегодня
Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные способы и оценить особенности, труднодоступные при ирге в демо режиме. Многие новые посетители переходят в количество неизменных, а оператор получает длительную прибыль. С этими ординарными советами любое казино с призом за регистрацию способно принести в разы больше выгоды и пользы. Как лишь на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу после сего можно забыть заявку на вывод выигрыша. Кредиты прибыльно отличаются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом реальных средств и выделяют вероятность ощутить задор. Во-вторых – возможно насладиться любой азартной игрой доступной на веб-сайте. В вашем постановлении находятся автоматы, настольные приложение, видео-покер, Live-дилеры.Не стоит незамедлительно же отказываться от приветственных подарков в похожих казино. Администрация готова начислить средства либо фриспины, но предварительно сотрудники обязаны убедиться, собственно вы не аферист. Дело что, нет, что развелось слишком большое охотников за призами. Они научились дурачить систему и зарабатывать солидные суммы денег. 1×slots регистрация 1×slots casino c2d ru <a href=http://rulinbang.com/home.php?mod=space&uid=238497>http://rulinbang.com/home.php?mod=space&uid=238497</a>
1×slots официальный сайт зеркало рабочее
<a href=http://service.gepart.su/forum/?PAGE_NAME=profile_view&UID=4883>http://service.gepart.su/forum/?PAGE_NAME=profile_view&UID=4883</a> Приветственный бездеп предоставляется какому игроку только раз один. Казино борются с например именуемыми бонусхантерами (от англ. Bonus Hunter — охотник за призами), пытающимися заводить многочисленные аккаунты для надувательства оператора и повторного получения презента. Исключить похожие действия дозволяет верификация данных. Администрация вправе потребовать у клиента подтвердить индивидуальные данные, обозначенные при регистрации.Принципиальным различием даровых призов от бонусов на депозит является неимение необходимости заносить средства на аккаунт. Из-за этого их часто нарекают бездепозитными (no down payment bonuses). 1×slots casino регистрация Во время забавы в казино, выигрыши, приобретенные благодаря безвозмездным призовым фондам, суммируются и срабатывают в совместную необходимую для отыгрывания. Однако, в удача улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно допустит вывести финансовые средства. Сумма вывода будет зависимости от лимита, утвержденного именно в данном учреждении. Поэтому, внимательно нужно разбирать верховодила выдачи анлимитных депозитов.
<b>Смотреть еще похожие новости:</b>
<a href=http://junlinro520.gain.tw/space.php?uid=1111051>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Не стоит путать забаву в демо и внедрение призов. В демонстрационном режиме игрок может оценить механику слота, сюжет и оформление. Но игра ведется на условные кредиты, поэтому отсутствует основное ? ощущение пыла. Активируя промокод или фриспины, клиент по-прежнему не тратит свои средства на игровые автоматы, но имеет сорвать реальный куш! Выполнив все требования оператора, клиент имеет оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем менее суток. Если дополнительно потребуется пройти функцию верификации, то срок увеличивается до 1–2 трудящихся дней. Для перевода используются банковские инструменты и электрические платежные системы. Второй метод подходит другого, как, так как основная транзакций такой осуществляются моментально. В связи со специфичностью функционирования банков обработка платежей может взятьвдолг(взятьвзаймы) до нескольких рабочих дней.
#1315 Charlesgunnyhttp://filmkachat.ru
1× слот зеркало
Создание аккаунта. На веб-сайте казино необходимо обнаружить регистрационную форму и наполнить пустые поля личными данными. Иногда на данном шаге потребуется показать только адрес электронной почты и пароль, но почаще бы наполнить анкету индивидуальной информацией (ФИО, дата рождения, место проживания и т.д. ). Нужно указывать только настоящие данные, что впоследствие они станут проверены.Главное превосходство спинов – возможность выучить разные слоты. Также получится насладиться бонусными раундами, испытать фортуну в риск-туре и преумножить выигрыш за счёт особенных символов. Однако столько игровой процесс заслуживает внимание, так другого сосредоточиться на реальном выигрыше. <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> Если при регистрации показать промокод, возможно гарантировано получить приз. Где брать ваучер? Посетите тематические блоги либо форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В заключительное время игорные жилища начали рекламироваться в кинокартинах и сериалах. Присмотритесь и скорее заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных рублей. <a href=https://joy.link/kalinka0588>https://joy.link/kalinka0588</a> 1×slots регистрация 1×slots casino c2d ru <a href=https://suomennbaseura.com/read-blog/6134>https://suomennbaseura.com/read-blog/6134</a>
1×slots официальный сайт зеркало
Бонус за регистрацию в казино без депозита с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша может понадобиться сделать ставки на необходимую, в несколько десятков раз превышающую необходимую приза или выигрыша. 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=https://forex-arabic.com/members/180680-Raymonddag>https://forex-arabic.com/members/180680-Raymonddag</a> Только выполнив все условия отыгрыша и дождавшись завершения ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить свои средства.Такие поощрения позволяют безвозмездно протестировать свежее казино, разобраться с игровым ходом онлайн слотов, заработать и исключить небольшую сумму средств. 1×slots быструю регистрацию а также мгновенное
1×slots casino регистрация 1×slotscasin online
Фриспины начисляются по конкретной ставке. После их активации игроку необходимо запустить слот и увериться, что в нем показываются благотворительные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода в отыгрыша определяется оператором и редко выше 5 000 рублей. <a href=http://forum.cncprovn.com/members/188777-ForsedropPt>http://forum.cncprovn.com/members/188777-ForsedropPt</a> Почти все игровые клубы требуют свидетельство контактных данных игрока для получения бездепозитного приза. 1×slots сайт Для казино, работающих интернет, бездепозитные призы необходимы для привлечения новых посетителей. Предложение сыграть на слотах без надобности внесения настоящих средств — работающий способ для повышения энтузиазма к компании. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит играть в казино, лишь теперь теснее на собственные средства.
1×slots рабочее зеркало
Для проверки используются сканы паспортов, водительских водительских, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если юзер обнаружен в попытке завести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их владелец попадает в темный перечень. При ирге на лицензионной площадке не стоит опасаться свидетельствовать достоверную персональную информацию (шифрование исключает утечку индивидуальных данных).Высокая конкурентность в сегменте азартных игр доказывает операторов привлекать посетителей разнообразными промоакциями. Благодаря этому у посетителей появляется возможность получить призы в казино за регистрацию без депозита. Воспользоваться этим предложением можно, минуя процедуру внесения средств на игровой счет, просто активировав акк на веб-сайте. Наш экскурсовод по бездепам поможет выбрать самую привлекательную бонусную программку, узнать управляла получения такого гонорары и воспользоваться им с наибольшей выгодой. Но эти рамки не смущают числе хайроллеров, что коэффициенты на слотах разрешают рассчитывать на крупные выигрыши, ну неких автоматах разыгрывается передовой джекпот.Бездепозитный приз – это финансовое вознаграждение, коие выдается участнику игры в казино, для его вербования и появления заинтересованности. Любой гость, который подходит условиям выдачи подобного бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое одобрение считается наиболее действенным способом, дающим возможность стартовать при, не вкладывая личных вещественных средств. 1×slots зеркало которую указывали при регистрации кстати <a href=https://emaze.me/redico#untitled>https://emaze.me/redico#untitled</a> Как правило, при выводе денег, от играющего требуется лишь сделать минимальный лепта чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом индивидуальный счет.А ознакомиться с свежими интернет казино, Вы сможете за счет призов с выводом выгоды, коие Вы можете получить без депозита.
x1 slots регистрация в 1×slots casino
Одним из поводов отдавать привилегию одному либо другому заведению содержится в привлекательности предлагаемых акций и бесплатных предложений. Безвозмездные фриспины, выдаваемые без нужды создавать какой-нибудь лепта, в перечне находится далеко не в конце.Бонус с зачислением денег на счет выделяет больше свободы поступков. Пользователь сам подбирает, каким образом распорядиться подаренными своими. Здесь того все действовать ограничения на перечень дешевых игр, но обычно эти рамки не например строги, как в промо с бесплатными вращениями. <a href=http://thrope.co.kr/bbs/board.php?bo_table=free&wr_id=3055>http://thrope.co.kr/bbs/board.php?bo_table=free&wr_id=3055</a> Активация случается с помощью промокодов, коие вводятся в собственном офисе последствии регистрации. Среди спецпредложений в перечне Casino.ru находятся неповторимые промокоды, которые доступны лишь посетителям портала. Другие способы начисления средств ? автоматическая активация сразу последствии создания аккаунта и получение дара по запросу в службу технической поддержки. 1×slots зеркало быструю регистрацию а также мгновенное При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток.
<b>Смотреть еще похожие новости:</b>
<a href=http://thienduongcacanh.com/threads/1×slots-casino-registracija-na-sajte.12784/>1×slots casino регистрация на сайте</a>
<a href=http://nakupnidivadlo.cz/index.php/forum/3-pripominky/46621-https-sk-service1-ru?start=54#239809>1×slots официальный demo регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бонус в казино без депозита содержит различные варианты: это может быть приветственный приз, акции в честь каких-то праздников или весомых дат, приз за вербование новых игроков, лояльность и получение VIP-статуса.
#1316 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Юдаева Ксения Валентиновна порно Комарова Наталья Владимировна порно <a href=https://glvk.guru/>pin up casino top top</a> Набиуллина Эльвира Сахипзадовна порно porno Александра Степанова, фигуристка <a href=https://specreporter.com/>1×bet зеркало на сегодня 1×bet xyz</a> пинко casino vavada casino букмекерская контора фонбет официальный гта онлайн казино балтбет букмекерская контора porno Вера Бирюкова, гимнастка 1×bet слоты
DiskiPlus pin up casino buzz DiskiPlus 1×bet зеркало слоты <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet официальный сайт</a> DiskiPlus 1×bet зеркало на сегодня DiskiPlus casino ап <a href=https://diskiplus.ru>DiskiPlus casino riobet</a> DiskiPlus black russia казино DiskiPlus порно с Сергей Бобровский (хоккей) DiskiPlus pin up casino зеркало DiskiPlus порно с Афонина Марина Игоревна DiskiPlus casino андроид DiskiPlus бк букмекерская контора DiskiPlus 1×bet зеркало на сегодня
#1317 RobertNeusy
От новичка до профи – каждый найдет подходящее снаряжение здесь <a href=https://www.mixcloud.com/AlienBike/>https://www.mixcloud.com/AlienBike/</a>
#1318 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
В интернете большое известных игорных площадок с красивыми акционными предложениями. Однако внимательно читать условия десятков предложений в надоест, ну и время отнимет количество. Поэтому наша команда подготовила ТОП-3 сайтов с лучшими бездепозитными бонусами: <a href=http://filmkachat.ru/>1×slot зеркало</a> Это раз из главных характеристик привлекательности дара. С завешенным коэффициентом том профессионалы не смогут выполнить условия по отыгрышу. И важно, как презентабельно выглядит предложение – бездепозитный бонус казино в размере $500 либо $1 000. Чтобы новенькие получше вникли, что же это вейджер, мы разберём на примере.Частенько новички не знают, как активировать подарки или вывести 1-ый выигрыш. Для похожих случаев наша команда обрисовала основные определения – что это фриспины, вейджер, как его отыграть, чего нужно протекать верификацию. <a href=https://s.id/kalinka0588>https://s.id/kalinka0588</a> Ограничения по забавам. Администрация воспрещает игрокам кое-какие игровые автоматы с бездепозитным бонусом, средствами либо бесплатными вращениями. Обычно, в правилах приводится полный перечень слотов для отыгрыша. Иногда дробленье выполняется по виду игр. Например, отыгрыш возможен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino. казино 1×slots <a href=https://chessdatabase.science/wiki/Shisha_Tobacco_From4_Eur>https://chessdatabase.science/wiki/Shisha_Tobacco_From4_Eur</a>
сайт 1× slots casino
1×slots официальный сайт скачать Только выполнив все обстоятельства отыгрыша и дождавшись окончания ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить средства средства.В бонусную программку многих операторов входят регулярные бездепы. Это пожизненные акции, поощряющие интенсивных постоянных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают неизменные бонусы без депо в обмен на скопленные баллы лояльности. <a href=http://suwonprint.com/bbs/board.php?bo_table=free&wr_id=44741>http://suwonprint.com/bbs/board.php?bo_table=free&wr_id=44741</a> Какие бонусы есть еще получить не бездепозитного приза за регистрацию в казино? По мимо бездепозитного приза, любое интернет казино предлагает игрокам прибыльное предложение на первый депозит, вы совершаете депо, ваш депозит увеличивается в двое или том в трое, тем самым начать играть возможно с более крупной суммой, так же не запамятываем про вейджер на призы.Для получения бонуса надо(надобно) пригласить в забаву нового клиента. Казино начислит пригласившему фиксированный процент от взносов приглашённого повторяющий бонуса: почаще всего его размер не превышает 10%. Срок действия приза правило не превышает месяца: пригласивший получает приз от проигранных ставок приглашённого в первый луна забавы. 1хслот зеркало В лицензионных бездепозитных казино выступать в азартные забавы действительно безопасно. Наличие лицензии подтверждает тот факт, собственно клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP.
1×slots официальный сайт, скачать
<a href=http://silabgarza.net/forums/member.php?action=profile&uid=227400>http://silabgarza.net/forums/member.php?action=profile&uid=227400</a> Большинство интернет-казино из нашего топ-10 готовы порадовать вас эксклюзивными промоакциями. Читайте о их в обзорах и на форуме. 1×slots зеркало
1×slot рабочее зеркало
Объективные – размер бонуса, коэффициент и обстоятельства вейджера, надобность внесения депо для вывода средств;Используйте наилучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, дабы заработать подарки за простые деяния теперь сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высокой отдачей и резвыми выводами на электронные кошельки. Фриспины начисляются по определенной ставке. После их активации игроку нужно запустить разъем и увериться, что в нем показываются безвозмездные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода последствии отыгрыша ориентируется оператором и изредка выше 5 000 руб. Бездеп с фриспинами возможность обхватывать всю коллекцию игр на веб-сайте или разработки одного провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш имеет быть выведен в как, как юзер отыграет данную сумму. Возможность расценить полный функционал слотов — основное совершенство этой разновидности. Игроку становятся доступны те функции, которые отсутствуют в демонстрационном режиме, а вероятность выиграть реальные деньги прибавляет ярких азартных ощущений. 1×slots на любой вкус как пройти регистрацию <a href=http://2012614.com/home.php?mod=space&uid=46618&do=profile>http://2012614.com/home.php?mod=space&uid=46618&do=profile</a> В лицензионных бездепозитных казино играть в азартные игры вправду неопасно. Наличие лицензии одобряет что, этот факт, собственно клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP.
1хслотс мобильная версия зеркало
Бывают ли бездепозитные бонусы без вейджера? Бывают, в у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино.В неких онлайн казино для получения бездепозитных бонусов не довольно просто зарегистрироваться на веб-сайте клуба и подтвердить свои контактные данные. Дополнительно потребуется активация промокода. На благотворительные призы онлайн-казино практически практически распространяется лимитирования по стране проживания клиентов. Даже если вам разрешено открывать счет и играть на деньги в заведении, это еще не означают, что вам доступны no deposit bonuses.2. Создать свежий профиль. Для регистрации нужно заполнить небольшую анкету или зайдите в индивидуальный офис посредством социальных сетей; <a href=https://images.google.tg/url?q=https://doctorlazuta.by/>https://images.google.tg/url?q=https://doctorlazuta.by/</a> При выполнении условий отыгрыша и верификации, деньги с бонусного счета переводятся на главный и шансы быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции находятся от выбранной платежной системы. 1×slots зеркало этих способов предполагает регистрацию Все любят получать подарки. Согласитесь, почти любой играющий человек будет необъятно рад, если получит безвозмездный подарок для игры в онлайн казино просто за регистрацию либо же бонус за внесенный депо, например именуемые приветственные бонусы для свежих игроков. Соответственно такие интернет клубы станут более востребованы и предпочтительны у игроков при выборе казино для забавы. Топ казино постоянно обновляется и прибавляются новые и занимательные игровые клубы с симпатичной бонусной политикой и всеми вероятными привилегиями, к коим относятся такие призы как фриспины за регистрацию, денежные бездепозитные призы, а также щедрые бонусы за внесенный депозит.В интернет-сети постоянно можно найти перечни более известных и обещанных поощрительных программ от известных онлайн-казино.
<b>Смотреть еще похожие новости:</b>
<a href=https://adminclub.org/showthread.php?tid=368798>1×slots зеркало проходить регистрацию это отличный вариант</a>
<a href=https://kfz-gringer.at/index.php/forum/donec-eu-elit/80498–1×slots#80262>1×slots казино мобильная версия</a>
<a href=http://jktroickiy.forumex.ru/viewtopic.php?f=2&t=5103>1×slots регистрация 1×slots review live</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В разделе с бонусами активировать собственный подарок. Найти забавы, для коих предусмотрено поощрение и использовать приз по назначению. В истинное время получить приз за регистрацию в казино довольно просто. Почти любой игорный дом с готовностью даст средства либо безвозмездные вращения. Многие игроки используют этим и не стыдятся региться в каждом клубе с прибыльными условиями. Кстати, это замечательная возможность выдумать выигрышную стратегию и сорвать куш.
#1319 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Шевцова Татьяна Викторовна порно порно с Антропова Валентина Викторовна <a href=https://strelochnik.com/>Москалькова Татьяна Николаевна порно</a> скачать букмекерскую контору порно с Васильева Татьяна Викторовна <a href=https://sovsekretno.net/>пин ап казино</a> скачать букмекерскую контору на андроид букмекерская контора мостбет сколько казино гта онлайн казино casino pin официальный 1×bet официальный xbet pin casino зеркало
DiskiPlus играющие казино DiskiPlus вавада казино <a href=https://www.diskiplus.ru/>DiskiPlus porno Алена Косторная (фигурное катание)</a> DiskiPlus 1×bet 1хбет DiskiPlus 1×bet 1 <a href=https://diskiplus.ru/>DiskiPlus букмекерская контора скачать приложение</a> DiskiPlus 1×bet приложение DiskiPlus скачать 1×bet DiskiPlus kent casino регистрация DiskiPlus порно с Георгий Джикия (футбол) DiskiPlus casino автомат DiskiPlus ешь казино DiskiPlus порно с Абрамченко Виктория Валериевна
#1320 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало которую указывали при регистрации кстати
Основное верховодило получения бездепа ? создаваемый аккаунт обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов требовательно запрещено. Проверка ведется по имени, e-mal, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита необходимо блюсти несложную очередность действий.Промокод – определённая композиция символов, коию нужно установить в соответствующее фон при создании учетной записи либо активировать в собственном профиле игрока в разделе с бонусами. <a href=http://filmkachat.ru/>1×слот регистрация в 1×slots casino</a> <a href=https://www.uscgq.com/forum/posts.php?forum=general&id=356101>https://www.uscgq.com/forum/posts.php?forum=general&id=356101</a> Если площадка презентует бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь ввести аккаунт на сайте и активировать его, подтвердив адрес электрической почты, номер аппарата либо иные данные, коие требует оператор. Перед этим нужно увериться, собственно юзер располагается на официальном сайте казино, не на мошеннической площадке. 1×slots casino регистрация 1×slotscasino09k online <a href=http://www.eionia.co.kr/home/bbs/board.php?bo_table=free&wr_id=350859>http://www.eionia.co.kr/home/bbs/board.php?bo_table=free&wr_id=350859</a> Если вы облюбовали себе количество брендов которые вам больше всего приглянулись, для постоянной игры! Таких гемблеров казино довольно предпочитает и ценит, за частую такие игроки становятся VIP игроками заведения, которым нередко поступают выгодные предложения повторяющий бонусов, например же туда заходит и бездепозитные.Размер бонусов чаще всего чисто условный и не превышает 50 руб. Приятно, но ощутимым бустом в игре вряд ли станет.
1×slot регистрация
<a href=https://karakol.com.kg/user/Jameskef/>1×slots актуальное зеркало</a> 1×slots зеркало сайта В онлайне количество узнаваемых игорных площадок с привлекательными акционными услугами. Однако пристально разбирать обстоятельства 10-ов услуг времени надоест, да и время отнимет много. Поэтому наша команда подготовила ТОП-3 вебсайтов с наилучшими бездепозитными призами:Фриспины. Бесплатные вращения предусмотрены для применения в видео-слотах. Внимательно читайте условия – они нередко выдаются для неких машин. В зависимости от клуба вам создавать определенное количество ставок. Кстати, современные игорные жилища дают возможность заводить «одноруких злодеев». <a href=https://imoodle.win/index.php?title=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%BF%D0%B8%D1%86%D1%86%D1%8B%20%D0%B8%D0%B7%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO>https://imoodle.win/index.php?title=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%BF%D0%B8%D1%86%D1%86%D1%8B%20%D0%B8%D0%B7%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO</a> 1×slots рабочее зеркало Сразу в активации промокода возможно пользоваться даром. Как теснее упоминалось, призы случаются трёх обликов – фриспины, кредиты и фриплей-бонусы.
1хслот зеркало
Подтверждение регистрации. Казино настоятельно привязки профиля к электрическому адресу и номеру телефона. Для сего на e-mail отчаливает письмо со ссылкой, а на телефонный ? текстовое сообщение с кодом.Новые клиенты онлайн-казино без первого депозита шансы выяснить собственную удачливость. К тому же есть вероятность конвертировать бездепы в реальные средства за регистрацию в казино, однако достичь приз нужно отыграть сообразно условиям акции. Выполнив все притязания оператора, клиент возможность оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем не более суток. Если дополнительно требуется пройти процедуру верификации, то срок увеличивается до 1–2 рабочих дней. Для перевода применяются банковские приборы и электрические платежные системы. Второй метод подходит другого, как, например как большинство транзакций в этом случае исполняются моментально. В связи со специфичностью функционирования банков обработка платежей имеет занять до нескольких рабочих дней. <a href=http://91075425.k216.opensrs.cn/home.php?mod=space&uid=1223161>http://91075425.k216.opensrs.cn/home.php?mod=space&uid=1223161</a> Ну и естесственно же, для казино бездепозитные призы прибыльны с имиджевой стороны: схожая щедрость повышает уровень преданности клиентов к фирмы.Далее требуется отыграть вагер и исключить выигрыш. Игрокам без опыта крупно повезло, у получить 10-ки даров за 1 регистрацию. Если не смогли получить Бездепозитный бонус, не тревожьтесь. Обратитесь в интернет чат, оператор поможет ситуацию. 1×slots регистрация 1×slotscasino09k online 3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефон или почту, показать персональную информацию;Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке представители онлайн-казино публикуют актуальную информацию о no down payment bonuses и других предложениях.
1×slots регистрация
Во время игры в казино, выигрыши, полученные благодаря бесплатным призовым фондам, суммируются и срабатывают в совместную сумму для отыгрывания. Однако, случае удача улыбнется и выйдет отыграть все призы, игровое заведение гарантированно допустит исключить финансовые свои. Сумма вывода будет зависеть от лимита, утвержденного именно в данном учреждении. Поэтому, пристально надо(надобно) разбирать верховодила выдачи безлимитных депозитов.Вейджер менее х30–35 считается применимым. Опытные игроки утверждают, собственно с таким вейджером реально остаться в плюсе, если верно подойти к выбору игрового аппарата. <a href=http://soumoli.com/home.php?mod=space&uid=24916>1× слот зеркало</a> Зачастую бездепозитные бонусы казино для забавы предлагаются различными заведениями азартных игр виде маркетинговых акций или в целях вербования к себя новых игроков. Для бездепозитных призов в казино 2022 геймеру не нужно пополнять счет до этапа вывода желанных средств.Заработать на бездепозитных бонусах за регистрацию в казино возможность каждый пользователь, достигший совершеннолетия. Доступные забавы – В некоторых азартных забавах возможно понизить математическое превосходство казино до нескольких 10-х процента. В их количестве многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как управляло, в таких играх ставки идут в зачет вейджера не полностью. Например, возможность учитываться лишь 50%. В некоторых забавах бездепозитные призы вообще невозможно отыгрывать.Получив собственный презент, Вы можете даром играть на настоящие средства, а выполнив обстоятельства отыгрыша, исключить собственный выигрыш. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=http://fonogramm.pro/user/DoctorLazutami/>http://fonogramm.pro/user/DoctorLazutami/</a>
1хслот скачать
Почти все игровые клубы требуют свидетельство контактных данных игрока для получения бездепозитного приза. К огорчению, нет. Почти все казино, просят внесение но бы 1-го малого депо для вывода выигрыша с бездепозитного приза. Также учитывайте, собственно исключить средства разрешается лишь на что, эту платежную систему, с коей был сделан депозит.Такой бесплатный эквивалент средств зачисляется на профиль пользователя в осуществления притязаний и предназначаются они только для игрового процесса. Вывод этих вознаграждений возможен лишь в воплощения вейджеровых критерий. <a href=http://ukrisa.pl/./member.php?action=profile&uid=8229>http://ukrisa.pl/./member.php?action=profile&uid=8229</a> В количестве случаев бесплатные призы начисляются в кредитах, которые нельзя незамедлительно вывести со счета. Прежде их нужно отыграть по установленным правилам. Эти притязания принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже. 1×slots зеркало рабочее Многие азартные клубы ограничивают необходимую вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании акции, суммы Вы не можете вывести. Разница будет аннулирована, Вы числе не можете делать на нее ставки.
<b>Смотреть еще похожие новости:</b>
<a href=http://thienduongcacanh.com/threads/1-x-slots.12533/>1 x slots</a>
<a href=https://forumsleague.org/forum/viewtopic.php?f=4&t=35513&p=404067#p404067>1×slots регистрация 1×slots casino 777 online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При регистрации идет указывать лишь достоверную информацию. Когда учетная запись будет активна, появится доступ в Личный офис. В нем можно избрать валюту, установить промокод и узнать доскональные верховодила получения и отыгрыша бездепа. Краткая информация об промоакции нередко присутствует непосредственно на регистрационной форме.
#1321 MarcoAnisy
Любите велоспорт? Загляните в каталог качественного оборудования здесь <a href=https://stocktwits.com/AlienBike>https://stocktwits.com/AlienBike</a>
#1322 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Константин Тюкавин (футбол) порно с Евгения Медведева, фигуристка <a href=https://repost.news/>bitz casino</a> казино официальные сайты казино <a href=https://strelochnik.com/>porno Светлана Ходченкова</a> casino бездепозитный pin up casino top top бесплатное казино 1×bet сайт 1×bet xyz пина букмекерской конторы лучшие казино бесплатно смотреть фильм казино
DiskiPlus bitz casino DiskiPlus порно с Юлия Ефимова <a href=https://www.diskiplus.ru/>DiskiPlus казино онлайн</a> DiskiPlus Светлана Ходченкова DiskiPlus porno Илья Ковальчук (хоккей) <a href=https://www.diskiplus.ru>DiskiPlus букмекерская контора фонбет</a> DiskiPlus inform@rucriminal.info DiskiPlus pinco casino DiskiPlus kometa casino DiskiPlus часы казино DiskiPlus pin up casino пин ап DiskiPlus казино рулетка DiskiPlus пин ап casino pin
#1323 토토사이트https://ggongto.com/
<p>안전한 <a href=„https://www.ggongta.com/“>토토사이트</a>를 찾고 계신가요? 꽁타에서 다양한 토토사이트 정보를 확인하세요! 신뢰할 수 있는 사이트 추천과 최신 정보를 제공하여 즐거운 베팅을 도와드립니다. 지금 바로 꽁타를 방문해보세요!</p>
#1324 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать 1×bet 1×bet xyz смотреть фильм казино <a href=https://www.ossetia.tv/>Преподобная Надежда Александровна порно</a> какие казино порно с Артемий Панарин (хоккей) <a href=https://m.repost.news/>1×bet слоты</a> казино гта 5 casino бонус скачать 1×bet на андроид бесплатно казино проиграл автомат казино casino betting пин casino
DiskiPlus casino скачать DiskiPlus Юдаева Ксения Валентиновна порно <a href=https://diskiplus.ru/>DiskiPlus балтбет букмекерская контора</a> DiskiPlus 1×bet слоты 1×bet top DiskiPlus 1×bet сайт 1×bet xyz <a href=https://www.diskiplus.ru/>DiskiPlus пин ап casino pin</a> DiskiPlus 1×bet зеркало DiskiPlus букмекерские конторы бет DiskiPlus cat casino DiskiPlus 1×bet рабочее DiskiPlus casino автомат DiskiPlus порно с Ирина Сидоркова DiskiPlus casino регистрации
#1325 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало
Во время игры в казино, выигрыши, полученные благодаря бесплатным призовым фондам, суммируются и срабатывают в совместную сумму для отыгрывания. Однако, случае удача улыбнется и получится отыграть все бонусы, игровое заведение гарантированно допустит исключить финансовые свои. Сумма вывода будет в от лимита, утвержденного непосредственно в этом учреждении. Поэтому, внимательно надо(надобно) разбирать управляла выдачи анлимитных депозитов.Для верификации аккаунта нужно дать спецам технической поддержки отсканированную копию паспорта и счета за коммунальные услуги, а также фотографию банковской карты либо снимок странички электрического кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для подтверждения личности. <a href=http://filmkachat.ru/>1×slots зеркало подтвердит вашу регистрацию если говорить</a> <a href=https://www.arrl.org/forum/topics/view/4345>https://www.arrl.org/forum/topics/view/4345</a> 1×slots регистрация 1×slotscasino09k online <a href=http://cjdog.com/home.php?mod=space&uid=129750>http://cjdog.com/home.php?mod=space&uid=129750</a> Вейджер (или вагер) ? это наименьшая сумма ставок, которую нужно устроить для вывода денежного бонуса. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение.В каждом казино с бездепозитным бонусом учтены вейджеровые условия. Это один-единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) сделать определённое количество ставок. Чем круче приз, тем сложнее выполнить обстоятельства, и напротив.
1хслотс зеркало
Если вы новичок в и лишь попали в неизведанную вами район азарта — за услуг как бездепозитные бонусы без пополнения. <a href=http://www.forum.kalor.ru/rabochee-zerkalo-1×slots-t23246.html>рабочее зеркало 1×slots</a> 1×slots зеркало видели такую регистрацию на В перечне требований к отыгрышу нередко присутствуют лимиты на ставки при забаве на собственные деньги. Так, если отыграть нужно 30 000 руб., а максимальная сумма ограничена 30 рублями, то вертеть барабаны светит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками условий по срокам действия промоакции. <a href=https://tsonlinevn.4it.top/User-JamesSkike>https://tsonlinevn.4it.top/User-JamesSkike</a> 1×slots casino регистрация 1×slots review live Бонус за регистрацию в казино без депозита с выводом средств нужно отыграть. Зачастую для отыгрыша может понадобиться устроить ставки на сумму, в несколько 10-ов один превосходящую сумму приза или выигрыша.Бездепозитные бонусы — это подарки от казино повторяющий бонусных денег либо фриспинов для игровых автоматов, коие начисляются на аккаунт игрока после процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депо не требуется.
1×slots официальный сайт мобильная версия скачать
<a href=http://fianresearch.com/bbs/board.php?bo_table=free&wr_id=228777>http://fianresearch.com/bbs/board.php?bo_table=free&wr_id=228777</a> Призовые начисления без депо шансы предоставляться для роли в турнирах онлайн казино. Потратить перечисленные средства возможно исключительно в рамках данной промоакции. Условия их проведения содержат лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться таким предложением, другого изучить его управляла. 1×slots регистрация Многие казино деют в маркетинговых целях благотворительные призы самая для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой вебсайт по партнерской ссылке с нашего портала.
1×slots рабочее зеркало на сегодня
Не желайте сыграть в азартные забавы, не рискуя своими средствами, но получая в все выплаты? Подобную возможность предоставляют многие превосходнейшие порталы с азартными увеселениями. В их числе много честных и надежных интернет-казино на российском языке. Они завлекают новых пользователей разными поощрительными мероприятиями, включая бездепозитные, либо бесплатные призы. Бездепозитные призы прекрасный вариант даровой игры в игровые автоматы. Многие юзеры сети не понимают, собственно в казино можно начать выступать безусловно даром, а позже вывести выигрыш на банковскую карту или электронный кошелек, иные не доверяют интернет казино, а третьи успешно играют и выигрывают – и тотчас довольно немалые суммы.Зачастую бездепозитные призы казино для игры предлагаются различными заведениями азартных игр в качестве маркетинговых акций или в целях вербования к для новых игроков. Для бездепозитных бонусов в казино 2022 игроку надо пополнять счет до момента вывода хотимых средств. Активация денежного гонорары случается автоматически после создания профиля или применения промокода. Иногда операторы предъявляют вспомогательные требования: подписаться на страницы казино в соц сетях либо на рассылку маркетинговых сообщений, скачать и установить вспомогательный софт и т.д.Необходимость отыгрыша. Вейджер в повыше, чем для призов за депозит. И пока средства не отыграны, вывести их невозможно. 1×slots зеркало регистрацию более популярный вариант это <a href=http://kkzkirova.ru/index.php?subaction=userinfo&user=overtmadness31>http://kkzkirova.ru/index.php?subaction=userinfo&user=overtmadness31</a> Для как, дабы отыграть необходимую вашего бездепозитного приза нужно выполнить обстоятельства вейджера. Очень часто фриспины даются на определенные слоты (book of ra, book of dead, book of sun), подбирайте слот себя по душе, они все довольно красивые и качественные. Бездепозитные приз имеет быть валютным так и повторяющий фриспинов на слотыЗaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, a зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.
сайт 1× slots casino
Лишь популярностью и известные азартные заведения могут разрешить себя раздавать бездепы вид добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депо, коие можно потратить в топовых аппаратах с высочайшей отдачей.Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих притязаний, считая неотъемлемой верификации. Если на веб-сайте учтена неотъемлемая процедура подтверждения личности, то вывести выигрыш получится только последствии ревизии данных. Приготовьтесь наполнить анкету и выслать в техподдержку документ, подтверждающий лицо. Бонус без депо за регистрацию в казино (бездепозитный приз) – это валютный подарок от клуба, кот-ый начисляется на аккаунт игрока последствии регистрации в казино. Кроме создания учетной записи, для получения бездепа, очень часто потребуется ещё и доказать контактные данные игрока и/или активировать специальный промо-код. <a href=http://n27244j0.bget.ru/index.php?subaction=userinfo&user=BrianCap>http://n27244j0.bget.ru/index.php?subaction=userinfo&user=BrianCap</a> Ну и естесственно же, для казино бездепозитные призы выгодны с имиджевой стороны: сходственная щедрость повышает степень преданности посетителей к компании.В подавляющем большинстве случаев безвозмездные бонусы начисляются в кредитах, коие невозможно сразу вывести со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже. 1×slots официальный сайт мобильная версия Главным нюансом в появлении данных вознаграждений состоит сомнений, собственно пустив их в ход, компьютерные ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он благодаря призам какой-нибудь выигрыш или моментально спустит все только собственно прибывшие финансы). То есть, казино снабжает игрока возможностью на дармовой основе выступать во всевозможные слоты и даже спонсирует забаву.
<b>Смотреть еще похожие новости:</b>
<a href=https://irc.floobits.com/Jamesamiva>1×slots коды</a>
<a href=https://www.ladyboyescort.com/topic/5148–1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D1%82%D0%BE-%D0%B4%D0%B0%D0%BB%D1%8C%D1%88%D0%B5-%D0%BD%D0%B5%D0%BE%D0%B1%D1%85%D0%BE%D0%B4%D0%B8%D0%BC%D0%BE-%D0%BF%D1%80%D0%BE%D0%B9%D1%82%D0%B8/>1×slots зеркало регистрация то дальше необходимо пройти</a>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=716037>1×slots рабочее зеркало</a>
<a href=http://soumoli.com/home.php?mod=space&uid=24916>1×slots casino регистрация 1×slotscasino09k online</a>
<a href=https://forum.vn.ua/showthread.php?p=3308690#post3308690>1×slots регистрация на 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Иногда для получения призов необходимо спутаться с представителями службы поддержки. Удобнее всего с ними разговаривать в онлайн-сате, но иногда довольно запроса по электрической почте.
#1326 Charlesgunnyhttp://filmkachat.ru
1 x slots casino
Бездепозитные призы, как уже понятно, являются уникальной вероятностью приступать к игровому процессу полностью безвозмездно, то есть играть в интернет казино бесплатно и на место свои незамедлительно последствии регистрации аккаунта. Автоматы с этим депозитом все стать прекрасной возможностью поиграть для почитателей пыла с определенными ограничениями в финансах. <a href=http://filmkachat.ru/>1×slots регистрация</a> <a href=https://linkfly.to/kalinka>https://linkfly.to/kalinka</a> 1 хслот регистрация в 1×slots casino <a href=http://sevastopol.saintbor.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://grav-frez.com/bitrix/redirect.php?goto=http://htcdev.com/www.washingtonwool.net/cgi-bin/show_website.cgi?URL=https://teletype.in/@urist555/NwFOPRzSbtP>http://sevastopol.saintbor.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://grav-frez.com/bitrix/redirect.php?goto=http://htcdev.com/www.washingtonwool.net/cgi-bin/show_website.cgi?URL=https://teletype.in/@urist555/NwFOPRzSbtP</a> Размер ставки для игры по бездепозитному бонусу (конечно же, когда, когда он представлен в виде бонусных валютных средств) зачастую ниже, чем при игре на депо. Ограничение будет действовать до момента отыгрыша бонуса.Изучить управляла и обстоятельства получения бездепозитных призов казино, Вы сможете у нас на сайте в разделе с призами или на официальном сайте выбранного Вами казино. Если имеет отыскать необходимую информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал или по электрической почте.
1× слот зеркало
Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.Также учтите, собственно кое-какие игровые платформы сузивают список стран, коие способны получить предложенный бездепозитный бонус за регистрацию. К образцу, существуют онлайн-заведения, выдающие подобные бонусы лишь обитателям конкретных государств. К примеру, интернет казино 777 Оригинал дает бездепозитный приз лишь игрокам из России и стран СНГ. Или наоборот, пичкают вознаграждением всех, кроме обитателей некоторых государств (исходя из сего, по внимательно изучать перечень, чтобы потом не появилось практически вопросов и претензий). 1×slots мобильная версия войти казино <a href=http://xn–2q1b33lkuah98a.com/bbs/board.php?bo_table=free&wr_id=383459>http://xn–2q1b33lkuah98a.com/bbs/board.php?bo_table=free&wr_id=383459</a> Так что основное отличие подарка на депо от бездепа – неотъемлемое пополнение счёта. Вы сможете привнести депозит и преувеличить стартовый капитал или забрать бездеп и всем не придётся рисковать своими сбережениями. Поспешите выполнить обычные требования, и администрация ресурса начисляет щедрое одобрение! 1×slots актуальное зеркало
1хслот зеркало
Получать информацию о самых прибыльных призах возможно без неизменного прогноза новостей казино. Мы брали эту задачу на себя и безпрерывно смотрим за предложениями операторов, избирая наилучшие из них. В этом разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список акций периодически пополняется. В топ вошли самые свежие бездепозитные бонусы за регистрацию в казино 2020, кратковременные и замкнутые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру прочим аспектам. Если срок деяния промоакции истек, она удаляется из перечня.Если при регистрации показать промокод, можно гарантировано получить приз. Где брать ваучер? Посетите тематические блоги или форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В заключительнее время игорные дома начали рекламироваться в фильмах и сериалах. Присмотритесь и всего заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных рублей. Иногда операторы настоятельно внесение малого депо перед выводом для верификации платежного прибора. В некоторых казино этот депозит кроме предстоит отыграть. <a href=https://wiki.streampy.at/index.php?title=%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%AF%D0%BD%D0%B4%D0%B5%D0%BA%D1%81>https://wiki.streampy.at/index.php?title=%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%AF%D0%BD%D0%B4%D0%B5%D0%BA%D1%81</a> 1 xslots рабочее зеркало
1×slots официальный сайт, скачать
Это тоже безвозмездные деньги, коие поступают на аккаунты свежеиспеченных компьютерные в регистрирования. А необыкновенность этих бонусов состоит никаких, что обретенные финансы непременно стопам использовать в продолжении назначенного времени. <a href=http://griffhunter.com/boards/viewtopic.php?p=1065460#p1065460>1×slots зеркало рабочее на сегодня</a> Также, ситуации нужно доказать свой номер аппарата, для этого код, полученный в смс-сообщении от клуба установить в специальное поле в личном кабинете игрока. Как только вы отыграли вейджер и свои с бонусного баланса перешли вас на реальный счет, Вы неустрашимо можете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (сделать наименьший депо например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депозитом). 1хслотс казино зеркало <a href=https://www.xn–72c9aa5escud2b.com/webboard/index.php?action=profile;u=2147878>https://www.xn–72c9aa5escud2b.com/webboard/index.php?action=profile;u=2147878</a> Практически все интернет казино с бездепозитным призом за регистрацию предусматривает программу лояльности — систему поощрения неизменных клиентов, которая произведено из множества значений. При достижении игроком одного уровня на его счёт поступает бонус. Чем выше степень — тем щедрее приз.Важно, удостоверьтесь в том, что раньше не регились в избранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи.
1×slot казино зеркало
Бездепозитные бонусы – это исключительно занимательная и наиболее перспективная промоакция интернет-казино. Они в никакого фри-спинов, потому собственно выплаты в безвозмездных вращениях не гарантированы, как комбинации на барабанах игрового аппарата могут не сложиться. <a href=https://tvoyaskala.com/user/WalterGuago/>https://tvoyaskala.com/user/WalterGuago/</a> В некоторых интернет казино для получения бездепозитных призов не довольно просто зарегистрироваться на сайте клуба и доказать свои контактные данные. Дополнительно потребуется активация промокода.Чтобы самостоятельно убедиться в превосходствах бездепозитных призов, достаточно зарегистрироваться в казино и получить одобрение. рабочее зеркало 1хслотс Также посещают случаи, когда казино начисляет оговоренный бонус после регистрации свежего клиента по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.kuyoux.com/space-uid-35770.html>1× slots сайт</a>
<a href=http://jagplay.ekafe.ru/viewtopic.php?f=65&t=6378>1хслотс официальный сайт зеркало</a>
<a href=https://forum.vn.ua/showthread.php?p=3309324#post3309324>1×slots зеркало регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы казино это экономическая компенсация, предлагаемая пользователям на дармовой базе и возможность выступать в интернет казино даром. Если ассоциировать их с поощрениями за лепта, каких свои выдаются только потом начального пополнения счета, то бездепозитные гонорары получаются безвозмездно. То есть, играющий получает возможность создавать ставки на теснее существующие деньги, коие выдаст заведение, исполняя, при, обыденные деянья, дабы их извлечь (тут идет речь о регистрация, удостоверении личности с использованием номера аппарата, дизайна заказы и т.д. ). Для казино, работающих интернет, бездепозитные призы необходимы для привлечения новых клиентов. Предложение поиграть на слотах без надобности внесения настоящих денег — работающий способ для повышения интереса к фирмы. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит играть в казино, только сейчас теснее на собственные средства.
#1327 Carloshenny
Доверяю этой компании за широкий ассортимент, подробнее тут <a href=https://www.lovecrafts.com/en-gb/user/FinTechGroup/11e57821–81b0–4e03–9d77-d439cf6e9061/>https://www.lovecrafts.com/en-gb/user/FinTechGroup/11e57821–81b0–4e03–9d77-d439cf6e9061/</a>
#1328 Rosarioror
Лучшая мебель по индивидуальным размерам, узнайте больше тут <a href=https://startupxplore.com/en/person/renessans/>https://startupxplore.com/en/person/renessans/</a>
#1329 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
r7 casino 1×bet слоты <a href=https://rumafia.news/>1×bet xbet</a> Скворцова Вероника Игоревна порно мелбет букмекерская контора <a href=https://glvk.guru/>porno Виктория Баркова, легкоатлетка</a> казино 1 Комарова Наталья Владимировна порно лучшие букмекерские конторы 1×bet официальный официальные букмекерские конторы скачать скачать 1×bet 1×bet xyz casino скачать приложение
DiskiPlus 1×bet телефон DiskiPlus как выиграть в казино <a href=https://www.diskiplus.ru>DiskiPlus порно с Георгий Джикия (футбол)</a> DiskiPlus почему в казино нет часов DiskiPlus казино регистрации <a href=https://www.diskiplus.ru>DiskiPlus казино рулетка</a> DiskiPlus casino официальный сайт DiskiPlus 7k casino зеркало на сегодня DiskiPlus букмекерская контора бетсити DiskiPlus porno Александр Соболев (футбол) DiskiPlus casino ru DiskiPlus casino вход DiskiPlus скачать 1×bet на андроид бесплатно
#1330 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало на сегодня
В качестве бонусов интернет казино нередко предлагает выдачу фриспинов, другими безвозмездных вращений игрового барабана. Виртуальные монеты можно применять для обучения в покерной школе либо для игры в казино.Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. <a href=http://filmkachat.ru/>1×slot казино зеркало</a> <a href=https://www.arrl.org/forum/topics/view/4344>https://www.arrl.org/forum/topics/view/4344</a> 1×slots сайт <a href=https://lavteam.org/user/Edwarderade/>https://lavteam.org/user/Edwarderade/</a> Наши специалисты изучают условия промоакции, этого в ручном режиме проверку их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и характеристики. Мы не рекламируем казино, а даем игрокам информацию о лучших из их.Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, дабы еще раз получить безвозмездный бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ждет неизбежное наказание.
1×slots официальный зеркало
Изучить верховодила и условия получения бездепозитных бонусов казино, Вы сможете у нас на сайте в разделе с призами или на официальном сайте избранного Вами казино. Если не найти необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал либо по электронной почте. <a href=https://mit-bbs.com/viewtopic.php?t=825239>1х слот регистрация в 1×slots casino</a> 1×slots бонус за регистрацию Срок активации и время на отыгрыш. Зачисление денег либо фриспинов происходит при активации на взыскательно ограниченного периода, похожие требования предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать приз количество дней либо том недель. Другие выдают солидную сумму за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высоким вейджером.Да, у даровых бонусов есть недостатки. Прежде всего, они обыкновенно большие. Кроме как, условия вейджера по ним практически строгие. Но все отсутствие риска проделывает их очень привлекательными для посетителей. <a href=https://www.wakewiki.de/index.php?title=Benutzer:IngeborgOji>https://www.wakewiki.de/index.php?title=Benutzer:IngeborgOji</a> Вы скорее, как и все предпочитаете получать подарки и бездепозитные бонусы казино. Игорные дома брали в привычку одаривать гэмблеров приятными призами. Стать обладателем приветственного подарка можно за создание профиля либо пополнение счёта. Второй вариант более интересный, так клубы готовы удвоить депо! Но если вы новичок и только знакомитесь с миром пыла, лучше воспользуйтесь призом за регистрацию. 1×slots официальный сайт скачать на айфон
1×slot зеркало рабочее регистрации на телефон придет
Бездепозитный приз предоставляется новому игроку за определенные деянья. Часто презент в виде средств либо фриспинов выдается за регистрацию, спасибо чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. Обыкновенные бездепозитные бонусы в размере от 3-х до 20 $ созданы чтобы, чтобы, дабы в забавы заходили все новые и новые игроки. Здесь, скорее, несомненно ограничение на наибольший выигрыш. Важно, дабы перед наименьшим вкладом был отключен бонус за 1-ое пополнение счета, и игры не попадет на повторный вейджер. <a href=http://radshir.com/list/index.php?subaction=userinfo&user=Briansmalm>http://radshir.com/list/index.php?subaction=userinfo&user=Briansmalm</a> зеркло казино 1×slots Прежде всего, не забывайте периодически заглядывать на страницу обзоров бездепозитных призов. Они шаг за шагом разглядывают более занимательные предложения водящих игорных порталов.
1×slots сайт зеркало
Помните, что в некоторых забавах сумма ставки идет в зачет вейджера только отчасти. Так, в настольных и карточных забавах лишь от 5% до 50% суммы ставки числятся как отыгранные средства, в то время как в слотах идет в зачет все 100% суммы.Хотя благотворительные призы начисляются без депозита, не исключено, собственно для понадобиться вносить средства. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты лишь в такого, как новый клиент впервые пополнит игровой счет. Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. Законодательство, регулирующее азартные игры в разных странах, влияние на полномочия операторов. В результате юзеры из отдельных регионов сталкиваются с ограничениями со стороны казино. Это имеет быть как глубокий отказ в доступе, например и невозможность загружать игры отдельных изготовителей.Многие казино предоставляют в рекламных целях безвозмездные призы необыкновенно для наших читателей. Чтобы их получить, надо(надобно) перебежать на игровой вебсайт по партнерской ссылке с нашего портала. 1×slots зеркало выигрыши обязательно пройдите регистрацию если <a href=http://www.zghncy.cn/home.php?mod=space&uid=616331>http://www.zghncy.cn/home.php?mod=space&uid=616331</a> С не отыгранным бонусом запрещается превосходить объем наибольшей ставки. Нарушение сего обстоятельства последствия аннулирование выигрыша.
1×slots зеркало регистрацию более популярный вариант это
К образцу, игроку выдаются безвозмездные свои в заведении в размере пятидесяти или ста $ (вейджер на коие составляет 100х). То есть, каждому новоприбывшему геймеру выскакивает манящая картинка, которая обещает выплату всех зачисленных компанией средств. Не стоит обращать внимания на казино бонус за регистрацию без депозита с сильно немалый или довольно махонькой суммой бонусов, потому собственно, даже кропотливо выучив все обстоятельства, здесь скорее, будет некий подвох.Бездепы шансы заходить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой или баллами. К образцу, игроку выдаются бесплатные свои в заведении в объеме пятидесяти либо ста $ (вейджер на коие сочиняет 100х). То есть, любому новоприбывшему игроку выскакивает манящая картинка, кот-ая сулит выплату всех зачисленных фирмой средств. Не стоит обращать внимания на казино приз за регистрацию без депо с слишком большой либо довольно махонькой суммой бонусов, поэтому что, и тщательно выучив все обстоятельства, здесь всего, несомненно какой-то подвох.Фриспины без депозита либо дополнительные свои помогут ближе познакомиться с игровой платформой и её функциями. За счёт подарков можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям из-за забавы против живых крупье. <a href=https://www.hukuki.net/member.php?255687-Julesactig>https://www.hukuki.net/member.php?255687-Julesactig</a> рабочее зеркало 1хслотс Зачастую бездепозитные призы казино для игры предлагаются различными заведениями азартных игр в качестве рекламных промоакций либо в целях вербования к себе новых игроков. Для бездепозитных бонусов в казино 2022 игроку не пополнять счет до момента вывода желанных средств.Для получения предоставленных бонусов вас понадобиться — ПК или мобильное прибор, и остальное дело за малым.
<b>Смотреть еще похожие новости:</b>
<a href=http://yamato-ryu.ru/communication/forum/index.php?PAGE_NAME=message&FID=1&TID=45276&MID=10022&sessid=a835d4be826836027c0b2933556cff7b&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1×slots бездепозитный бонус за регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы, как теснее ясно, считаются оригинальной вероятностью обратиться игровому процессу безусловно безвозмездно, словами выступать в интернет казино безвозмездно и на существующие средства сразу последствии регистрации аккаунта. Автоматы с таким депо могут замерзнуть прекрасной вероятностью поиграть для почитателей азарта с определенными лимитированиями в финансах.
#1331 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino daddy порно с Юлия Ефимова, пловчиха <a href=https://rumafia.news/>1×bet официальный сайт 1×bet xyz</a> порно с Абрамченко Виктория Валериевна бесплатное казино <a href=https://vestnik-jurnal.com/>porno Елизавета Туктамышева</a> сайте букмекерской конторы фонбет букмекерская контора фонбет официальный сайт винлайн букмекерская контора официальный сайт pin up casino официальный casino зеркало сегодня casino актуальное зеркало Самойлова Алла Владимировна порно
DiskiPlus Манилова Алла Юрьевна порно DiskiPlus 1×bet официальный сайт <a href=https://diskiplus.ru>DiskiPlus мобильные букмекерские конторы</a> DiskiPlus bitz casino DiskiPlus порно с Анна Щербакова, фигуристка <a href=https://diskiplus.ru/>DiskiPlus пин ап casino pin</a> DiskiPlus 1×bet слоты DiskiPlus букмекерская контора официальный сайт скачать DiskiPlus 7k casino бонус DiskiPlus ставки на спорт букмекерские конторы DiskiPlus сайт pin up casino DiskiPlus Черкесова Бэлла Мухарбиевна порно DiskiPlus официальные букмекерские конторы скачать
#1332 JavierbluBs
Доверяю этой компании за качество постельного белья, подробнее тут <a href=http://dreamsstore.pbworks.com/w/page/160363122/FrontPage/>http://dreamsstore.pbworks.com/w/page/160363122/FrontPage/</a>
#1333 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино без часы казино <a href=https://m.repost.news/>porno Екатерина Ефременкова, шорт-трекистка</a> смотреть фильм казино казино смотреть онлайн бесплатно <a href=https://7club7.com/>букмекерская контора зенит</a> спорт букмекерская контора 1×bet бесплатно Хорова Наталья Александровна порно симулятор казино порно с Константин Тюкавин (футбол) 1×bet официальный сайт порно с Илюшникова Татьяна Александровна
DiskiPlus Набиуллина Эльвира Сахипзадовна порно DiskiPlus pin up casino скачать <a href=https://www.diskiplus.ru/>DiskiPlus автомат казино</a> DiskiPlus казино сочи DiskiPlus 1×bet слоты официальный сайт <a href=https://diskiplus.ru>DiskiPlus букмекерская контора мостбет</a> DiskiPlus 1×bet рабочее на сегодня DiskiPlus pin up букмекерская контора DiskiPlus букмекерская контора официальный сайт скачать DiskiPlus porno Юлия Канакина DiskiPlus casino DiskiPlus порно с Афонина Марина Игоревна DiskiPlus casinos xyz
#1334 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрацию более популярный вариант это
В онлайне большое известных игорных площадок с привлекательными акционными предложениями. Однако внимательно разбирать условия десятков предложений скором надоест, да и время отнимет большое. Поэтому наша команда подготовила ТОП-3 сайтов с превосходнейшими бездепозитными бонусами: <a href=http://filmkachat.ru/>1×slots официальный сайт мобильная версия скачать</a> Но такие рамки не смущают в хайроллеров, что коэффициенты на слотах дозволяют рассчитывать на солидные выигрыши, ну неких автоматах разыгрывается передовой джекпот.На благотворительные бонусы онлайн-казино почти практически распространяется ограничения по стране проживания клиентов. Даже если вас разрешено раскрывать счет и выступать на средства в заведении, это еще не означают, собственно вас доступны no down payment bonuses. <a href=https://archinect.com/firms/cover/150465480/all>https://archinect.com/firms/cover/150465480/all</a> В разделе с призами активировать собственный презент. Найти игры, для которых учтено поощрение и использовать бонус по предназначению.Как лишь получите бездеп в казино, всё одинаково не запамятовывайте проверять электронную почту. Некоторые игорные клубы постоянно радуют активных гэмблеров приятными призами. Чаще всего получить презент возможно в преддверии веселья, на день рождение, за вербование друга. А кроме распространённым бонусом считается надбавка к депозиту. Нужно всего лишь пополнить счёт, и азартное заведение прирастит его на 50–100%. 1×slots актуальное зеркало <a href=https://www.kgef.kr/kor/bbs/board.php?bo_table=free&wr_id=419837>https://www.kgef.kr/kor/bbs/board.php?bo_table=free&wr_id=419837</a> Иногда в бездепа, казино дарует минимальный приз (до 50 рублей), ради которого не заморачиваться.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.
1×slots зеркало проходить регистрацию это отличный вариант
Получать информацию о самых выгодных призах возможно без постоянного мониторинга новостей казино. Мы брали эту задачку на себя и непрерывно следим за предложениями операторов, избирая наилучшие из их. В этом разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список промоакций регулярно дополняется. В топ зашли самые новые бездепозитные бонусы за регистрацию в казино 2020, временные и закрытые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и другим критериям. Если срок деянья акции истек, она удаляется из перечня. казино 1×slots официальный сайт Вообще перейдя в казино — верховодила схожи в получении бездепозитных бонусов, в стандартные управляла заходит: подтвердить эл. Почту и телефон, наполнить свой индивидуальный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ.Бездепозитные бонусы прекрасный вариант безвозмездной забавы в игровые автоматы. Многие пользователи сети не понимают, собственно в казино можно начать выступать полностью безвозмездно, а потом исключить выигрыш на банковскую карту либо электронный кошелек, другие не доверяют интернет казино, а третьи успешно играют и выигрывают – и подчас довольно великие суммы. <a href=http://nota.media/bitrix/redirect.php?goto=http://get.ru/bitrix/redirect.php?goto=http://fittoday.ru/go.php?url=https://teletype.in/@urist555/9p2n5ypK8×x>http://nota.media/bitrix/redirect.php?goto=http://get.ru/bitrix/redirect.php?goto=http://fittoday.ru/go.php?url=https://teletype.in/@urist555/9p2n5ypK8×x</a> Какие призы у еще получить кроме бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного бонуса, каждое онлайн казино предлагает игрокам выгодное предложение на 1-ый депо, вы совершаете депозит, ваш депо возрастает в двое либо даже в 3, что, этим наиболее начать выступать можно с больше солидной суммой, например же не забываем тему вейджер на бонусы.Изучить верховодила и условия получения бездепозитных призов казино, Вы можете у нас на сайте в разделе с призами или на официальном сайте избранного Вами казино. Если возможности отыскать необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электронной почте. 1×slots на любой вкус как пройти регистрацию Казино дает возможность заработать и вывести реальные деньги на бездепозитных призах. Обычно, это незначительная сумма, коию казино может для позволить презентовать игроку.
1×slots casino зеркало
<a href=https://wifidb.science/wiki/User:KashaCarmichael>https://wifidb.science/wiki/User:KashaCarmichael</a> Реже призы без депозита начисляются постоянным игрокам. С их подмогою администрация старается вычесть ценных клиентов либо вожделеет поблагодарить за лояльность правильных посетителей. Но гораздо чаще для похожих целей применяются эти акции: 1× slots регистрация в 1×slots casino Каждая игровая платформа выделяется условиями по получению и отыгрышу бездепов. В правилах отчетливо расписаны кратковременные рамки, за коие надо(надобно) прокрутить вейджер. Также не запамятовывайте тему максимальный объем ставки и максимальную необходимую выплаты. С иной стороны, дабы получить бездепозитные бонусы казино, достаточно истратить менее 1 минутки.Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы которые появляются у новичков.
1×slots официальный demo регистрация в 1×slots casino
Размер призов почаще всего чисто символический и не превышает 50 рублей. Приятно, хотя ощутимым бустом в игре ли станет. Более солидные предложения встречаются очень изредка. Зачастую они доступны только VIP-игрокам. В оставшихся случаях им скорее сопутствуют очень строгие обстоятельства отыгрыша. Также вероятны дополнительные условия и другие ограничения, прописанные в условиях и положения бонусной программы казино. 1× slots зеркало <a href=http://kirpich-opt-265.1gb.ru/index.php?subaction=userinfo&user=cowardlyfaithle>http://kirpich-opt-265.1gb.ru/index.php?subaction=userinfo&user=cowardlyfaithle</a> Возможность поиграть дополнительное состязание (а времени и количество) абсолютно даром, а выигрыш, в свою очередь, поступает на счёт игрока.
1×slot зеркало
Акционные предложения от казино есть в различных форматах. Часто призы даются в размен на депо. Игрок заносит платеж и получает средства, безвозмездные вращения прочие одобрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — картина бонуса, который гарантирован за выполнение конкретных поступков на сайте: <a href=http://crtdu-kras.ru/communication/forum/user/251138/>http://crtdu-kras.ru/communication/forum/user/251138/</a> 1×slots казино зеркало Заполняя данные в собственном профиле, указывайте только достоверную информацию, так как Вам придется ее подтвердить дальнейшем при выводе средств.Да, у бесплатных призов есть недостатки. Прежде всего, они обыкновенно маленькие. Кроме такого, обстоятельства вейджера по ним всегда строгие. Но таки отсутствие риска делает их очень красивыми для клиентов.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=41402>1× slots регистрация в 1×slots casino</a>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=100026&pid=371452#post_371452>1×slots зеркало</a>
<a href=https://adminclub.org/showthread.php?tid=298517>casino 1×slot</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При малый сумме приза рекомендуется выступать по низким ставкам, а использовать наибольшие превосходнее лишь сомнений случае, в вейджер очень большой, а время на отыгрыш крепко ограничено.
#1335 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
гама казино kent casino <a href=https://rhymes-punches.com/>казино</a> симулятор казино казино вулкан <a href=https://krtka.info/>casino приложения</a> бк букмекерская контора играющие казино casino порно с Александр Большунов (лыжные гонки) порно с Дарья Клишина, легкоатлетка букмекерская контора зенит Черкесова Бэлла Мухарбиевна порно
DiskiPlus букмекерская контора бетсити DiskiPlus porno Мария Шарапова <a href=https://diskiplus.ru>DiskiPlus скачать букмекерскую контору на андроид</a> DiskiPlus скачать 1×bet на андроид бесплатно DiskiPlus 1×bet телефон <a href=https://diskiplus.ru>DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz</a> DiskiPlus porno Виктория Баркова, легкоатлетка DiskiPlus 1×bet зеркало слоты 1×bet xyz DiskiPlus сайт винлайн букмекерская контора DiskiPlus казино фильм онлайн DiskiPlus casino актуальное зеркало DiskiPlus porno Яна Троянова DiskiPlus ап казино
#1336 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало рабочее этих способов предполагает регистрацию
Ниже указан актуальный список легальных казино в Беларуси с призами на 1-ый депозит. Вы можете попасть на официальный вебсайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз. <a href=http://filmkachat.ru/>1х слот 1хслотс регистрация перейти на 1×slots</a> <a href=https://matters.town/a/tx7fd8c97uu1>https://matters.town/a/tx7fd8c97uu1</a> Вы не в коем случае ни же рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической забавы на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, научится регулировать изменять ставки и линии, исследовать бонусные игры и их выигрышные композиции, да в просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные свои, которые можно отыграть и вывести, не просто на демо счет, тем самым адреналин в крови еще больше повысится а пульс забьется с частым ритмом!Возьми свой подарок. Чаще всего бонус активируется незамедлительно последствии регистрации. Но случаются истории, когда надо(надобно) зайти в индивидуальный кабинет либо написать в справочную службу. 1×slots зеркало регистрация в 1×slots casino <a href=http://www.audipiter.ru/index.php?subaction=userinfo&user=painfulpolitics>http://www.audipiter.ru/index.php?subaction=userinfo&user=painfulpolitics</a> Денежные средства. Третий бонус за регистрацию без депозита – наличные. К огорчению, лишь известные и популярные клубы могут дать средства в руб. Либо долларах. С их помощью у насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед этим нужно выполнение конкретных критерий.
1×slot регистрация
1×slots официальный сайт скачать на айфон Например, игрок получил 500 руб. При твореньи аккаунта и обязан отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 рублей, потребуется устроить 875 спинов для полного отыгрыша.Демоказино есть практически на каждом сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются веско реже: там когда выигрыша и соблюдения условий акций бездеп возможно превратить в реальные средства. <a href=http://anima-rpg.com:/member.php?action=profile&uid=336466>http://anima-rpg.com:/member.php?action=profile&uid=336466</a> Необходимость отыгрыша. Вейджер такой выше, чем для бонусов за депозит. И пока свои не отыграны, вывести их нельзя. 1×slot зеркало Денежные средства. Третий приз за регистрацию без депо – наличные. К раскаянью, только известные и модные клубы шансы уяснить деньги в рублях либо баксах. С их поддержкой у насладиться каждой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед данным нужно исполнение определенных критерий.Предложения с бездепозитными бонусами за регистрацию дозволяют новым заведениям заинтересовать аудиторию на собственный вебсайт. А игроки в свою очередь получают вероятность играть на реальные средства без депо в казино и заработать небольшой стартовый капитал, который разрешено вывести на карту банка либо электронный кошелек.
x1 slots регистрация в 1×slots casino
Бездепозитные бонусы прекрасный вариант даровой забавы в игровые автоматы. Многие пользователи сети не знают, собственно в казино можно начать выступать безусловно бесплатно, а потом вывести выигрыш на банковскую карту или электронный кошелек, другие не доверяют интернет казино, а третьи успешно играют и выигрывают – и подчас достаточно большие суммы. <a href=https://bbs.yhmoli.net/space-uid-639099.html?do=profile>https://bbs.yhmoli.net/space-uid-639099.html?do=profile</a> 1×slots зеркало регистрацию более популярный вариант это Выбрать казино с бездепозитным бонусом. У нас на веб-сайте представлен список лучших интернет казино, которые предлагают своим игрокам щедрые бонусы за регистрацию.
1×slots на любой вкус как пройти регистрацию
К образцу, игроку выдаются бесплатные свои в заведении в объеме пятидесяти либо 100 $ (вейджер на которые составляет 100х). То есть, каждому новоприбывшему игроку выскакивает притягивающая картинка, кот-ая сулит выплату всех зачисленных фирмой средств. Не стоит заострять на казино бонус за регистрацию без депозита с сильно великий или довольно маленькой суммой призов, поэтому что, том тщательно исследовав все обстоятельства, тут всего, будет некий подвох. <a href=https://bestshop.link/threads/1×slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D1%82%D0%BE-%D0%B4%D0%B0%D0%BB%D1%8C%D1%88%D0%B5-%D0%BD%D0%B5%D0%BE%D0%B1%D1%85%D0%BE%D0%B4%D0%B8%D0%BC%D0%BE-%D0%BF%D1%80%D0%BE%D0%B9%D1%82%D0%B8.541/>1×slots регистрация то дальше необходимо пройти</a> Как лишь на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу в сего возможно забыть заявку на вывод выигрыша. Кредиты прибыльно выделяются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом реальных средств и выделяют возможность почувствовать задор. Во-вторых – возможно насладиться каждой азартной игрой доступной на сайте. В вашем распоряжении присутствуют автоматы, настольные приложение, видео-покер, Live-дилеры.Благодаря программе преданности от игорного заведения, можно брать неплохой старт и без добавочных инвестициям запустить видеослоты. Кроме того, возможно рассчитывать на реальную фортуну и получить, без инвестиции собственных денег, большой выигрыш. Воспользоваться бездепом можно не во всех игровых автоматах: казино вдруг устанавливает ограничение для клиентов. Конечно, это возможно посчитать неким неудобством для игрока, но ради стоит отметить, собственно выбор автоматов всё также остаётся достаточно великим.Чаще всего казино бонус за регистрацию без депозита даёт вероятность запустить любой машина. Но другого внимательно ознакомиться с критериями. Иногда для забавы доступны лишь определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, другого, как начать знакомство с миром азарта непосредственно с «одноруких бандитов». 1×slots сайт зеркало <a href=http://forum.gokturkvirtual.com/uye-doctorlazutaoa.html>http://forum.gokturkvirtual.com/uye-doctorlazutaoa.html</a> Как лишь получите бездеп в казино, всё равно не забывайте проверять электрическую почту. Некоторые игорные клубы каждый веселят интенсивных гэмблеров приятными бонусами. Чаще всего получить презент возможно в преддверии праздника, на день рождение, за вербование приятеля. А того распространённым бонусом считается надбавка к депозиту. Нужно более восполнить счёт, и азартное заведение прирастит его на 50–100%.
казино 1×slots официальный сайт
Для тех, кто лишь подумывает испытать свою удачу, еще для проф игроков, ищущих свежие площадки для выигрышей, основные лицензированные казино нередко организуют разные акции, и лучшее предложений прошедшее время – как для новичков, например и для проф игроков – бездепозитный приз за регистрацию.У нас на сайте Вы найдете перечень бонусов без депозита в проверенных казино и доскональную информацию о том как их получить и применять. Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные способы и расценить особенности, недоступные при этой в демо режиме. Многие новые клиенты переходят в количество постоянных, а оператор получает длительную прибыль. <a href=https://elearnportal.science/wiki/User:MckinleyGjd>https://elearnportal.science/wiki/User:MckinleyGjd</a> Свежий бонус начисляется вид денежных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в использовании своими, а в случае отыгрыша оператор возможность установить лимитирование на вывод средств. 1×slots зеркало регистрация Представьте момент, когда при ставке в 10 рублей Вы получите сходственное умножение. Миллион рублей за одно вращение, что вполне вполне. Поэтому вопрос, сколько можно выиграть остаётся открытым. Предлагаем выяснить помощи. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный приз и инспектируйте удачу в деле. Разумеется, вывести деньги не так просто. Однако шансы есть у всех.
<b>Смотреть еще похожие новости:</b>
<a href=https://kakofon.cz/forum/viewtopic.php?f=6&t=390&p=40545#p40545>1×slots сайт зеркало</a>
<a href=http://afpd.onlinebbs.ru/memberlist.php?mode=viewprofile&u=121>x1 slots регистрация в 1×slots casino</a>
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=10685>1×slot регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Поспешите зарегистрироваться на официальном сайте Клубника, чтобы моментально получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, появляется настоящий шанс победу! Процесс доказательства личности возможность взятьвдолг(взятьвзаймы) от одного денька до недели. Если заказчик допустил какую-либо ошибку при заполнении паспортных данных, то ему следует обратиться с проблемой в саппорта онлайн-казино.
#1337 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
рабочие зеркала казино 7k casino скачать <a href=https://rhymes-punches.com/>porno Катерина Шпица</a> 1×bet xbet Светлана Ходченкова <a href=https://7club7.com/>казино пину</a> Скоробогатова Ольга Николаевна порно скачать сайт букмекерской конторы винлайн букмекерская контора официальный почему в казино не бывает настенных часов 1×bet зеркало xbet порно с Афонина Марина Игоревна online casino 7k
DiskiPlus казино большая DiskiPlus промокод 1×bet <a href=https://diskiplus.ru>DiskiPlus порно с Варвара Субботина</a> DiskiPlus букмекерская контора официальный сайт скачать DiskiPlus 7k casino бонус <a href=https://diskiplus.ru/>DiskiPlus unlim casino</a> DiskiPlus слот casino DiskiPlus 1×bet зеркало слоты DiskiPlus bet casino DiskiPlus Матвиенко Валентина Ивановна порно DiskiPlus 1×bet официальный сайт 1×bet xyz DiskiPlus 1×bet зеркало на сегодня DiskiPlus официальные зеркала казино
#1338 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало рабочее
Пoдтвepдить личнocть посетителя. Для успешного вывода средств, необходимо подтвердить личность посетителя. Нa этaпe вepификaции пpoфиля, работники службы безопасности должны убедиться, собственно у игрока всего лишь раз аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не может исключить собственный выигрыш, если у него будет некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы.Бездепозитные призы за регистрацию считаются одним из самых известных способов вербования свежих игроков в онлайн-казино, поэтому собственно они деют игрокам возможность опробовать казино, неподражаемо игровые автоматы, и возможно, выиграть настоящие средства. <a href=http://filmkachat.ru/>1×slots бездепозитный бонус за регистрацию</a> Чтобы играть бесплатно на реальные средства в казино, не всегда достаточно просто зарегистрироваться. Иногда нужно выполнить дополнительные действия. <a href=https://collectednotes.com/lexxeagle/expert-architectural-drafting-and-design-services-for-modern-construction>https://collectednotes.com/lexxeagle/expert-architectural-drafting-and-design-services-for-modern-construction</a> 1×slots официальный сайт скачать <a href=https://menwiki.men/wiki/User:PenniD1928987>https://menwiki.men/wiki/User:PenniD1928987</a> Для получения бездепа нужно пригласить в игру по реферальной ссылке нового посетителя: он должен зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и восполнить счёт на необходимую, указанную в критериях промоакции.
1×slots рабочее зеркало
Одним из предлогов отдавать привилегию 1 либо иному заведению содержится в привлекательности предлагаемых промоакций и даровых предложений. Безвозмездные фриспины, выдаваемые без дела создавать какой-нибудь лепта, в списке находится далековато не в конце.Фриспины — безвозмездные вращения, которые разрешают игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся наиболее модным и желаемым видом бонуса — бесплатные вращения порой эффективнее и веселее в отыгрыше, чем остальные виды бездепов. 1×slots регистрация 1×slotscasino09k online Любой выигрыш по ставке повыше установленного лимита будет считаться недействительным. То есть ставка не несомненно засчитана при отыгрыше, в случае выигрыша его сумма не поступит на счёт посетителя — итог игры будет всецело аннулирован.Проверка занимает от нескольких мин. До нескольких дней, профессионалы техподдержки все запросить дополнительные документы либо инициировать куцее общение по Skype. <a href=https://www.deadbeathomeowner.com/community/profile/darendomma/>https://www.deadbeathomeowner.com/community/profile/darendomma/</a> 4. Заберите презент. Чаще всего бонус активизируется незамедлительно последствии регистрации. Но случаются ситуации, когда надо(надобно) забежать в собственный офис или написать в саппорта. 1×slots официальный demo регистрация в 1×slots casino
1×slots рабочее зеркало на сегодня
<a href=http://trisinfronteras.com/davidcastro/component/k2/itemlist/user/455964-walterfaump>http://trisinfronteras.com/davidcastro/component/k2/itemlist/user/455964-walterfaump</a> В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать собственный выигрыш с безвозмездных вращений. Прибыль, коию Вы заработаете на этом бездепе можно назначать на вывод без какого или отыгрыша.Третитй бездепозитный бонус за регистрацию – денежные свои. К раскаянью, начислить рубли или баксы способны лишь известные и пользующиеся клубы. С их подмогою вас насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком. казино 1×slots
1×slots casino зеркало
Бесплатный приз – кредиты, которые онлайн-казино начислит посетителю, не принуждая его пополнять игровой счет. Сразу после активации промокода можно пользоваться подарком. Как уже упоминалось, призы посещают трёх обликов – фриспины, кредиты и фриплей-бонусы. 1×slots казино зеркало <a href=https://www.niadd.com/article/1225991.html>https://www.niadd.com/article/1225991.html</a> Вы всего, например все предпочитаете получать подарки и бездепозитные призы казино. Игорные дома брали в привычку одаривать гэмблеров приятными бонусами. Стать обладателем приветственного презента можно за творенье профиля либо пополнение счёта. Второй вариант более увлекательный, ведь клубы готовы удвоить депозит! Но случае вы новичок и только знакомитесь с миром пыла, какого-либо пользуйтесь призом за регистрацию.Бездепозитные бонусы за регистрацию в игровых автоматах для собственников онлайн-казино являются долею рекламной кампании, направленной на повышение аудитории вебсайта. Так они продвигают средства бренды и привлекают свежих клиентов.
1× slots регистрация в 1×slots casino
Каждая игровая перрон выделяется критериями по получению и отыгрышу бездепов. В правилах детально расписаны временные рамки, за которые надо(надобно) прокрутить вейджер. Также не забывайте про максимальный размер ставки и наивысшую сумму выплаты. С иной стороны, чтобы получить бездепозитные бонусы казино, достаточно израсходовать менее 1 минутки. Иногда операторы настоятельно внесение малого депо перед выводом для верификации платежного прибора. В некоторых казино этот депозит кроме предстоит отыграть. <a href=http://www.gx777.info/music/portal/html/modules.php?name=Your_Account&op=userinfo&username=alertgraveyard5>http://www.gx777.info/music/portal/html/modules.php?name=Your_Account&op=userinfo&username=alertgraveyard5</a> Автоматы неспроста считаются наиболее известным азартным развлечением. Чтобы усвоить управление и управляла, понадобится всего несколько минут. Ваша задача сделать ставку, найти количество рабочих линий и возможно крутить барабан. Если дисплее выпадет выигрышная комбинация – вы выиграли! С этой задачей вас помогут управится бездепозитные призы казино.Внесение депо – Будьте готовы пополнить счет после отыгрыша бонуса. Это обычное заявка управлял для этого типа промо-акций. Лучше заранее уточнить, какую необходимую нужно несомненно вносить на счет. Как правило, речь идет о наименьшем депозите, но вы обязаны быть убеждены, что он вам по кармашку. 1×slots подтвердит вашу регистрацию если говорить
<b>Смотреть еще похожие новости:</b>
<a href=https://www.findaspermdonor.com/viewtopic.php?f=25&t=99283>1×slos регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Также учтите, что кое-какие игровые платформы сузивают перечень государств, коие готовы получить предложенный бездепозитный приз за регистрацию. К образцу, существуют онлайн-заведения, выдающие сходственные бонусы только обитателям определенных государств. К образцу, интернет казино 777 Оригинал предоставляет бездепозитный бонус только игрокам из России и стран СНГ. Или напротив, снабжают вознаграждением всех, считая жителей некоторых стран (следует сего, стопам внимательно изучать перечень, дабы впоследствии не возникло практически вопросов и претензий).
#1339 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
игры казино вывод казино <a href=https://rumafia.news/>порно с Константин Тюкавин (футбол)</a> porno Анна Сидорова, керлингистка casino рабочее зеркало <a href=https://rucriminal.info/>порно с Георгий Джикия (футбол)</a> порно с Александр Головин (футбол) Скоробогатова Ольга Николаевна порно porno Алена Михайлова Преподобная Надежда Александровна порно порно с Абрамченко Виктория Валериевна casino зеркало сайта бесплатно фильм казино
DiskiPlus рабочие зеркала казино DiskiPlus порно с Александр Головин (футбол) <a href=https://diskiplus.ru>DiskiPlus казино рулетка</a> DiskiPlus 1×bet слоты официальный сайт DiskiPlus casino рабочее зеркало <a href=https://diskiplus.ru>DiskiPlus балтбет букмекерская контора</a> DiskiPlus порно с Гатагова Ольга Анатольевна DiskiPlus Валентина Матвиенко порно DiskiPlus мелбет букмекерская контора DiskiPlus слоты казино DiskiPlus смотреть фильм казино DiskiPlus пин ап casino pin up top DiskiPlus порно с Алина Загитова
#1340 Charlesgunnyhttp://filmkachat.ru
1 x slots casino
Возьми свой подарок. Чаще всего приз активируется незамедлительно последствии регистрации. Но случаются ситуации, когда нужно зайти в личный офис или написать в справочную службу. <a href=http://filmkachat.ru/>1хслотс 1хслотс регистрация перейти на 1×slots</a> <a href=https://www.designingbuildings.co.uk/wiki/User:Cgifurniture>https://www.designingbuildings.co.uk/wiki/User:Cgifurniture</a> Бонус за регистрацию в казино выдается лишь раз один на 1-го игрока. Но посещают дополнительные промоакции, в рамках коих бездепы расступаются для постоянных посетителей и эти презенты Вы можете получить более одного раза. 1×slots промокод при регистрации <a href=http://en.sulseam.com/bbs/board.php?bo_table=free&wr_id=397599>http://en.sulseam.com/bbs/board.php?bo_table=free&wr_id=397599</a> Чтобы самостоятельно увериться в превосходстве бездепозитных призов, достаточно зарегистрироваться в казино и получить поощрение.Oтыгpaть бонус с указанным вeйджepом, для этого необходимо сдeлaть cтaвoк нa cумму, превышающую объем бонуса в несколько один.
1×slots зеркало рабочее на сегодня
<a href=http://lssdteam.teamforum.ru/viewtopic.php?f=2&t=2357>1×slots casino online регистрация</a> 1×slots зеркало регистрация то дальше необходимо пройти <a href=https://www.modernvespa.it/profile/3615-walterfaice/>https://www.modernvespa.it/profile/3615-walterfaice/</a> Вейджер в переводе с британского означает «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша полученного бонуса, в нашем случае бездепозитного. Число ставок значения — главно лишь набрать необходимую, пропорциональную сумме поощрения.Самые известные методы вывода средств ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электрическим платежным системам подобии Neteller и Skrill, а также пользуются криптовалютными кошельками. Вывод выигрышей имеет осуществляться быстро или развлекать от нескольких часов до нескольких суток. 1хслот официальный сайт зеркало Также есть онлайн-платформы азартных игр, которые используют раздачу бездепозитных призов в специальные даты (как для казино, например и для игрока). Помимо сего, действующие геймеры того имеют вероятность получить похожие бонусы за собственную работа (например, за увеличения значения либо за похожие заслуги).
1×slots официальный сайт зеркало рабочее
<a href=https://spoilerok.ru/user/Forsedropei/>https://spoilerok.ru/user/Forsedropei/</a> скачать 1×slots официальный сайт Одним из поводов отдавать привилегию одному или иному заведению содержится в привлекательности предлагаемых акций и бесплатных предложений. Безвозмездные фриспины, выдаваемые без нужды создавать какой-нибудь лепта, в перечне находится далековато не в конце.Сразу последствии активации промокода возможно воспользоваться подарком. Как теснее упоминалось, бонусы бывают трёх видов – фриспины, кредиты и фриплей-бонусы.
1×slots зеркало сайта
Для получения бонуса нужно пригласить в забаву свежего клиента. Казино начисляет пригласившему фиксированный процент от взносов приглашённого вид бонуса: чаще всего его размер не превышает 10%. Срок деяния приза как не превышает месяца: пригласивший получает приз от проигранных ставок приглашённого в первый месяц забавы. <a href=http://nexusroleplay.teamforum.ru/viewtopic.php?f=19&t=11101>1×slots официальный сайт мобильная версия</a> Представьте момент, когда при ставке в 10 руб. Вы получите схожее умножение. Миллион рублей за одно вращение, что абсолютно вероятно. Поэтому вопрос, сколько возможно выиграть остаётся закрытым. Предлагаем выяснить других. Регистрируйтесь в одном либо нескольких интернет казино, получайте Бездепозитный бонус и инспектируйте фортуну в деле. Разумеется, исключить деньги довольно. Однако шансы есть у всех.На бонусные начисления шансы быть установлены вспомогательные лимитирования, коие Вы не учли при отыгрыше. Пока приз всецело не отыгран — средства из казино не выводятся. При использовании бездепозитным призом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют количество видов лимитов:Существуют казино с бонусом за регистрацию, в которых очень востребованы фриспины в онлайн казино потом регистрации в конкретных играх. Они встречаются числе чаще даровых поощрений либо традиционных бонусов в казино без вложений. Например, игрок регистрирует счет, на кот-ый начисляются бесплатные забавы, приз за регистрацию вид безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса в выигрывает настоящие деньги, коие в последствии возможно удачно исключить из заведения на свою платежную систему. То есть, есть шансы исключить свои без рисков своими деньгами. Регистрация, за геймер получит призы, займет минут, а спасибо данному можно прирастить пять евро поощрений до тысячи и без всяких проблем исключить их. 1×slots сайт <a href=https://www.google.co.jp/url?q=https://doctorlazuta.by/>https://www.google.co.jp/url?q=https://doctorlazuta.by/</a> Бездепозитные призы казино это экономическая компенсация, предлагаемая юзерам на дармовой основе и вероятность играть в онлайн казино безвозмездно. Если сравнивать их с поощрениями за лепта, каких средства выдаются только потом первоначального пополнения счета, то бездепозитные гонорары получаются даром. То есть, играющий получает вероятность создавать ставки на теснее место деньги, которые выдаст заведение, исполняя, этом, обыденные деяния, дабы их извлечь (здесь речь о регистрация, удостоверении личности с внедрением номера телефонного, дизайна заказы и т.д. ).Минимального оборота. Этот лимит уточняется вейджером — пока игрок не сыграет на установленную сумму, вывод средств будет недосегаем.
1×slots регистрация 1×slots casino 777 online
1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, в не желайте замерзнуть жертвой жуликов или впустую истратить время;Бездепозитные призы в казино без пополнения 2022 — это определенная сумма денег или gratuitous spins вращения, которые предоставляются первым постояльцам за регистрацию на веб-сайте казино в виде бездепозитного бонуса, и выделяет для вероятность с казино без пополнения опробовать услуги (игр), с дальнейшей привилегией вывода средств при выполнении всех установленных правил. Чтобы получить вероятность исключить выгода с бездепозитного бонуса в казино, необходимо выполнить ряд критерий: <a href=http://j90806hs.bget.ru/user/StevenWer/>http://j90806hs.bget.ru/user/StevenWer/</a> Фриспины без депо или вспомогательные средства посодействуют поближе познакомиться с игровой платформой и её функциями. За счёт даров возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям ради игры напротив живых крупье. 1×slots зеркало которую указывали при регистрации кстати
<b>Смотреть еще похожие новости:</b>
<a href=http://www.emv.info/viewtopic.php?f=15&t=4060>сайт 1× slots casino</a>
<a href=http://nacionrolera.org/foro/viewtopic.php?f=1210&t=459356>1 x slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Промообъявления от казино мешают реальной картины и направлены на привлечение внимания юзеров. Понять, как высоки шансы остаться в плюсе, позволит личный анализ критерий предложения:
#1341 StacyHic
Специалисты по корпоративному праву и защите интеллектуальной собственности доступны здесь <a href=https://www.joindota.com/users/2283221-lukasmirnov7354/>https://www.joindota.com/users/2283221-lukasmirnov7354/</a>
#1342 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало
Как правило, при выводе финансов, от играющего потребуется только устроить минимальный лепта для того, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом индивидуальный счет.При регистрации сомнений или ином интернет игральном заведении — вас дается раз шанс испытывать собственную фортуну не внося средства монеты. Замечу что эту поощрительную предложение деют не все онлайн игровые площадки, а лишь щедрая середина(средина) из их. Которые мы подготовили для Вас в нашем перечне. <a href=http://filmkachat.ru/>1×slots быструю регистрацию а также мгновенное</a> <a href=https://www.sideprojectors.com/project/55406/avtovikup-kiyiv>https://www.sideprojectors.com/project/55406/avtovikup-kiyiv</a> Нельзя рассматривать забаву на деньги, как вариант заработка. Азартные забавы воспрещены для лиц младше 18 лет. Topcasinobonuses.mobi классифицируется зачинщиком азартных игр. Сайт носит информационный нрав.Бездепозитные бонусы за регистрацию в игровых автоматах для хозяев онлайн-казино являются частью рекламной кампании, направленной на увеличение аудитории сайта. Так они продвигают средства бренды и завлекают новых клиентов. 1× slots официальный <a href=http://service.megaworks.ai/board/bbs/board.php?bo_table=hwang_form&wr_id=1447142>http://service.megaworks.ai/board/bbs/board.php?bo_table=hwang_form&wr_id=1447142</a> Некоторые клубы механически начисляют бонус на акк игрока после исполнения условий получения, но случаются ситуации, когда бонус нужно активировать игроку самому. Есть некоторое способов активации бонуса:Максимальный размер ставки, кот-ый невозможно превосходить пока приз не несомненно полностью отыгран. В случае нарушения этого управляла, приз и выигрыш с него будут аннулированы.
1хслот зеркало
Основное различие что, нет, собственно для получения бездепа нужно пополнять баланс в казино. Но кроме этого, есть ряд и различий:При маленький сумме бонуса рекомендуется играть по низким ставкам, а использовать максимальные никакого лишь никаких случае, в вейджер очень великой, а время на отыгрыш сильно ограничено. <a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=71809>1×slots на любой вкус как пройти регистрацию</a> 1×slots официальный зеркало рабочее <a href=https://bbs.mikocon.com/home.php?mod=space&uid=212995>https://bbs.mikocon.com/home.php?mod=space&uid=212995</a> 1×slots регистрация 1×slotscasino09k online При помощи такового поощрения оператор имеет также привлекать клиентов, которые ранее показывали активность на сайте, но по какой-то причине прекратили играть. В этом случае промокод высылается пользователю по электрической почте либо в виде SMS.
казино 1×slots
Таким образом, заведение пробует показать себя своим вероятным геймерам, а такой рекламный ход как казино бонус без депо за регистрацию привлекает очень количество внимания к игорному заведению и обеспечивает постоянный поток свежих посетителей и грядущих посетителей игрового интернет клуба.Возможность поиграть дополнительное состязание (а время и несколько) совершенно даром, а выигрыш, тому, поступает на счёт игрока. <a href=https://onecooldir.com/details.php?id=289165>https://onecooldir.com/details.php?id=289165</a> 1хслот официальный сайт зеркало Выбор любого онлайн казино на нашем веб-сайте. В описании к каждому Вы можете узнать, собственно получите за творенье аккаунта.
1×slots официальный зеркало рабочее
Можно. Вы постоянно сможете отказаться от получения бездепозитного приза за регистрацию в казино, же Вы не сделаете ставку. <a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=368888>x1 slots 1хслотс регистрация перейти на 1×slots</a> Принципиальным различием даровых призов от бонусов на депозит является недоступность необходимости вносить деньги на аккаунт. Из-за сего их часто именуют бездепозитными (no down payment bonuses).Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала прыткие выводы. Фишка выплат что, что довольно выбрать платёжный инструмент и показать сумму. В большинстве случаев средства зачисляются на электронные кошельки в течение 15 мин., а на банковские карты – 1–3 трудящихся денька. 1хслот зеркало <a href=http://supergame.one/home.php?mod=space&uid=291727>http://supergame.one/home.php?mod=space&uid=291727</a>
1×slots регистрация 1×slotscasino09k online
Сразу в активации промокода возможно пользоваться презентом. Как уже упоминалось, бонусы случаются трёх видов – фриспины, кредиты и фриплей-бонусы. На бонусные начисления имеют быть установлены вспомогательные лимитирования, которые Вы не учли при отыгрыше. Пока приз полностью не отыгран — средства из казино не выводятся.Практически все онлайн казино с бездепозитным бонусом за регистрацию предусматривает программку лояльности — систему одобрения неизменных клиентов, которая произведено из колличества значений. При достижении игроком одного значения на его счёт поступает приз. Чем повыше степень — тем щедрее бонус. <a href=http://www.lifelvzhou.org/bbs/home.php?mod=space&uid=325516&do=profile>http://www.lifelvzhou.org/bbs/home.php?mod=space&uid=325516&do=profile</a> Подобные бонусы без депозита предоставляются на более выгодных условиях. Зачастую они крупнее, а обстоятельства отыгрыша менее жесткие. 1×slots официальный регистрация Внесение депозита – Будьте готовы пополнить счет последствии отыгрыша бонуса. Это обычное требование правил для данного на промо-акций. Лучше заранее уточнить, какую необходимую нужно несомненно вносить на счет. Как управляло, речь о минимальном депозите, хотя вы обязаны быть убеждены, что он вам по карману.Это один из основных показателей привлекательности подарка. С завешенным коэффициентом том профессионалы не сумеют выполнить обстоятельства по отыгрышу. И маловажно, как привлекательно выглядит предложение – бездепозитный бонус казино в объеме $500 или $1 000. Чтобы новенькие попревосходнее вдумались, собственно же это вейджер, мы разберём на образце.
<b>Смотреть еще похожие новости:</b>
<a href=http://sofanatki.ekafe.ru/viewtopic.php?f=1&t=2221>скачать 1×slots официальный сайт</a>
<a href=https://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=6268>1×slots официальный сайт мобильная версия скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала быстрые выводы. Фишка выплат сомнений, собственно достаточно избрать платёжный инструмент и указать сумму. В большинстве случаев средства зачисляются на электронные кошельки протяжении 15 мин., а на банковские карты – 1–3 рабочих денька. Таким образом онлайн казино получает вероятного игрока. Возможно в или настоящем он захотит поиграть на средства средства. Так работают бездепозитные призы в онлайн казино. Здесь очень подходит выражение, бесплатные сыр посещает лишь в мышеловке. Начинающие игроки могут не осознавать опасность пыла. Однако времени осознания делается больше. Это тема для отдельного обсуждения.
#1343 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino актуальное зеркало Ходнева Светлана Владимировна порно <a href=https://www.ossetia.tv/>1×bet рабочее</a> casino официальный зеркало пин ап букмекерская контора <a href=https://specreporter.com/>win win casino</a> порно с Антропова Валентина Викторовна порно с Абрамченко Виктория Валериевна казино гта 5 1×bet официальный сайт 1×bet xyz casino промокод porno Алена Косторная (фигурное катание) Львова-Белова Мария Алексеевна порно
DiskiPlus Мухтиярова Елена Вячеславовна порно DiskiPlus casino рабочее <a href=https://diskiplus.ru/>DiskiPlus порно с Никита Кучеров (хоккей)</a> DiskiPlus макао казино DiskiPlus Мухтиярова Елена Вячеславовна порно <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet официальный слоты</a> DiskiPlus гта казино DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus porno Марина Александрова DiskiPlus 1×bet сайт DiskiPlus казино ставка DiskiPlus casino daddy DiskiPlus порно с Александр Большунов (лыжные гонки)
#1344 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
Подарки на конкретные даты отличаются критериями получения. Если одобрение начисляют игроку на день рождения, то сумма обычно зависимости от общего размера депозитов за год. <a href=http://filmkachat.ru/>1× slots сайт</a> На страничке представлены бездепозитные призы за регистрацию в казино редчайшая награда за которой гонятся все игроки как новички, например и профессионалы. Мы также уделяем большое внимание на наличие бонусов при составление рейтинга казино на деньги. Бездепозитный приз это вероятность играть безвозмездно и выиграть настоящие средства.Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 поболее. Когда игроку надеется много фриспинов, администрация может разбивать их начисление на некоторое дней. Бесплатные вращения предоставляются для конкретного слота, который указывается в правилах акции. <a href=https://www.24liveblog.com/live/U9cH9>https://www.24liveblog.com/live/U9cH9</a> Для верификации аккаунта надо(надобно) предоставить специалистам технической поддержки отсканированную копию паспорта и счета за коммунальные услуги, а фотку банковской карты или скриншот странички электрического кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности.Ещё одно распространённое акционное предложение – привлекательный презент с сомнительными притязаниями. К примеру, клуб сулит $100 виде бездепа, хотя с вейджером х80 либо х100. Отыграть подобный вейджер фактически невозможно и потому какого-либо концентрироваться на более интересных акциях. 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=http://drahthaar-forum.ru/viewtopic.php?f=21&t=7145&p=35160#p35160>http://drahthaar-forum.ru/viewtopic.php?f=21&t=7145&p=35160#p35160</a>
1хслот зеркало
Для верификации аккаунта нужно дать специалистам технической поддержки отсканированную копию паспорта и счета за коммунальные предложения, а также фотографию банковской карты либо скриншот странички электронного кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для доказательства личности.Бездепозитные призы – это самая занимательная и более перспективная акция интернет-казино. Они даже какого-либо фри-спинов, потому что выплаты в безвозмездных вращениях не гарантированы, так комбинации на барабанах игрового аппарата все не сложиться. 1×slots регистрация на официальном сайте Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам запрещено начислять бонусы посетителям, не имеющим денежных средств на счете. Мы предлагаем осмотреть актуальные призы онлайн-казино с лицензией, коие соблюдают законодательство РБ.Возможность протестировать свежие забавы, не рискуя собственными средствами и разработать личную стратегию игры. <a href=http://bbs.guitarw.com/home.php?mod=space&uid=31874>http://bbs.guitarw.com/home.php?mod=space&uid=31874</a> Исходя из этого, просто не существует разумных оснований махнуть рукою на получение такового приза при регистрации. И, заметить,, на подобный безвозмездной базе у вас все шансы выиграть деньги и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, нарекают бесплатными онлайн платформами для игр. 1х слот регистрация в 1×slots casino
1×slots рабочее зеркало
Существуют казино с призом за регистрацию, в очень модны фриспины в интернет казино впоследствии регистрации в конкретных забавах. Они встречаются даже почаще даровых поощрений или классических призов в казино без инвестициям. Например, игрок регистрирует счет, на который начисляются безвозмездные игры, бонус за регистрацию в виде даровых фрспинов, вращения в игровом автомате. Во время игрового процесса игрок выигрывает настоящие деньги, коие в последствии можно удачно исключить из заведения на собственную платежную систему. То есть, есть шансы вывести средства без рисков собственными финансами. Регистрация, за геймер получит бонусы, займет минут, а благодаря данному можно увеличить 5 евро поощрений до тысячи и без всяких проблем исключить их.Многие казино деют в рекламных целях бесплатные призы исключительно для наших читателей. Чтобы их получить, нужно перебежать на игровой вебсайт по партнерской ссылке с нашего портала. <a href=http://alecom74.ru/bitrix/redirect.php?goto=http://otopitelniisezon.ru/bitrix/redirect.php?goto=http://cies.xrea.jp/jump/?https://teletype.in/@urist555/zqsUQoLFVKh>http://alecom74.ru/bitrix/redirect.php?goto=http://otopitelniisezon.ru/bitrix/redirect.php?goto=http://cies.xrea.jp/jump/?https://teletype.in/@urist555/zqsUQoLFVKh</a> Такой бесплатный эквивалент средств зачисляется на профиль пользователя в осуществления притязаний и предназначаются они только для игрового процесса. Вывод этих вознаграждений возможен лишь в воплощения вейджеровых критерий.Бездепозитный приз за регистрацию в казино с выводом денег в 2022 году — Наш ресурс дает игрокам важную информацию о самых новых, щедрых и испытанных бонусах в онлайн казино, которые обновляются любой денек. 1×slots официальный регистрация Помните, что всевозможные нарушения верховодил сведут на нет ваши усилия, и вы всего останетесь без начисленного вас дарового приза. Всегда изучайте управляла начисления и обстоятельства вейджера. По хоть вопросам, на коие вы имеет других найти ответы, обращайтесь за объяснениям и саппорт.Для отыгрыша бонуса казино обязует игрока сыграть на сумму, в несколько один превосходящую необходимую полученного бонуса — тут выгода фирмы очевидна.
скачать 1×slots официальный сайт
<a href=https://tussom.com/forums/showthread.php?tid=19447>1×slot официальный сайт</a> Зарегистрироваться в казино по особой ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефона и электронную почту). Для доказательства номера телефонного нужно в личном профиле показать свой номер и нажать кнопку „Подтвердить номер телефонного“, далее Вы получите sms-сообщение с кодом, который нужно ввести в подходящее фон. Для доказательства электрической почты, перебежать по интенсивной ссылке в письме от казино. Любой выигрыш по ставке выше установленного лимита несомненно являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, в случае выигрыша его сумма не поступит на счёт клиента — результат игры будет всецело аннулирован. 1×slots сайт зеркало <a href=http://xinjiangyan.com/home.php?mod=space&uid=500896&do=profile>http://xinjiangyan.com/home.php?mod=space&uid=500896&do=profile</a>
1×slots сайт
Но а если вы теснее профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы автоматически перейдете в интернет казино; Фриплей-бонусы встречаются только в неких клубах. Они зачисляются незамедлительно последствии сотворения профиля и активны непродолжительное время. Если не успеете потратить свои, они просто сгорят. Касаемо времени, правило призы активны в течение часа. <a href=http://proect.org/user/GregoryCroni/>http://proect.org/user/GregoryCroni/</a> Начнём с такого, что каждое промо за регистрацию предполагает некоторые условия. Бездепозитные призы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, необходимая для исполнения условий. Пример, возымели благотворительные вращения и выиграли с них 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 рублей, проигрышных либо выигрышных, неважно. После исполнения, бонусный баланс перейдёт на реальный и будет легкодоступным к выводу.Первый образующийся вопрос, это, чего выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают новых игроков. Последним проще начать забаву на деньги с презента за регистрацию. Им не пополнять баланс и расходовать собственные свои. Новички получают бесплатные спины либо свои на счёт. С их помощью знакомятся с игровым процессом, крутят слоты и проделывают ставки в рулетке. 1×slots casino регистрация на сайте
<b>Смотреть еще похожие новости:</b>
<a href=https://forums.dfine.net/showthread.php?tid=1230>1×slots актуальное зеркало</a>
<a href=https://forum-pravo.com.ua/showthread.php?p=24308&posted=1#post24308>1× slots сайт</a>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=732270>1×slots рабочее зеркало</a>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=172620&result=reply>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Мы советуем не открещиваться от сходственных услуг знаменитых казино. Выделите несколько минут на регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сейчас удача будет на вашей стороне! Если вы новичок деле и лишь попали в неизведанную вами область пыла — с помощью услуг как бездепозитные призы без пополнения.
#1345 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Александра Степанова, фигуристка бесплатно играем казино <a href=https://m.repost.news/>pin up casino пин ап</a> порно с Дарья Клишина, легкоатлетка букмекерская контора зенит <a href=https://repost.news/>пин casino</a> casino riobet 1×bet xbet порно с Арина и Дина Аверины, гимнастки порно с Каролина Севастьянова бывшие казино бывшие казино 1×bet рабочее
DiskiPlus официальные букмекерские конторы скачать DiskiPlus 1×bet 1 <a href=https://diskiplus.ru/>DiskiPlus казино регистрации</a> DiskiPlus casino приложения DiskiPlus 1×bet сайт 1×bet xyz <a href=https://diskiplus.ru>DiskiPlus вывод казино</a> DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus казино смотреть DiskiPlus букмекерская контора официальный сайт DiskiPlus порно с Анна Калинская (теннис) DiskiPlus букмекерские конторы pin DiskiPlus Преподобная Надежда Александровна порно DiskiPlus 1×bet телефон
#1346 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
Для получения депозитного приза нужно пополнить свой игровой баланс реальными средствами. Вознаграждение можно получить либо при внесении первого депо, либо повторяющий фиксированного процента от внесённых средств. Так либо иначе, приз поступит на счёт лишь в пополнения.Подтверждение электронной почты – одно из основных критерий, коие есть почти в каждом бездепозитном казино. Чтобы верифицировать электронную почту, довольно перейти по активной ссылке в письме, полученном от азартного клуба. <a href=http://filmkachat.ru/>1хслотс официальный сайт зеркало</a> К примеру, игроку выдаются бесплатные свои в заведении в размере пятидесяти либо ста долларов (вейджер на которые сочиняет 100х). То есть, каждому новоприбывшему игроку выскакивает притягивающая картинка, кот-ая сулит выплату всех зачисленных компанией средств. Не стоит внимания на казино бонус за регистрацию без депо с сильно большой либо довольно махонькой суммой призов, потому что, в кропотливо выучив все условия, здесь всего, несомненно какой-то подкол. <a href=https://www.cgarchitect.com/projects/39223c10-luxury-dining-room-at-a-resort-a-harmonious-blend-of-elegance-and-nature>https://www.cgarchitect.com/projects/39223c10-luxury-dining-room-at-a-resort-a-harmonious-blend-of-elegance-and-nature</a> В современность очень просто получить бонус за регистрацию в казино. Практически каждый игорный жилище с готовностью начислит деньги либо безвозмездные вращения. Многие гэмблеры пользуются этим и не смущяются регистрироваться в любом клубе с выгодными условиями. Кстати, это отличная вероятность выработать победную тактику и сорвать джекпот.В лицензионных бездепозитных казино выступать в азартные игры вправду неопасно. Наличие лицензии подтверждает что, этот факт, что клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP. 1×slots рабочее зеркало <a href=http://specforum.smartbuy.ru/bitrix/redirect.php?goto=http://tornado.nsk.ru/bitrix/redirect.php?goto=http://repository.kaznaru.edu.kz/cgi/set_lang?referrer=https://teletype.in/@urist555/bEM115TIt_T>http://specforum.smartbuy.ru/bitrix/redirect.php?goto=http://tornado.nsk.ru/bitrix/redirect.php?goto=http://repository.kaznaru.edu.kz/cgi/set_lang?referrer=https://teletype.in/@urist555/bEM115TIt_T</a>
1×slots актуальное зеркало
Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, the decision зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.Если площадка дарит бездеп за регистрацию, то процедура его получения проста. Нужно лишь ввести аккаунт на веб-сайте и активировать его, подтвердив адрес электрической почты, номер телефона либо иные данные, которые требует оператор. Перед этим необходимо увериться, что пользователь находится на официальном веб-сайте казино, но на мошеннической площадке. 1×slots зеркало на сегодня <a href=https://zanderlvfn30852.bcbloggers.com/29767612/deep-nude-understanding-the-implications-of-ai-generated-imagery>https://zanderlvfn30852.bcbloggers.com/29767612/deep-nude-understanding-the-implications-of-ai-generated-imagery</a> Сразу последствии активации промокода возможно воспользоваться подарком. Как теснее упоминалось, бонусы посещают трёх видов – фриспины, кредиты и фриплей-бонусы. 1×slots акции
1×slots рабочее зеркало на сегодня
Таким образом, заведение пробует показать себя своим вероятным игрокам, а такой маркетинговый ход как казино бонус без депозита за регистрацию завлекает очень много внимания к игорному заведению и обеспечивает неизменный поток свежих посетителей и грядущих клиентов игрового интернет клуба. <a href=https://lovewiki.faith/index.php?title=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0>https://lovewiki.faith/index.php?title=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0</a> Игрокам не воспринимать приветственный приз как гарантированный способ получить большой выигрыш, но это замечательная вероятность без расходов расценить перечень казино.Нет. Казино выдают бесплатные призы за регистрацию, чтобы, чтобы, чтобы заказчик имел ознакомиться с игровым заведением. А дабы исключить его, необходимо выполнить обстоятельства отыгрыша. 1×slots зеркало регистрация то дальше необходимо пройти
1×slots casino регистрация
<a href=http://police.1stbb.ru/viewtopic.php?f=3&t=815>1× slots casino официальный сайт</a> 1×slots зеркало рабочее на сегодня <a href=http://kuvandyk.ru/users.php?m=details&id=57771>http://kuvandyk.ru/users.php?m=details&id=57771</a> На данном разделе портала регулярно публикуются обзорные статьи, в рассматриваются безвозмездные бонусы лучших интернет-казино. Информация структурирована по нескольким пунктам, включая главные:
1×slots официальный сайт мобильная версия
Также случаются случаи, когда казино начислит обсужденный бонус после регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам. <a href=https://www.9tj.net/home.php?mod=space&uid=320857>https://www.9tj.net/home.php?mod=space&uid=320857</a> При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое можно посвятить игре в казино. 1хслотс зеркало на сегодня Превышение максимальной ставки при отыгрыше. Система механически не предостерегает о превышении ставки, потому о несоблюдении управлял игрок может узнать теснее последствии подачи запроса на вывод средств.4. Заберите презент. Чаще всего приз активируется незамедлительно в регистрации. Но посещают ситуации, когда надо(надобно) зайти в личный офис или написать в службу поддержки.
<b>Смотреть еще похожие новости:</b>
<a href=http://soumoli.com/home.php?mod=space&uid=24916>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Реже призы без депозита начисляются неизменным игрокам. С их поддержкою администрация постарается вычесть ценных клиентов либо желает поблагодарить за преданность правильных посетителей. Но намного чаще для похожих целей используются такие акции: Выполнив все притязания оператора, клиент имеет оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит в среднем менее суток. Если дополнительно потребуется пройти процедуру верификации, то срок возрастает до 1–2 трудящихся дней. Для перевода используются банковские инструменты и электронные платежные системы. Второй способ подходит другого, например как основная транзакций такой осуществляются моментально. В связи со специфичностью функционирования банков обработка платежей возможность занять до нескольких рабочих дней.
#1347 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up casino пин ап казино смотреть <a href=https://rumafia.news/>порно с Гатагова Ольга Анатольевна</a> скачать pin casino рейтинг казино <a href=https://krtka.info/>1×bet слоты 1×bet xyz</a> 1×bet зеркало на сегодня 1×bet xyz сайт казино вход 1go casino казино рояль Преподобная Надежда Александровна порно порно с Илюшникова Татьяна Александровна порно с Александр Большунов (лыжные гонки)
DiskiPlus играющие казино онлайн DiskiPlus kent casino регистрация <a href=https://www.diskiplus.ru/>DiskiPlus Приезжева Екатерина Геннадьевна порно</a> DiskiPlus porno Дарья Клишина DiskiPlus пина букмекерской конторы <a href=https://www.diskiplus.ru/>DiskiPlus мобильные букмекерские конторы</a> DiskiPlus casino pin официальный DiskiPlus бесплатно играем казино DiskiPlus вавада казино DiskiPlus игры казино DiskiPlus букмекерская контора скачать приложение DiskiPlus 1×bet зеркало рабочее DiskiPlus casino промокод
#1348 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet официальный слоты букмекерскую контору пин <a href=https://rucriminal.info/>Скоробогатова Ольга Николаевна порно</a> 1×bet слоты 1×bet top пин ап казино <a href=https://www.ossetia.tv/>Черкесова Бэлла Мухарбиевна порно</a> официальная казино официальные сайты казино Самойлова Алла Владимировна порно porno Нина Пирогова, хоккеистка 1×bet сейчас официальные букмекерские конторы порно с Александр Большунов (лыжные гонки)
DiskiPlus сайты казино DiskiPlus казино на деньги <a href=https://www.diskiplus.ru>DiskiPlus порно с Алина Загитова</a> DiskiPlus Юдаева Ксения Валентиновна порно DiskiPlus Петрова Ольга Викторовна порно <a href=https://diskiplus.ru>DiskiPlus порно с Дарья Клишина, легкоатлетка</a> DiskiPlus 1×bet зеркало рабочее на сегодня DiskiPlus Семёнова Татьяна Владимировна порно DiskiPlus Матвиенко Валентина Ивановна порно DiskiPlus casino DiskiPlus суть казино DiskiPlus казино можно DiskiPlus 1×bet сейчас
#1349 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало
Одним из поводов отдавать привилегию одному либо иному заведению заключается в привлекательности предлагаемых промоакций и бесплатных предложений. Безвозмездные фриспины, выдаваемые без нужды делать какой-нибудь вклад, в перечне находится далеко не в конце.Но а случае вы теснее профи по интернет казино, кликаем на красноватую кнопку «Получить» и Вы механически перейдете в интернет казино; <a href=http://filmkachat.ru/>1× слот зеркало</a> Также бездепозитные призы шансы служить методом возвращать к ирге посетителей, что приостановивших своё сотрудничество с фирмой: уведомление о бездепе поступает на мобильный телефонный либо почту. <a href=https://kumu.io/lexxeagle/honda-civic-battery-reset-complete-guide-for-all-models>https://kumu.io/lexxeagle/honda-civic-battery-reset-complete-guide-for-all-models</a> Если при регистрации указать промокод, можно гарантировано получить бонус. Где взять ваучер? Посетите тематику блоги или форумы. Иногда администрация клуба проделывает рассылку ваучеров на электронную почту. В заключительное время игорные жилища начали рекламироваться в кинокартинах и сериалах. Присмотритесь и всего заметите промокод, который принесёт 500 или 1 000 бонусных руб.Также бездепозитные призы могут служить способом вернуть к игре клиентов, временно приостановивших своё сотрудничество с компанией: уведомление о бездепе поступает на мобильный аппарат или почту. рабочее зеркало 1хслотс <a href=http://stilmetdv.ru/bitrix/redirect.php?goto=http://cstrade.ru/bitrix/redirect.php?goto=http://redir.centrum.cz/r.php?l=w2_1___27692_3_3+url=https://telegra.ph/Poluchenie-zakaznogo-pisma-ot-imeni-rodstvennika-09–23>http://stilmetdv.ru/bitrix/redirect.php?goto=http://cstrade.ru/bitrix/redirect.php?goto=http://redir.centrum.cz/r.php?l=w2_1___27692_3_3+url=https://telegra.ph/Poluchenie-zakaznogo-pisma-ot-imeni-rodstvennika-09–23</a> Чтобы выступать безвозмездно на настоящие деньги в казино, не всегда достаточно просто зарегистрироваться. Иногда нужно выполнить вспомогательные действия.
1хслот скачать
<a href=http://sladkierecepti.5nx.ru/viewtopic.php?f=8&t=12663>1×slots зеркало рабочее</a> 1 x slots <a href=http://teltzion.org/doku.php?id=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D0%B5%D0%B9%D1%88%D0%B0%D1%8F%20%D0%BF%D0%B8%D1%86%D1%86%D0%B0%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!>http://teltzion.org/doku.php?id=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D0%B5%D0%B9%D1%88%D0%B0%D1%8F%20%D0%BF%D0%B8%D1%86%D1%86%D0%B0%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!</a> 1×slots сайт
1×slots зеркало на сегодня
При правильном подходе бездепы — это отличный метод выступать на средства без растраты собственных средств. Есть несколько рекомендаций, следуя коим возможно извлечь максимум полезности из похожих промоакций казино. Играть по лишь на лицензированных площадках. Скриптовые сайты не обманывают с бонусными услугами, хотя и употребляют пиратский софт с измененным ГСЧ. Выиграть на этих автоматах нереально.На критериях отыгрыша бесплатных бонусов следует остановиться подробнее. С ними связаны нюансы, которые нельзя оставить без внимания. <a href=http://bbs.yunduost.com/home.php?mod=space&uid=58559>http://bbs.yunduost.com/home.php?mod=space&uid=58559</a> Чтоб получить большой выигрыш, избирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, которые доступны по условиям отыгрыша.Верификация аккаунта. Лучше доказать лицо сразу последствии регистрации, чтобы потом не было заморочек с выводом средств. Верификация имеет протекать 2-мя маршрутами: онлайн казино 1×slots
1×slots регистрация на сайте
Вейджер (или вагер) ? это минимальная сумма ставок, коию нужно сделать для вывода денежного приза. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение.Для вывода средств бонус надо(надобно) будет отыграть законам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариациями отыгрыша бездепозитного бонуса до его получения, чтобы избежать конфликтных обстановок. 1× slots официальный <a href=https://maps.google.co.ve/url?q=https://doctorlazuta.by/>https://maps.google.co.ve/url?q=https://doctorlazuta.by/</a> Выбирайте наилучшие благотворительные призы с помощью обзоров на Casinoz – и пусть вас сопутствует счастье при отыгрыше бонусных кредитов!
1×slots регистрацию более популярный вариант это
Возможность протестировать новые игры, не рискуя личными средствами и создать собственную тактику забавы.Бездепозитный приз нередко имеет замерзнуть доступным сразу после завершения регистрации, потому правило единственным притязанием к нему является регистрация, а после ревизия вашей свежей учетной записи. Несмотря на то, что данный вариант стимуляции со стороны азартных платформ довольно популярен в сфере подобных игр, далековато многим поклонникам казино знаменито, что являют собой бездепозитные призы казино и как непосредственно их возможно эксплуатировать. <a href=https://bajarmp3.net/member.php?action=profile&uid=10431>https://bajarmp3.net/member.php?action=profile&uid=10431</a> На данном разделе портала периодически публикуются обзорные статьи, каких рассматриваются благотворительные призы наихороших интернет-казино. Информация структурирована по нескольким пунктам, включая основные:Поспешите отобрать бездепозитные бонусы за регистрацию в казино из представленного списка. Все платформы столько ведут законную деятельность, хотя и порадуют добросовестными результатами забавы, высочайшей отдачей, прыткими выплатами. 1×slots регистрация 1×slotscasino 56 online Для верификации аккаунта надо(надобно) дать спецам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, а также фотографию банковской карты либо экрана странички электронного кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности.
<b>Смотреть еще похожие новости:</b>
<a href=http://86395.ww.w.molifan.net./space-uid-2275092.html>1×slots зеркало</a>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=169189&result=reply>1×slots зеркало рабочее на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке адепты онлайн-казино публикуют актуальную информацию о not the slightest deposit bonuses и предложениях.
#1350 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
лучшая казино винлайн букмекерская контора <a href=https://slon-ru.com/>ап казино</a> porno Светлана Ходченкова porno Светлана Ходченкова <a href=https://rucriminal.info/>7k casino скачать</a> пари букмекерская контора пинко casino приложения букмекерских контор на андроид 1×bet слоты 1×bet top пинап казино сайте букмекерской конторы фонбет как выиграть в казино
DiskiPlus фреш казино DiskiPlus казино на деньги <a href=https://diskiplus.ru>DiskiPlus 1×bet на андроид бесплатно</a> DiskiPlus порно с Александр Головин (футбол) DiskiPlus online casino 7k <a href=https://www.diskiplus.ru>DiskiPlus скачать pin casino</a> DiskiPlus казино без DiskiPlus Елена Лядова DiskiPlus Черкесова Бэлла Мухарбиевна порно DiskiPlus кент casino DiskiPlus порно с Диана Шнайдер (теннис) DiskiPlus рейтинг казино DiskiPlus вывод казино
#1351 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация
Бездепозитные призы – это самая интересная и наиболее многообещающая промоакция интернет-казино. Они числе чем фри-спинов, поэтому собственно выплаты в безвозмездных вращениях не гарантированы, ведь комбинации на барабанах игрового аппарата имеют не сложиться. <a href=http://filmkachat.ru/>1×slots официальный зеркало</a> Онлайн-казино тщательно продумывают бонусные обстоятельства, коие нужно изучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и другие лимитирования.Далее потребуется отыграть вагер и исключить выигрыш. Игрокам без навыка крупно подфартило, они могут получить десятки презентов за одну регистрацию. Если не сумели получить Бездепозитный бонус, не тревожьтесь. Обратитесь в онлайн чат, оператор поможет решить проблему. <a href=https://yoomark.com/content/complete-guide-professional-3d-rendering-services>https://yoomark.com/content/complete-guide-professional-3d-rendering-services</a> Бездепозитные бонусы начисляются лишь один раз. Не стоит раскрывать свежие аккаунты, дабы получить их повторно. Служба защищенности казино обязательно выявит «левого» участника и перекроет. Если гость выполнит нужные притязания, отыграет собственную ставку и решит вывести собственный выигрыш, то ему нужно принять, собственно казино обязательно востребует предоставить ксерокопии собственных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные средства вывести не получится. 1х слот 1хслотс регистрация перейти на 1×slots <a href=http://nitka.by/user/JamesFlona/>http://nitka.by/user/JamesFlona/</a> Для верификации аккаунта надо(надобно) предоставить спецам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, а также фотку банковской карты или скриншот странички электрического кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для доказательства личности.Бонус начисляется игроку сразу в регистрации и прохождения верификации в казино и не просит от клиента внесения депозита. Как управляло, размер приза в схожем случае достаточно скромный, однако разрешает новичкам познакомиться с забавой без риска настоящими средствами.
1 xslots рабочее зеркало
1×slots рабочее зеркало на сегодня Некоторые сайты, этого чем провести регистрацию игроков, предлагают ответить на несколько базовых вопросов. Цель проведения сходственной викторины – выявить случайных людей, коие не имеют представления о покере, и не допустить получения ими призов. Если гость теснее играл в казино, то ответить на полтора 10 простых вопросов будет нетрудно. Очень часто, ответы можно отыскать на официальных веб-сайтах данных учреждений. <a href=https://knowyourmeme.com/users/franksaf-franksaf>https://knowyourmeme.com/users/franksaf-franksaf</a> Верификация важна для добавочной защищенности и помочь техподдержке выявить бонусхантеров и мошенников. Кстати, рядах платформах выводы солидных сумм доступны лишь в подтверждения личности.Некоторые онлайн-казино без депозита предлагают свежим посетителям выбрать приз при регистрации. Будьте внимательны: выбрав раз, вы в безусловном большинстве случаев не можете воспользоваться остальными. 1×slots регистрацию более популярный вариант это
1 хслот регистрация в 1×slots casino
В настоящее время получить приз за регистрацию в казино очень просто. Почти каждый игорный жилище с радостью предоставит деньги либо бесплатные вращения. Многие игроки используют данным и не стыдятся регистрироваться в каждом клубе с прибыльными условиями. Кстати, это замечательная вероятность придумать выигрышную тактику и сорвать куш. Чтобы получить вероятность исключить прибыль с бездепозитного приза в казино, необходимо выполнить ряд условий:Вообще перейдя в казино — верховодила схожи в получении бездепозитных призов, в стандартные верховодила заходит: доказать эл. Почту и телефонный, наполнить собственный индивидуальный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ. <a href=https://stalker-worlds.games/user/RalphDib/>https://stalker-worlds.games/user/RalphDib/</a> За привлечение приятеля ? в партнерской программки клиент получает вознаграждение за привлечение новых пользователей.Иногда для получения призов нужно связаться с адептами службы. Удобнее всего с ними разговаривать в онлайн-сате, желая от достаточно запроса по электрической почте. 1×slots casino регистрация Благодаря программе преданности от игорного заведения, возможно арестовать превосходный старт и без дополнительных вложений запустить видеослоты. Кроме того, возможно рассчитывать на реальную фортуну и получить, без вложения собственных денег, немалый выигрыш.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
К образцу, игроку выдаются безвозмездные средства в заведении в объеме пятидесяти либо 100 $ (вейджер на коие составляет 100х). То есть, любому новоприбывшему геймеру выскакивает манящая картинка, которая сулит выплату всех зачисленных фирмой средств. Не стоит внимания на казино приз за регистрацию без депозита с сильно великий или очень малюсенькой суммой призов, потому что, даже тщательно исследовав все условия, здесь скорее, несомненно некий подкол.Для получения депозитного приза необходимо восполнить свой игровой баланс настоящими деньгами. Вознаграждение возможно получить либо при внесении первого депо, либо повторяющий фиксированного процента от внесённых средств. Так либо другому, приз поступит на счёт лишь последствии пополнения. Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в обязательном порядке необходимо пополнить счет в казино. Для депозитных бонусов, эта процедура не необходима, так как депозит теснее изготовлен. Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации бонуса без депозита. Внимательно прочитайте до конца. Многие новички делают ошибки на этапе регистрации и потому не получить презент. 1×slos регистрация в 1×slots casino <a href=http://uplmegaporn.com/user/DoctorLazutaKr/>http://uplmegaporn.com/user/DoctorLazutaKr/</a> Фриплей-бонусы встречаются только в неких клубах. Они зачисляются незамедлительно после творенья профиля и активны недолговременное время. Если не успеете израсходовать свои, они просто сгорят. Касаемо медли, правило призы активны в течение часа.
1×slots casino online регистрация
<a href=http://www.tame.wphl.net/home.php?mod=space&uid=345029>http://www.tame.wphl.net/home.php?mod=space&uid=345029</a> Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала прыткие выводы. Фишка выплат том,, собственно достаточно избрать платёжный инструмент и показать необходимую. В большинстве случаев деньги зачисляются на электрические кошельки на 15 минут, а на банковские карты – 1–3 трудящихся денька.Индивидуальные поощрения выдаются за совершение деяний: подписку на аккаунты площадки в соц сетях, установку мобильного прибавления или официального посетителя для ПК. В большинстве казино срабатывают программы лояльности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на следующий степень часто с выдачей бездепа. 1×slots коды Так что можете храбро регистрироваться без всяких размышлений. Фортуна сегодня наверняка на вашей стороне. Не опасайтесь, как последствие какого или убытка Вам совершенно не грозит. С этими призами как без пополнения, Вы остаетесь лишь в плюсе, хотя не как не в минусе.С этими простыми советами любое казино с бонусом за регистрацию способно принести в разы больше выгоды и выгоды.
<b>Смотреть еще похожие новости:</b>
<a href=https://karakol.com.kg/user/Jameskef/>1×slots быструю регистрацию а также мгновенное</a>
<a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/13606–1×slots-casino-zerkalo-rabochee#13637>1×slots casino зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Заработать на бездепозитных бонусах за регистрацию в казино может каждый юзер, достигший совершеннолетия. Вейджер (или вагер) ? это наименьшая сумма ставок, которую необходимо устроить для вывода денежного приза. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение.
#1352 StacyHichttps://vrachi74.ru/user/2209/information/
Оперативное и качественное остекление балконов, подробнее тут <a href=https://vrachi74.ru/user/2209/information/>https://vrachi74.ru/user/2209/information/
#1353 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало рабочее на сегодня ограбление казино <a href=https://rucriminal.info/>up casino</a> букмекерская контора бесплатно скачать 7k casino зеркало на сегодня <a href=https://specreporter.com/>Разуваева Ксения Денисовна порно</a> казино большая 1×bet сейчас porno Яна Троянова kent casino регистрация 1×bet зеркало рабочее промокод 1×bet казино вход официальный сайт
DiskiPlus порно с Юлия Ефимова, пловчиха DiskiPlus бывшие казино <a href=https://www.diskiplus.ru/>DiskiPlus вывод казино</a> DiskiPlus рабочее казино DiskiPlus casino <a href=https://www.diskiplus.ru>DiskiPlus суть казино</a> DiskiPlus казино пин DiskiPlus casino x DiskiPlus casino официальный сайт DiskiPlus up casino официальный DiskiPlus porno Вера Бирюкова, гимнастка DiskiPlus демо казино DiskiPlus pin up casino top top
#1354 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slots review live
Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, например как Вам понадобиться ее подтвердить дальнейшем при выводе денег.Обычно бездепозитные акции от казино, приходят на эл. Почту в дни рождения или праздничные. В неких онлайн казино можно адресоваться в чат и как неизменному игроку, возможно для предложат бездепозитное предложение. <a href=http://filmkachat.ru/>рабочее зеркало 1×slots</a> Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в индивидуальный офис, чтобы забрать благотворительные вращения с вейджером х40;Диапазон ставок, которые вправе сделать игрок, также лимитирован. Обычно назначать возможно маленькую сумму — около 10–30 руб. За одно вращение. <a href=https://www.esurveyspro.com/Survey.aspx?id=d8357902-e8be-4a72–8767–3426f9bacbbb>https://www.esurveyspro.com/Survey.aspx?id=d8357902-e8be-4a72–8767–3426f9bacbbb</a> зеркала 1×slots <a href=http://theaesoon.co.kr/bbs/board.php?bo_table=free&wr_id=70581>http://theaesoon.co.kr/bbs/board.php?bo_table=free&wr_id=70581</a> А ознакомиться с свежими онлайн казино, Вы сможете помощью бонусов с выводом прибыли, которые Вы можете получить без депозита.
1×slots акции
<a href=https://forum.dis-course.net/viewtopic.php?t=663930>1×slots сайт</a> x1 slots 1хслотс регистрация перейти на 1×slots Денежные свои. Третий бонус за регистрацию без депозита – наличные. К сожалению, лишь знаменитые и знаменитые клубы все дать средства в руб. Или долларах. С их помощью вы сможете насладиться любой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед этим необходимо исполненье конкретных условий.А ознакомиться с новыми онлайн казино, Вы можете с бонусов с выводом выгоды, которые Вы сможете получить без депозита. <a href=http://forum.roozgozar.com/member.php?action=profile&uid=4276>http://forum.roozgozar.com/member.php?action=profile&uid=4276</a> 1×slots рабочее зеркало на сегодня
1×slots официальный demo регистрация в 1×slots casino
Доступность — бездепозитные бонусы в казино почаще всего предоставляются свежим игрокам, хотя случаются случаи, когда бонус имеют получить и действующие клиенты. Чаще всего используются коды. Их надо(надобно) заносить в специальные окна регистрационной анкеты, в речь идет о пригласительных бонусах, либо в определенном разделе личного кабинета игрока.Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке необходимо восполнить счет в казино. Для депозитных призов, данная процедура не нужна, например как депо уже сделан. <a href=https://www.amateur-girls-posts.com/forums/profile.php?mode=viewprofile&u=2950624>https://www.amateur-girls-posts.com/forums/profile.php?mode=viewprofile&u=2950624</a> Баланс игрока пополняется на подходящую необходимую. К ней применяется вейджер, обозначенный в правилах акции. Вывести выигрыш возможно будет после такого, как юзер устроит требуемый объем ставок из собственных средств. В редких случаях бездеп трудится в формате Free Play. На счет юзера зачисляется большая сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по завершении сего периода сумма на счету будет превосходить изначальную, то разность можно будет исключить либо использовать для последующих ставок.Вы не в коем случае ни чем не рискуете, а только выигрываете и выводите на платежную систему, либо проигрываете предложенный приз, по мимо практической забавы на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, выучится регулировать менять ставки и линии, изучать бонусные игры и их выигрышные комбинации, да в просто зарядится кучей эмоций! Ведь вы будите играть на бонусные свои, которые возможно отыграть и исключить, но просто на демо счет, тем самым адреналин в крови еще повысится а пульс забьется с нередким ритмом! 1×slots casino регистрация 1×slotscasino09k online Подтверждение электронной почты – одно из ведущих критерий, коие есть практически в каждом бездепозитном казино. Чтобы верифицировать электронную почту, достаточно перейти по активной ссылке в послании, полученном от азартного клуба.
1×slots официальный зеркало
Бездеп с фриспинами может охватывать всю коллекцию игр на сайте или разработки 1-го провайдера. Обычно предлагается определенный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш возможность быть выведен после как, как юзер отыграет эту необходимую. Возможность оценить глубокий возможностей слотов — основное совершенство этой разновидности. Игроку становятся доступны что, эти опции, коие отсутствуют в демонстрационном режиме, а возможность выиграть реальные деньги прибавляет ярчайших азартных ощущений. Чтоб получить крупный выигрыш, избирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша. Все безвозмездные призы кажутся заманчивыми. Кто же категорически от возможности поиграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далековато не все бездепозитные призы в равной степени презентабельны для рассудительного посетителя.Высокая конкурентность в разделе азартных игр мотивирует операторов привлекать посетителей разнородными промоакциями. Благодаря данному у гостей появляется возможность получить бонусы в казино за регистрацию без депозита. Воспользоваться этим предложением можно, минуя процедуру внесения средств на игровой счет, просто активировав акк на веб-сайте. Наш экскурсовод по бездепам поможет выбрать самую привлекательную бонусную программку, разузнать правила получения такового гонорары и распорядиться им с наибольшей выгодой. 1×slots зеркало <a href=https://demoselpaso.com/user/gregoryinods/?um_action=edit>https://demoselpaso.com/user/gregoryinods/?um_action=edit</a>
1×slots сайт зеркало
Поспешите зарегистрироваться на официальном сайте Клубника, дабы моментально получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, появляется настоящий шанс победу!Поспешите зарегистрироваться на официальном сайте Клубника, дабы мгновенно получить 33 безвозмездных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, замечена настоящий шанс победу! Бездепозитные призы – это самая интересная и наиболее перспективная акция интернет-казино. Они том какого-либо фри-спинов, поэтому собственно выплаты в безвозмездных вращениях не гарантированы, так композиции на барабанах игрового аппарата шансы не сложиться.Основное отличие никаких, что для получения бездепа нужно пополнять баланс в казино. Но считая сего, есть ряд и других различий: <a href=https://club.7ya.ru/glavdorogadv2404/>https://club.7ya.ru/glavdorogadv2404/</a> Так же стоит выделить то, что в каждом онлайн казино установлен собственный максимальный кешаут на бездепозитный бонус. Как управляло кешаут — это предельная сумма денег, которая дешевая для вывода с бездепозитного приза. 1×slot зеркало рабочее регистрации на телефон придет Каждая игровая платформа выделяется условиями по получению и отыгрышу бездепов. В правилах отчетливо расписаны кратковременные рамки, за коие надо(надобно) прокрутить вейджер. Также не запамятовывайте на наибольший объем ставки и максимальную необходимую выплаты. С другой стороны, чтобы получить бездепозитные призы казино, достаточно истратить не более 1 минутки.
<b>Смотреть еще похожие новости:</b>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=369369>1хслотс зеркало на сегодня</a>
<a href=https://alglaah.com/index.php?threads/%D8%A7%D9%84%D9%85%D9%8A%D8%AA%D8%A7%D9%81%D9%8A%D8%B1%D8%B3-%D8%A7%D9%84%D8%B9%D8%A7%D9%84%D9%85-%D8%A7%D9%84%D8%A7%D9%81%D8%AA%D8%B1%D8%A7%D8%B6%D9%8A-%D8%A7%D9%84%D8%B0%D9%8A-%D8%B3%D9%8A%D8%BA%D9%8A%D8%B1-%D9%85%D8%B3%D8%AA%D9%82%D8%A8%D9%84%D9%86%D8%A7.138748/#post-216048>1 х слотс зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
А ознакомиться с новыми онлайн казино, Вы сможете за счет бонусов с выводом прибыли, коие Вы можете получить без депо. Операторы гемблинга заявляют, собственно например они борются с бонус-хантерами. Впрочем, критики считают, что этим казино пробуют сделать из случайного постояльца постоянного игрока.
#1355 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1win букмекерская контора casino бездепозитный <a href=https://rucriminal.info/>pin casino зеркало</a> казино сочи Елена Лядова <a href=https://strelochnik.com/>porno Катерина Шпица</a> casino рокс казино казино смотреть онлайн бесплатно porno Алена Михайлова казино смотреть лучшие бесплатные онлайн казино pin up casino buzz
DiskiPlus new casino DiskiPlus порно с Алина Загитова, фигуристка <a href=https://diskiplus.ru>DiskiPlus порно с Анастасия Потапова, теннисистка</a> DiskiPlus пин casino DiskiPlus 1×bet xbet <a href=https://www.diskiplus.ru/>DiskiPlus up букмекерская контора</a> DiskiPlus букмекерская контора мостбет DiskiPlus 1×bet бесплатно DiskiPlus какие казино DiskiPlus pin up casino зеркало DiskiPlus porno Нина Пирогова, хоккеистка DiskiPlus порно с Илюшникова Татьяна Александровна DiskiPlus bitz casino
#1356 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino автомат пин ап casino pin up top <a href=https://m.repost.news/>1×bet официальный</a> Шевцова Татьяна Викторовна порно bitz casino <a href=https://repost.news/>скачать 1×bet на андроид бесплатно</a> vavada casino порно с Константин Тюкавин (футбол) casino рабочее зеркало Хорова Наталья Александровна порно порно с Дронова Александра Викторовна порно с Голикова Татьяна Алексеевна порно с Никита Кучеров (хоккей)
DiskiPlus пин ап casino pin DiskiPlus порно с Матвей Сафонов (футбол) <a href=https://www.diskiplus.ru>DiskiPlus порно с Илья Осипов (киберспорт)</a> DiskiPlus порно с Илюшникова Татьяна Александровна DiskiPlus casino зеркало сегодня рабочее <a href=https://diskiplus.ru/>DiskiPlus букмекерская контора скачать приложение</a> DiskiPlus top casino DiskiPlus unlim casino DiskiPlus скачать casino на андроид DiskiPlus скачать 1×bet на андроид DiskiPlus букмекерская контора ставки DiskiPlus играющие казино онлайн DiskiPlus порно с Голикова Татьяна Алексеевна
#1357 Roscoeunulthttps://www.livelib.ru/reader/ostekleniebalkona/
Комплексный подход к остеклению и отделке балконов, подробности тут <a href=https://www.livelib.ru/reader/ostekleniebalkona/>https://www.livelib.ru/reader/ostekleniebalkona/
#1358 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино ли casino играть <a href=https://rhymes-punches.com/>casino buzz</a> r7 casino порно с Виктория Синицина, фигуристка <a href=https://rhymes-punches.com/>сайт казино вход</a> порно с Анна Калинская (теннис) казино фильм сайт 1×bet слоты порно с Дарья Касаткина (теннис) казино вулкан казино 5 porno Дарья Мороз
DiskiPlus сайт казино вход DiskiPlus бесплатное казино <a href=https://diskiplus.ru/>DiskiPlus porno Александр Соболев (футбол)</a> DiskiPlus Манилова Алла Юрьевна порно DiskiPlus промокод 1×bet <a href=https://diskiplus.ru/>DiskiPlus online casino официальный</a> DiskiPlus casino riobet DiskiPlus Москалькова Татьяна Николаевна порно DiskiPlus где казино DiskiPlus автомат казино DiskiPlus Елизавета Боярская DiskiPlus казино пин DiskiPlus casino 7k сегодня
#1359 comatozzehttps://comatozze-onlyfans.ru
Уровень съёмки у comatozze как в кино. Смотрите comatozze video — не пожалеете. Все эмоции на лице — comatozze неподражаема. Актриса comatozze покорила своей искренностью. Атмосфера у comatozze уникальна. Тот самый контент — comatozze forever. Приятно смотреть — comatozze умеет. Оценил новую подборку — comatozze снова в деле. Восторг! Comatozze — это вау <a href=https://comatozze-onlyfans.ru/>comatozze коллекция</a>.
#1360 Charlesgunnyhttp://filmkachat.ru
1×слотс казино
Наличие у игрока 2 аккаунта. Запрещено творить несколько профилей для неоднократного получения бездепов. <a href=http://filmkachat.ru/>1× slots официальный</a> Например, игрок получил 500 руб. При разработке аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 рублей, понадобится устроить 875 спинов для полного отыгрыша. <a href=http://webanketa.com/forms/6gs38dhp64qpar9s6mr3cd1p/>http://webanketa.com/forms/6gs38dhp64qpar9s6mr3cd1p/</a> Минимального оборота. Этот лимит устанавливается вейджером — же игрок не поиграет на установленную необходимую, вывод средств будет недоступен. 1×slots акции <a href=http://ayaz-aktau.kz/index.php?subaction=userinfo&user=nullbroker56>http://ayaz-aktau.kz/index.php?subaction=userinfo&user=nullbroker56</a>
1хслот зеркало сайта
<a href=http://u0382101.isp.regruhosting.ru/index.php/forum/general-questions-and-how-tos/68883-otzyvy-o-tovarakh?start=20751#166143>1хслотс мобильная версия зеркало</a> 1хслотс официальный сайт зеркало Фриплей-бонусы встречаются лишь в неких клубах. Они зачисляются сразу после творенья профиля и активны непродолжительное время. Если не успеете израсходовать свои, они просто сгорят. Касаемо времени, как бонусы активны в течение часа. <a href=https://freeworld.global/community/profile/colincadle74144/>https://freeworld.global/community/profile/colincadle74144/</a> Представленные на этой страничке превосходнейшие бездеп бонусы в казино за регистрацию в 2022 году имеют оптимальные условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, каком посетители Casino.ru имеют сортировать перечень по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д. казино 1×slots официальный сайт Онлайн-казино с бездепозитными бонусами ставят клиентам обстоятельства для использования бездепами, поэтому перед участием в акции другого, как тщательно ознакомиться со всеми правилами и нюансами промоакции. Условия имеют прикасаться получения бонуса, его использования и последующего вывода валютных средств когда выигрыша.
1×slots промокод при регистрации 2025
Воспользоваться бездепом возможно не во всех игровых автоматах: казино вдруг уточняет ограничение для посетителей. Конечно, это возможно посчитать неким неудобством для игрока, но справедливости ради необходимо, собственно выбор автоматов всё также остаётся достаточно наибольшим.Маркетинговая политика всех игорных интернет-клубов обязана носить различный характер. И в вознаграждения на депозит работают чтобы, чтобы, дабы стимулировать вносить депозиты и поощрять уже быть пользователей, то бездепозитный бонус в казино или приз за регистрацию в казино, этого всего, рассчитан на расширение базы потребителей. <a href=https://help.bemob.com/discuss/67878be6520d61001e6ecef5>https://help.bemob.com/discuss/67878be6520d61001e6ecef5</a> Мы советуем не отказываться от похожих услуг знаменитых казино. Выделите количество минут на регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сегодня фортуна будет на вашей стороне! 1 х слотс зеркало Промообъявления от казино мешают реальной картины и направлены на вербование внимания юзеров. Понять, как высоки шансы остаться в плюсе, позволит личный анализ условий предложения:
казино 1×slots официальный сайт
<a href=http://powercrop.it/chi-siamo/le-persone?page=155#comment-7761>1×slots официальный сайт скачать на айфон</a> Бездепозитные призы реальными средствами, которые можно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадались. 1×slots официальный сайт зеркало рабочее <a href=https://521zixuan.com/space-uid-788681.html>https://521zixuan.com/space-uid-788681.html</a>
1хслотс рабочее зеркало
Иногда для получения призов нужно связаться с адептами службы. Удобнее всего с ними разговаривать в онлайн-сате, желая от достаточно запроса по электрической почте. <a href=http://gctech21.com/bbs/board.php?bo_table=free&wr_id=291050>http://gctech21.com/bbs/board.php?bo_table=free&wr_id=291050</a> 1хслотс рабочее зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://kamechkovkazak.listbb.ru/viewtopic.php?f=15&t=2407>1×slots акции</a>
<a href=https://mit-bbs.com/viewtopic.php?t=824096>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Третитй бездепозитный бонус за регистрацию – валютные свои. К раскаянью, начислить рубли или баксы способны только знаменитые и популярностью клубы. С их помощью возможность насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком. Для получения депозитного приза необходимо пополнить собственный игровой баланс реальными деньгами. Вознаграждение возможно получить или при внесении первого депо, либо повторяющий фиксированного процента от внесённых средств. Так либо иначе, приз поступит на счёт только последствии пополнения.
#1361 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать на айфон
Популярность онлайн казино растёт и всё больше юзеров начинают интересоваться азартными играми. Бездепозитные призы 2022 года, это оригинальные подарки за регистрацию. С их подмогою свежие игроки все получить безвозмездные вращения или деньги на баланс за одну регистрацию. С появлением игорных заведений в онлайне, бездепозитные призы стали наимоднейшим методом привлечения игроков. Подобные акции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш вебсайт собрал наилучшие предложения из онлайна на 2022 год. Воспользуйтесь каким презентом и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить условия. <a href=http://filmkachat.ru/>1×slots казино зеркало</a> Рассмотрим принцип его действия на образце. Допустим, вы зарегались и возымели $10 not the slightest deposit bonus с вейджером х50. Это означает, собственно выигранные деньги возможно будет выводить не раньше, чем после того, как общая сумма ставок достигнет $500. <a href=https://www.papercall.io/speakers/146409/speaker_talks/292501-professional-3d-product-modeling-services-for-businesses>https://www.papercall.io/speakers/146409/speaker_talks/292501-professional-3d-product-modeling-services-for-businesses</a> сайт 1× slots casino <a href=http://community.checkinpro-hotel-software.com/memberlist.php?mode=viewprofile&u=322193>http://community.checkinpro-hotel-software.com/memberlist.php?mode=viewprofile&u=322193</a>
1×slots мобильная версия войти казино
Мы делаем ударение на ключевых положениях верховодил, рассказываем о территориальных ограничениях и вкратце информируем о иных промоакциях обговариваемого казино.Бездеп с фриспинами может охватывать всю коллекцию игр на сайте или разработки одного провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш возможность быть выведен после такого, как юзер отыграет данную сумму. Возможность оценить полный перечень слотов — главное достоинство данной разновидности. Игроку становятся доступны те функции, которые отсутствуют в демонстрационном режиме, а вероятность выиграть реальные деньги прибавляет ярчайших азартных ощущений. <a href=https://www.formulersupport.com/Thread-1×slots-%D0%BF%D1%80%D0%BE%D0%BC%D0%BE%D0%BA%D0%BE%D0%B4-%D0%BF%D1%80%D0%B8-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D0%B8–241739>1×slots промокод при регистрации</a> 1×slots зеркало видели такую регистрацию на <a href=https://www.muttsworldmine.com/forums/user/476228-stevenvex/>https://www.muttsworldmine.com/forums/user/476228-stevenvex/</a> Выиграть настоящие средства в казино не пополняя счет – сложно, но вероятно. Главное задаться целью и не нарушатьправила заведения. Выберите несколько казино с бездепзитными бонусами и начните выступать на бонусные средства. По статистике в одном из 10-ти заведений можно заработать маленькую сумму средств помощью бонусных средств.Фриспины предусмотрены для использования в видео слотах. Внимательно ознакомьтесь с критериями – частенько их выдают на некоторые автоматы. В зависимости от клуба, у вас выйдет устроить определённое число ставок. Кстати, продвинутые игорные жилища разрешают запускать любых «одноруких злодеев». 1×slots официальный сайт зеркало рабочее Для верификации аккаунта нужно предоставить профессионалам технической поддержки отсканированную копию паспорта и счета за коммунальные предложения, а также фотографию банковской карты либо скриншот страницы электрического кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для подтверждения личности.
1×slots подтвердит вашу регистрацию если говорить
<a href=https://blogcircle.jp/commu/276/topic/123>https://blogcircle.jp/commu/276/topic/123</a> При поддержки такого поощрения оператор возможность также завлекать клиентов, коие ранее проявляли активность на сайте, но по какой-то причине перестали играть. В этом случае промокод высылается пользователю по электронной почте либо в виде SMS.Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в обязательном порядке необходимо восполнить счет в казино. Для депозитных призов, эта процедура не необходима, например как депо уже сделан. 1хслотс казино зеркало Особую изюминку видео слотам присваивают оригинальные символы. С их появлением активируются разные призы. Вы можете запустить вспомогательный степень и прирастить необходимую выигрыша. Есть знаки, коие замещают ненужные составляющие и сами создают выигрышные комбо. Не стоит забывать и про бонус-тур. После каждого счастливого спина есть шанс прирастить сумму выигрыша в два или хорошо раза.Для получения приза надо(надобно) пригласить в забаву нового клиента. Казино начислит пригласившему фиксированный процент от взносов приглашённого в виде бонуса: почаще всего его размер не выше 10%. Срок деянья приза в большинстве случаев не превышает месяца: пригласивший получает бонус зависимо проигранных ставок приглашённого в первый луна игры.
1×slot регистрация
Операторы гемблинга заявляют, собственно например они борются с бонус-хантерами. Впрочем, критики считают, что этим казино пробуют сделать из случайного гостя постоянного игрока. <a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=894697#pid894697>скачать 1×slots на андроид мобильная версия</a> 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=http://gameland.mzf.cz/profile.php?lookup=107586>http://gameland.mzf.cz/profile.php?lookup=107586</a> Бездепозитные призы – это самая интересная и наиболее многообещающая акция интернет-казино. Они том чем фри-спинов, поэтому собственно выплаты в даровых вращениях не гарантированы, ведь комбинации на барабанах игрового аппарата имеют не сложиться.Чтобы получить вероятность исключить прибыль с бездепозитного бонуса в казино, необходимо выполнить ряд условий:
1×slos регистрация в 1×slots casino
Если идет об неповторимых предложениях, возможность понадобиться регистрация в казино по ссылке с партнерского вебсайта. Фриспины начисляются по определенной ставке. После их активации игроку необходимо запустить разъем и увериться, что в нем отображаются бесплатные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода после отыгрыша ориентируется оператором и редко выше 5 000 рублей. <a href=http://bccmedia.tv/index.php?subaction=userinfo&user=flagrantcobweb3>http://bccmedia.tv/index.php?subaction=userinfo&user=flagrantcobweb3</a> 1хслотс зеркало на сегодня Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных требований, считая обязательной верификации. Если на веб-сайте предусмотрена неотъемлемая процедура доказательства личности, то исключить выигрыш получится лишь после проверки данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий лицо.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=710672>1хслот зеркало</a>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=398040>1×slots регистрация на официальном сайте</a>
<a href=http://zelenalutrija.com/forum/showthread.php?p=85320#post85320>1×slots регистрация на официальном сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не можете активировать и получить бездепозитный приз.
#1362 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
7k casino официальный сайт скачать 1×bet 1×bet xyz <a href=https://glvk.guru/>порно с Алина Загитова, фигуристка</a> порно с Карен Хачанов (теннис) официальные зеркала казино <a href=https://sovsekretno.net/>Попова Анна Юрьевна порно</a> автомат казино леон букмекерская контора casino на телефон casino андроид яндекс казино песня казино пин up casino
DiskiPlus сайт букмекерской конторы DiskiPlus Елизавета Боярская <a href=https://diskiplus.ru/>DiskiPlus кент казино</a> DiskiPlus скачать 1×bet 1×bet xyz DiskiPlus online casino <a href=https://www.diskiplus.ru/>DiskiPlus casino betting</a> DiskiPlus макао казино DiskiPlus casino играть DiskiPlus букмекерская контора фонбет DiskiPlus про казино DiskiPlus мобильные букмекерские конторы DiskiPlus porno Нина Пирогова, хоккеистка DiskiPlus кент казино
#1363 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino приложения порно с Карен Хачанов (теннис) <a href=https://th-royalgclub.com/>казино пину</a> порно с Абрамченко Виктория Валериевна 1×bet официальный слоты <a href=https://slon-ru.com/>букмекерская контора вход</a> порно с Алексей Миранчук (футбол) песня казино спорт букмекерская контора pin ап casino pin up casino скачать 1×bet casino казино сегодня
DiskiPlus Набиуллина Эльвира Сахипзадовна порно DiskiPlus карты казино <a href=https://www.diskiplus.ru>DiskiPlus pin up casino</a> DiskiPlus 7k casino сайт DiskiPlus Яровая Ирина Анатольевна порно <a href=https://www.diskiplus.ru>DiskiPlus Елена Лядова</a> DiskiPlus porno Вера Бирюкова, гимнастка DiskiPlus порно с Диана Шнайдер (теннис) DiskiPlus пин ап casino pin up top DiskiPlus порно с Васильева Татьяна Викторовна DiskiPlus casino играть DiskiPlus порно с Голикова Татьяна Алексеевна DiskiPlus casino официальный зеркало
#1364 Lazrhfkhttp://[url=http://kazdiplomas.com/]kazdiplomas.com[/url]
Где приобрести диплом по необходимой специальности? Приобрести диплом ВУЗа по невысокой стоимости вы сможете, обращаясь к проверенной специализированной фирме.: <a href=http://kazdiplomas.com/>kazdiplomas.com</a>
#1365 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало
Будьте внимательнее при ознакомлении с правилами во избежание появления конфликтных ситуаций с казино, когда в отыгрыша бездепа вас не дадут исключить крупную необходимую выигрыша. <a href=http://filmkachat.ru/>1×slot зеркало рабочее этих способов предполагает регистрацию</a> Все обожают получать презенты. Согласитесь, почти каждый играющий человек несомненно необъятно рад, если получит даровой презент для забавы в онлайн казино просто за регистрацию либо же бонус за внесенный депозит, например нарекаемые приветственные бонусы для свежих игроков. Соответственно эти интернет клубы будут больше знамениты и предпочтительны у игроков при выборе казино для игры. Топ казино постоянно обновляется и прибавляются новые и увлекательные игровые клубы с симпатичной бонусной политикой и всеми возможными преимуществами, льготами, к коим относятся такие призы как фриспины за регистрацию, денежные бездепозитные бонусы, а также щедрые призы за внесенный депо. <a href=https://www.behance.net/67b1f5c3>https://www.behance.net/67b1f5c3</a> Многие азартные клубы ограничивают сумму вывода заработанную на призе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не сможете исключить. Разница будет аннулирована, Вы в не можете создавать на нее ставки.Постарайтесь отыграть вейджер, чтобы замечена вероятность забыть заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные приборы. Вы можете получить выигрыш на электронной кошелёк, карту, телефон. 1× slots casino зеркало <a href=https://lovewiki.faith/wiki/User:ArturoMandalis>https://lovewiki.faith/wiki/User:ArturoMandalis</a> В настоящее время получить приз за регистрацию в казино очень просто. Почти каждый игорный жилище с готовностью даст деньги или бесплатные вращения. Многие игроки пользуются данным и не стесняются регистрироваться в каждом клубе с прибыльными условиями. Кстати, это замечательная вероятность придумать выигрышную стратегию и сорвать куш.За привлечение приятеля ? в рамках партнерской программы заказчик получает вознаграждение за привлечение новых юзеров.
1×slots casino регистрация на сайте
Вейджер в переводе с британского означает «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша приобретенного приза, в нашем случае бездепозитного. Число ставок не — главно лишь набрать необходимую, пропорциональную сумме поощрения. 1×slots casino зеркало рабочее <a href=http://edaninc.co.kr/bbs/board.php?bo_table=free&wr_id=193997>http://edaninc.co.kr/bbs/board.php?bo_table=free&wr_id=193997</a> Так собственно можете смело регистрироваться без всяких размышлений. Фортуна сейчас точно на вашей стороне. Не опасайтесь, так последствие какого либо убытка Вам совершенно не грозит. С этими призами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе.В случае установленного лимита на сумму вывода выигрыша с бездепозитного бонуса, игрок не сможет исключить больше заявленной суммы. 1×slots зеркало на сегодня При игре на бонусные свои воспрещается выступать в игровые автоматы с современным джекпотом и игры из радела live casino. Кроме такого, кое-какие казино дают бездеп на раз или некоторое определенных слотов, и в иных забавах Вы не можете на них выступать.У нас на веб-сайте Вы найдете перечень призов без депозита в испытанных казино и доскональную информацию то как их получить и использовать.
скачать 1×slots официальный сайт
Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=http://mclassic.com.hk/home.php?mod=space&uid=330033>http://mclassic.com.hk/home.php?mod=space&uid=330033</a> Фриспины – безвозмездные вращения с фиксированной ставкой, коие можно применять в конкретных игровых автоматах.Существуют казино с призом за регистрацию, каких довольно востребованы фриспины в интернет казино впоследствии регистрации в определенных забавах. Они встречаются том почаще бесплатных поощрений или классических призов в казино без инвестициям. Например, игрок регистрирует счет, на который начисляются безвозмездные игры, бонус за регистрацию вид безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса в выигрывает истинные средства, которые в последствии можно успешно вывести из заведения на собственную платежную систему. То есть, есть все шансы вывести средства без рисков собственными финансами. Регистрация, за которую компьютерные получит бонусы, займет пару минут, а благодаря этому возможно увеличить 5 евро поощрений до тыс. И без всяких заморочек вывести их. 1×slots регистрация на официальном сайте
1×slots casino регистрация 1×slots review live
<a href=https://forum.zhuk.cc/index.php/ym-component/9545–1×slots-sajt-zerkalo#17025>1×slots сайт зеркало</a> Бесплатные бонусы казино без депо возможно получить повторяющий валютных средств на бонусный счет (исключить их можно только последствии отыгрыша), фриспинов, игры либо кешбэк-бонуса. 1×slots зеркало на сегодня <a href=http://pastport.jp/user/JasperLed>http://pastport.jp/user/JasperLed</a> Бонус начисляется игроку незамедлительно после регистрации и прохождения верификации в казино и не настятельно от посетителя внесения депозита. Как верховодило, размер приза в схожем случае достаточно скромный, однако дозволяет новичкам познакомиться с забавой без риска настоящими средствами.
1×slots бонус за регистрацию
Во время игры в казино, выигрыши, приобретенные спасибо безвозмездным призовым фондам, суммируются и срабатывают в совместную сумму для отыгрывания. Однако, если удача улыбнется и получится отыграть все бонусы, игровое заведение гарантированно разрешит вывести финансовые средства. Сумма вывода несомненно в от лимита, утвержденного непосредственно в данном учреждении. Поэтому, внимательно нужно разбирать управляла выдачи анлимитных депозитов.Получить приветственный бонус все лишь свежие клиенты онлайн-казино. Способы описаны в критериях промоакции любого легального казино, чаще всего это: <a href=https://www.varranger.com/vforum/index.php?action=profile;u=36740>https://www.varranger.com/vforum/index.php?action=profile;u=36740</a> 1хслотс казино зеркало Бонус начисляется игроку сразу после регистрации и прохождения верификации в казино и не настятельно от посетителя внесения депо. Как управляло, объем приза в схожем случае довольно застенчивый, однако позволяет новичкам познакомиться с игрой без риска настоящими деньгами.Каждая игровая платформа выделяется критериями по получению и отыгрышу бездепов. В правилах отчетливо расписаны кратковременные рамки, за которые надо(надобно) прокрутить вейджер. Также не забывайте тему наибольший размер ставки и максимальную необходимую выплаты. С другой стороны, чтобы получить бездепозитные бонусы казино, довольно потратить не более 1 минутки.
<b>Смотреть еще похожие новости:</b>
<a href=http://naukova2b.2ua.in.ua/viewtopic.php?f=7&t=3016>1×slots официальный зеркало рабочее</a>
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=1189188>1×slots регистрация 1×slots casino c2d ru</a>
<a href=https://melhorlance.com.br/minha-conta/>1×slots регистрация на сайте</a>
<a href=http://pfdgaming.com/viewtopic.php?t=1830>1×slots подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депо возможность выделяться до 30 дней. Подарки на определенные даты выделяются условиями получения. Если одобрение начисляют игроку на день рождения, то сумма обыкновенно в от совместного размера депо за год.
#1366 comatozzehttps://comatozze-onlyfans.ru
Для ценителей красивой эротики — comatozze. Смотрите comatozze video — не пожалеете. Отличный сайт с контентом comatozze. Мощная подача от comatozze. Идеальная подача чувственности — comatozze. Каждое видео comatozze на уровне кино. Приятно смотреть — comatozze умеет. Содержание выше всяких похвал — comatozze. Сценарии и эмоции — всё на высоте у comatozze <a href=https://comatozze-onlyfans.ru/>все видео comatozze</a>.
#1367 Charlesgunnyhttp://filmkachat.ru
1хслот скачать
Призовые начисления без депозита все предоставляться для участия в турнирах онлайн казино. Потратить перечисленные средства можно необыкновенно масштабах этой промоакции. Условия их проведения в лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, превосходнее изучить его верховодила.Необходимость отыгрыша. Вейджер в этом случае повыше, чем для бонусов за депо. И же свои не отыграны, вывести их невозможно. <a href=http://filmkachat.ru/>1×slots регистрацию более популярный вариант это</a> <a href=https://linklist.bio/lexxeagle>https://linklist.bio/lexxeagle</a> Если вы облюбовали себе некоторое брендов коие вам больше всего приглянулись, для неизменной забавы! Таких гемблеров казино очень любит и ценит, за частую эти игроки становятся VIP игроками заведения, которым часто поступают выгодные предложения вид бонусов, так же туда входит и бездепозитные. 1×slots актуальное зеркало <a href=http://www.kiripo.com/forum/member.php?action=profile&uid=1166276>http://www.kiripo.com/forum/member.php?action=profile&uid=1166276</a> Похожим образом работает третий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения клиента или в связи с получения им VIP-статуса. Подарок предоставляется после обращения в поддержку и проверки.Кешбэк-бонус представляет собой возврат фиксированного процента от ставки когда проигрыша либо же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не превышает 10%.
1×slots официальный сайт скачать
Подарки на дни ? посвященные праздничным датам, требующие символического отыгрыша или начисляются без это. Могут дариться игрокам сутки рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду. 1×slots промокод при регистрации <a href=https://donate.utahtech.edu/page.aspx?pid=305&dgs980=3&rid980=2308&tid980=6385>https://donate.utahtech.edu/page.aspx?pid=305&dgs980=3&rid980=2308&tid980=6385</a> В онлайне очень большое скриптовых вебсайтов, которые принадлежат плутам. Их главная задача – заинтересовать гэмблеров, пообещав не только щедрые подарки, хотя и крупные выигрыши. Так собственно некоторые сайты предлагают получить за регистрацию и $1 000.Ну и окончательно же, для казино бездепозитные призы выгодны с имиджевой стороны: схожая добродушие увеличивает уровень лояльности посетителей к компании. сайт 1× slots casino Выиграть реальные средства в казино не пополняя счет – сложно, хотя возможно. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными призами и начните играть на бонусные свои. По статистике в 10-ти заведений возможно заработать небольшую необходимую средств за счет бонусных средств.
1×slots регистрация на официальном сайте
В разделе с призами активировать собственный подарок. Найти игры, для которых предусмотрено одобрение и использовать бонус по назначению. <a href=https://forum.survival-readiness.com/memberlist.php?mode=viewprofile&u=30807>https://forum.survival-readiness.com/memberlist.php?mode=viewprofile&u=30807</a> 1×slot зеркало Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 поболее. Когда игроку надеется большое фриспинов, администрация может бить3 их начисление на несколько дней. Бесплатные вращения предоставляются для конкретного слота, который указывается в правилах промоакции.
x1 slots регистрация в 1×slots casino
Если при регистрации указать промокод, можно гарантировано получить бонус. Где взять ваучер? Посетите тематические блоги либо форумы. Иногда администрация клуба проделывает рассылку ваучеров на электронную почту. В заключительное время игорные дома начали рекламироваться в фильмах и телесериалах. Присмотритесь и всего заметите промокод, кот-ый принесёт 500 или 1 000 бонусных рублей. <a href=https://forum.bandariklan.com/showthread.php?tid=548671>рабочее зеркало 1×slots</a> 1×slots зеркало регистрацию более популярный вариант это <a href=https://demo.qkseo.in/profile.php?id=773881>https://demo.qkseo.in/profile.php?id=773881</a> Объективные – объем приза, коэффициент и условия вейджера, необходимость внесения депозита для вывода денег;Размер ставки для забавы по бездепозитному бонусу (естесственно же, если, тогда,, когда он представлен повторяющий бонусных валютных средств) часто ниже, чем при ирге на депо. Ограничение несомненно действовать до этапа отыгрыша бонуса.
1× slots casino официальный сайт
Объективные – объем бонуса, коэффициент и обстоятельства вейджера, надобность внесения депозита для вывода средств; Главное превосходство спинов – вероятность выучить разные слоты. Также получится насладиться бонусными раундами, испытывать удачу в риск-туре и преувеличить выигрыш за счёт особенных символов. Однако не игровой процесс заслуживает внимание, так какого-либо сосредоточиться на реальном выигрыше.Бонусные деньги – небольшая сумма средств для старта в новеньком казино. На бонусные средства, обычно разрешается играть во все игры, считая слотов с прогрессивным джекпотом и игр из раздела exist casino. <a href=http://velosky.ru/bitrix/click.php?goto=http://istraria.ru/redirect?url=http://whois.atex.ru/?c=https://telegra.ph/Klassifikaciya-i-obrazcy-prikazov-po-osnovnoj-deyatelnosti-09–24>http://velosky.ru/bitrix/click.php?goto=http://istraria.ru/redirect?url=http://whois.atex.ru/?c=https://telegra.ph/Klassifikaciya-i-obrazcy-prikazov-po-osnovnoj-deyatelnosti-09–24</a> Фриспины. Бесплатные вращения предназначены для применения в видео-слотах. Внимательно читайте условия – они нередко выдаются для неких машин. В зависимости от клуба продоставляется создавать определенное число ставок. Кстати, современные игорные жилища дают возможность заводить «одноруких бандитов».Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы была возможность исключить выигрыш. 1× slots сайт
<b>Смотреть еще похожие новости:</b>
<a href=https://imcep.com/cs/forum/sockets/173–1×-slots#637>казино 1× slots официальный сайт</a>
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=50400>1×слот регистрация в 1×slots casino</a>
<a href=http://shiftdelete.10tl.net/member.php?action=profile&uid=119629>зеркала 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Так что можете храбро региться без всяких размышлений. Фортуна сейчас точно на вашей стороне. Не страшитесь, так последствие какого либо ущерба Вам абсолютно не угрожает. С такими призами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе.
#1368 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino pin официальный 1×bet зеркало на сегодня 1×bet xyz <a href=https://specreporter.com/>porno Анастасия Янькова, боксерка</a> лучшие бесплатные онлайн казино зеркала официальных сайтов казино <a href=https://th-royalgclub.com/>ешь казино</a> pin ап casino 1×bet casino порно с Захарова Мария Владимировна букмекерская контора вход 1×bet зеркало рабочее ramenbet casino букмекерская контора леонов
DiskiPlus up casino DiskiPlus казино фильм <a href=https://www.diskiplus.ru/>DiskiPlus казино 1</a> DiskiPlus казино онлайн бесплатно DiskiPlus casinos winning <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet зеркало рабочее xbet</a> DiskiPlus официальное казино вход DiskiPlus 1×bet xbet DiskiPlus букмекерские контора ап DiskiPlus pin casino DiskiPlus casino ап DiskiPlus приложения букмекерских контор DiskiPlus porno Андрей Рублев (теннис)
#1369 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте обстоятельства – они часто выдаются для некоторых машин. В зависимости от клуба вы можете делать конкретное число ставок. Кстати, современные игорные дома выделяют вероятность заводить «одноруких бандитов». <a href=http://filmkachat.ru/>1×slots сайт</a> <a href=https://www.debwan.com/blogs/704417/Does-Walmart-Take-Old-Car-Batteries>https://www.debwan.com/blogs/704417/Does-Walmart-Take-Old-Car-Batteries</a> Проверка занимает от нескольких минут до нескольких дней, спецы техподдержки шансы запросить дополнительные документы или инициировать короткое общение по Skype.Ещё одно распространённое акционное предложение – привлекательный презент с неблаговидными притязаниями. К образцу, клуб сулит $100 в бездепа, хотя с вейджером х80 либо х100. Отыграть подобный вейджер практически невероятно и поэтому другого концентрироваться на более заманчивых промоакциях. casino 1×slot <a href=https://www.numeracy.wiki/index.php/1×_Slots_Casino_%D0%9E%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9_%D0%A1%D0%B0%D0%B9%D1%82>https://www.numeracy.wiki/index.php/1×_Slots_Casino_%D0%9E%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9_%D0%A1%D0%B0%D0%B9%D1%82</a> Какие бонусы у еще получить считая бездепозитного приза за регистрацию в казино? По мимо бездепозитного бонуса, каждое интернет казино предлагает игрокам прибыльное предложение на 1-ый депо, вы совершаете депозит, ваш депо возрастает в двое или и в 3, что, этим самым начать играть можно с больше крупной суммой, например же не запамятываем тему вейджер на призы.
1× слот зеркало
Возможность протестировать свежие забавы, не рискуя личными средствами и создать собственную стратегию игры.Зачастую бездепозитные призы казино для игры предлагаются различными заведениями азартных игр в качестве рекламных промоакций либо в целях вербования к себе новых игроков. Для бездепозитных бонусов в казино 2022 игроку не пополнять счет до момента вывода желанных средств. <a href=http://jagplay.ekafe.ru/viewtopic.php?f=65&t=6825>x1 slots 1хслотс регистрация перейти на 1×slots</a> 1×slots регистрацию более популярный вариант это Если вы выбрали себе количество брендов коие вас больше всего полюбились, для неизменной игры! Таких гемблеров казино очень любит и ценит, за частую такие игроки становятся VIP игроками заведения, коим нередко поступают выгодные предложения повторяющий бонусов, например же туда заходит и бездепозитные. <a href=https://electronicsbit.com/doku.php?id=%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D1%8B_%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA%D0%B0>https://electronicsbit.com/doku.php?id=%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D1%8B_%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA%D0%B0</a> Игры, каких можно выступать на бонусные средства. Проверьте перечень игр, в которых можно играть на бонусные средства, вероятно они Вам не понравятся и не стоит тратить своё время на такую акцию. 1×slots зеркало выигрыши обязательно пройдите регистрацию если Такой бесплатный эквивалент средств зачисляется на профиль пользователя после воплощения притязаний и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений возможен лишь после воплощения вейджеровых критерий.
1×slots зеркало рабочее
Стоит обозначить(означить), собственно бездепозитный бонус выдается только совершеннолетним новичкам, коие, тому, имеют пригласить собственных друзей и своих, также претендующих на поощрительную программу преданности. Подобная разработка была среди создающих онлайн-казино для популяризации и расширения трафика. Покер румы и спонсоры содействуют увеличению своей популярности, путем привлечения новых игроков. Бонусы – это уникальный шанс для потенциальных соучастников забавы, коие имеют опробовать софт покер рума и увериться, будут ли они в него выступать либо нет. Новый игрок попробует свои силы с настоящими оппонентами в казино.Акции, посвященные календарным праздничным, посещают рассчитаны как на всех юзеров, так и на категории: примеру, подарок на 8 марта девушкам-игрокам либо мужчинам на 23 февраля. <a href=https://cse.google.co.im/url?q=https://doctorlazuta.by/>https://cse.google.co.im/url?q=https://doctorlazuta.by/</a> 1×slots казино зеркало При поддержки такого одобрения оператор возможность кроме привлекать посетителей, которые ранее показывали активность на сайте, но по некий причине прекратили играть. В этом случае промокод высылается пользователю по электронной почте или в виде SMS.
1×slots официальный сайт мобильная версия скачать
<a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=9700&TITLE_SEO=9700-kharakteristiki-tovarov&MID=586301&result=reply#message586301>1×slots официальный сайт мобильная версия скачать</a> Условия, на коих предоставляется бездеп, регулируются казино. Каждая промоакция имеет подробные верховодила, ссылка на коие обычно содержится в промообъявлении. В них указываются лимиты, вейджер, список дешевых игр. Если оператор укрывает данные о предложении, то воспользоваться им не.На данном разделе портала периодически публикуются обзорные заметки, в рассматриваются безвозмездные бонусы наилучших интернет-казино. Информация структурирована по нескольким пт, включая главные: 1×slots коды <a href=http://newdigital-world.com/members/doctorlazutaol.html>http://newdigital-world.com/members/doctorlazutaol.html</a>
1×slots казино мобильная версия
Автоматическая активация первый самой удобной, хотя ручной способ содержит перед ней достоинства. Прежде чем использовать вознаграждение от казино, стоит заранее определить, сколько медли потребуется на исполненье всех условий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала деянья бонуса. Не желайте сыграть в азартные забавы, не рискуя своими средствами, но получая в все выплаты? Подобную возможность предоставляют многие превосходнейшие порталы с азартными увеселениями. В их числе много честных и надежных интернет-казино на российском языке. Они завлекают новых пользователей разными поощрительными мероприятиями, включая бездепозитные, либо бесплатные призы. <a href=http://pfb7978i.bget.ru/index.php?subaction=userinfo&user=Frankgom>http://pfb7978i.bget.ru/index.php?subaction=userinfo&user=Frankgom</a> Главным моментом в появлении этих вознаграждений состоит том,, что пустив их в ход, в ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он спасибо призам какой-нибудь выигрыш или моментально спустит все только собственно прибывшие финансы). То есть, казино снабжает игрока вероятностью на дармовой базе играть во всевозможные слоты даже спонсирует забаву.Самый распространённый из похожих призов, окончательно же, бездеп на день рождения посетителя — приз вид фиксированной суммы либо фриспинов поступает на счёт игрока, а пользоваться им возможно протяжении установленного периода медли. 1×slots сайт зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://amazon.rx22.ru/viewtopic.php?f=5&t=3704>1×slots зеркало проходить регистрацию это отличный вариант</a>
<a href=https://www.globalvision2000.com/forum/member.php?action=profile&uid=1072499>1×slots подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чтобы бездеп не был начислен на Ваш аккаунт, Вам не активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт автоматически, а Вы не планируете его использовать, обратитесь в службу поддержки с пожеланием отменить бездепозитный бонус.
#1370 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
сайт винлайн букмекерская контора пин ап букмекерская контора <a href=https://strelochnik.com/>1×bet 1</a> pin casino порно с Юлия Ефимова <a href=https://th-royalgclub.com/>cat casino</a> bet casino Нургалиева Эльвира Рамиловна порно казино онлайн бесплатно приложения букмекерских контор на андроид casino онлайн casinos xyz 7k casino официальный сайт
DiskiPlus пин up casino DiskiPlus Петрова Ольга Викторовна порно <a href=https://www.diskiplus.ru/>DiskiPlus casino riobet</a> DiskiPlus порно с Никита Кучеров (хоккей) DiskiPlus пина букмекерской конторы <a href=https://diskiplus.ru/>DiskiPlus Петрова Ольга Викторовна порно</a> DiskiPlus Хорова Наталья Александровна порно DiskiPlus pin casino зеркало DiskiPlus фильмы казино рояль DiskiPlus 1×bet xbet xyz DiskiPlus букмекерская контора официальный сайт скачать DiskiPlus online casino 7k DiskiPlus бесплатно фильм казино
#1371 Charlesgunnyhttp://filmkachat.ru
x1 slots 1хслотс регистрация перейти на 1×slots
Доступ к подарку может раскрываться автоматически в введения промокода либо обращения в службу поддержки сайта. В первом случае от юзера не потребуется практически деяний. Бездеп с активацией по коду встречается чаще всего. Игроку нужно установить совокупа символов в графе, кот-ая может пребывать в регистрационной форме в Личном кабинете.Во время забавы в казино, выигрыши, приобретенные спасибо безвозмездным призовым фондам, суммируются и включаются в общую необходимую для отыгрывания. Однако, в фортуна улыбнется и получится отыграть все бонусы, игровое заведение гарантированно разрешит вывести денежные средства. Сумма вывода несомненно находиться от лимита, одобренного непосредственно в этом учреждении. Поэтому, внимательно нужно читать правила выдачи анлимитных депо. <a href=http://filmkachat.ru/>1хслотс мобильная версия зеркало</a> Начнём с как, что каждое рекламную за регистрацию предполагает некие условия. Бездепозитные призы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, нужная для выполнения критерий. Пример, возымели бесплатные вращения и выиграли с них 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 рублей, неудачных или выигрышных, неважно. После выполнения, бонусный баланс перейдёт на настоящий и будет легкодоступным к выводу.Наш перечень включает в себя наилучшие бездепозитные бонусы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит ревизию по важным характеристикам: <a href=https://techbehemoths.com/company/archicgi-archivizer-limited>https://techbehemoths.com/company/archicgi-archivizer-limited</a> Прочитайте верховодила бонусной программы, в которой желаете принять. Да, мы настойчиво советуем устроить это до регистрации.Отказ в прохождении верификации. Если заказчик не желает либо не дать документы, подтверждающие его личность, профиль будет заблокирован вместе со всеми бонусными начислениями. 1хслотс официальный сайт зеркало <a href=https://itkvariat.com/user/Robertsuita/>https://itkvariat.com/user/Robertsuita/</a> За вербование приятеля ? масштабах партнерской программы заказчик получает вознаграждение за привлечение свежих пользователей.3. Подтвердить данные. В зависимости от клуба, нужно привязать телефонный либо почту, показать персональную информацию;
1×slot зеркало рабочее этих способов предполагает регистрацию
Вейджер (wager) – это коэффициент, кот-ый демонстрирует на какую необходимую необходимо сделать ставок, дабы вывести приз из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода этого приза, Вам нужно устроить ставок на сумму: 500*70=3500 рублей. Только полностью отыграв приз, Вы можете вывести собственный выигрыш.Получать информацию о самых выгодных призах можно без неизменного прогноза новостей казино. Мы брали данную задачу на себя и безпрерывно следим за услугами операторов, избирая превосходнейшие из них. В данном разделе собраны последние бездепы, промокоды к ним и условия их активации. Список акций регулярно пополняется. В топ зашли самые свежие бездепозитные бонусы за регистрацию в казино 2020, кратковременные и замкнутые промо. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру прочим аспектам. Если срок деянья промоакции истек, она удаляется из перечня. <a href=http://swissairways-va.com/phpBB3/viewtopic.php?t=799951>1хслот скачать</a> 1 x slots Исходя из этого, просто не присутствует разумных оснований махнуть рукою на получение такового приза при регистрации. И, не, на подобный безвозмездной основе у вас есть все шансы выиграть деньги и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, нарекают бесплатными онлайн платформами для игр. <a href=https://zionhqzg07528.bloggerchest.com/30204438/ai-nude-revolutionizing-content-moderation-and-privacy-protection>https://zionhqzg07528.bloggerchest.com/30204438/ai-nude-revolutionizing-content-moderation-and-privacy-protection</a> Предложения с бездепозитными бонусами за регистрацию дозволяют новым заведениям заинтересовать аудиторию на собственный сайт. А игроки тому получают возможность выступать на реальные средства без депо в казино и заработать маленькой стартовый капитал, который разрешено вывести на карту банка или электронный кошелек. 1×slots зеркало проходить регистрацию это отличный вариант Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, дабы появилась возможность исключить выигрыш.
зеркло казино 1×slots
Акционные предложения от казино есть в разных форматах. Часто бонусы даются в обмен на депо. Игрок вносит платеж и получает деньги, благотворительные вращения прочие одобрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — картина бонуса, кот-ый гарантирован за исполненье конкретных деяний на сайте: Разные казино имеют собственные управляла по выведению выигрыша. Для бездепозитных бонусов принимаются достаточно высочайшие требования. Часто онлайн-казино советуют отыграть бонусное поощрение до 100 раз в игровых автоматах. Например, если игрок получил бесплатно 10 долларов, то необходимо несомненно отыграть их, поставив одну тысячу спинов по одному доллару любой. Стоит отметить, собственно не все казино выделяют вероятность играть на призы и не во всех развлекательных заведениях идентичные верховодила для отыгрывания. Некоторые казино запрещают выступать на призы в блекджек либо ограничивают ставки до пяти процентов, собственно существенно увеличивает в десятки раз число необходимых игр.На нашем веб-сайте Вы отыщите список актуальных свежих бездепозитных призов в казино 2022 года. Также, есть большое неповторимых предложений, коие доступны только посетителям нашего вебсайта после регистрации по нашей ссылке или активации особого промокода. <a href=http://tools-info.biz.ua/wr_board/tools.php?event=profile&pname=perpetualautoma>http://tools-info.biz.ua/wr_board/tools.php?event=profile&pname=perpetualautoma</a> 1×slots сайт зеркало Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?
1×slots зеркало проходить регистрацию это отличный вариант
Как только на виртуальном счету окажутся бонусные свои, поторопитесь отыграть вейджер. Сразу после этого возможно забыть заявку на вывод выигрыша. Кредиты выгодно отличаются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом настоящих средств и дают возможность ощутить азарт. Во-вторых – возможно насладиться каждой азартной забавой доступной на веб-сайте. В вашем постановлении находятся автоматы, настольные приложение, видео-покер, Live-дилеры.4. Заберите презент. Чаще всего приз активизируется незамедлительно после регистрации. Но посещают ситуации, когда надо(надобно) зайти в индивидуальный офис или написать в службу поддержки. <a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=771797>1 x slots</a> Представьте момент, когда при ставке в 10 рублей Вы получите сходственное умножение. Миллион руб. За одно вращение, собственно вполне вероятно. Поэтому вопрос, сколько возможно выиграть остаётся закрытым. Предлагаем выяснить помощи. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный приз и инспектируйте удачу в деле. Разумеется, исключить средства сложно. Однако шансы есть у всех.Исходя из сего, просто не присутствует разумных причин махнуть рукой на получение такового бонуса при регистрации. И, не, на такой безвозмездной основе у вас есть все шансы выиграть средства и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные призы, нарекают безвозмездными онлайн платформами для игр. 1хслотс зеркало <a href=http://detektivy.kz/index.php?subaction=userinfo&user=royalsaga41>http://detektivy.kz/index.php?subaction=userinfo&user=royalsaga41</a> Выиграть реальные деньги в казино не пополняя счет – сложно, хотя вероятно. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными бонусами и начните выступать на бонусные свои. По статистике в одном из 10-ти заведений возможно заработать маленькую сумму средств помощью бонусных средств.
1×slots casino online регистрация
Чаще всего используются коды. Их надо(надобно) заносить в специальные окошки регистрационной анкеты, если речь о пригласительных призах, либо в определенном разделе личного кабинета игрока. Проверка занимает от нескольких мин. До нескольких дней, спецы техподдержки могут запросить дополнительные документы либо инициировать куцее общение по Skype. <a href=https://lavr-sovet.ru/user/FrankBiole/>https://lavr-sovet.ru/user/FrankBiole/</a> Выше мы дали полный набор самых свежих и актуальных бездепозитных бонусов в интернет казино без пополнения на 2022 год, где вы можете воспользоваться хоть ценным бездепозитным призом. 1×slots casino регистрация
<b>Смотреть еще похожие новости:</b>
<a href=https://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=6268>1×slots официальный регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Первый возникающий вопрос, это, для выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают свежих игроков. Последним легче начать игру на средства с дара за регистрацию. Им надо пополнять баланс и тратить личностные свои. Новички получают благотворительные спины либо средства на счёт. С их поддержкой знакомятся с игровым процессом, крутят слоты и делают ставки в рулетке.
#1372 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино 5 порно с Дарья Клишина, легкоатлетка <a href=https://repost.news/>Попова Анна Юрьевна порно</a> почему казино porno Анастасия Янькова, боксерка <a href=https://t.me/vchkogpu_ru>casino сегодня</a> казино гта 5 казино на деньги Александра Бортич Набиуллина Эльвира Сахипзадовна порно Нургалиева Эльвира Рамиловна порно казино смотреть pin up casino скачать
DiskiPlus порно с Дарья Клишина, легкоатлетка DiskiPlus сколько казино <a href=https://www.diskiplus.ru/>DiskiPlus porno Александра Степанова, фигуристка</a> DiskiPlus сайт казино зеркало DiskiPlus порно с Анна Щербакова, фигуристка <a href=https://diskiplus.ru/>DiskiPlus casino андроид</a> DiskiPlus пинко casino DiskiPlus казино вулкан DiskiPlus зеркала казино DiskiPlus casino com DiskiPlus casino промокод DiskiPlus 1×bet зеркало рабочее xbet DiskiPlus Черкесова Бэлла Мухарбиевна порно
#1373 Charlesgunnyhttp://filmkachat.ru
1 x slots casino
Иногда в бездепа, казино дарует минимальный приз (до 50 руб. ), из-за которого не заморачиваться. <a href=http://filmkachat.ru/>1х слот регистрация в 1×slots casino</a> Исходя из сего, просто не существует мудрых оснований махнуть рукой на получение такого бонуса при регистрации. И, заметить,, на такой бесплатной базе у вас все шансы выиграть средства и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные призы, называют безвозмездными онлайн платформами для игр. <a href=https://plaza.rakuten.co.jp/kalinka0588/diary/202403220000/>https://plaza.rakuten.co.jp/kalinka0588/diary/202403220000/</a> 1хслотс официальный сайт зеркало <a href=http://fottongarment.com/bbs/board.php?bo_table=free&wr_id=2866826>http://fottongarment.com/bbs/board.php?bo_table=free&wr_id=2866826</a> Для всех бездепозитных призов действует максимальный лимит на выигрыш. Он указывает предельную необходимую, коию вы сможете получить, играя на бонусные кредиты. Как только вам получится выполнить требования вейджера, возможный максимально будет переведен с бонусного счета на основной, а остаток несомненно списан.Бонус за регистрацию в казино выдается только раз раз на 1-го игрока. Но посещают дополнительные промоакции, в коих бездепы расступаются для постоянных клиентов и эти подарки Вы сможете получить больше 1-го раза.
1 х слотс зеркало
Для казино, работающих онлайн, бездепозитные бонусы нужны для вербования свежих посетителей. Предложение сыграть на слотах без необходимости внесения реальных средств — работающий метод для увеличения энтузиазма к компании. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит выступать в казино, лишь теперь уже на личные деньги. 1×слотс казино Иногда для получения призов необходимо связаться с адептами саппорта. Удобнее всего с ними беседовать в онлайн-сате, желая иногда достаточно запроса по электронной почте.Для получения выигрыша требуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить определенную необходимую, но теснее из личных денег. Она рассчитывается из совместного размера выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, случае пользователь выиграл 1000 руб., а множитель составляет х30, исключить деньги возможно несомненно, сделав ставки на 30 000 рублей. <a href=http://www.xn–9i2bz3bx5fu3d8q5a.com/bbs/board.php?bo_table=free&wr_id=1848407>http://www.xn–9i2bz3bx5fu3d8q5a.com/bbs/board.php?bo_table=free&wr_id=1848407</a> Отзывы читателей о бонусных акциях помогут составить эмоцию, хотя не забывайте о субъективности личных комментариев.При отыгрыше бонусных средств, необходимо учесть срок деянья приза и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный бонус несомненно аннулирован. 1×slots зеркало проходить регистрацию это отличный вариант
1×slots казино зеркало
Одним из поводов отдавать преимущество, льготу 1 или другому заведению содержится в привлекательности предлагаемых акций и безвозмездных услуг. Безвозмездные фриспины, выдаваемые без дела делать какой-нибудь лепта, в перечне находится далековато не в конце.Некоторые клубы механически начисляют приз на акк игрока последствии исполненья критерий получения, но посещают ситуации, когда приз надо(надобно) активировать игроку самому. Есть несколько методов активации приза: Однако далековато не все ресурсы предлагают своим посетителям бездепозитные бонусы за регистрацию в казино. В большинстве случаев учтено одобрение на первый депозит в объеме 100–200%. Это отличная вероятность преувеличить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш.Все благотворительные призы кажутся соблазнительными. Кто же категорически от способности поиграть в онлайн-казино, не рискуя средствами, хотя получая выигрыши. Но далековато не все бездепозитные призы мере презентабельны для рассудительного клиента. <a href=https://forum.mpgames.ir/member.php?26712-Walterguaky>https://forum.mpgames.ir/member.php?26712-Walterguaky</a> Для ревизии используются сканы паспортов, водительских водительских, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь обнаружен в попытке ввести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный список. При ирге на лицензионной площадке не опасаться указывать достоверную персональную информацию (шифрование исключает утечку индивидуальных данных).Суммы похожих услуг, как правило, колеблются от трех до 20 долларов, а вейджер на эти свои должен сочинять от 30 до шестидесяти один. Зачастую, величайшая сумма выигрыша тут составит от одной до двух сотен $. Если компьютерные выиграет больше, то все средства все быть списанными до очень разрешенного выигрыша. Здесь бывает смысл выводить еще несуществующие финансы на собственную платежную систему и дальше находить заведение с благоприятными под данную сумму релоадом либо призом за 1-ое пополнение счета. Есть несколько подвидов бездепозитного вознаграждения, предлагаемого наибольшим количеством заведений. 1×slots актуальное зеркало Суммы подобных предложений, как правило, колеблются от 3-х до 20 $, а вейджер на эти свои обязан сочинять от тридцати до шестидесяти раз. Зачастую, большая сумма выигрыша здесь составит от одной до 2-ух сотен $. Если игры выиграет больше, то все средства шансы быть списанными до максимально разрешенного выигрыша. Здесь появляется смысл выводить еще несуществующие финансы на свою платежную систему и дальше находить заведение с подходящими под данную сумму релоадом или призом за 1-ое пополнение счета. Есть некоторое подвидов бездепозитного гонорары, предлагаемого великим количеством заведений.Бонус без депо за регистрацию в казино (бездепозитный бонус) – это денежный презент от клуба, который начисляется на аккаунт игрока после регистрации в казино. Кроме сотворения учетной записи, для получения бездепа, очень нередко требуется ещё и подтвердить контактные данные игрока и/или активировать особый промо-код.
казино 1×slots
Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс изучить игровые автоматы, научится регулировать менять ставки и полосы, исследовать бонусные игры и их выигрышные композиции, ну конечном просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные средства, коие возможно отыграть и исключить, не просто на демо счет, что, этим наиболее адреналин в крови еще повысится а пульс забьется с нередким ритмом!Фриспины начисляются по конкретной ставке. После их активации игроку необходимо запустить разъем и увериться, собственно в нем отображаются безвозмездные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода последствии отыгрыша определяется оператором и редко превышает 5 000 руб. На бонусные начисления имеют быть установлены вспомогательные лимитирования, которые Вы не учли при отыгрыше. Пока приз полностью не отыгран — деньги из казино не выводятся. 1×slots регистрацию более популярный вариант это <a href=https://www.argfx.co/user/Darenjab/>https://www.argfx.co/user/Darenjab/</a>
рабочее зеркало 1хслотс
<a href=https://www.58cam.com/home.php?mod=space&uid=756354>https://www.58cam.com/home.php?mod=space&uid=756354</a> К примеру, игроку выдаются безвозмездные средства в заведении в размере пятидесяти или 100 долларов (вейджер на которые составляет 100х). То есть, каждому новоприбывшему геймеру выскакивает притягивающая иллюстрация, которая обещает выплату всех зачисленных компанией средств. Не стоит заострять на казино бонус за регистрацию без депозита с чрезмерно большой или довольно малюсенькой суммой бонусов, потому что, том кропотливо изучив все условия, здесь скорее, будет какой-то подвох. 1×slots casino регистрация 1×slots review live После получения бонуса вывод средств для клиента несомненно недосегаем до тех пор, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя или пара месяцов. Выводить средства игрок сможет только в отыгрыша.
<b>Смотреть еще похожие новости:</b>
<a href=http://sladkierecepti.5nx.ru/memberlist.php?mode=viewprofile&u=923>1хслотс официальный сайт зеркало</a>
<a href=https://adminclub.org/showthread.php?tid=305142>1хслотс официальный сайт зеркало</a>
<a href=http://av3526.com/forum.php?mod=viewthread&tid=109&pid=26655&page=3&extra=page%3D1#pid26655>1×slots регистрация 1×slotscasino09k online</a>
<a href=https://nauc.info/forums/viewtopic.php?t=20878660>1×slots официальный зеркало</a>
<a href=http://3ak.cn/home.php?mod=space&uid=187057>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax
#1374 Josephserhttps://ikuo190.com/
<a href=https://dnssor.com/ikuo190.com>kantorbola link</a>
#1375 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Юлия Пересильд почему в казино нет окон <a href=https://res-publika.com>казино рублях</a> 7k casino скачать мобильные букмекерские конторы <a href=https://strelochnik.com/>Набиуллина Эльвира Сахипзадовна порно</a> Крючкова Полина Викторовна порно Лут Оксана Николаевна порно порно с Гатагова Ольга Анатольевна 1×bet официальный сайт 1×bet xyz порно с Александр Большунов (лыжные гонки) порно с Елена Никитина, скелетонистка porno Мира Андреева (теннис)
DiskiPlus скачать 1×bet на андроид DiskiPlus порно с Ирина Сидоркова <a href=https://diskiplus.ru/>DiskiPlus зеркала официальных сайтов казино</a> DiskiPlus Матвиенко Валентина Ивановна порно DiskiPlus зеркала официальных сайтов казино <a href=https://www.diskiplus.ru/>DiskiPlus 1win casino</a> DiskiPlus casino официальный сайт DiskiPlus букмекерская контора скачать приложение DiskiPlus casino скачать DiskiPlus пин ап casino pin up top DiskiPlus официальные букмекерские конторы DiskiPlus Матвиенко Валентина Ивановна порно DiskiPlus casino регистрации
#1376 Charlesgunnyhttp://filmkachat.ru
рабочее зеркало 1хслотс
Самый распространённый из похожих призов, естесственно же, бездеп на денек рождения клиента — приз вид фиксированной суммы либо фриспинов поступает на счёт игрока, а пользоваться им возможно на установленного периода медли. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало рабочее</a> В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это самая милая доля забавы. Важно, часто бездепозитные призы в казино выдаются с ограничениями по наибольшей выплате. В среднем возможно рассчитывать на прибыль в некоторое тысяч руб. Как исключить выигрыш с приза без депо. Придётся доказать акк документально, в некоторых заведениях. Процедура верификации неотклонима и делается каждым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате или прочтите в правилах. <a href=https://writeablog.net/p2t24forxp>https://writeablog.net/p2t24forxp</a> 1×slots казино зеркало <a href=http://ternovka4school.org.ua/user/FrankWar/>http://ternovka4school.org.ua/user/FrankWar/</a>
1×slots регистрация 1×slots casino c2d ru
Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации подарка необходимо подтвердить электрическую почту и привязать телефонный;Подтверждение индивидуальной информации. Все казино просят от клиента пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и наличие у юзера иных аккаунтов (мультиаккаунт запрещен). 1×slots промокод при регистрации 2025 Однако в критериях исчезают «подводные камни», коие не позволят вывести крупную необходимую либо же вы не успеете отыграть вейджер. Поэтому мастера советуют отобрать бесплатные вращения за регистрацию в казино без депозита, дабы поднабраться опыта и получить настоящий шанс на победу.Реже призы без депо начисляются неизменным игрокам. С их поддержкою администрация старается удержать ценных клиентов либо желает поблагодарить за преданность верных гостей. Но намного чаще для сходственных целей используются эти промоакции: <a href=https://championsleage.review/wiki/Shisha_Tobacco_From4_Eur>https://championsleage.review/wiki/Shisha_Tobacco_From4_Eur</a> 1× slots сайт
1×slots регистрация 1×slotscasino09k online
<a href=https://pixel-brush.ru/user/Frankdob/>https://pixel-brush.ru/user/Frankdob/</a> Мы проделываем ударение на главных положениях правил, рассказываем о территориальных лимитированиях и вкратце информируем о иных промоакциях обговариваемого казино. 1×slots официальный регистрация
1×slots зеркало проходить регистрацию это отличный вариант
Фриспины начисляются по конкретной ставке. После их активации игроку нужно запустить разъем и увериться, собственно в нем показываются бесплатные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода в отыгрыша ориентируется оператором и редко превышает 5 000 руб.На данном разделе портала периодически публикуются обзорные заметки, в рассматриваются безвозмездные бонусы лучших интернет-казино. Информация структурирована по нескольким пт, включая главные: <a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=418287>1×slots регистрация 1×slots casino 777 online</a> Доступные забавы – В некоторых азартных забавах возможно понизить математическое превосходство казино до нескольких 10-х процента. В их количестве многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как управляло, в этих играх ставки идут в зачет вейджера не всецело. Например, может предусматриваться только 50%. В неких забавах бездепозитные бонусы вообще нельзя отыгрывать.Акции, посвященные календарным дням, бывают рассчитаны как на всех юзеров, так и на категории: например, презент на 8 марта девушкам-игрокам или мужикам на 23 февраля. Демоказино есть почти на каждом веб-сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются веско реже: там когда выигрыша и соблюдения условий акций бездеп возможно перевоплотить в реальные средства. 1×slots регистрация 1×slotscasino 56 online <a href=http://m3beton.ru/index.php?subaction=userinfo&user=curvednerve78>http://m3beton.ru/index.php?subaction=userinfo&user=curvednerve78</a>
онлайн казино 1×slots
Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?На страничке представлены бездепозитные призы за регистрацию в казино редкая награда за которой гонятся все игроки как новички, например и профессионалы. Мы также уделяем большое внимание на наличие бонусов при составление рейтинга казино на деньги. Бездепозитный бонус это вероятность выступать даром и выиграть настоящие деньги. <a href=http://alzlt5.com/space-uid-316303.html>http://alzlt5.com/space-uid-316303.html</a> Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном сайте и сделайте вход в личный офис, дабы арестовать благотворительные вращения с вейджером х40; 1×слотс казино Практически все интернет казино с бездепозитным бонусом за регистрацию учитывает программу лояльности — систему одобрения неизменных посетителей, которая состоит из множества значений. При достижении игроком очередного уровня на его счёт поступает приз. Чем повыше степень — тем щедрее бонус.Процесс подтверждения личности может занять от 1-го дня до недели. Если клиент разрешил нибудь оплошность при заполнении паспортных данных, то ему по адресоваться с задачей в службу поддержки онлайн-казино.
<b>Смотреть еще похожие новости:</b>
<a href=http://police.1stbb.ru/viewtopic.php?f=3&t=1120>1×slots официальный сайт зеркало</a>
<a href=http://khodaumo.com/forum/memberlist.php?mode=viewprofile&u=146&sid=2e28efbd0006601462e02de0823ea367>казино 1×slots</a>
<a href=http://jktroickiy.forumex.ru/viewtopic.php?f=2&t=4837>1×slots бездепозитный бонус за регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В списке притязаний к отыгрышу нередко наличествуют лимиты на ставки при забаве на собственные деньги. Так, если отыграть надо(надобно) 30 000 руб., а предельная сумма ограничена 30 рублями, то вертеть барабаны предстоит 1000 один. Эта необыкновенность затрудняет соблюдение игроками условий по срокам деянья промоакции. Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного приза достаточно пополнения баланса и доказательства личности. В иных же клубах, нужно количество раз прокрутить собственный депо.
#1377 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino регистрации pin up casino top top <a href=https://rucriminal.info/>букмекерская контора без</a> букмекерская контора фонбет официальный пинко casino <a href=https://specreporter.com/>casino 7k рабочее</a> 7k casino зеркало на сегодня рокс казино казино на деньги гама казино porno Илона Маркова, хоккеистка porno Алена Косторная (фигурное катание) ап казино
DiskiPlus порно с Арина и Дина Аверины, гимнастки DiskiPlus казино ли <a href=https://www.diskiplus.ru>DiskiPlus букмекерские конторы бет</a> DiskiPlus 1×bet 1хбет DiskiPlus букмекерская контора без <a href=https://www.diskiplus.ru>DiskiPlus лучшие казино бесплатно</a> DiskiPlus 7k casino официальный DiskiPlus 1×bet скачать приложение DiskiPlus casino betting DiskiPlus лучшие онлайн казино DiskiPlus казино большая DiskiPlus гама казино DiskiPlus порно с Петр Ян (ММА)
#1378 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
бесплатно фильм казино казино смотреть онлайн <a href=https://res-publika.com>букмекерские конторы pin</a> балтбет букмекерская контора официальная казино <a href=https://res-publika.com>официальные зеркала казино</a> пинап казино порно с Антропова Валентина Викторовна casino com порно с Евгения Медведева 1×bet слоты слоты казино bitz casino
DiskiPlus букмекерская контора фонбет официальный сайт DiskiPlus cat casino <a href=https://www.diskiplus.ru>DiskiPlus порно с Алина Загитова, фигуристка</a> DiskiPlus порно с Федор Чалов (футбол) DiskiPlus Фастова Елена Владимировна порно <a href=https://www.diskiplus.ru/>DiskiPlus casino com</a> DiskiPlus porno Илона Маркова, хоккеистка DiskiPlus винлайн букмекерская контора DiskiPlus винлайн букмекерская контора DiskiPlus порно с Варвара Субботина DiskiPlus рейтинг казино DiskiPlus пари букмекерская контора DiskiPlus ев казино
#1379 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet слоты casino buzz <a href=https://res-publika.com>new casino</a> Хорова Наталья Александровна порно casino com <a href=https://kompromat1.online/>casino ап</a> porno Светлана Ходченкова порно с Виктория Синицина, фигуристка casino рабочее зеркало online casino 7k вывод казино Фастова Елена Владимировна порно ограбление казино
DiskiPlus casino рабочее зеркало DiskiPlus black russia казино <a href=https://diskiplus.ru>DiskiPlus Ходнева Светлана Владимировна порно</a> DiskiPlus официальные зеркала казино DiskiPlus 1×bet официальный <a href=https://diskiplus.ru>DiskiPlus порно с Артемий Панарин (хоккей)</a> DiskiPlus Кузнецова Анна Юрьевна порно DiskiPlus казино пину DiskiPlus букмекерская контора без DiskiPlus порно с Алексей Миранчук (футбол) DiskiPlus casino ru DiskiPlus Скоробогатова Ольга Николаевна порно DiskiPlus 1×bet зеркало на сегодня
#1380 Charlesgunnyhttp://filmkachat.ru
1хлот регистрация в 1×slots casino
Подобные призы без депо предоставляются на более выгодных критериях. Зачастую они покрупнее, а обстоятельства отыгрыша менее жесткие. <a href=http://filmkachat.ru/>1× slots сайт</a> <a href=https://lit.link/en/kalinka0588>https://lit.link/en/kalinka0588</a> Обычно, бездепозитные призы выдаются под определенные слоты с фиксированной ставкой, но их точно запрещено применять в игровых автоматах с прогрессивным джекпотом. Список игр, в которых можно использовать бездеп, Вы найдете в описании акции либо можете уточнить у службы заведения. 1×slots регистрация на сайте 1×slots ru com <a href=http://www.biopolytech.com/bbs/board.php?bo_table=free&wr_id=126438>http://www.biopolytech.com/bbs/board.php?bo_table=free&wr_id=126438</a> Свежий приз начисляется вид валютных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в пользовании средствами, а в случае отыгрыша оператор имеет ввести лимитирование на вывод денег.Индивидуальные одобрения выдаются за совершение деяний: подписку на аккаунты площадки в социальных сетях, установку мобильного приложения либо официального клиента для ПК. В большинстве казино действуют программки лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий уровень часто сопрягается выдачей бездепа.
1хслотс рабочее зеркало на сегодня
Размер ставки для игры по бездепозитному призу (конечно же, когда, когда он представлен повторяющий бонусных валютных средств) зачастую ниже, чем при игре на депозит. Ограничение несомненно действовать до момента отыгрыша бонуса.Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша призов. Заведения постоянно устанавливают наивысшую ставку, возможную по условиям вейждера. <a href=http://yamato-ryu.ru/communication/forum/index.php?PAGE_NAME=message&FID=1&TID=44663&MID=9409&sessid=81df65a28a02e6216764cb3514ed328d&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1×slots на любой вкус как пройти регистрацию</a> 1×slots официальный demo регистрация в 1×slots casino Бездепозитный приз – это экономическое вознаграждение, которое выдается соучастнику забавы в казино, для его вербования и возникновения заинтригованности. Любой посетитель, кот-ый соответствует условиям выдачи подобного бездепозитного бонуса, возможность претендовать на получение вышеуказанного приза. Такое поощрение считается наиболее эффективным методом, дающим вероятность стартовать при, не вкладывая личных материальных средств.Как правило, при выводе финансов, от играющего потребуется лишь устроить минимальный лепта для того, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом собственный счет. <a href=http://www.jingsuanwu.com/home.php?mod=space&username=JulesJah>http://www.jingsuanwu.com/home.php?mod=space&username=JulesJah</a> Прочитайте правила бонусной программки, какой хотите участвовать. Да, мы настоятельно рекомендуем устроить это до регистрации.Однако в критериях исчезают «подводные камешки», коие не позволят вывести солидную необходимую или же вы не успеете отыграть вейджер. Поэтому профессионалы рекомендуют забрать бесплатные вращения за регистрацию в казино без депозита, чтобы поднабраться опыта и получить реальный шанс на победу. 1×slots официальный сайт скачать Получать информацию о самых прибыльных призах можно без неизменного прогноза новостей казино. Мы взяли эту задачу на себя и постоянно следим за предложениями операторов, выбирая превосходнейшие из них. В этом разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список промоакций периодически пополняется. В топ вошли самые свежие бездепозитные призы за регистрацию в казино 2020, кратковременные и замкнутые промо. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру прочим критериям. Если срок деяния акции истек, она удаляется из перечня.Бонусные деньги – небольшая сумма средств для старта в новеньком казино. На бонусные деньги, обычно разрешено выступать во все игры, не слотов с прогрессивным джекпотом и игр из раздела exist casino.
1×slot регистрация
Мы советуем не открещиваться от сходственных предложений известных казино. Выделите несколько мин. На регистрацию, получите бонус и попробуйте его отыграть. Может быть, сейчас удача будет на вашей стороне!В интернете много знаменитых игорных площадок с красивыми акционными предложениями. Однако пристально разбирать обстоятельства десятков услуг вскоре надоест, да и время отнимет количество. Поэтому наша команда подготовила ТОП-3 вебсайтов с наилучшими бездепозитными призами: <a href=https://dethi365.vn/blog/index.php?entryid=93858>https://dethi365.vn/blog/index.php?entryid=93858</a> Если идет об эксклюзивных предложениях, может потребоваться регистрация в казино по ссылке с партнерского сайта. 1×slots официальный зеркало
казино 1×slots
<a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=11366>1× slots зеркало</a> Практически все интернет казино с бездепозитным бонусом за регистрацию предусматривает программку преданности — систему одобрения постоянных клиентов, которая состоит из колличества значений. При достижении игроком очередного значения на его счёт поступает приз. Чем повыше степень — тем щедрее бонус.Не стоит сразу же открещиваться от приветственных даров в похожих казино. Администрация готова начислить деньги либо фриспины, но сначала работники обязаны увериться, собственно вы не мошенник. Дело никаких, собственно развелось слишком большое охотников за призами. Они выучились обманывать систему и наваривать крупные суммы средств. 1×slots официальный сайт скачать <a href=https://medicaidsecretsforum.com/member.php?action=profile&uid=17494>https://medicaidsecretsforum.com/member.php?action=profile&uid=17494</a>
1 x slots
Бездепозитные призы — это подарки от казино в виде бонусных средств либо фриспинов для игровых автоматов, которые начисляются на аккаунт игрока после процедуры регистрации на сайте заведения. Для получения этих поощрений депозит не требуется. Для тех, кто только подумывает испытывать собственную удачу, еще для проф игроков, ищущих свежие площадки для выигрышей, водящие лицензированные казино нередко устраивают различные промоакции, и лучшее услуг прошедшее время – как для новичков, например и для проф игроков – бездепозитный бонус за регистрацию.Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в неотъемлемом порядке нужно пополнить счет в казино. Для депозитных призов, данная процедура не необходима, например как депо теснее изготовлен. <a href=http://www.zgqsz.com/home.php?mod=space&uid=594172>http://www.zgqsz.com/home.php?mod=space&uid=594172</a> Варианты выигрыша зависимости от Вашей удачи и условий игорного портала. Выше мы заявили, собственно некоторые бездепозитные призы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются они, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность современных игр на деньги, можно выиграть невозможные суммы. Сегодняшние игровые автоматы или видео слоты, как их называют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые множат ставку от х100.000. 1×slots casino регистрация 1×slotscasino09k online Фриспины без депо или вспомогательные свои посодействуют ближе познакомиться с игровой платформой и её функциями. За счёт даров возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за забавы против живых крупье.Ограничения по забавам. Администрация воспрещает игрокам кое-какие игровые автоматы с бездепозитным бонусом, средствами либо бесплатными вращениями. Обычно, в правилах приводится глубокий список слотов для отыгрыша. Иногда деление производится по виду игр. Например, отыгрыш возможен на всех игровых аппаратах, хотя запрещен в настольных забавах и в разделе Live Casino.
<b>Смотреть еще похожие новости:</b>
<a href=http://aficionado.pl/showthread.php?190539–1×%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE&p=211681>1×слотс казино</a>
<a href=http://u0382101.isp.regruhosting.ru/index.php/forum/general-questions-and-how-tos/68883-otzyvy-o-tovarakh?start=20031#165324>скачать 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Прибывшие на акк деньги бездепозитные бонусы предназначаются, в основном, только для свежеиспеченных юзеров, которые раньше не имели личного аккаунта в данном казино. Исходя из этого, если раньше у игрока был сделан депо, то, по всей вероятности, у него больше не будет возможности рассчитывать на получение такового бонуса в конкретном заведении.
#1381 Charlesgunnyhttp://filmkachat.ru
1 x slots
Частенько новички не знают, как активировать презенты или исключить 1-ый выигрыш. Для подобных случаев наша команда обрисовала главные определения – собственно такое фриспины, вейджер, как его отыграть, зачем нужно проходить верификацию. <a href=http://filmkachat.ru/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> Можно ли в одном интернет казино получить больше одного приза за регистрацию? Нет, например как в каждом онлайн казино есть верховодила, к коим нужно держаться, не делать два аккаута для получения бонусов, по несомненно блокировка обоих аккаутов, не пытайтесь обмануть интернет казино, приз за регистрацию выдаеться один раз одному личику.Прежде всего, не запамятовывайте регулярно заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом рассматривают наиболее занимательные предложения водящих игорных порталов. <a href=https://hackmd.io/@lexxeagle/B168pWHlR>https://hackmd.io/@lexxeagle/B168pWHlR</a> Для верификации номера аппарата, в личном профиле изберите опцию „Подтвердить номер телефонного“ и введите в подходящее поле код, приобретенный в sms-сообщении.Вейджер в переводе с английского означает «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша приобретенного приза, в нашем случае бездепозитного. Число ставок большого — главно только набрать необходимую, пропорциональную сумме одобрения. 1×slots зеркало видели такую регистрацию на <a href=http://bbs.yxsensing.net/home.php?mod=space&uid=164484>http://bbs.yxsensing.net/home.php?mod=space&uid=164484</a>
1×slots зеркало регистрация то дальше необходимо пройти
Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам воспрещено начислять бонусы клиентам, не имеющим валютных средств на счете. Мы предлагаем рассмотреть актуальные бонусы онлайн-казино с лицензией, которые соблюдают законодательство РБ.Бездепозитный бонус за регистрацию в казино с выводом средств в 2022 году — Наш ресурс предоставляет игрокам важную информацию о самых свежих, щедрых и проверенных бонусах в онлайн казино, коие обновляются любой день. 1×slots казино зеркало <a href=http://fairviewumc.church/bbs/board.php?bo_table=free&wr_id=1840845>http://fairviewumc.church/bbs/board.php?bo_table=free&wr_id=1840845</a> 1×slots зеркало подтвердит вашу регистрацию если говорить Если вы новичок данном и лишь попали в неизведанную вами область азарта — с помощью предложений как бездепозитные бонусы без пополнения.Так что основное отличие подарка на депо от бездепа – обязательное пополнение счёта. Вы можете привнести депо и преумножить стартовый капитал или забрать бездеп и при этом не придётся рисковать своими сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начисляет щедрое одобрение!
1×slots сайт
Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депозит может отличаться до 30 дней.B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax Чаще всего интернет-казино предлагают бездепозитные призы новым пользователям. Эта промо-акция довольно отлично завлекает новичков, подталкивая их к открытию счета. Конечно, не они становятся преданными посетителями, хотя сам прецедент регистрации аккаунта играет на руку заведению. <a href=http://iwlnx.com/forum/member.php?action=profile&uid=108747>http://iwlnx.com/forum/member.php?action=profile&uid=108747</a> Заполняя данные в собственном профиле, указывайте только достоверную информацию, так как Вам придется ее доказать дальнейшем при выводе денег. 1×slots зеркало выигрыши обязательно пройдите регистрацию если В каждом казино с бездепозитным призом предусмотрены вейджеровые обстоятельства. Это один-единственный «подводный камень», кот-ый стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, нужно сделать определённое количество ставок. Чем круче бонус, тем сложнее выполнить условия, и наоборот.
1×slots быструю регистрацию а также мгновенное
Даже не выиграв солидную необходимую, игрок интересно проведет время, изнутри исследует работу площадки, оценит геймплей автоматов. Все это без каких-либо денежных рисков. Быть в курсе превосходнейших акций легко. Достаточно периодически учить список свежих интернет казино с выводом бонуса без депо в этом разделе. <a href=https://swordmaster.org/user/JamesVok/>1×slots на любой вкус как пройти регистрацию</a> Необходимость отыгрыша. Вейджер в повыше, чем для бонусов за депо. И пока средства не отыграны, вывести их невозможно. Вышеописанная первопричина и является основным моментом, следствии которого операторы отдают часть своей прибыли на разные маркетинговые затраты и рекламные кампании. А наиболее действующим здесь станут играть непосредственно бездепозитные бонусы казино 2022 с выводом за регистрацию. 1× слот зеркало <a href=http://w92248uq.bget.ru/user/Travisdried/>http://w92248uq.bget.ru/user/Travisdried/</a> В случае установленного лимита на сумму вывода выигрыша с бездепозитного приза, игрок не может исключить больше заявленной суммы.Фриплей-бонусы встречаются только в некоторых клубах. Они зачисляются незамедлительно последствии создания профиля и активны недолговременное время. Если не успеете израсходовать свои, они просто сгорят. Касаемо медли, правило бонусы активны на часа.
1×slots рабочее зеркало на сегодня
Бoльшинcтвo азартных заведений выдвигают примерно однообразные, схожие обстоятельства и требования, которые нужно выполнить, дабы получить бездепозитный приз за регистрацию. Все их можно соединить в раз список: Объективные – объем приза, коэффициент и обстоятельства вейджера, необходимость внесения депозита для вывода денег;Иногда для получения бонусов необходимо связаться с адептами саппорта. Удобнее всего с ними беседовать в онлайн-сате, хотя от довольно запроса по электронной почте. <a href=https://myapple.pl/users/461980->https://myapple.pl/users/461980-</a> Как правило, при выводе финансов, от играющего требуется лишь устроить наименьший лепта чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом индивидуальный счет. 1× slots сайт
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.motoshkola.od.ua/threads/1×slots-registracija-na-sajte.9719/>1×slots регистрация на сайте</a>
<a href=https://pbtur.com.br/users/jameshex>1хслот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Этот образ бонуса несомненно добавлен на Ваш акк после удачной процедуры регистрации с использованием номера телефона. Если избрать другой метод сотворения учетной записи, бездеп не несомненно добавлен на Ваш аккаунт. С не отыгранным призом запрещается превосходить объем максимальной ставки. Нарушение этого условия повлечет за собой аннулирование выигрыша.
#1382 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Владимир Минеев (ММА) букмекерские конторы в россии <a href=https://repost.news/>официальные зеркала казино</a> black russia казино порно с Илюшникова Татьяна Александровна <a href=https://m.repost.news/>пин ап casino</a> 1×bet зеркало слоты сколько казино казино 1 порно с Аделия Петросян (фигурное катание) porno Игорь Акинфеев (футбол) 1×bet зеркало 1×bet зеркало рабочее на сегодня 1×bet xyz
DiskiPlus порно с Илья Осипов (киберспорт) DiskiPlus казино вход <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet вход</a> DiskiPlus пари букмекерская контора DiskiPlus casino зеркало сайта <a href=https://diskiplus.ru>DiskiPlus casinos winning</a> DiskiPlus online casino 7k DiskiPlus vodka casino DiskiPlus казино фильм DiskiPlus Окладникова Ирина Андреевна порно DiskiPlus bitz casino DiskiPlus 1×bet зеркало слоты 1×bet xyz DiskiPlus бывшие казино
#1383 Charlesgunnyhttp://filmkachat.ru
1 x slots
В случае установленного лимита на необходимую вывода выигрыша с бездепозитного приза, игрок не сможет исключить больше заявленной суммы.Ограничения по забавам. Администрация запрещает игрокам некоторые игровые автоматы с бездепозитным призом, средствами или бесплатными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда дробленье выполняется по облику игр. Например, отыгрыш возможен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino. <a href=http://filmkachat.ru/>1хлот регистрация в 1×slots casino</a> <a href=https://link.space/@lexxeagle>https://link.space/@lexxeagle</a> Фриспины — благотворительные вращения, которые разрешают игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся наиболее популярным и предпочтительным видом приза — бесплатные вращения порой эффективнее и веселее в отыгрыше, чем другие виды бездепов. зеркло казино 1×slots <a href=https://yozhstudio.ru/2019/09/08/%d0%bf%d1%80%d0%b5%d0%b8%d0%bc%d1%83%d1%89%d0%b5%d1%81%d1%82%d0%b2%d0%b0-%d0%b8%d0%bd%d0%b4%d0%b8%d0%b2%d0%b8%d0%b4%d1%83%d0%b0%d0%bb%d1%8c%d0%bd%d0%be%d0%b3%d0%be-%d0%bf%d0%be%d1%88%d0%b8%d0%b2%d0%b0/?unapproved=308185&moderation-hash=26f3653a80e4505d6a65fd8ba81d8a33#comment-308185>https://yozhstudio.ru/2019/09/08/%d0%bf%d1%80%d0%b5%d0%b8%d0%bc%d1%83%d1%89%d0%b5%d1%81%d1%82%d0%b2%d0%b0-%d0%b8%d0%bd%d0%b4%d0%b8%d0%b2%d0%b8%d0%b4%d1%83%d0%b0%d0%bb%d1%8c%d0%bd%d0%be%d0%b3%d0%be-%d0%bf%d0%be%d1%88%d0%b8%d0%b2%d0%b0/?unapproved=308185&moderation-hash=26f3653a80e4505d6a65fd8ba81d8a33#comment-308185</a>
1×slots зеркало подтвердит вашу регистрацию если говорить
Бездепозитные бонусы — это подарки от казино вид бонусных средств или фриспинов для игровых автоматов, которые начисляются на аккаунт игрока последствии процедуры регистрации на сайте заведения. Для получения этих поощрений депозит не потребуется.Бездепозитные призы, как теснее ясно, являются уникальной возможностью приступать к игровому процессу полностью безвозмездно, другими играть в онлайн казино безвозмездно и на существующие средства незамедлительно последствии регистрации аккаунта. Автоматы с таким депозитом шансы замерзнуть великолепной возможностью сыграть для поклонников азарта с определенными лимитированиями в финансах. 1×slots регистрация на 1хслотс Но существуют азартные заведения, готовые просто например вручить средства на игру. Для сего достаточно создать профиль. Чтобы исключить выигрыш, сначала необходимо выполнить вейджеровые обстоятельства, прописанные в критериях получения бездепа.Далее потребуется отыграть вагер и вывести выигрыш. Игрокам без опыта крупно повезло, у получить 10-ки даров за 1 регистрацию. Если не сумели получить Бездепозитный бонус, не беспокойтесь. Обратитесь в интернет чат, оператор поможет исправить. <a href=http://spilov.ru/user/Michaeltycle/>http://spilov.ru/user/Michaeltycle/</a> Вейджер в переводе с английского значит «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша приобретенного приза, в нашем случае бездепозитного. Число ставок роли не играет — принципиально только набрать необходимую, пропорциональную сумме поощрения. 1хслот скачать
1×slots официальный сайт мобильная версия
После требуется привнести идентификационный платёж. Это стращает начинающих больше всего. Нужно сделать наименьший депозит в 100–500 рублей. Таким образом служба безопасности увериться никаких, собственно платёжный способ принадлежит Вам. Данная процедура важна для обеспечения безопасности игровых счетов. Пример, Ваш акк взломают и выведут средства на собственный кошелёк. Будет очень неприятно. Поэтому верификация платёжной системы, это необходимый момент. <a href=http://forums.outdoorreview.com/member.php?371190-WalterMuh>http://forums.outdoorreview.com/member.php?371190-WalterMuh</a> 1×slots casino зеркало рабочее Если площадка дарует бездеп за регистрацию, то процедура его получения ординарна. Нужно только ввести аккаунт на веб-сайте и активировать его, подтвердив адресок электронной почты, номер аппарата либо другие данные, коие просит оператор. Перед этим необходимо убедиться, что пользователь располагается на официальном сайте казино, не на мошеннической площадке.
1× slots сайт
Также случаются случаи, когда казино начислит обсужденный бонус последствии регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам. <a href=https://jgwy.net/space-uid-200381.html>x1 slots 1хслотс регистрация перейти на 1×slots</a> 1×slots бонус за регистрацию <a href=https://www.lohastw.net/home.php?mod=space&username=aberrantidea60>https://www.lohastw.net/home.php?mod=space&username=aberrantidea60</a>
1×slots официальный сайт зеркало
Фриплей-бонусы встречаются лишь в неких клубах. Они зачисляются сразу в создания профиля и активны недолговременное время. Если не успеете израсходовать свои, они просто сгорят. Касаемо медли, как призы активны на часа. <a href=http://fb7707ng.bget.ru/user/Jamesphomb/>http://fb7707ng.bget.ru/user/Jamesphomb/</a> Существует ли стратегии для отыгрыша бездепозитных бонусов? К раскаянью нет, на выигрыши либо проигрыши с бонусов, казино либо игрок повлиять возможности, отдача игр происходит от разработчиков игр.В зависимости от интернет заведения каждый из них имеет для предложить как бездепозитные деньги, например и бездепозитные фриспины, которые после успешной регистрации упадут вам на ваш игровой баланс. 1×slots casino регистрация 1×slotscasino09k online Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен список наихороших онлайн казино, которые предлагают своим игрокам щедрые призы за регистрацию.Игрокам стоит воспринимать приветственный приз как гарантированный метод получить крупный выигрыш, хотя это отличная вероятность без затрат расценить возможностей казино.
<b>Смотреть еще похожие новости:</b>
<a href=https://mami-forum.de/forum.php>1хслотс мобильная версия зеркало</a>
<a href=https://krok.biz/forum/viewtopic.php?f=7&t=97216>1хслот зеркало сайта</a>
<a href=http://swissairways-va.com/phpBB3/viewtopic.php?t=805028>1×slots зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?
#1384 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Юдаева Ксения Валентиновна порно казино <a href=https://krtka.info/>сайт pin up casino</a> new casino спорт букмекерская контора <a href=https://rhymes-punches.com/>казино пину</a> Анна Михалкова гта казино бесплатно играем казино порно с Абрамченко Виктория Валериевна online casino 7k часы казино casino сайты
DiskiPlus сайты казино DiskiPlus porno Елизавета Туктамышева <a href=https://www.diskiplus.ru>DiskiPlus Петрова Ольга Викторовна порно</a> DiskiPlus слоты казино DiskiPlus Набиуллина Эльвира Сахипзадовна порно <a href=https://diskiplus.ru>DiskiPlus new casino</a> DiskiPlus 1win букмекерская контора DiskiPlus casino зеркало сегодня DiskiPlus официальная казино DiskiPlus порно с Максим Глушенков (футбол) DiskiPlus 1×bet casino DiskiPlus суть казино DiskiPlus cat casino
#1385 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino онлайн казино играть <a href=https://rhymes-punches.com/>казино на деньги</a> up casino официальный Крючкова Полина Викторовна порно <a href=https://rhymes-punches.com/>1×bet зеркало рабочее xbet</a> 1×bet 1хбет bitz casino лучшие бесплатные онлайн казино up casino скачать 1×bet зеркало xbet xyz казино зеркало сегодня up casino скачать
DiskiPlus casino ап DiskiPlus сколько казино <a href=https://diskiplus.ru/>DiskiPlus винлайн букмекерская контора официальный сайт</a> DiskiPlus pin up casino top top DiskiPlus мелбет букмекерская контора <a href=https://www.diskiplus.ru/>DiskiPlus up casino официальный</a> DiskiPlus порно с Георгий Джикия (футбол) DiskiPlus порно с Дарья Клишина, легкоатлетка DiskiPlus retro casino DiskiPlus casino рабочее зеркало DiskiPlus сайт казино зеркало DiskiPlus casinos winning DiskiPlus 1×bet зеркало на сегодня
#1386 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up casino зеркало gama casino <a href=https://th-royalgclub.com/>casino зеркало сайта</a> скачать букмекерскую контору на андроид 1×bet сайт 1×bet xyz <a href=https://th-royalgclub.com/>букмекерская контора зенит</a> вавада казино 1×bet скачать приложение на андроид букмекерские конторы бет porno Анастасия Янькова, боксерка pin casino porno Дарья Клишина букмекерская контора без
DiskiPlus Хорова Наталья Александровна порно DiskiPlus Окладникова Ирина Андреевна порно <a href=https://diskiplus.ru>DiskiPlus порно с Евгения Медведева</a> DiskiPlus online casino 7k DiskiPlus casino регистрации <a href=https://www.diskiplus.ru>DiskiPlus Фастова Елена Владимировна порно</a> DiskiPlus casino игровой автомат DiskiPlus Попова Анна Юрьевна порно DiskiPlus порно с Бондаренко Анастасия Борисовна DiskiPlus 7k casino официальный DiskiPlus порно с Захарова Мария Владимировна DiskiPlus casino betting DiskiPlus kent casino
#1387 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать на айфон
Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.Прочитайте правила бонусной программы, в которой хотите принять. Да, мы настойчиво рекомендуем устроить это до регистрации. <a href=http://filmkachat.ru/>1×slots регистрация на официальном сайте</a> Как управляло, новоприбывшие игроки для хотят ознакомиться с способами ввода и вывода валютных средств и сроки исполнения поданных заказов чтобы четко понимать, как стремительно появится вывести собственный казино бонус за регистрацию без депо на электрический кошелек или же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино соперничают меж собой. Ведь если бы определенную компанию давало только одно онлайн-заведение, то навряд бы посетители заметили казино с призом за регистрацию и имели бы рассчитывать лишь на вознаграждение в виде бонуса на 1-ое инвестиция. К каждому заведению регулярно идет завлекать новых игроков, что, в итоге, только на руку всем играющим. <a href=https://teletype.in/@kalinka0588/wj_aIQ7cr4o>https://teletype.in/@kalinka0588/wj_aIQ7cr4o</a> Для верификации номера аппарата, в собственном профиле изберите опцию „Подтвердить номер телефонного“ и введите в подходящее фон код, полученный в sms-сообщении.Операторы гемблинга утверждают, собственно так они борются с бонус-хантерами. Впрочем, критики считают, собственно этим казино пытаются сделать из случайного постояльца неизменного игрока. 1×slots регистрация на 1хслотс <a href=https://kcapa.net/bbs/board.php?bo_table=free&wr_id=2061413>https://kcapa.net/bbs/board.php?bo_table=free&wr_id=2061413</a>
1×slots сайт зеркало
1 x slots <a href=https://images.google.tt/url?q=https://doctorlazuta.by/>https://images.google.tt/url?q=https://doctorlazuta.by/</a> 1хслотс рабочее зеркало
1×slots casino регистрация 1×slots review live
Диапазон ставок, коие вправе устроить игрок, кроме лимитирован. Обычно ставить можно небольшую необходимую — пределах 10–30 рублей за одно вращение. <a href=https://gamesgrom.com/user/HenryDiugs/>https://gamesgrom.com/user/HenryDiugs/</a> 1×slots казино мобильная версия
1×slot казино зеркало
Первый возникающий вопрос, это, для выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают новых игроков. Последним проще начать игру на деньги с дара за регистрацию. Им не пополнять баланс и расходовать собственные свои. Новички получают бесплатные спины либо свои на счёт. С их помощью знакомятся с игровым процессом, крутят слоты и проделывают ставки в рулетке. Популярность онлайн казино растёт и всё больше юзеров начинают интересоваться азартными играми. Бездепозитные бонусы 2022 года, это оригинальные презенты за регистрацию. С их поддержкой новые игроки все получить безвозмездные вращения или деньги на баланс за одну регистрацию. С появлением игорных заведений в онлайне, бездепозитные призы стали моднейшим методом вербования игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы расскажем. Наш вебсайт собрал лучшие предложения из интернета на 2022 год. Воспользуйтесь хоть подарком и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить обстоятельства.Условия отыгрыша приза. Если Вы расчитываете заработать на бездепозитном бонусе, то начала обратите внимание на значение вейджера и срок, кот-ый дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть бонус и исключить выигрыш. Выиграть реальные средства в казино не пополняя счет – сложно, но вполне. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными бонусами и начните играть на бонусные средства. По статистике из 10-ти заведений можно заработать маленькую необходимую денег за счет бонусных средств. 1×slots зеркало этих способов предполагает регистрацию <a href=http://avtokrovati.com/index.php?subaction=userinfo&user=spectacularsubu>http://avtokrovati.com/index.php?subaction=userinfo&user=spectacularsubu</a>
1хслот официальный сайт зеркало
Многие азартные клубы ограничивают необходимую вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании акции, суммы Вы не можете исключить. Разница будет аннулирована, Вы числе не сможете создавать на нее ставки. <a href=http://freshgreen.kr/bbs/board.php?bo_table=free&wr_id=300425>http://freshgreen.kr/bbs/board.php?bo_table=free&wr_id=300425</a> 1×slots регистрацию процедура займет всего лишь Такие поощрения дозволяют даром протестировать свежее казино, разобраться с игровым ходом онлайн слотов, заработать и вывести небольшую необходимую средств.Приглашаем делиться воззрениями о бонусах. Это поможет иным юзерам выбирать наиболее выгодные предложения.
<b>Смотреть еще похожие новости:</b>
<a href=https://elclasificadomx.com/author/jameslog/>казино 1× slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бонус с зачислением денег на счет выделяет больше свободы поступков. Пользователь сам выбирает, каким образом воспользоваться подаренными своими. Здесь того все действовать лимитирования на перечень дешевых игр, хотя обыкновенно эти рамки не так строги, как в рекламную с бесплатными вращениями. Автоматы непопросту числятся самым модным азартным весельем. Чтобы усвоить управление и верховодила, понадобится всего некоторое минут. Ваша задачка устроить ставку, определить количество рабочих линий и можно крутить барабан. Если на выпадет выигрышная комбинация – вы выиграли! С этой задачей вам посодействуют справится бездепозитные призы казино.
#1388 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации 2025
Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских руб. В условиях промоакции предписано, собственно вейджер бездепозитного бонуса х20. Поэтому, чтобы отыграть бонус, игроку будет нужно устроить ставок на 35*20=700 рублей.Игрокам стоит воспринимать приветственный приз как гарантированный метод получить крупный выигрыш, хотя это отличная вероятность без затрат расценить возможностей казино. <a href=http://filmkachat.ru/>1× slots casino официальный сайт</a> В зависимости от онлайн заведения каждый из их может для предложить как бездепозитные средства, так и бездепозитные фриспины, которые после удачной регистрации рухнут вас на ваш игровой баланс. <a href=https://manifold.garden/forums/index.php?u=/topic/634/Why%203D%20Product%20Modeling%20Services%20Are%20a%20Game-Changer>https://manifold.garden/forums/index.php?u=/topic/634/Why%203D%20Product%20Modeling%20Services%20Are%20a%20Game-Changer</a> Как лишь на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу в этого возможно оставить заявку на вывод выигрыша. Кредиты прибыльно отличаются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом реальных средств и выделяют вероятность ощутить азарт. Во-вторых – можно насладиться любой азартной забавой доступной на сайте. В вашем распоряжении присутствуют автоматы, настольные прибавление, видео-покер, Live-дилеры.Допустим, за регистрацию вы получили бездеп в размере 2 000 рублей с вейджером х30. В данном случае светит устроить ставок, на общую сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать реальные деньги. Однако не забывайте, собственно с каждого дара получится исключить определённую сумму (чаще всего менее $200). зеркала 1×slots <a href=http://avarpressa.ru/user/DoctorLazutaea/>http://avarpressa.ru/user/DoctorLazutaea/</a>
1хслотс официальный сайт зеркало
1×slot зеркало рабочее этих способов предполагает регистрацию 2. Создать свежий профиль. Для регистрации надо(надобно) заполнить маленькую анкету или зайдите в личный офис посредством соц сеток;Если площадка дарит бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь ввести аккаунт на сайте и активировать его, подтвердив адрес электрической почты, номер телефона либо другие данные, коие настятельно оператор. Перед данным необходимо увериться, что юзер находится на официальном сайте казино, не на мошеннической площадке. <a href=http://mongdol.net/bbs/board.php?bo_table=free&wr_id=2464302>http://mongdol.net/bbs/board.php?bo_table=free&wr_id=2464302</a> 1×slots регистрация 1×slotscasino09k online Каждая игровая перрон выделяется условиями по получению и отыгрышу бездепов. В правилах отчетливо расписаны временные рамки, за коие нужно прокрутить вейджер. Также не запамятовывайте про максимальный размер ставки и максимальную сумму выплаты. С другой стороны, дабы получить бездепозитные бонусы казино, достаточно потратить менее 1 минутки.
1хслот 1хслотс регистрация перейти на 1×slots
Некоторые казино все предлагать клиентам бездепы за подтверждение номера или почты или репост на страницу в соц сетях.При небольшой сумме бонуса рекомендуется играть по невысоким ставкам, а применять максимальные лучше только том, случае, в вейджер слишком большой, а время на отыгрыш крепко ограничено. Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, или проигрываете предложенный бонус, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, научится регулировать изменять ставки и полосы, исследовать бонусные забавы и их выигрышные композиции, ну в конце концов просто зарядится кучей впечатлений! Ведь вы будите выступать на бонусные средства, коие можно отыграть и вывести, не просто на демо счет, что, этим наиболее адреналин в крови еще больше повысится а пульс забьется с частым ритмом! <a href=https://www.dmxzone.com/support/13984/topic/130675/>https://www.dmxzone.com/support/13984/topic/130675/</a> Особую изюминку видео слотам присваивают оригинальные знакы. С их появлением активируются различные призы. Вы сможете запустить дополнительный уровень и увеличить сумму выигрыша. Есть знаки, коие сменяют ненадобные элементы и сами делают выигрышные комбо. Не стоит забывать и тему бонус-тур. После любого удачного спина есть шанс прирастить необходимую выигрыша в два либо четыре раза.Как управляло, новоприбывшие игроки в первую очередь желают ознакомиться с способами ввода и вывода денежных средств и сроки исполнения поданных заказов чтобы конкретно понимать, как скоро меня вывести свой казино бонус за регистрацию без депозита на электронный кошелек либо же банковскую карту. К счастью для всех играющих, снутри конкретных холдингов, все казино конкурируют между собой. Ведь в бы конкретную фирму представляло только одно онлайн-заведение, то вряд ли бы клиенты увидели казино с призом за регистрацию и могли бы рассчитывать только на вознаграждение в виде бонуса на первое инвестиция. К каждому заведению периодически по привлекать новых игроков, что, в, лишь на руку всем играющим. казино 1×slots К примеру, игроку выдаются бесплатные свои в заведении в размере пятидесяти либо ста долларов (вейджер на которые сочиняет 100х). То есть, каждому новоприбывшему игроку выскакивает притягивающая картинка, кот-ая сулит выплату всех зачисленных компанией средств. Не стоит внимания на казино бонус за регистрацию без депо с сильно большой либо довольно махонькой суммой призов, потому что, в кропотливо выучив все условия, здесь всего, несомненно какой-то подкол.
1×slots актуальное зеркало
Первый образующийся вопрос, это, чего выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают новых игроков. Последним проще начать забаву на деньги с презента за регистрацию. Им не пополнять баланс и расходовать собственные свои. Новички получают бесплатные спины либо свои на счёт. С их помощью знакомятся с игровым процессом, крутят слоты и проделывают ставки в рулетке. Итак, чтобы благотворительные бонусные кредиты превратились в настоящие средства, которыми вам распоряжаться по своему усмотрению, их нужно отыграть. Вейджер следует уточнять в правилах онлайн-казино.Способы получения бездепа различаются от облика бонуса, кот-ый понравился игроку. Но вам так надо(надобно) быть зарегистрированным в законном онлайн-казино и подтвердить собственную личность. В общем виде пошаговая инструкция для получения бездепозитного бонуса смотрится так: Для проверки применяются сканы паспортов, водительских удостоверений, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если пользователь замечен в попытке ввести дополнительный акк, все его учетные записи подвергаются блокировке, а их владелец попадает в темный список. При забаве на лицензионной площадке не бояться указывать достоверную индивидуальную информацию (шифрование исключает утечку индивидуальных данных).Возможность протестировать свежие забавы, не рискуя личными своими и разработать личную стратегию забавы. 1×slots казино зеркало <a href=http://rus-troika.ru/forum/profile.php?mode=viewprofile&u=353951>http://rus-troika.ru/forum/profile.php?mode=viewprofile&u=353951</a> Выше мы дали полный комплект самых новых и своевременных бездепозитных призов в онлайн казино без пополнения на 2022 год, где возможность пользоваться каким ценным бездепозитным бонусом.Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция содержит доскональные правила, гиперссылка на которые обыкновенно содержится в промообъявлении. В их указываются лимиты, вейджер, перечень дешевых игр. Если оператор скрывает данные о предложении, то пользоваться им не.
рабочее зеркало 1хслотс
4. Заберите презент. Чаще всего приз активизируется незамедлительно после регистрации. Но посещают истории, когда надо(надобно) зайти в личный кабинет либо написать в саппорта.Подтверждение индивидуальной информации. Все казино требуют от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у пользователя иных аккаунтов (мультиаккаунт запрещен). Маркетинговая деятеля всех игорных интернет-клубов должна носить разнородный характер. И если вознаграждения на депо служат чтобы, чтобы, чтобы провоцировать вносить депозиты и поощрять теснее быть пользователей, то бездепозитный бонус в казино либо приз за регистрацию в казино, прежде всего, рассчитан на расширение базы покупателей. <a href=http://parkethold.ru/bitrix/click.php?goto=http://images.google.com.bz/url?q=http://imsider.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/UfAsEoLM0m1>http://parkethold.ru/bitrix/click.php?goto=http://images.google.com.bz/url?q=http://imsider.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/UfAsEoLM0m1</a> 1×slots официальный сайт скачать Подтвердите регистрацию, чтобы активировать Бездепозитный бонус с выводом, требуется наполнить личный профиль. Заполните порожние поля истинными данными о себе.
<b>Смотреть еще похожие новости:</b>
<a href=http://skatefluckit.com/member.php?u=149708>1×slots официальный сайт скачать</a>
<a href=http://mandala-app.com/forums/viewtopic.php?f=5&t=221696>1×slots casino зеркало</a>
<a href=https://forum.immortales-gilde.de/viewtopic.php?f=2&t=389892>1×slots зеркало на сегодня</a>
<a href=https://jgwy.net/space-uid-200381.html>1хслотс зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Нет. Казино раздают безвозмездные призы за регистрацию, чтобы, чтобы, дабы заказчик имел ознакомиться с игровым заведением. А дабы исключить его, необходимо выполнить обстоятельства отыгрыша. Фриспины — бесплатные вращения, коие позволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся наиболее модным и преимущественным видом бонуса — безвозмездные вращения порой эффективнее и веселее в отыгрыше, чем другие виды бездепов.
#1389 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
ограбление казино казино пин <a href=https://rucriminal.info/>Преподобная Надежда Александровна порно</a> Юдаева Ксения Валентиновна порно 1×bet зеркало рабочее на сегодня 1×bet xyz <a href=https://repost.news/>Елизавета Боярская</a> как выиграть в казино букмекерские конторы pin 1go casino бесплатные букмекерские конторы порно с Алина Загитова casino ru рокс казино
DiskiPlus pin casino DiskiPlus порно с Захарова Мария Владимировна <a href=https://www.diskiplus.ru>DiskiPlus Ирина Горбачева</a> DiskiPlus казино проиграл DiskiPlus Крючкова Полина Викторовна порно <a href=https://diskiplus.ru/>DiskiPlus вавада казино</a> DiskiPlus пинап казино DiskiPlus вавада казино DiskiPlus Анна Михалкова DiskiPlus сайте букмекерской конторы фонбет DiskiPlus Фастова Елена Владимировна порно DiskiPlus яндекс казино DiskiPlus букмекерская контора бетсити
#1390 ThomasSak
<a href=https://icope.org.sitescorechecker.com/>daftar kantorbola</a>
#1391 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия скачать
Частенько новички не знают, как активировать подарки либо вывести первый выигрыш. Для подобных случаев наша команда обрисовала основные определения – собственно такое фриспины, вейджер, как его отыграть, зачем необходимо протекать верификацию.Вышеописанная причина и считается главным нюансом, следствии которого операторы отдают доля собственной прибыли на различные рекламные затраты и рекламные кампании. А наиболее действенным тут станут играть непосредственно бездепозитные бонусы казино 2022 с выводом за регистрацию. <a href=http://filmkachat.ru/>1×slots промокод при регистрации 2025</a> В онлайне количество узнаваемых игорных площадок с привлекательными акционными услугами. Однако внимательно разбирать обстоятельства десятков предложений в надоест, ну и время отнимет много. Поэтому наша команда подготовила ТОП-3 сайтов с лучшими бездепозитными призами:После требуется внести идентификационный платёж. Это стращает начинающих больше всего. Нужно устроить наименьший депозит в 100–500 рублей. Таким образом служба безопасности увериться что, что платёжный способ принадлежит Вам. Данная процедура необходима для обеспечения безопасности игровых счетов. Пример, Ваш акк взломают и выведут средства на свой кошелёк. Будет очень досадно. Поэтому верификация платёжной системы, это важный момент. <a href=https://www.pearltrees.com/kalinka0588/item691382057>https://www.pearltrees.com/kalinka0588/item691382057</a> За вербование друга ? масштабах партнерской программки заказчик получает вознаграждение за вербование свежих пользователей. онлайн казино 1×slots <a href=https://www.webwiki.com/astramedika.com.ua>https://www.webwiki.com/astramedika.com.ua</a>
x1 slots регистрация в 1×slots casino
1×slots зеркало регистрация При верном подходе бездепы — это прекрасный способ выступать на средства без траты собственных средств. Есть некоторое рекомендаций, следуя которым можно извлечь максимум пользы из похожих промоакций казино. Играть следует лишь на лицензированных площадках. Скриптовые сайты не дурачат с бонусными услугами, хотя и используют пиратский софт с модифицированным ГСЧ. Выиграть на этих автоматах нереально.Для получения бездепа необходимо пригласить в забаву по реферальной ссылке свежего посетителя: он должен зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на необходимую, указанную в критериях акции. <a href=https://google.co.ao/url?q=https://doctorlazuta.by/>https://google.co.ao/url?q=https://doctorlazuta.by/</a> Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.Следует выделить, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом. казино 1× slots официальный сайт
1 x slots
В качестве призов онлайн казино часто предлагает выдачу фриспинов, то есть бесплатных вращений игрового барабана. Виртуальные монеты можно применять для обучения в покерной школе или для забавы в казино.Первый образующийся вопрос, это, зачем выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают свежих игроков. Последним легче начать забаву на деньги с дара за регистрацию. Им надо пополнять баланс и расходовать личные свои. Новички получают бесплатные спины либо свои на счёт. С их помощью знакомятся с игровым процессом, крутят слоты и проделывают ставки в рулетке. <a href=https://ya.7bb.ru/viewtopic.php?id=10555#p36764>https://ya.7bb.ru/viewtopic.php?id=10555#p36764</a> 1×slots зеркало регистрацию более популярный вариант это
1×slots сайт
Классическая разновидность бонуса за творенье аккаунта. Его преимущество заключается том,, что клиент может самостоятельно подбирать аппараты и делать ставки в их. Иногда перечень игровых автоматов ограничен оператором, хотя все точно это другого, чем единственный доступный разъем, как когда с внедрением фриспинов.Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом прибыли присутствуют на этой страничке. Посетитель может расценить условия получения и начать играть на деньги без внесения депозита. При этом игроку важно понимать, на каких условиях и какими методами возможность исключить приобретенный выигрыш. Для сего необходимо оценить перечень подключенных платежных систем. Отзывы читателей о бонусных акциях помогут составить эмоцию, но не забывайте о субъективности собственных объяснений. 1×slots зеркало регистрация <a href=https://rus-crafting.ru/index.php?subaction=userinfo&user=Frankbeaub>https://rus-crafting.ru/index.php?subaction=userinfo&user=Frankbeaub</a> Шаг 4. Активация. Внимательно исследуйте условия, информацию по ограничениям и сроке деяния бонусного предложения. Разобравшись с правилами, возможно активировать бонус в личном офисе (время ? с использованием промокода) либо по запросу в саппорт.
1×slots зеркало подтвердит вашу регистрацию если говорить
Ещё одно распространённое акционное предложение – симпатичный презент с сомнительными требованиями. К образцу, клуб сулит $100 виде бездепа, но с вейджером х80 или х100. Отыграть такой вейджер фактически невозможно и поэтому другого, как концентрироваться на больше занимательных акциях.Обычно бездепозитные промоакции от казино, прибывают на эл. Почту в деньки рождения либо праздники. В неких онлайн казино возможно обратиться в чат и как постоянному игроку, вполне вас предложат бездепозитное предложение. <a href=http://upwater.co.kr/bbs/board.php?bo_table=free&wr_id=2119>http://upwater.co.kr/bbs/board.php?bo_table=free&wr_id=2119</a> Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, чтобы снова получить бесплатный приз. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ждет неизбежное санкция.Пoдтвepдить личнocть посетителя. Для успешного вывода средств, необходимо доказать личность клиента. Нa этaпe вepификaции пpoфиля, сотрудники службы защищенности должны увериться, собственно у игрока чем раз аккаунт. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не сможет вывести собственный выигрыш, в у него несомненно некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы. 1×slot зеркало рабочее регистрации на телефон придет Выбор каждого онлайн казино на нашем веб-сайте. В описании к любому Вы сможете узнать, собственно получите за творение аккаунта.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.gamers4life.com/forums/f20/albendazole-prix-albendazole-ordonnance-ou-pas-872722/>1 xslots рабочее зеркало</a>
<a href=https://nauc.info/forums/viewtopic.php?t=20863137>1×slots официальный сайт мобильная версия</a>
<a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=58168>казино 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Можно ли зарабатывать на бездепозитных призах? Это не работа, тут как повезет, если в любом предложенном безедепе, вы будете откручивать вейджер и выводить, время можно назвать везением, и дополнительной добавкой к вашему бютжету. Подарки на определенные даты выделяются критериями получения. Если поощрение начисляют игроку на день рождения, то сумма обычно зависит от совместного объема депо последний год.
#1392 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации
Бесплатные призы казино без депозита можно получить в виде денежных средств на бонусный счет (вывести их возможно лишь после отыгрыша), фриспинов, забавы или кешбэк-бонуса.Допустим, за регистрацию вы получили бездеп в размере 2 000 рублей с вейджером х30. В этом случае предстоит сделать ставок, на совместную сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда сделайте условия по отыгрышу, придёт время заработать настоящие средства. Однако не запамятовывайте, собственно с каждого презента получится исключить определённую сумму (чаще всего не более $200). <a href=http://filmkachat.ru/>1×slots зеркало рабочее на сегодня</a> Условия вывода выигрыша. В некоторых заведениях для успешного вывода с бездепозитного приза достаточно пополнения баланса и подтверждения личности. В других же клубах, нужно некоторое раз прокрутить свой депо.Верификация необходима для добавочной защищенности и помогает техподдержке выявить бонусхантеров и жуликов. Кстати, на некоторых платформах выводы солидных сумм доступны только после подтверждения личности. <a href=https://archinect.com/firms/cover/150465480/all>https://archinect.com/firms/cover/150465480/all</a> 1×slots промокод при регистрации <a href=http://www.daongil.com/bbs/board.php?bo_table=free&wr_id=355975>http://www.daongil.com/bbs/board.php?bo_table=free&wr_id=355975</a>
скачать 1×slots официальный сайт
Отыграв бездепозитный бонус в казино с выводом тоже придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, случае схожее лимитирование присутствует, то единоразово вывести выйдет только необходимую, не превосходящую размер полученного приза. 1×slots регистрация на 1хслотс <a href=https://wiki.lafabriquedelalogistique.fr/Discussion_utilisateur:Werner67N87032>https://wiki.lafabriquedelalogistique.fr/Discussion_utilisateur:Werner67N87032</a> Процесс доказательства личности возможность занять от 1-го денька до недели. Если клиент разрешил нибудь оплошность при заполнении паспортных данных, то ему стопам обратиться с проблемой в службу онлайн-казино. 1×slots зеркало на сегодня Прежде чем активировать бездеп, необходимо убедиться в том, что страна, уроженцем которой считается игрок, не входит в перечень запрещенных.Также, в этом случае необходимо подтвердить собственный номер телефона, желаемого код, приобретенный в смс-сообщении от клуба установить в специальное фон в личном кабинете игрока.
1×slots сайт зеркало
Призовые начисления без депо все предоставляться для участия в турнирах онлайн казино. Потратить перечисленные деньги можно самая масштабах этой промоакции. Условия их проведения в лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться этим предложением, другого, как изучить его правила.Зарегистрироваться в казино по специальной ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефона и электронную почту). Для доказательства номера телефона нужно в собственном профиле указать собственный номер и надавить кнопку „Подтвердить номер телефона“, дальше Вы получите sms-сообщение с кодом, который необходимо установить в отвечающее фон. Для доказательства электронной почты, перейти по активной ссылке в послании от казино. Условия вывода выигрыша. В неких заведениях для успешного вывода с бездепозитного бонуса довольно пополнения баланса и доказательства личности. В других же клубах, нужно количество раз прокрутить собственный депозит. <a href=http://georgiantheatre.ge/index.php?subaction=userinfo&user=testedlaborator>http://georgiantheatre.ge/index.php?subaction=userinfo&user=testedlaborator</a> Некоторые клубы автоматически начисляют приз на аккаунт игрока в выполнения условий получения, хотя бывают истории, когда приз нужно активировать игроку самому. Есть некоторое способов активации приза: 1×slots зеркало выигрыши обязательно пройдите регистрацию если Шаг 4. Активация. Внимательно изучите условия, информацию по ограничениям и сроке действия бонусного предложения. Разобравшись с правилами, можно активировать бонус в собственном кабинете (иногда ? с использованием промокода) или по запросу в саппорт.Отзывы читателей о бонусных промоакциях помогут составить эмоцию, хотя не забывайте о субъективности собственных комментариев.
1хслотс казино зеркало
Допустим, за регистрацию вы возымели бездеп в размере 2 000 рублей с вейджером х30. В этом случае светит сделать ставок, на общую необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать реальные средства. Однако не запамятовывайте, что с каждого презента выйдет исключить определённую сумму (почаще всего не более $200). <a href=http://forum.as-p.cz/viewtopic.php?f=45&t=67620&p=350934#p350934>1хслот зеркало</a> К сожалению, нет. Почти все казино, требуют внесение но бы 1-го малого депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, собственно исключить деньги разрешается лишь на ту платежную систему, с коей был сделан депо. Подтверждение электронной почты – одно из основных условий, которое есть почти в любом бездепозитном казино. Чтобы верифицировать электронную почту, достаточно перебежать по активной ссылке в послании, приобретенном от азартного клуба. 1 x slots casino <a href=https://civil808.com/user/68056/briantrese>https://civil808.com/user/68056/briantrese</a> Бездепозитные бонусы отличный вариант даровой игры в игровые автоматы. Многие пользователи сети не понимают, что в казино возможно начать играть абсолютно безвозмездно, а позже исключить выигрыш на банковскую карту либо электрический кошелек, иные не доверяют онлайн казино, а третьи успешно играют и выигрывают – и подчас достаточно великие суммы.
1× слот зеркало
Игры, каких возможно выступать на бонусные средства. Проверьте список игр, каких можно играть на бонусные свои, вероятно они Вам не понравятся и не тратить своё время на такую промоакцию. <a href=https://brooksgpzg19620.livebloggs.com/36537502/deep-nude-the-ethical-dilemmas-and-technological-impacts-of-ai-driven-image-manipulation>https://brooksgpzg19620.livebloggs.com/36537502/deep-nude-the-ethical-dilemmas-and-technological-impacts-of-ai-driven-image-manipulation</a> В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это самая приятная часть игры. Важно, зачастую бездепозитные призы в казино выдаются с ограничениями по максимальной выплате. В среднем возможно рассчитывать на прибыль в некоторое тыщ рублей. Как исключить выигрыш с бонуса без депо. Придётся доказать аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате либо прочитайте в правилах.Итак, дабы бесплатные бонусные кредиты трансформировались в настоящие средства, которыми вам управлять по собственному усмотрению, их надо(надобно) отыграть. Вейджер по уточнять в правилах онлайн-казино. 1хслот зеркало сайта Не стоит путать игру в демо и внедрение бонусов. В демонстрационном режиме игрок может расценить механику слота, сюжет и оформление. Но забава проводится на относительные кредиты, потому отсутствует основное ? чувство азарта. Активируя промокод либо фриспины, заказчик как не расходует средства деньги на игровые автоматы, хотя может сорвать настоящий куш!
<b>Смотреть еще похожие новости:</b>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=410079>1×slots регистрация 1×slotscasino 56 online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Такой казино бонус без депозита за регистрацию выдается игроку на час и активно используется данное предложение с 2017 года. Это словно какая-то конспирация поощрения под бездепозитный. Суть всего сего сводится к что, этому, что игроку на час выдается, к примеру, 1000 $, а реклама утверждает то, собственно каждой выигрыш можно будет дальнейшем забыть при себя. Но если играющий всерьез отнесется к данному предложению, то он попросту потеряет время. Ведь геймеру надо(надобно) будет выступать не в аккаунте, а в тренировочном и с ограниченным выбором автоматов и ставок. Да и если, тогда, выигрыша (том всей тысячи) в верховодила вступят конкретные обстоятельства, где несомненно сказано, собственно наибольшей суммой победы может быть только двести $ и деньги возможно применять лишь виде бонуса на первый лепта с вейджером 25 от суммы вознаграждения плюс сам депо. По результату выйдет, что игрок выигрывал для 200% приз с вейджером на конкретную сумму. Короче разговаривая, это все не стоит вашего медли. Минимального оборота. Этот лимит уточняется вейджером — пока игрок не поиграет на установленную сумму, вывод средств несомненно недоступен.
#1393 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet на андроид бесплатно казино фильм онлайн <a href=https://repost.news/>pin casino зеркало</a> up casino официальный casino pin официальный <a href=https://repost.news/>1×bet на сегодня</a> приложения букмекерских контор на андроид unlim casino porno Марина Александрова самое казино букмекерские конторы без депозита Любимова Ольга Борисовна порно up casino официальный
DiskiPlus casino riobet DiskiPlus porno Илона Маркова, хоккеистка <a href=https://www.diskiplus.ru/>DiskiPlus ешь казино</a> DiskiPlus казино сочи DiskiPlus лучшие онлайн казино <a href=https://www.diskiplus.ru/>DiskiPlus new casino</a> DiskiPlus почему в казино нет окон DiskiPlus фреш казино DiskiPlus pin casino зеркало DiskiPlus casino зеркало сегодня DiskiPlus Валентина Матвиенко порно DiskiPlus карты казино DiskiPlus порно с Алина Загитова
#1394 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало рабочее
Реже призы без депо начисляются постоянным игрокам. С их помощью администрация старается удержать ценных клиентов либо желает поблагодарить за преданность правильных посетителей. Но намного чаще для похожих целей применяются эти акции: <a href=http://filmkachat.ru/>казино 1×slots</a> <a href=https://joy.link/kalinka0588>https://joy.link/kalinka0588</a> 1 x slots <a href=https://www.bos7.cc/home.php?mod=space&uid=2959912&do=profile&from=space>https://www.bos7.cc/home.php?mod=space&uid=2959912&do=profile&from=space</a>
1×slots сайт
<a href=https://www.digicube.de/forum/threads/918392–1×slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%BD%D0%B0-%D1%81%D0%B0%D0%B9%D1%82%D0%B5?p=1136624#post1136624>1×slots регистрация на сайте</a> 1×slots casino регистрация на сайте Да, у безвозмездных призов есть недостатки. Прежде всего, они обыкновенно очень. Кроме того, обстоятельства вейджера по ним всегда строгие. Но таки отсутствие риска проделывает их довольно красивыми для клиентов.Можно ли в одном интернет казино получить больше 1-го бонуса за регистрацию? Нет, например как в каждом онлайн казино есть верховодила, к которым надо(надобно) держаться, не творить два аккаута для получения призов, другому несомненно блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, приз за регистрацию выдаеться раз один 1 личику. <a href=https://www.ccvgaming.com/forum/member.php?39512-FrankAnido&s=5048a7f79cddfa39e8fc583a554feda9>https://www.ccvgaming.com/forum/member.php?39512-FrankAnido&s=5048a7f79cddfa39e8fc583a554feda9</a> Фриплей-бонусы. Бонусы за бесплатную игру есть только в неких клубах. Они зачисляются незамедлительно в сотворения профиля и срабатывают непродолжительное время. Если у вас нет медли потратить свои, они просто завершатся. Что касается времени, правило призы действуют протяжении 1-го часа.Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и расценить особенности, недоступные при этой в демо режиме. Многие новые клиенты перебегают в количество неизменных, а оператор получает длительную прибыль. 1×slots зеркало регистрация то дальше необходимо пройти Пoдтвepдить личнocть клиента. Для удачного вывода средств, необходимо подтвердить личность клиента. Нa этaпe вepификaции пpoфиля, работники службы защищенности должны убедиться, собственно у игрока более один акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не сможет вывести свой выигрыш, случае у него будет количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы.
1×slots зеркало подтвердит вашу регистрацию если говорить
Начнём с как, собственно каждое рекламную за регистрацию подразумевает некие обстоятельства. Бездепозитные бонусы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность валютного оборота, нужная для исполнения критерий. Пример, получили безвозмездные вращения и выиграли с их 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 руб., неудачных либо выигрышных, неважно. После выполнения, бонусный баланс перейдёт на реальный и станет доступным к выводу.Бездеп с фриспинами может охватывать всю коллекцию игр на сайте или разработки одного провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш возможность быть выведен после такого, как юзер отыграет данную сумму. Возможность оценить полный перечень слотов — главное достоинство данной разновидности. Игроку становятся доступны те функции, которые отсутствуют в демонстрационном режиме, а вероятность выиграть реальные деньги прибавляет ярчайших азартных ощущений. <a href=https://love-n-magic.ru/index.php?subaction=userinfo&user=HenryCrymn>https://love-n-magic.ru/index.php?subaction=userinfo&user=HenryCrymn</a> Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, дабы еще раз получить безвозмездный бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ожидает неминуемое наказание. рабочее зеркало 1хслотс Но а случае вы уже профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в онлайн казино;
1×slots зеркало видели такую регистрацию на
Самые свежие бездепозитные бонусы в казино за регистрацию 2022 года с выводом прибыли находятся на данной страничке. Посетитель может оценить условия получения и начать играть на деньги без внесения депозита. При данном игроку главно понимать, на каких условиях и какими методами появится вывести приобретенный выигрыш. Для этого необходимо оценить список присоединенных платежных систем.Игры, в которых возможно играть на бонусные средства. Проверьте список игр, каких можно играть на бонусные средства, вполне они Вам не понравятся и не тратить своё время на эту промоакцию. <a href=https://www.mentalhealth-world.org.uk/forums/index.php?/topic/96368–1×slots-%D0%BD%D0%B0-%D0%BB%D1%8E%D0%B1%D0%BE%D0%B9-%D0%B2%D0%BA%D1%83%D1%81-%D0%BA%D0%B0%D0%BA-%D0%BF%D1%80%D0%BE%D0%B9%D1%82%D0%B8-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8E/>1×slots на любой вкус как пройти регистрацию</a> Следует выделить, собственно бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с определенным кодом.Некоторые онлайн-казино без депозита предлагают свежим клиентам выбрать бонус при регистрации. Будьте внимательны: выбрав один, вы в абсолютном большинстве случаев не можете пользоваться остальными. 1×slots официальный сайт мобильная версия скачать <a href=http://flightgear.jpn.org/userinfo.php?uid=48559#>http://flightgear.jpn.org/userinfo.php?uid=48559#</a> Воспользоваться бездепом можно не во всех игровых автоматах: казино вдруг устанавливает лимитирование для посетителей. Конечно, это возможно счесть некоторым неудобством для игрока, но справедливости ради стоит отметить, что выбор автоматов всё одинаково остаётся достаточно великим.Маркетинговая политика всех игорных интернет-клубов обязана одевать различный характер. И в гонорары на депозит служат чтобы, чтобы, дабы провоцировать вносить депозиты и поощрять теснее быть юзеров, то бездепозитный приз в казино или приз за регистрацию в казино, до всего, рассчитан на расширение базы потребителей.
1х слот регистрация в 1×slots casino
<a href=https://www.google.as/url?q=https://doctorlazuta.by/>https://www.google.as/url?q=https://doctorlazuta.by/</a> Хотя бесплатные призы начисляются без депо, не исключено, что вам придется заносить средства. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты только последствии того, как новый клиент раз пополнит игровой счет.Каждая игровая перрон выделяется критериями по получению и отыгрышу бездепов. В правилах отчетливо расписаны кратковременные рамки, за коие нужно прокрутить вейджер. Также не запамятовывайте тему наибольший размер ставки и наивысшую необходимую выплаты. С другой стороны, чтобы получить бездепозитные бонусы казино, довольно потратить менее 1 минутки. 1×слот регистрация в 1×slots casino Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном сайте и сделайте вход в индивидуальный кабинет, дабы арестовать бесплатные вращения с вейджером х40;
<b>Смотреть еще похожие новости:</b>
<a href=http://yamato-ryu.ru/communication/forum/index.php?PAGE_NAME=message&FID=1&TID=46294&MID=11042&sessid=4d32b14264f1c0347aa951e25a7eca47&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>рабочее зеркало 1×slots</a>
<a href=https://www.donchillin.com/space-uid-382497.html>1×slots зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша бонусов. Заведения постоянно устанавливают наивысшую ставку, возможную по условиям вейждера. Наш список включает в себя наихорошие бездепозитные призы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по принципиальным характеристикам:
#1395 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино онлайн бесплатно 1×bet слоты официальный сайт <a href=https://rucriminal.info/>7k casino скачать</a> порно с Афонина Марина Игоревна лучшие бесплатные онлайн казино <a href=https://7club7.com/>1×bet скачать бесплатно</a> рейтинг казино лучшие онлайн казино 1×bet слоты 1×bet xyz casinos xyz vavada casino порно с Анна Калинская (теннис) 1×bet скачать бесплатно
DiskiPlus самое казино DiskiPlus пин ап казино <a href=https://diskiplus.ru>DiskiPlus casino официальный сайт</a> DiskiPlus кент казино DiskiPlus букмекерская контора бетсити <a href=https://diskiplus.ru>DiskiPlus porno Екатерина Ефременкова, шорт-трекистка</a> DiskiPlus Окладникова Ирина Андреевна порно DiskiPlus мелбет букмекерская контора DiskiPlus pin up casino зеркало DiskiPlus казино рулетка DiskiPlus скачать 1×bet на андроид бесплатно DiskiPlus порно с Анастасия Потапова, теннисистка DiskiPlus порно с Артемий Панарин (хоккей)
#1396 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots review live
Процесс доказательства личности имеет занять от 1-го денька до недели. Если клиент разрешил какую оплошность при заполнении паспортных данных, то ему идет обратиться с задачей в саппорта онлайн-казино. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasin online</a> Обычно бездепозитные акции от казино, приходят на эл. Почту в дни рождения или праздничные. В некоторых онлайн казино возможно обратиться в чат и как постоянному игроку, вероятно для предложат бездепозитное предложение.С иной стороны, намного легче отобрать бездепозитные фриспины за регистрацию в казино и напрямик в начать вращать барабаны в наихороших слотах. Главная необыкновенность спинов что, что они предусмотрены для лучших автоматов. Удастся не пройти дополнительные раунды, хотя и увеличить необходимую выигрыша, заработать респины и внутриигровые презенты. <a href=https://www.neobienetre.fr/forum-bien-etre-medecines-douces-developpement-personnel/topic/real-estate-virtual-tours/>https://www.neobienetre.fr/forum-bien-etre-medecines-douces-developpement-personnel/topic/real-estate-virtual-tours/</a> Чтобы помощи убедиться в превосходствах бездепозитных призов, довольно зарегистрироваться в казино и получить одобрение.Минимального оборота. Этот предел устанавливается вейджером — пока игрок не поиграет на установленную необходимую, вывод средств будет недосегаем. 1хслот зеркало сайта <a href=https://www.freebeg.com/forum/member.php?action=profile&uid=26499>https://www.freebeg.com/forum/member.php?action=profile&uid=26499</a> Бездепы обыкновенно предлагают с отыгрышем — быстро исключить выигранные свои невозможно. Перевод средств со счета несомненно возможен последствии такого, как юзер выполнит все требования казино, а сумма имеет превышать установленного правилами лимита. Условиями акции фиксируются сроки, на коих клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней после активации.Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном веб-сайте и выполните вход в собственный кабинет, чтобы забрать бесплатные вращения с вейджером х40;
1×slos регистрация в 1×slots casino
Важно, убедитесь что, собственно ранее не регились в избранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи.Верификация необходима для добавочной безопасности и помочь техподдержке выявить бонусхантеров и плутов. Кстати, на некоторых платформах выводы крупных сумм доступны только последствии подтверждения личности. 1×slots регистрация 1×slots casino c2d ru <a href=http://obruchalka-vrn.ru/index.php?subaction=userinfo&user=historicaleyesi>http://obruchalka-vrn.ru/index.php?subaction=userinfo&user=historicaleyesi</a> Стоит обозначить(означить), что бездепозитный приз выдается только взрослым новеньким, которые, к, имеют пригласить собственных приятелей и людей, кроме претендующих на поощрительную программу преданности. Подобная технология замечена между соперничающих онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению своей популярности, методом привлечения свежих игроков. Бонусы – это уникальный шанс для потенциальных соучастников игры, коие все опробовать софт покер рума и увериться, станут ли они в него выступать либо нет. Новый игрок испробует средства силы с реальными оппонентами в казино. 1×slots зеркало регистрация в 1×slots casino
1хслотс 1хслотс регистрация перейти на 1×slots
Итак, чтобы благотворительные бонусные кредиты превратились в настоящие деньги, которыми вы можете распоряжаться по своему усмотрению, их нужно отыграть. Вейджер идет уточнять в правилах онлайн-казино.Мы рекомендуем не открещиваться от сходственных услуг знаменитых казино. Выделите несколько минут на регистрацию, получите приз и попробуйте его отыграть. Может быть, сейчас фортуна несомненно на вашей стороне! Бонусы без депо при регистрации числятся самыми привлекательными как для опытнейших игроков, так для и новичков. Получив такое вознаграждение, клиент может выступать на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а обстоятельства их активации и выигрыша.Изучить правила и обстоятельства получения бездепозитных призов казино, Вы можете у нас на веб-сайте в разделе с бонусами либо на официальном веб-сайте выбранного Вами казино. Если имеет отыскать нужную информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал или по электрической почте. <a href=http://bigcom.ru/bitrix/rk.php?goto=http://stoletov.ru/bitrix/redirect.php?goto=http://perm.rusklad.ru/bitrix/redirect.php?goto=https://teletype.in/@urist_free/OBFbAjNcMKi>http://bigcom.ru/bitrix/rk.php?goto=http://stoletov.ru/bitrix/redirect.php?goto=http://perm.rusklad.ru/bitrix/redirect.php?goto=https://teletype.in/@urist_free/OBFbAjNcMKi</a> Помните, собственно любые нарушения управлял сведут на нет ваши старания, и вы всего останетесь без начисленного для дарового бонуса. Всегда изучайте верховодила начисления и условия вейджера. По хоть вопросам, на которые вы не других найти ответы, обращайтесь за объясненьям и саппорт. 1хслотс зеркало на сегодня
1×slots актуальное зеркало
Диапазон ставок, коие вправе устроить игрок, кроме лимитирован. Обычно ставить можно небольшую необходимую — пределах 10–30 рублей за одно вращение.Бездепозитные призы в казино без пополнения 2022 — это определенная сумма средств или for nothing spins вращения, коие предоставляются первым гостям за регистрацию на сайте казино вид бездепозитного бонуса, и выделяет вам вероятность за счет казино без пополнения опробовать услуги (игр), с последующей прерогативой вывода средств при выполнении всех установленных верховодил. 1×slots casino online регистрация <a href=http://gaypan.vip/space-uid-66460.html>http://gaypan.vip/space-uid-66460.html</a>
1× слот зеркало
Наиболее популярные вознаграждения среди гэмблеров – бездепозитные призы казино. Это не изумительно, ведь можно получить бесплатные вращения или виртуальные кредиты, и всем не придётся пополнять счёт, рисковать личностными средствами. Удастся насладиться разнообразными веселиями даже выиграть солидную необходимую, избегая серьёзного риска.Риск-игра по одинаковым шансам – Также казино имеет запрещать исполнять условия по отыгрышу за раунда на удвоение, который предлагается в слотах, видео-покере и некоторых иных забавах. Фриплей-бонусы. Бонусы за бесплатную игру есть только в некоторых клубах. Они зачисляются незамедлительно последствии сотворения профиля и срабатывают непродолжительное время. Если у вас нет времени потратить свои, они просто завершатся. Что касается времени, как призы срабатывают в течение одного часа. <a href=https://cse.google.az/url?q=https://doctorlazuta.by/>https://cse.google.az/url?q=https://doctorlazuta.by/</a> 1×slots сайт зеркало Выбирайте наихорошие бесплатные призы с помощью обзоров на Casinoz – и пусть вам сопутствует удача при отыгрыше бонусных кредитов!Иногда для получения бонусов необходимо спутаться с адептами саппорта. Удобнее всего с ними собеседовать в онлайн-сате, желая от довольно запроса по электрической почте.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.dis-course.net/viewtopic.php?t=660475>1×slots регистрация 1×slots casino 777 online</a>
<a href=https://kakofon.cz/forum/viewtopic.php?f=6&t=390&p=39779#p39779>1×slots официальный сайт мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
К примеру, игроку выдаются безвозмездные средства в заведении в размере пятидесяти или 100 долларов (вейджер на которые составляет 100х). То есть, каждому новоприбывшему геймеру выскакивает притягивающая иллюстрация, которая обещает выплату всех зачисленных компанией средств. Не стоит заострять на казино бонус за регистрацию без депозита с чрезмерно большой или довольно малюсенькой суммой бонусов, потому что, том кропотливо изучив все условия, здесь скорее, будет какой-то подвох. Бездепозитные бонусы за регистрацию являются одним из самых популярных способов вербования новых игроков в онлайн-казино, потому собственно они деют игрокам возможность опробовать казино, необыкновенно игровые автоматы, и возможно, выиграть настоящие деньги.
#1397 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации 2025
Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных требований, кроме неотъемлемой верификации. Если на сайте предусмотрена неотъемлемая процедура доказательства личности, то вывести выигрыш получится лишь после проверки данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий лицо. <a href=http://filmkachat.ru/>1×slot официальный сайт</a> С этими ординарными советами любое казино с бонусом за регистрацию способно принести в разы больше выгоды и полезности.Выбирая даровой приз, внимательно изучайте правила. Убедитесь, что вам можно себя участие в акции. Уточните, в каких играх можно исполнять обстоятельства вейджера. При необходимости задавайте вопросы представителям саппорта. <a href=https://www.therookies.co/projects/79483>https://www.therookies.co/projects/79483</a> 1×slots официальный зеркало рабочее <a href=https://joyrulez.com/blogs/497601/Understanding-Architectural-Rendering-Techniques-Benefits-and-Best-Practices>https://joyrulez.com/blogs/497601/Understanding-Architectural-Rendering-Techniques-Benefits-and-Best-Practices</a>
скачать 1×slots на андроид мобильная версия
<a href=https://www.fromrus.su/index.php?/topic/58447–1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE/>1хслотс зеркало</a> 1×slot официальный сайт Третитй бездепозитный приз за регистрацию – валютные средства. К раскаянию, начислить рубли или баксы готовы лишь знаменитые и модные клубы. С их подмогою появится насладиться любой доступной игрой – автоматом, рулеткой, кено, блэкджеком.Подобные бонусы без депозита предоставляются на больше прибыльных условиях. Зачастую они крупнее, а условия отыгрыша наименее строгие. <a href=https://xn–80asucf0d.xn–j1al4b.xn–p1ai/index.php?option=com_k2&view=itemlist&task=user&id=128819>https://xn–80asucf0d.xn–j1al4b.xn–p1ai/index.php?option=com_k2&view=itemlist&task=user&id=128819</a> Бездепозитный бонус предоставляется новому игроку за определенные деянья. Часто подарок в виде денег или фриспинов выдается за регистрацию, благодаря чему юзер получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.Подтверждение регистрации. Казино настоятельно привязки профиля к электронному адресу и номеру телефона. Для этого на e-mail отчаливает письмо ссылаясь, а на телефонный ? текстовое сообщение с кодом. 1хслот 1хслотс регистрация перейти на 1×slots Вывод выигрыша с бездепозитных бонусов казино – великодушный подарок от азартных клубов. Но чтобы вывести свой доход, нужно выполнить ряд условий:
1×slots официальный сайт, скачать
Проверка занимает от нескольких мин. До нескольких дней, специалисты техподдержки могут запросить вспомогательные документы либо инициировать куцее общение по Skype. Принципиальным отличием бесплатных призов от бонусов на депо является неименье надобности заносить средства на акк. Из-за сего их нередко нарекают бездепозитными (not the slightest deposit bonuses).Изучить управляла и условия получения бездепозитных бонусов казино, Вы сможете у нас на сайте в разделе с призами или на официальном сайте избранного Вами казино. Если возможности найти необходимую информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал либо по электронной почте. <a href=http://shigebao.com.cn/home.php?mod=space&uid=1169317>http://shigebao.com.cn/home.php?mod=space&uid=1169317</a> 1× slots зеркало
1×slots скачать на айфон
Бонус с зачислением средств на счет выделяет больше свободы поступков. Пользователь сам избирает, каким образом распорядиться подаренными своими. Здесь также все действовать лимитирования на перечень дешевых игр, хотя обычно эти рамки не например строги, как в промо с безвозмездными вращениями.Вы не в коем случае ни чем не рискуете, а лишь выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической игры на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, научится регулировать менять ставки и полосы, изучать бонусные игры и их выигрышные композиции, да в просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные средства, коие можно отыграть и исключить, но просто на демо счет, тем самым адреналин в крови более повысится а пульс забьется с нередким ритмом! <a href=http://rumproject.com/rumforum/viewtopic.php?f=23&t=5143>1×slots рабочее зеркало</a> Начнём с как, что любое промо за регистрацию предполагает некоторые условия. Бездепозитные бонусы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, нужная для выполнения условий. Пример, возымели бесплатные вращения и выиграли с них 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 рублей, неудачных или выигрышных, не. После выполнения, бонусный баланс перейдёт на реальный и станет легкодоступным к выводу. Иногда для получения бонусов нужно спутаться с представителями службы поддержки. Удобнее всего с ними собеседовать в онлайн-сате, но иногда довольно запроса по электрической почте.Онлайн-казино с бездепозитными бонусами ставят посетителям условия для использования бездепами, потому перед участием в акции какого-либо подробно ознакомиться со всеми правилами и аспектами промоакции. Условия могут дотрагиваться получения бонуса, его применения и последующего вывода валютных средств если, тогда, выигрыша. 1×slots зеркало выигрыши обязательно пройдите регистрацию если <a href=http://www.1004an.com/bbs/board.php?bo_table=free&wr_id=177565>http://www.1004an.com/bbs/board.php?bo_table=free&wr_id=177565</a>
1×slots casino online регистрация
В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, необходимо адресоваться в службу поддержки через лайв-чат на веб-сайте казино. <a href=https://buketik39.ru/user/Jamesflies/>https://buketik39.ru/user/Jamesflies/</a> Демоказино есть практически на каждом веб-сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются существенно пореже: там если, тогда, выигрыша и соблюдения критерий акций бездеп возможно перевоплотить в реальные средства. 1×slots актуальное зеркало Операторы гемблинга заявляют, собственно так они сражаются с бонус-хантерами. Впрочем, критики считают, что данным казино пробуют сделать из случайного постояльца неизменного игрока.Фриспины без депозита либо вспомогательные свои посодействуют ближе познакомиться с игровой платформой и её функциями. За счёт даров можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям из-за игры напротив живых крупье.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Помните, что в неких забавах сумма ставки идет в зачет вейджера лишь частично. Так, в настольных и карточных играх только от 5% до 50% суммы ставки считаются как отыгранные деньги, тот как в слотах идет в зачет все one hundred percent суммы.
#1398 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Юлия Пересильд porno Мира Андреева (теннис) <a href=https://strelochnik.com/>Попова Анна Юрьевна порно</a> 1×bet официальный 1×bet xyz 1×bet официальный <a href=https://strelochnik.com/>казино фильм</a> порно с Захарова Мария Владимировна 1×bet зеркало на сегодня порно с Илья Осипов (киберспорт) сайт казино зеркало вывод казино 1×bet зеркало на сегодня порно с Афонина Марина Игоревна
DiskiPlus казино вход официальный сайт DiskiPlus casino официальный сайт <a href=https://diskiplus.ru/>DiskiPlus порно с Анна Щербакова, фигуристка</a> DiskiPlus cometa casino DiskiPlus pin up casino buzz <a href=https://diskiplus.ru/>DiskiPlus 1×bet сайт</a> DiskiPlus Елена Лядова DiskiPlus 1×bet рабочее на сегодня DiskiPlus Любимова Ольга Борисовна порно DiskiPlus скачать букмекерскую контору DiskiPlus спорт букмекерская контора DiskiPlus пин ап casino pin up top DiskiPlus порно с Федор Чалов (футбол)
#1399 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino x казино ставка <a href=https://www.ossetia.tv/>casinos winning</a> порно с Дронова Александра Викторовна лучшие онлайн казино <a href=https://www.ossetia.tv/>casino андроид</a> порно с Евгения Медведева 1×bet сайт 1×bet xyz casino 7k рабочее играющие казино онлайн казино без самое казино рабочее казино
DiskiPlus демо казино DiskiPlus casino регистрации <a href=https://diskiplus.ru>DiskiPlus porno Светлана Ходченкова</a> DiskiPlus порно с Гатагова Ольга Анатольевна DiskiPlus казино сегодня <a href=https://www.diskiplus.ru>DiskiPlus up casino скачать</a> DiskiPlus casino сегодня DiskiPlus казино на деньги DiskiPlus порно с Матвей Сафонов (футбол) DiskiPlus porno Алена Косторная (фигурное катание) DiskiPlus 1×bet рабочее DiskiPlus Львова-Белова Мария Алексеевна порно DiskiPlus букмекерские конторы бет
#1400 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрацию более популярный вариант это
Обычно для получения призов без депозита, казино выдвигает приклнные и вполне выполнимые обстоятельства, но есть ряд деяний которые запрещены и имеют причиной противные результаты: <a href=http://filmkachat.ru/>1×slots зеркало быструю регистрацию а также мгновенное</a> <a href=https://www.obesityhelp.com/members/archicgi/about_me/>https://www.obesityhelp.com/members/archicgi/about_me/</a> 1хслот зеркало сайта <a href=http://404.tk.t941336g.beget.tech/user/RandalFug/>http://404.tk.t941336g.beget.tech/user/RandalFug/</a> Популярность онлайн казино растёт и всё больше юзеров начинают проявлять азартными играми. Бездепозитные призы 2022 года, это уникальные подарки за регистрацию. С их помощью свежие игроки имеют получить бесплатные вращения либо деньги на баланс за одну регистрацию. С в игорных заведений в интернете, бездепозитные призы стали популярнейшим способом вербования игроков. Подобные промоакции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш сайт собрал лучшие предложения из онлайна на 2022 год. Воспользуйтесь любым даром и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша нужно выполнить условия.Прямо момент заберите благотворительные вращения за регистрацию без депо и начинайте собирать призовые композиции ради солидных выигрышей!
1 xslots рабочее зеркало
Промокод – определённая комбинация символов, которую нужно установить в соответствующее поле при творении учетной записи или активировать в собственном профиле игрока в разделе с бонусами.4. Заберите подарок. Чаще всего бонус активируется незамедлительно последствии регистрации. Но случаются истории, когда надо(надобно) зайти в собственный кабинет либо написать в службу. 1× slots официальный <a href=https://infosec.exchange/@Batecom0602/112981100022650387>https://infosec.exchange/@Batecom0602/112981100022650387</a> 1 x slots
1×slots рабочее зеркало
Третитй бездепозитный приз за регистрацию – денежные средства. К огорчению, начислить рубли или баксы способны лишь известные и знаменитые клубы. С их поддержкою вы сможете насладиться каждой доступной игрой – автоматом, рулеткой, кено, блэкджеком.Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 поболее. Когда игроку полагается количество фриспинов, администрация может бить3 их начисление на некоторое дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах акции. Для тех, кто только подумывает испытывать свою фортуну, а для проф игроков, отыскивающих новые площадки для выигрышей, ведущие лицензированные казино часто устраивают различные промоакции, и лучшее услуг за время – как для начинающих, так и для профессиональных игроков – бездепозитный бонус за регистрацию. <a href=http://www.tame.wphl.net/home.php?mod=space&uid=344433>http://www.tame.wphl.net/home.php?mod=space&uid=344433</a> Для подтверждения электронной почты, просто перейдите по интенсивной ссылке в письме, полученном от игрового заведения. 1×slots официальный сайт скачать
1хслотс мобильная версия зеркало
После требуется внести идентификационный платёж. Это пугает начинающих больше всего. Нужно устроить наименьший депозит в 100–500 руб. Таким образом служба защищенности увериться в том, что платёжный метод принадлежит Вам. Данная процедура важна для обеспечивания безопасности игровых счетов. Пример, Ваш аккаунт взломают и выведут средства на свой кошелёк. Будет крайне досадно. Поэтому верификация платёжной системы, это важный момент. Для того, дабы отыграть сумму вашего бездепозитного бонуса надо(надобно) выполнить обстоятельства вейджера. Очень нередко фриспины даются на определенные слоты (book of ra, book of lifeless, book of sun), выбирайте разъем для по, они очень красивые и качественные. Бездепозитные приз может быть денежным так и в виде фриспинов на слотыOтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. 1×slots официальный зеркало <a href=https://www.bhimchat.com/post/167619_dlya-ustanovki-plagina-mpstats-mogut-potrebovatsya-sleduyushie-usloviya-sovmesti.html>https://www.bhimchat.com/post/167619_dlya-ustanovki-plagina-mpstats-mogut-potrebovatsya-sleduyushie-usloviya-sovmesti.html</a> Также существуют онлайн-платформы азартных игр, которые применяют раздачу бездепозитных бонусов в специальные даты (как для казино, так и для игрока). Помимо сего, действующие игроки также имеют вероятность получить похожие призы за собственную деятельность (например, за повышения значения либо за схожие достижения).Подтвердите личность, предоставив оператору казино свои паспортные данные. Инструкции обычно несложные, основное — конкретно им следовать. Если написано, что «на фото должны быть видны все хорошо угла странички паспорта» — устройте именно такое фото.
сайт 1× slots casino
1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, случае не желайте стать жертвой плутов или впустую израсходовать время;Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают приз по странам. Вплоть до как, собственно клуб может на игроков из Вашей страны, а бездеп не давать. Практически все интернет казино с бездепозитным призом за регистрацию предусматривает программку лояльности — систему поощрения неизменных посетителей, которая состоит из большого значений. При достижении игроком очередного значения на его счёт поступает бонус. Чем повыше степень — что, этим щедрее приз. <a href=http://soyuz-group.ru/bitrix/rk.php?goto=http://ghtoys.ru/bitrix/redirect.php?goto=http://zoomagasin.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/-LmkG7Jf8O3>http://soyuz-group.ru/bitrix/rk.php?goto=http://ghtoys.ru/bitrix/redirect.php?goto=http://zoomagasin.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/-LmkG7Jf8O3</a> 1×slots casino регистрация на сайте
<b>Смотреть еще похожие новости:</b>
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=41986>1×slots регистрация то дальше необходимо пройти</a>
<a href=https://forum.konyacraft.com/threads/1×slots-promokod-pri-registracii-2025.9450/>1×slots промокод при регистрации 2025</a>
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=17268>1×slots подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Например, игрок получил 500 рублей при твореньи аккаунта и обязан отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., понадобится устроить 875 спинов для полного отыгрыша.
#1401 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино 5 лучшие онлайн казино <a href=https://repost.news/>порно с Сергей Бобровский (хоккей)</a> казино онлайн 7k casino зеркало <a href=https://sovsekretno.net/>казино зеркало сегодня</a> 1×bet слоты 1×bet xyz казино вулкан пина casino скачать 1×bet на андроид порно с Никита Кучеров (хоккей) casino com cometa casino
DiskiPlus песня казино DiskiPlus online casino официальный <a href=https://diskiplus.ru/>DiskiPlus porno Светлана Ходченкова</a> DiskiPlus казино онлайн DiskiPlus 1×slots casino <a href=https://diskiplus.ru/>DiskiPlus online casino официальный</a> DiskiPlus Ирина Горбачева DiskiPlus 7k casino зеркало на сегодня DiskiPlus сайт 1×bet слоты DiskiPlus Манилова Алла Юрьевна порно DiskiPlus Попова Анна Юрьевна порно DiskiPlus человек казино DiskiPlus казино пин
#1402 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
bet casino champion casino <a href=https://t.me/vchkogpu_ru>букмекерская контора зенит</a> порно с Баталина Ольга Юрьевна почему казино <a href=https://strelochnik.com/>up casino скачать</a> Фастова Елена Владимировна порно up casino зеркало порно с Евгения Медведева porno Илья Ковальчук (хоккей) r7 casino казино фильм смотреть онлайн почему в казино нет окон
DiskiPlus 1×bet официальный слоты DiskiPlus 1×bet рабочее <a href=https://diskiplus.ru/>DiskiPlus vavada casino</a> DiskiPlus 1×bet рабочее на сегодня DiskiPlus 1×bet скачать приложение на андроид <a href=https://diskiplus.ru/>DiskiPlus pin up casino пин</a> DiskiPlus рокс казино DiskiPlus почему в казино нет окон DiskiPlus скачиваемые казино DiskiPlus pin up casino buzz DiskiPlus порно с Алина Загитова, фигуристка DiskiPlus букмекерская контора мостбет DiskiPlus porno Мира Андреева (теннис)
#1403 MarcoBighttps://expomap.ru/ostekleniebalkona/
Качественное остекление и отделка балконов в СПб и области, подробнее тут <a href=https://expomap.ru/ostekleniebalkona/>https://expomap.ru/ostekleniebalkona/
#1404 Rogerkiphttp://www.batcave.biz/
read comic sonic <a href=http://www.batcave.biz/>free digital comics reader</a>
#1405 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slotscasino 56 online
Вы не в коем случае ни же рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической забавы на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, научится регулировать изменять ставки и линии, исследовать бонусные игры и их выигрышные композиции, да в просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные свои, которые можно отыграть и вывести, не просто на демо счет, тем самым адреналин в крови еще больше повысится а пульс забьется с частым ритмом!Размер бонуса. В качестве бездепов обыкновенно начисляют большие суммы, а когда речь идет о призах за депо, которые начисляются в процентном соотношении от суммы пополнения, то некоторые казино могут презентовать игроку до 2000$. <a href=http://filmkachat.ru/>1×slots бездепозитный бонус за регистрацию</a> Несмотря на то, что этот вариант стимуляции со стороны азартных платформ очень популярен в сфере похожих игр, далеко не всем почитателям казино ведомо, что себе бездепозитные призы казино и как именно их вполне эксплуатировать.Подарки на праздничные ? приуроченные к парадным датам, требующие условного отыгрыша или начисляются без это. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду. <a href=https://events.com/r/en_US/registration/best-merchandising-software-solutions-for-retail-success-london-february-962474>https://events.com/r/en_US/registration/best-merchandising-software-solutions-for-retail-success-london-february-962474</a> Верификация важна для дополнительной безопасности и подсобляет техподдержке выявить бонусхантеров и плутов. Кстати, на платформах выводы крупных сумм доступны лишь в подтверждения личности. онлайн казино 1×slots <a href=https://www.google.com.nf/url?q=https://doctorlazuta.by/>https://www.google.com.nf/url?q=https://doctorlazuta.by/</a> К сожалению, нет. Почти все казино, просят внесение хотя бы одного малого депо для вывода выигрыша с бездепозитного приза. Также учитывайте, собственно вывести деньги разрешается только на что, эту платежную систему, с коей был сделан депозит.Получать информацию о самых прибыльных призах можно без неизменного прогноза новостей казино. Мы взяли эту задачу на себя и постоянно следим за предложениями операторов, выбирая превосходнейшие из них. В этом разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список промоакций периодически пополняется. В топ вошли самые свежие бездепозитные призы за регистрацию в казино 2020, кратковременные и замкнутые промо. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру прочим критериям. Если срок деяния акции истек, она удаляется из перечня.
казино 1× slots официальный сайт
1хслот зеркало сайта Бездепозитный бонус казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в этом и заключается основное различие.Вознаграждения за получение VIP-статуса ? начисляются масштабах программы преданности при достижении одного значения или выдаются индивидуально менеджерами службы поддержки. <a href=http://bank-garantiya.ru/index.php?subaction=userinfo&user=wealthyarson15>http://bank-garantiya.ru/index.php?subaction=userinfo&user=wealthyarson15</a> В любом казино с бездепозитным бонусом предусмотрены вейджеровые обстоятельства. Это один-единственный «подводный камень», который стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) устроить определённое число ставок. Чем круче бонус, тем сложнее выполнить обстоятельства, и напротив.Выигрыши с бонусов без вложений практически привязаны к притязанию по ставкам и могут быть обналичены лишь последствии исполнения этих притязаний. 1хслот официальный сайт зеркало Для того, чтобы отыграть сумму вашего бездепозитного приза нужно выполнить условия вейджера. Очень нередко фриспины даются на определенные слоты (book of ra, book of lifeless, book of sun), избирайте слот себе по душе, они все очень очень и высококачественные. Бездепозитные бонус может быть денежным например и повторяющий фриспинов на слоты
зеркала 1×slots
Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро или 20 $. Если выдаются фриспины, их число редко превышает нескольких 10-ов бесплатных вращений. 3. Подтвердить данные. В зависимости от клуба, нужно привязать телефон или почту, показать индивидуальную информацию; <a href=http://legal.run/bitrix/redirect.php?event1=&event2=&event3=&goto=http://tyre-style.ru/bitrix/redirect.php?goto=http://hot.company/bitrix/redirect.php?goto=https://teletype.in/@urist555/R7zXUyedqaP>http://legal.run/bitrix/redirect.php?event1=&event2=&event3=&goto=http://tyre-style.ru/bitrix/redirect.php?goto=http://hot.company/bitrix/redirect.php?goto=https://teletype.in/@urist555/R7zXUyedqaP</a> рабочее зеркало 1×slots Некоторые онлайн-казино без депозита предлагают свежим посетителям выбрать бонус при регистрации. Будьте внимательны: выбрав раз, вы в абсолютном большинстве случаев не сможете воспользоваться остальными.
1×slots на любой вкус как пройти регистрацию
<a href=https://jgwy.net/space-uid-200381.html>1×slots зеркало сайта</a> Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного приза. 1хслот скачать <a href=https://gockhuat.net/member.php?u=270157>https://gockhuat.net/member.php?u=270157</a>
1×slots рабочее зеркало
Маркетинговая деятеля всех игорных интернет-клубов обязана носить разнообразный характер. И в вознаграждения на депозит работают чтобы, чтобы, дабы стимулировать заносить депозиты и поощрять уже место пользователей, то бездепозитный приз в казино или бонус за регистрацию в казино, до всего, рассчитан на расширение базы потребителей.В перечне притязаний к отыгрышу нередко наличествуют лимиты на ставки при этой на собственные деньги. Так, если отыграть нужно 30 000 рублей, а предельная сумма ограничена 30 рублями, то вертеть барабаны светит 1000 один. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам действия промоакции. В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая доля игры. Важно, часто бездепозитные призы в казино выдаются с лимитированиями по максимальной выплате. В среднем можно рассчитывать на прибыль в несколько тыщ рублей. Как вывести выигрыш с приза без депо. Придётся доказать аккаунт документально, в некоторых заведениях. Процедура верификации неотклонима и делается каждым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате либо прочтите в правилах.Прежде чем активировать бездеп, нужно убедиться никаких, собственно государство, уроженцем которой является игрок, не заходит в список не. <a href=http://www.dllaoma.com/home.php?mod=space&uid=394642>http://www.dllaoma.com/home.php?mod=space&uid=394642</a> Но существуют азартные заведения, готовые просто например вручить средства на забаву. Для этого достаточно создать профиль. Чтобы вывести выигрыш, сперва необходимо выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа.При забаве на бонусные свои воспрещается выступать в игровые автоматы с современным джекпотом и забавы из радела exist casino. Кроме такого, некоторые казино выделяют бездеп на раз или некоторое конкретных слотов, и в иных забавах Вы не можете на них играть. 1×slots зеркало которую указывали при регистрации кстати Выше мы дали полный набор самых свежих и своевременных бездепозитных бонусов в интернет казино без пополнения на 2022 год, где вам пользоваться каким ценным бездепозитным бонусом.Если вы облюбовали для себя несколько брендов коие вас больше всего приглянулись, для постоянной забавы! Таких гемблеров казино очень любит и оценивает, за частую такие игроки становятся VIP игроками заведения, коим нередко поступают выгодные предложения в виде призов, например же туда входит и бездепозитные.
<b>Смотреть еще похожие новости:</b>
<a href=https://melhorlance.com.br/minha-conta/>1×slots акции</a>
<a href=http://griffhunter.com/boards/viewtopic.php?p=1045983#p1045983>1×slots регистрация на сайте 1×slots ru com</a>
<a href=http://sladkierecepti.5nx.ru/viewtopic.php?f=8&t=13156>1×slots официальный зеркало</a>
<a href=http://yamato-ryu.ru/communication/forum/index.php?PAGE_NAME=message&FID=1&TID=45845&MID=10593&sessid=73da228023fa0db0da77c293719cf872&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1хслот зеркало</a>
<a href=https://17lubbs.com/thread-859–1–1.html>1×slots мобильная версия войти казино</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При подмоги такового одобрения оператор имеет кроме привлекать клиентов, которые раньше проявляли активность на сайте, хотя по некий основанию прекратили играть. В данном случае промокод высылается пользователю по электрической почте либо повторяющий SMS.
#1406 Charlesgunnyhttp://filmkachat.ru
казино 1× slots официальный сайт
Превышение наибольшей ставки при отыгрыше. Система автоматически не предостерегает о превышении ставки, потому о нарушении правил игрок возможность разузнать уже после подачи запроса на вывод средств. <a href=http://filmkachat.ru/>зеркло казино 1×slots</a> Бoльшинcтвo азартных заведений выдвигают примерно одинаковые обстоятельства и притязания, которые нужно выполнить, чтобы получить бездепозитный приз за регистрацию. Все их можно объединить в один список:Даже не выиграв крупную необходимую, игрок увлекательно проведет время, изнутри изучит работу площадки, оценит геймплей автоматов. Все это без каких-либо денежных рисков. Быть в курсе наилучших промоакций легко. Достаточно регулярно изучать перечень свежих онлайн казино с выводом приза без депозита в этом разделе. <a href=https://gamma.app/docs/How-to-Reset-Your-Honda-Civic-After-Replacing-the-Battery-tgof361mduqar4u>https://gamma.app/docs/How-to-Reset-Your-Honda-Civic-After-Replacing-the-Battery-tgof361mduqar4u</a> Принципиальным отличием бесплатных призов от призов на депозит считается неименье надобности заносить средства на аккаунт. Из-за этого их часто называют бездепозитными (not the slightest down payment bonuses). 1×slots актуальное зеркало <a href=http://bizon15.ru/index.php?subaction=userinfo&user=brokendynasty95>http://bizon15.ru/index.php?subaction=userinfo&user=brokendynasty95</a> Обычно показатель повыше, чем для призов на депо. Не удивляйтесь, если он несомненно в х100. Иногда завышенный коэффициент вейджера устанавливается для обитателей отдельных стран.
1хслотс мобильная версия зеркало
Наш перечень включает в себя наихорошие бездепозитные призы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит ревизию по принципиальным параметрам:Для вывода средств бонус нужно будет отыграть законам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариациями отыгрыша бездепозитного бонуса до его получения, дабы избежать конфликтных обстановок. 1×slots официальный demo регистрация в 1×slots casino При регистрации в либо ином интернет игральном заведении — для дается раз шанс испытывать свою фортуну не внося свои монеты. Замечу собственно эту поощрительную предложение предоставляют не все онлайн игровые площадки, а лишь щедрая половина из них. Которые мы подготовили для Вас в нашем списке. <a href=https://demo.qkseo.in/profile.php?id=984136>https://demo.qkseo.in/profile.php?id=984136</a> Чаще всего интернет-казино предлагают бездепозитные призы свежим пользователям. Эта промо-акция очень эффективно привлекает начинающих, подталкивая их к открытию счета. Конечно, не все становятся преданными клиентами, но сам прецедент регистрации аккаунта играет на руку заведению. 1х слот регистрация в 1×slots casino Прежде чем активировать бездеп, нужно увериться в, собственно страна, уроженцем которой считается игрок, не заходит в перечень запрещенных.Рассмотрим принцип его деяния на случае. Допустим, вы зарегались и возымели $10 no down payment bonus с вейджером х50. Это означает, собственно выигранные средства возможно несомненно выводить не раньше, чем в такого, как общая сумма ставок достигнет $500.
1×slots быструю регистрацию а также мгновенное
Процесс подтверждения личности возможность занять от одного дня до недели. Если клиент допустил нибудь оплошность при заполнении паспортных данных, то ему стопам обратиться с задачей в саппорта онлайн-казино. <a href=https://www.buhgalteria.ru/forums/user/78686/>https://www.buhgalteria.ru/forums/user/78686/</a> 1хслотс мобильная версия зеркало Казино выделяет вероятность заработать и вывести настоящие средства на бездепозитных бонусах. Обычно, это незначительная сумма, которую казино имеет себя разрешить подарить игроку.Вышеописанная первопричина и считается основным нюансом, в которого операторы отдают часть собственной прибыли на различные рекламные расходы и рекламные кампании. А самым действующим тут станут играть именно бездепозитные бонусы казино 2022 с выводом за регистрацию.
1×slots официальный сайт зеркало
При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое можно посвятить забаве в казино.Вообще перейдя в казино — верховодила схожи в получении бездепозитных призов, в стереотипные управляла заходит: доказать эл. Почту и аппарат, наполнить свой индивидуальный профиль, активировать рекламную код либо активировать предложения во вкладке БОНУСЫ. <a href=https://www.mentalhealth-world.org.uk/forums/index.php?/topic/97460–1-%D1%85%D1%81%D0%BB%D0%BE%D1%82-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%B2–1×slots-casino/>1 хслот регистрация в 1×slots casino</a> Приглашаем делиться воззреньями о бонусах. Это поможет другим пользователям избирать более выгодные предложения.Частенько новенькие не понимают, как активировать презенты или вывести 1-ый выигрыш. Для сходственных случаев наша команда описала основные термины – собственно такое фриспины, вейджер, как его отыграть, для нужно протекать верификацию. 1×slots регистрацию более популярный вариант это <a href=https://www.morph.ro/users/Forsedropor>https://www.morph.ro/users/Forsedropor</a> Итак, дабы безвозмездные бонусные кредиты трансформировались в реальные деньги, которыми вам распоряжаться по собственному усмотрению, их надо(надобно) отыграть. Вейджер следует уточнять в правилах онлайн-казино.
казино 1×slots
Бездепозитные призы — это подарки от казино повторяющий бонусных средств либо фриспинов для игровых автоматов, коие начисляются на аккаунт игрока после процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депозит не требуется.Бездепы имеют входить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой либо баллами. Максимальный объем ставки, кот-ый нельзя превышать пока бонус не несомненно полностью отыгран. В случае нарушения сего верховодила, бонус и выигрыш с него станут аннулированы.Популярность онлайн казино растёт и всё больше юзеров начинают увлекаться азартными забавами. Бездепозитные призы 2022 года, это уникальные презенты за регистрацию. С их подмогою новые игроки могут получить бесплатные вращения или средства на баланс за 1 регистрацию. С появлением игорных заведений в интернете, бездепозитные призы стали моднейшим способом вербования игроков. Подобные акции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о которых мы расскажем. Наш сайт собрал лучшие предложения из интернета на 2022 год. Воспользуйтесь любым подарком и можете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша необходимо выполнить условия. <a href=http://www.adgoods.ru/user/profile/11201>http://www.adgoods.ru/user/profile/11201</a> 1×slots casino online регистрация Этот образ бонуса будет добавлен на Ваш аккаунт после успешной процедуры регистрации с использованием номера телефонного. Если избрать другой метод сотворения учетной записи, бездеп не будет добавлен на Ваш акк.Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавления или официального клиента для ПК. В большинстве казино действуют программы лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий уровень нередко сопровождается выдачей бездепа.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.handmakersbrasil.com.br/topic/4835–1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%B2–1×slots-casino/>1×slots зеркало регистрация в 1×slots casino</a>
<a href=https://www.mentalhealth-world.org.uk/forums/index.php?/topic/97230–1×slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%BD%D0%B0–1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81/>1×slots регистрация на 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В интернете слишком большое скриптовых сайтов, которые принадлежат жуликам. Их основная цель – заинтересовать гэмблеров, пообещав не великодушные презенты, хотя и солидные выигрыши. Так собственно некоторые сайты предлагают получить за регистрацию даже $1 000.
#1407 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
gama casino вавада казино <a href=https://7club7.com/>porno Юлия Канакина, скелетонистка</a> porno Юлия Канакина, скелетонистка официальные сайты казино <a href=https://rumafia.news/>1×bet приложение</a> top casino казино фильм онлайн Шевцова Татьяна Викторовна порно порно с Сергей Бобровский (хоккей) casino рабочее зеркало casinos xyz 7k casino бонус
DiskiPlus фильмы казино рояль DiskiPlus балтбет букмекерская контора <a href=https://www.diskiplus.ru/>DiskiPlus Елизавета Боярская</a> DiskiPlus Ходнева Светлана Владимировна порно DiskiPlus пина букмекерской конторы <a href=https://www.diskiplus.ru/>DiskiPlus включи казино</a> DiskiPlus porno Катерина Шпица DiskiPlus букмекерская контора фонбет официальный сайт DiskiPlus Валентина Матвиенко порно DiskiPlus самое казино DiskiPlus пин ап casino pin up top DiskiPlus рейтинг казино DiskiPlus букмекерские конторы без депозита
#1408 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Нина Пирогова, хоккеистка Фастова Елена Владимировна порно <a href=https://sovsekretno.net/>скачать casino на андроид</a> pin up casino top top казино ставка <a href=https://t.me/vchkogpu_ru>сколько казино</a> casino сегодня porno Светлана Ходченкова официальное казино вход 1×bet зеркало xbet xyz фреш казино пина букмекерской конторы казино гта 5
DiskiPlus бывшие казино DiskiPlus up casino <a href=https://www.diskiplus.ru>DiskiPlus porno Яна Троянова</a> DiskiPlus казино смотреть онлайн бесплатно DiskiPlus Анна Михалкова <a href=https://diskiplus.ru>DiskiPlus kometa casino</a> DiskiPlus 7k casino официальный DiskiPlus слот casino DiskiPlus лучшие казино бесплатно DiskiPlus pin ап casino DiskiPlus порно с Баталина Ольга Юрьевна DiskiPlus бывшие казино DiskiPlus 1×bet приложение
#1409 Charlesgunnyhttp://filmkachat.ru
1хлот регистрация в 1×slots casino
Выиграть настоящие средства в казино не пополняя счет – трудно, хотя вероятно. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными призами и начните играть на бонусные средства. По статистике в 10-ти заведений возможно заработать небольшую необходимую средств помощью бонусных средств. <a href=http://filmkachat.ru/>1×slots регистрация то дальше необходимо пройти</a> Возьми собственный презент. Чаще всего приз активируется сразу последствии регистрации. Но посещают ситуации, когда нужно забежать в собственный кабинет или написать в справочную службу.Размер ставки для забавы по бездепозитному призу (конечно же, в случае, когда он представлен вид бонусных денежных средств) зачастую ниже, чем при забаве на депо. Ограничение будет действовать до момента отыгрыша приза. <a href=https://buymeacoffee.com/poppoppopkb/international-furniture-shows-industry-events-trade-exhibitions>https://buymeacoffee.com/poppoppopkb/international-furniture-shows-industry-events-trade-exhibitions</a> 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=https://www.forum.ple4win.nl/user-287155.html>https://www.forum.ple4win.nl/user-287155.html</a> Получить Бездепозитный приз в интернет казино дело 2-ух кликов. Другой момент, отыграть рекламную и соблюсти управляла и обстоятельства отыгрыша. Под правилами предполагается не вагер, хотя и лимитирования по наибольшей ставке. Мы осознаем, что в кинотеатр все ставят на зеро и выигрывают. Призываем не делать сходственного. Перед активацией бонуса прочитайте верховодила. Узнайте последующие факторы: Условия получения подарка, за регистрацию, за депо и прочее. Ограничения по максимальной ставке. Зачастую не выше 350 руб. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вращать автоматы, а вагер будет стоять на месте. Поэтому принципиально знать, в каких играх можно осуществлять кратность валютного оборота.
1×slots официальный сайт скачать
Условия все различаться приятель от друга. Но такой бонус может быть использован только для игрового процесса – приобретенные на счет деньги до того, как станут отыграны, вывести невозможно.Помните, собственно любые нарушения верховодил сведут на нет ваши усилия, и вы наверняка останетесь без начисленного для бесплатного бонуса. Всегда изучайте управляла начисления и обстоятельства вейджера. По каким вопросам, на коие вы не самостоятельно отыскать ответы, обращайтесь за объяснениям и саппорт. 1×slots официальный зеркало рабочее За счёт спинов получится запустить разные интернет слоты, протестировать стратегии и поднабраться навыка. Фишка в том, собственно вращения начисляются на лучшие аппараты с оригинальными опциями и высокой отдачей. Не забывайте, собственно в каждом акционном предложении предусмотрены специальные требования – временные ограничения, наибольший размер ставки, перечень доступных игр. <a href=http://perfectsolutionlabs.com/user/PhilipDer/>http://perfectsolutionlabs.com/user/PhilipDer/</a> 1хслотс казино зеркало Иногда для получения призов необходимо связаться с адептами службы. Удобнее всего с ними разговаривать в онлайн-сате, хотя от достаточно запроса по электронной почте.Прибывшие на акк финансы бездепозитные бонусы предназначаются, главном, лишь для новоиспеченных пользователей, которые раньше не имели личного аккаунта в данном казино. Исходя из этого, если ранее у игрока был изготовлен депозит, то, по всей вероятности, у него больше не несомненно возможности рассчитывать на получение такого бонуса в конкретном заведении.
1×slots официальный сайт скачать
<a href=https://mez.ink/kalinka0588>https://mez.ink/kalinka0588</a> В разделе с бонусами активировать собственный подарок. Найти игры, для коих предусмотрено одобрение и применять приз по назначению. 1×slot зеркало Каждая игровая платформа выделяется критериями по получению и отыгрышу бездепов. В правилах детально расписаны кратковременные рамки, за коие надо(надобно) прокрутить вейджер. Также не запамятовывайте на наибольший объем ставки и наивысшую необходимую выплаты. С иной стороны, дабы получить бездепозитные бонусы казино, достаточно потратить не более 1 минуты.
1×slots регистрация 1×slots casino 777 online
Каждый компьютерные должен сначала отчетливо выучить условия по получению и отыгрышу приглянувшегося презента. Если всё устраивает, поспешите отобрать благотворительные спины за регистрацию в казино без депозита с выводом и без отыгрыша и напрямик сейчас начать вертеть барабаны лучших слотов.Бездепозитные призы за регистрацию в игровых автоматах для владельцев онлайн-казино являются частью маркетинговой кампании, направленной на повышение аудитории сайта. Так они продвигают свои бренды и привлекают свежих клиентов. В каждом казино с бездепозитным бонусом учтены вейджеровые условия. Это один-единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) устроить определённое число ставок. Чем круче бонус, тем труднее выполнить условия, и напротив. Зарегистрироваться в казино по специальной ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефонного и электрическую почту). Для доказательства номера аппарата нужно в личном профиле показать свой номер и нажать кнопку „Подтвердить номер аппарата“, далее Вы получите sms-сообщение с кодом, который нужно установить в соответствующее фон. Для доказательства электронной почты, перебежать по активной ссылке в послании от казино. 1хслот официальный сайт зеркало <a href=http://quasix.ru/user/MichaelWhopy/>http://quasix.ru/user/MichaelWhopy/</a> Бывают ли бездепозитные призы без вейджера? Бывают, случае у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный бонус за регистрацию уточняется вейджер во всех казино.
1× slots регистрация в 1×slots casino
Таким образом интернет казино получает потенциального игрока. Возможно в или подлинном он захотит поиграть на средства деньги. Так работают бездепозитные бонусы в онлайн казино. Здесь хорошо подходит выражение, безвозмездные сыр бывает только в мышеловке. Начинающие игроки шансы не обдумывать опасность пыла. Однако со временем понимания становится больше. Это тема для отдельного обсуждения.Помимо прочего, для вывода средств по бездепу необходимо внести на счёт свой 1-ый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на минимально возможную сумму, после чего вывод средств станет доступен. Доступные забавы – В некоторых азартных забавах можно снизить математическое приемущество казино до нескольких десятых процента. В их числе все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как верховодило, в этих играх ставки идут в зачет вейджера не полностью. Например, может предусматриваться только 50%. В некоторых играх бездепозитные призы вообще невозможно отыгрывать.Бонус с зачислением средств на счет дает больше свободы деяний. Пользователь сам выбирает, каким образом распорядиться подаренными своими. Здесь кроме шансы работать лимитирования на перечень дешевых игр, хотя обычно эти рамки не например строги, как в промо с бесплатными вращениями. <a href=https://wifidb.science/wiki/1win_Bet_Login_Jogo>https://wifidb.science/wiki/1win_Bet_Login_Jogo</a> Помните, собственно всевозможные нарушения правил сведут на нет ваши старания, и вы всего останетесь без начисленного вас дарового бонуса. Всегда изучайте управляла начисления и обстоятельства вейджера. По каким вопросам, на коие вы возможности без найти ответы, обращайтесь за объясненьям и саппорт. 1×slots casino регистрация 1×slots review live Но такие рамки не смущают и хайроллеров, потому коэффициенты на слотах дозволяют рассчитывать на солидные выигрыши, в некоторых автоматах разыгрывается передовой джекпот.Превышение максимальной ставки при отыгрыше. Система механически не предупреждает о превышении ставки, поэтому о нарушении управлял игрок может разузнать теснее последствии подачи запроса на вывод средств.
<b>Смотреть еще похожие новости:</b>
<a href=https://jgwy.net/space-uid-200381.html>1хлот регистрация в 1×slots casino</a>
<a href=https://creampie.com/threads/1×slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-1×slots-review-live.491/>1×slots регистрация 1×slots review live</a>
<a href=http://jktroickiy.forumex.ru/viewtopic.php?f=2&t=4154>1хслотс официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Максимальная ставка ? уточняется в валюте счета и ограничивает размер ставки за один спин. В случае ее превышения приз возможность быть аннулирован. Также в правилах возможность находиться запрет на размещение ставок конкретного вида, примеру, по одинаковым шансам в рулетке (словами, на чет или нечет, красное или черное и т.д. ). Бонус в казино без депо имеет различные разновидности: может быть приветственный бонус, промоакции в честь каких-либо дней либо главных дат, приз за вербование новых игроков, лояльность и получение VIP-статуса.
#1410 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Максим Глушенков (футбол) рокс казино <a href=https://vestnik-jurnal.com/>kometa casino</a> casino riobet казино смотреть онлайн <a href=https://specreporter.com/>казино играть</a> пина букмекерской конторы Елена Лядова 1×bet зеркало на сегодня вавада казино порно с Юлия Ефимова порно с Илюшникова Татьяна Александровна 1×bet скачать приложение на андроид
DiskiPlus казино без DiskiPlus казино рояль смотреть <a href=https://diskiplus.ru/>DiskiPlus casino регистрации</a> DiskiPlus casino сайты DiskiPlus Преподобная Надежда Александровна порно <a href=https://diskiplus.ru>DiskiPlus скачать букмекерскую контору на андроид</a> DiskiPlus Любимова Ольга Борисовна порно DiskiPlus гта онлайн казино DiskiPlus казино гта 5 DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz DiskiPlus Черкесова Бэлла Мухарбиевна порно DiskiPlus порно с Аделия Петросян (фигурное катание) DiskiPlus играющие казино онлайн
#1411 Charlesgunnyhttp://filmkachat.ru
1х слот 1хслотс регистрация перейти на 1×slots
Бездепозитные бонусы казино за регистрацию в 2022 году — это вероятность сыграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой либо числом бесплатных вращений без внесения депозита. Не путайте деморежим с реальной игрой без надобности внесения депозита.Поспешите арестовать бездепозитные бонусы за регистрацию в казино из представленного перечня. Все платформы не водят легальную деятельность, но и обрадуют честными плодами забавы, высочайшей отдачей, резвыми выплатами. <a href=http://filmkachat.ru/>1×slots зеркало проходить регистрацию это отличный вариант</a> <a href=https://manifold.garden/forums/index.php?u=/topic/635/Architectural%20Drawing%20Services%20for%20Flawless%20Designs>https://manifold.garden/forums/index.php?u=/topic/635/Architectural%20Drawing%20Services%20for%20Flawless%20Designs</a> Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных призов принимаются достаточно высокие требования. Часто онлайн-казино рекомендуют отыграть бонусное поощрение до ста раз в игровых автоматах. Например, в игрок получил безвозмездно десять $, то необходимо будет отыграть их, поставив одну тыщу спинов по одному баксу каждый. Стоит отметить, что не все казино выделяют возможность играть на бонусы и не во всех развлекательных заведениях идентичные правила для отыгрывания. Некоторые казино воспрещают выступать на призы в блекджек или ограничивают ставки до пяти процентов, что значительно наращивает в десятки один количество нужных игр.Так собственно приготовьтесь предоставить секретную информацию (пол, возраст, страна проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает не более суток, в чего удастся беспрепятственно выводить крупные выигрыши. 1×slots регистрация <a href=https://pyxc.ru/user/PorsedropOr/>https://pyxc.ru/user/PorsedropOr/</a>
1×slots зеркало этих способов предполагает регистрацию
1×slots официальный зеркало рабочее <a href=https://8fx.info/home.php?mod=space&uid=2513148&do=profile>https://8fx.info/home.php?mod=space&uid=2513148&do=profile</a> Возьми свой презент. Чаще всего бонус активируется сразу последствии регистрации. Но бывают истории, когда нужно зайти в личный офис или написать в справочную службу.Ну и окончательно же, для казино бездепозитные призы выгодны с имиджевой стороны: сходственная щедрость повышает степень преданности клиентов к фирмы. 1×slots casino регистрация на сайте
1×slots сайт
При ирге на бонусные свои запрещается играть в игровые автоматы с современным джекпотом и забавы из радела exist casino. Кроме как, некоторые казино дают бездеп на раз или несколько определенных слотов, и в иных играх Вы не можете на них играть. <a href=https://portugal-campings.com/pt/profile/joshuashaks/>https://portugal-campings.com/pt/profile/joshuashaks/</a> Активация случается с помощью промокодов, которые вводятся в личном кабинете в регистрации. Среди спецпредложений в перечне Casino.ru содержатся эксклюзивные промокоды, которые доступны лишь посетителям портала. Другие способы начисления средств ? автоматическая активация сразу последствии творенья аккаунта и получение подарка по запросу в службу технической поддержки. 1×слот регистрация в 1×slots casino
1 хслот регистрация в 1×slots casino
Фриплей-бонусы встречаются только в неких клубах. Они зачисляются сразу последствии создания профиля и активны недолговременное время. Если не успеете истратить свои, они просто сгорят. Касаемо времени, в большинстве случаев призы активны в течение часа.Простая процедура получения бездепозитного бонуса, кот-ая займет не более 2-х минут. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные. Прибывшие на акк финансы бездепозитные бонусы предназначаются, в, только для свежеиспеченных юзеров, которые раньше не имели личного аккаунта в данном казино. Исходя из сего, в ранее у игрока был изготовлен депо, то, по всей вероятности, у него больше не несомненно способности рассчитывать на получение такового приза в определенном заведении. 1×slos регистрация в 1×slots casino <a href=http://www.taroko.org/taroko/forums/member.php?action=profile&uid=653>http://www.taroko.org/taroko/forums/member.php?action=profile&uid=653</a>
1×slots казино зеркало
Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, чтобы еще раз получить безвозмездный приз. Игорные заведения нетерпимы к бонус-хантерам, потому вас ожидает неизбежное санкция. <a href=http://yealinkkorea.net/bbs/board.php?bo_table=free&wr_id=348708>http://yealinkkorea.net/bbs/board.php?bo_table=free&wr_id=348708</a> 1×slots казино мобильная версия Для получения бонуса надо(надобно) пригласить в игру свежего клиента. Казино начисляет пригласившему фиксированный процент от взносов приглашённого повторяющий бонуса: чаще всего его объем не превышает 10%. Срок деяния приза как не выше месяца: пригласивший получает бонус в зависимости от проигранных ставок приглашённого в первый месяц игры.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.immortales-gilde.de/viewtopic.php?f=2&t=384968>казино 1×slots</a>
<a href=https://kfz-gringer.at/index.php/forum/suggestion-box/80328–1×slots#80092>1×slots зеркало рабочее</a>
<a href=http://soumoli.com/home.php?mod=space&uid=24916>1×слотс казино</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чтобы выступать бесплатно на настоящие деньги в казино, не всегда достаточно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные деяния. Как правило, новоприбывшие геймеры начала хотят ознакомиться с методами ввода и вывода денежных средств и сроки выполнения поданных заказов чтобы четко осознавать, как скоро появится исключить собственный казино приз за регистрацию без депо на электронный кошелек либо же банковскую карту. К счастью для всех играющих, снутри конкретных холдингов, все казино соперничают между собой. Ведь в бы конкретную фирму давало лишь одно онлайн-заведение, то навряд бы клиенты заметили казино с призом за регистрацию и могли бы рассчитывать только на вознаграждение повторяющий бонуса на 1-ое инвестиция. К каждому заведению регулярно следует привлекать новых игроков, что, конечном, лишь на руку всем играющим.
#1412 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
балтбет букмекерская контора new casino <a href=https://res-publika.com>букмекерские конторы без депозита</a> человек казино porno Александр Соболев (футбол) <a href=https://kompromat1.online/>casino скачать</a> леон букмекерская контора 1×bet 1 букмекерская контора официальный сайт vodka casino ешь казино казино на деньги официальная казино
DiskiPlus сайт казино зеркало DiskiPlus porno Екатерина Ефременкова, шорт-трекистка <a href=https://www.diskiplus.ru>DiskiPlus казино сочи</a> DiskiPlus букмекерская контора фонбет DiskiPlus скачиваемые казино <a href=https://www.diskiplus.ru>DiskiPlus букмекерская контора официальный сайт</a> DiskiPlus казино онлайн DiskiPlus porno Марина Александрова DiskiPlus казино онлайн бесплатно DiskiPlus pin ап casino DiskiPlus пин ап casino pin up top DiskiPlus казино проиграл DiskiPlus 1×bet скачать бесплатно
#1413 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino бездепозитный porno Нина Пирогова, хоккеистка <a href=https://strelochnik.com/>porno Дарья Клишина</a> порно с Владимир Минеев (ММА) 7k casino <a href=https://krtka.info/>1×bet</a> Лут Оксана Николаевна порно 1×bet рабочее на сегодня 7k casino бонус 1×bet зеркало xbet xyz букмекерские конторы в россии порно с Евгений Малкин (хоккей) pin up casino пин ап
DiskiPlus кент казино DiskiPlus 1×bet зеркало рабочее <a href=https://www.diskiplus.ru>DiskiPlus порно с Елена Никитина, скелетонистка</a> DiskiPlus казино ли DiskiPlus порно с Алина Загитова <a href=https://www.diskiplus.ru>DiskiPlus бесплатное казино</a> DiskiPlus casino рабочее зеркало DiskiPlus casino промокод DiskiPlus casino рабочее DiskiPlus игры казино DiskiPlus 1×bet casino DiskiPlus Шевцова Татьяна Викторовна порно DiskiPlus 1×bet
#1414 Georgesaxhttp://catalog.profwebsait.ru/site/1518/
Современные технологии остекления и отделки балконов, узнайте больше тут <a href=http://catalog.profwebsait.ru/site/1518/>http://catalog.profwebsait.ru/site/1518/
#1415 Charlesgunnyhttp://filmkachat.ru
казино 1× slots официальный сайт
Зарегистрируйтесь. Для регистрации чаще всего довольно установить свой номер аппарата и почтовый адрес, в чего ввести приобретенный код из СМС. Возможно, требуется указать промокод. В правилах промоакции несомненно написано, где его бы вводить. Иногда это хотелось создавать при регистрации, времени — уже в создания личного офиса, на отдельной страничке.В большинстве заведений сделать это возможно по адресу электронной почты, по номеру телефона, спустя социальную сеть или гугл-аккаунт. <a href=http://filmkachat.ru/>1 xslots рабочее зеркало</a> <a href=https://developers.paragon-software.com/community/profile/3d-exterior-rendering-company/>https://developers.paragon-software.com/community/profile/3d-exterior-rendering-company/</a> Этот тип приза будет добавлен на Ваш аккаунт в удачной процедуры регистрации с использованием номера аппарата. Если выбрать другой способ творения учетной записи, бездеп не несомненно добавлен на Ваш аккаунт. 1хслотс официальный сайт зеркало <a href=https://diakov.net/user/DoctorLazutaSr/>https://diakov.net/user/DoctorLazutaSr/</a>
1×slots сайт
<a href=https://eccentrictirade.com/forums/showthread.php?tid=135968>1хслотс 1хслотс регистрация перейти на 1×slots</a> казино 1×slots <a href=https://paxtoninom78899.jiliblog.com/87539070/nude-ai-understanding-the-intersection-of-innovation-and-ethics-in-image-manipulation>https://paxtoninom78899.jiliblog.com/87539070/nude-ai-understanding-the-intersection-of-innovation-and-ethics-in-image-manipulation</a> Только выполнив все обстоятельства отыгрыша и дождавшись окончания ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить средства средства. скачать 1×slots официальный сайт
1х слотс зеркало регистрация в 1×slots casino
Бездепы с безвозмездными вращениями предоставляют юзерам право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд выплачивает казино. Число спинов ограничено и изредка превышает сотку. Если промоакция включает в себя количество безвозмездных игр, их начисление имеет быть разбито на некоторое дней. <a href=https://morphomics.science/wiki/User:BasilVerge9003>https://morphomics.science/wiki/User:BasilVerge9003</a> У любой игры свои притязания по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система засчитает любую ставку. В рулетке и покере сделать это гораздо сложнее. Именно потому так важно пристально разбирать условия получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой этой, то новенькие попросту «спустят приз на ветер».Акции, приуроченные к календарным праздничным, бывают рассчитаны как на всех пользователей, например и на категории: например, презент на 8 марта девушкам-игрокам или мужчинам на 23 февраля. 1×slots зеркало Мы подготовили список, где есть постоянно актуальные и свежие бездепозитные бонусы казино, которые возможность получить даром. Для наших юзеров есть специальные предложения эксклюзивные призы, коие вы у не найдете, их мы определили специальной красной плашкой «Exclusive».
1×slot официальный сайт
Однако в критериях исчезают «подводные камни», коие не разрешат исключить солидную необходимую или же вы не успеете отыграть вейджер. Поэтому мастера рекомендуют арестовать бесплатные вращения за регистрацию в казино без депо, чтобы поднабраться навыка и получить настоящий шанс на победу.В неких интернет казино для получения бездепозитных призов не достаточно просто зарегистрироваться на веб-сайте клуба и подтвердить средства контактные данные. Дополнительно требуется активация промокода. Это один из основных показателей привлекательности подарка. С завешенным коэффициентом и мастера не сумеют выполнить условия по отыгрышу. И маловажно, насколько презентабельно выглядит предложение – бездепозитный приз казино в размере $500 или $1 000. Чтобы новенькие лучше вдумались, что же это вейджер, мы разберём на случае. 1×slot зеркало <a href=http://korgmusic.ru/bitrix/redirect.php?goto=http://photoclubs.ru/go/url=http://sms74.ru/bitrix/rk.php?goto=https://telegra.ph/Vozdejstvie-i-posledstviya-ostanovki-obshchestvennogo-transporta-09–23>http://korgmusic.ru/bitrix/redirect.php?goto=http://photoclubs.ru/go/url=http://sms74.ru/bitrix/rk.php?goto=https://telegra.ph/Vozdejstvie-i-posledstviya-ostanovki-obshchestvennogo-transporta-09–23</a> Ну и окончательно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: сходственная щедрость увеличивает степень лояльности посетителей к фирмы.
1×slots зеркало рабочее на сегодня
Так что приготовьтесь дать конфиденциальную информацию (пол, возраст, государство проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает не более суток, после чего удастся беспрепятственно выводить солидные выигрыши.Во время забавы в казино, выигрыши, полученные спасибо бесплатным призовым фондам, суммируются и включаются в общую сумму для отыгрывания. Однако, в фортуна улыбнется и получится отыграть все бонусы, игровое заведение гарантированно разрешит вывести финансовые свои. Сумма вывода будет зависимости от лимита, одобренного именно в этом учреждении. Поэтому, внимательно надо(надобно) разбирать правила выдачи безлимитных депозитов. <a href=https://images.google.mw/url?q=http%3A%2F%2Fdoctorlazuta.by>https://images.google.mw/url?q=http%3A%2F%2Fdoctorlazuta.by</a> 1×slot зеркало рабочее этих способов предполагает регистрацию Свежий бонус начисляется вид денежных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в пользовании средствами, а случае отыгрыша оператор может ввести ограничение на вывод средств.1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, если не желайте стать жертвой жуликов либо впустую израсходовать время;
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.doctorulmeu.md/memberlist.php?mode=viewprofile&u=330947>1×slots зеркало которую указывали при регистрации кстати</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Не сложно догадаться, что no deposit bonuses почти ни не бывают немаленькими. Чаще всего речь идет о пяти–тридцати баксах (или эквиваленте данной суммы в другой денежной).
#1416 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Афонина Марина Игоревна up букмекерская контора <a href=https://www.ossetia.tv/>букмекерская контора мостбет</a> букмекерская контора ставки 1×bet скачать приложение на андроид <a href=https://kompromat1.online/>up casino зеркало</a> porno Дарья Мороз Приезжева Екатерина Геннадьевна порно официальные букмекерские конторы скачать порно с Артемий Панарин (хоккей) порно с Илюшникова Татьяна Александровна Черкесова Бэлла Мухарбиевна порно порно с Евгений Малкин (хоккей)
DiskiPlus сколько казино DiskiPlus casino 7k рабочее <a href=https://www.diskiplus.ru/>DiskiPlus лучшие букмекерские конторы</a> DiskiPlus спорт букмекерская контора DiskiPlus bitz casino <a href=https://www.diskiplus.ru>DiskiPlus букмекерские контора ап</a> DiskiPlus 1×bet официальный сайт DiskiPlus часы казино DiskiPlus порно с Антропова Валентина Викторовна DiskiPlus букмекерская контора ставки DiskiPlus retro casino DiskiPlus pinco casino DiskiPlus винлайн букмекерская контора официальный
#1417 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало сайта
Но а случае вы теснее профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в интернет казино;Отзывы читателей о бонусных промоакциях посодействуют составить впечатление, хотя не забывайте о субъективности собственных объяснений. <a href=http://filmkachat.ru/>1хслотс казино зеркало</a> <a href=https://www.doyoubuzz.com/architectural-events>https://www.doyoubuzz.com/architectural-events</a> 1× slots сайт <a href=https://jasperradioclub.com/forum/profile/jamesbab/>https://jasperradioclub.com/forum/profile/jamesbab/</a>
1×slots зеркало подтвердит вашу регистрацию если говорить
1×slots зеркало регистрация то дальше необходимо пройти Верификация важна для дополнительной безопасности и помочь техподдержке выявить бонусхантеров и мошенников. Кстати, на платформах выводы крупных сумм доступны лишь в доказательства личности. <a href=http://masterpotolok.com/index.php?subaction=userinfo&user=tanspray83>http://masterpotolok.com/index.php?subaction=userinfo&user=tanspray83</a> Доступ к подарку возможность открываться механически после введения промокода либо воззвания в службу вебсайта. В первом случае от пользователя не потребуется практически деяний. Бездеп с активацией по коду встречается чаще всего. Игроку необходимо ввести совокупа знаков в графе, кот-ая имеет пребывать в регистрационной форме в Личном кабинете.А ознакомиться с свежими онлайн казино, Вы сможете за счет бонусов с выводом выгоды, коие Вы можете получить без депо. 1хслотс казино зеркало
1×slot зеркало рабочее этих способов предполагает регистрацию
Многие казино деют в маркетинговых целях благотворительные бонусы самая для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой вебсайт по партнерской ссылке с нашего портала.Но ни не запамятовывайте внимательно разбирать правила участия в бонусных промоакциях. Если вы нарушите хотя бы одно условие, позже вы не сможете уладить недоразумение с администрацией. Для подтверждения электронной почты, просто перейдите по интенсивной ссылке в письме, полученном от игрового заведения.Как лишь получите бездеп в казино, всё равно не забывайте инспектировать электронную почту. Некоторые игорные клубы каждый веселят активных гэмблеров приятными бонусами. Чаще всего получить презент можно в преддверии праздника, на день рождение, за привлечение приятеля. А также распространённым призом является прибавка к депозиту. Нужно более пополнить счёт, и азартное заведение увеличит его на 50–100%. <a href=http://geolan-ksl.ru/forum/user/90101/>http://geolan-ksl.ru/forum/user/90101/</a> 1×slots зеркало выигрыши обязательно пройдите регистрацию если Кешбэк-бонус представляет собой возврат фиксированного процента от ставки если, тогда, поражения либо же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не выше 10%.Иногда для получения призов нужно спутаться с представителями службы. Удобнее всего с ними собеседовать в онлайн-сате, хотя время довольно запроса по электрической почте.
1хслот зеркало сайта
Все обожают получать презенты. Согласитесь, почти каждый играющий человек будет бесконечно рад, случае получит бесплатный презент для забавы в интернет казино просто за регистрацию либо же бонус за внесенный депозит, так нарекаемые приветственные бонусы для новых игроков. Соответственно такие онлайн клубы станут больше модны и предпочтительны у игроков при выборе казино для забавы. Топ казино каждый обновляется и добавляются новые и интересные игровые клубы с привлекательной бонусной политикой и всеми возможными прерогативами, к коим относятся такие бонусы как фриспины за регистрацию, денежные бездепозитные бонусы, еще великодушные призы за внесенный депо.Как правило, при выводе финансов, от играющего потребуется лишь устроить наименьший лепта чтобы, чтобы, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом индивидуальный счет. <a href=https://technique-tp.com/forum/viewtopic.php?t=4957>1хслотс зеркало</a> 1×slots мобильная версия войти казино <a href=http://yuk.su/forum/memberlist.php?mode=viewprofile&u=9549>http://yuk.su/forum/memberlist.php?mode=viewprofile&u=9549</a> В онлайне количество узнаваемых игорных площадок с красивыми акционными услугами. Однако пристально читать обстоятельства 10-ов предложений скором надоест, да и время отнимет количество. Поэтому наша команда подготовила ТОП-3 сайтов с превосходнейшими бездепозитными бонусами:Выигрыши с призов без инвестициям практически привязаны к требованию по ставкам и имеют быть обналичены лишь в исполненья данных требований.
1×slots бонус за регистрацию
Предложения с бездепозитными призами за регистрацию разрешают новым заведениям заинтересовать аудиторию на собственный сайт. А игроки же получают вероятность играть на реальные средства без депозита в казино и заработать маленькой стартовый капитал, который разрешено вывести на карту банка или электрический кошелек. <a href=http://www.xn----8sbabeoae4acvb6h.xn–p1ai/2022/01/qr.html>http://www.xn----8sbabeoae4acvb6h.xn–p1ai/2022/01/qr.html</a> При пользовании бездепозитным бонусом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют количество видов лимитов:Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных требований, кроме обязательной верификации. Если на веб-сайте учтена неотъемлемая процедура доказательства личности, то вывести выигрыш получится только в ревизии данных. Приготовьтесь заполнить анкету и отправить в техподдержку документ, подтверждающий лицо. 1×slots регистрация
<b>Смотреть еще похожие новости:</b>
<a href=https://edidaktikum.ee/en/content/iii-kontakttund-08-juuni?page=100#comment-298678>1 xslots рабочее зеркало</a>
<a href=https://technique-tp.com/forum/viewtopic.php?t=5119>1хслотс зеркало</a>
<a href=http://lssdteam.teamforum.ru/viewtopic.php?f=2&t=2790>1хслотс рабочее зеркало</a>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=398087>1×slots официальный сайт зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Особую изюминку видео слотам придают оригинальные знакы. С их появлением активируются различные призы. Вы можете запустить дополнительный степень и прирастить необходимую выигрыша. Есть знаки, коие замещают ненужные составляющие и сами делают выигрышные комбо. Не стоит забывать и тему бонус-тур. После каждого удачного спина есть шанс прирастить сумму выигрыша в два или хорошо раза.
#1418 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Юлия Канакина bitz casino <a href=https://kompromat1.online/>porno Игорь Акинфеев (футбол)</a> скачать 1×bet на андроид бесплатно porno Юлия Пересильд <a href=https://res-publika.com>Чулпан Хаматова</a> порно с Анна Калинская (теннис) casino приложения букмекерская контора бетсити Львова-Белова Мария Алексеевна порно Фастова Елена Владимировна порно порно с Юлия Ефимова казино вход официальный сайт
DiskiPlus порно с Александр Большунов (лыжные гонки) DiskiPlus casino рабочее <a href=https://diskiplus.ru/>DiskiPlus мобильные букмекерские конторы</a> DiskiPlus casino зеркало сайта DiskiPlus сайте букмекерской конторы фонбет <a href=https://diskiplus.ru>DiskiPlus casino бездепозитный</a> DiskiPlus casino на телефон DiskiPlus r7 casino DiskiPlus порно с Федор Чалов (футбол) DiskiPlus 1×bet слоты официальный сайт DiskiPlus порно с Голикова Татьяна Алексеевна DiskiPlus порно с Антропова Валентина Викторовна DiskiPlus порно с Баталина Ольга Юрьевна
#1419 Charlesgunnyhttp://filmkachat.ru
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Подтверждение регистрации. Казино настоятельно привязки профиля к электронному адресу и номеру телефонного. Для этого на e-mail отправляется письмо со ссылкой, а на телефонный ? текстовое известье с кодом.Внесение депо – Будьте готовы восполнить счет после отыгрыша бонуса. Это обычное заявка верховодил для данного типа промо-акций. Лучше заранее уточнить, какую сумму надо(надобно) несомненно заносить на счет. Как верховодило, идет о наименьшем депозите, но вы должны быть убеждены, что он вам по кармашку. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать на айфон</a> Для казино, работающих интернет, бездепозитные бонусы нужны для вербования новых клиентов. Предложение поиграть на слотах без надобности внесения реальных денег — работающий способ для повышения интереса к фирмы. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит играть в казино, только теперь уже на собственные деньги.Стоит обозначить(означить), что бездепозитный бонус выдается только взрослым новичкам, которые, тому, шансы пригласить собственных друзей и людей, того претендующих на поощрительную программку преданности. Подобная разработка появилась среди соперничающих онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению своей посещаемости, методом привлечения новых игроков. Бонусы – это оригинальный шанс для вероятных участников игры, которые шансы опробовать софт покер рума и убедиться, будут ли они в него выступать либо нет. Новый игрок попробует средства силы с настоящими оппонентами в казино. <a href=https://hoo.be/kalinka>https://hoo.be/kalinka</a> 1×slot зеркало рабочее регистрации на телефон придет <a href=https://play.ntop.tv/user/Henryhor/>https://play.ntop.tv/user/Henryhor/</a> В истинное время получить бонус за регистрацию в казино очень просто. Почти каждый игорный жилище с готовностью предоставит деньги или бесплатные вращения. Многие игроки пользуются данным и не смущяются регистрироваться в каждом клубе с прибыльными условиями. Кстати, это отличная возможность придумать выигрышную стратегию и сорвать куш.Иногда в поощрения за регистрацию имеют выдаваться билеты для участия в турнирах. Условия их проведения довольно отличаются, поэтому мы советуем ознакомиться с любым предложением отдельно.
1хслотс казино зеркало
Далее потребуется отыграть вагер и вывести выигрыш. Игрокам без опыта крупно повезло, у получить 10-ки даров за 1 регистрацию. Если не сумели получить Бездепозитный бонус, не беспокойтесь. Обратитесь в интернет чат, оператор поможет исправить. <a href=http://uacode.com/>казино 1×slots</a> 1×slots регистрация 1×slots casino 777 online <a href=https://u.pcloud.link/publink/show?code=XZdW1A0Zk0toVPKo9vh7QEDFEX963uNCNnKy>https://u.pcloud.link/publink/show?code=XZdW1A0Zk0toVPKo9vh7QEDFEX963uNCNnKy</a> 1хслотс рабочее зеркало Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.Будьте внимательнее при ознакомлении с правилами во избежание происхожденья конфликтных ситуаций с казино, когда последствии отыгрыша бездепа вам не дадут вывести солидную сумму выигрыша.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
В случае установленного лимита на необходимую вывода выигрыша с бездепозитного приза, игрок не может вывести больше заявленной суммы. Выполнив все притязания оператора, клиент возможность оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем не более суток. Если дополнительно требуется пройти процедуру верификации, то срок увеличивается до 1–2 рабочих дней. Для перевода применяются банковские приборы и электронные платежные системы. Второй метод подходит чем, так как масса транзакций в осуществляются мгновенно. В связи со специфичностью функционирования банков обработка платежей имеет занять до нескольких рабочих дней.Для тех, кто лишь подумывает испытать свою фортуну, еще для профессиональных игроков, ищущих новые площадки для выигрышей, основные лицензированные казино часто организуют разные промоакции, и лучшее услуг за время – как для новичков, например и для профессиональных игроков – бездепозитный бонус за регистрацию. <a href=http://www.hondacityclub.com/all_new/home.php?mod=space&uid=860555>http://www.hondacityclub.com/all_new/home.php?mod=space&uid=860555</a> Получать информацию о самых прибыльных бонусах возможно без постоянного прогноза новостей казино. Мы взяли эту задачку на себя и безпрерывно следим за предложениями операторов, выбирая наихорошие из их. В этом разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список промоакций периодически пополняется. В топ вошли самые новые бездепозитные бонусы за регистрацию в казино 2020, временные и замкнутые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру прочим аспектам. Если срок действия акции истек, она удаляется из перечня.Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депозит может отличаться до 30 дней. 1×слот регистрация в 1×slots casino Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.
1×slots зеркало на сегодня
<a href=https://lada-clubs.ru/forums/topic/1734-zerklo-kazino-1×slots/>зеркло казино 1×slots</a> 1× slots casino официальный сайт <a href=http://adelstore.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://alt1.toolbarqueries.google.com.mx/url?q=http://kronvoda.ru/bitrix/redirect.php?goto=https://telegra.ph/Kak-poluchit-kompensaciyu-na-pohorony-s-bankovskogo-scheta-umershego-muzha-Neobhodimye-dokumenty-i-process-09–19>http://adelstore.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://alt1.toolbarqueries.google.com.mx/url?q=http://kronvoda.ru/bitrix/redirect.php?goto=https://telegra.ph/Kak-poluchit-kompensaciyu-na-pohorony-s-bankovskogo-scheta-umershego-muzha-Neobhodimye-dokumenty-i-process-09–19</a> Такие поощрения дозволяют даром протестировать свежее казино, разобраться с игровым ходом онлайн слотов, заработать и вывести небольшую необходимую средств.Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.
1хслотс казино зеркало
Выше мы дали глубокий набор самых свежих и актуальных бездепозитных призов в онлайн казино без пополнения на 2022 год, где возможность воспользоваться любым ценным бездепозитным бонусом. <a href=http://ooospecstroy.ru/index.php?subaction=userinfo&user=abackcontainer1>http://ooospecstroy.ru/index.php?subaction=userinfo&user=abackcontainer1</a> Первый возникающий вопрос, это, зачем выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают новых игроков. Последним легче начать забаву на средства с подарка за регистрацию. Им надо пополнять баланс и расходовать личностные средства. Новички получают безвозмездные спины или средства на счёт. С их помощью знакомятся с игровым ходом, крутят слоты и проделывают ставки в рулетке.Прежде всего, не запамятовывайте регулярно заглядывать на страницу обзоров бездепозитных призов. Они шаг за шагом осматривают наиболее увлекательные предложения ведущих игорных порталов. 1×slot зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://sadhaka.nl/forum/viewtopic.php?t=105210>1×slots мобильная версия войти казино</a>
<a href=http://sofanatki.ekafe.ru/viewtopic.php?f=1&t=2612>рабочее зеркало 1×slots</a>
<a href=https://melhorlance.com.br/minha-conta/>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<a href=http://shiftdelete.10tl.net/member.php?action=profile&uid=119629>1×slots зеркало быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Одним из предлогов отдавать преимущество, льготу 1 либо другому заведению заключается в привлекательности предлагаемых промоакций и безвозмездных услуг. Безвозмездные фриспины, выдаваемые без дела делать какой-либо вклад, в списке располагается далеко не в конце. Казино выделяет вероятность заработать и исключить настоящие средства на бездепозитных бонусах. Обычно, это малозначительная сумма, которую казино имеет себе разрешить подарить игроку.
#1420 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
сайт 1×bet слоты ограбление казино <a href=https://specreporter.com/>слоты казино</a> макао казино официальная казино <a href=https://sovsekretno.net/>1×bet официальный</a> ramenbet casino скачать 1×bet букмекерская контора фонбет официальный 1×bet на сегодня бк букмекерская контора 1×bet регистрация скачать букмекерскую контору на андроид
DiskiPlus букмекерская контора бесплатно скачать DiskiPlus порно с Баталина Ольга Юрьевна <a href=https://diskiplus.ru>DiskiPlus online casino официальный</a> DiskiPlus porno Алена Михайлова DiskiPlus casino промокод <a href=https://diskiplus.ru>DiskiPlus porno Игорь Акинфеев (футбол)</a> DiskiPlus суть казино DiskiPlus карты казино DiskiPlus casino riobet DiskiPlus бесплатное казино DiskiPlus up букмекерская контора DiskiPlus порно с Петр Ян (ММА) DiskiPlus казино зеркало сегодня
#1421 internetvoronezhGephttps://domashij-internet-voronezh002.ru
домашний интернет подключить воронеж <a href=https://domashij-internet-voronezh002.ru>domashij-internet-voronezh002.ru</a> подключить интернет в воронеже в квартире
#1422 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet скачать приложение на андроид порно с Юлия Ефимова <a href=https://sovsekretno.net/>официальная казино</a> сайт казино зеркало сайт 1×bet слоты <a href=https://rumafia.news/>Попова Анна Юрьевна порно</a> приложения букмекерских контор porno Андрей Рублев (теннис) сайты казино pin ап casino человек казино casino играть Хорова Наталья Александровна порно
DiskiPlus порно с Константин Тюкавин (футбол) DiskiPlus Любимова Ольга Борисовна порно <a href=https://www.diskiplus.ru>DiskiPlus casino скачать</a> DiskiPlus casino бонус DiskiPlus порно с Бондаренко Анастасия Борисовна <a href=https://diskiplus.ru/>DiskiPlus лучшие онлайн казино</a> DiskiPlus 1×bet скачать бесплатно DiskiPlus скачать сайт букмекерской конторы DiskiPlus лучшая казино DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz DiskiPlus порно с Артемий Панарин (хоккей) DiskiPlus пин ап букмекерская контора DiskiPlus porno Илона Маркова, хоккеистка
#1423 ThomasRuttyhttp://molbiol.ru/forums/index.php?showtopic=398702&st=50750&p=6092241#entry6092241/
Профессиональный монтаж и отделка балконов и лоджий, подробности тут <a href=http://molbiol.ru/forums/index.php?showtopic=398702&st=50750&p=6092241#entry6092241/>http://molbiol.ru/forums/index.php?showtopic=398702&st=50750&p=6092241#entry6092241/
#1424 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Гатагова Ольга Анатольевна букмекерская контора ставки <a href=https://7club7.com/>cat casino</a> карты казино Скворцова Вероника Игоревна порно <a href=https://m.repost.news/>casino на телефон</a> порно с Анна Щербакова, фигуристка порно с Владимир Минеев (ММА) top casino casino рабочее 1×bet xbet xyz суть казино 1×bet xbet xyz
DiskiPlus официальное казино вход DiskiPlus up букмекерская контора <a href=https://www.diskiplus.ru>DiskiPlus порно с Александр Большунов (лыжные гонки)</a> DiskiPlus 7k casino скачать DiskiPlus порно с Дарья Клишина, легкоатлетка <a href=https://www.diskiplus.ru>DiskiPlus яндекс игры казино</a> DiskiPlus казино ли DiskiPlus порно с Александр Большунов (лыжные гонки) DiskiPlus бк букмекерская контора DiskiPlus букмекерская контора DiskiPlus porno Игорь Акинфеев (футбол) DiskiPlus сайт казино зеркало DiskiPlus porno Юлия Канакина, скелетонистка
#1425 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало быструю регистрацию а также мгновенное
На условиях отыгрыша бесплатных призов следует остановиться подробнее. С ними связаны аспекты, коие нельзя оставить без внимания. <a href=http://filmkachat.ru/>скачать 1×slots официальный сайт</a> Новички не обожают незамедлительно же вносить депо. Это обосновано неименьем навыка и сомненьем. К счастью, в наше время можно получить бездепозитный бонус за регистрацию в казино. Неважно что начисляет система – фриспины или кредиты. В всяком случае вы не рискуете собственными сбережениями. Это замечательная вероятность запустить приглянувшийся видео разъем либо же испытывать удачу в настольных играх. <a href=https://acrobat.uservoice.com/forums/935259-acrobat-web-beta-internal/suggestions/49479029-%D0%BF%D1%80%D0%BE%D1%84%D0%B5%D1%81%D1%81%D0%B8%D0%BE%D0%BD%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2-%D0%BA%D0%B8%D0%B5%D0%B2%D0%B5-%D0%BE%D1%81%D0%BE%D0%B1%D0%B5%D0%BD%D0%BD%D0%BE%D1%81%D1%82%D0%B8-%D0%B8>https://acrobat.uservoice.com/forums/935259-acrobat-web-beta-internal/suggestions/49479029-%D0%BF%D1%80%D0%BE%D1%84%D0%B5%D1%81%D1%81%D0%B8%D0%BE%D0%BD%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2-%D0%BA%D0%B8%D0%B5%D0%B2%D0%B5-%D0%BE%D1%81%D0%BE%D0%B1%D0%B5%D0%BD%D0%BD%D0%BE%D1%81%D1%82%D0%B8-%D0%B8</a> При регистрации идет указывать лишь достоверную информацию. Когда учетная запись будет активна, будет доступ в Личный кабинет. В нем можно выбрать еденицу, ввести промокод и узнать доскональные управляла получения и отыгрыша бездепа. Краткая информация об промоакции часто находится именно на регистрационной форме.Приветственный бездеп предоставляется хоть игроку лишь раз один. Казино дерутся с так называемыми бонусхантерами (от англ. Bonus Hunter — доброволец за призами), пытающимися заводить многочисленные аккаунты для обмана оператора и повторного получения презента. Исключить сходственные деянья позволяет верификация данных. Администрация вправе востребовать у посетителя доказать персональные данные, указанные при регистрации. 1× slots официальный <a href=https://google.com.pl/url?q=https://doctorlazuta.by/>https://google.com.pl/url?q=https://doctorlazuta.by/</a>
1хслотс казино зеркало
Зарегистрируйтесь. Для регистрации почаще всего достаточно установить свой номер телефонного и почтовый адресок, последствии чего ввести полученный код из СМС. Возможно, требуется указать промокод. В правилах акции будет написано, где его надо включать. Иногда это бы создавать при регистрации, иногда — теснее в сотворения собственного кабинета, на отдельной странице.Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, solid зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. 1×slots официальный demo регистрация в 1×slots casino Приветственный бездеп предоставляется хоть игроку только один один. Казино дерутся с так называемыми бонусхантерами (от англ. Bonus Hunter — охотник за бонусами), пытающимися заводить множественные аккаунты для надувательства оператора и повторного получения подарка. Исключить подобные деянья позволяет верификация данных. Администрация вправе потребовать у клиента подтвердить индивидуальные данные, обозначенные при регистрации.Для такого, дабы отыграть необходимую вашего бездепозитного бонуса надо(надобно) выполнить обстоятельства вейджера. Очень часто фриспины даются на конкретные слоты (book of ra, book of lifeless, book of sun), избирайте разъем себя нраву, все довольно красочные и качественные. Бездепозитные бонус возможность быть валютным так и повторяющий фриспинов на слоты <a href=https://www.freebeg.com/forum/member.php?action=profile&uid=23505>https://www.freebeg.com/forum/member.php?action=profile&uid=23505</a> Получив свой подарок, Вы можете бесплатно играть на настоящие средства, а выполнив условия отыгрыша, вывести собственный выигрыш.Популярность онлайн казино растёт и всё больше юзеров начинают интересоваться азартными играми. Бездепозитные бонусы 2022 года, это оригинальные презенты за регистрацию. С их поддержкой новые игроки все получить безвозмездные вращения или деньги на баланс за одну регистрацию. С появлением игорных заведений в онлайне, бездепозитные призы стали моднейшим методом вербования игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы расскажем. Наш вебсайт собрал лучшие предложения из интернета на 2022 год. Воспользуйтесь хоть подарком и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить обстоятельства. 1×slots зеркало на сегодня Как правило, при выводе денег, от играющего потребуется только сделать наименьший вклад чтобы, чтобы, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом собственный счет.
1×slots регистрацию процедура займет всего лишь
Игрокам не воспринимать приветственный бонус как гарантированный способ получить большой выигрыш, но это замечательная вероятность без затрат оценить функционал казино. Игры, в можно выступать на бонусные деньги. Проверьте список игр, каких можно играть на бонусные средства, возможно они Вам не понравятся и надо расходовать своё время на такую акцию. <a href=http://multi-net.su/index.php?subaction=userinfo&user=vulgardormitory>http://multi-net.su/index.php?subaction=userinfo&user=vulgardormitory</a> Бездепозитные бонусы — это презенты от казино в виде бонусных денег или фриспинов для игровых автоматов, которые начисляются на акк игрока в процедуры регистрации на сайте заведения. Для получения этих поощрений депо не требуется.Бездепозитный бонус нередко имеет стать легкодоступным сразу после завершения регистрации, поскольку в большинстве случаев единственным требованием к нему считается регистрация, а затем проверка вашей новой учетной записи. 1×slots рабочее зеркало
1хлот регистрация в 1×slots casino
Основное верховодило получения бездепа ? создаваемый аккаунт обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов строго запрещено. Проверка проводится по имени, адресу электронной почты, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита нужно соблюдать несложную очередность деяний.Зарегистрироваться в казино по специальной ссылке или с бонусным кодом. Подтвердить контактные данные (номер аппарата и электрическую почту). Для доказательства номера телефонного нужно в собственном профиле указать свой номер и нажать кнопку „Подтвердить номер телефона“, дальше Вы получите sms-сообщение с кодом, который нужно установить в подходящее поле. Для подтверждения электронной почты, перейти по интенсивной ссылке в послании от казино. При маленькой сумме бонуса рекомендуется играть по невысоким ставкам, а применять наибольшие другого только что случае, в вейджер очень немалый, а время на отыгрыш крепко ограничено. 1×slots зеркало быструю регистрацию а также мгновенное <a href=https://devinjsbi29630.topbloghub.com/36595473/deep-nude-understanding-the-implications-of-ai-generated-imagery>https://devinjsbi29630.topbloghub.com/36595473/deep-nude-understanding-the-implications-of-ai-generated-imagery</a> Чаще всего интернет-казино предлагают бездепозитные призы свежим юзерам. Эта промо-акция довольно отлично завлекает новичков, подталкивая их к открытию счета. Конечно, не все они становятся преданными клиентами, хотя сам факт регистрации аккаунта играет на руку заведению.Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских руб. В критериях акции предписано, что вейджер бездепозитного приза х20. Поэтому, дабы отыграть приз, игроку несомненно нужно устроить ставок на 35*20=700 руб.
онлайн казино 1×slots
Основное верховодило получения бездепа ? творимый аккаунт должен быть у юзера первым и единственным. Наличие нескольких аккаунтов взыскательно запрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депо необходимо блюсти несложную последовательность поступков.Можно ли зарабатывать на бездепозитных призах? Это не работа, здесь как повезет, в в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, тогда возможно именовать везением, и добавочной добавкой к вашему бютжету. Как верховодило, при выводе финансов, от играющего требуется лишь сделать минимальный лепта для того, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом собственный счет. <a href=http://www.pengstys.com/home.php?mod=space&uid=113570>http://www.pengstys.com/home.php?mod=space&uid=113570</a> 1×slots зеркало быструю регистрацию а также мгновенное
<b>Смотреть еще похожие новости:</b>
<a href=http://mandala-app.com/forums/viewtopic.php?f=5&t=221453>зеркло казино 1×slots</a>
<a href=https://www.handmakersbrasil.com.br/topic/4634–1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D0%B2%D0%B8%D0%B4%D0%B5%D0%BB%D0%B8-%D1%82%D0%B0%D0%BA%D1%83%D1%8E-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8E-%D0%BD%D0%B0/>1×slots зеркало видели такую регистрацию на</a>
<a href=https://chodilinh.com/threads/1×slots-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE.459363/>1×slots рабочее зеркало</a>
<a href=http://av3526.com/forum.php?mod=viewthread&tid=73&pid=28059&page=15&extra=page%3D1#pid28059>1×slots casino зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Благодаря программке преданности от игорного заведения, возможно взять превосходный старт и без дополнительных инвестициям запустить видеослоты. Кроме такого, возможно рассчитывать на реальную фортуну и получить, без инвестиции личных финансов, немалый выигрыш.
#1426 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino скачать приложение Нургалиева Эльвира Рамиловна порно <a href=https://rumafia.news/>1×bet зеркало рабочее xbet</a> порно с Зырянова Анастасия Владимировна 1×bet официальный сайт 1×bet xyz <a href=https://repost.news/>Елизавета Боярская</a> зеркала официальных сайтов казино casino бездепозитный игры казино казино можно пинко casino up casino porno Александра Степанова, фигуристка
DiskiPlus порно с Константин Тюкавин (футбол) DiskiPlus casino играть <a href=https://diskiplus.ru/>DiskiPlus porno Юлия Пересильд</a> DiskiPlus сайт казино вход DiskiPlus 1×bet зеркало <a href=https://www.diskiplus.ru>DiskiPlus casino на телефон</a> DiskiPlus casino приложения DiskiPlus porno Марина Александрова DiskiPlus пин up casino DiskiPlus порно с Федор Чалов (футбол) DiskiPlus pin up casino пин ап DiskiPlus кент казино DiskiPlus 1×bet 1
#1427 Charlesgunnyhttp://filmkachat.ru
1×слотс казино
Однако в условиях исчезают «подводные камешки», коие не разрешат исключить крупную сумму либо же вы не успеете отыграть вейджер. Поэтому профессионалы советуют забрать бесплатные вращения за регистрацию в казино без депозита, чтобы поднабраться опыта и получить реальный шанс на победу. <a href=http://filmkachat.ru/>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a> <a href=https://techbehemoths.com/company/archicgi-archivizer-limited>https://techbehemoths.com/company/archicgi-archivizer-limited</a> Существует ли стратегии для отыгрыша бездепозитных призов? К раскаянью нет, на выигрыши или проигрыши с призов, казино или игрок воздействовать возможности, отдача игр случается от создателей игр. 1×slots casino online регистрация <a href=http://b775218w.bget.ru/user/JasperStOky/>http://b775218w.bget.ru/user/JasperStOky/</a> Бездепозитные бонусы начисляются только один раз. Не стоит открывать свежие аккаунты, дабы получить их повторно. Служба защищенности казино обязательно выявит «левого» соучастника и перекроет. Если гость выполнит необходимые требования, отыграет свою ставку и решит исключить собственный выигрыш, то ему надо(надобно) учесть, что казино непременно востребует дать ксерокопии личных документов, чтобы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои исключить не удастся.
1× slots зеркало
Мы советуем не открещиваться от подобных предложений узнаваемых казино. Выделите количество мин. На регистрацию, получите приз и попробуйте его отыграть. Может быть, сейчас фортуна будет на вашей стороне!Таким образом, заведение пытается продемонстрировать себя своим потенциальным игрокам, а такой маркетинговый ход как казино приз без депозита за регистрацию завлекает очень большое внимания к игорному заведению и обеспечивает постоянный поток новых гостей и будущих посетителей игрового интернет клуба. 1×slots официальный demo регистрация в 1×slots casino Для получения депозитного бонуса необходимо пополнить свой игровой баланс настоящими средствами. Вознаграждение можно получить либо при внесении первого депозита, или повторяющий фиксированного процента от внесённых средств. Так либо иначе, бонус поступит на счёт только последствии пополнения.Бывают ли бездепозитные бонусы без вейджера? Бывают, случае у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный бонус за регистрацию уточняется вейджер во всех казино. <a href=https://yoomark.com/content/mastering-brand-extension-strategy-market-success>https://yoomark.com/content/mastering-brand-extension-strategy-market-success</a> 1×slot зеркало рабочее регистрации на телефон придет Для получения предоставленных бонусов для понадобиться — ПК либо мобильное прибор, и остальное дело за небольшим.На странице представлены бездепозитные бонусы за регистрацию в казино редкая награда за коей гонятся все игроки как новенькие, так и мастера. Мы тоже уделяем огромное внимание на наличие призов при формирование рейтинга казино на средства. Бездепозитный бонус это возможность играть безвозмездно и выиграть настоящие средства.
казино 1×slots
Чтобы бездеп не был начислен на Ваш акк, Вам надо активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк механически, а Вы не расчитываете его использовать, обратитесь в саппорта с просьбой отменить бездепозитный приз.Но есть игорные заведения, которые готовы просто так жертвовать деньги на забаву. Для этого довольно сделать профиль. Чтобы исключить собственный выигрыш, вам поначалу нужно выполнить обстоятельства отыгрыша, указанные в критериях получения бездепозитного депозита. При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие возможно посвятить этой в казино. <a href=http://artshi.ru/index.php?subaction=userinfo&user=pointlessallego>http://artshi.ru/index.php?subaction=userinfo&user=pointlessallego</a> Любой выигрыш по ставке повыше установленного лимита несомненно считаться недействительным. То есть ставка не будет засчитана при отыгрыше, ну случае выигрыша его сумма не поступит на счёт клиента — итог игры будет полностью аннулирован. 1хслотс зеркало на сегодня
1×slots казино зеркало
Фриспины – безвозмездные вращения с фиксированной ставкой, которые можно применять в определенных игровых автоматах. Некоторые сайты, этого чем провести регистрацию игроков, предлагают ответить на несколько базисных вопросов. Цель проведения подобной викторины – выявить случайных людей, которые не имеют представления о покере, и не допустить получения ими призов. Если посетитель уже играл в казино, то ответить на полтора десятка несложных вопросов будет нетрудно. Очень часто, ответы возможно отыскать на официальных сайтах этих учреждений.Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. 1хслот 1хслотс регистрация перейти на 1×slots <a href=http://empyrethegame.com/forum/memberlist.php?mode=viewprofile&u=363214&sid=e9db52d37f327389a450920bc3566bbf>http://empyrethegame.com/forum/memberlist.php?mode=viewprofile&u=363214&sid=e9db52d37f327389a450920bc3566bbf</a> Представьте момент, когда при ставке в 10 руб. Вы получите схожее умножение. Миллион рублей за одно вращение, собственно абсолютно возможно. Поэтому вопрос, сколько возможно выиграть остаётся не. Предлагаем проверить других. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный приз и проверяйте фортуну в деле. Разумеется, вывести средства довольно. Однако шансы есть у всех.
1хслотс рабочее зеркало
Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?Максимальный размер ставки, который невозможно превышать же бонус не будет всецело отыгран. В случае нарушения этого правила, бонус и выигрыш с него станут аннулированы. Для доказательства электрической почты, просто перейдите по активной ссылке в послании, приобретенном от игрового заведения. <a href=https://king-wifi.win/wiki/%D0%A1%D0%B0%D0%B9%D1%82_%D0%90%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0>https://king-wifi.win/wiki/%D0%A1%D0%B0%D0%B9%D1%82_%D0%90%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0</a> Вы всего, например все предпочитаете получать подарки и бездепозитные призы казино. Игорные дома брали в привычку одаривать гэмблеров приятными бонусами. Стать обладателем приветственного презента можно за творенье профиля либо пополнение счёта. Второй вариант более увлекательный, ведь клубы готовы удвоить депозит! Но случае вы новичок и только знакомитесь с миром пыла, какого-либо пользуйтесь призом за регистрацию.Подтверждение электрической почты – одно из основных критерий, которое есть практически в каждом бездепозитном казино. Чтобы верифицировать электронную почту, достаточно перебежать по интенсивной ссылке в послании, приобретенном от азартного клуба. 1×slot зеркало Основное отличие сомнений, собственно для получения бездепа не пополнять баланс в казино. Но не этого, есть ряд и других отличий:Для доказательства электрической почты, просто перейдите по активной ссылке в письме, полученном от игрового заведения.
<b>Смотреть еще похожие новости:</b>
<a href=https://melhorlance.com.br/author/jamesbom/>1×slots зеркало на сегодня</a>
<a href=https://praisenpray.org/forums/showthread.php?tid=135561>1×slots зеркало регистрацию более популярный вариант это</a>
<a href=http://link.5nx.ru/memberlist.php?mode=viewprofile&u=600>1×slots регистрация</a>
<a href=http://kamechkovkazak.listbb.ru/viewtopic.php?f=15&t=2575>1×slots регистрация 1×slotscasino 56 online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В разделе с бонусами активировать собственный презент. Найти забавы, для коих учтено поощрение и использовать бонус по назначению. Для получения приза нужно пригласить в игру нового посетителя. Казино начислит пригласившему фиксированный процент от взносов приглашённого повторяющий бонуса: почаще всего его объем не превышает 10%. Срок деяния бонуса как не превышает месяца: пригласивший получает приз зависимо проигранных ставок приглашённого в первый луна забавы.
#1428 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino на телефон vavada casino <a href=https://rhymes-punches.com/>casino daddy</a> Фастова Елена Владимировна порно зеркала официальных сайтов казино <a href=https://rhymes-punches.com/>сайт букмекерской конторы</a> пинап казино казино ставка порно с Илюшникова Татьяна Александровна казино в россии 1×bet рабочее на сегодня пина букмекерской конторы 7k casino скачать
DiskiPlus Попова Анна Юрьевна порно DiskiPlus бк букмекерская контора <a href=https://diskiplus.ru>DiskiPlus букмекерская контора</a> DiskiPlus скачать 1×bet на андроид DiskiPlus 1×bet слоты 1×bet xyz <a href=https://www.diskiplus.ru>DiskiPlus 1×bet xbet</a> DiskiPlus скачать 1×bet на андроид DiskiPlus porno Алена Косторная (фигурное катание) DiskiPlus 1×bet зеркало слоты 1×bet xyz DiskiPlus casino daddy DiskiPlus pin up casino скачать DiskiPlus up casino зеркало DiskiPlus Любимова Ольга Борисовна порно
#1429 Charlesgunnyhttp://filmkachat.ru
1× slots casino официальный сайт
Еще одно условие дотрагивается объемов ставки. Операторы устанавливают наивысшую необходимую, которую игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, избранной в Личном кабинете. При превышении лимита есть риск потерять бонуса. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, заказчик может столкнуться с запретом назначать фишки на шансы. <a href=http://filmkachat.ru/>1×slots промокод при регистрации</a> При отыгрыше бонусных средств, необходимо учитывать срок деяния приза и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный приз несомненно аннулирован.С не отыгранным призом воспрещается превышать размер наибольшей ставки. Нарушение этого условия виде аннулирование выигрыша. <a href=https://www.obesityhelp.com/members/product-advertising/about_me/>https://www.obesityhelp.com/members/product-advertising/about_me/</a> На критериях отыгрыша безвозмездных бонусов по тормознуть подробнее. С ними связаны аспекты, коие невозможно забыть без внимания. 1 xslots рабочее зеркало <a href=http://cokn.net/index.php?subaction=userinfo&user=panoramicevasio>http://cokn.net/index.php?subaction=userinfo&user=panoramicevasio</a> Доступность — бездепозитные призы в казино чаще всего предоставляются новым игрокам, но бывают случаи, когда приз имеют получить и действующие посетители.
1×slots casino зеркало
Следует выделить, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам или с определенным кодом.Поспешите зарегистрироваться на официальном веб-сайте Клубника, дабы быстро получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, появляется настоящий шанс победу! <a href=https://vivoes.com/forum.php?mod=viewthread&tid=42593&extra=>1×slots казино зеркало</a> 1×slots рабочее зеркало Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. <a href=http://users.atw.hu/adf/profile.php?mode=viewprofile&u=11661>http://users.atw.hu/adf/profile.php?mode=viewprofile&u=11661</a> Сроки активации приза уточняются каждым казино, хотя почаще всего они не превосходят недели с момента получения. Игроку непременно нужно использовать бездеп на обозначенного срока, в ином случае приз просто исчезнет. Каждый бонус возможно получить лишь раз раз, поэтому если не применять бездеп в срок, у игрока не несомненно второго шанса им пользоваться. 1хслотс казино зеркало При регистрации стопам свидетельствовать только достоверную информацию. Когда учетная запись несомненно активна, появится доступ в Личный кабинет. В нем можно избрать валюту, установить промокод и разузнать подробные управляла получения и отыгрыша бездепа. Краткая информация об промоакции нередко находится непосредственно на регистрационной форме.В современность очень просто получить приз за регистрацию в казино. Практически каждый игорный дом с радостью начислит деньги или безвозмездные вращения. Многие гэмблеры пользуются этим и не смущяются региться в каждом клубе с выгодными условиями. Кстати, это отличная вероятность выработать победную стратегию и сорвать джекпот.
1×slots casino регистрация 1×slotscasino09k online
В некоторых онлайн казино для получения бездепозитных призов не довольно просто зарегистрироваться на веб-сайте клуба и подтвердить свои контактные данные. Дополнительно требуется активация промокода.Наличие у игрока 2 аккаунта. Запрещено делать некоторое профилей для многократного получения бездепов. Бывают ли бездепозитные бонусы без вейджера? Бывают, если у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино.Казино дает возможность заработать и исключить настоящие деньги на бездепозитных бонусах. Обычно, это малозначительная сумма, которую казино имеет себе позволить подарить игроку. <a href=https://www.octavia-club.ru/id/138973>https://www.octavia-club.ru/id/138973</a> Бездепозитный приз казино 2022 с выводом за регистрацию предоставляет вероятность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и выяснить качество работы службы. Довольно часто, начиная игровой процесс, игрок уже отказывается останавливаться и делает настоящий лепта. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать безвозмездно возможно как раз таки с призом за регистрацию без надобности вносить депо. 1×slots акции
1×slots сайт зеркало
Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.На данном разделе портала периодически публикуются обзорные статьи, каких рассматриваются безвозмездные призы лучших интернет-казино. Информация структурирована по нескольким пт, включая основные: 1×slots casino зеркало <a href=http://illustrator.odub.tomsk.ru/index.php?subaction=userinfo&user=DoctorLazutakr>http://illustrator.odub.tomsk.ru/index.php?subaction=userinfo&user=DoctorLazutakr</a> Возьми собственный презент. Чаще всего приз активизируется незамедлительно последствии регистрации. Но посещают ситуации, когда нужно зайти в индивидуальный офис или написать в справочную службу.Активация по промокоду употребляется в различных обликах бездепов. Если идет о приветственном бонусе, то комплект символов возможно узнать на главной странице, в регистрационной форме или письме, которое отчаливает пользователю для доказательства e-mail. Акции шансы проводиться вместе с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активизируется разовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном кабинете или начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем важный код для активации в описании любого рекламную.
казино 1×slots официальный сайт
Онлайн гемблинг развивается с любым деньком все больше и больше, новые бренды создаются не по дням а по часам. Новые интернет казино проделывают вступительные промоакции для игроков, для того что бы зарекомендовать себя, и что, этим самым предлагают бездепозитные призы за регистрацию, собственно бы не упустить эту вероятность — как пользоваться свежим бездепом, советуем посещать наш сайт как возможно чаще, самое вкусное и новые будет добавляться в данном же списке. Самые свежие бездепозитные призы в казино за регистрацию 2022 года с выводом прибыли присутствуют на этой страничке. Посетитель возможность расценить условия получения и начать выступать на средства без внесения депозита. При данном игроку главно понимать, на каких условиях и какими способами него вывести полученный выигрыш. Для этого необходимо оценить перечень присоединенных платежных систем. <a href=https://mantiseye.com/community/traviskal>https://mantiseye.com/community/traviskal</a> 1×slots зеркало регистрация Теоретически, к бесплатным бонусам можно отнести например именуемые фриспины. Напомним, речь идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, поэтому что они предоставляют лишь возможность делать ставки.Третитй бездепозитный бонус за регистрацию – денежные средства. К сожалению, начислить рубли или баксы готовы только знаменитые и модные клубы. С их поддержкою вас насладиться каждой доступной игрой – автоматом, рулеткой, кено, блэкджеком.
<b>Смотреть еще похожие новости:</b>
<a href=https://nauc.info/forums/viewtopic.php?t=20873985>1× slots сайт</a>
<a href=https://forum.krymbezpravil.org.ua/memberlist.php?mode=viewprofile&u=10552>зеркала 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В качестве призов онлайн казино нередко предлагает выдачу фриспинов, то есть безвозмездных вращений игрового барабана. Виртуальные монеты возможно применять для изучения в покерной школе либо для игры в казино.
#1430 Остекление балконовhttps://tophotels.ru/member/2355538/about/
Оперативное и качественное остекление балконов, подробнее тут <a href=https://tophotels.ru/member/2355538/about/>https://tophotels.ru/member/2355538/about/
#1431 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино зеркало сегодня 1×bet зеркало на сегодня 1×bet xyz <a href=https://slon-ru.com/>pin up casino официальный</a> макао казино 7k casino зеркало рабочее <a href=https://strelochnik.com/>самое казино</a> porno Яна Троянова про казино пари букмекерская контора порно с Аделия Петросян (фигурное катание) порно с Илюшникова Татьяна Александровна pin up casino зеркало порно с Антропова Валентина Викторовна
DiskiPlus порно с Анна Калинская (теннис) DiskiPlus casinos winning <a href=https://diskiplus.ru>DiskiPlus симулятор казино</a> DiskiPlus 7k casino официальный DiskiPlus приложения букмекерских контор <a href=https://www.diskiplus.ru>DiskiPlus Александра Бортич</a> DiskiPlus порно с Федор Чалов (футбол) DiskiPlus porno Анастасия Янькова, боксерка DiskiPlus porno Анастасия Янькова, боксерка DiskiPlus vodka casino DiskiPlus casino betting DiskiPlus 7k casino скачать DiskiPlus porno Александр Соболев (футбол)
#1432 Charlesgunnyhttp://filmkachat.ru
1×slots casino зеркало рабочее
Большинство клубов привлекают внимание в за счёт разнородных даров. На 1 веб-сайтах возможно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает безвозмездные вращения для запуска топовых онлайн слотов. Несмотря на различные промоакции, стоит выделить самые основные. <a href=http://filmkachat.ru/>1х слот регистрация в 1×slots casino</a> Бездепозитный бонус – это финансовое вознаграждение, которое выдается участнику забавы в казино, для его вербования и появления заинтересованности. Любой посетитель, кот-ый соответствует условиям выдачи похожего бездепозитного бонуса, может претендовать на получение вышеуказанного приза. Такое одобрение считается наиболее эффективным методом, дающим возможность стартовать в игре, не вкладывая собственных материальных средств. <a href=https://buymeacoffee.com/poppoppopkb/international-furniture-shows-industry-events-trade-exhibitions>https://buymeacoffee.com/poppoppopkb/international-furniture-shows-industry-events-trade-exhibitions</a> 1хслотс казино зеркало <a href=http://www.shadowville.com/board/general-discussions/tapeko-4#p607856>http://www.shadowville.com/board/general-discussions/tapeko-4#p607856</a> Чаще всего, популярные сервисы, такие как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно неотъемлемое правило. Финансовые свои выводятся лишь через ту платежную систему, которой пользовались для пополнения депозита. Если же игрок получил бездепозитный покерный приз, потребуется восполнить счет на наименьшую необходимую, которая сочиняет обычно 10 $.
казино 1× slots официальный сайт
Вейджер не более х30–35 является приемлемым. Опытные игроки заявляют, что с этим вейджером реально остаться в плюсе, в верно подойти к выбору игрового аппарата.Важно, удостоверьтесь сомнений, собственно ранее не регились в избранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи. 1×slots скачать на айфон <a href=http://andres-website.de/profile.php?lookup=9150>http://andres-website.de/profile.php?lookup=9150</a> Бездепы все входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами. 1×slots сайт
1хслотс регистрация в 1×slots casino
Прежде всего, не забывайте периодически заглядывать на страницу обзоров бездепозитных бонусов. Они шаг за шагом осматривают наиболее увлекательные предложения ведущих игорных порталов.Онлайн гемблинг развивается с любым днем все больше и больше, новые бренды создаются не по денькам а по часам. Новые интернет казино делают вступительные акции для игроков, для того что бы зарекомендовать себя, и что, этим наиболее предлагают бездепозитные призы за регистрацию, собственно бы не упустить эту вероятность — как пользоваться свежим бездепом, рекомендуем навещать наш сайт как возможно почаще, самое лакомое и новые будет добавляться в этом же списке. <a href=http://minivenebi.ge/index.php?subaction=userinfo&user=nappyroster14>http://minivenebi.ge/index.php?subaction=userinfo&user=nappyroster14</a> 1х слот 1хслотс регистрация перейти на 1×slots Помните, что всевозможные нарушения правил сведут на нет ваши усилия, и вы скорее останетесь без начисленного вам бесплатного приза. Всегда изучайте правила начисления и обстоятельства вейджера. По любым вопросам, на коие вы возможности самостоятельно отыскать ответы, обращайтесь за разъяснениям и саппорт.
казино 1×slots
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=148259&pid=374137#post_374137>1х слот 1хслотс регистрация перейти на 1×slots</a> Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Активация по промокоду употребляется в различных обликах бездепов. Если речь идет о приветственном бонусе, то комплект знаков возможно разузнать на крупнейшей страничке, в регистрационной форме либо послании, которое отправляется юзеру для подтверждения e-mail. Акции имеют проводиться общо с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активируется разовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном кабинете или начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем важный код для активации в описании каждого рекламную. Вознаграждения за получение VIP-статуса ? начисляются в рамках программы лояльности при достижении очередного уровня или выдаются персонально менеджерами саппорта. 1×slots официальный сайт зеркало <a href=https://www.evangelie.eu/forum/members/86526.html>https://www.evangelie.eu/forum/members/86526.html</a>
1хлот регистрация в 1×slots casino
Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут устанавливает лимитирование для клиентов. Конечно, это можно счесть некоторым неудобством для игрока, хотя справедливости стоит отметить, что выбор автоматов всё точно остаётся довольно великим.При правильном подходе бездепы — это прекрасный способ выступать на деньги без растраты личных средств. Есть некоторое рекомендаций, следуя коим можно извлечь максимально выгоды из подобных акций казино. Играть стопам лишь на лицензированных площадках. Скриптовые веб-сайты не врут с бонусными услугами, хотя и употребляют пиратский софт с модифицированным ГСЧ. Выиграть на этих автоматах невозможно. <a href=http://www.3ak.cn/home.php?mod=space&uid=190266>http://www.3ak.cn/home.php?mod=space&uid=190266</a> Для ревизии используются сканы паспортов, водительских удостоверений, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если юзер обнаружен в попытке завести вспомогательный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный список. При забаве на лицензионной площадке не стоит опасаться указывать достоверную персональную информацию (шифрование исключает утечку индивидуальных данных).На нашем сайте Вы найдете перечень своевременных свежих бездепозитных бонусов в казино 2022 года. Также, есть много неповторимых услуг, коие доступны лишь гостям нашего сайта после регистрации по нашей ссылке либо активации специального промокода. 1×slots официальный зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://maddog-server.org/forum/member.php?action=profile&uid=27481>1×slots регистрация 1×slotscasino09k online</a>
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=126906&extra=>1×slots casino регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепы все входить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой либо баллами.
#1433 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Яровая Ирина Анатольевна порно казино в россии <a href=https://rhymes-punches.com/>casino pin официальный</a> casino официальный зеркало Любимова Ольга Борисовна порно <a href=https://th-royalgclub.com/>скачать pin casino</a> 1×bet официальный xbet porno Марина Александрова как выиграть в казино casino зеркало сайта Самойлова Алла Владимировна порно казино в россии Матвиенко Валентина Ивановна порно
DiskiPlus бесплатно фильм казино DiskiPlus букмекерская контора без <a href=https://diskiplus.ru/>DiskiPlus казино регистрации</a> DiskiPlus букмекерская контора фонбет DiskiPlus пин ап казино <a href=https://www.diskiplus.ru/>DiskiPlus порно с Бондаренко Анастасия Борисовна</a> DiskiPlus скачать 1×bet DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus макао казино DiskiPlus почему в казино нет окон DiskiPlus Радченко Светлана Юрьевна порно DiskiPlus porno Алена Косторная (фигурное катание) DiskiPlus пина casino
#1434 Остекление балконовhttps://www.b17.ru/sergienko_dmitriy/
Лучшие решения для остекления и отделки балконов и лоджий, узнайте больше тут <a href=https://www.b17.ru/sergienko_dmitriy/>https://www.b17.ru/sergienko_dmitriy/
#1435 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на официальном сайте
Выбор любого интернет казино на нашем сайте. В описании к каждому Вы можете разузнать, что получите за творенье аккаунта.Принципиальным различием даровых призов от бонусов на депозит является недоступность необходимости вносить деньги на аккаунт. Из-за сего их часто именуют бездепозитными (no down payment bonuses). <a href=http://filmkachat.ru/>1×slots зеркало сайта</a> В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, нужно адресоваться в службу поддержки через лайв-чат на веб-сайте казино. <a href=https://writeablog.net/p2t24forxp>https://writeablog.net/p2t24forxp</a> Осталось выбрать казино с призом за регистрацию и сделать профиль. После активации дара выигрыш находится от Фортуны и способностей. 1×slots регистрация на сайте 1×slots ru com <a href=http://honevi.grodno.by/index.php?subaction=userinfo&user=DoctorLazutaei>http://honevi.grodno.by/index.php?subaction=userinfo&user=DoctorLazutaei</a> Если при регистрации указать промокод, можно гарантировано получить приз. Где брать ваучер? Посетите направленные блоги или форумы. Иногда администрация клуба проделывает рассылку ваучеров на электронную почту. В последнее время игорные жилища начали рекламироваться в кинокартинах и телесериалах. Присмотритесь и наверняка заметите промокод, который принесёт 500 или 1 000 бонусных рублей.Бездепозитные бонусы настоящими деньгами, коие можно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадали.
1хслотс казино зеркало
1×slots официальный сайт зеркало Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы которые возникают у начинающих.Операторы гемблинга утверждают, собственно например они сражаются с бонус-хантерами. Впрочем, критики считают, что этим казино пытаются сделать из случайного гостя постоянного игрока. <a href=https://www.google.com.au/url?q=https://doctorlazuta.by/>https://www.google.com.au/url?q=https://doctorlazuta.by/</a> 1×slot зеркало рабочее регистрации на телефон придет Мы подготовили список, где есть постоянно животрепещущие и свежие бездепозитные призы казино, которые вам получить даром. Для наших пользователей есть особые предложения эксклюзивные призы, которые вы у не отыщите, их мы обозначили особой красной плашкой «Exclusive».Таким образом онлайн казино получает вероятного игрока. Возможно в будущем либо настоящем он захочет сыграть на средства деньги. Так работают бездепозитные бонусы в онлайн казино. Здесь очень подходит выражение, безвозмездные сыр посещает лишь в мышеловке. Начинающие игроки шансы не обдумывать опасность пыла. Однако с понимания делается больше. Это тема для отдельного обсуждения.
1×slots зеркало сайта
Все обожают получать подарки. Согласитесь, практически любой играющий человек несомненно необъятно счастлив, в получит даровой подарок для игры в онлайн казино просто за регистрацию либо же приз за внесенный депозит, например именуемые приветственные бонусы для свежих игроков. Соответственно такие интернет клубы будут больше известны и предпочтительны у игроков при выборе казино для забавы. Топ казино непрерывно обновляется и добавляются новые и занимательные игровые клубы с привлекательной бонусной политикой и всеми возможными привилегиями, к коим относятся эти бонусы как фриспины за регистрацию, валютные бездепозитные призы, а щедрые бонусы за внесенный депозит. Но такие рамки не смущают том хайроллеров, потому коэффициенты на слотах дозволяют рассчитывать на солидные выигрыши, а неких автоматах разыгрывается прогрессивный джекпот. <a href=http://fairviewumc.church/bbs/board.php?bo_table=free&wr_id=1840845>http://fairviewumc.church/bbs/board.php?bo_table=free&wr_id=1840845</a> Иногда операторы требуют внесение малого депо перед выводом для верификации платежного прибора. В некоторых казино этот депо также предстоит отыграть.При забаве на бонусные свои запрещается выступать в игровые автоматы с прогрессивным джекпотом и забавы из радела exist casino. Кроме как, некоторые казино дают бездеп на один либо некоторое конкретных слотов, и в других забавах Вы не можете на их играть. 1хслотс казино зеркало
1хслотс зеркало
Так что сможете отважно региться без всяких размышлений. Фортуна сегодня точно на вашей стороне. Не страшитесь, как последствие какого либо ущерба Вам совершенно не грозит. С такими бонусами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе.Допустим, за регистрацию вы возымели бездеп в объеме 2 000 рублей с вейджером х30. В этом случае предстоит устроить ставок, на совместную сумму в 60 000 рублей (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать реальные деньги. Однако не забывайте, собственно с любого презента выйдет вывести определённую необходимую (чаще всего менее $200). Выполнив все притязания оператора, клиент имеет оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит в среднем не более суток. Если дополнительно требуется пройти функцию верификации, то срок увеличивается до 1–2 рабочих дней. Для перевода применяются банковские приборы и электрические платежные системы. Второй способ подходит другого, так как основная транзакций такой исполняются мгновенно. В связи со специфичностью функционирования банков обработка платежей может взятьвдолг(взятьвзаймы) до нескольких рабочих дней.Можно ли в одном интернет казино получить больше одного приза за регистрацию? Нет, например как в каждом интернет казино есть правила, к которым надо(надобно) придерживаться, не делать два аккаута для получения призов, другому будет блокировка обоих аккаутов, не пытайтесь обмануть онлайн казино, приз за регистрацию выдаеться раз один одному личику. 1×slots промокод при регистрации <a href=https://www.agrosoft.ru/support/forum/index.php?PAGE_NAME=profile_view&UID=86282>https://www.agrosoft.ru/support/forum/index.php?PAGE_NAME=profile_view&UID=86282</a> Но а в вы уже профи по интернет казино, кликаем на красноватую кнопку «Получить» и Вы автоматически перейдете в онлайн казино;
1×slots регистрацию более популярный вариант это
Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Бездепозитный бонус предоставляется новенькому игроку за конкретные действия. Часто подарок в виде средств либо фриспинов выдается за регистрацию, спасибо чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. Бонусные средства – небольшая сумма средств для старта в новом казино. На бонусные средства, обыкновенно разрешено выступать во все игры, считая слотов с современным джекпотом и игр из раздела exist casino. <a href=https://aben75.cafe24.com/bbs/board.php?bo_table=free&wr_id=931549>https://aben75.cafe24.com/bbs/board.php?bo_table=free&wr_id=931549</a> В количестве случаев безвозмездные бонусы начисляются в кредитах, которые невозможно незамедлительно исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти требования принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д. ). О нем читайте ниже.Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, дабы была возможность вывести выигрыш. 1хслотс регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=9700&TITLE_SEO=9700-kharakteristiki-tovarov&MID=588909&result=reply#message588909>1 x slots casino</a>
<a href=https://forum.vn.ua/showthread.php?p=3302472#post3302472>1×slots регистрацию процедура займет всего лишь</a>
<a href=https://kakofon.cz/forum/viewtopic.php?f=6&t=390&p=39551#p39551>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, если не желаете замерзнуть жертвой жуликов либо впустую истратить время; Бесплатные призы казино без депозита можно получить в виде валютных средств на бонусный счет (исключить их можно лишь после отыгрыша), фриспинов, игры либо кешбэк-бонуса.
#1436 Charlesgunnyhttp://filmkachat.ru
1хслотс мобильная версия зеркало
Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте условия – они часто выдаются для некоторых машин. В зависимости от клуба возможность создавать определенное количество ставок. Кстати, современные игорные жилища выделяют возможность заводить «одноруких злодеев».Постарайтесь отыграть вейджер, чтобы замечена возможность забыть заявку на выплату. Кстати, на всех веб-сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электронной кошелёк, карту, аппарат. <a href=http://filmkachat.ru/>1×slots промокод при регистрации 2025</a> Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную функцию активации бонуса без депозита. Внимательно прочитайте до конца. Многие новенькие проделывают ошибки на шаге регистрации и поэтому не могут получить презент.Многие игроки, оценив перечень казино, остаются выступать в нем и далее ? на это и направлено любое рекламную. Постоянные клиенты вносят депозиты и проделывают ставки, обеспечивая длительную прибыль оператора. То есть, казино выдают бездепы новым пользователям для формирования приклнной аудитории. <a href=https://bio.site/kalinka0588>https://bio.site/kalinka0588</a> Если вы выбираете проверенное лицензионное интернет казино и сделайте все условия получения бездепозитного бонуса, проблем с получением дара у Вас не возникнет. 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=http://gta-gamer.ru/index.php?subaction=userinfo&user=dramaticaggress>http://gta-gamer.ru/index.php?subaction=userinfo&user=dramaticaggress</a> Бездепозитные призы за регистрацию в игровых автоматах для хозяев онлайн-казино являются частью маркетинговой кампании, направленной на повышение аудитории сайта. Так они продвигают свои бренды и завлекают новых посетителей.Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные способы и расценить необыкновенности, недоступные при забаве в демо режиме. Многие новые клиенты перебегают в количество постоянных, а оператор получает длительную выгода.
1×slots официальный сайт зеркало
1×slots официальный зеркало рабочее <a href=https://vrjam.mn.co/posts/68088857>https://vrjam.mn.co/posts/68088857</a> Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут устанавливает лимитирование для клиентов. Конечно, это возможно счесть некоторым неудобством для игрока, но справедливости ради отметить, собственно выбор автоматов всё равно остаётся довольно великим. онлайн казино 1×slots Да, у бесплатных призов есть недостатки. Прежде всего, они обычно очень. Кроме такого, обстоятельства вейджера по ним постоянно строгие. Но таки недоступность риска проделывает их довольно привлекательными для посетителей.Воспользоваться бездепом возможно не во всех игровых автоматах: казино и тут устанавливает лимитирование для клиентов. Конечно, это возможно счесть некоторым неудобством для игрока, но справедливости ради стоит отметить, что выбор автоматов всё точно остаётся достаточно великим.
1× slots сайт
Нет. Казино выдают безвозмездные призы за регистрацию, для того, чтобы заказчик возможность ознакомиться с игровым заведением. А дабы вывести его, нужно выполнить условия отыгрыша.При пользовании бездепозитным бонусом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют количество видов лимитов: <a href=http://povary.ru/forum/index.php?showuser=72144>http://povary.ru/forum/index.php?showuser=72144</a> 1хслотс зеркало на сегодня Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала быстрые выводы. Фишка выплат никаких, что довольно выбрать платёжный инструмент и указать необходимую. В большинстве случаев средства зачисляются на электронные кошельки на 15 мин., а на банковские карты – 1–3 трудящихся денька.
1х слот регистрация в 1×slots casino
Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных ситуаций с казино, когда в отыгрыша бездепа вас не дадут вывести крупную необходимую выигрыша.Обычно показатель повыше, чем для призов на депозит. Не изумляйтесь, в он будет том х100. Иногда завышенный коэффициент вейджера уточняется для жителей отдельных государств. <a href=http://av3526.com/forum.php?mod=viewthread&tid=75&pid=26345&page=14&extra=page%3D1#pid26345>1× slots casino зеркало</a> Варианты выигрыша зависят от Вашей успеха и условий игорного портала. Выше мы заявили, что кое-какие бездепозитные бонусы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются и те, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность передовых игр на деньги, возможно выиграть невероятные суммы. Сегодняшние игровые автоматы либо видео слоты, как их именуют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000.Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации подарка необходимо подтвердить электронную почту и привязать аппарат; Лишь известные и знаменитые азартные заведения имеют позволить себе выдавать бездепы в виде добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депо, которые возможно истратить в лучших аппаратах с высокой отдачей.Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются незамедлительно последствии творенья профиля и активны недолговременное время. Если не успеете израсходовать средства, они просто сгорят. Касаемо времени, как призы активны на часа. 1×slots зеркало видели такую регистрацию на <a href=https://www.spacepub.net/members/5050-Raymondtub?s=e48f84479bbed5482ed658623b6587dd>https://www.spacepub.net/members/5050-Raymondtub?s=e48f84479bbed5482ed658623b6587dd</a>
1×slots казино мобильная версия
Каждый из бездепозитных бонусов без пополнения 2022 имеет свой конкретный вейджер для отыгрыша, так же в каждом казино он уточняется персонально — где то он х55 а кое-где х30, повторюсь везде по различному! Бездепы могут входить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами. <a href=https://app.welvi.co.kr/bbs/board.php?bo_table=qa&wr_id=2422861>https://app.welvi.co.kr/bbs/board.php?bo_table=qa&wr_id=2422861</a> 1× slots официальный При регистрации по указывать лишь достоверную информацию. Когда учетная запись несомненно активна, будет доступ в Личный кабинет. В нем возможно избрать денежную, ввести промокод и разузнать подробные правила получения и отыгрыша бездепа. Краткая информация об промоакции часто присутствует непосредственно на регистрационной форме.Вейджер не более х30–35 является применимым. Опытные игроки утверждают, что с таким вейджером реально остаться в плюсе, в верно подойти к выбору игрового аппарата.
<b>Смотреть еще похожие новости:</b>
<a href=https://adminclub.org/showthread.php?tid=286047>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<a href=https://www.handmakersbrasil.com.br/topic/5524–1×slot-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE/>1×slot казино зеркало</a>
<a href=https://communities.leviton.com/threads/1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5-%D0%BD%D0%B0-%D1%81%D0%B5%D0%B3%D0%BE%D0%B4%D0%BD%D1%8F.872/>1×slots зеркало рабочее на сегодня</a>
<a href=http://forums.indexrise.com/thread-1096-post-511059.html#pid511059>скачать 1×slots на андроид мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax Некоторые казино все предлагать посетителям бездепы за свидетельство номера или почты либо репост на страницу в социальных сетях.
#1437 XCoicshttps://www.betriot-it.it
Scopri perche Betriot Casino e cosi popolare in Italia <a href=https://betriot-it.it>Betriot Casino online</a> per un'esperienza di gioco sicura e divertente.
#1438 Остекление балконовhttps://promindex.ru/spb/companies/273320-osteklenie-piter/
Комплексный подход к остеклению и отделке балконов, подробности тут <a href=https://promindex.ru/spb/companies/273320-osteklenie-piter/>https://promindex.ru/spb/companies/273320-osteklenie-piter/
#1439 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино можно 1×bet слоты 1×bet top <a href=https://res-publika.com>porno Александр Соболев (футбол)</a> 7k casino Набиуллина Эльвира Сахипзадовна порно <a href=https://th-royalgclub.com/>порно с Константин Тюкавин (футбол)</a> bet casino porno Елизавета Туктамышева 7k casino скачать букмекерские конторы бет casino официальный зеркало cometa casino casino скачать приложение
DiskiPlus 7k casino официальный сайт DiskiPlus Скворцова Вероника Игоревна порно <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet бесплатно</a> DiskiPlus bitz casino DiskiPlus порно с Юлия Ефимова, пловчиха <a href=https://diskiplus.ru>DiskiPlus пин ап casino</a> DiskiPlus 1win casino DiskiPlus букмекерская контора фонбет DiskiPlus порно с Юлия Ефимова DiskiPlus casinos xyz DiskiPlus сайт букмекерской конторы DiskiPlus casino рабочее зеркало DiskiPlus casino рабочее зеркало
#1440 Charlesgunnyhttp://filmkachat.ru
1хслотс 1хслотс регистрация перейти на 1×slots
Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, all зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.Игры, в можно выступать на бонусные деньги. Проверьте список игр, каких возможно играть на бонусные средства, вполне они Вам не понравятся и не стоит расходовать своё время на такую акцию. <a href=http://filmkachat.ru/>casino 1×slot</a> С такими ординарными советами каждое казино с призом за регистрацию способно принести в разы больше выгоды и пользы. <a href=https://bandzone.cz/fan/kalinka0588?at=blog&bi=615743>https://bandzone.cz/fan/kalinka0588?at=blog&bi=615743</a> В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это самая милая доля забавы. Важно, часто бездепозитные призы в казино выдаются с ограничениями по наибольшей выплате. В среднем возможно рассчитывать на прибыль в некоторое тысяч руб. Как исключить выигрыш с приза без депо. Придётся доказать акк документально, в некоторых заведениях. Процедура верификации неотклонима и делается каждым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате или прочтите в правилах. казино 1× slots официальный сайт <a href=http://pro100tools.ru/bitrix/redirect.php?goto=http://cokord.ru/bitrix/redirect.php?goto=http://furnitarium.ru/bitrix/redirect.php?goto=https://telegra.ph/Poshagovoe-rukovodstvo-po-nalogovym-vychetam-pri-remonte-kvartiry-09–23>http://pro100tools.ru/bitrix/redirect.php?goto=http://cokord.ru/bitrix/redirect.php?goto=http://furnitarium.ru/bitrix/redirect.php?goto=https://telegra.ph/Poshagovoe-rukovodstvo-po-nalogovym-vychetam-pri-remonte-kvartiry-09–23</a>
1×slot казино зеркало
Наши специалисты исследуют обстоятельства акции, после в ручном режиме проводят их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и другие параметры. Мы не рекламируем казино, а даем игрокам информацию о наихороших из их. <a href=https://imcep.com/cs/component/users/profile?Itemid=103>1×slots зеркало подтвердит вашу регистрацию если говорить</a> 1×slots официальный зеркало <a href=https://www.forum.ple4win.nl/user-287004.html>https://www.forum.ple4win.nl/user-287004.html</a> Для получения депозитного бонуса необходимо пополнить свой игровой баланс настоящими деньгами. Вознаграждение можно получить либо при внесении первого депозита, или повторяющий фиксированного процента от внесённых средств. Так либо другому, бонус поступит на счёт лишь после пополнения. 1×slots мобильная версия войти казино
1×slots регистрация 1×slotscasino09k online
Мы подготовили список, где есть всегда актуальные и свежие бездепозитные бонусы казино, которые вы можете получить бесплатно. Для наших пользователей есть особые предложения эксклюзивные призы, коие вы у не отыщите, их мы обозначили специальной красноватой плашкой «Exclusive».Третитй бездепозитный приз за регистрацию – денежные средства. К сожалению, начислить рубли либо доллары готовы лишь известные и популярные клубы. С их поддержкой вы сможете насладиться любой доступной игрой – автоматом, рулеткой, кено, блэкджеком. Так собственно можете неустрашимо регистрироваться без всяких размышлений. Фортуна сейчас наверняка на вашей стороне. Не бойтесь, как последствие какого или убытка Вам абсолютно не грозит. С этими призами как без пополнения, Вы остаетесь только в плюсе, но не как не в минусе. <a href=http://prosmart.by/index.php?subaction=userinfo&user=epixyto>http://prosmart.by/index.php?subaction=userinfo&user=epixyto</a> Реже бонусы без депо начисляются постоянным игрокам. С их помощью администрация старается удержать ценных посетителей или вожделеет поблагодарить за лояльность верных гостей. Но гораздо почаще для сходственных целей применяются эти промоакции: 1×slots зеркало этих способов предполагает регистрацию Бездепозитные призы за регистрацию считаются одним из самых известных способов вербования свежих игроков в онлайн-казино, поэтому что они деют игрокам вероятность опробовать казино, неподражаемо игровые автоматы, и вполне, выиграть реальные деньги.Бонус в казино без депо содержит различные вариации: такое быть приветственный приз, промоакции в честь каких-то праздничных либо главных дат, приз за привлечение свежих игроков, преданность и получение VIP-статуса.
1×slots регистрация на сайте 1×slots ru com
За вербование друга ? масштабах партнерской программки заказчик получает вознаграждение за вербование свежих пользователей.Прибывшие на акк финансы бездепозитные призы предназначаются, в основном, только для свежеиспеченных пользователей, коие ранее не имели собственного аккаунта в данном казино. Исходя из этого, в раньше у игрока был изготовлен депозит, то, по всей вероятности, у него больше не несомненно возможности рассчитывать на получение такового приза в конкретном заведении. <a href=http://yonghengro.gain.tw/space.php?uid=1555574>сайт 1× slots casino</a> 1×slot зеркало <a href=https://archives.megadiyhelp.com/member.php?184640-PorsedropMr>https://archives.megadiyhelp.com/member.php?184640-PorsedropMr</a> Бездепозитные бонусы в казино без пополнения 2022 — это определенная сумма средств либо gift spins вращения, которые предоставляются первым постояльцам за регистрацию на веб-сайте казино вид бездепозитного бонуса, и выделяет вас возможность за счет казино без пополнения опробовать услуги (игр), с последующей преимуществом, льготой вывода средств при исполнении всех установленных управлял.Благодаря программке преданности от игорного заведения, можно брать хороший старт и без дополнительных инвестициям запустить видеослоты. Кроме как, можно рассчитывать на реальную фортуну и получить, без инвестиции личных денег, великий выигрыш.
1×slots регистрация
Во время игры в казино, выигрыши, полученные благодаря бесплатным призовым фондам, суммируются и срабатывают в совместную сумму для отыгрывания. Однако, случае удача улыбнется и получится отыграть все бонусы, игровое заведение гарантированно допустит исключить финансовые свои. Сумма вывода будет в от лимита, утвержденного непосредственно в этом учреждении. Поэтому, внимательно надо(надобно) разбирать управляла выдачи анлимитных депозитов. Для получения выигрыша требуется выполнить обстоятельства казино. Чаще всего игроку нужно поставить определенную необходимую, но уже из собственных средств. Она рассчитывается из совместного размера выигрыша за всегда применения бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, случае пользователь выиграл 1000 руб., а множитель составляет х30, исключить деньги возможно будет, сделав ставки на 30 000 руб.Новые посетители онлайн-казино без первого депозита все проверить свою удачливость. К тому же есть вероятность преобразовать бездепы в реальные деньги за регистрацию в казино, впрочем результата бонус необходимо отыграть согласно условиям акции. <a href=http://xn–jj0bt2i8umnxa.com/bbs/board.php?bo_table=free&wr_id=20895>http://xn–jj0bt2i8umnxa.com/bbs/board.php?bo_table=free&wr_id=20895</a> 1×slots промокод при регистрации Минимального оборота. Этот лимит уточняется вейджером — же игрок не сыграет на установленную сумму, вывод средств будет недоступен.Основное правило получения бездепа ? творимый аккаунт должен быть у юзера первым и единственным. Наличие нескольких аккаунтов требовательно воспрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депо необходимо соблюдать простую последовательность деяний.
<b>Смотреть еще похожие новости:</b>
<a href=https://foro.muelendhir.com/showthread.php?tid=117787>1×slot казино зеркало</a>
<a href=https://forum.ltp-team.com/topic/196153–1×slots-zerkalo-bystruyu-registraciyu-a-takzhe-mgnovennoe/>1×slots зеркало быструю регистрацию а также мгновенное</a>
<a href=http://everestrolep.listbb.ru/viewtopic.php?f=38&t=18172>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=http://police.1stbb.ru/viewtopic.php?f=3&t=659>1хслот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные призы в казино без пополнения 2022 — это определенная сумма средств или valinomycin spins вращения, коие предоставляются первым постояльцам за регистрацию на сайте казино в виде бездепозитного бонуса, и выделяет для возможность за счет казино без пополнения опробовать предложения (игр), с последующей привилегией вывода средств при исполнении всех установленных верховодил. За счёт спинов получится запустить различные онлайн слоты, протестировать стратегии и поднабраться опыта. Фишка никаких, что вращения начисляются на топовые аппараты с оригинальными опциями и высокой отдачей. Не запамятовывайте, что в каждом акционном предложении учтены специальные притязания – временные ограничения, наибольший размер ставки, перечень доступных игр.
#1441 Charlesgunnyhttp://filmkachat.ru
1хлот регистрация в 1×slots casino
Индивидуальные одобрения выдаются за совершение деяний: подписку на аккаунты площадки в соц сетях, установку мобильного прибавления или официального клиента для ПК. В большинстве казино действуют программы лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий степень нередко сопровождается выдачей бездепа. <a href=http://filmkachat.ru/>скачать 1×slots официальный сайт</a> <a href=https://www.sideprojectors.com/project/55405/expert-construction-drafting-services>https://www.sideprojectors.com/project/55405/expert-construction-drafting-services</a> 1×slots официальный сайт зеркало рабочее <a href=http://probox-club.ru/forums/index.php?showtopic=3468&st=20&gopid=105541&#entry105541>http://probox-club.ru/forums/index.php?showtopic=3468&st=20&gopid=105541&#entry105541</a>
1×slots официальный сайт скачать
<a href=https://forum.spherecommunity.net/User-Jamesmew>1 хслот регистрация в 1×slots casino</a> 1×slots рабочее зеркало B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.Также, учите, что бездепозитный бонус возможно вывести лишь сомнений случае, когда будут выполнены все условия отыгрыша. <a href=http://fdaplus.co.kr/bbs/board.php?bo_table=free&wr_id=106066>http://fdaplus.co.kr/bbs/board.php?bo_table=free&wr_id=106066</a> Превышение наибольшей ставки при отыгрыше. Система автоматически не предупреждает о превышении ставки, потому о несоблюдении верховодил игрок может узнать уже после подачи запроса на вывод средств.Многие казино предоставляют в рекламных целях безвозмездные призы необыкновенно для наших читателей. Чтобы их получить, нужно перебежать на игровой сайт по партнерской ссылке с нашего портала. 1хслотс регистрация в 1×slots casino Осталось избрать казино с призом за регистрацию и сделать профиль. После активации презента выигрыш зависимости от Фортуны и навыков.В бонусную программку множества операторов входят регулярные бездепы. Это бессрочные промоакции, поощряющие активных неизменных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают постоянные призы без депо в мена на накопленные баллы преданности.
1×slot официальный сайт
Более солидные предложения встречаются довольно изредка. Зачастую они доступны только VIP-игрокам. В оставшихся случаях им всего сопутствуют довольно строгие обстоятельства отыгрыша. Также вероятны вспомогательные обстоятельства и ограничения, прописанные в условиях и положения бонусной программки казино.В некоторых интернет казино для получения бездепозитных призов не достаточно просто зарегистрироваться на веб-сайте клуба и подтвердить средства контактные данные. Дополнительно требуется активация промокода. Помимо прочего, для вывода средств по бездепу нужно привнести на счёт свой первый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально возможную необходимую, последствии чего вывод средств станет доступен. <a href=http://krair.kr/bbs/board.php?bo_table=free&wr_id=765189>http://krair.kr/bbs/board.php?bo_table=free&wr_id=765189</a> Бездепозитные призы, как уже понятно, являются уникальной возможностью приступать к игровому процессу абсолютно бескорыстно, словами выступать в интернет казино бесплатно и на место свои сразу в регистрации аккаунта. Автоматы с этим депозитом имеют замерзнуть великолепной возможностью поиграть для почитателей пыла с определенными ограничениями в денег.Не стоит незамедлительно же отказываться от приветственных подарков в похожих казино. Администрация готова начислить средства либо фриспины, но предварительно сотрудники обязаны убедиться, собственно вы не аферист. Дело что, нет, что развелось слишком большое охотников за призами. Они научились дурачить систему и зарабатывать солидные суммы денег. 1хслот официальный сайт зеркало Мы подготовили перечень, где есть практически животрепещущие и свежие бездепозитные призы казино, коие вы можете получить даром. Для наших юзеров есть специальные предложения неповторимые призы, которые вы у не найдете, их мы обозначили специальной красноватой плашкой «Exclusive».Это раз из главных характеристик привлекательности презента. С завешенным коэффициентом том мастера не сумеют выполнить обстоятельства по отыгрышу. И неважно, как презентабельно выглядит предложение – бездепозитный бонус казино в размере $500 либо $1 000. Чтобы новички попревосходнее вдумались, что же это вейджер, мы разберём на случае.
1×slots регистрация на 1хслотс
<a href=http://thienduongcacanh.com/members/rabofreepl.20903/>1×slots регистрация</a> Ниже указан важный перечень легальных казино в Беларуси с бонусами на 1-ый депозит. Вы можете попасть на официальный сайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз.Наш перечень включает в себя наихорошие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по принципиальным характеристикам: Призовые начисления без депозита могут предоставляться для роли в турнирах онлайн казино. Потратить перечисленные деньги возможно исключительно в рамках данной промоакции. Условия их проведения в ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться таким предложением, никакого изучить его верховодила. 1×slot зеркало рабочее регистрации на телефон придет <a href=https://www.theexeterdaily.co.uk/users/darenabard>https://www.theexeterdaily.co.uk/users/darenabard</a>
1×slots casino регистрация на сайте
Выбирая безвозмездный приз, пристально изучайте правила. Убедитесь, собственно для можно себя участие в промоакции. Уточните, в каких играх возможно скорпулезно обстоятельства вейджера. При надобности задавайте вопросы представителям саппорта. <a href=http://mebel-fabrik.com.ua/index.php?subaction=userinfo&user=spicyreproducti>http://mebel-fabrik.com.ua/index.php?subaction=userinfo&user=spicyreproducti</a> 1хслотс рабочее зеркало В реальное время получить бонус за регистрацию в казино довольно просто. Почти каждый игорный жилище с готовностью предоставит деньги либо безвозмездные вращения. Многие игроки пользуются данным и не смущяются региться в любом клубе с прибыльными условиями. Кстати, это отличная вероятность придумать выигрышную стратегию и сорвать куш.Онлайн-казино тщательно продумывают бонусные условия, коие необходимо выучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и другие лимитирования.
<b>Смотреть еще похожие новости:</b>
<a href=http://yinyue7.com/space-uid-962219.html>1×slots скачать на айфон</a>
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=71787>1×slots зеркало видели такую регистрацию на</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выбрать казино с бездепозитным бонусом. У нас на веб-сайте представлен список лучших интернет казино, которые предлагают своим игрокам щедрые бонусы за регистрацию.
#1442 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация на сайте
Акции распространяются как на все забавы казино, например и на узкий список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino прочие. Промо может обхватывать разработки 1-го производителя. Бездеп не пересекается с иными акциями казино. Если на сайте предусмотрен кэшбек, он не начисляется за ставки, сделанные бонусными деньгами. Для идентификации платежных реквизитов игрока имеет понадобиться пополнение счета на минимальную сумму.При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие можно посвятить ирге в казино. <a href=http://filmkachat.ru/>1×slots casino online регистрация</a> <a href=https://rentry.co/hkqe5hcw>https://rentry.co/hkqe5hcw</a> Бездепозитный бонус по промо-коду будет доступен для игры, только что случае когда Вы активируете специальный бонусный код в разделе с призами либо укажите промокод при регистрации на сайте. В некоторых случаях, кроме активации кода, понадобиться доказать контактные данные игрока и наполнить анкету клиента.B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. 1×slots casino online регистрация <a href=https://cse.google.ad/url?q=http%3A%2F%2Fdoctorlazuta.by>https://cse.google.ad/url?q=http%3A%2F%2Fdoctorlazuta.by</a> Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном сайте и выполните вход в личный офис, чтобы отобрать бесплатные вращения с вейджером х40;
1хслотс официальный сайт зеркало
Баланс игрока дополняется на подходящую сумму. К ней используется вейджер, указанный в правилах промоакции. Вывести выигрыш возможно несомненно после такого, как пользователь устроит требуемый объем ставок из собственных средств. В редких случаях бездеп трудится в формате Free Play. На счет юзера зачисляется крупная сумма, и предоставляется маленький срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по окончании сего периода сумма на счету несомненно превышать изначальную, то разность можно будет вывести или применять для последующих ставок. 1×slots рабочее зеркало <a href=http://fitboss.ru/user/PorsedropMa/>http://fitboss.ru/user/PorsedropMa/</a> Бездепозитный приз казино 2022 с выводом за регистрацию предоставляет вероятность ознакомиться игроку с лобби выбранного заведения, сориентироваться в выборе игр и выяснить качество работы службы. Довольно нередко, начиная игровой процесс, игрок теснее отказывается останавливаться и делает реальный вклад. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть бесплатно возможно как один таки с призом за регистрацию без необходимости вносить депозит. 1×slots зеркало 1хслотс регистрация перейти на 1×slots Стоит обозначить(означить), что бездепозитный приз выдается только взрослым новеньким, которые, к, имеют пригласить собственных приятелей и людей, кроме претендующих на поощрительную программу преданности. Подобная технология замечена между соперничающих онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению своей популярности, методом привлечения свежих игроков. Бонусы – это уникальный шанс для потенциальных соучастников игры, коие все опробовать софт покер рума и увериться, станут ли они в него выступать либо нет. Новый игрок испробует средства силы с реальными оппонентами в казино.Особую изюминку видео слотам присваивают оригинальные символы. С их в активируются различные бонусы. Вы сможете запустить дополнительный степень и увеличить необходимую выигрыша. Есть знаки, коие замещают негодные элементы и сами делают выигрышные комбо. Не стоит забывать и тему бонус-тур. После каждого счастливого спина есть шанс увеличить сумму выигрыша в два или хорошо раза.
скачать 1×slots официальный сайт
<a href=http://ledsoft.ru/forum/?PAGE_NAME=message&FID=3&TID=14488&TITLE_SEO=14488-_-_-_-_-_-_-_&MID=15316&result=new#message15316>http://ledsoft.ru/forum/?PAGE_NAME=message&FID=3&TID=14488&TITLE_SEO=14488-_-_-_-_-_-_-_&MID=15316&result=new#message15316</a> 1×slots casino регистрация Обычно, бездепозитные призы выдаются под конкретные слоты с фиксированной ставкой, хотя их точно запрещено применять в игровых автоматах с современным джекпотом. Список игр, каких возможно использовать бездеп, Вы отыщите в описании промоакции либо можете уточнить у саппорта заведения.Представленные на этой страничке превосходнейшие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные условия. После кропотливого анализа редакция портала составила рейтинг спецпредложений, каком гости Casino.ru могут сортировать перечень по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д.
1×slots регистрация на сайте 1×slots ru com
<a href=http://sofanatki.ekafe.ru/viewtopic.php?f=1&t=2823>1×slots регистрация на сайте</a> Помните, собственно всевозможные нарушения управлял сведут на нет ваши усилия, и вы скорее останетесь без начисленного вас бесплатного приза. Всегда изучайте верховодила начисления и условия вейджера. По каким вопросам, на коие вы не самостоятельно найти ответы, обращайтесь за разъяснениям и саппорт. 1×slots casino регистрация на сайте <a href=http://thinktoy.net/bbs/board.php?bo_table=customer2&wr_id=563209>http://thinktoy.net/bbs/board.php?bo_table=customer2&wr_id=563209</a> Прибывшие на акк деньги бездепозитные бонусы предназначаются, в основном, лишь для новоиспеченных юзеров, коие ранее не имели личного аккаунта в данном казино. Исходя из сего, если раньше у игрока был изготовлен депо, то, по всей вероятности, у него больше не несомненно способности рассчитывать на получение такого приза в определенном заведении.Основное верховодило получения бездепа ? творимый аккаунт должен быть у юзера первым и единственным. Наличие нескольких аккаунтов взыскательно запрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депо необходимо блюсти несложную последовательность поступков.
1×slots casino регистрация
Иногда для получения бонусов нужно спутаться с адептами службы. Удобнее всего с ними разговаривать в онлайн-сате, желая времени довольно запроса по электрической почте. Доступ к дару имеет открываться автоматически после введения промокода или воззвания в саппорта вебсайта. В первом случае от юзера не потребуется практически деяний. Бездеп с активацией по коду встречается чаще всего. Игроку нужно ввести совокупность символов в графе, кот-ая возможность пребывать в регистрационной форме в Личном кабинете.Шаг 4. Активация. Внимательно исследуйте условия, информацию по лимитированиям и сроке деяния бонусного предложения. Разобравшись с правилами, можно активировать бонус в личном офисе (время ? с использованием промокода) или по запросу в саппорт. <a href=http://hongtouwen.com/home.php?mod=space&uid=480352&do=profile>http://hongtouwen.com/home.php?mod=space&uid=480352&do=profile</a> казино 1×slots Индивидуальные одобрения выдаются за совершение деяний: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавления либо официального клиента для ПК. В большинстве казино действуют программки лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на грядущий степень нередко сопрягается выдачей бездепа.
<b>Смотреть еще похожие новости:</b>
<a href=http://amazon.rx22.ru/memberlist.php?mode=viewprofile&u=255>1×slots быструю регистрацию а также мгновенное</a>
<a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=903178#pid903178>1×slots casino регистрация 1×slotscasino09k online</a>
<a href=http://junlinro520.gain.tw/space.php?uid=1111051>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<a href=http://forums.indexrise.com/thread-92937-post-499869.html#pid499869>1×slots официальный зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный бонус нередко возможность замерзнуть легкодоступным незамедлительно последствии окончания регистрации, потому в большинстве случаев единственным притязанием к нему считается регистрация, а затем ревизия вашей новой учетной записи. Для вывода средств приз нужно будет отыграть законам, установленным казино. Внимательно ознакомьтесь с правилами акции и вариантами отыгрыша бездепозитного приза до его получения, дабы избежать конфликтных обстановок.
#1443 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
игры казино 7k casino зеркало <a href=https://m.repost.news/>casino играть</a> букмекерская контора фонбет слоты казино <a href=https://t.me/vchkogpu_ru>1×bet рабочее на сегодня</a> 1×bet зеркало рабочее на сегодня porno Нина Пирогова, хоккеистка casino скачать порно с Елена Никитина, скелетонистка casino ru porno Анна Сидорова, керлингистка porno Юлия Пересильд
DiskiPlus букмекерские контора ап DiskiPlus Елена Лядова <a href=https://diskiplus.ru>DiskiPlus porno Илья Ковальчук (хоккей)</a> DiskiPlus порно с Илюшникова Татьяна Александровна DiskiPlus vodka casino <a href=https://www.diskiplus.ru>DiskiPlus 1×bet сейчас</a> DiskiPlus порно с Максим Глушенков (футбол) DiskiPlus казино рояль смотреть DiskiPlus 1×bet зеркало рабочее DiskiPlus Черкесова Бэлла Мухарбиевна порно DiskiPlus 1×bet xbet DiskiPlus new casino DiskiPlus играющие казино онлайн
#1444 Charlesgunnyhttp://filmkachat.ru
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Превышение максимальной ставки при отыгрыше. Система автоматически не предуведомляет о превышении ставки, поэтому о нарушении правил игрок возможность разузнать теснее после подачи запроса на вывод средств.Представленные на этой страничке наилучшие бездеп призы в казино за регистрацию в 2022 году имеют подходящие обстоятельства. После тщательного анализа редакция портала составила рейтинг спецпредложений, в гости Casino.ru имеют сортировать список по нескольким критериям: по сумме, вейджеру, наибольшей сумме вывода и т.д. <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> Варианты выигрыша зависят от Вашей удачи и критерий игорного портала. Выше мы заявили, что кое-какие бездепозитные призы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются другие, все, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность современных игр на деньги, можно выиграть невозможные суммы. Сегодняшние игровые автоматы или видео слоты, как их нарекают. Могут выдавать крупные умножение от х1.000 и повыше. Некоторые умножают ставку от х100.000.В онлайне много известных игорных площадок с красивыми акционными услугами. Однако внимательно разбирать обстоятельства 10-ов предложений вскоре надоест, да и время отнимет количество. Поэтому наша команда подготовила ТОП-3 вебсайтов с лучшими бездепозитными бонусами: <a href=https://lessons.drawspace.com/post/646480/bmw-battery-reset-procedure>https://lessons.drawspace.com/post/646480/bmw-battery-reset-procedure</a> Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала быстрые выводы. Фишка выплат никаких, что достаточно избрать платёжный инструмент и указать сумму. В большинстве случаев деньги зачисляются на электрические кошельки на 15 мин., а на банковские карты – 1–3 рабочих денька. 1хслотс регистрация в 1×slots casino <a href=https://forums.twcpilots.com/member.php?action=profile&uid=1626>https://forums.twcpilots.com/member.php?action=profile&uid=1626</a>
1×slots официальный зеркало
Казино выводит деньги лишь на что, эту платежную систему, с котрой был изготовлен депо. То есть, для вывода бездепозитного приза, Вам поначалу нужно пополнить счет. В некоторых клубах узкий список методов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет именно с данных платежных способов, коие доступны для вывода.Большинство клубов привлекают внимание игроков за счёт различных подарков. На одних веб-сайтах можно получить виртуальные кредиты, коие откроют доступ ко всему софту. На иных же, администрация предлагает бесплатные вращения для запуска топовых онлайн слотов. Несмотря на различные промоакции, стоит выделить самые основные. 1×slots бонус за регистрацию Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам запрещено начислять призы посетителям, не имеющим валютных средств на счете. Мы предлагаем рассмотреть животрепещущие призы онлайн-казино с лицензией, которые соблюдают законодательство РБ.Основное различие что, нет, собственно для получения бездепа не пополнять баланс в казино. Но не этого, есть ряд и отличий: <a href=https://wiki.streampy.at/index.php?title=%C3%90%C3%A2%E2%82%AC%E2%84%A2%C3%90%C2%BE%C3%90%C2%B4%C3%90%C2%B8%C3%91%E2%80%9A%C3%90%C2%B5%C3%90%C2%BB%C3%91%C5%92%C3%91%C3%90%C2%BA%C3%90%C2%B8%C3%90%C2%B5_%C3%90%C5%B8%C3%91%E2%82%AC%C3%90%C2%B0%C3%90%C2%B2%C3%90%C2%B0_%C3%90%C3%A2%E2%82%AC%E2%84%A2%C3%90%C2%BB%C3%90%C2%B0%C2%B4%C3%90%C2%B8%C3%90%C2%B2%C3%90%C2%BE%C3%91%C3%91%E2%80%9A%C3%90%C2%BE%C3%90%C2%BA>https://wiki.streampy.at/index.php?title=%C3%90%C3%A2%E2%82%AC%E2%84%A2%C3%90%C2%BE%C3%90%C2%B4%C3%90%C2%B8%C3%91%E2%80%9A%C3%90%C2%B5%C3%90%C2%BB%C3%91%C5%92%C3%91%C3%90%C2%BA%C3%90%C2%B8%C3%90%C2%B5_%C3%90%C5%B8%C3%91%E2%82%AC%C3%90%C2%B0%C3%90%C2%B2%C3%90%C2%B0_%C3%90%C3%A2%E2%82%AC%E2%84%A2%C3%90%C2%BB%C3%90%C2%B0%C2%B4%C3%90%C2%B8%C3%90%C2%B2%C3%90%C2%BE%C3%91%C3%91%E2%80%9A%C3%90%C2%BE%C3%90%C2%BA</a> Вейджер в переводе с британского значит «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша полученного бонуса, в нашем случае бездепозитного. Число ставок имеет — важно лишь набрать сумму, пропорциональную сумме поощрения.Существует ли стратегии для отыгрыша бездепозитных бонусов? К сожалению нет, на выигрыши либо проигрыши с бонусов, казино или игрок повлиять имеет, отдача игр случается от создателей игр. скачать 1×slots на андроид мобильная версия Фриспины – бесплатные вращения с фиксированной ставкой, которые можно использовать в определенных игровых автоматах.
1хслот скачать
Подарки на праздники ? приуроченные к праздничным датам, требующие символического отыгрыша либо начисляются без это. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду. <a href=http://www.glaschat.ru/glas-f/member.php?541855-DoctorLazutaEn>http://www.glaschat.ru/glas-f/member.php?541855-DoctorLazutaEn</a> Выше мы предоставили глубокий комплект самых свежих и актуальных бездепозитных бонусов в онлайн казино без пополнения на 2022 год, где вы можете воспользоваться каким ценным бездепозитным призом. 1х слот регистрация в 1×slots casino Варианты выигрыша зависимости от Вашей успеха и условий игорного портала. Выше мы сказали, собственно некоторые бездепозитные призы в 2022 году выдаются с ограничениями по наибольшей выплате. Однако, остаются и, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность современных игр на средства, возможно выиграть невероятные суммы. Сегодняшние игровые автоматы или видео слоты, как их нарекают. Могут выдавать крупные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000.В интернете слишком количество скриптовых сайтов, коие принадлежат мошенникам. Их основная цель – привлечь гэмблеров, пообещав столько великодушные презенты, но и крупные выигрыши. Так собственно некоторые веб-сайты предлагают получить за регистрацию даже $1 000.
1×slots казино зеркало
<a href=https://minecraft.ru.net/user/Manuelsoarl/>1×slots быструю регистрацию а также мгновенное</a> 1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, если не желаете стать жертвой плутов либо впустую истратить время; Бoльшинcтвo азартных заведений выдвигают приблизительно однообразные, схожие обстоятельства и требования, которые необходимо выполнить, чтобы получить бездепозитный приз за регистрацию. Все их возможно соединить в раз список:Каждая игровая перрон отличается критериями по получению и отыгрышу бездепов. В правилах детально расписаны кратковременные рамки, за которые надо(надобно) прокрутить вейджер. Также не забывайте на наибольший размер ставки и максимальную сумму выплаты. С другой стороны, чтобы получить бездепозитные призы казино, достаточно потратить не более 1 минутки. 1× slots сайт <a href=https://giga2026.com/home.php?mod=space&uid=4182339>https://giga2026.com/home.php?mod=space&uid=4182339</a> Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить необыкновенности, труднодоступные при игре в демо режиме. Многие новые клиенты переходят в число неизменных, а оператор получает долгосрочную выгода.
скачать 1×slots официальный сайт
Далее потребуется отыграть вагер и вывести выигрыш. Игрокам без навыка крупно подфартило, они могут получить десятки презентов за 1 регистрацию. Если не сумели получить Бездепозитный бонус, не беспокойтесь. Обратитесь в интернет чат, оператор поможет ситуацию. Когда идет о денежных бонусах, казино всегда устанавливают обстоятельства вейджера, коие нужно выполнить, дабы вывести выигрыш. <a href=http://www.pawsarl.es/blog/%D1%81%D0%B0%D0%B4%D0%B8%D0%B3.html>http://www.pawsarl.es/blog/%D1%81%D0%B0%D0%B4%D0%B8%D0%B3.html</a> Вейджер (либо вагер) ? это минимальная сумма ставок, коию нужно устроить для вывода денежного бонуса. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим красивее спецпредложение. 1×slots casino зеркало рабочее Отыграв бездепозитный приз в казино с выводом также придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, случае схожее лимитирование присутствует, то единоразово вывести получится только необходимую, не превосходящую размер полученного бонуса.Максимальный размер ставки, который нельзя превышать пока бонус не будет всецело отыгран. В случае нарушения этого правила, бонус и выигрыш с него станут аннулированы.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.as-p.cz/viewtopic.php?f=45&t=281422>1хслот скачать</a>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=370547>1×slot официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подарки на конкретные даты выделяются критериями получения. Если поощрение начисляют игроку на день рождения, то сумма обычно зависимости от совместного объема депо за год.
#1445 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet вход почему казино <a href=https://krtka.info/>букмекерская контора бетсити</a> Кузнецова Анна Юрьевна порно Яровая Ирина Анатольевна порно <a href=https://strelochnik.com/>Черкесова Бэлла Мухарбиевна порно</a> играющие казино онлайн порно с Бондаренко Анастасия Борисовна 1win букмекерская контора 1×bet сайт pin up casino buzz 1×bet 1хбет букмекерская контора леонов
DiskiPlus бывшие казино DiskiPlus пин ап казино <a href=https://www.diskiplus.ru/>DiskiPlus порно с Юлия Ефимова, пловчиха</a> DiskiPlus 1×bet зеркало слоты DiskiPlus пина casino <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet рабочее</a> DiskiPlus казино онлайн DiskiPlus 1×bet слоты 1×bet top DiskiPlus 1×bet зеркало на сегодня 1×bet xyz DiskiPlus casino сегодня DiskiPlus 7k casino зеркало DiskiPlus играющие казино онлайн DiskiPlus porno Светлана Ходченкова
#1446 Charlesgunnyhttp://filmkachat.ru
1×slot казино зеркало
Рассмотрим на образце: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских руб. В критериях акции указано, собственно вейджер бездепозитного бонуса х20. Поэтому, чтобы отыграть бонус, игроку будет нужно сделать ставок на 35*20=700 рублей. <a href=http://filmkachat.ru/>1×slots официальный зеркало</a> Денежные средства. Третий бонус за регистрацию без депозита – наличные. К раскаянию, лишь знаменитые и популярностью клубы могут дать деньги в руб. Или долларах. С их поддержкою вас насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед этим необходимо исполнение конкретных условий.Риск-игра по равным шансам – Также казино может воспрещать выполнять условия по отыгрышу за раунда на удвоение, который предлагается в слотах, видео-покере и некоторых иных играх. <a href=https://forum.index.hu/User/UserDescription?u=2065074>https://forum.index.hu/User/UserDescription?u=2065074</a> Фриспины без депо или дополнительные средства помогут поближе познакомиться с игровой платформой и её функциями. За счёт презентов возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям ради забавы против живых крупье. 1хслот зеркало сайта <a href=http://forums.filatelija.lv/memberlist.php?mode=viewprofile&u=40754>http://forums.filatelija.lv/memberlist.php?mode=viewprofile&u=40754</a> Сразу в активации промокода можно пользоваться презентом. Как теснее упоминалось, бонусы посещают трёх видов – фриспины, кредиты и фриплей-бонусы.
скачать 1×slots на андроид мобильная версия
Таким образом интернет казино получает вероятного игрока. Возможно в или подлинном он захочет поиграть на свои деньги. Так трудятся бездепозитные призы в онлайн казино. Здесь очень подходит выражение, бесплатные сыр бывает только в мышеловке. Начинающие игроки имеют не обдумывать опасность азарта. Однако времени осознания делается больше. Это тема для отдельного обсуждения. <a href=http://mandala-app.com/forums/viewtopic.php?f=5&t=222140>1×slots быструю регистрацию а также мгновенное</a> 1хслот зеркало Бездепы шансы входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами.Для получения бонуса нужно ознакомиться с программкой лояльности казино и сделать ставки на сумму, необходимую для перехода на грядущий уровень. <a href=http://missis.apkservice.ru/index.php?subaction=userinfo&user=aboardfever86>http://missis.apkservice.ru/index.php?subaction=userinfo&user=aboardfever86</a> Классическая разновидность приза за создание аккаунта. Его превосходство заключается в, собственно заказчик возможность помощи избирать аппараты и создавать ставки в их. Иногда перечень игровых автоматов ограничен оператором, но все одинаково это другого, чем один-единственный доступный слот, как если, тогда, с использованием фриспинов. 1×slots зеркало рабочее Чаще всего казино приз за регистрацию без депо даёт возможность запустить любой машина. Но лучше пристально ознакомиться с критериями. Иногда для игры доступны лишь определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, превосходнее начать знакомство с миром азарта именно с «одноруких злодеев».
1×slots регистрация 1×slots casino 777 online
Все благотворительные бонусы кажутся соблазнительными. Кто же откажется от возможности поиграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далековато не все бездепозитные призы одинаковой презентабельны для рассудительного посетителя. Благодаря программе лояльности от игорного заведения, возможно брать превосходный старт и без дополнительных вложений запустить видеослоты. Кроме такого, возможно рассчитывать на реальную удачу и получить, без инвестиции личных денег, немалый выигрыш.Верификация необходима для дополнительной безопасности и подсобляет техподдержке выявить бонусхантеров и мошенников. Кстати, на некоторых платформах выводы солидных сумм доступны только в подтверждения личности. <a href=http://forum.evony.com/member.php?1325958-Porsedroppi>http://forum.evony.com/member.php?1325958-Porsedroppi</a> Итак, чтобы бесплатные бонусные кредиты трансформировались в настоящие средства, которыми вам распоряжаться по собственному усмотрению, их нужно отыграть. Вейджер по уточнять в правилах онлайн-казино. 1×slots casino регистрация 1×slotscasin online Фриспины – благотворительные вращения с фиксированной ставкой, коие возможно применять в конкретных игровых автоматах.В разделе с призами активировать собственный подарок. Найти игры, для которых учтено поощрение и применять бонус по предназначению.
рабочее зеркало 1×slots
Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. Каждая игровая перрон выделяется критериями по получению и отыгрышу бездепов. В правилах детально расписаны временные рамки, за которые нужно прокрутить вейджер. Также не забывайте про наибольший объем ставки и наивысшую сумму выплаты. С другой стороны, чтобы получить бездепозитные бонусы казино, достаточно израсходовать менее 1 минутки.Объективные – размер бонуса, коэффициент и обстоятельства вейджера, необходимость внесения депо для вывода средств; На благотворительные призы онлайн-казино почти практически распространяется ограничения по стране проживания клиентов. Даже если вас разрешается открывать счет и играть на деньги в заведении, это еще не означают, собственно вам доступны no deposit bonuses.Прочитайте управляла бонусной программы, какой желайте принять. Да, мы настойчиво рекомендуем устроить это до регистрации. 1×slots регистрацию процедура займет всего лишь <a href=http://classicjam.net/bbs/board.php?bo_table=free&wr_id=689447>http://classicjam.net/bbs/board.php?bo_table=free&wr_id=689447</a> Но ни не забывайте пристально разбирать верховодила роли в бонусных акциях. Если вы нарушите желая бы одно условие, позже вы не можете устроить недоразумение с администрацией.
1×slots актуальное зеркало
<a href=http://bbs.boway.net/home.php?mod=space&uid=989354>http://bbs.boway.net/home.php?mod=space&uid=989354</a> С такими ординарными советами любое казино с призом за регистрацию способно принести в разы больше выгоды и пользы. 1×slots зеркало на сегодня Чтобы бездеп не был начислен на Ваш акк, Вам не активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт автоматически, а Вы не планируете его применять, обратитесь в саппорта с пожеланием отменить бездепозитный бонус.
<b>Смотреть еще похожие новости:</b>
<a href=http://yonghengro.gain.tw/space.php?uid=1555574>1×slots бонус за регистрацию</a>
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=1194722>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке необходимо пополнить счет в казино. Для депозитных призов, данная процедура не необходима, так как депозит уже изготовлен. Одним из предлогов отдавать преимущество, льготу 1 или другому заведению содержится в привлекательности предлагаемых акций и даровых услуг. Безвозмездные фриспины, выдаваемые без дела создавать какой-либо лепта, в списке располагается далековато не в конце.
#1447 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
retro casino казино гта 5 <a href=https://m.repost.news/>bitz casino</a> рокс казино сколько казино <a href=https://vestnik-jurnal.com/>casino рабочее</a> порно с Дарья Касаткина (теннис) 1×bet официальный Шевцова Татьяна Викторовна порно порно с Дарья Касаткина (теннис) порно с Алексей Миранчук (футбол) мобильные букмекерские конторы букмекерская контора без
DiskiPlus casino автомат DiskiPlus порно с Аделия Петросян (фигурное катание) <a href=https://diskiplus.ru>DiskiPlus скачать сайт букмекерской конторы</a> DiskiPlus inform@rucriminal.info DiskiPlus скачать 1×bet на андроид <a href=https://www.diskiplus.ru>DiskiPlus пин ап casino pin</a> DiskiPlus inform@rucriminal.info DiskiPlus pin ап casino DiskiPlus букмекерская контора бесплатно скачать DiskiPlus Юдаева Ксения Валентиновна порно DiskiPlus Ирина Горбачева DiskiPlus порно с Евгений Малкин (хоккей) DiskiPlus casino официальный зеркало
#1448 Charlesgunnyhttp://filmkachat.ru
1×slots официальный demo регистрация в 1×slots casino
Для получения предоставленных бонусов для пригодиться — ПК или мобильное устройство, и остальное дело за малым. <a href=http://filmkachat.ru/>casino 1×slot</a> Но разу не забывайте внимательно читать верховодила роли в бонусных акциях. Если вы нарушите хотя бы одно условие, позже вы не сможете устроить недоразумение с администрацией.Игрокам не следует воспринимать приветственный бонус как гарантированный метод получить большой выигрыш, хотя это отличная возможность без затрат оценить перечень казино. <a href=https://linklist.bio/lexxeagle>https://linklist.bio/lexxeagle</a> Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депо может выделяться до 30 дней.За вербование приятеля ? в партнерской программки клиент получает вознаграждение за привлечение свежих юзеров. 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=http://whitepower.clanweb.eu/profile.php?lookup=26634>http://whitepower.clanweb.eu/profile.php?lookup=26634</a>
1 x slots
<a href=https://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=6268>1×slots казино зеркало</a> 1хслот зеркало Для вывода средств приз надо(надобно) несомненно отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами акции и вариантами отыгрыша бездепозитного бонуса до его получения, дабы избежать конфликтных ситуаций. <a href=http://www.micepm.co.kr/board/bbs/board.php?bo_table=press&wr_id=602149>http://www.micepm.co.kr/board/bbs/board.php?bo_table=press&wr_id=602149</a> В бонусную программку многих операторов входят регулярные бездепы. Это бессрочные промоакции, поощряющие активных постоянных игроков. Популярный формат — раздача фриспинов по конкретным дням недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают неизменные бонусы без депозита в обмен на накопленные баллы преданности. 1×слотс казино
1хслот скачать
Наиболее популярные вознаграждения среди гэмблеров – бездепозитные призы казино. Это не изумительно, ведь можно получить бесплатные вращения или виртуальные кредиты, и всем не придётся пополнять счёт, рисковать личностными средствами. Удастся насладиться разнообразными веселиями даже выиграть солидную необходимую, избегая серьёзного риска. <a href=https://www.mikocon.com/home.php?mod=space&uid=218929>https://www.mikocon.com/home.php?mod=space&uid=218929</a> Теоретически, к безвозмездным призам можно отнести например именуемые фриспины. Напомним, речь идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, поэтому что они предоставляют лишь вероятность создавать ставки.Также существуют онлайн-платформы азартных игр, которые используют раздачу бездепозитных бонусов в специальные даты (как для казино, например и для игрока). Помимо сего, действующие геймеры того имеют вероятность получить схожие бонусы за свою работа (например, за увеличения уровня или за схожие заслуги). 1×slots быструю регистрацию а также мгновенное Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить необыкновенности, недоступные при этой в демо режиме. Многие новые посетители переходят в число неизменных, а оператор получает длительную прибыль.
1×slot казино зеркало
Подтвердите регистрацию, дабы активировать Бездепозитный приз с выводом, требуется заполнить собственный профиль. Заполните пустые поля реальными данными о себе.В лицензионных бездепозитных казино играть в азартные игры вправду безопасно. Наличие лицензии подтверждает тот факт, собственно клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP. <a href=https://www.thefamilylegion.se/viewtopic.php?f=4&t=100527>1× slots официальный</a> Баланс игрока пополняется на соответствующую необходимую. К ней используется вейджер, обозначенный в правилах акции. Вывести выигрыш возможно несомненно после того, как пользователь устроит требуемый объем ставок из собственных средств. В редчайших случаях бездеп работает в формате Free Play. На счет юзера зачисляется крупная сумма, и предоставляется небольшой срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по окончании этого периода сумма на счету несомненно превышать изначальную, то разность возможно несомненно исключить либо применять для последующих ставок. Автоматическая активация может самой удобной, но ручной метод содержит перед ней достоинства. Прежде чем применять вознаграждение от казино, стоит заранее определить, сколько времени потребуется на исполнение всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала действия бонуса. 1×slots регистрация 1×slots review live <a href=https://pastebin.com/u/Glavdorogadv2106>https://pastebin.com/u/Glavdorogadv2106</a> Бездепозитные бонусы отличный вариант бесплатной забавы в игровые автоматы. Многие пользователи сети не понимают, собственно в казино можно начать играть безусловно даром, а потом исключить выигрыш на банковскую карту или электронный кошелек, другие не доверяют интернет казино, а третьи удачно играют и выигрывают – и тотчас довольно большие суммы.При регистрации по свидетельствовать лишь достоверную информацию. Когда учетная запись несомненно активна, замечен доступ в Личный офис. В нем возможно выбрать еденицу, ввести промокод и узнать доскональные управляла получения и отыгрыша бездепа. Краткая информация об акции нередко присутствует непосредственно на регистрационной форме.
зеркала 1×slots
Не желайте поиграть в азартные игры, не рискуя средствами средствами, хотя получая в все выплаты? Подобную вероятность деют почти превосходнейшие порталы с азартными весельями. В их числе большое добросовестных и надежных интернет-казино на российском языке. Они завлекают новых пользователей разными поощрительными мероприятиями, включая бездепозитные, или бесплатные бонусы. <a href=https://ai.igcps.com/home.php?mod=space&uid=727701&do=profile&from=space>https://ai.igcps.com/home.php?mod=space&uid=727701&do=profile&from=space</a> К огорчению, нет. Почти все казино, настоятельно внесение но бы одного малого депо для вывода выигрыша с бездепозитного бонуса. Также учитывайте, собственно вывести деньги разрешено лишь на что, эту платежную систему, с коей был сделан депозит.При забаве на бонусные свои воспрещается выступать в игровые автоматы с современным джекпотом и игры из радела exist casino. Кроме такого, кое-какие казино выделяют бездеп на раз либо некоторое конкретных слотов, и в других играх Вы не можете на них выступать. 1×slots casino регистрация 1×slots review live
<b>Смотреть еще похожие новости:</b>
<a href=https://mit-bbs.com/viewtopic.php?t=801441>1×slots регистрация 1×slots casino c2d ru</a>
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=1207328>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Как только получите бездеп в казино, всё одинаково не забывайте инспектировать электронную почту. Некоторые игорные клубы день радуют интенсивных гэмблеров приятными бонусами. Чаще всего получить подарок возможно в преддверии праздника, на день рождение, за привлечение друга. А того распространённым бонусом считается надбавка к депозиту. Нужно не восполнить счёт, и азартное заведение прирастит его на 50–100%. Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных притязаний, считая обязательной верификации. Если на веб-сайте учтена обязательная процедура подтверждения личности, то исключить выигрыш получится только после ревизии данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий лицо.
#1449 Остекление балконовhttps://www.mindmeister.com/users/channel/124591253/
Широкий спектр услуг по остеклению и отделке балконов и лоджий, узнайте тут <a href=https://www.mindmeister.com/users/channel/124591253/>https://www.mindmeister.com/users/channel/124591253/
#1450 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало рабочее
Для выбора азартного заведения Вы сможете пользоваться перечнем наших казино с бонусами за регистрацию. На нашем сайте мы опубликовали перечень бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, что доля призов неповторимые и доступны лишь для гостей нашего сайта по-специальному промо-коду или по уникальной ссылке. Кроме как, для каждого бонуса мы подготовили доскональный обзор, каком Вы узнаете как получить и отыграть поощрение и как исключить свой выигрыш с бездепа. <a href=http://filmkachat.ru/>1×slots зеркало быструю регистрацию а также мгновенное</a> Суммы сходственных предложений, в, колеблются от трех до 20 $, а вейджер на эти свои обязан сочинять от тридцати до шестидесяти раз. Зачастую, наивеличайшая сумма выигрыша здесь составит от одной до двух сотен долларов. Если в выиграет больше, то все средства могут быть списанными до максимально разрешенного выигрыша. Здесь появляется содержание выводить еще несуществующие финансы на собственную платежную систему и далее отыскивать заведение с подходящими под данную сумму релоадом либо призом за первое пополнение счета. Есть некоторое подвидов бездепозитного вознаграждения, предлагаемого большим количеством заведений.Иногда у посетителей вебсайта могут появиться проблемы при активации полученного промо-кода. В этих случаях, необходимо адресоваться за подмогою в службу поддержки «Support». Для получения ответа, непременно указывается конкретная причина воззвания и подтверждается информация дополнительными скриншотами. Если сформировалась спорная обстановка, практически можно обратиться к главному регулятору или контролирующему органу, выдавшему данному заведению лицензионный документ. <a href=https://www.bunity.com/-4272ed82–271c-4d7f-8ae6-c898dfa18867>https://www.bunity.com/-4272ed82–271c-4d7f-8ae6-c898dfa18867</a> Срок отыгрыша — это период, который начинается в момент активации приза и завершается с его закрытием. Пользователю нужно уложиться в этот временной промежуток, по призовые средства аннулируются. Казино устанавливают список игр, ставки в которых засчитываются при расчете отыгранных средств. Если тайтл не входит в этот список, то предоставляется быть недоступен для загрузки во время деяния бонусного предложения.Бездепозитный бонус за регистрацию в казино — это стартовый презент повторяющий валютного начисления или бесплатных вращений для свежих игроков заведения, для получения которого не заносить депо. 1×slots официальный сайт скачать на айфон <a href=http://matripedia.de/doku.php?id=%D0%B3%D0%BB%D0%B0%D0%B2%D0%BD%D0%B0%D1%8F%20%D0%B4%D0%BE%D1%80%D0%BE%D0%B3%D0%B0%20%D1%81%D0%B0%D0%B9%D1%82>http://matripedia.de/doku.php?id=%D0%B3%D0%BB%D0%B0%D0%B2%D0%BD%D0%B0%D1%8F%20%D0%B4%D0%BE%D1%80%D0%BE%D0%B3%D0%B0%20%D1%81%D0%B0%D0%B9%D1%82</a>
1×слотс казино
1×slots регистрацию процедура займет всего лишь 1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, в не желаете замерзнуть жертвой жуликов либо впустую истратить время; <a href=http://sibkomponent.ru/bitrix/click.php?anything=here&goto=http://lssrussia.ru/bitrix/redirect.php?goto=http://interproduct.ru/bitrix/redirect.php?goto=https://telegra.ph/SHtrafy-za-naezd-na-losya-ili-kabana-v-dorozhnyh-avariyah-09–24>http://sibkomponent.ru/bitrix/click.php?anything=here&goto=http://lssrussia.ru/bitrix/redirect.php?goto=http://interproduct.ru/bitrix/redirect.php?goto=https://telegra.ph/SHtrafy-za-naezd-na-losya-ili-kabana-v-dorozhnyh-avariyah-09–24</a> Чаще всего казино приз за регистрацию без депозита даёт возможность запустить каждой автомат. Но превосходнее внимательно ознакомиться с критериями. Иногда для забавы доступны лишь определённые модели. Если вы новичок и ничего не смыслите в гэмблинге, другого, как начать знакомство с миром азарта непосредственно с «одноруких бандитов». 1×слотс казино
1×slots актуальное зеркало
Более солидные предложения встречаются очень редко. Зачастую они доступны лишь VIP-игрокам. В остальных случаях им всего сопутствуют довольно строгие условия отыгрыша. Также возможны дополнительные обстоятельства и другие лимитирования, прописанные в условиях и положения бонусной программы казино.Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного бонуса. <a href=https://aprenderfotografia.online/usuarios/product360view/profile/>https://aprenderfotografia.online/usuarios/product360view/profile/</a> Для тех, кто только взвешивает испытывать свою удачу, а также для профессиональных игроков, ищущих свежие площадки для выигрышей, основные лицензированные казино нередко организуют разные промоакции, и одно из лучших предложений прошедшее время – как для новичков, например и для профессиональных игроков – бездепозитный бонус за регистрацию.Иногда в поощрения за регистрацию имеют выдаваться билеты для роли в турнирах. Условия их проведения очень отличаются, потому мы советуем ознакомиться с каждым предложением отдельно. 1×slots актуальное зеркало Все безвозмездные призы кажутся соблазнительными. Кто же откажется от возможности сыграть в онлайн-казино, не рискуя средствами, но получая выигрыши. Но далеко не все бездепозитные бонусы в привлекательны для рассудительного посетителя.Помимо прочего, для вывода средств по бездепу нужно внести на счёт свой 1-ый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально вероятную необходимую, после чего вывод средств станет доступен.
1×slots регистрацию более популярный вариант это
Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам запрещено начислять бонусы посетителям, не имеющим валютных средств на счете. Мы предлагаем разглядеть актуальные бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ. <a href=http://www.gamers4life.com/forums/f44/about-old-accounts-331101/index235.html>1×slots зеркало рабочее на сегодня</a> Как только на виртуальном счету окажутся бонусные свои, поспешите отыграть вейджер. Сразу последствии сего можно забыть заявку на вывод выигрыша. Кредиты выгодно отличаются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом реальных средств и дают возможность почувствовать задор. Во-вторых – можно насладиться каждой азартной забавой доступной на сайте. В вашем распоряжении присутствуют автоматы, настольные прибавление, видео-покер, Live-дилеры.Бoльшинcтвo азартных заведений выдвигают примерно одинаковые обстоятельства и притязания, которые необходимо выполнить, дабы получить бездепозитный бонус за регистрацию. Все их можно соединить в раз список: 1×slots регистрацию более популярный вариант это <a href=https://magadan-mebel.ru/forum/user/930/>https://magadan-mebel.ru/forum/user/930/</a>
1× slots сайт
<a href=http://paytree.co.kr/bbs/board.php?bo_table=free&wr_id=325709>http://paytree.co.kr/bbs/board.php?bo_table=free&wr_id=325709</a> Также, учите, что бездепозитный бонус возможно вывести лишь что, нет случае, когда будут исполнены все обстоятельства отыгрыша. 1хслотс казино зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://fin-molitor.com/forum/viewtopic.php?f=2&t=541132>1×slots casino регистрация 1×slots review live</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для получения депозитного приза необходимо пополнить собственный игровой баланс реальными деньгами. Вознаграждение возможно получить или при внесении первого депо, либо повторяющий фиксированного процента от внесённых средств. Так либо иначе, приз поступит на счёт только последствии пополнения.
#1451 internetvoronezhGephttps://domashij-internet-voronezh001.ru
провайдеры интернета в воронеже <a href=https://domashij-internet-voronezh001.ru>domashij-internet-voronezh001.ru</a> подключить интернет в квартиру воронеж
#1452 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино без букмекерская контора фонбет официальный <a href=https://rumafia.news/>pin ап casino</a> Скоробогатова Ольга Николаевна порно порно с Евгений Малкин (хоккей) <a href=https://rucriminal.info/>играющие казино онлайн</a> бесплатно фильм казино casino buzz porno Юлия Пересильд casino приложения порно с Антропова Валентина Викторовна 1×bet скачать приложение на андроид 1×bet официальный сайт
DiskiPlus порно с Бондаренко Анастасия Борисовна DiskiPlus ап казино <a href=https://diskiplus.ru/>DiskiPlus 1×bet зеркало xbet xyz</a> DiskiPlus unlim casino DiskiPlus up casino скачать <a href=https://www.diskiplus.ru/>DiskiPlus скачать букмекерскую контору</a> DiskiPlus порно с Юлия Ефимова, пловчиха DiskiPlus балтбет букмекерская контора DiskiPlus лучшие казино бесплатно DiskiPlus porno Александр Соболев (футбол) DiskiPlus pin up букмекерская контора DiskiPlus казино 5 DiskiPlus Шевцова Татьяна Викторовна порно
#1453 Charlesgunnyhttp://filmkachat.ru
1×slot казино зеркало
Бездепозитный бонус за регистрацию в казино с выводом средств в 2022 году — Наш ресурс предоставляет игрокам важную информацию о самых свежих, щедрых и проверенных бонусах в онлайн казино, коие обновляются любой день.Активация по промокоду используется в разных видах бездепов. Если речь идет о приветственном призе, то набор символов можно узнать на крупнейшей странице, в регистрационной форме или письме, коие отчаливает пользователю для доказательства адреса электронной почты. Акции все проводиться совместно с партнерскими площадками. Обычно код располагается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется одноразовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем актуальный код для активации в описании любого промо. <a href=http://filmkachat.ru/>1×slots скачать на айфон</a> Но на азартных платформах сходственные гонорары шансы получить и уже зарегистрированные юзеры. В таком случае, призы предоставляются в рамках оригинальных промоакций либо же неким геймерам в виде акционного предложения, которое прибывает на почту с целью «возвратить» игрока в свое казино.Приветственный бездеп предоставляется любому игроку только раз один. Казино борются с так именуемыми бонусхантерами (от англ. Bonus Hunter — доброволец за призами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения дара. Исключить подобные действия разрешает верификация данных. Администрация вправе востребовать у клиента доказать индивидуальные данные, обозначенные при регистрации. <a href=https://joy.link/kalinka0588>https://joy.link/kalinka0588</a> 1×slots зеркало регистрация <a href=http://00mall.biz/bbs/board.php?bo_table=free&wr_id=657123>http://00mall.biz/bbs/board.php?bo_table=free&wr_id=657123</a>
1×slots регистрация на сайте 1×slots ru com
1 xslots рабочее зеркало При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие можно предназначить этой в казино. <a href=https://www.hklovely.com/home.php?mod=space&uid=143617&do=profile>https://www.hklovely.com/home.php?mod=space&uid=143617&do=profile</a> С такими ординарными советами каждое казино с бонусом за регистрацию способно принести в разы больше выгоды и полезности. 1хслотс рабочее зеркало на сегодня
1хслотс зеркало
В некоторых онлайн казино для получения бездепозитных призов не довольно просто зарегистрироваться на веб-сайте клуба и подтвердить свои контактные данные. Дополнительно требуется активация промокода. Подтвердите личность, предоставив оператору казино средства паспортные данные. Инструкции обыкновенно несложные, главное — четко им следовать. Если написано, собственно «на фото обязаны быть видны все четыре угла странички паспорта» — сделайте непосредственно это фото.Бездепозитные бонусы начисляются лишь раз один. Не стоит раскрывать свежие аккаунты, дабы получить их повторно. Служба безопасности казино непременно выявит «левого» участника и перекроет. Если посетитель выполнит необходимые требования, отыграет собственную ставку и решит исключить собственный выигрыш, то ему надо(надобно) учесть, что казино обязательно потребует предоставить ксерокопии личных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои вывести не удастся. <a href=https://ai-db.science/wiki/%D0%90%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D1%8B_%D0%92%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA>https://ai-db.science/wiki/%D0%90%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D1%8B_%D0%92%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA</a> 1× slots сайт
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Бездепозитный бонус нередко возможность замерзнуть легкодоступным незамедлительно последствии окончания регистрации, потому в большинстве случаев единственным притязанием к нему считается регистрация, а затем ревизия вашей новой учетной записи. <a href=http://sz.80lvl.ru/memberlist.php?mode=viewprofile&u=865>1 xslots рабочее зеркало</a> Основное правило получения бездепа ? творимый акк должен быть у юзера первым и единственным. Наличие нескольких аккаунтов строго воспрещено. Проверка проводится по имени, e-mal, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депозита нужно блюсти простую очередность деяний.Чаще всего, модные сервисы, эти как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно неотъемлемое правило. Финансовые свои выводятся лишь через что, эту платежную систему, коей успех для пополнения депо. Если же игрок получил бездепозитный покерный приз, требуется пополнить счет на минимальную сумму, кот-ая сочиняет обыкновенно десять долларов. 1×slots зеркало регистрация то дальше необходимо пройти <a href=http://gdz-fizika.ru/index.php?subaction=userinfo&user=hurtbyte76>http://gdz-fizika.ru/index.php?subaction=userinfo&user=hurtbyte76</a> Чаще всего, популярные сервисы, эти как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное правило. Финансовые свои выводятся лишь спустя ту платежную систему, коей пользовались для пополнения депозита. Если же игрок получил бездепозитный покерный приз, потребуется восполнить счет на наименьшую сумму, кот-ая составляет обычно 10 долларов.Особую изюминку видео слотам присваивают оригинальные символы. С их появлением активизируются различные призы. Вы можете запустить дополнительный уровень и увеличить сумму выигрыша. Есть знаки, которые заменяют ненадобные элементы и сами делают выигрышные комбо. Не стоит забывать и на бонус-тур. После каждого счастливого спина есть шанс прирастить сумму выигрыша в 2 или хорошо раза.
1х слотс зеркало регистрация в 1×slots casino
Каждый из бездепозитных бонусов без пополнения 2022 имеет свой конкретный вейджер для отыгрыша, например же в каждом казино он устанавливается индивидуально — где то он х55 а кое-где х30, повторюсь всюду по разному! <a href=https://lunar.az/user/PhilipSency/>https://lunar.az/user/PhilipSency/</a> 1×slots скачать на айфон Некоторые казино имеют предлагать клиентам бездепы за подтверждение номера или почты либо репост на страничку в соц сетях.Игры, в которых можно выступать на бонусные деньги. Проверьте список игр, в возможно играть на бонусные свои, возможно они Вам не понравятся и не стоит расходовать своё время на эту акцию.
<b>Смотреть еще похожие новости:</b>
<a href=https://praisenpray.org/forums/showthread.php?tid=125414>1 x slots casino</a>
<a href=http://sz.80lvl.ru/viewtopic.php?f=8&t=3236>1хслот официальный сайт зеркало</a>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=709370>1×slots официальный зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Таким образом, заведение пробует показать себя своим вероятным игрокам, а такой маркетинговый ход как казино бонус без депо за регистрацию привлекает очень количество внимания к игорному заведению и обеспечивает постоянный струю новых посетителей и грядущих посетителей игрового онлайн клуба. Верификация важна для добавочной безопасности и подсобляет техподдержке выявить бонусхантеров и плутов. Кстати, рядах платформах выводы крупных сумм доступны лишь последствии подтверждения личности.
#1454 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1win букмекерская контора порно с Петр Ян (ММА) <a href=https://rucriminal.info/>Петрова Ольга Викторовна порно</a> new casino казино <a href=https://rumafia.news/>1×bet на андроид бесплатно</a> porno Алена Косторная (фигурное катание) 1×bet на андроид бесплатно 1×bet слоты Елизавета Боярская porno Игорь Акинфеев (футбол) 1×bet 1 porno Анна Сидорова, керлингистка
DiskiPlus casino официальный зеркало DiskiPlus ешь казино <a href=https://www.diskiplus.ru>DiskiPlus макао казино</a> DiskiPlus 1×bet скачать бесплатно DiskiPlus casino скачать <a href=https://www.diskiplus.ru>DiskiPlus порно с Зырянова Анастасия Владимировна</a> DiskiPlus официальное казино вход DiskiPlus gama casino DiskiPlus Приезжева Екатерина Геннадьевна порно DiskiPlus порно с Федор Чалов (футбол) DiskiPlus сайт pin up casino DiskiPlus 1×bet бесплатно DiskiPlus казино вход
#1455 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
Получив собственный подарок, Вы можете бесплатно выступать на настоящие средства, а выполнив условия отыгрыша, вывести свой выигрыш. <a href=http://filmkachat.ru/>скачать 1×slots официальный сайт</a> <a href=https://hearthis.at/group/466308/transform-your-e-commerce-success-with-360-spin-product-videos/>https://hearthis.at/group/466308/transform-your-e-commerce-success-with-360-spin-product-videos/</a> рабочее зеркало 1хслотс <a href=https://xebecar.com/author/jaspermot/>https://xebecar.com/author/jaspermot/</a> Чаще всего применяются коды. Их надо(надобно) вносить в специальные окна регистрационной анкеты, в речь идет о пригласительных призах, или в определенном разделе личного офиса игрока.
1×slots зеркало
1хслот 1хслотс регистрация перейти на 1×slots Онлайн-казино с бездепозитными призами ставят клиентам обстоятельства для использования бездепами, поэтому перед ролью в промоакции лучше досконально ознакомиться со всеми правилами и аспектами акции. Условия могут прикасаться получения приза, его использования и следующего вывода денежных средств если, тогда, выигрыша. <a href=http://www.biopolytech.com/bbs/board.php?bo_table=free&wr_id=47701>http://www.biopolytech.com/bbs/board.php?bo_table=free&wr_id=47701</a> Бездепозитные бонусы — это презенты от казино вид бонусных денег или фриспинов для игровых автоматов, которые начисляются на аккаунт игрока после процедуры регистрации на веб-сайте заведения. Для получения этих поощрений депо не требуется. 1 х слотс зеркало Так что можете смело регистрироваться без всяких размышлений. Фортуна сегодня точно на вашей стороне. Не бойтесь, ведь последствие какого или убытка Вам совершенно не грозит. С этими призами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.
1×slots актуальное зеркало
Также случаются случаи, когда казино начислит обсужденный бонус последствии регистрации свежего клиента по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам. В зависимости от онлайн заведения любой из них имеет для предложить как бездепозитные деньги, например и бездепозитные фриспины, коие последствии успешной регистрации упадут для на ваш игровой баланс.Получать информацию о самых прибыльных призах возможно без постоянного прогноза новостей казино. Мы взяли эту задачу на себя и постоянно следим за услугами операторов, выбирая лучшие из их. В данном разделе собраны последние бездепы, промокоды к ним и условия их активации. Список промоакций периодически пополняется. В топ вошли самые свежие бездепозитные бонусы за регистрацию в казино 2020, временные и закрытые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и другим аспектам. Если срок действия промоакции истек, она удаляется из списка. <a href=https://google.cd/url?q=https://doctorlazuta.by/>https://google.cd/url?q=https://doctorlazuta.by/</a> 1×slots коды Не стоит путать забаву в демо и внедрение бонусов. В демонстрационном режиме игрок возможность оценить механику слота, сюжет и оформление. Но забава ведется на относительные кредиты, поэтому отсутствует основное ? чувство азарта. Активируя промокод либо фриспины, заказчик и не расходует средства деньги на игровые автоматы, хотя возможность сорвать реальный куш!Фриспины. Бесплатные вращения предусмотрены для применения в видео-слотах. Внимательно читайте обстоятельства – они нередко выдаются для неких машин. В зависимости от клуба вам создавать конкретное число ставок. Кстати, современные игорные жилища дают вероятность заводить «одноруких бандитов».
рабочее зеркало 1хслотс
Для подтверждения электронной почты, просто перейдите по интенсивной ссылке в письме, полученном от игрового заведения. 1×slot казино зеркало <a href=https://able.extralifestudios.com/wiki/index.php/%D0%98%D0%B7_%D0%A7%D0%B5%D0%B3%D0%BE_%D0%A1%D0%BE%D1%81%D1%82%D0%BE%D0%B8%D1%82_%D0%94%D0%B8%D0%B5%D1%82%D0%B0_%D0%95%D0%BB%D0%B5%D0%BD%D1%8B_%D0%9C%D0%B0%D0%BB%D1%8B%D1%88%D0%B5%D0%B2%D0%BE%D0%B9>https://able.extralifestudios.com/wiki/index.php/%D0%98%D0%B7_%D0%A7%D0%B5%D0%B3%D0%BE_%D0%A1%D0%BE%D1%81%D1%82%D0%BE%D0%B8%D1%82_%D0%94%D0%B8%D0%B5%D1%82%D0%B0_%D0%95%D0%BB%D0%B5%D0%BD%D1%8B_%D0%9C%D0%B0%D0%BB%D1%8B%D1%88%D0%B5%D0%B2%D0%BE%D0%B9</a> Наличие у игрока 2 аккаунта. Запрещено создавать количество профилей для неоднократного получения бездепов.
1х слот 1хслотс регистрация перейти на 1×slots
<a href=http://wmrc.co.kr/bbs/board.php?bo_table=free&wr_id=14930>http://wmrc.co.kr/bbs/board.php?bo_table=free&wr_id=14930</a> 1×slots сайт зеркало Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.
<b>Смотреть еще похожие новости:</b>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=166206&result=reply>1хслотс рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Когда речь идет о денежных призах, казино практически устанавливают условия вейджера, коие нужно выполнить, чтобы исключить выигрыш. Внесение депо – Будьте готовы пополнить счет в отыгрыша бонуса. Это стандартное требование правил для этого подобии промо-акций. Лучше заранее уточнить, какую сумму нужно несомненно вносить на счет. Как правило, речь идет о наименьшем депозите, но вы обязаны быть уверены, собственно он вас по кармашку.
#1456 Остекление балконовhttp://ilinks.ru/site.phtml?id=470655/
Профессиональные услуги остекления и отделки балконов и лоджий, подробности тут <a href=http://ilinks.ru/site.phtml?id=470655/>http://ilinks.ru/site.phtml?id=470655/
#1457 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация то дальше необходимо пройти
Бонус за регистрацию в казино выдается лишь раз один на одного игрока. Но бывают дополнительные акции, масштабах которых бездепы расступаются для неизменных клиентов и такие подарки Вы сможете получить больше 1-го раза.Так собственно главное различие дара на депозит от бездепа – неотъемлемое пополнение счёта. Вы можете привнести депозит и преумножить стартовый капитал либо отобрать бездеп и всем не придётся рисковать собственными сбережениями. Поспешите выполнить простые притязания, и администрация ресурса начислит щедрое поощрение! <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasin online</a> Также существуют онлайн-платформы азартных игр, которые применяют раздачу бездепозитных бонусов в специальные даты (как для казино, так и для игрока). Помимо сего, действующие геймеры также имеют возможность получить похожие призы за собственную работа (например, за повышения уровня или за схожие заслуги).Перечисленные повыше главные характеристики сопровождают практически любой бонус и являются стандартными для бездепозитных бонусных начислений в казино. <a href=http://snstheme.com/forums/users/modern-interior-design/>http://snstheme.com/forums/users/modern-interior-design/</a> Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, дабы еще раз получить безвозмездный бонус. Игорные заведения нетерпимы к бонус-хантерам, потому вас ожидает неминуемое наказание.Казино дает вероятность заработать и вывести реальные деньги на бездепозитных призах. Обычно, это малозначительная сумма, которую казино может себя позволить подарить игроку. 1×slots регистрация 1×slots casino 777 online <a href=http://koreamuseum.ru/index.php?subaction=userinfo&user=acceptablecaptu>http://koreamuseum.ru/index.php?subaction=userinfo&user=acceptablecaptu</a> К образцу, игроку выдаются бесплатные свои в заведении в размере пятидесяти либо ста $ (вейджер на коие сочиняет 100х). То есть, любому новоприбывшему геймеру выскакивает привлекающая иллюстрация, которая сулит выплату всех зачисленных фирмой средств. Не стоит внимания на казино приз за регистрацию без депозита с чрезмерно великий или очень малюсенькой суммой призов, потому что, даже кропотливо выучив все обстоятельства, здесь скорее, будет некий подвох.
1×slots официальный сайт скачать на айфон
Ну и окончательно же, для казино бездепозитные бонусы прибыльны с имиджевой стороны: схожая щедрость повышает степень преданности посетителей к фирмы. <a href=http://www.xcosmic.net/rsf/showthread.php?tid=54826>1хслотс казино зеркало</a> 1× slots официальный <a href=https://elliotttmdx00899.qodsblog.com/30326108/deep-nude-ethical-concerns-and-the-impact-of-ai-on-privacy>https://elliotttmdx00899.qodsblog.com/30326108/deep-nude-ethical-concerns-and-the-impact-of-ai-on-privacy</a> Раздача бонусов возможность быть приурочена к разным датам: календарные праздники, деньки рождения игроков, юбилей открытия казино и т. Д. Подарок выдается в виде денег, фриспинов либо баллов для скопления и обмена на услуги оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода этой суммы придется выполнить ряд притязаний. 1×slots зеркало 1хслотс регистрация перейти на 1×slots
1хслот зеркало
Сразу после активации промокода возможно воспользоваться даром. Как теснее упоминалось, бонусы случаются трёх обликов – фриспины, кредиты и фриплей-бонусы. <a href=http://akva.by/forum/index.php?action=profile;u=17951>http://akva.by/forum/index.php?action=profile;u=17951</a> 1х слот регистрация в 1×slots casino Свежий бонус начисляется вид валютных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в пользовании средствами, ну случае отыгрыша оператор имеет установить ограничение на вывод средств.Главным нюансом в возникновении данных вознаграждений произведено никаких, собственно пустив их в ход, игрок ничем не рискует и в последствии никому ничего не несомненно обязан (не зависимо, получит ли он благодаря призам какой-нибудь выигрыш или мгновенно спустит все лишь что прибывшие финансы). То есть, казино снабжает игрока вероятностью на дармовой основе играть во различные слоты причем спонсирует забаву.
1×slots официальный сайт зеркало рабочее
Если ординарными текстами, бездепы – это определённая сумма денег либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать презенты. Но есть кое-какие нюансы. Существуют игорные жилища, коие перед что, этим как начислить призы настоятельно привязать телефонный, дать копии документов. 1хслот скачать <a href=https://quantrinet.com/forum/member.php?u=669042>https://quantrinet.com/forum/member.php?u=669042</a>
1×slots casino зеркало рабочее
Акционные предложения от казино есть в разных форматах. Часто призы даются в обмен на депо. Игрок вносит платеж и получает деньги, безвозмездные вращения прочие одобрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — картина приза, который гарантирован за исполненье определенных поступков на веб-сайте: <a href=http://fujikong3.cc/space-uid-3708828.html>http://fujikong3.cc/space-uid-3708828.html</a> Некоторые казино шансы предлагать посетителям бездепы за подтверждение номера или почты либо репост на страничку в социальных сетях.У каждого игорного заведения свои управляла и условия. Но, чтобы получить призы, нужно выполнить стандартные деянья: 1× slots casino официальный сайт
<b>Смотреть еще похожие новости:</b>
<a href=https://forumsleague.org/forum/viewtopic.php?f=4&t=34159&p=402461#p402461>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<a href=https://17lubbs.com/thread-1062–1–1.html>1×slots сайт</a>
<a href=http://griffhunter.com/boards/viewtopic.php?p=1068914#p1068914>1хслот официальный сайт зеркало</a>
<a href=https://www.findaspermdonor.com/viewtopic.php?f=25&t=98983>1×slots casino регистрация на сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При игре на бонусные средства воспрещается играть в игровые автоматы с современным джекпотом и забавы из радела exist casino. Кроме как, некоторые казино выделяют бездеп на один либо несколько определенных слотов, и в других забавах Вы не можете на них играть. Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки все запросить дополнительные документы либо инициировать короткое общение по Skype.
#1458 Остекление балконовhttps://n4.biz/web/u87340450/home/-/blogs/87340468_Остекление-балконов-и-лоджий-в-Санкт-Петербурге/
Надежный подрядчик по остеклению и отделке балконов, узнайте больше тут <a href=https://n4.biz/web/u87340450/home/-/blogs/87340468_Остекление-балконов-и-лоджий-в-Санкт-Петербурге/>https://n4.biz/web/u87340450/home/-/blogs/87340468_Остекление-балконов-и-лоджий-в-Санкт-Петербурге/
#1459 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
приложения букмекерских контор casino x <a href=https://slon-ru.com/>фреш казино</a> казино проиграл 1×bet официальный <a href=https://vestnik-jurnal.com/>порно с Петр Ян (ММА)</a> яндекс игры казино ramenbet casino порно с Анна Щербакова, фигуристка porno Дарья Клишина Шевцова Татьяна Викторовна порно 1×bet на сегодня Окладникова Ирина Андреевна порно
DiskiPlus 1×bet слоты 1×bet xyz DiskiPlus Кузнецова Анна Юрьевна порно <a href=https://www.diskiplus.ru>DiskiPlus 1×bet скачать приложение</a> DiskiPlus Елена Лядова DiskiPlus почему в казино нет часов <a href=https://diskiplus.ru>DiskiPlus 7k casino</a> DiskiPlus Семёнова Татьяна Владимировна порно DiskiPlus casino ru DiskiPlus porno Илья Ковальчук (хоккей) DiskiPlus порно с Дарья Клишина, легкоатлетка DiskiPlus порно с Евгений Малкин (хоккей) DiskiPlus online casino 7k DiskiPlus online casino
#1460 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
Для подтверждения электрической почты, просто перейдите по интенсивной ссылке в письме, полученном от игрового заведения. <a href=http://filmkachat.ru/>1×slots casino регистрация</a> Как верховодило, новоприбывшие игроки для хотят ознакомиться с методами ввода и вывода денежных средств и сроки исполнения поданных заявок дабы четко понимать, как живо у вывести собственный казино приз за регистрацию без депо на электрический кошелек либо же банковскую карту. К счастью для всех играющих, внутри определенных холдингов, все казино конкурируют между собой. Ведь если бы конкретную компанию давало лишь одно онлайн-заведение, то ли бы посетители увидели казино с бонусом за регистрацию и имели бы рассчитывать только на вознаграждение вид приза на первое вложение. К любому заведению регулярно идет привлекать новых игроков, что, итоге, лишь на руку всем играющим. <a href=https://www.diigo.com/item/note/aqhdz/q4ts?k=0192c9beb59f628588f0b87d54b3361f>https://www.diigo.com/item/note/aqhdz/q4ts?k=0192c9beb59f628588f0b87d54b3361f</a> Для всех бездепозитных бонусов функционирует максимальный предел на выигрыш. Он указывает предельную сумму, которую вас получить, играя на бонусные кредиты. Как лишь вам удастся выполнить требования вейджера, допустимый максимум будет переведен с бонусного счета на основной, а остаток несомненно списан.Шаг 5. Использование и отыгрыш. Бездеп должен быть применен в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера. 1 x slots casino <a href=http://a1pay06.com/bbs/board.php?bo_table=free&wr_id=2470165>http://a1pay06.com/bbs/board.php?bo_table=free&wr_id=2470165</a> Можно ли наваривать на бездепозитных бонусах? Это не работа, тут как повезет, если в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, за можно назвать везением, и дополнительной добавкой к вашему бютжету.Активация валютного вознаграждения происходит автоматически последствии творения профиля либо использования промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на странички казино в социальных сетях либо на рассылку маркетинговых извещений, скачать и ввести дополнительный софт и т.д.
1хслотс казино зеркало
Свежий приз начисляется повторяющий валютных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в пользовании средствами, а случае отыгрыша оператор может ввести лимитирование на вывод средств.В бонусную программу многих операторов входят регулярные бездепы. Это бессрочные акции, поощряющие интенсивных неизменных игроков. Популярный формат — раздача фриспинов по конкретным денькам недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депо в обмен на скопленные баллы лояльности. <a href=https://www.mentalhealth-world.org.uk/forums/index.php?/topic/96318–1×slots-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE/>1×slots казино зеркало</a> 1×slot зеркало <a href=https://www.startupforum.ir/members/jamesreice>https://www.startupforum.ir/members/jamesreice</a> Мы делаем акцент на главных положениях управлял, рассказываем о территориальных ограничениях и вкратце информируем о иных акциях обговариваемого казино. 1×slots casino зеркало рабочее
1×slots акции
<a href=http://www.eionia.co.kr/home/bbs/board.php?bo_table=free&wr_id=414650>http://www.eionia.co.kr/home/bbs/board.php?bo_table=free&wr_id=414650</a> Шаг 4. Активация. Внимательно изучите обстоятельства, информацию по ограничениям и сроке действия бонусного предложения. Разобравшись с правилами, возможно активировать бонус в собственном кабинете (время ? с внедрением промокода) либо по запросу в саппорт. 1×slot регистрация В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и если, тогда, неоднозначных обстановок нет возможности куда-то пожаловаться и обосновать собственную правоту.
скачать 1×slots официальный сайт
Если вы бывалый игрок, вы должны аристократия, что приз без депо – редчайшая находка. Тем ниже, мы в изучаем интернет, чтобы отыскать для вас превосходнейшие бездепозитные предложения. Высокая конкурентность в разделе азартных игр доказывает операторов привлекать клиентов различными промоакциями. Благодаря данному у посетителей замечена вероятность получить бонусы в казино за регистрацию без депозита. Воспользоваться таким предложением возможно, избегая функцию внесения денег на игровой счет, просто активировав аккаунт на веб-сайте. Наш гид по бездепам поможет избрать самую симпатичную бонусную программку, разузнать верховодила получения такового вознаграждения и распорядиться им с максимальной выгодой.Получив свой презент, Вы можете даром играть на настоящие деньги, а выполнив обстоятельства отыгрыша, исключить собственный выигрыш. 1хслотс 1хслотс регистрация перейти на 1×slots <a href=http://40th.jiuzhai.com/home.php?mod=space&uid=2603782&do=profile&from=space>http://40th.jiuzhai.com/home.php?mod=space&uid=2603782&do=profile&from=space</a> Более крупные предложения встречаются очень изредка. Зачастую они доступны лишь VIP-игрокам. В оставшихся случаях им наверняка сопутствуют очень жесткие обстоятельства отыгрыша. Также возможны вспомогательные условия и другие лимитирования, прописанные в условиях и положения бонусной программки казино.
1×slots рабочее зеркало
Для получения депозитного приза нужно восполнить собственный игровой баланс реальными средствами. Вознаграждение возможно получить или при внесении первого депо, либо повторяющий фиксированного процента от внесённых средств. Так или иначе, приз поступит на счёт только последствии пополнения.Бонусы без депозита при регистрации считаются самыми привлекательными как для опытнейших игроков, например для и новичков. Получив такое вознаграждение, заказчик возможность выступать на настоящие средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а также обстоятельства их активации и выигрыша. Бонус начисляется игроку незамедлительно после регистрации и прохождения верификации в казино и не просит от клиента внесения депо. Как верховодило, объем приза в схожем случае достаточно умеренный, впрочем позволяет новеньким познакомиться с игрой без риска настоящими деньгами. <a href=http://led119.ru/forum/user/109527/>http://led119.ru/forum/user/109527/</a> Если вы новичок в и только попали в неизведанную вами район пыла — с помощью предложений как бездепозитные бонусы без пополнения. 1×slots официальный зеркало рабочее В неких онлайн казино для получения бездепозитных призов не достаточно просто зарегистрироваться на веб-сайте клуба и доказать средства контактные данные. Дополнительно требуется активация промокода.
<b>Смотреть еще похожие новости:</b>
<a href=http://griffhunter.com/boards/viewtopic.php?p=1052919#p1052919>1×slots casino регистрация 1×slots review live</a>
<a href=http://kemsrr.forumex.ru/viewtopic.php?f=7&t=5713>1×slots скачать на айфон</a>
<a href=https://lada-clubs.ru/forums/topic/1720–1×slots-kazino-zerkalo/>1×slots казино зеркало</a>
<a href=https://10nsk.ru/user/JosephSuple/>1 xslots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Максимальный размер ставки, который нельзя превышать же приз не несомненно всецело отыгран. В случае нарушения сего правила, приз и выигрыш с него будут аннулированы.
#1461 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино ли порно с Владимир Минеев (ММА) <a href=https://kompromat1.online/>top casino</a> лучшие бесплатные онлайн казино казино онлайн <a href=https://sovsekretno.net/>играющие казино</a> букмекерская контора без спорт букмекерская контора бесплатно фильм казино букмекерскую контору пин порно с Юлия Ефимова, пловчиха r7 casino vodka casino
DiskiPlus Юдаева Ксения Валентиновна порно DiskiPlus порно с Захарова Мария Владимировна <a href=https://www.diskiplus.ru/>DiskiPlus casino pin официальный</a> DiskiPlus 1×bet на андроид DiskiPlus Светлана Ходченкова <a href=https://www.diskiplus.ru/>DiskiPlus спорт букмекерская контора</a> DiskiPlus 1×bet зеркало xbet DiskiPlus порно с Анастасия Потапова, теннисистка DiskiPlus Матвиенко Валентина Ивановна порно DiskiPlus порно с Артемий Панарин (хоккей) DiskiPlus Набиуллина Эльвира Сахипзадовна порно DiskiPlus 1win casino DiskiPlus казино онлайн бесплатно
#1462 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
Бездеп с фриспинами возможность обхватывать всю коллекцию игр на веб-сайте либо разработки 1-го провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш возможность быть выведен последствии как, как пользователь отыграет данную сумму. Возможность оценить глубокий перечень слотов — главное достоинство данной разновидности. Игроку становятся доступны что, эти опции, которые отсутствуют в демонстрационном режиме, а вероятность выиграть реальные средства прибавляет ярких азартных ощущений. <a href=http://filmkachat.ru/>зеркло казино 1×slots</a> Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, например как Вам придется ее доказать дальнейшем при выводе средств. <a href=https://www.designingbuildings.co.uk/wiki/User:Cgifurniture>https://www.designingbuildings.co.uk/wiki/User:Cgifurniture</a> Доступ к подарку может открываться механически в введения промокода либо воззвания в саппорта вебсайта. В первом случае от пользователя не потребуется никаких действий. Бездеп с активацией по коду встречается чаще всего. Игроку нужно ввести совокупа символов в графе, которая имеет пребывать в регистрационной форме в Личном офисе. 1×slots официальный сайт мобильная версия <a href=http://gtgogfl.matchfishing.ru/bitrix/redirect.php?goto=http://mosvik.ru/bitrix/redirect.php?goto=http://marketzdorovie.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/dxIE-cVMOtb>http://gtgogfl.matchfishing.ru/bitrix/redirect.php?goto=http://mosvik.ru/bitrix/redirect.php?goto=http://marketzdorovie.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/dxIE-cVMOtb</a> При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток.
1х слот 1хслотс регистрация перейти на 1×slots
1 х слотс зеркало Бонусные деньги – маленькая сумма средств для старта в новом казино. На бонусные средства, обычно разрешено выступать во все забавы, не слотов с современным джекпотом и игр из раздела exist casino. <a href=https://disgaeawiki.info/index.php/User:DustinFitzmauric>https://disgaeawiki.info/index.php/User:DustinFitzmauric</a> 1×slots регистрацию более популярный вариант это В настоящее время получить приз за регистрацию в казино очень просто. Почти каждый игорный жилище с готовностью даст деньги или бесплатные вращения. Многие игроки пользуются данным и не стесняются регистрироваться в каждом клубе с прибыльными условиями. Кстати, это замечательная вероятность придумать выигрышную стратегию и сорвать куш.Максимальный объем ставки, кот-ый нельзя превосходить пока приз не несомненно полностью отыгран. В случае нарушения сего управляла, приз и выигрыш с него будут аннулированы.
1×slots официальный сайт скачать
Срок активации и время на отыгрыш. Зачисление денег либо фриспинов происходит при активации в течение требовательно ограниченного периода, похожие притязания предъявляются и к срокам отыгрыша. Одни казино позволяют отыгрывать приз некоторое дней либо в недель. Другие выдают крупную сумму за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высоким вейджером. За вербование приятеля ? масштабах партнерской программки заказчик получает вознаграждение за вербование новых пользователей. <a href=https://xn–80abdzaxbkfak2ai0bzf4ce.xn–p1ai/communication/forum/user/42059/>https://xn–80abdzaxbkfak2ai0bzf4ce.xn–p1ai/communication/forum/user/42059/</a> Демоказино есть практически на любом сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются существенно пореже: там когда выигрыша и соблюдения условий промоакций бездеп можно перевоплотить в настоящие средства. 1×slots официальный сайт скачать
1×slots регистрация 1×slotscasino 56 online
Подтверждение электрической почты – одно из основных критерий, коие есть практически в любом бездепозитном казино. Чтобы верифицировать электронную почту, достаточно перейти по интенсивной ссылке в письме, полученном от азартного клуба. <a href=https://australianwinerytours.com/tours/showthread.php?tid=470020>1×slots регистрация на 1хслотс</a> Но рядах азартных платформах подобные вознаграждения все получить и уже зарегистрированные юзеры. В таком случае, призы предоставляются в уникальных промоакций либо же неким игрокам повторяющий акционного предложения, коие приходит на почту с целью «вернуть» игрока в свое казино. Обычно, бездепозитные бонусы выдаются под конкретные слоты с фиксированной ставкой, но их точно воспрещено использовать в игровых автоматах с прогрессивным джекпотом. Список игр, в которых возможно использовать бездеп, Вы найдете в описании акции или можете уточнить у службы поддержки заведения.Так собственно можете храбро регистрироваться без всяких размышлений. Фортуна сегодня наверняка на вашей стороне. Не страшитесь, как последствие какого либо ущерба Вам совершенно не угрожает. С этими бонусами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе. 1хслот официальный сайт зеркало <a href=http://dvorec-oktyabr.ru/index.php?subaction=userinfo&user=quizzicalcage70>http://dvorec-oktyabr.ru/index.php?subaction=userinfo&user=quizzicalcage70</a> Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих требований, кроме неотъемлемой верификации. Если на сайте предусмотрена обязательная процедура доказательства личности, то вывести выигрыш удастся только после ревизии данных. Приготовьтесь наполнить анкету и выслать в техподдержку документ, подтверждающий личность.
1хслотс рабочее зеркало
Для получения предоставленных бонусов вас понадобиться — ПК или мобильное устройство, и остальное дело за небольшим. <a href=https://tazovod.khalal.ru/forum/memberlist.php?mode=viewprofile&u=41095>https://tazovod.khalal.ru/forum/memberlist.php?mode=viewprofile&u=41095</a> Онлайн гемблинг развивается с любым днем все больше и больше, новые бренды создаются не по денькам а по часам. Новые интернет казино проделывают вступительные акции для игроков, чтобы, чтобы что бы зарекомендовать себя, и тем наиболее предлагают бездепозитные призы за регистрацию, что бы не пропустить эту возможность — как пользоваться новым бездепом, советуем посещать наш вебсайт как возможно почаще, самое лакомое и свежие несомненно добавляться в этом же списке. 1 x slots casino
<b>Смотреть еще похожие новости:</b>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=103146&pid=367372#post_367372>1×slots скачать на айфон</a>
<a href=http://skatefluckit.com/member.php?u=149708>1хслот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не можете активировать и получить бездепозитный приз.
#1463 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
Самые модные способы вывода денег ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам на Neteller и Skrill, а пользуются криптовалютными кошельками. Вывод выигрышей возможность осуществляться быстро либо занимать от нескольких часов до нескольких суток. <a href=http://filmkachat.ru/>1× слот зеркало</a> Фриспины начисляются по определенной ставке. После их активации игроку необходимо запустить слот и убедиться, что в нем отображаются благотворительные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода после отыгрыша определяется оператором и изредка выше 5 000 рублей.Выше мы дали полный комплект самых новых и своевременных бездепозитных призов в онлайн казино без пополнения на 2022 год, где возможность пользоваться каким ценным бездепозитным призом. <a href=https://www.obesityhelp.com/members/archicgi/about_me/>https://www.obesityhelp.com/members/archicgi/about_me/</a> Не стоит сразу же отказываться от приветственных подарков в подобных казино. Администрация готова начислить средства или фриспины, но сначала сотрудники должны убедиться, что вы не мошенник. Дело никаких, собственно развелось очень большое охотников за призами. Они выучились накалывать систему и наваривать крупные суммы денег.Также есть онлайн-платформы азартных игр, которые используют раздачу бездепозитных бонусов в специальные даты (как для казино, например и для игрока). Помимо сего, действующие геймеры кроме имеют вероятность получить похожие призы за свою работа (например, за повышения значения или за схожие достижения). 1×slots casino регистрация 1×slotscasin online <a href=http://d668804q.beget.tech/user/Porsedropoi/>http://d668804q.beget.tech/user/Porsedropoi/</a> Доступ к подарку возможность раскрываться автоматически после введения промокода либо обращения в саппорта сайта. В первом случае от юзера не потребуется никаких поступков. Бездеп с активацией по коду встречается почаще всего. Игроку нужно установить совокупность знаков в графе, которая может пребывать в регистрационной форме в Личном офисе.
1×slots зеркало видели такую регистрацию на
<a href=https://creampie.com/members/walterdic.4291/>1×slots актуальное зеркало</a> 1×slots официальный demo регистрация в 1×slots casino Даже не выиграв солидную необходимую, игрок увлекательно проведет время, изнутри изучит работу площадки, воспримет геймплей автоматов. Все это без каких-либо денежных рисков. Быть в курсе превосходнейших промоакций с. Достаточно периодически изучать список новых онлайн казино с выводом приза без депозита в этом разделе.Представьте момент, когда при ставке в 10 руб. Вы получите сходственное умножение. Миллион руб. За одно вращение, что вполне возможно. Поэтому вопрос, сколько возможно выиграть остаётся закрытым. Предлагаем выяснить без. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный приз и проверяйте удачу в деле. Разумеется, вывести средства довольно. Однако шансы есть у всех. <a href=http://xn–b1acebaenad0ccc3aiee.xn–p1ai/forum/user/9678/>http://xn–b1acebaenad0ccc3aiee.xn–p1ai/forum/user/9678/</a> Ограничения по играм. Администрация запрещает игрокам кое-какие игровые автоматы с бездепозитным призом, деньгами или бесплатными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда разделение производится по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, хотя запрещен в настольных забавах и в разделе Live Casino. 1×slots зеркало выигрыши обязательно пройдите регистрацию если Наши эксперты исследуют условия акции, после в ручном режиме проводят их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие параметры. Мы не рекламируем казино, а даем игрокам информацию о превосходнейших из их.Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?
1×slots сайт
Но есть игорные заведения, коие готовы просто например жертвовать деньги на забаву. Для сего довольно создать профиль. Чтобы исключить собственный выигрыш, для сначала нужно выполнить условия отыгрыша, обозначенные в критериях получения бездепозитного депо.В перечне притязаний к отыгрышу часто присутствуют лимиты на ставки при игре на собственные средства. Так, в отыграть надо(надобно) 30 000 рублей, а предельная сумма ограничена 30 рублями, то вертеть барабаны предстоит 1000 один. Эта особенность затрудняет соблюдение игроками условий по срокам действия акции. <a href=https://blogs.rufox.ru/~lexxeagle/48536.htm>https://blogs.rufox.ru/~lexxeagle/48536.htm</a> 1×slots зеркало которую указывали при регистрации кстати
1× слот зеркало
Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в личный офис, дабы забрать благотворительные вращения с вейджером х40; Активация случается за промокодов, которые вводятся в собственном кабинете в регистрации. Среди спецпредложений в списке Casino.ru находятся эксклюзивные промокоды, коие доступны лишь гостям портала. Другие способы начисления средств ? автоматическая активация сразу последствии сотворения аккаунта и получение подарка по запросу в службу технической помощи. 1×slots casino регистрация 1×slotscasin online <a href=http://www.fire-team.ru/forum/member.php?u=9162>http://www.fire-team.ru/forum/member.php?u=9162</a>
1×slots casino зеркало
<a href=http://mebelnaya-tkan.ru/bitrix/redirect.php?goto=http://radmed.ru/bitrix/click.php?goto=http://quadrosvet.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/K5PMHZyPi9c>http://mebelnaya-tkan.ru/bitrix/redirect.php?goto=http://radmed.ru/bitrix/click.php?goto=http://quadrosvet.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/K5PMHZyPi9c</a> На бонусные начисления могут быть установлены вспомогательные лимитирования, коие Вы не сведению при отыгрыше. Пока приз полностью не отыгран — средства из казино не выводятся.На нашем веб-сайте Вы найдете перечень актуальных новых бездепозитных бонусов в казино 2022 года. Также, есть количество неповторимых услуг, которые доступны лишь гостям нашего сайта последствии регистрации по нашей ссылке или активации специального промокода. 1×slots casino регистрация 1×slotscasino09k online Даже не выиграв солидную необходимую, игрок интересно проведет время, изнутри исследует работу площадки, оценит геймплей автоматов. Все это без каких-либо денежных рисков. Быть в курсе превосходнейших акций легко. Достаточно периодически учить список свежих интернет казино с выводом бонуса без депо в этом разделе.
<b>Смотреть еще похожие новости:</b>
<a href=http://yaoisennari.ekafe.ru/viewtopic.php?f=169&t=3567>онлайн казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При регистрации по указывать лишь достоверную информацию. Когда учетная запись несомненно активна, будет доступ в Личный офис. В нем можно избрать еденицу, установить промокод и разузнать доскональные правила получения и отыгрыша бездепа. Краткая информация об промоакции часто присутствует непосредственно на регистрационной форме.
#1464 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее на сегодня
Условия имеют разниться приятель от друга. Но такой бонус имеет быть использован только для игрового процесса – полученные на счет деньги до как, как будут отыграны, исключить нереально. <a href=http://filmkachat.ru/>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a> <a href=https://buymeacoffee.com/poppoppopkb/vr-architecture-revolutionizing-architectural-design-visualization>https://buymeacoffee.com/poppoppopkb/vr-architecture-revolutionizing-architectural-design-visualization</a> Условия вывода выигрыша. В неких заведениях для успешного вывода с бездепозитного бонуса довольно пополнения баланса и доказательства личности. В иных же клубах, нужно некоторое раз прокрутить свой депозит.Можно ли зарабатывать на бездепозитных бонусах? Это не работа, здесь как повезет, случае в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, тогда можно именовать везением, и добавочной добавкой к вашему бюджету. 1×slots коды <a href=http://krast-studio.ru/user/ForsedropOr/>http://krast-studio.ru/user/ForsedropOr/</a> С другой стороны, намного легче арестовать бездепозитные фриспины за регистрацию в казино и напрямик сейчас начать вертеть барабаны в превосходнейших слотах. Главная необыкновенность спинов что, нет, собственно они предусмотрены для топовых автоматов. Удастся столько пройти вспомогательные раунды, хотя и увеличить необходимую выигрыша, заработать респины и другие внутриигровые презенты.
1×slots официальный регистрация
1×slots зеркало регистрация <a href=https://agro-info.biz.ua/wr_board/tools.php?event=profile&pname=Porsedropmt>https://agro-info.biz.ua/wr_board/tools.php?event=profile&pname=Porsedropmt</a> 1×slots регистрация 1×slotscasino09k online Чаще всего казино бонус за регистрацию без депозита даёт возможность запустить любой машина. Но другого, как пристально ознакомиться с критериями. Иногда для забавы доступны лишь определённые модели. Если вы новичок и ничего не смыслите в гэмблинге, превосходнее начать знакомство с миром пыла именно с «одноруких злодеев».Начнём с как, что любое промо за регистрацию подразумевает некоторые условия. Бездепозитные бонусы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, нужная для исполнения критерий. Пример, получили безвозмездные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 руб., неудачных или выигрышных, неважно. После выполнения, бонусный баланс перейдёт на настоящий и будет легкодоступным к выводу.
1хслот зеркало
Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие возникают у новичков. Чтобы получить возможность вывести выгода с бездепозитного бонуса в казино, необходимо выполнить ряд критерий: <a href=http://behzistiardabil.ir/user/Edwardaveft/>http://behzistiardabil.ir/user/Edwardaveft/</a> 1×slots casino регистрация 1×slotscasin online Помните, собственно любые нарушения верховодил сведут на нет ваши старания, и вы наверняка останетесь без начисленного вам бесплатного бонуса. Всегда изучайте управляла начисления и условия вейджера. По каким вопросам, на коие вы не можете помощи отыскать ответы, обращайтесь за разъяснениям и саппорт.
1×slots сайт
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=16630>1×slots официальный сайт зеркало рабочее</a> Срок отыгрыша — это период, который наступает в момент активации приза и кончается с его закрытием. Пользователю необходимо уложиться в этот временной промежуток, другому призовые свои аннулируются. Казино устанавливают перечень игр, ставки каких засчитываются при расчете отыгранных средств. Если тайтл не заходит в данный перечень, то предоставляется быть недосегаем для загрузки во время деянья бонусного предложения.Отказ в прохождении верификации. Если заказчик не желает либо не может дать документы, подтверждающие его личность, профиль несомненно заблокирован совместно, вкупе со всеми бонусными начислениями. Бездепозитные бонусы — это презенты от казино повторяющий бонусных денег или фриспинов для игровых автоматов, коие начисляются на акк игрока после процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депо не потребуется.На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению сего медли, Вы не сможете активировать и получить бездепозитный приз. 1×slots casino зеркало рабочее <a href=http://forum.n34.pl/profile.php?mode=viewprofile&u=2042>http://forum.n34.pl/profile.php?mode=viewprofile&u=2042</a>
1×slots казино мобильная версия
Способы получения бездепа различаются от вида приза, кот-ый понравился игроку. Но вам в любом случае надо(надобно) быть зарегистрированным в легальном онлайн-казино и доказать свою личность. В общем облике пошаговая аннотация для получения бездепозитного бонуса смотрится так: Бездепозитный бонус по промо-коду несомненно доступен для игры, только том, случае когда Вы активируете специальный бонусный код в разделе с бонусами или укажите промокод при регистрации на сайте. В некоторых случаях, кроме активации кода, понадобиться доказать контактные данные игрока и наполнить анкету клиента. <a href=https://elliottgqzg08529.dailyblogzz.com/30819421/ai-nude-revolutionizing-content-moderation-and-privacy-protection>https://elliottgqzg08529.dailyblogzz.com/30819421/ai-nude-revolutionizing-content-moderation-and-privacy-protection</a> казино 1×slots официальный сайт Вейджер в переводе с английского означает «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша полученного приза, в нашем случае бездепозитного. Число ставок роли не играет — принципиально только набрать необходимую, пропорциональную сумме одобрения.Бездепозитные призы начисляются только раз раз. Не стоит открывать новые аккаунты, чтобы получить их повторно. Служба безопасности казино обязательно выявит «левого» участника и заблокирует. Если гость выполнит необходимые требования, отыграет собственную ставку и решит вывести собственный выигрыш, то ему надо(надобно) сведению, собственно казино непременно востребует предоставить ксерокопии собственных документов, чтобы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные средства исключить не получится.
<b>Смотреть еще похожие новости:</b>
<a href=http://check2go.net/author/jameslob/>1×слотс казино</a>
<a href=http://kemsrr.forumex.ru/memberlist.php?mode=viewprofile&u=375>1 x slots</a>
<a href=http://www.forum.kalor.ru/1hslots-1hslots-registraciya-pereyti-na-1×slots-t23108.html>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Можно ли зарабатывать на бездепозитных бонусах? Это не работа, тут как повезет, в в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, за можно назвать везением, и добавочной добавкой к вашему бюджету. Мы делаем акцент на ключевых положениях правил, рассказываем о территориальных ограничениях и кратко информируем о иных промоакциях обсуждаемого казино.
#1465 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
champion casino про казино <a href=https://rumafia.news/>букмекерская контора официальный сайт</a> гта казино casino зеркало сегодня <a href=https://vestnik-jurnal.com/>порно с Баталина Ольга Юрьевна</a> порно с Виктория Синицина, фигуристка casino зеркало сайта inform@rucriminal.info приложения букмекерских контор cat casino 1×bet рабочее на сегодня рокс казино
DiskiPlus casino бездепозитный DiskiPlus спорт букмекерская контора <a href=https://diskiplus.ru>DiskiPlus porno Мария Шарапова</a> DiskiPlus порно с Елена Никитина, скелетонистка DiskiPlus Юдаева Ксения Валентиновна порно <a href=https://diskiplus.ru>DiskiPlus 7k casino официальный</a> DiskiPlus букмекерская контора ставки DiskiPlus 1go casino DiskiPlus скачать сайт букмекерской конторы DiskiPlus Самойлова Алла Владимировна порно DiskiPlus Яровая Ирина Анатольевна порно DiskiPlus ставки на спорт букмекерские конторы DiskiPlus симулятор казино
#1466 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация
Как лишь вы отыграли вейджер и свои с бонусного баланса перебежали для на настоящий счет, Вы смело сможете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (устроить минимальный депо например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, вместе с депо).Так что приготовьтесь дать конфиденциальную информацию (пол, возраст, государство проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает не более суток, в чего удастся свободно выводить крупные выигрыши. <a href=http://filmkachat.ru/>1×slot рабочее зеркало</a> Бездепозитные призы прекрасный вариант даровой игры в игровые автоматы. Многие юзеры сети не понимают, собственно в казино можно начать выступать безусловно даром, а позже вывести выигрыш на банковскую карту или электронный кошелек, иные не доверяют интернет казино, а третьи успешно играют и выигрывают – и тотчас довольно немалые суммы.Чаще всего, модные сервисы, эти как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное верховодило. Финансовые свои выводятся только через ту платежную систему, которой успех для пополнения депозита. Если же игрок получил бездепозитный покерный приз, требуется восполнить счет на минимальную сумму, кот-ая сочиняет обыкновенно десять $. <a href=https://plaza.rakuten.co.jp/kalinka0588/diary/202403220000/>https://plaza.rakuten.co.jp/kalinka0588/diary/202403220000/</a> 1×slots рабочее зеркало на сегодня <a href=http://mayakminska.1stbb.ru/memberlist.php?mode=viewprofile&u=6716>http://mayakminska.1stbb.ru/memberlist.php?mode=viewprofile&u=6716</a> Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить необыкновенности, недоступные при этой в демо режиме. Многие новые клиенты перебегают в количество неизменных, а оператор получает долгосрочную выгода.Чтоб получить крупный выигрыш, избирайте игровые автоматы с предельным процентом отдачи (RTP) из списка тех, коие доступны по условиям отыгрыша.
1×slots казино мобильная версия
Как управляло, новоприбывшие игроки в первую очередь хотят ознакомиться с способами ввода и вывода валютных средств и сроки исполнения поданных заказов чтобы конкретно разуметь, как прытко у вывести свой казино приз за регистрацию без депо на электронный кошелек либо же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино соперничают между собой. Ведь случае бы определенную фирму представляло лишь одно онлайн-заведение, то навряд бы клиенты заметили казино с бонусом за регистрацию и могли бы рассчитывать только на вознаграждение в виде приза на первое вложение. К каждому заведению периодически идет привлекать новых игроков, собственно, в, только на руку всем играющим.Помните, собственно любые нарушения верховодил сведут на нет ваши усилия, и вы скорее останетесь без начисленного вам безвозмездного бонуса. Всегда изучайте правила начисления и условия вейджера. По хоть вопросам, на которые вы не можете помощи отыскать ответы, обращайтесь за разъяснениям и саппорт. 1×slots регистрация 1×slotscasino09k online Подтверждение индивидуальной инфы. Все казино требуют от посетителя пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и присутствие у пользователя иных аккаунтов (мультиаккаунт запрещен).Сразу после активации промокода можно воспользоваться даром. Как уже упоминалось, призы посещают трёх обликов – фриспины, кредиты и фриплей-бонусы. <a href=http://fh7707pk.bget.ru/index.php?subaction=userinfo&user=fastaccuser41>http://fh7707pk.bget.ru/index.php?subaction=userinfo&user=fastaccuser41</a> Реже бонусы без депозита начисляются постоянным игрокам. С их подмогою администрация постарается вычесть ценных клиентов либо вожделеет поблагодарить за преданность верных гостей. Но намного почаще для сходственных целей используются эти промоакции:Условия, на которых предоставляется бездеп, регулируются казино. Каждая акция содержит доскональные управляла, гиперссылка на которые обыкновенно находится в промообъявлении. В их указываются лимиты, вейджер, перечень доступных игр. Если оператор прячет данные о предложении, то пользоваться им надо. 1×slots сайт Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном веб-сайте и выполните вход в собственный офис, дабы забрать бесплатные вращения с вейджером х40;
1×slots мобильная версия войти казино
Чтобы других убедиться в преимуществах бездепозитных призов, достаточно зарегистрироваться в казино и получить одобрение. <a href=http://www.forderm.net/bbs/board.php?bo_table=free&wr_id=179916>http://www.forderm.net/bbs/board.php?bo_table=free&wr_id=179916</a> 1×slots casino online регистрация
1×slots зеркало регистрация в 1×slots casino
Бездеп с фриспинами имеет обхватывать всю коллекцию игр на веб-сайте либо разработки одного провайдера. Обычно предлагается определенный список автоматов. Он указывается в положениях о проведении акции. Выигрыш возможность быть выведен последствии такого, как пользователь отыграет эту сумму. Возможность расценить глубокий перечень слотов — главное достоинство этой разновидности. Игроку становятся доступны те опции, которые отсутствуют в демонстрационном режиме, а вероятность выиграть настоящие средства добавляет ясных азартных ощущений.Одним из предлогов отдавать привилегию 1 или иному заведению заключается в привлекательности предлагаемых промоакций и бесплатных предложений. Безвозмездные фриспины, выдаваемые без нужды делать какой-либо лепта, в перечне находится далековато не в конце. <a href=http://pravoslit.ru/forum/obshchee/181277–1×slots-bonus-za-registratsiyu.html>1×slots бонус за регистрацию</a> Помните, собственно всевозможные нарушения управлял сведут на нет ваши усилия, и вы наверняка останетесь без начисленного вам дарового бонуса. Всегда изучайте верховодила начисления и обстоятельства вейджера. По любым вопросам, на которые вы не других отыскать ответы, обращайтесь за разъяснениям и саппорт.Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. 1×slots казино мобильная версия <a href=https://xxh5gamebbs.uwan.com/home.php?mod=space&uid=901046>https://xxh5gamebbs.uwan.com/home.php?mod=space&uid=901046</a>
зеркло казино 1×slots
<a href=http://www.zgqsz.com/home.php?mod=space&uid=326998>http://www.zgqsz.com/home.php?mod=space&uid=326998</a> Выиграть настоящие деньги в казино не пополняя счет – сложно, хотя вероятно. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными призами и начните играть на бонусные свои. По статистике из 10-ти заведений возможно заработать небольшую сумму денег с бонусных средств.Шаг 4. Активация. Внимательно выучите условия, информацию по лимитированиям и сроке деяния бонусного предложения. Разобравшись с правилами, возможно активировать бонус в собственном офисе (от ? с внедрением промокода) или по запросу в саппорт. x1 slots 1хслотс регистрация перейти на 1×slots Также учтите, что кое-какие игровые платформы сужают список стран, коие готовы получить предложенный бездепозитный приз за регистрацию. К образцу, существуют онлайн-заведения, выдающие подобные бонусы только жителям определенных государств. К примеру, интернет казино 777 Оригинал дает бездепозитный бонус лишь игрокам из России и государств СНГ. Или наоборот, пичкают вознаграждением всех, считая обитателей неких государств (следует этого, стопам внимательно учить перечень, дабы впоследствии не появилось никаких вопросов и жалоб).
<b>Смотреть еще похожие новости:</b>
<a href=http://csuchen.de/bbs/space.php?uid=1144375>зеркло казино 1×slots</a>
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=51427>1 x slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выбор любого онлайн казино на нашем веб-сайте. В описании к каждому Вы сможете узнать, что получите за создание аккаунта. Бездепы с безвозмездными вращениями деют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд выплачивает казино. Число спинов ограничено и изредка превышает сотку. Если акция содержит количество даровых игр, их начисление возможность быть разбито на некоторое дней.
#1467 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
vodka casino порно с Баталина Ольга Юрьевна <a href=https://rhymes-punches.com/>букмекерская контора вход</a> Манилова Алла Юрьевна порно 7k casino зеркало на сегодня <a href=https://specreporter.com/>рабочее казино</a> порно с Бондаренко Анастасия Борисовна букмекерские конторы pin top casino порно с Матвей Сафонов (футбол) 1×bet зеркало рабочее на сегодня Любимова Ольга Борисовна порно 1×bet зеркало слоты 1×bet xyz
DiskiPlus 1×bet приложение DiskiPlus гта казино <a href=https://www.diskiplus.ru/>DiskiPlus лучшие букмекерские конторы</a> DiskiPlus gama casino DiskiPlus букмекерская контора фонбет <a href=https://www.diskiplus.ru/>DiskiPlus Радченко Светлана Юрьевна порно</a> DiskiPlus porno Илья Ковальчук (хоккей) DiskiPlus bet casino DiskiPlus казино онлайн DiskiPlus 1win букмекерская контора DiskiPlus 1×bet сейчас DiskiPlus 1×bet зеркало xbet xyz DiskiPlus online casino официальный
#1468 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия
Автоматическая активация кажется самой комфортной, но ручной способ содержит перед ней достоинства. Прежде чем использовать вознаграждение от казино, стоит заблаговременно найти, сколько медли требуется на выполнение всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала действия приза. <a href=http://filmkachat.ru/>1×slot регистрация</a> <a href=https://www.bunity.com/shopavto>https://www.bunity.com/shopavto</a> зеркло казино 1×slots <a href=https://svitlodar.org.ua/user/WalterSkist/>https://svitlodar.org.ua/user/WalterSkist/</a> За вербование приятеля ? масштабах партнерской программы заказчик получает вознаграждение за привлечение новых пользователей.Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке адепты онлайн-казино публикуют важную информацию о not the slightest down payment bonuses и других услугах.
1×slos регистрация в 1×slots casino
1×slots зеркало которую указывали при регистрации кстати В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, нужно адресоваться в службу через лайв-чат на веб-сайте казино.Не хотите поиграть в азартные забавы, не рискуя средствами средствами, но получая в все выплаты? Подобную вероятность предоставляют почти наилучшие порталы с азартными весельями. В их количестве количество честных и надежных интернет-казино на русском языке. Они завлекают свежих юзеров разными поощрительными мероприятиями, включая бездепозитные, или бесплатные призы. <a href=http://vitones.com/bitrix/redirect.php?goto=http://browart.ru/bitrix/redirect.php?goto=http://bizsolutions.ru/bitrix/redirect.php?goto=https://telegra.ph/Poluchenie-zakaznogo-pisma-ot-imeni-rodstvennika-09–23>http://vitones.com/bitrix/redirect.php?goto=http://browart.ru/bitrix/redirect.php?goto=http://bizsolutions.ru/bitrix/redirect.php?goto=https://telegra.ph/Poluchenie-zakaznogo-pisma-ot-imeni-rodstvennika-09–23</a> 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Лишь пользующиеся и знаменитые азартные заведения все позволить себе выдавать бездепы в виде дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, которые возможно истратить в лучших аппаратах с высокой отдачей.
1×slot зеркало рабочее этих способов предполагает регистрацию
В интернет-сети постоянно возможно найти списки более популярных и гарантированных поощрительных программ от знаменитых онлайн-казино. Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала резвые выводы. Фишка выплат никаких, что достаточно избрать платёжный инструмент и указать сумму. В большинстве случаев средства зачисляются на электронные кошельки на 15 минут, а на банковские карты – 1–3 рабочих дня.Это тоже благотворительные финансы, которые поступают на аккаунты новоиспеченных в после регистрирования. А особенность этих призов произведено сомнений, что обретенные деньги непременно следует использовать в продолжении назначенного медли. <a href=https://google.dz/url?q=https://doctorlazuta.by/>https://google.dz/url?q=https://doctorlazuta.by/</a> казино 1×slots
1×слот регистрация в 1×slots casino
Когда речь о валютных призах, казино постоянно устанавливают условия вейджера, коие необходимо выполнить, дабы вывести выигрыш.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. <a href=https://mit-bbs.com/viewtopic.php?t=719191>casino 1×slot</a> Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, чтобы замечена вероятность вывести выигрыш.Принципиальным отличием бесплатных призов от призов на депозит считается неименье надобности заносить средства на аккаунт. Из-за этого их часто называют бездепозитными (not the slightest down payment bonuses). 1×slot казино зеркало <a href=https://unitywizards.uk/member.php?action=profile&uid=70686>https://unitywizards.uk/member.php?action=profile&uid=70686</a>
1×slots регистрация
Иногда в бездепа, казино дарует минимальный приз (до 50 рублей), ради которого не заморачиваться. <a href=https://damienirai29630.blue-blogs.com/37071026/nude-ai-app-transforming-image-moderation-and-privacy-in-the-digital-age>https://damienirai29630.blue-blogs.com/37071026/nude-ai-app-transforming-image-moderation-and-privacy-in-the-digital-age</a> В наше время очень просто получить приз за регистрацию в казино. Практически каждый игорный жилище с готовностью начислит деньги либо благотворительные вращения. Многие гэмблеры используют этим и не стесняются регистрироваться в каждом клубе с прибыльными критериями. Кстати, это отличная вероятность выработать победную тактику и сорвать джекпот.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. 1×slots скачать на айфон
<b>Смотреть еще похожие новости:</b>
<a href=http://fin-molitor.com/forum/viewtopic.php?f=2&t=540478>1×slots зеркало видели такую регистрацию на</a>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=100032&pid=378464#post_378464>1×slots официальный сайт скачать</a>
<a href=https://bbs.sinbadgroup.org/index.php?xjkh-tampa-s-poster-pup-for-new-cancer-treatment.t48661.html/page-6730#post-289063>1×slots скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный бонус за регистрацию в казино — это стартовый подарок в виде валютного начисления либо бесплатных вращений для свежих игроков заведения, для получения которого не вносить депо.
#1469 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Каролина Севастьянова Окладникова Ирина Андреевна порно <a href=https://kompromat1.online/>porno Дарья Мороз</a> скачать pin casino casino buzz <a href=https://rhymes-punches.com/>бк букмекерская контора</a> официальное казино вход 7k casino скачать 1×bet скачать приложение Ходнева Светлана Владимировна порно официальные сайты казино вывод казино порно с Александр Большунов (лыжные гонки)
DiskiPlus casino вход DiskiPlus 1×bet зеркало слоты <a href=https://www.diskiplus.ru/>DiskiPlus пин ап casino pin</a> DiskiPlus винлайн букмекерская контора официальный DiskiPlus 1×bet официальный сайт 1×bet xyz <a href=https://diskiplus.ru>DiskiPlus Радченко Светлана Юрьевна порно</a> DiskiPlus porno Дарья Клишина DiskiPlus казино вулкан DiskiPlus пин ап букмекерская контора DiskiPlus играющие казино DiskiPlus Светлана Ходченкова DiskiPlus порно с Георгий Джикия (футбол) DiskiPlus реального казино
#1470 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
про казино pin up casino официальный <a href=https://rumafia.news/>рейтинг казино</a> casino официальный сайт Матвиенко Валентина Ивановна порно <a href=https://kompromat1.online/>реального казино</a> Попова Анна Юрьевна порно 1×bet зеркало рабочее xbet 1×bet официальный слоты Ирина Горбачева casino играть казино фильм porno Дарья Мороз
DiskiPlus 1×bet официальный xbet DiskiPlus балтбет букмекерская контора <a href=https://www.diskiplus.ru/>DiskiPlus pin casino зеркало</a> DiskiPlus casino бонус DiskiPlus порно с Анастасия Потапова, теннисистка <a href=https://www.diskiplus.ru/>DiskiPlus часы казино</a> DiskiPlus порно с Александр Головин (футбол) DiskiPlus 1×bet официальный скачать DiskiPlus casino зеркало сайта DiskiPlus лучшая казино DiskiPlus 1×bet xbet DiskiPlus kometa casino DiskiPlus казино сегодня
#1471 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия
Нет. Для получения бездепозитного бонуса в казино нужна обязательная регистрация на сайте. Играть в слоты бесплатно и без регистрации можно только в демо режиме. <a href=http://filmkachat.ru/>1×slots бонус за регистрацию</a> На нашем веб-сайте Вы найдете перечень актуальных свежих бездепозитных бонусов в казино 2022 года. Также, есть большое неповторимых услуг, коие доступны лишь посетителям нашего вебсайта в регистрации по нашей ссылке либо активации особого промокода.Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. <a href=https://companylistingnyc.com/listings/kompleksowy-skup-aut-wroclaw-od-wyceny-do-sprzedazy/>https://companylistingnyc.com/listings/kompleksowy-skup-aut-wroclaw-od-wyceny-do-sprzedazy/</a> 1×slot официальный сайт <a href=http://japanese-cars.ru/profile.php?u=crookedmosaic93>http://japanese-cars.ru/profile.php?u=crookedmosaic93</a> Некоторые сайты, до чем обмануть регистрацию игроков, предлагают ответить на некоторое базисных вопросов. Цель проведения сходственной викторины – выявить случайных людей, коие не имеют представления о покере, и не допустить получения ими призов. Если посетитель уже играл в казино, то ответить на полтора 10 несложных вопросов будет нетрудно. Очень часто, ответы возможно найти на официальных веб-сайтах данных учреждений.
1×slots casino зеркало рабочее
1×slots сайт зеркало На бонусные начисления могут быть установлены вспомогательные лимитирования, которые Вы не сведению при отыгрыше. Пока бонус полностью не отыгран — деньги из казино не выводятся.Казино выделяет возможность заработать и вывести реальные деньги на бездепозитных бонусах. Обычно, это малозначительная сумма, которую казино может для позволить презентовать игроку. <a href=https://progromatic.online/forum/member.php?action=profile&uid=888>https://progromatic.online/forum/member.php?action=profile&uid=888</a> На бонусные начисления все быть установлены дополнительные ограничения, которые Вы не сведению при отыгрыше. Пока бонус полностью не отыгран — деньги из казино не выводятся.Начнём с того, собственно каждое рекламную за регистрацию предполагает некие обстоятельства. Бездепозитные призы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность денежного оборота, необходимая для исполненья условий. Пример, возымели благотворительные вращения и выиграли с них 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 рублей, проигрышных либо выигрышных, важно. После исполненья, бонусный баланс перейдёт на реальный и станет доступным к выводу. 1×slots зеркало регистрацию более популярный вариант это Иногда у посетителей вебсайта могут появиться проблемы при активации полученного промо-кода. В этих случаях, необходимо адресоваться за подмогою в службу поддержки «Support». Для получения ответа, непременно указывается конкретная причина воззвания и подтверждается информация дополнительными скриншотами. Если сформировалась спорная обстановка, практически можно обратиться к главному регулятору или контролирующему органу, выдавшему данному заведению лицензионный документ.
казино 1× slots официальный сайт
<a href=https://rentry.co/yc875×nt>https://rentry.co/yc875×nt</a> 1 x slots casino Акции, посвященные календарным дням, бывают рассчитаны как на всех пользователей, так и на категории: примеру, презент на 8 марта девушкам-игрокам или мужчинам на 23 февраля.
1хслотс рабочее зеркало
Фриспины без депо либо дополнительные свои посодействуют поближе познакомиться с игровой платформой и её функциями. За счёт подарков можно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за забавы напротив живых крупье. Если вы новичок деле и лишь попали в неизведанную вами область азарта — счет услуг как бездепозитные призы без пополнения.Подтвердите лицо, предоставив оператору казино средства паспортные данные. Инструкции обычно несложные, главное — четко им идти. Если написано, собственно «на фото обязаны быть заметны все четыре угла страницы паспорта» — устройте непосредственно это фото. 1хслот зеркало <a href=http://thrope.co.kr/bbs/board.php?bo_table=free&wr_id=3019>http://thrope.co.kr/bbs/board.php?bo_table=free&wr_id=3019</a> Если при регистрации указать промокод, возможно гарантировано получить бонус. Где взять ваучер? Посетите тематические блоги или форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В заключительнее время игорные жилища начали рекламироваться в фильмах и сериалах. Присмотритесь и всего заметите промокод, кот-ый принесёт 500 или 1 000 бонусных руб.
1×slots зеркало рабочее
Помимо прочего, для вывода средств по бездепу нужно внести на счёт свой первый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально вероятную необходимую, последствии чего вывод средств станет доступен.Осталось выбрать казино с призом за регистрацию и сделать профиль. После активации дара выигрыш находится от Фортуны и способностей. <a href=http://aluxwheel.com/bbs/board.php?bo_table=free&wr_id=168280>http://aluxwheel.com/bbs/board.php?bo_table=free&wr_id=168280</a> 1×slots casino регистрация на сайте Если простыми словами, бездепы – это определённая сумма денег или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать подарки. Но есть некоторые аспекты. Существуют игорные дома, коие перед что, этим как начислить призы требуют привязать аппарат, дать копии документов.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.ihavethepussy.com/de/members/36184-Michaelbar?s=75836b44b9b98e1bc1ea110ecb4eec00>1×slots регистрация на сайте 1×slots ru com</a>
<a href=https://eccentrictirade.com/forums/showthread.php?tid=136174>зеркло казино 1×slots</a>
<a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=17169>1×slots официальный зеркало</a>
<a href=http://griffhunter.com/boards/viewtopic.php?p=1055901#p1055901>1×slots рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих требований, кроме обязательной верификации. Если на веб-сайте предусмотрена обязательная процедура подтверждения личности, то вывести выигрыш удастся лишь в проверки данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий лицо.
#1472 internetvolgogradGephttps://domashij-internet-volgograd003.ru
домашний интернет в волгограде <a href=https://domashij-internet-volgograd003.ru>domashij-internet-volgograd003.ru</a> провайдеры интернета омск
#1473 Cazrxtshttp://[url=http://ic-info.ru/forum/user/183049/]ic-info.ru/forum/user/183049[/url]
Заказать диплом ВУЗа по выгодной стоимости вы можете, обратившись к проверенной специализированной компании. Мы можем предложить документы ВУЗов на Ваш выбор, которые находятся в любом регионе Российской Федерации. <a href=http://ic-info.ru/forum/user/183049/>ic-info.ru/forum/user/183049</a>
#1474 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet скачать приложение на андроид porno Светлана Ходченкова <a href=https://repost.news/>1×bet casino</a> porno Андрей Рублев (теннис) Мухтиярова Елена Вячеславовна порно <a href=https://rumafia.news/>win win casino</a> ешь казино up букмекерская контора Хорова Наталья Александровна порно pin up букмекерская контора как выиграть в казино порно с Антропова Валентина Викторовна пина букмекерской конторы
DiskiPlus какие казино DiskiPlus часы казино <a href=https://diskiplus.ru>DiskiPlus казино большая</a> DiskiPlus Семёнова Татьяна Владимировна порно DiskiPlus самое казино <a href=https://www.diskiplus.ru/>DiskiPlus online casino</a> DiskiPlus скачать 1×bet на андроид DiskiPlus казино вулкан DiskiPlus порно с Петр Ян (ММА) DiskiPlus где казино DiskiPlus мобильные букмекерские конторы DiskiPlus Нургалиева Эльвира Рамиловна порно DiskiPlus Любимова Ольга Борисовна порно
#1475 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×slots casino 1×bet зеркало xbet xyz <a href=https://rumafia.news/>Разуваева Ксения Денисовна порно</a> скачать 1×bet 1×bet xyz казино в россии <a href=https://rucriminal.info/>7k casino зеркало</a> почему в казино нет часов porno Мира Андреева (теннис) pin casino Ходнева Светлана Владимировна порно casino pin up casino buzz почему казино
DiskiPlus слот casino DiskiPlus casino зеркало сайта <a href=https://diskiplus.ru>DiskiPlus букмекерская контора бесплатно скачать</a> DiskiPlus black russia казино DiskiPlus ставки на спорт букмекерские конторы <a href=https://diskiplus.ru>DiskiPlus порно с Юлия Ефимова</a> DiskiPlus бесплатно фильм казино DiskiPlus порно с Виктория Синицина, фигуристка DiskiPlus 1×bet приложение DiskiPlus часы казино DiskiPlus пинко casino DiskiPlus бывшие казино DiskiPlus Черкесова Бэлла Мухарбиевна порно
#1476 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet слоты porno Илона Маркова, хоккеистка <a href=https://rumafia.news/>порно с Федор Чалов (футбол)</a> porno Илья Ковальчук (хоккей) порно с Петр Ян (ММА) <a href=https://slon-ru.com/>pin casino зеркало</a> порно с Юлия Ефимова, пловчиха скачать 1×bet на андроид порно с Диана Шнайдер (теннис) бесплатно играем казино как выиграть в казино букмекерские конторы без депозита порно с Илья Осипов (киберспорт)
DiskiPlus порно с Зырянова Анастасия Владимировна DiskiPlus 1×bet слоты официальный сайт <a href=https://diskiplus.ru>DiskiPlus ап казино</a> DiskiPlus лучшие бесплатные онлайн казино DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz <a href=https://diskiplus.ru>DiskiPlus casino зеркало сайта</a> DiskiPlus bitz casino DiskiPlus порно с Алина Загитова DiskiPlus Александра Бортич DiskiPlus 1win casino DiskiPlus сайт pin up casino DiskiPlus casino pin официальный DiskiPlus порно с Карен Хачанов (теннис)
#1477 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino вход 1×bet официальный сайт 1×bet xyz <a href=https://glvk.guru/>порно с Максим Глушенков (футбол)</a> где казино яндекс казино <a href=https://th-royalgclub.com/>1×bet 1</a> приложения букмекерских контор казино вход pin ап casino Москалькова Татьяна Николаевна порно порно с Петр Ян (ММА) официальное казино вход пин up casino
DiskiPlus бесплатно играем казино DiskiPlus Фастова Елена Владимировна порно <a href=https://diskiplus.ru/>DiskiPlus 1×bet вход</a> DiskiPlus casino скачать приложение DiskiPlus букмекерская контора официальный сайт <a href=https://www.diskiplus.ru/>DiskiPlus pin ап casino</a> DiskiPlus букмекерские конторы бет DiskiPlus 1win casino DiskiPlus букмекерская контора зенит DiskiPlus винлайн букмекерская контора DiskiPlus 1×bet на андроид бесплатно DiskiPlus порно с Аделия Петросян (фигурное катание) DiskiPlus скачать 1×bet 1×bet xyz
#1478 Charlesgunnyhttp://filmkachat.ru
онлайн казино 1×slots
Вывод выигрыша с бездепозитных призов казино – великодушный подарок от азартных клубов. Но дабы вывести свой доход, нужно выполнить ряд условий: <a href=http://filmkachat.ru/>1×slot зеркало рабочее этих способов предполагает регистрацию</a> Бездепы с безвозмездными вращениями предоставляют пользователям право вертеть барабаны игровых автоматов без снятия средств со счета. За каждый раунд выплачивает казино. Число спинов ограничено и редко выше сотку. Если акция содержит много безвозмездных игр, их начисление может быть разбито на некоторое дней. <a href=https://techbehemoths.com/company/cgifurniture>https://techbehemoths.com/company/cgifurniture</a> Выигрыши с бонусов без инвестициям практически привязаны к притязанию по ставкам и могут быть обналичены только после исполненья этих притязаний.Максимальный объем ставки, кот-ый невозможно превосходить же приз не несомненно полностью отыгран. В случае нарушения сего правила, приз и выигрыш с него будут аннулированы. 1×slots casino регистрация 1×slotscasin online <a href=https://www.honkaistarrail.wiki/index.php?title=User:BrianneArredondo>https://www.honkaistarrail.wiki/index.php?title=User:BrianneArredondo</a> А ознакомиться с свежими интернет казино, Вы сможете за счет призов с выводом выгоды, коие Вы можете получить без депозита.Используйте наилучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, дабы заработать презенты за простые деяния теперь сейчас получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и резвыми выводами на электронные кошельки.
1 x slots
Для получения депозитного приза нужно пополнить свой игровой баланс настоящими деньгами. Вознаграждение возможно получить или при внесении первого депо, или вид фиксированного процента от внесённых средств. Так или иначе, бонус поступит на счёт лишь последствии пополнения. 1×slot рабочее зеркало <a href=https://www.spacepub.net/members/5151-FrankPhags?s=0b983e0bc582ff939142027826ec3dbb>https://www.spacepub.net/members/5151-FrankPhags?s=0b983e0bc582ff939142027826ec3dbb</a> 1×slots зеркало регистрация в 1×slots casino
1хслотс казино зеркало
Бoльшинcтвo азартных заведений выдвигают приблизительно одинаковые обстоятельства и требования, которые нужно выполнить, дабы получить бездепозитный приз за регистрацию. Все их возможно соединить в раз список:Не стоит незамедлительно же отрицаться от приветственных подарков в похожих казино. Администрация готова начислить деньги либо фриспины, хотя предварительно работники обязаны увериться, собственно вы не аферист. Дело никаких, что развелось очень большое охотников за призами. Они выучились дурачить систему и зарабатывать солидные суммы денег. <a href=https://lavr-sovet.ru/user/Travisgof/>https://lavr-sovet.ru/user/Travisgof/</a> Бездеп с фриспинами возможность обхватывать всю коллекцию игр на веб-сайте или разработки одного провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш имеет быть выведен в как, как юзер отыграет данную сумму. Возможность расценить полный функционал слотов — основное совершенство этой разновидности. Игроку становятся доступны те функции, которые отсутствуют в демонстрационном режиме, а вероятность выиграть реальные деньги прибавляет ярких азартных ощущений. 1×slots casino регистрация 1×slots review live Получать информацию о самых выгодных призах можно без постоянного мониторинга новостей казино. Мы брали эту задачу на себя и постоянно следим за услугами операторов, избирая наихорошие из их. В этом разделе собраны последние бездепы, промокоды к ним и условия их активации. Список промоакций периодически пополняется. В топ вошли самые новые бездепозитные бонусы за регистрацию в казино 2020, временные и закрытые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и другим критериям. Если срок действия промоакции истек, она удаляется из списка.Фриспины — бесплатные вращения, которые позволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины считаются самым известным и предпочтительным обликом приза — безвозмездные вращения иногда эффективнее и веселее в отыгрыше, чем остальные виды бездепов.
1×slots сайт зеркало
После потребуется привнести идентификационный платёж. Это пугает начинающих больше всего. Нужно сделать минимальный депо в 100–500 руб. Таким образом служба безопасности убедиться никаких, что платёжный способ принадлежит Вам. Данная процедура важна для обеспечивания защищенности игровых счетов. Пример, Ваш акк взломают и выведут свои на собственный кошелёк. Будет крайне досадно. Поэтому верификация платёжной системы, это важный момент.Бездепозитные призы, как теснее понятно, являются оригинальной вероятностью к игровому процессу полностью бесплатно, то есть играть в онлайн казино даром и на место средства сразу после регистрации аккаунта. Автоматы с этим депо могут замерзнуть великолепной возможностью сыграть для поклонников азарта с определенными лимитированиями в финансах. Максимальная ставка ? устанавливается в денежной счета и ограничивает размер ставки за один спин. В случае ее превышения бонус возможность быть аннулирован. Также в правилах имеет содержаться запрет на размещение ставок определенного вида, к, по одинаковым шансам в рулетке (то есть, на чет либо нечет, красноватое либо черное и т.д. ).Размер приза. В качестве бездепов обыкновенно начисляют большие суммы, а когда идет о бонусах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино все подарить игроку до 2000$. 1хслотс казино зеркало <a href=http://seneka-vl.ru/index.php?subaction=userinfo&user=yummyoutdoors73>http://seneka-vl.ru/index.php?subaction=userinfo&user=yummyoutdoors73</a> Получить Бездепозитный бонус в интернет казино дело 2-ух кликов. Другой момент, отыграть промо и соблюсти правила и обстоятельства отыгрыша. Под правилами предполагается не только вагер, но и лимитирования по наибольшей ставке. Мы разумеем, что в кинотеатр все ставят на зеро и выигрывают. Призываем не создавать подобного. Перед активацией бонуса прочтите правила. Узнайте последующие факторы: Условия получения презента, за регистрацию, за депозит и многое. Ограничения по максимальной ставке. Зачастую не выше 350 руб. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вращать автоматы, а вагер будет стоять на пространстве. Поэтому важно аристократия, в каких забавах возможно совершать кратность денежного оборота.
1×slots сайт зеркало
Онлайн-казино с бездепозитными бонусами ставят клиентам обстоятельства для пользования бездепами, потому перед ролью в акции другого, как подробно ознакомиться со всеми правилами и нюансами акции. Условия все касаться получения приза, его использования и следующего вывода денежных средств в случае выигрыша.Заполняя данные в собственном профиле, указывайте только достоверную информацию, например как Вам придется ее доказать в будущем при выводе денег. <a href=http://www.concerthouse.co.kr/bbs/board.php?bo_table=free&wr_id=739258>http://www.concerthouse.co.kr/bbs/board.php?bo_table=free&wr_id=739258</a> 1×slots зеркало выигрыши обязательно пройдите регистрацию если
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.konyacraft.com/members/rabofreeel.13265/>1хслотс рабочее зеркало</a>
<a href=http://link.5nx.ru/viewtopic.php?f=5&t=12638>1хслотс официальный сайт зеркало</a>
<a href=https://www.addonface.com/welcome>1×slots casino online регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Принципиальным отличием безвозмездных бонусов от призов на депо является отсутствие необходимости заносить деньги на аккаунт. Из-за этого их нередко нарекают бездепозитными (no down payment bonuses). Нет. Казино выдают бесплатные призы за регистрацию, чтобы, чтобы, чтобы заказчик имел ознакомиться с игровым заведением. А дабы исключить его, необходимо выполнить обстоятельства отыгрыша.
#1479 Charlesgunnyhttp://filmkachat.ru
1хлот регистрация в 1×slots casino
Также бездепозитные призы могут работать способом вернуть к игре посетителей, пока приостановивших своё сотрудничество с компанией: уведомление о бездепе поступает на мобильный аппарат или почту.Предложения с бездепозитными призами за регистрацию дозволяют свежим заведениям привлечь аудиторию на собственный вебсайт. А игроки к получают возможность выступать на настоящие деньги без депо в казино и заработать маленький стартовый капитал, кот-ый разрешается исключить на карту банка или электрический кошелек. <a href=http://filmkachat.ru/>1×slots зеркало которую указывали при регистрации кстати</a> Существует ли стратегии для отыгрыша бездепозитных бонусов? К раскаянию нет, на выигрыши либо проигрыши с призов, казино или игрок повлиять возможности, отдача игр происходит от разработчиков игр. <a href=https://writeablog.net/p2t24forxp>https://writeablog.net/p2t24forxp</a> Как лишь получите бездеп в казино, всё точно не запамятовывайте проверять электрическую почту. Некоторые игорные клубы непрерывно радуют активных гэмблеров приятными бонусами. Чаще всего получить подарок можно в преддверии праздника, на денек рождение, за вербование приятеля. А того распространённым призом является надбавка к депозиту. Нужно более пополнить счёт, и азартное заведение прирастит его на 50–100%.Но рядах азартных платформах подобные вознаграждения могут получить теперь зарегистрированные юзеры. В этом случае, бонусы предоставляются масштабах уникальных промоакций или же некоторым игрокам вид акционного предложения, которое приходит на почту с целью «возвратить» игрока в свое казино. 1×slots актуальное зеркало <a href=http://xn----ptbagsgdho0d.xn–p1ai/index.php?subaction=userinfo&user=symptomaticfire>http://xn----ptbagsgdho0d.xn–p1ai/index.php?subaction=userinfo&user=symptomaticfire</a> Иногда для получения бонусов необходимо спутаться с представителями службы. Удобнее всего с ними беседовать в онлайн-сате, хотя времени достаточно запроса по электрической почте.
1×slots официальный сайт мобильная версия
Но есть игорные заведения, которые готовы просто например жертвовать средства на забаву. Для этого достаточно сделать профиль. Чтобы исключить собственный выигрыш, для поначалу нужно выполнить обстоятельства отыгрыша, указанные в условиях получения бездепозитного депозита. онлайн казино 1×slots Чем ниже значение вейджера, тем легче отыграть и вывести приз. Если Вы расчитываете заработать на бездепе, а не просто ознакомиться с свежим игровым клубом, то стоит игнорировать бонусов с высоким вейджером их почти не реально отыграть. С ними Вы можете только протестировать игры заведения. <a href=http://o91202nk.beget.tech/profile.php?u=decisiveloser16>http://o91202nk.beget.tech/profile.php?u=decisiveloser16</a> 1×slots зеркало регистрация Представьте момент, когда при ставке в 10 рублей Вы получите сходственное умножение. Миллион руб. За одно вращение, собственно вполне возможно. Поэтому вопрос, сколько можно выиграть остаётся открытым. Предлагаем проверить помощи. Регистрируйтесь в одном или нескольких онлайн казино, получайте Бездепозитный приз и проверяйте удачу в деле. Разумеется, вывести средства не так просто. Однако шансы есть у всех.Некоторые казино шансы предлагать посетителям бездепы за свидетельство номера либо почты либо репост на страничку в социальных сетях.
1×slots официальный сайт зеркало
Индивидуальные поощрения выдаются за совершение действий: подписку на аккаунты площадки в соц сетях, установку мобильного приложения или официального посетителя для ПК. В большинстве казино срабатывают программы преданности, присваивающие игрокам статусы за активность на сайте. Продвижение на грядущий уровень нередко сопровождается выдачей бездепа. <a href=https://de.wikisexguide.com/wiki/Diskussion:Petain_road>https://de.wikisexguide.com/wiki/Diskussion:Petain_road</a> 1×slot регистрация В неких онлайн казино для получения бездепозитных призов не довольно просто зарегистрироваться на веб-сайте клуба и подтвердить свои контактные данные. Дополнительно требуется активация промокода.Заработать на бездепозитных призах за регистрацию в казино может каждый юзер, достигший совершеннолетия.
1×slots зеркало быструю регистрацию а также мгновенное
Подтвердите регистрацию, чтобы активировать Бездепозитный приз с выводом, требуется заполнить индивидуальный профиль. Заполните пустующие поля истинными данными о для.Oтыгpaть приз с обозначенным вeйджepом, для этого необходимо сдeлaть cтaвoк нa cумму, превышающую размер приза в несколько один. При регистрации в том либо ином онлайн игральном заведении — для дается раз шанс испытать свою удачу не внося свои монеты. Замечу что такую поощрительную услугу предоставляют не все онлайн игровые площадки, а лишь щедрая середина(средина) из их. Которые мы подготовили для Вас в нашем перечне.А ознакомиться с свежими интернет казино, Вы можете помощью бонусов с выводом выгоды, коие Вы сможете получить без депозита. 1х слот 1хслотс регистрация перейти на 1×slots <a href=http://forums.ggcorp.me/space-uid-3862636.html>http://forums.ggcorp.me/space-uid-3862636.html</a> Маркетинговая деятеля всех игорных интернет-клубов обязана одевать разнообразный характер. И если гонорары на депозит служат для того, чтобы провоцировать вносить депозиты и поощрять теснее место юзеров, то бездепозитный приз в казино либо приз за регистрацию в казино, прежде всего, рассчитан на расширение базы потребителей.
1× slots официальный
Также учтите, что кое-какие игровые платформы сузивают перечень стран, коие способны получить предложенный бездепозитный приз за регистрацию. К примеру, есть онлайн-заведения, выдающие подобные бонусы лишь жильцам конкретных стран. К примеру, онлайн казино 777 Оригинал дает бездепозитный приз лишь игрокам из России и стран СНГ. Или напротив, пичкают вознаграждением всех, считая обитателей некоторых стран (исходя из этого, по внимательно учить перечень, чтобы впоследствии не возникло никаких вопросов и жалоб). Бонус начисляется игроку незамедлительно после регистрации и прохождения верификации в казино и не просит от посетителя внесения депо. Как правило, размер бонуса в подобном случае довольно застенчивый, однако дозволяет новеньким познакомиться с забавой без риска реальными деньгами.Промообъявления от казино мешают реальной картины и направлены на вербование внимания юзеров. Понять, насколько высоки шансы остаться в плюсе, позволит собственный анализ условий предложения: <a href=https://stroyotzyvy.org/user/Porsedropki/>https://stroyotzyvy.org/user/Porsedropki/</a> 1×slots casino регистрация 1×slotscasino09k online Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?
<b>Смотреть еще похожие новости:</b>
<a href=http://swissairways-va.com/phpBB3/viewtopic.php?t=795046>1×slots регистрация 1×slots casino 777 online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Обычно показатель повыше, чем для бонусов на депо. Не изумляйтесь, случае он несомненно даже х100. Иногда завышенный коэффициент вейджера уточняется для обитателей отдельных государств.
#1480 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Андрей Рублев (теннис) почему казино <a href=https://7club7.com/>казино вход</a> официальные букмекерские конторы kometa casino <a href=https://www.ossetia.tv/>порно с Анна Щербакова, фигуристка</a> казино играть Мухтиярова Елена Вячеславовна порно порно с Бондаренко Анастасия Борисовна лучшие казино бесплатно игры казино 1×bet официальный скачать песня казино
DiskiPlus win win casino DiskiPlus пинап казино <a href=https://www.diskiplus.ru>DiskiPlus casino зеркало сайта</a> DiskiPlus казино фильм смотреть онлайн DiskiPlus porno Александр Соболев (футбол) <a href=https://www.diskiplus.ru/>DiskiPlus Анна Михалкова</a> DiskiPlus казино ли DiskiPlus kometa casino DiskiPlus ограбление казино DiskiPlus рабочее казино DiskiPlus букмекерская контора зенит DiskiPlus 1×bet слоты 1×bet top DiskiPlus Фастова Елена Владимировна порно
#1481 Charlesgunnyhttp://filmkachat.ru
казино 1× slots официальный сайт
Верификация важна для добавочной защищенности и подсобляет техподдержке выявить бонусхантеров и плутов. Кстати, на платформах выводы крупных сумм доступны лишь последствии подтверждения личности.Для получения бонуса нужно пригласить в забаву нового клиента. Казино начисляет пригласившему фиксированный процент от взносов приглашённого в виде бонуса: почаще всего его объем не превышает 10%. Срок деяния бонуса как не превышает месяца: пригласивший получает бонус от проигранных ставок приглашённого в первый луна забавы. <a href=http://filmkachat.ru/>1×slots casino online регистрация</a> Максимальная ставка ? уточняется в денежной счета и ограничивает размер ставки за один спин. В случае ее превышения бонус имеет быть аннулирован. Также в правилах может находиться запрет на размещение ставок конкретного вида, к, по равным шансам в рулетке (другими, на чет или нечет, красноватое или черное и т.д. ). <a href=https://joy.link/kalinka0588>https://joy.link/kalinka0588</a> 1хслот официальный сайт зеркало <a href=https://www.onfeetnation.com/profiles/blogs/6595159:BlogPost:34154114>https://www.onfeetnation.com/profiles/blogs/6595159:BlogPost:34154114</a>
1× slots регистрация в 1×slots casino
Бесплатный приз – кредиты, коие онлайн-казино начислит посетителю, не заставляя его пополнять игровой счет.Подтвердите личность, предоставив оператору казино свои паспортные данные. Инструкции обыкновенно легкие, главное — конкретно им стопам. Если написано, собственно «на фото должны быть видны все хорошо угла странички паспорта» — устройте непосредственно это фото. <a href=https://rolivka.online/forum/showthread.php?tid=45011>сайт 1× slots casino</a> 1× slots casino официальный сайт Фриспины предназначены для применения в видео слотах. Внимательно ознакомьтесь с условиями – часто их выдают на некоторые автоматы. В зависимости от клуба, у вас выйдет устроить определённое число ставок. Кстати, продвинутые игорные жилища позволяют запускать каждых «одноруких злодеев».Возможность поиграть дополнительное состязание (а времени и количество) абсолютно даром, а выигрыш, в свою очередь, поступает на счёт игрока. <a href=http://stopviolenta.md/index.php?subaction=userinfo&user=tranquilyouth95>http://stopviolenta.md/index.php?subaction=userinfo&user=tranquilyouth95</a> Каждый игрок обязан сначала детально выучить обстоятельства по получению и отыгрышу понравившегося презента. Если всё организует, поспешите забрать благотворительные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик момент начать вертеть барабаны лучших слотов. 1×slots зеркало 1хслотс регистрация перейти на 1×slots Прямо момент заберите бесплатные вращения за регистрацию без депо и начинайте коллекционировать призовые композиции из-за крупных выигрышей!Бывают ли бездепозитные призы без вейджера? Бывают, случае у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино.
1 xslots рабочее зеркало
Вы не в коем случае ни не рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный бонус, по мимо практической игры на бездепозитные призы, у Вас есть шанс выучить игровые автоматы, выучится регулировать менять ставки и полосы, исследовать бонусные игры и их выигрышные композиции, ну в конце концов просто зарядится кучей впечатлений! Ведь вы будите выступать на бонусные средства, коие возможно отыграть и исключить, не просто на демо счет, что, этим самым адреналин в крови еще повысится а пульс забьется с нередким ритмом! Также учтите, что некоторые игровые платформы сузивают перечень стран, коие способны получить предложенный бездепозитный бонус за регистрацию. К образцу, есть онлайн-заведения, выдающие сходственные призы лишь жильцам конкретных государств. К образцу, онлайн казино 777 Оригинал предоставляет бездепозитный приз только игрокам из России и стран СНГ. Или напротив, снабжают вознаграждением всех, кроме обитателей неких стран (следует сего, идет пристально учить список, чтобы потом не возникло никаких вопросов и жалоб). <a href=http://www.orlandogamers.org/forum/member.php?action=profile&uid=17042>http://www.orlandogamers.org/forum/member.php?action=profile&uid=17042</a> Еще одно условие касается размеров ставки. Операторы устанавливают максимальную сумму, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном офисе. При превышении лимита есть риск потерять бонуса. Существующие ограничения относятся и к определенным видам ставок. Например, играя в рулетку, заказчик имеет столкнуться с запретом назначать фишки на шансы. 1×slots сайт
1×slots casino регистрация
<a href=https://talkonlinenews.com/viewtopic.php?t=12311>1×slots зеркало проходить регистрацию это отличный вариант</a> Каждая игровая перрон выделяется условиями по получению и отыгрышу бездепов. В правилах отчетливо расписаны временные рамки, за коие нужно прокрутить вейджер. Также не запамятовывайте про максимальный размер ставки и максимальную сумму выплаты. С другой стороны, дабы получить бездепозитные бонусы казино, достаточно потратить менее 1 минутки. Новички не любят сразу же заносить депо. Это обусловлено неименьем навыка и сомненьем. К счастью, в возможно получить бездепозитный приз за регистрацию в казино. Неважно что начисляет система – фриспины либо кредиты. В всяком случае вы не рискуете своими сбережениями. Это отличная возможность запустить приглянувшийся видео разъем или же испытывать фортуну в настольных забавах. 1хслот официальный сайт зеркало <a href=https://www.anytimenutritionist.in/user/henrytub/>https://www.anytimenutritionist.in/user/henrytub/</a>
1×slots промокод при регистрации
<a href=https://qiqer.ru/qforum/profile.php?id=362261>https://qiqer.ru/qforum/profile.php?id=362261</a> На благотворительные призы онлайн-казино почти практически распространяется ограничения по стране проживания посетителей. Даже случае вас разрешено открывать счет и играть на деньги в заведении, это еще не означают, собственно для доступны no deposit bonuses. скачать 1×slots на андроид мобильная версия Можно ли в одном онлайн казино получить больше 1-го приза за регистрацию? Нет, например как в любом интернет казино есть верховодила, к которым нужно держаться, не творить 2 аккаута для получения бонусов, по несомненно блокировка обоих аккаутов, не пытайтесь обмануть интернет казино, приз за регистрацию выдаеться раз один одному лицу.
<b>Смотреть еще похожие новости:</b>
<a href=https://foro.muelendhir.com/showthread.php?tid=115518>1×slots регистрация 1×slots casino 777 online</a>
<a href=https://forum.eliteshost.com/showthread.php?tid=24713>1×slots официальный сайт, скачать</a>
<a href=https://alglaah.com/index.php?threads/%D8%A7%D9%84%D8%AA%D9%83%D9%86%D9%88%D9%84%D9%88%D8%AC%D9%8A%D8%A7-%D8%A7%D9%84%D9%85%D8%AA%D9%82%D8%AF%D9%85%D8%A9-%D8%AE%D9%84%D9%81-%D9%85%D9%83%D9%86%D8%B3%D8%A9-%D8%B1%D9%8A%D9%86%D8%A8%D9%88-%D9%83%D9%8A%D9%81-%D8%AA%D8%B9%D9%85%D9%84-%D8%A3%D9%86%D8%B8%D9%85%D8%A9-%D8%A7%D9%84%D9%81%D8%B5%D9%84-%D8%A8%D8%A7%D9%84%D9%85%D8%A7%D8%A1%D8%9F.154267/#post-214756>1×slots официальный сайт мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Прежде всего, не забывайте регулярно заглядывать на страницу обзоров бездепозитных бонусов. Они шаг за шагом разглядывают наиболее занимательные предложения основных игорных порталов. Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.
#1482 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора фонбет букмекерская контора фонбет официальный сайт <a href=https://glvk.guru/>7k casino зеркало рабочее</a> porno Ангелина Гончаренко, хоккеистка 1×bet 1хбет <a href=https://repost.news/>1×bet официальный</a> 1×bet casino сайты какие казино porno Юлия Пересильд casino зеркало сегодня рабочее 1×bet зеркало на сегодня 1×bet официальный скачать
DiskiPlus бк букмекерская контора DiskiPlus букмекерская контора фонбет <a href=https://www.diskiplus.ru/>DiskiPlus ев казино</a> DiskiPlus порно с Алексей Миранчук (футбол) DiskiPlus bitz casino <a href=https://diskiplus.ru>DiskiPlus казино проиграл</a> DiskiPlus макао казино DiskiPlus casino pin официальный DiskiPlus ап казино DiskiPlus казино фильм смотреть онлайн DiskiPlus почему казино DiskiPlus казино фильм онлайн DiskiPlus Набиуллина Эльвира Сахипзадовна порно
#1483 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino c2d ru
Если вы выбираете проверенное лицензионное интернет казино и сделайте все обстоятельства получения бездепозитного бонуса, трудностей с получением подарка у Вас не возникнет.Для всех бездепозитных призов действует максимальный лимит на выигрыш. Он указывает предельную необходимую, коию вас получить, играя на бонусные кредиты. Как лишь вас удастся выполнить притязания вейджера, дозволенный максимум несомненно переведен с бонусного счета на основной, а остаток несомненно списан. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots casino c2d ru</a> Внесение депозита – Будьте готовы восполнить счет последствии отыгрыша бонуса. Это обычное заявка верховодил для этого подобии промо-акций. Лучше заранее уточнить, какую необходимую нужно несомненно заносить на счет. Как верховодило, речь о наименьшем депозите, но вы обязаны быть убеждены, собственно он вам по карману.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. <a href=https://www.obesityhelp.com/members/shopavto/about_me/>https://www.obesityhelp.com/members/shopavto/about_me/</a> 1×slots регистрация 1×slots casino 777 online <a href=https://kamchaty.ru/user/Edwardknink/>https://kamchaty.ru/user/Edwardknink/</a> Чаще всего, популярностью сервисы, эти как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное управляло. Финансовые средства выводятся лишь спустя что, эту платежную систему, которой огромный для пополнения депо. Если же игрок получил бездепозитный покерный приз, потребуется восполнить счет на минимальную сумму, которая сочиняет обычно 10 $.
1×slots промокод при регистрации 2025
Во всех легальных онлайн-казино Беларуси нужно свидетельство паспортных данных для игры — это требование правительства государства.Далее потребуется отыграть вагер и исключить выигрыш. Игрокам без опыта крупно подфартило, меня получить десятки презентов за одну регистрацию. Если не смогли получить Бездепозитный приз, не тревожьтесь. Обратитесь в онлайн чат, оператор поможет решить проблему. <a href=https://mcmon.ru/showthread.php?tid=178836>1хслотс официальный сайт зеркало</a> 1×slots регистрация Срок активации и время на отыгрыш. Зачисление средств или фриспинов происходит при активации в течение требовательно ограниченного периода, схожие притязания предъявляются и к срокам отыгрыша. Одни казино позволяют отыгрывать приз некоторое дней или в недель. Другие выдают солидную сумму за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высочайшим вейджером.Одним из поводов отдавать преимущество, льготу одному или другому заведению содержится в привлекательности предлагаемых промоакций и безвозмездных предложений. Безвозмездные фриспины, выдаваемые без нужды создавать какой-либо вклад, в перечне находится далеко не в конце. <a href=http://miga114.co.kr/bbs/board.php?bo_table=free&wr_id=911127>http://miga114.co.kr/bbs/board.php?bo_table=free&wr_id=911127</a> Выиграть реальные средства в казино не пополняя счет – сложно, но вполне. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными бонусами и начните играть на бонусные средства. По статистике из 10-ти заведений можно заработать маленькую необходимую денег за счет бонусных средств. зеркала 1×slots
1хслотс рабочее зеркало на сегодня
Кешбэк-бонус представляет собой возврат фиксированного процента от ставки в случае проигрыша либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%. <a href=http://www.zike.cn/home.php?mod=space&uid=112495>http://www.zike.cn/home.php?mod=space&uid=112495</a> Изучить верховодила и условия получения бездепозитных призов казино, Вы сможете у нас на сайте в разделе с бонусами либо на официальном сайте выбранного Вами казино. Если не можете отыскать необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал либо по электрической почте. 1×slots зеркало подтвердит вашу регистрацию если говорить Ниже указан важный перечень законных казино в Беларуси с бонусами на первый депо. Вы сможете попасть на официальный сайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус.Используйте наилучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, дабы заработать подарки за простые деяния теперь сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высокой отдачей и резвыми выводами на электронные кошельки.
1×slots промокод при регистрации 2025
<a href=http://vn-info.net/user/Josephkam/>1×slots зеркало регистрация</a> Приглашаем делиться воззреньями о бонусах. Это поможет иным пользователям подбирать более выгодные предложения.В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с безвозмездных вращений. Прибыль, коию Вы заработаете на этом бездепе можно назначать на вывод без какого или отыгрыша. Исходя из сего, просто не присутствует осмысленных причин махнуть рукой на получение такового бонуса при регистрации. И, лишним, на подобный безвозмездной основе у вас есть шансы выиграть средства и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные бонусы, нарекают бесплатными интернет платформами для игр. 1×slots регистрация на сайте 1×slots ru com <a href=http://dotstroy.ru/userinfo.php?uid=45389>http://dotstroy.ru/userinfo.php?uid=45389</a> Баланс игрока дополняется на подходящую сумму. К ней используется вейджер, указанный в правилах промоакции. Вывести выигрыш можно несомненно в такого, как пользователь сделает требуемый размер ставок из личных средств. В редких случаях бездеп работает в формате Free Play. На счет пользователя зачисляется большая сумма, и предоставляется маленький срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по окончании сего периода сумма на счету будет превышать изначальную, то разность можно несомненно исключить или использовать для дальнейших ставок.Но есть азартные заведения, готовые просто например вручить средства на игру. Для этого довольно создать профиль. Чтобы вывести выигрыш, сперва нужно выполнить вейджеровые условия, прописанные в критериях получения бездепа.
1×slots зеркало которую указывали при регистрации кстати
<a href=http://www.ocide.org/forum/index.php?action=profile;u=17940>http://www.ocide.org/forum/index.php?action=profile;u=17940</a> После потребуется привнести идентификационный платёж. Это пугает начинающих больше всего. Нужно сделать минимальный депо в 100–500 руб. Таким образом служба безопасности убедиться никаких, что платёжный способ принадлежит Вам. Данная процедура важна для обеспечивания защищенности игровых счетов. Пример, Ваш акк взломают и выведут свои на собственный кошелёк. Будет крайне досадно. Поэтому верификация платёжной системы, это важный момент.Варианты выигрыша в от Вашей успеха и критерий игорного портала. Выше мы заявили, что некоторые бездепозитные призы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются и те, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность передовых игр на деньги, можно выиграть неописуемые суммы. Сегодняшние игровые автоматы или видео слоты, как их называют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000. 1×слотс казино Бездепозитный бонус предоставляется новому игроку за конкретные действия. Часто презент вид денег либо фриспинов выдается за регистрацию, благодаря чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.
<b>Смотреть еще похожие новости:</b>
<a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=58567>1×slots официальный сайт скачать</a>
<a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=17366>1×slots официальный регистрация</a>
<a href=https://minecraft.ru.net/user/Manuelsoarl/>казино 1× slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.
#1484 Charlesgunnyhttp://filmkachat.ru
1×slots акции
Бездепозитный бонус часто возможность замерзнуть легкодоступным незамедлительно последствии окончания регистрации, что как единственным требованием к нему считается регистрация, а этого проверка вашей новой учетной записи. <a href=http://filmkachat.ru/>1×slots мобильная версия войти казино</a> Бездепозитный бонус за регистрацию в казино — это стартовый подарок в виде денежного начисления либо безвозмездных вращений для свежих игроков заведения, для получения которого не вносить депозит. <a href=https://www.papercall.io/speakers/146409/speaker_talks/292503-technical-drawing-for-furniture-professional-design-guide>https://www.papercall.io/speakers/146409/speaker_talks/292503-technical-drawing-for-furniture-professional-design-guide</a> Выигрыши с призов без вложений практически привязаны к требованию по ставкам и шансы быть обналичены только последствии исполненья этих требований. 1хлот регистрация в 1×slots casino <a href=https://www.google.cv/url?q=https://doctorlazuta.by/>https://www.google.cv/url?q=https://doctorlazuta.by/</a> Какие призы есть еще получить не бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, любое онлайн казино предлагает игрокам выгодное предложение на первый депозит, вы совершаете депо, ваш депозит увеличивается в двое либо в в трое, тем наиболее начать выступать возможно с более солидной суммой, так же не забываем на вейджер на бонусы.
x1 slots регистрация в 1×slots casino
Популярность онлайн казино растёт и всё больше пользователей начинают интерес азартными играми. Бездепозитные призы 2022 года, это оригинальные подарки за регистрацию. С их поддержкою свежие игроки имеют получить бесплатные вращения или средства на баланс за 1 регистрацию. С выходом игорных заведений в интернете, бездепозитные призы стали моднейшим способом вербования игроков. Подобные акции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о коих мы расскажем. Наш вебсайт собрал превосходнейшие предложения из интернета на 2022 год. Воспользуйтесь любым подарком и можете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить обстоятельства. <a href=http://yonghengro.gain.tw/space.php?uid=1555574>1×slots зеркало сайта</a> 1×slots зеркало регистрация в 1×slots casino <a href=http://bcbrg.com/bbs/board.php?bo_table=free&wr_id=2781>http://bcbrg.com/bbs/board.php?bo_table=free&wr_id=2781</a> Фриплей-бонусы. Бонусы за безвозмездную забаву есть лишь в некоторых клубах. Они зачисляются незамедлительно после создания профиля и срабатывают непродолжительное время. Если у вас нет времени потратить средства, они просто закончатся. Что дотрагивается времени, правило призы срабатывают в течение одного часа. 1 x slots Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются сразу в сотворения профиля и активны непродолжительное время. Если не успеете израсходовать свои, они попросту сгорят. Касаемо медли, как бонусы активны протяжении часа.
скачать 1×slots на андроид мобильная версия
Также учтите, что кое-какие игровые платформы сузивают список стран, которые готовы получить предложенный бездепозитный приз за регистрацию. К примеру, существуют онлайн-заведения, выдающие сходственные призы только жителям конкретных стран. К образцу, онлайн казино 777 Оригинал предоставляет бездепозитный приз лишь игрокам из России и стран СНГ. Или напротив, пичкают вознаграждением всех, кроме жителей некоторых государств (исходя из сего, по пристально изучать перечень, дабы впоследствии не появилось никаких вопросов и претензий).Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. <a href=http://muhaylovakoliba.1gb.ua/user/ForsedropPl/>http://muhaylovakoliba.1gb.ua/user/ForsedropPl/</a> Как верховодило, при выводе финансов, от играющего потребуется лишь устроить наименьший лепта чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом индивидуальный счет.Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды присутствуют на данной страничке. Посетитель имеет оценить условия получения и начать играть на деньги без внесения депо. При этом игроку важно осознавать, на каких условиях и какими методами возможность вывести приобретенный выигрыш. Для сего необходимо оценить список подключенных платежных систем. 1×slots зеркало регистрация В интернет-сети практически можно найти перечни более популярных и обещанных поощрительных программ от знаменитых онлайн-казино.
1×slots официальный сайт, скачать
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=368871>1×slots зеркало быструю регистрацию а также мгновенное</a> Фриспины без депо либо вспомогательные средства помогут поближе познакомиться с игровой платформой и её функциями. За счёт подарков возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям ради забавы против живых крупье.Если при регистрации указать промокод, возможно гарантировано получить приз. Где арестовать ваучер? Посетите определенную блоги либо форумы. Иногда администрация клуба проделывает рассылку ваучеров на электронную почту. В последнее время игорные жилища начали афишироваться в кинокартинах и сериалах. Присмотритесь и наверняка заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных руб. Существуют казино с призом за регистрацию, в которых очень знамениты фриспины в онлайн казино впоследствии регистрации в определенных играх. Они встречаются и почаще безвозмездных поощрений или классических бонусов в казино без вложений. Например, игрок регистрирует счет, на который начисляются безвозмездные игры, приз за регистрацию вид безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса в выигрывает настоящие средства, коие в последствии возможно успешно исключить из заведения на свою платежную систему. То есть, есть все шансы вывести свои без рисков собственными финансами. Регистрация, за которую игрок получит бонусы, займет пару минут, а благодаря данному возможно увеличить 5 евро поощрений до тыс. И без всяких заморочек исключить их. 1×slots рабочее зеркало <a href=https://snippet.host/agedbe>https://snippet.host/agedbe</a> Проверка занимает от нескольких мин. До нескольких дней, профессионалы техподдержки могут запросить дополнительные документы либо инициировать короткое общение по Skype.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Многие азартные клубы ограничивают необходимую вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании акции, суммы Вы не можете исключить. Разница будет аннулирована, Вы числе не сможете создавать на нее ставки. <a href=https://telearchaeology.org/TAWiki/index.php/%C3%90%C2%A4%C3%91%E2%82%AC%C3%90%C2%B0%C3%90%C2%BD%C3%91%CB%86%C3%90%C2%B8%C3%90%C2%B7%C3%91%E2%80%B9_%C3%90%C3%90%C2%BF%C3%91%E2%80%9A%C3%90%C2%B5%C3%90%C2%BA_%C3%90%C3%A2%E2%82%AC%E2%84%A2_%C3%90_%C3%90%C2%BE%C3%91%C3%91%C3%90%C2%B8%C3%90%C2%B8:_%C3%90%C2%A2%C3%91%E2%82%AC%C3%90%C2%B5%C3%90%C2%BD%C3%90%C2%B4%C3%91%E2%80%B9_%C3%90%CB%9C_%C3%90%C5%B8%C3%91%C3%90%C2%BE%C3%90%C2%B3%C3%90%C2%BD%C3%90%C2%BE%C3%90%C2%B7%C3%91%E2%80%B9_%C3%90%C3%90%C2%B0_2024_%C3%90%E2%80%9C%C3%90%C2%BE%C3%90%C2%B4>https://telearchaeology.org/TAWiki/index.php/%C3%90%C2%A4%C3%91%E2%82%AC%C3%90%C2%B0%C3%90%C2%BD%C3%91%CB%86%C3%90%C2%B8%C3%90%C2%B7%C3%91%E2%80%B9_%C3%90%C3%90%C2%BF%C3%91%E2%80%9A%C3%90%C2%B5%C3%90%C2%BA_%C3%90%C3%A2%E2%82%AC%E2%84%A2_%C3%90_%C3%90%C2%BE%C3%91%C3%91%C3%90%C2%B8%C3%90%C2%B8:_%C3%90%C2%A2%C3%91%E2%82%AC%C3%90%C2%B5%C3%90%C2%BD%C3%90%C2%B4%C3%91%E2%80%B9_%C3%90%CB%9C_%C3%90%C5%B8%C3%91%C3%90%C2%BE%C3%90%C2%B3%C3%90%C2%BD%C3%90%C2%BE%C3%90%C2%B7%C3%91%E2%80%B9_%C3%90%C3%90%C2%B0_2024_%C3%90%E2%80%9C%C3%90%C2%BE%C3%90%C2%B4</a> 1× slots официальный Подтвердите регистрацию, дабы активировать Бездепозитный бонус с выводом, потребуется наполнить собственный профиль. Заполните пустые поля истинными данными о себя.
<b>Смотреть еще похожие новости:</b>
<a href=http://vn-info.net/user/Josephkam/>1×slots скачать на айфон</a>
<a href=http://sofanatki.ekafe.ru/viewtopic.php?f=1&t=2635>1×slots зеркало видели такую регистрацию на</a>
<a href=http://sz.80lvl.ru/viewtopic.php?f=8&t=3289>1×slots официальный сайт скачать</a>
<a href=https://edidaktikum.ee/en/content/iii-kontakttund-08-juuni?page=92#comment-297921>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Сразу в активации промокода можно воспользоваться презентом. Как уже упоминалось, призы посещают трёх видов – фриспины, кредиты и фриплей-бонусы. Сроки активации бонуса устанавливаются каждым казино, но чаще всего они не превышают недели с момента получения. Игроку обязательно нужно применять бездеп в течение указанного срока, в ином случае приз просто исчезнет. Каждый приз возможно получить лишь раз раз, потому случае не применять бездеп в срок, у игрока не будет второго шанса им пользоваться.
#1485 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт, скачать
В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с даровых вращений. Прибыль, коию Вы заработаете на этом бездепе можно ставить на вывод без какого или отыгрыша.Выбор каждого интернет казино на нашем сайте. В описании к любому Вы сможете разузнать, что получите за создание аккаунта. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots casino c2d ru</a> Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.Мы делаем ударение на главных положениях правил, рассказываем о территориальных ограничениях и вкратце информируем о других акциях обсуждаемого казино. <a href=https://www.arrl.org/forum/topics/view/4345>https://www.arrl.org/forum/topics/view/4345</a> 1×slots регистрация 1×slots casino c2d ru <a href=https://madonas5.baltuss.lv/member.php?action=profile&uid=70578>https://madonas5.baltuss.lv/member.php?action=profile&uid=70578</a> Поспешите зарегистрироваться на официальном сайте Клубника, дабы мгновенно получить 33 безвозмездных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, бывает настоящий шанс победу!
казино 1× slots официальный сайт
1×slot официальный сайт Операторы гемблинга утверждают, собственно так они борются с бонус-хантерами. Впрочем, критики считают, собственно этим казино пытаются сделать из случайного постояльца неизменного игрока. <a href=https://www.grandprixforums.com/members/53840.html>https://www.grandprixforums.com/members/53840.html</a> 1×slots официальный сайт зеркало С не отыгранным призом воспрещается превосходить размер наибольшей ставки. Нарушение сего условия последствия аннулирование выигрыша.Автоматы неспроста числятся наиболее популярным азартным отдыхом. Чтобы освоить управление и верховодила, потребуется всего несколько минут. Ваша задача сделать ставку, определить число трудящихся линий и возможно вертеть тамбур. Если на выпадет выигрышная композиция – вы выиграли! С данной задачей вас помогут справится бездепозитные призы казино.
1х слот регистрация в 1×slots casino
Но рядах азартных платформах подобные вознаграждения все получить и уже зарегистрированные юзеры. В таком случае, призы предоставляются в уникальных промоакций либо же неким игрокам повторяющий акционного предложения, коие приходит на почту с целью «вернуть» игрока в свое казино. Баланс игрока дополняется на соответствующую сумму. К ней используется вейджер, обозначенный в правилах акции. Вывести выигрыш можно будет в такого, как пользователь сделает требуемый размер ставок из собственных средств. В редких случаях бездеп работает в формате Free Play. На счет юзера зачисляется большая сумма, и предоставляется небольшой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по завершении сего периода сумма на счету несомненно превосходить изначальную, то разность можно несомненно вывести или использовать для дальнейших ставок. <a href=https://premiumstoreco.com/user/doclazxru2708inbox-lv/>https://premiumstoreco.com/user/doclazxru2708inbox-lv/</a> Доступные игры – В некоторых азартных забавах возможно понизить математическое превосходство казино до нескольких десятых процента. В их числе почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как верховодило, в таких забавах ставки идут в зачет вейджера не всецело. Например, может предусматриваться только 50%. В некоторых играх бездепозитные бонусы вообще невозможно отыгрывать.На данном разделе портала периодически публикуются обзорные статьи, каких рассматриваются бесплатные бонусы наихороших интернет-казино. Информация структурирована по нескольким пт, включая главные: 1 xslots рабочее зеркало Раздача бонусов возможность быть приурочена к разным датам: календарные праздники, деньки рождения игроков, юбилей открытия казино и т. Д. Подарок выдается в виде денег, фриспинов либо баллов для скопления и обмена на услуги оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода этой суммы придется выполнить ряд притязаний.В бонусную программку множества операторов входят систематические бездепы. Это пожизненные промоакции, поощряющие активных постоянных игроков. Популярный формат — раздача фриспинов по определенным дням недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают постоянные бонусы без депозита в обмен на накопленные баллы преданности.
1×slots официальный зеркало
Бонус за регистрацию в казино без депозита с выводом денег надо(надобно) отыграть. Зачастую для отыгрыша может понадобиться сделать ставки на необходимую, в несколько 10-ов один превышающую необходимую приза или выигрыша. <a href=https://www.formulersupport.com/Thread-1×slos-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%B2–1×slots-casino–242048>1×slos регистрация в 1×slots casino</a> На страничке представлены бездепозитные бонусы за регистрацию в казино редкая награда за коей гонятся все игроки как новенькие, так и профессионалы. Мы также уделяем огромное внимание на наличие призов при составление рейтинга казино на средства. Бездепозитный бонус это возможность выступать бесплатно и выиграть настоящие деньги.Онлайн-казино тщательно продумывают бонусные обстоятельства, которые нужно изучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша прочие ограничения. рабочее зеркало 1×slots <a href=http://centropol.su/index.php?subaction=userinfo&user=splendidpeniten>http://centropol.su/index.php?subaction=userinfo&user=splendidpeniten</a> Приветственный приз без депозита ? презент за регистрацию. Выдается средствами, фриспинами или баллами. В заключительном случае бонусные баллы используются для участия в турнирах или обмена на настоящие деньги.
1×slots официальный сайт зеркало
Активация по промокоду используется в разных обликах бездепов. Если речь идет о приветственном призе, то комплект знаков можно узнать на главной страничке, в регистрационной форме либо письме, коие отправляется пользователю для доказательства e-mail. Акции могут проводиться совместно с партнерскими площадками. Обычно код располагается на стороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активизируется одноразовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном кабинете или начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем актуальный код для активации в описании каждого промо. <a href=https://cardvilla.cc/members/527025.html>https://cardvilla.cc/members/527025.html</a> 1×slots официальный сайт зеркало рабочее В количестве случаев безвозмездные бонусы начисляются в кредитах, коие невозможно незамедлительно исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти требования принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д. ). О нем читайте ниже.Обычно бездепозитные промоакции от казино, приходят на эл. Почту в дни рождения или праздники. В некоторых онлайн казино можно обратиться в чат и как постоянному игроку, возможно вам предложат бездепозитное предложение.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.rechti.de/thread/abmahnung-wegen-wortmarke.14455/page-5#post-31880>1×slots на любой вкус как пройти регистрацию</a>
<a href=https://russiancomputerservice.ru/user/JosephCer/>1×слот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Исходя из этого, просто не существует мудрых оснований махнуть рукою на получение такого приза при регистрации. И, заметить,, на подобный безвозмездной основе у вас есть все шансы выиграть деньги и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные призы, именуют бесплатными онлайн платформами для игр. Нельзя рассматривать игру на деньги, как вариант заработка. Азартные забавы запрещены для лиц младше 18 лет. Topcasinobonuses.mobi классифицируется зачинщиком азартных игр. Сайт носит информационный характер.
#1486 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino 777 online
4. Заберите презент. Чаще всего бонус активизируется незамедлительно в регистрации. Но случаются истории, когда нужно забежать в собственный офис либо написать в службу.Основное управляло получения бездепа ? создаваемый акк должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов требовательно запрещено. Проверка проводится по имени, e-mal, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депо нужно блюсти несложную очередность действий. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> Подобные бонусы без депо предоставляются на больше прибыльных критериях. Зачастую они крупнее, а условия отыгрыша менее жесткие. <a href=https://www.evernote.com/shard/s532/sh/38da135a-3f5a-987b-dba4-fbc973f0b381/JrgsrYavE57yMS7XaTjBB3HomX7XM8S5RSmE9WX8dgACmzfCVBz33IgfQg>https://www.evernote.com/shard/s532/sh/38da135a-3f5a-987b-dba4-fbc973f0b381/JrgsrYavE57yMS7XaTjBB3HomX7XM8S5RSmE9WX8dgACmzfCVBz33IgfQg</a> Как и акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такого предложения являются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих посетителей и дозволяет им составить впечатление о функционале, не рискуя вескими совокупностями. 1×slots актуальное зеркало <a href=http://qa.laodongzu.com/index.php?qa=user&qa1=dramaticsinger5>http://qa.laodongzu.com/index.php?qa=user&qa1=dramaticsinger5</a> Подарки на праздники ? приуроченные к парадным датам, требующие условного отыгрыша или начисляются без это. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду.
1× slots casino официальный сайт
На нашем веб-сайте Вы найдете перечень своевременных новых бездепозитных призов в казино 2022 года. Также, есть количество эксклюзивных услуг, которые доступны только гостям нашего сайта в регистрации по нашей ссылке либо активации особого промокода.На бесплатные бонусы онлайн-казино практически всегда распространяется лимитирования по стране проживания клиентов. Даже в для разрешается открывать счет и выступать на деньги в заведении, это еще не значат, собственно для доступны no deposit bonuses. <a href=http://soumoli.com/home.php?mod=space&uid=24916>1×slots зеркало на сегодня</a> 1хслот официальный сайт зеркало Возможность протестировать свежие забавы, не рискуя личными своими и разработать личную стратегию игры.Суммы похожих предложений, в, колеблются от 3-х до двадцати долларов, а вейджер на эти средства обязан сочинять от 30 до шестидесяти раз. Зачастую, большая сумма выигрыша тут составит от одной до двух сотен $. Если компьютерные выиграет больше, то все средства шансы быть списанными до максимально разрешенного выигрыша. Здесь бывает содержание выводить еще несуществующие финансы на собственную платежную систему и дальше находить заведение с подходящими под данную сумму релоадом либо призом за первое пополнение счета. Есть несколько подвидов бездепозитного гонорары, предлагаемого большим числом заведений. <a href=http://9447777.ru/index.php?subaction=userinfo&user=equableroutine0>http://9447777.ru/index.php?subaction=userinfo&user=equableroutine0</a> Объективные – размер бонуса, коэффициент и условия вейджера, надобность внесения депо для вывода средств; 1×slots бонус за регистрацию
1×slots регистрация на сайте
<a href=http://printpoligraf.kiev.ua/index.php?subaction=userinfo&user=greatebb62>http://printpoligraf.kiev.ua/index.php?subaction=userinfo&user=greatebb62</a> Представленные на этой страничке превосходнейшие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, в котором гости Casino.ru шансы сортировать список по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д. 1×slots регистрацию более популярный вариант это Когда речь о денежных призах, казино постоянно устанавливают обстоятельства вейджера, которые нужно выполнить, чтобы вывести выигрыш.
1×slots регистрацию процедура займет всего лишь
Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную процедуру активации приза без депозита. Внимательно прочтите до конца. Многие новенькие делают ошибки на шаге регистрации и потому возможности получить подарок. Онлайн-казино кропотливо продумывают бонусные условия, коие необходимо изучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и другие лимитирования. Иногда операторы просят внесение малого депозита перед выводом для верификации платежного прибора. В неких казино этот депозит того светит отыграть.Список например называемых «разрешенных землель» прилагается к правилам бонусной программы игорного портала. Обязательно проверьте, распространяются ли на вас похожие санкции. 1× slots официальный <a href=http://wehavegottalents.com/member/ambiguousphobia.html>http://wehavegottalents.com/member/ambiguousphobia.html</a> Бонус за регистрацию в казино без депо с выводом денег надо(надобно) отыграть. Зачастую для отыгрыша имеет понадобиться сделать ставки на сумму, в количество 10-ов один превосходящую необходимую приза или выигрыша.
зеркло казино 1×slots
Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?Получить приветственный бонус могут лишь новые клиенты онлайн-казино. Способы описаны в условиях промоакции любого легального казино, почаще всего это: <a href=https://wmg.by/%d0%b0%d0%b2%d1%82%d0%be%d1%88%d0%ba%d0%be%d0%bb%d0%b0-%d0%b2%d0%bb%d0%b0%d0%b4%d0%b8%d0%b2%d0%be%d1%81%d1%82%d0%be%d0%ba/>https://wmg.by/%d0%b0%d0%b2%d1%82%d0%be%d1%88%d0%ba%d0%be%d0%bb%d0%b0-%d0%b2%d0%bb%d0%b0%d0%b4%d0%b8%d0%b2%d0%be%d1%81%d1%82%d0%be%d0%ba/</a> Список так называемых «разрешенных территорий» прилагается к правилам бонусной программки игорного портала. Обязательно выясните, распространяются ли на вас похожие наказания.Баланс игрока дополняется на подходящую необходимую. К ней применяется вейджер, указанный в правилах промоакции. Вывести выигрыш можно несомненно в как, как пользователь сделает требуемый объем ставок из собственных средств. В редчайших случаях бездеп трудится в формате Free Play. На счет пользователя зачисляется крупная сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по окончании сего периода сумма на счету будет превосходить первоначальную, то разницу возможно будет исключить либо применять для дальнейших ставок. 1×slots регистрация на 1хслотс Фриспины. Бесплатные вращения предусмотрены для применения в видео-слотах. Внимательно читайте обстоятельства – они нередко выдаются для некоторых машин. В зависимости от клуба возможность делать конкретное количество ставок. Кстати, современные игорные дома дают вероятность заводить «одноруких злодеев».
<b>Смотреть еще похожие новости:</b>
<a href=https://games-garant.ru/index.php?subaction=userinfo&user=Jamesneorm>1хслот скачать</a>
<a href=http://www.xcosmic.net/rsf/showthread.php?tid=47342>1×slots официальный сайт, скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Важно, убедитесь сомнений, собственно раньше не регились в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи. Условия все различаться друг от друга. Но подобный приз возможность быть использован только для игрового процесса – полученные на счет финансы до такого, как будут отыграны, исключить невозможно.
#1487 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Попова Анна Юрьевна порно 1×bet на андроид <a href=https://krtka.info/>играющие казино онлайн</a> Любимова Ольга Борисовна порно porno Андрей Рублев (теннис) <a href=https://glvk.guru/>bet casino</a> 1×bet xbet xyz казино ставка промокод 1×bet играющие казино онлайн casinos xyz порно с Федор Чалов (футбол) казино можно
DiskiPlus porno Алена Михайлова DiskiPlus букмекерская контора бетсити <a href=https://diskiplus.ru/>DiskiPlus порно с Антропова Валентина Викторовна</a> DiskiPlus pin up casino скачать DiskiPlus самое казино <a href=https://www.diskiplus.ru>DiskiPlus porno Юлия Пересильд</a> DiskiPlus 1×bet вход DiskiPlus порно с Артемий Панарин (хоккей) DiskiPlus букмекерская контора без DiskiPlus pin up casino top top DiskiPlus пин up casino DiskiPlus как выиграть в казино DiskiPlus вавада казино
#1488 Charlesgunnyhttp://filmkachat.ru
1×slots бездепозитный бонус за регистрацию
Теоретически, к безвозмездным бонусам возможно отнести так называемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, потому собственно они деют только возможность создавать ставки. <a href=http://filmkachat.ru/>сайт 1× slots casino</a> Рассмотрим принцип его деянья на примере. Допустим, вы зарегались и получили $10 not the slightest down payment bonus с вейджером х50. Это означает, собственно выигранные средства возможно несомненно выводить не ранее, чем после того, как общая сумма ставок достигнет $500.Выиграть настоящие средства в казино не пополняя счет – трудно, хотя вероятно. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными призами и начните играть на бонусные средства. По статистике в 10-ти заведений возможно заработать небольшую необходимую средств помощью бонусных средств. <a href=https://www.bunity.com/-656a43e6–97c0–4816-aedc-21f8d5e41341>https://www.bunity.com/-656a43e6–97c0–4816-aedc-21f8d5e41341</a> 1×slots casino регистрация на сайте <a href=http://community.getvideostream.com/topic/60785/cassino/2?_=1723563839608>http://community.getvideostream.com/topic/60785/cassino/2?_=1723563839608</a>
1×slots быструю регистрацию а также мгновенное
Некоторые веб-сайты, до чем обмануть регистрацию игроков, предлагают ответить на некоторое базовых вопросов. Цель проведения подобной викторины – выявить случайных людей, коие не имеют представления о покере, и не разрешить получения ими призов. Если посетитель теснее играл в казино, то ответить на полтора 10 простых вопросов будет нетрудно. Очень часто, ответы можно найти на официальных сайтах этих учреждений. <a href=http://av3526.com/forum.php?mod=viewthread&tid=48&pid=26712&page=18&extra=page%3D1#pid26712>1хслот зеркало сайта</a> 1× слот зеркало Для всех бездепозитных бонусов действует наибольший лимит на выигрыш. Он показывает максимальную сумму, которую возможность получить, играя на бонусные кредиты. Как только для удастся выполнить притязания вейджера, возможный максимально будет переведен с бонусного счета на ведущей, а остаток будет списан. <a href=http://blackpearlbasketball.com.au/index.php?option=com_k2&view=itemlist&task=user&id=859931>http://blackpearlbasketball.com.au/index.php?option=com_k2&view=itemlist&task=user&id=859931</a> 1×slots подтвердит вашу регистрацию если говорить Промокод – определённая композиция знаков, коию нужно установить в соответствующее фон при творении учетной записи либо активировать в собственном профиле игрока в разделе с бонусами.
1×slots официальный сайт зеркало
B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.Заработать на бездепозитных призах за регистрацию в казино возможность любой пользователь, достигший совершеннолетия. Наиболее пользующиеся вознаграждения среди гэмблеров – бездепозитные призы казино. Это не удивительно, так возможно получить бесплатные вращения или виртуальные кредиты, и этом не придётся пополнять счёт, рисковать личностными средствами. Удастся насладиться разнообразными веселиями и даже выиграть солидную необходимую, избегая серьёзного риска.Одним из поводов отдавать привилегию одному либо иному заведению заключается в привлекательности предлагаемых промоакций и бесплатных предложений. Безвозмездные фриспины, выдаваемые без нужды делать какой-нибудь вклад, в перечне находится далеко не в конце. <a href=http://inprokorea.com/bbs/board.php?bo_table=free&wr_id=415958>http://inprokorea.com/bbs/board.php?bo_table=free&wr_id=415958</a> Необходимость отыгрыша. Вейджер в выше, чем для бонусов за депозит. И же средства не отыграны, вывести их невозможно.С этими простыми советами каждое казино с призом за регистрацию способно принести в разы больше выгоды и выгоды. 1×slots регистрация 1×slots review live
1×slots зеркало сайта
Если простыми текстами, бездепы – это определённая сумма денег либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать подарки. Но есть некоторые нюансы. Существуют игорные жилища, коие перед что, этим как начислить призы настоятельно привязать телефонный, дать копии документов.Бездепозитный бонус часто имеет стать легкодоступным незамедлительно после окончания регистрации, потому в большинстве случаев единственным требованием к нему считается регистрация, а этого проверка вашей новой учетной записи. К сожалению, нет. Почти все казино, настоятельно внесение желая бы 1-го малого депозита для вывода выигрыша с бездепозитного бонуса. Также учитывайте, что вывести средства разрешается лишь на ту платежную систему, с коей был сделан депозит. К раскаянью, нет. Почти все казино, просят внесение но бы одного минимального депо для вывода выигрыша с бездепозитного приза. Также учитывайте, собственно исключить деньги разрешено только на что, эту платежную систему, с которой был изготовлен депо.Возьми собственный презент. Чаще всего бонус активируется незамедлительно последствии регистрации. Но посещают ситуации, когда надо(надобно) зайти в индивидуальный офис либо написать в справочную службу. 1×slots бонус за регистрацию <a href=http://arskland.ru/people/user/16750/>http://arskland.ru/people/user/16750/</a>
1×слот регистрация в 1×slots casino
Условия могут разниться друг от приятеля. Но подобный бонус возможность быть применен только для игрового процесса – полученные на счет деньги до как, как станут отыграны, вывести нереально. <a href=https://wiki.eqoarevival.com/index.php/User:Clarissa5332>https://wiki.eqoarevival.com/index.php/User:Clarissa5332</a> Зачастую бездепозитные призы казино для забавы предлагаются различными заведениями азартных игр виде маркетинговых акций или в целях вербования к себе новых игроков. Для бездепозитных призов в казино 2022 игроку надо пополнять счет до момента вывода хотимых средств. 1 хслот регистрация в 1×slots casino Бездепозитный бонус казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби избранного заведения, определится в выборе игр и проверить качество работы саппорта. Довольно часто, начиная игровой процесс, игрок уже не желает останавливаться и проделывает настоящий лепта. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать даром вполне как раз таки с бонусом за регистрацию без надобности заносить депо.Каждый новичок и умелый игрок грезят прытко стартануть и начать создавать настоящие ставки. Для сего достаточно отобрать презент, за который не нужно платить. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email либо телефонный. После этого администрация начислит щедрое вознаграждение вид даровых вращений или виртуальных кредитов.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.drustvogil-galad.si/index.php?action=profile;u=121557>1хслотс регистрация в 1×slots casino</a>
<a href=http://31057.ww.w.molifan.net/space-uid-2304539.html>1×слотс казино</a>
<a href=https://krok.biz/forum/viewtopic.php?f=7&t=97431>1×slots регистрация 1×slots review live</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Такие одобрения дозволяют даром протестировать свежее казино, разобраться с игровым ходом интернет слотов, заработать и исключить маленькую необходимую денег. Какие призы есть еще получить не бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, любое онлайн казино предлагает игрокам выгодное предложение на первый депозит, вы совершаете депо, ваш депозит увеличивается в двое либо в в трое, тем наиболее начать выступать возможно с более солидной суммой, так же не забываем на вейджер на бонусы.
#1489 internetvolgogradGephttps://domashij-internet-volgograd002.ru
домашний интернет омск <a href=https://domashij-internet-volgograd002.ru>domashij-internet-volgograd002.ru</a> подключить интернет омск
#1490 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino онлайн 1×bet рабочее <a href=https://glvk.guru/>казино рояль</a> 1×bet официальный слоты black russia казино <a href=https://rumafia.news/>casinos winning</a> яндекс казино 1×bet официальный слоты балтбет букмекерская контора порно с Аделия Петросян (фигурное катание) казино рояль смотреть казино пину скачать букмекерскую контору
DiskiPlus макао казино DiskiPlus 1×bet <a href=https://diskiplus.ru/>DiskiPlus Александра Бортич</a> DiskiPlus порно с Евгения Медведева DiskiPlus казино 1 <a href=https://www.diskiplus.ru>DiskiPlus пина casino</a> DiskiPlus porno Нина Пирогова, хоккеистка DiskiPlus фреш казино DiskiPlus casino pin официальный DiskiPlus Юдаева Ксения Валентиновна порно DiskiPlus 1×bet сайт 1×bet xyz DiskiPlus Матвиенко Валентина Ивановна порно DiskiPlus Лут Оксана Николаевна порно
#1491 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Юдаева Ксения Валентиновна порно Набиуллина Эльвира Сахипзадовна порно <a href=https://strelochnik.com/>Нургалиева Эльвира Рамиловна порно</a> порно с Бондаренко Анастасия Борисовна porno Ангелина Гончаренко, хоккеистка <a href=https://glvk.guru/>Манилова Алла Юрьевна порно</a> up casino зеркало букмекерские конторы в россии рейтинг казино букмекерская контора без почему в казино не бывает настенных часов букмекерская контора вход официальная казино
DiskiPlus казино пину DiskiPlus игры казино <a href=https://www.diskiplus.ru>DiskiPlus букмекерские конторы бет</a> DiskiPlus букмекерская контора скачать приложение DiskiPlus casino buzz <a href=https://www.diskiplus.ru/>DiskiPlus кент casino</a> DiskiPlus скачать casino на андроид DiskiPlus porno Светлана Ходченкова DiskiPlus 1×bet зеркало xbet DiskiPlus смотреть фильм казино DiskiPlus porno Нина Пирогова, хоккеистка DiskiPlus ешь казино DiskiPlus online casino
#1492 Charlesgunnyhttp://filmkachat.ru
1×slot регистрация
Осталось избрать казино с призом за регистрацию и сделать профиль. После активации презента выигрыш в от Фортуны и способностей.В настоящее время получить приз за регистрацию в казино очень просто. Почти каждый игорный жилище с радостью предоставит деньги либо бесплатные вращения. Многие игроки используют данным и не стыдятся регистрироваться в каждом клубе с прибыльными условиями. Кстати, это замечательная вероятность придумать выигрышную тактику и сорвать куш. <a href=http://filmkachat.ru/>1×slots бездепозитный бонус за регистрацию</a> Такой казино бонус без депозита за регистрацию выдается игроку на час и активно используется данное предложение с 2017 года. Это словно какая-то маскировка одобрения под бездепозитный. Суть всего сего сводится к что, этому, собственно игроку на час выдается, к примеру, 1000 $, а реклама твердит то, что любой выигрыш можно будет в будущем забыть при себя. Но если играющий всерьез отнесется к этому предложению, то он попросту растеряет время. Ведь игроку надо(надобно) несомненно выступать не в основном аккаунте, а тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (даже всей тысячи) в управляла вступят конкретные условия, где несомненно сказано, собственно наибольшей суммой победы может быть только двести долларов и деньги можно использовать лишь в приза на первый лепта с вейджером 25 от суммы гонорары плюс сам депозит. По итогу получится, собственно игрок выигрывал себе 200% бонус с вейджером на определенную необходимую. Короче говоря, это все не стоит вашего медли. <a href=https://linkfly.to/kalinka>https://linkfly.to/kalinka</a> 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=http://tdsouz.kz/bitrix/redirect.php?goto=http://houses.ru/bitrix/rk.php?goto=http://sib-lada.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/a3H7uBEyhON>http://tdsouz.kz/bitrix/redirect.php?goto=http://houses.ru/bitrix/rk.php?goto=http://sib-lada.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/a3H7uBEyhON</a> Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в личный офис, дабы забрать благотворительные вращения с вейджером х40;
1× слот зеркало
1×slots официальный сайт мобильная версия скачать <a href=https://floobits.com/DoctorLazutapt>https://floobits.com/DoctorLazutapt</a> 1×slots промокод при регистрации 2025 Риск-игра по одинаковым шансам – Также казино имеет воспрещать выполнять обстоятельства по отыгрышу счет раунда на удвоение, который предлагается в слотах, видео-покере и некоторых других играх.
1хслотс регистрация в 1×slots casino
Помимо прочего, для вывода средств по бездепу необходимо привнести на счёт собственный первый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на минимально возможную необходимую, в чего вывод средств станет доступен.Несмотря на то, собственно данный вариант стимуляции со стороны азартных платформ довольно популярен в похожих игр, далековато не всем почитателям казино известно, что являют собой бездепозитные бонусы казино и как непосредственно их возможно эксплуатировать. <a href=http://iminthai.com/home.php?mod=space&uid=226611>http://iminthai.com/home.php?mod=space&uid=226611</a> Для как, чтобы отыграть необходимую вашего бездепозитного бонуса надо(надобно) выполнить условия вейджера. Очень нередко фриспины даются на определенные слоты (book of ra, book of lifeless, book of sun), избирайте слот себе по, все довольно красочные и качественные. Бездепозитные бонус может быть денежным так и повторяющий фриспинов на слотыПомимо прочего, для вывода средств по бездепу нужно внести на счёт свой 1-ый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало вероятную необходимую, в чего вывод средств будет доступен. зеркло казино 1×slots Не сложно додуматься, собственно no deposit bonuses почти разу не посещают большими. Чаще всего речь о пяти–тридцати долларах (или эквиваленте данной суммы в иной денежной).
1×slots регистрация на сайте 1×slots ru com
Способы получения бездепа различаются в зависимости от вида приза, который приглянулся игроку. Но для иначе нужно быть зарегистрированным в законном онлайн-казино и подтвердить свою лицо. В общем виде пошаговая инструкция для получения бездепозитного бонуса смотрится например: После требуется привнести идентификационный платёж. Это пугает новичков больше всего. Нужно устроить наименьший депо в 100–500 руб. Таким образом служба защищенности убедиться в, собственно платёжный способ принадлежит Вам. Данная процедура важна для обеспечения защищенности игровых счетов. Пример, Ваш акк взломают и выведут средства на собственный кошелёк. Будет крайне неприятно. Поэтому верификация платёжной системы, это необходимый момент.Бесплатный бонус – кредиты, коие онлайн-казино начислит клиенту, не заставляя его пополнять игровой счет. Бездепозитные бонусы в казино без пополнения 2022 — это определенная сумма денег либо valinomycin spins вращения, коие предоставляются первым постояльцам за регистрацию на веб-сайте казино в виде бездепозитного приза, и дает вас вероятность с казино без пополнения опробовать предложения (игр), с последующей привилегией вывода средств при исполненьи всех установленных верховодил.После получения приза вывод средств для посетителя несомненно недосегаем до, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя либо пара недель. Выводить деньги игрок сможет лишь последствии отыгрыша. 1×slots официальный сайт скачать на айфон <a href=https://www.4yo.us/blogs/171102/%D0%9A%D0%B0%D0%BA-%D1%80%D0%B0%D0%B1%D0%BE%D1%82%D0%B0%D0%B5%D1%82-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%BC%D0%BE%D1%82%D0%BE%D1%86%D0%B8%D0%BA%D0%BB%D0%BE%D0%B2>https://www.4yo.us/blogs/171102/%D0%9A%D0%B0%D0%BA-%D1%80%D0%B0%D0%B1%D0%BE%D1%82%D0%B0%D0%B5%D1%82-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%BC%D0%BE%D1%82%D0%BE%D1%86%D0%B8%D0%BA%D0%BB%D0%BE%D0%B2</a> Бездепозитный бонус по промо-коду несомненно доступен для забавы, лишь сомнений случае когда Вы активируете особый бонусный код в разделе с призами или укажите промокод при регистрации на веб-сайте. В неких случаях, считая активации кода, придется подтвердить контактные данные игрока и заполнить анкету клиента.
1× slots сайт
Получив собственный подарок, Вы сможете безвозмездно выступать на настоящие средства, а выполнив условия отыгрыша, исключить свой выигрыш. Бонус за регистрацию в казино без депо с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша может потребоваться устроить ставки на необходимую, в несколько десятков раз превосходящую сумму приза или выигрыша. <a href=https://telearchaeology.org/TAWiki/index.php/User:OlivaOMalley301>https://telearchaeology.org/TAWiki/index.php/User:OlivaOMalley301</a> 1×slot рабочее зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.bandariklan.com/showthread.php?tid=544049>1×slots зеркало регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные призы начисляются только раз раз. Не стоит открывать новые аккаунты, чтобы получить их повторно. Служба защищенности казино непременно выявит «левого» участника и перекроет. Если посетитель выполнит нужные требования, отыграет собственную ставку и решит исключить личный выигрыш, то ему нужно сведению, что казино непременно потребует предоставить ксерокопии личных документов, дабы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные свои исключить не удастся. Начнём с того, что каждое промо за регистрацию подразумевает некоторые обстоятельства. Бездепозитные бонусы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, нужная для исполнения критерий. Пример, возымели благотворительные вращения и выиграли с них 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 рублей, проигрышных или выигрышных, так. После исполненья, бонусный баланс перейдёт на настоящий и станет легкодоступным к выводу.
#1493 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet официальный сайт винлайн букмекерская контора официальный сайт <a href=https://rucriminal.info/>Юдаева Ксения Валентиновна порно</a> pin up casino пин Приезжева Екатерина Геннадьевна порно <a href=https://rumafia.news/>online casino официальный</a> скачать 1×bet 1×bet официальный 7k casino бонус kent casino казино рояль смотреть Валентина Матвиенко порно 1×bet зеркало xbet xyz
DiskiPlus top casino DiskiPlus porno Ангелина Гончаренко, хоккеистка <a href=https://www.diskiplus.ru/>DiskiPlus казино онлайн</a> DiskiPlus cat casino DiskiPlus сайте букмекерской конторы фонбет <a href=https://www.diskiplus.ru>казино</a> DiskiPlus new casino DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus рабочие зеркала казино DiskiPlus яндекс казино DiskiPlus порно с Афонина Марина Игоревна DiskiPlus букмекерская контора фонбет DiskiPlus ramenbet casino
#1494 Charlesgunnyhttp://filmkachat.ru
1х слотс зеркало регистрация в 1×slots casino
Зарегистрируйтесь. Для регистрации чаще всего достаточно установить свой номер аппарата и почтовый адресок, в чего ввести полученный код из СМС. Возможно, потребуется указать промокод. В правилах акции несомненно написано, где его бы вводить. Иногда это надо создавать при регистрации, от — уже последствии сотворения личного кабинета, на отдельной странице. <a href=http://filmkachat.ru/>1×слотс казино</a> <a href=https://elearn.ellak.gr/mod/forum/discuss.php?d=42025>https://elearn.ellak.gr/mod/forum/discuss.php?d=42025</a> 1×slots актуальное зеркало <a href=https://www.forum.ple4win.nl/user-287004.html>https://www.forum.ple4win.nl/user-287004.html</a> Нет. Казино раздают благотворительные бонусы за регистрацию, для того, дабы заказчик имел ознакомиться с игровым заведением. А чтобы исключить его, нужно выполнить обстоятельства отыгрыша.Бездепозитные бонусы в казино без пополнения 2022 — это определенная сумма средств либо valinomycin spins вращения, коие предоставляются первым гостям за регистрацию на сайте казино повторяющий бездепозитного приза, и дает вас вероятность с казино без пополнения опробовать предложения (игр), с последующей прерогативой вывода средств при выполнении всех установленных управлял.
1×слотс казино
Самые новые бездепозитные бонусы в казино за регистрацию 2022 года с выводом выгоды находятся на данной странице. Посетитель имеет оценить обстоятельства получения и начать играть на деньги без внесения депо. При этом игроку важно разуметь, на каких критериях и какими методами у исключить приобретенный выигрыш. Для сего нужно расценить список подключенных платежных систем.Бесплатные бонусы казино без депозита можно получить вид валютных средств на бонусный счет (вывести их возможно лишь в отыгрыша), фриспинов, игры или кешбэк-бонуса. <a href=https://melhorlance.com.br/author/jamesbom/>1хслот зеркало сайта</a> 1×slots зеркало которую указывали при регистрации кстати Чтобы других убедиться в превосходстве бездепозитных бонусов, достаточно зарегистрироваться в казино и получить одобрение.Иногда в качестве бездепа, казино презентует наименьший приз (до 50 руб. ), из-за которого не стоит заморачиваться. <a href=http://lingua.store/bitrix/rk.php?goto=http://sporty.fit/bitrix/redirect.php?goto=http://clubbingbuy.com/proxy.php?link=https://teletype.in/@urist555/TaCh9MGwqKC>http://lingua.store/bitrix/rk.php?goto=http://sporty.fit/bitrix/redirect.php?goto=http://clubbingbuy.com/proxy.php?link=https://teletype.in/@urist555/TaCh9MGwqKC</a> 1×slots официальный сайт зеркало Наличие у игрока второго аккаунта. Запрещено создавать количество профилей для неоднократного получения бездепов.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Но на некоторых азартных платформах сходственные вознаграждения все получить теперь зарегистрированные пользователи. В таком случае, бонусы предоставляются в уникальных акций или же неким игрокам повторяющий акционного предложения, коие приходит на почту с целью «возвратить» игрока в свое казино.Ещё одно распространённое акционное предложение – привлекательный презент с сомнительными притязаниями. К образцу, клуб сулит $100 виде бездепа, хотя с вейджером х80 либо х100. Отыграть такой вейджер практически нереально и потому никакого концентрироваться на больше интересных промоакциях. Лишь известные и знаменитые азартные заведения все позволить себя раздавать бездепы повторяющий дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, коие можно истратить в топовых аппаратах с высочайшей отдачей.Главное преимущество спинов – возможность выучить различные слоты. Также удастся насладиться бонусными раундами, испытывать фортуну в риск-туре и преувеличить выигрыш за счёт особенных знаков. Однако столько игровой процесс заслуживает внимание, так превосходнее сосредоточиться на реальном выигрыше. <a href=https://clients1.google.tk/url?q=https://doctorlazuta.by/>https://clients1.google.tk/url?q=https://doctorlazuta.by/</a> Однако в критериях исчезают «подводные камни», коие не разрешат исключить солидную необходимую или же вы не успеете отыграть вейджер. Поэтому мастера рекомендуют арестовать бесплатные вращения за регистрацию в казино без депо, чтобы поднабраться навыка и получить настоящий шанс на победу. 1 x slots casino
1×slots рабочее зеркало на сегодня
Бездепозитные призы в казино без пополнения 2022 — это конкретная сумма денег или gratuitous spins вращения, которые предоставляются первым гостям за регистрацию на веб-сайте казино вид бездепозитного бонуса, и выделяет вам возможность помощью казино без пополнения опробовать предложения (игр), с последующей прерогативой вывода средств при выполнении всех установленных верховодил. <a href=https://forum.dis-course.net/viewtopic.php?t=652217>1×slots casino регистрация 1×slotscasin online</a> 4. Заберите презент. Чаще всего бонус активизируется незамедлительно последствии регистрации. Но бывают ситуации, когда нужно забежать в собственный кабинет или написать в саппорта. 1×slots быструю регистрацию а также мгновенное <a href=http://www.glife2120.ru/user/Travispog/>http://www.glife2120.ru/user/Travispog/</a> Если речь об неповторимых услугах, может потребоваться регистрация в казино по ссылке с партнерского вебсайта.
1×slots казино мобильная версия
Благодаря программке лояльности от игорного заведения, возможно взять хороший старт и без дополнительных вложений запустить видеослоты. Кроме того, можно рассчитывать на реальную фортуну и получить, без вложения личных денег, великой выигрыш.Как управляло, при выводе финансов, от играющего требуется только сделать наименьший лепта для того, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом личный счет. <a href=https://www.arrl.org/forum/topics/view/4345>https://www.arrl.org/forum/topics/view/4345</a> В разделе с бонусами активировать свой презент. Найти забавы, для которых предусмотрено поощрение и применять бонус по назначению. 1×slots официальный сайт скачать В игровых клубах без лицензии Вы покупаете „кота в мешке“ и если, тогда, неоднозначных ситуаций нет возможности куда-то пожаловаться и обосновать свою правоту.Но существуют азартные заведения, готовые просто например вручить деньги на игру. Для сего достаточно сделать профиль. Чтобы исключить выигрыш, сначала нужно выполнить вейджеровые обстоятельства, прописанные в критериях получения бездепа.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.immortales-gilde.de/viewtopic.php?f=2&t=383203>1×слот регистрация в 1×slots casino</a>
<a href=https://www.thefamilylegion.se/viewtopic.php?f=4&t=100031>1хслотс регистрация в 1×slots casino</a>
<a href=https://kakofon.cz/forum/viewtopic.php?f=6&t=459&p=40420#p40420>1×slots зеркало регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Почти все игровые клубы требуют подтверждение контактных данных игрока для получения бездепозитного приза.
#1495 internetvolgogradGephttps://domashij-internet-volgograd001.ru
домашний интернет омск <a href=https://domashij-internet-volgograd001.ru>domashij-internet-volgograd001.ru</a> лучший интернет провайдер омск
#1496 internetrostovGephttps://domashij-internet-rostov003.ru
подключить интернет в квартиру ростов <a href=https://domashij-internet-rostov003.ru>domashij-internet-rostov003.ru</a> провайдеры интернета в ростове
#1497 AllenAlilehttps://articlescad.com/c-digo-promocional-1xbet-hoy-usa-1xbum200-para-130-20278.html
https://share.evernote.com/…185f5ef28e76
#1498 internetrostovGephttps://domashij-internet-rostov002.ru
интернет тарифы ростов <a href=https://domashij-internet-rostov002.ru>domashij-internet-rostov002.ru</a> провайдеры домашнего интернета ростов
#1499 Charlesgunnyhttp://filmkachat.ru
казино 1× slots официальный сайт
У нас на сайте Вы найдете список призов без депо в проверенных казино и подробную информацию то как их получить и использовать. <a href=http://filmkachat.ru/>1 xslots рабочее зеркало</a> Нет. Казино выдают бесплатные призы за регистрацию, чтобы, чтобы, чтобы заказчик имел ознакомиться с игровым заведением. А дабы исключить его, необходимо выполнить обстоятельства отыгрыша. <a href=https://www.esurveyspro.com/Survey.aspx?id=7d40634a-251d-4a35-a116–1d7e11ae06f1>https://www.esurveyspro.com/Survey.aspx?id=7d40634a-251d-4a35-a116–1d7e11ae06f1</a> 1×slots коды <a href=http://www.safe1.co.kr/bbs/board.php?bo_table=free&wr_id=99333>http://www.safe1.co.kr/bbs/board.php?bo_table=free&wr_id=99333</a> Выше мы дали полный комплект самых новых и своевременных бездепозитных призов в онлайн казино без пополнения на 2022 год, где возможность пользоваться каким ценным бездепозитным бонусом.
1×slots подтвердит вашу регистрацию если говорить
Несмотря на то, собственно этот вариант стимуляции со стороны азартных платформ очень популярен в сфере сходственных игр, далеко не поклонникам казино ведомо, собственно по бездепозитные призы казино и как именно их вполне эксплуатировать. <a href=https://minecraft.ru.net/user/Manuelsoarl/>1×slots официальный зеркало рабочее</a> 1×slots официальный зеркало рабочее <a href=http://pasarinko.zeroweb.kr/bbs/board.php?bo_table=notice&wr_id=3881972>http://pasarinko.zeroweb.kr/bbs/board.php?bo_table=notice&wr_id=3881972</a> 1×slot зеркало Зарегистрируйтесь. Для регистрации почаще всего достаточно установить собственный номер телефона и почтовый адрес, в чего ввести приобретенный код из СМС. Возможно, требуется показать промокод. В правилах промоакции несомненно написано, где его надобно вводить. Иногда это надо делать при регистрации, от — уже после сотворения личного кабинета, на отдельной странице.
1×slots регистрацию процедура займет всего лишь
<a href=http://uplmegaporn.com/user/Stevenmep/>http://uplmegaporn.com/user/Stevenmep/</a> Условия все различаться приятель от друга. Но такой приз имеет быть применен лишь для игрового процесса – приобретенные на счет деньги до как, как будут отыграны, вывести нереально.Многие казино предоставляют в рекламных целях бесплатные призы самая для наших читателей. Чтобы их получить, нужно перейти на игровой вебсайт по партнерской ссылке с нашего портала. казино 1×slots Бывают ли бездепозитные бонусы без вейджера? Бывают, в у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино.При регистрации что либо ином интернет игральном заведении — вам дается раз шанс испытать свою удачу не внося средства монеты. Замечу что такую поощрительную услугу деют не все онлайн игровые площадки, а только щедрая середина(средина) из их. Которые мы подготовили для Вас в нашем списке.
1×slots промокод при регистрации 2025
<a href=http://soumoli.com/home.php?mod=space&uid=24916>сайт 1× slots casino</a> Эффективность бездепов в маркетингового прибора оценили почти операторы. Малоизвестные площадки используют эти промоакции, чтобы скоро набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны неизменных гостей. Не все веб-сайты, дающие подарки без депо, рекомендованы к игре. За привлекательным промоописанием все прятаться неосуществимые условия отыгрыша и другие подводные камни.Подтверждение электронной почты – одно из основных критерий, коие есть почти в каждом бездепозитном казино. Чтобы верифицировать электронную почту, довольно перейти по активной ссылке в письме, полученном от азартного клуба. Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала резвые выводы. Фишка выплат что, нет, что довольно выбрать платёжный инструмент и указать сумму. В большинстве случаев средства зачисляются на электронные кошельки протяжении 15 мин., а на банковские карты – 1–3 рабочих дня. 1×slots регистрация 1×slots review live <a href=http://nvkb.ru/forum/index.php/user/105042/>http://nvkb.ru/forum/index.php/user/105042/</a> Так собственно приготовьтесь дать конфиденциальную информацию (пол, возраст, страна проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает не более суток, после чего получится свободно выводить крупные выигрыши.
1хслотс мобильная версия зеркало
Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.В некоторых онлайн казино для получения бездепозитных призов не довольно просто зарегистрироваться на сайте клуба и подтвердить средства контактные данные. Дополнительно потребуется активация промокода. <a href=http://msk-ru.ru/index.php?subaction=userinfo&user=yellowsector6>http://msk-ru.ru/index.php?subaction=userinfo&user=yellowsector6</a> 1×slots рабочее зеркало Когда речь идет о валютных призах, казино постоянно устанавливают условия вейджера, которые нужно выполнить, чтобы исключить выигрыш.Если при регистрации указать промокод, возможно гарантировано получить приз. Где взять ваучер? Посетите тематические блоги либо форумы. Иногда администрация клуба проделывает рассылку ваучеров на электронную почту. В заключительное время игорные дома начали афишироваться в кинокартинах и сериалах. Присмотритесь и наверняка заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных руб.
<b>Смотреть еще похожие новости:</b>
<a href=http://182.237.3.195/home.php?mod=space&uid=580780>рабочее зеркало 1×slots</a>
<a href=https://forum.ltp-team.com/topic/195854–1×slot-zerkalo/>1×slot зеркало</a>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=703570>1 xslots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепы с бесплатными вращениями предоставляют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд уплачивает казино. Число спинов ограничено и изредка выше сотню. Если акция включает в себя количество бесплатных игр, их начисление возможность быть разбито на некоторое дней.
#1500 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Мария Шарапова порно с Гатагова Ольга Анатольевна <a href=https://res-publika.com>porno Марина Александрова</a> Валентина Матвиенко порно Радченко Светлана Юрьевна порно <a href=https://www.ossetia.tv/>win win casino</a> Ирина Горбачева сайт казино вход официальные букмекерские конторы скачать porno Мира Андреева (теннис) Попова Анна Юрьевна порно макао казино казино вход официальный сайт
DiskiPlus Светлана Ходченкова DiskiPlus 1win букмекерская контора <a href=https://diskiplus.ru>DiskiPlus porno Юлия Канакина, скелетонистка</a> DiskiPlus порно с Варвара Субботина DiskiPlus макао казино <a href=https://www.diskiplus.ru/>DiskiPlus казино вулкан</a> DiskiPlus up букмекерская контора DiskiPlus леон букмекерская контора DiskiPlus Комарова Наталья Владимировна порно DiskiPlus casino на телефон DiskiPlus скачать букмекерскую контору DiskiPlus Черкесова Бэлла Мухарбиевна порно DiskiPlus демо казино
#1501 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Валентина Матвиенко порно казино вход официальный сайт <a href=https://glvk.guru/>pin up casino официальный</a> казино на деньги промокод 1×bet <a href=https://slon-ru.com/>7k casino</a> Скворцова Вероника Игоревна порно казино в россии 1×bet зеркало xbet казино без up casino скачать 1×bet зеркало слоты 1×bet xyz 1×bet вход
DiskiPlus бесплатно фильм казино DiskiPlus pin up casino зеркало <a href=https://www.diskiplus.ru>DiskiPlus casino онлайн</a> DiskiPlus порно с Георгий Джикия (футбол) DiskiPlus порно с Виктория Синицина, фигуристка <a href=https://diskiplus.ru>DiskiPlus porno Анна Сидорова, керлингистка</a> DiskiPlus Комарова Наталья Владимировна порно DiskiPlus порно с Максим Глушенков (футбол) DiskiPlus рабочее казино DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz DiskiPlus 1×bet xbet DiskiPlus 1×bet зеркало DiskiPlus Светлана Ходченкова
#1502 Charlesgunnyhttp://filmkachat.ru
1хслотс 1хслотс регистрация перейти на 1×slots
Существуют казино с бонусом за регистрацию, в которых довольно известны фриспины в онлайн казино потом регистрации в конкретных забавах. Они встречаются и почаще даровых поощрений или традиционных бонусов в казино без вложений. Например, игрок регистрирует счет, на кот-ый начисляются бесплатные забавы, бонус за регистрацию вид безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса игрок выигрывает настоящие средства, коие в последствии можно удачно исключить из заведения на свою платежную систему. То есть, есть все шансы исключить свои без рисков собственными финансами. Регистрация, за компьютерные получит бонусы, займет минут, а спасибо данному возможно увеличить пять евро поощрений до тысячи и без всяких проблем исключить их. <a href=http://filmkachat.ru/>1×slos регистрация в 1×slots casino</a> <a href=https://www.shippingexplorer.net/en/user/architectural-rendering/146752>https://www.shippingexplorer.net/en/user/architectural-rendering/146752</a> На страничке представлены бездепозитные бонусы за регистрацию в казино редчайшая награда за которой гонятся все игроки как новенькие, например и профессионалы. Мы также уделяем великое внимание на наличие бонусов при составление рейтинга казино на деньги. Бездепозитный бонус это возможность выступать бесплатно и выиграть настоящие средства. 1х слотс зеркало регистрация в 1×slots casino <a href=https://www.thenewtop10s.com/author/julesleant/>https://www.thenewtop10s.com/author/julesleant/</a>
1×slots бонус за регистрацию
<a href=https://021snyw.com/space-uid-53919.html>1×slots регистрация на 1хслотс</a> 1×slots casino зеркало В бонусную программу многих операторов входят систематические бездепы. Это бессрочные акции, поощряющие интенсивных неизменных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают неизменные бонусы без депо в размен на скопленные баллы лояльности. <a href=http://akkaparallel.blogspot.com/2013/05/testlink30.html>http://akkaparallel.blogspot.com/2013/05/testlink30.html</a> 1×slots casino регистрация на сайте Не стоит незамедлительно же отрицаться от приветственных подарков в похожих казино. Администрация готова начислить деньги либо фриспины, хотя предварительно работники обязаны увериться, собственно вы не аферист. Дело никаких, что развелось очень большое охотников за призами. Они выучились дурачить систему и зарабатывать солидные суммы денег.
1×slots регистрация 1×slots review live
<a href=http://c909201u.beget.tech/user/DoctorLazutakn/>http://c909201u.beget.tech/user/DoctorLazutakn/</a> Некоторые онлайн-казино без депозита предлагают свежим клиентам выбрать приз при регистрации. Будьте внимательны: выбрав раз, вы в безусловном большинстве случаев не сможете воспользоваться остальными. 1×slots зеркало регистрация то дальше необходимо пройти Исходя из этого, просто не существует мудрых оснований махнуть рукою на получение такого приза при регистрации. И, заметить,, на подобный безвозмездной основе у вас есть все шансы выиграть деньги и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные призы, именуют бесплатными онлайн платформами для игр.
1×slos регистрация в 1×slots casino
Казино выводит средства лишь на ту платежную систему, с котрой был сделан депо. То есть, для вывода бездепозитного бонуса, Вам сначала необходимо восполнить счет. В некоторых клубах узкий перечень методов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет непосредственно с данных платежных способов, которые доступны для вывода. Онлайн-казино с бездепозитными бонусами ставят клиентам обстоятельства для использования бездепами, поэтому перед ролью в акции какого-либо тщательно ознакомиться со всеми правилами и нюансами промоакции. Условия все прикасаться получения бонуса, его использования и следующего вывода денежных средств если, тогда, выигрыша.Рассмотрим принцип его действия на образце. Допустим, вы зарегались и возымели $10 not the slightest deposit bonus с вейджером х50. Это означает, собственно выигранные деньги возможно будет выводить не раньше, чем после того, как общая сумма ставок достигнет $500. Возможность сыграть вспомогательное состязание (а время и несколько) совершенно бесплатно, а выигрыш, же, поступает на счёт игрока. 1×slots официальный сайт, скачать <a href=https://familydir.com/%D0%BA%D1%83%D0%BF%D0%B8%D1%82%D1%8C-%D0%B2%D0%BD%D0%B5%D1%88%D0%BD%D0%B8%D0%B5-%D1%81%D1%81%D1%8B%D0%BB%D0%BA%D0%B8-%D0%BD%D0%B0-%D1%81%D0%B0%D0%B9%D1%82_442902.html>https://familydir.com/%D0%BA%D1%83%D0%BF%D0%B8%D1%82%D1%8C-%D0%B2%D0%BD%D0%B5%D1%88%D0%BD%D0%B8%D0%B5-%D1%81%D1%81%D1%8B%D0%BB%D0%BA%D0%B8-%D0%BD%D0%B0-%D1%81%D0%B0%D0%B9%D1%82_442902.html</a>
casino 1×slot
Также случаются случаи, когда казино начисляет обсужденный приз в регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам.Риск-игра по равным шансам – Также казино может воспрещать исполнять условия по отыгрышу с помощью раунда на удвоение, который предлагается в слотах, видео-покере и некоторых иных забавах. 3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефонный либо почту, указать индивидуальную информацию; <a href=http://megatkani.ru/bitrix/redirect.php?goto=http://amritamed.ru/bitrix/redirect.php?goto=http://byfin.by/bitrix/redirect.php?goto=https://telegra.ph/Ponimanie-klyuchevyh-aspektov-i-znacheniya-pravosposobnosti-09–23>http://megatkani.ru/bitrix/redirect.php?goto=http://amritamed.ru/bitrix/redirect.php?goto=http://byfin.by/bitrix/redirect.php?goto=https://telegra.ph/Ponimanie-klyuchevyh-aspektov-i-znacheniya-pravosposobnosti-09–23</a> Некоторые клубы механически начисляют приз на акк игрока последствии выполнения условий получения, но бывают ситуации, когда бонус надо(надобно) активировать игроку самому. Есть несколько способов активации приза:Приветственный бонус без депозита ? подарок за регистрацию. Выдается средствами, фриспинами либо баллами. В заключительном случае бонусные баллы используются для роли в турнирах или обмена на реальные деньги. 1×slots зеркало регистрацию более популярный вариант это Высокая конкурентность в сегменте азартных игр мотивирует операторов завлекать посетителей разнообразными промоакциями. Благодаря данному у гостей замечена вероятность получить призы в казино за регистрацию без депозита. Воспользоваться таким предложением возможно, избегая функцию внесения денег на игровой счет, просто активировав аккаунт на веб-сайте. Наш экскурсовод по бездепам поможет выбрать самую симпатичную бонусную программу, узнать верховодила получения такого вознаграждения и распорядиться им с максимальной выгодой.Максимальный размер ставки, который невозможно превышать пока бонус не несомненно всецело отыгран. В случае нарушения сего верховодила, приз и выигрыш с него будут аннулированы.
<b>Смотреть еще похожие новости:</b>
<a href=https://praisenpray.org/forums/showthread.php?tid=134795>1×slots рабочее зеркало на сегодня</a>
<a href=https://www.mentalhealth-world.org.uk/forums/index.php?/topic/96546–1×slots-casino-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-1×slots-review-live/>1×slots casino регистрация 1×slots review live</a>
<a href=https://astraclub.ru/members/353998-Jameswow>рабочее зеркало 1×slots</a>
<a href=http://forum.l2endless.com/showthread.php?tid=566085>1×slots casino регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чаще всего интернет-казино предлагают бездепозитные бонусы новым пользователям. Эта промо-акция очень эффективно привлекает новичков, подталкивая их к открытию счета. Конечно, не они становятся послушными посетителями, но сам факт регистрации аккаунта играет на руку заведению.
#1503 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало слоты порно с Алина Загитова <a href=https://www.ossetia.tv/>зеркала официальных сайтов казино</a> casino x 1×bet официальный скачать <a href=https://sovsekretno.net/>казино 5</a> букмекерская контора ставки Хорова Наталья Александровна порно казино гта 5 демо казино букмекерская контора леонов порно с Виктория Синицина, фигуристка почему в казино не бывает настенных часов
DiskiPlus скачать 1×bet на андроид бесплатно DiskiPlus рокс казино <a href=https://diskiplus.ru>DiskiPlus карты казино</a> DiskiPlus 1×bet вход DiskiPlus up casino официальный <a href=https://diskiplus.ru>DiskiPlus порно с Артемий Панарин (хоккей)</a> DiskiPlus 1×bet скачать приложение DiskiPlus casino официальный зеркало DiskiPlus скачать 1×bet на андроид бесплатно DiskiPlus букмекерская контора без DiskiPlus casino online зеркало DiskiPlus Приезжева Екатерина Геннадьевна порно DiskiPlus 1×bet официальный слоты
#1504 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на 1хслотс
Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих требований, не обязательной верификации. Если на сайте учтена неотъемлемая процедура доказательства личности, то исключить выигрыш получится лишь после ревизии данных. Приготовьтесь заполнить анкету и отправить в техподдержку документ, подтверждающий личность. <a href=http://filmkachat.ru/>1× slots зеркало</a> В случае установленного лимита на сумму вывода выигрыша с бездепозитного приза, игрок не сможет исключить больше заявленной суммы.Так же стоит выделить то, собственно в каждом онлайн казино установлен собственный максимальный кешаут на бездепозитный бонус. Как верховодило кешаут — это максимальная сумма денег, которая дешевая для вывода с бездепозитного бонуса. <a href=https://www.lasso.net/go/link/TkCFy8>https://www.lasso.net/go/link/TkCFy8</a> Частенько новички не разумеют, как активировать подарки либо исключить 1-ый выигрыш. Для подобных случаев наша команда обрисовала главные термины – что такое фриспины, вейджер, как его отыграть, зачем нужно проходить верификацию.Почти все игровые клубы настоятельно свидетельство контактных данных игрока для получения бездепозитного приза. 1 хслот регистрация в 1×slots casino <a href=https://animeworld.ruhelp.com/viewtopic.php?id=3695>https://animeworld.ruhelp.com/viewtopic.php?id=3695</a>
скачать 1×slots официальный сайт
Бонусные средства – небольшая сумма средств для старта в новеньком казино. На бонусные средства, обыкновенно разрешается играть во все забавы, кроме слотов с прогрессивным джекпотом и игр из раздела exist casino. 1хслотс рабочее зеркало На данном разделе портала периодически публикуются обзорные статьи, каких рассматриваются бесплатные призы лучших интернет-казино. Информация структурирована по нескольким пт, включая основные: <a href=https://google.dm/url?q=https://doctorlazuta.by/>https://google.dm/url?q=https://doctorlazuta.by/</a> 1×slots зеркало подтвердит вашу регистрацию если говорить
x1 slots 1хслотс регистрация перейти на 1×slots
Все обожают получать подарки. Согласитесь, почти любой играющий человек будет бесконечно рад, если получит бесплатный подарок для игры в онлайн казино просто за регистрацию либо же приз за внесенный депозит, например называемые приветственные бонусы для новых игроков. Соответственно эти онлайн клубы станут больше популярны и предпочтительны у игроков при выборе казино для игры. Топ казино каждый обновляется и прибавляются свежие и интересные игровые клубы с симпатичной бонусной политикой и всеми вероятными прерогативами, к коим относятся эти призы как фриспины за регистрацию, денежные бездепозитные призы, а также великодушные бонусы за внесенный депо.Срок активации и время на отыгрыш. Зачисление денег либо фриспинов происходит при активации на взыскательно ограниченного периода, похожие требования предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать приз некоторое дней либо числе месяцов. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с неоправданно высоким вейджером. Автоматическая активация первый самой удобной, хотя ручной метод содержит перед ней превосходства. Прежде чем применять вознаграждение от казино, стоит заблаговременно определить, сколько медли потребуется на исполненье всех критерий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деяния бонуса. <a href=https://elclasificadomx.com/author/jameslog/>https://elclasificadomx.com/author/jameslog/</a> В каждом казино с бездепозитным призом предусмотрены вейджеровые обстоятельства. Это единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, нужно устроить определённое число ставок. Чем круче приз, тем сложнее выполнить обстоятельства, и напротив. 1×slots официальный demo регистрация в 1×slots casino Ещё одно распространённое акционное предложение – привлекательный презент с сомнительными притязаниями. К образцу, клуб сулит $100 виде бездепа, хотя с вейджером х80 либо х100. Отыграть такой вейджер практически нереально и потому никакого концентрироваться на больше интересных промоакциях.С иной стороны, гораздо легче отобрать бездепозитные фриспины за регистрацию в казино и прямо в начать вращать барабаны в наилучших слотах. Главная особенность спинов что, нет, собственно они предусмотрены для топовых автоматов. Удастся не пройти вспомогательные раунды, хотя и прирастить сумму выигрыша, заработать респины и другие внутриигровые презенты.
1×slots рабочее зеркало
Так что приготовьтесь предоставить секретную информацию (пол, возраст, государство проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает менее суток, в чего удастся свободно выводить солидные выигрыши.В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это исключительно приятная часть игры. Важно, зачастую бездепозитные бонусы в казино выдаются с лимитированиями по максимальной выплате. В среднем можно рассчитывать на выгода в несколько тыщ рублей. Как вывести выигрыш с бонуса без депозита. Придётся подтвердить аккаунт документально, в неких заведениях. Процедура верификации обязательна и делается любым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате либо прочитайте в правилах. <a href=http://support-groups.org/viewtopic.php?f=161&t=772045>1×slots быструю регистрацию а также мгновенное</a> Как управляло, при выводе финансов, от играющего требуется лишь сделать наименьший лепта для того, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом индивидуальный счет.Если вы новичок деле и лишь попали в неизведанную вами область азарта — счет предложений как бездепозитные бонусы без пополнения. Бездепы могут входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой или баллами. 1×slots рабочее зеркало <a href=http://bonusb.ru/bitrix/rk.php?goto=http://accordtec.ru/bitrix/redirect.php?goto=http://sv.paltalk.com/client/webapp/client/External.wmt?url=https://telegra.ph/10-vazhnejshih-pravil-ehffektivnoj-kritiki-09–24>http://bonusb.ru/bitrix/rk.php?goto=http://accordtec.ru/bitrix/redirect.php?goto=http://sv.paltalk.com/client/webapp/client/External.wmt?url=https://telegra.ph/10-vazhnejshih-pravil-ehffektivnoj-kritiki-09–24</a> Изучить управляла и обстоятельства получения бездепозитных бонусов казино, Вы можете у нас на веб-сайте в разделе с призами или на официальном сайте избранного Вами казино. Если не найти нужную информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал или по электрической почте.Бездепозитный приз – это экономическое вознаграждение, которое выдается участнику забавы в казино, для его привлечения и появления заинтригованности. Любой гость, кот-ый соответствует условиям выдачи сходственного бездепозитного бонуса, может претендовать на получение вышеуказанного приза. Такое одобрение считается более действенным способом, дающим возможность стартовать в игре, не вкладывая личных вещественных средств.
1×slots официальный сайт скачать
Этот тип приза будет добавлен на Ваш акк последствии удачной процедуры регистрации с внедрением номера аппарата. Если выбрать другой способ сотворения учетной записи, бездеп не будет добавлен на Ваш аккаунт. <a href=https://www.miyawaki.wiki/index.php/User:LurleneTharp21>https://www.miyawaki.wiki/index.php/User:LurleneTharp21</a> Для получения депозитного приза нужно восполнить собственный игровой баланс реальными деньгами. Вознаграждение возможно получить либо при внесении первого депозита, или вид фиксированного процента от внесённых средств. Так или по, приз поступит на счёт лишь в пополнения. 1×slots зеркало регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://tussom.com/forums/showthread.php?tid=12888>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=http://iptv.bestforums.org/memberlist.php?mode=viewprofile&u=514>1хслотс казино зеркало</a>
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=71166>1×slots официальный сайт зеркало рабочее</a>
<a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=1619624#pid1619624>1×slots регистрация 1×slotscasino 56 online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Получить Бездепозитный бонус в онлайн казино дело 2-ух кликов. Другой момент, отыграть рекламную и соблюсти управляла и обстоятельства отыгрыша. Под правилами подразумевается не только вагер, хотя и ограничения по наибольшей ставке. Мы осознаем, собственно в кинотеатр все ставят на зеро и выигрывают. Призываем не создавать похожего. Перед активацией бонуса прочитайте управляла. Узнайте последующие моменты: Условия получения подарка, за регистрацию, за депозит и многое. Ограничения по максимальной ставке. Зачастую не повыше 350 рублей. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вращать автоматы, а вагер несомненно стоять на месте. Поэтому принципиально аристократия, в каких играх возможно совершать кратность валютного оборота. Представьте момент, когда при ставке в 10 рублей Вы получите сходственное умножение. Миллион руб. За одно вращение, что вполне вероятно. Поэтому вопрос, сколько можно выиграть остаётся закрытым. Предлагаем выяснить помощи. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный бонус и инспектируйте удачу в деле. Разумеется, исключить деньги сложно. Однако шансы есть у всех.
#1505 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Нургалиева Эльвира Рамиловна порно букмекерские конторы в россии <a href=https://7club7.com/>порно с Захарова Мария Владимировна</a> скачать сайт букмекерской конторы скачиваемые казино <a href=https://7club7.com/>букмекерская контора на андроид</a> человек казино ограбление казино букмекерская контора бесплатно скачать порно с Евгения Медведева букмекерская контора без скачать букмекерскую контору на андроид black russia казино
DiskiPlus 1×bet на сегодня DiskiPlus рабочее казино <a href=https://diskiplus.ru>DiskiPlus Львова-Белова Мария Алексеевна порно</a> DiskiPlus porno Александр Соболев (футбол) DiskiPlus казино играть <a href=https://diskiplus.ru/>DiskiPlus казино пину</a> DiskiPlus порно с Анастасия Потапова, теннисистка DiskiPlus porno Яна Троянова DiskiPlus casino вход DiskiPlus слот casino DiskiPlus порно с Гатагова Ольга Анатольевна DiskiPlus порно с Гатагова Ольга Анатольевна DiskiPlus 1×bet бесплатно
#1506 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации 2025
Индивидуальные одобрения выдаются за совершение деяний: подписку на аккаунты площадки в соц сетях, установку мобильного прибавления или официального клиента для ПК. В большинстве казино действуют программы лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий степень нередко сопровождается выдачей бездепа. <a href=http://filmkachat.ru/>1×slot зеркало рабочее этих способов предполагает регистрацию</a> В случае с фриспинами без вейджера, Вам не придется отыгрывать свой выигрыш с даровых вращений. Прибыль, которую Вы заработаете на таком бездепе возможно ставить на вывод без какого либо отыгрыша. <a href=https://beacons.ai/lexxeagle>https://beacons.ai/lexxeagle</a> 1×slots зеркало на сегодня <a href=http://halcom.cn/home.php?mod=space&uid=138672&do=profile>http://halcom.cn/home.php?mod=space&uid=138672&do=profile</a> Варианты выигрыша в от Вашей успеха и критерий игорного портала. Выше мы заявили, что кое-какие бездепозитные бонусы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются и те, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность современных игр на деньги, возможно выиграть невозможные суммы. Сегодняшние игровые автоматы либо видео слоты, как их именуют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые множат ставку от х100.000.
1×slots зеркало этих способов предполагает регистрацию
Составленный специалистами Casino.ru список онлайн-казино с бездепозитным призом разрешает игрокам сравнить спецпредложения разных операторов.Как правило, новоприбывшие игроки начала хотят ознакомиться с методами ввода и вывода денежных средств и сроки выполнения поданных заявок дабы четко разуметь, как стремительно возможность исключить свой казино бонус за регистрацию без депозита на электрический кошелек или же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино соперничают между собой. Ведь если бы определенную компанию давало лишь одно онлайн-заведение, то навряд бы посетители увидели казино с призом за регистрацию и могли бы рассчитывать только на вознаграждение повторяющий приза на первое инвестиция. К каждому заведению регулярно следует привлекать свежих игроков, собственно, итоге, только на руку всем играющим. <a href=https://www.digicube.de/forum/threads/896219–1×-%D1%81%D0%BB%D0%BE%D1%82-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE?p=1113813#post1113813>1× слот зеркало</a> 1хслотс регистрация в 1×slots casino Обыкновенные бездепозитные призы в объеме от 3-х до двадцати долларов сделаны чтобы, чтобы, дабы в игры заходили все свежие и свежие игроки. Здесь, всего, несомненно лимитирование на максимальный выигрыш. Важно, дабы перед наименьшим вкладом был отключен бонус за 1-ое пополнение счета, и игрок не попадет на повторный вейджер.На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не можете активировать и получить бездепозитный приз. <a href=http://2012614.com/home.php?mod=space&uid=75594&do=profile>http://2012614.com/home.php?mod=space&uid=75594&do=profile</a> 1×slos регистрация в 1×slots casino В современность очень просто получить приз за регистрацию в казино. Практически каждый игорный дом с радостью начислит деньги или безвозмездные вращения. Многие гэмблеры пользуются этим и не смущяются региться в каждом клубе с выгодными условиями. Кстати, это отличная вероятность выработать победную стратегию и сорвать джекпот.
1×slots casino регистрация
Реже призы без депо начисляются неизменным игрокам. С их подмогою администрация постарается удержать ценных клиентов или вожделеет поблагодарить за лояльность правильных гостей. Но намного почаще для сходственных целей используются такие акции: <a href=http://xn–90aobsdmdi4fb1c.xn–p1ai/bitrix/redirect.php?goto=http://metallmebel-shop.ru/bitrix/redirect.php?goto=http://wot-planet.com/bitrix/redirect.php?goto=https://telegra.ph/Sudya-Konstitucionnogo-suda-Rossijskoj-Federacii-09–19>http://xn–90aobsdmdi4fb1c.xn–p1ai/bitrix/redirect.php?goto=http://metallmebel-shop.ru/bitrix/redirect.php?goto=http://wot-planet.com/bitrix/redirect.php?goto=https://telegra.ph/Sudya-Konstitucionnogo-suda-Rossijskoj-Federacii-09–19</a> 1× slots casino зеркало Бесплатный бонус – кредиты, коие онлайн-казино начислит клиенту, не заставляя его пополнять игровой счет.
1×slot зеркало рабочее регистрации на телефон придет
Свежий приз начисляется в виде денежных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в использовании своими, а случае отыгрыша оператор возможность ввести лимитирование на вывод денег. B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.Сразу после активации промокода возможно воспользоваться даром. Как теснее упоминалось, бонусы случаются трёх обликов – фриспины, кредиты и фриплей-бонусы. Доступ к подарку может раскрываться автоматически в введения промокода или обращения в службу поддержки вебсайта. В первом случае от пользователя не потребуется практически действий. Бездеп с активацией по коду встречается чаще всего. Игроку необходимо установить совокупа символов в графе, которая имеет находиться в регистрационной форме в Личном кабинете.Также, учите, что бездепозитный бонус возможно вывести лишь что, нет случае, когда будут исполнены все обстоятельства отыгрыша. 1×slots регистрация 1×slots casino c2d ru <a href=https://wiki.snooze-hotelsoftware.de/index.php?title=Benutzer:RaymondMagnuson>https://wiki.snooze-hotelsoftware.de/index.php?title=Benutzer:RaymondMagnuson</a> Помните, что в неких играх сумма ставки идет в зачет вейджера лишь частично. Так, в настольных и карточных забавах только от 5% до 50% суммы ставки считаются как отыгранные деньги, тот как в слотах идет в зачет все one hundred percent суммы.Акции распространяются как на все игры казино, так и на ограниченный список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и. Промо имеет обхватывать разработки одного производителя. Бездеп не пересекается с иными промоакциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, сделанные бонусными средствами. Для идентификации платежных реквизитов игрока имеет понадобиться пополнение счета на наименьшую сумму.
1×slots casino регистрация 1×slots review live
Главным нюансом в возникновении данных вознаграждений произведено никаких, собственно пустив их в ход, игрок ничем не рискует и в последствии никому ничего не несомненно обязан (не зависимо, получит ли он благодаря призам какой-нибудь выигрыш или мгновенно спустит все лишь что прибывшие финансы). То есть, казино снабжает игрока вероятностью на дармовой основе играть во различные слоты причем спонсирует забаву. Индивидуальные поощрения выдаются за совершение действий: подписку на аккаунты площадки в соц сетях, установку мобильного прибавления или официального клиента для ПК. В большинстве казино срабатывают программки преданности, присваивающие игрокам статусы за активность на сайте. Продвижение на грядущий степень нередко сопрягается выдачей бездепа. <a href=https://www.elderscrolls.net/conference/index.php?showuser=32753>https://www.elderscrolls.net/conference/index.php?showuser=32753</a> Срок отыгрыша — это период, который наступает в момент активации бонуса и заканчивается с его закрытием. Пользователю нужно уложиться в данный временной зазор, иначе призовые средства аннулируются. Казино устанавливают список игр, ставки в которых засчитываются при расчете отыгранных денег. Если тайтл не заходит в данный список, то возможность быть недоступен для загрузки в действия бонусного предложения.Прямо момент заберите благотворительные вращения за регистрацию без депо и начинайте собирать призовые композиции ради солидных выигрышей! 1×slots зеркало 1хслотс регистрация перейти на 1×slots Прочитайте правила бонусной программки, в которой желайте участие. Да, мы настойчиво советуем устроить это до регистрации.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.findaspermdonor.com/viewtopic.php?f=25&t=98119>1× slots регистрация в 1×slots casino</a>
<a href=https://kakofon.cz/forum/viewtopic.php?f=8&t=330&p=39826#p39826>1×slots зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если простыми словами, бездепы – это определённая сумма средств или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать подарки. Но есть некоторые аспекты. Существуют игорные дома, которые перед тем как начислить бонусы требуют привязать телефон, предоставить копии документов.
#1507 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Черкесова Бэлла Мухарбиевна порно порно с Каролина Севастьянова <a href=https://www.ossetia.tv/>vavada casino</a> up casino скачать порно с Диана Шнайдер (теннис) <a href=https://rumafia.news/>Москалькова Татьяна Николаевна порно</a> кент казино porno Дарья Мороз casino зеркало сайта Петрова Ольга Викторовна порно как выиграть в казино пин ап casino pin casino играть
DiskiPlus 1×bet официальный xbet DiskiPlus лучшие букмекерские конторы <a href=https://diskiplus.ru/>DiskiPlus порно с Александр Большунов (лыжные гонки)</a> DiskiPlus Львова-Белова Мария Алексеевна порно DiskiPlus порно с Карен Хачанов (теннис) <a href=https://www.diskiplus.ru>DiskiPlus r7 casino</a> DiskiPlus 1×bet сейчас DiskiPlus porno Юлия Пересильд DiskiPlus смотреть фильм казино DiskiPlus винлайн букмекерская контора DiskiPlus Разуваева Ксения Денисовна порно DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz DiskiPlus porno Катерина Шпица
#1508 Charlesgunnyhttp://filmkachat.ru
1×slot официальный сайт
Нет. Для получения бездепозитного бонуса в казино нужна неотъемлемая регистрация на сайте. Играть в слоты бесплатно и без регистрации возможно только в демо режиме.Самые известные методы вывода средств ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электронным платежным системам на Neteller и Skrill, еще используют криптовалютными кошельками. Вывод выигрышей имеет исполняться мгновенно либо занимать от нескольких часов до нескольких суток. <a href=http://filmkachat.ru/>1×slots зеркало на сегодня</a> Подобные призы без депо предоставляются на больше выгодных условиях. Зачастую они крупнее, а условия отыгрыша менее жесткие.Принципиальным различием безвозмездных призов от бонусов на депозит является неимение надобности вносить деньги на аккаунт. Из-за этого их нередко нарекают бездепозитными (not the slightest down payment bonuses). <a href=https://allmylinks.com/kalinka0588>https://allmylinks.com/kalinka0588</a> казино 1×slots <a href=http://evakuator-gruzchik.ru/index.php?subaction=userinfo&user=accuratebevy31>http://evakuator-gruzchik.ru/index.php?subaction=userinfo&user=accuratebevy31</a> Третитй бездепозитный приз за регистрацию – валютные средства. К раскаянию, начислить рубли или доллары способны лишь известные и модные клубы. С их поддержкою появится насладиться каждой доступной игрой – автоматом, рулеткой, кено, блэкджеком.Мы собрали и выпустили перечень наихороших бездепозитных казино с бонусами за регистрацию, которые гарантируют щедрые выигрыши и моментальные выплаты.
1×slots зеркало быструю регистрацию а также мгновенное
Призовые начисления без депозита шансы предоставляться для участия в турнирах онлайн казино. Потратить перечисленные средства возможно необыкновенно в рамках данной промоакции. Условия их проведения в лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, никакого выучить его правила. <a href=https://forum.visiteachapada.com/viewtopic.php?f=19&t=7626>1 х слотс зеркало</a> 1хслотс зеркало на сегодня Выше мы предоставили полный комплект самых новых и своевременных бездепозитных бонусов в интернет казино без пополнения на 2022 год, где вы можете пользоваться каким ценным бездепозитным призом.Эффективность бездепов в рекламного прибора расценили многие операторы. Малоизвестные площадки используют эти промоакции, дабы стремительно набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны неизменных посетителей. Не все сайты, дающие подарки без депозита, рекомендованы к этой. За привлекательным промоописанием все скрываться невыполнимые условия отыгрыша и подводные камешки. <a href=http://icfood.com/bbs/board.php?bo_table=free&wr_id=189080>http://icfood.com/bbs/board.php?bo_table=free&wr_id=189080</a> 1×slots регистрация Каждая игровая перрон выделяется условиями по получению и отыгрышу бездепов. В правилах отчетливо расписаны кратковременные рамки, за коие нужно прокрутить вейджер. Также не забывайте на наибольший объем ставки и наивысшую необходимую выплаты. С другой стороны, дабы получить бездепозитные бонусы казино, довольно израсходовать не более 1 минутки.
1×slots сайт
Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, the decision лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. Верификация аккаунта. Лучше подтвердить личность сразу после регистрации, чтобы потом не было заморочек с выводом денег. Верификация возможность протекать двумя маршрутами:При игре на бонусные средства воспрещается играть в игровые автоматы с прогрессивным джекпотом и забавы из радела exist casino. Кроме того, некоторые казино дают бездеп на раз либо количество определенных слотов, и в других играх Вы не можете на них играть. <a href=http://javset.net/index.php?subaction=userinfo&user=organicleaf59>http://javset.net/index.php?subaction=userinfo&user=organicleaf59</a> Обычно бездепозитные акции от казино, прибывают на эл. Почту в дни рождения или дни. В неких онлайн казино можно адресоваться в чат и как неизменному игроку, вероятно вас предложат бездепозитное предложение.Получив собственный подарок, Вы сможете даром играть на реальные деньги, а выполнив условия отыгрыша, исключить собственный выигрыш. 1×slots бездепозитный бонус за регистрацию Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы моментально получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, замечена настоящий шанс победу!Получить приветственный бонус имеют лишь свежие клиенты онлайн-казино. Способы описаны в критериях акции любого легального казино, чаще всего это:
1×slots на любой вкус как пройти регистрацию
<a href=http://medforum.5nx.ru/viewtopic.php?f=4&t=9907>1×slots регистрацию процедура займет всего лишь</a> Поспешите забрать бездепозитные призы за регистрацию в казино из представленного списка. Все платформы не водят законную работа, хотя и обрадуют добросовестными плодами игры, высочайшей отдачей, быстрыми выплатами.Когда речь идет о получении бездепозитных призов в казино, в первую очередь направьте на следующие условия: 1хслотс 1хслотс регистрация перейти на 1×slots <a href=http://mednad.ru/index.php?subaction=userinfo&user=varioustwilight>http://mednad.ru/index.php?subaction=userinfo&user=varioustwilight</a> Зарегистрироваться в казино по специальной ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефона и электрическую почту). Для доказательства номера телефонного нужно в собственном профиле показать собственный номер и нажать кнопку „Подтвердить номер телефона“, дальше Вы получите sms-сообщение с кодом, кот-ый необходимо установить в подходящее поле. Для доказательства электрической почты, перебежать по интенсивной ссылке в послании от казино.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Если ординарными словами, бездепы – это определённая сумма средств или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно брать презенты. Но есть кое-какие нюансы. Существуют игорные жилища, которые перед что, этим как начислить бонусы требуют привязать аппарат, дать копии документов.Подтвердите личность, предоставив оператору казино средства паспортные данные. Инструкции обычно легкие, главное — конкретно им стопам. Если написано, собственно «на фото обязаны быть заметны все хорошо угла страницы паспорта» — устройте непосредственно такое фото. Существуют казино с бонусом за регистрацию, в которых довольно известны фриспины в онлайн казино потом регистрации в конкретных забавах. Они встречаются и почаще даровых поощрений или традиционных бонусов в казино без вложений. Например, игрок регистрирует счет, на кот-ый начисляются бесплатные забавы, бонус за регистрацию вид безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса игрок выигрывает настоящие средства, коие в последствии можно удачно исключить из заведения на свою платежную систему. То есть, есть все шансы исключить свои без рисков собственными финансами. Регистрация, за компьютерные получит бонусы, займет минут, а спасибо данному возможно увеличить пять евро поощрений до тысячи и без всяких проблем исключить их. <a href=http://multi-net.su/index.php?subaction=userinfo&user=mundanepowder35>http://multi-net.su/index.php?subaction=userinfo&user=mundanepowder35</a> онлайн казино 1×slots В бонусную программу множества операторов входят регулярные бездепы. Это пожизненные промоакции, поощряющие активных неизменных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают неизменные бонусы без депозита в размен на скопленные баллы преданности.
<b>Смотреть еще похожие новости:</b>
<a href=http://nexusroleplay.teamforum.ru/viewtopic.php?f=19&t=11405>скачать 1×slots на андроид мобильная версия</a>
<a href=https://www.digicube.de/forum/threads/896750–1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5-%D0%BD%D0%B0-%D1%81%D0%B5%D0%B3%D0%BE%D0%B4%D0%BD%D1%8F?p=1114370#post1114370>1×slots зеркало рабочее на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Маркетинговая политического всех игорных интернет-клубов должна одевать различный характер. И в гонорары на депозит работают для того, дабы стимулировать заносить депозиты и поощрять теснее имеющих пользователей, то бездепозитный приз в казино или приз за регистрацию в казино, этого всего, рассчитан на расширение базы покупателей.
#1509 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
официальные сайты казино pin up букмекерская контора <a href=https://7club7.com/>гта онлайн казино</a> 1×bet зеркало рабочее xbet porno Мария Шарапова <a href=https://m.repost.news/>pin casino</a> порно с Афонина Марина Игоревна casino buzz 7k casino официальная казино casino buzz inform@rucriminal.info porno Светлана Ходченкова
DiskiPlus Черкесова Бэлла Мухарбиевна порно DiskiPlus Анна Михалкова <a href=https://www.diskiplus.ru/>DiskiPlus porno Юлия Канакина, скелетонистка</a> DiskiPlus букмекерская контора зенит DiskiPlus 1×bet регистрация <a href=https://www.diskiplus.ru>DiskiPlus Валентина Матвиенко порно</a> DiskiPlus 1go casino DiskiPlus мобильные букмекерские конторы DiskiPlus Лут Оксана Николаевна порно DiskiPlus 1×bet приложение DiskiPlus porno Виктория Баркова, легкоатлетка DiskiPlus Набиуллина Эльвира Сахипзадовна порно DiskiPlus официальная казино
#1510 Charlesgunnyhttp://filmkachat.ru
1×slots скачать на айфон
Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала резвые выводы. Фишка выплат сомнений, собственно довольно выбрать платёжный инструмент и указать необходимую. В большинстве случаев средства зачисляются на электрические кошельки протяжении 15 минут, а на банковские карты – 1–3 рабочих дня.Обычно для получения призов без депо, казино выдвигает лояльные и абсолютно выполнимые условия, но есть ряд поступков которые запрещены и имеют причиной досадные результаты: <a href=http://filmkachat.ru/>1×slots зеркало сайта</a> Подарки на конкретные даты отличаются критериями получения. Если одобрение начисляют игроку на день рождения, то сумма обычно зависимости от совместного размера депо за год.Даже не выиграв солидную необходимую, игрок интересно проведет время, изнутри исследует работу площадки, оценит геймплей автоматов. Все это без каких-либо денежных рисков. Быть в курсе превосходнейших акций легко. Достаточно периодически учить список свежих интернет казино с выводом бонуса без депо в этом разделе. <a href=http://bedfordfalls.live/read-blog/135761_professional-3d-furniture-design-from-concept-to-creation.html>http://bedfordfalls.live/read-blog/135761_professional-3d-furniture-design-from-concept-to-creation.html</a> Наш перечень включает в себя наихорошие бездепозитные призы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит ревизию по принципиальным параметрам: 1хслот зеркало <a href=https://www.professionistidelsuono.net/forums/member.php?action=profile&uid=240802>https://www.professionistidelsuono.net/forums/member.php?action=profile&uid=240802</a> У любого игорного клубы разные вейджеровые обстоятельства. Чтобы вы гарантировано смогли выполнить их, мы дадим количество советов. Если система начислила маленькую сумму, не создавать большие ставки – остановитесь на 10–30 центах. Как только сумеете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте выступать. В противном случае никакого присмотреться к иному автомату.
1×slots регистрация на официальном сайте
Самый распространённый из похожих призов, окончательно же, бездеп на день рождения посетителя — бонус вид фиксированной суммы либо фриспинов поступает на счёт игрока, а воспользоваться им можно в течение установленного периода времени.В неких интернет казино для получения бездепозитных призов не достаточно просто зарегистрироваться на веб-сайте клуба и подтвердить средства контактные данные. Дополнительно требуется активация промокода. скачать 1×slots на андроид мобильная версия Для ревизии применяются сканы паспортов, водительских прав, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если юзер замечен в попытке завести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их владелец попадает в темный список. При забаве на лицензионной площадке не стоит бояться указывать достоверную персональную информацию (шифрование ликвидирует утечку персональных данных).Также, учите, собственно бездепозитный приз можно вывести только никаких случае, когда будут выполнены все условия отыгрыша. <a href=http://www.detskiy-mir.net/index.php?subaction=userinfo&user=demonicruler90>http://www.detskiy-mir.net/index.php?subaction=userinfo&user=demonicruler90</a> Для вывода средств бонус надо(надобно) несомненно отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариациями отыгрыша бездепозитного приза до его получения, чтобы избежать конфликтных ситуаций.Подтверждение регистрации. Казино настоятельно привязки профиля к электронному адресу и номеру телефона. Для этого на e-mail отправляется послание со ссылкой, а на телефонный ? текстовое извещенье с кодом. казино 1×slots официальный сайт
1×slot зеркало рабочее регистрации на телефон придет
Срок активации и время на отыгрыш. Зачисление средств либо фриспинов случается при активации на требовательно ограниченного периода, схожие притязания предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать бонус количество дней или числе месяцов. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высочайшим вейджером.При пользовании бездепозитным бонусом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют количество видов лимитов: Простая процедура получения бездепозитного бонуса, кот-ая займет менее 2-х минут. Для получения бездепов, достаточно зарегистрироваться и подтвердить контактные данные.Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депо может отличаться до 30 дней. <a href=http://rubezhcad.ru/bitrix/redirect.php?goto=http://redroofs.ru/bitrix/redirect.php?goto=http://mimicotton.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/fwTfPZOI4eF>http://rubezhcad.ru/bitrix/redirect.php?goto=http://redroofs.ru/bitrix/redirect.php?goto=http://mimicotton.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/fwTfPZOI4eF</a> Получив свой подарок, Вы сможете безвозмездно играть на реальные средства, а выполнив обстоятельства отыгрыша, вывести собственный выигрыш.Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша бонусов. Заведения всегда устанавливают наивысшую ставку, возможную по условиям вейждера. 1х слотс зеркало регистрация в 1×slots casino Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном бонусе, то начала внимание на значение вейджера и срок, кот-ый дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть приз и исключить выигрыш.
1× slots регистрация в 1×slots casino
Особую изюминку видео слотам присваивают уникальные символы. С их свет активизируются различные призы. Вы можете запустить вспомогательный уровень и увеличить необходимую выигрыша. Есть знаки, коие замещают ненадобные составляющие и сами создают выигрышные комбо. Не стоит забывать и на бонус-тур. После каждого счастливого спина есть шанс прирастить сумму выигрыша в два либо четыре раза. <a href=https://acerfans.ru/user/JamesTed/>casino 1×slot</a> Получив собственный подарок, Вы можете даром выступать на реальные деньги, а выполнив условия отыгрыша, вывести собственный выигрыш. 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=https://masterarms.se/user/stevenpeera/>https://masterarms.se/user/stevenpeera/</a>
1×slos регистрация в 1×slots casino
Бездепозитные бонусы – это самая занимательная и более перспективная акция интернет-казино. Они в лучше фри-спинов, потому собственно выплаты в безвозмездных вращениях не гарантированы, ведь композиции на барабанах игрового аппарата могут не сложиться. Воспользоваться бездепом можно не во всех игровых автоматах: казино вдруг устанавливает ограничение для клиентов. Конечно, это возможно посчитать неким неудобством для игрока, но ради стоит отметить, собственно выбор автоматов всё также остаётся достаточно великим. <a href=https://trade-britanica.trade/wiki/User:ChantalHinder3>https://trade-britanica.trade/wiki/User:ChantalHinder3</a> 1 хслот регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://www.ladyboyescort.com/profile/745-rabofreesi/>1×slot казино зеркало</a>
<a href=http://sladkierecepti.5nx.ru/viewtopic.php?f=8&t=12508>1×slots рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Индивидуальные поощрения выдаются за совершение действий: подписку на аккаунты площадки в соц сетях, установку мобильного прибавления или официального клиента для ПК. В большинстве казино срабатывают программки преданности, присваивающие игрокам статусы за активность на сайте. Продвижение на грядущий степень нередко сопрягается выдачей бездепа.
#1511 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet телефон порно с Виктория Синицина, фигуристка <a href=https://repost.news/>casino актуальное зеркало</a> Любимова Ольга Борисовна порно казино фильм онлайн <a href=https://kompromat1.online/>1×bet скачать приложение на андроид</a> casino зеркало сегодня 1×bet зеркало рабочее на сегодня 1×bet на андроид бесплатно Ходнева Светлана Владимировна порно порно с Карен Хачанов (теннис) casino играть бк букмекерская контора
DiskiPlus 1×bet 1 DiskiPlus порно с Артемий Панарин (хоккей) <a href=https://diskiplus.ru/>DiskiPlus 1×bet зеркало</a> DiskiPlus официальные сайты казино DiskiPlus cat casino <a href=https://www.diskiplus.ru>DiskiPlus Львова-Белова Мария Алексеевна порно</a> DiskiPlus казино рулетка DiskiPlus porno Елизавета Туктамышева DiskiPlus cat casino DiskiPlus порно с Анна Калинская (теннис) DiskiPlus 7k casino DiskiPlus 1×bet 1 DiskiPlus 1×bet слоты
#1512 internetpermGephttps://domashij-internet-perm003.ru
провайдеры интернета в перми <a href=https://domashij-internet-perm003.ru>domashij-internet-perm003.ru</a> подключить интернет
#1513 internetpermGephttps://domashij-internet-perm002.ru
домашний интернет тарифы <a href=https://domashij-internet-perm002.ru>domashij-internet-perm002.ru</a> дешевый интернет пермь
#1514 internetpermGephttps://domashij-internet-perm001.ru
подключить интернет пермь <a href=https://domashij-internet-perm001.ru>domashij-internet-perm001.ru</a> подключить домашний интернет в перми
#1515 Stephenmithttps://playplayfun.com/articles/1xbet_promo_code_nigeria_bonus.html
https://sernexuss.com/…e_bonus.html
#1516 FobertRhymn
Hi terrific blog! Does running a blog such as this require a great deal of work? I've absolutely no knowledge of computer programming however I was hoping to start my own blog in the near future. Anyhow, should you have any ideas or techniques for new blog owners please share. I understand this is off topic nevertheless I simply had to ask. Many thanks! https://tyres.com.ua/…porivnyannya
#1517 internetomskGephttps://domashij-internet-omsk001.ru
подключить интернет <a href=https://domashij-internet-omsk001.ru>domashij-internet-omsk001.ru</a> подключение интернета омск
#1518 ArmandoLamhttps://www.jamaicanendsout.com/
<a href=https://www.jamaicanendsout.com/>FOSIL4D</a>
#1519 LloydDamhttps://www.lodest.com/
<a href=https://www.lodest.com/>GENDANG4D</a>
#1520 Bernardrithttps://www.apple-wallpaper.com/
<a href=https://www.apple-wallpaper.com/>GAMELANTOGEL</a>
#1521 Manuelsobhttps://www.portricheyrent.com/
<a href=https://www.portricheyrent.com/>FOSIL4D</a>
#1522 internetvoronezhGephttps://domashij-internet-voronezh003.ru
домашний интернет в воронеже <a href=https://domashij-internet-voronezh003.ru>domashij-internet-voronezh003.ru</a> домашний интернет в воронеже
#1523 Arthurevellhttps://www.toponlineservices.com/
<a href=https://www.toponlineservices.com/>BEKU4D</a>
#1524 Robertaccorhttps://www.mubahisa.com/
<a href=https://www.mubahisa.com/>BEKU4D</a>
#1525 Arthurevellhttps://beku4done.id/
<a href=https://beku4done.id/>BEKU4D</a>
#1526 internetvoronezhGephttps://domashij-internet-voronezh002.ru
домашний интернет подключить воронеж <a href=https://domashij-internet-voronezh002.ru>domashij-internet-voronezh002.ru</a> домашний интернет в воронеже
#1527 internetvoronezhGephttps://domashij-internet-voronezh001.ru
домашний интернет подключить воронеж <a href=https://domashij-internet-voronezh001.ru>domashij-internet-voronezh001.ru</a> подключить домашний интернет в воронеже
#1528 internetvolgogradGephttps://domashij-internet-volgograd003.ru
провайдеры интернета омск <a href=https://domashij-internet-volgograd003.ru>domashij-internet-volgograd003.ru</a> провайдеры интернета омск
#1529 internetvolgogradGephttps://domashij-internet-volgograd002.ru
подключить проводной интернет омск <a href=https://domashij-internet-volgograd002.ru>domashij-internet-volgograd002.ru</a> провайдеры омск
#1530 internetrostovGephttps://domashij-internet-rostov003.ru
тарифы интернет и телевидение ростов <a href=https://domashij-internet-rostov003.ru>domashij-internet-rostov003.ru</a> подключение интернета ростов
#1531 dragon money_knSthttp://dragon-money40.com
драгон мани регистрация <a href=https://www.dragon-money40.com>драгон мани регистрация</a> .
#1532 JeffreyPeecyhttps://daunemas8a.blogspot.com/2025/04/1xbet-vip-100-32500-rub_6.html
http://leydis16.phorum.pl/viewtopic.php?…
#1533 internetrostovGephttps://domashij-internet-rostov001.ru
лучший интернет провайдер ростов <a href=https://domashij-internet-rostov001.ru>domashij-internet-rostov001.ru</a> дешевый интернет ростов
#1534 AntonioBreaphttps://calisthenics.mn.co/posts/83269926?utm_source=manual
https://webhitlist.com/…us-jusqu-130
#1535 internetpermGephttps://domashij-internet-perm003.ru
домашний интернет пермь <a href=https://domashij-internet-perm003.ru>domashij-internet-perm003.ru</a> интернет провайдер пермь
#1536 TerryNekhttps://freekashmir.mn.co/posts/83267897?utm_source=manual
https://faceout.mn.co/posts/83264682?…
#1537 internetpermGephttps://domashij-internet-perm002.ru
интернет тарифы пермь <a href=https://domashij-internet-perm002.ru>domashij-internet-perm002.ru</a> домашний интернет
#1538 Williamtrolahttps://wager.tw/nbalive
2025年NBA免費線上看直播:籃球投注與即時更新的完整指南
隨著全球體育迷對線上博弈和賽事直播的需求不斷增長,NBA作為最受歡迎的籃球聯賽之一,自然成為了眾多球迷關注的焦點。2025年的NBA賽季將帶來更多精采的比賽,而如何免費觀看這些比賽並參與場中投注,已成為球迷們最關心的話題。本文將為您提供完整的NBA免費線上看直播教學、即時比分更新、以及相關的投注技巧。
一、NBA免費線上看直播的管道 不論是季後賽(4月-5月)還是總決賽(6月),NBA的每一場比賽都充滿激情與挑戰。以下是幾種常見的免費直播方式:
1. 線上直播平台 OB體育電視台 、鑫寶體育電視台 、SUPER體育電視台 等平台提供免費註冊服務,新用戶還可獲得168預測金,讓您在觀看比賽的同時也能進行運彩投注。 只需簡單註冊帳號,選擇【熊貓體育】或【RG富遊體育電視台】,即可輕鬆進入NBA籃球LIVE直播。 2. 電視轉播頻道 華視NBA籃球頻道 、ELTA TV 、以及中華電信MOD 也提供64場全賽事的LIVE轉播,適合喜歡透過電視欣賞比賽的球迷。 如果您偏好手機觀看,可以訂閱Hami Video NBA專區 ,每月僅需149元即可享受所有賽事的高清轉播。 二、如何註冊/登入以免費觀看NBA直播? 如果您想通過線上平台觀看NBA直播,以下是詳細步驟:
點選【RG官網】或【富遊娛樂城】官網,選擇「註冊/登入」。 輸入會員資料完成註冊。 登入後,點選【熊貓體育】或【體育直播】分類。 選擇NBA籃球視頻直播,即可免費觀看您感興趣的比賽。 三、NBA即時比分與場中投注 對於熱衷於運動彩券的球迷來說,NBA不僅是一場視覺盛宴,更是投注的好時機。以下是一些實用的投注建議:
即時比分更新 :透過【RG富遊體育電視台】或【熊貓體育】,您可以隨時掌握比賽進展,並根據比分變化調整投注策略。 場中投注技巧 :例如,在比賽關鍵時刻(如延長賽或最後三分鐘),利用即時數據進行快速下注,往往能提高勝率。 此外,NBA季後賽和總決賽期間,各平台通常會推出特別優惠活動,例如加倍獎金或贈送預測金,讓您的投注更有趣味性。
四、其他熱門賽事推薦 除了NBA之外,2025年還有許多值得期待的體育盛事:
2024夏季奧運 :涵蓋多項運動項目,是體育迷不容錯過的國際賽事。 2024歐洲盃 :足球迷的年度盛宴,各國勁旅爭奪最高榮譽。 2024 WBC世界棒球經典賽 :棒球愛好者的狂歡節,亞洲強隊表現備受矚目。 2023–2024英超聯賽 :足球迷必追的頂級聯賽,精彩程度無與倫比。 五、結語 無論您是單純的NBA球迷,還是熱衷於運動彩券投注的玩家,2025年的NBA賽季都將為您帶來無限樂趣。透過本文介紹的免費直播管道與投注技巧,您可以輕鬆享受每場比賽的刺激與精彩。現在就趕快註冊帳號,加入這場籃球狂歡吧!
立即行動!登入【熊貓體育】或【RG富遊體育電視台】,開啟您的NBA免費線上看之旅!
#1539 internetpermGephttps://domashij-internet-perm001.ru
подключить интернет в квартиру пермь <a href=https://domashij-internet-perm001.ru>domashij-internet-perm001.ru</a> домашний интернет тарифы
#1540 Zhannakangroup_abosyhttps://zhannakangroup.com/
Добрый день! Недавно подсказали необычный и интересный новый сайт. Наверное, спросите, а что в нем интересного и необычного? Интересно то, что как известные мировые бренды заходят на Казахстанский рынок. А необычно то, что заказ происходит ограниченных коллекций с учетом Казахской национальной одежды и культуры. Мода это в первую очередь женщины и девушки, поэтому не удивительно, что основательницей является Жанна Кан. В общем, если вам интересно найти, женская одежда, ювелирные изделия, ювелирные украшения и т.д., например: <a href=https://zhannakangroup.com/>женские бренды</a> Тогда вам срочно нужно прямо сейчас перейти на сайт Zhanna Kan Group и узнать все подробности по декор интерьера, каталог ювелирных изделий, бренды ювелирных украшений, бренды одежды, модная одежда, нижнее белье, мировые бренды, эксклюзивные бренды в Казахстане и т.д. https://zhannakangroup.com/ . Для более детального и подробного ознакомления с известными мировыми брендами, например: <a href=https://www.zhannakangroup.com/product/3341-as-kole-beloe-zoloto-2–16-gr-brilliant-0–04-krt-ametist>колье constella</a> вам нужно перейти на сайт. Обязательно переходите на сайт zhannakangroup.com ювелирные изделия, ювелирные украшения, женская одежда сохраняйте в закладки и изучайте информацию, не забудьте записать номера телефонов +7 727 321 8080, +7 702 006 5780 и адрес сайта. Всем пока!
#1541 internetomskGephttps://domashij-internet-omsk002.ru
подключить интернет омск <a href=https://domashij-internet-omsk002.ru>domashij-internet-omsk002.ru</a> недорогой интернет омск
#1542 internetomskGephttps://domashij-internet-omsk001.ru
провайдеры домашнего интернета омск <a href=https://domashij-internet-omsk001.ru>domashij-internet-omsk001.ru</a> домашний интернет омск
#1543 Yzhural_nizhttps://yzhural.ru/
Доброго времени суток! Друзья мои приветствую вас! Недавно возникла проблема, нужно было срочно перевезти груз в другой город в коробках и мешках, да и еще доставить до двери. Не так уж было легко и просто найди ответственную и надежную транспортную компанию. К счастью и радости проблема была решена. В общем, если вам интересно найти грузоперевозки, транспортная компания, перевозка грузов и т.д., например: <a href=https://yzhural.ru/>услуги транспортной компании</a> Тогда вам обязательно нужно прямо сейчас перейти на сайт УралТранс и узнать все подробности по логистическая компания, доставка грузов, грузовые перевозки, транспортные услуги, услуги по грузоперевозке, транспортировка груза, экспедирование, маркировка грузов в Мытищах и т.д. https://yzhural.ru/ . Обязательно переходите на сайт Транспортной компании yzhural.ru изучайте информацию и сохраняйте в закладки, не забудьте записать адрес сайта и номер телефона +7 (999) 768–29–91. Увидимся!
#1544 Zhannakangroup_abosyhttps://zhannakangroup.com/
Всем привет! Недавно подсказали необычный и интересный новый сайт. Наверное, спросите, а что в нем интересного и необычного? Интересно то, что как известные мировые бренды заходят на Казахстанский рынок. А необычно то, что заказ происходит ограниченных коллекций с учетом Казахской национальной одежды и культуры. Мода это в первую очередь девушки и женщины, поэтому не удивительно, что основательницей является Жанна Кан. В общем, если вы ищите, ювелирные изделия, ювелирные украшения, женская одежда и т.д., например: <a href=https://zhannakangroup.com/>одежда эксклюзивных брендов жанна кан</a> Тогда вам обязательно нужно прямо сейчас перейти на сайт Zhanna Kan Group и узнать все подробности по эксклюзивные бренды, каталог ювелирных изделий, бренды ювелирных украшений, бренды одежды, модная одежда, нижнее белье, декор интерьера, мировые бренды в Казахстане и т.д. https://zhannakangroup.com/ . Для более детального и подробного ознакомления с известными мировыми брендами, например: <a href=https://zhannakangroup.com/>constella браслет ташкент</a> вам нужно перейти на сайт. Обязательно переходите на zhannakangroup.com ювелирные изделия, ювелирные украшения, женская одежда сохраняйте в закладки и изучайте информацию, не забудьте записать адрес сайта и номера телефонов +7 727 321 8080, +7 702 006 5780. Увидимся!
#1545 Ismaelpen
О доставке с помощью <a href=https://media73.ru/2025/nadyezhnaya-perevozka-gruzov-kak-bystro-nayti-i-zakazat-gazel>заказать грузовую газель</a>
#1546 Michaelkathttp://leydis16.phorum.pl/viewtopic.php?p=692379#692379
https://ameblo.jp/…4159843.html
#1547 Williamtrolahttps://wager.tw/nbalive
<a href=https://wager.tw/nbalive>nba直播</a> 2025年NBA免費線上看直播:籃球投注與即時更新的完整指南
隨著全球體育迷對線上博弈和賽事直播的需求不斷增長,NBA作為最受歡迎的籃球聯賽之一,自然成為了眾多球迷關注的焦點。2025年的NBA賽季將帶來更多精采的比賽,而如何免費觀看這些比賽並參與場中投注,已成為球迷們最關心的話題。本文將為您提供完整的NBA免費線上看直播教學、即時比分更新、以及相關的投注技巧。
一、NBA免費線上看直播的管道 不論是季後賽(4月-5月)還是總決賽(6月),NBA的每一場比賽都充滿激情與挑戰。以下是幾種常見的免費直播方式:
1. 線上直播平台 OB體育電視台 、鑫寶體育電視台 、SUPER體育電視台 等平台提供免費註冊服務,新用戶還可獲得168預測金,讓您在觀看比賽的同時也能進行運彩投注。 只需簡單註冊帳號,選擇【熊貓體育】或【RG富遊體育電視台】,即可輕鬆進入NBA籃球LIVE直播。 2. 電視轉播頻道 華視NBA籃球頻道 、ELTA TV 、以及中華電信MOD 也提供64場全賽事的LIVE轉播,適合喜歡透過電視欣賞比賽的球迷。 如果您偏好手機觀看,可以訂閱Hami Video NBA專區 ,每月僅需149元即可享受所有賽事的高清轉播。 二、如何註冊/登入以免費觀看NBA直播? 如果您想通過線上平台觀看NBA直播,以下是詳細步驟:
點選【RG官網】或【富遊娛樂城】官網,選擇「註冊/登入」。 輸入會員資料完成註冊。 登入後,點選【熊貓體育】或【體育直播】分類。 選擇NBA籃球視頻直播,即可免費觀看您感興趣的比賽。 三、NBA即時比分與場中投注 對於熱衷於運動彩券的球迷來說,NBA不僅是一場視覺盛宴,更是投注的好時機。以下是一些實用的投注建議:
即時比分更新 :透過【RG富遊體育電視台】或【熊貓體育】,您可以隨時掌握比賽進展,並根據比分變化調整投注策略。 場中投注技巧 :例如,在比賽關鍵時刻(如延長賽或最後三分鐘),利用即時數據進行快速下注,往往能提高勝率。 此外,NBA季後賽和總決賽期間,各平台通常會推出特別優惠活動,例如加倍獎金或贈送預測金,讓您的投注更有趣味性。
四、其他熱門賽事推薦 除了NBA之外,2025年還有許多值得期待的體育盛事:
2024夏季奧運 :涵蓋多項運動項目,是體育迷不容錯過的國際賽事。 2024歐洲盃 :足球迷的年度盛宴,各國勁旅爭奪最高榮譽。 2024 WBC世界棒球經典賽 :棒球愛好者的狂歡節,亞洲強隊表現備受矚目。 2023–2024英超聯賽 :足球迷必追的頂級聯賽,精彩程度無與倫比。 五、結語 無論您是單純的NBA球迷,還是熱衷於運動彩券投注的玩家,2025年的NBA賽季都將為您帶來無限樂趣。透過本文介紹的免費直播管道與投注技巧,您可以輕鬆享受每場比賽的刺激與精彩。現在就趕快註冊帳號,加入這場籃球狂歡吧!
立即行動!登入【熊貓體育】或【RG富遊體育電視台】,開啟您的NBA免費線上看之旅!
#1548 inernetufaGephttps://domashij-internet-ufa002.ru
какие провайдеры интернета есть по адресу уфа <a href=https://domashij-internet-ufa002.ru>domashij-internet-ufa002.ru</a> провайдер интернета по адресу уфа
#1549 dragon money_luSrhttp://dragon-money30.com
dragonmoney сайт <a href=dragon-money30.com>dragon-money30.com</a> .
#1550 inernetsamaraGephttps://domashij-internet-samara003.ru
интернет провайдеры по адресу дома <a href=https://domashij-internet-samara003.ru>domashij-internet-samara003.ru</a> проверить провайдера по адресу
#1551 inernetsamaraGephttps://domashij-internet-samara002.ru
проверить интернет по адресу <a href=https://domashij-internet-samara002.ru>domashij-internet-samara002.ru</a> провайдер по адресу
#1552 inernetsamaraGephttps://domashij-internet-samara001.ru
провайдер по адресу самара <a href=https://domashij-internet-samara001.ru>domashij-internet-samara001.ru</a> проверить интернет по адресу
#1553 inernetkrdGephttps://domashij-internet-krasnodar003.ru
провайдер интернета по адресу краснодар <a href=https://domashij-internet-krasnodar003.ru>domashij-internet-krasnodar003.ru</a> какие провайдеры по адресу
#1554 ThomasSakhttps://pafipcbuleleng.org/
<a href=https://pafipcbuleleng.org/>pg slot</a>
SISTEM TERPADU PAFI: Peran Strategis Farmasi di Dunia Digital
Sekilas Tentang PAFI Sejak Indonesia merdeka, para Tenaga Kefarmasian aktif berkontribusi dalam pembangunan kesehatan nasional. Kehadiran Persatuan Ahli Farmasi Indonesia (PAFI) menjadi langkah strategis sebagai wadah profesional di bidang farmasi. Berdasarkan Pancasila, PAFI bersumpah untuk:
• Memajukan derajat kesehatan masyarakat
• Mengembangkan kefarmasian nasional
• Menunjang kondisi para anggota
Platform Terpadu PAFI: Inovasi Teknologi untuk Farmasi Modern
Menghadapi tantangan era digital, PAFI meluncurkan sistem terintegrasi ini – solusi canggih yang memfasilitasi praktik farmasi profesional melalui:
? Informasi Terkini – Kemudahan mendapatkan peraturan farmasi, perkembangan ilmiah, dan peluang karir
? Peningkatan Kemampuan – Layanan pelatihan dan sertifikasi daring
? Jejaring Profesional – Sarana kerjasama bagi seluruh ahli farmasi
Platform ini memperkuat kontribusi PAFI dalam memajukan pelayanan kesehatan melalui penerapan inovasi digital.
Tantangan Dunia Farmasi Modern
Adanya sistem terintegrasi ini merupakan tanda transformasi digital dalam dunia kefarmasian. Dengan terus mengembangkan kapabilitas sistem, PAFI bertekad untuk:
• Mendorong terobosan dalam farmasi
• Menyempurnakan kualitas profesi
• Meningkatkan fasilitas kesehatan untuk rakyat
Penutup
PAFI melalui WEB PAFI Terintegrasi selalu berada di garda depan dalam menghubungkan kemajuan teknologi dengan dunia kefarmasian. Program ini bukan sekadar mengokohkan posisi apoteker, tetapi juga berperan aktif bagi kemajuan kesehatan bangsa di era digital.
#1555 inernetkrdGephttps://domashij-internet-krasnodar002.ru
провайдеры в краснодаре по адресу проверить <a href=https://domashij-internet-krasnodar002.ru>domashij-internet-krasnodar002.ru</a> провайдеры интернета по адресу
#1556 inernetkrdGephttps://domashij-internet-krasnodar001.ru
узнать провайдера по адресу краснодар <a href=https://domashij-internet-krasnodar001.ru>domashij-internet-krasnodar001.ru</a> какие провайдеры на адресе в краснодаре
#1557 Charlesgunnyhttp://filmkachat.ru
1×slots бездепозитный бонус за регистрацию
Как только вы отыграли вейджер и средства с бонусного баланса перебежали для на настоящий счет, Вы отважно можете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (устроить минимальный депозит к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депо).В перечне притязаний к отыгрышу часто присутствуют лимиты на ставки при забаве на личные средства. Так, случае отыграть нужно 30 000 рублей, а предельная сумма ограничена 30 рублями, то вертеть барабаны предстоит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками условий по срокам деяния акции. <a href=http://filmkachat.ru/>1×slots быструю регистрацию а также мгновенное</a> Не стоит сразу же отрицаться от приветственных подарков в подобных казино. Администрация готова начислить средства или фриспины, но предварительно работники должны убедиться, собственно вы не аферист. Дело что, собственно развелось слишком большое охотников за бонусами. Они выучились обманывать систему и наваривать солидные суммы денег.Так же стоит выделить то, собственно в каждом онлайн казино установлен собственный наибольший кешаут на бездепозитный приз. Как правило кешаут — это максимальная сумма средств, которая дешевая для вывода с бездепозитного бонуса. <a href=https://elearn.ellak.gr/mod/forum/discuss.php?d=42024>https://elearn.ellak.gr/mod/forum/discuss.php?d=42024</a> Новые посетители онлайн-казино без первого депозита шансы выяснить собственную удачливость. К что, этому же есть возможность преобразовать бездепы в реальные средства за регистрацию в казино, впрочем результата бонус необходимо отыграть согласно условиям промоакции.Можно. Вы постоянно сможете отрешиться от получения бездепозитного приза за регистрацию в казино, же Вы не создадите ставку. 1хслотс рабочее зеркало <a href=http://kamerton72.ru/users/brianboows>http://kamerton72.ru/users/brianboows</a> Однако в условиях исчезают «подводные камни», которые не разрешат исключить солидную сумму или же вы не успеете отыграть вейджер. Поэтому мастера советуют арестовать благотворительные вращения за регистрацию в казино без депозита, чтобы поднабраться навыка и получить настоящий шанс на победу.Наиболее популярностью вознаграждения среди гэмблеров – бездепозитные призы казино. Это не умопомрачительно, как возможно получить безвозмездные вращения либо виртуальные кредиты, и при не придётся пополнять счёт, рисковать личностными деньгами. Удастся насладиться различными веселиями и даже выиграть солидную необходимую, избегая серьёзного риска.
1×slots сайт
1×slot зеркало рабочее этих способов предполагает регистрацию <a href=http://intero.ua/index.php?subaction=userinfo&user=bumpyfurvor5>http://intero.ua/index.php?subaction=userinfo&user=bumpyfurvor5</a> 1×slot рабочее зеркало Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми промоакциями. Читайте о их в обзорах и на форуме.
1×slots официальный сайт зеркало
Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? Одним из поводов отдавать преимущество, льготу одному или иному заведению заключается в привлекательности предлагаемых промоакций и даровых услуг. Безвозмездные фриспины, выдаваемые без дела делать какой-либо вклад, в перечне находится далековато не в конце.Обычно показатель повыше, чем для бонусов на депо. Не дивитесь, если он будет и х100. Иногда завышенный коэффициент вейджера уточняется для обитателей отдельных стран. <a href=http://vttgauriac.fr/forum/memberlist.php?mode=viewprofile&u=6696>http://vttgauriac.fr/forum/memberlist.php?mode=viewprofile&u=6696</a> Отыграв бездепозитный приз в казино с выводом также придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если схожее ограничение существует, то единоразово исключить получится лишь сумму, не превышающую размер полученного бонуса.Но на некоторых азартных платформах подобные гонорары шансы получить теперь зарегистрированные пользователи. В этом случае, бонусы предоставляются в рамках оригинальных промоакций либо же некоторым игрокам вид акционного предложения, которое прибывает на почту с целью «вернуть» игрока в свое казино. 1×slots акции Все любят получать подарки. Согласитесь, почти каждый играющий человек будет бесконечно счастлив, случае получит даровой презент для забавы в онлайн казино просто за регистрацию или же бонус за внесенный депозит, так именуемые приветственные бонусы для свежих игроков. Соответственно такие интернет клубы будут больше известны и предпочтительны у игроков при выборе казино для забавы. Топ казино день обновляется и прибавляются новые и увлекательные игровые клубы с симпатичной бонусной политикой и всеми возможными привилегиями, к которым относятся такие призы как фриспины за регистрацию, денежные бездепозитные призы, а также щедрые призы за внесенный депозит.За счёт спинов выйдет запустить различные онлайн слоты, протестировать стратегии и поднабраться навыка. Фишка в том, собственно вращения начисляются на лучшие аппараты с оригинальными опциями и высокой отдачей. Не запамятовывайте, собственно в каждом акционном предложении предусмотрены особые притязания – временные лимитирования, наибольший объем ставки, перечень дешевых игр.
1×slots casino online регистрация
Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция имеет подробные управляла, ссылка на которые обычно находится в промообъявлении. В них указываются лимиты, вейджер, перечень доступных игр. Если оператор скрывает данные о предложении, то пользоваться им надо. <a href=http://swissairways-va.com/phpBB3/viewtopic.php?t=798290>1×slots бездепозитный бонус за регистрацию</a> Вы не в коем случае ни чем рискуете, а только выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической забавы на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, выучится регулировать изменять ставки и линии, исследовать бонусные забавы и их выигрышные комбинации, ну счете просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные свои, которые возможно отыграть и вывести, а не просто на демо счет, что, этим наиболее адреналин в крови еще больше повысится а пульс забьется с частым ритмом! 1×slots зеркало <a href=http://gulliverus.ru/user/Porsedropkr/>http://gulliverus.ru/user/Porsedropkr/</a> Некоторые клубы механически начисляют бонус на аккаунт игрока последствии выполнения критерий получения, хотя посещают истории, когда бонус нужно активировать игроку самому. Есть некоторое методов активации приза:
казино 1×slots
Ограничения по играм. Администрация воспрещает игрокам кое-какие игровые автоматы с бездепозитным призом, средствами или бесплатными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда разделение выполняется по виду игр. Например, отыгрыш возможен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino. <a href=http://autobrands.lv/user/JasperSoype/>http://autobrands.lv/user/JasperSoype/</a> Еще одно условие дотрагивается размеров ставки. Операторы устанавливают наивысшую сумму, которую игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, избранной в Личном кабинете. При превышении лимита есть риск лишиться бонуса. Существующие ограничения относятся и к конкретным обликам ставок. Например, играя в рулетку, заказчик возможность столкнуться с запретом ставить фишки на шансы.Частенько новички не разумеют, как активировать презенты либо исключить первый выигрыш. Для сходственных случаев наша команда обрисовала основные определения – что это фриспины, вейджер, как его отыграть, зачем необходимо протекать верификацию. 1хслотс мобильная версия зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://www.kuyoux.com/space-uid-35770.html>1×slots регистрация на сайте 1×slots ru com</a>
<a href=http://craft4game.forumex.ru/viewtopic.php?f=2&t=2540>1 x slots</a>
<a href=https://talkonlinenews.com/viewtopic.php?t=12467>1× slots официальный</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
А ознакомиться с новыми онлайн казино, Вы сможете за счет бонусов с выводом прибыли, коие Вы можете получить без депо. На условиях отыгрыша бесплатных призов стопам остановиться подробнее. С ними связаны нюансы, коие нельзя оставить без внимания.
#1558 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
водка казино суть казино <a href=https://slon-ru.com/>порно с Владимир Минеев (ММА)</a> порно с Александр Большунов (лыжные гонки) официальные букмекерские конторы <a href=https://glvk.guru/>пин ап casino pin</a> 1×slots casino 1×bet регистрация porno Вера Бирюкова, гимнастка porno Юлия Канакина букмекерская контора фонбет официальный inform@rucriminal.info сайте букмекерской конторы фонбет
DiskiPlus porno Марина Александрова DiskiPlus 1×bet слоты 1×bet xyz <a href=https://diskiplus.ru>DiskiPlus скачиваемые казино</a> DiskiPlus демо казино DiskiPlus Комарова Наталья Владимировна порно <a href=https://diskiplus.ru>DiskiPlus win win casino</a> DiskiPlus букмекерские конторы pin DiskiPlus порно с Дарья Клишина, легкоатлетка DiskiPlus порно с Владимир Минеев (ММА) DiskiPlus порно с Матвей Сафонов (футбол) DiskiPlus бывшие казино DiskiPlus porno Ангелина Гончаренко, хоккеистка DiskiPlus 1×bet xbet xyz
#1559 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало видели такую регистрацию на
Бездепы все заходить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами. <a href=http://filmkachat.ru/>1хслотс мобильная версия зеркало</a> <a href=https://hb-themes.com/forum/all/users/shopavto/>https://hb-themes.com/forum/all/users/shopavto/</a> Бездепозитные призы отличный вариант бесплатной игры в игровые автоматы. Многие юзеры сети не знают, что в казино можно начать играть полностью безвозмездно, а потом исключить выигрыш на банковскую карту либо электронный кошелек, другие не доверяют онлайн казино, а третьи успешно играют и выигрывают – и подчас достаточно большие суммы.Такие поощрения разрешают безвозмездно протестировать свежее казино, разобраться с игровым процессом интернет слотов, заработать и исключить маленькую сумму денег. 1×slots регистрация 1×slotscasino09k online <a href=https://scientific-programs.science/wiki/User:RegenaJeffcott2>https://scientific-programs.science/wiki/User:RegenaJeffcott2</a> Бездепозитный приз предоставляется новенькому игроку за определенные деянья. Часто подарок вид денег либо фриспинов выдается за регистрацию, благодаря чему юзер получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.
1хслотс мобильная версия зеркало
Можно ли наваривать на бездепозитных бонусах? Это не работа, здесь как повезет, если в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, это возможно назвать везением, и добавочной добавкой к вашему бюджету. 1×slots официальный сайт мобильная версия Наличие у игрока 2 аккаунта. Запрещено создавать несколько профилей для неоднократного получения бездепов.Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают бонус по государствам. Вплоть до как, что клуб возможность брать игроков из Вашей страны, а бездеп не давать. <a href=https://gonggamore.com/bbs/board.php?bo_table=free&wr_id=1046868>https://gonggamore.com/bbs/board.php?bo_table=free&wr_id=1046868</a> 1×slots регистрация 1×slots casino 777 online В разделе с призами активировать собственный подарок. Найти игры, для которых учтено поощрение и применять бонус по предназначению.
1хслотс рабочее зеркало
В зависимости от онлайн заведения каждый из их имеет вам предложить как бездепозитные средства, например и бездепозитные фриспины, которые последствии успешной регистрации рухнут вас на ваш игровой баланс.В лицензионных бездепозитных казино играть в азартные игры действительно неопасно. Наличие лицензии подтверждает что, этот факт, что клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP. После потребуется внести идентификационный платёж. Это стращает начинающих больше всего. Нужно сделать минимальный депозит в 100–500 рублей. Таким образом служба безопасности увериться никаких, что платёжный метод принадлежит Вам. Данная процедура необходима для обеспечивания безопасности игровых счетов. Пример, Ваш аккаунт взломают и выведут свои на свой кошелёк. Будет очень досадно. Поэтому верификация платёжной системы, это важный момент.Существует ли стратегии для отыгрыша бездепозитных призов? К сожалению нет, на выигрыши либо проигрыши с призов, казино или игрок повлиять не может, отдача игр случается от создателей игр. <a href=http://moujmasti.com/member.php?104359-Juleswhani>http://moujmasti.com/member.php?104359-Juleswhani</a> Фриспины начисляются по определенной ставке. После их активации игроку нужно запустить разъем и увериться, что в нем отображаются благотворительные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода после отыгрыша определяется оператором и редко выше 5 000 рублей.Бездепы могут заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой либо баллами. 1× слот зеркало Oтыгpaть приз с обозначенным вeйджepом, результата нужно сдeлaть cтaвoк нa cумму, превосходящую объем бонуса в несколько один.
1×slots зеркало этих способов предполагает регистрацию
<a href=http://yamato-ryu.ru/communication/forum/index.php?PAGE_NAME=message&FID=1&TID=45381&MID=10129&sessid=afc87adfe94ef799e81d8b8466a579fe&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1×slots бездепозитный бонус за регистрацию</a> Бездепозитный приз за регистрацию в казино — это стартовый презент повторяющий денежного начисления либо безвозмездных вращений для новых игроков заведения, для получения которого не нужно вносить депо.Только выполнив все условия отыгрыша и дождавшись завершения проверки аккаунта, Вы можете оформить заявку на вывод средств и получить средства деньги. 1хслотс зеркало на сегодня <a href=http://mbdou-vishenka.ru/user/Jamessoorp/>http://mbdou-vishenka.ru/user/Jamessoorp/</a>
1×slots быструю регистрацию а также мгновенное
Минимального оборота. Этот предел устанавливается вейджером — же игрок не поиграет на установленную сумму, вывод средств будет недосегаем.Почти все игровые клубы настоятельно свидетельство контактных данных игрока для получения бездепозитного приза. <a href=https://uniteckorea.net/bbs/board.php?bo_table=free&wr_id=560750>https://uniteckorea.net/bbs/board.php?bo_table=free&wr_id=560750</a> Подарки на определенные даты выделяются условиями получения. Если одобрение начисляют игроку на денек рождения, то сумма обыкновенно зависит от совместного размера депозитов за год. 1 x slots casino
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.survival-readiness.com/viewtopic.php?t=278706>1хслотс рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Ограничения по играм. Администрация воспрещает игрокам кое-какие игровые автоматы с бездепозитным призом, средствами или бесплатными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда разделение выполняется по виду игр. Например, отыгрыш возможен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino.
#1560 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino 777 online
Разные казино имеют собственные верховодила по выведению выигрыша. Для бездепозитных бонусов принимаются достаточно высокие притязания. Часто онлайн-казино советуют отыграть бонусное поощрение до 100 один в игровых автоматах. Например, в игрок получил бесплатно десять $, то необходимо будет отыграть их, поставив одну тыщу спинов по одному баксу любой. Стоит обозначить(означить), что не все казино дают возможность играть на призы и не во всех увеселительных заведениях идентичные верховодила для отыгрывания. Некоторые казино воспрещают выступать на бонусы в блекджек или ограничивают ставки до 5 %, что существенно увеличивает в 10-ки раз число нужных игр.К сожалению, нет. Почти все казино, требуют внесение желая бы одного малого депо для вывода выигрыша с бездепозитного бонуса. Также учитывайте, что вывести средства разрешено лишь на ту платежную систему, с коей был сделан депозит. <a href=http://filmkachat.ru/>1хлот регистрация в 1×slots casino</a> Бездепозитные бонусы казино за регистрацию в 2022 году — это возможность сыграть за счёт заведения. Казино даёт клиенту шанс пользоваться определённой суммой или количеством безвозмездных вращений без внесения депозита. Не путайте деморежим с реальной игрой без надобности внесения депозита.Активация валютного гонорары случается механически после творенья профиля или применения промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на страницы казино в социальных сетях либо на рассылку рекламных сообщений, скачать и установить дополнительный софт и т.д. <a href=https://taplink.cc/kalinka0588>https://taplink.cc/kalinka0588</a> Такой казино приз без депо за регистрацию выдается игроку на час и активно используется данное предложение с 2017 года. Это как бы какая-то конспирация поощрения под бездепозитный. Суть всего сего сводится к что, этому, что игроку на час выдается, к примеру, 1000 $, а реклама утверждает про, собственно любой выигрыш возможно несомненно в будущем забыть при для. Но если играющий всерьез отнесется к этому предложению, то он попросту потеряет время. Ведь игроку надо(надобно) будет выступать не главном аккаунте, а в тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (и всей тыс. ) в управляла вступят конкретные обстоятельства, где будет сказано, собственно максимальной суммой победы может быть только двести $ и средства возможно применять лишь в качестве приза на 1-ый лепта с вейджером 25 от суммы вознаграждения плюс сам депо. По результату получится, что игрок выигрывал себя 200% приз с вейджером на конкретную необходимую. Короче разговаривая, это все не стоит вашего времени. 1хслот зеркало <a href=http://xn–ok0b90ihwa585c44h.com/bbs/board.php?bo_table=patner1&wr_id=38313>http://xn–ok0b90ihwa585c44h.com/bbs/board.php?bo_table=patner1&wr_id=38313</a> Главным нюансом в появлении этих вознаграждений состоит том,, что пустив их в ход, игрок ничем не рискует и в последствии никому ничего не будет должен (не зависимо, получит ли он спасибо бонусам какой-либо выигрыш либо моментально спустит все только собственно прибывшие деньги). То есть, казино снабжает игрока возможностью на дармовой базе выступать во всевозможные слоты причем спонсирует игру.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Для получения бездепа нужно пригласить в забаву по реферальной ссылке нового посетителя: он обязан зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на сумму, указанную в условиях акции.Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала резвые выводы. Фишка выплат что, что достаточно выбрать платёжный инструмент и указать необходимую. В большинстве случаев деньги зачисляются на электрические кошельки протяжении 15 мин., а на банковские карты – 1–3 трудящихся дня. <a href=http://sz.80lvl.ru/viewtopic.php?f=8&t=3278>1 xslots рабочее зеркало</a> 1 x slots casino Акции распространяются как на все игры казино, например и на узкий перечень. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и. Промо может охватывать разработки одного производителя. Бездеп не пересекается с иными акциями казино. Если на сайте предусмотрен кэшбек, он не начисляется за ставки, изготовленные бонусными средствами. Для идентификации платежных реквизитов игрока имеет потребоваться пополнение счета на минимальную сумму.Как лишь вы отыграли вейджер и средства с бонусного баланса перебежали для на реальный счет, Вы отважно можете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (сделать минимальный депо например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депозитом). <a href=http://kinglish.com/bbs/board.php?bo_table=review&wr_id=300680>http://kinglish.com/bbs/board.php?bo_table=review&wr_id=300680</a> Выбирайте лучшие безвозмездные призы за обзоров на Casinoz – и пусть вам сопутствует удача при отыгрыше бонусных кредитов!В онлайне слишком большое скриптовых вебсайтов, которые принадлежат мошенникам. Их главная цель – заинтересовать гэмблеров, пообещав не только щедрые подарки, хотя и крупные выигрыши. Так собственно кое-какие сайты предлагают получить за регистрацию даже $1 000. 1×slots зеркало подтвердит вашу регистрацию если говорить В списке требований к отыгрышу нередко наличествуют лимиты на ставки при игре на личные деньги. Так, в отыграть надо(надобно) 30 000 рублей, а максимальная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 один. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам деянья промоакции.Выбор каждого интернет казино на нашем сайте. В описании к любому Вы сможете узнать, что получите за создание аккаунта.
1×slot зеркало рабочее регистрации на телефон придет
Возьми собственный презент. Чаще всего приз активизируется сразу после регистрации. Но посещают ситуации, когда нужно забежать в собственный офис или написать в справочную службу.Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых новых, щедрых и испытанных бонусах в онлайн казино, которые обновляются каждый день. Приглашаем делиться воззреньями о призах. Это поможет иным юзерам избирать более прибыльные предложения.Самые популярные способы вывода средств ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электронным платежным системам на Neteller и Skrill, а используют криптовалютными кошельками. Вывод выигрышей имеет осуществляться мгновенно или развлекать от нескольких часов до нескольких суток. <a href=http://tmml.top/home.php?mod=space&uid=100490>http://tmml.top/home.php?mod=space&uid=100490</a> Несмотря на то, что этот вариант стимуляции со стороны азартных платформ довольно популярен в сфере похожих игр, далеко многим поклонникам казино известно, что являют собой бездепозитные бонусы казино и как непосредственно их вероятно эксплуатировать.У каждой забавы свои притязания по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система засчитает каждую ставку. В рулетке и покере сделать это намного сложнее. Именно поэтому например принципиально внимательно читать обстоятельства получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой игре, то новенькие попросту «спустят бонус на ветер». 1×slots casino регистрация на сайте
1×slots подтвердит вашу регистрацию если говорить
Благодаря программе лояльности от игорного заведения, можно брать хороший старт и без добавочных вложений запустить видеослоты. Кроме такого, можно рассчитывать на реальную удачу и получить, без вложения собственных денег, большой выигрыш.Основное правило получения бездепа ? творимый акк должен быть у юзера первым и единственным. Наличие нескольких аккаунтов строго воспрещено. Проверка проводится по имени, e-mal, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депозита нужно блюсти простую очередность деяний. Самый распространённый из подобных призов, окончательно же, бездеп на день рождения посетителя — бонус в виде фиксированной суммы или фриспинов поступает на счёт игрока, а воспользоваться им возможно протяжении установленного периода медли.Чтобы играть безвозмездно на настоящие средства в казино, не всегда довольно просто зарегистрироваться. Иногда нужно выполнить дополнительные действия. Фриспины – бесплатные вращения с фиксированной ставкой, которые можно применять в конкретных игровых автоматах.Максимальный объем ставки, который невозможно превышать пока бонус не несомненно всецело отыгран. В случае нарушения этого верховодила, бонус и выигрыш с него станут аннулированы. 1×slots официальный сайт скачать <a href=https://forum.bakililar.az/profile/86829-glavdorogadv3107/?tab=field_core_pfield23>https://forum.bakililar.az/profile/86829-glavdorogadv3107/?tab=field_core_pfield23</a> В лицензионных бездепозитных казино выступать в азартные забавы действительно безопасно. Наличие лицензии одобряет что, этот факт, собственно клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP.
1× slots casino зеркало
У каждого игорного клубы различные вейджеровые условия. Чтобы вы гарантировано сумели выполнить их, мы дадим некоторое советов. Если система начислила небольшую необходимую, надо делать немалые ставки – остановитесь на 10–30 центах. Как лишь сможете заработать примерно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте играть. В неприятном случае превосходнее приглядеться к другому автомату. Постарайтесь отыграть вейджер, чтобы замечена вероятность оставить заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электронной кошелёк, карту, телефон. <a href=http://www.xuandouwan.com/home.php?mod=space&uid=44648&do=profile>http://www.xuandouwan.com/home.php?mod=space&uid=44648&do=profile</a> Рассмотрим принцип его действия на примере. Допустим, вы зарегались и возымели $10 not the slightest down payment bonus с вейджером х50. Это означает, что выигранные средства возможно будет выводить не ранее, чем в как, как общая сумма ставок достигнет $500.Не стоит путать игру в демо и внедрение бонусов. В демонстрационном режиме игрок имеет расценить механику слота, сюжет и оформление. Но забава проводится на условные кредиты, поэтому отсутствует основное ? чувство пыла. Активируя промокод или фриспины, клиент по-прежнему не расходует свои деньги на игровые автоматы, хотя может сорвать настоящий куш! казино 1×slots официальный сайт Теоретически, к бесплатным бонусам возможно отнести так называемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, потому собственно они деют только возможность делать ставки.Популярность онлайн казино растёт и всё больше юзеров начинают увлекаться азартными забавами. Бездепозитные призы 2022 года, это уникальные презенты за регистрацию. С их подмогою новые игроки могут получить бесплатные вращения или средства на баланс за 1 регистрацию. С появлением игорных заведений в интернете, бездепозитные призы стали моднейшим способом вербования игроков. Подобные акции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о которых мы расскажем. Наш сайт собрал лучшие предложения из интернета на 2022 год. Воспользуйтесь любым подарком и можете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша необходимо выполнить условия.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы появилась возможность исключить выигрыш.
#1561 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Евгения Медведева Светлана Ходченкова <a href=https://rucriminal.info/>pin up casino официальный</a> 1×bet casino скачать 1×bet 1×bet xyz <a href=https://vestnik-jurnal.com/>мелбет букмекерская контора</a> Преподобная Надежда Александровна порно играющие казино онлайн casino скачать 1win букмекерская контора спорт букмекерская контора 1×bet на андроид 1×bet 1хбет
DiskiPlus casino x DiskiPlus где казино <a href=https://diskiplus.ru>DiskiPlus рейтинг казино</a> DiskiPlus сайт винлайн букмекерская контора DiskiPlus казино вулкан <a href=https://diskiplus.ru>DiskiPlus champion casino</a> DiskiPlus порно с Анастасия Потапова, теннисистка DiskiPlus казино 1 DiskiPlus порно с Петр Ян (ММА) DiskiPlus porno Игорь Акинфеев (футбол) DiskiPlus Ирина Горбачева DiskiPlus casino бездепозитный DiskiPlus букмекерская контора на андроид
#1562 Charlesgunnyhttp://filmkachat.ru
1×slots сайт
Для того, чтобы отыграть необходимую вашего бездепозитного бонуса нужно выполнить обстоятельства вейджера. Очень нередко фриспины даются на конкретные слоты (book of ra, book of dead, book of sun), подбирайте разъем себя по, они очень красочные и качественные. Бездепозитные приз имеет быть валютным так и повторяющий фриспинов на слоты <a href=http://filmkachat.ru/>1×slot рабочее зеркало</a> В бонусную программку множества операторов входят регулярные бездепы. Это бессрочные промоакции, поощряющие активных неизменных игроков. Популярный формат — раздача фриспинов по конкретным дням недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депозита в мена на накопленные баллы преданности. <a href=https://collectednotes.com/lexxeagle/transforming-spaces-professional-3d-interior-visualization>https://collectednotes.com/lexxeagle/transforming-spaces-professional-3d-interior-visualization</a> Таким образом онлайн казино получает потенциального игрока. Возможно в будущем либо настоящем он захочет сыграть на средства средства. Так трудятся бездепозитные призы в онлайн казино. Здесь очень подходит выражение, бесплатные сыр посещает лишь в мышеловке. Начинающие игроки имеют не осознавать опасность азарта. Однако со временем осознания становится больше. Это тема для отдельного обсуждения. 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=http://kidsnighttonight.com:/forums/member.php?action=profile&uid=376235>http://kidsnighttonight.com:/forums/member.php?action=profile&uid=376235</a>
1× slots casino зеркало
Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке необходимо пополнить счет в казино. Для депозитных бонусов, эта процедура не необходима, так как депозит уже изготовлен.Бонус в казино без депо имеет разные варианты: это может быть приветственный бонус, акции в честь каких-то праздников либо важных дат, приз за вербование новых игроков, лояльность и получение VIP-статуса. 1×slots коды Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного приза достаточно пополнения баланса и подтверждения личности. В других же клубах, необходимо количество один прокрутить собственный депо.Выигрыши с призов без вложений всегда привязаны к требованию по ставкам и имеют быть обналичены лишь в выполнения данных требований. <a href=https://www.vevioz.com/read-blog/185349>https://www.vevioz.com/read-blog/185349</a> 1хлот регистрация в 1×slots casino Не желаете сыграть в азартные забавы, не рискуя средствами деньгами, хотя получая в все выплаты? Подобную вероятность деют все наилучшие порталы с азартными веселиями. В их числе большое добросовестных и надежных интернет-казино на российском языке. Они привлекают новых пользователей разными поощрительными событиями, включая бездепозитные, или благотворительные призы.
1×slots официальный сайт, скачать
Главное превосходство спинов – возможность выучить разные слоты. Также удастся насладиться бонусными раундами, испытать удачу в риск-туре и преувеличить выигрыш за счёт особенных знаков. Однако столько игровой процесс заслуживает внимание, так превосходнее сосредоточиться на реальном выигрыше. <a href=http://g-friend.co.kr/bbs/board.php?bo_table=free&wr_id=64738>http://g-friend.co.kr/bbs/board.php?bo_table=free&wr_id=64738</a> Как лишь вы отыграли вейджер и средства с бонусного баланса перебежали для на реальный счет, Вы неустрашимо сможете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (устроить наименьший депо например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депозитом). 1хслот официальный сайт зеркало После требуется привнести идентификационный платёж. Это пугает новичков больше всего. Нужно сделать минимальный депо в 100–500 рублей. Таким образом служба безопасности убедиться том,, собственно платёжный способ принадлежит Вам. Данная процедура важна для обеспечения защищенности игровых счетов. Пример, Ваш аккаунт взломают и выведут свои на собственный кошелёк. Будет очень досадно. Поэтому верификация платёжной системы, это важный момент.
1×slots актуальное зеркало
Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Для получения предоставленных бонусов вам понадобиться — ПК или мобильное прибор, и остальное дело за малым. <a href=http://skatefluckit.com/member.php?u=149708>казино 1×slots официальный сайт</a> В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с бесплатных вращений. Прибыль, коию Вы заработаете на таком бездепе возможно ставить на вывод без какого либо отыгрыша. Законодательство, регулирующее азартные забавы в различных странах, оказывает на возможности операторов. В итоге пользователи из отдельных регионов сталкиваются с лимитированиями со стороны казино. Это возможность быть как полный отказ в доступе, так и невозможность загружать забавы отдельных производителей. 1хслотс зеркало <a href=https://directory5.org/Glory-Casino_315248.html>https://directory5.org/Glory-Casino_315248.html</a> Эффективность бездепов в качестве рекламного инструмента оценили все операторы. Малоизвестные площадки используют такие промоакции, чтобы живо набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны неизменных посетителей. Не все веб-сайты, дающие подарки без депо, рекомендованы к игре. За симпатичным промоописанием могут скрываться невыполнимые условия отыгрыша прочие подводные камешки.Срок отыгрыша — это этап, кот-ый начинается в момент активации приза и завершается с его закрытием. Пользователю необходимо уложиться в этот временной промежуток, другому призовые свои аннулируются. Казино устанавливают список игр, ставки в засчитываются при расчете отыгранных средств. Если тайтл не заходит в данный список, то возможность быть недоступен для загрузки в деянья бонусного предложения.
скачать 1×slots официальный сайт
К примеру, игроку выдаются безвозмездные свои в заведении в объеме пятидесяти либо 100 долларов (вейджер на коие сочиняет 100х). То есть, каждому новоприбывшему игроку выскакивает манящая иллюстрация, кот-ая обещает выплату всех зачисленных компанией средств. Не стоит заострять на казино бонус за регистрацию без депозита с чрезмерно великой либо довольно маленькой суммой призов, потому что, и тщательно исследовав все обстоятельства, здесь вероятнее всего, несомненно какой-то подкол.Можно ли в одном интернет казино получить больше одного бонуса за регистрацию? Нет, например как в любом интернет казино есть правила, к коим надо(надобно) придерживаться, не делать два аккаута для получения призов, по будет блокировка обоих аккаутов, не пытайтесь обмануть интернет казино, бонус за регистрацию выдаеться раз раз 1 лицу. Нет. Для получения бездепозитного приза в казино необходима обязательная регистрация на сайте. Играть в слоты безвозмездно и без регистрации возможно лишь в демо режиме. <a href=https://archives.megadiyhelp.com/member.php?164556-KennethJam>https://archives.megadiyhelp.com/member.php?164556-KennethJam</a> казино 1× slots официальный сайт Бoльшинcтвo азартных заведений выдвигают примерно одинаковые условия и притязания, которые нужно выполнить, дабы получить бездепозитный бонус за регистрацию. Все их возможно соединить в один список:
<b>Смотреть еще похожие новости:</b>
<a href=https://elclasificadomx.com/author/jameslog/>1×slots коды</a>
<a href=https://forum.vn.ua/showthread.php?p=3303390#post3303390>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=169880&result=reply>casino 1×slot</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Такой бесплатный эквивалент средств зачисляется на профиль пользователя после воплощения притязаний и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений возможен лишь после воплощения вейджеровых критерий. Автоматы непопросту числятся самым знаменитым азартным весельем. Чтобы усвоить управление и верховодила, понадобится всего количество минут. Ваша задачка устроить ставку, определить количество трудящихся линий и можно вертеть тамбур. Если на выпадет выигрышная композиция – вы выиграли! С этой задачей для посодействуют управится бездепозитные призы казино.
#1563 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Лут Оксана Николаевна порно казино 5 <a href=https://specreporter.com/>автомат казино</a> pin up casino скачать ев казино <a href=https://rhymes-punches.com/>casino приложения</a> 7k casino сайт казино фильм онлайн казино играть казино смотреть онлайн бесплатно скачать 1×bet на андроид леон букмекерская контора online casino официальный
DiskiPlus порно с Алина Загитова DiskiPlus порно с Матвей Сафонов (футбол) <a href=https://www.diskiplus.ru/>DiskiPlus casinos xyz</a> DiskiPlus казино фильм смотреть онлайн DiskiPlus вывод казино <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet слоты 1×bet xyz</a> DiskiPlus casinos winning DiskiPlus inform@rucriminal.info DiskiPlus порно с Гатагова Ольга Анатольевна DiskiPlus Кузнецова Анна Юрьевна порно DiskiPlus казино вход DiskiPlus bet casino DiskiPlus рабочее казино
#1564 pincohttps://pinco-kz.website.yandexcloud.net/
Есть удобное зеркало пинко для доступа. Интерфейс pinco прост и интуитивно понятен. pinko — это лицензированное казино. Зеркало pinko помогает обходить блокировки. pinko — достойная альтернатива другим казино. На pinko работают лучшие слоты от провайдеров. Зарегистрироваться в pinko можно за минуту. На pinko регулярно проходят акции. Рейтинг pinko в Казахстане очень высок <a href=https://pinco-kz.website.yandexcloud.net/>pinco зеркало</a>.
#1565 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино ли балтбет букмекерская контора <a href=https://7club7.com/>1×bet приложение</a> букмекерская контора ставки Манилова Алла Юрьевна порно <a href=https://rumafia.news/>Матвиенко Валентина Ивановна порно</a> Скоробогатова Ольга Николаевна порно порно с Дарья Клишина, легкоатлетка букмекерская контора ставки порно с Абрамченко Виктория Валериевна букмекерская контора зенит porno Александра Степанова, фигуристка фреш казино
DiskiPlus казино онлайн бесплатно DiskiPlus 1×bet на андроид <a href=https://www.diskiplus.ru>DiskiPlus порно с Аделия Петросян (фигурное катание)</a> DiskiPlus казино рулетка DiskiPlus Разуваева Ксения Денисовна порно <a href=https://diskiplus.ru>DiskiPlus porno Мира Андреева (теннис)</a> DiskiPlus 1×bet зеркало на сегодня 1×bet xyz DiskiPlus 1×bet регистрация DiskiPlus 1×bet слоты DiskiPlus Шевцова Татьяна Викторовна порно DiskiPlus casino скачать приложение DiskiPlus porno Александра Степанова, фигуристка DiskiPlus приложения букмекерских контор на андроид
#1566 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
ограбление казино casino рабочее зеркало <a href=https://m.repost.news/>ставки на спорт букмекерские конторы</a> 1×bet слоты casino riobet <a href=https://repost.news/>порно с Каролина Севастьянова</a> r7 casino porno Марина Александрова пин up casino яндекс казино casino 1×bet регистрация вавада казино
DiskiPlus 1×bet на сегодня DiskiPlus 1×slots casino <a href=https://diskiplus.ru/>DiskiPlus порно с Матвей Сафонов (футбол)</a> DiskiPlus 1×bet скачать бесплатно DiskiPlus 7k casino скачать <a href=https://diskiplus.ru>DiskiPlus 1×bet на андроид</a> DiskiPlus порно с Федор Чалов (футбол) DiskiPlus фильмы казино рояль DiskiPlus casino бонус DiskiPlus 1×bet официальный сайт 1×bet xyz DiskiPlus Лут Оксана Николаевна порно DiskiPlus porno Елизавета Туктамышева DiskiPlus casino андроид
#1567 Esmeraldosogt
Delete it,please! <a href=https://rekonstrukce-domy-na-klic.cz/>.</a>
#1568 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало
Диапазон ставок, которые вправе устроить игрок, кроме лимитирован. Обычно ставить возможно небольшую сумму — около 10–30 рублей за одно вращение. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasin online</a> <a href=https://wykop.pl/wpis/80059525/mastering-3d-product-design-from-concept-to-market>https://wykop.pl/wpis/80059525/mastering-3d-product-design-from-concept-to-market</a> Как лишь вы отыграли вейджер и свои с бонусного баланса перебежали вас на настоящий счет, Вы неустрашимо сможете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (сделать наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депо).Срок активации и время на отыгрыш. Зачисление денег либо фриспинов происходит при активации на требовательно ограниченного периода, похожие притязания предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать приз количество дней либо даже месяцов. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером. 1×slots casino регистрация <a href=http://regvoice.com/home.php?mod=space&uid=78452&do=profile>http://regvoice.com/home.php?mod=space&uid=78452&do=profile</a> У любого игорного клубы разные вейджеровые обстоятельства. Чтобы вы гарантировано сумели выполнить их, мы дадим несколько советов. Если система начислила маленькую сумму, не делать немалые ставки – остановитесь на 10–30 центах. Как лишь сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте играть. В неприятном случае лучше приглядеться к другому автомату.Варианты выигрыша в от Вашей успеха и условий игорного портала. Выше мы сказали, что некоторые бездепозитные призы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются другие, все, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на деньги, можно выиграть неописуемые суммы. Сегодняшние игровые автоматы или видео слоты, как их именуют. Могут выдавать солидные умножение от х1.000 и выше. Некоторые множат ставку от х100.000.
1×slots casino зеркало
Но есть азартные заведения, готовые просто например вручить деньги на игру. Для сего достаточно сделать профиль. Чтобы исключить выигрыш, сперва нужно выполнить вейджеровые обстоятельства, прописанные в критериях получения бездепа.Фриспины – бесплатные вращения с фиксированной ставкой, которые можно использовать в определенных игровых автоматах. 1×slots регистрацию более популярный вариант это <a href=https://www.jottacloud.com/s/3719d9d0f6bf70c47389198eae3221190dd>https://www.jottacloud.com/s/3719d9d0f6bf70c47389198eae3221190dd</a> Новые посетители онлайн-казино без первого депо могут проверить собственную удачливость. К что, этому же есть вероятность конвертировать бездепы в настоящие средства за регистрацию в казино, впрочем достичь бонус нужно отыграть сообразно условиям акции. 1×slots зеркало подтвердит вашу регистрацию если говорить
1хслотс регистрация в 1×slots casino
Онлайн-казино тщательно продумывают бонусные обстоятельства, которые нужно изучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша прочие ограничения. <a href=https://www.reikiandastrologypredictions.com/member.php?action=profile&uid=21395>https://www.reikiandastrologypredictions.com/member.php?action=profile&uid=21395</a> Каждая игровая перрон выделяется условиями по получению и отыгрышу бездепов. В правилах детально расписаны временные рамки, за коие нужно прокрутить вейджер. Также не запамятовывайте тему наибольший объем ставки и наивысшую сумму выплаты. С иной стороны, чтобы получить бездепозитные призы казино, довольно израсходовать менее 1 минуты. онлайн казино 1×slots Также, учите, собственно бездепозитный бонус можно вывести только никаких случае, когда будут исполнены все обстоятельства отыгрыша.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
<a href=http://forums.indexrise.com/thread-1096-post-513058.html#pid513058>1х слот 1хслотс регистрация перейти на 1×slots</a> Операторы гемблинга заявляют, собственно например они сражаются с бонус-хантерами. Впрочем, критики считают, что этим казино пытаются устроить из случайного гостя постоянного игрока.Бездепозитный приз часто имеет замерзнуть легкодоступным незамедлительно после окончания регистрации, потому как единственным требованием к нему считается регистрация, а затем ревизия вашей новой учетной записи. Риск-игра по равным шансам – Также казино может воспрещать выполнять условия по отыгрышу с помощью раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких других забавах.Возможность протестировать свежие забавы, не рискуя личными средствами и создать собственную стратегию игры. 1×slots зеркало на сегодня <a href=https://lifeactor.ru/user/JasperJeR/>https://lifeactor.ru/user/JasperJeR/</a>
1×slots актуальное зеркало
Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных требований, считая обязательной верификации. Если на сайте учтена обязательная процедура подтверждения личности, то вывести выигрыш удастся только после проверки данных. Приготовьтесь наполнить анкету и выслать в техподдержку документ, подтверждающий личность. Вейджер (или вагер) ? это наименьшая сумма ставок, которую нужно устроить для вывода денежного бонуса. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение. <a href=http://mail.aquarius-dir.com/1×slots-%D0%BF%D1%80%D0%BE%D0%BC%D0%BE%D0%BA%D0%BE%D0%B4-%D0%B1%D0%B5%D0%B7%D0%B4%D0%B5%D0%BF%D0%BE%D0%B7%D0%B8%D1%82%D0%BD%D1%8B%D0%B9–1×-620398_462646.html>http://mail.aquarius-dir.com/1×slots-%D0%BF%D1%80%D0%BE%D0%BC%D0%BE%D0%BA%D0%BE%D0%B4-%D0%B1%D0%B5%D0%B7%D0%B4%D0%B5%D0%BF%D0%BE%D0%B7%D0%B8%D1%82%D0%BD%D1%8B%D0%B9–1×-620398_462646.html</a> Также, учите, что бездепозитный приз можно исключить лишь что случае, когда будут выполнены все условия отыгрыша.Для верификации номера аппарата, в собственном профиле изберите опцию „Подтвердить номер аппарата“ и введите в соответствующее фон код, приобретенный в sms-сообщении. 1×slots мобильная версия войти казино Бездепозитный приз за регистрацию в казино с выводом средств в 2022 году — Наш ресурс дает игрокам важную информацию о самых новых, щедрых и испытанных призах в интернет казино, коие обновляются любой день.Основное отличие в том, собственно для получения бездепа не пополнять баланс в казино. Но считая сего, есть ряд и других различий:
<b>Смотреть еще похожие новости:</b>
<a href=https://kfz-gringer.at/index.php/forum/in-neque-arcu-vulputate-vitae/80036–1#79800>1хслот скачать</a>
<a href=http://craft4game.forumex.ru/viewtopic.php?f=2&t=2284>x1 slots регистрация в 1×slots casino</a>
<a href=https://roguedynasty.net/forums/member.php?10629-RabofreeKt>1× slots casino зеркало</a>
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=126314&extra=>1×slots на любой вкус как пройти регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подарки на конкретные даты выделяются условиями получения. Если поощрение начисляют игроку на день рождения, то сумма обыкновенно находится от общего размера депо последний год. Внесение депо – Будьте готовы восполнить счет после отыгрыша приза. Это стандартное заявка управлял для этого подобии промо-акций. Лучше заблаговременно уточнить, какую сумму надо(надобно) будет заносить на счет. Как верховодило, речь идет о наименьшем депозите, но вы должны быть уверены, собственно он для по кармашку.
#1569 Charlesgunnyhttp://filmkachat.ru
1хслотс 1хслотс регистрация перейти на 1×slots
Наличие у игрока 2 аккаунта. Запрещено создавать количество профилей для многократного получения бездепов.Доступность — бездепозитные призы в казино почаще всего предоставляются свежим игрокам, но случаются случаи, когда приз все получить и действующие посетители. <a href=http://filmkachat.ru/>1×slots на любой вкус как пройти регистрацию</a> Законодательство, регулирующее азартные игры в разных странах, оказывает на возможности операторов. В результате юзеры из отдельных регионов сталкиваются с ограничениями со стороны казино. Это имеет быть как полный отказ в доступе, например и невозможность загружать игры отдельных изготовителей.Перед активацией принципиально внимательно изучить условия акции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют значение также лимиты ставок при отыгрыше и сроки, на коих возможно пользоваться предложением. Если бездеп охватывает ограниченный перечень игр, рекомендуется разузнать максимальные коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят лишь том, случае, случае оператор не установил взыскательные ограничения на максимальную необходимую ставки. <a href=https://www.smartmoneymatch.com/job/3d-artist/968>https://www.smartmoneymatch.com/job/3d-artist/968</a> Демоказино есть почти на любом сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются значительно реже: там когда выигрыша и соблюдения критерий промоакций бездеп возможно перевоплотить в настоящие средства.Бездепозитный бонус предоставляется новому игроку за определенные деяния. Часто презент повторяющий средств или фриспинов выдается за регистрацию, спасибо чему пользователь получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. 1×slots регистрация 1×slots casino 777 online <a href=http://okna-online.ua/index.php?subaction=userinfo&user=gracefulspoof43>http://okna-online.ua/index.php?subaction=userinfo&user=gracefulspoof43</a>
1хлот регистрация в 1×slots casino
Классическая разновидность бонуса за создание аккаунта. Его преимущество заключается сомнений, собственно клиент может самостоятельно подбирать аппараты и создавать ставки в их. Иногда перечень игровых автоматов ограничен оператором, но все равно это другого, чем один-единственный доступный разъем, как когда с использованием фриспинов.Внесение депозита – Будьте готовы пополнить счет после отыгрыша бонуса. Это стандартное заявка управлял для данного типа промо-акций. Лучше заблаговременно уточнить, какую необходимую нужно будет вносить на счет. Как управляло, речь идет о минимальном депозите, хотя вы должны быть уверены, что он для по карману. 1×slots регистрация 1×slots casino 777 online <a href=http://mycs.ge/index.php?subaction=userinfo&user=erraticbandit61>http://mycs.ge/index.php?subaction=userinfo&user=erraticbandit61</a> 1 x slots
1×слот регистрация в 1×slots casino
Обычно показатель повыше, чем для призов на депозит. Не дивитесь, в он несомненно и х100. Иногда завышенный коэффициент вейджера устанавливается для обитателей отдельных стран. Зарегистрируйтесь. Для регистрации чаще всего довольно ввести свой номер телефонного и почтовый адресок, последствии чего установить полученный код из СМС. Возможно, потребуется указать промокод. В правилах акции будет написано, где его надо включать. Иногда это надобно создавать при регистрации, время — теснее последствии творенья собственного офиса, на отдельной страничке. <a href=https://www.reikiandastrologypredictions.com/member.php?action=profile&uid=19669>https://www.reikiandastrologypredictions.com/member.php?action=profile&uid=19669</a> На условиях отыгрыша даровых призов идет тормознуть подробнее. С ними связаны аспекты, коие невозможно забыть без внимания. 1×slots регистрация на официальном сайте
1× slots casino зеркало
Но есть игорные заведения, которые готовы просто так жертвовать средства на забаву. Для сего достаточно сделать профиль. Чтобы вывести свой выигрыш, для сначала нужно выполнить обстоятельства отыгрыша, указанные в условиях получения бездепозитного депо.Для получения предоставленных бонусов для пригодиться — ПК или мобильное устройство, и остальное дело за малым. Такие поощрения дозволяют даром протестировать свежее казино, разобраться с игровым ходом онлайн слотов, заработать и вывести небольшую необходимую средств.Но никогда не запамятовывайте пристально разбирать правила роли в бонусных промоакциях. Если вы нарушите желая бы одно условие, позже вы не сможете уладить недоразумение с администрацией. зеркло казино 1×slots <a href=https://ucgp.jujuy.edu.ar/profile/Glavdorogadv2509/>https://ucgp.jujuy.edu.ar/profile/Glavdorogadv2509/</a> Денежные свои. Третий бонус за регистрацию без депо – наличные. К огорчению, только известные и пользующиеся клубы шансы уяснить средства в рублях или баксах. С их поддержкой вы сможете насладиться любой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед данным необходимо выполнение конкретных условий.Активация по промокоду употребляется в различных видах бездепов. Если речь о приветственном призе, то набор знаков возможно разузнать на главной странице, в регистрационной форме либо послании, которое отправляется пользователю для подтверждения адреса электронной почты. Акции шансы проводиться совместно с партнерскими площадками. Обычно код размещается на стороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активизируется разовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем важный код для активации в описании любого промо.
1×slots регистрация
В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать собственный выигрыш с даровых вращений. Прибыль, коию Вы заработаете на этом бездепе можно ставить на вывод без какого или отыгрыша.Верификация аккаунта. Лучше доказать личность сразу последствии регистрации, дабы позже не было заморочек с выводом средств. Верификация имеет проходить 2-мя способами: <a href=http://g961713h.beget.tech/user/PorsedropEa/>http://g961713h.beget.tech/user/PorsedropEa/</a> Наиболее известные гонорары между гэмблеров – бездепозитные призы казино. Это не изумительно, как возможно получить благотворительные вращения либо виртуальные кредиты, и всем не придётся пополнять счёт, рисковать собственными средствами. Удастся насладиться разнородными увеселениями причем выиграть солидную сумму, избегая серьёзного риска.Размер приза. В качестве бездепов обыкновенно начисляют не суммы, а когда речь идет о бонусах за депо, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино шансы презентовать игроку до 2000$. 1×slots официальный сайт мобильная версия скачать Онлайн гемблинг развивается с каждым деньком все больше и больше, свежие бренды создаются не по дням а по часам. Новые онлайн казино делают вступительные акции для игроков, чтобы, чтобы собственно бы зарекомендовать себя, и что, этим самым предлагают бездепозитные призы за регистрацию, что бы не упустить такую возможность — как пользоваться свежим бездепом, рекомендуем посещать наш сайт как возможно почаще, самое аппетитное и новые несомненно добавляться в данном же списке.
<b>Смотреть еще похожие новости:</b>
<a href=https://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=6268>1×slots официальный demo регистрация в 1×slots casino</a>
<a href=https://praisenpray.org/forums/showthread.php?tid=121074>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный бонус по промо-коду несомненно доступен для игры, только том, случае когда Вы активируете особый бонусный код в разделе с призами либо укажите промокод при регистрации на сайте. В неких случаях, кроме активации кода, придется подтвердить контактные данные игрока и наполнить анкету клиента.
#1570 1win_ppolhttp://1win16.com.ng
1win betting site <a href=https://www.1win16.com.ng>https://www.1win16.com.ng</a> .
#1571 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми акциями. Читайте о них в обзорах и на форуме.Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке нужно восполнить счет в казино. Для депозитных бонусов, эта процедура не нужна, например как депо теснее сделан. <a href=http://filmkachat.ru/>1×slots зеркало рабочее на сегодня</a> Большинство интернет-казино из нашего топ-10 готовы повеселить вас эксклюзивными промоакциями. Читайте о их в обзорах и на форуме. <a href=https://steemit.com/watts/@kalinka0588/understanding-the-power-of-a-car-battery-a-comprehensive-guide>https://steemit.com/watts/@kalinka0588/understanding-the-power-of-a-car-battery-a-comprehensive-guide</a> Итак, дабы безвозмездные бонусные кредиты трансформировались в реальные деньги, которыми возможность распоряжаться по своему усмотрению, их надо(надобно) отыграть. Вейджер следует уточнять в правилах онлайн-казино. x1 slots регистрация в 1×slots casino <a href=http://vecmir.ru/index.php/vecmirlife/58024-shallowice21/profile>http://vecmir.ru/index.php/vecmirlife/58024-shallowice21/profile</a> Бездепозитные бонусы — это подарки от казино в виде бонусных средств или фриспинов для игровых автоматов, коие начисляются на аккаунт игрока последствии процедуры регистрации на сайте заведения. Для получения таких поощрений депозит не требуется.Приглашаем делиться суждениями о бонусах. Это поможет иным пользователям подбирать наиболее прибыльные предложения.
1 x slots
Нет. Для получения бездепозитного бонуса в казино нужна неотъемлемая регистрация на сайте. Играть в слоты даром и без регистрации можно только в демо режиме.С не отыгранным бонусом запрещается превышать объем наибольшей ставки. Нарушение сего обстоятельства иметь аннулирование выигрыша. <a href=http://turkteam.10tl.net/member.php?action=profile&uid=2012>1×slots зеркало на сегодня</a> 1×slots зеркало которую указывали при регистрации кстати <a href=https://latino-forex.com/members/250616-henryrab>https://latino-forex.com/members/250616-henryrab</a> Как и промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такого предложения являются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих гостей и дозволяет им составить эмоцию о функционале, не рискуя значительными суммами.Чтоб получить большой выигрыш, выбирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша. 1×slots casino зеркало рабочее Фриплей-бонусы встречаются лишь в неких клубах. Они зачисляются сразу в сотворения профиля и активны непродолжительное время. Если не успеете истратить средства, они просто сгорят. Касаемо медли, как призы активны протяжении часа.Выигрыши с призов без инвестициям практически привязаны к требованию по ставкам и могут быть обналичены только в исполнения данных притязаний.
1×slots зеркало рабочее на сегодня
Денежные свои. Третий бонус за регистрацию без депозита – наличные. К раскаянию, лишь известные и знаменитые клубы могут дать средства в руб. Или долларах. С их подмогою появится насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед данным нужно исполненье определенных условий.Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке адепты онлайн-казино публикуют актуальную информацию о no down payment bonuses и других услугах. <a href=http://arkosgold.ru/index.php?subaction=userinfo&user=aberranttag18>http://arkosgold.ru/index.php?subaction=userinfo&user=aberranttag18</a> Как управляло, при выводе финансов, от играющего требуется только сделать наименьший вклад чтобы, чтобы, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом собственный счет.Не хотите поиграть в азартные игры, не рискуя средствами деньгами, хотя получая в все выплаты? Подобную вероятность деют почти лучшие порталы с азартными весельями. В их числе много правдивых и надежных интернет-казино на русском языке. Они привлекают новых пользователей разными поощрительными мероприятиями, включая бездепозитные, или безвозмездные призы. скачать 1×slots на андроид мобильная версия Начнём с того, что любое промо за регистрацию подразумевает некие обстоятельства. Бездепозитные бонусы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность валютного оборота, нужная для исполнения критерий. Пример, получили безвозмездные вращения и выиграли с них 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 руб., проигрышных или выигрышных, так. После выполнения, бонусный баланс перейдёт на реальный и станет доступным к выводу.
1хслот зеркало
<a href=http://kemsrr.forumex.ru/viewtopic.php?f=7&t=5964>1×slots casino online регистрация</a> Активация по промокоду используется в различных видах бездепов. Если речь о приветственном призе, то комплект символов можно узнать на крупнейшей страничке, в регистрационной форме или письме, которое отчаливает пользователю для подтверждения e-mail. Акции все проводиться вместе с партнерскими площадками. Обычно код располагается на постороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется одноразовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном кабинете или начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем важный код для активации в описании каждого промо. x1 slots регистрация в 1×slots casino <a href=http://newoasisforlife.org/new/home.php?mod=space&uid=104136&do=profile>http://newoasisforlife.org/new/home.php?mod=space&uid=104136&do=profile</a>
1×slots регистрация 1×slotscasino09k online
Автоматы непопросту считаются самым знаменитым азартным веселием. Чтобы усвоить управление и управляла, понадобится всего количество мин. Ваша задача сделать ставку, найти число трудящихся линий и можно крутить барабан. Если на экране выпадет выигрышная комбинация – вы выиграли! С этой задачей для посодействуют управится бездепозитные призы казино. <a href=https://www.01husu.com/space-uid-2166048.html>https://www.01husu.com/space-uid-2166048.html</a> 1×slots зеркало рабочее
<b>Смотреть еще похожие новости:</b>
<a href=https://kfz-gringer.at/index.php/forum/suggestion-box/79945–1×slots#79709>скачать 1×slots официальный сайт</a>
<a href=http://soumoli.com/home.php?mod=space&uid=24916>1хслотс рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные призы истинными деньгами, которые возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадали.
#1572 ThomasSakhttps://pafipcbuleleng.org/
<a href=https://pafipcbuleleng.org/>pg slot mahjong</a>
SISTEM TERPADU PAFI: Fungsi Penting Farmasi dalam Era Digital
Profil Singkat PAFI Sejak kemerdekaan Indonesia, para Tenaga Kefarmasian turut berperan aktif dalam kemajuan kesehatan bangsa. Berdirinya Persatuan Ahli Farmasi Indonesia (PAFI) menjadi momen bersejarah sebagai wadah profesional di bidang farmasi. Berazaskan Pancasila, PAFI berkomitmen untuk:
• Mengembangkan kualitas kesehatan publik
• Memodernisasi farmasi Indonesia
• Meningkatkan kualitas hidup anggota
WEB PAFI Terintegrasi: Solusi Digital untuk Farmasi Modern
Menghadapi tantangan era digital, PAFI menghadirkan sistem terintegrasi ini – terobosan teknologi yang memfasilitasi profesi kefarmasian melalui:
? Data Real-time – Kemudahan mendapatkan peraturan farmasi, temuan terbaru, dan prospek pekerjaan
? Peningkatan Kemampuan – Program pelatihan dan sertifikasi daring
? Jejaring Profesional – Media sinergi se-Indonesia
Sistem digital ini memperkuat kontribusi PAFI dalam meningkatkan pelayanan kesehatan melalui pemanfaatan teknologi terkini.
Peluang Farmasi Digital
Keberadaan WEB PAFI Terintegrasi menandai perubahan sistem dalam dunia kefarmasian. Dengan selalu menyempurnakan fitur dan layanan, PAFI bertekad untuk:
• Mendorong inovasi pelayanan kefarmasian
• Memperkuat standar profesional
• Memperluas fasilitas kesehatan untuk rakyat
Epilog
PAFI berkat WEB PAFI Terintegrasi selalu berada di garda depan dalam memadukan inovasi digital dengan pekerjaan apoteker. Terobosan ini tidak hanya meningkatkan fungsi apoteker, tetapi juga berperan aktif bagi kemajuan kesehatan bangsa di masa modern.
#1573 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Кирьянова Дарья Борисовна casinos winning <a href=https://vestnik-jurnal.com/>казино пин</a> казино на деньги порно с Анна Калинская (теннис) <a href=https://www.ossetia.tv/>скачиваемые казино</a> слот casino casino официальный зеркало r7 casino официальная казино Валентина Матвиенко порно bitz casino porno Алена Косторная (фигурное катание)
DiskiPlus порно с Евгений Малкин (хоккей) DiskiPlus kent casino регистрация <a href=https://www.diskiplus.ru/>DiskiPlus порно с Матвей Сафонов (футбол)</a> DiskiPlus мелбет букмекерская контора DiskiPlus сайт 1×bet слоты <a href=https://www.diskiplus.ru/>DiskiPlus porno Юлия Пересильд</a> DiskiPlus casino daddy DiskiPlus порно с Васильева Татьяна Викторовна DiskiPlus официальные букмекерские конторы DiskiPlus casino регистрации DiskiPlus лучшие казино бесплатно DiskiPlus porno Игорь Акинфеев (футбол) DiskiPlus играющие казино онлайн
#1574 internetchelyabGephttps://domashij-internet-chelyabinsk003.ru
подключить интернет челябинск <a href=https://domashij-internet-chelyabinsk003.ru>domashij-internet-chelyabinsk003.ru</a> лучший интернет провайдер челябинск
#1575 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
официальные букмекерские конторы скачать букмекерские конторы pin <a href=https://rucriminal.info/>pin casino</a> Хорова Наталья Александровна порно pin ап casino <a href=https://rucriminal.info/>porno Анна Сидорова, керлингистка</a> приложения букмекерских контор казино рояль смотреть casino pin официальный Валентина Матвиенко порно лучшие онлайн казино 7k casino зеркало casino бездепозитный
DiskiPlus 7k casino официальный сайт DiskiPlus букмекерская контора ставки <a href=https://diskiplus.ru>DiskiPlus лучшие казино бесплатно</a> DiskiPlus казино большая DiskiPlus porno Дарья Мороз <a href=https://diskiplus.ru>DiskiPlus казино онлайн бесплатно</a> DiskiPlus Анна Михалкова DiskiPlus скачать pin casino DiskiPlus 1×bet зеркало xbet xyz DiskiPlus лучшие казино бесплатно DiskiPlus 1×bet регистрация DiskiPlus официальная казино DiskiPlus pin casino зеркало
#1576 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
Для казино, работающих интернет, бездепозитные бонусы нужны для вербования новых клиентов. Предложение поиграть на слотах без надобности внесения реальных денег — работающий способ для повышения интереса к фирмы. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит играть в казино, только теперь уже на собственные деньги. <a href=http://filmkachat.ru/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> <a href=https://cgscholar.com/community/community_profiles/3d-rendering-services/community_updates/234375>https://cgscholar.com/community/community_profiles/3d-rendering-services/community_updates/234375</a> 1×slots зеркало рабочее на сегодня <a href=http://jet-link.ru/index.php?subaction=userinfo&user=ludicrouspushov>http://jet-link.ru/index.php?subaction=userinfo&user=ludicrouspushov</a> В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и в случае неоднозначных ситуаций нет способности куда-то посетовать и доказать свою правоту.
1×slots рабочее зеркало на сегодня
Бонус с зачислением денег на счет выделяет больше свободы деяний. Пользователь сам избирает, каким образом воспользоваться подаренными средствами. Здесь того все действовать ограничения на список дешевых игр, хотя обычно эти рамки не например строги, как в рекламную с безвозмездными вращениями.В интернет-сети всегда можно отыскать перечни наиболее знаменитых и обещанных поощрительных программ от известных онлайн-казино. <a href=http://sz.80lvl.ru/viewtopic.php?f=8&t=3242>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a> 1×slots регистрация на сайте 1×slots ru com Будьте внимательнее при ознакомлении с правилами во избежание происхожденья конфликтных ситуаций с казино, когда последствии отыгрыша бездепа вам не дадут исключить крупную необходимую выигрыша. <a href=http://beloshveikaprom.ru/bitrix/redirect.php?goto=http://cies.xrea.jp/jump/?http://dekka.su/bitrix/redirect.php?goto=https://teletype.in/@urist555/fDlstGb1YEd>http://beloshveikaprom.ru/bitrix/redirect.php?goto=http://cies.xrea.jp/jump/?http://dekka.su/bitrix/redirect.php?goto=https://teletype.in/@urist555/fDlstGb1YEd</a> Бездепозитные бонусы в казино без пополнения 2022 — это определенная сумма средств или for nothing spins вращения, коие предоставляются первым гостям за регистрацию на веб-сайте казино вид бездепозитного бонуса, и дает для возможность с казино без пополнения опробовать предложения (игр), с дальнейшей привилегией вывода средств при исполненьи всех установленных управлял. x1 slots 1хслотс регистрация перейти на 1×slots Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, all зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.Вейджер менее х30–35 считается применимым. Опытные игроки утверждают, что с таким вейджером реально остаться в плюсе, в верно подойти к выбору игрового аппарата.
1×slots казино зеркало
Срок активации и время на отыгрыш. Зачисление средств или фриспинов случается при активации в течение требовательно ограниченного периода, схожие притязания предъявляются и к срокам отыгрыша. Одни казино позволяют отыгрывать бонус некоторое дней или даже месяцов. Другие выдают солидную сумму за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высоким вейджером.Каждая игровая платформа отличается условиями по получению и отыгрышу бездепов. В правилах детально расписаны кратковременные рамки, за коие нужно прокрутить вейджер. Также не забывайте про наибольший объем ставки и наивысшую сумму выплаты. С другой стороны, дабы получить бездепозитные призы казино, довольно истратить не более 1 минуты. Так собственно сможете отважно регистрироваться без всяких раздумий. Фортуна сейчас точно на вашей стороне. Не бойтесь, так следствие какого либо убытка Вам абсолютно не угрожает. С такими призами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе. <a href=https://narodovmnogo-omsk.ru/forum/user/4442/>https://narodovmnogo-omsk.ru/forum/user/4442/</a> 1хслотс рабочее зеркало на сегодня Особую изюминку видео слотам придают оригинальные символы. С их свет активируются разные бонусы. Вы сможете запустить вспомогательный степень и прирастить сумму выигрыша. Есть знаки, коие замещают негодные составляющие и сами творят выигрышные комбо. Не стоит забывать и на бонус-тур. После каждого удачного спина есть шанс прирастить необходимую выигрыша в два либо хорошо раза.
1х слотс зеркало регистрация в 1×slots casino
Несмотря на то, собственно данный вариант стимуляции со стороны азартных платформ очень востребован в сфере подобных игр, далековато не поклонникам казино ведомо, собственно себе бездепозитные призы казино и как именно их вполне эксплуатировать. <a href=https://timepost.info/showthread.php?tid=173761>1×слот регистрация в 1×slots casino</a> Необходимость отыгрыша. Вейджер в выше, чем для бонусов за депозит. И же средства не отыграны, исключить их невозможно. казино 1× slots официальный сайт <a href=http://demo.qkseo.in/profile.php?id=640485>http://demo.qkseo.in/profile.php?id=640485</a>
1×slots официальный сайт зеркало
Бездепозитные бонусы, как теснее ясно, являются оригинальной возможностью обратиться игровому процессу полностью бесплатно, то есть выступать в интернет казино бесплатно и на место свои незамедлительно последствии регистрации аккаунта. Автоматы с таким депозитом все замерзнуть великолепной возможностью поиграть для поклонников азарта с определенными лимитированиями в финансах. Это один из главных характеристик привлекательности дара. С завешенным коэффициентом и профессионалы не смогут выполнить условия по отыгрышу. И не, как презентабельно смотрится предложение – бездепозитный бонус казино в размере $500 или $1 000. Чтобы новички лучше вникли, что же такое вейджер, мы разберём на случае. <a href=http://222.239.231.61/bbs/board.php?bo_table=free&wr_id=5360591>http://222.239.231.61/bbs/board.php?bo_table=free&wr_id=5360591</a> 1×slots casino online регистрация
<b>Смотреть еще похожие новости:</b>
<a href=http://oszeresek.hu/forum/viewtopic.php?f=1&t=5746>рабочее зеркало 1×slots</a>
<a href=https://minecraft.ru.net/user/Manuelsoarl/>1 x slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Популярность онлайн казино растёт и всё больше юзеров начинают интересоваться азартными играми. Бездепозитные призы 2022 года, это оригинальные подарки за регистрацию. С их подмогою свежие игроки все получить безвозмездные вращения или деньги на баланс за одну регистрацию. С появлением игорных заведений в онлайне, бездепозитные призы стали наимоднейшим методом привлечения игроков. Подобные акции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш вебсайт собрал наилучшие предложения из онлайна на 2022 год. Воспользуйтесь каким презентом и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить условия. Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.
#1577 Charlesgunnyhttp://filmkachat.ru
1×slots акции
Это тоже бесплатные финансы, коие поступают на аккаунты новоиспеченных игроков после регистрирования. А особенность таких бонусов состоит в, собственно обретенные деньги обязательно следует использовать в продолжении назначенного медли. <a href=http://filmkachat.ru/>1×slots зеркало регистрация то дальше необходимо пройти</a> Когда речь идет о получении бездепозитных призов в казино, для внимание на следующие обстоятельства: <a href=https://yoomark.com/content/mastering-brand-extension-strategy-market-success>https://yoomark.com/content/mastering-brand-extension-strategy-market-success</a> Активация происходит за промокодов, которые вводятся в собственном офисе после регистрации. Среди спецпредложений в перечне Casino.ru находятся неповторимые промокоды, коие доступны лишь гостям портала. Другие методы начисления средств ? автоматическая активация сразу последствии творения аккаунта и получение дара по запросу в службу технической поддержки. 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=http://suprememasterchinghai.net/bbs/board.php?bo_table=free&wr_id=3823528>http://suprememasterchinghai.net/bbs/board.php?bo_table=free&wr_id=3823528</a> На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не можете активировать и получить бездепозитный бонус.Все благотворительные бонусы кажутся соблазнительными. Кто же откажется от возможности поиграть в онлайн-казино, не рискуя средствами, хотя получая выигрыши. Но далековато не все бездепозитные призы одинаковой привлекательны для рассудительного клиента.
1×slots промокод при регистрации
Для тех, кто лишь взвешивает испытать собственную фортуну, а также для профессиональных игроков, разыскивающих новые площадки для выигрышей, основные лицензированные казино часто устраивают различные акции, и одно из лучших услуг прошедшее время – как для начинающих, например и для проф игроков – бездепозитный приз за регистрацию. <a href=https://portugal-campings.com/pt/profile/jamescip/>1 x slots</a> 1×slots подтвердит вашу регистрацию если говорить <a href=http://jejuseapension.com/bbs/board.php?bo_table=free&wr_id=493645>http://jejuseapension.com/bbs/board.php?bo_table=free&wr_id=493645</a> Вы не в коем случае ни чем не рискуете, а только выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, выучится регулировать менять ставки и полосы, изучать бонусные забавы и их выигрышные комбинации, ну в конце концов просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные свои, которые можно отыграть и исключить, а не просто на демо счет, тем наиболее адреналин в крови еще больше повысится а пульс забьется с частым ритмом!В некоторых онлайн казино для получения бездепозитных призов не достаточно просто зарегистрироваться на веб-сайте клуба и доказать средства контактные данные. Дополнительно потребуется активация промокода. 1×slots регистрация 1×slots review live Основное различие что, нет, собственно для получения бездепа не пополнять баланс в казино. Но не этого, есть ряд и отличий:Бездепы обычно предлагают с отыгрышем — моментально вывести выигранные свои нельзя. Перевод средств со счета будет возможен в как, как пользователь выполнит все требования казино, а сумма не может быть выше установленного правилами лимита. Условиями промоакции фиксируются сроки, на которых заказчик вправе пользоваться предложением. Обычно они не превышают нескольких дней последствии активации.
1×slots регистрация на 1хслотс
Любой выигрыш по ставке выше установленного лимита несомненно считаться недействительным. То есть ставка не будет засчитана при отыгрыше, в случае выигрыша его сумма не поступит на счёт клиента — итог забавы будет полностью аннулирован.Можно. Вы постоянно можете отрешиться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не сделаете ставку. <a href=http://clear.rusoft.ru/2012/01/6.html>http://clear.rusoft.ru/2012/01/6.html</a> Новые клиенты онлайн-казино без первого депо имеют проверить свою удачливость. К что, этому же есть вероятность конвертировать бездепы в настоящие деньги за регистрацию в казино, однако результата бонус нужно отыграть сообразно условиям акции. 1×slots регистрация то дальше необходимо пройти
скачать 1×slots на андроид мобильная версия
При этой на бонусные средства воспрещается играть в игровые автоматы с прогрессивным джекпотом и забавы из радела exist casino. Кроме такого, некоторые казино выделяют бездеп на раз или некоторое конкретных слотов, и в иных играх Вы не можете на них выступать.Разные казино имеют собственные управляла по выведению выигрыша. Для бездепозитных призов принимаются достаточно высочайшие притязания. Часто онлайн-казино советуют отыграть бонусное поощрение до ста раз в игровых автоматах. Например, если игрок получил бесплатно 10 $, то необходимо несомненно отыграть их, поставив 1 тыщу спинов по 1 доллару любой. Стоит обозначить(означить), что не все казино выделяют вероятность выступать на бонусы и не во всех развлекательных заведениях идентичные правила для отыгрывания. Некоторые казино воспрещают выступать на призы в блекджек или ограничивают ставки до 5 %, что значительно наращивает в десятки раз количество необходимых игр. 1×slots рабочее зеркало <a href=https://www.thepostalcodes.net/pak-post-tracking/>https://www.thepostalcodes.net/pak-post-tracking/</a> Новички не обожают сразу же заносить депозит. Это обусловлено неимением опыта и сомненьем. К счастью, в возможно получить бездепозитный бонус за регистрацию в казино. Неважно собственно начисляет система – фриспины либо кредиты. В всяком случае вы не рискуете собственными сбережениями. Это замечательная вероятность запустить приглянувшийся видео слот либо же испытывать удачу в настольных играх.
1×slot казино зеркало
В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это самая милая доля забавы. Важно, часто бездепозитные призы в казино выдаются с ограничениями по наибольшей выплате. В среднем возможно рассчитывать на прибыль в некоторое тысяч руб. Как исключить выигрыш с приза без депо. Придётся доказать акк документально, в некоторых заведениях. Процедура верификации неотклонима и делается каждым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате или прочтите в правилах. Выбрать казино с бездепозитным бонусом. У нас на веб-сайте представлен перечень превосходнейших онлайн казино, коие предлагают своим игрокам щедрые бонусы за регистрацию.Автоматическая активация на самой удобной, но ручной метод содержит перед ней достоинства. Прежде чем применять вознаграждение от казино, стоит заранее найти, сколько времени потребуется на исполнение всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деяния приза. <a href=http://netvoyne.ru/user/JulesGeova/>http://netvoyne.ru/user/JulesGeova/</a> Верификация аккаунта. Лучше доказать личность сразу после регистрации, чтобы позже не было проблем с выводом средств. Верификация может проходить двумя способами: 1×slots зеркало регистрация в 1×slots casino Чтобы самостоятельно убедиться в превосходствах бездепозитных призов, достаточно зарегистрироваться в казино и получить одобрение.Как правило, при выводе денег, от играющего потребуется только сделать наименьший вклад чтобы, чтобы, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом собственный счет.
<b>Смотреть еще похожие новости:</b>
<a href=http://aficionado.pl/showthread.php?189521–1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5-%D0%BD%D0%B0-%D1%81%D0%B5%D0%B3%D0%BE%D0%B4%D0%BD%D1%8F&p=210652>1×slots зеркало рабочее на сегодня</a>
<a href=http://soumoli.com/home.php?mod=space&uid=24916>1×slots официальный сайт, скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Проверка занимает от нескольких мин. До нескольких дней, спецы техподдержки имеют запросить дополнительные документы или инициировать короткое общение по Skype.
#1578 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
промокод 1×bet casino com <a href=https://rhymes-punches.com/>Анна Михалкова</a> porno Андрей Рублев (теннис) фильмы казино рояль <a href=https://strelochnik.com/>сайт винлайн букмекерская контора</a> 7k casino 1×bet 1 1go casino Скворцова Вероника Игоревна порно porno Мария Шарапова 1×bet слоты ап казино
DiskiPlus промокод 1×bet DiskiPlus фреш казино <a href=https://www.diskiplus.ru/>DiskiPlus Черкесова Бэлла Мухарбиевна порно</a> DiskiPlus 1×bet официальный xbet DiskiPlus порно с Владимир Минеев (ММА) <a href=https://diskiplus.ru/>DiskiPlus порно с Гатагова Ольга Анатольевна</a> DiskiPlus casino бездепозитный DiskiPlus казино рояль DiskiPlus 1×bet зеркало на сегодня 1×bet xyz DiskiPlus казино смотреть онлайн бесплатно DiskiPlus casino зеркало сайта DiskiPlus порно с Петр Ян (ММА) DiskiPlus казино пин
#1579 Charlesgunnyhttp://filmkachat.ru
1хслотс мобильная версия зеркало
Для тех, кто только подумывает испытать собственную удачу, еще для профессиональных игроков, ищущих новые площадки для выигрышей, водящие лицензированные казино часто устраивают различные промоакции, и лучшее предложений прошедшее время – как для начинающих, например и для профессиональных игроков – бездепозитный бонус за регистрацию. <a href=http://filmkachat.ru/>1×слот регистрация в 1×slots casino</a> Возьми собственный подарок. Чаще всего приз активизируется незамедлительно в регистрации. Но случаются ситуации, когда надо(надобно) забежать в собственный кабинет либо написать в справочную службу. <a href=https://collectednotes.com/lexxeagle/kak-pravilno-i-vygodno-prodat-svoi-avtomobil>https://collectednotes.com/lexxeagle/kak-pravilno-i-vygodno-prodat-svoi-avtomobil</a> Чаще всего интернет-казино предлагают бездепозитные бонусы новым пользователям. Эта промо-акция очень эффективно привлекает новичков, подталкивая их к открытию счета. Конечно, не они становятся послушными посетителями, но сам факт регистрации аккаунта играет на руку заведению.Ознакомьтесь с нашим перечнем лучших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего перечня и получите бездеп сразу. Хватайте наихорошие безвозмездные предложения ниже и выигрывайте большие средства, не рискуя! 1×слот регистрация в 1×slots casino <a href=https://u.pcloud.link/publink/show?code=XZdW1A0Zk0toVPKo9vh7QEDFEX963uNCNnKy>https://u.pcloud.link/publink/show?code=XZdW1A0Zk0toVPKo9vh7QEDFEX963uNCNnKy</a> Важно, удостоверьтесь в том, что раньше не регистрировались в выбранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи.
1×slots зеркало на сегодня
1×slots casino регистрация 1×slots review live Самый распространённый из похожих призов, естесственно же, бездеп на денек рождения клиента — приз вид фиксированной суммы либо фриспинов поступает на счёт игрока, а пользоваться им возможно на установленного периода медли. <a href=https://www.mshowto.org/forum/members/forsedropst.html>https://www.mshowto.org/forum/members/forsedropst.html</a> 1×slots казино зеркало Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации дара нужно подтвердить электронную почту и привязать телефон;
1 xslots рабочее зеркало
Если вы новичок данном и только попали в неизведанную вами область пыла — счет предложений как бездепозитные призы без пополнения.Наличие у игрока второго аккаунта. Запрещено создавать количество профилей для многократного получения бездепов. <a href=https://www.xn–9n3bn8ewuh9zp.kr/bbs/board.php?bo_table=free&wr_id=542756>https://www.xn–9n3bn8ewuh9zp.kr/bbs/board.php?bo_table=free&wr_id=542756</a> 1× slots casino зеркало
x1 slots 1хслотс регистрация перейти на 1×slots
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/9639/#comment-401586>онлайн казино 1×slots</a> Бoльшинcтвo азартных заведений выдвигают приблизительно одинаковые обстоятельства и требования, которые нужно выполнить, дабы получить бездепозитный приз за регистрацию. Все их возможно соединить в раз список: Мы проделываем ударение на главных положениях управлял, рассказываем о территориальных ограничениях и вкратце информируем о других акциях обговариваемого казино. 1×slots казино мобильная версия <a href=https://images.google.ps/url?q=https://doctorlazuta.by/>https://images.google.ps/url?q=https://doctorlazuta.by/</a> Бесплатный бонус – кредиты, которые онлайн-казино начисляет клиенту, не принуждая его пополнять игровой счет.
1 хслот регистрация в 1×slots casino
<a href=http://agriexpert.kz/user/WalterNinia/>http://agriexpert.kz/user/WalterNinia/</a> 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=http://lssdteam.teamforum.ru/viewtopic.php?f=2&t=2538>1×slots официальный зеркало</a>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=100252&pid=376685#post_376685>зеркала 1×slots</a>
<a href=https://hassicity.com/wp-content/plugins/smart-cookie-kit/res/empty.html>1×slots зеркало регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Популярность интернет казино растёт и всё больше юзеров начинают проявлять азартными играми. Бездепозитные бонусы 2022 года, это уникальные презенты за регистрацию. С их поддержкой свежие игроки могут получить бесплатные вращения или деньги на баланс за 1 регистрацию. С в игорных заведений в онлайне, бездепозитные бонусы стали знаменитейшим способом привлечения игроков. Подобные акции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы расскажем. Наш сайт собрал наилучшие предложения из интернета на 2022 год. Воспользуйтесь хоть презентом и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить обстоятельства.
#1580 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора скачать приложение симулятор казино <a href=https://t.me/vchkogpu_ru>Матвиенко Валентина Ивановна порно</a> пари букмекерская контора бк букмекерская контора <a href=https://res-publika.com>порно с Каролина Севастьянова</a> Елизавета Боярская букмекерская контора скачать приложение слот casino porno Мира Андреева (теннис) порно с Арина и Дина Аверины, гимнастки яндекс игры казино порно с Антропова Валентина Викторовна
DiskiPlus casino ru DiskiPlus казино в россии <a href=https://diskiplus.ru/>DiskiPlus 1×bet слоты</a> DiskiPlus сайт винлайн букмекерская контора DiskiPlus casino актуальное зеркало <a href=https://www.diskiplus.ru>DiskiPlus казино рояль</a> DiskiPlus официальные зеркала казино DiskiPlus 1×bet приложение DiskiPlus пин up casino DiskiPlus порно с Евгения Медведева DiskiPlus казино фильм DiskiPlus Окладникова Ирина Андреевна порно DiskiPlus 1×bet скачать приложение
#1581 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало этих способов предполагает регистрацию
Риск-игра по равным шансам – Также казино может воспрещать выполнять обстоятельства по отыгрышу с помощью раунда на удвоение, который предлагается в слотах, видео-покере и некоторых других забавах.На критериях отыгрыша бесплатных бонусов стопам остановиться подробнее. С ними связаны аспекты, коие нельзя оставить без внимания. <a href=http://filmkachat.ru/>1×slots на любой вкус как пройти регистрацию</a> Внесение депозита – Будьте готовы пополнить счет в отыгрыша приза. Это стандартное требование правил для этого подобии промо-акций. Лучше заблаговременно уточнить, какую необходимую нужно будет вносить на счет. Как управляло, речь идет о минимальном депозите, хотя вы обязаны быть уверены, собственно он для по карману.Составленный знатоками Casino.ru перечень онлайн-казино с бездепозитным бонусом дозволяет игрокам сопоставить спецпредложения различных операторов. <a href=https://insta.tel/read-blog/115007>https://insta.tel/read-blog/115007</a> Получить Бездепозитный приз в интернет казино дело 2-ух кликов. Другой момент, отыграть рекламную и соблюсти управляла и условия отыгрыша. Под правилами подразумевается столько вагер, но и лимитирования по максимальной ставке. Мы осознаем, собственно в кинотеатр все ставят на зеро и выигрывают. Призываем не делать похожего. Перед активацией приза прочтите управляла. Узнайте последующие моменты: Условия получения подарка, за регистрацию, за депозит и прочее. Ограничения по наибольшей ставке. Зачастую не повыше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вращать автоматы, а вагер несомненно стоять на пространстве. Поэтому принципиально знать, в каких играх можно совершать кратность денежного оборота. 1×slots казино мобильная версия <a href=https://www.linomilita.com/uncategorized/18poeticamente-the-final-cut-3/>https://www.linomilita.com/uncategorized/18poeticamente-the-final-cut-3/</a> У любой забавы средства притязания по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система засчитает каждую ставку. В рулетке и покере сделать это намного труднее. Именно потому так главно внимательно разбирать обстоятельства получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в каждой игре, то новички просто «спустят приз на ветер».Популярность интернет казино растёт и всё больше пользователей начинают проявлять азартными играми. Бездепозитные призы 2022 года, это оригинальные презенты за регистрацию. С их подмогою новые игроки могут получить благотворительные вращения или средства на баланс за одну регистрацию. С в игорных заведений в онлайне, бездепозитные призы стали известнейшим методом вербования игроков. Подобные акции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о коих мы расскажем. Наш вебсайт собрал лучшие предложения из онлайна на 2022 год. Воспользуйтесь каким подарком и можете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша необходимо выполнить условия.
1х слотс зеркало регистрация в 1×slots casino
<a href=https://jgwy.net/space-uid-200381.html>зеркло казино 1×slots</a> 1×slots казино зеркало <a href=https://www.alive-directory.com/1×-%D1%81%D0%BB%D0%BE%D1%82-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE_650338.html>https://www.alive-directory.com/1×-%D1%81%D0%BB%D0%BE%D1%82-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE_650338.html</a> При отыгрыше бездепов, учитывайте временные ограничения. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток. 1×slots официальный сайт скачать Доступные игры – В некоторых азартных играх возможно понизить математическое преимущество казино до нескольких 10-х процента. В их количестве многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как управляло, в этих играх ставки идут в зачет вейджера не всецело. Например, имеет предусматриваться только 50%. В некоторых забавах бездепозитные бонусы вообщем нельзя отыгрывать.Более солидные предложения встречаются очень изредка. Зачастую они доступны лишь VIP-игрокам. В остальных случаях им наверняка сопутствуют довольно жесткие условия отыгрыша. Также вероятны дополнительные обстоятельства и лимитирования, прописанные в условиях и положения бонусной программы казино.
1× slots официальный
Мы рекомендуем не отрицаться от сходственных услуг знаменитых казино. Выделите несколько мин. На регистрацию, получите приз и попробуйте его отыграть. Может быть, сейчас фортуна будет на вашей стороне!Возможность протестировать новые забавы, не рискуя собственными средствами и разработать собственную стратегию игры. Фриспины. Бесплатные вращения предназначены для применения в видео-слотах. Внимательно читайте условия – они нередко выдаются для неких машин. В зависимости от клуба вам создавать конкретное количество ставок. Кстати, современные игорные жилища выделяют возможность заводить «одноруких бандитов». <a href=http://belitavitex.kz/bitrix/rk.php?goto=http://barfits.ru/bitrix/redirect.php?goto=http://pacheco.ru/bitrix/click.php?goto=https://teletype.in/@urist555/q0sGV-I1Cwp>http://belitavitex.kz/bitrix/rk.php?goto=http://barfits.ru/bitrix/redirect.php?goto=http://pacheco.ru/bitrix/click.php?goto=https://teletype.in/@urist555/q0sGV-I1Cwp</a> 1хслотс рабочее зеркало Призовые начисления без депозита шансы предоставляться для участия в турнирах онлайн казино. Потратить перечисленные деньги можно самая масштабах этой акции. Условия их проведения себе ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться этим предложением, превосходнее выучить его правила.После получения бонуса вывод средств для клиента несомненно недоступен того, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя или чета недель. Выводить средства игрок сможет лишь последствии отыгрыша.
1×slots зеркало рабочее на сегодня
Простая процедура получения бездепозитного бонуса, кот-ая займет не более 2-х минут. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные. В случае установленного лимита на сумму вывода выигрыша с бездепозитного приза, игрок не может вывести больше заявленной суммы.Одним из предлогов отдавать привилегию 1 или иному заведению заключается в привлекательности предлагаемых промоакций и бесплатных предложений. Безвозмездные фриспины, выдаваемые без нужды делать какой-либо лепта, в перечне находится далековато не в конце. Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам запрещено начислять бонусы клиентам, не имеющим денежных средств на счете. Мы предлагаем осмотреть животрепещущие бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ. 1×slot рабочее зеркало <a href=http://xn–bb0br5kvmftwn87bs3lywo.kr/bbs/board.php?bo_table=free&wr_id=138568>http://xn–bb0br5kvmftwn87bs3lywo.kr/bbs/board.php?bo_table=free&wr_id=138568</a> Таким образом, заведение пробует показать себя своим потенциальным игрокам, а такой маркетинговый ход как казино бонус без депо за регистрацию привлекает очень большое внимания к игорному заведению и обеспечивает постоянный струю новых гостей и грядущих посетителей игрового онлайн клуба.
1×slots зеркало регистрацию более популярный вариант это
На бонусные начисления имеют быть установлены вспомогательные ограничения, которые Вы не приняли при отыгрыше. Пока бонус всецело не отыгран — деньги из казино не выводятся.В большинстве заведений устроить это возможно по адресу электронной почты, по номеру телефона, через социальную сеть либо гугл-аккаунт. Чтобы бездеп не был начислен на Ваш аккаунт, Вам не активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт механически, а Вы не планируете его применять, обратитесь в службу поддержки с пожеланием отменить бездепозитный бонус. <a href=http://misssophie.net/AG_Wohnungssuche/doku.php?id=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%BF%D0%B8%D1%86%D1%86%D1%8B%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO>http://misssophie.net/AG_Wohnungssuche/doku.php?id=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%BF%D0%B8%D1%86%D1%86%D1%8B%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO</a> Каждый новичок и умелый игрок мечтают быстро стартануть и начать создавать реальные ставки. Для этого довольно забрать презент, за кот-ый не нужно выплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email или аппарат. После этого администрация начислит щедрое вознаграждение в виде безвозмездных вращений либо виртуальных кредитов.В перечне притязаний к отыгрышу нередко присутствуют лимиты на ставки при ирге на собственные деньги. Так, случае отыграть нужно 30 000 руб., а максимальная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам деянья акции. 1 x slots casino Онлайн-казино тщательно продумывают бонусные обстоятельства, коие нужно выучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и ограничения.Следует выделить, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом.
<b>Смотреть еще похожие новости:</b>
<a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=11435>зеркала 1×slots</a>
<a href=http://mi.minfish.com/home.php?mod=space&uid=1196847>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Превышение наибольшей ставки при отыгрыше. Система автоматически не предуведомляет о превышении ставки, потому о нарушении управлял игрок имеет узнать уже последствии подачи запроса на вывод средств.
#1582 Charlesgunnyhttp://filmkachat.ru
1хслот официальный сайт зеркало
Перед активацией принципиально внимательно выучить обстоятельства акции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют значение кроме лимиты ставок при отыгрыше и сроки, в течение коих можно воспользоваться предложением. Если бездеп охватывает ограниченный список игр, рекомендовано разузнать наибольшие коэффициенты, уровень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь сомнений случае, если оператор не установил взыскательные лимитирования на максимальную сумму ставки.Иногда в качестве одобрения за регистрацию имеют выдаваться билеты для участия в турнирах. Условия их проведения довольно отличаются, поэтому мы рекомендуем ознакомиться с любым предложением раздельно. <a href=http://filmkachat.ru/>1хслотс официальный сайт зеркало</a> Но есть игорные заведения, коие готовы просто например жертвовать деньги на забаву. Для этого довольно создать профиль. Чтобы вывести свой выигрыш, для поначалу нужно выполнить условия отыгрыша, указанные в условиях получения бездепозитного депо.4. Заберите подарок. Чаще всего приз активируется незамедлительно последствии регистрации. Но посещают истории, когда надо(надобно) забежать в личный кабинет либо написать в службу. <a href=https://www.bunity.com/shopavto>https://www.bunity.com/shopavto</a> Выбрать казино с бездепозитным бонусом. У нас на сайте представлен перечень наилучших интернет казино, которые предлагают своим игрокам великодушные призы за регистрацию.В неких интернет казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на веб-сайте клуба и подтвердить средства контактные данные. Дополнительно требуется активация промокода. 1×slots casino регистрация на сайте <a href=http://lit-book.ru/index.php?subaction=userinfo&user=guiltlessdent27>http://lit-book.ru/index.php?subaction=userinfo&user=guiltlessdent27</a>
рабочее зеркало 1×slots
Такой бесплатный эквивалент средств зачисляется на профиль юзера после воплощения требований и предназначаются они только для игрового процесса. Вывод этих вознаграждений возможен только после воплощения вейджеровых критерий.Для получения депозитного бонуса необходимо восполнить собственный игровой баланс реальными деньгами. Вознаграждение возможно получить или при внесении первого депозита, либо вид фиксированного процента от внесённых средств. Так либо по, приз поступит на счёт лишь после пополнения. <a href=https://forum.konyacraft.com/threads/1×slots-zerkalo-bystruju-registraciju-a-takzhe-mgnovennoe.9447/>1×slots зеркало быструю регистрацию а также мгновенное</a> 1×slots регистрацию процедура займет всего лишь Самые знаменитые способы вывода средств ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электрическим платежным системам подобии Neteller и Skrill, а также используют криптовалютными кошельками. Вывод выигрышей имеет исполняться моментально или занимать от нескольких часов до нескольких суток. <a href=http://bestwecando.ourproject.org/dokuwiki-2013–05–10a/doku.php?id=1win_cassino_online>http://bestwecando.ourproject.org/dokuwiki-2013–05–10a/doku.php?id=1win_cassino_online</a> 1хслотс официальный сайт зеркало
1×slots официальный зеркало рабочее
Итак, чтобы бесплатные бонусные кредиты превратились в настоящие средства, которыми вам распоряжаться по собственному усмотрению, их нужно отыграть. Вейджер идет уточнять в правилах онлайн-казино.Не рекомендуем сломя голову браться за всевозможные предложения получения средств без вложений. Вполне вполне, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на 1-ый взгляд. Альтернативой является казино бонус за депозит. Мы предлагаем для пару советов, спасибо коим у каждого игрока будет возможность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств: <a href=http://belmebru.ru/bitrix/redirect.php?goto=http://gefest.com/bitrix/redirect.php?goto=http://chipgu.ru/url.php?https://teletype.in/@urist555/509vpQAbGML>http://belmebru.ru/bitrix/redirect.php?goto=http://gefest.com/bitrix/redirect.php?goto=http://chipgu.ru/url.php?https://teletype.in/@urist555/509vpQAbGML</a> 1×slots casino регистрация 1×slots review live Реже призы без депозита начисляются неизменным игрокам. С их поддержкою администрация постарается удержать ценных посетителей или вожделеет поблагодарить за преданность правильных гостей. Но гораздо чаще для подобных целей используются такие промоакции:
1×slots рабочее зеркало
Прежде чем активировать бездеп, нужно убедиться никаких, собственно государство, уроженцем которой является игрок, не заходит в список не.Сроки активации приза уточняются каждым казино, но чаще всего они не превышают недели с этапа получения. Игроку непременно надо(надобно) использовать бездеп протяжении указанного срока, в ином случае приз просто исчезнет. Каждый приз можно получить только раз раз, потому случае не применять бездеп в срок, у игрока не будет второго шанса им воспользоваться. Как верховодило, при выводе денег, от играющего требуется лишь устроить наименьший лепта чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом индивидуальный счет. При маленькой сумме бонуса рекомендовано играть по невысоким ставкам, а применять максимальные другого, как только никаких случае, если вейджер слишком великий, а время на отыгрыш сильно ограничено.Для верификации аккаунта нужно дать специалистам технической поддержки отсканированную копию паспорта и счета за коммунальные услуги, а фотографию банковской карты или скриншот странички электронного кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности. 1×slots официальный сайт зеркало <a href=https://melon-tv.com/bbs/board.php?bo_table=free&wr_id=29067>https://melon-tv.com/bbs/board.php?bo_table=free&wr_id=29067</a> Такой бесплатный эквивалент средств зачисляется на профиль пользователя в осуществления требований и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений возможен только после воплощения вейджеровых критерий.Автоматическая активация кажется самой комфортной, но ручной способ имеет перед ней превосходства. Прежде чем применять вознаграждение от казино, стоит заблаговременно найти, сколько медли потребуется на выполнение всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деяния бонуса.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Внесение депо – Будьте готовы восполнить счет после отыгрыша приза. Это стандартное требование правил для данного на промо-акций. Лучше заблаговременно уточнить, какую необходимую нужно будет заносить на счет. Как управляло, речь о наименьшем депозите, но вы обязаны быть уверены, что он вам по карману. Можно ли в одном интернет казино получить больше 1-го бонуса за регистрацию? Нет, например как в любом интернет казино есть правила, к которым надо(надобно) придерживаться, не творить 2 аккаута для получения бонусов, иначе будет блокировка обоих аккаутов, не пытайтесь обмануть онлайн казино, бонус за регистрацию выдаеться раз раз одному личику.Далее потребуется отыграть вагер и вывести выигрыш. Игрокам без навыка крупно подфартило, у получить 10-ки презентов за 1 регистрацию. Если не смогли получить Бездепозитный бонус, не беспокойтесь. Обратитесь в онлайн чат, оператор поможет ситуацию. <a href=http://taiwanzhenglun5.com/home.php?mod=space&uid=154732>http://taiwanzhenglun5.com/home.php?mod=space&uid=154732</a> Не советуем опрометью голову браться за всевозможные предложения получения средств без инвестициям. Вполне вполне, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на 1-ый взор. Альтернативой является казино приз за депо. Мы предлагаем для пару советов, благодаря коим у любого игрока будет вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом денег: 1хслотс зеркало на сегодня Многие игроки, оценив перечень казино, остаются выступать в нем и дальше ? на это и направлено любое промо. Постоянные посетители заносят депозиты и проделывают ставки, обеспечивая длительную прибыль оператора. То есть, казино выдают бездепы новым пользователям для формирования лояльной аудитории.В любом казино с бездепозитным бонусом учтены вейджеровые условия. Это единственный «подводный камень», который стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) сделать определённое число ставок. Чем круче приз, тем сложнее выполнить условия, и напротив.
<b>Смотреть еще похожие новости:</b>
<a href=http://dd214.labelcreativeak.com/forums/viewtopic.php?f=3&t=1637>1×slots официальный сайт зеркало</a>
<a href=https://talkonlinenews.com/viewtopic.php?t=12368>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<a href=http://www.ihavethepussy.com/de/members/36184-Michaelbar?s=a6f7d35cbf4c84e5c2094d1762ab89f7>1×slots рабочее зеркало на сегодня</a>
<a href=https://portugal-campings.com/pt/profile/jamescip/>онлайн казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В неких онлайн казино для получения бездепозитных призов не довольно просто зарегистрироваться на веб-сайте клуба и подтвердить свои контактные данные. Дополнительно требуется активация промокода.
#1583 natyazhnye_vbpahttps://natyazhnye-potolki-dnepr.biz.ua/
Natyazhnye потолки в Днепре , где качество встречает стиль, добавьте шарм вашему пространству, решение, которое преобразит ваш дом. Премиум натяжные потолки в Днепре, профессиональный подход, которые подчеркнут ваш стиль, сделайте шаг к преображению. Экономьте с умом с натяжными потолками, по доступным ценам, оставьте позади скучные потолки, не упустите шанс. Натяжные потолки, созданные с любовью, доступные на natyazhnye-potolki-dnepr.biz.ua, создайте уникальный стиль, с нами это легко. Эстетика и функциональность натяжных потолков, для каждого интерьера, всё для вашего удобства, выбор по вашему желанию. Почему стоит выбрать натяжные потолки?, для вашего комфорта, отличная шумоизоляция, инвестируйте в качество. Эстетические решения для вашего потолка, всё на natyazhnye-potolki-dnepr.biz.ua, обратите внимание на детали, заказ натяжного потолка стал проще. Секреты успешного выбора потолка, в Днепре и за его пределами, доступные решения для каждого, обращайтесь к профессионалам. Качество натяжных потолков — наш приоритет, с многолетним опытом на рынке, мы подберем потолок для любого интерьера, вдохните жизнь в ваше пространство. Натяжные потолки по доступным ценам, от производителей, где ваши мечты становятся реальностью, позвоните нам сегодня. Преобразите свое пространство с натяжными потолками, с качеством, проверенным временем, всегда профессионально, закажите свою консультацию. Идеальные потолки для вашего дома, от наших профессионалов, качество и надежность, закажите консультацию. Ваш надежный партнер в мире натяжных потолков, где качество не подвело ни разу, потолок, о котором вы всегда мечтали, обновите свой дом с нами. Мы поможем вам создать идеальный интерьер, от natyazhnye-potolki-dnepr.biz.ua, где ваши идеи становятся реальностью, приобретайте лучшее. Эстетика натяжных потолков для вашего дома, где мечты становятся реальностью, долговечные и стильные решения, воспользуйтесь нашим опытом. Натяжные потолки: качество и стиль, от надежных производителей, мы создаем счастье для ваших глаз, не упустите шанс. натяжные потолки цена <a href=https://natyazhnye-potolki-dnepr.biz.ua/>натяжные потолки цена</a> .
#1584 Charlesgunnyhttp://filmkachat.ru
1×slot казино зеркало
С этими простыми советами каждое казино с призом за регистрацию способно принести в разы больше выгоды и выгоды. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots casino c2d ru</a> Промокод – определённая комбинация символов, коию необходимо ввести в подходящее фон при твореньи учетной записи либо активировать в собственном профиле игрока в разделе с бонусами. <a href=https://linkbio.co/kalinka>https://linkbio.co/kalinka</a> 1×slots казино зеркало <a href=http://b98415ql.bget.ru/user/GregoryOreks/>http://b98415ql.bget.ru/user/GregoryOreks/</a>
казино 1×slots
1×slots официальный сайт мобильная версия 3. Подтвердить данные. В зависимости от клуба, нужно привязать телефон или почту, показать индивидуальную информацию;Помните, что всевозможные нарушения правил сведут на нет ваши усилия, и вы скорее останетесь без начисленного вам бесплатного приза. Всегда изучайте правила начисления и обстоятельства вейджера. По любым вопросам, на коие вы возможности самостоятельно отыскать ответы, обращайтесь за разъяснениям и саппорт. <a href=https://imoodle.win/wiki/User:EASRudolph>https://imoodle.win/wiki/User:EASRudolph</a> Популярность онлайн казино растёт и всё больше пользователей начинают увлекаться азартными забавами. Бездепозитные призы 2022 года, это оригинальные презенты за регистрацию. С их подмогою свежие игроки шансы получить бесплатные вращения или деньги на баланс за 1 регистрацию. С свет игорных заведений в интернете, бездепозитные бонусы стали знаменитейшим методом привлечения игроков. Подобные акции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о которых мы поведаем. Наш вебсайт собрал наилучшие предложения из интернета на 2022 год. Воспользуйтесь каким подарком и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить условия.При регистрации никаких или ином онлайн игральном заведении — вас дается один шанс испытать собственную удачу не внося средства монеты. Замечу что такую поощрительную услугу деют не все интернет игровые площадки, а только великодушная середина(средина) из их. Которые мы подготовили для Вас в нашем перечне. 1×slots промокод при регистрации Мы подготовили список, где есть постоянно актуальные и свежие бездепозитные бонусы казино, которые возможность получить даром. Для наших юзеров есть специальные предложения эксклюзивные призы, коие вы у не найдете, их мы определили специальной красной плашкой «Exclusive».Если площадка презентует бездеп за регистрацию, то процедура его получения проста. Нужно лишь завести акк на сайте и активировать его, подтвердив адрес электрической почты, номер аппарата или иные данные, коие настятельно оператор. Перед этим нужно увериться, собственно юзер находится на официальном веб-сайте казино, не на жульнической площадке.
1×slots casino регистрация 1×slotscasino09k online
Прочитайте правила бонусной программки, в которой желаете участие. Да, мы безотступно советуем сделать это до регистрации.Чтоб получить крупный выигрыш, выбирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша. К раскаянью, нет. Почти все казино, просят внесение хотя бы 1-го минимального депо для вывода выигрыша с бездепозитного бонуса. Также учитывайте, собственно исключить деньги разрешено только на что, эту платежную систему, с которой был изготовлен депозит. <a href=https://clashofcryptos.trade/wiki/User:Ara654514796234>https://clashofcryptos.trade/wiki/User:Ara654514796234</a> казино 1×slots Воспользоваться бездепом возможно не во всех игровых автоматах: казино и тут устанавливает лимитирование для клиентов. Конечно, это можно счесть неким неудобством для игрока, но ради отметить, что выбор автоматов всё точно остаётся довольно наибольшим.В настоящее время получить приз за регистрацию в казино довольно просто. Почти любой игорный дом с радостью даст средства либо благотворительные вращения. Многие игроки используют этим и не стесняются региться в любом клубе с выгодными критериями. Кстати, это замечательная вероятность выдумать выигрышную тактику и сорвать куш.
1×slots регистрацию более популярный вариант это
В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая часть забавы. Важно, зачастую бездепозитные призы в казино выдаются с лимитированиями по максимальной выплате. В среднем можно рассчитывать на прибыль в несколько тыщ руб. Как вывести выигрыш с приза без депо. Придётся доказать акк документально, в некоторых заведениях. Процедура верификации обязательна и делается каждым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате или прочтите в правилах.В качестве призов онлайн казино нередко предлагает выдачу фриспинов, другими бесплатных вращений игрового барабана. Виртуальные монеты можно использовать для обучения в покерной школе либо для забавы в казино. <a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=174499&result=reply>1×slot зеркало</a> Некоторые сайты, этого чем провести регистрацию игроков, предлагают ответить на несколько базисных вопросов. Цель проведения подобной викторины – выявить случайных людей, которые не имеют представления о покере, и не допустить получения ими призов. Если посетитель уже играл в казино, то ответить на полтора десятка несложных вопросов будет нетрудно. Очень часто, ответы возможно отыскать на официальных сайтах этих учреждений. Похожим образом трудится третий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения клиента или в связи с получения им VIP-статуса. Подарок предоставляется после воззвания в поддержку и ревизии.Мы собрали и выпустили перечень наилучших бездепозитных казино с бонусами за регистрацию, которые гарантируют великодушные выигрыши и моментальные выплаты. 1×slots зеркало быструю регистрацию а также мгновенное <a href=https://thezal.kr/bbs/board.php?bo_table=free&wr_id=8277>https://thezal.kr/bbs/board.php?bo_table=free&wr_id=8277</a> 1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, случае не желайте замерзнуть жертвой мошенников либо впустую израсходовать время;Вообще перейдя в казино — правила одинаковы в получении бездепозитных призов, в стереотипные управляла входит: доказать эл. Почту и аппарат, заполнить собственный личный профиль, активировать рекламную код либо активировать предложения во вкладке БОНУСЫ.
1х слотс зеркало регистрация в 1×slots casino
Диапазон ставок, коие вправе сделать игрок, кроме лимитирован. Обычно назначать можно маленькую необходимую — в 10–30 руб. За одно вращение. <a href=http://bananashoes.ru/bitrix/redirect.php?goto=http://uge42.ru/bitrix/redirect.php?goto=http://geogas.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/nAQ-VQVmiso>http://bananashoes.ru/bitrix/redirect.php?goto=http://uge42.ru/bitrix/redirect.php?goto=http://geogas.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/nAQ-VQVmiso</a> 1×slots зеркало сайта 4. Заберите презент. Чаще всего бонус активизируется сразу в регистрации. Но случаются ситуации, когда нужно зайти в индивидуальный офис или написать в службу поддержки.Иногда для получения призов нужно связаться с адептами службы поддержки. Удобнее всего с ними беседовать в онлайн-сате, хотя времени достаточно запроса по электрической почте.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.animogen.com/memberlist.php?mode=viewprofile&u=15333>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<a href=https://www.thefamilylegion.se/viewtopic.php?f=4&t=108397>1×slots зеркало регистрацию более популярный вариант это</a>
<a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=421643>1хслотс мобильная версия зеркало</a>
<a href=https://portugal-campings.com/pt/profile/jamescip/>1×слот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В бонусную программу множества операторов входят регулярные бездепы. Это пожизненные акции, поощряющие активных неизменных игроков. Популярный формат — раздача фриспинов по конкретным дням недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают неизменные бонусы без депозита в обмен на накопленные баллы лояльности. Помните, что всевозможные нарушения управлял сведут на нет ваши старания, и вы наверняка останетесь без начисленного для дарового бонуса. Всегда изучайте управляла начисления и условия вейджера. По любым вопросам, на коие вы не можете помощи найти ответы, обращайтесь за объясненьям и саппорт.
#1585 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
7k casino сайт леон букмекерская контора <a href=https://rhymes-punches.com/>Львова-Белова Мария Алексеевна порно</a> Хорова Наталья Александровна порно 1×slots casino <a href=https://www.ossetia.tv/>Разуваева Ксения Денисовна порно</a> porno Анна Сидорова, керлингистка порно с Владимир Минеев (ММА) porno Игорь Акинфеев (футбол) зеркала официальных сайтов казино casino com 1×bet 1хбет up casino официальный
DiskiPlus Елена Лядова DiskiPlus рейтинг казино <a href=https://www.diskiplus.ru/>DiskiPlus казино фильм</a> DiskiPlus casino зеркало сайта DiskiPlus какие казино <a href=https://diskiplus.ru/>DiskiPlus официальные букмекерские конторы скачать</a> DiskiPlus pin up casino пин ап DiskiPlus 1×bet xbet xyz DiskiPlus официальные букмекерские конторы DiskiPlus песня казино DiskiPlus включи казино DiskiPlus porno Вера Бирюкова, гимнастка DiskiPlus Разуваева Ксения Денисовна порно
#1586 Charlesgunnyhttp://filmkachat.ru
1× slots сайт
Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных ситуаций с казино, когда последствии отыгрыша бездепа вас не дадут исключить солидную необходимую выигрыша.Для получения приза надо(надобно) ознакомиться с программой лояльности казино и сделать ставки на сумму, нужную для перехода на следующий уровень. <a href=http://filmkachat.ru/>1×slots официальный сайт, скачать</a> Существует ли стратегии для отыгрыша бездепозитных бонусов? К огорчению нет, на выигрыши или проигрыши с призов, казино либо игрок воздействовать не может, отдача игр случается от создателей игр.Каждый новичок и профессиональный игрок грезят живо стартануть и начать делать настоящие ставки. Для сего достаточно арестовать подарок, за который не уплачивать. В зависимости от игровой платформы, нужно сделать профиль, привязать email либо аппарат. После сего администрация начисляет щедрое вознаграждение в виде даровых вращений или виртуальных кредитов. <a href=https://events.com/r/en_US/event/floor-plan-to-3d-model-professional-conversion-services-london-february-962475>https://events.com/r/en_US/event/floor-plan-to-3d-model-professional-conversion-services-london-february-962475</a> Законодательство, регулирующее азартные игры в различных странах, влияет на полномочия операторов. В итоге юзеры из отдельных регионов сталкиваются с ограничениями со стороны казино. Это может быть как полный отказ в доступе, так и невозможность загружать забавы отдельных производителей. 1×слотс казино <a href=http://dinskoi-raion.ru/forum/?PAGE_NAME=profile_view&UID=65658>http://dinskoi-raion.ru/forum/?PAGE_NAME=profile_view&UID=65658</a> Все обожают получать презенты. Согласитесь, практически любой играющий человек несомненно необъятно рад, в получит безвозмездный подарок для игры в интернет казино просто за регистрацию либо же приз за внесенный депо, например именуемые приветственные призы для новых игроков. Соответственно эти онлайн клубы станут более модны и преимущественны у игроков при выборе казино для игры. Топ казино постоянно обновляется и добавляются свежие и интересные игровые клубы с привлекательной бонусной политикой и всеми вероятными прерогативами, к коим относятся эти бонусы как фриспины за регистрацию, валютные бездепозитные бонусы, еще великодушные бонусы за внесенный депо.Бывают ли бездепозитные бонусы без вейджера? Бывают, случае у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный приз за регистрацию устанавливается вейджер во всех казино.
1хслотс мобильная версия зеркало
Многие казино деют в рекламных целях благотворительные призы самая для наших читателей. Чтобы их получить, нужно перебежать на игровой вебсайт по партнерской ссылке с нашего портала.Выбирайте наихорошие благотворительные призы за обзоров на Casinoz – и пусть вам сопутствует счастье при отыгрыше бонусных кредитов! 1×slot зеркало рабочее этих способов предполагает регистрацию Ознакомьтесь с нашим списком наихороших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего перечня и получите бездеп сразу. Хватайте наихорошие благотворительные предложения ниже и выигрывайте большие средства, не рискуя!Бесплатные призы казино без депозита можно получить повторяющий валютных средств на бонусный счет (вывести их можно только после отыгрыша), фриспинов, игры или кешбэк-бонуса. <a href=http://gdz-fizika.ru/index.php?subaction=userinfo&user=impartialoverto>http://gdz-fizika.ru/index.php?subaction=userinfo&user=impartialoverto</a> 1× slots регистрация в 1×slots casino
1×slots casino зеркало
<a href=http://taiwanzhenglun5.com/home.php?mod=space&uid=18782>http://taiwanzhenglun5.com/home.php?mod=space&uid=18782</a> 1×slots официальный зеркало рабочее Фриспины предназначены для применения в видео слотах. Внимательно ознакомьтесь с условиями – частенько их выдают на некоторые автоматы. В зависимости от клуба, у вас получится устроить определённое количество ставок. Кстати, продвинутые игорные дома разрешают запускать любых «одноруких злодеев».Высокая конкурентность в разделе азартных игр мотивирует операторов привлекать посетителей разнородными промоакциями. Благодаря данному у посетителей появляется возможность получить бонусы в казино за регистрацию без депо. Воспользоваться этим предложением возможно, минуя функцию внесения денег на игровой счет, просто активировав аккаунт на веб-сайте. Наш экскурсовод по бездепам поможет избрать самую привлекательную бонусную программу, узнать правила получения такого гонорары и распорядиться им с максимальной выгодой.
1хслотс зеркало на сегодня
Чаще всего применяются коды. Их нужно вносить в особые окошки регистрационной анкеты, случае речь о пригласительных бонусах, либо в определенном разделе личного офиса игрока.Обычно, бездепозитные бонусы выдаются под определенные слоты с фиксированной ставкой, но их наверняка воспрещено использовать в игровых автоматах с прогрессивным джекпотом. Список игр, в можно применять бездеп, Вы найдете в описании промоакции или можете уточнить у службы поддержки заведения. <a href=https://krok.biz/forum/viewtopic.php?f=7&t=96870>1×slots официальный сайт скачать</a> 1×slot казино зеркало <a href=http://www.atego-club.ru/forum/member.php/137908-JamesNix>http://www.atego-club.ru/forum/member.php/137908-JamesNix</a>
1×slots зеркало быструю регистрацию а также мгновенное
Для верификации аккаунта надо(надобно) предоставить профессионалам технической помощи отсканированную копию паспорта и счета за коммунальные предложения, а также фотку банковской карты или экрана страницы электрического кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для подтверждения личности. Нельзя осматривать игру на деньги, как вариант заработка. Азартные игры запрещены для лиц моложе 18 лет. Topcasinobonuses.mobi классифицируется организатором азартных игр. Сайт одевает информационный характер. <a href=http://ceh-i.ru/user/DavidTrups/>http://ceh-i.ru/user/DavidTrups/</a> Воспользоваться бездепом можно не во всех игровых автоматах: казино вдруг уточняет лимитирование для посетителей. Конечно, это возможно счесть неким неудобством для игрока, хотя ради стоит отметить, что выбор автоматов всё равно остаётся достаточно великим.Так собственно можете неустрашимо регистрироваться без всяких раздумий. Фортуна сейчас наверняка на вашей стороне. Не опасайтесь, ведь следствие какого или убытка Вам абсолютно не угрожает. С этими призами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе. рабочее зеркало 1×slots Подтвердите личность, предоставив оператору казино средства паспортные данные. Инструкции обычно легкие, основное — четко им идти. Если написано, собственно «на фото обязаны быть видны все хорошо угла страницы паспорта» — устройте именно такое фото.Выиграть реальные средства в казино не пополняя счет – сложно, хотя возможно. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными призами и начните играть на бонусные средства. По статистике в одном из 10-ти заведений возможно заработать небольшую необходимую средств с бонусных средств.
<b>Смотреть еще похожие новости:</b>
<a href=https://krok.biz/forum/viewtopic.php?f=7&t=97441>1 х слотс зеркало</a>
<a href=http://u0382101.isp.regruhosting.ru/index.php/forum/general-questions-and-how-tos/68883-otzyvy-o-tovarakh?start=19182#164175>1×slots скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но такие рамки не смущают числе хайроллеров, поскольку коэффициенты на слотах разрешают рассчитывать на крупные выигрыши, в неких автоматах разыгрывается прогрессивный джекпот. Фриплей-бонусы встречаются только в некоторых клубах. Они зачисляются сразу в творенья профиля и активны непродолжительное время. Если не успеете израсходовать свои, они просто сгорят. Касаемо времени, в большинстве случаев бонусы активны в течение часа.
#1587 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pinco casino порно с Владимир Минеев (ММА) <a href=https://specreporter.com/>up casino зеркало</a> бывшие казино порно с Евгений Малкин (хоккей) <a href=https://rucriminal.info/>casino бонус</a> casino автомат casino автомат пин ап букмекерская контора Черкесова Бэлла Мухарбиевна порно Ходнева Светлана Владимировна порно porno Яна Троянова порно с Зырянова Анастасия Владимировна
DiskiPlus сколько казино DiskiPlus казино в россии <a href=https://diskiplus.ru>DiskiPlus 1×bet зеркало рабочее xbet</a> DiskiPlus Разуваева Ксения Денисовна порно DiskiPlus casino скачать <a href=https://www.diskiplus.ru/>DiskiPlus казино вход официальный сайт</a> DiskiPlus porno Александр Соболев (футбол) DiskiPlus сколько казино DiskiPlus 1×bet на сегодня DiskiPlus казино фильм DiskiPlus почему казино DiskiPlus Семёнова Татьяна Владимировна порно DiskiPlus ставки на спорт букмекерские конторы
#1588 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasin online
Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы которые появляются у новичков. <a href=http://filmkachat.ru/>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a> Некоторые сайты, до чем обмануть регистрацию игроков, предлагают ответить на несколько базисных вопросов. Цель проведения сходственной викторины – выявить случайных людей, которые не имеют представления о покере, и не разрешить получения ими призов. Если посетитель уже играл в казино, то ответить на полтора десятка простых вопросов будет несложно. Очень нередко, ответы возможно отыскать на официальных веб-сайтах этих учреждений.Бездепозитный бонус казино 2022 с выводом за регистрацию предоставляет вероятность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и проверить качество работы саппорта. Довольно нередко, начиная игровой процесс, игрок теснее не желает останавливаться и проделывает реальный лепта. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать безвозмездно вероятно как раз таки с призом за регистрацию без надобности заносить депо. <a href=https://www.papercall.io/speakers/146409/speaker_talks/292501-professional-3d-product-modeling-services-for-businesses>https://www.papercall.io/speakers/146409/speaker_talks/292501-professional-3d-product-modeling-services-for-businesses</a> 1хслотс казино зеркало <a href=https://pastebin.com/u/Glavdorogadv1808>https://pastebin.com/u/Glavdorogadv1808</a> Бездеп с фриспинами возможность обхватывать всю коллекцию игр на веб-сайте или разработки 1-го провайдера. Обычно предлагается определенный список автоматов. Он указывается в положениях о проведении акции. Выигрыш возможность быть выведен после как, как юзер отыграет эту необходимую. Возможность расценить полный функционал слотов — основное достоинство этой разновидности. Игроку становятся доступны что, эти функции, коие отсутствуют в демонстрационном режиме, а возможность выиграть реальные средства прибавляет ярчайших азартных ощущений.
1×slots регистрация 1×slots review live
В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это самая милая доля забавы. Важно, часто бездепозитные призы в казино выдаются с ограничениями по наибольшей выплате. В среднем возможно рассчитывать на прибыль в некоторое тысяч руб. Как исключить выигрыш с приза без депо. Придётся доказать акк документально, в некоторых заведениях. Процедура верификации неотклонима и делается каждым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате или прочтите в правилах. <a href=https://praisenpray.org/forums/showthread.php?tid=118699>casino 1×slot</a> 1×slots официальный зеркало Как и промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такового предложения являются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает свежих гостей и разрешает им составить впечатление о функционале, не рискуя значительными совокупностями. <a href=https://www.faribowl.com/author/evangelinei/>https://www.faribowl.com/author/evangelinei/</a> Промообъявления от казино не дают реальной картины и ориентированы на привлечение внимания пользователей. Понять, как высоки шансы остаться в плюсе, позволит личный анализ критерий предложения:Наш перечень содержит превосходнейшие бездепозитные бонусы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по главным параметрам: зеркло казино 1×slots На странице представлены бездепозитные бонусы за регистрацию в казино редкая заслуга за коей гонятся все игроки как новички, например и мастера. Мы тоже уделяем огромное внимание на присутствие бонусов при составление рейтинга казино на средства. Бездепозитный бонус это возможность играть безвозмездно и выиграть реальные деньги.Бездепозитные призы казино за регистрацию в 2022 году — это возможность поиграть за счёт заведения. Казино даёт клиенту шанс пользоваться определённой суммой либо числом безвозмездных вращений без внесения депо. Не путайте деморежим с реальной игрой без надобности внесения депо.
1× slots сайт
Обыкновенные бездепозитные призы в объеме от трех до 20 долларов созданы чтобы, чтобы, чтобы в забавы заходили все новые и свежие игроки. Здесь, скорее, будет ограничение на максимальный выигрыш. Важно, чтобы перед минимальным вкладом был отключен бонус за первое пополнение счета, и геймер не попадет на повторный вейджер.Получить Бездепозитный приз в онлайн казино дело двух кликов. Другой момент, отыграть рекламную и соблюсти управляла и условия отыгрыша. Под правилами предполагается столько вагер, но и ограничения по наибольшей ставке. Мы осознаем, собственно в кино все ставят на зеро и выигрывают. Призываем не делать сходственного. Перед активацией бонуса прочтите управляла. Узнайте последующие факторы: Условия получения дара, за регистрацию, за депозит и другое. Ограничения по максимальной ставке. Зачастую не повыше 350 руб. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на пространстве. Поэтому принципиально знать, в каких играх возможно совершать кратность денежного оборота. Верификация важна для дополнительной безопасности и помочь техподдержке выявить бонусхантеров и мошенников. Кстати, рядах платформах выводы солидных сумм доступны только после подтверждения личности.Одним из поводов отдавать привилегию 1 либо иному заведению заключается в привлекательности предлагаемых промоакций и даровых предложений. Безвозмездные фриспины, выдаваемые без дела делать какой-нибудь лепта, в списке располагается далековато не в конце. <a href=http://xenon-led.ru/bitrix/redirect.php?goto=http://terminus.ru/bitrix/redirect.php?goto=http://flyboots.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/dpRS7CiB0GB>http://xenon-led.ru/bitrix/redirect.php?goto=http://terminus.ru/bitrix/redirect.php?goto=http://flyboots.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/dpRS7CiB0GB</a> 1×slots сайт
онлайн казино 1×slots
Демоказино есть почти на любом веб-сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются значительно реже: там когда выигрыша и соблюдения критерий промоакций бездеп можно превратить в реальные деньги.Если речь идет об неповторимых предложениях, возможность потребоваться регистрация в казино по ссылке с партнерского вебсайта. Варианты выигрыша находятся от Вашей успеха и условий игорного портала. Выше мы заявили, что некоторые бездепозитные призы в 2022 году выдаются с лимитированиями по максимальной выплате. Однако, остаются другие, все, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на деньги, возможно выиграть невозможные суммы. Сегодняшние игровые автоматы либо видео слоты, как их именуют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000. 1×slots регистрация то дальше необходимо пройти <a href=http://ru.monumentefunerare.md/index.php?subaction=userinfo&user=needlessunderwo>http://ru.monumentefunerare.md/index.php?subaction=userinfo&user=needlessunderwo</a>
скачать 1×slots на андроид мобильная версия
При подмоги такого одобрения оператор может того завлекать клиентов, которые ранее проявляли активность на веб-сайте, хотя по какой-то основанию перестали играть. В данном случае промокод высылается юзеру по электрической почте или вид SMS.На страничке представлены бездепозитные призы за регистрацию в казино редчайшая заслуга за которой гонятся все игроки как новички, так и мастера. Мы также уделяем огромное внимание на присутствие бонусов при формирование рейтинга казино на средства. Бездепозитный бонус это возможность выступать даром и выиграть настоящие средства. <a href=https://sklad-slabov.ru/forum/user/9234/>https://sklad-slabov.ru/forum/user/9234/</a> Ещё одно распространённое акционное предложение – симпатичный подарок с неблаговидными требованиями. К примеру, клуб сулит $100 виде бездепа, но с вейджером х80 либо х100. Отыграть подобный вейджер практически невероятно и поэтому превосходнее концентрироваться на более заманчивых акциях.Так собственно можете неустрашимо регистрироваться без всяких размышлений. Фортуна сейчас наверняка на вашей стороне. Не бойтесь, как последствие какого или убытка Вам абсолютно не грозит. С этими призами как без пополнения, Вы остаетесь только в плюсе, но не как не в минусе. 1× slots официальный Реже бонусы без депо начисляются неизменным игрокам. С их поддержкой администрация старается вычесть ценных посетителей или желает поблагодарить за преданность верных гостей. Но гораздо почаще для подобных целей используются эти промоакции:B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.
<b>Смотреть еще похожие новости:</b>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=409566>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<a href=https://timepost.info/showthread.php?tid=171238>1×slots зеркало регистрацию более популярный вариант это</a>
<a href=http://nakupnidivadlo.cz/index.php/forum/3-pripominky/46621-https-sk-service1-ru?start=168#239924>рабочее зеркало 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Мы делаем акцент на главных положениях верховодил, рассказываем о территориальных ограничениях и вкратце информируем о иных промоакциях обсуждаемого казино. Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 поболее. Когда игроку полагается большое фриспинов, администрация возможность бить3 их начисление на некоторое дней. Бесплатные вращения предоставляются для определенного слота, кот-ый указывается в правилах акции.
#1589 natyazhnye_copahttps://natyazhnye-potolki-dnepr.biz.ua/
Natyazhnye потолки в Днепре , где современные решения становятся реальностью, добавьте шарм вашему пространству, выбор, который вас не разочарует. Элегантные натяжные потолки для вашего дома, профессиональный подход, которые сделают ваш интерьер уникальным, закажите прямо сейчас. Доступные натяжные потолки в Днепре, с качеством, проверенным временем, оставьте позади скучные потолки, не упустите шанс. Индивидуальный подход к каждому клиенту, потолки, которые вдохновляют, создайте уникальный стиль, машина времени в мир красоты. Натяжные потолки для квартир и офисов, для каждого интерьера, на любой вкус и цвет, выбор по вашему желанию. Натяжные потолки: преимущества и возможности, от natyazhnye-potolki-dnepr.biz.ua, долговечность и надежность, инвестируйте в качество. Эстетические решения для вашего потолка, всё на natyazhnye-potolki-dnepr.biz.ua, обратите внимание на детали, наш опыт к вашим услугам. Современные технологии натяжных потолков, от natyazhnye-potolki-dnepr.biz.ua, доступные решения для каждого, выбор только за вами. Натяжные потолки от профессионалов, с хорошей репутацией, поддержка и забота о клиенте, вдохните жизнь в ваше пространство. Лучшие предложения на натяжные потолки, от производителей, стиль, качество и цена — все в одном месте, позвоните нам сегодня. Натяжные потолки: быстро и стильно, от natyazhnye-potolki-dnepr.biz.ua, нам доверяют тысячи клиентов, начните свой проект с нами. Идеальные потолки для вашего дома, доступные на natyazhnye-potolki-dnepr.biz.ua, качество и надежность, сделайте выбор осознанно. Мы создаем идеальные потолки для вас, где качество не подвело ни разу, креативные решения для любого интерьера, сделайте свой выбор с умом. Натяжные потолки для ваших идей, с заботой о каждом клиенте, выбор, который вас удивит, приобретайте лучшее. Натяжные потолки: от замысла до реализации, где мечты становятся реальностью, долговечные и стильные решения, закажите прямо сейчас. Натяжные потолки: качество и стиль, от надежных производителей, долговечность и эстетика, сделайте правильный выбор. natyazhnye-potolki-dnepr.biz.ua <a href=https://natyazhnye-potolki-dnepr.biz.ua/>natyazhnye-potolki-dnepr.biz.ua</a> .
#1590 Charlesgunnyhttp://filmkachat.ru
зеркала 1×slots
Верификация аккаунта. Лучше подтвердить лицо сразу после регистрации, дабы позже не было проблем с выводом средств. Верификация возможность проходить 2-мя путями:Например, игрок получил 500 рублей при творении аккаунта и обязан отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 рублей, понадобится устроить 875 спинов для полного отыгрыша. <a href=http://filmkachat.ru/>казино 1×slots</a> <a href=https://yoomark.com/content/esli-vash-avtomobil-popal-v-avariyu-ne-stoit-toropitsya-s-remontom-inogda-ego-prodazha-v>https://yoomark.com/content/esli-vash-avtomobil-popal-v-avariyu-ne-stoit-toropitsya-s-remontom-inogda-ego-prodazha-v</a> Бесплатный бонус – кредиты, коие онлайн-казино начисляет клиенту, не принуждая его пополнять игровой счет.Перечисленные выше главные характеристики сопровождают фактически любой бонус и являются стереотипными для бездепозитных бонусных начислений в казино. 1× slots casino зеркало <a href=http://freedom.teamforum.ru/memberlist.php?mode=viewprofile&u=8089>http://freedom.teamforum.ru/memberlist.php?mode=viewprofile&u=8089</a> Чаще всего используются коды. Их нужно вносить в особые окна регистрационной анкеты, в речь идет о пригласительных призах, или в определенном разделе собственного кабинета игрока.
1×slots мобильная версия войти казино
Для получения депозитного приза нужно пополнить свой игровой баланс реальными средствами. Вознаграждение возможно получить или при внесении первого депозита, или в виде фиксированного процента от внесённых средств. Так или другому, приз поступит на счёт только после пополнения.Объективные – размер приза, коэффициент и условия вейджера, необходимость внесения депо для вывода средств; <a href=http://forum.lesprom.org/threads/1-xslot-registracija-v-1×slots-casino.24/>1 хслот регистрация в 1×slots casino</a> 1хслотс регистрация в 1×slots casino Промокод – определённая комбинация символов, которую необходимо ввести в соответствующее поле при творении учетной записи или активировать в собственном профиле игрока в разделе с бонусами.В списке притязаний к отыгрышу нередко наличествуют лимиты на ставки при этой на личные средства. Так, в отыграть надо(надобно) 30 000 руб., а предельная сумма ограничена 30 рублями, то вертеть барабаны светит 1000 один. Эта необыкновенность затрудняет соблюдение игроками условий по срокам деяния промоакции. <a href=http://service.megaworks.ai/board/bbs/board.php?bo_table=hwang_form&wr_id=751797>http://service.megaworks.ai/board/bbs/board.php?bo_table=hwang_form&wr_id=751797</a> 1×слот регистрация в 1×slots casino Бездепозитные призы казино это финансовая компенсация, предлагаемая юзерам на дармовой базе и возможность играть в интернет казино безвозмездно. Если сравнивать их с поощрениями за лепта, в средства выдаются только впоследствии первоначального пополнения счета, то бездепозитные гонорары получаются безвозмездно. То есть, играющий получает вероятность делать ставки на уже место деньги, коие выдаст заведение, выполняя, при, обычные действия, дабы их извлечь (тут идет о регистрация, удостоверении личности с использованием номера телефона, дизайна заказы и т.д. ).
1 хслот регистрация в 1×slots casino
Частенько новички не разумеют, как активировать презенты или вывести первый выигрыш. Для похожих случаев наша команда описала основные определения – что такое фриспины, вейджер, как его отыграть, чего нужно протекать верификацию.Выбор любого онлайн казино на нашем веб-сайте. В описании к каждому Вы сможете узнать, что получите за создание аккаунта. <a href=http://worldpoetry.cn/home.php?mod=space&username=peacefulopinion>http://worldpoetry.cn/home.php?mod=space&username=peacefulopinion</a> 1×slots регистрация на сайте Таким образом онлайн казино получает вероятного игрока. Возможно в будущем либо настоящем он захотит поиграть на свои средства. Так трудятся бездепозитные призы в онлайн казино. Здесь отлично подходит выражение, бесплатные сыр случается лишь в мышеловке. Начинающие игроки могут не осознавать опасность пыла. Однако течением понимания становится больше. Это тема для отдельного обсуждения.
1× slots официальный
<a href=https://www.fromrus.su/index.php?/topic/58691–1×slot-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE/>1×slot казино зеркало</a> Если простыми текстами, бездепы – это определённая сумма денег либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать презенты. Но есть кое-какие аспекты. Существуют игорные дома, коие перед что, этим как начислить призы просят привязать телефонный, дать копии документов. У каждой игры средства требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система засчитает любую ставку. В рулетке и покере сделать это намного труднее. Именно потому так важно внимательно разбирать условия получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой забаве, то новенькие просто «спустят бонус на ветер». скачать 1×slots официальный сайт <a href=https://gidro2000.com/forum-gidro/user/28574/>https://gidro2000.com/forum-gidro/user/28574/</a>
1×slots коды
Практически все онлайн казино с бездепозитным бонусом за регистрацию предусматривает программу лояльности — систему одобрения постоянных клиентов, кот-ая произведено из большого значений. При достижении игроком еще уровня на его счёт поступает бонус. Чем повыше уровень — что, этим щедрее приз. <a href=https://tradersreview.co.uk/forum/profile/MarcusVida>https://tradersreview.co.uk/forum/profile/MarcusVida</a> Выбор любого интернет казино на нашем сайте. В описании к любому Вы сможете узнать, что получите за создание аккаунта. зеркала 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=http://sofanatki.ekafe.ru/viewtopic.php?f=1&t=2383>1× slots сайт</a>
<a href=http://kamechkovkazak.listbb.ru/viewtopic.php?f=15&t=2187>1×slots актуальное зеркало</a>
<a href=https://technique-tp.com/forum/viewtopic.php?t=5318>1хслотс регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Акционные предложения от казино есть в разных форматах. Часто призы даются в обмен на депо. Игрок вносит платеж и получает деньги, безвозмездные вращения прочие одобрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — картина приза, который гарантирован за исполненье определенных поступков на веб-сайте: Бездепозитные призы за регистрацию являются одним из самых известных способов вербования свежих игроков в онлайн-казино, потому собственно они деют игрокам вероятность опробовать казино, более игровые автоматы, и вероятно, выиграть настоящие средства.
#1591 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Екатерина Ефременкова, шорт-трекистка Семёнова Татьяна Владимировна порно <a href=https://th-royalgclub.com/>как выиграть в казино</a> скачать pin casino 1×bet зеркало <a href=https://t.me/vchkogpu_ru>где казино</a> официальные зеркала казино casino buzz порно с Анастасия Потапова, теннисистка casino вход казино смотреть онлайн бесплатно gama casino казино зеркало сегодня
DiskiPlus гама казино DiskiPlus пин ап casino pin up top <a href=https://www.diskiplus.ru/>DiskiPlus 7k casino зеркало рабочее</a> DiskiPlus бывшие казино DiskiPlus сайт pin up casino <a href=https://diskiplus.ru>DiskiPlus casino рабочее зеркало</a> DiskiPlus порно с Абрамченко Виктория Валериевна DiskiPlus Валентина Матвиенко порно DiskiPlus pin up casino пин DiskiPlus Радченко Светлана Юрьевна порно DiskiPlus kometa casino DiskiPlus 1×bet зеркало рабочее DiskiPlus Черкесова Бэлла Мухарбиевна порно
#1592 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало
Зарегистрируйтесь. Для регистрации почаще всего довольно ввести собственный номер аппарата и почтовый адрес, после чего установить приобретенный код из СМС. Возможно, потребуется указать промокод. В правилах промоакции будет написано, где его хотелось вводить. Иногда это надобно делать при регистрации, от — теснее последствии творенья собственного офиса, на отдельной странице. <a href=http://filmkachat.ru/>казино 1×slots</a> Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные способы и оценить необыкновенности, труднодоступные при забаве в демо режиме. Многие свежие посетители переходят в число постоянных, а оператор получает долгосрочную выгода. <a href=https://events.com/r/en_US/registration/best-merchandising-software-solutions-for-retail-success-london-february-962474>https://events.com/r/en_US/registration/best-merchandising-software-solutions-for-retail-success-london-february-962474</a> Иногда у гостей вебсайта имеют появиться трудности, задачи, препядствия при активации полученного промо-кода. В этих случаях, необходимо обратиться за поддержкою в службу «Support». Для получения ответа, непременно указывается определенная причина воззвания и подтверждается информация дополнительными экрана. Если сложилась неоднозначная ситуация, всегда возможно обратиться к основному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ. 1×slots casino зеркало <a href=http://georgiantheatre.ge/index.php?subaction=userinfo&user=roastedutility8>http://georgiantheatre.ge/index.php?subaction=userinfo&user=roastedutility8</a> Иногда в бездепа, казино дарует минимальный приз (до 50 рублей), ради которого не заморачиваться.
1×slots официальный сайт мобильная версия
Бонус без депо за регистрацию в казино (бездепозитный бонус) – это валютный презент от клуба, который начисляется на аккаунт игрока после регистрации в казино. Кроме творенья учетной записи, для получения бездепа, очень нередко потребуется ещё и доказать контактные данные игрока и/или активировать специальный промо-код. 1 x slots Мы рекомендуем не отказываться от похожих предложений известных казино. Выделите количество мин. На регистрацию, получите приз и попробуйте его отыграть. Может быть, сегодня фортуна несомненно на вашей стороне! <a href=https://adminclub.org/member.php?action=profile&uid=185195>https://adminclub.org/member.php?action=profile&uid=185195</a> казино 1×slots официальный сайт Если вы облюбовали себе некоторое брендов коие вам больше всего приглянулись, для неизменной забавы! Таких гемблеров казино очень любит и ценит, за частую эти игроки становятся VIP игроками заведения, которым часто поступают выгодные предложения вид бонусов, так же туда входит и бездепозитные.Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 поболее. Когда игроку надеется много фриспинов, администрация имеет бить3 их начисление на несколько дней. Бесплатные вращения предоставляются для определенного слота, который указывается в правилах акции.
1×slots зеркало на сегодня
Так собственно сможете отважно регистрироваться без всяких размышлений. Фортуна сейчас наверняка на вашей стороне. Не побаивайтесь, так следствие какого либо ущерба Вам совершенно не угрожает. С этими бонусами как без пополнения, Вы остаетесь лишь в плюсе, хотя не как не в минусе. Чтоб получить крупный выигрыш, избирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, коие доступны по условиям отыгрыша.Подтвердите регистрацию, чтобы активировать Бездепозитный приз с выводом, требуется заполнить индивидуальный профиль. Заполните пустующие поля истинными данными о для. <a href=https://gtorr.net/index.php?subaction=userinfo&user=EdwardScedE>https://gtorr.net/index.php?subaction=userinfo&user=EdwardScedE</a> 1×slots зеркало выигрыши обязательно пройдите регистрацию если В каждом казино с бездепозитным бонусом предусмотрены вейджеровые обстоятельства. Это единственный «подводный камень», который стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) сделать определённое количество ставок. Чем круче бонус, тем сложнее выполнить условия, и напротив.Демоказино есть практически на каждом сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются значительно пореже: там когда выигрыша и соблюдения критерий промоакций бездеп возможно перевоплотить в реальные деньги.
1×slots регистрация на сайте 1×slots ru com
Oтыгpaть бонус с обозначенным вeйджepом, чтобы необходимо сдeлaть cтaвoк нa cумму, превышающую размер бонуса в несколько один.Нет. Казино выдают благотворительные бонусы за регистрацию, чтобы, чтобы, чтобы клиент мог ознакомиться с игровым заведением. А чтобы исключить его, нужно выполнить обстоятельства отыгрыша. Перед активацией главно внимательно изучить обстоятельства промоакции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют значение также лимиты ставок при отыгрыше и сроки, в течение которых можно воспользоваться предложением. Если бездеп обхватывает ограниченный перечень игр, рекомендуется разузнать наибольшие коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только в случае, в оператор не установил строгие ограничения на наивысшую необходимую ставки.Не стоит путать игру в демо и использование призов. В демонстрационном режиме игрок может оценить механику слота, сюжет и оформление. Но забава ведется на условные кредиты, потому отсутствует основное ? ощущение пыла. Активируя промокод или фриспины, клиент как не расходует свои средства на игровые автоматы, хотя имеет сорвать настоящий куш! Демоказино есть почти на каждом веб-сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются значительно реже: там когда выигрыша и соблюдения критерий акций бездеп можно превратить в настоящие средства.Но никогда не забывайте пристально читать верховодила роли в бонусных акциях. Если вы нарушите хотя бы одно условие, позже вы не можете уладить недоразумение с администрацией. 1×slots казино мобильная версия <a href=https://opensourcebridge.science/index.php?title=РР·_чего_состоит_диета_Елены_Малышевой>https://opensourcebridge.science/index.php?title=РР·_чего_состоит_диета_Елены_Малышевой</a> Бонус за регистрацию в казино без депо с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша имеет потребоваться устроить ставки на сумму, в количество 10-ов один превосходящую сумму приза или выигрыша.
1х слот регистрация в 1×slots casino
Для верификации номера телефонного, в собственном профиле выберите опцию „Подтвердить номер телефонного“ и введите в подходящее поле код, полученный в sms-сообщении.Прочитайте управляла бонусной программки, в желаете принять. Да, мы настоятельно рекомендуем сделать это до регистрации. <a href=http://ch-marine.co.kr/bbs/board.php?bo_table=qna&wr_id=51073>http://ch-marine.co.kr/bbs/board.php?bo_table=qna&wr_id=51073</a> Активация по промокоду используется в разных обликах бездепов. Если речь о приветственном призе, то комплект символов можно разузнать на главной страничке, в регистрационной форме либо письме, которое отправляется пользователю для подтверждения e-mail. Акции шансы проводиться общо с партнерскими площадками. Обычно код размещается на стороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активируется одноразовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном кабинете либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем важный код для активации в описании любого рекламную.Бездепозитный приз часто может замерзнуть легкодоступным незамедлительно в окончания регистрации, что правило единственным требованием к нему считается регистрация, а этого проверка вашей новой учетной записи. 1×slots зеркало на сегодня Ниже указан актуальный перечень законных казино в Беларуси с призами на первый депозит. Вы можете попасть на официальный сайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус.Отзывы читателей о бонусных промоакциях посодействуют составить эмоцию, хотя не запамятовывайте о субъективности личных комментариев.
<b>Смотреть еще похожие новости:</b>
<a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=10817>1×slots регистрация 1×slots review live</a>
<a href=https://minecraft.ru.net/user/Manuelsoarl/>1× slots регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Как только на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу последствии сего можно забыть заявку на вывод выигрыша. Кредиты прибыльно выделяются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом настоящих средств и выделяют вероятность почувствовать азарт. Во-вторых – можно насладиться любой азартной игрой доступной на сайте. В вашем распоряжении находятся автоматы, настольные приложение, видео-покер, Live-дилеры. Подтверждение регистрации. Казино требуют привязки профиля к электронному адресу и номеру аппарата. Для этого на e-mail отчаливает послание со ссылкой, а на аппарат ? текстовое известие с кодом.
#1593 internetchelyabGephttps://domashij-internet-chelyabinsk001.ru
подключить интернет <a href=https://domashij-internet-chelyabinsk001.ru>domashij-internet-chelyabinsk001.ru</a> подключить интернет тарифы челябинск
#1594 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация на сайте
Помимо остального, для вывода средств по бездепу нужно привнести на счёт свой первый депозит — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало вероятную сумму, в чего вывод средств будет доступен.Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить необыкновенности, труднодоступные при игре в демо режиме. Многие свежие посетители переходят в число постоянных, а оператор получает длительную выгода. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasino09k online</a> Вы не в коем случае ни же рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный бонус, по мимо практической игры на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, научится регулировать менять ставки и линии, исследовать бонусные игры и их выигрышные композиции, да счете просто зарядится кучей эмоций! Ведь вы будите играть на бонусные свои, которые возможно отыграть и исключить, не просто на демо счет, что, этим наиболее адреналин в крови более повысится а пульс забьется с частым ритмом!Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают приз по странам. Вплоть до как, собственно клуб возможность на игроков из Вашей государства, а бездеп мешает. <a href=http://bedfordfalls.live/read-blog/135760>http://bedfordfalls.live/read-blog/135760</a> Кешбэк-бонус дает собой возврат фиксированного процента от ставки если, тогда, проигрыша или же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не выше 10%.Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, чтобы появилась вероятность исключить выигрыш. 1хслотс рабочее зеркало <a href=http://www.kiopro.ru/support/forum/view_profile.php?UID=76218>http://www.kiopro.ru/support/forum/view_profile.php?UID=76218</a> Как только вы отыграли вейджер и свои с бонусного баланса перешли вам на настоящий счет, Вы смело можете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (сделать минимальный депозит к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депо).Можно. Вы практически сможете отказаться от получения бездепозитного приза за регистрацию в казино, же Вы не сделаете ставку.
зеркло казино 1×slots
Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. <a href=https://talkonlinenews.com/viewtopic.php?t=12799>1×slots официальный зеркало</a> 1хслотс казино зеркало <a href=https://www.mavsboard.com/member.php?action=profile&uid=4515>https://www.mavsboard.com/member.php?action=profile&uid=4515</a> 1×slots casino регистрация
1хслот зеркало
Ещё одно распространённое акционное предложение – симпатичный презент с сомнительными требованиями. К образцу, клуб сулит $100 виде бездепа, но с вейджером х80 или х100. Отыграть такой вейджер фактически невозможно и поэтому другого, как концентрироваться на больше занимательных акциях. Верификация важна для добавочной безопасности и может техподдержке выявить бонусхантеров и мошенников. Кстати, на некоторых платформах выводы солидных сумм доступны лишь после подтверждения личности. <a href=https://www.0574snyw.com/home.php?mod=space&uid=185825>https://www.0574snyw.com/home.php?mod=space&uid=185825</a> 1×slots промокод при регистрации 2025 Помните, что любые нарушения верховодил сведут на нет ваши старания, и вы наверняка останетесь без начисленного вам безвозмездного бонуса. Всегда изучайте правила начисления и обстоятельства вейджера. По любым вопросам, на которые вы возможности без отыскать ответы, обращайтесь за объясненьям и саппорт.
1×slots casino регистрация на сайте
В онлайне количество знаменитых игорных площадок с привлекательными акционными предложениями. Однако внимательно разбирать обстоятельства 10-ов услуг в надоест, да и время отнимет количество. Поэтому наша команда подготовила ТОП-3 сайтов с превосходнейшими бездепозитными призами: Отыграв бездепозитный бонус в казино с выводом тоже придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если схожее ограничение присутствует, то единоразово исключить получится только необходимую, не превосходящую размер приобретенного приза.При этой на бонусные средства воспрещается играть в игровые автоматы с прогрессивным джекпотом и забавы из радела exist casino. Кроме такого, некоторые казино выделяют бездеп на раз или некоторое конкретных слотов, и в иных играх Вы не можете на них выступать. 1×slots casino регистрация <a href=http://kaminsnab.ru/product-info.aspx?productId=341&backurl=http://vksrs.com/bitrix/click.php?goto=http://4rome.ru/bitrix/rk.php?goto=https://telegra.ph/Rossiya-uzhestochaet-ogranicheniya-na-zarubezhnye-poezdki-chinovnikov-09–19>http://kaminsnab.ru/product-info.aspx?productId=341&backurl=http://vksrs.com/bitrix/click.php?goto=http://4rome.ru/bitrix/rk.php?goto=https://telegra.ph/Rossiya-uzhestochaet-ogranicheniya-na-zarubezhnye-poezdki-chinovnikov-09–19</a>
1×slots промокод при регистрации
Для получения бонуса надо(надобно) ознакомиться с программкой лояльности казино и сделать ставки на сумму, нужную для перехода на грядущий уровень. Онлайн-казино кропотливо продумывают бонусные обстоятельства, которые нужно выучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и другие лимитирования. <a href=https://www.kuyoux.com/space-uid-38217.html>https://www.kuyoux.com/space-uid-38217.html</a> Выигрыши с бонусов без вложений всегда привязаны к требованию по ставкам и могут быть обналичены только в исполненья данных требований.Выигрыши с бонусов без инвестициям практически привязаны к требованию по ставкам и шансы быть обналичены лишь последствии исполнения этих притязаний. 1×slots официальный регистрация Чтобы бездеп не был начислен на Ваш акк, Вам надо активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт механически, а Вы не планируете его использовать, обратитесь в саппорта с пожеланием отменить бездепозитный бонус.Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?
<b>Смотреть еще похожие новости:</b>
<a href=http://board.eternityrpc.com/thread-481-post-18002.html#pid18002>1×slots регистрация 1×slotscasino 56 online</a>
<a href=http://pravoslit.ru/forum/obshchee/184966–1×slots-registratsiya-na-1khslots.html>1×slots регистрация на 1хслотс</a>
<a href=https://fmatras.ru/topic/92055–1hslots-rabochee-zerkalo/>1хслотс рабочее зеркало</a>
<a href=http://jktroickiy.forumex.ru/viewtopic.php?f=2&t=4628>1×slots скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Мы советуем не открещиваться от подобных предложений узнаваемых казино. Выделите количество мин. На регистрацию, получите приз и попробуйте его отыграть. Может быть, сейчас фортуна будет на вашей стороне!
#1595 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Комарова Наталья Владимировна порно 1×bet 1 <a href=https://7club7.com/>up casino</a> casino 7k рабочее официальное казино вход <a href=https://rumafia.news/>porno Дарья Клишина</a> порно с Георгий Джикия (футбол) зеркала официальных сайтов казино porno Мира Андреева (теннис) 1×bet зеркало рабочее казино 1 пин ап казино лучшие онлайн казино
DiskiPlus букмекерская контора фонбет DiskiPlus r7 casino <a href=https://www.diskiplus.ru>DiskiPlus игры казино</a> DiskiPlus 1×bet зеркало рабочее DiskiPlus porno Нина Пирогова, хоккеистка <a href=https://www.diskiplus.ru>DiskiPlus почему в казино нет окон</a> DiskiPlus казино на деньги DiskiPlus бесплатно фильм казино DiskiPlus сайт букмекерской конторы DiskiPlus водка казино DiskiPlus букмекерская контора скачать приложение DiskiPlus 1×bet xbet DiskiPlus casino x
#1596 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало
Для как, дабы отыграть необходимую вашего бездепозитного бонуса нужно выполнить условия вейджера. Очень часто фриспины даются на определенные слоты (book of ra, book of lifeless, book of sun), выбирайте слот себя по душе, все очень красивые и качественные. Бездепозитные бонус имеет быть валютным так и вид фриспинов на слотыТаким образом интернет казино получает потенциального игрока. Возможно в или подлинном он захотит поиграть на средства средства. Так трудятся бездепозитные бонусы в онлайн казино. Здесь хорошо подходит выражение, благотворительные сыр посещает лишь в мышеловке. Начинающие игроки все не осознавать опасность азарта. Однако с осознания делается больше. Это тема для отдельного обсуждения. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало</a> При пользовании бездепозитным бонусом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют несколько видов лимитов: <a href=https://www.obesityhelp.com/members/archicgi/about_me/>https://www.obesityhelp.com/members/archicgi/about_me/</a> Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные способы и расценить особенности, труднодоступные при ирге в демо режиме. Многие свежие посетители переходят в число постоянных, а оператор получает длительную прибыль.Процесс подтверждения личности возможность взятьвдолг(взятьвзаймы) от 1-го дня до недели. Если заказчик разрешил какую-либо оплошность при заполнении паспортных данных, то ему идет адресоваться с задачей в службу онлайн-казино. онлайн казино 1×slots <a href=http://regata.yar.ru/component/kunena/%D0%BE%D0%B1%D0%BC%D0%B5%D0%BD-%D0%BE%D0%BF%D1%8B%D1%82%D0%BE%D0%BC/5546-%D1%81%D0%B0%D0%B9%D1%82-%D0%B7%D0%BD%D0%B0%D0%BA%D0%BE%D0%BC%D1%81%D1%82%D0%B2-%D1%84%D0%BB%D0%B8%D1%80%D1%82-%D1%81%D0%B8%D1%82%D0%B8#10587>http://regata.yar.ru/component/kunena/%D0%BE%D0%B1%D0%BC%D0%B5%D0%BD-%D0%BE%D0%BF%D1%8B%D1%82%D0%BE%D0%BC/5546-%D1%81%D0%B0%D0%B9%D1%82-%D0%B7%D0%BD%D0%B0%D0%BA%D0%BE%D0%BC%D1%81%D1%82%D0%B2-%D1%84%D0%BB%D0%B8%D1%80%D1%82-%D1%81%D0%B8%D1%82%D0%B8#10587</a> Изучить верховодила и обстоятельства получения бездепозитных бонусов казино, Вы сможете у нас на веб-сайте в разделе с бонусами либо на официальном веб-сайте выбранного Вами казино. Если имеет найти необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал либо по электрической почте.
1×slots акции
Теоретически, к бесплатным призам можно отнести так нарекаемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, потому собственно они предоставляют только возможность создавать ставки. <a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=41903>1×slots зеркало которую указывали при регистрации кстати</a> 1х слот регистрация в 1×slots casino <a href=http://messmangler.com/forums/member.php?action=profile&uid=3199>http://messmangler.com/forums/member.php?action=profile&uid=3199</a> Обычно показатель выше, чем для призов на депозит. Не удивляйтесь, случае он несомненно в х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных государств.Выбирайте лучшие безвозмездные призы за обзоров на Casinoz – и пусть вам сопутствует удача при отыгрыше бонусных кредитов! 1×slots регистрация 1×slotscasino09k online Получать информацию о самых выгодных призах можно без неизменного прогноза новостей казино. Мы взяли данную задачу на себя и безпрерывно смотрим за предложениями операторов, избирая наилучшие из них. В данном разделе собраны заключительные бездепы, промокоды к ним и обстоятельства их активации. Список промоакций периодически дополняется. В топ вошли самые новые бездепозитные бонусы за регистрацию в казино 2020, кратковременные и закрытые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру прочим критериям. Если срок действия промоакции истек, она удаляется из перечня.
1хслотс 1хслотс регистрация перейти на 1×slots
Если площадка дарит бездеп за регистрацию, то процедура его получения проста. Нужно лишь ввести акк на веб-сайте и активировать его, подтвердив адресок электронной почты, номер телефонного либо иные данные, которые просит оператор. Перед данным необходимо убедиться, собственно юзер находится на официальном веб-сайте казино, но на мошеннической площадке.Онлайн-казино с бездепозитными призами ставят клиентам условия для пользования бездепами, поэтому перед участием в промоакции никакого подробно ознакомиться со всеми правилами и аспектами акции. Условия все прикасаться получения приза, его использования и следующего вывода валютных средств в случае выигрыша. Многие игроки, оценив функционал казино, остаются играть в нем и далее ? на это и нацелено любое рекламную. Постоянные клиенты заносят депозиты и делают ставки, обеспечивая длительную выгода оператора. То есть, казино раздают бездепы свежим пользователям для формирования приклнной аудитории.В лицензионных бездепозитных казино играть в азартные забавы вправду неопасно. Наличие лицензии подтверждает что, этот прецедент, собственно клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP. <a href=https://39504.org/member.php?action=profile&uid=3278>https://39504.org/member.php?action=profile&uid=3278</a> 1×slots официальный сайт мобильная версия скачать Чаще всего, популярностью сервисы, эти как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное управляло. Финансовые средства выводятся лишь спустя что, эту платежную систему, которой огромный для пополнения депо. Если же игрок получил бездепозитный покерный приз, потребуется восполнить счет на минимальную сумму, которая сочиняет обычно 10 $.Более крупные предложения встречаются очень редко. Зачастую они доступны лишь VIP-игрокам. В остальных случаях им скорее сопутствуют довольно строгие обстоятельства отыгрыша. Также возможны вспомогательные обстоятельства прочие лимитирования, прописанные в условиях и положения бонусной программки казино.
1×slots casino регистрация 1×slotscasin online
Прежде чем активировать бездеп, необходимо убедиться что, что государство, гражданином коей является игрок, не входит в список не.В большинстве заведений сделать это возможно по e-mal, по номеру аппарата, спустя социальную сеть или гугл-аккаунт. Представленные на этой страничке наилучшие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные условия. После кропотливого анализа редакция портала составила рейтинг спецпредложений, в котором гости Casino.ru могут сортировать перечень по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д.Вывод выигрыша с бездепозитных призов казино – великодушный презент от азартных клубов. Но дабы вывести собственный доход, необходимо выполнить ряд условий: Подтверждение индивидуальной информации. Все казино требуют от клиента пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у юзера других аккаунтов (мультиаккаунт запрещен). 1×слотс казино <a href=http://forum.combat-arnis.ru/profile.php?mode=viewprofile&u=333519>http://forum.combat-arnis.ru/profile.php?mode=viewprofile&u=333519</a>
1 x slots
Составленный экспертами Casino.ru перечень онлайн-казино с бездепозитным призом позволяет игрокам сравнить спецпредложения разных операторов.При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток. Если при регистрации указать промокод, можно гарантировано получить бонус. Где брать ваучер? Посетите определенную блоги или форумы. Иногда администрация клуба делает рассылку ваучеров на электрическую почту. В заключительнее время игорные дома начали афишироваться в фильмах и телесериалах. Присмотритесь и скорее заметите промокод, кот-ый принесёт 500 или 1 000 бонусных рублей.Каждый в обязан сначала отчетливо выучить условия по получению и отыгрышу приглянувшегося дара. Если всё устраивает, поспешите забрать бесплатные спины за регистрацию в казино без депозита с выводом и без отыгрыша и напрямик сейчас начать вертеть барабаны лучших слотов. <a href=http://nsejasconstruction.com/index.php/component/kunena/suggestion-box/902#902>http://nsejasconstruction.com/index.php/component/kunena/suggestion-box/902#902</a> Размер бонуса. В качестве бездепов обыкновенно начисляют большие суммы, а когда речь идет о призах за депо, которые начисляются в процентном соотношении от суммы пополнения, то некоторые казино могут презентовать игроку до 2000$.Верификация необходима для дополнительной безопасности и помогает техподдержке выявить бонусхантеров и плутов. Кстати, на некоторых платформах выводы крупных сумм доступны только последствии доказательства личности. 1×slots регистрация 1×slotscasino 56 online
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.eliteshost.com/member.php?action=profile&uid=7587>1× слот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриплей-бонусы встречаются только в некоторых клубах. Они зачисляются незамедлительно последствии создания профиля и активны недолговременное время. Если не успеете израсходовать свои, они просто сгорят. Касаемо медли, правило бонусы активны на часа.
#1597 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet слоты 1×bet xyz pin up casino buzz <a href=https://vestnik-jurnal.com/>casino официальный сайт</a> играющие казино casino андроид <a href=https://repost.news/>cat casino</a> 1×bet бесплатно pin up букмекерская контора Мухтиярова Елена Вячеславовна порно online casino официальный Набиуллина Эльвира Сахипзадовна порно Фастова Елена Владимировна порно вавада казино
DiskiPlus porno Юлия Канакина, скелетонистка DiskiPlus порно с Илюшникова Татьяна Александровна <a href=https://diskiplus.ru>DiskiPlus 1×bet 1</a> DiskiPlus порно с Петр Ян (ММА) DiskiPlus up casino официальный <a href=https://www.diskiplus.ru>DiskiPlus скачать 1×bet</a> DiskiPlus порно с Алина Загитова, фигуристка DiskiPlus лучшие онлайн казино DiskiPlus casino зеркало сегодня DiskiPlus официальные букмекерские конторы скачать DiskiPlus 1×bet бесплатно DiskiPlus Чулпан Хаматова DiskiPlus гама казино
#1598 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Хорова Наталья Александровна порно casino бездепозитный <a href=https://krtka.info/>казино рояль</a> казино сочи 1×bet слоты 1×bet xyz <a href=https://m.repost.news/>казино онлайн</a> Приезжева Екатерина Геннадьевна порно porno Катерина Шпица пари букмекерская контора лучшие онлайн казино porno Юлия Канакина сайт казино вход online casino
DiskiPlus pin up casino top top DiskiPlus Радченко Светлана Юрьевна порно <a href=https://diskiplus.ru>DiskiPlus porno Юлия Пересильд</a> DiskiPlus porno Анастасия Янькова, боксерка DiskiPlus 7k casino скачать <a href=https://www.diskiplus.ru/>DiskiPlus порно с Матвей Сафонов (футбол)</a> DiskiPlus лучшие онлайн казино DiskiPlus букмекерскую контору пин DiskiPlus казино вулкан DiskiPlus 1×bet телефон DiskiPlus казино регистрации DiskiPlus казино зеркало сегодня DiskiPlus pin up casino
#1599 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт, скачать
Подобные бонусы без депозита предоставляются на больше выгодных условиях. Зачастую они покрупнее, а обстоятельства отыгрыша наименее строгие.Так собственно главное различие презента на депозит от бездепа – неотъемлемое пополнение счёта. Вы сможете внести депо и преумножить стартовый капитал либо арестовать бездеп и этом не придётся рисковать своими сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начисляет щедрое одобрение! <a href=http://filmkachat.ru/>1×slots зеркало регистрация</a> <a href=https://feedback.goodnotes.com/forums/191274-customer-suggestions-for-goodnotes/suggestions/49478645-%D0%BA%D0%B0%D0%BA-%D0%B2%D1%8B%D0%B3%D0%BE%D0%B4%D0%BD%D0%BE-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D1%82%D1%8C-%D0%B0%D0%B2%D1%82%D0%BE-%D0%BF%D0%BE%D1%81%D0%BB%D0%B5-%D0%B4%D1%82%D0%BF-%D1%8D%D0%BA%D1%81%D0%BF%D0%B5%D1%80%D1%82%D0%BD%D0%BE%D0%B5-%D1%80%D1%83%D0%BA>https://feedback.goodnotes.com/forums/191274-customer-suggestions-for-goodnotes/suggestions/49478645-%D0%BA%D0%B0%D0%BA-%D0%B2%D1%8B%D0%B3%D0%BE%D0%B4%D0%BD%D0%BE-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D1%82%D1%8C-%D0%B0%D0%B2%D1%82%D0%BE-%D0%BF%D0%BE%D1%81%D0%BB%D0%B5-%D0%B4%D1%82%D0%BF-%D1%8D%D0%BA%D1%81%D0%BF%D0%B5%D1%80%D1%82%D0%BD%D0%BE%D0%B5-%D1%80%D1%83%D0%BA</a> 1×slot регистрация <a href=https://erickktcj29630.mybloglicious.com/51280784/deepnude-ai-navigating-the-controversial-landscape-of-image-manipulation-technology>https://erickktcj29630.mybloglicious.com/51280784/deepnude-ai-navigating-the-controversial-landscape-of-image-manipulation-technology</a> Для казино, работающих интернет, бездепозитные призы нужны для привлечения новых посетителей. Предложение сыграть на слотах без надобности внесения реальных денег — работающий способ для повышения интереса к компании. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит играть в казино, только теперь уже на собственные деньги.Акции распространяются как на все игры казино, например и на ограниченный список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino прочие. Промо может охватывать разработки одного производителя. Бездеп не пересекается с другими акциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, изготовленные бонусными деньгами. Для идентификации платежных реквизитов игрока может потребоваться пополнение счета на наименьшую необходимую.
1×slots casino регистрация
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=723494>1×slots скачать на айфон</a> 1хслотс зеркало <a href=https://heyanesthesia.com/forums/users/mariestrahan05/>https://heyanesthesia.com/forums/users/mariestrahan05/</a> Игрокам не следует принимать приветственный бонус как гарантированный способ получить большой выигрыш, но это замечательная вероятность без расходов оценить перечень казино. 1хслотс официальный сайт зеркало Стоит обозначить(означить), собственно бездепозитный приз выдается только совершеннолетним новичкам, которые, тому, имеют пригласить собственных приятелей и знакомых, кроме рассчитывающих на поощрительную программку преданности. Подобная технология замечена среди конкуренцию онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению собственной популярности, путем вербования свежих игроков. Бонусы – это оригинальный шанс для потенциальных участников игры, коие шансы опробовать софт покер рума и увериться, будут ли они в него выступать либо нет. Новый игрок испробует средства силы с реальными оппонентами в казино.Перечисленные выше главные характеристики сочетают фактически любой приз и являются стандартными для бездепозитных бонусных начислений в казино.
1×slots зеркало регистрация то дальше необходимо пройти
Мы подготовили список, где есть практически животрепещущие и новые бездепозитные призы казино, коие продоставляется получить бесплатно. Для наших пользователей есть особые предложения эксклюзивные призы, коие вы кого не отыщите, их мы определили особой красной плашкой «Exclusive». <a href=http://isaevclub.ru/user/JasperHourl/>http://isaevclub.ru/user/JasperHourl/</a> Маркетинговая политического всех игорных интернет-клубов должна одевать различный характер. И в гонорары на депозит работают для того, дабы стимулировать заносить депозиты и поощрять теснее имеющих пользователей, то бездепозитный приз в казино или приз за регистрацию в казино, этого всего, рассчитан на расширение базы покупателей.Для проверки используются сканы паспортов, водительских водительских, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если пользователь замечен в попытке завести вспомогательный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в темный перечень. При этой на лицензионной площадке не стоит опасаться свидетельствовать достоверную индивидуальную информацию (шифрование исключает утечку индивидуальных данных). 1×slots зеркало регистрацию более популярный вариант это Чтоб получить большой выигрыш, выбирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша.Наиболее знаменитые гонорары между гэмблеров – бездепозитные бонусы казино. Это не удивительно, ведь возможно получить благотворительные вращения либо виртуальные кредиты, и этом не придётся пополнять счёт, рисковать личностными деньгами. Удастся насладиться различными увеселениями причем выиграть крупную сумму, избегая серьёзного риска.
1×slot зеркало рабочее этих способов предполагает регистрацию
Для верификации номера телефонного, в собственном профиле выберите опцию „Подтвердить номер телефонного“ и введите в подходящее поле код, приобретенный в sms-сообщении. Маркетинговая политика всех игорных интернет-клубов обязана носить различный характер. И в вознаграждения на депозит работают чтобы, чтобы, дабы стимулировать вносить депозиты и поощрять уже быть пользователей, то бездепозитный бонус в казино или приз за регистрацию в казино, этого всего, рассчитан на расширение базы потребителей. 1хслотс мобильная версия зеркало <a href=http://www.fadimamooneira.com/2019/06/five-things-that-makes-iu-most16.html>http://www.fadimamooneira.com/2019/06/five-things-that-makes-iu-most16.html</a>
1×slots зеркало рабочее на сегодня
Иногда в качестве поощрения за регистрацию имеют выдаваться билеты для участия в турнирах. Условия их проведения довольно отличаются, потому мы советуем ознакомиться с каждым предложением раздельно. <a href=http://aquarius-dir.com/Glory-Casino_431199.html>http://aquarius-dir.com/Glory-Casino_431199.html</a> Одним из поводов отдавать привилегию 1 либо иному заведению заключается в привлекательности предлагаемых промоакций и даровых предложений. Безвозмездные фриспины, выдаваемые без дела делать какой-нибудь лепта, в списке располагается далековато не в конце. 1×slots зеркало регистрацию более популярный вариант это Автоматическая активация может самой комфортной, но ручной способ имеет перед ней превосходства. Прежде чем использовать вознаграждение от казино, стоит заранее найти, сколько времени требуется на исполненье всех условий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала действия приза.Практически все онлайн казино с бездепозитным бонусом за регистрацию учитывает программку преданности — систему поощрения неизменных посетителей, которая произведено из колличества значений. При достижении игроком еще значения на его счёт поступает бонус. Чем повыше уровень — тем щедрее приз.
<b>Смотреть еще похожие новости:</b>
<a href=https://portugal-campings.com/pt/profile/jamescip/>1×slots casino зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Нельзя разглядывать игру на средства, как вариант заработка. Азартные игры воспрещены для лиц младше 18 лет. Topcasinobonuses.mobi классифицируется организатором азартных игр. Сайт носит информационный характер.
#1600 inernetufaGephttps://domashij-internet-ufa003.ru
узнать интернет по адресу <a href=https://domashij-internet-ufa003.ru>domashij-internet-ufa003.ru</a> узнать интернет по адресу
#1601 Charlesgunnyhttp://filmkachat.ru
1× slots сайт
Когда идет о валютных бонусах, казино практически устанавливают обстоятельства вейджера, которые необходимо выполнить, дабы исключить выигрыш.Бездепозитные призы, как уже понятно, считаются оригинальной вероятностью к игровому процессу абсолютно безвозмездно, другими играть в онлайн казино бесплатно и на место средства сразу в регистрации аккаунта. Автоматы с этим депозитом могут замерзнуть прекрасной вероятностью поиграть для почитателей азарта с определенными ограничениями в денег. <a href=http://filmkachat.ru/>1хслотс рабочее зеркало</a> К огорчению, нет. Почти все казино, требуют внесение хотя бы одного минимального депо для вывода выигрыша с бездепозитного бонуса. Также учитывайте, собственно вывести деньги разрешено только на что, эту платежную систему, с которой был сделан депо.Мы собрали и выпустили перечень наилучших бездепозитных казино с призами за регистрацию, коие гарантируют щедрые выигрыши и мгновенные выплаты. <a href=https://hearthis.at/group/466307/3d-rendering-for-interior-design/>https://hearthis.at/group/466307/3d-rendering-for-interior-design/</a> 1хслот 1хслотс регистрация перейти на 1×slots <a href=http://shichaoliuluntan.com/home.php?mod=space&uid=345206>http://shichaoliuluntan.com/home.php?mod=space&uid=345206</a> Срок активации и время на отыгрыш. Зачисление средств либо фриспинов происходит при активации в течение требовательно ограниченного периода, подобные требования предъявляются и к срокам отыгрыша. Одни казино позволяют отыгрывать приз несколько дней либо том недель. Другие выдают солидную необходимую за регистрацию, но время отыгрыша ограничивают несколькими часами с необоснованно высочайшим вейджером.
рабочее зеркало 1хслотс
В неких интернет казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на веб-сайте клуба и доказать свои контактные данные. Дополнительно требуется активация промокода. 1×slots casino зеркало рабочее Далее потребуется отыграть вагер и исключить выигрыш. Игрокам без навыка крупно подфартило, меня получить десятки подарков за 1 регистрацию. Если не смогли получить Бездепозитный бонус, не тревожьтесь. Обратитесь в онлайн чат, оператор поможет решить проблему.2. Создать свежий профиль. Для регистрации нужно заполнить маленькую анкету либо зайдите в индивидуальный кабинет при помощи социальных сетей; <a href=http://roakr.com/home.php?mod=space&uid=36521&do=profile&from=space>http://roakr.com/home.php?mod=space&uid=36521&do=profile&from=space</a> Минимального оборота. Этот лимит устанавливается вейджером — же игрок не поиграет на установленную сумму, вывод средств несомненно недосегаем. 1×slot казино зеркало Максимальный объем ставки, кот-ый невозможно превосходить пока бонус не несомненно всецело отыгран. В случае нарушения этого верховодила, приз и выигрыш с него будут аннулированы.Похожим образом работает 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя либо из-за с получения им VIP-статуса. Подарок предоставляется последствии воззвания в поддержку и ревизии.
1×slots промокод при регистрации 2025
Не стоит путать игру в демо и использование призов. В демонстрационном режиме игрок может расценить механику слота, сюжет и оформление. Но игра проводится на условные кредиты, потому отсутствует основное ? чувство азарта. Активируя промокод или фриспины, заказчик раньше не тратит свои средства на игровые автоматы, хотя возможность сорвать реальный куш!Похожим образом работает 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя либо в связи с получения им VIP-статуса. Подарок предоставляется последствии воззвания в поддержку и ревизии. <a href=http://alp-proekt.ru/index.php?subaction=userinfo&user=proudalmanac37>http://alp-proekt.ru/index.php?subaction=userinfo&user=proudalmanac37</a> Законодательство, регулирующее азартные игры в различных странах, влияет на полномочия операторов. В итоге юзеры из отдельных регионов сталкиваются с ограничениями со стороны казино. Это возможность быть как глубокий отказ в доступе, так и невозможность загружать игры отдельных изготовителей. 1×slots регистрация то дальше необходимо пройти Свежий бонус начисляется в виде валютных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в пользовании своими, а в случае отыгрыша оператор возможность установить лимитирование на вывод денег.
1×slots casino регистрация
Обычно, бездепозитные призы выдаются под определенные слоты с фиксированной ставкой, но их точно воспрещено применять в игровых автоматах с современным джекпотом. Список игр, каких возможно применять бездеп, Вы отыщите в описании акции либо сможете уточнить у службы поддержки заведения. Если ординарными текстами, бездепы – это определённая сумма денег или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно забирать презенты. Но есть кое-какие аспекты. Существуют игорные дома, коие перед тем как начислить бонусы просят привязать телефон, предоставить копии документов.Превышение максимальной ставки при отыгрыше. Система механически не предупреждает о превышении ставки, потому о нарушении управлял игрок возможность разузнать уже последствии подачи запроса на вывод средств. 1×slots казино зеркало <a href=http://a96549hg.bget.ru/user/TravisJoymn/>http://a96549hg.bget.ru/user/TravisJoymn/</a>
1хслотс зеркало на сегодня
<a href=https://educationweb.com.gh/education/ges-school-selection-guidelines/>https://educationweb.com.gh/education/ges-school-selection-guidelines/</a> Бонусные средства – маленькая сумма денег для старта в новом казино. На бонусные деньги, обыкновенно разрешено выступать во все забавы, не слотов с современным джекпотом и игр из раздела live casino. 1хслотс зеркало Еще одно условие касается объемов ставки. Операторы устанавливают максимальную необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном офисе. При превышении лимита есть риск лишиться бонуса. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, заказчик возможность столкнуться с запретом ставить фишки на шансы.Особую изюминку видео слотам присваивают уникальные знакы. С их появлением активизируются разные призы. Вы сможете запустить вспомогательный уровень и прирастить необходимую выигрыша. Есть знаки, которые замещают негодные элементы и сами создают выигрышные комбо. Не стоит забывать и на бонус-тур. После каждого успешного спина есть шанс увеличить сумму выигрыша в два либо четыре раза.
<b>Смотреть еще похожие новости:</b>
<a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=12480>1 х слотс зеркало</a>
<a href=https://asiaopen.ru/t/113/#post-234>1хслотс казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Также бездепозитные бонусы имеют служить способом возвратить к забаве посетителей, пока приостановивших своё сотрудничество с фирмой: извещение о бездепе поступает на мобильный телефонный или почту.
#1602 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино 1 Фастова Елена Владимировна порно <a href=https://vestnik-jurnal.com/>бесплатно играем казино</a> казино регистрации винлайн букмекерская контора <a href=https://kompromat1.online/>1×bet бесплатно</a> casino приложения мелбет букмекерская контора casino pin официальный 7k casino официальный казино вавада казино ramenbet casino
DiskiPlus Фастова Елена Владимировна порно DiskiPlus букмекерская контора фонбет официальный <a href=https://diskiplus.ru>DiskiPlus казино сочи</a> DiskiPlus слоты казино DiskiPlus сайт pin up casino <a href=https://diskiplus.ru>DiskiPlus порно с Илья Осипов (киберспорт)</a> DiskiPlus порно с Каролина Севастьянова DiskiPlus суть казино DiskiPlus 1×bet бесплатно DiskiPlus официальные букмекерские конторы DiskiPlus порно с Варвара Субботина DiskiPlus порно с Зырянова Анастасия Владимировна DiskiPlus порно с Баталина Ольга Юрьевна
#1603 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Светлана Ходченкова 1×bet приложение <a href=https://strelochnik.com/>букмекерские конторы pin</a> порно с Анастасия Потапова, теннисистка casino актуальное зеркало <a href=https://krtka.info/>букмекерская контора ставки</a> бесплатное казино букмекерская контора скачать приложение казино смотреть онлайн Александра Бортич 1×bet зеркало на сегодня порно с Александр Головин (футбол) casino riobet
DiskiPlus bitz casino DiskiPlus casino сайты <a href=https://diskiplus.ru/>DiskiPlus бесплатно играем казино</a> DiskiPlus Хорова Наталья Александровна порно DiskiPlus скачать 1×bet на андроид бесплатно <a href=https://diskiplus.ru>DiskiPlus porno Мария Шарапова</a> DiskiPlus casino автомат DiskiPlus казино фильм DiskiPlus спорт букмекерская контора DiskiPlus пин casino DiskiPlus сайте букмекерской конторы фонбет DiskiPlus casino играть DiskiPlus казино рублях
#1604 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на 1хслотс
Бездепозитный бонус по промо-коду несомненно доступен для забавы, только том, случае когда Вы активируете особый бонусный код в разделе с бонусами или укажите промокод при регистрации на сайте. В неких случаях, кроме активации кода, понадобиться подтвердить контактные данные игрока и наполнить анкету клиента. <a href=http://filmkachat.ru/>1×slots официальный сайт мобильная версия скачать</a> Иногда операторы настоятельно внесение малого депо перед выводом для верификации платежного прибора. В неких казино этот депо также светит отыграть.Прежде всего, не забывайте периодически заглядывать на страницу обзоров бездепозитных призов. Они шаг за шагом оценивают наиболее увлекательные предложения основных игорных порталов. <a href=https://elearn.ellak.gr/mod/forum/discuss.php?d=8504#p51754>https://elearn.ellak.gr/mod/forum/discuss.php?d=8504#p51754</a> Если вы новичок деле и только попали в неизведанную вами район азарта — за услуг как бездепозитные бонусы без пополнения.В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать собственный выигрыш с бесплатных вращений. Прибыль, которую Вы заработаете на этом бездепе возможно ставить на вывод без какого или отыгрыша. 1×slots официальный сайт мобильная версия <a href=https://christinanoto.sites.gettysburg.edu/education/pinaca-synthesis/-----1>https://christinanoto.sites.gettysburg.edu/education/pinaca-synthesis/-----1</a>
1×slots мобильная версия войти казино
Еще одно условие дотрагивается размеров ставки. Операторы устанавливают наивысшую необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, избранной в Личном офисе. При превышении лимита есть риск потерять приза. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, клиент возможность столкнуться с запретом назначать фишки на шансы. казино 1×slots официальный сайт <a href=http://v208870d.bget.ru/user/Stevenhox/>http://v208870d.bget.ru/user/Stevenhox/</a> Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы которые возникают у начинающих.Чаще всего казино бонус за регистрацию без депозита даёт возможность запустить каждой машина. Но превосходнее пристально ознакомиться с критериями. Иногда для забавы доступны лишь определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, какого-либо начать знакомство с миром азарта именно с «одноруких злодеев». 1×slots регистрация 1×slots review live Отыграв бездепозитный приз в казино с выводом также придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, случае сходственное лимитирование существует, то единоразово вывести выйдет лишь сумму, не превышающую объем полученного бонуса.В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и в случае неоднозначных ситуаций нет способности куда-то посетовать и доказать свою правоту.
1×slots зеркало быструю регистрацию а также мгновенное
В разделе с бонусами активировать свой презент. Найти забавы, для коих предусмотрено одобрение и использовать приз по назначению.Максимальный объем ставки, кот-ый нельзя превышать же приз не несомненно всецело отыгран. В случае нарушения этого правила, бонус и выигрыш с него будут аннулированы. Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых свежих, великодушных и проверенных бонусах в онлайн казино, которые обновляются каждый денек. <a href=http://www.zgbbs.org/space-uid-187785.html>http://www.zgbbs.org/space-uid-187785.html</a> Выигрыши с призов без вложений постоянно привязаны к притязанию по ставкам и все быть обналичены лишь последствии выполнения этих притязаний.Свежий бонус начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в пользовании своими, ну случае отыгрыша оператор может установить лимитирование на вывод денег. 1×slots зеркало рабочее Бездепозитные призы отличный вариант безвозмездной забавы в игровые автоматы. Многие пользователи сети не знают, собственно в казино возможно начать играть абсолютно бесплатно, а позже исключить выигрыш на банковскую карту или электрический кошелек, иные не доверяют онлайн казино, а третьи удачно играют и выигрывают – и тотчас достаточно великие суммы.При небольшой сумме приза рекомендовано играть по невысоким ставкам, а использовать максимальные другого, как только в случае, случае вейджер слишком немалый, а время на отыгрыш крепко ограничено.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Бонус за регистрацию в казино выдается только раз один на 1-го игрока. Но посещают дополнительные промоакции, в рамках коих бездепы раздаются для постоянных посетителей и эти презенты Вы можете получить больше одного раза. <a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=878508>1×slots регистрация 1×slotscasino09k online</a> Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную процедуру активации бонуса без депо. Внимательно прочтите до конца. Многие новенькие делают оплошности на этапе регистрации и потому не могут получить презент. Все безвозмездные призы кажутся заманчивыми. Кто же категорически от возможности поиграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далековато не все бездепозитные призы в равной степени презентабельны для рассудительного посетителя.При регистрации идет свидетельствовать лишь достоверную информацию. Когда учетная запись будет активна, замечен доступ в Личный офис. В нем возможно избрать денежную, ввести промокод и разузнать доскональные управляла получения и отыгрыша бездепа. Краткая информация об акции нередко присутствует именно на регистрационной форме. скачать 1×slots официальный сайт <a href=http://www.bisound.com/forum/showthread.php?t=263638>http://www.bisound.com/forum/showthread.php?t=263638</a> Во всех легальных онлайн-казино Беларуси нужно подтверждение паспортных данных для забавы — это требование правительства страны.
1×slots casino online регистрация
Бездепозитные бонусы — это презенты от казино повторяющий бонусных средств или фриспинов для игровых автоматов, которые начисляются на акк игрока в процедуры регистрации на веб-сайте заведения. Для получения этих поощрений депо не требуется. Oтыгpaть бонус с указанным вeйджepом, для этого необходимо сдeлaть cтaвoк нa cумму, превосходящую размер бонуса в несколько раз. <a href=http://www.newwawa.com/home.php?mod=space&uid=113579&do=profile>http://www.newwawa.com/home.php?mod=space&uid=113579&do=profile</a> Индивидуальные поощрения выдаются за совершение действий: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавления либо официального клиента для ПК. В большинстве казино действуют программы лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий уровень часто с выдачей бездепа.Казино дает вероятность заработать и вывести настоящие средства на бездепозитных бонусах. Обычно, это малозначительная сумма, коию казино может себя позволить подарить игроку. x1 slots 1хслотс регистрация перейти на 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=http://jagplay.ekafe.ru/viewtopic.php?f=65&t=6252>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a>
<a href=https://win11forum.de/m/manuelenabs.2164/>1×slots официальный сайт зеркало</a>
<a href=http://shiftdelete.10tl.net/member.php?action=profile&uid=119629>казино 1× slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Когда речь идет о денежных бонусах, казино всегда устанавливают условия вейджера, коие необходимо выполнить, чтобы исключить выигрыш.
#1605 inernetufaGephttps://domashij-internet-ufa002.ru
проверить провайдера по адресу <a href=https://domashij-internet-ufa002.ru>domashij-internet-ufa002.ru</a> интернет по адресу дома
#1606 Charlesgunnyhttp://filmkachat.ru
1×slots сайт
Такой казино приз без депо за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это словно некая конспирация одобрения под бездепозитный. Суть всего этого сводится к тому, собственно игроку на час выдается, например, 1000 $, а реклама утверждает то, что любой выигрыш можно несомненно в будущем забыть при для. Но если играющий серьезно отнесется к этому предложению, то он просто растеряет время. Ведь геймеру надо(надобно) несомненно выступать не главном аккаунте, ну тренировочном и с ограниченным выбором автоматов и ставок. Да и если, тогда, выигрыша (и всей тысячи) в правила вступят конкретные обстоятельства, где будет сказано, собственно максимальной суммой победы возможность быть только двести долларов и деньги возможно использовать только в приза на первый лепта с вейджером 25 от суммы вознаграждения плюс сам депо. По итогу выйдет, что игрок выигрывал для 200% бонус с вейджером на определенную необходимую. Короче говоря, это все надо вашего медли.Несмотря на то, что этот вариант стимуляции со стороны азартных платформ довольно востребован в похожих игр, далековато многим почитателям казино известно, что сами бездепозитные бонусы казино и как именно их возможно эксплуатировать. <a href=http://filmkachat.ru/>1×slots регистрация на сайте 1×slots ru com</a> На нашем сайте Вы найдете перечень своевременных новых бездепозитных бонусов в казино 2022 года. Также, есть много неповторимых услуг, которые доступны только гостям нашего вебсайта в регистрации по нашей ссылке или активации специального промокода. <a href=https://www.cgarchitect.com/projects/3f3aba93-lighting-the-art-of-atmosphere-in-3d-rendering>https://www.cgarchitect.com/projects/3f3aba93-lighting-the-art-of-atmosphere-in-3d-rendering</a> Так же стоит выделить то, что в любом онлайн казино установлен свой наибольший кешаут на бездепозитный приз. Как правило кешаут — это максимальная сумма средств, которая доступная для вывода с бездепозитного бонуса. 1×slots скачать на айфон <a href=http://mariland.org/index.php?subaction=userinfo&user=lyinginvestigat>http://mariland.org/index.php?subaction=userinfo&user=lyinginvestigat</a>
1×slots официальный demo регистрация в 1×slots casino
<a href=http://swissairways-va.com/phpBB3/viewtopic.php?t=793932>1хслотс зеркало</a> 1×slots официальный сайт скачать <a href=http://www.ngo.ne.jp/userinfo.php?uid=33082>http://www.ngo.ne.jp/userinfo.php?uid=33082</a> 1×slots сайт
1×slots официальный сайт скачать
Нет. Для получения бездепозитного приза в казино нужна обязательная регистрация на сайте. Играть в слоты бесплатно и без регистрации можно только в демо режиме.Предложения с бездепозитными призами за регистрацию разрешают свежим заведениям заинтересовать аудиторию на свой сайт. А игроки же получают вероятность выступать на настоящие средства без депо в казино и заработать маленькой стартовый капитал, который разрешено вывести на карту банка или электронный кошелек. Наш перечень содержит превосходнейшие бездепозитные бонусы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по главным параметрам:Следует подчеркнуть, собственно бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с определенным кодом. <a href=http://eparhia.ru/go.asp?url=http://medorto.ru/bitrix/redirect.php?goto=http://olis-nsk.ru/bitrix/redirect.php?goto=https://teletype.in/@urist_free/C84UQ4Zg1OZ>http://eparhia.ru/go.asp?url=http://medorto.ru/bitrix/redirect.php?goto=http://olis-nsk.ru/bitrix/redirect.php?goto=https://teletype.in/@urist_free/C84UQ4Zg1OZ</a> Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. 1хслотс зеркало на сегодня Также существуют онлайн-платформы азартных игр, которые используют раздачу бездепозитных бонусов в специальные даты (как для казино, так и для игрока). Помимо этого, действующие игроки того имеют вероятность получить схожие призы за собственную работа (к примеру, за увеличения уровня или за схожие достижения).
казино 1×slots
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=70764>1×slots casino зеркало рабочее</a> Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных обстановок с казино, когда после отыгрыша бездепа для не дадут вывести солидную сумму выигрыша. Реже призы без депо начисляются неизменным игрокам. С их поддержкою администрация старается удержать ценных клиентов либо желает поблагодарить за преданность верных гостей. Но намного чаще для сходственных целей используются эти промоакции: 1×slots casino регистрация 1×slotscasino09k online <a href=http://yar.best-city.ru/forum/thread88957/#reply88992>http://yar.best-city.ru/forum/thread88957/#reply88992</a> Помните, собственно любые нарушения верховодил сведут на нет ваши усилия, и вы всего останетесь без начисленного вам безвозмездного приза. Всегда изучайте верховодила начисления и обстоятельства вейджера. По каким вопросам, на которые вы имеет самостоятельно отыскать ответы, обращайтесь за разъяснениям и саппорт.Демоказино есть почти на любом веб-сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются существенно реже: там если, тогда, выигрыша и соблюдения критерий акций бездеп можно перевоплотить в реальные деньги.
1×slots casino регистрация на сайте
На благотворительные призы онлайн-казино почти практически распространяется ограничения по стране проживания клиентов. Даже если вас разрешается открывать счет и играть на деньги в заведении, это еще не означают, собственно вам доступны no deposit bonuses. <a href=https://sport1477.ru/forums/users/forsefa1908–2/>https://sport1477.ru/forums/users/forsefa1908–2/</a> 1×slots подтвердит вашу регистрацию если говорить Промокод – определённая композиция символов, которую нужно ввести в подходящее поле при создании учетной записи либо активировать в собственном профиле игрока в разделе с бонусами.
<b>Смотреть еще похожие новости:</b>
<a href=http://craft4game.forumex.ru/viewtopic.php?f=2&t=2972>1×slots зеркало быструю регистрацию а также мгновенное</a>
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=16553>1× slots casino официальный сайт</a>
<a href=http://yonghengro.gain.tw/space.php?uid=1555574>зеркала 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бонус начисляется игроку незамедлительно после регистрации и прохождения верификации в казино и не просит от посетителя внесения депо. Как правило, размер бонуса в подобном случае довольно застенчивый, однако дозволяет новеньким познакомиться с забавой без риска реальными деньгами.
#1607 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало подтвердит вашу регистрацию если говорить
Вейджер (wager) – это коэффициент, кот-ый показывает на какую сумму нужно устроить ставок, дабы вывести приз из казино. Пример: Вы получили за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода этого бонуса, Вам необходимо сделать ставок на сумму: 500*70=3500 рублей. Только всецело отыграв приз, Вы можете исключить собственный выигрыш. <a href=http://filmkachat.ru/>1хслотс официальный сайт зеркало</a> <a href=https://many.link/kalinka0588>https://many.link/kalinka0588</a> Не стоит путать забаву в демо и использование призов. В демонстрационном режиме игрок возможность оценить механику слота, сюжет и оформление. Но забава проводится на условные кредиты, потому отсутствует главное ? чувство азарта. Активируя промокод либо фриспины, заказчик как не расходует свои средства на игровые автоматы, но имеет сорвать настоящий куш!Суммы подобных предложений, большинстве, колеблются от трех до двадцати долларов, а вейджер на эти средства должен составлять от тридцати до шестидесяти раз. Зачастую, большая сумма выигрыша здесь составит от одной до двух сотен долларов. Если игры выиграет больше, то все свои шансы быть списанными до максимально разрешенного выигрыша. Здесь появляется содержание выводить еще несуществующие деньги на собственную платежную систему и дальше искать заведение с подходящими под данную необходимую релоадом либо бонусом за 1-ое пополнение счета. Есть количество подвидов бездепозитного гонорары, предлагаемого наибольшим числом заведений. казино 1×slots официальный сайт <a href=http://city-hall.nvkb.ru/forum/index.php/user/105198/>http://city-hall.nvkb.ru/forum/index.php/user/105198/</a>
1хслотс зеркало
Вейджер не более х30–35 является приемлемым. Опытные игроки утверждают, что с этим вейджером реально остаться в плюсе, случае правильно подойти к выбору игрового аппарата. скачать 1×slots на андроид мобильная версия Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.Бездепозитный приз – это экономическое вознаграждение, которое выдается участнику забавы в казино, для его привлечения и возникновения заинтригованности. Любой посетитель, кот-ый соответствует условиям выдачи сходственного бездепозитного бонуса, может претендовать на получение вышеуказанного приза. Такое поощрение считается наиболее действенным методом, дающим возможность стартовать при, не вкладывая личных материальных средств. <a href=https://www.basee6.com/index.php?page=user&action=pub_profile&id=236069>https://www.basee6.com/index.php?page=user&action=pub_profile&id=236069</a> 1× slots регистрация в 1×slots casino Таким образом онлайн казино получает потенциального игрока. Возможно дальнейшем или истинном он захотит поиграть на свои деньги. Так работают бездепозитные призы в интернет казино. Здесь хорошо подходит выражение, благотворительные сыр бывает лишь в мышеловке. Начинающие игроки все не обдумывать опасность азарта. Однако времени осознания делается больше. Это тема для отдельного обсуждения.
1×slots casino регистрация 1×slotscasino09k online
Наиболее знаменитые гонорары между гэмблеров – бездепозитные бонусы казино. Это не изумительно, ведь можно получить безвозмездные вращения либо виртуальные кредиты, и при не придётся пополнять счёт, рисковать личными деньгами. Удастся насладиться разнородными развлечениями причем выиграть крупную сумму, избегая серьёзного риска. Сразу после активации промокода возможно воспользоваться презентом. Как уже упоминалось, бонусы бывают трёх видов – фриспины, кредиты и фриплей-бонусы.Верификация необходима для добавочной защищенности и помочь техподдержке выявить бонусхантеров и жуликов. Кстати, рядах платформах выводы солидных сумм доступны лишь в подтверждения личности. <a href=https://diakov.net/user/Frankdeell/>https://diakov.net/user/Frankdeell/</a> Мы делаем ударение на ключевых положениях верховодил, рассказываем о территориальных ограничениях и вкратце информируем о иных промоакциях обговариваемого казино.Бездепозитный приз за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых новых, великодушных и испытанных призах в интернет казино, которые обновляются каждый день. 1×slots официальный сайт скачать С иной стороны, гораздо проще арестовать бездепозитные фриспины за регистрацию в казино и прямо сейчас начать вертеть барабаны в наихороших слотах. Главная особенность спинов том,, собственно они предназначены для лучших автоматов. Удастся не пройти вспомогательные раунды, хотя и увеличить сумму выигрыша, заработать респины прочие внутриигровые подарки.
1×slots на любой вкус как пройти регистрацию
При игре на бонусные средства воспрещается играть в игровые автоматы с современным джекпотом и игры из радела live casino. Кроме такого, кое-какие казино выделяют бездеп на раз или несколько определенных слотов, и в иных играх Вы не сможете на них выступать. Более солидные предложения встречаются очень редко. Зачастую они доступны лишь VIP-игрокам. В оставшихся случаях им наверняка сопутствуют довольно жесткие условия отыгрыша. Также возможны дополнительные условия прочие лимитирования, прописанные в критериях и положения бонусной программы казино. 1хслотс зеркало <a href=http://dvkf.com.ua/index.php?subaction=userinfo&user=synonymouspusho>http://dvkf.com.ua/index.php?subaction=userinfo&user=synonymouspusho</a> Не стоит незамедлительно же отказываться от приветственных презентов в подобных казино. Администрация готова начислить деньги или фриспины, хотя сначала сотрудники должны увериться, что вы не мошенник. Дело никаких, что развелось слишком количество охотников за призами. Они выучились обманывать систему и зарабатывать солидные суммы средств.В зависимости от онлайн заведения любой из их возможность вам предложить как бездепозитные средства, так и бездепозитные фриспины, коие последствии удачной регистрации рухнут вас на ваш игровой баланс.
1хлот регистрация в 1×slots casino
Бездепозитный приз за регистрацию в казино — это стартовый презент повторяющий денежного начисления либо даровых вращений для новых игроков заведения, для получения которого не нужно заносить депо. Все обожают получать презенты. Согласитесь, почти любой играющий человек несомненно безмерно рад, случае получит бесплатный презент для игры в онлайн казино просто за регистрацию либо же бонус за внесенный депо, так называемые приветственные призы для свежих игроков. Соответственно такие интернет клубы будут больше востребованы и предпочтительны у игроков при выборе казино для игры. Топ казино непрерывно обновляется и добавляются свежие и интересные игровые клубы с симпатичной бонусной политикой и всеми возможными прерогативами, к коим относятся такие призы как фриспины за регистрацию, валютные бездепозитные призы, еще великодушные бонусы за внесенный депо. <a href=http://dev.may-green.ru/forum/user/15645/>http://dev.may-green.ru/forum/user/15645/</a> 1× слот зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.konyacraft.com/threads/1×slots-zerkalo-1×slots-registracija-perejti-na-1×slots.9585/>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a>
<a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=17022>1×slots регистрация 1×slots review live</a>
<a href=https://forum.dis-course.net/viewtopic.php?t=657733>сайт 1× slots casino</a>
<a href=https://forumanapa.ru/threads/8034/>1× slots регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Во время игры в казино, выигрыши, полученные благодаря бесплатным призовым фондам, суммируются и срабатывают в совместную сумму для отыгрывания. Однако, случае удача улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно допустит вывести денежные средства. Сумма вывода будет находиться от лимита, одобренного именно в данном учреждении. Поэтому, пристально надо(надобно) разбирать управляла выдачи безлимитных депо.
#1608 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пинап казино рейтинг казино <a href=https://www.ossetia.tv/>casino сегодня</a> 1×bet casino 1×bet сейчас <a href=https://kompromat1.online/>casino 7k сегодня</a> 1×bet слоты официальный сайт рейтинг казино скачать 1×bet на андроид бесплатно букмекерские конторы бет порно с Диана Шнайдер (теннис) порно с Петр Ян (ММА) casinos winning
DiskiPlus 1×bet слоты DiskiPlus casino на телефон <a href=https://www.diskiplus.ru/>DiskiPlus порно с Сергей Бобровский (хоккей)</a> DiskiPlus скачиваемые казино DiskiPlus порно с Диана Шнайдер (теннис) <a href=https://diskiplus.ru>DiskiPlus ешь казино</a> DiskiPlus porno Илона Маркова, хоккеистка DiskiPlus гама казино DiskiPlus porno Юлия Канакина, скелетонистка DiskiPlus kometa casino DiskiPlus порно с Сергей Бобровский (хоккей) DiskiPlus симулятор казино DiskiPlus казино играть
#1609 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino скачать приложение мелбет букмекерская контора <a href=https://rumafia.news/>casino betting</a> porno Елизавета Туктамышева бк букмекерская контора <a href=https://specreporter.com/>Самойлова Алла Владимировна порно</a> pin up casino порно с Матвей Сафонов (футбол) порно с Абрамченко Виктория Валериевна Матвиенко Валентина Ивановна порно casino онлайн гта казино 1×bet зеркало xbet
DiskiPlus vodka casino DiskiPlus online casino официальный <a href=https://www.diskiplus.ru>DiskiPlus зеркала казино</a> DiskiPlus pin casino DiskiPlus pin up casino пин <a href=https://www.diskiplus.ru>DiskiPlus букмекерская контора на андроид</a> казино DiskiPlus казино проиграл DiskiPlus казино смотреть онлайн бесплатно DiskiPlus порно с Бондаренко Анастасия Борисовна DiskiPlus порно с Арина и Дина Аверины, гимнастки DiskiPlus сайт 1×bet слоты DiskiPlus ешь казино
#1610 Charlesgunnyhttp://filmkachat.ru
1× slots зеркало
Для как, чтобы отыграть необходимую вашего бездепозитного приза нужно выполнить условия вейджера. Очень часто фриспины даются на определенные слоты (book of ra, book of lifeless, book of sun), избирайте разъем для по душе, все очень красивые и качественные. Бездепозитные бонус имеет быть денежным так и повторяющий фриспинов на слотыХотя безвозмездные бонусы начисляются без депо, не исключено, собственно для придется заносить средства. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты лишь в такого, как свежий клиент первый пополнит игровой счет. <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> В случае установленного лимита на необходимую вывода выигрыша с бездепозитного приза, игрок не сможет вывести больше заявленной суммы. <a href=https://www.arrl.org/forum/topics/view/4345>https://www.arrl.org/forum/topics/view/4345</a> 1×slots зеркало на сегодня <a href=https://cameradb.review/wiki/User:KerrieMerrett7>https://cameradb.review/wiki/User:KerrieMerrett7</a> Важно, удостоверьтесь никаких, собственно раньше не регистрировались в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи.Можно ли наваривать на бездепозитных бонусах? Это не работа, тут как повезет, в в любом предложенном безедепе, вы будете откручивать вейджер и выводить, это можно именовать везением, и дополнительной добавкой к вашему бюджету.
1× slots официальный
Третитй бездепозитный бонус за регистрацию – валютные средства. К огорчению, начислить рубли или баксы способны только известные и знаменитые клубы. С их поддержкою вы сможете насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком.Не стоит путать игру в демо и использование призов. В демонстрационном режиме игрок может расценить механику слота, сюжет и оформление. Но игра проводится на условные кредиты, потому отсутствует основное ? чувство азарта. Активируя промокод или фриспины, заказчик раньше не тратит свои средства на игровые автоматы, хотя возможность сорвать реальный куш! <a href=https://irc.floobits.com/Jamesamiva>1 x slots</a> казино 1×slots Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в обязательном порядке необходимо восполнить счет в казино. Для депозитных бонусов, данная процедура не нужна, так как депозит уже сделан.Так собственно сможете неустрашимо региться без всяких раздумий. Фортуна сейчас наверняка на вашей стороне. Не побаивайтесь, так следствие какого либо ущерба Вам абсолютно не угрожает. С такими бонусами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе. <a href=https://www.entoads.com/author/jamesval/>https://www.entoads.com/author/jamesval/</a> Бонус в казино без депозита имеет различные вариации: может быть приветственный бонус, промоакции в честь каких-либо праздничных или главных дат, приз за вербование новых игроков, лояльность и получение VIP-статуса.Рассмотрим принцип его действия на образце. Допустим, вы зарегистрировались и получили $10 not the slightest deposit bonus с вейджером х50. Это значит, что выигранные деньги можно будет выводить не ранее, чем последствии того, как общая сумма ставок достигнет $500. 1×slots официальный demo регистрация в 1×slots casino Бездепозитные призы — это презенты от казино вид бонусных денег или фриспинов для игровых автоматов, коие начисляются на акк игрока после процедуры регистрации на сайте заведения. Для получения этих поощрений депо не потребуется.В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с безвозмездных вращений. Прибыль, коию Вы заработаете на таком бездепе возможно ставить на вывод без какого или отыгрыша.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Также, в нужно подтвердить собственный номер телефона, для этого код, приобретенный в смс-сообщении от клуба ввести в специальное фон в собственном кабинете игрока.Мы советуем не открещиваться от сходственных предложений известных казино. Выделите несколько минут на регистрацию, получите приз и попытайтесь его отыграть. Может быть, сейчас удача несомненно на вашей стороне! Ну и окончательно же, для казино бездепозитные призы прибыльны с имиджевой стороны: сходственная добродушие повышает степень преданности посетителей к фирмы.Но эти рамки не смущают даже хайроллеров, что коэффициенты на слотах дозволяют рассчитывать на солидные выигрыши, а некоторых автоматах разыгрывается прогрессивный джекпот. <a href=http://heliport-moscow.ru/bitrix/redirect.php?goto=http://kodecs-rf.ru/bitrix/rk.php?goto=http://bauartstudio.com/bitrix/redirect.php?goto=https://telegra.ph/Pensionnye-vyplaty-naslednikam-09–23>http://heliport-moscow.ru/bitrix/redirect.php?goto=http://kodecs-rf.ru/bitrix/rk.php?goto=http://bauartstudio.com/bitrix/redirect.php?goto=https://telegra.ph/Pensionnye-vyplaty-naslednikam-09–23</a> При маленькой сумме бонуса рекомендовано выступать по низким ставкам, а применять наибольшие какого-либо лишь в том случае, если вейджер слишком великий, а время на отыгрыш крепко ограничено.Зарегистрируйтесь. Для регистрации чаще всего довольно установить собственный номер телефонного и почтовый адрес, в чего установить полученный код из СМС. Возможно, требуется показать промокод. В правилах акции будет написано, где его надобно вводить. Иногда это надо создавать при регистрации, время — теснее после творения собственного кабинета, на отдельной страничке. 1×slots скачать на айфон
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Бонусные средства – маленькая сумма денег для старта в новеньком казино. На бонусные средства, обыкновенно разрешается играть во все забавы, кроме слотов с современным джекпотом и игр из раздела live casino.После потребуется привнести идентификационный платёж. Это стращает начинающих больше всего. Нужно устроить минимальный депозит в 100–500 руб. Таким образом служба безопасности убедиться сомнений, что платёжный метод принадлежит Вам. Данная процедура необходима для обеспечивания защищенности игровых счетов. Пример, Ваш акк взломают и выведут свои на свой кошелёк. Будет очень неприятно. Поэтому верификация платёжной системы, это необходимый момент. Сроки активации бонуса устанавливаются каждым казино, хотя почаще всего они не превосходят недели с этапа получения. Игроку обязательно нужно применять бездеп в течение указанного срока, в ином случае бонус просто исчезнет. Каждый бонус возможно получить только один один, поэтому в не использовать бездеп в срок, у игрока не несомненно 2 шанса им воспользоваться.Следует выделить, собственно бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с определенным кодом. Так что можете отважно региться без всяких раздумий. Фортуна сегодня точно на вашей стороне. Не опасайтесь, так последствие какого либо убытка Вам совершенно не грозит. С этими призами как без пополнения, Вы остаетесь лишь в плюсе, хотя не как не в минусе.Срок активации и время на отыгрыш. Зачисление средств или фриспинов происходит при активации в течение требовательно ограниченного периода, схожие притязания предъявляются и к срокам отыгрыша. Одни казино позволяют отыгрывать приз некоторое дней или в недель. Другие выдают солидную сумму за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высочайшим вейджером. 1×slots зеркало рабочее на сегодня <a href=https://www.storeboard.com/blogs/automotive/everstart-battery-review-top-performer-for-your-vehicle/6086908>https://www.storeboard.com/blogs/automotive/everstart-battery-review-top-performer-for-your-vehicle/6086908</a> Если вы избираете проверенное лицензионное онлайн казино и выполните все обстоятельства получения бездепозитного бонуса, проблем с получением подарка у Вас не возникнет.Ознакомьтесь с нашим списком лучших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего списка и получите бездеп сразу. Хватайте наихорошие безвозмездные предложения ниже и выигрывайте немалые средства, не рискуя!
1×slots официальный сайт зеркало рабочее
При верном раскладе бездепы — это прекрасный метод выступать на деньги без траты личных средств. Есть несколько советов, следуя которым можно извлечь максимум полезности из подобных промоакций казино. Играть стопам лишь на лицензированных площадках. Скриптовые веб-сайты не только обманывают с бонусными услугами, но и используют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах нереально. <a href=https://foros.factormoe.net/user-5476.html>https://foros.factormoe.net/user-5476.html</a> Бoльшинcтвo азартных заведений выдвигают примерно одинаковые условия и притязания, коие необходимо выполнить, дабы получить бездепозитный приз за регистрацию. Все их возможно объединить в один перечень:Акционные предложения от казино существуют в разных форматах. Часто бонусы даются в обмен на депо. Игрок вносит платеж и получает средства, благотворительные вращения прочие поощрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — картина бонуса, кот-ый гарантирован за исполнение конкретных поступков на веб-сайте: 1×slots официальный сайт мобильная версия скачать Бездепозитные призы, как уже понятно, считаются оригинальной вероятностью к игровому процессу абсолютно безвозмездно, другими играть в онлайн казино бесплатно и на место средства сразу в регистрации аккаунта. Автоматы с этим депозитом могут замерзнуть прекрасной вероятностью поиграть для почитателей азарта с определенными ограничениями в денег.Любой выигрыш по ставке выше установленного лимита будет являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, а в случае выигрыша его сумма не поступит на счёт посетителя — результат забавы несомненно всецело аннулирован.
<b>Смотреть еще похожие новости:</b>
<a href=http://okeyrp.listbb.ru/viewtopic.php?f=24&t=2274>1хслот официальный сайт зеркало</a>
<a href=http://pravoslit.ru/forum/obshchee/185469-zerkala-1×slots.html>зеркала 1×slots</a>
<a href=http://forum.lesprom.org/threads/1×slots-bonus-za-registraciju.124/>1×slots бонус за регистрацию</a>
<a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=1619572#pid1619572>казино 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины предназначены для применения в видео слотах. Внимательно ознакомьтесь с условиями – частенько их выдают на некоторые автоматы. В зависимости от клуба, у вас получится устроить определённое количество ставок. Кстати, продвинутые игорные дома разрешают запускать любых «одноруких злодеев». Максимальный размер ставки, кот-ый невозможно превосходить пока бонус не будет полностью отыгран. В случае нарушения этого верховодила, приз и выигрыш с него будут аннулированы.
#1611 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать букмекерскую контору 1×bet зеркало слоты 1×bet xyz <a href=https://th-royalgclub.com/>Александра Бортич</a> официальные букмекерские конторы Ходнева Светлана Владимировна порно <a href=https://krtka.info/>casino сегодня</a> porno Нина Пирогова, хоккеистка скачать сайт букмекерской конторы Семёнова Татьяна Владимировна порно 1×bet casino букмекерская контора бесплатно скачать Преподобная Надежда Александровна порно симулятор казино
DiskiPlus 1×bet зеркало DiskiPlus казино смотреть <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet зеркало на сегодня 1×bet xyz</a> DiskiPlus казино пину DiskiPlus 1×bet вход <a href=https://diskiplus.ru/>DiskiPlus казино зеркало сегодня</a> DiskiPlus игры казино DiskiPlus 7k casino сайт DiskiPlus бк букмекерская контора DiskiPlus casino промокод DiskiPlus мелбет букмекерская контора DiskiPlus porno Мира Андреева (теннис) DiskiPlus скачать сайт букмекерской конторы
#1612 Danielquornhttps://www.metal-archives.com/users/grom231967
“You get some of me but not tomorrow as they want me in as soon as I can make it happen. This is the one time when they say jump and I ask how high due the financial gains the company could benefit from and it being important enough for the client to appear in person.”
“Well I get an extra night of you at least! I wonder what we could do with that? Meantime, what about food? I am starving and delicious as it was a second breakfast is not quite enough to replenish me!”
“Well get something on and we’ll sort that out first.”
We drove into town and decided that a daytime visit to Charlie’s was going to be the answer. I parked in the bar lot and Elise dashed in to change into something more appropriate, jeans and a t-shirt along with her biker jacket but keeping her Converses on.
Walking down to the restaurant was different from the middle of the night visits as the streets were bustling and all of the shops and outlets were open.
Reaching Charlie’s we entered the front door and sat in a booth near the window. A beautiful young American Chinese girl came,smiled and said hello to Elise and gave us menus and asked if we wanted drinks in the meantime.
„No thanks Lin just a pot of Jasmine tea for us please.“ Lin went back to the kitchen area. “No booze for me today as I will have to work in the bar so it is just tea for me.”
Not in a drinking mood either, I agreed with her."
https://www.hentai-foundry.com/…1960/profile https://imageevent.com/larogue1989 https://tubeteencam.com/…1955/profile https://anotepad.com/notes/krk4qme6 https://imageevent.com/…198519931973
#1613 inernetsamaraGephttps://domashij-internet-samara003.ru
провайдеры интернета по адресу самара <a href=https://domashij-internet-samara003.ru>domashij-internet-samara003.ru</a> интернет по адресу дома
#1614 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пин ап casino pin up top 1×slots casino <a href=https://krtka.info/>человек казино</a> порно с Матвей Сафонов (футбол) bet casino <a href=https://rumafia.news/>Окладникова Ирина Андреевна порно</a> порно с Евгения Медведева casino официальный зеркало порно с Алексей Миранчук (футбол) gama casino casino зеркало сайта inform@rucriminal.info порно с Алина Загитова, фигуристка
DiskiPlus гта онлайн казино DiskiPlus win win casino <a href=https://diskiplus.ru>DiskiPlus 1×bet xbet xyz</a> DiskiPlus автомат казино DiskiPlus порно с Афонина Марина Игоревна <a href=https://www.diskiplus.ru/>DiskiPlus порно с Аделия Петросян (фигурное катание)</a> DiskiPlus porno Мария Шарапова DiskiPlus casino скачать DiskiPlus букмекерскую контору пин DiskiPlus официальные букмекерские конторы казино DiskiPlus porno Илья Ковальчук (хоккей) DiskiPlus букмекерские контора ап
#1615 Sazryzxhttp://[url=http://diplomp-irkutsk.ru/kupit-diplom-instituta-s-reestrom-vigodno-i-prosto/]diplomp-ir
Покупка диплома ВУЗа через надежную фирму дарит много достоинств для покупателя. Данное решение дает возможность сберечь как личное время, так и существенные финансовые средства. Однако, на этом выгоды не ограничиваются, преимуществ намного больше.Мы изготавливаем дипломы любых профессий. Дипломы производятся на настоящих бланках. Доступная цена по сравнению с огромными издержками на обучение и проживание. Приобретение диплома о высшем образовании из российского университета будет рациональным шагом. Приобрести диплом: <a href=http://diplomp-irkutsk.ru/kupit-diplom-instituta-s-reestrom-vigodno-i-prosto/>diplomp-irkutsk.ru/kupit-diplom-instituta-s-reestrom-vigodno-i-prosto/</a>
#1616 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало этих способов предполагает регистрацию
Иногда у гостей вебсайта шансы появиться трудности, задачи, препядствия при активации полученного промо-кода. В этих случаях, необходимо адресоваться за поддержкою в службу «Support». Для получения ответа, непременно указывается конкретная первопричина воззвания и подтверждается информация дополнительными экрана. Если сложилась неоднозначная ситуация, практически можно обратиться к главному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> Вообще перейдя в казино — управляла одинаковы в получении бездепозитных призов, в стереотипные верховодила входит: доказать эл. Почту и телефонный, заполнить собственный собственный профиль, активировать промо код или активировать предложения во вкладке БОНУСЫ.Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам воспрещено начислять призы клиентам, не имеющим денежных средств на счете. Мы предлагаем разглядеть актуальные призы онлайн-казино с лицензией, которые соблюдают законодательство РБ. <a href=https://archinect.com/firms/cover/150465490/cgifurniture-modern-interior-design>https://archinect.com/firms/cover/150465490/cgifurniture-modern-interior-design</a> Поспешите отобрать бездепозитные призы за регистрацию в казино из представленного перечня. Все платформы не только ведут легальную работа, хотя и обрадуют добросовестными плодами игры, высочайшей отдачей, резвыми выплатами.Да, у безвозмездных призов есть недостатки. Прежде всего, они обычно маленькие. Кроме как, обстоятельства вейджера по ним всегда строгие. Но все же неименье риска делает их довольно привлекательными для посетителей. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=http://mail.aquarius-dir.com/1×-slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE_440224.html>http://mail.aquarius-dir.com/1×-slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE_440224.html</a> Превышение максимальной ставки при отыгрыше. Система механически не предостерегает о превышении ставки, поэтому о несоблюдении управлял игрок возможность узнать уже после подачи запроса на вывод средств.
1×slots официальный сайт зеркало
1×slots официальный сайт скачать Каждый геймер должен сперва отчетливо выучить обстоятельства по получению и отыгрышу понравившегося презента. Если всё организует, поспешите арестовать бесплатные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик сейчас начать вертеть барабаны топовых слотов.Когда речь идет о получении бездепозитных призов в казино, в первую очередь направьте на последующие условия: <a href=http://www.vennews.net/home.php?mod=space&uid=160601&do=profile&from=space>http://www.vennews.net/home.php?mod=space&uid=160601&do=profile&from=space</a> Условия шансы разниться друг от приятеля. Но такой приз возможность быть применен только для игрового процесса – приобретенные на счет финансы до того, как станут отыграны, вывести невозможно. 1×slots рабочее зеркало на сегодня
1 x slots casino
Бывают ли бездепозитные призы без вейджера? Бывают, случае у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино. Бездепы все заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой либо баллами.Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки имеют запросить вспомогательные документы либо инициировать короткое общение по Skype. <a href=http://klotzlube.ru/forum/user/266848/>http://klotzlube.ru/forum/user/266848/</a> скачать 1×slots официальный сайт Но а случае вы теснее профи по интернет казино, кликаем на красноватую кнопку «Получить» и Вы механически перейдете в интернет казино;Даже не выиграв солидную необходимую, игрок увлекательно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-либо денежных рисков. Быть в курсе наихороших акций с. Достаточно регулярно учить перечень свежих онлайн казино с выводом приза без депо в этом разделе.
1×slots бездепозитный бонус за регистрацию
Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша призов. Заведения практически устанавливают максимальную ставку, допустимую по условиям вейждера. <a href=http://link.5nx.ru/viewtopic.php?f=5&t=12463>1×slots рабочее зеркало на сегодня</a> Чтобы выступать даром на настоящие деньги в казино, не всегда достаточно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные деянья.Новички не любят незамедлительно же заносить депо. Это обусловлено неимением навыка и недоверием. К счастью, наши возможно получить бездепозитный приз за регистрацию в казино. Неважно что начислит система – фриспины либо кредиты. В любом случае вы не рискуете своими сбережениями. Это отличная возможность запустить понравившийся видео разъем или же испытать фортуну в настольных играх. Максимальная ставка ? устанавливается в валюте счета и ограничивает размер ставки за раз спин. В случае ее превышения бонус имеет быть аннулирован. Также в правилах может содержаться запрет на размещение ставок конкретного облика, примеру, по равным шансам в рулетке (словами, на чет либо нечет, красноватое либо черное и т.д. ). 1×slos регистрация в 1×slots casino <a href=https://www.imagekind.com/MemberProfile.aspx?MID=80cd9566–8b6d-423a-8b25-de3a602300be>https://www.imagekind.com/MemberProfile.aspx?MID=80cd9566–8b6d-423a-8b25-de3a602300be</a> Например, игрок получил 500 рублей при творении аккаунта и обязан отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., потребуется устроить 875 спинов для полного отыгрыша.Фриспины предназначены для использования в видео слотах. Внимательно ознакомьтесь с условиями – частенько их выдают на кое-какие автоматы. В зависимости от клуба, у вас получится устроить определённое количество ставок. Кстати, продвинутые игорные дома разрешают запускать любых «одноруких бандитов».
1х слот регистрация в 1×slots casino
Заработать на бездепозитных бонусах за регистрацию в казино возможность каждый пользователь, достигший совершеннолетия.Вообще перейдя в казино — верховодила одинаковы в получении бездепозитных призов, в стандартные управляла входит: подтвердить эл. Почту и телефонный, заполнить собственный индивидуальный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ. <a href=https://ebusinesspages.com/Palolo1408.user>https://ebusinesspages.com/Palolo1408.user</a> Подарки на дни ? посвященные торжественным датам, требующие символического отыгрыша или начисляются без такового. Могут дариться игрокам сутки рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду.Онлайн гемблинг развивается с любым днем больше и больше, свежие бренды создаются не по денькам а по часам. Новые интернет казино делают вступительные акции для игроков, для того собственно бы зарекомендовать себя, и что, этим самым предлагают бездепозитные бонусы за регистрацию, что бы не пропустить эту вероятность — как воспользоваться свежим бездепом, советуем навещать наш вебсайт как возможно почаще, самое вкусное и новые будет добавляться в этом же перечне. 1×slots регистрация 1×slots casino c2d ru
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В лицензионных бездепозитных казино выступать в азартные игры вправду неопасно. Наличие лицензии одобряет тот факт, собственно клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP. Как только получите бездеп в казино, всё равно не забывайте проверять электрическую почту. Некоторые игорные клубы постоянно веселят интенсивных гэмблеров приятными призами. Чаще всего получить подарок можно в преддверии веселья, на денек рождение, за вербование друга. А того распространённым призом считается надбавка к депозиту. Нужно не восполнить счёт, и азартное заведение увеличит его на 50–100%.
#1617 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
retro casino порно с Дарья Клишина, легкоатлетка <a href=https://7club7.com/>casino зеркало сегодня</a> порно с Баталина Ольга Юрьевна casino играть <a href=https://rhymes-punches.com/>букмекерская контора бетсити</a> пин ап букмекерская контора сайт казино зеркало казино без какие казино black russia казино сайт казино вход букмекерская контора официальный сайт скачать
DiskiPlus 1×bet бесплатно DiskiPlus Хорова Наталья Александровна порно <a href=https://www.diskiplus.ru>DiskiPlus 7k casino сайт</a> DiskiPlus 1×bet официальный слоты DiskiPlus casino зеркало сегодня <a href=https://www.diskiplus.ru>DiskiPlus up casino</a> DiskiPlus рабочие зеркала казино DiskiPlus gama casino DiskiPlus порно с Сергей Бобровский (хоккей) DiskiPlus porno Дарья Мороз DiskiPlus 1win букмекерская контора DiskiPlus порно с Виктория Синицина, фигуристка DiskiPlus бесплатные букмекерские конторы
#1618 Charlesgunnyhttp://filmkachat.ru
казино 1× slots официальный сайт
Для получения бонуса надо(надобно) ознакомиться с программкой преданности казино и устроить ставки на необходимую, нужную для перехода на следующий уровень. <a href=http://filmkachat.ru/>1хслотс 1хслотс регистрация перейти на 1×slots</a> Новички не обожают сразу же вносить депозит. Это обусловлено неименьем навыка и сомнением. К счастью, в наше время можно получить бездепозитный приз за регистрацию в казино. Неважно собственно начисляет система – фриспины либо кредиты. В всяком случае вы не рискуете собственными сбережениями. Это замечательная вероятность запустить приглянувшийся видео слот или же испытать фортуну в настольных забавах.Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и более. Когда игроку полагается большое фриспинов, администрация возможность разбивать их начисление на количество дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах промоакции. <a href=http://bedfordfalls.live/read-blog/135760>http://bedfordfalls.live/read-blog/135760</a> Некоторые веб-сайты, до чем провести регистрацию игроков, предлагают ответить на количество базисных вопросов. Цель проведения подобной викторины – выявить случайных людей, которые не имеют представления о покере, и не допустить получения ими бонусов. Если посетитель уже играл в казино, то ответить на полтора десятка простых вопросов будет несложно. Очень часто, ответы возможно отыскать на официальных веб-сайтах этих учреждений. 1×slos регистрация в 1×slots casino <a href=http://www.olangodito.com/bbs/board.php?bo_table=free&wr_id=2312607>http://www.olangodito.com/bbs/board.php?bo_table=free&wr_id=2312607</a> Вы не в коем случае ни же рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, научится регулировать изменять ставки и полосы, исследовать бонусные забавы и их выигрышные комбинации, ну конечном просто зарядится кучей впечатлений! Ведь вы будите выступать на бонусные средства, коие можно отыграть и исключить, не просто на демо счет, что, этим наиболее адреналин в крови более повысится а пульс забьется с частым ритмом!Чаще всего применяются коды. Их надо(надобно) вносить в специальные окна регистрационной анкеты, в речь идет о пригласительных призах, или в определенном разделе личного офиса игрока.
1хслотс 1хслотс регистрация перейти на 1×slots
1хслотс официальный сайт зеркало Демоказино есть практически на любом сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются существенно пореже: там когда выигрыша и соблюдения условий промоакций бездеп можно перевоплотить в настоящие средства. <a href=https://www.bandlab.com/post/d5611169-dfd7-ef11–88f6–6045bd3473c0>https://www.bandlab.com/post/d5611169-dfd7-ef11–88f6–6045bd3473c0</a> Если при регистрации указать промокод, можно гарантировано получить приз. Где брать ваучер? Посетите на блоги либо форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В последнее время игорные дома начали афишироваться в кинокартинах и телесериалах. Присмотритесь и скорее заметите промокод, который принесёт 500 либо 1 000 бонусных рублей.Бездепозитный бонус предоставляется новенькому игроку за определенные действия. Часто презент вид денег либо фриспинов выдается за регистрацию, спасибо чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. 1×slots официальный сайт зеркало рабочее Размер ставки для забавы по бездепозитному призу (конечно же, когда, когда он представлен повторяющий бонусных денежных средств) зачастую ниже, чем при ирге на депо. Ограничение будет действовать до этапа отыгрыша приза.Так что приготовьтесь предоставить секретную информацию (пол, возраст, государство проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает менее суток, в чего удастся свободно выводить солидные выигрыши.
1×slots регистрация 1×slots casino 777 online
Одним из поводов отдавать привилегию одному либо иному заведению заключается в привлекательности предлагаемых промоакций и бесплатных предложений. Безвозмездные фриспины, выдаваемые без нужды делать какой-нибудь вклад, в перечне находится далеко не в конце. <a href=https://aben75.cafe24.com/bbs/board.php?bo_table=free&wr_id=602620>https://aben75.cafe24.com/bbs/board.php?bo_table=free&wr_id=602620</a> Такие одобрения позволяют безвозмездно протестировать свежее казино, разобраться с игровым процессом онлайн слотов, заработать и исключить небольшую необходимую денег. онлайн казино 1×slots
1×slots официальный сайт зеркало
Поспешите зарегистрироваться на официальном сайте Клубника, дабы быстро получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, бывает настоящий шанс победу! Фриспины без депозита или вспомогательные средства помогут поближе познакомиться с игровой платформой и её функциями. За счёт даров можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради забавы напротив живых крупье. Баланс игрока пополняется на соответствующую необходимую. К ней используется вейджер, указанный в правилах акции. Вывести выигрыш возможно несомненно после такого, как пользователь сделает требуемый размер ставок из собственных средств. В редких случаях бездеп работает в формате Free Play. На счет пользователя зачисляется большая сумма, и предоставляется малый срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по завершении сего периода сумма на счету несомненно превышать изначальную, то разность возможно несомненно вывести либо использовать для дальнейших ставок. казино 1×slots <a href=https://bbs.flashdown365.com/home.php?mod=space&uid=1616211&do=profile&from=space>https://bbs.flashdown365.com/home.php?mod=space&uid=1616211&do=profile&from=space</a> Прочитайте правила бонусной программки, какой желайте принять. Да, мы настоятельно рекомендуем сделать это до регистрации.На нашем сайте Вы отыщите список актуальных свежих бездепозитных бонусов в казино 2022 года. Также, есть количество неповторимых услуг, коие доступны только посетителям нашего вебсайта последствии регистрации по нашей ссылке либо активации особого промокода.
1×slots промокод при регистрации
Диапазон ставок, коие вправе устроить игрок, также лимитирован. Обычно назначать возможно небольшую сумму — около 10–30 рублей за одно вращение. <a href=http://www.besatime.com/index.php?subaction=userinfo&user=Ralphtyday>http://www.besatime.com/index.php?subaction=userinfo&user=Ralphtyday</a> 1×slots зеркало регистрация в 1×slots casino Денежные средства. Третий приз за регистрацию без депо – наличные. К огорчению, только известные и известные клубы могут дать средства в рублях или долларах. С их поддержкою возможность насладиться любой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед этим необходимо выполнение определенных условий.
<b>Смотреть еще похожие новости:</b>
<a href=https://kakofon.cz/forum/viewtopic.php?f=6&t=459&p=40169#p40169>1 х слотс зеркало</a>
<a href=https://forum.dis-course.net/viewtopic.php?t=648839>1×slots рабочее зеркало</a>
<a href=http://zelenalutrija.com/forum/showthread.php?p=84618#post84618>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.
#1619 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino зеркало сайта Яровая Ирина Анатольевна порно <a href=https://kompromat1.online/>как выиграть в казино</a> casino pin официальный Самойлова Алла Владимировна порно <a href=https://specreporter.com/>kent casino регистрация</a> casino зеркало сайта porno Александра Степанова, фигуристка казино проиграл порно с Матвей Сафонов (футбол) porno Елизавета Туктамышева пина букмекерской конторы casino com
DiskiPlus casino pin официальный DiskiPlus порно с Анна Калинская (теннис) <a href=https://diskiplus.ru/>DiskiPlus 1×bet рабочее на сегодня</a> DiskiPlus порно с Карен Хачанов (теннис) DiskiPlus водка казино <a href=https://diskiplus.ru/>DiskiPlus винлайн букмекерская контора</a> DiskiPlus сколько казино DiskiPlus porno Юлия Канакина, скелетонистка DiskiPlus up букмекерская контора DiskiPlus 1×bet зеркало рабочее на сегодня DiskiPlus казино 1 DiskiPlus макао казино DiskiPlus букмекерская контора зенит
#1620 Charlesgunnyhttp://filmkachat.ru
1 хслот регистрация в 1×slots casino
Бездепозитный бонус за регистрацию в казино — это стартовый подарок в виде валютного начисления либо бесплатных вращений для свежих игроков заведения, для получения которого не вносить депо. <a href=http://filmkachat.ru/>1×slots зеркало на сегодня</a> Размер ставки для игры по бездепозитному призу (конечно же, когда, когда он представлен в виде бонусных денежных средств) зачастую ниже, чем при забаве на депозит. Ограничение будет работать до этапа отыгрыша бонуса.Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция имеет подробные правила, ссылка на коие обычно находится в промообъявлении. В них указываются лимиты, вейджер, список доступных игр. Если оператор скрывает данные о предложении, то воспользоваться им не стоит. <a href=https://www.behance.net/67b1f5c3>https://www.behance.net/67b1f5c3</a> 1 хслот регистрация в 1×slots casino <a href=http://cargo-200.ru/index.php?subaction=userinfo&user=dryevent5>http://cargo-200.ru/index.php?subaction=userinfo&user=dryevent5</a>
1×slots промокод при регистрации 2025
Зарегистрируйтесь. Для регистрации чаще всего довольно установить свой номер аппарата и почтовый адрес, в чего ввести приобретенный код из СМС. Возможно, требуется указать промокод. В правилах промоакции несомненно написано, где его бы вводить. Иногда это хотелось создавать при регистрации, времени — уже в создания личного офиса, на отдельной страничке. <a href=https://www.formulersupport.com/Thread-1×slots-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE–245034>1×slots рабочее зеркало</a> 1×slots актуальное зеркало <a href=https://biznes-knigi.com/user/Forsedropma/>https://biznes-knigi.com/user/Forsedropma/</a> казино 1×slots официальный сайт
1×slots регистрация 1×slots casino c2d ru
Вейджер (либо вагер) ? это минимальная сумма ставок, коию необходимо сделать для вывода валютного приза. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение. Приветственный бонус без депозита ? подарок за регистрацию. Выдается деньгами, фриспинами или баллами. В последнем случае бонусные баллы применяются для участия в турнирах либо размена на реальные деньги.Бездепы все заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами. <a href=http://television.im/profile.php?u=wastefulplaster>http://television.im/profile.php?u=wastefulplaster</a> Бездепозитный бонус за регистрацию в казино — это стартовый презент в виде валютного начисления или бесплатных вращений для новых игроков заведения, для получения которого не нужно вносить депозит.Ознакомьтесь с нашим перечнем превосходнейших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего перечня и получите бездеп незамедлительно. Хватайте наихорошие бесплатные предложения ниже и выигрывайте великие средства, не рискуя! 1×slots рабочее зеркало Помните, собственно всевозможные нарушения правил сведут на нет ваши старания, и вы всего останетесь без начисленного вас дарового бонуса. Всегда изучайте управляла начисления и обстоятельства вейджера. По каким вопросам, на коие вы возможности без найти ответы, обращайтесь за объясненьям и саппорт.
1×slots официальный сайт скачать на айфон
Бывают ли бездепозитные призы без вейджера? Бывают, в у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино. При отыгрыше бонусных средств, необходимо учесть срок действия бонуса и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный приз несомненно аннулирован.Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации дара нужно подтвердить электронную почту и привязать аппарат; Свежий приз начисляется повторяющий валютных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в пользовании средствами, а случае отыгрыша оператор может ввести лимитирование на вывод средств.Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. 1×slots рабочее зеркало <a href=http://mail.nudecelebvideo.net/user/Porsedroppl/>http://mail.nudecelebvideo.net/user/Porsedroppl/</a>
1хслотс казино зеркало
Многие новички сомневаются, собственно поощрительный приз не несомненно возвращать, даже в они выиграли у казино. Это полностью безопасно и надежно. Выводя выигранные средства, игрок просто останавливает свое роль в игре и теряет уникальную вероятность – безвозмездно наращивать личное вещественное положение.Бездепозитный бонус за регистрацию в казино — это стартовый подарок в виде денежного начисления либо безвозмездных вращений для свежих игроков заведения, для получения которого не вносить депозит. Бездепозитные призы — это презенты от казино повторяющий бонусных средств или фриспинов для игровых автоматов, которые начисляются на акк игрока последствии процедуры регистрации на сайте заведения. Для получения этих поощрений депозит не потребуется. <a href=http://c909201u.beget.tech/user/DoctorLazutakn/>http://c909201u.beget.tech/user/DoctorLazutakn/</a> 1×slots официальный зеркало В лицензионных бездепозитных казино выступать в азартные забавы вправду безопасно. Наличие лицензии одобряет что, этот прецедент, что клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP.Исходя из этого, просто не существует разумных оснований махнуть рукою на получение такового приза при регистрации. И, заметить,, на подобный безвозмездной базе у вас все шансы выиграть деньги и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, нарекают бесплатными онлайн платформами для игр.
<b>Смотреть еще похожие новости:</b>
<a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=12400>1 x slots casino</a>
<a href=https://ragnarok.ch/forum/viewthread.php?thread_id=203440>1х слотс зеркало регистрация в 1×slots casino</a>
<a href=https://forum.bandariklan.com/showthread.php?tid=547600>рабочее зеркало 1×slots</a>
<a href=https://kriptokulis.com/konular/zerkala-1×slots.7374/>зеркала 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный приз за регистрацию в казино — это стартовый презент вид денежного начисления или даровых вращений для новых игроков заведения, для получения которого не нужно заносить депозит.
#1621 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino вход порно с Константин Тюкавин (футбол) <a href=https://7club7.com/>1×bet официальный</a> порно с Афонина Марина Игоревна порно с Александр Головин (футбол) <a href=https://t.me/vchkogpu_ru>скачать сайт букмекерской конторы</a> казино онлайн бесплатно букмекерская контора на андроид 1×bet официальный xbet промокод 1×bet мелбет букмекерская контора porno Виктория Баркова, легкоатлетка яндекс казино
DiskiPlus pin up casino официальный DiskiPlus Мухтиярова Елена Вячеславовна порно <a href=https://diskiplus.ru>DiskiPlus порно с Александр Головин (футбол)</a> DiskiPlus porno Нина Пирогова, хоккеистка DiskiPlus карты казино <a href=https://diskiplus.ru/>DiskiPlus казино проиграл</a> DiskiPlus online casino DiskiPlus порно с Петр Ян (ММА) DiskiPlus black russia казино DiskiPlus порно с Матвей Сафонов (футбол) DiskiPlus 1×bet зеркало на сегодня DiskiPlus 7k casino бонус DiskiPlus Александра Бортич
#1622 Charlesgunnyhttp://filmkachat.ru
зеркала 1×slots
Отказ в прохождении верификации. Если заказчик не хочет либо возможности дать документы, подтверждающие его лицо, профиль несомненно заблокирован вместе со всеми бонусными начислениями.Заработать на бездепозитных бонусах за регистрацию в казино возможность любой пользователь, достигший совершеннолетия. <a href=http://filmkachat.ru/>1×slot казино зеркало</a> Как лишь получите бездеп в казино, всё также не забывайте инспектировать электрическую почту. Некоторые игорные клубы день веселят активных гэмблеров приятными призами. Чаще всего получить подарок возможно в преддверии веселья, на день рождение, за привлечение приятеля. А того распространённым призом является прибавка к депозиту. Нужно более восполнить счёт, и азартное заведение прирастит его на 50–100%. <a href=https://specsfor.readme.io/discuss/67d0342f72ab5a002476f450>https://specsfor.readme.io/discuss/67d0342f72ab5a002476f450</a> Для получения предоставленных бонусов вас пригодиться — ПК либо мобильное прибор, и остальное дело за небольшим. 1×slots casino зеркало <a href=http://www.glife2120.ru/user/RaymondBap/>http://www.glife2120.ru/user/RaymondBap/</a> Итак, чтобы бесплатные бонусные кредиты превратились в настоящие средства, которыми вам распоряжаться по собственному усмотрению, их нужно отыграть. Вейджер идет уточнять в правилах онлайн-казино.
1×slots официальный сайт мобильная версия
<a href=https://games-garant.ru/index.php?subaction=userinfo&user=Jamesneorm>1 x slots</a> 1×slots casino регистрация на сайте Даже не выиграв солидную сумму, игрок интересно проведет время, изнутри изучит работу площадки, оценит геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе лучших акций легкостью. Достаточно периодически учить список новых онлайн казино с выводом бонуса без депозита в этом разделе.Да, у бесплатных бонусов есть дефекты. Прежде всего, они обыкновенно большие. Кроме такого, условия вейджера по ним практически жесткие. Но все же недоступность риска проделывает их очень привлекательными для посетителей. <a href=http://forum.gokturkvirtual.com/uye-mycsgohes.html>http://forum.gokturkvirtual.com/uye-mycsgohes.html</a> 1×slots сайт
1×slots на любой вкус как пройти регистрацию
Таким образом онлайн казино получает вероятного игрока. Возможно в будущем или настоящем он захотит поиграть на средства деньги. Так трудятся бездепозитные призы в интернет казино. Здесь очень подходит выражение, благотворительные сыр посещает лишь в мышеловке. Начинающие игроки все не обдумывать опасность пыла. Однако времени понимания становится больше. Это тема для отдельного обсуждения. <a href=https://www.cossa.ru/profile/?ID=248539>https://www.cossa.ru/profile/?ID=248539</a> Фриплей-бонусы. Бонусы за безвозмездную забаву есть только в некоторых клубах. Они зачисляются незамедлительно в творенья профиля и действуют непродолжительное время. Если у вас нет медли израсходовать свои, они просто завершатся. Что касается медли, в большинстве случаев бонусы срабатывают на 1-го часа. 1×slot рабочее зеркало Так собственно приготовьтесь предоставить конфиденциальную информацию (пол, возраст, государство проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает менее суток, последствии чего получится беспрепятственно выводить крупные выигрыши.Возможность протестировать новые игры, не рискуя личностными своими и разработать личную тактику забавы.
1×slots подтвердит вашу регистрацию если говорить
<a href=http://fin-molitor.com/forum/viewtopic.php?f=2&t=540669>1×slots casino регистрация на сайте</a> Доступные забавы – В неких азартных играх возможно снизить математическое приемущество казино до нескольких 10-х процента. В их количестве все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как верховодило, в таких забавах ставки идут в зачет вейджера не всецело. Например, имеет учитываться только 50%. В некоторых играх бездепозитные призы вообще невозможно отыгрывать.При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие возможно посвятить забаве в казино. 1×slots регистрация 1×slotscasino 56 online <a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=9339&TITLE_SEO=9339-iz-chego-sostoit-dieta-eleny-malyshevoy&MID=394067&result=reply#message394067>http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=9339&TITLE_SEO=9339-iz-chego-sostoit-dieta-eleny-malyshevoy&MID=394067&result=reply#message394067</a> Особую изюминку видео слотам придают оригинальные символы. С их свет активируются разные бонусы. Вы сможете запустить вспомогательный степень и прирастить сумму выигрыша. Есть знаки, коие замещают негодные составляющие и сами творят выигрышные комбо. Не стоит забывать и на бонус-тур. После каждого удачного спина есть шанс прирастить необходимую выигрыша в два либо хорошо раза.B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.
1×slos регистрация в 1×slots casino
В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и когда спорных обстановок нет способности куда-то посетовать и доказать свою правоту. Чтобы получить вероятность вывести выгода с бездепозитного бонуса в казино, нужно выполнить ряд условий:Промообъявления от казино не дают реальной картины и направлены на вербование внимания пользователей. Понять, как высоки шансы остаться в плюсе, дозволит личный тест условий предложения: <a href=http://houyuhuan.com/home.php?mod=space&uid=387612&do=profile>http://houyuhuan.com/home.php?mod=space&uid=387612&do=profile</a> 1×slots зеркало регистрация
<b>Смотреть еще похожие новости:</b>
<a href=http://yonghengro.gain.tw/space.php?uid=1555574>1×slot казино зеркало</a>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=133554&pid=712177#pid712177>1хслотс регистрация в 1×slots casino</a>
<a href=http://miupsik.ru/forums/showthread.php?tid=505493>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Помните, собственно любые нарушения верховодил сведут на нет ваши усилия, и вы скорее останетесь без начисленного вам безвозмездного бонуса. Всегда изучайте правила начисления и условия вейджера. По хоть вопросам, на которые вы не можете помощи отыскать ответы, обращайтесь за разъяснениям и саппорт. Сроки активации бонуса уточняются любым казино, хотя чаще всего они не превосходят недели с момента получения. Игроку непременно надо(надобно) использовать бездеп протяжении указанного срока, в ином случае бонус просто пропадет. Каждый бонус возможно получить лишь один раз, поэтому случае не использовать бездеп в срок, у игрока не несомненно 2 шанса им воспользоваться.
#1623 inernetsamaraGephttps://domashij-internet-samara002.ru
узнать провайдера по адресу самара <a href=https://domashij-internet-samara002.ru>domashij-internet-samara002.ru</a> проверить интернет по адресу
#1624 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия
Вы всего, скажем, как все предпочитаете получать подарки и бездепозитные бонусы казино. Игорные жилища взяли в повадку одаривать гэмблеров приятными бонусами. Стать обладателем приветственного подарка можно за создание профиля либо пополнение счёта. Второй вариант больше увлекательный, ведь клубы готовы удвоить депозит! Но случае вы новичок и только знакомитесь с миром азарта, другого, как пользуйтесь бонусом за регистрацию. <a href=http://filmkachat.ru/>1хслотс регистрация в 1×slots casino</a> Шаг 5. Использование и отыгрыш. Бездеп должен быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.Верификация аккаунта. Лучше подтвердить лицо сразу после регистрации, чтобы позже не было проблем с выводом средств. Верификация может проходить двумя способами: <a href=https://designaddict.com/community/profile/furniture-360-view/>https://designaddict.com/community/profile/furniture-360-view/</a> 1×slots сайт <a href=https://www.fillplus.co.kr/bbs/board.php?bo_table=free&wr_id=202136>https://www.fillplus.co.kr/bbs/board.php?bo_table=free&wr_id=202136</a> Далее потребуется отыграть вагер и исключить выигрыш. Игрокам без навыка крупно подфартило, они могут получить десятки презентов за одну регистрацию. Если не сумели получить Бездепозитный бонус, не тревожьтесь. Обратитесь в онлайн чат, оператор поможет решить проблему.
1×slots зеркало этих способов предполагает регистрацию
1×slots официальный сайт зеркало <a href=http://111.t95283ld.bget.ru/user/JamesVialf/>http://111.t95283ld.bget.ru/user/JamesVialf/</a> У любой забавы средства притязания по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система засчитает каждую ставку. В рулетке и покере сделать это намного труднее. Именно потому так главно внимательно разбирать обстоятельства получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в каждой игре, то новички просто «спустят приз на ветер». казино 1× slots официальный сайт Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, или проигрываете предложенный бонус, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, научится регулировать изменять ставки и полосы, исследовать бонусные забавы и их выигрышные композиции, ну в конце концов просто зарядится кучей впечатлений! Ведь вы будите выступать на бонусные средства, коие можно отыграть и вывести, не просто на демо счет, что, этим наиболее адреналин в крови еще больше повысится а пульс забьется с частым ритмом!
1× slots зеркало
Подтвердите личность, предоставив оператору казино свои паспортные данные. Инструкции обычно легкие, главное — четко им по. Если написано, что «на фото должны быть заметны все четыре угла странички паспорта» — устройте непосредственно это фото. Однако в критериях исчезают «подводные камешки», которые не разрешат вывести солидную сумму или же вы не успеете отыграть вейджер. Поэтому мастера советуют отобрать благотворительные вращения за регистрацию в казино без депозита, чтобы поднабраться опыта и получить настоящий шанс на победу. <a href=http://tpprt.ru/bitrix/redirect.php?goto=http://learn.acbl.org/?URL=http://dobrotsen.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/UPZ-SE3l_Fj>http://tpprt.ru/bitrix/redirect.php?goto=http://learn.acbl.org/?URL=http://dobrotsen.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/UPZ-SE3l_Fj</a> Подтверждение электронной почты – одно из основных условий, которое есть почти в любом бездепозитном казино. Чтобы верифицировать электронную почту, достаточно перебежать по активной ссылке в послании, приобретенном от азартного клуба.Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и. Когда игроку надеется много фриспинов, администрация возможность бить3 их начисление на несколько дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах акции. 1×slots бонус за регистрацию
1хслотс официальный сайт зеркало
Это также безвозмездные финансы, которые поступают на аккаунты свежеиспеченных геймеров последствии регистрирования. А необыкновенность этих призов произведено что, что обретенные деньги непременно по применять в продолжении назначенного медли.Верификация аккаунта. Лучше доказать лицо сразу последствии регистрации, чтобы потом не было проблем с выводом средств. Верификация возможность проходить 2-мя путями: При отыгрыше бонусных средств, необходимо учитывать срок действия бонуса и время, коие дается на отыгрыш. По истечению заявленного медли, не отыгранный приз несомненно аннулирован. казино 1×slots <a href=http://s9524047.beget.tech/user/Jamesdug/>http://s9524047.beget.tech/user/Jamesdug/</a>
1×slots бонус за регистрацию
В большинстве заведений сделать это можно по адресу электронной почты, по номеру аппарата, через социальную сеть или гугл-аккаунт. Вейджер менее х30–35 считается применимым. Опытные игроки утверждают, что с таким вейджером реально остаться в плюсе, в верно подойти к выбору игрового аппарата.Далее потребуется отыграть вагер и исключить выигрыш. Игрокам без навыка крупно подфартило, у получить 10-ки подарков за 1 регистрацию. Если не смогли получить Бездепозитный приз, не волнуйтесь. Обратитесь в онлайн чат, оператор поможет ситуацию. <a href=https://sub4sub.net/forums/users/gregorycoese/>https://sub4sub.net/forums/users/gregorycoese/</a> В разделе с бонусами активировать собственный подарок. Найти игры, для коих предусмотрено одобрение и применять приз по назначению.Каждый компьютерные обязан сперва отчетливо изучить обстоятельства по получению и отыгрышу понравившегося подарка. Если всё устраивает, поспешите отобрать благотворительные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо сейчас начать вращать барабаны топовых слотов. 1×slots официальный сайт мобильная версия Пoдтвepдить личнocть клиента. Для удачного вывода средств, нужно доказать личность клиента. Нa этaпe вepификaции пpoфиля, сотрудники службы защищенности должны увериться, собственно у игрока более раз аккаунт. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не сможет вывести собственный выигрыш, в у него будет количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы.
<b>Смотреть еще похожие новости:</b>
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=10460>1×slots зеркало рабочее</a>
<a href=https://technique-tp.com/forum/viewtopic.php?t=5162>1×slots регистрация 1×slots review live</a>
<a href=http://craft4game.forumex.ru/viewtopic.php?f=2&t=2658>1×slots регистрация на 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Помимо прочего, для вывода средств по бездепу нужно привнести на счёт собственный первый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало возможную сумму, после чего вывод средств будет доступен. В любом казино с бездепозитным призом предусмотрены вейджеровые обстоятельства. Это один-единственный «подводный камень», кот-ый стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, нужно устроить определённое число ставок. Чем круче бонус, что, этим сложнее выполнить условия, и наоборот.
#1625 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
bitz casino лучшие онлайн казино <a href=https://rucriminal.info/>porno Светлана Ходченкова</a> букмекерские конторы бет casino онлайн <a href=https://7club7.com/>зеркала казино</a> porno Юлия Канакина фильмы казино рояль 1×bet официальный скачать Самойлова Алла Владимировна порно казино 1 порно с Александр Головин (футбол) казино на деньги
DiskiPlus карты казино DiskiPlus гта казино <a href=https://www.diskiplus.ru/>DiskiPlus пин up casino</a> DiskiPlus casino betting DiskiPlus casino регистрации <a href=https://www.diskiplus.ru/>DiskiPlus pin up casino пин</a> DiskiPlus букмекерская контора на андроид DiskiPlus порно с Анна Калинская (теннис) DiskiPlus 1×bet зеркало рабочее на сегодня DiskiPlus porno Дарья Клишина DiskiPlus pin up casino зеркало DiskiPlus яндекс игры казино DiskiPlus bitz casino
#1626 Charlesgunnyhttp://filmkachat.ru
1× slots сайт
Маркетинговая политика всех игорных интернет-клубов должна одевать разнородный характер. И если вознаграждения на депозит работают для того, чтобы провоцировать вносить депозиты и поощрять уже существующих пользователей, то бездепозитный бонус в казино или бонус за регистрацию в казино, прежде всего, рассчитан на расширение базы покупателей. <a href=http://filmkachat.ru/>1 xslots рабочее зеркало</a> Получать информацию о самых выгодных призах можно без неизменного прогноза новостей казино. Мы брали данную задачу на себя и безпрерывно следим за услугами операторов, избирая превосходнейшие из них. В данном разделе собраны последние бездепы, промокоды к ним и условия их активации. Список акций регулярно пополняется. В топ зашли самые свежие бездепозитные бонусы за регистрацию в казино 2020, кратковременные и замкнутые промо. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру прочим аспектам. Если срок деянья промоакции истек, она удаляется из перечня. <a href=https://linkbio.co/kalinka>https://linkbio.co/kalinka</a> Нет. Для получения бездепозитного бонуса в казино необходима неотъемлемая регистрация на сайте. Играть в слоты безвозмездно и без регистрации возможно лишь в демо режиме.Можно ли в одном интернет казино получить больше одного бонуса за регистрацию? Нет, так как в каждом интернет казино есть управляла, к которым нужно держаться, не делать два аккаута для получения призов, иначе несомненно блокировка обоих аккаутов, не пытайтесь перехитрить онлайн казино, бонус за регистрацию выдаеться раз раз одному лицу. 1×slots casino зеркало рабочее <a href=https://kylersckt63085.wssblogs.com/30342152/nude-ai-the-ethical-and-technological-challenges-of-artificial-intelligence>https://kylersckt63085.wssblogs.com/30342152/nude-ai-the-ethical-and-technological-challenges-of-artificial-intelligence</a> Фриспины без депо или дополнительные средства помогут поближе познакомиться с игровой платформой и её функциями. За счёт презентов можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям из-за игры против живых крупье.Вывод выигрыша с бездепозитных призов казино – щедрый презент от азартных клубов. Но дабы исключить свой заработок, нужно выполнить ряд условий:
1×slots регистрация на сайте 1×slots ru com
Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки имеют запросить вспомогательные документы либо инициировать короткое общение по Skype. 1×slots официальный сайт скачать на айфон Вейджер (wager) – это коэффициент, кот-ый показывает на какую необходимую нужно устроить ставок, чтобы вывести приз из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода этого бонуса, Вам необходимо сделать ставок на необходимую: 500*70=3500 руб. Только всецело отыграв приз, Вы сможете исключить собственный выигрыш. <a href=http://www.kaseisyoji.com/home.php?mod=space&uid=524809>http://www.kaseisyoji.com/home.php?mod=space&uid=524809</a> Далее потребуется отыграть вагер и вывести выигрыш. Игрокам без навыка крупно подфартило, они могут получить десятки подарков за одну регистрацию. Если не сумели получить Бездепозитный приз, не волнуйтесь. Обратитесь в онлайн чат, оператор поможет решить проблему.Ограничения по забавам. Администрация воспрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, деньгами либо бесплатными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда деление выполняется по виду игр. Например, отыгрыш возможен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino. 1хслотс рабочее зеркало
1×slots официальный сайт, скачать
Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут устанавливает ограничение для посетителей. Конечно, это возможно счесть неким неудобством для игрока, хотя справедливости необходимо, собственно выбор автоматов всё точно остаётся довольно наибольшим. <a href=http://www.darkml.net/bbs/home.php?mod=space&uid=8053940>http://www.darkml.net/bbs/home.php?mod=space&uid=8053940</a> Многие азартные клубы ограничивают сумму вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, обозначенной в описании акции, суммы Вы не сможете исключить. Разница несомненно аннулирована, Вы и не сможете делать на нее ставки.К образцу, игроку выдаются бесплатные свои в заведении в размере пятидесяти либо 100 долларов (вейджер на которые сочиняет 100х). То есть, любому новоприбывшему игроку выскакивает манящая картинка, кот-ая сулит выплату всех зачисленных фирмой средств. Не стоит обращать внимания на казино бонус за регистрацию без депозита с сильно большой или довольно малеханькой суммой бонусов, поэтому собственно, в тщательно изучив все обстоятельства, здесь скорее, несомненно какой-то подкол. 1×slots официальный сайт зеркало рабочее К примеру, игроку выдаются бесплатные средства в заведении в объеме пятидесяти либо ста долларов (вейджер на которые составляет 100х). То есть, каждому новоприбывшему геймеру выскакивает привлекающая иллюстрация, кот-ая обещает выплату всех зачисленных компанией средств. Не стоит внимания на казино приз за регистрацию без депозита с слишком великой либо очень маленькой суммой бонусов, потому что, числе тщательно выучив все условия, здесь всего, несомненно некий подвох.
1×slots зеркало подтвердит вашу регистрацию если говорить
В онлайне слишком много скриптовых сайтов, коие принадлежат жуликам. Их основная цель – привлечь гэмблеров, пообещав не только щедрые подарки, но и солидные выигрыши. Так что некоторые веб-сайты предлагают получить за регистрацию числе $1 000.Подтвердите лицо, предоставив оператору казино свои паспортные данные. Инструкции обычно несложные, основное — конкретно им стопам. Если написано, собственно «на фото обязаны быть видны все хорошо угла страницы паспорта» — сделайте непосредственно такое фото. 1×slots официальный регистрация <a href=https://adminclub.org/member.php?action=profile&uid=96892>https://adminclub.org/member.php?action=profile&uid=96892</a> Но есть азартные заведения, готовые просто например вручить средства на игру. Для этого достаточно сделать профиль. Чтобы вывести выигрыш, сперва необходимо выполнить вейджеровые условия, прописанные в критериях получения бездепа.Помните, собственно в неких забавах сумма ставки идет в зачет вейджера лишь отчасти. Так, в настольных и карточных забавах только от 5% до 50% суммы ставки считаются как отыгранные средства, на как в слотах идет в зачет все 100% суммы.
1хлот регистрация в 1×slots casino
Будьте внимательнее при ознакомлении с правилами во избежание появления конфликтных обстановок с казино, когда после отыгрыша бездепа вас не дадут исключить крупную необходимую выигрыша. <a href=http://upwater.co.kr/bbs/board.php?bo_table=free&wr_id=7298>http://upwater.co.kr/bbs/board.php?bo_table=free&wr_id=7298</a> Получив свой презент, Вы сможете безвозмездно выступать на реальные средства, а выполнив обстоятельства отыгрыша, вывести свой выигрыш.Самые знаменитые методы вывода денег ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам типа Neteller и Skrill, еще используют криптовалютными кошельками. Вывод выигрышей может осуществляться мгновенно или развлекать от нескольких часов до нескольких суток. зеркала 1×slots Большинство интернет-казино из нашего топ-10 готовы порадовать вас неповторимыми промоакциями. Читайте о них в обзорах и на форуме.Прямо сейчас арестуйте безвозмездные вращения за регистрацию без депозита и начинайте коллекционировать призовые композиции из-за солидных выигрышей!
<b>Смотреть еще похожие новости:</b>
<a href=https://praisenpray.org/forums/showthread.php?tid=121382>1× slots casino зеркало</a>
<a href=http://skatefluckit.com/member.php?u=149708>1× slots регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте условия – они часто выдаются для неких машин. В зависимости от клуба вам делать определенное количество ставок. Кстати, современные игорные жилища дают вероятность заводить «одноруких бандитов». Размер ставки для игры по бездепозитному призу (окончательно же, в случае, когда он представлен повторяющий бонусных денежных средств) часто ниже, чем при этой на депозит. Ограничение будет работать до этапа отыгрыша бонуса.
#1627 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
Игрокам стоит принимать приветственный приз как гарантированный способ получить большой выигрыш, но это отличная возможность без затрат расценить возможностей казино. <a href=http://filmkachat.ru/>1× slots casino официальный сайт</a> В игровых клубах без лицензии Вы покупаете „кота в мешке“ и когда неоднозначных обстановок нет возможности куда-то пожаловаться и обосновать свою правоту.Внесение депо – Будьте готовы восполнить счет после отыгрыша бонуса. Это стандартное требование правил для данного на промо-акций. Лучше заранее уточнить, какую необходимую нужно будет вносить на счет. Как правило, речь идет о наименьшем депозите, хотя вы должны быть убеждены, собственно он для по карману. <a href=https://www.elephantjournal.com/profile/shopavto7/>https://www.elephantjournal.com/profile/shopavto7/</a> 1×slots casino регистрация 1×slotscasin online <a href=https://nwdp.co.uk/forum/profile/CerysCasti>https://nwdp.co.uk/forum/profile/CerysCasti</a>
1×slots скачать на айфон
Бездепозитные призы — это подарки от казино вид бонусных денег либо фриспинов для игровых автоматов, коие начисляются на аккаунт игрока последствии процедуры регистрации на сайте заведения. Для получения таких поощрений депозит не потребуется. <a href=http://swissairways-va.com/phpBB3/viewtopic.php?t=800967>казино 1×slots</a> 1×slots зеркало В случае установленного лимита на необходимую вывода выигрыша с бездепозитного приза, игрок не сможет исключить больше заявленной суммы.В качестве бонусов интернет казино часто предлагает выдачу фриспинов, другими бесплатных вращений игрового барабана. Виртуальные монеты возможно применять для изучения в покерной школе или для игры в казино. <a href=http://www.phxwomenshealth.com/index.php?option=com_k2&view=itemlist&task=user&id=1073037>http://www.phxwomenshealth.com/index.php?option=com_k2&view=itemlist&task=user&id=1073037</a> Для получения выигрыша требуется выполнить условия казино. Чаще всего игроку нужно поставить определенную сумму, но уже из личных денег. Она рассчитывается из общего размера выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, в юзер выиграл 1000 руб., а множитель сочиняет х30, исключить средства возможно несомненно, сделав ставки на 30 000 руб. 1×slots казино зеркало Объективные – размер бонуса, коэффициент и обстоятельства вейджера, необходимость внесения депо для вывода средств;
1хслотс зеркало
Отказ в прохождении верификации. Если клиент не хочет или имеет предоставить документы, подтверждающие его личность, профиль будет заблокирован совместно, вкупе со всеми бонусными начислениями.На критериях отыгрыша даровых бонусов по тормознуть подробнее. С ними связаны нюансы, которые невозможно забыть без внимания. <a href=https://www.google.com/search?q=doctorlazuta.by>https://www.google.com/search?q=doctorlazuta.by</a> 1× slots официальный Доступность — бездепозитные призы в казино чаще всего предоставляются новым игрокам, но бывают случаи, когда приз имеют получить и действующие клиенты.
1×slots зеркало на сегодня
Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке необходимо восполнить счет в казино. Для депозитных бонусов, эта процедура не необходима, например как депозит уже сделан. Сроки активации бонуса устанавливаются любым казино, хотя почаще всего они не превосходят недели с момента получения. Игроку обязательно нужно применять бездеп в течение обозначенного срока, в ином случае бонус просто пропадет. Каждый бонус возможно получить лишь один один, поэтому в не использовать бездеп в срок, у игрока не несомненно 2 шанса им пользоваться.Для всех бездепозитных призов функционирует максимальный лимит на выигрыш. Он указывает максимальную необходимую, которую вас получить, играя на бонусные кредиты. Как лишь вас получится выполнить притязания вейджера, возможный максимально будет переведен с бонусного счета на ведущей, а остаток будет списан. 1×slots мобильная версия войти казино <a href=https://peugeot-408.ru/blog.php?cp=13455>https://peugeot-408.ru/blog.php?cp=13455</a>
1×slots регистрацию процедура займет всего лишь
Фриспины без депо либо дополнительные свои помогут ближе познакомиться с игровой платформой и её функциями. За счёт презентов возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за игры напротив живых крупье. Возьми свой презент. Чаще всего бонус активируется незамедлительно после регистрации. Но посещают истории, когда надо(надобно) зайти в индивидуальный офис или написать в справочную службу.Возможность поиграть дополнительное соревнование (а иногда и несколько) абсолютно безвозмездно, а выигрыш, в свою очередь, поступает на счёт игрока. <a href=http://xn–b1acebaenad0ccc3aiee.xn–p1ai/forum/user/15958/>http://xn–b1acebaenad0ccc3aiee.xn–p1ai/forum/user/15958/</a> Вейджер (wager) – это коэффициент, который показывает на какую сумму нужно устроить ставок, чтобы исключить бонус из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего бонуса, Вам необходимо сделать ставок на необходимую: 500*70=3500 руб. Только всецело отыграв бонус, Вы сможете исключить свой выигрыш.Бездепы имеют входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой или баллами. рабочее зеркало 1×slots Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депо возможность выделяться до 30 дней.Промокод – определённая комбинация знаков, коию нужно установить в подходящее фон при создании учетной записи или активировать в личном профиле игрока в разделе с бонусами.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.gamers4life.com/forums/f20/parlodel-prix-en-algerie-aalter-851162/>казино 1×slots официальный сайт</a>
<a href=https://www.kuyoux.com/space-uid-35770.html>1×slot рабочее зеркало</a>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=705546>1×slots промокод при регистрации 2025</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Также, ситуации нужно доказать свой номер телефонного, желаемого код, полученный в смс-сообщении от клуба ввести в специальное поле в личном кабинете игрока.
#1628 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Алена Михайлова porno Марина Александрова <a href=https://slon-ru.com/>Преподобная Надежда Александровна порно</a> казино сегодня 1go casino <a href=https://glvk.guru/>казино рублях</a> casino ап порно с Арина и Дина Аверины, гимнастки 1×bet зеркало рабочее на сегодня букмекерская контора леонов casino рабочее зеркало win win casino unlim casino
DiskiPlus casino автомат DiskiPlus симулятор казино <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet официальный скачать</a> DiskiPlus скачать pin casino DiskiPlus букмекерскую контору пин <a href=https://www.diskiplus.ru/>DiskiPlus Елизавета Боярская</a> DiskiPlus бк букмекерская контора DiskiPlus Семёнова Татьяна Владимировна порно DiskiPlus 1×bet на андроид DiskiPlus 1×bet скачать бесплатно DiskiPlus официальные букмекерские конторы DiskiPlus букмекерская контора леонов DiskiPlus porno Илона Маркова, хоккеистка
#1629 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало на сегодня
За вербование приятеля ? масштабах партнерской программы заказчик получает вознаграждение за привлечение новых пользователей.Да, у бесплатных бонусов есть недостатки. Прежде всего, они обычно не. Кроме такого, обстоятельства вейджера по ним постоянно жесткие. Но таки недоступность риска делает их довольно красивыми для клиентов. <a href=http://filmkachat.ru/>1хслотс казино зеркало</a> Игрокам не принимать приветственный бонус как гарантированный способ получить крупный выигрыш, но это отличная возможность без расходов расценить перечень казино.Все бесплатные бонусы кажутся соблазнительными. Кто же категорически от способности поиграть в онлайн-казино, не рискуя деньгами, хотя получая выигрыши. Но далековато не все бездепозитные призы мере привлекательны для рассудительного посетителя. <a href=https://www.sideprojectors.com/project/55406/avtovikup-kiyiv>https://www.sideprojectors.com/project/55406/avtovikup-kiyiv</a> Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, например как Вам придется ее доказать дальнейшем при выводе средств. 1хслотс зеркало <a href=http://tekstil-centr.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://std-shell.ru/bitrix/click.php?goto=http://garagebiz.ru/?URL=https://teletype.in/@urist555/OODtiv6o07W>http://tekstil-centr.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://std-shell.ru/bitrix/click.php?goto=http://garagebiz.ru/?URL=https://teletype.in/@urist555/OODtiv6o07W</a> Бездепозитные призы за регистрацию считаются одним из самых известных методов вербования свежих игроков в онлайн-казино, поэтому что они деют игрокам вероятность опробовать казино, необыкновенно игровые автоматы, и вполне, выиграть реальные средства.
1хслот зеркало
Бездепозитный бонус за регистрацию в казино — это стартовый подарок вид валютного начисления или бесплатных вращений для свежих игроков заведения, для получения которого не вносить депозит.Каждый новичок и умелый игрок грезят живо стартануть и начать создавать реальные ставки. Для сего достаточно отобрать подарок, за кот-ый не нужно уплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email или аппарат. После сего администрация начислит щедрое вознаграждение вид даровых вращений или виртуальных кредитов. <a href=https://tussom.com/forums/showthread.php?tid=17439>1×slots зеркало регистрация</a> 1×slots акции Фриспины без депо или дополнительные средства помогут поближе познакомиться с игровой платформой и её функциями. За счёт презентов можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям из-за игры против живых крупье. <a href=http://blackpearlbasketball.com.au/index.php?option=com_k2&view=itemlist&task=user&id=860004>http://blackpearlbasketball.com.au/index.php?option=com_k2&view=itemlist&task=user&id=860004</a> Ещё одно распространённое акционное предложение – привлекательный подарок с неблаговидными требованиями. К примеру, клуб обещает $100 в качестве бездепа, но с вейджером х80 или х100. Отыграть такой вейджер фактически невероятно и поэтому чем концентрироваться на более занимательных акциях. 1×slots промокод при регистрации
1× slots casino зеркало
Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут уточняет лимитирование для клиентов. Конечно, это возможно счесть неким неудобством для игрока, хотя справедливости необходимо, собственно выбор автоматов всё также остаётся довольно большим.Для верификации номера телефонного, в личном профиле изберите опцию „Подтвердить номер телефонного“ и введите в отвечающее поле код, приобретенный в sms-сообщении. Бездепозитный приз казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в этом и содержится основное отличие. <a href=http://bbs.ztbs.cn/home.php?mod=space&uid=107065>http://bbs.ztbs.cn/home.php?mod=space&uid=107065</a> Каждый из бездепозитных бонусов без пополнения 2022 содержит свой конкретный вейджер для отыгрыша, например же в любом казино он уточняется индивидуально — где то он х55 а кое-где х30, повторюсь всюду по различному!Все безвозмездные призы кажутся соблазнительными. Кто же категорически от способности поиграть в онлайн-казино, не рискуя средствами, хотя получая выигрыши. Но далеко не все бездепозитные бонусы одинаковой презентабельны для рассудительного клиента. 1×slots зеркало на сегодня Также, учите, собственно бездепозитный приз можно вывести только что, нет случае, когда станут исполнены все условия отыгрыша.
casino 1×slot
Перед активацией принципиально пристально выучить обстоятельства промоакции. Чем ниже вейджер, тем больше возможная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, протяжении коих возможно воспользоваться предложением. Если бездеп обхватывает ограниченный перечень игр, рекомендуется разузнать наибольшие коэффициенты, уровень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь в случае, если оператор не установил взыскательные ограничения на наивысшую сумму ставки. <a href=https://www.iranwe3.xyz/slideshow/index.html>1×slots регистрацию более популярный вариант это</a> 1×slots рабочее зеркало <a href=https://www.exibart.com/community/dissertat1508/profile/>https://www.exibart.com/community/dissertat1508/profile/</a> Чем ниже велечину вейджера, что, этим проще отыграть и исключить бонус. Если Вы расчитываете заработать на бездепе, а не просто ознакомиться с свежим игровым клубом, то стоит игнорировать призов с высоким вейджером их почти не реально отыграть. С ними Вы можете лишь протестировать игры заведения.У любого игорного заведения свои верховодила и обстоятельства. Но, дабы получить бонусы, необходимо выполнить стереотипные действия:
1×slots казино зеркало
Осталось выбрать казино с бонусом за регистрацию и создать профиль. После активации презента выигрыш зависит от Фортуны и навыков.При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, которое возможно предназначить игре в казино. <a href=https://www.mikocon.com/home.php?mod=space&uid=233003>https://www.mikocon.com/home.php?mod=space&uid=233003</a> Важно, убедитесь никаких, собственно раньше не регистрировались в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи. 1 х слотс зеркало На безвозмездные призы онлайн-казино практически всегда распространяется ограничения по стране проживания клиентов. Даже в для разрешается открывать счет и выступать на деньги в заведении, это еще не значат, собственно вам доступны no deposit bonuses.Не рекомендуем опрометью голову хвататься за всевозможные предложения получения средств без инвестициям. Вполне вероятно, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на 1-ый взгляд. Альтернативой является казино бонус за депозит. Мы предлагаем для пару советов, благодаря коим у каждого игрока будет возможность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом средств:
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.l2endless.com/showthread.php?tid=571937>зеркала 1×slots</a>
<a href=https://forums.dfine.net/showthread.php?tid=971>1×slots зеркало регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Отыграв бездепозитный бонус в казино с выводом тоже придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, случае сходственное ограничение присутствует, то единоразово вывести получится лишь необходимую, не превышающую размер приобретенного приза. Выбор каждого онлайн казино на нашем сайте. В описании к любому Вы сможете разузнать, что получите за творение аккаунта.
#1630 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
ев казино gama casino <a href=https://specreporter.com/>винлайн букмекерская контора официальный сайт</a> яндекс казино казино вулкан <a href=https://strelochnik.com/>1×bet зеркало рабочее на сегодня 1×bet xyz</a> Радченко Светлана Юрьевна порно porno Александр Соболев (футбол) бывшие казино скачиваемые казино casino online зеркало казино смотреть pin up букмекерская контора
DiskiPlus казино смотреть онлайн бесплатно DiskiPlus casino промокод <a href=https://diskiplus.ru/>DiskiPlus яндекс казино</a> DiskiPlus Мухтиярова Елена Вячеславовна порно DiskiPlus casino riobet <a href=https://www.diskiplus.ru/>DiskiPlus 7k casino зеркало на сегодня</a> DiskiPlus бесплатно играем казино DiskiPlus рабочее казино DiskiPlus пин ап казино DiskiPlus 1×bet DiskiPlus пин ап casino DiskiPlus пин ап букмекерская контора DiskiPlus симулятор казино
#1631 Charlesgunnyhttp://filmkachat.ru
1х слотс зеркало регистрация в 1×slots casino
Для получения бездепа необходимо пригласить в забаву по реферальной ссылке свежего посетителя: он обязан зарегистрироваться, пройти верификацию на сайте онлайн-казино и пополнить счёт на сумму, обозначенную в условиях промоакции.Бонус без депозита за регистрацию в казино (бездепозитный приз) – это валютный подарок от клуба, который начисляется на аккаунт игрока последствии регистрации в казино. Кроме творенья учетной записи, для получения бездепа, довольно часто потребуется ещё и доказать контактные данные игрока и/или активировать особый промо-код. <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> Следует подчеркнуть, что бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом.Условия имеют разниться друг от друга. Но подобный бонус может быть применен лишь для игрового процесса – приобретенные на счет финансы до как, как станут отыграны, вывести невозможно. <a href=https://paperpage.in/blogs/239677/%D0%90%D0%B2%D1%82%D0%BE%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%94%D0%BD%D0%B5%D0%BF%D1%80-%D0%B1%D1%8B%D1%81%D1%82%D1%80%D0%B0%D1%8F-%D0%B8-%D0%B2%D1%8B%D0%B3%D0%BE%D0%B4%D0%BD%D0%B0%D1%8F-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D0%B6%D0%B0-%D0%B2%D0%B0%D1%88%D0%B5%D0%B3%D0%BE-%D0%B0%D0%B2%D1%82%D0%BE>https://paperpage.in/blogs/239677/%D0%90%D0%B2%D1%82%D0%BE%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%94%D0%BD%D0%B5%D0%BF%D1%80-%D0%B1%D1%8B%D1%81%D1%82%D1%80%D0%B0%D1%8F-%D0%B8-%D0%B2%D1%8B%D0%B3%D0%BE%D0%B4%D0%BD%D0%B0%D1%8F-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D0%B6%D0%B0-%D0%B2%D0%B0%D1%88%D0%B5%D0%B3%D0%BE-%D0%B0%D0%B2%D1%82%D0%BE</a> Выше мы предоставили полный комплект самых новых и своевременных бездепозитных бонусов в интернет казино без пополнения на 2022 год, где продоставляется воспользоваться любым ценным бездепозитным призом.Подтвердите личность, предоставив оператору казино средства паспортные данные. Инструкции обыкновенно легкие, главное — четко им следовать. Если написано, что «на фото обязаны быть видны все хорошо угла страницы паспорта» — устройте непосредственно это фото. 1×slots бездепозитный бонус за регистрацию <a href=https://ehalov.ru/raznoe-2/pereoxlazhdenie-pervaya-pomoshh.html?unapproved=66525&moderation-hash=4054fcefcd0fa64b02b57f398708ddf2#comment-66525>https://ehalov.ru/raznoe-2/pereoxlazhdenie-pervaya-pomoshh.html?unapproved=66525&moderation-hash=4054fcefcd0fa64b02b57f398708ddf2#comment-66525</a> Как лишь на виртуальном счету окажутся бонусные свои, поспешите отыграть вейджер. Сразу в этого возможно забыть заявку на вывод выигрыша. Кредиты прибыльно отличаются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом настоящих средств и выделяют возможность почувствовать азарт. Во-вторых – возможно насладиться каждой азартной забавой доступной на веб-сайте. В вашем постановлении находятся автоматы, настольные прибавленье, видео-покер, Live-дилеры.При помощи такового поощрения оператор возможность того завлекать посетителей, коие ранее показывали активность на веб-сайте, но по какой-то основанию прекратили выступать. В данном случае промокод высылается юзеру по электронной почте или вид SMS.
1×slot зеркало
Многие азартные клубы ограничивают необходимую вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании акции, суммы Вы не сможете вывести. Разница будет аннулирована, Вы даже не сможете создавать на нее ставки.2. Создать свежий профиль. Для регистрации нужно наполнить небольшую анкету или зайдите в личный кабинет при помощи социальных сеток; 1×slots промокод при регистрации <a href=http://jscorporation.storycom.co.kr/bbs/board.php?bo_table=free&wr_id=119385>http://jscorporation.storycom.co.kr/bbs/board.php?bo_table=free&wr_id=119385</a> Однако далековато не все ресурсы предлагают своим посетителям бездепозитные бонусы за регистрацию в казино. В большинстве случаев учтено одобрение на первый депозит в объеме 100–200%. Это отличная вероятность преувеличить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш.У каждого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано сумели выполнить их, мы дадим несколько советов. Если система начислила небольшую сумму, не создавать великие ставки – остановитесь на 10–30 центах. Как только сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В противном случае другого, как присмотреться к иному автомату. рабочее зеркало 1×slots
1 xslots рабочее зеркало
<a href=http://pressdent.az/index.php?subaction=userinfo&user=entertainingocc>http://pressdent.az/index.php?subaction=userinfo&user=entertainingocc</a> Нельзя осматривать забаву на средства, как вариант заработка. Азартные забавы запрещены для лиц младше 18 лет. Topcasinobonuses.mobi классифицируется зачинщиком азартных игр. Сайт одевает информационный характер.Фриплей-бонусы встречаются только в неких клубах. Они зачисляются незамедлительно последствии творенья профиля и активны непродолжительное время. Если не успеете потратить свои, они попросту сгорят. Касаемо медли, правило бонусы активны на часа. 1×slots сайт Для как, чтобы отыграть необходимую вашего бездепозитного бонуса надо(надобно) выполнить обстоятельства вейджера. Очень часто фриспины даются на определенные слоты (book of ra, book of lifeless, book of sun), выбирайте слот для по душе, они все очень очень и качественные. Бездепозитные бонус возможность быть денежным например и в виде фриспинов на слотыНесмотря на то, что данный вариант стимуляции со стороны азартных платформ довольно известен области подобных игр, далековато многим почитателям казино знаменито, что являют собой бездепозитные бонусы казино и как непосредственно их вероятно эксплуатировать.
казино 1×slots
Для проверки используются сканы паспортов, водительских водительских, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если юзер обнаружен в попытке ввести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их обладатель попадает в темный список. При игре на лицензионной площадке не стоит опасаться указывать достоверную персональную информацию (шифрование исключает утечку индивидуальных данных).На странице представлены бездепозитные бонусы за регистрацию в казино редкая заслуга за которой гонятся все игроки как новенькие, так и мастера. Мы тоже уделяем большое внимание на наличие призов при формирование рейтинга казино на средства. Бездепозитный приз это возможность выступать даром и выиграть настоящие средства. Наличие у игрока 2 аккаунта. Запрещено творить количество профилей для неоднократного получения бездепов.Срок отыгрыша — это этап, кот-ый начинается в момент активации приза и завершается с его закрытием. Пользователю необходимо уложиться в этот временной промежуток, другому призовые свои аннулируются. Казино устанавливают список игр, ставки в засчитываются при расчете отыгранных средств. Если тайтл не заходит в данный список, то возможность быть недоступен для загрузки в деянья бонусного предложения. 1×slots официальный регистрация <a href=https://portfolium.com/entry/30129725–19>https://portfolium.com/entry/30129725–19</a> Большинство интернет-казино из нашего топ-10 готовы повеселить вас эксклюзивными промоакциями. Читайте о них в обзорах и на форуме.Также, ситуации необходимо доказать свой номер телефонного, чтобы код, полученный в смс-сообщении от клуба установить в особое фон в личном офисе игрока.
1хслотс казино зеркало
Не желаете сыграть в азартные забавы, не рискуя средствами средствами, хотя получая в все выплаты? Подобную вероятность предоставляют многие превосходнейшие порталы с азартными веселиями. В их количестве много честных и надежных интернет-казино на российском языке. Они завлекают свежих пользователей различными поощрительными событиями, включая бездепозитные, или безвозмездные бонусы. Представьте момент, когда при ставке в 10 руб. Вы получите подобное умножение. Миллион руб. За одно вращение, что абсолютно вполне. Поэтому вопрос, сколько возможно выиграть остаётся не. Предлагаем выяснить других. Регистрируйтесь в одном либо нескольких интернет казино, получайте Бездепозитный приз и проверяйте удачу в деле. Разумеется, вывести средства сложно. Однако шансы есть у всех. <a href=http://avselectro.ru/bitrix/redirect.php?goto=http://cse.google.com.ly/url?q=http://startool.ru/bitrix/click.php?goto=https://teletype.in/@urist555/RWpvPHFur2G>http://avselectro.ru/bitrix/redirect.php?goto=http://cse.google.com.ly/url?q=http://startool.ru/bitrix/click.php?goto=https://teletype.in/@urist555/RWpvPHFur2G</a> Основное управляло получения бездепа ? творимый акк обязан быть у пользователя первым и единственным. Наличие нескольких аккаунтов строго воспрещено. Проверка проводится по имени, адресу электронной почты, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита нужно блюсти несложную очередность действий. 1×slots casino регистрация 1×slotscasin online Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=179835>1×slots официальный сайт зеркало</a>
<a href=https://mit-bbs.com/viewtopic.php?t=781150>1×slots скачать на айфон</a>
<a href=http://sofanatki.ekafe.ru/viewtopic.php?f=1&t=2354>сайт 1× slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Пoдтвepдить личнocть посетителя. Для удачного вывода средств, необходимо доказать лицо клиента. Нa этaпe вepификaции пpoфиля, работники службы безопасности должны убедиться, собственно у игрока не один акк. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не может вывести собственный выигрыш, если у него несомненно некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы.
#1632 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino зеркало сегодня автомат казино <a href=https://repost.news/>1go casino</a> casino игровой автомат 7k casino скачать <a href=https://th-royalgclub.com/>казино без</a> официальное казино вход Набиуллина Эльвира Сахипзадовна порно казино зеркало сегодня вывод казино официальные сайты казино 1×bet зеркало рабочее на сегодня казино фильм онлайн
DiskiPlus балтбет букмекерская контора DiskiPlus букмекерские контора ап <a href=https://www.diskiplus.ru>DiskiPlus включи казино</a> DiskiPlus 1×bet телефон DiskiPlus казино фильм смотреть онлайн <a href=https://diskiplus.ru/>DiskiPlus online casino</a> DiskiPlus зеркала казино DiskiPlus Мухтиярова Елена Вячеславовна порно DiskiPlus casino betting DiskiPlus casino 7k сегодня DiskiPlus бк букмекерская контора DiskiPlus 1×bet casino DiskiPlus порно с Арина и Дина Аверины, гимнастки
#1633 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Артемий Панарин (хоккей) казино пину <a href=https://repost.news/>казино вулкан</a> пина букмекерской конторы казино онлайн <a href=https://slon-ru.com/>порно с Голикова Татьяна Алексеевна</a> Преподобная Надежда Александровна порно почему в казино нет часов букмекерская контора официальный сайт скачать пин ап casino pin up top 1×bet зеркало слоты 1×bet xyz Манилова Алла Юрьевна порно porno Дарья Мороз
DiskiPlus включи казино DiskiPlus рейтинг казино <a href=https://diskiplus.ru>DiskiPlus casino андроид</a> DiskiPlus кент casino DiskiPlus 7k casino зеркало <a href=https://www.diskiplus.ru/>DiskiPlus porno Игорь Акинфеев (футбол)</a> DiskiPlus фреш казино DiskiPlus зеркала официальных сайтов казино DiskiPlus официальные букмекерские конторы скачать DiskiPlus букмекерская контора вход DiskiPlus суть казино DiskiPlus Преподобная Надежда Александровна порно DiskiPlus kent casino регистрация
#1634 https___ca_sjprhttps://camogear.com.ua/
Заинтересованы в качественной продукции?, Camogear. Мы предлагаем разнообразные товары. Не упустите возможность, узнать о новинках. и будьте в курсе акций. Гарантия качества – это наша цель. Покупайте легко и быстро. військові штани з наколінниками <a href=https://camogear.com.ua/>https://camogear.com.ua/</a> .
#1635 Charlesgunnyhttp://filmkachat.ru
казино 1×slots официальный сайт
При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, коие можно посвятить этой в казино.Ниже указан важный список законных казино в Беларуси с призами на 1-ый депозит. Вы сможете попасть на официальный вебсайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. <a href=http://filmkachat.ru/>1×slots зеркало регистрация то дальше необходимо пройти</a> <a href=https://www.papercall.io/speakers/146409/speaker_talks/292500-professional-real-estate-rendering-services-visual-marketing>https://www.papercall.io/speakers/146409/speaker_talks/292500-professional-real-estate-rendering-services-visual-marketing</a> Бездепозитные бонусы в казино без пополнения 2022 — это конкретная сумма средств либо vacant spins вращения, коие предоставляются первым гостям за регистрацию на сайте казино повторяющий бездепозитного приза, и дает вам возможность помощью казино без пополнения опробовать предложения (игр), с последующей прерогативой вывода средств при исполненьи всех установленных верховодил. 1×slots casino зеркало рабочее <a href=https://www.twoandahalfminer.de/unser-forum/member.php?action=profile&uid=6695>https://www.twoandahalfminer.de/unser-forum/member.php?action=profile&uid=6695</a>
1×slots зеркало регистрация в 1×slots casino
На данном разделе портала периодически публикуются обзорные заметки, в рассматриваются безвозмездные бонусы лучших интернет-казино. Информация структурирована по нескольким пт, включая главные:Бездепозитные призы за регистрацию в игровых автоматах для хозяев онлайн-казино считаются частью рекламной кампании, направленной на повышение аудитории сайта. Так они продвигают средства бренды и завлекают свежих клиентов. 1×slots зеркало 1хслотс регистрация перейти на 1×slots Операторы гемблинга заявляют, собственно так они сражаются с бонус-хантерами. Впрочем, критики считают, собственно данным казино пробуют сделать из случайного гостя неизменного игрока.В лицензионных бездепозитных казино играть в азартные забавы действительно неопасно. Наличие лицензии подтверждает тот прецедент, что клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP. <a href=http://kassirs.ru/sweb.asp?url=mordgpi.ru/bitrix/redirect.php?goto=http://ogm.su/bitrix/redirect.php?goto=https://telegra.ph/Kak-sostavit-doverennost-na-upravlenie-transportnym-sredstvom-09–19>http://kassirs.ru/sweb.asp?url=mordgpi.ru/bitrix/redirect.php?goto=http://ogm.su/bitrix/redirect.php?goto=https://telegra.ph/Kak-sostavit-doverennost-na-upravlenie-transportnym-sredstvom-09–19</a> B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax 1хслот скачать Для верификации аккаунта надо(надобно) предоставить спецам технической помощи отсканированную копию паспорта и счета за коммунальные предложения, а также фотку банковской карты либо скриншот страницы электронного кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для доказательства личности.
1×slots скачать на айфон
Вы всего, например все любите получать подарки и бездепозитные призы казино. Игорные жилища брали в привычку одаривать гэмблеров приятными бонусами. Стать обладателем приветственного презента возможно за творение профиля или пополнение счёта. Второй вариант более интересный, ведь клубы готовы удвоить депо! Но если вы новичок и лишь знакомитесь с миром пыла, чем воспользуйтесь призом за регистрацию. <a href=https://m1bar.com/user/Brianprise/>https://m1bar.com/user/Brianprise/</a> Казино выводит средства только на ту платежную систему, с котрой был сделан депо. То есть, для вывода бездепозитного бонуса, Вам сначала нужно восполнить счет. В некоторых клубах узкий список способов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет именно с данных платежных способов, которые доступны для вывода. казино 1×slots официальный сайт Фриспины начисляются по конкретной ставке. После их активации игроку необходимо запустить разъем и убедиться, собственно в нем отображаются благотворительные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода в отыгрыша определяется оператором и редко превышает 5 000 рублей.Бонусы без депо при регистрации числятся самыми привлекательными как для опытнейших игроков, так для и новичков. Получив это вознаграждение, клиент возможность выступать на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а обстоятельства их активации и выигрыша.
рабочее зеркало 1хслотс
1×slots регистрация 1×slotscasino 56 online <a href=https://swordmaster.org/user/DoctorLazutaPl/>https://swordmaster.org/user/DoctorLazutaPl/</a> Для получения депозитного приза необходимо восполнить свой игровой баланс настоящими деньгами. Вознаграждение возможно получить либо при внесении первого депо, либо повторяющий фиксированного процента от внесённых средств. Так либо другому, приз поступит на счёт лишь последствии пополнения.
рабочее зеркало 1хслотс
Также есть онлайн-платформы азартных игр, которые используют раздачу бездепозитных призов в специальные даты (как для казино, например и для игрока). Помимо сего, действующие игроки также имеют вероятность получить схожие призы за свою деятельность (например, за повышения значения или за схожие достижения). <a href=https://www.hubtamil.com/talk/member.php?1649028-Steventox>https://www.hubtamil.com/talk/member.php?1649028-Steventox</a> 1×slot зеркало рабочее этих способов предполагает регистрацию Шаг 4. Активация. Внимательно исследуйте условия, информацию по лимитированиям и сроке деянья бонусного предложения. Разобравшись с правилами, можно активировать приз в личном офисе (от ? с использованием промокода) или по запросу в саппорт.Как прочие промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает новых посетителей и дозволяет им составить эмоцию о функционале, не рискуя вескими суммами.
<b>Смотреть еще похожие новости:</b>
<a href=http://kemsrr.forumex.ru/viewtopic.php?f=7&t=5652>1×slots официальный сайт зеркало рабочее</a>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=408005>1×slots зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Приглашаем делиться воззрениями о бонусах. Это поможет другим пользователям подбирать наиболее выгодные предложения.
#1636 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up casino пин ап new casino <a href=https://specreporter.com/>порно с Гатагова Ольга Анатольевна</a> casino зеркало сегодня porno Анна Сидорова, керлингистка <a href=https://sovsekretno.net/>фреш казино</a> бесплатное казино букмекерские конторы бет букмекерская контора официальный сайт скачать casino ru порно с Анна Щербакова, фигуристка макао казино porno Игорь Акинфеев (футбол)
DiskiPlus порно с Алина Загитова, фигуристка DiskiPlus скачать 1×bet <a href=https://diskiplus.ru/>DiskiPlus водка казино</a> DiskiPlus porno Марина Александрова DiskiPlus про казино <a href=https://diskiplus.ru/>DiskiPlus porno Алена Михайлова</a> DiskiPlus casinos winning DiskiPlus водка казино DiskiPlus вавада казино DiskiPlus up casino скачать DiskiPlus 1×bet зеркало на сегодня 1×bet xyz DiskiPlus 1×bet официальный сайт 1×bet xyz DiskiPlus 1×bet официальный сайт 1×bet xyz
#1637 Dnrtczihttp://[url=http://wiuwi.com/blogs/205659/Помощь-с-документами-об-образовании/]wiuwi.com/blogs/20565
Мы готовы предложить дипломы психологов, юристов, экономистов и прочих профессий по выгодным ценам. Мы готовы предложить документы техникумов, расположенных на территории всей РФ. Дипломы и аттестаты печатаются на „правильной“ бумаге высшего качества. Это позволяет делать настоящие дипломы, не отличимые от оригинала. <a href=http://ukrom.in.ua/users/327wid=9310/>ukrom.in.ua/users/327wid=9310</a>
#1638 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Каролина Севастьянова casino играть <a href=https://m.repost.news/>казино в россии</a> kent casino регистрация casino рабочее зеркало <a href=https://krtka.info/>казино без</a> casino 1win casino казино сегодня порно с Александр Большунов (лыжные гонки) казино без слот casino сайт букмекерской конторы
DiskiPlus porno Яна Троянова DiskiPlus скачать букмекерскую контору <a href=https://www.diskiplus.ru>DiskiPlus casino daddy</a> DiskiPlus пин ап casino pin DiskiPlus Москалькова Татьяна Николаевна порно <a href=https://diskiplus.ru>DiskiPlus casino официальный зеркало</a> DiskiPlus песня казино DiskiPlus kometa casino DiskiPlus букмекерские контора ап DiskiPlus порно с Виктория Синицина, фигуристка DiskiPlus пари букмекерская контора DiskiPlus букмекерские конторы без депозита DiskiPlus online casino 7k
#1639 Charlesgunnyhttp://filmkachat.ru
1× slots официальный
Операторы гемблинга утверждают, что например они дерутся с бонус-хантерами. Впрочем, критики считают, что этим казино пытаются устроить из случайного постояльца постоянного игрока. <a href=http://filmkachat.ru/>1×slots коды</a> Большинство интернет-казино из нашего топ-10 готовы повеселить вас эксклюзивными промоакциями. Читайте о них в обзорах и на форуме. <a href=https://www.designingbuildings.co.uk/wiki/User:Cgifurniture>https://www.designingbuildings.co.uk/wiki/User:Cgifurniture</a> 1×slots промокод при регистрации <a href=http://www.khleeg.net/vb/member.php?u=7770>http://www.khleeg.net/vb/member.php?u=7770</a>
онлайн казино 1×slots
1хслотс мобильная версия зеркало <a href=http://404.tk.t941336g.beget.tech/user/Juleslom/>http://404.tk.t941336g.beget.tech/user/Juleslom/</a> Бывают ли бездепозитные бонусы без вейджера? Бывают, если у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино. 1×slots сайт зеркало Законодательство, регулирующее азартные игры в различных странах, влияет на полномочия операторов. В итоге юзеры из отдельных регионов сталкиваются с ограничениями со стороны казино. Это возможность быть как глубокий отказ в доступе, так и невозможность загружать игры отдельных изготовителей.Новые посетители онлайн-казино без первого депо могут проверить свою удачливость. К тому же есть вероятность конвертировать бездепы в настоящие деньги за регистрацию в казино, впрочем чтобы бонус необходимо отыграть сообразно условиям акции.
зеркала 1×slots
Бездепозитный приз предоставляется новенькому игроку за определенные деянья. Часто подарок вид денег либо фриспинов выдается за регистрацию, благодаря чему юзер получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. Получив свой подарок, Вы сможете даром выступать на настоящие средства, а выполнив условия отыгрыша, вывести собственный выигрыш.Некоторые сайты, прежде чем провести регистрацию игроков, предлагают ответить на несколько базовых вопросов. Цель проведения сходственной викторины – выявить случайных людей, которые не имеют представления о покере, и не разрешить получения ими призов. Если посетитель уже играл в казино, то ответить на полтора 10 простых вопросов будет нетрудно. Очень нередко, ответы возможно отыскать на официальных сайтах данных учреждений. <a href=https://www.nintendo-master.com/profil/glavdorogadv1808>https://www.nintendo-master.com/profil/glavdorogadv1808</a> Мы подготовили список, где есть практически актуальные и новые бездепозитные призы казино, которые возможность получить даром. Для наших юзеров есть особые предложения неповторимые призы, которые вы кого не отыщите, их мы определили особой красноватой плашкой «Exclusive». 1хслотс официальный сайт зеркало Объективные – объем приза, коэффициент и обстоятельства вейджера, необходимость внесения депо для вывода средств;
1× slots официальный
<a href=http://junlinro520.gain.tw/space.php?uid=1111051>1×slots регистрация 1×slots review live</a> Обыкновенные бездепозитные призы в объеме от 3-х до двадцати долларов сделаны чтобы, чтобы, чтобы в забавы заходили все новые и свежие игроки. Здесь, скорее, будет лимитирование на максимальный выигрыш. Важно, чтобы перед наименьшим вкладом был отключен бонус за 1-ое пополнение счета, и в не попадет на повторный вейджер. В лицензионных бездепозитных казино играть в азартные игры действительно неопасно. Наличие лицензии одобряет что, этот факт, что клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP.В лицензионных бездепозитных казино играть в азартные игры действительно неопасно. Наличие лицензии подтверждает тот факт, собственно клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP. 1×slots casino регистрация 1×slotscasino09k online <a href=http://infozillon.com/index.php?subaction=userinfo&user=tritetreasury45>http://infozillon.com/index.php?subaction=userinfo&user=tritetreasury45</a> Все любят получать подарки. Согласитесь, практически каждый играющий человек будет беспредельно счастлив, если получит даровой подарок для забавы в интернет казино просто за регистрацию или же приз за внесенный депозит, например нарекаемые приветственные бонусы для новых игроков. Соответственно эти онлайн клубы станут более популярны и преимущественны у игроков при выборе казино для забавы. Топ казино постоянно обновляется и прибавляются новые и увлекательные игровые клубы с привлекательной бонусной политикой и всеми вероятными преимуществами, льготами, к которым относятся эти бонусы как фриспины за регистрацию, денежные бездепозитные бонусы, а щедрые призы за внесенный депозит.
1х слот регистрация в 1×slots casino
Возможность поиграть дополнительное соревнование (а времени и некоторое) абсолютно даром, а выигрыш, же, поступает на счёт игрока. Так что приготовьтесь предоставить секретную информацию (пол, возраст, страна проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает менее суток, последствии чего получится свободно выводить солидные выигрыши.Но на некоторых азартных платформах сходственные вознаграждения имеют получить и уже зарегистрированные пользователи. В этом случае, призы предоставляются в рамках оригинальных промоакций или же некоторым геймерам вид акционного предложения, которое прибывает на почту с целью «вернуть» игрока в свое казино. <a href=http://t95283ld.bget.ru/index.php?subaction=userinfo&user=jumpydent52>http://t95283ld.bget.ru/index.php?subaction=userinfo&user=jumpydent52</a> Такие поощрения дозволяют даром протестировать свежее казино, разобраться с игровым ходом онлайн слотов, заработать и вывести небольшую необходимую средств.Список например называемых «запрещенных землель» прилагается к правилам бонусной программки игорного портала. Обязательно проверьте, распространяются ли на вас похожие санкции. 1×slots зеркало этих способов предполагает регистрацию 1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, в не хотите стать жертвой жуликов или впустую потратить время;
<b>Смотреть еще похожие новости:</b>
<a href=http://sladkierecepti.5nx.ru/viewtopic.php?f=8&t=12098>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=http://pravoslit.ru/forum/obshchee/182158–1×slot-registratsiya.html>1×slot регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера.
#1640 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino рабочее зеркало казино смотреть <a href=https://glvk.guru/>1×bet слоты 1×bet xyz</a> порно с Дарья Клишина, легкоатлетка porno Яна Троянова <a href=https://m.repost.news/>casino приложения</a> casino зеркало сайта порно с Евгения Медведева, фигуристка скачать casino на андроид порно с Анна Щербакова, фигуристка Мухтиярова Елена Вячеславовна порно порно с Сергей Бобровский (хоккей) cat casino
DiskiPlus r7 casino DiskiPlus автомат казино <a href=https://diskiplus.ru>DiskiPlus порно с Дарья Клишина, легкоатлетка</a> DiskiPlus сколько казино DiskiPlus pin up casino buzz <a href=https://diskiplus.ru/>DiskiPlus порно с Александр Большунов (лыжные гонки)</a> DiskiPlus porno Андрей Рублев (теннис) DiskiPlus букмекерская контора официальный сайт DiskiPlus 7k casino зеркало DiskiPlus порно с Антропова Валентина Викторовна DiskiPlus букмекерские конторы в россии DiskiPlus 1×bet зеркало xbet xyz DiskiPlus винлайн букмекерская контора официальный
#1641 inernetsamaraGephttps://domashij-internet-samara001.ru
провайдеры по адресу дома <a href=https://domashij-internet-samara001.ru>domashij-internet-samara001.ru</a> провайдер интернета по адресу самара
#1642 Charlesgunnyhttp://filmkachat.ru
1хслот 1хслотс регистрация перейти на 1×slots
Подарки на праздники ? посвященные торжественным датам, требующие условного отыгрыша или начисляются без того. Могут дариться игрокам сутки рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду.Условия вывода выигрыша. В некоторых заведениях для успешного вывода с бездепозитного бонуса довольно пополнения баланса и подтверждения личности. В других же клубах, необходимо количество раз прокрутить свой депо. <a href=http://filmkachat.ru/>1×slots акции</a> Выбор каждого онлайн казино на нашем веб-сайте. В описании к любому Вы сможете узнать, собственно получите за творение аккаунта. <a href=https://designaddict.com/community/profile/real-estate-rendering-services/>https://designaddict.com/community/profile/real-estate-rendering-services/</a> Еще одно условие касается объемов ставки. Операторы устанавливают максимальную сумму, которую игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, избранной в Личном кабинете. При превышении лимита есть риск лишиться приза. Существующие ограничения относятся и к определенным обликам ставок. Например, играя в рулетку, клиент имеет столкнуться с запретом ставить фишки на шансы.В зависимости от онлайн заведения каждый из них возможность для предложить как бездепозитные средства, например и бездепозитные фриспины, которые в удачной регистрации рухнут вас на ваш игровой баланс. 1×slots зеркало рабочее <a href=https://shadeattak.forum.cool/viewtopic.php?id=324#p2435>https://shadeattak.forum.cool/viewtopic.php?id=324#p2435</a> Доступ к дару может раскрываться механически в введения промокода либо обращения в саппорта вебсайта. В первом случае от юзера не потребуется никаких действий. Бездеп с активацией по коду встречается почаще всего. Игроку необходимо ввести совокупа знаков в графе, кот-ая может пребывать в регистрационной форме в Личном кабинете.
1×slot казино зеркало
Перед активацией принципиально внимательно выучить обстоятельства акции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, на коих можно воспользоваться предложением. Если бездеп охватывает узкий перечень игр, рекомендовано узнать максимальные коэффициенты, уровень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь что случае, если оператор не установил требовательные лимитирования на наивысшую сумму ставки.Бонусные средства – небольшая сумма средств для старта в новом казино. На бонусные средства, обыкновенно разрешено выступать во все игры, считая слотов с современным джекпотом и игр из раздела exist casino. <a href=https://bbs.sinbadgroup.org/index.php?xjkh-tampa-s-poster-pup-for-new-cancer-treatment.t48661.html/page-6519#post-279982>1хслотс мобильная версия зеркало</a> 1 хслот регистрация в 1×slots casino Но ни не запамятовывайте пристально читать управляла участия в бонусных промоакциях. Если вы нарушите но бы одно условие, позднее вы не сможете устроить недоразумение с администрацией.В неких интернет казино для получения бездепозитных призов не довольно просто зарегистрироваться на сайте клуба и подтвердить средства контактные данные. Дополнительно требуется активация промокода. <a href=http://xn----7sbabja7ekbaahnetbi5o6b.xn–p1ai/profile.php?lookup=34665>http://xn----7sbabja7ekbaahnetbi5o6b.xn–p1ai/profile.php?lookup=34665</a> Таким образом, заведение пытается продемонстрировать себя своим потенциальным геймерам, а подобный маркетинговый ход как казино бонус без депо за регистрацию привлекает довольно количество внимания к игорному заведению и обеспечивает неизменный поток новых гостей и грядущих клиентов игрового интернет клуба. 1×slots зеркало сайта
1×slots официальный регистрация
Несмотря на то, что этот вариант стимуляции со стороны азартных платформ очень востребован в сфере сходственных игр, далеко не поклонникам казино известно, собственно по бездепозитные призы казино и как именно их вполне эксплуатировать.Доступные забавы – В неких азартных забавах возможно понизить математическое превосходство казино до нескольких 10-х процента. В их числе почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как верховодило, в таких забавах ставки идут в зачет вейджера не полностью. Например, возможность учитываться лишь 50%. В некоторых играх бездепозитные призы вообщем невозможно отыгрывать. <a href=http://images.google.co.mz/url?sa=t&url=http://belsis.ru/bitrix/redirect.php?goto=http://autoteplo.com/bitrix/redirect.php?goto=https://telegra.ph/Lgoty-i-garantii-dostupnye-dlya-lyudej-s-ogranichennymi-vozmozhnostyami-09–24>http://images.google.co.mz/url?sa=t&url=http://belsis.ru/bitrix/redirect.php?goto=http://autoteplo.com/bitrix/redirect.php?goto=https://telegra.ph/Lgoty-i-garantii-dostupnye-dlya-lyudej-s-ogranichennymi-vozmozhnostyami-09–24</a> 1×slots рабочее зеркало Перечисленные выше главные свойства сопровождают практически каждый приз и являются стереотипными для бездепозитных бонусных начислений в казино.
1×slots подтвердит вашу регистрацию если говорить
Итак, чтобы благотворительные бонусные кредиты превратились в реальные средства, которыми возможность распоряжаться по собственному усмотрению, их нужно отыграть. Вейджер следует уточнять в правилах онлайн-казино.Фриспины без депозита либо дополнительные свои помогут ближе познакомиться с игровой платформой и её функциями. За счёт подарков можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям из-за забавы против живых крупье. Для верификации номера аппарата, в личном профиле выберите опцию „Подтвердить номер телефонного“ и введите в подходящее поле код, приобретенный в sms-сообщении. 1×slots casino регистрация на сайте <a href=http://sanakirja.kronman.fi/index.php?title=РР·_чего_состоит_диета_Елены_Малышевой>http://sanakirja.kronman.fi/index.php?title=РР·_чего_состоит_диета_Елены_Малышевой</a> Ещё одно распространённое акционное предложение – привлекательный презент с сомнительными притязаниями. К образцу, клуб обещает $100 в качестве бездепа, хотя с вейджером х80 или х100. Отыграть такой вейджер фактически нереально и потому чем концентрироваться на больше интересных промоакциях.Поспешите забрать бездепозитные бонусы за регистрацию в казино из представленного списка. Все платформы не только водят законную работа, хотя и обрадуют честными результатами забавы, высокой отдачей, резвыми выплатами.
1×slots casino зеркало
<a href=http://www.letts.org/wiki/User:ClaritaMackay>http://www.letts.org/wiki/User:ClaritaMackay</a> 1×slots официальный сайт, скачать
<b>Смотреть еще похожие новости:</b>
<a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/13520–1×slots-zerkalo-kotoruyu-ukazyvali-pri-registratsii-kstati#13551>1×slots зеркало которую указывали при регистрации кстати</a>
<a href=https://alglaah.com/index.php?threads/%D8%B1%D9%88%D8%A7%D8%AF-%D8%A7%D9%84%D8%AD%D8%B1%D9%85%D9%8A%D9%86-%D9%84%D9%84%D8%AE%D8%AF%D9%85%D8%A7%D8%AA-%D8%A7%D9%84%D9%85%D9%86%D8%B2%D9%84%D9%8A%D8%A9-%D9%81%D9%8A-%D8%A7%D9%84%D9%83%D9%88%D9%8A%D8%AA.142239/#post-215887>1×slots официальный сайт, скачать</a>
<a href=http://kamechkovkazak.listbb.ru/viewtopic.php?f=15&t=2010>1хслотс регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Возможность протестировать новые игры, не рискуя личными своими и создать собственную тактику игры.
#1643 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up casino скачать 1×bet официальный слоты <a href=https://th-royalgclub.com/>Приезжева Екатерина Геннадьевна порно</a> пин ап казино porno Юлия Канакина, скелетонистка <a href=https://m.repost.news/>винлайн букмекерская контора официальный</a> суть казино букмекерские конторы в россии casino вход bitz casino винлайн букмекерская контора казино на деньги казино рояль смотреть
DiskiPlus пин ап casino pin up top DiskiPlus 7k casino бонус <a href=https://diskiplus.ru>DiskiPlus порно с Бондаренко Анастасия Борисовна</a> DiskiPlus ставки на спорт букмекерские конторы DiskiPlus 1×bet слоты официальный сайт <a href=https://www.diskiplus.ru>DiskiPlus пин casino</a> DiskiPlus pin up casino DiskiPlus 1×slots casino DiskiPlus casino 7k рабочее DiskiPlus porno Яна Троянова DiskiPlus почему в казино нет окон DiskiPlus скачать сайт букмекерской конторы DiskiPlus casino приложения
#1644 Charlesgunnyhttp://filmkachat.ru
1×slots коды
Денежные средства. Третий приз за регистрацию без депозита – наличные. К сожалению, только знаменитые и популярностью клубы все уяснить деньги в руб. Либо баксах. С их поддержкою появится насладиться любой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед данным необходимо выполнение определенных условий. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало рабочее</a> <a href=https://localendar.com/event?DAM=PublishedEvent&m=3152909&event_id=3&calendar_id=3152909&more_info=N&export_date=Dec%2014,%202031&category=8>https://localendar.com/event?DAM=PublishedEvent&m=3152909&event_id=3&calendar_id=3152909&more_info=N&export_date=Dec%2014,%202031&category=8</a> Как только на виртуальном счету окажутся бонусные свои, поторопитесь отыграть вейджер. Сразу последствии этого возможно оставить заявку на вывод выигрыша. Кредиты прибыльно отличаются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом настоящих средств и выделяют возможность ощутить задор. Во-вторых – возможно насладиться любой азартной забавой доступной на сайте. В вашем распоряжении находятся автоматы, настольные прибавление, видео-покер, Live-дилеры.Да, у бесплатных призов есть дефекты. Прежде всего, они обыкновенно маленькие. Кроме такого, обстоятельства вейджера по ним всегда жесткие. Но все недоступность риска проделывает их довольно привлекательными для клиентов. 1×slots регистрацию процедура займет всего лишь <a href=https://biznes-knigi.com/user/Mycsgobub/>https://biznes-knigi.com/user/Mycsgobub/</a>
1× slots официальный
Доступность — бездепозитные бонусы в казино почаще всего предоставляются свежим игрокам, но посещают случаи, когда бонус могут получить и действующие посетители. 1×slots зеркало рабочее на сегодня Если площадка презентует бездеп за регистрацию, то процедура его получения проста. Нужно лишь ввести аккаунт на веб-сайте и активировать его, подтвердив адресок электронной почты, номер телефонного или другие данные, коие настятельно оператор. Перед данным необходимо увериться, что юзер находится на официальном сайте казино, не на жульнической площадке. <a href=https://play.ntop.tv/user/Brianacuri/>https://play.ntop.tv/user/Brianacuri/</a> Ознакомьтесь с нашим списком наихороших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего списка и получите бездеп сразу. Хватайте лучшие бесплатные предложения ниже и выигрывайте большие деньги, не рискуя!Для вывода средств приз нужно несомненно отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами акции и вариациями отыгрыша бездепозитного бонуса до его получения, дабы избежать конфликтных ситуаций. 1хслотс рабочее зеркало на сегодня
1×slots casino регистрация 1×slotscasino09k online
В некоторых интернет казино для получения бездепозитных бонусов не довольно просто зарегистрироваться на веб-сайте клуба и подтвердить средства контактные данные. Дополнительно потребуется активация промокода. Акции распространяются как на все игры казино, так и на ограниченный список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino прочие. Промо может охватывать разработки 1-го производителя. Бездеп не пересекается с иными промоакциями казино. Если на веб-сайте предусмотрен кэшбек, он не начисляется за ставки, сделанные бонусными деньгами. Для идентификации платежных реквизитов игрока имеет понадобиться пополнение счета на минимальную необходимую. <a href=http://t20suzuki.com/phpBB2/profile.php?mode=viewprofile&u=5408>http://t20suzuki.com/phpBB2/profile.php?mode=viewprofile&u=5408</a> 1×slots зеркало проходить регистрацию это отличный вариант Акции распространяются как на все игры казино, так и на ограниченный список. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и другие. Промо имеет обхватывать разработки 1-го производителя. Бездеп не пересекается с иными промоакциями казино. Если на веб-сайте предусмотрен кэшбек, он не начисляется за ставки, сделанные бонусными деньгами. Для идентификации платежных реквизитов игрока может потребоваться пополнение счета на минимальную необходимую.
1×slot зеркало рабочее регистрации на телефон придет
Ограничения по забавам. Администрация запрещает игрокам кое-какие игровые автоматы с бездепозитным призом, деньгами либо безвозмездными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда дробленье производится по облику игр. Например, отыгрыш возможен на всех игровых аппаратах, хотя запрещен в настольных играх и в разделе Live Casino.Зарегистрироваться в казино по специальной ссылке или с бонусным кодом. Подтвердить контактные данные (номер аппарата и электрическую почту). Для доказательства номера телефонного нужно в собственном профиле указать свой номер и нажать кнопку „Подтвердить номер телефона“, дальше Вы получите sms-сообщение с кодом, который нужно установить в подходящее поле. Для подтверждения электронной почты, перейти по интенсивной ссылке в послании от казино. Благодаря программе лояльности от игорного заведения, возможно арестовать хороший старт и без дополнительных вложений запустить видеослоты. Кроме такого, можно рассчитывать на реальную удачу и получить, без инвестиции собственных денег, великой выигрыш. 1×slots официальный сайт мобильная версия <a href=https://smallpdf.com/file#s=947e9bab-f7cd-45be-8e6d-7494ff661b35>https://smallpdf.com/file#s=947e9bab-f7cd-45be-8e6d-7494ff661b35</a> 3. Подтвердить данные. В зависимости от клуба, нужно привязать телефон либо почту, указать индивидуальную информацию;
1×slots казино мобильная версия
Если при регистрации указать промокод, можно гарантировано получить бонус. Где брать ваучер? Посетите определенную блоги либо форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В заключительное время игорные дома начали рекламироваться в фильмах и телесериалах. Присмотритесь и всего заметите промокод, который принесёт 500 либо 1 000 бонусных руб. Принципиальным отличием безвозмездных бонусов от бонусов на депо считается отсутствие необходимости заносить средства на акк. Из-за сего их часто нарекают бездепозитными (no down payment bonuses).Помните, что в некоторых забавах сумма ставки идет в зачет вейджера лишь частично. Так, в настольных и карточных забавах лишь от 5% до 50% суммы ставки считаются как отыгранные средства, в то время как в слотах идет в зачет все 100% суммы. <a href=https://istinastroitelstva.xyz/user/Richardquary/>https://istinastroitelstva.xyz/user/Richardquary/</a> Мы рекомендуем не открещиваться от сходственных услуг известных казино. Выделите некоторое минут на регистрацию, получите бонус и попробуйте его отыграть. Может быть, сегодня фортуна будет на вашей стороне!Подтвердите регистрацию, чтобы активировать Бездепозитный приз с выводом, потребуется заполнить личный профиль. Заполните порожние поля реальными данными о для. 1×slots зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/9559/#comment-395613>рабочее зеркало 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но такие рамки не смущают том хайроллеров, что коэффициенты на слотах дозволяют рассчитывать на солидные выигрыши, а неких автоматах разыгрывается передовой джекпот.
#1645 Charlesgunnyhttp://filmkachat.ru
казино 1× slots официальный сайт
Многие азартные клубы ограничивают сумму вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не сможете исключить. Разница несомненно аннулирована, Вы том не сможете создавать на нее ставки.С этими ординарными советами любое казино с призом за регистрацию способно принести в разы больше выгоды и полезности. <a href=http://filmkachat.ru/>1хслотс казино зеркало</a> А ознакомиться с новыми онлайн казино, Вы можете с призов с выводом выгоды, коие Вы можете получить без депо.Подарки на праздничные ? приуроченные к торжественным датам, требующие символического отыгрыша либо начисляются без того. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду. <a href=https://www.debwan.com/blogs/704417/Does-Walmart-Take-Old-Car-Batteries>https://www.debwan.com/blogs/704417/Does-Walmart-Take-Old-Car-Batteries</a> Например, игрок получил 500 рублей при творении аккаунта и должен отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., понадобится сделать 875 спинов для полного отыгрыша.Если простыми текстами, бездепы – это определённая сумма денег или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно забирать подарки. Но есть некоторые аспекты. Существуют игорные жилища, которые перед что, этим как начислить призы просят привязать телефонный, предоставить копии документов. 1×slots официальный сайт скачать на айфон <a href=https://clients1.google.com.eg/url?q=http%3A%2F%2Fdoctorlazuta.by>https://clients1.google.com.eg/url?q=http%3A%2F%2Fdoctorlazuta.by</a>
1×slots официальный сайт зеркало
Отзывы читателей о бонусных промоакциях помогут составить эмоцию, хотя не запамятовывайте о субъективности личных объяснений.Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут уточняет лимитирование для посетителей. Конечно, это можно счесть некоторым неудобством для игрока, хотя ради отметить, собственно выбор автоматов всё равно остаётся достаточно большим. 1×slots casino зеркало Главным интересным в появлении данных вознаграждений произведено что, собственно пустив их в ход, компьютерные ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он благодаря призам какой-либо выигрыш либо моментально спустит все только собственно прибывшие деньги). То есть, казино снабжает игрока вероятностью на дармовой основе выступать во различные слоты причем спонсирует забаву.Какие бонусы есть еще получить кроме бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного бонуса, каждое онлайн казино предлагает игрокам прибыльное предложение на 1-ый депо, вы совершаете депозит, ваш депозит возрастает в двое или и в 3, что, этим наиболее начать выступать можно с больше солидной суммой, так же не запамятываем на вейджер на призы. <a href=http://mpozr.ru/bitrix/redirect.php?goto=http://aquamarine.gold/bitrix/redirect.php?goto=http://minobr-ra.ru/bitrix/click.php?goto=https://telegra.ph/Tochka-zreniya-svyashchennika-Ioanna-Valentina-Istrata-na-Bibliyu-i-tatuirovki-09–24>http://mpozr.ru/bitrix/redirect.php?goto=http://aquamarine.gold/bitrix/redirect.php?goto=http://minobr-ra.ru/bitrix/click.php?goto=https://telegra.ph/Tochka-zreniya-svyashchennika-Ioanna-Valentina-Istrata-na-Bibliyu-i-tatuirovki-09–24</a> Иногда виде бездепа, казино дарит минимальный бонус (до 50 рублей), ради которого надо заморачиваться. 1хслотс казино зеркало Такие одобрения позволяют даром протестировать свежее казино, разобраться с игровым процессом интернет слотов, заработать и вывести маленькую необходимую средств.
1×slots официальный сайт зеркало
Для проверки применяются сканы паспортов, водительских прав, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если пользователь замечен в попытке ввести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их владелец попадает в темный перечень. При ирге на лицензионной площадке надо бояться свидетельствовать достоверную индивидуальную информацию (шифрование ликвидирует утечку персональных данных). Размер приза. В качестве бездепов обычно начисляют очень суммы, а когда идет о бонусах за депозит, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино все презентовать игроку до 2000$.Мы проделываем ударение на главных положениях управлял, рассказываем о территориальных лимитированиях и кратко информируем о иных акциях обговариваемого казино. <a href=http://web.symbol.rs/forum/member.php?action=profile&uid=973987>http://web.symbol.rs/forum/member.php?action=profile&uid=973987</a> 1×slots casino зеркало рабочее
1×slots на любой вкус как пройти регистрацию
Бездепозитные бонусы — это подарки от казино вид бонусных средств или фриспинов для игровых автоматов, которые начисляются на аккаунт игрока последствии процедуры регистрации на сайте заведения. Для получения этих поощрений депозит не потребуется.В зависимости от интернет заведения любой из них может для предложить как бездепозитные деньги, так и бездепозитные фриспины, коие в удачной регистрации упадут для на ваш игровой баланс. <a href=http://forums.indexrise.com/thread-2362-post-497595.html#pid497595>1×slots сайт</a> Чаще всего, популярностью сервисы, эти как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно обязательное верховодило. Финансовые свои выводятся лишь через ту платежную систему, коей успех для пополнения депозита. Если же игрок получил бездепозитный покерный приз, потребуется восполнить счет на наименьшую сумму, которая сочиняет обыкновенно 10 $.Суммы похожих услуг, как правило, колеблются от трех до 20 долларов, а вейджер на эти свои должен сочинять от 30 до шестидесяти один. Зачастую, величайшая сумма выигрыша тут составит от одной до двух сотен $. Если компьютерные выиграет больше, то все средства все быть списанными до очень разрешенного выигрыша. Здесь бывает смысл выводить еще несуществующие финансы на собственную платежную систему и дальше находить заведение с благоприятными под данную сумму релоадом либо призом за 1-ое пополнение счета. Есть несколько подвидов бездепозитного вознаграждения, предлагаемого наибольшим количеством заведений. 1×slot зеркало <a href=https://forum.eliteshost.com/member.php?action=profile&uid=8663>https://forum.eliteshost.com/member.php?action=profile&uid=8663</a> Несмотря на то, что данный вариант стимуляции со стороны азартных платформ довольно популярен в сфере подобных игр, далековато многим поклонникам казино знаменито, что являют собой бездепозитные призы казино и как непосредственно их возможно эксплуатировать.
1× slots casino официальный сайт
Особую изюминку видео слотам присваивают уникальные символы. С их появлением активируются разные призы. Вы сможете запустить дополнительный уровень и увеличить необходимую выигрыша. Есть знаки, которые сменяют ненужные элементы и сами творят выигрышные комбо. Не стоит забывать и на бонус-тур. После любого успешного спина есть шанс прирастить сумму выигрыша в два или четыре раза.Когда идет о получении бездепозитных призов в казино, начала направьте на следующие обстоятельства: <a href=http://organmagazine.com/bbs/board.php?bo_table=free&wr_id=557962>http://organmagazine.com/bbs/board.php?bo_table=free&wr_id=557962</a> 1×slots casino регистрация 1×slotscasino09k online Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных обстановок с казино, когда последствии отыгрыша бездепа вам не дадут вывести крупную необходимую выигрыша.
<b>Смотреть еще похожие новости:</b>
<a href=http://forumforexmalaysia.com/threads/1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82-%D1%81%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C.289/>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В перечне требований к отыгрышу нередко присутствуют лимиты на ставки при забаве на собственные деньги. Так, в отыграть надо(надобно) 30 000 руб., а предельная сумма ограничена 30 рублями, то вертеть барабаны предстоит 1000 один. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам деяния акции.
#1646 Charlesgunnyhttp://filmkachat.ru
1×slot казино зеркало
Если площадка презентует бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь ввести акк на веб-сайте и активировать его, подтвердив адресок электронной почты, номер телефонного или другие данные, которые просит оператор. Перед данным необходимо убедиться, собственно юзер находится на официальном веб-сайте казино, но на жульнической площадке.Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, the decision зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasino09k online</a> Обычно показатель повыше, чем для призов на депо. Не дивитесь, если он несомненно числе х100. Иногда завышенный коэффициент вейджера устанавливается для обитателей отдельных государств.Шаг 4. Активация. Внимательно исследуйте условия, информацию по лимитированиям и сроке деяния бонусного предложения. Разобравшись с правилами, можно активировать бонус в личном офисе (время ? с использованием промокода) или по запросу в саппорт. <a href=https://acrobat.uservoice.com/forums/935259-acrobat-web-beta-internal/suggestions/49479029-%D0%BF%D1%80%D0%BE%D1%84%D0%B5%D1%81%D1%81%D0%B8%D0%BE%D0%BD%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2-%D0%BA%D0%B8%D0%B5%D0%B2%D0%B5-%D0%BE%D1%81%D0%BE%D0%B1%D0%B5%D0%BD%D0%BD%D0%BE%D1%81%D1%82%D0%B8-%D0%B8>https://acrobat.uservoice.com/forums/935259-acrobat-web-beta-internal/suggestions/49479029-%D0%BF%D1%80%D0%BE%D1%84%D0%B5%D1%81%D1%81%D0%B8%D0%BE%D0%BD%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2-%D0%BA%D0%B8%D0%B5%D0%B2%D0%B5-%D0%BE%D1%81%D0%BE%D0%B1%D0%B5%D0%BD%D0%BD%D0%BE%D1%81%D1%82%D0%B8-%D0%B8</a> 1×slots casino регистрация <a href=https://healingletter.com/bbs/board.php?bo_table=free&wr_id=871343>https://healingletter.com/bbs/board.php?bo_table=free&wr_id=871343</a> Шаг 4. Активация. Внимательно выучите условия, информацию по ограничениям и сроке действия бонусного предложения. Разобравшись с правилами, возможно активировать приз в личном кабинете (иногда ? с использованием промокода) или по запросу в саппорт.Раздача призов имеет быть посвящена различным датам: календарные дни, дни рождения игроков, годовщина открытия казино и т. Д. Подарок выдается повторяющий средств, фриспинов или баллов для накопления и размена на предложения оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд требований.
1×slots зеркало регистрацию более популярный вариант это
Благодаря программке преданности от игорного заведения, можно взять хороший старт и без добавочных инвестициям запустить видеослоты. Кроме как, можно рассчитывать на реальную фортуну и получить, без вложения собственных финансов, большой выигрыш.Получать информацию о самых прибыльных бонусах можно без постоянного мониторинга новостей казино. Мы взяли эту задачу на себя и непрерывно смотрим за предложениями операторов, выбирая наилучшие из их. В данном разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список промоакций периодически пополняется. В топ вошли самые новые бездепозитные бонусы за регистрацию в казино 2020, кратковременные и замкнутые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру прочим аспектам. Если срок деяния промоакции истек, она удаляется из перечня. 1хслотс казино зеркало <a href=http://shichaoliuluntan.com/home.php?mod=space&uid=331070>http://shichaoliuluntan.com/home.php?mod=space&uid=331070</a> Лишь пользующиеся и известные азартные заведения могут разрешить для выдавать бездепы вид добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депо, которые возможно потратить в лучших аппаратах с высокой отдачей.Если вы новичок данном и лишь попали в неизведанную вами область азарта — с помощью предложений как бездепозитные бонусы без пополнения. казино 1× slots официальный сайт В большинстве заведений устроить это можно по адресу электронной почты, по номеру телефона, через социальную сеть либо гугл-аккаунт.Способы получения бездепа различаются в зависимости от вида бонуса, кот-ый понравился игроку. Но вам в любом случае надо(надобно) быть зарегистрированным в законном онлайн-казино и подтвердить собственную личность. В общем облике пошаговая аннотация для получения бездепозитного приза выглядит например:
рабочее зеркало 1×slots
Фриспины предназначены для применения в видео слотах. Внимательно ознакомьтесь с условиями – частенько их выдают на кое-какие автоматы. В зависимости от клуба, у вас выйдет устроить определённое число ставок. Кстати, продвинутые игорные дома позволяют запускать любых «одноруких бандитов».Вознаграждения за получение VIP-статуса ? начисляются в рамках программы преданности при достижении еще значения либо выдаются персонально менеджерами службы. <a href=https://lorenzoghgg55667.digitollblog.com/30101419/deep-nude-ethical-concerns-and-the-impact-of-ai-on-privacy>https://lorenzoghgg55667.digitollblog.com/30101419/deep-nude-ethical-concerns-and-the-impact-of-ai-on-privacy</a> Похожим образом работает 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения клиента или из-за с получения им VIP-статуса. Подарок предоставляется последствии воззвания в поддержку и ревизии.Похожим образом трудится 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения посетителя или из-за с получения им VIP-статуса. Подарок предоставляется последствии обращения в поддержку и ревизии. 1×slots зеркало которую указывали при регистрации кстати
1×slots регистрация на официальном сайте
В некоторых онлайн казино для получения бездепозитных призов не достаточно просто зарегистрироваться на сайте клуба и подтвердить средства контактные данные. Дополнительно требуется активация промокода.Иногда операторы требуют внесение малого депо перед выводом для верификации платежного прибора. В неких казино данный депозит кроме предстоит отыграть. <a href=http://amazon.rx22.ru/viewtopic.php?f=5&t=3474>1×slots официальный сайт скачать на айфон</a> 1×slots казино мобильная версия <a href=https://skobka.com.ua/forum/user/5004/>https://skobka.com.ua/forum/user/5004/</a> В бонусную программку многих операторов входят систематические бездепы. Это пожизненные промоакции, поощряющие активных постоянных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают неизменные бонусы без депо в обмен на скопленные баллы преданности.Oтыгpaть бонус с указанным вeйджepом, для этого необходимо сдeлaть cтaвoк нa cумму, превосходящую объем приза в несколько один.
1×slots регистрация на сайте
Размер приза. В качестве бездепов обыкновенно начисляют не суммы, а когда идет о бонусах за депо, которые начисляются в процентном соотношении от суммы пополнения, то некоторые казино могут презентовать игроку до 2000$. <a href=https://www.ls1.com/forums/member.php?u=118650>https://www.ls1.com/forums/member.php?u=118650</a> Некоторые онлайн-казино без депозита предлагают свежим клиентам избрать бонус при регистрации. Будьте внимательны: выбрав раз, вы в безусловном большинстве случаев не можете воспользоваться остальными. 1×slots акции Почти все игровые клубы настоятельно свидетельство контактных данных игрока для получения бездепозитного приза.
<b>Смотреть еще похожие новости:</b>
<a href=https://forums.dfine.net/showthread.php?tid=1083>1×slots регистрация на 1хслотс</a>
<a href=http://www.infoknygos.lt/smforum/index.php?topic=134248.new#new>1×slots casino регистрация 1×slots review live</a>
<a href=http://powercrop.it/chi-siamo/le-persone?page=127#comment-6393>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для подтверждения электрической почты, просто перейдите по интенсивной ссылке в письме, полученном от игрового заведения. Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки имеют запросить дополнительные документы или инициировать куцее общение по Skype.
#1647 Charlesgunnyhttp://filmkachat.ru
1×slot казино зеркало
Зачастую бездепозитные призы казино для забавы предлагаются различными заведениями азартных игр виде маркетинговых акций или в целях вербования к себе новых игроков. Для бездепозитных призов в казино 2022 игроку надо пополнять счет до момента вывода хотимых средств.Как верховодило, при выводе финансов, от играющего требуется лишь устроить минимальный лепта для того, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом собственный счет. <a href=http://filmkachat.ru/>1хслот скачать</a> <a href=https://www.doyoubuzz.com/architectural-events>https://www.doyoubuzz.com/architectural-events</a> 1×slots официальный сайт, скачать <a href=https://demo5651.asly.nl/index.php/author/rainyrhythm44/>https://demo5651.asly.nl/index.php/author/rainyrhythm44/</a> Но а случае вы теснее профи по интернет казино, кликаем на красноватую кнопку «Получить» и Вы автоматически перейдете в онлайн казино;Автоматическая активация на самой удобной, хотя ручной способ содержит перед ней превосходства. Прежде чем использовать вознаграждение от казино, стоит заранее определить, сколько времени потребуется на исполнение всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деяния бонуса.
1×slots рабочее зеркало
Однако в критериях исчезают «подводные камешки», коие не разрешат вывести солидную необходимую либо же вы не успеете отыграть вейджер. Поэтому мастера советуют арестовать бесплатные вращения за регистрацию в казино без депозита, дабы поднабраться опыта и получить настоящий шанс на победу. <a href=http://sladkierecepti.5nx.ru/viewtopic.php?f=8&t=12707>1×slots зеркало видели такую регистрацию на</a> 1×slots рабочее зеркало Для как, дабы отыграть необходимую вашего бездепозитного бонуса нужно выполнить условия вейджера. Очень часто фриспины даются на определенные слоты (book of ra, book of lifeless, book of sun), выбирайте слот себя по душе, все очень красивые и качественные. Бездепозитные бонус имеет быть валютным так и вид фриспинов на слоты <a href=http://aloouud.com/vb/member.php?u=8932>http://aloouud.com/vb/member.php?u=8932</a> Да, у безвозмездных бонусов есть недостатки. Прежде всего, они обыкновенно небольшие. Кроме того, обстоятельства вейджера по ним практически жесткие. Но все недоступность риска делает их очень привлекательными для посетителей. 1×slots актуальное зеркало Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 долларов. Если выдаются фриспины, их число редко выше нескольких 10-ов бесплатных вращений.Отказ в прохождении верификации. Если клиент не желает или не дать документы, подтверждающие его лицо, профиль несомненно заблокирован вместе со всеми бонусными начислениями.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Приветственный бонус без депозита ? презент за регистрацию. Выдается средствами, фриспинами или баллами. В последнем случае бонусные баллы используются для участия в турнирах либо обмена на настоящие деньги. <a href=https://sixn.net/home.php?mod=space&uid=3746336>https://sixn.net/home.php?mod=space&uid=3746336</a> У любого игорного клубы различные вейджеровые обстоятельства. Чтобы вы гарантировано смогли выполнить их, мы дадим некоторое советов. Если система начислила маленькую сумму, надо создавать немалые ставки – остановитесь на 10–30 центах. Как лишь сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В противном случае другого приглядеться к другому автомату.Для выбора азартного заведения Вы сможете пользоваться списком наших казино с призами за регистрацию. На нашем веб-сайте мы опубликовали перечень бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, собственно часть бонусов эксклюзивные и доступны лишь для посетителей нашего сайта по-специальному промо-коду или по уникальной ссылке. Кроме как, для каждого бонуса мы подготовили доскональный обзор, в котором Вы узнаете как получить и отыграть поощрение и как исключить свой выигрыш с бездепа. сайт 1× slots casino
1×slots сайт зеркало
Помимо прочего, для вывода средств по бездепу необходимо привнести на счёт свой 1-ый депозит — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально вероятную необходимую, после чего вывод средств станет доступен.Некоторые клубы механически начисляют приз на аккаунт игрока последствии выполнения критерий получения, но посещают ситуации, когда бонус надо(надобно) активировать игроку самому. Есть некоторое методов активации приза: <a href=http://u0382101.isp.regruhosting.ru/index.php/forum/general-questions-and-how-tos/68883-otzyvy-o-tovarakh?start=19242#164268>1×slots casino online регистрация</a> Допустим, за регистрацию вы получили бездеп в объеме 2 000 рублей с вейджером х30. В данном случае светит устроить ставок, на совместную сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать реальные деньги. Однако не запамятовывайте, что с любого подарка выйдет исключить определённую необходимую (чаще всего менее $200). При пользовании бездепозитным бонусом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют несколько видов лимитов:Не желаете поиграть в азартные игры, не рискуя средствами деньгами, хотя получая в все выплаты? Подобную вероятность деют все лучшие порталы с азартными веселиями. В их количестве количество правдивых и надежных интернет-казино на русском языке. Они привлекают свежих юзеров различными поощрительными событиями, включая бездепозитные, или благотворительные бонусы. 1хслот зеркало <a href=http://ean5.adj.st/openArticle?placement=smartnews-web-home&identifier=4295310297800908734&installToken=%7B%22linkIds%22%3A%5B%224295310297800908734%22%5D%2C%22edition%22%3A%22en_US%22%7D&method=adjust&adjust_deeplink=smartnews%3A%2F%2FopenArticle%3Fplacement%3Dsmartnews-web-home%26identifier%3D4295310297800908734%26installToken%3D%257B%2522linkIds%2522%253A%255B%25224295310297800908734%2522%255D%252C%2522edition%2522%253A%2522en_US%2522%257D%26method%3Dadjust&adjust_t=23brw0u_zm5eb5i&adj_fallback=http://mkfitness.hatenablog.com/iframe/hatena_bookmark_comment?canonical_uri=http://statvoo.com/reviews/https://telegra.ph/Pyat-nauchnyh-prichin-po-kotorym-nekotorye-pesni-stanovyatsya-dlya-nas-osobennymi-09–24>http://ean5.adj.st/openArticle?placement=smartnews-web-home&identifier=4295310297800908734&installToken=%7B%22linkIds%22%3A%5B%224295310297800908734%22%5D%2C%22edition%22%3A%22en_US%22%7D&method=adjust&adjust_deeplink=smartnews%3A%2F%2FopenArticle%3Fplacement%3Dsmartnews-web-home%26identifier%3D4295310297800908734%26installToken%3D%257B%2522linkIds%2522%253A%255B%25224295310297800908734%2522%255D%252C%2522edition%2522%253A%2522en_US%2522%257D%26method%3Dadjust&adjust_t=23brw0u_zm5eb5i&adj_fallback=http://mkfitness.hatenablog.com/iframe/hatena_bookmark_comment?canonical_uri=http://statvoo.com/reviews/https://telegra.ph/Pyat-nauchnyh-prichin-po-kotorym-nekotorye-pesni-stanovyatsya-dlya-nas-osobennymi-09–24</a>
1×slots официальный сайт мобильная версия скачать
Вы скорее, как и все предпочитаете получать подарки и бездепозитные бонусы казино. Игорные дома брали в привычку одаривать гэмблеров приятными призами. Стать обладателем приветственного подарка можно за создание профиля либо пополнение счёта. Второй вариант более интересный, так клубы готовы удвоить депо! Но если вы новичок и только знакомитесь с миром пыла, лучше воспользуйтесь призом за регистрацию. Бездепозитный приз казино 2022 с выводом за регистрацию предоставляет вероятность ознакомиться игроку с лобби выбранного заведения, сориентироваться в выборе игр и выяснить качество работы службы. Довольно нередко, начиная игровой процесс, игрок теснее отказывается останавливаться и делает реальный вклад. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть бесплатно возможно как один таки с призом за регистрацию без необходимости вносить депозит. <a href=http://forums.filatelija.lv/memberlist.php?mode=viewprofile&u=41005>http://forums.filatelija.lv/memberlist.php?mode=viewprofile&u=41005</a> Для отыгрыша бонуса казино обязует игрока поиграть на необходимую, в несколько раз превосходящую необходимую полученного приза — здесь выгода компании явна.Бездепозитный приз за регистрацию в казино с выводом средств в 2022 году — Наш ресурс дает игрокам важную информацию о самых свежих, великодушных и испытанных призах в онлайн казино, которые обновляются каждый денек. x1 slots 1хслотс регистрация перейти на 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://australianwinerytours.com/tours/showthread.php?tid=457877>1хслотс рабочее зеркало</a>
<a href=http://police.1stbb.ru/viewtopic.php?f=3&t=345>1×slots зеркало проходить регистрацию это отличный вариант</a>
<a href=http://shiftdelete.10tl.net/member.php?action=profile&uid=119629>зеркло казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Отыграв бездепозитный бонус в казино с выводом тоже придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, случае сходственное лимитирование присутствует, то единоразово вывести выйдет только необходимую, не превосходящую объем приобретенного приза. Размер бонусов чаще всего чисто символический и не выше 50 рублей. Приятно, хотя осязаемым бустом при вряд ли станет.
#1648 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Константин Тюкавин (футбол) ставки на спорт букмекерские конторы <a href=https://slon-ru.com/>casino ап</a> фреш казино casino игровой автомат <a href=https://7club7.com/>Ирина Горбачева</a> включи казино казино большая порно с Сергей Бобровский (хоккей) vodka casino почему в казино нет окон porno Алена Михайлова карты казино
DiskiPlus самое казино DiskiPlus 1win casino <a href=https://diskiplus.ru/>DiskiPlus ставки на спорт букмекерские конторы</a> DiskiPlus vavada casino DiskiPlus порно с Варвара Субботина <a href=https://diskiplus.ru/>DiskiPlus casino ru</a> DiskiPlus casino сайты DiskiPlus Самойлова Алла Владимировна порно DiskiPlus казино 5 DiskiPlus 1×bet регистрация DiskiPlus букмекерская контора леонов DiskiPlus казино без DiskiPlus Манилова Алла Юрьевна порно
#1649 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации 2025
Такой бесплатный эквивалент средств зачисляется на профиль пользователя после воплощения притязаний и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений возможен лишь последствии осуществления вейджеровых условий. <a href=http://filmkachat.ru/>казино 1× slots официальный сайт</a> Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и более. Когда игроку надеется много фриспинов, администрация может разбивать их начисление на несколько дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах промоакции.Промообъявления от казино мешают реальной картины и направлены на вербование внимания юзеров. Понять, насколько высоки шансы остаться в плюсе, позволит собственный анализ условий предложения: <a href=https://www.doyoubuzz.com/animation-product>https://www.doyoubuzz.com/animation-product</a> 1 xslots рабочее зеркало <a href=https://martinhqzi18630.collectblogs.com/75681193/deepnude-ai-navigating-the-complexities-of-image-manipulation-and-ethics>https://martinhqzi18630.collectblogs.com/75681193/deepnude-ai-navigating-the-complexities-of-image-manipulation-and-ethics</a> Бездепозитные призы начисляются лишь раз один. Не стоит раскрывать новые аккаунты, чтобы получить их повторно. Служба безопасности казино непременно выявит «левого» участника и заблокирует. Если посетитель выполнит нужные притязания, отыграет собственную ставку и решит вывести личный выигрыш, то ему нужно сведению, собственно казино обязательно потребует предоставить ксерокопии собственных документов, дабы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные средства вывести не получится.Фриспины начисляются по определенной ставке. После их активации игроку нужно запустить разъем и увериться, что в нем показываются безвозмездные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода последствии отыгрыша ориентируется оператором и изредка выше 5 000 руб.
1×slots официальный сайт мобильная версия
Так собственно главное отличие подарка на депозит от бездепа – неотъемлемое пополнение счёта. Вы можете привнести депо и преумножить стартовый капитал либо забрать бездеп и при не придётся рисковать собственными сбережениями. Поспешите выполнить простые требования, и администрация ресурса начисляет щедрое поощрение!Автоматы непопросту числятся наиболее известным азартным весельем. Чтобы усвоить управление и правила, понадобится всего количество мин. Ваша задача устроить ставку, найти число трудящихся линий и можно крутить барабан. Если на выпадет выигрышная комбинация – вы выиграли! С этой задачей вас помогут управится бездепозитные призы казино. <a href=http://powercrop.it/chi-siamo/le-persone?page=128#comment-6419>1×slots регистрацию процедура займет всего лишь</a> 1хслот зеркало Как и другие акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такого предложения являются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых гостей и разрешает им составить впечатление о функционале, не рискуя значительными совокупностями.Не стоит сразу же отрицаться от приветственных подарков в похожих казино. Администрация готова начислить средства или фриспины, но сначала работники должны увериться, собственно вы не мошенник. Дело никаких, что развелось слишком количество охотников за призами. Они научились врать систему и наваривать солидные суммы средств. <a href=http://hawkee.com/profile/4377430/>http://hawkee.com/profile/4377430/</a> Используйте превосходнейшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из списка ниже, чтобы заработать подарки за обычные деянья теперь сейчас получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и резвыми выводами на электронные кошельки. 1×slots официальный зеркало рабочее Допустим, за регистрацию вы получили бездеп в объеме 2 000 рублей с вейджером х30. В данном случае светит сделать ставок, на общую необходимую в 60 000 руб. (2 000 * 30 = 60 000). Когда выполните обстоятельства по отыгрышу, придёт время заработать настоящие средства. Однако не забывайте, что с любого презента выйдет исключить определённую сумму (чаще всего менее $200).Онлайн гемблинг развивается с каждым деньком больше и больше, новые бренды создаются не по денькам а по часам. Новые онлайн казино делают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и что, этим наиболее предлагают бездепозитные бонусы за регистрацию, собственно бы не упустить эту вероятность — как воспользоваться новым бездепом, рекомендуем навещать наш сайт как можно почаще, самое лакомое и свежие будет добавляться в этом же перечне.
1×slots регистрация 1×slots casino 777 online
<a href=http://dac21.com/bbs/board.php?bo_table=free&wr_id=1008401>http://dac21.com/bbs/board.php?bo_table=free&wr_id=1008401</a> 1×slots казино зеркало С не отыгранным бонусом запрещается превосходить объем максимальной ставки. Нарушение сего обстоятельства в аннулирование выигрыша.Еще одно условие касается размеров ставки. Операторы устанавливают наивысшую сумму, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, избранной в Личном офисе. При превышении лимита есть риск потерять приза. Существующие ограничения относятся и к конкретным обликам ставок. Например, играя в рулетку, заказчик имеет столкнуться с запретом ставить фишки на шансы.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
После потребуется привнести идентификационный платёж. Это стращает новичков больше всего. Нужно сделать наименьший депо в 100–500 руб. Таким образом служба защищенности увериться том,, собственно платёжный метод принадлежит Вам. Данная процедура необходима для обеспечения безопасности игровых счетов. Пример, Ваш аккаунт взломают и выведут средства на собственный кошелёк. Будет очень досадно. Поэтому верификация платёжной системы, это необходимый момент. <a href=http://swissairways-va.com/phpBB3/viewtopic.php?t=802710>1хслотс казино зеркало</a> Сразу в активации промокода можно пользоваться подарком. Как уже упоминалось, призы бывают трёх видов – фриспины, кредиты и фриплей-бонусы. 1×slots регистрация 1×slotscasino09k online <a href=http://fut15forsale.is-programmer.com/guestbook/>http://fut15forsale.is-programmer.com/guestbook/</a> Фриспины без депо или дополнительные средства посодействуют ближе познакомиться с игровой платформой и её функциями. За счёт презентов возможно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям из-за игры напротив живых крупье.Зарегистрируйтесь. Для регистрации чаще всего достаточно установить свой номер аппарата и почтовый адресок, после чего ввести полученный код из СМС. Возможно, требуется показать промокод. В правилах акции несомненно написано, где его надо включать. Иногда это надо создавать при регистрации, времени — уже последствии создания личного кабинета, на отдельной страничке.
1×slots казино зеркало
Простая процедура получения бездепозитного приза, которая займет менее 2-х минут. Для получения бездепов, достаточно зарегистрироваться и подтвердить контактные данные.Активация валютного вознаграждения происходит механически последствии сотворения профиля или использования промокода. Иногда операторы предъявляют вспомогательные притязания: подписаться на странички казино в социальных сетях либо на рассылку рекламных сообщений, скачать и установить дополнительный софт и т.д. <a href=https://uadplugins.club/memberlist.php?mode=viewprofile&u=226646>https://uadplugins.club/memberlist.php?mode=viewprofile&u=226646</a> казино 1×slots Иногда для получения бонусов нужно спутаться с адептами службы. Удобнее всего с ними разговаривать в онлайн-сате, но время довольно запроса по электрической почте.
<b>Смотреть еще похожие новости:</b>
<a href=http://okeyrp.listbb.ru/viewtopic.php?f=24&t=1576>1×slots актуальное зеркало</a>
<a href=https://forums.dfine.net/showthread.php?tid=653>1×slots быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Самые свежие бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды находятся на данной странице. Посетитель может расценить условия получения и начать выступать на деньги без внесения депозита. При этом игроку важно осознавать, на каких условиях и какими методами он сможет вывести приобретенный выигрыш. Для этого необходимо расценить перечень подключенных платежных систем.
#1650 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора казино в россии <a href=https://glvk.guru/>Преподобная Надежда Александровна порно</a> new casino казино вулкан <a href=https://res-publika.com>Черкесова Бэлла Мухарбиевна порно</a> казино онлайн porno Игорь Акинфеев (футбол) сколько казино porno Александр Соболев (футбол) казино большая porno Мира Андреева (теннис) 1×bet зеркало на сегодня
DiskiPlus porno Мария Шарапова DiskiPlus букмекерские контора ап <a href=https://www.diskiplus.ru/>DiskiPlus порно с Евгений Малкин (хоккей)</a> DiskiPlus порно с Евгения Медведева, фигуристка DiskiPlus casino бонус <a href=https://www.diskiplus.ru/>DiskiPlus ramenbet casino</a> DiskiPlus букмекерская контора фонбет официальный сайт DiskiPlus Самойлова Алла Владимировна порно DiskiPlus винлайн букмекерская контора DiskiPlus букмекерские конторы бет DiskiPlus pinco casino DiskiPlus порно с Александр Большунов (лыжные гонки) DiskiPlus казино сегодня
#1651 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино можно inform@rucriminal.info <a href=https://repost.news/>казино большая</a> casino вход 1win букмекерская контора <a href=https://rhymes-punches.com/>макао казино</a> казино смотреть онлайн porno Катерина Шпица кент казино pin up casino пин ап букмекерская контора леонов Разуваева Ксения Денисовна порно приложения букмекерских контор
DiskiPlus официальные зеркала казино DiskiPlus порно с Гатагова Ольга Анатольевна <a href=https://diskiplus.ru>DiskiPlus porno Андрей Рублев (теннис)</a> DiskiPlus casino актуальное зеркало DiskiPlus vavada casino <a href=https://www.diskiplus.ru>DiskiPlus porno Дарья Клишина</a> DiskiPlus pin up casino официальный DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus казино ставка DiskiPlus вавада казино DiskiPlus porno Юлия Канакина, скелетонистка DiskiPlus пина casino DiskiPlus 1×bet приложение
#1652 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
Помните, что любые нарушения верховодил сведут на нет ваши старания, и вы скорее останетесь без начисленного вас бесплатного приза. Всегда изучайте правила начисления и условия вейджера. По хоть вопросам, на коие вы возможности помощи найти ответы, обращайтесь за объясненьям и саппорт.За вербование друга ? масштабах партнерской программки клиент получает вознаграждение за привлечение новых пользователей. <a href=http://filmkachat.ru/>казино 1×slots</a> В случае установленного лимита на необходимую вывода выигрыша с бездепозитного приза, игрок не может вывести больше заявленной суммы.Бездепозитные бонусы в казино без пополнения 2022 — это определенная сумма денег или vacant spins вращения, которые предоставляются первым гостям за регистрацию на веб-сайте казино в виде бездепозитного бонуса, и выделяет вам возможность с казино без пополнения опробовать услуги (игр), с последующей привилегией вывода средств при выполнении всех установленных управлял. <a href=https://blog.udn.com/G_107482553777754991/180423924>https://blog.udn.com/G_107482553777754991/180423924</a> Многие игроки, оценив функционал казино, остаются выступать в нем и дальше ? на это и нацелено любое промо. Постоянные посетители заносят депозиты и делают ставки, обеспечивая длительную прибыль оператора. То есть, казино выдают бездепы свежим юзерам для формирования лояльной аудитории. казино 1×slots <a href=https://www.mixcloud.com/Glavdorogadv1808/>https://www.mixcloud.com/Glavdorogadv1808/</a> Выбрать казино с бездепозитным бонусом. У нас на сайте представлен список превосходнейших онлайн казино, которые предлагают своим игрокам щедрые призы за регистрацию.B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.
1×slots регистрация на 1хслотс
зеркала 1×slots А ознакомиться с свежими интернет казино, Вы можете с призов с выводом прибыли, коие Вы сможете получить без депозита.Главным интересным в возникновении данных вознаграждений состоит никаких, что пустив их в ход, геймер ничем не рискует и в последствии никому ничего не несомненно должен (не зависимо, получит ли он благодаря бонусам какой-нибудь выигрыш или моментально спустит все только что прибывшие деньги). То есть, казино снабжает игрока вероятностью на дармовой базе играть во всевозможные слоты причем спонсирует игру. <a href=https://forum.bandariklan.com/member.php?action=profile&uid=20388>https://forum.bandariklan.com/member.php?action=profile&uid=20388</a> Также бездепозитные призы шансы работать методом возвращать к ирге посетителей, что приостановивших своё сотрудничество с фирмой: уведомление о бездепе поступает на мобильный телефонный либо почту. 1×slots казино зеркало
1х слот 1хслотс регистрация перейти на 1×slots
Как только на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу последствии сего можно оставить заявку на вывод выигрыша. Кредиты выгодно выделяются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом реальных средств и дают вероятность ощутить задор. Во-вторых – можно насладиться любой азартной игрой доступной на сайте. В вашем распоряжении присутствуют автоматы, настольные прибавление, видео-покер, Live-дилеры.Также, такой необходимо подтвердить свой номер телефона, достичь код, приобретенный в смс-сообщении от клуба ввести в специальное поле в личном офисе игрока. Подарки на праздничные ? посвященные торжественным датам, требующие условного отыгрыша или начисляются без это. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду.Суммы похожих услуг, случаев, колеблются от трех до двадцати долларов, а вейджер на эти свои должен составлять от 30 до шестидесяти раз. Зачастую, наивеличайшая сумма выигрыша тут составит от одной до 2-ух сотен $. Если компьютерные выиграет больше, то все свои могут быть списанными до очень разрешенного выигрыша. Здесь появляется содержание выводить еще несуществующие деньги на собственную платежную систему и дальше искать заведение с благоприятными под данную необходимую релоадом либо бонусом за первое пополнение счета. Есть количество подвидов бездепозитного гонорары, предлагаемого большим числом заведений. <a href=https://botdb.win/index.php?title=How_to_Bet_on_Cricket_Using_the_1×bet_APP_in_India_(IN)?>https://botdb.win/index.php?title=How_to_Bet_on_Cricket_Using_the_1×bet_APP_in_India_(IN)?</a> С не отыгранным призом запрещается превосходить объем максимальной ставки. Нарушение этого условия виде аннулирование выигрыша. 1×slots зеркало рабочее Выбирайте лучшие безвозмездные бонусы счет обзоров на Casinoz – и пусть вам сопутствует удача при отыгрыше бонусных кредитов!
1×слотс казино
Если площадка презентует бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь завести акк на сайте и активировать его, подтвердив адресок электронной почты, номер аппарата либо иные данные, которые требует оператор. Перед этим нужно убедиться, что пользователь находится на официальном веб-сайте казино, но на мошеннической площадке.С такими простыми советами каждое казино с бонусом за регистрацию способно принести в разы больше выгоды и пользы. <a href=https://melhorlance.com.br/minha-conta/>1×slot официальный сайт</a> Онлайн-казино тщательно продумывают бонусные обстоятельства, которые необходимо выучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша прочие ограничения. зеркала 1×slots <a href=https://onetable.world/read-blog/71176>https://onetable.world/read-blog/71176</a> Риск-игра по одинаковым шансам – Также казино возможность запрещать скорпулезно условия по отыгрышу счет раунда на удвоение, который предлагается в слотах, видео-покере и некоторых иных играх.Многие игроки, оценив возможностей казино, остаются играть в нем и дальше ? на это и направлено любое промо. Постоянные посетители заносят депозиты и делают ставки, обеспечивая долгосрочную выгода оператора. То есть, казино выдают бездепы свежим юзерам для формирования лояльной аудитории.
1×slots регистрация 1×slots review live
Вознаграждения за получение VIP-статуса ? начисляются масштабах программки лояльности при достижении еще значения или выдаются индивидуально менеджерами саппорта.Но такие рамки не смущают в хайроллеров, что коэффициенты на слотах разрешают рассчитывать на солидные выигрыши, а в неких автоматах разыгрывается передовой джекпот. <a href=http://studio-pd.ru/index.php?subaction=userinfo&user=lyingebb75>http://studio-pd.ru/index.php?subaction=userinfo&user=lyingebb75</a> Автоматическая активация взгляд самой комфортной, но ручной способ имеет перед ней преимущества. Прежде чем использовать вознаграждение от казино, стоит заблаговременно найти, сколько медли требуется на исполненье всех критерий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деяния бонуса. 1×slots casino зеркало Бесплатные бонусы казино без депозита возможно получить повторяющий денежных средств на бонусный счет (вывести их возможно только в отыгрыша), фриспинов, игры либо кешбэк-бонуса.Благодаря программке лояльности от игорного заведения, можно брать неплохой старт и без добавочных инвестициям запустить видеослоты. Кроме как, можно рассчитывать на реальную удачу и получить, без инвестиции личных финансов, великой выигрыш.
<b>Смотреть еще похожие новости:</b>
<a href=http://support-groups.org/viewtopic.php?f=161&t=767732>1хслотс казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Новые посетители онлайн-казино без первого депозита имеют проверить собственную удачливость. К что, этому же есть возможность преобразовать бездепы в реальные средства за регистрацию в казино, впрочем для этого приз нужно отыграть сообразно условиям промоакции.
#1653 inernetkrdGephttps://domashij-internet-krasnodar003.ru
провайдер по адресу краснодар <a href=https://domashij-internet-krasnodar003.ru>domashij-internet-krasnodar003.ru</a> подключить интернет по адресу
#1654 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино ли официальная казино <a href=https://kompromat1.online/>порно с Максим Глушенков (футбол)</a> порно с Анастасия Потапова, теннисистка порно с Кирьянова Дарья Борисовна <a href=https://7club7.com/>порно с Евгения Медведева, фигуристка</a> гта онлайн казино casinos winning Радченко Светлана Юрьевна порно официальные букмекерские конторы скачать casino pin официальный 7k casino зеркало рабочее скачать casino на андроид
DiskiPlus Радченко Светлана Юрьевна порно DiskiPlus демо казино <a href=https://diskiplus.ru/>DiskiPlus леон букмекерская контора</a> DiskiPlus сайт pin up casino DiskiPlus казино ли <a href=https://diskiplus.ru/>DiskiPlus порно с Карен Хачанов (теннис)</a> DiskiPlus винлайн букмекерская контора DiskiPlus казино пин DiskiPlus приложения букмекерских контор на андроид DiskiPlus часы казино DiskiPlus порно с Гатагова Ольга Анатольевна DiskiPlus скачать 1×bet на андроид DiskiPlus как выиграть в казино
#1655 Charlesgunnyhttp://filmkachat.ru
x1 slots 1хслотс регистрация перейти на 1×slots
Создание аккаунта. На сайте казино необходимо открыть регистрационную форму и наполнить пустые поля собственными данными. Иногда на данном этапе требуется указать только адресок электронной почты и пароль, но чаще надобно заполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д.). Нужно свидетельствовать только настоящие данные, поскольку впоследствие они станут испытаны. <a href=http://filmkachat.ru/>1×slots мобильная версия войти казино</a> Иногда виде бездепа, казино дарует минимальный бонус (до 50 руб. ), ради которого не заморачиваться.Принципиальным отличием безвозмездных бонусов от призов на депо считается отсутствие надобности заносить средства на акк. Из-за этого их нередко нарекают бездепозитными (not the slightest deposit bonuses). <a href=https://www.bondhuplus.com/read-blog/137790>https://www.bondhuplus.com/read-blog/137790</a> 1×slots официальный регистрация <a href=http://forum.xpscenery.net/member.php?action=profile&uid=1143>http://forum.xpscenery.net/member.php?action=profile&uid=1143</a>
1×slots рабочее зеркало
<a href=https://eccentrictirade.com/forums/showthread.php?tid=136313>1×slot зеркало рабочее регистрации на телефон придет</a> 1×slots официальный сайт мобильная версия скачать Только выполнив все условия отыгрыша и дождавшись завершения проверки аккаунта, Вы можете оформить заявку на вывод средств и получить свои деньги. <a href=https://full-chip.net/user/FrankDruck/>https://full-chip.net/user/FrankDruck/</a> Не стоит путать игру в демо и внедрение призов. В демонстрационном режиме игрок имеет расценить механику слота, сюжет и оформление. Но забава ведется на условные кредиты, поэтому отсутствует основное ? чувство пыла. Активируя промокод либо фриспины, клиент по-прежнему не расходует средства деньги на игровые автоматы, хотя может сорвать реальный куш! 1×slots зеркало сайта
1×slots casino online регистрация
Вообще перейдя в казино — управляла схожи в получении бездепозитных призов, в стереотипные верховодила заходит: подтвердить эл. Почту и телефон, наполнить свой собственный профиль, активировать рекламную код либо активировать предложения во вкладке БОНУСЫ.Бонус в казино без депо содержит различные вариации: может быть приветственный приз, акции в честь каких-то праздничных или главных дат, приз за привлечение новых игроков, преданность и получение VIP-статуса. B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax <a href=https://chessdatabase.science/wiki/User:CeliaMacon9300>https://chessdatabase.science/wiki/User:CeliaMacon9300</a> Прежде чем активировать бездеп, нужно убедиться никаких, собственно страна, уроженцем которой является игрок, не заходит в перечень не. 1×slots промокод при регистрации При отыгрыше бонусных средств, нужно учесть срок действия бонуса и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный приз несомненно аннулирован.
1хслотс казино зеркало
Бездепозитный приз казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в этом и заключается главное отличие. Риск-игра по одинаковым шансам – Также казино может воспрещать скорпулезно условия по отыгрышу за раунда на удвоение, кот-ый предлагается в слотах, видео-покере и некоторых других играх.Бездепозитные призы казино за регистрацию в 2022 году — это возможность поиграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой либо количеством бесплатных вращений без внесения депозита. Не путайте деморежим с реальной забавой без надобности внесения депозита. 1 xslots рабочее зеркало <a href=http://wiki.nl.memorix.nl/Gebruiker:Jeffery7975>http://wiki.nl.memorix.nl/Gebruiker:Jeffery7975</a>
1×slots зеркало выигрыши обязательно пройдите регистрацию если
2. Создать новый профиль. Для регистрации нужно заполнить небольшую анкету или зайдите в собственный офис при помощи социальных сетей; Верификация аккаунта. Лучше подтвердить личность сразу последствии регистрации, дабы потом не было проблем с выводом средств. Верификация имеет проходить двумя путями: <a href=http://7000lv.ru/bitrix/rk.php?goto=http://startgames.ws/friend.php?url=http://baseus1.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/W9gpJxFxP0u>http://7000lv.ru/bitrix/rk.php?goto=http://startgames.ws/friend.php?url=http://baseus1.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/W9gpJxFxP0u</a> Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.Приглашаем делиться воззрениями о призах. Это поможет другим пользователям избирать наиболее выгодные предложения. 1×slots регистрация на сайте 1×slots ru com
<b>Смотреть еще похожие новости:</b>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=369777>1×слотс казино</a>
<a href=http://junlinro520.gain.tw/space.php?uid=1111051>1×slots рабочее зеркало на сегодня</a>
<a href=http://kamechkovkazak.listbb.ru/viewtopic.php?f=15&t=2223>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Новые клиенты онлайн-казино без первого депо имеют выяснить собственную удачливость. К что, этому же есть вероятность конвертировать бездепы в реальные средства за регистрацию в казино, впрочем достичь приз нужно отыграть сообразно условиям акции.
#1656 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Бездепозитный приз нередко возможность замерзнуть легкодоступным незамедлительно последствии окончания регистрации, что правило единственным требованием к нему является регистрация, а затем проверка вашей свежей учетной записи. <a href=http://filmkachat.ru/>рабочее зеркало 1хслотс</a> Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. <a href=https://www.bunity.com/-656a43e6–97c0–4816-aedc-21f8d5e41341>https://www.bunity.com/-656a43e6–97c0–4816-aedc-21f8d5e41341</a> 1×slots регистрация 1×slotscasino 56 online <a href=http://in.net.ua/user/Jamesfoeks/>http://in.net.ua/user/Jamesfoeks/</a> Способы получения бездепа различаются в зависимости от вида приза, который понравился игроку. Но для в любом случае нужно быть зарегистрированным в законном онлайн-казино и доказать свою лицо. В общем виде пошаговая аннотация для получения бездепозитного бонуса выглядит например:Бездепы шансы входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами.
1хслотс зеркало
Похожим образом трудится третий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения клиента либо в связи с получения им VIP-статуса. Подарок предоставляется после воззвания в поддержку и ревизии.А ознакомиться с свежими онлайн казино, Вы сможете помощью бонусов с выводом прибыли, которые Вы можете получить без депозита. 1×slots официальный сайт скачать <a href=https://forumniebiescy.pl/memberlist.php?mode=viewprofile&u=70891>https://forumniebiescy.pl/memberlist.php?mode=viewprofile&u=70891</a> Акционные предложения от казино существуют в разных форматах. Часто призы даются в мена на депозит. Игрок заносит платеж и получает средства, безвозмездные вращения прочие поощрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — картина приза, кот-ый гарантирован за исполнение конкретных поступков на сайте: 1×slots зеркало рабочее Помимо прочего, для вывода средств по бездепу необходимо привнести на счёт свой первый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально возможную сумму, в чего вывод средств станет доступен.
1х слот регистрация в 1×slots casino
<a href=https://www.peacefulmind.co.kr/bbs/board.php?bo_table=free&wr_id=731669>https://www.peacefulmind.co.kr/bbs/board.php?bo_table=free&wr_id=731669</a> Максимальная ставка ? устанавливается в валюте счета и ограничивает размер ставки за один спин. В случае ее превышения приз возможность быть аннулирован. Также в правилах имеет содержаться запрет на размещение ставок конкретного облика, например, по равным шансам в рулетке (словами, на чет или нечет, красноватое либо темное и т.д.). 1х слот регистрация в 1×slots casino Проверка занимает от нескольких мин. До нескольких дней, профессионалы техподдержки могут запросить вспомогательные документы либо инициировать краткое общение по Skype.Многие азартные клубы ограничивают необходимую вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании акции, суммы Вы не сможете вывести. Разница будет аннулирована, Вы том не можете создавать на нее ставки.
1×slots casino зеркало рабочее
Но не мыслить, что снабжая юзеров такими призами, казино занимается спонсированием. Ведь объемы вознаграждений, в основном, не немалые (средним объемом от 5 до 20 долларов). И на эти свои налагаются конкретные условия и лимитирования, обязательные к исполнению игрока, в в последствии он желает получить все средства выигранные финансы. Максимальная ставка ? уточняется в валюте счета и ограничивает размер ставки за раз спин. В случае ее превышения бонус может быть аннулирован. Также в правилах может содержаться запрет на размещение ставок определенного облика, к, по одинаковым шансам в рулетке (то есть, на чет или нечет, красноватое или черное и т.д.).Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро или 20 $. Если выдаются фриспины, их количество изредка превышает нескольких десятков даровых вращений. Доступные игры – В некоторых азартных играх возможно понизить математическое преимущество казино до нескольких 10-х процента. В их количестве многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как управляло, в этих играх ставки идут в зачет вейджера не всецело. Например, имеет предусматриваться только 50%. В некоторых забавах бездепозитные бонусы вообщем нельзя отыгрывать.Так что приготовьтесь предоставить конфиденциальную информацию (пол, возраст, государство проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает менее суток, после чего получится беспрепятственно выводить солидные выигрыши. 1× slots зеркало <a href=https://forum.21up.co.uk/member.php?action=profile&uid=13112>https://forum.21up.co.uk/member.php?action=profile&uid=13112</a> Помните, собственно в неких играх сумма ставки идет в зачет вейджера лишь частично. Так, в настольных и карточных играх только от 5% до 50% суммы ставки считаются как отыгранные деньги, момент как в слотах идет в зачет все one hundred percent суммы.Чтобы играть безвозмездно на настоящие средства в казино, не всегда довольно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные деяния.
1×slots casino зеркало рабочее
Выигрыши с призов без инвестициям практически привязаны к требованию по ставкам и могут быть обналичены только после исполнения данных притязаний.Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и более. Когда игроку полагается количество фриспинов, администрация может бить3 их начисление на некоторое дней. Бесплатные вращения предоставляются для определенного слота, кот-ый указывается в правилах промоакции. В истинное время получить бонус за регистрацию в казино довольно просто. Почти любой игорный дом с радостью предоставит средства либо безвозмездные вращения. Многие игроки используют этим и не стыдятся региться в любом клубе с выгодными критериями. Кстати, это отличная возможность выдумать выигрышную тактику и сорвать куш. <a href=http://pinetree.sg/bbs/board.php?bo_table=free&wr_id=201792>http://pinetree.sg/bbs/board.php?bo_table=free&wr_id=201792</a> Простая процедура получения бездепозитного приза, кот-ая займет менее 2-х мин. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные.В каждом казино с бездепозитным призом учтены вейджеровые обстоятельства. Это единственный «подводный камень», который стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, нужно устроить определённое число ставок. Чем круче бонус, тем труднее выполнить условия, и наоборот. 1×slots зеркало рабочее на сегодня В неких онлайн казино для получения бездепозитных призов не достаточно просто зарегистрироваться на сайте клуба и доказать свои контактные данные. Дополнительно требуется активация промокода.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.digicube.de/forum/threads/858313–1×slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-1×slots-review-live?p=1074258#post1074258>1×slots регистрация 1×slots review live</a>
<a href=https://www.reisezielforum.de/viewtopic.php?t=595095>1×slots регистрация на сайте 1×slots ru com</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Как правило, новоприбывшие геймеры для желают ознакомиться с методами ввода и вывода валютных средств и сроки исполнения поданных заявок чтобы конкретно разуметь, как живо появится вывести свой казино приз за регистрацию без депо на электрический кошелек либо же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино соперничают меж собой. Ведь случае бы конкретную компанию давало только одно онлайн-заведение, то вряд ли бы посетители заметили казино с призом за регистрацию и имели бы рассчитывать лишь на вознаграждение вид приза на первое вложение. К любому заведению регулярно следует привлекать новых игроков, собственно, итоге, лишь на руку всем играющим.
#1657 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino андроид казино ставка <a href=https://rumafia.news/>фильмы казино рояль</a> porno Дарья Клишина скачать 1×bet 1×bet xyz <a href=https://rucriminal.info/>букмекерские контора ап</a> Кузнецова Анна Юрьевна порно Приезжева Екатерина Геннадьевна порно 1×bet зеркало xbet xyz Анна Михалкова рабочие зеркала казино 1×bet приложение букмекерская контора фонбет официальный
DiskiPlus porno Андрей Рублев (теннис) DiskiPlus 7k casino зеркало на сегодня <a href=https://www.diskiplus.ru/>DiskiPlus porno Мария Шарапова</a> DiskiPlus casino приложения DiskiPlus ев казино <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet зеркало рабочее xbet</a> DiskiPlus включи казино DiskiPlus Манилова Алла Юрьевна порно DiskiPlus gama casino DiskiPlus пин casino DiskiPlus porno Анастасия Янькова, боксерка DiskiPlus cometa casino DiskiPlus порно с Юлия Ефимова, пловчиха
#1658 stomatologiya Mitino_sxpnhttp://stomatologiya-mitino3.ru
топсмайл <a href=www.stomatologiya-mitino3.ru/>топсмайл</a> .
#1659 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Для отыгрыша приза казино обязует игрока поиграть на необходимую, в количество раз превышающую сумму полученного бонуса — здесь выгода фирмы явна.Отказ в прохождении верификации. Если заказчик не желает либо не может предоставить документы, подтверждающие его лицо, профиль будет заблокирован совместно, вкупе со всеми бонусными начислениями. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slots review live</a> Бездепозитный приз за регистрацию в казино с выводом денег в 2022 году — Наш ресурс дает игрокам важную информацию о самых новых, щедрых и испытанных бонусах в интернет казино, коие обновляются каждый день. <a href=https://www.therookies.co/projects/79483>https://www.therookies.co/projects/79483</a> А ознакомиться с свежими интернет казино, Вы можете помощью призов с выводом выгоды, которые Вы сможете получить без депозита.Бoльшинcтвo азартных заведений выдвигают примерно одинаковые обстоятельства и требования, коие нужно выполнить, чтобы получить бездепозитный бонус за регистрацию. Все их возможно объединить в один перечень: 1×slots регистрацию более популярный вариант это <a href=http://d90894u1.bget.ru/user/RalphSex/>http://d90894u1.bget.ru/user/RalphSex/</a> Еще одно условие касается размеров ставки. Операторы устанавливают наивысшую необходимую, которую игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, избранной в Личном офисе. При превышении лимита есть риск лишиться приза. Существующие ограничения относятся и к определенным обликам ставок. Например, играя в рулетку, клиент может столкнуться с запретом назначать фишки на шансы.В списке требований к отыгрышу часто наличествуют лимиты на ставки при забаве на личные деньги. Так, если отыграть надо(надобно) 30 000 руб., а предельная сумма ограничена 30 рублями, то вертеть барабаны предстоит 1000 один. Эта особенность затрудняет соблюдение игроками критерий по срокам деяния акции.
1×slots официальный сайт скачать на айфон
<a href=http://pravoslit.ru/forum/obshchee/183639–1khslots-rabochee-zerkalo-na-segodnya.html>1хслотс рабочее зеркало на сегодня</a> казино 1×slots официальный сайт Если при регистрации показать промокод, возможно гарантировано получить приз. Где взять ваучер? Посетите на блоги либо форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В заключительное время игорные дома начали рекламироваться в фильмах и сериалах. Присмотритесь и всего заметите промокод, который принесёт 500 или 1 000 бонусных рублей.Активация валютного гонорары происходит автоматически после творения профиля либо применения промокода. Иногда операторы предъявляют дополнительные требования: подписаться на странички казино в социальных сетях либо на рассылку рекламных извещений, скачать и ввести дополнительный софт и т.д. <a href=https://cameradb.review/wiki/User:GaySherry49>https://cameradb.review/wiki/User:GaySherry49</a> 1×slot официальный сайт С другой стороны, намного легче арестовать бездепозитные фриспины за регистрацию в казино и прямо сейчас начать вращать барабаны в превосходнейших слотах. Главная особенность спинов в том, собственно они предусмотрены для лучших автоматов. Удастся столько пройти вспомогательные раунды, но и прирастить необходимую выигрыша, заработать респины прочие внутриигровые презенты.
1×slot регистрация
<a href=https://matters.town/a/12klmfskckod>https://matters.town/a/12klmfskckod</a> Но а если вы уже профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы автоматически перейдете в интернет казино;Казино дает возможность заработать и вывести реальные деньги на бездепозитных призах. Обычно, это незначительная сумма, коию казино может для позволить презентовать игроку. 1× slots casino зеркало Одним из предлогов отдавать привилегию 1 или иному заведению заключается в привлекательности предлагаемых промоакций и бесплатных предложений. Безвозмездные фриспины, выдаваемые без нужды делать какой-либо лепта, в перечне находится далековато не в конце.
1×slots зеркало регистрация то дальше необходимо пройти
Также, учите, что бездепозитный бонус возможно исключить лишь сомнений случае, когда станут исполнены все обстоятельства отыгрыша. Для получения предоставленных призов для понадобиться — ПК или мобильное устройство, и остальное дело за небольшим.Верификация аккаунта. Лучше подтвердить лицо незамедлительно в регистрации, чтобы потом не было проблем с выводом средств. Верификация возможность проходить 2-мя маршрутами: Когда идет о валютных призах, казино практически устанавливают обстоятельства вейджера, коие нужно выполнить, чтобы вывести выигрыш. 1 х слотс зеркало <a href=http://www.sicilianodentro.it/forum/members/258854.html>http://www.sicilianodentro.it/forum/members/258854.html</a> Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в индивидуальный офис, дабы арестовать бесплатные вращения с вейджером х40;Да, у даровых бонусов есть дефекты. Прежде всего, они обычно очень. Кроме как, условия вейджера по ним постоянно жесткие. Но все неименье риска делает их очень привлекательными для посетителей.
1×slots рабочее зеркало
В зависимости от интернет заведения любой из них может для предложить как бездепозитные деньги, например и бездепозитные фриспины, которые в удачной регистрации упадут вас на ваш игровой баланс.Для подтверждения электронной почты, просто перейдите по активной ссылке в послании, полученном от игрового заведения. <a href=https://myapple.pl/users/493531–3d-visualization-artist>https://myapple.pl/users/493531–3d-visualization-artist</a> 1×slots официальный сайт скачать на айфон Иногда у гостей сайта могут возникнуть проблемы при активации полученного промо-кода. В этих случаях, нужно адресоваться за подмогою в саппорта «Support». Для получения ответа, непременно указывается определенная причина обращения и подтверждается информация дополнительными скриншотами. Если сложилась неоднозначная ситуация, постоянно возможно адресоваться к основному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.digicube.de/forum/threads/885877–1×slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F?p=1103318#post1103318>1×slots регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Способы получения бездепа различаются от облика бонуса, кот-ый приглянулся игроку. Но вам или надо(надобно) быть зарегистрированным в легальном онлайн-казино и подтвердить собственную личность. В общем облике пошаговая инструкция для получения бездепозитного приза смотрится так:
#1660 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
винлайн букмекерская контора официальный порно с Каролина Севастьянова <a href=https://slon-ru.com/>букмекерская контора скачать приложение</a> порно с Варвара Субботина пина casino <a href=https://krtka.info/>порно с Алексей Миранчук (футбол)</a> сколько казино как выиграть в казино unlim casino букмекерская контора официальный сайт скачать up casino зеркало 1×bet официальный слоты казино фильм онлайн
DiskiPlus лучшие бесплатные онлайн казино DiskiPlus порно с Илюшникова Татьяна Александровна <a href=https://diskiplus.ru>DiskiPlus 1×bet официальный сайт 1×bet xyz</a> DiskiPlus casino актуальное зеркало DiskiPlus почему казино <a href=https://diskiplus.ru/>DiskiPlus букмекерская контора фонбет официальный сайт</a> DiskiPlus автомат казино DiskiPlus ешь казино DiskiPlus демо казино DiskiPlus почему в казино нет часов DiskiPlus porno Елизавета Туктамышева DiskiPlus букмекерская контора фонбет официальный DiskiPlus casino x
#1661 Charlesgunnyhttp://filmkachat.ru
скачать 1×slots на андроид мобильная версия
Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют актуальную информацию о not the slightest down payment bonuses и других предложениях.После потребуется внести идентификационный платёж. Это стращает новичков больше всего. Нужно устроить наименьший депозит в 100–500 руб. Таким образом служба безопасности увериться в том, собственно платёжный способ принадлежит Вам. Данная процедура необходима для обеспечивания безопасности игровых счетов. Пример, Ваш аккаунт взломают и выведут средства на свой кошелёк. Будет очень досадно. Поэтому верификация платёжной системы, это важный момент. <a href=http://filmkachat.ru/>рабочее зеркало 1×slots</a> Отзывы читателей о бонусных акциях помогут составить эмоцию, хотя не запамятовывайте о субъективности личных комментариев. <a href=https://slides.com/archicgi-com/how-to-reset-subaru-ecu-after-battery-change>https://slides.com/archicgi-com/how-to-reset-subaru-ecu-after-battery-change</a> 1×slots зеркало видели такую регистрацию на <a href=https://www.bedirectory.com/1×%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9_389371.html>https://www.bedirectory.com/1×%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9_389371.html</a> Выбор любого интернет казино на нашем сайте. В описании к любому Вы сможете узнать, что получите за создание аккаунта.
1×слотс казино
К раскаянью, нет. Почти все казино, просят внесение хотя бы 1-го минимального депо для вывода выигрыша с бездепозитного бонуса. Также учитывайте, собственно исключить деньги разрешено только на что, эту платежную систему, с которой был изготовлен депозит. 1×slots регистрация на официальном сайте Третитй бездепозитный бонус за регистрацию – валютные свои. К раскаянью, начислить рубли либо доллары готовы лишь известные и пользующиеся клубы. С их поддержкой вы сможете насладиться каждой доступной игрой – автоматом, рулеткой, кено, блэкджеком. <a href=https://jasperzxui44321.win-blog.com/10423054/nude-ai-understanding-the-intersection-of-innovation-and-ethics-in-image-manipulation>https://jasperzxui44321.win-blog.com/10423054/nude-ai-understanding-the-intersection-of-innovation-and-ethics-in-image-manipulation</a> Условия шансы разниться друг от друга. Но такой приз возможность быть применен только для игрового процесса – приобретенные на счет финансы до того, как будут отыграны, исключить невероятно. зеркло казино 1×slots Можно ли зарабатывать на бездепозитных бонусах? Это не работа, тут как повезет, в в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, время возможно назвать везением, и дополнительной добавкой к вашему бюджету.
1×slots зеркало сайта
<a href=https://wifidb.science/wiki/1×bet_APP:_The_Perfect_Tool_For_Casino_And_Betting.>https://wifidb.science/wiki/1×bet_APP:_The_Perfect_Tool_For_Casino_And_Betting.</a> 1хслот официальный сайт зеркало
1×slots официальный сайт скачать
Бонус с зачислением средств на счет выделяет больше свободы действий. Пользователь сам подбирает, каким образом распорядиться подаренными своими. Здесь также все действовать лимитирования на список доступных игр, хотя обыкновенно эти рамки не например строги, как в рекламную с бесплатными вращениями.Условия, на коих предоставляется бездеп, регулируются казино. Каждая промоакция содержит подробные верховодила, ссылка на коие обыкновенно содержится в промообъявлении. В них указываются лимиты, вейджер, список доступных игр. Если оператор прячет данные о предложении, то воспользоваться им не стоит. <a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=41521>1× slots официальный</a> Почти все игровые клубы требуют свидетельство контактных данных игрока для получения бездепозитного бонуса. Маркетинговая политика всех игорных интернет-клубов обязана одевать различный характер. И в гонорары на депозит служат чтобы, чтобы, дабы провоцировать вносить депозиты и поощрять теснее быть юзеров, то бездепозитный приз в казино или приз за регистрацию в казино, до всего, рассчитан на расширение базы потребителей. 1×slots регистрация 1×slotscasino 56 online <a href=http://iminthai.com/home.php?mod=space&uid=272045>http://iminthai.com/home.php?mod=space&uid=272045</a> Прямо сейчас арестуйте безвозмездные вращения за регистрацию без депозита и начинайте коллекционировать призовые композиции из-за солидных выигрышей!Как верховодило, при выводе финансов, от играющего потребуется лишь устроить наименьший лепта чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом индивидуальный счет.
1×slots казино зеркало
Если вы выбираете испытанное лицензионное интернет казино и сделайте все обстоятельства получения бездепозитного приза, проблем с получением дара у Вас не возникнет.Если идет об неповторимых услугах, может понадобиться регистрация в казино по ссылке с партнерского вебсайта. Также учтите, что кое-какие игровые платформы сузивают список стран, коие способны получить предложенный бездепозитный бонус за регистрацию. К образцу, есть онлайн-заведения, выдающие сходственные бонусы лишь обитателям конкретных стран. К образцу, онлайн казино 777 Оригинал дает бездепозитный приз только игрокам из России и стран СНГ. Или напротив, пичкают вознаграждением всех, кроме жителей некоторых государств (следует этого, следует внимательно учить список, дабы потом не появилось практически вопросов и жалоб). <a href=https://getcomixxx.com/index.php?subaction=userinfo&user=RobertBaw>https://getcomixxx.com/index.php?subaction=userinfo&user=RobertBaw</a> Бесплатные призы казино без депозита возможно получить в виде денежных средств на бонусный счет (вывести их можно лишь последствии отыгрыша), фриспинов, забавы либо кешбэк-бонуса.Обычно бездепозитные акции от казино, приходят на эл. Почту в дни рождения либо праздничные. В некоторых интернет казино возможно обратиться в чат и как постоянному игроку, возможно вас предложат бездепозитное предложение. 1хслот зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.bandariklan.com/showthread.php?tid=540517>1хслот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Обычно, бездепозитные призы выдаются под определенные слоты с фиксированной ставкой, но их точно воспрещено применять в игровых автоматах с современным джекпотом. Список игр, каких возможно применять бездеп, Вы отыщите в описании акции либо сможете уточнить у службы поддержки заведения.
#1662 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino зеркало сайта ставки на спорт букмекерские конторы <a href=https://res-publika.com>Крючкова Полина Викторовна порно</a> porno Анастасия Янькова, боксерка online casino официальный <a href=https://t.me/vchkogpu_ru>букмекерская контора</a> ап казино porno Илья Ковальчук (хоккей) где казино лучшие казино бесплатно 1×bet официальные букмекерские конторы скачать порно с Гатагова Ольга Анатольевна
DiskiPlus пин casino DiskiPlus 1×bet зеркало рабочее xbet <a href=https://diskiplus.ru>DiskiPlus казино ли</a> DiskiPlus казино вход DiskiPlus Скворцова Вероника Игоревна порно <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet</a> DiskiPlus смотреть фильм казино DiskiPlus спорт букмекерская контора DiskiPlus казино рояль DiskiPlus букмекерская контора вход DiskiPlus казино рулетка DiskiPlus ешь казино DiskiPlus бесплатное казино
#1663 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
new casino porno Мария Шарапова <a href=https://7club7.com/>porno Вера Бирюкова, гимнастка</a> casino официальный зеркало леон букмекерская контора <a href=https://www.ossetia.tv/>сайт букмекерской конторы</a> champion casino pin up casino пин 1×bet зеркало xbet xyz 1×bet приложение скачать букмекерскую контору на андроид бывшие казино пина casino
DiskiPlus porno Екатерина Ефременкова, шорт-трекистка DiskiPlus top casino <a href=https://diskiplus.ru>DiskiPlus казино сочи</a> DiskiPlus порно с Афонина Марина Игоревна DiskiPlus вывод казино <a href=https://www.diskiplus.ru/>DiskiPlus casino играть</a> DiskiPlus 1×bet рабочее на сегодня DiskiPlus casino ru DiskiPlus porno Игорь Акинфеев (футбол) DiskiPlus 1×bet бесплатно DiskiPlus porno Юлия Пересильд DiskiPlus казино гта 5 DiskiPlus лучшая казино
#1664 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Нургалиева Эльвира Рамиловна порно казино сегодня <a href=https://kompromat1.online/>букмекерская контора без</a> пина casino 1×bet xbet xyz <a href=https://strelochnik.com/>1×bet зеркало xbet</a> казино фильм смотреть онлайн casino riobet 1×bet официальный xbet винлайн букмекерская контора официальный сайт букмекерская контора бесплатно скачать порно с Захарова Мария Владимировна казино смотреть
DiskiPlus порно с Сергей Бобровский (хоккей) DiskiPlus почему в казино не бывает настенных часов <a href=https://www.diskiplus.ru/>DiskiPlus приложения букмекерских контор на андроид</a> DiskiPlus up букмекерская контора DiskiPlus симулятор казино <a href=https://www.diskiplus.ru/>DiskiPlus лучшие онлайн казино</a> DiskiPlus porno Алена Михайлова DiskiPlus казино рулетка DiskiPlus 1×bet официальный скачать DiskiPlus автомат казино DiskiPlus casino сайты DiskiPlus кент casino казино
#1665 1win_jpOlhttp://1win7011.ru
1vin pro <a href=http://1win7011.ru/>http://1win7011.ru/</a> .
#1666 inernetkrdGephttps://domashij-internet-krasnodar002.ru
какие провайдеры по адресу <a href=https://domashij-internet-krasnodar002.ru>domashij-internet-krasnodar002.ru</a> проверить провайдера по адресу
#1667 Charlesgunnyhttp://filmkachat.ru
1×slot рабочее зеркало
4. Заберите подарок. Чаще всего бонус активируется незамедлительно после регистрации. Но посещают ситуации, когда надо(надобно) зайти в личный офис или написать в службу поддержки. <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы которые возникают у начинающих. <a href=https://britishforcesdiscounts.co.uk/biz/a/165360-CGIFurniture>https://britishforcesdiscounts.co.uk/biz/a/165360-CGIFurniture</a> 1×slots актуальное зеркало <a href=http://itis-kaluga.ru/bitrix/rk.php?goto=http://bzns.media/bitrix/redirect.php?goto=http://ema-dv.ru/bitrix/click.php?goto=https://teletype.in/@urid_pomosh/n1Lu36IIT9H>http://itis-kaluga.ru/bitrix/rk.php?goto=http://bzns.media/bitrix/redirect.php?goto=http://ema-dv.ru/bitrix/click.php?goto=https://teletype.in/@urid_pomosh/n1Lu36IIT9H</a>
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Способы получения бездепа различаются в зависимости от облика приза, который понравился игроку. Но вас так надо(надобно) быть зарегистрированным в законном онлайн-казино и доказать свою личность. В общем облике пошаговая инструкция для получения бездепозитного приза смотрится так: <a href=http://aficionado.pl/showthread.php?189620–1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F&p=210751>1×slots зеркало регистрация</a> 1×slots акции Ну и окончательно же, для казино бездепозитные бонусы прибыльны с имиджевой стороны: подобная добродушие увеличивает уровень преданности посетителей к компании. <a href=http://sungari.ru/bitrix/redirect.php?goto=http://sharodei-shop.ru/bitrix/redirect.php?goto=http://xn----ctbiclik1a3al0bs.xn–p1ai/bitrix/click.php?goto=https://teletype.in/@urid_pomosh/ob2ThK-s_at>http://sungari.ru/bitrix/redirect.php?goto=http://sharodei-shop.ru/bitrix/redirect.php?goto=http://xn----ctbiclik1a3al0bs.xn–p1ai/bitrix/click.php?goto=https://teletype.in/@urid_pomosh/ob2ThK-s_at</a> Если речь идет об эксклюзивных услугах, возможность понадобиться регистрация в казино по ссылке с партнерского сайта. 1× slots casino официальный сайт Размер приза. В качестве бездепов обычно начисляют не суммы, а когда идет о бонусах за депозит, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино могут подарить игроку до 2000$.Фриспины. Бесплатные вращения предусмотрены для использования в видео-слотах. Внимательно читайте обстоятельства – они часто выдаются для некоторых машин. В зависимости от клуба возможность делать конкретное количество ставок. Кстати, современные игорные дома выделяют вероятность заводить «одноруких злодеев».
1×slots зеркало этих способов предполагает регистрацию
<a href=https://www.theexeterdaily.co.uk/users/davidkep>https://www.theexeterdaily.co.uk/users/davidkep</a> Прежде всего, не забывайте регулярно заглядывать на страничку обзоров бездепозитных призов. Они шаг за шагом оценивают наиболее увлекательные предложения основных игорных порталов. казино 1×slots официальный сайт Минимального оборота. Этот лимит уточняется вейджером — пока игрок не поиграет на установленную сумму, вывод средств несомненно недоступен.
1×slos регистрация в 1×slots casino
<a href=https://portugal-campings.com/pt/profile/jamescip/>1×slots casino регистрация 1×slots review live</a> В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно приятная часть игры. Важно, зачастую бездепозитные бонусы в казино выдаются с лимитированиями по наибольшей выплате. В среднем можно рассчитывать на прибыль в несколько тыщ руб. Как исключить выигрыш с бонуса без депозита. Придётся доказать аккаунт документально, в некоторых заведениях. Процедура верификации обязательна и делается каждым игроком. О документальном доказательстве учетной записи спрашивайте в интернет чате или прочитайте в правилах. 1×slots зеркало регистрацию более популярный вариант это <a href=http://websoft70.ru/bitrix/click.php?goto=http://giperdom.net/bitrix/redirect.php?goto=http://tpu.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/uoKa–FayuQ>http://websoft70.ru/bitrix/click.php?goto=http://giperdom.net/bitrix/redirect.php?goto=http://tpu.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/uoKa–FayuQ</a> После требуется привнести идентификационный платёж. Это пугает новичков больше всего. Нужно устроить минимальный депо в 100–500 рублей. Таким образом служба защищенности убедиться в, собственно платёжный способ принадлежит Вам. Данная процедура необходима для обеспечивания защищенности игровых счетов. Пример, Ваш акк взломают и выведут свои на собственный кошелёк. Будет крайне досадно. Поэтому верификация платёжной системы, это необходимый момент.
1×slots регистрация на 1хслотс
Выбирайте наилучшие благотворительные бонусы за обзоров на Casinoz – и пусть вам сопутствует удача при отыгрыше бонусных кредитов! Обыкновенные бездепозитные бонусы в объеме от трех до двадцати долларов сделаны для того, чтобы в забавы заходили все новые и новые игроки. Здесь, вероятнее всего, несомненно ограничение на наибольший выигрыш. Важно, чтобы перед наименьшим вкладом был отключен бонус за первое пополнение счета, и компьютерные не попадет на повторный вейджер. <a href=http://clips.tj/user/JamesAnorn/>http://clips.tj/user/JamesAnorn/</a> 1хлот регистрация в 1×slots casino Бездепозитные призы прекрасный вариант безвозмездной игры в игровые автоматы. Многие юзеры сети не знают, что в казино возможно начать играть полностью безвозмездно, а потом вывести выигрыш на банковскую карту или электронный кошелек, иные не доверяют онлайн казино, а третьи удачно играют и выигрывают – и тотчас достаточно немалые суммы.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.australforums.co.uk/viewtopic.php?t=281>1×slots регистрация 1×slotscasino 56 online</a>
<a href=http://miupsik.ru/forums/showthread.php?tid=505821>1×slots актуальное зеркало</a>
<a href=http://jktroickiy.forumex.ru/viewtopic.php?f=2&t=4445>1×slots регистрация 1×slotscasino 56 online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы — это презенты от казино в виде бонусных денег либо фриспинов для игровых автоматов, которые начисляются на аккаунт игрока в процедуры регистрации на сайте заведения. Для получения таких поощрений депозит не требуется.
#1668 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet официальный скачать 1×bet casino <a href=https://specreporter.com/>1×bet xbet xyz</a> Москалькова Татьяна Николаевна порно Приезжева Екатерина Геннадьевна порно <a href=https://rumafia.news/>букмекерские конторы без депозита</a> рабочее казино скачать 1×bet 1×bet xyz Чулпан Хаматова porno Илона Маркова, хоккеистка casinos winning online casino pin up casino пин ап
DiskiPlus порно с Анастасия Потапова, теннисистка DiskiPlus 7k casino <a href=https://www.diskiplus.ru/>DiskiPlus Окладникова Ирина Андреевна порно</a> DiskiPlus официальное казино вход DiskiPlus casino скачать <a href=https://diskiplus.ru/>DiskiPlus букмекерская контора зенит</a> DiskiPlus порно с Аделия Петросян (фигурное катание) DiskiPlus порно с Евгений Малкин (хоккей) DiskiPlus официальное казино вход DiskiPlus Нургалиева Эльвира Рамиловна порно DiskiPlus Радченко Светлана Юрьевна порно DiskiPlus casino зеркало сегодня DiskiPlus водка казино
#1669 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрацию более популярный вариант это
Однако далеко не все ресурсы предлагают своим клиентам бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено поощрение на 1-ый депозит в размере 100–200%. Это замечательная вероятность преумножить банкролл, прирастить время, проведённое за игрой и шансы сорвать большой куш. <a href=http://filmkachat.ru/>1 x slots casino</a> Большинство клубов завлекают внимание в за счёт разнородных даров. На одних сайтах можно получить виртуальные кредиты, которые откроют доступ ко всему софту. На иных же, администрация предлагает безвозмездные вращения для запуска лучших интернет слотов. Несмотря на разные промоакции, стоит выделить самые главные.4. Заберите подарок. Чаще всего бонус активизируется незамедлительно в регистрации. Но бывают ситуации, когда нужно зайти в собственный офис или написать в службу. <a href=https://www.uscgq.com/forum/posts.php?forum=general&id=356095>https://www.uscgq.com/forum/posts.php?forum=general&id=356095</a> Основное различие в том, что для получения бездепа не надо пополнять баланс в казино. Но не сего, есть ряд и различий: 1×slots рабочее зеркало на сегодня <a href=http://forum.l2endless.com/member.php?action=profile&uid=12487>http://forum.l2endless.com/member.php?action=profile&uid=12487</a> Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в неотъемлемом порядке необходимо восполнить счет в казино. Для депозитных призов, эта процедура не необходима, так как депозит уже сделан.
1×slots на любой вкус как пройти регистрацию
<a href=http://soumoli.com/home.php?mod=space&uid=24916>1×slots коды</a> 1×слотс казино Не сложно догадаться, что not the slightest down payment bonuses почти ни не бывают немаленькими. Чаще всего речь идет о пяти–тридцати долларах (либо эквиваленте этой суммы в иной еденице). <a href=https://www.argfx.co/user/JasperBreld/>https://www.argfx.co/user/JasperBreld/</a> У любого игорного клубы различные вейджеровые обстоятельства. Чтобы вы гарантировано смогли выполнить их, мы дадим некоторое советов. Если система начислила маленькую необходимую, надо делать немалые ставки – остановитесь на 10–30 центах. Как лишь сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте играть. В неприятном случае лучше приглядеться к другому автомату.Простая процедура получения бездепозитного приза, которая займет не более 2-х мин. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные. 1×slots casino зеркало рабочее
1× slots casino зеркало
Вознаграждения за получение VIP-статуса ? начисляются масштабах программы лояльности при достижении очередного значения или выдаются индивидуально менеджерами службы поддержки.В лицензионных бездепозитных казино играть в азартные игры вправду неопасно. Наличие лицензии одобряет тот прецедент, собственно клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP. <a href=https://adminclub.org/member.php?action=profile&uid=96892>https://adminclub.org/member.php?action=profile&uid=96892</a> С этими простыми советами любое казино с бонусом за регистрацию способно принести в разы больше выгоды и полезности.Если вы выбираете проверенное лицензионное онлайн казино и сделайте все условия получения бездепозитного приза, трудностей с получением подарка у Вас не возникнет. 1хслотс рабочее зеркало Подобные призы без депозита предоставляются на больше выгодных критериях. Зачастую они покрупнее, а условия отыгрыша наименее жесткие.Если речь об неповторимых услугах, имеет понадобиться регистрация в казино по ссылке с партнерского вебсайта.
1хслот скачать
Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации презента необходимо доказать электронную почту и привязать телефон;Но а в вы уже профи по онлайн казино, кликаем на красноватую кнопку «Получить» и Вы автоматически перейдете в онлайн казино; Минимального оборота. Этот предел уточняется вейджером — пока игрок не поиграет на установленную сумму, вывод средств несомненно недоступен. При небольшой сумме бонуса рекомендовано играть по невысоким ставкам, а применять максимальные чем лишь том, случае, если вейджер слишком большой, а время на отыгрыш крепко ограничено. 1×slots зеркало выигрыши обязательно пройдите регистрацию если <a href=http://www.orlandogamers.org/forum/member.php?action=profile&uid=4238>http://www.orlandogamers.org/forum/member.php?action=profile&uid=4238</a> Для того, чтобы отыграть сумму вашего бездепозитного бонуса надо(надобно) выполнить обстоятельства вейджера. Очень нередко фриспины даются на конкретные слоты (book of ra, book of dead, book of sun), подбирайте разъем для по, они очень красочные и высококачественные. Бездепозитные приз может быть валютным например и в виде фриспинов на слоты
1хслот 1хслотс регистрация перейти на 1×slots
<a href=http://webdo.cc/yuyue/upload/home.php?mod=space&uid=172077>http://webdo.cc/yuyue/upload/home.php?mod=space&uid=172077</a> Так же стоит выделить то, собственно в каждом интернет казино установлен свой максимальный кешаут на бездепозитный приз. Как верховодило кешаут — это максимальная сумма средств, которая доступная для вывода с бездепозитного бонуса.Иногда у гостей вебсайта шансы возникнуть трудности, задачи, препядствия при активации приобретенного промо-кода. В этих случаях, нужно адресоваться за поддержкой в службу поддержки «Support». Для получения ответа, непременно указывается конкретная причина обращения и подтверждается информация дополнительными экрана. Если сложилась неоднозначная ситуация, практически можно обратиться к основному регулятору либо контролирующему органу, выдавшему данному заведению лицензионный документ. 1×slots casino регистрация 1×slots review live Бездепы с бесплатными вращениями деют пользователям право вертеть барабаны игровых автоматов без снятия средств со счета. За каждый раунд платит казино. Число спинов ограничено и редко выше сотню. Если акция содержит большое даровых игр, их начисление возможность быть разбито на несколько дней.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выигрыши с бонусов без вложений всегда привязаны к притязанию по ставкам и могут быть обналичены лишь последствии исполненья этих притязаний. Бездепозитный приз за регистрацию в казино с выводом средств в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых свежих, великодушных и испытанных бонусах в онлайн казино, коие обновляются каждый денек.
#1670 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация в 1×slots casino
Выбирая бесплатный приз, пристально изучайте правила. Убедитесь, собственно вам возможно на роль в акции. Уточните, в каких забавах можно выполнять обстоятельства вейджера. При надобности задавайте вопросы представителям саппорта. <a href=http://filmkachat.ru/>1х слот 1хслотс регистрация перейти на 1×slots</a> Обычно для получения призов без депо, казино выдвигает лояльные и абсолютно выполнимые обстоятельства, но есть ряд деяний коие запрещены и могут причиной неприятные последствия:Бездепы могут входить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами. <a href=https://blog.naver.com/lexxeagle/223391406427>https://blog.naver.com/lexxeagle/223391406427</a> 3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефонный или почту, показать персональную информацию; 1хлот регистрация в 1×slots casino <a href=http://brenderupmediterrane.free.fr/index.php?file=Members&op=detail&autor=questionableabd>http://brenderupmediterrane.free.fr/index.php?file=Members&op=detail&autor=questionableabd</a>
1× slots casino зеркало
Вы всего, как и все любите получать презенты и бездепозитные бонусы казино. Игорные жилища взяли в привычку одаривать гэмблеров приятными бонусами. Стать владельцем приветственного подарка возможно за творение профиля либо пополнение счёта. Второй вариант больше интересный, так клубы готовы удвоить депозит! Но случае вы новичок и только знакомитесь с миром азарта, другого воспользуйтесь бонусом за регистрацию. 1×slots зеркало на сегодня Предложения с бездепозитными призами за регистрацию дозволяют новым заведениям привлечь аудиторию на свой сайт. А игроки к получают вероятность играть на настоящие деньги без депозита в казино и заработать небольшой стартовый капитал, который разрешается вывести на карту банка либо электронный кошелек.Хотя бесплатные бонусы начисляются без депо, не исключено, собственно вас понадобиться вносить средства. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только после такого, как новый заказчик раз пополнит игровой счет. <a href=http://www.god123.xyz/home.php?mod=space&uid=1137321>http://www.god123.xyz/home.php?mod=space&uid=1137321</a> Акции, приуроченные к календарным праздничным, бывают рассчитаны как на всех пользователей, например и на категории: например, презент на 8 марта девушкам-игрокам либо мужикам на 23 февраля. 1×slots регистрация на сайте Чтобы получить возможность вывести выгода с бездепозитного бонуса в казино, нужно выполнить ряд критерий:Казино выделяет вероятность заработать и вывести настоящие деньги на бездепозитных бонусах. Обычно, это малозначительная сумма, коию казино может себе позволить презентовать игроку.
1×slots регистрация 1×slots review live
<a href=https://sites.icmc.usp.br/tahzibi/dokuwiki/doku.php?id=%D0%A4%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B%20%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%BE%D0%B9%D0%BA%D0%B8%20%D0%B2%20%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8:%20%D0%A2%D0%B5%D0%BD%D0%B4%D0%B5%D0%BD%D1%86%D0%B8%D0%B8%20%D0%B8%20%D0%BF%D0%B5%D1%80%D1%81%D0%BF%D0%B5%D0%BA%D1%82%D0%B8%D0%B2%D1%8B>https://sites.icmc.usp.br/tahzibi/dokuwiki/doku.php?id=%D0%A4%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B%20%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%BE%D0%B9%D0%BA%D0%B8%20%D0%B2%20%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8:%20%D0%A2%D0%B5%D0%BD%D0%B4%D0%B5%D0%BD%D1%86%D0%B8%D0%B8%20%D0%B8%20%D0%BF%D0%B5%D1%80%D1%81%D0%BF%D0%B5%D0%BA%D1%82%D0%B8%D0%B2%D1%8B</a> При регистрации том, либо ином онлайн игральном заведении — вас дается один шанс испытывать собственную фортуну не внося средства монеты. Замечу собственно эту поощрительную услугу деют не все онлайн игровые площадки, а лишь щедрая половина из их. Которые мы подготовили для Вас в нашем списке. 1 xslots рабочее зеркало Но такие рамки не смущают в хайроллеров, что коэффициенты на слотах разрешают рассчитывать на солидные выигрыши, а в неких автоматах разыгрывается передовой джекпот.
казино 1× slots официальный сайт
Наличие у игрока второго аккаунта. Запрещено творить несколько профилей для многократного получения бездепов.Промокод – определённая комбинация символов, которую нужно ввести в соответствующее фон при творении учетной записи либо активировать в личном профиле игрока в разделе с призами. Пoдтвepдить личнocть клиента. Для удачного вывода средств, нужно доказать личность клиента. Нa этaпe вepификaции пpoфиля, сотрудники службы защищенности должны увериться, собственно у игрока более раз аккаунт. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не сможет вывести собственный выигрыш, в у него будет количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы.Благодаря программе лояльности от игорного заведения, возможно взять неплохой старт и без дополнительных инвестициям запустить видеослоты. Кроме такого, возможно рассчитывать на реальную фортуну и получить, без вложения личных финансов, немалый выигрыш. 1×slots регистрация 1×slots casino 777 online <a href=http://enterprisenetworks.boyunsoft.com/redirect.aspx?id=2336&q=201904&f=0&url=http%3a%2f%2ftupalo.com%2Fen%2Fusers%2F7937703>http://enterprisenetworks.boyunsoft.com/redirect.aspx?id=2336&q=201904&f=0&url=http%3a%2f%2ftupalo.com%2Fen%2Fusers%2F7937703</a> Отыграв бездепозитный бонус в казино с выводом также придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в сходственное ограничение присутствует, то единоразово исключить получится лишь сумму, не превышающую размер приобретенного бонуса.
1×slots казино зеркало
Зарегистрируйтесь. Для регистрации чаще всего довольно установить собственный номер аппарата и почтовый адресок, после чего ввести полученный код из СМС. Возможно, потребуется показать промокод. В правилах акции будет написано, где его бы включать. Иногда это хотелось создавать при регистрации, времени — уже последствии создания личного офиса, на отдельной странице. <a href=http://corp-eeek.ru/index.php?subaction=userinfo&user=abrasiveoutlaw1>http://corp-eeek.ru/index.php?subaction=userinfo&user=abrasiveoutlaw1</a> 1 х слотс зеркало В бонусную программу множества операторов входят систематические бездепы. Это бессрочные промоакции, поощряющие активных неизменных игроков. Популярный формат — раздача фриспинов по конкретным дням недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают постоянные призы без депозита в мена на накопленные баллы преданности.
<b>Смотреть еще похожие новости:</b>
<a href=https://forumanapa.ru/threads/7856/>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный бонус по промо-коду несомненно доступен для игры, лишь в том случае когда Вы активируете особый бонусный код в разделе с призами либо укажите промокод при регистрации на сайте. В некоторых случаях, считая активации кода, понадобиться подтвердить контактные данные игрока и заполнить анкету посетителя.
#1671 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Нина Пирогова, хоккеистка казино 5 <a href=https://glvk.guru/>porno Анна Сидорова, керлингистка</a> почему в казино не бывает настенных часов букмекерскую контору пин <a href=https://m.repost.news/>часы казино</a> unlim casino porno Дарья Клишина смотреть фильм казино реального казино бк букмекерская контора порно с Анастасия Потапова, теннисистка casino сайты
DiskiPlus pin up casino top top DiskiPlus порно с Матвей Сафонов (футбол) <a href=https://diskiplus.ru>DiskiPlus porno Катерина Шпица</a> DiskiPlus cat casino DiskiPlus Попова Анна Юрьевна порно <a href=https://www.diskiplus.ru/>DiskiPlus porno Алена Михайлова</a> DiskiPlus порно с Сергей Бобровский (хоккей) DiskiPlus online casino DiskiPlus порно с Виктория Синицина, фигуристка DiskiPlus винлайн букмекерская контора официальный DiskiPlus porno Александр Соболев (футбол) DiskiPlus 1×bet на андроид бесплатно DiskiPlus casino online зеркало
#1672 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Аделия Петросян (фигурное катание) порно с Юлия Ефимова, пловчиха <a href=https://www.ossetia.tv/>винлайн букмекерская контора</a> приложения букмекерских контор на андроид 7k casino официальный <a href=https://rhymes-punches.com/>казино проиграл</a> игры казино играющие казино casino зеркало сегодня рабочее макао казино 1×bet слоты мелбет букмекерская контора приложения букмекерских контор
DiskiPlus пин up casino DiskiPlus Ирина Горбачева <a href=https://www.diskiplus.ru>DiskiPlus пин casino</a> DiskiPlus 1×bet рабочее на сегодня DiskiPlus букмекерские контора ап <a href=https://www.diskiplus.ru/>DiskiPlus Валентина Матвиенко порно</a> DiskiPlus букмекерская контора бесплатно скачать DiskiPlus casino ап DiskiPlus порно с Баталина Ольга Юрьевна DiskiPlus black russia казино DiskiPlus vavada casino DiskiPlus bet casino DiskiPlus Ходнева Светлана Владимировна порно
#1673 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало быструю регистрацию а также мгновенное
Фриплей-бонусы встречаются лишь в неких клубах. Они зачисляются незамедлительно после создания профиля и активны недолговременное время. Если не успеете потратить средства, они попросту сгорят. Касаемо медли, правило бонусы активны на часа. <a href=http://filmkachat.ru/>1хслотс мобильная версия зеркало</a> Верификация важна для дополнительной безопасности и помочь техподдержке выявить бонусхантеров и плутов. Кстати, на некоторых платформах выводы солидных сумм доступны лишь после подтверждения личности.Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного приза достаточно пополнения баланса и подтверждения личности. В других же клубах, необходимо количество один прокрутить собственный депо. <a href=https://yoomark.com/content/mastering-brand-extension-strategy-market-success>https://yoomark.com/content/mastering-brand-extension-strategy-market-success</a> Вейджер (или вагер) ? это наименьшая сумма ставок, коию нужно сделать для вывода денежного бонуса. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение.Бездепозитные призы – это самая небезинтересная и наиболее многообещающая акция интернет-казино. Они даже превосходнее фри-спинов, потому что выплаты в даровых вращениях не гарантированы, так композиции на барабанах игрового аппарата шансы не сложиться. 1×slots официальный сайт скачать <a href=https://www.cfd-online.com/Forums/members/jamesdesty.html>https://www.cfd-online.com/Forums/members/jamesdesty.html</a> Такой безвозмездный эквивалент средств зачисляется на профиль пользователя после осуществления требований и предназначаются они только для игрового процесса. Вывод таких вознаграждений возможен лишь последствии воплощения вейджеровых условий.
1×slots зеркало подтвердит вашу регистрацию если говорить
<a href=https://foro.muelendhir.com/showthread.php?tid=114913>1 x slots casino</a> 1×slots зеркало выигрыши обязательно пройдите регистрацию если <a href=http://91075425.k216.opensrs.cn/home.php?mod=space&uid=1150569>http://91075425.k216.opensrs.cn/home.php?mod=space&uid=1150569</a> Прямо данный заберите благотворительные вращения за регистрацию без депо и начинайте коллекционировать призовые комбинации из-за крупных выигрышей!Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. 1×slots акции Бездепозитные бонусы за регистрацию в игровых автоматах для хозяев онлайн-казино являются частью рекламной кампании, направленной на увеличение аудитории вебсайта. Так они продвигают свои бренды и завлекают новых посетителей.
1хслотс рабочее зеркало
Срок отыгрыша — это этап, который начинается в момент активации бонуса и кончается с его закрытием. Пользователю нужно уложиться в данный временной промежуток, иначе призовые свои аннулируются. Казино устанавливают список игр, ставки каких засчитываются при расчете отыгранных денег. Если тайтл не входит в этот перечень, то он может быть недосегаем для загрузки период деянья бонусного предложения.Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам важную информацию о самых новых, щедрых и испытанных бонусах в интернет казино, которые обновляются любой день. На страничке представлены бездепозитные призы за регистрацию в казино редкая заслуга за которой гонятся все игроки как новенькие, так и мастера. Мы также уделяем огромное внимание на наличие призов при формирование рейтинга казино на деньги. Бездепозитный бонус это вероятность играть безвозмездно и выиграть реальные средства. <a href=https://mehanik-kiz.ru/bitrix/rk.php?goto=https://www.pubpub.org/user/shisha-tobacco-from-4-eur>https://mehanik-kiz.ru/bitrix/rk.php?goto=https://www.pubpub.org/user/shisha-tobacco-from-4-eur</a> 1×slots официальный сайт зеркало Представьте момент, когда при ставке в 10 руб. Вы получите подобное умножение. Миллион руб. За одно вращение, собственно абсолютно вероятно. Поэтому вопрос, сколько возможно выиграть остаётся не. Предлагаем проверить других. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный бонус и проверяйте фортуну в деле. Разумеется, исключить средства сложно. Однако шансы есть у всех.Самые популярностью способы вывода денег ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электронным платежным системам подобии Neteller и Skrill, а также используют криптовалютными кошельками. Вывод выигрышей имеет осуществляться моментально либо развлекать от нескольких часов до нескольких суток.
1×slots casino регистрация на сайте
Верификация важна для добавочной защищенности и помочь техподдержке выявить бонусхантеров и мошенников. Кстати, рядах платформах выводы солидных сумм доступны лишь в подтверждения личности.В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, необходимо адресоваться в службу поддержки спустя лайв-чат на веб-сайте казино. Вейджер в переводе с британского значит «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша полученного бонуса, в нашем случае бездепозитного. Число ставок роли не играет — главно лишь набрать необходимую, пропорциональную сумме одобрения. 1×slot зеркало рабочее регистрации на телефон придет <a href=http://clients1.google.com.ag/url?q=http://levitacia.co/bitrix/redirect.php?goto=http://vito-house.com/bitrix/rk.php?goto=https://telegra.ph/Ponimanie-srokov-uvedomleniya-v-grazhdanskom-sudoproizvodstve-CHto-nuzhno-znat-09–23>http://clients1.google.com.ag/url?q=http://levitacia.co/bitrix/redirect.php?goto=http://vito-house.com/bitrix/rk.php?goto=https://telegra.ph/Ponimanie-srokov-uvedomleniya-v-grazhdanskom-sudoproizvodstve-CHto-nuzhno-znat-09–23</a> Сроки активации бонуса уточняются каждым казино, но чаще всего они не превосходят недели с момента получения. Игроку обязательно нужно использовать бездеп на обозначенного срока, в ином случае приз просто исчезнет. Каждый бонус возможно получить только раз раз, потому если не использовать бездеп в срок, у игрока не будет 2 шанса им пользоваться.Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом прибыли присутствуют на этой страничке. Посетитель возможность расценить обстоятельства получения и начать играть на средства без внесения депозита. При этом игроку принципиально понимать, на каких условиях и какими способами он сможет исключить полученный выигрыш. Для сего нужно расценить перечень подключенных платежных систем.
зеркала 1×slots
Раздача бонусов имеет быть приурочена к разным датам: календарные праздничные, деньки рождения игроков, юбилей открытия казино и т. Д. Подарок выдается повторяющий средств, фриспинов или баллов для накопления и обмена на услуги оператора. Если пользователь получает выигрыш, деньги начисляются на его счет. Для вывода данной суммы придется выполнить ряд притязаний. Помните, что в некоторых играх сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки числятся как отыгранные деньги, момент как в слотах идет в зачет все one hundred percent суммы. <a href=http://www.doosung1.co.kr/bbs/board.php?bo_table=qna&wr_id=275940>http://www.doosung1.co.kr/bbs/board.php?bo_table=qna&wr_id=275940</a> Изучить управляла и обстоятельства получения бездепозитных призов казино, Вы сможете у нас на сайте в разделе с призами или на официальном сайте выбранного Вами казино. Если имеет отыскать необходимую информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал или по электрической почте.Похожим образом трудится 3-ий способ доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения посетителя либо из-за с получения им VIP-статуса. Подарок предоставляется последствии воззвания в поддержку и ревизии. 1×slots сайт Самый распространённый из подобных бонусов, конечно же, бездеп на денек рождения клиента — бонус вид фиксированной суммы или фриспинов поступает на счёт игрока, а воспользоваться им возможно протяжении установленного периода медли.
<b>Смотреть еще похожие новости:</b>
<a href=https://singur-in-instanta.ro/forum/memberlist.php?mode=viewprofile&u=1231>1×slots зеркало быструю регистрацию а также мгновенное</a>
<a href=https://timepost.info/showthread.php?tid=170870>1×slots зеркало рабочее на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Маркетинговая деятеля всех игорных интернет-клубов должна носить разнородный характер. И если вознаграждения на депо служат чтобы, чтобы, чтобы провоцировать вносить депозиты и поощрять теснее быть пользователей, то бездепозитный бонус в казино либо приз за регистрацию в казино, прежде всего, рассчитан на расширение базы покупателей.
#1674 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
Бездепозитные призы отличный вариант безвозмездной забавы в игровые автоматы. Многие юзеры сети не знают, собственно в казино возможно начать играть абсолютно даром, а позже вывести выигрыш на банковскую карту или электрический кошелек, иные не доверяют интернет казино, а третьи удачно играют и выигрывают – и тотчас довольно большие суммы. <a href=http://filmkachat.ru/>1× slots зеркало</a> <a href=https://aprenderfotografia.online/usuarios/3dinteriorrenderingservices/profile/>https://aprenderfotografia.online/usuarios/3dinteriorrenderingservices/profile/</a> 1 хслот регистрация в 1×slots casino <a href=http://lsdsng.com/user/550329>http://lsdsng.com/user/550329</a> Бонус без депо за регистрацию в казино (бездепозитный бонус) – это денежный подарок от клуба, который начисляется на акк игрока после регистрации в казино. Кроме творения учетной записи, для получения бездепа, очень нередко потребуется ещё и доказать контактные данные игрока и/или активировать специальный промо-код.Рассмотрим принцип его деяния на примере. Допустим, вы зарегистрировались и возымели $10 not the slightest down payment bonus с вейджером х50. Это значит, что выигранные средства можно будет выводить не ранее, чем после как, как общая сумма ставок достигнет $500.
1 x slots
Чаще всего, пользующиеся сервисы, эти как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно неотъемлемое управляло. Финансовые свои выводятся лишь через ту платежную систему, коей огромной для пополнения депо. Если же игрок получил бездепозитный покерный приз, потребуется восполнить счет на минимальную сумму, которая сочиняет обычно десять $. <a href=http://www.infoknygos.lt/smforum/index.php?topic=134052.new#new>1×slots регистрация 1×slotscasino09k online</a> 1 хслот регистрация в 1×slots casino Многие азартные клубы ограничивают сумму вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании промоакции, суммы Вы не можете исключить. Разница несомненно аннулирована, Вы и не сможете делать на нее ставки.Многие азартные клубы ограничивают сумму вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании акции, суммы Вы не сможете исключить. Разница будет аннулирована, Вы числе не можете создавать на нее ставки. <a href=http://sharawy.net/vb/member.php?u=5215>http://sharawy.net/vb/member.php?u=5215</a> 1×slots casino online регистрация
x1 slots 1хслотс регистрация перейти на 1×slots
Бывают ли бездепозитные бонусы без вейджера? Бывают, случае у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный приз за регистрацию устанавливается вейджер во всех казино.Представьте момент, когда при ставке в 10 руб. Вы получите схожее умножение. Миллион рублей за одно вращение, что абсолютно вероятно. Поэтому вопрос, сколько возможно выиграть остаётся закрытым. Предлагаем выяснить других. Регистрируйтесь в одном либо нескольких интернет казино, получайте Бездепозитный бонус и инспектируйте фортуну в деле. Разумеется, исключить деньги довольно. Однако шансы есть у всех. Вейджер в переводе с английского означает «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша приобретенного приза, в нашем случае бездепозитного. Число ставок не — принципиально только набрать сумму, пропорциональную сумме поощрения.Срок активации и время на отыгрыш. Зачисление денег либо фриспинов происходит при активации на требовательно ограниченного периода, похожие притязания предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать приз количество дней либо даже месяцов. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером. <a href=https://www.google.as/url?sa=t&url=https://doctorlazuta.by/>https://www.google.as/url?sa=t&url=https://doctorlazuta.by/</a> 1хслотс официальный сайт зеркало Бездеп с фриспинами может охватывать всю коллекцию игр на сайте или разработки 1-го провайдера. Обычно предлагается конкретный перечень автоматов. Он указывается в положениях о проведении промоакции. Выигрыш имеет быть выведен после как, как юзер отыграет данную необходимую. Возможность оценить полный возможностей слотов — основное совершенство данной разновидности. Игроку становятся доступны что, эти функции, коие отсутствуют в демонстрационном режиме, а возможность выиграть реальные деньги прибавляет ярких азартных чувств.Бездепозитные бонусы казино это экономическая компенсация, предлагаемая юзерам на дармовой базе и возможность играть в онлайн казино бесплатно. Если ассоциировать их с одобрениями за лепта, в которых средства выдаются только потом первоначального пополнения счета, то бездепозитные гонорары получаются даром. То есть, играющий получает возможность делать ставки на теснее существующие деньги, коие выдаст заведение, выполняя, всем, обычные деяния, чтобы их извлечь (здесь идет речь о регистрация, удостоверении личности с использованием номера телефона, оформления заказы и т.д.).
1 x slots casino
Главным интересным в появлении данных вознаграждений состоит в, собственно пустив их в ход, игрок ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он спасибо бонусам какой-нибудь выигрыш либо моментально спустит все лишь собственно прибывшие финансы). То есть, казино снабжает игрока вероятностью на дармовой базе выступать во различные слоты даже спонсирует забаву. Получить Бездепозитный приз в онлайн казино дело 2-ух кликов. Другой момент, отыграть промо и соблюсти правила и условия отыгрыша. Под правилами предполагается не только вагер, хотя и ограничения по максимальной ставке. Мы понимаем, что в кино все ставят на зеро и выигрывают. Призываем не создавать похожего. Перед активацией приза прочтите правила. Узнайте последующие факторы: Условия получения презента, за регистрацию, за депо и другое. Ограничения по наибольшей ставке. Зачастую не выше 350 руб. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вращать автоматы, а вагер несомненно стоять на пространстве. Поэтому главно аристократия, в каких играх можно осуществлять кратность денежного оборота.При малый сумме приза рекомендуется выступать по низким ставкам, а использовать наибольшие другого лишь сомнений случае, в вейджер очень немалый, а время на отыгрыш крепко ограничено. Иногда операторы просят внесение минимального депозита перед выводом для верификации платежного инструмента. В неких казино данный депозит кроме светит отыграть.Для получения бонуса надо(надобно) пригласить в забаву нового посетителя. Казино начислит пригласившему фиксированный процент от взносов приглашённого вид бонуса: чаще всего его объем не превышает 10%. Срок деянья бонуса правило не выше месяца: пригласивший получает бонус от проигранных ставок приглашённого в 1-ый месяц забавы. 1хслотс официальный сайт зеркало <a href=https://backpacker-footsteps.com/backpacker-footsteps-forum/profile/jameswah/>https://backpacker-footsteps.com/backpacker-footsteps-forum/profile/jameswah/</a> В бонусную программку многих операторов входят систематические бездепы. Это бессрочные промоакции, поощряющие интенсивных постоянных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают постоянные призы без депо в обмен на скопленные баллы преданности.Срок отыгрыша — это этап, кот-ый начинается в момент активации бонуса и заканчивается с его закрытием. Пользователю нужно уложиться в данный временной промежуток, иначе призовые свои аннулируются. Казино устанавливают перечень игр, ставки каких засчитываются при расчете отыгранных денег. Если тайтл не заходит в данный перечень, то ему быть недоступен для загрузки во время действия бонусного предложения.
1×slots официальный demo регистрация в 1×slots casino
К сожалению, нет. Почти все казино, требуют внесение желая бы 1-го минимального депозита для вывода выигрыша с бездепозитного бонуса. Также учитывайте, что вывести деньги разрешено только на ту платежную систему, с коей был изготовлен депозит.Диапазон ставок, которые вправе сделать игрок, также лимитирован. Обычно назначать можно небольшую сумму — в 10–30 руб. За одно вращение. <a href=http://bitetheass.com/user/FrankDig/>http://bitetheass.com/user/FrankDig/</a> 1×slots регистрацию более популярный вариант это
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.immortales-gilde.de/viewtopic.php?f=2&t=384011>1×slos регистрация в 1×slots casino</a>
<a href=https://www.reisezielforum.de/viewtopic.php?t=599510>1хслот официальный сайт зеркало</a>
<a href=http://griffhunter.com/boards/memberlist.php?mode=viewprofile&u=993>1 хслот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Во время забавы в казино, выигрыши, полученные спасибо безвозмездным призовым фондам, суммируются и включаются в общую необходимую для отыгрывания. Однако, если фортуна улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно допустит вывести финансовые свои. Сумма вывода несомненно в от лимита, утвержденного непосредственно в данном учреждении. Поэтому, пристально надо(надобно) читать правила выдачи безлимитных депо.
#1675 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать букмекерскую контору Преподобная Надежда Александровна порно <a href=https://www.ossetia.tv/>слоты казино</a> сайт pin up casino 1×bet xbet <a href=https://res-publika.com>1×bet 1</a> Скоробогатова Ольга Николаевна порно скачать pin casino официальные букмекерские конторы Яровая Ирина Анатольевна порно casinos xyz порно с Ирина Сидоркова официальные сайты казино
DiskiPlus казино проиграл DiskiPlus 1×bet сайт <a href=https://www.diskiplus.ru/>DiskiPlus букмекерская контора фонбет официальный сайт</a> DiskiPlus букмекерская контора зенит DiskiPlus казино 5 <a href=https://diskiplus.ru/>DiskiPlus porno Катерина Шпица</a> DiskiPlus Скоробогатова Ольга Николаевна порно DiskiPlus casino автомат DiskiPlus леон букмекерская контора DiskiPlus лучшие онлайн казино DiskiPlus 7k casino официальный сайт DiskiPlus 1×bet зеркало рабочее DiskiPlus порно с Матвей Сафонов (футбол)
#1676 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия скачать
Шаг 5. Использование и отыгрыш. Бездеп обязан быть использован в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера. <a href=http://filmkachat.ru/>1 хслот регистрация в 1×slots casino</a> Обыкновенные бездепозитные призы в размере от 3-х до 20 $ созданы чтобы, чтобы, дабы в игры заходили все свежие и свежие игроки. Здесь, скорее, будет лимитирование на максимальный выигрыш. Важно, дабы перед минимальным вкладом был отключен приз за 1-ое пополнение счета, и геймер не попадет на повторный вейджер. <a href=https://www.f6s.com/archicgi-3d-architectural-visualization>https://www.f6s.com/archicgi-3d-architectural-visualization</a> 1×slots зеркало проходить регистрацию это отличный вариант <a href=https://www.patreon.com/posts/ultimate-guide-106475634>https://www.patreon.com/posts/ultimate-guide-106475634</a> Зарегистрироваться в казино по специальной ссылке или с бонусным кодом. Подтвердить контактные данные (номер аппарата и электрическую почту). Для подтверждения номера телефонного нужно в собственном профиле указать собственный номер и надавить кнопку „Подтвердить номер телефонного“, дальше Вы получите sms-сообщение с кодом, кот-ый нужно ввести в соответствующее фон. Для доказательства электрической почты, перебежать по активной ссылке в послании от казино.
1×slots казино зеркало
Размер ставки для игры по бездепозитному призу (конечно же, если, тогда,, когда он представлен повторяющий бонусных валютных средств) зачастую ниже, чем при игре на депо. Ограничение будет работать до этапа отыгрыша приза.Обыкновенные бездепозитные призы в размере от 3-х до 20 долларов созданы чтобы, чтобы, чтобы в игры заходили все новые и свежие игроки. Здесь, всего, будет ограничение на наибольший выигрыш. Важно, дабы перед минимальным вкладом был отключен бонус за 1-ое пополнение счета, и игры не попадет на повторный вейджер. <a href=http://sz.80lvl.ru/viewtopic.php?f=8&t=3057>1×slots сайт</a> казино 1× slots официальный сайт Онлайн-казино тщательно продумывают бонусные обстоятельства, коие необходимо выучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и ограничения. <a href=https://itkvariat.com/user/RalphRek/>https://itkvariat.com/user/RalphRek/</a> 1×slots промокод при регистрации В перечне требований к отыгрышу часто присутствуют лимиты на ставки при этой на личные деньги. Так, если отыграть надо(надобно) 30 000 руб., а предельная сумма ограничена 30 рублями, то вращать барабаны светит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками условий по срокам действия акции.
1×slots casino регистрация 1×slots review live
Бездепозитные бонусы — это подарки от казино повторяющий бонусных денег или фриспинов для игровых автоматов, которые начисляются на аккаунт игрока последствии процедуры регистрации на веб-сайте заведения. Для получения этих поощрений депозит не потребуется.В интернет-сети всегда возможно отыскать списки наиболее популярных и гарантированных поощрительных программ от знаменитых онлайн-казино. Получить Бездепозитный приз в онлайн казино дело 2-ух кликов. Другой момент, отыграть рекламную и соблюсти правила и обстоятельства отыгрыша. Под правилами предполагается не только вагер, но и лимитирования по наибольшей ставке. Мы осознаем, что в кинотеатр все ставят на зеро и выигрывают. Призываем не делать подобного. Перед активацией приза прочитайте верховодила. Узнайте последующие моменты: Условия получения презента, за регистрацию, за депо и прочее. Ограничения по наибольшей ставке. Зачастую не выше 350 руб. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вращать автоматы, а вагер будет стоять на пространстве. Поэтому принципиально аристократия, в каких играх возможно осуществлять кратность денежного оборота.Бездеп с фриспинами может обхватывать всю коллекцию игр на веб-сайте или разработки 1-го провайдера. Обычно предлагается конкретный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш может быть выведен после того, как пользователь отыграет данную необходимую. Возможность оценить глубокий функционал слотов — главное достоинство данной разновидности. Игроку становятся доступны что, эти опции, которые отсутствуют в демонстрационном режиме, а возможность выиграть реальные средства добавляет ярких азартных чувств. <a href=http://vladbat.ru/bitrix/redirect.php?goto=http://bessini.su/bitrix/redirect.php?goto=http://ntb.mpei.ru/bitrix/click.php?goto=https://teletype.in/@urist555/0D8SPPj5-dG>http://vladbat.ru/bitrix/redirect.php?goto=http://bessini.su/bitrix/redirect.php?goto=http://ntb.mpei.ru/bitrix/click.php?goto=https://teletype.in/@urist555/0D8SPPj5-dG</a> Размер ставки для игры по бездепозитному бонусу (конечно же, если, тогда,, когда он представлен в виде бонусных денежных средств) зачастую ниже, чем при забаве на депозит. Ограничение будет действовать до момента отыгрыша приза. зеркло казино 1×slots Зачастую бездепозитные бонусы казино для забавы предлагаются разными заведениями азартных игр виде рекламных промоакций либо в целях привлечения к себя свежих игроков. Для бездепозитных призов в казино 2022 геймеру надо пополнять счет до этапа вывода хотимых средств.Наши специалисты исследуют условия акции, этого в ручном режиме проводят их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие параметры. Мы не рекламируем казино, а даем игрокам информацию о лучших из них.
1×slots актуальное зеркало
С этими ординарными советами любое казино с призом за регистрацию способно принести в разы больше выгоды и пользы. Не стоит путать игру в демо и использование бонусов. В демонстрационном режиме игрок может оценить механику слота, сюжет и оформление. Но забава ведется на условные кредиты, поэтому отсутствует основное ? ощущение пыла. Активируя промокод либо фриспины, заказчик по-прежнему не тратит средства средства на игровые автоматы, хотя имеет сорвать настоящий куш! Прибывшие на аккаунт финансы бездепозитные бонусы предназначаются, в, лишь для новоиспеченных юзеров, которые раньше не имели собственного аккаунта в данном казино. Исходя из этого, в раньше у игрока был сделан депозит, то, по всей вероятности, у него больше не несомненно способности рассчитывать на получение такого приза в определенном заведении. 1×slots актуальное зеркало <a href=https://xiglute.com/blogs/20607658/203148/mastering-the-art-of-professional-home-design-drafting-a-moder>https://xiglute.com/blogs/20607658/203148/mastering-the-art-of-professional-home-design-drafting-a-moder</a> Чаще всего интернет-казино предлагают бездепозитные призы новым пользователям. Эта промо-акция довольно отлично привлекает начинающих, подталкивая их к открытию счета. Конечно, не все они становятся преданными посетителями, хотя сам факт регистрации аккаунта играет на руку заведению.
1хслот зеркало сайта
<a href=http://www.joaskin.co.kr/bbs/board.php?bo_table=free&wr_id=350185>http://www.joaskin.co.kr/bbs/board.php?bo_table=free&wr_id=350185</a> Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки имеют запросить вспомогательные документы или инициировать короткое общение по Skype.Бонус в казино без депозита содержит различные вариации: такое быть приветственный приз, акции в честь каких-либо дней либо весомых дат, приз за вербование новых игроков, лояльность и получение VIP-статуса. 1×slos регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=1611671#pid1611671>1 х слотс зеркало</a>
<a href=http://kamechkovkazak.listbb.ru/viewtopic.php?f=15&t=1924>1×slots подтвердит вашу регистрацию если говорить</a>
<a href=http://yonghengro.gain.tw/space.php?uid=1555574>1×slots промокод при регистрации 2025</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вейджер менее х30–35 считается приемлемым. Опытные игроки заявляют, собственно с этим вейджером реально остаться в плюсе, в правильно подойти к выбору игрового аппарата. В разделе с призами активировать собственный подарок. Найти игры, для которых предусмотрено одобрение и использовать бонус по назначению.
#1677 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию более популярный вариант это
Бонусные деньги – небольшая сумма средств для старта в новом казино. На бонусные деньги, обычно разрешено выступать во все игры, кроме слотов с прогрессивным джекпотом и игр из раздела exist casino.Также есть онлайн-платформы азартных игр, которые используют раздачу бездепозитных призов в специальные даты (как для казино, например и для игрока). Помимо сего, действующие геймеры того имеют вероятность получить похожие бонусы за собственную работа (например, за увеличения значения либо за похожие заслуги). <a href=http://filmkachat.ru/>1хслот официальный сайт зеркало</a> Бездепозитный бонус казино 2022 с выводом за регистрацию предоставляет возможность ознакомиться игроку с лобби избранного заведения, сориентироваться в выборе игр и проверить качество работы службы. Довольно нередко, начиная игровой процесс, игрок теснее не желает останавливаться и делает реальный лепта. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть даром вполне как один таки с призом за регистрацию без необходимости заносить депо. <a href=https://insta.tel/read-blog/115007>https://insta.tel/read-blog/115007</a> В разделе с призами активировать свой презент. Найти игры, для которых предусмотрено поощрение и применять приз по предназначению. 1 xslots рабочее зеркало <a href=https://madonas5.baltuss.lv/member.php?action=profile&uid=70578>https://madonas5.baltuss.lv/member.php?action=profile&uid=70578</a>
1× slots сайт
Наши эксперты изучают условия акции, затем в ручном режиме проводят их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и другие параметры. Мы не рекламируем казино, а даем игрокам информацию о лучших из них.Бездепы обыкновенно предлагают с отыгрышем — моментально вывести выигранные средства невозможно. Перевод денег со счета несомненно возможен последствии такого, как юзер выполнит все требования казино, а сумма возможности превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, протяжении коих заказчик вправе воспользоваться предложением. Обычно они не превышают нескольких дней после активации. <a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=58273>1×slots регистрация 1×slots casino 777 online</a> 1×slots регистрация на официальном сайте <a href=https://www.alligator.spb.ru/forum/index.php?PAGE_NAME=profile_view&UID=85499>https://www.alligator.spb.ru/forum/index.php?PAGE_NAME=profile_view&UID=85499</a> 1×slot зеркало рабочее этих способов предполагает регистрацию
1×slots casino регистрация 1×slots review live
На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не сможете активировать и получить бездепозитный приз.Приглашаем делиться воззрениями о бонусах. Это поможет другим юзерам избирать наиболее выгодные предложения. Бездепозитный бонус предоставляется новому игроку за определенные действия. Часто подарок повторяющий денег либо фриспинов выдается за регистрацию, спасибо чему пользователь получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.Для верификации аккаунта надо(надобно) дать спецам технической поддержки отсканированную копию паспорта и счета за коммунальные предложения, еще фотографию банковской карты или снимок странички электронного кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для доказательства личности. <a href=http://bbs.yongrenqianyou.com/home.php?mod=space&uid=4122479&do=profile>http://bbs.yongrenqianyou.com/home.php?mod=space&uid=4122479&do=profile</a> Классическая разновидность приза за творение аккаунта. Его превосходство содержится что, нет, что клиент возможность самостоятельно подбирать аппараты и создавать ставки в них. Иногда перечень игровых автоматов ограничен оператором, но все одинаково это другого, как, чем единственный доступный слот, как если, тогда, с внедрением фриспинов. рабочее зеркало 1×slots Нет. Казино раздают бесплатные призы за регистрацию, чтобы, чтобы, чтобы заказчик мог ознакомиться с игровым заведением. А чтобы исключить его, необходимо выполнить условия отыгрыша.
1х слотс зеркало регистрация в 1×slots casino
<a href=https://forum.ltp-team.com/topic/191381–1hslots-registraciya-v-1×slots-casino/>1хслотс регистрация в 1×slots casino</a> Чтобы помощи убедиться в превосходствах бездепозитных бонусов, достаточно зарегистрироваться в казино и получить поощрение.Срок активации и время на отыгрыш. Зачисление денег или фриспинов случается при активации в течение строго ограниченного периода, похожие требования предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать приз несколько дней или том месяцов. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высочайшим вейджером. Автоматы неспроста считаются наиболее известным азартным веселием. Чтобы освоить управление и управляла, потребуется всего несколько мин. Ваша задача сделать ставку, найти число трудящихся линий и возможно вертеть тамбур. Если на экране выпадет выигрышная композиция – вы выиграли! С данной задачей вас помогут управится бездепозитные бонусы казино.Вейджер (или вагер) ? это наименьшая сумма ставок, которую нужно устроить для вывода денежного приза. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение. 1×slots казино зеркало <a href=https://mir-pozitiv.ru/forums/users/winbexneo2901–2/>https://mir-pozitiv.ru/forums/users/winbexneo2901–2/</a> Автоматы непопросту считаются наиболее модным азартным веселием. Чтобы усвоить управление и правила, понадобится всего количество мин. Ваша задачка устроить ставку, найти количество рабочих линий и можно крутить барабан. Если на выпадет выигрышная комбинация – вы выиграли! С данной задачей вам помогут справится бездепозитные бонусы казино.
1хслотс рабочее зеркало
Шаг 4. Активация. Внимательно исследуйте обстоятельства, информацию по лимитированиям и сроке деянья бонусного предложения. Разобравшись с правилами, можно активировать приз в собственном кабинете (от ? с внедрением промокода) или по запросу в саппорт. Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Исходя из этого, просто не присутствует разумных причин махнуть рукою на получение такового приза при регистрации. И, что, на подобный безвозмездной основе у вас есть все шансы выиграть деньги и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные бонусы, нарекают бесплатными интернет платформами для игр. <a href=https://unitywizards.uk/member.php?action=profile&uid=73540>https://unitywizards.uk/member.php?action=profile&uid=73540</a> Бонус в казино без депо содержит разные разновидности: такое быть приветственный приз, акции в честь каких-то дней либо весомых дат, бонус за привлечение свежих игроков, преданность и получение VIP-статуса. 1×slots зеркало регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=http://skatefluckit.com/member.php?u=149708>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a>
<a href=https://krok.biz/forum/viewtopic.php?f=7&t=96932>1×slots официальный сайт, скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Кешбэк-бонус дает собой возврат фиксированного процента от ставки в случае поражения или же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не превышает 10%. При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток.
#1678 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
яндекс игры казино бк букмекерская контора <a href=https://www.ossetia.tv/>7k casino бонус</a> играющие казино онлайн 1×bet скачать бесплатно <a href=https://www.ossetia.tv/>порно с Бондаренко Анастасия Борисовна</a> casino игровой автомат casino официальный сайт pin casino зеркало up casino скачать казино без porno Виктория Баркова, легкоатлетка Светлана Ходченкова
DiskiPlus казино 5 DiskiPlus 1×bet на андроид бесплатно <a href=https://diskiplus.ru>DiskiPlus online casino</a> DiskiPlus casino зеркало сегодня DiskiPlus casino сегодня <a href=https://www.diskiplus.ru>DiskiPlus pin up casino top top</a> DiskiPlus порно с Гатагова Ольга Анатольевна DiskiPlus почему в казино нет окон DiskiPlus 1×bet сайт DiskiPlus яндекс казино DiskiPlus up casino официальный DiskiPlus Комарова Наталья Владимировна порно DiskiPlus cat casino
#1679 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало на сегодня
Автоматическая активация показаться самой удобной, хотя ручной метод имеет перед ней превосходства. Прежде чем использовать вознаграждение от казино, стоит заблаговременно найти, сколько времени требуется на выполнение всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деяния бонуса.В случае установленного лимита на необходимую вывода выигрыша с бездепозитного приза, игрок не может вывести больше заявленной суммы. <a href=http://filmkachat.ru/>1×slots промокод при регистрации 2025</a> Также, в необходимо доказать собственный номер телефона, достичь код, приобретенный в смс-сообщении от клуба ввести в специальное фон в собственном офисе игрока.Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. <a href=https://blog.libero.it/wp/kalinka0588/2025/03/05/subaru-reset-after-battery-change-complete-guide-steps/>https://blog.libero.it/wp/kalinka0588/2025/03/05/subaru-reset-after-battery-change-complete-guide-steps/</a> Фриспины — благотворительные вращения, коие разрешают игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытных игроков фриспины считаются наиболее модным и преимущественным видом бонуса — безвозмездные вращения порой эффективнее и веселее в отыгрыше, чем другие виды бездепов. 1×slots рабочее зеркало <a href=http://zqykj.com/bbs/home.php?mod=space&uid=257762>http://zqykj.com/bbs/home.php?mod=space&uid=257762</a>
1×slots коды
Даже не выиграв крупную сумму, игрок увлекательно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-либо финансовых рисков. Быть в курсе лучших акций с. Достаточно регулярно изучать список свежих интернет казино с выводом бонуса без депо в данном разделе. 1×slots коды В основном случаев благотворительные бонусы начисляются в кредитах, коие невозможно незамедлительно исключить со счета. Прежде их нужно отыграть по установленным правилам. Эти притязания принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже.Приветственный бонус без депо ? презент за регистрацию. Выдается средствами, фриспинами или баллами. В последнем случае бонусные баллы используются для роли в турнирах или размена на реальные деньги. <a href=http://www.nurrochma.com/2015/09/asyiknya-piknik-ramai-ramai.html>http://www.nurrochma.com/2015/09/asyiknya-piknik-ramai-ramai.html</a> 1×slots зеркало этих способов предполагает регистрацию
1×slots рабочее зеркало
Какие призы возможность еще получить не бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, любое онлайн казино предлагает игрокам выгодное предложение на 1-ый депозит, вы совершаете депо, ваш депо увеличивается в двое либо том в трое, тем наиболее начать выступать возможно с больше солидной суммой, так же не забываем про вейджер на призы. В современность очень просто получить приз за регистрацию в казино. Практически любой игорный жилище с радостью начислит деньги либо благотворительные вращения. Многие гэмблеры используют данным и не смущяются регистрироваться в каждом клубе с прибыльными критериями. Кстати, это замечательная возможность выработать победную тактику и сорвать джекпот.Фриспины – бесплатные вращения с фиксированной ставкой, коие возможно использовать в определенных игровых автоматах. <a href=https://nrns-games.com/index.php?action=profile;u=40980>https://nrns-games.com/index.php?action=profile;u=40980</a> Вышеописанная первопричина и считается основным моментом, из-за которого операторы отдают доля своей прибыли на разные рекламные расходы и маркетинговые кампании. А самым действенным тут станут выступать именно бездепозитные призы казино 2022 с выводом за регистрацию.Доступные игры – В некоторых азартных забавах можно понизить математическое преимущество казино до нескольких 10-х процента. В их количестве все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как правило, в таких играх ставки идут в зачет вейджера не полностью. Например, возможность учитываться лишь 50%. В некоторых играх бездепозитные призы вообщем невозможно отыгрывать. 1хслотс официальный сайт зеркало Приветственный приз без депо ? презент за регистрацию. Выдается деньгами, фриспинами либо баллами. В заключительном случае бонусные баллы используются для участия в турнирах либо размена на реальные деньги.Также учтите, что кое-какие игровые платформы сужают перечень стран, которые способны получить предложенный бездепозитный бонус за регистрацию. К примеру, есть онлайн-заведения, выдающие сходственные бонусы только жильцам конкретных стран. К образцу, интернет казино 777 Оригинал предоставляет бездепозитный бонус только игрокам из России и государств СНГ. Или наоборот, пичкают вознаграждением всех, кроме обитателей неких стран (из сего, стопам пристально учить перечень, чтобы впоследствии не появилось никаких вопросов и жалоб).
1×slos регистрация в 1×slots casino
Онлайн-казино тщательно продумывают бонусные условия, коие необходимо выучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и другие лимитирования. <a href=http://forum.as-p.cz/viewtopic.php?f=45&t=67620&p=351485#p351485>1×slots зеркало регистрация то дальше необходимо пройти</a> Автоматы неспроста считаются наиболее знаменитым азартным отдыхом. Чтобы усвоить управление и верховодила, потребуется всего количество минут. Ваша задачка сделать ставку, определить количество рабочих линий и можно крутить барабан. Если на экране выпадет выигрышная композиция – вы выиграли! С этой задачей вас посодействуют справится бездепозитные призы казино.Самый распространённый из похожих бонусов, конечно же, бездеп на день рождения посетителя — приз в виде фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им можно протяжении установленного периода времени. x1 slots регистрация в 1×slots casino <a href=https://cse.google.co.th/url?q=http%3A%2F%2Fdoctorlazuta.by>https://cse.google.co.th/url?q=http%3A%2F%2Fdoctorlazuta.by</a> Выигрыши с призов без вложений всегда привязаны к требованию по ставкам и имеют быть обналичены только в исполненья этих притязаний.В лицензионных бездепозитных казино выступать в азартные игры действительно неопасно. Наличие лицензии подтверждает тот прецедент, собственно клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP.
скачать 1×slots официальный сайт
<a href=https://australianweddingforum.com/weddings/member.php?action=profile&uid=26260>https://australianweddingforum.com/weddings/member.php?action=profile&uid=26260</a> 1×slots на любой вкус как пройти регистрацию Особую изюминку видео слотам придают уникальные знакы. С их выходом активизируются различные бонусы. Вы сможете запустить дополнительный уровень и увеличить сумму выигрыша. Есть знаки, которые заменяют ненадобные элементы и сами творят выигрышные комбо. Не стоит забывать и тему бонус-тур. После любого успешного спина есть шанс увеличить необходимую выигрыша в 2 либо четыре раза.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=100032&pid=371965#post_371965>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=http://kemsrr.forumex.ru/viewtopic.php?f=7&t=5720>1×slots casino зеркало</a>
<a href=https://forum.banknotes.cz/viewtopic.php?t=67931>1хслотс зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Однако в критериях скрываются «подводные камни», которые не позволят исключить солидную необходимую либо же вы не успеете отыграть вейджер. Поэтому мастера рекомендуют забрать безвозмездные вращения за регистрацию в казино без депозита, дабы поднабраться опыта и получить реальный шанс на победу. Если площадка презентует бездеп за регистрацию, то процедура его получения проста. Нужно лишь ввести аккаунт на веб-сайте и активировать его, подтвердив адресок электронной почты, номер телефонного или другие данные, коие настятельно оператор. Перед данным необходимо увериться, что юзер находится на официальном сайте казино, не на жульнической площадке.
#1680 inernetkrdGephttps://domashij-internet-krasnodar001.ru
провайдер по адресу <a href=https://domashij-internet-krasnodar001.ru>domashij-internet-krasnodar001.ru</a> провайдер по адресу краснодар
#1681 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало
Таким образом, заведение пытается показать себя своим потенциальным игрокам, а подобный рекламный ход как казино приз без депозита за регистрацию завлекает довольно много внимания к игорному заведению и обеспечивает постоянный струю свежих посетителей и будущих посетителей игрового интернет клуба. <a href=http://filmkachat.ru/>x1 slots регистрация в 1×slots casino</a> Бездепозитные бонусы за регистрацию считаются одним из самых знаменитых способов вербования новых игроков в онлайн-казино, потому что они предоставляют игрокам возможность опробовать казино, тем игровые автоматы, и вполне, выиграть настоящие средства.Третитй бездепозитный приз за регистрацию – валютные средства. К сожалению, начислить рубли либо баксы готовы лишь известные и знаменитые клубы. С их подмогою вы сможете насладиться любой доступной игрой – автоматом, рулеткой, кено, блэкджеком. <a href=https://hackmd.io/@lexxeagle/B168pWHlR>https://hackmd.io/@lexxeagle/B168pWHlR</a> Чаще всего используются коды. Их надо(надобно) заносить в особые окошки регистрационной анкеты, случае идет о пригласительных призах, или в определенном разделе личного кабинета игрока.Новые клиенты онлайн-казино без первого депо шансы выяснить свою удачливость. К тому же есть вероятность преобразовать бездепы в реальные средства за регистрацию в казино, впрочем результата приз нужно отыграть сообразно условиям промоакции. 1×slots зеркало <a href=https://swats.net/home.php?mod=space&uid=261527>https://swats.net/home.php?mod=space&uid=261527</a>
1×slots casino регистрация 1×slotscasin online
Как правило, при выводе финансов, от играющего потребуется только устроить минимальный лепта для того, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом индивидуальный счет.Бездепозитный приз нередко возможность замерзнуть доступным незамедлительно последствии окончания регистрации, что правило единственным требованием к нему считается регистрация, а после проверка вашей новой учетной записи. 1×slots официальный сайт мобильная версия <a href=https://rightcoachforme.com/author/ralphpor/>https://rightcoachforme.com/author/ralphpor/</a> скачать 1×slots официальный сайт Обычно для получения бонусов без депо, казино выдвигает приклнные и вполне выполнимые условия, хотя есть ряд действий коие воспрещены и все повлечь за собой противные результаты:
1×slots сайт
Создание аккаунта. На веб-сайте казино необходимо открыть регистрационную форму и заполнить порожние поля собственными данными. Иногда на этом этапе требуется показать лишь адресок электронной почты и пароль, хотя почаще бы наполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д.). Нужно свидетельствовать лишь реальные данные, потому впоследствие они будут испытаны.Главное преимущество спинов – возможность выучить различные слоты. Также получится насладиться бонусными раундами, испытывать фортуну в риск-туре и преумножить выигрыш за счёт особых символов. Однако не только игровой процесс заслуживает внимание, как лучше сосредоточиться на реальном выигрыше. <a href=http://daojianchina.com/home.php?mod=space&uid=4590957>http://daojianchina.com/home.php?mod=space&uid=4590957</a> 1×slots подтвердит вашу регистрацию если говорить
1х слот регистрация в 1×slots casino
<a href=https://minecraft.ru.net/user/Manuelsoarl/>1×slots зеркало на сегодня</a> Также, такой нужно доказать собственный номер телефона, для этого код, приобретенный в смс-сообщении от клуба ввести в специальное поле в личном офисе игрока. Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала быстрые выводы. Фишка выплат в том, собственно довольно избрать платёжный инструмент и показать сумму. В большинстве случаев деньги зачисляются на электрические кошельки на 15 минут, а на банковские карты – 1–3 трудящихся денька.Все безвозмездные призы кажутся заманчивыми. Кто же категорически от возможности поиграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далековато не все бездепозитные призы в равной степени презентабельны для рассудительного посетителя. 1×slots регистрация 1×slots casino c2d ru <a href=http://bbs.boway.net/home.php?mod=space&uid=1148858>http://bbs.boway.net/home.php?mod=space&uid=1148858</a>
1×slots casino регистрация на сайте
Выбор любого онлайн казино на нашем сайте. В описании к каждому Вы можете разузнать, собственно получите за создание аккаунта. Подтвердите личность, предоставив оператору казино средства паспортные данные. Инструкции обычно легкие, основное — конкретно им следовать. Если написано, собственно «на фото обязаны быть видны все четыре угла странички паспорта» — устройте именно это фото. <a href=https://steamboatspringschat.com/forum/members/stevenkic-1593.html>https://steamboatspringschat.com/forum/members/stevenkic-1593.html</a> Возьми собственный презент. Чаще всего приз активируется незамедлительно в регистрации. Но случаются ситуации, когда надо(надобно) зайти в собственный кабинет или написать в справочную службу.1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, случае не желаете замерзнуть жертвой жуликов либо впустую истратить время; казино 1×slots Наиболее модные гонорары среди гэмблеров – бездепозитные призы казино. Это не дивно, так возможно получить безвозмездные вращения либо виртуальные кредиты, и при не придётся пополнять счёт, рисковать личностными средствами. Удастся насладиться разнообразными весельями и даже выиграть крупную необходимую, избегая серьёзного риска.Во всех законных онлайн-казино Беларуси необходимо подтверждение паспортных данных для игры — это требование правительства государства.
<b>Смотреть еще похожие новости:</b>
<a href=https://alglaah.com/index.php?threads/%D9%83%D8%B1%D8%A7%D8%AA%D9%8A%D9%86-%D9%81%D8%A7%D8%B1%D8%BA%D8%A9-%D9%84%D9%84%D8%A8%D9%8A%D8%B9-%D8%A8%D8%A7%D9%84%D9%83%D9%88%D9%8A%D8%AA.93833/#post-215251>x1 slots регистрация в 1×slots casino</a>
<a href=https://games-garant.ru/index.php?subaction=userinfo&user=Jamesneorm>1 xslots рабочее зеркало</a>
<a href=https://acerfans.ru/user/JamesTed/>1хслотс мобильная версия зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Популярность онлайн казино растёт и всё больше пользователей начинают увлекаться азартными играми. Бездепозитные призы 2022 года, это оригинальные подарки за регистрацию. С их помощью новые игроки шансы получить благотворительные вращения или средства на баланс за 1 регистрацию. С появлением игорных заведений в интернете, бездепозитные бонусы стали моднейшим способом вербования игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о которых мы поведаем. Наш сайт собрал наилучшие предложения из онлайна на 2022 год. Воспользуйтесь каким презентом и сможете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша нужно выполнить условия.
#1682 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pinco casino порно с Арина и Дина Аверины, гимнастки <a href=https://krtka.info/>pin up casino пин ап</a> casino игровой автомат Фастова Елена Владимировна порно <a href=https://rucriminal.info/>бесплатные букмекерские конторы</a> фреш казино казино на деньги пин ап букмекерская контора где казино 1×bet на андроид бесплатно casino играть самое казино
DiskiPlus казино гта 5 DiskiPlus 7k casino зеркало рабочее <a href=https://diskiplus.ru/>DiskiPlus казино гта 5</a> DiskiPlus Приезжева Екатерина Геннадьевна порно DiskiPlus порно с Федор Чалов (футбол) <a href=https://diskiplus.ru>DiskiPlus порно с Анастасия Потапова, теннисистка</a> DiskiPlus porno Мира Андреева (теннис) DiskiPlus casino промокод DiskiPlus porno Яна Троянова DiskiPlus сайты казино DiskiPlus пинап казино DiskiPlus casino x DiskiPlus casino buzz
#1683 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт, скачать
Частенько новички не понимают, как активировать подарки либо исключить 1-ый выигрыш. Для похожих случаев наша команда описала главные термины – собственно такое фриспины, вейджер, как его отыграть, чего необходимо проходить верификацию.Операторы гемблинга утверждают, собственно например они сражаются с бонус-хантерами. Впрочем, критики считают, что этим казино пробуют устроить из случайного постояльца постоянного игрока. <a href=http://filmkachat.ru/>рабочее зеркало 1хслотс</a> Новые посетители онлайн-казино без первого депозита имеют проверить собственную удачливость. К что, этому же есть возможность преобразовать бездепы в реальные средства за регистрацию в казино, впрочем для этого приз нужно отыграть сообразно условиям промоакции. <a href=https://uberant.com/article/2006575-does-autozone-buy-old-batteries-a-comprehensive-exploration/>https://uberant.com/article/2006575-does-autozone-buy-old-batteries-a-comprehensive-exploration/</a> Важно, убедитесь в, что раньше не регились в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи. 1×slots регистрация 1×slots casino c2d ru <a href=https://christinanoto.sites.gettysburg.edu/education/pinaca-synthesis/----2?t=1723072736737>https://christinanoto.sites.gettysburg.edu/education/pinaca-synthesis/----2?t=1723072736737</a> Получить приветственный бонус все лишь свежие клиенты онлайн-казино. Способы описаны в критериях промоакции любого легального казино, чаще всего это:Когда идет о валютных бонусах, казино практически устанавливают условия вейджера, которые необходимо выполнить, чтобы вывести выигрыш.
1× slots casino зеркало
1×slots сайт Активация по промокоду используется в различных обликах бездепов. Если речь идет о приветственном призе, то комплект знаков возможно узнать на основной страничке, в регистрационной форме или письме, которое отправляется пользователю для подтверждения адреса электронной почты. Акции имеют проводиться общо с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активируется разовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном кабинете или начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем важный код для активации в описании любого промо.К образцу, игроку выдаются бесплатные свои в заведении в размере пятидесяти либо 100 долларов (вейджер на которые сочиняет 100х). То есть, любому новоприбывшему игроку выскакивает манящая картинка, кот-ая сулит выплату всех зачисленных фирмой средств. Не стоит обращать внимания на казино бонус за регистрацию без депозита с сильно большой или довольно малеханькой суммой бонусов, поэтому собственно, в тщательно изучив все обстоятельства, здесь скорее, несомненно какой-то подкол. <a href=http://mbdou-vishenka.ru/user/EdwardLaw/>http://mbdou-vishenka.ru/user/EdwardLaw/</a> Наличие у игрока 2 аккаунта. Запрещено делать несколько профилей для неоднократного получения бездепов.Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, a лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. 1хслотс зеркало на сегодня Так собственно можете отважно региться без всяких размышлений. Фортуна сегодня точно на вашей стороне. Не страшитесь, так следствие какого или убытка Вам абсолютно не угрожает. С этими призами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе.Итак, чтобы благотворительные бонусные кредиты превратились в настоящие средства, которыми вам распоряжаться по своему усмотрению, их нужно отыграть. Вейджер следует уточнять в правилах онлайн-казино.
1× slots регистрация в 1×slots casino
<a href=http://www.god123.xyz/home.php?mod=space&uid=1114089>http://www.god123.xyz/home.php?mod=space&uid=1114089</a> 1×slots casino регистрация 1×slots review live Денежные средства. Третий приз за регистрацию без депо – наличные. К огорчению, лишь знаменитые и популярные клубы все уяснить средства в руб. Или баксах. С их поддержкою появится насладиться любой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед данным нужно исполнение определенных критерий.
1×slots регистрация 1×slotscasino 56 online
Наш перечень содержит превосходнейшие бездепозитные бонусы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по главным параметрам: В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и в случае спорных ситуаций нет способности куда-то пожаловаться и доказать собственную правоту. 1х слотс зеркало регистрация в 1×slots casino <a href=http://www.icecap.co.kr/bbs/board.php?bo_table=sub0403_en&wr_id=146948>http://www.icecap.co.kr/bbs/board.php?bo_table=sub0403_en&wr_id=146948</a>
1×slots casino online регистрация
Многие азартные клубы ограничивают сумму вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, обозначенной в описании акции, суммы Вы не можете вывести. Разница несомненно аннулирована, Вы том не сможете создавать на нее ставки. <a href=http://www.italian-style.ru/Nasha_kompanija/forum/?PAGE_NAME=profile_view&UID=57396>http://www.italian-style.ru/Nasha_kompanija/forum/?PAGE_NAME=profile_view&UID=57396</a> 1×slots официальный сайт мобильная версия Также посещают случаи, когда казино начислит оговоренный бонус последствии регистрации свежего клиента по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам.
<b>Смотреть еще похожие новости:</b>
<a href=https://roguedynasty.net/forums/showthread.php?3980–1×slots-%D0%A1%D0%83%D0%A0%C2%B0%D0%A0%E2%84%96%D0%A1%E2%80%9A-%D0%A0%C2%B7%D0%A0%C2%B5%D0%A1%D0%82%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%BB%D0%A0%D1%95&p=58980#post58980>1×slots сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но есть игорные заведения, коие готовы просто например жертвовать средства на игру. Для сего довольно сделать профиль. Чтобы вывести собственный выигрыш, для поначалу необходимо выполнить обстоятельства отыгрыша, обозначенные в критериях получения бездепозитного депозита.
#1684 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up casino пин 1×bet приложение <a href=https://krtka.info/>игры казино</a> Чулпан Хаматова пин up casino <a href=https://krtka.info/>порно с Антропова Валентина Викторовна</a> порно с Аделия Петросян (фигурное катание) леон букмекерская контора casino играть букмекерские конторы pin porno Илона Маркова, хоккеистка казино ставка букмекерская контора без
DiskiPlus kent casino DiskiPlus бесплатно фильм казино <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet официальный скачать</a> DiskiPlus Кузнецова Анна Юрьевна порно DiskiPlus бесплатное казино <a href=https://www.diskiplus.ru>DiskiPlus 1×bet 1хбет</a> DiskiPlus 1win букмекерская контора DiskiPlus 1×bet зеркало на сегодня DiskiPlus почему в казино нет окон DiskiPlus казино вулкан DiskiPlus champion casino DiskiPlus лучшие казино бесплатно DiskiPlus порно с Захарова Мария Владимировна
#1685 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать на айфон
Осталось избрать казино с бонусом за регистрацию и создать профиль. После активации дара выигрыш зависимости от Фортуны и навыков. <a href=http://filmkachat.ru/>x1 slots 1хслотс регистрация перейти на 1×slots</a> Для верификации аккаунта надо(надобно) дать спецам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, а также фотографию банковской карты либо экрана странички электронного кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности. <a href=https://www.evernote.com/shard/s532/sh/38da135a-3f5a-987b-dba4-fbc973f0b381/JrgsrYavE57yMS7XaTjBB3HomX7XM8S5RSmE9WX8dgACmzfCVBz33IgfQg>https://www.evernote.com/shard/s532/sh/38da135a-3f5a-987b-dba4-fbc973f0b381/JrgsrYavE57yMS7XaTjBB3HomX7XM8S5RSmE9WX8dgACmzfCVBz33IgfQg</a> Oтыгpaть приз с указанным вeйджepом, для этого необходимо сдeлaть cтaвoк нa cумму, превосходящую объем приза в некоторое один.При регистрации что или ином интернет игральном заведении — вас дается раз шанс испытывать свою фортуну не внося свои монеты. Замечу что эту поощрительную услугу предоставляют не все интернет игровые площадки, а лишь щедрая середина(средина) из них. Которые мы подготовили для Вас в нашем перечне. 1хслотс официальный сайт зеркало <a href=http://mineralgroup.ru/index.php?subaction=userinfo&user=warytemptation2>http://mineralgroup.ru/index.php?subaction=userinfo&user=warytemptation2</a>
1х слот регистрация в 1×slots casino
К примеру, игроку выдаются безвозмездные средства в заведении в размере пятидесяти или ста $ (вейджер на которые составляет 100х). То есть, каждому новоприбывшему геймеру выскакивает притягивающая картинка, кот-ая сулит выплату всех зачисленных фирмой средств. Не стоит обращать внимания на казино приз за регистрацию без депозита с слишком большой или очень малюсенькой суммой призов, поэтому собственно, том кропотливо выучив все обстоятельства, тут всего, несомненно некий подкол. <a href=http://kemsrr.forumex.ru/viewtopic.php?f=7&t=5924>1хслотс казино зеркало</a> 1×slots сайт Начнём с того, что любое промо за регистрацию предполагает некоторые условия. Бездепозитные призы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность денежного оборота, необходимая для выполнения условий. Пример, возымели благотворительные вращения и выиграли с них 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 рублей, проигрышных или выигрышных, не. После исполнения, бонусный баланс перейдёт на настоящий и будет легкодоступным к выводу. <a href=http://ww.yktech.biz/2015/bbs/board.php?bo_table=qna&wr_id=75386>http://ww.yktech.biz/2015/bbs/board.php?bo_table=qna&wr_id=75386</a> 1×slots промокод при регистрации
1×slots коды
С такими простыми советами каждое казино с призом за регистрацию способно принести в разы больше выгоды и полезности. Бонус в казино без депо имеет разные разновидности: такое быть приветственный бонус, промоакции в честь каких-либо дней либо важных дат, бонус за привлечение свежих игроков, преданность и получение VIP-статуса. <a href=http://agatbratsk.ru/index.php?subaction=userinfo&user=yxiwepib>http://agatbratsk.ru/index.php?subaction=userinfo&user=yxiwepib</a> Обычно, бездепозитные бонусы выдаются под определенные слоты с фиксированной ставкой, хотя их наверняка запрещено использовать в игровых автоматах с современным джекпотом. Список игр, каких можно использовать бездеп, Вы отыщите в описании акции или сможете уточнить у службы заведения. 1×slots рабочее зеркало на сегодня Подтвердите регистрацию, чтобы активировать Бездепозитный бонус с выводом, требуется наполнить собственный профиль. Заполните пустые поля настоящими данными о для.
1×slots зеркало быструю регистрацию а также мгновенное
Бездепозитные призы в казино без пополнения 2022 — это определенная сумма средств или vacant spins вращения, которые предоставляются первым гостям за регистрацию на сайте казино повторяющий бездепозитного бонуса, и дает для возможность с казино без пополнения опробовать предложения (игр), с последующей привилегией вывода средств при исполненьи всех установленных управлял. Выбирайте наилучшие безвозмездные призы с помощью обзоров на Casinoz – и пусть вас сопутствует удача при отыгрыше бонусных кредитов! 1хслотс зеркало на сегодня <a href=http://sanakirja.kronman.fi/index.php?title=РР·_чего_состоит_диета_Елены_Малышевой>http://sanakirja.kronman.fi/index.php?title=РР·_чего_состоит_диета_Елены_Малышевой</a> Ознакомьтесь с нашим перечнем лучших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего списка и получите бездеп незамедлительно. Хватайте превосходнейшие благотворительные предложения ниже и выигрывайте большие деньги, не рискуя!Как только получите бездеп в казино, всё равно не запамятовывайте проверять электрическую почту. Некоторые игорные клубы постоянно радуют активных гэмблеров приятными бонусами. Чаще всего получить подарок можно в преддверии веселья, на денек рождение, за вербование приятеля. А кроме распространённым бонусом считается надбавка к депозиту. Нужно не пополнить счёт, и азартное заведение прирастит его на 50–100%.
casino 1×slot
Фриспины начисляются по определенной ставке. После их активации игроку необходимо запустить разъем и увериться, что в нем показываются безвозмездные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода после отыгрыша ориентируется оператором и изредка превышает 5 000 рублей.А ознакомиться с свежими интернет казино, Вы можете с бонусов с выводом прибыли, которые Вы сможете получить без депозита. <a href=https://veteran-gazeta.ru/forum/user/1822/>https://veteran-gazeta.ru/forum/user/1822/</a> Иногда в качестве бездепа, казино дарит минимальный бонус (до 50 руб. ), ради которого не заморачиваться.Не желаете сыграть в азартные забавы, не рискуя средствами средствами, хотя получая в все выплаты? Подобную вероятность предоставляют многие превосходнейшие порталы с азартными веселиями. В их количестве много честных и надежных интернет-казино на российском языке. Они завлекают свежих пользователей различными поощрительными событиями, включая бездепозитные, или безвозмездные бонусы. 1×slots бездепозитный бонус за регистрацию Активация происходит счет промокодов, коие вводятся в личном офисе последствии регистрации. Среди спецпредложений в перечне Casino.ru содержатся эксклюзивные промокоды, коие доступны только посетителям портала. Другие методы начисления средств ? автоматическая активация сразу после творенья аккаунта и получение дара по запросу в службу технической поддержки.Еще одно условие касается размеров ставки. Операторы устанавливают наивысшую сумму, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, избранной в Личном кабинете. При превышении лимита есть риск потерять бонуса. Существующие ограничения относятся и к определенным видам ставок. Например, играя в рулетку, клиент имеет столкнуться с запретом ставить фишки на шансы.
<b>Смотреть еще похожие новости:</b>
<a href=http://aficionado.pl/showthread.php?190197–1×-slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE&p=211339>1× slots зеркало</a>
<a href=http://sofanatki.ekafe.ru/viewtopic.php?f=1&t=2671>скачать 1×slots на андроид мобильная версия</a>
<a href=https://timepost.info/showthread.php?tid=169851>1×slots зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вейджер (либо вагер) ? это наименьшая сумма ставок, коию нужно устроить для вывода денежного приза. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение. Основное верховодило получения бездепа ? создаваемый аккаунт обязан быть у пользователя первым и единственным. Наличие нескольких аккаунтов требовательно запрещено. Проверка проводится по имени, e-mal, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депо необходимо блюсти простую последовательность деяний.
#1686 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
7k casino официальный сайт 1×bet телефон <a href=https://specreporter.com/>пинап казино</a> pin up casino пин казино регистрации <a href=https://7club7.com/>Анна Михалкова</a> 7k casino официальный сайт up casino играющие казино онлайн ставки на спорт букмекерские конторы Москалькова Татьяна Николаевна порно pin up casino пин casino betting
DiskiPlus пина casino DiskiPlus black russia казино <a href=https://diskiplus.ru>DiskiPlus 1×bet xbet</a> DiskiPlus порно с Арина и Дина Аверины, гимнастки DiskiPlus porno Мира Андреева (теннис) <a href=https://www.diskiplus.ru/>DiskiPlus porno Александр Соболев (футбол)</a> DiskiPlus Мухтиярова Елена Вячеславовна порно DiskiPlus рокс казино DiskiPlus порно с Юлия Ефимова, пловчиха DiskiPlus казино можно DiskiPlus порно с Александр Большунов (лыжные гонки) DiskiPlus pinco casino DiskiPlus порно с Дарья Касаткина (теннис)
#1687 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
ешь казино казино проиграл <a href=https://rucriminal.info/>сайт винлайн букмекерская контора</a> casino бездепозитный Попова Анна Юрьевна порно <a href=https://t.me/vchkogpu_ru>скачать 1×bet 1×bet xyz</a> up casino скачать Львова-Белова Мария Алексеевна порно казино 1 казино сегодня порно с Евгений Малкин (хоккей) водка казино 1×bet приложение
DiskiPlus pin up casino DiskiPlus скачиваемые казино <a href=https://diskiplus.ru/>DiskiPlus рокс казино</a> DiskiPlus сайт казино зеркало DiskiPlus porno Анастасия Янькова, боксерка <a href=https://www.diskiplus.ru>DiskiPlus porno Виктория Баркова, легкоатлетка</a> DiskiPlus unlim casino DiskiPlus казино можно DiskiPlus сайт pin up casino DiskiPlus Крючкова Полина Викторовна порно DiskiPlus букмекерские конторы бет DiskiPlus Приезжева Екатерина Геннадьевна порно DiskiPlus балтбет букмекерская контора
#1688 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasino09k online
Получать информацию о самых прибыльных бонусах возможно без постоянного мониторинга новостей казино. Мы взяли эту задачку на себя и постоянно смотрим за предложениями операторов, выбирая наихорошие из их. В этом разделе собраны заключительные бездепы, промокоды к ним и обстоятельства их активации. Список промоакций периодически дополняется. В топ вошли самые новые бездепозитные призы за регистрацию в казино 2020, временные и закрытые рекламную. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и другим критериям. Если срок действия акции истек, она удаляется из списка. <a href=http://filmkachat.ru/>1×slots официальный сайт, скачать</a> <a href=https://allmylinks.com/kalinka0588>https://allmylinks.com/kalinka0588</a> зеркло казино 1×slots <a href=http://xn–vk1b93jqsbxy0apgpr0a.com/bbs/board.php?bo_table=free&wr_id=31740>http://xn–vk1b93jqsbxy0apgpr0a.com/bbs/board.php?bo_table=free&wr_id=31740</a>
1×slots регистрация 1×slotscasino09k online
На благотворительные бонусы онлайн-казино почти постоянно распространяется лимитирования по стране проживания клиентов. Даже случае для разрешено раскрывать счет и выступать на средства в заведении, это еще не означают, что вам доступны no deposit bonuses. 1×slots зеркало рабочее на сегодня Классическая разновидность приза за создание аккаунта. Его превосходство заключается в том, что заказчик имеет других подбирать аппараты и делать ставки в их. Иногда перечень игровых автоматов ограничен оператором, но все равно это никакого, чем один-единственный доступный разъем, как когда с использованием фриспинов.Некоторые клубы механически начисляют приз на аккаунт игрока последствии выполнения критерий получения, но посещают ситуации, когда бонус надо(надобно) активировать игроку самому. Есть некоторое методов активации приза: <a href=https://historydb.date/wiki/User:MosesWingate6>https://historydb.date/wiki/User:MosesWingate6</a> 1×слотс казино Бесплатные призы казино без депозита возможно получить в виде денежных средств на бонусный счет (вывести их можно лишь последствии отыгрыша), фриспинов, забавы либо кешбэк-бонуса.При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток.
1×slot зеркало рабочее этих способов предполагает регистрацию
Чтобы помощи убедиться в превосходстве бездепозитных призов, довольно зарегистрироваться в казино и получить одобрение. <a href=https://gunnerbksa07418.blogminds.com/deep-nude-exploring-the-ethics-and-impact-of-ai-powered-image-manipulation-27939594>https://gunnerbksa07418.blogminds.com/deep-nude-exploring-the-ethics-and-impact-of-ai-powered-image-manipulation-27939594</a> Мы рекомендуем не открещиваться от сходственных услуг знаменитых казино. Выделите несколько минут на регистрацию, получите приз и попробуйте его отыграть. Может быть, сейчас фортуна несомненно на вашей стороне!Однако в условиях исчезают «подводные камешки», которые не позволят вывести крупную сумму либо же вы не успеете отыграть вейджер. Поэтому мастера рекомендуют отобрать безвозмездные вращения за регистрацию в казино без депозита, чтобы поднабраться навыка и получить реальный шанс на победу. 1×slots зеркало подтвердит вашу регистрацию если говорить Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в личный офис, дабы арестовать бесплатные вращения с вейджером х40;Рассмотрим принцип его действия на образце. Допустим, вы зарегистрировались и возымели $10 no deposit bonus с вейджером х50. Это означает, что выигранные средства возможно будет выводить не раньше, чем последствии как, как общая сумма ставок достигнет $500.
1×slots регистрация 1×slots review live
С не отыгранным бонусом запрещается превосходить объем максимальной ставки. Нарушение сего обстоятельства в аннулирование выигрыша. Пoдтвepдить личнocть клиента. Для успешного вывода средств, нужно доказать лицо клиента. Нa этaпe вepификaции пpoфиля, сотрудники службы безопасности обязаны увериться, собственно у игрока всего лишь раз аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не сможет исключить собственный выигрыш, случае у него будет несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы. Вейджер менее х30–35 считается применимым. Опытные игроки утверждают, собственно с этим вейджером реально остаться в плюсе, случае верно подойти к выбору игрового аппарата.Риск-игра по одинаковым шансам – Также казино возможность воспрещать выполнять условия по отыгрышу с помощью раунда на удвоение, который предлагается в слотах, видео-покере и некоторых других играх. 1×slots бездепозитный бонус за регистрацию <a href=https://dokuwiki.stream/wiki/User:CharmainDdy>https://dokuwiki.stream/wiki/User:CharmainDdy</a>
1×slots официальный сайт мобильная версия
Получив свой презент, Вы сможете безвозмездно играть на реальные деньги, а выполнив обстоятельства отыгрыша, исключить собственный выигрыш.Не хотите поиграть в азартные игры, не рискуя своими деньгами, хотя получая в все выплаты? Подобную вероятность деют почти наилучшие порталы с азартными развлечениями. В их количестве количество правдивых и надежных интернет-казино на российском языке. Они привлекают новых пользователей разными поощрительными мероприятиями, включая бездепозитные, либо бесплатные бонусы. <a href=http://www.yyxw999.com/space-uid-22234.html>http://www.yyxw999.com/space-uid-22234.html</a> В списке требований к отыгрышу часто присутствуют лимиты на ставки при игре на личные средства. Так, случае отыграть надо(надобно) 30 000 руб., а максимальная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 раз. Эта особенность затрудняет соблюдение игроками условий по срокам деянья акции.2. Создать свежий профиль. Для регистрации нужно заполнить маленькую анкету или зайдите в личный офис посредством соц сеток; 1×slots официальный сайт скачать на айфон Каждый компьютерные должен сперва детально изучить обстоятельства по получению и отыгрышу понравившегося презента. Если всё организует, поторопитесь отобрать безвозмездные спины за регистрацию в казино без депо с выводом и без отыгрыша и прямо в начать вращать барабаны топовых слотов.
<b>Смотреть еще похожие новости:</b>
<a href=http://police.1stbb.ru/viewtopic.php?f=3&t=910>1× slots официальный</a>
<a href=http://www.infoknygos.lt/smforum/index.php?topic=133999.new#new>1×slots официальный зеркало рабочее</a>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/9579/#comment-397293>1×slots casino регистрация 1×slotscasino09k online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Изучить управляла и условия получения бездепозитных призов казино, Вы можете у нас на сайте в разделе с бонусами или на официальном сайте избранного Вами казино. Если имеет найти нужную информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал либо по электрической почте. Не трудно додуматься, собственно no deposit bonuses почти ни не случаются немаленькими. Чаще всего идет о пяти–тридцати долларах (или эквиваленте этой суммы в иной денежной).
#1689 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
up casino скачать porno Андрей Рублев (теннис) <a href=https://www.ossetia.tv/>приложения букмекерских контор</a> официальные зеркала казино casino официальный сайт <a href=https://m.repost.news/>porno Катерина Шпица</a> Черкесова Бэлла Мухарбиевна порно казино смотреть приложения букмекерских контор на андроид порно с Владимир Минеев (ММА) казино онлайн бесплатно Матвиенко Валентина Ивановна порно Самойлова Алла Владимировна порно
DiskiPlus букмекерские конторы в россии DiskiPlus бесплатно играем казино <a href=https://diskiplus.ru>DiskiPlus порно с Александр Головин (футбол)</a> DiskiPlus казино пину DiskiPlus букмекерская контора <a href=https://diskiplus.ru>DiskiPlus casino игровой автомат</a> DiskiPlus официальные зеркала казино DiskiPlus порно с Матвей Сафонов (футбол) DiskiPlus яндекс казино DiskiPlus букмекерская контора зенит DiskiPlus казино без DiskiPlus букмекерская контора фонбет официальный DiskiPlus casino скачать
#1690 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия скачать
Так что приготовьтесь предоставить секретную информацию (пол, возраст, государство проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает не более суток, в чего удастся свободно выводить крупные выигрыши. <a href=http://filmkachat.ru/>1×slots зеркало видели такую регистрацию на</a> <a href=https://www.behance.net/67b1f5c3>https://www.behance.net/67b1f5c3</a> Подтверждение персональной информации. Все казино требуют от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и наличие у юзера других аккаунтов (мультиаккаунт запрещен). 1×slots на любой вкус как пройти регистрацию <a href=https://www.lifeisphoto.ru/page.aspx?id=84863>https://www.lifeisphoto.ru/page.aspx?id=84863</a> Вейджер (либо вагер) ? это минимальная сумма ставок, коию необходимо сделать для вывода валютного бонуса. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение.
1×slos регистрация в 1×slots casino
Нет. Казино раздают бесплатные призы за регистрацию, чтобы, чтобы, чтобы заказчик мог ознакомиться с игровым заведением. А чтобы исключить его, необходимо выполнить условия отыгрыша.Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте обстоятельства – они часто выдаются для некоторых машин. В зависимости от клуба вы можете делать конкретное число ставок. Кстати, современные игорные дома выделяют вероятность заводить «одноруких бандитов». <a href=https://portugal-campings.com/pt/profile/jamescip/>1х слот 1хслотс регистрация перейти на 1×slots</a> 1×slots регистрация 1×slotscasino 56 online <a href=http://dotstroy.ru/userinfo.php?uid=45389>http://dotstroy.ru/userinfo.php?uid=45389</a> Демоказино есть почти на каждом сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются существенно реже: там когда выигрыша и соблюдения критерий промоакций бездеп возможно превратить в реальные средства.Акции распространяются как на все забавы казино, так и на узкий список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и. Промо возможность охватывать разработки 1-го производителя. Бездеп не пересекается с другими акциями казино. Если на сайте предусмотрен кэшбек, он не начисляется за ставки, изготовленные бонусными средствами. Для идентификации платежных реквизитов игрока может потребоваться пополнение счета на минимальную необходимую. 1×slots бонус за регистрацию Первый возникающий вопрос, это, для выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают новых игроков. Последним проще начать игру на средства с подарка за регистрацию. Им не нужно пополнять баланс и тратить личностные средства. Новички получают безвозмездные спины или средства на счёт. С их поддержкой знакомятся с игровым ходом, крутят слоты и делают ставки в рулетке.
1× slots casino официальный сайт
Демоказино есть почти на любом сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются значительно реже: там в случае выигрыша и соблюдения критерий акций бездеп возможно превратить в реальные деньги.Так что приготовьтесь дать конфиденциальную информацию (пол, возраст, государство проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает не более суток, последствии чего удастся свободно выводить солидные выигрыши. <a href=http://forum.lundin.ro/member.php?action=profile&uid=14786>http://forum.lundin.ro/member.php?action=profile&uid=14786</a> Для получения выигрыша потребуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить определенную сумму, хотя уже из личных средств. Она рассчитывается из совместного объема выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, случае пользователь выиграл 1000 рублей, а множитель составляет х30, вывести деньги возможно несомненно, сделав ставки на 30 000 рублей.В зависимости от интернет заведения любой из их имеет вас предложить как бездепозитные деньги, так и бездепозитные фриспины, коие в успешной регистрации упадут вам на ваш игровой баланс. 1×slots зеркало регистрация Чаще всего интернет-казино предлагают бездепозитные бонусы новым пользователям. Эта промо-акция очень эффективно привлекает начинающих, подталкивая их к открытию счета. Конечно, не все они становятся послушными посетителями, но сам прецедент регистрации аккаунта играет на руку заведению.Бездепозитные бонусы в казино без пополнения 2022 — это конкретная сумма денег либо gorovyh spins вращения, которые предоставляются первым постояльцам за регистрацию на веб-сайте казино в виде бездепозитного приза, и дает для возможность с казино без пополнения опробовать предложения (игр), с дальнейшей привилегией вывода средств при исполнении всех установленных правил.
1×slots промокод при регистрации 2025
Игры, каких возможно играть на бонусные средства. Проверьте перечень игр, в возможно выступать на бонусные свои, вполне они Вам не понравятся и не тратить своё время на эту промоакцию.Но есть азартные заведения, готовые просто например вручить средства на игру. Для этого довольно сделать профиль. Чтобы вывести выигрыш, сперва нужно выполнить вейджеровые условия, прописанные в критериях получения бездепа. Выбирайте наилучшие бесплатные призы счет обзоров на Casinoz – и пусть вас сопутствует счастье при отыгрыше бонусных кредитов!На странице представлены бездепозитные призы за регистрацию в казино редчайшая заслуга за которой гонятся все игроки как новички, так и профессионалы. Мы также уделяем большое внимание на наличие призов при формирование рейтинга казино на деньги. Бездепозитный бонус это возможность выступать даром и выиграть реальные деньги. С такими ординарными советами любое казино с бонусом за регистрацию способно принести в разы больше выгоды и выгоды. 1×slots casino online регистрация <a href=https://wood.co.ua/wr_board/tools.php?event=profile&pname=Raymondflurn>https://wood.co.ua/wr_board/tools.php?event=profile&pname=Raymondflurn</a> Так собственно основное отличие дара на депозит от бездепа – неотъемлемое пополнение счёта. Вы можете внести депо и преувеличить стартовый капитал или арестовать бездеп и всем не придётся рисковать собственными сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начислит щедрое поощрение!
1×slots зеркало проходить регистрацию это отличный вариант
Основное различие в том, что для получения бездепа не надо пополнять баланс в казино. Но считая этого, есть ряд и других отличий:Верификация аккаунта. Лучше подтвердить лицо сразу последствии регистрации, дабы потом не было проблем с выводом средств. Верификация имеет протекать двумя путями: Допустим, за регистрацию вы возымели бездеп в размере 2 000 руб. С вейджером х30. В этом случае предстоит сделать ставок, на общую необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать настоящие средства. Однако не забывайте, собственно с каждого дара получится вывести определённую сумму (почаще всего не более $200). <a href=http://bbs.yongrenqianyou.com/home.php?mod=space&uid=4198131&do=profile>http://bbs.yongrenqianyou.com/home.php?mod=space&uid=4198131&do=profile</a> Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.Некоторые клубы автоматически начисляют бонус на акк игрока после исполненья критерий получения, но бывают ситуации, когда приз нужно активировать игроку самому. Есть несколько способов активации приза: 1×slots регистрация на сайте
<b>Смотреть еще похожие новости:</b>
<a href=http://kemsrr.forumex.ru/viewtopic.php?f=7&t=5675>1хслотс зеркало на сегодня</a>
<a href=http://sladkierecepti.5nx.ru/viewtopic.php?f=8&t=12100>1×slots регистрацию процедура займет всего лишь</a>
<a href=http://av3526.com/forum.php?mod=viewthread&tid=84&pid=27759&page=5&extra=page%3D1#pid27759>1×slots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция имеет доскональные управляла, ссылка на коие обычно находится в промообъявлении. В них указываются лимиты, вейджер, перечень дешевых игр. Если оператор укрывает данные о предложении, то воспользоваться им не. Вейджер (wager) – это коэффициент, кот-ый показывает на какую необходимую необходимо устроить ставок, чтобы вывести приз из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего приза, Вам необходимо сделать ставок на необходимую: 500*70=3500 руб. Только полностью отыграв бонус, Вы можете вывести собственный выигрыш.
#1691 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало подтвердит вашу регистрацию если говорить
Простая процедура получения бездепозитного бонуса, кот-ая займет не более 2-х минут. Для получения бездепов, достаточно зарегистрироваться и доказать контактные данные. <a href=http://filmkachat.ru/>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a> При регистрации идет свидетельствовать только достоверную информацию. Когда учетная запись несомненно активна, замечен доступ в Личный кабинет. В нем возможно выбрать еденицу, ввести промокод и узнать подробные верховодила получения и отыгрыша бездепа. Краткая информация об промоакции нередко находится непосредственно на регистрационной форме.При исполнении условий отыгрыша и верификации, средства с бонусного счета переводятся на ведущей и все быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции находятся от избранной платежной системы. <a href=https://www.bondhuplus.com/read-blog/137790>https://www.bondhuplus.com/read-blog/137790</a> 1×slots казино зеркало <a href=https://sex18babes.com/user/Gregorynen/>https://sex18babes.com/user/Gregorynen/</a>
1хслотс рабочее зеркало
1×slots зеркало рабочее Каждая игровая перрон отличается критериями по получению и отыгрышу бездепов. В правилах отчетливо расписаны временные рамки, за которые надо(надобно) прокрутить вейджер. Также не запамятовывайте на наибольший объем ставки и максимальную сумму выплаты. С другой стороны, дабы получить бездепозитные призы казино, достаточно потратить не более 1 минутки.Перед активацией главно пристально изучить условия акции. Чем ниже вейджер, что, этим больше потенциальная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, на коих можно воспользоваться предложением. Если бездеп охватывает узкий перечень игр, рекомендовано узнать максимальные коэффициенты, уровень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь никаких случае, если оператор не установил строгие лимитирования на наивысшую сумму ставки. <a href=https://able2know.org/user/kennethpal/>https://able2know.org/user/kennethpal/</a> Приглашаем делиться мнениями о бонусах. Это поможет иным юзерам выбирать наиболее прибыльные предложения.Подобные призы без депозита предоставляются на более выгодных условиях. Зачастую они покрупнее, а условия отыгрыша наименее жесткие. 1 x slots casino Бездепозитные бонусы – это исключительно занимательная и более перспективная промоакция интернет-казино. Они и какого-либо фри-спинов, поэтому собственно выплаты в безвозмездных вращениях не гарантированы, ведь комбинации на барабанах игрового аппарата все не сложиться.Мы делаем акцент на ключевых положениях правил, рассказываем о территориальных ограничениях и вкратце информируем о других промоакциях обсуждаемого казино.
1×slots casino регистрация
При маленький сумме бонуса рекомендуется играть по невысоким ставкам, а применять наибольшие чем лишь никаких случае, если вейджер очень великой, а время на отыгрыш сильно ограничено.Пoдтвepдить личнocть посетителя. Для удачного вывода средств, необходимо подтвердить личность посетителя. Нa этaпe вepификaции пpoфиля, сотрудники службы безопасности должны убедиться, что у игрока чем раз акк. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не сможет вывести собственный выигрыш, в у него будет некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы. Вознаграждения за получение VIP-статуса ? начисляются масштабах программы преданности при достижении очередного уровня либо выдаются индивидуально менеджерами саппорта.Когда речь идет о денежных бонусах, казино практически устанавливают обстоятельства вейджера, которые нужно выполнить, чтобы исключить выигрыш. <a href=http://nbrkv.ru/user/StevenBiz/>http://nbrkv.ru/user/StevenBiz/</a> 1×slots зеркало выигрыши обязательно пройдите регистрацию если Составленный специалистами Casino.ru список онлайн-казино с бездепозитным призом разрешает игрокам сравнить спецпредложения разных операторов.Но существуют азартные заведения, готовые просто например вручить средства на игру. Для сего достаточно сделать профиль. Чтобы вывести выигрыш, сперва необходимо выполнить вейджеровые условия, прописанные в критериях получения бездепа.
1хслот официальный сайт зеркало
Теоретически, к безвозмездным бонусам можно отнести так называемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, поэтому собственно они деют только вероятность делать ставки. <a href=https://forum.banknotes.cz/viewtopic.php?t=70568>1×slots казино зеркало</a> Во время забавы в казино, выигрыши, приобретенные спасибо безвозмездным призовым фондам, суммируются и срабатывают в совместную необходимую для отыгрывания. Однако, если фортуна улыбнется и получится отыграть все призы, игровое заведение гарантированно допустит исключить денежные средства. Сумма вывода будет зависимости от лимита, утвержденного именно в этом учреждении. Поэтому, пристально надо(надобно) читать правила выдачи анлимитных депозитов.Это раз из главных характеристик привлекательности подарка. С завешенным коэффициентом числе профессионалы не сумеют выполнить обстоятельства по отыгрышу. И не, насколько презентабельно смотрится предложение – бездепозитный приз казино в размере $500 или $1 000. Чтобы новички получше вникли, что же это вейджер, мы разберём на образце. 1×slots официальный сайт скачать <a href=http://lebbook.kz/user/Frankpam/>http://lebbook.kz/user/Frankpam/</a>
1×slots официальный сайт зеркало рабочее
Шаг 5. Использование и отыгрыш. Бездеп должен быть применен в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера.Бесплатные бонусы казино без депо можно получить в виде валютных средств на бонусный счет (вывести их возможно только после отыгрыша), фриспинов, игры или кешбэк-бонуса. Подтвердите регистрацию, чтобы активировать Бездепозитный бонус с выводом, потребуется наполнить индивидуальный профиль. Заполните пустующие поля настоящими данными о себя. <a href=https://www.polovw.it/foro/memberlist.php?mode=viewprofile&u=76028>https://www.polovw.it/foro/memberlist.php?mode=viewprofile&u=76028</a> Составленный экспертами Casino.ru список онлайн-казино с бездепозитным бонусом позволяет игрокам сопоставить спецпредложения разных операторов.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. 1хслотс рабочее зеркало на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=http://miupsik.ru/forums/showthread.php?tid=508991>рабочее зеркало 1×slots</a>
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=41582>1× slots casino зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Получить Бездепозитный бонус в интернет казино дело двух кликов. Другой момент, отыграть промо и соблюсти правила и обстоятельства отыгрыша. Под правилами предполагается не только вагер, но и лимитирования по наибольшей ставке. Мы разумеем, что в кинотеатр все ставят на зеро и выигрывают. Призываем не создавать похожего. Перед активацией приза прочитайте управляла. Узнайте последующие факторы: Условия получения подарка, за регистрацию, за депозит и прочее. Ограничения по максимальной ставке. Зачастую не выше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах можно отыгрывать вагер. Можно вращать автоматы, а вагер несомненно стоять на пространстве. Поэтому принципиально аристократия, в каких забавах можно осуществлять кратность валютного оборота.
#1692 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Ирина Сидоркова самое казино <a href=https://t.me/vchkogpu_ru>casino ru</a> Валентина Матвиенко порно играющие казино онлайн <a href=https://kompromat1.online/>1×bet зеркало слоты</a> 1×bet зеркало xbet xyz r7 casino порно с Илюшникова Татьяна Александровна пинко casino часы казино порно с Варвара Субботина казино проиграл
DiskiPlus порно с Захарова Мария Владимировна DiskiPlus часы казино <a href=https://www.diskiplus.ru/>DiskiPlus казино онлайн</a> DiskiPlus casino официальный сайт DiskiPlus Набиуллина Эльвира Сахипзадовна порно <a href=https://www.diskiplus.ru>DiskiPlus сайты казино</a> DiskiPlus Попова Анна Юрьевна порно DiskiPlus kent casino DiskiPlus casino на телефон DiskiPlus 1win букмекерская контора DiskiPlus скачать букмекерскую контору DiskiPlus Семёнова Татьяна Владимировна порно DiskiPlus казино пин
#1693 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
У каждого игорного клубы разные вейджеровые обстоятельства. Чтобы вы гарантировано смогли выполнить их, мы дадим несколько советов. Если система начислила маленькую сумму, не делать немалые ставки – остановитесь на 10–30 центах. Как только сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте выступать. В неприятном случае лучше приглядеться к другому автомату.На данном разделе портала периодически публикуются обзорные заметки, каких рассматриваются бесплатные бонусы наихороших интернет-казино. Информация структурирована по нескольким пт, включая основные: <a href=http://filmkachat.ru/>1×slots зеркало сайта</a> Иногда для получения бонусов нужно связаться с представителями службы поддержки. Удобнее всего с ними собеседовать в онлайн-сате, желая время довольно запроса по электрической почте.Бонус за регистрацию в казино выдается только один раз на одного игрока. Но бывают вспомогательные акции, масштабах которых бездепы расступаются для постоянных клиентов и эти подарки Вы можете получить более 1-го раза. <a href=https://bio.link/crazycatd4>https://bio.link/crazycatd4</a> Это также бесплатные финансы, коие поступают на аккаунты новоиспеченных в в регистрирования. А особенность таких призов произведено сомнений, что обретенные деньги непременно следует использовать в продолжении назначенного медли.Отыграв бездепозитный приз в казино с выводом также придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если схожее лимитирование присутствует, то единоразово вывести выйдет лишь необходимую, не превосходящую размер приобретенного бонуса. 1×slots казино мобильная версия <a href=https://games-garant.ru/index.php?subaction=userinfo&user=JasperFag>https://games-garant.ru/index.php?subaction=userinfo&user=JasperFag</a> При отыгрыше бонусных средств, необходимо учесть срок деянья бонуса и время, которое дается на отыгрыш. По истечению заявленного времени, не отыгранный приз несомненно аннулирован.При выполнении критерий отыгрыша и верификации, средства с бонусного счета переводятся на ведущей и все быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции зависимости от выбранной платежной системы.
1 x slots
При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток. 1хслотс казино зеркало <a href=http://bbs.darkml.net/home.php?mod=space&uid=8052252>http://bbs.darkml.net/home.php?mod=space&uid=8052252</a> Размер ставки для игры по бездепозитному призу (конечно же, в случае, когда он представлен повторяющий бонусных валютных средств) часто ниже, чем при ирге на депозит. Ограничение несомненно действовать до этапа отыгрыша бонуса.Исходя из сего, просто не присутствует разумных оснований махнуть рукой на получение такого приза при регистрации. И, что, на такой безвозмездной основе у вас все шансы выиграть деньги и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные призы, называют бесплатными интернет платформами для игр. 1хслотс официальный сайт зеркало Бездепозитный бонус предоставляется новенькому игроку за конкретные действия. Часто подарок в виде денег либо фриспинов выдается за регистрацию, спасибо чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.Как управляло, при выводе денег, от играющего потребуется лишь устроить минимальный вклад чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом индивидуальный счет.
1×slots казино зеркало
В истиннее время получить бонус за регистрацию в казино очень просто. Почти каждый игорный дом с готовностью предоставит средства либо благотворительные вращения. Многие игроки используют этим и не смущяются регистрироваться в каждом клубе с выгодными критериями. Кстати, это отличная возможность выдумать выигрышную стратегию и сорвать куш.Для получения приза нужно ознакомиться с программкой лояльности казино и устроить ставки на сумму, необходимую для перехода на грядущий уровень. Представленные на этой странице наихорошие бездеп бонусы в казино за регистрацию в 2022 году имеют оптимальные обстоятельства. После тщательного анализа редакция портала составила рейтинг спецпредложений, в гости Casino.ru имеют сортировать список по нескольким критериям: по сумме, вейджеру, наибольшей сумме вывода и т.д.Как лишь получите бездеп в казино, всё точно не забывайте инспектировать электрическую почту. Некоторые игорные клубы непрерывно веселят активных гэмблеров приятными бонусами. Чаще всего получить подарок возможно в преддверии праздника, на день рождение, за привлечение друга. А того распространённым бонусом является надбавка к депозиту. Нужно не восполнить счёт, и азартное заведение увеличит его на 50–100%. <a href=http://zakazlegko.ru/bitrix/click.php?goto=http://rir39.ru/bitrix/rk.php?goto=http://ao-ugh.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/XhxlPmhYt7q>http://zakazlegko.ru/bitrix/click.php?goto=http://rir39.ru/bitrix/rk.php?goto=http://ao-ugh.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/XhxlPmhYt7q</a> Для отыгрыша бонуса казино обязует игрока сыграть на необходимую, в некоторое один превышающую необходимую полученного бонуса — тут выгода компании явна. 1×slots регистрацию более популярный вариант это Ограничения по забавам. Администрация запрещает игрокам некоторые игровые автоматы с бездепозитным призом, средствами или бесплатными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда дробленье выполняется по облику игр. Например, отыгрыш возможен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino.Бонус начисляется игроку незамедлительно после регистрации и прохождения верификации в казино и не просит от клиента внесения депо. Как управляло, объем приза в сходственном случае достаточно стыдливый, впрочем позволяет новеньким познакомиться с игрой без риска реальными деньгами.
1×slot рабочее зеркало
Бездепозитный приз по промо-коду будет доступен для забавы, лишь что случае когда Вы активируете специальный бонусный код в разделе с бонусами или укажите промокод при регистрации на веб-сайте. В некоторых случаях, считая активации кода, понадобиться доказать контактные данные игрока и заполнить анкету посетителя. <a href=https://roguedynasty.net/forums/showthread.php?3990–1×slots-%D0%A0%D1%97%D0%A1%D0%82%D0%A0%D1%95%D0%A0%D1%98%D0%A0%D1%95%D0%A0%D1%94%D0%A0%D1%95%D0%A0%D2%91-%D0%A0%D1%97%D0%A1%D0%82%D0%A0%D1%91-%D0%A1%D0%82%D0%A0%C2%B5%D0%A0%D1%96%D0%A0%D1%91%D0%A1%D0%83%D0%A1%E2%80%9A%D0%A1%D0%82%D0%A0%C2%B0%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A0%D1%91–2025&p=58990#post58990>1×slots промокод при регистрации 2025</a> Более крупные предложения встречаются очень изредка. Зачастую они доступны только VIP-игрокам. В остальных случаях им наверняка сопутствуют очень жесткие условия отыгрыша. Также возможны дополнительные обстоятельства и другие лимитирования, прописанные в условиях и положения бонусной программки казино. Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют важную информацию о no down payment bonuses и других предложениях.Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. 1хслотс зеркало <a href=http://telexeber.az/index.php?subaction=userinfo&user=knottyhacienda7>http://telexeber.az/index.php?subaction=userinfo&user=knottyhacienda7</a> Маркетинговая политического всех игорных интернет-клубов обязана носить разнородный характер. И если вознаграждения на депо служат для того, дабы провоцировать вносить депозиты и поощрять уже имеющих юзеров, то бездепозитный бонус в казино или приз за регистрацию в казино, прежде всего, рассчитан на расширение базы покупателей.
1×slot официальный сайт
Но такие рамки не смущают и хайроллеров, что коэффициенты на слотах разрешают рассчитывать на солидные выигрыши, в неких автоматах разыгрывается прогрессивный джекпот. Можно. Вы постоянно можете отказаться от получения бездепозитного приза за регистрацию в казино, пока Вы не сделаете ставку.Все любят получать презенты. Согласитесь, практически каждый играющий человек несомненно бесконечно рад, случае получит бесплатный подарок для игры в онлайн казино просто за регистрацию или же приз за внесенный депо, так именуемые приветственные призы для новых игроков. Соответственно такие интернет клубы станут больше известны и предпочтительны у игроков при выборе казино для забавы. Топ казино каждый обновляется и прибавляются новые и увлекательные игровые клубы с привлекательной бонусной политикой и всеми возможными привилегиями, к которым относятся такие призы как фриспины за регистрацию, денежные бездепозитные бонусы, а великодушные призы за внесенный депо. <a href=http://fujikong3.cc/space-uid-3710278.html>http://fujikong3.cc/space-uid-3710278.html</a> 1×slots сайт зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://communities.leviton.com/threads/1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D0%BD%D0%B0-%D1%81%D0%B5%D0%B3%D0%BE%D0%B4%D0%BD%D1%8F.1329/>1×slots зеркало на сегодня</a>
<a href=http://forums.indexrise.com/thread-94454-post-510453.html#pid510453>1×slots регистрация 1×slots casino c2d ru</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Изучить верховодила и условия получения бездепозитных призов казино, Вы можете у нас на сайте в разделе с призами или на официальном сайте избранного Вами казино. Если возможности отыскать необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электронной почте.
#1694 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
балтбет букмекерская контора почему в казино нет окон <a href=https://rucriminal.info/>porno Александра Степанова, фигуристка</a> бесплатное казино рабочие зеркала казино <a href=https://glvk.guru/>porno Мария Шарапова</a> 1×bet бесплатно порно с Аделия Петросян (фигурное катание) порно с Анна Калинская (теннис) 1×bet регистрация ставки на спорт букмекерские конторы скачать 1×bet 1×bet xyz 1×bet официальный сайт 1×bet xyz
DiskiPlus 1×bet слоты 1×bet xyz DiskiPlus порно с Баталина Ольга Юрьевна <a href=https://diskiplus.ru>DiskiPlus 1×bet приложение</a> DiskiPlus порно с Дарья Клишина, легкоатлетка DiskiPlus casino онлайн <a href=https://diskiplus.ru>DiskiPlus casino бездепозитный</a> DiskiPlus казино пин DiskiPlus porno Александр Соболев (футбол) DiskiPlus Юдаева Ксения Валентиновна порно DiskiPlus порно с Илюшникова Татьяна Александровна DiskiPlus официальные букмекерские конторы DiskiPlus самое казино DiskiPlus сайт букмекерской конторы
#1695 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
Игрокам не следует воспринимать приветственный бонус как гарантированный метод получить большой выигрыш, хотя это отличная возможность без расходов оценить перечень казино. <a href=http://filmkachat.ru/>1х слот 1хслотс регистрация перейти на 1×slots</a> При отыгрыше бонусных средств, нужно учесть срок действия приза и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный приз несомненно аннулирован.Чтобы без убедиться в превосходствах бездепозитных бонусов, довольно зарегистрироваться в казино и получить одобрение. <a href=https://padlet.com/kalinka0588/padlet-mnoytahfu18jiz1m>https://padlet.com/kalinka0588/padlet-mnoytahfu18jiz1m</a> Вейджер (wager) – это коэффициент, кот-ый демонстрирует на какую необходимую необходимо устроить ставок, дабы вывести бонус из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего бонуса, Вам нужно устроить ставок на сумму: 500*70=3500 руб. Только полностью отыграв приз, Вы можете вывести собственный выигрыш. 1×slots официальный сайт зеркало <a href=http://tellmy.ru/index.php?subaction=userinfo&user=scandalousflat7>http://tellmy.ru/index.php?subaction=userinfo&user=scandalousflat7</a> Вывод выигрыша с бездепозитных бонусов казино – щедрый подарок от азартных клубов. Но чтобы исключить свой заработок, нужно выполнить ряд критерий:На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению этого времени, Вы не можете активировать и получить бездепозитный приз.
казино 1× slots официальный сайт
Риск-игра по равным шансам – Также казино может воспрещать выполнять обстоятельства по отыгрышу с помощью раунда на удвоение, который предлагается в слотах, видео-покере и некоторых других забавах.Обыкновенные бездепозитные призы в объеме от 3-х до двадцати $ сделаны чтобы, чтобы, дабы в игры заходили все свежие и новые игроки. Здесь, всего, будет ограничение на максимальный выигрыш. Важно, дабы перед минимальным вкладом был отключен бонус за 1-ое пополнение счета, и игрок не попадет на повторный вейджер. <a href=http://www.xcosmic.net/rsf/showthread.php?tid=50954>1×slots casino зеркало рабочее</a> 1×slot зеркало Как только на виртуальном счету окажутся бонусные средства, поспешите отыграть вейджер. Сразу после сего возможно оставить заявку на вывод выигрыша. Кредиты прибыльно выделяются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом настоящих средств и дают возможность ощутить азарт. Во-вторых – можно насладиться любой азартной игрой доступной на сайте. В вашем постановлении присутствуют автоматы, настольные прибавление, видео-покер, Live-дилеры. <a href=https://bajarmp3.net/member.php?action=profile&uid=5017>https://bajarmp3.net/member.php?action=profile&uid=5017</a> Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен перечень превосходнейших онлайн казино, которые предлагают своим игрокам великодушные бонусы за регистрацию. 1хслот скачать Раздача бонусов имеет быть посвящена различным датам: календарные праздники, деньки рождения игроков, годовщина открытия казино и т. Д. Подарок выдается повторяющий денег, фриспинов либо баллов для скопления и размена на предложения оператора. Если пользователь получает выигрыш, деньги начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд требований.На нашем сайте Вы отыщите список актуальных свежих бездепозитных бонусов в казино 2022 года. Также, есть количество неповторимых услуг, коие доступны только посетителям нашего вебсайта последствии регистрации по нашей ссылке либо активации особого промокода.
1×slots на любой вкус как пройти регистрацию
Постарайтесь отыграть вейджер, чтобы появилась вероятность забыть заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электронной кошелёк, карту, телефонный. <a href=https://vietnamplayboy.com/bbs/board.php?bo_table=free&wr_id=378645>https://vietnamplayboy.com/bbs/board.php?bo_table=free&wr_id=378645</a> Вообще перейдя в казино — правила одинаковы в получении бездепозитных бонусов, в стереотипные управляла входит: подтвердить эл. Почту и аппарат, заполнить свой собственный профиль, активировать промо код или активировать предложения во вкладке БОНУСЫ.Как управляло, при выводе денег, от играющего потребуется лишь устроить наименьший лепта для того, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом личный счет. 1×slot зеркало рабочее регистрации на телефон придет Также бездепозитные призы могут служить способом возвращать к игре посетителей, что приостановивших своё сотрудничество с фирмой: уведомление о бездепе поступает на мобильный аппарат или почту.
1хслот 1хслотс регистрация перейти на 1×slots
1×slots официальный сайт зеркало <a href=http://realtor-cheb.ru/index.php?subaction=userinfo&user=wealthymalady60>http://realtor-cheb.ru/index.php?subaction=userinfo&user=wealthymalady60</a> Промообъявления от казино не дают реальной картины и направлены на вербование внимания юзеров. Понять, как высоки шансы остаться в плюсе, позволит личный анализ условий предложения:Размер ставки для забавы по бездепозитному бонусу (естесственно же, когда, когда он представлен в виде бонусных денежных средств) часто ниже, чем при ирге на депозит. Ограничение несомненно действовать до момента отыгрыша бонуса.
1хслотс мобильная версия зеркало
В онлайне слишком много скриптовых сайтов, коие принадлежат плутам. Их основная задача – заинтересовать гэмблеров, пообещав столько щедрые подарки, хотя и солидные выигрыши. Так собственно некоторые веб-сайты предлагают получить за регистрацию даже $1 000. Для получения бонуса надо(надобно) ознакомиться с программкой преданности казино и устроить ставки на сумму, необходимую для перехода на грядущий уровень. <a href=https://popcporn.net/user/GregorybeX/>https://popcporn.net/user/GregorybeX/</a> 1×slots мобильная версия войти казино В некоторых онлайн казино для получения бездепозитных призов не довольно просто зарегистрироваться на сайте клуба и подтвердить свои контактные данные. Дополнительно требуется активация промокода.Срок отыгрыша — это период, который наступает в момент активации приза и кончается с его закрытием. Пользователю необходимо уложиться в этот временной промежуток, другому призовые свои аннулируются. Казино устанавливают перечень игр, ставки каких засчитываются при расчете отыгранных средств. Если тайтл не заходит в данный перечень, то предоставляется быть недосегаем для загрузки во время деянья бонусного предложения.
<b>Смотреть еще похожие новости:</b>
<a href=https://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=6268>1 xslots рабочее зеркало</a>
<a href=https://minecraft.ru.net/user/Manuelsoarl/>1×slots регистрация 1×slots review live</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если идет об неповторимых услугах, возможность понадобиться регистрация в казино по ссылке с партнерского вебсайта. Не стоит путать игру в демо и использование бонусов. В демонстрационном режиме игрок может расценить механику слота, сюжет и оформление. Но забава проводится на относительные кредиты, поэтому отсутствует главное ? чувство пыла. Активируя промокод или фриспины, клиент раньше не расходует свои деньги на игровые автоматы, хотя может сорвать настоящий куш!
#1696 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало рабочее на сегодня порно с Каролина Севастьянова <a href=https://www.ossetia.tv/>винлайн букмекерская контора официальный</a> win win casino casino бонус <a href=https://7club7.com/>порно с Юлия Ефимова</a> Александра Бортич pin casino kent casino регистрация букмекерская контора леонов порно с Юлия Ефимова Хорова Наталья Александровна порно Валентина Матвиенко порно
DiskiPlus букмекерская контора официальный сайт скачать DiskiPlus бывшие казино <a href=https://www.diskiplus.ru>DiskiPlus почему в казино не бывает настенных часов</a> DiskiPlus online casino официальный DiskiPlus порно с Максим Глушенков (футбол) <a href=https://diskiplus.ru>DiskiPlus pin up casino зеркало</a> DiskiPlus порно с Дарья Касаткина (теннис) DiskiPlus бк букмекерская контора DiskiPlus казино смотреть онлайн бесплатно DiskiPlus pin up casino buzz DiskiPlus человек казино DiskiPlus porno Ангелина Гончаренко, хоккеистка DiskiPlus играющие казино онлайн
#1697 Cazrxkbhttp://[url=http://п»їtutdiploms.com/]п»їtutdiploms.com/[/url]
Здравствуйте! Мы изготавливаем дипломы психологов, юристов, экономистов и любых других профессий по доступным ценам. Цена может зависеть от той или иной специальности, года получения и ВУЗа: <a href=http://п»їtutdiploms.com/>п»їtutdiploms.com/</a>
#1698 Charlesgunnyhttp://filmkachat.ru
1×slot рабочее зеркало
Главным нюансом в появлении данных вознаграждений произведено сомнений, что пустив их в ход, геймер ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он спасибо призам какой-нибудь выигрыш или моментально спустит все лишь что прибывшие деньги). То есть, казино снабжает игрока вероятностью на дармовой основе выступать во различные слоты причем спонсирует игру.Для казино, работающих интернет, бездепозитные призы необходимы для привлечения свежих посетителей. Предложение сыграть на слотах без необходимости внесения настоящих денег — работающий способ для увеличения энтузиазма к компании. После отыгрыша бездепа велик шанс, что игроку понравится и он продолжит играть в казино, лишь теперь теснее на собственные средства. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasino09k online</a> Но на азартных платформах похожие гонорары шансы получить теперь зарегистрированные юзеры. В таком случае, бонусы предоставляются масштабах уникальных акций либо же неким игрокам в виде акционного предложения, коие приходит на почту с целью «возвратить» игрока в свое казино. <a href=https://note.com/joyous_otter80/n/ne75a51f43668>https://note.com/joyous_otter80/n/ne75a51f43668</a> Вообще перейдя в казино — верховодила схожи в получении бездепозитных призов, в стандартные управляла входит: доказать эл. Почту и аппарат, наполнить собственный личный профиль, активировать промо код или активировать предложения во вкладке БОНУСЫ. 1хлот регистрация в 1×slots casino <a href=https://images.google.com.ai/url?q=https://doctorlazuta.by/>https://images.google.com.ai/url?q=https://doctorlazuta.by/</a> Иногда у посетителей сайта имеют появиться проблемы при активации приобретенного промо-кода. В таких случаях, нужно обратиться за помощью в саппорта «Support». Для получения ответа, непременно указывается определенная причина обращения и подтверждается информация дополнительными экрана. Если сложилась неоднозначная обстановка, постоянно возможно адресоваться к главному регулятору или контролирующему органу, выдавшему этому заведению лицензионный документ.Вейджер (либо вагер) ? это минимальная сумма ставок, которую необходимо устроить для вывода денежного бонуса. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение.
casino 1×slot
1хслотс 1хслотс регистрация перейти на 1×slots Активация по промокоду употребляется в различных видах бездепов. Если идет о приветственном бонусе, то комплект знаков возможно узнать на основной странице, в регистрационной форме или письме, коие отчаливает юзеру для подтверждения адреса электронной почты. Акции все проводиться вместе с партнерскими площадками. Обычно код располагается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активируется разовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем важный код для активации в описании каждого рекламную.В зависимости от интернет заведения каждый из их может для предложить как бездепозитные средства, так и бездепозитные фриспины, коие последствии успешной регистрации рухнут вас на ваш игровой баланс. <a href=http://andres-website.de/profile.php?lookup=12010>http://andres-website.de/profile.php?lookup=12010</a> Размер бонусов чаще всего чисто условный и не выше 50 рублей. Приятно, хотя ощутимым бустом в игре вряд ли станет. 1×slots зеркало 1хслотс регистрация перейти на 1×slots
скачать 1×slots официальный сайт
Для подтверждения электрической почты, просто перейдите по интенсивной ссылке в послании, полученном от игрового заведения.Активация происходит счет промокодов, коие вводятся в личном офисе последствии регистрации. Среди спецпредложений в перечне Casino.ru содержатся эксклюзивные промокоды, коие доступны только посетителям портала. Другие методы начисления средств ? автоматическая активация сразу после творенья аккаунта и получение дара по запросу в службу технической поддержки. <a href=http://lineyka.org/user/Ralphemort/>http://lineyka.org/user/Ralphemort/</a> Маркетинговая деятеля всех игорных интернет-клубов обязана носить разнообразный характер. И в вознаграждения на депозит работают чтобы, чтобы, дабы стимулировать заносить депозиты и поощрять уже место пользователей, то бездепозитный приз в казино или бонус за регистрацию в казино, до всего, рассчитан на расширение базы потребителей. 1×slot зеркало рабочее регистрации на телефон придет Вейджер в переводе с английского значит «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша приобретенного приза, в нашем случае бездепозитного. Число ставок имеет — главно лишь набрать сумму, пропорциональную сумме поощрения.Онлайн-казино с бездепозитными призами ставят посетителям условия для пользования бездепами, поэтому перед ролью в промоакции никакого досконально ознакомиться со всеми правилами и аспектами промоакции. Условия имеют дотрагиваться получения приза, его использования и следующего вывода денежных средств если, тогда, выигрыша.
1× slots casino официальный сайт
Автоматы неспроста считаются самым модным азартным веселием. Чтобы освоить управление и правила, потребуется всего некоторое минут. Ваша задачка сделать ставку, найти количество трудящихся линий и можно вертеть тамбур. Если дисплее выпадет выигрышная композиция – вы выиграли! С данной задачей вам помогут справится бездепозитные призы казино. <a href=https://melhorlance.com.br/author/jamesbom/>1×slots актуальное зеркало</a> Бездепозитные призы начисляются лишь раз один. Не стоит раскрывать новые аккаунты, чтобы получить их повторно. Служба безопасности казино непременно выявит «левого» участника и заблокирует. Если посетитель выполнит нужные притязания, отыграет собственную ставку и решит вывести личный выигрыш, то ему нужно сведению, собственно казино обязательно потребует предоставить ксерокопии собственных документов, дабы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные средства вывести не получится.Основное отличие в, что для получения бездепа не надо пополнять баланс в казино. Но не этого, есть ряд и других различий: Если вы новичок в этом деле и только попали в неизведанную вами район азарта — счет предложений как бездепозитные призы без пополнения.Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. 1×slots официальный сайт скачать <a href=https://dbmyxxw.cn/home.php?mod=space&uid=105313&do=profile&from=space>https://dbmyxxw.cn/home.php?mod=space&uid=105313&do=profile&from=space</a> Маркетинговая политического всех игорных интернет-клубов должна одевать разнородный характер. И если вознаграждения на депозит служат для того, дабы стимулировать вносить депозиты и поощрять уже быть пользователей, то бездепозитный приз в казино либо приз за регистрацию в казино, до всего, рассчитан на расширение базы покупателей.Доступность — бездепозитные призы в казино чаще всего предоставляются новым игрокам, хотя бывают случаи, когда бонус все получить и действующие клиенты.
1×slots зеркало регистрация в 1×slots casino
При правильном подходе бездепы — это отличный метод играть на средства без траты собственных средств. Есть количество рекомендаций, следуя коим можно извлечь максимально полезности из похожих промоакций казино. Играть следует лишь на лицензированных площадках. Скриптовые веб-сайты столько накалывают с бонусными услугами, хотя и используют пиратский софт с модифицированным ГСЧ. Выиграть на этих автоматах нереально. Как верховодило, при выводе денег, от играющего потребуется только сделать минимальный вклад чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом личный счет.Вейджер (wager) – это коэффициент, который показывает на какую сумму необходимо сделать ставок, дабы вывести приз из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего бонуса, Вам необходимо устроить ставок на необходимую: 500*70=3500 рублей. Только полностью отыграв бонус, Вы сможете вывести собственный выигрыш. <a href=http://medspecial.ru/bitrix/click.php?goto=http://googleweblight.com/i?u=http://hinadaifuku.hatenablog.com/iframe/hatena_bookmark_comment?canonical_uri=https://teletype.in/@urist_free/8DpIi6VTsev>http://medspecial.ru/bitrix/click.php?goto=http://googleweblight.com/i?u=http://hinadaifuku.hatenablog.com/iframe/hatena_bookmark_comment?canonical_uri=https://teletype.in/@urist_free/8DpIi6VTsev</a> 1×slots актуальное зеркало Список например называемых «не территорий» прилагается к правилам бонусной программки игорного портала. Обязательно выясните, распространяются ли на вас похожие санкции.
<b>Смотреть еще похожие новости:</b>
<a href=https://acerfans.ru/user/JamesTed/>casino 1×slot</a>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/9608/#comment-399498>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чаще всего интернет-казино предлагают бездепозитные призы свежим пользователям. Эта промо-акция довольно эффективно привлекает начинающих, подталкивая их к открытию счета. Конечно, не все становятся преданными посетителями, хотя сам прецедент регистрации аккаунта играет на руку заведению. Существует ли стратегии для отыгрыша бездепозитных призов? К огорчению нет, на выигрыши либо проигрыши с бонусов, казино либо игрок воздействовать имеет, отдача игр происходит от создателей игр.
#1699 Charlesgunnyhttp://filmkachat.ru
1× slots официальный
Такие поощрения позволяют бесплатно протестировать новое казино, разобраться с игровым процессом интернет слотов, заработать и исключить небольшую сумму денег.В разделе с бонусами активировать свой подарок. Найти игры, для которых предусмотрено одобрение и использовать приз по предназначению. <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> <a href=https://techbehemoths.com/company/archicgi-archivizer-limited>https://techbehemoths.com/company/archicgi-archivizer-limited</a> В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с безвозмездных вращений. Прибыль, коию Вы заработаете на этом бездепе можно назначать на вывод без какого или отыгрыша.Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам запрещено начислять бонусы посетителям, не имеющим денежных средств на счете. Мы предлагаем осмотреть животрепещущие бонусы онлайн-казино с лицензией, которые соблюдают законодательство РБ. 1хслотс казино зеркало <a href=https://www.catfish-assassins.org/forum/memberlist.php?mode=viewprofile&u=1968>https://www.catfish-assassins.org/forum/memberlist.php?mode=viewprofile&u=1968</a> Подтверждение индивидуальной инфы. Все казино настоятельно от посетителя пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и наличие у юзера иных аккаунтов (мультиаккаунт запрещен).
1×slots зеркало регистрация
При исполнении условий отыгрыша и верификации, средства с бонусного счета переводятся на главной и все быть выведены на карту либо электронный кошелек. Лимиты на вывод и сроки проведения транзакции в от избранной платежной системы. <a href=http://skatefluckit.com/member.php?u=149708>1×slots сайт зеркало</a> 1×slots зеркало которую указывали при регистрации кстати <a href=http://randy-harrison.it/gallery/profile.php?uid=144338>http://randy-harrison.it/gallery/profile.php?uid=144338</a> В каждом казино с бездепозитным бонусом учтены вейджеровые условия. Это один-единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) устроить определённое число ставок. Чем круче бонус, тем труднее выполнить условия, и напротив.Бонус начисляется игроку сразу в регистрации и прохождения верификации в казино и не настятельно от посетителя внесения депозита. Как правило, размер бонуса в подобном случае довольно застенчивый, однако дозволяет новичкам познакомиться с забавой без риска реальными средствами. 1×slots casino регистрация на сайте Для проверки применяются сканы паспортов, водительских удостоверений, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь замечен в попытке ввести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их владелец попадает в темный список. При игре на лицензионной площадке надо опасаться свидетельствовать достоверную индивидуальную информацию (шифрование ликвидирует утечку персональных данных).
1×slot зеркало
Обычно бездепозитные акции от казино, приходят на эл. Почту в деньки рождения либо праздники. В неких интернет казино можно адресоваться в чат и как постоянному игроку, вероятно вас предложат бездепозитное предложение.Подтвердите личность, предоставив оператору казино средства паспортные данные. Инструкции обыкновенно несложные, главное — четко им следовать. Если написано, собственно «на фото обязаны быть видны все четыре угла странички паспорта» — сделайте непосредственно это фото. В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая доля игры. Важно, зачастую бездепозитные призы в казино выдаются с ограничениями по максимальной выплате. В среднем возможно рассчитывать на прибыль в несколько тысяч руб. Как вывести выигрыш с приза без депо. Придётся подтвердить аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате или прочитайте в правилах. <a href=https://lorenzocffe83950.blog-ezine.com/29613944/the-cutting-fringe-of-nsfw-ai-discovering-the-functions-of-undress-ai>https://lorenzocffe83950.blog-ezine.com/29613944/the-cutting-fringe-of-nsfw-ai-discovering-the-functions-of-undress-ai</a> Для выбора азартного заведения Вы можете воспользоваться перечнем наших казино с призами за регистрацию. На нашем веб-сайте мы опубликовали перечень бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, что доля бонусов эксклюзивные и доступны лишь для посетителей нашего сайта по-специальному промо-коду или по уникальной ссылке. Кроме того, для каждого бонуса мы подготовили подробный обозрение, в котором Вы узнаете как получить и отыграть поощрение и как вывести собственный выигрыш с бездепа.Чаще всего казино приз за регистрацию без депо даёт возможность запустить каждой автомат. Но чем пристально ознакомиться с условиями. Иногда для игры доступны только определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, лучше начать знакомство с миром пыла именно с «одноруких злодеев». 1×slots casino регистрация 1×slotscasino09k online При регистрации стопам свидетельствовать только достоверную информацию. Когда учетная запись будет активна, будет доступ в Личный офис. В нем можно выбрать валюту, установить промокод и разузнать подробные верховодила получения и отыгрыша бездепа. Краткая информация об промоакции часто присутствует именно на регистрационной форме.Но надо думать, собственно снабжая пользователей этими бонусами, казино занимается спонсированием. Ведь размеры вознаграждений, главном, не большие (средним объемом от 5 до 20 долларов). И на эти свои налагаются определенные условия и ограничения, неотклонимые к исполнению игрока, в в последствии он желает получить все свои выигранные финансы.
1×slot казино зеркало
Если площадка презентует бездеп за регистрацию, то процедура его получения проста. Нужно лишь завести акк на сайте и активировать его, подтвердив адрес электрической почты, номер аппарата или иные данные, коие настятельно оператор. Перед этим нужно увериться, собственно юзер находится на официальном веб-сайте казино, не на жульнической площадке.Вообще перейдя в казино — управляла одинаковы в получении бездепозитных бонусов, в стандартные верховодила заходит: доказать эл. Почту и телефонный, заполнить свой личный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ. <a href=http://forum.as-p.cz/viewtopic.php?f=45&t=279050>1×slots регистрация 1×slots review live</a> Бездепозитный бонус казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в данном и заключается главное отличие. Автоматы неспроста считаются самым известным азартным весельем. Чтобы освоить управление и правила, потребуется всего несколько минут. Ваша задачка сделать ставку, определить количество рабочих линий и можно крутить тамбур. Если на экране выпадет выигрышная комбинация – вы выиграли! С этой задачей вам помогут управится бездепозитные бонусы казино.Но на некоторых азартных платформах сходственные вознаграждения имеют получить и уже зарегистрированные пользователи. В этом случае, призы предоставляются в рамках оригинальных промоакций или же некоторым геймерам вид акционного предложения, которое прибывает на почту с целью «вернуть» игрока в свое казино. 1×слот регистрация в 1×slots casino <a href=https://knoxumfw10990.howeweb.com/30874804/deepnude-ai-navigating-the-fine-line-between-innovation-and-ethics>https://knoxumfw10990.howeweb.com/30874804/deepnude-ai-navigating-the-fine-line-between-innovation-and-ethics</a>
1хслот зеркало
Итак, чтобы благотворительные бонусные кредиты превратились в реальные деньги, которыми вы можете управлять по собственному усмотрению, их нужно отыграть. Вейджер по уточнять в правилах онлайн-казино.Для получения бездепа необходимо пригласить в забаву по реферальной ссылке нового клиента: он обязан зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и восполнить счёт на сумму, указанную в критериях промоакции. <a href=https://gtorr.net/index.php?subaction=userinfo&user=DoctorLazutaPr>https://gtorr.net/index.php?subaction=userinfo&user=DoctorLazutaPr</a> Также, учите, что бездепозитный приз возможно исключить лишь в случае, когда станут выполнены все условия отыгрыша.Возможность протестировать свежие забавы, не рискуя собственными средствами и разработать личную стратегию игры. 1×slots регистрация то дальше необходимо пройти Баланс игрока дополняется на соответствующую необходимую. К ней используется вейджер, обозначенный в правилах акции. Вывести выигрыш можно несомненно последствии как, как юзер сделает требуемый размер ставок из собственных средств. В редчайших случаях бездеп работает в формате Free Play. На счет пользователя зачисляется большая сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по окончании сего периода сумма на счету будет превосходить изначальную, то разницу возможно будет исключить либо использовать для последующих ставок.Бездепозитный бонус предоставляется новому игроку за конкретные действия. Часто подарок в виде средств или фриспинов выдается за регистрацию, благодаря чему пользователь получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но надо мыслить, что снабжая пользователей этими бонусами, казино занимается спонсированием. Ведь размеры вознаграждений, в основном, не немалые (средним размером от 5 до 20 долларов). И на эти средства налагаются определенные условия и ограничения, неотклонимые к исполнению игрока, случае в последствии он вожделеет получить все свои выигранные деньги. Изучить управляла и условия получения бездепозитных призов казино, Вы можете у нас на сайте в разделе с бонусами либо на официальном веб-сайте избранного Вами казино. Если не найти необходимую информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал или по электрической почте.
#1700 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
7k casino официальный Ирина Горбачева <a href=https://vestnik-jurnal.com/>бесплатное казино</a> казино фильм Черкесова Бэлла Мухарбиевна порно <a href=https://specreporter.com/>пинап казино</a> casino сайты казино в россии kent casino регистрация 7k casino скачать up casino казино зеркало сегодня сайте букмекерской конторы фонбет
DiskiPlus 1×bet регистрация DiskiPlus винлайн букмекерская контора официальный сайт <a href=https://diskiplus.ru>DiskiPlus казино регистрации</a> DiskiPlus Манилова Алла Юрьевна порно DiskiPlus порно с Петр Ян (ММА) <a href=https://www.diskiplus.ru/>DiskiPlus porno Алена Косторная (фигурное катание)</a> DiskiPlus 1×bet слоты DiskiPlus 1×bet xbet DiskiPlus 1×bet зеркало xbet DiskiPlus pin up casino официальный DiskiPlus r7 casino DiskiPlus сайт букмекерской конторы DiskiPlus casino вход
#1701 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало рабочее этих способов предполагает регистрацию
Список например именуемых «разрешенных землель» прилагается к правилам бонусной программы игорного портала. Обязательно выясните, распространяются ли на вас похожие санкции. <a href=http://filmkachat.ru/>1×слот регистрация в 1×slots casino</a> <a href=https://solo.to/lexxeagle>https://solo.to/lexxeagle</a> Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных обстановок с казино, когда после отыгрыша бездепа для не дадут вывести солидную сумму выигрыша. x1 slots регистрация в 1×slots casino <a href=https://equessurge.win/phpBB3N/memberlist.php?mode=viewprofile&u=74783>https://equessurge.win/phpBB3N/memberlist.php?mode=viewprofile&u=74783</a> Чаще всего казино приз за регистрацию без депо даёт возможность запустить каждой автомат. Но другого пристально ознакомиться с критериями. Иногда для забавы доступны лишь определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, никакого начать знакомство с миром азарта непосредственно с «одноруких злодеев».
1×slots бездепозитный бонус за регистрацию
В истинное время получить приз за регистрацию в казино довольно просто. Почти любой игорный дом с готовностью даст средства либо безвозмездные вращения. Многие игроки используют этим и не стыдятся региться в каждом клубе с прибыльными условиями. Кстати, это замечательная возможность выдумать выигрышную стратегию и сорвать куш.Мы подготовили перечень, где есть всегда животрепещущие и свежие бездепозитные бонусы казино, коие возможность получить даром. Для наших юзеров есть особые предложения эксклюзивные призы, которые вы нигде не отыщите, их мы обозначили специальной красноватой плашкой «Exclusive». сайт 1× slots casino Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, так как Вам понадобиться ее доказать в при выводе средств. <a href=https://connercltc18529.suomiblog.com/nude-ai-app-navigating-the-balance-between-privacy-and-technology-45959359>https://connercltc18529.suomiblog.com/nude-ai-app-navigating-the-balance-between-privacy-and-technology-45959359</a> Казино выводит деньги лишь на что, эту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного приза, Вам поначалу необходимо пополнить счет. В неких клубах ограниченный перечень методов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет непосредственно с этих платежных методов, коие доступны для вывода.Бонус с зачислением средств на счет выделяет больше свободы поступков. Пользователь сам выбирает, каким образом воспользоваться подаренными своими. Здесь также все работать лимитирования на список доступных игр, хотя обыкновенно эти рамки не так строги, как в промо с бесплатными вращениями. 1×slots казино мобильная версия Особую изюминку видео слотам придают оригинальные символы. С их выходом активируются различные бонусы. Вы сможете запустить дополнительный уровень и увеличить необходимую выигрыша. Есть знаки, которые заменяют негодные составляющие и сами творят выигрышные комбо. Не стоит забывать и тему бонус-тур. После каждого успешного спина есть шанс увеличить необходимую выигрыша в два или хорошо раза.
1×slots регистрация 1×slotscasino 56 online
Баланс игрока дополняется на подходящую необходимую. К ней применяется вейджер, указанный в правилах промоакции. Вывести выигрыш можно несомненно в как, как пользователь сделает требуемый объем ставок из собственных средств. В редчайших случаях бездеп трудится в формате Free Play. На счет пользователя зачисляется крупная сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по окончании сего периода сумма на счету будет превосходить первоначальную, то разницу возможно будет исключить либо применять для дальнейших ставок.Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. <a href=http://blyzki.ru/bitrix/redirect.php?goto=http://kpforma.ru/bitrix/click.php?goto=http://vstclub.com/go?https://telegra.ph/Uslugi-po-licenzirovaniyu-kompanij-Polnoe-rukovodstvo-po-licenzirovaniyu-biznesa-09–19>http://blyzki.ru/bitrix/redirect.php?goto=http://kpforma.ru/bitrix/click.php?goto=http://vstclub.com/go?https://telegra.ph/Uslugi-po-licenzirovaniyu-kompanij-Polnoe-rukovodstvo-po-licenzirovaniyu-biznesa-09–19</a> 1×slots бонус за регистрацию
1×slots официальный сайт зеркало
Даже не выиграв солидную необходимую, игрок увлекательно проведет время, изнутри изучит работу площадки, воспримет геймплей автоматов. Все это без каких-либо денежных рисков. Быть в курсе превосходнейших промоакций с. Достаточно периодически изучать список новых онлайн казино с выводом приза без депозита в этом разделе.В зависимости от интернет заведения любой из их может вам предложить как бездепозитные деньги, так и бездепозитные фриспины, которые в успешной регистрации рухнут вам на ваш игровой баланс. <a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=17187>1×slots регистрация то дальше необходимо пройти</a> Однако далековато не все ресурсы предлагают своим клиентам бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено одобрение на 1-ый депо в объеме 100–200%. Это замечательная возможность преумножить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш. 1 x slots casino <a href=http://cjdog.com/home.php?mod=space&uid=129712>http://cjdog.com/home.php?mod=space&uid=129712</a>
1×slots регистрация то дальше необходимо пройти
Если идет об эксклюзивных услугах, возможность понадобиться регистрация в казино по ссылке с партнерского вебсайта. <a href=https://roacytomedy.com/bbs/board.php?bo_table=free&wr_id=305382>https://roacytomedy.com/bbs/board.php?bo_table=free&wr_id=305382</a> Вы не в коем случае ни чем не рискуете, а только выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической забавы на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, научится регулировать менять ставки и полосы, изучать бонусные забавы и их выигрышные композиции, ну конечном просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные средства, которые возможно отыграть и исключить, а не просто на демо счет, тем самым адреналин в крови более повысится а пульс забьется с нередким ритмом!Важно, удостоверьтесь сомнений, собственно ранее не регились в избранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи. 1×slots зеркало этих способов предполагает регистрацию
<b>Смотреть еще похожие новости:</b>
<a href=http://aficionado.pl/showthread.php?190139–1×slot-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE&p=211281>1×slot рабочее зеркало</a>
<a href=https://tussom.com/forums/showthread.php?tid=17451>1× slots casino зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подтверждение электронной почты – одно из ведущих условий, которое есть почти в каждом бездепозитном казино. Чтобы верифицировать электронную почту, довольно перейти по интенсивной ссылке в письме, полученном от азартного клуба.
#1702 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet официальный слоты казино рояль <a href=https://rhymes-punches.com/>casino андроид</a> Комарова Наталья Владимировна порно порно с Петр Ян (ММА) <a href=https://strelochnik.com/>пари букмекерская контора</a> casino сегодня 1×bet casino казино ставка casino зеркало сегодня рабочее Львова-Белова Мария Алексеевна порно bet casino Попова Анна Юрьевна порно
DiskiPlus лучшие онлайн казино DiskiPlus pin up casino <a href=https://diskiplus.ru/>DiskiPlus casino online зеркало</a> DiskiPlus лучшие букмекерские конторы DiskiPlus Самойлова Алла Владимировна порно <a href=https://www.diskiplus.ru/>DiskiPlus porno Александра Степанова, фигуристка</a> DiskiPlus casino скачать приложение DiskiPlus casino riobet DiskiPlus винлайн букмекерская контора официальный DiskiPlus casino сайты DiskiPlus казино играть DiskiPlus 1×bet зеркало рабочее на сегодня DiskiPlus порно с Евгения Медведева, фигуристка
#1703 Charlesgunnyhttp://filmkachat.ru
1 xslots рабочее зеркало
Ещё одно распространённое акционное предложение – привлекательный презент с сомнительными притязаниями. К примеру, клуб сулит $100 виде бездепа, хотя с вейджером х80 либо х100. Отыграть подобный вейджер фактически невозможно и потому какого-либо концентрироваться на более интересных акциях.Выше мы дали полный набор самых свежих и актуальных бездепозитных бонусов в интернет казино без пополнения на 2022 год, где вы можете воспользоваться хоть ценным бездепозитным призом. <a href=http://filmkachat.ru/>1×slot зеркало</a> <a href=https://elearn.ellak.gr/mod/forum/discuss.php?d=42025>https://elearn.ellak.gr/mod/forum/discuss.php?d=42025</a> Большинство клубов завлекают внимание игры за счёт разнообразных презентов. На одних сайтах возможно получить виртуальные кредиты, которые откроют доступ ко всему софту. На иных же, администрация предлагает бесплатные вращения для пуска топовых онлайн слотов. Несмотря на различные акции, стоит выделить самые основные. 1×slots регистрация 1×slots casino 777 online <a href=https://saitou-kk.co.jp/blog/?redirect=http%3A%2F%2Fsocial.studentb.eu%2Fread-blog%2F191472&wptouch_switch=desktop>https://saitou-kk.co.jp/blog/?redirect=http%3A%2F%2Fsocial.studentb.eu%2Fread-blog%2F191472&wptouch_switch=desktop</a>
1×slots casino регистрация 1×slotscasin online
Да, у безвозмездных бонусов есть недостатки. Прежде всего, они обыкновенно небольшие. Кроме того, обстоятельства вейджера по ним практически жесткие. Но все недоступность риска делает их очень привлекательными для посетителей. 1х слот 1хслотс регистрация перейти на 1×slots <a href=http://islamdini.kg/index.php?subaction=userinfo&user=ceaselesshairst>http://islamdini.kg/index.php?subaction=userinfo&user=ceaselesshairst</a> При подмоги такого одобрения оператор может кроме привлекать посетителей, коие раньше проявляли активность на сайте, но по какой-то причине перестали выступать. В данном случае промокод высылается юзеру по электронной почте или повторяющий SMS. 1 x slots Не рекомендуем сломя голову хвататься за различные предложения получения средств без вложений. Вполне вполне, что бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на 1-ый взор. Альтернативой является казино приз за депо. Мы предлагаем вас пару советов, спасибо коим у любого игрока несомненно возможность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом денег:Подтверждение персональной инфы. Все казино требуют от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у пользователя иных аккаунтов (мультиаккаунт запрещен).
1×slots зеркало регистрацию более популярный вариант это
<a href=https://biowiki.clinomics.com/index.php?title=РР·_чего_состоит_диета_Елены_Малышевой>https://biowiki.clinomics.com/index.php?title=РР·_чего_состоит_диета_Елены_Малышевой</a> Если вы избираете испытанное лицензионное интернет казино и сделайте все условия получения бездепозитного приза, проблем с получением презента у Вас не возникнет.Еще одно условие касается размеров ставки. Операторы устанавливают наивысшую необходимую, которую игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, избранной в Личном офисе. При превышении лимита есть риск лишиться приза. Существующие ограничения относятся и к определенным обликам ставок. Например, играя в рулетку, клиент может столкнуться с запретом назначать фишки на шансы. 1×slots зеркало рабочее
казино 1×slots официальный сайт
С не отыгранным бонусом запрещается превосходить объем максимальной ставки. Нарушение сего обстоятельства в аннулирование выигрыша. <a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=148284&pid=376399#post_376399>1×slots зеркало рабочее</a> Если идет об неповторимых предложениях, имеет потребоваться регистрация в казино по ссылке с партнерского сайта.Прочитайте верховодила бонусной программы, какой хотите принять. Да, мы безотступно рекомендуем устроить это до регистрации. B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=http://xn–80aeh5aeeb3a7a4f.xn–p1ai/forum/user/53060/>http://xn–80aeh5aeeb3a7a4f.xn–p1ai/forum/user/53060/</a> Такой безвозмездный эквивалент средств зачисляется на профиль юзера после воплощения требований и предназначаются они лишь для игрового процесса. Вывод таких вознаграждений вероятен лишь в воплощения вейджеровых критерий.Новые клиенты онлайн-казино без первого депозита могут проверить свою удачливость. К что, этому же есть вероятность конвертировать бездепы в настоящие средства за регистрацию в казино, впрочем для этого бонус необходимо отыграть сообразно условиям акции.
1×slots зеркало подтвердит вашу регистрацию если говорить
Бонус за регистрацию в казино без депо с выводом средств нужно отыграть. Зачастую для отыгрыша возможность потребоваться устроить ставки на сумму, в количество десятков раз превосходящую сумму бонуса либо выигрыша. Обычно показатель выше, чем для призов на депозит. Не изумляйтесь, случае он несомненно и х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных государств. <a href=https://www.xn–9n3bn8ewuh9zp.kr/bbs/board.php?bo_table=free&wr_id=542824>https://www.xn–9n3bn8ewuh9zp.kr/bbs/board.php?bo_table=free&wr_id=542824</a> Иногда операторы просят внесение минимального депозита перед выводом для верификации платежного инструмента. В некоторых казино данный депо того светит отыграть. 1х слотс зеркало регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=http://fumankong1.cc/home.php?mod=space&uid=580780>1×slots рабочее зеркало</a>
<a href=https://www.findaspermdonor.com/viewtopic.php?f=25&t=98677>1×slots регистрация на официальном сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Также учтите, что кое-какие игровые платформы сужают перечень стран, которые способны получить предложенный бездепозитный бонус за регистрацию. К примеру, есть онлайн-заведения, выдающие сходственные бонусы только жильцам конкретных стран. К образцу, интернет казино 777 Оригинал предоставляет бездепозитный бонус только игрокам из России и государств СНГ. Или наоборот, пичкают вознаграждением всех, кроме обитателей неких стран (из сего, стопам пристально учить перечень, чтобы впоследствии не появилось никаких вопросов и жалоб). Отзывы читателей о бонусных промоакциях помогут составить эмоцию, но не запамятовывайте о субъективности собственных комментариев.
#1704 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino приложения casino betting <a href=https://sovsekretno.net/>1×bet зеркало на сегодня 1×bet xyz</a> порно с Петр Ян (ММА) 1×bet официальный xbet <a href=https://specreporter.com/>рокс казино</a> 7k casino официальный casino вход порно с Евгений Малкин (хоккей) сайт казино зеркало Львова-Белова Мария Алексеевна порно 1×bet официальный сайт 1×bet xyz казино ставка
DiskiPlus casino официальный зеркало DiskiPlus букмекерская контора <a href=https://www.diskiplus.ru/>DiskiPlus букмекерская контора официальный сайт скачать</a> DiskiPlus pin up casino buzz DiskiPlus сайт pin up casino <a href=https://diskiplus.ru>DiskiPlus casino игровой автомат</a> DiskiPlus porno Светлана Ходченкова DiskiPlus Семёнова Татьяна Владимировна порно DiskiPlus порно с Сергей Бобровский (хоккей) DiskiPlus casino андроид DiskiPlus pin up casino пин DiskiPlus казино рояль смотреть DiskiPlus включи казино
#1705 Charlesgunnyhttp://filmkachat.ru
1× slots casino зеркало
Осталось выбрать казино с призом за регистрацию и сделать профиль. После активации презента выигрыш в от Фортуны и навыков. <a href=http://filmkachat.ru/>1хслот скачать</a> Самый распространённый из похожих призов, конечно же, бездеп на день рождения посетителя — бонус в виде фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им можно на установленного периода времени.Способы получения бездепа различаются от вида приза, который приглянулся игроку. Но для или надо(надобно) быть зарегистрированным в законном онлайн-казино и доказать свою личность. В общем виде пошаговая аннотация для получения бездепозитного бонуса выглядит например: <a href=https://yoomark.com/content/mastering-brand-extension-strategy-market-success>https://yoomark.com/content/mastering-brand-extension-strategy-market-success</a> 1×slots зеркало регистрация в 1×slots casino <a href=http://doctor-klin.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://n-l-e.ru/bitrix/redirect.php?goto=http://naruto.su/link.ext.php?url=https://teletype.in/@urist555/2NbbvUNfERE>http://doctor-klin.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://n-l-e.ru/bitrix/redirect.php?goto=http://naruto.su/link.ext.php?url=https://teletype.in/@urist555/2NbbvUNfERE</a> С этими простыми советами любое казино с призом за регистрацию способно принести в разы больше выгоды и полезности.Когда идет о валютных бонусах, казино практически устанавливают обстоятельства вейджера, коие нужно выполнить, чтобы исключить выигрыш.
1 х слотс зеркало
Также бездепозитные призы могут работать способом вернуть к этой посетителей, что приостановивших своё сотрудничество с компанией: уведомление о бездепе поступает на мобильный телефонный либо почту.Нет. Для получения бездепозитного бонуса в казино необходима неотъемлемая регистрация на веб-сайте. Играть в слоты безвозмездно и без регистрации можно лишь в демо режиме. <a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=10204>1 х слотс зеркало</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots В качестве бонусов интернет казино нередко предлагает выдачу фриспинов, другими бесплатных вращений игрового барабана. Виртуальные монеты возможно применять для обучения в покерной школе либо для игры в казино. <a href=https://social.studentb.eu/read-blog/191472>https://social.studentb.eu/read-blog/191472</a> Реже призы без депозита начисляются постоянным игрокам. С их поддержкою администрация постарается удержать ценных посетителей или желает поблагодарить за лояльность правильных гостей. Но гораздо чаще для похожих целей применяются эти акции: 1×slots актуальное зеркало
1×slots зеркало быструю регистрацию а также мгновенное
Вейджер (wager) – это коэффициент, который демонстрирует на какую сумму нужно устроить ставок, дабы вывести бонус из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода сего бонуса, Вам нужно устроить ставок на необходимую: 500*70=3500 рублей. Только полностью отыграв приз, Вы можете исключить собственный выигрыш. Большинство клубов завлекают внимание компьютерные за счёт разнообразных подарков. На одних веб-сайтах можно получить виртуальные кредиты, которые откроют доступ ко всему софту. На иных же, администрация предлагает бесплатные вращения для пуска лучших онлайн слотов. Несмотря на разные промоакции, стоит выделить самые основные. <a href=https://w-o-n.org/member.php?action=profile&uid=5439>https://w-o-n.org/member.php?action=profile&uid=5439</a> С иной стороны, намного проще отобрать бездепозитные фриспины за регистрацию в казино и прямо сейчас начать вертеть барабаны в превосходнейших слотах. Главная особенность спинов что, собственно они предназначены для лучших автоматов. Удастся не пройти дополнительные раунды, хотя и прирастить необходимую выигрыша, заработать респины и другие внутриигровые подарки. 1×slots официальный сайт, скачать Все безвозмездные бонусы кажутся соблазнительными. Кто же откажется от способности сыграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далековато не все бездепозитные призы одинаковой презентабельны для рассудительного клиента.Условия, на коих предоставляется бездеп, регулируются казино. Каждая промоакция содержит доскональные верховодила, ссылка на которые обыкновенно находится в промообъявлении. В их указываются лимиты, вейджер, список дешевых игр. Если оператор скрывает данные о предложении, то воспользоваться им не стоит.
1×slots рабочее зеркало на сегодня
За вербование приятеля ? в партнерской программки заказчик получает вознаграждение за вербование свежих юзеров. Бездепы с бесплатными вращениями предоставляют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд уплачивает казино. Число спинов ограничено и изредка выше сотку. Если промоакция включает в себя количество безвозмездных игр, их начисление имеет быть разбито на количество дней. Таким образом, заведение пытается показать себя своим вероятным геймерам, а подобный маркетинговый ход как казино приз без депо за регистрацию привлекает очень много внимания к игорному заведению и обеспечивает постоянный поток новых посетителей и грядущих клиентов игрового интернет клуба. 1×слот регистрация в 1×slots casino <a href=http://www.adgoods.ru/user/profile/6101>http://www.adgoods.ru/user/profile/6101</a> Простая процедура получения бездепозитного приза, которая займет менее 2-х мин. Для получения бездепов, достаточно зарегистрироваться и доказать контактные данные.Бездепозитный бонус за регистрацию в казино с выводом средств в 2022 году — Наш ресурс предоставляет игрокам важную информацию о самых новых, великодушных и испытанных бонусах в онлайн казино, которые обновляются каждый денек.
1×slots акции
Практически все интернет казино с бездепозитным призом за регистрацию учитывает программу преданности — систему одобрения неизменных посетителей, кот-ая состоит из колличества уровней. При достижении игроком еще значения на его счёт поступает бонус. Чем выше уровень — что, этим щедрее бонус.Представьте момент, когда при ставке в 10 рублей Вы получите подобное умножение. Миллион рублей за одно вращение, что вполне вполне. Поэтому вопрос, сколько возможно выиграть остаётся закрытым. Предлагаем проверить помощи. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный бонус и инспектируйте удачу в деле. Разумеется, исключить средства сложно. Однако шансы есть у всех. <a href=http://dooood.fun/member.php?action=profile&uid=4424>http://dooood.fun/member.php?action=profile&uid=4424</a> Мы проделываем ударение на ключевых положениях правил, рассказываем о территориальных ограничениях и кратко информируем о иных акциях обсуждаемого казино.Многие новички сомневаются, что поощрительный приз не будет отдавать, числе в они выиграли у казино. Это абсолютно безопасно и надежно. Выводя выигранные средства, игрок просто останавливает свое роль в игре и теряет уникальную возможность – даром наращивать собственное материальное положение. 1×слот регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=170554&result=reply>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=http://jktroickiy.forumex.ru/viewtopic.php?f=2&t=4252>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На странице представлены бездепозитные призы за регистрацию в казино редчайшая награда за которой гонятся все игроки как новенькие, например и профессионалы. Мы тоже уделяем огромное внимание на присутствие бонусов при составление рейтинга казино на деньги. Бездепозитный приз это вероятность играть безвозмездно и выиграть реальные средства. Чаще всего интернет-казино предлагают бездепозитные призы свежим пользователям. Эта промо-акция очень эффективно привлекает новичков, подталкивая их к открытию счета. Конечно, не все становятся преданными посетителями, хотя сам факт регистрации аккаунта играет на руку заведению.
#1706 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Карен Хачанов (теннис) 7k casino зеркало <a href=https://glvk.guru/>casino бездепозитный</a> бесплатно фильм казино порно с Дронова Александра Викторовна <a href=https://rhymes-punches.com/>ешь казино</a> порно с Юлия Ефимова, пловчиха сайте букмекерской конторы фонбет казино фильм казино проиграл казино регистрации букмекерская контора фонбет официальный Разуваева Ксения Денисовна порно
DiskiPlus 1×bet скачать приложение DiskiPlus pin up casino зеркало <a href=https://www.diskiplus.ru/>DiskiPlus казино вход официальный сайт</a> DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus up casino <a href=https://www.diskiplus.ru>DiskiPlus сайт букмекерской конторы</a> DiskiPlus cometa casino DiskiPlus vodka casino DiskiPlus 7k casino официальный сайт DiskiPlus casino официальный зеркало DiskiPlus казино в россии DiskiPlus бесплатное казино DiskiPlus казино играть
#1707 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на сайте
Нельзя осматривать игру на деньги, как вариант заработка. Азартные забавы запрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не является организатором азартных игр. Сайт одевает информационный нрав.Классическая разновидность бонуса за творенье аккаунта. Его превосходство заключается что, нет, что заказчик возможность других подбирать аппараты и делать ставки в их. Иногда список игровых автоматов ограничен оператором, но все точно это чем, чем единственный доступный разъем, как если, тогда, с использованием фриспинов. <a href=http://filmkachat.ru/>1х слот 1хслотс регистрация перейти на 1×slots</a> Основное верховодило получения бездепа ? создаваемый акк обязан быть у пользователя первым и единственным. Наличие нескольких аккаунтов взыскательно запрещено. Проверка проводится по имени, e-mal, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депозита нужно блюсти несложную очередность поступков.Первый образующийся вопрос, это, для выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают новых игроков. Последним легче начать игру на деньги с дара за регистрацию. Им надо пополнять баланс и расходовать личные свои. Новички получают безвозмездные спины либо свои на счёт. С их поддержкой знакомятся с игровым ходом, крутят слоты и делают ставки в рулетке. <a href=https://hackmd.io/@lexxeagle/B168pWHlR>https://hackmd.io/@lexxeagle/B168pWHlR</a> Нет. Для получения бездепозитного бонуса в казино необходима обязательная регистрация на сайте. Играть в слоты даром и без регистрации возможно только в демо режиме. 1×slots сайт <a href=http://compuralsk.kz/bitrix/redirect.php?goto=http://petfood.ru/bitrix/rk.php?goto=http://mos.news/bitrix/redirect.php?goto=https://teletype.in/@urist555/Y4A8gJGOGIa>http://compuralsk.kz/bitrix/redirect.php?goto=http://petfood.ru/bitrix/rk.php?goto=http://mos.news/bitrix/redirect.php?goto=https://teletype.in/@urist555/Y4A8gJGOGIa</a> Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных ситуаций с казино, когда последствии отыгрыша бездепа вас не дадут исключить крупную сумму выигрыша.Представьте момент, когда при ставке в 10 руб. Вы получите подобное умножение. Миллион рублей за одно вращение, что абсолютно возможно. Поэтому вопрос, сколько возможно выиграть остаётся открытым. Предлагаем выяснить помощи. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный приз и инспектируйте фортуну в деле. Разумеется, вывести деньги довольно. Однако шансы есть у всех.
1×slots официальный сайт скачать
Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?При правильном раскладе бездепы — это отличный способ играть на средства без растраты собственных средств. Есть количество советов, следуя коим можно извлечь максимально выгоды из похожих промоакций казино. Играть идет лишь на лицензированных площадках. Скриптовые веб-сайты не врут с бонусными предложениями, хотя и употребляют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах невозможно. <a href=http://everestrolep.listbb.ru/viewtopic.php?f=38&t=17731>1×slots скачать на айфон</a> казино 1×slots официальный сайт <a href=http://11499.ww.w.molifan.net/space-uid-2175162.html>http://11499.ww.w.molifan.net/space-uid-2175162.html</a> Можно ли в одном онлайн казино получить больше 1-го бонуса за регистрацию? Нет, так как в любом интернет казино есть верховодила, к которым нужно держаться, не делать 2 аккаута для получения призов, иначе несомненно блокировка обоих аккаутов, не пытайтесь перехитрить онлайн казино, приз за регистрацию выдаеться один раз одному лицу.В случае установленного лимита на сумму вывода выигрыша с бездепозитного бонуса, игрок не может исключить больше заявленной суммы. 1×slots официальный сайт скачать Выполнив все притязания оператора, клиент имеет оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит примерно менее суток. Если дополнительно потребуется пройти процедуру верификации, то срок возрастает до 1–2 трудящихся дней. Для перевода используются банковские приборы и электронные платежные системы. Второй метод подходит другого, так как основная транзакций такой исполняются моментально. В связи со спецификой функционирования банков обработка платежей возможность занять до нескольких рабочих дней.Активация происходит с помощью промокодов, которые вводятся в собственном кабинете в регистрации. Среди спецпредложений в перечне Casino.ru находятся неповторимые промокоды, которые доступны лишь гостям портала. Другие способы начисления средств ? автоматическая активация сразу последствии творения аккаунта и получение подарка по запросу в службу технической поддержки.
1×slots быструю регистрацию а также мгновенное
При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, коие возможно предназначить игре в казино. <a href=http://www.soe-parrot.com/home.php?mod=space&uid=169319>http://www.soe-parrot.com/home.php?mod=space&uid=169319</a> 1×slot зеркало рабочее этих способов предполагает регистрацию Так же стоит выделить то, собственно в каждом онлайн казино установлен свой наибольший кешаут на бездепозитный приз. Как управляло кешаут — это максимальная сумма средств, кот-ая доступная для вывода с бездепозитного бонуса.Верификация аккаунта. Лучше подтвердить лицо сразу в регистрации, дабы позже не было проблем с выводом денег. Верификация имеет проходить двумя маршрутами:
1×slots казино зеркало
К огорчению, нет. Почти все казино, настоятельно внесение хотя бы одного малого депо для вывода выигрыша с бездепозитного приза. Также учитывайте, собственно исключить средства разрешается только на что, эту платежную систему, с которой был сделан депозит.Фриспины предназначены для применения в видео слотах. Внимательно ознакомьтесь с условиями – часто их выдают на некоторые автоматы. В зависимости от клуба, у вас выйдет устроить определённое число ставок. Кстати, продвинутые игорные жилища позволяют запускать каждых «одноруких злодеев». <a href=https://rolivka.online/forum/showthread.php?tid=41008>скачать 1×slots на андроид мобильная версия</a> Фриспины начисляются по определенной ставке. После их активации игроку необходимо запустить разъем и увериться, что в нем показываются благотворительные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода в отыгрыша ориентируется оператором и редко выше 5 000 рублей. Бездепозитные призы в казино без пополнения 2022 — это конкретная сумма денег или gratuitous spins вращения, которые предоставляются первым гостям за регистрацию на веб-сайте казино вид бездепозитного бонуса, и выделяет вам возможность помощью казино без пополнения опробовать предложения (игр), с последующей прерогативой вывода средств при выполнении всех установленных верховодил. 1×slos регистрация в 1×slots casino <a href=http://ceraboom.ru/bitrix/redirect.php?goto=http://ldsp-shop.ru/bitrix/redirect.php?goto=http://bbulvar.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/WdePSTxzU9P>http://ceraboom.ru/bitrix/redirect.php?goto=http://ldsp-shop.ru/bitrix/redirect.php?goto=http://bbulvar.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/WdePSTxzU9P</a>
1×slots официальный зеркало рабочее
Чем ниже велечину вейджера, что, этим легче отыграть и исключить бонус. Если Вы планируете заработать на бездепе, но просто ознакомиться с свежим игровым клубом, то стоит игнорировать призов с высоким вейджером их практически не реально отыграть. С ними Вы можете лишь протестировать игры заведения. <a href=http://turkteam.10tl.net/member.php?action=profile&uid=1853>http://turkteam.10tl.net/member.php?action=profile&uid=1853</a> Если вы выбрали себе несколько брендов которые вас больше всего полюбились, для постоянной забавы! Таких гемблеров казино очень предпочитает и оценивает, за частую такие игроки становятся VIP игроками заведения, которым часто поступают прибыльные предложения в виде призов, так же туда входит и бездепозитные.Вы не в коем случае ни чем рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, выучится регулировать изменять ставки и линии, изучать бонусные игры и их выигрышные композиции, да в просто зарядится кучей эмоций! Ведь вы будите играть на бонусные свои, которые можно отыграть и вывести, не просто на демо счет, тем самым адреналин в крови еще больше повысится а пульс забьется с частым ритмом! 1×slots casino зеркало Для получения депозитного приза нужно восполнить собственный игровой баланс реальными деньгами. Вознаграждение возможно получить либо при внесении первого депозита, или вид фиксированного процента от внесённых средств. Так или по, приз поступит на счёт лишь в пополнения.Превышение наибольшей ставки при отыгрыше. Система автоматически не предостерегает о превышении ставки, потому о нарушении правил игрок возможность разузнать уже после подачи запроса на вывод средств.
<b>Смотреть еще похожие новости:</b>
<a href=http://support-groups.org/viewtopic.php?f=161&t=771470>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a>
<a href=https://tussom.com/forums/showthread.php?tid=9692>1×slots казино мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
С такими простыми советами каждое казино с бонусом за регистрацию способно принести в разы больше выгоды и пользы.
#1708 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пина casino win win casino <a href=https://specreporter.com/>1×bet официальный сайт</a> Ирина Горбачева пин up casino <a href=https://sovsekretno.net/>casino зеркало сегодня</a> где казино зеркала официальных сайтов казино порно с Петр Ян (ММА) black russia казино казино рулетка казино ставка casino скачать приложение
DiskiPlus букмекерская контора бетсити DiskiPlus букмекерская контора зенит <a href=https://diskiplus.ru/>DiskiPlus casino на телефон</a> DiskiPlus букмекерские конторы без депозита DiskiPlus винлайн букмекерская контора официальный сайт <a href=https://www.diskiplus.ru/>DiskiPlus 7k casino зеркало</a> DiskiPlus букмекерская контора без DiskiPlus сайт казино зеркало DiskiPlus порно с Сергей Бобровский (хоккей) DiskiPlus порно с Владимир Минеев (ММА) DiskiPlus porno Нина Пирогова, хоккеистка DiskiPlus букмекерская контора ставки DiskiPlus online casino
#1709 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало
Вывод выигрыша с бездепозитных бонусов казино – щедрый подарок от азартных клубов. Но чтобы исключить собственный доход, нужно выполнить ряд критерий:Обычно, бездепозитные бонусы выдаются под конкретные слоты с фиксированной ставкой, но их точно запрещено использовать в игровых автоматах с прогрессивным джекпотом. Список игр, каких можно применять бездеп, Вы отыщите в описании акции либо можете уточнить у саппорта заведения. <a href=http://filmkachat.ru/>1 x slots casino</a> Для получения бонуса надо(надобно) пригласить в игру свежего клиента. Казино начислит пригласившему фиксированный процент от взносов приглашённого вид приза: чаще всего его размер не превышает 10%. Срок деяния бонуса как не превышает месяца: пригласивший получает бонус в зависимости от проигранных ставок приглашённого в первый луна забавы. <a href=https://collectednotes.com/lexxeagle/transforming-concepts-into-reality-professional-3d-rendering-services>https://collectednotes.com/lexxeagle/transforming-concepts-into-reality-professional-3d-rendering-services</a> Такие поощрения позволяют бесплатно протестировать новое казино, разобраться с игровым процессом интернет слотов, заработать и исключить небольшую сумму денег.Автоматы непопросту числятся самым знаменитым азартным развлечением. Чтобы усвоить управление и правила, потребуется всего некоторое минут. Ваша задача устроить ставку, определить количество рабочих линий и возможно крутить барабан. Если на экране выпадет выигрышная композиция – вы выиграли! С этой задачей вас посодействуют управится бездепозитные призы казино. 1×slots регистрацию процедура займет всего лишь <a href=https://mmatycoon.info/index.php/User:SuzannaYewen60>https://mmatycoon.info/index.php/User:SuzannaYewen60</a> Отыграв бездепозитный приз в казино с выводом также придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, случае схожее лимитирование существует, то единоразово исключить выйдет только сумму, не превосходящую объем полученного бонуса.
1×slots бонус за регистрацию
Размер бонуса. В качестве бездепов обычно начисляют большие суммы, а когда речь о призах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то кое-какие казино все подарить игроку до 2000$.Выигрыши с призов без инвестициям практически привязаны к требованию по ставкам и шансы быть обналичены только в исполнения данных требований. 1×slots зеркало которую указывали при регистрации кстати Подтверждение индивидуальной информации. Все казино просят от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у юзера других аккаунтов (мультиаккаунт запрещен).В реальное время получить приз за регистрацию в казино довольно просто. Почти любой игорный жилище с радостью даст деньги или безвозмездные вращения. Многие игроки пользуются данным и не стесняются региться в любом клубе с прибыльными условиями. Кстати, это замечательная вероятность придумать выигрышную тактику и сорвать куш. <a href=http://3366dns.com-www.molifan.net/space-uid-2196515.html>http://3366dns.com-www.molifan.net/space-uid-2196515.html</a> При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток.2. Создать новый профиль. Для регистрации нужно заполнить небольшую анкету или зайдите в индивидуальный офис при помощи социальных сеток; 1хслотс регистрация в 1×slots casino Зачастую бездепозитные бонусы казино для забавы предлагаются различными заведениями азартных игр виде маркетинговых акций или в целях вербования к себя новых игроков. Для бездепозитных призов в казино 2022 геймеру не нужно пополнять счет до этапа вывода желанных средств.Автоматы непопросту числятся самым знаменитым азартным весельем. Чтобы усвоить управление и верховодила, понадобится всего количество минут. Ваша задачка устроить ставку, определить количество трудящихся линий и можно вертеть тамбур. Если на выпадет выигрышная композиция – вы выиграли! С этой задачей для посодействуют управится бездепозитные призы казино.
1×слот регистрация в 1×slots casino
Онлайн-казино с бездепозитными призами ставят клиентам обстоятельства для пользования бездепами, потому перед ролью в акции превосходнее досконально ознакомиться со всеми правилами и нюансами промоакции. Условия могут касаться получения приза, его применения и последующего вывода валютных средств в случае выигрыша. Какие призы возможность еще получить не бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, любое онлайн казино предлагает игрокам выгодное предложение на 1-ый депозит, вы совершаете депо, ваш депо увеличивается в двое либо том в трое, тем наиболее начать выступать возможно с больше солидной суммой, так же не забываем про вейджер на призы.В неких онлайн казино для получения бездепозитных призов не довольно просто зарегистрироваться на веб-сайте клуба и подтвердить средства контактные данные. Дополнительно требуется активация промокода. <a href=http://flashliang.gonnaflynow.org/?p=450&cpage=8365#comment-1947902>http://flashliang.gonnaflynow.org/?p=450&cpage=8365#comment-1947902</a> 1хслотс мобильная версия зеркало В большинстве заведений устроить это возможно по адресу электронной почты, по номеру телефонного, через социальную сеть либо гугл-аккаунт.
казино 1×slots
<a href=http://sofanatki.ekafe.ru/viewtopic.php?f=1&t=2295>1хслотс рабочее зеркало</a> Размер приза. В качестве бездепов обычно начисляют очень суммы, а когда идет о призах за депо, которые начисляются в процентном соотношении от суммы пополнения, то некоторые казино шансы презентовать игроку до 2000$. 1х слотс зеркало регистрация в 1×slots casino <a href=https://beaunex.net/bbs/board.php?bo_table=free&wr_id=287978>https://beaunex.net/bbs/board.php?bo_table=free&wr_id=287978</a> Активация валютного гонорары происходит автоматически после создания профиля либо использования промокода. Иногда операторы предъявляют вспомогательные притязания: подписаться на странички казино в социальных сетях или на рассылку маркетинговых известий, скачать и ввести дополнительный софт и т.д.
1× slots зеркало
Бездепозитные бонусы за регистрацию в игровых автоматах для собственников онлайн-казино считаются долею рекламной кампании, направленной на повышение аудитории сайта. Так они продвигают свои бренды и привлекают свежих клиентов. <a href=http://dudoser.com/user/JasperTar/>http://dudoser.com/user/JasperTar/</a> 1×slots регистрация На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению сего медли, Вы не сможете активировать и получить бездепозитный бонус.В количестве случаев безвозмездные бонусы начисляются в кредитах, коие невозможно незамедлительно исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти требования принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д. ). О нем читайте ниже.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.formulersupport.com/Thread-1×slots-%D1%81%D0%B0%D0%B9%D1%82–237834>1×slots сайт</a>
<a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=58216>1× slots casino зеркало</a>
<a href=http://yonghengro.gain.tw/space.php?uid=1555574>1×slots casino регистрация 1×slotscasin online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Такой казино приз без депо за регистрацию выдается игроку на час и энергично используется данное предложение с 2017 года. Это словно некая маскировка поощрения под бездепозитный. Суть всего сего сводится к что, этому, собственно игроку на час выдается, например, 1000 долларов, а реклама твердит то, собственно каждой выигрыш можно несомненно в будущем оставить при себя. Но если играющий серьезно отнесется к данному предложению, то он просто растеряет время. Ведь игроку нужно будет играть не главном аккаунте, а в тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (в всей тысячи) в правила вступят конкретные обстоятельства, где несомненно сказано, что максимальной суммой победы имеет быть лишь двести долларов и деньги можно применять лишь в приза на первый вклад с вейджером 25 от суммы вознаграждения плюс сам депозит. По итогу выйдет, собственно игрок выигрывал себя 200% приз с вейджером на определенную необходимую. Короче разговаривая, это все надо вашего времени.
#1710 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
Иногда у посетителей вебсайта имеют возникнуть трудности, задачи, препядствия при активации полученного промо-кода. В таких случаях, необходимо адресоваться за поддержкою в службу поддержки «Support». Для получения ответа, обязательно указывается конкретная причина обращения и подтверждается информация дополнительными снимками. Если сложилась спорная обстановка, всегда можно обратиться к основному регулятору либо контролирующему органу, выдавшему данному заведению лицензионный документ. <a href=http://filmkachat.ru/>1×slots коды</a> <a href=https://note.com/joyous_otter80/n/n668a7c74c58d>https://note.com/joyous_otter80/n/n668a7c74c58d</a> 1х слот 1хслотс регистрация перейти на 1×slots <a href=https://tpforums.org/forum/member.php?70302-DoctorLazutakt>https://tpforums.org/forum/member.php?70302-DoctorLazutakt</a> Способы получения бездепа различаются в зависимости от вида бонуса, который понравился игроку. Но вас так надо(надобно) быть зарегистрированным в легальном онлайн-казино и доказать собственную личность. В общем виде пошаговая аннотация для получения бездепозитного приза смотрится так:
1×slots зеркало регистрация в 1×slots casino
казино 1×slots Обычно для получения бонусов без депо, казино выдвигает лояльные и вполне выполнимые условия, хотя есть ряд деяний которые запрещены и шансы повлечь за собой противные результаты:При использовании бездепозитным бонусом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют некоторое видов лимитов: <a href=http://www.11ria.com/home.php?mod=space&uid=77524&do=profile>http://www.11ria.com/home.php?mod=space&uid=77524&do=profile</a> На нашем сайте Вы найдете перечень актуальных новых бездепозитных призов в казино 2022 года. Также, есть количество неповторимых предложений, коие доступны лишь гостям нашего сайта в регистрации по нашей ссылке либо активации специального промокода. 1×slots актуальное зеркало Фриспины. Бесплатные вращения предназначены для применения в видео-слотах. Внимательно читайте условия – они часто выдаются для некоторых машин. В зависимости от клуба возможность делать конкретное количество ставок. Кстати, современные игорные жилища выделяют вероятность заводить «одноруких бандитов».Так же стоит выделить то, что в любом онлайн казино установлен собственный наибольший кешаут на бездепозитный приз. Как правило кешаут — это максимальная сумма средств, которая дешевая для вывода с бездепозитного бонуса.
1хслотс официальный сайт зеркало
Все благотворительные бонусы кажутся заманчивыми. Кто же откажется от способности поиграть в онлайн-казино, не рискуя средствами, но получая выигрыши. Но далековато не все бездепозитные призы мере привлекательны для рассудительного посетителя. Ну и окончательно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: подобная добродушие увеличивает степень лояльности посетителей к компании.Когда идет о получении бездепозитных призов в казино, для направьте на последующие обстоятельства: <a href=https://funsilo.date/wiki/Glory_Casino>https://funsilo.date/wiki/Glory_Casino</a> Основное различие том,, что для получения бездепа нужно пополнять баланс в казино. Но кроме этого, есть ряд и отличий:Вейджер не более х30–35 является приемлемым. Опытные игроки заявляют, что с этим вейджером реально остаться в плюсе, случае правильно подойти к выбору игрового аппарата. 1 хслот регистрация в 1×slots casino Каждый новичок и умелый игрок грезят прытко стартануть и начать делать настоящие ставки. Для сего достаточно арестовать презент, за кот-ый надо платить. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email или телефонный. После этого администрация начислит щедрое вознаграждение в виде безвозмездных вращений или виртуальных кредитов.
1×slot зеркало рабочее этих способов предполагает регистрацию
<a href=http://board.eternityrpc.com/thread-481-post-18244.html#pid18244>казино 1×slots официальный сайт</a> Бездепозитный приз – это экономическое вознаграждение, коие выдается соучастнику забавы в казино, для его вербования и появления заинтересованности. Любой посетитель, который соответствует условиям выдачи подобного бездепозитного приза, имеет претендовать на получение вышеуказанного приза. Такое поощрение является наиболее действенным способом, дающим возможность стартовать деле, не вкладывая собственных материальных средств. Прямо данный отберите бесплатные вращения за регистрацию без депозита и начинайте коллекционировать призовые комбинации из-за солидных выигрышей!Вейджер (либо вагер) ? это минимальная сумма ставок, коию необходимо сделать для вывода валютного приза. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, тем привлекательнее спецпредложение. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=http://trisinfronteras.com/davidcastro/component/k2/itemlist/user/455920-jamesagind>http://trisinfronteras.com/davidcastro/component/k2/itemlist/user/455920-jamesagind</a> Мы рекомендуем не отказываться от подобных услуг узнаваемых казино. Выделите количество мин. На регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сегодня удача будет на вашей стороне!
1×slots регистрация
Подарки на праздники ? приуроченные к парадным датам, требующие условного отыгрыша или начисляются без такового. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду. <a href=http://bbs.theviko.com/home.php?mod=space&uid=2678302>http://bbs.theviko.com/home.php?mod=space&uid=2678302</a> 1×slots зеркало проходить регистрацию это отличный вариант Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен список превосходнейших интернет казино, коие предлагают своим игрокам щедрые бонусы за регистрацию.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.dis-course.net/viewtopic.php?t=651663>1х слот 1хслотс регистрация перейти на 1×slots</a>
<a href=https://timepost.info/showthread.php?tid=174145>1× slots casino официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Когда речь о получении бездепозитных призов в казино, начала обратите внимание на последующие условия: При регистрации идет указывать лишь достоверную информацию. Когда учетная запись будет активна, будет доступ в Личный кабинет. В нем можно выбрать еденицу, ввести промокод и узнать доскональные управляла получения и отыгрыша бездепа. Краткая информация об промоакции часто находится именно на регистрационной форме.
#1711 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
kent casino 1×bet бесплатно <a href=https://specreporter.com/>человек казино</a> Ирина Горбачева pin ап casino <a href=https://rhymes-punches.com/>casino официальный зеркало</a> Крючкова Полина Викторовна порно 1×bet зеркало рабочее скачать 1×bet на андроид бесплатно 1×bet зеркало на сегодня 1×bet xyz Чулпан Хаматова casino зеркало сайта казино вулкан
DiskiPlus Хорова Наталья Александровна порно DiskiPlus ramenbet casino <a href=https://diskiplus.ru/>DiskiPlus pin up букмекерская контора</a> DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus bitz casino <a href=https://www.diskiplus.ru/>DiskiPlus скачать 1×bet на андроид</a> DiskiPlus приложения букмекерских контор DiskiPlus Радченко Светлана Юрьевна порно DiskiPlus макао казино DiskiPlus пин ап casino DiskiPlus порно с Илюшникова Татьяна Александровна DiskiPlus Хорова Наталья Александровна порно DiskiPlus букмекерская контора фонбет официальный
#1712 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
официальные зеркала казино порно с Константин Тюкавин (футбол) <a href=https://krtka.info/>Нургалиева Эльвира Рамиловна порно</a> порно с Алина Загитова Елизавета Боярская <a href=https://t.me/vchkogpu_ru>казино большая</a> скачать 1×bet на андроид бесплатно казино онлайн казино 1 1×bet слоты 1×bet top почему в казино не бывает настенных часов скачать сайт букмекерской конторы букмекерские контора ап
DiskiPlus казино ставка DiskiPlus 1×bet зеркало рабочее xbet <a href=https://www.diskiplus.ru/>DiskiPlus casino com</a> DiskiPlus casino 7k рабочее DiskiPlus 1×bet casino <a href=https://diskiplus.ru>DiskiPlus букмекерская контора леонов</a> DiskiPlus скачиваемые казино DiskiPlus Петрова Ольга Викторовна порно DiskiPlus букмекерская контора леонов DiskiPlus porno Дарья Клишина DiskiPlus казино проиграл DiskiPlus винлайн букмекерская контора официальный сайт DiskiPlus Скоробогатова Ольга Николаевна порно
#1713 Charlesgunnyhttp://filmkachat.ru
1×slot регистрация
Первый образующийся вопрос, это, чего выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают новых игроков. Последним проще начать игру на средства с подарка за регистрацию. Им не нужно пополнять баланс и расходовать личные средства. Новички получают безвозмездные спины либо свои на счёт. С их помощью знакомятся с игровым процессом, крутят слоты и делают ставки в рулетке.Объективные – размер бонуса, коэффициент и обстоятельства вейджера, необходимость внесения депо для вывода средств; <a href=http://filmkachat.ru/>1× slots casino зеркало</a> Обычно для получения призов без депозита, казино выдвигает лояльные и абсолютно выполнимые обстоятельства, хотя есть ряд действий коие запрещены и могут причиной неприятные результаты:За вербование друга ? в рамках партнерской программки клиент получает вознаграждение за вербование свежих пользователей. <a href=https://lit.link/en/kalinka0588>https://lit.link/en/kalinka0588</a> Кешбэк-бонус дает собой возврат фиксированного процента от ставки в случае поражения либо же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не выше 10%. 1×slots зеркало регистрация <a href=http://regvoice.com/home.php?mod=space&uid=74789&do=profile>http://regvoice.com/home.php?mod=space&uid=74789&do=profile</a>
1×slot официальный сайт
Бездепозитные бонусы, как уже ясно, считаются уникальной возможностью к игровому процессу полностью бескорыстно, словами выступать в интернет казино даром и на быть свои незамедлительно после регистрации аккаунта. Автоматы с таким депозитом шансы стать прекрасной вероятностью поиграть для почитателей пыла с определенными ограничениями в денег. казино 1×slots официальный сайт Таким образом, заведение пытается показать себя своим потенциальным игрокам, а подобный маркетинговый ход как казино приз без депозита за регистрацию завлекает очень много внимания к игорному заведению и обеспечивает неизменный поток свежих посетителей и будущих посетителей игрового онлайн клуба.Игрокам стоит принимать приветственный приз как гарантированный метод получить большой выигрыш, но это замечательная возможность без затрат оценить возможностей казино. <a href=https://www.penexchange.de/pen-wiki/index.php/Benutzer:MildredStrauss0>https://www.penexchange.de/pen-wiki/index.php/Benutzer:MildredStrauss0</a> Можно ли наваривать на бездепозитных бонусах? Это не работа, здесь как повезет, в в любом предложенном безедепе, вы будете откручивать вейджер и выводить, время можно именовать везением, и дополнительной добавкой к вашему бюджету.Вейджер не более х30–35 считается приемлемым. Опытные игроки утверждают, собственно с таким вейджером реально остаться в плюсе, если верно подойти к выбору игрового аппарата. 1×slots официальный сайт мобильная версия скачать При маленький сумме приза рекомендовано играть по низким ставкам, а использовать наибольшие какого-либо только в случае, если вейджер слишком великой, а время на отыгрыш крепко ограничено.Иногда операторы просят внесение минимального депозита перед выводом для верификации платежного прибора. В некоторых казино данный депо того предстоит отыграть.
1×slots зеркало быструю регистрацию а также мгновенное
Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке нужно восполнить счет в казино. Для депозитных призов, данная процедура не нужна, например как депо теснее сделан. <a href=http://xn–ok0b90ihwa585c44h.com/bbs/board.php?bo_table=patner1&wr_id=35137>http://xn–ok0b90ihwa585c44h.com/bbs/board.php?bo_table=patner1&wr_id=35137</a> Чтобы бездеп не был начислен на Ваш акк, Вам надо активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк автоматически, а Вы не планируете его использовать, обратитесь в службу с просьбой отменить бездепозитный бонус.Диапазон ставок, коие вправе сделать игрок, также лимитирован. Обычно ставить возможно небольшую сумму — пределах 10–30 руб. За одно вращение. 1×slots регистрация то дальше необходимо пройти
1хслотс рабочее зеркало
В зависимости от онлайн заведения каждый из их возможность вам предложить как бездепозитные деньги, например и бездепозитные фриспины, которые в удачной регистрации упадут для на ваш игровой баланс.В игровых клубах без лицензии Вы покупаете „кота в мешке“ и если, тогда, неоднозначных обстановок нет возможности куда-то пожаловаться и доказать собственную правоту. <a href=https://foro.muelendhir.com/showthread.php?tid=113885>1× slots сайт</a> Но на азартных платформах похожие вознаграждения все получить и уже зарегистрированные юзеры. В этом случае, призы предоставляются в оригинальных промоакций либо же неким геймерам в виде акционного предложения, которое приходит на почту с целью «вернуть» игрока в свое казино.Самые модные способы вывода денег ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам типа Neteller и Skrill, а также пользуются криптовалютными кошельками. Вывод выигрышей имеет исполняться мгновенно или занимать от нескольких часов до нескольких суток. 1×slots зеркало видели такую регистрацию на <a href=https://www.intensedebate.com/people/Glavdorogadv>https://www.intensedebate.com/people/Glavdorogadv</a>
1×slots официальный сайт зеркало рабочее
Представленные на этой страничке превосходнейшие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные условия. После кропотливого анализа редакция портала составила рейтинг спецпредложений, каком гости Casino.ru могут сортировать перечень по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д.Для получения выигрыша требуется выполнить условия казино. Чаще всего игроку нужно поставить определенную необходимую, но уже из собственных средств. Она рассчитывается из общего размера выигрыша за всегда использования бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, случае пользователь выиграл 1000 рублей, а множитель сочиняет х30, вывести средства возможно будет, сделав ставки на 30 000 рублей. <a href=https://hastui.com/home.php?mod=space&uid=15537>https://hastui.com/home.php?mod=space&uid=15537</a> Некоторые онлайн-казино без депозита предлагают свежим клиентам избрать приз при регистрации. Будьте внимательны: выбрав раз, вы в безусловном большинстве случаев не сможете воспользоваться остальными.Размер ставки для забавы по бездепозитному призу (конечно же, когда, когда он представлен повторяющий бонусных денежных средств) зачастую ниже, чем при ирге на депо. Ограничение будет действовать до этапа отыгрыша приза. 1хслот зеркало сайта
<b>Смотреть еще похожие новости:</b>
<a href=http://naukova2b.2ua.in.ua/viewtopic.php?f=7&t=2779>1×slots промокод при регистрации 2025</a>
<a href=http://forum.as-p.cz/viewtopic.php?f=45&t=67620&p=355287#p355287>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<a href=http://www.fumankong1.cc/home.php?mod=space&uid=580780>1хслотс рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax
#1714 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации
В качестве призов онлайн казино нередко предлагает выдачу фриспинов, словами безвозмездных вращений игрового барабана. Виртуальные монеты можно применять для обучения в покерной школе либо для забавы в казино. <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> <a href=https://manylink.co/@lexxeagle>https://manylink.co/@lexxeagle</a> Хотя безвозмездные бонусы начисляются без депо, не исключено, собственно вас придется заносить средства. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь после как, как свежий заказчик раз пополнит игровой счет. 1×slots коды <a href=https://simracing.su/user/GregorySkepe/>https://simracing.su/user/GregorySkepe/</a> Наличие у игрока 2 аккаунта. Запрещено творить несколько профилей для многократного получения бездепов.Для получения приза надо(надобно) ознакомиться с программой преданности казино и устроить ставки на необходимую, нужную для перехода на следующий степень.
1×slots зеркало регистрацию более популярный вариант это
К примеру, игроку выдаются бесплатные средства в заведении в размере пятидесяти либо ста долларов (вейджер на коие составляет 100х). То есть, каждому новоприбывшему игроку выскакивает притягивающая иллюстрация, которая обещает выплату всех зачисленных фирмой средств. Не стоит обращать внимания на казино приз за регистрацию без депо с чрезмерно большой либо довольно малюсенькой суммой бонусов, потому что, и кропотливо исследовав все обстоятельства, тут скорее, несомненно некий подкол.Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам воспрещено начислять призы посетителям, не имеющим денежных средств на счете. Мы предлагаем разглядеть животрепещущие бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ. <a href=http://sladkierecepti.5nx.ru/viewtopic.php?f=8&t=12671>1×slots зеркало регистрация в 1×slots casino</a> 1 х слотс зеркало Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных требований, кроме обязательной верификации. Если на веб-сайте учтена неотъемлемая процедура доказательства личности, то вывести выигрыш получится только в ревизии данных. Приготовьтесь заполнить анкету и отправить в техподдержку документ, подтверждающий лицо.Помимо прочего, для вывода средств по бездепу нужно внести на счёт свой 1-ый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально возможную сумму, после чего вывод средств будет доступен. <a href=http://zqykj.com/bbs/home.php?mod=space&uid=258563>http://zqykj.com/bbs/home.php?mod=space&uid=258563</a> Казино выводит деньги только на ту платежную систему, с котрой был сделан депозит. То есть, для вывода бездепозитного приза, Вам сначала нужно восполнить счет. В неких клубах ограниченный список способов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет именно с этих платежных методов, которые доступны для вывода. 1×slot официальный сайт
1х слотс зеркало регистрация в 1×slots casino
Однако в критериях скрываются «подводные камни», которые не позволят вывести солидную необходимую или же вы не успеете отыграть вейджер. Поэтому мастера рекомендуют отобрать благотворительные вращения за регистрацию в казино без депо, дабы поднабраться навыка и получить настоящий шанс на победу.Приветственный бонус без депозита ? подарок за регистрацию. Выдается деньгами, фриспинами или баллами. В заключительном случае бонусные баллы используются для участия в турнирах либо обмена на настоящие деньги. Бездепы шансы входить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой либо баллами. <a href=http://centropol.su/index.php?subaction=userinfo&user=questionablekee>http://centropol.su/index.php?subaction=userinfo&user=questionablekee</a> Условия отыгрыша приза. Если Вы расчитываете заработать на бездепозитном призе, то в первую очередь внимание на значение вейджера и срок, кот-ый дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть бонус и вывести выигрыш.Так что можете отважно региться без всяких размышлений. Фортуна сейчас наверняка на вашей стороне. Не опасайтесь, ведь следствие какого либо ущерба Вам абсолютно не грозит. С такими призами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе. рабочее зеркало 1×slots При игре на бонусные свои воспрещается играть в игровые автоматы с прогрессивным джекпотом и игры из радела exist casino. Кроме такого, кое-какие казино выделяют бездеп на один или количество конкретных слотов, и в других забавах Вы не сможете на их играть.
1х слот 1хслотс регистрация перейти на 1×slots
Но есть азартные заведения, готовые просто например вручить средства на игру. Для сего довольно сделать профиль. Чтобы исключить выигрыш, сперва необходимо выполнить вейджеровые условия, прописанные в критериях получения бездепа.Обычно показатель повыше, чем для бонусов на депозит. Не дивитесь, случае он будет том х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных стран. <a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=9735>1хслотс официальный сайт зеркало</a> Фриплей-бонусы. Бонусы за безвозмездную забаву есть только в неких клубах. Они зачисляются незамедлительно после создания профиля и срабатывают недолговременное время. Если у вас нет медли истратить средства, они просто завершатся. Что дотрагивается медли, в большинстве случаев бонусы срабатывают на одного часа. казино 1×slots официальный сайт <a href=http://suprememasterchinghai.net/bbs/board.php?bo_table=free&wr_id=3117085>http://suprememasterchinghai.net/bbs/board.php?bo_table=free&wr_id=3117085</a> Чаще всего казино приз за регистрацию без депо даёт возможность запустить любой автомат. Но какого-либо внимательно ознакомиться с условиями. Иногда для игры доступны только определённые модели. Если вы новичок и ничего не смыслите в гэмблинге, другого начать знакомство с миром азарта именно с «одноруких злодеев».
1×slots регистрацию процедура займет всего лишь
Следует подчеркнуть, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом. <a href=http://xn----7sbgj9bdrl.xn–p1ai/users/momentouswander>http://xn----7sbgj9bdrl.xn–p1ai/users/momentouswander</a> 1х слот регистрация в 1×slots casino Бездепозитный бонус по промо-коду несомненно доступен для забавы, только никаких случае когда Вы активируете особый бонусный код в разделе с призами либо укажите промокод при регистрации на веб-сайте. В некоторых случаях, кроме активации кода, придется подтвердить контактные данные игрока и заполнить анкету посетителя.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.konyacraft.com/threads/1×-slots-zerkalo-registracija-v-1×slots-casino.9622/>1х слотс зеркало регистрация в 1×slots casino</a>
<a href=http://sz.80lvl.ru/viewtopic.php?f=8&t=3366>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=https://foro.muelendhir.com/showthread.php?tid=114350>1×slots казино мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Процесс подтверждения личности может занять от одного денька до недели. Если клиент допустил какую оплошность при заполнении паспортных данных, то ему по обратиться с проблемой в службу поддержки онлайн-казино. B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.
#1715 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Алена Михайлова смотреть фильм казино <a href=https://rhymes-punches.com/>букмекерская контора мостбет</a> Светлана Ходченкова официальные букмекерские конторы <a href=https://rhymes-punches.com/>приложения букмекерских контор на андроид</a> pin up casino top top сайт винлайн букмекерская контора 1×bet официальный слоты порно с Юлия Ефимова, пловчиха porno Илона Маркова, хоккеистка porno Марина Александрова 7k casino зеркало
DiskiPlus casino buzz DiskiPlus casino online зеркало <a href=https://diskiplus.ru/>DiskiPlus casino приложения</a> DiskiPlus казино сочи DiskiPlus casino ап <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet xbet</a> DiskiPlus up casino скачать DiskiPlus porno Марина Александрова DiskiPlus скачать букмекерскую контору DiskiPlus porno Алена Косторная (фигурное катание) DiskiPlus порно с Абрамченко Виктория Валериевна DiskiPlus спорт букмекерская контора DiskiPlus 1×bet 1хбет
#1716 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet слоты спорт букмекерская контора <a href=https://kompromat1.online/>1×bet зеркало xbet xyz</a> вывод казино порно с Юлия Ефимова, пловчиха <a href=https://th-royalgclub.com/>играющие казино</a> pin up букмекерская контора фреш казино casino сегодня песня казино Хорова Наталья Александровна порно винлайн букмекерская контора pin ап casino
DiskiPlus вавада казино DiskiPlus букмекерская контора официальный сайт скачать <a href=https://diskiplus.ru>DiskiPlus бесплатно фильм казино</a> DiskiPlus win win casino DiskiPlus порно с Кирьянова Дарья Борисовна <a href=https://www.diskiplus.ru>DiskiPlus porno Мира Андреева (теннис)</a> DiskiPlus casino рабочее зеркало DiskiPlus 1×bet слоты DiskiPlus букмекерская контора DiskiPlus казино вход официальный сайт DiskiPlus Нургалиева Эльвира Рамиловна порно DiskiPlus casino pin официальный DiskiPlus porno Игорь Акинфеев (футбол)
#1717 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало сайта
Такой бесплатный эквивалент средств зачисляется на профиль юзера в осуществления требований и предназначаются они только для игрового процесса. Вывод этих вознаграждений возможен лишь последствии осуществления вейджеровых условий. <a href=http://filmkachat.ru/>1×slots регистрация на официальном сайте</a> Вы наверняка, как и все предпочитаете получать презенты и бездепозитные бонусы казино. Игорные жилища брали в повадку одаривать гэмблеров приятными бонусами. Стать владельцем приветственного подарка возможно за творение профиля либо пополнение счёта. Второй вариант больше интересный, так клубы готовы удвоить депозит! Но в вы новичок и только знакомитесь с миром пыла, какого-либо воспользуйтесь бонусом за регистрацию. <a href=https://www.dailygram.com/blog/1324092/how-to-reset-honda-systems-after-battery-replacement/>https://www.dailygram.com/blog/1324092/how-to-reset-honda-systems-after-battery-replacement/</a> Почти все игровые клубы требуют подтверждение контактных данных игрока для получения бездепозитного бонуса.Для получения приза нужно пригласить в игру нового клиента. Казино начислит пригласившему фиксированный процент от взносов приглашённого в виде приза: чаще всего его объем не превышает 10%. Срок действия приза как не выше месяца: пригласивший получает приз в зависимости от проигранных ставок приглашённого в первый месяц забавы. 1× slots регистрация в 1×slots casino <a href=https://fromdust.art/index.php?title=User:VetaMaher17>https://fromdust.art/index.php?title=User:VetaMaher17</a>
1×slots официальный сайт скачать
Наиболее модные гонорары среди гэмблеров – бездепозитные бонусы казино. Это не дивно, так возможно получить безвозмездные вращения либо виртуальные кредиты, и всем не придётся пополнять счёт, рисковать личными деньгами. Удастся насладиться разнородными увеселениями причем выиграть крупную необходимую, избегая серьёзного риска. 1×slots бездепозитный бонус за регистрацию <a href=https://kamchaty.ru/user/JamesMoiff/>https://kamchaty.ru/user/JamesMoiff/</a> Подтверждение электрической почты – одно из главных условий, которое есть практически в любом бездепозитном казино. Чтобы верифицировать электрическую почту, достаточно перейти по интенсивной ссылке в послании, полученном от азартного клуба. 1×slots официальный demo регистрация в 1×slots casino Для казино, работающих онлайн, бездепозитные призы необходимы для вербования новых клиентов. Предложение сыграть на слотах без надобности внесения настоящих средств — работающий метод для повышения энтузиазма к фирмы. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит играть в казино, только сейчас теснее на собственные деньги.Так что основное различие подарка на депо от бездепа – обязательное пополнение счёта. Вы можете привнести депозит и преувеличить стартовый капитал либо забрать бездеп и этом не придётся рисковать своими сбережениями. Поспешите выполнить простые требования, и администрация ресурса начислит щедрое поощрение!
1х слотс зеркало регистрация в 1×slots casino
Как лишь получите бездеп в казино, всё точно не забывайте инспектировать электронную почту. Некоторые игорные клубы каждый веселят активных гэмблеров приятными призами. Чаще всего получить подарок возможно в преддверии праздника, на день рождение, за привлечение друга. А того распространённым бонусом считается надбавка к депозиту. Нужно чем пополнить счёт, и азартное заведение прирастит его на 50–100%. <a href=https://silvery-iris-h007n2.mystrikingly.com/store/products/da39a3ee5e6-bc6693ca-dd4b-425a-9f49–482a02dfae7b>https://silvery-iris-h007n2.mystrikingly.com/store/products/da39a3ee5e6-bc6693ca-dd4b-425a-9f49–482a02dfae7b</a> Можно ли в одном интернет казино получить больше одного бонуса за регистрацию? Нет, например как в любом интернет казино есть верховодила, к которым надо(надобно) придерживаться, не делать два аккаута для получения бонусов, иначе будет блокировка обоих аккаутов, не пытайтесь обмануть онлайн казино, приз за регистрацию выдаеться один один 1 лицу. 1×slots зеркало рабочее на сегодня
1×slots зеркало рабочее на сегодня
За счёт спинов получится запустить разные онлайн слоты, протестировать стратегии и поднабраться опыта. Фишка в том, собственно вращения начисляются на лучшие аппараты с оригинальными опциями и высочайшей отдачей. Не запамятовывайте, что в каждом акционном предложении предусмотрены специальные притязания – кратковременные лимитирования, максимальный размер ставки, перечень доступных игр.Это тоже благотворительные финансы, коие поступают на аккаунты новоиспеченных геймеров в регистрирования. А особенность этих бонусов произведено что, что обретенные финансы обязательно по использовать в продолжении назначенного медли. 1×slot казино зеркало <a href=http://realtor-cheb.ru/index.php?subaction=userinfo&user=absurdpraise34>http://realtor-cheb.ru/index.php?subaction=userinfo&user=absurdpraise34</a> На бесплатные бонусы онлайн-казино практически всегда распространяется лимитирования по стране проживания клиентов. Даже в для разрешается открывать счет и выступать на деньги в заведении, это еще не значат, собственно для доступны no deposit bonuses.
зеркло казино 1×slots
<a href=http://silkhunter.com/index.php?title=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0>http://silkhunter.com/index.php?title=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0</a> Также случаются случаи, когда казино начислит обсужденный приз в регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам.Но а если вы уже профи по онлайн казино, кликаем на красноватую кнопку «Получить» и Вы автоматически перейдете в онлайн казино; 1хслот 1хслотс регистрация перейти на 1×slots Исходя из сего, просто не существует мудрых оснований махнуть рукой на получение такового бонуса при регистрации. И, не, на такой бесплатной основе у вас есть все шансы выиграть средства и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные призы, нарекают бесплатными интернет платформами для игр.Бездепозитные бонусы отличный вариант безвозмездной забавы в игровые автоматы. Многие юзеры сети не понимают, что в казино возможно начать выступать безусловно безвозмездно, а позже вывести выигрыш на банковскую карту или электрический кошелек, иные не доверяют онлайн казино, а третьи успешно играют и выигрывают – и тотчас достаточно великие суммы.
<b>Смотреть еще похожие новости:</b>
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=16634>1×slots зеркало на сегодня</a>
<a href=http://sladkierecepti.5nx.ru/viewtopic.php?f=8&t=12130>1×slots зеркало которую указывали при регистрации кстати</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, необходимо обратиться в службу поддержки спустя лайв-чат на веб-сайте казино. Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный приз, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс изучить игровые автоматы, выучится регулировать изменять ставки и линии, изучать бонусные забавы и их выигрышные комбинации, ну в конце концов просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные средства, коие возможно отыграть и вывести, а не просто на демо счет, тем самым адреналин в крови еще больше повысится а пульс забьется с нередким ритмом!
#1718 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора на андроид порно с Максим Глушенков (футбол) <a href=https://t.me/vchkogpu_ru>казино без</a> Черкесова Бэлла Мухарбиевна порно гта казино <a href=https://t.me/vchkogpu_ru>porno Дарья Клишина</a> порно с Илюшникова Татьяна Александровна казино онлайн бесплатно casino riobet 1×bet официальный слоты cometa casino букмекерская контора официальный сайт скачать porno Анастасия Янькова, боксерка
DiskiPlus porno Юлия Канакина, скелетонистка DiskiPlus почему в казино не бывает настенных часов <a href=https://www.diskiplus.ru/>DiskiPlus человек казино</a> DiskiPlus porno Мира Андреева (теннис) DiskiPlus 1×bet слоты 1×bet xyz <a href=https://www.diskiplus.ru>DiskiPlus казино большая</a> DiskiPlus ешь казино DiskiPlus официальные букмекерские конторы скачать DiskiPlus казино смотреть онлайн бесплатно DiskiPlus casino com DiskiPlus porno Ангелина Гончаренко, хоккеистка DiskiPlus официальные сайты казино DiskiPlus bet casino
#1719 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
Для такого, чтобы отыграть сумму вашего бездепозитного бонуса надо(надобно) выполнить условия вейджера. Очень нередко фриспины даются на конкретные слоты (book of ra, book of dead, book of sun), выбирайте разъем для нраву, они очень красивые и высококачественные. Бездепозитные бонус имеет быть денежным например и вид фриспинов на слоты <a href=http://filmkachat.ru/>1×slots зеркало сайта</a> <a href=https://paperpage.in/blogs/239677/%D0%90%D0%B2%D1%82%D0%BE%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%94%D0%BD%D0%B5%D0%BF%D1%80-%D0%B1%D1%8B%D1%81%D1%82%D1%80%D0%B0%D1%8F-%D0%B8-%D0%B2%D1%8B%D0%B3%D0%BE%D0%B4%D0%BD%D0%B0%D1%8F-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D0%B6%D0%B0-%D0%B2%D0%B0%D1%88%D0%B5%D0%B3%D0%BE-%D0%B0%D0%B2%D1%82%D0%BE>https://paperpage.in/blogs/239677/%D0%90%D0%B2%D1%82%D0%BE%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%94%D0%BD%D0%B5%D0%BF%D1%80-%D0%B1%D1%8B%D1%81%D1%82%D1%80%D0%B0%D1%8F-%D0%B8-%D0%B2%D1%8B%D0%B3%D0%BE%D0%B4%D0%BD%D0%B0%D1%8F-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D0%B6%D0%B0-%D0%B2%D0%B0%D1%88%D0%B5%D0%B3%D0%BE-%D0%B0%D0%B2%D1%82%D0%BE</a> С иной стороны, гораздо легче отобрать бездепозитные фриспины за регистрацию в казино и прямо в начать вращать барабаны в наилучших слотах. Главная особенность спинов что, нет, собственно они предусмотрены для топовых автоматов. Удастся не пройти вспомогательные раунды, хотя и прирастить сумму выигрыша, заработать респины и другие внутриигровые презенты. 1×slots официальный сайт скачать <a href=http://www.chenjiagou.net/home.php?mod=space&uid=204248>http://www.chenjiagou.net/home.php?mod=space&uid=204248</a>
1×slots зеркало 1хслотс регистрация перейти на 1×slots
<a href=https://talkonlinenews.com/viewtopic.php?t=12305>1×slots зеркало которую указывали при регистрации кстати</a> 1×slots регистрация 1×slotscasino09k online Существуют казино с призом за регистрацию, в довольно популярны фриспины в интернет казино впоследствии регистрации в определенных забавах. Они встречаются числе почаще безвозмездных поощрений либо традиционных бонусов в казино без инвестициям. Например, игрок регистрирует счет, на кот-ый начисляются бесплатные игры, бонус за регистрацию в виде даровых фрспинов, вращения в игровом автомате. Во время игрового процесса геймер выигрывает истинные средства, коие в последствии возможно удачно исключить из заведения на свою платежную систему. То есть, есть шансы исключить свои без рисков собственными деньгами. Регистрация, какую геймер получит призы, займет несколько, а благодаря данному можно прирастить пять евро поощрений до тысячи и без всяких заморочек исключить их. <a href=https://www.fitday.com/fitness/forums/members/glavdorogadv0307.html>https://www.fitday.com/fitness/forums/members/glavdorogadv0307.html</a> Классическая разновидность бонуса за творение аккаунта. Его превосходство содержится том,, собственно заказчик имеет самостоятельно подбирать аппараты и создавать ставки в них. Иногда список игровых автоматов ограничен оператором, хотя все точно это никакого, чем единственный дешевый разъем, как в случае с использованием фриспинов.Маркетинговая политического всех игорных интернет-клубов обязана одевать разнородный нрав. И случае вознаграждения на депо служат для того, чтобы стимулировать заносить депозиты и поощрять уже быть юзеров, то бездепозитный бонус в казино или приз за регистрацию в казино, прежде всего, рассчитан на расширение базы покупателей. 1×slots зеркало этих способов предполагает регистрацию
1хслотс рабочее зеркало
Фриспины начисляются по определенной ставке. После их активации игроку необходимо запустить разъем и увериться, что в нем показываются безвозмездные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода после отыгрыша ориентируется оператором и изредка превышает 5 000 рублей. Для подтверждения электрической почты, просто перейдите по интенсивной ссылке в письме, полученном от игрового заведения.Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке адепты онлайн-казино публикуют актуальную информацию о no down payment bonuses и других услугах. <a href=http://bbs.ztbs.cn/home.php?mod=space&uid=115008>http://bbs.ztbs.cn/home.php?mod=space&uid=115008</a> 1×slots рабочее зеркало
1×slots официальный сайт, скачать
<a href=http://sz.80lvl.ru/viewtopic.php?f=8&t=2930>1×slots casino зеркало рабочее</a> В качестве призов интернет казино нередко предлагает выдачу фриспинов, то есть бесплатных вращений игрового барабана. Виртуальные монеты можно использовать для изучения в покерной школе либо для забавы в казино. 1×slots официальный регистрация <a href=http://ovit-stroy.ru/bitrix/redirect.php?goto=http://picnic-club.ru/bitrix/click.php?goto=http://kdds.ru/bitrix/redirect.php?goto=https://teletype.in/@urist_free/LvREKhkmR27>http://ovit-stroy.ru/bitrix/redirect.php?goto=http://picnic-club.ru/bitrix/click.php?goto=http://kdds.ru/bitrix/redirect.php?goto=https://teletype.in/@urist_free/LvREKhkmR27</a>
1×slots официальный demo регистрация в 1×slots casino
Активация происходит с помощью промокодов, которые вводятся в собственном кабинете в регистрации. Среди спецпредложений в перечне Casino.ru содержатся неповторимые промокоды, которые доступны только гостям портала. Другие методы начисления средств ? автоматическая активация сразу после творенья аккаунта и получение дара по запросу в службу технической помощи.На благотворительные бонусы онлайн-казино практически практически распространяется лимитирования по стране проживания клиентов. Даже если вам разрешено открывать счет и играть на деньги в заведении, это еще не значат, что вас доступны not the slightest down payment bonuses. <a href=http://www.markusragger.at/chess/index.php/kforum/jm-lifestyle/688836-pharmacy-under-green#688957>http://www.markusragger.at/chess/index.php/kforum/jm-lifestyle/688836-pharmacy-under-green#688957</a> 1×slots casino регистрация 1×slots review live Не стоит сразу же отрицаться от приветственных презентов в похожих казино. Администрация готова начислить средства либо фриспины, хотя сначала работники обязаны убедиться, собственно вы не мошенник. Дело сомнений, что развелось слишком много охотников за бонусами. Они выучились врать систему и зарабатывать крупные суммы средств.
<b>Смотреть еще похожие новости:</b>
<a href=https://pbtur.com.br/users/jameshex>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=369822>1×slots casino зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Срок отыгрыша — это период, который наступает в момент активации приза и заканчивается с его закрытием. Пользователю необходимо уложиться в этот временной зазор, иначе призовые свои аннулируются. Казино устанавливают перечень игр, ставки в засчитываются при расчете отыгранных средств. Если тайтл не входит в данный список, то он может быть недоступен для загрузки период деяния бонусного предложения.
#1720 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино вход online casino официальный <a href=https://www.ossetia.tv/>казино фильм смотреть онлайн</a> букмекерская контора мостбет top casino <a href=https://vestnik-jurnal.com/>порно с Илюшникова Татьяна Александровна</a> 1×bet слоты 1×bet xyz Скоробогатова Ольга Николаевна порно porno Александр Соболев (футбол) Попова Анна Юрьевна порно 1×bet на сегодня букмекерская контора официальный сайт porno Яна Троянова
DiskiPlus pin up casino пин ап DiskiPlus мелбет букмекерская контора <a href=https://diskiplus.ru>DiskiPlus online casino</a> DiskiPlus почему казино DiskiPlus мобильные букмекерские конторы <a href=https://www.diskiplus.ru>DiskiPlus casino ап</a> DiskiPlus порно с Ирина Сидоркова DiskiPlus black russia казино DiskiPlus 1win casino DiskiPlus 1×bet 1хбет DiskiPlus порно с Виктория Синицина, фигуристка DiskiPlus porno Светлана Ходченкова DiskiPlus 1×bet xbet xyz
#1721 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
бесплатно фильм казино casino com <a href=https://rumafia.news/>порно с Виктория Синицина, фигуристка</a> cat casino 1×bet на андроид бесплатно <a href=https://kompromat1.online/>порно с Евгения Медведева</a> porno Екатерина Ефременкова, шорт-трекистка pin up casino скачать 1go casino букмекерская контора бесплатно скачать макао казино Самойлова Алла Владимировна порно kent casino регистрация
DiskiPlus casino ап DiskiPlus Елена Лядова <a href=https://www.diskiplus.ru/>DiskiPlus порно с Баталина Ольга Юрьевна</a> DiskiPlus 7k casino бонус DiskiPlus Ходнева Светлана Владимировна порно <a href=https://www.diskiplus.ru/>DiskiPlus часы казино</a> DiskiPlus пин ап casino pin up top DiskiPlus 1×bet слоты 1×bet xyz DiskiPlus online casino официальный DiskiPlus пари букмекерская контора DiskiPlus порно с Артемий Панарин (хоккей) DiskiPlus порно с Кирьянова Дарья Борисовна DiskiPlus порно с Голикова Татьяна Алексеевна
#1722 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
Получив собственный подарок, Вы можете бесплатно выступать на настоящие средства, а выполнив условия отыгрыша, вывести свой выигрыш.Более солидные предложения встречаются довольно редко. Зачастую они доступны лишь VIP-игрокам. В оставшихся случаях им скорее сопутствуют очень строгие обстоятельства отыгрыша. Также вероятны дополнительные обстоятельства и ограничения, прописанные в критериях и положения бонусной программы казино. <a href=http://filmkachat.ru/>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a> <a href=https://solo.to/lexxeagle>https://solo.to/lexxeagle</a> Активация по промокоду используется в различных обликах бездепов. Если речь идет о приветственном призе, то набор символов возможно разузнать на главной страничке, в регистрационной форме или письме, коие отправляется пользователю для доказательства e-mail. Акции имеют проводиться общо с партнерскими площадками. Обычно код располагается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется разовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном кабинете либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем важный код для активации в описании любого рекламную. 1×slots регистрацию более популярный вариант это <a href=http://itsr.pro/index.php?subaction=userinfo&user=wealthycobweb76>http://itsr.pro/index.php?subaction=userinfo&user=wealthycobweb76</a> У каждого игорного заведения свои верховодила и условия. Но, дабы получить бонусы, нужно выполнить стереотипные деянья:Мы проделываем ударение на ключевых положениях правил, рассказываем о территориальных лимитированиях и кратко информируем о других промоакциях обсуждаемого казино.
1×slots регистрация то дальше необходимо пройти
Какие призы я могу еще получить считая бездепозитного приза за регистрацию в казино? По мимо бездепозитного бонуса, любое онлайн казино предлагает игрокам выгодное предложение на 1-ый депозит, вы совершаете депозит, ваш депозит увеличивается в двое либо в в трое, тем самым начать играть можно с больше крупной суммой, например же не забываем на вейджер на бонусы.Доступные игры – В некоторых азартных играх возможно понизить математическое преимущество казино до нескольких 10-х процента. В их количестве многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как управляло, в этих играх ставки идут в зачет вейджера не всецело. Например, имеет предусматриваться только 50%. В некоторых забавах бездепозитные бонусы вообщем нельзя отыгрывать. <a href=https://games-garant.ru/index.php?subaction=userinfo&user=Jamesneorm>казино 1×slots</a> 1×slots подтвердит вашу регистрацию если говорить Выбирая бесплатный бонус, пристально изучайте правила. Убедитесь, собственно для возможно принимать участие в акции. Уточните, в каких забавах можно выполнять условия вейджера. При необходимости задавайте вопросы представителям саппорта. <a href=https://bdsmboard.org/member.php?435884-JamesPlano>https://bdsmboard.org/member.php?435884-JamesPlano</a> Новички не обожают незамедлительно же заносить депозит. Это обосновано неименьем опыта и сомненьем. К счастью, наши возможно получить бездепозитный бонус за регистрацию в казино. Неважно собственно начисляет система – фриспины либо кредиты. В всяком случае вы не рискуете собственными сбережениями. Это замечательная возможность запустить понравившийся видео разъем или же испытать удачу в настольных забавах. 1×slot казино зеркало Главным моментом в возникновении данных вознаграждений произведено в, собственно пустив их в ход, игры ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он спасибо призам какой-либо выигрыш либо мгновенно спустит все только что прибывшие деньги). То есть, казино снабжает игрока вероятностью на дармовой базе играть во различные слоты даже спонсирует забаву.Бездепы обыкновенно предлагают с отыгрышем — мгновенно исключить выигранные свои нельзя. Перевод средств со счета несомненно вероятен в такого, как пользователь выполнит все требования казино, а сумма возможности быть выше установленного правилами лимита. Условиями промоакции фиксируются сроки, на которых заказчик вправе воспользоваться предложением. Обычно они не превосходят нескольких дней последствии активации.
1х слот регистрация в 1×slots casino
Такие поощрения позволяют бесплатно протестировать новое казино, разобраться с игровым процессом интернет слотов, заработать и исключить небольшую сумму денег.Эффективность бездепов в маркетингового инструмента оценили все операторы. Малоизвестные площадки используют такие промоакции, дабы быстро набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны неизменных гостей. Не все сайты, дающие презенты без депозита, рекомендованы к игре. За симпатичным промоописанием шансы прятаться невыполнимые условия отыгрыша прочие подводные камешки. <a href=http://camillacastro.us/forums/profile.php?id=238003>http://camillacastro.us/forums/profile.php?id=238003</a> 1хслотс зеркало на сегодня Прежде всего, не забывайте периодически заглядывать на страницу обзоров бездепозитных призов. Они шаг за шагом оценивают наиболее увлекательные предложения основных игорных порталов.Доступ к подарку имеет раскрываться автоматически последствии введения промокода или воззвания в саппорта вебсайта. В первом случае от юзера не потребуется никаких поступков. Бездеп с активацией по коду встречается чаще всего. Игроку нужно ввести совокупа знаков в графе, кот-ая может находиться в регистрационной форме в Личном офисе.
1хслотс зеркало на сегодня
Все безвозмездные бонусы кажутся заманчивыми. Кто же категорически от способности сыграть в онлайн-казино, не рискуя средствами, хотя получая выигрыши. Но далеко не все бездепозитные бонусы мере презентабельны для рассудительного посетителя.Самые популярные методы вывода денег ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электрическим платежным системам типа Neteller и Skrill, а пользуются криптовалютными кошельками. Вывод выигрышей возможность осуществляться быстро или развлекать от нескольких часов до нескольких суток. Бонус в казино без депо содержит разные вариации: это может быть приветственный приз, акции в честь каких-то праздников либо весомых дат, приз за привлечение свежих игроков, лояльность и получение VIP-статуса.Чем ниже значение вейджера, что, этим проще отыграть и исключить приз. Если Вы расчитываете заработать на бездепе, не просто ознакомиться с свежим игровым клубом, то стоит избегать бонусов с высоким вейджером их почти не реально отыграть. С ними Вы сможете лишь протестировать игры заведения. казино 1×slots <a href=http://www.audipiter.ru/user/Robertfiply/>http://www.audipiter.ru/user/Robertfiply/</a> Для подтверждения электрической почты, просто перейдите по активной ссылке в письме, приобретенном от игрового заведения.Не желайте сыграть в азартные забавы, не рискуя средствами средствами, но получая в все выплаты? Подобную вероятность предоставляют многие превосходнейшие порталы с азартными увеселениями. В их числе большое добросовестных и надежных интернет-казино на российском языке. Они завлекают новых пользователей разными поощрительными событиями, включая бездепозитные, либо безвозмездные призы.
1×slots зеркало которую указывали при регистрации кстати
Помните, собственно в неких забавах сумма ставки идет в зачет вейджера лишь отчасти. Так, в настольных и карточных играх только от 5% до 50% суммы ставки считаются как отыгранные средства, момент как в слотах идет в зачет все one hundred percent суммы. На нашем сайте Вы отыщите список своевременных новых бездепозитных призов в казино 2022 года. Также, есть количество эксклюзивных услуг, которые доступны лишь посетителям нашего сайта в регистрации по нашей ссылке либо активации особого промокода. <a href=https://sklad-slabov.ru/forum/user/9485/>https://sklad-slabov.ru/forum/user/9485/</a> Можно ли наваривать на бездепозитных бонусах? Это не работа, здесь как повезет, в в любом предложенном безедепе, вы будете откручивать вейджер и выводить, за возможно именовать везением, и добавочной добавкой к вашему бютжету.Игрокам стоит принимать приветственный приз как гарантированный метод получить большой выигрыш, но это отличная возможность без расходов расценить перечень казино. 1хслотс рабочее зеркало Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам запрещено начислять призы посетителям, не имеющим денежных средств на счете. Мы предлагаем рассмотреть животрепещущие бонусы онлайн-казино с лицензией, которые соблюдают законодательство РБ.Практически все онлайн казино с бездепозитным призом за регистрацию учитывает программку лояльности — систему одобрения постоянных клиентов, кот-ая состоит из большого значений. При достижении игроком еще значения на его счёт поступает приз. Чем повыше уровень — что, этим щедрее приз.
<b>Смотреть еще похожие новости:</b>
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=10298>зеркала 1×slots</a>
<a href=http://fin-molitor.com/forum/viewtopic.php?f=2&t=540478>1×slots зеркало видели такую регистрацию на</a>
<a href=http://www.topboard.org/threads/1×slots-rabochee-zerkalo-na-segodnja.630759/>1хслотс рабочее зеркало на сегодня</a>
<a href=https://jgwy.net/space-uid-200381.html>1хслотс зеркало</a>
<a href=http://craft4game.forumex.ru/viewtopic.php?f=2&t=2897>1хслотс рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Автоматы неспроста числятся наиболее популярным азартным отдыхом. Чтобы освоить управление и верховодила, потребуется всего несколько минут. Ваша задача сделать ставку, определить число трудящихся линий и возможно вертеть тамбур. Если на выпадет выигрышная композиция – вы выиграли! С данной задачей вас помогут справится бездепозитные призы казино.
#1723 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet официальный 1×bet xyz гама казино <a href=https://rhymes-punches.com/>порно с Константин Тюкавин (футбол)</a> яндекс игры казино порно с Федор Чалов (футбол) <a href=https://specreporter.com/>casino официальный сайт</a> какие казино bitz casino сайт винлайн букмекерская контора скачать casino на андроид скачать 1×bet на андроид бесплатно 7k casino скачать гама казино
DiskiPlus Разуваева Ксения Денисовна порно DiskiPlus 1×bet зеркало рабочее xbet <a href=https://www.diskiplus.ru>DiskiPlus Ирина Горбачева</a> DiskiPlus лучшие букмекерские конторы DiskiPlus официальные сайты казино <a href=https://www.diskiplus.ru>DiskiPlus up casino зеркало</a> DiskiPlus пин ап casino pin up top DiskiPlus up casino скачать DiskiPlus ешь казино DiskiPlus казино пин DiskiPlus porno Катерина Шпица DiskiPlus пин ап букмекерская контора DiskiPlus win win casino
#1724 Charlesgunnyhttp://filmkachat.ru
1×slot регистрация
Бездепозитный приз казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в этом и заключается основное отличие. <a href=http://filmkachat.ru/>1 хслот регистрация в 1×slots casino</a> <a href=https://www.bunity.com/-4272ed82–271c-4d7f-8ae6-c898dfa18867>https://www.bunity.com/-4272ed82–271c-4d7f-8ae6-c898dfa18867</a> 1×slots регистрация то дальше необходимо пройти <a href=http://www.nhps1914.com/wiki/index.php?title=What_Are_the_Security_Features_of_the_1×bet_APP?>http://www.nhps1914.com/wiki/index.php?title=What_Are_the_Security_Features_of_the_1×bet_APP?</a> Oтыгpaть бонус с обозначенным вeйджepом, чтобы нужно сдeлaть cтaвoк нa cумму, превосходящую объем приза в некоторое раз.
казино 1×slots
Новички не обожают сразу же заносить депозит. Это обусловлено отсутствием навыка и недоверием. К счастью, в можно получить бездепозитный бонус за регистрацию в казино. Неважно собственно начисляет система – фриспины или кредиты. В всяком случае вы не рискуете своими сбережениями. Это замечательная возможность запустить приглянувшийся видео разъем или же испытать фортуну в настольных забавах. 1×slots подтвердит вашу регистрацию если говорить <a href=https://www.mikocon.com/home.php?mod=space&uid=212853>https://www.mikocon.com/home.php?mod=space&uid=212853</a> рабочее зеркало 1×slots
1×slots регистрация 1×slotscasino09k online
Чаще всего интернет-казино предлагают бездепозитные призы новым юзерам. Эта промо-акция довольно отлично привлекает начинающих, подталкивая их к открытию счета. Конечно, не все становятся преданными клиентами, но сам прецедент регистрации аккаунта играет на руку заведению. <a href=https://gidro2000.com/forum-gidro/user/27347/>https://gidro2000.com/forum-gidro/user/27347/</a> При исполненьи критерий отыгрыша и верификации, средства с бонусного счета переводятся на главной и шансы быть выведены на карту либо электрический кошелек. Лимиты на вывод и сроки проведения транзакции зависимости от избранной платежной системы. 1×slots casino регистрация 1×slots review live
казино 1×slots официальный сайт
Чтобы других увериться в превосходствах бездепозитных призов, достаточно зарегистрироваться в казино и получить поощрение. <a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=10904>1хслотс рабочее зеркало</a> 1хслотс рабочее зеркало <a href=http://olddle.orkclub.ru/index.php?subaction=userinfo&user=statuesquestude>http://olddle.orkclub.ru/index.php?subaction=userinfo&user=statuesquestude</a>
1 хслот регистрация в 1×slots casino
Можно ли наваривать на бездепозитных призах? Это не работа, тут как повезет, случае в любом предложенном безедепе, вы будете откручивать вейджер и выводить, за возможно именовать везением, и дополнительной добавкой к вашему бюджету. Акции, приуроченные к календарным праздникам, посещают рассчитаны как на всех пользователей, так и на категории: например, подарок на 8 марта девушкам-игрокам либо мужикам на 23 февраля.Бездепозитные бонусы — это презенты от казино вид бонусных средств или фриспинов для игровых автоматов, которые начисляются на акк игрока после процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депозит не потребуется. <a href=http://2012614.com/home.php?mod=space&uid=74942&do=profile>http://2012614.com/home.php?mod=space&uid=74942&do=profile</a> B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpaxВарианты выигрыша находятся от Вашей успеха и условий игорного портала. Выше мы сказали, собственно некоторые бездепозитные бонусы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются они, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на средства, возможно выиграть неописуемые суммы. Сегодняшние игровые автоматы либо видео слоты, как их нарекают. Могут выдавать солидные умножение от х1.000 и выше. Некоторые множат ставку от х100.000. сайт 1× slots casino Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической забавы на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, выучится регулировать менять ставки и линии, исследовать бонусные забавы и их выигрышные комбинации, ну конечном просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные средства, которые можно отыграть и вывести, не просто на демо счет, что, этим самым адреналин в крови еще повысится а пульс забьется с частым ритмом!Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.
<b>Смотреть еще похожие новости:</b>
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=16777>1×slots акции</a>
<a href=http://forum.drustvogil-galad.si/index.php?action=profile;u=121557>1×slots скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выбирая даровой бонус, внимательно изучайте верховодила. Убедитесь, собственно для можно брать участие в промоакции. Уточните, в каких играх можно исполнять условия вейджера. При необходимости задавайте вопросы представителям саппорта.
#1725 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pinco casino Ирина Горбачева <a href=https://kompromat1.online/>Анна Михалкова</a> официальные букмекерские конторы скачать 1×bet 1хбет <a href=https://rhymes-punches.com/>casino x</a> казино смотреть онлайн бесплатно порно с Зырянова Анастасия Владимировна казино ставка казино проиграл porno Дарья Мороз Фастова Елена Владимировна порно казино рояль
DiskiPlus 1×bet приложение DiskiPlus скачать букмекерскую контору <a href=https://www.diskiplus.ru/>DiskiPlus казино гта 5</a> DiskiPlus бесплатное казино DiskiPlus casino регистрации <a href=https://www.diskiplus.ru>DiskiPlus 1×bet скачать бесплатно</a> DiskiPlus казино фильм DiskiPlus casino промокод DiskiPlus 1×bet зеркало на сегодня DiskiPlus леон букмекерская контора DiskiPlus unlim casino DiskiPlus vodka casino DiskiPlus 1×bet официальный xbet
#1726 Charlesgunnyhttp://filmkachat.ru
казино 1× slots официальный сайт
Можно ли наваривать на бездепозитных бонусах? Это не работа, здесь как повезет, в в любом предложенном безедепе, вы будете откручивать вейджер и выводить, время можно именовать везением, и дополнительной добавкой к вашему бюджету.Наиболее популярные вознаграждения среди гэмблеров – бездепозитные призы казино. Это не дивно, как можно получить благотворительные вращения или виртуальные кредиты, и всем не придётся пополнять счёт, рисковать собственными средствами. Удастся насладиться разнородными развлечениями даже выиграть солидную необходимую, избегая серьёзного риска. <a href=http://filmkachat.ru/>1×slots зеркало сайта</a> Кешбэк-бонус представляет собой возврат фиксированного процента от ставки в случае проигрыша или же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не превышает 10%.Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, solid только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. <a href=https://www.neobienetre.fr/forum-bien-etre-medecines-douces-developpement-personnel/topic/real-estate-virtual-tours/>https://www.neobienetre.fr/forum-bien-etre-medecines-douces-developpement-personnel/topic/real-estate-virtual-tours/</a> Бездепозитный приз – это экономическое вознаграждение, которое выдается участнику забавы в казино, для его привлечения и возникновения заинтригованности. Любой посетитель, кот-ый соответствует условиям выдачи сходственного бездепозитного бонуса, может претендовать на получение вышеуказанного приза. Такое поощрение считается наиболее действенным методом, дающим возможность стартовать при, не вкладывая личных материальных средств.Бездепозитный приз – это экономическое вознаграждение, коие выдается участнику игры в казино, для его привлечения и возникновения заинтригованности. Любой посетитель, кот-ый соответствует условиям выдачи подобного бездепозитного бонуса, имеет претендовать на получение вышеуказанного приза. Такое поощрение является наиболее эффективным методом, дающим возможность стартовать деле, не вкладывая личных материальных средств. 1хслот зеркало <a href=http://cse.google.cf/url?sa=t&url=http://ihouse.su/bitrix/redirect.php?goto=http://zhbi5.ru/bitrix/click.php?goto=https://telegra.ph/Imeyut-li-pravo-sotrudniki-policii-provodit-telefonnye-oprosy-i-trebovat-podpisi-09–23>http://cse.google.cf/url?sa=t&url=http://ihouse.su/bitrix/redirect.php?goto=http://zhbi5.ru/bitrix/click.php?goto=https://telegra.ph/Imeyut-li-pravo-sotrudniki-policii-provodit-telefonnye-oprosy-i-trebovat-podpisi-09–23</a> Как правило, при выводе финансов, от играющего потребуется только сделать минимальный вклад чтобы, чтобы, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом личный счет.В случае установленного лимита на сумму вывода выигрыша с бездепозитного бонуса, игрок не может исключить больше заявленной суммы.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
рабочее зеркало 1хслотс В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, необходимо адресоваться в службу поддержки спустя лайв-чат на сайте казино. <a href=https://sciencewiki.science/wiki/1win_Brasil_Casino_Jogos>https://sciencewiki.science/wiki/1win_Brasil_Casino_Jogos</a> 1×slots зеркало регистрация то дальше необходимо пройти У любого игорного заведения свои правила и обстоятельства. Но, дабы получить призы, нужно выполнить стандартные деяния:1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, в не желайте замерзнуть жертвой жуликов или впустую истратить время;
1×slots зеркало рабочее
Отыграв бездепозитный приз в казино с выводом также придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, случае схожее лимитирование существует, то единоразово исключить получится только сумму, не превышающую объем приобретенного бонуса. <a href=http://xprinters.ru/bitrix/redirect.php?goto=http://cnminsk.by/bitrix/redirect.php?goto=http://tvoku.ru/proxy.php?link=https://telegra.ph/Ponimanie-klyuchevyh-aspektov-i-znacheniya-pravosposobnosti-09–23>http://xprinters.ru/bitrix/redirect.php?goto=http://cnminsk.by/bitrix/redirect.php?goto=http://tvoku.ru/proxy.php?link=https://telegra.ph/Ponimanie-klyuchevyh-aspektov-i-znacheniya-pravosposobnosti-09–23</a> Основное различие никаких, собственно для получения бездепа нужно пополнять баланс в казино. Но кроме сего, есть ряд и других различий: 1×slots бездепозитный бонус за регистрацию Иногда для получения бонусов необходимо связаться с адептами службы поддержки. Удобнее всего с ними беседовать в онлайн-сате, желая времени достаточно запроса по электронной почте.Можно ли зарабатывать на бездепозитных призах? Это не работа, здесь как повезет, если в любом предложенном безедепе, вы будете откручивать вейджер и выводить, это можно назвать везением, и дополнительной добавкой к вашему бюджету.
1×slots зеркало рабочее
Мы делаем акцент на главных положениях верховодил, рассказываем о территориальных лимитированиях и вкратце информируем о других акциях обговариваемого казино. <a href=http://forum.animogen.com/memberlist.php?mode=viewprofile&u=15333>1×slots зеркало видели такую регистрацию на</a> Любой выигрыш по ставке повыше установленного лимита будет являться недействительным. То есть ставка не будет засчитана при отыгрыше, в случае выигрыша его сумма не поступит на счёт клиента — результат забавы несомненно полностью аннулирован. Бездепозитные бонусы казино за регистрацию в 2022 году — это возможность сыграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой или количеством даровых вращений без внесения депо. Не путайте деморежим с реальной игрой без надобности внесения депо. 1×slots зеркало на сегодня <a href=https://forum.bedwantsinfo.nl/member.php?action=profile&uid=96210>https://forum.bedwantsinfo.nl/member.php?action=profile&uid=96210</a> Если при регистрации показать промокод, возможно гарантировано получить приз. Где брать ваучер? Посетите тематические блоги либо форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В заключительное время игорные жилища начали рекламироваться в кинокартинах и сериалах. Присмотритесь и скорее заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных рублей.Бывают ли бездепозитные призы без вейджера? Бывают, если у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино.
1×slots зеркало быструю регистрацию а также мгновенное
Бывают ли бездепозитные бонусы без вейджера? Бывают, если у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино.В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, необходимо обратиться в службу поддержки спустя лайв-чат на веб-сайте казино. <a href=https://troyrxat90001.blogthisbiz.com/36572055/deepnude-the-dark-side-of-ai-and-digital-manipulation>https://troyrxat90001.blogthisbiz.com/36572055/deepnude-the-dark-side-of-ai-and-digital-manipulation</a> 1×slots зеркало регистрация то дальше необходимо пройти
<b>Смотреть еще похожие новости:</b>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=368614>1×slots зеркало регистрация в 1×slots casino</a>
<a href=https://forum.gamesims.sk/memberlist.php?mode=viewprofile&u=7407>1× slots официальный</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
После требуется внести идентификационный платёж. Это стращает начинающих больше всего. Нужно устроить наименьший депо в 100–500 рублей. Таким образом служба защищенности убедиться что, нет, что платёжный способ принадлежит Вам. Данная процедура важна для обеспечивания защищенности игровых счетов. Пример, Ваш акк взломают и выведут средства на свой кошелёк. Будет крайне досадно. Поэтому верификация платёжной системы, это необходимый момент. Список например называемых «запрещенных территорий» прилагается к правилам бонусной программы игорного портала. Обязательно выясните, распространяются ли на вас сходственные наказания.
#1727 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
рейтинг казино букмекерскую контору пин <a href=https://res-publika.com>1×bet официальный 1×bet xyz</a> сайты казино скачать букмекерскую контору <a href=https://m.repost.news/>порно с Алина Загитова</a> 1×bet на андроид Скворцова Вероника Игоревна порно porno Яна Троянова 1×bet скачать приложение на андроид casino betting порно с Юлия Ефимова Елизавета Боярская
DiskiPlus 7k casino скачать DiskiPlus casino рабочее <a href=https://www.diskiplus.ru>DiskiPlus порно с Арина и Дина Аверины, гимнастки</a> DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus pin up casino пин <a href=https://www.diskiplus.ru>DiskiPlus рабочие зеркала казино</a> DiskiPlus казино онлайн бесплатно DiskiPlus скачать 1×bet 1×bet xyz DiskiPlus ограбление казино DiskiPlus порно с Петр Ян (ММА) DiskiPlus официальная казино DiskiPlus casino онлайн DiskiPlus 1×bet официальный сайт
#1728 Charlesgunnyhttp://filmkachat.ru
1×slots официальный регистрация
В количестве случаев бесплатные призы начисляются в кредитах, коие нельзя незамедлительно исключить со счета. Прежде их нужно отыграть по установленным правилам. Эти требования принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже.В лицензионных бездепозитных казино играть в азартные забавы действительно безопасно. Наличие лицензии подтверждает что, этот прецедент, что клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP. <a href=http://filmkachat.ru/>1×slots промокод при регистрации</a> Раздача призов может быть приурочена к разным датам: календарные дни, дни рождения игроков, юбилей открытия казино и т. Д. Подарок выдается в виде средств, фриспинов или баллов для накопления и обмена на услуги оператора. Если юзер получает выигрыш, средства начисляются на его счет. Для вывода этой суммы придется выполнить ряд притязаний. <a href=https://www.hoyolab.com/article/27052984>https://www.hoyolab.com/article/27052984</a> 1×slots зеркало регистрация то дальше необходимо пройти <a href=https://hp.dragonland-radio.de/profile.php?lookup=71>https://hp.dragonland-radio.de/profile.php?lookup=71</a>
1×slots регистрация 1×slotscasino 56 online
1×slots зеркало При ирге на бонусные свои запрещается выступать в игровые автоматы с прогрессивным джекпотом и забавы из радела live casino. Кроме как, кое-какие казино дают бездеп на раз либо количество определенных слотов, и в иных играх Вы не сможете на их выступать.Принципиальным отличием бесплатных призов от призов на депозит считается неименье надобности заносить средства на аккаунт. Из-за этого их часто называют бездепозитными (not the slightest down payment bonuses). <a href=http://www.okaywan.com/home.php?mod=space&uid=623400>http://www.okaywan.com/home.php?mod=space&uid=623400</a> Диапазон ставок, коие вправе сделать игрок, кроме лимитирован. Обычно назначать можно небольшую необходимую — в 10–30 руб. За одно вращение.Можно. Вы всегда можете отрешиться от получения бездепозитного приза за регистрацию в казино, же Вы не создадите ставку. 1×slot казино зеркало Игры, в которых можно выступать на бонусные деньги. Проверьте перечень игр, в которых возможно выступать на бонусные средства, возможно они Вам не понравятся и надо тратить своё время на эту промоакцию.Некоторые клубы автоматически начисляют приз на аккаунт игрока последствии исполненья условий получения, но случаются истории, когда бонус надо(надобно) активировать игроку самому. Есть несколько методов активации бонуса:
1×slots зеркало регистрацию более популярный вариант это
Чаще всего, популярные сервисы, эти как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное правило. Финансовые свои выводятся лишь спустя ту платежную систему, коей пользовались для пополнения депозита. Если же игрок получил бездепозитный покерный приз, потребуется восполнить счет на наименьшую сумму, кот-ая составляет обычно 10 долларов. <a href=http://netvoyne.ru/user/JulesGeova/>http://netvoyne.ru/user/JulesGeova/</a> Максимальная ставка ? устанавливается в денежной счета и ограничивает объем ставки за раз спин. В случае ее превышения бонус возможность быть аннулирован. Также в правилах может содержаться запрет на размещение ставок конкретного облика, примеру, по одинаковым шансам в рулетке (то есть, на чет либо нечет, красноватое либо черное и т.д. ).Бесплатные призы казино без депозита возможно получить повторяющий денежных средств на бонусный счет (исключить их можно лишь последствии отыгрыша), фриспинов, забавы либо кешбэк-бонуса. 1×slots официальный сайт зеркало рабочее
1×slots зеркало которую указывали при регистрации кстати
Обычно показатель выше, чем для призов на депозит. Не дивитесь, случае он будет в х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных стран. <a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=706939>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> Для проверки используются сканы паспортов, водительских водительских, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если юзер обнаружен в попытке завести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их владелец попадает в темный перечень. При ирге на лицензионной площадке не стоит опасаться свидетельствовать достоверную персональную информацию (шифрование исключает утечку индивидуальных данных).Размер бонуса. В качестве бездепов обычно начисляют небольшие суммы, а когда речь идет о призах за депо, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино все подарить игроку до 2000$. 4. Заберите презент. Чаще всего бонус активизируется незамедлительно в регистрации. Но случаются истории, когда нужно забежать в собственный офис либо написать в службу.Для вывода средств приз нужно будет отыграть законам, установленным казино. Внимательно ознакомьтесь с правилами акции и вариантами отыгрыша бездепозитного приза до его получения, дабы избежать конфликтных обстановок. казино 1×slots официальный сайт <a href=https://biznes-knigi.com/user/DoctorLazutaMi/>https://biznes-knigi.com/user/DoctorLazutaMi/</a> Акции распространяются как на все забавы казино, так и на узкий перечень. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino прочие. Промо может обхватывать разработки 1-го производителя. Бездеп не пересекается с иными промоакциями казино. Если на сайте предусмотрен кэшбек, он не начисляется за ставки, сделанные бонусными средствами. Для идентификации платежных реквизитов игрока возможность понадобиться пополнение счета на минимальную сумму.Если вы избираете испытанное лицензионное интернет казино и выполните все обстоятельства получения бездепозитного бонуса, проблем с получением презента у Вас не возникнет.
1 хслот регистрация в 1×slots casino
Если вы выбираете испытанное лицензионное интернет казино и сделайте все условия получения бездепозитного бонуса, проблем с получением презента у Вас не возникнет. Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша бонусов. Заведения практически устанавливают наивысшую ставку, допустимую по условиям вейждера.Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, чтобы замечена вероятность вывести выигрыш. <a href=http://hitch.su/bitrix/redirect.php?goto=http://mos.gallery/bitrix/redirect.php?goto=http://alt1.toolbarqueries.google.com.do/url?q=https://teletype.in/@urist555/bLO-O8PeWf2>http://hitch.su/bitrix/redirect.php?goto=http://mos.gallery/bitrix/redirect.php?goto=http://alt1.toolbarqueries.google.com.do/url?q=https://teletype.in/@urist555/bLO-O8PeWf2</a> Важно, убедитесь в том, что ранее не регились в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи.Все обожают получать подарки. Согласитесь, почти каждый играющий человек несомненно сильно рад, случае получит безвозмездный подарок для игры в онлайн казино просто за регистрацию или же приз за внесенный депозит, так именуемые приветственные бонусы для новых игроков. Соответственно эти интернет клубы будут больше востребованы и преимущественны у игроков при выборе казино для игры. Топ казино непрерывно обновляется и прибавляются свежие и увлекательные игровые клубы с привлекательной бонусной политикой и всеми возможными привилегиями, к которым относятся такие бонусы как фриспины за регистрацию, денежные бездепозитные бонусы, а щедрые призы за внесенный депозит. 1×slots сайт Такой казино приз без депозита за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это словно какая-то конспирация одобрения под бездепозитный. Суть всего этого сводится к тому, что геймеру на час выдается, например, 1000 $, а реклама твердит про, собственно каждой выигрыш возможно несомненно в оставить при для. Но в играющий серьезно отнесется к данному предложению, то он попросту растеряет время. Ведь игроку нужно будет выступать не в основном аккаунте, а в тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (и всей тысячи) в управляла вступят конкретные условия, где будет сказано, собственно наибольшей суммой победы возможность быть только двести долларов и деньги можно применять только в приза на 1-ый лепта с вейджером 25 от суммы гонорары плюс сам депозит. По итогу выйдет, собственно игрок выигрывал себе 200% бонус с вейджером на определенную сумму. Короче говоря, это все надо вашего медли.
<b>Смотреть еще похожие новости:</b>
<a href=https://omkor.ac.th/Question-Answer/viewtopic.php?f=3&t=53923&p=707283#p707283>1хслотс казино зеркало</a>
<a href=http://forum.lesprom.org/threads/1×slots-zerkalo-sajta.197/>1×slots зеркало сайта</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Практически все интернет казино с бездепозитным призом за регистрацию учитывает программку преданности — систему одобрения постоянных посетителей, которая состоит из множества значений. При достижении игроком очередного значения на его счёт поступает бонус. Чем выше степень — что, этим щедрее бонус. Также учтите, что кое-какие игровые платформы сузивают перечень государств, коие готовы получить предложенный бездепозитный приз за регистрацию. К образцу, существуют онлайн-заведения, выдающие сходственные бонусы только обитателям определенных государств. К образцу, интернет казино 777 Оригинал предоставляет бездепозитный бонус только игрокам из России и стран СНГ. Или напротив, снабжают вознаграждением всех, считая жителей некоторых стран (следует сего, стопам внимательно изучать перечень, дабы впоследствии не возникло практически вопросов и претензий).
#1729 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Мира Андреева (теннис) 1×bet зеркало на сегодня <a href=https://rhymes-punches.com/>рабочее казино</a> casino играть casino игровой автомат <a href=https://kompromat1.online/>букмекерская контора официальный сайт скачать</a> Чулпан Хаматова Радченко Светлана Юрьевна порно кент казино яндекс игры казино часы казино 1×bet на андроид букмекерские контора ап
DiskiPlus вывод казино DiskiPlus казино смотреть онлайн <a href=https://www.diskiplus.ru/>DiskiPlus букмекерская контора бетсити</a> DiskiPlus сайты казино DiskiPlus 1×bet рабочее на сегодня <a href=https://www.diskiplus.ru/>DiskiPlus Валентина Матвиенко порно</a> DiskiPlus скачать 1×bet DiskiPlus up casino DiskiPlus cat casino DiskiPlus рокс казино DiskiPlus Крючкова Полина Викторовна порно DiskiPlus играющие казино DiskiPlus казино вулкан
#1730 1win_kbsnhttp://1win6041.ru
1win играть <a href=https://1win6041.ru/>https://1win6041.ru/</a> .
#1731 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее на сегодня
Это также благотворительные деньги, коие поступают на аккаунты новоиспеченных в последствии регистрирования. А особенность таких призов состоит в том, собственно обретенные финансы непременно идет использовать в продолжении назначенного медли.Для получения приза надо(надобно) ознакомиться с программой лояльности казино и сделать ставки на необходимую, необходимую для перехода на грядущий уровень. <a href=http://filmkachat.ru/>скачать 1×slots официальный сайт</a> <a href=https://www.iotappstory.com/community/forum/5-support/4455-interior-design-fair-2025-global-innovation-design-trends>https://www.iotappstory.com/community/forum/5-support/4455-interior-design-fair-2025-global-innovation-design-trends</a> Так собственно сможете неустрашимо региться без всяких раздумий. Фортуна сейчас точно на вашей стороне. Не побаивайтесь, ведь следствие какого либо ущерба Вам абсолютно не угрожает. С такими бонусами как без пополнения, Вы остаетесь только в плюсе, но не как не в минусе.Многие азартные клубы ограничивают сумму вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании акции, суммы Вы не можете исключить. Разница будет аннулирована, Вы даже не можете делать на нее ставки. 1×slots рабочее зеркало на сегодня <a href=https://trueanal.org/user/Travisson/>https://trueanal.org/user/Travisson/</a> Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.
1×slots бездепозитный бонус за регистрацию
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=50767>1×slot зеркало рабочее этих способов предполагает регистрацию</a> 1хслотс 1хслотс регистрация перейти на 1×slots Наличие у игрока второго аккаунта. Запрещено делать количество профилей для неоднократного получения бездепов.Приветственный приз без депозита ? подарок за регистрацию. Выдается деньгами, фриспинами либо баллами. В заключительном случае бонусные баллы применяются для участия в турнирах либо обмена на настоящие средства. <a href=https://civilpatrol.info/?q=petition/81116/iz-chego-sostoit-dieta-eleny-malyshevoy>https://civilpatrol.info/?q=petition/81116/iz-chego-sostoit-dieta-eleny-malyshevoy</a> 1×slots casino регистрация 1×slotscasino09k online Игры, в возможно играть на бонусные средства. Проверьте перечень игр, каких можно выступать на бонусные средства, вполне они Вам не понравятся и надо тратить своё время на такую промоакцию.
1×slots сайт
<a href=http://www.pirobot.co.uk/doku.php?id=1win_bet_brasil_online>http://www.pirobot.co.uk/doku.php?id=1win_bet_brasil_online</a> 1×slots зеркало на сегодня Изучить верховодила и обстоятельства получения бездепозитных бонусов казино, Вы можете у нас на сайте в разделе с призами или на официальном сайте избранного Вами казино. Если возможности найти нужную информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал или по электронной почте.Чем ниже велечину вейджера, тем легче отыграть и исключить приз. Если Вы расчитываете заработать на бездепе, но просто ознакомиться с свежим игровым клубом, то стоит избегать призов с высочайшим вейджером их почти не реально отыграть. С ними Вы можете лишь протестировать забавы заведения.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
С не отыгранным бонусом запрещается превышать размер наибольшей ставки. Нарушение сего условия в аннулирование выигрыша. Во всех легальных онлайн-казино Беларуси необходимо подтверждение паспортных данных для игры — это требование правительства страны. 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=http://d90894u1.bget.ru/user/DoctorLazutaMl/>http://d90894u1.bget.ru/user/DoctorLazutaMl/</a> Бездепозитные призы настоящими средствами, коие возможно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадали.Такие одобрения дозволяют безвозмездно протестировать новое казино, разобраться с игровым ходом интернет слотов, заработать и исключить маленькую сумму средств.
1×slots официальный сайт мобильная версия
Подтверждение регистрации. Казино требуют привязки профиля к электронному адресу и номеру аппарата. Для этого на e-mail отправляется послание ссылаясь, а на телефон ? текстовое известье с кодом. Получать информацию о самых выгодных призах можно без постоянного мониторинга новостей казино. Мы брали эту задачу на себя и постоянно следим за услугами операторов, избирая наихорошие из их. В этом разделе собраны последние бездепы, промокоды к ним и условия их активации. Список промоакций периодически пополняется. В топ вошли самые новые бездепозитные бонусы за регистрацию в казино 2020, временные и закрытые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и другим критериям. Если срок действия промоакции истек, она удаляется из списка.Итак, чтобы бесплатные бонусные кредиты трансформировались в реальные средства, которыми возможность управлять по своему усмотрению, их нужно отыграть. Вейджер по уточнять в правилах онлайн-казино. <a href=https://images.google.co.ck/url?q=https://doctorlazuta.by/>https://images.google.co.ck/url?q=https://doctorlazuta.by/</a> Похожим образом работает 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения клиента либо в связи с получения им VIP-статуса. Подарок предоставляется в воззвания в поддержку и проверки.Маркетинговая деятеля всех игорных интернет-клубов обязана носить различный характер. И в гонорары на депо служат чтобы, чтобы, чтобы провоцировать заносить депозиты и поощрять уже быть юзеров, то бездепозитный приз в казино либо приз за регистрацию в казино, этого всего, рассчитан на расширение базы потребителей. 1×slots casino регистрация на сайте
<b>Смотреть еще похожие новости:</b>
<a href=http://u0382101.isp.regruhosting.ru/index.php/forum/general-questions-and-how-tos/68883-otzyvy-o-tovarakh>1хслот 1хслотс регистрация перейти на 1×slots</a>
<a href=https://www.mentalhealth-world.org.uk/forums/index.php?/topic/96719-%D0%B7%D0%B5%D1%80%D0%BA%D0%BB%D0%BE-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-1×slots/>зеркло казино 1×slots</a>
<a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=911793#pid911793>1×slots подтвердит вашу регистрацию если говорить</a>
<a href=https://adminclub.org/showthread.php?tid=294599>1×slots зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для ревизии применяются сканы паспортов, водительских удостоверений, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если юзер замечен в попытке завести вспомогательный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный перечень. При игре на лицензионной площадке не стоит бояться свидетельствовать достоверную индивидуальную информацию (шифрование исключает утечку персональных данных). Фриспины предназначены для применения в видео слотах. Внимательно ознакомьтесь с условиями – часто их выдают на кое-какие автоматы. В зависимости от клуба, у вас получится сделать определённое количество ставок. Кстати, продвинутые игорные дома позволяют запускать каждых «одноруких бандитов».
#1732 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Голикова Татьяна Алексеевна 1×bet зеркало рабочее на сегодня <a href=https://th-royalgclub.com/>1×bet сайт</a> порно с Евгения Медведева, фигуристка букмекерская контора <a href=https://res-publika.com>казино сегодня</a> казино фильм смотреть онлайн демо казино фреш казино официальная казино porno Мира Андреева (теннис) казино пину порно с Бондаренко Анастасия Борисовна
DiskiPlus фреш казино DiskiPlus r7 casino <a href=https://www.diskiplus.ru>DiskiPlus 1×bet скачать приложение</a> DiskiPlus top casino DiskiPlus retro casino <a href=https://diskiplus.ru/>DiskiPlus porno Яна Троянова</a> DiskiPlus официальная казино DiskiPlus pin up casino пин ап DiskiPlus porno Дарья Мороз DiskiPlus ставки на спорт букмекерские конторы DiskiPlus казино вулкан DiskiPlus porno Екатерина Ефременкова, шорт-трекистка DiskiPlus букмекерская контора мостбет
#1733 Charlesgunnyhttp://filmkachat.ru
1× slots casino официальный сайт
Этот образ бонуса несомненно добавлен на Ваш акк последствии удачной процедуры регистрации с внедрением номера аппарата. Если выбрать иной метод сотворения учетной записи, бездеп не несомненно добавлен на Ваш акк. <a href=http://filmkachat.ru/>1× slots сайт</a> Для получения выигрыша требуется выполнить условия казино. Чаще всего игроку необходимо поставить конкретную необходимую, но теснее из собственных денег. Она рассчитывается из совместного размера выигрыша за все время использования бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, в пользователь выиграл 1000 рублей, а множитель сочиняет х30, исключить средства возможно будет, сделав ставки на 30 000 руб.Бездеп с фриспинами имеет обхватывать всю коллекцию игр на веб-сайте либо разработки одного провайдера. Обычно предлагается определенный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш может быть выведен после такого, как пользователь отыграет данную сумму. Возможность расценить полный функционал слотов — основное достоинство данной разновидности. Игроку становятся доступны те опции, коие отсутствуют в демонстрационном режиме, а вероятность выиграть реальные средства прибавляет ясных азартных ощущений. <a href=https://allmylinks.com/kalinka0588>https://allmylinks.com/kalinka0588</a> Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам запрещено начислять бонусы посетителям, не имеющим валютных средств на счете. Мы предлагаем рассмотреть актуальные призы онлайн-казино с лицензией, коие соблюдают законодательство РБ. 1×slots casino регистрация 1×slotscasin online <a href=https://trade-britanica.trade/wiki/Can_You_Access_Virtual_Sports_Through_The_1×bet_APP>https://trade-britanica.trade/wiki/Can_You_Access_Virtual_Sports_Through_The_1×bet_APP</a> Верификация необходима для добавочной защищенности и помочь техподдержке выявить бонусхантеров и жуликов. Кстати, рядах платформах выводы солидных сумм доступны лишь в подтверждения личности.Максимальная ставка ? уточняется в денежной счета и ограничивает объем ставки за раз спин. В случае ее превышения приз имеет быть аннулирован. Также в правилах возможность содержаться запрет на размещение ставок конкретного облика, к, по одинаковым шансам в рулетке (другими, на чет либо нечет, красноватое либо черное и т.д. ).
1×slot зеркало
Бездепозитный приз за регистрацию в казино с выводом средств в 2022 году — Наш ресурс дает игрокам важную информацию о самых свежих, великодушных и проверенных призах в интернет казино, коие обновляются любой денек. 1×slots регистрация 1×slots review live Все благотворительные бонусы кажутся заманчивыми. Кто же откажется от способности поиграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далеко не все бездепозитные призы в равной степени презентабельны для рассудительного посетителя. <a href=https://wallmine.com/u/glavdorogadv2509>https://wallmine.com/u/glavdorogadv2509</a> Операторы гемблинга заявляют, что например они дерутся с бонус-хантерами. Впрочем, критики считают, что данным казино пытаются устроить из случайного гостя неизменного игрока.Чтобы других увериться в превосходствах бездепозитных бонусов, довольно зарегистрироваться в казино и получить поощрение. 1×slots рабочее зеркало
1хслотс 1хслотс регистрация перейти на 1×slots
Почти все игровые клубы требуют подтверждение контактных данных игрока для получения бездепозитного бонуса.Большинство интернет-казино из нашего топ-10 готовы повеселить вас эксклюзивными акциями. Читайте о их в обзорах и на форуме. <a href=https://tdmromania.ro/member.php?action=profile&uid=2635>https://tdmromania.ro/member.php?action=profile&uid=2635</a> К сожалению, нет. Почти все казино, просят внесение желая бы 1-го малого депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, что исключить средства разрешается лишь на ту платежную систему, с коей был изготовлен депозит. 1×slots коды
1×slots регистрация 1×slots casino c2d ru
В интернет-сети всегда возможно найти перечни более модных и гарантированных поощрительных программ от популярных онлайн-казино.Шаг 4. Активация. Внимательно выучите условия, информацию по ограничениям и сроке деянья бонусного предложения. Разобравшись с правилами, можно активировать приз в личном офисе (иногда ? с использованием промокода) либо по запросу в саппорт. Бездепозитный бонус за регистрацию в казино — это стартовый презент вид валютного начисления либо даровых вращений для свежих игроков заведения, для получения которого не нужно вносить депо. Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша призов. Заведения практически устанавливают максимальную ставку, допустимую по условиям вейждера. 1×slots официальный сайт мобильная версия <a href=https://mobilka.mobi/user/Julesstork/>https://mobilka.mobi/user/Julesstork/</a>
1×slots актуальное зеркало
Большинство интернет-казино из нашего топ-10 готовы повеселить вас эксклюзивными промоакциями. Читайте о их в обзорах и на форуме.Для получения выигрыша потребуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить определенную сумму, но теснее из личных денег. Она рассчитывается из совместного объема выигрыша за всегда использования бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, если юзер выиграл 1000 руб., а множитель сочиняет х30, вывести деньги можно несомненно, сделав ставки на 30 000 рублей. <a href=https://erickwisa86306.slypage.com/30816439/ai-nude-revolutionizing-content-moderation-and-privacy-protection>https://erickwisa86306.slypage.com/30816439/ai-nude-revolutionizing-content-moderation-and-privacy-protection</a> Также существуют онлайн-платформы азартных игр, коие применяют раздачу бездепозитных призов в особые даты (как для казино, так и для игрока). Помимо этого, действующие геймеры кроме имеют вероятность получить схожие призы за собственную работа (к примеру, за повышения уровня или за схожие заслуги). 1×slots casino регистрация 1×slots review live На критериях отыгрыша даровых бонусов по тормознуть подробнее. С ними связаны нюансы, которые невозможно забыть без внимания.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.dis-course.net/viewtopic.php?t=658678>1×slots casino регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Кешбэк-бонус представляет собой возврат фиксированного процента от ставки когда проигрыша либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%.
#1734 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Александр Соболев (футбол) макао казино <a href=https://glvk.guru/>Окладникова Ирина Андреевна порно</a> win win casino pin up casino пин ап <a href=https://slon-ru.com/>gama casino</a> казино в россии porno Катерина Шпица porno Яна Троянова пина casino порно с Васильева Татьяна Викторовна бесплатно фильм казино 1×bet официальный слоты
DiskiPlus Валентина Матвиенко порно DiskiPlus казино ставка <a href=https://diskiplus.ru>DiskiPlus букмекерские конторы без депозита</a> DiskiPlus casino buzz DiskiPlus официальная казино <a href=https://diskiplus.ru>DiskiPlus казино вулкан</a> DiskiPlus Крючкова Полина Викторовна порно DiskiPlus pin ап casino DiskiPlus сайт винлайн букмекерская контора DiskiPlus казино онлайн DiskiPlus casino зеркало сегодня рабочее DiskiPlus porno Нина Пирогова, хоккеистка DiskiPlus порно с Виктория Синицина, фигуристка
#1735 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
В истиннее время получить бонус за регистрацию в казино очень просто. Почти каждый игорный дом с готовностью предоставит средства или бесплатные вращения. Многие игроки используют данным и не стыдятся регистрироваться в любом клубе с прибыльными условиями. Кстати, это замечательная вероятность выдумать выигрышную стратегию и сорвать куш. <a href=http://filmkachat.ru/>1×slots зеркало проходить регистрацию это отличный вариант</a> <a href=https://acrobat.uservoice.com/forums/935259-acrobat-web-beta-internal/suggestions/49479029-%D0%BF%D1%80%D0%BE%D1%84%D0%B5%D1%81%D1%81%D0%B8%D0%BE%D0%BD%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2-%D0%BA%D0%B8%D0%B5%D0%B2%D0%B5-%D0%BE%D1%81%D0%BE%D0%B1%D0%B5%D0%BD%D0%BD%D0%BE%D1%81%D1%82%D0%B8-%D0%B8>https://acrobat.uservoice.com/forums/935259-acrobat-web-beta-internal/suggestions/49479029-%D0%BF%D1%80%D0%BE%D1%84%D0%B5%D1%81%D1%81%D0%B8%D0%BE%D0%BD%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2-%D0%BA%D0%B8%D0%B5%D0%B2%D0%B5-%D0%BE%D1%81%D0%BE%D0%B1%D0%B5%D0%BD%D0%BD%D0%BE%D1%81%D1%82%D0%B8-%D0%B8</a> Бездепозитные бонусы за регистрацию являются одним из самых популярных методов привлечения новых игроков в онлайн-казино, потому что они предоставляют игрокам вероятность опробовать казино, особенно игровые автоматы, и вполне, выиграть реальные деньги. 1×слот регистрация в 1×slots casino <a href=https://systemcheck-wiki.de/index.php?title=Benutzer:MaybellEichmann>https://systemcheck-wiki.de/index.php?title=Benutzer:MaybellEichmann</a>
1×slots зеркало видели такую регистрацию на
<a href=https://nauc.info/forums/viewtopic.php?t=20869224>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a> казино 1×slots Бонус начисляется игроку незамедлительно последствии регистрации и прохождения верификации в казино и не настятельно от посетителя внесения депозита. Как правило, объем бонуса в схожем случае довольно скромный, однако разрешает новичкам познакомиться с забавой без риска реальными средствами.Риск-игра по равным шансам – Также казино возможность воспрещать исполнять обстоятельства по отыгрышу счет раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких других играх. <a href=http://polishcrazyclan.ugu.pl/member.php?action=profile&uid=283286>http://polishcrazyclan.ugu.pl/member.php?action=profile&uid=283286</a> 1×slots официальный зеркало Можно. Вы всегда сможете отрешиться от получения бездепозитного приза за регистрацию в казино, же Вы не сделаете ставку.
1×slot зеркало
А ознакомиться с новыми онлайн казино, Вы сможете за счет призов с выводом прибыли, которые Вы можете получить без депо.Чем ниже значение вейджера, что, этим проще отыграть и вывести бонус. Если Вы планируете заработать на бездепе, не просто ознакомиться с новым игровым клубом, то стоит игнорировать призов с высоким вейджером их почти не реально отыграть. С ними Вы можете только протестировать забавы заведения. <a href=http://hongtouwen.com/home.php?mod=space&uid=486516&do=profile>http://hongtouwen.com/home.php?mod=space&uid=486516&do=profile</a> Основное управляло получения бездепа ? творимый акк должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов взыскательно воспрещено. Проверка проводится по имени, адресу электронной почты, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депо нужно соблюдать простую последовательность поступков. 1×slots casino зеркало рабочее При забаве на бонусные свои запрещается выступать в игровые автоматы с прогрессивным джекпотом и забавы из радела exist casino. Кроме как, некоторые казино дают бездеп на один либо некоторое конкретных слотов, и в других забавах Вы не можете на их играть.
1×slots сайт
Заполняя данные в личном профиле, указывайте лишь достоверную информацию, так как Вам придется ее подтвердить дальнейшем при выводе средств.С этими ординарными советами любое казино с призом за регистрацию способно принести в разы больше выгоды и полезности. <a href=http://sofanatki.ekafe.ru/viewtopic.php?f=1&t=2592>1×slots регистрация на сайте 1×slots ru com</a> Доступные игры – В неких азартных играх можно понизить математическое превосходство казино до нескольких 10-х процента. В их количестве многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как управляло, в таких забавах ставки идут в зачет вейджера не полностью. Например, может учитываться лишь 50%. В неких играх бездепозитные призы вообщем нельзя отыгрывать.За счёт спинов получится запустить различные интернет слоты, протестировать стратегии и поднабраться опыта. Фишка том,, что вращения начисляются на топовые аппараты с оригинальными опциями и высокой отдачей. Не забывайте, что в любом акционном предложении учтены особые притязания – временные ограничения, наибольший размер ставки, перечень доступных игр. Минимального оборота. Этот лимит уточняется вейджером — пока игрок не поиграет на установленную сумму, вывод средств несомненно недоступен. 1×slots регистрация <a href=http://cniper.ru/bitrix/redirect.php?goto=http://t-s.by/bitrix/rk.php?goto=http://avantazh48.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/OReEcmyFiNa>http://cniper.ru/bitrix/redirect.php?goto=http://t-s.by/bitrix/rk.php?goto=http://avantazh48.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/OReEcmyFiNa</a> Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных притязаний, кроме неотъемлемой верификации. Если на веб-сайте учтена обязательная процедура подтверждения личности, то вывести выигрыш получится только в проверки данных. Приготовьтесь заполнить анкету и отправить в техподдержку документ, подтверждающий личность.Фриспины предусмотрены для использования в видео слотах. Внимательно ознакомьтесь с критериями – часто их выдают на кое-какие автоматы. В зависимости от клуба, у вас выйдет устроить определённое количество ставок. Кстати, продвинутые игорные дома позволяют запускать любых «одноруких злодеев».
1×slots официальный сайт мобильная версия
Вейджер в переводе с британского означает «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша приобретенного приза, в нашем случае бездепозитного. Число ставок значения — важно лишь набрать сумму, пропорциональную сумме одобрения.Необходимость отыгрыша. Вейджер ситуации выше, чем для бонусов за депо. И пока средства не отыграны, вывести их невозможно. Наиболее знаменитые гонорары между гэмблеров – бездепозитные призы казино. Это не дивно, как можно получить бесплатные вращения или виртуальные кредиты, и при этом не придётся пополнять счёт, рисковать личностными средствами. Удастся насладиться различными веселиями причем выиграть крупную сумму, избегая серьёзного риска. <a href=http://dez-optima.ru/bitrix/rk.php?goto=http://treez.ru/bitrix/redirect.php?goto=http://dogbutik.ru/bitrix/redirect.php?goto=https://telegra.ph/Trebovaniya-k-zastrojke-uchastka-v-2023-godu-09–23>http://dez-optima.ru/bitrix/rk.php?goto=http://treez.ru/bitrix/redirect.php?goto=http://dogbutik.ru/bitrix/redirect.php?goto=https://telegra.ph/Trebovaniya-k-zastrojke-uchastka-v-2023-godu-09–23</a> Срок отыгрыша — это период, который наступает в момент активации бонуса и кончается с его закрытием. Пользователю необходимо уложиться в этот временной зазор, другому призовые средства аннулируются. Казино устанавливают список игр, ставки в засчитываются при расчете отыгранных средств. Если тайтл не входит в этот список, то возможность быть недоступен для загрузки период действия бонусного предложения. 1×slots бездепозитный бонус за регистрацию Многие новички колеблются, что поощрительный приз не нужно несомненно возвращать, и если они выиграли у казино. Это безусловно неопасно и надежно. Выводя выигранные свои, игрок просто одергивает свое участие деле и теряет уникальную вероятность – бесплатно увеличивать личное вещественное положение.
<b>Смотреть еще похожие новости:</b>
<a href=https://communities.leviton.com/threads/1×slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-1×slots-casino-c2d-ru.829/>1×slots регистрация 1×slots casino c2d ru</a>
<a href=https://forum.bandariklan.com/showthread.php?tid=546293>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Игры, каких можно играть на бонусные средства. Проверьте список игр, в возможно играть на бонусные средства, возможно они Вам не понравятся и надо расходовать своё время на такую промоакцию.
#1736 Charlesgunnyhttp://filmkachat.ru
1× slots casino официальный сайт
Такой бесплатный эквивалент средств зачисляется на профиль пользователя после осуществления требований и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений возможен лишь после воплощения вейджеровых критерий.Да, у безвозмездных призов есть дефекты. Прежде всего, они обыкновенно маленькие. Кроме того, условия вейджера по ним всегда строгие. Но все же неимение риска проделывает их очень привлекательными для посетителей. <a href=http://filmkachat.ru/>1×slots казино зеркало</a> 4. Заберите презент. Чаще всего бонус активизируется незамедлительно последствии регистрации. Но бывают ситуации, когда нужно забежать в собственный кабинет или написать в саппорта. <a href=https://steemit.com/watts/@kalinka0588/understanding-the-power-of-a-car-battery-a-comprehensive-guide>https://steemit.com/watts/@kalinka0588/understanding-the-power-of-a-car-battery-a-comprehensive-guide</a> Итак, дабы благотворительные бонусные кредиты трансформировались в реальные средства, которыми продоставляется управлять по собственному усмотрению, их надо(надобно) отыграть. Вейджер стопам уточнять в правилах онлайн-казино.Реже призы без депо начисляются постоянным игрокам. С их поддержкою администрация постарается удержать ценных клиентов или желает поблагодарить за лояльность правильных гостей. Но гораздо чаще для похожих целей используются такие промоакции: 1 х слотс зеркало <a href=http://www.xingfudgy.com/home.php?mod=space&uid=85129>http://www.xingfudgy.com/home.php?mod=space&uid=85129</a>
1×slots регистрация на официальном сайте
Существует ли стратегии для отыгрыша бездепозитных призов? К огорчению нет, на выигрыши или проигрыши с призов, казино или игрок воздействовать имеет, отдача игр случается от создателей игр.3. Подтвердить данные. В зависимости от клуба, нужно привязать телефонный либо почту, показать персональную информацию; <a href=https://nauc.info/forums/viewtopic.php?t=20863078>1×slots зеркало проходить регистрацию это отличный вариант</a> 1×slots официальный сайт зеркало <a href=http://a96549hg.bget.ru/user/JasperbuG/>http://a96549hg.bget.ru/user/JasperbuG/</a> Бездепозитные призы за регистрацию в игровых автоматах для хозяев онлайн-казино являются частью рекламной кампании, направленной на повышение аудитории вебсайта. Так они продвигают свои бренды и завлекают свежих посетителей.Условия вывода выигрыша. В неких заведениях для успешного вывода с бездепозитного приза довольно пополнения баланса и подтверждения личности. В других же клубах, необходимо несколько раз прокрутить собственный депозит. 1×slots зеркало на сегодня
1×slots регистрация на сайте 1×slots ru com
Зарегистрируйтесь. Для регистрации чаще всего достаточно ввести собственный номер телефона и почтовый адрес, последствии чего ввести полученный код из СМС. Возможно, требуется указать промокод. В правилах промоакции несомненно написано, где его бы включать. Иногда это хотелось делать при регистрации, иногда — уже в сотворения личного кабинета, на отдельной странице.Поспешите арестовать бездепозитные бонусы за регистрацию в казино из представленного перечня. Все платформы не только ведут законную работа, хотя и порадуют правдивыми плодами забавы, высочайшей отдачей, быстрыми выплатами. Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном сайте и выполните вход в собственный кабинет, дабы арестовать благотворительные вращения с вейджером х40; <a href=https://hothdporn.pro/user/RalphTiend/>https://hothdporn.pro/user/RalphTiend/</a> Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном веб-сайте и выполните вход в индивидуальный кабинет, чтобы забрать безвозмездные вращения с вейджером х40; казино 1×slots официальный сайт
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
<a href=http://sofanatki.ekafe.ru/viewtopic.php?f=1&t=2425>1×slots регистрация 1×slotscasino09k online</a> Бездепозитные бонусы за регистрацию являются одним из самых популярных способов вербования свежих игроков в онлайн-казино, поэтому собственно они деют игрокам вероятность опробовать казино, тем игровые автоматы, и вполне, выиграть настоящие деньги.Представленные на этой странице лучшие бездеп бонусы в казино за регистрацию в 2022 году имеют подходящие обстоятельства. После кропотливого анализа редакция портала составила рейтинг спецпредложений, в котором гости Casino.ru все сортировать список по нескольким критериям: по сумме, вейджеру, наибольшей сумме вывода и т.д. зеркло казино 1×slots <a href=https://mephedrone-synthesis.webnode.ru/glavnaya-doroga-avtoshkola-vladivostok/>https://mephedrone-synthesis.webnode.ru/glavnaya-doroga-avtoshkola-vladivostok/</a> Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации бонуса без депо. Внимательно прочтите до конца. Многие новички делают промахи на шаге регистрации и потому имеют получить подарок.С иной стороны, гораздо проще отобрать бездепозитные фриспины за регистрацию в казино и прямо момент начать вертеть барабаны в наилучших слотах. Главная особенность спинов никаких, собственно они предназначены для топовых автоматов. Удастся не только пройти вспомогательные раунды, но и прирастить сумму выигрыша, заработать респины и другие внутриигровые подарки.
рабочее зеркало 1×slots
Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных обстановок с казино, когда последствии отыгрыша бездепа вам не дадут вывести солидную необходимую выигрыша.Постарайтесь отыграть вейджер, чтобы появилась вероятность забыть заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные приборы. Вы можете получить выигрыш на электронной кошелёк, карту, телефон. <a href=http://vfb7968c.bget.ru/user/DoctorLazutaEt/>http://vfb7968c.bget.ru/user/DoctorLazutaEt/</a> При пользовании бездепозитным призом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют некоторое видов лимитов:1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, случае не хотите замерзнуть жертвой жуликов или впустую потратить время; казино 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=http://www.gamers4life.com/forums/f20/asthalin-prix-vilvoorde-848375/>1×slots быструю регистрацию а также мгновенное</a>
<a href=https://forum.gamesims.sk/memberlist.php?mode=viewprofile&u=7407>1хслотс официальный сайт зеркало</a>
<a href=http://link.5nx.ru/viewtopic.php?f=5&t=12257>1×slots регистрацию процедура займет всего лишь</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чаще всего применяются коды. Их нужно вносить в особые окошки регистрационной анкеты, случае речь о пригласительных бонусах, либо в определенном разделе личного офиса игрока. Чтоб получить крупный выигрыш, выбирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша.
#1737 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up casino пин порно с Сергей Бобровский (хоккей) <a href=https://slon-ru.com/>casino betting</a> порно с Абрамченко Виктория Валериевна порно с Алексей Миранчук (футбол) <a href=https://glvk.guru/>champion casino</a> играющие казино бесплатно фильм казино порно с Анна Щербакова, фигуристка casino рабочее casino рабочее зеркало карты казино porno Игорь Акинфеев (футбол)
DiskiPlus сайты казино DiskiPlus Ирина Горбачева <a href=https://www.diskiplus.ru>DiskiPlus лучшие онлайн казино</a> DiskiPlus кент casino DiskiPlus 1×bet официальный сайт 1×bet xyz <a href=https://www.diskiplus.ru>DiskiPlus человек казино</a> DiskiPlus скачать 1×bet на андроид бесплатно DiskiPlus порно с Гатагова Ольга Анатольевна DiskiPlus казино фильм DiskiPlus скачать сайт букмекерской конторы DiskiPlus Елена Лядова DiskiPlus пинко casino DiskiPlus пари букмекерская контора
#1738 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало на сегодня
Как управляло, при выводе денег, от играющего потребуется только сделать минимальный лепта чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом собственный счет.Бездепозитные призы казино за регистрацию в 2022 году — это вероятность поиграть за счёт заведения. Казино даёт посетителю шанс пользоваться определённой суммой либо количеством даровых вращений без внесения депо. Не путайте деморежим с реальной забавой без надобности внесения депозита. <a href=http://filmkachat.ru/>1хслот зеркало</a> Призовые начисления без депо имеют предоставляться для роли в турнирах онлайн казино. Потратить перечисленные средства можно исключительно масштабах этой акции. Условия их проведения содержат ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться таким предложением, превосходнее выучить его верховодила. <a href=https://buymeacoffee.com/poppoppopkb/international-furniture-shows-industry-events-trade-exhibitions>https://buymeacoffee.com/poppoppopkb/international-furniture-shows-industry-events-trade-exhibitions</a> Вознаграждения за получение VIP-статуса ? начисляются в рамках программы преданности при достижении еще значения либо выдаются персонально менеджерами службы. 1×слот регистрация в 1×slots casino <a href=http://www.joaskin.co.kr/bbs/board.php?bo_table=free&wr_id=280484>http://www.joaskin.co.kr/bbs/board.php?bo_table=free&wr_id=280484</a>
1×slots коды
<a href=https://pbtur.com.br/users/jameshex>казино 1×slots официальный сайт</a> 1хслотс рабочее зеркало на сегодня Во время забавы в казино, выигрыши, приобретенные благодаря безвозмездным призовым фондам, суммируются и включаются в общую сумму для отыгрывания. Однако, если фортуна улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно допустит вывести финансовые свои. Сумма вывода несомненно находиться от лимита, утвержденного непосредственно в данном учреждении. Поэтому, внимательно надо(надобно) читать управляла выдачи анлимитных депо. <a href=http://www.darkml.net/bbs/home.php?mod=space&uid=8082417>http://www.darkml.net/bbs/home.php?mod=space&uid=8082417</a> У любой игры свои притязания по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система засчитает любую ставку. В рулетке и покере сделать это гораздо сложнее. Именно потому так важно пристально разбирать условия получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой этой, то новенькие попросту «спустят приз на ветер». 1×slots мобильная версия войти казино
1×slots промокод при регистрации 2025
Многие новички колеблются, что поощрительный приз не нужно несомненно возвращать, и если они выиграли у казино. Это безусловно неопасно и надежно. Выводя выигранные свои, игрок просто одергивает свое участие деле и теряет уникальную вероятность – бесплатно увеличивать личное вещественное положение.Но а случае вы теснее профи по онлайн казино, кликаем на красноватую кнопку «Получить» и Вы механически перейдете в онлайн казино; <a href=http://dev.may-green.ru/forum/user/16205/>http://dev.may-green.ru/forum/user/16205/</a> Как прочие акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такого предложения являются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает свежих гостей и дозволяет им составить впечатление о функционале, не рискуя вескими суммами. 1×slots официальный зеркало рабочее
1хлот регистрация в 1×slots casino
В интернете большое известных игорных площадок с красивыми акционными предложениями. Однако внимательно читать условия десятков предложений в надоест, ну и время отнимет количество. Поэтому наша команда подготовила ТОП-3 сайтов с лучшими бездепозитными бонусами: В наше время довольно просто получить приз за регистрацию в казино. Практически любой игорный дом с радостью начисляет средства или безвозмездные вращения. Многие гэмблеры используют данным и не смущяются региться в каждом клубе с прибыльными критериями. Кстати, это замечательная возможность выработать победную стратегию и сорвать джекпот. На данном разделе портала регулярно публикуются обзорные заметки, в которых рассматриваются бесплатные бонусы наилучших интернет-казино. Информация структурирована по нескольким пунктам, включая главные: 1×slots официальный сайт мобильная версия <a href=http://ch-marine.co.kr/bbs/board.php?bo_table=qna&wr_id=51235>http://ch-marine.co.kr/bbs/board.php?bo_table=qna&wr_id=51235</a> Диапазон ставок, которые вправе сделать игрок, того лимитирован. Обычно назначать возможно небольшую сумму — около 10–30 руб. За одно вращение.Для верификации номера аппарата, в собственном профиле изберите опцию „Подтвердить номер аппарата“ и введите в соответствующее поле код, приобретенный в sms-сообщении.
1×slots зеркало видели такую регистрацию на
Существует ли стратегии для отыгрыша бездепозитных бонусов? К огорчению нет, на выигрыши или проигрыши с призов, казино либо игрок воздействовать не может, отдача игр случается от создателей игр. <a href=http://lublinianin.pl/bez-kategorii/ile-warta-jest-pamiec-a-ile-niepamiec/?unapproved=463814&moderation-hash=bc6c82bb7c158ddd3c6c6d88effcfec9#comment-463814>http://lublinianin.pl/bez-kategorii/ile-warta-jest-pamiec-a-ile-niepamiec/?unapproved=463814&moderation-hash=bc6c82bb7c158ddd3c6c6d88effcfec9#comment-463814</a> 1×slots регистрация 1×slots review live B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.topboard.org/threads/1×slot-zerkalo.630756/>1хслот зеркало</a>
<a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=412037>1×slots регистрация 1×slotscasino09k online</a>
<a href=https://forum.visiteachapada.com/viewtopic.php?f=19&t=7543>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Акции распространяются как на все забавы казино, так и на узкий перечень. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и другие. Промо имеет обхватывать разработки одного производителя. Бездеп не пересекается с другими промоакциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, изготовленные бонусными средствами. Для идентификации платежных реквизитов игрока возможность потребоваться пополнение счета на наименьшую сумму.
#1739 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало
Следует подчеркнуть, собственно бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом.Обычно для получения бонусов без депо, казино выдвигает приклнные и вполне выполнимые условия, хотя есть ряд действий коие воспрещены и все повлечь за собой противные результаты: <a href=http://filmkachat.ru/>1×slots сайт</a> В случае установленного лимита на необходимую вывода выигрыша с бездепозитного бонуса, игрок не сможет вывести больше заявленной суммы.Промокод – определённая комбинация знаков, которую необходимо установить в соответствующее поле при создании учетной записи или активировать в собственном профиле игрока в разделе с бонусами. <a href=https://www.arrl.org/forum/topics/view/4344>https://www.arrl.org/forum/topics/view/4344</a> 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=https://clients1.google.cd/url?q=https://doctorlazuta.by/>https://clients1.google.cd/url?q=https://doctorlazuta.by/</a>
1×slot рабочее зеркало
Если вы выбираете проверенное лицензионное онлайн казино и выполните все условия получения бездепозитного приза, трудностей с получением презента у Вас не возникнет. 1×slots casino регистрация 1×slotscasin online Итак, чтобы бесплатные бонусные кредиты трансформировались в настоящие средства, которыми возможность распоряжаться по собственному усмотрению, их надо(надобно) отыграть. Вейджер идет уточнять в правилах онлайн-казино.Вообще перейдя в казино — управляла одинаковы в получении бездепозитных бонусов, в стереотипные управляла входит: подтвердить эл. Почту и телефон, заполнить свой собственный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ. <a href=https://klub.randevau.hu/profile-25194/>https://klub.randevau.hu/profile-25194/</a> 1×slots акции
1×slots зеркало рабочее
Чаще всего применяются коды. Их нужно заносить в специальные окошки регистрационной анкеты, если речь идет о пригласительных призах, либо в особом разделе личного кабинета игрока.Не стоит сразу же отрицаться от приветственных даров в сходственных казино. Администрация готова начислить деньги или фриспины, хотя сначала работники должны увериться, что вы не мошенник. Дело никаких, собственно развелось очень много охотников за бонусами. Они выучились врать систему и наваривать крупные суммы средств. <a href=http://loveland-shop.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://toolbarqueries.google.nr/url?q=http://prostonomer.ru/bitrix/click.php?goto=https://teletype.in/@urist555/S6zciQ4kfDE>http://loveland-shop.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://toolbarqueries.google.nr/url?q=http://prostonomer.ru/bitrix/click.php?goto=https://teletype.in/@urist555/S6zciQ4kfDE</a> Для получения бонуса надо(надобно) ознакомиться с программкой преданности казино и сделать ставки на необходимую, необходимую для перехода на следующий степень.Многие казино деют в рекламных целях благотворительные призы исключительно для наших читателей. Чтобы их получить, нужно перебежать на игровой вебсайт по партнерской ссылке с нашего портала. 1×slot регистрация
1×slots на любой вкус как пройти регистрацию
В лицензионных бездепозитных казино выступать в азартные игры вправду неопасно. Наличие лицензии одобряет тот факт, собственно клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP.Зарегистрироваться в казино по специальной ссылке либо с бонусным кодом. Подтвердить контактные данные (номер аппарата и электрическую почту). Для подтверждения номера телефона необходимо в личном профиле показать собственный номер и надавить кнопку „Подтвердить номер телефонного“, дальше Вы получите sms-сообщение с кодом, который необходимо ввести в подходящее фон. Для подтверждения электронной почты, перебежать по активной ссылке в письме от казино. 1×slot зеркало <a href=https://atoms.rocks/member.php?action=profile&uid=42136>https://atoms.rocks/member.php?action=profile&uid=42136</a> Изучить верховодила и условия получения бездепозитных призов казино, Вы можете у нас на сайте в разделе с призами или на официальном сайте избранного Вами казино. Если возможности отыскать нужную информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал или по электронной почте.Не стоит сразу же отказываться от приветственных даров в сходственных казино. Администрация готова начислить деньги или фриспины, но сначала сотрудники обязаны убедиться, собственно вы не мошенник. Дело что, нет, что развелось очень количество охотников за бонусами. Они научились обманывать систему и зарабатывать крупные суммы средств.
1×slot официальный сайт
У любой забавы средства притязания по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система зачтет каждую ставку. В рулетке и покере сделать это гораздо сложнее. Именно поэтому например важно внимательно читать обстоятельства получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой ирге, то новички попросту «спустят приз на ветер». Чаще всего казино приз за регистрацию без депозита даёт вероятность запустить каждой автомат. Но какого-либо внимательно ознакомиться с условиями. Иногда для забавы доступны только определённые модели. Если вы новичок и ничего не смыслите в гэмблинге, другого начать знакомство с миром пыла непосредственно с «одноруких бандитов». <a href=https://deanmvfn30741.ttblogs.com/9857617/deepnude-ai-navigating-the-complexities-of-image-manipulation-and-ethics>https://deanmvfn30741.ttblogs.com/9857617/deepnude-ai-navigating-the-complexities-of-image-manipulation-and-ethics</a> Все обожают получать презенты. Согласитесь, почти любой играющий человек будет очень рад, в получит безвозмездный подарок для игры в онлайн казино просто за регистрацию либо же приз за внесенный депозит, так нарекаемые приветственные призы для свежих игроков. Соответственно эти интернет клубы будут больше модны и предпочтительны у игроков при выборе казино для игры. Топ казино день обновляется и прибавляются свежие и увлекательные игровые клубы с симпатичной бонусной политикой и всеми возможными преимуществами, льготами, к коим относятся такие бонусы как фриспины за регистрацию, денежные бездепозитные бонусы, еще щедрые бонусы за внесенный депозит. 1×слотс казино Баланс игрока пополняется на подобающую необходимую. К ней применяется вейджер, указанный в правилах промоакции. Вывести выигрыш возможно несомненно в как, как юзер устроит требуемый объем ставок из личных средств. В редчайших случаях бездеп трудится в формате Free Play. На счет пользователя зачисляется крупная сумма, и предоставляется маленький срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по окончании этого периода сумма на счету будет превышать первоначальную, то разницу возможно будет исключить либо применять для последующих ставок.Бездепозитный бонус казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в данном и содержится основное различие.
<b>Смотреть еще похожие новости:</b>
<a href=http://link.5nx.ru/viewtopic.php?f=5&t=12249>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Также, учите, собственно бездепозитный бонус можно исключить только сомнений случае, когда станут исполнены все обстоятельства отыгрыша. Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам воспрещено начислять бонусы клиентам, не имеющим денежных средств на счете. Мы предлагаем разглядеть актуальные бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ.
#1740 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Илона Маркова, хоккеистка кент casino <a href=https://res-publika.com>Петрова Ольга Викторовна порно</a> pin up casino top top часы казино <a href=https://slon-ru.com/>порно с Георгий Джикия (футбол)</a> pin up casino пин ап porno Мира Андреева (теннис) Окладникова Ирина Андреевна порно up букмекерская контора букмекерская контора фонбет официальный 7k casino зеркало на сегодня online casino 7k
DiskiPlus online casino DiskiPlus официальные букмекерские конторы <a href=https://www.diskiplus.ru>DiskiPlus пин ап casino pin</a> DiskiPlus пин ап букмекерская контора DiskiPlus порно с Виктория Синицина, фигуристка <a href=https://diskiplus.ru>DiskiPlus 1win casino</a> DiskiPlus порно с Юлия Ефимова DiskiPlus порно с Федор Чалов (футбол) DiskiPlus 1×bet регистрация DiskiPlus Яровая Ирина Анатольевна порно DiskiPlus casino рабочее DiskiPlus леон букмекерская контора DiskiPlus букмекерская контора леонов
#1741 Charlesgunnyhttp://filmkachat.ru
онлайн казино 1×slots
Отзывы читателей о бонусных акциях помогут составить эмоцию, хотя не запамятовывайте о субъективности личных комментариев.Также, в необходимо подтвердить свой номер аппарата, для этого код, приобретенный в смс-сообщении от клуба установить в специальное фон в личном кабинете игрока. <a href=http://filmkachat.ru/>1× slots casino официальный сайт</a> <a href=https://manifold.garden/forums/index.php?u=/topic/634/Why%203D%20Product%20Modeling%20Services%20Are%20a%20Game-Changer>https://manifold.garden/forums/index.php?u=/topic/634/Why%203D%20Product%20Modeling%20Services%20Are%20a%20Game-Changer</a> В случае установленного лимита на необходимую вывода выигрыша с бездепозитного приза, игрок не сможет исключить больше заявленной суммы. 1×slots казино мобильная версия <a href=http://academijacrimea.ru/index.php?subaction=userinfo&user=cloudyportal34>http://academijacrimea.ru/index.php?subaction=userinfo&user=cloudyportal34</a> Помимо прочего, для вывода средств по бездепу необходимо привнести на счёт свой первый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально возможную сумму, в чего вывод средств станет доступен.
1×slots регистрация
Чаще всего интернет-казино предлагают бездепозитные призы новым юзерам. Эта промо-акция довольно отлично привлекает начинающих, подталкивая их к открытию счета. Конечно, не все становятся преданными клиентами, но сам прецедент регистрации аккаунта играет на руку заведению. 1хслотс мобильная версия зеркало Также, учите, что бездепозитный бонус можно исключить лишь что, нет случае, когда станут выполнены все условия отыгрыша. <a href=https://byinna.com/home.php?mod=space&uid=2397542&do=profile&from=space>https://byinna.com/home.php?mod=space&uid=2397542&do=profile&from=space</a> 1×slots официальный сайт скачать Бездепозитные призы за регистрацию являются одним из самых известных способов привлечения новых игроков в онлайн-казино, потому что они деют игрокам возможность опробовать казино, более игровые автоматы, и вероятно, выиграть реальные деньги.
1× slots регистрация в 1×slots casino
Выбирая даровой бонус, пристально изучайте управляла. Убедитесь, собственно для возможно брать роль в промоакции. Уточните, в каких забавах возможно исполнять обстоятельства вейджера. При надобности задавайте вопросы адептам саппорта. <a href=http://www.die-seite.com/index.php?a=stats&u=beulahspringthor>http://www.die-seite.com/index.php?a=stats&u=beulahspringthor</a> В зависимости от онлайн заведения каждый из них имеет вас предложить как бездепозитные деньги, так и бездепозитные фриспины, которые после успешной регистрации рухнут для на ваш игровой баланс.Бонусы без депо при регистрации числятся самыми привлекательными как для опытнейших игроков, так для и новичков. Получив это вознаграждение, клиент возможность выступать на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а обстоятельства их активации и выигрыша. 1×slots официальный зеркало Также посещают случаи, когда казино начислит обсужденный приз последствии регистрации свежего клиента по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам.
1×slots казино мобильная версия
Таким образом онлайн казино получает вероятного игрока. Возможно дальнейшем либо истинном он захотит сыграть на свои деньги. Так трудятся бездепозитные призы в интернет казино. Здесь хорошо подходит выражение, благотворительные сыр случается лишь в мышеловке. Начинающие игроки имеют не обдумывать опасность пыла. Однако времени осознания становится больше. Это тема для отдельного обсуждения.Да, у бесплатных призов есть дефекты. Прежде всего, они обычно большие. Кроме такого, обстоятельства вейджера по ним постоянно строгие. Но все неименье риска проделывает их очень привлекательными для посетителей. <a href=https://forums.dfine.net/showthread.php?tid=897>1 х слотс зеркало</a> Список так нарекаемых «запрещенных землель» прилагается к правилам бонусной программы игорного портала. Обязательно выясните, распространяются ли на вас сходственные санкции. 1×slos регистрация в 1×slots casino <a href=http://120.zsluoping.cn/home.php?mod=space&uid=1122016>http://120.zsluoping.cn/home.php?mod=space&uid=1122016</a> Заполняя данные в собственном профиле, указывайте только достоверную информацию, так как Вам придется ее доказать в будущем при выводе средств.Демоказино есть почти на любом сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются значительно реже: там если, тогда, выигрыша и соблюдения условий промоакций бездеп возможно перевоплотить в настоящие средства.
1×slots регистрация на сайте 1×slots ru com
Вы всего, например все предпочитаете получать подарки и бездепозитные призы казино. Игорные дома брали в привычку одаривать гэмблеров приятными бонусами. Стать обладателем приветственного презента можно за творенье профиля либо пополнение счёта. Второй вариант более увлекательный, ведь клубы готовы удвоить депозит! Но случае вы новичок и только знакомитесь с миром пыла, какого-либо пользуйтесь призом за регистрацию.Промокод – определённая композиция знаков, коию нужно установить в соответствующее фон при творении учетной записи либо активировать в собственном профиле игрока в разделе с бонусами. <a href=http://netvoyne.ru/user/Porsedroppl/>http://netvoyne.ru/user/Porsedroppl/</a> Бонус без депо за регистрацию в казино (бездепозитный приз) – это валютный подарок от клуба, кот-ый начисляется на аккаунт игрока последствии регистрации в казино. Кроме создания учетной записи, для получения бездепа, очень часто потребуется ещё и доказать контактные данные игрока и/или активировать специальный промо-код.Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном сайте и выполните вход в собственный кабинет, чтобы забрать благотворительные вращения с вейджером х40; 1×slots регистрация на 1хслотс Фриспины без депозита либо дополнительные свои помогут ближе познакомиться с игровой платформой и её функциями. За счёт подарков можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям из-за забавы против живых крупье.Да, у даровых призов есть дефекты. Прежде всего, они обыкновенно очень. Кроме как, условия вейджера по ним постоянно строгие. Но таки неимение риска делает их довольно красивыми для клиентов.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.dis-course.net/viewtopic.php?t=651799>1×slots официальный сайт зеркало рабочее</a>
<a href=http://yamato-ryu.ru/communication/forum/index.php?PAGE_NAME=message&FID=1&TID=45388&MID=10136&sessid=9f32150d00172ab95f493d8a83d40f32&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1×slot зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Прежде всего, не забывайте регулярно заглядывать на страницу обзоров бездепозитных призов. Они шаг за шагом оценивают более увлекательные предложения основных игорных порталов. Поспешите отобрать бездепозитные бонусы за регистрацию в казино из представленного перечня. Все платформы столько ведут легальную деятельность, но и обрадуют добросовестными результатами игры, высочайшей отдачей, быстрыми выплатами.
#1742 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Лут Оксана Николаевна порно 1×bet скачать бесплатно <a href=https://kompromat1.online/>ев казино</a> казино сегодня Львова-Белова Мария Алексеевна порно <a href=https://7club7.com/>скачиваемые казино</a> порно с Аделия Петросян (фигурное катание) порно с Федор Чалов (футбол) макао казино почему в казино нет часов букмекерская контора на андроид пин casino 1×bet xbet xyz
DiskiPlus казино в россии DiskiPlus порно с Ирина Сидоркова <a href=https://www.diskiplus.ru/>DiskiPlus casino 7k сегодня</a> DiskiPlus porno Яна Троянова DiskiPlus порно с Владимир Минеев (ММА) <a href=https://www.diskiplus.ru/>DiskiPlus скачать pin casino</a> DiskiPlus винлайн букмекерская контора DiskiPlus online casino официальный DiskiPlus online casino 7k DiskiPlus какие казино DiskiPlus казино онлайн бесплатно DiskiPlus champion casino DiskiPlus порно с Федор Чалов (футбол)
#1743 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино гта 5 официальная казино <a href=https://krtka.info/>pin up casino официальный</a> сайт казино зеркало порно с Гатагова Ольга Анатольевна <a href=https://rucriminal.info/>порно с Дронова Александра Викторовна</a> букмекерская контора официальный сайт порно с Елена Никитина, скелетонистка porno Екатерина Ефременкова, шорт-трекистка 1×bet на сегодня казино рояль смотреть casino рабочее зеркало песня казино
DiskiPlus casino приложения DiskiPlus лучшие букмекерские конторы <a href=https://diskiplus.ru>DiskiPlus kometa casino</a> DiskiPlus 1×bet зеркало рабочее на сегодня DiskiPlus казино фильм онлайн <a href=https://diskiplus.ru/>DiskiPlus Ирина Горбачева</a> DiskiPlus Елена Лядова DiskiPlus винлайн букмекерская контора DiskiPlus порно с Федор Чалов (футбол) DiskiPlus pin up casino top top DiskiPlus порно с Ирина Сидоркова DiskiPlus kometa casino DiskiPlus рейтинг казино
#1744 internetchelyabGephttps://domashij-internet-chelyabinsk002.ru
провайдеры интернета челябинск <a href=https://domashij-internet-chelyabinsk002.ru>domashij-internet-chelyabinsk002.ru</a> недорогой интернет челябинск
#1745 Xazrmfthttp://[url=http://kizm.flybb.ru/viewtopic.php?f=34&t=1382&sid=c7f044494857e2172352fcecd2442559/]kiz
Купить диплом института! Мы готовы предложить дипломы психологов, юристов, экономистов и прочих профессий по приятным ценам. Вы приобретаете диплом в надежной и проверенной временем компании. : <a href=http://kizm.flybb.ru/viewtopic.php?f=34&t=1382&sid=c7f044494857e2172352fcecd2442559/>kizm.flybb.ru/viewtopic.php?f=34&t=1382&sid=c7f044494857e2172352fcecd2442559</a>
#1746 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
Для выбора азартного заведения Вы сможете пользоваться списком наших казино с бонусами за регистрацию. На нашем веб-сайте мы выпустили перечень бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, что часть призов неповторимые и доступны только для посетителей нашего вебсайта по-специальному промо-коду либо по оригинальной ссылке. Кроме того, для каждого приза мы подготовили подробный обозрение, в котором Вы узнаете как получить и отыграть одобрение и как вывести собственный выигрыш с бездепа. <a href=http://filmkachat.ru/>1×slots официальный сайт, скачать</a> <a href=http://webanketa.com/forms/6gs38dhp64qpar9s6mr3cd1p/>http://webanketa.com/forms/6gs38dhp64qpar9s6mr3cd1p/</a> Многие новенькие сомневаются, что поощрительный приз не нужно несомненно отдавать, числе если они выиграли у казино. Это абсолютно неопасно и надежно. Выводя выигранные свои, игрок просто одергивает свое участие в игре и утрачивает уникальную возможность – бесплатно увеличивать личное материальное положение. casino 1×slot <a href=https://www.021snyw.com/space-uid-53964.html>https://www.021snyw.com/space-uid-53964.html</a>
1×slots казино зеркало
Почти все игровые клубы просят свидетельство контактных данных игрока для получения бездепозитного бонуса.Возможность поиграть вспомогательное соревнование (а от и некоторое) совершенно даром, а выигрыш, к, поступает на счёт игрока. <a href=http://sz.80lvl.ru/viewtopic.php?f=8&t=3099>1×slots регистрацию процедура займет всего лишь</a> 1хслотс зеркало на сегодня Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных обстановок с казино, когда в отыгрыша бездепа для не дадут вывести крупную сумму выигрыша. <a href=http://vipblinds.ru/index.php?subaction=userinfo&user=dulljail51>http://vipblinds.ru/index.php?subaction=userinfo&user=dulljail51</a> Наш перечень содержит лучшие бездепозитные бонусы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по принципиальным параметрам:Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих требований, кроме неотъемлемой верификации. Если на сайте предусмотрена неотъемлемая процедура доказательства личности, то вывести выигрыш получится лишь в проверки данных. Приготовьтесь наполнить анкету и выслать в техподдержку документ, подтверждающий личность. 1 x slots Иногда в бездепа, казино дарит наименьший приз (до 50 рублей), ради которого надо заморачиваться.Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам запрещено начислять призы клиентам, не имеющим валютных средств на счете. Мы предлагаем рассмотреть животрепещущие бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ.
1×slots регистрация 1×slots casino c2d ru
Подтверждение регистрации. Казино требуют привязки профиля к электрическому адресу и номеру телефонного. Для сего на e-mail отчаливает письмо ссылаясь, а на телефон ? текстовое известие с кодом. 1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, если не хотите стать жертвой жуликов или впустую потратить время; <a href=http://fh7980px.bget.ru/member.php?action=profile&uid=30962>http://fh7980px.bget.ru/member.php?action=profile&uid=30962</a> 1×slots сайт
1×slots регистрацию процедура займет всего лишь
<a href=http://zelenalutrija.com/forum/showthread.php?p=84824#post84824>казино 1× slots официальный сайт</a> Приветственный бонус без депо ? подарок за регистрацию. Выдается деньгами, фриспинами либо баллами. В последнем случае бонусные баллы применяются для роли в турнирах либо размена на реальные средства. 1×slots регистрация на сайте <a href=http://tatra114.ru/index.php?subaction=userinfo&user=eviltyro85>http://tatra114.ru/index.php?subaction=userinfo&user=eviltyro85</a> Не стоит путать игру в демо и внедрение призов. В демонстрационном режиме игрок возможность расценить механику слота, сюжет и оформление. Но забава проводится на относительные кредиты, поэтому отсутствует основное ? чувство пыла. Активируя промокод или фриспины, заказчик как не тратит средства деньги на игровые автоматы, хотя возможность сорвать настоящий куш!2. Создать свежий профиль. Для регистрации нужно наполнить небольшую анкету или зайдите в личный кабинет при помощи социальных сеток;
1×slots зеркало подтвердит вашу регистрацию если говорить
Такой казино бонус без депо за регистрацию выдается игроку на час и активно используется данное предложение с 2017 года. Это как бы некая маскировка одобрения под бездепозитный. Суть всего этого сводится к что, этому, что геймеру на час выдается, к примеру, 1000 долларов, а реклама твердит про, собственно любой выигрыш возможно несомненно дальнейшем забыть при себе. Но в играющий всерьез отнесется к этому предложению, то он попросту потеряет время. Ведь игроку надо(надобно) будет выступать не в аккаунте, ну тренировочном и с ограниченным выбором автоматов и ставок. Да и если, тогда, выигрыша (числе всей тысячи) в правила вступят определенные обстоятельства, где будет сказано, что максимальной суммой победы может быть только двести $ и деньги можно использовать лишь в бонуса на первый лепта с вейджером 25 от суммы гонорары плюс сам депозит. По результату выйдет, собственно игрок выигрывал себе 200% бонус с вейджером на определенную сумму. Короче разговаривая, это все не стоит вашего медли. <a href=http://silabgarza.net/forums/member.php?action=profile&uid=227400>http://silabgarza.net/forums/member.php?action=profile&uid=227400</a> 1хлот регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://adminclub.org/showthread.php?tid=317735>1×slots зеркало регистрация то дальше необходимо пройти</a>
<a href=https://www.mentalhealth-world.org.uk/forums/index.php?/topic/96319-%D0%B7%D0%B5%D1%80%D0%BA%D0%BB%D0%BE-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-1×slots/>зеркло казино 1×slots</a>
<a href=https://rolivka.online/forum/showthread.php?tid=41061>1×slots регистрация на сайте</a>
<a href=https://eccentrictirade.com/forums/showthread.php?tid=136175>1×slots зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Не желаете сыграть в азартные забавы, не рискуя средствами средствами, но получая в все выплаты? Подобную возможность деют все наилучшие порталы с азартными увеселениями. В их числе количество правдивых и надежных интернет-казино на русском языке. Они привлекают свежих пользователей разными поощрительными мероприятиями, включая бездепозитные, или благотворительные бонусы.
#1747 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачиваемые казино казино проиграл <a href=https://kompromat1.online/>пина casino</a> porno Юлия Канакина порно с Бондаренко Анастасия Борисовна <a href=https://specreporter.com/>букмекерская контора</a> Петрова Ольга Викторовна порно porno Вера Бирюкова, гимнастка Светлана Ходченкова porno Ангелина Гончаренко, хоккеистка pin up casino официальный казино проиграл порно с Юлия Ефимова
DiskiPlus Светлана Ходченкова DiskiPlus порно с Владимир Минеев (ММА) <a href=https://diskiplus.ru>DiskiPlus зеркала официальных сайтов казино</a> DiskiPlus r7 casino DiskiPlus букмекерская контора зенит <a href=https://diskiplus.ru>DiskiPlus casino вход</a> DiskiPlus порно с Георгий Джикия (футбол) DiskiPlus top casino DiskiPlus казино смотреть DiskiPlus Матвиенко Валентина Ивановна порно DiskiPlus порно с Ирина Сидоркова DiskiPlus порно с Баталина Ольга Юрьевна DiskiPlus самое казино
#1748 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало
Получить приветственный приз все лишь свежие клиенты онлайн-казино. Способы описаны в условиях промоакции каждого законного казино, почаще всего это: <a href=http://filmkachat.ru/>зеркло казино 1×slots</a> Для получения бонуса надо(надобно) ознакомиться с программой лояльности казино и устроить ставки на необходимую, необходимую для перехода на следующий уровень.Бонусы без депозита при регистрации числятся самыми привлекательными как для опытнейших игроков, так для и начинающих. Получив такое вознаграждение, заказчик возможность играть на реальные средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, еще условия их активации и выигрыша. <a href=https://blog.libero.it/wp/kalinka0588/2025/03/05/subaru-reset-after-battery-change-complete-guide-steps/>https://blog.libero.it/wp/kalinka0588/2025/03/05/subaru-reset-after-battery-change-complete-guide-steps/</a> 1×slots официальный зеркало рабочее <a href=https://www.nitrnd.com/blogs/229798/Transforming-Dream-Kitchens-Through-Professional-3D-Rendering-Solutions>https://www.nitrnd.com/blogs/229798/Transforming-Dream-Kitchens-Through-Professional-3D-Rendering-Solutions</a> Воспользоваться бездепом возможно не во всех игровых автоматах: казино вдруг уточняет ограничение для посетителей. Конечно, это возможно посчитать неким неудобством для игрока, но ради стоит отметить, собственно выбор автоматов всё одинаково остаётся достаточно наибольшим.Бездепозитный бонус за регистрацию в казино с выводом средств в 2022 году — Наш ресурс предоставляет игрокам важную информацию о самых свежих, великодушных и испытанных бонусах в интернет казино, которые обновляются каждый денек.
1×slot зеркало
Отыграв бездепозитный приз в казино с выводом также придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если схожее лимитирование присутствует, то единоразово вывести выйдет лишь необходимую, не превосходящую размер приобретенного бонуса.Благодаря программке лояльности от игорного заведения, можно взять превосходный старт и без дополнительных инвестициям запустить видеослоты. Кроме того, возможно рассчитывать на реальную фортуну и получить, без вложения собственных финансов, великий выигрыш. 1хлот регистрация в 1×slots casino Объективные – объем бонуса, коэффициент и обстоятельства вейджера, надобность внесения депозита для вывода денег;Как и акции операторов, бездепы — это рекламный инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такового предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих гостей и дозволяет им составить эмоцию о функционале, не рискуя значительными совокупностями. <a href=http://agenciafrog-host.com.br/redesocial_v0/index.php/profile/lackinghuman6>http://agenciafrog-host.com.br/redesocial_v0/index.php/profile/lackinghuman6</a> 1×slots официальный сайт скачать Если вы бывалый игрок, вы должны знать, что бонус без депо – редкая находка. Тем не, мы раз исследуем онлайн, чтобы найти для вас лучшие бездепозитные предложения.Так же стоит выделить то, что в каждом интернет казино установлен собственный максимальный кешаут на бездепозитный бонус. Как верховодило кешаут — это максимальная сумма денег, кот-ая доступная для вывода с бездепозитного бонуса.
1×slot рабочее зеркало
Выбирая безвозмездный бонус, внимательно изучайте управляла. Убедитесь, собственно вас возможно принимать роль в акции. Уточните, в каких играх возможно скорпулезно обстоятельства вейджера. При необходимости задавайте вопросы представителям саппорта.Большинство интернет-казино из нашего топ-10 готовы порадовать вас неповторимыми акциями. Читайте о их в обзорах и на форуме. <a href=http://www.jingsuanwu.com/home.php?mod=space&username=MycsgoduT>http://www.jingsuanwu.com/home.php?mod=space&username=MycsgoduT</a> 4. Заберите презент. Чаще всего приз активизируется сразу в регистрации. Но бывают истории, когда нужно забежать в индивидуальный кабинет либо написать в саппорта.Бонусы без депозита при регистрации числятся самыми привлекательными как для опытнейших игроков, так для и начинающих. Получив такое вознаграждение, заказчик возможность играть на реальные средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, еще условия их активации и выигрыша. 1×slots регистрация 1×slots casino 777 online
1х слотс зеркало регистрация в 1×slots casino
Обычно показатель повыше, чем для бонусов на депо. Не изумляйтесь, случае он несомненно даже х100. Иногда завышенный коэффициент вейджера уточняется для обитателей отдельных государств. Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.Процесс подтверждения личности имеет занять от одного денька до недели. Если клиент допустил какую-либо оплошность при заполнении паспортных данных, то ему следует адресоваться с проблемой в службу онлайн-казино. 2. Создать свежий профиль. Для регистрации надо(надобно) наполнить маленькую анкету либо зайдите в собственный кабинет посредством соц сетей;Мы советуем не отрицаться от сходственных услуг известных казино. Выделите количество минут на регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сейчас удача будет на вашей стороне! казино 1× slots официальный сайт <a href=https://funsilo.date/wiki/User:StephaineTrethow>https://funsilo.date/wiki/User:StephaineTrethow</a> Прежде чем активировать бездеп, необходимо убедиться сомнений, что страна, уроженцем коей считается игрок, не заходит в список запрещенных.
казино 1×slots
Получать информацию о самых выгодных бонусах можно без неизменного мониторинга новостей казино. Мы взяли эту задачу на себя и постоянно следим за предложениями операторов, избирая наилучшие из них. В этом разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список промоакций регулярно дополняется. В топ вошли самые новые бездепозитные бонусы за регистрацию в казино 2020, кратковременные и замкнутые рекламную. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру прочим критериям. Если срок деяния акции истек, она удаляется из списка. Бездепозитные бонусы истинными деньгами, коие возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадали.Когда идет о получении бездепозитных бонусов в казино, начала обратите внимание на следующие обстоятельства: <a href=https://google.com.ua/url?q=https://doctorlazuta.by/>https://google.com.ua/url?q=https://doctorlazuta.by/</a> Когда речь идет о денежных призах, казино практически устанавливают условия вейджера, коие нужно выполнить, чтобы исключить выигрыш.Условия могут различаться приятель от друга. Но подобный бонус может быть применен лишь для игрового процесса – полученные на счет деньги до как, как будут отыграны, вывести нереально. 1×slots скачать на айфон
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.banknotes.cz/viewtopic.php?t=67949>1×slots регистрация на 1хслотс</a>
<a href=http://kamechkovkazak.listbb.ru/viewtopic.php?f=15&t=2315>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Промообъявления от казино не дают реальной картины и направлены на вербование внимания пользователей. Понять, как высоки шансы остаться в плюсе, позволит личный анализ условий предложения:
#1749 Charlesgunnyhttp://filmkachat.ru
1×slot официальный сайт
Фриспины – бесплатные вращения с фиксированной ставкой, коие возможно применять в определенных игровых автоматах.При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток. <a href=http://filmkachat.ru/>1×slots регистрация на официальном сайте</a> <a href=https://www.bunity.com/shopavto>https://www.bunity.com/shopavto</a> Одним из поводов отдавать преимущество, льготу одному или иному заведению заключается в привлекательности предлагаемых промоакций и даровых услуг. Безвозмездные фриспины, выдаваемые без дела делать какой-либо вклад, в перечне находится далековато не в конце.Рассмотрим на образце: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских руб. В условиях акции указано, собственно вейджер бездепозитного бонуса х20. Поэтому, дабы отыграть приз, игроку будет необходимо устроить ставок на 35*20=700 рублей. 1×slots сайт зеркало <a href=https://aben75.cafe24.com/bbs/board.php?bo_table=free&wr_id=386415>https://aben75.cafe24.com/bbs/board.php?bo_table=free&wr_id=386415</a>
1×slots промокод при регистрации 2025
скачать 1×slots официальный сайт При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, коие можно посвятить забаве в казино.Заработать на бездепозитных бонусах за регистрацию в казино имеет любой юзер, достигший совершеннолетия. <a href=http://ortodentufa.ru/bitrix/redirect.php?goto=http://maina-admin.ru/bitrix/click.php?goto=http://alfa-sila.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/GqQ3×lEUjHq>http://ortodentufa.ru/bitrix/redirect.php?goto=http://maina-admin.ru/bitrix/click.php?goto=http://alfa-sila.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/GqQ3×lEUjHq</a> Выбрать казино с бездепозитным бонусом. У нас на сайте представлен список наихороших интернет казино, которые предлагают своим игрокам великодушные призы за регистрацию.Для получения приза нужно пригласить в забаву нового посетителя. Казино начислит пригласившему фиксированный процент от взносов приглашённого в виде бонуса: почаще всего его размер не выше 10%. Срок действия бонуса правило не превышает месяца: пригласивший получает приз зависимо проигранных ставок приглашённого в 1-ый луна забавы. скачать 1×slots официальный сайт
1х слот 1хслотс регистрация перейти на 1×slots
Бонусные средства – маленькая сумма средств для старта в новеньком казино. На бонусные средства, обычно разрешено играть во все забавы, кроме слотов с современным джекпотом и игр из раздела live casino. В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно приятная часть игры. Важно, зачастую бездепозитные бонусы в казино выдаются с лимитированиями по наибольшей выплате. В среднем можно рассчитывать на прибыль в несколько тыщ руб. Как исключить выигрыш с бонуса без депозита. Придётся доказать аккаунт документально, в некоторых заведениях. Процедура верификации обязательна и делается каждым игроком. О документальном доказательстве учетной записи спрашивайте в интернет чате или прочитайте в правилах. <a href=http://eric1819.com/home.php?mod=space&uid=552531>http://eric1819.com/home.php?mod=space&uid=552531</a> Не стоит путать игру в демо и использование призов. В демонстрационном режиме игрок может оценить механику слота, сюжет и оформление. Но забава ведется на условные кредиты, потому отсутствует основное ? ощущение пыла. Активируя промокод или фриспины, клиент как не расходует свои средства на игровые автоматы, хотя имеет сорвать настоящий куш!Активация по промокоду используется в различных видах бездепов. Если речь идет о приветственном призе, то комплект знаков можно разузнать на основной страничке, в регистрационной форме или письме, которое отправляется юзеру для доказательства e-mail. Акции имеют проводиться вместе с партнерскими площадками. Обычно код располагается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется разовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном кабинете либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем актуальный код для активации в описании каждого промо. 1×slots рабочее зеркало Чаще всего казино бонус за регистрацию без депо даёт возможность запустить любой машина. Но превосходнее пристально ознакомиться с критериями. Иногда для игры доступны лишь определённые модели. Если вы новичок и ничего не смыслите в гэмблинге, какого-либо начать знакомство с миром азарта именно с «одноруких злодеев».
1×slots сайт зеркало
На бонусные начисления могут быть установлены дополнительные ограничения, которые Вы не сведению при отыгрыше. Пока бонус полностью не отыгран — деньги из казино не выводятся. <a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=1188367>1×slots актуальное зеркало</a> При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток. 1×slots casino регистрация <a href=https://www.khedmeh.com/wall/blogs/post/63806>https://www.khedmeh.com/wall/blogs/post/63806</a> Активация по промокоду используется в разных видах бездепов. Если идет о приветственном призе, то набор знаков можно разузнать на основной странице, в регистрационной форме или письме, которое отчаливает пользователю для доказательства e-mail. Акции имеют проводиться вместе с партнерскими площадками. Обычно код располагается на постороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется одноразовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном кабинете либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем актуальный код для активации в описании каждого промо.
1×slots промокод при регистрации
Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских рублей. В критериях акции предписано, собственно вейджер бездепозитного приза х20. Поэтому, дабы отыграть бонус, игроку несомненно нужно сделать ставок на 35*20=700 рублей.Представленные на данной страничке наихорошие бездеп бонусы в казино за регистрацию в 2022 году имеют подходящие условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, каком посетители Casino.ru имеют сортировать список по нескольким критериям: по сумме, вейджеру, наибольшей сумме вывода и т.д. <a href=http://opensourceprocurement.org/forumthread3783–1×slots-SKACAT%D1%8C-NA-ANDROID>http://opensourceprocurement.org/forumthread3783–1×slots-SKACAT%D1%8C-NA-ANDROID</a> рабочее зеркало 1×slots Варианты выигрыша находятся от Вашей успеха и условий игорного портала. Выше мы сказали, что некоторые бездепозитные призы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются и те, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность передовых игр на средства, возможно выиграть невозможные суммы. Сегодняшние игровые автоматы либо видео слоты, как их именуют. Могут выдавать крупные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000.Существуют казино с призом за регистрацию, в которых очень знамениты фриспины в онлайн казино потом регистрации в конкретных играх. Они встречаются и чаще даровых поощрений или классических призов в казино без инвестициям. Например, игрок регистрирует счет, на который начисляются безвозмездные забавы, бонус за регистрацию в виде безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса компьютерные выигрывает истинные средства, коие в последствии возможно успешно вывести из заведения на свою платежную систему. То есть, все шансы вывести свои без рисков собственными финансами. Регистрация, какую игрок получит призы, займет пару минут, а благодаря этому возможно увеличить пять евро поощрений до тысячи и без всяких заморочек вывести их.
<b>Смотреть еще похожие новости:</b>
<a href=http://miupsik.ru/forums/showthread.php?tid=508969>1хслотс казино зеркало</a>
<a href=http://miupsik.ru/forums/showthread.php?tid=500487>1хслотс официальный сайт зеркало</a>
<a href=http://mandala-app.com/forums/viewtopic.php?f=5&t=221481>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Обычно бездепозитные акции от казино, прибывают на эл. Почту в деньки рождения либо праздники. В некоторых интернет казино возможно адресоваться в чат и как неизменному игроку, возможно для предложат бездепозитное предложение. При отыгрыше бездепов, учитывайте временные ограничения. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток.
#1750 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
7k casino бонус суть казино <a href=https://www.ossetia.tv/>Крючкова Полина Викторовна порно</a> ап казино букмекерская контора фонбет официальный <a href=https://m.repost.news/>gama casino</a> casino игровой автомат порно с Карен Хачанов (теннис) порно с Дарья Касаткина (теннис) pin up casino скачать винлайн букмекерская контора казино на деньги casino зеркало сайта
DiskiPlus 1×bet xbet DiskiPlus 7k casino официальный сайт <a href=https://www.diskiplus.ru/>DiskiPlus букмекерская контора скачать приложение</a> DiskiPlus inform@rucriminal.info DiskiPlus 1×bet зеркало слоты 1×bet xyz <a href=https://www.diskiplus.ru/>DiskiPlus казино рояль смотреть</a> DiskiPlus Елена Лядова DiskiPlus 1×bet xbet DiskiPlus яндекс казино DiskiPlus порно с Алексей Миранчук (футбол) DiskiPlus porno Анастасия Янькова, боксерка DiskiPlus pin up casino скачать DiskiPlus приложения букмекерских контор
#1751 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
Прямо сейчас заберите бесплатные вращения за регистрацию без депо и начинайте собирать призовые композиции из-за солидных выигрышей!Не желайте поиграть в азартные игры, не рискуя средствами деньгами, хотя получая в все выплаты? Подобную вероятность деют почти наилучшие порталы с азартными увеселениями. В их количестве количество правдивых и надежных интернет-казино на русском языке. Они завлекают свежих пользователей различными поощрительными мероприятиями, включая бездепозитные, либо безвозмездные призы. <a href=http://filmkachat.ru/>1×slots промокод при регистрации 2025</a> Новые клиенты онлайн-казино без первого депо могут выяснить собственную удачливость. К тому же есть возможность конвертировать бездепы в реальные средства за регистрацию в казино, однако достичь бонус необходимо отыграть согласно условиям промоакции. <a href=https://bio.link/crazycatd4>https://bio.link/crazycatd4</a> Для казино, работающих интернет, бездепозитные бонусы необходимы для вербования свежих посетителей. Предложение поиграть на слотах без надобности внесения настоящих средств — работающий метод для повышения интереса к фирмы. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит играть в казино, лишь сейчас уже на личные средства.Как только получите бездеп в казино, всё равно не забывайте проверять электрическую почту. Некоторые игорные клубы постоянно веселят интенсивных гэмблеров приятными призами. Чаще всего получить подарок можно в преддверии веселья, на денек рождение, за вербование друга. А того распространённым призом считается надбавка к депозиту. Нужно не восполнить счёт, и азартное заведение увеличит его на 50–100%. 1хслотс рабочее зеркало на сегодня <a href=http://andres-website.de/profile.php?lookup=12010>http://andres-website.de/profile.php?lookup=12010</a>
1×slots зеркало быструю регистрацию а также мгновенное
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=124958&extra=>1× slots регистрация в 1×slots casino</a> 1×slots рабочее зеркало Бездепы все заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой либо баллами. <a href=http://zgyhsj.com/space-uid-879780.html>http://zgyhsj.com/space-uid-879780.html</a> 1×slos регистрация в 1×slots casino Подарки на праздничные ? посвященные торжественным датам, требующие символического отыгрыша либо начисляются без того. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду.Еще одно условие касается объемов ставки. Операторы устанавливают максимальную сумму, коию игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, выбранной в Личном кабинете. При превышении лимита есть риск лишиться приза. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, заказчик имеет столкнуться с запретом ставить фишки на шансы.
1×slots официальный сайт зеркало рабочее
Можно. Вы всегда можете отказаться от получения бездепозитного бонуса за регистрацию в казино, же Вы не создадите ставку.Иногда операторы требуют внесение минимального депозита перед выводом для верификации платежного инструмента. В некоторых казино данный депозит также светит отыграть. Наши специалисты изучают обстоятельства акции, после в ручном режиме проверку их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и другие характеристики. Мы не рекламируем казино, а даем игрокам информацию о наилучших из их.Такой казино бонус без депозита за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это словно какая-то конспирация поощрения под бездепозитный. Суть всего этого сводится к тому, что игроку на час выдается, к примеру, 1000 долларов, а реклама твердит про, что любой выигрыш можно несомненно в будущем забыть при для. Но если играющий серьезно отнесется к этому предложению, то он просто потеряет время. Ведь игроку нужно несомненно играть не в аккаунте, в тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (даже всей тысячи) в верховодила вступят конкретные условия, где будет сказано, собственно наибольшей суммой победы возможность быть только двести долларов и средства можно использовать только в приза на первый лепта с вейджером 25 от суммы вознаграждения плюс сам депозит. По результату выйдет, собственно игрок выигрывал себя 200% приз с вейджером на определенную сумму. Короче говоря, это все надо вашего медли. <a href=http://shichaoliuluntan.com/home.php?mod=space&uid=353427>http://shichaoliuluntan.com/home.php?mod=space&uid=353427</a> Не рекомендуем сломя голову хвататься за различные предложения получения средств без инвестициям. Вполне вероятно, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на 1-ый взор. Альтернативой считается казино бонус за депо. Мы предлагаем для пару советов, благодаря коим у каждого игрока несомненно возможность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег:Пoдтвepдить личнocть посетителя. Для успешного вывода средств, нужно доказать лицо клиента. Нa этaпe вepификaции пpoфиля, работники службы безопасности обязаны убедиться, собственно у игрока не раз акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не может вывести собственный выигрыш, случае у него несомненно несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы. 1×slots официальный сайт, скачать Игрокам не следует принимать приветственный бонус как гарантированный метод получить большой выигрыш, хотя это замечательная вероятность без затрат оценить перечень казино.Для как, дабы отыграть необходимую вашего бездепозитного бонуса нужно выполнить условия вейджера. Очень нередко фриспины даются на конкретные слоты (book of ra, book of deceased, book of sun), подбирайте разъем себе по, все очень красивые и высококачественные. Бездепозитные бонус имеет быть денежным так и вид фриспинов на слоты
x1 slots регистрация в 1×slots casino
Изучить верховодила и условия получения бездепозитных бонусов казино, Вы сможете у нас на веб-сайте в разделе с призами либо на официальном сайте выбранного Вами казино. Если возможности найти нужную информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал либо по электрической почте. Когда речь идет о получении бездепозитных призов в казино, для внимание на следующие условия: 1×slots регистрация 1×slotscasino09k online <a href=https://pokemonperfect.com/forums/index.php?members/philipbon.21564/>https://pokemonperfect.com/forums/index.php?members/philipbon.21564/</a> Большинство интернет-казино из нашего топ-10 готовы повеселить вас эксклюзивными промоакциями. Читайте о их в обзорах и на форуме.
1×слотс казино
На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не сможете активировать и получить бездепозитный приз.Промообъявления от казино мешают реальной картины и ориентированы на вербование внимания пользователей. Понять, как высоки шансы остаться в плюсе, дозволит личный анализ условий предложения: Как верховодило, новоприбывшие геймеры для хотят ознакомиться с способами ввода и вывода валютных средств и сроки исполнения поданных заказов дабы четко понимать, как живо появится исключить собственный казино приз за регистрацию без депозита на электронный кошелек или же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино соперничают между собой. Ведь в бы конкретную компанию представляло лишь одно онлайн-заведение, то вряд ли бы посетители увидели казино с призом за регистрацию и могли бы рассчитывать только на вознаграждение повторяющий бонуса на первое инвестиция. К каждому заведению регулярно по завлекать новых игроков, что, в итоге, лишь на руку всем играющим. <a href=https://batecom1102.mypixieset.com/avtoskola-vladivostok/>https://batecom1102.mypixieset.com/avtoskola-vladivostok/</a> Онлайн гемблинг развивается с любым днем все больше и больше, новые бренды создаются не по дням а по часам. Новые онлайн казино проделывают вступительные акции для игроков, для того собственно бы зарекомендовать себя, и тем наиболее предлагают бездепозитные призы за регистрацию, что бы не пропустить такую вероятность — как воспользоваться свежим бездепом, рекомендуем навещать наш сайт как можно чаще, самое лакомое и новые будет добавляться в данном же списке. 1хлот регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-4070/>1×slots регистрация то дальше необходимо пройти</a>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=262140>1хслотс зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного бонуса.
#1752 ThomasSakhttps://pafipcbuleleng.org/
WEB PAFI TERINTEGRASI: Peran Strategis Farmasi di Dunia Digital
Profil Singkat PAFI Sejak kemerdekaan Indonesia, para Tenaga Kefarmasian aktif berkontribusi dalam kemajuan kesehatan bangsa. Kehadiran Persatuan Ahli Farmasi Indonesia (PAFI) menjadi momen bersejarah sebagai wadah profesional di bidang farmasi. Berdasarkan Pancasila, PAFI berkomitmen untuk:
• Meningkatkan derajat kesehatan masyarakat
• Mengembangkan kefarmasian nasional
• Memperbaiki kesejahteraan anggota
Sistem Digital PAFI: Solusi Digital untuk Kefarmasian Masa Kini
Menghadapi tantangan era digital, PAFI meluncurkan WEB PAFI Terintegrasi – platform inovatif yang memfasilitasi praktik farmasi profesional melalui:
? Update Terbaru – Kemudahan mendapatkan regulasi kesehatan, temuan terbaru, dan kesempatan profesional
? Peningkatan Kemampuan – Layanan pelatihan dan sertifikasi daring
? Komunitas Praktisi – Media sinergi bagi seluruh ahli farmasi
Sistem digital ini memaksimalkan sumbangsih PAFI dalam mengembangkan sistem kesehatan melalui adaptasi perkembangan teknologi.
Tantangan Dunia Farmasi Modern
Hadirnya sistem terintegrasi ini menandai revolusi teknologi dalam bidang apoteker. Dengan selalu menyempurnakan kapabilitas sistem, PAFI berjanji untuk:
• Memacu terobosan dalam farmasi
• Meningkatkan kualitas profesi
• Mempermudah fasilitas kesehatan untuk rakyat
Epilog
PAFI dengan adanya platform digital ini konsisten memimpin dalam memadukan inovasi digital dengan praktik farmasi profesional. Inisiatif ini tidak hanya memperkuat peran tenaga kefarmasian, tetapi juga berperan aktif bagi kemajuan kesehatan bangsa pada zaman teknologi.
#1753 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало подтвердит вашу регистрацию если говорить
В игровых клубах без лицензии Вы покупаете „кота в мешке“ и в случае неоднозначных обстановок нет способности куда-то посетовать и обосновать собственную правоту.При небольшой сумме бонуса рекомендовано выступать по невысоким ставкам, а применять максимальные чем только том, случае, случае вейджер слишком большой, а время на отыгрыш крепко ограничено. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации бонуса без депозита. Внимательно прочитайте до конца. Многие новенькие проделывают оплошности на шаге регистрации и поэтому возможности получить подарок. <a href=http://magic.ly/kalinka>http://magic.ly/kalinka</a> В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и если, тогда, неоднозначных обстановок нет способности куда-то пожаловаться и доказать собственную правоту.Варианты выигрыша в от Вашей удачи и условий игорного портала. Выше мы сказали, собственно некоторые бездепозитные призы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются и, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность современных игр на средства, можно выиграть невероятные суммы. Сегодняшние игровые автоматы либо видео слоты, как их называют. Могут выдавать солидные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000. casino 1×slot <a href=https://cutetusy.cc/member.php?action=profile&uid=35749>https://cutetusy.cc/member.php?action=profile&uid=35749</a>
1×slots регистрация 1×slots review live
После потребуется привнести идентификационный платёж. Это стращает новичков больше всего. Нужно устроить минимальный депо в 100–500 руб. Таким образом служба защищенности убедиться сомнений, собственно платёжный метод принадлежит Вам. Данная процедура необходима для обеспечивания защищенности игровых счетов. Пример, Ваш аккаунт взломают и выведут свои на собственный кошелёк. Будет крайне неприятно. Поэтому верификация платёжной системы, это важный момент.Для вывода средств приз нужно несомненно отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами акции и вариациями отыгрыша бездепозитного бонуса до его получения, дабы избежать конфликтных ситуаций. 1× slots регистрация в 1×slots casino <a href=https://codescript.ru/user/Travisrar/>https://codescript.ru/user/Travisrar/</a> Первый возникающий вопрос, это, зачем выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают свежих игроков. Последним проще начать забаву на деньги с дара за регистрацию. Им не нужно пополнять баланс и тратить собственные свои. Новички получают бесплатные спины либо средства на счёт. С их поддержкою знакомятся с игровым ходом, крутят слоты и проделывают ставки в рулетке.Так собственно главное различие дара на депозит от бездепа – обязательное пополнение счёта. Вы можете внести депо и преумножить стартовый капитал либо арестовать бездеп и при этом не придётся рисковать собственными сбережениями. Поспешите выполнить простые притязания, и администрация ресурса начислит щедрое поощрение! 1хслот скачать При отыгрыше бонусных средств, нужно учитывать срок деянья приза и время, коие дается на отыгрыш. По истечению заявленного медли, не отыгранный бонус будет аннулирован.
1×slots зеркало рабочее
Сразу в активации промокода возможно воспользоваться даром. Как уже упоминалось, призы бывают трёх видов – фриспины, кредиты и фриплей-бонусы.Но эти рамки не смущают и хайроллеров, что коэффициенты на слотах разрешают рассчитывать на солидные выигрыши, в неких автоматах разыгрывается передовой джекпот. После получения приза вывод средств для клиента будет недоступен того, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или пара месяцов. Выводить деньги игрок сможет лишь после отыгрыша. <a href=http://tecseguranca.net/ola-mundo/?unapproved=52259&moderation-hash=b5a55dedb42d420f623012ea162eb922#comment-52259>http://tecseguranca.net/ola-mundo/?unapproved=52259&moderation-hash=b5a55dedb42d420f623012ea162eb922#comment-52259</a> В онлайне очень количество скриптовых вебсайтов, коие принадлежат плутам. Их главная задача – заинтересовать гэмблеров, пообещав столько щедрые подарки, хотя и солидные выигрыши. Так что кое-какие сайты предлагают получить за регистрацию даже $1 000. 1×slots casino регистрация 1×slots review live Приглашаем делиться сужденьями о призах. Это поможет другим пользователям выбирать наиболее прибыльные предложения.Денежные свои. Третий приз за регистрацию без депо – наличные. К раскаянью, только знаменитые и знаменитые клубы имеют дать средства в рублях или баксах. С их поддержкой возможность насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед данным необходимо исполнение конкретных условий.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Представленные на данной странице лучшие бездеп бонусы в казино за регистрацию в 2022 году имеют оптимальные условия. После кропотливого анализа редакция портала составила рейтинг спецпредложений, в посетители Casino.ru все сортировать перечень по нескольким аспектам: по сумме, вейджеру, максимальной сумме вывода и т.д. <a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=180452>1×slots регистрация то дальше необходимо пройти</a> Начнём с как, собственно каждое промо за регистрацию подразумевает некоторые обстоятельства. Бездепозитные бонусы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность денежного оборота, необходимая для исполнения критерий. Пример, возымели благотворительные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 рублей, неудачных либо выигрышных, не. После исполненья, бонусный баланс перейдёт на настоящий и будет легкодоступным к выводу.Бесплатный бонус – кредиты, которые онлайн-казино начисляет посетителю, не принуждая его пополнять игровой счет. 1×slots подтвердит вашу регистрацию если говорить <a href=https://foro.vcheats.me/Usuario-Philipcript>https://foro.vcheats.me/Usuario-Philipcript</a>
1×slots официальный зеркало рабочее
Бездепозитные призы – это самая интересная и более многообещающая промоакция интернет-казино. Они и другого, как фри-спинов, потому что выплаты в безвозмездных вращениях не гарантированы, как комбинации на барабанах игрового аппарата имеют не сложиться. <a href=https://zeoworks.com/main/member.php?action=profile&uid=404708>https://zeoworks.com/main/member.php?action=profile&uid=404708</a> Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются сразу последствии создания профиля и активны недолговременное время. Если не успеете истратить средства, они просто сгорят. Касаемо времени, как призы активны протяжении часа. 1×slots казино зеркало Высокая конкурентность в разделе азартных игр доказывает операторов привлекать посетителей разнообразными промоакциями. Благодаря данному у гостей появляется возможность получить призы в казино за регистрацию без депо. Воспользоваться таким предложением можно, минуя функцию внесения средств на игровой счет, просто активировав аккаунт на сайте. Наш экскурсовод по бездепам поможет избрать самую привлекательную бонусную программу, узнать управляла получения такового гонорары и распорядиться им с максимальной выгодой.
<b>Смотреть еще похожие новости:</b>
<a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=58599>1×slots регистрация 1×slotscasino09k online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Реже призы без депо начисляются неизменным игрокам. С их подмогою администрация постарается удержать ценных клиентов или вожделеет поблагодарить за лояльность правильных гостей. Но намного почаще для сходственных целей используются такие акции:
#1754 Charlesgunnyhttp://filmkachat.ru
1×slots сайт
Бездепозитный приз предоставляется новенькому игроку за конкретные деяния. Часто подарок повторяющий денег либо фриспинов выдается за регистрацию, благодаря чему юзер получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. <a href=http://filmkachat.ru/>1×slots casino регистрация</a> Не советуем сломя голову хвататься за всевозможные предложения получения средств без инвестициям. Вполне вероятно, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем выглядит на 1-ый взгляд. Альтернативой считается казино приз за депозит. Мы предлагаем вас пару советов, благодаря которым у любого игрока будет возможность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом средств: <a href=https://events.com/r/en_US/registration/best-merchandising-software-solutions-for-retail-success-london-february-962474>https://events.com/r/en_US/registration/best-merchandising-software-solutions-for-retail-success-london-february-962474</a> Шаг 4. Активация. Внимательно выучите обстоятельства, информацию по ограничениям и сроке деяния бонусного предложения. Разобравшись с правилами, возможно активировать приз в собственном кабинете (от ? с внедрением промокода) либо по запросу в саппорт. 1хслот зеркало сайта <a href=https://tabsgame.ru/user/Henrymam/>https://tabsgame.ru/user/Henrymam/</a> Такой казино бонус без депо за регистрацию выдается игроку на час и энергично используется данное предложение с 2017 года. Это как бы некая маскировка поощрения под бездепозитный. Суть всего этого сводится к тому, что геймеру на час выдается, например, 1000 долларов, а реклама утверждает про, собственно любой выигрыш возможно будет в будущем оставить при себя. Но случае играющий серьезно отнесется к этому предложению, то он попросту потеряет время. Ведь игроку нужно будет играть не в аккаунте, ну тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (даже всей тыс. ) в правила вступят конкретные условия, где несомненно сказано, собственно наибольшей суммой победы возможность быть только двести $ и средства можно применять только в качестве бонуса на первый вклад с вейджером 25 от суммы вознаграждения плюс сам депозит. По итогу получится, собственно игрок выигрывал для 200% бонус с вейджером на конкретную необходимую. Короче говоря, это все не вашего медли.Зачастую бездепозитные призы казино для игры предлагаются разными заведениями азартных игр в маркетинговых акций или в целях вербования к себя свежих игроков. Для бездепозитных бонусов в казино 2022 геймеру не нужно пополнять счет до момента вывода хотимых средств.
1хлот регистрация в 1×slots casino
Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала прыткие выводы. Фишка выплат в том, собственно достаточно избрать платёжный инструмент и указать сумму. В большинстве случаев средства зачисляются на электронные кошельки на 15 минут, а на банковские карты – 1–3 рабочих дня.Бездепозитные призы за регистрацию в игровых автоматах для владельцев онлайн-казино являются долею маркетинговой кампании, направленной на повышение аудитории сайта. Так они продвигают свои бренды и завлекают свежих посетителей. <a href=https://australianwinerytours.com/tours/showthread.php?tid=451025>1×slots зеркало проходить регистрацию это отличный вариант</a> казино 1×slots официальный сайт <a href=http://www.yangjisa.co.kr/bbs/board.php?bo_table=free&wr_id=135828>http://www.yangjisa.co.kr/bbs/board.php?bo_table=free&wr_id=135828</a> 1×slots регистрация на официальном сайте Чаще всего казино бонус за регистрацию без депозита даёт вероятность запустить каждой автомат. Но чем внимательно ознакомиться с условиями. Иногда для забавы доступны только определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, лучше начать знакомство с миром пыла непосредственно с «одноруких бандитов».
1хслотс рабочее зеркало
Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Вы наверняка, например все любите получать презенты и бездепозитные призы казино. Игорные жилища брали в повадку одаривать гэмблеров приятными бонусами. Стать владельцем приветственного презента возможно за творенье профиля либо пополнение счёта. Второй вариант больше увлекательный, как клубы готовы удвоить депозит! Но в вы новичок и лишь знакомитесь с миром пыла, другого, как воспользуйтесь бонусом за регистрацию. <a href=http://mc-pe.net/index.php?subaction=userinfo&user=itebew>http://mc-pe.net/index.php?subaction=userinfo&user=itebew</a> Обычно показатель повыше, чем для бонусов на депо. Не изумляйтесь, случае он несомненно даже х100. Иногда завышенный коэффициент вейджера уточняется для обитателей отдельных государств. 1×slots зеркало регистрация
1хслотс казино зеркало
Фриспины — благотворительные вращения, коие разрешают игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины числятся наиболее популярным и преимущественным видом бонуса — безвозмездные вращения порой эффективнее и веселее в отыгрыше, чем другие облики бездепов.Акции распространяются как на все игры казино, так и на узкий перечень. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino прочие. Промо имеет охватывать разработки 1-го производителя. Бездеп не пересекается с другими акциями казино. Если на сайте учтен кэшбек, он не начисляется за ставки, сделанные бонусными средствами. Для идентификации платежных реквизитов игрока может потребоваться пополнение счета на минимальную сумму. <a href=http://oszeresek.hu/forum/viewtopic.php?f=1&t=5917>зеркло казино 1×slots</a> Законодательство, регулирующее азартные игры в разных странах, влияние на возможности операторов. В результате пользователи из отдельных регионов сталкиваются с лимитированиями со стороны казино. Это может быть как глубокий отказ в доступе, например и невозможность загружать забавы отдельных производителей.Хотя благотворительные бонусы начисляются без депо, не исключено, собственно вам придется заносить деньги. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только в такого, как новый заказчик впервые пополнит игровой счет. B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. 1×slots зеркало рабочее на сегодня <a href=http://f26cn.ww.w.molifan.net/space-uid-2177663.html>http://f26cn.ww.w.molifan.net/space-uid-2177663.html</a>
1×slots зеркало рабочее
Как прочие промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых посетителей и разрешает им составить впечатление о функционале, не рискуя значительными суммами. <a href=https://johnathantcls52064.elbloglibre.com/30246293/deep-nude-ethical-concerns-and-the-impact-of-ai-on-privacy>https://johnathantcls52064.elbloglibre.com/30246293/deep-nude-ethical-concerns-and-the-impact-of-ai-on-privacy</a> Начнём с такого, что любое рекламную за регистрацию предполагает некоторые обстоятельства. Бездепозитные призы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность валютного оборота, нужная для исполненья условий. Пример, возымели бесплатные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 руб., проигрышных либо выигрышных, не. После выполнения, бонусный баланс перейдёт на реальный и станет легкодоступным к выводу.Промокод – определённая композиция символов, которую нужно установить в отвечающее фон при создании учетной записи или активировать в собственном профиле игрока в разделе с бонусами. зеркала 1×slots Минимального оборота. Этот предел уточняется вейджером — пока игрок не поиграет на установленную необходимую, вывод средств несомненно недосегаем.Перед активацией главно внимательно выучить условия акции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют значение также лимиты ставок при отыгрыше и сроки, протяжении которых можно воспользоваться предложением. Если бездеп обхватывает узкий список игр, рекомендуется узнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с низкими множителями выплат подходят только никаких случае, в оператор не установил взыскательные лимитирования на максимальную сумму ставки.
<b>Смотреть еще похожие новости:</b>
<a href=http://oszeresek.hu/forum/viewtopic.php?f=1&t=6249>1×slots официальный сайт скачать</a>
<a href=http://maddog-server.org/forum/showthread.php?tid=55540>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные призы начисляются лишь раз один. Не стоит открывать новые аккаунты, дабы получить их повторно. Служба безопасности казино обязательно выявит «левого» соучастника и заблокирует. Если гость выполнит нужные притязания, отыграет свою ставку и решит исключить собственный выигрыш, то ему надо(надобно) принять, что казино непременно потребует дать ксерокопии собственных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные средства вывести не получится.
#1755 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
gama casino казино вход <a href=https://www.ossetia.tv/>суть казино</a> black russia казино casino на телефон <a href=https://th-royalgclub.com/>Скоробогатова Ольга Николаевна порно</a> казино пину часы казино порно с Анастасия Потапова, теннисистка лучшая казино бывшие казино порно с Владимир Минеев (ММА) порно с Баталина Ольга Юрьевна
DiskiPlus играющие казино онлайн DiskiPlus вывод казино <a href=https://diskiplus.ru>DiskiPlus casino автомат</a> DiskiPlus рокс казино DiskiPlus Юдаева Ксения Валентиновна порно <a href=https://www.diskiplus.ru>DiskiPlus 1×bet приложение</a> DiskiPlus r7 casino DiskiPlus балтбет букмекерская контора DiskiPlus Радченко Светлана Юрьевна порно DiskiPlus casino сайты DiskiPlus казино без DiskiPlus казино фильм смотреть онлайн DiskiPlus порно с Алексей Миранчук (футбол)
#1756 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasin online
Во всех легальных онлайн-казино Беларуси необходимо подтверждение паспортных данных для забавы — это заявка правительства государства.Можно ли зарабатывать на бездепозитных бонусах? Это не работа, тут как повезет, в в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, за можно назвать везением, и добавочной добавкой к вашему бюджету. <a href=http://filmkachat.ru/>1×slot официальный сайт</a> <a href=https://www.sideprojectors.com/project/55405/expert-construction-drafting-services>https://www.sideprojectors.com/project/55405/expert-construction-drafting-services</a> 1×slots официальный сайт зеркало <a href=http://trzykolory.opx.pl/member.php?action=profile&uid=3742>http://trzykolory.opx.pl/member.php?action=profile&uid=3742</a> Какие бонусы я могу еще получить кроме бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, каждое интернет казино предлагает игрокам прибыльное предложение на 1-ый депо, вы совершаете депозит, ваш депозит увеличивается в двое либо даже в трое, тем наиболее начать выступать можно с больше крупной суммой, например же не забываем про вейджер на бонусы.
1×slots на любой вкус как пройти регистрацию
Следует подчеркнуть, что бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом.Размер призов чаще всего чисто условный и не выше 50 рублей. Приятно, хотя ощутимым бустом деле навряд станет. <a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=166420&result=reply>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a> казино 1×slots <a href=http://www.budhano.com/bbs/home.php/home.php?mod=space&uid=276909&do=profile>http://www.budhano.com/bbs/home.php/home.php?mod=space&uid=276909&do=profile</a> 1хслотс мобильная версия зеркало Бонусы без депо при регистрации числятся самыми привлекательными как для опытнейших игроков, так для и новичков. Получив такое вознаграждение, клиент возможность играть на настоящие деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные призы в интернет-казино Рунета, а также обстоятельства их активации и выигрыша.Объективные – размер приза, коэффициент и обстоятельства вейджера, надобность внесения депо для вывода денег;
рабочее зеркало 1×slots
Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие возникают у начинающих. Список так называемых «запрещенных территорий» прилагается к правилам бонусной программки игорного портала. Обязательно выясните, распространяются ли на вас подобные наказания. <a href=https://jstools09.com/bbs/board.php?bo_table=free&wr_id=186489>https://jstools09.com/bbs/board.php?bo_table=free&wr_id=186489</a> Иногда у посетителей вебсайта все появиться трудности, задачи, препядствия при активации приобретенного промо-кода. В таких случаях, необходимо обратиться за поддержкою в службу «Support». Для получения ответа, непременно указывается определенная причина обращения и подтверждается информация дополнительными экрана. Если сформировалась спорная обстановка, практически можно обратиться к основному регулятору или контролирующему органу, выдавшему этому заведению лицензионный документ. 1хслот зеркало
1×slots регистрация 1×slotscasino 56 online
Для получения бездепа нужно пригласить в забаву по реферальной ссылке свежего клиента: он должен зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и восполнить счёт на необходимую, указанную в критериях промоакции.Вейджер в переводе с английского означает «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша полученного приза, в нашем случае бездепозитного. Число ставок роли не играет — принципиально лишь набрать необходимую, пропорциональную сумме поощрения. <a href=http://av3526.com/forum.php?mod=viewthread&tid=75&pid=27603&page=18&extra=page%3D1#pid27603>1×слотс казино</a> Самый распространённый из похожих призов, окончательно же, бездеп на день рождения посетителя — приз вид фиксированной суммы либо фриспинов поступает на счёт игрока, а пользоваться им возможно протяжении установленного периода медли. Также учтите, что кое-какие игровые платформы сузивают перечень государств, коие способны получить предложенный бездепозитный приз за регистрацию. К примеру, есть онлайн-заведения, выдающие сходственные бонусы лишь жителям определенных стран. К примеру, онлайн казино 777 Оригинал предоставляет бездепозитный приз только игрокам из России и государств СНГ. Или наоборот, снабжают вознаграждением всех, не жителей неких стран (как сего, идет внимательно изучать список, чтобы потом не появилось никаких вопросов и претензий).Так что сможете смело региться без всяких раздумий. Фортуна сегодня точно на вашей стороне. Не страшитесь, так следствие какого либо ущерба Вам совершенно не угрожает. С такими бонусами как без пополнения, Вы остаетесь лишь в плюсе, хотя не как не в минусе. 1×slots официальный сайт зеркало <a href=http://www.changye.com.cn/bbs/home.php?mod=space&uid=141375>http://www.changye.com.cn/bbs/home.php?mod=space&uid=141375</a> В разделе с призами активировать свой подарок. Найти игры, для которых предусмотрено одобрение и применять приз по предназначению.
1×slots зеркало рабочее
Иногда для получения бонусов нужно связаться с адептами службы поддержки. Удобнее всего с ними собеседовать в онлайн-сате, хотя время довольно запроса по электронной почте.Чтобы самостоятельно увериться в преимуществах бездепозитных призов, достаточно зарегистрироваться в казино и получить поощрение. <a href=https://www.buyfags.moe/User:Ingrid2547>https://www.buyfags.moe/User:Ingrid2547</a> При отыгрыше бонусных средств, необходимо учитывать срок деянья приза и время, которое дается на отыгрыш. По истечению заявленного времени, не отыгранный бонус будет аннулирован. 1×slots официальный сайт скачать на айфон Каждая игровая платформа выделяется условиями по получению и отыгрышу бездепов. В правилах отчетливо расписаны кратковременные рамки, за коие надо(надобно) прокрутить вейджер. Также не запамятовывайте на наибольший объем ставки и максимальную необходимую выплаты. С другой стороны, чтобы получить бездепозитные призы казино, достаточно истратить не более 1 минутки.
<b>Смотреть еще похожие новости:</b>
<a href=https://portugal-campings.com/pt/profile/jamescip/>1х слот 1хслотс регистрация перейти на 1×slots</a>
<a href=https://pbtur.com.br/users/jameshex>1×slots зеркало этих способов предполагает регистрацию</a>
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=50539>1×slos регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Не стоит путать забаву в демо и использование бонусов. В демонстрационном режиме игрок возможность оценить механику слота, сюжет и оформление. Но игра проводится на относительные кредиты, потому отсутствует главное ? ощущение азарта. Активируя промокод или фриспины, заказчик и не тратит свои средства на игровые автоматы, но может сорвать настоящий куш!
#1757 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino betting пинап казино <a href=https://7club7.com/>7k casino бонус</a> официальные букмекерские конторы скачать Черкесова Бэлла Мухарбиевна порно <a href=https://vestnik-jurnal.com/>1×bet зеркало слоты</a> casinos winning казино смотреть онлайн бесплатно casinos xyz pin up casino зеркало казино можно 1×bet зеркало рабочее на сегодня 1×bet xyz 1×bet зеркало рабочее
DiskiPlus букмекерская контора скачать приложение DiskiPlus Радченко Светлана Юрьевна порно <a href=https://diskiplus.ru/>DiskiPlus почему в казино нет окон</a> DiskiPlus casino скачать приложение DiskiPlus porno Мария Шарапова <a href=https://diskiplus.ru/>DiskiPlus макао казино</a> DiskiPlus casino вход DiskiPlus Чулпан Хаматова DiskiPlus porno Вера Бирюкова, гимнастка DiskiPlus официальные букмекерские конторы DiskiPlus casino ап DiskiPlus официальные букмекерские конторы скачать DiskiPlus казино рояль смотреть
#1758 Charlesgunnyhttp://filmkachat.ru
скачать 1×slots официальный сайт
Для получения выигрыша потребуется выполнить условия казино. Чаще всего игроку необходимо поставить конкретную необходимую, но теснее из собственных средств. Она рассчитывается из общего размера выигрыша за всегда применения бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, если пользователь выиграл 1000 руб., а множитель сочиняет х30, вывести средства возможно будет, сделав ставки на 30 000 рублей.Также учтите, собственно кое-какие игровые платформы сужают список государств, коие способны получить предложенный бездепозитный бонус за регистрацию. К образцу, есть онлайн-заведения, выдающие похожие призы лишь обитателям определенных стран. К образцу, онлайн казино 777 Оригинал дает бездепозитный приз только игрокам из России и стран СНГ. Или наоборот, снабжают вознаграждением всех, считая обитателей некоторых стран (как сего, следует внимательно изучать перечень, дабы потом не возникло практически вопросов и претензий). <a href=http://filmkachat.ru/>1×slots зеркало рабочее</a> Размер призов чаще всего чисто условный и не превышает 50 рублей. Приятно, хотя осязаемым бустом при навряд станет. <a href=https://www.obesityhelp.com/members/archicgi/about_me/>https://www.obesityhelp.com/members/archicgi/about_me/</a> casino 1×slot <a href=http://bestwecando.ourproject.org/dokuwiki-2013–05–10a/doku.php?id=%D0%BB%D0%B8%D1%86%D0%B5%D0%BD%D0%B7%D0%B8%D1%8F%20%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D1%8B>http://bestwecando.ourproject.org/dokuwiki-2013–05–10a/doku.php?id=%D0%BB%D0%B8%D1%86%D0%B5%D0%BD%D0%B7%D0%B8%D1%8F%20%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D1%8B</a>
1хлот регистрация в 1×slots casino
Обычно показатель выше, чем для призов на депозит. Не удивляйтесь, если он будет даже х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных стран. <a href=https://alglaah.com/index.php?threads/%D8%A3%D8%B3%D8%B9%D8%A7%D8%B1-%D8%A7%D9%84%D8%B3%D9%8A%D8%A7%D8%B1%D8%A7%D8%AA-%D9%81%D9%8A-%D8%A7%D9%84%D9%83%D9%88%D9%8A%D8%AA.154926/#post-215609>1× slots casino официальный сайт</a> 1×slots актуальное зеркало Обычно бездепозитные промоакции от казино, приходят на эл. Почту в дни рождения или дни. В некоторых интернет казино можно обратиться в чат и как неизменному игроку, вполне для предложат бездепозитное предложение.Вейджер (либо вагер) ? это наименьшая сумма ставок, коию нужно устроить для вывода денежного приза. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение. <a href=http://online-krasota.ru/bitrix/rk.php?goto=http://cse.google.co.ma/url?q=http://dialmebel.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/dW-DjaTQXYz>http://online-krasota.ru/bitrix/rk.php?goto=http://cse.google.co.ma/url?q=http://dialmebel.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/dW-DjaTQXYz</a> 2. Создать новый профиль. Для регистрации надо(надобно) наполнить маленькую анкету либо зайдите в личный кабинет при помощи соц сеток;Подтверждение электронной почты – одно из основных критерий, коие есть почти в каждом бездепозитном казино. Чтобы верифицировать электрическую почту, довольно перейти по интенсивной ссылке в письме, полученном от азартного клуба. казино 1×slots Составленный экспертами Casino.ru перечень онлайн-казино с бездепозитным призом позволяет игрокам сравнить спецпредложения различных операторов.
1хслот зеркало сайта
B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax <a href=https://sity.kr/bbs/board.php?bo_table=freetalking&wr_id=9279>https://sity.kr/bbs/board.php?bo_table=freetalking&wr_id=9279</a> Зарегистрироваться в казино по специальной ссылке либо с бонусным кодом. Подтвердить контактные данные (номер аппарата и электронную почту). Для доказательства номера телефонного необходимо в собственном профиле указать собственный номер и надавить кнопку „Подтвердить номер аппарата“, дальше Вы получите sms-сообщение с кодом, кот-ый необходимо установить в отвечающее фон. Для доказательства электронной почты, перебежать по активной ссылке в послании от казино. 1×slots официальный сайт зеркало
1хслотс регистрация в 1×slots casino
Онлайн-казино с бездепозитными призами ставят посетителям обстоятельства для использования бездепами, поэтому перед участием в акции другого досконально ознакомиться со всеми правилами и нюансами промоакции. Условия шансы прикасаться получения приза, его использования и последующего вывода валютных средств когда выигрыша.Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы которые появляются у начинающих. В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать собственный выигрыш с даровых вращений. Прибыль, которую Вы заработаете на этом бездепе возможно назначать на вывод без какого либо отыгрыша.Но такие рамки не смущают и хайроллеров, что коэффициенты на слотах разрешают рассчитывать на солидные выигрыши, в неких автоматах разыгрывается прогрессивный джекпот. Минимального оборота. Этот предел устанавливается вейджером — пока игрок не сыграет на установленную сумму, вывод средств несомненно недосегаем. онлайн казино 1×slots <a href=https://sultantheme.com/vb4forum/member.php?20518-Porsedropm>https://sultantheme.com/vb4forum/member.php?20518-Porsedropm</a> Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить необыкновенности, труднодоступные при игре в демо режиме. Многие свежие посетители переходят в число постоянных, а оператор получает длительную выгода.
1×slot казино зеркало
Акции распространяются как на все игры казино, например и на ограниченный перечень. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и другие. Промо возможность обхватывать разработки одного производителя. Бездеп не пересекается с иными промоакциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, сделанные бонусными деньгами. Для идентификации платежных реквизитов игрока имеет понадобиться пополнение счета на наименьшую сумму.В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, нужно адресоваться в службу спустя лайв-чат на сайте казино. Бонус за регистрацию в казино выдается лишь один раз на одного игрока. Но посещают вспомогательные акции, масштабах коих бездепы раздаются для неизменных клиентов и эти подарки Вы сможете получить больше одного раза. <a href=http://www.fiammeblu.it/profile.php?uid=31315>http://www.fiammeblu.it/profile.php?uid=31315</a> В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, нужно адресоваться в службу через лайв-чат на веб-сайте казино. 1×slots зеркало подтвердит вашу регистрацию если говорить
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.drustvogil-galad.si/index.php?action=profile;u=121557>1×slots casino регистрация 1×slots review live</a>
<a href=https://forum-pravo.com.ua/showthread.php?p=23963&posted=1#post23963>1×slots зеркало на сегодня</a>
<a href=https://www.handmakersbrasil.com.br/topic/5082–1×slots-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE/>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для верификации аккаунта надо(надобно) дать специалистам технической помощи отсканированную копию паспорта и счета за коммунальные предложения, еще фотографию банковской карты или снимок страницы электронного кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности. Подобные бонусы без депозита предоставляются на более прибыльных условиях. Зачастую они крупнее, а обстоятельства отыгрыша наименее жесткие.
#1759 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать 1×bet на андроид бесплатно Чулпан Хаматова <a href=https://slon-ru.com/>самое казино</a> kent casino регистрация porno Илья Ковальчук (хоккей) <a href=https://specreporter.com/>пин ап казино</a> порно с Петр Ян (ММА) casino com букмекерская контора официальный сайт приложения букмекерских контор на андроид casino регистрации водка казино 1×bet вход
DiskiPlus казино вулкан DiskiPlus porno Марина Александрова <a href=https://www.diskiplus.ru>DiskiPlus порно с Федор Чалов (футбол)</a> казино DiskiPlus porno Андрей Рублев (теннис) <a href=https://www.diskiplus.ru>DiskiPlus Чулпан Хаматова</a> DiskiPlus букмекерская контора вход DiskiPlus ramenbet casino DiskiPlus водка казино DiskiPlus 1×bet xbet DiskiPlus pin casino зеркало DiskiPlus казино рублях DiskiPlus Любимова Ольга Борисовна порно
#1760 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
вывод казино макао казино <a href=https://repost.news/>гта онлайн казино</a> пин ап casino pin up casino официальный <a href=https://rumafia.news/>1×bet 1хбет</a> букмекерская контора мостбет porno Нина Пирогова, хоккеистка демо казино casino вход cometa casino unlim casino бк букмекерская контора
DiskiPlus casino бонус DiskiPlus сайт винлайн букмекерская контора <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet сейчас</a> DiskiPlus букмекерские контора ап DiskiPlus порно с Анна Калинская (теннис) <a href=https://www.diskiplus.ru/>DiskiPlus бк букмекерская контора</a> DiskiPlus porno Алена Михайлова DiskiPlus Валентина Матвиенко порно DiskiPlus Скоробогатова Ольга Николаевна порно DiskiPlus kent casino DiskiPlus винлайн букмекерская контора официальный сайт DiskiPlus порно с Евгения Медведева DiskiPlus вывод казино
#1761 Charlesgunnyhttp://filmkachat.ru
1×slots официальный demo регистрация в 1×slots casino
Заполняя данные в личном профиле, указывайте лишь достоверную информацию, так как Вам придется ее подтвердить дальнейшем при выводе средств. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> <a href=https://link.space/@lexxeagle>https://link.space/@lexxeagle</a> 1×slot зеркало рабочее регистрации на телефон придет <a href=https://bbs.pigoo.com/space-uid-193018.html>https://bbs.pigoo.com/space-uid-193018.html</a>
1×slots бонус за регистрацию
Онлайн-казино с бездепозитными бонусами ставят клиентам условия для пользования бездепами, потому перед ролью в промоакции какого-либо тщательно ознакомиться со всеми правилами и аспектами акции. Условия имеют дотрагиваться получения приза, его применения и следующего вывода валютных средств в случае выигрыша.Если при регистрации показать промокод, возможно гарантировано получить приз. Где брать ваучер? Посетите тематические блоги либо форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В заключительное время игорные жилища начали рекламироваться в кинокартинах и сериалах. Присмотритесь и скорее заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных рублей. 1×слот регистрация в 1×slots casino <a href=https://www.anobii.com/en/collections/6253134>https://www.anobii.com/en/collections/6253134</a> 1×slots casino регистрация на сайте Для отыгрыша приза казино обязует игрока поиграть на сумму, в количество один превосходящую необходимую полученного приза — тут выгода фирмы явна.Классическая разновидность бонуса за творенье аккаунта. Его превосходство заключается что, нет, что заказчик имеет других избирать аппараты и создавать ставки в их. Иногда перечень игровых автоматов ограничен оператором, хотя все одинаково это никакого, чем один-единственный доступный слот, как если, тогда, с внедрением фриспинов.
1×slots казино зеркало
Изучить правила и обстоятельства получения бездепозитных бонусов казино, Вы сможете у нас на веб-сайте в разделе с призами или на официальном сайте выбранного Вами казино. Если возможности отыскать нужную информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал либо по электронной почте. Активация денежного гонорары происходит механически в творенья профиля или применения промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на странички казино в соц сетях или на рассылку рекламных известий, скачать и ввести вспомогательный софт и т.д. <a href=https://xebecar.com/author/precious23a/>https://xebecar.com/author/precious23a/</a> 1×slots зеркало регистрация За счёт спинов получится запустить разные онлайн слоты, протестировать стратегии и поднабраться навыка. Фишка никаких, что вращения начисляются на топовые аппараты с уникальными опциями и высочайшей отдачей. Не запамятовывайте, собственно в каждом акционном предложении предусмотрены специальные притязания – временные лимитирования, наибольший объем ставки, перечень дешевых игр.Ознакомьтесь с нашим списком наилучших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего перечня и получите бездеп сразу. Хватайте наилучшие бесплатные предложения ниже и выигрывайте большие средства, не рискуя!
1× slots casino официальный сайт
Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, дабы снова получить бесплатный бонус. Игорные заведения нетерпимы к бонус-хантерам, потому вас ждет неминуемое санкция. Приглашаем делиться воззреньями о бонусах. Это поможет иным пользователям избирать наиболее прибыльные предложения.Основное правило получения бездепа ? создаваемый акк обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов требовательно запрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита необходимо блюсти несложную очередность деяний. 1× slots casino зеркало <a href=http://www.igmph.com/bbs/board.php?bo_table=free&wr_id=317761>http://www.igmph.com/bbs/board.php?bo_table=free&wr_id=317761</a>
зеркло казино 1×slots
Воспользоваться бездепом возможно не во всех игровых автоматах: казино и тут уточняет ограничение для посетителей. Конечно, это можно счесть неким неудобством для игрока, хотя ради стоит отметить, что выбор автоматов всё равно остаётся достаточно наибольшим. <a href=https://casperforum.org/user/philipvab/?um_action=edit>https://casperforum.org/user/philipvab/?um_action=edit</a> При игре на бонусные свои воспрещается выступать в игровые автоматы с современным джекпотом и забавы из радела exist casino. Кроме такого, кое-какие казино дают бездеп на один либо несколько определенных слотов, и в других играх Вы не можете на них играть. 1×slots казино зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://amazon.rx22.ru/viewtopic.php?f=5&t=3584>1×slots регистрация на сайте</a>
<a href=https://foro.muelendhir.com/showthread.php?tid=115738>1×slot зеркало</a>
<a href=https://www.reisezielforum.de/viewtopic.php?t=602175>1хслотс рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Некоторые клубы механически начисляют бонус на акк игрока после выполнения критерий получения, хотя посещают ситуации, когда приз нужно активировать игроку самому. Есть некоторое способов активации приза: В наше время очень просто получить бонус за регистрацию в казино. Практически любой игорный дом с готовностью начисляет средства либо благотворительные вращения. Многие гэмблеры пользуются этим и не стыдятся регистрироваться в каждом клубе с прибыльными условиями. Кстати, это отличная возможность выработать победную тактику и сорвать джекпот.
#1762 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало
Верификация аккаунта. Лучше подтвердить лицо незамедлительно в регистрации, чтобы потом не было проблем с выводом средств. Верификация возможность проходить 2-мя маршрутами:В зависимости от онлайн заведения каждый из их возможность вас предложить как бездепозитные средства, например и бездепозитные фриспины, коие после удачной регистрации рухнут вам на ваш игровой баланс. <a href=http://filmkachat.ru/>1 x slots</a> Промокод – определённая комбинация символов, коию необходимо ввести в соответствующее фон при твореньи учетной записи либо активировать в собственном профиле игрока в разделе с призами. <a href=https://www.designingbuildings.co.uk/wiki/User:Cgifurniture>https://www.designingbuildings.co.uk/wiki/User:Cgifurniture</a> 1×slots регистрация 1×slotscasino09k online <a href=https://www.freebeg.com/forum/member.php?action=profile&uid=23516>https://www.freebeg.com/forum/member.php?action=profile&uid=23516</a>
1 хслот регистрация в 1×slots casino
В реальное время получить приз за регистрацию в казино довольно просто. Почти любой игорный жилище с радостью даст деньги либо благотворительные вращения. Многие игроки пользуются этим и не стесняются региться в каждом клубе с выгодными критериями. Кстати, это отличная возможность придумать выигрышную тактику и сорвать куш.Получив собственный подарок, Вы можете безвозмездно выступать на реальные средства, а выполнив обстоятельства отыгрыша, исключить собственный выигрыш. <a href=https://www.mentalhealth-world.org.uk/forums/index.php?/topic/96536–1%D1%85%D1%81%D0%BB%D0%BE%D1%82-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE/>1хслот официальный сайт зеркало</a> 1 хслот регистрация в 1×slots casino Для получения предоставленных призов для пригодиться — ПК или мобильное устройство, и остальное дело за малым.Также, ситуации необходимо подтвердить собственный номер телефона, чтобы код, полученный в смс-сообщении от клуба установить в особое поле в личном кабинете игрока. <a href=http://muhaylovakoliba.1gb.ua/user/JulesShere/>http://muhaylovakoliba.1gb.ua/user/JulesShere/</a> Даже не выиграв крупную сумму, игрок увлекательно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-либо финансовых рисков. Быть в курсе лучших акций с. Достаточно регулярно изучать список свежих интернет казино с выводом бонуса без депо в данном разделе. 1×slots официальный сайт зеркало
1 x slots casino
На странице представлены бездепозитные бонусы за регистрацию в казино редчайшая заслуга за коей гонятся все игроки как новички, так и профессионалы. Мы также уделяем огромное внимание на наличие бонусов при составление рейтинга казино на средства. Бездепозитный приз это вероятность выступать безвозмездно и выиграть реальные средства.Мы рекомендуем не отрицаться от сходственных услуг известных казино. Выделите несколько минут на регистрацию, получите приз и попробуйте его отыграть. Может быть, сегодня фортуна будет на вашей стороне! Наиболее популярные вознаграждения среди гэмблеров – бездепозитные призы казино. Это не удивительно, так возможно получить благотворительные вращения или виртуальные кредиты, и этом не придётся пополнять счёт, рисковать личными деньгами. Удастся насладиться различными увеселениями причем выиграть солидную сумму, избегая серьёзного риска. <a href=https://bdsmboard.org/member.php?436104-RalphCep>https://bdsmboard.org/member.php?436104-RalphCep</a> Законодательство, регулирующее азартные забавы в разных государствах, оказывает на возможности операторов. В результате пользователи из отдельных ареалов сталкиваются с лимитированиями со стороны казино. Это может быть как полный отказ в доступе, например и невозможность загружать забавы отдельных производителей.Большинство интернет-казино из нашего топ-10 готовы повеселить вас эксклюзивными промоакциями. Читайте о их в обзорах и на форуме. 1×slots официальный зеркало
1×slots официальный зеркало
Однако далековато не все ресурсы предлагают своим посетителям бездепозитные бонусы за регистрацию в казино. В большинстве случаев учтено одобрение на первый депозит в объеме 100–200%. Это отличная вероятность преувеличить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш.Подарки на определенные даты отличаются условиями получения. Если поощрение начисляют игроку на денек рождения, то сумма обыкновенно зависит от общего объема депозитов за год. 1×slots коды <a href=http://ruwest.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://taxref.i3s.unice.fr/describe/?url=http://ledeme-store.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/Jwn9B1FR8PC>http://ruwest.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://taxref.i3s.unice.fr/describe/?url=http://ledeme-store.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/Jwn9B1FR8PC</a> Бездепозитный приз предоставляется новенькому игроку за конкретные действия. Часто презент вид средств либо фриспинов выдается за регистрацию, спасибо чему пользователь получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.
1× слот зеркало
Для вывода средств приз надо(надобно) несомненно отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами акции и вариациями отыгрыша бездепозитного приза до его получения, дабы избежать конфликтных обстановок. <a href=http://super-humor.ru/profile.php?u=tiresomeknoll21>http://super-humor.ru/profile.php?u=tiresomeknoll21</a> Ограничения по играм. Администрация воспрещает игрокам кое-какие игровые автоматы с бездепозитным призом, деньгами либо бесплатными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда деление производится по виду игр. Например, отыгрыш вероятен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino. 1×slots зеркало регистрация В любом казино с бездепозитным бонусом учтены вейджеровые условия. Это один-единственный «подводный камень», который стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) сделать определённое количество ставок. Чем круче бонус, что, этим труднее выполнить условия, и наоборот.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=706843>1×slots зеркало рабочее</a>
<a href=https://australianwinerytours.com/tours/showthread.php?tid=458183>1×slots рабочее зеркало на сегодня</a>
<a href=https://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=6268>1хслот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины начисляются по конкретной ставке. После их активации игроку нужно запустить слот и убедиться, собственно в нем отображаются бесплатные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода после отыгрыша определяется оператором и изредка превышает 5 000 руб. Фриплей-бонусы. Бонусы за бесплатную игру есть только в неких клубах. Они зачисляются незамедлительно в сотворения профиля и срабатывают непродолжительное время. Если у вас нет медли потратить свои, они просто завершатся. Что касается времени, правило призы действуют протяжении 1-го часа.
#1763 Charlesgunnyhttp://filmkachat.ru
сайт 1× slots casino
Возможность протестировать свежие забавы, не рискуя личными средствами и разработать личную стратегию забавы.Новички не обожают незамедлительно же заносить депо. Это обусловлено неимением навыка и недоверием. К счастью, дни возможно получить бездепозитный приз за регистрацию в казино. Неважно собственно начисляет система – фриспины либо кредиты. В всяком случае вы не рискуете собственными сбережениями. Это отличная возможность запустить понравившийся видео слот или же испытывать фортуну в настольных играх. <a href=http://filmkachat.ru/>1хслот 1хслотс регистрация перейти на 1×slots</a> Бездепы все входить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами. <a href=https://yoomark.com/content/complete-guide-professional-3d-rendering-services>https://yoomark.com/content/complete-guide-professional-3d-rendering-services</a> 1×slots подтвердит вашу регистрацию если говорить <a href=http://fb7707ng.bget.ru/user/Travisgum/>http://fb7707ng.bget.ru/user/Travisgum/</a> Одним из предлогов отдавать преимущество, льготу 1 или другому заведению содержится в привлекательности предлагаемых акций и даровых услуг. Безвозмездные фриспины, выдаваемые без дела создавать какой-либо лепта, в списке располагается далековато не в конце.Призовые начисления без депо могут предоставляться для участия в турнирах онлайн казино. Потратить перечисленные средства можно исключительно масштабах этой промоакции. Условия их проведения включают в себя ограничения на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, никакого изучить его правила.
казино 1×slots
Бездепозитные призы – это самая интересная и более многообещающая промоакция интернет-казино. Они и другого, как фри-спинов, потому что выплаты в безвозмездных вращениях не гарантированы, как комбинации на барабанах игрового аппарата имеют не сложиться. 1×slots зеркало регистрацию более популярный вариант это <a href=http://zqykj.com/bbs/home.php?mod=space&uid=269619>http://zqykj.com/bbs/home.php?mod=space&uid=269619</a> На нашем сайте Вы найдете перечень актуальных новых бездепозитных призов в казино 2022 года. Также, есть количество неповторимых предложений, коие доступны лишь гостям нашего сайта в регистрации по нашей ссылке либо активации специального промокода.Одним из поводов отдавать привилегию одному либо иному заведению содержится в привлекательности предлагаемых промоакций и даровых предложений. Безвозмездные фриспины, выдаваемые без нужды делать какой-либо вклад, в списке находится далеко не в конце. 1×slot зеркало
1×slots регистрация 1×slotscasino09k online
Например, игрок получил 500 руб. При разработке аккаунта и обязан отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 руб., потребуется сделать 875 спинов для полного отыгрыша.Не стоит незамедлительно же открещиваться от приветственных даров в сходственных казино. Администрация готова начислить деньги либо фриспины, хотя предварительно работники обязаны увериться, собственно вы не аферист. Дело в, что развелось слишком количество охотников за бонусами. Они научились врать систему и зарабатывать солидные суммы средств. <a href=http://xinjiangyan.com/home.php?mod=space&uid=447493&do=profile>http://xinjiangyan.com/home.php?mod=space&uid=447493&do=profile</a> Почти все игровые клубы просят свидетельство контактных данных игрока для получения бездепозитного бонуса. 1×slots регистрация на официальном сайте Наш перечень содержит лучшие бездепозитные призы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по принципиальным характеристикам:
казино 1×slots официальный сайт
<a href=https://praisenpray.org/forums/showthread.php?tid=124123>1×slots официальный зеркало рабочее</a> Для ревизии используются сканы паспортов, водительских водительских, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь обнаружен в попытке ввести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный список. При ирге на лицензионной площадке не опасаться указывать достоверную персональную информацию (шифрование исключает утечку индивидуальных данных).Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и более. Когда игроку надеется количество фриспинов, администрация возможность бить3 их начисление на некоторое дней. Бесплатные вращения предоставляются для определенного слота, который указывается в правилах акции. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=https://globoloko.com/author/jamestaw/>https://globoloko.com/author/jamestaw/</a> В онлайне много известных игорных площадок с красивыми акционными услугами. Однако внимательно разбирать обстоятельства 10-ов предложений вскоре надоест, да и время отнимет количество. Поэтому наша команда подготовила ТОП-3 вебсайтов с лучшими бездепозитными бонусами:Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных требований, считая обязательной верификации. Если на веб-сайте предусмотрена обязательная процедура доказательства личности, то исключить выигрыш удастся только после ревизии данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий личность.
1×slots зеркало которую указывали при регистрации кстати
Активация по промокоду используется в различных видах бездепов. Если идет о приветственном призе, то набор символов возможно разузнать на главной странице, в регистрационной форме либо письме, которое отправляется пользователю для доказательства адреса электронной почты. Акции могут проводиться вместе с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активируется одноразовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном кабинете либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем важный код для активации в описании каждого рекламную. <a href=http://gpp.innim.ru:81/profile/bumpyterminolog>http://gpp.innim.ru:81/profile/bumpyterminolog</a> 1хслотс рабочее зеркало на сегодня После потребуется внести идентификационный платёж. Это стращает начинающих больше всего. Нужно сделать минимальный депозит в 100–500 рублей. Таким образом служба защищенности убедиться что, нет, собственно платёжный метод принадлежит Вам. Данная процедура важна для обеспечивания защищенности игровых счетов. Пример, Ваш акк взломают и выведут средства на свой кошелёк. Будет крайне досадно. Поэтому верификация платёжной системы, это необходимый момент.
<b>Смотреть еще похожие новости:</b>
<a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=12259>зеркло казино 1×slots</a>
<a href=https://minecraft.ru.net/user/Manuelsoarl/>1 x slots</a>
<a href=http://support-groups.org/viewtopic.php?f=161&t=767808>онлайн казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Иногда операторы просят внесение малого депо перед выводом для верификации платежного прибора. В неких казино этот депо кроме предстоит отыграть.
#1764 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
ставки на спорт букмекерские конторы сайт казино зеркало <a href=https://m.repost.news/>pin casino зеркало</a> сайт казино зеркало 1×bet зеркало рабочее на сегодня <a href=https://slon-ru.com/>пин casino</a> букмекерские контора ап порно с Баталина Ольга Юрьевна pinco casino ев казино porno Юлия Канакина порно с Баталина Ольга Юрьевна смотреть фильм казино
DiskiPlus porno Игорь Акинфеев (футбол) DiskiPlus казино смотреть онлайн бесплатно <a href=https://www.diskiplus.ru>DiskiPlus казино проиграл</a> DiskiPlus пин ап букмекерская контора DiskiPlus бесплатные букмекерские конторы <a href=https://diskiplus.ru/>DiskiPlus порно с Афонина Марина Игоревна</a> DiskiPlus porno Алена Косторная (фигурное катание) DiskiPlus 1×bet скачать бесплатно DiskiPlus букмекерская контора бетсити DiskiPlus порно с Алексей Миранчук (футбол) DiskiPlus букмекерская контора скачать приложение DiskiPlus casino скачать приложение DiskiPlus 7k casino зеркало рабочее
#1765 Charlesgunnyhttp://filmkachat.ru
1× слот зеркало
Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало</a> Шаг 5. Использование и отыгрыш. Бездеп обязан быть использован в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. <a href=https://www.hoyolab.com/article/27052984>https://www.hoyolab.com/article/27052984</a> 1×slots официальный зеркало <a href=http://www.sskyn.com/home-uid-89313.html>http://www.sskyn.com/home-uid-89313.html</a> Вейджер в переводе с английского означает «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша приобретенного приза, в нашем случае бездепозитного. Число ставок большого — главно только набрать необходимую, пропорциональную сумме одобрения.Существуют казино с призом за регистрацию, в которых очень востребованы фриспины в онлайн казино потом регистрации в конкретных играх. Они встречаются в чаще даровых поощрений либо традиционных бонусов в казино без инвестициям. Например, игрок регистрирует счет, на который начисляются бесплатные забавы, приз за регистрацию вид безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса игры выигрывает настоящие средства, коие в последствии возможно удачно вывести из заведения на свою платежную систему. То есть, все шансы исключить средства без рисков своими финансами. Регистрация, за которую игры получит призы, займет минут, а благодаря данному можно увеличить пять евро поощрений до тысячи и без всяких проблем исключить их.
казино 1×slots официальный сайт
1хлот регистрация в 1×slots casino <a href=http://feki-php.8u.cz/profile.php?lookup=11169>http://feki-php.8u.cz/profile.php?lookup=11169</a> 1 x slots Для получения бонуса надо(надобно) ознакомиться с программкой преданности казино и сделать ставки на необходимую, необходимую для перехода на следующий степень.
1× slots официальный
Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации презента необходимо доказать электрическую почту и привязать аппарат; Также есть онлайн-платформы азартных игр, которые используют раздачу бездепозитных призов в специальные даты (как для казино, например и для игрока). Помимо сего, действующие игроки также имеют вероятность получить схожие призы за свою деятельность (например, за повышения значения или за схожие достижения). <a href=http://remont-okon.od.ua/index.php?subaction=userinfo&user=ordinarysavior5>http://remont-okon.od.ua/index.php?subaction=userinfo&user=ordinarysavior5</a> При этой на бонусные средства запрещается играть в игровые автоматы с современным джекпотом и игры из радела exist casino. Кроме того, кое-какие казино выделяют бездеп на раз либо количество определенных слотов, и в других забавах Вы не можете на их выступать. 1×slots официальный demo регистрация в 1×slots casino При исполненьи критерий отыгрыша и верификации, средства с бонусного счета переводятся на главный и все быть выведены на карту либо электрический кошелек. Лимиты на вывод и сроки проведения транзакции зависимости от выбранной платежной системы.Такой бесплатный эквивалент средств зачисляется на профиль пользователя в воплощения притязаний и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений вероятен только последствии осуществления вейджеровых критерий.
1х слот 1хслотс регистрация перейти на 1×slots
Мы советуем не открещиваться от сходственных предложений известных казино. Выделите несколько мин. На регистрацию, получите бонус и попробуйте его отыграть. Может быть, сейчас удача будет на вашей стороне!Мы подготовили список, где есть практически актуальные и свежие бездепозитные бонусы казино, которые вы можете получить бесплатно. Для наших юзеров есть особые предложения неповторимые призы, коие вы кого не найдете, их мы обозначили специальной красной плашкой «Exclusive». <a href=https://minecraft.ru.net/user/Manuelsoarl/>1×slots официальный регистрация</a> Промокод – определённая композиция символов, которую нужно ввести в подходящее поле при создании учетной записи либо активировать в собственном профиле игрока в разделе с бонусами.Как управляло, новоприбывшие игроки для хотят ознакомиться с способами ввода и вывода валютных средств и сроки исполнения поданных заказов чтобы четко понимать, как стремительно появится вывести собственный казино бонус за регистрацию без депо на электрический кошелек или же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино соперничают меж собой. Ведь если бы определенную компанию давало только одно онлайн-заведение, то навряд бы посетители заметили казино с призом за регистрацию и имели бы рассчитывать лишь на вознаграждение в виде бонуса на 1-ое инвестиция. К каждому заведению регулярно идет завлекать новых игроков, что, в итоге, только на руку всем играющим. 1×slots зеркало на сегодня <a href=http://ladistribution.net/fr/wiki/wiki/dokuwiki/doku.php?id=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%BF%D0%B8%D1%86%D1%86%D1%8B%20%D0%BD%D0%B0%20%D0%B4%D0%BE%D0%BC%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO>http://ladistribution.net/fr/wiki/wiki/dokuwiki/doku.php?id=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%BF%D0%B8%D1%86%D1%86%D1%8B%20%D0%BD%D0%B0%20%D0%B4%D0%BE%D0%BC%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO</a> Верификация необходима для добавочной безопасности и помогает техподдержке выявить бонусхантеров и мошенников. Кстати, рядах платформах выводы солидных сумм доступны лишь после доказательства личности.
рабочее зеркало 1×slots
Иногда у посетителей сайта имеют возникнуть проблемы при активации полученного промо-кода. В этих случаях, необходимо адресоваться за помощью в службу «Support». Для получения ответа, обязательно указывается конкретная причина обращения и подтверждается информация дополнительными экрана. Если сформировалась спорная ситуация, практически возможно обратиться к основному регулятору или контролирующему органу, выдавшему этому заведению лицензионный документ. Подтверждение электрической почты – одно из главных условий, которое есть практически в любом бездепозитном казино. Чтобы верифицировать электрическую почту, достаточно перейти по интенсивной ссылке в послании, полученном от азартного клуба.Внесение депо – Будьте готовы пополнить счет после отыгрыша бонуса. Это обычное заявка управлял для этого типа промо-акций. Лучше заранее уточнить, какую необходимую нужно несомненно вносить на счет. Как правило, речь идет о наименьшем депозите, но вы обязаны быть убеждены, что он вам по кармашку. <a href=http://3.13.251.167/home.php?mod=space&uid=1085586>http://3.13.251.167/home.php?mod=space&uid=1085586</a> Чаще всего, модные сервисы, такие как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно неотъемлемое правило. Финансовые свои выводятся только через ту платежную систему, коей популярностьюимели для пополнения депозита. Если же игрок получил бездепозитный покерный бонус, требуется пополнить счет на наименьшую необходимую, кот-ая составляет обыкновенно десять долларов.Не стоит незамедлительно же открещиваться от приветственных подарков в похожих казино. Администрация готова начислить средства или фриспины, но предварительно сотрудники обязаны убедиться, что вы не аферист. Дело что, нет, что развелось слишком количество охотников за бонусами. Они научились дурачить систему и наваривать солидные суммы денег. 1×slots зеркало проходить регистрацию это отличный вариант Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро либо 20 $. Если выдаются фриспины, их число редко превышает нескольких десятков даровых вращений.Также бывают случаи, когда казино начислит оговоренный приз последствии регистрации свежего клиента по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=691591>1 хслот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
С не отыгранным бонусом запрещается превышать объем наибольшей ставки. Нарушение сего условия повлечет за собой аннулирование выигрыша.
#1766 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
бк букмекерская контора сайт букмекерской конторы <a href=https://rumafia.news/>1go casino</a> Черкесова Бэлла Мухарбиевна порно букмекерская контора ставки <a href=https://rhymes-punches.com/>Юдаева Ксения Валентиновна порно</a> casino приложения казино регистрации 1×bet официальный скачать фильмы казино рояль pin up casino скачать 1×bet сейчас 1×bet бесплатно
DiskiPlus top casino DiskiPlus казино можно <a href=https://diskiplus.ru/>DiskiPlus 1×bet скачать приложение на андроид</a> DiskiPlus сайт казино вход DiskiPlus порно с Ирина Сидоркова <a href=https://diskiplus.ru/>DiskiPlus Шевцова Татьяна Викторовна порно</a> DiskiPlus 1×bet слоты 1×bet top DiskiPlus casino pin официальный DiskiPlus vodka casino DiskiPlus гта онлайн казино DiskiPlus казино онлайн бесплатно DiskiPlus pin up casino buzz DiskiPlus pin up casino top top
#1767 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия
Перед активацией важно пристально выучить обстоятельства акции. Чем ниже вейджер, тем больше возможная выгода игрока. Имеют значение также лимиты ставок при отыгрыше и сроки, на коих можно воспользоваться предложением. Если бездеп охватывает ограниченный перечень игр, рекомендуется разузнать максимальные коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только в том случае, в оператор не установил строгие ограничения на наивысшую необходимую ставки. <a href=http://filmkachat.ru/>1×slot зеркало рабочее регистрации на телефон придет</a> <a href=https://writeablog.net/p2t24forxp>https://writeablog.net/p2t24forxp</a> При ирге на бонусные средства запрещается играть в игровые автоматы с прогрессивным джекпотом и игры из радела live casino. Кроме как, кое-какие казино дают бездеп на один либо количество определенных слотов, и в других играх Вы не сможете на их выступать.Риск-игра по одинаковым шансам – Также казино возможность воспрещать исполнять обстоятельства по отыгрышу с помощью раунда на удвоение, который предлагается в слотах, видео-покере и некоторых других забавах. 1х слот регистрация в 1×slots casino <a href=http://demo2-ecomm.in.ua/user/JulesClelt/>http://demo2-ecomm.in.ua/user/JulesClelt/</a>
1×slots зеркало быструю регистрацию а также мгновенное
Автоматы неспроста числятся самым знаменитым азартным развлечением. Чтобы освоить управление и управляла, потребуется всего количество минут. Ваша задачка сделать ставку, определить число трудящихся линий и возможно крутить тамбур. Если дисплее выпадет выигрышная комбинация – вы выиграли! С этой задачей вам помогут управится бездепозитные бонусы казино.Как только на виртуальном счету окажутся бонусные средства, поспешите отыграть вейджер. Сразу после этого возможно забыть заявку на вывод выигрыша. Кредиты выгодно выделяются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом реальных средств и дают возможность ощутить задор. Во-вторых – можно насладиться любой азартной игрой доступной на веб-сайте. В вашем распоряжении присутствуют автоматы, настольные прибавленье, видео-покер, Live-дилеры. <a href=http://pfdgaming.com/viewtopic.php?t=2001>1хслот зеркало сайта</a> 1хслотс официальный сайт зеркало Зачастую бездепозитные бонусы казино для игры предлагаются различными заведениями азартных игр в качестве рекламных акций либо в целях вербования к себе свежих игроков. Для бездепозитных призов в казино 2022 геймеру не пополнять счет до этапа вывода желаемых средств. <a href=http://classicalmusicmp3freedownload.com/ja/index.php?title=%E5%88%A9%E7%94%A8%E8%80%85:LeonardSalomons>http://classicalmusicmp3freedownload.com/ja/index.php?title=%E5%88%A9%E7%94%A8%E8%80%85:LeonardSalomons</a> У каждого игорного заведения средства верховодила и обстоятельства. Но, дабы получить бонусы, нужно выполнить стандартные деяния:На нашем сайте Вы найдете перечень актуальных новых бездепозитных призов в казино 2022 года. Также, есть большое эксклюзивных предложений, коие доступны только посетителям нашего вебсайта последствии регистрации по нашей ссылке либо активации специального промокода. 1×slots промокод при регистрации 2025 В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, нужно обратиться в саппорта через лайв-чат на сайте казино.Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие возникают у новичков.
1×slots официальный зеркало
Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.Основное правило получения бездепа ? создаваемый акк обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов требовательно запрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита необходимо блюсти несложную очередность деяний. <a href=https://paladinscounter.com/users/PorsedropMa>https://paladinscounter.com/users/PorsedropMa</a> Как правило, новоприбывшие игроки начала хотят ознакомиться с методами ввода и вывода денежных средств и сроки выполнения поданных заявок дабы четко разуметь, как стремительно возможность исключить свой казино бонус за регистрацию без депозита на электрический кошелек или же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино соперничают между собой. Ведь если бы определенную компанию давало лишь одно онлайн-заведение, то навряд бы посетители увидели казино с призом за регистрацию и могли бы рассчитывать только на вознаграждение повторяющий приза на первое инвестиция. К каждому заведению регулярно следует привлекать свежих игроков, собственно, итоге, только на руку всем играющим. казино 1×slots Мы рекомендуем не отказываться от похожих услуг узнаваемых казино. Выделите некоторое мин. На регистрацию, получите бонус и попробуйте его отыграть. Может быть, сегодня фортуна будет на вашей стороне!Ограничения по забавам. Администрация запрещает игрокам кое-какие игровые автоматы с бездепозитным призом, деньгами или безвозмездными вращениями. Обычно, в правилах приводится глубокий список слотов для отыгрыша. Иногда дробление выполняется по облику игр. Например, отыгрыш возможен на всех игровых аппаратах, хотя запрещен в настольных забавах и в разделе Live Casino.
1хслотс рабочее зеркало на сегодня
Так что можете отважно региться без всяких раздумий. Фортуна сегодня точно на вашей стороне. Не опасайтесь, так последствие какого либо убытка Вам совершенно не грозит. С этими призами как без пополнения, Вы остаетесь лишь в плюсе, хотя не как не в минусе.Также учтите, собственно некоторые игровые платформы сужают список стран, которые способны получить предложенный бездепозитный бонус за регистрацию. К примеру, есть онлайн-заведения, выдающие похожие призы лишь жителям конкретных стран. К примеру, онлайн казино 777 Оригинал дает бездепозитный приз лишь игрокам из России и государств СНГ. Или наоборот, пичкают вознаграждением всех, кроме обитателей неких государств (исходя из этого, по пристально учить список, чтобы потом не появилось никаких вопросов и жалоб). Доступные игры – В неких азартных играх можно снизить математическое преимущество казино до нескольких десятых процента. В их числе почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как правило, в таких забавах ставки идут в зачет вейджера не полностью. Например, возможность учитываться лишь 50%. В некоторых играх бездепозитные призы вообщем невозможно отыгрывать.Существуют казино с бонусом за регистрацию, в очень знамениты фриспины в онлайн казино впоследствии регистрации в конкретных забавах. Они встречаются том почаще безвозмездных поощрений либо классических призов в казино без инвестициям. Например, игрок регистрирует счет, на который начисляются бесплатные игры, бонус за регистрацию в виде безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса геймер выигрывает истинные средства, которые в последствии возможно удачно вывести из заведения на свою платежную систему. То есть, есть шансы исключить свои без рисков собственными финансами. Регистрация, за компьютерные получит призы, займет пару минут, а благодаря данному возможно увеличить 5 евро поощрений до тысячи и без всяких заморочек вывести их. 1×slots промокод при регистрации 2025 <a href=http://www.edid.co.kr/bbs/board.php?bo_table=free&wr_id=221963>http://www.edid.co.kr/bbs/board.php?bo_table=free&wr_id=221963</a> Для получения предоставленных призов для пригодиться — ПК или мобильное прибор, и остальное дело за небольшим.Изучить управляла и обстоятельства получения бездепозитных призов казино, Вы можете у нас на веб-сайте в разделе с призами либо на официальном сайте избранного Вами казино. Если возможности найти необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электрической почте.
1×slots регистрация 1×slots review live
Бездепозитный бонус по промо-коду несомненно доступен для забавы, лишь в том случае когда Вы активируете особый бонусный код в разделе с бонусами либо укажите промокод при регистрации на сайте. В неких случаях, не активации кода, понадобиться подтвердить контактные данные игрока и заполнить анкету посетителя.Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала быстрые выводы. Фишка выплат сомнений, собственно достаточно избрать платёжный инструмент и указать сумму. В большинстве случаев средства зачисляются на электронные кошельки протяжении 15 мин., а на банковские карты – 1–3 рабочих денька. <a href=http://tellmy.ru/index.php?subaction=userinfo&user=scandalousflat7>http://tellmy.ru/index.php?subaction=userinfo&user=scandalousflat7</a> При помощи такового поощрения оператор возможность того завлекать посетителей, коие ранее показывали активность на веб-сайте, но по какой-то основанию прекратили выступать. В данном случае промокод высылается юзеру по электронной почте или вид SMS. рабочее зеркало 1×slots Фриспины – безвозмездные вращения с фиксированной ставкой, коие можно применять в определенных игровых автоматах.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.reisezielforum.de/viewtopic.php?t=601481>1хслот зеркало</a>
<a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=58009>1× slots сайт</a>
<a href=https://forums.dfine.net/showthread.php?tid=382>1хслотс казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Стоит обозначить(означить), что бездепозитный бонус выдается лишь совершеннолетним новеньким, коие, тому, имеют пригласить личных приятелей и людей, также рассчитывающих на поощрительную программку лояльности. Подобная технология появилась между создающих онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры содействуют повышению собственной посещаемости, методом привлечения свежих игроков. Бонусы – это оригинальный шанс для потенциальных соучастников игры, которые шансы опробовать софт покер рума и увериться, станут ли они в него выступать либо нет. Новый игрок попробует средства силы с реальными оппонентами в казино.
#1768 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало
Бездепозитный бонус казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в данном и заключается основное отличие.В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и в случае неоднозначных ситуаций нет способности куда-то посетовать и доказать свою правоту. <a href=http://filmkachat.ru/>1×slots зеркало регистрация в 1×slots casino</a> Еще одно условие дотрагивается размеров ставки. Операторы устанавливают наивысшую сумму, которую игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, избранной в Личном кабинете. При превышении лимита есть риск лишиться бонуса. Существующие ограничения относятся и к конкретным обликам ставок. Например, играя в рулетку, заказчик возможность столкнуться с запретом ставить фишки на шансы. <a href=https://www.esurveyspro.com/Survey.aspx?id=7d40634a-251d-4a35-a116–1d7e11ae06f1>https://www.esurveyspro.com/Survey.aspx?id=7d40634a-251d-4a35-a116–1d7e11ae06f1</a> Такой бесплатный эквивалент средств зачисляется на профиль юзера в осуществления требований и предназначаются они только для игрового процесса. Вывод этих вознаграждений возможен лишь последствии осуществления вейджеровых условий.Нет. Казино выдают бесплатные призы за регистрацию, чтобы, чтобы, чтобы клиент мог ознакомиться с игровым заведением. А дабы вывести его, необходимо выполнить условия отыгрыша. 1хслотс зеркало на сегодня <a href=https://rafaelimkd34433.blogpixi.com/30574372/nude-ai-the-ethical-and-technological-challenges-of-artificial-intelligence>https://rafaelimkd34433.blogpixi.com/30574372/nude-ai-the-ethical-and-technological-challenges-of-artificial-intelligence</a>
1×slots казино мобильная версия
Не советуем опрометью голову браться за различные предложения получения средств без инвестициям. Вполне возможно, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на 1-ый взор. Альтернативой считается казино бонус за депо. Мы предлагаем для пару советов, спасибо которым у любого игрока несомненно возможность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом денег: x1 slots 1хслотс регистрация перейти на 1×slots <a href=http://kerchlibrary.ru/index.php?subaction=userinfo&user=squeamishseer40>http://kerchlibrary.ru/index.php?subaction=userinfo&user=squeamishseer40</a> 1×slots казино зеркало
1хслотс 1хслотс регистрация перейти на 1×slots
Бонус без депозита за регистрацию в казино (бездепозитный приз) – это валютный подарок от клуба, который начисляется на акк игрока в регистрации в казино. Кроме творенья учетной записи, для получения бездепа, очень часто потребуется ещё и подтвердить контактные данные игрока и/или активировать специальный промо-код.Диапазон ставок, коие вправе сделать игрок, также лимитирован. Обычно ставить возможно небольшую сумму — пределах 10–30 рублей за одно вращение. <a href=https://swordmaster.org/user/MichaelImime/>https://swordmaster.org/user/MichaelImime/</a> рабочее зеркало 1×slots Простая процедура получения бездепозитного бонуса, кот-ая займет менее 2-х минут. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные.Бездепозитный бонус казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в данном и содержится основное отличие.
1хслотс рабочее зеркало
<a href=https://rolivka.online/forum/showthread.php?tid=41861>1хслотс официальный сайт зеркало</a> Также бездепозитные призы имеют служить методом возвращать к ирге клиентов, что приостановивших своё сотрудничество с компанией: уведомление о бездепе поступает на мобильный аппарат либо почту. Нельзя осматривать забаву на деньги, как вариант заработка. Азартные забавы запрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не зачинщиком азартных игр. Сайт одевает информационный нрав. 1×slots официальный сайт скачать <a href=http://www.zgqsz.com/home.php?mod=space&uid=594216>http://www.zgqsz.com/home.php?mod=space&uid=594216</a> Раздача бонусов возможность быть посвящена разным датам: календарные праздники, деньки рождения игроков, годовщина открытия казино и т. Д. Подарок выдается в виде средств, фриспинов либо баллов для скопления и размена на предложения оператора. Если пользователь получает выигрыш, деньги начисляются на его счет. Для вывода данной суммы придется выполнить ряд требований.Бесплатные призы казино без депо можно получить вид денежных средств на бонусный счет (вывести их возможно только после отыгрыша), фриспинов, игры или кешбэк-бонуса.
1×slots casino зеркало рабочее
Основное управляло получения бездепа ? создаваемый аккаунт обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов строго запрещено. Проверка проводится по имени, адресу электронной почты, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита необходимо соблюдать простую последовательность действий.Активация происходит за промокодов, коие вводятся в личном офисе после регистрации. Среди спецпредложений в перечне Casino.ru содержатся неповторимые промокоды, которые доступны только посетителям портала. Другие методы начисления средств ? автоматическая активация незамедлительно в творенья аккаунта и получение дара по запросу в службу технической поддержки. Бонус в казино без депозита имеет различные вариации: может быть приветственный бонус, промоакции в честь каких-либо праздничных или важных дат, бонус за вербование свежих игроков, преданность и получение VIP-статуса. <a href=https://carecepthealth.com/community/profile/stevennor/>https://carecepthealth.com/community/profile/stevennor/</a> Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации презента необходимо подтвердить электрическую почту и привязать аппарат; 1×slot зеркало рабочее регистрации на телефон придет Также, учите, собственно бездепозитный приз можно исключить только никаких случае, когда станут выполнены все условия отыгрыша.
<b>Смотреть еще похожие новости:</b>
<a href=http://yaoisennari.ekafe.ru/viewtopic.php?f=169&t=4144>1×slots зеркало регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При пользовании бездепозитным бонусом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют некоторое видов лимитов:
#1769 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
сайт казино вход порно с Арина и Дина Аверины, гимнастки <a href=https://res-publika.com>пинко casino</a> порно с Диана Шнайдер (теннис) лучшие казино бесплатно <a href=https://th-royalgclub.com/>скачать 1×bet на андроид бесплатно</a> Валентина Матвиенко порно casinos xyz скачать 1×bet на андроид Набиуллина Эльвира Сахипзадовна порно казино смотреть Лут Оксана Николаевна порно up casino
DiskiPlus casino рабочее зеркало DiskiPlus скачать 1×bet на андроид бесплатно <a href=https://www.diskiplus.ru>DiskiPlus спорт букмекерская контора</a> DiskiPlus casino online зеркало DiskiPlus pin up букмекерская контора <a href=https://www.diskiplus.ru>DiskiPlus inform@rucriminal.info</a> DiskiPlus porno Дарья Мороз DiskiPlus Скоробогатова Ольга Николаевна порно DiskiPlus леон букмекерская контора DiskiPlus букмекерская контора фонбет DiskiPlus реального казино DiskiPlus про казино DiskiPlus бесплатно фильм казино
#1770 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало
Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, all зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.Так собственно главное различие дара на депо от бездепа – обязательное пополнение счёта. Вы можете привнести депо и преумножить стартовый капитал либо отобрать бездеп и этом не придётся рисковать собственными сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начислит щедрое поощрение! <a href=http://filmkachat.ru/>1×slots зеркало регистрация то дальше необходимо пройти</a> Риск-игра по одинаковым шансам – Также казино возможность запрещать скорпулезно обстоятельства по отыгрышу за раунда на удвоение, кот-ый предлагается в слотах, видео-покере и некоторых других играх.Главным нюансом в возникновении этих вознаграждений состоит том,, собственно пустив их в ход, игры ничем не рискует и в последствии никому ничего не несомненно должен (не зависимо, получит ли он благодаря бонусам какой-либо выигрыш либо мгновенно спустит все только собственно прибывшие финансы). То есть, казино снабжает игрока возможностью на дармовой базе играть во всевозможные слоты и даже спонсирует забаву. <a href=https://medium.com/@kalinka0588/duralast-vs-diehard-battery-expert-comparison-for-informed-buyers-a19ce72e4bae>https://medium.com/@kalinka0588/duralast-vs-diehard-battery-expert-comparison-for-informed-buyers-a19ce72e4bae</a> Мы рекомендуем не открещиваться от подобных услуг узнаваемых казино. Выделите некоторое минут на регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сегодня удача несомненно на вашей стороне!Верификация аккаунта. Лучше доказать лицо незамедлительно в регистрации, дабы потом не было заморочек с выводом денег. Верификация может проходить 2-мя маршрутами: 1×slots casino online регистрация <a href=https://noti.st/alinavideneeva/c3XVdu/professional-3d-modeling-services-custom-design-solutions>https://noti.st/alinavideneeva/c3XVdu/professional-3d-modeling-services-custom-design-solutions</a> Бесплатный бонус – кредиты, коие онлайн-казино начислит посетителю, не заставляя его пополнять игровой счет.Во всех законных онлайн-казино Беларуси необходимо свидетельство паспортных данных для забавы — это заявка правительства государства.
1×slots скачать на айфон
Представьте момент, когда при ставке в 10 руб. Вы получите подобное умножение. Миллион рублей за одно вращение, что вполне вероятно. Поэтому вопрос, сколько можно выиграть остаётся закрытым. Предлагаем выяснить помощи. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный бонус и инспектируйте удачу в деле. Разумеется, вывести деньги сложно. Однако шансы есть у всех. 1×slots официальный сайт мобильная версия <a href=http://randy-harrison.it/gallery/profile.php?uid=156396>http://randy-harrison.it/gallery/profile.php?uid=156396</a> 1×slots актуальное зеркало Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные методы и расценить необыкновенности, недоступные при игре в демо режиме. Многие свежие клиенты перебегают в число постоянных, а оператор получает долгосрочную выгода.
1×slots регистрация 1×slots review live
<a href=https://mantiseye.com/community/doctorlazutasa>https://mantiseye.com/community/doctorlazutasa</a> Каждая игровая платформа выделяется критериями по получению и отыгрышу бездепов. В правилах детально расписаны кратковременные рамки, за коие надо(надобно) прокрутить вейджер. Также не запамятовывайте на наибольший объем ставки и наивысшую необходимую выплаты. С иной стороны, дабы получить бездепозитные бонусы казино, достаточно потратить не более 1 минуты.Как прочие промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такого предложения являются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых гостей и позволяет им составить впечатление о функционале, не рискуя значительными суммами. 1×slots зеркало регистрацию более популярный вариант это
1×slots регистрация 1×slots casino 777 online
Помимо остального, для вывода средств по бездепу необходимо привнести на счёт собственный первый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально возможную сумму, последствии чего вывод средств станет доступен.Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного приза достаточно пополнения баланса и подтверждения личности. В других же клубах, необходимо количество один прокрутить собственный депо. <a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=58479>онлайн казино 1×slots</a> Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми промоакциями. Читайте о них в обзорах и на форуме.За вербование приятеля ? в партнерской программки клиент получает вознаграждение за привлечение свежих юзеров. На бесплатные бонусы онлайн-казино практически постоянно распространяется лимитирования по стране проживания клиентов. Даже в для разрешается раскрывать счет и выступать на средства в заведении, это еще не значат, что вас доступны not the slightest down payment bonuses. 1×slots casino регистрация 1×slotscasino09k online <a href=https://qashvqt.uz/index.php?subaction=userinfo&user=Michaeldit>https://qashvqt.uz/index.php?subaction=userinfo&user=Michaeldit</a> Диапазон ставок, коие вправе сделать игрок, того лимитирован. Обычно ставить возможно маленькую необходимую — в 10–30 руб. За одно вращение.В истинное время получить приз за регистрацию в казино очень просто. Почти любой игорный жилище с радостью предоставит средства либо бесплатные вращения. Многие игроки используют данным и не смущяются региться в каждом клубе с выгодными условиями. Кстати, это замечательная возможность придумать выигрышную тактику и сорвать куш.
1×slots casino регистрация 1×slotscasin online
Исходя из этого, просто не присутствует осмысленных причин махнуть рукой на получение такового приза при регистрации. И, что, на такой безвозмездной базе у вас есть шансы выиграть деньги и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные призы, именуют бесплатными онлайн платформами для игр.Но такие рамки не смущают том хайроллеров, поскольку коэффициенты на слотах позволяют рассчитывать на крупные выигрыши, а некоторых автоматах разыгрывается прогрессивный джекпот. Возьми свой подарок. Чаще всего бонус активируется незамедлительно в регистрации. Но посещают истории, когда надо(надобно) зайти в индивидуальный кабинет или написать в справочную службу.Прямо данный отберите безвозмездные вращения за регистрацию без депо и начинайте коллекционировать призовые комбинации из-за солидных выигрышей! <a href=http://andrea-mebel.ru/bitrix/rk.php?goto=http://berg-air.ru/bitrix/redirect.php?goto=http://amritamed.ru/bitrix/redirect.php?goto=https://telegra.ph/Harakteristiki-i-vidy-uproshchennyh-grazhdanskih-processualnyh-del-09–24>http://andrea-mebel.ru/bitrix/rk.php?goto=http://berg-air.ru/bitrix/redirect.php?goto=http://amritamed.ru/bitrix/redirect.php?goto=https://telegra.ph/Harakteristiki-i-vidy-uproshchennyh-grazhdanskih-processualnyh-del-09–24</a> Бездепозитный приз нередко может стать легкодоступным сразу после завершения регистрации, поскольку как единственным требованием к нему считается регистрация, а этого ревизия вашей свежей учетной записи. рабочее зеркало 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=http://www.emv.info/viewtopic.php?f=15&t=4094>скачать 1×slots на андроид мобильная версия</a>
<a href=https://technique-tp.com/forum/viewtopic.php?t=4964>1х слотс зеркало регистрация в 1×slots casino</a>
<a href=https://portugal-campings.com/pt/profile/jamescip/>казино 1×slots</a>
<a href=https://forum.banknotes.cz/viewtopic.php?t=67804>1×slots зеркало регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Сразу последствии активации промокода возможно воспользоваться подарком. Как уже упоминалось, призы посещают трёх обликов – фриспины, кредиты и фриплей-бонусы.
#1771 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
сайт казино зеркало казино без <a href=https://rumafia.news/>сайт pin up casino</a> 1×bet рабочее на сегодня казино вулкан <a href=https://7club7.com/>1×bet зеркало слоты</a> Ирина Горбачева pin ап casino сайт казино вход bitz casino лучшая казино спорт букмекерская контора 7k casino бонус
DiskiPlus бесплатные букмекерские конторы DiskiPlus порно с Алина Загитова <a href=https://diskiplus.ru/>DiskiPlus retro casino</a> DiskiPlus 7k casino зеркало рабочее DiskiPlus 1×bet скачать приложение <a href=https://www.diskiplus.ru/>DiskiPlus порно с Васильева Татьяна Викторовна</a> DiskiPlus про казино DiskiPlus online casino DiskiPlus up casino зеркало DiskiPlus Юдаева Ксения Валентиновна порно DiskiPlus букмекерские контора ап DiskiPlus яндекс игры казино DiskiPlus порно с Евгения Медведева
#1772 Charlesgunnyhttp://filmkachat.ru
1×slots casino зеркало рабочее
Подтвердите лицо, предоставив оператору казино средства паспортные данные. Инструкции обыкновенно легкие, основное — четко им по. Если написано, что «на фото обязаны быть видны все четыре угла странички паспорта» — сделайте непосредственно это фото. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots review live</a> <a href=https://plaza.rakuten.co.jp/kalinka0588/diary/202403220000/>https://plaza.rakuten.co.jp/kalinka0588/diary/202403220000/</a> 1×slots casino зеркало <a href=https://www.easyhits4u.com/profile.cgi?login=glavdorogadv1606&view_as=1>https://www.easyhits4u.com/profile.cgi?login=glavdorogadv1606&view_as=1</a>
1×slots промокод при регистрации
Выбирайте наихорошие благотворительные призы за обзоров на Casinoz – и пусть для сопутствует счастье при отыгрыше бонусных кредитов! 1×slots casino зеркало рабочее <a href=http://agriexpert.kz/user/Jasperabuts/>http://agriexpert.kz/user/Jasperabuts/</a> 1×slots промокод при регистрации
1× slots casino зеркало
Прибывшие на акк деньги бездепозитные призы предназначаются, в, только для свежеиспеченных юзеров, которые раньше не имели собственного аккаунта в данном казино. Исходя из этого, в ранее у игрока был сделан депо, то, по всей вероятности, у него больше не несомненно способности рассчитывать на получение такого приза в определенном заведении.В наше время очень просто получить приз за регистрацию в казино. Практически каждый игорный жилище с готовностью начислит деньги либо благотворительные вращения. Многие гэмблеры используют этим и не стесняются регистрироваться в каждом клубе с прибыльными критериями. Кстати, это отличная вероятность выработать победную тактику и сорвать джекпот. <a href=https://98e.fun/space-uid-7970102.html>https://98e.fun/space-uid-7970102.html</a> Бездепозитный бонус за регистрацию в казино — это стартовый презент в виде валютного начисления или бесплатных вращений для новых игроков заведения, для получения которого не нужно вносить депозит. 1 x slots casino Самый распространённый из подобных призов, естесственно же, бездеп на день рождения посетителя — приз вид фиксированной суммы либо фриспинов поступает на счёт игрока, а воспользоваться им можно протяжении установленного периода медли.Выигрыши с призов без вложений постоянно привязаны к притязанию по ставкам и могут быть обналичены только последствии исполнения этих притязаний.
1×slots casino регистрация на сайте
Любой выигрыш по ставке повыше установленного лимита несомненно считаться недействительным. То есть ставка не будет засчитана при отыгрыше, ну случае выигрыша его сумма не поступит на счёт посетителя — итог забавы будет всецело аннулирован.Такой казино бонус без депо за регистрацию выдается игроку на час и активно используется данное предложение с 2017 года. Это словно какая-то конспирация одобрения под бездепозитный. Суть всего сего сводится к тому, собственно геймеру на час выдается, к примеру, 1000 $, а реклама повторяет про, что каждой выигрыш возможно несомненно в будущем оставить при себя. Но если играющий всерьез отнесется к данному предложению, то он попросту потеряет время. Ведь геймеру нужно будет выступать не в основном аккаунте, а тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (даже всей тыс. ) в управляла вступят конкретные обстоятельства, где несомненно сказано, собственно наибольшей суммой победы может быть лишь двести долларов и деньги можно применять лишь виде приза на 1-ый вклад с вейджером 25 от суммы вознаграждения плюс сам депо. По итогу получится, собственно игрок выигрывал себе 200% приз с вейджером на конкретную сумму. Короче разговаривая, это все не стоит вашего медли. Бонусные деньги – маленькая сумма средств для старта в новеньком казино. На бонусные деньги, обычно разрешено играть во все игры, считая слотов с современным джекпотом и игр из раздела live casino.Помните, что в неких забавах сумма ставки идет в зачет вейджера лишь частично. Так, в настольных и карточных забавах только от 5% до 50% суммы ставки числятся как отыгранные деньги, тот как в слотах идет в зачет все 100% суммы. Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить необыкновенности, труднодоступные при игре в демо режиме. Многие новые клиенты переходят в число неизменных, а оператор получает долгосрочную выгода.При отыгрыше бонусных средств, необходимо учесть срок действия бонуса и время, коие дается на отыгрыш. По истечению заявленного медли, не отыгранный приз будет аннулирован. 1×slot казино зеркало <a href=https://www.forumklassika.ru/member.php?u=196615>https://www.forumklassika.ru/member.php?u=196615</a>
1×slots официальный сайт, скачать
Суммы сходственных услуг, как правило, колеблются от трех до двадцати долларов, а вейджер на эти свои должен сочинять от 30 до шестидесяти раз. Зачастую, наибольшая сумма выигрыша здесь составит от одной до двух сотен $. Если игрок выиграет больше, то все свои шансы быть списанными до очень разрешенного выигрыша. Здесь бывает содержание выводить еще несуществующие деньги на собственную платежную систему и дальше искать заведение с благоприятными под данную сумму релоадом или призом за первое пополнение счета. Есть некоторое подвидов бездепозитного вознаграждения, предлагаемого великим числом заведений.Представьте момент, когда при ставке в 10 руб. Вы получите подобное умножение. Миллион руб. За одно вращение, собственно абсолютно вероятно. Поэтому вопрос, сколько возможно выиграть остаётся не. Предлагаем проверить других. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный бонус и проверяйте фортуну в деле. Разумеется, исключить средства сложно. Однако шансы есть у всех. Почти все игровые клубы настоятельно свидетельство контактных данных игрока для получения бездепозитного приза. <a href=http://ksem.ru/bitrix/click.php?goto=http://nnplus.ru/bitrix/redirect.php?goto=http://parking-dme.ru/bitrix/click.php?goto=https://teletype.in/@urist555/8×_6CcFvNDD>http://ksem.ru/bitrix/click.php?goto=http://nnplus.ru/bitrix/redirect.php?goto=http://parking-dme.ru/bitrix/click.php?goto=https://teletype.in/@urist555/8×_6CcFvNDD</a> Приветственный бездеп предоставляется любому игроку только один один. Казино дерутся с например нарекаемыми бонусхантерами (от англ. Bonus Hunter — доброволец за бонусами), пытающимися заводить многочисленные аккаунты для обмана оператора и повторного получения подарка. Исключить сходственные деяния дозволяет верификация данных. Администрация вправе потребовать у клиента доказать персональные данные, обозначенные при регистрации. 1×slots регистрация
<b>Смотреть еще похожие новости:</b>
<a href=http://yonghengro.gain.tw/space.php?uid=1555574>1×slots сайт зеркало</a>
<a href=http://forums.indexrise.com/thread-93997-post-505650.html#pid505650>1×slots регистрация 1×slotscasino 56 online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Во всех легальных онлайн-казино Беларуси нужно свидетельство паспортных данных для забавы — это заявка правительства страны. Чтоб получить крупный выигрыш, выбирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша.
#1773 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Евгения Медведева, фигуристка букмекерская контора <a href=https://rumafia.news/>1×bet рабочее</a> казино фильм онлайн porno Мария Шарапова <a href=https://th-royalgclub.com/>порно с Матвей Сафонов (футбол)</a> казино фильм порно с Зырянова Анастасия Владимировна pin up casino скачать казино на деньги pin casino 1×bet официальный Разуваева Ксения Денисовна порно
DiskiPlus up casino скачать DiskiPlus скачать букмекерскую контору <a href=https://www.diskiplus.ru>DiskiPlus pinco casino</a> DiskiPlus online casino 7k DiskiPlus казино смотреть онлайн <a href=https://diskiplus.ru/>DiskiPlus казино 5</a> DiskiPlus black russia казино DiskiPlus порно с Владимир Минеев (ММА) DiskiPlus porno Илона Маркова, хоккеистка DiskiPlus порно с Зырянова Анастасия Владимировна DiskiPlus cometa casino DiskiPlus 1×bet официальный скачать DiskiPlus бк букмекерская контора
#1774 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино ли порно с Баталина Ольга Юрьевна <a href=https://rumafia.news/>кент казино</a> карты казино 1×bet сайт 1×bet xyz <a href=https://vestnik-jurnal.com/>porno Александра Степанова, фигуристка</a> порно с Варвара Субботина порно с Дарья Клишина, легкоатлетка casino симулятор казино порно с Алексей Миранчук (футбол) приложения букмекерских контор на андроид порно с Алина Загитова, фигуристка
DiskiPlus скачать букмекерскую контору на андроид DiskiPlus casino игровой автомат <a href=https://www.diskiplus.ru/>DiskiPlus леон букмекерская контора</a> DiskiPlus почему казино DiskiPlus Скворцова Вероника Игоревна порно <a href=https://www.diskiplus.ru/>DiskiPlus 7k casino</a> DiskiPlus вавада казино DiskiPlus Фастова Елена Владимировна порно DiskiPlus гта онлайн казино DiskiPlus реального казино DiskiPlus 1×slots casino DiskiPlus порно с Афонина Марина Игоревна DiskiPlus Александра Бортич
#1775 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать на айфон
Верификация важна для добавочной защищенности и помогает техподдержке выявить бонусхантеров и жуликов. Кстати, на некоторых платформах выводы крупных сумм доступны лишь последствии доказательства личности. <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> Только выполнив все обстоятельства отыгрыша и дождавшись окончания проверки аккаунта, Вы можете оформить заявку на вывод средств и получить свои средства.Свежий приз начисляется повторяющий валютных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в пользовании средствами, а случае отыгрыша оператор может ввести лимитирование на вывод средств. <a href=https://bento.me/lexxeagle>https://bento.me/lexxeagle</a> Если вы выбрали себе некоторое брендов которые для больше всего полюбились, для неизменной игры! Таких гемблеров казино очень любит и ценит, за частую такие игроки становятся VIP игроками заведения, которым нередко поступают прибыльные предложения повторяющий призов, например же туда заходит и бездепозитные.Не желаете поиграть в азартные игры, не рискуя своими деньгами, но получая в все выплаты? Подобную вероятность деют почти наилучшие порталы с азартными развлечениями. В их числе количество добросовестных и надежных интернет-казино на русском языке. Они привлекают новых пользователей различными поощрительными мероприятиями, включая бездепозитные, либо бесплатные бонусы. 1 х слотс зеркало <a href=http://forum.pinoo.com.tr/profile.php?id=1111374>http://forum.pinoo.com.tr/profile.php?id=1111374</a>
казино 1× slots официальный сайт
<a href=http://check2go.net/author/jameslob/>1×slots рабочее зеркало</a> 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Некоторые клубы механически начисляют бонус на аккаунт игрока последствии выполнения условий получения, хотя случаются истории, когда бонус надо(надобно) активировать игроку самому. Есть некоторое способов активации приза: <a href=https://alphacs.ro/member.php?77653-Raymondwhoto>https://alphacs.ro/member.php?77653-Raymondwhoto</a> 1хслот зеркало сайта Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.
1хслотс официальный сайт зеркало
Но существуют азартные заведения, готовые просто так вручить средства на забаву. Для этого довольно создать профиль. Чтобы вывести выигрыш, сначала необходимо выполнить вейджеровые условия, прописанные в условиях получения бездепа. На условиях отыгрыша даровых призов стопам остановиться подробнее. С ними связаны нюансы, которые нельзя оставить без внимания. <a href=http://l-avt.ru/support/dialog/?PAGE_NAME=profile_view&UID=74591>http://l-avt.ru/support/dialog/?PAGE_NAME=profile_view&UID=74591</a> 1хслотс мобильная версия зеркало К примеру, игроку выдаются безвозмездные средства в заведении в объеме пятидесяти или ста $ (вейджер на коие составляет 100х). То есть, каждому новоприбывшему геймеру выскакивает привлекающая иллюстрация, которая обещает выплату всех зачисленных компанией средств. Не стоит обращать внимания на казино приз за регистрацию без депо с слишком великой либо очень махонькой суммой призов, потому что, даже кропотливо изучив все условия, тут всего, будет некий подвох.Приглашаем делиться суждениями о призах. Это поможет другим юзерам выбирать более прибыльные предложения.
1× slots зеркало
Чаще всего, известные сервисы, такие как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное управляло. Финансовые свои выводятся лишь через ту платежную систему, коей популярностьюимели для пополнения депо. Если же игрок получил бездепозитный покерный бонус, потребуется пополнить счет на наименьшую сумму, которая составляет обычно десять $.Не сложно догадаться, что no deposit bonuses почти ни не бывают великими. Чаще всего речь идет о пяти–тридцати долларах (или эквиваленте этой суммы в другой еденице). <a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=17014>1×slos регистрация в 1×slots casino</a> 1х слот регистрация в 1×slots casino <a href=http://nasamomdele.su/forum/memberlist.php?mode=viewprofile&u=66068>http://nasamomdele.su/forum/memberlist.php?mode=viewprofile&u=66068</a>
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Верификация необходима для дополнительной защищенности и может техподдержке выявить бонусхантеров и мошенников. Кстати, рядах платформах выводы крупных сумм доступны только после доказательства личности. Шаг 4. Активация. Внимательно изучите обстоятельства, информацию по лимитированиям и сроке действия бонусного предложения. Разобравшись с правилами, возможно активировать бонус в собственном кабинете (времени ? с внедрением промокода) либо по запросу в саппорт.Любой выигрыш по ставке выше установленного лимита будет являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, а в случае выигрыша его сумма не поступит на счёт клиента — результат игры несомненно всецело аннулирован. <a href=http://led119.ru/forum/user/115446/>http://led119.ru/forum/user/115446/</a> Как правило, при выводе финансов, от играющего потребуется только устроить минимальный лепта для того, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом индивидуальный счет.Риск-игра по одинаковым шансам – Также казино имеет воспрещать выполнять обстоятельства по отыгрышу счет раунда на удвоение, который предлагается в слотах, видео-покере и некоторых других играх. 1×slots официальный сайт скачать
<b>Смотреть еще похожие новости:</b>
<a href=https://edidaktikum.ee/en/content/iii-kontakttund-08-juuni?page=95#comment-298181>1×slots официальный регистрация</a>
<a href=https://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=6268>1×slots зеркало на сегодня</a>
<a href=http://powercrop.it/chi-siamo/le-persone?page=130#comment-6520>1хслотс официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Таким образом, заведение пробует показать себя своим потенциальным геймерам, а подобный рекламный ход как казино приз без депо за регистрацию привлекает довольно много внимания к игорному заведению и обеспечивает неизменный поток свежих гостей и будущих клиентов игрового онлайн клуба.
#1776 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать на айфон
Призовые начисления без депо имеют предоставляться для роли в турнирах онлайн казино. Потратить перечисленные деньги возможно самая в рамках данной промоакции. Условия их проведения себе ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, другого выучить его правила.В разделе с призами активировать собственный подарок. Найти игры, для которых предусмотрено одобрение и использовать бонус по назначению. <a href=http://filmkachat.ru/>1×slots зеркало регистрация то дальше необходимо пройти</a> Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.Обычно показатель выше, чем для бонусов на депо. Не дивитесь, если он несомненно числе х100. Иногда завышенный коэффициент вейджера уточняется для жителей отдельных государств. <a href=https://www.therookies.co/projects/79483>https://www.therookies.co/projects/79483</a> 1хслотс мобильная версия зеркало <a href=http://e-audit.gefest.me/index.php?subaction=userinfo&user=flagrantimpleme>http://e-audit.gefest.me/index.php?subaction=userinfo&user=flagrantimpleme</a> В интернет-сети постоянно возможно отыскать списки наиболее известных и обещанных поощрительных программ от известных онлайн-казино.
1×slots на любой вкус как пройти регистрацию
<a href=http://jagplay.ekafe.ru/viewtopic.php?f=65&t=6492>1× slots casino официальный сайт</a> 1×slots зеркало регистрация в 1×slots casino Нельзя осматривать игру на средства, как вариант заработка. Азартные забавы воспрещены для лиц моложе 18 лет. Topcasinobonuses.mobi классифицируется зачинщиком азартных игр. Сайт одевает информационный характер. <a href=https://tsonlinevn.4it.top/User-Brianjeoca>https://tsonlinevn.4it.top/User-Brianjeoca</a> 1х слот 1хслотс регистрация перейти на 1×slots Фриспины — бесплатные вращения, коие позволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытных игроков фриспины считаются самым популярным и предпочтительным обликом бонуса — бесплатные вращения порой эффективнее и веселее в отыгрыше, чем другие облики бездепов.Баланс игрока дополняется на соответствующую необходимую. К ней используется вейджер, обозначенный в правилах акции. Вывести выигрыш возможно несомненно после того, как пользователь устроит требуемый размер ставок из собственных средств. В редчайших случаях бездеп трудится в формате Free Play. На счет юзера зачисляется большая сумма, и предоставляется маленький срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по завершении этого периода сумма на счету несомненно превышать изначальную, то разницу возможно будет исключить либо использовать для последующих ставок.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
<a href=http://www.hanwhagreen.co.kr/bbs/board.php?bo_table=free&wr_id=35377>http://www.hanwhagreen.co.kr/bbs/board.php?bo_table=free&wr_id=35377</a> С не отыгранным призом воспрещается превышать размер наибольшей ставки. Нарушение этого условия виде аннулирование выигрыша. онлайн казино 1×slots
1×slots акции
Но ни не забывайте пристально читать правила роли в бонусных промоакциях. Если вы нарушите желая бы одно условие, позже вы не сможете уладить недоразумение с администрацией. Как прочие промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такого предложения являются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих посетителей и разрешает им составить эмоцию о функционале, не рискуя значительными совокупностями.Все безвозмездные бонусы кажутся заманчивыми. Кто же откажется от возможности сыграть в онлайн-казино, не рискуя деньгами, хотя получая выигрыши. Но далеко не все бездепозитные бонусы в привлекательны для рассудительного посетителя. Зарегистрироваться в казино по специальной ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефона и электрическую почту). Для доказательства номера телефона необходимо в личном профиле показать свой номер и нажать кнопку „Подтвердить номер аппарата“, далее Вы получите sms-сообщение с кодом, кот-ый нужно установить в подходящее фон. Для доказательства электрической почты, перейти по интенсивной ссылке в письме от казино. 1×slots официальный сайт зеркало рабочее <a href=https://google.ae/url?q=https://doctorlazuta.by/>https://google.ae/url?q=https://doctorlazuta.by/</a> Чтобы получить возможность вывести выгода с бездепозитного бонуса в казино, нужно выполнить ряд критерий:
1×slots зеркало на сегодня
Верификация аккаунта. Лучше доказать личность сразу после регистрации, дабы позже не было заморочек с выводом денег. Верификация возможность проходить двумя путями:Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и более. Когда игроку надеется много фриспинов, администрация может разбивать их начисление на несколько дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах промоакции. Oтыгpaть бонус с указанным вeйджepом, достичь нужно сдeлaть cтaвoк нa cумму, превосходящую объем бонуса в несколько раз. <a href=http://forum.roozgozar.com/member.php?action=profile&uid=4276>http://forum.roozgozar.com/member.php?action=profile&uid=4276</a> Свежий бонус начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в использовании средствами, а в случае отыгрыша оператор имеет установить ограничение на вывод денег.В интернет-сети постоянно можно найти перечни более известных и обещанных поощрительных программ от известных онлайн-казино. казино 1×slots официальный сайт Обычно для получения призов без депозита, казино выдвигает лояльные и абсолютно выполнимые обстоятельства, но есть ряд деяний которые запрещены и могут причиной неприятные последствия:Максимальный размер ставки, который нельзя превышать же приз не несомненно всецело отыгран. В случае нарушения сего правила, бонус и выигрыш с него будут аннулированы.
<b>Смотреть еще похожие новости:</b>
<a href=https://forumsleague.org/forum/viewtopic.php?f=4&t=33460&p=401615#p401615>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если речь идет об эксклюзивных услугах, возможность понадобиться регистрация в казино по ссылке с партнерского вебсайта. Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала прыткие выводы. Фишка выплат что, нет, что достаточно выбрать платёжный инструмент и указать необходимую. В большинстве случаев деньги зачисляются на электронные кошельки в течение 15 минут, а на банковские карты – 1–3 трудящихся денька.
#1777 Charlesgunnyhttp://filmkachat.ru
1×slots мобильная версия войти казино
С не отыгранным призом воспрещается превосходить размер наибольшей ставки. Нарушение сего условия последствия аннулирование выигрыша.При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, коие можно посвятить забаве в казино. <a href=http://filmkachat.ru/>casino 1×slot</a> <a href=https://blogcircle.jp/commu/276/topic/123>https://blogcircle.jp/commu/276/topic/123</a> С иной стороны, гораздо легче арестовать бездепозитные фриспины за регистрацию в казино и прямо данный начать вертеть барабаны в лучших слотах. Главная необыкновенность спинов том,, собственно они предназначены для топовых автоматов. Удастся не только пройти дополнительные раунды, хотя и увеличить необходимую выигрыша, заработать респины прочие внутриигровые презенты.Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша бонусов. Заведения всегда устанавливают максимальную ставку, допустимую по условиям вейждера. 1 x slots <a href=https://edwinnqpo17284.thezenweb.com/unlocking-the-strength-of-undress-ai-a-deep-dive-into-nsfw-content-material-creation-67294310>https://edwinnqpo17284.thezenweb.com/unlocking-the-strength-of-undress-ai-a-deep-dive-into-nsfw-content-material-creation-67294310</a> Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют важную информацию о not the slightest down payment bonuses прочих предложениях.
1×slots casino зеркало
Сразу последствии активации промокода возможно пользоваться подарком. Как теснее упоминалось, бонусы бывают трёх обликов – фриспины, кредиты и фриплей-бонусы. <a href=http://swissairways-va.com/phpBB3/viewtopic.php?t=795552>1 хслот регистрация в 1×slots casino</a> 1×slots зеркало регистрация то дальше необходимо пройти Акционные предложения от казино существуют в различных форматах. Часто бонусы даются в мена на депозит. Игрок заносит платеж и получает деньги, безвозмездные вращения прочие поощрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — вид приза, кот-ый гарантирован за исполнение конкретных поступков на сайте:Лишь популярностью и известные азартные заведения могут разрешить себя раздавать бездепы вид добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депо, коие можно потратить в топовых аппаратах с высочайшей отдачей. <a href=http://twchess.lionfree.net/discuz/home.php?mod=space&uid=27830>http://twchess.lionfree.net/discuz/home.php?mod=space&uid=27830</a> 1×slots сайт Бездепозитные бонусы – это исключительно занимательная и более перспективная промоакция интернет-казино. Они и какого-либо фри-спинов, поэтому собственно выплаты в безвозмездных вращениях не гарантированы, ведь комбинации на барабанах игрового аппарата все не сложиться.Для проверки используются сканы паспортов, водительских водительских, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь замечен в попытке завести дополнительный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный список. При игре на лицензионной площадке не бояться указывать достоверную индивидуальную информацию (шифрование ликвидирует утечку персональных данных).
1×slots регистрация 1×slots review live
Каждый новичок и умелый игрок грезят прытко стартануть и начать создавать настоящие ставки. Для сего достаточно отобрать презент, за который не нужно платить. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email либо телефонный. После этого администрация начислит щедрое вознаграждение вид даровых вращений или виртуальных кредитов. <a href=http://badminton-kreuztal.de/index.php?option=com_easygb>http://badminton-kreuztal.de/index.php?option=com_easygb</a> Также бездепозитные бонусы шансы служить способом вернуть к этой клиентов, временно приостановивших своё сотрудничество с компанией: уведомление о бездепе поступает на мобильный телефон либо почту. 1×slots зеркало видели такую регистрацию на У каждой игры средства требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система засчитает любую ставку. В рулетке и покере сделать это намного труднее. Именно потому так важно внимательно разбирать условия получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой забаве, то новенькие просто «спустят бонус на ветер».
1×slots регистрация 1×slots casino c2d ru
Бездепы обычно предлагают с отыгрышем — мгновенно исключить выигранные средства нельзя. Перевод средств со счета будет вероятен после как, как пользователь выполнит все притязания казино, а сумма возможности превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, протяжении которых клиент вправе воспользоваться предложением. Обычно они не превышают нескольких дней после активации.Иногда в одобрения за регистрацию могут выдаваться билеты для роли в турнирах. Условия их проведения очень отличаются, потому мы рекомендуем ознакомиться с каждым предложением раздельно. <a href=http://link.5nx.ru/viewtopic.php?f=5&t=12152>1×slots регистрацию более популярный вариант это</a> Хотя благотворительные призы начисляются без депозита, не исключено, что вас придется заносить деньги. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только после такого, как свежий клиент первый пополнит игровой счет.Денежные свои. Третий приз за регистрацию без депо – наличные. К раскаянью, только знаменитые и знаменитые клубы имеют дать средства в рублях или баксах. С их поддержкой возможность насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед данным необходимо исполнение конкретных условий. 1×slots официальный зеркало рабочее <a href=https://championsleage.review/index.php?title=Can_You_Use_the_1×bet_APP_Without_an_Update?>https://championsleage.review/index.php?title=Can_You_Use_the_1×bet_APP_Without_an_Update?</a>
1хслотс рабочее зеркало
Срок активации и время на отыгрыш. Зачисление средств либо фриспинов случается при активации на требовательно ограниченного периода, схожие притязания предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать бонус количество дней или числе месяцов. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высочайшим вейджером.Сразу последствии активации промокода можно пользоваться презентом. Как теснее упоминалось, призы посещают трёх обликов – фриспины, кредиты и фриплей-бонусы. Иногда у гостей сайта шансы возникнуть проблемы при активации приобретенного промо-кода. В этих случаях, необходимо обратиться за помощью в службу «Support». Для получения ответа, непременно указывается конкретная причина обращения и подтверждается информация дополнительными снимками. Если сложилась спорная ситуация, постоянно возможно адресоваться к главному регулятору или контролирующему органу, выдавшему данному заведению лицензионный документ.Бонусы без депо при регистрации числятся наиболее красивыми как для опытнейших игроков, например для и начинающих. Получив такое вознаграждение, клиент имеет выступать на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные призы в интернет-казино Рунета, еще обстоятельства их активации и выигрыша. <a href=http://vetkakvetka.by/bitrix/redirect.php?goto=http://zoloto-ru.ru/bitrix/rk.php?goto=http://hotlider.ru/bitrix/redirect.php?goto=https://telegra.ph/Process-i-sroki-pervonachalnoj-postanovki-na-voinskij-uchet-09–23>http://vetkakvetka.by/bitrix/redirect.php?goto=http://zoloto-ru.ru/bitrix/rk.php?goto=http://hotlider.ru/bitrix/redirect.php?goto=https://telegra.ph/Process-i-sroki-pervonachalnoj-postanovki-na-voinskij-uchet-09–23</a> Одним из поводов отдавать преимущество, льготу 1 или другому заведению заключается в привлекательности предлагаемых акций и безвозмездных услуг. Безвозмездные фриспины, выдаваемые без дела создавать какой-нибудь лепта, в перечне располагается далеко не в конце.Представьте момент, когда при ставке в 10 руб. Вы получите схожее умножение. Миллион рублей за одно вращение, что вполне вполне. Поэтому вопрос, сколько можно выиграть остаётся не. Предлагаем выяснить без. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный бонус и инспектируйте удачу в деле. Разумеется, исключить деньги не так просто. Однако шансы есть у всех. 1×slots сайт Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих требований, не неотъемлемой верификации. Если на веб-сайте предусмотрена неотъемлемая процедура доказательства личности, то вывести выигрыш получится только после ревизии данных. Приготовьтесь заполнить анкету и отправить в техподдержку документ, подтверждающий личность.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.handmakersbrasil.com.br/topic/4924-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%B0–1×slots/>зеркала 1×slots</a>
<a href=http://forum.drustvogil-galad.si/index.php?action=profile;u=121557>1×slots официальный сайт зеркало</a>
<a href=https://juancorner.com/threads/1×slot-zerkalo-rabocee-registracii-na-telefon-pridet.296/>1×slot зеркало рабочее регистрации на телефон придет</a>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=404553>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<a href=https://tussom.com/forums/showthread.php?tid=11530>1×slots casino регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
У каждого игорного заведения свои управляла и условия. Но, дабы получить призы, нужно выполнить стереотипные деяния: Возможность сыграть вспомогательное состязание (а время и некоторое) совершенно даром, а выигрыш, к, поступает на счёт игрока.
#1778 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало этих способов предполагает регистрацию
Суммы подобных предложений, большинстве, колеблются от 3-х до двадцати долларов, а вейджер на эти свои обязан сочинять от 30 до шестидесяти один. Зачастую, величайшая сумма выигрыша тут составит от одной до 2-ух сотен $. Если компьютерные выиграет больше, то все свои имеют быть списанными до максимально разрешенного выигрыша. Здесь появляется смысл выводить еще несуществующие финансы на свою платежную систему и дальше отыскивать заведение с подходящими под данную необходимую релоадом или бонусом за первое пополнение счета. Есть количество подвидов бездепозитного вознаграждения, предлагаемого наибольшим числом заведений. <a href=http://filmkachat.ru/>1×slots регистрацию процедура займет всего лишь</a> Но а в вы теснее профи по интернет казино, кликаем на красноватую кнопку «Получить» и Вы механически перейдете в онлайн казино; <a href=https://international.projectwet.org/discussion/%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-lexus-%D0%B1%D1%8B%D1%81%D1%82%D1%80%D0%B0%D1%8F-%D0%B8-%D0%B2%D1%8B%D0%B3%D0%BE%D0%B4%D0%BD%D0%B0%D1%8F-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D0%B6%D0%B0-%D0%BF%D1%80%D0%B5%D0%BC%D0%B8%D1%83%D0%BC-%D0%B0%D0%B2%D1%82%D0%BE>https://international.projectwet.org/discussion/%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-lexus-%D0%B1%D1%8B%D1%81%D1%82%D1%80%D0%B0%D1%8F-%D0%B8-%D0%B2%D1%8B%D0%B3%D0%BE%D0%B4%D0%BD%D0%B0%D1%8F-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D0%B6%D0%B0-%D0%BF%D1%80%D0%B5%D0%BC%D0%B8%D1%83%D0%BC-%D0%B0%D0%B2%D1%82%D0%BE</a> 1×slots бездепозитный бонус за регистрацию <a href=https://tony-sheryl.com/bbs/board.php?bo_table=free&wr_id=110099>https://tony-sheryl.com/bbs/board.php?bo_table=free&wr_id=110099</a> Ограничения по играм. Администрация воспрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, средствами или бесплатными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда разделение выполняется по виду игр. Например, отыгрыш вероятен на всех игровых аппаратах, но запрещен в настольных забавах и в разделе Live Casino.
1×slots сайт зеркало
Поспешите отобрать бездепозитные бонусы за регистрацию в казино из представленного перечня. Все платформы не только ведут легальную деятельность, но и порадуют правдивыми результатами забавы, высокой отдачей, прыткими выплатами. 1х слот регистрация в 1×slots casino Основное правило получения бездепа ? творимый акк должен быть у юзера первым и единственным. Наличие нескольких аккаунтов взыскательно воспрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депозита нужно соблюдать несложную очередность действий. <a href=http://remont-okon.od.ua/index.php?subaction=userinfo&user=knottygala86>http://remont-okon.od.ua/index.php?subaction=userinfo&user=knottygala86</a> 1хслот официальный сайт зеркало Также, учите, собственно бездепозитный бонус можно вывести только никаких случае, когда будут исполнены все обстоятельства отыгрыша.
1× slots официальный
<a href=http://bbs.01bim.com/home.php?mod=space&uid=634039>http://bbs.01bim.com/home.php?mod=space&uid=634039</a> К образцу, игроку выдаются безвозмездные средства в заведении в объеме пятидесяти или 100 долларов (вейджер на которые сочиняет 100х). То есть, любому новоприбывшему игроку выскакивает притягивающая иллюстрация, кот-ая сулит выплату всех зачисленных компанией средств. Не стоит внимания на казино приз за регистрацию без депозита с слишком великий либо очень маленькой суммой бонусов, поэтому что, в кропотливо изучив все обстоятельства, здесь вероятнее всего, будет некий подкол.Фриплей-бонусы. Бонусы за безвозмездную забаву есть только в некоторых клубах. Они зачисляются незамедлительно в творенья профиля и действуют непродолжительное время. Если у вас нет медли израсходовать свои, они просто завершатся. Что касается медли, в большинстве случаев бонусы срабатывают на 1-го часа. 1×slots мобильная версия войти казино
1хслот зеркало сайта
Не желаете сыграть в азартные забавы, не рискуя средствами средствами, хотя получая в все выплаты? Подобную вероятность предоставляют многие превосходнейшие порталы с азартными веселиями. В их количестве много честных и надежных интернет-казино на российском языке. Они завлекают свежих пользователей различными поощрительными событиями, включая бездепозитные, или безвозмездные бонусы. <a href=https://www.formulersupport.com/Thread-%D0%B7%D0%B5%D1%80%D0%BA%D0%BB%D0%BE-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-1×slots–237762>зеркло казино 1×slots</a> Бездепозитный приз за регистрацию в казино с выводом средств в 2022 году — Наш ресурс дает игрокам актуальную информацию о самых свежих, великодушных и испытанных бонусах в онлайн казино, коие обновляются каждый день. 1×slots казино зеркало <a href=http://gticlub.lv/user/ForsedropMr/>http://gticlub.lv/user/ForsedropMr/</a> Условия, на коих предоставляется бездеп, регулируются казино. Каждая промоакция содержит доскональные управляла, ссылка на которые обыкновенно содержится в промообъявлении. В них указываются лимиты, вейджер, список доступных игр. Если оператор прячет данные о предложении, то воспользоваться им не.
1×slots коды
Проверка занимает от нескольких мин. До нескольких дней, профессионалы техподдержки могут запросить дополнительные документы либо инициировать короткое общение по Skype.Подтверждение регистрации. Казино требуют привязки профиля к электрическому адресу и номеру телефонного. Для этого на e-mail отправляется письмо ссылаясь, а на аппарат ? текстовое сообщение с кодом. В истинное время получить бонус за регистрацию в казино довольно просто. Почти любой игорный жилище с готовностью предоставит деньги или бесплатные вращения. Многие игроки пользуются этим и не стесняются регистрироваться в любом клубе с прибыльными критериями. Кстати, это замечательная возможность придумать выигрышную тактику и сорвать куш. <a href=http://stroikraska.ru/bitrix/redirect.php?goto=http://edu.gumrf.ru/bitrix/redirect.php?goto=http://ezproxy-f.deakin.edu.au/login?url=https://teletype.in/@urist555/M2vGnjf5jOJ>http://stroikraska.ru/bitrix/redirect.php?goto=http://edu.gumrf.ru/bitrix/redirect.php?goto=http://ezproxy-f.deakin.edu.au/login?url=https://teletype.in/@urist555/M2vGnjf5jOJ</a> 1×slots регистрация 1×slots casino c2d ru
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.l2endless.com/showthread.php?tid=572332>1×slots официальный сайт мобильная версия</a>
<a href=https://communities.leviton.com/threads/1×slot-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82.1195/>1×slot официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При регистрации идет свидетельствовать лишь достоверную информацию. Когда учетная запись будет активна, замечен доступ в Личный офис. В нем возможно избрать денежную, ввести промокод и разузнать доскональные управляла получения и отыгрыша бездепа. Краткая информация об акции нередко присутствует именно на регистрационной форме.
#1779 Charlesgunnyhttp://filmkachat.ru
казино 1×slots официальный сайт
Приветственный бездеп предоставляется любому игроку лишь раз раз. Казино борются с например нарекаемыми бонусхантерами (от англ. Bonus Hunter — доброволец за бонусами), пытающимися заводить множественные аккаунты для надувательства оператора и повторного получения подарка. Исключить подобные действия позволяет верификация данных. Администрация вправе востребовать у клиента доказать индивидуальные данные, указанные при регистрации.Бонус без депо за регистрацию в казино (бездепозитный бонус) – это валютный подарок от клуба, кот-ый начисляется на аккаунт игрока после регистрации в казино. Кроме сотворения учетной записи, для получения бездепа, довольно часто потребуется ещё и доказать контактные данные игрока и/или активировать особый промо-код. <a href=http://filmkachat.ru/>1×slots зеркало регистрацию более популярный вариант это</a> Бездепы с безвозмездными вращениями предоставляют юзерам право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд выплачивает казино. Число спинов ограничено и изредка превышает сотню. Если акция включает в себя много бесплатных игр, их начисление возможность быть разбито на некоторое дней.Несмотря на то, собственно данный вариант стимуляции со стороны азартных платформ довольно популярен в сфере сходственных игр, далековато не почитателям казино известно, собственно по бездепозитные бонусы казино и как именно их вероятно эксплуатировать. <a href=https://forum.index.hu/User/UserDescription?u=2065076>https://forum.index.hu/User/UserDescription?u=2065076</a> Выбор каждого онлайн казино на нашем сайте. В описании к любому Вы можете узнать, что получите за творение аккаунта.Зарегистрироваться в казино по особой ссылке либо с бонусным кодом. Подтвердить контактные данные (номер аппарата и электрическую почту). Для подтверждения номера телефона нужно в личном профиле указать собственный номер и надавить кнопку „Подтвердить номер аппарата“, дальше Вы получите sms-сообщение с кодом, который необходимо установить в отвечающее поле. Для доказательства электрической почты, перейти по интенсивной ссылке в послании от казино. 1хслотс зеркало на сегодня <a href=https://yogaasanas.science/wiki/Green_Pharmacy>https://yogaasanas.science/wiki/Green_Pharmacy</a> Не советуем опрометью голову хвататься за различные предложения получения средств без инвестициям. Вполне возможно, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на 1-ый взгляд. Альтернативой является казино бонус за депо. Мы предлагаем вас пару советов, благодаря коим у каждого игрока будет возможность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом денег:Самый распространённый из подобных бонусов, естесственно же, бездеп на денек рождения посетителя — приз вид фиксированной суммы или фриспинов поступает на счёт игрока, а воспользоваться им возможно на установленного периода времени.
скачать 1×slots официальный сайт
Чаще всего казино приз за регистрацию без депо даёт возможность запустить любой автомат. Но какого-либо внимательно ознакомиться с условиями. Иногда для игры доступны только определённые модели. Если вы новичок и ничего не смыслите в гэмблинге, другого начать знакомство с миром азарта именно с «одноруких злодеев». 1×slots зеркало сайта Бездепы могут заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой либо баллами. <a href=http://fumankong2.cc/home.php?mod=space&uid=615485>http://fumankong2.cc/home.php?mod=space&uid=615485</a> Такие одобрения дозволяют бесплатно протестировать свежее казино, разобраться с игровым ходом интернет слотов, заработать и вывести небольшую сумму денег.Стоит обозначить(означить), собственно бездепозитный бонус выдается лишь взрослым новеньким, коие, тому, имеют пригласить личных приятелей и людей, того рассчитывающих на поощрительную программу лояльности. Подобная разработка была между соперничающих онлайн-казино для популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению собственной популярности, путем привлечения новых игроков. Бонусы – это уникальный шанс для вероятных участников игры, коие все опробовать софт покер рума и убедиться, будут ли они в него играть либо нет. Новый игрок попробует средства силы с настоящими оппонентами в казино. 1×слот регистрация в 1×slots casino
1хслотс регистрация в 1×slots casino
Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации дара необходимо подтвердить электронную почту и привязать телефонный; <a href=http://xn–80aaaa4cjbdg4b5d.xn–p1ai/bitrix/rk.php?goto=http://gc-dina.ru/bitrix/redirect.php?goto=http://dp3.minzdravrso.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/wyZIAki0r87>http://xn–80aaaa4cjbdg4b5d.xn–p1ai/bitrix/rk.php?goto=http://gc-dina.ru/bitrix/redirect.php?goto=http://dp3.minzdravrso.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/wyZIAki0r87</a> Фриплей-бонусы. Бонусы за бесплатную игру есть только в неких клубах. Они зачисляются сразу последствии творения профиля и действуют недолговременное время. Если у вас нет медли истратить свои, они просто завершатся. Что касается медли, как бонусы действуют на 1-го часа.Чаще всего интернет-казино предлагают бездепозитные бонусы свежим пользователям. Эта промо-акция довольно эффективно привлекает начинающих, подталкивая их к открытию счета. Конечно, не все они становятся послушными клиентами, хотя сам прецедент регистрации аккаунта играет на руку заведению. казино 1×slots Получить Бездепозитный бонус в интернет казино дело 2-ух кликов. Другой момент, отыграть промо и соблюсти верховодила и обстоятельства отыгрыша. Под правилами подразумевается не вагер, хотя и лимитирования по максимальной ставке. Мы понимаем, что в кинотеатр все ставят на зеро и выигрывают. Призываем не создавать похожего. Перед активацией приза прочитайте правила. Узнайте следующие моменты: Условия получения подарка, за регистрацию, за депо и другое. Ограничения по наибольшей ставке. Зачастую не выше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вращать автоматы, а вагер будет стоять на месте. Поэтому важно аристократия, в каких забавах можно осуществлять кратность валютного оборота.
1×slots мобильная версия войти казино
Практически все интернет казино с бездепозитным бонусом за регистрацию предусматривает программу преданности — систему поощрения постоянных посетителей, кот-ая произведено из колличества значений. При достижении игроком одного значения на его счёт поступает приз. Чем повыше степень — тем щедрее бонус.В каждом казино с бездепозитным призом предусмотрены вейджеровые обстоятельства. Это единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, нужно устроить определённое число ставок. Чем круче приз, тем сложнее выполнить обстоятельства, и напротив. <a href=http://rapbeatsforum.com/viewtopic.php?t=674055>1×slots регистрацию процедура займет всего лишь</a> После получения приза вывод средств для клиента несомненно недосегаем того, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо пара месяцов. Выводить деньги игрок сможет только в отыгрыша.При регистрации следует указывать лишь достоверную информацию. Когда учетная запись будет активна, будет доступ в Личный офис. В нем можно избрать валюту, ввести промокод и узнать подробные верховодила получения и отыгрыша бездепа. Краткая информация об промоакции часто присутствует непосредственно на регистрационной форме. 1×slots зеркало регистрация в 1×slots casino <a href=https://cadetmove.ru/index.php?subaction=userinfo&user=Franksoofe>https://cadetmove.ru/index.php?subaction=userinfo&user=Franksoofe</a> Как верховодило, при выводе финансов, от играющего требуется лишь устроить минимальный лепта для того, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом собственный счет.
1×slots зеркало быструю регистрацию а также мгновенное
Частенько новички не разумеют, как активировать подарки либо исключить первый выигрыш. Для подобных случаев наша команда обрисовала главные определения – что это фриспины, вейджер, как его отыграть, чего необходимо проходить верификацию.Ограничения по забавам. Администрация воспрещает игрокам кое-какие игровые автоматы с бездепозитным бонусом, средствами либо бесплатными вращениями. Обычно, в правилах приводится полный перечень слотов для отыгрыша. Иногда дробленье выполняется по виду игр. Например, отыгрыш возможен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino. <a href=https://r2tbiohospital.com/bbs/board.php?bo_table=free&wr_id=476027>https://r2tbiohospital.com/bbs/board.php?bo_table=free&wr_id=476027</a> В современность очень просто получить бонус за регистрацию в казино. Практически каждый игорный дом с радостью начисляет средства либо бесплатные вращения. Многие гэмблеры пользуются этим и не смущяются региться в любом клубе с выгодными условиями. Кстати, это отличная возможность выработать победную тактику и сорвать джекпот. 1×slots casino регистрация 1×slotscasin online
<b>Смотреть еще похожие новости:</b>
<a href=https://www.mentalhealth-world.org.uk/forums/index.php?/topic/96769–1×slots-%D0%B0%D0%BA%D1%82%D1%83%D0%B0%D0%BB%D1%8C%D0%BD%D0%BE%D0%B5-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE/>1×slots актуальное зеркало</a>
<a href=https://ragnarok.ch/forum/viewthread.php?thread_id=197595>1×slots казино зеркало</a>
<a href=http://turkteam.10tl.net/member.php?action=profile&uid=2012>1×слот регистрация в 1×slots casino</a>
<a href=https://forum.motoshkola.od.ua/threads/1×lot-registracija-v-1×slots-casino.9187/>1хлот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Наиболее известные гонорары между гэмблеров – бездепозитные бонусы казино. Это не изумительно, так возможно получить безвозмездные вращения или виртуальные кредиты, и при этом не придётся пополнять счёт, рисковать личностными деньгами. Удастся насладиться разнообразными весельями причем выиграть крупную сумму, избегая серьёзного риска. В каждом казино с бездепозитным призом предусмотрены вейджеровые обстоятельства. Это единственный «подводный камень», который стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) сделать определённое количество ставок. Чем круче приз, тем сложнее выполнить обстоятельства, и напротив.
#1780 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
7k casino скачать слот casino <a href=https://t.me/vchkogpu_ru>букмекерские конторы бет</a> скачать 1×bet 1×bet xyz порно с Гатагова Ольга Анатольевна <a href=https://krtka.info/>казино без</a> винлайн букмекерская контора официальный казино играть casino сайты vodka casino Чулпан Хаматова спорт букмекерская контора Александра Бортич
DiskiPlus bet casino DiskiPlus 1×bet слоты <a href=https://diskiplus.ru/>DiskiPlus 1×bet официальный сайт 1×bet xyz</a> DiskiPlus 1×bet скачать приложение на андроид DiskiPlus порно с Зырянова Анастасия Владимировна <a href=https://diskiplus.ru>DiskiPlus casino официальный сайт</a> DiskiPlus top casino DiskiPlus казино пину DiskiPlus 1×bet xbet DiskiPlus ешь казино DiskiPlus рокс казино DiskiPlus 1×bet скачать приложение DiskiPlus casino сегодня
#1781 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up casino скачать Разуваева Ксения Денисовна порно <a href=https://res-publika.com>песня казино</a> порно с Евгения Медведева, фигуристка казино сегодня <a href=https://rumafia.news/>сайт pin up casino</a> vodka casino казино рояль 1×bet xbet xyz casino pin официальный сайте букмекерской конторы фонбет официальные сайты казино porno Мария Шарапова
DiskiPlus букмекерская контора бесплатно скачать DiskiPlus казино играть <a href=https://diskiplus.ru>DiskiPlus porno Александра Степанова, фигуристка</a> DiskiPlus 1×bet приложение DiskiPlus 7k casino бонус <a href=https://diskiplus.ru>DiskiPlus казино 1</a> DiskiPlus Анна Михалкова DiskiPlus порно с Евгений Малкин (хоккей) DiskiPlus фреш казино DiskiPlus 7k casino бонус DiskiPlus букмекерская контора ставки DiskiPlus пин up casino DiskiPlus kent casino регистрация
#1782 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
Во время забавы в казино, выигрыши, приобретенные спасибо безвозмездным призовым фондам, суммируются и включаются в совместную необходимую для отыгрывания. Однако, в удача улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно допустит исключить денежные свои. Сумма вывода несомненно зависеть от лимита, одобренного непосредственно в этом учреждении. Поэтому, внимательно нужно читать верховодила выдачи безлимитных депо. <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> <a href=https://note.com/joyous_otter80/n/n668a7c74c58d>https://note.com/joyous_otter80/n/n668a7c74c58d</a> 1×slots официальный сайт мобильная версия <a href=http://111.t95283ld.bget.ru/user/JamesVialf/>http://111.t95283ld.bget.ru/user/JamesVialf/</a>
casino 1×slot
<a href=http://forum.as-p.cz/viewtopic.php?f=45&t=281170>1хслотс мобильная версия зеркало</a> 1хслотс казино зеркало Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.Фриспины. Бесплатные вращения предназначены для применения в видео-слотах. Внимательно читайте условия – они нередко выдаются для неких машин. В зависимости от клуба вам создавать конкретное количество ставок. Кстати, современные игорные жилища выделяют возможность заводить «одноруких бандитов». <a href=https://szkolenia.myslepozytywnie.pl/fora/watek/%d1%81%d1%81%d1%8b%d0%bb%d0%be%d1%87%d0%bd%d0%b0%d1%8f-%d0%bc%d0%b0%d1%81%d1%81%d0%b0-%d1%81%d1%82%d1%80%d0%b0%d0%bd%d0%b8%d1%86%d1%8b/>https://szkolenia.myslepozytywnie.pl/fora/watek/%d1%81%d1%81%d1%8b%d0%bb%d0%be%d1%87%d0%bd%d0%b0%d1%8f-%d0%bc%d0%b0%d1%81%d1%81%d0%b0-%d1%81%d1%82%d1%80%d0%b0%d0%bd%d0%b8%d1%86%d1%8b/</a> Онлайн-казино тщательно продумывают бонусные обстоятельства, которые необходимо выучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и лимитирования. 1×slots зеркало рабочее на сегодня Срок активации и время на отыгрыш. Зачисление денег либо фриспинов случается при активации на взыскательно ограниченного периода, похожие требования предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать бонус количество дней либо и месяцов. Другие выдают крупную необходимую за регистрацию, но время отыгрыша ограничивают несколькими часами с неоправданно высоким вейджером.Главное преимущество спинов – возможность выучить разные слоты. Также удастся насладиться бонусными раундами, испытывать фортуну в риск-туре и преувеличить выигрыш за счёт особенных символов. Однако столько игровой процесс заслуживает внимание, ведь другого, как сосредоточиться на реальном выигрыше.
казино 1× slots официальный сайт
Зачастую бездепозитные призы казино для игры предлагаются разными заведениями азартных игр в маркетинговых акций либо в целях привлечения к себе свежих игроков. Для бездепозитных призов в казино 2022 игроку надо пополнять счет до этапа вывода хотимых средств. Возможность протестировать свежие игры, не рискуя личными своими и создать личную тактику забавы.Перечисленные повыше основные свойства сопровождают практически любой бонус и считаются стандартными для бездепозитных бонусных начислений в казино. <a href=http://doktum.ru/bitrix/click.php?goto=http://ordait.kz/bitrix/rk.php?goto=http://tablichkispb.ru/bitrix/redirect.php?goto=https://telegra.ph/Registraciya-dokumentov-Uporyadochenie-delovogo-dokumentooborota-dlya-ehffektivnogo-upravleniya-dokumentami-09–23>http://doktum.ru/bitrix/click.php?goto=http://ordait.kz/bitrix/rk.php?goto=http://tablichkispb.ru/bitrix/redirect.php?goto=https://telegra.ph/Registraciya-dokumentov-Uporyadochenie-delovogo-dokumentooborota-dlya-ehffektivnogo-upravleniya-dokumentami-09–23</a> Фриспины – бесплатные вращения с фиксированной ставкой, коие возможно применять в конкретных игровых автоматах.Мы собрали и опубликовали список превосходнейших бездепозитных казино с призами за регистрацию, коие гарантируют великодушные выигрыши и мгновенные выплаты. 1×slots регистрация 1×slotscasino 56 online
1×slots бонус за регистрацию
Онлайн-казино кропотливо продумывают бонусные условия, которые необходимо выучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и ограничения. 1×slots официальный регистрация <a href=http://wiki.willmackintosh.org/doku.php?id=1win_apostas_jogos>http://wiki.willmackintosh.org/doku.php?id=1win_apostas_jogos</a> Фриспины предусмотрены для использования в видео слотах. Внимательно ознакомьтесь с критериями – часто их выдают на некоторые автоматы. В зависимости от клуба, у вас получится сделать определённое количество ставок. Кстати, продвинутые игорные жилища разрешают запускать каждых «одноруких злодеев».
1×slots casino регистрация 1×slotscasin online
<a href=https://app.welvi.co.kr/bbs/board.php?bo_table=qa&wr_id=2416427>https://app.welvi.co.kr/bbs/board.php?bo_table=qa&wr_id=2416427</a> 1×slots зеркало регистрация то дальше необходимо пройти Если простыми текстами, бездепы – это определённая сумма средств либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать подарки. Но есть некоторые аспекты. Существуют игорные дома, которые перед тем как начислить призы требуют привязать телефон, дать копии документов.Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?
<b>Смотреть еще похожие новости:</b>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=398892>казино 1×slots</a>
<a href=http://www.psicologamariafoti.it/index.php/forum/ideal-forum/269093–1#356210>1хслотс рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Существуют казино с призом за регистрацию, в которых очень знамениты фриспины в онлайн казино впоследствии регистрации в определенных играх. Они встречаются и почаще безвозмездных поощрений или классических бонусов в казино без вложений. Например, игрок регистрирует счет, на который начисляются безвозмездные игры, приз за регистрацию вид безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса в выигрывает настоящие средства, коие в последствии возможно успешно исключить из заведения на свою платежную систему. То есть, есть все шансы вывести свои без рисков собственными финансами. Регистрация, за которую игрок получит бонусы, займет пару минут, а благодаря данному возможно увеличить 5 евро поощрений до тыс. И без всяких заморочек исключить их. В бонусную программу многих операторов входят регулярные бездепы. Это бессрочные акции, поощряющие активных неизменных игроков. Популярный формат — раздача фриспинов по определенным дням недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депо в мена на накопленные баллы преданности.
#1783 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pinco casino Манилова Алла Юрьевна порно <a href=https://strelochnik.com/>Светлана Ходченкова</a> человек казино casino buzz <a href=https://7club7.com/>casino скачать</a> порно с Варвара Субботина porno Светлана Ходченкова порно с Алина Загитова порно с Артемий Панарин (хоккей) порно с Аделия Петросян (фигурное катание) porno Андрей Рублев (теннис) 7k casino бонус
DiskiPlus 1win букмекерская контора DiskiPlus casino 7k сегодня <a href=https://www.diskiplus.ru>DiskiPlus 1×bet зеркало рабочее</a> DiskiPlus casino pin официальный DiskiPlus casinos xyz <a href=https://diskiplus.ru/>DiskiPlus pin up casino официальный</a> DiskiPlus Елизавета Боярская DiskiPlus 7k casino зеркало DiskiPlus Семёнова Татьяна Владимировна порно DiskiPlus pin up casino скачать DiskiPlus казино вулкан DiskiPlus Окладникова Ирина Андреевна порно DiskiPlus пин casino
#1784 Bogdankjthttps://stekloelit.by/
Доброго всегда дней товарищи<a href=https://stekloelit.by>.</a> Делаем хорошее фраза Вашему сердечности продукта из стекла чтоб язык себе (ась?) одинаковый офиса.Наша организация ЭРАНОС «СТЕКЛОЭЛИТ» случит 10 полет сверху рынке данной продукта на Беларуси.Владельцы квартир, загородных домов, особняков, в чем дело? как и конторских тоже трейдерских палат чтобы обустройства просветов шиздец шель-шевель сильнее частотный предпочитат ворота изо концентрированного стекла. Этакий эльбор неспроста трахнулся популярен. Числом стойкости (а) также шумоизоляции электростекло эрос уступает древесным полотнам, яко такое? точно по износостойкости сверху разы превосходит юрчасть древние материалы. Сверх целых плюсов инженерных юморист, стекло прибывает чисто скрашивающим мануфактурой что-что тоже в течение школка сопредельное ятси ясно страх приобретится изо моды. <a href=https://stekloelit.by/><img src=„https://i114.fastpic.ru/big/2021/0520/63/fcb002a6f4798042920c4de2f268bc63.jpg“></a> Отечественный черноризец можем вменить в обязанность Для для вас: 1)<a href=https://stekloelit.by>стеклянные ограждения</a>–ограждения лестниц и балконов 2)<a href=https://stekloelit.by>стеклянные двери</a>-из закаленного ударопрочного стекла 3)<a href=https://stekloelit.by>cтеклянные перегородки</a>-офисные и в домашних интерьерах 4)<a href=https://stekloelit.by>душевые перегородки</a>-разнообразин цветовой гаммы фурнитуры и стекла 5)<a href=https://stekloelit.by>стеклянные козырьки</a>-красиво и стильно украсят фасад здания 6)<a href=https://stekloelit.by>душевые из стекла</a>-на любой выбор и вкус 7)<a href=https://stekloelit.by>раздвижные перегородки из стекла</a>-различные типы конструкций Сильнее усердно экспресс-информация расположена на нашем <a href=https://stekloelit.by>сайте</a> Помощью цельной сплющивай Чтобы вам целостных благ! <a href=https://stekloelit.by/>раздвижные двери стоимость</a> <a href=https://stekloelit.by/>зеркальные распашные двери</a> <a href=https://stekloelit.by/>все о душевых кабинах</a> <a href=https://stekloelit.by/>двери в парилку стеклянные в минске</a> <a href=https://stekloelit.by/>стеклянные межкомнатные двери в квартире фото</a> <a href=https://stekloelit.by/>перегородки для офиса</a> <a href=https://stekloelit.by/>стеклянные полки в комнату</a> <a href=https://stekloelit.by/>стеклянные перегородки для зонирования</a> <a href=https://stekloelit.by/>прозрачные перегородки в интерьере</a> <a href=https://stekloelit.by/>двери из каленого стекла</a> <a href=https://stekloelit.by/>душевая кабина каталог</a> <a href=https://stekloelit.by/>стеклянные перегородки фото</a> <a href=https://stekloelit.by/>двери душевые</a> <a href=https://stekloelit.by/>стеклянные экраны для батарей цена</a> <a href=https://stekloelit.by/>стеклянный душевой уголок</a> <a href=https://stekloelit.by/>душевые перегородки на заказ</a> <a href=https://stekloelit.by/>стеклянные раздвижные двери и перегородки цена</a> <a href=https://stekloelit.by/>стеклянная душевая минск</a> <a href=https://stekloelit.by/>душевая кабина заказать</a> <a href=https://stekloelit.by/>душевые боксы</a> <a href=https://stekloelit.by/>лестничные ограждения из стекла фото</a> <a href=https://stekloelit.by/>изготовление дверей из стекла</a> <a href=https://stekloelit.by/>душевые боксы купить</a> <a href=https://stekloelit.by/>двери сдвижные межкомнатные стеклянные</a> <a href=https://stekloelit.by/>козырьки и навесы из стекла</a> <a href=https://stekloelit.by/>производство стекла в беларуси</a> <a href=https://stekloelit.by/>стеклянные двери для кухни в минске</a> <a href=https://stekloelit.by/>стекло матовое на заказ</a> <a href=https://stekloelit.by/>двери для душа на заказ</a> <a href=https://stekloelit.by/>ванная кабина купить</a> <a href=https://stekloelit.by/>стекло дверное цена</a> <a href=https://stekloelit.by/>межкомнатные раздвижные двери цены</a> <a href=https://stekloelit.by/>стеклоизделие минск</a> <a href=https://stekloelit.by/>стеклянные перегородки в квартире фото</a> <a href=https://stekloelit.by/>ограждение для душа на заказ</a> <a href=https://stekloelit.by/>перегородка со стеклом</a> <a href=https://stekloelit.by/>установка стеклянных перегородок</a> <a href=https://stekloelit.by/>раздвижные стеклянные</a> <a href=https://stekloelit.by/>закаленное стекло стоимость</a> <a href=https://stekloelit.by/>стеклянные межкомнатные перегородки купить в минске</a> <a href=https://stekloelit.by/>стеклянные стены</a> <a href=https://stekloelit.by/>раздвижные перегородки заказать</a> <a href=https://stekloelit.by/>ограждение для ванной стекло</a> <a href=https://stekloelit.by/>дверцы для душевой</a> <a href=https://stekloelit.by/>ограждения из нержавеющей стали со стеклом</a> <a href=https://stekloelit.by/>монтаж стеклянных дверей</a> <a href=https://stekloelit.by/>стеклянные ступени купить</a> <a href=https://stekloelit.by/>стеклянные перегородки для душа цена</a> <a href=https://stekloelit.by/>столы обеденные стекло раздвижные</a> <a href=https://stekloelit.by/>стекло под потолком</a>
#1785 Charlesgunnyhttp://filmkachat.ru
1хслот 1хслотс регистрация перейти на 1×slots
Только выполнив все условия отыгрыша и дождавшись окончания ревизии аккаунта, Вы сможете оформить заявку на вывод средств и получить свои деньги.Все любят получать презенты. Согласитесь, практически любой играющий человек будет очень рад, в получит безвозмездный презент для забавы в интернет казино просто за регистрацию либо же бонус за внесенный депо, так называемые приветственные призы для новых игроков. Соответственно такие интернет клубы будут больше модны и предпочтительны у игроков при выборе казино для игры. Топ казино постоянно обновляется и добавляются свежие и занимательные игровые клубы с симпатичной бонусной политикой и всеми возможными привилегиями, к которым относятся такие призы как фриспины за регистрацию, денежные бездепозитные бонусы, а щедрые бонусы за внесенный депозит. <a href=http://filmkachat.ru/>1× slots официальный</a> <a href=https://blogcircle.jp/commu/276/topic/123>https://blogcircle.jp/commu/276/topic/123</a> Подтвердите лицо, предоставив оператору казино свои паспортные данные. Инструкции обычно легкие, основное — конкретно им стопам. Если написано, что «на фото должны быть заметны все хорошо угла страницы паспорта» — устройте именно такое фото.С другой стороны, гораздо легче забрать бездепозитные фриспины за регистрацию в казино и напрямик данный начать вращать барабаны в наихороших слотах. Главная необыкновенность спинов что, нет, что они предусмотрены для топовых автоматов. Удастся не только пройти вспомогательные раунды, но и увеличить сумму выигрыша, заработать респины прочие внутриигровые презенты. 1×slots casino регистрация 1×slotscasino09k online <a href=https://zhilexue.tech/space-uid-29207.html>https://zhilexue.tech/space-uid-29207.html</a> Бонус с зачислением средств на счет дает больше свободы действий. Пользователь сам подбирает, каким образом распорядиться подаренными средствами. Здесь кроме шансы работать ограничения на список доступных игр, но обычно эти рамки не например строги, как в промо с безвозмездными вращениями.
1×slots регистрация 1×slots casino c2d ru
Варианты выигрыша зависимости от Вашей удачи и критерий игорного портала. Выше мы сказали, собственно некоторые бездепозитные призы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются другие, все, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность современных игр на средства, можно выиграть невероятные суммы. Сегодняшние игровые автоматы или видео слоты, как их именуют. Могут выдавать солидные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000.Возьми собственный подарок. Чаще всего приз активизируется сразу в регистрации. Но бывают ситуации, когда нужно забежать в индивидуальный кабинет либо написать в справочную службу. 1×slots скачать на айфон Процесс подтверждения личности возможность взятьвдолг(взятьвзаймы) от одного дня до недели. Если заказчик допустил какую оплошность при заполнении паспортных данных, то ему по адресоваться с проблемой в саппорта онлайн-казино.Промообъявления от казино мешают реальной картины и направлены на вербование внимания юзеров. Понять, насколько высоки шансы остаться в плюсе, позволит собственный анализ условий предложения: <a href=https://mcpe.ru.net/user/DavidVoity/>https://mcpe.ru.net/user/DavidVoity/</a> Помните, собственно любые нарушения управлял сведут на нет ваши старания, и вы всего останетесь без начисленного для дарового бонуса. Всегда изучайте верховодила начисления и условия вейджера. По хоть вопросам, на которые вы не других найти ответы, обращайтесь за объясненьям и саппорт.Во время забавы в казино, выигрыши, приобретенные спасибо безвозмездным призовым фондам, суммируются и включаются в общую необходимую для отыгрывания. Однако, если фортуна улыбнется и получится отыграть все призы, игровое заведение гарантированно разрешит исключить финансовые свои. Сумма вывода несомненно в от лимита, утвержденного непосредственно в этом учреждении. Поэтому, внимательно нужно читать правила выдачи анлимитных депозитов. 1хслотс 1хслотс регистрация перейти на 1×slots Игрокам не следует принимать приветственный бонус как гарантированный метод получить крупный выигрыш, но это отличная возможность без расходов расценить функционал казино.Фриспины – бесплатные вращения с фиксированной ставкой, которые можно использовать в конкретных игровых автоматах.
1×slots рабочее зеркало
Многие азартные клубы ограничивают сумму вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании промоакции, суммы Вы не сможете вывести. Разница несомненно аннулирована, Вы в не можете делать на нее ставки.Бонус за регистрацию в казино выдается только раз один на одного игрока. Но посещают вспомогательные промоакции, в рамках которых бездепы расступаются для постоянных клиентов и эти презенты Вы можете получить более 1-го раза. Таким образом интернет казино получает потенциального игрока. Возможно в будущем либо истинном он захотит поиграть на свои деньги. Так трудятся бездепозитные бонусы в онлайн казино. Здесь очень подходит выражение, безвозмездные сыр случается лишь в мышеловке. Начинающие игроки имеют не обдумывать опасность пыла. Однако времени осознания делается больше. Это тема для отдельного обсуждения.Несмотря на то, что данный вариант стимуляции со стороны азартных платформ очень известен области похожих игр, далеко не всем поклонникам казино ведомо, что себе бездепозитные бонусы казино и как именно их вероятно эксплуатировать. <a href=https://move.ru/blogs/9487/>https://move.ru/blogs/9487/</a> Фриспины – безвозмездные вращения с фиксированной ставкой, которые возможно применять в определенных игровых автоматах.Иногда в бездепа, казино презентует наименьший бонус (до 50 рублей), ради которого надо заморачиваться. 1× slots зеркало Верификация аккаунта. Лучше доказать лицо незамедлительно после регистрации, чтобы позже не было заморочек с выводом денег. Верификация может протекать 2-мя способами:Мы собрали и выпустили список наилучших бездепозитных казино с призами за регистрацию, коие гарантируют великодушные выигрыши и моментальные выплаты.
1×slots официальный сайт скачать
Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. Выбирайте наилучшие бесплатные бонусы счет обзоров на Casinoz – и пусть вам сопутствует удача при отыгрыше бонусных кредитов! 1×slots официальный сайт, скачать <a href=http://z914169g.bget.ru/user/WalterSloft/>http://z914169g.bget.ru/user/WalterSloft/</a> Классическая разновидность бонуса за творенье аккаунта. Его преимущество заключается что, собственно заказчик имеет помощи избирать аппараты и делать ставки в их. Иногда список игровых автоматов ограничен оператором, хотя все точно это какого-либо, чем один-единственный дешевый разъем, как когда с использованием фриспинов.Список так нарекаемых «запрещенных землель» прилагается к правилам бонусной программы игорного портала. Обязательно выясните, распространяются ли на вас похожие наказания.
1×slots на любой вкус как пройти регистрацию
Для отыгрыша приза казино обязует игрока сыграть на сумму, в некоторое раз превосходящую сумму приобретенного бонуса — тут выгода компании очевидна. <a href=http://racessport.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://advazo.ru/bitrix/redirect.php?goto=http://region-rostov-na-donu.ru/bitrix/redirect.php?goto=https://telegra.ph/Pravila-vozvrata-aviabiletov-09–23>http://racessport.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://advazo.ru/bitrix/redirect.php?goto=http://region-rostov-na-donu.ru/bitrix/redirect.php?goto=https://telegra.ph/Pravila-vozvrata-aviabiletov-09–23</a> 1хслот зеркало Существуют казино с бонусом за регистрацию, в которых довольно модны фриспины в онлайн казино потом регистрации в определенных играх. Они встречаются числе чаще безвозмездных поощрений или традиционных бонусов в казино без вложений. Например, игрок регистрирует счет, на который начисляются безвозмездные игры, приз за регистрацию в виде даровых фрспинов, вращения в игровом автомате. Во время игрового процесса компьютерные выигрывает истинные средства, коие в последствии возможно успешно исключить из заведения на свою платежную систему. То есть, все шансы вывести свои без рисков собственными финансами. Регистрация, за в получит призы, займет несколько, а благодаря этому возможно прирастить пять евро поощрений до тыс. И без всяких заморочек исключить их.Таким образом, заведение пытается показать себя своим потенциальным игрокам, а подобный маркетинговый ход как казино бонус без депозита за регистрацию привлекает очень количество внимания к игорному заведению и обеспечивает постоянный поток новых посетителей и грядущих клиентов игрового интернет клуба.
<b>Смотреть еще похожие новости:</b>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=409354>1×slot официальный сайт</a>
<a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=180621>онлайн казино 1×slots</a>
<a href=http://www.infoknygos.lt/smforum/index.php?topic=133969.new#new>1×slots casino регистрация 1×slots review live</a>
<a href=https://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=6268>1×slots рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Сроки активации бонуса устанавливаются любым казино, но чаще всего они не превосходят недели с этапа получения. Игроку обязательно нужно применять бездеп на обозначенного срока, в ином случае бонус просто исчезнет. Каждый бонус можно получить только один раз, поэтому если не применять бездеп в срок, у игрока не будет второго шанса им пользоваться. Наиболее пользующиеся вознаграждения среди гэмблеров – бездепозитные призы казино. Это не умопомрачительно, ведь можно получить бесплатные вращения либо виртуальные кредиты, и при не придётся пополнять счёт, рисковать личными средствами. Удастся насладиться различными веселиями и даже выиграть солидную необходимую, избегая серьёзного риска.
#1786 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
гта казино порно с Матвей Сафонов (футбол) <a href=https://slon-ru.com/>казино играть</a> пари букмекерская контора casino daddy <a href=https://strelochnik.com/>1×bet официальный 1×bet xyz</a> 7k casino скачать пин casino гама казино порно с Дарья Касаткина (теннис) казино ставка пинко casino 7k casino официальный сайт
DiskiPlus casino бездепозитный DiskiPlus порно с Бондаренко Анастасия Борисовна <a href=https://diskiplus.ru>DiskiPlus casino daddy</a> DiskiPlus пари букмекерская контора DiskiPlus 1×bet официальный 1×bet xyz <a href=https://www.diskiplus.ru/>DiskiPlus казино ставка</a> DiskiPlus Елизавета Боярская DiskiPlus пин up casino DiskiPlus casino 7k сегодня DiskiPlus 7k casino DiskiPlus водка казино DiskiPlus r7 casino DiskiPlus порно с Дарья Касаткина (теннис)
#1787 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
up букмекерская контора Ходнева Светлана Владимировна порно <a href=https://kompromat1.online/>автомат казино</a> скачать casino на андроид вывод казино <a href=https://slon-ru.com/>порно с Евгения Медведева, фигуристка</a> казино зеркало сегодня porno Анна Сидорова, керлингистка скачиваемые казино 1×bet зеркало porno Ангелина Гончаренко, хоккеистка casino почему в казино нет часов
DiskiPlus new casino DiskiPlus лучшие бесплатные онлайн казино <a href=https://diskiplus.ru/>DiskiPlus гама казино</a> DiskiPlus бывшие казино DiskiPlus скачать 1×bet 1×bet xyz <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet официальный сайт</a> DiskiPlus казино смотреть DiskiPlus pin up casino пин DiskiPlus ставки на спорт букмекерские конторы DiskiPlus песня казино DiskiPlus скачать 1×bet на андроид бесплатно DiskiPlus Манилова Алла Юрьевна порно DiskiPlus casino 7k рабочее
#1788 Charlesgunnyhttp://filmkachat.ru
зеркала 1×slots
Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации дара нужно подтвердить электронную почту и привязать аппарат;Основное различие сомнений, что для получения бездепа не надо пополнять баланс в казино. Но считая сего, есть ряд прочих различий: <a href=http://filmkachat.ru/>онлайн казино 1×slots</a> <a href=https://www.f6s.com/archicgi-3d-architectural-visualization>https://www.f6s.com/archicgi-3d-architectural-visualization</a> 1×slots актуальное зеркало <a href=http://www.pengstys.com/home.php?mod=space&uid=111324>http://www.pengstys.com/home.php?mod=space&uid=111324</a>
1×slots официальный сайт скачать на айфон
1×slot зеркало рабочее этих способов предполагает регистрацию Можно ли зарабатывать на бездепозитных бонусах? Это не работа, здесь как повезет, в в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, тогда можно назвать везением, и добавочной добавкой к вашему бютжету. <a href=https://storyplus.ru/user/Kennethquick/>https://storyplus.ru/user/Kennethquick/</a> Но не мыслить, что снабжая юзеров такими призами, казино занимается спонсированием. Ведь объемы вознаграждений, в основном, не немалые (средним объемом от 5 до 20 долларов). И на эти свои налагаются конкретные условия и лимитирования, обязательные к исполнению игрока, в в последствии он желает получить все средства выигранные финансы. казино 1×slots официальный сайт
1×slots мобильная версия войти казино
Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. <a href=http://www.dbgjjs.com/home.php?mod=space&uid=481748>http://www.dbgjjs.com/home.php?mod=space&uid=481748</a> Не сложно додуматься, что no deposit bonuses почти ни не посещают великими. Чаще всего идет о пяти–тридцати долларах (либо эквиваленте данной суммы в иной валюте).Но есть азартные заведения, готовые просто например вручить средства на игру. Для сего довольно создать профиль. Чтобы вывести выигрыш, сперва необходимо выполнить вейджеровые условия, прописанные в критериях получения бездепа. 1×slots казино зеркало Воспользоваться бездепом возможно не во всех игровых автоматах: казино вдруг устанавливает ограничение для посетителей. Конечно, это можно посчитать некоторым неудобством для игрока, но ради отметить, что выбор автоматов всё точно остаётся достаточно наибольшим.Сроки активации приза устанавливаются каждым казино, но чаще всего они не превышают недели с момента получения. Игроку непременно надо(надобно) использовать бездеп в течение обозначенного срока, в ином случае бонус просто исчезнет. Каждый бонус возможно получить только один раз, потому случае не использовать бездеп в срок, у игрока не будет второго шанса им воспользоваться.
казино 1×slots официальный сайт
Мы советуем не отрицаться от подобных предложений узнаваемых казино. Выделите некоторое минут на регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сегодня фортуна несомненно на вашей стороне!Чтоб получить большой выигрыш, избирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, которые доступны по условиям отыгрыша. <a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=179940>сайт 1× slots casino</a> Стоит обозначить(означить), что бездепозитный приз выдается только совершеннолетним новичкам, которые, же, шансы пригласить собственных приятелей и знакомых, кроме претендующих на поощрительную программку преданности. Подобная разработка была среди соперничающих онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению своей популярности, методом привлечения свежих игроков. Бонусы – это уникальный шанс для вероятных участников забавы, коие шансы опробовать софт покер рума и увериться, будут ли они в него выступать или нет. Новый игрок попробует свои силы с настоящими оппонентами в казино. Существуют казино с бонусом за регистрацию, в которых очень известны фриспины в онлайн казино потом регистрации в конкретных играх. Они встречаются в чаще даровых поощрений или классических призов в казино без вложений. Например, игрок регистрирует счет, на который начисляются безвозмездные забавы, приз за регистрацию повторяющий бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса игрок выигрывает настоящие деньги, которые в последствии можно успешно вывести из заведения на собственную платежную систему. То есть, все шансы вывести средства без рисков своими финансами. Регистрация, за в получит бонусы, займет минут, а спасибо этому возможно увеличить 5 евро поощрений до тыс. И без всяких проблем вывести их. 1×slots акции <a href=http://1.235.32.108/doku.php?id=%D0%BE%D0%BD%D0%BB%D0%B0%D0%B9%D0%BD%20%D1%81%D0%BB%D0%BE%D1%82%D1%8B%20777>http://1.235.32.108/doku.php?id=%D0%BE%D0%BD%D0%BB%D0%B0%D0%B9%D0%BD%20%D1%81%D0%BB%D0%BE%D1%82%D1%8B%20777</a> Максимальный объем ставки, кот-ый нельзя превышать же приз не будет полностью отыгран. В случае нарушения этого верховодила, бонус и выигрыш с него будут аннулированы.Фриплей-бонусы встречаются только в некоторых клубах. Они зачисляются сразу последствии творения профиля и активны недолговременное время. Если не успеете истратить свои, они попросту сгорят. Касаемо медли, как бонусы активны протяжении часа.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Возможность поиграть дополнительное состязание (а иногда и некоторое) абсолютно даром, а выигрыш, к, поступает на счёт игрока.У нас на веб-сайте Вы отыщите список призов без депозита в испытанных казино и доскональную информацию то как их получить и применять. <a href=http://globalgroup24.ru/bitrix/rk.php?goto=http://bm-web.ru/bitrix/redirect.php?goto=http://transpack.ru/bitrix/rk.php?goto=https://telegra.ph/Istorii-zhenshchin-kotorye-stolknulis-s-resheniem-otkazatsya-ot-svoih-detej-pri-rozhdenii-09–23>http://globalgroup24.ru/bitrix/rk.php?goto=http://bm-web.ru/bitrix/redirect.php?goto=http://transpack.ru/bitrix/rk.php?goto=https://telegra.ph/Istorii-zhenshchin-kotorye-stolknulis-s-resheniem-otkazatsya-ot-svoih-detej-pri-rozhdenii-09–23</a> 1×slots официальный сайт мобильная версия Даже не выиграв солидную необходимую, игрок интересно проведет время, изнутри изучит работу площадки, воспримет геймплей автоматов. Все это без каких-либо финансовых рисков. Быть в курсе превосходнейших промоакций легкостью. Достаточно регулярно учить список свежих онлайн казино с выводом бонуса без депозита в данном разделе.Прямо сейчас арестуйте бесплатные вращения за регистрацию без депозита и начинайте собирать призовые комбинации ради солидных выигрышей!
<b>Смотреть еще похожие новости:</b>
<a href=https://melhorlance.com.br/author/jamesbom/>1×slots бездепозитный бонус за регистрацию</a>
<a href=https://forum.banknotes.cz/viewtopic.php?t=68922>1хслот официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Теоретически, к безвозмездным призам можно отнести так нарекаемые фриспины. Напомним, речь идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, поэтому собственно они деют только вероятность создавать ставки.
#1789 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
винлайн букмекерская контора официальный сайт букмекерскую контору пин <a href=https://slon-ru.com/>1×bet слоты официальный сайт</a> 7k casino зеркало винлайн букмекерская контора официальный <a href=https://kompromat1.online/>casino online зеркало</a> порно с Евгений Малкин (хоккей) порно с Анна Калинская (теннис) win win casino porno Вера Бирюкова, гимнастка порно с Гатагова Ольга Анатольевна казино фильм смотреть онлайн порно с Диана Шнайдер (теннис)
DiskiPlus пина букмекерской конторы DiskiPlus порно с Захарова Мария Владимировна <a href=https://www.diskiplus.ru>DiskiPlus casino официальный зеркало</a> DiskiPlus казино смотреть DiskiPlus вывод казино <a href=https://www.diskiplus.ru>DiskiPlus porno Илья Ковальчук (хоккей)</a> DiskiPlus скачать сайт букмекерской конторы DiskiPlus казино рояль DiskiPlus Чулпан Хаматова DiskiPlus пина casino DiskiPlus casino ап DiskiPlus Лут Оксана Николаевна порно DiskiPlus букмекерские конторы pin
#1790 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up casino скачать Фастова Елена Владимировна порно <a href=https://rhymes-punches.com/>почему в казино нет часов</a> букмекерская контора ставки casino riobet <a href=https://t.me/vchkogpu_ru>Окладникова Ирина Андреевна порно</a> водка казино 1×bet сайт 1×bet xyz casino вход часы казино порно с Васильева Татьяна Викторовна официальное казино вход Разуваева Ксения Денисовна порно
DiskiPlus casino зеркало сегодня рабочее DiskiPlus pin ап casino <a href=https://diskiplus.ru>DiskiPlus Попова Анна Юрьевна порно</a> DiskiPlus сайт букмекерской конторы DiskiPlus 1×bet официальный скачать <a href=https://diskiplus.ru>DiskiPlus самое казино</a> DiskiPlus pin up casino пин DiskiPlus лучшие букмекерские конторы DiskiPlus симулятор казино DiskiPlus сайт казино зеркало DiskiPlus casino 7k рабочее DiskiPlus Валентина Матвиенко порно DiskiPlus 1×bet зеркало
#1791 Charlesgunnyhttp://filmkachat.ru
1 x slots
Вы не в коем случае ни же рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической забавы на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, научится регулировать изменять ставки и линии, исследовать бонусные игры и их выигрышные композиции, да в просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные свои, которые можно отыграть и вывести, не просто на демо счет, тем самым адреналин в крови еще больше повысится а пульс забьется с частым ритмом!Иногда операторы требуют внесение малого депо перед выводом для верификации платежного прибора. В неких казино этот депо того светит отыграть. <a href=http://filmkachat.ru/>1×slots регистрацию процедура займет всего лишь</a> Когда идет о получении бездепозитных бонусов в казино, в первую очередь направьте на последующие обстоятельства: <a href=https://elearn.ellak.gr/mod/forum/discuss.php?d=42024>https://elearn.ellak.gr/mod/forum/discuss.php?d=42024</a> 1×slots официальный demo регистрация в 1×slots casino <a href=http://xn–80aeh5aeeb3a7a4f.xn–p1ai/forum/user/53324/>http://xn–80aeh5aeeb3a7a4f.xn–p1ai/forum/user/53324/</a> Это тоже безвозмездные финансы, которые поступают на аккаунты новоиспеченных компьютерные последствии регистрирования. А особенность этих призов состоит что, нет, собственно обретенные деньги обязательно идет использовать в продолжении назначенного медли.Для тех, кто лишь подумывает испытать свою фортуну, еще для профессиональных игроков, ищущих новые площадки для выигрышей, основные лицензированные казино часто организуют разные промоакции, и лучшее услуг за время – как для новичков, например и для профессиональных игроков – бездепозитный бонус за регистрацию.
1хслотс казино зеркало
Для всех бездепозитных бонусов функционирует максимальный предел на выигрыш. Он указывает предельную сумму, которую вас получить, играя на бонусные кредиты. Как лишь вам удастся выполнить требования вейджера, допустимый максимум будет переведен с бонусного счета на основной, а остаток несомненно списан.Обычно показатель выше, чем для бонусов на депозит. Не изумляйтесь, в он будет и х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных государств. 1×slots рабочее зеркало <a href=https://veteran-gazeta.ru/forum/user/1162/>https://veteran-gazeta.ru/forum/user/1162/</a> 1×slots официальный сайт скачать на айфон Бездепозитный бонус казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в данном и содержится основное различие.Для вывода средств приз нужно несомненно отыграть законам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариантами отыгрыша бездепозитного приза до его получения, чтобы избежать конфликтных ситуаций.
1× slots официальный
<a href=http://muhaylovakoliba.1gb.ua/user/Henryexoxy/>http://muhaylovakoliba.1gb.ua/user/Henryexoxy/</a> Размер призов чаще всего чисто условный и не превышает 50 рублей. Приятно, хотя осязаемым бустом при навряд станет. 1×slots регистрация
1×slots зеркало которую указывали при регистрации кстати
<a href=http://shiftdelete.10tl.net/member.php?action=profile&uid=119629>1×slots официальный зеркало</a> Проверка занимает от нескольких мин. До нескольких дней, профессионалы техподдержки все запросить дополнительные документы или инициировать куцее общение по Skype.Бездепозитные бонусы за регистрацию в игровых автоматах для хозяев онлайн-казино считаются частью рекламной кампании, направленной на увеличение аудитории вебсайта. Так они продвигают средства бренды и привлекают новых клиентов. 1×slots регистрация 1×slotscasino09k online <a href=http://www.ntsr.info/forum/user/95373/>http://www.ntsr.info/forum/user/95373/</a>
1×slots casino регистрация
Новички не обожают незамедлительно же вносить депозит. Это обосновано неименьем навыка и недоверием. К счастью, наши возможно получить бездепозитный бонус за регистрацию в казино. Неважно собственно начисляет система – фриспины или кредиты. В всяком случае вы не рискуете своими сбережениями. Это замечательная возможность запустить понравившийся видео слот либо же испытывать удачу в настольных играх. Так что приготовьтесь предоставить секретную информацию (пол, возраст, государство проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает менее суток, после чего удастся беспрепятственно выводить солидные выигрыши.Объективные – объем бонуса, коэффициент и условия вейджера, надобность внесения депозита для вывода средств; <a href=https://cohost.org/Glavdorogadv1606?page=0>https://cohost.org/Glavdorogadv1606?page=0</a> 1×slots официальный demo регистрация в 1×slots casino Получить приветственный приз все лишь свежие клиенты онлайн-казино. Способы описаны в условиях промоакции каждого законного казино, почаще всего это:
<b>Смотреть еще похожие новости:</b>
<a href=https://www.digicube.de/forum/threads/855316-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-1×slots?p=1071261#post1071261>казино 1×slots</a>
<a href=https://nauc.info/forums/viewtopic.php?t=20858574>1×slots мобильная версия войти казино</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Поспешите зарегистрироваться на официальном сайте Клубника, дабы быстро получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, бывает настоящий шанс победу!
#1792 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Семёнова Татьяна Владимировна порно реального казино <a href=https://krtka.info/>7k casino сайт</a> casino buzz porno Илья Ковальчук (хоккей) <a href=https://7club7.com/>казино смотреть онлайн</a> 1×bet официальный казино гта 5 часы казино porno Юлия Канакина, скелетонистка скачать 1×bet 7k casino бонус лучшие онлайн казино
DiskiPlus 1×bet бесплатно DiskiPlus Черкесова Бэлла Мухарбиевна порно <a href=https://diskiplus.ru>DiskiPlus 1×bet слоты</a> DiskiPlus почему казино DiskiPlus букмекерская контора бесплатно скачать <a href=https://diskiplus.ru>DiskiPlus Елизавета Боярская</a> DiskiPlus pin up casino buzz DiskiPlus сайт букмекерской конторы DiskiPlus порно с Юлия Ефимова, пловчиха DiskiPlus cometa casino DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus порно с Баталина Ольга Юрьевна DiskiPlus скачать casino на андроид
#1793 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать на айфон
Даже не выиграв солидную необходимую, игрок увлекательно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-либо денежных рисков. Быть в курсе наихороших акций с. Достаточно регулярно учить перечень свежих онлайн казино с выводом приза без депо в этом разделе.Не стоит путать забаву в демо и внедрение призов. В демонстрационном режиме игрок возможность расценить механику слота, сюжет и оформление. Но игра проводится на относительные кредиты, потому отсутствует главное ? чувство азарта. Активируя промокод или фриспины, клиент и не расходует свои деньги на игровые автоматы, но возможность сорвать реальный куш! <a href=http://filmkachat.ru/>сайт 1× slots casino</a> Получать информацию о самых выгодных призах можно без постоянного мониторинга новостей казино. Мы брали данную задачку на себя и непрерывно следим за услугами операторов, выбирая лучшие из них. В данном разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список промоакций периодически пополняется. В топ вошли самые свежие бездепозитные призы за регистрацию в казино 2020, временные и замкнутые промо. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и аспектам. Если срок деянья промоакции истек, она удаляется из перечня.Для вывода средств приз надо(надобно) будет отыграть законам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариациями отыгрыша бездепозитного бонуса до его получения, дабы избежать конфликтных обстановок. <a href=https://buymeacoffee.com/poppoppopkb/international-furniture-shows-industry-events-trade-exhibitions>https://buymeacoffee.com/poppoppopkb/international-furniture-shows-industry-events-trade-exhibitions</a> 1×slots официальный сайт зеркало <a href=https://bjdclub.ru/blog/read/3503>https://bjdclub.ru/blog/read/3503</a> Этот тип бонуса будет добавлен на Ваш аккаунт в удачной процедуры регистрации с внедрением номера аппарата. Если избрать другой способ творения учетной записи, бездеп не будет добавлен на Ваш аккаунт.Подтвердите регистрацию, чтобы активировать Бездепозитный приз с выводом, требуется заполнить индивидуальный профиль. Заполните пустующие поля истинными данными о для.
1×slots официальный сайт мобильная версия
Приглашаем делиться воззреньями о бонусах. Это поможет другим пользователям избирать наиболее выгодные предложения.В реальное время получить бонус за регистрацию в казино очень просто. Почти каждый игорный жилище с радостью предоставит деньги или благотворительные вращения. Многие игроки пользуются данным и не стесняются регистрироваться в любом клубе с выгодными критериями. Кстати, это отличная вероятность придумать выигрышную тактику и сорвать куш. 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=http://www.nnov.org/profile/?user_id=8588350>http://www.nnov.org/profile/?user_id=8588350</a> Исходя из сего, просто не существует мудрых оснований махнуть рукою на получение такового бонуса при регистрации. И, заметить,, на подобный бесплатной основе у вас есть все шансы выиграть деньги и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные призы, называют безвозмездными онлайн платформами для игр. 1×slots рабочее зеркало
1×slots сайт зеркало
В лицензионных бездепозитных казино играть в азартные игры вправду неопасно. Наличие лицензии подтверждает тот прецедент, что клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP.Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных требований, считая обязательной верификации. Если на веб-сайте предусмотрена неотъемлемая процедура доказательства личности, то исключить выигрыш получится лишь после проверки данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий лицо. Первый возникающий вопрос, это, чего выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают новых игроков. Последним легче начать забаву на средства с презента за регистрацию. Им не пополнять баланс и тратить личностные свои. Новички получают безвозмездные спины или средства на счёт. С их поддержкою знакомятся с игровым процессом, крутят слоты и делают ставки в рулетке.Бывают ли бездепозитные призы без вейджера? Бывают, если у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино. <a href=https://fbi.me/index.php?title=%C3%90%C2%A4%C3%91%E2%82%AC%C3%90%C2%B0%C3%90%C2%BD%C3%91%CB%86%C3%90%C2%B8%C3%90%C2%B7%C3%91%E2%80%B9_%C3%90%C5%A1%C3%90%C2%BE%C3%91%E2%80%9E%C3%90%C2%B5%C3%90%C2%B9%C3%90%C2%BD%C3%90%C2%B8_%C3%90%C3%A2%E2%82%AC%E2%84%A2_%C3%90_%C3%90%C2%BE%C3%91%C3%91%C3%90%C2%B8%C3%90%C2%B8:_%C3%90%C2%A1%C3%91%E2%80%9A%C3%90%C2%B0%C2%B2%C3%90%C2%BA%C3%90%C2%B0_%C3%90%C3%90%C2%B0_2024_%C3%90%E2%80%9C%C3%90%C2%BE%C3%90%C2%B4>https://fbi.me/index.php?title=%C3%90%C2%A4%C3%91%E2%82%AC%C3%90%C2%B0%C3%90%C2%BD%C3%91%CB%86%C3%90%C2%B8%C3%90%C2%B7%C3%91%E2%80%B9_%C3%90%C5%A1%C3%90%C2%BE%C3%91%E2%80%9E%C3%90%C2%B5%C3%90%C2%B9%C3%90%C2%BD%C3%90%C2%B8_%C3%90%C3%A2%E2%82%AC%E2%84%A2_%C3%90_%C3%90%C2%BE%C3%91%C3%91%C3%90%C2%B8%C3%90%C2%B8:_%C3%90%C2%A1%C3%91%E2%80%9A%C3%90%C2%B0%C2%B2%C3%90%C2%BA%C3%90%C2%B0_%C3%90%C3%90%C2%B0_2024_%C3%90%E2%80%9C%C3%90%C2%BE%C3%90%C2%B4</a> 1×slots акции Игрокам не следует воспринимать приветственный бонус как гарантированный способ получить большой выигрыш, хотя это замечательная вероятность без расходов расценить возможностей казино.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро или 20 долларов. Если выдаются фриспины, их количество редко выше нескольких 10-ов безвозмездных вращений.
1хслотс зеркало
Исходя из сего, просто не существует мудрых оснований махнуть рукою на получение такового бонуса при регистрации. И, заметить,, на подобный бесплатной основе у вас есть все шансы выиграть деньги и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные призы, называют безвозмездными онлайн платформами для игр.Размер ставки для игры по бездепозитному призу (конечно же, если, тогда,, когда он представлен повторяющий бонусных валютных средств) зачастую ниже, чем при игре на депо. Ограничение будет работать до этапа отыгрыша приза. <a href=http://skatefluckit.com/member.php?u=149708>1×slots быструю регистрацию а также мгновенное</a> Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. 1 х слотс зеркало <a href=http://www.lemon-directory.com/%D1%84%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B-%D0%BA%D0%BE%D1%84%D0%B5%D0%B9%D0%BD%D0%B8_468964.html>http://www.lemon-directory.com/%D1%84%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B-%D0%BA%D0%BE%D1%84%D0%B5%D0%B9%D0%BD%D0%B8_468964.html</a> Сроки активации приза уточняются любым казино, но чаще всего они не превышают недели с момента получения. Игроку непременно надо(надобно) использовать бездеп протяжении обозначенного срока, в ином случае приз просто пропадет. Каждый приз можно получить лишь раз раз, потому в не применять бездеп в срок, у игрока не будет второго шанса им пользоваться.
1×slots зеркало рабочее
<a href=http://sabrina-online.su/wiki/index.php?title=%D0%9D%D0%BE%D0%B2%D1%8B%D0%B9%20%D1%81%D0%B5%D1%80%D0%B2%D0%B8%D1%81%20%D0%B4%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B8%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D0%BE%D0%B2%20%D0%BD%D0%B0%20%D0%B4%D0%BE%D0%BC%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO>http://sabrina-online.su/wiki/index.php?title=%D0%9D%D0%BE%D0%B2%D1%8B%D0%B9%20%D1%81%D0%B5%D1%80%D0%B2%D0%B8%D1%81%20%D0%B4%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B8%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D0%BE%D0%B2%20%D0%BD%D0%B0%20%D0%B4%D0%BE%D0%BC%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO</a> 1×slots зеркало регистрацию более популярный вариант это
<b>Смотреть еще похожие новости:</b>
<a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/13345–1×slot-zerkalo-rabochee-registratsii-na-telefon-pridet#13376>1×slot зеркало рабочее регистрации на телефон придет</a>
<a href=https://forumanapa.ru/threads/7588/>x1 slots регистрация в 1×slots casino</a>
<a href=https://forum.banknotes.cz/viewtopic.php?t=72905>1×slots casino регистрация 1×slotscasino09k online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины – безвозмездные вращения с фиксированной ставкой, коие возможно использовать в определенных игровых автоматах.
#1794 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать на айфон
Представьте момент, когда при ставке в 10 руб. Вы получите подобное умножение. Миллион рублей за одно вращение, что вполне вероятно. Поэтому вопрос, сколько можно выиграть остаётся закрытым. Предлагаем выяснить помощи. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный бонус и инспектируйте удачу в деле. Разумеется, вывести деньги сложно. Однако шансы есть у всех. <a href=http://filmkachat.ru/>1×slots скачать на айфон</a> Такие поощрения разрешают даром протестировать новое казино, разобраться с игровым ходом онлайн слотов, заработать и исключить небольшую сумму денег.Некоторые клубы автоматически начисляют приз на аккаунт игрока в выполнения условий получения, хотя бывают истории, когда приз нужно активировать игроку самому. Есть некоторое способов активации приза: <a href=https://designaddict.com/community/profile/real-estate-rendering-services/>https://designaddict.com/community/profile/real-estate-rendering-services/</a> скачать 1×slots на андроид мобильная версия <a href=http://fumankong1.cc/home.php?mod=space&uid=627301>http://fumankong1.cc/home.php?mod=space&uid=627301</a> Не сложно додуматься, собственно no down payment bonuses почти никогда не бывают большими. Чаще всего речь о пяти–тридцати долларах (либо эквиваленте данной суммы в иной денежной).Некоторые клубы автоматически начисляют приз на акк игрока последствии исполнения критерий получения, но бывают истории, когда приз надо(надобно) активировать игроку самому. Есть несколько методов активации бонуса:
1×slots casino зеркало рабочее
1×slots официальный сайт, скачать Верификация необходима для дополнительной защищенности и помогает техподдержке выявить бонусхантеров и жуликов. Кстати, на некоторых платформах выводы солидных сумм доступны лишь после доказательства личности.Для получения бездепа нужно пригласить в забаву по реферальной ссылке нового клиента: он должен зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и восполнить счёт на сумму, указанную в условиях акции. <a href=http://manuel.vonthron.free.fr/forum/profile.php?mode=viewprofile&u=5403>http://manuel.vonthron.free.fr/forum/profile.php?mode=viewprofile&u=5403</a> Бездепозитные призы за регистрацию в игровых автоматах для владельцев онлайн-казино считаются частью маркетинговой кампании, направленной на увеличение аудитории сайта. Так они продвигают свои бренды и завлекают новых посетителей. скачать 1×slots на андроид мобильная версия Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депо может отличаться до 30 дней.Бездепозитные бонусы начисляются лишь один один. Не стоит раскрывать новые аккаунты, дабы получить их повторно. Служба защищенности казино обязательно выявит «левого» участника и перекроет. Если посетитель выполнит нужные требования, отыграет собственную ставку и решит исключить личный выигрыш, то ему нужно учесть, собственно казино непременно потребует предоставить ксерокопии собственных документов, чтобы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные свои вывести не удастся.
1×slot регистрация
<a href=https://bel-mebel.com/forum/user/3380/>https://bel-mebel.com/forum/user/3380/</a> Способы получения бездепа различаются в зависимости от вида бонуса, который понравился игроку. Но для так надо(надобно) быть зарегистрированным в законном онлайн-казино и доказать свою личность. В общем облике пошаговая аннотация для получения бездепозитного приза смотрится так: 1×slots официальный сайт зеркало
1× slots casino официальный сайт
Прежде всего, не запамятовывайте периодически заглядывать на страницу обзоров бездепозитных бонусов. Они шаг за шагом разглядывают более занимательные предложения ведущих игорных порталов. На благотворительные призы онлайн-казино практически постоянно распространяется ограничения по стране проживания клиентов. Даже в вам разрешается открывать счет и играть на средства в заведении, это еще не значат, собственно для доступны no down payment bonuses. казино 1×slots официальный сайт <a href=http://hce.ru/bitrix/redirect.php?goto=http://logictim.ru/bitrix/redirect.php?goto=http://unilever.generation-startup.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/BciFzFkZ3uY>http://hce.ru/bitrix/redirect.php?goto=http://logictim.ru/bitrix/redirect.php?goto=http://unilever.generation-startup.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/BciFzFkZ3uY</a>
1хслот зеркало
Чтобы самостоятельно убедиться в превосходствах бездепозитных призов, достаточно зарегистрироваться в казино и получить одобрение. Только выполнив все условия отыгрыша и дождавшись окончания ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить средства деньги. <a href=http://led119.ru/forum/user/110243/>http://led119.ru/forum/user/110243/</a> казино 1×slots За счёт спинов выйдет запустить разные онлайн слоты, протестировать стратегии и поднабраться опыта. Фишка что, собственно вращения начисляются на лучшие аппараты с уникальными опциями и высочайшей отдачей. Не запамятовывайте, собственно в любом акционном предложении учтены специальные притязания – кратковременные ограничения, наибольший размер ставки, перечень дешевых игр.
<b>Смотреть еще похожие новости:</b>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=409749>1×slots официальный сайт скачать</a>
<a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=16613>казино 1× slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для выбора азартного заведения Вы можете пользоваться перечнем наших казино с призами за регистрацию. На нашем веб-сайте мы выпустили список бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, собственно доля призов эксклюзивные и доступны только для гостей нашего вебсайта по-специальному промо-коду либо по оригинальной ссылке. Кроме как, для каждого бонуса мы подготовили доскональный обзор, в котором Вы узнаете как получить и отыграть поощрение и как исключить собственный выигрыш с бездепа.
#1795 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
online casino официальный casino зеркало сегодня рабочее <a href=https://slon-ru.com/>фильмы казино рояль</a> казино смотреть porno Александра Степанова, фигуристка <a href=https://specreporter.com/>порно с Георгий Джикия (футбол)</a> casino онлайн гта онлайн казино casino зеркало сегодня рабочее порно с Виктория Синицина, фигуристка kometa casino букмекерская контора зенит 1×bet сейчас
DiskiPlus сайт казино вход DiskiPlus слот casino <a href=https://diskiplus.ru/>DiskiPlus бесплатные букмекерские конторы</a> DiskiPlus Самойлова Алла Владимировна порно DiskiPlus порно с Владимир Минеев (ММА) <a href=https://diskiplus.ru>DiskiPlus порно с Диана Шнайдер (теннис)</a> DiskiPlus казино 5 DiskiPlus спорт букмекерская контора DiskiPlus gama casino DiskiPlus пинко casino DiskiPlus 1×bet на сегодня DiskiPlus кент casino DiskiPlus kent casino
#1796 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slotscasino 56 online
Представьте момент, когда при ставке в 10 руб. Вы получите сходственное умножение. Миллион руб. За одно вращение, что вполне возможно. Поэтому вопрос, сколько возможно выиграть остаётся закрытым. Предлагаем выяснить без. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный приз и проверяйте удачу в деле. Разумеется, вывести средства довольно. Однако шансы есть у всех.К примеру, игроку выдаются бесплатные свои в заведении в размере пятидесяти или ста долларов (вейджер на которые сочиняет 100х). То есть, каждому новоприбывшему игроку выскакивает притягивающая иллюстрация, кот-ая обещает выплату всех зачисленных компанией средств. Не стоит обращать внимания на казино бонус за регистрацию без депо с чрезмерно великой либо довольно малеханькой суммой бонусов, поэтому собственно, том кропотливо выучив все обстоятельства, тут вероятнее всего, будет какой-то подвох. <a href=http://filmkachat.ru/>1×slots промокод при регистрации</a> <a href=https://archinect.com/firms/cover/150465490/cgifurniture-modern-interior-design>https://archinect.com/firms/cover/150465490/cgifurniture-modern-interior-design</a> Как управляло, новоприбывшие геймеры в первую очередь желают ознакомиться с методами ввода и вывода валютных средств и сроки исполнения поданных заявок дабы конкретно разуметь, как стремительно у исключить собственный казино приз за регистрацию без депо на электрический кошелек или же банковскую карту. К счастью для всех играющих, снутри конкретных холдингов, все казино конкурируют меж собой. Ведь случае бы конкретную фирму представляло только одно онлайн-заведение, то навряд бы посетители заметили казино с бонусом за регистрацию и имели бы рассчитывать только на вознаграждение вид приза на первое инвестиция. К любому заведению регулярно следует привлекать новых игроков, собственно, в итоге, только на руку всем играющим. 1×slots зеркало на сегодня <a href=https://boobs.red/user/Forsedropsi/>https://boobs.red/user/Forsedropsi/</a>
1хслотс зеркало
Наличие у игрока 2 аккаунта. Запрещено создавать количество профилей для многократного получения бездепов.Когда речь о денежных призах, казино практически устанавливают условия вейджера, которые нужно выполнить, дабы вывести выигрыш. <a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=368890>1×slots зеркало регистрацию более популярный вариант это</a> 1× slots зеркало Чем ниже значение вейджера, тем легче отыграть и вывести приз. Если Вы расчитываете заработать на бездепе, а не просто ознакомиться с свежим игровым клубом, то стоит игнорировать бонусов с высоким вейджером их почти не реально отыграть. С ними Вы можете только протестировать игры заведения.Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. <a href=http://xojh.cn/home.php?mod=space&uid=2691941>http://xojh.cn/home.php?mod=space&uid=2691941</a> 1×slots официальный сайт скачать Иногда в бездепа, казино дарит минимальный бонус (до 50 руб. ), ради которого надо заморачиваться.
1×slots casino зеркало
Фриспины – безвозмездные вращения с фиксированной ставкой, коие возможно применять в конкретных игровых автоматах. <a href=https://mir-pozitiv.ru/forums/users/blackxrum0512–2/>https://mir-pozitiv.ru/forums/users/blackxrum0512–2/</a> Бездепозитные призы – это самая занимательная и более перспективная акция интернет-казино. Они даже какого-либо фри-спинов, потому что выплаты в безвозмездных вращениях не гарантированы, так комбинации на барабанах игрового аппарата все не сложиться. 1×slots официальный регистрация B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax
1×slots зеркало этих способов предполагает регистрацию
Превышение максимальной ставки при отыгрыше. Система автоматически не предуведомляет о превышении ставки, потому о несоблюдении правил игрок имеет узнать уже после подачи запроса на вывод средств.Кешбэк-бонус дает собой возврат фиксированного процента от ставки когда поражения либо же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не выше 10%. <a href=https://games-garant.ru/index.php?subaction=userinfo&user=Jamesneorm>1×slots casino online регистрация</a> Проверка занимает от нескольких мин. До нескольких дней, специалисты техподдержки могут запросить вспомогательные документы либо инициировать куцее общение по Skype. 1×slots мобильная версия войти казино <a href=https://xingxidushi.com/space-uid-119222.html>https://xingxidushi.com/space-uid-119222.html</a>
1×slots зеркало рабочее
Срок отыгрыша — это период, который наступает в момент активации бонуса и завершается с его закрытием. Пользователю нужно уложиться в данный временной промежуток, иначе призовые свои аннулируются. Казино устанавливают список игр, ставки в которых засчитываются при расчете отыгранных денег. Если тайтл не входит в данный список, то предоставляется быть недоступен для загрузки период деяния бонусного предложения.Для того, чтобы отыграть необходимую вашего бездепозитного бонуса надо(надобно) выполнить условия вейджера. Очень нередко фриспины даются на конкретные слоты (book of ra, book of deceased, book of sun), избирайте слот себе нраву, все довольно красочные и высококачественные. Бездепозитные приз может быть денежным так и вид фриспинов на слоты В современность довольно просто получить приз за регистрацию в казино. Практически каждый игорный жилище с готовностью начислит деньги или безвозмездные вращения. Многие гэмблеры пользуются данным и не стесняются региться в каждом клубе с выгодными критериями. Кстати, это замечательная вероятность выработать победную стратегию и сорвать джекпот. <a href=http://www.support.ipron.com/communication/forum/index.php?PAGE_NAME=profile_view&UID=18678>http://www.support.ipron.com/communication/forum/index.php?PAGE_NAME=profile_view&UID=18678</a> 1х слот 1хслотс регистрация перейти на 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=http://gradina.com/threads/1×slot-registracija-v-1×slots-casino.58294/>1×слот регистрация в 1×slots casino</a>
<a href=https://forum.banknotes.cz/viewtopic.php?t=67783>1×slot зеркало</a>
<a href=https://rolivka.online/forum/showthread.php?tid=41024>1×slots casino зеркало</a>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=410718>1×slots регистрация на 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
У любого игорного заведения средства правила и обстоятельства. Но, чтобы получить призы, нужно выполнить стереотипные деяния: Заполняя данные в личном профиле, указывайте только достоверную информацию, так как Вам понадобиться ее подтвердить в при выводе средств.
#1797 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
почему в казино нет часов порно с Голикова Татьяна Алексеевна <a href=https://www.ossetia.tv/>мелбет букмекерская контора</a> казино сегодня про казино <a href=https://rumafia.news/>1×bet зеркало</a> порно с Захарова Мария Владимировна ап казино букмекерская контора леонов бывшие казино casino регистрации порно с Юлия Ефимова рабочие зеркала казино
DiskiPlus какие казино DiskiPlus казино в россии <a href=https://www.diskiplus.ru/>DiskiPlus казино можно</a> DiskiPlus порно с Баталина Ольга Юрьевна DiskiPlus casino бонус <a href=https://www.diskiplus.ru>DiskiPlus 1×bet слоты 1×bet top</a> DiskiPlus казино фильм смотреть онлайн DiskiPlus порно с Виктория Синицина, фигуристка DiskiPlus Любимова Ольга Борисовна порно DiskiPlus porno Виктория Баркова, легкоатлетка DiskiPlus Фастова Елена Владимировна порно DiskiPlus up букмекерская контора DiskiPlus бесплатные букмекерские конторы
#1798 Charlesgunnyhttp://filmkachat.ru
1×slots коды
Еще одно условие дотрагивается размеров ставки. Операторы устанавливают наивысшую необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, избранной в Личном офисе. При превышении лимита есть риск потерять приза. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, клиент возможность столкнуться с запретом назначать фишки на шансы. <a href=http://filmkachat.ru/>x1 slots 1хслотс регистрация перейти на 1×slots</a> После получения приза вывод средств для клиента будет недоступен того, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо пара недель. Выводить средства игрок может лишь в отыгрыша.Доступные забавы – В некоторых азартных забавах можно снизить математическое преимущество казино до нескольких десятых процента. В их количестве все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как правило, в таких играх ставки идут в зачет вейджера не полностью. Например, возможность предусматриваться лишь 50%. В неких забавах бездепозитные призы вообще невозможно отыгрывать. <a href=http://webanketa.com/forms/6gs38dhp64qpar9s6mr3cd1p/>http://webanketa.com/forms/6gs38dhp64qpar9s6mr3cd1p/</a> Ещё одно распространённое акционное предложение – привлекательный презент с неблаговидными притязаниями. К образцу, клуб обещает $100 виде бездепа, но с вейджером х80 либо х100. Отыграть подобный вейджер практически невероятно и потому превосходнее концентрироваться на более интересных промоакциях. 1×slots официальный сайт скачать на айфон <a href=http://flightgear.jpn.org/userinfo.php?uid=48559#>http://flightgear.jpn.org/userinfo.php?uid=48559#</a> Нет. Для получения бездепозитного приза в казино нужна обязательная регистрация на веб-сайте. Играть в слоты бесплатно и без регистрации возможно лишь в демо режиме.Используйте наихорошие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из списка ниже, дабы заработать подарки за простые действия теперь сегодня получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высокой отдачей и быстрыми выводами на электрические кошельки.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
1×slots зеркало регистрация то дальше необходимо пройти Если площадка дарует бездеп за регистрацию, то процедура его получения проста. Нужно только завести акк на веб-сайте и активировать его, подтвердив адресок электронной почты, номер телефонного или иные данные, которые просит оператор. Перед этим нужно убедиться, собственно пользователь располагается на официальном веб-сайте казино, но на жульнической площадке. <a href=https://mobilka.mobi/user/DoctorLazutaPl/>https://mobilka.mobi/user/DoctorLazutaPl/</a> B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpaxКазино выделяет вероятность заработать и вывести реальные деньги на бездепозитных бонусах. Обычно, это малозначительная сумма, коию казино имеет себе разрешить презентовать игроку. 1хслотс рабочее зеркало
1×slots официальный сайт зеркало рабочее
Бездепозитные призы в казино без пополнения 2022 — это конкретная сумма денег либо gorovyh spins вращения, коие предоставляются первым гостям за регистрацию на сайте казино повторяющий бездепозитного бонуса, и дает вас вероятность помощью казино без пополнения опробовать услуги (игр), с дальнейшей преимуществом, льготой вывода средств при выполнении всех установленных правил. Фриплей-бонусы. Бонусы за благотворительную игру есть только в неких клубах. Они зачисляются сразу последствии создания профиля и действуют непродолжительное время. Если у вас нет медли потратить средства, они просто закончатся. Что касается времени, правило бонусы действуют на одного часа.Практически все онлайн казино с бездепозитным призом за регистрацию учитывает программу преданности — систему одобрения постоянных посетителей, которая произведено из множества значений. При достижении игроком одного уровня на его счёт поступает приз. Чем выше уровень — тем щедрее приз. <a href=http://educatorpages.com/site/Bbgatecom0412/pages/mpstats>http://educatorpages.com/site/Bbgatecom0412/pages/mpstats</a> 1×slots зеркало
1хслотс 1хслотс регистрация перейти на 1×slots
Бездепы могут входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой или баллами. <a href=http://oszeresek.hu/forum/viewtopic.php?f=1&t=6128>1×slots рабочее зеркало на сегодня</a> Суммы похожих услуг, в, колеблются от трех до 20 $, а вейджер на эти средства обязан составлять от 30 до шестидесяти раз. Зачастую, величайшая сумма выигрыша тут составит от одной до 2-ух сотен $. Если игры выиграет больше, то все средства имеют быть списанными до максимально разрешенного выигрыша. Здесь бывает смысл выводить еще несуществующие финансы на свою платежную систему и дальше находить заведение с благоприятными под данную необходимую релоадом либо бонусом за первое пополнение счета. Есть несколько подвидов бездепозитного гонорары, предлагаемого большим количеством заведений. Вообще перейдя в казино — правила одинаковы в получении бездепозитных бонусов, в стереотипные управляла входит: подтвердить эл. Почту и аппарат, заполнить свой собственный профиль, активировать промо код или активировать предложения во вкладке БОНУСЫ.Иногда в качестве бездепа, казино дарует наименьший бонус (до 50 руб. ), ради которого не заморачиваться. 1×slots регистрацию более популярный вариант это <a href=https://www.fortressrisk.com/user/richarddixricharddix/>https://www.fortressrisk.com/user/richarddixricharddix/</a>
casino 1×slot
Если вы новичок данном и лишь попали в неизведанную вами район пыла — счет предложений как бездепозитные бонусы без пополнения. Для получения приза нужно ознакомиться с программкой лояльности казино и устроить ставки на сумму, необходимую для перехода на грядущий уровень.Но а в вы теснее профи по интернет казино, кликаем на красную кнопку «Получить» и Вы автоматически перейдете в онлайн казино; <a href=http://klass.ru/bitrix/redirect.php?goto=http://decor-penza.ru/bitrix/redirect.php?goto=http://fczerna.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/T3V1V6ZXztD>http://klass.ru/bitrix/redirect.php?goto=http://decor-penza.ru/bitrix/redirect.php?goto=http://fczerna.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/T3V1V6ZXztD</a> Бездепозитные призы за регистрацию в игровых автоматах для собственников онлайн-казино считаются долею маркетинговой кампании, направленной на повышение аудитории вебсайта. Так они продвигают средства бренды и привлекают новых клиентов.Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную процедуру активации приза без депо. Внимательно прочтите до конца. Многие новенькие проделывают промахи на шаге регистрации и поэтому не могут получить подарок. 1×slots официальный сайт зеркало рабочее
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.gamesims.sk/memberlist.php?mode=viewprofile&u=7407>скачать 1×slots официальный сайт</a>
<a href=https://forum.vn.ua/showthread.php?p=3305565#post3305565>1×slots casino online регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Законодательство, регулирующее азартные игры в различных странах, влияет на полномочия операторов. В итоге юзеры из отдельных регионов сталкиваются с ограничениями со стороны казино. Это возможность быть как глубокий отказ в доступе, так и невозможность загружать игры отдельных изготовителей. Отказ в прохождении верификации. Если клиент не хочет либо возможности предоставить документы, подтверждающие его лицо, профиль несомненно заблокирован совместно, вкупе со всеми бонусными начислениями.
#1799 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Афонина Марина Игоревна казино 5 <a href=https://rumafia.news/>сайт винлайн букмекерская контора</a> casino online зеркало порно с Афонина Марина Игоревна <a href=https://rucriminal.info/>Приезжева Екатерина Геннадьевна порно</a> champion casino порно с Артемий Панарин (хоккей) казино сочи casino riobet Чулпан Хаматова porno Алена Косторная (фигурное катание) porno Юлия Канакина
DiskiPlus винлайн букмекерская контора DiskiPlus casino сайты <a href=https://diskiplus.ru/>DiskiPlus карты казино</a> DiskiPlus ешь казино DiskiPlus лучшие онлайн казино <a href=https://diskiplus.ru>DiskiPlus casino ru</a> DiskiPlus porno Илья Ковальчук (хоккей) DiskiPlus казино вулкан DiskiPlus 1×bet casino DiskiPlus unlim casino DiskiPlus pin ап casino DiskiPlus бк букмекерская контора DiskiPlus порно с Георгий Джикия (футбол)
#1800 Charlesgunnyhttp://filmkachat.ru
1хслот скачать
Даже не выиграв крупную необходимую, игрок увлекательно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-либо денежных рисков. Быть в курсе лучших акций легко. Достаточно регулярно учить список новых онлайн казино с выводом бонуса без депо в этом разделе. <a href=http://filmkachat.ru/>1×slot зеркало рабочее регистрации на телефон придет</a> Операторы гемблинга утверждают, собственно так они борются с бонус-хантерами. Впрочем, критики считают, что данным казино пробуют сделать из случайного гостя постоянного игрока.Можно ли зарабатывать на бездепозитных призах? Это не работа, тут как повезет, случае в любом предложенном безедепе, вы будете откручивать вейджер и выводить, время можно именовать везением, и дополнительной добавкой к вашему бютжету. <a href=https://designaddict.com/community/profile/avto-vikup/>https://designaddict.com/community/profile/avto-vikup/</a> Для вывода средств приз надо(надобно) несомненно отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами акции и вариантами отыгрыша бездепозитного бонуса до его получения, дабы избежать конфликтных ситуаций.Возможность протестировать новые игры, не рискуя личными своими и создать собственную тактику игры. 1×slots официальный регистрация <a href=https://lovewiki.faith/index.php?title=Can_You_Download_the_1×bet_APP_on_PC?>https://lovewiki.faith/index.php?title=Can_You_Download_the_1×bet_APP_on_PC?</a>
1×slots официальный сайт мобильная версия
зеркала 1×slots Наличие у игрока 2 аккаунта. Запрещено делать некоторое профилей для многократного получения бездепов. <a href=http://worklocal.com.au/users/travismusty>http://worklocal.com.au/users/travismusty</a> Подтверждение регистрации. Казино требуют привязки профиля к электронному адресу и номеру телефонного. Для этого на e-mail отправляется послание со ссылкой, а на телефон ? текстовое известие с кодом. 1×slots рабочее зеркало на сегодня
1×slots casino регистрация на сайте
С другой стороны, намного легче арестовать бездепозитные фриспины за регистрацию в казино и прямо сейчас начать вращать барабаны в превосходнейших слотах. Главная особенность спинов в том, собственно они предусмотрены для лучших автоматов. Удастся столько пройти вспомогательные раунды, но и прирастить необходимую выигрыша, заработать респины прочие внутриигровые презенты.Бездепы обыкновенно предлагают с отыгрышем — моментально вывести выигранные средства невозможно. Перевод денег со счета несомненно возможен последствии такого, как юзер выполнит все требования казино, а сумма возможности превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, протяжении коих заказчик вправе воспользоваться предложением. Обычно они не превышают нескольких дней после активации. <a href=https://notionpress.com/author/1090012>https://notionpress.com/author/1090012</a> Бездепозитный бонус по промо-коду будет доступен для забавы, только в случае когда Вы активируете специальный бонусный код в разделе с призами или укажите промокод при регистрации на сайте. В некоторых случаях, не активации кода, придется доказать контактные данные игрока и заполнить анкету посетителя.Бездепозитные призы, как уже понятно, являются уникальной вероятностью приступать к игровому процессу полностью безвозмездно, то есть играть в интернет казино бесплатно и на место свои незамедлительно последствии регистрации аккаунта. Автоматы с этим депозитом все стать прекрасной возможностью поиграть для почитателей пыла с определенными ограничениями в финансах. 1×slots зеркало регистрация в 1×slots casino Активация денежного гонорары происходит механически последствии сотворения профиля или использования промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на страницы казино в соц сетях или на рассылку рекламных известий, скачать и установить вспомогательный софт и т.д.
1хслот зеркало сайта
Не стоит путать забаву в демо и использование бонусов. В демонстрационном режиме игрок возможность оценить механику слота, сюжет и оформление. Но забава ведется на относительные кредиты, поэтому отсутствует основное ? чувство пыла. Активируя промокод либо фриспины, клиент раньше не тратит свои средства на игровые автоматы, хотя может сорвать настоящий куш!Процесс доказательства личности имеет взятьвдолг(взятьвзаймы) от 1-го денька до недели. Если клиент разрешил нибудь ошибку при заполнении паспортных данных, то ему по обратиться с задачей в саппорта онлайн-казино. Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Представленные на данной страничке наихорошие бездеп бонусы в казино за регистрацию в 2022 году имеют подходящие условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, в котором гости Casino.ru шансы сортировать список по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д. 1 x slots <a href=http://g95887q6.beget.tech/user/Jameshaict/>http://g95887q6.beget.tech/user/Jameshaict/</a> В современность очень просто получить бонус за регистрацию в казино. Практически каждый игорный дом с готовностью начислит деньги либо бесплатные вращения. Многие гэмблеры используют данным и не смущяются региться в любом клубе с выгодными критериями. Кстати, это отличная возможность выработать победную тактику и сорвать джекпот.После получения бонуса вывод средств для клиента несомненно недоступен до тех пор, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо пара месяцов. Выводить деньги игрок сможет лишь последствии отыгрыша.
1х слот 1хслотс регистрация перейти на 1×slots
<a href=http://www.zgbbs.org/space-uid-173050.html>http://www.zgbbs.org/space-uid-173050.html</a> 1×slot официальный сайт Если речь идет об неповторимых услугах, возможность понадобиться регистрация в казино по ссылке с партнерского сайта.Акции распространяются как на все игры казино, например и на ограниченный перечень. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и другие. Промо возможность обхватывать разработки одного производителя. Бездеп не пересекается с иными промоакциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, сделанные бонусными деньгами. Для идентификации платежных реквизитов игрока имеет понадобиться пополнение счета на наименьшую сумму.
<b>Смотреть еще похожие новости:</b>
<a href=http://police.1stbb.ru/viewtopic.php?f=3&t=764>1×slots зеркало</a>
<a href=https://timepost.info/showthread.php?tid=173706>1хлот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для ревизии применяются сканы паспортов, водительских удостоверений, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь замечен в попытке завести вспомогательный акк, все его учетные записи подвергаются блокировке, а их владелец попадает в черный перечень. При ирге на лицензионной площадке надо бояться свидетельствовать достоверную индивидуальную информацию (шифрование ликвидирует утечку персональных данных).
#1801 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Максим Глушенков (футбол) Кузнецова Анна Юрьевна порно <a href=https://www.ossetia.tv/>порно с Алина Загитова, фигуристка</a> букмекерские конторы в россии лучшие букмекерские конторы <a href=https://krtka.info/>casinos winning</a> Черкесова Бэлла Мухарбиевна порно пина букмекерской конторы пин casino Матвиенко Валентина Ивановна порно 7k casino скачать гама казино porno Игорь Акинфеев (футбол)
DiskiPlus porno Елизавета Туктамышева DiskiPlus порно с Евгения Медведева <a href=https://diskiplus.ru/>DiskiPlus порно с Анастасия Потапова, теннисистка</a> DiskiPlus Кузнецова Анна Юрьевна порно DiskiPlus реального казино <a href=https://www.diskiplus.ru>DiskiPlus black russia казино</a> DiskiPlus пин ап букмекерская контора DiskiPlus порно с Захарова Мария Владимировна DiskiPlus Лут Оксана Николаевна порно DiskiPlus порно с Алина Загитова DiskiPlus casino промокод DiskiPlus букмекерская контора официальный сайт DiskiPlus pin up casino пин ап
#1802 Charlesgunnyhttp://filmkachat.ru
1×слотс казино
Помимо прочего, для вывода средств по бездепу нужно внести на счёт свой первый депозит — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на мало вероятную необходимую, в чего вывод средств станет доступен. <a href=http://filmkachat.ru/>1×slots официальный зеркало</a> Осталось выбрать казино с призом за регистрацию и создать профиль. После активации подарка выигрыш зависит от Фортуны и способностей.Если при регистрации указать промокод, возможно гарантировано получить бонус. Где брать ваучер? Посетите на блоги или форумы. Иногда администрация клуба делает рассылку ваучеров на электрическую почту. В заключительнее время игорные дома начали афишироваться в фильмах и сериалах. Присмотритесь и наверняка заметите промокод, кот-ый принесёт 500 или 1 000 бонусных руб. <a href=https://feedback.challonge.com/forums/44455-feature-requests/suggestions/49478687-%D1%82%D0%B5%D1%80%D0%BC%D1%96%D0%BD%D0%BE%D0%B2%D0%B8%D0%B9-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D0%B6-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2-%D1%96%D0%B2%D0%B0%D0%BD%D0%BE-%D1%84%D1%80%D0%B0%D0%BD%D0%BA%D1%96%D0%B2%D1%81%D1%8C%D0%BA%D1%83-%D1%8F%D0%BA-%D0%B2%D0%B8%D0%B3>https://feedback.challonge.com/forums/44455-feature-requests/suggestions/49478687-%D1%82%D0%B5%D1%80%D0%BC%D1%96%D0%BD%D0%BE%D0%B2%D0%B8%D0%B9-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D0%B6-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2-%D1%96%D0%B2%D0%B0%D0%BD%D0%BE-%D1%84%D1%80%D0%B0%D0%BD%D0%BA%D1%96%D0%B2%D1%81%D1%8C%D0%BA%D1%83-%D1%8F%D0%BA-%D0%B2%D0%B8%D0%B3</a> На страничке представлены бездепозитные бонусы за регистрацию в казино редчайшая награда за которой гонятся все игроки как новички, так и мастера. Мы тоже уделяем большое внимание на присутствие призов при формирование рейтинга казино на деньги. Бездепозитный приз это вероятность выступать даром и выиграть реальные средства. 1×slots быструю регистрацию а также мгновенное <a href=https://woodmancx.com/user/Richardror/>https://woodmancx.com/user/Richardror/</a> Нет. Казино раздают безвозмездные бонусы за регистрацию, для того, чтобы заказчик возможность ознакомиться с игровым заведением. А чтобы вывести его, нужно выполнить условия отыгрыша.Главным нюансом в появлении этих вознаграждений произведено в том, собственно пустив их в ход, компьютерные ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он спасибо призам какой-либо выигрыш либо мгновенно спустит все лишь собственно прибывшие финансы). То есть, казино снабжает игрока возможностью на дармовой основе выступать во различные слоты и даже спонсирует забаву.
1хслотс зеркало
Как правило, при выводе финансов, от играющего требуется лишь устроить наименьший лепта чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом индивидуальный счет.Игры, в которых возможно выступать на бонусные средства. Проверьте перечень игр, каких можно выступать на бонусные свои, возможно они Вам не понравятся и надо расходовать своё время на такую акцию. 1×slots зеркало видели такую регистрацию на Помимо прочего, для вывода средств по бездепу необходимо привнести на счёт свой 1-ый депо — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на мало возможную сумму, после чего вывод средств станет доступен.К раскаянию, нет. Почти все казино, требуют внесение но бы 1-го малого депозита для вывода выигрыша с бездепозитного бонуса. Также учитывайте, что исключить средства разрешается лишь на что, эту платежную систему, с которой был изготовлен депозит. <a href=http://en.sulseam.com/bbs/board.php?bo_table=free&wr_id=2327902>http://en.sulseam.com/bbs/board.php?bo_table=free&wr_id=2327902</a> При верном подходе бездепы — это прекрасный способ выступать на деньги без растраты личных средств. Есть количество советов, следуя коим возможно извлечь максимально полезности из сходственных промоакций казино. Играть идет только на лицензированных площадках. Скриптовые веб-сайты не только обманывают с бонусными предложениями, хотя и используют пиратский софт с измененным ГСЧ. Выиграть на таких автоматах невозможно. 1×slots коды
1хслот 1хслотс регистрация перейти на 1×slots
Условия могут разниться друг от приятеля. Но подобный бонус возможность быть использован только для игрового процесса – полученные на счет финансы до такого, как станут отыграны, исключить невероятно. <a href=https://bybak.com/home.php?mod=space&uid=4232670>https://bybak.com/home.php?mod=space&uid=4232670</a> 1×slots зеркало которую указывали при регистрации кстати Для верификации аккаунта надо(надобно) предоставить профессионалам технической поддержки отсканированную копию паспорта и счета за коммунальные услуги, еще фотку банковской карты либо экрана странички электронного кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности.
зеркло казино 1×slots
В случае установленного лимита на необходимую вывода выигрыша с бездепозитного бонуса, игрок не сможет вывести больше заявленной суммы. Для тех, кто лишь подумывает испытывать свою удачу, а для проф игроков, разыскивающих свежие площадки для выигрышей, ведущие лицензированные казино часто устраивают различные акции, и одно из лучших услуг за последнее время – как для начинающих, например и для профессиональных игроков – бездепозитный приз за регистрацию.При регистрации по указывать лишь достоверную информацию. Когда учетная запись несомненно активна, будет доступ в Личный кабинет. В нем возможно избрать денежную, ввести промокод и разузнать подробные правила получения и отыгрыша бездепа. Краткая информация об промоакции часто присутствует непосредственно на регистрационной форме. 1×slots официальный сайт зеркало <a href=http://wiki.catfolks.net/doku.php?id=%D0%A4%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B%20%D0%B0%D0%B3%D0%B5%D0%BD%D1%82%D1%81%D1%82%D0%B2%D0%B0%20%D0%BD%D0%B5%D0%B4%D0%B2%D0%B8%D0%B6%D0%B8%D0%BC%D0%BE%D1%81%D1%82%D0%B8%20%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8:%20%D0%92%D1%85%D0%BE%D0%B4%20%D0%B2%20%D0%BC%D0%B8%D1%80%20%D1%83%D1%81%D0%BF%D0%B5%D1%88%D0%BD%D0%BE%D0%B3%D0%BE%20%D0%B1%D0%B8%D0%B7%D0%BD%D0%B5%D1%81%D0%B0>http://wiki.catfolks.net/doku.php?id=%D0%A4%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B%20%D0%B0%D0%B3%D0%B5%D0%BD%D1%82%D1%81%D1%82%D0%B2%D0%B0%20%D0%BD%D0%B5%D0%B4%D0%B2%D0%B8%D0%B6%D0%B8%D0%BC%D0%BE%D1%81%D1%82%D0%B8%20%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8:%20%D0%92%D1%85%D0%BE%D0%B4%20%D0%B2%20%D0%BC%D0%B8%D1%80%20%D1%83%D1%81%D0%BF%D0%B5%D1%88%D0%BD%D0%BE%D0%B3%D0%BE%20%D0%B1%D0%B8%D0%B7%D0%BD%D0%B5%D1%81%D0%B0</a>
1×slots бездепозитный бонус за регистрацию
Также посещают случаи, когда казино начисляет оговоренный приз после регистрации нового клиента по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам.Самые популярные методы вывода денег ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электронным платежным системам подобии Neteller и Skrill, а также используют криптовалютными кошельками. Вывод выигрышей может осуществляться моментально либо занимать от нескольких часов до нескольких суток. <a href=http://www.11ria.com/home.php?mod=space&uid=74654&do=profile>http://www.11ria.com/home.php?mod=space&uid=74654&do=profile</a> На бесплатные призы онлайн-казино почти практически распространяется лимитирования по стране проживания клиентов. Даже если вам разрешено раскрывать счет и играть на деньги в заведении, это еще не означают, собственно вам доступны no deposit bonuses.Сразу после активации промокода можно пользоваться подарком. Как уже упоминалось, призы посещают трёх обликов – фриспины, кредиты и фриплей-бонусы. сайт 1× slots casino Ниже указан актуальный перечень легальных казино в Беларуси с бонусами на первый депо. Вы сможете попасть на официальный сайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус.Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации бонуса без депо. Внимательно прочитайте до конца. Многие новички проделывают оплошности на этапе регистрации и поэтому не могут получить презент.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.findaspermdonor.com/viewtopic.php?f=25&t=98454>рабочее зеркало 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В качестве призов интернет казино нередко предлагает выдачу фриспинов, то есть даровых вращений игрового барабана. Виртуальные монеты возможно использовать для изучения в покерной школе либо для забавы в казино.
#1803 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация то дальше необходимо пройти
Для вывода средств приз надо(надобно) будет отыграть законам, установленным казино. Внимательно ознакомьтесь с правилами акции и вариантами отыгрыша бездепозитного бонуса до его получения, дабы избежать конфликтных ситуаций. <a href=http://filmkachat.ru/>1хслотс рабочее зеркало</a> Главное преимущество спинов – возможность изучить различные слоты. Также удастся насладиться бонусными раундами, испытать фортуну в риск-туре и преумножить выигрыш за счёт особых знаков. Однако не только игровой процесс заслуживает внимание, ведь никакого сосредоточиться на реальном выигрыше.Многие казино предоставляют в маркетинговых целях безвозмездные бонусы необыкновенно для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой вебсайт по партнерской ссылке с нашего портала. <a href=https://telegra.ph/Walmarts-battery-return-policy-03–13>https://telegra.ph/Walmarts-battery-return-policy-03–13</a> Варианты выигрыша находятся от Вашей удачи и критерий игорного портала. Выше мы заявили, собственно кое-какие бездепозитные бонусы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются и, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность современных игр на деньги, возможно выиграть невозможные суммы. Сегодняшние игровые автоматы или видео слоты, как их нарекают. Могут выдавать крупные умножение от х1.000 и повыше. Некоторые умножают ставку от х100.000.На нашем веб-сайте Вы найдете список своевременных новых бездепозитных бонусов в казино 2022 года. Также, есть количество эксклюзивных предложений, коие доступны лишь посетителям нашего вебсайта последствии регистрации по нашей ссылке либо активации специального промокода. казино 1×slots <a href=https://backpacker-footsteps.com/backpacker-footsteps-forum/profile/jameswah/>https://backpacker-footsteps.com/backpacker-footsteps-forum/profile/jameswah/</a> В разделе с бонусами активировать свой презент. Найти игры, для коих предусмотрено поощрение и применять приз по назначению.
1×slots casino регистрация 1×slots review live
Перед активацией главно пристально изучить условия акции. Чем ниже вейджер, что, этим больше потенциальная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, на которых можно пользоваться предложением. Если бездеп обхватывает ограниченный список игр, рекомендуется разузнать максимальные коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только что, нет случае, случае оператор не установил взыскательные лимитирования на максимальную необходимую ставки. <a href=http://skatefluckit.com/showthread.php?t=232151&p=480020#post480020>1×slots официальный сайт зеркало</a> 1×slot официальный сайт Для как, чтобы отыграть необходимую вашего бездепозитного бонуса надо(надобно) выполнить условия вейджера. Очень нередко фриспины даются на определенные слоты (book of ra, book of lifeless, book of sun), избирайте слот себе по, все довольно красочные и качественные. Бездепозитные бонус может быть денежным так и повторяющий фриспинов на слотыОсобую изюминку видео слотам присваивают оригинальные знакы. С их появлением активируются различные призы. Вы сможете запустить дополнительный уровень и увеличить сумму выигрыша. Есть знаки, коие сменяют ненадобные элементы и сами делают выигрышные комбо. Не стоит забывать и тему бонус-тур. После любого удачного спина есть шанс прирастить необходимую выигрыша в два либо четыре раза. <a href=http://akva.by/forum/index.php?action=profile;u=18720>http://akva.by/forum/index.php?action=profile;u=18720</a> Проверка занимает от нескольких минут до нескольких дней, спецы техподдержки все запросить вспомогательные документы или инициировать куцее общение по Skype.Доступные забавы – В некоторых азартных забавах возможно снизить математическое преимущество казино до нескольких десятых процента. В их числе почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как верховодило, в этих играх ставки идут в зачет вейджера не всецело. Например, возможность предусматриваться только 50%. В некоторых забавах бездепозитные бонусы вообще невозможно отыгрывать. 1×slots официальный сайт мобильная версия
1×slots бездепозитный бонус за регистрацию
Объективные – размер приза, коэффициент и обстоятельства вейджера, необходимость внесения депо для вывода денег; Как только вы отыграли вейджер и средства с бонусного баланса перебежали вам на настоящий счет, Вы смело можете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депо). <a href=http://gongganab.com/bbs/board.php?bo_table=gallery5010&wr_id=204667>http://gongganab.com/bbs/board.php?bo_table=gallery5010&wr_id=204667</a> 1×slots регистрация 1×slots casino 777 online
1×slots рабочее зеркало
Как и другие акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых гостей и позволяет им составить впечатление о функционале, не рискуя вескими суммами.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. 1хслотс рабочее зеркало <a href=https://tussom.com/forums/member.php?action=profile&uid=71377>https://tussom.com/forums/member.php?action=profile&uid=71377</a>
1хслотс мобильная версия зеркало
Благодаря программке преданности от игорного заведения, возможно арестовать хороший старт и без дополнительных вложений запустить видеослоты. Кроме как, возможно рассчитывать на реальную удачу и получить, без инвестиции собственных финансов, немалый выигрыш. Но есть азартные заведения, готовые просто например вручить деньги на игру. Для сего достаточно сделать профиль. Чтобы исключить выигрыш, сперва нужно выполнить вейджеровые обстоятельства, прописанные в критериях получения бездепа. <a href=https://www.kenpoguy.com/phasickombatives/profile.php?id=2438093>https://www.kenpoguy.com/phasickombatives/profile.php?id=2438093</a> Возможность сыграть дополнительное состязание (а от и несколько) абсолютно безвозмездно, а выигрыш, же, поступает на счёт игрока.Одним из поводов отдавать преимущество, льготу одному или иному заведению содержится в привлекательности предлагаемых промоакций и безвозмездных предложений. Безвозмездные фриспины, выдаваемые без нужды делать какой-нибудь лепта, в перечне располагается далековато не в конце. 1×slots казино зеркало Самый распространённый из сходственных призов, конечно же, бездеп на день рождения клиента — бонус повторяющий фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им возможно на установленного периода времени.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.kuyoux.com/space-uid-35770.html>1хлот регистрация в 1×slots casino</a>
<a href=https://kriptokulis.com/konular/1×slots-zerkalo-rabochee-na-segodnja.6929/>1×slots зеркало рабочее на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В зависимости от онлайн заведения любой из их имеет для предложить как бездепозитные средства, так и бездепозитные фриспины, которые в удачной регистрации рухнут вас на ваш игровой баланс. B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax
#1804 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино смотреть онлайн бесплатно porno Нина Пирогова, хоккеистка <a href=https://slon-ru.com/>Нургалиева Эльвира Рамиловна порно</a> казино сегодня казино проиграл <a href=https://specreporter.com/>casino автомат</a> порно с Максим Глушенков (футбол) скачиваемые казино casino бонус букмекерская контора ставки букмекерские конторы pin порно с Александр Головин (футбол) порно с Кирьянова Дарья Борисовна
DiskiPlus Черкесова Бэлла Мухарбиевна порно DiskiPlus казино сочи <a href=https://diskiplus.ru/>DiskiPlus kometa casino</a> DiskiPlus casino бонус DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz <a href=https://diskiplus.ru>DiskiPlus 7k casino зеркало на сегодня</a> DiskiPlus Шевцова Татьяна Викторовна порно DiskiPlus Самойлова Алла Владимировна порно DiskiPlus балтбет букмекерская контора DiskiPlus Елена Лядова DiskiPlus kent casino регистрация DiskiPlus винлайн букмекерская контора официальный DiskiPlus порно с Антропова Валентина Викторовна
#1805 Charlesgunnyhttp://filmkachat.ru
1х слотс зеркало регистрация в 1×slots casino
В любом казино с бездепозитным призом предусмотрены вейджеровые обстоятельства. Это один-единственный «подводный камень», кот-ый стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, нужно устроить определённое число ставок. Чем круче бонус, что, этим сложнее выполнить условия, и наоборот. <a href=http://filmkachat.ru/>1×slots подтвердит вашу регистрацию если говорить</a> <a href=https://feedback.goodnotes.com/forums/191274-customer-suggestions-for-goodnotes/suggestions/49478645-%D0%BA%D0%B0%D0%BA-%D0%B2%D1%8B%D0%B3%D0%BE%D0%B4%D0%BD%D0%BE-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D1%82%D1%8C-%D0%B0%D0%B2%D1%82%D0%BE-%D0%BF%D0%BE%D1%81%D0%BB%D0%B5-%D0%B4%D1%82%D0%BF-%D1%8D%D0%BA%D1%81%D0%BF%D0%B5%D1%80%D1%82%D0%BD%D0%BE%D0%B5-%D1%80%D1%83%D0%BA>https://feedback.goodnotes.com/forums/191274-customer-suggestions-for-goodnotes/suggestions/49478645-%D0%BA%D0%B0%D0%BA-%D0%B2%D1%8B%D0%B3%D0%BE%D0%B4%D0%BD%D0%BE-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D1%82%D1%8C-%D0%B0%D0%B2%D1%82%D0%BE-%D0%BF%D0%BE%D1%81%D0%BB%D0%B5-%D0%B4%D1%82%D0%BF-%D1%8D%D0%BA%D1%81%D0%BF%D0%B5%D1%80%D1%82%D0%BD%D0%BE%D0%B5-%D1%80%D1%83%D0%BA</a> 1×slots casino зеркало рабочее <a href=https://google.co.ao/url?q=https://doctorlazuta.by/>https://google.co.ao/url?q=https://doctorlazuta.by/</a>
1×slots быструю регистрацию а также мгновенное
Принципиальным различием безвозмездных бонусов от призов на депозит считается неимение необходимости вносить деньги на аккаунт. Из-за этого их часто именуют бездепозитными (no down payment bonuses). <a href=http://lssdteam.teamforum.ru/viewtopic.php?f=2&t=2107>1×slot зеркало рабочее регистрации на телефон придет</a> 1×slots casino регистрация 1×slotscasin online <a href=http://www.rhl-mod.ru/members/98893-kennetheropy/>http://www.rhl-mod.ru/members/98893-kennetheropy/</a> Стоит обозначить(означить), что бездепозитный бонус выдается только взрослым новичкам, которые, к, шансы пригласить личных приятелей и знакомых, также претендующих на поощрительную программку преданности. Подобная технология замечена среди конкуренцию онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры содействуют увеличению собственной посещаемости, методом вербования свежих игроков. Бонусы – это оригинальный шанс для вероятных соучастников забавы, коие могут опробовать софт покер рума и увериться, станут ли они в него выступать или нет. Новый игрок испробует средства силы с настоящими оппонентами в казино.Акции, посвященные календарным праздничным, посещают рассчитаны как на всех юзеров, так и на категории: примеру, подарок на 8 марта девушкам-игрокам либо мужчинам на 23 февраля. 1× slots регистрация в 1×slots casino Процесс подтверждения личности возможность занять от 1-го денька до недели. Если заказчик допустил нибудь оплошность при заполнении паспортных данных, то ему стопам обратиться с проблемой в службу онлайн-казино.
1×slots официальный сайт зеркало
Каждый игры должен сперва детально выучить обстоятельства по получению и отыгрышу понравившегося презента. Если всё организует, поторопитесь отобрать бесплатные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо в начать вращать барабаны лучших слотов.Как прочие акции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых гостей и разрешает им составить впечатление о функционале, не рискуя значительными совокупностями. Бывают ли бездепозитные призы без вейджера? Бывают, случае у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный бонус за регистрацию уточняется вейджер во всех казино.Можно ли в одном онлайн казино получить больше одного бонуса за регистрацию? Нет, так как в любом онлайн казино есть управляла, к коим нужно придерживаться, не создавать два аккаута для получения призов, другому несомненно блокировка обоих аккаутов, не пытайтесь обмануть онлайн казино, приз за регистрацию выдаеться один раз 1 личику. <a href=http://ems.college-eisk.ru/?module=forum&action=topic&id=271>http://ems.college-eisk.ru/?module=forum&action=topic&id=271</a> Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную процедуру активации бонуса без депозита. Внимательно прочтите до конца. Многие новенькие проделывают оплошности на шаге регистрации и потому не могут получить презент.Подтвердите лицо, предоставив оператору казино свои паспортные данные. Инструкции обыкновенно несложные, главное — конкретно им стопам. Если написано, что «на фото должны быть заметны все четыре угла странички паспорта» — сделайте непосредственно это фото. 1× slots регистрация в 1×slots casino
1×slots регистрация на официальном сайте
Классическая разновидность бонуса за творение аккаунта. Его превосходство заключается в, собственно заказчик может самостоятельно избирать аппараты и делать ставки в них. Иногда список игровых автоматов ограничен оператором, хотя все одинаково это лучше, чем один-единственный доступный слот, как если, тогда, с внедрением фриспинов. Бонус за регистрацию в казино без депо с выводом денег надо(надобно) отыграть. Зачастую для отыгрыша возможность потребоваться сделать ставки на необходимую, в количество десятков раз превышающую необходимую бонуса либо выигрыша.На странице представлены бездепозитные бонусы за регистрацию в казино редчайшая заслуга за коей гонятся все игроки как новенькие, так и мастера. Мы тоже уделяем большое внимание на присутствие призов при формирование рейтинга казино на средства. Бездепозитный приз это возможность играть безвозмездно и выиграть реальные средства. 1× slots casino официальный сайт <a href=http://tc322.ru/bitrix/redirect.php?goto=http://hqcelebcorner.net/proxy.php?link=http://dolgovagro.ru/bitrix/click.php?goto=https://teletype.in/@urist555/GZ60lj06YbT>http://tc322.ru/bitrix/redirect.php?goto=http://hqcelebcorner.net/proxy.php?link=http://dolgovagro.ru/bitrix/click.php?goto=https://teletype.in/@urist555/GZ60lj06YbT</a> В лицензионных бездепозитных казино играть в азартные игры вправду неопасно. Наличие лицензии одобряет что, этот факт, собственно клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.
1 x slots casino
Обыкновенные бездепозитные бонусы в размере от 3-х до двадцати $ сделаны для того, чтобы в забавы заходили все свежие и свежие игроки. Здесь, вероятнее всего, несомненно ограничение на максимальный выигрыш. Важно, дабы перед минимальным вкладом был отключен бонус за 1-ое пополнение счета, и игры не попадет на повторный вейджер.Отыграв бездепозитный приз в казино с выводом также придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если схожее лимитирование присутствует, то единоразово вывести выйдет лишь необходимую, не превосходящую размер приобретенного бонуса. Подтвердите регистрацию, чтобы активировать Бездепозитный бонус с выводом, потребуется наполнить личный профиль. Заполните пустые поля реальными данными о себя. <a href=http://mtpkrskstate.ru/forum/user/208630/>http://mtpkrskstate.ru/forum/user/208630/</a> скачать 1×slots официальный сайт После получения бонуса вывод средств для посетителя несомненно недосегаем до, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо чета недель. Выводить средства игрок может только в отыгрыша.
<b>Смотреть еще похожие новости:</b>
<a href=http://powercrop.it/chi-siamo/le-persone?page=139#comment-6995>1хслотс мобильная версия зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы казино это экономическая компенсация, предлагаемая юзерам на дармовой базе и возможность играть в онлайн казино бесплатно. Если ассоциировать их с одобрениями за лепта, в которых средства выдаются только потом первоначального пополнения счета, то бездепозитные гонорары получаются даром. То есть, играющий получает возможность делать ставки на теснее существующие деньги, коие выдаст заведение, выполняя, всем, обычные деяния, чтобы их извлечь (здесь идет речь о регистрация, удостоверении личности с использованием номера телефона, оформления заказы и т.д.).
#1806 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Евгений Малкин (хоккей) гама казино <a href=https://t.me/vchkogpu_ru>порно с Диана Шнайдер (теннис)</a> porno Катерина Шпица включи казино <a href=https://slon-ru.com/>Елизавета Боярская</a> casino сайты букмекерская контора 1×bet слоты 1×bet xyz гта казино официальные зеркала казино porno Андрей Рублев (теннис) порно с Сергей Бобровский (хоккей)
DiskiPlus порно с Антропова Валентина Викторовна DiskiPlus скачать 1×bet 1×bet xyz <a href=https://www.diskiplus.ru>DiskiPlus 1×bet слоты 1×bet top</a> DiskiPlus мелбет букмекерская контора DiskiPlus pinco casino <a href=https://diskiplus.ru/>DiskiPlus casino зеркало сегодня</a> DiskiPlus автомат казино DiskiPlus pin casino DiskiPlus сайт pin up casino DiskiPlus 1×bet рабочее на сегодня DiskiPlus какие казино DiskiPlus рабочие зеркала казино DiskiPlus сайт 1×bet слоты
#1807 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
бесплатные букмекерские конторы casino официальный зеркало <a href=https://slon-ru.com/>порно с Захарова Мария Владимировна</a> casino регистрации зеркала казино <a href=https://glvk.guru/>демо казино</a> porno Дарья Клишина 1×bet на андроид casino online зеркало porno Александр Соболев (футбол) порно с Илья Осипов (киберспорт) casino рабочее казино регистрации
DiskiPlus 1×bet сайт DiskiPlus порно с Илюшникова Татьяна Александровна <a href=https://diskiplus.ru/>DiskiPlus порно с Дарья Касаткина (теннис)</a> DiskiPlus казино вход официальный сайт DiskiPlus pinco casino <a href=https://diskiplus.ru/>DiskiPlus официальное казино вход</a> DiskiPlus казино ставка DiskiPlus 7k casino DiskiPlus сайт pin up casino DiskiPlus часы казино DiskiPlus win win casino казино DiskiPlus 1×bet xbet
#1808 Charlesgunnyhttp://filmkachat.ru
1×slots casino online регистрация
Прежде чем активировать бездеп, нужно убедиться что, собственно страна, уроженцем которой считается игрок, не входит в список запрещенных. <a href=http://filmkachat.ru/>1×slots промокод при регистрации</a> Бездепозитный бонус – это экономическое вознаграждение, которое выдается участнику игры в казино, для его привлечения и появления заинтересованности. Любой посетитель, который соответствует условиям выдачи похожего бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое одобрение считается более действенным способом, дающим возможность стартовать в игре, не вкладывая собственных материальных средств.Онлайн гемблинг развивается с каждым днем все больше и больше, свежие бренды создаются не по дням а по часам. Новые онлайн казино делают вступительные акции для игроков, чтобы, чтобы что бы зарекомендовать себя, и тем самым предлагают бездепозитные бонусы за регистрацию, собственно бы не пропустить эту вероятность — как воспользоваться свежим бездепом, рекомендуем навещать наш сайт как возможно почаще, самое лакомое и свежие несомненно добавляться в данном же списке. <a href=https://www.debwan.com/blogs/704417/Does-Walmart-Take-Old-Car-Batteries>https://www.debwan.com/blogs/704417/Does-Walmart-Take-Old-Car-Batteries</a> x1 slots 1хслотс регистрация перейти на 1×slots <a href=http://vashtehnadzor.ru/index.php?subaction=userinfo&user=voicelessransom>http://vashtehnadzor.ru/index.php?subaction=userinfo&user=voicelessransom</a> Такой казино бонус без депо за регистрацию выдается игроку на час и активно употребляется данное предложение с 2017 года. Это словно некая конспирация поощрения под бездепозитный. Суть всего сего сводится к что, этому, собственно игроку на час выдается, к примеру, 1000 $, а реклама повторяет то, собственно любой выигрыш возможно несомненно в оставить при себя. Но если играющий всерьез отнесется к данному предложению, то он попросту потеряет время. Ведь геймеру нужно несомненно играть не главном аккаунте, а в тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (даже всей тыс. ) в верховодила вступят определенные условия, где несомненно сказано, что максимальной суммой победы возможность быть только двести $ и средства можно использовать только в качестве бонуса на первый лепта с вейджером 25 от суммы гонорары плюс сам депозит. По результату получится, что игрок выигрывал для 200% бонус с вейджером на конкретную необходимую. Короче разговаривая, это все надо вашего времени.Воспользоваться бездепом возможно не во всех игровых автоматах: казино и тут уточняет лимитирование для клиентов. Конечно, это возможно счесть неким неудобством для игрока, но ради отметить, собственно выбор автоматов всё точно остаётся достаточно большим.
1хслотс официальный сайт зеркало
При помощи такого одобрения оператор имеет кроме привлекать клиентов, коие ранее показывали активность на веб-сайте, хотя по некий причине прекратили выступать. В данном случае промокод высылается юзеру по электрической почте или в виде SMS.Однако далековато не все ресурсы предлагают своим клиентам бездепозитные призы за регистрацию в казино. В большинстве случаев учтено одобрение на 1-ый депозит в размере 100–200%. Это отличная возможность преувеличить банкролл, прирастить время, проведённое за игрой и шансы сорвать крупный куш. 1× slots регистрация в 1×slots casino Все бесплатные бонусы кажутся соблазнительными. Кто же откажется от способности сыграть в онлайн-казино, не рискуя средствами, хотя получая выигрыши. Но далеко не все бездепозитные бонусы мере привлекательны для рассудительного клиента. <a href=https://mozillabd.science/index.php?title=1win_bet_brasil_apostas>https://mozillabd.science/index.php?title=1win_bet_brasil_apostas</a> Высокая конкурентность в разделе азартных игр мотивирует операторов привлекать клиентов разнообразными промоакциями. Благодаря данному у посетителей появляется вероятность получить призы в казино за регистрацию без депозита. Воспользоваться этим предложением можно, избегая процедуру внесения средств на игровой счет, просто активировав акк на сайте. Наш гид по бездепам поможет выбрать самую привлекательную бонусную программку, узнать правила получения такового гонорары и распорядиться им с наибольшей выгодой. 1×slots официальный сайт зеркало рабочее Изучить верховодила и обстоятельства получения бездепозитных бонусов казино, Вы сможете у нас на сайте в разделе с бонусами или на официальном сайте выбранного Вами казино. Если возможности отыскать нужную информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал либо по электрической почте.Вообще перейдя в казино — верховодила одинаковы в получении бездепозитных призов, в стереотипные верховодила заходит: доказать эл. Почту и аппарат, заполнить собственный индивидуальный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ.
1×slots регистрацию более популярный вариант это
При регистрации никаких или ином интернет игральном заведении — вас дается один шанс испытывать свою фортуну не внося свои монеты. Замечу что эту поощрительную услугу предоставляют не все интернет игровые площадки, а только великодушная половина из их. Которые мы подготовили для Вас в нашем перечне.Варианты выигрыша зависимости от Вашей успеха и условий игорного портала. Выше мы сказали, собственно некоторые бездепозитные призы в 2022 году выдаются с ограничениями по наибольшей выплате. Однако, остаются и, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность современных игр на средства, возможно выиграть невероятные суммы. Сегодняшние игровые автоматы или видео слоты, как их нарекают. Могут выдавать крупные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000. <a href=http://wiki.hightgames.ru/index.php?title=%D0%B3%D0%BB%D0%B0%D0%B2%D0%BD%D0%B0%D1%8F%20%D0%B4%D0%BE%D1%80%D0%BE%D0%B3%D0%B0>http://wiki.hightgames.ru/index.php?title=%D0%B3%D0%BB%D0%B0%D0%B2%D0%BD%D0%B0%D1%8F%20%D0%B4%D0%BE%D1%80%D0%BE%D0%B3%D0%B0</a> Так собственно приготовьтесь предоставить секретную информацию (пол, возраст, страна проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает не более суток, последствии чего удастся свободно выводить крупные выигрыши. 1×slots casino регистрация 1×slotscasino09k online Мы собрали и опубликовали список наихороших бездепозитных казино с бонусами за регистрацию, которые гарантируют великодушные выигрыши и моментальные выплаты.
1хслотс 1хслотс регистрация перейти на 1×slots
Процесс доказательства личности имеет взятьвдолг(взятьвзаймы) от одного денька до недели. Если клиент разрешил нибудь ошибку при заполнении паспортных данных, то ему следует адресоваться с проблемой в службу онлайн-казино.Акционные предложения от казино существуют в разных форматах. Часто призы даются в мена на депозит. Игрок заносит платеж и получает средства, безвозмездные вращения прочие поощрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — картина приза, кот-ый гарантирован за исполнение конкретных поступков на сайте: <a href=http://www.gamers4life.com/forums/f20/acheter-clomid-pas-cher-en-france-scherpenheuvel-zichem-849288/>1×slots казино зеркало</a> Фриспины. Бесплатные вращения предусмотрены для использования в видео-слотах. Внимательно читайте обстоятельства – они часто выдаются для некоторых машин. В зависимости от клуба вы можете делать определенное число ставок. Кстати, современные игорные дома дают вероятность заводить «одноруких злодеев». Заработать на бездепозитных бонусах за регистрацию в казино возможность каждый пользователь, достигший совершеннолетия.Все благотворительные бонусы кажутся соблазнительными. Кто же категорически от возможности сыграть в онлайн-казино, не рискуя средствами, но получая выигрыши. Но далеко не все бездепозитные призы одинаковой привлекательны для рассудительного посетителя. 1×slots регистрация 1×slots review live <a href=https://m1bar.com/user/Jasperlig/>https://m1bar.com/user/Jasperlig/</a> Но есть игорные заведения, которые готовы просто например жертвовать деньги на игру. Для этого довольно сделать профиль. Чтобы исключить собственный выигрыш, вас сначала необходимо выполнить условия отыгрыша, указанные в критериях получения бездепозитного депо.
1хслотс казино зеркало
<a href=http://coinauctionshelp.com/forum/memberlist.php?mode=viewprofile&u=59523>http://coinauctionshelp.com/forum/memberlist.php?mode=viewprofile&u=59523</a> 1×slots зеркало быструю регистрацию а также мгновенное Зарегистрироваться в казино по специальной ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефонного и электрическую почту). Для подтверждения номера телефона необходимо в личном профиле показать собственный номер и нажать кнопку „Подтвердить номер телефона“, далее Вы получите sms-сообщение с кодом, который нужно установить в отвечающее поле. Для подтверждения электрической почты, перейти по активной ссылке в послании от казино.
<b>Смотреть еще похожие новости:</b>
<a href=http://lssdteam.teamforum.ru/viewtopic.php?f=2&t=2065>1×slots официальный сайт зеркало рабочее</a>
<a href=http://junlinro520.gain.tw/space.php?uid=1111051>x1 slots регистрация в 1×slots casino</a>
<a href=https://melhorlance.com.br/author/jamesbom/>1×slos регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?
#1809 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Мухтиярова Елена Вячеславовна порно Валентина Матвиенко порно <a href=https://glvk.guru/>рокс казино</a> казино Валентина Матвиенко порно <a href=https://glvk.guru/>Преподобная Надежда Александровна порно</a> casino андроид Радченко Светлана Юрьевна порно 1×bet слоты 1×bet top up casino казино вход pin up casino пин скачать casino на андроид
DiskiPlus retro casino DiskiPlus 1×bet слоты <a href=https://www.diskiplus.ru>DiskiPlus букмекерская контора бетсити</a> DiskiPlus casino скачать приложение DiskiPlus казино регистрации <a href=https://www.diskiplus.ru>DiskiPlus up casino скачать</a> DiskiPlus казино без DiskiPlus человек казино DiskiPlus букмекерская контора вход DiskiPlus 7k casino официальный сайт DiskiPlus казино рояль DiskiPlus Любимова Ольга Борисовна порно DiskiPlus порно с Алина Загитова, фигуристка
#1810 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация на сайте
Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Бoльшинcтвo азартных заведений выдвигают примерно одинаковые условия и притязания, коие необходимо выполнить, дабы получить бездепозитный приз за регистрацию. Все их можно соединить в раз перечень: <a href=http://filmkachat.ru/>зеркала 1×slots</a> Любой выигрыш по ставке выше установленного лимита будет являться недействительным. То есть ставка не будет засчитана при отыгрыше, ну случае выигрыша его сумма не поступит на счёт клиента — итог забавы несомненно всецело аннулирован.Фриспины предусмотрены для использования в видео слотах. Внимательно ознакомьтесь с критериями – часто их выдают на некоторые автоматы. В зависимости от клуба, у вас выйдет устроить определённое число ставок. Кстати, продвинутые игорные жилища позволяют запускать любых «одноруких злодеев». <a href=https://lynk.id/kalinka0588>https://lynk.id/kalinka0588</a> Выиграть реальные деньги в казино не пополняя счет – трудно, хотя вполне. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными призами и начните играть на бонусные свои. По статистике каком-то 10-ти заведений возможно заработать небольшую необходимую денег за счет бонусных средств.Сразу последствии активации промокода возможно воспользоваться даром. Как теснее упоминалось, призы бывают трёх обликов – фриспины, кредиты и фриплей-бонусы. казино 1×slots <a href=https://jeffreyzaby62738.ja-blog.com/29564418/the-cutting-fringe-of-nsfw-ai-discovering-the-attributes-of-undress-ai>https://jeffreyzaby62738.ja-blog.com/29564418/the-cutting-fringe-of-nsfw-ai-discovering-the-attributes-of-undress-ai</a>
1×slots casino регистрация 1×slotscasin online
Прочитайте верховодила бонусной программки, какой желайте участие. Да, мы настоятельно рекомендуем сделать это до регистрации. <a href=https://juancorner.com/threads/1hslot-1hslots-registracia-perejti-na-1×slots.293/>1хслот 1хслотс регистрация перейти на 1×slots</a> 1хслотс мобильная версия зеркало Шаг 5. Использование и отыгрыш. Бездеп обязан быть применен в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера. <a href=http://www.samwoon.co.kr/bbs/board.php?bo_table=free&wr_id=159409>http://www.samwoon.co.kr/bbs/board.php?bo_table=free&wr_id=159409</a> Более крупные предложения встречаются очень редко. Зачастую они доступны лишь VIP-игрокам. В остальных случаях им скорее сопутствуют довольно строгие обстоятельства отыгрыша. Также возможны вспомогательные обстоятельства прочие лимитирования, прописанные в условиях и положения бонусной программки казино. 1×slots казино зеркало Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных ситуаций с казино, когда после отыгрыша бездепа для не дадут вывести солидную необходимую выигрыша.
1хслотс зеркало на сегодня
Но надо думать, собственно снабжая юзеров этими призами, казино увлекается спонсированием. Ведь размеры вознаграждений, в, не великие (средним объемом от 5 до 20 долларов). И на эти средства налагаются конкретные обстоятельства и ограничения, неотклонимые к выполнению игрока, если в последствии он желает получить все свои выигранные деньги.Получив свой подарок, Вы сможете безвозмездно выступать на реальные деньги, а выполнив условия отыгрыша, вывести свой выигрыш. Многие казино деют в маркетинговых целях благотворительные бонусы исключительно для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой вебсайт по партнерской ссылке с нашего портала. <a href=https://www.google.de/url?q=https://doctorlazuta.by/>https://www.google.de/url?q=https://doctorlazuta.by/</a> Отказ в прохождении верификации. Если заказчик не желает либо не дать документы, подтверждающие его лицо, профиль несомненно заблокирован вместе со всеми бонусными начислениями.Для как, дабы отыграть сумму вашего бездепозитного бонуса нужно выполнить условия вейджера. Очень часто фриспины даются на определенные слоты (book of ra, book of deceased, book of sun), выбирайте разъем себе нраву, они все довольно красочные и высококачественные. Бездепозитные приз имеет быть денежным например и в виде фриспинов на слоты 1×slots акции Процесс доказательства личности возможность взятьвдолг(взятьвзаймы) от одного денька до недели. Если заказчик допустил какую-либо ошибку при заполнении паспортных данных, то ему следует обратиться с проблемой в саппорта онлайн-казино.
1×slots регистрация на сайте 1×slots ru com
Иногда виде бездепа, казино дарит минимальный бонус (до 50 руб. ), ради которого не стоит заморачиваться. На бонусные начисления шансы быть установлены вспомогательные ограничения, которые Вы не сведению при отыгрыше. Пока приз всецело не отыгран — средства из казино не выводятся.2. Создать свежий профиль. Для регистрации нужно заполнить небольшую анкету или зайдите в собственный офис посредством социальных сетей; 1хслот 1хслотс регистрация перейти на 1×slots <a href=http://welovewords.com/richarderona>http://welovewords.com/richarderona</a> Необходимость отыгрыша. Вейджер в этом случае повыше, чем для призов за депозит. И пока средства не отыграны, исключить их невозможно.Обыкновенные бездепозитные призы в объеме от 3-х до 20 долларов созданы чтобы, чтобы, дабы в забавы заходили все новые и новые игроки. Здесь, скорее, несомненно ограничение на максимальный выигрыш. Важно, чтобы перед наименьшим вкладом был отключен бонус за первое пополнение счета, и игры не попадет на повторный вейджер.
1×slots быструю регистрацию а также мгновенное
При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое возможно предназначить игре в казино.Фриспины без депозита либо вспомогательные свои помогут поближе познакомиться с игровой платформой и её функциями. За счёт подарков можно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям ради забавы против живых крупье. <a href=https://games-garant.ru/index.php?subaction=userinfo&user=Kennethtor>https://games-garant.ru/index.php?subaction=userinfo&user=Kennethtor</a> Например, игрок получил 500 рублей при твореньи аккаунта и обязан отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., понадобится устроить 875 спинов для полного отыгрыша. 1×slots казино зеркало На благотворительные бонусы онлайн-казино почти практически распространяется лимитирования по стране проживания клиентов. Даже в для разрешается раскрывать счет и выступать на деньги в заведении, это еще не значат, что для доступны not the slightest deposit bonuses.
<b>Смотреть еще похожие новости:</b>
<a href=https://timepost.info/showthread.php?tid=171356>1×slots промокод при регистрации 2025</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Несмотря на то, собственно этот вариант стимуляции со стороны азартных платформ довольно моден в подобных игр, далековато многим почитателям казино знаменито, собственно сами бездепозитные призы казино и как непосредственно их возможно эксплуатировать.
#1811 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
7k casino зеркало на сегодня порно с Голикова Татьяна Алексеевна <a href=https://krtka.info/>сайт букмекерской конторы</a> порно с Владимир Минеев (ММА) casino x <a href=https://specreporter.com/>casino официальный сайт</a> человек казино фреш казино porno Илона Маркова, хоккеистка up букмекерская контора казино фильм Семёнова Татьяна Владимировна порно порно с Зырянова Анастасия Владимировна
DiskiPlus porno Мария Шарапова DiskiPlus casino андроид <a href=https://www.diskiplus.ru>DiskiPlus букмекерские конторы pin</a> DiskiPlus 1×bet зеркало рабочее xbet DiskiPlus Набиуллина Эльвира Сахипзадовна порно <a href=https://www.diskiplus.ru/>DiskiPlus Радченко Светлана Юрьевна порно</a> DiskiPlus порно с Дронова Александра Викторовна DiskiPlus пинап казино DiskiPlus casino ru DiskiPlus casino онлайн DiskiPlus Юдаева Ксения Валентиновна порно DiskiPlus казино сегодня DiskiPlus cometa casino
#1812 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на сайте
Но на некоторых азартных платформах подобные вознаграждения могут получить теперь зарегистрированные пользователи. В этом случае, бонусы предоставляются в уникальных акций или же некоторым игрокам повторяющий акционного предложения, коие приходит на почту с целью «вернуть» игрока в свое казино. <a href=http://filmkachat.ru/>1×slots промокод при регистрации</a> Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 поболее. Когда игроку надеется большое фриспинов, администрация возможность разбивать их начисление на некоторое дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах промоакции.Способы получения бездепа различаются в зависимости от облика приза, который понравился игроку. Но вас так надо(надобно) быть зарегистрированным в законном онлайн-казино и доказать свою личность. В общем облике пошаговая инструкция для получения бездепозитного приза смотрится так: <a href=https://www.doyoubuzz.com/architectural-events>https://www.doyoubuzz.com/architectural-events</a> Таким образом, заведение пытается продемонстрировать себя своим вероятным геймерам, а такой рекламный ход как казино бонус без депозита за регистрацию завлекает очень большое внимания к игорному заведению и обеспечивает неизменный струю свежих гостей и будущих посетителей игрового онлайн клуба. 1×slots сайт <a href=http://akvalife.by/user/Frankpak/>http://akvalife.by/user/Frankpak/</a>
1х слотс зеркало регистрация в 1×slots casino
Подобные бонусы без депо предоставляются на более выгодных критериях. Зачастую они покрупнее, а обстоятельства отыгрыша наименее жесткие. 1×слотс казино Вейджер (wager) – это коэффициент, который показывает на какую необходимую необходимо устроить ставок, чтобы исключить бонус из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода сего приза, Вам нужно сделать ставок на сумму: 500*70=3500 руб. Только всецело отыграв бонус, Вы можете исключить свой выигрыш.Чаще всего казино приз за регистрацию без депо даёт возможность запустить любой автомат. Но другого, как пристально ознакомиться с критериями. Иногда для забавы доступны лишь определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, превосходнее начать знакомство с миром азарта непосредственно с «одноруких бандитов». <a href=https://king-wifi.win/index.php?title=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%BF%D0%B8%D1%86%D1%86%D1%8B%20%D0%BD%D0%B0%20%D0%B4%D0%BE%D0%BC%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO>https://king-wifi.win/index.php?title=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%BF%D0%B8%D1%86%D1%86%D1%8B%20%D0%BD%D0%B0%20%D0%B4%D0%BE%D0%BC%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO</a> 1хслотс рабочее зеркало
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Бонусы без депо при регистрации числятся наиболее привлекательными как для опытнейших игроков, так для и новичков. Получив это вознаграждение, клиент может играть на реальные средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные призы в интернет-казино Рунета, а также обстоятельства их активации и выигрыша.Шаг 4. Активация. Внимательно исследуйте обстоятельства, информацию по ограничениям и сроке действия бонусного предложения. Разобравшись с правилами, можно активировать бонус в личном кабинете (времени ? с внедрением промокода) или по запросу в саппорт. <a href=https://www.xibeiwujin.com/home.php?mod=space&uid=2229341&do=profile>https://www.xibeiwujin.com/home.php?mod=space&uid=2229341&do=profile</a> Возьми свой подарок. Чаще всего бонус активируется незамедлительно в регистрации. Но посещают истории, когда надо(надобно) зайти в индивидуальный кабинет или написать в справочную службу. 1 x slots В каждом казино с бездепозитным призом предусмотрены вейджеровые условия. Это один-единственный «подводный камень», который стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, нужно сделать определённое количество ставок. Чем круче бонус, что, этим сложнее выполнить обстоятельства, и напротив.В истинное время получить приз за регистрацию в казино довольно просто. Почти каждый игорный жилище с радостью даст деньги или благотворительные вращения. Многие игроки пользуются данным и не смущяются регистрироваться в каждом клубе с выгодными условиями. Кстати, это замечательная вероятность придумать выигрышную тактику и сорвать куш.
1×slots casino online регистрация
Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие появляются у новичков.Рассмотрим принцип его деянья на образце. Допустим, вы зарегались и получили $10 no deposit bonus с вейджером х50. Это значит, что выигранные деньги возможно несомненно выводить не ранее, чем после такого, как общая сумма ставок достигнет $500. <a href=https://forum-pravo.com.ua/showthread.php?p=24142&posted=1#post24142>1×slots рабочее зеркало на сегодня</a> Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Как лишь получите бездеп в казино, всё точно не запамятовывайте проверять электрическую почту. Некоторые игорные клубы постоянно веселят активных гэмблеров приятными призами. Чаще всего получить презент можно в преддверии веселья, на денек рождение, за вербование приятеля. А также распространённым призом является прибавка к депозиту. Нужно чем пополнить счёт, и азартное заведение увеличит его на 50–100%. Приветственный приз без депозита ? подарок за регистрацию. Выдается средствами, фриспинами либо баллами. В заключительном случае бонусные баллы применяются для роли в турнирах либо размена на настоящие деньги. 1×slots официальный сайт мобильная версия <a href=https://sims-game.com/user/Ralphsuife/>https://sims-game.com/user/Ralphsuife/</a> Oтыгpaть бонус с указанным вeйджepом, для этого необходимо сдeлaть cтaвoк нa cумму, превосходящую размер бонуса в несколько раз.Бездепозитный бонус предоставляется новому игроку за определенные деянья. Часто подарок повторяющий средств или фриспинов выдается за регистрацию, спасибо чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.
1хлот регистрация в 1×slots casino
При выполнении условий отыгрыша и верификации, деньги с бонусного счета переводятся на главной и шансы быть выведены на карту либо электрический кошелек. Лимиты на вывод и сроки проведения транзакции зависят от избранной платежной системы. Операторы гемблинга утверждают, что например они сражаются с бонус-хантерами. Впрочем, критики считают, что данным казино пробуют устроить из случайного постояльца постоянного игрока.В наше время довольно просто получить приз за регистрацию в казино. Практически любой игорный дом с готовностью начисляет деньги либо благотворительные вращения. Многие гэмблеры используют этим и не стесняются региться в любом клубе с выгодными критериями. Кстати, это замечательная возможность выработать победную тактику и сорвать джекпот. <a href=http://azad.az/user/JamesTor/>http://azad.az/user/JamesTor/</a> 1× slots регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://ragnarok.ch/forum/viewthread.php?thread_id=192073>казино 1× slots официальный сайт</a>
<a href=https://edidaktikum.ee/en/content/iii-kontakttund-08-juuni?page=99#comment-298618>1хслот зеркало сайта</a>
<a href=http://sofanatki.ekafe.ru/viewtopic.php?f=1&t=2563>1×слот регистрация в 1×slots casino</a>
<a href=http://forum.survival-readiness.com/viewtopic.php?t=278025>онлайн казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины начисляются по определенной ставке. После их активации игроку необходимо запустить слот и увериться, собственно в нем показываются благотворительные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода после отыгрыша ориентируется оператором и редко превышает 5 000 рублей. Сроки активации приза уточняются каждым казино, хотя чаще всего они не превосходят недели с момента получения. Игроку обязательно нужно использовать бездеп на обозначенного срока, в ином случае приз просто исчезнет. Каждый приз возможно получить лишь один раз, поэтому в не использовать бездеп в срок, у игрока не будет 2 шанса им пользоваться.
#1813 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up casino buzz букмекерская контора фонбет официальный сайт <a href=https://rucriminal.info/>pin up букмекерская контора</a> up casino официальный казино ли <a href=https://sovsekretno.net/>букмекерская контора зенит</a> casino актуальное зеркало 1×bet зеркало на сегодня 1×bet xyz почему в казино не бывает настенных часов букмекерская контора зенит порно с Гатагова Ольга Анатольевна мобильные букмекерские конторы пин casino
DiskiPlus 1×bet на сегодня DiskiPlus букмекерская контора мостбет <a href=https://diskiplus.ru/>DiskiPlus 1×bet официальный xbet</a> DiskiPlus top casino DiskiPlus казино фильм <a href=https://www.diskiplus.ru/>DiskiPlus человек казино</a> DiskiPlus 1×bet DiskiPlus casino официальный сайт DiskiPlus казино пину DiskiPlus casino pin официальный DiskiPlus казино зеркало сегодня DiskiPlus pin up casino buzz DiskiPlus casino актуальное зеркало
#1814 Charlesgunnyhttp://filmkachat.ru
казино 1×slots официальный сайт
При пользовании бездепозитным призом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют некоторое видов лимитов: <a href=http://filmkachat.ru/>1×slots casino online регистрация</a> <a href=https://www.pearltrees.com/kalinka0588/item691380214>https://www.pearltrees.com/kalinka0588/item691380214</a> Зачастую бездепозитные призы казино для забавы предлагаются различными заведениями азартных игр в маркетинговых акций либо в целях вербования к себя свежих игроков. Для бездепозитных призов в казино 2022 геймеру надо пополнять счет до момента вывода желанных средств.Получать информацию о самых выгодных призах можно без постоянного мониторинга новостей казино. Мы брали эту задачу на себя и постоянно следим за услугами операторов, избирая наихорошие из их. В этом разделе собраны последние бездепы, промокоды к ним и условия их активации. Список промоакций периодически пополняется. В топ вошли самые новые бездепозитные бонусы за регистрацию в казино 2020, временные и закрытые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и другим критериям. Если срок действия промоакции истек, она удаляется из списка. казино 1×slots <a href=http://mos-it.ru/index.php?subaction=userinfo&user=prettycuff3>http://mos-it.ru/index.php?subaction=userinfo&user=prettycuff3</a> Денежные свои. Третий приз за регистрацию без депозита – наличные. К сожалению, лишь известные и пользующиеся клубы могут дать деньги в руб. Либо долларах. С их поддержкою возможность насладиться любой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед данным нужно исполненье конкретных условий.
казино 1×slots официальный сайт
Как прочие акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такого предложения являются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает свежих гостей и дозволяет им составить впечатление о функционале, не рискуя значительными совокупностями.Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке необходимо пополнить счет в казино. Для депозитных бонусов, эта процедура не необходима, так как депозит уже изготовлен. <a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=1614704#pid1614704>1×slot рабочее зеркало</a> 1×slots зеркало видели такую регистрацию на <a href=http://raid4×4.ru/memberlist.php?mode=viewprofile&u=6158>http://raid4×4.ru/memberlist.php?mode=viewprofile&u=6158</a> Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, the decision только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.На критериях отыгрыша безвозмездных призов следует тормознуть подробнее. С ними связаны нюансы, которые невозможно оставить без внимания. 1хслотс казино зеркало Бездепы обычно предлагают с отыгрышем — моментально вывести выигранные средства нельзя. Перевод средств со счета несомненно возможен последствии такого, как пользователь выполнит все требования казино, а сумма не быть выше установленного правилами лимита. Условиями промоакции фиксируются сроки, протяжении которых заказчик вправе воспользоваться предложением. Обычно они не превышают нескольких дней после активации.
1×slots официальный сайт скачать на айфон
Все любят получать презенты. Согласитесь, практически любой играющий человек будет безмерно счастлив, в получит безвозмездный презент для забавы в интернет казино просто за регистрацию либо же бонус за внесенный депо, например именуемые приветственные призы для свежих игроков. Соответственно такие онлайн клубы станут более модны и предпочтительны у игроков при выборе казино для забавы. Топ казино постоянно обновляется и добавляются новые и интересные игровые клубы с симпатичной бонусной политикой и всеми вероятными прерогативами, к коим относятся эти призы как фриспины за регистрацию, валютные бездепозитные призы, а также великодушные бонусы за внесенный депо. <a href=http://www.3vzq.com/space-uid-162510.html>http://www.3vzq.com/space-uid-162510.html</a> 1×slots официальный сайт мобильная версия Новые посетители онлайн-казино без первого депо имеют проверить свою удачливость. К тому же есть вероятность конвертировать бездепы в реальные средства за регистрацию в казино, однако достичь приз необходимо отыграть согласно условиям акции.
рабочее зеркало 1хслотс
Как правило, при выводе денег, от играющего требуется лишь сделать минимальный лепта чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом индивидуальный счет. Максимальный размер ставки, который невозможно превосходить же приз не будет всецело отыгран. В случае нарушения этого верховодила, приз и выигрыш с него будут аннулированы.На бонусные начисления имеют быть установлены дополнительные ограничения, которые Вы не приняли при отыгрыше. Пока бонус полностью не отыгран — средства из казино не выводятся. Хотя благотворительные призы начисляются без депо, не исключено, что для понадобиться вносить средства. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь после того, как новый клиент раз пополнит игровой счет.Главное превосходство спинов – возможность изучить различные слоты. Также удастся насладиться бонусными раундами, испытать фортуну в риск-туре и преувеличить выигрыш за счёт особенных знаков. Однако столько игровой процесс заслуживает внимание, как никакого сосредоточиться на реальном выигрыше. 1×slots зеркало этих способов предполагает регистрацию <a href=http://arskland.ru/people/user/16702/>http://arskland.ru/people/user/16702/</a> Этот тип бонуса будет добавлен на Ваш аккаунт в удачной процедуры регистрации с использованием номера аппарата. Если выбрать другой метод создания учетной записи, бездеп не несомненно добавлен на Ваш акк.
1×slots подтвердит вашу регистрацию если говорить
Онлайн-казино кропотливо продумывают бонусные условия, которые нужно изучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша прочие лимитирования.Помните, что любые нарушения управлял сведут на нет ваши старания, и вы всего останетесь без начисленного для бесплатного бонуса. Всегда изучайте правила начисления и условия вейджера. По любым вопросам, на коие вы не других отыскать ответы, обращайтесь за разъяснениям и саппорт. Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 долларов. Если выдаются фриспины, их число редко выше нескольких 10-ов бесплатных вращений.Так что главное отличие дара на депо от бездепа – обязательное пополнение счёта. Вы сможете внести депо и преувеличить стартовый капитал либо забрать бездеп и при этом не придётся рисковать своими сбережениями. Поспешите выполнить простые притязания, и администрация ресурса начисляет щедрое поощрение! <a href=http://bloodsharks.net/phpBB/profile.php?mode=viewprofile&u=145658>http://bloodsharks.net/phpBB/profile.php?mode=viewprofile&u=145658</a> Так собственно основное отличие презента на депо от бездепа – обязательное пополнение счёта. Вы можете привнести депозит и преувеличить стартовый капитал или забрать бездеп и всем не придётся рисковать собственными сбережениями. Поспешите выполнить простые требования, и администрация ресурса начисляет щедрое одобрение!Ещё одно распространённое акционное предложение – симпатичный подарок с неблаговидными требованиями. К примеру, клуб обещает $100 в качестве бездепа, но с вейджером х80 или х100. Отыграть подобный вейджер фактически невозможно и поэтому другого, как концентрироваться на более занимательных акциях. 1хслотс рабочее зеркало Постарайтесь отыграть вейджер, дабы появилась возможность оставить заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные приборы. Вы можете получить выигрыш на электронной кошелёк, карту, телефонный.
<b>Смотреть еще похожие новости:</b>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=369167>1×slots зеркало регистрация то дальше необходимо пройти</a>
<a href=https://kfz-gringer.at/index.php/forum/donec-eu-elit/80263–1#80027>1хслотс официальный сайт зеркало</a>
<a href=https://pbtur.com.br/users/jameshex>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<a href=http://lssdteam.teamforum.ru/viewtopic.php?f=2&t=2338>казино 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток. Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала резвые выводы. Фишка выплат сомнений, собственно довольно выбрать платёжный инструмент и указать необходимую. В большинстве случаев средства зачисляются на электрические кошельки протяжении 15 минут, а на банковские карты – 1–3 рабочих дня.
#1815 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
включи казино почему в казино нет часов <a href=https://kompromat1.online/>порно с Илья Осипов (киберспорт)</a> pin ап casino Александра Бортич <a href=https://krtka.info/>1×bet зеркало рабочее на сегодня 1×bet xyz</a> 1×bet скачать приложение букмекерская контора без bet casino kent casino casino ru порно с Дронова Александра Викторовна pinco casino
DiskiPlus porno Юлия Канакина, скелетонистка DiskiPlus казино сегодня <a href=https://www.diskiplus.ru/>DiskiPlus casino 7k сегодня</a> DiskiPlus casino официальный зеркало DiskiPlus казино сегодня <a href=https://www.diskiplus.ru>DiskiPlus порно с Карен Хачанов (теннис)</a> DiskiPlus ешь казино DiskiPlus казино онлайн DiskiPlus казино проиграл DiskiPlus порно с Дарья Клишина, легкоатлетка DiskiPlus мелбет букмекерская контора DiskiPlus казино на деньги DiskiPlus букмекерская контора фонбет
#1816 Charlesgunnyhttp://filmkachat.ru
1×slos регистрация в 1×slots casino
Мы советуем не отказываться от похожих услуг знаменитых казино. Выделите количество минут на регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сегодня фортуна будет на вашей стороне! <a href=http://filmkachat.ru/>1×slots casino зеркало рабочее</a> Бездепозитный приз по промо-коду несомненно доступен для игры, только сомнений случае когда Вы активируете специальный бонусный код в разделе с призами или укажите промокод при регистрации на сайте. В неких случаях, не активации кода, понадобиться подтвердить контактные данные игрока и заполнить анкету посетителя. <a href=https://blog.udn.com/G_107482553777754991/180423924>https://blog.udn.com/G_107482553777754991/180423924</a> Рассмотрим принцип его действия на примере. Допустим, вы зарегистрировались и получили $10 no deposit bonus с вейджером х50. Это означает, что выигранные средства возможно несомненно выводить не раньше, чем последствии того, как общая сумма ставок достигнет $500.Фриспины – безвозмездные вращения с фиксированной ставкой, коие возможно использовать в конкретных игровых автоматах. 1х слотс зеркало регистрация в 1×slots casino <a href=https://lavr-sovet.ru/user/JulesAmone/>https://lavr-sovet.ru/user/JulesAmone/</a>
1хслот скачать
Можно ли в одном интернет казино получить больше 1-го приза за регистрацию? Нет, так как в любом интернет казино есть верховодила, к которым надо(надобно) держаться, не делать два аккаута для получения бонусов, по несомненно блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, приз за регистрацию выдаеться один раз 1 лицу. <a href=https://forum.dis-course.net/viewtopic.php?t=648705>1×slots регистрация на сайте</a> 1 хслот регистрация в 1×slots casino <a href=https://mitao7.cc/home.php?mod=space&uid=25061&do=profile>https://mitao7.cc/home.php?mod=space&uid=25061&do=profile</a> сайт 1× slots casino
казино 1×slots официальный сайт
Фриспины начисляются по конкретной ставке. После их активации игроку необходимо запустить разъем и увериться, собственно в нем показываются бесплатные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода после отыгрыша определяется оператором и редко выше 5 000 рублей. <a href=http://predictorllc.ru/bitrix/redirect.php?goto=http://lk.broen.ru/bitrix/redirect.php?goto=http://clients1.google.gy/url?q=https://teletype.in/@urid_pomosh/oloIV3Wgnrk>http://predictorllc.ru/bitrix/redirect.php?goto=http://lk.broen.ru/bitrix/redirect.php?goto=http://clients1.google.gy/url?q=https://teletype.in/@urid_pomosh/oloIV3Wgnrk</a> Чтобы самостоятельно убедиться в превосходствах бездепозитных призов, достаточно зарегистрироваться в казино и получить одобрение. 1×slots на любой вкус как пройти регистрацию Многие новички сомневаются, что поощрительный приз надо несомненно отдавать, числе если они выиграли у казино. Это безусловно неопасно и надежно. Выводя выигранные свои, игрок просто останавливает свое роль деле и теряет уникальную вероятность – безвозмездно увеличивать личное вещественное положение.
1×slots официальный сайт зеркало
Выбор каждого интернет казино на нашем веб-сайте. В описании к каждому Вы можете разузнать, что получите за творение аккаунта. Бoльшинcтвo азартных заведений выдвигают примерно одинаковые условия и требования, которые нужно выполнить, чтобы получить бездепозитный приз за регистрацию. Все их можно соединить в один список:Денежные средства. Третий бонус за регистрацию без депозита – наличные. К раскаянию, лишь знаменитые и популярностью клубы могут дать деньги в руб. Или долларах. С их поддержкою вас насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед этим необходимо исполнение конкретных условий. 1×slots рабочее зеркало на сегодня <a href=https://lifeactor.ru/user/DoctorLazutaMa/>https://lifeactor.ru/user/DoctorLazutaMa/</a> Не стоит путать забаву в демо и использование бонусов. В демонстрационном режиме игрок имеет оценить механику слота, сюжет и оформление. Но игра проводится на условные кредиты, потому отсутствует основное ? чувство азарта. Активируя промокод либо фриспины, клиент по-прежнему не расходует средства деньги на игровые автоматы, хотя имеет сорвать реальный куш!
1×slots официальный сайт зеркало
Бесплатный приз – кредиты, которые онлайн-казино начисляет посетителю, не заставляя его пополнять игровой счет.Даже не выиграв крупную необходимую, игрок увлекательно проведет время, изнутри исследует работу площадки, воспримет геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе лучших акций легкостью. Достаточно регулярно изучать перечень свежих интернет казино с выводом приза без депозита в данном разделе. <a href=https://xn–6-gtb4aicb3c6b.xn–p1ai/user/Raymondfum/>https://xn–6-gtb4aicb3c6b.xn–p1ai/user/Raymondfum/</a> 1хслот зеркало сайта
<b>Смотреть еще похожие новости:</b>
<a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=58168>казино 1×slots официальный сайт</a>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=263522>1×slots регистрация на сайте 1×slots ru com</a>
<a href=http://powercrop.it/chi-siamo/le-persone?page=138#comment-6942>1×slots casino зеркало рабочее</a>
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=125208&extra=>1хслотс рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
У каждого игорного клубы разные вейджеровые обстоятельства. Чтобы вы гарантировано смогли выполнить их, мы дадим несколько советов. Если система начислила маленькую сумму, не делать немалые ставки – остановитесь на 10–30 центах. Как только сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте выступать. В неприятном случае лучше приглядеться к другому автомату.
#1817 1win_vhpahttp://1win6010.ru
1win rossvya <a href=http://1win6010.ru/>http://1win6010.ru/</a> .
#1818 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Ангелина Гончаренко, хоккеистка порно с Анна Щербакова, фигуристка <a href=https://t.me/vchkogpu_ru>black russia казино</a> где казино casino ru <a href=https://sovsekretno.net/>casino регистрации</a> casino online зеркало официальные сайты казино порно с Петр Ян (ММА) 1×bet бесплатно porno Мира Андреева (теннис) казино играть casinos winning
DiskiPlus порно с Александр Головин (футбол) DiskiPlus Попова Анна Юрьевна порно <a href=https://www.diskiplus.ru>DiskiPlus пина букмекерской конторы</a> DiskiPlus 7k casino зеркало DiskiPlus порно с Александр Головин (футбол) <a href=https://www.diskiplus.ru>DiskiPlus бесплатные букмекерские конторы</a> DiskiPlus промокод 1×bet DiskiPlus порно с Варвара Субботина DiskiPlus Александра Бортич DiskiPlus Семёнова Татьяна Владимировна порно DiskiPlus карты казино DiskiPlus гта онлайн казино DiskiPlus porno Юлия Пересильд
#1819 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Дарья Клишина, легкоатлетка Матвиенко Валентина Ивановна порно <a href=https://t.me/vchkogpu_ru>porno Александр Соболев (футбол)</a> win win casino 1×bet вход <a href=https://rucriminal.info/>porno Дарья Клишина</a> casinos winning 1×bet регистрация водка казино мобильные букмекерские конторы porno Юлия Канакина, скелетонистка pin up casino пин Ходнева Светлана Владимировна порно
DiskiPlus сайт казино зеркало DiskiPlus зеркала официальных сайтов казино <a href=https://diskiplus.ru/>DiskiPlus porno Игорь Акинфеев (футбол)</a> DiskiPlus порно с Гатагова Ольга Анатольевна DiskiPlus casino бездепозитный <a href=https://www.diskiplus.ru/>DiskiPlus Шевцова Татьяна Викторовна порно</a> DiskiPlus 1×bet зеркало рабочее xbet DiskiPlus казино проиграл DiskiPlus леон букмекерская контора DiskiPlus сайт букмекерской конторы DiskiPlus 7k casino официальный DiskiPlus играющие казино онлайн DiskiPlus 1×bet рабочее
#1820 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало
Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные методы и расценить необыкновенности, недоступные при игре в демо режиме. Многие свежие клиенты перебегают в число постоянных, а оператор получает долгосрочную выгода.Все обожают получать подарки. Согласитесь, почти каждый играющий человек несомненно сильно рад, случае получит безвозмездный подарок для игры в онлайн казино просто за регистрацию или же приз за внесенный депозит, так именуемые приветственные бонусы для новых игроков. Соответственно эти интернет клубы будут больше востребованы и преимущественны у игроков при выборе казино для игры. Топ казино непрерывно обновляется и прибавляются свежие и увлекательные игровые клубы с привлекательной бонусной политикой и всеми возможными привилегиями, к которым относятся такие бонусы как фриспины за регистрацию, денежные бездепозитные бонусы, а щедрые призы за внесенный депозит. <a href=http://filmkachat.ru/>1хслотс 1хслотс регистрация перейти на 1×slots</a> Если площадка дарит бездеп за регистрацию, то процедура его получения проста. Нужно лишь ввести акк на веб-сайте и активировать его, подтвердив адресок электронной почты, номер телефонного либо иные данные, которые просит оператор. Перед данным необходимо убедиться, собственно юзер находится на официальном веб-сайте казино, но на мошеннической площадке.Обычно бездепозитные акции от казино, прибывают на эл. Почту в дни рождения или праздничные. В неких интернет казино можно адресоваться в чат и как постоянному игроку, возможно вам предложат бездепозитное предложение. <a href=https://www.storeboard.com/blogs/automotive/everstart-battery-review-top-performer-for-your-vehicle/6086908>https://www.storeboard.com/blogs/automotive/everstart-battery-review-top-performer-for-your-vehicle/6086908</a> При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток.Иногда в качестве бездепа, казино дарит наименьший приз (до 50 рублей), ради которого не стоит заморачиваться. 1хслотс регистрация в 1×slots casino <a href=https://spritedatabase.net/forums/member.php?action=profile&uid=9188>https://spritedatabase.net/forums/member.php?action=profile&uid=9188</a>
1×slots рабочее зеркало
1×slots casino online регистрация Баланс игрока дополняется на подобающую сумму. К ней используется вейджер, указанный в правилах промоакции. Вывести выигрыш можно несомненно в как, как пользователь сделает требуемый размер ставок из личных средств. В редчайших случаях бездеп работает в формате Free Play. На счет пользователя зачисляется крупная сумма, и предоставляется малый срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по окончании этого периода сумма на счету несомненно превышать первоначальную, то разницу возможно несомненно вывести или применять для дальнейших ставок. <a href=https://www.argfx.co/user/DoctorLazutaEr/>https://www.argfx.co/user/DoctorLazutaEr/</a> Допустим, за регистрацию вы получили бездеп в размере 2 000 рублей с вейджером х30. В этом случае предстоит сделать ставок, на совместную сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда сделайте условия по отыгрышу, придёт время заработать настоящие средства. Однако не запамятовывайте, собственно с каждого презента получится исключить определённую сумму (чаще всего не более $200).Эффективность бездепов виде маркетингового прибора расценили все операторы. Малоизвестные площадки используют эти промоакции, чтобы стремительно набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны постоянных посетителей. Не все веб-сайты, дающие презенты без депозита, рекомендованы к забаве. За симпатичным промоописанием могут скрываться невыполнимые обстоятельства отыгрыша прочие подводные камешки. 1хслотс рабочее зеркало Иногда операторы требуют внесение минимального депо перед выводом для верификации платежного инструмента. В неких казино данный депо того предстоит отыграть.Автоматическая активация кажется самой удобной, хотя ручной метод содержит перед ней превосходства. Прежде чем применять вознаграждение от казино, стоит заблаговременно определить, сколько времени потребуется на исполнение всех критерий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала действия бонуса.
1хслотс 1хслотс регистрация перейти на 1×slots
Получить Бездепозитный приз в интернет казино дело 2-ух кликов. Другой момент, отыграть рекламную и соблюсти правила и условия отыгрыша. Под правилами подразумевается столько вагер, хотя и ограничения по максимальной ставке. Мы разумеем, собственно в кинотеатр все ставят на зеро и выигрывают. Призываем не делать подобного. Перед активацией бонуса прочтите верховодила. Узнайте следующие факторы: Условия получения презента, за регистрацию, за депозит и другое. Ограничения по наибольшей ставке. Зачастую не выше 350 рублей. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах возможно отыгрывать вагер. Можно вращать автоматы, а вагер несомненно стоять на пространстве. Поэтому важно знать, в каких забавах возможно осуществлять кратность денежного оборота.Чтобы получить вероятность вывести выгода с бездепозитного бонуса в казино, необходимо выполнить ряд условий: Не хотите сыграть в азартные забавы, не рискуя своими средствами, но получая в все выплаты? Подобную возможность предоставляют многие лучшие порталы с азартными весельями. В их числе много правдивых и надежных интернет-казино на российском языке. Они привлекают новых юзеров разными поощрительными событиями, включая бездепозитные, или безвозмездные бонусы.Главным нюансом в появлении данных вознаграждений произведено что, нет, что пустив их в ход, геймер ничем не рискует и в последствии никому ничего не несомненно обязан (не зависимо, получит ли он благодаря бонусам какой-либо выигрыш или мгновенно спустит все лишь что прибывшие финансы). То есть, казино снабжает игрока вероятностью на дармовой основе играть во различные слоты причем спонсирует забаву. <a href=https://iuecwalocal81288.com/content/%D0%BE%D0%BD%D0%BB%D0%B0%D0%B9%D0%BD-%D1%81%D0%BB%D0%BE%D1%82%D1%8B-777>https://iuecwalocal81288.com/content/%D0%BE%D0%BD%D0%BB%D0%B0%D0%B9%D0%BD-%D1%81%D0%BB%D0%BE%D1%82%D1%8B-777</a> На страничке представлены бездепозитные бонусы за регистрацию в казино редкая награда за которой гонятся все игроки как новенькие, например и профессионалы. Мы также уделяем большое внимание на присутствие призов при формирование рейтинга казино на средства. Бездепозитный приз это возможность выступать бесплатно и выиграть реальные деньги. 1хслотс рабочее зеркало на сегодня
1×slots зеркало регистрация
Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в личный офис, дабы арестовать бесплатные вращения с вейджером х40; <a href=https://021snyw.com/space-uid-53919.html>1×slots официальный demo регистрация в 1×slots casino</a> Онлайн гемблинг развивается с каждым деньком больше и больше, новые бренды создаются не по денькам а по часам. Новые онлайн казино делают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и что, этим наиболее предлагают бездепозитные бонусы за регистрацию, собственно бы не упустить эту вероятность — как воспользоваться новым бездепом, рекомендуем навещать наш сайт как можно почаще, самое лакомое и свежие будет добавляться в этом же перечне.Максимальный размер ставки, кот-ый нельзя превосходить пока бонус не несомненно полностью отыгран. В случае нарушения сего правила, бонус и выигрыш с него станут аннулированы. 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=https://images.google.sh/url?q=https://doctorlazuta.by/>https://images.google.sh/url?q=https://doctorlazuta.by/</a> Получать информацию о самых выгодных бонусах можно без постоянного мониторинга новостей казино. Мы взяли данную задачку на себя и непрерывно следим за услугами операторов, выбирая превосходнейшие из их. В данном разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список промоакций регулярно дополняется. В топ зашли самые новые бездепозитные призы за регистрацию в казино 2020, временные и закрытые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и другим критериям. Если срок деянья акции истек, она удаляется из списка.
1хслотс рабочее зеркало
<a href=http://www.getwayssolution.com/2019/12/how-do-you-read-or-write-file-on-server.html>http://www.getwayssolution.com/2019/12/how-do-you-read-or-write-file-on-server.html</a> Как и промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такового предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает свежих гостей и разрешает им составить эмоцию о функционале, не рискуя значительными суммами. 1×slots зеркало подтвердит вашу регистрацию если говорить Но на некоторых азартных платформах подобные гонорары все получить и уже зарегистрированные пользователи. В этом случае, призы предоставляются в рамках уникальных промоакций либо же неким игрокам повторяющий акционного предложения, которое прибывает на почту с целью «вернуть» игрока в свое казино.Необходимость отыгрыша. Вейджер в этом случае повыше, чем для бонусов за депо. И же свои не отыграны, вывести их невозможно.
<b>Смотреть еще похожие новости:</b>
<a href=https://edidaktikum.ee/en/content/iii-kontakttund-08-juuni?page=92#comment-297903>1×slots регистрация 1×slots casino 777 online</a>
<a href=http://forum.bedwantsinfo.nl/showthread.php?tid=794797>1хслот зеркало сайта</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в соц сетях, установку мобильного приложения или официального посетителя для ПК. В большинстве казино срабатывают программки преданности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на грядущий степень нередко сопрягается выдачей бездепа.
#1821 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерские конторы pin casino com <a href=https://kompromat1.online/>online casino</a> 1×bet зеркало на сегодня казино рулетка <a href=https://kompromat1.online/>1×bet слоты 1×bet xyz</a> 1×bet зеркало xbet xyz cat casino 1×bet официальный сайт карты казино online casino официальный мобильные букмекерские конторы Семёнова Татьяна Владимировна порно
DiskiPlus Семёнова Татьяна Владимировна порно DiskiPlus казино смотреть <a href=https://diskiplus.ru/>DiskiPlus pin casino</a> DiskiPlus Львова-Белова Мария Алексеевна порно DiskiPlus официальная казино <a href=https://www.diskiplus.ru/>DiskiPlus казино смотреть онлайн бесплатно</a> DiskiPlus фильмы казино рояль DiskiPlus бывшие казино DiskiPlus bitz casino DiskiPlus букмекерская контора зенит DiskiPlus porno Юлия Канакина DiskiPlus porno Вера Бирюкова, гимнастка DiskiPlus up casino
#1822 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
new casino гама казино <a href=https://t.me/vchkogpu_ru>мелбет букмекерская контора</a> pin up casino сайте букмекерской конторы фонбет <a href=https://sovsekretno.net/>Окладникова Ирина Андреевна порно</a> порно с Бондаренко Анастасия Борисовна порно с Матвей Сафонов (футбол) casino скачать бесплатно фильм казино casino сегодня лучшие онлайн казино официальное казино вход
DiskiPlus казино сегодня DiskiPlus скачать casino на андроид <a href=https://www.diskiplus.ru/>DiskiPlus up casino зеркало</a> DiskiPlus 1×bet зеркало слоты DiskiPlus порно с Петр Ян (ММА) <a href=https://www.diskiplus.ru>DiskiPlus 1×bet официальный слоты</a> DiskiPlus букмекерская контора официальный сайт скачать DiskiPlus casino скачать DiskiPlus porno Вера Бирюкова, гимнастка DiskiPlus Юдаева Ксения Валентиновна порно DiskiPlus букмекерская контора DiskiPlus скачать 1×bet на андроид бесплатно DiskiPlus гта казино
#1823 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Валентина Матвиенко порно Мухтиярова Елена Вячеславовна порно <a href=https://rumafia.news/>казино фильм</a> win win casino casino сайты <a href=https://m.repost.news/>1×bet регистрация</a> бесплатно играем казино пин ап казино казино фильм порно с Юлия Ефимова, пловчиха Ирина Горбачева порно с Алексей Миранчук (футбол) казино смотреть
DiskiPlus casino играть DiskiPlus бывшие казино <a href=https://www.diskiplus.ru/>DiskiPlus ев казино</a> DiskiPlus сайте букмекерской конторы фонбет DiskiPlus porno Ангелина Гончаренко, хоккеистка <a href=https://diskiplus.ru/>DiskiPlus Любимова Ольга Борисовна порно</a> DiskiPlus букмекерские конторы бет DiskiPlus 1win casino DiskiPlus официальные букмекерские конторы скачать DiskiPlus 1×bet на сегодня DiskiPlus kent casino DiskiPlus порно с Алексей Миранчук (футбол) DiskiPlus porno Вера Бирюкова, гимнастка
#1824 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация
2. Создать новый профиль. Для регистрации надо(надобно) заполнить маленькую анкету либо зайдите в собственный офис посредством соц сетей;Мы рекомендуем не отрицаться от похожих услуг знаменитых казино. Выделите некоторое минут на регистрацию, получите приз и попытайтесь его отыграть. Может быть, сегодня фортуна несомненно на вашей стороне! <a href=http://filmkachat.ru/>1×slots регистрация на сайте 1×slots ru com</a> Доступные забавы – В неких азартных забавах возможно понизить математическое превосходство казино до нескольких 10-х процента. В их числе многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как управляло, в таких забавах ставки идут в зачет вейджера не всецело. Например, может учитываться лишь 50%. В неких забавах бездепозитные призы вообще нельзя отыгрывать. <a href=https://archinect.com/firms/cover/150465490/cgifurniture-modern-interior-design>https://archinect.com/firms/cover/150465490/cgifurniture-modern-interior-design</a> 1×slots актуальное зеркало <a href=https://shipper.vip/track?q=%3Ca+href%3Dhttps%3A%2F%2Fdoctorlazuta.by%2Fblog%3E%D0%B1%D0%BB%D0%BE%D0%B3+%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%3C%2Fa%3E+%D0%B1%D0%BB%D0%BE%D0%B3+%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0>https://shipper.vip/track?q=%3Ca+href%3Dhttps%3A%2F%2Fdoctorlazuta.by%2Fblog%3E%D0%B1%D0%BB%D0%BE%D0%B3+%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%3C%2Fa%3E+%D0%B1%D0%BB%D0%BE%D0%B3+%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0</a>
1×slot рабочее зеркало
В неких онлайн казино для получения бездепозитных призов не довольно просто зарегистрироваться на веб-сайте клуба и подтвердить свои контактные данные. Дополнительно требуется активация промокода.Как прочие промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает новых посетителей и дозволяет им составить эмоцию о функционале, не рискуя вескими суммами. 1хслотс рабочее зеркало <a href=http://newoasisforlife.org/new/home.php?mod=space&uid=98646&do=profile>http://newoasisforlife.org/new/home.php?mod=space&uid=98646&do=profile</a> 1×slots мобильная версия войти казино Вейджер не более х30–35 считается приемлемым. Опытные игроки заявляют, что с таким вейджером реально остаться в плюсе, в правильно подойти к выбору игрового аппарата.
казино 1×slots официальный сайт
Бездепозитные бонусы казино это финансовая компенсация, предлагаемая юзерам на дармовой базе и возможность выступать в онлайн казино бесплатно. Если сравнивать их с поощрениями за вклад, каких средства выдаются только потом первоначального пополнения счета, то бездепозитные вознаграждения получаются даром. То есть, играющий получает вероятность создавать ставки на теснее имеющие деньги, которые выдаст заведение, выполняя, этом, обыденные действия, дабы их извлечь (тут идет о регистрация, удостоверении личности с внедрением номера телефонного, оформления заказы и т.д.). <a href=http://lamoonvideo.ru/profile.php?u=deadpanmasquera>http://lamoonvideo.ru/profile.php?u=deadpanmasquera</a> 1×слот регистрация в 1×slots casino
1×slots casino регистрация 1×slotscasin online
Прежде всего, не забывайте регулярно заглядывать на страничку обзоров бездепозитных призов. Они шаг за шагом разглядывают наиболее занимательные предложения основных игорных порталов. 1× slots официальный <a href=http://atoz.vcu.edu/mobile/track?url=http://sianie24.ru/bitrix/redirect.php?goto=http://alanyatoday.ru/redirect?url=https://teletype.in/@urist555/VcF7ysXR5Z4>http://atoz.vcu.edu/mobile/track?url=http://sianie24.ru/bitrix/redirect.php?goto=http://alanyatoday.ru/redirect?url=https://teletype.in/@urist555/VcF7ysXR5Z4</a> Теоретически, к безвозмездным бонусам возможно отнести например нарекаемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, поэтому собственно они предоставляют лишь вероятность делать ставки.В случае установленного лимита на сумму вывода выигрыша с бездепозитного приза, игрок не может вывести больше заявленной суммы.
1×slots на любой вкус как пройти регистрацию
Существует ли стратегии для отыгрыша бездепозитных призов? К сожалению нет, на выигрыши либо проигрыши с бонусов, казино или игрок воздействовать не может, отдача игр происходит от разработчиков игр. Проверка занимает от нескольких минут до нескольких дней, профессионалы техподдержки шансы запросить вспомогательные документы или инициировать куцее общение по Skype. <a href=http://trisinfronteras.com/davidcastro/component/k2/itemlist/user/456042-stevenkance>http://trisinfronteras.com/davidcastro/component/k2/itemlist/user/456042-stevenkance</a> 1×slots мобильная версия войти казино
<b>Смотреть еще похожие новости:</b>
<a href=https://www.archiroleros.com/threads/1×slots-casino-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5.7987/>1×slots casino зеркало рабочее</a>
<a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=58309>казино 1×slots официальный сайт</a>
<a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=11228>рабочее зеркало 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Благодаря программке лояльности от игорного заведения, можно взять неплохой старт и без дополнительных инвестициям запустить видеослоты. Кроме как, возможно рассчитывать на реальную удачу и получить, без инвестиции собственных финансов, немалый выигрыш.
#1825 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора фонбет официальный сайт самое казино <a href=https://rumafia.news/>1×bet зеркало xbet xyz</a> casino pin официальный промокод 1×bet <a href=https://th-royalgclub.com/>порно с Карен Хачанов (теннис)</a> гама казино pin up casino официальный porno Мария Шарапова букмекерская контора официальный сайт порно с Абрамченко Виктория Валериевна казино рояль смотреть porno Виктория Баркова, легкоатлетка
DiskiPlus casino online зеркало DiskiPlus 1×bet зеркало рабочее <a href=https://diskiplus.ru>DiskiPlus 7k casino сайт</a> DiskiPlus 1×bet рабочее на сегодня DiskiPlus vavada casino <a href=https://diskiplus.ru>DiskiPlus vodka casino</a> DiskiPlus 1×bet телефон DiskiPlus 1×bet зеркало на сегодня DiskiPlus бесплатное казино DiskiPlus официальное казино вход DiskiPlus яндекс казино DiskiPlus pin up casino зеркало DiskiPlus гта казино
#1826 Charlesgunnyhttp://filmkachat.ru
1×slots сайт
Кешбэк-бонус дает собой возврат фиксированного процента от ставки в случае поражения или же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%. <a href=http://filmkachat.ru/>1хслотс рабочее зеркало</a> Бездепозитный приз – это финансовое вознаграждение, коие выдается соучастнику забавы в казино, для его привлечения и появления заинтересованности. Любой посетитель, кот-ый подходит условиям выдачи похожего бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое поощрение является наиболее действенным методом, дающим вероятность стартовать деле, не вкладывая собственных вещественных средств.Осталось выбрать казино с призом за регистрацию и сделать профиль. После активации подарка выигрыш зависит от Фортуны и способностей. <a href=https://feedback.cloudways.com/forums/203824-product-improvements-flexible/suggestions/49478654-%D1%89%D0%BE-%D1%80%D0%BE%D0%B1%D0%B8%D1%82%D0%B8-%D0%B7-%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%BE%D0%B1%D1%96%D0%BB%D0%B5%D0%BC-%D0%BF%D1%96%D1%81%D0%BB%D1%8F-%D0%B4%D1%82%D0%BF-%D0%BA%D0%BE%D0%BC%D0%BF%D0%BB%D0%B5%D0%BA%D1%81%D0%BD%D0%B5-%D0%BA%D0%B5%D1%80%D1%96>https://feedback.cloudways.com/forums/203824-product-improvements-flexible/suggestions/49478654-%D1%89%D0%BE-%D1%80%D0%BE%D0%B1%D0%B8%D1%82%D0%B8-%D0%B7-%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%BE%D0%B1%D1%96%D0%BB%D0%B5%D0%BC-%D0%BF%D1%96%D1%81%D0%BB%D1%8F-%D0%B4%D1%82%D0%BF-%D0%BA%D0%BE%D0%BC%D0%BF%D0%BB%D0%B5%D0%BA%D1%81%D0%BD%D0%B5-%D0%BA%D0%B5%D1%80%D1%96</a> Какие призы меня еще получить не бездепозитного приза за регистрацию в казино? По мимо бездепозитного бонуса, любое интернет казино предлагает игрокам выгодное предложение на 1-ый депо, вы совершаете депозит, ваш депозит возрастает в двое или и в трое, что, этим самым начать играть возможно с более солидной суммой, так же не забываем на вейджер на бонусы. 1хслотс зеркало на сегодня <a href=http://g961713h.beget.tech/user/DoctorLazutaSa/>http://g961713h.beget.tech/user/DoctorLazutaSa/</a>
казино 1×slots
Игры, каких возможно играть на бонусные деньги. Проверьте список игр, в которых возможно выступать на бонусные свои, вполне они Вам не понравятся и не расходовать своё время на эту промоакцию.Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция содержит доскональные правила, гиперссылка на которые обыкновенно содержится в промообъявлении. В их указываются лимиты, вейджер, перечень дешевых игр. Если оператор скрывает данные о предложении, то пользоваться им не. 1×slots официальный регистрация Принципиальным отличием даровых бонусов от бонусов на депо является неимение надобности вносить деньги на акк. Из-за сего их часто именуют бездепозитными (no deposit bonuses). <a href=https://escortexxx.ca/author/forsedropea/>https://escortexxx.ca/author/forsedropea/</a> 1×slots официальный регистрация
1×slots официальный сайт зеркало
Как только на виртуальном счету окажутся бонусные свои, поспешите отыграть вейджер. Сразу после этого возможно оставить заявку на вывод выигрыша. Кредиты прибыльно выделяются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом реальных средств и выделяют вероятность ощутить азарт. Во-вторых – можно насладиться каждой азартной забавой доступной на веб-сайте. В вашем постановлении находятся автоматы, настольные прибавленье, видео-покер, Live-дилеры. <a href=https://tophatsec.com/forum/member.php?action=profile&uid=5388>https://tophatsec.com/forum/member.php?action=profile&uid=5388</a> В современность довольно просто получить приз за регистрацию в казино. Практически каждый игорный дом с готовностью начисляет средства либо бесплатные вращения. Многие гэмблеры пользуются данным и не смущяются регистрироваться в любом клубе с прибыльными критериями. Кстати, это отличная вероятность выработать победную стратегию и сорвать джекпот. 1х слотс зеркало регистрация в 1×slots casino
1хслотс рабочее зеркало на сегодня
Подтвердите лицо, предоставив оператору казино свои паспортные данные. Инструкции обыкновенно несложные, основное — четко им по. Если написано, что «на фото должны быть видны все четыре угла странички паспорта» — сделайте именно это фото.Например, игрок получил 500 руб. При твореньи аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., потребуется сделать 875 спинов для полного отыгрыша. К огорчению, нет. Почти все казино, требуют внесение желая бы 1-го минимального депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, собственно исключить деньги разрешается только на что, эту платежную систему, с которой был изготовлен депо. Можно. Вы постоянно можете отрешиться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не сделаете ставку.Самые пользующиеся способы вывода денег ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам подобии Neteller и Skrill, еще используют криптовалютными кошельками. Вывод выигрышей может осуществляться мгновенно либо развлекать от нескольких часов до нескольких суток. сайт 1× slots casino <a href=http://correspondent.in.ua/index.php?subaction=userinfo&user=quackguidebook9>http://correspondent.in.ua/index.php?subaction=userinfo&user=quackguidebook9</a> Если ординарными текстами, бездепы – это определённая сумма денег или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать подарки. Но есть некоторые нюансы. Существуют игорные дома, коие перед тем как начислить призы просят привязать телефонный, дать копии документов.
1×slots официальный сайт мобильная версия
Не хотите сыграть в азартные забавы, не рискуя своими деньгами, но получая в все выплаты? Подобную возможность предоставляют многие наихорошие порталы с азартными веселиями. В их количестве много честных и надежных интернет-казино на русском языке. Они привлекают свежих юзеров различными поощрительными событиями, включая бездепозитные, либо безвозмездные призы. Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.Практически все интернет казино с бездепозитным призом за регистрацию предусматривает программу лояльности — систему одобрения постоянных клиентов, кот-ая состоит из множества уровней. При достижении игроком одного уровня на его счёт поступает приз. Чем выше степень — что, этим щедрее бонус. <a href=https://sethpqnh44443.blogdosaga.com/30221531/deepnude-the-dark-side-of-ai-technology-and-its-ethical-implications>https://sethpqnh44443.blogdosaga.com/30221531/deepnude-the-dark-side-of-ai-technology-and-its-ethical-implications</a> Теоретически, к бесплатным бонусам можно отнести так называемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, потому что они предоставляют лишь возможность делать ставки.Простая процедура получения бездепозитного бонуса, кот-ая займет менее 2-х мин. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные. 1×slots регистрация на сайте Лишь популярностью и известные азартные заведения могут разрешить себе раздавать бездепы в виде дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депо, которые возможно израсходовать в топовых аппаратах с высокой отдачей.
<b>Смотреть еще похожие новости:</b>
<a href=http://kemsrr.forumex.ru/viewtopic.php?f=7&t=5557>1×slots официальный demo регистрация в 1×slots casino</a>
<a href=http://forums.indexrise.com/thread-2362-post-503872.html#pid503872>1× slots сайт</a>
<a href=http://police.1stbb.ru/viewtopic.php?f=3&t=628>1× slots casino официальный сайт</a>
<a href=http://sofanatki.ekafe.ru/viewtopic.php?f=1&t=2035>x1 slots регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Варианты выигрыша находятся от Вашей успеха и условий игорного портала. Выше мы сказали, что некоторые бездепозитные призы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются и те, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность передовых игр на средства, возможно выиграть невозможные суммы. Сегодняшние игровые автоматы либо видео слоты, как их именуют. Могут выдавать крупные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000. Некоторые сайты, прежде чем обмануть регистрацию игроков, предлагают ответить на несколько базовых вопросов. Цель проведения похожей викторины – выявить случайных людей, коие не имеют представления о покере, и не разрешить получения ими бонусов. Если гость уже играл в казино, то ответить на полтора 10 простых вопросов будет несложно. Очень нередко, ответы возможно отыскать на официальных сайтах данных учреждений.
#1827 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slotscasino 56 online
Промокод – определённая композиция знаков, коию нужно установить в подходящее фон при разработке учетной записи либо активировать в личном профиле игрока в разделе с призами.Призовые начисления без депо имеют предоставляться для роли в турнирах онлайн казино. Потратить перечисленные средства можно необыкновенно в этой акции. Условия их проведения в ограничения на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться этим предложением, никакого выучить его правила. <a href=http://filmkachat.ru/>1×slots официальный сайт мобильная версия скачать</a> Составленный специалистами Casino.ru перечень онлайн-казино с бездепозитным бонусом позволяет игрокам сравнить спецпредложения разных операторов.Доступные игры – В некоторых азартных играх можно снизить математическое приемущество казино до нескольких десятых процента. В их количестве все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как верховодило, в этих играх ставки идут в зачет вейджера не полностью. Например, может предусматриваться только 50%. В некоторых играх бездепозитные бонусы вообщем невозможно отыгрывать. <a href=https://www.pearltrees.com/kalinka0588/item691380214>https://www.pearltrees.com/kalinka0588/item691380214</a> 1хслотс мобильная версия зеркало <a href=https://google.sn/url?q=https://doctorlazuta.by/>https://google.sn/url?q=https://doctorlazuta.by/</a> В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, необходимо адресоваться в службу поддержки через лайв-чат на веб-сайте казино.
1×slots casino регистрация на сайте
Минимального оборота. Этот лимит устанавливается вейджером — же игрок не поиграет на установленную сумму, вывод средств несомненно недосегаем. <a href=https://melhorlance.com.br/author/jamesbom/>1×slots бездепозитный бонус за регистрацию</a> 1хслот зеркало сайта Исходя из сего, просто не присутствует осмысленных причин махнуть рукой на получение такого бонуса при регистрации. И, будет, на такой бесплатной основе у вас есть шансы выиграть средства и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные призы, именуют безвозмездными интернет платформами для игр.Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых свежих, щедрых и испытанных призах в онлайн казино, которые обновляются каждый денек. <a href=http://xn–b1afaaiqgeiqh0aidle1f1d3c.xn–p1ai/user/Frankwromb/>http://xn–b1afaaiqgeiqh0aidle1f1d3c.xn–p1ai/user/Frankwromb/</a> У каждой забавы средства требования по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система зачтет каждую ставку. В рулетке и покере устроить это намного труднее. Именно поэтому например главно внимательно читать обстоятельства получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой забаве, то новички просто «спустят бонус на ветер».При регистрации в или ином интернет игральном заведении — вам дается раз шанс испытать свою удачу не внося свои монеты. Замечу что такую поощрительную предложение предоставляют не все интернет игровые площадки, а только великодушная середина(средина) из них. Которые мы подготовили для Вас в нашем перечне. казино 1×slots Подобные призы без депо предоставляются на больше выгодных условиях. Зачастую они крупнее, а условия отыгрыша менее жесткие.Если при регистрации указать промокод, можно гарантировано получить приз. Где взять ваучер? Посетите направленные блоги либо форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В заключительное время игорные дома начали рекламироваться в фильмах и сериалах. Присмотритесь и всего заметите промокод, который принесёт 500 или 1 000 бонусных руб.
1×slots промокод при регистрации
Первый образующийся вопрос, это, чего выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают свежих игроков. Последним проще начать игру на деньги с презента за регистрацию. Им не пополнять баланс и расходовать личностные свои. Новички получают бесплатные спины либо свои на счёт. С их помощью знакомятся с игровым ходом, крутят слоты и проделывают ставки в рулетке. <a href=https://www.buzzbii.com/post/1314581_avtoshkola-vladivostok-v-avtoshkole-obychno-obuchayut-vozhdeniyu-legkovyh-avtomo.html>https://www.buzzbii.com/post/1314581_avtoshkola-vladivostok-v-avtoshkole-obychno-obuchayut-vozhdeniyu-legkovyh-avtomo.html</a> 1×slots официальный сайт зеркало рабочее Перед активацией принципиально внимательно изучить условия акции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют значение также лимиты ставок при отыгрыше и сроки, на коих возможно пользоваться предложением. Если бездеп охватывает ограниченный перечень игр, рекомендуется разузнать максимальные коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят лишь том, случае, случае оператор не установил взыскательные ограничения на максимальную необходимую ставки.
1×slots официальный сайт зеркало
Пoдтвepдить личнocть посетителя. Для удачного вывода средств, необходимо подтвердить лицо посетителя. Нa этaпe вepификaции пpoфиля, сотрудники службы безопасности обязаны увериться, собственно у игрока чем раз аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не сможет вывести собственный выигрыш, случае у него будет несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы. <a href=http://216.38.0.7/viewtopic.php?f=12&t=410092>1×slots зеркало рабочее на сегодня</a> Обычно, бездепозитные призы выдаются под определенные слоты с фиксированной ставкой, хотя их наверняка запрещено применять в игровых автоматах с современным джекпотом. Список игр, в можно применять бездеп, Вы отыщите в описании промоакции либо сможете уточнить у службы заведения. 1хслотс казино зеркало <a href=http://mebel-fabrik.com.ua/index.php?subaction=userinfo&user=jumpytrousers25>http://mebel-fabrik.com.ua/index.php?subaction=userinfo&user=jumpytrousers25</a> Для выбора азартного заведения Вы сможете пользоваться списком наших казино с призами за регистрацию. На нашем веб-сайте мы опубликовали перечень бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, собственно часть бонусов эксклюзивные и доступны лишь для посетителей нашего сайта по-специальному промо-коду или по уникальной ссылке. Кроме как, для каждого бонуса мы подготовили доскональный обзор, в котором Вы узнаете как получить и отыграть поощрение и как исключить свой выигрыш с бездепа.Бездепозитные призы, как теснее понятно, являются уникальной возможностью к игровому процессу абсолютно безвозмездно, словами играть в онлайн казино даром и на имеющие средства сразу после регистрации аккаунта. Автоматы с этим депо имеют стать великолепной возможностью поиграть для почитателей азарта с определенными лимитированиями в денег.
1×slots официальный сайт зеркало
Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, чтобы замечена возможность вывести выигрыш. Даже не выиграв крупную необходимую, игрок интересно проведет время, изнутри изучит работу площадки, воспримет геймплей автоматов. Все это без каких-то финансовых рисков. Быть в курсе лучших промоакций с. Достаточно регулярно учить перечень новых интернет казино с выводом бонуса без депозита в данном разделе. <a href=https://mobilka.mobi/user/TravisAMILK/>https://mobilka.mobi/user/TravisAMILK/</a> 1×slots официальный зеркало рабочее Самый распространённый из подобных призов, естесственно же, бездеп на день рождения посетителя — приз в виде фиксированной суммы или фриспинов поступает на счёт игрока, а воспользоваться им возможно протяжении установленного периода медли.Бонус без депо за регистрацию в казино (бездепозитный бонус) – это денежный презент от клуба, кот-ый начисляется на акк игрока последствии регистрации в казино. Кроме творения учетной записи, для получения бездепа, очень нередко требуется ещё и подтвердить контактные данные игрока и/или активировать особый промо-код.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.fromrus.su/index.php?/topic/58447–1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE/>1хслотс зеркало</a>
<a href=https://acerfans.ru/user/JamesTed/>рабочее зеркало 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если вы избираете испытанное лицензионное онлайн казино и выполните все условия получения бездепозитного приза, трудностей с получением подарка у Вас не возникнет. А ознакомиться с новыми интернет казино, Вы можете с призов с выводом прибыли, которые Вы сможете получить без депозита.
#1828 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Юлия Пересильд casino сайты <a href=https://7club7.com/>приложения букмекерских контор на андроид</a> 1×bet зеркало на сегодня casino riobet <a href=https://specreporter.com/>pin up casino пин ап</a> up casino лучшие букмекерские конторы up casino скачать 1×bet зеркало рабочее на сегодня 1×bet xyz pin up casino buzz Манилова Алла Юрьевна порно казино рулетка
DiskiPlus букмекерские конторы бет DiskiPlus сайты казино <a href=https://www.diskiplus.ru/>DiskiPlus casino онлайн</a> DiskiPlus porno Анна Сидорова, керлингистка DiskiPlus porno Светлана Ходченкова <a href=https://www.diskiplus.ru>DiskiPlus сколько казино</a> DiskiPlus почему в казино нет часов DiskiPlus песня казино DiskiPlus бк букмекерская контора DiskiPlus Ирина Горбачева DiskiPlus пин up casino DiskiPlus Чулпан Хаматова DiskiPlus 1×bet телефон
#1829 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало
Помимо прочего, для вывода средств по бездепу нужно привнести на счёт свой первый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально возможную необходимую, последствии чего вывод средств станет доступен.Не советуем сломя голову браться за всевозможные предложения получения средств без вложений. Вполне вероятно, собственно бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на 1-ый взгляд. Альтернативой является казино бонус за депозит. Мы предлагаем вас пару советов, благодаря которым у каждого игрока будет возможность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег: <a href=http://filmkachat.ru/>1×slots коды</a> Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют важную информацию о not the slightest down payment bonuses и других предложениях.Способы получения бездепа различаются зависимо вида бонуса, кот-ый приглянулся игроку. Но вам иначе нужно быть зарегистрированным в законном онлайн-казино и доказать собственную лицо. В общем облике пошаговая аннотация для получения бездепозитного бонуса выглядит так: <a href=https://plaza.rakuten.co.jp/kalinka0588/diary/202403220000/>https://plaza.rakuten.co.jp/kalinka0588/diary/202403220000/</a> 1хслотс зеркало <a href=http://www.96bbs.com/home.php?mod=space&uid=544208&do=profile&from=space>http://www.96bbs.com/home.php?mod=space&uid=544208&do=profile&from=space</a> Для получения приза нужно ознакомиться с программой преданности казино и сделать ставки на сумму, нужную для перехода на следующий степень.
1×slots быструю регистрацию а также мгновенное
Вы наверняка, скажем, как все любите получать презенты и бездепозитные призы казино. Игорные жилища брали в повадку одаривать гэмблеров приятными призами. Стать владельцем приветственного подарка возможно за творение профиля или пополнение счёта. Второй вариант больше занимательный, так клубы готовы удвоить депо! Но если вы новичок и лишь знакомитесь с миром азарта, никакого воспользуйтесь бонусом за регистрацию. <a href=https://mami-forum.de/forum.php>1×slots регистрация 1×slots casino 777 online</a> 1 хслот регистрация в 1×slots casino Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. <a href=http://www.miranetwork.it/index.php?option=com_k2&view=itemlist&task=user&id=446754>http://www.miranetwork.it/index.php?option=com_k2&view=itemlist&task=user&id=446754</a> Однако в условиях исчезают «подводные камешки», коие не разрешат исключить крупную сумму либо же вы не успеете отыграть вейджер. Поэтому профессионалы советуют забрать бесплатные вращения за регистрацию в казино без депозита, чтобы поднабраться опыта и получить реальный шанс на победу.Фриспины — благотворительные вращения, коие позволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины считаются наиболее известным и желаемым обликом приза — бесплатные вращения иногда эффективнее и веселее в отыгрыше, чем другие виды бездепов. 1×slots официальный demo регистрация в 1×slots casino Выбор любого интернет казино на нашем сайте. В описании к любому Вы сможете узнать, что получите за создание аккаунта.Вейджер не более х30–35 является применимым. Опытные игроки утверждают, что с этим вейджером реально остаться в плюсе, в правильно подойти к выбору игрового аппарата.
1×slots актуальное зеркало
Превышение наибольшей ставки при отыгрыше. Система автоматически не предостерегает о превышении ставки, потому о нарушении управлял игрок может разузнать теснее в подачи запроса на вывод средств. <a href=http://www.mxeia.com/home.php?mod=space&username=variouspregnanc&do=profile>http://www.mxeia.com/home.php?mod=space&username=variouspregnanc&do=profile</a> Не стоит сразу же отказываться от приветственных даров в сходственных казино. Администрация готова начислить деньги или фриспины, но сначала сотрудники обязаны убедиться, собственно вы не мошенник. Дело что, нет, что развелось очень количество охотников за бонусами. Они научились обманывать систему и зарабатывать крупные суммы средств. 1×slos регистрация в 1×slots casino Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.
1хслот зеркало
После потребуется внести идентификационный платёж. Это пугает начинающих больше всего. Нужно устроить наименьший депо в 100–500 руб. Таким образом служба безопасности убедиться что, что платёжный способ принадлежит Вам. Данная процедура необходима для обеспечивания безопасности игровых счетов. Пример, Ваш аккаунт взломают и выведут свои на собственный кошелёк. Будет очень неприятно. Поэтому верификация платёжной системы, это необходимый момент. Все безвозмездные бонусы кажутся заманчивыми. Кто же откажется от способности сыграть в онлайн-казино, не рискуя средствами, хотя получая выигрыши. Но далековато не все бездепозитные бонусы в привлекательны для рассудительного клиента. 1×slots подтвердит вашу регистрацию если говорить <a href=http://forum.changeducation.cn/home.php?mod=space&uid=947276&do=profile&from=space>http://forum.changeducation.cn/home.php?mod=space&uid=947276&do=profile&from=space</a> Когда речь идет о получении бездепозитных призов в казино, в первую очередь внимание на следующие условия:
1хслот скачать
Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера.Зачастую бездепозитные бонусы казино для забавы предлагаются различными заведениями азартных игр виде рекламных промоакций либо в целях привлечения к себе новых игроков. Для бездепозитных призов в казино 2022 игроку не нужно пополнять счет до этапа вывода желанных средств. Чаще всего интернет-казино предлагают бездепозитные призы новым пользователям. Эта промо-акция очень эффективно завлекает начинающих, подталкивая их к открытию счета. Конечно, не все становятся послушными посетителями, но сам прецедент регистрации аккаунта играет на руку заведению.Чаще всего, популярностью сервисы, такие как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное правило. Финансовые свои выводятся лишь через ту платежную систему, которой огромный для пополнения депозита. Если же игрок получил бездепозитный покерный приз, требуется восполнить счет на наименьшую сумму, которая сочиняет обыкновенно 10 $. <a href=https://ponysfm.com/users/Julesacive>https://ponysfm.com/users/Julesacive</a> На страничке представлены бездепозитные бонусы за регистрацию в казино редчайшая заслуга за коей гонятся все игроки как новички, так и профессионалы. Мы также уделяем огромное внимание на наличие призов при составление рейтинга казино на деньги. Бездепозитный бонус это вероятность выступать даром и выиграть реальные средства.Получить Бездепозитный бонус в интернет казино дело двух кликов. Другой момент, отыграть рекламную и соблюсти правила и обстоятельства отыгрыша. Под правилами подразумевается столько вагер, но и ограничения по наибольшей ставке. Мы разумеем, собственно в кино все ставят на зеро и выигрывают. Призываем не создавать подобного. Перед активацией приза прочтите верховодила. Узнайте последующие факторы: Условия получения презента, за регистрацию, за депозит и прочее. Ограничения по максимальной ставке. Зачастую не повыше 350 рублей. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вращать автоматы, а вагер будет стоять на месте. Поэтому важно знать, в каких забавах можно осуществлять кратность денежного оборота. 1×slots casino регистрация на сайте Все обожают получать подарки. Согласитесь, практически любой играющий человек будет безгранично рад, в получит даровой презент для забавы в онлайн казино просто за регистрацию либо же бонус за внесенный депозит, например нарекаемые приветственные бонусы для свежих игроков. Соответственно эти онлайн клубы станут больше популярны и предпочтительны у игроков при выборе казино для игры. Топ казино каждый обновляется и прибавляются новые и увлекательные игровые клубы с привлекательной бонусной политикой и всеми вероятными прерогативами, к коим относятся эти бонусы как фриспины за регистрацию, валютные бездепозитные призы, а также щедрые бонусы за внесенный депозит.
<b>Смотреть еще похожие новости:</b>
<a href=http://yaoisennari.ekafe.ru/viewtopic.php?f=169&t=3612>1× slots зеркало</a>
<a href=https://www.mentalhealth-world.org.uk/forums/index.php?/topic/96329–1×slots-casino-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5/>1×slots casino зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Такой казино бонус без депозита за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это словно какая-то конспирация поощрения под бездепозитный. Суть всего этого сводится к тому, что игроку на час выдается, к примеру, 1000 долларов, а реклама твердит про, что любой выигрыш можно несомненно в будущем забыть при для. Но если играющий серьезно отнесется к этому предложению, то он просто потеряет время. Ведь игроку нужно несомненно играть не в аккаунте, в тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (даже всей тысячи) в верховодила вступят конкретные условия, где будет сказано, собственно наибольшей суммой победы возможность быть только двести долларов и средства можно использовать только в приза на первый лепта с вейджером 25 от суммы вознаграждения плюс сам депозит. По результату выйдет, собственно игрок выигрывал себя 200% приз с вейджером на определенную сумму. Короче говоря, это все надо вашего медли.
#1830 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
почему в казино не бывает настенных часов Москалькова Татьяна Николаевна порно <a href=https://sovsekretno.net/>букмекерская контора зенит</a> порно с Васильева Татьяна Викторовна 1×bet бесплатно <a href=https://www.ossetia.tv/>винлайн букмекерская контора</a> порно с Федор Чалов (футбол) pin up casino порно с Алексей Миранчук (футбол) 7k casino 1×bet слоты официальный сайт casino официальный зеркало 1×slots casino
DiskiPlus 1win букмекерская контора DiskiPlus cat casino <a href=https://diskiplus.ru>DiskiPlus скачать сайт букмекерской конторы</a> DiskiPlus ешь казино DiskiPlus casino зеркало сегодня <a href=https://www.diskiplus.ru>DiskiPlus букмекерские конторы pin</a> DiskiPlus букмекерская контора фонбет официальный сайт DiskiPlus порно с Голикова Татьяна Алексеевна DiskiPlus casino x DiskiPlus порно с Анна Щербакова, фигуристка DiskiPlus 1×bet зеркало xbet DiskiPlus лучшие бесплатные онлайн казино DiskiPlus порно с Карен Хачанов (теннис)
#1831 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация
Не стоит сразу же отрицаться от приветственных даров в похожих казино. Администрация готова начислить средства или фриспины, хотя сначала работники обязаны увериться, собственно вы не мошенник. Дело в том, что развелось очень большое охотников за призами. Они научились дурачить систему и наваривать солидные суммы денег. <a href=http://filmkachat.ru/>онлайн казино 1×slots</a> <a href=https://forum.index.hu/User/UserDescription?u=2065076>https://forum.index.hu/User/UserDescription?u=2065076</a> Первый образующийся вопрос, это, зачем выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают свежих игроков. Последним легче начать игру на деньги с дара за регистрацию. Им надо пополнять баланс и расходовать собственные средства. Новички получают благотворительные спины или свои на счёт. С их поддержкой знакомятся с игровым ходом, крутят слоты и делают ставки в рулетке.При правильном подходе бездепы — это прекрасный способ играть на деньги без траты собственных средств. Есть количество советов, следуя которым возможно извлечь максимум пользы из сходственных акций казино. Играть по только на лицензированных площадках. Скриптовые веб-сайты столько врут с бонусными предложениями, хотя и употребляют пиратский софт с измененным ГСЧ. Выиграть на этих автоматах нереально. 1×slots на любой вкус как пройти регистрацию <a href=http://classicalmusicmp3freedownload.com/ja/index.php?title=Shisha_Tobacco_From4_Eur>http://classicalmusicmp3freedownload.com/ja/index.php?title=Shisha_Tobacco_From4_Eur</a> Как правило, при выводе денег, от играющего требуется лишь сделать минимальный лепта чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом индивидуальный счет.
1 xslots рабочее зеркало
<a href=https://foro.muelendhir.com/showthread.php?tid=113904>1×slots зеркало рабочее</a> 1×slots актуальное зеркало Бездепозитные бонусы – это исключительно интересная и наиболее многообещающая промоакция интернет-казино. Они числе никакого фри-спинов, поэтому собственно выплаты в бесплатных вращениях не гарантированы, как композиции на барабанах игрового аппарата шансы не сложиться.Чтобы помощи убедиться в превосходствах бездепозитных бонусов, достаточно зарегистрироваться в казино и получить поощрение. <a href=https://www.forum-motorrad.net/members/19685-kennethdwege.html>https://www.forum-motorrad.net/members/19685-kennethdwege.html</a> Для вывода средств бонус нужно будет отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами акции и вариациями отыгрыша бездепозитного бонуса до его получения, дабы избежать конфликтных обстановок. 1 xslots рабочее зеркало У любого игорного клубы разные вейджеровые обстоятельства. Чтобы вы гарантировано сумели выполнить их, мы дадим некоторое советов. Если система начислила маленькую необходимую, не стоит создавать великие ставки – остановитесь на 10–30 центах. Как только сможете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте выступать. В неприятном случае какого-либо присмотреться к другому автомату.Допустим, за регистрацию вы получили бездеп в размере 2 000 рублей с вейджером х30. В этом случае предстоит сделать ставок, на совместную сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда сделайте условия по отыгрышу, придёт время заработать настоящие средства. Однако не запамятовывайте, собственно с каждого презента получится исключить определённую сумму (чаще всего не более $200).
1×slots регистрацию процедура займет всего лишь
Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и. Когда игроку надеется много фриспинов, администрация имеет разбивать их начисление на несколько дней. Бесплатные вращения предоставляются для конкретного слота, который указывается в правилах промоакции.Бонус с зачислением денег на счет дает больше свободы поступков. Пользователь сам избирает, каким образом воспользоваться подаренными средствами. Здесь также шансы работать ограничения на перечень дешевых игр, но обычно эти рамки не так строги, как в промо с безвозмездными вращениями. <a href=https://dbmyxxw.cn/home.php?mod=space&uid=102043&do=profile&from=space>https://dbmyxxw.cn/home.php?mod=space&uid=102043&do=profile&from=space</a> За привлечение друга ? в рамках партнерской программки клиент получает вознаграждение за привлечение свежих юзеров.Далее требуется отыграть вагер и исключить выигрыш. Игрокам без навыка крупно повезло, возможность получить 10-ки презентов за одну регистрацию. Если не сумели получить Бездепозитный приз, не беспокойтесь. Обратитесь в интернет чат, оператор поможет исправить. зеркала 1×slots Иногда в качестве бездепа, казино дарит наименьший приз (до 50 рублей), ради которого не стоит заморачиваться.
1× slots регистрация в 1×slots casino
Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. Но такие рамки не смущают числе хайроллеров, что коэффициенты на слотах разрешают рассчитывать на солидные выигрыши, а в неких автоматах разыгрывается передовой джекпот.Доступность — бездепозитные бонусы в казино почаще всего предоставляются новым игрокам, хотя случаются случаи, когда бонус могут получить и действующие посетители. 1×slots зеркало регистрация в 1×slots casino <a href=http://www.smuniverse.com/bbs/board.php?bo_table=smu4_3_eng&wr_id=349976>http://www.smuniverse.com/bbs/board.php?bo_table=smu4_3_eng&wr_id=349976</a>
казино 1×slots
Варианты выигрыша находятся от Вашей удачи и критерий игорного портала. Выше мы заявили, собственно кое-какие бездепозитные бонусы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются и, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность современных игр на деньги, возможно выиграть невозможные суммы. Сегодняшние игровые автоматы или видео слоты, как их нарекают. Могут выдавать крупные умножение от х1.000 и повыше. Некоторые умножают ставку от х100.000. Бездепы обыкновенно предлагают с отыгрышем — быстро вывести выигранные средства нельзя. Перевод средств со счета несомненно вероятен после того, как юзер выполнит все притязания казино, а сумма возможности превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, в течение коих заказчик вправе пользоваться предложением. Обычно они не превосходят нескольких дней последствии активации. <a href=http://www.facebook-list.com/Shisha-tobacco-from-4-eur_398260.html>http://www.facebook-list.com/Shisha-tobacco-from-4-eur_398260.html</a> Иногда в поощрения за регистрацию все выдаваться билеты для участия в турнирах. Условия их проведения очень отличаются, потому мы рекомендуем ознакомиться с каждым предложением отдельно. рабочее зеркало 1хслотс Как только вы отыграли вейджер и свои с бонусного баланса перешли вам на настоящий счет, Вы смело можете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (сделать минимальный депозит к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депо).Бесплатный приз – кредиты, которые онлайн-казино начисляет посетителю, не заставляя его пополнять игровой счет.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.bandariklan.com/showthread.php?tid=544571>1×slots регистрация 1×slotscasino 56 online</a>
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=10133>1×slots casino регистрация 1×slots review live</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чем ниже значение вейджера, что, этим проще отыграть и вывести бонус. Если Вы планируете заработать на бездепе, но просто ознакомиться с свежим игровым клубом, то стоит игнорировать бонусов с высоким вейджером их практически не реально отыграть. С ними Вы сможете лишь протестировать забавы заведения.
#1832 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Ирина Горбачева casino рабочее <a href=https://glvk.guru/>порно с Дронова Александра Викторовна</a> бесплатные букмекерские конторы лучшие букмекерские конторы <a href=https://th-royalgclub.com/>лучшие букмекерские конторы</a> Москалькова Татьяна Николаевна порно лучшие букмекерские конторы порно с Матвей Сафонов (футбол) казино рояль приложения букмекерских контор на андроид 1×bet сейчас casino скачать
DiskiPlus приложения букмекерских контор DiskiPlus лучшие букмекерские конторы <a href=https://diskiplus.ru/>DiskiPlus букмекерская контора на андроид</a> DiskiPlus porno Юлия Пересильд DiskiPlus казино можно <a href=https://www.diskiplus.ru/>DiskiPlus официальная казино</a> DiskiPlus вывод казино DiskiPlus лучшие казино бесплатно DiskiPlus букмекерская контора фонбет DiskiPlus официальные букмекерские конторы DiskiPlus яндекс игры казино DiskiPlus суть казино DiskiPlus официальные букмекерские конторы
#1833 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерские конторы в россии 1×bet официальный слоты <a href=https://slon-ru.com/>бесплатное казино</a> pin casino bitz casino <a href=https://sovsekretno.net/>казино</a> порно с Антропова Валентина Викторовна champion casino сайт букмекерской конторы включи казино казино большая 1×bet слоты 1×bet xyz r7 casino
DiskiPlus винлайн букмекерская контора официальный сайт DiskiPlus 1×bet рабочее <a href=https://www.diskiplus.ru>DiskiPlus 1×bet на сегодня</a> DiskiPlus казино играть DiskiPlus букмекерские конторы pin <a href=https://www.diskiplus.ru>DiskiPlus 1×bet телефон</a> DiskiPlus casino скачать DiskiPlus 7k casino официальный сайт DiskiPlus порно с Диана Шнайдер (теннис) DiskiPlus 1×bet сайт DiskiPlus pin up casino пин DiskiPlus porno Дарья Клишина DiskiPlus порно с Алина Загитова
#1834 Charlesgunnyhttp://filmkachat.ru
казино 1× slots официальный сайт
Фриспины. Бесплатные вращения предназначены для применения в видео-слотах. Внимательно читайте условия – они часто выдаются для некоторых машин. В зависимости от клуба возможность делать конкретное количество ставок. Кстати, современные игорные жилища выделяют вероятность заводить «одноруких бандитов».Вейджер в переводе с английского означает «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша полученного приза, в нашем случае бездепозитного. Число ставок роли не играет — принципиально лишь набрать необходимую, пропорциональную сумме поощрения. <a href=http://filmkachat.ru/>1×слот регистрация в 1×slots casino</a> <a href=http://bedfordfalls.live/read-blog/135761_professional-3d-furniture-design-from-concept-to-creation.html>http://bedfordfalls.live/read-blog/135761_professional-3d-furniture-design-from-concept-to-creation.html</a> При подмоги такового поощрения оператор может кроме завлекать посетителей, которые раньше проявляли активность на сайте, но по какой-то основанию перестали играть. В этом случае промокод высылается пользователю по электронной почте либо в виде SMS.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 $. Если выдаются фриспины, их количество изредка выше нескольких 10-ов даровых вращений. 1×slots регистрация 1×slotscasino 56 online <a href=http://smol-sport22.ru/index.php?subaction=userinfo&user=alivepedigree55>http://smol-sport22.ru/index.php?subaction=userinfo&user=alivepedigree55</a> Онлайн-казино тщательно продумывают бонусные условия, коие необходимо изучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и другие лимитирования.Все обожают получать презенты. Согласитесь, практически любой играющий человек несомненно необъятно рад, в получит безвозмездный подарок для игры в интернет казино просто за регистрацию либо же приз за внесенный депо, например именуемые приветственные призы для новых игроков. Соответственно эти онлайн клубы станут более модны и преимущественны у игроков при выборе казино для игры. Топ казино постоянно обновляется и добавляются свежие и интересные игровые клубы с привлекательной бонусной политикой и всеми вероятными прерогативами, к коим относятся эти бонусы как фриспины за регистрацию, валютные бездепозитные бонусы, еще великодушные бонусы за внесенный депо.
1хслотс регистрация в 1×slots casino
1×slots казино зеркало Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом прибыли присутствуют на этой страничке. Посетитель возможность расценить обстоятельства получения и начать играть на средства без внесения депозита. При этом игроку принципиально понимать, на каких условиях и какими способами он сможет исключить полученный выигрыш. Для сего нужно расценить перечень подключенных платежных систем. <a href=https://www.feeder.mobi/members/michaelkig/profile/>https://www.feeder.mobi/members/michaelkig/profile/</a> 1×slots зеркало проходить регистрацию это отличный вариант Чтобы играть безвозмездно на настоящие средства в казино, не всегда довольно просто зарегистрироваться. Иногда нужно выполнить дополнительные действия.
1×slots официальный сайт скачать на айфон
<a href=http://yarkz.ru/index.php?subaction=userinfo&user=moaninggown23>http://yarkz.ru/index.php?subaction=userinfo&user=moaninggown23</a> Вы скорее, например все предпочитаете получать презенты и бездепозитные бонусы казино. Игорные дома взяли в повадку одаривать гэмблеров приятными призами. Стать владельцем приветственного подарка можно за творенье профиля либо пополнение счёта. Второй вариант больше увлекательный, так клубы готовы удвоить депо! Но случае вы новичок и лишь знакомитесь с миром азарта, другого пользуйтесь бонусом за регистрацию.Каждая игровая перрон отличается условиями по получению и отыгрышу бездепов. В правилах детально расписаны временные рамки, за которые надо(надобно) прокрутить вейджер. Также не забывайте тему наибольший размер ставки и наивысшую необходимую выплаты. С другой стороны, дабы получить бездепозитные призы казино, достаточно потратить не более 1 минуты. 1×slots официальный зеркало
1×slots официальный зеркало рабочее
Поспешите зарегистрироваться на официальном сайте Клубника, дабы быстро получить 33 безвозмездных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, замечена реальный шанс победу! <a href=http://yamato-ryu.ru/communication/forum/index.php?PAGE_NAME=message&FID=1&TID=45663&MID=10411&sessid=69441e9d2fc95a08d351f59ef6b37081&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1×slots зеркало регистрация</a> Выигрыши с призов без инвестициям всегда привязаны к притязанию по ставкам и имеют быть обналичены лишь в выполнения этих притязаний.Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют важную информацию о not the slightest down payment bonuses и других услугах. 1×slot рабочее зеркало <a href=https://sklad-slabov.ru/forum/user/7367/>https://sklad-slabov.ru/forum/user/7367/</a> Если вы новичок в этом деле и только попали в неизведанную вами область пыла — счет предложений как бездепозитные призы без пополнения.Прежде всего, не запамятовывайте регулярно заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом рассматривают наиболее занимательные предложения водящих игорных порталов.
1×slots официальный demo регистрация в 1×slots casino
<a href=https://www.9lewan.com/space-uid-10667.html>https://www.9lewan.com/space-uid-10667.html</a> На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению сего медли, Вы не можете активировать и получить бездепозитный приз.Бездепозитные призы за регистрацию в игровых автоматах для владельцев онлайн-казино являются долею маркетинговой кампании, направленной на повышение аудитории сайта. Так они продвигают свои бренды и завлекают свежих посетителей. 1×slots зеркало проходить регистрацию это отличный вариант Даже не выиграв солидную необходимую, игрок увлекательно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-либо денежных рисков. Быть в курсе наихороших акций с. Достаточно регулярно учить перечень свежих онлайн казино с выводом приза без депо в этом разделе.
<b>Смотреть еще похожие новости:</b>
<a href=http://u0382101.isp.regruhosting.ru/index.php/forum/general-questions-and-how-tos/68883-otzyvy-o-tovarakh?start=19875#165143>1хслотс официальный сайт зеркало</a>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=368583>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a>
<a href=http://sz.80lvl.ru/viewtopic.php?f=8&t=3099>1×slots регистрацию процедура займет всего лишь</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Промообъявления от казино мешают реальной картины и направлены на вербование внимания юзеров. Понять, насколько высоки шансы остаться в плюсе, позволит собственный анализ условий предложения: Многие новенькие колеблются, собственно поощрительный приз не нужно будет возвращать, в случае они выиграли у казино. Это полностью безопасно и надежно. Выводя выигранные средства, игрок просто останавливает свое роль в игре и утрачивает уникальную вероятность – даром наращивать личное вещественное положение.
#1835 Charlesgunnyhttp://filmkachat.ru
1×slots casino online регистрация
Классическая разновидность приза за творение аккаунта. Его превосходство заключается сомнений, что заказчик имеет других подбирать аппараты и делать ставки в них. Иногда перечень игровых автоматов ограничен оператором, но все одинаково это никакого, чем один-единственный дешевый слот, как когда с использованием фриспинов.Иногда виде бездепа, казино дарит минимальный приз (до 50 рублей), из-за которого надо заморачиваться. <a href=http://filmkachat.ru/>1хслотс 1хслотс регистрация перейти на 1×slots</a> Некоторые клубы механически начисляют приз на аккаунт игрока в исполненья условий получения, хотя бывают истории, когда бонус нужно активировать игроку самому. Есть несколько способов активации бонуса:Перечисленные повыше главные характеристики сочетают фактически любой приз и являются стереотипными для бездепозитных бонусных начислений в казино. <a href=https://s.id/kalinka0588>https://s.id/kalinka0588</a> Игрокам не следует принимать приветственный приз как гарантированный метод получить крупный выигрыш, хотя это отличная вероятность без расходов оценить перечень казино.Эффективность бездепов виде рекламного прибора расценили многие операторы. Малоизвестные площадки употребляют такие акции, дабы быстро набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны неизменных посетителей. Не все сайты, дающие презенты без депо, рекомендованы к этой. За привлекательным промоописанием все скрываться невыполнимые обстоятельства отыгрыша и подводные камешки. 1×slots регистрация 1×slots casino 777 online <a href=https://lavteam.org/user/Porsedropsa/>https://lavteam.org/user/Porsedropsa/</a>
1×slots регистрацию более популярный вариант это
Автоматы непопросту числятся самым модным азартным развлечением. Чтобы освоить управление и правила, понадобится всего несколько мин. Ваша задачка устроить ставку, найти число трудящихся линий и возможно вертеть тамбур. Если на выпадет выигрышная композиция – вы выиграли! С данной задачей вас посодействуют управится бездепозитные призы казино. 1×slots казино мобильная версия Как правило, при выводе финансов, от играющего требуется лишь устроить минимальный лепта для того, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом собственный счет.Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом прибыли присутствуют на данной странице. Посетитель возможность оценить условия получения и начать выступать на деньги без внесения депозита. При данном игроку важно осознавать, на каких условиях и какими способами он сможет вывести приобретенный выигрыш. Для этого нужно расценить перечень подключенных платежных систем. <a href=https://analsex.tube/user/StevenHix/>https://analsex.tube/user/StevenHix/</a> Проверка занимает от нескольких мин. До нескольких дней, профессионалы техподдержки могут запросить вспомогательные документы либо инициировать краткое общение по Skype.Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных бонусов принимаются достаточно высочайшие притязания. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до ста раз в игровых автоматах. Например, в игрок получил безвозмездно 10 долларов, то необходимо несомненно отыграть их, поставив одну тысячу спинов по одному доллару любой. Стоит обозначить(означить), что не все казино выделяют возможность выступать на бонусы и не во всех развлекательных заведениях идентичные верховодила для отыгрывания. Некоторые казино запрещают выступать на призы в блекджек либо ограничивают ставки до 5 %, что значительно наращивает в десятки раз число необходимых игр. сайт 1× slots casino Онлайн-казино тщательно продумывают бонусные условия, коие нужно изучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и лимитирования.Мы рекомендуем не открещиваться от подобных услуг узнаваемых казино. Выделите некоторое минут на регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сегодня удача несомненно на вашей стороне!
1×slots casino регистрация 1×slotscasin online
Для вывода средств бонус надо(надобно) будет отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариациями отыгрыша бездепозитного приза до его получения, дабы избежать конфликтных обстановок.Oтыгpaть приз с обозначенным вeйджepом, чтобы необходимо сдeлaть cтaвoк нa cумму, превышающую размер бонуса в количество раз. Фриспины. Бесплатные вращения предусмотрены для использования в видео-слотах. Внимательно читайте условия – они часто выдаются для некоторых машин. В зависимости от клуба вам делать определенное число ставок. Кстати, современные игорные дома выделяют вероятность заводить «одноруких бандитов».Подарки на определенные даты отличаются условиями получения. Если одобрение начисляют игроку на денек рождения, то сумма обычно зависимости от совместного объема депозитов последний год. <a href=http://msfo-soft.ru/msfo/forum/user/44562/>http://msfo-soft.ru/msfo/forum/user/44562/</a> Чаще всего, модные сервисы, эти как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное верховодило. Финансовые свои выводятся только через ту платежную систему, которой успех для пополнения депозита. Если же игрок получил бездепозитный покерный приз, требуется восполнить счет на минимальную сумму, кот-ая сочиняет обыкновенно десять $. 1×slots зеркало регистрация в 1×slots casino Фриспины без депозита или вспомогательные свои помогут поближе познакомиться с игровой платформой и её функциями. За счёт даров возможно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради игры против живых крупье.
1×slots сайт
Ну и естесственно же, для казино бездепозитные призы выгодны с имиджевой стороны: схожая добродушие увеличивает уровень лояльности клиентов к компании. <a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=50899>1×slots зеркало подтвердит вашу регистрацию если говорить</a> Когда речь идет о получении бездепозитных призов в казино, в первую очередь направьте на следующие условия: 1×slots зеркало рабочее <a href=http://malina-seo.ru/index.php?subaction=userinfo&user=ugyqocace>http://malina-seo.ru/index.php?subaction=userinfo&user=ugyqocace</a> В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, необходимо обратиться в службу через лайв-чат на веб-сайте казино.
1×slot казино зеркало
Бездепозитные бонусы в казино без пополнения 2022 — это определенная сумма денег либо valinomycin spins вращения, коие предоставляются первым постояльцам за регистрацию на веб-сайте казино в виде бездепозитного приза, и дает вас вероятность с казино без пополнения опробовать предложения (игр), с последующей привилегией вывода средств при исполненьи всех установленных верховодил.Такой казино приз без депозита за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это словно какая-то конспирация одобрения под бездепозитный. Суть всего этого сводится к что, этому, что игроку на час выдается, к примеру, 1000 долларов, а реклама повторяет о том, что каждой выигрыш можно несомненно в забыть при себя. Но случае играющий всерьез отнесется к данному предложению, то он просто растеряет время. Ведь геймеру надо(надобно) будет выступать не в основном аккаунте, ну тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (даже всей тысячи) в управляла вступят конкретные обстоятельства, где несомненно сказано, собственно максимальной суммой победы возможность быть лишь двести $ и деньги возможно применять только в бонуса на 1-ый вклад с вейджером 25 от суммы гонорары плюс сам депозит. По итогу получится, что игрок выигрывал для 200% приз с вейджером на конкретную необходимую. Короче разговаривая, это все не стоит вашего медли. <a href=http://1optomed.ru/bitrix/click.php?goto=http://charles.by/bitrix/redirect.php?goto=http://svetmarket-msk.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/snZsmAjlxSP>http://1optomed.ru/bitrix/click.php?goto=http://charles.by/bitrix/redirect.php?goto=http://svetmarket-msk.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/snZsmAjlxSP</a> Активация по промокоду используется в различных видах бездепов. Если речь о приветственном призе, то комплект символов можно узнать на крупнейшей страничке, в регистрационной форме или письме, которое отчаливает пользователю для подтверждения e-mail. Акции все проводиться вместе с партнерскими площадками. Обычно код располагается на постороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется одноразовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном кабинете или начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем важный код для активации в описании каждого промо. 1хслотс регистрация в 1×slots casino Такие одобрения дозволяют безвозмездно протестировать новое казино, разобраться с игровым ходом онлайн слотов, заработать и вывести небольшую необходимую средств.
<b>Смотреть еще похожие новости:</b>
<a href=https://bestshop.link/threads/1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D0%BC%D0%BE%D0%B1%D0%B8%D0%BB%D1%8C%D0%BD%D0%B0%D1%8F-%D0%B2%D0%B5%D1%80%D1%81%D0%B8%D1%8F-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE.308/>1хслотс мобильная версия зеркало</a>
<a href=http://sofanatki.ekafe.ru/viewtopic.php?f=1&t=2495>1×slots регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро или 20 $. Если выдаются фриспины, их количество редко выше нескольких 10-ов бесплатных вращений.
#1836 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet на андроид сайт pin up casino <a href=https://specreporter.com/>пин casino</a> гама казино почему в казино нет часов <a href=https://res-publika.com>porno Алена Косторная (фигурное катание)</a> сайт казино зеркало сколько казино 1×bet скачать бесплатно 1×bet слоты официальный сайт порно с Елена Никитина, скелетонистка порно с Антропова Валентина Викторовна букмекерская контора официальный сайт
DiskiPlus porno Катерина Шпица DiskiPlus бесплатно играем казино <a href=https://diskiplus.ru/>DiskiPlus 1×bet скачать приложение</a> DiskiPlus официальные букмекерские конторы скачать DiskiPlus 1×bet слоты официальный сайт <a href=https://diskiplus.ru/>DiskiPlus зеркала казино</a> DiskiPlus мобильные букмекерские конторы DiskiPlus casino online зеркало DiskiPlus porno Игорь Акинфеев (футбол) DiskiPlus балтбет букмекерская контора DiskiPlus inform@rucriminal.info DiskiPlus Кузнецова Анна Юрьевна порно DiskiPlus porno Светлана Ходченкова
#1837 Charlesgunnyhttp://filmkachat.ru
1×slots официальный регистрация
Главное превосходство спинов – возможность изучить разные слоты. Также получится насладиться бонусными раундами, испытать фортуну в риск-туре и преумножить выигрыш за счёт особых знаков. Однако не только игровой процесс заслуживает внимание, так другого, как сосредоточиться на реальном выигрыше. <a href=http://filmkachat.ru/>1хслотс 1хслотс регистрация перейти на 1×slots</a> <a href=https://forum.index.hu/User/UserDescription?u=2065076>https://forum.index.hu/User/UserDescription?u=2065076</a> x1 slots регистрация в 1×slots casino <a href=http://login.libproxy.vassar.edu/login?url=http://uvatregion.ru/bitrix/rk.php?goto=http://helmar-shoes.ru/bitrix/redirect.php?goto=https://telegra.ph/Kak-poluchit-vozvrat-gosposhliny-za-pasport-posle-otkaza-FMS-i-sovety-po-vozvratu-09–23>http://login.libproxy.vassar.edu/login?url=http://uvatregion.ru/bitrix/rk.php?goto=http://helmar-shoes.ru/bitrix/redirect.php?goto=https://telegra.ph/Kak-poluchit-vozvrat-gosposhliny-za-pasport-posle-otkaza-FMS-i-sovety-po-vozvratu-09–23</a>
1×slots зеркало на сегодня
<a href=http://kemsrr.forumex.ru/viewtopic.php?f=7&t=5920>1хслот официальный сайт зеркало</a> 1×slots официальный регистрация <a href=https://forum.lazarev.ru/memberlist.php?mode=viewprofile&u=160614>https://forum.lazarev.ru/memberlist.php?mode=viewprofile&u=160614</a> 1×slots casino регистрация 1×slots review live При правильном подходе бездепы — это отличный метод играть на деньги без траты личных средств. Есть несколько рекомендаций, следуя коим возможно извлечь максимум пользы из сходственных промоакций казино. Играть идет только на лицензированных площадках. Скриптовые веб-сайты не только врут с бонусными услугами, но и используют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах невозможно.С этими простыми советами любое казино с призом за регистрацию способно принести в разы больше выгоды и выгоды.
1×slots бонус за регистрацию
Если речь об неповторимых предложениях, возможность понадобиться регистрация в казино по ссылке с партнерского сайта.Можно. Вы всегда сможете отрешиться от получения бездепозитного бонуса за регистрацию в казино, же Вы не создадите ставку. Прибывшие на акк финансы бездепозитные призы предназначаются, в основном, только для свежеиспеченных пользователей, которые ранее не имели личного аккаунта в данном казино. Исходя из этого, если ранее у игрока был сделан депозит, то, по всей вероятности, у него больше не несомненно способности рассчитывать на получение такового приза в определенном заведении.Высокая конкуренция в сегменте азартных игр мотивирует операторов завлекать клиентов разнообразными акциями. Благодаря этому у посетителей бывает вероятность получить бонусы в казино за регистрацию без депозита. Воспользоваться этим предложением возможно, избегая процедуру внесения денег на игровой счет, просто активировав акк на веб-сайте. Наш гид по бездепам поможет выбрать самую симпатичную бонусную программку, разузнать управляла получения такого вознаграждения и воспользоваться им с наибольшей выгодой. <a href=https://sciencewiki.science/wiki/User:ThelmaTrainor>https://sciencewiki.science/wiki/User:ThelmaTrainor</a> Мы собрали и выпустили перечень превосходнейших бездепозитных казино с бонусами за регистрацию, которые гарантируют великодушные выигрыши и мгновенные выплаты. 1×slots зеркало регистрацию более популярный вариант это Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, all лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.
1×slots промокод при регистрации 2025
Отказ в прохождении верификации. Если клиент не хочет либо не предоставить документы, подтверждающие его лицо, профиль будет заблокирован совместно, вкупе со всеми бонусными начислениями.Эффективность бездепов в качестве маркетингового прибора расценили почти операторы. Малоизвестные площадки используют такие промоакции, дабы скоро набрать базу. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны неизменных гостей. Не все веб-сайты, дающие презенты без депо, рекомендованы к игре. За привлекательным промоописанием могут скрываться невыполнимые обстоятельства отыгрыша и подводные камни. Любой выигрыш по ставке выше установленного лимита несомненно являться недействительным. То есть ставка не будет засчитана при отыгрыше, ну случае выигрыша его сумма не поступит на счёт клиента — итог забавы будет полностью аннулирован. Мы советуем не отрицаться от сходственных предложений известных казино. Выделите несколько минут на регистрацию, получите приз и попробуйте его отыграть. Может быть, сейчас фортуна несомненно на вашей стороне! 1×slots официальный сайт зеркало <a href=http://pumarefrattari.com/index.php/component/k2/item/19869>http://pumarefrattari.com/index.php/component/k2/item/19869</a> У нас на сайте Вы найдете список бонусов без депо в испытанных казино и подробную информацию про как их получить и применять.Индивидуальные одобрения выдаются за совершение действий: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавленья или официального посетителя для ПК. В большинстве казино действуют программы преданности, присваивающие игрокам статусы за активность на сайте. Продвижение на грядущий степень нередко сопрягается выдачей бездепа.
x1 slots 1хслотс регистрация перейти на 1×slots
Но есть азартные заведения, готовые просто так вручить средства на игру. Для сего достаточно создать профиль. Чтобы исключить выигрыш, сначала нужно выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа.Да, у бесплатных призов есть дефекты. Прежде всего, они обычно небольшие. Кроме того, условия вейджера по ним практически строгие. Но все отсутствие риска проделывает их очень привлекательными для клиентов. Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного бонуса.Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша призов. Заведения практически устанавливают наивысшую ставку, возможную по условиям вейждера. <a href=http://www.svit-world.kiev.ua/user/BrianUtecy/>http://www.svit-world.kiev.ua/user/BrianUtecy/</a> казино 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=http://police.1stbb.ru/viewtopic.php?f=3&t=388>1×slots casino online регистрация</a>
<a href=http://rumproject.com/rumforum/viewtopic.php?f=23&t=5310>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<a href=https://mami-forum.de/forum.php>сайт 1× slots casino</a>
<a href=http://yonghengro.gain.tw/space.php?uid=1555574>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать аппарат или почту, показать индивидуальную информацию; При регистрации в том или ином интернет игральном заведении — вас дается один шанс испытывать свою фортуну не внося средства монеты. Замечу собственно эту поощрительную услугу предоставляют не все онлайн игровые площадки, а только великодушная середина(средина) из их. Которые мы подготовили для Вас в нашем перечне.
#1838 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slotscasino 56 online
Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, чтобы снова получить бесплатный приз. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ждет неминуемое наказание.Бездепозитные призы отличный вариант даровой игры в игровые автоматы. Многие пользователи сети не понимают, что в казино можно начать играть безусловно даром, а позже исключить выигрыш на банковскую карту либо электрический кошелек, другие не доверяют онлайн казино, а третьи успешно играют и выигрывают – и тотчас достаточно большие суммы. <a href=http://filmkachat.ru/>1х слот 1хслотс регистрация перейти на 1×slots</a> <a href=https://blog.naver.com/lexxeagle/223391406427>https://blog.naver.com/lexxeagle/223391406427</a> 1 x slots <a href=https://forumsadovodov.com.ua/memberlist.php?mode=viewprofile&u=66122>https://forumsadovodov.com.ua/memberlist.php?mode=viewprofile&u=66122</a> Бонус в казино без депо имеет различные разновидности: это может быть приветственный приз, акции в честь каких-либо праздничных или весомых дат, бонус за вербование свежих игроков, лояльность и получение VIP-статуса.
онлайн казино 1×slots
<a href=http://everestrolep.listbb.ru/viewtopic.php?f=38&t=17484>1×slots на любой вкус как пройти регистрацию</a> 1×slots казино зеркало <a href=https://google.cz/url?q=https://doctorlazuta.by/>https://google.cz/url?q=https://doctorlazuta.by/</a> 1×slots зеркало подтвердит вашу регистрацию если говорить Бездепозитные бонусы за регистрацию являются одним из самых популярных методов привлечения новых игроков в онлайн-казино, потому собственно они предоставляют игрокам возможность опробовать казино, более игровые автоматы, и вероятно, выиграть настоящие средства.Иногда операторы просят внесение малого депозита перед выводом для верификации платежного прибора. В некоторых казино этот депо кроме предстоит отыграть.
1×slots зеркало рабочее
Представьте момент, когда при ставке в 10 руб. Вы получите сходственное умножение. Миллион руб. За одно вращение, собственно абсолютно вероятно. Поэтому вопрос, сколько можно выиграть остаётся открытым. Предлагаем выяснить самостоятельно. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный приз и проверяйте фортуну в деле. Разумеется, вывести деньги довольно. Однако шансы есть у всех. Помните, что любые нарушения правил сведут на нет ваши усилия, и вы скорее останетесь без начисленного вам безвозмездного приза. Всегда изучайте управляла начисления и условия вейджера. По хоть вопросам, на которые вы имеет самостоятельно отыскать ответы, обращайтесь за объясненьям и саппорт.За привлечение друга ? в рамках партнерской программки клиент получает вознаграждение за вербование новых пользователей. <a href=http://hongtouwen.com/home.php?mod=space&uid=429406&do=profile>http://hongtouwen.com/home.php?mod=space&uid=429406&do=profile</a> Важно, удостоверьтесь никаких, собственно ранее не регились в выбранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи.В онлайне очень много скриптовых вебсайтов, которые принадлежат плутам. Их главная задача – заинтересовать гэмблеров, пообещав не только щедрые подарки, хотя и солидные выигрыши. Так что кое-какие сайты предлагают получить за регистрацию в $1 000. 1×slots зеркало Многие игроки, оценив функционал казино, остаются играть в нем и далее ? на это и нацелено каждое промо. Постоянные посетители заносят депозиты и делают ставки, обеспечивая долгосрочную прибыль оператора. То есть, казино раздают бездепы новым пользователям для формирования лояльной аудитории.
казино 1×slots официальный сайт
Разные казино имеют личные управляла по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высочайшие притязания. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до 100 один в игровых автоматах. Например, случае игрок получил бесплатно 10 $, то нужно будет отыграть их, поставив одну тыщу спинов по 1 баксу любой. Стоит обозначить(означить), что не все казино выделяют вероятность выступать на призы и не во всех развлекательных заведениях схожие правила для отыгрывания. Некоторые казино запрещают играть на призы в блекджек или ограничивают ставки до 5 %, собственно существенно наращивает в 10-ки раз количество нужных игр. Однако далеко не все ресурсы предлагают своим клиентам бездепозитные призы за регистрацию в казино. В большинстве случаев учтено одобрение на 1-ый депозит в объеме 100–200%. Это замечательная возможность преувеличить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш. 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=http://dz.luyizaixian.com/home.php?mod=space&uid=3287613>http://dz.luyizaixian.com/home.php?mod=space&uid=3287613</a> Максимальный объем ставки, кот-ый нельзя превосходить пока приз не несомненно полностью отыгран. В случае нарушения сего управляла, приз и выигрыш с него будут аннулированы.
1хслотс зеркало
B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. <a href=http://forums.escapefromelba.com/index.php?action=profile;u=138845>http://forums.escapefromelba.com/index.php?action=profile;u=138845</a> Доступность — бездепозитные призы в казино почаще всего предоставляются свежим игрокам, но посещают случаи, когда бонус имеют получить и действующие посетители. 1×slots официальный регистрация
<b>Смотреть еще похожие новости:</b>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=368939>1×slots бездепозитный бонус за регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Можно. Вы всегда можете отрешиться от получения бездепозитного приза за регистрацию в казино, же Вы не создадите ставку. Игры, в можно выступать на бонусные средства. Проверьте перечень игр, в можно играть на бонусные свои, возможно они Вам не понравятся и надо тратить своё время на эту промоакцию.
#1839 Charlesgunnyhttp://filmkachat.ru
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Принципиальным различием бесплатных призов от призов на депозит является недоступность надобности вносить деньги на аккаунт. Из-за этого их нередко называют бездепозитными (not the slightest deposit bonuses).Нет. Для получения бездепозитного бонуса в казино нужна неотъемлемая регистрация на веб-сайте. Играть в слоты бесплатно и без регистрации можно лишь в демо режиме. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots review live</a> Отзывы читателей о бонусных промоакциях посодействуют составить впечатление, но не забывайте о субъективности личных комментариев. <a href=https://www.bondhuplus.com/read-blog/137790>https://www.bondhuplus.com/read-blog/137790</a> Чтоб получить крупный выигрыш, избирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, коие доступны по условиям отыгрыша. 1×slots зеркало на сегодня <a href=https://backpacker-footsteps.com/backpacker-footsteps-forum/profile/henryalugs/>https://backpacker-footsteps.com/backpacker-footsteps-forum/profile/henryalugs/</a> Ниже указан важный список законных казино в Беларуси с призами на 1-ый депозит. Вы можете попасть на официальный вебсайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз.Фриспины предназначены для использования в видео слотах. Внимательно ознакомьтесь с условиями – частенько их выдают на некоторые автоматы. В зависимости от клуба, у вас получится сделать определённое количество ставок. Кстати, продвинутые игорные дома позволяют запускать каждых «одноруких злодеев».
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Да, у безвозмездных призов есть недостатки. Прежде всего, они обычно очень. Кроме такого, обстоятельства вейджера по ним практически строгие. Но все же отсутствие риска делает их довольно привлекательными для посетителей. <a href=http://yamato-ryu.ru/communication/forum/index.php?PAGE_NAME=message&FID=1&TID=44933&MID=9679&sessid=0c284305aa90c0f7d0a039a96c2f435e&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1×slots промокод при регистрации 2025</a> 1хслот скачать Заработать на бездепозитных призах за регистрацию в казино имеет любой пользователь, достигший совершеннолетия. <a href=http://supergame.one/home.php?mod=space&uid=63044>http://supergame.one/home.php?mod=space&uid=63044</a> Можно ли в одном интернет казино получить больше одного бонуса за регистрацию? Нет, например как в каждом онлайн казино есть управляла, к которым нужно держаться, не создавать два аккаута для получения призов, иначе несомненно блокировка обоих аккаутов, не пытайтесь перехитрить онлайн казино, бонус за регистрацию выдаеться один один 1 личику.Обычно для получения призов без депозита, казино выдвигает приклнные и вполне выполнимые условия, хотя есть ряд действий которые воспрещены и шансы повлечь за собой досадные последствия: 1хслотс зеркало Акции распространяются как на все игры казино, например и на ограниченный список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino прочие. Промо может охватывать разработки одного производителя. Бездеп не пересекается с другими акциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, изготовленные бонусными деньгами. Для идентификации платежных реквизитов игрока может потребоваться пополнение счета на наименьшую необходимую.
1×slots casino регистрация 1×slotscasino09k online
Вывод выигрыша с бездепозитных бонусов казино – великодушный презент от азартных клубов. Но дабы вывести собственный доход, необходимо выполнить ряд условий:Не сложно догадаться, что no deposit bonuses практически разу не случаются немаленькими. Чаще всего идет о пяти–тридцати долларах (или эквиваленте этой суммы в иной валюте). <a href=http://www.ritual-letichev.km.ua/user/Davidgop/>http://www.ritual-letichev.km.ua/user/Davidgop/</a> Таким образом, заведение пытается продемонстрировать себя своим потенциальным геймерам, а подобный рекламный ход как казино приз без депо за регистрацию привлекает довольно большое внимания к игорному заведению и обеспечивает постоянный струю новых гостей и будущих посетителей игрового онлайн клуба.Ещё одно распространённое акционное предложение – симпатичный подарок с неблаговидными требованиями. К примеру, клуб сулит $100 виде бездепа, но с вейджером х80 либо х100. Отыграть подобный вейджер практически невероятно и поэтому превосходнее концентрироваться на более заманчивых акциях. 1хслотс регистрация в 1×slots casino
скачать 1×slots на андроид мобильная версия
Бывают ли бездепозитные бонусы без вейджера? Бывают, случае у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино. <a href=https://kakofon.cz/forum/viewtopic.php?f=8&t=330&p=39130#p39130>1×slots казино зеркало</a> При регистрации сомнений или ином интернет игральном заведении — вас дается раз шанс испытать собственную фортуну не внося свои монеты. Замечу что эту поощрительную услугу предоставляют не все интернет игровые площадки, а лишь великодушная половина из них. Которые мы подготовили для Вас в нашем перечне.Объективные – размер бонуса, коэффициент и обстоятельства вейджера, необходимость внесения депо для вывода средств; 1×slots зеркало на сегодня <a href=https://images.google.gp/url?q=https://doctorlazuta.by/>https://images.google.gp/url?q=https://doctorlazuta.by/</a> Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских руб. В критериях акции указано, собственно вейджер бездепозитного приза х20. Поэтому, дабы отыграть бонус, игроку будет нужно устроить ставок на 35*20=700 рублей.Выбрать казино с бездепозитным бонусом. У нас на сайте представлен список наихороших онлайн казино, которые предлагают своим игрокам щедрые призы за регистрацию.
1×slots скачать на айфон
Бывают ли бездепозитные призы без вейджера? Бывают, случае у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино.При регистрации сомнений либо ином онлайн игральном заведении — для дается один шанс испытывать собственную удачу не внося средства монеты. Замечу что эту поощрительную предложение деют не все интернет игровые площадки, а лишь великодушная половина из их. Которые мы подготовили для Вас в нашем списке. Почти все игровые клубы просят свидетельство контактных данных игрока для получения бездепозитного бонуса. <a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=10676>http://www.predictive-datascience.com/forum/member.php?action=profile&uid=10676</a> x1 slots 1хслотс регистрация перейти на 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://www.fromrus.su/index.php?/topic/60072–1%D1%85-%D1%81%D0%BB%D0%BE%D1%82-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%B2–1×slots-casino/>1х слот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Доступные игры – В неких азартных играх возможно снизить математическое преимущество казино до нескольких десятых процента. В их количестве почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как управляло, в таких забавах ставки идут в зачет вейджера не всецело. Например, может предусматриваться только 50%. В неких забавах бездепозитные бонусы вообщем нельзя отыгрывать.
#1840 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора фонбет букмекерская контора бесплатно скачать <a href=https://res-publika.com>мобильные букмекерские конторы</a> пин ап казино сайт казино зеркало <a href=https://7club7.com/>букмекерская контора фонбет</a> букмекерская контора скачать приложение порно с Сергей Бобровский (хоккей) порно с Константин Тюкавин (футбол) casino зеркало сайта Юдаева Ксения Валентиновна порно смотреть фильм казино 1×bet скачать приложение
DiskiPlus casino игровой автомат DiskiPlus порно с Евгения Медведева <a href=https://www.diskiplus.ru>DiskiPlus pin up букмекерская контора</a> DiskiPlus букмекерская контора леонов DiskiPlus pin up casino скачать <a href=https://diskiplus.ru>DiskiPlus букмекерская контора без</a> DiskiPlus балтбет букмекерская контора DiskiPlus pin up casino зеркало DiskiPlus пин ап казино DiskiPlus винлайн букмекерская контора официальный сайт казино DiskiPlus скачать pin casino DiskiPlus inform@rucriminal.info
#1841 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino зеркало сегодня демо казино <a href=https://t.me/vchkogpu_ru>Матвиенко Валентина Ивановна порно</a> casino pin официальный 1win букмекерская контора <a href=https://www.ossetia.tv/>bet casino</a> 7k casino бонус про казино casino автомат казино 7k casino бонус retro casino Комарова Наталья Владимировна порно
DiskiPlus porno Александра Степанова, фигуристка DiskiPlus букмекерские конторы бет <a href=https://www.diskiplus.ru/>DiskiPlus казино вход</a> DiskiPlus up букмекерская контора DiskiPlus леон букмекерская контора <a href=https://www.diskiplus.ru/>DiskiPlus win win casino</a> DiskiPlus pin up casino пин DiskiPlus inform@rucriminal.info DiskiPlus gama casino DiskiPlus порно с Юлия Ефимова DiskiPlus Львова-Белова Мария Алексеевна порно DiskiPlus cometa casino DiskiPlus порно с Арина и Дина Аверины, гимнастки
#1842 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
Хотя бесплатные призы начисляются без депозита, не исключено, собственно вам понадобиться заносить средства. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь в такого, как свежий клиент раз пополнит игровой счет. <a href=http://filmkachat.ru/>1×slots зеркало</a> Вы не в коем случае ни чем не рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный приз, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс изучить игровые автоматы, научится регулировать менять ставки и полосы, изучать бонусные забавы и их выигрышные композиции, ну в конце концов просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные средства, которые возможно отыграть и исключить, но просто на демо счет, что, этим самым адреналин в крови более повысится а пульс забьется с частым ритмом!Каждый из бездепозитных призов без пополнения 2022 имеет свой определенный вейджер для отыгрыша, так же в каждом казино он устанавливается персонально — где то он х55 а где-то х30, повторюсь везде по различному! <a href=https://designaddict.com/community/profile/furniture-360-view/>https://designaddict.com/community/profile/furniture-360-view/</a> Существуют казино с бонусом за регистрацию, в довольно популярны фриспины в онлайн казино впоследствии регистрации в определенных играх. Они встречаются том чаще бесплатных поощрений или классических призов в казино без вложений. Например, игрок регистрирует счет, на кот-ый начисляются безвозмездные забавы, бонус за регистрацию повторяющий безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса игрок выигрывает настоящие деньги, которые в последствии можно успешно вывести из заведения на свою платежную систему. То есть, есть шансы вывести свои без рисков своими финансами. Регистрация, за компьютерные получит призы, займет несколько, а спасибо данному можно прирастить пять евро поощрений до тыс. И без всяких заморочек вывести их. 1×slots casino зеркало <a href=http://gsm-standart.com/bitrix/redirect.php?goto=http://exim.by/bitrix/redirect.php?goto=http://artstep.com.ua/bitrix/click.php?goto=https://teletype.in/@urid_pomosh/6gD2AtyrMlf>http://gsm-standart.com/bitrix/redirect.php?goto=http://exim.by/bitrix/redirect.php?goto=http://artstep.com.ua/bitrix/click.php?goto=https://teletype.in/@urid_pomosh/6gD2AtyrMlf</a> Для тех, кто только взвешивает испытывать свою фортуну, а также для проф игроков, разыскивающих новые площадки для выигрышей, водящие лицензированные казино часто организуют разные промоакции, и одно из лучших услуг прошедшее время – как для начинающих, так и для проф игроков – бездепозитный приз за регистрацию.Для получения бездепа нужно пригласить в игру по реферальной ссылке нового клиента: он должен зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и восполнить счёт на необходимую, указанную в критериях акции.
1×slots регистрация то дальше необходимо пройти
Можно. Вы практически можете отрешиться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не сделаете ставку.Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=50928>1хслотс рабочее зеркало</a> 1хслотс казино зеркало <a href=http://www.kiripo.com/forum/member.php?action=profile&uid=1172193>http://www.kiripo.com/forum/member.php?action=profile&uid=1172193</a> Помните, собственно в неких забавах сумма ставки идет в зачет вейджера только отчасти. Так, в настольных и карточных забавах лишь от 5% до 50% суммы ставки считаются как отыгранные деньги, в то время как в слотах идет в зачет все one hundred percent суммы.На нашем веб-сайте Вы отыщите список актуальных свежих бездепозитных бонусов в казино 2022 года. Также, есть много неповторимых предложений, которые доступны только посетителям нашего сайта после регистрации по нашей ссылке или активации особого промокода. 1×slots официальный сайт зеркало рабочее Когда речь идет о денежных бонусах, казино всегда устанавливают условия вейджера, коие необходимо выполнить, чтобы исключить выигрыш.Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, the decision зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.
1× slots официальный
Прямо сейчас отберите бесплатные вращения за регистрацию без депозита и начинайте коллекционировать призовые композиции ради солидных выигрышей! А ознакомиться с свежими онлайн казино, Вы сможете помощью бонусов с выводом прибыли, которые Вы сможете получить без депозита.Не стоит путать забаву в демо и использование призов. В демонстрационном режиме игрок возможность расценить механику слота, сюжет и оформление. Но игра проводится на относительные кредиты, поэтому отсутствует основное ? чувство азарта. Активируя промокод либо фриспины, клиент по-прежнему не тратит свои средства на игровые автоматы, хотя может сорвать настоящий куш! <a href=https://www.fortressrisk.com/user/kennethanottkennethanott/>https://www.fortressrisk.com/user/kennethanottkennethanott/</a> Подтверждение персональной инфы. Все казино настоятельно от посетителя пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и наличие у пользователя иных аккаунтов (мультиаккаунт запрещен).Выигрыши с бонусов без вложений всегда привязаны к требованию по ставкам и все быть обналичены только после выполнения данных требований. казино 1×slots Перечисленные выше главные свойства сочетают фактически каждый бонус и являются стандартными для бездепозитных бонусных начислений в казино.Постарайтесь отыграть вейджер, чтобы появилась вероятность оставить заявку на выплату. Кстати, на всех сайтах, представленных в списке, доступны современные платёжные приборы. Вы сможете получить выигрыш на электронной кошелёк, карту, телефонный.
1×slots регистрация 1×slots casino c2d ru
А ознакомиться с свежими интернет казино, Вы сможете за счет бонусов с выводом выгоды, коие Вы сможете получить без депо.При забаве на бонусные свои запрещается выступать в игровые автоматы с современным джекпотом и игры из радела live casino. Кроме такого, кое-какие казино выделяют бездеп на один или несколько конкретных слотов, и в иных забавах Вы не сможете на их выступать. 1хслот зеркало сайта <a href=http://krasna-devica.ru/forum/puteshestviya/5434-s-turciey-pohozhe-oblom-gde-otdyhat-budem#comment-32915>http://krasna-devica.ru/forum/puteshestviya/5434-s-turciey-pohozhe-oblom-gde-otdyhat-budem#comment-32915</a> В настоящее время получить приз за регистрацию в казино очень просто. Почти каждый игорный жилище с готовностью предоставит деньги либо безвозмездные вращения. Многие игроки используют данным и не стесняются региться в каждом клубе с выгодными условиями. Кстати, это отличная вероятность выдумать выигрышную тактику и сорвать куш.
1хслотс регистрация в 1×slots casino
Индивидуальные поощрения выдаются за совершение действий: подписку на аккаунты площадки в социальных сетях, установку мобильного приложения либо официального посетителя для ПК. В большинстве казино срабатывают программки преданности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на грядущий уровень часто сопрягается выдачей бездепа. <a href=https://bbs.wuxhqi.com/home.php?mod=space&uid=1452236&do=profile&from=space>https://bbs.wuxhqi.com/home.php?mod=space&uid=1452236&do=profile&from=space</a> Важно, убедитесь в том, собственно ранее не регились в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи.Частенько новенькие не разумеют, как активировать подарки или вывести первый выигрыш. Для подобных случаев наша команда описала главные определения – что это фриспины, вейджер, как его отыграть, для нужно протекать верификацию. 1× slots зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://powercrop.it/chi-siamo/le-persone?page=131#comment-6565>1×slots зеркало на сегодня</a>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=100038&pid=367845#post_367845>1×slots рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Наличие у игрока 2 аккаунта. Запрещено создавать количество профилей для неоднократного получения бездепов.
#1843 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора бесплатно скачать Шевцова Татьяна Викторовна порно <a href=https://repost.news/>7k casino зеркало</a> porno Илона Маркова, хоккеистка porno Юлия Канакина <a href=https://repost.news/>champion casino</a> автомат казино casino вход 1×bet бесплатно ставки на спорт букмекерские конторы порно с Максим Глушенков (футбол) 7k casino зеркало рабочее казино сегодня
DiskiPlus порно с Никита Кучеров (хоккей) DiskiPlus казино ставка <a href=https://diskiplus.ru>DiskiPlus Нургалиева Эльвира Рамиловна порно</a> DiskiPlus porno Дарья Мороз DiskiPlus Преподобная Надежда Александровна порно <a href=https://www.diskiplus.ru>DiskiPlus букмекерская контора вход</a> DiskiPlus 1×bet официальный сайт 1×bet xyz DiskiPlus Семёнова Татьяна Владимировна порно DiskiPlus порно с Илюшникова Татьяна Александровна DiskiPlus Окладникова Ирина Андреевна порно DiskiPlus букмекерская контора фонбет DiskiPlus Москалькова Татьяна Николаевна порно DiskiPlus casino
#1844 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
приложения букмекерских контор на андроид казино рублях <a href=https://krtka.info/>casino</a> порно с Алексей Миранчук (футбол) casino betting <a href=https://kompromat1.online/>up casino скачать</a> рабочие зеркала казино букмекерская контора фонбет Светлана Ходченкова букмекерская контора без 1×bet официальный xbet казино в россии kent casino
DiskiPlus casino на телефон DiskiPlus официальная казино <a href=https://www.diskiplus.ru>DiskiPlus porno Анастасия Янькова, боксерка</a> DiskiPlus порно с Абрамченко Виктория Валериевна DiskiPlus пина casino <a href=https://diskiplus.ru/>DiskiPlus букмекерская контора без</a> DiskiPlus Разуваева Ксения Денисовна порно DiskiPlus бесплатное казино DiskiPlus порно с Алина Загитова, фигуристка DiskiPlus porno Нина Пирогова, хоккеистка DiskiPlus лучшая казино DiskiPlus Лут Оксана Николаевна порно DiskiPlus автомат казино
#1845 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slotscasino09k online
На нашем сайте Вы отыщите перечень актуальных свежих бездепозитных бонусов в казино 2022 года. Также, есть много неповторимых предложений, коие доступны лишь посетителям нашего сайта после регистрации по нашей ссылке либо активации особого промокода.Приглашаем делиться воззрениями о бонусах. Это поможет другим пользователям подбирать наиболее выгодные предложения. <a href=http://filmkachat.ru/>1× slots casino зеркало</a> Иногда операторы настоятельно внесение малого депо перед выводом для верификации платежного инструмента. В некоторых казино этот депозит того светит отыграть.Прежде всего, не забывайте периодически заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом оценивают наиболее интересные предложения водящих игорных порталов. <a href=https://link.space/@lexxeagle>https://link.space/@lexxeagle</a> Не советуем сломя голову хвататься за различные предложения получения средств без инвестициям. Вполне вероятно, собственно бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на 1-ый взор. Альтернативой считается казино приз за депозит. Мы предлагаем вас пару советов, спасибо которым у любого игрока будет возможность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег: 1хслотс 1хслотс регистрация перейти на 1×slots <a href=https://forumniebiescy.pl/memberlist.php?mode=viewprofile&u=71234>https://forumniebiescy.pl/memberlist.php?mode=viewprofile&u=71234</a> Обычно бездепозитные промоакции от казино, приходят на эл. Почту в деньки рождения либо дни. В неких онлайн казино возможно обратиться в чат и как неизменному игроку, вероятно для предложат бездепозитное предложение.
онлайн казино 1×slots
Да, у бесплатных призов есть дефекты. Прежде всего, они обычно небольшие. Кроме того, условия вейджера по ним постоянно строгие. Но таки недоступность риска делает их очень привлекательными для клиентов.Практически все онлайн казино с бездепозитным призом за регистрацию учитывает программку преданности — систему поощрения постоянных клиентов, кот-ая состоит из колличества значений. При достижении игроком очередного значения на его счёт поступает бонус. Чем повыше уровень — что, этим щедрее приз. <a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=166061&result=reply>1×slots регистрацию более популярный вариант это</a> 1× slots зеркало Также, в этом случае нужно доказать свой номер аппарата, чтобы код, приобретенный в смс-сообщении от клуба ввести в специальное фон в собственном офисе игрока. <a href=http://bbs.totoroclub.com.cn/home.php?mod=space&uid=381373&do=profile>http://bbs.totoroclub.com.cn/home.php?mod=space&uid=381373&do=profile</a> 1хслотс официальный сайт зеркало
1хслотс регистрация в 1×slots casino
<a href=https://smartlocksmiths.co.uk/forum/profile/HansTang7>https://smartlocksmiths.co.uk/forum/profile/HansTang7</a> У каждого игорного заведения средства управляла и обстоятельства. Но, дабы получить призы, нужно выполнить стереотипные деянья:Даже не выиграв крупную необходимую, игрок интересно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-либо финансовых рисков. Быть в курсе наихороших акций легко. Достаточно регулярно изучать список свежих интернет казино с выводом бонуса без депозита в этом разделе. зеркло казино 1×slots При игре на бонусные свои воспрещается выступать в игровые автоматы с современным джекпотом и забавы из радела exist casino. Кроме такого, кое-какие казино дают бездеп на один либо несколько определенных слотов, и в других играх Вы не можете на них играть.
1×slot рабочее зеркало
Первый образующийся вопрос, это, для выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают свежих игроков. Последним проще начать игру на деньги с дара за регистрацию. Им не нужно пополнять баланс и расходовать личные средства. Новички получают бесплатные спины либо свои на счёт. С их подмогою знакомятся с игровым ходом, крутят слоты и проделывают ставки в рулетке. Для получения выигрыша потребуется выполнить условия казино. Чаще всего игроку необходимо поставить определенную сумму, хотя теснее из личных денег. Она рассчитывается из общего размера выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, случае юзер выиграл 1000 рублей, а множитель составляет х30, исключить деньги возможно будет, сделав ставки на 30 000 рублей.Промообъявления от казино мешают реальной картины и направлены на привлечение внимания пользователей. Понять, как высоки шансы остаться в плюсе, позволит собственный тест условий предложения: Наиболее знаменитые гонорары среди гэмблеров – бездепозитные призы казино. Это не умопомрачительно, ведь возможно получить безвозмездные вращения или виртуальные кредиты, и при этом не придётся пополнять счёт, рисковать собственными средствами. Удастся насладиться разнородными веселиями и даже выиграть крупную сумму, избегая серьёзного риска.Самые популярностью способы вывода денег ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам подобии Neteller и Skrill, а используют криптовалютными кошельками. Вывод выигрышей возможность исполняться быстро либо занимать от нескольких часов до нескольких суток. 1×slots зеркало на сегодня <a href=http://147.47.238.227/bbs/board.php?bo_table=qna&wr_id=3703607>http://147.47.238.227/bbs/board.php?bo_table=qna&wr_id=3703607</a>
1×slots официальный регистрация
Минимального оборота. Этот предел уточняется вейджером — пока игрок не поиграет на установленную необходимую, вывод средств несомненно недосегаем. <a href=https://bookcrossing.ru/users/54035>https://bookcrossing.ru/users/54035</a> Ограничения по забавам. Администрация запрещает игрокам кое-какие игровые автоматы с бездепозитным бонусом, деньгами либо безвозмездными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда дробленье производится по виду игр. Например, отыгрыш вероятен на всех игровых аппаратах, но запрещен в настольных забавах и в разделе Live Casino. 1× slots официальный Выше мы предоставили глубокий набор самых свежих и своевременных бездепозитных бонусов в онлайн казино без пополнения на 2022 год, где продоставляется пользоваться каким ценным бездепозитным призом.
<b>Смотреть еще похожие новости:</b>
<a href=http://forums.indexrise.com/thread-25165-post-500884.html#pid500884>1×slots казино зеркало</a>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=398590>1×slot зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы – это исключительно интересная и более многообещающая промоакция интернет-казино. Они в превосходнее фри-спинов, потому собственно выплаты в безвозмездных вращениях не гарантированы, так композиции на барабанах игрового аппарата могут не сложиться.
#1846 Charlesgunnyhttp://filmkachat.ru
1× slots casino зеркало
При маленькой сумме приза рекомендуется выступать по низким ставкам, а применять максимальные какого-либо только что случае, если вейджер слишком большой, а время на отыгрыш крепко ограничено.С такими простыми советами каждое казино с призом за регистрацию способно принести в разы больше выгоды и полезности. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> <a href=https://events.com/r/en_US/event/floor-plan-to-3d-model-professional-conversion-services-london-february-962475>https://events.com/r/en_US/event/floor-plan-to-3d-model-professional-conversion-services-london-february-962475</a> Подтвердите регистрацию, чтобы активировать Бездепозитный бонус с выводом, потребуется наполнить собственный профиль. Заполните пустующие поля реальными данными о для.Начнём с того, собственно каждое промо за регистрацию подразумевает некоторые условия. Бездепозитные бонусы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, необходимая для исполнения условий. Пример, возымели благотворительные вращения и выиграли с них 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 рублей, неудачных либо выигрышных, важно. После исполнения, бонусный баланс перейдёт на настоящий и станет доступным к выводу. 1×slot зеркало рабочее регистрации на телефон придет <a href=http://maglik.ru/user/DarenJor/>http://maglik.ru/user/DarenJor/</a> Но есть игорные заведения, коие готовы просто например жертвовать средства на игру. Для сего довольно сделать профиль. Чтобы вывести собственный выигрыш, для поначалу необходимо выполнить обстоятельства отыгрыша, обозначенные в критериях получения бездепозитного депозита.Мы подготовили список, где есть постоянно животрепещущие и свежие бездепозитные призы казино, которые вам получить даром. Для наших пользователей есть особые предложения эксклюзивные призы, которые вы у не отыщите, их мы обозначили особой красной плашкой «Exclusive».
1×slots официальный сайт зеркало
Новички не обожают сразу же вносить депозит. Это обосновано отсутствием опыта и сомненьем. К счастью, дни можно получить бездепозитный приз за регистрацию в казино. Неважно собственно начисляет система – фриспины или кредиты. В всяком случае вы не рискуете своими сбережениями. Это отличная возможность запустить приглянувшийся видео разъем либо же испытать удачу в настольных играх. 1×slots регистрация 1×slotscasino09k online 4. Заберите подарок. Чаще всего приз активируется незамедлительно последствии регистрации. Но посещают истории, когда надо(надобно) забежать в личный кабинет либо написать в службу. <a href=http://nasamomdele.su/forum/memberlist.php?mode=viewprofile&u=65590>http://nasamomdele.su/forum/memberlist.php?mode=viewprofile&u=65590</a> 1хслотс зеркало Это тоже безвозмездные деньги, которые поступают на аккаунты свежеиспеченных в последствии регистрирования. А необыкновенность таких бонусов произведено никаких, собственно обретенные финансы обязательно идет применять в продолжении назначенного медли.В зависимости от интернет заведения любой из них может для предложить как бездепозитные деньги, так и бездепозитные фриспины, коие в удачной регистрации упадут для на ваш игровой баланс.
1×slots регистрация на сайте 1×slots ru com
<a href=http://kspcapital-am.ru/bitrix/redirect.php?goto=http://dcam.ru/bitrix/redirect.php?goto=http://halitovo.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/_QT0OTIYmt1>http://kspcapital-am.ru/bitrix/redirect.php?goto=http://dcam.ru/bitrix/redirect.php?goto=http://halitovo.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/_QT0OTIYmt1</a> Активация по промокоду используется в различных обликах бездепов. Если речь о приветственном призе, то комплект символов можно узнать на главной странице, в регистрационной форме либо послании, коие отправляется пользователю для доказательства адреса электронной почты. Акции имеют проводиться общо с партнерскими площадками. Обычно код располагается на постороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется одноразовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном офисе или начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем важный код для активации в описании каждого промо.Мы рекомендуем не отрицаться от сходственных услуг известных казино. Выделите несколько минут на регистрацию, получите приз и попробуйте его отыграть. Может быть, сегодня фортуна будет на вашей стороне! 1хслотс зеркало
1×slots зеркало рабочее
<a href=https://forum.ltp-team.com/topic/191133–1hslots-rabochee-zerkalo/>1хслотс рабочее зеркало</a> Бывают ли бездепозитные бонусы без вейджера? Бывают, в у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино. Зарегистрируйтесь. Для регистрации почаще всего достаточно установить свой номер телефонного и почтовый адресок, последствии чего ввести полученный код из СМС. Возможно, требуется указать промокод. В правилах акции будет написано, где его надо включать. Иногда это бы создавать при регистрации, иногда — теснее в сотворения собственного кабинета, на отдельной странице.На критериях отыгрыша бесплатных бонусов стопам тормознуть подробнее. С ними связаны аспекты, которые невозможно забыть без внимания. 1×slots коды <a href=https://latino-forex.com/members/234914-stevenzen>https://latino-forex.com/members/234914-stevenzen</a> Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном веб-сайте и выполните вход в собственный офис, дабы забрать бесплатные вращения с вейджером х40;К раскаянию, нет. Почти все казино, просят внесение но бы одного минимального депозита для вывода выигрыша с бездепозитного бонуса. Также учитывайте, собственно вывести средства разрешается только на что, эту платежную систему, с коей был изготовлен депо.
1×slots быструю регистрацию а также мгновенное
Если вы выбираете проверенное лицензионное интернет казино и выполните все обстоятельства получения бездепозитного бонуса, трудностей с получением презента у Вас не возникнет. В интернете слишком много скриптовых вебсайтов, коие принадлежат жуликам. Их главная задача – заинтересовать гэмблеров, пообещав столько великодушные подарки, хотя и солидные выигрыши. Так что кое-какие сайты предлагают получить за регистрацию числе $1 000. <a href=http://web.symbol.rs/forum/member.php?action=profile&uid=771331>http://web.symbol.rs/forum/member.php?action=profile&uid=771331</a> 1×slots зеркало проходить регистрацию это отличный вариант
<b>Смотреть еще похожие новости:</b>
<a href=http://okeyrp.listbb.ru/viewtopic.php?f=24&t=1685>1×slots сайт</a>
<a href=http://sofanatki.ekafe.ru/viewtopic.php?f=1&t=2116>1×slots регистрация 1×slots review live</a>
<a href=http://www.topboard.org/threads/1×slots-registracija-1×slots-review-live.630700/>1×slots регистрация 1×slots review live</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вейджер (wager) – это коэффициент, кот-ый демонстрирует на какую сумму необходимо устроить ставок, дабы вывести бонус из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего бонуса, Вам нужно устроить ставок на сумму: 500*70=3500 руб. Только всецело отыграв бонус, Вы можете исключить собственный выигрыш. Бывают ли бездепозитные призы без вейджера? Бывают, случае у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино.
#1847 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
лучшие бесплатные онлайн казино cometa casino <a href=https://slon-ru.com/>играющие казино</a> яндекс казино букмекерская контора леонов <a href=https://krtka.info/>1×bet официальный 1×bet xyz</a> 1×bet зеркало на сегодня сайт 1×bet слоты 1×bet скачать приложение на андроид porno Игорь Акинфеев (футбол) порно с Александр Большунов (лыжные гонки) гта онлайн казино Хорова Наталья Александровна порно
DiskiPlus автомат казино DiskiPlus порно с Баталина Ольга Юрьевна <a href=https://diskiplus.ru>DiskiPlus porno Юлия Пересильд</a> DiskiPlus казино смотреть онлайн DiskiPlus официальная казино <a href=https://diskiplus.ru>DiskiPlus букмекерская контора официальный сайт</a> DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz DiskiPlus сайты казино DiskiPlus порно с Алексей Миранчук (футбол) DiskiPlus фреш казино DiskiPlus Радченко Светлана Юрьевна порно DiskiPlus пина букмекерской конторы DiskiPlus лучшие онлайн казино
#1848 Charlesgunnyhttp://filmkachat.ru
рабочее зеркало 1×slots
В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая доля забавы. Важно, зачастую бездепозитные призы в казино выдаются с лимитированиями по наибольшей выплате. В среднем возможно рассчитывать на выгода в количество тысяч рублей. Как исключить выигрыш с бонуса без депо. Придётся подтвердить аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном доказательстве учетной записи спрашивайте в интернет чате либо прочтите в правилах. <a href=http://filmkachat.ru/>1× slots casino официальный сайт</a> <a href=https://www.neobienetre.fr/forum-bien-etre-medecines-douces-developpement-personnel/topic/real-estate-virtual-tours/>https://www.neobienetre.fr/forum-bien-etre-medecines-douces-developpement-personnel/topic/real-estate-virtual-tours/</a> 1×slots casino зеркало <a href=http://www.greenparking-dhd.com/bbs/board.php?bo_table=free&wr_id=202071>http://www.greenparking-dhd.com/bbs/board.php?bo_table=free&wr_id=202071</a>
1×slots официальный сайт скачать на айфон
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=71787>1×slots зеркало видели такую регистрацию на</a> 1×slots регистрацию процедура займет всего лишь На бонусные начисления могут быть установлены вспомогательные ограничения, коие Вы не сведению при отыгрыше. Пока бонус полностью не отыгран — деньги из казино не выводятся. <a href=https://strokedb.lighthouseapp.com/users/1962947>https://strokedb.lighthouseapp.com/users/1962947</a> 1×slots зеркало подтвердит вашу регистрацию если говорить
1×slots регистрация на официальном сайте
<a href=https://emiliooygo41852.newsbloger.com/30847155/ai-nude-revolutionizing-content-moderation-and-privacy-protection>https://emiliooygo41852.newsbloger.com/30847155/ai-nude-revolutionizing-content-moderation-and-privacy-protection</a> Так собственно основное отличие дара на депозит от бездепа – обязательное пополнение счёта. Вы сможете внести депо и преумножить стартовый капитал либо забрать бездеп и всем не придётся рисковать собственными сбережениями. Поспешите выполнить простые притязания, и администрация ресурса начислит щедрое одобрение!Список так нарекаемых «запрещенных территорий» прилагается к правилам бонусной программки игорного портала. Обязательно выясните, распространяются ли на вас подобные санкции. 1×slots промокод при регистрации 2025 Маркетинговая деятеля всех игорных интернет-клубов обязана одевать различный характер. И если вознаграждения на депозит работают чтобы, чтобы, чтобы провоцировать вносить депозиты и поощрять теснее имеющих юзеров, то бездепозитный бонус в казино либо бонус за регистрацию в казино, до всего, рассчитан на расширение базы покупателей.
1×slots зеркало
Подтверждение индивидуальной информации. Все казино требуют от клиента пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и наличие у пользователя других аккаунтов (мультиаккаунт запрещен).Игры, в можно играть на бонусные деньги. Проверьте перечень игр, в возможно выступать на бонусные средства, вполне они Вам не понравятся и не стоит тратить своё время на эту акцию. <a href=https://bestshop.link/threads/1×%D1%81%D0%BB%D0%BE%D1%82-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%B2–1×slots-casino.329/>1×слот регистрация в 1×slots casino</a> Составленный специалистами Casino.ru список онлайн-казино с бездепозитным призом дозволяет игрокам сопоставить спецпредложения разных операторов.Чаще всего, знаменитые сервисы, такие как MoneyBookers и WebMoney, еще MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно неотъемлемое верховодило. Финансовые средства выводятся только через что, эту платежную систему, которой огромной для пополнения депо. Если же игрок получил бездепозитный покерный бонус, требуется пополнить счет на минимальную необходимую, которая сочиняет обыкновенно десять $. Не сложно догадаться, собственно not the slightest deposit bonuses почти ни не бывают большими. Чаще всего речь о пяти–тридцати долларах (либо эквиваленте этой суммы в другой денежной).Это один из основных показателей привлекательности презента. С завешенным коэффициентом даже мастера не сумеют выполнить обстоятельства по отыгрышу. И не, насколько привлекательно смотрится предложение – бездепозитный приз казино в объеме $500 или $1 000. Чтобы новички попревосходнее вдумались, собственно же такое вейджер, мы разберём на образце. казино 1× slots официальный сайт <a href=http://biyografiforum.10tl.net/member.php?action=profile&uid=4016>http://biyografiforum.10tl.net/member.php?action=profile&uid=4016</a> Ещё одно распространённое акционное предложение – привлекательный презент с сомнительными притязаниями. К примеру, клуб сулит $100 в бездепа, хотя с вейджером х80 или х100. Отыграть подобный вейджер практически невозможно и потому какого-либо концентрироваться на больше интересных промоакциях.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Воспользоваться бездепом возможно не во всех игровых автоматах: казино и тут устанавливает ограничение для клиентов. Конечно, это можно посчитать некоторым неудобством для игрока, но справедливости отметить, собственно выбор автоматов всё одинаково остаётся довольно наибольшим.Игры, в можно играть на бонусные деньги. Проверьте список игр, в которых можно выступать на бонусные свои, вполне они Вам не понравятся и надо расходовать своё время на эту акцию. Чтоб получить крупный выигрыш, подбирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша.Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? <a href=http://kaptur.club/proxy.php?link=http://kafekrasoti-chita.ru/bitrix/redirect.php?goto=http://mimicotton.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/ra5m4YYvAKB>http://kaptur.club/proxy.php?link=http://kafekrasoti-chita.ru/bitrix/redirect.php?goto=http://mimicotton.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/ra5m4YYvAKB</a> Для подтверждения электронной почты, просто перейдите по интенсивной ссылке в послании, приобретенном от игрового заведения.Но а в вы уже профи по онлайн казино, кликаем на красноватую кнопку «Получить» и Вы автоматически перейдете в онлайн казино; 1×slot зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=170109&result=reply>1×slots зеркало на сегодня</a>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=148113&pid=371810#post_371810>1хслотс официальный сайт зеркало</a>
<a href=http://link.5nx.ru/viewtopic.php?f=5&t=12089>casino 1×slot</a>
<a href=http://thienduongcacanh.com/threads/1×slots-casino-online-registracija.12341/>1×slots casino online регистрация</a>
<a href=http://forum.drustvogil-galad.si/index.php?action=profile;u=121557>1хслотс мобильная версия зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.
#1849 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
рабочие зеркала казино лучшие букмекерские конторы <a href=https://glvk.guru/>как выиграть в казино</a> приложения букмекерских контор casino pin официальный <a href=https://sovsekretno.net/>pin up casino скачать</a> porno Ангелина Гончаренко, хоккеистка Радченко Светлана Юрьевна порно пин ап casino pin up casino зеркало порно с Голикова Татьяна Алексеевна win win casino порно с Каролина Севастьянова
DiskiPlus 1×bet скачать приложение DiskiPlus порно с Виктория Синицина, фигуристка <a href=https://diskiplus.ru>DiskiPlus порно с Аделия Петросян (фигурное катание)</a> DiskiPlus казино ли DiskiPlus 1×bet <a href=https://diskiplus.ru/>DiskiPlus порно с Георгий Джикия (футбол)</a> DiskiPlus 1×bet зеркало на сегодня DiskiPlus пин ап казино DiskiPlus промокод 1×bet DiskiPlus скачать casino на андроид DiskiPlus сайт винлайн букмекерская контора DiskiPlus букмекерская контора зенит DiskiPlus pin up букмекерская контора
#1850 Charlesgunnyhttp://filmkachat.ru
зеркала 1×slots
Верификация аккаунта. Лучше доказать лицо незамедлительно в регистрации, чтобы потом не было заморочек с выводом средств. Верификация возможность протекать 2-мя маршрутами: <a href=http://filmkachat.ru/>1× slots регистрация в 1×slots casino</a> В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая доля забавы. Важно, часто бездепозитные призы в казино выдаются с ограничениями по наибольшей выплате. В среднем возможно рассчитывать на выгода в некоторое тыщ рублей. Как исключить выигрыш с приза без депозита. Придётся доказать аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается каждым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате либо прочтите в правилах. <a href=https://acrobat.uservoice.com/forums/935259-acrobat-web-beta-internal/suggestions/49479029-%D0%BF%D1%80%D0%BE%D1%84%D0%B5%D1%81%D1%81%D0%B8%D0%BE%D0%BD%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2-%D0%BA%D0%B8%D0%B5%D0%B2%D0%B5-%D0%BE%D1%81%D0%BE%D0%B1%D0%B5%D0%BD%D0%BD%D0%BE%D1%81%D1%82%D0%B8-%D0%B8>https://acrobat.uservoice.com/forums/935259-acrobat-web-beta-internal/suggestions/49479029-%D0%BF%D1%80%D0%BE%D1%84%D0%B5%D1%81%D1%81%D0%B8%D0%BE%D0%BD%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2-%D0%BA%D0%B8%D0%B5%D0%B2%D0%B5-%D0%BE%D1%81%D0%BE%D0%B1%D0%B5%D0%BD%D0%BD%D0%BE%D1%81%D1%82%D0%B8-%D0%B8</a> Верификация аккаунта. Лучше подтвердить личность незамедлительно последствии регистрации, дабы позже не было заморочек с выводом средств. Верификация возможность протекать 2-мя путями: 1×slots подтвердит вашу регистрацию если говорить <a href=http://www.skypedeenglish.com/userinfo.php?uid=15202#>http://www.skypedeenglish.com/userinfo.php?uid=15202#</a> Вы наверняка, например все любите получать подарки и бездепозитные призы казино. Игорные дома брали в повадку одаривать гэмблеров приятными бонусами. Стать владельцем приветственного презента можно за создание профиля либо пополнение счёта. Второй вариант больше занимательный, так клубы готовы удвоить депо! Но в вы новичок и только знакомитесь с миром азарта, превосходнее воспользуйтесь призом за регистрацию.
1×slots актуальное зеркало
При использовании бездепозитным бонусом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют некоторое видов лимитов:Бездепозитные призы — это презенты от казино повторяющий бонусных средств или фриспинов для игровых автоматов, которые начисляются на аккаунт игрока последствии процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депозит не требуется. 1×slots официальный сайт зеркало Такой казино приз без депозита за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это словно какая-то конспирация поощрения под бездепозитный. Суть всего сего сводится к тому, собственно игроку на час выдается, например, 1000 $, а реклама утверждает то, что каждой выигрыш можно будет в будущем оставить при себя. Но случае играющий серьезно отнесется к данному предложению, то он просто растеряет время. Ведь геймеру нужно несомненно играть не главном аккаунте, а тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (в всей тыс. ) в управляла вступят конкретные условия, где несомненно сказано, собственно наибольшей суммой победы возможность быть лишь двести долларов и средства возможно применять только в качестве приза на 1-ый вклад с вейджером 25 от суммы вознаграждения плюс сам депо. По итогу получится, что игрок выигрывал себя 200% приз с вейджером на конкретную необходимую. Короче говоря, это все надо вашего времени.Высокая конкуренция в разделе азартных игр доказывает операторов привлекать клиентов различными акциями. Благодаря этому у посетителей бывает возможность получить бонусы в казино за регистрацию без депо. Воспользоваться этим предложением можно, минуя процедуру внесения средств на игровой счет, просто активировав акк на сайте. Наш гид по бездепам поможет избрать самую привлекательную бонусную программку, разузнать правила получения такового гонорары и воспользоваться им с наибольшей выгодой. <a href=https://m2bob.shop/forum/member.php?action=profile&uid=3831>https://m2bob.shop/forum/member.php?action=profile&uid=3831</a> Это раз из основных показателей привлекательности презента. С завешенным коэффициентом даже профессионалы не смогут выполнить обстоятельства по отыгрышу. И важно, насколько привлекательно выглядит предложение – бездепозитный приз казино в объеме $500 либо $1 000. Чтобы новенькие попревосходнее вдумались, собственно же это вейджер, мы разберём на образце. 1хслот 1хслотс регистрация перейти на 1×slots Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке необходимо восполнить счет в казино. Для депозитных призов, эта процедура не необходима, так как депозит теснее изготовлен.
скачать 1×slots на андроид мобильная версия
Для получения предоставленных бонусов вас пригодиться — ПК либо мобильное прибор, и остальное дело за малым. К примеру, игроку выдаются безвозмездные свои в заведении в объеме пятидесяти либо 100 долларов (вейджер на коие сочиняет 100х). То есть, каждому новоприбывшему игроку выскакивает манящая иллюстрация, кот-ая обещает выплату всех зачисленных компанией средств. Не стоит заострять на казино бонус за регистрацию без депозита с чрезмерно великой либо довольно маленькой суммой призов, потому что, и тщательно исследовав все обстоятельства, здесь вероятнее всего, несомненно какой-то подкол.Несмотря на то, собственно этот вариант стимуляции со стороны азартных платформ довольно востребован в сфере сходственных игр, далеко многим почитателям казино ведомо, что сами бездепозитные призы казино и как непосредственно их вполне эксплуатировать. <a href=https://princeofrubber.com/user-profile/travispew/?um_action=edit>https://princeofrubber.com/user-profile/travispew/?um_action=edit</a> Срок активации и время на отыгрыш. Зачисление денег либо фриспинов случается при активации в течение требовательно ограниченного периода, схожие притязания предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать приз некоторое дней либо числе месяцов. Другие выдают крупную необходимую за регистрацию, но время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером. 1х слот 1хслотс регистрация перейти на 1×slots Для ревизии применяются сканы паспортов, водительских прав, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь обнаружен в попытке ввести вспомогательный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в темный список. При игре на лицензионной площадке не бояться свидетельствовать достоверную персональную информацию (шифрование ликвидирует утечку персональных данных).
1хслот официальный сайт зеркало
Также, учите, что бездепозитный приз возможно вывести лишь том, случае, когда будут выполнены все условия отыгрыша.Практически все онлайн казино с бездепозитным призом за регистрацию предусматривает программку преданности — систему поощрения постоянных клиентов, кот-ая произведено из колличества уровней. При достижении игроком еще значения на его счёт поступает бонус. Чем выше уровень — что, этим щедрее приз. Раздача бонусов возможность быть приурочена к разным датам: календарные праздники, деньки рождения игроков, годовщина открытия казино и т. Д. Подарок выдается повторяющий средств, фриспинов либо баллов для скопления и размена на услуги оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода этой суммы придется выполнить ряд требований. 1×slots регистрация то дальше необходимо пройти <a href=https://stalker-worlds.games/user/JamesVus/>https://stalker-worlds.games/user/JamesVus/</a>
зеркло казино 1×slots
Бездепозитные призы – это самая интересная и более многообещающая акция интернет-казино. Они в лучше фри-спинов, поэтому что выплаты в бесплатных вращениях не гарантированы, ведь композиции на барабанах игрового аппарата все не сложиться. <a href=http://cjdog.com/home.php?mod=space&uid=130758>http://cjdog.com/home.php?mod=space&uid=130758</a> Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми промоакциями. Читайте о них в обзорах и на форуме.Бонус в казино без депозита содержит разные варианты: это может быть приветственный приз, акции в честь каких-то праздничных или важных дат, бонус за привлечение свежих игроков, преданность и получение VIP-статуса. 1×slots зеркало на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=https://minecraft.ru.net/user/Manuelsoarl/>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a>
<a href=https://krok.biz/forum/viewtopic.php?f=7&t=96968>1× слот зеркало</a>
<a href=http://fin-molitor.com/forum/viewtopic.php?f=2&t=541014>казино 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Ну и конечно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: подобная добродушие увеличивает степень преданности клиентов к фирмы. При отыгрыше бонусных средств, необходимо учесть срок деянья бонуса и время, которое дается на отыгрыш. По истечению заявленного медли, не отыгранный приз будет аннулирован.
#1851 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать букмекерскую контору на андроид казино ли <a href=https://www.ossetia.tv/>Ходнева Светлана Владимировна порно</a> ев казино букмекерская контора мостбет <a href=https://rhymes-punches.com/>букмекерскую контору пин</a> казино играть Ирина Горбачева 1×bet зеркало рабочее на сегодня new casino 1×bet на андроид порно с Гатагова Ольга Анатольевна porno Катерина Шпица
DiskiPlus порно с Ирина Сидоркова DiskiPlus pin up букмекерская контора <a href=https://diskiplus.ru>DiskiPlus Юдаева Ксения Валентиновна порно</a> DiskiPlus casino ru DiskiPlus casino бездепозитный <a href=https://diskiplus.ru>DiskiPlus 1×bet xbet</a> DiskiPlus букмекерская контора ставки DiskiPlus Шевцова Татьяна Викторовна порно DiskiPlus champion casino DiskiPlus pin ап casino DiskiPlus официальные зеркала казино DiskiPlus казино 5 DiskiPlus букмекерские конторы без депозита
#1852 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию более популярный вариант это
В интернет-сети постоянно возможно отыскать списки наиболее знаменитых и гарантированных поощрительных программ от известных онлайн-казино.Частенько новички не понимают, как активировать подарки либо вывести 1-ый выигрыш. Для сходственных случаев наша команда обрисовала главные термины – что это фриспины, вейджер, как его отыграть, зачем нужно протекать верификацию. <a href=http://filmkachat.ru/>1×slots зеркало на сегодня</a> Бездепозитный приз по промо-коду будет доступен для игры, только что случае когда Вы активируете специальный бонусный код в разделе с призами или укажите промокод при регистрации на веб-сайте. В некоторых случаях, кроме активации кода, придется доказать контактные данные игрока и наполнить анкету клиента. <a href=https://techbehemoths.com/company/cgifurniture>https://techbehemoths.com/company/cgifurniture</a> 1хслотс рабочее зеркало <a href=http://compuralsk.kz/bitrix/redirect.php?goto=http://vichuga37.ru/bitrix/click.php?goto=http://m4-shop.com/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/ZRJi2-Ja0mm>http://compuralsk.kz/bitrix/redirect.php?goto=http://vichuga37.ru/bitrix/click.php?goto=http://m4-shop.com/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/ZRJi2-Ja0mm</a> При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие можно посвятить ирге в казино.Итак, дабы благотворительные бонусные кредиты превратились в настоящие средства, которыми вы можете управлять по своему усмотрению, их надо(надобно) отыграть. Вейджер по уточнять в правилах онлайн-казино.
1×slots официальный сайт скачать
Выигрыши с бонусов без вложений практически привязаны к притязанию по ставкам и могут быть обналичены лишь последствии исполнения этих притязаний.Главным нюансом в появлении данных вознаграждений состоит в том, собственно пустив их в ход, геймер ничем не рискует и в последствии никому ничего не будет должен (не зависимо, получит ли он спасибо бонусам какой-нибудь выигрыш либо моментально спустит все лишь что прибывшие деньги). То есть, казино снабжает игрока возможностью на дармовой базе играть во всевозможные слоты и даже спонсирует игру. 1×slots casino регистрация <a href=https://stroyotzyvy.org/user/Steventhurb/>https://stroyotzyvy.org/user/Steventhurb/</a> Бездепозитные призы за регистрацию в игровых автоматах для хозяев онлайн-казино считаются частью рекламной кампании, направленной на повышение аудитории сайта. Так они продвигают средства бренды и завлекают свежих клиентов.Классическая разновидность приза за творение аккаунта. Его преимущество содержится в, что клиент имеет помощи выбирать аппараты и создавать ставки в их. Иногда перечень игровых автоматов ограничен оператором, хотя все равно это другого, чем единственный доступный слот, как если, тогда, с использованием фриспинов. 1×slots регистрация 1×slots review live Риск-игра по равным шансам – Также казино имеет воспрещать скорпулезно обстоятельства по отыгрышу счет раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких других забавах.Свежий бонус начисляется вид денежных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в использовании средствами, ну случае отыгрыша оператор может установить лимитирование на вывод средств.
1хслотс рабочее зеркало
B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.Прочитайте правила бонусной программы, какой желайте участие. Да, мы настоятельно рекомендуем устроить это до регистрации. Помните, что всевозможные нарушения верховодил сведут на нет ваши усилия, и вы скорее останетесь без начисленного для безвозмездного бонуса. Всегда изучайте верховодила начисления и условия вейджера. По любым вопросам, на которые вы имеет других отыскать ответы, обращайтесь за объяснениям и саппорт.Не желаете поиграть в азартные игры, не рискуя средствами деньгами, хотя получая в все выплаты? Подобную вероятность деют все лучшие порталы с азартными веселиями. В их количестве количество правдивых и надежных интернет-казино на русском языке. Они привлекают свежих юзеров различными поощрительными событиями, включая бездепозитные, или благотворительные бонусы. <a href=http://mydomlya.ru/redirect?url=http://optic-street.ru/bitrix/redirect.php?goto=http://stsl.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/DbLruw48K8U>http://mydomlya.ru/redirect?url=http://optic-street.ru/bitrix/redirect.php?goto=http://stsl.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/DbLruw48K8U</a> Призовые начисления без депозита шансы предоставляться для роли в турнирах онлайн казино. Потратить перечисленные деньги возможно необыкновенно в данной промоакции. Условия их проведения себе ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться этим предложением, чем выучить его управляла. 1×slots зеркало на сегодня Фриспины предназначены для использования в видео слотах. Внимательно ознакомьтесь с условиями – часто их выдают на некоторые автоматы. В зависимости от клуба, у вас выйдет сделать определённое число ставок. Кстати, продвинутые игорные жилища разрешают запускать каждых «одноруких бандитов».
1×slots акции
Некоторые казино шансы предлагать клиентам бездепы за подтверждение номера либо почты или репост на страничку в соц сетях. Шаг 4. Активация. Внимательно исследуйте условия, информацию по ограничениям и сроке деяния бонусного предложения. Разобравшись с правилами, возможно активировать бонус в личном офисе (время ? с использованием промокода) либо по запросу в саппорт.При подмоги такового одобрения оператор имеет кроме привлекать клиентов, которые раньше проявляли активность на сайте, хотя по некий основанию прекратили играть. В данном случае промокод высылается пользователю по электрической почте либо повторяющий SMS. Онлайн гемблинг развивается с каждым днем все больше и больше, свежие бренды создаются не по дням а по часам. Новые онлайн казино делают вступительные акции для игроков, чтобы, чтобы что бы зарекомендовать себя, и тем самым предлагают бездепозитные бонусы за регистрацию, собственно бы не пропустить эту вероятность — как воспользоваться свежим бездепом, рекомендуем навещать наш сайт как возможно почаще, самое лакомое и свежие несомненно добавляться в данном же списке.Лишь известные и знаменитые азартные заведения все позволить себя раздавать бездепы повторяющий дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, коие можно истратить в топовых аппаратах с высочайшей отдачей. 1×slots регистрация 1×slotscasino 56 online <a href=http://www.princeton.com.cn/home.php?mod=space&uid=78535&do=profile>http://www.princeton.com.cn/home.php?mod=space&uid=78535&do=profile</a> Вышеописанная причина и является главным моментом, следствии которого операторы отдают доля своей выгоды на разные маркетинговые затраты и маркетинговые кампании. А наиболее действенным здесь будут выступать непосредственно бездепозитные призы казино 2022 с выводом за регистрацию.Максимальный объем ставки, кот-ый нельзя превышать же приз не будет полностью отыгран. В случае нарушения этого верховодила, бонус и выигрыш с него будут аннулированы.
1×slots казино зеркало
Вывод выигрыша с бездепозитных призов казино – щедрый подарок от азартных клубов. Но чтобы исключить свой заработок, нужно выполнить ряд критерий: <a href=http://demo2-ecomm.in.ua/index.php?subaction=userinfo&user=lazyexplosive34>http://demo2-ecomm.in.ua/index.php?subaction=userinfo&user=lazyexplosive34</a> Бездепозитный бонус нередко может стать легкодоступным незамедлительно после завершения регистрации, потому как единственным требованием к нему является регистрация, а затем проверка вашей свежей учетной записи. x1 slots 1хслотс регистрация перейти на 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.ltp-team.com/topic/186464–1×slots-klubu1×slots-1hslots-registraciya-pereyti-na-1×slots/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<a href=http://pravoslit.ru/forum/obshchee/181579–1×slots-registratsiya-na-sajte-1×slots-ru-com.html>1×slots регистрация на сайте 1×slots ru com</a>
<a href=https://forumanapa.ru/threads/7668/>1×slots регистрацию более популярный вариант это</a>
<a href=http://forum-kprf.ru/threads/415/>1×slots быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В большинстве заведений устроить это можно по e-mal, по номеру телефона, спустя социальную сеть или гугл-аккаунт. При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, которое возможно предназначить игре в казино.
#1853 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация
Некоторые казино могут предлагать клиентам бездепы за подтверждение номера или почты или репост на страницу в соц сетях. <a href=http://filmkachat.ru/>1×slots casino зеркало</a> Промокод – определённая композиция символов, коию нужно ввести в подходящее фон при разработке учетной записи либо активировать в личном профиле игрока в разделе с призами. <a href=https://www.sideprojectors.com/project/55403/3d-product-rendering-services>https://www.sideprojectors.com/project/55403/3d-product-rendering-services</a> Рассмотрим принцип его деянья на примере. Допустим, вы зарегистрировались и возымели $10 not the slightest down payment bonus с вейджером х50. Это значит, собственно выигранные средства возможно будет выводить не раньше, чем последствии такого, как общая сумма ставок достигнет $500. 1хслот зеркало сайта <a href=https://forum.papbio.org/member.php?action=profile&uid=87288>https://forum.papbio.org/member.php?action=profile&uid=87288</a>
1×slots бездепозитный бонус за регистрацию
Постарайтесь отыграть вейджер, дабы появилась вероятность оставить заявку на выплату. Кстати, на всех сайтах, представленных в списке, доступны современные платёжные приборы. Вы можете получить выигрыш на электронной кошелёк, карту, телефонный. <a href=http://forum.lesprom.org/threads/1×slots-registracija-na-1×slots.139/>1×slots регистрация на 1хслотс</a> 1×slots рабочее зеркало Возьми свой презент. Чаще всего бонус активируется сразу последствии регистрации. Но бывают истории, когда нужно зайти в личный офис или написать в справочную службу.Онлайн-казино кропотливо продумывают бонусные условия, коие нужно изучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и другие ограничения. <a href=http://www.dbgjjs.com/home.php?mod=space&uid=463011>http://www.dbgjjs.com/home.php?mod=space&uid=463011</a> Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. 1×slots официальный сайт скачать на айфон
1×slot зеркало рабочее регистрации на телефон придет
Вейджер (wager) – это коэффициент, кот-ый показывает на какую необходимую нужно устроить ставок, чтобы вывести приз из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода этого бонуса, Вам необходимо сделать ставок на необходимую: 500*70=3500 руб. Только всецело отыграв приз, Вы сможете исключить собственный выигрыш.Индивидуальные поощрения выдаются за совершение деяний: подписку на аккаунты площадки в соц сетях, установку мобильного прибавления либо официального посетителя для ПК. В большинстве казино срабатывают программы лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий степень часто сопрягается выдачей бездепа. Как лишь получите бездеп в казино, всё точно не запамятовывайте проверять электрическую почту. Некоторые игорные клубы постоянно радуют активных гэмблеров приятными призами. Чаще всего получить презент возможно в преддверии веселья, на денек рождение, за привлечение приятеля. А кроме распространённым бонусом является прибавка к депозиту. Нужно чем пополнить счёт, и азартное заведение прирастит его на 50–100%.Иногда у посетителей сайта имеют возникнуть проблемы при активации полученного промо-кода. В этих случаях, необходимо адресоваться за помощью в службу «Support». Для получения ответа, обязательно указывается конкретная причина обращения и подтверждается информация дополнительными экрана. Если сформировалась спорная ситуация, практически возможно обратиться к основному регулятору или контролирующему органу, выдавшему этому заведению лицензионный документ. <a href=https://www.muttsworldmine.com/forums/user/476144-philipshobe/>https://www.muttsworldmine.com/forums/user/476144-philipshobe/</a> При использовании бездепозитным бонусом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют некоторое видов лимитов:Частенько новенькие не разумеют, как активировать подарки или исключить первый выигрыш. Для сходственных случаев наша команда обрисовала основные термины – собственно такое фриспины, вейджер, как его отыграть, для необходимо проходить верификацию. 1×slot зеркало рабочее регистрации на телефон придет Существует ли стратегии для отыгрыша бездепозитных призов? К огорчению нет, на выигрыши либо проигрыши с призов, казино либо игрок воздействовать возможности, отдача игр случается от разработчиков игр.Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских руб. В условиях промоакции указано, собственно вейджер бездепозитного приза х20. Поэтому, чтобы отыграть бонус, игроку будет нужно устроить ставок на 35*20=700 рублей.
1×slots регистрацию процедура займет всего лишь
Обычно для получения бонусов без депозита, казино выдвигает лояльные и абсолютно выполнимые условия, но есть ряд деяний коие воспрещены и имеют причиной противные результаты:Иногда операторы просят внесение малого депо перед выводом для верификации платежного инструмента. В некоторых казино данный депозит также светит отыграть. <a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=1613935#pid1613935>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a> Помимо прочего, для вывода средств по бездепу нужно внести на счёт свой 1-ый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально вероятную необходимую, после чего вывод средств станет доступен. 1×slots casino регистрация 1×slots review live <a href=https://trade-britanica.trade/wiki/1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81_%D0%A0%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5_%D0%97%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE>https://trade-britanica.trade/wiki/1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81_%D0%A0%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5_%D0%97%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE</a>
1×slots официальный сайт зеркало
Похожим образом трудится третий способ доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения посетителя либо в связи с получения им VIP-статуса. Подарок предоставляется в обращения в поддержку и проверки.Не стоит незамедлительно же отказываться от приветственных презентов в подобных казино. Администрация готова начислить деньги или фриспины, хотя сначала сотрудники должны увериться, что вы не мошенник. Дело никаких, что развелось слишком количество охотников за призами. Они выучились обманывать систему и зарабатывать солидные суммы средств. <a href=http://proect.org/user/GregoryCroni/>http://proect.org/user/GregoryCroni/</a> Подарки на определенные даты отличаются условиями получения. Если поощрение начисляют игроку на день рождения, то сумма обычно в от совместного размера депо последний год. 1×slot официальный сайт Самые модные способы вывода денег ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам на Neteller и Skrill, еще используют криптовалютными кошельками. Вывод выигрышей может исполняться быстро или развлекать от нескольких часов до нескольких суток.Вейджер (wager) – это коэффициент, который показывает на какую необходимую необходимо устроить ставок, дабы вывести бонус из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода этого приза, Вам нужно сделать ставок на необходимую: 500*70=3500 рублей. Только полностью отыграв бонус, Вы сможете исключить свой выигрыш.
<b>Смотреть еще похожие новости:</b>
<a href=https://edidaktikum.ee/en/content/iii-kontakttund-08-juuni?page=85#comment-297329>1×slots официальный регистрация</a>
<a href=http://soumoli.com/home.php?mod=space&uid=24916>1×slots регистрация на сайте 1×slots ru com</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
2. Создать свежий профиль. Для регистрации нужно наполнить небольшую анкету либо зайдите в собственный кабинет при помощи социальных сеток; Заполняя данные в личном профиле, указывайте лишь достоверную информацию, так как Вам понадобиться ее подтвердить в будущем при выводе денег.
#1854 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Мухтиярова Елена Вячеславовна порно 1×bet официальный <a href=https://t.me/vchkogpu_ru>Радченко Светлана Юрьевна порно</a> карты казино бк букмекерская контора <a href=https://rucriminal.info/>Шевцова Татьяна Викторовна порно</a> порно с Артемий Панарин (хоккей) букмекерская контора скачать приложение яндекс казино casino актуальное зеркало порно с Васильева Татьяна Викторовна porno Катерина Шпица демо казино
DiskiPlus пин ап casino DiskiPlus Семёнова Татьяна Владимировна порно <a href=https://diskiplus.ru>DiskiPlus Львова-Белова Мария Алексеевна порно</a> DiskiPlus пина букмекерской конторы DiskiPlus букмекерская контора <a href=https://diskiplus.ru>DiskiPlus лучшие казино бесплатно</a> DiskiPlus pin up casino top top DiskiPlus 1×bet скачать бесплатно DiskiPlus ешь казино DiskiPlus порно с Илья Осипов (киберспорт) DiskiPlus Шевцова Татьяна Викторовна порно DiskiPlus online casino DiskiPlus casino бонус
#1855 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
Бездепозитные призы казино за регистрацию в 2022 году — это возможность поиграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой либо числом бесплатных вращений без внесения депо. Не путайте деморежим с реальной забавой без надобности внесения депозита.1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, в не желаете замерзнуть жертвой плутов либо впустую истратить время; <a href=http://filmkachat.ru/>1×slots зеркало быструю регистрацию а также мгновенное</a> Это один из основных характеристик привлекательности дара. С завешенным коэффициентом в профессионалы не смогут выполнить условия по отыгрышу. И важно, насколько презентабельно выглядит предложение – бездепозитный приз казино в объеме $500 или $1 000. Чтобы новички попревосходнее вдумались, собственно же это вейджер, мы разберём на примере.Вейджер (wager) – это коэффициент, который демонстрирует на какую сумму необходимо сделать ставок, дабы исключить бонус из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода сего приза, Вам нужно устроить ставок на сумму: 500*70=3500 рублей. Только полностью отыграв бонус, Вы можете вывести свой выигрыш. <a href=https://bandzone.cz/fan/kalinka0588?at=blog&bi=615743>https://bandzone.cz/fan/kalinka0588?at=blog&bi=615743</a> 1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, в не хотите стать жертвой плутов или впустую потратить время;У каждого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано смогли выполнить их, мы дадим некоторое советов. Если система начислила маленькую сумму, не создавать немалые ставки – остановитесь на 10–30 центах. Как только сумеете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В противном случае превосходнее приглядеться к другому автомату. 1×slots casino регистрация 1×slotscasino09k online <a href=http://geolan-ksl.ru/forum/user/89001/>http://geolan-ksl.ru/forum/user/89001/</a> Чаще всего интернет-казино предлагают бездепозитные бонусы новым пользователям. Эта промо-акция довольно эффективно завлекает начинающих, подталкивая их к открытию счета. Конечно, не все они становятся послушными посетителями, но сам факт регистрации аккаунта играет на руку заведению.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Новые клиенты онлайн-казино без первого депозита все выяснить собственную удачливость. К тому же есть вероятность конвертировать бездепы в настоящие средства за регистрацию в казино, впрочем желаемого приз нужно отыграть согласно условиям промоакции. 1×slot регистрация Подтвердите регистрацию, чтобы активировать Бездепозитный бонус с выводом, потребуется наполнить индивидуальный профиль. Заполните пустующие поля реальными данными о себя. <a href=http://yu856.com/home.php?mod=space&uid=1544881>http://yu856.com/home.php?mod=space&uid=1544881</a> Ниже указан важный перечень законных казино в Беларуси с призами на 1-ый депозит. Вы сможете попасть на официальный сайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. x1 slots 1хслотс регистрация перейти на 1×slots Подтверждение индивидуальной информации. Все казино настоятельно от клиента пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и наличие у юзера иных аккаунтов (мультиаккаунт запрещен).Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных обстановок с казино, когда последствии отыгрыша бездепа вам не дадут вывести солидную необходимую выигрыша.
1хслотс официальный сайт зеркало
Подобные бонусы без депо предоставляются на более выгодных критериях. Зачастую они покрупнее, а обстоятельства отыгрыша наименее жесткие.Лишь известные и знаменитые азартные заведения имеют позволить себе раздавать бездепы в виде дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, коие возможно потратить в топовых аппаратах с высочайшей отдачей. <a href=http://0018688.com/home.php?mod=space&username=KennethFax>http://0018688.com/home.php?mod=space&username=KennethFax</a> 1×slots официальный сайт зеркало
1×slots промокод при регистрации
Вейджер (wager) – это коэффициент, кот-ый демонстрирует на какую необходимую необходимо сделать ставок, дабы вывести приз из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода этого приза, Вам нужно устроить ставок на сумму: 500*70=3500 рублей. Только полностью отыграв приз, Вы можете вывести собственный выигрыш. <a href=https://kakofon.cz/forum/viewtopic.php?f=6&t=459&p=39676#p39676>зеркала 1×slots</a> Несмотря на то, что данный вариант стимуляции со стороны азартных платформ очень известен области похожих игр, далеко не всем поклонникам казино ведомо, что себе бездепозитные бонусы казино и как именно их вероятно эксплуатировать. 1×slots зеркало быструю регистрацию а также мгновенное <a href=https://xn–9ev33a.xn–cksr0a.asia/home.php?mod=space&uid=608091&do=profile&from=space>https://xn–9ev33a.xn–cksr0a.asia/home.php?mod=space&uid=608091&do=profile&from=space</a> У любой игры свои притязания по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система засчитает любую ставку. В рулетке и покере сделать это гораздо сложнее. Именно потому так важно пристально разбирать условия получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой этой, то новенькие попросту «спустят приз на ветер».В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, необходимо обратиться в службу спустя лайв-чат на веб-сайте казино.
1×slots casino регистрация
Прежде всего, не забывайте регулярно заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом оценивают наиболее интересные предложения основных игорных порталов. <a href=http://www.carshowsociety.com/forum.php?action=profile;u=13448>http://www.carshowsociety.com/forum.php?action=profile;u=13448</a> Стоит обозначить(означить), что бездепозитный приз выдается только совершеннолетним новичкам, которые, же, шансы пригласить собственных приятелей и знакомых, кроме претендующих на поощрительную программку преданности. Подобная разработка была среди соперничающих онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению своей популярности, методом привлечения свежих игроков. Бонусы – это уникальный шанс для вероятных участников забавы, коие шансы опробовать софт покер рума и увериться, будут ли они в него выступать или нет. Новый игрок попробует свои силы с настоящими оппонентами в казино.1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, если не желаете замерзнуть жертвой мошенников либо впустую потратить время; 1×slots зеркало регистрация Важно, убедитесь том,, что раньше не регистрировались в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи.К раскаянию, нет. Почти все казино, требуют внесение но бы 1-го малого депозита для вывода выигрыша с бездепозитного бонуса. Также учитывайте, что исключить средства разрешается лишь на что, эту платежную систему, с которой был изготовлен депозит.
<b>Смотреть еще похожие новости:</b>
<a href=https://minecraft.ru.net/user/Manuelsoarl/>1×slots акции</a>
<a href=https://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=6268>онлайн казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вышеописанная причина и является главным интересным, из-за которого операторы отдают часть своей прибыли на различные рекламные расходы и маркетинговые кампании. А наиболее действенным тут будут играть непосредственно бездепозитные призы казино 2022 с выводом за регистрацию.
#1856 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
вывод казино porno Екатерина Ефременкова, шорт-трекистка <a href=https://www.ossetia.tv/>Юдаева Ксения Валентиновна порно</a> сайт казино вход Анна Михалкова <a href=https://slon-ru.com/>1×bet зеркало рабочее</a> r7 casino букмекерские конторы без депозита 1×bet зеркало xbet casino рабочее casino на телефон скачать casino на андроид 1×bet зеркало рабочее на сегодня 1×bet xyz
DiskiPlus карты казино DiskiPlus казино вход официальный сайт <a href=https://www.diskiplus.ru>DiskiPlus букмекерская контора вход</a> DiskiPlus бесплатно фильм казино DiskiPlus пинко casino <a href=https://diskiplus.ru>DiskiPlus pin up casino пин ап</a> DiskiPlus 1win букмекерская контора DiskiPlus порно с Дарья Касаткина (теннис) DiskiPlus 1×bet на андроид DiskiPlus porno Мира Андреева (теннис) DiskiPlus Матвиенко Валентина Ивановна порно DiskiPlus up casino скачать DiskiPlus пин ап букмекерская контора
#1857 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало
Стоит обозначить(означить), что бездепозитный приз выдается только взрослым новеньким, которые, к, имеют пригласить собственных приятелей и людей, кроме претендующих на поощрительную программу преданности. Подобная технология замечена между соперничающих онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению своей популярности, методом привлечения свежих игроков. Бонусы – это уникальный шанс для потенциальных соучастников игры, коие все опробовать софт покер рума и увериться, станут ли они в него выступать либо нет. Новый игрок испробует средства силы с реальными оппонентами в казино. <a href=http://filmkachat.ru/>1×slots casino зеркало</a> <a href=https://feedback.cloudways.com/forums/203824-product-improvements-flexible/suggestions/49478654-%D1%89%D0%BE-%D1%80%D0%BE%D0%B1%D0%B8%D1%82%D0%B8-%D0%B7-%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%BE%D0%B1%D1%96%D0%BB%D0%B5%D0%BC-%D0%BF%D1%96%D1%81%D0%BB%D1%8F-%D0%B4%D1%82%D0%BF-%D0%BA%D0%BE%D0%BC%D0%BF%D0%BB%D0%B5%D0%BA%D1%81%D0%BD%D0%B5-%D0%BA%D0%B5%D1%80%D1%96>https://feedback.cloudways.com/forums/203824-product-improvements-flexible/suggestions/49478654-%D1%89%D0%BE-%D1%80%D0%BE%D0%B1%D0%B8%D1%82%D0%B8-%D0%B7-%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%BE%D0%B1%D1%96%D0%BB%D0%B5%D0%BC-%D0%BF%D1%96%D1%81%D0%BB%D1%8F-%D0%B4%D1%82%D0%BF-%D0%BA%D0%BE%D0%BC%D0%BF%D0%BB%D0%B5%D0%BA%D1%81%D0%BD%D0%B5-%D0%BA%D0%B5%D1%80%D1%96</a> 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=http://parkethold.ru/bitrix/click.php?goto=http://images.google.com.bz/url?q=http://imsider.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/UfAsEoLM0m1>http://parkethold.ru/bitrix/click.php?goto=http://images.google.com.bz/url?q=http://imsider.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/UfAsEoLM0m1</a>
1×slots промокод при регистрации 2025
Это тоже благотворительные деньги, коие поступают на аккаунты новоиспеченных в после регистрирования. А особенность таких бонусов состоит том,, собственно обретенные финансы обязательно идет использовать в продолжении назначенного времени. казино 1× slots официальный сайт <a href=http://www.gurumeguri.com/userinfo.php?uid=25556#>http://www.gurumeguri.com/userinfo.php?uid=25556#</a> зеркло казино 1×slots В зависимости от интернет заведения каждый из их может для предложить как бездепозитные средства, так и бездепозитные фриспины, коие последствии успешной регистрации рухнут вас на ваш игровой баланс.На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не можете активировать и получить бездепозитный бонус.
1×slots регистрация 1×slots casino c2d ru
Варианты выигрыша в от Вашей успеха и условий игорного портала. Выше мы сказали, что некоторые бездепозитные призы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются другие, все, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на деньги, можно выиграть неописуемые суммы. Сегодняшние игровые автоматы или видео слоты, как их именуют. Могут выдавать солидные умножение от х1.000 и выше. Некоторые множат ставку от х100.000.Отказ в прохождении верификации. Если клиент не хочет либо возможности дать документы, подтверждающие его личность, профиль несомненно заблокирован вместе со всеми бонусными начислениями. <a href=https://swordmaster.org/user/MichaelImime/>https://swordmaster.org/user/MichaelImime/</a> Когда идет о валютных бонусах, казино практически устанавливают обстоятельства вейджера, которые необходимо выполнить, чтобы вывести выигрыш. 1×slots регистрация 1×slotscasino09k online Частенько новички не понимают, как активировать презенты или исключить первый выигрыш. Для подобных случаев наша команда обрисовала основные термины – что это фриспины, вейджер, как его отыграть, зачем нужно протекать верификацию.Для получения бонуса надо(надобно) ознакомиться с программой преданности казино и сделать ставки на необходимую, нужную для перехода на следующий степень.
1×slots зеркало проходить регистрацию это отличный вариант
Частенько новички не разумеют, как активировать презенты или вывести первый выигрыш. Для похожих случаев наша команда описала основные определения – что такое фриспины, вейджер, как его отыграть, чего нужно протекать верификацию. <a href=https://forum.motoshkola.od.ua/threads/1×slot-zerkalo-rabochee-registracii-na-telefon-pridet.8459/>1×slot зеркало рабочее регистрации на телефон придет</a> Каждый геймер должен сначала детально изучить обстоятельства по получению и отыгрышу понравившегося презента. Если всё устраивает, поспешите забрать благотворительные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо сейчас начать вращать барабаны лучших слотов. 1× slots casino официальный сайт <a href=https://shanetiex11115.blogtov.com/10771223/ai-nude-revolutionizing-content-moderation-and-privacy-protection>https://shanetiex11115.blogtov.com/10771223/ai-nude-revolutionizing-content-moderation-and-privacy-protection</a>
казино 1×slots
Шаг 4. Активация. Внимательно изучите обстоятельства, информацию по лимитированиям и сроке деянья бонусного предложения. Разобравшись с правилами, можно активировать бонус в собственном офисе (время ? с внедрением промокода) либо по запросу в саппорт. <a href=https://fakenews.win/index.php?title=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D0%B5%D0%B9%D1%88%D0%B8%D0%B5%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!>https://fakenews.win/index.php?title=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D0%B5%D0%B9%D1%88%D0%B8%D0%B5%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!</a> На странице представлены бездепозитные призы за регистрацию в казино редкая награда за которой гонятся все игроки как новенькие, например и мастера. Мы тоже уделяем большое внимание на присутствие бонусов при формирование рейтинга казино на средства. Бездепозитный приз это возможность играть безвозмездно и выиграть настоящие деньги. 1×slots зеркало на сегодня В интернет-сети постоянно возможно отыскать перечни более известных и обещанных поощрительных программ от известных онлайн-казино.Не стоит путать игру в демо и использование бонусов. В демонстрационном режиме игрок имеет расценить механику слота, сюжет и оформление. Но забава проводится на относительные кредиты, потому отсутствует главное ? чувство азарта. Активируя промокод либо фриспины, заказчик как не расходует средства деньги на игровые автоматы, хотя возможность сорвать настоящий куш!
<b>Смотреть еще похожие новости:</b>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=734650>1×slos регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Промокод – определённая комбинация символов, коию нужно установить в соответствующее поле при творении учетной записи или активировать в личном профиле игрока в разделе с призами.
#1858 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
рокс казино 7k casino зеркало на сегодня <a href=https://www.ossetia.tv/>сайт pin up casino</a> бесплатно играем казино porno Яна Троянова <a href=https://glvk.guru/>casino онлайн</a> 1×bet регистрация порно с Захарова Мария Владимировна pin up casino зеркало казино фильм онлайн водка казино яндекс казино porno Елизавета Туктамышева
DiskiPlus porno Яна Троянова DiskiPlus black russia казино <a href=https://www.diskiplus.ru/>DiskiPlus online casino</a> DiskiPlus порно с Анна Калинская (теннис) DiskiPlus casino betting <a href=https://diskiplus.ru>DiskiPlus porno Алена Михайлова</a> DiskiPlus 1×bet официальный 1×bet xyz DiskiPlus букмекерские конторы в россии DiskiPlus букмекерскую контору пин DiskiPlus где казино DiskiPlus porno Игорь Акинфеев (футбол) DiskiPlus смотреть фильм казино DiskiPlus online casino официальный
#1859 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало
Маркетинговая политика всех игорных интернет-клубов должна носить разнородный нрав. И если вознаграждения на депо работают чтобы, чтобы, дабы провоцировать вносить депозиты и поощрять теснее существующих пользователей, то бездепозитный приз в казино либо приз за регистрацию в казино, прежде всего, рассчитан на расширение базы потребителей.Список например называемых «не территорий» прилагается к правилам бонусной программки игорного портала. Обязательно выясните, распространяются ли на вас похожие санкции. <a href=http://filmkachat.ru/>1×slots зеркало на сегодня</a> Для получения приза нужно ознакомиться с программой преданности казино и сделать ставки на сумму, нужную для перехода на следующий степень. <a href=https://events.com/r/en_US/registration/best-merchandising-software-solutions-for-retail-success-london-february-962474>https://events.com/r/en_US/registration/best-merchandising-software-solutions-for-retail-success-london-february-962474</a> 1×slots официальный сайт скачать <a href=http://whdf.ru/forum/user/80466/>http://whdf.ru/forum/user/80466/</a>
1хслот официальный сайт зеркало
Если вы облюбовали себе несколько брендов которые для больше всего полюбились, для неизменной игры! Таких гемблеров казино очень предпочитает и оценивает, за частую такие игроки становятся VIP игроками заведения, которым часто поступают выгодные предложения в виде бонусов, так же туда заходит и бездепозитные.При подмоги такового одобрения оператор имеет кроме привлекать клиентов, которые раньше проявляли активность на сайте, хотя по некий основанию прекратили играть. В данном случае промокод высылается пользователю по электрической почте либо повторяющий SMS. 1×slots регистрация на 1хслотс В некоторых онлайн казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на веб-сайте клуба и доказать свои контактные данные. Дополнительно потребуется активация промокода.Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в личный офис, дабы арестовать бесплатные вращения с вейджером х40; <a href=http://msk-service.spb.ru/index.php?subaction=userinfo&user=wantinginformat>http://msk-service.spb.ru/index.php?subaction=userinfo&user=wantinginformat</a> Обычно показатель повыше, чем для бонусов на депозит. Не дивитесь, случае он будет том х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных стран.Бездепозитные бонусы прекрасный вариант даровой игры в игровые автоматы. Многие пользователи сети не понимают, собственно в казино можно начать играть абсолютно бесплатно, а потом вывести выигрыш на банковскую карту или электронный кошелек, иные не доверяют интернет казино, а третьи удачно играют и выигрывают – и тотчас достаточно большие суммы. 1×slots регистрация 1×slotscasino09k online Если площадка презентует бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь завести аккаунт на веб-сайте и активировать его, подтвердив адрес электронной почты, номер телефона либо другие данные, коие требует оператор. Перед данным необходимо убедиться, собственно юзер располагается на официальном веб-сайте казино, но на мошеннической площадке.
1×slots регистрация 1×slots review live
Воспользоваться бездепом возможно не во всех игровых автоматах: казино и тут уточняет лимитирование для клиентов. Конечно, это возможно счесть неким неудобством для игрока, но ради отметить, собственно выбор автоматов всё точно остаётся достаточно большим. <a href=http://shop.ororo.co.kr/bbs/board.php?bo_table=free&wr_id=1076594>http://shop.ororo.co.kr/bbs/board.php?bo_table=free&wr_id=1076594</a> Доступность — бездепозитные призы в казино чаще всего предоставляются свежим игрокам, но посещают случаи, когда бонус шансы получить и действующие клиенты.Процесс доказательства личности возможность занять от 1-го денька до недели. Если заказчик разрешил нибудь ошибку при заполнении паспортных данных, то ему следует адресоваться с задачей в саппорта онлайн-казино. 1×slots сайт зеркало
1×slots зеркало регистрация в 1×slots casino
Бездепозитный приз за регистрацию в казино — это стартовый подарок в виде денежного начисления либо бесплатных вращений для новых игроков заведения, для получения которого не нужно заносить депо.Когда речь идет о получении бездепозитных призов в казино, в первую очередь обратите внимание на последующие обстоятельства: 1×slots сайт зеркало <a href=https://autolocksmithlocal.co.uk/forum/profile/MildredCol>https://autolocksmithlocal.co.uk/forum/profile/MildredCol</a>
1×slots зеркало быструю регистрацию а также мгновенное
<a href=https://www.thenewtop10s.com/author/doctorlazutapi/>https://www.thenewtop10s.com/author/doctorlazutapi/</a> 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://kakofon.cz/forum/viewtopic.php?f=6&t=381&p=39959#p39959>1×slots регистрация на официальном сайте</a>
<a href=http://griffhunter.com/boards/viewtopic.php?p=985704#p985704>1×slots официальный сайт зеркало</a>
<a href=https://kakofon.cz/forum/viewtopic.php?f=6&t=390&p=40044#p40044>1×slots официальный зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Существуют казино с бонусом за регистрацию, каких довольно модны фриспины в интернет казино впоследствии регистрации в определенных забавах. Они встречаются даже почаще безвозмездных поощрений либо традиционных бонусов в казино без вложений. Например, игрок регистрирует счет, на кот-ый начисляются бесплатные игры, приз за регистрацию повторяющий бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса игры выигрывает настоящие деньги, которые в последствии можно удачно исключить из заведения на собственную платежную систему. То есть, есть все шансы исключить средства без рисков своими деньгами. Регистрация, за игры получит бонусы, займет несколько, а спасибо данному можно прирастить 5 евро поощрений до тыс. И без всяких проблем исключить их. При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое возможно посвятить ирге в казино.
#1860 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино смотреть пари букмекерская контора <a href=https://kompromat1.online/>pin up casino</a> официальные букмекерские конторы скачать казино в россии <a href=https://rhymes-punches.com/>порно с Александр Головин (футбол)</a> up букмекерская контора вывод казино казино фильм онлайн букмекерские конторы pin пина casino порно с Илья Осипов (киберспорт) 1×bet зеркало рабочее на сегодня 1×bet xyz
DiskiPlus официальные сайты казино DiskiPlus porno Яна Троянова <a href=https://www.diskiplus.ru>DiskiPlus порно с Александр Головин (футбол)</a> DiskiPlus смотреть фильм казино DiskiPlus казино вулкан <a href=https://diskiplus.ru/>DiskiPlus порно с Виктория Синицина, фигуристка</a> DiskiPlus ставки на спорт букмекерские конторы DiskiPlus 1×bet официальный DiskiPlus Нургалиева Эльвира Рамиловна порно DiskiPlus casino 7k рабочее DiskiPlus Самойлова Алла Владимировна порно DiskiPlus online casino DiskiPlus porno Алена Михайлова
#1861 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
bitz casino 1×bet зеркало рабочее <a href=https://repost.news/>водка казино</a> казино 5 букмекерская контора бетсити <a href=https://repost.news/>порно с Юлия Ефимова</a> cat casino 7k casino casino betting pin casino казино ли casino рабочее зеркало Кузнецова Анна Юрьевна порно
DiskiPlus казино зеркало сегодня DiskiPlus casino 7k сегодня <a href=https://diskiplus.ru>DiskiPlus 7k casino сайт</a> DiskiPlus казино вход официальный сайт DiskiPlus сайты казино <a href=https://diskiplus.ru/>DiskiPlus Елена Лядова</a> DiskiPlus официальные сайты казино DiskiPlus 1×bet на сегодня DiskiPlus часы казино DiskiPlus casino riobet DiskiPlus Попова Анна Юрьевна порно DiskiPlus букмекерская контора вход DiskiPlus лучшие букмекерские конторы
#1862 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin ап casino сайт pin up casino <a href=https://rucriminal.info/>порно с Алина Загитова, фигуристка</a> лучшие онлайн казино casino актуальное зеркало <a href=https://rhymes-punches.com/>спорт букмекерская контора</a> cat casino смотреть фильм казино казино рояль 1×bet зеркало xbet xyz Анна Михалкова почему в казино нет окон win win casino
DiskiPlus Окладникова Ирина Андреевна порно DiskiPlus 7k casino зеркало рабочее <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet официальный скачать</a> DiskiPlus 1×bet xbet DiskiPlus pin up casino скачать <a href=https://www.diskiplus.ru>DiskiPlus casino online зеркало</a> DiskiPlus букмекерская контора ставки DiskiPlus казино фильм DiskiPlus яндекс игры казино DiskiPlus pin up casino buzz DiskiPlus карты казино DiskiPlus Анна Михалкова DiskiPlus kometa casino
#1863 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
Приветственный приз без депо ? презент за регистрацию. Выдается деньгами, фриспинами либо баллами. В последнем случае бонусные баллы применяются для роли в турнирах либо размена на реальные средства.Обыкновенные бездепозитные призы в объеме от трех до 20 долларов созданы чтобы, чтобы, чтобы в забавы заходили все новые и свежие игроки. Здесь, скорее, будет ограничение на максимальный выигрыш. Важно, чтобы перед минимальным вкладом был отключен бонус за первое пополнение счета, и геймер не попадет на повторный вейджер. <a href=http://filmkachat.ru/>1×slots официальный зеркало</a> В перечне притязаний к отыгрышу нередко присутствуют лимиты на ставки при ирге на личные деньги. Так, если отыграть нужно 30 000 руб., а максимальная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам действия промоакции. <a href=https://click4r.com/posts/g/16359634/the-rise-of-duracell-a-powerhouse-in-battery-manufacturing>https://click4r.com/posts/g/16359634/the-rise-of-duracell-a-powerhouse-in-battery-manufacturing</a> В реальное время получить приз за регистрацию в казино очень просто. Почти каждый игорный дом с радостью предоставит средства либо безвозмездные вращения. Многие игроки используют этим и не стыдятся региться в каждом клубе с выгодными условиями. Кстати, это замечательная вероятность выдумать выигрышную стратегию и сорвать куш.Для получения депозитного приза нужно восполнить свой игровой баланс реальными деньгами. Вознаграждение можно получить или при внесении первого депозита, или в виде фиксированного процента от внесённых средств. Так либо иначе, бонус поступит на счёт только последствии пополнения. 1× slots официальный <a href=http://worklocal.com.au/users/porsedropsa>http://worklocal.com.au/users/porsedropsa</a>
1 x slots
Хотя безвозмездные призы начисляются без депозита, не исключено, что вам придется заносить средства. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь в такого, как новый заказчик первый пополнит игровой счет.Существует ли стратегии для отыгрыша бездепозитных призов? К раскаянью нет, на выигрыши либо проигрыши с бонусов, казино или игрок воздействовать возможности, отдача игр случается от создателей игр. <a href=http://zelenalutrija.com/forum/showthread.php?p=84798#post84798>1×slots рабочее зеркало на сегодня</a> 1×slot зеркало В настоящее время получить бонус за регистрацию в казино довольно просто. Почти каждый игорный дом с готовностью даст деньги или бесплатные вращения. Многие игроки пользуются этим и не стесняются регистрироваться в любом клубе с прибыльными критериями. Кстати, это отличная вероятность выдумать выигрышную стратегию и сорвать куш. <a href=https://printland.ca/shisha-tobacco-from-4-eur/>https://printland.ca/shisha-tobacco-from-4-eur/</a> 1×slots официальный demo регистрация в 1×slots casino Ознакомьтесь с нашим перечнем наилучших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего перечня и получите бездеп незамедлительно. Хватайте наилучшие благотворительные предложения ниже и выигрывайте немалые средства, не рискуя!
1×slot зеркало
Чаще всего казино бонус за регистрацию без депо даёт вероятность запустить каждой машина. Но никакого внимательно ознакомиться с условиями. Иногда для забавы доступны только определённые модели. Если вы новичок и ничего не смыслите в гэмблинге, другого начать знакомство с миром азарта именно с «одноруких бандитов».Сроки активации приза устанавливаются каждым казино, но чаще всего они не превышают недели с момента получения. Игроку непременно надо(надобно) использовать бездеп в течение обозначенного срока, в ином случае бонус просто исчезнет. Каждый бонус возможно получить только один раз, потому случае не использовать бездеп в срок, у игрока не будет второго шанса им воспользоваться. <a href=https://mangatal.uk/index.php/User:DoreenCurrey>https://mangatal.uk/index.php/User:DoreenCurrey</a> зеркло казино 1×slots Допустим, за регистрацию вы возымели бездеп в объеме 2 000 рублей с вейджером х30. В данном случае светит сделать ставок, на совместную необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать настоящие средства. Однако не запамятовывайте, что с любого подарка получится исключить определённую сумму (почаще всего не более $200).
1×slot казино зеркало
Игрокам стоит воспринимать приветственный бонус как гарантированный способ получить большой выигрыш, но это замечательная возможность без затрат расценить возможностей казино.Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают приз по государствам. Вплоть до того, собственно клуб имеет принимать игроков из Вашей страны, а бездеп мешает. <a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=698004>1хслот зеркало</a> 1×slots регистрация 1×slotscasino 56 online <a href=http://www.max-elmar.de/?s=%3Ca+href%3Dhttps%3A%2F%2Fdoctorlazuta.by%2Fblog%3E%D0%B1%D0%BB%D0%BE%D0%B3+%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0+%D1%8F%D0%BD%D0%B4%D0%B5%D0%BA%D1%81+%D0%B4%D0%B7%D0%B5%D0%BD%3C%2Fa%3E+%D0%B1%D0%BB%D0%BE%D0%B3+%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0&x=0&y=0>http://www.max-elmar.de/?s=%3Ca+href%3Dhttps%3A%2F%2Fdoctorlazuta.by%2Fblog%3E%D0%B1%D0%BB%D0%BE%D0%B3+%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0+%D1%8F%D0%BD%D0%B4%D0%B5%D0%BA%D1%81+%D0%B4%D0%B7%D0%B5%D0%BD%3C%2Fa%3E+%D0%B1%D0%BB%D0%BE%D0%B3+%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0&x=0&y=0</a> При использовании бездепозитным призом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют количество видов лимитов:Большинство клубов завлекают внимание в за счёт разнородных даров. На 1 веб-сайтах возможно получить виртуальные кредиты, коие откроют доступ ко всему софту. На иных же, администрация предлагает бесплатные вращения для пуска лучших интернет слотов. Несмотря на различные акции, стоит выделить самые главные.
1×slots casino регистрация на сайте
В большинстве заведений устроить это можно по e-mal, по номеру телефонного, через социальную сеть либо гугл-аккаунт. <a href=https://opensourcebridge.science/index.php?title=%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0%20%D0%B2%D0%BE%20%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA%D0%B5>https://opensourcebridge.science/index.php?title=%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0%20%D0%B2%D0%BE%20%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA%D0%B5</a> Бездепозитные призы отличный вариант даровой забавы в игровые автоматы. Многие юзеры сети не знают, что в казино возможно начать выступать полностью безвозмездно, а позже вывести выигрыш на банковскую карту либо электронный кошелек, иные не доверяют онлайн казино, а третьи успешно играют и выигрывают – и тотчас довольно великие суммы.Как лишь вы отыграли вейджер и средства с бонусного баланса перешли вам на настоящий счет, Вы неустрашимо можете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать минимальный депо к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депозитом). 1×slots регистрацию процедура займет всего лишь Не рекомендуем опрометью голову браться за различные предложения получения средств без вложений. Вполне вполне, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем смотрится на первый взор. Альтернативой является казино бонус за депо. Мы предлагаем для пару советов, спасибо коим у каждого игрока несомненно вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом денег:
<b>Смотреть еще похожие новости:</b>
<a href=https://communities.leviton.com/threads/1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE.844/>1хслотс зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Также, учите, собственно бездепозитный бонус возможно исключить лишь в том случае, когда будут выполнены все условия отыгрыша.
#1864 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
рабочее казино 7k casino официальный <a href=https://kompromat1.online/>порно с Карен Хачанов (теннис)</a> порно с Елена Никитина, скелетонистка retro casino <a href=https://www.ossetia.tv/>ограбление казино</a> порно с Виктория Синицина, фигуристка casino онлайн 1×bet вход казино 1 inform@rucriminal.info online casino 7k Мухтиярова Елена Вячеславовна порно
DiskiPlus казино на деньги DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz <a href=https://www.diskiplus.ru>DiskiPlus карты казино</a> DiskiPlus пина букмекерской конторы DiskiPlus 1×bet слоты 1×bet top <a href=https://diskiplus.ru>DiskiPlus лучшая казино</a> DiskiPlus играющие казино онлайн DiskiPlus casino вход DiskiPlus винлайн букмекерская контора DiskiPlus pin up casino DiskiPlus Львова-Белова Мария Алексеевна порно DiskiPlus порно с Никита Кучеров (хоккей) DiskiPlus online casino 7k
#1865 1win_pvpthttp://1win15.com.ng
1 win bet <a href=https://1win15.com.ng/>https://1win15.com.ng/</a> .
#1866 Richardbichttps://medium.com/@agurkin2021/online-casino-for-people-c15fc0c3e996
<a href=https://medium.com/@agurkin2021/online-casino-for-people-c15fc0c3e996>Online casino for people</a>
Online Casino „Know This“: Secure, Rapid, and User-Centric** No fluff—just the facts you care about.*
Why Gamblers Choose It – Regulated & Transparent: Certified by Malta MGA and UKGC. Decentralized tech verifies all results. – Blazing-Fast Withdrawals: Cryptocurrency withdrawals under 5 minutes, traditional payments processed within 24 hours.
Standout Features – Exclusive Titles: Evolution’s Lightning Roulette, Crypto Quest slots (exclusive). – Rewards Galore: 200 free spins for newcomers, monthly cashback for loyal players.
Play Anywhere Instant-play mode, tailored alerts for big wins, and a user-friendly mobile interface.
Verified Feedback** – “Cashed out $4k in 2 hours—zero hassle.”* – Sarah – “Support staff remembered my details. 10/10.”* – a loyal member
Stay in Control – 24/7 Human Assistance: No bots—real agents. – Self-Regulation Tools**: Deposit caps and breaks built into the system.
Begin Your Journey Register quickly, use code KNOWTHIS for complimentary rounds.
P.S. Gamble wisely. Always define your spending limit.
#1867 BoaBoaCoicshttps://www.astikoktelptolemaidas.gr
Επισκεφτείτε το <a href=https://www.astikoktelptolemaidas.gr> καζίνο BoaBoa</a> και απολαύστε παιχνίδια υψηλής ποιότητας με Ελληνική υποστήριξη
#1868 Charlesgunnyhttp://filmkachat.ru
1×slots casino зеркало
Бездепозитные призы начисляются только раз один. Не стоит открывать новые аккаунты, чтобы получить их повторно. Служба защищенности казино обязательно выявит «левого» соучастника и заблокирует. Если гость выполнит необходимые требования, отыграет собственную ставку и решит вывести личный выигрыш, то ему надо(надобно) сведению, что казино непременно потребует дать ксерокопии личных документов, чтобы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные средства исключить не получится.Самые знаменитые способы вывода денег ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электрическим платежным системам подобии Neteller и Skrill, а пользуются криптовалютными кошельками. Вывод выигрышей возможность осуществляться моментально или занимать от нескольких часов до нескольких суток. <a href=http://filmkachat.ru/>1×slots официальный зеркало</a> Да, у бесплатных призов есть недостатки. Прежде всего, они обычно очень. Кроме такого, обстоятельства вейджера по ним постоянно строгие. Но таки недоступность риска проделывает их довольно привлекательными для посетителей. <a href=https://archinect.com/firms/cover/150465489/archicgi-3d-rendering>https://archinect.com/firms/cover/150465489/archicgi-3d-rendering</a> Чаще всего, знаменитые сервисы, эти как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно обязательное управляло. Финансовые свои выводятся только через ту платежную систему, коей популярностьюимели для пополнения депо. Если же игрок получил бездепозитный покерный бонус, требуется восполнить счет на наименьшую необходимую, кот-ая сочиняет обыкновенно 10 долларов.Условия, на коих предоставляется бездеп, регулируются казино. Каждая промоакция имеет доскональные управляла, гиперссылка на коие обыкновенно содержится в промообъявлении. В их указываются лимиты, вейджер, список дешевых игр. Если оператор скрывает данные о предложении, то воспользоваться им не. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=http://intentionalpress.com/author/jamesturry/>http://intentionalpress.com/author/jamesturry/</a> Бездепозитные призы отличный вариант бесплатной забавы в игровые автоматы. Многие юзеры сети не знают, что в казино можно начать играть полностью бесплатно, а позже исключить выигрыш на банковскую карту либо электрический кошелек, другие не доверяют интернет казино, а третьи успешно играют и выигрывают – и подчас довольно большие суммы.
1× slots зеркало
Размер ставки для забавы по бездепозитному призу (конечно же, когда, когда он представлен повторяющий бонусных денежных средств) зачастую ниже, чем при ирге на депо. Ограничение будет действовать до этапа отыгрыша приза.В настоящее время получить бонус за регистрацию в казино довольно просто. Почти каждый игорный жилище с радостью даст средства либо безвозмездные вращения. Многие игроки пользуются данным и не смущяются регистрироваться в любом клубе с выгодными критериями. Кстати, это замечательная возможность придумать выигрышную тактику и сорвать куш. x1 slots 1хслотс регистрация перейти на 1×slots Максимальный объем ставки, кот-ый нельзя превосходить пока бонус не несомненно всецело отыгран. В случае нарушения этого верховодила, приз и выигрыш с него будут аннулированы.Это тоже бесплатные деньги, которые поступают на аккаунты свежеиспеченных игры в регистрирования. А необыкновенность этих бонусов состоит в, собственно обретенные финансы обязательно стопам применять в продолжении назначенного времени. <a href=http://teama2t.free.fr/index.php?file=Members&op=detail&autor=maturepreview6>http://teama2t.free.fr/index.php?file=Members&op=detail&autor=maturepreview6</a> У каждого игорного клубы различные вейджеровые условия. Чтобы вы гарантировано сумели выполнить их, мы дадим некоторое советов. Если система начислила маленькую необходимую, не создавать немалые ставки – остановитесь на 10–30 центах. Как только сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте играть. В противном случае никакого присмотреться к другому автомату.Как лишь получите бездеп в казино, всё равно не забывайте инспектировать электронную почту. Некоторые игорные клубы каждый веселят активных гэмблеров приятными бонусами. Чаще всего получить презент можно в преддверии праздника, на день рождение, за привлечение приятеля. А также распространённым призом является прибавка к депозиту. Нужно более пополнить счёт, и азартное заведение увеличит его на 50–100%. 1×slots зеркало на сегодня Перечисленные повыше главные характеристики сопровождают практически каждый приз и считаются стандартными для бездепозитных бонусных начислений в казино.
1хслот зеркало
Вывод выигрыша с бездепозитных призов казино – щедрый подарок от азартных клубов. Но чтобы исключить свой доход, необходимо выполнить ряд условий: <a href=http://www.orlandogamers.org/forum/member.php?action=profile&uid=7545>http://www.orlandogamers.org/forum/member.php?action=profile&uid=7545</a> Если вы новичок данном и только попали в неизведанную вами область азарта — за услуг как бездепозитные призы без пополнения. 1хслотс рабочее зеркало Если при регистрации указать промокод, возможно гарантировано получить бонус. Где арестовать ваучер? Посетите определенную блоги либо форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В заключительное время игорные жилища начали афишироваться в кинокартинах и телесериалах. Присмотритесь и скорее заметите промокод, который принесёт 500 или 1 000 бонусных руб.Выбирая бесплатный бонус, внимательно изучайте правила. Убедитесь, собственно вам можно себя роль в акции. Уточните, в каких играх можно скорпулезно условия вейджера. При надобности задавайте вопросы представителям саппорта.
1×slots казино зеркало
Призовые начисления без депо все предоставляться для роли в турнирах интернет казино. Потратить перечисленные деньги можно исключительно масштабах этой акции. Условия их проведения себе ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться этим предложением, чем изучить его управляла. <a href=http://aficionado.pl/showthread.php?190034–1×slots-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D0%BD%D0%B0-%D1%81%D0%B5%D0%B3%D0%BE%D0%B4%D0%BD%D1%8F&p=211176>1×slots рабочее зеркало на сегодня</a> Допустим, за регистрацию вы возымели бездеп в объеме 2 000 рублей с вейджером х30. В этом случае предстоит устроить ставок, на совместную сумму в 60 000 рублей (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать реальные деньги. Однако не забывайте, собственно с любого презента выйдет вывести определённую необходимую (чаще всего менее $200). Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депозит может выделяться до 30 дней.Можно ли в одном онлайн казино получить больше 1-го бонуса за регистрацию? Нет, так как в любом онлайн казино есть правила, к коим нужно придерживаться, не создавать 2 аккаута для получения призов, иначе будет блокировка обоих аккаутов, не пытайтесь обмануть интернет казино, приз за регистрацию выдаеться раз раз 1 лицу. 1×slots casino регистрация на сайте <a href=https://www.mavsboard.com/member.php?action=profile&uid=4529>https://www.mavsboard.com/member.php?action=profile&uid=4529</a> В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, нужно обратиться в саппорта через лайв-чат на веб-сайте казино.
1×slot зеркало рабочее этих способов предполагает регистрацию
<a href=https://locksmithsandsecurity.co.uk/forum/profile/DanutaOdx1>https://locksmithsandsecurity.co.uk/forum/profile/DanutaOdx1</a> 1×slots зеркало быструю регистрацию а также мгновенное
<b>Смотреть еще похожие новости:</b>
<a href=https://bans.org.ua/index.php?topic=139590.new#new>онлайн казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При маленькой сумме бонуса рекомендуется выступать по низким ставкам, а применять наибольшие какого-либо лишь том, случае, если вейджер очень великий, а время на отыгрыш сильно ограничено. Вейджер (wager) – это коэффициент, который демонстрирует на какую сумму нужно устроить ставок, дабы вывести приз из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода сего бонуса, Вам необходимо сделать ставок на необходимую: 500*70=3500 руб. Только полностью отыграв бонус, Вы можете вывести собственный выигрыш.
#1869 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
kometa casino скачать 1×bet на андроид <a href=https://th-royalgclub.com/>ев казино</a> casino официальный сайт яндекс казино <a href=https://sovsekretno.net/>casino вход</a> casino игровой автомат 1×bet официальный 1×bet xyz porno Дарья Мороз казино фильм онлайн Черкесова Бэлла Мухарбиевна порно 1×bet зеркало рабочее на сегодня лучшие букмекерские конторы
DiskiPlus up casino зеркало DiskiPlus бесплатные букмекерские конторы <a href=https://diskiplus.ru>DiskiPlus 1×bet скачать приложение на андроид</a> DiskiPlus porno Мира Андреева (теннис) DiskiPlus ап казино <a href=https://www.diskiplus.ru/>DiskiPlus porno Мира Андреева (теннис)</a> DiskiPlus порно с Никита Кучеров (хоккей) DiskiPlus 1×bet casino DiskiPlus pin up casino скачать DiskiPlus porno Светлана Ходченкова DiskiPlus 1×bet слоты официальный сайт DiskiPlus pin ап casino DiskiPlus Скоробогатова Ольга Николаевна порно
#1870 Charlesgunnyhttp://filmkachat.ru
1×slots сайт
Для получения выигрыша потребуется выполнить условия казино. Чаще всего игроку необходимо поставить конкретную необходимую, хотя теснее из личных денег. Она рассчитывается из общего размера выигрыша за всегда использования бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, в пользователь выиграл 1000 рублей, а множитель сочиняет х30, исключить деньги возможно несомненно, сделав ставки на 30 000 руб. <a href=http://filmkachat.ru/>онлайн казино 1×slots</a> <a href=https://kumu.io/lexxeagle/honda-civic-battery-reset-complete-guide-for-all-models>https://kumu.io/lexxeagle/honda-civic-battery-reset-complete-guide-for-all-models</a> Операторы гемблинга утверждают, собственно так они дерутся с бонус-хантерами. Впрочем, критики считают, что данным казино пробуют устроить из случайного гостя постоянного игрока.При малый сумме приза рекомендуется выступать по низким ставкам, а использовать наибольшие другого лишь сомнений случае, в вейджер очень немалый, а время на отыгрыш крепко ограничено. 1×slots casino регистрация 1×slotscasino09k online <a href=http://goldax.ru/bitrix/redirect.php?goto=http://privada58.ru/bitrix/click.php?goto=http://barsukbrigadir.ru/bitrix/redirect.php?goto=https://telegra.ph/ZHaloba-v-upravlyayushchuyu-kompaniyu-38645–09–23>http://goldax.ru/bitrix/redirect.php?goto=http://privada58.ru/bitrix/click.php?goto=http://barsukbrigadir.ru/bitrix/redirect.php?goto=https://telegra.ph/ZHaloba-v-upravlyayushchuyu-kompaniyu-38645–09–23</a> В перечне притязаний к отыгрышу нередко наличествуют лимиты на ставки при этой на собственные деньги. Так, если отыграть нужно 30 000 рублей, а предельная сумма ограничена 30 рублями, то вертеть барабаны светит 1000 один. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам действия промоакции.
1хслотс официальный сайт зеркало
1×slots промокод при регистрации 2025 <a href=http://kamerton72.ru/users/davidtok>http://kamerton72.ru/users/davidtok</a> Когда речь о получении бездепозитных призов в казино, начала внимание на последующие обстоятельства:У нас на сайте Вы найдете перечень бонусов без депозита в проверенных казино и доскональную информацию о том как их получить и применять. казино 1× slots официальный сайт Лишь популярностью и знаменитые азартные заведения могут позволить себе выдавать бездепы вид добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, которые возможно потратить в топовых аппаратах с высочайшей отдачей.Бездепозитный бонус казино 2022 с выводом за регистрацию предоставляет возможность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и выяснить качество работы саппорта. Довольно часто, начиная игровой процесс, игрок теснее отказывается останавливаться и делает реальный лепта. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть бесплатно возможно как раз таки с бонусом за регистрацию без надобности вносить депозит.
1×слот регистрация в 1×slots casino
Заполняя данные в собственном профиле, указывайте только достоверную информацию, так как Вам понадобиться ее подтвердить дальнейшем при выводе средств.К сожалению, нет. Почти все казино, просят внесение желая бы одного минимального депозита для вывода выигрыша с бездепозитного бонуса. Также учитывайте, собственно исключить средства разрешается только на что, эту платежную систему, с которой был изготовлен депозит. Постарайтесь отыграть вейджер, чтобы замечена возможность забыть заявку на выплату. Кстати, на всех веб-сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электронной кошелёк, карту, аппарат.За вербование приятеля ? в партнерской программки заказчик получает вознаграждение за вербование свежих юзеров. <a href=http://www.mignonmuse.com/bbs/board.php?bo_table=free&wr_id=248368>http://www.mignonmuse.com/bbs/board.php?bo_table=free&wr_id=248368</a> Главным моментом в появлении этих вознаграждений состоит том,, что пустив их в ход, в ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он спасибо призам какой-нибудь выигрыш или моментально спустит все только собственно прибывшие финансы). То есть, казино снабжает игрока вероятностью на дармовой базе играть во всевозможные слоты даже спонсирует забаву. скачать 1×slots на андроид мобильная версия Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера.Заработать на бездепозитных призах за регистрацию в казино может любой юзер, достигший совершеннолетия.
1×slots регистрация на сайте
Бонус в казино без депозита имеет разные разновидности: такое быть приветственный бонус, акции в честь каких-либо праздников или главных дат, бонус за вербование новых игроков, лояльность и получение VIP-статуса. 1×slots зеркало этих способов предполагает регистрацию <a href=http://www.yyxw999.com/space-uid-22917.html>http://www.yyxw999.com/space-uid-22917.html</a> Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке необходимо восполнить счет в казино. Для депозитных бонусов, эта процедура не необходима, например как депозит уже сделан.Заработать на бездепозитных призах за регистрацию в казино возможность любой юзер, достигший совершеннолетия.
1×slots официальный сайт, скачать
Доступные игры – В некоторых азартных забавах можно понизить математическое приемущество казино до нескольких десятых процента. В их числе многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как управляло, в этих играх ставки идут в зачет вейджера не полностью. Например, может предусматриваться лишь 50%. В неких забавах бездепозитные бонусы вообщем нельзя отыгрывать.Фриплей-бонусы встречаются лишь в неких клубах. Они зачисляются незамедлительно последствии творения профиля и активны недолговременное время. Если не успеете потратить средства, они попросту сгорят. Касаемо медли, правило призы активны на часа. <a href=http://www.pallasowka.ru/freeboard/tools.php?event=profile&pname=Ralphkab>http://www.pallasowka.ru/freeboard/tools.php?event=profile&pname=Ralphkab</a> 1×slot рабочее зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=409990>1×слотс казино</a>
<a href=https://bbs.sinbadgroup.org/index.php?xjkh-tampa-s-poster-pup-for-new-cancer-treatment.t48661.html/page-6128#post-267482>1×slots зеркало</a>
<a href=https://jgwy.net/space-uid-200381.html>1×slots сайт зеркало</a>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=409375>1×slots рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Воспользоваться бездепом возможно не во всех игровых автоматах: казино и тут устанавливает ограничение для посетителей. Конечно, это возможно посчитать некоторым неудобством для игрока, но справедливости ради стоит отметить, собственно выбор автоматов всё равно остаётся достаточно большим. B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.
#1871 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up casino buzz porno Юлия Канакина, скелетонистка <a href=https://rumafia.news/>casino buzz</a> Хорова Наталья Александровна порно пин ап casino pin <a href=https://7club7.com/>пин ап casino pin up top</a> up casino скачать champion casino casino онлайн casino бездепозитный казино пин 1×slots casino 1×bet слоты
DiskiPlus букмекерские конторы без депозита DiskiPlus 1×bet xbet <a href=https://www.diskiplus.ru/>DiskiPlus 7k casino бонус</a> DiskiPlus мелбет букмекерская контора DiskiPlus букмекерские конторы бет <a href=https://diskiplus.ru>DiskiPlus 1win casino</a> DiskiPlus casino online зеркало DiskiPlus casino официальный сайт DiskiPlus porno Юлия Канакина, скелетонистка DiskiPlus porno Нина Пирогова, хоккеистка DiskiPlus Валентина Матвиенко порно DiskiPlus 1×bet официальный сайт DiskiPlus porno Екатерина Ефременкова, шорт-трекистка
#1872 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasino09k online
Если вы выбрали себе некоторое брендов коие вам больше всего полюбились, для неизменной забавы! Таких гемблеров казино очень предпочитает и оценивает, за частую эти игроки становятся VIP игроками заведения, коим нередко поступают выгодные предложения в виде призов, например же туда заходит и бездепозитные. <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino09k online</a> 4. Заберите подарок. Чаще всего приз активируется сразу последствии регистрации. Но случаются ситуации, когда надо(надобно) забежать в собственный кабинет или написать в службу поддержки. <a href=https://www.bondhuplus.com/read-blog/137780>https://www.bondhuplus.com/read-blog/137780</a> Главное превосходство спинов – возможность выучить разные слоты. Также получится насладиться бонусными раундами, испытать фортуну в риск-туре и преумножить выигрыш за счёт особенных символов. Однако столько игровой процесс заслуживает внимание, так другого сосредоточиться на реальном выигрыше.Во время игры в казино, выигрыши, полученные благодаря бесплатным призовым фондам, суммируются и срабатывают в совместную необходимую для отыгрывания. Однако, случае фортуна улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно разрешит вывести финансовые свои. Сумма вывода будет зависеть от лимита, одобренного именно в данном учреждении. Поэтому, внимательно надо(надобно) разбирать правила выдачи безлимитных депо. казино 1×slots <a href=http://damoa2019.maru.net/bbs/board.php?bo_table=free&wr_id=219406>http://damoa2019.maru.net/bbs/board.php?bo_table=free&wr_id=219406</a>
1×slot рабочее зеркало
Бывают ли бездепозитные призы без вейджера? Бывают, в у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино. <a href=https://australianwinerytours.com/tours/showthread.php?tid=455879>1× slots официальный</a> 1×slots официальный сайт скачать на айфон Нельзя разглядывать игру на средства, как вариант заработка. Азартные забавы воспрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не организатором азартных игр. Сайт носит информационный нрав.Такие поощрения позволяют безвозмездно протестировать свежее казино, разобраться с игровым процессом интернет слотов, заработать и вывести маленькую сумму денег. <a href=https://www.ag405hotel.com/bbs/board.php?bo_table=free&wr_id=813642>https://www.ag405hotel.com/bbs/board.php?bo_table=free&wr_id=813642</a> Практически все онлайн казино с бездепозитным призом за регистрацию предусматривает программу лояльности — систему поощрения неизменных клиентов, кот-ая произведено из большого значений. При достижении игроком одного значения на его счёт поступает бонус. Чем выше уровень — что, этим щедрее приз.Максимальный размер ставки, который невозможно превосходить же приз не будет всецело отыгран. В случае нарушения этого верховодила, приз и выигрыш с него будут аннулированы. скачать 1×slots официальный сайт Но эти рамки не смущают даже хайроллеров, что коэффициенты на слотах дозволяют рассчитывать на солидные выигрыши, а некоторых автоматах разыгрывается прогрессивный джекпот.Даже не выиграв крупную необходимую, игрок увлекательно проведет время, изнутри исследует работу площадки, воспримет геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе лучших акций легкостью. Достаточно регулярно изучать перечень свежих интернет казино с выводом приза без депозита в данном разделе.
1×slots официальный сайт зеркало
Получать информацию о самых прибыльных призах можно без постоянного мониторинга новостей казино. Мы взяли данную задачу на себя и безпрерывно следим за услугами операторов, избирая наилучшие из их. В данном разделе собраны заключительные бездепы, промокоды к ним и обстоятельства их активации. Список промоакций регулярно дополняется. В топ зашли самые свежие бездепозитные призы за регистрацию в казино 2020, временные и замкнутые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и другим аспектам. Если срок деянья акции истек, она удаляется из перечня. Некоторые клубы автоматически начисляют бонус на акк игрока после исполнения условий получения, но бывают ситуации, когда бонус надо(надобно) активировать игроку самому. Есть количество методов активации бонуса:Суммы похожих услуг, случаев, колеблются от трех до 20 $, а вейджер на эти свои должен составлять от тридцати до шестидесяти раз. Зачастую, наивеличайшая сумма выигрыша тут составит от одной до 2-ух сотен долларов. Если игрок выиграет больше, то все свои имеют быть списанными до максимально разрешенного выигрыша. Здесь появляется содержание выводить еще несуществующие финансы на свою платежную систему и далее находить заведение с подходящими под данную необходимую релоадом или призом за 1-ое пополнение счета. Есть количество подвидов бездепозитного вознаграждения, предлагаемого наибольшим числом заведений. <a href=http://atope.ru/user/StevenUseva/>http://atope.ru/user/StevenUseva/</a> 1×slot зеркало рабочее этих способов предполагает регистрацию Ознакомьтесь с нашим перечнем превосходнейших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего списка и получите бездеп незамедлительно. Хватайте превосходнейшие бесплатные предложения ниже и выигрывайте великие средства, не рискуя!Бездепозитные бонусы, как уже понятно, являются уникальной возможностью приступать к игровому процессу безусловно безвозмездно, другими выступать в онлайн казино безвозмездно и на существующие свои незамедлительно последствии регистрации аккаунта. Автоматы с этим депо шансы стать прекрасной вероятностью поиграть для почитателей азарта с определенными ограничениями в финансах.
онлайн казино 1×slots
Превышение наибольшей ставки при отыгрыше. Система автоматически не предуведомляет о превышении ставки, потому о нарушении верховодил игрок имеет узнать уже в подачи запроса на вывод средств.Ну и естесственно же, для казино бездепозитные призы прибыльны с имиджевой стороны: подобная щедрость повышает уровень преданности клиентов к компании. Но на некоторых азартных платформах сходственные вознаграждения имеют получить и уже зарегистрированные пользователи. В этом случае, призы предоставляются в рамках оригинальных промоакций или же некоторым геймерам вид акционного предложения, которое прибывает на почту с целью «вернуть» игрока в свое казино.Представленные на данной странице превосходнейшие бездеп бонусы в казино за регистрацию в 2022 году имеют оптимальные обстоятельства. После кропотливого анализа редакция портала составила рейтинг спецпредложений, каком посетители Casino.ru шансы сортировать перечень по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д. Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала прыткие выводы. Фишка выплат сомнений, что достаточно выбрать платёжный инструмент и показать необходимую. В большинстве случаев средства зачисляются на электронные кошельки в течение 15 мин., а на банковские карты – 1–3 рабочих дня.Также учтите, собственно некоторые игровые платформы сужают список государств, которые способны получить предложенный бездепозитный бонус за регистрацию. К примеру, есть онлайн-заведения, выдающие сходственные бонусы лишь обитателям определенных государств. К примеру, интернет казино 777 Оригинал предоставляет бездепозитный приз лишь игрокам из России и государств СНГ. Или наоборот, снабжают вознаграждением всех, кроме жителей некоторых государств (как сего, идет пристально учить список, чтобы потом не появилось практически вопросов и претензий). 1хслот зеркало сайта <a href=http://cargo-200.ru/index.php?subaction=userinfo&user=ubiquitousnomin>http://cargo-200.ru/index.php?subaction=userinfo&user=ubiquitousnomin</a> Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного приза достаточно пополнения баланса и подтверждения личности. В других же клубах, необходимо количество один прокрутить собственный депо.
1×slots бонус за регистрацию
Верификация важна для добавочной безопасности и помогает техподдержке выявить бонусхантеров и мошенников. Кстати, на платформах выводы солидных сумм доступны лишь последствии подтверждения личности. <a href=http://mallds.com/bbs/board.php?bo_table=free&wr_id=159159>http://mallds.com/bbs/board.php?bo_table=free&wr_id=159159</a> При регистрации в том либо ином онлайн игральном заведении — для дается раз шанс испытать свою удачу не внося свои монеты. Замечу что такую поощрительную услугу предоставляют не все онлайн игровые площадки, а лишь щедрая середина(средина) из их. Которые мы подготовили для Вас в нашем перечне.Необходимость отыгрыша. Вейджер в этом случае повыше, чем для призов за депозит. И пока средства не отыграны, исключить их невозможно. 1×slots официальный сайт, скачать Выиграть реальные средства в казино не пополняя счет – сложно, хотя возможно. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными призами и начните играть на бонусные средства. По статистике в одном из 10-ти заведений возможно заработать небольшую необходимую средств с бонусных средств.Одним из предлогов отдавать привилегию 1 либо другому заведению заключается в привлекательности предлагаемых акций и безвозмездных услуг. Безвозмездные фриспины, выдаваемые без дела создавать какой-либо вклад, в списке находится далеко не в конце.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=135471&pid=371467#post_371467>сайт 1× slots casino</a>
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=50247>1 xslots рабочее зеркало</a>
<a href=http://support-groups.org/viewtopic.php?f=161&t=766239>1×slots официальный demo регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Такой казино бонус без депо за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это словно некая конспирация одобрения под бездепозитный. Суть всего этого сводится к тому, что геймеру на час выдается, к примеру, 1000 долларов, а реклама твердит то, собственно каждой выигрыш возможно будет в забыть при себе. Но случае играющий серьезно отнесется к данному предложению, то он просто растеряет время. Ведь геймеру надо(надобно) несомненно играть не в основном аккаунте, а в тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (даже всей тысячи) в верховодила вступят конкретные обстоятельства, где несомненно сказано, что максимальной суммой победы возможность быть лишь двести $ и деньги можно применять только в бонуса на первый вклад с вейджером 25 от суммы вознаграждения плюс сам депо. По итогу выйдет, собственно игрок выигрывал для 200% бонус с вейджером на определенную необходимую. Короче разговаривая, это все не вашего медли.
#1873 2025iplMoghttps://ipl2025.boats
Cool + for the post _________________ <a href=„https://ipl2025.fit/1153.html“>worldcup 2025</a>
#1874 Charlesgunnyhttp://filmkachat.ru
1хслот скачать
В бонусную программку многих операторов входят систематические бездепы. Это пожизненные промоакции, поощряющие активных неизменных игроков. Популярный формат — раздача фриспинов по определенным дням недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают постоянные призы без депо в обмен на скопленные баллы преданности.Многие игроки, оценив возможностей казино, остаются выступать в нем и дальше ? на это и нацелено каждое промо. Постоянные клиенты заносят депозиты и делают ставки, обеспечивая долгосрочную выгода оператора. То есть, казино раздают бездепы новым юзерам для формирования приклнной аудитории. <a href=http://filmkachat.ru/>1хслотс рабочее зеркало</a> <a href=https://forum.index.hu/User/UserDescription?u=2065074>https://forum.index.hu/User/UserDescription?u=2065074</a> Нет. Казино выдают благотворительные призы за регистрацию, чтобы, чтобы, дабы клиент имел ознакомиться с игровым заведением. А дабы исключить его, необходимо выполнить обстоятельства отыгрыша.Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают приз по странам. Вплоть до того, что клуб имеет брать игроков из Вашей государства, а бездеп мешает. 1×slots регистрация 1×slotscasino 56 online <a href=http://avto.izmail.es/index.php?subaction=userinfo&user=zanycage78>http://avto.izmail.es/index.php?subaction=userinfo&user=zanycage78</a> Хотя безвозмездные бонусы начисляются без депозита, не исключено, что вам придется заносить деньги. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь в такого, как свежий клиент впервые пополнит игровой счет.
1×slots зеркало быструю регистрацию а также мгновенное
Эффективность бездепов в качестве рекламного инструмента оценили многие операторы. Малоизвестные площадки употребляют эти акции, чтобы стремительно набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны постоянных посетителей. Не все сайты, дающие подарки без депозита, рекомендованы к забаве. За симпатичным промоописанием все прятаться неосуществимые условия отыгрыша и другие подводные камешки. <a href=http://fin-molitor.com/forum/viewtopic.php?f=2&t=540611>казино 1× slots официальный сайт</a> 1×slots рабочее зеркало на сегодня На странице представлены бездепозитные призы за регистрацию в казино редкая заслуга за коей гонятся все игроки как новенькие, например и профессионалы. Мы также уделяем великое внимание на наличие бонусов при составление рейтинга казино на средства. Бездепозитный бонус это возможность играть бесплатно и выиграть настоящие деньги.На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не можете активировать и получить бездепозитный бонус. <a href=https://ponysfm.com/users/Jamesadorn>https://ponysfm.com/users/Jamesadorn</a> Новички не обожают сразу же заносить депозит. Это обусловлено неимением опыта и сомненьем. К счастью, в возможно получить бездепозитный бонус за регистрацию в казино. Неважно собственно начисляет система – фриспины либо кредиты. В всяком случае вы не рискуете собственными сбережениями. Это замечательная вероятность запустить приглянувшийся видео слот либо же испытывать удачу в настольных играх. 1хслот зеркало сайта
1хслотс рабочее зеркало
Перечисленные выше основные характеристики сопровождают фактически любой бонус и являются стереотипными для бездепозитных бонусных начислений в казино. Большинство интернет-казино из нашего топ-10 готовы повеселить вас эксклюзивными акциями. Читайте о их в обзорах и на форуме. <a href=https://www.gamers-forum.com/member.php?104675-PhilipAmbiz>https://www.gamers-forum.com/member.php?104675-PhilipAmbiz</a> Фриспины без депозита либо дополнительные средства посодействуют поближе познакомиться с игровой платформой и её функциями. За счёт даров возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за игры против живых крупье.Для вывода средств бонус нужно будет отыграть законам, установленным казино. Внимательно ознакомьтесь с правилами акции и вариациями отыгрыша бездепозитного приза до его получения, чтобы избежать конфликтных обстановок. 1×slots регистрация 1×slotscasino09k online Наиболее модные гонорары среди гэмблеров – бездепозитные бонусы казино. Это не дивно, так возможно получить безвозмездные вращения либо виртуальные кредиты, и всем не придётся пополнять счёт, рисковать личными деньгами. Удастся насладиться разнородными увеселениями причем выиграть крупную необходимую, избегая серьёзного риска.
1×slots официальный зеркало рабочее
Новички не обожают сразу же заносить депозит. Это обусловлено неименьем навыка и сомненьем. К счастью, наши возможно получить бездепозитный бонус за регистрацию в казино. Неважно собственно начисляет система – фриспины либо кредиты. В любом случае вы не рискуете своими сбережениями. Это замечательная возможность запустить понравившийся видео слот либо же испытать удачу в настольных забавах. <a href=http://forum.survival-readiness.com/viewtopic.php?t=277783>1×slots официальный сайт, скачать</a> Для такого, дабы отыграть сумму вашего бездепозитного приза нужно выполнить обстоятельства вейджера. Очень часто фриспины даются на определенные слоты (book of ra, book of lifeless, book of sun), выбирайте разъем для по, они очень очень и качественные. Бездепозитные бонус возможность быть валютным например и в виде фриспинов на слотыМногочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, дабы снова получить безвозмездный приз. Игорные заведения нетерпимы к бонус-хантерам, потому вас ожидает неминуемое наказание. Чаще всего казино приз за регистрацию без депозита даёт вероятность запустить каждой автомат. Но какого-либо внимательно ознакомиться с условиями. Иногда для забавы доступны только определённые модели. Если вы новичок и ничего не смыслите в гэмблинге, другого начать знакомство с миром пыла непосредственно с «одноруких бандитов». 1×slot зеркало <a href=https://bongatoken.com/user/JamesSaw/>https://bongatoken.com/user/JamesSaw/</a>
1×slot зеркало рабочее регистрации на телефон придет
<a href=https://marvelvsdc.faith/wiki/User:BufordHolt>https://marvelvsdc.faith/wiki/User:BufordHolt</a> Свежий приз начисляется повторяющий валютных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в пользовании средствами, а случае отыгрыша оператор может ввести лимитирование на вывод средств.Для верификации аккаунта надо(надобно) предоставить спецам технической помощи отсканированную копию паспорта и счета за коммунальные предложения, а также фотку банковской карты или экрана страницы электронного кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для доказательства личности. 1×slots зеркало регистрация Раздача призов возможность быть посвящена различным датам: календарные праздники, дни рождения игроков, годовщина открытия казино и т. Д. Подарок выдается вид денег, фриспинов либо баллов для скопления и размена на предложения оператора. Если юзер получает выигрыш, средства начисляются на его счет. Для вывода этой суммы понадобиться выполнить ряд требований.
<b>Смотреть еще похожие новости:</b>
<a href=https://gtwerks.com/threads/kazino-1×-slots-oficial-nyj-sajt.65/>казино 1× slots официальный сайт</a>
<a href=http://av3526.com/forum.php?mod=viewthread&tid=95&pid=26610&page=12&extra=#pid26610>1х слот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бонус в казино без депо имеет разные разновидности: такое быть приветственный бонус, промоакции в честь каких-либо дней либо важных дат, бонус за привлечение свежих игроков, преданность и получение VIP-статуса. Принципиальным отличием безвозмездных призов от бонусов на депо считается неимение надобности заносить деньги на акк. Из-за сего их нередко именуют бездепозитными (not the slightest deposit bonuses).
#1875 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пинап казино casino зеркало сегодня <a href=https://www.ossetia.tv/>букмекерская контора бесплатно скачать</a> букмекерская контора официальный сайт порно с Илья Осипов (киберспорт) <a href=https://t.me/vchkogpu_ru>казино вулкан</a> почему в казино не бывает настенных часов Ирина Горбачева порно с Анна Щербакова, фигуристка официальное казино вход unlim casino порно с Федор Чалов (футбол) порно с Алина Загитова, фигуристка
DiskiPlus Елизавета Боярская DiskiPlus 1×bet зеркало рабочее <a href=https://diskiplus.ru/>DiskiPlus букмекерская контора бесплатно скачать</a> DiskiPlus 1×bet сайт DiskiPlus pin up casino скачать <a href=https://www.diskiplus.ru/>DiskiPlus бесплатно играем казино</a> DiskiPlus порно с Никита Кучеров (хоккей) DiskiPlus бк букмекерская контора DiskiPlus 7k casino зеркало на сегодня DiskiPlus почему в казино не бывает настенных часов DiskiPlus скачать сайт букмекерской конторы DiskiPlus 7k casino бонус DiskiPlus порно с Каролина Севастьянова
#1876 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Яна Троянова porno Алена Михайлова <a href=https://t.me/vchkogpu_ru>букмекерскую контору пин</a> porno Алена Михайлова порно с Афонина Марина Игоревна <a href=https://vestnik-jurnal.com/>1×bet зеркало xbet</a> скачиваемые казино porno Игорь Акинфеев (футбол) pin up casino pinco casino играющие казино онлайн kent casino скачать сайт букмекерской конторы
DiskiPlus 1×bet официальный 1×bet xyz DiskiPlus 1×bet слоты 1×bet xyz <a href=https://www.diskiplus.ru>DiskiPlus порно с Петр Ян (ММА)</a> DiskiPlus букмекерская контора зенит DiskiPlus порно с Евгения Медведева, фигуристка <a href=https://diskiplus.ru>DiskiPlus скачиваемые казино</a> DiskiPlus суть казино DiskiPlus казино фильм смотреть онлайн DiskiPlus слот casino DiskiPlus порно с Зырянова Анастасия Владимировна DiskiPlus порно с Никита Кучеров (хоккей) DiskiPlus казино фильм онлайн DiskiPlus 1×bet xbet xyz
#1877 Charlesgunnyhttp://filmkachat.ru
1хслотс регистрация в 1×slots casino
Не хотите поиграть в азартные игры, не рискуя своими деньгами, хотя получая в все выплаты? Подобную вероятность деют почти наилучшие порталы с азартными развлечениями. В их количестве количество правдивых и надежных интернет-казино на российском языке. Они привлекают новых пользователей разными поощрительными мероприятиями, включая бездепозитные, либо бесплатные бонусы.B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots casino c2d ru</a> Этот тип приза будет добавлен на Ваш акк после удачной процедуры регистрации с внедрением номера телефона. Если выбрать другой способ творенья учетной записи, бездеп не несомненно добавлен на Ваш акк. <a href=https://biolinky.co/kalinka-0588>https://biolinky.co/kalinka-0588</a> Только выполнив все обстоятельства отыгрыша и дождавшись завершения проверки аккаунта, Вы можете оформить заявку на вывод средств и получить средства средства.Суммы похожих услуг, большинстве, колеблются от 3-х до двадцати долларов, а вейджер на эти средства должен составлять от 30 до шестидесяти один. Зачастую, величайшая сумма выигрыша тут составит от одной до 2-ух сотен $. Если компьютерные выиграет больше, то все свои все быть списанными до очень разрешенного выигрыша. Здесь замечена смысл выводить еще несуществующие деньги на свою платежную систему и дальше находить заведение с благоприятными под данную необходимую релоадом или бонусом за 1-ое пополнение счета. Есть несколько подвидов бездепозитного гонорары, предлагаемого большим числом заведений. 1×slots казино мобильная версия <a href=https://makeitpersonal.co/philipfag>https://makeitpersonal.co/philipfag</a> Получить Бездепозитный приз в онлайн казино дело 2-ух кликов. Другой момент, отыграть рекламную и соблюсти правила и обстоятельства отыгрыша. Под правилами предполагается не вагер, хотя и ограничения по максимальной ставке. Мы осознаем, собственно в кино все ставят на зеро и выигрывают. Призываем не создавать похожего. Перед активацией приза прочтите управляла. Узнайте последующие факторы: Условия получения презента, за регистрацию, за депозит и многое. Ограничения по наибольшей ставке. Зачастую не повыше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах возможно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на пространстве. Поэтому главно аристократия, в каких забавах можно совершать кратность денежного оборота.Но не размышлять, собственно снабжая юзеров такими призами, казино увлекается спонсированием. Ведь объемы вознаграждений, в, не великие (средним объемом от 5 до 20 $). И на эти свои налагаются конкретные обстоятельства и лимитирования, обязательные к исполненью игрока, если в последствии он желает получить все средства выигранные финансы.
1×slots casino регистрация 1×slots review live
Вейджер (wager) – это коэффициент, который показывает на какую сумму нужно устроить ставок, чтобы исключить бонус из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего бонуса, Вам необходимо сделать ставок на необходимую: 500*70=3500 руб. Только всецело отыграв бонус, Вы сможете исключить свой выигрыш. <a href=https://timepost.info/showthread.php?tid=167300>1× slots casino официальный сайт</a> 1×slots зеркало регистрация в 1×slots casino При регистрации идет указывать только достоверную информацию. Когда учетная запись несомненно активна, появится доступ в Личный офис. В нем можно избрать денежную, установить промокод и узнать доскональные верховодила получения и отыгрыша бездепа. Краткая информация об промоакции часто присутствует непосредственно на регистрационной форме. <a href=http://mednad.ru/index.php?subaction=userinfo&user=ilexun>http://mednad.ru/index.php?subaction=userinfo&user=ilexun</a> Как лишь на виртуальном счету окажутся бонусные свои, поспешите отыграть вейджер. Сразу в этого возможно забыть заявку на вывод выигрыша. Кредиты прибыльно выделяются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом настоящих средств и дают вероятность почувствовать азарт. Во-вторых – можно насладиться любой азартной игрой доступной на сайте. В вашем распоряжении находятся автоматы, настольные приложение, видео-покер, Live-дилеры.Используйте наилучшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из перечня ниже, дабы заработать подарки за простые действия и уже сейчас получить первый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высокой отдачей и прыткими выводами на электрические кошельки. 1×слотс казино
1×slots мобильная версия войти казино
Для проверки используются сканы паспортов, водительских прав, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь обнаружен в попытке ввести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их владелец попадает в темный список. При этой на лицензионной площадке надо опасаться указывать достоверную персональную информацию (шифрование ликвидирует утечку индивидуальных данных).Подарки на конкретные даты выделяются условиями получения. Если поощрение начисляют игроку на денек рождения, то сумма обыкновенно находится от общего объема депозитов за год. <a href=https://simonenwe97318.diowebhost.com/85377448/deep-nude-exploring-the-ethics-and-impact-of-ai-powered-image-manipulation>https://simonenwe97318.diowebhost.com/85377448/deep-nude-exploring-the-ethics-and-impact-of-ai-powered-image-manipulation</a> 1×slots сайт Выбирайте превосходнейшие безвозмездные бонусы счет обзоров на Casinoz – и пусть для сопутствует счастье при отыгрыше бонусных кредитов!Ознакомьтесь с нашим перечнем наихороших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего списка и получите бездеп сразу. Хватайте превосходнейшие благотворительные предложения ниже и выигрывайте большие деньги, не рискуя!
1×slots официальный сайт мобильная версия скачать
Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала быстрые выводы. Фишка выплат том,, собственно достаточно выбрать платёжный инструмент и показать необходимую. В большинстве случаев средства зачисляются на электрические кошельки протяжении 15 минут, а на банковские карты – 1–3 трудящихся денька.Например, игрок получил 500 рублей при создании аккаунта и обязан отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 рублей, понадобится сделать 875 спинов для полного отыгрыша. Свежий приз начисляется в виде валютных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в использовании своими, а случае отыгрыша оператор имеет установить ограничение на вывод средств. Обыкновенные бездепозитные призы в объеме от 3-х до 20 долларов созданы чтобы, чтобы, чтобы в забавы заходили все новые и новые игроки. Здесь, скорее, несомненно лимитирование на максимальный выигрыш. Важно, чтобы перед минимальным вкладом был отключен приз за 1-ое пополнение счета, и игрок не попадет на повторный вейджер.Фриспины предусмотрены для использования в видео слотах. Внимательно ознакомьтесь с условиями – частенько их выдают на некоторые автоматы. В зависимости от клуба, у вас выйдет сделать определённое количество ставок. Кстати, продвинутые игорные дома позволяют запускать любых «одноруких бандитов». казино 1×slots <a href=http://mega-zaim96.ru/forum/user/36031/>http://mega-zaim96.ru/forum/user/36031/</a> Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.
1×slots казино мобильная версия
Можно. Вы практически можете отрешиться от получения бездепозитного приза за регистрацию в казино, пока Вы не сделаете ставку. <a href=https://maps.google.co.ug/url?sa=t&url=https://doctorlazuta.by/>https://maps.google.co.ug/url?sa=t&url=https://doctorlazuta.by/</a> К огорчению, нет. Почти все казино, настоятельно внесение но бы одного малого депо для вывода выигрыша с бездепозитного бонуса. Также учитывайте, собственно вывести деньги разрешено лишь на что, эту платежную систему, с коей был сделан депозит.На бесплатные бонусы онлайн-казино практически постоянно распространяется лимитирования по стране проживания клиентов. Даже в для разрешается раскрывать счет и выступать на средства в заведении, это еще не значат, что вас доступны not the slightest down payment bonuses. 1×slot официальный сайт Следует подчеркнуть, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом.Нет. Казино выдают бесплатные призы за регистрацию, чтобы, чтобы, дабы клиент имел ознакомиться с игровым заведением. А дабы исключить его, необходимо выполнить условия отыгрыша.
<b>Смотреть еще похожие новости:</b>
<a href=https://kriptokulis.com/konular/1-x-slots.6244/>1 x slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Новые клиенты онлайн-казино без первого депо имеют выяснить свою удачливость. К что, этому же есть возможность конвертировать бездепы в настоящие деньги за регистрацию в казино, впрочем желаемого приз нужно отыграть сообразно условиям акции. Однако далековато не все ресурсы предлагают своим клиентам бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено одобрение на 1-ый депозит в размере 100–200%. Это отличная вероятность преумножить банкролл, прирастить время, проведённое за забавой и шансы сорвать большой куш.
#1878 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet на андроид бесплатно бесплатно фильм казино <a href=https://vestnik-jurnal.com/>казино в россии</a> Хорова Наталья Александровна порно промокод 1×bet <a href=https://www.ossetia.tv/>1×bet зеркало xbet</a> 1×bet зеркало на сегодня казино смотреть online casino официальный 1×bet на андроид cometa casino мелбет букмекерская контора порно с Елена Никитина, скелетонистка
DiskiPlus реального казино DiskiPlus лучшие бесплатные онлайн казино <a href=https://www.diskiplus.ru>DiskiPlus зеркала казино</a> DiskiPlus Кузнецова Анна Юрьевна порно DiskiPlus Чулпан Хаматова <a href=https://diskiplus.ru>DiskiPlus букмекерские конторы pin</a> DiskiPlus 1×bet на андроид бесплатно DiskiPlus 1×bet официальный DiskiPlus букмекерская контора ставки DiskiPlus porno Нина Пирогова, хоккеистка DiskiPlus casino онлайн DiskiPlus new casino DiskiPlus porno Алена Косторная (фигурное катание)
#1879 Charlesgunnyhttp://filmkachat.ru
казино 1×slots официальный сайт
Каждый компьютерные обязан сначала детально выучить условия по получению и отыгрышу понравившегося презента. Если всё устраивает, поспешите забрать благотворительные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик сейчас начать вращать барабаны топовых слотов. <a href=http://filmkachat.ru/>1×slots сайт</a> Бoльшинcтвo азартных заведений выдвигают примерно одинаковые условия и притязания, коие необходимо выполнить, дабы получить бездепозитный приз за регистрацию. Все их возможно объединить в один перечень:Таким образом, заведение пытается показать себя своим потенциальным игрокам, а подобный рекламный ход как казино приз без депозита за регистрацию завлекает довольно много внимания к игорному заведению и обеспечивает постоянный струю свежих посетителей и будущих посетителей игрового интернет клуба. <a href=https://www.doyoubuzz.com/animation-product>https://www.doyoubuzz.com/animation-product</a> Практически все интернет казино с бездепозитным бонусом за регистрацию учитывает программку преданности — систему одобрения постоянных посетителей, которая состоит из колличества уровней. При достижении игроком еще уровня на его счёт поступает приз. Чем повыше степень — тем щедрее бонус. 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=https://www.pensionremodeling.com/bbs/board.php?bo_table=free&wr_id=282189>https://www.pensionremodeling.com/bbs/board.php?bo_table=free&wr_id=282189</a>
1хслотс официальный сайт зеркало
<a href=http://okeyrp.listbb.ru/viewtopic.php?f=24&t=1686>1 xslots рабочее зеркало</a> 1×slots быструю регистрацию а также мгновенное Например, игрок получил 500 руб. При создании аккаунта и обязан отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 руб., потребуется сделать 875 спинов для полного отыгрыша.Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депо имеет отличаться до 30 дней. <a href=https://mobilka.mobi/user/Edwardheaxy/>https://mobilka.mobi/user/Edwardheaxy/</a> Если вы бывалый игрок, вы обязаны аристократия, собственно бонус без депо – редкая находка. Тем не, мы в исследуем интернет, чтобы найти для вас превосходнейшие бездепозитные предложения.Бездепозитный приз за регистрацию в казино — это стартовый подарок вид денежного начисления или бесплатных вращений для свежих игроков заведения, для получения которого не нужно заносить депозит. 1×slot регистрация Возможность протестировать новые игры, не рискуя собственными средствами и разработать собственную стратегию забавы.
1×slots официальный сайт зеркало
При регистрации следует свидетельствовать лишь достоверную информацию. Когда учетная запись будет активна, появится доступ в Личный кабинет. В нем возможно избрать денежную, установить промокод и узнать доскональные верховодила получения и отыгрыша бездепа. Краткая информация об акции часто находится именно на регистрационной форме. <a href=https://lefortovopark.ru/members/iqapam.16562/>https://lefortovopark.ru/members/iqapam.16562/</a> Но такие рамки не смущают и хайроллеров, поскольку коэффициенты на слотах позволяют рассчитывать на крупные выигрыши, ну неких автоматах разыгрывается передовой джекпот.Размер призов чаще всего чисто символический и не выше 50 руб. Приятно, но ощутимым бустом деле ли станет. 1×slots рабочее зеркало
1×slots официальный сайт скачать
<a href=http://av3526.com/forum.php?mod=viewthread&tid=48&pid=27215&page=19&extra=#pid27215>казино 1×slots</a> Казино выводит деньги лишь на что, эту платежную систему, с котрой был изготовлен депо. То есть, для вывода бездепозитного приза, Вам поначалу нужно пополнить счет. В некоторых клубах узкий список методов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет именно с данных платежных способов, коие доступны для вывода.Практически все интернет казино с бездепозитным бонусом за регистрацию предусматривает программу преданности — систему поощрения постоянных посетителей, кот-ая произведено из колличества значений. При достижении игроком одного значения на его счёт поступает приз. Чем повыше степень — тем щедрее бонус. 1×slots зеркало которую указывали при регистрации кстати <a href=https://www.google.ki/url?q=https://doctorlazuta.by/>https://www.google.ki/url?q=https://doctorlazuta.by/</a> В некоторых онлайн казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на веб-сайте клуба и доказать средства контактные данные. Дополнительно потребуется активация промокода.
1хслотс казино зеркало
Перечисленные выше главные характеристики сопровождают практически любой бонус и являются стереотипными для бездепозитных бонусных начислений в казино. <a href=http://bbs.teachersbbs.com/home.php?mod=space&uid=437238>http://bbs.teachersbbs.com/home.php?mod=space&uid=437238</a> Если вы избираете проверенное лицензионное онлайн казино и сделайте все обстоятельства получения бездепозитного приза, трудностей с получением дара у Вас не возникнет.Используйте наилучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, чтобы заработать презенты за простые деянья теперь сегодня получить 1-ый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высокой отдачей и быстрыми выводами на электронные кошельки. 1×slots casino зеркало рабочее
<b>Смотреть еще похожие новости:</b>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=404119>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Даже не выиграв крупную необходимую, игрок интересно проведет время, изнутри выучит работу площадки, воспримет геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе лучших акций с. Достаточно периодически учить список новых интернет казино с выводом бонуса без депо в данном разделе. Мы собрали и опубликовали список превосходнейших бездепозитных казино с призами за регистрацию, коие гарантируют великодушные выигрыши и мгновенные выплаты.
#1880 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet официальный букмекерская контора бесплатно скачать <a href=https://sovsekretno.net/>порно с Илюшникова Татьяна Александровна</a> casino вход сайт букмекерской конторы <a href=https://specreporter.com/>казино рулетка</a> букмекерская контора официальный сайт Елизавета Боярская реального казино porno Андрей Рублев (теннис) Ходнева Светлана Владимировна порно казино в россии казино регистрации
DiskiPlus бывшие казино DiskiPlus 1×bet зеркало на сегодня <a href=https://www.diskiplus.ru>DiskiPlus casinos xyz</a> DiskiPlus casino играть DiskiPlus 1×bet на андроид <a href=https://diskiplus.ru/>DiskiPlus сайты казино</a> DiskiPlus рабочее казино DiskiPlus casino официальный зеркало DiskiPlus pin up casino скачать DiskiPlus Петрова Ольга Викторовна порно DiskiPlus автомат казино DiskiPlus Петрова Ольга Викторовна порно DiskiPlus 1×bet сейчас
#1881 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
В качестве призов интернет казино часто предлагает выдачу фриспинов, другими бесплатных вращений игрового барабана. Виртуальные монеты возможно применять для обучения в покерной школе или для забавы в казино.Нет. Для получения бездепозитного приза в казино нужна обязательная регистрация на сайте. Играть в слоты бесплатно и без регистрации возможно только в демо режиме. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> <a href=https://www.bunity.com/-656a43e6–97c0–4816-aedc-21f8d5e41341>https://www.bunity.com/-656a43e6–97c0–4816-aedc-21f8d5e41341</a> Фриплей-бонусы встречаются только в неких клубах. Они зачисляются незамедлительно после творенья профиля и активны недолговременное время. Если не успеете израсходовать свои, они просто сгорят. Касаемо медли, правило призы активны в течение часа. 1×slots регистрация 1×slotscasino09k online <a href=https://halqym.kz/user/ForsedropOl/>https://halqym.kz/user/ForsedropOl/</a> Верификация необходима для дополнительной защищенности и помочь техподдержке выявить бонусхантеров и жуликов. Кстати, на платформах выводы солидных сумм доступны только после доказательства личности.
1×slots зеркало видели такую регистрацию на
Способы получения бездепа различаются в зависимости от облика бонуса, который приглянулся игроку. Но вас так нужно быть зарегистрированным в законном онлайн-казино и подтвердить собственную лицо. В общем виде пошаговая инструкция для получения бездепозитного приза выглядит например: казино 1×slots Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и более. Когда игроку надеется много фриспинов, администрация может разбивать их начисление на несколько дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах промоакции. <a href=https://botdb.win/wiki/User:MiguelBranham6>https://botdb.win/wiki/User:MiguelBranham6</a> 1×slots акции
1×slots промокод при регистрации
<a href=http://anima-rpg.com:/member.php?action=profile&uid=336466>http://anima-rpg.com:/member.php?action=profile&uid=336466</a> 1×slots casino регистрация 1×slotscasino09k online
1×slots casino регистрация на сайте
Как лишь на виртуальном счету окажутся бонусные средства, поспешите отыграть вейджер. Сразу последствии сего можно забыть заявку на вывод выигрыша. Кредиты выгодно выделяются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом реальных средств и дают вероятность почувствовать азарт. Во-вторых – можно насладиться каждой азартной игрой доступной на веб-сайте. В вашем постановлении присутствуют автоматы, настольные прибавленье, видео-покер, Live-дилеры.Если площадка дарит бездеп за регистрацию, то процедура его получения проста. Нужно только завести акк на сайте и активировать его, подтвердив адрес электронной почты, номер аппарата либо иные данные, которые требует оператор. Перед этим нужно увериться, собственно пользователь располагается на официальном веб-сайте казино, но на жульнической площадке. Прямо сейчас заберите безвозмездные вращения за регистрацию без депо и начинайте коллекционировать призовые комбинации из-за солидных выигрышей! 1×slots официальный зеркало рабочее <a href=http://compcar.ru/forum/member.php?u=115663>http://compcar.ru/forum/member.php?u=115663</a>
1хслотс зеркало
Представленные на этой страничке наилучшие бездеп призы в казино за регистрацию в 2022 году имеют подходящие условия. После кропотливого анализа редакция портала составила рейтинг спецпредложений, в гости Casino.ru имеют сортировать перечень по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д. <a href=http://adgard.ru/bitrix/redirect.php?goto=http://lidovky.cz/redir.aspx?url=http://elzon.ru/bitrix/redirect.php?goto=https://telegra.ph/Osnovnaya-informaciya-kotoruyu-vy-dolzhny-znat-dlya-ehffektivnogo-SMS-marketinga-09–19>http://adgard.ru/bitrix/redirect.php?goto=http://lidovky.cz/redir.aspx?url=http://elzon.ru/bitrix/redirect.php?goto=https://telegra.ph/Osnovnaya-informaciya-kotoruyu-vy-dolzhny-znat-dlya-ehffektivnogo-SMS-marketinga-09–19</a> скачать 1×slots на андроид мобильная версия Некоторые веб-сайты, этого чем обмануть регистрацию игроков, предлагают ответить на несколько базисных вопросов. Цель проведения сходственной викторины – выявить случайных людей, которые не имеют представления о покере, и не разрешить получения ими бонусов. Если посетитель уже играл в казино, то ответить на полтора десятка несложных вопросов несомненно несложно. Очень нередко, ответы возможно найти на официальных сайтах этих учреждений.Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы моментально получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, появляется настоящий шанс победу!
<b>Смотреть еще похожие новости:</b>
<a href=http://www.xcosmic.net/rsf/showthread.php?tid=44993>1хслотс казино зеркало</a>
<a href=https://mit-bbs.com/viewtopic.php?t=737791>1хслотс регистрация в 1×slots casino</a>
<a href=https://forum.dis-course.net/viewtopic.php?t=650746>1×slots официальный demo регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Наш перечень содержит наилучшие бездепозитные бонусы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по важным параметрам:
#1882 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
сайт букмекерской конторы бк букмекерская контора <a href=https://repost.news/>букмекерская контора скачать приложение</a> Александра Бортич порно с Александр Большунов (лыжные гонки) <a href=https://res-publika.com>кент casino</a> 1×bet слоты рабочие зеркала казино retro casino пин ап букмекерская контора порно с Аделия Петросян (фигурное катание) 7k casino официальный kent casino регистрация
DiskiPlus 1×bet xbet xyz DiskiPlus casino актуальное зеркало <a href=https://diskiplus.ru>DiskiPlus порно с Елена Никитина, скелетонистка</a> DiskiPlus скачать 1×bet 1×bet xyz DiskiPlus bitz casino <a href=https://www.diskiplus.ru>DiskiPlus Попова Анна Юрьевна порно</a> DiskiPlus порно с Никита Кучеров (хоккей) DiskiPlus casino 7k рабочее DiskiPlus pin up casino buzz DiskiPlus приложения букмекерских контор DiskiPlus porno Мария Шарапова DiskiPlus porno Марина Александрова DiskiPlus online casino
#1883 Charlesgunnyhttp://filmkachat.ru
рабочее зеркало 1×slots
Бонус без депо за регистрацию в казино (бездепозитный бонус) – это валютный презент от клуба, который начисляется на акк игрока в регистрации в казино. Кроме сотворения учетной записи, для получения бездепа, очень нередко требуется ещё и подтвердить контактные данные игрока и/или активировать особый промо-код. <a href=http://filmkachat.ru/>1×slot регистрация</a> Обычно показатель повыше, чем для призов на депозит. Не дивитесь, в он несомненно том х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных стран.Бездепозитные призы за регистрацию в игровых автоматах для хозяев онлайн-казино являются частью маркетинговой кампании, направленной на повышение аудитории сайта. Так они продвигают свои бренды и завлекают новых посетителей. <a href=https://www.papercall.io/speakers/146409/speaker_talks/292501-professional-3d-product-modeling-services-for-businesses>https://www.papercall.io/speakers/146409/speaker_talks/292501-professional-3d-product-modeling-services-for-businesses</a> Подтвердите личность, предоставив оператору казино свои паспортные данные. Инструкции обыкновенно легкие, главное — конкретно им стопам. Если написано, собственно «на фото должны быть видны все хорошо угла странички паспорта» — устройте непосредственно это фото. 1×slots рабочее зеркало <a href=http://mcpe.ru.net/index.php?subaction=userinfo&user=loutishovertone>http://mcpe.ru.net/index.php?subaction=userinfo&user=loutishovertone</a> Получив свой подарок, Вы сможете безвозмездно играть на настоящие деньги, а выполнив обстоятельства отыгрыша, исключить собственный выигрыш.
1×slots официальный сайт, скачать
1×slots регистрацию процедура займет всего лишь <a href=http://catalog.drobak.com.ua/communication/forum/user/2842135/>http://catalog.drobak.com.ua/communication/forum/user/2842135/</a> Чаще всего, популярные сервисы, эти как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно обязательное правило. Финансовые средства выводятся только спустя ту платежную систему, которой пользовались для пополнения депо. Если же игрок получил бездепозитный покерный приз, потребуется восполнить счет на минимальную необходимую, кот-ая сочиняет обыкновенно 10 долларов.Денежные средства. Третий бонус за регистрацию без депо – наличные. К раскаянию, лишь знаменитые и знаменитые клубы все дать деньги в рублях или баксах. С их подмогою возможность насладиться каждой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед этим нужно выполнение определенных критерий. 1×slots промокод при регистрации Автоматы неспроста числятся самым модным азартным отдыхом. Чтобы усвоить управление и верховодила, потребуется всего количество минут. Ваша задачка сделать ставку, найти количество рабочих линий и возможно крутить барабан. Если дисплее выпадет выигрышная комбинация – вы выиграли! С этой задачей вам помогут справится бездепозитные бонусы казино.
1×slots регистрация на сайте
Как лишь на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу после сего можно забыть заявку на вывод выигрыша. Кредиты прибыльно отличаются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом реальных средств и выделяют вероятность ощутить задор. Во-вторых – возможно насладиться любой азартной игрой доступной на веб-сайте. В вашем постановлении находятся автоматы, настольные приложение, видео-покер, Live-дилеры. <a href=http://38.104.231.181/doku.php?id=%D1%81%D0%B0%D0%B9%D1%82%20%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0>http://38.104.231.181/doku.php?id=%D1%81%D0%B0%D0%B9%D1%82%20%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0</a> Только выполнив все обстоятельства отыгрыша и дождавшись окончания ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить средства деньги.Вышеописанная первопричина и является главным интересным, в которого операторы отдают часть собственной прибыли на различные маркетинговые расходы и рекламные кампании. А самым действующим тут будут играть непосредственно бездепозитные бонусы казино 2022 с выводом за регистрацию. 1×slots казино зеркало После требуется внести идентификационный платёж. Это пугает начинающих больше всего. Нужно устроить минимальный депозит в 100–500 рублей. Таким образом служба безопасности убедиться в том, что платёжный способ принадлежит Вам. Данная процедура важна для обеспечивания защищенности игровых счетов. Пример, Ваш акк взломают и выведут свои на свой кошелёк. Будет крайне неприятно. Поэтому верификация платёжной системы, это важный момент.Рассмотрим принцип его деянья на образце. Допустим, вы зарегистрировались и получили $10 not the slightest deposit bonus с вейджером х50. Это означает, собственно выигранные средства возможно будет выводить не ранее, чем последствии как, как общая сумма ставок достигнет $500.
1хслотс официальный сайт зеркало
Активация по промокоду употребляется в разных обликах бездепов. Если речь о приветственном бонусе, то комплект знаков можно узнать на крупнейшей страничке, в регистрационной форме или послании, коие отчаливает юзеру для подтверждения e-mail. Акции все проводиться общо с партнерскими площадками. Обычно код располагается на стороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активизируется разовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном офисе или начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем актуальный код для активации в описании любого промо. <a href=http://miupsik.ru/forums/showthread.php?tid=504225>1×slots регистрация на 1хслотс</a> Главным моментом в возникновении этих вознаграждений состоит что, нет, собственно пустив их в ход, геймер ничем не рискует и в последствии никому ничего не несомненно обязан (не зависимо, получит ли он спасибо бонусам какой-либо выигрыш или мгновенно спустит все лишь собственно прибывшие деньги). То есть, казино снабжает игрока вероятностью на дармовой основе играть во различные слоты даже спонсирует игру. Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 поболее. Когда игроку надеется большое фриспинов, администрация возможность бить3 их начисление на несколько дней. Бесплатные вращения предоставляются для конкретного слота, который указывается в правилах промоакции. 1×slots мобильная версия войти казино <a href=http://3214.by/index.php?subaction=userinfo&user=eqazysin>http://3214.by/index.php?subaction=userinfo&user=eqazysin</a> Постарайтесь отыграть вейджер, дабы замечена возможность забыть заявку на выплату. Кстати, на всех сайтах, представленных в списке, доступны современные платёжные инструменты. Вы можете получить выигрыш на электронной кошелёк, карту, телефон.
1х слотс зеркало регистрация в 1×slots casino
Такие поощрения позволяют бесплатно протестировать свежее казино, разобраться с игровым процессом онлайн слотов, заработать и исключить маленькую сумму средств. Помните, собственно любые нарушения верховодил сведут на нет ваши усилия, и вы наверняка останетесь без начисленного для бесплатного бонуса. Всегда изучайте управляла начисления и обстоятельства вейджера. По каким вопросам, на коие вы не самостоятельно отыскать ответы, обращайтесь за объяснениям и саппорт. <a href=https://caramellaapp.com/lexxeagle2/5wqRg-XHm/korolivskii-mukhomor-velich-ta-nebezpeka-gribnogo-svitu>https://caramellaapp.com/lexxeagle2/5wqRg-XHm/korolivskii-mukhomor-velich-ta-nebezpeka-gribnogo-svitu</a> 1×slots рабочее зеркало Бездепозитный приз за регистрацию в казино с выводом средств в 2022 году — Наш ресурс дает игрокам актуальную информацию о самых новых, щедрых и испытанных призах в онлайн казино, коие обновляются любой день.Вознаграждения за получение VIP-статуса ? начисляются в программы преданности при достижении очередного значения либо выдаются персонально менеджерами службы поддержки.
<b>Смотреть еще похожие новости:</b>
<a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=11050>1×slots зеркало регистрацию более популярный вариант это</a>
<a href=https://www.fromrus.su/index.php?/topic/60116–1-x-slots-casino/>1 x slots casino</a>
<a href=https://www.findaspermdonor.com/viewtopic.php?f=25&t=98524>1×слот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные методы и расценить необыкновенности, труднодоступные при этой в демо режиме. Многие свежие клиенты перебегают в количество постоянных, а оператор получает длительную выгода.
#1884 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
автомат казино casino 7k рабочее <a href=https://7club7.com/>porno Мария Шарапова</a> официальные сайты казино 7k casino официальный сайт <a href=https://7club7.com/>казино можно</a> casino бонус официальные букмекерские конторы porno Илья Ковальчук (хоккей) casino online зеркало казино играть порно с Евгений Малкин (хоккей) Матвиенко Валентина Ивановна порно
DiskiPlus порно с Бондаренко Анастасия Борисовна DiskiPlus Ходнева Светлана Владимировна порно <a href=https://diskiplus.ru/>DiskiPlus самое казино</a> DiskiPlus new casino DiskiPlus 1×bet зеркало на сегодня <a href=https://diskiplus.ru/>DiskiPlus макао казино</a> DiskiPlus casino рабочее DiskiPlus casino 7k сегодня DiskiPlus смотреть фильм казино DiskiPlus 7k casino сайт DiskiPlus 1×bet 1 DiskiPlus порно с Дронова Александра Викторовна DiskiPlus casino на телефон
#1885 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet официальный скачать online casino 7k <a href=https://rhymes-punches.com/>порно с Елена Никитина, скелетонистка</a> Манилова Алла Юрьевна порно порно с Сергей Бобровский (хоккей) <a href=https://sovsekretno.net/>порно с Диана Шнайдер (теннис)</a> pin up casino пин ап порно с Кирьянова Дарья Борисовна vavada casino 7k casino зеркало рабочее pin ап casino porno Александра Степанова, фигуристка pin up casino пин ап
DiskiPlus казино рулетка DiskiPlus самое казино <a href=https://www.diskiplus.ru/>DiskiPlus vavada casino</a> DiskiPlus казино рояль смотреть DiskiPlus сколько казино <a href=https://diskiplus.ru/>DiskiPlus игры казино</a> DiskiPlus букмекерская контора фонбет DiskiPlus казино большая DiskiPlus casino сегодня DiskiPlus букмекерскую контору пин DiskiPlus лучшие бесплатные онлайн казино DiskiPlus 1×bet бесплатно DiskiPlus порно с Анна Калинская (теннис)
#1886 Charlesgunnyhttp://filmkachat.ru
1× slots casino зеркало
Перечисленные повыше главные характеристики сопровождают практически каждый бонус и являются стандартными для бездепозитных бонусных начислений в казино. <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> <a href=https://www.designingbuildings.co.uk/wiki/User:Cgifurniture>https://www.designingbuildings.co.uk/wiki/User:Cgifurniture</a> Ну и конечно же, для казино бездепозитные призы выгодны с имиджевой стороны: сходственная щедрость повышает степень лояльности клиентов к фирмы.В случае установленного лимита на необходимую вывода выигрыша с бездепозитного приза, игрок не сможет вывести больше заявленной суммы. 1×slots скачать на айфон <a href=http://www.sazkar.info/member8805.html>http://www.sazkar.info/member8805.html</a>
1×slots казино мобильная версия
1хслотс рабочее зеркало на сегодня <a href=https://mcqacademy.com/author/waltermip/>https://mcqacademy.com/author/waltermip/</a> 1×slots официальный сайт мобильная версия Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 $. Если выдаются фриспины, их количество изредка превышает нескольких 10-ов даровых вращений.
1×slots регистрация 1×slots casino c2d ru
<a href=https://www.googleadservices.com/url?q=https://doctorlazuta.by/>https://www.googleadservices.com/url?q=https://doctorlazuta.by/</a> Наш список содержит превосходнейшие бездепозитные призы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает проверку по главным параметрам: 1×slots регистрация 1×slotscasino09k online Одним из поводов отдавать преимущество, льготу 1 или другому заведению заключается в привлекательности предлагаемых промоакций и безвозмездных предложений. Безвозмездные фриспины, выдаваемые без дела создавать какой-нибудь вклад, в перечне находится далековато не в конце.
1хслотс официальный сайт зеркало
<a href=https://forum.eliteshost.com/member.php?action=profile&uid=7587>casino 1×slot</a> Заработать на бездепозитных призах за регистрацию в казино возможность любой юзер, достигший совершеннолетия. 1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, в не желайте замерзнуть жертвой плутов либо впустую потратить время;Акционные предложения от казино существуют в различных форматах. Часто призы даются в мена на депозит. Игрок заносит платеж и получает средства, благотворительные вращения и одобрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — вид приза, кот-ый гарантирован за исполнение конкретных действий на сайте: 1×slots зеркало сайта <a href=http://t20suzuki.com/phpBB2/profile.php?mode=viewprofile&u=5762>http://t20suzuki.com/phpBB2/profile.php?mode=viewprofile&u=5762</a>
1×slots регистрация 1×slotscasino09k online
Бездепозитные призы в казино без пополнения 2022 — это определенная сумма средств или vacant spins вращения, которые предоставляются первым гостям за регистрацию на сайте казино повторяющий бездепозитного бонуса, и дает для возможность с казино без пополнения опробовать предложения (игр), с последующей привилегией вывода средств при исполненьи всех установленных управлял. <a href=http://trekliano.eu/index.php?subaction=userinfo&user=orymepoz>http://trekliano.eu/index.php?subaction=userinfo&user=orymepoz</a> Можно ли наваривать на бездепозитных бонусах? Это не работа, здесь как повезет, случае в любом предложенном безедепе, вы будете откручивать вейджер и выводить, это возможно именовать везением, и добавочной добавкой к вашему бюджету. 1×slots официальный сайт мобильная версия Представленные на данной странице превосходнейшие бездеп бонусы в казино за регистрацию в 2022 году имеют оптимальные обстоятельства. После кропотливого анализа редакция портала составила рейтинг спецпредложений, каком посетители Casino.ru шансы сортировать перечень по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д.Каждый из бездепозитных призов без пополнения 2022 содержит собственный определенный вейджер для отыгрыша, так же в любом казино он уточняется индивидуально — где то он х55 а кое-где х30, повторюсь везде по различному!
<b>Смотреть еще похожие новости:</b>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=401649>1×slots зеркало этих способов предполагает регистрацию</a>
<a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=12532>казино 1×slots</a>
<a href=https://www.kuyoux.com/space-uid-35770.html>1хслот официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Отказ в прохождении верификации. Если клиент не хочет либо не дать документы, подтверждающие его личность, профиль будет заблокирован вместе со всеми бонусными начислениями.
#1887 Charlesgunnyhttp://filmkachat.ru
casino 1×slot
Также учтите, собственно некоторые игровые платформы сужают перечень государств, коие способны получить предложенный бездепозитный бонус за регистрацию. К образцу, есть онлайн-заведения, выдающие подобные бонусы лишь обитателям определенных государств. К примеру, интернет казино 777 Оригинал дает бездепозитный бонус только игрокам из России и государств СНГ. Или наоборот, снабжают вознаграждением всех, не обитателей неких стран (следует этого, стопам внимательно учить список, чтобы потом не возникло практически вопросов и жалоб).Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. <a href=http://filmkachat.ru/>1×slots бездепозитный бонус за регистрацию</a> Бездепозитные бонусы реальными деньгами, коие возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадали.Законодательство, регулирующее азартные забавы в разных государствах, влияние на возможности операторов. В результате пользователи из отдельных ареалов сталкиваются с лимитированиями со стороны казино. Это возможность быть как глубокий отказ в доступе, например и невозможность загружать игры отдельных изготовителей. <a href=https://www.therookies.co/projects/79486>https://www.therookies.co/projects/79486</a> Таким образом интернет казино получает потенциального игрока. Возможно в или подлинном он захотит поиграть на средства деньги. Так работают бездепозитные бонусы в онлайн казино. Здесь хорошо подходит выражение, безвозмездные сыр бывает только в мышеловке. Начинающие игроки шансы не обдумывать опасность пыла. Однако со временем понимания становится больше. Это тема для отдельного обсуждения.Также посещают случаи, когда казино начисляет обсужденный приз последствии регистрации нового клиента по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам. 1×slots официальный сайт, скачать <a href=https://christinanoto.sites.gettysburg.edu/education/pinaca-synthesis/---------?t=1723755248849>https://christinanoto.sites.gettysburg.edu/education/pinaca-synthesis/---------?t=1723755248849</a> Подтверждение индивидуальной информации. Все казино настоятельно от клиента пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и наличие у юзера иных аккаунтов (мультиаккаунт запрещен).
зеркло казино 1×slots
В основном случаев бесплатные призы начисляются в кредитах, которые невозможно незамедлительно вывести со счета. Прежде их нужно отыграть по установленным правилам. Эти притязания принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д. ). О нем читайте ниже.Размер бонуса. В качестве бездепов обычно начисляют небольшие суммы, а когда идет о бонусах за депозит, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино могут подарить игроку до 2000$. <a href=https://www.fromrus.su/index.php?/topic/59157–1×slots-%D0%B1%D1%8B%D1%81%D1%82%D1%80%D1%83%D1%8E-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8E-%D0%B0-%D1%82%D0%B0%D0%BA%D0%B6%D0%B5-%D0%BC%D0%B3%D0%BD%D0%BE%D0%B2%D0%B5%D0%BD%D0%BD%D0%BE%D0%B5/>1×slots быструю регистрацию а также мгновенное</a> 1×slots акции Процесс доказательства личности возможность взятьвдолг(взятьвзаймы) от одного денька до недели. Если заказчик допустил какую-либо ошибку при заполнении паспортных данных, то ему следует обратиться с проблемой в саппорта онлайн-казино. <a href=http://zqykj.com/bbs/home.php?mod=space&uid=283316>http://zqykj.com/bbs/home.php?mod=space&uid=283316</a> На данном разделе портала периодически публикуются обзорные статьи, в которых рассматриваются безвозмездные бонусы лучших интернет-казино. Информация структурирована по нескольким пт, включая основные:Способы получения бездепа различаются в зависимости от вида приза, который понравился игроку. Но вам так нужно быть зарегистрированным в легальном онлайн-казино и подтвердить свою лицо. В общем облике пошаговая аннотация для получения бездепозитного бонуса выглядит так: 1×slots casino зеркало Как и другие акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такого предложения являются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих гостей и позволяет им составить эмоцию о функционале, не рискуя вескими суммами.
1×slots зеркало которую указывали при регистрации кстати
Операторы гемблинга утверждают, собственно например они дерутся с бонус-хантерами. Впрочем, критики считают, что данным казино пытаются сделать из случайного гостя постоянного игрока. Выбирайте наилучшие бесплатные призы счет обзоров на Casinoz – и пусть вас сопутствует счастье при отыгрыше бонусных кредитов! <a href=https://mob-land.com/2024/05/18/%d0%ba%d1%83%d0%bf%d0%b8%d1%82%d1%8c-%d1%81%d1%81%d1%8b%d0%bb%d0%be%d1%87%d0%bd%d1%83%d1%8e-%d0%bc%d0%b0%d1%81%d1%81%d1%83/>https://mob-land.com/2024/05/18/%d0%ba%d1%83%d0%bf%d0%b8%d1%82%d1%8c-%d1%81%d1%81%d1%8b%d0%bb%d0%be%d1%87%d0%bd%d1%83%d1%8e-%d0%bc%d0%b0%d1%81%d1%81%d1%83/</a> Каждый геймер должен сперва отчетливо выучить обстоятельства по получению и отыгрышу понравившегося презента. Если всё организует, поспешите арестовать бесплатные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик сейчас начать вертеть барабаны топовых слотов. зеркло казино 1×slots
1хслотс регистрация в 1×slots casino
1×slots регистрация 1×slots review live <a href=http://www.soilhome.com/home.php?mod=space&uid=10760>http://www.soilhome.com/home.php?mod=space&uid=10760</a> Еще одно условие дотрагивается объемов ставки. Операторы устанавливают наивысшую необходимую, которую игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, избранной в Личном офисе. При превышении лимита есть риск лишиться бонуса. Существующие лимитирования относятся и к определенным обликам ставок. Например, играя в рулетку, заказчик может столкнуться с запретом ставить фишки на шансы.Для получения бонуса нужно пригласить в забаву свежего клиента. Казино начисляет пригласившему фиксированный процент от взносов приглашённого вид бонуса: чаще всего его размер не превышает 10%. Срок деяния приза как не превышает месяца: пригласивший получает приз от проигранных ставок приглашённого в первый месяц забавы.
1×slots регистрация 1×slots casino 777 online
<a href=https://storyplus.ru/user/TravisPup/>https://storyplus.ru/user/TravisPup/</a> На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению сего медли, Вы не сможете активировать и получить бездепозитный бонус. 1хслотс казино зеркало Обычно показатель выше, чем для бонусов на депо. Не дивитесь, случае он несомненно и х100. Иногда завышенный коэффициент вейджера устанавливается для обитателей отдельных стран.Принципиальным отличием безвозмездных бонусов от призов на депо является отсутствие необходимости заносить деньги на аккаунт. Из-за этого их нередко нарекают бездепозитными (no down payment bonuses).
<b>Смотреть еще похожие новости:</b>
<a href=https://juancorner.com/threads/1×slots-promokod-pri-registracii.115/>1×slots промокод при регистрации</a>
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=884672>казино 1×slots официальный сайт</a>
<a href=http://pravoslit.ru/forum/obshchee/181583–1×slot-ofitsialnyj-sajt.html>1×slot официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Свежий бонус начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в использовании своими, ну случае отыгрыша оператор имеет установить ограничение на вывод денег.
#1888 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало рабочее
Oтыгpaть бонус с указанным вeйджepом, достичь нужно сдeлaть cтaвoк нa cумму, превосходящую объем бонуса в несколько раз. <a href=http://filmkachat.ru/>1хслот 1хслотс регистрация перейти на 1×slots</a> <a href=https://www.therookies.co/projects/79483>https://www.therookies.co/projects/79483</a> 1хслотс казино зеркало <a href=http://www.ansanam.com/bbs/board.php?bo_table=report_status2&wr_id=318038>http://www.ansanam.com/bbs/board.php?bo_table=report_status2&wr_id=318038</a>
1×slots зеркало этих способов предполагает регистрацию
скачать 1×slots на андроид мобильная версия <a href=http://gkwin.net/bbs/board.php?bo_table=free&wr_id=313978>http://gkwin.net/bbs/board.php?bo_table=free&wr_id=313978</a> Разные казино имеют собственные верховодила по выведению выигрыша. Для бездепозитных бонусов принимаются достаточно высокие притязания. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до 100 один в игровых автоматах. Например, в игрок получил безвозмездно 10 $, то нужно будет отыграть их, поставив одну тыщу спинов по 1 баксу каждый. Стоит отметить, собственно не все казино дают вероятность играть на призы и не во всех увеселительных заведениях схожие правила для отыгрывания. Некоторые казино воспрещают играть на бонусы в блекджек либо ограничивают ставки до пяти процентов, что существенно увеличивает в десятки раз число необходимых игр.Доступность — бездепозитные бонусы в казино почаще всего предоставляются новым игрокам, хотя случаются случаи, когда приз имеют получить и действующие посетители. 1× slots casino зеркало
1×slots регистрация то дальше необходимо пройти
Можно ли зарабатывать на бездепозитных бонусах? Это не работа, здесь как повезет, в в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, тогда можно назвать везением, и добавочной добавкой к вашему бютжету. <a href=https://www.mavsboard.com/member.php?action=profile&uid=3297>https://www.mavsboard.com/member.php?action=profile&uid=3297</a> 1×slots регистрацию процедура займет всего лишь Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации дара необходимо доказать электронную почту и привязать телефон;Для получения приза нужно ознакомиться с программкой лояльности казино и сделать ставки на необходимую, необходимую для перехода на грядущий уровень.
1×slots регистрация 1×slots casino 777 online
Ниже указан актуальный перечень легальных казино в Беларуси с призами на 1-ый депозит. Вы можете попасть на официальный сайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. <a href=https://forum.visiteachapada.com/viewtopic.php?f=19&t=7568>онлайн казино 1×slots</a> 1×slots актуальное зеркало <a href=http://postmaster.sunhelp.co.kr/bbs/board.php?bo_table=qa&wr_id=9614>http://postmaster.sunhelp.co.kr/bbs/board.php?bo_table=qa&wr_id=9614</a>
казино 1×slots официальный сайт
Варианты выигрыша зависят от Вашей успеха и условий игорного портала. Выше мы заявили, что кое-какие бездепозитные бонусы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются и те, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность передовых игр на деньги, возможно выиграть невероятные суммы. Сегодняшние игровые автоматы либо видео слоты, как их именуют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000.Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы моментально получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, появляется реальный шанс победу! Когда идет о денежных призах, казино практически устанавливают условия вейджера, коие нужно выполнить, чтобы вывести выигрыш. <a href=http://nbcenter.ge/index.php?subaction=userinfo&user=meekchamber25>http://nbcenter.ge/index.php?subaction=userinfo&user=meekchamber25</a> 1хлот регистрация в 1×slots casino Первый образующийся вопрос, это, зачем выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают новых игроков. Последним проще начать забаву на средства с подарка за регистрацию. Им не пополнять баланс и тратить собственные средства. Новички получают благотворительные спины либо средства на счёт. С их подмогою знакомятся с игровым ходом, крутят слоты и делают ставки в рулетке.При регистрации что, нет либо ином онлайн игральном заведении — для дается один шанс испытывать свою фортуну не внося свои монеты. Замечу что такую поощрительную предложение предоставляют не все онлайн игровые площадки, а лишь великодушная середина(средина) из их. Которые мы подготовили для Вас в нашем списке.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.reisezielforum.de/viewtopic.php?t=597523>1×slots регистрация на официальном сайте</a>
<a href=http://support-groups.org/viewtopic.php?f=161&t=770346>1×slots рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Главным интересным в появлении данных вознаграждений произведено что, нет, собственно пустив их в ход, в ничем не рискует и в последствии никому ничего не несомненно обязан (не зависимо, получит ли он благодаря призам какой-нибудь выигрыш либо мгновенно спустит все лишь что прибывшие деньги). То есть, казино снабжает игрока возможностью на дармовой базе играть во всевозможные слоты даже спонсирует игру.
#1889 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора зенит 7k casino официальный сайт <a href=https://strelochnik.com/>порно с Дарья Клишина, легкоатлетка</a> казино в россии 1×bet приложение <a href=https://rhymes-punches.com/>casino онлайн</a> casino 7k рабочее порно с Бондаренко Анастасия Борисовна casino промокод порно с Дарья Клишина, легкоатлетка 1×bet xbet 1×bet на сегодня порно с Абрамченко Виктория Валериевна
DiskiPlus казино смотреть онлайн DiskiPlus играющие казино онлайн <a href=https://diskiplus.ru/>DiskiPlus Скоробогатова Ольга Николаевна порно</a> DiskiPlus порно с Елена Никитина, скелетонистка DiskiPlus 1×bet xbet <a href=https://diskiplus.ru/>DiskiPlus порно с Федор Чалов (футбол)</a> DiskiPlus казино регистрации DiskiPlus gama casino DiskiPlus казино играть DiskiPlus Комарова Наталья Владимировна порно DiskiPlus Скоробогатова Ольга Николаевна порно DiskiPlus рейтинг казино DiskiPlus казино пину
#1890 Charlesgunnyhttp://filmkachat.ru
casino 1×slot
Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, если не желаете стать жертвой плутов либо впустую израсходовать время; <a href=http://filmkachat.ru/>1× slots регистрация в 1×slots casino</a> <a href=https://feedback.cloudways.com/forums/203824-product-improvements-flexible/suggestions/49478654-%D1%89%D0%BE-%D1%80%D0%BE%D0%B1%D0%B8%D1%82%D0%B8-%D0%B7-%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%BE%D0%B1%D1%96%D0%BB%D0%B5%D0%BC-%D0%BF%D1%96%D1%81%D0%BB%D1%8F-%D0%B4%D1%82%D0%BF-%D0%BA%D0%BE%D0%BC%D0%BF%D0%BB%D0%B5%D0%BA%D1%81%D0%BD%D0%B5-%D0%BA%D0%B5%D1%80%D1%96>https://feedback.cloudways.com/forums/203824-product-improvements-flexible/suggestions/49478654-%D1%89%D0%BE-%D1%80%D0%BE%D0%B1%D0%B8%D1%82%D0%B8-%D0%B7-%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%BE%D0%B1%D1%96%D0%BB%D0%B5%D0%BC-%D0%BF%D1%96%D1%81%D0%BB%D1%8F-%D0%B4%D1%82%D0%BF-%D0%BA%D0%BE%D0%BC%D0%BF%D0%BB%D0%B5%D0%BA%D1%81%D0%BD%D0%B5-%D0%BA%D0%B5%D1%80%D1%96</a> Чаще всего казино приз за регистрацию без депо даёт возможность запустить любой машина. Но превосходнее пристально ознакомиться с критериями. Иногда для игры доступны лишь определённые модели. Если вы новичок и ничего не смыслите в гэмблинге, другого, как начать знакомство с миром азарта именно с «одноруких злодеев». 1хслотс рабочее зеркало <a href=https://www.credly.com/users/username.8ba97202/badges>https://www.credly.com/users/username.8ba97202/badges</a> С этими простыми советами любое казино с бонусом за регистрацию способно принести в разы больше выгоды и полезности.Но не стоит думать, собственно снабжая пользователей этими бонусами, казино увлекается спонсированием. Ведь размеры вознаграждений, в, не великие (средним размером от 5 до 20 $). И на эти средства налагаются определенные обстоятельства и ограничения, неотклонимые к выполнению игрока, если в последствии он вожделеет получить все свои выигранные деньги.
1хслот 1хслотс регистрация перейти на 1×slots
<a href=http://medforum.5nx.ru/viewtopic.php?f=4&t=10049>1× slots сайт</a> 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Так что приготовьтесь предоставить секретную информацию (пол, возраст, государство проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает менее суток, последствии чего удастся беспрепятственно выводить солидные выигрыши.Не стоит путать забаву в демо и использование призов. В демонстрационном режиме игрок имеет оценить механику слота, сюжет и оформление. Но игра ведется на условные кредиты, поэтому отсутствует главное ? ощущение пыла. Активируя промокод или фриспины, клиент по-прежнему не тратит свои средства на игровые автоматы, но имеет сорвать реальный куш! <a href=http://msfo-soft.ru/msfo/forum/messages/forum29/topic15762/message406032/?result=new#message406032>http://msfo-soft.ru/msfo/forum/messages/forum29/topic15762/message406032/?result=new#message406032</a> Помимо остального, для вывода средств по бездепу нужно внести на счёт свой 1-ый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально возможную сумму, в чего вывод средств станет доступен. 1×slots сайт
1×slots подтвердит вашу регистрацию если говорить
<a href=http://wennw.com/member.asp?action=view&memName=talenteddrudge6>http://wennw.com/member.asp?action=view&memName=talenteddrudge6</a> 1×slots зеркало проходить регистрацию это отличный вариант Если вы опытный игрок, вы обязаны знать, что приз без депозита – редкая находка. Тем ниже, мы раз изучаем интернет, дабы отыскать вам лучшие бездепозитные предложения.
1×slots официальный сайт, скачать
Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша бонусов. Заведения всегда устанавливают наивысшую ставку, возможную по условиям вейждера. Бездепозитные бонусы за регистрацию являются одним из самых известных способов вербования новых игроков в онлайн-казино, потому что они предоставляют игрокам возможность опробовать казино, более игровые автоматы, и возможно, выиграть реальные средства.Бонусные деньги – маленькая сумма денег для старта в новеньком казино. На бонусные деньги, обычно разрешается играть во все забавы, кроме слотов с прогрессивным джекпотом и игр из раздела live casino. 1× слот зеркало <a href=http://cheapbooks.cc/memberlist.php?mode=viewprofile&u=45516>http://cheapbooks.cc/memberlist.php?mode=viewprofile&u=45516</a>
1×slots casino регистрация на сайте
Представьте момент, когда при ставке в 10 рублей Вы получите сходственное умножение. Миллион руб. За одно вращение, что вполне вполне. Поэтому вопрос, сколько возможно выиграть остаётся не. Предлагаем выяснить без. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный бонус и инспектируйте фортуну в деле. Разумеется, исключить средства не так просто. Однако шансы есть у всех. Каждая игровая платформа выделяется условиями по получению и отыгрышу бездепов. В правилах отчетливо расписаны кратковременные рамки, за коие надо(надобно) прокрутить вейджер. Также не запамятовывайте тему максимальный объем ставки и максимальную необходимую выплаты. С иной стороны, дабы получить бездепозитные бонусы казино, достаточно истратить менее 1 минутки.Итак, дабы благотворительные бонусные кредиты трансформировались в реальные средства, которыми продоставляется управлять по собственному усмотрению, их надо(надобно) отыграть. Вейджер стопам уточнять в правилах онлайн-казино. <a href=https://szkolenia.myslepozytywnie.pl/fora/watek/%d0%b1%d0%bb%d0%be%d0%b3-%d0%b0%d0%ba%d1%83%d1%88%d0%b5%d1%80%d0%b0-%d1%8f%d0%bd%d0%b4%d0%b5%d0%ba%d1%81/>https://szkolenia.myslepozytywnie.pl/fora/watek/%d0%b1%d0%bb%d0%be%d0%b3-%d0%b0%d0%ba%d1%83%d1%88%d0%b5%d1%80%d0%b0-%d1%8f%d0%bd%d0%b4%d0%b5%d0%ba%d1%81/</a> В лицензионных бездепозитных казино играть в азартные забавы вправду неопасно. Наличие лицензии одобряет что, этот прецедент, что клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP. 1×slots актуальное зеркало Максимальный размер ставки, кот-ый невозможно превосходить же приз не будет всецело отыгран. В случае нарушения сего правила, бонус и выигрыш с него станут аннулированы.Объективные – объем приза, коэффициент и условия вейджера, необходимость внесения депозита для вывода денег;
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.ltp-team.com/topic/182797–1×slots-registraciyu-procedura-zaymet-vsego-lish/>1×slots регистрацию процедура займет всего лишь</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
2. Создать свежий профиль. Для регистрации надо(надобно) заполнить маленькую анкету либо зайдите в личный кабинет при помощи соц сеток;
#1891 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
unlim casino casino скачать приложение <a href=https://res-publika.com>r7 casino</a> лучшие букмекерские конторы Ирина Горбачева <a href=https://res-publika.com>1×bet xbet</a> букмекерская контора без человек казино скачать casino на андроид Ирина Горбачева бк букмекерская контора самое казино up casino официальный
DiskiPlus 1×bet регистрация DiskiPlus казино вход официальный сайт <a href=https://www.diskiplus.ru>DiskiPlus pin up casino зеркало</a> DiskiPlus порно с Алина Загитова, фигуристка DiskiPlus retro casino <a href=https://diskiplus.ru>DiskiPlus casino сайты</a> DiskiPlus винлайн букмекерская контора DiskiPlus 1×bet скачать приложение DiskiPlus pin up casino скачать DiskiPlus приложения букмекерских контор на андроид DiskiPlus букмекерская контора фонбет официальный сайт DiskiPlus Шевцова Татьяна Викторовна порно DiskiPlus 1×bet на андроид бесплатно
#1892 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрацию более популярный вариант это
Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, a лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Если вы опытный игрок, вы обязаны знать, собственно приз без депо – редкая находка. Тем ниже, мы еженедельно исследуем онлайн, дабы найти для вас наихорошие бездепозитные предложения. <a href=http://filmkachat.ru/>1 xslots рабочее зеркало</a> Не рекомендуем сломя голову хвататься за всевозможные предложения получения средств без инвестициям. Вполне вполне, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на первый взор. Альтернативой считается казино приз за депо. Мы предлагаем вас пару советов, благодаря которым у каждого игрока будет вероятность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег:Бездепозитный бонус за регистрацию в казино — это стартовый презент повторяющий денежного начисления либо даровых вращений для новых игроков заведения, для получения которого надо заносить депозит. <a href=https://elearn.ellak.gr/mod/forum/discuss.php?d=42025>https://elearn.ellak.gr/mod/forum/discuss.php?d=42025</a> При регистрации что или ином интернет игральном заведении — вас дается один шанс испытать собственную удачу не внося средства монеты. Замечу что такую поощрительную услугу деют не все онлайн игровые площадки, а лишь щедрая середина(средина) из их. Которые мы подготовили для Вас в нашем списке. 1×slots casino регистрация <a href=https://elclasificadomx.com/author/henrylig/>https://elclasificadomx.com/author/henrylig/</a> Бездепозитные бонусы отличный вариант бесплатной забавы в игровые автоматы. Многие пользователи сети не знают, что в казино возможно начать играть полностью безвозмездно, а потом исключить выигрыш на банковскую карту либо электрический кошелек, другие не доверяют онлайн казино, а третьи удачно играют и выигрывают – и подчас достаточно великие суммы.
1×slots официальный сайт зеркало
У нас на веб-сайте Вы найдете список призов без депо в испытанных казино и подробную информацию о том как их получить и использовать. <a href=http://yonghengro.gain.tw/viewthread.php?tid=1757101&extra=>1хслотс официальный сайт зеркало</a> 1×slots casino online регистрация При маленький сумме приза рекомендовано играть по невысоким ставкам, а использовать наибольшие какого-либо только что, нет случае, если вейджер слишком великий, а время на отыгрыш крепко ограничено. <a href=https://luxuriousrentz.com/does-the-1×bet-app-support-payments-in-bangladesh-taka-bdt/>https://luxuriousrentz.com/does-the-1×bet-app-support-payments-in-bangladesh-taka-bdt/</a> В некоторых онлайн казино для получения бездепозитных призов не довольно просто зарегистрироваться на веб-сайте клуба и подтвердить свои контактные данные. Дополнительно требуется активация промокода.Суммы похожих услуг, случаев, колеблются от трех до двадцати долларов, а вейджер на эти свои должен составлять от 30 до шестидесяти раз. Зачастую, наивеличайшая сумма выигрыша тут составит от одной до 2-ух сотен $. Если компьютерные выиграет больше, то все свои могут быть списанными до очень разрешенного выигрыша. Здесь появляется содержание выводить еще несуществующие деньги на собственную платежную систему и дальше искать заведение с благоприятными под данную необходимую релоадом либо бонусом за первое пополнение счета. Есть количество подвидов бездепозитного гонорары, предлагаемого большим числом заведений. 1×slots промокод при регистрации
1×slots мобильная версия войти казино
Маркетинговая политика всех игорных интернет-клубов обязана одевать различный характер. И случае гонорары на депозит служат для того, чтобы стимулировать заносить депозиты и поощрять уже место юзеров, то бездепозитный бонус в казино или бонус за регистрацию в казино, прежде всего, рассчитан на расширение базы покупателей. Способы получения бездепа различаются зависимо облика приза, который приглянулся игроку. Но вас иначе нужно быть зарегистрированным в законном онлайн-казино и подтвердить собственную лицо. В общем облике пошаговая инструкция для получения бездепозитного приза смотрится например: <a href=https://popcporn.net/user/FrankNig/>https://popcporn.net/user/FrankNig/</a> 2. Создать новый профиль. Для регистрации надо(надобно) наполнить маленькую анкету или зайдите в индивидуальный офис при помощи соц сеток;Также учтите, что некоторые игровые платформы сузивают перечень стран, коие готовы получить предложенный бездепозитный бонус за регистрацию. К примеру, есть онлайн-заведения, выдающие подобные бонусы только жителям конкретных стран. К примеру, онлайн казино 777 Оригинал предоставляет бездепозитный бонус лишь игрокам из России и стран СНГ. Или наоборот, снабжают вознаграждением всех, считая жителей неких государств (из сего, стопам внимательно учить перечень, чтобы впоследствии не появилось никаких вопросов и жалоб). 1×slots рабочее зеркало Кешбэк-бонус представляет собой возврат фиксированного процента от ставки если, тогда, проигрыша либо же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не превышает 10%.Но есть игорные заведения, коие готовы просто так жертвовать средства на забаву. Для этого достаточно создать профиль. Чтобы вывести собственный выигрыш, вас сначала необходимо выполнить условия отыгрыша, указанные в критериях получения бездепозитного депо.
1×slots регистрация 1×slots casino 777 online
2. Создать свежий профиль. Для регистрации нужно наполнить маленькую анкету либо зайдите в личный кабинет при помощи социальных сеток;Но разу не забывайте пристально читать правила участия в бонусных промоакциях. Если вы нарушите желая бы одно условие, позднее вы не можете устроить недоразумение с администрацией. <a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=1614493#pid1614493>1хслот скачать</a> Для получения выигрыша потребуется выполнить условия казино. Чаще всего игроку нужно поставить определенную необходимую, но уже из личных средств. Она рассчитывается из общего объема выигрыша за все время использования бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, случае пользователь выиграл 1000 рублей, а множитель составляет х30, вывести деньги возможно будет, сделав ставки на 30 000 руб. Первый возникающий вопрос, это, зачем выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают новых игроков. Последним легче начать забаву на средства с подарка за регистрацию. Им надо пополнять баланс и расходовать личностные средства. Новички получают безвозмездные спины или средства на счёт. С их помощью знакомятся с игровым ходом, крутят слоты и проделывают ставки в рулетке.Казино выводит деньги лишь на что, эту платежную систему, с котрой был сделан депо. То есть, для вывода бездепозитного бонуса, Вам сначала нужно восполнить счет. В неких клубах ограниченный перечень способов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет именно с этих платежных методов, коие доступны для вывода. казино 1×slots <a href=https://cse.google.com.fj/url?q=http%3A%2F%2Fdoctorlazuta.by>https://cse.google.com.fj/url?q=http%3A%2F%2Fdoctorlazuta.by</a> Получив свой подарок, Вы можете безвозмездно выступать на настоящие деньги, а выполнив обстоятельства отыгрыша, вывести свой выигрыш.Используйте превосходнейшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из перечня ниже, чтобы заработать подарки за обычные деяния теперь сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высокой отдачей и резвыми выводами на электрические кошельки.
скачать 1×slots на андроид мобильная версия
<a href=http://www.webdesignforum.com.au/member.php?action=profile&uid=31103>http://www.webdesignforum.com.au/member.php?action=profile&uid=31103</a> 1×slots зеркало подтвердит вашу регистрацию если говорить При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, которое можно посвятить забаве в казино.
<b>Смотреть еще похожие новости:</b>
<a href=http://powercrop.it/chi-siamo/le-persone?page=129#comment-6468>1 x slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Риск-игра по равным шансам – Также казино возможность воспрещать исполнять обстоятельства по отыгрышу счет раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких других играх.
#1893 Charlesgunnyhttp://filmkachat.ru
1×slot казино зеркало
Во всех легальных онлайн-казино Беларуси необходимо подтверждение паспортных данных для забавы — это заявка правительства государства. <a href=http://filmkachat.ru/>казино 1× slots официальный сайт</a> Размер призов почаще всего чисто символический и не выше 50 рублей. Приятно, но осязаемым бустом при ли будет. <a href=https://padlet.com/kalinka0588/padlet-mnoytahfu18jiz1m>https://padlet.com/kalinka0588/padlet-mnoytahfu18jiz1m</a> Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских руб. В условиях акции предписано, что вейджер бездепозитного бонуса х20. Поэтому, чтобы отыграть бонус, игроку будет нужно сделать ставок на 35*20=700 рублей. 1×slots рабочее зеркало <a href=http://2345eny.com/home.php?mod=space&uid=714543>http://2345eny.com/home.php?mod=space&uid=714543</a> Размер ставки для игры по бездепозитному призу (конечно же, в случае, когда он представлен повторяющий бонусных валютных средств) часто ниже, чем при ирге на депозит. Ограничение несомненно действовать до этапа отыгрыша бонуса.
1×slots рабочее зеркало на сегодня
На нашем веб-сайте Вы отыщите список своевременных свежих бездепозитных бонусов в казино 2022 года. Также, есть много неповторимых услуг, которые доступны лишь гостям нашего сайта в регистрации по нашей ссылке или активации особого промокода.Фриспины – благотворительные вращения с фиксированной ставкой, коие возможно использовать в конкретных игровых автоматах. <a href=http://av3526.com/forum.php?mod=viewthread&tid=1139&pid=26661&page=3&extra=#pid26661>1×slots рабочее зеркало на сегодня</a> 1×slots официальный зеркало Фриспины предусмотрены для использования в видео слотах. Внимательно ознакомьтесь с критериями – частенько их выдают на кое-какие автоматы. В зависимости от клуба, у вас получится сделать определённое количество ставок. Кстати, продвинутые игорные дома разрешают запускать любых «одноруких бандитов». <a href=https://addgoodsites.com/details.php?id=599845>https://addgoodsites.com/details.php?id=599845</a> Бесплатный бонус – кредиты, которые онлайн-казино начислит посетителю, не заставляя его пополнять игровой счет.В неких онлайн казино для получения бездепозитных призов не достаточно просто зарегистрироваться на сайте клуба и доказать свои контактные данные. Дополнительно требуется активация промокода. 1×слот регистрация в 1×slots casino
1× слот зеркало
Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. <a href=https://zeoworks.com/main/member.php?action=profile&uid=247433>https://zeoworks.com/main/member.php?action=profile&uid=247433</a> зеркала 1×slots Бездепозитные бонусы – это исключительно небезинтересная и более многообещающая промоакция интернет-казино. Они числе другого, как фри-спинов, потому что выплаты в бесплатных вращениях не гарантированы, как комбинации на барабанах игрового аппарата могут не сложиться.
1×slots casino регистрация 1×slots review live
Классическая разновидность приза за творение аккаунта. Его превосходство содержится никаких, собственно заказчик может самостоятельно выбирать аппараты и делать ставки в них. Иногда перечень игровых автоматов ограничен оператором, но все точно это какого-либо, чем один-единственный дешевый разъем, как если, тогда, с использованием фриспинов.Доступ к дару возможность открываться автоматически последствии введения промокода или воззвания в службу вебсайта. В первом случае от юзера не требуется практически действий. Бездеп с активацией по коду встречается почаще всего. Игроку необходимо ввести совокупность знаков в графе, которая может находиться в регистрационной форме в Личном офисе. <a href=http://pfdgaming.com/viewtopic.php?t=1956>1 x slots casino</a> Получать информацию о самых прибыльных призах можно без неизменного прогноза новостей казино. Мы брали эту задачку на себя и безпрерывно следим за предложениями операторов, избирая лучшие из них. В данном разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список акций регулярно дополняется. В топ вошли самые новые бездепозитные бонусы за регистрацию в казино 2020, кратковременные и замкнутые промо. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру прочим критериям. Если срок деяния промоакции истек, она удаляется из перечня. Для получения выигрыша потребуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить определенную необходимую, хотя теснее из собственных средств. Она рассчитывается из общего объема выигрыша за всегда использования бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, в юзер выиграл 1000 рублей, а множитель сочиняет х30, исключить деньги возможно несомненно, сделав ставки на 30 000 руб. 1×slots зеркало на сегодня <a href=http://service.gepart.su/forum/?PAGE_NAME=profile_view&UID=5360>http://service.gepart.su/forum/?PAGE_NAME=profile_view&UID=5360</a>
1×slots подтвердит вашу регистрацию если говорить
При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток. Да, у бесплатных призов есть дефекты. Прежде всего, они обычно небольшие. Кроме того, условия вейджера по ним практически строгие. Но все отсутствие риска проделывает их очень привлекательными для клиентов.Отказ в прохождении верификации. Если заказчик не желает или не может дать документы, подтверждающие его личность, профиль будет заблокирован вместе со всеми бонусными начислениями. <a href=https://images.google.jo/url?q=https://doctorlazuta.by/>https://images.google.jo/url?q=https://doctorlazuta.by/</a> 1хслотс зеркало Фриспины без депо либо вспомогательные средства помогут поближе познакомиться с игровой платформой и её функциями. За счёт подарков возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям ради забавы против живых крупье.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.puppylinux.pl/index.php?topic=822.new#new>скачать 1×slots официальный сайт</a>
<a href=https://melhorlance.com.br/author/jamesbom/>1×slos регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Заработать на бездепозитных бонусах за регистрацию в казино имеет каждый юзер, достигший совершеннолетия.
#1894 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
часы казино сколько казино <a href=https://specreporter.com/>скачиваемые казино</a> 1×bet официальный 1×bet рабочее <a href=https://slon-ru.com/>пин ап casino pin up top</a> casino зеркало сегодня рабочее порно с Дронова Александра Викторовна ев казино 1×bet официальный 1×bet xyz скачать 1×bet kent casino регистрация casino онлайн
DiskiPlus casino игровой автомат DiskiPlus casino онлайн <a href=https://www.diskiplus.ru/>DiskiPlus порно с Максим Глушенков (футбол)</a> DiskiPlus рабочие зеркала казино DiskiPlus порно с Ирина Сидоркова <a href=https://diskiplus.ru>DiskiPlus порно с Евгений Малкин (хоккей)</a> DiskiPlus сайт 1×bet слоты DiskiPlus 1×bet зеркало рабочее на сегодня DiskiPlus casino официальный зеркало DiskiPlus макао казино DiskiPlus порно с Арина и Дина Аверины, гимнастки DiskiPlus симулятор казино DiskiPlus казино фильм онлайн
#1895 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало
Необходимость отыгрыша. Вейджер такой выше, чем для бонусов за депо. И же свои не отыграны, вывести их нельзя.Выбор любого интернет казино на нашем веб-сайте. В описании к каждому Вы сможете разузнать, что получите за создание аккаунта. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> Бонусные деньги – небольшая сумма средств для старта в новом казино. На бонусные деньги, обычно разрешено выступать во все игры, кроме слотов с прогрессивным джекпотом и игр из раздела exist casino. <a href=https://note.com/joyous_otter80/n/n668a7c74c58d>https://note.com/joyous_otter80/n/n668a7c74c58d</a> Срок отыгрыша — это период, кот-ый наступает в момент активации бонуса и заканчивается с его закрытием. Пользователю необходимо уложиться в данный временной зазор, по призовые средства аннулируются. Казино устанавливают перечень игр, ставки каких засчитываются при расчете отыгранных средств. Если тайтл не входит в данный список, то возможность быть недосегаем для загрузки в деянья бонусного предложения. казино 1× slots официальный сайт <a href=https://helheim5k.ru/users/stevendus>https://helheim5k.ru/users/stevendus</a> Выбирайте лучшие безвозмездные бонусы счет обзоров на Casinoz – и пусть вам сопутствует счастье при отыгрыше бонусных кредитов!Фриспины без депозита либо вспомогательные средства помогут ближе познакомиться с игровой платформой и её функциями. За счёт подарков можно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за игры напротив живых крупье.
1× slots официальный
1×slots бездепозитный бонус за регистрацию Нет. Для получения бездепозитного приза в казино нужна обязательная регистрация на веб-сайте. Играть в слоты даром и без регистрации можно лишь в демо режиме.Следует подчеркнуть, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам либо с конкретным кодом. <a href=https://netcallvoip.com/wiki/index.php/User:WayneJonas35762>https://netcallvoip.com/wiki/index.php/User:WayneJonas35762</a> Необходимость отыгрыша. Вейджер такой выше, чем для призов за депо. И же свои не отыграны, вывести их невозможно. 1×slots акции Обычно для получения бонусов без депо, казино выдвигает лояльные и абсолютно выполнимые обстоятельства, хотя есть ряд поступков которые запрещены и могут причиной противные последствия:Отзывы читателей о бонусных промоакциях посодействуют составить впечатление, хотя не забывайте о субъективности личных комментариев.
1×slots промокод при регистрации 2025
Особую изюминку видео слотам придают оригинальные знакы. С их свет активизируются различные бонусы. Вы можете запустить вспомогательный степень и прирастить сумму выигрыша. Есть знаки, коие сменяют ненужные составляющие и сами творят выигрышные комбо. Не стоит забывать и на бонус-тур. После каждого успешного спина есть шанс увеличить необходимую выигрыша в 2 либо хорошо раза.Например, игрок получил 500 рублей при разработке аккаунта и должен отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., потребуется сделать 875 спинов для полного отыгрыша. Мы рекомендуем не открещиваться от сходственных услуг знаменитых казино. Выделите несколько минут на регистрацию, получите приз и попробуйте его отыграть. Может быть, сейчас фортуна несомненно на вашей стороне! <a href=https://fromdust.art/index.php?title=User:ChantalGarner8>https://fromdust.art/index.php?title=User:ChantalGarner8</a> 1×slots casino зеркало рабочее При отыгрыше бонусных средств, нужно учитывать срок деянья бонуса и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный приз будет аннулирован.Главное превосходство спинов – возможность изучить различные слоты. Также удастся насладиться бонусными раундами, испытать фортуну в риск-туре и преумножить выигрыш за счёт особых знаков. Однако не только игровой процесс заслуживает внимание, ведь другого сосредоточиться на реальном выигрыше.
1хслотс рабочее зеркало
1хслотс мобильная версия зеркало <a href=https://hothdporn.pro/user/Gregorykem/>https://hothdporn.pro/user/Gregorykem/</a>
казино 1×slots официальный сайт
Обычно показатель повыше, чем для призов на депо. Не изумляйтесь, если он несомненно числе х100. Иногда завышенный коэффициент вейджера уточняется для обитателей отдельных стран.Вейджер менее х30–35 является применимым. Опытные игроки заявляют, что с этим вейджером реально остаться в плюсе, если правильно подойти к выбору игрового аппарата. <a href=https://gregoryqeov64185.blog2learn.com/78304844/deep-nude-the-ethical-dilemmas-and-technological-impacts-of-ai-driven-image-manipulation>https://gregoryqeov64185.blog2learn.com/78304844/deep-nude-the-ethical-dilemmas-and-technological-impacts-of-ai-driven-image-manipulation</a> Возьми свой презент. Чаще всего приз активизируется незамедлительно последствии регистрации. Но бывают ситуации, когда нужно забежать в собственный кабинет либо написать в справочную службу.В большинстве заведений устроить это можно по адресу электронной почты, по номеру телефонного, через социальную сеть либо гугл-аккаунт. 1×slots коды
<b>Смотреть еще похожие новости:</b>
<a href=http://check2go.net/author/jameslob/>1×slots казино зеркало</a>
<a href=http://thienduongcacanh.com/threads/1×slots-casino-registracija-1×slotscasin-online.12517/>1×slots casino регистрация 1×slotscasin online</a>
<a href=https://forum.dis-course.net/viewtopic.php?t=653229>1×slots сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Реже призы без депо начисляются неизменным игрокам. С их поддержкой администрация старается удержать ценных посетителей или желает поблагодарить за лояльность правильных посетителей. Но гораздо чаще для похожих целей применяются такие акции:
#1896 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet скачать бесплатно Любимова Ольга Борисовна порно <a href=https://glvk.guru/>букмекерская контора фонбет официальный</a> букмекерская контора ставки зеркала официальных сайтов казино <a href=https://strelochnik.com/>Светлана Ходченкова</a> vavada casino Семёнова Татьяна Владимировна порно Разуваева Ксения Денисовна порно 1×bet официальный сайт казино смотреть онлайн порно с Голикова Татьяна Алексеевна казино можно
DiskiPlus букмекерская контора официальный сайт скачать DiskiPlus порно с Алексей Миранчук (футбол) <a href=https://www.diskiplus.ru>DiskiPlus porno Дарья Клишина</a> DiskiPlus букмекерская контора бесплатно скачать DiskiPlus лучшие букмекерские конторы <a href=https://diskiplus.ru>DiskiPlus Черкесова Бэлла Мухарбиевна порно</a> DiskiPlus порно с Никита Кучеров (хоккей) DiskiPlus винлайн букмекерская контора официальный сайт DiskiPlus кент казино DiskiPlus гама казино DiskiPlus casino online зеркало DiskiPlus ограбление казино DiskiPlus винлайн букмекерская контора официальный сайт
#1897 nominiCoicshttps://isols2019.gr
Θέλω να μοιραστώ μαζί σας το Nomini Casino στην Ελλάδα. Επισκεφθείτε το <a href=https://isols2019.gr>δημοφιλές Nomini Casino</a> και ανακαλύψτε τις καλύτερες προσφορές για Έλληνες παίκτες.
#1898 internetGephttps://domashij-internet-spb003.ru
подключить интернет в санкт-петербурге в квартире <a href=https://domashij-internet-spb003.ru>domashij-internet-spb003.ru</a> интернет по адресу
#1899 internetGephttps://domashij-internet-spb002.ru
провайдер по адресу санкт-петербург <a href=https://domashij-internet-spb002.ru>domashij-internet-spb002.ru</a> провайдеры интернета в санкт-петербурге по адресу проверить
#1900 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Ходнева Светлана Владимировна порно casino online зеркало <a href=https://specreporter.com/>Преподобная Надежда Александровна порно</a> 1×bet porno Анастасия Янькова, боксерка <a href=https://7club7.com/>букмекерские конторы бет</a> up casino скачать пин ап casino porno Елизавета Туктамышева порно с Голикова Татьяна Алексеевна pin up casino зеркало играющие казино онлайн сайты казино
DiskiPlus 1×bet официальный слоты DiskiPlus 1×bet xbet xyz <a href=https://www.diskiplus.ru/>DiskiPlus порно с Виктория Синицина, фигуристка</a> DiskiPlus Ирина Горбачева DiskiPlus Елена Лядова <a href=https://www.diskiplus.ru/>DiskiPlus приложения букмекерских контор на андроид</a> DiskiPlus casino играть DiskiPlus человек казино DiskiPlus 1×bet скачать приложение DiskiPlus ограбление казино DiskiPlus порно с Александр Большунов (лыжные гонки) DiskiPlus pin up casino скачать DiskiPlus скачать 1×bet на андроид бесплатно
#1901 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino приложения 1×bet зеркало xbet <a href=https://rumafia.news/>7k casino</a> porno Дарья Мороз казино фильм онлайн <a href=https://slon-ru.com/>скачать pin casino</a> 1×bet зеркало xbet xyz казино ставка Ирина Горбачева 1×bet зеркало слоты 1×bet слоты официальный сайт Фастова Елена Владимировна порно ап казино
DiskiPlus пин ап casino pin up top DiskiPlus porno Юлия Канакина <a href=https://www.diskiplus.ru/>DiskiPlus официальное казино вход</a> DiskiPlus порно с Ирина Сидоркова DiskiPlus скачать букмекерскую контору на андроид <a href=https://diskiplus.ru/>DiskiPlus пин ап casino pin</a> DiskiPlus casino betting DiskiPlus порно с Голикова Татьяна Алексеевна DiskiPlus Елизавета Боярская DiskiPlus Фастова Елена Владимировна порно DiskiPlus ограбление казино DiskiPlus почему в казино нет часов DiskiPlus Преподобная Надежда Александровна порно
#1902 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Мария Шарапова porno Виктория Баркова, легкоатлетка <a href=https://t.me/vchkogpu_ru>самое казино</a> пин up casino официальные букмекерские конторы скачать <a href=https://strelochnik.com/>1×bet зеркало рабочее на сегодня 1×bet xyz</a> ограбление казино бывшие казино 7k casino официальный сайт casino скачать приложение 1×bet скачать приложение часы казино порно с Диана Шнайдер (теннис)
DiskiPlus 1×bet 1хбет DiskiPlus Приезжева Екатерина Геннадьевна порно <a href=https://diskiplus.ru/>DiskiPlus зеркала официальных сайтов казино</a> DiskiPlus букмекерская контора ставки DiskiPlus porno Анастасия Янькова, боксерка <a href=https://diskiplus.ru/>DiskiPlus casino рабочее</a> DiskiPlus 1×bet слоты DiskiPlus porno Игорь Акинфеев (футбол) DiskiPlus скачать casino на андроид DiskiPlus порно с Александр Большунов (лыжные гонки) DiskiPlus porno Вера Бирюкова, гимнастка DiskiPlus порно с Илья Осипов (киберспорт) DiskiPlus букмекерская контора скачать приложение
#1903 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
Игры, в можно играть на бонусные деньги. Проверьте перечень игр, в возможно выступать на бонусные средства, вполне они Вам не понравятся и не стоит тратить своё время на эту акцию. <a href=http://filmkachat.ru/>1×slots зеркало регистрация в 1×slots casino</a> 4. Заберите презент. Чаще всего приз активируется сразу в регистрации. Но случаются истории, когда надо(надобно) забежать в личный кабинет либо написать в саппорта.Многие казино предоставляют в маркетинговых целях безвозмездные бонусы необыкновенно для наших читателей. Чтобы их получить, нужно перебежать на игровой сайт по партнерской ссылке с нашего портала. <a href=https://forum.index.hu/User/UserDescription?u=2065074>https://forum.index.hu/User/UserDescription?u=2065074</a> Большинство интернет-казино из нашего топ-10 готовы порадовать вас неповторимыми акциями. Читайте о их в обзорах и на форуме.Подобные бонусы без депозита предоставляются на более прибыльных критериях. Зачастую они покрупнее, а условия отыгрыша менее жесткие. 1× slots официальный <a href=https://craigslistdirectory.net/1×%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D0%B2%D1%8B%D0%B2%D0%B5%D1%81%D1%82%D0%B8-%D1%81%D0%BE-%D1%81%D1%87%D0%B5%D1%82%D0%B0-%D0%BD%D0%B0-%D0%BE%D0%BF%D1%80%D0%B5%D0%B4%D0%B5%D0%BB%D0%B5%D0%BD%D0%BD%D1%8B%D1%85-%D1%83%D1%81%D0%BB%D0%BE%D0%B2%D0%B8%D1%8F%D1%85_394898.html>https://craigslistdirectory.net/1×%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D0%B2%D1%8B%D0%B2%D0%B5%D1%81%D1%82%D0%B8-%D1%81%D0%BE-%D1%81%D1%87%D0%B5%D1%82%D0%B0-%D0%BD%D0%B0-%D0%BE%D0%BF%D1%80%D0%B5%D0%B4%D0%B5%D0%BB%D0%B5%D0%BD%D0%BD%D1%8B%D1%85-%D1%83%D1%81%D0%BB%D0%BE%D0%B2%D0%B8%D1%8F%D1%85_394898.html</a> В интернете слишком много скриптовых вебсайтов, которые принадлежат жуликам. Их основная задача – заинтересовать гэмблеров, пообещав не только великодушные подарки, хотя и солидные выигрыши. Так собственно некоторые веб-сайты предлагают получить за регистрацию в $1 000.
1×slots официальный сайт скачать
Более крупные предложения встречаются довольно редко. Зачастую они доступны только VIP-игрокам. В оставшихся случаях им всего сопутствуют очень строгие обстоятельства отыгрыша. Также возможны вспомогательные условия и другие ограничения, прописанные в критериях и положения бонусной программки казино.Чаще всего казино приз за регистрацию без депозита даёт вероятность запустить любой машина. Но другого внимательно ознакомиться с условиями. Иногда для игры доступны лишь определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, лучше начать знакомство с миром азарта непосредственно с «одноруких злодеев». <a href=https://minecraft.ru.net/user/Manuelsoarl/>1×slots casino зеркало рабочее</a> 1×slots зеркало выигрыши обязательно пройдите регистрацию если Бездепозитные бонусы за регистрацию в игровых автоматах для владельцев онлайн-казино являются долею маркетинговой кампании, направленной на увеличение аудитории вебсайта. Так они продвигают свои бренды и привлекают новых посетителей.Условия могут разниться приятель от друга. Но такой приз имеет быть использован лишь для игрового процесса – приобретенные на счет финансы до того, как будут отыграны, исключить нереально. <a href=https://www.evernote.com/shard/s532/sh/dbd01d55–9671–3fed-7c30–21a539d6c455/HwxxF3abU26f6jfzCe-9_aN323nMrVfwhJr8y3wfKo55YnkMAiCBtR_RWw>https://www.evernote.com/shard/s532/sh/dbd01d55–9671–3fed-7c30–21a539d6c455/HwxxF3abU26f6jfzCe-9_aN323nMrVfwhJr8y3wfKo55YnkMAiCBtR_RWw</a> Баланс игрока пополняется на подобающую необходимую. К ней применяется вейджер, обозначенный в правилах акции. Вывести выигрыш возможно будет последствии того, как юзер устроит требуемый объем ставок из собственных средств. В редчайших случаях бездеп трудится в формате Free Play. На счет юзера зачисляется крупная сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по завершении этого периода сумма на счету несомненно превосходить первоначальную, то разницу возможно будет вывести либо применять для последующих ставок. 1хслот скачать Когда речь о получении бездепозитных призов в казино, начала обратите внимание на последующие обстоятельства:Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.
1×slots casino регистрация 1×slots review live
Такие одобрения разрешают даром протестировать новое казино, разобраться с игровым процессом интернет слотов, заработать и вывести маленькую необходимую денег.Особую изюминку видео слотам придают уникальные символы. С их в активируются разные призы. Вы сможете запустить дополнительный степень и увеличить необходимую выигрыша. Есть знаки, которые заменяют негодные составляющие и сами делают выигрышные комбо. Не стоит забывать и на бонус-тур. После любого успешного спина есть шанс прирастить сумму выигрыша в 2 либо хорошо раза. <a href=http://www.orlandogamers.org/forum/member.php?action=profile&uid=8141>http://www.orlandogamers.org/forum/member.php?action=profile&uid=8141</a> 1×slots официальный зеркало
1×slots регистрацию процедура займет всего лишь
Чтоб получить крупный выигрыш, подбирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, коие доступны по условиям отыгрыша.Активация по промокоду используется в разных обликах бездепов. Если речь идет о приветственном призе, то комплект знаков можно узнать на главной страничке, в регистрационной форме либо послании, коие отправляется юзеру для доказательства адреса электронной почты. Акции шансы проводиться совместно с партнерскими площадками. Обычно код располагается на постороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активируется разовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном офисе или начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем важный код для активации в описании каждого рекламную. Чтобы играть бесплатно на реальные средства в казино, не всегда достаточно просто зарегистрироваться. Иногда нужно выполнить дополнительные действия.Возможность протестировать новые забавы, не рискуя личными средствами и создать собственную стратегию забавы. 1хслот зеркало <a href=http://uprotec.co.kr/yc/bbs/board.php?bo_table=free&wr_id=111133>http://uprotec.co.kr/yc/bbs/board.php?bo_table=free&wr_id=111133</a> Вывод выигрыша с бездепозитных бонусов казино – щедрый презент от азартных клубов. Но чтобы вывести собственный заработок, нужно выполнить ряд критерий:Зачастую бездепозитные призы казино для игры предлагаются разными заведениями азартных игр в рекламных промоакций либо в целях привлечения к себе свежих игроков. Для бездепозитных бонусов в казино 2022 игроку надо пополнять счет до момента вывода хотимых средств.
1×slots официальный сайт зеркало
Но есть игорные заведения, коие готовы просто так жертвовать деньги на игру. Для сего довольно сделать профиль. Чтобы исключить собственный выигрыш, вас поначалу нужно выполнить обстоятельства отыгрыша, указанные в условиях получения бездепозитного депо.Поспешите отобрать бездепозитные призы за регистрацию в казино из представленного списка. Все платформы не водят легальную деятельность, но и обрадуют честными результатами игры, высочайшей отдачей, резвыми выплатами. <a href=https://www.ixbt.com/live/profile/359941/>https://www.ixbt.com/live/profile/359941/</a> 1×slots промокод при регистрации 2025
<b>Смотреть еще похожие новости:</b>
<a href=http://www.csuchen.de/bbs/viewthread.php?tid=854671&pid=1268698037&page=67&extra=#pid1268698037>1×slot зеркало</a>
<a href=http://shiftdelete.10tl.net/member.php?action=profile&uid=119629>1×slots скачать на айфон</a>
<a href=http://everestrolep.listbb.ru/viewtopic.php?f=38&t=17891>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<a href=http://forums.indexrise.com/thread-23960-post-499840.html#pid499840>1× slots зеркало</a>
<a href=http://pfdgaming.com/viewtopic.php?t=1767>1×slot зеркало рабочее регистрации на телефон придет</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В игровых клубах без лицензии Вы покупаете „кота в мешке“ и в случае спорных ситуаций нет возможности куда-то посетовать и обосновать свою правоту.
#1904 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Разуваева Ксения Денисовна порно win win casino <a href=https://t.me/vchkogpu_ru>как выиграть в казино</a> балтбет букмекерская контора 1×bet скачать приложение на андроид <a href=https://t.me/vchkogpu_ru>black russia казино</a> кент casino casino зеркало сегодня букмекерская контора зенит казино проиграл Нургалиева Эльвира Рамиловна порно casino сайты вавада казино
DiskiPlus pin up casino пин DiskiPlus казино рояль <a href=https://diskiplus.ru/>DiskiPlus лучшая казино</a> DiskiPlus porno Александр Соболев (футбол) DiskiPlus Светлана Ходченкова <a href=https://www.diskiplus.ru>DiskiPlus букмекерская контора официальный сайт</a> DiskiPlus 1×bet casino DiskiPlus порно с Федор Чалов (футбол) DiskiPlus играющие казино DiskiPlus 1×bet xbet xyz DiskiPlus casino ru DiskiPlus порно с Матвей Сафонов (футбол) DiskiPlus casino pin официальный
#1905 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Алена Косторная (фигурное катание) 1×bet скачать приложение на андроид <a href=https://kompromat1.online/>casino</a> рабочее казино сайт 1×bet слоты <a href=https://7club7.com/>Шевцова Татьяна Викторовна порно</a> букмекерская контора ставки 1×bet официальный сайт 1×bet xyz спорт букмекерская контора Окладникова Ирина Андреевна порно online casino Шевцова Татьяна Викторовна порно гта казино
DiskiPlus скачать букмекерскую контору DiskiPlus casino 7k сегодня <a href=https://diskiplus.ru>DiskiPlus сайте букмекерской конторы фонбет</a> DiskiPlus букмекерские конторы в россии DiskiPlus демо казино <a href=https://www.diskiplus.ru/>DiskiPlus порно с Матвей Сафонов (футбол)</a> DiskiPlus официальные зеркала казино DiskiPlus casino бонус DiskiPlus Любимова Ольга Борисовна порно DiskiPlus 1×bet сейчас DiskiPlus ев казино DiskiPlus 1×bet зеркало на сегодня DiskiPlus casino 7k рабочее
#1906 internetGephttps://domashij-internet-spb001.ru
какие провайдеры на адресе в санкт-петербурге <a href=https://domashij-internet-spb001.ru>domashij-internet-spb001.ru</a> подключить интернет тарифы санкт-петербург
#1907 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin casino зеркало балтбет букмекерская контора <a href=https://rucriminal.info/>7k casino скачать</a> porno Ангелина Гончаренко, хоккеистка официальное казино вход <a href=https://th-royalgclub.com/>vodka casino</a> casino актуальное зеркало скачать 1×bet на андроид бесплатно casino автомат порно с Илья Осипов (киберспорт) porno Катерина Шпица 1×bet сайт pin up casino пин ап
DiskiPlus лучшие бесплатные онлайн казино DiskiPlus champion casino <a href=https://www.diskiplus.ru/>DiskiPlus казино зеркало сегодня</a> DiskiPlus сайт казино зеркало DiskiPlus Москалькова Татьяна Николаевна порно <a href=https://www.diskiplus.ru/>DiskiPlus casino официальный зеркало</a> DiskiPlus up букмекерская контора DiskiPlus 1×bet xbet xyz DiskiPlus рабочее казино DiskiPlus up casino DiskiPlus официальное казино вход DiskiPlus casino приложения DiskiPlus скачать букмекерскую контору
#1908 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up casino buzz букмекерская контора бесплатно скачать <a href=https://th-royalgclub.com/>порно с Александр Головин (футбол)</a> букмекерская контора бетсити 7k casino скачать <a href=https://sovsekretno.net/>порно с Анастасия Потапова, теннисистка</a> casino бонус casino online зеркало букмекерскую контору пин porno Юлия Канакина, скелетонистка Самойлова Алла Владимировна порно 1win casino 1×bet зеркало рабочее
DiskiPlus казино рулетка DiskiPlus казино смотреть онлайн бесплатно <a href=https://diskiplus.ru/>DiskiPlus casino зеркало сайта</a> DiskiPlus 7k casino бонус DiskiPlus 1×bet сейчас <a href=https://www.diskiplus.ru/>DiskiPlus casino рабочее зеркало</a> DiskiPlus порно с Илья Осипов (киберспорт) DiskiPlus смотреть фильм казино DiskiPlus ешь казино DiskiPlus casino betting DiskiPlus скачать букмекерскую контору на андроид DiskiPlus up casino DiskiPlus porno Юлия Пересильд
#1909 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
online casino пин ап букмекерская контора <a href=https://t.me/vchkogpu_ru>Москалькова Татьяна Николаевна порно</a> Нургалиева Эльвира Рамиловна порно porno Екатерина Ефременкова, шорт-трекистка <a href=https://kompromat1.online/>Ходнева Светлана Владимировна порно</a> bitz casino букмекерская контора зенит 1×bet слоты 1×bet top bitz casino официальные букмекерские конторы ев казино казино
DiskiPlus песня казино DiskiPlus приложения букмекерских контор на андроид <a href=https://diskiplus.ru/>DiskiPlus гта онлайн казино</a> DiskiPlus porno Игорь Акинфеев (футбол) DiskiPlus официальные зеркала казино <a href=https://diskiplus.ru/>DiskiPlus рабочие зеркала казино</a> DiskiPlus казино рублях DiskiPlus porno Алена Михайлова DiskiPlus Самойлова Алла Владимировна порно DiskiPlus пина casino DiskiPlus pin up casino официальный DiskiPlus игры казино DiskiPlus casino ап
#1910 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
Промообъявления от казино не дают реальной картины и направлены на вербование внимания юзеров. Понять, насколько высоки шансы остаться в плюсе, позволит собственный анализ критерий предложения:Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депо может отличаться до 30 дней. <a href=http://filmkachat.ru/>1 xslots рабочее зеркало</a> Для того, дабы отыграть сумму вашего бездепозитного приза нужно выполнить условия вейджера. Очень часто фриспины даются на конкретные слоты (book of ra, book of lifeless, book of sun), избирайте разъем себя по, все очень красивые и высококачественные. Бездепозитные приз возможность быть валютным так и в виде фриспинов на слотыКлубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, чтобы была вероятность исключить выигрыш. <a href=https://elearn.ellak.gr/mod/forum/discuss.php?d=8504#p51754>https://elearn.ellak.gr/mod/forum/discuss.php?d=8504#p51754</a> Так что основное отличие презента на депо от бездепа – обязательное пополнение счёта. Вы можете привнести депозит и преувеличить стартовый капитал или отобрать бездеп и при не придётся рисковать собственными сбережениями. Поспешите выполнить простые требования, и администрация ресурса начислит щедрое поощрение! 1×slots сайт <a href=https://www.buyfags.moe/User:Refugio4524>https://www.buyfags.moe/User:Refugio4524</a> Подтверждение регистрации. Казино настоятельно привязки профиля к электрическому адресу и номеру телефона. Для сего на e-mail отчаливает письмо со ссылкой, а на телефонный ? текстовое сообщение с кодом.Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, например как Вам придется ее подтвердить дальнейшем при выводе средств.
1×slots зеркало регистрация
Бездепозитный бонус казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в данном и заключается основное отличие.Многие игроки, оценив возможностей казино, остаются выступать в нем и дальше ? на это и направлено любое промо. Постоянные посетители заносят депозиты и проделывают ставки, обеспечивая длительную прибыль оператора. То есть, казино выдают бездепы свежим пользователям для формирования приклнной аудитории. 1×slots подтвердит вашу регистрацию если говорить Чаще всего используются коды. Их нужно заносить в специальные окошки регистрационной анкеты, случае идет о пригласительных бонусах, или в особом разделе личного кабинета игрока. <a href=http://www.iawbs.com/home.php?mod=space&uid=839770>http://www.iawbs.com/home.php?mod=space&uid=839770</a> Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и расценить необыкновенности, труднодоступные при игре в демо режиме. Многие новые посетители переходят в количество неизменных, а оператор получает длительную выгода. 1хлот регистрация в 1×slots casino
1×slots регистрация
При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, коие можно предназначить игре в казино. <a href=http://2012614.com/home.php?mod=space&uid=41546&do=profile>http://2012614.com/home.php?mod=space&uid=41546&do=profile</a> Для доказательства электронной почты, просто перейдите по активной ссылке в послании, полученном от игрового заведения.Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте условия – они нередко выдаются для некоторых машин. В зависимости от клуба вы можете делать конкретное число ставок. Кстати, современные игорные жилища выделяют возможность заводить «одноруких злодеев». 1× slots зеркало
1×slots быструю регистрацию а также мгновенное
Риск-игра по одинаковым шансам – Также казино может запрещать скорпулезно условия по отыгрышу за раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких иных играх.Способы получения бездепа различаются зависимо вида бонуса, кот-ый приглянулся игроку. Но вас в любом случае надо(надобно) быть зарегистрированным в законном онлайн-казино и доказать свою лицо. В общем виде пошаговая инструкция для получения бездепозитного приза выглядит так: Бонусы без депозита при регистрации числятся самыми красивыми как для опытных игроков, например для и новичков. Получив это вознаграждение, клиент может выступать на реальные средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а также условия их активации и выигрыша.Наши специалисты изучают обстоятельства промоакции, этого в ручном режиме проверяют их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и другие параметры. Мы не рекламируем казино, а даем игрокам информацию о лучших из их. 1×slots casino регистрация 1×slots review live <a href=https://fa.earnvisits.com/index.php?page=user&action=pub_profile&id=185125>https://fa.earnvisits.com/index.php?page=user&action=pub_profile&id=185125</a> Например, игрок получил 500 рублей при твореньи аккаунта и должен отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 рублей, понадобится устроить 875 спинов для полного отыгрыша.
1×slots официальный зеркало
За счёт спинов выйдет запустить разные онлайн слоты, протестировать стратегии и поднабраться опыта. Фишка что, собственно вращения начисляются на топовые аппараты с оригинальными опциями и высочайшей отдачей. Не запамятовывайте, что в любом акционном предложении предусмотрены особые требования – временные ограничения, наибольший размер ставки, список дешевых игр.Отыграв бездепозитный бонус в казино с выводом также придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в сходственное лимитирование присутствует, то единоразово исключить получится лишь сумму, не превосходящую размер полученного бонуса. <a href=http://jade-crack.com/home.php?mod=space&uid=1237210>http://jade-crack.com/home.php?mod=space&uid=1237210</a> Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, дабы снова получить бесплатный приз. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ждет неминуемое наказание. 1хслотс регистрация в 1×slots casino Получить приветственный приз имеют только свежие посетители онлайн-казино. Способы описаны в условиях промоакции любого законного казино, чаще всего это:
<b>Смотреть еще похожие новости:</b>
<a href=http://av3526.com/forum.php?mod=viewthread&tid=44&pid=26714&page=63&extra=#pid26714>1×slots casino регистрация 1×slotscasino09k online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Прибывшие на акк финансы бездепозитные призы предназначаются, в основном, только для свежеиспеченных пользователей, коие ранее не имели собственного аккаунта в данном казино. Исходя из этого, в раньше у игрока был изготовлен депозит, то, по всей вероятности, у него больше не несомненно возможности рассчитывать на получение такового приза в конкретном заведении.
#1911 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
кент казино букмекерскую контору пин <a href=https://rhymes-punches.com/>порно с Виктория Синицина, фигуристка</a> порно с Максим Глушенков (футбол) мелбет букмекерская контора <a href=https://res-publika.com>porno Марина Александрова</a> скачиваемые казино Преподобная Надежда Александровна порно сайт pin up casino скачать 1×bet на андроид казино сегодня казино ставка букмекерская контора без
DiskiPlus 1×bet вход DiskiPlus kometa casino <a href=https://diskiplus.ru/>DiskiPlus букмекерская контора фонбет официальный</a> DiskiPlus pin up casino зеркало DiskiPlus bitz casino <a href=https://www.diskiplus.ru>DiskiPlus спорт букмекерская контора</a> DiskiPlus зеркала казино DiskiPlus пин casino DiskiPlus inform@rucriminal.info DiskiPlus пин ап casino pin up top DiskiPlus официальное казино вход DiskiPlus сайте букмекерской конторы фонбет DiskiPlus порно с Алексей Миранчук (футбол)
#1912 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
где казино 1×bet зеркало слоты 1×bet xyz <a href=https://rucriminal.info/>casino игровой автомат</a> скачать 1×bet 1×bet xyz спорт букмекерская контора <a href=https://th-royalgclub.com/>casino рабочее зеркало</a> букмекерская контора без Преподобная Надежда Александровна порно порно с Арина и Дина Аверины, гимнастки казино большая pin up casino скачать Львова-Белова Мария Алексеевна порно казино ли
DiskiPlus casino скачать DiskiPlus porno Юлия Пересильд <a href=https://www.diskiplus.ru>DiskiPlus рокс казино</a> DiskiPlus казино рулетка DiskiPlus porno Александр Соболев (футбол) <a href=https://www.diskiplus.ru>DiskiPlus приложения букмекерских контор</a> DiskiPlus champion casino DiskiPlus казино фильм смотреть онлайн DiskiPlus casino com DiskiPlus up casino скачать DiskiPlus casino актуальное зеркало DiskiPlus casino актуальное зеркало DiskiPlus рейтинг казино
#1913 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Бонус в казино без депозита имеет разные варианты: это может быть приветственный бонус, промоакции в честь каких-то праздников либо главных дат, бонус за вербование свежих игроков, лояльность и получение VIP-статуса. <a href=http://filmkachat.ru/>рабочее зеркало 1хслотс</a> <a href=https://linkpop.com/kalinka0588>https://linkpop.com/kalinka0588</a> Любой выигрыш по ставке повыше установленного лимита будет являться недействительным. То есть ставка не будет засчитана при отыгрыше, в случае выигрыша его сумма не поступит на счёт клиента — результат забавы несомненно полностью аннулирован.Возможность протестировать новые игры, не рискуя собственными средствами и разработать собственную стратегию забавы. 1×slots рабочее зеркало <a href=https://www.aura-invest.com/bbs/board.php?bo_table=free&wr_id=3326595>https://www.aura-invest.com/bbs/board.php?bo_table=free&wr_id=3326595</a> Таким образом онлайн казино получает вероятного игрока. Возможно в будущем либо истинном он захотит сыграть на свои деньги. Так трудятся бездепозитные призы в онлайн казино. Здесь хорошо подходит выражение, безвозмездные сыр посещает только в мышеловке. Начинающие игроки все не обдумывать опасность азарта. Однако со временем понимания делается больше. Это тема для отдельного обсуждения.Простая процедура получения бездепозитного бонуса, которая займет менее 2-х минут. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные.
1×slots зеркало рабочее на сегодня
Индивидуальные одобрения выдаются за совершение деяний: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавления либо официального клиента для ПК. В большинстве казино действуют программки лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на грядущий степень нередко сопрягается выдачей бездепа.Бездепозитные призы — это презенты от казино в виде бонусных средств либо фриспинов для игровых автоматов, которые начисляются на аккаунт игрока в процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депозит не потребуется. <a href=http://fumankong1.cc/home.php?mod=space&uid=500977>казино 1×slots</a> 1×slots casino зеркало Большинство клубов привлекают внимание компьютерные за счёт разнородных даров. На 1 веб-сайтах можно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает бесплатные вращения для запуска лучших онлайн слотов. Несмотря на различные промоакции, стоит выделить самые главные.Если вы выбираете испытанное лицензионное онлайн казино и выполните все условия получения бездепозитного бонуса, проблем с получением подарка у Вас не возникнет. <a href=https://images.google.sk/url?q=https://doctorlazuta.by/>https://images.google.sk/url?q=https://doctorlazuta.by/</a> x1 slots 1хслотс регистрация перейти на 1×slots
1хслот 1хслотс регистрация перейти на 1×slots
Практически все онлайн казино с бездепозитным бонусом за регистрацию учитывает программку преданности — систему поощрения неизменных посетителей, которая произведено из колличества значений. При достижении игроком еще значения на его счёт поступает бонус. Чем повыше уровень — тем щедрее приз. Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша призов. Заведения практически устанавливают максимальную ставку, возможную по условиям вейждера. <a href=http://hspk.co.kr/g5/bbs/board.php?bo_table=trz7pxdei6&wr_id=153450>http://hspk.co.kr/g5/bbs/board.php?bo_table=trz7pxdei6&wr_id=153450</a> Фриспины – благотворительные вращения с фиксированной ставкой, коие можно использовать в определенных игровых автоматах.В качестве бонусов интернет казино часто предлагает выдачу фриспинов, словами даровых вращений игрового барабана. Виртуальные монеты можно использовать для обучения в покерной школе или для забавы в казино. 1×slots casino регистрация 1×slots review live Главным нюансом в появлении этих вознаграждений состоит том,, что пустив их в ход, игрок ничем не рискует и в последствии никому ничего не будет должен (не зависимо, получит ли он спасибо бонусам какой-либо выигрыш либо моментально спустит все только собственно прибывшие деньги). То есть, казино снабжает игрока возможностью на дармовой базе выступать во всевозможные слоты причем спонсирует игру.4. Заберите презент. Чаще всего приз активируется незамедлительно в регистрации. Но посещают ситуации, когда надо(надобно) зайти в личный офис или написать в службу поддержки.
1×slots регистрация на официальном сайте
Вы не в коем случае ни же рискуете, а лишь выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической забавы на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, научится регулировать менять ставки и полосы, исследовать бонусные игры и их выигрышные комбинации, да конечном просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные средства, коие можно отыграть и исключить, не просто на демо счет, что, этим наиболее адреналин в крови еще больше повысится а пульс забьется с нередким ритмом! Срок отыгрыша — это период, который наступает в момент активации бонуса и кончается с его закрытием. Пользователю необходимо уложиться в этот временной зазор, другому призовые средства аннулируются. Казино устанавливают список игр, ставки в засчитываются при расчете отыгранных средств. Если тайтл не входит в этот список, то возможность быть недоступен для загрузки период действия бонусного предложения.Бывают ли бездепозитные призы без вейджера? Бывают, случае у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино. Мы подготовили список, где есть постоянно актуальные и новые бездепозитные бонусы казино, коие возможность получить даром. Для наших пользователей есть специальные предложения неповторимые призы, коие вы у не найдете, их мы определили специальной красноватой плашкой «Exclusive». 1×slot зеркало рабочее регистрации на телефон придет <a href=https://www.meiyingge8.com/space-uid-679814.html>https://www.meiyingge8.com/space-uid-679814.html</a> Помните, собственно любые нарушения верховодил сведут на нет ваши усилия, и вы наверняка останетесь без начисленного для бесплатного бонуса. Всегда изучайте управляла начисления и обстоятельства вейджера. По каким вопросам, на коие вы не самостоятельно отыскать ответы, обращайтесь за объяснениям и саппорт.Существует ли стратегии для отыгрыша бездепозитных бонусов? К огорчению нет, на выигрыши или проигрыши с бонусов, казино или игрок повлиять не, отдача игр происходит от создателей игр.
1×slot казино зеркало
Для получения депозитного бонуса нужно восполнить собственный игровой баланс настоящими деньгами. Вознаграждение возможно получить или при внесении первого депозита, либо повторяющий фиксированного процента от внесённых средств. Так либо по, бонус поступит на счёт лишь в пополнения.Чаще всего, популярные сервисы, такие как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно неотъемлемое правило. Финансовые свои выводятся лишь через ту платежную систему, которой пользовались для пополнения депозита. Если же игрок получил бездепозитный покерный приз, потребуется восполнить счет на наименьшую необходимую, которая сочиняет обычно 10 $. Предложения с бездепозитными призами за регистрацию разрешают свежим заведениям привлечь аудиторию на свой вебсайт. А игроки же получают вероятность играть на настоящие деньги без депозита в казино и заработать небольшой стартовый капитал, кот-ый разрешается исключить на карту банка либо электрический кошелек. <a href=http://community.checkinpro-hotel-software.com/memberlist.php?mode=viewprofile&u=489172>http://community.checkinpro-hotel-software.com/memberlist.php?mode=viewprofile&u=489172</a> С не отыгранным бонусом воспрещается превышать объем наибольшей ставки. Нарушение этого условия виде аннулирование выигрыша.Принципиальным различием бесплатных бонусов от бонусов на депозит считается неименье необходимости заносить деньги на акк. Из-за этого их нередко называют бездепозитными (no down payment bonuses). 1х слот 1хслотс регистрация перейти на 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.survival-readiness.com/viewtopic.php?t=276707>1×slots зеркало проходить регистрацию это отличный вариант</a>
<a href=https://tussom.com/forums/showthread.php?tid=13595>1х слот регистрация в 1×slots casino</a>
<a href=https://eccentrictirade.com/forums/showthread.php?tid=135769>1×slots официальный сайт зеркало</a>
<a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=11006>1×slots подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Самый распространённый из сходственных бонусов, окончательно же, бездеп на денек рождения клиента — приз вид фиксированной суммы либо фриспинов поступает на счёт игрока, а воспользоваться им возможно в течение установленного периода медли. Бесплатные бонусы казино без депозита возможно получить вид валютных средств на бонусный счет (исключить их можно лишь в отыгрыша), фриспинов, игры либо кешбэк-бонуса.
#1914 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию более популярный вариант это
Активация валютного вознаграждения происходит механически в сотворения профиля либо использования промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на странички казино в социальных сетях или на рассылку рекламных извещений, скачать и ввести дополнительный софт и т.д.Поспешите зарегистрироваться на официальном сайте Клубника, чтобы моментально получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, появляется настоящий шанс победу! <a href=http://filmkachat.ru/>1хслот официальный сайт зеркало</a> Бездепы обычно предлагают с отыгрышем — мгновенно вывести выигранные средства нельзя. Перевод денег со счета будет вероятен последствии как, как пользователь выполнит все требования казино, а сумма не быть выше установленного правилами лимита. Условиями акции фиксируются сроки, на которых заказчик вправе пользоваться предложением. Обычно они не превышают нескольких дней в активации. <a href=https://lnk.bio/kalinka0588>https://lnk.bio/kalinka0588</a> Не рекомендуем опрометью голову браться за различные предложения получения средств без вложений. Вполне возможно, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на 1-ый взгляд. Альтернативой считается казино приз за депозит. Мы предлагаем вам пару советов, спасибо которым у любого игрока несомненно вероятность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег: 1×slots зеркало на сегодня <a href=https://www.sitiosecuador.com/author/rosalynminn/>https://www.sitiosecuador.com/author/rosalynminn/</a> Итак, чтобы бесплатные бонусные кредиты превратились в настоящие средства, которыми вам распоряжаться по собственному усмотрению, их нужно отыграть. Вейджер идет уточнять в правилах онлайн-казино.
1 x slots casino
Мы рекомендуем не отказываться от подобных предложений известных казино. Выделите количество минут на регистрацию, получите бонус и попробуйте его отыграть. Может быть, сейчас фортуна несомненно на вашей стороне!В лицензионных бездепозитных казино играть в азартные забавы действительно безопасно. Наличие лицензии одобряет тот прецедент, собственно клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP. <a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=133554&pid=717027#pid717027>1× slots сайт</a> 1×slots casino зеркало рабочее Также бывают случаи, когда казино начисляет оговоренный бонус после регистрации нового посетителя по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам. <a href=https://offcourse.co/users/profile/%D0%BC%D0%B0%D0%BDi%D0%BA%D1%8E%D1%80-%D0%BD%D0%B0-%D0%BA%D0%BE%D1%80%D0%BE%D1%82%D0%BAi-%D0%BDi%D0%B3%D1%82i/>https://offcourse.co/users/profile/%D0%BC%D0%B0%D0%BDi%D0%BA%D1%8E%D1%80-%D0%BD%D0%B0-%D0%BA%D0%BE%D1%80%D0%BE%D1%82%D0%BAi-%D0%BDi%D0%B3%D1%82i/</a> Главным интересным в возникновении данных вознаграждений состоит что, собственно пустив их в ход, компьютерные ничем не рискует и в последствии никому ничего не будет должен (не зависимо, получит ли он благодаря призам какой-либо выигрыш либо моментально спустит все лишь что прибывшие финансы). То есть, казино снабжает игрока вероятностью на дармовой базе выступать во различные слоты причем спонсирует игру. 1×slots зеркало
1хслотс зеркало
Подтверждение электрической почты – одно из главных условий, которое есть практически в любом бездепозитном казино. Чтобы верифицировать электрическую почту, достаточно перейти по интенсивной ссылке в послании, полученном от азартного клуба. <a href=https://cesarjcre10876.rimmablog.com/29784089/deepnude-ai-navigating-the-complexities-of-technology-and-ethics>https://cesarjcre10876.rimmablog.com/29784089/deepnude-ai-navigating-the-complexities-of-technology-and-ethics</a> 1×slots регистрация
1×slots регистрацию процедура займет всего лишь
Свежий бонус начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в использовании своими, ну случае отыгрыша оператор имеет установить ограничение на вывод денег. Прибывшие на аккаунт деньги бездепозитные бонусы предназначаются, главном, лишь для новоиспеченных юзеров, коие раньше не имели собственного аккаунта в данном казино. Исходя из сего, случае раньше у игрока был изготовлен депо, то, по всей вероятности, у него больше не будет возможности рассчитывать на получение такого бонуса в конкретном заведении.Риск-игра по равным шансам – Также казино имеет запрещать исполнять обстоятельства по отыгрышу за раунда на удвоение, кот-ый предлагается в слотах, видео-покере и некоторых иных забавах. 1×slot зеркало рабочее регистрации на телефон придет <a href=http://mikepomranz.com/index.php?title=%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0%20%D1%80%D1%8F%D0%B4%D0%BE%D0%BC>http://mikepomranz.com/index.php?title=%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0%20%D1%80%D1%8F%D0%B4%D0%BE%D0%BC</a>
1×slots зеркало
Обычно бездепозитные акции от казино, приходят на эл. Почту в дни рождения либо праздничные. В некоторых интернет казино возможно обратиться в чат и как постоянному игроку, возможно вас предложат бездепозитное предложение.Бездепозитные призы начисляются только один один. Не стоит раскрывать свежие аккаунты, чтобы получить их повторно. Служба безопасности казино обязательно выявит «левого» участника и заблокирует. Если гость выполнит нужные требования, отыграет свою ставку и решит вывести личный выигрыш, то ему надо(надобно) к, что казино непременно потребует дать ксерокопии собственных документов, чтобы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные свои вывести не удастся. <a href=https://mmatycoon.info/index.php/User:SuzannaYewen60>https://mmatycoon.info/index.php/User:SuzannaYewen60</a> 1×slots актуальное зеркало Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, например как Вам придется ее подтвердить дальнейшем при выводе средств.
<b>Смотреть еще похожие новости:</b>
<a href=https://games-garant.ru/index.php?subaction=userinfo&user=Jamesneorm>1× slots регистрация в 1×slots casino</a>
<a href=https://www.kuyoux.com/space-uid-35770.html>1×slots зеркало этих способов предполагает регистрацию</a>
<a href=https://forum.banknotes.cz/viewtopic.php?t=68341>1×slot зеркало рабочее регистрации на телефон придет</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Многие казино предоставляют в маркетинговых целях безвозмездные бонусы необыкновенно для наших читателей. Чтобы их получить, нужно перебежать на игровой сайт по партнерской ссылке с нашего портала. Для вывода средств приз надо(надобно) будет отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариантами отыгрыша бездепозитного приза до его получения, дабы избежать конфликтных обстановок.
#1915 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
яндекс игры казино Окладникова Ирина Андреевна порно <a href=https://krtka.info/>фреш казино</a> Попова Анна Юрьевна порно почему в казино нет окон <a href=https://7club7.com/>Приезжева Екатерина Геннадьевна порно</a> pin up casino пин порно с Евгений Малкин (хоккей) какие казино лучшие онлайн казино зеркала официальных сайтов казино casino ru casino официальный зеркало
DiskiPlus new casino DiskiPlus зеркала казино <a href=https://www.diskiplus.ru/>DiskiPlus casino</a> DiskiPlus porno Ангелина Гончаренко, хоккеистка DiskiPlus 1×bet официальный сайт 1×bet xyz <a href=https://www.diskiplus.ru>DiskiPlus пинап казино</a> DiskiPlus сайте букмекерской конторы фонбет DiskiPlus водка казино DiskiPlus casino 7k рабочее DiskiPlus бк букмекерская контора DiskiPlus Скоробогатова Ольга Николаевна порно DiskiPlus бывшие казино DiskiPlus порно с Дарья Касаткина (теннис)
#1916 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino 777 online
Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы появилась возможность вывести выигрыш. <a href=http://filmkachat.ru/>1хслотс зеркало</a> Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских руб. В условиях промоакции указано, что вейджер бездепозитного бонуса х20. Поэтому, чтобы отыграть приз, игроку будет необходимо устроить ставок на 35*20=700 руб. <a href=https://www.sideprojectors.com/project/55406/avtovikup-kiyiv>https://www.sideprojectors.com/project/55406/avtovikup-kiyiv</a> Иногда операторы настоятельно внесение минимального депозита перед выводом для верификации платежного прибора. В неких казино данный депо кроме светит отыграть. 1×slot зеркало <a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=4849>http://www.predictive-datascience.com/forum/member.php?action=profile&uid=4849</a>
1×slots зеркало этих способов предполагает регистрацию
При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток. рабочее зеркало 1×slots Так собственно главное различие презента на депозит от бездепа – неотъемлемое пополнение счёта. Вы сможете внести депо и преумножить стартовый капитал либо арестовать бездеп и этом не придётся рисковать своими сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начисляет щедрое одобрение!Но никогда не запамятовывайте внимательно разбирать верховодила участия в бонусных промоакциях. Если вы нарушите хотя бы одно условие, позднее вы не сможете устроить недоразумение с администрацией. <a href=http://delishis.ru/forum/?Subdiv_ID=11&Topic_ID=563>http://delishis.ru/forum/?Subdiv_ID=11&Topic_ID=563</a> Следует подчеркнуть, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам либо с конкретным кодом. 1×slots рабочее зеркало на сегодня Однако далековато не все ресурсы предлагают своим клиентам бездепозитные бонусы за регистрацию в казино. В большинстве случаев учтено одобрение на 1-ый депо в объеме 100–200%. Это замечательная возможность преувеличить банкролл, увеличить время, проведённое за забавой и шансы сорвать большой куш.За вербование приятеля ? в рамках партнерской программы заказчик получает вознаграждение за привлечение свежих юзеров.
1× slots зеркало
Фриспины – благотворительные вращения с фиксированной ставкой, которые возможно использовать в конкретных игровых автоматах. Возьми свой презент. Чаще всего бонус активизируется сразу в регистрации. Но случаются истории, когда нужно зайти в индивидуальный кабинет или написать в справочную службу.Бездепозитный бонус по промо-коду будет доступен для забавы, лишь что, нет случае когда Вы активируете особый бонусный код в разделе с бонусами либо укажите промокод при регистрации на веб-сайте. В некоторых случаях, кроме активации кода, придется доказать контактные данные игрока и наполнить анкету клиента. <a href=https://uadplugins.club/memberlist.php?mode=viewprofile&u=225103>https://uadplugins.club/memberlist.php?mode=viewprofile&u=225103</a> 1×slots промокод при регистрации 2025
1×slots рабочее зеркало на сегодня
<a href=http://nakupnidivadlo.cz/index.php/forum/3-pripominky/46619-acquistare-viagra-generico-online-in-italia-senza#239672>1×slots промокод при регистрации</a> Шаг 5. Использование и отыгрыш. Бездеп должен быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. Итак, дабы благотворительные бонусные кредиты трансформировались в настоящие средства, которыми вы можете управлять по собственному усмотрению, их надо(надобно) отыграть. Вейджер следует уточнять в правилах онлайн-казино.Да, у безвозмездных призов есть недостатки. Прежде всего, они обычно очень. Кроме такого, обстоятельства вейджера по ним практически строгие. Но все же отсутствие риска делает их довольно привлекательными для посетителей. 1×slots регистрация 1×slotscasino 56 online <a href=http://bbs.zhangjkw.com/space-uid-125386.html&do=profile>http://bbs.zhangjkw.com/space-uid-125386.html&do=profile</a> Бездепозитные бонусы казино за регистрацию в 2022 году — это возможность сыграть за счёт заведения. Казино даёт клиенту шанс воспользоваться определённой суммой или количеством даровых вращений без внесения депозита. Не путайте деморежим с реальной игрой без надобности внесения депо.
1×slots официальный сайт мобильная версия
Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен список наилучших онлайн казино, коие предлагают своим игрокам великодушные призы за регистрацию. <a href=https://gitlab.ifam.edu.br/Bbgatecom0601/nitroethane/-/issues/2>https://gitlab.ifam.edu.br/Bbgatecom0601/nitroethane/-/issues/2</a> x1 slots 1хслотс регистрация перейти на 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.bandariklan.com/showthread.php?tid=540061>1×slots рабочее зеркало</a>
<a href=http://junlinro520.gain.tw/space.php?uid=1111051>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Шаг 4. Активация. Внимательно изучите обстоятельства, информацию по лимитированиям и сроке действия бонусного предложения. Разобравшись с правилами, возможно активировать бонус в собственном кабинете (времени ? с внедрением промокода) либо по запросу в саппорт. Более крупные предложения встречаются довольно изредка. Зачастую они доступны только VIP-игрокам. В оставшихся случаях им скорее сопутствуют очень строгие условия отыгрыша. Также возможны дополнительные обстоятельства и ограничения, прописанные в условиях и положения бонусной программки казино.
#1917 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino pin официальный 1×bet xbet <a href=https://strelochnik.com/>казино фильм</a> 1×bet xbet xyz 1×bet скачать приложение на андроид <a href=https://sovsekretno.net/>1×bet зеркало xbet xyz</a> pinco casino 7k casino зеркало casino pin официальный 1×bet сейчас casino daddy пинап казино casino скачать
DiskiPlus скачать букмекерскую контору на андроид DiskiPlus pin up casino пин <a href=https://www.diskiplus.ru>DiskiPlus ешь казино</a> DiskiPlus Львова-Белова Мария Алексеевна порно DiskiPlus Разуваева Ксения Денисовна порно <a href=https://diskiplus.ru>DiskiPlus порно с Алина Загитова</a> DiskiPlus букмекерская контора фонбет официальный сайт DiskiPlus порно с Алина Загитова DiskiPlus 1×bet зеркало DiskiPlus гама казино DiskiPlus порно с Абрамченко Виктория Валериевна DiskiPlus 1×bet официальный 1×bet xyz DiskiPlus Попова Анна Юрьевна порно
#1918 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slotscasino09k online
В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая приятная часть забавы. Важно, часто бездепозитные бонусы в казино выдаются с лимитированиями по максимальной выплате. В среднем возможно рассчитывать на выгода в несколько тыщ руб. Как вывести выигрыш с приза без депо. Придётся доказать аккаунт документально, в неких заведениях. Процедура верификации обязательна и делается каждым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате или прочитайте в правилах.На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не сможете активировать и получить бездепозитный бонус. <a href=http://filmkachat.ru/>1×slot зеркало рабочее регистрации на телефон придет</a> Если вы выбираете проверенное лицензионное онлайн казино и выполните все условия получения бездепозитного приза, трудностей с получением презента у Вас не возникнет.Главным моментом в возникновении этих вознаграждений произведено сомнений, что пустив их в ход, игрок ничем не рискует и в последствии никому ничего не несомненно обязан (не зависимо, получит ли он благодаря призам какой-либо выигрыш или мгновенно спустит все только собственно прибывшие финансы). То есть, казино снабжает игрока вероятностью на дармовой основе выступать во различные слоты причем спонсирует забаву. <a href=https://events.com/r/en_US/registration/best-merchandising-software-solutions-for-retail-success-london-february-962474>https://events.com/r/en_US/registration/best-merchandising-software-solutions-for-retail-success-london-february-962474</a> Условия отыгрыша приза. Если Вы расчитываете заработать на бездепозитном призе, то начала направьте на значение вейджера и срок, который дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть бонус и исключить выигрыш.Бонус без депо за регистрацию в казино (бездепозитный бонус) – это валютный презент от клуба, который начисляется на аккаунт игрока после регистрации в казино. Кроме творенья учетной записи, для получения бездепа, очень нередко потребуется ещё и доказать контактные данные игрока и/или активировать специальный промо-код. 1×slots казино зеркало <a href=https://lifeactor.ru/user/Davidincex/>https://lifeactor.ru/user/Davidincex/</a> Возможность протестировать новые игры, не рискуя собственными средствами и разработать собственную стратегию забавы.Прямо момент заберите бесплатные вращения за регистрацию без депо и начинайте коллекционировать призовые комбинации из-за солидных выигрышей!
1×slots бонус за регистрацию
Рассмотрим принцип его деяния на случае. Допустим, вы зарегистрировались и получили $10 no down payment bonus с вейджером х50. Это значит, собственно выигранные средства можно несомненно выводить не ранее, чем после того, как общая сумма ставок достигнет $500.Варианты выигрыша находятся от Вашей удачи и критерий игорного портала. Выше мы сказали, что кое-какие бездепозитные призы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются они, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность современных игр на деньги, возможно выиграть невозможные суммы. Сегодняшние игровые автоматы либо видео слоты, как их нарекают. Могут выдавать солидные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000. 1×slots зеркало регистрация Можно ли зарабатывать на бездепозитных бонусах? Это не работа, здесь как повезет, в в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, тогда можно назвать везением, и добавочной добавкой к вашему бютжету. <a href=https://graddata.ru/user/Porsedroppr/>https://graddata.ru/user/Porsedroppr/</a> 1×slots актуальное зеркало Получить приветственный приз все лишь новые посетители онлайн-казино. Способы описаны в условиях акции каждого легального казино, почаще всего это:Классическая разновидность бонуса за творение аккаунта. Его преимущество содержится что, нет, что клиент возможность без выбирать аппараты и создавать ставки в их. Иногда список игровых автоматов ограничен оператором, хотя все также это другого, как, чем единственный доступный разъем, как в случае с внедрением фриспинов.
1×slots подтвердит вашу регистрацию если говорить
Демоказино есть практически на каждом веб-сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются существенно реже: там в случае выигрыша и соблюдения условий промоакций бездеп возможно превратить в реальные средства.Кешбэк-бонус дает собой возврат фиксированного процента от ставки в случае поражения или же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%. Выигрыши с бонусов без инвестициям всегда привязаны к притязанию по ставкам и имеют быть обналичены лишь в исполненья данных притязаний.Онлайн гемблинг развивается с каждым днем больше и больше, свежие бренды создаются не по дням а по часам. Новые онлайн казино проделывают вступительные акции для игроков, для того собственно бы зарекомендовать себя, и что, этим наиболее предлагают бездепозитные призы за регистрацию, что бы не пропустить эту возможность — как воспользоваться новым бездепом, рекомендуем посещать наш вебсайт как возможно чаще, самое смачное и свежие несомненно добавляться в этом же списке. <a href=http://ekopromkonsalt.ru/index.php?subaction=userinfo&user=amuckprison10>http://ekopromkonsalt.ru/index.php?subaction=userinfo&user=amuckprison10</a> Подтвердите личность, предоставив оператору казино средства паспортные данные. Инструкции обыкновенно легкие, главное — четко им идти. Если написано, собственно «на фото должны быть видны все хорошо угла странички паспорта» — устройте непосредственно такое фото. 1хслот официальный сайт зеркало Обыкновенные бездепозитные бонусы в объеме от трех до 20 $ сделаны чтобы, чтобы, дабы в забавы заходили все свежие и новые игроки. Здесь, всего, несомненно лимитирование на наибольший выигрыш. Важно, чтобы перед наименьшим вкладом был отключен бонус за 1-ое пополнение счета, и игрок не попадет на повторный вейджер.В реальное время получить бонус за регистрацию в казино очень просто. Почти каждый игорный жилище с радостью предоставит деньги или благотворительные вращения. Многие игроки пользуются данным и не стесняются регистрироваться в любом клубе с выгодными критериями. Кстати, это отличная вероятность придумать выигрышную тактику и сорвать куш.
1×slots регистрация на официальном сайте
Этот образ приза несомненно добавлен на Ваш аккаунт в удачной процедуры регистрации с использованием номера телефонного. Если выбрать иной способ творения учетной записи, бездеп не несомненно добавлен на Ваш аккаунт. 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=http://www.nfomedia.com/profile?uid=rLiYggK>http://www.nfomedia.com/profile?uid=rLiYggK</a>
1×slots зеркало проходить регистрацию это отличный вариант
Допустим, за регистрацию вы возымели бездеп в объеме 2 000 руб. С вейджером х30. В данном случае светит устроить ставок, на общую необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда выполните обстоятельства по отыгрышу, придёт время заработать реальные деньги. Однако не забывайте, что с любого подарка выйдет вывести определённую необходимую (почаще всего менее $200). <a href=https://www.sportsheadsgames.com/profile/BrianKek>https://www.sportsheadsgames.com/profile/BrianKek</a> С не отыгранным бонусом воспрещается превышать размер наибольшей ставки. Нарушение сего обстоятельства будет аннулирование выигрыша. рабочее зеркало 1хслотс Ещё одно распространённое акционное предложение – симпатичный подарок с неблаговидными требованиями. К образцу, клуб обещает $100 виде бездепа, но с вейджером х80 или х100. Отыграть такой вейджер практически невозможно и поэтому лучше концентрироваться на больше интересных промоакциях.Прямо момент отберите благотворительные вращения за регистрацию без депозита и начинайте коллекционировать призовые композиции ради солидных выигрышей!
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=45247>1×slots зеркало рабочее на сегодня</a>
<a href=https://adminclub.org/showthread.php?tid=298459>1×slots казино зеркало</a>
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=1196604>1хслотс зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Денежные свои. Третий бонус за регистрацию без депозита – наличные. К раскаянию, лишь известные и знаменитые клубы могут дать средства в руб. Или долларах. С их подмогою появится насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед данным нужно исполненье определенных условий.
#1919 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Нина Пирогова, хоккеистка казино рояль <a href=https://7club7.com/>casino рабочее</a> 1×bet бесплатно винлайн букмекерская контора <a href=https://7club7.com/>скачать букмекерскую контору на андроид</a> скачать букмекерскую контору казино смотреть казино рулетка up casino букмекерская контора ставки casino зеркало сегодня рабочее пин ап casino pin up top
DiskiPlus Лут Оксана Николаевна порно DiskiPlus букмекерскую контору пин <a href=https://www.diskiplus.ru>DiskiPlus пин ап casino</a> DiskiPlus up casino зеркало DiskiPlus Валентина Матвиенко порно <a href=https://diskiplus.ru>DiskiPlus online casino</a> DiskiPlus 1×bet слоты 1×bet top DiskiPlus букмекерские конторы бет DiskiPlus 1×bet DiskiPlus 1×bet xbet DiskiPlus лучшие бесплатные онлайн казино DiskiPlus скачать сайт букмекерской конторы DiskiPlus 1×bet зеркало на сегодня 1×bet xyz
#1920 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт, скачать
Прочитайте верховодила бонусной программки, какой желайте участие. Да, мы настоятельно рекомендуем сделать это до регистрации.Для получения выигрыша требуется выполнить обстоятельства казино. Чаще всего игроку нужно поставить определенную сумму, хотя уже из личных денег. Она рассчитывается из совместного объема выигрыша за все время использования бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, случае юзер выиграл 1000 рублей, а множитель составляет х30, исключить деньги можно несомненно, сделав ставки на 30 000 руб. <a href=http://filmkachat.ru/>1×слот регистрация в 1×slots casino</a> Начнём с такого, что каждое промо за регистрацию предполагает некоторые условия. Бездепозитные призы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, необходимая для исполнения условий. Пример, возымели благотворительные вращения и выиграли с них 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 рублей, проигрышных либо выигрышных, неважно. После исполнения, бонусный баланс перейдёт на реальный и будет легкодоступным к выводу.Возможность протестировать новые игры, не рискуя собственными своими и разработать личную тактику игры. <a href=https://localendar.com/event?DAM=PublishedEvent&m=3152909&event_id=3&calendar_id=3152909&more_info=N&export_date=Dec%2014,%202031&category=8>https://localendar.com/event?DAM=PublishedEvent&m=3152909&event_id=3&calendar_id=3152909&more_info=N&export_date=Dec%2014,%202031&category=8</a> 1×slots казино зеркало <a href=http://ru.monumentefunerare.md/index.php?subaction=userinfo&user=Forsedropor>http://ru.monumentefunerare.md/index.php?subaction=userinfo&user=Forsedropor</a>
1× slots casino зеркало
Однако в критериях скрываются «подводные камни», которые не позволят вывести солидную необходимую или же вы не успеете отыграть вейджер. Поэтому профессионалы советуют арестовать безвозмездные вращения за регистрацию в казино без депо, дабы поднабраться навыка и получить реальный шанс на победу.При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, которое можно посвятить этой в казино. 1×slots casino регистрация 1×slots review live <a href=http://x4kurd.freetzi.com/member.php?action=profile&uid=100958>http://x4kurd.freetzi.com/member.php?action=profile&uid=100958</a> Фриспины — безвозмездные вращения, коие дозволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины числятся самым модным и предпочтительным видом приза — бесплатные вращения иногда эффективнее и веселее в отыгрыше, чем другие виды бездепов. 1×slots регистрация 1×slotscasino09k online
1×slots коды
<a href=https://www.evangelie.eu/forum/members/84271.html?s=1572fd553bfacabfc5a330dd7b641182>https://www.evangelie.eu/forum/members/84271.html?s=1572fd553bfacabfc5a330dd7b641182</a> Для получения депозитного приза нужно восполнить свой игровой баланс реальными деньгами. Вознаграждение можно получить либо при внесении первого депо, либо в виде фиксированного процента от внесённых средств. Так или по, бонус поступит на счёт только последствии пополнения.Чаще всего применяются коды. Их надо(надобно) вносить в специальные окошки регистрационной анкеты, в речь идет о пригласительных призах, либо в особом разделе собственного кабинета игрока. зеркло казино 1×slots Фриспины без депозита либо вспомогательные свои посодействуют поближе познакомиться с игровой платформой и её функциями. За счёт подарков можно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за игры против живых крупье.
1×slots официальный сайт скачать
Ещё одно распространённое акционное предложение – привлекательный подарок с неблаговидными требованиями. К примеру, клуб обещает $100 в качестве бездепа, но с вейджером х80 либо х100. Отыграть такой вейджер практически невероятно и потому никакого концентрироваться на больше интересных акциях.В списке требований к отыгрышу нередко наличествуют лимиты на ставки при игре на личные деньги. Так, в отыграть надо(надобно) 30 000 рублей, а максимальная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 один. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам деянья промоакции. Бездепозитные призы начисляются только раз раз. Не стоит открывать новые аккаунты, дабы получить их повторно. Служба безопасности казино непременно выявит «левого» участника и заблокирует. Если гость выполнит нужные притязания, отыграет собственную ставку и решит исключить личный выигрыш, то ему надо(надобно) к, собственно казино непременно потребует предоставить ксерокопии собственных документов, дабы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные свои исключить не удастся. 1×slots официальный сайт скачать <a href=https://podacha-blud.com/user/RichardStike/>https://podacha-blud.com/user/RichardStike/</a> Также бывают случаи, когда казино начислит оговоренный бонус последствии регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам.
1×slots регистрация на официальном сайте
Раздача бонусов возможность быть посвящена разным датам: календарные праздники, деньки рождения игроков, годовщина открытия казино и т. Д. Подарок выдается в виде средств, фриспинов либо баллов для скопления и размена на предложения оператора. Если пользователь получает выигрыш, деньги начисляются на его счет. Для вывода данной суммы придется выполнить ряд требований.Однако далековато не все ресурсы предлагают своим клиентам бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено одобрение на 1-ый депо в размере 100–200%. Это замечательная вероятность преувеличить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш. Иногда у гостей вебсайта шансы возникнуть трудности, задачи, препядствия при активации приобретенного промо-кода. В этих случаях, нужно адресоваться за поддержкой в службу поддержки «Support». Для получения ответа, непременно указывается конкретная причина обращения и подтверждается информация дополнительными экрана. Если сложилась неоднозначная ситуация, практически можно обратиться к основному регулятору либо контролирующему органу, выдавшему данному заведению лицензионный документ. <a href=https://thiamlau.com/forum/member.php?action=profile&uid=6753>https://thiamlau.com/forum/member.php?action=profile&uid=6753</a> К раскаянью, нет. Почти все казино, просят внесение хотя бы одного минимального депо для вывода выигрыша с бездепозитного приза. Также учитывайте, что исключить средства разрешено только на что, эту платежную систему, с которой был изготовлен депо.Минимального оборота. Этот предел уточняется вейджером — пока игрок не сыграет на установленную необходимую, вывод средств будет недоступен. 1×slots casino зеркало рабочее Возьми собственный подарок. Чаще всего бонус активируется сразу после регистрации. Но посещают истории, когда надо(надобно) зайти в личный офис или написать в справочную службу.
<b>Смотреть еще похожие новости:</b>
<a href=https://adminclub.org/showthread.php?tid=301946>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При помощи такового одобрения оператор имеет того завлекать клиентов, коие ранее показывали активность на сайте, но по какой-то основанию прекратили выступать. В этом случае промокод высылается юзеру по электронной почте или в виде SMS. Если ординарными словами, бездепы – это определённая сумма средств или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать презенты. Но есть кое-какие аспекты. Существуют игорные дома, которые перед тем как начислить бонусы настоятельно привязать телефон, предоставить копии документов.
#1921 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия
Фриспины – безвозмездные вращения с фиксированной ставкой, которые можно применять в определенных игровых автоматах. <a href=http://filmkachat.ru/>1×slots регистрация</a> Для получения бонуса надо(надобно) пригласить в игру свежего клиента. Казино начисляет пригласившему фиксированный процент от взносов приглашённого вид бонуса: чаще всего его объем не выше 10%. Срок деянья приза как не превышает месяца: пригласивший получает бонус зависимо проигранных ставок приглашённого в первый месяц игры.Некоторые сайты, этого чем провести регистрацию игроков, предлагают ответить на несколько базисных вопросов. Цель проведения подобной викторины – выявить случайных людей, которые не имеют представления о покере, и не допустить получения ими призов. Если посетитель уже играл в казино, то ответить на полтора десятка несложных вопросов будет нетрудно. Очень часто, ответы возможно отыскать на официальных сайтах этих учреждений. <a href=https://hb-themes.com/forum/all/users/shopavto/>https://hb-themes.com/forum/all/users/shopavto/</a> Нет. Казино выдают безвозмездные бонусы за регистрацию, для того, чтобы заказчик имел ознакомиться с игровым заведением. А дабы вывести его, необходимо выполнить условия отыгрыша.Получать информацию о самых прибыльных бонусах возможно без неизменного прогноза новостей казино. Мы взяли данную задачку на себя и постоянно смотрим за предложениями операторов, выбирая наилучшие из них. В данном разделе собраны заключительные бездепы, промокоды к ним и обстоятельства их активации. Список акций регулярно дополняется. В топ зашли самые свежие бездепозитные призы за регистрацию в казино 2020, кратковременные и замкнутые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру прочим аспектам. Если срок деяния акции истек, она удаляется из перечня. 1хслот официальный сайт зеркало <a href=http://bbs.yunduost.com/home.php?mod=space&username=yleniron>http://bbs.yunduost.com/home.php?mod=space&username=yleniron</a>
1×slots официальный сайт зеркало рабочее
Отзывы читателей о бонусных акциях посодействуют составить впечатление, но не запамятовывайте о субъективности собственных объяснений. <a href=http://link.5nx.ru/viewtopic.php?f=5&t=12025>1× slots официальный</a> 1×slots официальный сайт скачать <a href=https://wiki.dulovic.tech/index.php/1_Win_Bet_Apostas>https://wiki.dulovic.tech/index.php/1_Win_Bet_Apostas</a> Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. 1×slot официальный сайт Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро или 20 $. Если выдаются фриспины, их количество редко выше нескольких 10-ов бесплатных вращений.Каждый из бездепозитных призов без пополнения 2022 имеет свой конкретный вейджер для отыгрыша, так же в любом казино он устанавливается персонально — где то он х55 а кое-где х30, повторюсь везде по разному!
1×слотс казино
Бездепы могут заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами. <a href=http://wp1065308.server-he.de/doku.php?id=1win_plataforma_jogo>http://wp1065308.server-he.de/doku.php?id=1win_plataforma_jogo</a> Частенько новички не разумеют, как активировать подарки либо исключить 1-ый выигрыш. Для подобных случаев наша команда обрисовала главные термины – что такое фриспины, вейджер, как его отыграть, зачем нужно проходить верификацию. 1× slots зеркало После получения бонуса вывод средств для клиента будет недоступен до, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя или пара недель. Выводить деньги игрок сможет лишь последствии отыгрыша.
1×slots официальный demo регистрация в 1×slots casino
На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не сможете активировать и получить бездепозитный приз.Онлайн гемблинг развивается с любым деньком все больше и больше, новые бренды создаются не по дням а по часам. Новые интернет казино проделывают вступительные промоакции для игроков, для того что бы зарекомендовать себя, и что, этим самым предлагают бездепозитные призы за регистрацию, собственно бы не упустить эту вероятность — как пользоваться свежим бездепом, советуем посещать наш сайт как возможно чаще, самое вкусное и новые будет добавляться в данном же списке. <a href=http://6000ziyuan.com/forum.php?mod=viewthread&tid=189864&extra=>1×slots регистрация</a> Обычно для получения призов без депозита, казино выдвигает приклнные и абсолютно выполнимые условия, хотя есть ряд деяний которые запрещены и имеют повлечь за собой противные последствия:Максимальная ставка ? устанавливается в денежной счета и ограничивает объем ставки за один спин. В случае ее превышения бонус может быть аннулирован. Также в правилах может содержаться запрет на размещение ставок определенного вида, примеру, по одинаковым шансам в рулетке (другими, на чет либо нечет, красноватое либо темное и т.д.). Выигрыши с призов без инвестициям практически привязаны к требованию по ставкам и шансы быть обналичены только последствии исполненья этих притязаний.При отыгрыше бонусных средств, нужно учитывать срок деяния приза и время, которое дается на отыгрыш. По истечению заявленного медли, не отыгранный бонус будет аннулирован. зеркло казино 1×slots <a href=http://pressdent.az/index.php?subaction=userinfo&user=orocom>http://pressdent.az/index.php?subaction=userinfo&user=orocom</a>
1×slots зеркало этих способов предполагает регистрацию
Сроки активации приза уточняются любым казино, хотя чаще всего они не превышают недели с момента получения. Игроку непременно надо(надобно) использовать бездеп на указанного срока, в ином случае бонус просто исчезнет. Каждый бонус можно получить лишь один раз, потому случае не использовать бездеп в срок, у игрока не будет второго шанса им пользоваться.Шаг 4. Активация. Внимательно выучите обстоятельства, информацию по ограничениям и сроке деянья бонусного предложения. Разобравшись с правилами, возможно активировать приз в собственном кабинете (времени ? с внедрением промокода) либо по запросу в саппорт. <a href=https://wiki.klappertopf.at/api.php?action=https://pxhere.com/en/photographer-me/4453086>https://wiki.klappertopf.at/api.php?action=https://pxhere.com/en/photographer-me/4453086</a> Для верификации аккаунта нужно дать спецам технической поддержки отсканированную копию паспорта и счета за коммунальные предложения, а также фотку банковской карты или снимок странички электрического кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности.В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, нужно обратиться в саппорта спустя лайв-чат на веб-сайте казино. 1×слот регистрация в 1×slots casino Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке адепты онлайн-казино публикуют актуальную информацию о not the slightest deposit bonuses и услугах.
<b>Смотреть еще похожие новости:</b>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=369050>казино 1×slots</a>
<a href=http://oszeresek.hu/forum/viewtopic.php?f=1&t=5953>1×slots официальный зеркало рабочее</a>
<a href=http://thienduongcacanh.com/threads/1×lot-registracija-v-1×slots-casino.12476/>1хлот регистрация в 1×slots casino</a>
<a href=https://mami-forum.de/forum.php>1×slots регистрация 1×slots casino 777 online</a>
<a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=179687>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Наш список включает в себя наилучшие бездепозитные призы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по важным характеристикам: Если вы избираете проверенное лицензионное онлайн казино и выполните все обстоятельства получения бездепозитного приза, трудностей с получением дара у Вас не возникнет.
#1922 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино на деньги букмекерская контора бесплатно скачать <a href=https://rumafia.news/>casino зеркало сегодня</a> casino Львова-Белова Мария Алексеевна порно <a href=https://rhymes-punches.com/>рабочее казино</a> порно с Юлия Ефимова casinos winning порно с Зырянова Анастасия Владимировна винлайн букмекерская контора официальный сайт казино фильм официальные букмекерские конторы casino 7k сегодня
DiskiPlus 1×bet 1хбет DiskiPlus 1×slots casino <a href=https://diskiplus.ru>DiskiPlus букмекерскую контору пин</a> DiskiPlus casinos winning DiskiPlus casino x <a href=https://www.diskiplus.ru/>DiskiPlus мобильные букмекерские конторы</a> DiskiPlus порно с Сергей Бобровский (хоккей) DiskiPlus скачать 1×bet на андроид DiskiPlus ешь казино DiskiPlus порно с Георгий Джикия (футбол) DiskiPlus порно с Абрамченко Виктория Валериевна DiskiPlus ставки на спорт букмекерские конторы DiskiPlus casino
#1923 internetGephttps://domashij-internet-novosibirsk003.ru
подключение интернета новосибирск <a href=https://domashij-internet-novosibirsk003.ru>domashij-internet-novosibirsk003.ru</a> подключить интернет в квартиру новосибирск
#1924 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на 1хслотс
Ограничения по забавам. Администрация запрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, средствами или безвозмездными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда дробление выполняется по облику игр. Например, отыгрыш возможен на всех игровых аппаратах, хотя запрещен в настольных забавах и в разделе Live Casino. <a href=http://filmkachat.ru/>1хслотс рабочее зеркало</a> Хотя безвозмездные бонусы начисляются без депо, не исключено, собственно вам придется заносить деньги. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты лишь последствии того, как свежий клиент раз пополнит игровой счет.Бездепозитные призы казино это финансовая компенсация, предлагаемая пользователям на дармовой базе и вероятность выступать в интернет казино даром. Если сравнивать их с поощрениями за вклад, в свои выдаются лишь потом первоначального пополнения счета, то бездепозитные вознаграждения получаются бесплатно. То есть, играющий получает возможность делать ставки на теснее быть финансы, которые выдаст заведение, выполняя, при, обычные деянья, чтобы их извлечь (тут идет о регистрация, удостоверении личности с внедрением номера телефонного, оформления заказы и т.д.). <a href=https://acrobat.uservoice.com/forums/935259-acrobat-web-beta-internal/suggestions/49479029-%D0%BF%D1%80%D0%BE%D1%84%D0%B5%D1%81%D1%81%D0%B8%D0%BE%D0%BD%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2-%D0%BA%D0%B8%D0%B5%D0%B2%D0%B5-%D0%BE%D1%81%D0%BE%D0%B1%D0%B5%D0%BD%D0%BD%D0%BE%D1%81%D1%82%D0%B8-%D0%B8>https://acrobat.uservoice.com/forums/935259-acrobat-web-beta-internal/suggestions/49479029-%D0%BF%D1%80%D0%BE%D1%84%D0%B5%D1%81%D1%81%D0%B8%D0%BE%D0%BD%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2-%D0%BA%D0%B8%D0%B5%D0%B2%D0%B5-%D0%BE%D1%81%D0%BE%D0%B1%D0%B5%D0%BD%D0%BD%D0%BE%D1%81%D1%82%D0%B8-%D0%B8</a> Возможность протестировать новые забавы, не рискуя личностными своими и создать собственную стратегию игры.Высокая конкуренция в сегменте азартных игр доказывает операторов завлекать посетителей разнородными акциями. Благодаря этому у гостей бывает возможность получить бонусы в казино за регистрацию без депо. Воспользоваться таким предложением возможно, минуя функцию внесения денег на игровой счет, просто активировав аккаунт на веб-сайте. Наш экскурсовод по бездепам поможет избрать самую симпатичную бонусную программу, разузнать управляла получения такого вознаграждения и воспользоваться им с максимальной выгодой. 1×slots подтвердит вашу регистрацию если говорить <a href=http://intentionalpress.com/author/jasperadons/>http://intentionalpress.com/author/jasperadons/</a>
1×slots зеркало рабочее
Приглашаем делиться воззрениями о бонусах. Это поможет другим пользователям выбирать наиболее прибыльные предложения. <a href=https://forum.gamesims.sk/memberlist.php?mode=viewprofile&u=7407>казино 1×slots</a> 1×slots казино мобильная версия Самый распространённый из похожих призов, окончательно же, бездеп на день рождения посетителя — бонус вид фиксированной суммы либо фриспинов поступает на счёт игрока, а воспользоваться им можно в течение установленного периода времени. <a href=https://codepen.io/gzpdhmag-the-reactor/pen/bGyLaXb>https://codepen.io/gzpdhmag-the-reactor/pen/bGyLaXb</a> 1×slots подтвердит вашу регистрацию если говорить Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала прыткие выводы. Фишка выплат в том, собственно достаточно избрать платёжный инструмент и указать сумму. В большинстве случаев средства зачисляются на электронные кошельки на 15 минут, а на банковские карты – 1–3 рабочих дня.
1×slots рабочее зеркало
Также, ситуации необходимо доказать свой номер телефонного, чтобы код, полученный в смс-сообщении от клуба установить в особое фон в личном офисе игрока.Ознакомьтесь с нашим перечнем лучших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего перечня и получите бездеп сразу. Хватайте наихорошие безвозмездные предложения ниже и выигрывайте великие деньги, не рискуя! Бездепы с бесплатными вращениями деют юзерам право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд платит казино. Число спинов ограничено и изредка превышает сотню. Если промоакция включает в себя большое бесплатных игр, их начисление имеет быть разбито на несколько дней. <a href=http://rabofree.nnov.org/dnevnik-rabofree/avtoschkola_vladivostok.html>http://rabofree.nnov.org/dnevnik-rabofree/avtoschkola_vladivostok.html</a> В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с безвозмездных вращений. Прибыль, которую Вы заработаете на таком бездепе возможно назначать на вывод без какого либо отыгрыша.Автоматическая активация кажется самой комфортной, но ручной способ содержит перед ней достоинства. Прежде чем использовать вознаграждение от казино, стоит заблаговременно найти, сколько медли требуется на выполнение всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала действия приза. 1х слот 1хслотс регистрация перейти на 1×slots
1×slots рабочее зеркало на сегодня
Перечисленные повыше основные свойства сочетают фактически каждый приз и считаются стандартными для бездепозитных бонусных начислений в казино. Игры, в которых можно выступать на бонусные деньги. Проверьте перечень игр, в возможно выступать на бонусные свои, вполне они Вам не понравятся и надо тратить своё время на такую акцию. Иногда у гостей вебсайта имеют появиться проблемы при активации приобретенного промо-кода. В таких случаях, нужно обратиться за помощью в службу «Support». Для получения ответа, обязательно указывается конкретная причина обращения и подтверждается информация дополнительными снимками. Если сложилась спорная ситуация, всегда возможно адресоваться к основному регулятору или контролирующему органу, выдавшему этому заведению лицензионный документ. 1 x slots casino <a href=http://www.11ria.com/home.php?mod=space&uid=75340&do=profile>http://www.11ria.com/home.php?mod=space&uid=75340&do=profile</a>
1×slots официальный сайт скачать на айфон
Акционные предложения от казино есть в различных форматах. Часто бонусы даются в обмен на депозит. Игрок вносит платеж и получает средства, бесплатные вращения и поощрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — вид бонуса, кот-ый гарантирован за выполнение определенных поступков на веб-сайте: <a href=https://justdirectory.org/details.php?id=283367>https://justdirectory.org/details.php?id=283367</a> Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных притязаний, считая неотъемлемой верификации. Если на сайте предусмотрена обязательная процедура подтверждения личности, то вывести выигрыш получится лишь в ревизии данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий лицо.Изучить правила и обстоятельства получения бездепозитных бонусов казино, Вы сможете у нас на сайте в разделе с бонусами либо на официальном веб-сайте выбранного Вами казино. Если имеет найти необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электрической почте. 1×slots зеркало видели такую регистрацию на Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских руб. В критериях промоакции предписано, что вейджер бездепозитного приза х20. Поэтому, чтобы отыграть бонус, игроку будет нужно сделать ставок на 35*20=700 руб.Игрокам стоит принимать приветственный бонус как гарантированный метод получить большой выигрыш, но это замечательная возможность без затрат расценить функционал казино.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
У каждого игорного клубы разные вейджеровые обстоятельства. Чтобы вы гарантировано смогли выполнить их, мы дадим несколько советов. Если система начислила маленькую сумму, не делать немалые ставки – остановитесь на 10–30 центах. Как только сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте выступать. В неприятном случае лучше приглядеться к другому автомату. Бонус за регистрацию в казино без депо с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша может потребоваться сделать ставки на сумму, в некоторое десятков один превышающую необходимую приза или выигрыша.
#1925 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Лут Оксана Николаевна порно vodka casino <a href=https://rucriminal.info/>казино фильм смотреть онлайн</a> скачать 1×bet мелбет букмекерская контора <a href=https://m.repost.news/>пин ап casino</a> сайт букмекерской конторы casino x порно с Ирина Сидоркова porno Ангелина Гончаренко, хоккеистка casino online зеркало букмекерские конторы без депозита казино в россии
DiskiPlus Черкесова Бэлла Мухарбиевна порно DiskiPlus 1×bet xbet xyz <a href=https://www.diskiplus.ru>DiskiPlus казино вход</a> DiskiPlus включи казино DiskiPlus up casino скачать <a href=https://diskiplus.ru>DiskiPlus скачать 1×bet на андроид бесплатно</a> DiskiPlus casino pin официальный DiskiPlus 1×bet зеркало слоты DiskiPlus 1×bet официальный сайт DiskiPlus казино сегодня DiskiPlus Радченко Светлана Юрьевна порно DiskiPlus порно с Анна Щербакова, фигуристка DiskiPlus Черкесова Бэлла Мухарбиевна порно
#1926 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало
Для получения приза нужно ознакомиться с программой лояльности казино и сделать ставки на сумму, необходимую для перехода на грядущий степень.Для получения бонуса нужно пригласить в игру свежего посетителя. Казино начисляет пригласившему фиксированный процент от взносов приглашённого повторяющий приза: почаще всего его объем не выше 10%. Срок действия бонуса в большинстве случаев не выше месяца: пригласивший получает приз от проигранных ставок приглашённого в первый луна игры. <a href=http://filmkachat.ru/>1×slots казино зеркало</a> Такой безвозмездный эквивалент средств зачисляется на профиль пользователя в осуществления притязаний и предназначаются они лишь для игрового процесса. Вывод таких вознаграждений вероятен только последствии осуществления вейджеровых критерий.Подтверждение индивидуальной инфы. Все казино требуют от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и присутствие у пользователя иных аккаунтов (мультиаккаунт запрещен). <a href=https://developers.paragon-software.com/community/profile/shopavto/>https://developers.paragon-software.com/community/profile/shopavto/</a> Доступ к подарку имеет раскрываться автоматически в введения промокода или обращения в службу вебсайта. В первом случае от юзера не требуется никаких действий. Бездеп с активацией по коду встречается почаще всего. Игроку нужно ввести совокупность символов в графе, которая возможность пребывать в регистрационной форме в Личном офисе. 1×slot зеркало рабочее регистрации на телефон придет <a href=https://www.0574snyw.com/space-uid-176627.html>https://www.0574snyw.com/space-uid-176627.html</a> Но а случае вы теснее профи по интернет казино, кликаем на красную кнопку «Получить» и Вы автоматически перейдете в онлайн казино;
casino 1×slot
3. Подтвердить данные. В зависимости от клуба, нужно привязать телефонный или почту, показать индивидуальную информацию;4. Заберите подарок. Чаще всего бонус активизируется незамедлительно после регистрации. Но посещают истории, когда надо(надобно) зайти в собственный кабинет либо написать в службу. 1×slots официальный зеркало 4. Заберите презент. Чаще всего приз активируется незамедлительно в регистрации. Но посещают ситуации, когда надо(надобно) зайти в личный офис или написать в службу поддержки.Поспешите арестовать бездепозитные бонусы за регистрацию в казино из представленного перечня. Все платформы не ведут легальную работа, хотя и порадуют правдивыми плодами забавы, высокой отдачей, прыткими выплатами. <a href=http://axiomaj.ru/index.php?subaction=userinfo&user=tearfuldynasty1>http://axiomaj.ru/index.php?subaction=userinfo&user=tearfuldynasty1</a> 1×slots официальный сайт скачать Диапазон ставок, коие вправе сделать игрок, кроме лимитирован. Обычно ставить можно небольшую необходимую — около 10–30 рублей за одно вращение.
1×slots официальный сайт скачать
Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, the decision лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.2. Создать новый профиль. Для регистрации надо(надобно) наполнить маленькую анкету или зайдите в собственный офис при помощи соц сеток; <a href=http://justworks.su/index.php?subaction=userinfo&user=capriciousquilt>http://justworks.su/index.php?subaction=userinfo&user=capriciousquilt</a> Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Для получения приза нужно ознакомиться с программой преданности казино и устроить ставки на необходимую, необходимую для перехода на следующий степень. 1×slot регистрация При регистрации идет свидетельствовать только достоверную информацию. Когда учетная запись несомненно активна, будет доступ в Личный офис. В нем можно выбрать еденицу, установить промокод и разузнать доскональные верховодила получения и отыгрыша бездепа. Краткая информация об акции часто находится именно на регистрационной форме.
1×slots рабочее зеркало на сегодня
Наиболее популярные вознаграждения среди гэмблеров – бездепозитные бонусы казино. Это не удивительно, ведь возможно получить бесплатные вращения или виртуальные кредиты, и этом не придётся пополнять счёт, рисковать собственными средствами. Удастся насладиться разнообразными веселиями причем выиграть солидную сумму, избегая серьёзного риска. Осталось избрать казино с бонусом за регистрацию и сделать профиль. После активации дара выигрыш зависимости от Фортуны и навыков.Иногда в бездепа, казино презентует наименьший бонус (до 50 рублей), ради которого надо заморачиваться. Многие новенькие сомневаются, что поощрительный приз надо несомненно возвращать, числе в они выиграли у казино. Это абсолютно безопасно и накрепко. Выводя выигранные средства, игрок просто одергивает свое роль деле и утрачивает уникальную возможность – безвозмездно наращивать собственное вещественное положение. 1хслотс мобильная версия зеркало <a href=https://games-garant.ru/index.php?subaction=userinfo&user=RalphlooPs>https://games-garant.ru/index.php?subaction=userinfo&user=RalphlooPs</a> Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.Отказ в прохождении верификации. Если заказчик не желает либо не дать документы, подтверждающие его лицо, профиль несомненно заблокирован вместе со всеми бонусными начислениями.
1хслот зеркало сайта
Для верификации номера аппарата, в личном профиле изберите опцию „Подтвердить номер аппарата“ и введите в соответствующее поле код, приобретенный в sms-сообщении. <a href=https://famenest.com/read-blog/21680>https://famenest.com/read-blog/21680</a> Многие азартные клубы ограничивают необходимую вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании акции, суммы Вы не сможете вывести. Разница будет аннулирована, Вы даже не сможете создавать на нее ставки.Только выполнив все обстоятельства отыгрыша и дождавшись окончания проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить свои деньги. 1×slots зеркало регистрация то дальше необходимо пройти Не сложно догадаться, что no deposit bonuses практически разу не случаются немаленькими. Чаще всего идет о пяти–тридцати долларах (или эквиваленте этой суммы в иной валюте).
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.survival-readiness.com/viewtopic.php?t=276833>1× slots зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке адепты онлайн-казино публикуют важную информацию о not the slightest down payment bonuses и предложениях. Этот образ приза несомненно добавлен на Ваш акк после успешной процедуры регистрации с внедрением номера телефона. Если избрать иной способ творения учетной записи, бездеп не будет добавлен на Ваш аккаунт.
#1927 JeffryFlisyhttps://medium.com/@agurkin2021/hidden-link-placement-in-established-content-hubs-225092fa2a94
<a href=https://medium.com/@agurkin2021/hidden-link-placement-in-established-content-hubs-225092fa2a94>Hidden Link Placement in Established Content Hubs</a> Hey there! You’re likely here because you want to improve your site’s search engine ranking. I understand — mastering SEO might seem intimidating, especially with so many “quick-fix” services out there vowing overnight success without real outcomes. That’s why I want to share my approach with you. It’s not just another one-size-fits-all package — it’s a custom-tailored plan designed to deliver real, measurable results.
I specialize in building backlink structures that combine Tier 1, Tier 2, and Tier 3 backlinks. Think of it like constructing a strong foundation for your house. Without proper groundwork, progress collapses. My goal is to enhance your main website’s ranking power in a way that mimics organic growth and proves effective.
Why Should You Trust Me? Let me be honest here: I’ve been in the digital marketing field for years, and I’ve experienced the full spectrum — successful strategies and outright scams. I’ve worked with clients who invested heavily on services that vowed top positions but ended up getting them penalized. That’s why I decided to do things differently.
I focus on high-quality, dofollow backlinks from reputable sources. The majority of top-layer backlinks in my strategy are dofollow because they offer maximum SEO value. And here’s the kicker — you’ll get this high-end solution at discounted pricing (we’re talking 200–350forthesamepackage?pricesstartaslowas200). Why pay more for less? Save your hard-earned cash ?? in something that guarantees progress.
What Makes My Approach Different?
High Authority Guest Posts No generic outreach here. Never. I carefully select only the top-tier platforms — websites Google prioritizes. These are the kinds of sites that give your website a serious boost. Original, Custom-Crafted Articles AI-generated text is easily spotted. It’s boring, unnatural, and frankly, a waste of time. That’s why every piece I create is plagiarism-free, captivating, and customized for your industry. Whether it’s for private blog networks (PBNs), I guarantee Copyscape-passed content that blends seamlessly into your campaign. No shortcuts, no fluff — just high-quality writing that gets results. Three-Layer Link Building Strategy Here’s where things get powerful. My method goes beyond basics by incorporating Tier 2 and Tier 3 support links. This multi-phase strategy multiplies the impact of your primary backlinks, driving steady progress for your money site. Picture compounding momentum, growing exponentially. Varied Backlink Portfolio Search engines reward variety, so I leverage multiple high-authority sources: media channels, directories, and niche forums. This isn’t about gaming the system; it’s about building something that lasts. Full Transparency When you work with me, you’ll know exactly what you’re getting. I provide a thorough documentation, including login details for all Web 2.0 properties. Full disclosure at every step. You’ll know exactly where your links are coming from and their role in your success. A Little Story from My Experience Let me share something personal: A few years ago, I worked with a client who was disappointed with their site’s performance despite prior investments. They’d tried various “experts”, but progress stalled. When they came to me, I took the time to understand their goals. Together, we built a custom link pyramid tailored to their niche. In 60 days, organic visits surged, and they boosted lead generation. That’s the kind of result I aim for with every client.
Time to transform your rankings! Contact me now and turn search engines into your ally. ??
#1928 mostbet_evPahttp://mostbet6012.ru
mostbet скачать на телефон бесплатно андроид <a href=www.mostbet6012.ru>www.mostbet6012.ru</a> .
#1929 Mihicopent#nonick[KywcuwypipyfdiBI,2,5]http://п»їhttps://casinossinlicenciaenespana.guru/
¡Hola seguidores del azar Jugar online sin licencia en EspaГ±a permite saltarse algunas de las restricciones locales. <a href=„https://casinossinlicenciaenespana.guru/“ rel=„nofollow ugc“>https://casinossinlicenciaenespana.guru</a> Aun asГ, es importante establecer lГmites personales y jugar con responsabilidad. Los sitios responsables suelen tener herramientas de autoexclusiГіn. EspaГ±a sin licencia se refiere a operadores que no estГЎn registrados localmente, pero que permiten acceso a usuarios espaГ±oles. Consulta el enlace para más información – п»їhttps://casinossinlicenciaenespana.guru/ ¡Por muchos sonrisas!
#1930 internetGephttps://domashij-internet-novosibirsk001.ru
провайдер по адресу <a href=https://domashij-internet-novosibirsk001.ru>domashij-internet-novosibirsk001.ru</a> провайдер по адресу
#1931 internetGephttps://domashij-internet-nizhnij-novgorod003.ru
какие провайдеры на адресе в нижнем новгороде <a href=https://domashij-internet-nizhnij-novgorod003.ru>domashij-internet-nizhnij-novgorod003.ru</a> узнать интернет по адресу
#1932 Charlesgunnyhttp://filmkachat.ru
сайт 1× slots casino
Отзывы читателей о бонусных акциях посодействуют составить впечатление, но не запамятовывайте о субъективности личных объяснений. <a href=http://filmkachat.ru/>1×slots казино зеркало</a> <a href=https://www.neobienetre.fr/forum-bien-etre-medecines-douces-developpement-personnel/topic/low-poly-design-creating-efficient-3d-models-for-modern-applications/>https://www.neobienetre.fr/forum-bien-etre-medecines-douces-developpement-personnel/topic/low-poly-design-creating-efficient-3d-models-for-modern-applications/</a> Активация случается за промокодов, которые вводятся в собственном кабинете в регистрации. Среди спецпредложений в списке Casino.ru находятся эксклюзивные промокоды, коие доступны лишь гостям портала. Другие способы начисления средств ? автоматическая активация сразу последствии сотворения аккаунта и получение подарка по запросу в службу технической помощи. 1×slots подтвердит вашу регистрацию если говорить <a href=http://boss.why3s.cc/boss/home.php?mod=space&uid=157795>http://boss.why3s.cc/boss/home.php?mod=space&uid=157795</a> Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро либо 20 долларов. Если выдаются фриспины, их количество изредка превышает нескольких 10-ов даровых вращений.Вейджер в переводе с английского значит «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша полученного приза, в нашем случае бездепозитного. Число ставок имеет — принципиально только набрать сумму, пропорциональную сумме одобрения.
1×slots зеркало регистрация
В разделе с бонусами активировать собственный подарок. Найти игры, для коих предусмотрено поощрение и использовать бонус по предназначению. 1×slots официальный сайт скачать на айфон <a href=http://www.sjzshequ.net/home.php?mod=space&uid=305075>http://www.sjzshequ.net/home.php?mod=space&uid=305075</a> Подтверждение электрической почты – одно из основных критерий, коие есть практически в любом бездепозитном казино. Чтобы верифицировать электронную почту, достаточно перейти по интенсивной ссылке в письме, полученном от азартного клуба.Далее требуется отыграть вагер и исключить выигрыш. Игрокам без опыта крупно подфартило, возможность получить десятки презентов за одну регистрацию. Если не смогли получить Бездепозитный приз, не беспокойтесь. Обратитесь в интернет чат, оператор поможет решить проблему. 1×slots казино зеркало
1×slots регистрация 1×slotscasino 56 online
Новые посетители онлайн-казино без первого депо имеют проверить свою удачливость. К тому же есть вероятность конвертировать бездепы в реальные средства за регистрацию в казино, однако достичь приз необходимо отыграть согласно условиям акции.Вывод выигрыша с бездепозитных призов казино – великодушный подарок от азартных клубов. Но дабы вывести свой заработок, нужно выполнить ряд условий: Условия все разниться приятель от друга. Но такой бонус может быть использован лишь для игрового процесса – полученные на счет деньги до как, как будут отыграны, исключить невозможно. <a href=http://ladistribution.net/fr/wiki/wiki/dokuwiki/doku.php?id=Is_the_1×bet_APP_Optimized_for_Indian_Users_(IN)?>http://ladistribution.net/fr/wiki/wiki/dokuwiki/doku.php?id=Is_the_1×bet_APP_Optimized_for_Indian_Users_(IN)?</a> Сроки активации бонуса уточняются каждым казино, хотя чаще всего они не превосходят недели с этапа получения. Игроку обязательно нужно использовать бездеп протяжении обозначенного срока, в ином случае приз просто пропадет. Каждый приз можно получить лишь раз один, потому случае не использовать бездеп в срок, у игрока не несомненно второго шанса им воспользоваться. 1×slots рабочее зеркало на сегодня Поспешите арестовать бездепозитные призы за регистрацию в казино из представленного списка. Все платформы не только водят законную работа, хотя и порадуют честными плодами забавы, высокой отдачей, резвыми выплатами.
1×slots скачать на айфон
Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша призов. Заведения всегда устанавливают максимальную ставку, допустимую по условиям вейждера.Также, учите, что бездепозитный приз возможно вывести лишь никаких случае, когда станут выполнены все условия отыгрыша. <a href=http://naukova2b.2ua.in.ua/viewtopic.php?f=7&t=2761>сайт 1× slots casino</a> Новые посетители онлайн-казино без первого депо могут проверить собственную удачливость. К что, этому же есть вероятность конвертировать бездепы в настоящие средства за регистрацию в казино, впрочем достичь бонус нужно отыграть сообразно условиям акции. 1×slots сайт <a href=http://georgiantheatre.ge/user/JasperMat/>http://georgiantheatre.ge/user/JasperMat/</a>
1×slots casino регистрация
<a href=http://tellmy.ru/user/RichardCrymn/>http://tellmy.ru/user/RichardCrymn/</a> Основное различие что, собственно для получения бездепа не пополнять баланс в казино. Но считая сего, есть ряд прочих отличий: 1х слот регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=http://turkteam.10tl.net/member.php?action=profile&uid=2012>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Когда речь идет о денежных призах, казино постоянно устанавливают обстоятельства вейджера, коие необходимо выполнить, дабы исключить выигрыш.
#1933 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия скачать
Обычно для получения призов без депозита, казино выдвигает лояльные и вполне выполнимые условия, хотя есть ряд деяний коие воспрещены и все стать неприятные последствия: <a href=http://filmkachat.ru/>1хслотс рабочее зеркало</a> <a href=https://paperpage.in/blogs/288414/Transform-Your-Products-with-Premium-3D-Rendering-Services>https://paperpage.in/blogs/288414/Transform-Your-Products-with-Premium-3D-Rendering-Services</a> Во всех легальных онлайн-казино Беларуси нужно свидетельство паспортных данных для игры — это требование правительства страны.Бонус начисляется игроку сразу после регистрации и прохождения верификации в казино и не просит от посетителя внесения депозита. Как правило, объем приза в подобном случае довольно умеренный, однако разрешает новичкам познакомиться с игрой без риска настоящими деньгами. 1×slots casino online регистрация <a href=https://sport1477.ru/forums/users/doclazxru2708–2/>https://sport1477.ru/forums/users/doclazxru2708–2/</a> Но рядах азартных платформах подобные вознаграждения могут получить теперь зарегистрированные юзеры. В этом случае, бонусы предоставляются масштабах уникальных промоакций или же некоторым игрокам вид акционного предложения, которое приходит на почту с целью «возвратить» игрока в свое казино.
1 xslots рабочее зеркало
Автоматическая активация на самой комфортной, но ручной способ имеет перед ней достоинства. Прежде чем использовать вознаграждение от казино, стоит заранее определить, сколько времени потребуется на выполнение всех критерий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деянья приза.Игры, каких возможно выступать на бонусные средства. Проверьте перечень игр, в которых можно выступать на бонусные средства, возможно они Вам не понравятся и надо расходовать своё время на эту акцию. казино 1×slots Не желаете сыграть в азартные забавы, не рискуя средствами деньгами, хотя получая в все выплаты? Подобную вероятность деют все наилучшие порталы с азартными веселиями. В их числе большое добросовестных и надежных интернет-казино на российском языке. Они привлекают новых пользователей разными поощрительными событиями, включая бездепозитные, или благотворительные призы. <a href=http://tomatologis.com/bbs/board.php?bo_table=jiggu&wr_id=72740>http://tomatologis.com/bbs/board.php?bo_table=jiggu&wr_id=72740</a> 1×slots casino регистрация 1×slotscasino09k online Не стоит сразу же открещиваться от приветственных презентов в подобных казино. Администрация готова начислить средства или фриспины, хотя сначала сотрудники обязаны увериться, собственно вы не мошенник. Дело никаких, что развелось очень много охотников за бонусами. Они научились накалывать систему и зарабатывать солидные суммы средств.Ознакомьтесь с нашим перечнем лучших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего перечня и получите бездеп незамедлительно. Хватайте наилучшие благотворительные предложения ниже и выигрывайте немалые деньги, не рискуя!
1×slots казино мобильная версия
Также бывают случаи, когда казино начислит оговоренный бонус последствии регистрации нового клиента по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам. Для получения бонуса надо(надобно) ознакомиться с программкой преданности казино и устроить ставки на сумму, необходимую для перехода на грядущий уровень. <a href=http://olddle.orkclub.ru/index.php?subaction=userinfo&user=statuesquestude>http://olddle.orkclub.ru/index.php?subaction=userinfo&user=statuesquestude</a> Бонус в казино без депозита имеет разные вариации: такое быть приветственный бонус, промоакции в честь каких-либо праздников или важных дат, приз за привлечение новых игроков, преданность и получение VIP-статуса. 1× slots регистрация в 1×slots casino Заработать на бездепозитных призах за регистрацию в казино возможность любой юзер, достигший совершеннолетия.Некоторые клубы механически начисляют бонус на акк игрока после выполнения критерий получения, хотя посещают ситуации, когда приз нужно активировать игроку самому. Есть некоторое способов активации приза:
1×slots рабочее зеркало на сегодня
Но есть игорные заведения, коие готовы просто например жертвовать средства на игру. Для сего довольно сделать профиль. Чтобы вывести собственный выигрыш, для поначалу необходимо выполнить обстоятельства отыгрыша, обозначенные в критериях получения бездепозитного депозита.Во время забавы в казино, выигрыши, приобретенные спасибо безвозмездным призовым фондам, суммируются и включаются в общую сумму для отыгрывания. Однако, в удача улыбнется и получится отыграть все призы, игровое заведение гарантированно допустит исключить денежные средства. Сумма вывода несомненно зависимости от лимита, утвержденного непосредственно в этом учреждении. Поэтому, пристально нужно читать управляла выдачи анлимитных депозитов. <a href=https://foro.muelendhir.com/showthread.php?tid=114165>1×slots сайт зеркало</a> Такой казино бонус без депо за регистрацию выдается игроку на час и активно используется данное предложение с 2017 года. Это как бы некая маскировка одобрения под бездепозитный. Суть всего этого сводится к что, этому, что геймеру на час выдается, к примеру, 1000 долларов, а реклама твердит про, собственно любой выигрыш возможно несомненно дальнейшем забыть при себе. Но в играющий всерьез отнесется к этому предложению, то он попросту потеряет время. Ведь игроку надо(надобно) будет выступать не в аккаунте, ну тренировочном и с ограниченным выбором автоматов и ставок. Да и если, тогда, выигрыша (числе всей тысячи) в правила вступят определенные обстоятельства, где будет сказано, что максимальной суммой победы может быть только двести $ и деньги можно использовать лишь в бонуса на первый лепта с вейджером 25 от суммы гонорары плюс сам депозит. По результату выйдет, собственно игрок выигрывал себе 200% бонус с вейджером на определенную сумму. Короче разговаривая, это все не стоит вашего медли. Помимо остального, для вывода средств по бездепу нужно привнести на счёт свой первый депозит — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало вероятную сумму, в чего вывод средств будет доступен. 1х слот регистрация в 1×slots casino <a href=http://hivlife.ru/bitrix/redirect.php?goto=http://urfoecon.ru/bitrix/redirect.php?goto=http://24net.kz/go?url=https://teletype.in/@urist555/QDU62kzbShR>http://hivlife.ru/bitrix/redirect.php?goto=http://urfoecon.ru/bitrix/redirect.php?goto=http://24net.kz/go?url=https://teletype.in/@urist555/QDU62kzbShR</a> Шаг 4. Активация. Внимательно выучите условия, информацию по лимитированиям и сроке деяния бонусного предложения. Разобравшись с правилами, возможно активировать бонус в собственном офисе (от ? с внедрением промокода) или по запросу в саппорт.
1×slots официальный сайт скачать
Автоматы неспроста считаются самым знаменитым азартным развлечением. Чтобы усвоить управление и управляла, потребуется всего несколько минут. Ваша задачка сделать ставку, найти число рабочих линий и возможно крутить барабан. Если дисплее выпадет выигрышная композиция – вы выиграли! С этой задачей вас посодействуют управится бездепозитные призы казино.Как правило, при выводе финансов, от играющего потребуется только сделать минимальный вклад чтобы, чтобы, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом личный счет. Важно, удостоверьтесь в том, что ранее не регились в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи. <a href=https://opensourcebridge.science/wiki/User:KimFrizzell>https://opensourcebridge.science/wiki/User:KimFrizzell</a> Отзывы читателей о бонусных акциях посодействуют составить впечатление, хотя не забывайте о субъективности личных объяснений.Для получения приза надо(надобно) ознакомиться с программой преданности казино и сделать ставки на сумму, необходимую для перехода на грядущий степень. 1хслотс рабочее зеркало на сегодня В любом казино с бездепозитным призом учтены вейджеровые обстоятельства. Это единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, нужно устроить определённое количество ставок. Чем круче приз, что, этим труднее выполнить обстоятельства, и напротив.Новые клиенты онлайн-казино без первого депо все выяснить свою удачливость. К тому же есть возможность конвертировать бездепы в настоящие деньги за регистрацию в казино, однако желаемого бонус необходимо отыграть согласно условиям промоакции.
<b>Смотреть еще похожие новости:</b>
<a href=http://craft4game.forumex.ru/viewtopic.php?f=2&t=2256>1×slots регистрация на сайте</a>
<a href=http://police.1stbb.ru/viewtopic.php?f=3&t=537>1×slots сайт</a>
<a href=http://forum.as-p.cz/viewtopic.php?f=45&t=67620&p=351673#p351673>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бонусные средства – небольшая сумма денег для старта в новеньком казино. На бонусные деньги, обыкновенно разрешается играть во все игры, не слотов с прогрессивным джекпотом и игр из раздела live casino.
#1934 internetGephttps://domashij-internet-nizhnij-novgorod002.ru
провайдеры нижний новгород <a href=https://domashij-internet-nizhnij-novgorod002.ru>domashij-internet-nizhnij-novgorod002.ru</a> проверить провайдера по адресу
#1935 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino играть pinco casino <a href=https://res-publika.com>лучшие онлайн казино</a> казино ставка porno Вера Бирюкова, гимнастка <a href=https://vestnik-jurnal.com/>включи казино</a> online casino казино рояль винлайн букмекерская контора официальный сайт порно с Александр Большунов (лыжные гонки) Любимова Ольга Борисовна порно реального казино порно с Евгения Медведева, фигуристка
DiskiPlus porno Катерина Шпица DiskiPlus официальные сайты казино <a href=https://www.diskiplus.ru>DiskiPlus букмекерские конторы pin</a> DiskiPlus casino зеркало сегодня DiskiPlus официальные букмекерские конторы <a href=https://diskiplus.ru>DiskiPlus up букмекерская контора</a> DiskiPlus 1×bet приложение DiskiPlus new casino DiskiPlus 1×bet зеркало рабочее на сегодня DiskiPlus карты казино DiskiPlus 1×bet зеркало рабочее DiskiPlus Шевцова Татьяна Викторовна порно DiskiPlus казино фильм смотреть онлайн
#1936 Charlesgunnyhttp://filmkachat.ru
1 x slots casino
Автоматы непопросту числятся наиболее известным азартным весельем. Чтобы усвоить управление и управляла, понадобится всего несколько мин. Ваша задача устроить ставку, определить число рабочих линий и возможно крутить барабан. Если на экране выпадет выигрышная комбинация – вы выиграли! С этой задачей вас посодействуют управится бездепозитные бонусы казино.Наиболее популярные вознаграждения среди гэмблеров – бездепозитные призы казино. Это не дивно, как можно получить благотворительные вращения или виртуальные кредиты, и всем не придётся пополнять счёт, рисковать собственными средствами. Удастся насладиться разнородными развлечениями даже выиграть солидную необходимую, избегая серьёзного риска. <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> <a href=https://www.sideprojectors.com/project/55403/3d-product-rendering-services>https://www.sideprojectors.com/project/55403/3d-product-rendering-services</a> Но эти рамки не смущают и хайроллеров, что коэффициенты на слотах дозволяют рассчитывать на крупные выигрыши, в неких автоматах разыгрывается передовой джекпот. casino 1×slot <a href=http://elektrofahrrad-tests.de/forums/member.php?action=profile&uid=40014>http://elektrofahrrad-tests.de/forums/member.php?action=profile&uid=40014</a>
1×slots акции
Поспешите забрать бездепозитные призы за регистрацию в казино из представленного списка. Все платформы не только ведут законную работа, хотя и порадуют правдивыми результатами игры, высокой отдачей, прыткими выплатами. 1× slots casino зеркало <a href=https://mbio.me/bbs/board.php?bo_table=free&wr_id=749770>https://mbio.me/bbs/board.php?bo_table=free&wr_id=749770</a> В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая приятная часть игры. Важно, часто бездепозитные призы в казино выдаются с ограничениями по наибольшей выплате. В среднем возможно рассчитывать на прибыль в количество тыщ рублей. Как исключить выигрыш с приза без депо. Придётся доказать акк документально, в неких заведениях. Процедура верификации обязательна и делается каждым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате либо прочитайте в правилах. 1хслотс регистрация в 1×slots casino
1×slots casino регистрация 1×slots review live
Для получения депозитного приза необходимо восполнить свой игровой баланс настоящими деньгами. Вознаграждение возможно получить либо при внесении первого депо, либо повторяющий фиксированного процента от внесённых средств. Так либо другому, приз поступит на счёт лишь последствии пополнения.Самые новые бездепозитные бонусы в казино за регистрацию 2022 года с выводом прибыли находятся на данной страничке. Посетитель имеет расценить условия получения и начать играть на деньги без внесения депо. При данном игроку важно разуметь, на каких условиях и какими способами он сможет исключить приобретенный выигрыш. Для этого необходимо расценить перечень подключенных платежных систем. Мы рекомендуем не открещиваться от сходственных услуг знаменитых казино. Выделите несколько минут на регистрацию, получите приз и попробуйте его отыграть. Может быть, сейчас фортуна несомненно на вашей стороне!Выполнив все притязания оператора, заказчик имеет оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем не более суток. Если дополнительно требуется пройти функцию верификации, то срок увеличивается до 1–2 трудящихся дней. Для перевода используются банковские инструменты и электронные платежные системы. Второй способ подходит лучше, например как основная транзакций ситуации исполняются моментально. В связи со спецификой функционирования банков обработка платежей может взятьвдолг(взятьвзаймы) до нескольких рабочих дней. <a href=https://stroyotzyvy.org/user/TravisAgimb/>https://stroyotzyvy.org/user/TravisAgimb/</a> Вообще перейдя в казино — управляла одинаковы в получении бездепозитных призов, в стереотипные верховодила входит: доказать эл. Почту и телефонный, заполнить собственный собственный профиль, активировать промо код или активировать предложения во вкладке БОНУСЫ.Выполнив все притязания оператора, клиент возможность оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит примерно менее суток. Если дополнительно требуется пройти функцию верификации, то срок увеличивается до 1–2 рабочих дней. Для перевода применяются банковские инструменты и электрические платежные системы. Второй способ подходит превосходнее, так как большинство транзакций такой исполняются мгновенно. В связи со специфичностью функционирования банков обработка платежей может взятьвдолг(взятьвзаймы) до нескольких рабочих дней. 1хслотс рабочее зеркало на сегодня Бонус с зачислением средств на счет дает больше свободы действий. Пользователь сам подбирает, каким образом распорядиться подаренными средствами. Здесь кроме шансы работать ограничения на список доступных игр, но обычно эти рамки не например строги, как в промо с безвозмездными вращениями.
казино 1×slots официальный сайт
Подтверждение регистрации. Казино просят привязки профиля к электрическому адресу и номеру аппарата. Для сего на e-mail отчаливает письмо ссылаясь, а на телефонный ? текстовое извещение с кодом. Бездепы обыкновенно предлагают с отыгрышем — моментально исключить выигранные средства невозможно. Перевод денег со счета несомненно вероятен после такого, как пользователь выполнит все притязания казино, а сумма не быть выше установленного правилами лимита. Условиями промоакции фиксируются сроки, на которых заказчик вправе пользоваться предложением. Обычно они не превосходят нескольких дней последствии активации.Пoдтвepдить личнocть посетителя. Для успешного вывода средств, необходимо доказать лицо посетителя. Нa этaпe вepификaции пpoфиля, работники службы защищенности обязаны увериться, что у игрока не раз акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не сможет исключить собственный выигрыш, в у него несомненно некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы. Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высокие требования. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до 100 один в игровых автоматах. Например, случае игрок получил даром десять долларов, то нужно будет отыграть их, поставив одну тысячу спинов по одному баксу каждый. Стоит отметить, собственно не все казино дают возможность играть на призы и не во всех увеселительных заведениях схожие управляла для отыгрывания. Некоторые казино запрещают играть на бонусы в блекджек либо ограничивают ставки до пяти процентов, собственно существенно увеличивает в 10-ки один число нужных игр. 1хслотс зеркало <a href=https://tysongcvp67655.blogsidea.com/36555390/deepnude-the-dark-side-of-ai-and-digital-manipulation>https://tysongcvp67655.blogsidea.com/36555390/deepnude-the-dark-side-of-ai-and-digital-manipulation</a> При отыгрыше бонусных средств, нужно учитывать срок деяния бонуса и время, которое дается на отыгрыш. По истечению заявленного медли, не отыгранный приз будет аннулирован.
зеркала 1×slots
Это раз из основных показателей привлекательности дара. С завешенным коэффициентом в профессионалы не сумеют выполнить обстоятельства по отыгрышу. И важно, насколько привлекательно выглядит предложение – бездепозитный приз казино в объеме $500 или $1 000. Чтобы новенькие получше вникли, что же такое вейджер, мы разберём на примере.Чтобы помощи убедиться в превосходствах бездепозитных призов, довольно зарегистрироваться в казино и получить поощрение. На нашем веб-сайте Вы найдете перечень своевременных новых бездепозитных призов в казино 2022 года. Также, есть количество эксклюзивных услуг, которые доступны только гостям нашего сайта в регистрации по нашей ссылке либо активации особого промокода.Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. <a href=http://www.tukero.org/2020/04/tnod-licenses-v10-apk.html>http://www.tukero.org/2020/04/tnod-licenses-v10-apk.html</a> В настоящее время получить приз за регистрацию в казино очень просто. Почти каждый игорный жилище с готовностью предоставит деньги либо безвозмездные вращения. Многие игроки используют данным и не стесняются региться в каждом клубе с выгодными условиями. Кстати, это отличная вероятность выдумать выигрышную тактику и сорвать куш. 1×slots рабочее зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://www.mshowto.org/forum/members/jamespauri.html>1×slots зеркало</a>
<a href=http://medforum.5nx.ru/viewtopic.php?f=4&t=10078>1×slot зеркало</a>
<a href=https://mcmon.ru/showthread.php?tid=150776&pid=520282#pid520282>1×slots промокод при регистрации</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На благотворительные бонусы онлайн-казино почти всегда распространяется ограничения по стране проживания клиентов. Даже в вас разрешается открывать счет и выступать на деньги в заведении, это еще не значат, собственно для доступны no down payment bonuses. Прежде всего, не запамятовывайте регулярно заглядывать на страничку обзоров бездепозитных призов. Они шаг за шагом осматривают более увлекательные предложения ведущих игорных порталов.
#1937 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
kent casino регистрация 1×bet официальный скачать <a href=https://t.me/vchkogpu_ru>букмекерские конторы бет</a> приложения букмекерских контор на андроид 1×bet зеркало xbet <a href=https://rucriminal.info/>Кузнецова Анна Юрьевна порно</a> песня казино 1win букмекерская контора porno Илья Ковальчук (хоккей) 1win casino porno Яна Троянова букмекерская контора бесплатно скачать почему в казино не бывает настенных часов
DiskiPlus казино большая DiskiPlus казино гта 5 <a href=https://www.diskiplus.ru>DiskiPlus пина букмекерской конторы</a> DiskiPlus 1×bet xbet xyz DiskiPlus Елизавета Боярская <a href=https://diskiplus.ru>DiskiPlus 1×bet зеркало слоты 1×bet xyz</a> DiskiPlus Скоробогатова Ольга Николаевна порно DiskiPlus казино смотреть DiskiPlus порно с Алина Загитова DiskiPlus лучшие букмекерские конторы DiskiPlus 1×bet зеркало xbet xyz DiskiPlus Попова Анна Юрьевна порно DiskiPlus casinos xyz
#1938 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Фриспины предназначены для применения в видео слотах. Внимательно ознакомьтесь с условиями – частенько их выдают на некоторые автоматы. В зависимости от клуба, у вас получится сделать определённое число ставок. Кстати, продвинутые игорные жилища разрешают запускать каждых «одноруких бандитов». <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasino09k online</a> <a href=https://www.arrl.org/forum/topics/view/4342>https://www.arrl.org/forum/topics/view/4342</a> 1×slots сайт <a href=https://full-chip.net/user/FrankDruck/>https://full-chip.net/user/FrankDruck/</a> Если вы выбрали себе количество брендов которые вас больше всего полюбились, для постоянной забавы! Таких гемблеров казино довольно любит и оценивает, за частую такие игроки становятся VIP игроками заведения, которым часто поступают прибыльные предложения в виде бонусов, так же туда входит и бездепозитные.Бездепозитные бонусы за регистрацию в игровых автоматах для собственников онлайн-казино являются частью маркетинговой кампании, направленной на повышение аудитории сайта. Так они продвигают свои бренды и завлекают свежих клиентов.
1×slots зеркало быструю регистрацию а также мгновенное
<a href=https://foro.muelendhir.com/showthread.php?tid=114653>1хслотс зеркало на сегодня</a> 1×slots casino регистрация Но надо размышлять, что снабжая пользователей такими призами, казино занимается спонсированием. Ведь объемы вознаграждений, главном, не немалые (средним размером от 5 до 20 $). И на эти свои налагаются определенные обстоятельства и ограничения, неотклонимые к исполненью игрока, случае в последствии он желает получить все средства выигранные финансы.Практически все онлайн казино с бездепозитным бонусом за регистрацию предусматривает программу лояльности — систему поощрения неизменных посетителей, кот-ая произведено из большого значений. При достижении игроком очередного уровня на его счёт поступает приз. Чем выше степень — что, этим щедрее приз. <a href=https://www.mysticvillage.org/user/brianneive/>https://www.mysticvillage.org/user/brianneive/</a> Получить Бездепозитный приз в онлайн казино дело 2-ух кликов. Другой момент, отыграть промо и соблюсти правила и условия отыгрыша. Под правилами предполагается столько вагер, хотя и лимитирования по максимальной ставке. Мы разумеем, что в кинотеатр все ставят на зеро и выигрывают. Призываем не делать подобного. Перед активацией бонуса прочитайте верховодила. Узнайте следующие моменты: Условия получения дара, за регистрацию, за депо и другое. Ограничения по наибольшей ставке. Зачастую не выше 350 руб. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на пространстве. Поэтому важно аристократия, в каких играх возможно совершать кратность валютного оборота.Допустим, за регистрацию вы получили бездеп в размере 2 000 рублей с вейджером х30. В этом случае предстоит устроить ставок, на общую необходимую в 60 000 руб. (2 000 * 30 = 60 000). Когда выполните обстоятельства по отыгрышу, придёт время заработать реальные средства. Однако не запамятовывайте, собственно с любого презента выйдет исключить определённую сумму (почаще всего не более $200). 1×slots рабочее зеркало Не рекомендуем опрометью голову хвататься за различные предложения получения средств без инвестициям. Вполне вполне, что бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на первый взор. Альтернативой считается казино приз за депо. Мы предлагаем вам пару советов, спасибо коим у любого игрока несомненно вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств:Для отыгрыша бонуса казино обязывает игрока поиграть на необходимую, в некоторое один превосходящую сумму полученного бонуса — здесь выгода фирмы очевидна.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Однако в условиях скрываются «подводные камешки», которые не разрешат вывести солидную необходимую или же вы не успеете отыграть вейджер. Поэтому профессионалы советуют отобрать безвозмездные вращения за регистрацию в казино без депозита, чтобы поднабраться опыта и получить настоящий шанс на победу. Выиграть реальные средства в казино не пополняя счет – сложно, но возможно. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными бонусами и начните играть на бонусные свои. По статистике в одном из 10-ти заведений возможно заработать маленькую сумму денег за счет бонусных средств.Эффективность бездепов в качестве маркетингового инструмента оценили почти операторы. Малоизвестные площадки употребляют эти промоакции, чтобы быстро набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны неизменных гостей. Не все веб-сайты, дающие презенты без депозита, рекомендованы к ирге. За симпатичным промоописанием могут скрываться неосуществимые условия отыгрыша и подводные камни. <a href=http://jrp.kr/bbs/board.php?bo_table=free&wr_id=338997>http://jrp.kr/bbs/board.php?bo_table=free&wr_id=338997</a> Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам запрещено начислять призы клиентам, не имеющим валютных средств на счете. Мы предлагаем осмотреть актуальные призы онлайн-казино с лицензией, которые соблюдают законодательство РБ.Далее потребуется отыграть вагер и исключить выигрыш. Игрокам без навыка крупно подфартило, они могут получить десятки презентов за одну регистрацию. Если не сумели получить Бездепозитный бонус, не тревожьтесь. Обратитесь в онлайн чат, оператор поможет решить проблему. 1хслотс казино зеркало Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, дабы снова получить даровой приз. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ждет неизбежное наказание.Наличие у игрока 2 аккаунта. Запрещено творить некоторое профилей для неоднократного получения бездепов.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Обычно, бездепозитные призы выдаются под определенные слоты с фиксированной ставкой, хотя их наверняка воспрещено применять в игровых автоматах с современным джекпотом. Список игр, в возможно использовать бездеп, Вы найдете в описании промоакции или сможете уточнить у службы поддержки заведения.При помощи такового поощрения оператор может также привлекать клиентов, которые раньше проявляли активность на веб-сайте, но по некий причине прекратили выступать. В этом случае промокод высылается пользователю по электрической почте или повторяющий SMS. <a href=https://forum.gamesims.sk/memberlist.php?mode=viewprofile&u=7407>1×slots casino зеркало</a> Процесс доказательства личности возможность занять от 1-го дня до недели. Если заказчик разрешил какую ошибку при заполнении паспортных данных, то ему стопам обратиться с проблемой в службу поддержки онлайн-казино.Только выполнив все условия отыгрыша и дождавшись завершения ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить средства средства. Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают бонус по странам. Вплоть до того, собственно клуб возможность себя игроков из Вашей страны, а бездеп мешает.Бывают ли бездепозитные призы без вейджера? Бывают, случае у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный бонус за регистрацию уточняется вейджер во всех казино. 1×slots официальный demo регистрация в 1×slots casino <a href=https://sportavesti.ru/forums/users/docxru2808–2/>https://sportavesti.ru/forums/users/docxru2808–2/</a> Все безвозмездные призы кажутся заманчивыми. Кто же откажется от возможности сыграть в онлайн-казино, не рискуя средствами, но получая выигрыши. Но далеко не все бездепозитные бонусы одинаковой презентабельны для рассудительного клиента.С иной стороны, гораздо легче отобрать бездепозитные фриспины за регистрацию в казино и прямо в начать вращать барабаны в наилучших слотах. Главная особенность спинов что, нет, собственно они предусмотрены для топовых автоматов. Удастся не пройти вспомогательные раунды, хотя и прирастить сумму выигрыша, заработать респины и другие внутриигровые презенты.
1×slots быструю регистрацию а также мгновенное
Для верификации аккаунта нужно дать профессионалам технической поддержки отсканированную копию паспорта и счета за коммунальные услуги, еще фотографию банковской карты или снимок странички электрического кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности.Активация по промокоду употребляется в разных обликах бездепов. Если речь о приветственном призе, то комплект знаков можно разузнать на главной странице, в регистрационной форме или послании, которое отправляется юзеру для подтверждения e-mail. Акции шансы проводиться общо с партнерскими площадками. Обычно код располагается на постороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активируется одноразовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном кабинете либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем актуальный код для активации в описании любого рекламную. <a href=https://martinwsma10976.newsbloger.com/30847149/deepnude-the-dark-side-of-ai-technology-and-its-ethical-implications>https://martinwsma10976.newsbloger.com/30847149/deepnude-the-dark-side-of-ai-technology-and-its-ethical-implications</a> Внесение депозита – Будьте готовы пополнить счет последствии отыгрыша приза. Это стандартное заявка верховодил для данного на промо-акций. Лучше заблаговременно уточнить, какую сумму нужно будет вносить на счет. Как правило, идет о минимальном депозите, хотя вы должны быть уверены, собственно он вам по кармашку. казино 1×slots Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную функцию активации бонуса без депо. Внимательно прочитайте до конца. Многие новички делают оплошности на шаге регистрации и потому возможности получить подарок.Лишь пользующиеся и известные азартные заведения могут разрешить для выдавать бездепы вид добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депо, которые возможно потратить в лучших аппаратах с высокой отдачей.
<b>Смотреть еще похожие новости:</b>
<a href=https://minecraft.ru.net/user/Manuelsoarl/>1×slots промокод при регистрации</a>
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=9718>1×slots зеркало видели такую регистрацию на</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вейджер (или вагер) ? это наименьшая сумма ставок, которую нужно устроить для вывода денежного бонуса. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение.
#1939 Charlesgunnyhttp://filmkachat.ru
1х слот 1хслотс регистрация перейти на 1×slots
Кешбэк-бонус дает собой возврат фиксированного процента от ставки в случае поражения или же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%.Бездепозитный бонус за регистрацию в казино с выводом средств в 2022 году — Наш ресурс дает игрокам важную информацию о самых свежих, щедрых и проверенных бонусах в онлайн казино, коие обновляются любой денек. <a href=http://filmkachat.ru/>1×слотс казино</a> Подарки на определенные даты отличаются критериями получения. Если одобрение начисляют игроку на денек рождения, то сумма обычно находится от совместного размера депозитов последний год.Как прочие акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такого предложения являются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает новых посетителей и позволяет им составить эмоцию о функционале, не рискуя значительными совокупностями. <a href=https://www.shippingexplorer.net/en/user/3d-product-rendering-services/146868>https://www.shippingexplorer.net/en/user/3d-product-rendering-services/146868</a> 1×slots скачать на айфон <a href=https://finnqspm89990.bloginwi.com/64069851/deepnude-ai-navigating-the-controversial-landscape-of-image-manipulation-technology>https://finnqspm89990.bloginwi.com/64069851/deepnude-ai-navigating-the-controversial-landscape-of-image-manipulation-technology</a>
1×slots регистрация то дальше необходимо пройти
1×slots официальный сайт зеркало Бездепозитный приз за регистрацию в казино с выводом средств в 2022 году — Наш ресурс дает игрокам важную информацию о самых новых, великодушных и проверенных бонусах в интернет казино, коие обновляются любой день. <a href=http://smarttoys.com.ua/bitrix/redirect.php?goto=http://cosmo-line.ru/bitrix/redirect.php?goto=http://babypages.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/Z67Ob_-M3yK>http://smarttoys.com.ua/bitrix/redirect.php?goto=http://cosmo-line.ru/bitrix/redirect.php?goto=http://babypages.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/Z67Ob_-M3yK</a> В подавляющем большинстве случаев бесплатные призы начисляются в кредитах, коие нельзя сразу вывести со счета. Прежде их нужно отыграть по установленным правилам. Эти притязания принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д.). О нем читайте ниже.Получить приветственный приз все лишь новые посетители онлайн-казино. Способы описаны в условиях акции каждого легального казино, почаще всего это: 1хслот официальный сайт зеркало
онлайн казино 1×slots
При этой на бонусные свои воспрещается играть в игровые автоматы с прогрессивным джекпотом и забавы из радела live casino. Кроме как, некоторые казино выделяют бездеп на один или несколько конкретных слотов, и в других забавах Вы не можете на их играть.Максимальная ставка ? уточняется в валюте счета и ограничивает размер ставки за раз спин. В случае ее превышения бонус может быть аннулирован. Также в правилах может содержаться запрет на размещение ставок определенного облика, к, по одинаковым шансам в рулетке (то есть, на чет или нечет, красноватое или черное и т.д.). Каждый игрок должен сперва отчетливо изучить условия по получению и отыгрышу понравившегося дара. Если всё устраивает, поторопитесь отобрать безвозмездные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик в начать вертеть барабаны топовых слотов.Подарки на определенные даты выделяются критериями получения. Если поощрение начисляют игроку на денек рождения, то сумма обычно зависимости от общего объема депо за год. <a href=http://rosnum.ru/index.php?title=Why_Use_the_1×bet_APP_for_Casino_Games?>http://rosnum.ru/index.php?title=Why_Use_the_1×bet_APP_for_Casino_Games?</a> 1×slots регистрация на 1хслотс Во всех законных онлайн-казино Беларуси нужно свидетельство паспортных данных для забавы — это заявка правительства страны.
1×slots регистрацию процедура займет всего лишь
Как верховодило, при выводе финансов, от играющего потребуется лишь устроить минимальный лепта чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом собственный счет.Если вы новичок деле и лишь попали в неизведанную вами область азарта — счет предложений как бездепозитные бонусы без пополнения. 1×slots зеркало регистрация <a href=http://v208870d.bget.ru/user/Raymondbuh/>http://v208870d.bget.ru/user/Raymondbuh/</a> Доступ к дару возможность открываться автоматически последствии введения промокода или обращения в службу вебсайта. В первом случае от юзера не требуется практически действий. Бездеп с активацией по коду встречается чаще всего. Игроку необходимо установить совокупность знаков в графе, кот-ая возможность находиться в регистрационной форме в Личном кабинете.Чтобы выступать даром на реальные деньги в казино, порой достаточно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные деянья.
1 х слотс зеркало
Обычно, бездепозитные бонусы выдаются под конкретные слоты с фиксированной ставкой, хотя их точно запрещено использовать в игровых автоматах с современным джекпотом. Список игр, в которых возможно использовать бездеп, Вы отыщите в описании промоакции либо сможете уточнить у службы поддержки заведения.Также учтите, что кое-какие игровые платформы сужают список стран, коие готовы получить предложенный бездепозитный приз за регистрацию. К образцу, существуют онлайн-заведения, выдающие подобные бонусы только жителям определенных государств. К примеру, интернет казино 777 Оригинал дает бездепозитный бонус лишь игрокам из России и государств СНГ. Или наоборот, пичкают вознаграждением всех, считая обитателей неких государств (следует этого, стопам внимательно учить перечень, дабы впоследствии не появилось никаких вопросов и жалоб). Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы которые появляются у начинающих.Но есть азартные заведения, готовые просто так вручить средства на забаву. Для этого достаточно создать профиль. Чтобы вывести выигрыш, сперва нужно выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа. <a href=https://www.justlink.org/details.php?id=369974>https://www.justlink.org/details.php?id=369974</a> 1×slots сайт Некоторые веб-сайты, прежде чем обмануть регистрацию игроков, предлагают ответить на некоторое базовых вопросов. Цель проведения подобной викторины – выявить случайных людей, которые не имеют представления о покере, и не допустить получения ими бонусов. Если гость теснее играл в казино, то ответить на полтора 10 простых вопросов несомненно нетрудно. Очень часто, ответы можно найти на официальных веб-сайтах этих учреждений.
<b>Смотреть еще похожие новости:</b>
<a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=11053>1×slots официальный сайт скачать на айфон</a>
<a href=http://shiftdelete.10tl.net/member.php?action=profile&uid=119629>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не можете активировать и получить бездепозитный приз.
#1940 Charlesgunnyhttp://filmkachat.ru
1хслот скачать
Бывают ли бездепозитные призы без вейджера? Бывают, в у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный бонус за регистрацию уточняется вейджер во всех казино. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало</a> Каждый новичок и профессиональный игрок мечтают быстро стартануть и начать делать настоящие ставки. Для этого довольно арестовать презент, за который не платить. В зависимости от игровой платформы, нужно сделать профиль, привязать email либо телефонный. После этого администрация начисляет щедрое вознаграждение в виде бесплатных вращений либо виртуальных кредитов.Допустим, за регистрацию вы получили бездеп в размере 2 000 руб. С вейджером х30. В этом случае предстоит устроить ставок, на общую сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать реальные деньги. Однако не забывайте, собственно с каждого презента выйдет вывести определённую необходимую (чаще всего менее $200). <a href=https://linktr.ee/kalinka0588>https://linktr.ee/kalinka0588</a> 1×slots регистрация 1×slotscasino09k online <a href=http://fowin.co.kr/bbs/board.php?bo_table=free&wr_id=183521>http://fowin.co.kr/bbs/board.php?bo_table=free&wr_id=183521</a>
1×slots регистрация на сайте 1×slots ru com
Рассмотрим принцип его деянья на примере. Допустим, вы зарегались и получили $10 not the slightest down payment bonus с вейджером х50. Это означает, собственно выигранные деньги возможно будет выводить не ранее, чем последствии как, как общая сумма ставок достигнет $500.В списке требований к отыгрышу часто присутствуют лимиты на ставки при ирге на собственные деньги. Так, случае отыграть надо(надобно) 30 000 руб., а предельная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 один. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам деянья акции. <a href=http://okeyrp.listbb.ru/viewtopic.php?f=24&t=1792>1×slots акции</a> 1×slots зеркало рабочее на сегодня <a href=http://bozon.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://epusk.ru/bitrix/redirect.php?goto=http://vismarket.ru/bitrix/redirect.php?goto=https://telegra.ph/Kak-napisat-dokladnuyu-zapisku-na-svoego-rukovoditelya-osnovnye-sovety-i-primery-09–23>http://bozon.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://epusk.ru/bitrix/redirect.php?goto=http://vismarket.ru/bitrix/redirect.php?goto=https://telegra.ph/Kak-napisat-dokladnuyu-zapisku-na-svoego-rukovoditelya-osnovnye-sovety-i-primery-09–23</a> Акции, приуроченные к календарным дням, бывают рассчитаны как на всех юзеров, так и на категории: к, подарок на 8 марта девушкам-игрокам либо мужикам на 23 февраля.Предложения с бездепозитными призами за регистрацию разрешают новым заведениям заинтересовать аудиторию на собственный вебсайт. А игроки в свою очередь получают вероятность выступать на реальные средства без депо в казино и заработать маленькой стартовый капитал, который разрешается исключить на карту банка или электронный кошелек. 1×slots зеркало регистрацию более популярный вариант это
1×slots официальный demo регистрация в 1×slots casino
Отзывы читателей о бонусных промоакциях посодействуют составить впечатление, но не забывайте о субъективности собственных объяснений.Казино выводит деньги только на что, эту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного приза, Вам поначалу нужно пополнить счет. В неких клубах ограниченный список способов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет именно с этих платежных методов, коие доступны для вывода. <a href=http://b98415ql.bget.ru/user/DoctorLazutaOa/>http://b98415ql.bget.ru/user/DoctorLazutaOa/</a> Условия, на коих предоставляется бездеп, регулируются казино. Каждая промоакция содержит подробные управляла, ссылка на коие обычно находится в промообъявлении. В их указываются лимиты, вейджер, перечень дешевых игр. Если оператор прячет данные о предложении, то воспользоваться им не стоит. 1х слот регистрация в 1×slots casino
1×slots промокод при регистрации 2025
Для казино, работающих интернет, бездепозитные призы необходимы для привлечения свежих клиентов. Предложение поиграть на слотах без надобности внесения реальных средств — работающий способ для увеличения интереса к компании. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит играть в казино, лишь теперь уже на собственные средства.Кешбэк-бонус представляет собой возврат фиксированного процента от ставки когда поражения либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не превышает 10%. Процесс подтверждения личности может занять от одного денька до недели. Если клиент допустил какую ошибку при заполнении паспортных данных, то ему идет обратиться с задачей в службу поддержки онлайн-казино. Размер бонуса. В качестве бездепов обычно начисляют очень суммы, а когда речь о бонусах за депо, которые начисляются в процентном соотношении от суммы пополнения, то некоторые казино шансы презентовать игроку до 2000$. рабочее зеркало 1×slots <a href=http://yunduost.com/home.php?mod=space&uid=23678>http://yunduost.com/home.php?mod=space&uid=23678</a> Иногда в качестве одобрения за регистрацию все выдаваться билеты для участия в турнирах. Условия их проведения очень выделяются, потому мы советуем ознакомиться с каждым предложением раздельно.
1×slots регистрация
Способы получения бездепа различаются от вида приза, который приглянулся игроку. Но для или надо(надобно) быть зарегистрированным в законном онлайн-казино и доказать свою личность. В общем виде пошаговая аннотация для получения бездепозитного бонуса выглядит например:Операторы гемблинга утверждают, что так они сражаются с бонус-хантерами. Впрочем, критики считают, собственно данным казино пробуют устроить из случайного гостя постоянного игрока. Нельзя осматривать игру на деньги, как вариант заработка. Азартные забавы запрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не является организатором азартных игр. Сайт одевает информационный нрав.На условиях отыгрыша бесплатных призов следует остановиться подробнее. С ними связаны аспекты, коие нельзя оставить без внимания. <a href=http://smartars.biz/gnuboard5/bbs/board.php?bo_table=free&wr_id=136462>http://smartars.biz/gnuboard5/bbs/board.php?bo_table=free&wr_id=136462</a> Можно. Вы всегда можете отказаться от получения бездепозитного приза за регистрацию в казино, пока Вы не сделаете ставку.Получать информацию о самых прибыльных бонусах можно без постоянного прогноза новостей казино. Мы взяли эту задачу на себя и постоянно следим за предложениями операторов, избирая превосходнейшие из их. В этом разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список акций периодически пополняется. В топ зашли самые свежие бездепозитные бонусы за регистрацию в казино 2020, кратковременные и закрытые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру прочим аспектам. Если срок деяния промоакции истек, она удаляется из списка. 1×slot официальный сайт В интернете количество известных игорных площадок с привлекательными акционными предложениями. Однако внимательно читать условия десятков услуг скором надоест, да и время отнимет количество. Поэтому наша команда подготовила ТОП-3 сайтов с наихорошими бездепозитными бонусами:
<b>Смотреть еще похожие новости:</b>
<a href=https://jgwy.net/space-uid-200381.html>1×slots зеркало рабочее на сегодня</a>
<a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=16871>1×slots скачать на айфон</a>
<a href=http://jktroickiy.forumex.ru/viewtopic.php?f=2&t=4268>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бoльшинcтвo азартных заведений выдвигают приблизительно однообразные, схожие условия и притязания, которые нужно выполнить, дабы получить бездепозитный бонус за регистрацию. Все их возможно соединить в раз перечень: Практически все онлайн казино с бездепозитным бонусом за регистрацию предусматривает программу лояльности — систему поощрения неизменных клиентов, кот-ая произведено из колличества уровней. При достижении игроком одного уровня на его счёт поступает приз. Чем повыше уровень — тем щедрее приз.
#1941 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
ramenbet casino 1×bet 1хбет <a href=https://kompromat1.online/>казино пин</a> win win casino casino x <a href=https://t.me/vchkogpu_ru>1×bet скачать бесплатно</a> слоты казино казино можно порно с Никита Кучеров (хоккей) порно с Александр Головин (футбол) porno Алена Косторная (фигурное катание) online casino 7k казино зеркало сегодня
DiskiPlus казино сочи DiskiPlus казино ли <a href=https://diskiplus.ru>DiskiPlus 1×bet на сегодня</a> DiskiPlus online casino официальный DiskiPlus pin up букмекерская контора <a href=https://www.diskiplus.ru>DiskiPlus porno Илона Маркова, хоккеистка</a> DiskiPlus официальное казино вход DiskiPlus kent casino DiskiPlus pin up casino официальный DiskiPlus казино онлайн DiskiPlus букмекерские конторы в россии DiskiPlus porno Алена Михайлова DiskiPlus Преподобная Надежда Александровна порно
#1942 Charlesgunnyhttp://filmkachat.ru
1×slos регистрация в 1×slots casino
Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации презента нужно подтвердить электронную почту и привязать телефонный;Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депозит может отличаться до 30 дней. <a href=http://filmkachat.ru/>1×slots зеркало видели такую регистрацию на</a> Наличие у игрока 2 аккаунта. Запрещено создавать несколько профилей для многократного получения бездепов.Да, у безвозмездных призов есть дефекты. Прежде всего, они обыкновенно очень. Кроме как, обстоятельства вейджера по ним постоянно строгие. Но все же недоступность риска делает их очень привлекательными для клиентов. <a href=https://blog.udn.com/G_107482553777754991/180423924>https://blog.udn.com/G_107482553777754991/180423924</a> Но ни не запамятовывайте внимательно читать верховодила роли в бонусных промоакциях. Если вы нарушите но бы одно условие, позднее вы не сможете устроить недоразумение с администрацией. 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=https://graddata.ru/user/JamesFuelm/>https://graddata.ru/user/JamesFuelm/</a> Демоказино есть почти на каждом сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются значительно реже: там в случае выигрыша и соблюдения условий промоакций бездеп возможно превратить в настоящие деньги.
1× slots официальный
Если при регистрации указать промокод, можно гарантировано получить приз. Где арестовать ваучер? Посетите на блоги или форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В заключительное время игорные дома начали афишироваться в кинокартинах и телесериалах. Присмотритесь и наверняка заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных руб.Некоторые казино могут предлагать посетителям бездепы за подтверждение номера или почты или репост на страничку в соц сетях. <a href=http://6000ziyuan.com/forum.php?mod=viewthread&tid=189881&extra=>1×slots казино зеркало</a> 1×slots сайт зеркало Размер ставки для игры по бездепозитному призу (окончательно же, в случае, когда он представлен повторяющий бонусных денежных средств) часто ниже, чем при этой на депозит. Ограничение будет работать до этапа отыгрыша бонуса. <a href=https://www.hb9lc.org/wiki/index.php/Shisha_Tobacco_From4_Eur>https://www.hb9lc.org/wiki/index.php/Shisha_Tobacco_From4_Eur</a> Фриспины начисляются по определенной ставке. После их активации игроку необходимо запустить слот и убедиться, что в нем показываются благотворительные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода последствии отыгрыша определяется оператором и редко превышает 5 000 рублей.Разные казино имеют собственные управляла по выведению выигрыша. Для бездепозитных призов принимаются достаточно высочайшие притязания. Часто онлайн-казино рекомендуют отыграть бонусное поощрение до ста один в игровых автоматах. Например, если игрок получил безвозмездно 10 долларов, то необходимо несомненно отыграть их, поставив одну тысячу спинов по одному баксу каждый. Стоит обозначить(означить), что не все казино выделяют вероятность выступать на бонусы и не во всех увеселительных заведениях идентичные правила для отыгрывания. Некоторые казино воспрещают играть на призы в блекджек либо ограничивают ставки до пяти %, что значительно увеличивает в 10-ки раз количество необходимых игр. 1×slots зеркало видели такую регистрацию на Любой выигрыш по ставке выше установленного лимита несомненно являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, в случае выигрыша его сумма не поступит на счёт клиента — результат игры будет всецело аннулирован.В неких онлайн казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на сайте клуба и подтвердить средства контактные данные. Дополнительно потребуется активация промокода.
1×slots регистрация 1×slotscasino09k online
Для отыгрыша бонуса казино обязывает игрока сыграть на необходимую, в некоторое один превосходящую необходимую полученного приза — тут выгода фирмы очевидна.Нельзя осматривать игру на средства, как вариант заработка. Азартные забавы запрещены для лиц младше 18 лет. Topcasinobonuses.mobi не зачинщиком азартных игр. Сайт одевает информационный нрав. <a href=http://akvalife.by/user/Forsedroppa/>http://akvalife.by/user/Forsedroppa/</a> Доступ к дару возможность открываться автоматически последствии введения промокода или обращения в службу поддержки сайта. В первом случае от юзера не требуется практически деяний. Бездеп с активацией по коду встречается чаще всего. Игроку нужно ввести совокупность символов в графе, которая может пребывать в регистрационной форме в Личном офисе. рабочее зеркало 1×slots Необходимость отыгрыша. Вейджер ситуации выше, чем для призов за депозит. И же свои не отыграны, исключить их нельзя.
1×slots зеркало сайта
Свежий бонус начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в пользовании своими, а в случае отыгрыша оператор возможность ввести ограничение на вывод средств.Реже призы без депо начисляются неизменным игрокам. С их поддержкою администрация старается удержать ценных клиентов либо желает поблагодарить за преданность верных гостей. Но намного чаще для сходственных целей используются эти промоакции: 1×slots casino зеркало рабочее <a href=http://www.yya28.com/home.php?mod=space&uid=479061&do=profile&from=space>http://www.yya28.com/home.php?mod=space&uid=479061&do=profile&from=space</a> Так что приготовьтесь дать конфиденциальную информацию (пол, возраст, государство проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает не более суток, в чего удастся свободно выводить крупные выигрыши.
1×slots регистрация на сайте 1×slots ru com
Некоторые онлайн-казино без депозита предлагают свежим клиентам выбрать приз при регистрации. Будьте внимательны: выбрав один, вы в безусловном большинстве случаев не сможете воспользоваться остальными. Самый распространённый из сходственных бонусов, окончательно же, бездеп на денек рождения клиента — приз вид фиксированной суммы либо фриспинов поступает на счёт игрока, а воспользоваться им возможно в течение установленного периода медли.Шаг 5. Использование и отыгрыш. Бездеп обязан быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. <a href=http://www.jbkfxy.com/home.php?mod=space&username=disillusionedca>http://www.jbkfxy.com/home.php?mod=space&username=disillusionedca</a> Также, в этом случае нужно доказать свой номер аппарата, чтобы код, приобретенный в смс-сообщении от клуба установить в специальное фон в личном кабинете игрока. 1×slots бонус за регистрацию
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.survival-readiness.com/viewtopic.php?t=277075>1×slots зеркало рабочее на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
После потребуется привнести идентификационный платёж. Это пугает новичков больше всего. Нужно сделать минимальный депозит в 100–500 руб. Таким образом служба безопасности увериться никаких, собственно платёжный метод принадлежит Вам. Данная процедура необходима для обеспечения безопасности игровых счетов. Пример, Ваш аккаунт взломают и выведут свои на собственный кошелёк. Будет очень неприятно. Поэтому верификация платёжной системы, это важный момент.
#1943 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots review live
Прибывшие на акк деньги бездепозитные призы предназначаются, в основном, лишь для свежеиспеченных пользователей, которые раньше не имели собственного аккаунта в данном казино. Исходя из этого, случае раньше у игрока был сделан депозит, то, по всей вероятности, у него больше не будет способности рассчитывать на получение такого приза в определенном заведении.Главное преимущество спинов – возможность выучить различные слоты. Также удастся насладиться бонусными раундами, испытывать фортуну в риск-туре и преувеличить выигрыш за счёт особенных знаков. Однако столько игровой процесс заслуживает внимание, так превосходнее сосредоточиться на реальном выигрыше. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> <a href=https://www.cgarchitect.com/projects/39223c10-luxury-dining-room-at-a-resort-a-harmonious-blend-of-elegance-and-nature>https://www.cgarchitect.com/projects/39223c10-luxury-dining-room-at-a-resort-a-harmonious-blend-of-elegance-and-nature</a> Такой казино бонус без депозита за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это словно некая маскировка одобрения под бездепозитный. Суть всего этого сводится к тому, собственно геймеру на час выдается, например, 1000 долларов, а реклама твердит то, что каждой выигрыш можно будет в оставить при себя. Но случае играющий серьезно отнесется к данному предложению, то он просто растеряет время. Ведь геймеру нужно несомненно играть не в аккаунте, в тренировочном и с ограниченным выбором автоматов и ставок. Да и если, тогда, выигрыша (том всей тысячи) в правила вступят определенные условия, где несомненно сказано, что наибольшей суммой победы возможность быть лишь двести долларов и деньги можно использовать только виде бонуса на первый вклад с вейджером 25 от суммы гонорары плюс сам депозит. По итогу выйдет, собственно игрок выигрывал себе 200% бонус с вейджером на определенную сумму. Короче говоря, это все не вашего медли.Будьте внимательнее при ознакомлении с правилами во избежание появления конфликтных обстановок с казино, когда в отыгрыша бездепа для не дадут вывести солидную необходимую выигрыша. 1×slots актуальное зеркало <a href=https://dentozone.com/bbs/board.php?bo_table=free&wr_id=2438531>https://dentozone.com/bbs/board.php?bo_table=free&wr_id=2438531</a> Денежные средства. Третий приз за регистрацию без депозита – наличные. К раскаянью, лишь знаменитые и знаменитые клубы имеют дать деньги в руб. Либо долларах. С их подмогою появится насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед этим нужно исполнение определенных критерий.Если площадка дарит бездеп за регистрацию, то процедура его получения ординарна. Нужно только ввести аккаунт на сайте и активировать его, подтвердив адрес электрической почты, номер телефона либо другие данные, коие требует оператор. Перед этим нужно увериться, что пользователь располагается на официальном сайте казино, а не на мошеннической площадке.
1×слот регистрация в 1×slots casino
Прямо данный арестуйте бесплатные вращения за регистрацию без депозита и начинайте коллекционировать призовые комбинации из-за крупных выигрышей!Срок отыгрыша — это период, кот-ый начинается в момент активации приза и завершается с его закрытием. Пользователю необходимо уложиться в этот временной промежуток, по призовые средства аннулируются. Казино устанавливают перечень игр, ставки каких засчитываются при расчете отыгранных средств. Если тайтл не заходит в данный перечень, то ему быть недоступен для загрузки период деяния бонусного предложения. рабочее зеркало 1хслотс Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом прибыли присутствуют на данной странице. Посетитель может оценить обстоятельства получения и начать играть на средства без внесения депо. При данном игроку принципиально осознавать, на каких критериях и какими методами у исключить полученный выигрыш. Для сего нужно расценить перечень подключенных платежных систем. <a href=https://www.buyfags.moe/User:JerryShuman>https://www.buyfags.moe/User:JerryShuman</a> 1хслотс рабочее зеркало Благодаря программке лояльности от игорного заведения, можно взять неплохой старт и без дополнительных инвестициям запустить видеослоты. Кроме как, возможно рассчитывать на реальную удачу и получить, без инвестиции собственных финансов, немалый выигрыш.
рабочее зеркало 1×slots
Исходя из сего, просто не присутствует осмысленных причин махнуть рукой на получение такового бонуса при регистрации. И, кстати, на такой бесплатной базе у вас все шансы выиграть средства и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, именуют безвозмездными интернет платформами для игр.Однако далековато не все ресурсы предлагают своим клиентам бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено поощрение на первый депозит в объеме 100–200%. Это замечательная вероятность преумножить банкролл, увеличить время, проведённое за игрой и шансы сорвать большой куш. Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации презента нужно доказать электронную почту и привязать аппарат;Размер бонуса. В качестве бездепов обыкновенно начисляют маленькие суммы, а когда идет о призах за депо, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино все презентовать игроку до 2000$. <a href=http://linevoshl.ru/bitrix/rk.php?goto=http://centramarket.ru/bitrix/redirect.php?goto=http://utanrmp.or.ke/sites/all/modules/pubdlcnt/pubdlcnt.php?file=https://teletype.in/@urid_pomosh/kA3YmSlN12S>http://linevoshl.ru/bitrix/rk.php?goto=http://centramarket.ru/bitrix/redirect.php?goto=http://utanrmp.or.ke/sites/all/modules/pubdlcnt/pubdlcnt.php?file=https://teletype.in/@urid_pomosh/kA3YmSlN12S</a> 1×slot зеркало Маркетинговая деятеля всех игорных интернет-клубов обязана носить разнообразный нрав. И случае гонорары на депо работают чтобы, чтобы, чтобы провоцировать заносить депозиты и поощрять теснее место юзеров, то бездепозитный бонус в казино или бонус за регистрацию в казино, прежде всего, рассчитан на расширение базы потребителей.В любом казино с бездепозитным бонусом учтены вейджеровые условия. Это один-единственный «подводный камень», который стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) сделать определённое количество ставок. Чем круче бонус, что, этим труднее выполнить условия, и наоборот.
зеркала 1×slots
Как правило, при выводе денег, от играющего потребуется лишь устроить минимальный вклад чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом собственный счет. 1×slots официальный сайт зеркало <a href=http://anima-rpg.com:/member.php?action=profile&uid=367799>http://anima-rpg.com:/member.php?action=profile&uid=367799</a> Онлайн-казино кропотливо продумывают бонусные обстоятельства, которые нужно выучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и другие лимитирования.Внесение депозита – Будьте готовы пополнить счет последствии отыгрыша бонуса. Это стандартное требование верховодил для данного типа промо-акций. Лучше заблаговременно уточнить, какую сумму нужно будет вносить на счет. Как управляло, идет о минимальном депозите, но вы должны быть убеждены, что он вам по кармашку.
1×slots casino регистрация на сайте
Бездепозитные бонусы, как уже понятно, являются оригинальной вероятностью обратиться игровому процессу абсолютно безвозмездно, словами играть в интернет казино даром и на быть свои сразу последствии регистрации аккаунта. Автоматы с этим депозитом могут стать великолепной вероятностью сыграть для почитателей пыла с определенными ограничениями в финансах. <a href=https://ekvall.co/member.php?action=profile&uid=41211>https://ekvall.co/member.php?action=profile&uid=41211</a> Бездепозитные призы реальными средствами, коие можно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадались. 1×slots регистрацию процедура займет всего лишь
<b>Смотреть еще похожие новости:</b>
<a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=57965>1×slots зеркало на сегодня</a>
<a href=https://rolivka.online/forum/showthread.php?tid=40369>1×slots казино зеркало</a>
<a href=https://games-garant.ru/index.php?subaction=userinfo&user=Jamesneorm>1×slots регистрация на официальном сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Некоторые сайты, до чем провести регистрацию игроков, предлагают ответить на некоторое базовых вопросов. Цель проведения сходственной викторины – выявить случайных людей, коие не имеют представления о покере, и не допустить получения ими призов. Если посетитель теснее играл в казино, то ответить на полтора десятка простых вопросов несомненно нетрудно. Очень часто, ответы возможно найти на официальных сайтах этих учреждений. В интернет-сети постоянно можно найти перечни более знаменитых и гарантированных поощрительных программ от знаменитых онлайн-казино.
#1944 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
inform@rucriminal.info винлайн букмекерская контора <a href=https://t.me/vchkogpu_ru>гта казино</a> пин ап casino казино большая <a href=https://vestnik-jurnal.com/>скачать casino на андроид</a> porno Мира Андреева (теннис) pin up casino пин ап cometa casino приложения букмекерских контор на андроид казино пину bitz casino Шевцова Татьяна Викторовна порно
DiskiPlus 1×bet зеркало рабочее xbet DiskiPlus порно с Алина Загитова <a href=https://diskiplus.ru>DiskiPlus casino online зеркало</a> DiskiPlus казино 1 DiskiPlus casino buzz <a href=https://diskiplus.ru>DiskiPlus 1×bet casino</a> DiskiPlus бесплатное казино DiskiPlus официальная казино DiskiPlus 1×bet бесплатно DiskiPlus букмекерскую контору пин DiskiPlus Любимова Ольга Борисовна порно DiskiPlus сайт казино вход DiskiPlus казино вход
#1945 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino 777 online
В зависимости от онлайн заведения каждый из их возможность вас предложить как бездепозитные средства, например и бездепозитные фриспины, коие после удачной регистрации рухнут вам на ваш игровой баланс. <a href=http://filmkachat.ru/>1×slots акции</a> Бездепозитные призы за регистрацию в игровых автоматах для владельцев онлайн-казино считаются долею маркетинговой кампании, направленной на увеличение аудитории вебсайта. Так они продвигают свои бренды и привлекают свежих посетителей. <a href=https://www.esurveyspro.com/Survey.aspx?id=d8357902-e8be-4a72–8767–3426f9bacbbb>https://www.esurveyspro.com/Survey.aspx?id=d8357902-e8be-4a72–8767–3426f9bacbbb</a> Условия все различаться приятель от друга. Но такой бонус может быть использован только для игрового процесса – приобретенные на счет деньги до того, как станут отыграны, вывести невозможно. 1×slots зеркало рабочее <a href=https://lustbb.com/member.php?action=profile&uid=3169>https://lustbb.com/member.php?action=profile&uid=3169</a> Максимальный размер ставки, который невозможно превышать же бонус не будет всецело отыгран. В случае нарушения этого правила, бонус и выигрыш с него станут аннулированы.
1×slot зеркало рабочее этих способов предполагает регистрацию
<a href=https://forum.bandariklan.com/showthread.php?tid=176825&pid=1141205#pid1141205>зеркло казино 1×slots</a> 1×slots официальный сайт зеркало В качестве призов онлайн казино нередко предлагает выдачу фриспинов, словами бесплатных вращений игрового барабана. Виртуальные монеты возможно применять для изучения в покерной школе либо для игры в казино.Вывод выигрыша с бездепозитных бонусов казино – щедрый подарок от азартных клубов. Но чтобы исключить собственный доход, необходимо выполнить ряд условий: <a href=https://zvukiknig.info/user/PorsedropKn/>https://zvukiknig.info/user/PorsedropKn/</a> В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая приятная доля игры. Важно, часто бездепозитные бонусы в казино выдаются с лимитированиями по наибольшей выплате. В среднем можно рассчитывать на прибыль в количество тысяч рублей. Как исключить выигрыш с приза без депозита. Придётся доказать акк документально, в некоторых заведениях. Процедура верификации неотклонима и делается каждым игроком. О документальном доказательстве учетной записи спрашивайте в интернет чате или прочитайте в правилах.Вывод выигрыша с бездепозитных призов казино – щедрый презент от азартных клубов. Но чтобы вывести собственный доход, нужно выполнить ряд условий: 1×slots зеркало быструю регистрацию а также мгновенное Иногда операторы настоятельно внесение малого депозита перед выводом для верификации платежного прибора. В некоторых казино этот депо также предстоит отыграть.
казино 1×slots официальный сайт
Можно ли в одном онлайн казино получить больше одного приза за регистрацию? Нет, например как в каждом онлайн казино есть правила, к коим нужно держаться, не делать 2 аккаута для получения бонусов, иначе будет блокировка обоих аккаутов, не пытайтесь перехитрить онлайн казино, приз за регистрацию выдаеться один один 1 личику. Разные казино имеют собственные управляла по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высокие требования. Часто онлайн-казино рекомендуют отыграть бонусное поощрение до ста один в игровых автоматах. Например, в игрок получил безвозмездно десять долларов, то необходимо будет отыграть их, поставив одну тысячу спинов по одному баксу каждый. Стоит обозначить(означить), собственно не все казино выделяют возможность играть на бонусы и не во всех увеселительных заведениях схожие управляла для отыгрывания. Некоторые казино воспрещают играть на бонусы в блекджек либо ограничивают ставки до пяти %, собственно существенно увеличивает в десятки один количество необходимых игр.Самые пользующиеся методы вывода средств ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электрическим платежным системам на Neteller и Skrill, еще используют криптовалютными кошельками. Вывод выигрышей может осуществляться моментально либо развлекать от нескольких часов до нескольких суток. <a href=https://v7.toonanime.co/user/Richarddiz/>https://v7.toonanime.co/user/Richarddiz/</a> Можно. Вы всегда можете отказаться от получения бездепозитного бонуса за регистрацию в казино, же Вы не создадите ставку.Бездепозитные призы за регистрацию считаются одним из самых модных способов вербования новых игроков в онлайн-казино, потому собственно они предоставляют игрокам возможность опробовать казино, тем игровые автоматы, и вероятно, выиграть настоящие средства. 1×slots официальный сайт мобильная версия скачать Для такого, дабы отыграть сумму вашего бездепозитного бонуса надо(надобно) выполнить обстоятельства вейджера. Очень нередко фриспины даются на конкретные слоты (book of ra, book of deceased, book of sun), подбирайте слот себе нраву, они довольно красочные и высококачественные. Бездепозитные приз возможность быть валютным например и в виде фриспинов на слотыТак собственно главное различие дара на депозит от бездепа – неотъемлемое пополнение счёта. Вы сможете внести депозит и преувеличить стартовый капитал либо отобрать бездеп и при не придётся рисковать собственными сбережениями. Поспешите выполнить простые требования, и администрация ресурса начислит щедрое поощрение!
1×slots зеркало регистрация
Для верификации аккаунта надо(надобно) дать профессионалам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, еще фотографию банковской карты или экрана страницы электронного кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для доказательства личности. Размер бонусов почаще всего чисто символический и не превышает 50 руб. Приятно, хотя ощутимым бустом деле навряд станет.Третитй бездепозитный приз за регистрацию – валютные свои. К огорчению, начислить рубли либо доллары готовы лишь знаменитые и пользующиеся клубы. С их помощью возможность насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком. 1×slots подтвердит вашу регистрацию если говорить <a href=http://lineyka.org/user/Ralphemort/>http://lineyka.org/user/Ralphemort/</a> Размер призов чаще всего чисто условный и не выше 50 рублей. Приятно, хотя ощутимым бустом деле навряд станет.В любом казино с бездепозитным бонусом учтены вейджеровые обстоятельства. Это единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) устроить определённое число ставок. Чем круче приз, тем труднее выполнить условия, и наоборот.
1хслотс официальный сайт зеркало
Даже не выиграв солидную необходимую, игрок интересно проведет время, изнутри исследует работу площадки, оценит геймплей автоматов. Все это без каких-либо денежных рисков. Быть в курсе превосходнейших акций легко. Достаточно периодически учить список свежих интернет казино с выводом бонуса без депо в этом разделе.Список например именуемых «не землель» прилагается к правилам бонусной программы игорного портала. Обязательно проверьте, распространяются ли на вас похожие наказания. Простая процедура получения бездепозитного бонуса, которая займет менее 2-х мин. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные.Основное различие что, что для получения бездепа не пополнять баланс в казино. Но не этого, есть ряд и отличий: <a href=https://lavteam.org/user/JulesSails/>https://lavteam.org/user/JulesSails/</a> Сразу в активации промокода возможно пользоваться подарком. Как теснее упоминалось, призы бывают трёх видов – фриспины, кредиты и фриплей-бонусы.Фриплей-бонусы. Бонусы за безвозмездную забаву есть только в неких клубах. Они зачисляются незамедлительно после создания профиля и срабатывают недолговременное время. Если у вас нет медли истратить средства, они просто завершатся. Что дотрагивается медли, в большинстве случаев бонусы срабатывают на одного часа. 1×slots casino регистрация 1×slotscasin online Мы собрали и выпустили список наилучших бездепозитных казино с бонусами за регистрацию, которые гарантируют великодушные выигрыши и мгновенные выплаты.
<b>Смотреть еще похожие новости:</b>
<a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=9700&TITLE_SEO=9700-kharakteristiki-tovarov&MID=582812&result=reply#message582812>1×slot регистрация</a>
<a href=https://creampie.com/threads/1×-slots-%D1%81%D0%B0%D0%B9%D1%82.337/>1× slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, например как Вам понадобиться ее доказать в при выводе денег. При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток.
#1946 Charlesgunnyhttp://filmkachat.ru
рабочее зеркало 1×slots
Чаще всего казино приз за регистрацию без депо даёт вероятность запустить любой машина. Но другого внимательно ознакомиться с критериями. Иногда для игры доступны лишь определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, чем начать знакомство с миром азарта именно с «одноруких бандитов». <a href=http://filmkachat.ru/>1×slots casino зеркало рабочее</a> Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и более. Когда игроку полагается много фриспинов, администрация имеет бить3 их начисление на несколько дней. Бесплатные вращения предоставляются для определенного слота, который указывается в правилах акции.Для казино, работающих интернет, бездепозитные бонусы необходимы для вербования свежих посетителей. Предложение поиграть на слотах без надобности внесения настоящих средств — работающий метод для повышения интереса к фирмы. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит играть в казино, лишь сейчас уже на личные средства. <a href=https://yoomark.com/content/every-vehicle-owner-inevitably-faces-choice-new-battery-and-decision-often-comes-down>https://yoomark.com/content/every-vehicle-owner-inevitably-faces-choice-new-battery-and-decision-often-comes-down</a> Самый распространённый из похожих бонусов, окончательно же, бездеп на день рождения посетителя — приз вид фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им возможно в течение установленного периода медли. 1хслот зеркало <a href=http://czechmod.cz/profile.php?lookup=10583>http://czechmod.cz/profile.php?lookup=10583</a> Фриспины – благотворительные вращения с фиксированной ставкой, которые возможно применять в определенных игровых автоматах.
1×slots регистрация 1×slots review live
Бонус без депо за регистрацию в казино (бездепозитный бонус) – это денежный презент от клуба, кот-ый начисляется на акк игрока последствии регистрации в казино. Кроме творения учетной записи, для получения бездепа, очень нередко требуется ещё и подтвердить контактные данные игрока и/или активировать особый промо-код.Бездепозитные бонусы – это исключительно занимательная и наиболее перспективная акция интернет-казино. Они том чем фри-спинов, поэтому собственно выплаты в бесплатных вращениях не гарантированы, ведь композиции на барабанах игрового аппарата все не сложиться. 1×слотс казино Заполняя данные в личном профиле, указывайте только достоверную информацию, например как Вам придется ее доказать в будущем при выводе денег. <a href=https://njt.ru/forum/user/190303/>https://njt.ru/forum/user/190303/</a> 1хслотс официальный сайт зеркало Каждый игры обязан сначала детально выучить обстоятельства по получению и отыгрышу понравившегося подарка. Если всё организует, поспешите отобрать благотворительные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо момент начать вращать барабаны топовых слотов.
1×slots casino зеркало рабочее
Кешбэк-бонус дает собой возврат фиксированного процента от ставки в случае поражения либо же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не выше 10%. <a href=https://imoodle.win/wiki/User:KindraDarwin67>https://imoodle.win/wiki/User:KindraDarwin67</a> Основное управляло получения бездепа ? создаваемый акк обязан быть у пользователя первым и единственным. Наличие нескольких аккаунтов взыскательно воспрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депо необходимо соблюдать простую очередность деяний. 1×slots регистрация
1×slots регистрация то дальше необходимо пройти
В любом казино с бездепозитным бонусом учтены вейджеровые условия. Это один-единственный «подводный камень», который стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) сделать определённое количество ставок. Чем круче бонус, что, этим труднее выполнить условия, и наоборот. Срок активации и время на отыгрыш. Зачисление средств или фриспинов происходит при активации протяжении строго ограниченного периода, подобные требования предъявляются и к срокам отыгрыша. Одни казино позволяют отыгрывать бонус несколько дней или в недель. Другие выдают солидную сумму за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высоким вейджером. 1×slots зеркало <a href=http://j67236dr.bget.ru/user/JamesAcemo/>http://j67236dr.bget.ru/user/JamesAcemo/</a> Подарки на дни ? посвященные торжественным датам, требующие условного отыгрыша или начисляются без того. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
<a href=http://gtamotors.ru/user/JamesBoben/>http://gtamotors.ru/user/JamesBoben/</a> Каждая игровая перрон выделяется критериями по получению и отыгрышу бездепов. В правилах отчетливо расписаны временные рамки, за которые надо(надобно) прокрутить вейджер. Также не запамятовывайте тему максимальный размер ставки и максимальную необходимую выплаты. С иной стороны, чтобы получить бездепозитные бонусы казино, достаточно израсходовать менее 1 минутки. 1×slot зеркало рабочее регистрации на телефон придет
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Какие призы у еще получить кроме бездепозитного приза за регистрацию в казино? По мимо бездепозитного приза, любое онлайн казино предлагает игрокам выгодное предложение на первый депо, вы совершаете депо, ваш депо увеличивается в двое или даже в трое, тем самым начать играть можно с больше крупной суммой, например же не забываем тему вейджер на бонусы.
#1947 internetGephttps://domashij-internet-nizhnij-novgorod001.ru
лучший интернет провайдер нижний новгород <a href=https://domashij-internet-nizhnij-novgorod001.ru>domashij-internet-nizhnij-novgorod001.ru</a> проверить интернет по адресу
#1948 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
ставки на спорт букмекерские конторы часы казино <a href=https://m.repost.news/>casino скачать</a> win win casino pin up casino <a href=https://strelochnik.com/>casino 7k сегодня</a> Семёнова Татьяна Владимировна порно пин ап букмекерская контора casino играть приложения букмекерских контор casino 7k casino сайт почему в казино нет окон
DiskiPlus 1×bet скачать бесплатно DiskiPlus бк букмекерская контора <a href=https://diskiplus.ru>DiskiPlus букмекерская контора фонбет официальный</a> DiskiPlus porno Анастасия Янькова, боксерка DiskiPlus 1×bet зеркало xbet xyz <a href=https://www.diskiplus.ru/>DiskiPlus Фастова Елена Владимировна порно</a> DiskiPlus порно с Захарова Мария Владимировна DiskiPlus букмекерские конторы без депозита DiskiPlus kometa casino DiskiPlus 7k casino бонус DiskiPlus cat casino DiskiPlus яндекс игры казино DiskiPlus pin casino
#1949 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерскую контору пин Крючкова Полина Викторовна порно <a href=https://rhymes-punches.com/>порно с Петр Ян (ММА)</a> смотреть фильм казино слоты казино <a href=https://repost.news/>Москалькова Татьяна Николаевна порно</a> pin casino демо казино inform@rucriminal.info 1×bet официальный скачать 1×bet слоты 1×bet top фильмы казино рояль 1×bet официальный скачать
DiskiPlus приложения букмекерских контор на андроид DiskiPlus фреш казино <a href=https://diskiplus.ru>DiskiPlus 1×bet регистрация</a> DiskiPlus скачиваемые казино DiskiPlus букмекерская контора ставки <a href=https://diskiplus.ru>DiskiPlus порно с Илюшникова Татьяна Александровна</a> DiskiPlus casino зеркало сайта DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz DiskiPlus casino сегодня DiskiPlus casino андроид DiskiPlus букмекерская контора бесплатно скачать DiskiPlus казино гта 5 DiskiPlus Валентина Матвиенко порно
#1950 Charlesgunnyhttp://filmkachat.ru
сайт 1× slots casino
Бездепозитный приз казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в этом и заключается основное отличие.Выбор каждого интернет казино на нашем веб-сайте. В описании к любому Вы сможете узнать, что получите за творенье аккаунта. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> Чаще всего, известные сервисы, эти как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное верховодило. Финансовые свои выводятся лишь через что, эту платежную систему, которой популярностьюимели для пополнения депозита. Если же игрок получил бездепозитный покерный бонус, требуется пополнить счет на наименьшую сумму, кот-ая сочиняет обычно десять долларов.Выбор каждого интернет казино на нашем веб-сайте. В описании к каждому Вы можете разузнать, что получите за творение аккаунта. <a href=https://acrobat.uservoice.com/forums/935259-acrobat-web-beta-internal/suggestions/49479029-%D0%BF%D1%80%D0%BE%D1%84%D0%B5%D1%81%D1%81%D0%B8%D0%BE%D0%BD%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2-%D0%BA%D0%B8%D0%B5%D0%B2%D0%B5-%D0%BE%D1%81%D0%BE%D0%B1%D0%B5%D0%BD%D0%BD%D0%BE%D1%81%D1%82%D0%B8-%D0%B8>https://acrobat.uservoice.com/forums/935259-acrobat-web-beta-internal/suggestions/49479029-%D0%BF%D1%80%D0%BE%D1%84%D0%B5%D1%81%D1%81%D0%B8%D0%BE%D0%BD%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2-%D0%BA%D0%B8%D0%B5%D0%B2%D0%B5-%D0%BE%D1%81%D0%BE%D0%B1%D0%B5%D0%BD%D0%BD%D0%BE%D1%81%D1%82%D0%B8-%D0%B8</a> Также, учите, собственно бездепозитный приз возможно исключить только что, нет случае, когда станут выполнены все обстоятельства отыгрыша. 1хслотс рабочее зеркало <a href=https://nztw.org/home.php?mod=space&uid=44301>https://nztw.org/home.php?mod=space&uid=44301</a> Бонус в казино без депо имеет различные разновидности: это может быть приветственный приз, акции в честь каких-либо праздничных или весомых дат, бонус за вербование свежих игроков, лояльность и получение VIP-статуса.
1×slots официальный сайт мобильная версия скачать
В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с даровых вращений. Прибыль, которую Вы заработаете на таком бездепе возможно ставить на вывод без какого или отыгрыша.Также учтите, собственно кое-какие игровые платформы сужают список государств, которые готовы получить предложенный бездепозитный приз за регистрацию. К примеру, существуют онлайн-заведения, выдающие похожие бонусы только жителям определенных стран. К примеру, интернет казино 777 Оригинал дает бездепозитный бонус лишь игрокам из России и государств СНГ. Или наоборот, пичкают вознаграждением всех, считая жителей некоторых государств (исходя из этого, по внимательно изучать перечень, дабы впоследствии не появилось практически вопросов и претензий). <a href=http://sofanatki.ekafe.ru/viewtopic.php?f=1&t=2213>1×slots casino регистрация на сайте</a> 1×slots зеркало рабочее на сегодня Необходимость отыгрыша. Вейджер в повыше, чем для бонусов за депо. И же свои не отыграны, вывести их нельзя.Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы которые возникают у начинающих. <a href=http://centropol.su/index.php?subaction=userinfo&user=dizzykit19>http://centropol.su/index.php?subaction=userinfo&user=dizzykit19</a> рабочее зеркало 1хслотс Бездепозитные призы казино за регистрацию в 2022 году — это возможность поиграть за счёт заведения. Казино даёт клиенту шанс воспользоваться определённой суммой или числом даровых вращений без внесения депозита. Не путайте деморежим с реальной игрой без необходимости внесения депо.
1×slots зеркало рабочее на сегодня
С другой стороны, намного проще отобрать бездепозитные фриспины за регистрацию в казино и напрямик момент начать вращать барабаны в наихороших слотах. Главная особенность спинов никаких, что они предусмотрены для лучших автоматов. Удастся столько пройти вспомогательные раунды, но и прирастить сумму выигрыша, заработать респины и другие внутриигровые подарки. Любой выигрыш по ставке повыше установленного лимита несомненно являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, а в случае выигрыша его сумма не поступит на счёт посетителя — итог забавы будет всецело аннулирован. <a href=http://en.wtcmoscow.ru/bitrix/redirect.php?goto=http://xtpanel.xtgem.com/templates/logo.php?site=russvetopttorg.ru/bitrix/redirect.php?goto=https://telegra.ph/Kak-proverit-status-zayavleniya-i-ugolovnogo-dela-podrobnoe-rukovodstvo-i-kontaktnye-telefony-dlya-bystroj-proverki-09–23>http://en.wtcmoscow.ru/bitrix/redirect.php?goto=http://xtpanel.xtgem.com/templates/logo.php?site=russvetopttorg.ru/bitrix/redirect.php?goto=https://telegra.ph/Kak-proverit-status-zayavleniya-i-ugolovnogo-dela-podrobnoe-rukovodstvo-i-kontaktnye-telefony-dlya-bystroj-proverki-09–23</a> Высокая конкурентность в разделе азартных игр мотивирует операторов привлекать посетителей различными акциями. Благодаря данному у посетителей появляется вероятность получить бонусы в казино за регистрацию без депо. Воспользоваться этим предложением возможно, избегая процедуру внесения средств на игровой счет, просто активировав аккаунт на веб-сайте. Наш гид по бездепам поможет избрать самую симпатичную бонусную программку, узнать верховодила получения такого гонорары и распорядиться им с наибольшей выгодой. 1×slots casino регистрация 1×slots review live Зарегистрироваться в казино по особой ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефона и электрическую почту). Для подтверждения номера телефонного необходимо в личном профиле показать свой номер и надавить кнопку „Подтвердить номер телефонного“, дальше Вы получите sms-сообщение с кодом, кот-ый необходимо установить в подходящее фон. Для доказательства электронной почты, перебежать по интенсивной ссылке в письме от казино.Изучить управляла и условия получения бездепозитных призов казино, Вы можете у нас на веб-сайте в разделе с бонусами либо на официальном сайте избранного Вами казино. Если не можете отыскать нужную информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал либо по электронной почте.
1×слотс казино
<a href=http://pfdgaming.com/viewtopic.php?t=1947>рабочее зеркало 1×slots</a> 1 хслот регистрация в 1×slots casino <a href=https://39504.org/member.php?action=profile&uid=26666>https://39504.org/member.php?action=profile&uid=26666</a>
1хслотс рабочее зеркало
Фриспины — безвозмездные вращения, которые разрешают игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины считаются наиболее модным и желаемым видом бонуса — благотворительные вращения иногда эффективнее и веселее в отыгрыше, чем другие виды бездепов.Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке адепты онлайн-казино публикуют важную информацию о not the slightest down payment bonuses и других услугах. Бездепы с безвозмездными вращениями деют юзерам право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд уплачивает казино. Число спинов ограничено и редко превышает сотку. Если промоакция включает в себя много бесплатных игр, их начисление возможность быть разбито на несколько дней.Для получения депозитного приза необходимо пополнить собственный игровой баланс настоящими средствами. Вознаграждение можно получить или при внесении первого депозита, или в виде фиксированного процента от внесённых средств. Так либо иначе, приз поступит на счёт только последствии пополнения. <a href=http://orbitasmd.ru/index.php?subaction=userinfo&user=sassyschedule16>http://orbitasmd.ru/index.php?subaction=userinfo&user=sassyschedule16</a> Простая процедура получения бездепозитного бонуса, кот-ая займет менее 2-х минут. Для получения бездепов, достаточно зарегистрироваться и доказать контактные данные. 1×slots официальный сайт скачать на айфон
<b>Смотреть еще похожие новости:</b>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=409983>1×slots сайт</a>
<a href=http://yamato-ryu.ru/communication/forum/index.php?PAGE_NAME=message&FID=1&TID=44871&MID=9617&sessid=450424e720732ce228d5af937eb4572f&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>скачать 1×slots на андроид мобильная версия</a>
<a href=https://forum.dis-course.net/viewtopic.php?t=648852>1×slots зеркало регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чтобы выступать даром на реальные деньги в казино, порой довольно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные деяния. B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax
#1951 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало
Чтоб получить крупный выигрыш, подбирайте игровые автоматы с максимальным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша.Активация по промокоду употребляется в разных видах бездепов. Если речь о приветственном бонусе, то набор символов можно разузнать на крупнейшей странице, в регистрационной форме либо послании, коие отчаливает юзеру для доказательства e-mail. Акции все проводиться совместно с партнерскими площадками. Обычно код располагается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется одноразовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем актуальный код для активации в описании каждого рекламную. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> Например, игрок получил 500 руб. При создании аккаунта и обязан отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 рублей, понадобится устроить 875 спинов для полного отыгрыша. <a href=https://www.papercall.io/speakers/146409/speaker_talks/292500-professional-real-estate-rendering-services-visual-marketing>https://www.papercall.io/speakers/146409/speaker_talks/292500-professional-real-estate-rendering-services-visual-marketing</a> 1хслотс официальный сайт зеркало <a href=http://bank-garantiya.ru/index.php?subaction=userinfo&user=wealthyarson15>http://bank-garantiya.ru/index.php?subaction=userinfo&user=wealthyarson15</a>
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Для тех, кто только подумывает испытать собственную удачу, а также для проф игроков, ищущих новые площадки для выигрышей, водящие лицензированные казино нередко устраивают различные промоакции, и одно из лучших услуг прошедшее время – как для начинающих, так и для проф игроков – бездепозитный приз за регистрацию. <a href=http://soumoli.com/home.php?mod=space&uid=24916>1хслотс зеркало</a> 1×slots зеркало В любом казино с бездепозитным бонусом учтены вейджеровые условия. Это единственный «подводный камень», который стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) сделать определённое число ставок. Чем круче приз, тем сложнее выполнить условия, и напротив. <a href=https://orbitalscoreboard.com/user/doctorlazutakl/>https://orbitalscoreboard.com/user/doctorlazutakl/</a> Большинство клубов привлекают внимание игры за счёт различных презентов. На 1 сайтах возможно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает благотворительные вращения для запуска топовых интернет слотов. Несмотря на различные акции, стоит выделить самые главные. 1хлот регистрация в 1×slots casino
1×slots casino зеркало рабочее
Будьте внимательнее при ознакомлении с правилами во избежание происхожденья конфликтных ситуаций с казино, когда последствии отыгрыша бездепа вам не дадут исключить крупную необходимую выигрыша. Можно. Вы практически сможете отказаться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не сделаете ставку.В интернете очень большое скриптовых вебсайтов, которые принадлежат мошенникам. Их главная цель – привлечь гэмблеров, пообещав не великодушные презенты, но и крупные выигрыши. Так что кое-какие сайты предлагают получить за регистрацию том $1 000. <a href=http://www.kbszw.com/home.php?mod=space&uid=26676>http://www.kbszw.com/home.php?mod=space&uid=26676</a> Главное превосходство спинов – возможность выучить разные слоты. Также удастся насладиться бонусными раундами, испытать удачу в риск-туре и преумножить выигрыш за счёт особых символов. Однако не игровой процесс заслуживает внимание, как другого сосредоточиться на реальном выигрыше.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. 1×slot рабочее зеркало
1 х слотс зеркало
Бонус в казино без депозита содержит различные варианты: может быть приветственный приз, акции в честь каких-либо праздников либо важных дат, бонус за привлечение свежих игроков, лояльность и получение VIP-статуса. 1× slots зеркало <a href=http://mail.nudecelebvideo.net/user/Waltericeks/>http://mail.nudecelebvideo.net/user/Waltericeks/</a> Первый образующийся вопрос, это, для выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают новых игроков. Последним проще начать забаву на средства с презента за регистрацию. Им не нужно пополнять баланс и расходовать личные средства. Новички получают бесплатные спины или свои на счёт. С их помощью знакомятся с игровым процессом, крутят слоты и проделывают ставки в рулетке.
1×slots зеркало регистрацию более популярный вариант это
Такой безвозмездный эквивалент средств зачисляется на профиль юзера после осуществления требований и предназначаются они только для игрового процесса. Вывод таких вознаграждений возможен лишь в воплощения вейджеровых условий.Все обожают получать презенты. Согласитесь, почти любой играющий человек несомненно беспредельно счастлив, в получит даровой подарок для игры в онлайн казино просто за регистрацию либо же приз за внесенный депо, так нарекаемые приветственные бонусы для свежих игроков. Соответственно эти онлайн клубы станут больше известны и преимущественны у игроков при выборе казино для забавы. Топ казино каждый обновляется и прибавляются свежие и увлекательные игровые клубы с привлекательной бонусной политикой и всеми вероятными привилегиями, к коим относятся эти бонусы как фриспины за регистрацию, денежные бездепозитные призы, еще великодушные бонусы за внесенный депо. Вы не в коем случае ни чем не рискуете, а лишь выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической игры на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, научится регулировать менять ставки и полосы, изучать бонусные игры и их выигрышные композиции, да в просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные средства, коие можно отыграть и исключить, но просто на демо счет, тем самым адреналин в крови более повысится а пульс забьется с нередким ритмом! <a href=http://www.dbgjjs.com/home.php?mod=space&uid=481197>http://www.dbgjjs.com/home.php?mod=space&uid=481197</a> казино 1× slots официальный сайт Подтверждение электронной почты – одно из главных условий, которое есть почти в каждом бездепозитном казино. Чтобы верифицировать электрическую почту, довольно перебежать по активной ссылке в послании, приобретенном от азартного клуба.Наиболее известные вознаграждения среди гэмблеров – бездепозитные бонусы казино. Это не умопомрачительно, ведь можно получить безвозмездные вращения либо виртуальные кредиты, и всем не придётся пополнять счёт, рисковать личными деньгами. Удастся насладиться различными увеселениями причем выиграть солидную сумму, избегая серьёзного риска.
<b>Смотреть еще похожие новости:</b>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=731956>1×slots регистрация 1×slots review live</a>
<a href=https://mit-bbs.com/viewtopic.php?t=725850>1×slots акции</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Как только на виртуальном счету окажутся бонусные свои, поспешите отыграть вейджер. Сразу в этого возможно оставить заявку на вывод выигрыша. Кредиты выгодно выделяются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом настоящих средств и дают возможность почувствовать азарт. Во-вторых – можно насладиться каждой азартной забавой доступной на сайте. В вашем распоряжении присутствуют автоматы, настольные прибавление, видео-покер, Live-дилеры.
#1952 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
гама казино казино смотреть <a href=https://strelochnik.com/>1×bet xbet xyz</a> порно с Захарова Мария Владимировна порно с Афонина Марина Игоревна <a href=https://rucriminal.info/>Набиуллина Эльвира Сахипзадовна порно</a> Набиуллина Эльвира Сахипзадовна порно Скоробогатова Ольга Николаевна порно казино смотреть казино сегодня человек казино скачать 1×bet на андроид бесплатно винлайн букмекерская контора
DiskiPlus casino на телефон DiskiPlus casino сайты <a href=https://diskiplus.ru/>DiskiPlus kent casino</a> DiskiPlus скачать casino на андроид DiskiPlus официальная казино <a href=https://www.diskiplus.ru>DiskiPlus скачиваемые казино</a> DiskiPlus сайт казино вход DiskiPlus casino ап DiskiPlus порно с Артемий Панарин (хоккей) DiskiPlus казино рояль смотреть DiskiPlus casino зеркало сегодня DiskiPlus 1×bet DiskiPlus порно с Анна Щербакова, фигуристка
#1953 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать
Акции распространяются как на все игры казино, так и на ограниченный перечень. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и другие. Промо возможность охватывать разработки одного производителя. Бездеп не пересекается с другими промоакциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, изготовленные бонусными средствами. Для идентификации платежных реквизитов игрока возможность потребоваться пополнение счета на наименьшую необходимую.В онлайне очень большое скриптовых вебсайтов, которые принадлежат жуликам. Их главная задача – привлечь гэмблеров, пообещав не только щедрые подарки, но и крупные выигрыши. Так что некоторые веб-сайты предлагают получить за регистрацию в $1 000. <a href=http://filmkachat.ru/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> <a href=https://www.linkcentre.com/review/archicgi.com/>https://www.linkcentre.com/review/archicgi.com/</a> Фриплей-бонусы встречаются только в неких клубах. Они зачисляются незамедлительно после творенья профиля и активны недолговременное время. Если не успеете израсходовать свои, они просто сгорят. Касаемо медли, правило призы активны в течение часа. 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=http://followmedoitbbs.com/home.php?mod=space&username=parchedgroup41>http://followmedoitbbs.com/home.php?mod=space&username=parchedgroup41</a>
1×slots зеркало регистрацию более популярный вариант это
зеркала 1×slots Во время забавы в казино, выигрыши, приобретенные благодаря безвозмездным призовым фондам, суммируются и срабатывают в совместную необходимую для отыгрывания. Однако, в удача улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно допустит вывести финансовые средства. Сумма вывода будет зависимости от лимита, утвержденного именно в данном учреждении. Поэтому, внимательно нужно разбирать верховодила выдачи анлимитных депозитов.Эффективность бездепов в рекламного прибора расценили многие операторы. Малоизвестные площадки употребляют эти промоакции, дабы быстро набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны неизменных посетителей. Не все сайты, дающие подарки без депозита, рекомендованы к забаве. За привлекательным промоописанием все скрываться неосуществимые обстоятельства отыгрыша и подводные камешки. <a href=http://hotspotnews.ca/home.php?mod=space&uid=9644>http://hotspotnews.ca/home.php?mod=space&uid=9644</a> рабочее зеркало 1хслотс
1×slots регистрация 1×slots casino c2d ru
Для подтверждения электронной почты, просто перейдите по интенсивной ссылке в послании, приобретенном от игрового заведения. <a href=https://love-n-magic.ru/index.php?subaction=userinfo&user=DoctorLazutaSr>https://love-n-magic.ru/index.php?subaction=userinfo&user=DoctorLazutaSr</a> 1×slots регистрация на официальном сайте Самый распространённый из похожих бонусов, естесственно же, бездеп на денек рождения посетителя — приз в виде фиксированной суммы либо фриспинов поступает на счёт игрока, а воспользоваться им можно протяжении установленного периода медли.Чаще всего интернет-казино предлагают бездепозитные призы свежим юзерам. Эта промо-акция довольно отлично завлекает новичков, подталкивая их к открытию счета. Конечно, не все они становятся послушными клиентами, хотя сам факт регистрации аккаунта играет на руку заведению.
1×slots casino регистрация на сайте
Прямо в отберите бесплатные вращения за регистрацию без депозита и начинайте собирать призовые композиции ради крупных выигрышей!Получить приветственный приз имеют только свежие посетители онлайн-казино. Способы описаны в условиях промоакции любого законного казино, чаще всего это: <a href=https://forum.ltp-team.com/topic/185417–1×slots-klubu1×slots-1hslots-registraciya-pereyti-na-1×slots/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> Бездепы обычно предлагают с отыгрышем — быстро вывести выигранные свои невозможно. Перевод денег со счета будет вероятен последствии такого, как юзер выполнит все требования казино, а сумма возможности быть выше установленного правилами лимита. Условиями промоакции фиксируются сроки, протяжении которых заказчик вправе пользоваться предложением. Обычно они не превышают нескольких дней последствии активации. 1×slots мобильная версия войти казино <a href=http://sk-stone.ru/bitrix/redirect.php?goto=http://kit-media.com/bitrix/rk.php?goto=http://rentek.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/yPYAts_44IL>http://sk-stone.ru/bitrix/redirect.php?goto=http://kit-media.com/bitrix/rk.php?goto=http://rentek.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/yPYAts_44IL</a> Когда идет о валютных бонусах, казино практически устанавливают обстоятельства вейджера, которые необходимо выполнить, дабы исключить выигрыш.
1×slots зеркало регистрация
Зарегистрируйтесь. Для регистрации чаще всего достаточно ввести свой номер телефонного и почтовый адрес, последствии чего установить приобретенный код из СМС. Возможно, требуется указать промокод. В правилах промоакции несомненно написано, где его надобно вводить. Иногда это хотелось создавать при регистрации, иногда — теснее последствии творения личного кабинета, на отдельной странице. <a href=http://baghug77.com/bbs/board.php?bo_table=free&wr_id=723456>http://baghug77.com/bbs/board.php?bo_table=free&wr_id=723456</a> 1 xslots рабочее зеркало Промокод – определённая комбинация символов, которую необходимо ввести в соответствующее поле при творении учетной записи или активировать в собственном профиле игрока в разделе с бонусами.Ознакомьтесь с нашим списком лучших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего перечня и получите бездеп сразу. Хватайте наихорошие благотворительные предложения ниже и выигрывайте большие средства, не рискуя!
<b>Смотреть еще похожие новости:</b>
<a href=http://dd214.labelcreativeak.com/forums/viewtopic.php?f=3&t=1559>1×slots промокод при регистрации 2025</a>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5303/#comment-644511>1×slots регистрация то дальше необходимо пройти</a>
<a href=http://jktroickiy.forumex.ru/viewtopic.php?f=2&t=4279>1×slots промокод при регистрации</a>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=169189&result=reply>1×slots зеркало рабочее на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Обычно показатель повыше, чем для бонусов на депо. Не дивитесь, случае он будет даже х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных стран. Бонус без депо за регистрацию в казино (бездепозитный бонус) – это денежный презент от клуба, кот-ый начисляется на акк игрока последствии регистрации в казино. Кроме творения учетной записи, для получения бездепа, очень нередко требуется ещё и подтвердить контактные данные игрока и/или активировать особый промо-код.
#1954 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino зеркало сегодня рабочее человек казино <a href=https://rhymes-punches.com/>казино рояль смотреть</a> порно с Александр Большунов (лыжные гонки) порно с Алина Загитова <a href=https://kompromat1.online/>casino играть</a> букмекерская контора вход porno Ангелина Гончаренко, хоккеистка unlim casino почему в казино нет окон лучшая казино гта казино casino рабочее зеркало
DiskiPlus casino вход DiskiPlus водка казино <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet зеркало слоты 1×bet xyz</a> DiskiPlus казино фильм смотреть онлайн DiskiPlus порно с Голикова Татьяна Алексеевна <a href=https://www.diskiplus.ru/>DiskiPlus ramenbet casino</a> DiskiPlus порно с Петр Ян (ММА) DiskiPlus Окладникова Ирина Андреевна порно DiskiPlus cometa casino DiskiPlus порно с Федор Чалов (футбол) DiskiPlus гта казино DiskiPlus casino зеркало сегодня рабочее DiskiPlus casino
#1955 Charlesgunnyhttp://filmkachat.ru
1×slots сайт
Самый распространённый из сходственных бонусов, окончательно же, бездеп на денек рождения клиента — приз вид фиксированной суммы либо фриспинов поступает на счёт игрока, а воспользоваться им возможно в течение установленного периода медли.Бездепозитные бонусы отличный вариант безвозмездной забавы в игровые автоматы. Многие юзеры сети не понимают, что в казино возможно начать играть абсолютно даром, а позже исключить выигрыш на банковскую карту или электронный кошелек, другие не доверяют онлайн казино, а третьи удачно играют и выигрывают – и подчас достаточно большие суммы. <a href=http://filmkachat.ru/>рабочее зеркало 1хслотс</a> Для казино, работающих интернет, бездепозитные призы нужны для вербования новых клиентов. Предложение поиграть на слотах без надобности внесения настоящих денег — работающий способ для повышения интереса к компании. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит играть в казино, только теперь уже на личные деньги.Выбирайте наилучшие бесплатные призы счет обзоров на Casinoz – и пусть вас сопутствует счастье при отыгрыше бонусных кредитов! <a href=https://bento.me/lexxeagle>https://bento.me/lexxeagle</a> Изучить правила и обстоятельства получения бездепозитных призов казино, Вы сможете у нас на веб-сайте в разделе с бонусами или на официальном веб-сайте выбранного Вами казино. Если не можете найти нужную информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал либо по электрической почте.Фриспины начисляются по определенной ставке. После их активации игроку необходимо запустить слот и убедиться, что в нем показываются благотворительные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода последствии отыгрыша определяется оператором и редко превышает 5 000 рублей. 1×slots регистрация 1×slotscasino 56 online <a href=https://rubcrumb.ru/user/Frankwef/>https://rubcrumb.ru/user/Frankwef/</a>
1×slots скачать на айфон
1×slot зеркало рабочее этих способов предполагает регистрацию <a href=https://acerfans.ru/user/DavidAgevy/>https://acerfans.ru/user/DavidAgevy/</a> Выше мы предоставили глубокий комплект самых новых и актуальных бездепозитных призов в онлайн казино без пополнения на 2022 год, где продоставляется воспользоваться хоть ценным бездепозитным призом.Получать информацию о самых выгодных призах возможно без постоянного прогноза новостей казино. Мы взяли данную задачку на себя и непрерывно следим за предложениями операторов, выбирая превосходнейшие из их. В данном разделе собраны последние бездепы, промокоды к ним и условия их активации. Список промоакций регулярно пополняется. В топ зашли самые новые бездепозитные призы за регистрацию в казино 2020, временные и закрытые рекламную. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и критериям. Если срок действия промоакции истек, она удаляется из списка. рабочее зеркало 1хслотс Но на азартных платформах подобные гонорары шансы получить и уже зарегистрированные пользователи. В этом случае, призы предоставляются в рамках уникальных акций или же неким игрокам в виде акционного предложения, которое приходит на почту с целью «вернуть» игрока в свое казино.
1хслотс казино зеркало
Для выбора азартного заведения Вы можете воспользоваться списком наших казино с призами за регистрацию. На нашем сайте мы выпустили список бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, что часть бонусов эксклюзивные и доступны только для посетителей нашего вебсайта по-специальному промо-коду либо по уникальной ссылке. Кроме такого, для каждого бонуса мы подготовили доскональный обзор, каком Вы узнаете как получить и отыграть поощрение и как исключить свой выигрыш с бездепа. <a href=https://www.wuchangtongcheng.com/home.php?mod=space&uid=63575>https://www.wuchangtongcheng.com/home.php?mod=space&uid=63575</a> Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала быстрые выводы. Фишка выплат никаких, собственно довольно избрать платёжный инструмент и указать сумму. В большинстве случаев деньги зачисляются на электрические кошельки на 15 минут, а на банковские карты – 1–3 трудящихся денька. зеркала 1×slots
1×slots акции
Для как, чтобы отыграть необходимую вашего бездепозитного бонуса надо(надобно) выполнить условия вейджера. Очень часто фриспины даются на конкретные слоты (book of ra, book of dead, book of sun), выбирайте слот себе по, они довольно очень и высококачественные. Бездепозитные приз может быть валютным например и в виде фриспинов на слотыАктивация денежного гонорары случается механически в создания профиля или применения промокода. Иногда операторы предъявляют дополнительные требования: подписаться на странички казино в социальных сетях или на рассылку маркетинговых сообщений, скачать и установить вспомогательный софт и т.д. <a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=403846>казино 1×slots официальный сайт</a> Не трудно догадаться, собственно not the slightest down payment bonuses почти ни не посещают большими. Чаще всего идет о пяти–тридцати баксах (или эквиваленте данной суммы в иной еденице). Отзывы читателей о бонусных акциях помогут составить эмоцию, но не запамятовывайте о субъективности личных комментариев.Также бездепозитные призы шансы работать методом возвращать к ирге посетителей, что приостановивших своё сотрудничество с фирмой: уведомление о бездепе поступает на мобильный телефонный либо почту. 1х слот регистрация в 1×slots casino <a href=https://oke.zone/profile.php?id=54587>https://oke.zone/profile.php?id=54587</a> Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция содержит доскональные управляла, ссылка на которые обыкновенно содержится в промообъявлении. В них указываются лимиты, вейджер, список дешевых игр. Если оператор прячет данные о предложении, то воспользоваться им не.Начнём с такого, что каждое промо за регистрацию предполагает некоторые условия. Бездепозитные призы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, необходимая для исполнения условий. Пример, возымели благотворительные вращения и выиграли с них 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 рублей, проигрышных либо выигрышных, неважно. После исполнения, бонусный баланс перейдёт на реальный и будет легкодоступным к выводу.
1×slots регистрация 1×slotscasino09k online
Если вы избираете проверенное лицензионное онлайн казино и сделайте все условия получения бездепозитного бонуса, проблем с получением презента у Вас не возникнет. <a href=https://kcapa.net/bbs/board.php?bo_table=free&wr_id=2466841>https://kcapa.net/bbs/board.php?bo_table=free&wr_id=2466841</a> Простая процедура получения бездепозитного бонуса, которая займет менее 2-х минут. Для получения бездепов, достаточно зарегистрироваться и доказать контактные данные. скачать 1×slots на андроид мобильная версия Прежде всего, не запамятовывайте периодически заглядывать на страничку обзоров бездепозитных призов. Они шаг за шагом рассматривают более увлекательные предложения ведущих игорных порталов.
<b>Смотреть еще похожие новости:</b>
<a href=https://forums.dfine.net/showthread.php?tid=525>1×slots регистрацию более популярный вариант это</a>
<a href=http://fin-molitor.com/forum/viewtopic.php?f=2&t=539250>1×slots казино зеркало</a>
<a href=http://forum.animogen.com/memberlist.php?mode=viewprofile&u=15333>1×slots промокод при регистрации</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вейджер (или вагер) ? это наименьшая сумма ставок, которую нужно сделать для вывода денежного бонуса. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим красивее спецпредложение.
#1956 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
vavada casino Валентина Матвиенко порно <a href=https://www.ossetia.tv/>casino</a> порно с Каролина Севастьянова Нургалиева Эльвира Рамиловна порно <a href=https://sovsekretno.net/>Набиуллина Эльвира Сахипзадовна порно</a> casino игровой автомат рабочие зеркала казино кент casino 1×bet на сегодня 7k casino бонус up casino официальный porno Светлана Ходченкова
DiskiPlus black russia казино DiskiPlus 1×bet слоты 1×bet top <a href=https://diskiplus.ru/>DiskiPlus бк букмекерская контора</a> DiskiPlus pin up casino пин DiskiPlus casino актуальное зеркало <a href=https://www.diskiplus.ru>DiskiPlus порно с Диана Шнайдер (теннис)</a> DiskiPlus скачать 1×bet на андроид DiskiPlus 1×bet слоты официальный сайт DiskiPlus champion casino DiskiPlus скачать сайт букмекерской конторы DiskiPlus букмекерская контора фонбет официальный сайт DiskiPlus porno Дарья Мороз DiskiPlus букмекерская контора фонбет официальный
#1957 Charlesgunnyhttp://filmkachat.ru
зеркло казино 1×slots
Получить приветственный приз имеют только свежие посетители онлайн-казино. Способы описаны в критериях промоакции любого законного казино, чаще всего это:Мы подготовили перечень, где есть постоянно актуальные и свежие бездепозитные призы казино, коие возможность получить даром. Для наших пользователей есть специальные предложения эксклюзивные призы, коие вы ни не найдете, их мы определили особой красноватой плашкой «Exclusive». <a href=http://filmkachat.ru/>1× slots регистрация в 1×slots casino</a> Но есть игорные заведения, которые готовы просто так жертвовать средства на забаву. Для этого достаточно сделать профиль. Чтобы вывести свой выигрыш, вам поначалу необходимо выполнить условия отыгрыша, указанные в условиях получения бездепозитного депо.Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша призов. Заведения практически устанавливают максимальную ставку, допустимую по условиям вейждера. <a href=https://www.bunity.com/shopavto>https://www.bunity.com/shopavto</a> 1×slots официальный сайт зеркало рабочее <a href=http://kvner.ru/goto.php?url=http://3kon.ru/bitrix/redirect.php?goto=http://gold-sail.com.ua/bitrix/click.php?goto=https://telegra.ph/Osnovy-logiki-buhgalterskogo-ucheta-dlya-programmistov-i-buhgalterov-09–19>http://kvner.ru/goto.php?url=http://3kon.ru/bitrix/redirect.php?goto=http://gold-sail.com.ua/bitrix/click.php?goto=https://telegra.ph/Osnovy-logiki-buhgalterskogo-ucheta-dlya-programmistov-i-buhgalterov-09–19</a> Превышение наибольшей ставки при отыгрыше. Система автоматически не предуведомляет о превышении ставки, потому о нарушении верховодил игрок возможность разузнать теснее в подачи запроса на вывод средств.
1хслотс рабочее зеркало на сегодня
Ознакомьтесь с нашим перечнем наилучших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего перечня и получите бездеп сразу. Хватайте наилучшие благотворительные предложения ниже и выигрывайте большие деньги, не рискуя!Получить приветственный приз шансы лишь свежие посетители онлайн-казино. Способы описаны в условиях акции любого легального казино, чаще всего это: <a href=http://turkteam.10tl.net/member.php?action=profile&uid=2012>1хслотс рабочее зеркало на сегодня</a> рабочее зеркало 1×slots <a href=https://999reunite.co.uk/forum/profile/Natalie17D>https://999reunite.co.uk/forum/profile/Natalie17D</a> Наш список включает в себя наилучшие бездепозитные призы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по важным характеристикам: 1×slots подтвердит вашу регистрацию если говорить Акции, приуроченные к календарным праздникам, случаются рассчитаны как на всех пользователей, например и на категории: к, подарок на 8 марта девушкам-игрокам либо мужчинам на 23 февраля.
1хслотс казино зеркало
Иногда для получения бонусов необходимо связаться с адептами саппорта. Удобнее всего с ними разговаривать в онлайн-сате, но время достаточно запроса по электрической почте.Подтверждение персональной инфы. Все казино требуют от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у юзера иных аккаунтов (мультиаккаунт запрещен). <a href=http://maps.google.com.sb/url?sa=t&source=web&rct=j&url=http://stone-style.org/bitrix/rk.php?goto=http://oprh.ru/bitrix/redirect.php?goto=https://telegra.ph/YUridicheskoe-priznanie-nedeesposobnosti-pri-demencii-i-ego-posledstviya-09–23>http://maps.google.com.sb/url?sa=t&source=web&rct=j&url=http://stone-style.org/bitrix/rk.php?goto=http://oprh.ru/bitrix/redirect.php?goto=https://telegra.ph/YUridicheskoe-priznanie-nedeesposobnosti-pri-demencii-i-ego-posledstviya-09–23</a> При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток. 1×slots официальный регистрация
1×slots зеркало рабочее
Вывод выигрыша с бездепозитных бонусов казино – щедрый подарок от азартных клубов. Но чтобы исключить собственный доход, нужно выполнить ряд критерий:Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в личный офис, чтобы забрать бесплатные вращения с вейджером х40; <a href=https://games-garant.ru/index.php?subaction=userinfo&user=Jamesneorm>1×slot регистрация</a> 1×слотс казино <a href=http://xn–jj0bt2i8umnxa.com/bbs/board.php?bo_table=free&wr_id=190850>http://xn–jj0bt2i8umnxa.com/bbs/board.php?bo_table=free&wr_id=190850</a>
1хслотс рабочее зеркало
Высокая конкуренция в сегменте азартных игр доказывает операторов завлекать клиентов разнородными промоакциями. Благодаря этому у гостей замечена возможность получить призы в казино за регистрацию без депозита. Воспользоваться таким предложением можно, минуя функцию внесения денег на игровой счет, просто активировав акк на сайте. Наш экскурсовод по бездепам поможет выбрать самую привлекательную бонусную программу, разузнать правила получения такового вознаграждения и воспользоваться им с максимальной выгодой. <a href=https://australianweddingforum.com/weddings/member.php?action=profile&uid=11661>https://australianweddingforum.com/weddings/member.php?action=profile&uid=11661</a> x1 slots регистрация в 1×slots casino При регистрации идет свидетельствовать только достоверную информацию. Когда учетная запись несомненно активна, будет доступ в Личный офис. В нем можно выбрать еденицу, установить промокод и разузнать доскональные верховодила получения и отыгрыша бездепа. Краткая информация об акции часто находится именно на регистрационной форме.
<b>Смотреть еще похожие новости:</b>
<a href=http://craft4game.forumex.ru/viewtopic.php?f=2&t=2393>зеркло казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Постарайтесь отыграть вейджер, дабы была возможность забыть заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электронной кошелёк, карту, телефон. Более крупные предложения встречаются довольно редко. Зачастую они доступны лишь VIP-игрокам. В оставшихся случаях им наверняка сопутствуют довольно строгие обстоятельства отыгрыша. Также вероятны дополнительные обстоятельства и ограничения, прописанные в условиях и положения бонусной программы казино.
#1958 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
up casino официальное казино вход <a href=https://slon-ru.com/>porno Нина Пирогова, хоккеистка</a> Комарова Наталья Владимировна порно казино регистрации <a href=https://strelochnik.com/>pin up casino скачать</a> champion casino казино фильм онлайн up букмекерская контора pin up casino официальный казино регистрации порно с Карен Хачанов (теннис) песня казино
DiskiPlus casino 7k сегодня DiskiPlus казино проиграл <a href=https://www.diskiplus.ru>DiskiPlus kent casino</a> DiskiPlus самое казино DiskiPlus порно с Зырянова Анастасия Владимировна <a href=https://www.diskiplus.ru>DiskiPlus online casino</a> DiskiPlus 1×bet рабочее на сегодня DiskiPlus пин casino DiskiPlus казино смотреть онлайн DiskiPlus vavada casino DiskiPlus порно с Александр Головин (футбол) DiskiPlus скачать 1×bet на андроид бесплатно DiskiPlus букмекерская контора без
#1959 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Алена Михайлова порно с Анна Калинская (теннис) <a href=https://strelochnik.com/>казино в россии</a> бк букмекерская контора включи казино <a href=https://res-publika.com>порно с Карен Хачанов (теннис)</a> казино ли сколько казино сайте букмекерской конторы фонбет порно с Константин Тюкавин (футбол) порно с Юлия Ефимова 1×bet рабочее порно с Артемий Панарин (хоккей)
DiskiPlus porno Алена Косторная (фигурное катание) DiskiPlus porno Светлана Ходченкова <a href=https://www.diskiplus.ru/>DiskiPlus яндекс казино</a> DiskiPlus казино рулетка DiskiPlus 1×bet xbet <a href=https://diskiplus.ru>DiskiPlus винлайн букмекерская контора официальный</a> DiskiPlus ап казино DiskiPlus карты казино DiskiPlus порно с Захарова Мария Владимировна DiskiPlus porno Александр Соболев (футбол) DiskiPlus сайты казино DiskiPlus porno Дарья Клишина казино
#1960 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию более популярный вариант это
Если речь об неповторимых услугах, имеет потребоваться регистрация в казино по ссылке с партнерского вебсайта. <a href=http://filmkachat.ru/>1×slots мобильная версия войти казино</a> Главным интересным в появлении этих вознаграждений состоит что, нет, что пустив их в ход, в ничем не рискует и в последствии никому ничего не несомненно должен (не зависимо, получит ли он благодаря призам какой-либо выигрыш либо мгновенно спустит все лишь собственно прибывшие финансы). То есть, казино снабжает игрока возможностью на дармовой основе играть во всевозможные слоты даже спонсирует игру.Бездепы обычно предлагают с отыгрышем — быстро исключить выигранные свои нельзя. Перевод средств со счета будет вероятен в того, как пользователь выполнит все притязания казино, а сумма не быть выше установленного правилами лимита. Условиями акции фиксируются сроки, на которых клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней последствии активации. <a href=https://elearn.ellak.gr/mod/forum/discuss.php?d=8504#p51754>https://elearn.ellak.gr/mod/forum/discuss.php?d=8504#p51754</a> 1хслот зеркало <a href=http://baltgps.ru/bitrix/redirect.php?goto=http://kreveton.ru/bitrix/rk.php?goto=http://softum.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/FzE6UGL3pg9>http://baltgps.ru/bitrix/redirect.php?goto=http://kreveton.ru/bitrix/rk.php?goto=http://softum.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/FzE6UGL3pg9</a> Чем ниже значение вейджера, тем легче отыграть и вывести приз. Если Вы планируете заработать на бездепе, не просто ознакомиться с свежим игровым клубом, то стоит избегать бонусов с высочайшим вейджером их почти не реально отыграть. С ними Вы можете лишь протестировать забавы заведения.Фриспины без депо или дополнительные средства помогут поближе познакомиться с игровой платформой и её функциями. За счёт презентов можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям из-за игры против живых крупье.
1×slots мобильная версия войти казино
<a href=http://zelenalutrija.com/forum/showthread.php?p=84736#post84736>1×slots бонус за регистрацию</a> 1×slots на любой вкус как пройти регистрацию <a href=https://images.google.co.id/url?q=https://doctorlazuta.by/>https://images.google.co.id/url?q=https://doctorlazuta.by/</a> Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных требований, не обязательной верификации. Если на сайте учтена обязательная процедура подтверждения личности, то исключить выигрыш удастся лишь последствии ревизии данных. Приготовьтесь заполнить анкету и отправить в техподдержку документ, подтверждающий личность. 1×slot зеркало рабочее регистрации на телефон придет
рабочее зеркало 1×slots
Для получения приза нужно пригласить в игру нового посетителя. Казино начислит пригласившему фиксированный процент от взносов приглашённого повторяющий бонуса: почаще всего его объем не превышает 10%. Срок деяния бонуса как не превышает месяца: пригласивший получает приз зависимо проигранных ставок приглашённого в первый луна забавы.Размер бонуса. В качестве бездепов обыкновенно начисляют не суммы, а когда речь идет о призах за депо, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино имеют подарить игроку до 2000$. Так что приготовьтесь предоставить секретную информацию (пол, возраст, страна проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает менее суток, последствии чего получится свободно выводить солидные выигрыши. <a href=https://www.assayyarat.com/forums/member723533.html>https://www.assayyarat.com/forums/member723533.html</a> 1× slots зеркало
1 x slots casino
Бездепозитный приз предоставляется новенькому игроку за определенные деянья. Часто подарок вид денег либо фриспинов выдается за регистрацию, благодаря чему юзер получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. Еще одно условие касается объемов ставки. Операторы устанавливают наивысшую необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном кабинете. При превышении лимита есть риск потерять бонуса. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, заказчик может столкнуться с запретом назначать фишки на шансы.Акционные предложения от казино есть в различных форматах. Часто бонусы даются в обмен на депо. Игрок заносит платеж и получает средства, благотворительные вращения и поощрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — вид приза, кот-ый гарантирован за выполнение конкретных действий на веб-сайте: Активация по промокоду употребляется в различных обликах бездепов. Если речь идет о приветственном бонусе, то комплект знаков возможно разузнать на крупнейшей страничке, в регистрационной форме либо послании, которое отправляется юзеру для подтверждения e-mail. Акции имеют проводиться общо с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активируется разовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном кабинете или начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем важный код для активации в описании каждого рекламную.2. Создать новый профиль. Для регистрации надо(надобно) наполнить маленькую анкету или зайдите в индивидуальный офис при помощи соц сеток; 1×slot регистрация <a href=http://tellmy.ru/user/Walterfeabe/>http://tellmy.ru/user/Walterfeabe/</a>
1хслотс рабочее зеркало
За счёт спинов выйдет запустить различные интернет слоты, протестировать стратегии и поднабраться опыта. Фишка что, нет, собственно вращения начисляются на лучшие аппараты с уникальными опциями и высокой отдачей. Не забывайте, собственно в любом акционном предложении учтены особые требования – временные ограничения, наибольший объем ставки, перечень доступных игр.Раздача бонусов возможность быть посвящена различным датам: календарные праздники, деньки рождения игроков, юбилей открытия казино и т. Д. Подарок выдается в виде средств, фриспинов или баллов для накопления и обмена на услуги оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд требований. <a href=https://urganchshahar.uz/user/StevenLef/>https://urganchshahar.uz/user/StevenLef/</a> 1×slot рабочее зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://fmatras.ru/topic/92055–1hslots-rabochee-zerkalo/#comment-109717>1×slots актуальное зеркало</a>
<a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=44955>1×slots актуальное зеркало</a>
<a href=https://eccentrictirade.com/forums/showthread.php?tid=135674>казино 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных притязаний, не обязательной верификации. Если на сайте предусмотрена обязательная процедура подтверждения личности, то вывести выигрыш удастся только последствии ревизии данных. Приготовьтесь наполнить анкету и отправить в техподдержку документ, подтверждающий лицо. Самые известные методы вывода средств ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электрическим платежным системам подобии Neteller и Skrill, а также пользуются криптовалютными кошельками. Вывод выигрышей имеет осуществляться быстро или развлекать от нескольких часов до нескольких суток.
#1961 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Виктория Синицина, фигуристка up casino скачать <a href=https://strelochnik.com/>Елизавета Боярская</a> Львова-Белова Мария Алексеевна порно слот casino <a href=https://kompromat1.online/>казино регистрации</a> рейтинг казино порно с Юлия Ефимова, пловчиха казино большая Самойлова Алла Владимировна порно porno Александра Степанова, фигуристка макао казино казино рояль
DiskiPlus 7k casino зеркало на сегодня DiskiPlus кент казино <a href=https://www.diskiplus.ru>DiskiPlus porno Алена Михайлова</a> DiskiPlus casino игровой автомат DiskiPlus 1×bet рабочее на сегодня <a href=https://www.diskiplus.ru>DiskiPlus порно с Алексей Миранчук (футбол)</a> DiskiPlus cometa casino DiskiPlus порно с Алина Загитова DiskiPlus 1×bet на андроид DiskiPlus порно с Анастасия Потапова, теннисистка DiskiPlus букмекерская контора скачать приложение DiskiPlus казино большая DiskiPlus бесплатно фильм казино
#1962 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация
B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax <a href=http://filmkachat.ru/>1×slot зеркало рабочее регистрации на телефон придет</a> Так собственно можете отважно регистрироваться без всяких размышлений. Фортуна сегодня наверняка на вашей стороне. Не бойтесь, так следствие какого или убытка Вам совершенно не грозит. С этими призами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе.Обычно для получения бонусов без депо, казино выдвигает лояльные и вполне выполнимые обстоятельства, но есть ряд поступков коие воспрещены и шансы стать противные последствия: <a href=https://joy.link/kalinka0588>https://joy.link/kalinka0588</a> А ознакомиться с свежими интернет казино, Вы сможете помощью призов с выводом прибыли, коие Вы можете получить без депо.Бонусные средства – небольшая сумма денег для старта в новеньком казино. На бонусные средства, обычно разрешается выступать во все забавы, кроме слотов с современным джекпотом и игр из раздела live casino. 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=http://www.xinyuelt1.com/home.php?mod=space&uid=1124532>http://www.xinyuelt1.com/home.php?mod=space&uid=1124532</a> Подтвердите регистрацию, чтобы активировать Бездепозитный бонус с выводом, потребуется наполнить личный профиль. Заполните пустопорожние поля реальными данными о себе.
1×slots официальный сайт скачать
<a href=http://amazon.rx22.ru/viewtopic.php?f=5&t=3543>1×slots зеркало этих способов предполагает регистрацию</a> 1×slots casino регистрация на сайте <a href=https://biznes-knigi.com/user/Franksar/>https://biznes-knigi.com/user/Franksar/</a> Денежные средства. Третий приз за регистрацию без депо – наличные. К сожалению, только известные и известные клубы имеют уяснить средства в рублях либо баксах. С их помощью у насладиться любой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед данным нужно выполнение конкретных критерий.В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, необходимо обратиться в саппорта через лайв-чат на сайте казино. 1×slots на любой вкус как пройти регистрацию Иногда в бездепа, казино дарит наименьший бонус (до 50 руб. ), из-за которого не стоит заморачиваться.
1 x slots casino
<a href=http://lnx.hotelresidencevillateresaischia.com/casamicciola/index.php?option=com_k2&view=itemlist&task=user&id=449117>http://lnx.hotelresidencevillateresaischia.com/casamicciola/index.php?option=com_k2&view=itemlist&task=user&id=449117</a> 1хслот зеркало Бездепы обычно предлагают с отыгрышем — мгновенно исключить выигранные свои нельзя. Перевод денег со счета несомненно возможен в того, как пользователь выполнит все требования казино, а сумма имеет быть выше установленного правилами лимита. Условиями промоакции фиксируются сроки, на которых клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней в активации.
1× slots зеркало
Условия вывода выигрыша. В неких заведениях для удачного вывода с бездепозитного бонуса достаточно пополнения баланса и подтверждения личности. В других же клубах, нужно количество раз прокрутить собственный депо.Для верификации номера телефонного, в личном профиле изберите опцию „Подтвердить номер телефона“ и введите в отвечающее поле код, полученный в sms-сообщении. 1×slots скачать на айфон <a href=http://igrat-online.ru/index.php?subaction=userinfo&user=ekixu>http://igrat-online.ru/index.php?subaction=userinfo&user=ekixu</a> Казино выводит средства лишь на что, эту платежную систему, с котрой был сделан депо. То есть, для вывода бездепозитного приза, Вам поначалу нужно восполнить счет. В неких клубах узкий список методов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с этих платежных способов, коие доступны для вывода.
1×slot официальный сайт
Бездепы обычно предлагают с отыгрышем — быстро исключить выигранные свои невозможно. Перевод денег со счета будет возможен последствии того, как пользователь выполнит все требования казино, а сумма имеет быть выше установленного правилами лимита. Условиями промоакции фиксируются сроки, протяжении коих заказчик вправе пользоваться предложением. Обычно они не превосходят нескольких дней в активации.Да, у даровых бонусов есть дефекты. Прежде всего, они обыкновенно не. Кроме такого, условия вейджера по ним постоянно строгие. Но таки неимение риска проделывает их очень красивыми для клиентов. <a href=http://zvezdjuchki.ru/user/Jasperlog/>http://zvezdjuchki.ru/user/Jasperlog/</a> 1×slots регистрацию более популярный вариант это Одним из поводов отдавать привилегию 1 либо иному заведению заключается в привлекательности предлагаемых промоакций и даровых предложений. Безвозмездные фриспины, выдаваемые без дела делать какой-нибудь лепта, в списке располагается далековато не в конце.
<b>Смотреть еще похожие новости:</b>
<a href=https://melhorlance.com.br/author/jamesbom/>1×slots регистрация на сайте</a>
<a href=http://forum.bedwantsinfo.nl/showthread.php?tid=791551>1хслотс официальный сайт зеркало</a>
<a href=https://forum.immortales-gilde.de/viewtopic.php?f=2&t=382781>1 xslots рабочее зеркало</a>
<a href=http://sz.80lvl.ru/viewtopic.php?f=8&t=2955>1х слот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для выбора азартного заведения Вы сможете воспользоваться списком наших казино с бонусами за регистрацию. На нашем веб-сайте мы выпустили перечень бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, собственно доля призов эксклюзивные и доступны только для гостей нашего вебсайта по-специальному промо-коду либо по оригинальной ссылке. Кроме того, для каждого бонуса мы подготовили подробный обзор, в Вы узнаете как получить и отыграть одобрение и как вывести собственный выигрыш с бездепа.
#1963 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пин ап казино 1×bet сайт 1×bet xyz <a href=https://rumafia.news/>casino riobet</a> какие казино букмекерская контора леонов <a href=https://m.repost.news/>pin up casino top top</a> ограбление казино скачать 1×bet на андроид бесплатно 7k casino зеркало рабочее игры казино порно с Арина и Дина Аверины, гимнастки мобильные букмекерские конторы сайте букмекерской конторы фонбет
DiskiPlus 1×bet официальный сайт 1×bet xyz DiskiPlus 1win casino <a href=https://diskiplus.ru>DiskiPlus сайт pin up casino</a> DiskiPlus порно с Гатагова Ольга Анатольевна DiskiPlus 1×bet xbet xyz <a href=https://www.diskiplus.ru/>DiskiPlus какие казино</a> DiskiPlus unlim casino DiskiPlus порно с Александр Головин (футбол) DiskiPlus казино рулетка DiskiPlus казино онлайн DiskiPlus casino зеркало сегодня рабочее DiskiPlus играющие казино DiskiPlus порно с Зырянова Анастасия Владимировна
#1964 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало
Самые новые бездепозитные бонусы в казино за регистрацию 2022 года с выводом прибыли находятся на данной страничке. Посетитель имеет расценить условия получения и начать играть на деньги без внесения депо. При данном игроку важно разуметь, на каких условиях и какими способами он сможет исключить приобретенный выигрыш. Для этого необходимо расценить перечень подключенных платежных систем. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots casino c2d ru</a> Даже не выиграв крупную необходимую, игрок интересно проведет время, изнутри изучит работу площадки, воспримет геймплей автоматов. Все это без каких-то финансовых рисков. Быть в курсе лучших промоакций с. Достаточно регулярно учить перечень новых интернет казино с выводом бонуса без депозита в данном разделе. <a href=https://collectednotes.com/lexxeagle/transforming-concepts-into-reality-professional-3d-rendering-services>https://collectednotes.com/lexxeagle/transforming-concepts-into-reality-professional-3d-rendering-services</a> скачать 1×slots официальный сайт <a href=http://www.pk10zc.com/space-uid-354642.html>http://www.pk10zc.com/space-uid-354642.html</a> Прибывшие на аккаунт финансы бездепозитные призы предназначаются, в основном, только для новоиспеченных пользователей, коие ранее не имели собственного аккаунта в данном казино. Исходя из этого, случае раньше у игрока был изготовлен депо, то, по всей вероятности, у него больше не несомненно возможности рассчитывать на получение такого бонуса в конкретном заведении.Маркетинговая политика всех игорных интернет-клубов обязана носить различный характер. И в вознаграждения на депозит работают чтобы, чтобы, дабы стимулировать вносить депозиты и поощрять уже быть пользователей, то бездепозитный бонус в казино или приз за регистрацию в казино, этого всего, рассчитан на расширение базы потребителей.
рабочее зеркало 1×slots
1×slots зеркало сайта Пoдтвepдить личнocть посетителя. Для удачного вывода средств, необходимо подтвердить лицо посетителя. Нa этaпe вepификaции пpoфиля, сотрудники службы безопасности должны убедиться, что у игрока всего лишь раз аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не может исключить собственный выигрыш, случае у него будет несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы.Акции распространяются как на все забавы казино, например и на узкий список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino прочие. Промо может обхватывать разработки 1-го производителя. Бездеп не пересекается с иными акциями казино. Если на сайте предусмотрен кэшбек, он не начисляется за ставки, сделанные бонусными деньгами. Для идентификации платежных реквизитов игрока имеет понадобиться пополнение счета на минимальную сумму. <a href=https://aiia.su/index.php?subaction=userinfo&user=Ralphrew>https://aiia.su/index.php?subaction=userinfo&user=Ralphrew</a> 1х слот регистрация в 1×slots casino При верном подходе бездепы — это прекрасный способ выступать на средства без траты собственных средств. Есть некоторое рекомендаций, следуя которым можно извлечь максимум пользы из похожих промоакций казино. Играть следует лишь на лицензированных площадках. Скриптовые сайты не дурачат с бонусными услугами, хотя и используют пиратский софт с модифицированным ГСЧ. Выиграть на этих автоматах нереально.Внесение депо – Будьте готовы восполнить счет после отыгрыша бонуса. Это стандартное требование правил для данного на промо-акций. Лучше заранее уточнить, какую необходимую нужно будет вносить на счет. Как правило, речь идет о наименьшем депозите, хотя вы должны быть убеждены, собственно он для по карману.
1×slots рабочее зеркало
Получить приветственный приз шансы только новые клиенты онлайн-казино. Способы описаны в критериях промоакции каждого легального казино, почаще всего это: Большинство интернет-казино из нашего топ-10 готовы повеселить вас эксклюзивными промоакциями. Читайте о них в обзорах и на форуме. <a href=http://ru.monumentefunerare.md/index.php?subaction=userinfo&user=DoctorLazutaOn>http://ru.monumentefunerare.md/index.php?subaction=userinfo&user=DoctorLazutaOn</a> Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша призов. Заведения всегда устанавливают максимальную ставку, допустимую по условиям вейждера. 1×slots официальный сайт зеркало Будьте внимательнее при ознакомлении с правилами во избежание появления конфликтных ситуаций с казино, когда в отыгрыша бездепа для не дадут исключить солидную сумму выигрыша.
1×slots актуальное зеркало
Фриспины. Бесплатные вращения предусмотрены для использования в видео-слотах. Внимательно читайте обстоятельства – они часто выдаются для неких машин. В зависимости от клуба вам создавать определенное количество ставок. Кстати, современные игорные жилища дают вероятность заводить «одноруких бандитов». <a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=71210>1х слот 1хслотс регистрация перейти на 1×slots</a> На бонусные начисления все быть установлены дополнительные ограничения, коие Вы не приняли при отыгрыше. Пока бонус всецело не отыгран — деньги из казино не выводятся. казино 1×slots официальный сайт <a href=https://www.vforum.org/forum/members/26806.html>https://www.vforum.org/forum/members/26806.html</a> Максимальный объем ставки, который нельзя превышать же бонус не будет всецело отыгран. В случае нарушения сего верховодила, бонус и выигрыш с него станут аннулированы.Акции распространяются как на все забавы казино, например и на узкий перечень. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino прочие. Промо возможность охватывать разработки одного производителя. Бездеп не пересекается с другими акциями казино. Если на сайте учтен кэшбек, он не начисляется за ставки, изготовленные бонусными средствами. Для идентификации платежных реквизитов игрока имеет понадобиться пополнение счета на наименьшую сумму.
1×slot регистрация
Если вы избираете проверенное лицензионное интернет казино и выполните все обстоятельства получения бездепозитного бонуса, проблем с получением подарка у Вас не возникнет. <a href=http://orbitasmd.ru/index.php?subaction=userinfo&user=humorousunderst>http://orbitasmd.ru/index.php?subaction=userinfo&user=humorousunderst</a> Создание аккаунта. На веб-сайте казино нужно обнаружить регистрационную форму и наполнить пустующие поля собственными данными. Иногда на этом шаге потребуется показать лишь адрес электрической почты и пароль, но почаще надобно наполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д.). Нужно указывать только реальные данные, потому впоследствие они станут испытаны.При пользовании бездепозитным бонусом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют некоторое обликов лимитов: 1× slots официальный Бездепы обыкновенно предлагают с отыгрышем — мгновенно вывести выигранные свои невозможно. Перевод денег со счета несомненно возможен последствии как, как юзер выполнит все требования казино, а сумма имеет быть выше установленного правилами лимита. Условиями акции фиксируются сроки, в течение коих заказчик вправе воспользоваться предложением. Обычно они не превосходят нескольких дней в активации.
<b>Смотреть еще похожие новости:</b>
<a href=https://technique-tp.com/forum/viewtopic.php?t=4997>1×slots регистрацию более популярный вариант это</a>
<a href=http://turkteam.10tl.net/member.php?action=profile&uid=2012>1×slots коды</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Представленные на данной странице лучшие бездеп бонусы в казино за регистрацию в 2022 году имеют оптимальные условия. После кропотливого анализа редакция портала составила рейтинг спецпредложений, в посетители Casino.ru все сортировать перечень по нескольким аспектам: по сумме, вейджеру, максимальной сумме вывода и т.д. Зарегистрироваться в казино по специальной ссылке или с бонусным кодом. Подтвердить контактные данные (номер аппарата и электрическую почту). Для подтверждения номера телефона необходимо в собственном профиле показать собственный номер и надавить кнопку „Подтвердить номер аппарата“, далее Вы получите sms-сообщение с кодом, который необходимо установить в отвечающее поле. Для подтверждения электронной почты, перейти по интенсивной ссылке в послании от казино.
#1965 internetGephttps://domashij-internet-msk003.ru
узнать интернет по адресу <a href=https://domashij-internet-msk003.ru>domashij-internet-msk003.ru</a> тарифы интернет и телевидение москва
#1966 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up букмекерская контора лучшие бесплатные онлайн казино <a href=https://rumafia.news/>слот casino</a> симулятор казино 1×bet сайт 1×bet xyz <a href=https://th-royalgclub.com/>1×slots casino</a> vodka casino казино смотреть онлайн бесплатно 7k casino зеркало porno Юлия Канакина, скелетонистка порно с Баталина Ольга Юрьевна сайт pin up casino casino скачать приложение
DiskiPlus 7k casino DiskiPlus 1×bet слоты официальный сайт <a href=https://www.diskiplus.ru>DiskiPlus porno Игорь Акинфеев (футбол)</a> DiskiPlus скачать сайт букмекерской конторы DiskiPlus 7k casino зеркало рабочее <a href=https://diskiplus.ru>DiskiPlus 1×bet официальный xbet</a> DiskiPlus лучшая казино DiskiPlus порно с Антропова Валентина Викторовна DiskiPlus спорт букмекерская контора DiskiPlus cometa casino DiskiPlus casino скачать приложение DiskiPlus casino рабочее DiskiPlus Мухтиярова Елена Вячеславовна порно
#1967 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
демо казино Комарова Наталья Владимировна порно <a href=https://7club7.com/>casinos winning</a> 1×bet xbet r7 casino <a href=https://slon-ru.com/>букмекерская контора зенит</a> Нургалиева Эльвира Рамиловна порно casino официальный зеркало porno Анастасия Янькова, боксерка пина casino где казино porno Марина Александрова 1×bet зеркало рабочее
DiskiPlus ramenbet casino DiskiPlus casino 7k рабочее <a href=https://diskiplus.ru>DiskiPlus porno Дарья Клишина</a> DiskiPlus порно с Евгения Медведева, фигуристка DiskiPlus porno Дарья Клишина <a href=https://diskiplus.ru/>DiskiPlus букмекерские контора ап</a> DiskiPlus почему в казино не бывает настенных часов DiskiPlus 1×bet сайт DiskiPlus 1×bet официальный скачать DiskiPlus букмекерская контора зенит DiskiPlus букмекерская контора вход DiskiPlus 1×bet приложение DiskiPlus сайте букмекерской конторы фонбет
#1968 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
kometa casino 1×bet телефон <a href=https://rucriminal.info/>кент казино</a> 7k casino бонус pin up casino <a href=https://krtka.info/>букмекерская контора фонбет</a> porno Юлия Пересильд Шевцова Татьяна Викторовна порно бесплатное казино Шевцова Татьяна Викторовна порно 7k casino скачать Яровая Ирина Анатольевна порно 7k casino зеркало
DiskiPlus казино сегодня DiskiPlus казино 5 <a href=https://www.diskiplus.ru>DiskiPlus казино ли</a> DiskiPlus порно с Алина Загитова DiskiPlus casino бонус <a href=https://www.diskiplus.ru>DiskiPlus про казино</a> DiskiPlus букмекерская контора фонбет официальный DiskiPlus casino скачать приложение DiskiPlus 1×bet официальный сайт DiskiPlus 1×bet зеркало на сегодня 1×bet xyz DiskiPlus казино 5 DiskiPlus Радченко Светлана Юрьевна порно DiskiPlus Александра Бортич
#1969 Charlesgunnyhttp://filmkachat.ru
1×slots сайт
Бонус начисляется игроку сразу после регистрации и прохождения верификации в казино и не требует от клиента внесения депо. Как правило, объем бонуса в схожем случае достаточно скромный, однако позволяет новеньким познакомиться с забавой без риска настоящими средствами. <a href=http://filmkachat.ru/>1×slots официальный demo регистрация в 1×slots casino</a> <a href=https://cgscholar.com/community/community_profiles/3d-rendering-services/community_updates/234376>https://cgscholar.com/community/community_profiles/3d-rendering-services/community_updates/234376</a> 1×slots зеркало <a href=http://l-avt.ru/support/dialog/?PAGE_NAME=profile_view&UID=74250>http://l-avt.ru/support/dialog/?PAGE_NAME=profile_view&UID=74250</a>
1×slots регистрация 1×slotscasino 56 online
Лишь пользующиеся и знаменитые азартные заведения все позволить себе выдавать бездепы в виде дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, которые возможно истратить в лучших аппаратах с высокой отдачей.Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы замечена возможность вывести выигрыш. <a href=https://mit-bbs.com/viewtopic.php?t=709011>1× slots регистрация в 1×slots casino</a> 1×slots казино зеркало <a href=https://forums.twcpilots.com/member.php?action=profile&uid=1621>https://forums.twcpilots.com/member.php?action=profile&uid=1621</a> 1×slots casino зеркало Похожим образом трудится 3-ий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя или в связи с получения им VIP-статуса. Подарок предоставляется последствии воззвания в поддержку и проверки.Фриплей-бонусы. Бонусы за благотворительную забаву есть лишь в неких клубах. Они зачисляются сразу после сотворения профиля и срабатывают недолговременное время. Если у вас нет медли потратить свои, они просто завершатся. Что касается медли, в большинстве случаев призы срабатывают протяжении одного часа.
1×slots промокод при регистрации
Лишь пользующиеся и известные азартные заведения все разрешить себя раздавать бездепы повторяющий добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, коие возможно истратить в лучших аппаратах с высокой отдачей.Сроки активации бонуса устанавливаются каждым казино, но почаще всего они не превышают недели с момента получения. Игроку обязательно нужно применять бездеп протяжении указанного срока, в ином случае приз просто пропадет. Каждый бонус можно получить только раз один, потому если не использовать бездеп в срок, у игрока не будет 2 шанса им пользоваться. При выполнении условий отыгрыша и верификации, деньги с бонусного счета переводятся на главный и шансы быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции находятся от выбранной платежной системы. <a href=http://mariland.org/index.php?subaction=userinfo&user=blackmiscellany>http://mariland.org/index.php?subaction=userinfo&user=blackmiscellany</a> 1×slots casino регистрация 1×slots review live
1×slots официальный зеркало рабочее
После потребуется привнести идентификационный платёж. Это стращает новичков больше всего. Нужно сделать минимальный депо в 100–500 руб. Таким образом служба защищенности убедиться в, собственно платёжный способ принадлежит Вам. Данная процедура необходима для обеспечения безопасности игровых счетов. Пример, Ваш аккаунт взломают и выведут свои на собственный кошелёк. Будет крайне неприятно. Поэтому верификация платёжной системы, это важный момент. При забаве на бонусные свои запрещается выступать в игровые автоматы с современным джекпотом и игры из радела live casino. Кроме такого, кое-какие казино дают бездеп на один либо некоторое определенных слотов, и в других забавах Вы не сможете на их играть.Такой казино приз без депо за регистрацию выдается игроку на час и активно употребляется данное предложение с 2017 года. Это словно какая-то конспирация одобрения под бездепозитный. Суть всего сего сводится к тому, что геймеру на час выдается, к примеру, 1000 долларов, а реклама утверждает про, что каждой выигрыш можно несомненно дальнейшем забыть при для. Но в играющий серьезно отнесется к данному предложению, то он просто потеряет время. Ведь геймеру надо(надобно) будет выступать не в аккаунте, а в тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (и всей тысячи) в верховодила вступят определенные условия, где будет сказано, что наибольшей суммой победы может быть только двести долларов и средства можно применять лишь в качестве бонуса на 1-ый лепта с вейджером 25 от суммы гонорары плюс сам депозит. По итогу получится, что игрок выигрывал для 200% бонус с вейджером на конкретную сумму. Короче говоря, это все не вашего времени. 1×slots регистрацию процедура займет всего лишь <a href=http://radshir.com/list/index.php?subaction=userinfo&user=GregorySog>http://radshir.com/list/index.php?subaction=userinfo&user=GregorySog</a> При исполнении критерий отыгрыша и верификации, средства с бонусного счета переводятся на основной и все быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции находятся от выбранной платежной системы.Иногда в бездепа, казино дарует минимальный приз (до 50 рублей), ради которого не заморачиваться.
1×slots официальный сайт мобильная версия скачать
Онлайн гемблинг развивается с любым днем все больше и больше, новые бренды создаются не по денькам а по часам. Новые интернет казино делают вступительные акции для игроков, для того что бы зарекомендовать себя, и тем наиболее предлагают бездепозитные бонусы за регистрацию, собственно бы не упустить эту возможность — как воспользоваться свежим бездепом, рекомендуем навещать наш вебсайт как возможно почаще, самое вкусное и свежие будет добавляться в этом же списке.Отзывы читателей о бонусных промоакциях посодействуют составить впечатление, хотя не забывайте о субъективности собственных объяснений. Если площадка дарует бездеп за регистрацию, то процедура его получения ординарна. Нужно только завести акк на сайте и активировать его, подтвердив адресок электронной почты, номер аппарата или другие данные, коие просит оператор. Перед данным нужно убедиться, собственно юзер располагается на официальном сайте казино, не на жульнической площадке.Условия отыгрыша приза. Если Вы планируете заработать на бездепозитном бонусе, то в первую очередь внимание на велечину вейджера и срок, который дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть приз и вывести выигрыш. <a href=https://www.ipixels.com/profile/95154/Robertgah>https://www.ipixels.com/profile/95154/Robertgah</a> 1×slots регистрация то дальше необходимо пройти Итак, дабы безвозмездные бонусные кредиты трансформировались в настоящие деньги, которыми вам управлять по своему усмотрению, их надо(надобно) отыграть. Вейджер по уточнять в правилах онлайн-казино.
<b>Смотреть еще похожие новости:</b>
<a href=http://aficionado.pl/showthread.php?189567–1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F&p=210698>1×slots зеркало регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Помимо остального, для вывода средств по бездепу необходимо привнести на счёт собственный первый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало вероятную необходимую, в чего вывод средств станет доступен.
#1970 Ремонт сетевых хранилищ в Челябинскеhttps://chelk.pdacenter.ru/remont-setevyh-hranilishh.html
pdacenter.ru – сервис по ремонту бытовой техники <a href=https://chelk.pdacenter.ru/remont-setevyh-hranilishh.html>Ремонт сетевых хранилищ в Челябинске</a> в официальном сервисном центре PDACENTER. Наши инженеры выполняют ремонт любой сложности по дотупным ценам!
#1971 1win_xhprhttp://1win5011.ru
1win <a href=https://www.1win5011.ru>https://www.1win5011.ru</a> .
#1972 internetGephttps://domashij-internet-msk002.ru
интернет тарифы москва <a href=https://domashij-internet-msk002.ru>domashij-internet-msk002.ru</a> подключить интернет тарифы москва
#1973 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino рабочее зеркало porno Юлия Канакина <a href=https://rumafia.news/>казино вулкан</a> porno Мария Шарапова casino бонус <a href=https://repost.news/>казино пину</a> букмекерские контора ап casino ru win win casino Анна Михалкова человек казино porno Елизавета Туктамышева какие казино
DiskiPlus 1×bet сейчас DiskiPlus top casino <a href=https://diskiplus.ru/>DiskiPlus скачать pin casino</a> DiskiPlus порно с Анна Калинская (теннис) DiskiPlus casino приложения <a href=https://www.diskiplus.ru/>DiskiPlus пин casino</a> DiskiPlus 1×bet зеркало xbet DiskiPlus 1×bet на сегодня DiskiPlus porno Игорь Акинфеев (футбол) DiskiPlus сайт казино зеркало DiskiPlus слот casino DiskiPlus букмекерская контора бесплатно скачать DiskiPlus порно с Матвей Сафонов (футбол)
#1974 Charlesgunnyhttp://filmkachat.ru
1×slot казино зеркало
Для получения бездепа нужно пригласить в забаву по реферальной ссылке свежего клиента: он должен зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и восполнить счёт на необходимую, указанную в критериях промоакции.4. Заберите презент. Чаще всего бонус активизируется незамедлительно в регистрации. Но случаются истории, когда нужно забежать в собственный офис либо написать в службу. <a href=http://filmkachat.ru/>1×slots мобильная версия войти казино</a> Далее требуется отыграть вагер и вывести выигрыш. Игрокам без опыта крупно подфартило, меня получить десятки презентов за одну регистрацию. Если не смогли получить Бездепозитный бонус, не волнуйтесь. Обратитесь в интернет чат, оператор поможет исправить. <a href=https://localendar.com/event?DAM=PublishedEvent&m=3152909&event_id=3&calendar_id=3152909&more_info=N&export_date=Dec%2014,%202031&category=8>https://localendar.com/event?DAM=PublishedEvent&m=3152909&event_id=3&calendar_id=3152909&more_info=N&export_date=Dec%2014,%202031&category=8</a> В игровых клубах без лицензии Вы покупаете „кота в мешке“ и когда неоднозначных обстановок нет возможности куда-то пожаловаться и обосновать свою правоту. 1×слотс казино <a href=http://www.ironbodies.com/userinfo.php?uid=63442>http://www.ironbodies.com/userinfo.php?uid=63442</a>
1хслотс зеркало на сегодня
Многие игроки, оценив перечень казино, остаются выступать в нем и далее ? на это и направлено любое промо. Постоянные посетители заносят депозиты и делают ставки, обеспечивая долгосрочную прибыль оператора. То есть, казино выдают бездепы новым юзерам для формирования приклнной аудитории.Шаг 4. Активация. Внимательно изучите условия, информацию по ограничениям и сроке деяния бонусного предложения. Разобравшись с правилами, можно активировать бонус в собственном кабинете (от ? с внедрением промокода) либо по запросу в саппорт. 1×slots casino зеркало Главным моментом в возникновении этих вознаграждений состоит что, нет, собственно пустив их в ход, геймер ничем не рискует и в последствии никому ничего не несомненно обязан (не зависимо, получит ли он спасибо бонусам какой-либо выигрыш или мгновенно спустит все лишь собственно прибывшие деньги). То есть, казино снабжает игрока вероятностью на дармовой основе играть во различные слоты даже спонсирует игру.Во всех законных онлайн-казино Беларуси нужно подтверждение паспортных данных для игры — это заявка правительства страны. <a href=http://a96549hg.bget.ru/user/DavidBlery/>http://a96549hg.bget.ru/user/DavidBlery/</a> Сразу последствии активации промокода можно пользоваться презентом. Как теснее упоминалось, бонусы посещают трёх обликов – фриспины, кредиты и фриплей-бонусы.На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не сможете активировать и получить бездепозитный приз. 1хслотс официальный сайт зеркало Бездепы шансы входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами.
1×slots официальный сайт скачать
После получения бонуса вывод средств для посетителя несомненно недосегаем до тех пор, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо чета недель. Выводить деньги игрок сможет лишь после отыгрыша. Акционные предложения от казино существуют в различных форматах. Часто призы даются в размен на депозит. Игрок заносит платеж и получает средства, бесплатные вращения прочие одобрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — картина приза, кот-ый гарантирован за исполненье конкретных поступков на веб-сайте:Способы получения бездепа различаются в зависимости от облика приза, кот-ый приглянулся игроку. Но вас в любом случае нужно быть зарегистрированным в законном онлайн-казино и подтвердить свою личность. В общем виде пошаговая аннотация для получения бездепозитного бонуса смотрится например: <a href=http://www.engel-und-waisen.de/index.php/%D0%A4%D0%BB%D0%B8%D1%80%D1%82_%D0%97%D0%BD%D0%B0%D0%BA%D0%BE%D0%BC%D1%81%D1%82%D0%B2_%D0%A1_%D0%9D%D0%BE%D0%BC%D0%B5%D1%80%D0%B0%D0%BC%D0%B8>http://www.engel-und-waisen.de/index.php/%D0%A4%D0%BB%D0%B8%D1%80%D1%82_%D0%97%D0%BD%D0%B0%D0%BA%D0%BE%D0%BC%D1%81%D1%82%D0%B2_%D0%A1_%D0%9D%D0%BE%D0%BC%D0%B5%D1%80%D0%B0%D0%BC%D0%B8</a> Если при регистрации указать промокод, можно гарантировано получить бонус. Где взять ваучер? Посетите тематику блоги либо форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В заключительнее время игорные жилища начали афишироваться в кинокартинах и телесериалах. Присмотритесь и скорее заметите промокод, который принесёт 500 или 1 000 бонусных рублей. 1×slots рабочее зеркало на сегодня
1 xslots рабочее зеркало
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5306/#comment-644951>1х слотс зеркало регистрация в 1×slots casino</a> Если вы опытный игрок, вы обязаны знать, что бонус без депозита – редчайшая находка. Тем не менее, мы неделю изучаем интернет, чтобы найти вам превосходнейшие бездепозитные предложения. Допустим, за регистрацию вы получили бездеп в объеме 2 000 рублей с вейджером х30. В данном случае светит устроить ставок, на совместную необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать настоящие средства. Однако не запамятовывайте, что с каждого дара получится вывести определённую сумму (чаще всего менее $200). 1× слот зеркало <a href=http://classicjam.net/bbs/board.php?bo_table=free&wr_id=728535>http://classicjam.net/bbs/board.php?bo_table=free&wr_id=728535</a> При регистрации что либо ином интернет игральном заведении — вам дается раз шанс испытать свою удачу не внося средства монеты. Замечу что такую поощрительную услугу деют не все онлайн игровые площадки, а только щедрая середина(средина) из их. Которые мы подготовили для Вас в нашем списке.
1×slots регистрация на 1хслотс
Фриспины без депозита либо вспомогательные свои посодействуют поближе познакомиться с игровой платформой и её функциями. За счёт подарков можно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за игры против живых крупье.Бездепозитный бонус казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби избранного заведения, сориентироваться в выборе игр и выяснить качество работы саппорта. Довольно нередко, начиная игровой процесс, игрок уже отказывается останавливаться и делает настоящий вклад. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть безвозмездно вероятно как один таки с бонусом за регистрацию без необходимости вносить депозит. На бонусные начисления имеют быть установлены дополнительные ограничения, которые Вы не приняли при отыгрыше. Пока бонус полностью не отыгран — средства из казино не выводятся.Для вывода средств приз нужно несомненно отыграть законам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариантами отыгрыша бездепозитного приза до его получения, чтобы избежать конфликтных ситуаций. <a href=https://login.virtuoso.com/LogIn/ChangePassword.aspx?returnUrl=https://raovat49.com/s/shisha-tobacco-5713143>https://login.virtuoso.com/LogIn/ChangePassword.aspx?returnUrl=https://raovat49.com/s/shisha-tobacco-5713143</a> Игрокам не принимать приветственный приз как гарантированный способ получить крупный выигрыш, но это замечательная возможность без затрат расценить функционал казино. 1×slots регистрацию более популярный вариант это
<b>Смотреть еще похожие новости:</b>
<a href=https://www.fromrus.su/index.php?/topic/60259–1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D0%B2%D0%B8%D0%B4%D0%B5%D0%BB%D0%B8-%D1%82%D0%B0%D0%BA%D1%83%D1%8E-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8E-%D0%BD%D0%B0/>1×slots зеркало видели такую регистрацию на</a>
<a href=https://mami-forum.de/forum.php>1х слот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Такой бесплатный эквивалент средств зачисляется на профиль юзера последствии воплощения притязаний и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений вероятен лишь в воплощения вейджеровых критерий. Для получения предоставленных призов для понадобиться — ПК либо мобильное прибор, и остальное дело за малым.
#1975 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино рояль Мухтиярова Елена Вячеславовна порно <a href=https://kompromat1.online/>пин ап букмекерская контора</a> 1×bet официальный сайт 1×bet xyz pin casino <a href=https://rumafia.news/>ставки на спорт букмекерские конторы</a> зеркала казино сайт pin up casino официальные сайты казино скачать 1×bet на андроид casino сайты какие казино 7k casino зеркало
DiskiPlus пинко casino DiskiPlus porno Анна Сидорова, керлингистка <a href=https://www.diskiplus.ru/>DiskiPlus porno Анастасия Янькова, боксерка</a> DiskiPlus казино на деньги DiskiPlus букмекерская контора бетсити <a href=https://www.diskiplus.ru/>DiskiPlus пари букмекерская контора</a> DiskiPlus пина букмекерской конторы DiskiPlus пин casino DiskiPlus фильмы казино рояль DiskiPlus часы казино DiskiPlus букмекерская контора без DiskiPlus Фастова Елена Владимировна порно DiskiPlus казино большая
#1976 mostbet_oeMthttp://mostbet6032.ru
мостбет вход <a href=http://mostbet6032.ru/>мостбет вход</a> .
#1977 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на сайте
Денежные свои. Третий приз за регистрацию без депо – наличные. К раскаянию, только известные и пользующиеся клубы могут уяснить деньги в руб. Или долларах. С их поддержкою появится насладиться любой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед этим необходимо исполнение определенных критерий.Создание аккаунта. На сайте казино необходимо открыть регистрационную форму и наполнить пустые поля собственными данными. Иногда на данном этапе требуется указать только адресок электронной почты и пароль, но чаще надобно заполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д.). Нужно свидетельствовать только настоящие данные, поскольку впоследствие они станут испытаны. <a href=http://filmkachat.ru/>1×slots регистрация</a> С такими простыми советами каждое казино с бонусом за регистрацию способно принести в разы больше выгоды и полезности.Возможность протестировать свежие игры, не рискуя собственными своими и разработать личную тактику игры. <a href=https://manifold.garden/forums/index.php?u=/topic/636/%D0%9A%D0%B0%D0%BA%20%D1%80%D0%B0%D0%B1%D0%BE%D1%82%D0%B0%D0%B5%D1%82%20%D0%B0%D0%B2%D1%82%D0%BE%D0%B2%D1%8B%D0%BA%D1%83%D0%BF%20%D0%B2%20%D0%A5%D0%B0%D1%80%D1%8C%D0%BA%D0%BE%D0%B2%D0%B5>https://manifold.garden/forums/index.php?u=/topic/636/%D0%9A%D0%B0%D0%BA%20%D1%80%D0%B0%D0%B1%D0%BE%D1%82%D0%B0%D0%B5%D1%82%20%D0%B0%D0%B2%D1%82%D0%BE%D0%B2%D1%8B%D0%BA%D1%83%D0%BF%20%D0%B2%20%D0%A5%D0%B0%D1%80%D1%8C%D0%BA%D0%BE%D0%B2%D0%B5</a> 1×slots рабочее зеркало на сегодня <a href=http://vkusno-legko.com/bitrix/click.php?goto=http://lisacrown.ru/bitrix/rk.php?goto=http://proxy.lib.uwaterloo.ca/login?url=https://teletype.in/@urist555/_lAWB3gZ2NZ>http://vkusno-legko.com/bitrix/click.php?goto=http://lisacrown.ru/bitrix/rk.php?goto=http://proxy.lib.uwaterloo.ca/login?url=https://teletype.in/@urist555/_lAWB3gZ2NZ</a>
1×slots зеркало регистрация то дальше необходимо пройти
Автоматическая активация взгляд самой удобной, хотя ручной метод имеет перед ней превосходства. Прежде чем применять вознаграждение от казино, стоит заблаговременно определить, сколько медли потребуется на выполнение всех критерий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деяния приза. 1×slots зеркало которую указывали при регистрации кстати Автоматы непопросту числятся наиболее известным азартным весельем. Чтобы усвоить управление и правила, понадобится всего количество мин. Ваша задача устроить ставку, найти число трудящихся линий и можно крутить барабан. Если на выпадет выигрышная комбинация – вы выиграли! С этой задачей вас помогут управится бездепозитные призы казино.Бонус за регистрацию в казино без депо с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша имеет понадобиться сделать ставки на сумму, в количество десятков раз превосходящую сумму бонуса либо выигрыша. <a href=http://clips.tj/user/StevenIllet/>http://clips.tj/user/StevenIllet/</a> 1×slots регистрация 1×slots casino c2d ru
casino 1×slot
После потребуется привнести идентификационный платёж. Это стращает начинающих больше всего. Нужно устроить минимальный депозит в 100–500 руб. Таким образом служба безопасности убедиться сомнений, что платёжный метод принадлежит Вам. Данная процедура необходима для обеспечивания защищенности игровых счетов. Пример, Ваш акк взломают и выведут свои на свой кошелёк. Будет очень неприятно. Поэтому верификация платёжной системы, это необходимый момент. <a href=http://photoconnor.space/PHPFusion/profile.php?lookup=12725>http://photoconnor.space/PHPFusion/profile.php?lookup=12725</a> В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, нужно адресоваться в саппорта через лайв-чат на сайте казино. 1×slots бездепозитный бонус за регистрацию Бездепозитный бонус – это экономическое вознаграждение, которое выдается участнику игры в казино, для его вербования и появления заинтересованности. Любой посетитель, который соответствует условиям выдачи подобного бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое одобрение считается более эффективным способом, дающим возможность стартовать в игре, не вкладывая собственных вещественных средств.
1хслот 1хслотс регистрация перейти на 1×slots
Онлайн-казино кропотливо продумывают бонусные условия, коие необходимо изучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и другие лимитирования. <a href=http://link.5nx.ru/viewtopic.php?f=5&t=12214>1хслотс зеркало</a> Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, a лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Некоторые веб-сайты, до чем провести регистрацию игроков, предлагают ответить на несколько базисных вопросов. Цель проведения сходственной викторины – выявить случайных людей, коие не имеют представления о покере, и не разрешить получения ими призов. Если гость уже играл в казино, то ответить на полтора 10 простых вопросов будет несложно. Очень часто, ответы можно отыскать на официальных веб-сайтах данных учреждений. Создание аккаунта. На сайте казино нужно обнаружить регистрационную форму и наполнить пустопорожние поля собственными данными. Иногда на данном этапе потребуется указать лишь адресок электронной почты и пароль, хотя чаще хотелось заполнить анкету персональной информацией (ФИО, дата рождения, место проживания и т.д. ). Нужно свидетельствовать только настоящие данные, потому впоследствие они будут испытаны.1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, если не хотите замерзнуть жертвой жуликов либо впустую потратить время; 1 хслот регистрация в 1×slots casino <a href=https://exsite.su/user/PorsedropOt>https://exsite.su/user/PorsedropOt</a> Рассмотрим принцип его действия на случае. Допустим, вы зарегистрировались и возымели $10 no deposit bonus с вейджером х50. Это значит, собственно выигранные средства возможно будет выводить не раньше, чем после как, как общая сумма ставок достигнет $500.Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке нужно пополнить счет в казино. Для депозитных бонусов, данная процедура не нужна, например как депо уже сделан.
1хслот скачать
Призовые начисления без депо имеют предоставляться для роли в турнирах онлайн казино. Потратить перечисленные средства возможно самая в этой акции. Условия их проведения включают в себя лимитирования на список игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться таким предложением, какого-либо изучить его верховодила.Фриспины. Бесплатные вращения предусмотрены для применения в видео-слотах. Внимательно читайте обстоятельства – они нередко выдаются для некоторых машин. В зависимости от клуба возможность делать конкретное количество ставок. Кстати, современные игорные дома дают вероятность заводить «одноруких злодеев». <a href=http://autoschool-progress.kz/index.php?subaction=userinfo&user=absorbingcyst61>http://autoschool-progress.kz/index.php?subaction=userinfo&user=absorbingcyst61</a> Бездепы имеют входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами. 1×slots промокод при регистрации
<b>Смотреть еще похожие новости:</b>
<a href=https://www.formulersupport.com/Thread-1×slots-%D0%BF%D0%BE%D0%B4%D1%82%D0%B2%D0%B5%D1%80%D0%B4%D0%B8%D1%82-%D0%B2%D0%B0%D1%88%D1%83-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8E-%D0%B5%D1%81%D0%BB%D0%B8-%D0%B3%D0%BE%D0%B2%D0%BE%D1%80%D0%B8%D1%82%D1%8C–238198>1×slots подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На страничке представлены бездепозитные бонусы за регистрацию в казино редчайшая награда за которой гонятся все игроки как новички, например и профессионалы. Мы тоже уделяем огромное внимание на присутствие призов при составление рейтинга казино на средства. Бездепозитный приз это возможность играть бесплатно и выиграть настоящие деньги.
#1978 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Артемий Панарин (хоккей) букмекерская контора зенит <a href=https://vestnik-jurnal.com/>казино рояль смотреть</a> 1×bet xbet xyz bitz casino <a href=https://7club7.com/>скачать 1×bet</a> официальные букмекерские конторы балтбет букмекерская контора игры казино Крючкова Полина Викторовна порно 7k casino сайт vodka casino Ирина Горбачева
DiskiPlus пин ап casino pin DiskiPlus букмекерская контора зенит <a href=https://www.diskiplus.ru>DiskiPlus букмекерские конторы pin</a> DiskiPlus порно с Евгения Медведева, фигуристка DiskiPlus pin up casino <a href=https://diskiplus.ru>DiskiPlus up casino</a> DiskiPlus vavada casino DiskiPlus ев казино DiskiPlus Хорова Наталья Александровна порно DiskiPlus 1×bet слоты DiskiPlus casino регистрации DiskiPlus казино 5 DiskiPlus порно с Каролина Севастьянова
#1979 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Анна Сидорова, керлингистка 1×bet сайт 1×bet xyz <a href=https://rucriminal.info/>порно с Ирина Сидоркова</a> порно с Илюшникова Татьяна Александровна букмекерские контора ап <a href=https://rhymes-punches.com/>гта онлайн казино</a> 1×bet 1 1win casino casino daddy букмекерская контора мостбет скачать 1×bet на андроид бесплатно retro casino porno Мира Андреева (теннис)
DiskiPlus казино на деньги DiskiPlus реального казино <a href=https://diskiplus.ru>DiskiPlus pin up casino зеркало</a> DiskiPlus cometa casino DiskiPlus porno Илона Маркова, хоккеистка <a href=https://www.diskiplus.ru>DiskiPlus casino промокод</a> DiskiPlus казино можно DiskiPlus суть казино DiskiPlus 1×bet слоты официальный сайт DiskiPlus porno Елизавета Туктамышева DiskiPlus букмекерская контора мостбет DiskiPlus retro casino DiskiPlus фильмы казино рояль
#1980 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация
Маркетинговая политического всех игорных интернет-клубов обязана одевать разнородный нрав. И случае вознаграждения на депо служат для того, чтобы стимулировать заносить депозиты и поощрять уже быть юзеров, то бездепозитный бонус в казино или приз за регистрацию в казино, прежде всего, рассчитан на расширение базы покупателей. <a href=http://filmkachat.ru/>1 x slots</a> <a href=https://heylink.me/kalinka0588/>https://heylink.me/kalinka0588/</a> Бездепозитные бонусы начисляются лишь один один. Не стоит открывать свежие аккаунты, чтобы получить их повторно. Служба безопасности казино непременно выявит «левого» соучастника и перекроет. Если гость выполнит нужные притязания, отыграет собственную ставку и решит исключить личный выигрыш, то ему нужно сведению, что казино обязательно востребует предоставить ксерокопии личных документов, чтобы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои исключить не удастся. 1×slots официальный сайт зеркало <a href=https://fakenews.win/wiki/User:MatthiasCasteel>https://fakenews.win/wiki/User:MatthiasCasteel</a> Чаще всего казино бонус за регистрацию без депозита даёт возможность запустить каждой машина. Но лучше внимательно ознакомиться с условиями. Иногда для забавы доступны лишь определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, чем начать знакомство с миром пыла именно с «одноруких бандитов».В каждом казино с бездепозитным призом предусмотрены вейджеровые обстоятельства. Это один-единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, нужно устроить определённое количество ставок. Чем круче бонус, что, этим труднее выполнить обстоятельства, и наоборот.
1×slots скачать на айфон
<a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=45035>1×slots регистрация 1×slotscasino09k online</a> 1×slots регистрация то дальше необходимо пройти Чаще всего используются коды. Их надо(надобно) заносить в специальные окна регистрационной анкеты, если речь о пригласительных призах, или в особом разделе собственного кабинета игрока.Популярность интернет казино растёт и всё больше юзеров начинают проявлять азартными играми. Бездепозитные бонусы 2022 года, это уникальные презенты за регистрацию. С их поддержкой свежие игроки могут получить бесплатные вращения или деньги на баланс за 1 регистрацию. С в игорных заведений в онлайне, бездепозитные бонусы стали знаменитейшим способом привлечения игроков. Подобные акции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы расскажем. Наш сайт собрал наилучшие предложения из интернета на 2022 год. Воспользуйтесь хоть презентом и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить обстоятельства. <a href=http://okaywan.com/home.php?mod=space&uid=515222>http://okaywan.com/home.php?mod=space&uid=515222</a> казино 1× slots официальный сайт Таким образом, заведение пытается продемонстрировать себя своим вероятным игрокам, а подобный маркетинговый ход как казино приз без депо за регистрацию привлекает довольно большое внимания к игорному заведению и обеспечивает постоянный поток свежих гостей и будущих клиентов игрового интернет клуба.
зеркло казино 1×slots
Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и расценить необыкновенности, труднодоступные при игре в демо режиме. Многие новые посетители переходят в количество неизменных, а оператор получает длительную выгода.Рассмотрим принцип его действия на образце. Допустим, вы зарегались и возымели $10 no down payment bonus с вейджером х50. Это означает, собственно выигранные деньги возможно будет выводить не ранее, чем последствии такого, как общая сумма ставок достигнет $500. Реже призы без депозита начисляются неизменным игрокам. С их подмогою администрация постарается удержать ценных посетителей или желает поблагодарить за лояльность правильных посетителей. Но гораздо чаще для похожих целей используются такие промоакции:Начнём с такого, собственно любое рекламную за регистрацию предполагает некие обстоятельства. Бездепозитные бонусы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, необходимая для исполненья условий. Пример, возымели бесплатные вращения и выиграли с их 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 руб., проигрышных или выигрышных, важно. После выполнения, бонусный баланс перейдёт на настоящий и будет легкодоступным к выводу. <a href=https://pokemonperfect.com/forums/index.php?members/doctorlazutasa.23469/>https://pokemonperfect.com/forums/index.php?members/doctorlazutasa.23469/</a> Хотя благотворительные призы начисляются без депозита, не исключено, собственно вам понадобиться вносить деньги. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь в того, как свежий заказчик раз пополнит игровой счет. 1×slots casino зеркало рабочее Некоторые веб-сайты, до чем обмануть регистрацию игроков, предлагают ответить на несколько базисных вопросов. Цель проведения подобной викторины – выявить случайных людей, коие не имеют представления о покере, и не разрешить получения ими призов. Если посетитель уже играл в казино, то ответить на полтора десятка несложных вопросов будет нетрудно. Очень часто, ответы возможно найти на официальных веб-сайтах данных учреждений.
1×slots быструю регистрацию а также мгновенное
Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам воспрещено начислять призы клиентам, не имеющим денежных средств на счете. Мы предлагаем разглядеть животрепещущие бонусы онлайн-казино с лицензией, которые соблюдают законодательство РБ. Выбор каждого интернет казино на нашем сайте. В описании к любому Вы сможете разузнать, что получите за создание аккаунта. 1×slots мобильная версия войти казино <a href=http://maps.google.com.sv/url?sa=t&source=web&rct=j&url=http://demos.su/bitrix/redirect.php?goto=http://buro-nv.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/NXiuw8hfR8L>http://maps.google.com.sv/url?sa=t&source=web&rct=j&url=http://demos.su/bitrix/redirect.php?goto=http://buro-nv.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/NXiuw8hfR8L</a> Ознакомьтесь с нашим списком наилучших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего перечня и получите бездеп сразу. Хватайте лучшие бесплатные предложения ниже и выигрывайте великие средства, не рискуя!Бездепозитный приз предоставляется новенькому игроку за определенные деяния. Часто презент повторяющий денег либо фриспинов выдается за регистрацию, спасибо чему юзер получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.
1хслотс казино зеркало
B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. Представленные на этой странице наихорошие бездеп призы в казино за регистрацию в 2022 году имеют подходящие обстоятельства. После тщательного анализа редакция портала составила рейтинг спецпредложений, в котором посетители Casino.ru имеют сортировать список по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д. <a href=https://www.imdb.com/user/ur186770157>https://www.imdb.com/user/ur186770157</a> казино 1× slots официальный сайт Если вы опытный игрок, вы обязаны знать, что бонус без депозита – редчайшая находка. Тем не менее, мы неделю изучаем интернет, чтобы найти вам превосходнейшие бездепозитные предложения.
<b>Смотреть еще похожие новости:</b>
<a href=https://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=6268>казино 1×slots официальный сайт</a>
<a href=http://dd214.labelcreativeak.com/forums/viewtopic.php?f=3&t=1407>1×slots регистрация на сайте</a>
<a href=http://yinyue7.com/space-uid-962219.html>1×slots зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Также, учите, что бездепозитный бонус можно вывести лишь том, случае, когда будут исполнены все условия отыгрыша.
#1981 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино смотреть онлайн бесплатно porno Екатерина Ефременкова, шорт-трекистка <a href=https://rhymes-punches.com/>casino ап</a> яндекс казино скачать букмекерскую контору <a href=https://glvk.guru/>Набиуллина Эльвира Сахипзадовна порно</a> casino на телефон casino регистрации casino регистрации пин ап casino pin up top Крючкова Полина Викторовна порно porno Андрей Рублев (теннис) букмекерские конторы pin
DiskiPlus казино рояль смотреть DiskiPlus часы казино <a href=https://diskiplus.ru>DiskiPlus Набиуллина Эльвира Сахипзадовна порно</a> DiskiPlus порно с Ирина Сидоркова DiskiPlus pin casino <a href=https://www.diskiplus.ru>DiskiPlus порно с Аделия Петросян (фигурное катание)</a> DiskiPlus 1×bet скачать приложение DiskiPlus casino регистрации DiskiPlus порно с Илья Осипов (киберспорт) DiskiPlus up casino официальный DiskiPlus up букмекерская контора DiskiPlus casino скачать приложение DiskiPlus pin up casino пин ап
#1982 Charlesgunnyhttp://filmkachat.ru
casino 1×slot
Выиграть настоящие деньги в казино не пополняя счет – сложно, хотя вполне. Главное задаться целью и не нарушатьправила заведения. Выберите несколько казино с бездепзитными призами и начните выступать на бонусные свои. По статистике в 10-ти заведений можно заработать маленькую сумму денег с бонусных средств.Вышеописанная первопричина и является главным интересным, в которого операторы отдают часть собственной прибыли на различные маркетинговые расходы и рекламные кампании. А самым действующим тут будут играть непосредственно бездепозитные бонусы казино 2022 с выводом за регистрацию. <a href=http://filmkachat.ru/>1×slots регистрация на 1хслотс</a> 2. Создать свежий профиль. Для регистрации надо(надобно) наполнить маленькую анкету либо зайдите в личный офис при помощи соц сеток;В наше время очень просто получить бонус за регистрацию в казино. Практически каждый игорный дом с радостью начисляет деньги или благотворительные вращения. Многие гэмблеры используют этим и не стесняются регистрироваться в каждом клубе с прибыльными критериями. Кстати, это отличная вероятность выработать победную стратегию и сорвать джекпот. <a href=https://bandzone.cz/fan/kalinka0588?at=blog&bi=615743>https://bandzone.cz/fan/kalinka0588?at=blog&bi=615743</a> 1хслотс рабочее зеркало <a href=http://ds2.edu.sbor.net/index.php?subaction=userinfo&user=miscreantfirewo>http://ds2.edu.sbor.net/index.php?subaction=userinfo&user=miscreantfirewo</a> На бонусные начисления имеют быть установлены дополнительные ограничения, которые Вы не к при отыгрыше. Пока бонус всецело не отыгран — средства из казино не выводятся.Выбирайте наихорошие благотворительные призы за обзоров на Casinoz – и пусть вам сопутствует счастье при отыгрыше бонусных кредитов!
1хслот официальный сайт зеркало
Теоретически, к безвозмездным бонусам возможно отнести так называемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, потому собственно они деют только возможность создавать ставки.Все обожают получать презенты. Согласитесь, практически каждый играющий человек будет беспредельно рад, если получит бесплатный презент для забавы в интернет казино просто за регистрацию либо же бонус за внесенный депозит, так называемые приветственные бонусы для новых игроков. Соответственно эти интернет клубы станут больше известны и преимущественны у игроков при выборе казино для забавы. Топ казино день обновляется и прибавляются новые и занимательные игровые клубы с привлекательной бонусной политикой и всеми вероятными преимуществами, льготами, к коим относятся эти бонусы как фриспины за регистрацию, денежные бездепозитные призы, еще великодушные бонусы за внесенный депо. <a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=688276>казино 1×slots</a> 1×slots сайт При регистрации стопам свидетельствовать только достоверную информацию. Когда учетная запись несомненно активна, появится доступ в Личный кабинет. В нем можно избрать валюту, установить промокод и разузнать подробные управляла получения и отыгрыша бездепа. Краткая информация об промоакции нередко находится непосредственно на регистрационной форме. <a href=https://tdmromania.ro/member.php?action=profile&uid=6525>https://tdmromania.ro/member.php?action=profile&uid=6525</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots Бонус начисляется игроку незамедлительно в регистрации и прохождения верификации в казино и не просит от посетителя внесения депозита. Как верховодило, объем бонуса в сходственном случае достаточно скромный, однако позволяет новеньким познакомиться с забавой без риска реальными деньгами.
1× slots casino официальный сайт
Не желайте сыграть в азартные игры, не рискуя средствами деньгами, но получая в все выплаты? Подобную вероятность предоставляют многие превосходнейшие порталы с азартными весельями. В их количестве много честных и надежных интернет-казино на русском языке. Они завлекают новых юзеров разными поощрительными событиями, включая бездепозитные, либо бесплатные призы.Операторы гемблинга заявляют, собственно так они сражаются с бонус-хантерами. Впрочем, критики считают, собственно данным казино пробуют сделать из случайного гостя неизменного игрока. <a href=http://fr3809hv.bget.ru/user/Stevenereni/>http://fr3809hv.bget.ru/user/Stevenereni/</a> Подарки на праздничные ? посвященные торжественным датам, требующие условного отыгрыша или начисляются без это. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду. 1×slots регистрацию более популярный вариант это К огорчению, нет. Почти все казино, настоятельно внесение но бы 1-го минимального депо для вывода выигрыша с бездепозитного бонуса. Также учитывайте, что вывести деньги разрешено только на ту платежную систему, с коей был сделан депо.B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax
1х слотс зеркало регистрация в 1×slots casino
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=50269>1хслотс официальный сайт зеркало</a> Не стоит путать игру в демо и внедрение бонусов. В демонстрационном режиме игрок может расценить механику слота, сюжет и оформление. Но игра ведется на относительные кредиты, поэтому отсутствует основное ? ощущение пыла. Активируя промокод или фриспины, клиент и не тратит средства деньги на игровые автоматы, хотя может сорвать реальный куш! Таким образом онлайн казино получает потенциального игрока. Возможно в будущем либо истинном он захочет поиграть на средства средства. Так работают бездепозитные призы в интернет казино. Здесь хорошо подходит выражение, безвозмездные сыр бывает только в мышеловке. Начинающие игроки шансы не осознавать опасность пыла. Однако времени понимания делается больше. Это тема для отдельного обсуждения. 1× slots официальный <a href=https://lorenzoppom16273.blogtov.com/9985785/the-chopping-fringe-of-nsfw-ai-exploring-the-options-of-undress-ai>https://lorenzoppom16273.blogtov.com/9985785/the-chopping-fringe-of-nsfw-ai-exploring-the-options-of-undress-ai</a>
1×slots зеркало регистрация в 1×slots casino
Превышение наибольшей ставки при отыгрыше. Система автоматически не предостерегает о превышении ставки, потому о нарушении верховодил игрок может разузнать теснее в подачи запроса на вывод средств.Подтверждение регистрации. Казино настоятельно привязки профиля к электронному адресу и номеру телефона. Для этого на e-mail отчаливает письмо со ссылкой, а на телефонный ? текстовое известье с кодом. Вейджер в переводе с британского значит «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша полученного бонуса, в нашем случае бездепозитного. Число ставок роли не играет — главно лишь набрать необходимую, пропорциональную сумме одобрения.Важно, удостоверьтесь что, что ранее не регились в избранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи. <a href=https://zakon.ru/Profile/Show/288008>https://zakon.ru/Profile/Show/288008</a> Также есть онлайн-платформы азартных игр, которые применяют раздачу бездепозитных бонусов в специальные даты (как для казино, так и для игрока). Помимо этого, действующие геймеры кроме имеют возможность получить схожие бонусы за собственную работа (к примеру, за увеличения уровня либо за схожие достижения).Риск-игра по равным шансам – Также казино имеет воспрещать скорпулезно условия по отыгрышу с помощью раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких других играх. 1×slots официальный сайт зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://edidaktikum.ee/en/content/iii-kontakttund-08-juuni?page=87#comment-297537>1×slots официальный сайт мобильная версия</a>
<a href=http://u0382101.isp.regruhosting.ru/index.php/forum/general-questions-and-how-tos/68883-otzyvy-o-tovarakh?start=19740#164983>1×slots на любой вкус как пройти регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При поддержки такового одобрения оператор может того привлекать клиентов, которые ранее проявляли активность на сайте, но по какой-то причине прекратили выступать. В этом случае промокод высылается пользователю по электрической почте или вид SMS. Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша призов. Заведения практически устанавливают максимальную ставку, допустимую по условиям вейждера.
#1983 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
про казино лучшие букмекерские конторы <a href=https://sovsekretno.net/>Ирина Горбачева</a> casino ап 1×bet casino <a href=https://vestnik-jurnal.com/>retro casino</a> 1×bet зеркало на сегодня 1×bet официальный сайт лучшие онлайн казино порно с Елена Никитина, скелетонистка porno Виктория Баркова, легкоатлетка pin ап casino casino pin официальный
DiskiPlus 1×bet зеркало рабочее на сегодня DiskiPlus порно с Абрамченко Виктория Валериевна <a href=https://diskiplus.ru>DiskiPlus pin up casino официальный</a> DiskiPlus пин up casino DiskiPlus porno Юлия Канакина <a href=https://www.diskiplus.ru>DiskiPlus гта казино</a> DiskiPlus самое казино DiskiPlus скачать pin casino DiskiPlus Ходнева Светлана Владимировна порно DiskiPlus порно с Алина Загитова, фигуристка DiskiPlus фильмы казино рояль DiskiPlus Москалькова Татьяна Николаевна порно DiskiPlus casino 7k сегодня
#1984 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino 777 online
Не рекомендуем сломя голову хвататься за различные предложения получения средств без вложений. Вполне вполне, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем выглядит на 1-ый взор. Альтернативой является казино приз за депо. Мы предлагаем вам пару советов, спасибо которым у любого игрока будет возможность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом средств:Предложения с бездепозитными бонусами за регистрацию разрешают свежим заведениям заинтересовать аудиторию на собственный вебсайт. А игроки в свою очередь получают возможность выступать на реальные средства без депо в казино и заработать маленькой стартовый капитал, кот-ый разрешено исключить на карту банка или электрический кошелек. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> Каждый компьютерные обязан сначала детально изучить обстоятельства по получению и отыгрышу приглянувшегося дара. Если всё устраивает, поспешите забрать безвозмездные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо в начать вращать барабаны лучших слотов. <a href=https://lnk.bio/kalinka0588>https://lnk.bio/kalinka0588</a> Как только получите бездеп в казино, всё также не запамятовывайте инспектировать электрическую почту. Некоторые игорные клубы непрерывно радуют активных гэмблеров приятными бонусами. Чаще всего получить подарок возможно в преддверии веселья, на день рождение, за привлечение друга. А того распространённым бонусом считается прибавка к депозиту. Нужно всего лишь восполнить счёт, и азартное заведение прирастит его на 50–100%. 1×slots быструю регистрацию а также мгновенное <a href=http://tmml.top/home.php?mod=space&uid=100228>http://tmml.top/home.php?mod=space&uid=100228</a> При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, которое можно посвятить забаве в казино.
1×slots регистрацию более популярный вариант это
Наличие у игрока второго аккаунта. Запрещено создавать несколько профилей для многократного получения бездепов.Прочитайте управляла бонусной программы, какой желаете принять. Да, мы настоятельно советуем сделать это до регистрации. 1×slots акции Казино выводит средства только на ту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного приза, Вам сначала нужно пополнить счет. В некоторых клубах узкий перечень методов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет именно с этих платежных методов, которые доступны для вывода.Подобные призы без депозита предоставляются на больше выгодных условиях. Зачастую они крупнее, а условия отыгрыша наименее жесткие. <a href=http://hsmg.kr/bbs/board.php?bo_table=free&wr_id=67847>http://hsmg.kr/bbs/board.php?bo_table=free&wr_id=67847</a> Бездепозитный приз за регистрацию в казино с выводом средств в 2022 году — Наш ресурс дает игрокам важную информацию о самых новых, щедрых и проверенных бонусах в интернет казино, коие обновляются каждый день.Мы подготовили перечень, где есть практически актуальные и свежие бездепозитные бонусы казино, которые вам получить безвозмездно. Для наших юзеров есть особые предложения неповторимые призы, коие вы ни не найдете, их мы обозначили особой красноватой плашкой «Exclusive». 1×слот регистрация в 1×slots casino Особую изюминку видео слотам присваивают уникальные знакы. С их свет активизируются разные призы. Вы можете запустить вспомогательный степень и прирастить сумму выигрыша. Есть знаки, коие сменяют ненадобные элементы и сами создают выигрышные комбо. Не стоит забывать и на бонус-тур. После любого счастливого спина есть шанс прирастить сумму выигрыша в 2 либо четыре раза.Но есть игорные заведения, коие готовы просто так жертвовать средства на забаву. Для сего довольно сделать профиль. Чтобы вывести собственный выигрыш, вас поначалу нужно выполнить условия отыгрыша, обозначенные в критериях получения бездепозитного депозита.
1×slots акции
Отзывы читателей о бонусных акциях посодействуют составить впечатление, но не забывайте о субъективности личных объяснений. Благодаря программе преданности от игорного заведения, можно арестовать хороший старт и без дополнительных инвестициям запустить видеослоты. Кроме такого, возможно рассчитывать на реальную удачу и получить, без инвестиции собственных денег, великой выигрыш. <a href=https://menwiki.men/wiki/User:JZTDenice481098>https://menwiki.men/wiki/User:JZTDenice481098</a> Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала резвые выводы. Фишка выплат что, нет, собственно довольно избрать платёжный инструмент и показать необходимую. В большинстве случаев средства зачисляются на электронные кошельки протяжении 15 мин., а на банковские карты – 1–3 трудящихся денька.Хотя бесплатные бонусы начисляются без депозита, не исключено, собственно вам придется заносить средства. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только после такого, как свежий клиент раз пополнит игровой счет. 1×slots регистрация на 1хслотс
1×slots казино мобильная версия
Прибывшие на акк деньги бездепозитные призы предназначаются, главном, лишь для новоиспеченных пользователей, которые раньше не имели собственного аккаунта в данном казино. Исходя из сего, если ранее у игрока был изготовлен депозит, то, по всей вероятности, у него больше не будет возможности рассчитывать на получение такового бонуса в определенном заведении.Все бесплатные бонусы кажутся заманчивыми. Кто же откажется от возможности сыграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далеко не все бездепозитные бонусы в равной степени привлекательны для рассудительного посетителя. <a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=10884>1×slots casino регистрация 1×slotscasin online</a> Подтверждение индивидуальной информации. Все казино настоятельно от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и присутствие у юзера других аккаунтов (мультиаккаунт запрещен).Многие казино предоставляют в рекламных целях благотворительные призы самая для наших читателей. Чтобы их получить, надо(надобно) перебежать на игровой вебсайт по партнерской ссылке с нашего портала. 1хслотс зеркало на сегодня <a href=https://sub4sub.net/forums/users/jasperpef/>https://sub4sub.net/forums/users/jasperpef/</a> Промокод – определённая композиция знаков, которую нужно ввести в соответствующее поле при творении учетной записи либо активировать в собственном профиле игрока в разделе с бонусами.Какие бонусы меня еще получить считая бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного бонуса, каждое интернет казино предлагает игрокам прибыльное предложение на 1-ый депозит, вы совершаете депозит, ваш депозит возрастает в двое либо числе в 3, что, этим наиболее начать выступать возможно с более солидной суммой, так же не запамятываем на вейджер на призы.
1×slots рабочее зеркало на сегодня
При этой на бонусные средства воспрещается играть в игровые автоматы с прогрессивным джекпотом и забавы из радела exist casino. Кроме такого, некоторые казино выделяют бездеп на раз или некоторое конкретных слотов, и в иных играх Вы не можете на них выступать.Для как, дабы отыграть сумму вашего бездепозитного приза нужно выполнить обстоятельства вейджера. Очень нередко фриспины даются на определенные слоты (book of ra, book of dead, book of sun), избирайте разъем себе по душе, они все очень красочные и качественные. Бездепозитные бонус возможность быть денежным так и повторяющий фриспинов на слоты <a href=http://demo2-ecomm.in.ua/user/Henryglymn/>http://demo2-ecomm.in.ua/user/Henryglymn/</a> Как только на виртуальном счету окажутся бонусные средства, поспешите отыграть вейджер. Сразу после сего возможно забыть заявку на вывод выигрыша. Кредиты прибыльно отличаются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом настоящих средств и дают возможность ощутить азарт. Во-вторых – можно насладиться любой азартной забавой доступной на сайте. В вашем распоряжении находятся автоматы, настольные прибавление, видео-покер, Live-дилеры. 1×slots зеркало рабочее На бесплатные призы онлайн-казино почти практически распространяется лимитирования по стране проживания клиентов. Даже если вам разрешено раскрывать счет и играть на деньги в заведении, это еще не означают, собственно вам доступны no deposit bonuses.Также, в этом случае необходимо подтвердить собственный номер телефона, желаемого код, приобретенный в смс-сообщении от клуба установить в специальное фон в личном кабинете игрока.
<b>Смотреть еще похожие новости:</b>
<a href=http://kemsrr.forumex.ru/viewtopic.php?f=7&t=5562>1×slots официальный зеркало</a>
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=9808>1хлот регистрация в 1×slots casino</a>
<a href=https://forum.vn.ua/showthread.php?p=3304231#post3304231>1×slots зеркало этих способов предполагает регистрацию</a>
<a href=https://www.prtrecovery.org/threads/1×slots-zerkalo.495/>1хслотс зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для получения приза надо(надобно) пригласить в игру свежего посетителя. Казино начислит пригласившему фиксированный процент от взносов приглашённого вид приза: чаще всего его размер не выше 10%. Срок деянья приза в большинстве случаев не выше месяца: пригласивший получает приз зависимо проигранных ставок приглашённого в 1-ый месяц игры. Бездепозитные призы, как теснее ясно, считаются оригинальной вероятностью обратиться игровому процессу безусловно бесплатно, другими выступать в онлайн казино безвозмездно и на имеющие свои сразу в регистрации аккаунта. Автоматы с таким депо имеют замерзнуть великолепной вероятностью поиграть для поклонников азарта с определенными лимитированиями в денег.
#1985 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Евгения Медведева порно с Захарова Мария Владимировна <a href=https://repost.news/>рабочие зеркала казино</a> Кузнецова Анна Юрьевна порно pin up casino пин ап <a href=https://th-royalgclub.com/>казино 5</a> скачать pin casino casino ап porno Алена Михайлова cat casino 1×bet xbet up casino зеркало casino официальный зеркало
DiskiPlus 1×bet xbet DiskiPlus Приезжева Екатерина Геннадьевна порно <a href=https://diskiplus.ru/>DiskiPlus смотреть фильм казино</a> DiskiPlus casino на телефон DiskiPlus порно с Евгения Медведева <a href=https://www.diskiplus.ru/>DiskiPlus porno Екатерина Ефременкова, шорт-трекистка</a> DiskiPlus casinos xyz DiskiPlus казино ли DiskiPlus porno Мария Шарапова DiskiPlus казино смотреть онлайн DiskiPlus пин ап казино DiskiPlus 1×bet на сегодня DiskiPlus ограбление казино
#1986 Charlesgunnyhttp://filmkachat.ru
1 x slots casino
Несмотря на то, собственно данный вариант стимуляции со стороны азартных платформ довольно популярен в сфере сходственных игр, далековато многим почитателям казино ведомо, что сами бездепозитные бонусы казино и как непосредственно их возможно эксплуатировать.Бездепозитный бонус по промо-коду несомненно доступен для забавы, лишь том, случае когда Вы активируете особый бонусный код в разделе с призами или укажите промокод при регистрации на веб-сайте. В некоторых случаях, кроме активации кода, понадобиться подтвердить контактные данные игрока и наполнить анкету посетителя. <a href=http://filmkachat.ru/>1×slots на любой вкус как пройти регистрацию</a> Отыграв бездепозитный бонус в казино с выводом тоже придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в схожее ограничение присутствует, то единоразово вывести получится только необходимую, не превышающую размер полученного бонуса. <a href=https://telegra.ph/Walmarts-battery-return-policy-03–13>https://telegra.ph/Walmarts-battery-return-policy-03–13</a> Выбирая даровой бонус, пристально изучайте верховодила. Убедитесь, что вас возможно на участие в промоакции. Уточните, в каких забавах можно выполнять обстоятельства вейджера. При надобности задавайте вопросы адептам саппорта.В игровых клубах без лицензии Вы покупаете „кота в мешке“ и когда спорных ситуаций нет способности куда-то посетовать и доказать свою правоту. 1×slots казино мобильная версия <a href=https://lider-school174.com/forum/user/2613/>https://lider-school174.com/forum/user/2613/</a>
1×слотс казино
<a href=http://u0382101.isp.regruhosting.ru/index.php/forum/general-questions-and-how-tos/68883-otzyvy-o-tovarakh?start=19485#164683>1×slots официальный зеркало рабочее</a> 1×slots зеркало регистрация то дальше необходимо пройти <a href=https://flaxeco.com/user/Walterarouh/>https://flaxeco.com/user/Walterarouh/</a> А ознакомиться с новыми онлайн казино, Вы сможете за счет призов с выводом выгоды, которые Вы сможете получить без депозита.Особую изюминку видео слотам придают уникальные символы. С их выходом активизируются разные бонусы. Вы можете запустить вспомогательный степень и прирастить необходимую выигрыша. Есть знаки, которые сменяют ненужные составляющие и сами создают выигрышные комбо. Не стоит забывать и про бонус-тур. После каждого удачного спина есть шанс увеличить сумму выигрыша в 2 или хорошо раза. 1 xslots рабочее зеркало Онлайн гемблинг развивается с каждым деньком больше и больше, новые бренды создаются не по дням а по часам. Новые онлайн казино проделывают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и что, этим наиболее предлагают бездепозитные бонусы за регистрацию, собственно бы не упустить такую возможность — как воспользоваться свежим бездепом, рекомендуем посещать наш вебсайт как можно чаще, самое вкусное и новые будет добавляться в данном же перечне.
зеркала 1×slots
Для вывода средств бонус нужно будет отыграть законам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариациями отыгрыша бездепозитного приза до его получения, чтобы избежать конфликтных обстановок.У любого игорного заведения средства управляла и условия. Но, дабы получить призы, необходимо выполнить стандартные деянья: <a href=http://fh3809kd.bget.ru/index.php?name=account&op=info&uname=niftyrhythm86>http://fh3809kd.bget.ru/index.php?name=account&op=info&uname=niftyrhythm86</a> 1×slots зеркало которую указывали при регистрации кстати Объективные – размер бонуса, коэффициент и условия вейджера, необходимость внесения депозита для вывода денег;Доступ к дару возможность открываться автоматически последствии введения промокода или обращения в службу поддержки вебсайта. В первом случае от юзера не потребуется никаких деяний. Бездеп с активацией по коду встречается почаще всего. Игроку необходимо ввести совокупность символов в графе, которая может находиться в регистрационной форме в Личном офисе.
1×slots бонус за регистрацию
Первый возникающий вопрос, это, зачем выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают новых игроков. Последним легче начать игру на деньги с подарка за регистрацию. Им не пополнять баланс и расходовать личные средства. Новички получают бесплатные спины или средства на счёт. С их поддержкою знакомятся с игровым процессом, крутят слоты и проделывают ставки в рулетке. <a href=https://praisenpray.org/forums/showthread.php?tid=122033>1×slots регистрация 1×slotscasino09k online</a> Риск-игра по одинаковым шансам – Также казино возможность запрещать исполнять условия по отыгрышу с помощью раунда на удвоение, который предлагается в слотах, видео-покере и некоторых иных забавах.Выбор каждого интернет казино на нашем сайте. В описании к любому Вы сможете узнать, собственно получите за творенье аккаунта. 1×slots регистрация на 1хслотс <a href=https://astradigital.co.uk/wiki/index.php?title=User:EleanoreMcMullan>https://astradigital.co.uk/wiki/index.php?title=User:EleanoreMcMullan</a> Простая процедура получения бездепозитного бонуса, кот-ая займет менее 2-х мин. Для получения бездепов, достаточно зарегистрироваться и подтвердить контактные данные.Если при регистрации указать промокод, можно гарантировано получить приз. Где брать ваучер? Посетите направленные блоги или форумы. Иногда администрация клуба проделывает рассылку ваучеров на электронную почту. В последнее время игорные жилища начали рекламироваться в кинокартинах и телесериалах. Присмотритесь и наверняка заметите промокод, который принесёт 500 или 1 000 бонусных рублей.
x1 slots 1хслотс регистрация перейти на 1×slots
Для отыгрыша приза казино обязывает игрока поиграть на необходимую, в количество один превосходящую необходимую приобретенного бонуса — тут выгода компании очевидна.Вы не в коем случае ни чем не рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, выучится регулировать менять ставки и полосы, изучать бонусные забавы и их выигрышные комбинации, ну конечном просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные средства, коие возможно отыграть и исключить, а не просто на демо счет, что, этим наиболее адреналин в крови более повысится а пульс забьется с нередким ритмом! Для верификации аккаунта надо(надобно) предоставить профессионалам технической поддержки отсканированную копию паспорта и счета за коммунальные услуги, еще фотку банковской карты либо экрана странички электронного кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности. <a href=http://www.jindoushiqi.com/bbs/home.php?mod=space&uid=130555>http://www.jindoushiqi.com/bbs/home.php?mod=space&uid=130555</a> Бездепозитные призы прекрасный вариант бесплатной забавы в игровые автоматы. Многие юзеры сети не понимают, что в казино можно начать играть безусловно бесплатно, а потом вывести выигрыш на банковскую карту либо электрический кошелек, другие не доверяют интернет казино, а третьи удачно играют и выигрывают – и тотчас достаточно великие суммы.B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. 1×slots промокод при регистрации Бездепозитные бонусы — это подарки от казино в виде бонусных денег или фриспинов для игровых автоматов, коие начисляются на акк игрока последствии процедуры регистрации на сайте заведения. Для получения этих поощрений депозит не потребуется.Бездепозитный бонус – это экономическое вознаграждение, которое выдается участнику игры в казино, для его привлечения и появления заинтригованности. Любой гость, который подходит условиям выдачи похожего бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое одобрение является наиболее эффективным методом, дающим вероятность стартовать при, не вкладывая личных вещественных средств.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.eliteshost.com/showthread.php?tid=24103>x1 slots регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Нельзя разглядывать забаву на деньги, как вариант заработка. Азартные забавы запрещены для лиц младше 18 лет. Topcasinobonuses.mobi классифицируется организатором азартных игр. Сайт носит информационный нрав. Во время забавы в казино, выигрыши, приобретенные спасибо безвозмездным призовым фондам, суммируются и срабатывают в совместную необходимую для отыгрывания. Однако, если фортуна улыбнется и получится отыграть все призы, игровое заведение гарантированно допустит вывести денежные свои. Сумма вывода несомненно зависимости от лимита, одобренного именно в данном учреждении. Поэтому, внимательно нужно читать правила выдачи безлимитных депозитов.
#1987 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Хорова Наталья Александровна порно про казино <a href=https://vestnik-jurnal.com/>автомат казино</a> букмекерская контора вход casino актуальное зеркало <a href=https://sovsekretno.net/>Окладникова Ирина Андреевна порно</a> порно с Бондаренко Анастасия Борисовна casino играть пинко casino 1×bet слоты официальный сайт casino pin официальный фильмы казино рояль 1×bet зеркало на сегодня
DiskiPlus retro casino DiskiPlus porno Катерина Шпица <a href=https://diskiplus.ru/>DiskiPlus порно с Максим Глушенков (футбол)</a> DiskiPlus казино большая DiskiPlus kometa casino <a href=https://www.diskiplus.ru>DiskiPlus casino зеркало сегодня</a> DiskiPlus porno Алена Михайлова DiskiPlus букмекерская контора DiskiPlus casino скачать приложение DiskiPlus скачать 1×bet DiskiPlus casino скачать приложение DiskiPlus порно с Гатагова Ольга Анатольевна DiskiPlus Радченко Светлана Юрьевна порно
#1988 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Набиуллина Эльвира Сахипзадовна порно 1×bet слоты <a href=https://vestnik-jurnal.com/>ап казино</a> порно с Афонина Марина Игоревна яндекс игры казино <a href=https://strelochnik.com/>pin up casino</a> бесплатно фильм казино порно с Абрамченко Виктория Валериевна Елизавета Боярская казино в россии casino играть играющие казино онлайн 1×bet 1хбет
DiskiPlus сайты казино DiskiPlus самое казино <a href=https://diskiplus.ru/>DiskiPlus casino ru</a> DiskiPlus порно с Зырянова Анастасия Владимировна DiskiPlus Фастова Елена Владимировна порно <a href=https://diskiplus.ru/>DiskiPlus макао казино</a> DiskiPlus ешь казино DiskiPlus порно с Алексей Миранчук (футбол) DiskiPlus сайт букмекерской конторы DiskiPlus порно с Евгений Малкин (хоккей) DiskiPlus casino автомат DiskiPlus казино гта 5 DiskiPlus casino 7k сегодня
#1989 Charlesgunnyhttp://filmkachat.ru
1×slots casino зеркало
Но существуют азартные заведения, готовые просто так вручить деньги на забаву. Для этого довольно создать профиль. Чтобы вывести выигрыш, сначала нужно выполнить вейджеровые условия, прописанные в условиях получения бездепа. <a href=http://filmkachat.ru/>1хслотс рабочее зеркало на сегодня</a> B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpaxБонусные средства – маленькая сумма средств для старта в новеньком казино. На бонусные деньги, обыкновенно разрешено играть во все игры, считая слотов с современным джекпотом и игр из раздела exist casino. <a href=https://www.esurveyspro.com/Survey.aspx?id=d8357902-e8be-4a72–8767–3426f9bacbbb>https://www.esurveyspro.com/Survey.aspx?id=d8357902-e8be-4a72–8767–3426f9bacbbb</a> Онлайн-казино с бездепозитными призами ставят клиентам обстоятельства для пользования бездепами, поэтому перед ролью в акции какого-либо досконально ознакомиться со всеми правилами и нюансами акции. Условия могут дотрагиваться получения бонуса, его применения и следующего вывода валютных средств если, тогда, выигрыша. 1×slots рабочее зеркало на сегодня <a href=http://golpro.jp/userinfo.php?uid=15742#>http://golpro.jp/userinfo.php?uid=15742#</a> Все любят получать презенты. Согласитесь, почти любой играющий человек несомненно сильно счастлив, в получит безвозмездный презент для забавы в интернет казино просто за регистрацию либо же бонус за внесенный депозит, так нарекаемые приветственные призы для свежих игроков. Соответственно эти онлайн клубы станут больше востребованы и преимущественны у игроков при выборе казино для забавы. Топ казино постоянно обновляется и добавляются свежие и интересные игровые клубы с симпатичной бонусной политикой и всеми возможными привилегиями, к которым относятся эти призы как фриспины за регистрацию, денежные бездепозитные призы, а щедрые призы за внесенный депозит.
1×slot официальный сайт
Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в социальных сетях, установку мобильного приложения либо официального посетителя для ПК. В большинстве казино действуют программы преданности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий уровень нередко сопрягается выдачей бездепа.Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала резвые выводы. Фишка выплат никаких, собственно достаточно избрать платёжный инструмент и указать необходимую. В большинстве случаев деньги зачисляются на электрические кошельки протяжении 15 минут, а на банковские карты – 1–3 рабочих дня. зеркала 1×slots Бoльшинcтвo азартных заведений выдвигают приблизительно однообразные, схожие обстоятельства и требования, которые необходимо выполнить, чтобы получить бездепозитный приз за регистрацию. Все их можно соединить в один перечень: <a href=http://www.gdljs.net/home.php?mod=space&uid=850713>http://www.gdljs.net/home.php?mod=space&uid=850713</a> Какие призы я могу еще получить не бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, любое онлайн казино предлагает игрокам выгодное предложение на первый депо, вы совершаете депо, ваш депо возрастает в двое либо том в 3, что, этим наиболее начать играть возможно с более крупной суммой, например же не запамятываем про вейджер на призы.Чаще всего интернет-казино предлагают бездепозитные бонусы свежим юзерам. Эта промо-акция очень эффективно привлекает новичков, подталкивая их к открытию счета. Конечно, не они становятся послушными клиентами, но сам прецедент регистрации аккаунта играет на руку заведению. 1хслотс официальный сайт зеркало
1хслотс рабочее зеркало
Большинство клубов привлекают внимание игры за счёт разнообразных презентов. На одних сайтах можно получить виртуальные кредиты, которые откроют доступ ко всему софту. На иных же, администрация предлагает безвозмездные вращения для пуска лучших онлайн слотов. Несмотря на разные промоакции, стоит выделить самые главные. Используйте наихорошие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из перечня ниже, дабы заработать подарки за обычные деяния и уже сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высокой отдачей и прыткими выводами на электронные кошельки. <a href=http://hauptmanns-gartenpflege.com/profile.php?lookup=20184>http://hauptmanns-gartenpflege.com/profile.php?lookup=20184</a> 1×slot казино зеркало Бездепозитный приз предоставляется новому игроку за определенные деяния. Часто подарок в виде денег или фриспинов выдается за регистрацию, спасибо чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.
1×slots зеркало подтвердит вашу регистрацию если говорить
Маркетинговая политического всех игорных интернет-клубов обязана носить разнородный характер. И если вознаграждения на депо служат для того, дабы провоцировать вносить депозиты и поощрять уже имеющих юзеров, то бездепозитный бонус в казино или приз за регистрацию в казино, прежде всего, рассчитан на расширение базы покупателей. 1×slots сайт <a href=https://medium.com/@arliecannon24/the-technology-behind-deepnude-tool-how-machine-learning-creates-realistic-images-e974a3fb3d01>https://medium.com/@arliecannon24/the-technology-behind-deepnude-tool-how-machine-learning-creates-realistic-images-e974a3fb3d01</a> Превышение максимальной ставки при отыгрыше. Система механически не предуведомляет о превышении ставки, поэтому о несоблюдении верховодил игрок имеет узнать уже в подачи запроса на вывод средств.Если вы бывалый игрок, вы обязаны аристократия, что бонус без депозита – редкая находка. Тем ниже, мы раз изучаем интернет, чтобы найти вам превосходнейшие бездепозитные предложения.
1 хслот регистрация в 1×slots casino
<a href=https://fbi.me/index.php?title=User:WinifredHess43>https://fbi.me/index.php?title=User:WinifredHess43</a> 1×slots рабочее зеркало Выбор каждого онлайн казино на нашем сайте. В описании к любому Вы сможете разузнать, что получите за творение аккаунта.
<b>Смотреть еще похожие новости:</b>
<a href=http://u0382101.isp.regruhosting.ru/index.php/forum/general-questions-and-how-tos/68883-otzyvy-o-tovarakh>1×slots регистрация 1×slots casino 777 online</a>
<a href=http://iptv.bestforums.org/viewtopic.php?f=3&t=4812>1×slot регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для получения предоставленных призов для пригодиться — ПК либо мобильное прибор, и остальное дело за малым. Самый распространённый из похожих бонусов, конечно же, бездеп на день рождения посетителя — приз в виде фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им можно протяжении установленного периода времени.
#1990 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet скачать приложение на андроид casino автомат <a href=https://sovsekretno.net/>Мухтиярова Елена Вячеславовна порно</a> бесплатно играем казино человек казино <a href=https://glvk.guru/>порно с Кирьянова Дарья Борисовна</a> винлайн букмекерская контора 1win букмекерская контора порно с Юлия Ефимова Лут Оксана Николаевна порно пари букмекерская контора casino промокод porno Игорь Акинфеев (футбол)
DiskiPlus порно с Абрамченко Виктория Валериевна DiskiPlus смотреть фильм казино <a href=https://diskiplus.ru/>DiskiPlus ешь казино</a> DiskiPlus официальное казино вход DiskiPlus casinos winning <a href=https://diskiplus.ru>DiskiPlus 1×bet официальный слоты</a> DiskiPlus black russia казино DiskiPlus порно с Алина Загитова, фигуристка DiskiPlus пин ап casino DiskiPlus букмекерские конторы без депозита DiskiPlus рабочее казино DiskiPlus рейтинг казино DiskiPlus champion casino
#1991 Charlesgunnyhttp://filmkachat.ru
1×slots быструю регистрацию а также мгновенное
Заполняя данные в собственном профиле, указывайте только достоверную информацию, так как Вам придется ее доказать дальнейшем при выводе денег.При регистрации стопам свидетельствовать только достоверную информацию. Когда учетная запись несомненно активна, появится доступ в Личный кабинет. В нем можно избрать валюту, установить промокод и разузнать подробные управляла получения и отыгрыша бездепа. Краткая информация об промоакции нередко находится непосредственно на регистрационной форме. <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino09k online</a> Если простыми текстами, бездепы – это определённая сумма денег либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать презенты. Но есть кое-какие аспекты. Существуют игорные дома, коие перед что, этим как начислить призы просят привязать телефонный, дать копии документов. <a href=https://www.neobienetre.fr/forum-bien-etre-medecines-douces-developpement-personnel/topic/low-poly-design-creating-efficient-3d-models-for-modern-applications/>https://www.neobienetre.fr/forum-bien-etre-medecines-douces-developpement-personnel/topic/low-poly-design-creating-efficient-3d-models-for-modern-applications/</a> 1хслотс казино зеркало <a href=https://bbs.wuxhqi.com/home.php?mod=space&uid=1311983>https://bbs.wuxhqi.com/home.php?mod=space&uid=1311983</a> Если вы избираете проверенное лицензионное онлайн казино и сделайте все обстоятельства получения бездепозитного бонуса, проблем с получением презента у Вас не возникнет.
1×slos регистрация в 1×slots casino
Некоторые онлайн-казино без депозита предлагают новым посетителям выбрать приз при регистрации. Будьте внимательны: выбрав раз, вы в безусловном большинстве случаев не можете пользоваться остальными. <a href=https://foro.muelendhir.com/showthread.php?tid=114444>1 xslots рабочее зеркало</a> 1×slots быструю регистрацию а также мгновенное Бездепы обыкновенно предлагают с отыгрышем — моментально вывести выигранные свои невозможно. Перевод денег со счета несомненно возможен в того, как юзер выполнит все требования казино, а сумма не может быть выше установленного правилами лимита. Условиями акции фиксируются сроки, на коих заказчик вправе пользоваться предложением. Обычно они не превосходят нескольких дней в активации. <a href=https://onlylove.kr/bbs/board.php?bo_table=free&wr_id=365695>https://onlylove.kr/bbs/board.php?bo_table=free&wr_id=365695</a> 1хслотс мобильная версия зеркало
1× slots сайт
<a href=http://truck-legion.ru/index.php?subaction=userinfo&user=wackydrink44>http://truck-legion.ru/index.php?subaction=userinfo&user=wackydrink44</a> 1× slots официальный
1хслотс официальный сайт зеркало
Риск-игра по равным шансам – Также казино имеет воспрещать исполнять обстоятельства по отыгрышу за раунда на удвоение, который предлагается в слотах, видео-покере и неких других играх.Фриспины без депо либо дополнительные средства посодействуют ближе познакомиться с игровой платформой и её функциями. За счёт презентов можно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за забавы напротив живых крупье. <a href=https://mami-forum.de/forum.php>1×slots зеркало на сегодня</a> Популярность интернет казино растёт и всё больше юзеров начинают проявлять азартными играми. Бездепозитные бонусы 2022 года, это уникальные презенты за регистрацию. С их поддержкой свежие игроки могут получить бесплатные вращения или деньги на баланс за 1 регистрацию. С в игорных заведений в онлайне, бездепозитные бонусы стали знаменитейшим способом привлечения игроков. Подобные акции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы расскажем. Наш сайт собрал наилучшие предложения из интернета на 2022 год. Воспользуйтесь хоть презентом и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить обстоятельства.Вышеописанная первопричина и считается основным нюансом, в которого операторы отдают часть собственной прибыли на различные рекламные расходы и рекламные кампании. А самым действующим тут станут играть именно бездепозитные бонусы казино 2022 с выводом за регистрацию. 1×slots регистрация 1×slots casino 777 online <a href=http://alex-zarya.ru/user/Robertvasty/>http://alex-zarya.ru/user/Robertvasty/</a>
1хслотс рабочее зеркало на сегодня
<a href=http://www.uin.in.ua/forum/viewtopic.php?f=7&t=45879&p=68101&sid=e60d014d9fe58ff47336f4b11cbb8ed1#p68101>http://www.uin.in.ua/forum/viewtopic.php?f=7&t=45879&p=68101&sid=e60d014d9fe58ff47336f4b11cbb8ed1#p68101</a> Каждый из бездепозитных призов без пополнения 2022 содержит собственный определенный вейджер для отыгрыша, так же в каждом казино он устанавливается персонально — где то он х55 а где-то х30, повторюсь всюду по разному!Ну и естесственно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: схожая щедрость увеличивает степень преданности посетителей к компании. казино 1×slots Для получения бонуса нужно ознакомиться с программой преданности казино и сделать ставки на необходимую, необходимую для перехода на грядущий степень.
<b>Смотреть еще похожие новости:</b>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=399179>1×slots регистрацию процедура займет всего лишь</a>
<a href=http://forum.as-p.cz/viewtopic.php?f=45&t=67620&p=351556#p351556>1×slots зеркало регистрация</a>
<a href=https://technique-tp.com/forum/viewtopic.php?t=4938>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Риск-игра по равным шансам – Также казино может воспрещать исполнять условия по отыгрышу с помощью раунда на удвоение, который предлагается в слотах, видео-покере и некоторых иных забавах.
#1992 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
винлайн букмекерская контора официальный порно с Дронова Александра Викторовна <a href=https://rhymes-punches.com/>порно с Алексей Миранчук (футбол)</a> бк букмекерская контора ограбление казино <a href=https://repost.news/>1×bet зеркало xbet</a> porno Илона Маркова, хоккеистка 1×bet слоты официальный сайт почему казино Манилова Алла Юрьевна порно порно с Баталина Ольга Юрьевна порно с Виктория Синицина, фигуристка букмекерская контора скачать приложение
DiskiPlus самое казино DiskiPlus казино гта 5 <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet на андроид бесплатно</a> DiskiPlus porno Елизавета Туктамышева DiskiPlus ограбление казино <a href=https://www.diskiplus.ru/>DiskiPlus casino сегодня</a> DiskiPlus лучшая казино DiskiPlus unlim casino DiskiPlus Елизавета Боярская DiskiPlus порно с Антропова Валентина Викторовна DiskiPlus casino рабочее зеркало DiskiPlus casino рабочее зеркало DiskiPlus винлайн букмекерская контора официальный
#1993 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация то дальше необходимо пройти
Онлайн гемблинг развивается с каждым днем все больше и больше, свежие бренды создаются не по денькам а по часам. Новые интернет казино делают вступительные акции для игроков, чтобы, чтобы что бы зарекомендовать себя, и что, этим самым предлагают бездепозитные бонусы за регистрацию, что бы не упустить такую возможность — как пользоваться новым бездепом, советуем навещать наш вебсайт как возможно почаще, самое вкусное и свежие будет добавляться в данном же списке. <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> <a href=https://matters.town/a/tx7fd8c97uu1>https://matters.town/a/tx7fd8c97uu1</a> Вы наверняка, скажем, как все любите получать презенты и бездепозитные бонусы казино. Игорные жилища взяли в повадку одаривать гэмблеров приятными призами. Стать владельцем приветственного подарка возможно за творение профиля или пополнение счёта. Второй вариант больше увлекательный, ведь клубы готовы удвоить депо! Но случае вы новичок и лишь знакомитесь с миром азарта, чем воспользуйтесь бонусом за регистрацию.Бездепы шансы входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами. зеркала 1×slots <a href=http://www.kladonahodki.ru/component/k2/itemlist/user/340042>http://www.kladonahodki.ru/component/k2/itemlist/user/340042</a> Также, учите, собственно бездепозитный приз возможно вывести лишь в случае, когда станут выполнены все обстоятельства отыгрыша.
1×slots подтвердит вашу регистрацию если говорить
Большинство интернет-казино из нашего топ-10 готовы порадовать вас неповторимыми промоакциями. Читайте о них в обзорах и на форуме.Вейджер в переводе с британского означает «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша приобретенного приза, в нашем случае бездепозитного. Число ставок значения — важно лишь набрать сумму, пропорциональную сумме одобрения. 1хлот регистрация в 1×slots casino Многие новенькие сомневаются, что поощрительный приз надо несомненно возвращать, и случае они выиграли у казино. Это безусловно безопасно и накрепко. Выводя выигранные средства, игрок просто останавливает свое роль в игре и теряет уникальную вероятность – даром наращивать личное материальное положение.В подавляющем большинстве случаев благотворительные призы начисляются в кредитах, коие нельзя сразу вывести со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже. <a href=http://biyografiforum.10tl.net/member.php?action=profile&uid=2848>http://biyografiforum.10tl.net/member.php?action=profile&uid=2848</a> 1×slots регистрация то дальше необходимо пройти Промообъявления от казино мешают реальной картины и направлены на привлечение внимания пользователей. Понять, как высоки шансы остаться в плюсе, позволит личный анализ условий предложения:На страничке представлены бездепозитные призы за регистрацию в казино редкая заслуга за которой гонятся все игроки как новенькие, так и мастера. Мы также уделяем огромное внимание на наличие призов при формирование рейтинга казино на деньги. Бездепозитный бонус это вероятность играть безвозмездно и выиграть реальные средства.
1хслот зеркало
<a href=https://www.digitalistings.com/author/michaelciz/>https://www.digitalistings.com/author/michaelciz/</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots Законодательство, регулирующее азартные игры в различных странах, влияет на полномочия операторов. В итоге юзеры из отдельных регионов сталкиваются с ограничениями со стороны казино. Это возможность быть как глубокий отказ в доступе, так и невозможность загружать игры отдельных изготовителей.Онлайн-казино с бездепозитными бонусами ставят посетителям условия для использования бездепами, потому перед ролью в акции чем досконально ознакомиться со всеми правилами и аспектами акции. Условия могут дотрагиваться получения приза, его применения и последующего вывода валютных средств если, тогда, выигрыша.
1×slots зеркало
Мы подготовили список, где есть постоянно животрепещущие и свежие бездепозитные призы казино, которые вам получить даром. Для наших пользователей есть особые предложения эксклюзивные призы, которые вы у не отыщите, их мы обозначили особой красной плашкой «Exclusive». <a href=https://forums.dfine.net/showthread.php?tid=590>1×slots сайт</a> Заработать на бездепозитных бонусах за регистрацию в казино имеет каждый юзер, достигший совершеннолетия. 1×slots скачать на айфон <a href=https://ascendnow.ca/1win-bet-website-jogos/>https://ascendnow.ca/1win-bet-website-jogos/</a> Приветственный приз без депо ? презент за регистрацию. Выдается деньгами, фриспинами или баллами. В последнем случае бонусные баллы применяются для участия в турнирах либо размена на настоящие средства.
1×slots официальный зеркало
Рассмотрим принцип его деяния на случае. Допустим, вы зарегистрировались и возымели $10 no deposit bonus с вейджером х50. Это значит, что выигранные средства можно несомненно выводить не раньше, чем в такого, как общая сумма ставок достигнет $500. <a href=http://drop-let.ru/index.php?subaction=userinfo&user=swelteringeyesi>http://drop-let.ru/index.php?subaction=userinfo&user=swelteringeyesi</a> Вывод выигрыша с бездепозитных призов казино – великодушный презент от азартных клубов. Но дабы вывести собственный доход, необходимо выполнить ряд условий:Если вы выбираете испытанное лицензионное интернет казино и сделайте все условия получения бездепозитного бонуса, проблем с получением презента у Вас не возникнет. 1×slots зеркало видели такую регистрацию на Верификация аккаунта. Лучше подтвердить лицо незамедлительно после регистрации, дабы потом не было заморочек с выводом денег. Верификация имеет протекать 2-мя путями:Такой казино бонус без депо за регистрацию выдается игроку на час и активно употребляется данное предложение с 2017 года. Это словно некая конспирация поощрения под бездепозитный. Суть всего сего сводится к тому, собственно геймеру на час выдается, например, 1000 $, а реклама утверждает про, собственно любой выигрыш можно несомненно в будущем оставить при себе. Но в играющий всерьез отнесется к этому предложению, то он попросту растеряет время. Ведь геймеру надо(надобно) будет играть не в основном аккаунте, ну тренировочном и с ограниченным выбором автоматов и ставок. Да и если, тогда, выигрыша (том всей тысячи) в правила вступят определенные условия, где будет сказано, что наибольшей суммой победы может быть только двести $ и деньги можно использовать лишь виде бонуса на первый вклад с вейджером 25 от суммы вознаграждения плюс сам депозит. По результату выйдет, что игрок выигрывал себя 200% бонус с вейджером на конкретную необходимую. Короче разговаривая, это все не вашего медли.
<b>Смотреть еще похожие новости:</b>
<a href=http://sz.80lvl.ru/viewtopic.php?f=8&t=3021>1×slots зеркало проходить регистрацию это отличный вариант</a>
<a href=https://omkor.ac.th/Question-Answer/viewtopic.php?f=3&t=53923&p=699352#p699352>1хслотс официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Иногда виде поощрения за регистрацию все выдаваться билеты для роли в турнирах. Условия их проведения довольно выделяются, поэтому мы советуем ознакомиться с любым предложением раздельно. Ещё одно распространённое акционное предложение – привлекательный подарок с неблаговидными требованиями. К примеру, клуб обещает $100 в качестве бездепа, но с вейджером х80 либо х100. Отыграть такой вейджер практически невероятно и потому никакого концентрироваться на больше интересных акциях.
#1994 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
играющие казино 1×bet зеркало на сегодня <a href=https://sovsekretno.net/>cat casino</a> kent casino 7k casino сайт <a href=https://kompromat1.online/>симулятор казино</a> pin ап casino бесплатное казино Скворцова Вероника Игоревна порно казино вход официальный сайт porno Ангелина Гончаренко, хоккеистка порно с Евгения Медведева vavada casino
DiskiPlus Мухтиярова Елена Вячеславовна порно DiskiPlus казино 1 <a href=https://diskiplus.ru/>DiskiPlus 1×bet скачать приложение на андроид</a> DiskiPlus casino промокод DiskiPlus 1×bet xbet xyz <a href=https://www.diskiplus.ru>DiskiPlus porno Юлия Канакина, скелетонистка</a> DiskiPlus cometa casino DiskiPlus порно с Варвара Субботина DiskiPlus порно с Карен Хачанов (теннис) DiskiPlus top casino DiskiPlus porno Катерина Шпица DiskiPlus porno Мария Шарапова DiskiPlus Крючкова Полина Викторовна порно
#1995 Charlesgunnyhttp://filmkachat.ru
1× slots сайт
Фриспины – благотворительные вращения с фиксированной ставкой, которые можно применять в определенных игровых автоматах. <a href=http://filmkachat.ru/>1хслотс рабочее зеркало на сегодня</a> Принципиальным различием даровых призов от бонусов на депозит считается неименье надобности вносить средства на акк. Из-за сего их часто называют бездепозитными (not the slightest deposit bonuses).Для получения депозитного бонуса необходимо пополнить собственный игровой баланс настоящими средствами. Вознаграждение возможно получить или при внесении первого депозита, или повторяющий фиксированного процента от внесённых средств. Так либо другому, приз поступит на счёт лишь в пополнения. <a href=https://www.obesityhelp.com/members/archicgi/about_me/>https://www.obesityhelp.com/members/archicgi/about_me/</a> Создание аккаунта. На сайте казино необходимо обнаружить регистрационную форму и заполнить пустопорожние поля собственными данными. Иногда на этом шаге требуется указать только адресок электронной почты и пароль, хотя чаще надобно заполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д.). Нужно указывать только реальные данные, поскольку впоследствие они будут проверены. 1хслотс рабочее зеркало <a href=http://jejuseapension.com/bbs/board.php?bo_table=free&wr_id=447063>http://jejuseapension.com/bbs/board.php?bo_table=free&wr_id=447063</a> В реальное время получить приз за регистрацию в казино довольно просто. Почти любой игорный жилище с радостью даст деньги или безвозмездные вращения. Многие игроки пользуются данным и не стесняются региться в любом клубе с прибыльными условиями. Кстати, это замечательная вероятность придумать выигрышную тактику и сорвать куш.Самые модные методы вывода денег ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электронным платежным системам типа Neteller и Skrill, а пользуются криптовалютными кошельками. Вывод выигрышей возможность осуществляться мгновенно либо занимать от нескольких часов до нескольких суток.
1×slots официальный зеркало
Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.Основное отличие в, собственно для получения бездепа не пополнять баланс в казино. Но не сего, есть ряд и отличий: <a href=http://rapbeatsforum.com/viewtopic.php?t=669253>1×slots зеркало на сегодня</a> 1×slots скачать на айфон Автоматы неспроста числятся наиболее знаменитым азартным весельем. Чтобы освоить управление и правила, потребуется всего количество минут. Ваша задача сделать ставку, найти количество рабочих линий и возможно крутить тамбур. Если на выпадет выигрышная композиция – вы выиграли! С данной задачей для помогут справится бездепозитные призы казино.В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая часть забавы. Важно, часто бездепозитные бонусы в казино выдаются с ограничениями по максимальной выплате. В среднем можно рассчитывать на прибыль в количество тыщ рублей. Как вывести выигрыш с бонуса без депозита. Придётся доказать аккаунт документально, в некоторых заведениях. Процедура верификации обязательна и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате либо прочтите в правилах. <a href=https://swordmaster.org/user/Edwardaerop/>https://swordmaster.org/user/Edwardaerop/</a> Бездепозитные бонусы, как уже понятно, являются уникальной возможностью приступать к игровому процессу безусловно безвозмездно, другими выступать в онлайн казино безвозмездно и на существующие свои незамедлительно последствии регистрации аккаунта. Автоматы с этим депо шансы стать прекрасной вероятностью поиграть для почитателей азарта с определенными ограничениями в финансах. скачать 1×slots на андроид мобильная версия Вейджер не более х30–35 является приемлемым. Опытные игроки заявляют, что с таким вейджером реально остаться в плюсе, если правильно подойти к выбору игрового аппарата.
1×slots официальный demo регистрация в 1×slots casino
При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, которое можно посвятить этой в казино.Когда речь о валютных бонусах, казино всегда устанавливают условия вейджера, которые нужно выполнить, чтобы вывести выигрыш. <a href=https://www.empowher.com/users/dsartru0906>https://www.empowher.com/users/dsartru0906</a> Фриспины – благотворительные вращения с фиксированной ставкой, коие можно применять в определенных игровых автоматах. 1хслотс рабочее зеркало Бездепозитный приз часто может замерзнуть доступным незамедлительно в завершения регистрации, потому в большинстве случаев единственным требованием к нему является регистрация, а после ревизия вашей свежей учетной записи.Каждый новичок и профессиональный игрок мечтают живо стартануть и начать создавать настоящие ставки. Для этого довольно арестовать презент, за который не выплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email или телефон. После сего администрация начисляет щедрое вознаграждение повторяющий безвозмездных вращений либо виртуальных кредитов.
1×slots официальный регистрация
<a href=https://adminclub.org/showthread.php?tid=294940>1хслотс казино зеркало</a> Как верховодило, при выводе денег, от играющего требуется лишь сделать наименьший вклад чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом личный счет.Если площадка презентует бездеп за регистрацию, то процедура его получения проста. Нужно лишь ввести аккаунт на веб-сайте и активировать его, подтвердив адресок электронной почты, номер телефонного или другие данные, коие настятельно оператор. Перед данным необходимо увериться, что юзер находится на официальном сайте казино, не на жульнической площадке. Если площадка дарует бездеп за регистрацию, то процедура его получения проста. Нужно только ввести акк на сайте и активировать его, подтвердив адресок электрической почты, номер телефонного или иные данные, которые просит оператор. Перед этим нужно увериться, что пользователь находится на официальном сайте казино, а не на жульнической площадке. 1×slots зеркало регистрация то дальше необходимо пройти <a href=https://www.deviantart.com/cuponskid/journal/mpstats-1096287039>https://www.deviantart.com/cuponskid/journal/mpstats-1096287039</a> Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 долларов. Если выдаются фриспины, их число изредка превышает нескольких 10-ов безвозмездных вращений.Бездепозитные призы – это самая интересная и наиболее многообещающая промоакция интернет-казино. Они числе чем фри-спинов, поэтому собственно выплаты в безвозмездных вращениях не гарантированы, ведь комбинации на барабанах игрового аппарата имеют не сложиться.
1×slot зеркало
<a href=http://samsoberi.ru/index.php?subaction=userinfo&user=aromaticdrudge6>http://samsoberi.ru/index.php?subaction=userinfo&user=aromaticdrudge6</a> 1×slots промокод при регистрации 2025 Бонусы без депозита при регистрации считаются самыми красивыми как для опытных игроков, например для и начинающих. Получив такое вознаграждение, заказчик имеет выступать на настоящие деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а условия их активации и выигрыша.
<b>Смотреть еще похожие новости:</b>
<a href=http://everestrolep.listbb.ru/viewtopic.php?f=38&t=17329>1×slots промокод при регистрации</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, solid зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.
#1996 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию процедура займет всего лишь
Акции, приуроченные к календарным праздникам, случаются рассчитаны как на всех пользователей, так и на категории: к, подарок на 8 марта девушкам-игрокам либо мужикам на 23 февраля.Мы подготовили список, где есть практически животрепещущие и новые бездепозитные призы казино, которые вы можете получить безвозмездно. Для наших юзеров есть особые предложения эксклюзивные призы, которые вы у не найдете, их мы обозначили специальной красноватой плашкой «Exclusive». <a href=http://filmkachat.ru/>1× слот зеркало</a> Приветственный бездеп предоставляется любому игроку лишь один раз. Казино борются с например именуемыми бонусхантерами (от англ. Bonus Hunter — охотник за бонусами), пытающимися заводить многочисленные аккаунты для надувательства оператора и повторного получения презента. Исключить похожие деянья позволяет верификация данных. Администрация вправе востребовать у посетителя доказать индивидуальные данные, обозначенные при регистрации.При верном подходе бездепы — это отличный метод играть на средства без растраты личных средств. Есть количество рекомендаций, следуя которым возможно извлечь максимум полезности из подобных акций казино. Играть следует лишь на лицензированных площадках. Скриптовые веб-сайты не врут с бонусными услугами, хотя и используют пиратский софт с измененным ГСЧ. Выиграть на этих автоматах невероятно. <a href=https://collectednotes.com/lexxeagle/transforming-spaces-professional-3d-interior-visualization>https://collectednotes.com/lexxeagle/transforming-spaces-professional-3d-interior-visualization</a> Призовые начисления без депо могут предоставляться для роли в турнирах интернет казино. Потратить перечисленные средства можно самая масштабах данной промоакции. Условия их проведения в ограничения на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться этим предложением, никакого выучить его верховодила.Некоторые казино могут предлагать посетителям бездепы за подтверждение номера или почты или репост на страничку в соц сетях. 1× slots сайт <a href=http://twchess.lionfree.net/discuz/home.php?mod=space&uid=24843>http://twchess.lionfree.net/discuz/home.php?mod=space&uid=24843</a>
1×слотс казино
Благодаря программе преданности от игорного заведения, можно взять неплохой старт и без добавочных вложений запустить видеослоты. Кроме как, можно рассчитывать на реальную фортуну и получить, без вложения собственных денег, великий выигрыш. <a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=166295&result=reply>1×slots зеркало регистрацию более популярный вариант это</a> 1×slots регистрация на 1хслотс Нет. Для получения бездепозитного приза в казино нужна неотъемлемая регистрация на сайте. Играть в слоты бесплатно и без регистрации можно лишь в демо режиме.Бездепозитный бонус часто имеет стать доступным сразу после завершения регистрации, потому в большинстве случаев единственным притязанием к нему считается регистрация, а после ревизия вашей новой учетной записи. <a href=http://bts.clanweb.eu/profile.php?lookup=40024>http://bts.clanweb.eu/profile.php?lookup=40024</a> 1×slots официальный регистрация
1×slots официальный сайт зеркало
Новички не обожают сразу же заносить депозит. Это обусловлено неимением навыка и недоверием. К счастью, в возможно получить бездепозитный приз за регистрацию в казино. Неважно собственно начислит система – фриспины либо кредиты. В любом случае вы не рискуете собственными сбережениями. Это отличная возможность запустить приглянувшийся видео слот или же испытать фортуну в настольных забавах.Бесплатные призы казино без депозита можно получить в виде валютных средств на бонусный счет (исключить их можно лишь после отыгрыша), фриспинов, игры либо кешбэк-бонуса. Перед активацией главно пристально изучить условия акции. Чем ниже вейджер, что, этим больше потенциальная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, на коих можно воспользоваться предложением. Если бездеп охватывает узкий перечень игр, рекомендовано узнать максимальные коэффициенты, уровень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь никаких случае, если оператор не установил строгие лимитирования на наивысшую сумму ставки. <a href=https://www.thenewtop10s.com/author/jasperhaito/>https://www.thenewtop10s.com/author/jasperhaito/</a> Ознакомьтесь с нашим списком превосходнейших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего перечня и получите бездеп незамедлительно. Хватайте наихорошие безвозмездные предложения ниже и выигрывайте немалые средства, не рискуя!Самые известные методы вывода денег ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электрическим платежным системам типа Neteller и Skrill, а также пользуются криптовалютными кошельками. Вывод выигрышей имеет осуществляться мгновенно либо занимать от нескольких часов до нескольких суток. 1×slots официальный сайт скачать на айфон С этими простыми советами любое казино с бонусом за регистрацию способно принести в разы больше выгоды и выгоды.Как только вы отыграли вейджер и свои с бонусного баланса перебежали вас на настоящий счет, Вы отважно можете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать минимальный депозит к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, вместе с депо).
1×slots зеркало сайта
<a href=https://omkor.ac.th/Question-Answer/viewtopic.php?f=3&t=53923&p=699352#p699352>1хслотс официальный сайт зеркало</a> Шаг 5. Использование и отыгрыш. Бездеп должен быть применен в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера. Бездепозитный приз за регистрацию в казино — это стартовый подарок в виде денежного начисления либо безвозмездных вращений для новых игроков заведения, для получения которого надо вносить депозит.Самые известные методы вывода средств ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электрическим платежным системам типа Neteller и Skrill, а также используют криптовалютными кошельками. Вывод выигрышей имеет осуществляться моментально или занимать от нескольких часов до нескольких суток. 1×slots быструю регистрацию а также мгновенное <a href=https://cse.google.com.af/url?q=http%3A%2F%2Fdoctorlazuta.by>https://cse.google.com.af/url?q=http%3A%2F%2Fdoctorlazuta.by</a> Как правило, при выводе финансов, от играющего требуется только сделать наименьший лепта для того, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом собственный счет.Для получения бонуса нужно ознакомиться с программкой преданности казино и устроить ставки на необходимую, необходимую для перехода на грядущий степень.
1×slots зеркало подтвердит вашу регистрацию если говорить
Чтобы получить возможность исключить прибыль с бездепозитного бонуса в казино, необходимо выполнить ряд условий:Выигрыши с призов без инвестициям практически привязаны к требованию по ставкам и могут быть обналичены только в исполнения данных притязаний. Варианты выигрыша зависят от Вашей успеха и условий игорного портала. Выше мы заявили, что некоторые бездепозитные призы в 2022 году выдаются с ограничениями по наибольшей выплате. Однако, остаются и, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность передовых игр на средства, можно выиграть невероятные суммы. Сегодняшние игровые автоматы либо видео слоты, как их называют. Могут выдавать солидные умножение от х1.000 и выше. Некоторые множат ставку от х100.000. <a href=https://zrz26.ru/user/BrianLok/>https://zrz26.ru/user/BrianLok/</a> 1хслотс мобильная версия зеркало Предложения с бездепозитными бонусами за регистрацию позволяют новым заведениям заинтересовать аудиторию на собственный сайт. А игроки к получают возможность выступать на реальные средства без депозита в казино и заработать малый стартовый капитал, который разрешено исключить на карту банка или электрический кошелек.Когда идет о получении бездепозитных призов в казино, для направьте на последующие обстоятельства:
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На страничке представлены бездепозитные призы за регистрацию в казино редкая заслуга за которой гонятся все игроки как новички, так и профессионалы. Мы тоже уделяем большое внимание на присутствие бонусов при формирование рейтинга казино на деньги. Бездепозитный бонус это вероятность играть безвозмездно и выиграть реальные деньги.
#1997 Charlesgunnyhttp://filmkachat.ru
сайт 1× slots casino
Похожим образом трудится 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения посетителя или из-за с получения им VIP-статуса. Подарок предоставляется последствии обращения в поддержку и проверки.Доступные игры – В некоторых азартных забавах возможно снизить математическое приемущество казино до нескольких десятых процента. В их числе почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как правило, в таких играх ставки идут в зачет вейджера не всецело. Например, может учитываться только 50%. В некоторых играх бездепозитные призы вообщем невозможно отыгрывать. <a href=http://filmkachat.ru/>1×slots быструю регистрацию а также мгновенное</a> С не отыгранным бонусом запрещается превосходить объем максимальной ставки. Нарушение этого условия последствия аннулирование выигрыша. <a href=https://britishforcesdiscounts.co.uk/biz/a/165360-CGIFurniture>https://britishforcesdiscounts.co.uk/biz/a/165360-CGIFurniture</a> Пoдтвepдить личнocть клиента. Для успешного вывода средств, необходимо доказать лицо клиента. Нa этaпe вepификaции пpoфиля, сотрудники службы защищенности должны убедиться, собственно у игрока всего лишь раз акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не сможет исключить собственный выигрыш, в у него несомненно количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы. 1×slots казино зеркало <a href=http://orto-prof.ru/bitrix/rk.php?goto=http://mmenu.com/bitrix/rk.php?goto=http://w.mledy.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/dXlMjPyUDEK>http://orto-prof.ru/bitrix/rk.php?goto=http://mmenu.com/bitrix/rk.php?goto=http://w.mledy.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/dXlMjPyUDEK</a>
1хслотс казино зеркало
Мы рекомендуем не отказываться от похожих предложений известных казино. Выделите количество мин. На регистрацию, получите приз и попробуйте его отыграть. Может быть, сегодня фортуна несомненно на вашей стороне!Главным моментом в возникновении этих вознаграждений произведено сомнений, что пустив их в ход, игрок ничем не рискует и в последствии никому ничего не несомненно обязан (не зависимо, получит ли он благодаря призам какой-либо выигрыш или мгновенно спустит все только собственно прибывшие финансы). То есть, казино снабжает игрока вероятностью на дармовой основе выступать во различные слоты причем спонсирует забаву. 1×slots регистрация 1×slots casino c2d ru Подтверждение регистрации. Казино требуют привязки профиля к электрическому адресу и номеру аппарата. Для этого на e-mail отчаливает послание ссылаясь, а на аппарат ? текстовое извещенье с кодом. <a href=http://www.musichunt.pro/blogs/view.htm?id=80051>http://www.musichunt.pro/blogs/view.htm?id=80051</a> Ещё одно распространённое акционное предложение – привлекательный подарок с неблаговидными требованиями. К примеру, клуб обещает $100 в качестве бездепа, но с вейджером х80 либо х100. Отыграть такой вейджер практически невероятно и потому никакого концентрироваться на больше интересных акциях. 1×slots сайт В наше время довольно просто получить приз за регистрацию в казино. Практически любой игорный жилище с готовностью начислит деньги или безвозмездные вращения. Многие гэмблеры используют данным и не стесняются регистрироваться в каждом клубе с прибыльными критериями. Кстати, это замечательная вероятность выработать победную стратегию и сорвать джекпот.Бoльшинcтвo азартных заведений выдвигают приблизительно одинаковые условия и требования, которые нужно выполнить, дабы получить бездепозитный приз за регистрацию. Все их возможно соединить в один перечень:
1хслотс официальный сайт зеркало
Также, в необходимо подтвердить свой номер аппарата, для этого код, приобретенный в смс-сообщении от клуба установить в специальное фон в личном кабинете игрока.Получив свой подарок, Вы сможете даром выступать на настоящие деньги, а выполнив обстоятельства отыгрыша, вывести собственный выигрыш. Акции распространяются как на все забавы казино, например и на ограниченный список. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и другие. Промо может охватывать разработки одного производителя. Бездеп не пересекается с другими промоакциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, сделанные бонусными средствами. Для идентификации платежных реквизитов игрока имеет потребоваться пополнение счета на минимальную необходимую.Но на некоторых азартных платформах сходственные вознаграждения все получить теперь зарегистрированные пользователи. В таком случае, бонусы предоставляются в уникальных акций или же неким игрокам повторяющий акционного предложения, коие приходит на почту с целью «возвратить» игрока в свое казино. <a href=http://www.clubwww1.com/dating/member/blog_post_view.php?postId=38848>http://www.clubwww1.com/dating/member/blog_post_view.php?postId=38848</a> Также посещают случаи, когда казино начислит обсужденный бонус последствии регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам. 1× slots casino зеркало Если речь об эксклюзивных предложениях, может потребоваться регистрация в казино по ссылке с партнерского сайта.Бездепы могут заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
<a href=http://sladkierecepti.5nx.ru/viewtopic.php?f=8&t=12150>1× slots официальный</a> Итак, дабы бесплатные бонусные кредиты превратились в реальные деньги, которыми вы можете управлять по своему усмотрению, их надо(надобно) отыграть. Вейджер идет уточнять в правилах онлайн-казино. 1× slots сайт <a href=https://www.penexchange.de/pen-wiki/index.php/Benutzer:Nannie95F2487>https://www.penexchange.de/pen-wiki/index.php/Benutzer:Nannie95F2487</a> Законодательство, регулирующее азартные игры в различных странах, влияет на полномочия операторов. В результате пользователи из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это имеет быть как полный отказ в доступе, так и невозможность загружать забавы отдельных производителей.
1×slots рабочее зеркало
Активация валютного гонорары происходит автоматически после творения профиля либо применения промокода. Иногда операторы предъявляют дополнительные требования: подписаться на странички казино в социальных сетях либо на рассылку рекламных извещений, скачать и ввести дополнительный софт и т.д. Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция содержит доскональные верховодила, гиперссылка на коие обыкновенно содержится в промообъявлении. В их указываются лимиты, вейджер, список дешевых игр. Если оператор укрывает данные о предложении, то воспользоваться им не.Предложения с бездепозитными призами за регистрацию позволяют свежим заведениям привлечь аудиторию на свой сайт. А игроки к получают возможность выступать на настоящие деньги без депозита в казино и заработать маленькой стартовый капитал, кот-ый разрешается исключить на карту банка или электрический кошелек. <a href=https://www.x-fta.com/foro/member.php?1256124-Kennethsex>https://www.x-fta.com/foro/member.php?1256124-Kennethsex</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots Бездепы с бесплатными вращениями предоставляют пользователям право вертеть барабаны игровых автоматов без снятия средств со счета. За каждый раунд платит казино. Число спинов ограничено и изредка выше сотню. Если акция содержит количество безвозмездных игр, их начисление может быть разбито на некоторое дней.
<b>Смотреть еще похожие новости:</b>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=168590&result=reply>1×slot официальный сайт</a>
<a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=179315>зеркала 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Прежде чем активировать бездеп, нужно увериться что, нет, что государство, гражданином которой является игрок, не входит в перечень не. Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых новых, щедрых и испытанных бонусах в онлайн казино, коие обновляются каждый день.
#1998 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Окладникова Ирина Андреевна порно pinco casino <a href=https://krtka.info/>ramenbet casino</a> porno Андрей Рублев (теннис) 1×bet casino <a href=https://vestnik-jurnal.com/>porno Екатерина Ефременкова, шорт-трекистка</a> фильмы казино рояль r7 casino ев казино pin up букмекерская контора букмекерская контора официальный сайт скачать порно с Максим Глушенков (футбол) ограбление казино
DiskiPlus 1×bet официальный скачать DiskiPlus Лут Оксана Николаевна порно <a href=https://diskiplus.ru/>DiskiPlus рейтинг казино</a> DiskiPlus 7k casino официальный сайт DiskiPlus 1×bet слоты официальный сайт <a href=https://www.diskiplus.ru/>DiskiPlus casino 7k сегодня</a> DiskiPlus порно с Диана Шнайдер (теннис) DiskiPlus 1×bet официальный xbet DiskiPlus 1×bet рабочее DiskiPlus мобильные букмекерские конторы DiskiPlus сайт винлайн букмекерская контора DiskiPlus скачать сайт букмекерской конторы DiskiPlus порно с Федор Чалов (футбол)
#1999 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
Способы получения бездепа различаются от вида приза, который понравился игроку. Но вам в любом случае надо(надобно) быть зарегистрированным в законном онлайн-казино и доказать свою лицо. В общем облике пошаговая инструкция для получения бездепозитного приза смотрится так: <a href=http://filmkachat.ru/>1×slots казино мобильная версия</a> Иногда операторы требуют внесение малого депозита перед выводом для верификации платежного инструмента. В некоторых казино этот депо того предстоит отыграть.Максимальная ставка ? уточняется в еденице счета и ограничивает размер ставки за раз спин. В случае ее превышения приз возможность быть аннулирован. Также в правилах возможность находиться запрет на размещение ставок конкретного облика, к, по равным шансам в рулетке (то есть, на чет или нечет, красное или черное и т.д. ). <a href=https://www.sideprojectors.com/project/55405/expert-construction-drafting-services>https://www.sideprojectors.com/project/55405/expert-construction-drafting-services</a> 1×slot рабочее зеркало <a href=http://www.tandemkf.com.ua/index.php?subaction=userinfo&user=victorioussled5>http://www.tandemkf.com.ua/index.php?subaction=userinfo&user=victorioussled5</a>
1×slots зеркало сайта
Обычно, бездепозитные призы выдаются под определенные слоты с фиксированной ставкой, хотя их точно воспрещено использовать в игровых автоматах с прогрессивным джекпотом. Список игр, в которых можно использовать бездеп, Вы отыщите в описании акции либо можете уточнить у саппорта заведения. казино 1×slots Для ревизии применяются сканы паспортов, водительских водительских, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь замечен в попытке завести вспомогательный аккаунт, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный список. При игре на лицензионной площадке надо бояться свидетельствовать достоверную индивидуальную информацию (шифрование ликвидирует утечку персональных данных). <a href=https://forum.papbio.org/member.php?action=profile&uid=80090>https://forum.papbio.org/member.php?action=profile&uid=80090</a> Каждый из бездепозитных призов без пополнения 2022 имеет свой определенный вейджер для отыгрыша, так же в каждом казино он устанавливается индивидуально — где то он х55 а кое-где х30, повторюсь всюду по разному!Зарегистрироваться в казино по специальной ссылке или с бонусным кодом. Подтвердить контактные данные (номер аппарата и электронную почту). Для подтверждения номера телефонного необходимо в собственном профиле указать собственный номер и надавить кнопку „Подтвердить номер телефона“, далее Вы получите sms-сообщение с кодом, который нужно установить в отвечающее поле. Для подтверждения электрической почты, перебежать по интенсивной ссылке в письме от казино. казино 1×slots Многие игроки, оценив перечень казино, остаются играть в нем и далее ? на это и нацелено каждое рекламную. Постоянные клиенты вносят депозиты и делают ставки, обеспечивая долгосрочную выгода оператора. То есть, казино раздают бездепы новым юзерам для формирования лояльной аудитории.Бездепозитные призы за регистрацию в игровых автоматах для собственников онлайн-казино считаются долею маркетинговой кампании, направленной на повышение аудитории сайта. Так они продвигают средства бренды и привлекают свежих клиентов.
1×slots casino online регистрация
<a href=https://www.weaselmods.net/member.php?action=profile&uid=5670>https://www.weaselmods.net/member.php?action=profile&uid=5670</a> Некоторые веб-сайты, до чем провести регистрацию игроков, предлагают ответить на некоторое базовых вопросов. Цель проведения подобной викторины – выявить случайных людей, которые не имеют представления о покере, и не разрешить получения ими бонусов. Если гость теснее играл в казино, то ответить на полтора десятка простых вопросов несомненно несложно. Очень нередко, ответы можно отыскать на официальных сайтах этих учреждений.Чаще всего казино бонус за регистрацию без депозита даёт вероятность запустить каждой машина. Но другого внимательно ознакомиться с условиями. Иногда для игры доступны только определённые модели. Если вы новичок и ничего не смыслите в гэмблинге, чем начать знакомство с миром пыла именно с «одноруких злодеев». 1×slots зеркало Каждая игровая перрон отличается условиями по получению и отыгрышу бездепов. В правилах отчетливо расписаны временные рамки, за которые нужно прокрутить вейджер. Также не забывайте про максимальный размер ставки и максимальную сумму выплаты. С другой стороны, чтобы получить бездепозитные призы казино, довольно истратить менее 1 минутки.
1×slots рабочее зеркало на сегодня
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=125173&extra=>1×slots зеркало рабочее на сегодня</a> Далее потребуется отыграть вагер и вывести выигрыш. Игрокам без навыка крупно подфартило, у получить 10-ки презентов за 1 регистрацию. Если не смогли получить Бездепозитный бонус, не беспокойтесь. Обратитесь в онлайн чат, оператор поможет ситуацию.Какие призы меня еще получить кроме бездепозитного приза за регистрацию в казино? По мимо бездепозитного приза, любое онлайн казино предлагает игрокам выгодное предложение на 1-ый депозит, вы совершаете депо, ваш депозит возрастает в двое или том в трое, тем самым начать играть можно с более солидной суммой, например же не запамятываем про вейджер на призы. Срок отыгрыша — это период, который наступает в момент активации бонуса и завершается с его закрытием. Пользователю нужно уложиться в данный временной промежуток, иначе призовые свои аннулируются. Казино устанавливают список игр, ставки в которых засчитываются при расчете отыгранных денег. Если тайтл не входит в данный список, то предоставляется быть недоступен для загрузки период деяния бонусного предложения.Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам запрещено начислять бонусы посетителям, не имеющим валютных средств на счете. Мы предлагаем разглядеть актуальные призы онлайн-казино с лицензией, коие соблюдают законодательство РБ. 1 хслот регистрация в 1×slots casino <a href=http://cnccompany.com.ua/index.php?subaction=userinfo&user=chillysemester6>http://cnccompany.com.ua/index.php?subaction=userinfo&user=chillysemester6</a>
сайт 1× slots casino
Фриплей-бонусы встречаются только в неких клубах. Они зачисляются сразу последствии создания профиля и активны недолговременное время. Если не успеете истратить свои, они просто сгорят. Касаемо времени, в большинстве случаев призы активны в течение часа. Баланс игрока дополняется на подходящую сумму. К ней используется вейджер, указанный в правилах акции. Вывести выигрыш можно будет после такого, как пользователь устроит требуемый объем ставок из личных средств. В редчайших случаях бездеп трудится в формате Free Play. На счет пользователя зачисляется большая сумма, и предоставляется малый срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по окончании этого периода сумма на счету будет превосходить изначальную, то разницу возможно будет вывести либо применять для дальнейших ставок.Предложения с бездепозитными бонусами за регистрацию дозволяют свежим заведениям заинтересовать аудиторию на собственный вебсайт. А игроки к получают вероятность выступать на реальные деньги без депозита в казино и заработать малый стартовый капитал, который разрешено вывести на карту банка или электрический кошелек. <a href=http://haytap.tv/profile.php?u=axujy>http://haytap.tv/profile.php?u=axujy</a> Бывают ли бездепозитные бонусы без вейджера? Бывают, случае у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино. 1 хслот регистрация в 1×slots casino В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с безвозмездных вращений. Прибыль, коию Вы заработаете на этом бездепе можно назначать на вывод без какого или отыгрыша.Да, у бесплатных призов есть дефекты. Прежде всего, они обычно очень. Кроме такого, обстоятельства вейджера по ним практически жесткие. Но все неимение риска делает их довольно красивыми для клиентов.
<b>Смотреть еще похожие новости:</b>
<a href=http://check2go.net/author/jameslob/>1×slots casino регистрация 1×slots review live</a>
<a href=https://games-garant.ru/index.php?subaction=userinfo&user=Jamesneorm>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для всех бездепозитных бонусов действует наибольший предел на выигрыш. Он показывает предельную необходимую, коию у получить, играя на бонусные кредиты. Как только вам получится выполнить требования вейджера, возможный максимально будет переведен с бонусного счета на ведущей, а остаток будет списан. Таким образом, заведение пытается продемонстрировать себя своим потенциальным игрокам, а такой маркетинговый ход как казино приз без депозита за регистрацию завлекает очень большое внимания к игорному заведению и обеспечивает постоянный поток новых гостей и будущих посетителей игрового интернет клуба.
#2000 internetGephttps://domashij-internet-msk001.ru
подключить интернет в москве в квартире <a href=https://domashij-internet-msk001.ru>domashij-internet-msk001.ru</a> подключить интернет в москве в квартире
#2001 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пинко casino порно с Каролина Севастьянова <a href=https://m.repost.news/>1×bet сайт</a> казино рояль смотреть kometa casino <a href=https://rumafia.news/>официальное казино вход</a> казино вход официальный сайт казино пину casino зеркало сегодня рабочее 1×bet xbet 1×bet зеркало рабочее на сегодня 7k casino скачать порно с Дарья Клишина, легкоатлетка
DiskiPlus porno Мария Шарапова DiskiPlus porno Вера Бирюкова, гимнастка <a href=https://diskiplus.ru>DiskiPlus лучшие казино бесплатно</a> DiskiPlus porno Катерина Шпица DiskiPlus Кузнецова Анна Юрьевна порно <a href=https://diskiplus.ru>DiskiPlus Петрова Ольга Викторовна порно</a> DiskiPlus Мухтиярова Елена Вячеславовна порно DiskiPlus букмекерская контора фонбет DiskiPlus 1×bet скачать приложение на андроид DiskiPlus 1×bet скачать приложение на андроид DiskiPlus порно с Юлия Ефимова DiskiPlus 1go casino DiskiPlus букмекерская контора официальный сайт скачать
#2002 1win_xuprhttp://1win5011.ru
1win.com <a href=www.1win5011.ru>www.1win5011.ru</a> .
#2003 internetGephttps://domashij-internet-kazan003.ru
подключить интернет тарифы казань <a href=https://domashij-internet-kazan003.ru>domashij-internet-kazan003.ru</a> лучший интернет провайдер казань
#2004 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало которую указывали при регистрации кстати
Стоит отметить, собственно бездепозитный бонус выдается только совершеннолетним новичкам, которые, же, могут пригласить личных приятелей и знакомых, кроме претендующих на поощрительную программу лояльности. Подобная разработка появилась среди соперничающих онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры способствуют увеличению своей популярности, методом привлечения новых игроков. Бонусы – это оригинальный шанс для потенциальных участников игры, коие все опробовать софт покер рума и увериться, станут ли они в него выступать или нет. Новый игрок испробует свои силы с реальными оппонентами в казино.Вейджер (или вагер) ? это наименьшая сумма ставок, коию необходимо сделать для вывода валютного бонуса. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение. <a href=http://filmkachat.ru/>1хслотс регистрация в 1×slots casino</a> Но не стоит думать, собственно снабжая пользователей этими призами, казино занимается спонсированием. Ведь размеры вознаграждений, главном, не немалые (средним размером от 5 до 20 $). И на эти средства налагаются определенные условия и ограничения, обязательные к исполнению игрока, в в последствии он вожделеет получить все средства выигранные деньги. <a href=https://many.link/kalinka0588>https://many.link/kalinka0588</a> 1хслотс регистрация в 1×slots casino <a href=https://rollbol.com/blogs/1884756/%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0-%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA-%D0%B3%D0%BB%D0%B0%D0%B2%D0%BD%D0%B0%D1%8F-%D0%B4%D0%BE%D1%80%D0%BE%D0%B3%D0%B0>https://rollbol.com/blogs/1884756/%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0-%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA-%D0%B3%D0%BB%D0%B0%D0%B2%D0%BD%D0%B0%D1%8F-%D0%B4%D0%BE%D1%80%D0%BE%D0%B3%D0%B0</a>
рабочее зеркало 1×slots
1×slots зеркало регистрация то дальше необходимо пройти Максимальный размер ставки, который нельзя превосходить пока приз не будет полностью отыгран. В случае нарушения этого управляла, бонус и выигрыш с него будут аннулированы. <a href=http://xn–9r2b13phzdq9r.com/bbs/board.php?bo_table=free&wr_id=4227905>http://xn–9r2b13phzdq9r.com/bbs/board.php?bo_table=free&wr_id=4227905</a> Размер ставки для игры по бездепозитному бонусу (естесственно же, в случае, когда он представлен вид бонусных валютных средств) зачастую ниже, чем при ирге на депозит. Ограничение несомненно работать до момента отыгрыша бонуса.Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и. Когда игроку надеется количество фриспинов, администрация может бить3 их начисление на несколько дней. Бесплатные вращения предоставляются для определенного слота, который указывается в правилах промоакции. 1хслот зеркало
1×slots скачать на айфон
Разные казино имеют собственные верховодила по выведению выигрыша. Для бездепозитных бонусов принимаются достаточно высокие притязания. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до 100 один в игровых автоматах. Например, в игрок получил безвозмездно 10 $, то нужно будет отыграть их, поставив одну тыщу спинов по 1 баксу каждый. Стоит отметить, собственно не все казино дают вероятность играть на призы и не во всех увеселительных заведениях схожие правила для отыгрывания. Некоторые казино воспрещают играть на бонусы в блекджек либо ограничивают ставки до пяти процентов, что существенно увеличивает в десятки раз число необходимых игр.Также бывают случаи, когда казино начисляет оговоренный приз в регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам. Но надо думать, собственно снабжая юзеров этими бонусами, казино увлекается спонсированием. Ведь объемы вознаграждений, главном, не великие (средним объемом от 5 до 20 $). И на эти средства налагаются конкретные обстоятельства и ограничения, неотклонимые к исполненью игрока, случае в последствии он вожделеет получить все свои выигранные финансы. <a href=http://droid-cash.ru/user/JasperOPILT/>http://droid-cash.ru/user/JasperOPILT/</a> 1×slots скачать на айфон Главным моментом в возникновении этих вознаграждений произведено в, собственно пустив их в ход, игры ничем не рискует и в последствии никому ничего не несомненно обязан (не зависимо, получит ли он спасибо бонусам какой-нибудь выигрыш либо моментально спустит все только что прибывшие финансы). То есть, казино снабжает игрока вероятностью на дармовой основе играть во различные слоты и даже спонсирует игру.
1×slots casino регистрация на сайте
Чтобы получить вероятность вывести выгода с бездепозитного бонуса в казино, нужно выполнить ряд условий: Как только вы отыграли вейджер и средства с бонусного баланса перебежали для на настоящий счет, Вы неустрашимо сможете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (устроить наименьший депо к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депо). Бездепозитные бонусы казино за регистрацию в 2022 году — это возможность поиграть за счёт заведения. Казино даёт посетителю шанс пользоваться определённой суммой или числом безвозмездных вращений без внесения депо. Не путайте деморежим с реальной забавой без необходимости внесения депо.Выше мы дали полный набор самых свежих и актуальных бездепозитных бонусов в интернет казино без пополнения на 2022 год, где вы можете воспользоваться хоть ценным бездепозитным призом. 1×slots регистрация 1×slots review live <a href=http://forum.cncprovn.com/members/178171-RaymondNuace>http://forum.cncprovn.com/members/178171-RaymondNuace</a>
1×slots на любой вкус как пройти регистрацию
Самый распространённый из сходственных бонусов, естесственно же, бездеп на денек рождения клиента — приз повторяющий фиксированной суммы либо фриспинов поступает на счёт игрока, а пользоваться им можно в течение установленного периода времени.На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не можете активировать и получить бездепозитный бонус. <a href=http://forum.cncprovn.com/members/188341-Jamesmex>http://forum.cncprovn.com/members/188341-Jamesmex</a> Раздача призов имеет быть посвящена различным датам: календарные праздничные, дни рождения игроков, юбилей открытия казино и т. Д. Подарок выдается вид денег, фриспинов или баллов для накопления и обмена на предложения оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд притязаний. 1×slots зеркало видели такую регистрацию на Нет. Казино выдают благотворительные бонусы за регистрацию, для того, чтобы клиент имел ознакомиться с игровым заведением. А чтобы вывести его, нужно выполнить условия отыгрыша.Прочитайте управляла бонусной программы, какой желайте принять. Да, мы настойчиво рекомендуем устроить это до регистрации.
<b>Смотреть еще похожие новости:</b>
<a href=https://praisenpray.org/forums/showthread.php?tid=121114>1×slos регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Ознакомьтесь с нашим списком превосходнейших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего списка и получите бездеп незамедлительно. Хватайте лучшие бесплатные предложения ниже и выигрывайте немалые средства, не рискуя!
#2005 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
вавада казино vavada casino <a href=https://rumafia.news/>1×bet сайт 1×bet xyz</a> казино без сайт казино зеркало <a href=https://rucriminal.info/>казино вход</a> casino зеркало сайта Комарова Наталья Владимировна порно порно с Илья Осипов (киберспорт) казино зеркало сегодня ставки на спорт букмекерские конторы лучшая казино 1×bet рабочее
DiskiPlus яндекс игры казино DiskiPlus реального казино <a href=https://diskiplus.ru/>DiskiPlus скачать 1×bet на андроид бесплатно</a> DiskiPlus игры казино DiskiPlus online casino <a href=https://www.diskiplus.ru>DiskiPlus 7k casino официальный сайт</a> DiskiPlus яндекс игры казино DiskiPlus почему в казино нет часов DiskiPlus казино большая DiskiPlus Александра Бортич DiskiPlus порно с Евгений Малкин (хоккей) DiskiPlus Ирина Горбачева DiskiPlus официальные зеркала казино
#2006 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации 2025
Чтобы получить возможность вывести выгода с бездепозитного бонуса в казино, нужно выполнить ряд критерий:У каждого игорного клубы различные вейджеровые условия. Чтобы вы гарантировано сумели выполнить их, мы дадим некоторое советов. Если система начислила маленькую необходимую, не создавать немалые ставки – остановитесь на 10–30 центах. Как только сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте играть. В противном случае никакого присмотреться к другому автомату. <a href=http://filmkachat.ru/>1хслотс официальный сайт зеркало</a> <a href=https://manifold.garden/forums/index.php?u=/topic/634/Why%203D%20Product%20Modeling%20Services%20Are%20a%20Game-Changer>https://manifold.garden/forums/index.php?u=/topic/634/Why%203D%20Product%20Modeling%20Services%20Are%20a%20Game-Changer</a> Такой бесплатный эквивалент средств зачисляется на профиль юзера последствии осуществления притязаний и предназначаются они только для игрового процесса. Вывод таких вознаграждений вероятен только в осуществления вейджеровых условий. 1×slots регистрация на сайте <a href=https://www.ls1.com/forums/member.php?u=118934>https://www.ls1.com/forums/member.php?u=118934</a> Как лишь вы отыграли вейджер и свои с бонусного баланса перешли для на настоящий счет, Вы неустрашимо можете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать наименьший депо например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депо).Самые новые бездепозитные бонусы в казино за регистрацию 2022 года с выводом прибыли присутствуют на данной страничке. Посетитель возможность расценить обстоятельства получения и начать играть на средства без внесения депозита. При данном игроку принципиально осознавать, на каких условиях и какими методами у исключить полученный выигрыш. Для сего необходимо оценить список подключенных платежных систем.
1×slots бездепозитный бонус за регистрацию
Прямо сейчас заберите безвозмездные вращения за регистрацию без депо и начинайте собирать призовые комбинации из-за крупных выигрышей!Далее требуется отыграть вагер и исключить выигрыш. Игрокам без опыта крупно повезло, есть получить 10-ки подарков за одну регистрацию. Если не смогли получить Бездепозитный приз, не волнуйтесь. Обратитесь в онлайн чат, оператор поможет исправить. <a href=http://pravoslit.ru/forum/obshchee/179124–1×slots-klubu1×slots-1khslots-registratsiya-perejti-na-1×slots.html>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> 1хслотс рабочее зеркало <a href=http://krlife.co.kr/bbs/board.php?bo_table=free&wr_id=10498>http://krlife.co.kr/bbs/board.php?bo_table=free&wr_id=10498</a> Для выбора азартного заведения Вы можете пользоваться списком наших казино с бонусами за регистрацию. На нашем веб-сайте мы опубликовали список бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, собственно часть призов эксклюзивные и доступны лишь для гостей нашего сайта по-специальному промо-коду либо по уникальной ссылке. Кроме того, для любого приза мы подготовили подробный обзор, в Вы узнаете как получить и отыграть поощрение и как исключить свой выигрыш с бездепа.Но а если вы уже профи по онлайн казино, кликаем на красноватую кнопку «Получить» и Вы автоматически перейдете в онлайн казино; 1хслотс 1хслотс регистрация перейти на 1×slots Индивидуальные одобрения выдаются за совершение действий: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавленья либо официального клиента для ПК. В большинстве казино срабатывают программки преданности, присваивающие игрокам статусы за активность на сайте. Продвижение на грядущий степень часто сопровождается выдачей бездепа.Верификация аккаунта. Лучше доказать лицо сразу последствии регистрации, чтобы потом не было заморочек с выводом средств. Верификация имеет протекать 2-мя маршрутами:
1×slots официальный сайт скачать на айфон
Также случаются случаи, когда казино начислит обсужденный приз в регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам.В качестве бонусов интернет казино часто предлагает выдачу фриспинов, другими безвозмездных вращений игрового барабана. Виртуальные монеты возможно применять для обучения в покерной школе или для забавы в казино. <a href=https://www.gamers-forum.com/member.php?104674-JamesGaf>https://www.gamers-forum.com/member.php?104674-JamesGaf</a> Таким образом, заведение пробует показать себя своим потенциальным геймерам, а такой маркетинговый ход как казино приз без депозита за регистрацию привлекает очень количество внимания к игорному заведению и обеспечивает неизменный струю новых гостей и грядущих посетителей игрового интернет клуба.У каждого игорного клубы различные вейджеровые обстоятельства. Чтобы вы гарантировано сумели выполнить их, мы дадим количество советов. Если система начислила небольшую необходимую, надо делать великие ставки – остановитесь на 10–30 центах. Как лишь сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте играть. В противном случае какого-либо присмотреться к иному автомату. 1×slots казино мобильная версия В интернете большое известных игорных площадок с привлекательными акционными услугами. Однако пристально читать условия десятков предложений вскоре надоест, да и время отнимет количество. Поэтому наша команда подготовила ТОП-3 сайтов с наихорошими бездепозитными призами:Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, solid только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.
1×slots рабочее зеркало
Условия вывода выигрыша. В некоторых заведениях для успешного вывода с бездепозитного приза довольно пополнения баланса и доказательства личности. В иных же клубах, нужно несколько раз прокрутить собственный депо. <a href=https://www.kuyoux.com/space-uid-35770.html>1×slots зеркало на сегодня</a> 1×slots регистрация <a href=https://deanxhpv74185.shoutmyblog.com/29771651/deep-nude-understanding-the-implications-of-ai-generated-imagery>https://deanxhpv74185.shoutmyblog.com/29771651/deep-nude-understanding-the-implications-of-ai-generated-imagery</a> Бездепозитный приз по промо-коду несомненно доступен для забавы, только в том случае когда Вы активируете специальный бонусный код в разделе с бонусами либо укажите промокод при регистрации на сайте. В неких случаях, считая активации кода, понадобиться подтвердить контактные данные игрока и наполнить анкету клиента.Иногда для получения призов необходимо спутаться с представителями службы поддержки. Удобнее всего с ними разговаривать в онлайн-сате, но иногда довольно запроса по электрической почте.
1×slots casino online регистрация
Частенько новички не знают, как активировать подарки или вывести 1-ый выигрыш. Для подобных случаев наша команда описала основные термины – что такое фриспины, вейджер, как его отыграть, чего нужно проходить верификацию.Чаще всего казино приз за регистрацию без депозита даёт возможность запустить каждой автомат. Но другого пристально ознакомиться с условиями. Иногда для игры доступны лишь определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, какого-либо начать знакомство с миром пыла непосредственно с «одноруких злодеев». <a href=http://myvrgame.cn/home.php?mod=space&uid=5065485&do=profile&from=space>http://myvrgame.cn/home.php?mod=space&uid=5065485&do=profile&from=space</a> Лишь популярностью и известные азартные заведения шансы разрешить себя раздавать бездепы вид дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депо, коие возможно израсходовать в лучших аппаратах с высочайшей отдачей.Большинство интернет-казино из нашего топ-10 готовы повеселить вас эксклюзивными акциями. Читайте о их в обзорах и на форуме. 1×slots зеркало этих способов предполагает регистрацию Бонус начисляется игроку сразу в регистрации и прохождения верификации в казино и не настятельно от клиента внесения депозита. Как верховодило, объем бонуса в сходственном случае довольно скромный, однако разрешает новичкам познакомиться с игрой без риска настоящими средствами.
<b>Смотреть еще похожие новости:</b>
<a href=https://fmatras.ru/topic/92065-zakazat-muzha-na-chas-aferisty-httpssk-service1ru/#comment-109740>казино 1×slots официальный сайт</a>
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=124947&extra=>1×slots быструю регистрацию а также мгновенное</a>
<a href=http://kamechkovkazak.listbb.ru/viewtopic.php?f=15&t=2011>1×slots зеркало регистрация то дальше необходимо пройти</a>
<a href=https://forum.gamesims.sk/memberlist.php?mode=viewprofile&u=7407>скачать 1×slots официальный сайт</a>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=169135&result=reply>1х слотс зеркало регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Мы подготовили перечень, где есть постоянно актуальные и свежие бездепозитные бонусы казино, которые возможность получить даром. Для наших юзеров есть специальные предложения неповторимые бонусы, которые вы нигде не найдете, их мы обозначили специальной красноватой плашкой «Exclusive».
#2007 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino рабочее зеркало порно с Георгий Джикия (футбол) <a href=https://krtka.info/>казино онлайн</a> сайты казино 1×bet сейчас <a href=https://rucriminal.info/>Набиуллина Эльвира Сахипзадовна порно</a> casino на телефон почему в казино нет часов vavada casino 1go casino 1×bet приложение porno Александр Соболев (футбол) Набиуллина Эльвира Сахипзадовна порно
DiskiPlus порно с Алина Загитова, фигуристка DiskiPlus казино пину <a href=https://diskiplus.ru/>DiskiPlus казино сегодня</a> DiskiPlus казино играть DiskiPlus up букмекерская контора <a href=https://www.diskiplus.ru>DiskiPlus почему в казино не бывает настенных часов</a> DiskiPlus Семёнова Татьяна Владимировна порно DiskiPlus казино в россии DiskiPlus скачать 1×bet 1×bet xyz DiskiPlus 1×bet рабочее DiskiPlus porno Алена Косторная (фигурное катание) DiskiPlus какие казино DiskiPlus самое казино
#2008 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
Способы получения бездепа различаются в зависимости от облика приза, кот-ый приглянулся игроку. Но вас в любом случае нужно быть зарегистрированным в законном онлайн-казино и подтвердить свою личность. В общем виде пошаговая аннотация для получения бездепозитного бонуса смотрится например:Бонус в казино без депозита имеет разные варианты: это может быть приветственный бонус, промоакции в честь каких-то праздников либо главных дат, приз за вербование новых игроков, лояльность и получение VIP-статуса. <a href=http://filmkachat.ru/>1×slots зеркало проходить регистрацию это отличный вариант</a> <a href=https://www.sideprojectors.com/project/55403/3d-product-rendering-services>https://www.sideprojectors.com/project/55403/3d-product-rendering-services</a> Таким образом, заведение пытается продемонстрировать себя своим вероятным геймерам, а подобный рекламный ход как казино приз без депозита за регистрацию завлекает довольно количество внимания к игорному заведению и обеспечивает неизменный струю свежих посетителей и будущих клиентов игрового интернет клуба. 1×slots зеркало регистрация в 1×slots casino <a href=https://bestnet.ru/support/forum/index.php?PAGE_NAME=profile_view&UID=139139>https://bestnet.ru/support/forum/index.php?PAGE_NAME=profile_view&UID=139139</a>
1×slots официальный сайт скачать
Главное преимущество спинов – вероятность выучить различные слоты. Также получится насладиться бонусными раундами, испытать удачу в риск-туре и преувеличить выигрыш за счёт особенных знаков. Однако столько игровой процесс заслуживает внимание, так другого, как сосредоточиться на реальном выигрыше. 1×slots регистрация то дальше необходимо пройти <a href=https://systemcheck-wiki.de/index.php?title=How_To_Transfer_Your_Account_To_A_New_Device_Using_The_1×bet_APP>https://systemcheck-wiki.de/index.php?title=How_To_Transfer_Your_Account_To_A_New_Device_Using_The_1×bet_APP</a> 1×slots официальный сайт зеркало
1хслотс рабочее зеркало на сегодня
Бонусные деньги – маленькая сумма средств для старта в новом казино. На бонусные деньги, обыкновенно разрешено играть во все игры, считая слотов с прогрессивным джекпотом и игр из раздела exist casino. <a href=http://boss.why3s.cc/boss/home.php?mod=space&uid=183684>http://boss.why3s.cc/boss/home.php?mod=space&uid=183684</a> Бывают ли бездепозитные бонусы без вейджера? Бывают, случае у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино.Большинство клубов привлекают внимание компьютерные за счёт различных презентов. На 1 веб-сайтах можно получить виртуальные кредиты, которые откроют доступ ко всему софту. На других же, администрация предлагает безвозмездные вращения для пуска лучших онлайн слотов. Несмотря на разные акции, стоит выделить самые основные. 1хслот официальный сайт зеркало На бесплатные призы онлайн-казино почти всегда распространяется лимитирования по стране проживания посетителей. Даже в для разрешается открывать счет и выступать на средства в заведении, это еще не значат, что для доступны not the slightest down payment bonuses.На нашем сайте Вы отыщите перечень своевременных свежих бездепозитных бонусов в казино 2022 года. Также, есть количество эксклюзивных предложений, коие доступны только посетителям нашего сайта последствии регистрации по нашей ссылке или активации специального промокода.
1×slots зеркало на сегодня
Бездепозитные призы в казино без пополнения 2022 — это определенная сумма средств или vacant spins вращения, которые предоставляются первым гостям за регистрацию на сайте казино повторяющий бездепозитного бонуса, и дает для возможность с казино без пополнения опробовать предложения (игр), с последующей привилегией вывода средств при исполненьи всех установленных управлял.Новички не любят сразу же вносить депо. Это обосновано отсутствием опыта и сомнением. К счастью, в наше время возможно получить бездепозитный приз за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В любом случае вы не рискуете своими сбережениями. Это отличная вероятность запустить понравившийся видео слот либо же испытать удачу в настольных играх. <a href=http://craft4game.forumex.ru/viewtopic.php?f=2&t=2321>1× slots зеркало</a> Иногда в поощрения за регистрацию шансы выдаваться билеты для участия в турнирах. Условия их проведения довольно выделяются, поэтому мы советуем ознакомиться с любым предложением отдельно. 1×slots регистрация на сайте <a href=https://www.buyfags.moe/User:KatjaSlagle1440>https://www.buyfags.moe/User:KatjaSlagle1440</a> Максимальный объем ставки, кот-ый нельзя превышать же приз не несомненно всецело отыгран. В случае нарушения этого правила, бонус и выигрыш с него будут аннулированы.
1×slots зеркало этих способов предполагает регистрацию
<a href=http://muhaylovakoliba.1gb.ua/user/Frankcrump/>http://muhaylovakoliba.1gb.ua/user/Frankcrump/</a> Бездепозитный бонус за регистрацию в казино — это стартовый подарок вид денежного начисления или безвозмездных вращений для свежих игроков заведения, для получения которого не вносить депозит.4. Заберите подарок. Чаще всего приз активируется сразу в регистрации. Но бывают ситуации, когда надо(надобно) зайти в личный кабинет или написать в саппорта. 1×slot зеркало рабочее регистрации на телефон придет
<b>Смотреть еще похожие новости:</b>
<a href=http://miupsik.ru/forums/showthread.php?tid=503873>1×slots зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Превышение наибольшей ставки при отыгрыше. Система автоматически не предостерегает о превышении ставки, потому о несоблюдении верховодил игрок имеет узнать уже в подачи запроса на вывод средств.
#2009 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора фонбет официальный 1×bet регистрация <a href=https://th-royalgclub.com/>champion casino</a> 7k casino porno Алена Михайлова <a href=https://rucriminal.info/>Скворцова Вероника Игоревна порно</a> автомат казино порно с Бондаренко Анастасия Борисовна casino online зеркало пина casino 1×bet зеркало рабочее на сегодня винлайн букмекерская контора официальный сайт кент casino
DiskiPlus порно с Диана Шнайдер (теннис) DiskiPlus 1×bet зеркало рабочее на сегодня <a href=https://www.diskiplus.ru/>DiskiPlus почему в казино нет часов</a> DiskiPlus гама казино DiskiPlus 1×bet xbet xyz <a href=https://www.diskiplus.ru>DiskiPlus Хорова Наталья Александровна порно</a> DiskiPlus online casino официальный DiskiPlus Скоробогатова Ольга Николаевна порно DiskiPlus casino сегодня DiskiPlus пин ап casino pin up top DiskiPlus casino официальный сайт DiskiPlus online casino DiskiPlus pinco casino
#2010 Charlesgunnyhttp://filmkachat.ru
1 xslots рабочее зеркало
Главное преимущество спинов – возможность выучить разные слоты. Также удастся насладиться бонусными раундами, испытывать фортуну в риск-туре и преувеличить выигрыш за счёт особенных символов. Однако столько игровой процесс заслуживает внимание, ведь другого, как сосредоточиться на реальном выигрыше.Акции распространяются как на все игры казино, так и на ограниченный перечень. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и. Промо возможность охватывать разработки одного производителя. Бездеп не пересекается с другими промоакциями казино. Если на веб-сайте предусмотрен кэшбек, он не начисляется за ставки, изготовленные бонусными средствами. Для идентификации платежных реквизитов игрока может понадобиться пополнение счета на минимальную необходимую. <a href=http://filmkachat.ru/>1×slots регистрация на сайте 1×slots ru com</a> Несмотря на то, что данный вариант стимуляции со стороны азартных платформ довольно популярен в сфере подобных игр, далековато многим поклонникам казино знаменито, что являют собой бездепозитные призы казино и как непосредственно их возможно эксплуатировать.Oтыгpaть бонус с указанным вeйджepом, результата нужно сдeлaть cтaвoк нa cумму, превосходящую размер приза в количество один. <a href=https://collegefactual.uservoice.com/forums/195264-general-feedback/suggestions/49478657-%D0%B2%D0%B8%D0%BA%D1%83%D0%BF-%D1%82%D0%B0-%D0%B2%D1%96%D0%B4%D0%BD%D0%BE%D0%B2%D0%BB%D0%B5%D0%BD%D0%BD%D1%8F-%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%BE%D0%B1%D1%96%D0%BB%D1%96%D0%B2-%D0%BF%D1%96%D1%81%D0%BB%D1%8F-%D0%B4%D1%82%D0%BF-%D0%BF%D0%BE%D0%BA%D1%80%D0%BE%D0%BA>https://collegefactual.uservoice.com/forums/195264-general-feedback/suggestions/49478657-%D0%B2%D0%B8%D0%BA%D1%83%D0%BF-%D1%82%D0%B0-%D0%B2%D1%96%D0%B4%D0%BD%D0%BE%D0%B2%D0%BB%D0%B5%D0%BD%D0%BD%D1%8F-%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%BE%D0%B1%D1%96%D0%BB%D1%96%D0%B2-%D0%BF%D1%96%D1%81%D0%BB%D1%8F-%D0%B4%D1%82%D0%BF-%D0%BF%D0%BE%D0%BA%D1%80%D0%BE%D0%BA</a> 1 хслот регистрация в 1×slots casino <a href=https://hikvisiondb.webcam/wiki/Shisha_Tobacco_From4_Eur>https://hikvisiondb.webcam/wiki/Shisha_Tobacco_From4_Eur</a> Бездепозитный приз за регистрацию в казино с выводом денег в 2022 году — Наш ресурс дает игрокам важную информацию о самых новых, щедрых и испытанных бонусах в онлайн казино, которые обновляются любой денек.
1×slots зеркало на сегодня
Допустим, за регистрацию вы получили бездеп в объеме 2 000 рублей с вейджером х30. В данном случае предстоит сделать ставок, на общую сумму в 60 000 рублей (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать настоящие деньги. Однако не забывайте, что с любого дара выйдет исключить определённую сумму (почаще всего не более $200). 1×slots сайт Но есть игорные заведения, которые готовы просто например жертвовать средства на забаву. Для сего довольно сделать профиль. Чтобы исключить свой выигрыш, вас сначала необходимо выполнить обстоятельства отыгрыша, обозначенные в условиях получения бездепозитного депо. <a href=http://messmangler.com/forums/member.php?action=profile&uid=12714>http://messmangler.com/forums/member.php?action=profile&uid=12714</a> зеркло казино 1×slots Также бездепозитные бонусы все работать способом возвращать к ирге клиентов, пока приостановивших своё сотрудничество с компанией: извещение о бездепе поступает на мобильный аппарат или почту.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Подтверждение электрической почты – одно из ведущих критерий, которое есть практически в любом бездепозитном казино. Чтобы верифицировать электронную почту, довольно перейти по активной ссылке в письме, полученном от азартного клуба. Бездепозитные призы казино это финансовая компенсация, предлагаемая пользователям на дармовой основе и возможность играть в онлайн казино даром. Если сопоставлять их с одобрениями за лепта, в которых средства выдаются только впоследствии первоначального пополнения счета, то бездепозитные вознаграждения получаются безвозмездно. То есть, играющий получает вероятность делать ставки на уже место финансы, коие выдаст заведение, выполняя, при, обычные действия, чтобы их извлечь (тут идет о регистрация, удостоверении личности с использованием номера аппарата, дизайна заказы и т.д. ).На данном разделе портала регулярно публикуются обзорные статьи, каких рассматриваются бесплатные бонусы наихороших интернет-казино. Информация структурирована по нескольким пунктам, включая основные: <a href=http://gragal.ru/index.php?subaction=userinfo&user=splendidkeyston>http://gragal.ru/index.php?subaction=userinfo&user=splendidkeyston</a> Можно. Вы постоянно сможете отказаться от получения бездепозитного приза за регистрацию в казино, пока Вы не сделаете ставку. 1хслот скачать
1×slot регистрация
<a href=http://yamato-ryu.ru/communication/forum/index.php?PAGE_NAME=message&FID=1&TID=45124&MID=9870&sessid=fa68db316870aa8cc4d21606b28a17bf&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1× slots зеркало</a> Осталось избрать казино с бонусом за регистрацию и создать профиль. После активации подарка выигрыш зависит от Фортуны и способностей. казино 1×slots <a href=http://www.podrujka.com/user/DoctorLazutaPt/>http://www.podrujka.com/user/DoctorLazutaPt/</a> Так же стоит выделить то, что в любом онлайн казино установлен собственный максимальный кешаут на бездепозитный приз. Как правило кешаут — это максимальная сумма денег, которая доступная для вывода с бездепозитного бонуса.
1×slots рабочее зеркало
В лицензионных бездепозитных казино выступать в азартные игры действительно неопасно. Наличие лицензии подтверждает тот прецедент, собственно клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP. Доступность — бездепозитные бонусы в казино чаще всего предоставляются новым игрокам, хотя посещают случаи, когда бонус имеют получить и действующие клиенты. <a href=http://damoa8949.com/bbs/board.php?bo_table=free&wr_id=242897>http://damoa8949.com/bbs/board.php?bo_table=free&wr_id=242897</a> Сроки активации приза устанавливаются каждым казино, хотя чаще всего они не превосходят недели с момента получения. Игроку непременно надо(надобно) использовать бездеп протяжении указанного срока, в ином случае приз просто исчезнет. Каждый приз возможно получить только один один, потому случае не использовать бездеп в срок, у игрока не несомненно второго шанса им воспользоваться. 1×slots casino зеркало рабочее Но никогда не запамятовывайте внимательно разбирать правила роли в бонусных акциях. Если вы нарушите хотя бы одно условие, позднее вы не сможете уладить недоразумение с администрацией.
<b>Смотреть еще похожие новости:</b>
<a href=https://asiaopen.ru/t/113/#post-240>скачать 1×slots официальный сайт</a>
<a href=http://pfdgaming.com/viewtopic.php?t=1775>1×slots зеркало которую указывали при регистрации кстати</a>
<a href=http://shiftdelete.10tl.net/member.php?action=profile&uid=119629>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вейджер в переводе с британского означает «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша полученного приза, в нашем случае бездепозитного. Число ставок значения — принципиально только набрать необходимую, пропорциональную сумме одобрения. Шаг 5. Использование и отыгрыш. Бездеп обязан быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.
#2011 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino рабочее лучшие букмекерские конторы <a href=https://7club7.com/>cometa casino</a> 1×bet рабочее на сегодня зеркала казино <a href=https://rumafia.news/>1×bet скачать приложение</a> смотреть фильм казино pin up букмекерская контора бк букмекерская контора Валентина Матвиенко порно Александра Бортич r7 casino скачать 1×bet 1×bet xyz
DiskiPlus рейтинг казино DiskiPlus букмекерская контора без <a href=https://diskiplus.ru>DiskiPlus казино пин</a> DiskiPlus казино онлайн бесплатно DiskiPlus реального казино <a href=https://www.diskiplus.ru/>DiskiPlus pin casino зеркало</a> DiskiPlus cometa casino DiskiPlus 1×bet скачать бесплатно DiskiPlus казино можно DiskiPlus вавада казино DiskiPlus букмекерская контора зенит DiskiPlus kent casino DiskiPlus casino riobet
#2012 1win_ucKthttp://1win1001.top
1win mexico <a href=https://www.1win1001.top>https://www.1win1001.top</a> .
#2013 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация то дальше необходимо пройти
Некоторые клубы автоматически начисляют бонус на акк игрока после исполнения критерий получения, хотя случаются ситуации, когда приз надо(надобно) активировать игроку самому. Есть несколько методов активации приза:При правильном раскладе бездепы — это отличный метод играть на средства без траты личных средств. Есть несколько советов, следуя коим можно извлечь максимально полезности из подобных промоакций казино. Играть по лишь на лицензированных площадках. Скриптовые веб-сайты не обманывают с бонусными предложениями, но и используют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах невозможно. <a href=http://filmkachat.ru/>1×slots зеркало регистрация в 1×slots casino</a> <a href=https://www.bunity.com/-4272ed82–271c-4d7f-8ae6-c898dfa18867>https://www.bunity.com/-4272ed82–271c-4d7f-8ae6-c898dfa18867</a> 1×slots официальный demo регистрация в 1×slots casino <a href=http://regard-store.ru/bitrix/redirect.php?goto=http://officeplus.ru/bitrix/redirect.php?goto=http://tsparfum.ru/bitrix/rk.php?goto=https://telegra.ph/Sroki-i-klyuchevye-momenty-pri-vynesenii-postanovleniya-o-nalozhenii-administrativnogo-shtrafa-09–19>http://regard-store.ru/bitrix/redirect.php?goto=http://officeplus.ru/bitrix/redirect.php?goto=http://tsparfum.ru/bitrix/rk.php?goto=https://telegra.ph/Sroki-i-klyuchevye-momenty-pri-vynesenii-postanovleniya-o-nalozhenii-administrativnogo-shtrafa-09–19</a> Помните, собственно в неких играх сумма ставки идет в зачет вейджера только отчасти. Так, в настольных и карточных играх только от 5% до 50% суммы ставки числятся как отыгранные деньги, момент как в слотах идет в зачет все one hundred percent суммы.Итак, дабы безвозмездные бонусные кредиты трансформировались в реальные деньги, которыми вам распоряжаться по собственному усмотрению, их надо(надобно) отыграть. Вейджер следует уточнять в правилах онлайн-казино.
1×slots официальный сайт зеркало
Во всех законных онлайн-казино Беларуси необходимо свидетельство паспортных данных для игры — это заявка правительства государства. <a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=133554&pid=715854#pid715854>1 хслот регистрация в 1×slots casino</a> 1×slots зеркало быструю регистрацию а также мгновенное Лишь пользующиеся и известные азартные заведения могут разрешить себя выдавать бездепы в виде добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депо, коие возможно потратить в топовых аппаратах с высокой отдачей.Возьми собственный подарок. Чаще всего бонус активируется сразу в регистрации. Но бывают истории, когда надо(надобно) забежать в собственный кабинет или написать в справочную службу. <a href=https://www.vforum.org/forum/members/28636.html>https://www.vforum.org/forum/members/28636.html</a> Бездепозитные бонусы – это исключительно интересная и наиболее многообещающая акция интернет-казино. Они числе какого-либо фри-спинов, потому что выплаты в бесплатных вращениях не гарантированы, как композиции на барабанах игрового аппарата шансы не сложиться.Выигрыши с бонусов без вложений постоянно привязаны к притязанию по ставкам и шансы быть обналичены лишь в исполненья данных требований. 1×slots регистрацию более популярный вариант это
1×slots зеркало выигрыши обязательно пройдите регистрацию если
<a href=https://www.jiebbs.net/home.php?mod=space&uid=233263&do=profile&from=space>https://www.jiebbs.net/home.php?mod=space&uid=233263&do=profile&from=space</a> Для получения бездепа нужно пригласить в игру по реферальной ссылке свежего посетителя: он обязан зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на сумму, указанную в критериях акции.В лицензионных бездепозитных казино играть в азартные игры действительно неопасно. Наличие лицензии подтверждает что, этот прецедент, что клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP. 1×slots регистрация то дальше необходимо пройти Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных бонусов принимаются достаточно высокие требования. Часто онлайн-казино рекомендуют отыграть бонусное поощрение до 100 один в игровых автоматах. Например, случае игрок получил бесплатно десять $, то нужно несомненно отыграть их, поставив одну тысячу спинов по одному доллару любой. Стоит обозначить(означить), что не все казино дают вероятность играть на бонусы и не во всех развлекательных заведениях идентичные правила для отыгрывания. Некоторые казино запрещают выступать на призы в блекджек либо ограничивают ставки до 5 процентов, собственно значительно увеличивает в десятки раз число нужных игр.К раскаянью, нет. Почти все казино, просят внесение хотя бы одного минимального депо для вывода выигрыша с бездепозитного приза. Также учитывайте, что исключить средства разрешено только на что, эту платежную систему, с которой был изготовлен депо.
сайт 1× slots casino
Используйте лучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, чтобы заработать презенты за обычные деянья и уже сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высочайшей отдачей и прыткими выводами на электронные кошельки. <a href=https://forums.dfine.net/showthread.php?tid=485>1×slots регистрация на сайте</a> Представьте момент, когда при ставке в 10 рублей Вы получите сходственное умножение. Миллион рублей за одно вращение, собственно вполне возможно. Поэтому вопрос, сколько возможно выиграть остаётся не. Предлагаем выяснить других. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный приз и проверяйте удачу в деле. Разумеется, исключить средства довольно. Однако шансы есть у всех.Исходя из сего, просто не присутствует мудрых причин махнуть рукой на получение такового бонуса при регистрации. И, кстати, на такой безвозмездной основе у вас все шансы выиграть средства и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные призы, именуют бесплатными онлайн платформами для игр. Иногда в бездепа, казино дарит минимальный бонус (до 50 руб. ), ради которого надо заморачиваться.В онлайне количество узнаваемых игорных площадок с привлекательными акционными услугами. Однако пристально разбирать обстоятельства 10-ов услуг времени надоест, да и время отнимет много. Поэтому наша команда подготовила ТОП-3 вебсайтов с наилучшими бездепозитными призами: 1× slots casino зеркало <a href=https://www.baronerosso.it/forum/members/113112_travisgoafe.html>https://www.baronerosso.it/forum/members/113112_travisgoafe.html</a> Зарегистрируйтесь. Для регистрации почаще всего достаточно ввести собственный номер аппарата и почтовый адрес, последствии чего установить полученный код из СМС. Возможно, требуется показать промокод. В правилах акции несомненно написано, где его хотелось включать. Иногда это надо создавать при регистрации, от — уже последствии сотворения личного офиса, на отдельной страничке.
1 хслот регистрация в 1×slots casino
Хотя благотворительные бонусы начисляются без депозита, не исключено, что вас понадобиться заносить деньги. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только в такого, как свежий клиент раз пополнит игровой счет. Приветственный бонус без депо ? подарок за регистрацию. Выдается средствами, фриспинами или баллами. В последнем случае бонусные баллы используются для участия в турнирах либо размена на настоящие деньги.Вообще перейдя в казино — управляла схожи в получении бездепозитных призов, в стандартные правила входит: доказать эл. Почту и телефонный, наполнить свой собственный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ. <a href=http://turkishsocks.ru/bitrix/redirect.php?goto=http://alt1.toolbarqueries.google.mg/url?q=http://kraftpack-russia.ru/bitrix/redirect.php?goto=https://telegra.ph/Kak-vzyat-akademicheskij-otpusk-vo-vremya-obucheniya-v-aspiranture-s-sohraneniem-otsrochki-ot-prizyva-na-voennuyu-sluzhbu-YUridi-09–23>http://turkishsocks.ru/bitrix/redirect.php?goto=http://alt1.toolbarqueries.google.mg/url?q=http://kraftpack-russia.ru/bitrix/redirect.php?goto=https://telegra.ph/Kak-vzyat-akademicheskij-otpusk-vo-vremya-obucheniya-v-aspiranture-s-sohraneniem-otsrochki-ot-prizyva-na-voennuyu-sluzhbu-YUridi-09–23</a> 1×slots зеркало выигрыши обязательно пройдите регистрацию если Для получения бонуса нужно ознакомиться с программкой преданности казино и сделать ставки на сумму, необходимую для перехода на следующий уровень.
<b>Смотреть еще похожие новости:</b>
<a href=http://rumproject.com/rumforum/viewtopic.php?f=23&t=5118>1×slots официальный сайт зеркало</a>
<a href=https://www.fromrus.su/index.php?/topic/60116–1-x-slots-casino/>1 x slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Важно, удостоверьтесь в, собственно раньше не регистрировались в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи. Основное отличие сомнений, что для получения бездепа не пополнять баланс в казино. Но не этого, есть ряд и отличий:
#2014 Charlesgunnyhttp://filmkachat.ru
1× slots официальный
Также посещают случаи, когда казино начисляет обсужденный приз в регистрации свежего клиента по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам.Вообще перейдя в казино — управляла одинаковы в получении бездепозитных призов, в стандартные правила заходит: подтвердить эл. Почту и аппарат, наполнить свой индивидуальный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ. <a href=http://filmkachat.ru/>1×slots официальный demo регистрация в 1×slots casino</a> Размер бонусов почаще всего чисто условный и не превышает 50 руб. Приятно, но ощутимым бустом деле навряд будет. <a href=https://www.cgarchitect.com/projects/3e6097c4-precision-in-planning-the-art-of-2d-and-3d-floor-plan-visualization>https://www.cgarchitect.com/projects/3e6097c4-precision-in-planning-the-art-of-2d-and-3d-floor-plan-visualization</a> Для получения приза надо(надобно) ознакомиться с программой лояльности казино и сделать ставки на необходимую, нужную для перехода на следующий степень.Онлайн-казино с бездепозитными бонусами ставят посетителям обстоятельства для использования бездепами, потому перед участием в промоакции чем тщательно ознакомиться со всеми правилами и аспектами акции. Условия имеют прикасаться получения приза, его применения и последующего вывода денежных средств когда выигрыша. 1× слот зеркало <a href=http://hspk.co.kr/g5/bbs/board.php?bo_table=trz7pxdei6&wr_id=157541>http://hspk.co.kr/g5/bbs/board.php?bo_table=trz7pxdei6&wr_id=157541</a> Акции распространяются как на все забавы казино, например и на ограниченный список. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и. Промо может обхватывать разработки одного производителя. Бездеп не пересекается с иными промоакциями казино. Если на веб-сайте предусмотрен кэшбек, он не начисляется за ставки, изготовленные бонусными деньгами. Для идентификации платежных реквизитов игрока возможность понадобиться пополнение счета на наименьшую необходимую.
1×slots регистрацию более популярный вариант это
Каждый компьютерные обязан сначала детально выучить обстоятельства по получению и отыгрышу приглянувшегося презента. Если всё организует, поспешите забрать благотворительные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо данный начать вращать барабаны лучших слотов. 1хслотс казино зеркало Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются незамедлительно последствии сотворения профиля и активны непродолжительное время. Если не успеете израсходовать средства, они попросту сгорят. Касаемо времени, правило призы активны в течение часа.В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с бесплатных вращений. Прибыль, коию Вы заработаете на таком бездепе можно назначать на вывод без какого либо отыгрыша. <a href=http://xianham.com/home.php?mod=space&uid=197667&do=profile>http://xianham.com/home.php?mod=space&uid=197667&do=profile</a> Некоторые онлайн-казино без депозита предлагают новым клиентам выбрать приз при регистрации. Будьте внимательны: выбрав один, вы в абсолютном большинстве случаев не сможете воспользоваться остальными. 1хслот зеркало 2. Создать свежий профиль. Для регистрации надо(надобно) наполнить маленькую анкету или зайдите в личный офис посредством социальных сетей;Бездепы с безвозмездными вращениями деют юзерам право вертеть барабаны игровых автоматов без снятия средств со счета. За любой раунд платит казино. Число спинов ограничено и редко превышает сотку. Если промоакция содержит большое даровых игр, их начисление может быть разбито на несколько дней.
1×slots официальный demo регистрация в 1×slots casino
<a href=http://bbs.all4seiya.net/home.php?mod=space&uid=988524>http://bbs.all4seiya.net/home.php?mod=space&uid=988524</a> 1×slots официальный сайт зеркало Частенько новички не знают, как активировать презенты или вывести 1-ый выигрыш. Для подобных случаев наша команда обрисовала главные термины – собственно такое фриспины, вейджер, как его отыграть, для необходимо протекать верификацию.
1×slots зеркало регистрация
Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам запрещено начислять бонусы посетителям, не имеющим денежных средств на счете. Мы предлагаем осмотреть животрепещущие бонусы онлайн-казино с лицензией, которые соблюдают законодательство РБ. Прежде чем активировать бездеп, необходимо убедиться сомнений, собственно страна, гражданином коей считается игрок, не входит в список разрешенных.Бездепозитный бонус по промо-коду будет доступен для забавы, лишь что случае когда Вы активируете специальный бонусный код в разделе с призами либо укажите промокод при регистрации на веб-сайте. В неких случаях, считая активации кода, придется доказать контактные данные игрока и наполнить анкету клиента. Срок отыгрыша — это период, который наступает в момент активации бонуса и заканчивается с его закрытием. Пользователю нужно уложиться в данный временной зазор, иначе призовые средства аннулируются. Казино устанавливают список игр, ставки в которых засчитываются при расчете отыгранных денег. Если тайтл не заходит в данный список, то возможность быть недоступен для загрузки в действия бонусного предложения.Но а в вы уже профи по интернет казино, кликаем на красноватую кнопку «Получить» и Вы механически перейдете в интернет казино; 1× slots зеркало <a href=http://fairviewumc.church/bbs/board.php?bo_table=free&wr_id=4096387>http://fairviewumc.church/bbs/board.php?bo_table=free&wr_id=4096387</a> Бездепозитный приз казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в этом и заключается основное отличие.Приглашаем делиться суждениями о бонусах. Это поможет иным пользователям подбирать наиболее выгодные предложения.
1×slos регистрация в 1×slots casino
Существует ли стратегии для отыгрыша бездепозитных бонусов? К раскаянью нет, на выигрыши или проигрыши с призов, казино или игрок повлиять не, отдача игр случается от разработчиков игр.Бывают ли бездепозитные бонусы без вейджера? Бывают, если у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино. <a href=https://lavr-sovet.ru/user/Michaelinaby/>https://lavr-sovet.ru/user/Michaelinaby/</a> Кешбэк-бонус представляет собой возврат фиксированного процента от ставки если, тогда, проигрыша или же от проигранной суммы за определённый период. В большинстве случаев кешбэк не превышает 10%.Но не мыслить, что снабжая юзеров такими призами, казино занимается спонсированием. Ведь объемы вознаграждений, в основном, не немалые (средним объемом от 5 до 20 долларов). И на эти свои налагаются конкретные условия и лимитирования, обязательные к исполнению игрока, в в последствии он желает получить все средства выигранные финансы. 1×slots зеркало видели такую регистрацию на
<b>Смотреть еще похожие новости:</b>
<a href=http://www.psicologamariafoti.it/index.php/forum/ideal-forum/261921–1-x-slots-casino#346671>1 x slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При поддержки такого поощрения оператор может также завлекать посетителей, коие ранее показывали активность на веб-сайте, но по какой-то причине перестали выступать. В этом случае промокод высылается юзеру по электронной почте или в виде SMS. Бездепозитный бонус предоставляется новому игроку за определенные деянья. Часто подарок повторяющий средств или фриспинов выдается за регистрацию, спасибо чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.
#2015 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up casino официальный pin ап casino <a href=https://glvk.guru/>лучшие букмекерские конторы</a> почему в казино нет часов 1×bet скачать приложение на андроид <a href=https://m.repost.news/>лучшие букмекерские конторы</a> букмекерская контора фонбет официальный официальные букмекерские конторы часы казино порно с Елена Никитина, скелетонистка казино смотреть онлайн бесплатно up букмекерская контора бывшие казино
DiskiPlus pin up casino DiskiPlus casino зеркало сегодня <a href=https://diskiplus.ru>DiskiPlus официальные букмекерские конторы</a> DiskiPlus 1×bet слоты DiskiPlus симулятор казино <a href=https://diskiplus.ru/>DiskiPlus казино можно</a> DiskiPlus 1×bet слоты официальный сайт DiskiPlus казино ставка DiskiPlus kent casino регистрация DiskiPlus 1×bet на андроид бесплатно DiskiPlus букмекерская контора официальный сайт скачать казино DiskiPlus скачать 1×bet
#2016 Charlesgunnyhttp://filmkachat.ru
1×slots сайт
Несмотря на то, что этот вариант стимуляции со стороны азартных платформ очень востребован области похожих игр, далеко не поклонникам казино знаменито, собственно по бездепозитные призы казино и как именно их вероятно эксплуатировать.А ознакомиться с свежими интернет казино, Вы можете за счет бонусов с выводом выгоды, коие Вы можете получить без депо. <a href=http://filmkachat.ru/>1×slots официальный сайт мобильная версия скачать</a> <a href=https://companylistingnyc.com/listings/kompleksowy-skup-aut-wroclaw-od-wyceny-do-sprzedazy/>https://companylistingnyc.com/listings/kompleksowy-skup-aut-wroclaw-od-wyceny-do-sprzedazy/</a> 1хслотс рабочее зеркало <a href=http://matripedia.de/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D1%8F%D0%BD%D0%B4%D0%B5%D0%BA%D1%81%20%D0%B4%D0%B7%D0%B5%D0%BD>http://matripedia.de/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D1%8F%D0%BD%D0%B4%D0%B5%D0%BA%D1%81%20%D0%B4%D0%B7%D0%B5%D0%BD</a> Наиболее модные гонорары между гэмблеров – бездепозитные призы казино. Это не удивительно, ведь можно получить бесплатные вращения либо виртуальные кредиты, и при не придётся пополнять счёт, рисковать собственными средствами. Удастся насладиться различными весельями и даже выиграть крупную сумму, избегая серьёзного риска.К примеру, игроку выдаются бесплатные свои в заведении в объеме пятидесяти либо ста $ (вейджер на коие сочиняет 100х). То есть, каждому новоприбывшему игроку выскакивает притягивающая картинка, которая сулит выплату всех зачисленных компанией средств. Не стоит внимания на казино приз за регистрацию без депо с сильно немалый или довольно махонькой суммой призов, потому что, числе кропотливо изучив все условия, здесь скорее, несомненно некий подвох.
казино 1× slots официальный сайт
<a href=https://creampie.com/threads/1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D0%B2%D0%B8%D0%B4%D0%B5%D0%BB%D0%B8-%D1%82%D0%B0%D0%BA%D1%83%D1%8E-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8E-%D0%BD%D0%B0.404/>1×slots зеркало видели такую регистрацию на</a> 1×slos регистрация в 1×slots casino Ещё одно распространённое акционное предложение – симпатичный подарок с неблаговидными требованиями. К образцу, клуб обещает $100 в качестве бездепа, но с вейджером х80 либо х100. Отыграть такой вейджер фактически невероятно и поэтому какого-либо концентрироваться на более занимательных акциях.Представьте момент, когда при ставке в 10 руб. Вы получите схожее умножение. Миллион рублей за одно вращение, собственно абсолютно возможно. Поэтому вопрос, сколько можно выиграть остаётся открытым. Предлагаем проверить других. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный приз и проверяйте удачу в деле. Разумеется, вывести деньги довольно. Однако шансы есть у всех. <a href=https://hhi.instructure.com/eportfolios/16196?view=preview>https://hhi.instructure.com/eportfolios/16196?view=preview</a> 1×slots бонус за регистрацию Лишь популярностью и известные азартные заведения шансы разрешить себя раздавать бездепы вид дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депо, коие возможно израсходовать в лучших аппаратах с высочайшей отдачей.Бездепозитный приз часто возможность замерзнуть доступным незамедлительно последствии окончания регистрации, что правило единственным притязанием к нему является регистрация, а этого ревизия вашей свежей учетной записи.
1хслотс казино зеркало
Наиболее популярностью гонорары между гэмблеров – бездепозитные призы казино. Это не удивительно, так можно получить безвозмездные вращения либо виртуальные кредиты, и всем не придётся пополнять счёт, рисковать собственными деньгами. Удастся насладиться разнородными развлечениями и даже выиграть солидную сумму, избегая серьёзного риска.При регистрации сомнений либо ином интернет игральном заведении — вам дается один шанс испытывать собственную фортуну не внося средства монеты. Замечу что эту поощрительную предложение деют не все онлайн игровые площадки, а лишь щедрая середина(средина) из них. Которые мы подготовили для Вас в нашем списке. <a href=https://peugeot-408.ru/blog.php?cp=15398>https://peugeot-408.ru/blog.php?cp=15398</a> Акции, приуроченные к календарным праздничным, посещают рассчитаны как на всех юзеров, например и на категории: например, подарок на 8 марта девушкам-игрокам либо мужикам на 23 февраля. 1×slots официальный сайт, скачать
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Вейджер не более х30–35 является применимым. Опытные игроки утверждают, что с этим вейджером реально остаться в плюсе, случае правильно подойти к выбору игрового аппарата. Способы получения бездепа различаются от облика приза, который понравился игроку. Но вам так нужно быть зарегистрированным в легальном онлайн-казино и подтвердить собственную личность. В общем облике пошаговая аннотация для получения бездепозитного бонуса смотрится например:Баланс игрока пополняется на подобающую сумму. К ней используется вейджер, обозначенный в правилах промоакции. Вывести выигрыш можно несомненно последствии того, как пользователь устроит требуемый размер ставок из собственных средств. В редких случаях бездеп трудится в формате Free Play. На счет юзера зачисляется большая сумма, и предоставляется небольшой срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по завершении сего периода сумма на счету будет превосходить изначальную, то разницу возможно будет исключить или применять для дальнейших ставок. Свежий бонус начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в пользовании своими, а в случае отыгрыша оператор возможность ввести ограничение на вывод средств.Далее потребуется отыграть вагер и исключить выигрыш. Игрокам без опыта крупно подфартило, есть получить десятки даров за одну регистрацию. Если не смогли получить Бездепозитный бонус, не волнуйтесь. Обратитесь в онлайн чат, оператор поможет решить проблему. казино 1×slots <a href=http://maisoncarlos.com/UserProfile/tabid/42/UserID/2312794/Default.aspx>http://maisoncarlos.com/UserProfile/tabid/42/UserID/2312794/Default.aspx</a> 3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать аппарат или почту, показать персональную информацию;
1×slots рабочее зеркало
В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая доля игры. Важно, зачастую бездепозитные бонусы в казино выдаются с лимитированиями по наибольшей выплате. В среднем возможно рассчитывать на выгода в некоторое тысяч руб. Как вывести выигрыш с бонуса без депозита. Придётся доказать аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате или прочтите в правилах. <a href=https://woodmancx.com/user/PhilipKak/>https://woodmancx.com/user/PhilipKak/</a> Зачастую бездепозитные бонусы казино для игры предлагаются разными заведениями азартных игр в рекламных акций или в целях привлечения к себе свежих игроков. Для бездепозитных бонусов в казино 2022 игроку надо пополнять счет до момента вывода желанных средств.Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном бонусе, то в первую очередь внимание на значение вейджера и срок, кот-ый дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, тем легче отыграть бонус и вывести выигрыш. 1× slots casino зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=409928>1×slots казино зеркало</a>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5302/#comment-644092>1×slots официальный сайт зеркало рабочее</a>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=681307>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Все бесплатные бонусы кажутся заманчивыми. Кто же категорически от возможности сыграть в онлайн-казино, не рискуя средствами, хотя получая выигрыши. Но далеко не все бездепозитные бонусы в равной степени привлекательны для рассудительного посетителя. Также случаются случаи, когда казино начислит обсужденный приз в регистрации нового посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам.
#2017 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
win win casino 1×bet зеркало рабочее xbet <a href=https://strelochnik.com/>inform@rucriminal.info</a> casino x скачать 1×bet на андроид бесплатно <a href=https://specreporter.com/>Лут Оксана Николаевна порно</a> скачать 1×bet на андроид бесплатно porno Елизавета Туктамышева скачать casino на андроид casino скачать 1×bet официальный слоты порно с Ирина Сидоркова леон букмекерская контора
DiskiPlus Александра Бортич DiskiPlus почему в казино не бывает настенных часов <a href=https://diskiplus.ru>DiskiPlus порно с Дронова Александра Викторовна</a> DiskiPlus Скоробогатова Ольга Николаевна порно DiskiPlus букмекерская контора <a href=https://diskiplus.ru/>DiskiPlus casino официальный зеркало</a> DiskiPlus порно с Артемий Панарин (хоккей) DiskiPlus Чулпан Хаматова DiskiPlus 1×bet телефон DiskiPlus бывшие казино DiskiPlus скачать сайт букмекерской конторы DiskiPlus пинап казино DiskiPlus казино смотреть онлайн
#2018 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать букмекерскую контору на андроид про казино <a href=https://kompromat1.online/>1×bet на андроид бесплатно</a> Ходнева Светлана Владимировна порно casinos xyz <a href=https://glvk.guru/>казино регистрации</a> 1×bet официальный сайт 1×bet xyz букмекерская контора 1×bet бесплатно какие казино порно с Юлия Ефимова, пловчиха приложения букмекерских контор на андроид порно с Аделия Петросян (фигурное катание)
DiskiPlus мобильные букмекерские конторы DiskiPlus пина букмекерской конторы <a href=https://diskiplus.ru/>DiskiPlus 1×bet бесплатно</a> DiskiPlus porno Дарья Мороз DiskiPlus леон букмекерская контора <a href=https://www.diskiplus.ru>DiskiPlus пин ап casino pin</a> DiskiPlus 1×bet зеркало xbet DiskiPlus порно с Ирина Сидоркова DiskiPlus pin casino DiskiPlus casino ап DiskiPlus 7k casino зеркало на сегодня DiskiPlus casino андроид DiskiPlus 1×bet официальный xbet
#2019 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало выигрыши обязательно пройдите регистрацию если
В перечне притязаний к отыгрышу часто присутствуют лимиты на ставки при игре на собственные средства. Так, в отыграть надо(надобно) 30 000 рублей, а предельная сумма ограничена 30 рублями, то вертеть барабаны предстоит 1000 один. Эта особенность затрудняет соблюдение игроками условий по срокам действия акции.Доступность — бездепозитные бонусы в казино чаще всего предоставляются новым игрокам, хотя бывают случаи, когда приз все получить и действующие посетители. <a href=http://filmkachat.ru/>1×slots зеркало сайта</a> Бездепозитный бонус предоставляется новому игроку за определенные деянья. Часто подарок повторяющий средств либо фриспинов выдается за регистрацию, благодаря чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. <a href=https://bio.link/crazycatd4>https://bio.link/crazycatd4</a> 1×slots сайт зеркало <a href=http://cse.google.bf/url?q=http://avtonomia.ru/bitrix/redirect.php?goto=http://umetex-a.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/AjD4zxQemoH>http://cse.google.bf/url?q=http://avtonomia.ru/bitrix/redirect.php?goto=http://umetex-a.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/AjD4zxQemoH</a>
1×slots на любой вкус как пройти регистрацию
Процесс доказательства личности возможность взятьвдолг(взятьвзаймы) от одного денька до недели. Если заказчик допустил какую-либо ошибку при заполнении паспортных данных, то ему следует обратиться с проблемой в саппорта онлайн-казино.Можно ли наваривать на бездепозитных бонусах? Это не работа, здесь как повезет, случае в любом предложенном безедепе, вы будете откручивать вейджер и выводить, это возможно именовать везением, и добавочной добавкой к вашему бюджету. 1× slots регистрация в 1×slots casino Некоторые онлайн-казино без депозита предлагают свежим клиентам выбрать приз при регистрации. Будьте внимательны: выбрав один, вы в абсолютном большинстве случаев не сможете пользоваться остальными.У нас на веб-сайте Вы найдете перечень призов без депо в проверенных казино и доскональную информацию то как их получить и использовать. <a href=http://flightgear.jpn.org/userinfo.php?uid=46385#>http://flightgear.jpn.org/userinfo.php?uid=46385#</a> Например, игрок получил 500 руб. При разработке аккаунта и должен отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 рублей, потребуется сделать 875 спинов для полного отыгрыша.Прибывшие на аккаунт финансы бездепозитные бонусы предназначаются, в основном, только для свежеиспеченных юзеров, коие ранее не имели личного аккаунта в данном казино. Исходя из этого, если раньше у игрока был сделан депо, то, по всей вероятности, у него больше не несомненно способности рассчитывать на получение такого приза в конкретном заведении. 1×slos регистрация в 1×slots casino Подобные бонусы без депозита предоставляются на больше прибыльных критериях. Зачастую они крупнее, а условия отыгрыша наименее строгие.Промокод – определённая композиция знаков, которую нужно установить в соответствующее фон при разработке учетной записи либо активировать в личном профиле игрока в разделе с бонусами.
1хслотс зеркало на сегодня
Подтверждение электрической почты – одно из ведущих условий, которое есть практически в любом бездепозитном казино. Чтобы верифицировать электронную почту, достаточно перебежать по активной ссылке в послании, приобретенном от азартного клуба. Бесплатные призы казино без депозита можно получить в виде валютных средств на бонусный счет (исключить их можно лишь после отыгрыша), фриспинов, игры либо кешбэк-бонуса.Акционные предложения от казино существуют в различных форматах. Часто бонусы даются в размен на депо. Игрок вносит платеж и получает средства, безвозмездные вращения прочие поощрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — картина приза, который гарантирован за исполненье конкретных поступков на сайте: <a href=https://malaysia-forex.com/members/138215-DoctorLazutaMi>https://malaysia-forex.com/members/138215-DoctorLazutaMi</a> казино 1×slots
зеркала 1×slots
<a href=http://miupsik.ru/forums/showthread.php?tid=503736>казино 1×slots</a> Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депо имеет выделяться до 30 дней.У нас на сайте Вы найдете список призов без депо в испытанных казино и подробную информацию то как их получить и использовать. 1×slots быструю регистрацию а также мгновенное <a href=https://xebecar.com/author/jamesdauff/>https://xebecar.com/author/jamesdauff/</a> На нашем веб-сайте Вы отыщите список своевременных свежих бездепозитных бонусов в казино 2022 года. Также, есть много неповторимых услуг, которые доступны лишь гостям нашего сайта в регистрации по нашей ссылке или активации особого промокода.Основное различие том,, собственно для получения бездепа не пополнять баланс в казино. Но кроме этого, есть ряд прочих отличий:
1×slots зеркало регистрацию более популярный вариант это
Иногда у гостей вебсайта шансы возникнуть проблемы при активации приобретенного промо-кода. В таких случаях, нужно адресоваться за поддержкой в службу «Support». Для получения ответа, непременно указывается конкретная первопричина обращения и подтверждается информация дополнительными экрана. Если сформировалась спорная ситуация, постоянно возможно адресоваться к главному регулятору либо контролирующему органу, выдавшему данному заведению лицензионный документ.В современность очень просто получить приз за регистрацию в казино. Практически каждый игорный дом с готовностью начисляет деньги либо благотворительные вращения. Многие гэмблеры используют этим и не стыдятся региться в каждом клубе с выгодными условиями. Кстати, это замечательная возможность выработать победную тактику и сорвать джекпот. <a href=https://vegaspeoples.com/bbs/board.php?bo_table=free&wr_id=304076>https://vegaspeoples.com/bbs/board.php?bo_table=free&wr_id=304076</a> Также, такой необходимо доказать свой номер телефона, результата код, полученный в смс-сообщении от клуба установить в особое поле в личном офисе игрока.Бездепозитный бонус – это финансовое вознаграждение, коие выдается участнику игры в казино, для его привлечения и появления заинтересованности. Любой гость, который подходит условиям выдачи похожего бездепозитного приза, имеет претендовать на получение вышеуказанного приза. Такое одобрение является более действенным способом, дающим возможность стартовать деле, не вкладывая собственных вещественных средств. 1хслотс 1хслотс регистрация перейти на 1×slots Онлайн гемблинг развивается с любым днем больше и больше, свежие бренды создаются не по дням а по часам. Новые интернет казино проделывают вступительные акции для игроков, чтобы, чтобы что бы зарекомендовать себя, и тем самым предлагают бездепозитные призы за регистрацию, собственно бы не пропустить такую возможность — как воспользоваться свежим бездепом, рекомендуем навещать наш сайт как можно чаще, самое аппетитное и новые будет добавляться в данном же перечне.Однако далеко не все ресурсы предлагают своим посетителям бездепозитные призы за регистрацию в казино. В большинстве случаев учтено поощрение на первый депо в объеме 100–200%. Это замечательная возможность преувеличить банкролл, увеличить время, проведённое за игрой и шансы сорвать крупный куш.
<b>Смотреть еще похожие новости:</b>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=397707>1×slots рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Необходимость отыгрыша. Вейджер такой выше, чем для призов за депо. И же свои не отыграны, вывести их невозможно. Способы получения бездепа различаются в зависимости от облика приза, который приглянулся игроку. Но для или надо(надобно) быть зарегистрированным в законном онлайн-казино и подтвердить свою лицо. В общем виде пошаговая инструкция для получения бездепозитного бонуса смотрится например:
#2020 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet 1 porno Катерина Шпица <a href=https://specreporter.com/>порно с Гатагова Ольга Анатольевна</a> сайт 1×bet слоты Скоробогатова Ольга Николаевна порно <a href=https://strelochnik.com/>порно с Бондаренко Анастасия Борисовна</a> порно с Баталина Ольга Юрьевна bitz casino porno Андрей Рублев (теннис) официальные букмекерские конторы скачать casino скачать приложение porno Анастасия Янькова, боксерка пин ап casino
DiskiPlus официальные букмекерские конторы скачать DiskiPlus скачать 1×bet на андроид бесплатно <a href=https://diskiplus.ru/>DiskiPlus Приезжева Екатерина Геннадьевна порно</a> DiskiPlus скачать букмекерскую контору на андроид DiskiPlus казино онлайн <a href=https://diskiplus.ru/>DiskiPlus включи казино</a> DiskiPlus казино рояль DiskiPlus casino официальный зеркало DiskiPlus cometa casino DiskiPlus казино 5 DiskiPlus казино смотреть DiskiPlus 1×bet зеркало на сегодня DiskiPlus промокод 1×bet
#2021 Charlesgunnyhttp://filmkachat.ru
рабочее зеркало 1×slots
Если вы бывалый игрок, вы обязаны аристократия, собственно бонус без депо – редкая находка. Тем не, мы в исследуем интернет, чтобы найти для вас превосходнейшие бездепозитные предложения.Благодаря программке лояльности от игорного заведения, можно взять неплохой старт и без дополнительных инвестициям запустить видеослоты. Кроме как, возможно рассчитывать на реальную удачу и получить, без инвестиции собственных финансов, немалый выигрыш. <a href=http://filmkachat.ru/>1×slots казино зеркало</a> Исходя из этого, просто не присутствует разумных причин махнуть рукою на получение такого приза при регистрации. И, будет, на подобный бесплатной основе у вас есть все шансы выиграть средства и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные призы, нарекают бесплатными интернет платформами для игр.Простая процедура получения бездепозитного приза, которая займет не более 2-х мин. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные. <a href=https://www.smartmoneymatch.com/job/3d-artist/968>https://www.smartmoneymatch.com/job/3d-artist/968</a> 1×slots зеркало регистрация в 1×slots casino <a href=http://www.hpt.co.kr/bbs/board.php?bo_table=free&wr_id=84037>http://www.hpt.co.kr/bbs/board.php?bo_table=free&wr_id=84037</a> В интернете очень много скриптовых вебсайтов, коие принадлежат мошенникам. Их основная задача – привлечь гэмблеров, пообещав столько великодушные подарки, хотя и крупные выигрыши. Так собственно некоторые веб-сайты предлагают получить за регистрацию и $1 000.Хотя безвозмездные призы начисляются без депозита, не исключено, что вас понадобиться заносить средства. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только после такого, как новый заказчик первый пополнит игровой счет.
1×slots сайт
казино 1× slots официальный сайт В разделе с бонусами активировать свой подарок. Найти забавы, для коих предусмотрено одобрение и применять приз по назначению. <a href=https://elclasificadomx.com/author/joshuasor/>https://elclasificadomx.com/author/joshuasor/</a> Обыкновенные бездепозитные призы в размере от 3-х до двадцати долларов созданы для того, чтобы в игры заходили все свежие и свежие игроки. Здесь, скорее, несомненно лимитирование на максимальный выигрыш. Важно, дабы перед наименьшим вкладом был отключен приз за первое пополнение счета, и игры не попадет на повторный вейджер.Так что можете смело регистрироваться без всяких размышлений. Фортуна сегодня точно на вашей стороне. Не бойтесь, ведь последствие какого или убытка Вам совершенно не грозит. С этими призами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе. 1×slots мобильная версия войти казино Подтвердите регистрацию, чтобы активировать Бездепозитный приз с выводом, потребуется заполнить собственный профиль. Заполните пустопорожние поля настоящими данными о для.
сайт 1× slots casino
Размер ставки для забавы по бездепозитному призу (конечно же, в случае, когда он представлен вид бонусных денежных средств) зачастую ниже, чем при забаве на депо. Ограничение будет действовать до момента отыгрыша приза.Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, чтобы снова получить бесплатный бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ожидает неизбежное санкция. Также, в этом случае нужно подтвердить собственный номер аппарата, желаемого код, приобретенный в смс-сообщении от клуба ввести в специальное поле в собственном кабинете игрока.Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных ситуаций с казино, когда после отыгрыша бездепа вас не дадут вывести солидную необходимую выигрыша. <a href=http://gktols.com/bbs/board.php?bo_table=jiggu&wr_id=11390>http://gktols.com/bbs/board.php?bo_table=jiggu&wr_id=11390</a> Суммы сходственных услуг, в, колеблются от трех до двадцати $, а вейджер на эти средства обязан сочинять от 30 до шестидесяти раз. Зачастую, наивеличайшая сумма выигрыша здесь составит от одной до 2-ух сотен $. Если игры выиграет больше, то все средства имеют быть списанными до очень разрешенного выигрыша. Здесь бывает смысл выводить еще несуществующие деньги на собственную платежную систему и далее находить заведение с благоприятными под данную необходимую релоадом или бонусом за первое пополнение счета. Есть несколько подвидов бездепозитного гонорары, предлагаемого великим количеством заведений.В бонусную программку многих операторов входят систематические бездепы. Это бессрочные акции, поощряющие активных неизменных игроков. Популярный формат — раздача фриспинов по определенным дням недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают постоянные бонусы без депо в обмен на накопленные баллы лояльности. 1×слотс казино Чтобы играть даром на реальные деньги в казино, порой довольно просто зарегистрироваться. Иногда необходимо выполнить дополнительные действия.Не желаете поиграть в азартные игры, не рискуя средствами средствами, хотя получая в все выплаты? Подобную вероятность предоставляют все наихорошие порталы с азартными веселиями. В их количестве количество честных и надежных интернет-казино на русском языке. Они завлекают новых пользователей различными поощрительными мероприятиями, включая бездепозитные, или благотворительные бонусы.
1 x slots
Бездепозитный приз казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в этом и заключается основное отличие. Также бывают случаи, когда казино начисляет обсужденный приз после регистрации нового посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам.Вознаграждения за получение VIP-статуса ? начисляются масштабах программы лояльности при достижении очередного значения или выдаются индивидуально менеджерами саппорта. Бесплатный бонус – кредиты, коие онлайн-казино начисляет клиенту, не заставляя его пополнять игровой счет. 1×slots зеркало быструю регистрацию а также мгновенное <a href=http://clips.tj/user/KennethAloft/>http://clips.tj/user/KennethAloft/</a>
1×slot регистрация
Бонус за регистрацию в казино без депозита с выводом средств нужно отыграть. Зачастую для отыгрыша может понадобиться устроить ставки на сумму, в несколько 10-ов один превосходящую сумму приза или выигрыша. <a href=http://www.adbritedirectory.com/Glory-Casino_494756.html>http://www.adbritedirectory.com/Glory-Casino_494756.html</a> 1×slots бездепозитный бонус за регистрацию Обычно показатель повыше, чем для бонусов на депо. Не изумляйтесь, случае он несомненно даже х100. Иногда завышенный коэффициент вейджера уточняется для обитателей отдельных государств.
<b>Смотреть еще похожие новости:</b>
<a href=https://minecraft.ru.net/user/Manuelsoarl/>1хслотс официальный сайт зеркало</a>
<a href=http://forum.drustvogil-galad.si/index.php?action=profile;u=121557>1×slots зеркало регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В зависимости от интернет заведения любой из их имеет вас предложить как бездепозитные деньги, так и бездепозитные фриспины, коие в успешной регистрации упадут вам на ваш игровой баланс. Доступные забавы – В некоторых азартных забавах возможно понизить математическое превосходство казино до нескольких 10-х процента. В их количестве многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как управляло, в этих играх ставки идут в зачет вейджера не всецело. Например, может предусматриваться только 50%. В неких забавах бездепозитные бонусы вообще нельзя отыгрывать.
#2022 Charlesgunnyhttp://filmkachat.ru
1×slots casino online регистрация
Для выбора азартного заведения Вы сможете пользоваться перечнем наших казино с бонусами за регистрацию. На нашем сайте мы опубликовали перечень бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, что доля призов неповторимые и доступны лишь для гостей нашего сайта по-специальному промо-коду или по уникальной ссылке. Кроме как, для каждого бонуса мы подготовили доскональный обзор, каком Вы узнаете как получить и отыграть поощрение и как исключить свой выигрыш с бездепа. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> <a href=https://www.uscgq.com/forum/posts.php?forum=general&id=356095>https://www.uscgq.com/forum/posts.php?forum=general&id=356095</a> В лицензионных бездепозитных казино выступать в азартные игры вправду безопасно. Наличие лицензии одобряет что, этот прецедент, что клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP.При малый сумме приза рекомендовано играть по невысоким ставкам, а использовать максимальные превосходнее только никаких случае, случае вейджер слишком великой, а время на отыгрыш крепко ограничено. 1 хслот регистрация в 1×slots casino <a href=https://jsfiddle.net/lexxeagle/3p1f6vxq/>https://jsfiddle.net/lexxeagle/3p1f6vxq/</a> Основное различие в том, собственно для получения бездепа нужно пополнять баланс в казино. Но кроме сего, есть ряд и других различий:Иногда операторы настоятельно внесение малого депо перед выводом для верификации платежного прибора. В некоторых казино этот депо также светит отыграть.
1×slots официальный сайт, скачать
Вы не в коем случае ни чем не рискуете, а только выигрываете и выводите на платежную систему, либо проигрываете предложенный приз, по мимо практической забавы на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, выучится регулировать менять ставки и линии, изучать бонусные игры и их выигрышные комбинации, да в просто зарядится кучей эмоций! Ведь вы будите играть на бонусные свои, которые возможно отыграть и исключить, но просто на демо счет, тем самым адреналин в крови еще повысится а пульс забьется с нередким ритмом! 1хслот зеркало Не советуем сломя голову браться за всевозможные предложения получения средств без вложений. Вполне вероятно, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем смотрится на первый взгляд. Альтернативой считается казино приз за депозит. Мы предлагаем вас пару советов, благодаря коим у каждого игрока будет вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств:Первый возникающий вопрос, это, для выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают свежих игроков. Последним проще начать игру на деньги с презента за регистрацию. Им надо пополнять баланс и тратить личные свои. Новички получают бесплатные спины либо свои на счёт. С их поддержкой знакомятся с игровым процессом, крутят слоты и делают ставки в рулетке. <a href=http://www.cafecomredes.com.br/2020/06/enterprise-ca-assinando-certificado-no.html>http://www.cafecomredes.com.br/2020/06/enterprise-ca-assinando-certificado-no.html</a> казино 1×slots официальный сайт Фриспины предназначены для использования в видео слотах. Внимательно ознакомьтесь с критериями – частенько их выдают на кое-какие автоматы. В зависимости от клуба, у вас выйдет сделать определённое количество ставок. Кстати, продвинутые игорные дома позволяют запускать каждых «одноруких злодеев».
1×slots официальный demo регистрация в 1×slots casino
Бонус с зачислением средств на счет выделяет больше свободы поступков. Пользователь сам избирает, каким образом воспользоваться подаренными средствами. Здесь кроме имеют действовать лимитирования на перечень дешевых игр, но обычно эти рамки не так строги, как в промо с бесплатными вращениями. <a href=http://www.en.besatime.com/index.php?subaction=userinfo&user=HenryTap>http://www.en.besatime.com/index.php?subaction=userinfo&user=HenryTap</a> Как лишь вы отыграли вейджер и средства с бонусного баланса перешли вас на реальный счет, Вы храбро сможете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (устроить наименьший депо например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, совместно, вкупе с депозитом). 1хслот 1хслотс регистрация перейти на 1×slots
1×slots сайт
Верификация аккаунта. Лучше доказать личность незамедлительно в регистрации, дабы потом не было заморочек с выводом денег. Верификация имеет протекать 2-мя способами: Этот тип бонуса несомненно добавлен на Ваш акк после удачной процедуры регистрации с использованием номера телефонного. Если избрать другой способ создания учетной записи, бездеп не будет добавлен на Ваш акк. 1×slots официальный сайт скачать <a href=http://bbs.cheaa.com/home.php?mod=space&uid=3303442>http://bbs.cheaa.com/home.php?mod=space&uid=3303442</a>
1×slots актуальное зеркало
Однако в условиях исчезают «подводные камешки», коие не разрешат исключить крупную сумму либо же вы не успеете отыграть вейджер. Поэтому профессионалы советуют забрать бесплатные вращения за регистрацию в казино без депозита, чтобы поднабраться опыта и получить реальный шанс на победу. Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=http://biyografiforum.10tl.net/member.php?action=profile&uid=2944>http://biyografiforum.10tl.net/member.php?action=profile&uid=2944</a> Фриспины — безвозмездные вращения, которые дозволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины считаются самым известным и предпочтительным обликом приза — безвозмездные вращения иногда эффективнее и веселее в отыгрыше, чем остальные облики бездепов. 1×slots регистрация 1×slotscasino09k online Новые посетители онлайн-казино без первого депозита могут проверить собственную удачливость. К что, этому же есть вероятность преобразовать бездепы в реальные средства за регистрацию в казино, впрочем чтобы приз нужно отыграть сообразно условиям акции.Мы собрали и опубликовали перечень лучших бездепозитных казино с бонусами за регистрацию, коие гарантируют щедрые выигрыши и мгновенные выплаты.
<b>Смотреть еще похожие новости:</b>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=409566>1хслот скачать</a>
<a href=http://miupsik.ru/forums/showthread.php?tid=504630>1х слот 1хслотс регистрация перейти на 1×slots</a>
<a href=http://www.infoknygos.lt/smforum/index.php?topic=134107.new#new>1×slots регистрация на 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Так что сможете неустрашимо региться без всяких раздумий. Фортуна сегодня наверняка на вашей стороне. Не бойтесь, ведь следствие какого или ущерба Вам абсолютно не угрожает. С такими бонусами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе.
#2023 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино фильм 7k casino официальный сайт <a href=https://vestnik-jurnal.com/>букмекерская контора зенит</a> 1×bet сейчас casino x <a href=https://www.ossetia.tv/>казино рояль смотреть</a> самое казино порно с Александр Головин (футбол) казино 1 балтбет букмекерская контора порно с Виктория Синицина, фигуристка pin up casino порно с Карен Хачанов (теннис)
DiskiPlus порно с Васильева Татьяна Викторовна DiskiPlus casino рабочее <a href=https://www.diskiplus.ru/>DiskiPlus ап казино</a> DiskiPlus порно с Голикова Татьяна Алексеевна DiskiPlus порно с Никита Кучеров (хоккей) <a href=https://diskiplus.ru>DiskiPlus порно с Петр Ян (ММА)</a> DiskiPlus 1×bet скачать приложение на андроид DiskiPlus ставки на спорт букмекерские конторы DiskiPlus pinco casino DiskiPlus казино ли DiskiPlus porno Ангелина Гончаренко, хоккеистка DiskiPlus казино на деньги DiskiPlus букмекерская контора на андроид
#2024 internetGephttps://domashij-internet-kazan002.ru
подключить домашний интернет казань <a href=https://domashij-internet-kazan002.ru>domashij-internet-kazan002.ru</a> провайдер по адресу
#2025 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать сайт букмекерской конторы unlim casino <a href=https://krtka.info/>porno Марина Александрова</a> casino online зеркало porno Юлия Канакина <a href=https://vestnik-jurnal.com/>casino betting</a> про казино яндекс казино 1×bet официальный 1×bet зеркало на сегодня 1×bet xyz Юдаева Ксения Валентиновна порно букмекерские конторы без депозита балтбет букмекерская контора
DiskiPlus казино ли DiskiPlus 7k casino зеркало <a href=https://diskiplus.ru>DiskiPlus vodka casino</a> DiskiPlus казино гта 5 DiskiPlus vodka casino <a href=https://diskiplus.ru>DiskiPlus porno Марина Александрова</a> DiskiPlus сайте букмекерской конторы фонбет DiskiPlus ев казино DiskiPlus casino приложения DiskiPlus пин ап casino DiskiPlus букмекерская контора зенит DiskiPlus скачать pin casino DiskiPlus рабочие зеркала казино
#2026 Charlesgunnyhttp://filmkachat.ru
скачать 1×slots официальный сайт
Минимального оборота. Этот предел уточняется вейджером — пока игрок не сыграет на установленную необходимую, вывод средств будет недоступен. <a href=http://filmkachat.ru/>1хслотс официальный сайт зеркало</a> <a href=https://linkfly.to/kalinka>https://linkfly.to/kalinka</a> Не трудно догадаться, что no down payment bonuses почти никогда не случаются великими. Чаще всего идет о пяти–тридцати баксах (или эквиваленте этой суммы в иной денежной).Обычно показатель выше, чем для призов на депозит. Не изумляйтесь, в он будет в х100. Иногда завышенный коэффициент вейджера уточняется для обитателей отдельных государств. 1×slots регистрацию процедура займет всего лишь <a href=http://www.taijiacademy.com/newforum_down/profile.php?mode=viewprofile&u=303938>http://www.taijiacademy.com/newforum_down/profile.php?mode=viewprofile&u=303938</a> При исполнении условий отыгрыша и верификации, средства с бонусного счета переводятся на ведущей и все быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции находятся от избранной платежной системы.Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном призе, то в первую очередь направьте на велечину вейджера и срок, который дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть бонус и вывести выигрыш.
1хслотс казино зеркало
У каждого игорного заведения средства правила и условия. Но, чтобы получить призы, нужно выполнить стандартные деянья: <a href=https://australianwinerytours.com/tours/showthread.php?tid=448782>1×slots официальный сайт зеркало</a> 1×slots сайт <a href=https://www.gameawards.ru/forum/thread/1119/posovetujte-igru/>https://www.gameawards.ru/forum/thread/1119/posovetujte-igru/</a> скачать 1×slots официальный сайт
1хслотс казино зеркало
Особую изюминку видео слотам придают уникальные знакы. С их выходом активизируются различные бонусы. Вы можете запустить вспомогательный уровень и увеличить необходимую выигрыша. Есть знаки, которые заменяют ненадобные составляющие и сами делают выигрышные комбо. Не стоит забывать и на бонус-тур. После любого успешного спина есть шанс прирастить сумму выигрыша в 2 или четыре раза.Бонус с зачислением денег на счет выделяет больше свободы деяний. Пользователь сам подбирает, каким образом воспользоваться подаренными средствами. Здесь также все действовать ограничения на список доступных игр, но обыкновенно эти рамки не так строги, как в рекламную с безвозмездными вращениями. <a href=https://metalverk.ru/forum/?PAGE_NAME=profile_view&UID=81639>https://metalverk.ru/forum/?PAGE_NAME=profile_view&UID=81639</a> Все безвозмездные призы кажутся соблазнительными. Кто же откажется от возможности поиграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далеко не все бездепозитные бонусы в равной степени привлекательны для рассудительного клиента.В зависимости от интернет заведения каждый из их возможность вам предложить как бездепозитные средства, так и бездепозитные фриспины, которые после удачной регистрации рухнут вам на ваш игровой баланс. 1×slots зеркало которую указывали при регистрации кстати Шаг 4. Активация. Внимательно изучите обстоятельства, информацию по ограничениям и сроке деяния бонусного предложения. Разобравшись с правилами, возможно активировать приз в личном офисе (время ? с использованием промокода) или по запросу в саппорт.
1×slots зеркало регистрацию более популярный вариант это
Бездепозитные призы казино за регистрацию в 2022 году — это вероятность сыграть за счёт заведения. Казино даёт клиенту шанс пользоваться определённой суммой либо количеством даровых вращений без внесения депозита. Не путайте деморежим с реальной забавой без необходимости внесения депозита. Многие новенькие сомневаются, собственно поощрительный приз надо несомненно отдавать, и в они выиграли у казино. Это абсолютно неопасно и надежно. Выводя выигранные средства, игрок просто останавливает свое роль деле и утрачивает уникальную возможность – бесплатно наращивать личное вещественное положение. 1× slots сайт <a href=https://phileo.me/blogs/295814/Professional-CAD-Drawing-Services-Expert-Design-Solutions>https://phileo.me/blogs/295814/Professional-CAD-Drawing-Services-Expert-Design-Solutions</a>
1хслот официальный сайт зеркало
Как только вы отыграли вейджер и средства с бонусного баланса перебежали вам на реальный счет, Вы неустрашимо сможете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депо). <a href=http://soumoli.com/home.php?mod=space&uid=73350>http://soumoli.com/home.php?mod=space&uid=73350</a> Многие игроки, оценив перечень казино, остаются выступать в нем и далее ? на это и направлено любое рекламную. Постоянные клиенты вносят депозиты и проделывают ставки, обеспечивая длительную прибыль оператора. То есть, казино выдают бездепы новым пользователям для формирования приклнной аудитории.Так же стоит выделить то, собственно в каждом интернет казино установлен свой максимальный кешаут на бездепозитный бонус. Как верховодило кешаут — это предельная сумма денег, кот-ая доступная для вывода с бездепозитного приза. 1×slots casino регистрация Для выбора азартного заведения Вы сможете пользоваться перечнем наших казино с призами за регистрацию. На нашем сайте мы опубликовали перечень бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, что часть бонусов эксклюзивные и доступны лишь для посетителей нашего сайта по-специальному промо-коду либо по уникальной ссылке. Кроме того, для любого бонуса мы подготовили подробный обозрение, каком Вы узнаете как получить и отыграть поощрение и как исключить свой выигрыш с бездепа.
<b>Смотреть еще похожие новости:</b>
<a href=http://nexusroleplay.teamforum.ru/viewtopic.php?f=19&t=10967>1×slots casino online регистрация</a>
<a href=https://www.fromrus.su/index.php?/topic/60581-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-1×-slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82/>казино 1× slots официальный сайт</a>
<a href=http://yonghengro.gain.tw/space.php?uid=1555574>1хслотс зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную процедуру активации приза без депо. Внимательно прочтите до конца. Многие новички проделывают промахи на этапе регистрации и потому не могут получить подарок.
#2027 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Елена Лядова играющие казино <a href=https://rhymes-punches.com/>1×bet скачать приложение на андроид</a> Лут Оксана Николаевна порно 1×bet на андроид бесплатно <a href=https://m.repost.news/>Петрова Ольга Викторовна порно</a> 1×bet 1 официальные букмекерские конторы скачать 1×bet рабочее на сегодня 1×bet зеркало слоты винлайн букмекерская контора официальный 1×bet сайт 1×bet xyz порно с Илья Осипов (киберспорт)
DiskiPlus 1×bet рабочее DiskiPlus казино сегодня <a href=https://www.diskiplus.ru/>DiskiPlus top casino</a> DiskiPlus винлайн букмекерская контора официальный DiskiPlus букмекерская контора официальный сайт <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet слоты</a> DiskiPlus casino 7k рабочее DiskiPlus букмекерская контора бесплатно скачать DiskiPlus порно с Анастасия Потапова, теннисистка DiskiPlus casino ап DiskiPlus porno Виктория Баркова, легкоатлетка DiskiPlus casinos winning DiskiPlus карты казино
#2028 Charlesgunnyhttp://filmkachat.ru
1×slot рабочее зеркало
Баланс игрока дополняется на подобающую необходимую. К ней применяется вейджер, указанный в правилах промоакции. Вывести выигрыш можно будет последствии такого, как юзер сделает требуемый объем ставок из личных средств. В редчайших случаях бездеп работает в формате Free Play. На счет юзера зачисляется большая сумма, и предоставляется малый срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по завершении сего периода сумма на счету несомненно превышать изначальную, то разницу можно несомненно вывести или использовать для последующих ставок. <a href=http://filmkachat.ru/>1×slot казино зеркало</a> Так что сможете неустрашимо региться без всяких раздумий. Фортуна сегодня наверняка на вашей стороне. Не бойтесь, ведь следствие какого или ущерба Вам абсолютно не угрожает. С такими бонусами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе.Получив собственный подарок, Вы можете безвозмездно выступать на настоящие средства, а выполнив обстоятельства отыгрыша, вывести собственный выигрыш. <a href=https://elearn.ellak.gr/mod/forum/discuss.php?d=42024>https://elearn.ellak.gr/mod/forum/discuss.php?d=42024</a> 1×slots скачать на айфон <a href=http://avtoworld.lv/index.php?subaction=userinfo&user=onerousaccounta>http://avtoworld.lv/index.php?subaction=userinfo&user=onerousaccounta</a> Бездепы обыкновенно предлагают с отыгрышем — моментально исключить выигранные свои невозможно. Перевод денег со счета несомненно вероятен после такого, как юзер выполнит все требования казино, а сумма не быть выше установленного правилами лимита. Условиями акции фиксируются сроки, протяжении которых заказчик вправе воспользоваться предложением. Обычно они не превышают нескольких дней последствии активации.
1×slots зеркало рабочее
Промокод – определённая комбинация символов, коию нужно ввести в отвечающее фон при твореньи учетной записи либо активировать в собственном профиле игрока в разделе с бонусами. <a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=10767>1×slot зеркало рабочее регистрации на телефон придет</a> 1×slots рабочее зеркало на сегодня <a href=http://printpoligraf.kiev.ua/index.php?subaction=userinfo&user=offbeatelite88>http://printpoligraf.kiev.ua/index.php?subaction=userinfo&user=offbeatelite88</a> Прежде чем активировать бездеп, нужно убедиться сомнений, собственно страна, гражданином которой считается игрок, не входит в список разрешенных. 1 х слотс зеркало В интернет-сети практически возможно отыскать перечни более популярных и гарантированных поощрительных программ от модных онлайн-казино.Размер ставки для забавы по бездепозитному призу (окончательно же, если, тогда,, когда он представлен повторяющий бонусных денежных средств) часто ниже, чем при забаве на депо. Ограничение будет действовать до этапа отыгрыша приза.
1×slots зеркало
Бездепозитные бонусы казино за регистрацию в 2022 году — это возможность сыграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой или количеством даровых вращений без внесения депо. Не путайте деморежим с реальной игрой без надобности внесения депо. <a href=https://lavr-sovet.ru/user/DoctorLazutael/>https://lavr-sovet.ru/user/DoctorLazutael/</a> Получив свой презент, Вы сможете даром играть на реальные деньги, а выполнив обстоятельства отыгрыша, исключить свой выигрыш.Вы всего, скажем, как все предпочитаете получать подарки и бездепозитные призы казино. Игорные жилища взяли в привычку одаривать гэмблеров приятными призами. Стать обладателем приветственного презента возможно за творение профиля или пополнение счёта. Второй вариант больше увлекательный, ведь клубы готовы удвоить депозит! Но случае вы новичок и только знакомитесь с миром азарта, лучше воспользуйтесь бонусом за регистрацию. 1×slots регистрация на сайте 1×slots ru com Прибывшие на акк деньги бездепозитные призы предназначаются, главном, лишь для новоиспеченных пользователей, которые раньше не имели собственного аккаунта в данном казино. Исходя из сего, если ранее у игрока был изготовлен депозит, то, по всей вероятности, у него больше не будет возможности рассчитывать на получение такового бонуса в определенном заведении.
1×slots регистрация 1×slots casino c2d ru
В лицензионных бездепозитных казино выступать в азартные игры действительно безопасно. Наличие лицензии подтверждает тот факт, собственно клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP. <a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=16602>1хслотс рабочее зеркало</a> 1хслотс мобильная версия зеркало <a href=https://dedignat.ru/component/users/?option=com_k2&view=itemlist&task=user&id=29004>https://dedignat.ru/component/users/?option=com_k2&view=itemlist&task=user&id=29004</a> Бездеп с фриспинами имеет обхватывать всю коллекцию игр на веб-сайте либо разработки 1-го провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш может быть выведен последствии того, как пользователь отыграет данную необходимую. Возможность оценить полный перечень слотов — основное достоинство этой разновидности. Игроку становятся доступны что, эти опции, которые отсутствуют в демонстрационном режиме, а вероятность выиграть настоящие деньги добавляет ярких азартных ощущений.Изучить верховодила и условия получения бездепозитных бонусов казино, Вы сможете у нас на сайте в разделе с призами или на официальном сайте избранного Вами казино. Если не найти необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал либо по электронной почте.
1×slots официальный demo регистрация в 1×slots casino
Прочитайте верховодила бонусной программы, в желайте участвовать. Да, мы безотступно советуем устроить это до регистрации. <a href=http://worklocal.com.au/users/doctorlazutama>http://worklocal.com.au/users/doctorlazutama</a> 1хслотс регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://www.fromrus.su/index.php?/topic/58524–1×slots-%D0%BF%D1%80%D0%BE%D0%BC%D0%BE%D0%BA%D0%BE%D0%B4-%D0%BF%D1%80%D0%B8-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D0%B8–2025/>1×slots промокод при регистрации 2025</a>
<a href=http://nakupnidivadlo.cz/index.php/forum/3-pripominky/46621-https-sk-service1-ru?start=6#239761>1×slots регистрация на сайте</a>
<a href=https://forum.bandariklan.com/showthread.php?tid=532936>1×slots зеркало быструю регистрацию а также мгновенное</a>
<a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/13104–1×slots-zerkalo-registratsiya-v-1×slots-casino#13135>1×slots зеркало регистрация в 1×slots casino</a>
<a href=https://www.formulersupport.com/Thread-1×slots-%D1%81%D0%B0%D0%B9%D1%82–234104>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выполнив все притязания оператора, заказчик возможность оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит в среднем менее суток. Если дополнительно потребуется пройти процедуру верификации, то срок увеличивается до 1–2 рабочих дней. Для перевода применяются банковские приборы и электронные платежные системы. Второй метод подходит другого, например как большинство транзакций такой исполняются мгновенно. В связи со спецификой функционирования банков обработка платежей может взятьвдолг(взятьвзаймы) до нескольких рабочих дней.
#2029 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Андрей Рублев (теннис) casino бездепозитный <a href=https://strelochnik.com/>casino автомат</a> порно с Никита Кучеров (хоккей) гама казино <a href=https://strelochnik.com/>рейтинг казино</a> порно с Сергей Бобровский (хоккей) включи казино Кузнецова Анна Юрьевна порно пин ап букмекерская контора порно с Зырянова Анастасия Владимировна Елена Лядова 7k casino сайт
DiskiPlus бесплатные букмекерские конторы DiskiPlus casino скачать приложение <a href=https://www.diskiplus.ru/>DiskiPlus букмекерская контора бесплатно скачать</a> DiskiPlus 1×bet слоты официальный сайт DiskiPlus casino на телефон <a href=https://www.diskiplus.ru/>DiskiPlus рабочие зеркала казино</a> DiskiPlus бесплатное казино DiskiPlus скачать сайт букмекерской конторы DiskiPlus casino сайты DiskiPlus пинап казино DiskiPlus Кузнецова Анна Юрьевна порно DiskiPlus 1×bet официальный 1×bet xyz DiskiPlus порно с Захарова Мария Владимировна
#2030 Charlesgunnyhttp://filmkachat.ru
1хслотс регистрация в 1×slots casino
Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного приза достаточно пополнения баланса и доказательства личности. В иных же клубах, нужно количество раз прокрутить собственный депо.Баланс игрока дополняется на подходящую сумму. К ней используется вейджер, указанный в правилах промоакции. Вывести выигрыш можно несомненно в такого, как пользователь сделает требуемый размер ставок из личных средств. В редких случаях бездеп работает в формате Free Play. На счет пользователя зачисляется большая сумма, и предоставляется маленький срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по окончании сего периода сумма на счету будет превышать изначальную, то разность можно несомненно исключить или использовать для дальнейших ставок. <a href=http://filmkachat.ru/>1×slots казино зеркало</a> <a href=https://writeablog.net/p2t24forxp>https://writeablog.net/p2t24forxp</a> В перечне требований к отыгрышу часто присутствуют лимиты на ставки при игре на личные деньги. Так, если отыграть нужно 30 000 рублей, а максимальная сумма ограничена 30 рублями, то вертеть барабаны светит 1000 раз. Эта особенность затрудняет соблюдение игроками условий по срокам деянья промоакции.Все благотворительные бонусы кажутся заманчивыми. Кто же откажется от способности поиграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далеко не все бездепозитные призы в равной степени презентабельны для рассудительного посетителя. 1хслотс 1хслотс регистрация перейти на 1×slots <a href=http://gticlub.lv/user/DoctorLazutaMl/>http://gticlub.lv/user/DoctorLazutaMl/</a> Большинство клубов завлекают внимание геймеров за счёт разнообразных даров. На одних веб-сайтах возможно получить виртуальные кредиты, которые откроют доступ ко всему софту. На других же, администрация предлагает безвозмездные вращения для запуска топовых онлайн слотов. Несмотря на разные промоакции, стоит выделить самые главные.
1×slots регистрация то дальше необходимо пройти
Когда идет о получении бездепозитных призов в казино, начала направьте на следующие обстоятельства: <a href=https://www.handmakersbrasil.com.br/topic/4674–1×slots-casino-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE/>1×slots casino зеркало</a> 1×slots casino online регистрация <a href=https://www.hogwartsishere.com/1685677/>https://www.hogwartsishere.com/1685677/</a> Создание аккаунта. На сайте казино необходимо обнаружить регистрационную форму и наполнить пустые поля личными данными. Иногда на этом шаге потребуется указать только адрес электрической почты и пароль, но чаще надо заполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д.). Нужно указывать лишь настоящие данные, потому впоследствие они станут проверены.Чаще всего казино приз за регистрацию без депо даёт вероятность запустить каждой автомат. Но никакого внимательно ознакомиться с условиями. Иногда для игры доступны только определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, никакого начать знакомство с миром азарта непосредственно с «одноруких бандитов». 1×slots официальный сайт зеркало рабочее Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Доступ к дару возможность открываться автоматически последствии введения промокода или обращения в службу поддержки вебсайта. В первом случае от юзера не потребуется никаких деяний. Бездеп с активацией по коду встречается почаще всего. Игроку необходимо ввести совокупность символов в графе, которая может находиться в регистрационной форме в Личном офисе.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Предложения с бездепозитными призами за регистрацию позволяют свежим заведениям привлечь аудиторию на свой сайт. А игроки к получают возможность выступать на настоящие деньги без депозита в казино и заработать маленькой стартовый капитал, кот-ый разрешается исключить на карту банка или электрический кошелек. <a href=https://funsilo.date/wiki/User:WilliamEisenhowe>https://funsilo.date/wiki/User:WilliamEisenhowe</a> 1×slots казино зеркало Бездепы с безвозмездными вращениями деют юзерам право вертеть барабаны игровых автоматов без снятия средств со счета. За любой раунд платит казино. Число спинов ограничено и редко превышает сотку. Если промоакция содержит большое даровых игр, их начисление может быть разбито на несколько дней.Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного приза.
1×slot казино зеркало
Доступные игры – В некоторых азартных играх можно снизить математическое преимущество казино до нескольких десятых процента. В их числе все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как управляло, в таких играх ставки идут в зачет вейджера не полностью. Например, может предусматриваться лишь 50%. В некоторых играх бездепозитные бонусы вообщем невозможно отыгрывать. <a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=12237>1×slots зеркало регистрацию более популярный вариант это</a> На бонусные начисления могут быть установлены вспомогательные ограничения, коие Вы не сведению при отыгрыше. Пока бонус полностью не отыгран — деньги из казино не выводятся. 1×slots официальный сайт мобильная версия <a href=https://ep-team.ru/forum/index.php?action=profile;u=8032>https://ep-team.ru/forum/index.php?action=profile;u=8032</a> Бездепозитные бонусы настоящими средствами, коие можно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадали.Бездепозитные призы начисляются лишь раз один. Не стоит раскрывать свежие аккаунты, чтобы получить их повторно. Служба защищенности казино непременно выявит «левого» соучастника и заблокирует. Если посетитель выполнит необходимые притязания, отыграет собственную ставку и решит исключить собственный выигрыш, то ему надо(надобно) к, что казино обязательно потребует дать ксерокопии личных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные свои исключить не удастся.
1×slots официальный сайт, скачать
<a href=http://meiying89.com/home.php?mod=space&uid=430973>http://meiying89.com/home.php?mod=space&uid=430973</a> 1×slots промокод при регистрации 2025 Призовые начисления без депозита шансы предоставляться для роли в турнирах онлайн казино. Потратить перечисленные деньги возможно необыкновенно в данной промоакции. Условия их проведения себе ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться этим предложением, чем выучить его управляла.Промообъявления от казино мешают реальной картины и ориентированы на привлечение внимания юзеров. Понять, насколько высоки шансы остаться в плюсе, позволит собственный анализ критерий предложения:
<b>Смотреть еще похожие новости:</b>
<a href=http://support-groups.org/viewtopic.php?f=161&t=767521>1×slots актуальное зеркало</a>
<a href=https://www.fromrus.su/index.php?/topic/59996–1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5-%D0%BD%D0%B0-%D1%81%D0%B5%D0%B3%D0%BE%D0%B4%D0%BD%D1%8F/>1×slots зеркало рабочее на сегодня</a>
<a href=http://mandala-app.com/forums/viewtopic.php?f=5&t=221494>x1 slots регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бoльшинcтвo азартных заведений выдвигают приблизительно однообразные, схожие условия и притязания, которые нужно выполнить, дабы получить бездепозитный бонус за регистрацию. Все их возможно соединить в раз перечень:
#2031 Charlesgunnyhttp://filmkachat.ru
1×slots сайт
Ознакомьтесь с нашим списком превосходнейших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего списка и получите бездеп сразу. Хватайте лучшие благотворительные предложения ниже и выигрывайте великие средства, не рискуя!Подобные бонусы без депо предоставляются на более прибыльных критериях. Зачастую они покрупнее, а обстоятельства отыгрыша менее строгие. <a href=http://filmkachat.ru/>зеркала 1×slots</a> Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, чтобы снова получить бесплатный приз. Игорные заведения нетерпимы к бонус-хантерам, потому вас ожидает неминуемое санкция.Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, all зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. <a href=https://international.projectwet.org/discussion/%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-lexus-%D0%B1%D1%8B%D1%81%D1%82%D1%80%D0%B0%D1%8F-%D0%B8-%D0%B2%D1%8B%D0%B3%D0%BE%D0%B4%D0%BD%D0%B0%D1%8F-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D0%B6%D0%B0-%D0%BF%D1%80%D0%B5%D0%BC%D0%B8%D1%83%D0%BC-%D0%B0%D0%B2%D1%82%D0%BE>https://international.projectwet.org/discussion/%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-lexus-%D0%B1%D1%8B%D1%81%D1%82%D1%80%D0%B0%D1%8F-%D0%B8-%D0%B2%D1%8B%D0%B3%D0%BE%D0%B4%D0%BD%D0%B0%D1%8F-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D0%B6%D0%B0-%D0%BF%D1%80%D0%B5%D0%BC%D0%B8%D1%83%D0%BC-%D0%B0%D0%B2%D1%82%D0%BE</a> 1×slots регистрация на 1хслотс <a href=http://borsa-motokari.com/user/everotypo>http://borsa-motokari.com/user/everotypo</a> Все любят получать презенты. Согласитесь, практически любой играющий человек несомненно беспредельно рад, случае получит безвозмездный подарок для игры в интернет казино просто за регистрацию либо же бонус за внесенный депозит, так именуемые приветственные призы для свежих игроков. Соответственно такие интернет клубы станут более известны и преимущественны у игроков при выборе казино для игры. Топ казино каждый обновляется и прибавляются свежие и занимательные игровые клубы с симпатичной бонусной политикой и всеми вероятными прерогативами, к которым относятся такие бонусы как фриспины за регистрацию, денежные бездепозитные призы, а великодушные бонусы за внесенный депозит.Подтвердите личность, предоставив оператору казино средства паспортные данные. Инструкции обыкновенно несложные, главное — четко им следовать. Если написано, собственно «на фото обязаны быть видны все четыре угла странички паспорта» — сделайте непосредственно это фото.
1×slots регистрация на сайте 1×slots ru com
При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое возможно предназначить этой в казино. <a href=https://forum.immortales-gilde.de/viewtopic.php?f=2&t=382650>1×слотс казино</a> 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Многие новенькие колеблются, что поощрительный приз не нужно будет отдавать, даже если они выиграли у казино. Это полностью безопасно и накрепко. Выводя выигранные свои, игрок просто одергивает свое участие деле и утрачивает уникальную вероятность – бесплатно наращивать собственное материальное положение.Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном веб-сайте и выполните вход в собственный офис, дабы забрать бесплатные вращения с вейджером х40; <a href=https://xn----7sbarohhk4a0dxb3c.xn–p1ai/user/Ralphenlit/>https://xn----7sbarohhk4a0dxb3c.xn–p1ai/user/Ralphenlit/</a> Основное правило получения бездепа ? создаваемый акк должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов взыскательно запрещено. Проверка проводится по имени, e-mal, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита необходимо блюсти простую очередность действий.Заработать на бездепозитных бонусах за регистрацию в казино может каждый юзер, достигший совершеннолетия. 1×slots рабочее зеркало В наше время довольно просто получить бонус за регистрацию в казино. Практически любой игорный жилище с готовностью начисляет средства либо благотворительные вращения. Многие гэмблеры используют данным и не стесняются регистрироваться в любом клубе с прибыльными критериями. Кстати, это замечательная возможность выработать победную тактику и сорвать джекпот.Главным моментом в возникновении этих вознаграждений состоит никаких, что пустив их в ход, в ничем не рискует и в последствии никому ничего не несомненно должен (не зависимо, получит ли он спасибо бонусам какой-нибудь выигрыш или мгновенно спустит все лишь что прибывшие финансы). То есть, казино снабжает игрока возможностью на дармовой базе играть во всевозможные слоты даже спонсирует игру.
1×slots казино зеркало
Следует подчеркнуть, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам либо с конкретным кодом.Также, учите, собственно бездепозитный бонус возможно вывести лишь в случае, когда будут исполнены все условия отыгрыша. <a href=http://blackpearlbasketball.com.au/index.php?option=com_k2&view=itemlist&task=user&id=858157>http://blackpearlbasketball.com.au/index.php?option=com_k2&view=itemlist&task=user&id=858157</a> Бездепы обычно предлагают с отыгрышем — мгновенно исключить выигранные средства нельзя. Перевод денег со счета несомненно вероятен в того, как пользователь выполнит все требования казино, а сумма возможности быть выше установленного правилами лимита. Условиями промоакции фиксируются сроки, на коих клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней в активации. 1×slots casino регистрация
1×slots официальный сайт, скачать
Бонус в казино без депозита имеет различные вариации: такое быть приветственный бонус, акции в честь каких-либо дней либо главных дат, бонус за вербование новых игроков, лояльность и получение VIP-статуса. <a href=https://krok.biz/forum/viewtopic.php?f=7&t=96603>рабочее зеркало 1×slots</a> Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам запрещено начислять бонусы посетителям, не имеющим денежных средств на счете. Мы предлагаем осмотреть актуальные призы онлайн-казино с лицензией, которые соблюдают законодательство РБ. Такой бесплатный эквивалент средств зачисляется на профиль юзера после воплощения притязаний и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений вероятен только последствии осуществления вейджеровых критерий.Прежде всего, не забывайте регулярно заглядывать на страничку обзоров бездепозитных призов. Они шаг за шагом разглядывают наиболее занимательные предложения основных игорных порталов. рабочее зеркало 1×slots <a href=https://www.detdom.info/users/glavdorogadv1606>https://www.detdom.info/users/glavdorogadv1606</a>
1×slots скачать на айфон
Бездепозитные бонусы — это подарки от казино повторяющий бонусных денег либо фриспинов для игровых автоматов, коие начисляются на аккаунт игрока после процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депо не требуется. Помните, собственно в некоторых играх сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных забавах лишь от 5% до 50% суммы ставки считаются как отыгранные средства, в то время как в слотах идет в зачет все 100% суммы. <a href=https://gidro2000.com/forum-gidro/user/28618/>https://gidro2000.com/forum-gidro/user/28618/</a> Если при регистрации указать промокод, возможно гарантировано получить приз. Где арестовать ваучер? Посетите тематику блоги или форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В заключительное время игорные жилища начали рекламироваться в фильмах и сериалах. Присмотритесь и скорее заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных руб.Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депо возможность выделяться до 30 дней. 1×slots зеркало выигрыши обязательно пройдите регистрацию если Стоит отметить, собственно бездепозитный приз выдается лишь совершеннолетним новеньким, которые, тому, шансы пригласить собственных приятелей и знакомых, того претендующих на поощрительную программку преданности. Подобная технология появилась среди конкуренцию онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры содействуют увеличению своей посещаемости, методом вербования новых игроков. Бонусы – это уникальный шанс для вероятных соучастников игры, коие все опробовать софт покер рума и убедиться, будут ли они в него играть или нет. Новый игрок испробует свои силы с настоящими оппонентами в казино.Для доказательства электронной почты, просто перейдите по интенсивной ссылке в послании, приобретенном от игрового заведения.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.bedwantsinfo.nl/showthread.php?tid=792311>зеркала 1×slots</a>
<a href=http://shiftdelete.10tl.net/member.php?action=profile&uid=119629>1×slots зеркало проходить регистрацию это отличный вариант</a>
<a href=http://shiftdelete.10tl.net/member.php?action=profile&uid=119629>1хслотс казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но существуют азартные заведения, готовые просто так вручить деньги на забаву. Для этого достаточно сделать профиль. Чтобы исключить выигрыш, сначала нужно выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа.
#2032 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора официальный сайт скачать порно с Голикова Татьяна Алексеевна <a href=https://sovsekretno.net/>porno Юлия Канакина</a> casino сегодня porno Дарья Клишина <a href=https://t.me/vchkogpu_ru>casino регистрации</a> гта онлайн казино порно с Петр Ян (ММА) балтбет букмекерская контора casino x ешь казино champion casino Лут Оксана Николаевна порно
DiskiPlus порно с Алина Загитова DiskiPlus porno Анна Сидорова, керлингистка <a href=https://www.diskiplus.ru>DiskiPlus 1×bet вход</a> DiskiPlus сайт казино вход DiskiPlus casino рабочее зеркало <a href=https://diskiplus.ru/>DiskiPlus букмекерская контора официальный сайт скачать</a> DiskiPlus casino DiskiPlus кент casino DiskiPlus 1×bet официальный слоты DiskiPlus порно с Георгий Джикия (футбол) DiskiPlus официальное казино вход DiskiPlus игры казино DiskiPlus 1×bet зеркало слоты
#2033 Charlesgunnyhttp://filmkachat.ru
1×slots официальный регистрация
Минимального оборота. Этот лимит уточняется вейджером — пока игрок не поиграет на установленную сумму, вывод средств несомненно недоступен. <a href=http://filmkachat.ru/>1×slots регистрация на официальном сайте</a> <a href=https://yoomark.com/content/every-vehicle-owner-inevitably-faces-choice-new-battery-and-decision-often-comes-down>https://yoomark.com/content/every-vehicle-owner-inevitably-faces-choice-new-battery-and-decision-often-comes-down</a> На страничке представлены бездепозитные призы за регистрацию в казино редчайшая награда за которой гонятся все игроки как новички, например и профессионалы. Мы также уделяем большое внимание на наличие бонусов при составление рейтинга казино на деньги. Бездепозитный приз это вероятность играть безвозмездно и выиграть настоящие средства. 1хслотс рабочее зеркало <a href=https://www.elephantjournal.com/profile/glavdorogadv1606/>https://www.elephantjournal.com/profile/glavdorogadv1606/</a>
1×slots скачать на айфон
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=124769&extra=>1×slots зеркало рабочее на сегодня</a> онлайн казино 1×slots Размер ставки для забавы по бездепозитному призу (конечно же, в случае, когда он представлен вид бонусных денежных средств) зачастую ниже, чем при забаве на депо. Ограничение будет действовать до момента отыгрыша приза.Одним из поводов отдавать преимущество, льготу одному или другому заведению содержится в привлекательности предлагаемых промоакций и безвозмездных предложений. Безвозмездные фриспины, выдаваемые без нужды создавать какой-либо вклад, в перечне находится далеко не в конце. <a href=https://www.bseo-agency.com/blogs/188128/Skup-samochod%C3%B3w-Warszawa-Profesjonalna-wycena-i-uczciw%C4%85-cen%C4%99>https://www.bseo-agency.com/blogs/188128/Skup-samochod%C3%B3w-Warszawa-Profesjonalna-wycena-i-uczciw%C4%85-cen%C4%99</a> 1×slots промокод при регистрации 2025 Благодаря программке преданности от игорного заведения, можно брать хороший старт и без добавочных вложений запустить видеослоты. Кроме того, можно рассчитывать на реальную удачу и получить, без инвестиции собственных денег, великой выигрыш.
1×slot официальный сайт
<a href=https://thiamlau.com/forum/member.php?action=profile&uid=10595>https://thiamlau.com/forum/member.php?action=profile&uid=10595</a> 1×slots официальный сайт, скачать Активация денежного вознаграждения случается механически после сотворения профиля либо применения промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на странички казино в социальных сетях или на рассылку рекламных сообщений, скачать и установить вспомогательный софт и т.д.
1× slots casino официальный сайт
<a href=http://fumankong1.cc/home.php?mod=space&uid=500977>1×slots регистрация</a> В количестве случаев безвозмездные бонусы начисляются в кредитах, коие невозможно незамедлительно исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти требования принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д. ). О нем читайте ниже. 1×slots на любой вкус как пройти регистрацию <a href=http://eco-adamant.kz/index.php?subaction=userinfo&user=lyricalbyword26>http://eco-adamant.kz/index.php?subaction=userinfo&user=lyricalbyword26</a>
онлайн казино 1×slots
Любой выигрыш по ставке повыше установленного лимита несомненно считаться недействительным. То есть ставка не будет засчитана при отыгрыше, ну случае выигрыша его сумма не поступит на счёт клиента — итог игры будет полностью аннулирован. <a href=http://classicalmusicmp3freedownload.com/ja/index.php?title=%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%AF%D0%BD%D0%B4%D0%B5%D0%BA%D1%81>http://classicalmusicmp3freedownload.com/ja/index.php?title=%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%AF%D0%BD%D0%B4%D0%B5%D0%BA%D1%81</a> У любого игорного клубы различные вейджеровые условия. Чтобы вы гарантировано сумели выполнить их, мы дадим некоторое советов. Если система начислила небольшую необходимую, не стоит создавать великие ставки – остановитесь на 10–30 центах. Как лишь сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте играть. В противном случае другого, как присмотреться к иному автомату.Прежде всего, не запамятовывайте периодически заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом разглядывают наиболее интересные предложения водящих игорных порталов. 1×slots сайт зеркало Онлайн-казино с бездепозитными призами ставят посетителям обстоятельства для использования бездепами, поэтому перед участием в промоакции чем тщательно ознакомиться со всеми правилами и нюансами акции. Условия имеют прикасаться получения бонуса, его использования и последующего вывода валютных средств когда выигрыша.Несмотря на то, собственно данный вариант стимуляции со стороны азартных платформ довольно востребован области подобных игр, далеко не почитателям казино ведомо, что себе бездепозитные призы казино и как именно их вполне эксплуатировать.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Самые новые бездепозитные бонусы в казино за регистрацию 2022 года с выводом прибыли присутствуют на данной страничке. Посетитель возможность расценить обстоятельства получения и начать играть на средства без внесения депозита. При данном игроку принципиально осознавать, на каких условиях и какими методами у исключить полученный выигрыш. Для сего необходимо оценить список подключенных платежных систем. Обычно для получения бонусов без депо, казино выдвигает лояльные и абсолютно выполнимые условия, хотя есть ряд поступков коие воспрещены и все стать неприятные последствия:
#2034 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино сегодня Набиуллина Эльвира Сахипзадовна порно <a href=https://m.repost.news/>как выиграть в казино</a> Приезжева Екатерина Геннадьевна порно casino <a href=https://th-royalgclub.com/>casino актуальное зеркало</a> пин ап букмекерская контора 7k casino официальный casino сегодня букмекерские конторы бет 1×bet слоты 1×bet xyz порно с Дарья Касаткина (теннис) леон букмекерская контора
DiskiPlus спорт букмекерская контора DiskiPlus казино смотреть онлайн <a href=https://diskiplus.ru/>DiskiPlus casinos winning</a> DiskiPlus часы казино DiskiPlus 1×bet зеркало на сегодня <a href=https://diskiplus.ru/>DiskiPlus рокс казино</a> DiskiPlus 7k casino сайт DiskiPlus бесплатно играем казино DiskiPlus 1×bet рабочее DiskiPlus porno Елизавета Туктамышева DiskiPlus kometa casino DiskiPlus сайт 1×bet слоты DiskiPlus 1×bet официальный xbet
#2035 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию процедура займет всего лишь
На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению этого времени, Вы не сможете активировать и получить бездепозитный бонус.Если вы избираете испытанное лицензионное интернет казино и выполните все обстоятельства получения бездепозитного бонуса, проблем с получением презента у Вас не возникнет. <a href=http://filmkachat.ru/>1×slots зеркало регистрация</a> <a href=https://www.arrl.org/forum/topics/view/4342>https://www.arrl.org/forum/topics/view/4342</a> Так собственно можете отважно регистрироваться без всяких размышлений. Фортуна сегодня наверняка на вашей стороне. Не бойтесь, так следствие какого или убытка Вам совершенно не грозит. С этими призами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе.Изучить верховодила и обстоятельства получения бездепозитных бонусов казино, Вы сможете у нас на сайте в разделе с бонусами или на официальном сайте выбранного Вами казино. Если возможности отыскать нужную информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал либо по электрической почте. 1×slots рабочее зеркало <a href=http://fb7922hj.bget.ru/home.php?mod=space&uid=319652&do=profile>http://fb7922hj.bget.ru/home.php?mod=space&uid=319652&do=profile</a> Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша призов. Заведения постоянно устанавливают максимальную ставку, возможную по условиям вейждера.
1хслотс официальный сайт зеркало
Ещё одно распространённое акционное предложение – привлекательный подарок с неблаговидными требованиями. К примеру, клуб обещает $100 в бездепа, но с вейджером х80 или х100. Отыграть такой вейджер фактически невозможно и потому другого концентрироваться на больше занимательных промоакциях.Можно ли зарабатывать на бездепозитных призах? Это не работа, тут как повезет, случае в любом предложенном безедепе, вы будете откручивать вейджер и выводить, время можно именовать везением, и дополнительной добавкой к вашему бютжету. 1×slots официальный сайт зеркало рабочее Отзывы читателей о бонусных промоакциях помогут составить впечатление, но не запамятовывайте о субъективности личных комментариев. <a href=http://dom-farfora.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://avtomir365.ru/bitrix/redirect.php?goto=http://5seasons-nsk.ru/bitrix/redirect.php?goto=https://telegra.ph/Poryadok-vedeniya-kollektivnyh-peregovorov-v-sootvetstvii-so-statej-37–09–23>http://dom-farfora.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://avtomir365.ru/bitrix/redirect.php?goto=http://5seasons-nsk.ru/bitrix/redirect.php?goto=https://telegra.ph/Poryadok-vedeniya-kollektivnyh-peregovorov-v-sootvetstvii-so-statej-37–09–23</a> x1 slots 1хслотс регистрация перейти на 1×slots
1×slots на любой вкус как пройти регистрацию
Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. <a href=https://play.ntop.tv/user/ForsedropEl/>https://play.ntop.tv/user/ForsedropEl/</a> У любого игорного заведения средства правила и обстоятельства. Но, дабы получить бонусы, необходимо выполнить стереотипные деянья:Шаг 5. Использование и отыгрыш. Бездеп обязан быть применен в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера. 1×slots регистрация на сайте Необходимость отыгрыша. Вейджер такой выше, чем для бонусов за депо. И же свои не отыграны, вывести их нельзя.Если вы облюбовали себе количество брендов которые для больше всего приглянулись, для постоянной игры! Таких гемблеров казино довольно любит и ценит, за частую такие игроки становятся VIP игроками заведения, коим нередко поступают выгодные предложения вид бонусов, так же туда входит и бездепозитные.
1×slots регистрация 1×slots casino 777 online
Иногда у посетителей вебсайта шансы появиться трудности, задачи, препядствия при активации полученного промо-кода. В этих случаях, необходимо адресоваться за подмогою в службу поддержки «Support». Для получения ответа, обязательно указывается конкретная первопричина обращения и подтверждается информация дополнительными снимками. Если сформировалась спорная обстановка, постоянно можно обратиться к главному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ. К образцу, игроку выдаются бесплатные средства в заведении в размере пятидесяти или ста $ (вейджер на которые составляет 100х). То есть, любому новоприбывшему геймеру выскакивает привлекающая картинка, которая сулит выплату всех зачисленных фирмой средств. Не стоит обращать внимания на казино приз за регистрацию без депо с слишком большой или очень малеханькой суммой бонусов, поэтому собственно, в кропотливо выучив все условия, тут всего, будет некий подвох.Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 поболее. Когда игроку полагается количество фриспинов, администрация возможность бить3 их начисление на некоторое дней. Бесплатные вращения предоставляются для определенного слота, который указывается в правилах акции. 1хлот регистрация в 1×slots casino <a href=https://itkvariat.com/user/Kennethboaby/>https://itkvariat.com/user/Kennethboaby/</a> Во время игры в казино, выигрыши, полученные спасибо безвозмездным призовым фондам, суммируются и срабатывают в общую сумму для отыгрывания. Однако, в удача улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно допустит исключить денежные средства. Сумма вывода будет зависимости от лимита, одобренного именно в этом учреждении. Поэтому, пристально нужно читать правила выдачи безлимитных депозитов.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.
1хслот 1хслотс регистрация перейти на 1×slots
Получать информацию о самых прибыльных призах возможно без неизменного прогноза новостей казино. Мы брали эту задачу на себя и безпрерывно смотрим за предложениями операторов, избирая наилучшие из них. В этом разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список акций периодически пополняется. В топ вошли самые свежие бездепозитные бонусы за регистрацию в казино 2020, кратковременные и замкнутые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру прочим аспектам. Если срок деяния промоакции истек, она удаляется из перечня.Еще одно условие дотрагивается объемов ставки. Операторы устанавливают максимальную необходимую, которую игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, выбранной в Личном офисе. При превышении лимита есть риск лишиться приза. Существующие лимитирования относятся и к конкретным обликам ставок. Например, играя в рулетку, заказчик может столкнуться с запретом назначать фишки на шансы. Обычно для получения бонусов без депо, казино выдвигает лояльные и вполне выполнимые обстоятельства, но есть ряд действий коие воспрещены и шансы стать досадные результаты:Обычно для получения призов без депо, казино выдвигает приклнные и абсолютно выполнимые условия, хотя есть ряд деяний которые воспрещены и все стать неприятные последствия: <a href=http://itkvariat.com/index.php?subaction=userinfo&user=vigorousmalprac>http://itkvariat.com/index.php?subaction=userinfo&user=vigorousmalprac</a> 1×slots бездепозитный бонус за регистрацию Такие одобрения позволяют безвозмездно протестировать новое казино, разобраться с игровым ходом интернет слотов, заработать и вывести небольшую необходимую денег.
<b>Смотреть еще похожие новости:</b>
<a href=http://yamato-ryu.ru/communication/forum/index.php?PAGE_NAME=message&FID=1&TID=44577&MID=9323&sessid=c8626fd17ce4a5c1975f4b8a697c061d&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1×slots регистрацию более популярный вариант это</a>
<a href=http://amazon.rx22.ru/viewtopic.php?f=5&t=3532>1× slots casino зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для получения приза надо(надобно) ознакомиться с программой лояльности казино и устроить ставки на необходимую, нужную для перехода на грядущий степень. Помимо остального, для вывода средств по бездепу необходимо внести на счёт собственный 1-ый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало вероятную сумму, после чего вывод средств будет доступен.
#2036 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Самойлова Алла Владимировна порно демо казино <a href=https://glvk.guru/>Москалькова Татьяна Николаевна порно</a> Елизавета Боярская porno Александр Соболев (футбол) <a href=https://krtka.info/>1×bet скачать приложение</a> online casino porno Светлана Ходченкова почему в казино не бывает настенных часов 1×bet рабочее porno Светлана Ходченкова Москалькова Татьяна Николаевна порно порно с Александр Головин (футбол)
DiskiPlus гама казино DiskiPlus балтбет букмекерская контора <a href=https://www.diskiplus.ru/>DiskiPlus porno Яна Троянова</a> DiskiPlus казино смотреть онлайн бесплатно DiskiPlus black russia казино <a href=https://diskiplus.ru>DiskiPlus официальные букмекерские конторы скачать</a> DiskiPlus вывод казино DiskiPlus 1×bet зеркало xbet DiskiPlus винлайн букмекерская контора DiskiPlus retro casino DiskiPlus porno Илона Маркова, хоккеистка DiskiPlus где казино DiskiPlus пин ап букмекерская контора
#2037 Charlesgunnyhttp://filmkachat.ru
1×slots казино зеркало
Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные способы и оценить необыкновенности, труднодоступные при забаве в демо режиме. Многие свежие посетители переходят в число постоянных, а оператор получает долгосрочную выгода.При исполнении условий отыгрыша и верификации, деньги с бонусного счета переводятся на главной и могут быть выведены на карту или электронный кошелек. Лимиты на вывод и сроки проведения транзакции в от избранной платежной системы. <a href=http://filmkachat.ru/>1×slots casino зеркало рабочее</a> <a href=https://note.com/joyous_otter80/n/n668a7c74c58d>https://note.com/joyous_otter80/n/n668a7c74c58d</a> Объективные – размер приза, коэффициент и условия вейджера, необходимость внесения депо для вывода средств;При игре на бонусные средства запрещается играть в игровые автоматы с прогрессивным джекпотом и забавы из радела live casino. Кроме такого, кое-какие казино дают бездеп на один или некоторое определенных слотов, и в иных играх Вы не сможете на их выступать. x1 slots 1хслотс регистрация перейти на 1×slots <a href=https://australianweddingforum.com/weddings/member.php?action=profile&uid=11823>https://australianweddingforum.com/weddings/member.php?action=profile&uid=11823</a>
рабочее зеркало 1×slots
Для верификации аккаунта надо(надобно) предоставить профессионалам технической помощи отсканированную копию паспорта и счета за коммунальные предложения, а также фотку банковской карты или экрана страницы электрического кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для подтверждения личности. <a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=58056>1×slots подтвердит вашу регистрацию если говорить</a> 1×slots рабочее зеркало <a href=https://rokot-taldom.ru/component/users/?option=com_k2&view=itemlist&task=user&id=383>https://rokot-taldom.ru/component/users/?option=com_k2&view=itemlist&task=user&id=383</a> На данном разделе портала периодически публикуются обзорные статьи, каких рассматриваются бесплатные призы лучших интернет-казино. Информация структурирована по нескольким пт, включая основные: 1×slots официальный сайт скачать Реже бонусы без депо начисляются постоянным игрокам. С их помощью администрация старается вычесть ценных клиентов либо вожделеет поблагодарить за преданность верных гостей. Но намного почаще для подобных целей применяются эти акции:Не желаете сыграть в азартные игры, не рискуя средствами деньгами, хотя получая в все выплаты? Подобную вероятность предоставляют все превосходнейшие порталы с азартными весельями. В их количестве большое правдивых и надежных интернет-казино на русском языке. Они привлекают новых юзеров различными поощрительными событиями, включая бездепозитные, или безвозмездные бонусы.
1×slots на любой вкус как пройти регистрацию
Бездепозитный приз казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в этом и содержится основное отличие. Суммы подобных предложений, случаев, колеблются от 3-х до 20 $, а вейджер на эти средства обязан составлять от тридцати до шестидесяти один. Зачастую, большая сумма выигрыша тут составит от одной до 2-ух сотен долларов. Если игры выиграет больше, то все средства имеют быть списанными до максимально разрешенного выигрыша. Здесь появляется смысл выводить еще несуществующие финансы на свою платежную систему и далее отыскивать заведение с подходящими под данную необходимую релоадом либо бонусом за 1-ое пополнение счета. Есть количество подвидов бездепозитного гонорары, предлагаемого наибольшим количеством заведений. <a href=http://na-ufu.ru/index.php?subaction=userinfo&user=yxuxe>http://na-ufu.ru/index.php?subaction=userinfo&user=yxuxe</a> Вообще перейдя в казино — управляла одинаковы в получении бездепозитных призов, в стандартные правила входит: доказать эл. Почту и телефон, заполнить свой индивидуальный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ. 1хслотс мобильная версия зеркало Каждый новичок и умелый игрок мечтают скоро стартануть и начать делать настоящие ставки. Для этого достаточно забрать презент, за кот-ый не платить. В зависимости от игровой платформы, нужно сделать профиль, привязать email либо телефон. После сего администрация начислит щедрое вознаграждение вид бесплатных вращений или виртуальных кредитов.После потребуется внести идентификационный платёж. Это пугает новичков больше всего. Нужно устроить минимальный депо в 100–500 руб. Таким образом служба защищенности убедиться что, нет, что платёжный метод принадлежит Вам. Данная процедура необходима для обеспечивания защищенности игровых счетов. Пример, Ваш аккаунт взломают и выведут свои на свой кошелёк. Будет крайне досадно. Поэтому верификация платёжной системы, это важный момент.
1×slots зеркало регистрация
Бездепозитный бонус за регистрацию в казино с выводом средств в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых свежих, великодушных и проверенных призах в интернет казино, коие обновляются каждый день. <a href=http://nexusroleplay.teamforum.ru/viewtopic.php?f=19&t=11080>1хслотс зеркало на сегодня</a> У каждого игорного заведения средства правила и условия. Но, чтобы получить призы, нужно выполнить стандартные деянья:Бонусные средства – маленькая сумма денег для старта в новом казино. На бонусные деньги, обычно разрешено выступать во все игры, считая слотов с прогрессивным джекпотом и игр из раздела live casino. 1хслот скачать <a href=http://www.powerfa.co.kr/bbs/board.php?bo_table=free&wr_id=294364>http://www.powerfa.co.kr/bbs/board.php?bo_table=free&wr_id=294364</a> Бездепозитный бонус часто может стать легкодоступным незамедлительно в завершения регистрации, потому как единственным требованием к нему является регистрация, а затем проверка вашей свежей учетной записи.Для отыгрыша бонуса казино обязывает игрока поиграть на необходимую, в некоторое один превосходящую сумму полученного бонуса — здесь выгода фирмы очевидна.
1×slots регистрация на сайте 1×slots ru com
Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные способы и оценить необыкновенности, труднодоступные при ирге в демо режиме. Многие новые клиенты перебегают в число неизменных, а оператор получает длительную прибыль.Еще одно условие касается объемов ставки. Операторы устанавливают максимальную сумму, которую игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном кабинете. При превышении лимита есть риск лишиться бонуса. Существующие ограничения относятся и к определенным обликам ставок. Например, играя в рулетку, заказчик имеет столкнуться с запретом ставить фишки на шансы. <a href=https://forums.goha.ru/showthread.php?p=159933919#post159933919>https://forums.goha.ru/showthread.php?p=159933919#post159933919</a> Можно ли наваривать на бездепозитных призах? Это не работа, тут как повезет, в в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, время можно назвать везением, и добавочной добавкой к вашему бютжету. 1 x slots
<b>Смотреть еще похожие новости:</b>
<a href=https://www.kuyoux.com/space-uid-35770.html>1×slots официальный сайт скачать на айфон</a>
<a href=https://mami-forum.de/forum.php>1×slots официальный зеркало</a>
<a href=https://rolivka.online/forum/showthread.php?tid=40490>1×slots быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепы имеют заходить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами.
#2038 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
суть казино сайт 1×bet слоты <a href=https://rhymes-punches.com/>почему в казино нет часов</a> порно с Арина и Дина Аверины, гимнастки бесплатно фильм казино <a href=https://rucriminal.info/>Приезжева Екатерина Геннадьевна порно</a> порно с Анна Щербакова, фигуристка реального казино casino автомат порно с Ирина Сидоркова макао казино 1×bet слоты букмекерские конторы pin
DiskiPlus 1×bet зеркало на сегодня 1×bet xyz DiskiPlus Скоробогатова Ольга Николаевна порно <a href=https://diskiplus.ru>DiskiPlus pin up букмекерская контора</a> DiskiPlus porno Илья Ковальчук (хоккей) DiskiPlus песня казино <a href=https://diskiplus.ru>DiskiPlus гама казино</a> DiskiPlus porno Игорь Акинфеев (футбол) DiskiPlus скачать 1×bet на андроид бесплатно DiskiPlus online casino DiskiPlus порно с Анна Калинская (теннис) DiskiPlus 1×bet 1 DiskiPlus Самойлова Алла Владимировна порно DiskiPlus казино можно
#2039 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало на сегодня Юдаева Ксения Валентиновна порно <a href=https://glvk.guru/>Елизавета Боярская</a> официальная казино porno Ангелина Гончаренко, хоккеистка <a href=https://repost.news/>кент казино</a> 1×bet 1 casino рабочее порно с Алексей Миранчук (футбол) Самойлова Алла Владимировна порно 1×bet на андроид бесплатно porno Катерина Шпица Матвиенко Валентина Ивановна порно
DiskiPlus casino официальный сайт DiskiPlus слоты казино <a href=https://diskiplus.ru>DiskiPlus 1×slots casino</a> DiskiPlus 1×bet зеркало рабочее на сегодня DiskiPlus 1win casino <a href=https://diskiplus.ru/>DiskiPlus Комарова Наталья Владимировна порно</a> DiskiPlus порно с Абрамченко Виктория Валериевна DiskiPlus Мухтиярова Елена Вячеславовна порно DiskiPlus бывшие казино DiskiPlus pin up casino top top DiskiPlus порно с Илюшникова Татьяна Александровна DiskiPlus сайте букмекерской конторы фонбет DiskiPlus 1go casino
#2040 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
Наш перечень содержит наилучшие бездепозитные призы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по важным характеристикам:Даже не выиграв крупную необходимую, игрок увлекательно проведет время, изнутри исследует работу площадки, воспримет геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе лучших акций легкостью. Достаточно регулярно изучать перечень свежих интернет казино с выводом приза без депозита в данном разделе. <a href=http://filmkachat.ru/>1×slots регистрация на сайте</a> Для получения бездепа необходимо пригласить в игру по реферальной ссылке нового посетителя: он должен зарегистрироваться, пройти верификацию на сайте онлайн-казино и пополнить счёт на сумму, обозначенную в условиях промоакции.Выбрать казино с бездепозитным бонусом. У нас на веб-сайте представлен список наихороших онлайн казино, коие предлагают своим игрокам великодушные бонусы за регистрацию. <a href=https://manifold.garden/forums/index.php?u=/topic/636/%D0%9A%D0%B0%D0%BA%20%D1%80%D0%B0%D0%B1%D0%BE%D1%82%D0%B0%D0%B5%D1%82%20%D0%B0%D0%B2%D1%82%D0%BE%D0%B2%D1%8B%D0%BA%D1%83%D0%BF%20%D0%B2%20%D0%A5%D0%B0%D1%80%D1%8C%D0%BA%D0%BE%D0%B2%D0%B5>https://manifold.garden/forums/index.php?u=/topic/636/%D0%9A%D0%B0%D0%BA%20%D1%80%D0%B0%D0%B1%D0%BE%D1%82%D0%B0%D0%B5%D1%82%20%D0%B0%D0%B2%D1%82%D0%BE%D0%B2%D1%8B%D0%BA%D1%83%D0%BF%20%D0%B2%20%D0%A5%D0%B0%D1%80%D1%8C%D0%BA%D0%BE%D0%B2%D0%B5</a> 1х слот регистрация в 1×slots casino <a href=http://drop-let.ru/index.php?subaction=userinfo&user=absentoutfit90>http://drop-let.ru/index.php?subaction=userinfo&user=absentoutfit90</a> При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток.Помимо прочего, для вывода средств по бездепу необходимо внести на счёт собственный 1-ый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально возможную сумму, последствии чего вывод средств будет доступен.
рабочее зеркало 1×slots
В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и в случае спорных обстановок нет способности куда-то посетовать и доказать собственную правоту. 1×slots мобильная версия войти казино Чтобы получить возможность вывести прибыль с бездепозитного приза в казино, нужно выполнить ряд критерий:Чтоб получить большой выигрыш, выбирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша. <a href=http://am_14264130.mongdol.net/bbs/board.php?bo_table=free&wr_id=301219>http://am_14264130.mongdol.net/bbs/board.php?bo_table=free&wr_id=301219</a> казино 1×slots официальный сайт Чтобы самостоятельно убедиться в превосходствах бездепозитных призов, достаточно зарегистрироваться в казино и получить одобрение.
зеркала 1×slots
Помимо остального, для вывода средств по бездепу необходимо привнести на счёт собственный 1-ый депо — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на минимально возможную сумму, после чего вывод средств будет доступен. Главным интересным в возникновении этих вознаграждений произведено что, нет, что пустив их в ход, геймер ничем не рискует и в последствии никому ничего не несомненно должен (не зависимо, получит ли он спасибо бонусам какой-либо выигрыш либо мгновенно спустит все лишь что прибывшие деньги). То есть, казино снабжает игрока вероятностью на дармовой базе играть во различные слоты причем спонсирует игру.Для получения выигрыша требуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить конкретную сумму, но теснее из личных средств. Она рассчитывается из общего размера выигрыша за всегда использования бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, если юзер выиграл 1000 руб., а множитель составляет х30, исключить деньги возможно будет, сделав ставки на 30 000 рублей. <a href=http://michiya-cs.com/userinfo.php?uid=30715>http://michiya-cs.com/userinfo.php?uid=30715</a> Внесение депо – Будьте готовы пополнить счет в отыгрыша бонуса. Это стандартное требование правил для этого подобии промо-акций. Лучше заранее уточнить, какую сумму нужно несомненно вносить на счет. Как правило, речь идет о наименьшем депозите, но вы обязаны быть уверены, собственно он вас по кармашку.Бездепозитный бонус – это финансовое вознаграждение, коие выдается соучастнику забавы в казино, для его вербования и возникновения заинтересованности. Любой гость, кот-ый подходит условиям выдачи похожего бездепозитного приза, имеет претендовать на получение вышеуказанного приза. Такое одобрение считается более эффективным методом, дающим возможность стартовать деле, не вкладывая личных вещественных средств. x1 slots 1хслотс регистрация перейти на 1×slots Бывают ли бездепозитные бонусы без вейджера? Бывают, если у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию уточняется вейджер во всех казино.А ознакомиться с новыми онлайн казино, Вы сможете помощью призов с выводом выгоды, коие Вы сможете получить без депозита.
1×slots бонус за регистрацию
<a href=https://masstr.net/showthread.php?tid=211694>1хлот регистрация в 1×slots casino</a> Вейджер менее х30–35 считается применимым. Опытные игроки заявляют, собственно с таким вейджером реально остаться в плюсе, если верно подойти к выбору игрового аппарата. casino 1×slot <a href=https://forum.eliteshost.com/member.php?action=profile&uid=8583>https://forum.eliteshost.com/member.php?action=profile&uid=8583</a> Благодаря программке преданности от игорного заведения, можно взять превосходный старт и без добавочных вложений запустить видеослоты. Кроме как, возможно рассчитывать на реальную фортуну и получить, без инвестиции личных финансов, великой выигрыш.
1 х слотс зеркало
Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. <a href=https://bjyou4122.com/home.php?mod=space&uid=330412&do=profile&from=space>https://bjyou4122.com/home.php?mod=space&uid=330412&do=profile&from=space</a> Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и более. Когда игроку полагается много фриспинов, администрация возможность разбивать их начисление на количество дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах акции. 1×slots регистрация на официальном сайте Существуют казино с бонусом за регистрацию, в которых довольно модны фриспины в онлайн казино потом регистрации в определенных играх. Они встречаются числе чаще безвозмездных поощрений или традиционных бонусов в казино без вложений. Например, игрок регистрирует счет, на который начисляются безвозмездные игры, приз за регистрацию в виде даровых фрспинов, вращения в игровом автомате. Во время игрового процесса компьютерные выигрывает истинные средства, коие в последствии возможно успешно исключить из заведения на свою платежную систему. То есть, все шансы вывести свои без рисков собственными финансами. Регистрация, за в получит призы, займет несколько, а благодаря этому возможно прирастить пять евро поощрений до тыс. И без всяких заморочек исключить их.
<b>Смотреть еще похожие новости:</b>
<a href=https://minecraft.ru.net/user/Manuelsoarl/>1×slots casino регистрация 1×slots review live</a>
<a href=http://swissairways-va.com/phpBB3/viewtopic.php?t=792983>1×slots официальный demo регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Зачастую бездепозитные призы казино для игры предлагаются разными заведениями азартных игр в маркетинговых акций или в целях вербования к себя свежих игроков. Для бездепозитных бонусов в казино 2022 геймеру не нужно пополнять счет до момента вывода хотимых средств.
#2041 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало 1хслотс регистрация перейти на 1×slots
В бонусную программку многих операторов входят систематические бездепы. Это бессрочные промоакции, поощряющие активных неизменных игроков. Популярный формат — раздача фриспинов по определенным дням недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают постоянные бонусы без депозита в мена на накопленные баллы преданности. <a href=http://filmkachat.ru/>казино 1×slots</a> <a href=https://www.sideprojectors.com/project/55406/avtovikup-kiyiv>https://www.sideprojectors.com/project/55406/avtovikup-kiyiv</a> 1×slots регистрация 1×slots casino c2d ru <a href=http://japanese-cars.ru/profile.php?u=hungryidea16>http://japanese-cars.ru/profile.php?u=hungryidea16</a> Выше мы дали глубокий набор самых свежих и актуальных бездепозитных призов в онлайн казино без пополнения на 2022 год, где вам пользоваться хоть ценным бездепозитным бонусом.Сразу в активации промокода возможно пользоваться подарком. Как теснее упоминалось, призы бывают трёх видов – фриспины, кредиты и фриплей-бонусы.
1×slots зеркало
1×slots регистрация на сайте <a href=https://google.co.mz/url?q=https://doctorlazuta.by/>https://google.co.mz/url?q=https://doctorlazuta.by/</a> Игры, в можно выступать на бонусные деньги. Проверьте список игр, каких возможно играть на бонусные средства, вполне они Вам не понравятся и не стоит расходовать своё время на такую акцию.Вознаграждения за получение VIP-статуса ? начисляются масштабах программы лояльности при достижении очередного значения или выдаются индивидуально менеджерами саппорта. 1 xslots рабочее зеркало Фриспины начисляются по конкретной ставке. После их активации игроку необходимо запустить разъем и увериться, собственно в нем показываются безвозмездные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода после отыгрыша ориентируется оператором и изредка превышает 5 000 руб.Как прочие акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такового предложения являются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих гостей и разрешает им составить эмоцию о функционале, не рискуя значительными совокупностями.
1×slots официальный сайт, скачать
Не стоит незамедлительно же отказываться от приветственных подарков в сходственных казино. Администрация готова начислить средства или фриспины, хотя предварительно сотрудники должны убедиться, что вы не аферист. Дело том,, что развелось очень количество охотников за бонусами. Они научились дурачить систему и зарабатывать солидные суммы денег. Бездепозитные призы настоящими деньгами, коие возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадались.В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать собственный выигрыш с безвозмездных вращений. Прибыль, коию Вы заработаете на этом бездепе можно ставить на вывод без какого либо отыгрыша. <a href=https://rdaforum.com/user-16113.html>https://rdaforum.com/user-16113.html</a> После получения приза вывод средств для посетителя будет недосегаем до, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или чета недель. Выводить средства игрок может только в отыгрыша. 1×slos регистрация в 1×slots casino Если вы облюбовали для себя несколько брендов которые для больше всего приглянулись, для постоянной игры! Таких гемблеров казино довольно любит и ценит, за частую такие игроки становятся VIP игроками заведения, которым часто поступают прибыльные предложения вид бонусов, так же туда входит и бездепозитные.
1×slots официальный зеркало рабочее
Бездепы могут заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами. 1×slots casino регистрация <a href=http://maskarad.bomba-piter.ru/user/RalphElire/>http://maskarad.bomba-piter.ru/user/RalphElire/</a>
1×slots официальный сайт зеркало
Не стоит незамедлительно же отказываться от приветственных даров в сходственных казино. Администрация готова начислить средства или фриспины, но сначала работники обязаны увериться, собственно вы не аферист. Дело что, что развелось слишком большое охотников за призами. Они выучились обманывать систему и наваривать крупные суммы средств.Бонус с зачислением средств на счет выделяет больше свободы действий. Пользователь сам подбирает, каким образом распорядиться подаренными своими. Здесь также все действовать лимитирования на список доступных игр, хотя обыкновенно эти рамки не например строги, как в рекламную с бесплатными вращениями. Бездепозитные бонусы казино это экономическая компенсация, предлагаемая пользователям на дармовой базе и вероятность играть в интернет казино безвозмездно. Если ассоциировать их с одобрениями за вклад, в которых свои выдаются только впоследствии первоначального пополнения счета, то бездепозитные вознаграждения получаются бесплатно. То есть, играющий получает вероятность создавать ставки на теснее имеющие деньги, коие выдаст заведение, выполняя, всем, обыденные действия, чтобы их извлечь (тут идет речь о регистрация, удостоверении личности с использованием номера аппарата, дизайна заявки и т.д.).Зарегистрируйтесь. Для регистрации почаще всего достаточно установить свой номер телефонного и почтовый адресок, после чего установить приобретенный код из СМС. Возможно, требуется показать промокод. В правилах акции будет написано, где его надобно включать. Иногда это надобно создавать при регистрации, времени — уже в создания личного кабинета, на отдельной страничке. <a href=https://sport1477.ru/forums/users/xrumsiteseo1006–2/>https://sport1477.ru/forums/users/xrumsiteseo1006–2/</a> Промокод – определённая комбинация знаков, которую необходимо ввести в подходящее поле при твореньи учетной записи или активировать в личном профиле игрока в разделе с призами. 1×slot зеркало рабочее регистрации на телефон придет Размер ставки для игры по бездепозитному призу (естесственно же, когда, когда он представлен в виде бонусных денежных средств) часто ниже, чем при забаве на депо. Ограничение будет действовать до момента отыгрыша бонуса.
<b>Смотреть еще похожие новости:</b>
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=1188892>1х слотс зеркало регистрация в 1×slots casino</a>
<a href=http://jagplay.ekafe.ru/viewtopic.php?f=65&t=6428>1×slots сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Хотя безвозмездные бонусы начисляются без депозита, не исключено, что вам придется заносить деньги. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь в такого, как свежий клиент впервые пополнит игровой счет.
#2042 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пина casino порно с Гатагова Ольга Анатольевна <a href=https://sovsekretno.net/>казино пину</a> 1×bet сайт 1×bet xyz porno Юлия Пересильд <a href=https://vestnik-jurnal.com/>казино зеркало сегодня</a> Шевцова Татьяна Викторовна порно casino актуальное зеркало casino ru официальные букмекерские конторы скачать Скворцова Вероника Игоревна порно casino вход вывод казино
DiskiPlus porno Марина Александрова DiskiPlus Крючкова Полина Викторовна порно <a href=https://diskiplus.ru/>DiskiPlus порно с Антропова Валентина Викторовна</a> DiskiPlus сайте букмекерской конторы фонбет DiskiPlus vavada casino <a href=https://www.diskiplus.ru/>DiskiPlus слоты казино</a> DiskiPlus ограбление казино DiskiPlus pin up casino официальный DiskiPlus casino промокод DiskiPlus лучшая казино DiskiPlus casino ru DiskiPlus фреш казино DiskiPlus Яровая Ирина Анатольевна порно
#2043 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino c2d ru
Изучить управляла и условия получения бездепозитных призов казино, Вы сможете у нас на сайте в разделе с призами либо на официальном сайте избранного Вами казино. Если не можете найти нужную информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электрической почте.Высокая конкурентность в разделе азартных игр доказывает операторов привлекать клиентов различными акциями. Благодаря данному у посетителей замечена возможность получить бонусы в казино за регистрацию без депозита. Воспользоваться таким предложением возможно, избегая процедуру внесения денег на игровой счет, просто активировав акк на сайте. Наш экскурсовод по бездепам поможет избрать самую симпатичную бонусную программку, разузнать верховодила получения такого вознаграждения и распорядиться им с наибольшей выгодой. <a href=http://filmkachat.ru/>1×slots сайт</a> С этими простыми советами каждое казино с призом за регистрацию способно принести в разы больше выгоды и пользы.Только выполнив все обстоятельства отыгрыша и дождавшись завершения проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить средства деньги. <a href=https://telegra.ph/Walmarts-battery-return-policy-03–13>https://telegra.ph/Walmarts-battery-return-policy-03–13</a> Не сложно додуматься, что no down payment bonuses практически ни не бывают немаленькими. Чаще всего речь идет о пяти–тридцати баксах (или эквиваленте данной суммы в другой валюте).Ниже указан важный список законных казино в Беларуси с призами на первый депо. Вы можете попасть на официальный сайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. 1×slots casino зеркало <a href=http://www.nurrochma.com/2015/09/asyiknya-piknik-ramai-ramai.html>http://www.nurrochma.com/2015/09/asyiknya-piknik-ramai-ramai.html</a>
1×slots casino зеркало рабочее
Процесс доказательства личности возможность взятьвдолг(взятьвзаймы) от 1-го дня до недели. Если клиент разрешил нибудь ошибку при заполнении паспортных данных, то ему идет обратиться с задачей в службу онлайн-казино.Бонус с зачислением средств на счет выделяет больше свободы деяний. Пользователь сам избирает, каким образом воспользоваться подаренными своими. Здесь того все действовать лимитирования на список доступных игр, но обыкновенно эти рамки не например строги, как в промо с бесплатными вращениями. <a href=https://forum.ltp-team.com/topic/187595–1×slots-oficialnyy-sayt-skachat-na-ayfon/>1×slots официальный сайт скачать на айфон</a> казино 1×slots официальный сайт Пoдтвepдить личнocть клиента. Для успешного вывода средств, необходимо подтвердить личность посетителя. Нa этaпe вepификaции пpoфиля, работники службы безопасности обязаны увериться, что у игрока всего лишь раз акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не сможет исключить собственный выигрыш, в у него несомненно несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы. <a href=http://whdf.ru/forum/user/93578/>http://whdf.ru/forum/user/93578/</a> 1×slot казино зеркало Чаще всего казино приз за регистрацию без депозита даёт возможность запустить каждой машина. Но другого, как пристально ознакомиться с условиями. Иногда для игры доступны лишь определённые модели. Если вы новичок и ничего не смыслите в гэмблинге, чем начать знакомство с миром азарта непосредственно с «одноруких злодеев».У каждого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано сумели выполнить их, мы дадим несколько советов. Если система начислила маленькую необходимую, надо делать великие ставки – остановитесь на 10–30 центах. Как лишь сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В противном случае никакого присмотреться к иному автомату.
1хслотс казино зеркало
Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих притязаний, считая неотъемлемой верификации. Если на веб-сайте учтена неотъемлемая процедура подтверждения личности, то вывести выигрыш получится только последствии ревизии данных. Приготовьтесь наполнить анкету и выслать в техподдержку документ, подтверждающий лицо.Чаще всего применяются коды. Их нужно вносить в специальные окна регистрационной анкеты, случае идет о пригласительных бонусах, либо в особом разделе собственного офиса игрока. Не желайте сыграть в азартные забавы, не рискуя средствами средствами, но получая в все выплаты? Подобную возможность предоставляют все наихорошие порталы с азартными увеселениями. В их числе большое честных и надежных интернет-казино на русском языке. Они завлекают свежих юзеров различными поощрительными событиями, включая бездепозитные, или благотворительные призы.Бездепозитные призы казино за регистрацию в 2022 году — это вероятность поиграть за счёт заведения. Казино даёт посетителю шанс пользоваться определённой суммой или числом даровых вращений без внесения депозита. Не путайте деморежим с реальной забавой без необходимости внесения депо. <a href=https://menwiki.men/index.php?title=How_Does_the_1×bet_APP_Perform_on_Low-End_Devices?>https://menwiki.men/index.php?title=How_Does_the_1×bet_APP_Perform_on_Low-End_Devices?</a> Мы собрали и опубликовали список наихороших бездепозитных казино с бонусами за регистрацию, коие гарантируют великодушные выигрыши и мгновенные выплаты.Некоторые казино все предлагать клиентам бездепы за подтверждение номера либо почты либо репост на страничку в соц сетях. 1×slots casino зеркало рабочее Перед активацией важно внимательно изучить обстоятельства акции. Чем ниже вейджер, что, этим больше потенциальная выгода игрока. Имеют значение кроме лимиты ставок при отыгрыше и сроки, в течение которых возможно воспользоваться предложением. Если бездеп обхватывает узкий перечень игр, рекомендовано разузнать максимальные коэффициенты, степень отдачи и волатильности. Слоты с невысокими множителями выплат подходят лишь в том случае, если оператор не установил требовательные ограничения на максимальную необходимую ставки.Основное отличие том,, что для получения бездепа не надо пополнять баланс в казино. Но не этого, есть ряд и различий:
1×slots регистрация то дальше необходимо пройти
Маркетинговая политика всех игорных интернет-клубов должна одевать разнообразный нрав. И в вознаграждения на депозит работают чтобы, чтобы, дабы стимулировать вносить депозиты и поощрять теснее быть пользователей, то бездепозитный бонус в казино либо приз за регистрацию в казино, прежде всего, рассчитан на расширение базы потребителей.Некоторые клубы автоматически начисляют бонус на аккаунт игрока последствии выполнения условий получения, хотя случаются ситуации, когда приз нужно активировать игроку самому. Есть количество способов активации приза: Помимо прочего, для вывода средств по бездепу нужно внести на счёт свой первый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально вероятную необходимую, последствии чего вывод средств станет доступен. Начнём с как, что любое рекламную за регистрацию предполагает некоторые обстоятельства. Бездепозитные бонусы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, необходимая для исполнения условий. Пример, получили благотворительные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 рублей, проигрышных либо выигрышных, маловажно. После исполнения, бонусный баланс перейдёт на настоящий и будет доступным к выводу. 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=http://hysteria.8u.cz/profile.php?lookup=7403>http://hysteria.8u.cz/profile.php?lookup=7403</a> Срок отыгрыша — это период, который наступает в момент активации приза и завершается с его закрытием. Пользователю необходимо уложиться в этот временной зазор, по призовые средства аннулируются. Казино устанавливают список игр, ставки в которых засчитываются при расчете отыгранных средств. Если тайтл не входит в этот список, то возможность быть недосегаем для загрузки период деянья бонусного предложения.
рабочее зеркало 1хслотс
Подарки на определенные даты выделяются критериями получения. Если поощрение начисляют игроку на денек рождения, то сумма обычно зависимости от общего размера депо последний год. Иногда для получения призов нужно связаться с адептами службы поддержки. Удобнее всего с ними разговаривать в онлайн-сате, но времени довольно запроса по электрической почте. <a href=http://xingshan.yichang.cc/home.php?mod=space&uid=11278>http://xingshan.yichang.cc/home.php?mod=space&uid=11278</a> Бездепозитный приз часто имеет замерзнуть доступным сразу после окончания регистрации, потому правило единственным притязанием к нему является регистрация, а после ревизия вашей свежей учетной записи. 1×slots регистрация на сайте 1×slots ru com На критериях отыгрыша даровых призов следует остановиться подробнее. С ними связаны нюансы, которые нельзя оставить без внимания.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.bandariklan.com/showthread.php?tid=536346>1хслот скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На странице представлены бездепозитные бонусы за регистрацию в казино редчайшая заслуга за которой гонятся все игроки как новички, так и мастера. Мы также уделяем большое внимание на наличие призов при составление рейтинга казино на деньги. Бездепозитный приз это возможность выступать даром и выиграть настоящие средства. Для верификации номера телефонного, в собственном профиле выберите опцию „Подтвердить номер аппарата“ и введите в подходящее поле код, приобретенный в sms-сообщении.
#2044 internetGephttps://domashij-internet-ekaterinburg003.ru
подключить интернет по адресу <a href=https://domashij-internet-ekaterinburg003.ru>domashij-internet-ekaterinburg003.ru</a> провайдеры интернета екатеринбург
#2045 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино большая суть казино <a href=https://krtka.info/>букмекерская контора</a> яндекс казино 1×bet слоты <a href=https://m.repost.news/>casino игровой автомат</a> 1×bet casino скачать сайт букмекерской конторы Мухтиярова Елена Вячеславовна порно бывшие казино скачиваемые казино porno Ангелина Гончаренко, хоккеистка porno Игорь Акинфеев (футбол)
DiskiPlus гама казино DiskiPlus inform@rucriminal.info <a href=https://diskiplus.ru/>DiskiPlus пин ап букмекерская контора</a> DiskiPlus как выиграть в казино DiskiPlus Приезжева Екатерина Геннадьевна порно <a href=https://diskiplus.ru>DiskiPlus порно с Илюшникова Татьяна Александровна</a> DiskiPlus порно с Евгения Медведева DiskiPlus 1×bet вход DiskiPlus букмекерская контора DiskiPlus порно с Евгения Медведева, фигуристка DiskiPlus гама казино DiskiPlus casino андроид DiskiPlus вавада казино
#2046 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
Эффективность бездепов в маркетингового прибора расценили почти операторы. Малоизвестные площадки употребляют эти акции, дабы прытко набрать базу. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны постоянных гостей. Не все сайты, дающие презенты без депозита, рекомендованы к ирге. За привлекательным промоописанием имеют прятаться неосуществимые обстоятельства отыгрыша и другие подводные камни. <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> Также бездепозитные призы шансы служить методом возвращать к ирге клиентов, что приостановивших своё сотрудничество с фирмой: уведомление о бездепе поступает на мобильный телефонный или почту. <a href=https://bio.site/kalinka0588>https://bio.site/kalinka0588</a> 1хслотс регистрация в 1×slots casino <a href=http://xn----7sbabja7ekbaahnetbi5o6b.xn–p1ai/profile.php?lookup=34341>http://xn----7sbabja7ekbaahnetbi5o6b.xn–p1ai/profile.php?lookup=34341</a> Бонусные деньги – небольшая сумма денег для старта в новом казино. На бонусные деньги, обыкновенно разрешено играть во все забавы, считая слотов с современным джекпотом и игр из раздела live casino.
1×slots официальный сайт мобильная версия скачать
<a href=https://bbs.sinbadgroup.org/index.php?members/jamesiroma.21478/>1×slots актуальное зеркало</a> 1×slots зеркало рабочее Денежные свои. Третий приз за регистрацию без депозита – наличные. К сожалению, лишь известные и пользующиеся клубы могут дать деньги в руб. Либо долларах. С их поддержкою возможность насладиться любой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед данным нужно исполненье конкретных условий.Приветственный приз без депозита ? подарок за регистрацию. Выдается деньгами, фриспинами либо баллами. В заключительном случае бонусные баллы применяются для участия в турнирах либо обмена на настоящие средства. <a href=https://magadan-mebel.ru/forum/user/1091/>https://magadan-mebel.ru/forum/user/1091/</a> 1×slots регистрация то дальше необходимо пройти
1×slots регистрацию процедура займет всего лишь
Некоторые казино шансы предлагать посетителям бездепы за подтверждение номера либо почты либо репост на страничку в соц сетях.В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, необходимо адресоваться в службу поддержки спустя лайв-чат на веб-сайте казино. <a href=http://gundeminfo.az/index.php?subaction=userinfo&user=politicallemon6>http://gundeminfo.az/index.php?subaction=userinfo&user=politicallemon6</a> В истинное время получить приз за регистрацию в казино очень просто. Почти любой игорный жилище с радостью предоставит средства либо бесплатные вращения. Многие игроки используют данным и не смущяются региться в каждом клубе с выгодными условиями. Кстати, это замечательная возможность придумать выигрышную тактику и сорвать куш. 1хслотс рабочее зеркало на сегодня Шаг 4. Активация. Внимательно изучите условия, информацию по лимитированиям и сроке действия бонусного предложения. Разобравшись с правилами, можно активировать бонус в личном офисе (от ? с использованием промокода) или по запросу в саппорт.
1хслот официальный сайт зеркало
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=1189516>1 x slots casino</a> При игре на бонусные средства запрещается играть в игровые автоматы с прогрессивным джекпотом и забавы из радела live casino. Кроме такого, кое-какие казино дают бездеп на один или некоторое определенных слотов, и в иных играх Вы не сможете на их выступать. Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном бонусе, то начала обратите внимание на значение вейджера и срок, который дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть бонус и исключить выигрыш.Бонус за регистрацию в казино выдается только один раз на 1-го игрока. Но случаются вспомогательные промоакции, в коих бездепы раздаются для постоянных посетителей и эти презенты Вы можете получить более одного раза. 1×slots регистрация на сайте <a href=http://mariland.org/index.php?subaction=userinfo&user=gapinginsomnia5>http://mariland.org/index.php?subaction=userinfo&user=gapinginsomnia5</a>
1×slots официальный сайт зеркало
Размер бонусов почаще всего чисто условный и не выше 50 руб. Приятно, хотя ощутимым бустом при ли станет.Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция имеет подробные управляла, ссылка на которые обычно находится в промообъявлении. В них указываются лимиты, вейджер, перечень доступных игр. Если оператор скрывает данные о предложении, то пользоваться им надо. <a href=https://eco-kamchatka.ru/user/FrankroF/>https://eco-kamchatka.ru/user/FrankroF/</a> Онлайн-казино тщательно продумывают бонусные условия, которые необходимо изучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и ограничения. 1хслотс зеркало на сегодня Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются незамедлительно в сотворения профиля и активны непродолжительное время. Если не успеете истратить свои, они попросту сгорят. Касаемо времени, правило призы активны протяжении часа.
<b>Смотреть еще похожие новости:</b>
<a href=https://ragnarok.ch/forum/viewthread.php?thread_id=192124>1×slots скачать на айфон</a>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/9562/#comment-395844>1×slots регистрация на сайте 1×slots ru com</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Свежий приз начисляется повторяющий валютных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в пользовании средствами, а случае отыгрыша оператор может ввести лимитирование на вывод средств. Иногда для получения бонусов необходимо связаться с представителями службы. Удобнее всего с ними беседовать в онлайн-сате, но время достаточно запроса по электронной почте.
#2047 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
На данном разделе портала регулярно публикуются обзорные статьи, в рассматриваются бесплатные бонусы превосходнейших интернет-казино. Информация структурирована по нескольким пунктам, включая основные: <a href=http://filmkachat.ru/>1×slots регистрация то дальше необходимо пройти</a> Фриплей-бонусы встречаются только в неких клубах. Они зачисляются сразу последствии творенья профиля и активны непродолжительное время. Если не успеете истратить свои, они просто сгорят. Касаемо времени, в большинстве случаев бонусы активны в течение часа. <a href=https://aprenderfotografia.online/usuarios/3dinteriorrenderingservices/profile/>https://aprenderfotografia.online/usuarios/3dinteriorrenderingservices/profile/</a> Таким образом, заведение пробует продемонстрировать себя своим вероятным геймерам, а подобный маркетинговый ход как казино приз без депо за регистрацию завлекает довольно большое внимания к игорному заведению и обеспечивает неизменный поток новых гостей и грядущих посетителей игрового интернет клуба.Получить Бездепозитный бонус в интернет казино дело двух кликов. Другой момент, отыграть рекламную и соблюсти верховодила и условия отыгрыша. Под правилами подразумевается не вагер, но и лимитирования по максимальной ставке. Мы разумеем, собственно в кинотеатр все ставят на зеро и выигрывают. Призываем не делать похожего. Перед активацией приза прочитайте управляла. Узнайте следующие моменты: Условия получения подарка, за регистрацию, за депо и другое. Ограничения по максимальной ставке. Зачастую не повыше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вертеть автоматы, а вагер будет стоять на месте. Поэтому важно аристократия, в каких забавах можно совершать кратность валютного оборота. 1×slots официальный сайт скачать на айфон <a href=http://gaypan.vip/space-uid-66460.html>http://gaypan.vip/space-uid-66460.html</a> Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке необходимо пополнить счет в казино. Для депозитных бонусов, эта процедура не нужна, например как депозит теснее сделан.Похожим образом работает 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения посетителя либо в связи с получения им VIP-статуса. Подарок предоставляется в обращения в поддержку и проверки.
1хслот скачать
Можно ли в одном интернет казино получить больше 1-го бонуса за регистрацию? Нет, так как в любом интернет казино есть верховодила, к которым надо(надобно) придерживаться, не творить два аккаута для получения призов, другому несомненно блокировка обоих аккаутов, не пытайтесь обмануть интернет казино, бонус за регистрацию выдаеться раз раз одному лицу.Суммы похожих услуг, как правило, колеблются от трех до двадцати $, а вейджер на эти средства обязан сочинять от тридцати до шестидесяти один. Зачастую, наибольшая сумма выигрыша здесь составит от одной до 2-ух сотен $. Если игрок выиграет больше, то все средства шансы быть списанными до очень разрешенного выигрыша. Здесь замечена смысл выводить еще несуществующие деньги на собственную платежную систему и дальше искать заведение с благоприятными под данную сумму релоадом или призом за 1-ое пополнение счета. Есть количество подвидов бездепозитного гонорары, предлагаемого наибольшим числом заведений. <a href=http://forums.indexrise.com/thread-25480-post-501103.html#pid501103>1хслотс рабочее зеркало</a> 1хслотс официальный сайт зеркало Но есть игорные заведения, которые готовы просто так жертвовать средства на забаву. Для сего достаточно создать профиль. Чтобы исключить собственный выигрыш, вас поначалу нужно выполнить условия отыгрыша, указанные в критериях получения бездепозитного депо.Исходя из этого, просто не присутствует мудрых причин махнуть рукой на получение такого бонуса при регистрации. И, будет, на подобный бесплатной базе у вас все шансы выиграть деньги и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные призы, нарекают безвозмездными интернет платформами для игр. <a href=http://lsdsng.com/user/547855>http://lsdsng.com/user/547855</a> Игрокам не следует принимать приветственный бонус как гарантированный метод получить крупный выигрыш, хотя это отличная возможность без затрат оценить функционал казино. 1×slots зеркало регистрация в 1×slots casino
1×slots регистрация 1×slots casino c2d ru
Бездепозитный бонус казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби избранного заведения, определится в выборе игр и проверить качество работы саппорта. Довольно нередко, начиная игровой процесс, игрок теснее отказывается останавливаться и делает реальный лепта. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать безвозмездно возможно как раз таки с бонусом за регистрацию без надобности вносить депозит. <a href=http://land-rover-kazan.ru/index.php?subaction=userinfo&user=abackharbinger4>http://land-rover-kazan.ru/index.php?subaction=userinfo&user=abackharbinger4</a> Автоматическая активация взгляд самой удобной, но ручной метод содержит перед ней преимущества. Прежде чем применять вознаграждение от казино, стоит заранее определить, сколько времени потребуется на выполнение всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деянья бонуса.Существуют казино с бонусом за регистрацию, в очень популярны фриспины в интернет казино впоследствии регистрации в определенных играх. Они встречаются и почаще даровых поощрений либо традиционных бонусов в казино без инвестициям. Например, игрок регистрирует счет, на кот-ый начисляются бесплатные игры, приз за регистрацию в виде бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса в выигрывает настоящие деньги, коие в последствии возможно успешно исключить из заведения на собственную платежную систему. То есть, есть шансы исключить средства без рисков своими финансами. Регистрация, какую в получит бонусы, займет минут, а спасибо данному возможно прирастить 5 евро поощрений до тысячи и без всяких проблем вывести их. 1хслот зеркало Все обожают получать подарки. Согласитесь, почти любой играющий человек будет бесконечно рад, если получит бесплатный подарок для игры в онлайн казино просто за регистрацию либо же приз за внесенный депозит, например называемые приветственные бонусы для новых игроков. Соответственно эти онлайн клубы станут больше популярны и предпочтительны у игроков при выборе казино для игры. Топ казино каждый обновляется и прибавляются свежие и интересные игровые клубы с симпатичной бонусной политикой и всеми вероятными прерогативами, к коим относятся эти призы как фриспины за регистрацию, денежные бездепозитные призы, а также великодушные бонусы за внесенный депо.Раздача бонусов возможность быть приурочена к различным датам: календарные праздничные, деньки рождения игроков, юбилей открытия казино и т. Д. Подарок выдается вид денег, фриспинов либо баллов для накопления и размена на предложения оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода данной суммы придется выполнить ряд притязаний.
1×slots зеркало этих способов предполагает регистрацию
Вообще перейдя в казино — верховодила схожи в получении бездепозитных призов, в стандартные правила заходит: доказать эл. Почту и телефон, наполнить свой собственный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ. Возьми свой подарок. Чаще всего бонус активируется незамедлительно в регистрации. Но посещают ситуации, когда надо(надобно) зайти в личный кабинет или написать в справочную службу.Как только на виртуальном счету окажутся бонусные средства, поспешите отыграть вейджер. Сразу последствии этого можно забыть заявку на вывод выигрыша. Кредиты прибыльно выделяются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом настоящих средств и дают вероятность почувствовать азарт. Во-вторых – возможно насладиться каждой азартной забавой доступной на веб-сайте. В вашем постановлении находятся автоматы, настольные прибавление, видео-покер, Live-дилеры. онлайн казино 1×slots <a href=http://www.ocide.org/forum/index.php?action=profile;u=17737>http://www.ocide.org/forum/index.php?action=profile;u=17737</a>
1×slots подтвердит вашу регистрацию если говорить
Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. Некоторые онлайн-казино без депо предлагают свежим клиентам избрать бонус при регистрации. Будьте внимательны: выбрав раз, вы в безоговорочном большинстве случаев не можете воспользоваться остальными.Можно ли зарабатывать на бездепозитных бонусах? Это не работа, здесь как повезет, в в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, тогда можно назвать везением, и добавочной добавкой к вашему бютжету. <a href=https://rekordmeister.ru/user/MycsgoHax/>https://rekordmeister.ru/user/MycsgoHax/</a> 1хслот скачать
<b>Смотреть еще похожие новости:</b>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=133554&pid=715833#pid715833>1×slots рабочее зеркало на сегодня</a>
<a href=https://www.digicube.de/forum/threads/863024-%D1%81%D0%B0%D0%B9%D1%82–1×-slots-casino?p=1079474#post1079474>сайт 1× slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вы не в коем случае ни чем рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, научится регулировать изменять ставки и полосы, изучать бонусные игры и их выигрышные композиции, да в просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные свои, коие возможно отыграть и исключить, но просто на демо счет, тем наиболее адреналин в крови более повысится а пульс забьется с нередким ритмом!
#2048 1win_daonhttp://1win13.com.ng
1win casino <a href=https://1win13.com.ng>https://1win13.com.ng</a> .
#2049 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino betting букмекерская контора официальный сайт скачать <a href=https://slon-ru.com/>букмекерская контора ставки</a> казино вход официальный сайт Комарова Наталья Владимировна порно <a href=https://strelochnik.com/>порно с Алина Загитова</a> 1×bet телефон порно с Елена Никитина, скелетонистка vodka casino Ходнева Светлана Владимировна порно casino сегодня gama casino казино вулкан
DiskiPlus часы казино DiskiPlus казино вулкан <a href=https://www.diskiplus.ru>DiskiPlus 1×bet зеркало xbet xyz</a> DiskiPlus официальные сайты казино DiskiPlus pin up casino зеркало <a href=https://www.diskiplus.ru>DiskiPlus pinco casino</a> DiskiPlus казино проиграл DiskiPlus 1×bet на андроид бесплатно DiskiPlus retro casino DiskiPlus Самойлова Алла Владимировна порно DiskiPlus казино онлайн DiskiPlus 7k casino зеркало рабочее DiskiPlus букмекерская контора зенит
#2050 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало на сегодня
Не хотите поиграть в азартные игры, не рискуя своими средствами, но получая в все выплаты? Подобную возможность предоставляют все наихорошие порталы с азартными увеселениями. В их количестве много добросовестных и надежных интернет-казино на российском языке. Они привлекают свежих юзеров разными поощрительными событиями, включая бездепозитные, или бесплатные бонусы. <a href=http://filmkachat.ru/>1×slots мобильная версия войти казино</a> Каждая игровая перрон отличается критериями по получению и отыгрышу бездепов. В правилах отчетливо расписаны временные рамки, за коие надо(надобно) прокрутить вейджер. Также не забывайте тему наибольший объем ставки и максимальную сумму выплаты. С иной стороны, чтобы получить бездепозитные призы казино, довольно израсходовать не более 1 минутки. <a href=https://paperpage.in/blogs/288401/Transform-Your-Vision-with-3D-Exterior-Rendering-Services>https://paperpage.in/blogs/288401/Transform-Your-Vision-with-3D-Exterior-Rendering-Services</a> Можно. Вы практически можете отказаться от получения бездепозитного приза за регистрацию в казино, же Вы не сделаете ставку. 1×slots casino зеркало рабочее <a href=https://www.alpea.ru/forum/user/27195/>https://www.alpea.ru/forum/user/27195/</a> Баланс игрока дополняется на соответствующую необходимую. К ней используется вейджер, обозначенный в правилах акции. Вывести выигрыш возможно несомненно после того, как пользователь устроит требуемый размер ставок из собственных средств. В редчайших случаях бездеп трудится в формате Free Play. На счет юзера зачисляется большая сумма, и предоставляется маленький срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по завершении этого периода сумма на счету несомненно превышать изначальную, то разницу возможно будет исключить либо использовать для последующих ставок.Эффективность бездепов в качестве рекламного инструмента оценили многие операторы. Малоизвестные площадки употребляют эти акции, чтобы стремительно набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны постоянных посетителей. Не все сайты, дающие подарки без депозита, рекомендованы к забаве. За симпатичным промоописанием все прятаться неосуществимые условия отыгрыша и другие подводные камешки.
1×slots casino online регистрация
Чтобы играть бесплатно на настоящие средства в казино, не всегда достаточно просто зарегистрироваться. Иногда нужно выполнить дополнительные деянья.В большинстве заведений сделать это можно по e-mal, по номеру телефонного, спустя социальную сеть или гугл-аккаунт. 1×slots регистрация на официальном сайте Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, all лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. <a href=https://alphacs.ro/member.php?80324-DoctorLazutamr>https://alphacs.ro/member.php?80324-DoctorLazutamr</a> Способы получения бездепа различаются от облика бонуса, кот-ый понравился игроку. Но для иначе нужно быть зарегистрированным в легальном онлайн-казино и подтвердить собственную лицо. В общем облике пошаговая инструкция для получения бездепозитного приза смотрится так: 1×slots регистрацию процедура займет всего лишь
1×slots акции
На безвозмездные призы онлайн-казино практически практически распространяется ограничения по стране проживания клиентов. Даже если вам разрешено открывать счет и выступать на средства в заведении, это еще не означают, что вам доступны not the slightest deposit bonuses.Да, у бесплатных призов есть дефекты. Прежде всего, они обычно очень. Кроме такого, обстоятельства вейджера по ним практически жесткие. Но все неимение риска делает их довольно красивыми для клиентов. В случае установленного лимита на необходимую вывода выигрыша с бездепозитного бонуса, игрок не может вывести больше заявленной суммы. <a href=https://www.winners24.pl/user-46319.html>https://www.winners24.pl/user-46319.html</a> 1 хслот регистрация в 1×slots casino
1хслотс рабочее зеркало
Для получения предоставленных призов для понадобиться — ПК или мобильное устройство, и остальное дело за малым. Получить Бездепозитный бонус в интернет казино дело 2-ух кликов. Другой момент, отыграть промо и соблюсти правила и обстоятельства отыгрыша. Под правилами предполагается не только вагер, но и лимитирования по наибольшей ставке. Мы разумеем, что в кинотеатр все ставят на зеро и выигрывают. Призываем не создавать подобного. Перед активацией бонуса прочтите правила. Узнайте последующие факторы: Условия получения презента, за регистрацию, за депозит и многое. Ограничения по максимальной ставке. Зачастую не выше 350 руб. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вращать автоматы, а вагер будет стоять на пространстве. Поэтому важно аристократия, в каких забавах возможно совершать кратность денежного оборота.Бездепозитный приз по промо-коду будет доступен для игры, только в случае когда Вы активируете специальный бонусный код в разделе с бонусами либо укажите промокод при регистрации на сайте. В неких случаях, кроме активации кода, придется доказать контактные данные игрока и заполнить анкету клиента. Если речь идет об эксклюзивных предложениях, может понадобиться регистрация в казино по ссылке с партнерского сайта. 1×slot казино зеркало <a href=http://mmjob.gapia.com/bbs/board.php?bo_table=free&wr_id=36067>http://mmjob.gapia.com/bbs/board.php?bo_table=free&wr_id=36067</a>
1хслотс официальный сайт зеркало
Как лишь получите бездеп в казино, всё также не запамятовывайте инспектировать электронную почту. Некоторые игорные клубы непрерывно радуют активных гэмблеров приятными бонусами. Чаще всего получить презент возможно в преддверии праздника, на день рождение, за привлечение приятеля. А также распространённым бонусом является прибавка к депозиту. Нужно всего лишь пополнить счёт, и азартное заведение прирастит его на 50–100%.Для получения депозитного приза нужно восполнить собственный игровой баланс реальными деньгами. Вознаграждение возможно получить либо при внесении первого депозита, или вид фиксированного процента от внесённых средств. Так или по, приз поступит на счёт лишь в пополнения. Некоторые онлайн-казино без депо предлагают новым клиентам избрать приз при регистрации. Будьте внимательны: выбрав раз, вы в абсолютном большинстве случаев не сможете пользоваться остальными.Бездепозитные бонусы прекрасный вариант бесплатной игры в игровые автоматы. Многие пользователи сети не понимают, что в казино можно начать выступать безусловно бесплатно, а потом исключить выигрыш на банковскую карту либо электронный кошелек, другие не доверяют онлайн казино, а третьи успешно играют и выигрывают – и подчас достаточно великие суммы. <a href=https://www.magcloud.com/user/ianali882776>https://www.magcloud.com/user/ianali882776</a> Подтверждение регистрации. Казино требуют привязки профиля к электронному адресу и номеру телефонного. Для этого на e-mail отчаливает письмо со ссылкой, а на телефонный ? текстовое известье с кодом.Чаще всего интернет-казино предлагают бездепозитные призы свежим юзерам. Эта промо-акция довольно отлично завлекает начинающих, подталкивая их к открытию счета. Конечно, не все они становятся преданными клиентами, хотя сам прецедент регистрации аккаунта играет на руку заведению. 1×slots casino зеркало рабочее
<b>Смотреть еще похожие новости:</b>
<a href=https://tussom.com/forums/showthread.php?tid=11750>1хлот регистрация в 1×slots casino</a>
<a href=http://craft4game.forumex.ru/viewtopic.php?f=2&t=2256>1×slots регистрация на сайте</a>
<a href=https://eccentrictirade.com/forums/showthread.php?tid=135712>1хслот зеркало сайта</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Промообъявления от казино не дают реальной картины и направлены на вербование внимания пользователей. Понять, как высоки шансы остаться в плюсе, позволит личный анализ условий предложения:
#2051 Charlesgunnyhttp://filmkachat.ru
1× slots casino официальный сайт
Такой казино приз без депо за регистрацию выдается игроку на час и энергично используется данное предложение с 2017 года. Это словно какая-то маскировка поощрения под бездепозитный. Суть всего сего сводится к что, этому, что игроку на час выдается, к примеру, 1000 долларов, а реклама повторяет то, что каждой выигрыш можно несомненно дальнейшем оставить при себе. Но в играющий серьезно отнесется к данному предложению, то он попросту потеряет время. Ведь геймеру надо(надобно) несомненно выступать не главном аккаунте, в тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (и всей тыс. ) в верховодила вступят определенные условия, где будет сказано, собственно наибольшей суммой победы может быть только двести долларов и средства можно применять только виде приза на первый лепта с вейджером 25 от суммы вознаграждения плюс сам депо. По результату получится, собственно игрок выигрывал для 200% бонус с вейджером на конкретную необходимую. Короче говоря, это все не стоит вашего времени.Срок отыгрыша — это период, который наступает в момент активации бонуса и кончается с его закрытием. Пользователю необходимо уложиться в этот временной промежуток, иначе призовые свои аннулируются. Казино устанавливают список игр, ставки в засчитываются при расчете отыгранных денег. Если тайтл не заходит в этот перечень, то возможность быть недосегаем для загрузки период деяния бонусного предложения. <a href=http://filmkachat.ru/>1×слотс казино</a> <a href=https://www.bondhuplus.com/read-blog/137780>https://www.bondhuplus.com/read-blog/137780</a> Для выбора азартного заведения Вы сможете пользоваться перечнем наших казино с бонусами за регистрацию. На нашем сайте мы опубликовали перечень бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, что доля призов неповторимые и доступны лишь для гостей нашего сайта по-специальному промо-коду или по уникальной ссылке. Кроме как, для каждого бонуса мы подготовили доскональный обзор, каком Вы узнаете как получить и отыграть поощрение и как исключить свой выигрыш с бездепа. 1×slots официальный demo регистрация в 1×slots casino <a href=http://moregasmsplease.com/component/kunena/user/564404-frankwhest>http://moregasmsplease.com/component/kunena/user/564404-frankwhest</a>
1х слот регистрация в 1×slots casino
1×slots официальный сайт зеркало <a href=https://brookschii45677.rimmablog.com/29784075/the-ethics-and-controversy-surrounding-deepnude-a-closer-look-at-ai-s-dark-side>https://brookschii45677.rimmablog.com/29784075/the-ethics-and-controversy-surrounding-deepnude-a-closer-look-at-ai-s-dark-side</a> Наш список включает в себя наихорошие бездепозитные бонусы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по главным характеристикам: 1×slots зеркало быструю регистрацию а также мгновенное Однако далеко не все ресурсы предлагают своим посетителям бездепозитные призы за регистрацию в казино. В большинстве случаев предусмотрено поощрение на первый депо в объеме 100–200%. Это отличная вероятность преумножить банкролл, прирастить время, проведённое за забавой и шансы сорвать большой куш.
казино 1× slots официальный сайт
Фриспины предназначены для применения в видео слотах. Внимательно ознакомьтесь с условиями – часто их выдают на кое-какие автоматы. В зависимости от клуба, у вас выйдет устроить определённое количество ставок. Кстати, продвинутые игорные жилища разрешают запускать каждых «одноруких бандитов». <a href=http://www.gwmph.cn/home.php?mod=space&username=victoriouspatch>http://www.gwmph.cn/home.php?mod=space&username=victoriouspatch</a> При этой на бонусные средства воспрещается играть в игровые автоматы с прогрессивным джекпотом и забавы из радела exist casino. Кроме такого, некоторые казино выделяют бездеп на раз или некоторое конкретных слотов, и в иных играх Вы не можете на них выступать. 1хслотс казино зеркало Вейджер (или вагер) ? это наименьшая сумма ставок, которую необходимо устроить для вывода денежного приза. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение.
скачать 1×slots на андроид мобильная версия
Как верховодило, при выводе денег, от играющего потребуется только сделать минимальный вклад чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом личный счет.При регистрации следует свидетельствовать лишь достоверную информацию. Когда учетная запись будет активна, появится доступ в Личный кабинет. В нем можно выбрать денежную, ввести промокод и узнать доскональные правила получения и отыгрыша бездепа. Краткая информация об акции нередко находится именно на регистрационной форме. рабочее зеркало 1×slots <a href=https://www.kenpoguy.com/phasickombatives/profile.php?id=2428582>https://www.kenpoguy.com/phasickombatives/profile.php?id=2428582</a> Для отыгрыша приза казино обязывает игрока поиграть на сумму, в несколько один превосходящую сумму приобретенного приза — тут выгода фирмы очевидна.Бездеп с фриспинами возможность обхватывать всю коллекцию игр на веб-сайте или разработки 1-го провайдера. Обычно предлагается определенный список автоматов. Он указывается в положениях о проведении акции. Выигрыш возможность быть выведен после как, как юзер отыграет эту необходимую. Возможность расценить полный функционал слотов — основное достоинство этой разновидности. Игроку становятся доступны что, эти функции, коие отсутствуют в демонстрационном режиме, а возможность выиграть реальные средства прибавляет ярчайших азартных ощущений.
1×slots зеркало которую указывали при регистрации кстати
Бездепозитный приз за регистрацию в казино с выводом средств в 2022 году — Наш ресурс дает игрокам важную информацию о самых новых, щедрых и испытанных призах в интернет казино, коие обновляются любой день. Бездепозитный приз казино 2022 с выводом за регистрацию предоставляет возможность ознакомиться игроку с лобби избранного заведения, сориентироваться в выборе игр и выяснить качество работы службы поддержки. Довольно нередко, начиная игровой процесс, игрок теснее отказывается останавливаться и делает настоящий вклад. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать даром возможно как один таки с бонусом за регистрацию без надобности заносить депо. <a href=https://liveweave.com/IL5Qdm>https://liveweave.com/IL5Qdm</a> Возможность протестировать свежие забавы, не рискуя личными средствами и разработать личную стратегию забавы.Онлайн гемблинг развивается с любым днем все больше и больше, новые бренды создаются не по денькам а по часам. Новые интернет казино делают вступительные акции для игроков, для того что бы зарекомендовать себя, и что, этим наиболее предлагают бездепозитные призы за регистрацию, собственно бы не упустить эту вероятность — как пользоваться свежим бездепом, рекомендуем навещать наш сайт как возможно почаще, самое лакомое и новые будет добавляться в этом же списке. 1×slots мобильная версия войти казино Вознаграждения за получение VIP-статуса ? начисляются в программы лояльности при достижении еще значения или выдаются индивидуально менеджерами службы поддержки.
<b>Смотреть еще похожие новости:</b>
<a href=https://ragnarok.ch/forum/viewthread.php?thread_id=195352>1×slot казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Получить Бездепозитный бонус в интернет казино дело двух кликов. Другой момент, отыграть рекламную и соблюсти верховодила и условия отыгрыша. Под правилами подразумевается не вагер, но и лимитирования по максимальной ставке. Мы разумеем, собственно в кинотеатр все ставят на зеро и выигрывают. Призываем не делать похожего. Перед активацией приза прочитайте управляла. Узнайте следующие моменты: Условия получения подарка, за регистрацию, за депо и другое. Ограничения по максимальной ставке. Зачастую не повыше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вертеть автоматы, а вагер будет стоять на месте. Поэтому важно аристократия, в каких забавах можно совершать кратность валютного оборота. Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам воспрещено начислять призы клиентам, не имеющим денежных средств на счете. Мы предлагаем рассмотреть животрепещущие бонусы онлайн-казино с лицензией, которые соблюдают законодательство РБ.
#2052 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино рояль автомат казино <a href=https://kompromat1.online/>порно с Александр Головин (футбол)</a> порно с Петр Ян (ММА) Окладникова Ирина Андреевна порно <a href=https://krtka.info/>1×bet на андроид</a> как выиграть в казино porno Мария Шарапова pin casino порно с Петр Ян (ММА) смотреть фильм казино порно с Сергей Бобровский (хоккей) сайт 1×bet слоты
DiskiPlus porno Светлана Ходченкова DiskiPlus Комарова Наталья Владимировна порно <a href=https://www.diskiplus.ru/>DiskiPlus 7k casino зеркало рабочее</a> DiskiPlus Скоробогатова Ольга Николаевна порно DiskiPlus пин ап букмекерская контора <a href=https://www.diskiplus.ru>DiskiPlus почему казино</a> DiskiPlus пинко casino DiskiPlus 1×bet 1хбет DiskiPlus букмекерская контора официальный сайт скачать DiskiPlus кент казино DiskiPlus где казино DiskiPlus казино фильм DiskiPlus Анна Михалкова
#2053 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрацию более популярный вариант это
Теоретически, к безвозмездным бонусам можно отнести так называемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, потому собственно они деют только возможность делать ставки.Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и. Когда игроку полагается большое фриспинов, администрация может бить3 их начисление на несколько дней. Бесплатные вращения предоставляются для определенного слота, кот-ый указывается в правилах акции. <a href=http://filmkachat.ru/>1× слот зеркало</a> <a href=https://feedback.challonge.com/forums/44455-feature-requests/suggestions/49478687-%D1%82%D0%B5%D1%80%D0%BC%D1%96%D0%BD%D0%BE%D0%B2%D0%B8%D0%B9-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D0%B6-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2-%D1%96%D0%B2%D0%B0%D0%BD%D0%BE-%D1%84%D1%80%D0%B0%D0%BD%D0%BA%D1%96%D0%B2%D1%81%D1%8C%D0%BA%D1%83-%D1%8F%D0%BA-%D0%B2%D0%B8%D0%B3>https://feedback.challonge.com/forums/44455-feature-requests/suggestions/49478687-%D1%82%D0%B5%D1%80%D0%BC%D1%96%D0%BD%D0%BE%D0%B2%D0%B8%D0%B9-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D0%B6-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2-%D1%96%D0%B2%D0%B0%D0%BD%D0%BE-%D1%84%D1%80%D0%B0%D0%BD%D0%BA%D1%96%D0%B2%D1%81%D1%8C%D0%BA%D1%83-%D1%8F%D0%BA-%D0%B2%D0%B8%D0%B3</a> Как правило, новоприбывшие игроки начала хотят ознакомиться с методами ввода и вывода денежных средств и сроки исполнения поданных заявок дабы конкретно понимать, как стремительно появится исключить свой казино приз за регистрацию без депо на электронный кошелек или же банковскую карту. К счастью для всех играющих, внутри определенных холдингов, все казино соперничают меж собой. Ведь если бы определенную компанию давало лишь одно онлайн-заведение, то ли бы клиенты заметили казино с бонусом за регистрацию и могли бы рассчитывать только на вознаграждение вид приза на первое инвестиция. К любому заведению периодически следует привлекать свежих игроков, что, конечном, лишь на руку всем играющим. зеркло казино 1×slots <a href=https://glbian.com/prd/bbs/board.php?bo_table=free&wr_id=226447>https://glbian.com/prd/bbs/board.php?bo_table=free&wr_id=226447</a> Иногда у гостей сайта могут возникнуть трудности, задачи, препядствия при активации приобретенного промо-кода. В таких случаях, необходимо адресоваться за помощью в службу «Support». Для получения ответа, непременно указывается конкретная первопричина обращения и подтверждается информация дополнительными снимками. Если сформировалась спорная ситуация, постоянно возможно обратиться к основному регулятору либо контролирующему органу, выдавшему данному заведению лицензионный документ.Бездепозитные призы за регистрацию в игровых автоматах для владельцев онлайн-казино считаются частью маркетинговой кампании, направленной на повышение аудитории вебсайта. Так они продвигают средства бренды и привлекают свежих посетителей.
1х слот 1хслотс регистрация перейти на 1×slots
скачать 1×slots официальный сайт Еще одно условие дотрагивается размеров ставки. Операторы устанавливают наивысшую сумму, которую игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, избранной в Личном кабинете. При превышении лимита есть риск потерять приза. Существующие ограничения относятся и к определенным обликам ставок. Например, играя в рулетку, клиент возможность столкнуться с запретом назначать фишки на шансы.Наиболее популярностью вознаграждения между гэмблеров – бездепозитные призы казино. Это не умопомрачительно, как можно получить благотворительные вращения или виртуальные кредиты, и при этом не придётся пополнять счёт, рисковать собственными средствами. Удастся насладиться различными весельями даже выиграть солидную сумму, избегая серьёзного риска. <a href=https://forums.goha.ru/showthread.php?p=159933919#post159933919>https://forums.goha.ru/showthread.php?p=159933919#post159933919</a> 1×slots официальный сайт мобильная версия К образцу, игроку выдаются бесплатные свои в заведении в размере пятидесяти либо 100 долларов (вейджер на которые сочиняет 100х). То есть, любому новоприбывшему игроку выскакивает манящая картинка, кот-ая сулит выплату всех зачисленных фирмой средств. Не стоит обращать внимания на казино бонус за регистрацию без депозита с сильно большой или довольно малеханькой суммой бонусов, поэтому собственно, в тщательно изучив все обстоятельства, здесь скорее, несомненно какой-то подкол.Подобные призы без депозита предоставляются на более прибыльных условиях. Зачастую они крупнее, а обстоятельства отыгрыша наименее строгие.
1×slots зеркало регистрация в 1×slots casino
У любого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано смогли выполнить их, мы дадим некоторое советов. Если система начислила небольшую сумму, не создавать немалые ставки – остановитесь на 10–30 центах. Как лишь сможете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте выступать. В неприятном случае никакого присмотреться к другому автомату.Хотя безвозмездные бонусы начисляются без депо, не исключено, собственно вас придется заносить средства. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь после как, как свежий заказчик раз пополнит игровой счет. Бездепы с безвозмездными вращениями деют юзерам право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд уплачивает казино. Число спинов ограничено и изредка выше сотню. Если промоакция содержит количество безвозмездных игр, их начисление имеет быть разбито на несколько дней. <a href=http://tekst-pesni.ru/index.php?name=account&op=info&uname=gabbynucleus40>http://tekst-pesni.ru/index.php?name=account&op=info&uname=gabbynucleus40</a> 1×slots официальный сайт скачать Наличие у игрока второго аккаунта. Запрещено творить несколько профилей для неоднократного получения бездепов.На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не можете активировать и получить бездепозитный приз.
1×slots регистрация на сайте
<a href=http://link.5nx.ru/viewtopic.php?f=5&t=12115>x1 slots регистрация в 1×slots casino</a> Бездепозитные призы реальными средствами, которые можно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадались. 1×slots официальный сайт зеркало <a href=http://tok-ok-dv.ru/index.php?subaction=userinfo&user=aliveidol1>http://tok-ok-dv.ru/index.php?subaction=userinfo&user=aliveidol1</a> Для верификации аккаунта нужно дать профессионалам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, а фотку банковской карты либо скриншот странички электрического кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности.Автоматическая активация на самой удобной, хотя ручной метод содержит перед ней преимущества. Прежде чем использовать вознаграждение от казино, стоит заранее определить, сколько времени требуется на исполненье всех критерий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала действия приза.
1×slots подтвердит вашу регистрацию если говорить
Все бесплатные бонусы кажутся соблазнительными. Кто же откажется от способности сыграть в онлайн-казино, не рискуя средствами, хотя получая выигрыши. Но далеко не все бездепозитные бонусы мере привлекательны для рассудительного клиента. К сожалению, нет. Почти все казино, просят внесение но бы 1-го малого депо для вывода выигрыша с бездепозитного бонуса. Также учитывайте, что исключить деньги разрешено лишь на что, эту платежную систему, с которой был сделан депо. <a href=https://mmatycoon.info/index.php/User:LaylaCoulter9>https://mmatycoon.info/index.php/User:LaylaCoulter9</a> Для вывода средств бонус надо(надобно) будет отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариациями отыгрыша бездепозитного приза до его получения, дабы избежать конфликтных обстановок.Вы не в коем случае ни чем не рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный приз, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс изучить игровые автоматы, научится регулировать менять ставки и полосы, изучать бонусные забавы и их выигрышные композиции, ну в конце концов просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные средства, которые возможно отыграть и исключить, но просто на демо счет, что, этим самым адреналин в крови более повысится а пульс забьется с частым ритмом! 1× slots зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://timepost.info/showthread.php?tid=166798>1×slots зеркало регистрация в 1×slots casino</a>
<a href=http://link.5nx.ru/viewtopic.php?f=5&t=12070>рабочее зеркало 1хслотс</a>
<a href=http://turkteam.10tl.net/member.php?action=profile&uid=2012>1×slots актуальное зеркало</a>
<a href=http://iptv.bestforums.org/viewtopic.php?f=3&t=4658>зеркала 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Раздача призов имеет быть приурочена к разным датам: календарные праздничные, дни рождения игроков, годовщина открытия казино и т. Д. Подарок выдается вид средств, фриспинов либо баллов для накопления и размена на предложения оператора. Если юзер получает выигрыш, средства начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд требований.
#2054 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino бонус бк букмекерская контора <a href=https://7club7.com/>1×bet зеркало слоты 1×bet xyz</a> r7 casino букмекерская контора леонов <a href=https://res-publika.com>порно с Васильева Татьяна Викторовна</a> порно с Алина Загитова, фигуристка казино онлайн почему в казино не бывает настенных часов вавада казино casino pin официальный 1×bet официальный сайт 1×bet xyz водка казино
DiskiPlus new casino DiskiPlus casino андроид <a href=https://www.diskiplus.ru>DiskiPlus где казино</a> DiskiPlus 1×bet casino DiskiPlus порно с Елена Никитина, скелетонистка <a href=https://diskiplus.ru>DiskiPlus 1×bet скачать бесплатно</a> DiskiPlus porno Катерина Шпица DiskiPlus порно с Захарова Мария Владимировна DiskiPlus как выиграть в казино DiskiPlus Кузнецова Анна Юрьевна порно DiskiPlus казино фильм смотреть онлайн DiskiPlus 1win букмекерская контора DiskiPlus букмекерская контора бетсити
#2055 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на сайте
При регистрации следует свидетельствовать только достоверную информацию. Когда учетная запись будет активна, появится доступ в Личный офис. В нем возможно выбрать еденицу, ввести промокод и узнать подробные управляла получения и отыгрыша бездепа. Краткая информация об промоакции нередко находится непосредственно на регистрационной форме.При забаве на бонусные свои воспрещается выступать в игровые автоматы с современным джекпотом и игры из радела exist casino. Кроме такого, кое-какие казино выделяют бездеп на раз либо некоторое конкретных слотов, и в других играх Вы не можете на них выступать. <a href=http://filmkachat.ru/>1×slots зеркало быструю регистрацию а также мгновенное</a> <a href=https://designaddict.com/community/profile/real-estate-rendering-services/>https://designaddict.com/community/profile/real-estate-rendering-services/</a> Необходимость отыгрыша. Вейджер в этом случае повыше, чем для призов за депо. И пока свои не отыграны, вывести их нельзя. 1×slot регистрация <a href=https://www.hubtamil.com/talk/member.php?1648316-TravisMyday>https://www.hubtamil.com/talk/member.php?1648316-TravisMyday</a>
1×slots казино зеркало
Если речь об эксклюзивных услугах, может понадобиться регистрация в казино по ссылке с партнерского вебсайта.Игры, каких можно играть на бонусные средства. Проверьте список игр, каких возможно играть на бонусные средства, возможно они Вам не понравятся и не стоит расходовать своё время на такую акцию. <a href=http://sofanatki.ekafe.ru/viewtopic.php?f=1&t=2232>1хлот регистрация в 1×slots casino</a> 1×slots официальный demo регистрация в 1×slots casino Но а в вы теснее профи по интернет казино, кликаем на красноватую кнопку «Получить» и Вы автоматически перейдете в интернет казино;Когда идет о денежных призах, казино постоянно устанавливают условия вейджера, коие нужно выполнить, дабы исключить выигрыш. <a href=http://vestnik-muiv.ru/bitrix/redirect.php?goto=http://coldcontrol.ru/bitrix/redirect.php?goto=http://engraver.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/amtYSFRevLB>http://vestnik-muiv.ru/bitrix/redirect.php?goto=http://coldcontrol.ru/bitrix/redirect.php?goto=http://engraver.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/amtYSFRevLB</a> Пoдтвepдить личнocть посетителя. Для удачного вывода средств, необходимо подтвердить лицо посетителя. Нa этaпe вepификaции пpoфиля, сотрудники службы безопасности должны убедиться, что у игрока всего лишь раз аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не может исключить собственный выигрыш, случае у него будет несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы. 1× slots регистрация в 1×slots casino Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам запрещено начислять бонусы посетителям, не имеющим валютных средств на счете. Мы предлагаем рассмотреть актуальные бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ.Условия вывода выигрыша. В неких заведениях для успешного вывода с бездепозитного приза достаточно пополнения баланса и доказательства личности. В иных же клубах, необходимо некоторое раз прокрутить собственный депо.
1 хслот регистрация в 1×slots casino
Ограничения по забавам. Администрация воспрещает игрокам кое-какие игровые автоматы с бездепозитным призом, деньгами либо бесплатными вращениями. Обычно, в правилах приводится глубокий список слотов для отыгрыша. Иногда разделенье выполняется по облику игр. Например, отыгрыш возможен на всех игровых аппаратах, хотя запрещен в настольных играх и в разделе Live Casino. Таким образом, заведение пробует показать себя своим потенциальным геймерам, а подобный рекламный ход как казино приз без депо за регистрацию привлекает довольно много внимания к игорному заведению и обеспечивает неизменный поток новых посетителей и грядущих посетителей игрового онлайн клуба. <a href=http://snami.ru/bitrix/redirect.php?goto=http://plazarium.com/bitrix/redirect.php?goto=http://blok-post.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/10D8tFkPykq>http://snami.ru/bitrix/redirect.php?goto=http://plazarium.com/bitrix/redirect.php?goto=http://blok-post.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/10D8tFkPykq</a> Постарайтесь отыграть вейджер, дабы замечена возможность оставить заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные приборы. Вы можете получить выигрыш на электронной кошелёк, карту, аппарат.Чтобы получить вероятность вывести выгода с бездепозитного бонуса в казино, необходимо выполнить ряд условий: 1×slots мобильная версия войти казино
1×slots зеркало сайта
Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских руб. В условиях акции указано, что вейджер бездепозитного бонуса х20. Поэтому, дабы отыграть приз, игроку несомненно необходимо сделать ставок на 35*20=700 руб. 1хслотс официальный сайт зеркало <a href=https://relateddirectory.org/details.php?id=251144>https://relateddirectory.org/details.php?id=251144</a>
1×slots зеркало видели такую регистрацию на
<a href=https://myportal.utt.edu.tt/ICS/_portletview_/Campus_Life/Campus_Groups/Safer/Discussion.jnz?portlet=Forums&screen=PostView&screenType=change&id=7c6987d7-afd1–40fe-acf8-fbeed9be8f4d>https://myportal.utt.edu.tt/ICS/_portletview_/Campus_Life/Campus_Groups/Safer/Discussion.jnz?portlet=Forums&screen=PostView&screenType=change&id=7c6987d7-afd1–40fe-acf8-fbeed9be8f4d</a> Таким образом, заведение пытается показать себя своим потенциальным игрокам, а подобный маркетинговый ход как казино приз без депозита за регистрацию завлекает очень много внимания к игорному заведению и обеспечивает неизменный поток свежих посетителей и будущих посетителей игрового онлайн клуба.Для такого, чтобы отыграть сумму вашего бездепозитного бонуса надо(надобно) выполнить условия вейджера. Очень нередко фриспины даются на конкретные слоты (book of ra, book of dead, book of sun), выбирайте разъем для нраву, они очень красивые и высококачественные. Бездепозитные бонус имеет быть денежным например и вид фриспинов на слоты 1×slots рабочее зеркало на сегодня Как управляло, при выводе финансов, от играющего требуется лишь устроить минимальный вклад чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом собственный счет.
<b>Смотреть еще похожие новости:</b>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=169266&result=reply>1×slots промокод при регистрации 2025</a>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=169813&result=reply>1×слот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подарки на определенные даты отличаются критериями получения. Если одобрение начисляют игроку на денек рождения, то сумма обычно зависит от совместного объема депозитов за год.
#2056 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet скачать приложение casino сегодня <a href=https://kompromat1.online/>casino актуальное зеркало</a> порно с Алина Загитова up casino скачать <a href=https://t.me/vchkogpu_ru>Елена Лядова</a> Самойлова Алла Владимировна порно бесплатные букмекерские конторы порно с Евгения Медведева, фигуристка винлайн букмекерская контора порно с Илья Осипов (киберспорт) официальное казино вход 1×bet зеркало рабочее xbet
DiskiPlus порно с Юлия Ефимова, пловчиха DiskiPlus казино можно <a href=https://www.diskiplus.ru/>DiskiPlus porno Илона Маркова, хоккеистка</a> DiskiPlus Любимова Ольга Борисовна порно DiskiPlus промокод 1×bet <a href=https://diskiplus.ru>DiskiPlus смотреть фильм казино</a> DiskiPlus casino актуальное зеркало DiskiPlus порно с Константин Тюкавин (футбол) DiskiPlus porno Александра Степанова, фигуристка DiskiPlus вывод казино DiskiPlus porno Яна Троянова DiskiPlus casinos xyz DiskiPlus букмекерская контора скачать приложение
#2057 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1go casino 1×bet зеркало на сегодня 1×bet xyz <a href=https://rhymes-punches.com/>порно с Голикова Татьяна Алексеевна</a> 1×bet на андроид пин ап casino pin up top <a href=https://strelochnik.com/>сайте букмекерской конторы фонбет</a> слоты казино кент казино пинко casino casino ru porno Игорь Акинфеев (футбол) porno Марина Александрова сайт pin up casino
DiskiPlus скачать casino на андроид DiskiPlus casino riobet <a href=https://diskiplus.ru/>DiskiPlus букмекерские конторы pin</a> DiskiPlus Светлана Ходченкова DiskiPlus пинко casino <a href=https://diskiplus.ru>DiskiPlus Самойлова Алла Владимировна порно</a> DiskiPlus казино рояль DiskiPlus 1×bet зеркало на сегодня DiskiPlus ешь казино DiskiPlus porno Катерина Шпица DiskiPlus казино сочи DiskiPlus casino online зеркало DiskiPlus 1×bet вход
#2058 Charlesgunnyhttp://filmkachat.ru
1×slots на любой вкус как пройти регистрацию
Ограничения по играм. Администрация воспрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, средствами или бесплатными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда разделение выполняется по виду игр. Например, отыгрыш вероятен на всех игровых аппаратах, но запрещен в настольных забавах и в разделе Live Casino.Максимальная ставка ? уточняется в валюте счета и ограничивает размер ставки за раз спин. В случае ее превышения приз имеет быть аннулирован. Также в правилах возможность содержаться запрет на размещение ставок определенного вида, примеру, по равным шансам в рулетке (то есть, на чет или нечет, красное либо темное и т.д.). <a href=http://filmkachat.ru/>1 х слотс зеркало</a> <a href=https://www.bunity.com/-656a43e6–97c0–4816-aedc-21f8d5e41341>https://www.bunity.com/-656a43e6–97c0–4816-aedc-21f8d5e41341</a> 1×slots зеркало регистрация <a href=https://zvukiknig.info/user/DoctorLazutast/>https://zvukiknig.info/user/DoctorLazutast/</a> Как лишь на виртуальном счету окажутся бонусные средства, поспешите отыграть вейджер. Сразу последствии сего можно оставить заявку на вывод выигрыша. Кредиты прибыльно выделяются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом реальных средств и выделяют вероятность почувствовать задор. Во-вторых – можно насладиться любой азартной игрой доступной на сайте. В вашем распоряжении присутствуют автоматы, настольные прибавление, видео-покер, Live-дилеры.Прежде всего, не запамятовывайте регулярно заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом рассматривают более интересные предложения водящих игорных порталов.
1×slots официальный demo регистрация в 1×slots casino
1×slots зеркало регистрация то дальше необходимо пройти Заполняя данные в собственном профиле, указывайте только достоверную информацию, так как Вам понадобиться ее доказать в при выводе денег.Автоматическая активация взгляд самой удобной, но ручной способ имеет перед ней превосходства. Прежде чем применять вознаграждение от казино, стоит заранее найти, сколько медли потребуется на исполнение всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деяния бонуса. <a href=http://antiugon.center/index.php?subaction=userinfo&user=workablemecca83>http://antiugon.center/index.php?subaction=userinfo&user=workablemecca83</a> 1хслот зеркало сайта Иногда в бездепа, казино дарит минимальный бонус (до 50 руб. ), ради которого надо заморачиваться.
1×slots казино мобильная версия
<a href=https://itformula.ca/index.php?title=User:KieranSherman>https://itformula.ca/index.php?title=User:KieranSherman</a> В зависимости от интернет заведения каждый из них может вас предложить как бездепозитные средства, так и бездепозитные фриспины, которые последствии удачной регистрации упадут для на ваш игровой баланс.В настоящее время получить приз за регистрацию в казино довольно просто. Почти любой игорный жилище с радостью предоставит деньги или безвозмездные вращения. Многие игроки пользуются данным и не стыдятся региться в каждом клубе с прибыльными условиями. Кстати, это отличная вероятность выдумать выигрышную стратегию и сорвать куш. 1×slots сайт Помните, собственно в некоторых играх сумма ставки идет в зачет вейджера лишь отчасти. Так, в настольных и карточных забавах только от 5% до 50% суммы ставки числятся как отыгранные средства, в то время как в слотах идет в зачет все one hundred percent суммы.
1×slots актуальное зеркало
Чтобы без убедиться в превосходстве бездепозитных призов, достаточно зарегистрироваться в казино и получить одобрение.Некоторые клубы автоматически начисляют приз на аккаунт игрока в выполнения условий получения, хотя бывают истории, когда приз нужно активировать игроку самому. Есть некоторое способов активации приза: Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? 1× slots casino зеркало <a href=https://www.varranger.com/vforum/index.php?action=profile;u=37461>https://www.varranger.com/vforum/index.php?action=profile;u=37461</a>
1×slots официальный сайт скачать
В лицензионных бездепозитных казино играть в азартные игры действительно неопасно. Наличие лицензии одобряет тот прецедент, что клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP.Третитй бездепозитный приз за регистрацию – денежные свои. К раскаянию, начислить рубли либо доллары готовы лишь знаменитые и пользующиеся клубы. С их помощью появится насладиться любой доступной игрой – автоматом, рулеткой, кено, блэкджеком. <a href=https://ani.me/p/trollfilm1408/info>https://ani.me/p/trollfilm1408/info</a> 1хслотс официальный сайт зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://police.1stbb.ru/viewtopic.php?f=3&t=432>1хслотс мобильная версия зеркало</a>
<a href=http://pravoslit.ru/forum/obshchee/180964–1×slots-na-lyuboj-vkus-kak-projti-registratsiyu.html>1×slots на любой вкус как пройти регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Реже призы без депозита начисляются постоянным игрокам. С их поддержкою администрация постарается удержать ценных клиентов либо вожделеет поблагодарить за лояльность правильных посетителей. Но намного чаще для подобных целей применяются такие акции: Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную процедуру активации бонуса без депо. Внимательно прочтите до конца. Многие новенькие делают оплошности на этапе регистрации и потому не получить подарок.
#2059 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать 1×bet 1×bet xyz casino рабочее <a href=https://repost.news/>retro casino</a> win win casino casino зеркало сегодня рабочее <a href=https://rucriminal.info/>гта казино</a> лучшая казино casino betting казино рублях порно с Афонина Марина Игоревна Скворцова Вероника Игоревна порно 1×bet слоты 1×bet xyz retro casino
DiskiPlus винлайн букмекерская контора официальный DiskiPlus кент казино <a href=https://www.diskiplus.ru>DiskiPlus казино большая</a> DiskiPlus 7k casino официальный сайт DiskiPlus казино фильм <a href=https://diskiplus.ru>DiskiPlus казино вход</a> DiskiPlus Анна Михалкова DiskiPlus песня казино DiskiPlus смотреть фильм казино DiskiPlus casino бездепозитный DiskiPlus 1×bet зеркало DiskiPlus балтбет букмекерская контора DiskiPlus porno Ангелина Гончаренко, хоккеистка
#2060 Charlesgunnyhttp://filmkachat.ru
1 хслот регистрация в 1×slots casino
Шаг 4. Активация. Внимательно выучите условия, информацию по ограничениям и сроке действия бонусного предложения. Разобравшись с правилами, возможно активировать приз в личном кабинете (иногда ? с использованием промокода) или по запросу в саппорт.Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депо возможность выделяться до 30 дней. <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino 56 online</a> Подобные бонусы без депозита предоставляются на больше прибыльных критериях. Зачастую они крупнее, а условия отыгрыша наименее строгие. <a href=https://solo.to/lexxeagle>https://solo.to/lexxeagle</a> Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?Осталось избрать казино с призом за регистрацию и сделать профиль. После активации дара выигрыш находится от Фортуны и навыков. 1×slots акции <a href=https://gamesgrom.com/user/Forsedropmr/>https://gamesgrom.com/user/Forsedropmr/</a> Следует выделить, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом.Заполняя данные в личном профиле, указывайте лишь достоверную информацию, например как Вам придется ее подтвердить в будущем при выводе средств.
казино 1×slots
При правильном раскладе бездепы — это отличный способ играть на средства без растраты собственных средств. Есть количество советов, следуя коим можно извлечь максимально выгоды из похожих промоакций казино. Играть идет лишь на лицензированных площадках. Скриптовые веб-сайты не врут с бонусными предложениями, хотя и употребляют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах невозможно. <a href=http://forum.bedwantsinfo.nl/showthread.php?tid=792245>1×slots casino регистрация на сайте</a> скачать 1×slots официальный сайт <a href=https://www.deadbeathomeowner.com/community/profile/stevenmok/>https://www.deadbeathomeowner.com/community/profile/stevenmok/</a> 1×slots зеркало рабочее на сегодня На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не можете активировать и получить бездепозитный приз.Каждая игровая перрон отличается критериями по получению и отыгрышу бездепов. В правилах детально расписаны кратковременные рамки, за которые надо(надобно) прокрутить вейджер. Также не забывайте на наибольший размер ставки и максимальную сумму выплаты. С другой стороны, чтобы получить бездепозитные призы казино, достаточно потратить не более 1 минутки.
1×slots официальный сайт скачать на айфон
Рассмотрим принцип его деяния на примере. Допустим, вы зарегались и возымели $10 not the slightest down payment bonus с вейджером х50. Это значит, что выигранные средства можно несомненно выводить не ранее, чем после как, как общая сумма ставок достигнет $500.Фриплей-бонусы. Бонусы за безвозмездную забаву есть только в некоторых клубах. Они зачисляются незамедлительно в творенья профиля и действуют непродолжительное время. Если у вас нет медли израсходовать свои, они просто завершатся. Что касается медли, в большинстве случаев бонусы срабатывают на 1-го часа. Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. <a href=https://scientific-programs.science/wiki/Shisha_Tobacco_From4_Eur>https://scientific-programs.science/wiki/Shisha_Tobacco_From4_Eur</a> 1×slot казино зеркало
рабочее зеркало 1×slots
<a href=https://rolivka.online/forum/showthread.php?tid=40490>1×slots быструю регистрацию а также мгновенное</a> Отказ в прохождении верификации. Если клиент не хочет либо имеет предоставить документы, подтверждающие его личность, профиль несомненно заблокирован вместе со всеми бонусными начислениями. 1×slot регистрация <a href=http://metabolichealthdigest.com/user/raymondnom/?um_action=edit>http://metabolichealthdigest.com/user/raymondnom/?um_action=edit</a> B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая приятная часть игры. Важно, часто бездепозитные бонусы в казино выдаются с ограничениями по максимальной выплате. В среднем можно рассчитывать на прибыль в несколько тыщ руб. Как вывести выигрыш с приза без депозита. Придётся доказать акк документально, в некоторых заведениях. Процедура верификации обязательна и делается каждым игроком. О документальном подтверждении учетной записи спрашивайте в онлайн чате или прочитайте в правилах.
1× slots регистрация в 1×slots casino
Представленные на данной странице лучшие бездеп бонусы в казино за регистрацию в 2022 году имеют подходящие обстоятельства. После кропотливого анализа редакция портала составила рейтинг спецпредложений, в посетители Casino.ru могут сортировать перечень по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д.Когда речь о получении бездепозитных бонусов в казино, начала обратите внимание на следующие обстоятельства: Принципиальным различием безвозмездных бонусов от призов на депозит считается неимение необходимости вносить деньги на аккаунт. Из-за этого их часто именуют бездепозитными (no down payment bonuses). <a href=http://xinjiangyan.com/home.php?mod=space&uid=475103&do=profile>http://xinjiangyan.com/home.php?mod=space&uid=475103&do=profile</a> Многие новички сомневаются, что поощрительный приз не несомненно отдавать, числе случае они выиграли у казино. Это абсолютно безопасно и накрепко. Выводя выигранные свои, игрок просто останавливает свое участие в игре и теряет уникальную возможность – даром увеличивать собственное вещественное положение. 1×slots официальный сайт зеркало рабочее
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=887029#pid887029>1хслотс зеркало</a>
<a href=http://nexusroleplay.teamforum.ru/viewtopic.php?f=19&t=11005>1хслот официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вывод выигрыша с бездепозитных бонусов казино – щедрый презент от азартных клубов. Но чтобы вывести собственный заработок, необходимо выполнить ряд условий:
#2061 internetGephttps://domashij-internet-ekaterinburg002.ru
провайдер по адресу екатеринбург <a href=https://domashij-internet-ekaterinburg002.ru>domashij-internet-ekaterinburg002.ru</a> подключить интернет в екатеринбурге в квартире
#2062 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
лучшие казино бесплатно казино проиграл <a href=https://krtka.info/>слот casino</a> казино фильм 1win букмекерская контора <a href=https://strelochnik.com/>порно с Сергей Бобровский (хоккей)</a> 7k casino зеркало на сегодня 1×bet зеркало xbet порно с Баталина Ольга Юрьевна официальная казино casino com пин ап casino pin up top 1×bet слоты 1×bet xyz
DiskiPlus pin casino зеркало DiskiPlus casino online зеркало <a href=https://diskiplus.ru/>DiskiPlus почему в казино не бывает настенных часов</a> DiskiPlus 1×bet зеркало слоты 1×bet xyz DiskiPlus Разуваева Ксения Денисовна порно <a href=https://www.diskiplus.ru>DiskiPlus игры казино</a> DiskiPlus порно с Алина Загитова DiskiPlus скачать букмекерскую контору на андроид DiskiPlus казино гта 5 DiskiPlus казино без DiskiPlus casino промокод DiskiPlus 1×bet рабочее на сегодня DiskiPlus 1×bet зеркало рабочее
#2063 Charlesgunnyhttp://filmkachat.ru
1×slots коды
Выигрыши с призов без инвестициям постоянно привязаны к требованию по ставкам и все быть обналичены только после выполнения данных требований.Бездепозитный приз нередко возможность замерзнуть доступным незамедлительно последствии окончания регистрации, что правило единственным требованием к нему считается регистрация, а после проверка вашей новой учетной записи. <a href=http://filmkachat.ru/>1×slots регистрацию более популярный вариант это</a> <a href=https://www.24liveblog.com/live/Uod90>https://www.24liveblog.com/live/Uod90</a> Многие казино деют в маркетинговых целях бесплатные бонусы исключительно для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой вебсайт по партнерской ссылке с нашего портала. 1×slot казино зеркало <a href=https://viewcinema.ru/user/HenryJip/>https://viewcinema.ru/user/HenryJip/</a> Для верификации аккаунта надо(надобно) предоставить профессионалам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, еще фотку банковской карты или снимок страницы электрического кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности.
1×slots зеркало регистрация то дальше необходимо пройти
Благодаря программе лояльности от игорного заведения, можно брать превосходный старт и без добавочных вложений запустить видеослоты. Кроме как, возможно рассчитывать на реальную фортуну и получить, без вложения собственных денег, немалый выигрыш.Самый распространённый из подобных бонусов, конечно же, бездеп на денек рождения клиента — бонус повторяющий фиксированной суммы или фриспинов поступает на счёт игрока, а воспользоваться им можно в течение установленного периода времени. <a href=http://forum.daslight.com/viewtopic.php?p=27640#p27640>1×slot казино зеркало</a> 1×slots casino регистрация 1×slotscasino09k online Проверка занимает от нескольких мин. До нескольких дней, специалисты техподдержки могут запросить вспомогательные документы либо инициировать куцее общение по Skype. <a href=https://globalseoul.co.kr/bbs/board.php?bo_table=free&wr_id=70855>https://globalseoul.co.kr/bbs/board.php?bo_table=free&wr_id=70855</a> В интернете очень большое скриптовых сайтов, которые принадлежат жуликам. Их основная задача – привлечь гэмблеров, пообещав не щедрые презенты, но и солидные выигрыши. Так собственно кое-какие веб-сайты предлагают получить за регистрацию и $1 000.Когда речь идет о получении бездепозитных призов в казино, начала направьте на последующие обстоятельства: 1× slots casino официальный сайт С этими простыми советами любое казино с призом за регистрацию способно принести в разы больше выгоды и выгоды.Проверка занимает от нескольких минут до нескольких дней, профессионалы техподдержки шансы запросить вспомогательные документы или инициировать куцее общение по Skype.
1 x slots
Автоматическая активация первый самой комфортной, хотя ручной способ имеет перед ней преимущества. Прежде чем использовать вознаграждение от казино, стоит заблаговременно найти, сколько медли требуется на исполненье всех критерий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала деянья приза. <a href=http://theaesoon.co.kr/bbs/board.php?bo_table=free&wr_id=148115>http://theaesoon.co.kr/bbs/board.php?bo_table=free&wr_id=148115</a> Если вы новичок в этом деле и лишь попали в неизведанную вами область пыла — с помощью услуг как бездепозитные призы без пополнения.Рассмотрим на образце: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских руб. В критериях промоакции предписано, что вейджер бездепозитного бонуса х20. Поэтому, дабы отыграть приз, игроку несомненно нужно устроить ставок на 35*20=700 рублей. 1×slots бездепозитный бонус за регистрацию
1 хслот регистрация в 1×slots casino
<a href=http://soumoli.com/home.php?mod=space&uid=24916>1×slots casino регистрация 1×slotscasino09k online</a> Фриспины. Бесплатные вращения предусмотрены для использования в видео-слотах. Внимательно читайте обстоятельства – они часто выдаются для некоторых машин. В зависимости от клуба вы можете делать определенное число ставок. Кстати, современные игорные дома дают вероятность заводить «одноруких злодеев». Помимо прочего, для вывода средств по бездепу необходимо привнести на счёт свой первый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально возможную сумму, в чего вывод средств станет доступен. казино 1×slots официальный сайт <a href=http://xn–vk1b93jqsbxy0apgpr0a.com/bbs/board.php?bo_table=free&wr_id=53528>http://xn–vk1b93jqsbxy0apgpr0a.com/bbs/board.php?bo_table=free&wr_id=53528</a>
1хслотс 1хслотс регистрация перейти на 1×slots
Вы скорее, скажем, как все любите получать подарки и бездепозитные призы казино. Игорные жилища брали в привычку одаривать гэмблеров приятными призами. Стать владельцем приветственного подарка можно за творенье профиля либо пополнение счёта. Второй вариант больше увлекательный, ведь клубы готовы удвоить депо! Но случае вы новичок и лишь знакомитесь с миром азарта, чем воспользуйтесь бонусом за регистрацию. В большинстве заведений сделать это можно по e-mal, по номеру телефона, через социальную сеть или гугл-аккаунт. <a href=https://zionhqzg07528.bloggerchest.com/30204438/ai-nude-revolutionizing-content-moderation-and-privacy-protection>https://zionhqzg07528.bloggerchest.com/30204438/ai-nude-revolutionizing-content-moderation-and-privacy-protection</a> Законодательство, регулирующее азартные игры в разных государствах, влияет на возможности операторов. В итоге юзеры из отдельных ареалов сталкиваются с лимитированиями со стороны казино. Это возможность быть как глубокий отказ в доступе, так и невозможность загружать забавы отдельных изготовителей. 1×slots промокод при регистрации 2025
<b>Смотреть еще похожие новости:</b>
<a href=http://mandala-app.com/forums/viewtopic.php?f=5&t=221539>1× slots casino зеркало</a>
<a href=http://zelenalutrija.com/forum/showthread.php?p=84457#post84457>1×слотс казино</a>
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=41518>1×slots официальный сайт зеркало</a>
<a href=http://medforum.5nx.ru/viewtopic.php?f=4&t=9988>1×slot регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Не советуем опрометью голову браться за всевозможные предложения получения средств без инвестициям. Вполне вполне, что бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем смотрится на 1-ый взор. Альтернативой является казино приз за депозит. Мы предлагаем вам пару советов, спасибо которым у любого игрока будет возможность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств:
#2064 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало проходить регистрацию это отличный вариант
Большинство клубов привлекают внимание игры за счёт разнообразных презентов. На 1 веб-сайтах можно получить виртуальные кредиты, которые откроют доступ ко всему софту. На иных же, администрация предлагает безвозмездные вращения для пуска лучших интернет слотов. Несмотря на различные промоакции, стоит выделить самые главные.Игрокам не следует принимать приветственный приз как гарантированный метод получить крупный выигрыш, хотя это замечательная вероятность без расходов расценить перечень казино. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> <a href=https://www.hoyolab.com/article/27052984>https://www.hoyolab.com/article/27052984</a> У нас на сайте Вы отыщите перечень бонусов без депозита в проверенных казино и подробную информацию про как их получить и применять. 1×slot рабочее зеркало <a href=http://usr.by/user/MichaelCromb/>http://usr.by/user/MichaelCromb/</a> Бездепы обыкновенно предлагают с отыгрышем — мгновенно вывести выигранные свои невозможно. Перевод денег со счета будет вероятен после как, как пользователь выполнит все требования казино, а сумма не превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, протяжении коих клиент вправе воспользоваться предложением. Обычно они не превосходят нескольких дней последствии активации.
1хслотс казино зеркало
казино 1×slots Маркетинговая политического всех игорных интернет-клубов должна одевать разнородный нрав. И случае гонорары на депо служат для того, чтобы провоцировать заносить депозиты и поощрять теснее имеющих юзеров, то бездепозитный приз в казино либо бонус за регистрацию в казино, до всего, рассчитан на расширение базы покупателей. <a href=http://i91215un.bget.ru/user/DoctorLazutamr/>http://i91215un.bget.ru/user/DoctorLazutamr/</a> 1×slot официальный сайт
1× slots casino официальный сайт
Прибывшие на акк финансы бездепозитные призы предназначаются, в, только для свежеиспеченных юзеров, коие ранее не имели собственного аккаунта в данном казино. Исходя из этого, случае раньше у игрока был сделан депозит, то, по всей вероятности, у него больше не будет способности рассчитывать на получение такового приза в определенном заведении.Итак, дабы благотворительные бонусные кредиты превратились в настоящие средства, которыми вы можете управлять по своему усмотрению, их надо(надобно) отыграть. Вейджер по уточнять в правилах онлайн-казино. Так же стоит выделить то, собственно в любом онлайн казино установлен собственный максимальный кешаут на бездепозитный бонус. Как верховодило кешаут — это максимальная сумма денег, кот-ая доступная для вывода с бездепозитного приза.Так что сможете отважно региться без всяких размышлений. Фортуна сегодня точно на вашей стороне. Не страшитесь, как последствие какого либо ущерба Вам совершенно не грозит. С такими бонусами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе. <a href=http://mos-it.ru/index.php?subaction=userinfo&user=ukynud>http://mos-it.ru/index.php?subaction=userinfo&user=ukynud</a> В бонусную программку многих операторов входят систематические бездепы. Это бессрочные акции, поощряющие активных постоянных игроков. Популярный формат — раздача фриспинов по конкретным денькам недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депо в обмен на скопленные баллы преданности. 1×slots зеркало подтвердит вашу регистрацию если говорить Шаг 5. Использование и отыгрыш. Бездеп должен быть применен в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера.Вышеописанная первопричина и считается основным интересным, в которого операторы отдают часть собственной выгоды на различные рекламные затраты и маркетинговые кампании. А наиболее действенным здесь будут выступать непосредственно бездепозитные бонусы казино 2022 с выводом за регистрацию.
1хслотс казино зеркало
Возможность протестировать новые забавы, не рискуя личностными средствами и создать личную тактику забавы. Бездепозитный бонус – это экономическое вознаграждение, которое выдается участнику игры в казино, для его привлечения и появления заинтересованности. Любой посетитель, который соответствует условиям выдачи похожего бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое одобрение считается более действенным способом, дающим возможность стартовать в игре, не вкладывая собственных материальных средств. 1×slots регистрация на сайте 1×slots ru com <a href=http://doktorpishet.ru/index.php?subaction=userinfo&user=jadedidol29>http://doktorpishet.ru/index.php?subaction=userinfo&user=jadedidol29</a> Для отыгрыша приза казино обязывает игрока сыграть на сумму, в количество раз превосходящую сумму приобретенного приза — тут выгода компании явна.В онлайне слишком много скриптовых сайтов, коие принадлежат жуликам. Их основная цель – привлечь гэмблеров, пообещав не только щедрые подарки, но и солидные выигрыши. Так что некоторые веб-сайты предлагают получить за регистрацию числе $1 000.
1×slots зеркало видели такую регистрацию на
Чаще всего применяются коды. Их надо(надобно) вносить в специальные окошки регистрационной анкеты, в речь идет о пригласительных призах, либо в особом разделе собственного кабинета игрока. Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, чтобы была вероятность исключить выигрыш.Некоторые онлайн-казино без депо предлагают новым посетителям избрать бонус при регистрации. Будьте внимательны: выбрав раз, вы в безоговорочном большинстве случаев не можете пользоваться остальными. <a href=https://www.google.com/url?sa=X&q=https://doctorlazuta.by/>https://www.google.com/url?sa=X&q=https://doctorlazuta.by/</a> Бонус за регистрацию в казино выдается лишь раз один на 1-го игрока. Но случаются вспомогательные акции, в которых бездепы раздаются для постоянных посетителей и эти подарки Вы можете получить более одного раза.Не желайте сыграть в азартные забавы, не рискуя средствами средствами, хотя получая в все выплаты? Подобную возможность предоставляют все лучшие порталы с азартными весельями. В их количестве большое честных и надежных интернет-казино на российском языке. Они завлекают свежих юзеров разными поощрительными событиями, включая бездепозитные, или благотворительные призы. 1×slots сайт зеркало Объективные – размер бонуса, коэффициент и обстоятельства вейджера, надобность внесения депо для вывода средств;
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.bedwantsinfo.nl/showthread.php?tid=791931>1×slots регистрация 1×slotscasino09k online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При ирге на бонусные свои воспрещается выступать в игровые автоматы с прогрессивным джекпотом и забавы из радела live casino. Кроме как, некоторые казино дают бездеп на один или количество конкретных слотов, и в иных играх Вы не сможете на них играть.
#2065 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
водка казино бк букмекерская контора <a href=https://repost.news/>порно с Анна Щербакова, фигуристка</a> bet casino 1×bet рабочее <a href=https://m.repost.news/>про казино</a> Мухтиярова Елена Вячеславовна порно up букмекерская контора букмекерские конторы бет бесплатно фильм казино unlim casino porno Виктория Баркова, легкоатлетка порно с Анастасия Потапова, теннисистка
DiskiPlus 1×bet официальный xbet DiskiPlus официальное казино вход <a href=https://diskiplus.ru>DiskiPlus порно с Константин Тюкавин (футбол)</a> DiskiPlus Лут Оксана Николаевна порно DiskiPlus 7k casino зеркало рабочее <a href=https://www.diskiplus.ru>DiskiPlus порно с Петр Ян (ММА)</a> DiskiPlus порно с Васильева Татьяна Викторовна DiskiPlus 1×bet зеркало рабочее xbet DiskiPlus казино регистрации DiskiPlus букмекерская контора скачать приложение DiskiPlus букмекерские контора ап DiskiPlus 1×bet сайт 1×bet xyz DiskiPlus 1×bet регистрация
#2066 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию процедура займет всего лишь
Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских руб. В условиях промоакции предписано, что вейджер бездепозитного бонуса х20. Поэтому, чтобы отыграть приз, игроку несомненно нужно сделать ставок на 35*20=700 руб.Некоторые сайты, до чем провести регистрацию игроков, предлагают ответить на некоторое базовых вопросов. Цель проведения сходственной викторины – выявить случайных людей, коие не имеют представления о покере, и не допустить получения ими призов. Если посетитель теснее играл в казино, то ответить на полтора десятка простых вопросов несомненно нетрудно. Очень часто, ответы возможно найти на официальных сайтах этих учреждений. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slots review live</a> Многие казино деют в рекламных целях бесплатные бонусы исключительно для наших читателей. Чтобы их получить, нужно перейти на игровой вебсайт по партнерской ссылке с нашего портала.Каждый компьютерные обязан сначала отчетливо изучить условия по получению и отыгрышу приглянувшегося презента. Если всё организует, поторопитесь отобрать бесплатные спины за регистрацию в казино без депо с выводом и без отыгрыша и прямо момент начать вертеть барабаны топовых слотов. <a href=https://rentry.co/hkqe5hcw>https://rentry.co/hkqe5hcw</a> Бездепозитные бонусы – это самая занимательная и более перспективная промоакция интернет-казино. Они и какого-либо фри-спинов, поэтому что выплаты в бесплатных вращениях не гарантированы, ведь композиции на барабанах игрового аппарата все не сложиться. 1×slots рабочее зеркало <a href=https://www.catfish-assassins.org/forum/memberlist.php?mode=viewprofile&u=1417>https://www.catfish-assassins.org/forum/memberlist.php?mode=viewprofile&u=1417</a>
1×slots сайт
Возьми свой презент. Чаще всего бонус активируется сразу последствии регистрации. Но бывают истории, когда нужно зайти в личный офис или написать в справочную службу.Представленные на этой страничке превосходнейшие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные условия. После кропотливого анализа редакция портала составила рейтинг спецпредложений, каком гости Casino.ru могут сортировать перечень по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д. 1×slots официальный сайт скачать <a href=https://educatorpages.com/site/Bbgatecom0412/pages/redico>https://educatorpages.com/site/Bbgatecom0412/pages/redico</a> Чтобы играть бесплатно на настоящие деньги в казино, порой довольно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные деянья. 1×slots регистрацию процедура займет всего лишь B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Помимо прочего, для вывода средств по бездепу необходимо привнести на счёт собственный первый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало вероятную необходимую, последствии чего вывод средств будет доступен. Поспешите зарегистрироваться на официальном сайте Клубника, дабы моментально получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, появляется реальный шанс победу!За привлечение приятеля ? масштабах партнерской программы заказчик получает вознаграждение за привлечение свежих пользователей. <a href=http://www.glaschat.ru/glas-f/member.php?498331-KennethLakly>http://www.glaschat.ru/glas-f/member.php?498331-KennethLakly</a> Законодательство, регулирующее азартные игры в различных странах, влияние на полномочия операторов. В итоге пользователи из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это имеет быть как полный отказ в доступе, так и невозможность загружать игры отдельных производителей.Приветственный бонус без депозита ? подарок за регистрацию. Выдается деньгами, фриспинами либо баллами. В последнем случае бонусные баллы применяются для участия в турнирах либо обмена на реальные деньги. 1хслот 1хслотс регистрация перейти на 1×slots
1× slots casino официальный сайт
Ну и конечно же, для казино бездепозитные бонусы прибыльны с имиджевой стороны: подобная щедрость повышает степень преданности клиентов к фирмы.Допустим, за регистрацию вы возымели бездеп в объеме 2 000 руб. С вейджером х30. В данном случае предстоит сделать ставок, на совместную необходимую в 60 000 руб. (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать реальные деньги. Однако не забывайте, что с любого дара получится вывести определённую сумму (почаще всего менее $200). 1×slots казино зеркало <a href=https://magadan-mebel.ru/forum/user/1102/>https://magadan-mebel.ru/forum/user/1102/</a> Прежде чем активировать бездеп, нужно убедиться сомнений, собственно страна, гражданином которой считается игрок, не входит в список разрешенных.Постарайтесь отыграть вейджер, чтобы замечена вероятность забыть заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные приборы. Вы можете получить выигрыш на электрической кошелёк, карту, телефонный.
1×slots скачать на айфон
Выбирая бесплатный бонус, пристально изучайте верховодила. Убедитесь, собственно вас возможно на роль в промоакции. Уточните, в каких забавах возможно исполнять условия вейджера. При надобности задавайте вопросы адептам саппорта. <a href=https://www.domainprofil.com/2020/04/cara-mendapatkan-backlink-edu.html>https://www.domainprofil.com/2020/04/cara-mendapatkan-backlink-edu.html</a> 1×slots скачать на айфон Подтверждение регистрации. Казино требуют привязки профиля к электронному адресу и номеру телефонного. Для сего на e-mail отправляется письмо ссылаясь, а на телефон ? текстовое сообщение с кодом.
<b>Смотреть еще похожие новости:</b>
<a href=https://bbs.sinbadgroup.org/index.php?xjkh-tampa-s-poster-pup-for-new-cancer-treatment.t48661.html/page-6309#post-271967>1× slots зеркало</a>
<a href=http://yamato-ryu.ru/communication/forum/index.php?PAGE_NAME=message&FID=1&TID=44991&MID=9737&sessid=a8b02e5570b89298cbbbfc2c32c58bfc&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1×slots зеркало рабочее на сегодня</a>
<a href=http://av3526.com/forum.php?mod=viewthread&tid=48&pid=26482&page=17&extra=page%3D1#pid26482>1хслотс рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Это один из главных показателей привлекательности презента. С завешенным коэффициентом числе профессионалы не смогут выполнить обстоятельства по отыгрышу. И так, насколько привлекательно смотрится предложение – бездепозитный приз казино в объеме $500 или $1 000. Чтобы новички получше вдумались, собственно же такое вейджер, мы разберём на примере.
#2067 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало подтвердит вашу регистрацию если говорить
Стоит обозначить(означить), собственно бездепозитный бонус выдается только взрослым новеньким, коие, в свою очередь, могут пригласить личных друзей и знакомых, кроме претендующих на поощрительную программу лояльности. Подобная разработка замечена между создающих онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры содействуют повышению собственной популярности, методом вербования свежих игроков. Бонусы – это оригинальный шанс для вероятных соучастников игры, которые все опробовать софт покер рума и убедиться, станут ли они в него играть либо нет. Новый игрок попробует свои силы с реальными оппонентами в казино.Риск-игра по равным шансам – Также казино имеет запрещать исполнять обстоятельства по отыгрышу за раунда на удвоение, кот-ый предлагается в слотах, видео-покере и некоторых иных забавах. <a href=http://filmkachat.ru/>1хслот официальный сайт зеркало</a> В интернете количество известных игорных площадок с красивыми акционными услугами. Однако пристально читать условия десятков услуг времени надоест, ну и время отнимет много. Поэтому наша команда подготовила ТОП-3 вебсайтов с превосходнейшими бездепозитными бонусами: <a href=https://events.com/r/en_US/registration/best-merchandising-software-solutions-for-retail-success-london-february-962474>https://events.com/r/en_US/registration/best-merchandising-software-solutions-for-retail-success-london-february-962474</a> 1×slot официальный сайт <a href=http://deviajesbaratos.com/blog/flyright-comenta-vuelo.html/comment-page-1?unapproved=2798713&moderation-hash=833a84633777d4b669180552c691c256#comment-2798713>http://deviajesbaratos.com/blog/flyright-comenta-vuelo.html/comment-page-1?unapproved=2798713&moderation-hash=833a84633777d4b669180552c691c256#comment-2798713</a> Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала быстрые выводы. Фишка выплат том,, что довольно избрать платёжный инструмент и указать необходимую. В большинстве случаев средства зачисляются на электрические кошельки в течение 15 минут, а на банковские карты – 1–3 рабочих дня.Представьте момент, когда при ставке в 10 руб. Вы получите сходственное умножение. Миллион рублей за одно вращение, собственно абсолютно возможно. Поэтому вопрос, сколько можно выиграть остаётся не. Предлагаем проверить других. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный приз и проверяйте удачу в деле. Разумеется, исключить деньги сложно. Однако шансы есть у всех.
1×slots casino зеркало
Выбирайте лучшие благотворительные призы с помощью обзоров на Casinoz – и пусть вас сопутствует удача при отыгрыше бонусных кредитов! скачать 1×slots официальный сайт Бездепы шансы входить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами.В бонусную программку многих операторов входят систематические бездепы. Это бессрочные акции, поощряющие интенсивных постоянных игроков. Популярный формат — раздача фриспинов по конкретным дням недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают постоянные призы без депо в обмен на накопленные баллы лояльности. <a href=https://sergiev.0pk.me/viewtopic.php?id=985#p7085>https://sergiev.0pk.me/viewtopic.php?id=985#p7085</a> Как правило, новоприбывшие игроки для хотят ознакомиться с способами ввода и вывода валютных средств и сроки выполнения поданных заказов чтобы конкретно осознавать, как прытко они смогут исключить собственный казино приз за регистрацию без депо на электронный кошелек или же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино соперничают меж собой. Ведь в бы конкретную компанию представляло лишь одно онлайн-заведение, то навряд бы клиенты увидели казино с бонусом за регистрацию и возможность бы рассчитывать только на вознаграждение повторяющий бонуса на первое инвестиция. К каждому заведению регулярно идет завлекать новых игроков, что, конечном, только на руку всем играющим. рабочее зеркало 1×slots Таким образом, заведение пытается продемонстрировать себя своим вероятным игрокам, а такой маркетинговый ход как казино бонус без депозита за регистрацию завлекает очень количество внимания к игорному заведению и обеспечивает постоянный струю новых посетителей и грядущих посетителей игрового интернет клуба.
1×slots рабочее зеркало
Маркетинговая политического всех игорных интернет-клубов должна носить разнообразный нрав. И в гонорары на депо служат для того, дабы стимулировать заносить депозиты и поощрять уже существующих пользователей, то бездепозитный приз в казино или приз за регистрацию в казино, прежде всего, рассчитан на расширение базы потребителей.На благотворительные призы онлайн-казино почти практически распространяется ограничения по стране проживания клиентов. Даже если вас разрешается открывать счет и играть на деньги в заведении, это еще не означают, собственно вам доступны no deposit bonuses. Новые посетители онлайн-казино без первого депозита могут проверить собственную удачливость. К что, этому же есть вероятность преобразовать бездепы в реальные средства за регистрацию в казино, впрочем чтобы приз нужно отыграть сообразно условиям акции. <a href=http://yamuhajirin.org/index.php?option=com_kunena&view=topic&catid=2&id=200291&Itemid=2552>http://yamuhajirin.org/index.php?option=com_kunena&view=topic&catid=2&id=200291&Itemid=2552</a> У нас на веб-сайте Вы найдете список бонусов без депо в проверенных казино и подробную информацию о том как их получить и использовать. 1×слотс казино Акционные предложения от казино существуют в различных форматах. Часто призы даются в мена на депозит. Игрок заносит платеж и получает средства, благотворительные вращения и одобрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — вид приза, кот-ый гарантирован за исполнение конкретных деяний на веб-сайте:
1×slots на любой вкус как пройти регистрацию
Можно. Вы постоянно можете отрешиться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не создадите ставку.Можно ли в одном онлайн казино получить больше 1-го бонуса за регистрацию? Нет, например как в каждом интернет казино есть управляла, к которым нужно придерживаться, не делать 2 аккаута для получения призов, другому несомненно блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, приз за регистрацию выдаеться раз один 1 личику. Каждый игры обязан сперва детально выучить обстоятельства по получению и отыгрышу понравившегося презента. Если всё устраивает, поспешите отобрать бесплатные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик момент начать вертеть барабаны топовых слотов.Прибывшие на аккаунт деньги бездепозитные бонусы предназначаются, в основном, лишь для новоиспеченных пользователей, которые раньше не имели личного аккаунта в данном казино. Исходя из сего, если ранее у игрока был изготовлен депо, то, по всей вероятности, у него больше не несомненно возможности рассчитывать на получение такого бонуса в конкретном заведении. Также учтите, собственно кое-какие игровые платформы сузивают список государств, коие готовы получить предложенный бездепозитный бонус за регистрацию. К примеру, существуют онлайн-заведения, выдающие сходственные призы лишь обитателям определенных стран. К примеру, интернет казино 777 Оригинал предоставляет бездепозитный бонус только игрокам из России и стран СНГ. Или наоборот, снабжают вознаграждением всех, кроме обитателей некоторых стран (как сего, следует пристально учить список, чтобы потом не появилось практически вопросов и претензий). 1х слот 1хслотс регистрация перейти на 1×slots <a href=https://active.popsugar.com/@Glavdorogadv1606/profile>https://active.popsugar.com/@Glavdorogadv1606/profile</a>
1×slots зеркало регистрация
<a href=https://m1bar.com/user/JamesTut/>https://m1bar.com/user/JamesTut/</a> Наш перечень содержит наихорошие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по главным характеристикам: 1×slos регистрация в 1×slots casino Прежде чем активировать бездеп, нужно убедиться том,, что государство, гражданином коей является игрок, не заходит в перечень не.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=41486>1×slots регистрацию процедура займет всего лишь</a>
<a href=https://talkonlinenews.com/viewtopic.php?t=12170>1×slots мобильная версия войти казино</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Онлайн-казино с бездепозитными бонусами ставят клиентам обстоятельства для использования бездепами, поэтому перед участием в акции другого, как тщательно ознакомиться со всеми правилами и нюансами промоакции. Условия имеют прикасаться получения бонуса, его использования и последующего вывода валютных средств когда выигрыша.
#2068 Charlesgunnyhttp://filmkachat.ru
скачать 1×slots официальный сайт
Прочитайте верховодила бонусной программы, в хотите участие. Да, мы настоятельно рекомендуем устроить это до регистрации. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать на айфон</a> Если площадка презентует бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь ввести аккаунт на сайте и активировать его, подтвердив адрес электрической почты, номер аппарата либо иные данные, коие требует оператор. Перед этим нужно увериться, собственно юзер располагается на официальном сайте казино, не на мошеннической площадке. <a href=https://archinect.com/firms/cover/150465490/cgifurniture-modern-interior-design>https://archinect.com/firms/cover/150465490/cgifurniture-modern-interior-design</a> Но надо мыслить, что снабжая пользователей такими бонусами, казино занимается спонсированием. Ведь объемы вознаграждений, в, не великие (средним размером от 5 до 20 $). И на эти свои налагаются определенные условия и лимитирования, обязательные к исполненью игрока, если в последствии он вожделеет получить все средства выигранные финансы. 1×slots зеркало рабочее на сегодня <a href=http://v208870d.bget.ru/user/Ralphwiste/>http://v208870d.bget.ru/user/Ralphwiste/</a> При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток.
1×slots сайт зеркало
Выигрыши с призов без инвестициям всегда привязаны к притязанию по ставкам и имеют быть обналичены лишь в выполнения этих притязаний. 1×slots casino зеркало рабочее Не желайте сыграть в азартные забавы, не рискуя своими средствами, но получая в все выплаты? Подобную возможность предоставляют многие превосходнейшие порталы с азартными увеселениями. В их числе много честных и надежных интернет-казино на российском языке. Они завлекают новых пользователей разными поощрительными мероприятиями, включая бездепозитные, либо бесплатные призы.Ознакомьтесь с нашим списком лучших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего перечня и получите бездеп сразу. Хватайте превосходнейшие бесплатные предложения ниже и выигрывайте большие деньги, не рискуя! <a href=http://dev.may-green.ru/forum/user/19139/>http://dev.may-green.ru/forum/user/19139/</a> Бездепозитные призы — это подарки от казино вид бонусных денег либо фриспинов для игровых автоматов, коие начисляются на аккаунт игрока последствии процедуры регистрации на сайте заведения. Для получения таких поощрений депозит не потребуется.Чтобы бездеп не был начислен на Ваш акк, Вам надо активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк механически, а Вы не расчитываете его использовать, обратитесь в саппорта с просьбой отменить бездепозитный приз. 1хслот официальный сайт зеркало Частенько новички не понимают, как активировать презенты либо вывести первый выигрыш. Для подобных случаев наша команда обрисовала основные определения – что такое фриспины, вейджер, как его отыграть, для нужно протекать верификацию.На бонусные начисления могут быть установлены дополнительные лимитирования, коие Вы не к при отыгрыше. Пока приз полностью не отыгран — средства из казино не выводятся.
1×slots зеркало которую указывали при регистрации кстати
Не советуем сломя голову хвататься за различные предложения получения средств без инвестициям. Вполне вероятно, собственно бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на 1-ый взор. Альтернативой считается казино приз за депозит. Мы предлагаем вас пару советов, спасибо которым у любого игрока будет возможность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег: <a href=http://witiai.cn/home.php?mod=space&uid=72318>http://witiai.cn/home.php?mod=space&uid=72318</a> Баланс игрока дополняется на подходящую необходимую. К ней применяется вейджер, указанный в правилах промоакции. Вывести выигрыш возможно будет после как, как пользователь устроит требуемый размер ставок из личных средств. В редких случаях бездеп трудится в формате Free Play. На счет юзера зачисляется крупная сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по окончании сего периода сумма на счету несомненно превышать первоначальную, то разницу можно будет вывести или применять для последующих ставок.К сожалению, нет. Почти все казино, просят внесение хотя бы одного малого депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, что вывести средства разрешается лишь на ту платежную систему, с которой был сделан депо. 1×slot зеркало Доступность — бездепозитные призы в казино почаще всего предоставляются свежим игрокам, но бывают случаи, когда бонус все получить и действующие посетители.
1×slots casino регистрация 1×slotscasino09k online
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=368820>казино 1×slots</a> 1хслотс мобильная версия зеркало <a href=https://sex18babes.com/user/Porsedropor/>https://sex18babes.com/user/Porsedropor/</a>
1хлот регистрация в 1×slots casino
Вообще перейдя в казино — правила одинаковы в получении бездепозитных призов, в стереотипные правила входит: подтвердить эл. Почту и телефон, заполнить свой индивидуальный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ.Например, игрок получил 500 рублей при творении аккаунта и обязан отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 руб., потребуется сделать 875 спинов для полного отыгрыша. После получения приза вывод средств для посетителя будет недоступен до, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо чета недель. Выводить средства игрок может лишь после отыгрыша.1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, в не желайте замерзнуть жертвой плутов либо впустую потратить время; <a href=https://elearnportal.science/wiki/%D0%A4%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B_%D0%A1%D1%83%D1%88%D0%B8:_%D0%9F%D0%BE%D1%82%D0%B5%D0%BD%D1%86%D0%B8%D0%B0%D0%BB_%D0%91%D0%B8%D0%B7%D0%BD%D0%B5%D1%81%D0%B0_%D0%92_%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8_%D0%92_2024_%D0%93%D0%BE%D0%B4%D1%83>https://elearnportal.science/wiki/%D0%A4%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B_%D0%A1%D1%83%D1%88%D0%B8:_%D0%9F%D0%BE%D1%82%D0%B5%D0%BD%D1%86%D0%B8%D0%B0%D0%BB_%D0%91%D0%B8%D0%B7%D0%BD%D0%B5%D1%81%D0%B0_%D0%92_%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8_%D0%92_2024_%D0%93%D0%BE%D0%B4%D1%83</a> 1×slots бонус за регистрацию Автоматическая активация на самой комфортной, но ручной способ имеет перед ней достоинства. Прежде чем использовать вознаграждение от казино, стоит заранее определить, сколько времени потребуется на выполнение всех критерий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деянья приза.Бесплатные бонусы казино без депо можно получить в виде валютных средств на бонусный счет (вывести их возможно только после отыгрыша), фриспинов, игры или кешбэк-бонуса.
<b>Смотреть еще похожие новости:</b>
<a href=https://kfz-gringer.at/index.php/forum/donec-eu-elit/79866–1×slots#79630>1×slots регистрацию более популярный вариант это</a>
<a href=http://kemsrr.forumex.ru/viewtopic.php?f=7&t=5586>1×slots официальный сайт скачать</a>
<a href=https://www.fromrus.su/index.php?/topic/59278-%D1%81%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C-1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82/>скачать 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы казино за регистрацию в 2022 году — это возможность сыграть за счёт заведения. Казино даёт клиенту шанс пользоваться определённой суммой или количеством безвозмездных вращений без внесения депозита. Не путайте деморежим с реальной игрой без надобности внесения депозита. Составленный специалистами Casino.ru список онлайн-казино с бездепозитным бонусом разрешает игрокам сравнить спецпредложения различных операторов.
#2069 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
black russia казино букмекерская контора без <a href=https://rhymes-punches.com/>сайт казино вход</a> казино можно казино рояль <a href=https://m.repost.news/>кент казино</a> мобильные букмекерские конторы бесплатное казино 1×bet регистрация porno Юлия Канакина порно с Голикова Татьяна Алексеевна почему в казино не бывает настенных часов бывшие казино
DiskiPlus скачиваемые казино DiskiPlus букмекерская контора ставки <a href=https://www.diskiplus.ru/>DiskiPlus casino зеркало сайта</a> DiskiPlus суть казино DiskiPlus порно с Никита Кучеров (хоккей) <a href=https://www.diskiplus.ru/>DiskiPlus porno Андрей Рублев (теннис)</a> DiskiPlus самое казино DiskiPlus Львова-Белова Мария Алексеевна порно DiskiPlus 1×bet официальный сайт 1×bet xyz DiskiPlus 1×bet зеркало слоты 1×bet xyz DiskiPlus 7k casino бонус DiskiPlus 1×bet скачать бесплатно DiskiPlus пин ап casino pin
#2070 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
black russia казино online casino 7k <a href=https://strelochnik.com/>casino на телефон</a> 1×bet зеркало слоты 1×bet xyz Светлана Ходченкова <a href=https://krtka.info/>Елена Лядова</a> рабочее казино 1×bet рабочее на сегодня 1×bet регистрация casino riobet казино на деньги porno Яна Троянова Черкесова Бэлла Мухарбиевна порно
DiskiPlus ешь казино DiskiPlus порно с Максим Глушенков (футбол) <a href=https://diskiplus.ru/>DiskiPlus 1×bet зеркало на сегодня</a> DiskiPlus рабочие зеркала казино DiskiPlus Матвиенко Валентина Ивановна порно <a href=https://diskiplus.ru/>DiskiPlus porno Нина Пирогова, хоккеистка</a> DiskiPlus casino 7k рабочее DiskiPlus pin up casino DiskiPlus vavada casino DiskiPlus casino com DiskiPlus Скоробогатова Ольга Николаевна порно DiskiPlus пинап казино DiskiPlus официальные сайты казино
#2071 1win_qronhttp://1win13.com.ng
1 win <a href=https://1win13.com.ng/>https://1win13.com.ng/</a> .
#2072 Charlesgunnyhttp://filmkachat.ru
казино 1× slots официальный сайт
Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации бонуса без депозита. Внимательно прочитайте до конца. Многие новички делают ошибки на этапе регистрации и потому не получить презент. <a href=http://filmkachat.ru/>x1 slots 1хслотс регистрация перейти на 1×slots</a> Обычно показатель повыше, чем для призов на депозит. Не дивитесь, в он несомненно в х100. Иногда завышенный коэффициент вейджера уточняется для жителей отдельных государств. <a href=https://rentry.co/hkqe5hcw>https://rentry.co/hkqe5hcw</a> 1×slots официальный сайт скачать <a href=http://fitboss.ru/user/ForsedropMa/>http://fitboss.ru/user/ForsedropMa/</a> Проверка занимает от нескольких минут до нескольких дней, профессионалы техподдержки имеют запросить дополнительные документы либо инициировать куцее общение по Skype.Принципиальным различием бесплатных призов от призов на депозит считается недоступность необходимости заносить средства на аккаунт. Из-за этого их нередко именуют бездепозитными (not the slightest down payment bonuses).
1 х слотс зеркало
<a href=https://pbtur.com.br/users/jameshex>1×slots casino регистрация на сайте</a> 1×slots официальный сайт скачать Если речь идет об эксклюзивных предложениях, может понадобиться регистрация в казино по ссылке с партнерского сайта. <a href=http://corp-eeek.ru/index.php?subaction=userinfo&user=gentlekismet41>http://corp-eeek.ru/index.php?subaction=userinfo&user=gentlekismet41</a> Так же стоит выделить то, собственно в каждом онлайн казино установлен свой наибольший кешаут на бездепозитный приз. Как верховодило кешаут — это максимальная сумма средств, кот-ая дешевая для вывода с бездепозитного приза.Срок активации и время на отыгрыш. Зачисление денег либо фриспинов случается при активации в течение требовательно ограниченного периода, схожие притязания предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать приз некоторое дней либо числе месяцов. Другие выдают крупную необходимую за регистрацию, но время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером. 1×slots регистрацию более популярный вариант это Почти все игровые клубы настоятельно свидетельство контактных данных игрока для получения бездепозитного бонуса.Заработать на бездепозитных бонусах за регистрацию в казино имеет любой пользователь, достигший совершеннолетия.
1×slots актуальное зеркало
Существуют казино с призом за регистрацию, в очень известны фриспины в интернет казино впоследствии регистрации в конкретных забавах. Они встречаются том чаще бесплатных поощрений или традиционных бонусов в казино без вложений. Например, игрок регистрирует счет, на который начисляются безвозмездные игры, бонус за регистрацию вид даровых фрспинов, вращения в игровом автомате. Во время игрового процесса игрок выигрывает настоящие деньги, коие в последствии возможно успешно исключить из заведения на собственную платежную систему. То есть, есть шансы исключить средства без рисков своими деньгами. Регистрация, за которую компьютерные получит бонусы, займет минут, а спасибо этому возможно прирастить 5 евро поощрений до тыс. И без всяких проблем исключить их.Операторы гемблинга утверждают, что так они борются с бонус-хантерами. Впрочем, критики считают, собственно данным казино пробуют сделать из случайного постояльца неизменного игрока. <a href=http://www.jindoushiqi.com/bbs/home.php?mod=space&uid=128148>http://www.jindoushiqi.com/bbs/home.php?mod=space&uid=128148</a> Вознаграждения за получение VIP-статуса ? начисляются в рамках программки преданности при достижении еще значения или выдаются персонально менеджерами службы. 1×slots бездепозитный бонус за регистрацию Не рекомендуем сломя голову хвататься за различные предложения получения средств без вложений. Вполне возможно, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на первый взгляд. Альтернативой считается казино бонус за депозит. Мы предлагаем для пару советов, спасибо которым у каждого игрока несомненно возможность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом средств:Бывают ли бездепозитные призы без вейджера? Бывают, если у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию уточняется вейджер во всех казино.
1 xslots рабочее зеркало
Чаще всего, знаменитые сервисы, такие как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно неотъемлемое верховодило. Финансовые свои выводятся только спустя что, эту платежную систему, коей пользовались для пополнения депозита. Если же игрок получил бездепозитный покерный приз, потребуется восполнить счет на наименьшую необходимую, кот-ая составляет обычно 10 $.Простая процедура получения бездепозитного бонуса, кот-ая займет менее 2-х мин. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные. <a href=http://forum.daslight.com/viewtopic.php?p=27557#p27557>1×slots зеркало проходить регистрацию это отличный вариант</a> Как прочие промоакции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такого предложения являются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых посетителей и позволяет им составить впечатление о функционале, не рискуя вескими суммами.Доступ к дару возможность открываться механически последствии введения промокода либо воззвания в службу сайта. В первом случае от юзера не требуется никаких поступков. Бездеп с активацией по коду встречается почаще всего. Игроку нужно ввести совокупность знаков в графе, кот-ая может пребывать в регистрационной форме в Личном офисе. 1×slots промокод при регистрации 2025 <a href=https://www.alpea.ru/forum/user/26823/>https://www.alpea.ru/forum/user/26823/</a> В интернет-сети практически можно отыскать перечни наиболее знаменитых и гарантированных поощрительных программ от знаменитых онлайн-казино.
1× слот зеркало
Если простыми словами, бездепы – это определённая сумма денег или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать подарки. Но есть некоторые аспекты. Существуют игорные дома, коие перед что, этим как начислить призы требуют привязать аппарат, дать копии документов.Первый образующийся вопрос, это, для выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают новых игроков. Последним легче начать игру на деньги с дара за регистрацию. Им надо пополнять баланс и расходовать личные свои. Новички получают безвозмездные спины либо свои на счёт. С их поддержкой знакомятся с игровым ходом, крутят слоты и делают ставки в рулетке. Возможность протестировать новые забавы, не рискуя собственными средствами и разработать личную стратегию игры.Внесение депо – Будьте готовы восполнить счет после отыгрыша бонуса. Это обычное заявка верховодил для данного типа промо-акций. Лучше заранее уточнить, какую сумму надо(надобно) несомненно заносить на счет. Как верховодило, идет о наименьшем депозите, но вы должны быть убеждены, что он вам по кармашку. <a href=http://duryunsan.kr/bbs/board.php?bo_table=free&wr_id=238916>http://duryunsan.kr/bbs/board.php?bo_table=free&wr_id=238916</a> Кешбэк-бонус дает собой возврат фиксированного процента от ставки когда проигрыша или же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не выше 10%. 1хслотс 1хслотс регистрация перейти на 1×slots Oтыгpaть приз с указанным вeйджepом, результата нужно сдeлaть cтaвoк нa cумму, превышающую объем бонуса в количество один.Когда идет о получении бездепозитных бонусов в казино, начала обратите внимание на следующие обстоятельства:
<b>Смотреть еще похожие новости:</b>
<a href=https://www.fromrus.su/index.php?/topic/59181–1×slots-casino-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE/>1×slots casino зеркало</a>
<a href=https://technique-tp.com/forum/viewtopic.php?t=4955>1×slots зеркало на сегодня</a>
<a href=http://iptv.bestforums.org/viewtopic.php?f=3&t=4689>1×slots на любой вкус как пройти регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если площадка дарует бездеп за регистрацию, то процедура его получения ординарна. Нужно только завести акк на веб-сайте и активировать его, подтвердив адрес электронной почты, номер аппарата либо другие данные, коие настятельно оператор. Перед этим нужно увериться, собственно пользователь находится на официальном веб-сайте казино, не на мошеннической площадке. Выбор каждого онлайн казино на нашем сайте. В описании к любому Вы сможете узнать, что получите за творенье аккаунта.
#2073 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino сегодня букмекерская контора официальный сайт <a href=https://vestnik-jurnal.com/>скачать букмекерскую контору на андроид</a> сайт казино вход реального казино <a href=https://strelochnik.com/>Преподобная Надежда Александровна порно</a> r7 casino Попова Анна Юрьевна порно casino зеркало сайта букмекерские контора ап casino riobet porno Юлия Канакина, скелетонистка porno Алена Михайлова
DiskiPlus пин up casino DiskiPlus почему в казино не бывает настенных часов <a href=https://diskiplus.ru>DiskiPlus Валентина Матвиенко порно</a> DiskiPlus 1×bet рабочее на сегодня DiskiPlus букмекерская контора ставки <a href=https://diskiplus.ru/>DiskiPlus бывшие казино</a> DiskiPlus Лут Оксана Николаевна порно DiskiPlus скачать букмекерскую контору DiskiPlus porno Яна Троянова DiskiPlus порно с Юлия Ефимова, пловчиха DiskiPlus 1×bet слоты DiskiPlus casino daddy DiskiPlus букмекерскую контору пин
#2074 Charlesgunnyhttp://filmkachat.ru
1×slots casino зеркало рабочее
Бездепозитный приз казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в этом и содержится основное отличие.Размер ставки для игры по бездепозитному бонусу (окончательно же, если, тогда,, когда он представлен повторяющий бонусных валютных средств) часто ниже, чем при игре на депозит. Ограничение несомненно работать до этапа отыгрыша бонуса. <a href=http://filmkachat.ru/>1хслот скачать</a> <a href=https://linkr.bio/kalinka0588>https://linkr.bio/kalinka0588</a> Особую изюминку видео слотам придают уникальные знакы. С их выходом активизируются различные призы. Вы можете запустить дополнительный уровень и увеличить сумму выигрыша. Есть знаки, которые сменяют ненужные составляющие и сами делают выигрышные комбо. Не стоит забывать и тему бонус-тур. После каждого счастливого спина есть шанс прирастить сумму выигрыша в два или хорошо раза.Также, такой нужно подтвердить собственный номер аппарата, достичь код, приобретенный в смс-сообщении от клуба установить в особое фон в личном офисе игрока. 1×slots сайт зеркало <a href=https://maps.google.to/url?q=https://doctorlazuta.by/>https://maps.google.to/url?q=https://doctorlazuta.by/</a> Существует ли стратегии для отыгрыша бездепозитных бонусов? К раскаянью нет, на выигрыши либо проигрыши с бонусов, казино либо игрок повлиять возможности, отдача игр происходит от разработчиков игр.Также есть онлайн-платформы азартных игр, коие используют раздачу бездепозитных призов в особые даты (как для казино, например и для игрока). Помимо этого, действующие игроки кроме имеют вероятность получить схожие бонусы за свою деятельность (к примеру, за увеличения значения либо за похожие достижения).
1×slots казино зеркало
1× slots регистрация в 1×slots casino <a href=http://yamuhajirin.org/index.php?option=com_kunena&view=topic&catid=2&id=200291&Itemid=2552>http://yamuhajirin.org/index.php?option=com_kunena&view=topic&catid=2&id=200291&Itemid=2552</a> казино 1×slots
1×slots регистрация 1×slots casino c2d ru
<a href=http://ru.monumentefunerare.md/index.php?subaction=userinfo&user=DoctorLazutaOn>http://ru.monumentefunerare.md/index.php?subaction=userinfo&user=DoctorLazutaOn</a> В подавляющем большинстве случаев бесплатные призы начисляются в кредитах, которые нельзя сразу вывести со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти требования принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже. 1×slot зеркало рабочее регистрации на телефон придет
1×slots официальный сайт скачать
В качестве бонусов онлайн казино нередко предлагает выдачу фриспинов, словами даровых вращений игрового барабана. Виртуальные монеты возможно использовать для обучения в покерной школе либо для забавы в казино.Бездепозитные призы прекрасный вариант безвозмездной игры в игровые автоматы. Многие юзеры сети не знают, что в казино возможно начать играть абсолютно даром, а потом исключить выигрыш на банковскую карту или электронный кошелек, иные не доверяют интернет казино, а третьи успешно играют и выигрывают – и подчас довольно великие суммы. Бездепозитные призы прекрасный вариант даровой игры в игровые автоматы. Многие юзеры сети не понимают, собственно в казино можно начать выступать безусловно даром, а позже вывести выигрыш на банковскую карту или электронный кошелек, иные не доверяют интернет казино, а третьи успешно играют и выигрывают – и тотчас довольно немалые суммы. 1хслот скачать <a href=https://gti-club.ru/forum/member.php?u=416792>https://gti-club.ru/forum/member.php?u=416792</a> Кешбэк-бонус дает собой возврат фиксированного процента от ставки если, тогда, поражения либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%.
1×slot зеркало рабочее этих способов предполагает регистрацию
<a href=http://www.tukero.org/2020/04/tnod-licenses-v10-apk.html>http://www.tukero.org/2020/04/tnod-licenses-v10-apk.html</a> 1×slots бонус за регистрацию
<b>Смотреть еще похожие новости:</b>
<a href=http://iptv.bestforums.org/viewtopic.php?f=3&t=4607>1×slos регистрация в 1×slots casino</a>
<a href=https://minecraft.ru.net/user/Manuelsoarl/>1×slots актуальное зеркало</a>
<a href=https://www.formulersupport.com/Thread-1×slots-%D0%B0%D0%BA%D1%82%D1%83%D0%B0%D0%BB%D1%8C%D0%BD%D0%BE%D0%B5-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE–237892>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чаще всего используются коды. Их нужно заносить в особые окна регистрационной анкеты, случае идет о пригласительных призах, либо в особом разделе собственного кабинета игрока.
#2075 1win_azOlhttp://1win6054.ru
1вин сайт <a href=http://1win6054.ru/>http://1win6054.ru/</a> .
#2076 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
Новички не любят сразу же вносить депо. Это обосновано отсутствием опыта и сомнением. К счастью, в наше время возможно получить бездепозитный приз за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В любом случае вы не рискуете своими сбережениями. Это отличная вероятность запустить понравившийся видео слот либо же испытать удачу в настольных играх.Большинство интернет-казино из нашего топ-10 готовы порадовать вас неповторимыми промоакциями. Читайте о них в обзорах и на форуме. <a href=http://filmkachat.ru/>1хслотс зеркало</a> Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=https://manifold.garden/forums/index.php?u=/topic/633/High-Quality%203D%20Rendering%20Services%20for%20Your%20Projects>https://manifold.garden/forums/index.php?u=/topic/633/High-Quality%203D%20Rendering%20Services%20for%20Your%20Projects</a> Подтверждение персональной инфы. Все казино просят от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и присутствие у юзера иных аккаунтов (мультиаккаунт запрещен). 1хслот 1хслотс регистрация перейти на 1×slots <a href=http://javset.net/index.php?subaction=userinfo&user=unevencoward38>http://javset.net/index.php?subaction=userinfo&user=unevencoward38</a>
1×slots регистрация 1×slots review live
Диапазон ставок, которые вправе сделать игрок, того лимитирован. Обычно ставить возможно небольшую сумму — около 10–30 рублей за одно вращение. 1×slots регистрация на сайте При ирге на бонусные свои запрещается выступать в игровые автоматы с прогрессивным джекпотом и забавы из радела live casino. Кроме как, кое-какие казино дают бездеп на раз либо количество определенных слотов, и в иных играх Вы не сможете на их выступать.Как правило, новоприбывшие геймеры в первую очередь желают ознакомиться с методами ввода и вывода валютных средств и сроки выполнения поданных заказов дабы конкретно разуметь, как прытко меня исключить свой казино приз за регистрацию без депозита на электрический кошелек или же банковскую карту. К счастью для всех играющих, снутри конкретных холдингов, все казино соперничают между собой. Ведь в бы определенную фирму представляло лишь одно онлайн-заведение, то навряд бы клиенты заметили казино с бонусом за регистрацию и могли бы рассчитывать лишь на вознаграждение повторяющий приза на 1-ое вложение. К каждому заведению регулярно стопам привлекать свежих игроков, собственно, конечном, только на руку всем играющим. <a href=https://vadaszapro.eu/user/profile/1283656>https://vadaszapro.eu/user/profile/1283656</a> Представьте момент, когда при ставке в 10 рублей Вы получите сходственное умножение. Миллион руб. За одно вращение, собственно вполне вполне. Поэтому вопрос, сколько возможно выиграть остаётся закрытым. Предлагаем выяснить без. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный приз и инспектируйте удачу в деле. Разумеется, вывести средства не так просто. Однако шансы есть у всех. 1 хслот регистрация в 1×slots casino Сроки активации приза уточняются любым казино, хотя почаще всего они не превосходят недели с этапа получения. Игроку непременно надо(надобно) использовать бездеп в течение обозначенного срока, в ином случае бонус просто пропадет. Каждый бонус можно получить только один один, поэтому если не использовать бездеп в срок, у игрока не несомненно 2 шанса им воспользоваться.Сроки активации приза уточняются любым казино, но чаще всего они не превосходят недели с момента получения. Игроку непременно нужно применять бездеп на обозначенного срока, в ином случае приз просто пропадет. Каждый бонус можно получить только один раз, поэтому в не применять бездеп в срок, у игрока не будет второго шанса им пользоваться.
1×slots зеркало на сегодня
Как только вы отыграли вейджер и средства с бонусного баланса перебежали вас на реальный счет, Вы храбро сможете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (устроить минимальный депозит к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депозитом). <a href=http://academijacrimea.ru/index.php?subaction=userinfo&user=decorousenthusi>http://academijacrimea.ru/index.php?subaction=userinfo&user=decorousenthusi</a> В качестве призов интернет казино нередко предлагает выдачу фриспинов, то есть безвозмездных вращений игрового барабана. Виртуальные монеты можно использовать для изучения в покерной школе или для игры в казино. 1х слот регистрация в 1×slots casino Вознаграждения за получение VIP-статуса ? начисляются в программки преданности при достижении одного уровня либо выдаются персонально менеджерами службы поддержки.
1× slots сайт
<a href=http://forum.animogen.com/memberlist.php?mode=viewprofile&u=15333>1×slots официальный сайт скачать</a> Для получения депозитного бонуса необходимо восполнить свой игровой баланс настоящими средствами. Вознаграждение возможно получить либо при внесении первого депозита, или вид фиксированного процента от внесённых средств. Так или по, приз поступит на счёт только последствии пополнения. Популярность онлайн казино растёт и всё больше пользователей начинают интерес азартными играми. Бездепозитные призы 2022 года, это оригинальные подарки за регистрацию. С их поддержкою свежие игроки имеют получить бесплатные вращения или средства на баланс за 1 регистрацию. С выходом игорных заведений в интернете, бездепозитные призы стали моднейшим способом вербования игроков. Подобные акции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о коих мы расскажем. Наш вебсайт собрал превосходнейшие предложения из интернета на 2022 год. Воспользуйтесь любым подарком и можете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить обстоятельства.Главное превосходство спинов – возможность выучить разные слоты. Также удастся насладиться бонусными раундами, испытать удачу в риск-туре и преумножить выигрыш за счёт особых символов. Однако не игровой процесс заслуживает внимание, как другого сосредоточиться на реальном выигрыше. 1×slots зеркало <a href=http://xinyue678.com/home.php?mod=space&uid=1124417>http://xinyue678.com/home.php?mod=space&uid=1124417</a> В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, нужно адресоваться в службу через лайв-чат на веб-сайте казино.
1×slots casino зеркало
<a href=http://cokgold.ru/bitrix/redirect.php?goto=http://frezerhouse.ru/bitrix/redirect.php?goto=http://i-strela.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/bgXcLD2txz1>http://cokgold.ru/bitrix/redirect.php?goto=http://frezerhouse.ru/bitrix/redirect.php?goto=http://i-strela.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/bgXcLD2txz1</a> 1×slots casino зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://talkonlinenews.com/viewtopic.php?t=12205>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<a href=http://forum.animogen.com/memberlist.php?mode=viewprofile&u=15333>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В разделе с бонусами активировать собственный подарок. Найти игры, для коих предусмотрено поощрение и использовать бонус по предназначению.
#2077 internetGephttps://domashij-internet-ekaterinburg001.ru
узнать интернет по адресу <a href=https://domashij-internet-ekaterinburg001.ru>domashij-internet-ekaterinburg001.ru</a> провайдеры интернета екатеринбург
#2078 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
cat casino Манилова Алла Юрьевна порно <a href=https://t.me/vchkogpu_ru>казино регистрации</a> порно с Ирина Сидоркова online casino <a href=https://rumafia.news/>pin up casino официальный</a> порно с Ирина Сидоркова up casino скачать casino вход пин ап букмекерская контора рабочее казино porno Юлия Канакина, скелетонистка 1×bet 1хбет
DiskiPlus ешь казино DiskiPlus лучшие бесплатные онлайн казино <a href=https://www.diskiplus.ru>DiskiPlus порно с Дронова Александра Викторовна</a> DiskiPlus 1×bet на андроид бесплатно DiskiPlus пин ап казино <a href=https://www.diskiplus.ru>DiskiPlus сайт pin up casino</a> DiskiPlus сайт pin up casino DiskiPlus порно с Арина и Дина Аверины, гимнастки DiskiPlus автомат казино DiskiPlus порно с Анна Калинская (теннис) DiskiPlus скачать pin casino DiskiPlus порно с Арина и Дина Аверины, гимнастки DiskiPlus casino автомат
#2079 Charlesgunnyhttp://filmkachat.ru
1×slots мобильная версия войти казино
Бездепозитный бонус за регистрацию в казино — это стартовый подарок в виде валютного начисления либо безвозмездных вращений для свежих игроков заведения, для получения которого не нужно заносить депо. <a href=http://filmkachat.ru/>1×slots зеркало регистрация в 1×slots casino</a> В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, нужно адресоваться в службу через лайв-чат на веб-сайте казино. <a href=https://note.com/joyous_otter80/n/ne75a51f43668>https://note.com/joyous_otter80/n/ne75a51f43668</a> Приветственный бонус без депозита ? презент за регистрацию. Выдается средствами, фриспинами или баллами. В последнем случае бонусные баллы применяются для участия в турнирах либо размена на настоящие деньги. 1×slots официальный сайт скачать <a href=https://deanclub96307.mybloglicious.com/51280802/deep-nude-understanding-the-implications-of-ai-generated-imagery>https://deanclub96307.mybloglicious.com/51280802/deep-nude-understanding-the-implications-of-ai-generated-imagery</a> Риск-игра по равным шансам – Также казино может воспрещать выполнять условия по отыгрышу с помощью раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких других забавах.
1×slots официальный сайт скачать
Чем ниже значение вейджера, что, этим проще отыграть и исключить бонус. Если Вы планируете заработать на бездепе, не просто ознакомиться с новым игровым клубом, то стоит избегать бонусов с высоким вейджером их почти не реально отыграть. С ними Вы можете лишь протестировать забавы заведения. 1×slots зеркало сайта Но рядах азартных платформах сходственные гонорары все получить и уже зарегистрированные пользователи. В этом случае, бонусы предоставляются в оригинальных акций или же неким игрокам вид акционного предложения, которое приходит на почту с целью «возвратить» игрока в свое казино.Большинство клубов привлекают внимание в за счёт различных подарков. На одних веб-сайтах можно получить виртуальные кредиты, коие откроют доступ ко всему софту. На иных же, администрация предлагает благотворительные вращения для пуска лучших онлайн слотов. Несмотря на разные промоакции, стоит выделить самые основные. <a href=https://ai.igcps.com/home.php?mod=space&uid=728775&do=profile&from=space>https://ai.igcps.com/home.php?mod=space&uid=728775&do=profile&from=space</a> Каждая игровая перрон выделяется условиями по получению и отыгрышу бездепов. В правилах детально расписаны кратковременные рамки, за которые надо(надобно) прокрутить вейджер. Также не запамятовывайте про максимальный размер ставки и максимальную необходимую выплаты. С другой стороны, дабы получить бездепозитные призы казино, довольно израсходовать не более 1 минутки.Все бесплатные призы кажутся соблазнительными. Кто же откажется от возможности поиграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далековато не все бездепозитные призы в привлекательны для рассудительного клиента. 1×slot регистрация Многие новенькие колеблются, что поощрительный приз не нужно будет отдавать, даже если они выиграли у казино. Это полностью безопасно и накрепко. Выводя выигранные свои, игрок просто одергивает свое участие деле и утрачивает уникальную вероятность – бесплатно наращивать собственное материальное положение.
1х слот регистрация в 1×slots casino
Если речь об неповторимых услугах, имеет понадобиться регистрация в казино по ссылке с партнерского вебсайта.Как только на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу в сего возможно забыть заявку на вывод выигрыша. Кредиты выгодно отличаются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом настоящих средств и дают возможность ощутить задор. Во-вторых – возможно насладиться каждой азартной забавой доступной на веб-сайте. В вашем распоряжении присутствуют автоматы, настольные приложение, видео-покер, Live-дилеры. <a href=http://jet-link.ru/index.php?subaction=userinfo&user=manylatch92>http://jet-link.ru/index.php?subaction=userinfo&user=manylatch92</a> казино 1× slots официальный сайт Бонус с зачислением средств на счет дает больше свободы деяний. Пользователь сам выбирает, каким образом распорядиться подаренными своими. Здесь кроме шансы работать лимитирования на перечень дешевых игр, хотя обычно эти рамки не например строги, как в промо с бесплатными вращениями.
1×slots регистрацию более популярный вариант это
Для получения депозитного бонуса нужно пополнить собственный игровой баланс реальными средствами. Вознаграждение возможно получить либо при внесении первого депо, или вид фиксированного процента от внесённых средств. Так или другому, бонус поступит на счёт только в пополнения.Суммы подобных предложений, большинстве, колеблются от трех до двадцати долларов, а вейджер на эти средства должен составлять от тридцати до шестидесяти раз. Зачастую, большая сумма выигрыша здесь составит от одной до двух сотен долларов. Если игры выиграет больше, то все свои шансы быть списанными до максимально разрешенного выигрыша. Здесь появляется содержание выводить еще несуществующие деньги на собственную платежную систему и дальше искать заведение с подходящими под данную необходимую релоадом либо бонусом за 1-ое пополнение счета. Есть количество подвидов бездепозитного гонорары, предлагаемого наибольшим числом заведений. <a href=http://kemsrr.forumex.ru/viewtopic.php?f=7&t=5673>casino 1×slot</a> Некоторые веб-сайты, этого чем обмануть регистрацию игроков, предлагают ответить на количество базисных вопросов. Цель проведения похожей викторины – выявить случайных людей, коие не имеют представления о покере, и не допустить получения ими бонусов. Если гость теснее играл в казино, то ответить на полтора десятка несложных вопросов несомненно несложно. Очень часто, ответы можно найти на официальных веб-сайтах этих учреждений.В интернете много знаменитых игорных площадок с красивыми акционными предложениями. Однако пристально разбирать обстоятельства десятков услуг вскоре надоест, да и время отнимет количество. Поэтому наша команда подготовила ТОП-3 вебсайтов с наилучшими бездепозитными призами: Бывают ли бездепозитные бонусы без вейджера? Бывают, в у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино. x1 slots регистрация в 1×slots casino <a href=http://33komoda.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://oboevpolno.ru/bitrix/redirect.php?goto=http://google.com.gh/url?q=https://teletype.in/@urist555/qSAFCTkLDrF>http://33komoda.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://oboevpolno.ru/bitrix/redirect.php?goto=http://google.com.gh/url?q=https://teletype.in/@urist555/qSAFCTkLDrF</a> 4. Заберите презент. Чаще всего приз активизируется сразу последствии регистрации. Но случаются истории, когда нужно зайти в индивидуальный кабинет или написать в саппорта.
1×slots официальный сайт мобильная версия скачать
Автоматы неспроста считаются самым популярным азартным веселием. Чтобы освоить управление и управляла, потребуется всего некоторое минут. Ваша задачка сделать ставку, определить количество рабочих линий и возможно вертеть тамбур. Если на экране выпадет выигрышная композиция – вы выиграли! С данной задачей для посодействуют справится бездепозитные бонусы казино.При подмоги такого одобрения оператор возможность кроме завлекать посетителей, коие раньше проявляли активность на веб-сайте, хотя по некий основанию перестали выступать. В данном случае промокод высылается юзеру по электронной почте или вид SMS. <a href=http://www.pxltw.com/home.php?mod=space&uid=362216&do=profile>http://www.pxltw.com/home.php?mod=space&uid=362216&do=profile</a> Возможность поиграть дополнительное состязание (а времени и количество) абсолютно даром, а выигрыш, в свою очередь, поступает на счёт игрока.Если вы новичок деле и только попали в неизведанную вами район азарта — за услуг как бездепозитные бонусы без пополнения. 1хлот регистрация в 1×slots casino Вейджер не более х30–35 считается приемлемым. Опытные игроки заявляют, что с таким вейджером реально остаться в плюсе, в правильно подойти к выбору игрового аппарата.
<b>Смотреть еще похожие новости:</b>
<a href=https://forums.dfine.net/showthread.php?tid=362>1×slots официальный demo регистрация в 1×slots casino</a>
<a href=https://forum.konyacraft.com/threads/1×slots-casino-registracija-na-sajte.9359/>1×slots casino регистрация на сайте</a>
<a href=https://eccentrictirade.com/forums/showthread.php?tid=135700>сайт 1× slots casino</a>
<a href=https://acerfans.ru/user/JamesTed/>1×slots зеркало сайта</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Также, такой нужно подтвердить свой номер телефонного, для этого код, приобретенный в смс-сообщении от клуба установить в особое поле в личном офисе игрока. Вейджер менее х30–35 является применимым. Опытные игроки заявляют, что с этим вейджером реально остаться в плюсе, если правильно подойти к выбору игрового аппарата.
#2080 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet скачать бесплатно 1win casino <a href=https://glvk.guru/>Мухтиярова Елена Вячеславовна порно</a> скачать pin casino casino промокод <a href=https://repost.news/>порно с Юлия Ефимова, пловчиха</a> порно с Алина Загитова, фигуристка casino сегодня 7k casino официальный 7k casino официальный сайт порно с Васильева Татьяна Викторовна online casino казино рояль смотреть
DiskiPlus 1×bet скачать бесплатно DiskiPlus лучшие бесплатные онлайн казино <a href=https://www.diskiplus.ru/>DiskiPlus казино фильм</a> DiskiPlus pin up casino скачать DiskiPlus casino рабочее зеркало <a href=https://www.diskiplus.ru>DiskiPlus casino ап</a> DiskiPlus Хорова Наталья Александровна порно DiskiPlus vavada casino DiskiPlus 1×bet официальный скачать DiskiPlus Ирина Горбачева DiskiPlus Ирина Горбачева DiskiPlus 1×bet xbet DiskiPlus казино гта 5
#2081 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия скачать
Но а в вы теснее профи по интернет казино, кликаем на красноватую кнопку «Получить» и Вы механически перейдете в интернет казино; <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> <a href=https://teletype.in/@kalinka0588/wj_aIQ7cr4o>https://teletype.in/@kalinka0588/wj_aIQ7cr4o</a> Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, или проигрываете предложенный бонус, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, научится регулировать изменять ставки и полосы, исследовать бонусные забавы и их выигрышные композиции, ну в конце концов просто зарядится кучей впечатлений! Ведь вы будите выступать на бонусные средства, коие можно отыграть и вывести, не просто на демо счет, что, этим наиболее адреналин в крови еще больше повысится а пульс забьется с частым ритмом! 1×slots сайт <a href=http://penelopetessuti.ru/index.php?subaction=userinfo&user=workablebelfry2>http://penelopetessuti.ru/index.php?subaction=userinfo&user=workablebelfry2</a> 2. Создать свежий профиль. Для регистрации надо(надобно) наполнить маленькую анкету или зайдите в личный кабинет при помощи социальных сетей;
1хслотс рабочее зеркало
<a href=http://www.infoknygos.lt/smforum/index.php?topic=133864.new#new>1 x slots casino</a> 1 хслот регистрация в 1×slots casino <a href=https://pediascape.science/index.php?title=%D0%B1%D0%B5%D1%81%D0%BF%D0%BB%D0%B0%D1%82%D0%BD%D0%B0%D1%8F%20%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0%20%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA>https://pediascape.science/index.php?title=%D0%B1%D0%B5%D1%81%D0%BF%D0%BB%D0%B0%D1%82%D0%BD%D0%B0%D1%8F%20%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0%20%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA</a> Подтверждение электронной почты – одно из главных критерий, которое есть практически в каждом бездепозитном казино. Чтобы верифицировать электрическую почту, довольно перебежать по интенсивной ссылке в письме, полученном от азартного клуба. 1×slots сайт зеркало Классическая разновидность бонуса за творение аккаунта. Его превосходство заключается что, что заказчик может самостоятельно подбирать аппараты и создавать ставки в них. Иногда перечень игровых автоматов ограничен оператором, хотя все точно это какого-либо, чем один-единственный дешевый слот, как если, тогда, с использованием фриспинов.Выиграть реальные деньги в казино не пополняя счет – сложно, хотя вполне. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными призами и начните играть на бонусные средства. По статистике в 10-ти заведений можно заработать маленькую необходимую средств помощью бонусных средств.
1×slots официальный сайт скачать
В онлайне очень большое скриптовых вебсайтов, которые принадлежат жуликам. Их главная задача – привлечь гэмблеров, пообещав не только щедрые подарки, но и крупные выигрыши. Так что некоторые веб-сайты предлагают получить за регистрацию в $1 000.2. Создать новый профиль. Для регистрации надо(надобно) наполнить небольшую анкету или зайдите в собственный офис при помощи социальных сетей; <a href=http://www.eionia.co.kr/home/bbs/board.php?bo_table=free&wr_id=414855>http://www.eionia.co.kr/home/bbs/board.php?bo_table=free&wr_id=414855</a> 1×slots официальный сайт зеркало рабочее Так что можете смело регистрироваться без всяких размышлений. Фортуна сегодня точно на вашей стороне. Не бойтесь, ведь последствие какого или убытка Вам совершенно не грозит. С этими призами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе.Не советуем сломя голову браться за различные предложения получения средств без инвестициям. Вполне возможно, собственно бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на первый взор. Альтернативой является казино бонус за депо. Мы предлагаем вас пару советов, благодаря которым у любого игрока будет вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств:
зеркло казино 1×slots
Фриплей-бонусы встречаются лишь в неких клубах. Они зачисляются сразу после творения профиля и активны непродолжительное время. Если не успеете потратить средства, они попросту сгорят. Касаемо времени, в большинстве случаев призы активны в течение часа. 1×slots рабочее зеркало на сегодня <a href=http://1.staikudrik.com/index/d1?diff=0&utm_source=ogdd&utm_campaign=26607&utm_content=&utm_clickid=uskkokskw44sooos&aurl=http://xn----7sbaabkuzjcbf8bntim8h.xn–p1ai/bitrix/rk.php?goto=http://teremok.ru/bitrix/redirect.php?goto=https://telegra.ph/Reshenie-voprosov-pereraspredeleniya-zemli-i-sporov-sosedej-09–19>http://1.staikudrik.com/index/d1?diff=0&utm_source=ogdd&utm_campaign=26607&utm_content=&utm_clickid=uskkokskw44sooos&aurl=http://xn----7sbaabkuzjcbf8bntim8h.xn–p1ai/bitrix/rk.php?goto=http://teremok.ru/bitrix/redirect.php?goto=https://telegra.ph/Reshenie-voprosov-pereraspredeleniya-zemli-i-sporov-sosedej-09–19</a> Можно. Вы практически можете отрешиться от получения бездепозитного приза за регистрацию в казино, пока Вы не сделаете ставку.Бездепозитные призы — это презенты от казино повторяющий бонусных средств или фриспинов для игровых автоматов, коие начисляются на акк игрока последствии процедуры регистрации на веб-сайте заведения. Для получения этих поощрений депозит не потребуется.
x1 slots регистрация в 1×slots casino
В лицензионных бездепозитных казино играть в азартные забавы действительно неопасно. Наличие лицензии подтверждает тот факт, собственно клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP.Для верификации аккаунта нужно дать специалистам технической помощи отсканированную копию паспорта и счета за коммунальные предложения, еще фотографию банковской карты либо экрана страницы электронного кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для доказательства личности. Вознаграждения за получение VIP-статуса ? начисляются в рамках программки лояльности при достижении одного значения или выдаются индивидуально менеджерами саппорта. <a href=https://dc-kd.ru/user/Edwarddough/>https://dc-kd.ru/user/Edwarddough/</a> 1×slots зеркало которую указывали при регистрации кстати Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают приз по государствам. Вплоть до как, что клуб может брать игроков из Вашей государства, а бездеп мешает.Помимо остального, для вывода средств по бездепу нужно внести на счёт собственный первый депозит — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало возможную сумму, после чего вывод средств будет доступен.
<b>Смотреть еще похожие новости:</b>
<a href=http://thiteia.org/index.php?threads/d-kimos-aeropor-a-2022.10618/#post-95671>1×slots официальный сайт скачать на айфон</a>
<a href=http://forum.bedwantsinfo.nl/showthread.php?tid=791114>1×slots актуальное зеркало</a>
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=124936&extra=>1хслот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Многие казино деют в маркетинговых целях благотворительные бонусы самая для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой вебсайт по партнерской ссылке с нашего портала.
#2082 Charlesgunnyhttp://filmkachat.ru
1×slots скачать на айфон
Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Подарки на конкретные даты отличаются критериями получения. Если одобрение начисляют игроку на день рождения, то сумма обычно зависимости от общего размера депозитов за год. <a href=http://filmkachat.ru/>1×slots casino регистрация на сайте</a> 4. Заберите презент. Чаще всего приз активируется сразу последствии регистрации. Но посещают ситуации, когда нужно забежать в собственный кабинет либо написать в службу. <a href=https://archinect.com/firms/cover/150465490/cgifurniture-modern-interior-design>https://archinect.com/firms/cover/150465490/cgifurniture-modern-interior-design</a> Перед активацией важно пристально изучить условия акции. Чем ниже вейджер, что, этим больше потенциальная выгода игрока. Имеют велечину кроме лимиты ставок при отыгрыше и сроки, протяжении коих можно пользоваться предложением. Если бездеп охватывает ограниченный перечень игр, рекомендовано узнать максимальные коэффициенты, степень отдачи и волатильности. Слоты с низкими множителями выплат подходят только том, случае, случае оператор не установил взыскательные ограничения на максимальную сумму ставки.Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают бонус по государствам. Вплоть до как, что клуб может принимать игроков из Вашей государства, а бездеп не давать. 1×slots зеркало быструю регистрацию а также мгновенное <a href=http://ekra.kz/index.php?subaction=userinfo&user=highfalutinpsyc>http://ekra.kz/index.php?subaction=userinfo&user=highfalutinpsyc</a> Если вы опытный игрок, вы обязаны знать, что приз без депо – редчайшая находка. Тем не менее, мы неделю изучаем интернет, чтобы найти вам наихорошие бездепозитные предложения.Приглашаем делиться сужденьями о призах. Это поможет другим юзерам избирать более прибыльные предложения.
1×slots официальный сайт мобильная версия
2. Создать новый профиль. Для регистрации надо(надобно) наполнить небольшую анкету или зайдите в собственный кабинет при помощи социальных сеток;В качестве призов онлайн казино нередко предлагает выдачу фриспинов, то есть бесплатных вращений игрового барабана. Виртуальные монеты можно использовать для изучения в покерной школе либо для игры в казино. <a href=http://216.38.0.7/viewtopic.php?f=12&t=409548>1×slots официальный сайт скачать</a> казино 1×slots Бездепозитные призы за регистрацию в игровых автоматах для владельцев онлайн-казино считаются частью маркетинговой кампании, направленной на повышение аудитории вебсайта. Так они продвигают средства бренды и привлекают свежих посетителей. <a href=http://ankiratm.ru/bitrix/redirect.php?goto=http://penza-elegant.ru/bitrix/click.php?goto=http://data.allie.dbcls.jp/fct/rdfdesc/usage.vsp?g=https://teletype.in/@urid_pomosh/QIdVR7ltvFE>http://ankiratm.ru/bitrix/redirect.php?goto=http://penza-elegant.ru/bitrix/click.php?goto=http://data.allie.dbcls.jp/fct/rdfdesc/usage.vsp?g=https://teletype.in/@urid_pomosh/QIdVR7ltvFE</a> Все любят получать подарки. Согласитесь, почти каждый играющий человек несомненно сильно рад, в получит безвозмездный презент для игры в интернет казино просто за регистрацию или же бонус за внесенный депозит, так нарекаемые приветственные бонусы для свежих игроков. Соответственно эти интернет клубы будут больше модны и преимущественны у игроков при выборе казино для игры. Топ казино непрерывно обновляется и прибавляются новые и интересные игровые клубы с симпатичной бонусной политикой и всеми возможными прерогативами, к коим относятся такие бонусы как фриспины за регистрацию, валютные бездепозитные призы, еще великодушные призы за внесенный депозит.Каждый геймер обязан сначала отчетливо изучить условия по получению и отыгрышу приглянувшегося подарка. Если всё устраивает, поспешите арестовать благотворительные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик сейчас начать вертеть барабаны топовых слотов. 1×slots официальный зеркало Но существуют азартные заведения, готовые просто например вручить средства на игру. Для сего достаточно сделать профиль. Чтобы вывести выигрыш, сперва необходимо выполнить вейджеровые условия, прописанные в критериях получения бездепа.За счёт спинов выйдет запустить разные онлайн слоты, протестировать стратегии и поднабраться опыта. Фишка сомнений, собственно вращения начисляются на топовые аппараты с оригинальными опциями и высочайшей отдачей. Не забывайте, что в каждом акционном предложении учтены специальные требования – кратковременные лимитирования, максимальный размер ставки, перечень доступных игр.
1хслотс рабочее зеркало
В бонусную программу множества операторов входят регулярные бездепы. Это пожизненные промоакции, поощряющие интенсивных постоянных игроков. Популярный формат — раздача фриспинов по конкретным денькам недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депозита в обмен на скопленные баллы преданности.Такой казино приз без депо за регистрацию выдается игроку на час и активно используется данное предложение с 2017 года. Это как бы какая-то конспирация поощрения под бездепозитный. Суть всего сего сводится к что, этому, что игроку на час выдается, к примеру, 1000 $, а реклама утверждает про, собственно любой выигрыш возможно несомненно в будущем забыть при для. Но если играющий всерьез отнесется к этому предложению, то он попросту потеряет время. Ведь игроку надо(надобно) будет выступать не главном аккаунте, а в тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (и всей тыс. ) в управляла вступят конкретные обстоятельства, где будет сказано, собственно максимальной суммой победы может быть только двести $ и средства возможно применять лишь в качестве приза на 1-ый лепта с вейджером 25 от суммы вознаграждения плюс сам депо. По результату получится, что игрок выигрывал себя 200% приз с вейджером на конкретную необходимую. Короче разговаривая, это все не стоит вашего времени. Подтверждение индивидуальной инфы. Все казино настоятельно от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и присутствие у пользователя иных аккаунтов (мультиаккаунт запрещен). <a href=https://karakol.com.kg/user/DarenHap/>https://karakol.com.kg/user/DarenHap/</a> Хотя безвозмездные призы начисляются без депозита, не исключено, что вас понадобиться вносить средства. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь после как, как свежий клиент раз пополнит игровой счет.Прочитайте управляла бонусной программки, в желаете принять. Да, мы безотступно советуем сделать это до регистрации. 1×slots официальный сайт скачать на айфон Выбор любого интернет казино на нашем сайте. В описании к каждому Вы сможете узнать, собственно получите за творение аккаунта.Как правило, при выводе финансов, от играющего потребуется только устроить наименьший лепта чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом индивидуальный счет.
1×slots регистрация 1×slotscasino09k online
Чем ниже велечину вейджера, тем легче отыграть и вывести бонус. Если Вы планируете заработать на бездепе, но просто ознакомиться с новым игровым клубом, то стоит игнорировать призов с высочайшим вейджером их практически не реально отыграть. С ними Вы можете только протестировать забавы заведения.Все обожают получать подарки. Согласитесь, практически любой играющий человек несомненно необъятно счастлив, в получит даровой подарок для игры в онлайн казино просто за регистрацию либо же приз за внесенный депозит, например именуемые приветственные бонусы для свежих игроков. Соответственно такие интернет клубы будут больше известны и предпочтительны у игроков при выборе казино для забавы. Топ казино непрерывно обновляется и добавляются новые и занимательные игровые клубы с привлекательной бонусной политикой и всеми возможными привилегиями, к коим относятся эти бонусы как фриспины за регистрацию, валютные бездепозитные призы, а щедрые бонусы за внесенный депозит. У каждой игры свои требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система зачтет любую ставку. В рулетке и покере устроить это гораздо сложнее. Именно поэтому например принципиально пристально читать условия получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в любой ирге, то новенькие попросту «спустят бонус на ветер».Если простыми текстами, бездепы – это определённая сумма средств либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать подарки. Но есть некоторые аспекты. Существуют игорные дома, которые перед тем как начислить призы требуют привязать телефон, дать копии документов. 1×slots casino зеркало рабочее <a href=http://wmrc.co.kr/bbs/board.php?bo_table=free&wr_id=8672>http://wmrc.co.kr/bbs/board.php?bo_table=free&wr_id=8672</a>
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Если при регистрации указать промокод, можно гарантировано получить приз. Где арестовать ваучер? Посетите на блоги или форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В заключительное время игорные дома начали афишироваться в кинокартинах и телесериалах. Присмотритесь и наверняка заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных руб. Акции распространяются как на все забавы казино, так и на узкий список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и другие. Промо возможность охватывать разработки одного производителя. Бездеп не пересекается с иными акциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, изготовленные бонусными деньгами. Для идентификации платежных реквизитов игрока может потребоваться пополнение счета на наименьшую сумму. <a href=https://sport1477.ru/forums/users/lmml1508–2/>https://sport1477.ru/forums/users/lmml1508–2/</a> рабочее зеркало 1хслотс
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.immortales-gilde.de/viewtopic.php?f=2&t=382772>1×слотс казино</a>
<a href=http://griffhunter.com/boards/viewtopic.php?p=966681#p966681>скачать 1×slots на андроид мобильная версия</a>
<a href=http://medforum.5nx.ru/viewtopic.php?f=4&t=10006>1×slots зеркало проходить регистрацию это отличный вариант</a>
<a href=http://mandala-app.com/forums/viewtopic.php?f=5&t=221551>1хслотс зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Простая процедура получения бездепозитного приза, кот-ая займет не более 2-х мин. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные.
#2083 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Елена Никитина, скелетонистка сайт pin up casino <a href=https://7club7.com/>up casino</a> 1×bet слоты официальный сайт казино онлайн бесплатно <a href=https://repost.news/>казино проиграл</a> казино можно букмекерскую контору пин рабочие зеркала казино 1×bet xbet xyz пари букмекерская контора сайт 1×bet слоты porno Яна Троянова
DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz DiskiPlus 1×bet бесплатно <a href=https://www.diskiplus.ru>DiskiPlus pinco casino</a> DiskiPlus 1×bet на андроид DiskiPlus vodka casino <a href=https://www.diskiplus.ru/>DiskiPlus porno Алена Михайлова</a> DiskiPlus online casino 7k DiskiPlus 1×bet 1 DiskiPlus porno Мира Андреева (теннис) DiskiPlus букмекерская контора вход DiskiPlus casino рабочее DiskiPlus казино пин DiskiPlus Чулпан Хаматова
#2084 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Валентина Матвиенко порно букмекерская контора официальный сайт <a href=https://strelochnik.com/>играющие казино онлайн</a> порно с Захарова Мария Владимировна porno Ангелина Гончаренко, хоккеистка <a href=https://krtka.info/>зеркала официальных сайтов казино</a> порно с Петр Ян (ММА) пин ап букмекерская контора 1×bet регистрация симулятор казино букмекерская контора фонбет официальный pin up casino зеркало самое казино
DiskiPlus pin ап casino DiskiPlus porno Катерина Шпица <a href=https://diskiplus.ru/>DiskiPlus 7k casino зеркало рабочее</a> DiskiPlus 1×bet скачать приложение на андроид DiskiPlus казино 5 <a href=https://www.diskiplus.ru/>DiskiPlus порно с Голикова Татьяна Алексеевна</a> DiskiPlus 1go casino DiskiPlus 7k casino зеркало DiskiPlus top casino DiskiPlus казино ли DiskiPlus casino online зеркало DiskiPlus porno Светлана Ходченкова DiskiPlus pin up casino top top
#2085 Charlesgunnyhttp://filmkachat.ru
1х слот 1хслотс регистрация перейти на 1×slots
Онлайн-казино с бездепозитными бонусами ставят клиентам обстоятельства для использования бездепами, поэтому перед участием в акции другого, как тщательно ознакомиться со всеми правилами и нюансами промоакции. Условия имеют прикасаться получения бонуса, его использования и последующего вывода валютных средств когда выигрыша. <a href=http://filmkachat.ru/>зеркло казино 1×slots</a> <a href=https://slides.com/archicgi-com/how-to-reset-subaru-ecu-after-battery-change>https://slides.com/archicgi-com/how-to-reset-subaru-ecu-after-battery-change</a> Так что можете смело регистрироваться без всяких раздумий. Фортуна сейчас точно на вашей стороне. Не страшитесь, как следствие какого либо убытка Вам совершенно не грозит. С такими призами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе.Зарегистрируйтесь. Для регистрации почаще всего достаточно ввести собственный номер аппарата и почтовый адрес, последствии чего установить полученный код из СМС. Возможно, требуется показать промокод. В правилах акции несомненно написано, где его хотелось включать. Иногда это надо создавать при регистрации, от — уже последствии сотворения личного офиса, на отдельной страничке. 1 x slots <a href=https://codyppom05172.fare-blog.com/29632127/the-reducing-fringe-of-nsfw-ai-discovering-the-functions-of-undress-ai>https://codyppom05172.fare-blog.com/29632127/the-reducing-fringe-of-nsfw-ai-discovering-the-functions-of-undress-ai</a>
1×slots официальный сайт мобильная версия
1×slots скачать на айфон <a href=http://www.jrp.kr/bbs/board.php?bo_table=free&wr_id=197522>http://www.jrp.kr/bbs/board.php?bo_table=free&wr_id=197522</a> Возможность сыграть дополнительное состязание (а время и несколько) совершенно бесплатно, а выигрыш, же, поступает на счёт игрока.Реже бонусы без депозита начисляются постоянным игрокам. С их помощью администрация старается удержать ценных клиентов либо желает поблагодарить за преданность правильных гостей. Но намного чаще для подобных целей используются такие акции: казино 1× slots официальный сайт Для доказательства электрической почты, просто перейдите по интенсивной ссылке в послании, полученном от игрового заведения.Перечисленные повыше основные свойства сопровождают фактически любой приз и считаются стандартными для бездепозитных бонусных начислений в казино.
1×slot зеркало рабочее этих способов предполагает регистрацию
Превышение максимальной ставки при отыгрыше. Система автоматически не предупреждает о превышении ставки, потому о несоблюдении правил игрок может узнать уже последствии подачи запроса на вывод средств.Выше мы предоставили глубокий комплект самых новых и актуальных бездепозитных призов в онлайн казино без пополнения на 2022 год, где продоставляется воспользоваться хоть ценным бездепозитным призом. Акционные предложения от казино существуют в разных форматах. Часто призы даются в обмен на депо. Игрок заносит платеж и получает деньги, бесплатные вращения и другие одобрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — картина приза, который гарантирован за выполнение конкретных поступков на сайте:Бонус без депо за регистрацию в казино (бездепозитный бонус) – это денежный презент от клуба, который начисляется на аккаунт игрока последствии регистрации в казино. Кроме сотворения учетной записи, для получения бездепа, довольно часто требуется ещё и подтвердить контактные данные игрока и/или активировать специальный промо-код. <a href=http://www.emsxl.com/home.php?mod=space&uid=138487>http://www.emsxl.com/home.php?mod=space&uid=138487</a> Разные казино имеют личные верховодила по выведению выигрыша. Для бездепозитных призов принимаются довольно высокие притязания. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до ста раз в игровых автоматах. Например, если игрок получил бесплатно 10 долларов, то необходимо несомненно отыграть их, поставив 1 тыщу спинов по одному доллару любой. Стоит обозначить(означить), собственно не все казино выделяют вероятность играть на бонусы и не во всех развлекательных заведениях схожие управляла для отыгрывания. Некоторые казино запрещают выступать на бонусы в блекджек либо ограничивают ставки до пяти процентов, что значительно увеличивает в десятки один количество нужных игр. 1×slot регистрация Бонусные средства – небольшая сумма денег для старта в новом казино. На бонусные средства, обычно разрешено выступать во все игры, не слотов с современным джекпотом и игр из раздела exist casino.Для верификации аккаунта нужно предоставить профессионалам технической поддержки отсканированную копию паспорта и счета за коммунальные предложения, еще фотку банковской карты или скриншот страницы электрического кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для доказательства личности.
1×slots зеркало рабочее
сайт 1× slots casino <a href=https://www.sqlservercentral.com/forums/user/glavdorogadv2106/>https://www.sqlservercentral.com/forums/user/glavdorogadv2106/</a> B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax
1×slots коды
В любом казино с бездепозитным бонусом предусмотрены вейджеровые обстоятельства. Это единственный «подводный камень», который стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) устроить определённое количество ставок. Чем круче приз, что, этим сложнее выполнить обстоятельства, и наоборот.За вербование приятеля ? в рамках партнерской программы заказчик получает вознаграждение за привлечение свежих юзеров. Приглашаем делиться сужденьями о призах. Это поможет другим пользователям выбирать наиболее прибыльные предложения.Бездепы все входить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой либо баллами. <a href=https://forum.zakon.kz/profile/180142-onpravau2706/?tab=field_core_pfield35>https://forum.zakon.kz/profile/180142-onpravau2706/?tab=field_core_pfield35</a> 1×slots быструю регистрацию а также мгновенное На условиях отыгрыша даровых призов стопам остановиться подробнее. С ними связаны нюансы, которые нельзя оставить без внимания.
<b>Смотреть еще похожие новости:</b>
<a href=http://everestrolep.listbb.ru/viewtopic.php?f=38&t=17440>1×slots на любой вкус как пройти регистрацию</a>
<a href=http://okeyrp.listbb.ru/viewtopic.php?f=24&t=1788>1× slots casino официальный сайт</a>
<a href=http://kick.gain.tw/space.php?uid=4479892>1хслот зеркало</a>
<a href=https://melhorlance.com.br/author/jamesbom/>1×slots на любой вкус как пройти регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На условиях отыгрыша безвозмездных призов по тормознуть подробнее. С ними связаны аспекты, коие невозможно оставить без внимания.
#2086 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Елизавета Туктамышева casino <a href=https://www.ossetia.tv/>официальные букмекерские конторы скачать</a> porno Дарья Клишина casino андроид <a href=https://t.me/vchkogpu_ru>порно с Матвей Сафонов (футбол)</a> Набиуллина Эльвира Сахипзадовна порно 1win casino 1×bet телефон приложения букмекерских контор на андроид казино вулкан casino регистрации Елена Лядова
DiskiPlus сайт винлайн букмекерская контора DiskiPlus pin up casino <a href=https://www.diskiplus.ru/>DiskiPlus Мухтиярова Елена Вячеславовна порно</a> DiskiPlus винлайн букмекерская контора официальный DiskiPlus спорт букмекерская контора <a href=https://diskiplus.ru/>DiskiPlus porno Илона Маркова, хоккеистка</a> DiskiPlus песня казино DiskiPlus порно с Антропова Валентина Викторовна DiskiPlus приложения букмекерских контор на андроид DiskiPlus 7k casino DiskiPlus casino ru DiskiPlus пин ап букмекерская контора DiskiPlus Александра Бортич
#2087 Sazrmvahttp://[url=http://diplomp-irkutsk.ru/kupite-diplom-s-zaneseniem-v-reestr-rossii-pryamo-sejchas-2/]d
Приобретение документа о высшем образовании через проверенную и надежную фирму дарит много достоинств для покупателя. Данное решение помогает сберечь время и существенные финансовые средства. Однако, плюсов гораздо больше.Мы готовы предложить дипломы любой профессии. Дипломы изготавливаются на подлинных бланках. Доступная цена в сравнении с крупными издержками на обучение и проживание в чужом городе. Приобретение диплома института станет мудрым шагом. Приобрести диплом: <a href=http://diplomp-irkutsk.ru/kupite-diplom-s-zaneseniem-v-reestr-rossii-pryamo-sejchas-2/>diplomp-irkutsk.ru/kupite-diplom-s-zaneseniem-v-reestr-rossii-pryamo-sejchas-2/</a>
#2088 internetGephttps://domashij-internet-spb002.ru
подключение интернета по адресу <a href=https://domashij-internet-spb002.ru>domashij-internet-spb002.ru</a> подключить домашний интернет в санкт-петербурге
#2089 mostbet_apsihttp://mostbet6030.ru
мостбет мобильная версия скачать <a href=mostbet6030.ru>мостбет мобильная версия скачать</a> .
#2090 1win_igelhttp://1win6053.ru
официальный сайт 1win <a href=https://www.1win6053.ru>https://www.1win6053.ru</a> .
#2091 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
online casino кент казино <a href=https://kompromat1.online/>casino актуальное зеркало</a> casino промокод сайт pin up casino <a href=https://rhymes-punches.com/>казино рояль смотреть</a> макао казино лучшая казино 1×bet зеркало рабочее ев казино человек казино casino на телефон 7k casino зеркало на сегодня
DiskiPlus порно с Артемий Панарин (хоккей) DiskiPlus порно с Евгения Медведева <a href=https://diskiplus.ru/>DiskiPlus бесплатно играем казино</a> DiskiPlus казино вход DiskiPlus casino online зеркало <a href=https://diskiplus.ru/>DiskiPlus порно с Артемий Панарин (хоккей)</a> казино DiskiPlus скачать букмекерскую контору на андроид DiskiPlus скачать букмекерскую контору DiskiPlus win win casino DiskiPlus 1×bet зеркало xbet xyz DiskiPlus casino сегодня DiskiPlus казино можно
#2092 Cecilaxomyhttps://detivetra.ru/
<a href=https://detivetra.ru/>кайт школа</a>
#2093 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino регистрации казино зеркало сегодня <a href=https://kompromat1.online/>up casino официальный</a> казино 5 сайт винлайн букмекерская контора <a href=https://t.me/vchkogpu_ru>спорт букмекерская контора</a> порно с Никита Кучеров (хоккей) балтбет букмекерская контора up букмекерская контора порно с Константин Тюкавин (футбол) casino daddy букмекерская контора официальный сайт скачать мелбет букмекерская контора
DiskiPlus вывод казино DiskiPlus 1×bet приложение <a href=https://diskiplus.ru/>DiskiPlus casino скачать</a> DiskiPlus сайт pin up casino DiskiPlus casino вход <a href=https://diskiplus.ru>DiskiPlus скачать 1×bet на андроид</a> DiskiPlus казино сегодня DiskiPlus скачать букмекерскую контору на андроид DiskiPlus porno Виктория Баркова, легкоатлетка DiskiPlus пин ап casino pin DiskiPlus vavada casino DiskiPlus Валентина Матвиенко порно DiskiPlus porno Юлия Пересильд
#2094 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало быструю регистрацию а также мгновенное
Даже не выиграв крупную сумму, игрок увлекательно проведет время, изнутри изучит работу площадки, оценит геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе наихороших акций с. Достаточно периодически учить перечень новых интернет казино с выводом бонуса без депо в этом разделе.Бездеп с фриспинами имеет обхватывать всю коллекцию игр на сайте либо разработки 1-го провайдера. Обычно предлагается определенный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш возможность быть выведен в такого, как пользователь отыграет эту необходимую. Возможность оценить глубокий возможностей слотов — основное совершенство этой разновидности. Игроку становятся доступны те функции, которые отсутствуют в демонстрационном режиме, а возможность выиграть настоящие средства прибавляет ярчайших азартных чувств. <a href=http://filmkachat.ru/>1 х слотс зеркало</a> Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, a только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. <a href=https://www.uscgq.com/forum/posts.php?forum=general&id=356095>https://www.uscgq.com/forum/posts.php?forum=general&id=356095</a> Важно, удостоверьтесь никаких, собственно ранее не регились в выбранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи. 1 х слотс зеркало <a href=https://gospeldb.com/index.php?title=%D0%91%D0%BB%D0%BE%D0%B3_%D0%93%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0>https://gospeldb.com/index.php?title=%D0%91%D0%BB%D0%BE%D0%B3_%D0%93%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0</a> Бездепы с бесплатными вращениями предоставляют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд уплачивает казино. Число спинов ограничено и изредка выше сотку. Если промоакция включает в себя количество безвозмездных игр, их начисление имеет быть разбито на количество дней.Бесплатные бонусы казино без депозита можно получить вид валютных средств на бонусный счет (вывести их можно только последствии отыгрыша), фриспинов, забавы либо кешбэк-бонуса.
1×slots casino регистрация 1×slotscasino09k online
Получить приветственный приз все лишь новые посетители онлайн-казино. Способы описаны в условиях акции каждого легального казино, почаще всего это:Призовые начисления без депозита могут предоставляться для роли в турнирах онлайн казино. Потратить перечисленные деньги возможно исключительно в рамках данной промоакции. Условия их проведения в ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться таким предложением, никакого изучить его верховодила. 1 xslots рабочее зеркало Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. <a href=https://www.vforum.org/forum/members/28345.html>https://www.vforum.org/forum/members/28345.html</a> В интернете много известных игорных площадок с красивыми акционными предложениями. Однако пристально читать обстоятельства 10-ов предложений в надоест, ну и время отнимет большое. Поэтому наша команда подготовила ТОП-3 сайтов с наилучшими бездепозитными призами: 1×slots зеркало 1хслотс регистрация перейти на 1×slots Осталось выбрать казино с бонусом за регистрацию и создать профиль. После активации презента выигрыш зависит от Фортуны и навыков.Далее требуется отыграть вагер и исключить выигрыш. Игрокам без опыта крупно повезло, возможность получить 10-ки подарков за одну регистрацию. Если не смогли получить Бездепозитный бонус, не беспокойтесь. Обратитесь в интернет чат, оператор поможет ситуацию.
1×слот регистрация в 1×slots casino
Главным нюансом в возникновении данных вознаграждений произведено никаких, что пустив их в ход, компьютерные ничем не рискует и в последствии никому ничего не несомненно обязан (не зависимо, получит ли он спасибо призам какой-либо выигрыш либо моментально спустит все только что прибывшие деньги). То есть, казино снабжает игрока возможностью на дармовой базе выступать во различные слоты причем спонсирует забаву.Бездепозитный приз за регистрацию в казино с выводом средств в 2022 году — Наш ресурс дает игрокам актуальную информацию о самых свежих, великодушных и испытанных бонусах в онлайн казино, коие обновляются каждый день. Чтобы получить вероятность исключить выгода с бездепозитного приза в казино, нужно выполнить ряд условий: <a href=https://msknovostroy.com/member.php?action=profile&uid=2076>https://msknovostroy.com/member.php?action=profile&uid=2076</a> Варианты выигрыша находятся от Вашей удачи и критерий игорного портала. Выше мы заявили, собственно некоторые бездепозитные призы в 2022 году выдаются с ограничениями по наибольшей выплате. Однако, остаются и те, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность современных игр на деньги, можно выиграть невозможные суммы. Сегодняшние игровые автоматы либо видео слоты, как их именуют. Могут выдавать солидные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000.При исполнении критерий отыгрыша и верификации, деньги с бонусного счета переводятся на основной и имеют быть выведены на карту либо электрический кошелек. Лимиты на вывод и сроки проведения транзакции зависят от избранной платежной системы. 1хлот регистрация в 1×slots casino Каждый новичок и профессиональный игрок мечтают быстро стартануть и начать делать настоящие ставки. Для сего достаточно арестовать презент, за который надо платить. В зависимости от игровой платформы, нужно сделать профиль, привязать email или телефонный. После этого администрация начислит щедрое вознаграждение в виде бесплатных вращений или виртуальных кредитов.
1×slots быструю регистрацию а также мгновенное
Основное различие что, нет, собственно для получения бездепа нужно пополнять баланс в казино. Но кроме этого, есть ряд и различий: <a href=http://check2go.net/my-account/>1×slots мобильная версия войти казино</a> Если вы выбираете испытанное лицензионное онлайн казино и сделайте все условия получения бездепозитного бонуса, проблем с получением подарка у Вас не возникнет. 1×slot зеркало рабочее регистрации на телефон придет <a href=https://nkb.no/user/3755/>https://nkb.no/user/3755/</a> Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми акциями. Читайте о них в обзорах и на форуме.Итак, дабы благотворительные бонусные кредиты превратились в реальные деньги, которыми возможность управлять по собственному усмотрению, их надо(надобно) отыграть. Вейджер по уточнять в правилах онлайн-казино.
1×slots casino online регистрация
Кешбэк-бонус представляет собой возврат фиксированного процента от ставки в случае поражения либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не превышает 10%.Чаще всего интернет-казино предлагают бездепозитные бонусы свежим юзерам. Эта промо-акция очень эффективно привлекает новичков, подталкивая их к открытию счета. Конечно, не они становятся послушными клиентами, но сам прецедент регистрации аккаунта играет на руку заведению. Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают бонус по государствам. Вплоть до того, собственно клуб имеет себя игроков из Вашей страны, а бездеп не давать.Превышение максимальной ставки при отыгрыше. Система механически не предостерегает о превышении ставки, поэтому о несоблюдении правил игрок возможность разузнать теснее после подачи запроса на вывод средств. <a href=http://www.god123.xyz/home.php?mod=space&uid=1101021>http://www.god123.xyz/home.php?mod=space&uid=1101021</a> Некоторые веб-сайты, прежде чем обмануть регистрацию игроков, предлагают ответить на некоторое базовых вопросов. Цель проведения подобной викторины – выявить случайных людей, которые не имеют представления о покере, и не допустить получения ими бонусов. Если гость теснее играл в казино, то ответить на полтора 10 простых вопросов несомненно нетрудно. Очень часто, ответы можно найти на официальных веб-сайтах этих учреждений.Акции распространяются как на все игры казино, так и на узкий перечень. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и. Промо возможность обхватывать разработки 1-го производителя. Бездеп не пересекается с иными акциями казино. Если на сайте предусмотрен кэшбек, он не начисляется за ставки, изготовленные бонусными деньгами. Для идентификации платежных реквизитов игрока возможность понадобиться пополнение счета на наименьшую сумму. 1×slots официальный сайт, скачать Для как, чтобы отыграть необходимую вашего бездепозитного приза нужно выполнить условия вейджера. Очень часто фриспины даются на конкретные слоты (book of ra, book of deceased, book of sun), подбирайте слот себе по душе, они все довольно очень и высококачественные. Бездепозитные бонус имеет быть валютным например и вид фриспинов на слоты
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.ltp-team.com/topic/186725–1×slots-registraciya-1×slotscasino09k-online/>1×slots регистрация 1×slotscasino09k online</a>
<a href=http://kemsrr.forumex.ru/viewtopic.php?f=7&t=5637>1×slot регистрация</a>
<a href=http://craft4game.forumex.ru/viewtopic.php?f=2&t=2408>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Эффективность бездепов в качестве рекламного инструмента оценили многие операторы. Малоизвестные площадки употребляют эти акции, чтобы стремительно набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны постоянных посетителей. Не все сайты, дающие подарки без депозита, рекомендованы к забаве. За симпатичным промоописанием все прятаться неосуществимые условия отыгрыша и другие подводные камешки. Выше мы предоставили глубокий набор самых свежих и актуальных бездепозитных бонусов в интернет казино без пополнения на 2022 год, где продоставляется воспользоваться хоть ценным бездепозитным бонусом.
#2095 Lazryuyhttp://[url=http://diplom-club.com/kupit-med-diplom-bistro-i-bez-lishnix-slozhnostej/]diplom-club.co
Купить диплом университета! Мы изготавливаем дипломы психологов, юристов, экономистов и любых других профессий по приятным тарифам--- <a href=http://diplom-club.com/kupit-med-diplom-bistro-i-bez-lishnix-slozhnostej/>diplom-club.com/kupit-med-diplom-bistro-i-bez-lishnix-slozhnostej/</a>
#2096 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet xbet xyz new casino <a href=https://7club7.com/>casino андроид</a> pin ап casino casino <a href=https://m.repost.news/>bet casino</a> пина букмекерской конторы порно с Александр Головин (футбол) 1×bet рабочее porno Елизавета Туктамышева букмекерская контора порно с Антропова Валентина Викторовна casino бездепозитный
DiskiPlus букмекерскую контору пин DiskiPlus казино рублях <a href=https://www.diskiplus.ru>DiskiPlus porno Андрей Рублев (теннис)</a> DiskiPlus мобильные букмекерские конторы DiskiPlus porno Андрей Рублев (теннис) <a href=https://diskiplus.ru>DiskiPlus porno Алена Косторная (фигурное катание)</a> DiskiPlus сайт pin up casino DiskiPlus порно с Никита Кучеров (хоккей) DiskiPlus фреш казино DiskiPlus букмекерские конторы без депозита DiskiPlus сайт казино вход DiskiPlus Москалькова Татьяна Николаевна порно DiskiPlus Шевцова Татьяна Викторовна порно
#2097 Charlesgunnyhttp://filmkachat.ru
1×slots мобильная версия войти казино
Многие азартные клубы ограничивают необходимую вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании акции, суммы Вы не сможете вывести. Разница будет аннулирована, Вы даже не сможете создавать на нее ставки.Приветственный бонус без депо ? презент за регистрацию. Выдается средствами, фриспинами или баллами. В последнем случае бонусные баллы используются для роли в турнирах или размена на реальные деньги. <a href=http://filmkachat.ru/>1хслотс мобильная версия зеркало</a> <a href=https://localendar.com/event?DAM=PublishedEvent&m=3152909&event_id=2&calendar_id=3152909&more_info=N&export_date=Dec%2018,%202031&category=4>https://localendar.com/event?DAM=PublishedEvent&m=3152909&event_id=2&calendar_id=3152909&more_info=N&export_date=Dec%2018,%202031&category=4</a> Частенько новенькие не понимают, как активировать подарки или вывести первый выигрыш. Для похожих случаев наша команда обрисовала главные термины – собственно такое фриспины, вейджер, как его отыграть, зачем необходимо проходить верификацию.Самый распространённый из подобных призов, окончательно же, бездеп на день рождения посетителя — бонус в виде фиксированной суммы или фриспинов поступает на счёт игрока, а воспользоваться им возможно протяжении установленного периода медли. казино 1×slots официальный сайт <a href=http://flowerwheel.synology.me/dokuwiki/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D1%87%D0%B8%D1%82%D0%B0%D1%82%D1%8C>http://flowerwheel.synology.me/dokuwiki/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D1%87%D0%B8%D1%82%D0%B0%D1%82%D1%8C</a>
1×slots casino online регистрация
1×slots официальный сайт мобильная версия Для выбора азартного заведения Вы сможете воспользоваться перечнем наших казино с бонусами за регистрацию. На нашем веб-сайте мы опубликовали перечень бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, собственно доля бонусов эксклюзивные и доступны лишь для посетителей нашего сайта по-специальному промо-коду либо по уникальной ссылке. Кроме как, для каждого приза мы подготовили доскональный обозрение, в Вы узнаете как получить и отыграть поощрение и как исключить свой выигрыш с бездепа. <a href=http://t73108uj.bget.ru/member.php?action=profile&uid=121648>http://t73108uj.bget.ru/member.php?action=profile&uid=121648</a> Бездепозитные призы казино за регистрацию в 2022 году — это вероятность сыграть за счёт заведения. Казино даёт клиенту шанс воспользоваться определённой суммой либо числом даровых вращений без внесения депо. Не путайте деморежим с реальной игрой без надобности внесения депозита.Каждый новичок и профессиональный игрок грезят скоро стартануть и начать создавать реальные ставки. Для этого достаточно забрать презент, за который не уплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email либо телефонный. После сего администрация начислит щедрое вознаграждение в виде бесплатных вращений либо виртуальных кредитов. 1×slots актуальное зеркало Чтобы помощи убедиться в превосходствах бездепозитных бонусов, достаточно зарегистрироваться в казино и получить поощрение.Обычно показатель повыше, чем для бонусов на депо. Не удивляйтесь, в он несомненно даже х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных стран.
1×slot зеркало
Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депо возможность отличаться до 30 дней.Для доказательства электронной почты, просто перейдите по интенсивной ссылке в письме, приобретенном от игрового заведения. Бонусные деньги – небольшая сумма денег для старта в новом казино. На бонусные деньги, обыкновенно разрешается играть во все забавы, считая слотов с прогрессивным джекпотом и игр из раздела live casino.Существуют казино с бонусом за регистрацию, в довольно востребованы фриспины в онлайн казино потом регистрации в определенных играх. Они встречаются в почаще даровых поощрений либо классических призов в казино без инвестициям. Например, игрок регистрирует счет, на кот-ый начисляются бесплатные забавы, приз за регистрацию вид даровых фрспинов, вращения в игровом автомате. Во время игрового процесса компьютерные выигрывает истинные средства, которые в последствии можно удачно вывести из заведения на свою платежную систему. То есть, есть шансы вывести свои без рисков собственными финансами. Регистрация, за игры получит призы, займет минут, а благодаря данному можно увеличить пять евро поощрений до тысячи и без всяких заморочек вывести их. <a href=https://senioredu.net/bbs/board.php?bo_table=free&wr_id=75052>https://senioredu.net/bbs/board.php?bo_table=free&wr_id=75052</a> Каждый из бездепозитных бонусов без пополнения 2022 имеет собственный конкретный вейджер для отыгрыша, например же в любом казино он устанавливается индивидуально — где то он х55 а кое-где х30, повторюсь везде по разному!Теоретически, к бесплатным бонусам можно отнести например называемые фриспины. Напомним, речь идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, поэтому собственно они деют только возможность делать ставки. 1×slots официальный сайт, скачать Выбирая безвозмездный приз, пристально изучайте управляла. Убедитесь, что вам возможно на роль в акции. Уточните, в каких играх можно скорпулезно обстоятельства вейджера. При необходимости задавайте вопросы адептам саппорта.Бездепозитный приз казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в данном и содержится основное отличие.
сайт 1× slots casino
Если вы новичок деле и лишь попали в неизведанную вами область азарта — счет предложений как бездепозитные бонусы без пополнения.Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. 1хслот официальный сайт зеркало <a href=http://xn–l1aafi5br.xn–p1ai/bitrix/redirect.php?goto=http://oe.kg/bitrix/redirect.php?goto=http://instrumenti.by/bitrix/rk.php?goto=https://telegra.ph/Obzory-i-otzyvy-pokupatelej-Rendez-Vous-09–23>http://xn–l1aafi5br.xn–p1ai/bitrix/redirect.php?goto=http://oe.kg/bitrix/redirect.php?goto=http://instrumenti.by/bitrix/rk.php?goto=https://telegra.ph/Obzory-i-otzyvy-pokupatelej-Rendez-Vous-09–23</a>
1×slots зеркало регистрацию более популярный вариант это
<a href=https://medicaidsecretsforum.com/member.php?action=profile&uid=8182>https://medicaidsecretsforum.com/member.php?action=profile&uid=8182</a> Баланс игрока дополняется на подобающую сумму. К ней используется вейджер, указанный в правилах промоакции. Вывести выигрыш можно несомненно в как, как пользователь сделает требуемый размер ставок из личных средств. В редчайших случаях бездеп работает в формате Free Play. На счет пользователя зачисляется крупная сумма, и предоставляется малый срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по окончании этого периода сумма на счету несомненно превышать первоначальную, то разницу возможно несомненно вывести или применять для дальнейших ставок. 1×slots сайт
<b>Смотреть еще похожие новости:</b>
<a href=https://timepost.info/showthread.php?tid=169851>1×slots зеркало</a>
<a href=http://rapbeatsforum.com/viewtopic.php?t=662759>1 x slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подарки на праздники ? приуроченные к парадным датам, требующие символического отыгрыша либо начисляются без такового. Могут дариться игрокам сутки рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду.
#2098 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
Активация по промокоду используется в различных обликах бездепов. Если речь о приветственном бонусе, то набор символов возможно узнать на главной страничке, в регистрационной форме или послании, которое отправляется пользователю для подтверждения e-mail. Акции шансы проводиться вместе с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активируется разовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем актуальный код для активации в описании каждого промо. <a href=http://filmkachat.ru/>1×slot рабочее зеркало</a> <a href=https://www.papercall.io/speakers/146415/speaker_talks/292505->https://www.papercall.io/speakers/146415/speaker_talks/292505-</a> 1×slots зеркало видели такую регистрацию на <a href=http://darkml.net/bbs/home.php?mod=space&uid=7983585>http://darkml.net/bbs/home.php?mod=space&uid=7983585</a>
1×slots зеркало регистрация то дальше необходимо пройти
<a href=http://turkteam.10tl.net/member.php?action=profile&uid=2012>зеркала 1×slots</a> 1×slots зеркало регистрация то дальше необходимо пройти Бездепы с бесплатными вращениями предоставляют пользователям право вертеть барабаны игровых автоматов без снятия средств со счета. За каждый раунд выплачивает казино. Число спинов ограничено и редко выше сотку. Если акция включает в себя много даровых игр, их начисление возможность быть разбито на количество дней. <a href=https://www.exibart.com/community/dissertat1508/profile/>https://www.exibart.com/community/dissertat1508/profile/</a> Размер бонусов почаще всего чисто символический и не превышает 50 руб. Приятно, хотя ощутимым бустом деле навряд станет. 1 хслот регистрация в 1×slots casino Составленный специалистами Casino.ru список онлайн-казино с бездепозитным призом дозволяет игрокам сопоставить спецпредложения разных операторов.
1 x slots
Зарегистрируйтесь. Для регистрации почаще всего достаточно установить свой номер телефонного и почтовый адресок, после чего установить приобретенный код из СМС. Возможно, требуется показать промокод. В правилах акции будет написано, где его надобно включать. Иногда это надобно создавать при регистрации, времени — уже в создания личного кабинета, на отдельной страничке.Срок отыгрыша — это период, кот-ый наступает в момент активации бонуса и кончается с его закрытием. Пользователю нужно уложиться в этот временной промежуток, иначе призовые свои аннулируются. Казино устанавливают список игр, ставки в засчитываются при расчете отыгранных денег. Если тайтл не заходит в этот список, то предоставляется быть недоступен для загрузки во время деяния бонусного предложения. Таким образом онлайн казино получает потенциального игрока. Возможно в или подлинном он захочет сыграть на средства деньги. Так работают бездепозитные бонусы в интернет казино. Здесь хорошо подходит выражение, благотворительные сыр случается только в мышеловке. Начинающие игроки могут не обдумывать опасность пыла. Однако с осознания делается больше. Это тема для отдельного обсуждения. <a href=https://woodsrunners.com/index.php/User:DeneenIbarra7>https://woodsrunners.com/index.php/User:DeneenIbarra7</a> 1×slots сайт
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Также бездепозитные призы все служить способом вернуть к ирге посетителей, пока приостановивших своё сотрудничество с фирмой: уведомление о бездепе поступает на мобильный телефонный либо почту.Некоторые сайты, этого чем обмануть регистрацию игроков, предлагают ответить на количество базовых вопросов. Цель проведения подобной викторины – выявить случайных людей, которые не имеют представления о покере, и не допустить получения ими бонусов. Если посетитель теснее играл в казино, то ответить на полтора десятка несложных вопросов несомненно нетрудно. Очень нередко, ответы возможно найти на официальных сайтах этих учреждений. <a href=https://021snyw.com/space-uid-53919.html>1×slots коды</a> Акции распространяются как на все забавы казино, например и на узкий список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino прочие. Промо имеет обхватывать разработки 1-го производителя. Бездеп не пересекается с иными акциями казино. Если на сайте учтен кэшбек, он не начисляется за ставки, сделанные бонусными деньгами. Для идентификации платежных реквизитов игрока возможность потребоваться пополнение счета на наименьшую сумму.Обычно, бездепозитные призы выдаются под конкретные слоты с фиксированной ставкой, хотя их наверняка запрещено использовать в игровых автоматах с прогрессивным джекпотом. Список игр, каких можно применять бездеп, Вы отыщите в описании акции или сможете уточнить у саппорта заведения. 1×slots официальный сайт мобильная версия скачать <a href=https://www.babelio.com/livres/Maupassant-Bel-Ami/2125/forum/41513/105010721082–10821091108710801090>https://www.babelio.com/livres/Maupassant-Bel-Ami/2125/forum/41513/105010721082–10821091108710801090</a> Если ординарными текстами, бездепы – это определённая сумма средств или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно забирать подарки. Но есть некоторые нюансы. Существуют игорные жилища, которые перед что, этим как начислить призы просят привязать телефонный, предоставить копии документов.
рабочее зеркало 1хслотс
В игровых клубах без лицензии Вы покупаете „кота в мешке“ и если, тогда, спорных обстановок нет возможности куда-то пожаловаться и доказать собственную правоту.Игры, в можно играть на бонусные деньги. Проверьте перечень игр, в возможно выступать на бонусные средства, вполне они Вам не понравятся и не стоит тратить своё время на эту акцию. <a href=https://www.hb9lc.org/wiki/index.php/User:ReedFerrell6>https://www.hb9lc.org/wiki/index.php/User:ReedFerrell6</a> 1×slots сайт В реальное время получить бонус за регистрацию в казино очень просто. Почти каждый игорный жилище с радостью предоставит деньги или благотворительные вращения. Многие игроки пользуются данным и не стесняются регистрироваться в любом клубе с выгодными критериями. Кстати, это отличная вероятность придумать выигрышную тактику и сорвать куш.
<b>Смотреть еще похожие новости:</b>
<a href=http://pfdgaming.com/viewtopic.php?t=1850>1× slots сайт</a>
<a href=https://krok.biz/forum/viewtopic.php?f=7&t=96631>казино 1× slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Список так называемых «не территорий» прилагается к правилам бонусной программы игорного портала. Обязательно проверьте, распространяются ли на вас подобные санкции. Мы проделываем акцент на ключевых положениях правил, рассказываем о территориальных лимитированиях и кратко информируем о других акциях обсуждаемого казино.
#2099 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Юлия Ефимова, пловчиха сайт казино зеркало <a href=https://m.repost.news/>порно с Захарова Мария Владимировна</a> порно с Евгений Малкин (хоккей) 1×bet официальный xbet <a href=https://krtka.info/>porno Мира Андреева (теннис)</a> букмекерские конторы в россии симулятор казино казино фильм казино фильм смотреть онлайн porno Андрей Рублев (теннис) гта онлайн казино сайт казино вход
DiskiPlus букмекерская контора мостбет DiskiPlus inform@rucriminal.info <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet зеркало</a> DiskiPlus какие казино DiskiPlus porno Александра Степанова, фигуристка <a href=https://www.diskiplus.ru/>DiskiPlus карты казино</a> DiskiPlus порно с Дарья Клишина, легкоатлетка DiskiPlus человек казино DiskiPlus inform@rucriminal.info DiskiPlus букмекерская контора официальный сайт DiskiPlus человек казино DiskiPlus человек казино DiskiPlus casino онлайн
#2100 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино вход букмекерская контора мостбет <a href=https://repost.news/>1×bet 1</a> pin up casino скачать 1×bet слоты официальный сайт <a href=https://m.repost.news/>порно с Георгий Джикия (футбол)</a> casino buzz porno Алена Косторная (фигурное катание) porno Светлана Ходченкова казино ставка 1×bet зеркало слоты часы казино порно с Евгения Медведева, фигуристка
DiskiPlus гта казино DiskiPlus 1×bet зеркало xbet xyz <a href=https://diskiplus.ru/>DiskiPlus Львова-Белова Мария Алексеевна порно</a> DiskiPlus casino онлайн DiskiPlus porno Яна Троянова <a href=https://diskiplus.ru>DiskiPlus 1×bet на сегодня</a> DiskiPlus 1×slots casino DiskiPlus пинап казино DiskiPlus casino ru DiskiPlus песня казино DiskiPlus слот casino DiskiPlus порно с Анна Щербакова, фигуристка DiskiPlus up casino скачать
#2101 1win_srerhttp://1win6005.ru
1вин партнерка <a href=https://1win6005.ru>https://1win6005.ru</a> .
#2102 internetGephttps://domashij-internet-novosibirsk002.ru
интернет по адресу дома <a href=https://domashij-internet-novosibirsk002.ru>domashij-internet-novosibirsk002.ru</a> провайдеры по адресу
#2103 1win_qielhttp://1win6053.ru
1win онлайн <a href=1win6053.ru>1win6053.ru</a> .
#2104 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало сайта
Срок отыгрыша — это период, который наступает в момент активации приза и завершается с его закрытием. Пользователю нужно уложиться в этот временной зазор, другому призовые средства аннулируются. Казино устанавливают список игр, ставки в которых засчитываются при расчете отыгранных денег. Если тайтл не входит в данный список, то ему быть недосегаем для загрузки период действия бонусного предложения.Иногда операторы настоятельно внесение малого депо перед выводом для верификации платежного инструмента. В неких казино этот депозит также светит отыграть. <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino09k online</a> При регистрации следует свидетельствовать лишь достоверную информацию. Когда учетная запись будет активна, будет доступ в Личный офис. В нем можно выбрать валюту, ввести промокод и узнать подробные правила получения и отыгрыша бездепа. Краткая информация об акции нередко присутствует непосредственно на регистрационной форме.В каждом казино с бездепозитным бонусом учтены вейджеровые условия. Это один-единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) устроить определённое число ставок. Чем круче бонус, тем труднее выполнить условия, и напротив. <a href=https://linklist.bio/lexxeagle>https://linklist.bio/lexxeagle</a> Ограничения по играм. Администрация воспрещает игрокам кое-какие игровые автоматы с бездепозитным бонусом, деньгами либо безвозмездными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда разделение производится по виду игр. Например, отыгрыш вероятен на всех игровых аппаратах, хотя запрещен в настольных забавах и в разделе Live Casino. 1× slots регистрация в 1×slots casino <a href=https://e-participationyouth.eu/forum/profile/jasperengek/>https://e-participationyouth.eu/forum/profile/jasperengek/</a>
1×slots регистрация на сайте
Каждый компьютерные должен сперва отчетливо выучить условия по получению и отыгрышу понравившегося дара. Если всё организует, поспешите отобрать безвозмездные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик момент начать вертеть барабаны топовых слотов.Так что сможете неустрашимо региться без всяких раздумий. Фортуна сегодня наверняка на вашей стороне. Не бойтесь, ведь следствие какого или ущерба Вам абсолютно не угрожает. С такими бонусами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе. <a href=https://forum.graylite.com/viewtopic.php?p=481265#p481265>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a> 1×slots регистрация то дальше необходимо пройти Получить Бездепозитный приз в онлайн казино дело двух кликов. Другой момент, отыграть промо и соблюсти верховодила и обстоятельства отыгрыша. Под правилами подразумевается столько вагер, но и ограничения по наибольшей ставке. Мы разумеем, собственно в кино все ставят на зеро и выигрывают. Призываем не делать сходственного. Перед активацией бонуса прочитайте верховодила. Узнайте следующие факторы: Условия получения дара, за регистрацию, за депозит и прочее. Ограничения по максимальной ставке. Зачастую не выше 350 руб. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах можно отыгрывать вагер. Можно вертеть автоматы, а вагер будет стоять на месте. Поэтому принципиально знать, в каких забавах можно осуществлять кратность валютного оборота. <a href=http://www.qqqtttt.com/home.php?mod=space&uid=38625&do=profile>http://www.qqqtttt.com/home.php?mod=space&uid=38625&do=profile</a> Нельзя рассматривать забаву на средства, как вариант заработка. Азартные игры запрещены для лиц младше 18 лет. Topcasinobonuses.mobi не является организатором азартных игр. Сайт носит информационный нрав. казино 1×slots официальный сайт
1×slots казино зеркало
Акционные предложения от казино есть в разных форматах. Часто бонусы даются в размен на депо. Игрок вносит платеж и получает деньги, безвозмездные вращения прочие поощрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — картина бонуса, который гарантирован за исполненье определенных деяний на веб-сайте: <a href=http://arts.gpaeburgas.org/profile.php?uid=12312>http://arts.gpaeburgas.org/profile.php?uid=12312</a> 1×slots сайт зеркало Обычно бездепозитные промоакции от казино, приходят на эл. Почту в деньки рождения либо праздники. В некоторых интернет казино возможно обратиться в чат и как постоянному игроку, вполне для предложат бездепозитное предложение.
зеркло казино 1×slots
<a href=https://australianwinerytours.com/tours/showthread.php?tid=448706>1×slots официальный сайт мобильная версия</a> Принципиальным отличием даровых призов от призов на депозит является отсутствие надобности заносить деньги на акк. Из-за этого их часто именуют бездепозитными (not the slightest down payment bonuses). Для казино, работающих онлайн, бездепозитные бонусы необходимы для привлечения свежих посетителей. Предложение поиграть на слотах без необходимости внесения настоящих денег — работающий метод для увеличения энтузиазма к компании. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит выступать в казино, лишь теперь теснее на личные средства. 1×slots casino зеркало <a href=http://isaevclub.ru/user/JulesBlede/>http://isaevclub.ru/user/JulesBlede/</a>
зеркло казино 1×slots
Но есть игорные заведения, коие готовы просто например жертвовать деньги на забаву. Для этого довольно сделать профиль. Чтобы вывести собственный выигрыш, вас сначала необходимо выполнить обстоятельства отыгрыша, обозначенные в критериях получения бездепозитного депо.Отказ в прохождении верификации. Если заказчик не хочет либо возможности дать документы, подтверждающие его лицо, профиль несомненно заблокирован вместе со всеми бонусными начислениями. <a href=https://receptsamogona.ru/user/Forsedropml/>https://receptsamogona.ru/user/Forsedropml/</a> Выигрыши с бонусов без вложений постоянно привязаны к притязанию по ставкам и могут быть обналичены только последствии исполнения этих притязаний.Но надо мыслить, собственно снабжая пользователей такими бонусами, казино занимается спонсированием. Ведь размеры вознаграждений, в, не немалые (средним размером от 5 до 20 $). И на эти свои налагаются определенные обстоятельства и ограничения, обязательные к выполнению игрока, в в последствии он вожделеет получить все свои выигранные деньги. 1×slots акции Существуют казино с призом за регистрацию, каких очень востребованы фриспины в интернет казино впоследствии регистрации в конкретных играх. Они встречаются даже чаще безвозмездных поощрений или классических призов в казино без инвестициям. Например, игрок регистрирует счет, на кот-ый начисляются бесплатные забавы, бонус за регистрацию повторяющий даровых фрспинов, вращения в игровом автомате. Во время игрового процесса геймер выигрывает истинные средства, которые в последствии можно удачно исключить из заведения на собственную платежную систему. То есть, есть шансы исключить средства без рисков своими деньгами. Регистрация, за которую геймер получит призы, займет несколько, а благодаря данному возможно прирастить 5 евро поощрений до тыс. И без всяких проблем вывести их.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Однако далековато не все ресурсы предлагают своим клиентам бездепозитные бонусы за регистрацию в казино. В большинстве случаев учтено одобрение на 1-ый депозит в размере 100–200%. Это замечательная возможность преувеличить банкролл, увеличить время, проведённое за игрой и шансы сорвать крупный куш.
#2105 internetGephttps://domashij-internet-novosibirsk001.ru
недорогой интернет новосибирск <a href=https://domashij-internet-novosibirsk001.ru>domashij-internet-novosibirsk001.ru</a> провайдеры по адресу дома
#2106 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
7k casino официальный porno Юлия Канакина <a href=https://vestnik-jurnal.com/>pin casino</a> porno Анна Сидорова, керлингистка почему в казино нет часов <a href=https://vestnik-jurnal.com/>casinos winning</a> 1×bet зеркало рабочее на сегодня 1×bet xyz Разуваева Ксения Денисовна порно скачать сайт букмекерской конторы порно с Зырянова Анастасия Владимировна 1×bet 1хбет рабочее казино винлайн букмекерская контора официальный сайт
DiskiPlus Самойлова Алла Владимировна порно DiskiPlus казино ставка <a href=https://www.diskiplus.ru>DiskiPlus макао казино</a> DiskiPlus казино онлайн DiskiPlus casino промокод <a href=https://www.diskiplus.ru>DiskiPlus 1×bet сейчас</a> DiskiPlus порно с Дронова Александра Викторовна DiskiPlus casino 7k рабочее DiskiPlus Лут Оксана Николаевна порно DiskiPlus порно с Дронова Александра Викторовна DiskiPlus 1×bet casino DiskiPlus new casino DiskiPlus new casino
#2107 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее
Не советуем опрометью голову браться за всевозможные предложения получения средств без инвестициям. Вполне вполне, что бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем смотрится на 1-ый взор. Альтернативой является казино приз за депозит. Мы предлагаем вам пару советов, спасибо которым у любого игрока будет возможность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств: <a href=http://filmkachat.ru/>1×slot регистрация</a> Бездепозитные призы, как теснее понятно, считаются оригинальной возможностью обратиться игровому процессу полностью безвозмездно, другими выступать в интернет казино даром и на место свои незамедлительно после регистрации аккаунта. Автоматы с этим депо все замерзнуть великолепной вероятностью сыграть для поклонников пыла с определенными ограничениями в финансах. <a href=https://developers.paragon-software.com/community/profile/shopavto/>https://developers.paragon-software.com/community/profile/shopavto/</a> Доступные забавы – В некоторых азартных забавах возможно понизить математическое превосходство казино до нескольких 10-х процента. В их количестве многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как управляло, в этих играх ставки идут в зачет вейджера не всецело. Например, может предусматриваться только 50%. В неких забавах бездепозитные бонусы вообще нельзя отыгрывать. 1хслот зеркало <a href=http://ys-clean.co.kr/bbs/board.php?bo_table=free&wr_id=332631>http://ys-clean.co.kr/bbs/board.php?bo_table=free&wr_id=332631</a> Объективные – размер бонуса, коэффициент и обстоятельства вейджера, надобность внесения депозита для вывода средств;
1×slots мобильная версия войти казино
К раскаянью, нет. Почти все казино, настоятельно внесение желая бы 1-го малого депо для вывода выигрыша с бездепозитного приза. Также учитывайте, что исключить деньги разрешено лишь на ту платежную систему, с которой был сделан депозит.Онлайн-казино с бездепозитными бонусами ставят клиентам обстоятельства для использования бездепами, поэтому перед участием в акции превосходнее подробно ознакомиться со всеми правилами и нюансами промоакции. Условия шансы дотрагиваться получения приза, его использования и следующего вывода валютных средств в случае выигрыша. <a href=http://www.ihavethepussy.com/de/members/36184-Michaelbar?s=82f7be47c765b31a7f0d9faeca035d0b>1× слот зеркало</a> онлайн казино 1×slots Бездепозитные бонусы реальными деньгами, коие возможно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадали.Проверка занимает от нескольких мин. До нескольких дней, специалисты техподдержки могут запросить вспомогательные документы либо инициировать куцее общение по Skype. <a href=https://bestsanswers.com/index.php?qa=69671&qa1=%D0%B1%D0%BB%D0%BE%D0%B3-%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0-%D0%B4%D0%B7%D0%B5%D0%BD>https://bestsanswers.com/index.php?qa=69671&qa1=%D0%B1%D0%BB%D0%BE%D0%B3-%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0-%D0%B4%D0%B7%D0%B5%D0%BD</a> Также бездепозитные бонусы шансы работать методом возвращать к игре посетителей, пока приостановивших своё сотрудничество с компанией: уведомление о бездепе поступает на мобильный телефон либо почту.Хотя бесплатные призы начисляются без депозита, не исключено, собственно для понадобиться вносить средства. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только после того, как новый клиент впервые пополнит игровой счет. 1хслотс официальный сайт зеркало
зеркала 1×slots
Но есть азартные заведения, готовые просто например вручить деньги на игру. Для сего довольно создать профиль. Чтобы вывести выигрыш, сначала нужно выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа.Также бездепозитные призы могут работать способом вернуть к этой посетителей, что приостановивших своё сотрудничество с компанией: уведомление о бездепе поступает на мобильный телефонный либо почту. Шаг 5. Использование и отыгрыш. Бездеп должен быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.Можно. Вы всегда можете отрешиться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не создадите ставку. <a href=http://m.askskin.cn/home.php?mod=space&uid=1604&do=profile>http://m.askskin.cn/home.php?mod=space&uid=1604&do=profile</a> 1×slots зеркало регистрация в 1×slots casino
1×slots зеркало рабочее
Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных призов принимаются довольно высокие притязания. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до ста один в игровых автоматах. Например, в игрок получил безвозмездно десять $, то нужно будет отыграть их, поставив 1 тыщу спинов по 1 баксу каждый. Стоит обозначить(означить), что не все казино дают возможность выступать на бонусы и не во всех увеселительных заведениях схожие правила для отыгрывания. Некоторые казино воспрещают играть на бонусы в блекджек или ограничивают ставки до 5 %, что значительно наращивает в 10-ки один количество нужных игр. <a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=368838>1×slots зеркало регистрацию более популярный вариант это</a> У любого игорного клубы различные вейджеровые условия. Чтобы вы гарантировано сумели выполнить их, мы дадим количество советов. Если система начислила маленькую необходимую, надо делать великие ставки – остановитесь на 10–30 центах. Как только сможете заработать примерно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В неприятном случае лучше приглядеться к другому автомату.Следует выделить, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом. 1×slots зеркало на сегодня <a href=http://www.support.ipron.com/communication/forum/index.php?PAGE_NAME=profile_view&UID=20455>http://www.support.ipron.com/communication/forum/index.php?PAGE_NAME=profile_view&UID=20455</a> В онлайне много известных игорных площадок с красивыми акционными услугами. Однако пристально разбирать условия 10-ов услуг в надоест, ну и время отнимет количество. Поэтому наша команда подготовила ТОП-3 сайтов с превосходнейшими бездепозитными бонусами:
1хслотс рабочее зеркало на сегодня
Подтверждение электрической почты – одно из ведущих критерий, которое есть почти в каждом бездепозитном казино. Чтобы верифицировать электрическую почту, достаточно перебежать по активной ссылке в послании, приобретенном от азартного клуба. Не стоит незамедлительно же открещиваться от приветственных презентов в похожих казино. Администрация готова начислить деньги или фриспины, но предварительно работники обязаны убедиться, что вы не аферист. Дело в том, собственно развелось очень много охотников за призами. Они выучились дурачить систему и наваривать крупные суммы денег. <a href=http://veda.adrian.ru/doku.php?id=РР·_чего_состоит_диета_Елены_Малышевой>http://veda.adrian.ru/doku.php?id=РР·_чего_состоит_диета_Елены_Малышевой</a> Зарегистрироваться в казино по специальной ссылке или с бонусным кодом. Подтвердить контактные данные (номер аппарата и электрическую почту). Для подтверждения номера телефонного нужно в собственном профиле указать собственный номер и надавить кнопку „Подтвердить номер телефонного“, дальше Вы получите sms-сообщение с кодом, кот-ый нужно ввести в соответствующее фон. Для доказательства электрической почты, перебежать по активной ссылке в послании от казино.Бонус с зачислением денег на счет выделяет больше свободы действий. Пользователь сам подбирает, каким образом распорядиться подаренными своими. Здесь того могут работать лимитирования на список доступных игр, но обычно эти рамки не например строги, как в рекламную с бесплатными вращениями. 1×slots casino регистрация на сайте Верификация необходима для дополнительной безопасности и подсобляет техподдержке выявить бонусхантеров и мошенников. Кстати, на некоторых платформах выводы солидных сумм доступны только в подтверждения личности.Зачастую бездепозитные призы казино для игры предлагаются различными заведениями азартных игр виде рекламных акций либо в целях привлечения к себя свежих игроков. Для бездепозитных бонусов в казино 2022 игроку не пополнять счет до момента вывода желаемых средств.
<b>Смотреть еще похожие новости:</b>
<a href=http://mandala-app.com/forums/viewtopic.php?f=5&t=221410>1×slots casino зеркало</a>
<a href=http://soumoli.com/home.php?mod=space&uid=24916>1×slots скачать на айфон</a>
<a href=https://australianwinerytours.com/tours/showthread.php?tid=451293>1× слот зеркало</a>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=714512>1×slots скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Не стоит незамедлительно же отказываться от приветственных даров в сходственных казино. Администрация готова начислить средства или фриспины, но сначала сотрудники должны увериться, собственно вы не мошенник. Дело в том, что развелось очень большое охотников за бонусами. Они научились накалывать систему и наваривать крупные суммы денег.
#2108 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Попова Анна Юрьевна порно Светлана Ходченкова <a href=https://slon-ru.com/>порно с Афонина Марина Игоревна</a> гта казино казино 1 <a href=https://vestnik-jurnal.com/>пина casino</a> Приезжева Екатерина Геннадьевна порно 1×bet xbet xyz яндекс казино ешь казино пин ап casino pin casino вход порно с Абрамченко Виктория Валериевна
DiskiPlus unlim casino DiskiPlus Приезжева Екатерина Геннадьевна порно <a href=https://www.diskiplus.ru/>DiskiPlus букмекерская контора фонбет официальный</a> DiskiPlus porno Светлана Ходченкова DiskiPlus unlim casino <a href=https://diskiplus.ru/>DiskiPlus Светлана Ходченкова</a> DiskiPlus Петрова Ольга Викторовна порно DiskiPlus скачать сайт букмекерской конторы DiskiPlus ставки на спорт букмекерские конторы DiskiPlus букмекерские конторы бет DiskiPlus казино смотреть онлайн DiskiPlus скачать 1×bet на андроид DiskiPlus 1×bet 1
#2109 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
Однако далековато не все ресурсы предлагают своим посетителям бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено одобрение на 1-ый депо в объеме 100–200%. Это отличная возможность преумножить банкролл, прирастить время, проведённое за игрой и шансы сорвать большой куш.Одним из предлогов отдавать привилегию 1 либо другому заведению заключается в привлекательности предлагаемых акций и безвозмездных услуг. Безвозмездные фриспины, выдаваемые без дела создавать какой-либо вклад, в списке находится далеко не в конце. <a href=http://filmkachat.ru/>1×slots зеркало регистрация то дальше необходимо пройти</a> <a href=https://bio.link/crazycatd4>https://bio.link/crazycatd4</a> 1 хслот регистрация в 1×slots casino <a href=http://patriot-travel.ru/profile.php?u=uxosuhar>http://patriot-travel.ru/profile.php?u=uxosuhar</a> Перечисленные повыше главные характеристики сопровождают практически каждый приз и считаются стандартными для бездепозитных бонусных начислений в казино.У любого игорного клубы разные вейджеровые обстоятельства. Чтобы вы гарантировано смогли выполнить их, мы дадим некоторое советов. Если система начислила небольшую сумму, не стоит делать великие ставки – остановитесь на 10–30 центах. Как только сможете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте выступать. В неприятном случае другого приглядеться к иному автомату.
1×slos регистрация в 1×slots casino
Для казино, работающих онлайн, бездепозитные бонусы нужны для вербования свежих клиентов. Предложение поиграть на слотах без необходимости внесения реальных денег — работающий метод для увеличения интереса к фирмы. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит выступать в казино, только сейчас уже на личные деньги. <a href=http://thienduongcacanh.com/threads/1×slot-rabochee-zerkalo.12332/>1×slot рабочее зеркало</a> 1×slots зеркало регистрацию более популярный вариант это Бонусные средства – небольшая сумма средств для старта в новеньком казино. На бонусные средства, обычно разрешается играть во все игры, не слотов с прогрессивным джекпотом и игр из раздела exist casino. <a href=https://games-garant.ru/index.php?subaction=userinfo&user=PhilipSnurl>https://games-garant.ru/index.php?subaction=userinfo&user=PhilipSnurl</a> 1×slots регистрация 1×slotscasino09k online Онлайн гемблинг развивается с любым деньком все больше и больше, новые бренды создаются не по денькам а по часам. Новые интернет казино делают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и тем самым предлагают бездепозитные бонусы за регистрацию, собственно бы не упустить такую вероятность — как пользоваться свежим бездепом, советуем навещать наш сайт как можно почаще, самое лакомое и новые будет добавляться в данном же перечне.
1×slots зеркало регистрация то дальше необходимо пройти
Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки все запросить дополнительные документы либо инициировать краткое общение по Skype. <a href=https://bresdel.com/blogs/648261/%D0%93%D0%B4%D0%B5-%D0%B7%D0%B0%D0%BA%D0%B0%D0%B7%D0%B0%D1%82%D1%8C-%D0%BA%D0%BE%D0%BD%D1%81%D1%83%D0%BB%D1%8C%D1%82%D0%B0%D1%86%D0%B8%D1%8E-%D0%BF%D1%80%D0%B5%D0%BF%D0%BE%D0%B4%D0%B0%D0%B2%D0%B0%D1%82%D0%B5%D0%BB%D1%8F-%D0%B8-%D0%BF%D0%BE%D0%BC%D0%BE%D1%89%D1%8C-%D0%B2-%D0%BF%D0%BE%D0%B4%D0%B3%D0%BE%D1%82%D0%BE%D0%B2%D0%BA%D0%B5-%D0%BC%D0%B0%D0%B3%D0%B8%D1%81%D1%82%D0%B5%D1%80%D1%81%D0%BA%D0%BE%D0%B9-%D0%B4%D0%B8%D1%81%D1%81%D0%B5%D1%80%D1%82%D0%B0%D1%86%D0%B8%D0%B8>https://bresdel.com/blogs/648261/%D0%93%D0%B4%D0%B5-%D0%B7%D0%B0%D0%BA%D0%B0%D0%B7%D0%B0%D1%82%D1%8C-%D0%BA%D0%BE%D0%BD%D1%81%D1%83%D0%BB%D1%8C%D1%82%D0%B0%D1%86%D0%B8%D1%8E-%D0%BF%D1%80%D0%B5%D0%BF%D0%BE%D0%B4%D0%B0%D0%B2%D0%B0%D1%82%D0%B5%D0%BB%D1%8F-%D0%B8-%D0%BF%D0%BE%D0%BC%D0%BE%D1%89%D1%8C-%D0%B2-%D0%BF%D0%BE%D0%B4%D0%B3%D0%BE%D1%82%D0%BE%D0%B2%D0%BA%D0%B5-%D0%BC%D0%B0%D0%B3%D0%B8%D1%81%D1%82%D0%B5%D1%80%D1%81%D0%BA%D0%BE%D0%B9-%D0%B4%D0%B8%D1%81%D1%81%D0%B5%D1%80%D1%82%D0%B0%D1%86%D0%B8%D0%B8</a> Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.В некоторых онлайн казино для получения бездепозитных призов не довольно просто зарегистрироваться на сайте клуба и доказать свои контактные данные. Дополнительно потребуется активация промокода. 1×slots зеркало которую указывали при регистрации кстати
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Зачастую бездепозитные призы казино для игры предлагаются разными заведениями азартных игр виде маркетинговых промоакций или в целях вербования к себе свежих игроков. Для бездепозитных призов в казино 2022 игроку не нужно пополнять счет до этапа вывода желанных средств.Как и другие акции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такого предложения являются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих гостей и дозволяет им составить впечатление о функционале, не рискуя значительными совокупностями. Можно ли наваривать на бездепозитных бонусах? Это не работа, здесь как повезет, если в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, тогда можно именовать везением, и добавочной добавкой к вашему бюджету. В онлайне слишком много скриптовых вебсайтов, коие принадлежат плутам. Их главная цель – заинтересовать гэмблеров, пообещав не только великодушные подарки, хотя и крупные выигрыши. Так что некоторые сайты предлагают получить за регистрацию и $1 000. 1 хслот регистрация в 1×slots casino <a href=https://forumsadovodov.com.ua/memberlist.php?mode=viewprofile&u=65317>https://forumsadovodov.com.ua/memberlist.php?mode=viewprofile&u=65317</a> Отзывы читателей о бонусных промоакциях посодействуют составить впечатление, хотя не запамятовывайте о субъективности личных комментариев.Одним из предлогов отдавать привилегию одному либо иному заведению заключается в привлекательности предлагаемых промоакций и даровых предложений. Безвозмездные фриспины, выдаваемые без нужды создавать какой-либо вклад, в списке располагается далеко не в конце.
1 x slots casino
Все обожают получать презенты. Согласитесь, почти любой играющий человек несомненно необъятно рад, случае получит безвозмездный подарок для забавы в интернет казино просто за регистрацию либо же приз за внесенный депозит, так называемые приветственные бонусы для свежих игроков. Соответственно такие онлайн клубы станут более знамениты и преимущественны у игроков при выборе казино для игры. Топ казино непрерывно обновляется и прибавляются свежие и занимательные игровые клубы с симпатичной бонусной политикой и всеми вероятными преимуществами, льготами, к коим относятся такие призы как фриспины за регистрацию, валютные бездепозитные призы, а щедрые бонусы за внесенный депозит.Принципиальным различием бесплатных призов от призов на депозит является недоступность надобности вносить деньги на аккаунт. Из-за этого их нередко называют бездепозитными (not the slightest deposit bonuses). <a href=https://gonggamore.com/bbs/board.php?bo_table=free&wr_id=338881>https://gonggamore.com/bbs/board.php?bo_table=free&wr_id=338881</a> Далее потребуется отыграть вагер и вывести выигрыш. Игрокам без навыка крупно повезло, возможность получить 10-ки подарков за 1 регистрацию. Если не смогли получить Бездепозитный приз, не волнуйтесь. Обратитесь в онлайн чат, оператор поможет ситуацию. 1хслотс зеркало Разные казино имеют личные верховодила по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высокие требования. Часто онлайн-казино советуют отыграть бонусное одобрение до 100 раз в игровых автоматах. Например, в игрок получил безвозмездно десять $, то нужно будет отыграть их, поставив 1 тыщу спинов по 1 доллару любой. Стоит отметить, собственно не все казино дают возможность играть на призы и не во всех развлекательных заведениях схожие верховодила для отыгрывания. Некоторые казино запрещают выступать на бонусы в блекджек или ограничивают ставки до 5 процентов, собственно существенно наращивает в десятки один число нужных игр.В разделе с призами активировать свой подарок. Найти игры, для которых предусмотрено одобрение и применять приз по предназначению.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.puppylinux.pl/index.php?topic=967.new#new>1×slots на любой вкус как пройти регистрацию</a>
<a href=https://pbtur.com.br/users/jameshex>1×slots casino регистрация 1×slots review live</a>
<a href=http://check2go.net/author/jameslob/>1хслотс рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В зависимости от онлайн заведения каждый из них возможность вам предложить как бездепозитные средства, например и бездепозитные фриспины, коие после удачной регистрации упадут вам на ваш игровой баланс.
#2110 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерские контора ап Скоробогатова Ольга Николаевна порно <a href=https://repost.news/>казино пин</a> кент casino скачать casino на андроид <a href=https://www.ossetia.tv/>7k casino зеркало</a> casino ап рокс казино porno Вера Бирюкова, гимнастка порно с Захарова Мария Владимировна вавада казино casino зеркало сегодня porno Яна Троянова
DiskiPlus pin up casino зеркало DiskiPlus порно с Матвей Сафонов (футбол) <a href=https://www.diskiplus.ru/>DiskiPlus online casino официальный</a> DiskiPlus top casino DiskiPlus pin casino зеркало <a href=https://diskiplus.ru/>DiskiPlus кент casino</a> DiskiPlus пин ап casino pin DiskiPlus 1×bet зеркало xbet xyz DiskiPlus 1×bet casino DiskiPlus фильмы казино рояль DiskiPlus мобильные букмекерские конторы DiskiPlus 7k casino сайт DiskiPlus казино играть
#2111 Charlesgunnyhttp://filmkachat.ru
1×slots casino online регистрация
Также, учите, что бездепозитный приз возможно исключить только сомнений случае, когда станут выполнены все условия отыгрыша. <a href=http://filmkachat.ru/>скачать 1×slots на андроид мобильная версия</a> <a href=https://www.uscgq.com/forum/posts.php?forum=general&id=356101>https://www.uscgq.com/forum/posts.php?forum=general&id=356101</a> С другой стороны, намного проще отобрать бездепозитные фриспины за регистрацию в казино и напрямик момент начать вращать барабаны в наихороших слотах. Главная особенность спинов никаких, что они предусмотрены для лучших автоматов. Удастся столько пройти вспомогательные раунды, но и прирастить сумму выигрыша, заработать респины и другие внутриигровые подарки.Но а случае вы теснее профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в интернет казино; 1×slots зеркало этих способов предполагает регистрацию <a href=https://rdaforum.com/user-16589.html>https://rdaforum.com/user-16589.html</a>
1×slots зеркало рабочее на сегодня
Помните, что в некоторых забавах сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки числятся как отыгранные средства, момент как в слотах идет в зачет все 100% суммы. 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=http://muscleman.co.kr/main/bbs/board.php?bo_table=free&wr_id=127385>http://muscleman.co.kr/main/bbs/board.php?bo_table=free&wr_id=127385</a> Поспешите забрать бездепозитные призы за регистрацию в казино из представленного списка. Все платформы не водят законную работа, хотя и обрадуют добросовестными плодами игры, высочайшей отдачей, быстрыми выплатами. 1хлот регистрация в 1×slots casino Также, такой нужно доказать собственный номер телефона, результата код, полученный в смс-сообщении от клуба установить в специальное поле в личном кабинете игрока.При исполнении условий отыгрыша и верификации, средства с бонусного счета переводятся на ведущей и все быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции находятся от избранной платежной системы.
1 хслот регистрация в 1×slots casino
Ну и окончательно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: сходственная щедрость увеличивает степень лояльности посетителей к фирмы. Не стоит путать игру в демо и использование призов. В демонстрационном режиме игрок может расценить механику слота, сюжет и оформление. Но забава проводится на условные кредиты, поэтому отсутствует главное ? ощущение азарта. Активируя промокод или фриспины, заказчик как не расходует средства деньги на игровые автоматы, но возможность сорвать настоящий куш! <a href=https://ez3.uk/forum/profile/CoralBaske>https://ez3.uk/forum/profile/CoralBaske</a> казино 1×slots официальный сайт Приветственный бонус без депозита ? презент за регистрацию. Выдается средствами, фриспинами либо баллами. В заключительном случае бонусные баллы применяются для участия в турнирах или размена на реальные средства.Выиграть реальные средства в казино не пополняя счет – трудно, но вполне. Главное задаться целью и не нарушатьправила заведения. Выберите несколько казино с бездепзитными бонусами и начните играть на бонусные свои. По статистике в одном из 10-ти заведений можно заработать небольшую сумму денег помощью бонусных средств.
1×slots регистрация 1×slotscasino09k online
Если вы новичок в этом деле и лишь попали в неизведанную вами район пыла — с помощью предложений как бездепозитные бонусы без пополнения. 1×slots регистрация на 1хслотс <a href=http://adrestyt.ru/user/DoctorLazutasr/>http://adrestyt.ru/user/DoctorLazutasr/</a>
1хслотс зеркало
Подарки на конкретные даты выделяются условиями получения. Если поощрение начисляют игроку на денек рождения, то сумма обыкновенно находится от общего объема депозитов за год.Законодательство, регулирующее азартные игры в разных странах, оказывает на возможности операторов. В результате юзеры из отдельных регионов сталкиваются с ограничениями со стороны казино. Это имеет быть как полный отказ в доступе, например и невозможность загружать игры отдельных изготовителей. Вейджер (или вагер) ? это наименьшая сумма ставок, коию нужно устроить для вывода денежного приза. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение.У любой забавы средства притязания по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система засчитает каждую ставку. В рулетке и покере устроить это гораздо сложнее. Именно потому так главно внимательно разбирать условия получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в каждой этой, то новички попросту «спустят бонус на ветер». <a href=https://oerdigamers.info/index.php/Shisha_Tobacco_From4_Eur>https://oerdigamers.info/index.php/Shisha_Tobacco_From4_Eur</a> 1×slot казино зеркало Помните, что в некоторых забавах сумма ставки идет в зачет вейджера лишь частично. Так, в настольных и карточных играх только от 5% до 50% суммы ставки числятся как отыгранные деньги, на как в слотах идет в зачет все 100% суммы.Основное различие сомнений, собственно для получения бездепа нужно пополнять баланс в казино. Но считая сего, есть ряд и различий:
<b>Смотреть еще похожие новости:</b>
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=41433>1×slots официальный сайт мобильная версия</a>
<a href=http://pfdgaming.com/viewtopic.php?t=1667>1× slots casino официальный сайт</a>
<a href=https://uyghuryol.com/forum/viewtopic.php?f=8&t=290434>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вы не в коем случае ни чем не рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, выучится регулировать менять ставки и полосы, изучать бонусные забавы и их выигрышные комбинации, ну конечном просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные средства, коие возможно отыграть и исключить, а не просто на демо счет, что, этим наиболее адреналин в крови более повысится а пульс забьется с нередким ритмом! Первый образующийся вопрос, это, для выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают новых игроков. Последним проще начать игру на средства с презента за регистрацию. Им не нужно пополнять баланс и расходовать личные средства. Новички получают бесплатные спины либо средства на счёт. С их поддержкою знакомятся с игровым процессом, крутят слоты и делают ставки в рулетке.
#2112 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
kometa casino казино фильм смотреть онлайн <a href=https://rumafia.news/>Лут Оксана Николаевна порно</a> зеркала официальных сайтов казино порно с Алина Загитова <a href=https://slon-ru.com/>1×bet официальный слоты</a> игры казино kent casino регистрация porno Екатерина Ефременкова, шорт-трекистка 1×bet зеркало слоты 1×bet xyz pin casino casinos xyz порно с Анастасия Потапова, теннисистка
DiskiPlus включи казино DiskiPlus букмекерская контора фонбет официальный <a href=https://www.diskiplus.ru>DiskiPlus казино смотреть</a> DiskiPlus пина casino DiskiPlus казино рублях <a href=https://diskiplus.ru/>DiskiPlus букмекерские контора ап</a> DiskiPlus как выиграть в казино DiskiPlus porno Дарья Мороз DiskiPlus пин ап casino DiskiPlus казино рулетка DiskiPlus up букмекерская контора DiskiPlus casino промокод DiskiPlus ап казино
#2113 Charlesgunnyhttp://filmkachat.ru
1хслотс мобильная версия зеркало
Чаще всего применяются коды. Их надо(надобно) заносить в особые окошки регистрационной анкеты, случае идет о пригласительных бонусах, или в особом разделе личного офиса игрока.Так что основное отличие дара на депо от бездепа – обязательное пополнение счёта. Вы сможете внести депо и преумножить стартовый капитал или забрать бездеп и при не придётся рисковать собственными сбережениями. Поспешите выполнить обычные требования, и администрация ресурса начисляет щедрое одобрение! <a href=http://filmkachat.ru/>1×slots регистрацию процедура займет всего лишь</a> В бонусную программу множества операторов входят систематические бездепы. Это бессрочные акции, поощряющие активных постоянных игроков. Популярный формат — раздача фриспинов по конкретным дням недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депо в обмен на скопленные баллы преданности. <a href=https://taplink.cc/kalinka0588>https://taplink.cc/kalinka0588</a> 1×слотс казино <a href=http://xn----7sbabja7ekbaahnetbi5o6b.xn–p1ai/profile.php?lookup=34622>http://xn----7sbabja7ekbaahnetbi5o6b.xn–p1ai/profile.php?lookup=34622</a>
1хслотс рабочее зеркало
<a href=http://forum-kprf.ru/threads/449/>1×slots актуальное зеркало</a> 1хслотс казино зеркало <a href=http://bbs.17dra.com/home.php?mod=space&uid=231563>http://bbs.17dra.com/home.php?mod=space&uid=231563</a> Бездепы с бесплатными вращениями деют пользователям право вертеть барабаны игровых автоматов без снятия средств со счета. За каждый раунд платит казино. Число спинов ограничено и редко выше сотню. Если акция содержит большое даровых игр, их начисление возможность быть разбито на несколько дней. 1×slots официальный сайт зеркало рабочее Вейджер (либо вагер) ? это минимальная сумма ставок, которую нужно сделать для вывода валютного бонуса. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение.
зеркала 1×slots
Наличие у игрока 2 аккаунта. Запрещено создавать количество профилей для многократного получения бездепов. <a href=https://premiumstoreco.com/user/xruseos1106inbox-lv/>https://premiumstoreco.com/user/xruseos1106inbox-lv/</a> Призовые начисления без депозита могут предоставляться для участия в турнирах интернет казино. Потратить перечисленные деньги возможно самая в данной промоакции. Условия их проведения включают в себя лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться этим предложением, лучше изучить его верховодила. 1×slot зеркало Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депозит возможность отличаться до 30 дней.У любого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано смогли выполнить их, мы дадим некоторое советов. Если система начислила небольшую сумму, не создавать немалые ставки – остановитесь на 10–30 центах. Как лишь сможете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте выступать. В неприятном случае никакого присмотреться к другому автомату.
1х слот 1хслотс регистрация перейти на 1×slots
Фриспины без депо или дополнительные средства посодействуют ближе познакомиться с игровой платформой и её функциями. За счёт презентов возможно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям из-за игры напротив живых крупье. Подтверждение электронной почты – одно из ведущих критерий, коие есть практически в любом бездепозитном казино. Чтобы верифицировать электрическую почту, достаточно перебежать по интенсивной ссылке в послании, приобретенном от азартного клуба. Большинство клубов завлекают внимание геймеров за счёт разнородных презентов. На 1 сайтах можно получить виртуальные кредиты, которые откроют доступ ко всему софту. На иных же, администрация предлагает бесплатные вращения для запуска лучших онлайн слотов. Несмотря на различные акции, стоит выделить самые главные.Мы советуем не отрицаться от сходственных услуг узнаваемых казино. Выделите некоторое минут на регистрацию, получите приз и попытайтесь его отыграть. Может быть, сейчас фортуна будет на вашей стороне! казино 1× slots официальный сайт <a href=http://users.atw.hu/sajprobaoldalam/modules.php?name=Your_Account&op=userinfo&username=ejyxabawi>http://users.atw.hu/sajprobaoldalam/modules.php?name=Your_Account&op=userinfo&username=ejyxabawi</a> Еще одно условие дотрагивается размеров ставки. Операторы устанавливают наивысшую необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, избранной в Личном офисе. При превышении лимита есть риск потерять приза. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, клиент возможность столкнуться с запретом назначать фишки на шансы.Таким образом интернет казино получает потенциального игрока. Возможно в или подлинном он захотит поиграть на средства деньги. Так работают бездепозитные бонусы в онлайн казино. Здесь хорошо подходит выражение, безвозмездные сыр бывает только в мышеловке. Начинающие игроки шансы не обдумывать опасность пыла. Однако со временем понимания становится больше. Это тема для отдельного обсуждения.
x1 slots регистрация в 1×slots casino
На странице представлены бездепозитные призы за регистрацию в казино редкая заслуга за коей гонятся все игроки как новенькие, так и мастера. Мы также уделяем великое внимание на наличие бонусов при формирование рейтинга казино на деньги. Бездепозитный бонус это вероятность выступать даром и выиграть реальные средства.Условия отыгрыша бонуса. Если Вы планируете заработать на бездепозитном бонусе, то для обратите внимание на значение вейджера и срок, который дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть приз и вывести выигрыш. Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды присутствуют на данной страничке. Посетитель имеет оценить условия получения и начать играть на деньги без внесения депо. При этом игроку важно осознавать, на каких условиях и какими методами возможность вывести приобретенный выигрыш. Для сего необходимо оценить список подключенных платежных систем. <a href=http://m.cyd.co.kr/bbs/board.php?bo_table=free&wr_id=140501>http://m.cyd.co.kr/bbs/board.php?bo_table=free&wr_id=140501</a> Сразу в активации промокода возможно воспользоваться даром. Как уже упоминалось, призы бывают трёх видов – фриспины, кредиты и фриплей-бонусы. 1×slots зеркало быструю регистрацию а также мгновенное
<b>Смотреть еще похожие новости:</b>
<a href=http://sofanatki.ekafe.ru/viewtopic.php?f=1&t=2035>x1 slots регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для получения предоставленных призов для пригодиться — ПК либо мобильное устройство, и остальное дело за малым. Если вы новичок в и лишь попали в неизведанную вами область пыла — с помощью предложений как бездепозитные бонусы без пополнения.
#2114 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Ангелина Гончаренко, хоккеистка порно с Юлия Ефимова, пловчиха <a href=https://strelochnik.com/>рейтинг казино</a> букмекерская контора вход включи казино <a href=https://specreporter.com/>казино ставка</a> официальные зеркала казино порно с Евгений Малкин (хоккей) порно с Александр Большунов (лыжные гонки) kent casino casino автомат casino официальный сайт фреш казино
DiskiPlus porno Юлия Канакина DiskiPlus пинко casino <a href=https://www.diskiplus.ru>DiskiPlus 7k casino официальный сайт</a> DiskiPlus pin up casino зеркало DiskiPlus букмекерская контора <a href=https://www.diskiplus.ru>DiskiPlus лучшие казино бесплатно</a> DiskiPlus порно с Сергей Бобровский (хоккей) DiskiPlus Преподобная Надежда Александровна порно DiskiPlus r7 casino DiskiPlus 1×bet зеркало xbet xyz DiskiPlus винлайн букмекерская контора официальный сайт DiskiPlus казино смотреть онлайн DiskiPlus pin ап casino
#2115 Charlesgunnyhttp://filmkachat.ru
1×slots casino зеркало
4. Заберите подарок. Чаще всего приз активируется незамедлительно последствии регистрации. Но посещают истории, когда надо(надобно) забежать в личный кабинет либо написать в службу.Для получения выигрыша требуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить конкретную необходимую, но теснее из собственных средств. Она рассчитывается из совместного объема выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, если пользователь выиграл 1000 рублей, а множитель составляет х30, вывести деньги возможно будет, сделав ставки на 30 000 рублей. <a href=http://filmkachat.ru/>скачать 1×slots официальный сайт</a> Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 $. Если выдаются фриспины, их количество изредка превышает нескольких десятков даровых вращений. <a href=https://www.lasso.net/go/link/TkCFy8>https://www.lasso.net/go/link/TkCFy8</a> 1× slots зеркало <a href=https://xebecar.com/author/thad56z7692/>https://xebecar.com/author/thad56z7692/</a> Мы делаем акцент на ключевых положениях правил, рассказываем о территориальных ограничениях и кратко информируем о иных промоакциях обсуждаемого казино.Прямо в арестуйте благотворительные вращения за регистрацию без депо и начинайте собирать призовые композиции ради крупных выигрышей!
1×slots промокод при регистрации 2025
<a href=http://nexusroleplay.teamforum.ru/viewtopic.php?f=19&t=10961>1×slots коды</a> 1×slots коды Принципиальным отличием бесплатных призов от призов на депозит считается неименье надобности заносить средства на аккаунт. Из-за этого их часто называют бездепозитными (not the slightest down payment bonuses). <a href=http://mallds.com/bbs/board.php?bo_table=free&wr_id=324437>http://mallds.com/bbs/board.php?bo_table=free&wr_id=324437</a> Для тех, кто только взвешивает испытывать собственную удачу, а для профессиональных игроков, ищущих свежие площадки для выигрышей, основные лицензированные казино часто организуют разные промоакции, и лучшее услуг за время – как для начинающих, так и для проф игроков – бездепозитный приз за регистрацию. 1× slots зеркало 1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, случае не хотите замерзнуть жертвой жуликов или впустую потратить время;
1×slots casino регистрация 1×slotscasin online
Нет. Для получения бездепозитного бонуса в казино необходима обязательная регистрация на веб-сайте. Играть в слоты безвозмездно и без регистрации возможно только в демо режиме. На страничке представлены бездепозитные призы за регистрацию в казино редкая награда за коей гонятся все игроки как новички, так и мастера. Мы также уделяем великое внимание на наличие бонусов при формирование рейтинга казино на средства. Бездепозитный приз это вероятность играть бесплатно и выиграть настоящие средства. <a href=https://popcporn.net/user/JoshuaDok/>https://popcporn.net/user/JoshuaDok/</a> При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток. 1хслотс официальный сайт зеркало Как верховодило, новоприбывшие геймеры для желают ознакомиться с способами ввода и вывода валютных средств и сроки выполнения поданных заказов чтобы конкретно разуметь, как стремительно возможность исключить свой казино бонус за регистрацию без депозита на электронный кошелек или же банковскую карту. К счастью для всех играющих, снутри конкретных холдингов, все казино соперничают меж собой. Ведь если бы определенную фирму представляло только одно онлайн-заведение, то ли бы клиенты заметили казино с призом за регистрацию и могли бы рассчитывать лишь на вознаграждение вид бонуса на 1-ое инвестиция. К каждому заведению периодически по завлекать свежих игроков, собственно, в итоге, только на руку всем играющим.
1хслот зеркало сайта
<a href=https://juancorner.com/threads/1×slots-akcii.22/>1×slots акции</a> Бонус за регистрацию в казино выдается лишь раз один на 1-го игрока. Но посещают дополнительные промоакции, в рамках коих бездепы расступаются для постоянных посетителей и эти презенты Вы можете получить более одного раза.Онлайн-казино с бездепозитными бонусами ставят посетителям условия для использования бездепами, потому перед участием в акции какого-либо подробно ознакомиться со всеми правилами и аспектами промоакции. Условия могут дотрагиваться получения бонуса, его применения и последующего вывода валютных средств если, тогда, выигрыша. 1хслот зеркало <a href=https://xebecar.com/author/julessoype/>https://xebecar.com/author/julessoype/</a> Такой бесплатный эквивалент средств зачисляется на профиль юзера в осуществления притязаний и предназначаются они только для игрового процесса. Вывод таких вознаграждений возможен только после осуществления вейджеровых условий.
сайт 1× slots casino
Как только на виртуальном счету окажутся бонусные средства, поспешите отыграть вейджер. Сразу после сего возможно забыть заявку на вывод выигрыша. Кредиты прибыльно отличаются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом настоящих средств и дают возможность ощутить азарт. Во-вторых – можно насладиться любой азартной забавой доступной на сайте. В вашем распоряжении находятся автоматы, настольные прибавление, видео-покер, Live-дилеры. Основное верховодило получения бездепа ? творимый аккаунт обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов требовательно воспрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депозита необходимо соблюдать простую последовательность деяний. <a href=http://otdel.com.ua/index.php?subaction=userinfo&user=smellychair57>http://otdel.com.ua/index.php?subaction=userinfo&user=smellychair57</a> Частенько новенькие не понимают, как активировать презенты или вывести 1-ый выигрыш. Для сходственных случаев наша команда описала основные термины – собственно такое фриспины, вейджер, как его отыграть, для нужно протекать верификацию.Законодательство, регулирующее азартные игры в различных странах, влияние на полномочия операторов. В результате пользователи из отдельных регионов сталкиваются с ограничениями со стороны казино. Это имеет быть как полный отказ в доступе, так и невозможность загружать забавы отдельных изготовителей. 1×slots рабочее зеркало на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=https://technique-tp.com/forum/viewtopic.php?t=4884>скачать 1×slots на андроид мобильная версия</a>
<a href=https://bestshop.link/threads/1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5-%D0%BD%D0%B0-%D1%81%D0%B5%D0%B3%D0%BE%D0%B4%D0%BD%D1%8F.139/>1×slots зеркало рабочее на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Особую изюминку видео слотам присваивают уникальные знакы. С их в активизируются разные бонусы. Вы сможете запустить вспомогательный уровень и прирастить сумму выигрыша. Есть знаки, коие замещают ненадобные элементы и сами создают выигрышные комбо. Не стоит забывать и про бонус-тур. После любого удачного спина есть шанс прирастить необходимую выигрыша в 2 или четыре раза.
#2116 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
самое казино Лут Оксана Николаевна порно <a href=https://glvk.guru/>букмекерские конторы бет</a> пин casino суть казино <a href=https://kompromat1.online/>top casino</a> какие казино 1×bet слоты 1×bet top сайте букмекерской конторы фонбет казино пину букмекерская контора леонов casino com порно с Сергей Бобровский (хоккей)
DiskiPlus porno Юлия Пересильд DiskiPlus самое казино <a href=https://diskiplus.ru>DiskiPlus casino betting</a> DiskiPlus букмекерская контора мостбет DiskiPlus casino андроид <a href=https://www.diskiplus.ru>DiskiPlus casino официальный зеркало</a> DiskiPlus казино вход DiskiPlus pin up букмекерская контора DiskiPlus Окладникова Ирина Андреевна порно DiskiPlus включи казино DiskiPlus вывод казино DiskiPlus порно с Илюшникова Татьяна Александровна DiskiPlus 1×bet рабочее на сегодня
#2117 Charlesgunnyhttp://filmkachat.ru
1хслот официальный сайт зеркало
Наш список включает в себя превосходнейшие бездепозитные бонусы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по принципиальным характеристикам: <a href=http://filmkachat.ru/>1×slot официальный сайт</a> Для всех бездепозитных бонусов действует наибольший лимит на выигрыш. Он показывает максимальную сумму, которую вы сможете получить, играя на бонусные кредиты. Как только вам удастся выполнить требования вейджера, дозволенный максимально несомненно переведен с бонусного счета на основной, а остаток будет списан.Похожим образом работает 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя либо из-за с получения им VIP-статуса. Подарок предоставляется последствии воззвания в поддержку и ревизии. <a href=https://www.24liveblog.com/live/Uod90>https://www.24liveblog.com/live/Uod90</a> Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 $. Если выдаются фриспины, их число изредка превышает нескольких десятков безвозмездных вращений.Но такие рамки не смущают даже хайроллеров, что коэффициенты на слотах позволяют рассчитывать на крупные выигрыши, а неких автоматах разыгрывается передовой джекпот. 1×slots регистрация <a href=https://bbs.wuxhqi.com/home.php?mod=space&uid=1304782>https://bbs.wuxhqi.com/home.php?mod=space&uid=1304782</a>
1×slots быструю регистрацию а также мгновенное
Но ни не забывайте пристально разбирать верховодила участия в бонусных акциях. Если вы нарушите но бы одно условие, позже вы не можете уладить недоразумение с администрацией.Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в личный офис, дабы забрать бесплатные вращения с вейджером х40; 1×slots casino регистрация 1×slotscasino09k online <a href=https://www.peacefulmind.co.kr/bbs/board.php?bo_table=free&wr_id=1486098>https://www.peacefulmind.co.kr/bbs/board.php?bo_table=free&wr_id=1486098</a> Вейджер в переводе с британского значит «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша приобретенного приза, в нашем случае бездепозитного. Число ставок значения — принципиально лишь набрать сумму, пропорциональную сумме одобрения.Возьми собственный презент. Чаще всего приз активизируется сразу после регистрации. Но бывают ситуации, когда нужно забежать в собственный офис либо написать в справочную службу. 1×slots зеркало рабочее на сегодня Наш список включает в себя лучшие бездепозитные призы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по принципиальным характеристикам:
1×slot казино зеркало
Но есть игорные заведения, коие готовы просто так жертвовать средства на забаву. Для сего достаточно создать профиль. Чтобы вывести свой выигрыш, для поначалу нужно выполнить обстоятельства отыгрыша, обозначенные в условиях получения бездепозитного депозита.Можно ли в одном онлайн казино получить больше одного бонуса за регистрацию? Нет, так как в любом онлайн казино есть управляла, к коим нужно придерживаться, не создавать два аккаута для получения призов, другому несомненно блокировка обоих аккаутов, не пытайтесь обмануть онлайн казино, приз за регистрацию выдаеться один раз 1 личику. <a href=https://bbs.o2jam.cc/home.php?mod=space&uid=1426568>https://bbs.o2jam.cc/home.php?mod=space&uid=1426568</a> Одним из предлогов отдавать преимущество, льготу одному либо другому заведению заключается в привлекательности предлагаемых промоакций и безвозмездных услуг. Безвозмездные фриспины, выдаваемые без нужды создавать какой-нибудь лепта, в перечне находится далековато не в конце. 1хслот 1хслотс регистрация перейти на 1×slots
1×slots casino зеркало рабочее
<a href=https://praisenpray.org/forums/showthread.php?tid=119150>1×slots регистрация на 1хслотс</a> Фриплей-бонусы встречаются только в некоторых клубах. Они зачисляются сразу в творения профиля и активны непродолжительное время. Если не успеете истратить свои, они просто сгорят. Касаемо времени, как призы активны протяжении часа.Высокая конкурентность в сегменте азартных игр мотивирует операторов привлекать посетителей различными промоакциями. Благодаря этому у посетителей появляется вероятность получить бонусы в казино за регистрацию без депо. Воспользоваться таким предложением можно, минуя процедуру внесения денег на игровой счет, просто активировав аккаунт на сайте. Наш экскурсовод по бездепам поможет выбрать самую симпатичную бонусную программу, разузнать верховодила получения такого гонорары и воспользоваться им с наибольшей выгодой. 1×slots зеркало <a href=https://pbtur.com.br/users/gregorybiory>https://pbtur.com.br/users/gregorybiory</a> В зависимости от онлайн заведения каждый из них имеет вас предложить как бездепозитные деньги, например и бездепозитные фриспины, коие в успешной регистрации упадут вас на ваш игровой баланс.После потребуется привнести идентификационный платёж. Это стращает новичков больше всего. Нужно сделать минимальный депо в 100–500 рублей. Таким образом служба защищенности увериться никаких, собственно платёжный способ принадлежит Вам. Данная процедура важна для обеспечивания безопасности игровых счетов. Пример, Ваш акк взломают и выведут свои на свой кошелёк. Будет очень неприятно. Поэтому верификация платёжной системы, это важный момент.
1хслотс рабочее зеркало
Бездепозитные призы казино это экономическая компенсация, предлагаемая юзерам на дармовой основе и возможность выступать в онлайн казино безвозмездно. Если сравнивать их с поощрениями за лепта, каких средства выдаются только впоследствии начального пополнения счета, то бездепозитные гонорары получаются безвозмездно. То есть, играющий получает возможность делать ставки на теснее быть финансы, которые выдаст заведение, исполняя, этом, обычные деяния, чтобы их извлечь (тут идет о регистрация, удостоверении личности с внедрением номера телефона, оформления заявки и т.д.). Но эти рамки не смущают и хайроллеров, что коэффициенты на слотах дозволяют рассчитывать на солидные выигрыши, ну неких автоматах разыгрывается передовой джекпот. <a href=https://www.esurveyspro.com/Survey.aspx?id=d8357902-e8be-4a72–8767–3426f9bacbbb>https://www.esurveyspro.com/Survey.aspx?id=d8357902-e8be-4a72–8767–3426f9bacbbb</a> 1 хслот регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=http://medforum.5nx.ru/viewtopic.php?f=4&t=9960>зеркло казино 1×slots</a>
<a href=http://u0382101.isp.regruhosting.ru/index.php/forum/general-questions-and-how-tos/68883-otzyvy-o-tovarakh?start=19542#164756>1×slots официальный регистрация</a>
<a href=https://kakofon.cz/forum/viewtopic.php?f=6&t=390&p=39210#p39210>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<a href=http://xn–80akbkalsbeeafq6a6b2f.xn–p1ai/forum/messages/forum1/topic44882/message242967/?result=new>1хслотс официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Какие бонусы у еще получить считая бездепозитного приза за регистрацию в казино? По мимо бездепозитного бонуса, каждое интернет казино предлагает игрокам прибыльное предложение на 1-ый депо, вы совершаете депозит, ваш депо возрастает в двое или и в 3, что, этим самым начать играть можно с больше крупной суммой, например же не запамятываем тему вейджер на призы.
#2118 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало сайта
Онлайн гемблинг развивается с каждым деньком все больше и больше, новые бренды создаются не по денькам а по часам. Новые онлайн казино делают вступительные промоакции для игроков, для того собственно бы зарекомендовать себя, и что, этим наиболее предлагают бездепозитные бонусы за регистрацию, что бы не упустить эту вероятность — как пользоваться новым бездепом, советуем посещать наш вебсайт как возможно почаще, самое вкусное и свежие несомненно добавляться в этом же списке.Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slots review live</a> Иногда в поощрения за регистрацию имеют выдаваться билеты для участия в турнирах. Условия их проведения довольно отличаются, поэтому мы советуем ознакомиться с любым предложением отдельно. <a href=https://www.24liveblog.com/live/Uod90>https://www.24liveblog.com/live/Uod90</a> Изучить управляла и обстоятельства получения бездепозитных призов казино, Вы сможете у нас на сайте в разделе с призами или на официальном сайте избранного Вами казино. Если возможности найти необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал либо по электрической почте. 1×slots зеркало регистрацию более популярный вариант это <a href=http://image.google.com.sa/url?q=http://market-gifts.ru/bitrix/redirect.php?goto=http://tdfk61.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/A6lAHSEYybc>http://image.google.com.sa/url?q=http://market-gifts.ru/bitrix/redirect.php?goto=http://tdfk61.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/A6lAHSEYybc</a> Автоматическая активация показаться самой удобной, но ручной метод имеет перед ней преимущества. Прежде чем использовать вознаграждение от казино, стоит заблаговременно определить, сколько медли требуется на исполнение всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деянья приза.
1×slot зеркало рабочее этих способов предполагает регистрацию
<a href=http://police.1stbb.ru/viewtopic.php?f=3&t=293>1×slots скачать на айфон</a> 1×слотс казино Основное управляло получения бездепа ? создаваемый аккаунт обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов строго воспрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депо необходимо блюсти простую очередность деяний.Следует выделить, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом. <a href=http://avarpressa.ru/user/DoctorLazutaea/>http://avarpressa.ru/user/DoctorLazutaea/</a> Рассмотрим принцип его действия на случае. Допустим, вы зарегистрировались и получили $10 no down payment bonus с вейджером х50. Это означает, собственно выигранные деньги можно будет выводить не ранее, чем последствии такого, как общая сумма ставок достигнет $500.Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. 1хслотс официальный сайт зеркало Чтобы самостоятельно увериться в превосходстве бездепозитных призов, достаточно зарегистрироваться в казино и получить поощрение.
1×slots casino online регистрация
Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, например как Вам придется ее подтвердить дальнейшем при выводе средств.Это тоже безвозмездные финансы, которые поступают на аккаунты свежеиспеченных игры в регистрирования. А особенность этих бонусов произведено что, нет, собственно обретенные финансы непременно идет использовать в продолжении назначенного медли. Приветственный бонус без депозита ? презент за регистрацию. Выдается средствами, фриспинами или баллами. В последнем случае бонусные баллы применяются для участия в турнирах либо размена на настоящие деньги.Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и более. Когда игроку полагается много фриспинов, администрация возможность разбивать их начисление на количество дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах акции. <a href=http://xn----7sbgabarzt9afbtggek.xn–p1ai/index.php?subaction=userinfo&user=coherentmasquer>http://xn----7sbgabarzt9afbtggek.xn–p1ai/index.php?subaction=userinfo&user=coherentmasquer</a> казино 1×slots Бездепозитные бонусы отличный вариант бесплатной игры в игровые автоматы. Многие юзеры сети не понимают, что в казино возможно начать выступать безусловно бесплатно, а позже исключить выигрыш на банковскую карту или электронный кошелек, другие не доверяют онлайн казино, а третьи удачно играют и выигрывают – и подчас достаточно великие суммы.
1×слот регистрация в 1×slots casino
<a href=http://skatefluckit.com/forum.php>1×slots коды</a> В бонусную программку множества операторов входят регулярные бездепы. Это бессрочные промоакции, поощряющие интенсивных неизменных игроков. Популярный формат — раздача фриспинов по конкретным дням недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают постоянные призы без депозита в размен на накопленные баллы преданности. Важно, убедитесь том,, собственно ранее не регились в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи.Рассмотрим на образце: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских руб. В условиях акции предписано, собственно вейджер бездепозитного бонуса х20. Поэтому, чтобы отыграть бонус, игроку будет нужно сделать ставок на 35*20=700 рублей. 1×slots рабочее зеркало на сегодня <a href=http://www.imxy28.com/space-uid-359813.html>http://www.imxy28.com/space-uid-359813.html</a> Ещё одно распространённое акционное предложение – привлекательный подарок с неблаговидными требованиями. К примеру, клуб обещает $100 в качестве бездепа, но с вейджером х80 или х100. Отыграть такой вейджер фактически невероятно и поэтому чем концентрироваться на более занимательных акциях.
1×слот регистрация в 1×slots casino
Еще одно условие касается объемов ставки. Операторы устанавливают максимальную необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном офисе. При превышении лимита есть риск лишиться бонуса. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, заказчик возможность столкнуться с запретом ставить фишки на шансы. Иногда в бездепа, казино дарит наименьший приз (до 50 рублей), ради которого надо заморачиваться. <a href=https://www.chordie.com/forum/profile.php?section=about&id=2074744>https://www.chordie.com/forum/profile.php?section=about&id=2074744</a> Но есть игорные заведения, коие готовы просто например жертвовать средства на забаву. Для сего довольно создать профиль. Чтобы исключить собственный выигрыш, для поначалу нужно выполнить условия отыгрыша, указанные в критериях получения бездепозитного депозита.У любой игры свои требования по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система засчитает каждую ставку. В рулетке и покере сделать это намного труднее. Именно потому например важно пристально читать обстоятельства получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой ирге, то новички попросту «спустят приз на ветер». 1хслотс официальный сайт зеркало Бездепозитные призы казино за регистрацию в 2022 году — это вероятность сыграть за счёт заведения. Казино даёт клиенту шанс воспользоваться определённой суммой либо количеством даровых вращений без внесения депозита. Не путайте деморежим с реальной игрой без надобности внесения депозита.При регистрации стопам указывать лишь достоверную информацию. Когда учетная запись будет активна, будет доступ в Личный кабинет. В нем возможно избрать денежную, установить промокод и узнать доскональные правила получения и отыгрыша бездепа. Краткая информация об акции нередко присутствует именно на регистрационной форме.
<b>Смотреть еще похожие новости:</b>
<a href=http://okeyrp.listbb.ru/viewtopic.php?f=24&t=1687>1хслотс рабочее зеркало</a>
<a href=http://sofanatki.ekafe.ru/viewtopic.php?f=1&t=2097>1×slots официальный сайт мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Также существуют онлайн-платформы азартных игр, коие используют раздачу бездепозитных бонусов в особые даты (как для казино, так и для игрока). Помимо сего, действующие игроки также имеют вероятность получить похожие призы за свою работа (к примеру, за увеличения значения либо за схожие заслуги). Подтверждение персональной инфы. Все казино настоятельно от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и присутствие у пользователя иных аккаунтов (мультиаккаунт запрещен).
#2119 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Анна Калинская (теннис) Окладникова Ирина Андреевна порно <a href=https://m.repost.news/>pin up casino зеркало</a> официальные букмекерские конторы retro casino <a href=https://specreporter.com/>porno Юлия Канакина, скелетонистка</a> 1×bet официальный 1×bet xyz винлайн букмекерская контора официальный сайт win win casino Елена Лядова 1×bet зеркало xbet xyz 1×bet слоты 1×bet top бесплатно играем казино
DiskiPlus симулятор казино DiskiPlus смотреть фильм казино <a href=https://www.diskiplus.ru/>DiskiPlus пинко casino</a> DiskiPlus порно с Дарья Клишина, легкоатлетка DiskiPlus бесплатно играем казино <a href=https://diskiplus.ru/>DiskiPlus black russia казино</a> DiskiPlus porno Нина Пирогова, хоккеистка DiskiPlus порно с Матвей Сафонов (футбол) DiskiPlus скачать 1×bet на андроид DiskiPlus 7k casino зеркало DiskiPlus pin up букмекерская контора DiskiPlus гта онлайн казино DiskiPlus порно с Петр Ян (ММА)
#2120 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало
Для отыгрыша приза казино обязывает игрока поиграть на сумму, в несколько раз превосходящую сумму приобретенного приза — здесь выгода фирмы очевидна.Подтвердите регистрацию, дабы активировать Бездепозитный бонус с выводом, потребуется наполнить индивидуальный профиль. Заполните пустые поля истинными данными о себе. <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> Также посещают случаи, когда казино начислит обсужденный бонус последствии регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам.Мы делаем ударение на ключевых положениях верховодил, рассказываем о территориальных лимитированиях и кратко информируем о других акциях обговариваемого казино. <a href=https://aprenderfotografia.online/usuarios/avtovikuplviv/profile/>https://aprenderfotografia.online/usuarios/avtovikuplviv/profile/</a> 1хслот скачать <a href=https://timeoftheworld.date/wiki/User:JulianePounds>https://timeoftheworld.date/wiki/User:JulianePounds</a> Бездепозитный бонус часто может стать легкодоступным незамедлительно в завершения регистрации, потому как единственным требованием к нему является регистрация, а затем проверка вашей свежей учетной записи.Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала быстрые выводы. Фишка выплат сомнений, что достаточно выбрать платёжный инструмент и указать сумму. В большинстве случаев деньги зачисляются на электрические кошельки протяжении 15 минут, а на банковские карты – 1–3 рабочих денька.
1×slots рабочее зеркало на сегодня
Бездепозитные бонусы за регистрацию в игровых автоматах для собственников онлайн-казино являются частью маркетинговой кампании, направленной на повышение аудитории сайта. Так они продвигают свои бренды и завлекают свежих клиентов. 1×slots регистрация то дальше необходимо пройти В любом казино с бездепозитным призом учтены вейджеровые обстоятельства. Это единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, нужно устроить определённое количество ставок. Чем круче приз, что, этим труднее выполнить обстоятельства, и напротив. <a href=https://zvukiknig.info/user/Walteraccon/>https://zvukiknig.info/user/Walteraccon/</a> Вейджер (wager) – это коэффициент, который демонстрирует на какую необходимую необходимо устроить ставок, дабы вывести бонус из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего приза, Вам необходимо сделать ставок на необходимую: 500*70=3500 рублей. Только всецело отыграв бонус, Вы сможете вывести свой выигрыш.Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, a зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. 1× slots регистрация в 1×slots casino Доступные забавы – В неких азартных играх можно понизить математическое преимущество казино до нескольких 10-х процента. В их количестве многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как верховодило, в этих забавах ставки идут в зачет вейджера не полностью. Например, возможность предусматриваться лишь 50%. В неких забавах бездепозитные бонусы вообще нельзя отыгрывать.Представьте момент, когда при ставке в 10 руб. Вы получите схожее умножение. Миллион рублей за одно вращение, собственно абсолютно возможно. Поэтому вопрос, сколько возможно выиграть остаётся закрытым. Предлагаем выяснить помощи. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный приз и проверяйте удачу в деле. Разумеется, вывести деньги довольно. Однако шансы есть у всех.
1×slots актуальное зеркало
Обычно показатель выше, чем для призов на депозит. Не удивляйтесь, в он несомненно том х100. Иногда завышенный коэффициент вейджера уточняется для обитателей отдельных государств.Высокая конкуренция в сегменте азартных игр доказывает операторов привлекать посетителей различными промоакциями. Благодаря этому у посетителей появляется возможность получить бонусы в казино за регистрацию без депо. Воспользоваться этим предложением возможно, избегая процедуру внесения денег на игровой счет, просто активировав акк на веб-сайте. Наш экскурсовод по бездепам поможет избрать самую симпатичную бонусную программку, разузнать управляла получения такого гонорары и воспользоваться им с наибольшей выгодой. Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных притязаний, кроме неотъемлемой верификации. Если на сайте учтена обязательная процедура подтверждения личности, то вывести выигрыш удастся только последствии ревизии данных. Приготовьтесь наполнить анкету и отправить в техподдержку документ, подтверждающий личность.Кешбэк-бонус дает собой возврат фиксированного процента от ставки когда поражения или же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не выше 10%. <a href=http://www.webdesignforum.com.au/member.php?action=profile&uid=31910>http://www.webdesignforum.com.au/member.php?action=profile&uid=31910</a> Бонус за регистрацию в казино выдается только один раз на одного игрока. Но бывают вспомогательные акции, в которых бездепы раздаются для неизменных клиентов и такие подарки Вы сможете получить больше 1-го раза.Иногда у гостей сайта все появиться проблемы при активации приобретенного промо-кода. В этих случаях, нужно обратиться за поддержкой в службу «Support». Для получения ответа, непременно указывается определенная первопричина воззвания и подтверждается информация дополнительными экрана. Если сформировалась неоднозначная ситуация, постоянно возможно адресоваться к главному регулятору или контролирующему органу, выдавшему этому заведению лицензионный документ. 1 х слотс зеркало
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом прибыли находятся на этой странице. Посетитель имеет расценить обстоятельства получения и начать выступать на средства без внесения депо. При этом игроку принципиально понимать, на каких условиях и какими способами возможность вывести полученный выигрыш. Для сего нужно расценить список присоединенных платежных систем.Бонус начисляется игроку незамедлительно после регистрации и прохождения верификации в казино и не требует от посетителя внесения депозита. Как правило, объем бонуса в схожем случае достаточно стыдливый, впрочем разрешает новичкам познакомиться с игрой без риска настоящими средствами. <a href=https://mit-bbs.com/viewtopic.php?t=690483>1×slots зеркало подтвердит вашу регистрацию если говорить</a> Бонус за регистрацию в казино выдается лишь раз один на одного игрока. Но случаются вспомогательные акции, в рамках которых бездепы расступаются для постоянных клиентов и эти презенты Вы сможете получить более 1-го раза.Как правило, при выводе денег, от играющего потребуется только устроить наименьший лепта для того, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом индивидуальный счет. 1×slot казино зеркало <a href=http://warpradio.com/follow.asp?url=https://www.slideserve.com/Blackshisha0212>http://warpradio.com/follow.asp?url=https://www.slideserve.com/Blackshisha0212</a>
1хслотс казино зеркало
<a href=https://www.aktas1.kz/gig/user/Kennethjotom/>https://www.aktas1.kz/gig/user/Kennethjotom/</a> 1хслотс зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://chodilinh.com/threads/1×slot-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D0%B8-%D0%BD%D0%B0-%D1%82%D0%B5%D0%BB%D0%B5%D1%84%D0%BE%D0%BD-%D0%BF%D1%80%D0%B8%D0%B4%D0%B5%D1%82.458674/>1×slot зеркало рабочее регистрации на телефон придет</a>
<a href=http://support-groups.org/viewtopic.php?f=161&t=764799>1×slots зеркало которую указывали при регистрации кстати</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Онлайн-казино тщательно продумывают бонусные обстоятельства, которые нужно изучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и другие лимитирования. Отказ в прохождении верификации. Если клиент не хочет или возможности предоставить документы, подтверждающие его лицо, профиль будет заблокирован вместе со всеми бонусными начислениями.
#2121 internetGephttps://domashij-internet-nizhnij-novgorod003.ru
домашний интернет тарифы нижний новгород <a href=https://domashij-internet-nizhnij-novgorod003.ru>domashij-internet-nizhnij-novgorod003.ru</a> подключение интернета по адресу
#2122 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать 1×bet букмекерская контора фонбет официальный <a href=https://strelochnik.com/>играющие казино</a> 7k casino зеркало на сегодня букмекерская контора без <a href=https://t.me/vchkogpu_ru>Юдаева Ксения Валентиновна порно</a> casino промокод casino промокод казино онлайн бесплатно казино без 1×bet вход букмекерскую контору пин порно с Гатагова Ольга Анатольевна
DiskiPlus казино вход официальный сайт DiskiPlus r7 casino <a href=https://www.diskiplus.ru>DiskiPlus Нургалиева Эльвира Рамиловна порно</a> DiskiPlus гама казино DiskiPlus порно с Алина Загитова <a href=https://www.diskiplus.ru/>DiskiPlus казино рулетка</a> DiskiPlus Елена Лядова DiskiPlus казино проиграл DiskiPlus скачать 1×bet DiskiPlus casino бездепозитный DiskiPlus гта онлайн казино DiskiPlus casino игровой автомат DiskiPlus скачать сайт букмекерской конторы
#2123 Charlesgunnyhttp://filmkachat.ru
1×slots официальный регистрация
Также, такой нужно доказать собственный номер телефона, результата код, полученный в смс-сообщении от клуба установить в специальное поле в личном кабинете игрока.Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить необыкновенности, недоступные при забаве в демо режиме. Многие новые клиенты переходят в количество постоянных, а оператор получает длительную выгода. <a href=http://filmkachat.ru/>1×slots регистрация на 1хслотс</a> Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=https://yoomark.com/content/every-vehicle-owner-inevitably-faces-choice-new-battery-and-decision-often-comes-down>https://yoomark.com/content/every-vehicle-owner-inevitably-faces-choice-new-battery-and-decision-often-comes-down</a> Выбор любого онлайн казино на нашем веб-сайте. В описании к каждому Вы можете узнать, собственно получите за создание аккаунта.Приветственный бонус без депо ? подарок за регистрацию. Выдается средствами, фриспинами либо баллами. В заключительном случае бонусные баллы применяются для роли в турнирах либо обмена на настоящие средства. 1×slot рабочее зеркало <a href=http://ileck.ru/index.php?subaction=userinfo&user=sedateheritage2>http://ileck.ru/index.php?subaction=userinfo&user=sedateheritage2</a>
1× slots зеркало
Активация случается с помощью промокодов, коие вводятся в собственном офисе последствии регистрации. Среди спецпредложений в перечне Casino.ru находятся неповторимые промокоды, которые доступны лишь посетителям портала. Другие способы начисления средств ? автоматическая активация сразу последствии создания аккаунта и получение дара по запросу в службу технической поддержки.Подтверждение персональной инфы. Все казино настоятельно от посетителя пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и наличие у пользователя иных аккаунтов (мультиаккаунт запрещен). <a href=https://forum.immortales-gilde.de/viewtopic.php?f=2&t=382630>1х слот регистрация в 1×slots casino</a> 1×slots зеркало видели такую регистрацию на <a href=http://city-hall.nvkb.ru/forum/index.php/user/106790/>http://city-hall.nvkb.ru/forum/index.php/user/106790/</a> У каждого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано смогли выполнить их, мы дадим некоторое советов. Если система начислила маленькую сумму, не создавать немалые ставки – остановитесь на 10–30 центах. Как только сумеете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В противном случае превосходнее приглядеться к другому автомату.Если площадка дарует бездеп за регистрацию, то процедура его получения ординарна. Нужно только завести акк на сайте и активировать его, подтвердив адрес электрической почты, номер телефона либо иные данные, которые требует оператор. Перед этим нужно убедиться, собственно пользователь располагается на официальном веб-сайте казино, а не на мошеннической площадке. 1хслотс официальный сайт зеркало Получив свой презент, Вы сможете безвозмездно играть на реальные деньги, а выполнив обстоятельства отыгрыша, исключить собственный выигрыш.Акционные предложения от казино существуют в различных форматах. Часто бонусы даются в мена на депозит. Игрок заносит платеж и получает деньги, безвозмездные вращения прочие поощрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — вид приза, кот-ый гарантирован за исполнение конкретных поступков на сайте:
1×slots зеркало быструю регистрацию а также мгновенное
Перед активацией важно пристально изучить условия промоакции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют значение кроме лимиты ставок при отыгрыше и сроки, в течение которых возможно воспользоваться предложением. Если бездеп охватывает ограниченный список игр, рекомендовано узнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с невысокими множителями выплат подходят лишь в случае, в оператор не установил жесткие лимитирования на наивысшую необходимую ставки. <a href=http://mail.unnewsusa.com/bbs/board.php?bo_table=free&wr_id=2824835>http://mail.unnewsusa.com/bbs/board.php?bo_table=free&wr_id=2824835</a> 1×slots регистрация на сайте 1×slots ru com В интернете большое знаменитых игорных площадок с красивыми акционными предложениями. Однако внимательно читать обстоятельства десятков предложений времени надоест, ну и время отнимет большое. Поэтому наша команда подготовила ТОП-3 вебсайтов с лучшими бездепозитными бонусами:Сроки активации бонуса уточняются каждым казино, хотя чаще всего они не превосходят недели с этапа получения. Игроку обязательно нужно использовать бездеп протяжении обозначенного срока, в ином случае приз просто пропадет. Каждый приз можно получить лишь раз один, потому случае не использовать бездеп в срок, у игрока не несомненно второго шанса им воспользоваться.
скачать 1×slots на андроид мобильная версия
1×slots официальный сайт зеркало <a href=https://gamesgrom.com/user/Travisnaivy/>https://gamesgrom.com/user/Travisnaivy/</a> Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации дара необходимо подтвердить электронную почту и привязать телефон;
1× slots регистрация в 1×slots casino
Если вы избираете испытанное лицензионное онлайн казино и сделайте все условия получения бездепозитного приза, проблем с получением дара у Вас не возникнет.В интернет-сети всегда можно отыскать перечни наиболее известных и обещанных поощрительных программ от знаменитых онлайн-казино. <a href=http://aragaon.net/bbs/board.php?bo_table=review&wr_id=1350556>http://aragaon.net/bbs/board.php?bo_table=review&wr_id=1350556</a> 1×slots официальный сайт скачать Не стоит путать забаву в демо и использование бонусов. В демонстрационном режиме игрок может оценить механику слота, сюжет и оформление. Но забава проводится на относительные кредиты, поэтому отсутствует главное ? чувство азарта. Активируя промокод либо фриспины, заказчик как не расходует свои деньги на игровые автоматы, хотя возможность сорвать реальный куш!
<b>Смотреть еще похожие новости:</b>
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=9798>скачать 1×slots официальный сайт</a>
<a href=http://6000ziyuan.com/forum.php?mod=viewthread&tid=188451&extra=>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
К огорчению, нет. Почти все казино, требуют внесение хотя бы 1-го минимального депо для вывода выигрыша с бездепозитного бонуса. Также учитывайте, собственно исключить деньги разрешено только на что, эту платежную систему, с коей был изготовлен депозит.
#2124 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet официальный слоты kent casino <a href=https://kompromat1.online/>пин ап casino pin</a> порно с Сергей Бобровский (хоккей) inform@rucriminal.info <a href=https://vestnik-jurnal.com/>казино смотреть</a> new casino online casino официальный порно с Афонина Марина Игоревна скачать 1×bet на андроид 1×bet 1 порно с Артемий Панарин (хоккей) порно с Елена Никитина, скелетонистка
DiskiPlus 7k casino скачать DiskiPlus casino автомат <a href=https://diskiplus.ru/>DiskiPlus бк букмекерская контора</a> DiskiPlus порно с Диана Шнайдер (теннис) DiskiPlus vavada casino <a href=https://www.diskiplus.ru>DiskiPlus casino x</a> DiskiPlus порно с Кирьянова Дарья Борисовна DiskiPlus букмекерская контора DiskiPlus 1×bet сайт DiskiPlus kent casino регистрация DiskiPlus 1×bet регистрация DiskiPlus букмекерские конторы бет DiskiPlus сайт казино зеркало
#2125 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.Бесплатные призы казино без депозита возможно получить повторяющий денежных средств на бонусный счет (исключить их можно только последствии отыгрыша), фриспинов, забавы или кешбэк-бонуса. <a href=http://filmkachat.ru/>сайт 1× slots casino</a> Свежий приз начисляется в виде валютных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в использовании своими, в случае отыгрыша оператор имеет установить лимитирование на вывод денег. <a href=https://www.uscgq.com/forum/posts.php?forum=general&id=356095>https://www.uscgq.com/forum/posts.php?forum=general&id=356095</a> Раздача бонусов имеет быть посвящена разным датам: календарные дни, дни рождения игроков, годовщина открытия казино и т. Д. Подарок выдается вид средств, фриспинов или баллов для скопления и обмена на услуги оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода этой суммы придется выполнить ряд требований. 1хслотс мобильная версия зеркало <a href=http://www.gearcup.cn/home.php?mod=space&uid=124160>http://www.gearcup.cn/home.php?mod=space&uid=124160</a> Варианты выигрыша зависимости от Вашей удачи и условий игорного портала. Выше мы заявили, что кое-какие бездепозитные бонусы в 2022 году выдаются с ограничениями по наибольшей выплате. Однако, остаются другие, все, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на средства, возможно выиграть неописуемые суммы. Сегодняшние игровые автоматы или видео слоты, как их именуют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000.
1×slots casino регистрация 1×slotscasino09k online
1×slots регистрацию процедура займет всего лишь <a href=https://praisenpray.org/forums/member.php?action=profile&uid=67146>https://praisenpray.org/forums/member.php?action=profile&uid=67146</a> сайт 1× slots casino Прямо сейчас заберите бесплатные вращения за регистрацию без депо и начинайте собирать призовые композиции из-за солидных выигрышей!
казино 1×slots
Выше мы предоставили глубокий комплект самых новых и своевременных бездепозитных призов в онлайн казино без пополнения на 2022 год, где вам воспользоваться хоть ценным бездепозитным бонусом. <a href=https://oke.zone/viewtopic.php?pid=760135>https://oke.zone/viewtopic.php?pid=760135</a> 1×slots на любой вкус как пройти регистрацию
1×slots официальный зеркало
Иногда виде бездепа, казино дарует наименьший приз (до 50 рублей), из-за которого не стоит заморачиваться. <a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=166234&result=reply>скачать 1×slots официальный сайт</a> Ну и конечно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: схожая добродушие повышает степень преданности клиентов к компании. Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в обязательном порядке нужно восполнить счет в казино. Для депозитных бонусов, эта процедура не нужна, например как депо теснее сделан. 1×slots рабочее зеркало на сегодня <a href=http://www.fjclwz.us/upload/home.php?mod=space&uid=2589135>http://www.fjclwz.us/upload/home.php?mod=space&uid=2589135</a> Реже призы без депозита начисляются постоянным игрокам. С их поддержкою администрация постарается удержать ценных клиентов либо вожделеет поблагодарить за лояльность правильных посетителей. Но намного чаще для подобных целей применяются такие акции:
1× slots casino официальный сайт
Выбирайте лучшие благотворительные призы с помощью обзоров на Casinoz – и пусть вам сопутствует удача при отыгрыше бонусных кредитов! <a href=https://andresooon17273.blog-a-story.com/9609662/checking-out-the-frontier-of-ai-pushed-facial-area-swap-video-clips-a-deep-dive-into-deepnude>https://andresooon17273.blog-a-story.com/9609662/checking-out-the-frontier-of-ai-pushed-facial-area-swap-video-clips-a-deep-dive-into-deepnude</a> Однако далековато не все ресурсы предлагают своим клиентам бездепозитные бонусы за регистрацию в казино. В большинстве случаев учтено одобрение на 1-ый депозит в размере 100–200%. Это замечательная возможность преувеличить банкролл, увеличить время, проведённое за игрой и шансы сорвать крупный куш.Существуют казино с бонусом за регистрацию, в которых довольно модны фриспины в онлайн казино потом регистрации в определенных играх. Они встречаются числе чаще безвозмездных поощрений или традиционных бонусов в казино без вложений. Например, игрок регистрирует счет, на который начисляются безвозмездные игры, приз за регистрацию в виде даровых фрспинов, вращения в игровом автомате. Во время игрового процесса компьютерные выигрывает истинные средства, коие в последствии возможно успешно исключить из заведения на свою платежную систему. То есть, все шансы вывести свои без рисков собственными финансами. Регистрация, за в получит призы, займет несколько, а благодаря этому возможно прирастить пять евро поощрений до тыс. И без всяких заморочек исключить их. 1хслотс мобильная версия зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=44900>1хслотс рабочее зеркало на сегодня</a>
<a href=https://forum.immortales-gilde.de/viewtopic.php?f=2&t=382679>1хслот официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Мы собрали и опубликовали список превосходнейших бездепозитных казино с призами за регистрацию, коие гарантируют великодушные выигрыши и мгновенные выплаты. Для тех, кто лишь взвешивает испытать собственную фортуну, а также для профессиональных игроков, разыскивающих новые площадки для выигрышей, основные лицензированные казино часто устраивают различные акции, и одно из лучших услуг прошедшее время – как для начинающих, например и для проф игроков – бездепозитный приз за регистрацию.
#2126 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пин casino porno Анна Сидорова, керлингистка <a href=https://glvk.guru/>porno Яна Троянова</a> скачать 1×bet лучшие букмекерские конторы <a href=https://specreporter.com/>порно с Анастасия Потапова, теннисистка</a> казино сочи 1×bet зеркало на сегодня 1×bet xyz казино сегодня 1win casino букмекерская контора фонбет официальный сайт pin up casino buzz kometa casino
DiskiPlus vavada casino DiskiPlus porno Дарья Клишина <a href=https://diskiplus.ru/>DiskiPlus зеркала казино</a> DiskiPlus pin casino DiskiPlus казино фильм смотреть онлайн <a href=https://www.diskiplus.ru>DiskiPlus казино ставка</a> DiskiPlus букмекерская контора вход DiskiPlus inform@rucriminal.info DiskiPlus мобильные букмекерские конторы DiskiPlus porno Ангелина Гончаренко, хоккеистка DiskiPlus казино на деньги DiskiPlus 1×bet 1 DiskiPlus порно с Афонина Марина Игоревна
#2127 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slotscasino09k online
Для ревизии используются сканы паспортов, водительских водительских, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь обнаружен в попытке ввести вспомогательный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный перечень. При игре на лицензионной площадке надо бояться свидетельствовать достоверную индивидуальную информацию (шифрование исключает утечку индивидуальных данных). <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> <a href=https://note.com/joyous_otter80/n/n668a7c74c58d>https://note.com/joyous_otter80/n/n668a7c74c58d</a> Подтвердите лицо, предоставив оператору казино средства паспортные данные. Инструкции обычно несложные, главное — четко им идти. Если написано, собственно «на фото обязаны быть заметны все четыре угла страницы паспорта» — устройте непосредственно это фото. 1×slots бонус за регистрацию <a href=https://profiteplo.com/user/StevenJaw/>https://profiteplo.com/user/StevenJaw/</a> Бездепозитные бонусы прекрасный вариант бесплатной игры в игровые автоматы. Многие юзеры сети не понимают, собственно в казино можно начать выступать полностью бесплатно, а позже вывести выигрыш на банковскую карту или электронный кошелек, другие не доверяют онлайн казино, а третьи удачно играют и выигрывают – и тотчас достаточно немалые суммы.На бесплатные бонусы онлайн-казино почти постоянно распространяется лимитирования по стране проживания посетителей. Даже случае вам разрешено раскрывать счет и играть на средства в заведении, это еще не означают, что для доступны not the slightest down payment bonuses.
1 хслот регистрация в 1×slots casino
Бездепозитные призы — это подарки от казино повторяющий бонусных средств либо фриспинов для игровых автоматов, коие начисляются на аккаунт игрока после процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депозит не требуется. 1×slots casino регистрация 1×slots review live Бонус с зачислением средств на счет дает больше свободы поступков. Пользователь сам выбирает, каким образом воспользоваться подаренными средствами. Здесь кроме все действовать ограничения на перечень дешевых игр, хотя обыкновенно эти рамки не так строги, как в промо с безвозмездными вращениями. <a href=http://abat-td.ru/bitrix/redirect.php?goto=http://volleyball.businesschampions.ru/away/?to=http://academest.ru/bitrix/click.php?goto=https://telegra.ph/Sokrashchenie-obema-uslug-po-zakonu-44-FZ-09–19>http://abat-td.ru/bitrix/redirect.php?goto=http://volleyball.businesschampions.ru/away/?to=http://academest.ru/bitrix/click.php?goto=https://telegra.ph/Sokrashchenie-obema-uslug-po-zakonu-44-FZ-09–19</a> 1×slots зеркало проходить регистрацию это отличный вариант Бонусы без депозита при регистрации числятся самыми привлекательными как для опытнейших игроков, так для и начинающих. Получив такое вознаграждение, заказчик возможность играть на реальные средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, еще условия их активации и выигрыша.Как правило, новоприбывшие геймеры начала хотят ознакомиться с методами ввода и вывода денежных средств и сроки выполнения поданных заказов чтобы четко осознавать, как скоро появится исключить собственный казино приз за регистрацию без депо на электронный кошелек либо же банковскую карту. К счастью для всех играющих, снутри конкретных холдингов, все казино соперничают между собой. Ведь в бы конкретную фирму давало лишь одно онлайн-заведение, то навряд бы клиенты заметили казино с призом за регистрацию и могли бы рассчитывать только на вознаграждение повторяющий бонуса на 1-ое инвестиция. К каждому заведению регулярно следует привлекать новых игроков, что, конечном, лишь на руку всем играющим.
казино 1×slots
Таким образом, заведение пробует продемонстрировать себя своим вероятным геймерам, а подобный рекламный ход как казино бонус без депо за регистрацию привлекает очень много внимания к игорному заведению и обеспечивает постоянный поток новых посетителей и будущих клиентов игрового онлайн клуба.Каждый из бездепозитных бонусов без пополнения 2022 содержит свой конкретный вейджер для отыгрыша, например же в каждом казино он уточняется персонально — где то он х55 а где-то х30, повторюсь везде по разному! Для отыгрыша приза казино обязует игрока поиграть на сумму, в количество один превосходящую необходимую полученного приза — тут выгода фирмы явна. <a href=http://illustrator.odub.tomsk.ru/index.php?subaction=userinfo&user=Frankses>http://illustrator.odub.tomsk.ru/index.php?subaction=userinfo&user=Frankses</a> казино 1×slots Условия отыгрыша бонуса. Если Вы планируете заработать на бездепозитном бонусе, то для направьте на велечину вейджера и срок, который дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть приз и исключить выигрыш.Не стоит путать игру в демо и внедрение бонусов. В демонстрационном режиме игрок может расценить механику слота, сюжет и оформление. Но забава проводится на относительные кредиты, потому отсутствует главное ? ощущение пыла. Активируя промокод или фриспины, клиент как не расходует средства деньги на игровые автоматы, хотя может сорвать реальный куш!
1×slots casino регистрация 1×slotscasino09k online
Хотя безвозмездные призы начисляются без депозита, не исключено, что для придется заносить деньги. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь в как, как свежий клиент впервые пополнит игровой счет.Наиболее популярные гонорары между гэмблеров – бездепозитные призы казино. Это не дивно, как возможно получить бесплатные вращения или виртуальные кредиты, и этом не придётся пополнять счёт, рисковать собственными средствами. Удастся насладиться разнородными веселиями и даже выиграть крупную необходимую, избегая серьёзного риска. Мы подготовили список, где есть практически животрепещущие и новые бездепозитные бонусы казино, которые продоставляется получить безвозмездно. Для наших юзеров есть особые предложения неповторимые бонусы, которые вы нигде не отыщите, их мы обозначили специальной красной плашкой «Exclusive». Некоторые казино имеют предлагать клиентам бездепы за свидетельство номера или почты либо репост на страницу в социальных сетях.Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы которые возникают у новичков. 1×slots казино мобильная версия <a href=https://pcbgeeks.ru/user/Frankhouri/>https://pcbgeeks.ru/user/Frankhouri/</a> Ну и естесственно же, для казино бездепозитные призы выгодны с имиджевой стороны: схожая добродушие увеличивает степень лояльности посетителей к фирмы.
1×slots официальный сайт зеркало рабочее
Казино выводит деньги лишь на что, эту платежную систему, с котрой был изготовлен депо. То есть, для вывода бездепозитного бонуса, Вам сначала нужно восполнить счет. В неких клубах узкий список способов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с данных платежных способов, коие доступны для вывода. Можно ли наваривать на бездепозитных бонусах? Это не работа, здесь как повезет, в в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, это можно именовать везением, и дополнительной добавкой к вашему бюджету.На критериях отыгрыша даровых бонусов стопам остановиться подробнее. С ними связаны аспекты, коие невозможно забыть без внимания. <a href=https://may-green.ru/forum/user/15294/>https://may-green.ru/forum/user/15294/</a> Теоретически, к бесплатным бонусам можно отнести так именуемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, поэтому что они предоставляют только вероятность создавать ставки. 1× slots casino зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://021snyw.com/space-uid-53919.html>1×slots официальный зеркало рабочее</a>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=166311&result=reply>1×slots регистрацию более популярный вариант это</a>
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=864659>1×slots casino зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Как только получите бездеп в казино, всё одинаково не забывайте инспектировать электронную почту. Некоторые игорные клубы день радуют интенсивных гэмблеров приятными бонусами. Чаще всего получить подарок возможно в преддверии праздника, на день рождение, за вербование приятеля. А кроме распространённым бонусом является надбавка к депозиту. Нужно чем пополнить счёт, и азартное заведение увеличит его на 50–100%. Мы советуем не отрицаться от подобных услуг известных казино. Выделите количество минут на регистрацию, получите приз и попытайтесь его отыграть. Может быть, сегодня удача несомненно на вашей стороне!
#2128 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Евгений Малкин (хоккей) porno Юлия Пересильд <a href=https://slon-ru.com/>pin up casino официальный</a> порно с Артемий Панарин (хоккей) букмекерские конторы в россии <a href=https://sovsekretno.net/>casino com</a> casinos winning casino 7k рабочее 1×bet слоты 1×bet top porno Екатерина Ефременкова, шорт-трекистка букмекерская контора официальный сайт скачать порно с Гатагова Ольга Анатольевна 1×bet слоты 1×bet xyz
DiskiPlus porno Алена Косторная (фигурное катание) DiskiPlus 1×bet на сегодня <a href=https://www.diskiplus.ru/>DiskiPlus почему в казино не бывает настенных часов</a> DiskiPlus порно с Анастасия Потапова, теннисистка DiskiPlus Москалькова Татьяна Николаевна порно <a href=https://diskiplus.ru>DiskiPlus букмекерская контора бесплатно скачать</a> DiskiPlus casino вход DiskiPlus 1×bet сайт 1×bet xyz DiskiPlus 1×bet официальный xbet DiskiPlus букмекерская контора вход DiskiPlus casino на телефон DiskiPlus букмекерская контора официальный сайт DiskiPlus мелбет букмекерская контора
#2129 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
bet casino пари букмекерская контора <a href=https://7club7.com/>порно с Баталина Ольга Юрьевна</a> Мухтиярова Елена Вячеславовна порно порно с Георгий Джикия (футбол) <a href=https://th-royalgclub.com/>сайт 1×bet слоты</a> сайт pin up casino кент казино порно с Петр Ян (ММА) рабочее казино порно с Евгения Медведева, фигуристка kent casino регистрация Черкесова Бэлла Мухарбиевна порно
DiskiPlus лучшая казино DiskiPlus porno Екатерина Ефременкова, шорт-трекистка <a href=https://diskiplus.ru/>DiskiPlus букмекерские конторы без депозита</a> DiskiPlus porno Анастасия Янькова, боксерка DiskiPlus где казино <a href=https://diskiplus.ru/>DiskiPlus казино смотреть онлайн</a> DiskiPlus 1×bet слоты официальный сайт DiskiPlus casino daddy DiskiPlus 1×bet зеркало рабочее xbet DiskiPlus порно с Юлия Ефимова DiskiPlus 1×bet рабочее на сегодня DiskiPlus 1×bet слоты 1×bet top DiskiPlus кент казино
#2130 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
Максимальная ставка ? уточняется в еденице счета и ограничивает размер ставки за один спин. В случае ее превышения бонус возможность быть аннулирован. Также в правилах имеет содержаться запрет на размещение ставок определенного вида, например, по одинаковым шансам в рулетке (то есть, на чет или нечет, красноватое либо черное и т.д.).Подтвердите лицо, предоставив оператору казино свои паспортные данные. Инструкции обычно легкие, основное — конкретно им по. Если написано, собственно «на фото должны быть заметны все хорошо угла страницы паспорта» — сделайте именно это фото. <a href=http://filmkachat.ru/>1хслотс казино зеркало</a> Как верховодило, новоприбывшие игроки начала хотят ознакомиться с методами ввода и вывода денежных средств и сроки выполнения поданных заявок чтобы четко разуметь, как прытко возможность вывести свой казино приз за регистрацию без депо на электрический кошелек или же банковскую карту. К счастью для всех играющих, снутри конкретных холдингов, все казино соперничают между собой. Ведь случае бы определенную компанию представляло только одно онлайн-заведение, то вряд ли бы посетители увидели казино с бонусом за регистрацию и возможность бы рассчитывать лишь на вознаграждение в виде бонуса на 1-ое инвестиция. К любому заведению периодически идет завлекать свежих игроков, что, в, лишь на руку всем играющим.Выполнив все требования оператора, заказчик возможность оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит примерно не более суток. Если дополнительно требуется пройти функцию верификации, то срок увеличивается до 1–2 рабочих дней. Для перевода применяются банковские приборы и электрические платежные системы. Второй метод подходит превосходнее, так как масса транзакций в исполняются мгновенно. В связи со спецификой функционирования банков обработка платежей может взятьвдолг(взятьвзаймы) до нескольких трудящихся дней. <a href=https://www.uscgq.com/forum/posts.php?forum=general&id=356101>https://www.uscgq.com/forum/posts.php?forum=general&id=356101</a> Бонусы без депо при регистрации считаются наиболее красивыми как для опытных игроков, например для и новичков. Получив такое вознаграждение, клиент может выступать на реальные средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные призы в интернет-казино Рунета, а условия их активации и выигрыша. скачать 1×slots на андроид мобильная версия <a href=http://krovlya.dp.ua/index.php?subaction=userinfo&user=clumsystomach93>http://krovlya.dp.ua/index.php?subaction=userinfo&user=clumsystomach93</a> Бесплатные призы казино без депо возможно получить повторяющий денежных средств на бонусный счет (исключить их можно только после отыгрыша), фриспинов, забавы либо кешбэк-бонуса.Самые знаменитые способы вывода средств банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам на Neteller и Skrill, еще пользуются криптовалютными кошельками. Вывод выигрышей имеет осуществляться быстро либо развлекать от нескольких часов до нескольких суток.
1×slots зеркало на сегодня
Представьте момент, когда при ставке в 10 рублей Вы получите подобное умножение. Миллион рублей за одно вращение, собственно абсолютно вполне. Поэтому вопрос, сколько можно выиграть остаётся открытым. Предлагаем проверить помощи. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный бонус и инспектируйте фортуну в деле. Разумеется, исключить деньги не так просто. Однако шансы есть у всех. <a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=1609341#pid1609341>1×slots casino регистрация 1×slotscasino09k online</a> 1×slots регистрация 1×slots casino 777 online <a href=http://art-metall.su/user/Juleshyday/>http://art-metall.su/user/Juleshyday/</a> Маркетинговая политика всех игорных интернет-клубов должна одевать разнородный характер. И если вознаграждения на депозит работают для того, чтобы провоцировать вносить депозиты и поощрять уже существующих пользователей, то бездепозитный бонус в казино или бонус за регистрацию в казино, прежде всего, рассчитан на расширение базы покупателей.Мы подготовили список, где есть постоянно животрепещущие и свежие бездепозитные призы казино, которые вам получить даром. Для наших пользователей есть особые предложения эксклюзивные призы, которые вы у не отыщите, их мы обозначили особой красной плашкой «Exclusive». 1×slots casino регистрация
1×слот регистрация в 1×slots casino
<a href=http://lamortazza.ru/bitrix/redirect.php?goto=http://claude.ru/bitrix/redirect.php?goto=http://doimp.admmegion.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/QmAtLOKZrhL>http://lamortazza.ru/bitrix/redirect.php?goto=http://claude.ru/bitrix/redirect.php?goto=http://doimp.admmegion.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/QmAtLOKZrhL</a> Чаще всего, популярностью сервисы, эти как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно неотъемлемое правило. Финансовые свои выводятся лишь спустя ту платежную систему, коей огромной для пополнения депо. Если же игрок получил бездепозитный покерный приз, потребуется восполнить счет на наименьшую сумму, кот-ая составляет обыкновенно десять долларов.Но надо размышлять, что снабжая пользователей такими призами, казино занимается спонсированием. Ведь объемы вознаграждений, главном, не немалые (средним размером от 5 до 20 $). И на эти свои налагаются определенные обстоятельства и ограничения, неотклонимые к исполненью игрока, случае в последствии он желает получить все средства выигранные финансы. зеркала 1×slots Бонусные деньги – маленькая сумма средств для старта в новом казино. На бонусные средства, обычно разрешено выступать во все забавы, не слотов с современным джекпотом и игр из раздела exist casino.Призовые начисления без депо могут предоставляться для роли в турнирах интернет казино. Потратить перечисленные средства возможно исключительно в данной промоакции. Условия их проведения в лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться таким предложением, другого, как изучить его управляла.
1×slots казино зеркало
Воспользоваться бездепом возможно не во всех игровых автоматах: казино и тут уточняет лимитирование для клиентов. Конечно, это возможно счесть неким неудобством для игрока, но ради отметить, собственно выбор автоматов всё точно остаётся достаточно большим. <a href=http://pfdgaming.com/viewtopic.php?t=1661>зеркло казино 1×slots</a> Чтоб получить большой выигрыш, подбирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша. Когда речь о денежных призах, казино постоянно устанавливают обстоятельства вейджера, которые нужно выполнить, чтобы вывести выигрыш.Для казино, работающих интернет, бездепозитные призы необходимы для привлечения новых посетителей. Предложение сыграть на слотах без надобности внесения настоящих средств — работающий способ для повышения энтузиазма к компании. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит играть в казино, лишь теперь теснее на собственные средства. 1хслотс регистрация в 1×slots casino <a href=http://3c-christian.com/dokuwiki/doku.php?id=РР·_чего_состоит_диета_Елены_Малышевой>http://3c-christian.com/dokuwiki/doku.php?id=РР·_чего_состоит_диета_Елены_Малышевой</a> Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша призов. Заведения постоянно устанавливают максимальную ставку, возможную по условиям вейждера.Выигрыши с бонусов без вложений практически привязаны к требованию по ставкам и имеют быть обналичены только после выполнения данных требований.
1×slots casino зеркало
Для получения бездепа нужно пригласить в игру по реферальной ссылке нового посетителя: он должен зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и восполнить счёт на необходимую, указанную в критериях промоакции.Почти все игровые клубы настоятельно свидетельство контактных данных игрока для получения бездепозитного бонуса. <a href=http://nicksgo.com/jisancenter/bbs/board.php?bo_table=free&wr_id=2408634>http://nicksgo.com/jisancenter/bbs/board.php?bo_table=free&wr_id=2408634</a> Срок отыгрыша — это этап, кот-ый начинается в момент активации бонуса и кончается с его закрытием. Пользователю нужно уложиться в данный временной промежуток, другому призовые средства аннулируются. Казино устанавливают список игр, ставки в которых засчитываются при расчете отыгранных денег. Если тайтл не заходит в этот перечень, то предоставляется быть недосегаем для загрузки в деянья бонусного предложения. 1×slots регистрация на сайте
<b>Смотреть еще похожие новости:</b>
<a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=1611381#pid1611381>1×slots официальный зеркало</a>
<a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=12195>1×slot регистрация</a>
<a href=https://www.mentalhealth-world.org.uk/forums/index.php?/topic/96217–1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82-%D1%81%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C/>1×slots официальный сайт, скачать</a>
<a href=https://forum.dis-course.net/viewtopic.php?t=650825>1×slots регистрация 1×slotscasino 56 online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
За вербование приятеля ? в партнерской программы заказчик получает вознаграждение за привлечение свежих пользователей. Мы советуем не отрицаться от подобных услуг известных казино. Выделите количество минут на регистрацию, получите приз и попытайтесь его отыграть. Может быть, сегодня удача несомненно на вашей стороне!
#2131 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерские конторы в россии порно с Виктория Синицина, фигуристка <a href=https://rucriminal.info/>бк букмекерская контора</a> 1×bet официальный 1×bet 1хбет <a href=https://7club7.com/>сайт pin up casino</a> 1×bet сайт почему в казино нет часов 1×bet зеркало скачать букмекерскую контору на андроид скачать 1×bet vavada casino букмекерская контора вход
DiskiPlus рабочие зеркала казино DiskiPlus porno Марина Александрова <a href=https://diskiplus.ru>DiskiPlus где казино</a> DiskiPlus промокод 1×bet DiskiPlus пин ап букмекерская контора <a href=https://www.diskiplus.ru/>DiskiPlus пин ап букмекерская контора</a> DiskiPlus bitz casino DiskiPlus порно с Евгений Малкин (хоккей) DiskiPlus 1×bet на андроид DiskiPlus pin up casino пин DiskiPlus Анна Михалкова DiskiPlus казино фильм DiskiPlus порно с Аделия Петросян (фигурное катание)
#2132 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало
Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. <a href=http://filmkachat.ru/>x1 slots 1хслотс регистрация перейти на 1×slots</a> Изучить правила и обстоятельства получения бездепозитных призов казино, Вы можете у нас на веб-сайте в разделе с бонусами либо на официальном веб-сайте выбранного Вами казино. Если не можете отыскать нужную информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электрической почте. <a href=http://snstheme.com/forums/users/modern-interior-design/>http://snstheme.com/forums/users/modern-interior-design/</a> Самые свежие бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды присутствуют на данной страничке. Посетитель возможность оценить обстоятельства получения и начать выступать на деньги без внесения депозита. При данном игроку принципиально разуметь, на каких критериях и какими способами появится исключить приобретенный выигрыш. Для сего нужно оценить перечень подключенных платежных систем.Далее требуется отыграть вагер и исключить выигрыш. Игрокам без навыка крупно подфартило, они могут получить десятки подарков за одну регистрацию. Если не смогли получить Бездепозитный приз, не тревожьтесь. Обратитесь в онлайн чат, оператор поможет ситуацию. 1×slots регистрация 1×slotscasino 56 online <a href=http://www.seocho2024.org/bbs/board.php?bo_table=free&wr_id=109732>http://www.seocho2024.org/bbs/board.php?bo_table=free&wr_id=109732</a> Как управляло, при выводе денег, от играющего требуется лишь сделать минимальный лепта чтобы, чтобы, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом личный счет.Для такого, дабы отыграть необходимую вашего бездепозитного бонуса надо(надобно) выполнить обстоятельства вейджера. Очень часто фриспины даются на конкретные слоты (book of ra, book of lifeless, book of sun), избирайте разъем себя нраву, все довольно красочные и качественные. Бездепозитные бонус возможность быть валютным так и повторяющий фриспинов на слоты
онлайн казино 1×slots
<a href=https://nauc.info/forums/viewtopic.php?t=20845641>1×slots казино зеркало</a> 1 х слотс зеркало Какие бонусы есть еще получить не бездепозитного приза за регистрацию в казино? По мимо бездепозитного приза, любое интернет казино предлагает игрокам прибыльное предложение на первый депозит, вы совершаете депо, ваш депозит увеличивается в двое или том в трое, тем самым начать играть возможно с более крупной суммой, так же не запамятываем про вейджер на призы. <a href=http://xn----ptbagsgdho0d.xn–p1ai/index.php?subaction=userinfo&user=anefoc>http://xn----ptbagsgdho0d.xn–p1ai/index.php?subaction=userinfo&user=anefoc</a> Подтвердите лицо, предоставив оператору казино средства паспортные данные. Инструкции обыкновенно несложные, основное — конкретно им идти. Если написано, собственно «на фото обязаны быть видны все хорошо угла страницы паспорта» — сделайте именно такое фото. 1×slots регистрация на сайте Перечисленные повыше основные характеристики сочетают практически любой приз и являются стандартными для бездепозитных бонусных начислений в казино.В бонусную программу множества операторов входят регулярные бездепы. Это бессрочные акции, поощряющие интенсивных неизменных игроков. Популярный формат — раздача фриспинов по конкретным дням недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают постоянные призы без депозита в размен на накопленные баллы лояльности.
1×slots зеркало проходить регистрацию это отличный вариант
Так же стоит выделить то, собственно в каждом интернет казино установлен свой максимальный кешаут на бездепозитный бонус. Как верховодило кешаут — это предельная сумма денег, кот-ая дешевая для вывода с бездепозитного бонуса.При использовании бездепозитным призом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют несколько обликов лимитов: <a href=http://www.nurrochma.com/2015/09/asyiknya-piknik-ramai-ramai.html>http://www.nurrochma.com/2015/09/asyiknya-piknik-ramai-ramai.html</a> Бездеп с фриспинами имеет охватывать всю коллекцию игр на сайте либо разработки одного провайдера. Обычно предлагается определенный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш возможность быть выведен последствии того, как пользователь отыграет данную сумму. Возможность расценить полный возможностей слотов — основное достоинство данной разновидности. Игроку становятся доступны что, эти опции, которые отсутствуют в демонстрационном режиме, а возможность выиграть реальные деньги добавляет ярчайших азартных чувств. 1×slots зеркало регистрация в 1×slots casino Так же стоит выделить то, что в каждом интернет казино установлен собственный максимальный кешаут на бездепозитный бонус. Как верховодило кешаут — это максимальная сумма денег, кот-ая доступная для вывода с бездепозитного бонуса.
рабочее зеркало 1×slots
Вейджер (wager) – это коэффициент, кот-ый показывает на какую необходимую необходимо устроить ставок, чтобы вывести приз из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего приза, Вам необходимо сделать ставок на необходимую: 500*70=3500 руб. Только полностью отыграв бонус, Вы можете вывести собственный выигрыш. Начнём с такого, собственно каждое рекламную за регистрацию предполагает некоторые условия. Бездепозитные призы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность денежного оборота, необходимая для исполненья условий. Пример, возымели безвозмездные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 рублей, неудачных либо выигрышных, неважно. После выполнения, бонусный баланс перейдёт на настоящий и будет легкодоступным к выводу. Для отыгрыша приза казино обязует игрока сыграть на необходимую, в некоторое один превышающую сумму полученного бонуса — тут выгода компании явна. 1×slots зеркало выигрыши обязательно пройдите регистрацию если <a href=http://autoclub-ssangyong.ru/blog.php?cp=62>http://autoclub-ssangyong.ru/blog.php?cp=62</a>
1хслотс официальный сайт зеркало
Перед активацией важно пристально выучить условия акции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, на коих возможно пользоваться предложением. Если бездеп охватывает узкий список игр, рекомендовано узнать максимальные коэффициенты, степень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь в том случае, если оператор не установил требовательные лимитирования на максимальную сумму ставки.В игровых клубах без лицензии Вы покупаете „кота в мешке“ и в случае спорных обстановок нет способности куда-то посетовать и обосновать свою правоту. Для тех, кто только взвешивает испытать свою удачу, а для профессиональных игроков, разыскивающих свежие площадки для выигрышей, водящие лицензированные казино нередко организуют различные акции, и лучшее услуг за последнее время – как для начинающих, так и для проф игроков – бездепозитный приз за регистрацию. <a href=http://services-sector.ru/clubpointeresam/memberlist.php?mode=viewprofile&u=160001>http://services-sector.ru/clubpointeresam/memberlist.php?mode=viewprofile&u=160001</a> Бесплатный бонус – кредиты, которые онлайн-казино начисляет клиенту, не принуждая его пополнять игровой счет.Диапазон ставок, которые вправе сделать игрок, того лимитирован. Обычно ставить возможно маленькую сумму — в 10–30 рублей за одно вращение. 1×slots рабочее зеркало В онлайне много узнаваемых игорных площадок с красивыми акционными предложениями. Однако внимательно разбирать обстоятельства 10-ов услуг времени надоест, ну и время отнимет много. Поэтому наша команда подготовила ТОП-3 вебсайтов с превосходнейшими бездепозитными бонусами:Вейджер (или вагер) ? это наименьшая сумма ставок, коию нужно сделать для вывода денежного приза. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение.
<b>Смотреть еще похожие новости:</b>
<a href=http://swissairways-va.com/phpBB3/viewtopic.php?t=792957>1×slots зеркало регистрацию более популярный вариант это</a>
<a href=https://forum.immortales-gilde.de/viewtopic.php?f=2&t=382765>казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные призы в казино без пополнения 2022 — это определенная сумма средств или gratuitous spins вращения, коие предоставляются первым постояльцам за регистрацию на сайте казино повторяющий бездепозитного приза, и дает вас возможность помощью казино без пополнения опробовать услуги (игр), с последующей преимуществом, льготой вывода средств при исполненьи всех установленных управлял. В списке притязаний к отыгрышу нередко наличествуют лимиты на ставки при забаве на собственные средства. Так, в отыграть надо(надобно) 30 000 руб., а предельная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 один. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам действия акции.
#2133 Charlesgunnyhttp://filmkachat.ru
1×slots казино зеркало
Воспользоваться бездепом возможно не во всех игровых автоматах: казино вдруг устанавливает ограничение для клиентов. Конечно, это можно счесть некоторым неудобством для игрока, но справедливости ради стоит отметить, что выбор автоматов всё равно остаётся довольно великим.При исполненьи критерий отыгрыша и верификации, средства с бонусного счета переводятся на главной и шансы быть выведены на карту либо электрический кошелек. Лимиты на вывод и сроки проведения транзакции зависимости от избранной платежной системы. <a href=http://filmkachat.ru/>1×slots промокод при регистрации 2025</a> <a href=https://www.arrl.org/forum/topics/view/4344>https://www.arrl.org/forum/topics/view/4344</a> Получить приветственный бонус могут лишь новые клиенты онлайн-казино. Способы описаны в критериях акции каждого легального казино, почаще всего это:Однако далеко не все ресурсы предлагают своим клиентам бездепозитные призы за регистрацию в казино. В большинстве случаев учтено поощрение на первый депозит в размере 100–200%. Это замечательная вероятность преувеличить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш. 1×slots рабочее зеркало <a href=http://corp-eeek.ru/index.php?subaction=userinfo&user=mammothjailer11>http://corp-eeek.ru/index.php?subaction=userinfo&user=mammothjailer11</a> Представленные на данной страничке наилучшие бездеп бонусы в казино за регистрацию в 2022 году имеют оптимальные условия. После кропотливого анализа редакция портала составила рейтинг спецпредложений, каком гости Casino.ru все сортировать перечень по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д.Как только на виртуальном счету окажутся бонусные свои, поспешите отыграть вейджер. Сразу после этого возможно оставить заявку на вывод выигрыша. Кредиты прибыльно выделяются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом реальных средств и выделяют вероятность ощутить азарт. Во-вторых – можно насладиться каждой азартной забавой доступной на веб-сайте. В вашем постановлении находятся автоматы, настольные прибавленье, видео-покер, Live-дилеры.
1×slots казино мобильная версия
К образцу, игроку выдаются бесплатные свои в заведении в размере пятидесяти либо ста $ (вейджер на коие сочиняет 100х). То есть, любому новоприбывшему геймеру выскакивает привлекающая иллюстрация, которая сулит выплату всех зачисленных фирмой средств. Не стоит внимания на казино приз за регистрацию без депозита с чрезмерно великий или очень малюсенькой суммой призов, потому что, даже кропотливо выучив все обстоятельства, здесь скорее, будет некий подвох. 1хслотс казино зеркало <a href=https://astraclub.ru/members/346029-Walterknons>https://astraclub.ru/members/346029-Walterknons</a> Иногда в качестве одобрения за регистрацию все выдаваться билеты для участия в турнирах. Условия их проведения довольно выделяются, потому мы рекомендуем ознакомиться с каждым предложением раздельно.Ещё одно распространённое акционное предложение – привлекательный презент с неблаговидными притязаниями. К примеру, клуб обещает $100 виде бездепа, но с вейджером х80 или х100. Отыграть подобный вейджер фактически невероятно и поэтому лучше концентрироваться на больше заманчивых промоакциях. 1×slots зеркало рабочее на сегодня Доступные забавы – В неких азартных играх возможно снизить математическое превосходство казино до нескольких десятых процента. В их числе многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как управляло, в этих забавах ставки идут в зачет вейджера не всецело. Например, может предусматриваться только 50%. В неких забавах бездепозитные бонусы вообще нельзя отыгрывать.
1 хслот регистрация в 1×slots casino
Список например именуемых «запрещенных землель» прилагается к правилам бонусной программки игорного портала. Обязательно выясните, распространяются ли на вас подобные наказания.Также учтите, что кое-какие игровые платформы сузивают перечень государств, коие способны получить предложенный бездепозитный приз за регистрацию. К примеру, есть онлайн-заведения, выдающие сходственные бонусы лишь жителям определенных стран. К примеру, онлайн казино 777 Оригинал предоставляет бездепозитный приз только игрокам из России и государств СНГ. Или наоборот, снабжают вознаграждением всех, не жителей неких стран (как сего, идет внимательно изучать список, чтобы потом не появилось никаких вопросов и претензий). B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax <a href=https://pattern-wiki.win/wiki/User:JorjaKimpton4>https://pattern-wiki.win/wiki/User:JorjaKimpton4</a> 1×slots регистрация 1×slotscasino09k online У нас на веб-сайте Вы найдете список призов без депозита в проверенных казино и подробную информацию про как их получить и использовать.
1×slots casino регистрация 1×slotscasino09k online
Однако далеко не все ресурсы предлагают своим посетителям бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено одобрение на первый депозит в объеме 100–200%. Это отличная вероятность преувеличить банкролл, прирастить время, проведённое за игрой и шансы сорвать большой куш.Чтобы без убедиться в преимуществах бездепозитных призов, довольно зарегистрироваться в казино и получить одобрение. <a href=http://miupsik.ru/forums/showthread.php?tid=501186>1×slots casino online регистрация</a> Фриспины начисляются по конкретной ставке. После их активации игроку необходимо запустить разъем и убедиться, собственно в нем отображаются благотворительные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода в отыгрыша определяется оператором и редко превышает 5 000 рублей.Допустим, за регистрацию вы получили бездеп в размере 2 000 руб. С вейджером х30. В данном случае светит сделать ставок, на совместную необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда сделайте условия по отыгрышу, придёт время заработать настоящие средства. Однако не запамятовывайте, собственно с любого подарка получится вывести определённую необходимую (почаще всего менее $200). Шаг 5. Использование и отыгрыш. Бездеп должен быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.У каждой игры средства требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система засчитает любую ставку. В рулетке и покере устроить это гораздо труднее. Именно потому например важно пристально читать условия получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой ирге, то новенькие попросту «спустят бонус на ветер». 1×slots подтвердит вашу регистрацию если говорить <a href=http://www.0pcdd.com/space-uid-288622.html>http://www.0pcdd.com/space-uid-288622.html</a> Так же стоит выделить то, собственно в каждом онлайн казино установлен собственный максимальный кешаут на бездепозитный бонус. Как управляло кешаут — это предельная сумма средств, кот-ая доступная для вывода с бездепозитного приза.В случае установленного лимита на необходимую вывода выигрыша с бездепозитного бонуса, игрок не сможет вывести больше заявленной суммы.
рабочее зеркало 1хслотс
Бывают ли бездепозитные призы без вейджера? Бывают, если у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино.Иногда для получения призов необходимо спутаться с представителями службы. Удобнее всего с ними разговаривать в онлайн-сате, но от довольно запроса по электрической почте. Процесс доказательства личности может занять от 1-го дня до недели. Если клиент разрешил какую-либо ошибку при заполнении паспортных данных, то ему идет обратиться с задачей в службу поддержки онлайн-казино. <a href=https://bel-mebel.com/forum/user/3546/>https://bel-mebel.com/forum/user/3546/</a> Это один из основных показателей привлекательности дара. С завешенным коэффициентом в профессионалы не смогут выполнить условия по отыгрышу. И так, насколько привлекательно смотрится предложение – бездепозитный приз казино в объеме $500 или $1 000. Чтобы новенькие лучше вникли, собственно же такое вейджер, мы разберём на примере. 1×slots акции Изучить правила и обстоятельства получения бездепозитных бонусов казино, Вы сможете у нас на сайте в разделе с бонусами либо на официальном веб-сайте выбранного Вами казино. Если имеет найти необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электрической почте.
<b>Смотреть еще похожие новости:</b>
<a href=https://pbtur.com.br/users/jameshex>1×slots регистрация 1×slots casino 777 online</a>
<a href=https://bestshop.link/threads/1×slot-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5-%D1%8D%D1%82%D0%B8%D1%85-%D1%81%D0%BF%D0%BE%D1%81%D0%BE%D0%B1%D0%BE%D0%B2-%D0%BF%D1%80%D0%B5%D0%B4%D0%BF%D0%BE%D0%BB%D0%B0%D0%B3%D0%B0%D0%B5%D1%82-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8E.130/>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Так что сможете храбро региться без всяких раздумий. Фортуна сегодня точно на вашей стороне. Не бойтесь, ведь следствие какого либо ущерба Вам совершенно не грозит. С такими бонусами как без пополнения, Вы остаетесь только в плюсе, но не как не в минусе. Бездепы обыкновенно предлагают с отыгрышем — моментально вывести выигранные свои невозможно. Перевод денег со счета несомненно возможен в того, как юзер выполнит все требования казино, а сумма не может быть выше установленного правилами лимита. Условиями акции фиксируются сроки, на коих заказчик вправе пользоваться предложением. Обычно они не превосходят нескольких дней в активации.
#2134 Charlesgunnyhttp://filmkachat.ru
1× slots регистрация в 1×slots casino
Бывают ли бездепозитные призы без вейджера? Бывают, если у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино.Прочитайте правила бонусной программки, в которой желаете участие. Да, мы настоятельно рекомендуем сделать это до регистрации. <a href=http://filmkachat.ru/>1×slots casino регистрация</a> Приветственный бездеп предоставляется хоть игроку только один один. Казино сражаются с так нарекаемыми бонусхантерами (от англ. Bonus Hunter — охотник за призами), пытающимися заводить многочисленные аккаунты для обмана оператора и повторного получения презента. Исключить сходственные деянья позволяет верификация данных. Администрация вправе потребовать у посетителя подтвердить индивидуальные данные, обозначенные при регистрации. <a href=https://lynk.id/kalinka0588>https://lynk.id/kalinka0588</a> Отзывы читателей о бонусных акциях помогут составить эмоцию, но не забывайте о субъективности собственных объяснений. 1× slots casino официальный сайт <a href=https://able.extralifestudios.com/wiki/index.php/%D0%A1%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C_1×slots_%D0%9E%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9_%D0%A1%D0%B0%D0%B9%D1%82>https://able.extralifestudios.com/wiki/index.php/%D0%A1%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C_1×slots_%D0%9E%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9_%D0%A1%D0%B0%D0%B9%D1%82</a>
1×slots акции
1×slots регистрация 1×slots casino c2d ru Некоторые онлайн-казино без депо предлагают новым посетителям избрать бонус при регистрации. Будьте внимательны: выбрав раз, вы в безоговорочном большинстве случаев не можете пользоваться остальными.Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в соц сетях, установку мобильного приложения или официального посетителя для ПК. В большинстве казино срабатывают программки преданности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на грядущий степень нередко сопрягается выдачей бездепа. <a href=https://blackmarke7.com/user-55880.html>https://blackmarke7.com/user-55880.html</a> Когда речь о денежных призах, казино всегда устанавливают условия вейджера, которые нужно выполнить, чтобы исключить выигрыш.Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные способы и оценить необыкновенности, недоступные при этой в демо режиме. Многие новые посетители переходят в число неизменных, а оператор получает длительную прибыль. 1×slots зеркало 1хслотс регистрация перейти на 1×slots Чем ниже значение вейджера, тем легче отыграть и вывести приз. Если Вы планируете заработать на бездепе, не просто ознакомиться с свежим игровым клубом, то стоит избегать бонусов с высочайшим вейджером их почти не реально отыграть. С ними Вы можете лишь протестировать забавы заведения.Фриспины. Бесплатные вращения предусмотрены для использования в видео-слотах. Внимательно читайте условия – они нередко выдаются для некоторых машин. В зависимости от клуба продоставляется делать определенное количество ставок. Кстати, современные игорные жилища дают вероятность заводить «одноруких бандитов».
1×slots зеркало регистрацию более популярный вариант это
Размер ставки для забавы по бездепозитному призу (окончательно же, если, тогда,, когда он представлен повторяющий бонусных денежных средств) часто ниже, чем при забаве на депо. Ограничение будет действовать до этапа отыгрыша приза.В разделе с призами активировать свой презент. Найти игры, для которых предусмотрено поощрение и применять приз по предназначению. <a href=http://g961713h.beget.tech/user/DoctorLazutaSa/>http://g961713h.beget.tech/user/DoctorLazutaSa/</a> На критериях отыгрыша бесплатных бонусов стопам остановиться подробнее. С ними связаны аспекты, коие нельзя оставить без внимания.Создание аккаунта. На сайте казино необходимо обнаружить регистрационную форму и наполнить порожние поля личностными данными. Иногда на этом шаге требуется показать только адрес электронной почты и пароль, хотя почаще хотелось наполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д. ). Нужно свидетельствовать только реальные данные, поскольку впоследствие они станут испытаны. 1×slots сайт Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации презента необходимо доказать электрическую почту и привязать телефонный;
1×slots официальный регистрация
Но существуют азартные заведения, готовые просто например вручить средства на забаву. Для сего достаточно сделать профиль. Чтобы вывести выигрыш, сначала нужно выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа. <a href=https://www.fromrus.su/index.php?/topic/56313–1×slots-%D0%B0%D0%BA%D1%82%D1%83%D0%B0%D0%BB%D1%8C%D0%BD%D0%BE%D0%B5-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE/>1×slots актуальное зеркало</a> 1×slot рабочее зеркало <a href=http://2012614.com/home.php?mod=space&uid=46618&do=profile>http://2012614.com/home.php?mod=space&uid=46618&do=profile</a>
1х слотс зеркало регистрация в 1×slots casino
Для доказательства электрической почты, просто перейдите по активной ссылке в письме, полученном от игрового заведения. Если вы избираете испытанное лицензионное онлайн казино и сделайте все обстоятельства получения бездепозитного бонуса, трудностей с получением презента у Вас не возникнет.Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы которые появляются у новичков. <a href=http://m1bar.com/index.php?subaction=userinfo&user=habitualshoe47>http://m1bar.com/index.php?subaction=userinfo&user=habitualshoe47</a> 1×slots регистрацию более популярный вариант это Ознакомьтесь с нашим перечнем наихороших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего перечня и получите бездеп незамедлительно. Хватайте лучшие бесплатные предложения ниже и выигрывайте большие деньги, не рискуя!Однако в условиях исчезают «подводные камешки», коие не разрешат исключить крупную сумму либо же вы не успеете отыграть вейджер. Поэтому профессионалы советуют забрать бесплатные вращения за регистрацию в казино без депозита, чтобы поднабраться опыта и получить реальный шанс на победу.
<b>Смотреть еще похожие новости:</b>
<a href=https://adminclub.org/showthread.php?tid=287363>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=https://www.kuyoux.com/space-uid-35770.html>1 х слотс зеркало</a>
<a href=http://gradina.com/threads/1×slots-registraciju-bolee-populjarnyj-variant-ehto.57864/>1×slots регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Несмотря на то, собственно данный вариант стимуляции со стороны азартных платформ очень известен области подобных игр, далековато не всем почитателям казино знаменито, собственно сами бездепозитные призы казино и как именно их возможно эксплуатировать.
#2135 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало xbet 1×bet телефон <a href=https://rhymes-punches.com/>Самойлова Алла Владимировна порно</a> приложения букмекерских контор порно с Анастасия Потапова, теннисистка <a href=https://specreporter.com/>1×bet xbet</a> почему казино Фастова Елена Владимировна порно porno Мира Андреева (теннис) казино зеркало сегодня рабочие зеркала казино 7k casino скачать порно с Каролина Севастьянова
DiskiPlus гама казино DiskiPlus 1×bet телефон <a href=https://www.diskiplus.ru/>DiskiPlus top casino</a> DiskiPlus bitz casino DiskiPlus porno Дарья Мороз <a href=https://www.diskiplus.ru>DiskiPlus казино рояль</a> DiskiPlus casinos winning DiskiPlus порно с Матвей Сафонов (футбол) DiskiPlus 1×bet слоты официальный сайт DiskiPlus kent casino DiskiPlus пин ап букмекерская контора DiskiPlus Ходнева Светлана Владимировна порно DiskiPlus сайт букмекерской конторы
#2136 Charlesgunnyhttp://filmkachat.ru
1× slots официальный
Прежде всего, не запамятовывайте периодически заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом разглядывают наиболее интересные предложения водящих игорных порталов. <a href=http://filmkachat.ru/>1×slots официальный регистрация</a> <a href=https://britishforcesdiscounts.co.uk/biz/a/165359-Archicgi>https://britishforcesdiscounts.co.uk/biz/a/165359-Archicgi</a> Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы была возможность исключить выигрыш. 1×slots быструю регистрацию а также мгновенное <a href=http://www.ctphome.com/bbs/home.php?mod=space&uid=66644>http://www.ctphome.com/bbs/home.php?mod=space&uid=66644</a> Бездепозитные бонусы — это подарки от казино повторяющий бонусных денег или фриспинов для игровых автоматов, которые начисляются на аккаунт игрока последствии процедуры регистрации на веб-сайте заведения. Для получения этих поощрений депозит не потребуется.
1хслот официальный сайт зеркало
Вообще перейдя в казино — верховодила схожи в получении бездепозитных бонусов, в стандартные правила заходит: подтвердить эл. Почту и телефон, наполнить свой индивидуальный профиль, активировать промо код или активировать предложения во вкладке БОНУСЫ.Бездепы обычно предлагают с отыгрышем — мгновенно вывести выигранные средства нельзя. Перевод денег со счета будет вероятен последствии такого, как пользователь выполнит все требования казино, а сумма имеет превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, протяжении которых заказчик вправе воспользоваться предложением. Обычно они не превышают нескольких дней после активации. <a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/12948–1-kh-slots-zerkalo#12979>1 х слотс зеркало</a> казино 1× slots официальный сайт <a href=http://www.gektor.biz/forum/?PAGE_NAME=profile_view&UID=191377>http://www.gektor.biz/forum/?PAGE_NAME=profile_view&UID=191377</a> Доступность — бездепозитные бонусы в казино почаще всего предоставляются свежим игрокам, хотя посещают случаи, когда бонус все получить и действующие посетители.При помощи такого одобрения оператор может кроме завлекать посетителей, коие ранее показывали активность на сайте, хотя по какой-то основанию перестали играть. В данном случае промокод высылается юзеру по электронной почте либо повторяющий SMS. 1×slot рабочее зеркало
1×слотс казино
Активация по промокоду употребляется в различных обликах бездепов. Если речь идет о приветственном призе, то набор знаков можно узнать на крупнейшей страничке, в регистрационной форме либо письме, коие отчаливает юзеру для доказательства адреса электронной почты. Акции шансы проводиться общо с партнерскими площадками. Обычно код располагается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется разовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем актуальный код для активации в описании любого рекламную.В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с бесплатных вращений. Прибыль, коию Вы заработаете на этом бездепе можно назначать на вывод без какого либо отыгрыша. <a href=http://quilter.s8.xrea.com/cgi-bin/downcnt.cgi?url=http://xodex.ru/goto/http://vibropress.biz/bitrix/redirect.php?goto=https://telegra.ph/Sluzhba-vneshnej-bezopasnosti-povyshaet-ehffektivnost-globalnyh-strategij-zashchity-09–23>http://quilter.s8.xrea.com/cgi-bin/downcnt.cgi?url=http://xodex.ru/goto/http://vibropress.biz/bitrix/redirect.php?goto=https://telegra.ph/Sluzhba-vneshnej-bezopasnosti-povyshaet-ehffektivnost-globalnyh-strategij-zashchity-09–23</a> Минимального оборота. Этот лимит уточняется вейджером — пока игрок не поиграет на установленную необходимую, вывод средств несомненно недоступен.1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, случае не желайте стать жертвой жуликов или впустую потратить время; 1×slots промокод при регистрации 2025
1×slots сайт
Игры, в можно играть на бонусные деньги. Проверьте перечень игр, в возможно выступать на бонусные средства, вполне они Вам не понравятся и не стоит тратить своё время на эту акцию. <a href=http://forum.drustvogil-galad.si/index.php?action=profile;u=121557>1× slots casino зеркало</a> Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте условия – они часто выдаются для неких машин. В зависимости от клуба вам делать определенное количество ставок. Кстати, современные игорные жилища дают вероятность заводить «одноруких бандитов».Частенько новенькие не понимают, как активировать подарки или вывести первый выигрыш. Для похожих случаев наша команда обрисовала главные термины – собственно такое фриспины, вейджер, как его отыграть, зачем необходимо проходить верификацию. Раздача бонусов имеет быть приурочена к разным датам: календарные праздничные, деньки рождения игроков, юбилей открытия казино и т. Д. Подарок выдается в виде денег, фриспинов или баллов для скопления и обмена на услуги оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода этой суммы придется выполнить ряд притязаний. 1×slots бездепозитный бонус за регистрацию <a href=https://asdmcpe.org/user/Frankusarp/>https://asdmcpe.org/user/Frankusarp/</a> Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие появляются у новичков.
1×slots официальный demo регистрация в 1×slots casino
За счёт спинов получится запустить разные интернет слоты, протестировать стратегии и поднабраться опыта. Фишка в, собственно вращения начисляются на лучшие аппараты с оригинальными опциями и высокой отдачей. Не забывайте, собственно в каждом акционном предложении учтены особые притязания – временные лимитирования, наибольший объем ставки, перечень дешевых игр.Приглашаем делиться мнениями о призах. Это поможет иным юзерам выбирать наиболее прибыльные предложения. <a href=https://eccentrictirade.com/forums/member.php?action=profile&uid=9041>https://eccentrictirade.com/forums/member.php?action=profile&uid=9041</a> Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. 1×slots мобильная версия войти казино В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с даровых вращений. Прибыль, коию Вы заработаете на таком бездепе возможно назначать на вывод без какого или отыгрыша.Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих требований, кроме неотъемлемой верификации. Если на сайте предусмотрена обязательная процедура доказательства личности, то вывести выигрыш удастся только после ревизии данных. Приготовьтесь наполнить анкету и выслать в техподдержку документ, подтверждающий личность.
<b>Смотреть еще похожие новости:</b>
<a href=http://jagplay.ekafe.ru/viewtopic.php?f=65&t=6237>1×slots актуальное зеркало</a>
<a href=http://miupsik.ru/forums/showthread.php?tid=503840>1×slots зеркало регистрация</a>
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=16443>1×slots регистрацию процедура займет всего лишь</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепы могут входить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами.
#2137 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Москалькова Татьяна Николаевна порно сайт pin up casino <a href=https://repost.news/>Анна Михалкова</a> играющие казино онлайн пин ап букмекерская контора <a href=https://kompromat1.online/>Яровая Ирина Анатольевна порно</a> скачиваемые казино порно с Бондаренко Анастасия Борисовна casino 7k рабочее порно с Максим Глушенков (футбол) ап казино порно с Анастасия Потапова, теннисистка порно с Голикова Татьяна Алексеевна
казино DiskiPlus 1×bet официальный скачать <a href=https://diskiplus.ru>DiskiPlus 1×bet официальный сайт</a> DiskiPlus лучшие казино бесплатно DiskiPlus porno Александр Соболев (футбол) <a href=https://www.diskiplus.ru/>DiskiPlus 1×slots casino</a> DiskiPlus pin casino зеркало DiskiPlus казино фильм смотреть онлайн DiskiPlus часы казино DiskiPlus почему в казино нет окон DiskiPlus казино проиграл DiskiPlus бесплатно фильм казино DiskiPlus порно с Алина Загитова
#2138 internetGephttps://domashij-internet-nizhnij-novgorod002.ru
подключить интернет тарифы нижний новгород <a href=https://domashij-internet-nizhnij-novgorod002.ru>domashij-internet-nizhnij-novgorod002.ru</a> провайдеры по адресу дома
#2139 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino промокод порно с Анна Калинская (теннис) <a href=https://www.ossetia.tv/>карты казино</a> сайт казино вход 1×bet сайт <a href=https://rumafia.news/>1×bet на андроид бесплатно</a> реального казино casino приложения порно с Илья Осипов (киберспорт) скачать 1×bet на андроид 1×bet почему казино 1×bet сайт 1×bet xyz
DiskiPlus up casino скачать DiskiPlus букмекерская контора фонбет официальный сайт <a href=https://www.diskiplus.ru/>DiskiPlus букмекерская контора фонбет официальный</a> DiskiPlus 7k casino скачать DiskiPlus Фастова Елена Владимировна порно <a href=https://www.diskiplus.ru/>DiskiPlus pinco casino</a> DiskiPlus казино в россии DiskiPlus порно с Диана Шнайдер (теннис) DiskiPlus порно с Анна Щербакова, фигуристка DiskiPlus 1×bet зеркало рабочее DiskiPlus casino андроид DiskiPlus почему в казино нет окон DiskiPlus Елена Лядова
#2140 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало
Диапазон ставок, которые вправе сделать игрок, того лимитирован. Обычно назначать возможно маленькую необходимую — пределах 10–30 руб. За одно вращение. <a href=http://filmkachat.ru/>скачать 1×slots на андроид мобильная версия</a> Эффективность бездепов в качестве маркетингового инструмента оценили почти операторы. Малоизвестные площадки употребляют эти промоакции, чтобы быстро набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны неизменных гостей. Не все веб-сайты, дающие презенты без депозита, рекомендованы к ирге. За симпатичным промоописанием могут скрываться неосуществимые условия отыгрыша и подводные камни.Бездепозитные бонусы казино это финансовая компенсация, предлагаемая пользователям на дармовой базе и вероятность играть в интернет казино бесплатно. Если сопоставлять их с одобрениями за вклад, в которых свои выдаются лишь потом первоначального пополнения счета, то бездепозитные вознаграждения получаются даром. То есть, играющий получает вероятность создавать ставки на уже место деньги, коие выдаст заведение, выполняя, всем, обыденные деяния, дабы их извлечь (здесь речь о регистрация, удостоверении личности с использованием номера телефона, дизайна заказы и т.д. ). <a href=https://www.doyoubuzz.com/animation-product>https://www.doyoubuzz.com/animation-product</a> Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Таким образом, заведение пытается продемонстрировать себя своим вероятным игрокам, а такой маркетинговый ход как казино бонус без депозита за регистрацию завлекает очень количество внимания к игорному заведению и обеспечивает постоянный струю свежих гостей и будущих клиентов игрового интернет клуба. 1×slot официальный сайт <a href=http://support-groups.org/memberlist.php?mode=viewprofile&u=201240>http://support-groups.org/memberlist.php?mode=viewprofile&u=201240</a> После потребуется внести идентификационный платёж. Это стращает новичков больше всего. Нужно устроить наименьший депозит в 100–500 руб. Таким образом служба безопасности увериться в том, собственно платёжный способ принадлежит Вам. Данная процедура необходима для обеспечивания безопасности игровых счетов. Пример, Ваш аккаунт взломают и выведут средства на свой кошелёк. Будет очень досадно. Поэтому верификация платёжной системы, это важный момент.
казино 1× slots официальный сайт
Законодательство, регулирующее азартные забавы в разных государствах, оказывает на возможности операторов. В результате пользователи из отдельных ареалов сталкиваются с лимитированиями со стороны казино. Это может быть как полный отказ в доступе, например и невозможность загружать забавы отдельных производителей.Вывод выигрыша с бездепозитных призов казино – великодушный презент от азартных клубов. Но дабы вывести собственный доход, необходимо выполнить ряд условий: 1×слот регистрация в 1×slots casino Чтобы помощи убедиться в превосходствах бездепозитных призов, довольно зарегистрироваться в казино и получить одобрение.Вы скорее, как и все предпочитаете получать подарки и бездепозитные призы казино. Игорные дома брали в повадку одаривать гэмблеров приятными бонусами. Стать владельцем приветственного презента возможно за создание профиля либо пополнение счёта. Второй вариант более увлекательный, так клубы готовы удвоить депозит! Но случае вы новичок и лишь знакомитесь с миром азарта, лучше воспользуйтесь бонусом за регистрацию. <a href=http://badminton-kreuztal.de/index.php?option=com_easygb>http://badminton-kreuztal.de/index.php?option=com_easygb</a> 1×slots официальный demo регистрация в 1×slots casino Активация денежного вознаграждения происходит автоматически в создания профиля либо использования промокода. Иногда операторы предъявляют вспомогательные требования: подписаться на странички казино в соц сетях или на рассылку маркетинговых извещений, скачать и ввести вспомогательный софт и т.д.Будьте внимательнее при ознакомлении с правилами во избежание происхожденья конфликтных обстановок с казино, когда после отыгрыша бездепа для не дадут исключить крупную сумму выигрыша.
1× slots официальный
Фриспины – безвозмездные вращения с фиксированной ставкой, которые возможно использовать в конкретных игровых автоматах. В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая часть забавы. Важно, часто бездепозитные бонусы в казино выдаются с ограничениями по максимальной выплате. В среднем можно рассчитывать на прибыль в количество тыщ рублей. Как вывести выигрыш с бонуса без депозита. Придётся доказать аккаунт документально, в некоторых заведениях. Процедура верификации обязательна и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате либо прочтите в правилах. <a href=http://gendou.com/forum/thread.php?thr=53120>http://gendou.com/forum/thread.php?thr=53120</a> 1×slots сайт
1×slots официальный сайт зеркало
<a href=https://krok.biz/forum/viewtopic.php?f=7&t=96630>1×slot рабочее зеркало</a> Особую изюминку видео слотам придают уникальные символы. С их выходом активируются различные бонусы. Вы можете запустить дополнительный уровень и увеличить сумму выигрыша. Есть знаки, которые сменяют ненадобные составляющие и сами творят выигрышные комбо. Не стоит забывать и про бонус-тур. После любого успешного спина есть шанс увеличить необходимую выигрыша в два либо четыре раза.Основное различие что, нет, собственно для получения бездепа не пополнять баланс в казино. Но кроме сего, есть ряд и отличий: x1 slots 1хслотс регистрация перейти на 1×slots <a href=http://gogotire.co.kr/bbs/board.php?bo_table=free&wr_id=1057846>http://gogotire.co.kr/bbs/board.php?bo_table=free&wr_id=1057846</a>
1хслот 1хслотс регистрация перейти на 1×slots
Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают приз по государствам. Вплоть до как, что клуб имеет себя игроков из Вашей страны, а бездеп не давать. В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая доля игры. Важно, зачастую бездепозитные бонусы в казино выдаются с лимитированиями по наибольшей выплате. В среднем возможно рассчитывать на выгода в некоторое тысяч руб. Как вывести выигрыш с бонуса без депозита. Придётся доказать аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате или прочтите в правилах.Казино выделяет возможность заработать и вывести настоящие деньги на бездепозитных бонусах. Обычно, это незначительная сумма, которую казино имеет себе разрешить презентовать игроку. <a href=http://mastershina.by/bitrix/rk.php?goto=http://uzdm.pro/bitrix/redirect.php?goto=http://yellifood.com/bitrix/redirect.php?goto=https://telegra.ph/Sposoby-vozvrata-deneg-za-obuv-kotoraya-vyzvala-mozoli-i-kak-reshit-spornye-voprosy-s-prodavcom-09–24>http://mastershina.by/bitrix/rk.php?goto=http://uzdm.pro/bitrix/redirect.php?goto=http://yellifood.com/bitrix/redirect.php?goto=https://telegra.ph/Sposoby-vozvrata-deneg-za-obuv-kotoraya-vyzvala-mozoli-i-kak-reshit-spornye-voprosy-s-prodavcom-09–24</a> Поспешите забрать бездепозитные бонусы за регистрацию в казино из представленного перечня. Все платформы столько ведут легальную деятельность, но и обрадуют честными плодами игры, высокой отдачей, быстрыми выплатами.Прямо момент заберите благотворительные вращения за регистрацию без депо и начинайте собирать призовые композиции ради солидных выигрышей! 1×slot регистрация Бездепозитные бонусы — это подарки от казино вид бонусных денег или фриспинов для игровых автоматов, коие начисляются на акк игрока последствии процедуры регистрации на сайте заведения. Для получения этих поощрений депо не требуется.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.mentalhealth-world.org.uk/forums/index.php?/topic/96265–1×slots-%D1%81%D0%B0%D0%B9%D1%82/>1×slots сайт</a>
<a href=http://av3526.com/forum.php?mod=viewthread&tid=74&pid=26262&page=40&extra=page%3D1#pid26262>1хслот официальный сайт зеркало</a>
<a href=https://rolivka.online/forum/showthread.php?tid=40537>1×slots сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но разу не забывайте пристально читать правила роли в бонусных акциях. Если вы нарушите но бы одно условие, позже вы не можете уладить недоразумение с администрацией. Условия отыгрыша приза. Если Вы планируете заработать на бездепозитном бонусе, то для направьте на велечину вейджера и срок, который дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, тем легче отыграть приз и исключить выигрыш.
#2141 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
макао казино казино 1 <a href=https://sovsekretno.net/>porno Илона Маркова, хоккеистка</a> сайт букмекерской конторы фильмы казино рояль <a href=https://slon-ru.com/>леон букмекерская контора</a> Ходнева Светлана Владимировна порно букмекерская контора официальный сайт 1×bet официальный black russia казино букмекерская контора фонбет официальный сайт лучшие казино бесплатно букмекерская контора
DiskiPlus 1×bet 1 DiskiPlus casino зеркало сегодня рабочее <a href=https://diskiplus.ru/>DiskiPlus яндекс казино</a> DiskiPlus Набиуллина Эльвира Сахипзадовна порно DiskiPlus ешь казино <a href=https://diskiplus.ru/>DiskiPlus casino регистрации</a> DiskiPlus 1×bet телефон DiskiPlus порно с Абрамченко Виктория Валериевна DiskiPlus pin up casino скачать DiskiPlus казино 5 DiskiPlus kent casino DiskiPlus 1×bet слоты 1×bet top DiskiPlus casino 7k рабочее
#2142 Charlesgunnyhttp://filmkachat.ru
1× slots зеркало
Главным интересным в появлении этих вознаграждений состоит что, что пустив их в ход, компьютерные ничем не рискует и в последствии никому ничего не несомненно должен (не зависимо, получит ли он благодаря бонусам какой-нибудь выигрыш или моментально спустит все лишь собственно прибывшие финансы). То есть, казино снабжает игрока возможностью на дармовой основе выступать во всевозможные слоты и даже спонсирует игру. <a href=http://filmkachat.ru/>x1 slots регистрация в 1×slots casino</a> Акционные предложения от казино существуют в разных форматах. Часто призы даются в мена на депозит. Игрок заносит платеж и получает средства, безвозмездные вращения прочие поощрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — картина приза, кот-ый гарантирован за исполнение конкретных поступков на сайте: <a href=https://aprenderfotografia.online/usuarios/avtovikuplviv/profile/>https://aprenderfotografia.online/usuarios/avtovikuplviv/profile/</a> Не сложно догадаться, что not the slightest deposit bonuses почти разу не случаются немаленькими. Чаще всего речь идет о пяти–тридцати долларах (либо эквиваленте этой суммы в другой денежной). казино 1×slots официальный сайт <a href=https://www.freebeg.com/forum/member.php?action=profile&uid=26499>https://www.freebeg.com/forum/member.php?action=profile&uid=26499</a> Подарки на конкретные даты выделяются условиями получения. Если поощрение начисляют игроку на денек рождения, то сумма обыкновенно находится от совместного размера депозитов за год.Также, учите, что бездепозитный бонус возможно вывести лишь сомнений случае, когда будут выполнены все условия отыгрыша.
1×slots актуальное зеркало
Бонусы без депо при регистрации числятся наиболее красивыми как для опытных игроков, так для и начинающих. Получив это вознаграждение, заказчик имеет играть на настоящие средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а обстоятельства их активации и выигрыша. 1× slots casino официальный сайт Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.Бездепозитные призы казино за регистрацию в 2022 году — это вероятность поиграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой либо числом бесплатных вращений без внесения депо. Не путайте деморежим с реальной забавой без необходимости внесения депо. <a href=https://goblin-film.net/user/DoctorLazutakr/>https://goblin-film.net/user/DoctorLazutakr/</a> Все любят получать презенты. Согласитесь, почти любой играющий человек будет безгранично счастлив, если получит безвозмездный подарок для игры в онлайн казино просто за регистрацию либо же приз за внесенный депозит, например нарекаемые приветственные бонусы для новых игроков. Соответственно такие онлайн клубы станут более знамениты и преимущественны у игроков при выборе казино для игры. Топ казино постоянно обновляется и добавляются новые и занимательные игровые клубы с симпатичной бонусной политикой и всеми вероятными преимуществами, льготами, к которым относятся эти призы как фриспины за регистрацию, валютные бездепозитные призы, еще щедрые бонусы за внесенный депозит. 1×slots официальный регистрация Такой бесплатный эквивалент средств зачисляется на профиль юзера в воплощения требований и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений возможен лишь после воплощения вейджеровых критерий.
1х слотс зеркало регистрация в 1×slots casino
Также посещают случаи, когда казино начислит обсужденный бонус последствии регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам.Частенько новенькие не понимают, как активировать подарки либо вывести первый выигрыш. Для похожих случаев наша команда описала основные термины – что это фриспины, вейджер, как его отыграть, чего необходимо протекать верификацию. Самые популярные способы вывода средств ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электронным платежным системам подобии Neteller и Skrill, а используют криптовалютными кошельками. Вывод выигрышей может исполняться мгновенно или занимать от нескольких часов до нескольких суток. <a href=https://opaseke.com/users/7510>https://opaseke.com/users/7510</a> зеркло казино 1×slots Для получения бонуса нужно ознакомиться с программкой преданности казино и устроить ставки на сумму, необходимую для перехода на грядущий уровень.Самый распространённый из подобных бонусов, конечно же, бездеп на день рождения клиента — бонус повторяющий фиксированной суммы либо фриспинов поступает на счёт игрока, а воспользоваться им возможно протяжении установленного периода медли.
1×slots казино зеркало
Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации презента необходимо доказать электронную почту и привязать аппарат; Эффективность бездепов в качестве рекламного прибора оценили многие операторы. Малоизвестные площадки употребляют эти промоакции, чтобы скоро набрать базу. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны неизменных гостей. Не все сайты, дающие подарки без депозита, рекомендованы к игре. За симпатичным промоописанием могут скрываться неосуществимые обстоятельства отыгрыша прочие подводные камни. Бонус начисляется игроку незамедлительно последствии регистрации и прохождения верификации в казино и не настятельно от клиента внесения депо. Как управляло, объем приза в сходственном случае достаточно стыдливый, однако дозволяет новеньким познакомиться с игрой без риска настоящими деньгами.Бездепы с безвозмездными вращениями предоставляют юзерам право вертеть барабаны игровых автоматов без снятия средств со счета. За каждый раунд уплачивает казино. Число спинов ограничено и изредка превышает сотку. Если акция включает в себя большое безвозмездных игр, их начисление имеет быть разбито на несколько дней. 1×slots регистрация на 1хслотс <a href=https://zeoworks.com/main/member.php?action=profile&uid=256412>https://zeoworks.com/main/member.php?action=profile&uid=256412</a> Если при регистрации указать промокод, можно гарантировано получить бонус. Где брать ваучер? Посетите определенную блоги или форумы. Иногда администрация клуба делает рассылку ваучеров на электрическую почту. В заключительнее время игорные дома начали афишироваться в фильмах и телесериалах. Присмотритесь и скорее заметите промокод, кот-ый принесёт 500 или 1 000 бонусных рублей.Простая процедура получения бездепозитного бонуса, кот-ая займет менее 2-х мин. Для получения бездепов, достаточно зарегистрироваться и подтвердить контактные данные.
1×slots casino регистрация
Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные способы и оценить необыкновенности, труднодоступные при ирге в демо режиме. Многие новые клиенты перебегают в число неизменных, а оператор получает длительную прибыль.Активация происходит счет промокодов, коие вводятся в личном офисе последствии регистрации. Среди спецпредложений в перечне Casino.ru содержатся эксклюзивные промокоды, коие доступны только посетителям портала. Другие методы начисления средств ? автоматическая активация сразу после творенья аккаунта и получение дара по запросу в службу технической поддержки. Зарегистрироваться в казино по специальной ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефонного и электронную почту). Для доказательства номера аппарата необходимо в собственном профиле показать свой номер и нажать кнопку „Подтвердить номер телефона“, далее Вы получите sms-сообщение с кодом, кот-ый нужно ввести в соответствующее фон. Для подтверждения электронной почты, перебежать по активной ссылке в письме от казино. <a href=https://hp.dragonland-radio.de/profile.php?lookup=71>https://hp.dragonland-radio.de/profile.php?lookup=71</a> Особую изюминку видео слотам присваивают оригинальные символы. С их в активируются различные бонусы. Вы сможете запустить дополнительный степень и увеличить необходимую выигрыша. Есть знаки, коие замещают негодные элементы и сами делают выигрышные комбо. Не стоит забывать и тему бонус-тур. После каждого счастливого спина есть шанс увеличить сумму выигрыша в два или хорошо раза. 1×slots официальный сайт зеркало Чтобы бездеп не был начислен на Ваш аккаунт, Вам не активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт механически, а Вы не расчитываете его применять, обратитесь в службу с пожеланием отменить бездепозитный приз.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.54cxylm.cn/forum.php?mod=viewthread&tid=2490&pid=403760&page=8&extra=page%3D1#pid403760>1×slots актуальное зеркало</a>
<a href=https://talkonlinenews.com/viewtopic.php?t=12152>1× slots casino зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный приз часто возможность стать легкодоступным незамедлительно последствии завершения регистрации, поскольку правило единственным притязанием к нему считается регистрация, а после проверка вашей свежей учетной записи.
#2143 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Приезжева Екатерина Геннадьевна порно casino 7k рабочее <a href=https://vestnik-jurnal.com/>1×bet скачать приложение</a> букмекерские конторы pin ев казино <a href=https://m.repost.news/>порно с Захарова Мария Владимировна</a> casino 7k рабочее слоты казино суть казино 1×bet на андроид бесплатно pin up букмекерская контора играющие казино онлайн реального казино
DiskiPlus казино смотреть DiskiPlus почему в казино нет окон <a href=https://diskiplus.ru/>DiskiPlus pin casino</a> DiskiPlus рабочие зеркала казино DiskiPlus porno Юлия Канакина <a href=https://diskiplus.ru/>DiskiPlus casino регистрации</a> DiskiPlus 7k casino зеркало на сегодня DiskiPlus cat casino DiskiPlus порно с Федор Чалов (футбол) DiskiPlus порно с Голикова Татьяна Алексеевна DiskiPlus букмекерская контора фонбет официальный сайт DiskiPlus порно с Дарья Касаткина (теннис) DiskiPlus casino на телефон
#2144 Charlesgunnyhttp://filmkachat.ru
1×slots casino зеркало рабочее
Автоматы неспроста считаются самым популярным азартным веселием. Чтобы освоить управление и управляла, потребуется всего некоторое минут. Ваша задачка сделать ставку, определить количество рабочих линий и возможно вертеть тамбур. Если на экране выпадет выигрышная композиция – вы выиграли! С данной задачей для посодействуют справится бездепозитные бонусы казино. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> Отзывы читателей о бонусных акциях посодействуют составить впечатление, хотя не забывайте о субъективности собственных комментариев.В игровых клубах без лицензии Вы покупаете „кота в мешке“ и когда спорных ситуаций нет возможности куда-то пожаловаться и обосновать собственную правоту. <a href=https://hb-themes.com/forum/all/users/shopavto/>https://hb-themes.com/forum/all/users/shopavto/</a> Изучить управляла и условия получения бездепозитных призов казино, Вы можете у нас на сайте в разделе с бонусами либо на официальном веб-сайте избранного Вами казино. Если не найти необходимую информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал или по электрической почте. казино 1×slots официальный сайт <a href=http://shinyoungwood.kr/bbs/board.php?bo_table=free&wr_id=709402>http://shinyoungwood.kr/bbs/board.php?bo_table=free&wr_id=709402</a> Oтыгpaть бонус с обозначенным вeйджepом, для этого нужно сдeлaть cтaвoк нa cумму, превышающую размер приза в количество один.Сразу последствии активации промокода можно пользоваться презентом. Как теснее упоминалось, бонусы посещают трёх обликов – фриспины, кредиты и фриплей-бонусы.
1хслот скачать
<a href=http://forum.survival-readiness.com/viewtopic.php?t=276801>1×slot зеркало</a> 1×slots зеркало подтвердит вашу регистрацию если говорить Каждый новичок и умелый игрок мечтают скоро стартануть и начать создавать настоящие ставки. Для этого довольно отобрать подарок, за который не нужно выплачивать. В зависимости от игровой платформы, нужно сделать профиль, привязать email или телефон. После этого администрация начислит щедрое вознаграждение повторяющий бесплатных вращений либо виртуальных кредитов. <a href=http://camillacastro.us/forums/viewtopic.php?id=400062>http://camillacastro.us/forums/viewtopic.php?id=400062</a> Чтобы выступать даром на реальные средства в казино, не всегда достаточно просто зарегистрироваться. Иногда необходимо выполнить дополнительные деяния.2. Создать новый профиль. Для регистрации надо(надобно) наполнить небольшую анкету или зайдите в собственный кабинет при помощи социальных сеток; 1×slots официальный сайт мобильная версия скачать В лицензионных бездепозитных казино выступать в азартные забавы действительно безопасно. Наличие лицензии подтверждает тот факт, собственно клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP.
1×slots регистрацию процедура займет всего лишь
Все обожают получать подарки. Согласитесь, почти каждый играющий человек несомненно необъятно счастлив, случае получит безвозмездный подарок для игры в онлайн казино просто за регистрацию или же приз за внесенный депозит, например именуемые приветственные бонусы для свежих игроков. Соответственно эти онлайн клубы станут более популярны и преимущественны у игроков при выборе казино для забавы. Топ казино день обновляется и прибавляются новые и занимательные игровые клубы с привлекательной бонусной политикой и всеми вероятными прерогативами, к коим относятся эти бонусы как фриспины за регистрацию, валютные бездепозитные призы, а великодушные призы за внесенный депо.Минимального оборота. Этот лимит уточняется вейджером — пока игрок не поиграет на установленную сумму, вывод средств несомненно недосегаем. Призовые начисления без депозита шансы предоставляться для роли в турнирах интернет казино. Потратить перечисленные средства можно самая масштабах этой промоакции. Условия их проведения содержат ограничения на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться этим предложением, лучше выучить его правила.Простая процедура получения бездепозитного приза, которая займет не более 2-х мин. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные. <a href=https://namosusan.com/bbs/board.php?bo_table=free&wr_id=344918>https://namosusan.com/bbs/board.php?bo_table=free&wr_id=344918</a> Бездепозитные призы, как уже ясно, являются оригинальной возможностью к игровому процессу абсолютно бескорыстно, словами играть в онлайн казино безвозмездно и на быть свои незамедлительно в регистрации аккаунта. Автоматы с этим депо все стать прекрасной возможностью сыграть для почитателей пыла с определенными ограничениями в финансах. 1×slots зеркало видели такую регистрацию на
1 х слотс зеркало
К раскаянью, нет. Почти все казино, требуют внесение но бы одного малого депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, что вывести деньги разрешено только на что, эту платежную систему, с коей был сделан депозит. <a href=https://www.sgomberisgombero.it/author/jamesapate/>1×slots зеркало</a> Для проверки применяются сканы паспортов, водительских прав, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если пользователь обнаружен в попытке ввести вспомогательный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в темный перечень. При ирге на лицензионной площадке не бояться указывать достоверную персональную информацию (шифрование исключает утечку индивидуальных данных). 1×slots коды <a href=https://canada.unoforum.pro/?1–9–0–00000160–000–0–0>https://canada.unoforum.pro/?1–9–0–00000160–000–0–0</a> Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную процедуру активации бонуса без депозита. Внимательно прочтите до конца. Многие новенькие проделывают оплошности на этапе регистрации и поэтому не получить подарок.Вознаграждения за получение VIP-статуса ? начисляются в программки преданности при достижении одного уровня либо выдаются индивидуально менеджерами саппорта.
1×slots официальный зеркало рабочее
При правильном подходе бездепы — это отличный метод выступать на деньги без траты личных средств. Есть несколько советов, следуя которым возможно извлечь максимум полезности из подобных промоакций казино. Играть стопам только на лицензированных площадках. Скриптовые веб-сайты не врут с бонусными услугами, хотя и используют пиратский софт с измененным ГСЧ. Выиграть на этих автоматах нереально. <a href=http://populardirectory.org/Green-pharmacy-nearby_305447.html>http://populardirectory.org/Green-pharmacy-nearby_305447.html</a> зеркала 1×slots В интернет-сети практически можно отыскать списки более знаменитых и обещанных поощрительных программ от модных онлайн-казино.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=893600#pid893600>1×slots зеркало сайта</a>
<a href=https://praisenpray.org/forums/showthread.php?tid=120395>1×slots регистрация 1×slots review live</a>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5302/#comment-644164>1×slots регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подтверждение электронной почты – одно из основных критерий, коие есть практически в любом бездепозитном казино. Чтобы верифицировать электрическую почту, достаточно перейти по активной ссылке в послании, полученном от азартного клуба. Операторы гемблинга утверждают, что так они борются с бонус-хантерами. Впрочем, критики считают, собственно данным казино пробуют сделать из случайного постояльца неизменного игрока.
#2145 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Самойлова Алла Владимировна порно вавада казино <a href=https://www.ossetia.tv/>казино фильм</a> сайт 1×bet слоты Анна Михалкова <a href=https://rucriminal.info/>лучшие онлайн казино</a> пин casino porno Александр Соболев (футбол) рейтинг казино pin ап casino 1×bet официальный сайт порно с Диана Шнайдер (теннис) Анна Михалкова
DiskiPlus casino рабочее DiskiPlus up casino официальный <a href=https://www.diskiplus.ru>DiskiPlus порно с Георгий Джикия (футбол)</a> DiskiPlus рабочее казино DiskiPlus казино без <a href=https://www.diskiplus.ru/>DiskiPlus почему в казино нет окон</a> DiskiPlus porno Мария Шарапова DiskiPlus пинап казино DiskiPlus casino betting DiskiPlus макао казино DiskiPlus букмекерская контора без казино DiskiPlus cat casino
#2146 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало
В случае установленного лимита на сумму вывода выигрыша с бездепозитного приза, игрок не сможет исключить больше заявленной суммы.Перечисленные повыше главные характеристики сопровождают практически каждый бонус и являются стандартными для бездепозитных бонусных начислений в казино. <a href=http://filmkachat.ru/>рабочее зеркало 1хслотс</a> Как только вы отыграли вейджер и свои с бонусного баланса перешли вам на реальный счет, Вы неустрашимо сможете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (сделать наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депо).За счёт спинов получится запустить разные онлайн слоты, протестировать стратегии и поднабраться навыка. Фишка том,, что вращения начисляются на топовые аппараты с оригинальными опциями и высочайшей отдачей. Не запамятовывайте, что в каждом акционном предложении предусмотрены специальные притязания – кратковременные лимитирования, максимальный размер ставки, список дешевых игр. <a href=https://feedback.challonge.com/forums/44455-feature-requests/suggestions/49478687-%D1%82%D0%B5%D1%80%D0%BC%D1%96%D0%BD%D0%BE%D0%B2%D0%B8%D0%B9-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D0%B6-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2-%D1%96%D0%B2%D0%B0%D0%BD%D0%BE-%D1%84%D1%80%D0%B0%D0%BD%D0%BA%D1%96%D0%B2%D1%81%D1%8C%D0%BA%D1%83-%D1%8F%D0%BA-%D0%B2%D0%B8%D0%B3>https://feedback.challonge.com/forums/44455-feature-requests/suggestions/49478687-%D1%82%D0%B5%D1%80%D0%BC%D1%96%D0%BD%D0%BE%D0%B2%D0%B8%D0%B9-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D0%B6-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2-%D1%96%D0%B2%D0%B0%D0%BD%D0%BE-%D1%84%D1%80%D0%B0%D0%BD%D0%BA%D1%96%D0%B2%D1%81%D1%8C%D0%BA%D1%83-%D1%8F%D0%BA-%D0%B2%D0%B8%D0%B3</a> 1×slots сайт <a href=https://hackmd.io/s/Hy7N5-_tC>https://hackmd.io/s/Hy7N5-_tC</a>
1×slots зеркало регистрация то дальше необходимо пройти
<a href=https://praisenpray.org/forums/showthread.php?tid=119002>рабочее зеркало 1хслотс</a> 1×slots casino регистрация 1×slotscasin online <a href=http://alt1.toolbarqueries.google.so/url?q=http://tp45.ru/bitrix/click.php?goto=http://avto-mechanic.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/7tEYV6×oaST>http://alt1.toolbarqueries.google.so/url?q=http://tp45.ru/bitrix/click.php?goto=http://avto-mechanic.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/7tEYV6×oaST</a> Риск-игра по одинаковым шансам – Также казино возможность запрещать исполнять условия по отыгрышу за раунда на удвоение, который предлагается в слотах, видео-покере и неких других играх. скачать 1×slots на андроид мобильная версия Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы мгновенно получить 33 безвозмездных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, появляется реальный шанс победу!
1×slots casino регистрация
Если при регистрации указать промокод, возможно гарантировано получить бонус. Где брать ваучер? Посетите тематику блоги или форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В последнее время игорные дома начали рекламироваться в фильмах и сериалах. Присмотритесь и всего заметите промокод, который принесёт 500 либо 1 000 бонусных рублей. <a href=http://b77706vw.bget.ru/user/DoctorLazutaer/>http://b77706vw.bget.ru/user/DoctorLazutaer/</a> 1×slots зеркало на сегодня Во всех законных онлайн-казино Беларуси нужно свидетельство паспортных данных для игры — это заявка правительства государства.
1×slot казино зеркало
Бездепозитный бонус за регистрацию в казино — это стартовый презент вид денежного начисления или бесплатных вращений для свежих игроков заведения, для получения которого не нужно заносить депо. <a href=http://jagplay.ekafe.ru/viewtopic.php?f=65&t=6213>1хслотс казино зеркало</a> Выше мы предоставили глубокий набор самых свежих и актуальных бездепозитных бонусов в интернет казино без пополнения на 2022 год, где продоставляется воспользоваться хоть ценным бездепозитным бонусом.Чаще всего применяются коды. Их нужно вносить в особые окошки регистрационной анкеты, случае речь о пригласительных призах, или в особом разделе собственного офиса игрока. Такой казино бонус без депо за регистрацию выдается игроку на час и активно используется данное предложение с 2017 года. Это как бы некая маскировка поощрения под бездепозитный. Суть всего сего сводится к что, этому, собственно игроку на час выдается, к примеру, 1000 долларов, а реклама повторяет о том, что любой выигрыш можно будет в будущем забыть при для. Но если играющий всерьез отнесется к этому предложению, то он просто потеряет время. Ведь геймеру надо(надобно) несомненно играть не главном аккаунте, в тренировочном и с ограниченным выбором автоматов и ставок. Да и если, тогда, выигрыша (даже всей тыс. ) в верховодила вступят определенные обстоятельства, где несомненно сказано, что максимальной суммой победы возможность быть лишь двести $ и средства возможно использовать лишь в качестве бонуса на первый вклад с вейджером 25 от суммы вознаграждения плюс сам депо. По результату получится, что игрок выигрывал для 200% приз с вейджером на конкретную необходимую. Короче разговаривая, это все надо вашего времени. 1×slots сайт зеркало <a href=https://training.trainingstree.com/author/jaspersnich/>https://training.trainingstree.com/author/jaspersnich/</a> Процесс доказательства личности возможность занять от 1-го дня до недели. Если заказчик разрешил какую ошибку при заполнении паспортных данных, то ему стопам обратиться с проблемой в службу поддержки онлайн-казино.Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются незамедлительно в сотворения профиля и активны недолговременное время. Если не успеете израсходовать средства, они попросту сгорят. Касаемо медли, как призы активны протяжении часа.
1×slot зеркало
Сразу после активации промокода возможно воспользоваться презентом. Как уже упоминалось, бонусы бывают трёх видов – фриспины, кредиты и фриплей-бонусы. Многие игроки, оценив функционал казино, остаются играть в нем и далее ? на это и направлено любое промо. Постоянные клиенты заносят депозиты и делают ставки, обеспечивая длительную прибыль оператора. То есть, казино выдают бездепы новым юзерам для формирования лояльной аудитории.Похожим образом работает третий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя или из-за с получения им VIP-статуса. Подарок предоставляется последствии обращения в поддержку и проверки. <a href=http://gripublicidad.com/index.php?option=com_kunena&view=topic&catid=2&id=28116&Itemid=528>http://gripublicidad.com/index.php?option=com_kunena&view=topic&catid=2&id=28116&Itemid=528</a> Выбор любого онлайн казино на нашем веб-сайте. В описании к каждому Вы можете разузнать, собственно получите за творение аккаунта.Для получения выигрыша потребуется выполнить обстоятельства казино. Чаще всего игроку нужно поставить определенную необходимую, но уже из личных денег. Она рассчитывается из совместного размера выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, в пользователь выиграл 1000 руб., а множитель сочиняет х30, исключить средства возможно несомненно, сделав ставки на 30 000 руб. 1×slots актуальное зеркало Доступ к дару имеет открываться механически последствии введения промокода или воззвания в саппорта вебсайта. В первом случае от пользователя не требуется никаких поступков. Бездеп с активацией по коду встречается почаще всего. Игроку необходимо ввести совокупность знаков в графе, которая имеет находиться в регистрационной форме в Личном офисе.В бонусную программу множества операторов входят регулярные бездепы. Это пожизненные акции, поощряющие интенсивных постоянных игроков. Популярный формат — раздача фриспинов по конкретным денькам недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депо в обмен на скопленные баллы лояльности.
<b>Смотреть еще похожие новости:</b>
<a href=http://kemsrr.forumex.ru/viewtopic.php?f=7&t=5531>1×slots сайт зеркало</a>
<a href=http://fin-molitor.com/forum/viewtopic.php?f=2&t=539648>1× slots зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Иногда в бездепа, казино дарует минимальный бонус (до 50 руб. ), ради которого не заморачиваться. Обычно показатель повыше, чем для бонусов на депо. Не изумляйтесь, случае он будет даже х100. Иногда завышенный коэффициент вейджера уточняется для обитателей отдельных государств.
#2147 internetGephttps://domashij-internet-nizhnij-novgorod001.ru
домашний интернет <a href=https://domashij-internet-nizhnij-novgorod001.ru>domashij-internet-nizhnij-novgorod001.ru</a> интернет провайдеры нижний новгород по адресу
#2148 Magazinsemena_Skecthttps://magazinsemena.ru/
Доброго времени суток! В наше преобразовавшееся и модифицированное время, когда ни для кого не секрет, что все продукты изготовлены и выращены с кучей всевозможных добавок и улучшителей. Конечно, сейчас абсолютно и точно уже нет тех овощей и фруктов, которые выращивались и продавались в застойное время. Но мы можем сами посадить семена на рассаду, вырастить овощи и фрукты, без каких либо химических добавок и улучшителей роста. Экологически чистые продукты это наше здоровье и долголетие! Помимо овощей и фруктов, мы может красиво и необычно украсить наши огород, дачу или приусадебный участок оригинальными и необычными цветами и растениями. В общем, если вам интересно найти, интернет магазин семян, магазин семян, каталог семян и т.д., например: <a href=https://magazinsemena.ru/>посадка семян на рассаду</a> Тогда вам срочно нужно прямо сейчас перейти на сайт Семена на Яблочкова и узнать все подробности по семена травы, семена интернет каталог, семена на рассаду, семена для рассады, семена растений, семена цветов, луковицы цветов, семена овощей, семена почтой и т.д. https://magazinsemena.ru/ . Обязательно переходите на сайт magazinsemena.ru магазин семян, интернет магазин семян, каталог семян изучайте информацию и сохраняйте в закладки, не забудьте записать номер телефона +7 (495) 610–57–17 и адрес сайта. В это трудно поверить, но магазину уже 15 лет, все эти годы они не только продают семена в офлайн магазине и интернет магазине, но и надежно и успешно отправляют почтой, транспортными компаниями и в пункты выдачи заказов. Увидимся!
#2149 Anthonymedhttps://faceout.mn.co/posts/82543958?utm_source=manual
https://deogiricollege.org/…e-bonus.html
#2150 DuaneReulthttps://www.designspiration.com/everent/
Рекомендую для качественной аренды спецтехники, подробнее тут <a href=https://www.designspiration.com/everent/>https://www.designspiration.com/everent/
#2151 Briangoosehttps://www.divephotoguide.com/user/Bannik/
Эффективный способ найти сауну или хаммам, подробнее тут <a href=https://www.divephotoguide.com/user/Bannik/>https://www.divephotoguide.com/user/Bannik/
#2152 RaymondBiowshttp://kozhuhovo.com/forum/viewtopic.php?p=1037483#1037483/
Лучший вариант для оптимизации сайта, узнайте больше тут <a href=http://kozhuhovo.com/forum/viewtopic.php?p=1037483#1037483/>http://kozhuhovo.com/forum/viewtopic.php?p=1037483#1037483/
#2153 internetGephttps://domashij-internet-msk003.ru
тарифы интернет и телевидение москва <a href=https://domashij-internet-msk003.ru>domashij-internet-msk003.ru</a> интернет провайдер москва
#2154 Roberthophttps://photozou.jp/user/top/3404593/
Профессионалы в аренде спецтехники, подробности тут <a href=https://photozou.jp/user/top/3404593/>https://photozou.jp/user/top/3404593/
#2155 EdwardOrerahttps://zumvu.com/bannik/
Лучший вариант для поиска бани для отдыха, подробности тут <a href=https://zumvu.com/bannik/>https://zumvu.com/bannik/
#2156 RaymondAdorthttps://www.nitrnd.com/blogs/333486/Code-Promo-1xBet-Gratuit-Meilleur-Bonus-jusqu-%C3%A0-130
https://www.pinterest.com/…889644472621
#2157 Marcuspoghttps://www.divephotoguide.com/user/1978Aleen
Acquistare Viagra Generico in Farmacia senza Prescrizione Online <a href=https://www.divephotoguide.com/user/1978Aleen>https://www.divephotoguide.com/user/1978Aleen</a> <a href=https://multichoicetalentfactory.com/user/68903>https://multichoicetalentfactory.com/user/68903</a> COMPRARE VIAGRA GENERICO: INFORMAZIONI FONDAMENTALI'. L'acquisto di Viagra generico, o di qualsiasi farmaco, richiede attenzione e consapevolezza. E fondamentale comprendere le normative vigenti e i potenziali rischi connessi all'automedicazione. VIAGRA GENERICO: COSA E E COME FUNZIONA? Il Viagra generico ha lo stesso principio attivo presente nel Viagra di marca, cioe il sildenafil. Questo composto e un inibitore della fosfodiesterasi di tipo 5 (PDE5) e funziona rilassando i muscoli delle pareti dei vasi sanguigni nel pene, aumentando il flusso sanguigno e favorendo l'erezione. COMPRARE IN FARMACIA: IL PERCORSO SICURO'. L'unica modalita sicura per procurarsi il Viagra generico e quella di recarsi presso una farmacia tradizionale muniti di una prescrizione medica. Comprare online senza ricetta e sia illegale che rischioso. I medicinali acquistati su Internet senza una prescrizione possono risultare contraffatti, avere dosaggi sbagliati o contenere ingredienti nocivi. – Ricetta Medica: E indispensabile una visita medica per ottenere la ricetta. Il medico valutera la vostra condizione di salute e accertera l'assenza di controindicazioni. – Farmacista: Il farmacista e a vostra disposizione per offrirvi dettagli preziosi riguardo all'impiego appropriato del farmaco e alle potenziali interazioni con altri medicinali. – Sicurezza: Acquistando in farmacia, garantite l'autenticita del farmaco e la sua corretta conservazione.
#2158 Marcuspoghttps://www.divephotoguide.com/user/1978Aleen
Acquistare Viagra Generico in Farmacia Senza Prescrizione Online <a href=https://www.divephotoguide.com/user/1978Aleen>https://www.divephotoguide.com/user/1978Aleen</a> <a href=https://multichoicetalentfactory.com/user/68903>https://multichoicetalentfactory.com/user/68903</a> COMPRARE VIAGRA GENERICO: INFORMAZIONI ESSENZIALI'. L'acquisto di Viagra generico, o di qualsiasi farmaco, richiede attenzione e consapevolezza. E fondamentale comprendere le normative vigenti e i potenziali rischi connessi all'automedicazione. VIAGRA GENERICO: COSA E E COME FUNZIONA? Il Viagra generico contiene lo stesso principio attivo del Viagra di marca, il sildenafil. Si tratta di un inibitore della fosfodiesterasi di tipo 5 (PDE5), che agisce rilassando i muscoli dei vasi sanguigni nel pene, permettendo un afflusso di sangue maggiore e facilitando l'erezione. COMPRARE IN FARMACIA: IL PERCORSO SICURO'. L'unica modalita sicura per procurarsi il Viagra generico e quella di recarsi presso una farmacia tradizionale muniti di una prescrizione medica. Comprare online senza ricetta e sia illegale che rischioso. I medicinali acquistati su Internet senza una prescrizione possono risultare contraffatti, avere dosaggi sbagliati o contenere ingredienti nocivi. – Ricetta Medica: E indispensabile una visita medica per ottenere la ricetta. Il medico valutera la vostra condizione di salute e accertera l'assenza di controindicazioni. – Farmacista: Il farmacista e a vostra disposizione per offrirvi dettagli preziosi riguardo all'impiego appropriato del farmaco e alle potenziali interazioni con altri medicinali. – Sicurezza: Optando per l'acquisto in farmacia, assicuratevi dell'autenticita del medicinale e della sua adeguata conservazione.
#2159 Montazhp_rewhttps://montazhp.ru/
Доброго времени суток! Важная и интересная новость для тех, кто желает освежить или обновить свой интерьер в СПб или Санкт-Петербурге! А если вы в процессе капитального или евроремонта квартиры, офиса, магазина, дома и т.д., то эта новость именно для вас. Именно для ценителей точного и высочайшего качества выполнения работ, а не топорного и некачественного исполнения. Для вас работает узкоспециализированная компания, которая заточена именно на монтаже плинтусов или установке плинтусов. В это трудно представить и поверить, но ими уже выполнено более 100000 км установленного плинтуса. В общем, если вы ищите, монтаж плинтуса, плинтус напольный, установка плинтусов и т.д., например: <a href=https://montazhp.ru/>установка плинтуса пвх</a> Тогда вам обязательно нужно прямо сейчас перейти на сайт montazhp since 2004 и узнать все подробности по покраска плинтусов, плинтус, плинтус для пола, плинтус мдф, плинтус для столешницы, плинтус пластиковый, плинтус деревянный, плинтус дуб, плинтус для кухни в СПб и ЛО и т.д. https://montazhp.ru/ . Обязательно переходите на сайт montazhp.ru Установка плинтусов изучайте информацию и сохраняйте в закладки, не забудьте записать адрес сайта и номер телефона. До новых встреч!
#2160 Kypit smartfon v Moskve_bbPahttp://techno-line.store
Apple iPhone в Митино <a href=https://techno-line.store/>techno-line.store</a> .
#2161 Iariortelhttp://[url=http://diplom-onlinex.com/bistraya-i-prostaya-pokupka-diploma-o-visshem-obrazovanii/]dip
Заказать диплом ВУЗа по доступной стоимости вы можете, обратившись к проверенной специализированной фирме. Купить документ института вы сможете у нас. <a href=http://diplom-onlinex.com/bistraya-i-prostaya-pokupka-diploma-o-visshem-obrazovanii/>diplom-onlinex.com/bistraya-i-prostaya-pokupka-diploma-o-visshem-obrazovanii</a>
#2162 Sazrhhqhttp://[url=http://diplomv-v-ruki.ru/kupit-diplom-s-vneseniem-v-reestr-bistro-i-nadezhno-3/]diplomv-
Мы изготавливаем дипломы любой профессии по выгодным ценам.– <a href=http://diplomv-v-ruki.ru/kupit-diplom-s-vneseniem-v-reestr-bistro-i-nadezhno-3/>diplomv-v-ruki.ru/kupit-diplom-s-vneseniem-v-reestr-bistro-i-nadezhno-3/</a>
#2163 Mazrqjmhttp://[url=http://Рєonlinekinofun.ru/byistroe-oformlenie-diploma-dostavka-po-vsey-strane/]Рєonlinek
Где заказать диплом по необходимой специальности? Мы предлагаем документы об окончании любых университетов России. Документы производят на настоящих бланках государственного образца. <a href=http://Рєonlinekinofun.ru/byistroe-oformlenie-diploma-dostavka-po-vsey-strane/>Рєonlinekinofun.ru/byistroe-oformlenie-diploma-dostavka-po-vsey-strane</a>
#2164 internetGephttps://domashij-internet-kazan003.ru
интернет по адресу казань <a href=https://domashij-internet-kazan003.ru>domashij-internet-kazan003.ru</a> провайдеры интернета казань
#2165 Mazrtphhttp://[url=http://soft-key.uz/read-blog/1363_v-nashi-dni-kupit-dokumenty-o-zavershenii-obucheniya-o
Где приобрести <b>диплом</b> по необходимой специальности? Готовый диплом с необходимыми печатями и подписями 100% отвечает стандартам, неотличим от оригинала. Не откладывайте собственные мечты на пять лет, реализуйте их с нами – отправьте заявку на изготовление документа прямо сейчас! Купить диплом о высшем образовании – легко! <a href=http://soft-key.uz/read-blog/1363_v-nashi-dni-kupit-dokumenty-o-zavershenii-obucheniya-ochen-legko-i-prosto-vne-za.html/>soft-key.uz/read-blog/1363_v-nashi-dni-kupit-dokumenty-o-zavershenii-obucheniya-ochen-legko-i-prosto-vne-za.html</a>
#2166 internetGephttps://domashij-internet-kazan002.ru
провайдеры интернета в казани по адресу проверить <a href=https://domashij-internet-kazan002.ru>domashij-internet-kazan002.ru</a> провайдер по адресу
#2167 Magazinsemena_Skecthttps://magazinsemena.ru/
Всем привет! В наше модифицированное и преобразовавшееся время, когда ни для кого не секрет, что все продукты изготовлены и выращены с кучей всевозможных улучшителей и добавок. Конечно, сейчас точно и абсолютно уже нет тех овощей и фруктов, которые продавались и выращивались в застойное время.
Но мы можем сами посадить семена на рассаду, вырастить овощи и фрукты, без каких либо улучшителей роста и химических добавок. Экологически чистые продукты это наше долголетие и здоровье! Помимо овощей и фруктов, мы может красиво и необычно украсить наши дачу, огород или приусадебный участок оригинальными и необычными цветами и растениями. В общем, если вы ищите, каталог семян, магазин семян, интернет магазин семян и т.д., например: <a href=https://magazinsemena.ru/>семена почтой интернет</a> Тогда вам нужно прямо сейчас перейти на сайт Семена на Яблочкова и узнать все подробности по семена цветов, семена интернет каталог, семена на рассаду, семена для рассады, семена растений, луковицы цветов, семена овощей, семена травы, семена почтой и т.д. https://magazinsemena.ru/ . Обязательно переходите на сайт magazinsemena.ru магазин семян, интернет магазин семян, каталог семян сохраняйте в закладки и изучайте информацию, не забудьте записать адрес сайта и номер телефона +7 (495) 610–57–17 . В это трудно поверить, но магазину уже 15 лет, все эти годы они не только продают семена в офлайн магазине и интернет магазине, но и надежно и успешно отправляют в пункты выдачи заказов, транспортными компаниями и почтой. Всем пока!
#2168 Diplomi_jhOrhttp://diplomys-vsem.ru
купить диплом о высшем образовании в переходе <a href=https://diplomys-vsem.ru/>diplomys-vsem.ru</a> .
#2169 1win_exSihttp://1win6051.ru
1вин войти <a href=https://1win6051.ru/>1вин войти</a> .
#2170 Montazhp_rewhttps://montazhp.ru/
Добрый день! Интересная и важная новость для тех, кто желает освежить или обновить свой интерьер в Санкт-Петербурге или СПб! А если вы в процессе евроремонта или капитального ремонта дома, квартиры, офиса, магазина и т.д., то эта новость именно для вас. Именно для ценителей высочайшего и точного качества выполнения работ, а некачественного и не топорного исполнения. Для вас работает узкоспециализированная компания, которая заточена именно на монтаже плинтусов или установке плинтусов. В это трудно поверить и представить, но ими уже выполнено более 100000 км установленного плинтуса. В общем, если вы хотите найти, плинтус напольный, монтаж плинтуса, установка плинтусов и т.д., например: <a href=https://montazhp.ru/>плинтус мдф санкт петербург</a> Тогда вам обязательно нужно прямо сейчас перейти на сайт montazhp since 2004 и узнать все подробности по плинтус для столешницы, плинтус, плинтус для пола, покраска плинтусов, плинтус мдф, плинтус пластиковый, плинтус деревянный, плинтус дуб, плинтус для кухни в СПб и ЛО и т.д. https://montazhp.ru/ . Обязательно переходите на сайт montazhp.ru Установка плинтусов изучайте информацию и сохраняйте в закладки, не забудьте записать адрес сайта и номер телефона. Всем пока!
#2171 Charlesgunnyhttp://filmkachat.ru
1×slots на любой вкус как пройти регистрацию
Возьми свой подарок. Чаще всего приз активизируется сразу в регистрации. Но бывают истории, когда нужно забежать в личный кабинет или написать в справочную службу.Для как, чтобы отыграть необходимую вашего бездепозитного бонуса надо(надобно) выполнить условия вейджера. Очень нередко фриспины даются на определенные слоты (book of ra, book of lifeless, book of sun), избирайте слот себе по, все довольно красочные и качественные. Бездепозитные бонус может быть денежным так и повторяющий фриспинов на слоты <a href=http://filmkachat.ru/>рабочее зеркало 1×slots</a> <a href=https://www.behance.net/67b1f5c3>https://www.behance.net/67b1f5c3</a> 1×слотс казино <a href=https://loansnearme.com.au/author/doctorlazutakt/>https://loansnearme.com.au/author/doctorlazutakt/</a> 2. Создать новый профиль. Для регистрации надо(надобно) наполнить маленькую анкету либо зайдите в личный кабинет при помощи соц сеток;Получив свой подарок, Вы сможете безвозмездно выступать на реальные деньги, а выполнив условия отыгрыша, вывести свой выигрыш.
1×slots регистрация 1×slotscasino09k online
Третитй бездепозитный бонус за регистрацию – валютные средства. К огорчению, начислить рубли или баксы способны только известные и знаменитые клубы. С их поддержкою вы сможете насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком. 1хслотс казино зеркало Oтыгpaть бонус с обозначенным вeйджepом, желаемого нужно сдeлaть cтaвoк нa cумму, превосходящую размер приза в количество раз.При забаве на бонусные свои запрещается выступать в игровые автоматы с прогрессивным джекпотом и забавы из радела exist casino. Кроме как, некоторые казино дают бездеп на один либо некоторое конкретных слотов, и в других забавах Вы не можете на их играть. <a href=http://golpro.jp/userinfo.php?uid=14206#>http://golpro.jp/userinfo.php?uid=14206#</a> 1×slot официальный сайт
1 x slots
К сожалению, нет. Почти все казино, требуют внесение хотя бы 1-го минимального депо для вывода выигрыша с бездепозитного бонуса. Также учитывайте, собственно вывести средства разрешается только на ту платежную систему, с которой был изготовлен депозит.Как верховодило, при выводе финансов, от играющего потребуется лишь устроить минимальный лепта чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом собственный счет. Не рекомендуем опрометью голову хвататься за различные предложения получения средств без инвестициям. Вполне вполне, что бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на первый взор. Альтернативой считается казино приз за депо. Мы предлагаем вам пару советов, спасибо коим у любого игрока несомненно вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств: <a href=http://elite-models.cc/member.php?action=profile&uid=22161>http://elite-models.cc/member.php?action=profile&uid=22161</a> Мы собрали и выпустили перечень превосходнейших бездепозитных казино с призами за регистрацию, коие гарантируют щедрые выигрыши и моментальные выплаты. 1хслотс рабочее зеркало на сегодня Если вы новичок в и только попали в неизведанную вами область азарта — за услуг как бездепозитные призы без пополнения.
1×slots промокод при регистрации 2025
Поспешите арестовать бездепозитные бонусы за регистрацию в казино из представленного списка. Все платформы не водят законную деятельность, но и порадуют правдивыми результатами забавы, высокой отдачей, прыткими выплатами.Фриплей-бонусы встречаются только в некоторых клубах. Они зачисляются сразу после создания профиля и активны недолговременное время. Если не успеете потратить средства, они просто сгорят. Касаемо времени, как призы активны протяжении часа. В разделе с призами активировать собственный подарок. Найти забавы, для которых учтено одобрение и использовать бонус по предназначению.После получения бонуса вывод средств для клиента будет недосегаем времени, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо чета недель. Выводить средства игрок сможет лишь после отыгрыша. 1×slot рабочее зеркало <a href=https://google.bi/url?q=https://doctorlazuta.by/>https://google.bi/url?q=https://doctorlazuta.by/</a> Для получения бонуса надо(надобно) пригласить в забаву нового посетителя. Казино начислит пригласившему фиксированный процент от взносов приглашённого вид бонуса: чаще всего его объем не превышает 10%. Срок деянья бонуса правило не выше месяца: пригласивший получает бонус от проигранных ставок приглашённого в 1-ый месяц забавы.
скачать 1×slots на андроид мобильная версия
У каждого игорного заведения свои управляла и обстоятельства. Но, чтобы получить призы, необходимо выполнить стандартные деянья: <a href=https://educationweb.com.gh/education/ges-school-selection-guidelines/>https://educationweb.com.gh/education/ges-school-selection-guidelines/</a> Допустим, за регистрацию вы получили бездеп в объеме 2 000 рублей с вейджером х30. В данном случае светит сделать ставок, на общую необходимую в 60 000 руб. (2 000 * 30 = 60 000). Когда выполните обстоятельства по отыгрышу, придёт время заработать настоящие средства. Однако не забывайте, что с любого презента выйдет исключить определённую сумму (чаще всего менее $200).Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, дабы замечена вероятность вывести выигрыш. 1×slots зеркало рабочее
<b>Смотреть еще похожие новости:</b>
<a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=1609663#pid1609663>1×slots официальный сайт зеркало</a>
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=70583>1×slots регистрация на сайте</a>
<a href=http://sz.80lvl.ru/viewtopic.php?f=8&t=2844>1×slots casino зеркало</a>
<a href=https://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=6268>1×slots зеркало сайта</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депо может выделяться до 30 дней.
#2172 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino вход pin up casino пин ап <a href=https://kompromat1.online/>porno Илья Ковальчук (хоккей)</a> порно с Сергей Бобровский (хоккей) вывод казино <a href=https://vestnik-jurnal.com/>1×bet на сегодня</a> про казино казино ставка порно с Александр Большунов (лыжные гонки) 1go casino порно с Карен Хачанов (теннис) pin up casino cat casino
DiskiPlus букмекерская контора DiskiPlus up casino официальный <a href=https://diskiplus.ru/>DiskiPlus букмекерская контора леонов</a> DiskiPlus Комарова Наталья Владимировна порно DiskiPlus casino daddy <a href=https://diskiplus.ru>DiskiPlus официальное казино вход</a> DiskiPlus букмекерская контора официальный сайт DiskiPlus рейтинг казино DiskiPlus 7k casino официальный сайт DiskiPlus казино ставка DiskiPlus скачать букмекерскую контору DiskiPlus порно с Алина Загитова DiskiPlus 1×bet
#2173 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия
Варианты выигрыша зависят от Вашей успеха и условий игорного портала. Выше мы заявили, что некоторые бездепозитные призы в 2022 году выдаются с ограничениями по наибольшей выплате. Однако, остаются и, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность передовых игр на средства, можно выиграть невероятные суммы. Сегодняшние игровые автоматы либо видео слоты, как их называют. Могут выдавать солидные умножение от х1.000 и выше. Некоторые множат ставку от х100.000. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> <a href=https://britishforcesdiscounts.co.uk/biz/a/165360-CGIFurniture>https://britishforcesdiscounts.co.uk/biz/a/165360-CGIFurniture</a> Самые популярностью способы вывода денег ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электронным платежным системам подобии Neteller и Skrill, а также используют криптовалютными кошельками. Вывод выигрышей имеет осуществляться моментально либо развлекать от нескольких часов до нескольких суток. рабочее зеркало 1×slots <a href=https://lavr-sovet.ru/user/Stevenvob/>https://lavr-sovet.ru/user/Stevenvob/</a> Онлайн-казино тщательно продумывают бонусные условия, коие необходимо выучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и другие лимитирования.Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.
1×slots casino online регистрация
Свежий приз начисляется в виде валютных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в пользовании средствами, а случае отыгрыша оператор имеет ввести ограничение на вывод денег.У любого игорного заведения средства управляла и условия. Но, дабы получить призы, необходимо выполнить стандартные деянья: <a href=https://krok.biz/forum/viewtopic.php?f=7&t=96646>1× slots зеркало</a> 1хслотс рабочее зеркало К раскаянью, нет. Почти все казино, просят внесение хотя бы 1-го минимального депо для вывода выигрыша с бездепозитного бонуса. Также учитывайте, собственно исключить деньги разрешено только на что, эту платежную систему, с которой был изготовлен депозит.В онлайне очень количество скриптовых вебсайтов, коие принадлежат плутам. Их главная задача – заинтересовать гэмблеров, пообещав столько щедрые подарки, хотя и солидные выигрыши. Так что кое-какие сайты предлагают получить за регистрацию даже $1 000. <a href=http://dac21.com/bbs/board.php?bo_table=free&wr_id=1021323>http://dac21.com/bbs/board.php?bo_table=free&wr_id=1021323</a> Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам воспрещено начислять бонусы посетителям, не имеющим денежных средств на счете. Мы предлагаем рассмотреть животрепещущие бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ. 1×slots зеркало подтвердит вашу регистрацию если говорить Если вы выбираете проверенное лицензионное онлайн казино и сделайте все условия получения бездепозитного приза, трудностей с получением подарка у Вас не возникнет.Как прочие промоакции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения считаются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых посетителей и разрешает им составить эмоцию о функционале, не рискуя вескими суммами.
1× слот зеркало
Казино выводит средства лишь на ту платежную систему, с котрой был сделан депо. То есть, для вывода бездепозитного бонуса, Вам сначала необходимо восполнить счет. В некоторых клубах узкий перечень методов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет непосредственно с данных платежных способов, которые доступны для вывода. <a href=http://psicolinguistica.letras.ufmg.br/wiki/index.php?title=%D0%94%D0%B5%D1%82%D1%81%D0%BA%D0%B8%D0%B5%20%D1%84%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B%20%D0%B2%20%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8:%20%D0%92%D0%BE%D0%B7%D0%BC%D0%BE%D0%B6%D0%BD%D0%BE%D1%81%D1%82%D0%B8%20%D0%B4%D0%BB%D1%8F%20%D0%B1%D0%B8%D0%B7%D0%BD%D0%B5%D1%81%D0%B0>http://psicolinguistica.letras.ufmg.br/wiki/index.php?title=%D0%94%D0%B5%D1%82%D1%81%D0%BA%D0%B8%D0%B5%20%D1%84%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B%20%D0%B2%20%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8:%20%D0%92%D0%BE%D0%B7%D0%BC%D0%BE%D0%B6%D0%BD%D0%BE%D1%81%D1%82%D0%B8%20%D0%B4%D0%BB%D1%8F%20%D0%B1%D0%B8%D0%B7%D0%BD%D0%B5%D1%81%D0%B0</a> У любой игры свои требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система зачтет любую ставку. В рулетке и покере сделать это гораздо труднее. Именно потому например принципиально пристально читать условия получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в каждой забаве, то новички просто «спустят бонус на ветер». 1×slots сайт зеркало
1×slots сайт
<a href=https://nauc.info/forums/viewtopic.php?t=20843866>1×slots casino зеркало</a> 1хслот 1хслотс регистрация перейти на 1×slots <a href=http://ruchess.ru/bitrix/redirect.php?goto=http://sm-ochki.ru/bitrix/redirect.php?goto=http://fvsmoscow.ru/bitrix/rk.php?goto=https://telegra.ph/Soderzhanie-i-struktura-zaklyucheniya-prokurora-v-grazhdanskom-processe-09–19>http://ruchess.ru/bitrix/redirect.php?goto=http://sm-ochki.ru/bitrix/redirect.php?goto=http://fvsmoscow.ru/bitrix/rk.php?goto=https://telegra.ph/Soderzhanie-i-struktura-zaklyucheniya-prokurora-v-grazhdanskom-processe-09–19</a> Бездепозитный бонус за регистрацию в казино — это стартовый презент повторяющий валютного начисления либо безвозмездных вращений для новых игроков заведения, для получения которого надо вносить депо.
1×slots зеркало регистрацию более популярный вариант это
Для казино, работающих интернет, бездепозитные бонусы нужны для вербования новых клиентов. Предложение поиграть на слотах без надобности внесения реальных денег — работающий способ для повышения интереса к фирмы. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит играть в казино, только теперь уже на собственные деньги.Бездепозитный бонус нередко имеет стать легкодоступным сразу после завершения регистрации, поскольку в большинстве случаев единственным требованием к нему считается регистрация, а затем проверка вашей новой учетной записи. <a href=http://drop-let.ru/index.php?subaction=userinfo&user=roastedlaborer6>http://drop-let.ru/index.php?subaction=userinfo&user=roastedlaborer6</a> Отказ в прохождении верификации. Если заказчик не желает или возможности дать документы, подтверждающие его лицо, профиль будет заблокирован совместно, вкупе со всеми бонусными начислениями. 1×slots регистрацию более популярный вариант это Перед активацией главно пристально изучить условия промоакции. Чем ниже вейджер, тем больше возможная выгода игрока. Имеют значение также лимиты ставок при отыгрыше и сроки, на которых можно пользоваться предложением. Если бездеп обхватывает узкий список игр, рекомендовано узнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только сомнений случае, случае оператор не установил требовательные лимитирования на наивысшую сумму ставки.
<b>Смотреть еще похожие новости:</b>
<a href=http://powercrop.it/chi-siamo/le-persone?page=128#comment-6409>1×slots зеркало быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Операторы гемблинга заявляют, что например они дерутся с бонус-хантерами. Впрочем, критики считают, что данным казино пробуют устроить из случайного гостя постоянного игрока. Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депозит может выделяться до 30 дней.
#2174 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet 1 1×bet xbet <a href=https://rucriminal.info/>букмекерская контора фонбет официальный</a> porno Мария Шарапова casino вход <a href=https://sovsekretno.net/>казино ставка</a> porno Нина Пирогова, хоккеистка ев казино casino игровой автомат включи казино порно с Матвей Сафонов (футбол) 1×bet скачать приложение на андроид porno Алена Косторная (фигурное катание)
DiskiPlus porno Дарья Мороз DiskiPlus porno Александр Соболев (футбол) <a href=https://diskiplus.ru/>DiskiPlus порно с Баталина Ольга Юрьевна</a> DiskiPlus скачать 1×bet на андроид DiskiPlus 7k casino зеркало <a href=https://diskiplus.ru/>DiskiPlus 1×bet официальный сайт 1×bet xyz</a> DiskiPlus 1×bet слоты DiskiPlus inform@rucriminal.info DiskiPlus винлайн букмекерская контора официальный сайт DiskiPlus пари букмекерская контора казино DiskiPlus порно с Федор Чалов (футбол) DiskiPlus casino играть
#2175 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Захарова Мария Владимировна игры казино <a href=https://slon-ru.com/>1×bet слоты</a> ап казино порно с Елена Никитина, скелетонистка <a href=https://m.repost.news/>porno Катерина Шпица</a> 1win casino пинап казино casinos xyz яндекс казино казино рояль смотреть 7k casino зеркало рабочее 1×bet xbet xyz
DiskiPlus букмекерские конторы pin DiskiPlus Разуваева Ксения Денисовна порно <a href=https://diskiplus.ru/>DiskiPlus Скворцова Вероника Игоревна порно</a> DiskiPlus бесплатно играем казино DiskiPlus кент casino <a href=https://www.diskiplus.ru>DiskiPlus про казино</a> DiskiPlus online casino официальный DiskiPlus сайт букмекерской конторы DiskiPlus Крючкова Полина Викторовна порно DiskiPlus casino на телефон DiskiPlus пин ап casino DiskiPlus 1×bet casino DiskiPlus porno Анна Сидорова, керлингистка
#2176 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
7k casino сайт ев казино <a href=https://slon-ru.com/>гта онлайн казино</a> демо казино винлайн букмекерская контора <a href=https://kompromat1.online/>часы казино</a> приложения букмекерских контор на андроид сайт букмекерской конторы Валентина Матвиенко порно пари букмекерская контора Елизавета Боярская 1×bet слоты 1×bet top букмекерская контора леонов
DiskiPlus порно с Евгения Медведева DiskiPlus какие казино <a href=https://www.diskiplus.ru/>DiskiPlus Кузнецова Анна Юрьевна порно</a> DiskiPlus порно с Илюшникова Татьяна Александровна DiskiPlus casino бонус <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet скачать приложение на андроид</a> DiskiPlus 1×bet зеркало рабочее на сегодня DiskiPlus порно с Захарова Мария Владимировна DiskiPlus 1×bet зеркало DiskiPlus pin up casino DiskiPlus gama casino DiskiPlus порно с Алексей Миранчук (футбол) DiskiPlus vodka casino
#2177 1win_ycSihttp://1win6051.ru
один вин <a href=https://www.1win6051.ru>https://www.1win6051.ru</a> .
#2178 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация
Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала быстрые выводы. Фишка выплат в, собственно довольно избрать платёжный инструмент и показать необходимую. В большинстве случаев средства зачисляются на электронные кошельки на 15 минут, а на банковские карты – 1–3 трудящихся дня.Похожим образом работает 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения клиента либо в связи с получения им VIP-статуса. Подарок предоставляется в воззвания в поддержку и проверки. <a href=http://filmkachat.ru/>1×slots мобильная версия войти казино</a> <a href=https://click4r.com/posts/g/16359634/the-rise-of-duracell-a-powerhouse-in-battery-manufacturing>https://click4r.com/posts/g/16359634/the-rise-of-duracell-a-powerhouse-in-battery-manufacturing</a> Бесплатные призы казино без депозита возможно получить в виде денежных средств на бонусный счет (исключить их можно лишь последствии отыгрыша), фриспинов, забавы или кешбэк-бонуса.4. Заберите подарок. Чаще всего бонус активируется сразу в регистрации. Но бывают ситуации, когда нужно забежать в собственный офис или написать в службу поддержки. 1х слот 1хслотс регистрация перейти на 1×slots <a href=http://www.micepm.co.kr/board/bbs/board.php?bo_table=press&wr_id=602149>http://www.micepm.co.kr/board/bbs/board.php?bo_table=press&wr_id=602149</a>
1хслот 1хслотс регистрация перейти на 1×slots
Принципиальным отличием бесплатных призов от бонусов на депозит является неимение необходимости вносить средства на акк. Из-за этого их нередко называют бездепозитными (not the slightest deposit bonuses). 1×slots регистрация 1×slots casino c2d ru С такими простыми советами любое казино с бонусом за регистрацию способно принести в разы больше выгоды и полезности.Далее требуется отыграть вагер и вывести выигрыш. Игрокам без опыта крупно повезло, меня получить десятки презентов за одну регистрацию. Если не сумели получить Бездепозитный бонус, не беспокойтесь. Обратитесь в интернет чат, оператор поможет решить проблему. <a href=http://o926476g.bget.ru/users/smallrubbish28>http://o926476g.bget.ru/users/smallrubbish28</a> 1× slots регистрация в 1×slots casino Бездепозитный приз по промо-коду будет доступен для забавы, лишь том, случае когда Вы активируете особый бонусный код в разделе с призами либо укажите промокод при регистрации на веб-сайте. В неких случаях, не активации кода, придется подтвердить контактные данные игрока и заполнить анкету посетителя.
1хслот скачать
Еще одно условие касается размеров ставки. Операторы устанавливают максимальную сумму, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном офисе. При превышении лимита есть риск потерять бонуса. Существующие ограничения относятся и к определенным видам ставок. Например, играя в рулетку, заказчик имеет столкнуться с запретом назначать фишки на шансы. <a href=https://xn----7sbarohhk4a0dxb3c.xn–p1ai/user/Porsedroppa/>https://xn----7sbarohhk4a0dxb3c.xn–p1ai/user/Porsedroppa/</a> сайт 1× slots casino
1хслотс зеркало на сегодня
Бездепозитные призы за регистрацию считаются одним из самых знаменитых способов привлечения свежих игроков в онлайн-казино, потому собственно они предоставляют игрокам возможность опробовать казино, неподражаемо игровые автоматы, и вероятно, выиграть реальные средства. <a href=https://mit-bbs.com/viewtopic.php?t=693880>1×slots регистрация</a> 1хслотс мобильная версия зеркало <a href=https://training.trainingstree.com/author/darenchoof/>https://training.trainingstree.com/author/darenchoof/</a> Бонусные деньги – маленькая сумма средств для старта в новеньком казино. На бонусные деньги, обычно разрешено играть во все игры, считая слотов с современным джекпотом и игр из раздела live casino.Иногда у посетителей сайта могут появиться проблемы при активации приобретенного промо-кода. В этих случаях, необходимо адресоваться за помощью в службу «Support». Для получения ответа, обязательно указывается конкретная причина воззвания и подтверждается информация дополнительными экрана. Если сформировалась неоднозначная ситуация, постоянно возможно адресоваться к главному регулятору или контролирующему органу, выдавшему данному заведению лицензионный документ.
1×slots казино зеркало
<a href=https://australianwinerytours.com/tours/member.php?action=profile&uid=2700>https://australianwinerytours.com/tours/member.php?action=profile&uid=2700</a> Таким образом онлайн казино получает вероятного игрока. Возможно в либо настоящем он захочет сыграть на свои средства. Так трудятся бездепозитные призы в интернет казино. Здесь хорошо подходит выражение, бесплатные сыр бывает лишь в мышеловке. Начинающие игроки могут не осознавать опасность азарта. Однако с осознания делается больше. Это тема для отдельного обсуждения.Прежде всего, не забывайте периодически заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом оценивают наиболее интересные предложения водящих игорных порталов. рабочее зеркало 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=http://link.5nx.ru/viewtopic.php?f=5&t=11947>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=680978>1×slots рабочее зеркало</a>
<a href=https://eccentrictirade.com/forums/showthread.php?tid=135722>1× slots зеркало</a>
<a href=http://naukova2b.2ua.in.ua/viewtopic.php?f=7&t=2781>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
А ознакомиться с новыми интернет казино, Вы можете за счет призов с выводом прибыли, которые Вы можете получить без депо. Как лишь получите бездеп в казино, всё равно не запамятовывайте инспектировать электронную почту. Некоторые игорные клубы каждый веселят интенсивных гэмблеров приятными призами. Чаще всего получить презент можно в преддверии веселья, на денек рождение, за привлечение друга. А того распространённым призом является надбавка к депозиту. Нужно чем пополнить счёт, и азартное заведение прирастит его на 50–100%.
#2179 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Приезжева Екатерина Геннадьевна порно порно с Петр Ян (ММА) <a href=https://th-royalgclub.com/>pinco casino</a> casino на телефон сайте букмекерской конторы фонбет <a href=https://sovsekretno.net/>какие казино</a> порно с Антропова Валентина Викторовна смотреть фильм казино порно с Антропова Валентина Викторовна 1×bet бесплатно porno Дарья Клишина карты казино бывшие казино
казино DiskiPlus порно с Константин Тюкавин (футбол) <a href=https://diskiplus.ru>DiskiPlus букмекерская контора мостбет</a> DiskiPlus 1×bet слоты 1×bet xyz DiskiPlus 7k casino зеркало <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet зеркало на сегодня</a> DiskiPlus казино вулкан DiskiPlus 1×bet скачать приложение на андроид DiskiPlus 7k casino зеркало на сегодня DiskiPlus Чулпан Хаматова DiskiPlus cat casino DiskiPlus porno Яна Троянова DiskiPlus вавада казино
#2180 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало
Когда речь о валютных бонусах, казино всегда устанавливают условия вейджера, которые нужно выполнить, чтобы вывести выигрыш.Так же стоит выделить то, что в любом интернет казино установлен собственный максимальный кешаут на бездепозитный бонус. Как верховодило кешаут — это максимальная сумма средств, которая дешевая для вывода с бездепозитного приза. <a href=http://filmkachat.ru/>1×slots зеркало</a> Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро или 20 долларов. Если выдаются фриспины, их количество редко превышает нескольких 10-ов безвозмездных вращений.Принципиальным отличием бесплатных призов от бонусов на депо является неименье надобности заносить средства на акк. Из-за сего их нередко нарекают бездепозитными (not the slightest deposit bonuses). <a href=https://lit.link/en/kalinka0588>https://lit.link/en/kalinka0588</a> Внесение депозита – Будьте готовы восполнить счет после отыгрыша приза. Это обычное заявка управлял для данного на промо-акций. Лучше заблаговременно уточнить, какую необходимую надо(надобно) будет заносить на счет. Как верховодило, речь о минимальном депозите, хотя вы должны быть убеждены, что он для по карману. 1×slots на любой вкус как пройти регистрацию <a href=http://www.webdesignforum.com.au/member.php?action=profile&uid=29635>http://www.webdesignforum.com.au/member.php?action=profile&uid=29635</a> Особую изюминку видео слотам присваивают уникальные символы. С их в активизируются разные бонусы. Вы сможете запустить вспомогательный уровень и увеличить сумму выигрыша. Есть знаки, которые замещают негодные элементы и сами делают выигрышные комбо. Не стоит забывать и про бонус-тур. После любого счастливого спина есть шанс увеличить необходимую выигрыша в 2 либо четыре раза.Бездепозитный бонус за регистрацию в казино — это стартовый презент повторяющий денежного начисления либо даровых вращений для новых игроков заведения, для получения которого надо заносить депозит.
1×slots регистрация 1×slots casino 777 online
Выбор каждого онлайн казино на нашем веб-сайте. В описании к любому Вы можете разузнать, что получите за творенье аккаунта. 1×slots бездепозитный бонус за регистрацию <a href=http://freereklama.borda.ru/?1–0–0–00009500–000–0–0>http://freereklama.borda.ru/?1–0–0–00009500–000–0–0</a> Более солидные предложения встречаются очень изредка. Зачастую они доступны лишь VIP-игрокам. В остальных случаях им всего сопутствуют очень строгие условия отыгрыша. Также возможны дополнительные обстоятельства прочие ограничения, прописанные в критериях и положения бонусной программы казино. 1×slots официальный сайт, скачать Пoдтвepдить личнocть клиента. Для удачного вывода средств, нужно доказать личность клиента. Нa этaпe вepификaции пpoфиля, сотрудники службы защищенности должны увериться, собственно у игрока более раз аккаунт. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не сможет вывести собственный выигрыш, в у него будет количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы.Бездепы все заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами.
1×slots регистрация 1×slots review live
Похожим образом работает 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя либо из-за с получения им VIP-статуса. Подарок предоставляется после обращения в поддержку и ревизии.Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, например как Вам придется ее доказать дальнейшем при выводе денег. 2. Создать новый профиль. Для регистрации надо(надобно) наполнить небольшую анкету или зайдите в собственный офис при помощи социальных сетей; <a href=http://bloodsharks.net/phpBB/profile.php?mode=viewprofile&u=156546>http://bloodsharks.net/phpBB/profile.php?mode=viewprofile&u=156546</a> 1×slots сайт
1×slot зеркало рабочее этих способов предполагает регистрацию
Получив свой подарок, Вы сможете бесплатно играть на реальные средства, а выполнив условия отыгрыша, вывести свой выигрыш.Как правило, при выводе денег, от играющего потребуется лишь устроить минимальный вклад чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом индивидуальный счет. <a href=https://kriptokulis.com/konular/1×slots-oficialnyj-zerkalo.5333/>1×slots официальный зеркало</a> В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая часть игры. Важно, зачастую бездепозитные призы в казино выдаются с лимитированиями по наибольшей выплате. В среднем можно рассчитывать на выгода в количество тыщ рублей. Как вывести выигрыш с бонуса без депозита. Придётся подтвердить акк документально, в некоторых заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате либо прочтите в правилах.К образцу, игроку выдаются бесплатные свои в заведении в объеме пятидесяти либо 100 $ (вейджер на которые составляет 100х). То есть, каждому новоприбывшему игроку выскакивает притягивающая картинка, кот-ая сулит выплату всех зачисленных фирмой средств. Не стоит заострять на казино бонус за регистрацию без депозита с сильно великий или довольно маленькой суммой призов, поэтому что, том тщательно исследовав все обстоятельства, тут всего, будет некий подвох. Благодаря программке преданности от игорного заведения, можно взять хороший старт и без добавочных инвестициям запустить видеослоты. Кроме как, можно рассчитывать на реальную фортуну и получить, без вложения собственных финансов, большой выигрыш.Предложения с бездепозитными призами за регистрацию позволяют новым заведениям заинтересовать аудиторию на свой сайт. А игроки же получают вероятность выступать на настоящие средства без депозита в казино и заработать малый стартовый капитал, который разрешается вывести на карту банка либо электронный кошелек. 1×slots casino зеркало рабочее <a href=http://mebel-stroy.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=http://shindodomestic.ru/bitrix/click.php?goto=http://shot51.ru/bitrix/redirect.php?goto=https://telegra.ph/Ponimanie-togo-chto-pishetsya-v-diplome-bakalavra-09–24>http://mebel-stroy.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=http://shindodomestic.ru/bitrix/click.php?goto=http://shot51.ru/bitrix/redirect.php?goto=https://telegra.ph/Ponimanie-togo-chto-pishetsya-v-diplome-bakalavra-09–24</a> Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера.
1×slots зеркало быструю регистрацию а также мгновенное
Бездепозитный бонус – это финансовое вознаграждение, коие выдается участнику забавы в казино, для его вербования и возникновения заинтригованности. Любой посетитель, который соответствует условиям выдачи похожего бездепозитного бонуса, имеет претендовать на получение вышеуказанного приза. Такое поощрение считается наиболее эффективным способом, дающим вероятность стартовать деле, не вкладывая собственных вещественных средств.У нас на сайте Вы найдете перечень бонусов без депо в испытанных казино и доскональную информацию о том как их получить и применять. <a href=http://jade-crack.com/home.php?mod=space&uid=1107447>http://jade-crack.com/home.php?mod=space&uid=1107447</a> 1×slot официальный сайт Чтобы бездеп не был начислен на Ваш аккаунт, Вам надо активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк автоматически, а Вы не планируете его использовать, обратитесь в службу поддержки с пожеланием отменить бездепозитный приз.Онлайн-казино тщательно продумывают бонусные обстоятельства, коие необходимо изучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и другие лимитирования.
<b>Смотреть еще похожие новости:</b>
<a href=https://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=6268>1×slots сайт</a>
<a href=https://bestshop.link/threads/%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81.85/>рабочее зеркало 1хслотс</a>
<a href=http://www.xcosmic.net/rsf/showthread.php?tid=44931>казино 1×slots</a>
<a href=https://eccentrictirade.com/forums/showthread.php?tid=135719>1×slots акции</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вознаграждения за получение VIP-статуса ? начисляются масштабах программки лояльности при достижении еще значения или выдаются индивидуально менеджерами саппорта.
#2181 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало
Мы подготовили список, где есть практически актуальные и новые бездепозитные призы казино, которые возможность получить даром. Для наших юзеров есть особые предложения неповторимые призы, которые вы кого не отыщите, их мы определили особой красноватой плашкой «Exclusive».Обыкновенные бездепозитные бонусы в объеме от 3-х до 20 долларов созданы для того, чтобы в игры заходили все свежие и новые игроки. Здесь, скорее, будет ограничение на наибольший выигрыш. Важно, чтобы перед наименьшим вкладом был отключен приз за 1-ое пополнение счета, и игрок не попадет на повторный вейджер. <a href=http://filmkachat.ru/>1× slots сайт</a> Наши специалисты изучают условия промоакции, после в ручном режиме проверку их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие характеристики. Мы не рекламируем казино, а даем игрокам информацию о наилучших из их.Онлайн гемблинг развивается с каждым деньком больше и больше, новые бренды создаются не по денькам а по часам. Новые онлайн казино делают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и что, этим наиболее предлагают бездепозитные бонусы за регистрацию, собственно бы не упустить эту вероятность — как воспользоваться новым бездепом, рекомендуем навещать наш сайт как можно почаще, самое лакомое и свежие будет добавляться в этом же перечне. <a href=https://biolinky.co/kalinka-0588>https://biolinky.co/kalinka-0588</a> Иногда у гостей вебсайта имеют возникнуть трудности, задачи, препядствия при активации приобретенного промо-кода. В этих случаях, необходимо адресоваться за помощью в саппорта «Support». Для получения ответа, непременно указывается конкретная причина воззвания и подтверждается информация дополнительными скриншотами. Если сложилась неоднозначная ситуация, всегда можно обратиться к основному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ.Не стоит сразу же отрицаться от приветственных презентов в сходственных казино. Администрация готова начислить деньги либо фриспины, но сначала сотрудники должны убедиться, что вы не мошенник. Дело что, что развелось слишком количество охотников за призами. Они научились накалывать систему и зарабатывать солидные суммы денег. казино 1× slots официальный сайт <a href=http://bme.clanweb.eu/profile.php?lookup=6151>http://bme.clanweb.eu/profile.php?lookup=6151</a> Вообще перейдя в казино — правила схожи в получении бездепозитных бонусов, в стандартные управляла входит: подтвердить эл. Почту и телефон, наполнить свой собственный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ.
1×slots зеркало рабочее на сегодня
Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке необходимо пополнить счет в казино. Для депозитных бонусов, эта процедура не нужна, так как депо теснее изготовлен.Чаще всего казино бонус за регистрацию без депозита даёт вероятность запустить любой машина. Но чем пристально ознакомиться с критериями. Иногда для игры доступны лишь определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, превосходнее начать знакомство с миром пыла именно с «одноруких злодеев». <a href=http://mandala-app.com/forums/viewtopic.php?f=5&t=221396>1× slots casino зеркало</a> 1×slots зеркало подтвердит вашу регистрацию если говорить Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. <a href=http://qooh.me/Glavdorogadv>http://qooh.me/Glavdorogadv</a> Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, например как Вам придется ее доказать дальнейшем при выводе денег.Еще одно условие касается объемов ставки. Операторы устанавливают наивысшую сумму, которую игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, избранной в Личном офисе. При превышении лимита есть риск потерять бонуса. Существующие ограничения относятся и к определенным обликам ставок. Например, играя в рулетку, клиент возможность столкнуться с запретом ставить фишки на шансы. 1хслот скачать
1хслотс зеркало на сегодня
Представленные на данной странице наихорошие бездеп бонусы в казино за регистрацию в 2022 году имеют подходящие обстоятельства. После тщательного анализа редакция портала составила рейтинг спецпредложений, каком посетители Casino.ru имеют сортировать список по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д. <a href=http://gtamotors.ru/user/MichaelAlava/>http://gtamotors.ru/user/MichaelAlava/</a> x1 slots 1хслотс регистрация перейти на 1×slots После потребуется привнести идентификационный платёж. Это пугает новичков больше всего. Нужно сделать наименьший депозит в 100–500 руб. Таким образом служба защищенности увериться что, нет, что платёжный способ принадлежит Вам. Данная процедура необходима для обеспечивания безопасности игровых счетов. Пример, Ваш аккаунт взломают и выведут свои на собственный кошелёк. Будет очень неприятно. Поэтому верификация платёжной системы, это важный момент.
1 x slots
Вейджер в переводе с британского значит «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша приобретенного приза, в нашем случае бездепозитного. Число ставок значения — принципиально лишь набрать сумму, пропорциональную сумме одобрения. Но такие рамки не смущают том хайроллеров, потому коэффициенты на слотах позволяют рассчитывать на крупные выигрыши, а в неких автоматах разыгрывается передовой джекпот.Обыкновенные бездепозитные бонусы в размере от трех до 20 $ сделаны для того, чтобы в игры заходили все свежие и свежие игроки. Здесь, вероятнее всего, будет лимитирование на максимальный выигрыш. Важно, чтобы перед наименьшим вкладом был отключен приз за первое пополнение счета, и компьютерные не попадет на повторный вейджер. казино 1×slots <a href=http://kafdp.or.kr/bbs/board.php?bo_table=free&wr_id=1306088>http://kafdp.or.kr/bbs/board.php?bo_table=free&wr_id=1306088</a>
1×slots на любой вкус как пройти регистрацию
Так что приготовьтесь дать конфиденциальную информацию (пол, возраст, страна проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает не более суток, в чего получится беспрепятственно выводить солидные выигрыши.Начнём с как, что каждое промо за регистрацию предполагает некоторые условия. Бездепозитные бонусы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность денежного оборота, необходимая для выполнения критерий. Пример, получили благотворительные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 рублей, проигрышных или выигрышных, неважно. После исполнения, бонусный баланс перейдёт на настоящий и станет доступным к выводу. Вейджер в переводе с британского значит «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша полученного бонуса, в нашем случае бездепозитного. Число ставок роли не играет — главно лишь набрать необходимую, пропорциональную сумме одобрения.Не хотите сыграть в азартные забавы, не рискуя своими деньгами, но получая в все выплаты? Подобную возможность предоставляют многие наихорошие порталы с азартными веселиями. В их количестве много честных и надежных интернет-казино на русском языке. Они привлекают свежих юзеров различными поощрительными событиями, включая бездепозитные, либо безвозмездные призы. <a href=https://wiki.streampy.at/index.php?title=User:GuyRather495964>https://wiki.streampy.at/index.php?title=User:GuyRather495964</a> При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток. 1хслотс рабочее зеркало на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=http://www.ihavethepussy.com/de/members/36184-Michaelbar?s=4b83336c2ab84d1ee77793f510b95dd1>1×slots регистрация 1×slotscasino09k online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если вы избираете проверенное лицензионное онлайн казино и выполните все обстоятельства получения бездепозитного бонуса, проблем с получением подарка у Вас не возникнет. Подтверждение электронной почты – одно из главных условий, которое есть почти в каждом бездепозитном казино. Чтобы верифицировать электрическую почту, довольно перебежать по активной ссылке в послании, приобретенном от азартного клуба.
#2182 Charlesgunnyhttp://filmkachat.ru
зеркала 1×slots
Наш список включает в себя лучшие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по важным характеристикам: <a href=http://filmkachat.ru/>1×slots зеркало этих способов предполагает регистрацию</a> Также учтите, что некоторые игровые платформы сужают перечень стран, коие способны получить предложенный бездепозитный приз за регистрацию. К образцу, существуют онлайн-заведения, выдающие сходственные призы только жильцам конкретных государств. К примеру, интернет казино 777 Оригинал предоставляет бездепозитный бонус только игрокам из России и стран СНГ. Или наоборот, пичкают вознаграждением всех, не обитателей некоторых стран (следует этого, по пристально изучать список, чтобы потом не возникло никаких вопросов и жалоб).Список например именуемых «запрещенных землель» прилагается к правилам бонусной программки игорного портала. Обязательно выясните, распространяются ли на вас подобные наказания. <a href=https://www.cgarchitect.com/projects/3f3aba93-lighting-the-art-of-atmosphere-in-3d-rendering>https://www.cgarchitect.com/projects/3f3aba93-lighting-the-art-of-atmosphere-in-3d-rendering</a> Чаще всего интернет-казино предлагают бездепозитные бонусы новым юзерам. Эта промо-акция довольно эффективно завлекает новичков, подталкивая их к открытию счета. Конечно, не все становятся преданными посетителями, хотя сам факт регистрации аккаунта играет на руку заведению.Вывод выигрыша с бездепозитных призов казино – великодушный презент от азартных клубов. Но дабы вывести свой заработок, необходимо выполнить ряд условий: 1×slot официальный сайт <a href=http://bbs.chinabidding.com/home.php?mod=space&uid=711750>http://bbs.chinabidding.com/home.php?mod=space&uid=711750</a> Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в обязательном порядке необходимо восполнить счет в казино. Для депозитных бонусов, данная процедура не нужна, так как депозит уже сделан.Похожим образом работает 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения клиента либо в связи с получения им VIP-статуса. Подарок предоставляется в воззвания в поддержку и проверки.
1×slots регистрация то дальше необходимо пройти
Особую изюминку видео слотам придают оригинальные знакы. С их свет активируются различные призы. Вы сможете запустить дополнительный степень и увеличить необходимую выигрыша. Есть знаки, коие сменяют негодные элементы и сами создают выигрышные комбо. Не стоит забывать и про бонус-тур. После любого удачного спина есть шанс увеличить сумму выигрыша в два либо хорошо раза. <a href=https://melhorlance.com.br/author/jamesbom/>1хслотс рабочее зеркало</a> сайт 1× slots casino <a href=https://holisticdoggie.com/home-family-holidays/1×slot-%D1%81%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C/>https://holisticdoggie.com/home-family-holidays/1×slot-%D1%81%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C/</a> 4. Заберите презент. Чаще всего приз активизируется незамедлительно после регистрации. Но посещают ситуации, когда надо(надобно) зайти в индивидуальный офис или написать в службу поддержки.3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать аппарат либо почту, указать персональную информацию; 1×slots официальный сайт зеркало Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала быстрые выводы. Фишка выплат сомнений, что достаточно выбрать платёжный инструмент и указать сумму. В большинстве случаев деньги зачисляются на электрические кошельки протяжении 15 минут, а на банковские карты – 1–3 рабочих денька.
1×slots официальный сайт скачать
Для получения бонуса надо(надобно) пригласить в забаву свежего посетителя. Казино начисляет пригласившему фиксированный процент от взносов приглашённого вид бонуса: почаще всего его размер не выше 10%. Срок действия бонуса правило не превышает месяца: пригласивший получает бонус зависимо проигранных ставок приглашённого в 1-ый луна игры. Прежде всего, не забывайте регулярно заглядывать на страничку обзоров бездепозитных призов. Они шаг за шагом оценивают наиболее увлекательные предложения основных игорных порталов.Бесплатные призы казино без депо можно получить повторяющий денежных средств на бонусный счет (вывести их возможно только последствии отыгрыша), фриспинов, забавы или кешбэк-бонуса. <a href=http://marko.by/bitrix/redirect.php?goto=http://servizi.unionesarda.it/ssl/accountadmin.aspx?Returnurl=http://xn–h1aafker4c.xn–p1ai/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/VNobm9OHX4l>http://marko.by/bitrix/redirect.php?goto=http://servizi.unionesarda.it/ssl/accountadmin.aspx?Returnurl=http://xn–h1aafker4c.xn–p1ai/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/VNobm9OHX4l</a> 1×slots регистрация 1×slotscasino 56 online
казино 1×slots
Прибывшие на акк деньги бездепозитные бонусы предназначаются, главном, лишь для свежеиспеченных пользователей, коие ранее не имели личного аккаунта в данном казино. Исходя из этого, в ранее у игрока был сделан депозит, то, по всей вероятности, у него больше не будет способности рассчитывать на получение такового приза в конкретном заведении. Не стоит сразу же отказываться от приветственных даров в похожих казино. Администрация готова начислить деньги либо фриспины, хотя сначала сотрудники должны убедиться, что вы не аферист. Дело в, собственно развелось очень большое охотников за бонусами. Они выучились обманывать систему и наваривать крупные суммы средств. 1×slots казино мобильная версия <a href=http://www.gwmph.cn/home.php?mod=space&username=wackyspiral85>http://www.gwmph.cn/home.php?mod=space&username=wackyspiral85</a> В разделе с бонусами активировать свой подарок. Найти игры, для которых учтено поощрение и использовать приз по назначению.
1×slots регистрация на официальном сайте
Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы которые появляются у начинающих.Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. 1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, случае не желайте замерзнуть жертвой плутов либо впустую израсходовать время;Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша бонусов. Заведения всегда устанавливают наивысшую ставку, допустимую по условиям вейждера. <a href=https://www.cfbwz.com/home.php?mod=space&uid=88522&do=profile&from=space>https://www.cfbwz.com/home.php?mod=space&uid=88522&do=profile&from=space</a> 1×slots зеркало регистрацию более популярный вариант это В бонусную программку множества операторов входят регулярные бездепы. Это бессрочные промоакции, поощряющие активных неизменных игроков. Популярный формат — раздача фриспинов по конкретным дням недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депозита в мена на накопленные баллы преданности.
<b>Смотреть еще похожие новости:</b>
<a href=http://yonghengro.gain.tw/space.php?uid=1555574>1х слотс зеркало регистрация в 1×slots casino</a>
<a href=http://nexusroleplay.teamforum.ru/viewtopic.php?f=19&t=10980>1 х слотс зеркало</a>
<a href=https://www.australforums.co.uk/viewtopic.php?t=278>1×slot регистрация</a>
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=70516>1×slots официальный регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Таким образом, заведение пытается продемонстрировать себя своим потенциальным геймерам, а подобный рекламный ход как казино приз без депозита за регистрацию завлекает довольно большое внимания к игорному заведению и обеспечивает неизменный поток свежих гостей и будущих клиентов игрового интернет клуба. Реже призы без депо начисляются постоянным игрокам. С их поддержкою администрация постарается удержать ценных клиентов или вожделеет поблагодарить за преданность верных посетителей. Но намного чаще для подобных целей используются эти акции:
#2183 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора фонбет 1×bet на сегодня <a href=https://th-royalgclub.com/>бесплатно играем казино</a> сайт 1×bet слоты up casino скачать <a href=https://th-royalgclub.com/>официальное казино вход</a> порно с Никита Кучеров (хоккей) Любимова Ольга Борисовна порно порно с Федор Чалов (футбол) официальные букмекерские конторы скачать porno Вера Бирюкова, гимнастка фреш казино скачать 1×bet 1×bet xyz
DiskiPlus пина casino DiskiPlus порно с Анна Щербакова, фигуристка <a href=https://diskiplus.ru>DiskiPlus скачать casino на андроид</a> DiskiPlus Семёнова Татьяна Владимировна порно DiskiPlus casino промокод <a href=https://diskiplus.ru>DiskiPlus винлайн букмекерская контора официальный</a> DiskiPlus pin up букмекерская контора DiskiPlus 1×bet casino DiskiPlus r7 casino DiskiPlus Елена Лядова DiskiPlus порно с Артемий Панарин (хоккей) DiskiPlus online casino 7k DiskiPlus лучшая казино
#2184 Charlesgunnyhttp://filmkachat.ru
сайт 1× slots casino
Для подтверждения электронной почты, просто перейдите по активной ссылке в послании, полученном от игрового заведения. <a href=http://filmkachat.ru/>1×slots зеркало этих способов предполагает регистрацию</a> <a href=https://campsite.bio/kalinka>https://campsite.bio/kalinka</a> Таким образом, заведение пытается продемонстрировать себя своим потенциальным геймерам, а подобный маркетинговый ход как казино приз без депо за регистрацию завлекает довольно количество внимания к игорному заведению и обеспечивает неизменный струю свежих гостей и будущих клиентов игрового онлайн клуба.Вышеописанная первопричина и считается основным моментом, следствии которого операторы отдают доля собственной выгоды на разные маркетинговые затраты и рекламные кампании. А самым действующим здесь станут выступать именно бездепозитные бонусы казино 2022 с выводом за регистрацию. 1хслот скачать <a href=http://art-metall.su/index.php?subaction=userinfo&user=painstakingwarl>http://art-metall.su/index.php?subaction=userinfo&user=painstakingwarl</a>
1×slots акции
Условия вывода выигрыша. В неких заведениях для удачного вывода с бездепозитного бонуса достаточно пополнения баланса и подтверждения личности. В других же клубах, необходимо несколько один прокрутить свой депо. 1×slots официальный сайт скачать на айфон Самые модные способы вывода денег ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам на Neteller и Skrill, а пользуются криптовалютными кошельками. Вывод выигрышей возможность осуществляться быстро либо занимать от нескольких часов до нескольких суток. <a href=http://xn----ptbagsgdho0d.xn–p1ai/index.php?subaction=userinfo&user=anefoc>http://xn----ptbagsgdho0d.xn–p1ai/index.php?subaction=userinfo&user=anefoc</a> 1×slots зеркало регистрация то дальше необходимо пройти
1×slots казино мобильная версия
Помните, собственно любые нарушения управлял сведут на нет ваши старания, и вы наверняка останетесь без начисленного вас бесплатного приза. Всегда изучайте правила начисления и обстоятельства вейджера. По каким вопросам, на коие вы возможности без найти ответы, обращайтесь за разъяснениям и саппорт. <a href=https://forum.spherecommunity.net/User-JamesRes>https://forum.spherecommunity.net/User-JamesRes</a> 1×slots официальный сайт мобильная версия скачать Выбирайте наихорошие благотворительные призы за обзоров на Casinoz – и пусть для сопутствует счастье при отыгрыше бонусных кредитов!B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.
1×slots сайт
Прямо данный заберите бесплатные вращения за регистрацию без депо и начинайте собирать призовые комбинации ради крупных выигрышей! 1×slots промокод при регистрации <a href=https://cardvilla.cc/members/528089.html>https://cardvilla.cc/members/528089.html</a>
1×slots рабочее зеркало на сегодня
Но а случае вы теснее профи по онлайн казино, кликаем на красноватую кнопку «Получить» и Вы механически перейдете в онлайн казино;Основное верховодило получения бездепа ? создаваемый аккаунт должен быть у юзера первым и единственным. Наличие нескольких аккаунтов требовательно запрещено. Проверка ведется по имени, e-mal, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депо необходимо соблюдать простую последовательность поступков. <a href=https://mantiseye.com/community/frankbom>https://mantiseye.com/community/frankbom</a> В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с даровых вращений. Прибыль, коию Вы заработаете на этом бездепе можно ставить на вывод без какого или отыгрыша.К примеру, игроку выдаются бесплатные свои в заведении в объеме пятидесяти или 100 долларов (вейджер на коие составляет 100х). То есть, любому новоприбывшему игроку выскакивает манящая иллюстрация, кот-ая сулит выплату всех зачисленных фирмой средств. Не стоит внимания на казино приз за регистрацию без депо с чрезмерно немалый либо очень малюсенькой суммой призов, потому что, том тщательно исследовав все обстоятельства, здесь скорее, будет некий подкол. 1×slot регистрация Чем ниже велечину вейджера, что, этим проще отыграть и исключить бонус. Если Вы расчитываете заработать на бездепе, но просто ознакомиться с свежим игровым клубом, то стоит избегать бонусов с высочайшим вейджером их почти не реально отыграть. С ними Вы можете только протестировать игры заведения.Как только получите бездеп в казино, всё точно не запамятовывайте инспектировать электронную почту. Некоторые игорные клубы непрерывно веселят интенсивных гэмблеров приятными призами. Чаще всего получить презент возможно в преддверии веселья, на день рождение, за вербование друга. А также распространённым призом считается прибавка к депозиту. Нужно всего лишь пополнить счёт, и азартное заведение увеличит его на 50–100%.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.iranwe3.xyz/thread53257.html#post357639>1×slots зеркало регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Индивидуальные поощрения выдаются за совершение поступков: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавленья либо официального посетителя для ПК. В большинстве казино действуют программки преданности, присваивающие игрокам статусы за активность на сайте. Продвижение на грядущий степень нередко с выдачей бездепа. Существуют казино с бонусом за регистрацию, каких довольно модны фриспины в интернет казино впоследствии регистрации в определенных забавах. Они встречаются и почаще бесплатных поощрений или классических призов в казино без вложений. Например, игрок регистрирует счет, на кот-ый начисляются безвозмездные игры, бонус за регистрацию повторяющий даровых фрспинов, вращения в игровом автомате. Во время игрового процесса игрок выигрывает истинные деньги, которые в последствии можно успешно исключить из заведения на собственную платежную систему. То есть, есть все шансы вывести свои без рисков собственными деньгами. Регистрация, за игрок получит бонусы, займет пару минут, а спасибо этому возможно прирастить 5 евро поощрений до тыс. И без всяких заморочек вывести их.
#2185 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up casino top top порно с Гатагова Ольга Анатольевна <a href=https://rumafia.news/>сайт pin up casino</a> vodka casino пин ап casino pin up top <a href=https://res-publika.com>1×bet телефон</a> бесплатное казино почему в казино не бывает настенных часов порно с Ирина Сидоркова casino betting porno Елизавета Туктамышева pin up букмекерская контора почему в казино нет окон
DiskiPlus порно с Анастасия Потапова, теннисистка DiskiPlus балтбет букмекерская контора <a href=https://diskiplus.ru>DiskiPlus казино играть</a> DiskiPlus казино рояль DiskiPlus casino автомат <a href=https://www.diskiplus.ru>DiskiPlus пинап казино</a> DiskiPlus порно с Дронова Александра Викторовна DiskiPlus casino daddy DiskiPlus pin up casino официальный DiskiPlus ramenbet casino DiskiPlus казино гта 5 DiskiPlus porno Мира Андреева (теннис) DiskiPlus pin up букмекерская контора
#2186 Charlesgunnyhttp://filmkachat.ru
x1 slots регистрация в 1×slots casino
Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют актуальную информацию о not the slightest down payment bonuses и других предложениях.Любой выигрыш по ставке выше установленного лимита будет считаться недействительным. То есть ставка не будет засчитана при отыгрыше, а случае выигрыша его сумма не поступит на счёт клиента — результат игры несомненно полностью аннулирован. <a href=http://filmkachat.ru/>1×slots скачать на айфон</a> Вы скорее, скажем, как все любите получать подарки и бездепозитные бонусы казино. Игорные дома взяли в привычку одаривать гэмблеров приятными бонусами. Стать владельцем приветственного презента можно за творение профиля либо пополнение счёта. Второй вариант больше увлекательный, так клубы готовы удвоить депозит! Но если вы новичок и только знакомитесь с миром азарта, какого-либо воспользуйтесь призом за регистрацию. <a href=https://link.space/@lexxeagle>https://link.space/@lexxeagle</a> Бездепозитный бонус часто имеет стать легкодоступным незамедлительно после окончания регистрации, потому в большинстве случаев единственным требованием к нему считается регистрация, а этого проверка вашей новой учетной записи. казино 1×slots официальный сайт <a href=http://www.rhl-mod.ru/members/98893-kennetheropy/>http://www.rhl-mod.ru/members/98893-kennetheropy/</a>
1×slots официальный сайт, скачать
Срок отыгрыша — это период, который начинается в момент активации приза и завершается с его закрытием. Пользователю нужно уложиться в этот временной промежуток, по призовые средства аннулируются. Казино устанавливают список игр, ставки в которых засчитываются при расчете отыгранных средств. Если тайтл не входит в этот список, то предоставляется быть недоступен для загрузки во время деяния бонусного предложения. 1×slots зеркало сайта <a href=https://telegra.ph/Navigating-Cannabis-Delivery-Services-in-Whitby-11–24>https://telegra.ph/Navigating-Cannabis-Delivery-Services-in-Whitby-11–24</a> В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая часть забавы. Важно, зачастую бездепозитные призы в казино выдаются с ограничениями по максимальной выплате. В среднем возможно рассчитывать на выгода в количество тыщ руб. Как вывести выигрыш с бонуса без депо. Придётся подтвердить аккаунт документально, в неких заведениях. Процедура верификации обязательна и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в онлайн чате либо прочтите в правилах.Прочитайте верховодила бонусной программки, в которой желаете принять. Да, мы безотступно рекомендуем устроить это до регистрации. 1×slots casino зеркало рабочее Вейджер (wager) – это коэффициент, который показывает на какую сумму необходимо сделать ставок, дабы вывести приз из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего бонуса, Вам необходимо устроить ставок на необходимую: 500*70=3500 рублей. Только полностью отыграв бонус, Вы сможете вывести собственный выигрыш.
1хслотс казино зеркало
Каждый новичок и умелый игрок мечтают стремительно стартануть и начать создавать настоящие ставки. Для этого довольно забрать подарок, за который надо уплачивать. В зависимости от игровой платформы, нужно создать профиль, привязать email или аппарат. После сего администрация начисляет щедрое вознаграждение вид даровых вращений или виртуальных кредитов. Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция содержит подробные верховодила, гиперссылка на коие обыкновенно содержится в промообъявлении. В их указываются лимиты, вейджер, список дешевых игр. Если оператор прячет данные о предложении, то пользоваться им надо.В игровых клубах без лицензии Вы покупаете „кота в мешке“ и если, тогда, спорных обстановок нет возможности куда-то пожаловаться и обосновать собственную правоту. <a href=https://lunar.az/user/DoctorLazutakl/>https://lunar.az/user/DoctorLazutakl/</a> 1хслотс рабочее зеркало на сегодня
1×slots зеркало сайта
1×slots casino зеркало <a href=https://www.modewort.pl/2019/06/karikatur.html>https://www.modewort.pl/2019/06/karikatur.html</a> Для ревизии используются сканы паспортов, водительских водительских, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь обнаружен в попытке ввести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный список. При ирге на лицензионной площадке не опасаться указывать достоверную персональную информацию (шифрование исключает утечку индивидуальных данных).Бездепозитный приз по промо-коду будет доступен для игры, лишь что, нет случае когда Вы активируете специальный бонусный код в разделе с бонусами или укажите промокод при регистрации на сайте. В неких случаях, не активации кода, понадобиться доказать контактные данные игрока и наполнить анкету клиента.
1× slots регистрация в 1×slots casino
Бонус с зачислением средств на счет дает больше свободы действий. Пользователь сам подбирает, каким образом распорядиться подаренными средствами. Здесь также шансы действовать ограничения на список дешевых игр, но обыкновенно эти рамки не например строги, как в рекламную с бесплатными вращениями. <a href=http://www.pallasowka.ru/freeboard/tools.php?event=profile&pname=Jefferyattet>http://www.pallasowka.ru/freeboard/tools.php?event=profile&pname=Jefferyattet</a> Вейджер в переводе с английского значит «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша приобретенного приза, в нашем случае бездепозитного. Число ставок имеет — главно лишь набрать сумму, пропорциональную сумме поощрения.Нет. Для получения бездепозитного приза в казино необходима обязательная регистрация на сайте. Играть в слоты безвозмездно и без регистрации возможно только в демо режиме. 1×slots регистрацию процедура займет всего лишь Обычно бездепозитные акции от казино, прибывают на эл. Почту в дни рождения либо праздники. В некоторых онлайн казино можно адресоваться в чат и как постоянному игроку, вполне для предложат бездепозитное предложение.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.mentalhealth-world.org.uk/forums/index.php?/topic/96195–1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5-%D0%BD%D0%B0-%D1%81%D0%B5%D0%B3%D0%BE%D0%B4%D0%BD%D1%8F/>1×slots зеркало рабочее на сегодня</a>
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=50200>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Не стоит путать забаву в демо и использование бонусов. В демонстрационном режиме игрок имеет оценить механику слота, сюжет и оформление. Но игра проводится на условные кредиты, потому отсутствует основное ? чувство азарта. Активируя промокод либо фриспины, клиент по-прежнему не расходует средства деньги на игровые автоматы, хотя имеет сорвать реальный куш! Условия отыгрыша бонуса. Если Вы планируете заработать на бездепозитном бонусе, то начала обратите внимание на значение вейджера и срок, который дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, что, этим проще отыграть приз и вывести выигрыш.
#2187 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casinos winning Манилова Алла Юрьевна порно <a href=https://sovsekretno.net/>gama casino</a> приложения букмекерских контор Крючкова Полина Викторовна порно <a href=https://repost.news/>1×bet скачать приложение на андроид</a> porno Екатерина Ефременкова, шорт-трекистка porno Андрей Рублев (теннис) бесплатно играем казино почему в казино нет часов casino com Елизавета Боярская скачать 1×bet на андроид бесплатно
DiskiPlus 1win букмекерская контора DiskiPlus букмекерские конторы без депозита <a href=https://diskiplus.ru/>DiskiPlus 1×bet регистрация</a> DiskiPlus порно с Юлия Ефимова DiskiPlus pin up casino зеркало <a href=https://diskiplus.ru>DiskiPlus champion casino</a> DiskiPlus Петрова Ольга Викторовна порно DiskiPlus top casino DiskiPlus рокс казино DiskiPlus букмекерская контора леонов DiskiPlus 1win букмекерская контора DiskiPlus рокс казино DiskiPlus букмекерские конторы в россии
#2188 Charlesgunnyhttp://filmkachat.ru
casino 1×slot
Не желаете поиграть в азартные игры, не рискуя своими деньгами, но получая в все выплаты? Подобную вероятность деют почти наихорошие порталы с азартными веселиями. В их числе много правдивых и надежных интернет-казино на русском языке. Они привлекают свежих пользователей разными поощрительными событиями, включая бездепозитные, либо бесплатные бонусы. <a href=http://filmkachat.ru/>1×slots зеркало проходить регистрацию это отличный вариант</a> <a href=https://developers.paragon-software.com/community/profile/3d-model-360-view/>https://developers.paragon-software.com/community/profile/3d-model-360-view/</a> Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депо имеет отличаться до 30 дней.Любой выигрыш по ставке повыше установленного лимита несомненно являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, а в случае выигрыша его сумма не поступит на счёт посетителя — итог забавы будет всецело аннулирован. 1×slots зеркало видели такую регистрацию на <a href=http://beton.ru/communication/forum/?PAGE_NAME=profile_view&UID=36508>http://beton.ru/communication/forum/?PAGE_NAME=profile_view&UID=36508</a>
1×slots регистрация
<a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=10776>1×slots официальный demo регистрация в 1×slots casino</a> 1×slot регистрация <a href=http://www.ngo.ne.jp/userinfo.php?uid=33082>http://www.ngo.ne.jp/userinfo.php?uid=33082</a> 1×slots зеркало видели такую регистрацию на Возьми собственный презент. Чаще всего бонус активируется незамедлительно последствии регистрации. Но посещают ситуации, когда надо(надобно) зайти в индивидуальный офис либо написать в справочную службу.
1×slots промокод при регистрации 2025
<a href=http://b775218w.bget.ru/user/DoctorLazutaEa/>http://b775218w.bget.ru/user/DoctorLazutaEa/</a> Обычно для получения призов без депозита, казино выдвигает приклнные и абсолютно выполнимые условия, хотя есть ряд деяний которые запрещены и имеют стать противные результаты: 1×slots акции
1хслотс казино зеркало
Однако в критериях скрываются «подводные камни», коие не разрешат исключить солидную сумму либо же вы не успеете отыграть вейджер. Поэтому мастера советуют арестовать благотворительные вращения за регистрацию в казино без депо, чтобы поднабраться навыка и получить реальный шанс на победу. 4. Заберите подарок. Чаще всего бонус активизируется сразу в регистрации. Но посещают истории, когда нужно забежать в собственный кабинет либо написать в саппорта. Максимальная ставка ? уточняется в денежной счета и ограничивает объем ставки за раз спин. В случае ее превышения приз возможность быть аннулирован. Также в правилах может находиться запрет на размещение ставок конкретного облика, к, по равным шансам в рулетке (другими, на чет или нечет, красное или темное и т.д.).Для верификации аккаунта нужно предоставить профессионалам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, а фотку банковской карты либо скриншот страницы электрического кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для подтверждения личности. 1×slots бонус за регистрацию <a href=http://suvenir.k-78.ru/communication/forum/user/49927/>http://suvenir.k-78.ru/communication/forum/user/49927/</a> Прямо момент арестуйте бесплатные вращения за регистрацию без депозита и начинайте собирать призовые комбинации из-за солидных выигрышей!
x1 slots 1хслотс регистрация перейти на 1×slots
У любого игорного клубы различные вейджеровые условия. Чтобы вы гарантировано смогли выполнить их, мы дадим несколько советов. Если система начислила небольшую сумму, надо делать великие ставки – остановитесь на 10–30 центах. Как лишь сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В неприятном случае превосходнее присмотреться к иному автомату.Возможность поиграть вспомогательное соревнование (а время и количество) совершенно бесплатно, а выигрыш, к, поступает на счёт игрока. После получения бонуса вывод средств для посетителя несомненно недосегаем времени, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или чета месяцов. Выводить деньги игрок сможет только после отыгрыша. <a href=https://bbs.yhmoli.net/space-uid-651930.html?do=profile>https://bbs.yhmoli.net/space-uid-651930.html?do=profile</a> 1× slots зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://miupsik.ru/forums/showthread.php?tid=500697>1×slots промокод при регистрации</a>
<a href=https://houseofmorningstar.gamerlaunch.com/forums/posting.php?mode=reply&t=12193728&gid=518596>казино 1× slots официальный сайт</a>
<a href=https://omkor.ac.th/Question-Answer/viewtopic.php?f=3&t=53923&p=695337#p695337>1х слот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Несмотря на то, что этот вариант стимуляции со стороны азартных платформ довольно востребован в подобных игр, далековато многим почитателям казино ведомо, собственно по бездепозитные призы казино и как непосредственно их возможно эксплуатировать.
#2189 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet слоты 1×bet xyz порно с Федор Чалов (футбол) <a href=https://t.me/vchkogpu_ru>автомат казино</a> 1×bet регистрация промокод 1×bet <a href=https://strelochnik.com/>1×bet на сегодня</a> 1×bet зеркало рабочее 7k casino зеркало порно с Георгий Джикия (футбол) 1×bet зеркало на сегодня 1×bet xyz 1×bet официальный сайт лучшие онлайн казино 1×bet рабочее на сегодня
DiskiPlus букмекерская контора фонбет официальный DiskiPlus casino зеркало сегодня <a href=https://www.diskiplus.ru>DiskiPlus casino pin официальный</a> DiskiPlus casino DiskiPlus порно с Анна Калинская (теннис) <a href=https://diskiplus.ru/>DiskiPlus порно с Васильева Татьяна Викторовна</a> DiskiPlus Лут Оксана Николаевна порно DiskiPlus Александра Бортич DiskiPlus Самойлова Алла Владимировна порно DiskiPlus пинко casino DiskiPlus casino играть DiskiPlus casino 7k рабочее DiskiPlus официальные букмекерские конторы
#2190 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать casino на андроид букмекерская контора фонбет официальный <a href=https://rucriminal.info/>сайт 1×bet слоты</a> casino 7k сегодня Нургалиева Эльвира Рамиловна порно <a href=https://vestnik-jurnal.com/>букмекерская контора зенит</a> яндекс игры казино 1×bet casino официальные букмекерские конторы casino на телефон скачать 1×bet casino играть казино ли
DiskiPlus букмекерские конторы бет DiskiPlus демо казино <a href=https://www.diskiplus.ru>DiskiPlus сайт 1×bet слоты</a> DiskiPlus porno Алена Михайлова DiskiPlus 1×bet xbet xyz <a href=https://diskiplus.ru/>DiskiPlus porno Екатерина Ефременкова, шорт-трекистка</a> DiskiPlus Львова-Белова Мария Алексеевна порно DiskiPlus казино онлайн DiskiPlus порно с Петр Ян (ММА) DiskiPlus Петрова Ольга Викторовна порно DiskiPlus casino онлайн DiskiPlus Скоробогатова Ольга Николаевна порно DiskiPlus pin up casino официальный
#2191 Charlesgunnyhttp://filmkachat.ru
1×slots казино зеркало
Бoльшинcтвo азартных заведений выдвигают примерно однообразные, схожие условия и притязания, коие нужно выполнить, дабы получить бездепозитный приз за регистрацию. Все их возможно соединить в раз список: <a href=http://filmkachat.ru/>1 x slots casino</a> Подтверждение электронной почты – одно из основных условий, коие есть практически в любом бездепозитном казино. Чтобы верифицировать электронную почту, довольно перейти по интенсивной ссылке в письме, полученном от азартного клуба.Фриспины – безвозмездные вращения с фиксированной ставкой, которые возможно применять в конкретных игровых автоматах. <a href=https://telegra.ph/Walmarts-battery-return-policy-03–13>https://telegra.ph/Walmarts-battery-return-policy-03–13</a> Вы не в коем случае ни чем не рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической забавы на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, выучится регулировать менять ставки и линии, изучать бонусные игры и их выигрышные композиции, да счете просто зарядится кучей эмоций! Ведь вы будите играть на бонусные свои, которые возможно отыграть и вывести, но просто на демо счет, тем самым адреналин в крови еще повысится а пульс забьется с нередким ритмом! 1×slots рабочее зеркало на сегодня <a href=https://www.penexchange.de/pen-wiki/index.php/Benutzer:Nannie95F2487>https://www.penexchange.de/pen-wiki/index.php/Benutzer:Nannie95F2487</a> Подтверждение электрической почты – одно из основных критерий, которое есть практически в каждом бездепозитном казино. Чтобы верифицировать электронную почту, достаточно перебежать по интенсивной ссылке в послании, приобретенном от азартного клуба.
1×slots бездепозитный бонус за регистрацию
<a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=10765>1хслотс официальный сайт зеркало</a> 1хслотс мобильная версия зеркало <a href=http://qywd.jingyunys.top/home.php?mod=space&uid=60105&do=profile&from=space>http://qywd.jingyunys.top/home.php?mod=space&uid=60105&do=profile&from=space</a> 1×slots регистрацию процедура займет всего лишь
1×slots актуальное зеркало
В неких онлайн казино для получения бездепозитных бонусов не довольно просто зарегистрироваться на сайте клуба и доказать свои контактные данные. Дополнительно потребуется активация промокода. Также бездепозитные призы имеют служить методом возвращать к забаве посетителей, временно приостановивших своё сотрудничество с компанией: извещение о бездепе поступает на мобильный аппарат либо почту.Нельзя разглядывать забаву на деньги, как вариант заработка. Азартные игры воспрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не является организатором азартных игр. Сайт носит информационный характер. <a href=http://www.g3rmaica.de/elfredo/member.php?action=showprofile&user_id=21480>http://www.g3rmaica.de/elfredo/member.php?action=showprofile&user_id=21480</a> Бездеп с фриспинами может обхватывать всю коллекцию игр на сайте или разработки 1-го провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении акции. Выигрыш возможность быть выведен после того, как пользователь отыграет данную необходимую. Возможность расценить полный функционал слотов — главное совершенство данной разновидности. Игроку становятся доступны те опции, коие отсутствуют в демонстрационном режиме, а возможность выиграть реальные деньги добавляет ясных азартных ощущений.Похожим образом трудится 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения клиента или в связи с получения им VIP-статуса. Подарок предоставляется в воззвания в поддержку и проверки. 1×slots регистрация то дальше необходимо пройти Любой выигрыш по ставке выше установленного лимита будет являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, ну случае выигрыша его сумма не поступит на счёт посетителя — результат игры несомненно полностью аннулирован.
1× slots сайт
Ограничения по забавам. Администрация запрещает игрокам некоторые игровые автоматы с бездепозитным призом, средствами либо бесплатными вращениями. Обычно, в правилах приводится полный перечень слотов для отыгрыша. Иногда дробленье выполняется по облику игр. Например, отыгрыш возможен на всех игровых аппаратах, хотя запрещен в настольных играх и в разделе Live Casino. Для получения бездепа нужно пригласить в игру по реферальной ссылке нового посетителя: он должен зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и восполнить счёт на необходимую, указанную в критериях промоакции. Для доказательства электрической почты, просто перейдите по интенсивной ссылке в послании, приобретенном от игрового заведения.Как только вы отыграли вейджер и средства с бонусного баланса перебежали вам на настоящий счет, Вы отважно сможете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (устроить наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, совместно, вкупе с депо). 1× slots официальный <a href=http://yaasbae.com/bitrix/redirect.php?goto=http://oftcomp.ru/bitrix/redirect.php?goto=http://clients1.google.gg/url?q=https://teletype.in/@urist555/9gktp5v-mdy>http://yaasbae.com/bitrix/redirect.php?goto=http://oftcomp.ru/bitrix/redirect.php?goto=http://clients1.google.gg/url?q=https://teletype.in/@urist555/9gktp5v-mdy</a> Основное управляло получения бездепа ? создаваемый акк должен быть у юзера первым и единственным. Наличие нескольких аккаунтов взыскательно воспрещено. Проверка проводится по имени, e-mal, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депо нужно соблюдать несложную последовательность деяний.Высокая конкуренция в сегменте азартных игр доказывает операторов привлекать посетителей различными промоакциями. Благодаря этому у посетителей появляется возможность получить бонусы в казино за регистрацию без депо. Воспользоваться этим предложением возможно, избегая процедуру внесения денег на игровой счет, просто активировав акк на веб-сайте. Наш экскурсовод по бездепам поможет избрать самую симпатичную бонусную программку, разузнать управляла получения такого гонорары и воспользоваться им с наибольшей выгодой.
1×slots регистрацию процедура займет всего лишь
Размер бонусов почаще всего чисто символический и не выше 50 руб. Приятно, хотя осязаемым бустом деле ли будет.Классическая разновидность приза за творение аккаунта. Его преимущество содержится в том, собственно заказчик возможность других подбирать аппараты и делать ставки в их. Иногда список игровых автоматов ограничен оператором, но все точно это другого, чем один-единственный доступный слот, как если, тогда, с использованием фриспинов. <a href=https://common.hkjc.com/corporate/ProcessLogon.aspx?Lang=E&SignOut=true&ReturnURL=https://www.wpanet.org/profile/blackshisha0212/profile>https://common.hkjc.com/corporate/ProcessLogon.aspx?Lang=E&SignOut=true&ReturnURL=https://www.wpanet.org/profile/blackshisha0212/profile</a> Составленный экспертами Casino.ru перечень онлайн-казино с бездепозитным призом позволяет игрокам сравнить спецпредложения разных операторов.Вообще перейдя в казино — правила одинаковы в получении бездепозитных призов, в стереотипные управляла заходит: подтвердить эл. Почту и аппарат, наполнить собственный индивидуальный профиль, активировать промо код или активировать предложения во вкладке БОНУСЫ. 1×slots зеркало выигрыши обязательно пройдите регистрацию если Приветственный бездеп предоставляется какому игроку лишь раз раз. Казино дерутся с например называемыми бонусхантерами (от англ. Bonus Hunter — доброволец за бонусами), пытающимися заводить множественные аккаунты для надувательства оператора и повторного получения подарка. Исключить похожие деяния дозволяет верификация данных. Администрация вправе востребовать у клиента доказать персональные данные, указанные при регистрации.
<b>Смотреть еще похожие новости:</b>
<a href=http://iptv.bestforums.org/viewtopic.php?f=3&t=4476>1×slots коды</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Способы получения бездепа различаются от облика бонуса, кот-ый понравился игроку. Но вам так надо(надобно) быть зарегистрированным в законном онлайн-казино и подтвердить собственную личность. В общем виде пошаговая инструкция для получения бездепозитного бонуса смотрится так:
#2192 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало слоты 1×bet xyz porno Александра Степанова, фигуристка <a href=https://t.me/vchkogpu_ru>порно с Юлия Ефимова, пловчиха</a> вывод казино порно с Арина и Дина Аверины, гимнастки <a href=https://rucriminal.info/>1×bet вход</a> какие казино официальные сайты казино 1×bet официальный слоты 1×bet регистрация 1×bet официальный скачать казино пин casino riobet
DiskiPlus официальная казино DiskiPlus скачать сайт букмекерской конторы <a href=https://diskiplus.ru/>DiskiPlus порно с Дарья Касаткина (теннис)</a> DiskiPlus пин ап казино DiskiPlus официальные зеркала казино <a href=https://www.diskiplus.ru>DiskiPlus порно с Дарья Клишина, легкоатлетка</a> DiskiPlus 1×bet регистрация DiskiPlus рабочее казино DiskiPlus лучшие онлайн казино DiskiPlus porno Анастасия Янькова, боксерка DiskiPlus up casino скачать DiskiPlus 1×bet сайт 1×bet xyz DiskiPlus porno Андрей Рублев (теннис)
#2193 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на сайте 1×slots ru com
Бонус начисляется игроку сразу после регистрации и прохождения верификации в казино и не требует от клиента внесения депо. Как правило, объем бонуса в схожем случае достаточно скромный, однако позволяет новеньким познакомиться с забавой без риска настоящими средствами.Процесс подтверждения личности возможность занять от одного дня до недели. Если клиент допустил нибудь оплошность при заполнении паспортных данных, то ему стопам обратиться с задачей в саппорта онлайн-казино. <a href=http://filmkachat.ru/>1×slot зеркало</a> <a href=https://lit.link/en/kalinka0588>https://lit.link/en/kalinka0588</a> Рассмотрим на образце: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских руб. В условиях акции предписано, собственно вейджер бездепозитного бонуса х20. Поэтому, чтобы отыграть бонус, игроку будет нужно сделать ставок на 35*20=700 рублей. 1×slots зеркало быструю регистрацию а также мгновенное <a href=https://benjamins.ch/index.php?title=Benutzer:OWWPatricia>https://benjamins.ch/index.php?title=Benutzer:OWWPatricia</a>
1×slots casino регистрация 1×slotscasino09k online
Выше мы дали полный комплект самых свежих и своевременных бездепозитных призов в онлайн казино без пополнения на 2022 год, где продоставляется воспользоваться любым ценным бездепозитным призом. 1×slots подтвердит вашу регистрацию если говорить Многие игроки, оценив возможностей казино, остаются выступать в нем и дальше ? на это и направлено любое промо. Постоянные посетители заносят депозиты и проделывают ставки, обеспечивая длительную прибыль оператора. То есть, казино выдают бездепы свежим пользователям для формирования приклнной аудитории. <a href=http://www.pxltw.com/home.php?mod=space&uid=366408&do=profile>http://www.pxltw.com/home.php?mod=space&uid=366408&do=profile</a> 1×slots регистрация 1×slots casino 777 online Иногда для получения призов нужно связаться с адептами службы. Удобнее всего с ними разговаривать в онлайн-сате, желая от достаточно запроса по электрической почте.
1×slots официальный сайт зеркало рабочее
При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое возможно предназначить игре в казино. <a href=https://funsilo.date/index.php?title=%D0%B1%D0%BB%D0%BE%D0%B3%D0%B8%20%D0%BE%20%D0%B6%D0%B5%D0%BD%D1%81%D0%BA%D0%BE%D0%BC%20%D0%B7%D0%B4%D0%BE%D1%80%D0%BE%D0%B2%D1%8C%D0%B5>https://funsilo.date/index.php?title=%D0%B1%D0%BB%D0%BE%D0%B3%D0%B8%20%D0%BE%20%D0%B6%D0%B5%D0%BD%D1%81%D0%BA%D0%BE%D0%BC%20%D0%B7%D0%B4%D0%BE%D1%80%D0%BE%D0%B2%D1%8C%D0%B5</a> Рассмотрим принцип его деянья на образце. Допустим, вы зарегались и возымели $10 no down payment bonus с вейджером х50. Это означает, собственно выигранные средства возможно несомненно выводить не ранее, чем после того, как общая сумма ставок достигнет $500.Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке необходимо пополнить счет в казино. Для депозитных призов, данная процедура не необходима, так как депозит уже изготовлен. 1×slots регистрация то дальше необходимо пройти
1×slots мобильная версия войти казино
Главным моментом в возникновении этих вознаграждений состоит что, нет, собственно пустив их в ход, геймер ничем не рискует и в последствии никому ничего не несомненно обязан (не зависимо, получит ли он спасибо бонусам какой-либо выигрыш или мгновенно спустит все лишь собственно прибывшие деньги). То есть, казино снабжает игрока вероятностью на дармовой основе играть во различные слоты даже спонсирует игру. Наличие у игрока второго аккаунта. Запрещено создавать некоторое профилей для многократного получения бездепов.Бездепозитные бонусы в казино без пополнения 2022 — это конкретная сумма денег либо gift spins вращения, коие предоставляются первым постояльцам за регистрацию на веб-сайте казино в виде бездепозитного приза, и выделяет вас вероятность помощью казино без пополнения опробовать услуги (игр), с дальнейшей преимуществом, льготой вывода средств при исполнении всех установленных правил. 1×slots регистрация 1×slots review live <a href=https://www.nederpix.nl/profile.php?mode=viewprofile&u=73850>https://www.nederpix.nl/profile.php?mode=viewprofile&u=73850</a> Чаще всего интернет-казино предлагают бездепозитные призы свежим юзерам. Эта промо-акция довольно отлично завлекает новичков, подталкивая их к открытию счета. Конечно, не все они становятся преданными клиентами, хотя сам факт регистрации аккаунта играет на руку заведению.
1×slots акции
Доступность — бездепозитные призы в казино чаще всего предоставляются свежим игрокам, но посещают случаи, когда приз имеют получить и действующие клиенты.Промокод – определённая композиция символов, которую нужно установить в соответствующее поле при создании учетной записи либо активировать в собственном профиле игрока в разделе с бонусами. Такой бесплатный эквивалент средств зачисляется на профиль юзера в осуществления притязаний и предназначаются они только для игрового процесса. Вывод таких вознаграждений возможен только после осуществления вейджеровых условий.Также случаются случаи, когда казино начислит оговоренный приз после регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам. <a href=http://yxhsm.net/home.php?mod=space&uid=243603>http://yxhsm.net/home.php?mod=space&uid=243603</a> Такой безвозмездный эквивалент средств зачисляется на профиль юзера в осуществления требований и предназначаются они лишь для игрового процесса. Вывод таких вознаграждений вероятен только после воплощения вейджеровых критерий.Бездепозитный приз за регистрацию в казино с выводом средств в 2022 году — Наш ресурс дает игрокам актуальную информацию о самых новых, щедрых и испытанных призах в онлайн казино, коие обновляются любой день. зеркло казино 1×slots В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, необходимо адресоваться в службу спустя лайв-чат на веб-сайте казино.Осталось выбрать казино с призом за регистрацию и сделать профиль. После активации презента выигрыш в от Фортуны и навыков.
<b>Смотреть еще похожие новости:</b>
<a href=https://praisenpray.org/forums/showthread.php?tid=118895>1×slots регистрация на сайте 1×slots ru com</a>
<a href=https://www.handmakersbrasil.com.br/topic/4542–1×slots-%D0%BC%D0%BE%D0%B1%D0%B8%D0%BB%D1%8C%D0%BD%D0%B0%D1%8F-%D0%B2%D0%B5%D1%80%D1%81%D0%B8%D1%8F-%D0%B2%D0%BE%D0%B9%D1%82%D0%B8-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE/>1×slots мобильная версия войти казино</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Индивидуальные поощрения выдаются за совершение действий: подписку на аккаунты площадки в соц сетях, установку мобильного прибавленья или официального посетителя для ПК. В большинстве казино срабатывают программы преданности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на грядущий степень нередко с выдачей бездепа.
#2194 WilliamUrilkhttps://maispin.tw/
Maispin——2025年最新USDT娛樂城,安全、快速、刺激! 歡迎來到 Maispin,2025年最具潛力的新秀 USDT娛樂城!在這裡,您只需提供 錢包地址 即可註冊,無需繁瑣的個人資訊,享受 安全、匿名、快速 的遊戲體驗。Maispin 提供超過 1000種賭場遊戲,涵蓋 真人百家樂、體育投注、老虎機、撲克、輪盤 等經典娛樂,讓您隨時隨地感受頂級賭場的刺激氛圍。我們與世界知名遊戲供應商合作,確保遊戲 公平公正,並提供高額彩金、獎勵活動,讓玩家輕鬆贏大獎!作為 USDT區塊鏈娛樂城,Maispin 存提款秒到帳,無需繁瑣審核,資金流動安全透明,讓玩家更安心地享受遊戲樂趣。立即加入 M宇宙,體驗前所未有的加密娛樂新潮流!
#2195 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на сайте 1×slots ru com
Для получения бездепа необходимо пригласить в забаву по реферальной ссылке свежего посетителя: он должен зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на необходимую, указанную в критериях акции.Предложения с бездепозитными бонусами за регистрацию позволяют новым заведениям заинтересовать аудиторию на собственный сайт. А игроки к получают возможность выступать на реальные средства без депозита в казино и заработать малый стартовый капитал, который разрешено исключить на карту банка или электрический кошелек. <a href=http://filmkachat.ru/>1× слот зеркало</a> Игрокам не следует принимать приветственный бонус как гарантированный метод получить большой выигрыш, но это замечательная вероятность без затрат оценить перечень казино.1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, в не желайте замерзнуть жертвой мошенников либо впустую израсходовать время; <a href=https://feedback.challonge.com/forums/44455-feature-requests/suggestions/49478687-%D1%82%D0%B5%D1%80%D0%BC%D1%96%D0%BD%D0%BE%D0%B2%D0%B8%D0%B9-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D0%B6-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2-%D1%96%D0%B2%D0%B0%D0%BD%D0%BE-%D1%84%D1%80%D0%B0%D0%BD%D0%BA%D1%96%D0%B2%D1%81%D1%8C%D0%BA%D1%83-%D1%8F%D0%BA-%D0%B2%D0%B8%D0%B3>https://feedback.challonge.com/forums/44455-feature-requests/suggestions/49478687-%D1%82%D0%B5%D1%80%D0%BC%D1%96%D0%BD%D0%BE%D0%B2%D0%B8%D0%B9-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D0%B6-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2-%D1%96%D0%B2%D0%B0%D0%BD%D0%BE-%D1%84%D1%80%D0%B0%D0%BD%D0%BA%D1%96%D0%B2%D1%81%D1%8C%D0%BA%D1%83-%D1%8F%D0%BA-%D0%B2%D0%B8%D0%B3</a> Основное управляло получения бездепа ? создаваемый акк обязан быть у пользователя первым и единственным. Наличие нескольких аккаунтов взыскательно воспрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депо необходимо соблюдать простую очередность деяний. 1×slots зеркало регистрация <a href=http://airmax.ge/index.php?subaction=userinfo&user=secretiveauger5>http://airmax.ge/index.php?subaction=userinfo&user=secretiveauger5</a> Размер призов чаще всего чисто символический и не выше 50 рублей. Приятно, хотя осязаемым бустом при ли станет.
1×slots актуальное зеркало
1×slots официальный сайт зеркало <a href=http://www.xiaoditech.com/bbs/home.php?mod=space&uid=2345022>http://www.xiaoditech.com/bbs/home.php?mod=space&uid=2345022</a> Бездепы с бесплатными вращениями предоставляют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд уплачивает казино. Число спинов ограничено и изредка выше сотню. Если акция включает в себя количество бесплатных игр, их начисление возможность быть разбито на некоторое дней. 1хслотс мобильная версия зеркало На бесплатные призы онлайн-казино практически постоянно распространяется лимитирования по стране проживания посетителей. Даже случае для разрешено раскрывать счет и играть на средства в заведении, это еще не означают, что вам доступны not the slightest deposit bonuses.Выполнив все притязания оператора, клиент имеет оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит примерно не более суток. Если дополнительно требуется пройти функцию верификации, то срок возрастает до 1–2 рабочих дней. Для перевода используются банковские приборы и электрические платежные системы. Второй способ подходит лучше, например как основная транзакций в осуществляются мгновенно. В связи со специфичностью функционирования банков обработка платежей возможность занять до нескольких рабочих дней.
онлайн казино 1×slots
Мы собрали и опубликовали список лучших бездепозитных казино с призами за регистрацию, которые гарантируют щедрые выигрыши и моментальные выплаты.Доступные игры – В неких азартных играх можно снизить математическое преимущество казино до нескольких десятых процента. В их числе почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как правило, в таких забавах ставки идут в зачет вейджера не полностью. Например, возможность учитываться лишь 50%. В некоторых играх бездепозитные призы вообщем невозможно отыгрывать. Даже не выиграв крупную сумму, игрок увлекательно проведет время, изнутри изучит работу площадки, оценит геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе наихороших акций с. Достаточно периодически учить перечень новых интернет казино с выводом бонуса без депо в этом разделе.Возможность сыграть вспомогательное состязание (а время и некоторое) совершенно даром, а выигрыш, к, поступает на счёт игрока. <a href=http://www.literatort.ru/2018/09/zajachji-lapy.html>http://www.literatort.ru/2018/09/zajachji-lapy.html</a> Еще одно условие касается объемов ставки. Операторы устанавливают наивысшую сумму, которую игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, избранной в Личном кабинете. При превышении лимита есть риск лишиться бонуса. Существующие лимитирования относятся и к определенным видам ставок. Например, играя в рулетку, клиент может столкнуться с запретом назначать фишки на шансы. 1×slots бонус за регистрацию
1×slots зеркало регистрацию более популярный вариант это
x1 slots 1хслотс регистрация перейти на 1×slots <a href=http://www.gx777.info/music/portal/html/modules.php?name=Your_Account&op=userinfo&username=symptomaticqual>http://www.gx777.info/music/portal/html/modules.php?name=Your_Account&op=userinfo&username=symptomaticqual</a> Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высокие требования. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до 100 один в игровых автоматах. Например, случае игрок получил даром десять долларов, то нужно будет отыграть их, поставив одну тысячу спинов по одному баксу каждый. Стоит отметить, собственно не все казино дают возможность играть на призы и не во всех увеселительных заведениях схожие управляла для отыгрывания. Некоторые казино запрещают играть на бонусы в блекджек либо ограничивают ставки до пяти процентов, собственно существенно увеличивает в 10-ки один число нужных игр.
1× slots зеркало
Максимальная ставка ? уточняется в еденице счета и ограничивает размер ставки за один спин. В случае ее превышения бонус возможность быть аннулирован. Также в правилах может находиться запрет на размещение ставок конкретного вида, например, по одинаковым шансам в рулетке (другими, на чет либо нечет, красное или темное и т.д. ).Бездепы обыкновенно предлагают с отыгрышем — моментально вывести выигранные средства невозможно. Перевод денег со счета несомненно возможен последствии такого, как юзер выполнит все требования казино, а сумма возможности превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, протяжении коих заказчик вправе воспользоваться предложением. Обычно они не превышают нескольких дней после активации. <a href=https://dream-weaver.co.kr/bbs/board.php?bo_table=free&wr_id=2874046>https://dream-weaver.co.kr/bbs/board.php?bo_table=free&wr_id=2874046</a> В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это самая приятная часть игры. Важно, зачастую бездепозитные призы в казино выдаются с ограничениями по максимальной выплате. В среднем возможно рассчитывать на прибыль в некоторое тыщ рублей. Как исключить выигрыш с бонуса без депо. Придётся доказать аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате либо прочитайте в правилах. зеркло казино 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=http://swissairways-va.com/phpBB3/viewtopic.php?t=792965>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=http://forum.daslight.com/viewtopic.php?p=27567#p27567>рабочее зеркало 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Можно ли наваривать на бездепозитных бонусах? Это не работа, здесь как повезет, в в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, это можно именовать везением, и дополнительной добавкой к вашему бюджету.
#2196 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее
В большинстве заведений устроить это возможно по адресу электронной почты, по номеру телефона, через социальную сеть либо гугл-аккаунт. <a href=http://filmkachat.ru/>1×slots коды</a> Чем ниже значение вейджера, тем проще отыграть и вывести приз. Если Вы расчитываете заработать на бездепе, а не просто ознакомиться с новым игровым клубом, то стоит избегать бонусов с высочайшим вейджером их почти не реально отыграть. С ними Вы сможете только протестировать забавы заведения.При подмоги такового поощрения оператор имеет также завлекать клиентов, коие раньше проявляли активность на веб-сайте, хотя по какой-то основанию перестали выступать. В данном случае промокод высылается юзеру по электрической почте либо вид SMS. <a href=https://steemit.com/watts/@kalinka0588/understanding-the-power-of-a-car-battery-a-comprehensive-guide>https://steemit.com/watts/@kalinka0588/understanding-the-power-of-a-car-battery-a-comprehensive-guide</a> На страничке представлены бездепозитные призы за регистрацию в казино редкая награда за которой гонятся все игроки как новички, например и профессионалы. Мы также уделяем большое внимание на наличие бонусов при составление рейтинга казино на деньги. Бездепозитный бонус это вероятность выступать даром и выиграть настоящие деньги.В бонусную программу многих операторов входят регулярные бездепы. Это бессрочные акции, поощряющие активных неизменных игроков. Популярный формат — раздача фриспинов по определенным дням недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают постоянные бонусы без депозита в размен на скопленные баллы лояльности. 1×slot регистрация <a href=http://www.zian100pi.com/discuz/home.php?mod=space&uid=1141552&do=profile&from=space>http://www.zian100pi.com/discuz/home.php?mod=space&uid=1141552&do=profile&from=space</a> Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют важную информацию о no down payment bonuses и других предложениях.
1×slots зеркало рабочее
Доступность — бездепозитные бонусы в казино почаще всего предоставляются свежим игрокам, хотя случаются случаи, когда приз могут получить и действующие посетители.Представьте момент, когда при ставке в 10 рублей Вы получите сходственное умножение. Миллион рублей за одно вращение, собственно вполне возможно. Поэтому вопрос, сколько возможно выиграть остаётся не. Предлагаем выяснить других. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный приз и проверяйте удачу в деле. Разумеется, исключить средства довольно. Однако шансы есть у всех. <a href=http://iptv.bestforums.org/viewtopic.php?f=3&t=4450>1×slots регистрацию более популярный вариант это</a> 1×slots регистрация на официальном сайте Выбирайте лучшие безвозмездные бонусы счет обзоров на Casinoz – и пусть вам сопутствует удача при отыгрыше бонусных кредитов!Способы получения бездепа различаются в зависимости от вида приза, который приглянулся игроку. Но вас в любом случае нужно быть зарегистрированным в легальном онлайн-казино и доказать свою лицо. В общем облике пошаговая аннотация для получения бездепозитного приза выглядит например: <a href=http://forums.ago.ir/member.php?action=profile&uid=3828>http://forums.ago.ir/member.php?action=profile&uid=3828</a> 1 х слотс зеркало Помните, собственно в некоторых забавах сумма ставки идет в зачет вейджера только отчасти. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки числятся как отыгранные средства, момент как в слотах идет в зачет все 100% суммы.Бездепозитные призы отличный вариант бесплатной игры в игровые автоматы. Многие юзеры сети не понимают, собственно в казино можно начать играть полностью бесплатно, а позже исключить выигрыш на банковскую карту или электронный кошелек, иные не доверяют интернет казино, а третьи удачно играют и выигрывают – и подчас довольно немалые суммы.
рабочее зеркало 1×slots
Нет. Для получения бездепозитного приза в казино нужна обязательная регистрация на веб-сайте. Играть в слоты даром и без регистрации можно лишь в демо режиме.Демоказино есть почти на любом сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются значительно пореже: там когда выигрыша и соблюдения критерий акций бездеп можно перевоплотить в настоящие деньги. <a href=http://elite-models.cc/member.php?action=profile&uid=21862>http://elite-models.cc/member.php?action=profile&uid=21862</a> 1×slots актуальное зеркало При отыгрыше бонусных средств, нужно учесть срок деяния приза и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный бонус несомненно аннулирован.
1×slots казино зеркало
Бывают ли бездепозитные призы без вейджера? Бывают, в у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино. <a href=http://turkteam.10tl.net/member.php?action=profile&uid=2012>1×slots официальный зеркало</a> Классическая разновидность бонуса за творение аккаунта. Его преимущество содержится в, собственно клиент возможность без выбирать аппараты и создавать ставки в них. Иногда список игровых автоматов ограничен оператором, хотя все одинаково это лучше, чем единственный дешевый слот, как когда с внедрением фриспинов. Разные казино имеют личные управляла по выведению выигрыша. Для бездепозитных призов принимаются достаточно высокие притязания. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до ста один в игровых автоматах. Например, в игрок получил даром десять долларов, то необходимо несомненно отыграть их, поставив 1 тыщу спинов по одному доллару любой. Стоит обозначить(означить), собственно не все казино выделяют возможность играть на бонусы и не во всех развлекательных заведениях идентичные управляла для отыгрывания. Некоторые казино запрещают играть на призы в блекджек либо ограничивают ставки до 5 процентов, собственно существенно наращивает в 10-ки раз число нужных игр. 1×slots официальный сайт мобильная версия скачать <a href=http://www.fumankong2.cc/home.php?mod=space&username=RichardLodep>http://www.fumankong2.cc/home.php?mod=space&username=RichardLodep</a>
1х слот регистрация в 1×slots casino
<a href=http://forum.xpscenery.net/member.php?action=profile&uid=633>http://forum.xpscenery.net/member.php?action=profile&uid=633</a> Вообще перейдя в казино — правила одинаковы в получении бездепозитных бонусов, в стереотипные управляла входит: подтвердить эл. Почту и телефонный, заполнить собственный собственный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ.Также, учите, что бездепозитный приз возможно исключить только сомнений случае, когда станут выполнены все условия отыгрыша. 1×slots зеркало Бывают ли бездепозитные призы без вейджера? Бывают, в у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино.
<b>Смотреть еще похожие новости:</b>
<a href=https://melhorlance.com.br/minha-conta/>1×slots актуальное зеркало</a>
<a href=http://forum.as-p.cz/viewtopic.php?f=45&t=279040>1×slots официальный зеркало рабочее</a>
<a href=http://forum.bedwantsinfo.nl/showthread.php?tid=787731>1х слотс зеркало регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Некоторые казино могут предлагать клиентам бездепы за подтверждение номера или почты или репост на страницу в соц сетях. Также посещают случаи, когда казино начисляет оговоренный приз последствии регистрации нового посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам.
#2197 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up casino официальный pin up casino официальный <a href=https://7club7.com/>1×bet официальный слоты</a> pin casino промокод 1×bet <a href=https://rumafia.news/>1×bet официальный 1×bet xyz</a> гта онлайн казино 7k casino мобильные букмекерские конторы porno Андрей Рублев (теннис) casino online зеркало официальные букмекерские конторы pin up casino пин
DiskiPlus казино сочи DiskiPlus играющие казино онлайн <a href=https://www.diskiplus.ru>DiskiPlus казино смотреть</a> DiskiPlus букмекерская контора официальный сайт скачать DiskiPlus Елена Лядова <a href=https://diskiplus.ru/>DiskiPlus casino рабочее</a> DiskiPlus Елена Лядова DiskiPlus букмекерскую контору пин DiskiPlus казино зеркало сегодня DiskiPlus casino сайты DiskiPlus пин ап казино DiskiPlus бесплатно фильм казино DiskiPlus Самойлова Алла Владимировна порно
#2198 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало рабочее
С этими ординарными советами каждое казино с призом за регистрацию способно принести в разы больше выгоды и полезности.Также бездепозитные призы все служить способом возвращать к этой клиентов, что приостановивших своё сотрудничество с фирмой: извещение о бездепе поступает на мобильный аппарат или почту. <a href=http://filmkachat.ru/>онлайн казино 1×slots</a> У нас на сайте Вы отыщите список бонусов без депо в проверенных казино и доскональную информацию про как их получить и использовать. <a href=https://rentry.co/hkqe5hcw>https://rentry.co/hkqe5hcw</a> 1×slot казино зеркало <a href=http://led119.ru/forum/user/110269/>http://led119.ru/forum/user/110269/</a> Ознакомьтесь с нашим перечнем превосходнейших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего перечня и получите бездеп незамедлительно. Хватайте превосходнейшие благотворительные предложения ниже и выигрывайте великие деньги, не рискуя!
1×slots официальный сайт, скачать
Основное отличие что, что для получения бездепа нужно пополнять баланс в казино. Но кроме сего, есть ряд и других отличий:На нашем веб-сайте Вы отыщите список актуальных новых бездепозитных призов в казино 2022 года. Также, есть большое эксклюзивных предложений, которые доступны только посетителям нашего вебсайта в регистрации по нашей ссылке или активации особого промокода. 1× slots casino официальный сайт Поспешите зарегистрироваться на официальном сайте Клубника, чтобы моментально получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, появляется настоящий шанс победу!Чтобы бездеп не был начислен на Ваш аккаунт, Вам не нужно активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк механически, а Вы не расчитываете его использовать, обратитесь в службу с просьбой отменить бездепозитный бонус. <a href=https://www.alligator.spb.ru/forum/index.php?PAGE_NAME=profile_view&UID=79143>https://www.alligator.spb.ru/forum/index.php?PAGE_NAME=profile_view&UID=79143</a> В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и в случае спорных ситуаций нет возможности куда-то пожаловаться и обосновать свою правоту. 1×slots акции
1×slots зеркало видели такую регистрацию на
Многие казино предоставляют в маркетинговых целях благотворительные призы исключительно для наших читателей. Чтобы их получить, нужно перейти на игровой вебсайт по партнерской ссылке с нашего портала. <a href=http://istiqbolsari.uz/user/JefferyInFem/>http://istiqbolsari.uz/user/JefferyInFem/</a> Некоторые казино имеют предлагать посетителям бездепы за свидетельство номера либо почты или репост на страничку в социальных сетях.Сразу после активации промокода можно воспользоваться даром. Как уже упоминалось, бонусы случаются трёх обликов – фриспины, кредиты и фриплей-бонусы. 1 x slots casino Выбор любого интернет казино на нашем веб-сайте. В описании к каждому Вы сможете разузнать, собственно получите за создание аккаунта.
скачать 1×slots официальный сайт
Таким образом, заведение пробует показать себя своим вероятным игрокам, а такой рекламный ход как казино приз без депозита за регистрацию завлекает очень много внимания к игорному заведению и обеспечивает постоянный струю свежих посетителей и будущих посетителей игрового онлайн клуба.У каждого игорного заведения средства правила и условия. Но, дабы получить призы, нужно выполнить стереотипные действия: Выбирая бесплатный приз, пристально изучайте управляла. Убедитесь, что для возможно принимать роль в акции. Уточните, в каких играх возможно выполнять условия вейджера. При необходимости задавайте вопросы адептам саппорта.На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не сможете активировать и получить бездепозитный приз. 1хслотс регистрация в 1×slots casino <a href=http://www.dachamania.ru/photo_gallrey/profile.php?uid=59422>http://www.dachamania.ru/photo_gallrey/profile.php?uid=59422</a> Выбор любого интернет казино на нашем сайте. В описании к каждому Вы можете разузнать, что получите за творенье аккаунта.
скачать 1×slots официальный сайт
Такой безвозмездный эквивалент средств зачисляется на профиль юзера в осуществления требований и предназначаются они только для игрового процесса. Вывод этих вознаграждений возможен лишь в осуществления вейджеровых условий. <a href=https://amvnews.ru/forum/profile.php?mode=viewprofile&u=75328>https://amvnews.ru/forum/profile.php?mode=viewprofile&u=75328</a> Мы собрали и опубликовали список наилучших бездепозитных казино с бонусами за регистрацию, которые гарантируют великодушные выигрыши и мгновенные выплаты.Ещё одно распространённое акционное предложение – привлекательный презент с неблаговидными притязаниями. К образцу, клуб обещает $100 виде бездепа, но с вейджером х80 либо х100. Отыграть подобный вейджер практически невероятно и потому превосходнее концентрироваться на более интересных промоакциях. 1×slots промокод при регистрации 2025 Мы делаем акцент на ключевых положениях правил, рассказываем о территориальных ограничениях и вкратце информируем о других промоакциях обговариваемого казино.Более солидные предложения встречаются довольно редко. Зачастую они доступны лишь VIP-игрокам. В оставшихся случаях им скорее сопутствуют очень строгие обстоятельства отыгрыша. Также вероятны дополнительные обстоятельства и ограничения, прописанные в критериях и положения бонусной программы казино.
<b>Смотреть еще похожие новости:</b>
<a href=http://nakupnidivadlo.cz/index.php/forum/3-pripominky/46618-https-sk-service1-ru?start=468#239642>1×slots официальный сайт скачать на айфон</a>
<a href=https://forum.banknotes.cz/viewtopic.php?t=67766>1×slots казино мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
У каждого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано сумели выполнить их, мы дадим несколько советов. Если система начислила маленькую сумму, не стоит создавать великие ставки – остановитесь на 10–30 центах. Как только сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте играть. В неприятном случае другого присмотреться к иному автомату. В онлайне количество известных игорных площадок с красивыми акционными предложениями. Однако внимательно читать обстоятельства 10-ов предложений скором надоест, да и время отнимет большое. Поэтому наша команда подготовила ТОП-3 вебсайтов с наилучшими бездепозитными призами:
#2199 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Екатерина Ефременкова, шорт-трекистка порно с Алина Загитова, фигуристка <a href=https://res-publika.com>скачать букмекерскую контору на андроид</a> макао казино unlim casino <a href=https://slon-ru.com/>порно с Дарья Клишина, легкоатлетка</a> casino на телефон Преподобная Надежда Александровна порно Нургалиева Эльвира Рамиловна порно какие казино сайте букмекерской конторы фонбет казино проиграл 1×bet зеркало слоты 1×bet xyz
DiskiPlus казино на деньги DiskiPlus бесплатные букмекерские конторы <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet официальный 1×bet xyz</a> DiskiPlus зеркала официальных сайтов казино DiskiPlus пин up casino <a href=https://www.diskiplus.ru/>DiskiPlus официальные букмекерские конторы скачать</a> DiskiPlus porno Александр Соболев (футбол) DiskiPlus бесплатное казино DiskiPlus рейтинг казино DiskiPlus фильмы казино рояль DiskiPlus сайте букмекерской конторы фонбет DiskiPlus порно с Евгения Медведева DiskiPlus букмекерская контора скачать приложение
#2200 Charlesgunnyhttp://filmkachat.ru
1×slos регистрация в 1×slots casino
Денежные свои. Третий приз за регистрацию без депо – наличные. К раскаянью, только знаменитые и знаменитые клубы имеют дать средства в рублях или баксах. С их поддержкой возможность насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед данным необходимо исполнение конкретных условий.Для получения бонуса надо(надобно) пригласить в забаву нового клиента. Казино начислит пригласившему фиксированный процент от взносов приглашённого повторяющий бонуса: почаще всего его размер не выше 10%. Срок деянья приза в большинстве случаев не выше месяца: пригласивший получает бонус зависимо проигранных ставок приглашённого в 1-ый месяц игры. <a href=http://filmkachat.ru/>1×slots быструю регистрацию а также мгновенное</a> За счёт спинов получится запустить разные онлайн слоты, протестировать стратегии и поднабраться опыта. Фишка в том, собственно вращения начисляются на лучшие аппараты с оригинальными опциями и высочайшей отдачей. Не запамятовывайте, что в каждом акционном предложении предусмотрены специальные притязания – кратковременные лимитирования, максимальный размер ставки, перечень доступных игр. <a href=https://linkfly.to/kalinka>https://linkfly.to/kalinka</a> Максимальная ставка ? уточняется в еденице счета и ограничивает размер ставки за раз спин. В случае ее превышения приз имеет быть аннулирован. Также в правилах возможность содержаться запрет на размещение ставок конкретного вида, к, по равным шансам в рулетке (то есть, на чет или нечет, красное или черное и т.д.). рабочее зеркало 1×slots <a href=http://xn–ch1b5ip1vkdt62c.com/bbs/board.php?bo_table=free&wr_id=40103>http://xn–ch1b5ip1vkdt62c.com/bbs/board.php?bo_table=free&wr_id=40103</a>
1×slots регистрация 1×slotscasino 56 online
<a href=https://eccentrictirade.com/forums/showthread.php?tid=135694>1хслотс зеркало</a> 1×slots рабочее зеркало <a href=https://kosmetikinstitut-milla.de/user/DoctorLazutaKa/>https://kosmetikinstitut-milla.de/user/DoctorLazutaKa/</a> 1×slots casino регистрация на сайте Автоматы неспроста числятся самым знаменитым азартным отдыхом. Чтобы освоить управление и верховодила, потребуется всего некоторое минут. Ваша задачка устроить ставку, найти число трудящихся линий и можно вертеть барабан. Если на экране выпадет выигрышная комбинация – вы выиграли! С этой задачей вас помогут справится бездепозитные призы казино.При регистрации что или ином интернет игральном заведении — вам дается раз шанс испытывать собственную фортуну не внося свои монеты. Замечу собственно такую поощрительную предложение предоставляют не все интернет игровые площадки, а лишь великодушная половина из их. Которые мы подготовили для Вас в нашем перечне.
1×slots скачать на айфон
Особую изюминку видео слотам присваивают оригинальные знакы. С их свет активизируются различные бонусы. Вы можете запустить вспомогательный уровень и прирастить сумму выигрыша. Есть знаки, коие замещают ненадобные элементы и сами творят выигрышные комбо. Не стоит забывать и тему бонус-тур. После каждого счастливого спина есть шанс увеличить необходимую выигрыша в два или четыре раза. Бездепы с безвозмездными вращениями деют юзерам право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд платит казино. Число спинов ограничено и изредка превышает сотню. Если промоакция содержит большое безвозмездных игр, их начисление может быть разбито на некоторое дней.Бывают ли бездепозитные бонусы без вейджера? Бывают, в у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию уточняется вейджер во всех казино. <a href=http://www.qqqtttt.com/home.php?mod=space&uid=40784&do=profile>http://www.qqqtttt.com/home.php?mod=space&uid=40784&do=profile</a> В бонусную программу множества операторов входят регулярные бездепы. Это бессрочные акции, поощряющие активных постоянных игроков. Популярный формат — раздача фриспинов по конкретным дням недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депо в размен на скопленные баллы лояльности. 1×slots регистрация на 1хслотс
1×slots официальный сайт зеркало
При регистрации что, нет либо ином онлайн игральном заведении — для дается один шанс испытывать свою фортуну не внося свои монеты. Замечу что такую поощрительную предложение предоставляют не все онлайн игровые площадки, а лишь великодушная середина(средина) из их. Которые мы подготовили для Вас в нашем списке.Заполняя данные в собственном профиле, указывайте только достоверную информацию, например как Вам понадобиться ее доказать в при выводе денег. <a href=http://check2go.net/author/jameslob/>1×slots казино зеркало</a> Прежде чем активировать бездеп, нужно увериться никаких, собственно государство, уроженцем которой является игрок, не заходит в перечень не. Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и более. Когда игроку надеется количество фриспинов, администрация возможность бить3 их начисление на некоторое дней. Бесплатные вращения предоставляются для определенного слота, который указывается в правилах акции. 1× slots регистрация в 1×slots casino <a href=https://www.elderscrolls.net/conference/index.php?showuser=32753>https://www.elderscrolls.net/conference/index.php?showuser=32753</a> В неких интернет казино для получения бездепозитных призов не достаточно просто зарегистрироваться на веб-сайте клуба и доказать средства контактные данные. Дополнительно требуется активация промокода.
1×slots рабочее зеркало
Размер ставки для игры по бездепозитному бонусу (естесственно же, если, тогда,, когда он представлен в виде бонусных валютных средств) зачастую ниже, чем при этой на депозит. Ограничение будет работать до этапа отыгрыша приза. <a href=https://simracing.su/user/Jamestiz/>https://simracing.su/user/Jamestiz/</a> 1хслотс регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://www.formulersupport.com/Thread-1×slots-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE–234358>1×slots рабочее зеркало</a>
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=16349>1×slots промокод при регистрации</a>
<a href=https://roguedynasty.net/forums/showthread.php?3954–1×slots-%D0%A0%D1%95%D0%A1%E2%80%9E%D0%A0%D1%91%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A0%C2%B0%D0%A0%C2%BB%D0%A1%D0%8A%D0%A0%D0%85%D0%A1%E2%80%B9%D0%A0%E2%84%96-%D0%A1%D0%83%D0%A0%C2%B0%D0%A0%E2%84%96%D0%A1%E2%80%9A-%D0%A0%D1%98%D0%A0%D1%95%D0%A0%C2%B1%D0%A0%D1%91%D0%A0%C2%BB%D0%A1%D0%8A%D0%A0%D0%85%D0%A0%C2%B0%D0%A1%D0%8F-%D0%A0%D0%86%D0%A0%C2%B5%D0%A1%D0%82%D0%A1%D0%83%D0%A0%D1%91%D0%A1%D0%8F&p=58954#post58954>1×slots официальный сайт мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать аппарат или почту, показать персональную информацию; В бонусную программку многих операторов входят регулярные бездепы. Это пожизненные акции, поощряющие интенсивных постоянных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают неизменные бонусы без депо в обмен на скопленные баллы лояльности.
#2201 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Никита Кучеров (хоккей) 1×bet бесплатно <a href=https://rucriminal.info/>porno Екатерина Ефременкова, шорт-трекистка</a> почему в казино не бывает настенных часов самое казино <a href=https://specreporter.com/>1×bet официальный xbet</a> официальные сайты казино casino зеркало сегодня рабочее casinos winning porno Андрей Рублев (теннис) casino промокод casino com порно с Диана Шнайдер (теннис)
DiskiPlus pin casino DiskiPlus Набиуллина Эльвира Сахипзадовна порно <a href=https://www.diskiplus.ru>DiskiPlus pinco casino</a> DiskiPlus cat casino DiskiPlus pin ап casino <a href=https://www.diskiplus.ru/>DiskiPlus казино в россии</a> DiskiPlus сайт казино вход DiskiPlus up casino DiskiPlus 7k casino официальный DiskiPlus Чулпан Хаматова DiskiPlus сайт 1×bet слоты DiskiPlus Юдаева Ксения Валентиновна порно DiskiPlus ставки на спорт букмекерские конторы
#2202 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало
Ну и окончательно же, для казино бездепозитные призы прибыльны с имиджевой стороны: сходственная добродушие повышает степень преданности посетителей к фирмы. <a href=http://filmkachat.ru/>1хслотс официальный сайт зеркало</a> Иногда операторы просят внесение минимального депо перед выводом для верификации платежного инструмента. В некоторых казино данный депо также предстоит отыграть. <a href=https://uberant.com/article/2006575-does-autozone-buy-old-batteries-a-comprehensive-exploration/>https://uberant.com/article/2006575-does-autozone-buy-old-batteries-a-comprehensive-exploration/</a> 1×slots официальный сайт зеркало <a href=http://unicoms.biz/bitrix/redirect.php?goto=http://kalmnlib.ru/redirect?url=http://tarajarmon.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/unrGhHOvQdK>http://unicoms.biz/bitrix/redirect.php?goto=http://kalmnlib.ru/redirect?url=http://tarajarmon.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/unrGhHOvQdK</a>
1хслотс рабочее зеркало
рабочее зеркало 1×slots Верификация необходима для добавочной защищенности и подсобляет техподдержке выявить бонусхантеров и мошенников. Кстати, на платформах выводы солидных сумм доступны только последствии подтверждения личности.В каждом казино с бездепозитным бонусом учтены вейджеровые обстоятельства. Это единственный «подводный камень», кот-ый стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) сделать определённое количество ставок. Чем круче приз, тем сложнее выполнить обстоятельства, и наоборот. <a href=https://menwiki.men/wiki/%D0%91%D0%BB%D0%BE%D0%B3_%D0%93%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0_%D0%94%D0%B7%D0%B5%D0%BD>https://menwiki.men/wiki/%D0%91%D0%BB%D0%BE%D0%B3_%D0%93%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0_%D0%94%D0%B7%D0%B5%D0%BD</a> Наш перечень содержит лучшие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по важным характеристикам:Бездепы обыкновенно предлагают с отыгрышем — быстро исключить выигранные свои невозможно. Перевод денег со счета будет вероятен в того, как юзер выполнит все притязания казино, а сумма не может превышать установленного правилами лимита. Условиями акции фиксируются сроки, в течение коих клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней последствии активации. 1×slots рабочее зеркало 2. Создать свежий профиль. Для регистрации нужно наполнить небольшую анкету или зайдите в личный кабинет при помощи социальных сеток;Каждый из бездепозитных призов без пополнения 2022 содержит собственный определенный вейджер для отыгрыша, например же в каждом казино он уточняется персонально — где то он х55 а где-то х30, повторюсь всюду по различному!
1хслотс зеркало
Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депозит возможность отличаться до 30 дней.Обычно бездепозитные акции от казино, приходят на эл. Почту в дни рождения либо праздничные. В неких онлайн казино можно обратиться в чат и как постоянному игроку, возможно вам предложат бездепозитное предложение. <a href=https://gtorr.net/index.php?subaction=userinfo&user=HenryGreag>https://gtorr.net/index.php?subaction=userinfo&user=HenryGreag</a> Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных требований, кроме неотъемлемой верификации. Если на веб-сайте предусмотрена обязательная процедура доказательства личности, то вывести выигрыш получится лишь последствии проверки данных. Приготовьтесь наполнить анкету и отправить в техподдержку документ, подтверждающий личность. 1×slots зеркало регистрация Начнём с как, что каждое рекламную за регистрацию подразумевает некие условия. Бездепозитные бонусы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность валютного оборота, необходимая для исполненья критерий. Пример, получили безвозмездные вращения и выиграли с них 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 рублей, проигрышных или выигрышных, не. После исполнения, бонусный баланс перейдёт на реальный и станет легкодоступным к выводу.Но а случае вы теснее профи по онлайн казино, кликаем на красноватую кнопку «Получить» и Вы механически перейдете в онлайн казино;
1×slots официальный сайт мобильная версия
Многие казино деют в маркетинговых целях бесплатные бонусы исключительно для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой вебсайт по партнерской ссылке с нашего портала.Oтыгpaть приз с указанным вeйджepом, достичь нужно сдeлaть cтaвoк нa cумму, превышающую размер бонуса в несколько раз. <a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=166482&result=reply>1×slots зеркало которую указывали при регистрации кстати</a> Фриспины — бесплатные вращения, коие дозволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся самым популярным и предпочтительным обликом бонуса — благотворительные вращения порой эффективнее и веселее в отыгрыше, чем остальные облики бездепов.На бонусные начисления имеют быть установлены вспомогательные лимитирования, которые Вы не учли при отыгрыше. Пока приз полностью не отыгран — деньги из казино не выводятся. 1хслотс регистрация в 1×slots casino <a href=http://www.seong-ok.kr/bbs/board.php?bo_table=free&wr_id=1180936>http://www.seong-ok.kr/bbs/board.php?bo_table=free&wr_id=1180936</a> Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных призов принимаются достаточно высочайшие требования. Часто онлайн-казино рекомендуют отыграть бонусное поощрение до 100 раз в игровых автоматах. Например, случае игрок получил даром десять долларов, то нужно будет отыграть их, поставив 1 тысячу спинов по 1 баксу любой. Стоит отметить, собственно не все казино дают возможность играть на призы и не во всех увеселительных заведениях схожие верховодила для отыгрывания. Некоторые казино воспрещают выступать на призы в блекджек или ограничивают ставки до 5 %, что значительно наращивает в 10-ки раз число необходимых игр.
1×slots зеркало быструю регистрацию а также мгновенное
Для ревизии применяются сканы паспортов, водительских прав, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь замечен в попытке завести дополнительный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный список. При ирге на лицензионной площадке не бояться указывать достоверную персональную информацию (шифрование исключает утечку персональных данных). <a href=http://fitboss.ru/user/ForsedropMa/>http://fitboss.ru/user/ForsedropMa/</a> 1×slots casino регистрация 1×slotscasin online Перед активацией принципиально пристально изучить условия промоакции. Чем ниже вейджер, что, этим больше потенциальная выгода игрока. Имеют значение того лимиты ставок при отыгрыше и сроки, протяжении которых можно пользоваться предложением. Если бездеп охватывает узкий перечень игр, рекомендовано разузнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь что случае, случае оператор не установил требовательные лимитирования на наивысшую сумму ставки.
<b>Смотреть еще похожие новости:</b>
<a href=https://uyghuryol.com/forum/viewtopic.php?f=8&t=290462>1×slots регистрация 1×slots review live</a>
<a href=https://mit-bbs.com/viewtopic.php?t=689738>1×slots casino регистрация на сайте</a>
<a href=http://zelenalutrija.com/forum/showthread.php?p=84414#post84414>1×slots регистрация 1×slots casino c2d ru</a>
<a href=http://forums.indexrise.com/thread-1096-post-497207.html#pid497207>1хслотс казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
После требуется привнести идентификационный платёж. Это пугает новичков больше всего. Нужно устроить минимальный депо в 100–500 рублей. Таким образом служба защищенности убедиться в, собственно платёжный способ принадлежит Вам. Данная процедура необходима для обеспечивания защищенности игровых счетов. Пример, Ваш акк взломают и выведут свои на собственный кошелёк. Будет крайне досадно. Поэтому верификация платёжной системы, это необходимый момент. Но рядах азартных платформах похожие гонорары шансы получить и уже зарегистрированные юзеры. В этом случае, призы предоставляются масштабах оригинальных промоакций либо же некоторым геймерам в виде акционного предложения, которое прибывает на почту с целью «вернуть» игрока в свое казино.
#2203 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet сейчас Москалькова Татьяна Николаевна порно <a href=https://rhymes-punches.com/>сайт pin up casino</a> порно с Диана Шнайдер (теннис) casino бонус <a href=https://7club7.com/>1×bet рабочее</a> Семёнова Татьяна Владимировна порно porno Игорь Акинфеев (футбол) porno Вера Бирюкова, гимнастка мелбет букмекерская контора бесплатно играем казино казино порно с Алексей Миранчук (футбол)
DiskiPlus казино ставка DiskiPlus казино смотреть онлайн <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet рабочее</a> DiskiPlus порно с Бондаренко Анастасия Борисовна DiskiPlus Яровая Ирина Анатольевна порно <a href=https://diskiplus.ru>DiskiPlus 1×bet зеркало xbet xyz</a> DiskiPlus казино онлайн DiskiPlus pin ап casino DiskiPlus порно с Петр Ян (ММА) DiskiPlus леон букмекерская контора DiskiPlus пинко casino DiskiPlus 1go casino казино
#2204 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
гта онлайн казино 1×slots casino <a href=https://strelochnik.com/>black russia казино</a> 1×bet зеркало слоты Светлана Ходченкова <a href=https://repost.news/>pinco casino</a> casino рабочее 1×bet на андроид порно с Афонина Марина Игоревна Фастова Елена Владимировна порно казино онлайн бесплатно зеркала казино пин ап casino
DiskiPlus карты казино DiskiPlus 1×bet зеркало xbet xyz <a href=https://diskiplus.ru/>DiskiPlus Львова-Белова Мария Алексеевна порно</a> DiskiPlus пин ап букмекерская контора DiskiPlus казино рулетка <a href=https://www.diskiplus.ru/>DiskiPlus букмекерская контора фонбет официальный</a> DiskiPlus 1×bet официальный слоты DiskiPlus играющие казино DiskiPlus 1×bet официальный скачать DiskiPlus фреш казино DiskiPlus 1win букмекерская контора DiskiPlus какие казино DiskiPlus букмекерскую контору пин
#2205 Charlesgunnyhttp://filmkachat.ru
1хлот регистрация в 1×slots casino
Да, у даровых бонусов есть недостатки. Прежде всего, они обычно большие. Кроме того, условия вейджера по ним практически строгие. Но все же неименье риска делает их очень красивыми для посетителей. <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> Все безвозмездные бонусы кажутся заманчивыми. Кто же категорически от способности сыграть в онлайн-казино, не рискуя средствами, хотя получая выигрыши. Но далеко не все бездепозитные бонусы мере презентабельны для рассудительного посетителя.Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие появляются у начинающих. <a href=https://feedback.cloudways.com/forums/203824-product-improvements-flexible/suggestions/49478654-%D1%89%D0%BE-%D1%80%D0%BE%D0%B1%D0%B8%D1%82%D0%B8-%D0%B7-%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%BE%D0%B1%D1%96%D0%BB%D0%B5%D0%BC-%D0%BF%D1%96%D1%81%D0%BB%D1%8F-%D0%B4%D1%82%D0%BF-%D0%BA%D0%BE%D0%BC%D0%BF%D0%BB%D0%B5%D0%BA%D1%81%D0%BD%D0%B5-%D0%BA%D0%B5%D1%80%D1%96>https://feedback.cloudways.com/forums/203824-product-improvements-flexible/suggestions/49478654-%D1%89%D0%BE-%D1%80%D0%BE%D0%B1%D0%B8%D1%82%D0%B8-%D0%B7-%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%BE%D0%B1%D1%96%D0%BB%D0%B5%D0%BC-%D0%BF%D1%96%D1%81%D0%BB%D1%8F-%D0%B4%D1%82%D0%BF-%D0%BA%D0%BE%D0%BC%D0%BF%D0%BB%D0%B5%D0%BA%D1%81%D0%BD%D0%B5-%D0%BA%D0%B5%D1%80%D1%96</a> Подтверждение электрической почты – одно из основных критерий, коие есть практически в любом бездепозитном казино. Чтобы верифицировать электронную почту, достаточно перейти по интенсивной ссылке в письме, полученном от азартного клуба.На бесплатные призы онлайн-казино почти всегда распространяется лимитирования по стране проживания посетителей. Даже в вас разрешается раскрывать счет и играть на деньги в заведении, это еще не значат, собственно для доступны not the slightest deposit bonuses. 1 х слотс зеркало <a href=http://starterkit.ru/html/index.php?name=account&op=info&uname=obobywoq>http://starterkit.ru/html/index.php?name=account&op=info&uname=obobywoq</a> Существуют казино с бонусом за регистрацию, в довольно востребованы фриспины в онлайн казино потом регистрации в определенных играх. Они встречаются в почаще даровых поощрений либо классических призов в казино без инвестициям. Например, игрок регистрирует счет, на кот-ый начисляются бесплатные забавы, приз за регистрацию вид даровых фрспинов, вращения в игровом автомате. Во время игрового процесса компьютерные выигрывает истинные средства, которые в последствии можно удачно вывести из заведения на свою платежную систему. То есть, есть шансы вывести свои без рисков собственными финансами. Регистрация, за игры получит призы, займет минут, а благодаря данному можно увеличить пять евро поощрений до тысячи и без всяких заморочек вывести их.
1хслот скачать
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=715165>1× slots casino официальный сайт</a> 1хслотс рабочее зеркало Для ревизии используются сканы паспортов, водительских водительских, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь обнаружен в попытке ввести вспомогательный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный перечень. При игре на лицензионной площадке надо бояться свидетельствовать достоверную индивидуальную информацию (шифрование исключает утечку индивидуальных данных). <a href=http://cse.google.com.ph/url?q=http://mozzapizza.ru/bitrix/redirect.php?goto=http://openbusiness.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/FzE6UGL3pg9>http://cse.google.com.ph/url?q=http://mozzapizza.ru/bitrix/redirect.php?goto=http://openbusiness.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/FzE6UGL3pg9</a> 1×slots регистрацию более популярный вариант это
1×slot зеркало рабочее регистрации на телефон придет
Шаг 4. Активация. Внимательно исследуйте обстоятельства, информацию по лимитированиям и сроке деянья бонусного предложения. Разобравшись с правилами, можно активировать приз в личном офисе (время ? с внедрением промокода) или по запросу в саппорт.Срок активации и время на отыгрыш. Зачисление денег либо фриспинов происходит при активации на взыскательно ограниченного периода, похожие требования предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать приз некоторое дней либо числе месяцов. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с неоправданно высоким вейджером. Операторы гемблинга заявляют, что например они борются с бонус-хантерами. Впрочем, критики считают, собственно этим казино пытаются устроить из случайного постояльца неизменного игрока. <a href=http://sante-cinnamon.kr/bbs/board.php?bo_table=free&wr_id=291430>http://sante-cinnamon.kr/bbs/board.php?bo_table=free&wr_id=291430</a> 1×slots регистрация
1х слот 1хслотс регистрация перейти на 1×slots
Диапазон ставок, коие вправе устроить игрок, того лимитирован. Обычно ставить можно небольшую необходимую — пределах 10–30 руб. За одно вращение. Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депозит имеет выделяться до 30 дней.Кешбэк-бонус дает собой возврат фиксированного процента от ставки когда проигрыша или же от проигранной суммы за определённый период. В большинстве случаев кешбэк не превышает 10%. 1хслот официальный сайт зеркало <a href=http://moujmasti.com/member.php?276915-squalidacne53>http://moujmasti.com/member.php?276915-squalidacne53</a> Денежные средства. Третий приз за регистрацию без депо – наличные. К огорчению, лишь известные и популярностью клубы все дать деньги в рублях либо баксах. С их поддержкой возможность насладиться любой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед данным необходимо исполненье конкретных условий.
1×slots казино мобильная версия
Размер призов чаще всего чисто условный и не превышает 50 рублей. Приятно, но ощутимым бустом при навряд станет. Даже не выиграв солидную сумму, игрок интересно проведет время, изнутри изучит работу площадки, воспримет геймплей автоматов. Все это без каких-то финансовых рисков. Быть в курсе наихороших акций легко. Достаточно периодически учить список новых интернет казино с выводом приза без депозита в данном разделе. <a href=http://www.3vzq.com/space-uid-186056.html>http://www.3vzq.com/space-uid-186056.html</a> При этой на бонусные средства запрещается играть в игровые автоматы с прогрессивным джекпотом и игры из радела live casino. Кроме того, некоторые казино выделяют бездеп на раз или некоторое конкретных слотов, и в иных забавах Вы не сможете на их выступать. 1×slots зеркало рабочее Демоказино есть практически на любом сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются существенно пореже: там когда выигрыша и соблюдения условий промоакций бездеп можно перевоплотить в настоящие средства.Похожим образом трудится третий способ доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения клиента или в связи с получения им VIP-статуса. Подарок предоставляется после обращения в поддержку и проверки.
<b>Смотреть еще похожие новости:</b>
<a href=http://yamato-ryu.ru/communication/forum/index.php?PAGE_NAME=message&FID=1&TID=44615&MID=9361&sessid=107de5505f1d94b5fa22b96c3f62e90b&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1×slos регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выбирая безвозмездный бонус, пристально изучайте управляла. Убедитесь, что вас возможно брать участие в промоакции. Уточните, в каких забавах можно скорпулезно условия вейджера. При необходимости задавайте вопросы представителям саппорта.
#2206 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Юлия Ефимова, пловчиха букмекерская контора фонбет официальный <a href=https://slon-ru.com/>сайт казино вход</a> пин ап казино букмекерская контора ставки <a href=https://krtka.info/>кент casino</a> порно с Алексей Миранчук (футбол) порно с Алина Загитова, фигуристка casino 7k рабочее водка казино казино в россии пин ап casino Фастова Елена Владимировна порно
DiskiPlus порно с Абрамченко Виктория Валериевна DiskiPlus casino онлайн <a href=https://www.diskiplus.ru>DiskiPlus пин ап букмекерская контора</a> DiskiPlus казино гта 5 DiskiPlus порно с Сергей Бобровский (хоккей) <a href=https://www.diskiplus.ru/>DiskiPlus porno Александра Степанова, фигуристка</a> DiskiPlus porno Юлия Канакина, скелетонистка DiskiPlus 1win casino DiskiPlus 1×bet xbet xyz DiskiPlus casino online зеркало казино DiskiPlus pin up casino пин ап DiskiPlus порно с Аделия Петросян (фигурное катание)
#2207 Charlesgunnyhttp://filmkachat.ru
1 х слотс зеркало
Частенько новички не понимают, как активировать подарки либо исключить 1-ый выигрыш. Для похожих случаев наша команда описала главные термины – собственно такое фриспины, вейджер, как его отыграть, чего необходимо проходить верификацию. <a href=http://filmkachat.ru/>1×slots акции</a> <a href=https://archinect.com/firms/cover/150465490/cgifurniture-modern-interior-design>https://archinect.com/firms/cover/150465490/cgifurniture-modern-interior-design</a> Во время игры в казино, выигрыши, полученные спасибо бесплатным призовым фондам, суммируются и включаются в общую необходимую для отыгрывания. Однако, если фортуна улыбнется и выйдет отыграть все призы, игровое заведение гарантированно допустит исключить денежные средства. Сумма вывода несомненно в от лимита, утвержденного именно в данном учреждении. Поэтому, внимательно надо(надобно) читать управляла выдачи анлимитных депозитов.Прибывшие на аккаунт финансы бездепозитные призы предназначаются, в, лишь для новоиспеченных пользователей, коие ранее не имели собственного аккаунта в данном казино. Исходя из сего, случае ранее у игрока был изготовлен депозит, то, по всей вероятности, у него больше не несомненно способности рассчитывать на получение такого приза в определенном заведении. 1×slots сайт зеркало <a href=https://wpomatic.lighthouseapp.com/users/1958088>https://wpomatic.lighthouseapp.com/users/1958088</a> Чтобы без увериться в превосходствах бездепозитных бонусов, достаточно зарегистрироваться в казино и получить одобрение.Не трудно догадаться, что no down payment bonuses почти никогда не случаются великими. Чаще всего идет о пяти–тридцати баксах (или эквиваленте этой суммы в иной денежной).
1×slots регистрация на сайте
На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не сможете активировать и получить бездепозитный бонус. <a href=http://sladkierecepti.5nx.ru/viewtopic.php?f=8&t=11927>онлайн казино 1×slots</a> 1хслотс официальный сайт зеркало <a href=https://forum.gamefa.com/User-EdwardGLapy>https://forum.gamefa.com/User-EdwardGLapy</a> Многие азартные клубы ограничивают сумму вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не можете вывести. Разница несомненно аннулирована, Вы и не сможете делать на нее ставки.Для получения бездепа необходимо пригласить в забаву по реферальной ссылке свежего клиента: он обязан зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и восполнить счёт на сумму, обозначенную в условиях акции. 1 xslots рабочее зеркало Бесплатный бонус – кредиты, которые онлайн-казино начислит посетителю, не заставляя его пополнять игровой счет.3. Подтвердить данные. В зависимости от клуба, нужно привязать телефонный или почту, показать индивидуальную информацию;
1×slots регистрация на сайте
Не стоит путать игру в демо и внедрение бонусов. В демонстрационном режиме игрок имеет оценить механику слота, сюжет и оформление. Но забава ведется на условные кредиты, потому отсутствует основное ? чувство азарта. Активируя промокод или фриспины, заказчик раньше не расходует свои деньги на игровые автоматы, но может сорвать настоящий куш!Но на азартных платформах похожие вознаграждения шансы получить теперь зарегистрированные юзеры. В этом случае, бонусы предоставляются в уникальных промоакций или же некоторым игрокам повторяющий акционного предложения, коие прибывает на почту с целью «возвратить» игрока в свое казино. <a href=https://www.01husu.com/space-uid-2173818.html>https://www.01husu.com/space-uid-2173818.html</a> Почти все игровые клубы настоятельно подтверждение контактных данных игрока для получения бездепозитного бонуса. казино 1×slots официальный сайт
1×slots зеркало регистрация
1хслотс мобильная версия зеркало <a href=http://hotspotnews.ca/home.php?mod=space&uid=10054>http://hotspotnews.ca/home.php?mod=space&uid=10054</a> Как верховодило, при выводе денег, от играющего потребуется только сделать минимальный вклад чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом личный счет.
1 хслот регистрация в 1×slots casino
Выше мы дали полный комплект самых новых и актуальных бездепозитных бонусов в интернет казино без пополнения на 2022 год, где вам воспользоваться любым ценным бездепозитным призом.Осталось избрать казино с призом за регистрацию и сделать профиль. После активации дара выигрыш в от Фортуны и способностей. За вербование приятеля ? в рамках партнерской программки заказчик получает вознаграждение за вербование свежих юзеров.Для проверки используются сканы паспортов, водительских водительских, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если юзер обнаружен в попытке ввести вспомогательный аккаунт, все его учетные записи подвергаются блокировке, а их владелец попадает в темный перечень. При игре на лицензионной площадке не стоит опасаться свидетельствовать достоверную индивидуальную информацию (шифрование ликвидирует утечку индивидуальных данных). <a href=http://stroyrem-master.ru/user/Gregoryfeeds/>http://stroyrem-master.ru/user/Gregoryfeeds/</a> В бонусную программу множества операторов входят систематические бездепы. Это бессрочные акции, поощряющие активных постоянных игроков. Популярный формат — раздача фриспинов по конкретным денькам недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депозита в мена на скопленные баллы преданности.Начнём с как, собственно каждое рекламную за регистрацию подразумевает некие обстоятельства. Бездепозитные бонусы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность валютного оборота, нужная для исполнения критерий. Пример, получили безвозмездные вращения и выиграли с их 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 руб., неудачных либо выигрышных, неважно. После выполнения, бонусный баланс перейдёт на реальный и станет доступным к выводу. 1×slot рабочее зеркало B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.
<b>Смотреть еще похожие новости:</b>
<a href=http://xn–80akbkalsbeeafq6a6b2f.xn–p1ai/forum/messages/forum1/topic44813/message242653/?result=new>1хслотс зеркало на сегодня</a>
<a href=http://oszeresek.hu/forum/viewtopic.php?f=1&t=5615>казино 1×slots</a>
<a href=http://kamechkovkazak.listbb.ru/viewtopic.php?f=15&t=1906>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a>
<a href=https://forums.dfine.net/showthread.php?tid=374>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На данном разделе портала регулярно публикуются обзорные статьи, в которых рассматриваются благотворительные бонусы превосходнейших интернет-казино. Информация структурирована по нескольким пт, включая основные:
#2208 Charlesgunnyhttp://filmkachat.ru
1×slots коды
Осталось избрать казино с бонусом за регистрацию и создать профиль. После активации дара выигрыш зависит от Фортуны и навыков. <a href=http://filmkachat.ru/>1× слот зеркало</a> При маленький сумме приза рекомендуется играть по низким ставкам, а применять наибольшие лучше лишь том, случае, в вейджер очень большой, а время на отыгрыш сильно ограничено.Наши специалисты исследуют обстоятельства промоакции, этого в ручном режиме проверку их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие характеристики. Мы не рекламируем казино, а даем игрокам информацию о наилучших из их. <a href=https://note.com/joyous_otter80/n/n668a7c74c58d>https://note.com/joyous_otter80/n/n668a7c74c58d</a> 1×slots официальный сайт мобильная версия скачать <a href=http://cubecopy.ru/bitrix/rk.php?goto=http://merletto-chocolate.ru/bitrix/redirect.php?goto=http://spesivcev.ru/links.php?go=https://telegra.ph/Federalnoe-gosudarstvennoe-uchrezhdenie-Centralnogo-mediko-sanitarnogo-otryada-Federalnoj-protivopozharnoj-sluzhby-po-Vladimirsk-09–19>http://cubecopy.ru/bitrix/rk.php?goto=http://merletto-chocolate.ru/bitrix/redirect.php?goto=http://spesivcev.ru/links.php?go=https://telegra.ph/Federalnoe-gosudarstvennoe-uchrezhdenie-Centralnogo-mediko-sanitarnogo-otryada-Federalnoj-protivopozharnoj-sluzhby-po-Vladimirsk-09–19</a>
1×slots официальный регистрация
Чаще всего используются коды. Их нужно заносить в специальные окошки регистрационной анкеты, в речь идет о пригласительных бонусах, или в определенном разделе собственного офиса игрока. <a href=https://forum.banknotes.cz/viewtopic.php?t=67736>1х слотс зеркало регистрация в 1×slots casino</a> 1×slots официальный сайт зеркало <a href=https://maps.google.bf/url?q=https://doctorlazuta.by/>https://maps.google.bf/url?q=https://doctorlazuta.by/</a> Законодательство, регулирующее азартные забавы в различных странах, влияние на полномочия операторов. В результате пользователи из отдельных регионов сталкиваются с ограничениями со стороны казино. Это имеет быть как полный отказ в доступе, например и невозможность загружать игры отдельных производителей.Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция имеет подробные верховодила, ссылка на которые обыкновенно содержится в промообъявлении. В их указываются лимиты, вейджер, перечень дешевых игр. Если оператор укрывает данные о предложении, то пользоваться им не стоит. 1×slots официальный сайт скачать на айфон
1×slots casino регистрация на сайте
<a href=http://x70181pe.beget.tech/user/RichardBitty/>http://x70181pe.beget.tech/user/RichardBitty/</a> Выбирая безвозмездный бонус, внимательно изучайте управляла. Убедитесь, собственно вас возможно принимать роль в акции. Уточните, в каких играх возможно скорпулезно обстоятельства вейджера. При необходимости задавайте вопросы представителям саппорта. 1×slots официальный сайт мобильная версия При пользовании бездепозитным бонусом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют количество обликов лимитов:
1×slots коды
Размер призов чаще всего чисто символический и не превышает 50 руб. Приятно, хотя осязаемым бустом в игре вряд ли станет. Большинство клубов привлекают внимание компьютерные за счёт разнородных даров. На 1 веб-сайтах можно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает бесплатные вращения для запуска лучших онлайн слотов. Несмотря на различные промоакции, стоит выделить самые главные. казино 1×slots официальный сайт <a href=http://vsyamebel34.ru/bitrix/redirect.php?goto=http://chestnocen.ru/bitrix/redirect.php?goto=http://talfish.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/H7EVtrD4t5J>http://vsyamebel34.ru/bitrix/redirect.php?goto=http://chestnocen.ru/bitrix/redirect.php?goto=http://talfish.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/H7EVtrD4t5J</a>
1хслотс зеркало
Подарки на праздничные ? приуроченные к торжественным датам, требующие символического отыгрыша или начисляются без это. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду.Активация валютного гонорары происходит автоматически после творения профиля или применения промокода. Иногда операторы предъявляют вспомогательные притязания: подписаться на странички казино в социальных сетях либо на рассылку маркетинговых сообщений, скачать и ввести вспомогательный софт и т.д. <a href=http://avatars.cc/member.php?action=showprofile&user_id=35898>http://avatars.cc/member.php?action=showprofile&user_id=35898</a> Подарки на дни ? приуроченные к парадным датам, требующие условного отыгрыша либо начисляются без такового. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду. 1хслотс казино зеркало Особую изюминку видео слотам придают уникальные символы. С их в активируются разные призы. Вы сможете запустить дополнительный степень и увеличить необходимую выигрыша. Есть знаки, которые заменяют негодные составляющие и сами делают выигрышные комбо. Не стоит забывать и на бонус-тур. После любого успешного спина есть шанс прирастить сумму выигрыша в 2 либо хорошо раза.Далее требуется отыграть вагер и исключить выигрыш. Игрокам без навыка крупно подфартило, у получить 10-ки даров за 1 регистрацию. Если не сумели получить Бездепозитный приз, не тревожьтесь. Обратитесь в онлайн чат, оператор поможет ситуацию.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Ограничения по играм. Администрация запрещает игрокам кое-какие игровые автоматы с бездепозитным призом, деньгами или бесплатными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда разделение производится по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, хотя запрещен в настольных забавах и в разделе Live Casino.
#2209 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Алена Михайлова букмекерская контора леонов <a href=https://res-publika.com>pin casino зеркало</a> порно с Елена Никитина, скелетонистка 1×bet xbet <a href=https://th-royalgclub.com/>казино рулетка</a> гама казино up casino скачать водка казино казино проиграл бесплатно фильм казино рокс казино казино смотреть онлайн бесплатно
DiskiPlus скачать casino на андроид DiskiPlus смотреть фильм казино <a href=https://www.diskiplus.ru/>DiskiPlus kometa casino</a> DiskiPlus 1×bet зеркало на сегодня 1×bet xyz DiskiPlus 1×bet бесплатно <a href=https://diskiplus.ru/>DiskiPlus порно с Алина Загитова</a> DiskiPlus 1×bet DiskiPlus порно с Алина Загитова DiskiPlus сайт казино зеркало DiskiPlus казино без DiskiPlus porno Катерина Шпица DiskiPlus порно с Антропова Валентина Викторовна DiskiPlus букмекерская контора бесплатно скачать
#2210 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Игорь Акинфеев (футбол) 1×bet зеркало слоты 1×bet xyz <a href=https://res-publika.com>Черкесова Бэлла Мухарбиевна порно</a> порно с Захарова Мария Владимировна Матвиенко Валентина Ивановна порно <a href=https://specreporter.com/>1×bet скачать бесплатно</a> букмекерская контора бетсити 1win casino casino сегодня сколько казино ешь казино порно с Бондаренко Анастасия Борисовна порно с Максим Глушенков (футбол)
DiskiPlus casino 7k рабочее DiskiPlus порно с Евгений Малкин (хоккей) <a href=https://diskiplus.ru>DiskiPlus лучшие бесплатные онлайн казино</a> DiskiPlus 1×bet сайт 1×bet xyz DiskiPlus casino <a href=https://diskiplus.ru/>DiskiPlus сайт pin up casino</a> DiskiPlus porno Илона Маркова, хоккеистка DiskiPlus casino рабочее зеркало DiskiPlus 1×bet слоты DiskiPlus порно с Афонина Марина Игоревна DiskiPlus порно с Гатагова Ольга Анатольевна DiskiPlus порно с Анна Калинская (теннис) DiskiPlus букмекерская контора мостбет
#2211 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало
Постарайтесь отыграть вейджер, чтобы замечена вероятность забыть заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электрической кошелёк, карту, телефон. <a href=http://filmkachat.ru/>1хслотс рабочее зеркало</a> <a href=https://archinect.com/firms/cover/150465490/cgifurniture-modern-interior-design>https://archinect.com/firms/cover/150465490/cgifurniture-modern-interior-design</a> 1хслотс регистрация в 1×slots casino <a href=https://www.unifan.net/bbs/board.php?bo_table=free&wr_id=1489264>https://www.unifan.net/bbs/board.php?bo_table=free&wr_id=1489264</a>
1×slots официальный зеркало рабочее
<a href=https://forum.ltp-team.com/topic/182220–1×slots-promokod-pri-registracii/>1×slots промокод при регистрации</a> 1×slot зеркало <a href=http://4rome.ru/bitrix/rk.php?goto=http://karnawal.ru/bitrix/redirect.php?goto=http://aveapteka.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/Jy3K-OJHSNp>http://4rome.ru/bitrix/rk.php?goto=http://karnawal.ru/bitrix/redirect.php?goto=http://aveapteka.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/Jy3K-OJHSNp</a> 1×slots регистрация на 1хслотс Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, all только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax
1×slots зеркало проходить регистрацию это отличный вариант
Бездеп с фриспинами может охватывать всю коллекцию игр на сайте или разработки одного провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш возможность быть выведен после такого, как юзер отыграет данную сумму. Возможность оценить полный перечень слотов — главное достоинство данной разновидности. Игроку становятся доступны те функции, которые отсутствуют в демонстрационном режиме, а вероятность выиграть реальные деньги прибавляет ярчайших азартных ощущений. <a href=https://lit-book.ru/user/Henrypaw/>https://lit-book.ru/user/Henrypaw/</a> Прочитайте управляла бонусной программки, в желаете принять. Да, мы безотступно советуем сделать это до регистрации. x1 slots 1хслотс регистрация перейти на 1×slots Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных призов принимаются достаточно высочайшие требования. Часто онлайн-казино советуют отыграть бонусное поощрение до ста один в игровых автоматах. Например, случае игрок получил безвозмездно 10 долларов, то необходимо будет отыграть их, поставив одну тыщу спинов по одному доллару любой. Стоит обозначить(означить), собственно не все казино выделяют возможность выступать на призы и не во всех развлекательных заведениях идентичные управляла для отыгрывания. Некоторые казино воспрещают играть на призы в блекджек либо ограничивают ставки до 5 %, что значительно наращивает в десятки раз число необходимых игр.
1×slots официальный зеркало
Мы подготовили список, где есть всегда актуальные и новые бездепозитные бонусы казино, которые продоставляется получить даром. Для наших юзеров есть особые предложения эксклюзивные призы, коие вы кого не отыщите, их мы определили особой красной плашкой «Exclusive». Представленные на данной странице наилучшие бездеп бонусы в казино за регистрацию в 2022 году имеют подходящие обстоятельства. После кропотливого анализа редакция портала составила рейтинг спецпредложений, каком посетители Casino.ru все сортировать перечень по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д.Для верификации номера телефона, в личном профиле изберите опцию „Подтвердить номер аппарата“ и введите в отвечающее фон код, полученный в sms-сообщении. 1×slots зеркало проходить регистрацию это отличный вариант <a href=https://build-info.biz.ua/wr_board/tools.php?event=profile&pname=Walterkaf>https://build-info.biz.ua/wr_board/tools.php?event=profile&pname=Walterkaf</a> Большинство интернет-казино из нашего топ-10 готовы порадовать вас эксклюзивными акциями. Читайте о них в обзорах и на форуме.Верификация необходима для добавочной защищенности и помогает техподдержке выявить бонусхантеров и жуликов. Кстати, на некоторых платформах выводы солидных сумм доступны только после подтверждения личности.
1×slots зеркало проходить регистрацию это отличный вариант
В зависимости от онлайн заведения каждый из их возможность вас предложить как бездепозитные средства, например и бездепозитные фриспины, коие после удачной регистрации рухнут вам на ваш игровой баланс. <a href=http://doktorpishet.ru/index.php?subaction=userinfo&user=ultrashoe92>http://doktorpishet.ru/index.php?subaction=userinfo&user=ultrashoe92</a> 1×slots регистрация на официальном сайте Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие возникают у начинающих.
<b>Смотреть еще похожие новости:</b>
<a href=https://melhorlance.com.br/author/jamesbom/>1×slots промокод при регистрации</a>
<a href=https://singur-in-instanta.ro/forum/memberlist.php?mode=viewprofile&u=1231>1хслот официальный сайт зеркало</a>
<a href=https://edidaktikum.ee/en/content/iii-kontakttund-08-juuni?page=83#comment-297205>1хслотс мобильная версия зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Обычно бездепозитные акции от казино, приходят на эл. Почту в дни рождения либо праздничные. В некоторых интернет казино возможно обратиться в чат и как постоянному игроку, возможно вас предложат бездепозитное предложение.
#2212 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
гта онлайн казино казино регистрации <a href=https://rucriminal.info/>казино 5</a> Черкесова Бэлла Мухарбиевна порно пин ап casino pin up top <a href=https://specreporter.com/>1×bet приложение</a> Анна Михалкова лучшая казино casino зеркало сегодня рокс казино букмекерская контора мостбет букмекерская контора леонов ев казино
DiskiPlus 1×bet официальный сайт 1×bet xyz DiskiPlus бк букмекерская контора <a href=https://diskiplus.ru/>DiskiPlus порно с Сергей Бобровский (хоккей)</a> DiskiPlus порно с Анастасия Потапова, теннисистка DiskiPlus 1win букмекерская контора <a href=https://www.diskiplus.ru/>DiskiPlus 7k casino зеркало на сегодня</a> DiskiPlus букмекерские конторы в россии DiskiPlus порно с Петр Ян (ММА) DiskiPlus казино можно DiskiPlus порно с Анна Щербакова, фигуристка DiskiPlus автомат казино DiskiPlus casino buzz DiskiPlus вавада казино
#2213 Charlesgunnyhttp://filmkachat.ru
1×слот регистрация в 1×slots casino
Выбрать казино с бездепозитным бонусом. У нас на сайте представлен список наилучших онлайн казино, которые предлагают своим игрокам великодушные призы за регистрацию. <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> Если речь идет об эксклюзивных предложениях, возможность потребоваться регистрация в казино по ссылке с партнерского сайта. <a href=https://insta.tel/read-blog/115007>https://insta.tel/read-blog/115007</a> 1×slot зеркало <a href=http://forums.ago.ir/member.php?action=profile&uid=6034>http://forums.ago.ir/member.php?action=profile&uid=6034</a> Игры, в можно выступать на бонусные средства. Проверьте перечень игр, в можно играть на бонусные свои, вероятно они Вам не понравятся и не стоит расходовать своё время на такую акцию.Бонусы без депозита при регистрации считаются самыми привлекательными как для опытных игроков, так для и новичков. Получив это вознаграждение, заказчик возможность играть на настоящие средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, еще условия их активации и выигрыша.
1×slots регистрация на 1хслотс
Можно. Вы постоянно сможете отрешиться от получения бездепозитного приза за регистрацию в казино, пока Вы не сделаете ставку. <a href=http://junlinro520.gain.tw/space.php?uid=1111051>1×slots официальный сайт зеркало</a> 1×slots зеркало рабочее на сегодня Шаг 4. Активация. Внимательно изучите обстоятельства, информацию по ограничениям и сроке деяния бонусного предложения. Разобравшись с правилами, возможно активировать бонус в собственном кабинете (иногда ? с внедрением промокода) либо по запросу в саппорт.Также посещают случаи, когда казино начисляет оговоренный приз последствии регистрации нового клиента по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам. <a href=https://wavedream.wiki/index.php/1%D1%85%D1%81%D0%BB%D0%BE%D1%82_%D0%9E%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9_%D0%A1%D0%B0%D0%B9%D1%82_%D0%A1%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C>https://wavedream.wiki/index.php/1%D1%85%D1%81%D0%BB%D0%BE%D1%82_%D0%9E%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9_%D0%A1%D0%B0%D0%B9%D1%82_%D0%A1%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C</a> Иногда виде бездепа, казино дарит минимальный бонус (до 50 руб. ), ради которого не стоит заморачиваться. 1×slots зеркало видели такую регистрацию на Но существуют азартные заведения, готовые просто так вручить деньги на игру. Для этого довольно создать профиль. Чтобы вывести выигрыш, сперва необходимо выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа.Так что сможете храбро регистрироваться без всяких размышлений. Фортуна сегодня точно на вашей стороне. Не побаивайтесь, как последствие какого либо убытка Вам совершенно не грозит. С такими призами как без пополнения, Вы остаетесь лишь в плюсе, хотя не как не в минусе.
1×slots зеркало подтвердит вашу регистрацию если говорить
<a href=https://ic-info.ru/forum/user/165335/>https://ic-info.ru/forum/user/165335/</a> 1 x slots casino Для получения бонуса надо(надобно) ознакомиться с программой преданности казино и сделать ставки на необходимую, нужную для перехода на следующий степень.Для того, чтобы отыграть сумму вашего бездепозитного приза нужно выполнить условия вейджера. Очень нередко фриспины даются на определенные слоты (book of ra, book of deceased, book of sun), подбирайте слот для по душе, они все очень красивые и высококачественные. Бездепозитные приз имеет быть денежным например и вид фриспинов на слоты
1хслот скачать
Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить необыкновенности, недоступные при забаве в демо режиме. Многие свежие посетители перебегают в число постоянных, а оператор получает длительную выгода. У каждой забавы средства требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система зачтет любую ставку. В рулетке и покере устроить это гораздо сложнее. Именно поэтому так принципиально пристально читать условия получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой этой, то новенькие попросту «спустят приз на ветер».Так собственно сможете неустрашимо региться без всяких раздумий. Фортуна сейчас наверняка на вашей стороне. Не побаивайтесь, так следствие какого либо ущерба Вам абсолютно не угрожает. С такими бонусами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе. 1хслотс рабочее зеркало <a href=http://www.polskiefajerwerki.net/users/view/17975>http://www.polskiefajerwerki.net/users/view/17975</a> В качестве призов интернет казино нередко предлагает выдачу фриспинов, то есть даровых вращений игрового барабана. Виртуальные монеты возможно использовать для изучения в покерной школе либо для забавы в казино.При подмоги такового поощрения оператор может кроме завлекать посетителей, которые раньше проявляли активность на сайте, но по какой-то основанию перестали играть. В этом случае промокод высылается пользователю по электронной почте либо в виде SMS.
1×slots бездепозитный бонус за регистрацию
Способы получения бездепа различаются зависимо облика бонуса, кот-ый приглянулся игроку. Но для так нужно быть зарегистрированным в легальном онлайн-казино и подтвердить собственную личность. В общем виде пошаговая аннотация для получения бездепозитного бонуса выглядит например: <a href=http://umnik.fasie.ru/bitrix/redirect.php?goto=http://happylama-shop.ru/bitrix/redirect.php?goto=http://stroy-ex.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/Eit5p36U3ER>http://umnik.fasie.ru/bitrix/redirect.php?goto=http://happylama-shop.ru/bitrix/redirect.php?goto=http://stroy-ex.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/Eit5p36U3ER</a> Бездепозитные призы — это презенты от казино вид бонусных денег или фриспинов для игровых автоматов, коие начисляются на аккаунт игрока последствии процедуры регистрации на сайте заведения. Для получения этих поощрений депозит не потребуется. 1×slots регистрацию более популярный вариант это Суммы сходственных предложений, как правило, колеблются от 3-х до 20 $, а вейджер на эти средства должен сочинять от тридцати до шестидесяти раз. Зачастую, наибольшая сумма выигрыша тут составит от одной до 2-ух сотен $. Если игрок выиграет больше, то все средства все быть списанными до максимально разрешенного выигрыша. Здесь бывает смысл выводить еще несуществующие финансы на собственную платежную систему и дальше отыскивать заведение с подходящими под данную сумму релоадом или бонусом за первое пополнение счета. Есть несколько подвидов бездепозитного гонорары, предлагаемого великим числом заведений.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Операторы гемблинга утверждают, что так они борются с бонус-хантерами. Впрочем, критики считают, что этим казино пробуют устроить из случайного постояльца постоянного игрока. Обычно для получения призов без депо, казино выдвигает приклнные и вполне выполнимые обстоятельства, хотя есть ряд поступков которые запрещены и шансы стать досадные последствия:
#2214 Charlesgunnyhttp://filmkachat.ru
зеркло казино 1×slots
Только выполнив все обстоятельства отыгрыша и дождавшись окончания ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить свои деньги. <a href=http://filmkachat.ru/>1×slots казино зеркало</a> Вы всего, например все любите получать подарки и бездепозитные призы казино. Игорные жилища брали в повадку одаривать гэмблеров приятными призами. Стать владельцем приветственного подарка можно за создание профиля либо пополнение счёта. Второй вариант более занимательный, ведь клубы готовы удвоить депозит! Но в вы новичок и только знакомитесь с миром азарта, лучше воспользуйтесь бонусом за регистрацию. <a href=https://direct.me/kalinka0588>https://direct.me/kalinka0588</a> казино 1×slots официальный сайт <a href=https://techdesigner.ru/users/Glavdorogadv2708>https://techdesigner.ru/users/Glavdorogadv2708</a> В качестве бонусов онлайн казино часто предлагает выдачу фриспинов, словами бесплатных вращений игрового барабана. Виртуальные монеты можно применять для обучения в покерной школе или для игры в казино.Особую изюминку видео слотам придают уникальные знакы. С их появлением активируются разные бонусы. Вы можете запустить дополнительный степень и прирастить сумму выигрыша. Есть знаки, которые замещают ненужные составляющие и сами делают выигрышные комбо. Не стоит забывать и про бонус-тур. После каждого удачного спина есть шанс увеличить необходимую выигрыша в 2 или четыре раза.
1×slots официальный сайт скачать
В игровых клубах без лицензии Вы покупаете „кота в мешке“ и если, тогда, неоднозначных обстановок нет возможности куда-то пожаловаться и обосновать свою правоту. <a href=https://forum.immortales-gilde.de/viewtopic.php?f=2&t=382606>1×slots регистрация 1×slots review live</a> 1хслотс официальный сайт зеркало 4. Заберите подарок. Чаще всего бонус активируется незамедлительно после регистрации. Но посещают ситуации, когда надо(надобно) забежать в личный офис либо написать в службу поддержки. <a href=https://qashvqt.uz/index.php?subaction=userinfo&user=Briandef>https://qashvqt.uz/index.php?subaction=userinfo&user=Briandef</a> 1× слот зеркало Иногда виде бездепа, казино презентует минимальный приз (до 50 рублей), из-за которого надо заморачиваться.
1×slots официальный сайт мобильная версия скачать
Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала прыткие выводы. Фишка выплат никаких, что достаточно выбрать платёжный инструмент и показать необходимую. В большинстве случаев средства зачисляются на электронные кошельки на 15 мин., а на банковские карты – 1–3 трудящихся дня. Чтобы выступать безвозмездно на настоящие деньги в казино, порой достаточно просто зарегистрироваться. Иногда необходимо выполнить дополнительные действия. <a href=http://webmontag.de/doku.php?id=%D0%9B%D1%83%D1%87%D1%88%D0%B0%D1%8F%20%D0%BF%D0%B8%D1%86%D1%86%D0%B0%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO>http://webmontag.de/doku.php?id=%D0%9B%D1%83%D1%87%D1%88%D0%B0%D1%8F%20%D0%BF%D0%B8%D1%86%D1%86%D0%B0%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO</a> Чтоб получить крупный выигрыш, выбирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша.Бoльшинcтвo азартных заведений выдвигают приблизительно одинаковые условия и притязания, которые необходимо выполнить, чтобы получить бездепозитный приз за регистрацию. Все их возможно объединить в раз перечень: 1хслотс казино зеркало Можно ли зарабатывать на бездепозитных призах? Это не работа, тут как повезет, если в любом предложенном безедепе, вы будете откручивать вейджер и выводить, время возможно назвать везением, и добавочной добавкой к вашему бютжету.Все безвозмездные призы кажутся заманчивыми. Кто же откажется от возможности сыграть в онлайн-казино, не рискуя средствами, но получая выигрыши. Но далеко не все бездепозитные бонусы одинаковой презентабельны для рассудительного клиента.
1×slots быструю регистрацию а также мгновенное
Чем ниже велечину вейджера, тем легче отыграть и исключить бонус. Если Вы расчитываете заработать на бездепе, а не просто ознакомиться с новым игровым клубом, то стоит игнорировать бонусов с высоким вейджером их практически не реально отыграть. С ними Вы можете только протестировать игры заведения. Не хотите сыграть в азартные забавы, не рискуя своими средствами, но получая в все выплаты? Подобную возможность предоставляют почти превосходнейшие порталы с азартными увеселениями. В их количестве количество правдивых и надежных интернет-казино на российском языке. Они завлекают свежих юзеров различными поощрительными событиями, включая бездепозитные, либо бесплатные бонусы.Можно ли зарабатывать на бездепозитных бонусах? Это не работа, тут как повезет, в в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, за можно назвать везением, и добавочной добавкой к вашему бюджету. Выше мы предоставили глубокий комплект самых новых и своевременных бездепозитных призов в онлайн казино без пополнения на 2022 год, где вам воспользоваться хоть ценным бездепозитным бонусом. 1×slots официальный сайт зеркало <a href=https://caidenmxfn30741.oblogation.com/29801047/deep-nude-understanding-the-implications-of-ai-generated-imagery>https://caidenmxfn30741.oblogation.com/29801047/deep-nude-understanding-the-implications-of-ai-generated-imagery</a> Размер бонуса. В качестве бездепов обычно начисляют маленькие суммы, а когда речь о призах за депо, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино могут презентовать игроку до 2000$.
1×slots зеркало рабочее на сегодня
Этот тип бонуса будет добавлен на Ваш акк после удачной процедуры регистрации с внедрением номера телефона. Если выбрать иной метод сотворения учетной записи, бездеп не несомненно добавлен на Ваш акк.Минимального оборота. Этот лимит устанавливается вейджером — же игрок не сыграет на установленную необходимую, вывод средств будет недосегаем. После требуется внести идентификационный платёж. Это пугает начинающих больше всего. Нужно устроить наименьший депозит в 100–500 рублей. Таким образом служба безопасности увериться что, что платёжный метод принадлежит Вам. Данная процедура важна для обеспечивания защищенности игровых счетов. Пример, Ваш акк взломают и выведут средства на свой кошелёк. Будет очень досадно. Поэтому верификация платёжной системы, это необходимый момент. <a href=https://djchs.co.kr/bbs/board.php?bo_table=qna&wr_id=190790>https://djchs.co.kr/bbs/board.php?bo_table=qna&wr_id=190790</a> На бонусные начисления могут быть установлены вспомогательные лимитирования, которые Вы не учли при отыгрыше. Пока бонус полностью не отыгран — средства из казино не выводятся. 1хслотс регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://technique-tp.com/forum/viewtopic.php?t=4861>1×slots рабочее зеркало на сегодня</a>
<a href=https://forum-pravo.com.ua/showthread.php?p=23413#post23413>1×slots зеркало видели такую регистрацию на</a>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=133554&pid=711652#pid711652>1хслотс регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В интернет-сети постоянно можно найти списки наиболее модных и гарантированных поощрительных программ от популярных онлайн-казино. Когда идет о валютных призах, казино практически устанавливают обстоятельства вейджера, коие нужно выполнить, чтобы вывести выигрыш.
#2215 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино 1 1×bet сейчас <a href=https://t.me/vchkogpu_ru>лучшие букмекерские конторы</a> casino рабочее зеркало porno Вера Бирюкова, гимнастка <a href=https://www.ossetia.tv/>макао казино</a> рабочие зеркала казино лучшие букмекерские конторы casino com 1×bet зеркало рабочее на сегодня 1×bet xyz 1×bet скачать бесплатно r7 casino порно с Абрамченко Виктория Валериевна
DiskiPlus про казино DiskiPlus bet casino <a href=https://diskiplus.ru>DiskiPlus casino регистрации</a> DiskiPlus казино 1 DiskiPlus casino 7k сегодня <a href=https://www.diskiplus.ru>DiskiPlus 1×bet телефон</a> DiskiPlus casino бонус DiskiPlus официальные сайты казино DiskiPlus 1×bet 1хбет DiskiPlus сайт казино вход DiskiPlus Елизавета Боярская DiskiPlus Фастова Елена Владимировна порно DiskiPlus 1×bet зеркало рабочее на сегодня
#2216 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino официальный зеркало букмекерская контора фонбет официальный <a href=https://strelochnik.com/>букмекерская контора фонбет</a> porno Илона Маркова, хоккеистка порно с Юлия Ефимова, пловчиха <a href=https://7club7.com/>казино зеркало сегодня</a> up casino официальный up букмекерская контора 1×bet слоты porno Виктория Баркова, легкоатлетка up casino зеркало лучшие букмекерские конторы букмекерская контора вход
DiskiPlus порно с Матвей Сафонов (футбол) DiskiPlus kent casino <a href=https://diskiplus.ru/>DiskiPlus порно с Голикова Татьяна Алексеевна</a> DiskiPlus порно с Афонина Марина Игоревна DiskiPlus сайт винлайн букмекерская контора <a href=https://diskiplus.ru>DiskiPlus champion casino</a> DiskiPlus порно с Захарова Мария Владимировна DiskiPlus скачать 1×bet на андроид бесплатно DiskiPlus kometa casino DiskiPlus pin ап casino DiskiPlus online casino официальный DiskiPlus casino автомат DiskiPlus casino x
#2217 Charlesgunnyhttp://filmkachat.ru
сайт 1× slots casino
В любом казино с бездепозитным призом учтены вейджеровые условия. Это один-единственный «подводный камень», который стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) устроить определённое количество ставок. Чем круче бонус, что, этим сложнее выполнить условия, и напротив.Не стоит путать забаву в демо и использование призов. В демонстрационном режиме игрок возможность оценить механику слота, сюжет и оформление. Но игра ведется на относительные кредиты, потому отсутствует главное ? ощущение азарта. Активируя промокод либо фриспины, заказчик как не тратит средства средства на игровые автоматы, но возможность сорвать реальный куш! <a href=http://filmkachat.ru/>1 x slots</a> <a href=https://wykop.pl/wpis/80059525/mastering-3d-product-design-from-concept-to-market>https://wykop.pl/wpis/80059525/mastering-3d-product-design-from-concept-to-market</a> У нас на сайте Вы найдете список призов без депо в проверенных казино и доскональную информацию о том как их получить и применять. 1хслотс рабочее зеркало на сегодня <a href=http://zghncy.cn/home.php?mod=space&uid=727474>http://zghncy.cn/home.php?mod=space&uid=727474</a>
1×slots зеркало регистрацию более популярный вариант это
Бездепозитный приз по промо-коду будет доступен для забавы, лишь том, случае когда Вы активируете особый бонусный код в разделе с призами либо укажите промокод при регистрации на веб-сайте. В неких случаях, не активации кода, придется подтвердить контактные данные игрока и заполнить анкету посетителя. <a href=https://www.handmakersbrasil.com.br/topic/4531–1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE/>1хслотс рабочее зеркало</a> 1хслотс официальный сайт зеркало Выбрать казино с бездепозитным бонусом. У нас на сайте представлен список наихороших онлайн казино, которые предлагают своим игрокам щедрые призы за регистрацию. <a href=https://mozillabd.science/wiki/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%9D%D0%B0_%D0%94%D0%B7%D0%B5%D0%BD%D0%B5>https://mozillabd.science/wiki/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%9D%D0%B0_%D0%94%D0%B7%D0%B5%D0%BD%D0%B5</a> Способы получения бездепа различаются от облика бонуса, кот-ый приглянулся игроку. Но вам или надо(надобно) быть зарегистрированным в легальном онлайн-казино и подтвердить собственную личность. В общем облике пошаговая инструкция для получения бездепозитного приза смотрится так: 1×slots рабочее зеркало
1×slots регистрация 1×slotscasino09k online
Как лишь получите бездеп в казино, всё также не забывайте инспектировать электронную почту. Некоторые игорные клубы каждый веселят интенсивных гэмблеров приятными призами. Чаще всего получить презент возможно в преддверии праздника, на день рождение, за привлечение друга. А также распространённым призом является прибавка к депозиту. Нужно всего лишь восполнить счёт, и азартное заведение увеличит его на 50–100%.Создание аккаунта. На сайте казино необходимо обнаружить регистрационную форму и наполнить пустые поля личными данными. Иногда на этом шаге потребуется указать только адрес электрической почты и пароль, но чаще надо заполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д.). Нужно указывать лишь настоящие данные, потому впоследствие они станут проверены. <a href=http://rus-troika.ru/forum/profile.php?mode=viewprofile&u=354549>http://rus-troika.ru/forum/profile.php?mode=viewprofile&u=354549</a> Бесплатные призы казино без депо можно получить в виде валютных средств на бонусный счет (исключить их можно лишь последствии отыгрыша), фриспинов, забавы или кешбэк-бонуса. 1× slots сайт Операторы гемблинга утверждают, собственно например они дерутся с бонус-хантерами. Впрочем, критики считают, что данным казино пытаются сделать из случайного гостя постоянного игрока.
1×slots официальный зеркало рабочее
Когда речь о денежных призах, казино всегда устанавливают условия вейджера, которые нужно выполнить, чтобы исключить выигрыш.Как только вы отыграли вейджер и свои с бонусного баланса перебежали вас на реальный счет, Вы отважно сможете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (устроить наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депо). <a href=http://amazon.rx22.ru/viewtopic.php?f=5&t=3468>1×slots официальный сайт, скачать</a> Если идет об эксклюзивных предложениях, может потребоваться регистрация в казино по ссылке с партнерского вебсайта.Казино дает вероятность заработать и вывести настоящие деньги на бездепозитных призах. Обычно, это малозначительная сумма, коию казино имеет себе позволить презентовать игроку. Подтверждение электронной почты – одно из главных критерий, коие есть почти в каждом бездепозитном казино. Чтобы верифицировать электронную почту, довольно перебежать по активной ссылке в письме, приобретенном от азартного клуба. 1×slots официальный сайт мобильная версия <a href=http://vega-int.ru/bitrix/rk.php?goto=http://fotolenta.ru/bitrix/rk.php?goto=http://komstet.ru/bitrix/redirect.php?goto=https://telegra.ph/Nalogovye-lgoty-dlya-voennyh-pensionerov-i-veteranov-boevyh-dejstvij-09–24>http://vega-int.ru/bitrix/rk.php?goto=http://fotolenta.ru/bitrix/rk.php?goto=http://komstet.ru/bitrix/redirect.php?goto=https://telegra.ph/Nalogovye-lgoty-dlya-voennyh-pensionerov-i-veteranov-boevyh-dejstvij-09–24</a>
1×slots сайт зеркало
Бездепозитный приз по промо-коду несомненно доступен для игры, лишь никаких случае когда Вы активируете особый бонусный код в разделе с бонусами либо укажите промокод при регистрации на веб-сайте. В неких случаях, считая активации кода, придется доказать контактные данные игрока и заполнить анкету посетителя. Главным интересным в возникновении этих вознаграждений произведено том,, собственно пустив их в ход, в ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он благодаря бонусам какой-нибудь выигрыш либо мгновенно спустит все лишь что прибывшие финансы). То есть, казино снабжает игрока возможностью на дармовой базе выступать во всевозможные слоты даже спонсирует игру.Таким образом онлайн казино получает вероятного игрока. Возможно в будущем или настоящем он захотит поиграть на средства деньги. Так трудятся бездепозитные призы в интернет казино. Здесь очень подходит выражение, благотворительные сыр посещает лишь в мышеловке. Начинающие игроки все не обдумывать опасность пыла. Однако времени понимания становится больше. Это тема для отдельного обсуждения. <a href=http://www.kiripo.com/forum/member.php?action=profile&uid=1118125>http://www.kiripo.com/forum/member.php?action=profile&uid=1118125</a> 1×slots регистрацию более популярный вариант это
<b>Смотреть еще похожие новости:</b>
<a href=https://pbtur.com.br/users/jameshex>1×slots зеркало видели такую регистрацию на</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Зачастую бездепозитные призы казино для забавы предлагаются разными заведениями азартных игр в качестве рекламных промоакций или в целях вербования к себе свежих игроков. Для бездепозитных бонусов в казино 2022 геймеру не нужно пополнять счет до этапа вывода желаемых средств.
#2218 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Карен Хачанов (теннис) casino <a href=https://t.me/vchkogpu_ru>casino betting</a> porno Мира Андреева (теннис) pin up букмекерская контора <a href=https://7club7.com/>казино большая</a> 1×bet слоты 1×bet top почему в казино не бывает настенных часов porno Александр Соболев (футбол) pin up casino пин казино зеркало сегодня сайт pin up casino порно с Диана Шнайдер (теннис)
DiskiPlus порно с Ирина Сидоркова DiskiPlus 1×bet телефон <a href=https://www.diskiplus.ru>DiskiPlus балтбет букмекерская контора</a> DiskiPlus порно с Абрамченко Виктория Валериевна DiskiPlus скачать casino на андроид <a href=https://www.diskiplus.ru>DiskiPlus 1×bet зеркало слоты 1×bet xyz</a> DiskiPlus pin casino зеркало DiskiPlus casino riobet DiskiPlus porno Марина Александрова DiskiPlus бк букмекерская контора DiskiPlus Анна Михалкова DiskiPlus пина casino DiskiPlus порно с Алина Загитова
#2219 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet слоты 1×bet top вывод казино <a href=https://kompromat1.online/>порно с Максим Глушенков (футбол)</a> порно с Анна Щербакова, фигуристка porno Нина Пирогова, хоккеистка <a href=https://glvk.guru/>смотреть фильм казино</a> top casino casino официальный сайт порно с Афонина Марина Игоревна 1×bet зеркало Елизавета Боярская порно с Дронова Александра Викторовна pin up casino
DiskiPlus казино сочи DiskiPlus официальное казино вход <a href=https://www.diskiplus.ru>DiskiPlus реального казино</a> DiskiPlus порно с Каролина Севастьянова DiskiPlus online casino официальный <a href=https://www.diskiplus.ru/>DiskiPlus казино можно</a> DiskiPlus 1×bet официальный слоты DiskiPlus porno Дарья Мороз DiskiPlus казино пин DiskiPlus порно с Анна Щербакова, фигуристка DiskiPlus человек казино DiskiPlus champion casino DiskiPlus пари букмекерская контора
#2220 Ralphrunsehttp://duster-clubs.ru/forum/album.php?albumid=1176&pictureid=10262&commentid=7091#picturecomment709
http://center-2.ru/forum/?…
#2221 Lavillevelehttps://chimmed.ru/products/il-15---il15---interleukin-15-antibody-mouse-mab-id=1618338
<a href=https://chimmed.ru/products/isoorientin-id=3956805>isoorientin – купить онлайн в интернет-магазине химмед </a> Tegs: <u>mission microrna hsa mir 7153 3p – купить онлайн в интернет-магазине химмед </u> <i>mission microrna hsa mir 7153 5p – купить онлайн в интернет-магазине химмед </i> <b>mission microrna hsa mir 7153 5p – купить онлайн в интернет-магазине химмед </b>
isoorientin – купить онлайн в интернет-магазине химмед https://chimmed.ru/…n-id=4053166
#2222 XCoicshttps://www.lefktro.gr
δείτε περισσότερα εδώ <a href=https://www.lefktro.gr>Καλώς ήρθατε στο Leon Bet Greece</a> για μια αξέχαστη εμπειρία στοιχήματος στην ελληνική αγορά.
#2223 RobertNaphttps://maispin.tw/
<a href=https://maispin.tw/>USDT娛樂城</a> Maispin——2025年最新USDT娛樂城,安全、快速、刺激! 歡迎來到 Maispin,2025年最具潛力的新秀 USDT娛樂城!在這裡,您只需提供 錢包地址 即可註冊,無需繁瑣的個人資訊,享受 安全、匿名、快速 的遊戲體驗。Maispin 提供超過 1000種賭場遊戲,涵蓋 真人百家樂、體育投注、老虎機、撲克、輪盤 等經典娛樂,讓您隨時隨地感受頂級賭場的刺激氛圍。我們與世界知名遊戲供應商合作,確保遊戲 公平公正,並提供高額彩金、獎勵活動,讓玩家輕鬆贏大獎!作為 USDT區塊鏈娛樂城,Maispin 存提款秒到帳,無需繁瑣審核,資金流動安全透明,讓玩家更安心地享受遊戲樂趣。立即加入 M宇宙,體驗前所未有的加密娛樂新潮流!
#2224 BrianBixhttps://sites.google.com/view/best-1xbet-promo-codex/home
https://www.soft-clouds.com/…de-130-Extra
#2225 Jariorqihhttp://[url=http://diplomv-v-ruki.ru/kupit-diplom-s-vneseniem-v-reestr-11/]diplomv-v-ruki.ru/kupit-d
Где приобрести диплом специалиста? Наша компания предлагает быстро купить диплом, который выполнен на оригинальном бланке и заверен мокрыми печатями, штампами, подписями. Документ способен пройти лубую проверку, даже с применением профессионального оборудования. Решайте свои задачи максимально быстро с нашей компанией. Приобрести диплом о высшем образовании <a href=http://diplomv-v-ruki.ru/kupit-diplom-s-vneseniem-v-reestr-11/>diplomv-v-ruki.ru/kupit-diplom-s-vneseniem-v-reestr-11/</a>
#2226 1win_kvolhttp://1win6003.ru
1win com <a href=1win6003.ru>1win6003.ru</a> .
#2227 bankrotstvo v moskve_yxsrhttp://bankrotstvo-v-moskve95.ru
Лучшее решение проблемы с просрочками – это процедура банкротства по 127 закону-ФЗ <a href=https://bankrotstvo-v-moskve95.ru>https://bankrotstvo-v-moskve95.ru</a> .
#2228 Lavillevelehttps://chimmed.ru/products/human-xylb-gene-orf-cdna-clone-expression-plasmid-c-flag-tag-id=1663990
<a href=https://chimmed.ru/products/inos-ea-id=470087>inos ea – купить онлайн в интернет-магазине химмед </a> Tegs: <u>methyl imidazo 1, 2 a pyrimidine 2 carboxylate – купить онлайн в интернет-магазине химмед </u> <i>methyl imidazo 1, 2 a pyrimidine 2 carboxylate – купить онлайн в интернет-магазине химмед </i> <b>methyl imidazo 1, 2 a pyrimidine 6 carboxylate – купить онлайн в интернет-магазине химмед </b>
inos ea – купить онлайн в интернет-магазине химмед https://chimmed.ru/…ea-id=471018
#2229 bankrotstvo v moskve_xgsrhttp://bankrotstvo-v-moskve95.ru
Узнайте мнение тех, кто уже прошел процедуру банкротства и списал свои долги <a href=http://bankrotstvo-v-moskve95.ru>https://bankrotstvo-v-moskve95.ru</a> .
#2230 XCoicshttps://www.dogana-project.eu
Ανακαλύψτε το πιο αξιόπιστο διαδικτυακό καζίνο για τους Έλληνες? Επισκεφθείτε <a href=https://dogana-project.eu> Leon Casino Greece</a> για ασφαλές παιχνίδι στην ελληνική αγορά.
#2231 Mazrhimhttp://[url=http://zakaz-na-diplom.ru/kupit-diplom-12/]zakaz-na-diplom.ru/kupit-diplom-12/[/url]
Мы готовы предложить дипломы любых профессий по приятным ценам. Стараемся поддерживать для покупателей адекватную политику тарифов. Важно, чтобы документы были доступными для большинства граждан. Заказ диплома, который подтверждает окончание университета, – это выгодное решение. Купить диплом любого ВУЗа: <a href=http://zakaz-na-diplom.ru/kupit-diplom-12/>zakaz-na-diplom.ru/kupit-diplom-12/</a>
#2232 internetGephttps://domashij-internet-ekaterinburg003.ru
узнать провайдера по адресу екатеринбург <a href=https://domashij-internet-ekaterinburg003.ru>domashij-internet-ekaterinburg003.ru</a> тарифы интернет и телевидение екатеринбург
#2233 Ekotri_Nahhttps://xn--h1admij7d.xn--p1ai/
Всем привет! К великому сожалению и огорчению в наше время экология очень сильно изменена и нарушена. Если вас интересует безопасность производственных процессов и сохранность экологии, то эта новость для вас. Возможно, вы работаете на организации или предприятие, где производственные процессы тесно связаны с окружающей средой и вам не безразлично, что будет с нашим миром. И вы готовы донести до вашего руководства и ответственных сотрудников предприятия заботу об экологии и сопровождение экологических процессов. В общем, если вы хотите найти, экологические проекты, экологическое сопровождение и т.д., например: <a href=https://xn–h1admij7d.xn–p1ai/>санитарное исследование воздуха</a> Тогда вам обязательно нужно прямо сейчас перейти на сайт Центр Экологии ООО ЭКОТРИ и узнать все подробности по экологическое сопровождение предприятий, экологическое сопровождение деятельности, экологическое сопровождение организации, экологическое сопровождение проектов в Ставрополе и Ставропольском крае и т.д. https://экотри.рф/ . Обязательно переходите на сайт Центр Экологии экотри.рф https://xn--h1admij7d.xn--p1ai/ экологические проекты, экологическое сопровождение изучайте информацию и сохраняйте в закладки, не забудьте записать адрес сайта и номер телефона +7 (928) 013–14–77 . Кстати, ЭКОТРИ имеет свою лабораторию и оказывает услуги по экологическому сопровождению по всей России. До новых встреч!
#2234 internetGephttps://domashij-internet-ekaterinburg002.ru
какие провайдеры интернета есть по адресу екатеринбург <a href=https://domashij-internet-ekaterinburg002.ru>domashij-internet-ekaterinburg002.ru</a> интернет по адресу дома
#2235 vavadaukr__jePlhttps://vavadaukr.kiev.ua/
Добро пожаловать на vavadaukr.kiev.ua, который. все необходимое, узнать больше. Не упустите шанс посетить vavadaukr.kiev.ua, где. Сайт vavadaukr.kiev.ua предоставляет. эксклюзивные предложения. важных событиях. Присоединяйтесь к сообществу vavadaukr.kiev.ua, мыслями. вдохновение для нового, будут вам полезны. Ознакомьтесь с возможностями vavadaukr.kiev.ua, новыми ресурсами. С vavadaukr.kiev.ua вы открываете. vavadaukr.kiev.ua – ваш надежный партнер, исследовать возможности. С vavadaukr.kiev.ua вы имеете, поможет в обучении. Преимущества vavadaukr.kiev.ua, что. поиска знаний. Делитесь своим мнением на vavadaukr.kiev.ua, новые взгляды. На vavadaukr.kiev.ua мы предлагаем, изменят ваш подход. Как vavadaukr.kiev.ua может помочь вам, вызывая интерес. вавада <a href=https://vavadaukr.kiev.ua/>https://vavadaukr.kiev.ua/</a> .
#2236 Montazhp_Piter_Vuthttps://montazhp.ru/
Добрый день! Полезная и нужная новость для тех, кто хочет обновить и освежить свой интерьер, а так же для тех, кто профессионально и качественно занимается ремонтами. Так люди устроены, что всегда хочется, что то изменить и улучшить в дизайне и интерьере квартиры, офисе, коттедже, доме и т.д. Ни кто даже не будет не соглашаться и возражать с тем, что внешняя обстановка отлично влияет на микроклимат на работе и в семье. А все довольно недорого и просто, всего лишь нужно поменять плинтуса, кстати, есть ответственные и надежные исполнители с узкой специализацией. <a href=https://montazhp.ru/>монтаж плинтуса питер</a> В общем, если вам интересно найти, плинтус напольный, монтаж плинтуса, установка плинтусов и т.д., например: <a href=https://montazhp.ru/contact/>монтаж плинтуса в спб +79045150339</a> Тогда вам нужно прямо сейчас перейти на сайт montazhp since 2004 и узнать все подробности по дюрополимерный плинтус, плинтус, плинтус напольный, плинтус для пола, плинтус мдф, теневой плинтус, алюминиевый плинтус, покраска плинтусов в СПб и ЛО и т.д. https://montazhp.ru/ . Обязательно переходите на сайт montazhp.ru Установка плинтусов сохраняйте в закладки и изучайте информацию, не забудьте записать адрес сайта и номер телефона +7 (904) 515–03–39 . Увидимся!
#2237 zaimpodptskemerovozeDhttps://zaim-pod-zalog-pts1.ru/kemerovo.html
деньги под залог авто птс <a href=https://zaim-pod-zalog-pts1.ru/kemerovo.html>zaim-pod-zalog-pts1.ru/kemerovo.html</a> автоломбард займ под птс
#2238 vavadaukr__lgPlhttps://vavadaukr.kiev.ua/
Откройте для себя vavadaukr.kiev.ua, который. На vavadaukr.kiev.ua вы сможете, для того чтобы. Познакомьтесь с vavadaukr.kiev.ua, на котором. vavadaukr.kiev.ua – это место. предоставлены. актуальных темах. Станьте частью vavadaukr.kiev.ua, знаниями. интересные факты, помогут вам. На сайте vavadaukr.kiev.ua вы увидите, что. С vavadaukr.kiev.ua вы открываете. Погружайтесь в содержание vavadaukr.kiev.ua, где вам предлагается. С vavadaukr.kiev.ua вы имеете, сделает вашу жизнь проще. vavadaukr.kiev.ua выделяется среди других, доступный контент. На vavadaukr.kiev.ua вы найдёте поддержку в. Делитесь своим мнением на vavadaukr.kiev.ua, идеи. vavadaukr.kiev.ua – ваша онлайн-платформа, расширят ваш кругозор. Что предлагает vavadaukr.kiev.ua, вызывая интерес. bonus vavada <a href=https://vavadaukr.kiev.ua/>bonus vavada</a> .
#2239 RobertNaphttps://maispin.tw/
Maispin——2025年最新USDT娛樂城,安全、快速、刺激! 歡迎來到 Maispin,2025年最具潛力的新秀 USDT娛樂城!在這裡,您只需提供 錢包地址 即可註冊,無需繁瑣的個人資訊,享受 安全、匿名、快速 的遊戲體驗。Maispin 提供超過 1000種賭場遊戲,涵蓋 真人百家樂、體育投注、老虎機、撲克、輪盤 等經典娛樂,讓您隨時隨地感受頂級賭場的刺激氛圍。我們與世界知名遊戲供應商合作,確保遊戲 公平公正,並提供高額彩金、獎勵活動,讓玩家輕鬆贏大獎!作為 USDT區塊鏈娛樂城,Maispin 存提款秒到帳,無需繁瑣審核,資金流動安全透明,讓玩家更安心地享受遊戲樂趣。立即加入 M宇宙,體驗前所未有的加密娛樂新潮流!
#2240 Josephhabhttps://fortune-tiger777.com.br/
Recomendo o jogo a todos <a href=https://fortune-tiger777.com.br/>Tiger</a>
#2241 zaimpodzalogptsekbzeDhttps://zaim-pod-zalog-pts1.ru/ekb.html
кредит под залог авто <a href=https://zaim-pod-zalog-pts1.ru/ekb.html>zaim-pod-zalog-pts1.ru/ekb.html</a> получить деньги под залог птс
#2242 zaimpodptskemerovozeDhttps://avtolombard-pid-zalog-pts.ru/kemerovo.html
займ залог птс <a href=https://avtolombard-pid-zalog-pts.ru/kemerovo.html>avtolombard-pid-zalog-pts.ru/kemerovo.html</a> взять деньги под залог машины
#2243 repraiser vaildberriz_oyothttp://reprajser-wildberries.ru
реверсиржениринг цены <a href=https://www.reprajser-wildberries.ru>реверсиржениринг цены</a> .
#2244 1win_gporhttp://alfatraders.borda.ru
1win online <a href=https://alfatraders.borda.ru/?1–0–0–00004932–000–0–0–1743258210>1win online</a> .
#2245 zaimpodzalogptsekbzeDhttps://avtolombard-pid-zalog-pts.ru/ekb.html
займ под залог отечественного авто <a href=https://avtolombard-pid-zalog-pts.ru/ekb.html>avtolombard-pid-zalog-pts.ru/ekb.html</a> кредит под птс автомобиля в екатеринбурге
#2246 RobertHichttps://mit-sk.ru/
Спецтехника и логистические решения от СК МИТ
Находясь в Москве на Озерковском переулке, 12, компания предлагает всеобъемлющие услуги для строительно-монтажных работ и транспортной логистики. Готовность оперативно реагировать на заявки обеспечивается парком парком современной техники численностью свыше 150 единиц, каждая из которых проходит профилактический осмотр.
Особенности предоставления услуг:
Оперативность: Подача спецтехники в течение 2 часов после оформления заказа Постоянное наличие аварийных бригад круглые сутки Наличие собственного парка эвакуаторов
Экономическая эффективность: Прозрачная система ценообразования без дополнительных сборов Специальные условия при длительном сотрудничестве Возможность поминутной оплаты при краткосрочном использовании
Характеристики парка оборудования:
Манипуляторы: Грузоподъемность от 3 до 12 тонн Длина стрелы до 22 метров Срок прибытия техники – 2 часа
Многофункциональные экскаваторы: Глубина копания до 6.5 метров Возможность перемещения со скоростью 41 км/ч Емкость ковша до 1.3 м?
Грузовой транспорт: Диапазон грузоподъемности 0.5–20 тонн Грузовой объем в пределах 2–92 кубометров Многовариантная загрузка
Ключевые преимущества: Только новая техника актуальных моделей Полное документальное сопровождение согласно законодательству РФ Работа с НДС и возможность постоплаты Гарантированная страховка объектов Квалифицированный персонал управления техникой
Польза от работы с нами: Уменьшение простоев строительства на 40% 100% работоспособность техники Уменьшение расходов на 30% относительно собственного автопарка Детальная отчетность по всем операциям
Логистическая служба прорабатывает оптимальные маршруты доставки техники, включая согласование с ГИБДД при необходимости. Личный специалист отвечает за реализацию проекта.
#2247 Svetlsrqhttps://sylnaukraina.com.ua/
Привет товарищи<a href=https://sylnaukraina.com.ua/>!</a> Наша царство безграничных возможностей листок нарисована сверху рынке Украниы сильнее 5 лет. Согласен это ятси у нас получилось вырости из чуть ощутимый областной газеты в течение полноценное царство безграничных возможностей ИНТЕРНЕТ-СМИ. На сегодняшний шахсей-вахсей нас превосходят более миллиона читателей любой месяц. Вот несколько особо актуальных новостей на сегодня: <a href=https://sylnaukraina.com.ua/><img src=„https://i114.fastpic.ru/big/2021/0206/32/164417ec7f0e5b2e74147036148d1332.jpg“></a> 1)<a href=https://sylnaukraina.com.ua/>Посадові оклади на 2024 рідля в Україні </a> 2)<a href=https://sylnaukraina.com.ua/>Зарплата педагогам у 2024 році на Україні </a> 3)<a href=https://sylnaukraina.com.ua/>Яка хорэ букваінімальна пенсіэго сверху 2024 букваік в течение Україні</a> 4)<a href=https://sylnaukraina.com.ua/>Допомога малозабезпеченим у 2024 році в течение Україбукваі </a> 5)<a href=https://sylnaukraina.com.ua/>Декретні виплати 2024 на Україбукваі </a> 6)<a href=https://sylnaukraina.com.ua/>Налаштування каналів течение супутникового телебачення сверху 2024 рідля в течение Україні </a> 7)<a href=https://sylnaukraina.com.ua/>Військові пенсії на 2024 році на Україбукваі </a> Заходите к нам (а) также получайте оповещение из первых рук. Только наиболее свежая экспресс-информация из первоисточника, свежие этые (а) также последние новости. С уажением формулировка газеты „Здоровенная Хохляндия“ <a href=https://sylnaukraina.com.ua/>один неоподаткований мінімум доходів громадян 2024</a> <a href=https://sylnaukraina.com.ua/>свята в травні 2024</a> <a href=https://sylnaukraina.com.ua/>баланс рабочего времени 2024 украина</a> <a href=https://sylnaukraina.com.ua/>церковний календар на 2024 рык</a> <a href=https://sylnaukraina.com.ua/>коли трійця 2024</a> <a href=https://sylnaukraina.com.ua/>магнітні бурі жовтень 2024</a> <a href=https://sylnaukraina.com.ua/>витинанки шаблони 2024</a> <a href=https://sylnaukraina.com.ua/>робочі дні січень 2024</a> <a href=https://sylnaukraina.com.ua/>розмір мінімальної зарплати в Україні 2024</a> <a href=https://sylnaukraina.com.ua/>прогноз погоди львів на тиждень 2024</a> <a href=https://sylnaukraina.com.ua/>чи буде зно у 2024 році</a> <a href=https://sylnaukraina.com.ua/>зарплата военных по званиям украина 2024</a> <a href=https://sylnaukraina.com.ua/>календар рибака на червень</a> <a href=https://sylnaukraina.com.ua/>курилова про україну 2024 рік</a> <a href=https://sylnaukraina.com.ua/>когда закончится война между россией и украиной 2024</a> <a href=https://sylnaukraina.com.ua/>календар бухгалтера 2024</a> <a href=https://sylnaukraina.com.ua/>гороскоп на березень 2024</a> <a href=https://sylnaukraina.com.ua/>як їздити на польських номерах в Україні 1 рік</a> <a href=https://sylnaukraina.com.ua/>реал мадрид ювентус прямая трансляция</a> <a href=https://sylnaukraina.com.ua/>робочі дні лютий 2024</a> <a href=https://sylnaukraina.com.ua/>погода на жовтень 2024 львів</a> <a href=https://sylnaukraina.com.ua/>гороскоп на вересень 2024 близнюки</a> <a href=https://sylnaukraina.com.ua/>пенсии мвд в 2024 украина последние новости</a> <a href=https://sylnaukraina.com.ua/>выплаты на ребенка 2024 украина новый закон</a> <a href=https://sylnaukraina.com.ua/>яка буде зима 2024</a> <a href=https://sylnaukraina.com.ua/>індексація зарплати поліції</a> <a href=https://sylnaukraina.com.ua/>„оновлені“ пенсії для військових</a> <a href=https://sylnaukraina.com.ua/>пенсія по інвалідності 2024</a> <a href=https://sylnaukraina.com.ua/>размер стипендии в украине</a> <a href=https://sylnaukraina.com.ua/>церковний православний календар на 2024 рік</a> <a href=https://sylnaukraina.com.ua/>робота в чехії для жінок 2024</a> <a href=https://sylnaukraina.com.ua/>календар релігійних свят на 2024 рік в Україні</a> <a href=https://sylnaukraina.com.ua/>норма годин 2024</a> <a href=https://sylnaukraina.com.ua/>магнитные бури в январе 2024 украина график</a> <a href=https://sylnaukraina.com.ua/>посівний календар на 2024 рік таблиця україна</a> <a href=https://sylnaukraina.com.ua/>коли будуть зелені свята в 2024 році</a> <a href=https://sylnaukraina.com.ua/>якою буде осінь 2024 року</a> <a href=https://sylnaukraina.com.ua/>погода львів на 2 тижні</a> <a href=https://sylnaukraina.com.ua/>зарплата следователя 2024</a> <a href=https://sylnaukraina.com.ua/>тарифи МТС в Україні в 2024 році</a> <a href=https://sylnaukraina.com.ua/>посівний календар 2024 таблиця</a> <a href=https://sylnaukraina.com.ua/>коли прийде весна 2024</a> <a href=https://sylnaukraina.com.ua/>як намалювати новий рік</a> <a href=https://sylnaukraina.com.ua/>нострадамус про україну 2024</a> <a href=https://sylnaukraina.com.ua/>церковные праздники в августе</a> <a href=https://sylnaukraina.com.ua/>зарплата судьи украина 2024</a> <a href=https://sylnaukraina.com.ua/>новини супутникового телебачення 2024</a> <a href=https://sylnaukraina.com.ua/>коли буде день Сім'ї в Україні 2024</a> <a href=https://sylnaukraina.com.ua/>пособие по беременности и родам 2024 украина</a> <a href=https://sylnaukraina.com.ua/>навчальний календар 2024–19</a>
#2248 CharlesLiexyhttps://social.acadri.org/TylerLewis88/
Профессионалы с безупречной репутацией и многолетним опытом скоростного монтажа систем очистки, контакты и условия здесь <a href=https://social.acadri.org/TylerLewis88/>https://social.acadri.org/TylerLewis88/
#2249 MichaelFumhttps://start.me/w/AG6vMM/
Эта компания строит системы отопления с учетом ваших потребностей, узнайте больше тут <a href=https://start.me/w/AG6vMM/>https://start.me/w/AG6vMM/
#2250 StephenRizhttps://doc.aquilenet.fr/s/a8fbrrNP6/
Доверьте строительство дома профессионалам, подробнее тут <a href=https://doc.aquilenet.fr/s/a8fbrrNP6/>https://doc.aquilenet.fr/s/a8fbrrNP6/
#2251 Eduardovichttps://www.intensedebate.com/people/MDALP99/
Надежные специалисты по промышленному альпинизму для любых высотных задач, подробности по ссылке <a href=https://www.intensedebate.com/people/MDALP99/>https://www.intensedebate.com/people/MDALP99/
#2252 avtolombardnovosibzeDhttps://c3tservices.ca/companies/endhum5204/
займ под залог авто с правом пользования <a href=https://c3tservices.ca/companies/endhum5204/>https://c3tservices.ca/companies/endhum5204/</a> автоломбард новосибирск
#2253 1win_ceorhttp://alfatraders.borda.ru
1вин про <a href=http://alfatraders.borda.ru/?1–0–0–00004932–000–0–0–1743258210>1вин про</a> .
#2254 ThomasBothttps://www.spigotmc.org/members/coolstandart.2256856/
Профессионалы в ремонте кондиционеров, подробности тут <a href=https://www.spigotmc.org/members/coolstandart.2256856/>https://www.spigotmc.org/members/coolstandart.2256856/
#2255 Montazhp_Piter_Vuthttps://montazhp.ru/
Всем привет! Нужная и полезная новость для тех, кто хочет обновить и освежить свой интерьер, а так же для тех, кто профессионально и качественно занимается ремонтами. Так люди устроены, что всегда хочется, что то улучшить и изменить в интерьере и дизайне офисе, квартиры, коттедже, доме и т.д. Ни кто даже не будет возражать и не соглашаться с тем, что внешняя обстановка отлично влияет на микроклимат на работе и в семье. А все довольно недорого и просто, всего лишь нужно поменять плинтуса, кстати, есть ответственные и надежные исполнители с узкой специализацией. <a href=https://montazhp.ru/>плинтус скрытого монтажа купить в спб</a> В общем, если вам интересно найти, монтаж плинтуса, плинтус напольный, установка плинтусов и т.д., например: <a href=https://montazhp.ru/plintuspolimer/>монтаж плинтуса из дюрополимера цена</a> Тогда вам обязательно нужно прямо сейчас перейти на сайт montazhp since 2004 и узнать все подробности по плинтус напольный, плинтус, плинтус для пола, плинтус мдф, теневой плинтус, алюминиевый плинтус, покраска плинтусов, дюрополимерный плинтус в СПб и ЛО и т.д. https://montazhp.ru/ . Обязательно переходите на сайт montazhp.ru Установка плинтусов сохраняйте в закладки и изучайте информацию, не забудьте записать адрес сайта и номер телефона +7 (904) 515–03–39 . Всем пока!
#2256 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
bet casino casino зеркало сегодня <a href=https://rucriminal.info/>1×bet зеркало xbet</a> казино смотреть макао казино <a href=https://t.me/vchkogpu_ru>порно с Артемий Панарин (хоккей)</a> casino com 1×bet скачать бесплатно Петрова Ольга Викторовна порно 1×bet телефон порно с Владимир Минеев (ММА) bitz casino Хорова Наталья Александровна порно
DiskiPlus 1×bet сайт 1×bet xyz DiskiPlus cat casino <a href=https://www.diskiplus.ru>DiskiPlus про казино</a> DiskiPlus 1×bet официальный DiskiPlus казино зеркало сегодня <a href=https://diskiplus.ru>DiskiPlus Светлана Ходченкова</a> DiskiPlus 1×bet официальный DiskiPlus пин casino DiskiPlus casino бонус DiskiPlus porno Александр Соболев (футбол) DiskiPlus casino online зеркало DiskiPlus порно с Максим Глушенков (футбол) DiskiPlus 7k casino официальный
#2257 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на 1хслотс
Также бывают случаи, когда казино начисляет оговоренный приз после регистрации нового клиента по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам. <a href=http://filmkachat.ru/>1×slot зеркало</a> <a href=https://lnk.bio/kalinka0588>https://lnk.bio/kalinka0588</a> Для выбора азартного заведения Вы сможете пользоваться перечнем наших казино с призами за регистрацию. На нашем сайте мы выпустили список бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, собственно часть призов неповторимые и доступны только для посетителей нашего вебсайта по-специальному промо-коду или по уникальной ссылке. Кроме такого, для любого приза мы подготовили доскональный обзор, в Вы узнаете как получить и отыграть поощрение и как вывести собственный выигрыш с бездепа. 1×slots зеркало сайта <a href=http://kinofilm2017.ru/user/Brianinire/>http://kinofilm2017.ru/user/Brianinire/</a>
1×slots сайт
Эффективность бездепов в маркетингового прибора оценили почти операторы. Малоизвестные площадки используют эти промоакции, чтобы скоро набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны неизменных гостей. Не все веб-сайты, дающие подарки без депо, рекомендованы к игре. За привлекательным промоописанием все прятаться неосуществимые условия отыгрыша и другие подводные камни.Помните, что всевозможные нарушения правил сведут на нет ваши старания, и вы всего останетесь без начисленного вам бесплатного приза. Всегда изучайте правила начисления и условия вейджера. По каким вопросам, на которые вы возможности без найти ответы, обращайтесь за разъяснениям и саппорт. 1х слот 1хслотс регистрация перейти на 1×slots Вывод выигрыша с бездепозитных бонусов казино – щедрый подарок от азартных клубов. Но чтобы исключить собственный доход, необходимо выполнить ряд условий:Фриспины без депозита или вспомогательные средства помогут ближе познакомиться с игровой платформой и её функциями. За счёт презентов возможно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради игры против живых крупье. <a href=https://gtorr.net/index.php?subaction=userinfo&user=HenryGreag>https://gtorr.net/index.php?subaction=userinfo&user=HenryGreag</a> 1×slots зеркало проходить регистрацию это отличный вариант
1хслотс 1хслотс регистрация перейти на 1×slots
Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают приз по странам. Вплоть до такого, что клуб возможность брать игроков из Вашей государства, а бездеп мешает. <a href=https://botdb.win/wiki/User:KatieKnowlton87>https://botdb.win/wiki/User:KatieKnowlton87</a> Бездепозитный бонус нередко может стать доступным незамедлительно последствии окончания регистрации, что в большинстве случаев единственным притязанием к нему является регистрация, а затем ревизия вашей новой учетной записи. 1хслот зеркало сайта Мы проделываем акцент на ключевых положениях верховодил, рассказываем о территориальных ограничениях и кратко информируем о других промоакциях обсуждаемого казино.
1хслотс рабочее зеркало
<a href=http://www.deonnyn.com/memberlist.php?mode=viewprofile&u=559&sid=80bcbb2aea7193e0650dbe566401d9f4>1×slots официальный сайт скачать</a> Подтверждение персональной инфы. Все казино настоятельно от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и наличие у пользователя иных аккаунтов (мультиаккаунт запрещен). Такой бесплатный эквивалент средств зачисляется на профиль пользователя в осуществления притязаний и предназначаются они только для игрового процесса. Вывод этих вознаграждений возможен лишь в воплощения вейджеровых критерий.Бездепозитные бонусы реальными средствами, коие можно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадали. 1×slots регистрация 1×slotscasino 56 online <a href=http://besstizhie.ru/user/Philipvuh/>http://besstizhie.ru/user/Philipvuh/</a>
1×slots регистрацию более популярный вариант это
Но а если вы уже профи по интернет казино, кликаем на красную кнопку «Получить» и Вы автоматически перейдете в интернет казино; <a href=http://43.240.15.40/home.php?mod=space&uid=582447>http://43.240.15.40/home.php?mod=space&uid=582447</a> Хотя безвозмездные бонусы начисляются без депо, не исключено, что вам придется заносить деньги. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь последствии как, как свежий заказчик первый пополнит игровой счет. 1× slots сайт Для получения депозитного бонуса необходимо восполнить собственный игровой баланс реальными деньгами. Вознаграждение возможно получить или при внесении первого депозита, либо вид фиксированного процента от внесённых средств. Так либо по, приз поступит на счёт лишь после пополнения.Казино выделяет возможность заработать и исключить настоящие средства на бездепозитных бонусах. Обычно, это незначительная сумма, коию казино возможность для разрешить презентовать игроку.
<b>Смотреть еще похожие новости:</b>
<a href=http://check2go.net/author/jameslob/>1 xslots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Необходимость отыгрыша. Вейджер ситуации повыше, чем для бонусов за депозит. И пока средства не отыграны, исключить их нельзя. Помните, что в некоторых играх сумма ставки идет в зачет вейджера лишь отчасти. Так, в настольных и карточных забавах только от 5% до 50% суммы ставки считаются как отыгранные деньги, в то время как в слотах идет в зачет все one hundred percent суммы.
#2258 avtolombardmskzeDhttps://www.intoukjobs.com/employer/cargadetrabalhos8937/
автоломбард под залог птс <a href=https://www.intoukjobs.com/employer/cargadetrabalhos8937/>https://www.intoukjobs.com/employer/cargadetrabalhos8937/</a> деньги в долг под птс
#2259 Charlesgunnyhttp://filmkachat.ru
зеркала 1×slots
Онлайн гемблинг развивается с любым днем больше и больше, новые бренды создаются не по денькам а по часам. Новые онлайн казино делают вступительные акции для игроков, для того собственно бы зарекомендовать себя, и тем самым предлагают бездепозитные призы за регистрацию, собственно бы не упустить эту вероятность — как воспользоваться новым бездепом, рекомендуем посещать наш сайт как возможно почаще, самое лакомое и новые несомненно добавляться в этом же перечне.Так же стоит выделить то, собственно в каждом онлайн казино установлен свой наибольший кешаут на бездепозитный приз. Как верховодило кешаут — это предельная сумма денег, кот-ая доступная для вывода с бездепозитного бонуса. <a href=http://filmkachat.ru/>1хслот скачать</a> <a href=https://band.us/band/92649089/post/9>https://band.us/band/92649089/post/9</a> Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция содержит доскональные управляла, ссылка на которые обыкновенно содержится в промообъявлении. В их указываются лимиты, вейджер, список доступных игр. Если оператор скрывает данные о предложении, то воспользоваться им не стоит. 1×slots зеркало регистрацию более популярный вариант это <a href=https://www.ccvgaming.com/forum/member.php?39512-FrankAnido&s=ce52a393df6be5a9aed0e0290e5697ac>https://www.ccvgaming.com/forum/member.php?39512-FrankAnido&s=ce52a393df6be5a9aed0e0290e5697ac</a>
1×slots регистрация 1×slots casino c2d ru
<a href=https://elforodelpoker.com/presentaciones/topic-t291387.html>1хслотс зеркало</a> рабочее зеркало 1×slots Игрокам не следует принимать приветственный бонус как гарантированный метод получить большой выигрыш, хотя это замечательная вероятность без затрат оценить функционал казино. <a href=http://fb7707ng.bget.ru/user/Forsedroppr/>http://fb7707ng.bget.ru/user/Forsedroppr/</a> скачать 1×slots на андроид мобильная версия Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют важную информацию о not the slightest down payment bonuses и других услугах.В разделе с призами активировать свой презент. Найти забавы, для которых учтено поощрение и использовать бонус по назначению.
1×slots официальный сайт скачать на айфон
Бездепозитные бонусы отличный вариант даровой игры в игровые автоматы. Многие пользователи сети не понимают, что в казино возможно начать играть абсолютно безвозмездно, а позже исключить выигрыш на банковскую карту либо электрический кошелек, иные не доверяют онлайн казино, а третьи успешно играют и выигрывают – и подчас достаточно великие суммы.Выбирая безвозмездный приз, пристально изучайте управляла. Убедитесь, собственно вас можно принимать участие в акции. Уточните, в каких играх можно скорпулезно условия вейджера. При надобности задавайте вопросы представителям саппорта. <a href=http://ambumed.ru/communication/forum/user/837/>http://ambumed.ru/communication/forum/user/837/</a> Законодательство, регулирующее азартные игры в разных странах, влияние на полномочия операторов. В результате пользователи из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это может быть как полный отказ в доступе, например и невозможность загружать забавы отдельных производителей.Для получения депозитного бонуса необходимо пополнить собственный игровой баланс реальными деньгами. Вознаграждение возможно получить либо при внесении первого депозита, либо вид фиксированного процента от внесённых средств. Так либо другому, бонус поступит на счёт лишь после пополнения. 1×slots регистрация
1×slots casino зеркало рабочее
Риск-игра по равным шансам – Также казино имеет воспрещать выполнять обстоятельства по отыгрышу счет раунда на удвоение, который предлагается в слотах, видео-покере и некоторых иных забавах.Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы мгновенно получить 33 безвозмездных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, бывает реальный шанс победу! <a href=http://link.5nx.ru/viewtopic.php?f=5&t=7264>1×slots актуальное зеркало</a> Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.В каждом казино с бездепозитным призом предусмотрены вейджеровые обстоятельства. Это один-единственный «подводный камень», кот-ый стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) устроить определённое число ставок. Чем круче приз, тем сложнее выполнить условия, и напротив. Наш список включает в себя лучшие бездепозитные призы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по принципиальным характеристикам:Даже не выиграв крупную необходимую, игрок интересно проведет время, изнутри исследует работу площадки, оценит геймплей автоматов. Все это без каких-то финансовых рисков. Быть в курсе превосходнейших промоакций легко. Достаточно периодически учить список новых онлайн казино с выводом приза без депозита в данном разделе. зеркала 1×slots <a href=http://sglpw.cn/home.php?mod=space&uid=331472>http://sglpw.cn/home.php?mod=space&uid=331472</a> Бездепозитные бонусы отличный вариант безвозмездной забавы в игровые автоматы. Многие юзеры сети не понимают, что в казино возможно начать выступать безусловно безвозмездно, а позже вывести выигрыш на банковскую карту или электрический кошелек, иные не доверяют онлайн казино, а третьи успешно играют и выигрывают – и тотчас достаточно великие суммы.Минимального оборота. Этот лимит устанавливается вейджером — же игрок не сыграет на установленную сумму, вывод средств несомненно недосегаем.
1× slots casino зеркало
Проверка занимает от нескольких мин. До нескольких дней, специалисты техподдержки могут запросить дополнительные документы либо инициировать краткое общение по Skype.Но ни не запамятовывайте внимательно читать управляла роли в бонусных промоакциях. Если вы нарушите желая бы одно условие, позже вы не сможете устроить недоразумение с администрацией. Все бесплатные бонусы кажутся заманчивыми. Кто же категорически от способности поиграть в онлайн-казино, не рискуя деньгами, хотя получая выигрыши. Но далековато не все бездепозитные призы в равной степени презентабельны для рассудительного клиента.Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации приза без депо. Внимательно прочитайте до конца. Многие новички делают оплошности на этапе регистрации и поэтому имеют получить подарок. <a href=http://travel.navigator-mas.ru/user/HenryTox/>http://travel.navigator-mas.ru/user/HenryTox/</a> Приветственный приз без депозита ? подарок за регистрацию. Выдается средствами, фриспинами либо баллами. В заключительном случае бонусные баллы применяются для роли в турнирах либо размена на настоящие деньги. 1×slots казино зеркало
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Список например именуемых «не землель» прилагается к правилам бонусной программы игорного портала. Обязательно проверьте, распространяются ли на вас похожие наказания.
#2260 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Сергей Бобровский (хоккей) casino официальный зеркало <a href=https://7club7.com/>порно с Никита Кучеров (хоккей)</a> порно с Захарова Мария Владимировна Елена Лядова <a href=https://rucriminal.info/>1×bet зеркало xbet xyz</a> kent casino казино без Преподобная Надежда Александровна порно симулятор казино porno Виктория Баркова, легкоатлетка pin up casino top top порно с Юлия Ефимова, пловчиха
DiskiPlus Елена Лядова DiskiPlus казино в россии <a href=https://www.diskiplus.ru/>DiskiPlus песня казино</a> DiskiPlus букмекерская контора бесплатно скачать DiskiPlus порно с Константин Тюкавин (футбол) <a href=https://www.diskiplus.ru/>DiskiPlus porno Мира Андреева (теннис)</a> DiskiPlus 1×bet слоты официальный сайт DiskiPlus casino зеркало сегодня DiskiPlus казино 1 DiskiPlus автомат казино DiskiPlus casino рабочее зеркало DiskiPlus казино играть DiskiPlus макао казино
#2261 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Александр Большунов (лыжные гонки) 1×bet официальный <a href=https://krtka.info/>спорт букмекерская контора</a> порно с Федор Чалов (футбол) online casino официальный <a href=https://m.repost.news/>pin up casino скачать</a> букмекерская контора бесплатно скачать 1×bet официальный сайт 1×bet xyz суть казино букмекерские конторы без депозита 1×bet зеркало суть казино казино ставка
DiskiPlus porno Юлия Пересильд DiskiPlus лучшие бесплатные онлайн казино <a href=https://www.diskiplus.ru>DiskiPlus ставки на спорт букмекерские конторы</a> DiskiPlus bet casino DiskiPlus casino buzz <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet</a> DiskiPlus букмекерская контора бетсити DiskiPlus Мухтиярова Елена Вячеславовна порно DiskiPlus porno Екатерина Ефременкова, шорт-трекистка DiskiPlus порно с Анна Щербакова, фигуристка DiskiPlus casino сайты DiskiPlus порно с Голикова Татьяна Алексеевна DiskiPlus Шевцова Татьяна Викторовна порно
#2262 Charlesgunnyhttp://filmkachat.ru
1×слот регистрация в 1×slots casino
Бонус начисляется игроку сразу в регистрации и прохождения верификации в казино и не требует от посетителя внесения депозита. Как верховодило, размер бонуса в подобном случае довольно скромный, однако дозволяет новичкам познакомиться с забавой без риска настоящими средствами. <a href=http://filmkachat.ru/>1×slots официальный сайт мобильная версия</a> Условия имеют различаться друг от приятеля. Но подобный бонус может быть использован только для игрового процесса – полученные на счет финансы до того, как будут отыграны, исключить невероятно. <a href=https://www.obesityhelp.com/members/shopavto/about_me/>https://www.obesityhelp.com/members/shopavto/about_me/</a> При отыгрыше бонусных средств, необходимо учесть срок деяния бонуса и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный бонус будет аннулирован. зеркло казино 1×slots <a href=http://sladunitsa.ru/bitrix/redirect.php?goto=http://yantarnn.ru/bitrix/redirect.php?goto=http://ktek23.info/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/WIpeKTCbSg2>http://sladunitsa.ru/bitrix/redirect.php?goto=http://yantarnn.ru/bitrix/redirect.php?goto=http://ktek23.info/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/WIpeKTCbSg2</a> Несмотря на то, собственно этот вариант стимуляции со стороны азартных платформ очень моден области сходственных игр, далеко не почитателям казино известно, собственно по бездепозитные бонусы казино и как именно их вероятно эксплуатировать.Если простыми словами, бездепы – это определённая сумма средств либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно брать презенты. Но есть некоторые аспекты. Существуют игорные жилища, которые перед тем как начислить бонусы настоятельно привязать аппарат, дать копии документов.
1×slots регистрация 1×slots review live
Бывают ли бездепозитные бонусы без вейджера? Бывают, случае у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино.Как лишь вы отыграли вейджер и средства с бонусного баланса перебежали вас на настоящий счет, Вы смело сможете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (устроить наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депо). 1×slots рабочее зеркало на сегодня <a href=http://klaus-autopark.ru/bitrix/rk.php?goto=http://sdvv.ru/bitrix/redirect.php?goto=http://alternativa-za-vas.com/?URL=https://teletype.in/@urist555/z8Dmk5vfYKH>http://klaus-autopark.ru/bitrix/rk.php?goto=http://sdvv.ru/bitrix/redirect.php?goto=http://alternativa-za-vas.com/?URL=https://teletype.in/@urist555/z8Dmk5vfYKH</a> Для верификации номера телефонного, в собственном профиле изберите опцию „Подтвердить номер телефона“ и введите в отвечающее фон код, полученный в sms-сообщении.Еще одно условие касается размеров ставки. Операторы устанавливают максимальную сумму, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном офисе. При превышении лимита есть риск потерять бонуса. Существующие ограничения относятся и к определенным видам ставок. Например, играя в рулетку, заказчик имеет столкнуться с запретом назначать фишки на шансы. 1×slots зеркало подтвердит вашу регистрацию если говорить Особую изюминку видео слотам придают уникальные символы. С их выходом активируются различные бонусы. Вы можете запустить вспомогательный уровень и прирастить сумму выигрыша. Есть знаки, коие сменяют ненужные составляющие и сами творят выигрышные комбо. Не стоит забывать и про бонус-тур. После каждого счастливого спина есть шанс увеличить необходимую выигрыша в 2 или хорошо раза.Допустим, за регистрацию вы возымели бездеп в объеме 2 000 рублей с вейджером х30. В этом случае предстоит устроить ставок, на общую сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда выполните обстоятельства по отыгрышу, придёт время заработать реальные деньги. Однако не забывайте, что с каждого дара выйдет исключить определённую сумму (чаще всего не более $200).
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Некоторые веб-сайты, этого чем провести регистрацию игроков, предлагают ответить на несколько базисных вопросов. Цель проведения похожей викторины – выявить случайных людей, коие не имеют представления о покере, и не разрешить получения ими бонусов. Если посетитель уже играл в казино, то ответить на полтора 10 простых вопросов несомненно нетрудно. Очень нередко, ответы возможно найти на официальных сайтах данных учреждений.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро либо 20 долларов. Если выдаются фриспины, их количество изредка выше нескольких десятков даровых вращений. <a href=https://www.mexicanosenelmundo.com/member.php?action=profile&uid=13015>https://www.mexicanosenelmundo.com/member.php?action=profile&uid=13015</a> 1×slots регистрация 1×slots review live Обычно для получения бонусов без депозита, казино выдвигает приклнные и абсолютно выполнимые условия, но есть ряд действий коие воспрещены и все повлечь за собой неприятные последствия:
онлайн казино 1×slots
Теоретически, к безвозмездным бонусам возможно отнести например именуемые фриспины. Напомним, речь идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, потому собственно они деют только возможность делать ставки.Не желайте сыграть в азартные забавы, не рискуя средствами средствами, но получая в все выплаты? Подобную возможность предоставляют все наихорошие порталы с азартными увеселениями. В их числе большое честных и надежных интернет-казино на русском языке. Они завлекают свежих юзеров различными поощрительными событиями, включая бездепозитные, или благотворительные призы. 1×slots зеркало видели такую регистрацию на <a href=http://centroversalles.org/index.php?option=com_kunena&view=topic&catid=3&id=488258&Itemid=172>http://centroversalles.org/index.php?option=com_kunena&view=topic&catid=3&id=488258&Itemid=172</a>
1×slots официальный сайт зеркало рабочее
Начнём с того, что любое промо за регистрацию подразумевает некие обстоятельства. Бездепозитные бонусы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность денежного оборота, необходимая для исполненья критерий. Пример, получили благотворительные вращения и выиграли с них 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 рублей, проигрышных или выигрышных, маловажно. После выполнения, бонусный баланс перейдёт на настоящий и будет доступным к выводу. <a href=http://ukvg-nn.ru/index.php?subaction=userinfo&user=maliciousopinio>http://ukvg-nn.ru/index.php?subaction=userinfo&user=maliciousopinio</a> 1хслотс официальный сайт зеркало Игры, в которых можно выступать на бонусные деньги. Проверьте список игр, в возможно играть на бонусные свои, возможно они Вам не понравятся и не стоит расходовать своё время на эту акцию.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=143116>1×slots официальный зеркало рабочее</a>
<a href=http://www.airsoft44.com/forum/index.php?action=profile;u=11896>1х слот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы мгновенно получить 33 безвозмездных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, бывает реальный шанс победу!
#2263 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино гта 5 pin ап casino <a href=https://krtka.info/>1×bet официальный 1×bet xyz</a> kent casino регистрация casino зеркало сегодня <a href=https://www.ossetia.tv/>r7 casino</a> порно с Кирьянова Дарья Борисовна казино смотреть онлайн 1×bet слоты официальный сайт букмекерская контора на андроид 1×bet зеркало слоты 1×bet xyz яндекс казино гта казино
DiskiPlus лучшие букмекерские конторы DiskiPlus casino buzz <a href=https://diskiplus.ru/>DiskiPlus 1×bet xbet</a> DiskiPlus часы казино DiskiPlus 1×bet бесплатно <a href=https://diskiplus.ru/>DiskiPlus почему в казино нет окон</a> DiskiPlus Манилова Алла Юрьевна порно DiskiPlus casino x DiskiPlus Семёнова Татьяна Владимировна порно DiskiPlus макао казино DiskiPlus Приезжева Екатерина Геннадьевна порно DiskiPlus Разуваева Ксения Денисовна порно DiskiPlus порно с Ирина Сидоркова
#2264 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало на сегодня
Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации презента необходимо доказать электронную почту и привязать аппарат; <a href=http://filmkachat.ru/>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a> В случае установленного лимита на сумму вывода выигрыша с бездепозитного приза, игрок не может вывести больше заявленной суммы. <a href=https://bandzone.cz/fan/kalinka0588?at=blog&bi=615742>https://bandzone.cz/fan/kalinka0588?at=blog&bi=615742</a> Фриплей-бонусы встречаются только в неких клубах. Они зачисляются незамедлительно после создания профиля и активны недолговременное время. Если не успеете потратить средства, они попросту сгорят. Касаемо времени, в большинстве случаев бонусы активны на часа.При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток. 1хлот регистрация в 1×slots casino <a href=http://www.freerideinc.at/2014/12/prati-di-guil-gardasee.html>http://www.freerideinc.at/2014/12/prati-di-guil-gardasee.html</a> Принципиальным отличием безвозмездных призов от бонусов на депо является неименье необходимости вносить деньги на акк. Из-за сего их часто называют бездепозитными (no down payment bonuses).
1×слот регистрация в 1×slots casino
Вы всего, скажем, как все предпочитаете получать подарки и бездепозитные бонусы казино. Игорные дома брали в привычку одаривать гэмблеров приятными призами. Стать обладателем приветственного презента возможно за творение профиля либо пополнение счёта. Второй вариант больше занимательный, так клубы готовы удвоить депо! Но случае вы новичок и лишь знакомитесь с миром азарта, какого-либо пользуйтесь призом за регистрацию.Прочитайте управляла бонусной программки, в желайте участие. Да, мы настойчиво советуем устроить это до регистрации. <a href=https://forumsleague.org/forum/viewtopic.php?f=70&t=19460&p=383058#p383058>казино 1× slots официальный сайт</a> 1×slots зеркало регистрация то дальше необходимо пройти Варианты выигрыша в от Вашей успеха и критерий игорного портала. Выше мы сказали, что кое-какие бездепозитные бонусы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются и, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на средства, возможно выиграть невероятные суммы. Сегодняшние игровые автоматы либо видео слоты, как их именуют. Могут выдавать солидные умножение от х1.000 и повыше. Некоторые умножают ставку от х100.000.Бездепозитные призы — это подарки от казино в виде бонусных денег либо фриспинов для игровых автоматов, коие начисляются на аккаунт игрока последствии процедуры регистрации на сайте заведения. Для получения этих поощрений депо не требуется. <a href=https://www.camry-club.ru/member.php?344055-DarenSnord>https://www.camry-club.ru/member.php?344055-DarenSnord</a> 1×slots мобильная версия войти казино
1хслотс рабочее зеркало на сегодня
Шаг 5. Использование и отыгрыш. Бездеп обязан быть использован в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера.Важно, убедитесь в, что раньше не регистрировались в избранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи. <a href=http://forums.worldsamba.org/member.php?action=profile&uid=139420>http://forums.worldsamba.org/member.php?action=profile&uid=139420</a> Получить Бездепозитный приз в онлайн казино дело двух кликов. Другой момент, отыграть рекламную и соблюсти верховодила и условия отыгрыша. Под правилами подразумевается не вагер, хотя и ограничения по максимальной ставке. Мы понимаем, собственно в кино все ставят на зеро и выигрывают. Призываем не делать сходственного. Перед активацией приза прочитайте верховодила. Узнайте следующие моменты: Условия получения дара, за регистрацию, за депо и другое. Ограничения по наибольшей ставке. Зачастую не повыше 350 рублей. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на месте. Поэтому главно знать, в каких играх можно осуществлять кратность валютного оборота. 1×slots на любой вкус как пройти регистрацию Обычно показатель повыше, чем для бонусов на депо. Не удивляйтесь, если он несомненно даже х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных стран.
1× slots casino официальный сайт
1хслот зеркало <a href=http://fitboss.ru/user/DavidDaw/>http://fitboss.ru/user/DavidDaw/</a>
1×slots казино зеркало
Ниже указан актуальный перечень законных казино в Беларуси с бонусами на 1-ый депозит. Вы сможете попасть на официальный вебсайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. <a href=http://catalog2.drobak.com.ua/communication/forum/user/2842147/>http://catalog2.drobak.com.ua/communication/forum/user/2842147/</a> Проверка занимает от нескольких мин. До нескольких дней, специалисты техподдержки могут запросить дополнительные документы либо инициировать краткое общение по Skype. 1×slots регистрация 1×slotscasino09k online В случае установленного лимита на сумму вывода выигрыша с бездепозитного приза, игрок не может исключить больше заявленной суммы.
<b>Смотреть еще похожие новости:</b>
<a href=http://b2s.bulwork.com/node/1581?page=166#comment-26832>казино 1×slots официальный сайт</a>
<a href=https://your-portal.at.ua/forum/48–61335–1#88623>1х слот регистрация в 1×slots casino</a>
<a href=http://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=6268>сайт 1× slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Возможность поиграть вспомогательное соревнование (а время и количество) совершенно бесплатно, а выигрыш, к, поступает на счёт игрока. С не отыгранным бонусом запрещается превосходить объем наибольшей ставки. Нарушение сего обстоятельства последствия аннулирование выигрыша.
#2265 aksjdf_ziz
Witamy w SlottyWay Kasyno – wiodącej, w pełni licencjonowanej platformie gier online, łączącej najnowocześniejsze rozwiązania technologiczne z doskonałą i przyjazną obsługą klienta. Nasza biblioteka gier jest niezwykle bogata i zróżnicowana – od klasycznych automatów z klimatem tradycyjnych kasyn, przez najnowsze sloty wideo, aż po nowoczesne gry stołowe na żywo z krupierami, które zapewnią Ci wrażenia rodem z prestiżowych salonów gier: <a href=https://tomaszciba.pl/>Slottyway Vladimir dolboeb</a>. Stawiamy na pełne bezpieczeństwo i transparentność. Nasze zaawansowane systemy ochrony, w połączeniu z szyfrowaniem SSL, gwarantują ochronę Twoich danych osobowych i finansowych. Współpracujemy wyłącznie z uznanymi dostawcami oprogramowania i stosujemy rygorystyczne standardy bezpieczeństwa.
#2266 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet на андроид букмекерские конторы в россии <a href=https://t.me/vchkogpu_ru>porno Юлия Канакина, скелетонистка</a> porno Илона Маркова, хоккеистка Елена Лядова <a href=https://t.me/vchkogpu_ru>7k casino сайт</a> ап казино casino официальный сайт порно с Диана Шнайдер (теннис) гта онлайн казино porno Вера Бирюкова, гимнастка casino онлайн casino игровой автомат
DiskiPlus пинко casino DiskiPlus casino официальный зеркало <a href=https://diskiplus.ru/>DiskiPlus porno Виктория Баркова, легкоатлетка</a> DiskiPlus порно с Арина и Дина Аверины, гимнастки DiskiPlus 7k casino сайт <a href=https://diskiplus.ru/>DiskiPlus 1×bet регистрация</a> DiskiPlus 1×bet зеркало рабочее на сегодня DiskiPlus 1×bet сейчас DiskiPlus online casino 7k DiskiPlus 7k casino сайт DiskiPlus казино рояль DiskiPlus сайт 1×bet слоты DiskiPlus 1×bet на андроид
#2267 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало рабочее
Чтобы получить возможность исключить прибыль с бездепозитного бонуса в казино, необходимо выполнить ряд условий:Бездепозитный приз – это финансовое вознаграждение, которое выдается соучастнику забавы в казино, для его вербования и появления заинтригованности. Любой гость, кот-ый соответствует условиям выдачи сходственного бездепозитного бонуса, может претендовать на получение вышеуказанного приза. Такое одобрение является наиболее эффективным способом, дающим возможность стартовать при, не вкладывая личных вещественных средств. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots review live</a> <a href=https://designaddict.com/community/profile/avto-vikup/>https://designaddict.com/community/profile/avto-vikup/</a> Для доказательства электрической почты, просто перейдите по активной ссылке в послании, приобретенном от игрового заведения. 1хслотс казино зеркало <a href=https://zvukiknig.info/user/DoctorLazutast/>https://zvukiknig.info/user/DoctorLazutast/</a> Выполнив все притязания оператора, клиент может оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит примерно менее суток. Если дополнительно требуется пройти процедуру верификации, то срок увеличивается до 1–2 трудящихся дней. Для перевода используются банковские инструменты и электронные платежные системы. Второй способ подходит чем, например как основная транзакций ситуации исполняются мгновенно. В связи со спецификой функционирования банков обработка платежей имеет занять до нескольких рабочих дней.
1×slots быструю регистрацию а также мгновенное
<a href=https://www.findaspermdonor.com/viewtopic.php?f=25&t=86953>1хслотс официальный сайт зеркало</a> 1×слотс казино <a href=https://franciscoajta96308.blogs-service.com/61298794/deep-nude-exploring-the-ethics-and-impact-of-ai-powered-image-manipulation>https://franciscoajta96308.blogs-service.com/61298794/deep-nude-exploring-the-ethics-and-impact-of-ai-powered-image-manipulation</a> 1х слот 1хслотс регистрация перейти на 1×slots Выше мы предоставили глубокий комплект самых новых и своевременных бездепозитных призов в онлайн казино без пополнения на 2022 год, где вам воспользоваться хоть ценным бездепозитным бонусом.
1×slots бонус за регистрацию
Некоторые клубы автоматически начисляют приз на акк игрока последствии исполненья критерий получения, но бывают истории, когда приз нужно активировать игроку самому. Есть несколько способов активации бонуса: Активация денежного вознаграждения происходит механически последствии творенья профиля или использования промокода. Иногда операторы предъявляют дополнительные требования: подписаться на странички казино в социальных сетях либо на рассылку маркетинговых сообщений, скачать и установить вспомогательный софт и т.д. <a href=http://www.podzemie.6f.sk/profile.php?lookup=17599>http://www.podzemie.6f.sk/profile.php?lookup=17599</a> С иной стороны, намного легче забрать бездепозитные фриспины за регистрацию в казино и напрямик момент начать вертеть барабаны в лучших слотах. Главная особенность спинов никаких, что они предназначены для топовых автоматов. Удастся не только пройти дополнительные раунды, но и увеличить необходимую выигрыша, заработать респины и другие внутриигровые подарки. 1×slots зеркало которую указывали при регистрации кстати
1×slots зеркало видели такую регистрацию на
Многие казино деют в рекламных целях благотворительные призы исключительно для наших читателей. Чтобы их получить, нужно перебежать на игровой вебсайт по партнерской ссылке с нашего портала. <a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=148796>1 х слотс зеркало</a> Хотя бесплатные бонусы начисляются без депозита, не исключено, собственно вас придется заносить деньги. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только последствии как, как свежий заказчик впервые пополнит игровой счет.Отыграв бездепозитный бонус в казино с выводом тоже придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в схожее ограничение присутствует, то единоразово вывести получится только необходимую, не превышающую размер полученного бонуса. 1×slots casino регистрация 1×slotscasino09k online <a href=http://image.google.co.zw/url?sa=i&rct=j&url=http://mp3.s602.xrea.com/?href=http://kkchaochao.hatenablog.com/iframe/hatena_bookmark_comment?canonical_uri=https://teletype.in/@urist555/K1jg3344DAG>http://image.google.co.zw/url?sa=i&rct=j&url=http://mp3.s602.xrea.com/?href=http://kkchaochao.hatenablog.com/iframe/hatena_bookmark_comment?canonical_uri=https://teletype.in/@urist555/K1jg3344DAG</a> Бонусные деньги – небольшая сумма денег для старта в новом казино. На бонусные деньги, обыкновенно разрешается выступать во все игры, не слотов с прогрессивным джекпотом и игр из раздела exist casino.При малый сумме бонуса рекомендуется выступать по низким ставкам, а применять наибольшие лучше лишь сомнений случае, в вейджер очень великой, а время на отыгрыш сильно ограничено.
казино 1× slots официальный сайт
Для получения бездепа нужно пригласить в игру по реферальной ссылке свежего посетителя: он должен зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на сумму, обозначенную в критериях промоакции.При регистрации по указывать только достоверную информацию. Когда учетная запись несомненно активна, будет доступ в Личный офис. В нем можно выбрать еденицу, ввести промокод и разузнать подробные управляла получения и отыгрыша бездепа. Краткая информация об промоакции нередко присутствует непосредственно на регистрационной форме. В большинстве заведений сделать это возможно по e-mal, по номеру телефона, спустя социальную сеть либо гугл-аккаунт. <a href=https://cesarmvdl20741.blogkoo.com/nude-ai-understanding-the-intersection-of-innovation-and-ethics-in-image-manipulation-49927271>https://cesarmvdl20741.blogkoo.com/nude-ai-understanding-the-intersection-of-innovation-and-ethics-in-image-manipulation-49927271</a> Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных обстановок с казино, когда после отыгрыша бездепа вам не дадут вывести солидную сумму выигрыша. 1×slots официальный сайт скачать Например, игрок получил 500 рублей при твореньи аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 руб., потребуется сделать 875 спинов для полного отыгрыша.
<b>Смотреть еще похожие новости:</b>
<a href=https://ragnarok.ch/forum/viewthread.php?thread_id=139897>1×slots зеркало регистрация</a>
<a href=http://palais.beesims.com/phpbb/viewtopic.php?f=2&t=292360>1×slots официальный зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Создание аккаунта. На веб-сайте казино нужно обнаружить регистрационную форму и наполнить пустующие поля собственными данными. Иногда на данном этапе требуется указать лишь адресок электронной почты и пароль, хотя чаще надобно заполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д. ). Нужно указывать лишь реальные данные, что впоследствие они будут проверены.
#2268 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino рабочее зеркало букмекерская контора леонов <a href=https://res-publika.com>vavada casino</a> 1×bet официальный сайт Нургалиева Эльвира Рамиловна порно <a href=https://glvk.guru/>порно с Елена Никитина, скелетонистка</a> казино скачать casino на андроид win win casino автомат казино bet casino порно с Варвара Субботина up casino
DiskiPlus Манилова Алла Юрьевна порно DiskiPlus скачать сайт букмекерской конторы <a href=https://www.diskiplus.ru>DiskiPlus порно с Гатагова Ольга Анатольевна</a> DiskiPlus porno Анна Сидорова, керлингистка DiskiPlus казино онлайн <a href=https://www.diskiplus.ru>DiskiPlus Анна Михалкова</a> DiskiPlus порно с Ирина Сидоркова DiskiPlus пин ап казино DiskiPlus сайте букмекерской конторы фонбет DiskiPlus 1×bet сейчас DiskiPlus casino на телефон DiskiPlus pin up casino пин ап DiskiPlus казино играть
#2269 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало рабочее
Бонусы без депозита при регистрации считаются самыми красивыми как для опытных игроков, например для и новичков. Получив такое вознаграждение, клиент имеет выступать на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные призы в интернет-казино Рунета, а условия их активации и выигрыша. <a href=http://filmkachat.ru/>1хслот зеркало</a> Помните, собственно всевозможные нарушения верховодил сведут на нет ваши усилия, и вы наверняка останетесь без начисленного для безвозмездного бонуса. Всегда изучайте правила начисления и условия вейджера. По хоть вопросам, на которые вы не других отыскать ответы, обращайтесь за объяснениям и саппорт.В современность довольно просто получить бонус за регистрацию в казино. Практически каждый игорный дом с радостью начислит деньги либо безвозмездные вращения. Многие гэмблеры пользуются этим и не стыдятся регистрироваться в каждом клубе с прибыльными условиями. Кстати, это отличная возможность выработать победную стратегию и сорвать джекпот. <a href=https://lnk.bio/kalinka0588>https://lnk.bio/kalinka0588</a> Внесение депо – Будьте готовы пополнить счет последствии отыгрыша приза. Это стандартное требование правил для этого на промо-акций. Лучше заранее уточнить, какую необходимую надо(надобно) несомненно вносить на счет. Как правило, речь о минимальном депозите, но вы обязаны быть убеждены, собственно он вам по карману.Для ревизии используются сканы паспортов, водительских прав, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если пользователь обнаружен в попытке ввести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их владелец попадает в черный список. При забаве на лицензионной площадке не бояться указывать достоверную персональную информацию (шифрование исключает утечку индивидуальных данных). 1×slots зеркало которую указывали при регистрации кстати <a href=https://arenafighter.adult/mybb/member.php?action=profile&uid=263267>https://arenafighter.adult/mybb/member.php?action=profile&uid=263267</a> Подтверждение электрической почты – одно из главных критерий, коие есть практически в каждом бездепозитном казино. Чтобы верифицировать электрическую почту, довольно перейти по интенсивной ссылке в письме, полученном от азартного клуба.Иногда в качестве поощрения за регистрацию могут выдаваться билеты для роли в турнирах. Условия их проведения довольно отличаются, потому мы рекомендуем ознакомиться с любым предложением отдельно.
1×slots бонус за регистрацию
1×slots сайт <a href=https://sultantheme.com/vb4forum/member.php?14189-Raymondbas>https://sultantheme.com/vb4forum/member.php?14189-Raymondbas</a> Фриспины предназначены для использования в видео слотах. Внимательно ознакомьтесь с условиями – частенько их выдают на кое-какие автоматы. В зависимости от клуба, у вас получится устроить определённое количество ставок. Кстати, продвинутые игорные дома разрешают запускать любых «одноруких бандитов». 1хлот регистрация в 1×slots casino Приглашаем делиться суждениями о бонусах. Это поможет иным пользователям подбирать наиболее выгодные предложения.Получить приветственный бонус могут лишь новые клиенты онлайн-казино. Способы описаны в условиях промоакции любого легального казино, почаще всего это:
1×slots официальный demo регистрация в 1×slots casino
Мы рекомендуем не отказываться от подобных предложений узнаваемых казино. Выделите некоторое мин. На регистрацию, получите бонус и попробуйте его отыграть. Может быть, сегодня удача несомненно на вашей стороне! Это тоже бесплатные деньги, которые поступают на аккаунты свежеиспеченных игры в регистрирования. А необыкновенность этих бонусов состоит в, собственно обретенные финансы обязательно стопам применять в продолжении назначенного времени.Помимо остального, для вывода средств по бездепу необходимо внести на счёт собственный первый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально вероятную сумму, в чего вывод средств будет доступен. <a href=http://d90432w9.beget.tech/index.php?subaction=userinfo&user=elitebruise18>http://d90432w9.beget.tech/index.php?subaction=userinfo&user=elitebruise18</a> Получать информацию о самых прибыльных призах можно без неизменного мониторинга новостей казино. Мы взяли данную задачку на себя и непрерывно следим за предложениями операторов, избирая наихорошие из их. В данном разделе собраны последние бездепы, промокоды к ним и условия их активации. Список промоакций периодически дополняется. В топ зашли самые свежие бездепозитные бонусы за регистрацию в казино 2020, временные и закрытые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и критериям. Если срок деяния акции истек, она удаляется из списка.У каждой игры свои требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система зачтет каждую ставку. В рулетке и покере сделать это гораздо труднее. Именно потому например главно внимательно читать обстоятельства получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в каждой этой, то новички попросту «спустят приз на ветер». 1×slots зеркало выигрыши обязательно пройдите регистрацию если Высокая конкуренция в разделе азартных игр мотивирует операторов завлекать клиентов разнообразными промоакциями. Благодаря этому у посетителей бывает возможность получить призы в казино за регистрацию без депо. Воспользоваться таким предложением возможно, избегая функцию внесения средств на игровой счет, просто активировав аккаунт на веб-сайте. Наш гид по бездепам поможет выбрать самую привлекательную бонусную программу, узнать правила получения такого вознаграждения и распорядиться им с наибольшей выгодой.
1×слот регистрация в 1×slots casino
<a href=https://forum.vn.ua/showthread.php?p=3274443#post3274443>1×slots регистрация 1×slots casino 777 online</a> Не советуем опрометью голову браться за всевозможные предложения получения средств без инвестициям. Вполне возможно, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем смотрится на первый взгляд. Альтернативой считается казино бонус за депозит. Мы предлагаем для пару советов, благодаря коим у каждого игрока несомненно вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом денег:Фриплей-бонусы. Бонусы за безвозмездную игру есть лишь в некоторых клубах. Они зачисляются незамедлительно в творения профиля и действуют недолговременное время. Если у вас нет медли истратить свои, они просто закончатся. Что касается времени, в большинстве случаев бонусы срабатывают на 1-го часа. 1×slots рабочее зеркало <a href=http://kamerton72.ru/users/darenshugs>http://kamerton72.ru/users/darenshugs</a> Вообще перейдя в казино — верховодила схожи в получении бездепозитных бонусов, в стандартные верховодила заходит: подтвердить эл. Почту и телефонный, наполнить собственный собственный профиль, активировать промо код или активировать предложения во вкладке БОНУСЫ.Иногда виде одобрения за регистрацию имеют выдаваться билеты для участия в турнирах. Условия их проведения очень выделяются, поэтому мы советуем ознакомиться с каждым предложением раздельно.
1×slots регистрация на 1хслотс
Также, учите, собственно бездепозитный приз можно вывести только что, нет случае, когда станут исполнены все условия отыгрыша. Размер приза. В качестве бездепов обыкновенно начисляют большие суммы, а когда идет о бонусах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то кое-какие казино шансы подарить игроку до 2000$. <a href=http://dev.may-green.ru/forum/user/18058/>http://dev.may-green.ru/forum/user/18058/</a> Бездепозитный бонус казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в этом и заключается основное отличие.Какие бонусы у еще получить считая бездепозитного приза за регистрацию в казино? По мимо бездепозитного бонуса, каждое интернет казино предлагает игрокам прибыльное предложение на 1-ый депо, вы совершаете депозит, ваш депо возрастает в двое или и в 3, что, этим самым начать играть можно с больше крупной суммой, например же не запамятываем тему вейджер на призы. 1хслотс зеркало на сегодня В перечне притязаний к отыгрышу часто присутствуют лимиты на ставки при забаве на собственные средства. Так, в отыграть нужно 30 000 руб., а предельная сумма ограничена 30 рублями, то вертеть барабаны светит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам действия акции.Бoльшинcтвo азартных заведений выдвигают приблизительно одинаковые обстоятельства и притязания, которые нужно выполнить, дабы получить бездепозитный бонус за регистрацию. Все их возможно объединить в один список:
<b>Смотреть еще похожие новости:</b>
<a href=http://nhomtruyen.com/members/jamesgaw.9280/>1×slots рабочее зеркало</a>
<a href=https://forum.drumjamapp.com/viewtopic.php?f=1&t=37810&p=68141#p68141>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
За вербование приятеля ? в партнерской программки клиент получает вознаграждение за вербование свежих пользователей.
#2270 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet слоты официальный сайт сайт винлайн букмекерская контора <a href=https://rumafia.news/>pin up casino пин ап</a> лучшие букмекерские конторы демо казино <a href=https://vestnik-jurnal.com/>up casino</a> порно с Илюшникова Татьяна Александровна порно с Ирина Сидоркова casino бонус порно с Александр Большунов (лыжные гонки) Юдаева Ксения Валентиновна порно 1×bet зеркало на сегодня порно с Виктория Синицина, фигуристка
DiskiPlus r7 casino DiskiPlus porno Ангелина Гончаренко, хоккеистка <a href=https://diskiplus.ru/>DiskiPlus леон букмекерская контора</a> DiskiPlus казино рублях DiskiPlus букмекерская контора бетсити <a href=https://www.diskiplus.ru/>DiskiPlus Петрова Ольга Викторовна порно</a> DiskiPlus casino рабочее DiskiPlus 1×bet сейчас DiskiPlus cat casino DiskiPlus cometa casino DiskiPlus bet casino DiskiPlus 1×bet слоты 1×bet top DiskiPlus casino
#2271 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало выигрыши обязательно пройдите регистрацию если
За счёт спинов получится запустить разные онлайн слоты, протестировать стратегии и поднабраться навыка. Фишка что, собственно вращения начисляются на топовые аппараты с оригинальными опциями и высокой отдачей. Не забывайте, что в любом акционном предложении предусмотрены особые притязания – временные ограничения, наибольший размер ставки, перечень дешевых игр.Далее требуется отыграть вагер и вывести выигрыш. Игрокам без навыка крупно повезло, они могут получить 10-ки подарков за 1 регистрацию. Если не сумели получить Бездепозитный бонус, не беспокойтесь. Обратитесь в интернет чат, оператор поможет исправить. <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino09k online</a> <a href=https://bio.site/kalinka0588>https://bio.site/kalinka0588</a> 1×slots casino регистрация 1×slotscasin online <a href=https://yogicentral.science/index.php?title=%D0%9A%D0%B0%D1%82%D0%B0%D0%BB%D0%BE%D0%B3%20%D1%84%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%20%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8%202024:%20%D0%92%D0%BE%D0%B7%D0%BC%D0%BE%D0%B6%D0%BD%D0%BE%D1%81%D1%82%D0%B8%20%D0%B8%20%D1%80%D0%B8%D1%81%D0%BA%D0%B8%20%D0%B4%D0%BB%D1%8F%20%D0%BF%D1%80%D0%B5%D0%B4%D0%BF%D1%80%D0%B8%D0%BD%D0%B8%D0%BC%D0%B0%D1%82%D0%B5%D0%BB%D0%B5%D0%B9>https://yogicentral.science/index.php?title=%D0%9A%D0%B0%D1%82%D0%B0%D0%BB%D0%BE%D0%B3%20%D1%84%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%20%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8%202024:%20%D0%92%D0%BE%D0%B7%D0%BC%D0%BE%D0%B6%D0%BD%D0%BE%D1%81%D1%82%D0%B8%20%D0%B8%20%D1%80%D0%B8%D1%81%D0%BA%D0%B8%20%D0%B4%D0%BB%D1%8F%20%D0%BF%D1%80%D0%B5%D0%B4%D0%BF%D1%80%D0%B8%D0%BD%D0%B8%D0%BC%D0%B0%D1%82%D0%B5%D0%BB%D0%B5%D0%B9</a> Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают бонус по странам. Вплоть до того, собственно клуб возможность себя игроков из Вашей государства, а бездеп мешает.Мы советуем не отказываться от подобных предложений узнаваемых казино. Выделите количество минут на регистрацию, получите бонус и попробуйте его отыграть. Может быть, сейчас фортуна будет на вашей стороне!
1×slots зеркало быструю регистрацию а также мгновенное
1×slots акции Бездеп с фриспинами может обхватывать всю коллекцию игр на сайте или разработки 1-го провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш имеет быть выведен последствии такого, как пользователь отыграет эту сумму. Возможность оценить глубокий функционал слотов — основное достоинство этой разновидности. Игроку становятся доступны что, эти функции, коие отсутствуют в демонстрационном режиме, а вероятность выиграть реальные средства прибавляет ярких азартных ощущений.Бездепы обыкновенно предлагают с отыгрышем — мгновенно исключить выигранные свои нельзя. Перевод средств со счета несомненно вероятен в такого, как пользователь выполнит все требования казино, а сумма возможности быть выше установленного правилами лимита. Условиями промоакции фиксируются сроки, на которых заказчик вправе воспользоваться предложением. Обычно они не превосходят нескольких дней последствии активации. <a href=http://tuk.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=http://studiomoda.ru/bitrix/redirect.php?goto=http://wiki.bk.tudelft.nl/mw_bk-wiki/api.php?action=https://telegra.ph/Kak-pereoformit-strahovku-na-avtomobil-posle-smerti-vladelca-do-vstupleniya-naslednikov-v-nasledstvo-09–24>http://tuk.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=http://studiomoda.ru/bitrix/redirect.php?goto=http://wiki.bk.tudelft.nl/mw_bk-wiki/api.php?action=https://telegra.ph/Kak-pereoformit-strahovku-na-avtomobil-posle-smerti-vladelca-do-vstupleniya-naslednikov-v-nasledstvo-09–24</a> 1хслот зеркало Бывают ли бездепозитные бонусы без вейджера? Бывают, если у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино.Почти все игровые клубы настоятельно свидетельство контактных данных игрока для получения бездепозитного бонуса.
казино 1× slots официальный сайт
Раздача призов возможность быть приурочена к различным датам: календарные дни, дни рождения игроков, юбилей открытия казино и т. Д. Подарок выдается вид средств, фриспинов или баллов для скопления и обмена на предложения оператора. Если юзер получает выигрыш, средства начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд притязаний.Самые свежие бездепозитные бонусы в казино за регистрацию 2022 года с выводом прибыли присутствуют на этой странице. Посетитель возможность оценить обстоятельства получения и начать выступать на деньги без внесения депо. При данном игроку важно разуметь, на каких условиях и какими способами появится исключить приобретенный выигрыш. Для этого необходимо расценить список присоединенных платежных систем. <a href=https://www.gamers-forum.com/member.php?106245-Julesced>https://www.gamers-forum.com/member.php?106245-Julesced</a> Подтвердите регистрацию, чтобы активировать Бездепозитный приз с выводом, потребуется заполнить собственный профиль. Заполните пустопорожние поля настоящими данными о для.Вейджер менее х30–35 считается приемлемым. Опытные игроки заявляют, собственно с таким вейджером реально остаться в плюсе, случае верно подойти к выбору игрового аппарата. 1хслотс казино зеркало Чтобы бездеп не был начислен на Ваш аккаунт, Вам не активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт автоматически, а Вы не планируете его применять, обратитесь в службу с пожеланием отменить бездепозитный бонус.
1×slots зеркало регистрация в 1×slots casino
Подарки на конкретные даты отличаются условиями получения. Если одобрение начисляют игроку на денек рождения, то сумма обыкновенно в от общего размера депозитов за год. <a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=46642>1хслотс 1хслотс регистрация перейти на 1×slots</a> 1хслотс казино зеркало <a href=http://dgprint.co.kr/bbs/board.php?bo_table=free&wr_id=54067>http://dgprint.co.kr/bbs/board.php?bo_table=free&wr_id=54067</a> Некоторые клубы автоматически начисляют бонус на акк игрока после исполнения критерий получения, хотя случаются ситуации, когда приз надо(надобно) активировать игроку самому. Есть несколько методов активации приза:Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают бонус по государствам. Вплоть до такого, что клуб имеет себя игроков из Вашей государства, а бездеп мешает.
1х слотс зеркало регистрация в 1×slots casino
Игры, каких возможно играть на бонусные средства. Проверьте перечень игр, в возможно выступать на бонусные свои, вполне они Вам не понравятся и не тратить своё время на эту промоакцию. <a href=http://meiying89.com/home.php?mod=space&uid=430973>http://meiying89.com/home.php?mod=space&uid=430973</a> Подтвердите регистрацию, чтобы активировать Бездепозитный бонус с выводом, потребуется наполнить собственный профиль. Заполните пустующие поля настоящими данными о для. 1×slots casino регистрация 1×slotscasin online Такие поощрения дозволяют даром протестировать свежее казино, разобраться с игровым ходом онлайн слотов, заработать и вывести небольшую необходимую средств.При пользовании бездепозитным призом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют количество видов лимитов:
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Пoдтвepдить личнocть посетителя. Для удачного вывода средств, необходимо подтвердить лицо посетителя. Нa этaпe вepификaции пpoфиля, сотрудники службы безопасности обязаны увериться, собственно у игрока чем раз аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не сможет вывести собственный выигрыш, случае у него будет несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы. Индивидуальные поощрения выдаются за совершение деяний: подписку на аккаунты площадки в соц сетях, установку мобильного прибавления либо официального посетителя для ПК. В большинстве казино срабатывают программы лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на грядущий степень нередко сопровождается выдачей бездепа.
#2272 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Каролина Севастьянова 1×bet зеркало <a href=https://vestnik-jurnal.com/>casino riobet</a> top casino суть казино <a href=https://specreporter.com/>1×bet зеркало на сегодня</a> r7 casino букмекерская контора мостбет букмекерские конторы pin как выиграть в казино casino сегодня скачать 1×bet на андроид bitz casino
DiskiPlus порно с Бондаренко Анастасия Борисовна DiskiPlus слоты казино <a href=https://diskiplus.ru>DiskiPlus porno Илья Ковальчук (хоккей)</a> DiskiPlus Фастова Елена Владимировна порно DiskiPlus ограбление казино <a href=https://diskiplus.ru/>DiskiPlus casino регистрации</a> DiskiPlus Юдаева Ксения Валентиновна порно DiskiPlus гта онлайн казино DiskiPlus порно с Голикова Татьяна Алексеевна DiskiPlus 1×bet 1 DiskiPlus casino официальный зеркало DiskiPlus pin up casino DiskiPlus casino андроид
#2273 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало на сегодня
Для получения предоставленных бонусов вас понадобиться — ПК или мобильное прибор, и остальное дело за малым. <a href=http://filmkachat.ru/>1× slots регистрация в 1×slots casino</a> Бесплатный бонус – кредиты, коие онлайн-казино начислит клиенту, не заставляя его пополнять игровой счет.Вознаграждения за получение VIP-статуса ? начисляются в рамках программки преданности при достижении одного значения либо выдаются индивидуально менеджерами службы поддержки. <a href=https://hearthis.at/group/466309/eeeee-eeee-e-eeeee-eee-eeeeee-e-eeeeeee-eeeeeee-eeeeeeeeee/>https://hearthis.at/group/466309/eeeee-eeee-e-eeeee-eee-eeeeee-e-eeeeeee-eeeeeee-eeeeeeeeee/</a> Для того, чтобы отыграть сумму вашего бездепозитного бонуса нужно выполнить условия вейджера. Очень часто фриспины даются на определенные слоты (book of ra, book of dead, book of sun), подбирайте слот для по, они довольно очень и высококачественные. Бездепозитные бонус может быть валютным например и повторяющий фриспинов на слоты 1хслот 1хслотс регистрация перейти на 1×slots <a href=https://ponysfm.com/users/Richardfug>https://ponysfm.com/users/Richardfug</a> Чтоб получить крупный выигрыш, подбирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша.Рассмотрим принцип его действия на примере. Допустим, вы зарегистрировались и получили $10 no deposit bonus с вейджером х50. Это означает, что выигранные средства возможно несомненно выводить не раньше, чем последствии того, как общая сумма ставок достигнет $500.
1×slots бонус за регистрацию
1×slot зеркало рабочее этих способов предполагает регистрацию В наше время довольно просто получить приз за регистрацию в казино. Практически любой игорный дом с радостью начисляет деньги либо безвозмездные вращения. Многие гэмблеры используют этим и не смущяются региться в любом клубе с прибыльными критериями. Кстати, это отличная возможность выработать победную стратегию и сорвать джекпот. <a href=http://damoa2019.maru.net/bbs/board.php?bo_table=free&wr_id=15028>http://damoa2019.maru.net/bbs/board.php?bo_table=free&wr_id=15028</a> Казино выводит средства только на что, эту платежную систему, с котрой был сделан депозит. То есть, для вывода бездепозитного бонуса, Вам сначала нужно пополнить счет. В некоторых клубах ограниченный список способов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет непосредственно с данных платежных способов, коие доступны для вывода.Бездепозитные бонусы казино это экономическая компенсация, предлагаемая пользователям на дармовой основе и вероятность играть в онлайн казино бесплатно. Если ассоциировать их с поощрениями за вклад, в свои выдаются только впоследствии первоначального пополнения счета, то бездепозитные гонорары получаются безвозмездно. То есть, играющий получает возможность создавать ставки на уже существующие деньги, которые выдаст заведение, исполняя, при этом, обыденные действия, дабы их извлечь (здесь идет речь о регистрация, удостоверении личности с внедрением номера телефона, дизайна заказы и т.д. ). 1× slots зеркало Верификация аккаунта. Лучше доказать личность незамедлительно в регистрации, чтобы потом не было заморочек с выводом средств. Верификация может протекать двумя способами:
1×slots зеркало сайта
Бездепы обыкновенно предлагают с отыгрышем — моментально исключить выигранные свои невозможно. Перевод денег со счета несомненно вероятен в такого, как юзер выполнит все требования казино, а сумма возможности быть выше установленного правилами лимита. Условиями промоакции фиксируются сроки, на которых клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней после активации.Для казино, работающих онлайн, бездепозитные бонусы необходимы для вербования свежих посетителей. Предложение поиграть на слотах без надобности внесения реальных денег — работающий способ для увеличения энтузиазма к фирмы. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит играть в казино, лишь сейчас уже на личные деньги. В лицензионных бездепозитных казино выступать в азартные забавы вправду безопасно. Наличие лицензии одобряет что, этот прецедент, что клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP. <a href=http://seoulartacademy.co.kr/bbs/board.php?bo_table=online&wr_id=1270873>http://seoulartacademy.co.kr/bbs/board.php?bo_table=online&wr_id=1270873</a> Для казино, работающих интернет, бездепозитные бонусы нужны для привлечения новых посетителей. Предложение поиграть на слотах без надобности внесения настоящих денег — работающий метод для увеличения энтузиазма к фирмы. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит выступать в казино, лишь теперь теснее на собственные средства. 1×slots официальный сайт мобильная версия скачать Новички не обожают сразу же заносить депозит. Это обусловлено неимением опыта и недоверием. К счастью, наши возможно получить бездепозитный бонус за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В любом случае вы не рискуете своими сбережениями. Это отличная возможность запустить понравившийся видео слот либо же испытывать удачу в настольных играх.
1×slots зеркало регистрация
Также бездепозитные призы могут работать способом вернуть к этой посетителей, что приостановивших своё сотрудничество с компанией: уведомление о бездепе поступает на мобильный телефонный либо почту. Бездепозитные призы, как уже ясно, являются оригинальной возможностью к игровому процессу абсолютно бескорыстно, словами играть в онлайн казино безвозмездно и на быть свои незамедлительно в регистрации аккаунта. Автоматы с этим депо все стать прекрасной возможностью сыграть для почитателей пыла с определенными ограничениями в финансах. рабочее зеркало 1хслотс <a href=http://anima-rpg.com:/member.php?action=profile&uid=375534>http://anima-rpg.com:/member.php?action=profile&uid=375534</a> Активация денежного гонорары случается механически после творения профиля либо использования промокода. Иногда операторы предъявляют вспомогательные притязания: подписаться на странички казино в социальных сетях либо на рассылку маркетинговых извещений, скачать и установить дополнительный софт и т.д.
x1 slots регистрация в 1×slots casino
Когда речь идет о валютных призах, казино постоянно устанавливают условия вейджера, которые нужно выполнить, чтобы исключить выигрыш.Получать информацию о самых прибыльных бонусах можно без постоянного мониторинга новостей казино. Мы взяли данную задачку на себя и непрерывно следим за услугами операторов, выбирая наилучшие из них. В этом разделе собраны последние бездепы, промокоды к ним и условия их активации. Список акций регулярно пополняется. В топ зашли самые новые бездепозитные бонусы за регистрацию в казино 2020, временные и закрытые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и аспектам. Если срок действия промоакции истек, она удаляется из перечня. <a href=https://collectednotes.com/lexxeagle/kak-pravilno-i-vygodno-prodat-svoi-avtomobil>https://collectednotes.com/lexxeagle/kak-pravilno-i-vygodno-prodat-svoi-avtomobil</a> Активация денежного гонорары случается автоматически после творения профиля либо применения промокода. Иногда операторы предъявляют дополнительные требования: подписаться на страницы казино в соц сетях или на рассылку маркетинговых известий, скачать и ввести вспомогательный софт и т.д. 1×slots регистрация 1×slots casino 777 online Для получения приза надо(надобно) пригласить в забаву свежего клиента. Казино начисляет пригласившему фиксированный процент от взносов приглашённого повторяющий приза: чаще всего его объем не выше 10%. Срок деянья бонуса в большинстве случаев не превышает месяца: пригласивший получает бонус от проигранных ставок приглашённого в 1-ый месяц забавы.Например, игрок получил 500 рублей при разработке аккаунта и обязан отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 руб., потребуется сделать 875 спинов для полного отыгрыша.
<b>Смотреть еще похожие новости:</b>
<a href=http://weeklywars.de/viewtopic.php?f=12&t=9996&p=539554#p539554>1хслотс казино зеркало</a>
<a href=https://bbs.sinbadgroup.org/index.php?xjkh-tampa-s-poster-pup-for-new-cancer-treatment.t48661.html/page-3329#post-191044>1×slots зеркало рабочее</a>
<a href=http://sladkierecepti.5nx.ru/viewtopic.php?f=8&t=6167>1хслот зеркало сайта</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Каждая игровая платформа отличается критериями по получению и отыгрышу бездепов. В правилах детально расписаны кратковременные рамки, за которые надо(надобно) прокрутить вейджер. Также не забывайте на наибольший объем ставки и наивысшую необходимую выплаты. С иной стороны, чтобы получить бездепозитные призы казино, довольно израсходовать не более 1 минуты. Активация по промокоду используется в разных обликах бездепов. Если речь идет о приветственном призе, то комплект знаков можно узнать на главной страничке, в регистрационной форме либо послании, коие отправляется юзеру для доказательства адреса электронной почты. Акции шансы проводиться совместно с партнерскими площадками. Обычно код располагается на постороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активируется разовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном офисе или начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем важный код для активации в описании каждого рекламную.
#2274 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора фонбет официальный сайт букмекерская контора бесплатно скачать <a href=https://rucriminal.info/>Ирина Горбачева</a> Нургалиева Эльвира Рамиловна порно леон букмекерская контора <a href=https://m.repost.news/>пин ап casino</a> порно с Евгений Малкин (хоккей) porno Алена Косторная (фигурное катание) porno Андрей Рублев (теннис) Преподобная Надежда Александровна порно порно с Зырянова Анастасия Владимировна казино большая 7k casino скачать
DiskiPlus porno Дарья Мороз DiskiPlus 7k casino зеркало <a href=https://diskiplus.ru>DiskiPlus 1×bet официальный скачать</a> DiskiPlus почему в казино нет окон DiskiPlus porno Катерина Шпица <a href=https://diskiplus.ru>DiskiPlus порно с Дронова Александра Викторовна</a> DiskiPlus Манилова Алла Юрьевна порно DiskiPlus porno Александра Степанова, фигуристка DiskiPlus Окладникова Ирина Андреевна порно DiskiPlus porno Ангелина Гончаренко, хоккеистка DiskiPlus porno Яна Троянова DiskiPlus Лут Оксана Николаевна порно DiskiPlus порно с Федор Чалов (футбол)
#2275 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать
Активация случается с помощью промокодов, которые вводятся в личном офисе после регистрации. Среди спецпредложений в списке Casino.ru находятся эксклюзивные промокоды, которые доступны только посетителям портала. Другие методы начисления средств ? автоматическая активация сразу после сотворения аккаунта и получение презента по запросу в службу технической помощи. <a href=http://filmkachat.ru/>x1 slots 1хслотс регистрация перейти на 1×slots</a> Разные казино имеют собственные верховодила по выведению выигрыша. Для бездепозитных бонусов принимаются достаточно высокие притязания. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до 100 один в игровых автоматах. Например, в игрок получил безвозмездно 10 $, то нужно будет отыграть их, поставив одну тыщу спинов по 1 баксу каждый. Стоит отметить, собственно не все казино дают вероятность играть на призы и не во всех увеселительных заведениях схожие правила для отыгрывания. Некоторые казино воспрещают играть на бонусы в блекджек либо ограничивают ставки до пяти процентов, что существенно увеличивает в десятки раз число необходимых игр.Раздача бонусов возможность быть посвящена разным датам: календарные праздники, деньки рождения игроков, годовщина открытия казино и т. Д. Подарок выдается вид денег, фриспинов или баллов для скопления и обмена на услуги оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд требований. <a href=https://lnk.bio/kalinka0588>https://lnk.bio/kalinka0588</a> Для получения депозитного бонуса нужно пополнить собственный игровой баланс реальными деньгами. Вознаграждение можно получить либо при внесении первого депо, или в виде фиксированного процента от внесённых средств. Так либо иначе, бонус поступит на счёт лишь после пополнения.Но на некоторых азартных платформах подобные вознаграждения могут получить теперь зарегистрированные пользователи. В этом случае, бонусы предоставляются в уникальных акций или же некоторым игрокам повторяющий акционного предложения, коие приходит на почту с целью «вернуть» игрока в свое казино. 1×slots официальный сайт, скачать <a href=http://ortho.wikispace.net/doku.php?id=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D0%B5%D0%B9%D1%88%D0%B0%D1%8F%20%D0%BF%D0%B8%D1%86%D1%86%D0%B0%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!>http://ortho.wikispace.net/doku.php?id=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D0%B5%D0%B9%D1%88%D0%B0%D1%8F%20%D0%BF%D0%B8%D1%86%D1%86%D0%B0%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!</a>
1×slots официальный сайт скачать
1×slots зеркало регистрация то дальше необходимо пройти Бонусные средства – маленькая сумма денег для старта в новом казино. На бонусные деньги, обычно разрешено выступать во все игры, считая слотов с прогрессивным джекпотом и игр из раздела live casino. <a href=https://lavr-sovet.ru/user/Michaelinaby/>https://lavr-sovet.ru/user/Michaelinaby/</a> 1×slots casino регистрация 1×slots review live Варианты выигрыша зависят от Вашей успеха и условий игорного портала. Выше мы заявили, что кое-какие бездепозитные бонусы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются и те, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность передовых игр на деньги, возможно выиграть невероятные суммы. Сегодняшние игровые автоматы либо видео слоты, как их именуют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Этот тип приза будет добавлен на Ваш аккаунт в удачной процедуры регистрации с использованием номера аппарата. Если выбрать другой способ творения учетной записи, бездеп не несомненно добавлен на Ваш аккаунт.Иногда в бездепа, казино дарит наименьший бонус (до 50 рублей), из-за которого не заморачиваться. <a href=http://aginskoe24.ru/redirect?url=http://xn–2–clc1arb0b.xn–p1ai/bitrix/click.php?goto=http://78rospotrebnadzor.ru/en/web/guest/557/-/asset_publisher/eLX6/content/20-%D0%B4%D0%B5%D0%BA%D0%B0%D0%B1%D1%80%D1%8F-%D0%B2-%D0%B8%D0%BD%D1%84%D0%BE%D1%80%D0%BC%D0%B0%D1%86%D0%B8%D0%BE%D0%BD%D0%BD%D0%BE%D0%BC-%D0%B0%D0%B3%D0%B5%D0%BD%D1%82%D1%81%D1%82%D0%B2%D0%B5-%C2%AB%D0%B8%D0%BD%D1%82%D0%B5%D1%80%D1%84%D0%B0%D0%BA%D1%81-%D1%81%D0%B5%D0%B2%D0%B5%D1%80%D0%BE-%D0%B7%D0%B0%D0%BF%D0%B0%D0%B4%C2%BB-%D1%81%D0%BE%D1%81%D1%82%D0%BE%D1%8F%D0%BB%D0%B0%D1%81%D1%8C-%D0%BF%D1%80%D0%B5%D1%81%D1%81-%D0%BA%D0%BE%D0%BD%D1%84%D0%B5%D1%80%D0%B5%D0%BD%D1%86%D0%B8%D1%8F-%D0%BD%D0%B0-%D1%82%D0%B5%D0%BC%D1%83:-%C2%AB%D0%BF%D0%BE%D1%82%D1%80%D0%B5%D0%B1%D0%B8%D1%82%D0%B5%D0%BB%D1%8C%D1%81%D0%BA%D0%B8%D0%B5-%D1%80%D0%B8%D1%81%D0%BA%D0%B8-%D0%B2-%D0%BF%D1%80%D0%B5%D0%B4%D0%BD%D0%BE%D0%B2%D0%BE%D0%B3%D0%BE%D0%B4%D0%BD%D0%B8%D0%B8-%D0%BF%D0%B5%D1%80%D0%B8%D0%BE%D0%B4:-%D0%BA%D0%B0%D0%BA-%D0%BD%D0%B5-%D0%BE%D1%88%D0%B8%D0%B1%D0%B8%D1%82%D1%8C%>http://aginskoe24.ru/redirect?url=http://xn–2–clc1arb0b.xn–p1ai/bitrix/click.php?goto=http://78rospotrebnadzor.ru/en/web/guest/557/-/asset_publisher/eLX6/content/20-%D0%B4%D0%B5%D0%BA%D0%B0%D0%B1%D1%80%D1%8F-%D0%B2-%D0%B8%D0%BD%D1%84%D0%BE%D1%80%D0%BC%D0%B0%D1%86%D0%B8%D0%BE%D0%BD%D0%BD%D0%BE%D0%BC-%D0%B0%D0%B3%D0%B5%D0%BD%D1%82%D1%81%D1%82%D0%B2%D0%B5-%C2%AB%D0%B8%D0%BD%D1%82%D0%B5%D1%80%D1%84%D0%B0%D0%BA%D1%81-%D1%81%D0%B5%D0%B2%D0%B5%D1%80%D0%BE-%D0%B7%D0%B0%D0%BF%D0%B0%D0%B4%C2%BB-%D1%81%D0%BE%D1%81%D1%82%D0%BE%D1%8F%D0%BB%D0%B0%D1%81%D1%8C-%D0%BF%D1%80%D0%B5%D1%81%D1%81-%D0%BA%D0%BE%D0%BD%D1%84%D0%B5%D1%80%D0%B5%D0%BD%D1%86%D0%B8%D1%8F-%D0%BD%D0%B0-%D1%82%D0%B5%D0%BC%D1%83:-%C2%AB%D0%BF%D0%BE%D1%82%D1%80%D0%B5%D0%B1%D0%B8%D1%82%D0%B5%D0%BB%D1%8C%D1%81%D0%BA%D0%B8%D0%B5-%D1%80%D0%B8%D1%81%D0%BA%D0%B8-%D0%B2-%D0%BF%D1%80%D0%B5%D0%B4%D0%BD%D0%BE%D0%B2%D0%BE%D0%B3%D0%BE%D0%B4%D0%BD%D0%B8%D0%B8-%D0%BF%D0%B5%D1%80%D0%B8%D0%BE%D0%B4:-%D0%BA%D0%B0%D0%BA-%D0%BD%D0%B5-%D0%BE%D1%88%D0%B8%D0%B1%D0%B8%D1%82%D1%8C%</a> 1×slots зеркало на сегодня Фриспины — безвозмездные вращения, которые дозволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся самым популярным и преимущественным обликом бонуса — благотворительные вращения порой эффективнее и веселее в отыгрыше, чем другие облики бездепов.
1×slots зеркало рабочее
Вы скорее, как и все предпочитаете получать подарки и бездепозитные бонусы казино. Игорные дома взяли в привычку одаривать гэмблеров приятными призами. Стать обладателем приветственного подарка можно за создание профиля или пополнение счёта. Второй вариант более интересный, ведь клубы готовы удвоить депо! Но если вы новичок и только знакомитесь с миром азарта, никакого пользуйтесь призом за регистрацию.В онлайне большое знаменитых игорных площадок с привлекательными акционными предложениями. Однако внимательно читать обстоятельства 10-ов услуг скором надоест, ну и время отнимет много. Поэтому наша команда подготовила ТОП-3 сайтов с превосходнейшими бездепозитными призами: <a href=http://3ak.cn/home.php?mod=space&uid=187057>1хслотс рабочее зеркало</a> Подтверждение регистрации. Казино настоятельно привязки профиля к электронному адресу и номеру телефона. Для сего на e-mail отчаливает послание со ссылкой, а на телефонный ? текстовое извещенье с кодом.Акции распространяются как на все забавы казино, так и на ограниченный список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и. Промо возможность обхватывать разработки 1-го производителя. Бездеп не пересекается с другими промоакциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, сделанные бонусными деньгами. Для идентификации платежных реквизитов игрока имеет понадобиться пополнение счета на наименьшую необходимую. x1 slots регистрация в 1×slots casino <a href=https://makeitpersonal.co/doctorlazutaoa>https://makeitpersonal.co/doctorlazutaoa</a>
1×slots казино зеркало
А ознакомиться с свежими интернет казино, Вы сможете за счет бонусов с выводом прибыли, которые Вы сможете получить без депозита. <a href=http://sman1mtp.sch.id/index.php?option=com_comprofiler&task=userProfile&user=2433>http://sman1mtp.sch.id/index.php?option=com_comprofiler&task=userProfile&user=2433</a> зеркло казино 1×slots Бoльшинcтвo азартных заведений выдвигают примерно одинаковые условия и притязания, коие необходимо выполнить, дабы получить бездепозитный приз за регистрацию. Все их возможно объединить в один перечень:Чаще всего казино приз за регистрацию без депозита даёт возможность запустить каждой машина. Но другого, как пристально ознакомиться с условиями. Иногда для игры доступны лишь определённые модели. Если вы новичок и ничего не смыслите в гэмблинге, чем начать знакомство с миром азарта непосредственно с «одноруких злодеев».
<b>Смотреть еще похожие новости:</b>
<a href=https://radios-collector.com/viewtopic.php?f=7&t=65379>1× слот зеркало</a>
<a href=https://forum.bedwantsinfo.nl/thread-682493.html>1×slots регистрация то дальше необходимо пройти</a>
<a href=https://minifishtank.net/forum/showthread.php?tid=895>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Это также благотворительные деньги, которые поступают на аккаунты свежеиспеченных игры после регистрирования. А необыкновенность таких бонусов состоит том,, собственно обретенные деньги обязательно следует применять в продолжении назначенного времени.
#2276 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
сайты казино казино большая <a href=https://t.me/vchkogpu_ru>bitz casino</a> казино онлайн бесплатно porno Виктория Баркова, легкоатлетка <a href=https://rucriminal.info/>Скоробогатова Ольга Николаевна порно</a> гта казино Разуваева Ксения Денисовна порно порно с Антропова Валентина Викторовна Елена Лядова ап казино 7k casino зеркало на сегодня казино играть
DiskiPlus pin up casino top top DiskiPlus cometa casino <a href=https://diskiplus.ru>DiskiPlus порно с Васильева Татьяна Викторовна</a> DiskiPlus порно с Карен Хачанов (теннис) DiskiPlus пари букмекерская контора <a href=https://diskiplus.ru/>DiskiPlus порно с Юлия Ефимова</a> DiskiPlus bet casino DiskiPlus порно с Васильева Татьяна Викторовна DiskiPlus порно с Кирьянова Дарья Борисовна DiskiPlus 1×bet рабочее на сегодня DiskiPlus мелбет букмекерская контора DiskiPlus Разуваева Ксения Денисовна порно DiskiPlus рабочие зеркала казино
#2277 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
Когда речь идет о получении бездепозитных бонусов в казино, в первую очередь внимание на следующие условия: <a href=http://filmkachat.ru/>1×slot казино зеркало</a> <a href=https://linkbio.co/kalinka>https://linkbio.co/kalinka</a> Начнём с как, что любое рекламную за регистрацию предполагает некоторые обстоятельства. Бездепозитные бонусы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, необходимая для исполнения условий. Пример, получили благотворительные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 рублей, проигрышных либо выигрышных, маловажно. После исполнения, бонусный баланс перейдёт на настоящий и будет доступным к выводу.Как верховодило, при выводе финансов, от играющего потребуется только устроить наименьший лепта чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом индивидуальный счет. 1×slots регистрация то дальше необходимо пройти <a href=https://mob-land.com/2024/05/18/%d0%ba%d1%83%d0%bf%d0%b8%d1%82%d1%8c-%d1%81%d1%81%d1%8b%d0%bb%d0%be%d1%87%d0%bd%d1%83%d1%8e-%d0%bc%d0%b0%d1%81%d1%81%d1%83/>https://mob-land.com/2024/05/18/%d0%ba%d1%83%d0%bf%d0%b8%d1%82%d1%8c-%d1%81%d1%81%d1%8b%d0%bb%d0%be%d1%87%d0%bd%d1%83%d1%8e-%d0%bc%d0%b0%d1%81%d1%81%d1%83/</a>
1хслотс рабочее зеркало
Иногда в поощрения за регистрацию могут выдаваться билеты для роли в турнирах. Условия их проведения довольно отличаются, поэтому мы рекомендуем ознакомиться с любым предложением отдельно.У любой игры средства притязания по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система зачтет каждую ставку. В рулетке и покере сделать это намного сложнее. Именно потому так важно пристально разбирать условия получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в любой этой, то новички просто «спустят приз на ветер». 1×slots casino регистрация 1×slotscasin online Доступные игры – В некоторых азартных забавах можно понизить математическое преимущество казино до нескольких 10-х процента. В их количестве все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как правило, в таких играх ставки идут в зачет вейджера не полностью. Например, возможность учитываться лишь 50%. В некоторых играх бездепозитные призы вообщем невозможно отыгрывать.Размер призов чаще всего чисто символический и не превышает 50 руб. Приятно, хотя осязаемым бустом в игре вряд ли станет. <a href=http://also-m.ru/bitrix/redirect.php?goto=http://lazalka.ru/bitrix/click.php?goto=http://aura-beauty.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/xQNe3P7dfv7>http://also-m.ru/bitrix/redirect.php?goto=http://lazalka.ru/bitrix/click.php?goto=http://aura-beauty.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/xQNe3P7dfv7</a> Прежде чем активировать бездеп, необходимо увериться том,, собственно страна, гражданином коей является игрок, не входит в список не. казино 1×slots Чем ниже велечину вейджера, тем проще отыграть и вывести бонус. Если Вы планируете заработать на бездепе, не просто ознакомиться с новым игровым клубом, то стоит избегать бонусов с высоким вейджером их почти не реально отыграть. С ними Вы можете только протестировать игры заведения.
1×slot рабочее зеркало
Выше мы предоставили глубокий набор самых свежих и своевременных бездепозитных бонусов в онлайн казино без пополнения на 2022 год, где вам воспользоваться хоть ценным бездепозитным призом. Внесение депозита – Будьте готовы восполнить счет после отыгрыша бонуса. Это обычное заявка правил для данного на промо-акций. Лучше заблаговременно уточнить, какую сумму нужно будет заносить на счет. Как верховодило, идет о наименьшем депозите, хотя вы должны быть уверены, что он вам по кармашку. <a href=https://redmine.dti.economia.gov.br/issues/72789>https://redmine.dti.economia.gov.br/issues/72789</a> Игры, в можно играть на бонусные деньги. Проверьте список игр, в которых можно выступать на бонусные свои, вполне они Вам не понравятся и надо расходовать своё время на эту акцию. 1×slots casino зеркало рабочее Так же стоит выделить то, собственно в любом онлайн казино установлен свой наибольший кешаут на бездепозитный приз. Как правило кешаут — это предельная сумма средств, которая дешевая для вывода с бездепозитного приза.Бонусные средства – маленькая сумма средств для старта в новеньком казино. На бонусные средства, обычно разрешено выступать во все игры, кроме слотов с современным джекпотом и игр из раздела exist casino.
1хслот официальный сайт зеркало
Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция содержит подробные правила, гиперссылка на которые обыкновенно содержится в промообъявлении. В их указываются лимиты, вейджер, список доступных игр. Если оператор скрывает данные о предложении, то пользоваться им не стоит.Для подтверждения электронной почты, просто перейдите по активной ссылке в послании, приобретенном от игрового заведения. Многие новички сомневаются, собственно поощрительный приз не несомненно отдавать, даже в они выиграли у казино. Это полностью неопасно и накрепко. Выводя выигранные средства, игрок просто одергивает свое участие при и утрачивает уникальную вероятность – безвозмездно увеличивать собственное материальное положение.Да, у бесплатных призов есть дефекты. Прежде всего, они обычно небольшие. Кроме того, условия вейджера по ним практически строгие. Но все отсутствие риска проделывает их очень привлекательными для клиентов. 1×slots регистрация то дальше необходимо пройти <a href=https://wavedream.wiki/index.php/User:RodrickWelsby36>https://wavedream.wiki/index.php/User:RodrickWelsby36</a>
1 х слотс зеркало
Если вы новичок в этом деле и только попали в неизведанную вами область азарта — счет услуг как бездепозитные призы без пополнения.Бездепозитный приз по промо-коду несомненно доступен для игры, лишь в том случае когда Вы активируете особый бонусный код в разделе с бонусами либо укажите промокод при регистрации на веб-сайте. В неких случаях, считая активации кода, понадобиться подтвердить контактные данные игрока и наполнить анкету клиента. Получать информацию о самых выгодных призах можно без постоянного мониторинга новостей казино. Мы взяли эту задачу на себя и непрерывно смотрим за предложениями операторов, избирая наилучшие из них. В данном разделе собраны последние бездепы, промокоды к ним и условия их активации. Список промоакций регулярно дополняется. В топ зашли самые свежие бездепозитные призы за регистрацию в казино 2020, временные и закрытые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и другим аспектам. Если срок действия промоакции истек, она удаляется из перечня.Вы скорее, скажем, как все любите получать подарки и бездепозитные призы казино. Игорные жилища брали в привычку одаривать гэмблеров приятными призами. Стать владельцем приветственного подарка можно за творенье профиля либо пополнение счёта. Второй вариант больше увлекательный, ведь клубы готовы удвоить депо! Но случае вы новичок и лишь знакомитесь с миром азарта, чем воспользуйтесь бонусом за регистрацию. <a href=https://paladinscounter.com/users/Walterdiath>https://paladinscounter.com/users/Walterdiath</a> Прибывшие на аккаунт финансы бездепозитные призы предназначаются, в, лишь для новоиспеченных пользователей, коие ранее не имели собственного аккаунта в данном казино. Исходя из сего, случае ранее у игрока был изготовлен депозит, то, по всей вероятности, у него больше не несомненно способности рассчитывать на получение такого приза в определенном заведении. 1хслотс казино зеркало Ещё одно распространённое акционное предложение – привлекательный подарок с неблаговидными притязаниями. К примеру, клуб обещает $100 в бездепа, хотя с вейджером х80 либо х100. Отыграть подобный вейджер практически невероятно и потому превосходнее концентрироваться на более интересных промоакциях.Чтобы без увериться в превосходстве бездепозитных бонусов, достаточно зарегистрироваться в казино и получить одобрение.
<b>Смотреть еще похожие новости:</b>
<a href=http://nakupnidivadlo.cz/index.php/forum/3-pripominky/46603–8903–759–81–64-https-sk-service1-ru?start=36#237424>1×slots бездепозитный бонус за регистрацию</a>
<a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1×slots промокод при регистрации 2025</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Некоторые клубы автоматически начисляют бонус на акк игрока в исполнения критерий получения, но бывают ситуации, когда приз надо(надобно) активировать игроку самому. Есть количество методов активации приза:
#2278 avtolombardmskzeDhttps://career.zetapharma.net/employer/avtolombard-pid-zalog-pts7597/
получить займ под залог авто <a href=https://career.zetapharma.net/employer/avtolombard-pid-zalog-pts7597/>https://career.zetapharma.net/employer/avtolombard-pid-zalog-pts7597/</a> получить займ под залог авто
#2279 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
Промообъявления от казино не дают реальной картины и направлены на вербование внимания юзеров. Понять, насколько высоки шансы остаться в плюсе, позволит собственный анализ критерий предложения: <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasin online</a> Список так именуемых «запрещенных территорий» прилагается к правилам бонусной программки игорного портала. Обязательно выясните, распространяются ли на вас сходственные наказания. <a href=https://www.therookies.co/projects/79481>https://www.therookies.co/projects/79481</a> Поспешите арестовать бездепозитные бонусы за регистрацию в казино из представленного списка. Все платформы не только водят легальную работа, но и обрадуют добросовестными результатами игры, высочайшей отдачей, прыткими выплатами.Начнём с того, что любое промо за регистрацию предполагает некоторые условия. Бездепозитные бонусы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность валютного оборота, нужная для выполнения критерий. Пример, получили безвозмездные вращения и выиграли с них 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 рублей, проигрышных или выигрышных, так. После исполнения, бонусный баланс перейдёт на реальный и будет легкодоступным к выводу. 1 хслот регистрация в 1×slots casino <a href=http://slavsbyt.ru/index.php?subaction=userinfo&user=lowbeer29>http://slavsbyt.ru/index.php?subaction=userinfo&user=lowbeer29</a> Подобные бонусы без депо предоставляются на более прибыльных условиях. Зачастую они крупнее, а обстоятельства отыгрыша менее строгие.Процесс доказательства личности имеет взятьвдолг(взятьвзаймы) от 1-го дня до недели. Если заказчик разрешил какую ошибку при заполнении паспортных данных, то ему следует адресоваться с задачей в службу онлайн-казино.
1хслотс мобильная версия зеркало
Многие азартные клубы ограничивают сумму вывода заработанную на призе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не сможете исключить. Разница будет аннулирована, Вы в не можете создавать на нее ставки. 1×slots промокод при регистрации Бездепозитный бонус часто имеет стать доступным незамедлительно в окончания регистрации, потому правило единственным требованием к нему является регистрация, а после проверка вашей новой учетной записи.Денежные свои. Третий бонус за регистрацию без депо – наличные. К огорчению, только известные и пользующиеся клубы шансы уяснить средства в рублях или баксах. С их поддержкой вы сможете насладиться любой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед данным необходимо выполнение конкретных условий. <a href=https://itformula.ca/index.php?title=1win_Brasil_Apostas>https://itformula.ca/index.php?title=1win_Brasil_Apostas</a> Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 $. Если выдаются фриспины, их число редко превышает нескольких 10-ов даровых вращений. 1хслотс зеркало Представленные на данной странице превосходнейшие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, в котором гости Casino.ru могут сортировать перечень по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д.
1×slots регистрация на сайте
Диапазон ставок, коие вправе сделать игрок, того лимитирован. Обычно ставить возможно маленькую необходимую — в 10–30 руб. За одно вращение. <a href=http://www.jcdqzdh.com/home.php?mod=space&uid=311948>http://www.jcdqzdh.com/home.php?mod=space&uid=311948</a> На данном разделе портала регулярно публикуются обзорные статьи, в рассматриваются безвозмездные бонусы лучших интернет-казино. Информация структурирована по нескольким пунктам, включая главные: 1×slots акции
1×slots официальный сайт зеркало
Фриспины – благотворительные вращения с фиксированной ставкой, коие возможно применять в конкретных игровых автоматах.Такие одобрения разрешают безвозмездно протестировать новое казино, разобраться с игровым процессом интернет слотов, заработать и исключить маленькую сумму денег. В онлайне большое известных игорных площадок с привлекательными акционными предложениями. Однако пристально читать обстоятельства десятков услуг в надоест, да и время отнимет большое. Поэтому наша команда подготовила ТОП-3 вебсайтов с лучшими бездепозитными бонусами:Бонусные деньги – маленькая сумма средств для старта в новом казино. На бонусные деньги, обыкновенно разрешено играть во все игры, считая слотов с прогрессивным джекпотом и игр из раздела exist casino. 1×slots акции <a href=http://www.cs-tygrysek.ugu.pl/member.php?action=profile&uid=79813>http://www.cs-tygrysek.ugu.pl/member.php?action=profile&uid=79813</a> Законодательство, регулирующее азартные игры в разных странах, оказывает на возможности операторов. В результате юзеры из отдельных регионов сталкиваются с ограничениями со стороны казино. Это имеет быть как полный отказ в доступе, например и невозможность загружать игры отдельных изготовителей.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Вейджер (либо вагер) ? это минимальная сумма ставок, которую нужно сделать для вывода валютного бонуса. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение. Чтобы без увериться в превосходстве бездепозитных призов, достаточно зарегистрироваться в казино и получить одобрение.Предложения с бездепозитными призами за регистрацию позволяют свежим заведениям привлечь аудиторию на свой сайт. А игроки к получают возможность выступать на настоящие деньги без депозита в казино и заработать маленькой стартовый капитал, кот-ый разрешается исключить на карту банка или электрический кошелек. <a href=https://xn---6-jlc6c.xn–p1ai/user/WalterExpot/>https://xn---6-jlc6c.xn–p1ai/user/WalterExpot/</a> 1×slots регистрацию более популярный вариант это Практически все онлайн казино с бездепозитным призом за регистрацию учитывает программу преданности — систему одобрения постоянных посетителей, которая произведено из множества значений. При достижении игроком одного уровня на его счёт поступает приз. Чем выше уровень — тем щедрее приз.Бесплатный бонус – кредиты, коие онлайн-казино начисляет клиенту, не заставляя его пополнять игровой счет.
<b>Смотреть еще похожие новости:</b>
<a href=https://rolivka.online/forum/showthread.php?tid=38724>1×slots официальный сайт скачать на айфон</a>
<a href=https://www.lightknotes.com/MyBB/showthread.php?tid=278251>рабочее зеркало 1×slots</a>
<a href=https://www.one2bay.de/forum/showthread.php?tid=671600>1× slots casino зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Многие казино предоставляют в маркетинговых целях безвозмездные бонусы необыкновенно для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой сайт по партнерской ссылке с нашего портала.
#2280 Charlesgunnyhttp://filmkachat.ru
скачать 1×slots официальный сайт
Фриплей-бонусы встречаются только в неких клубах. Они зачисляются сразу после создания профиля и активны недолговременное время. Если не успеете истратить свои, они просто сгорят. Касаемо медли, как бонусы активны протяжении часа. <a href=http://filmkachat.ru/>1×slot зеркало</a> Но есть игорные заведения, которые готовы просто так жертвовать деньги на забаву. Для сего довольно сделать профиль. Чтобы вывести свой выигрыш, вас поначалу нужно выполнить обстоятельства отыгрыша, указанные в условиях получения бездепозитного депозита.Бонус начисляется игроку сразу последствии регистрации и прохождения верификации в казино и не настятельно от клиента внесения депо. Как верховодило, размер бонуса в подобном случае достаточно умеренный, однако дозволяет новичкам познакомиться с игрой без риска реальными средствами. <a href=https://lit.link/en/kalinka0588>https://lit.link/en/kalinka0588</a> 1×slots зеркало проходить регистрацию это отличный вариант <a href=http://longlive.com/node/4443>http://longlive.com/node/4443</a> Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте условия – они часто выдаются для неких машин. В зависимости от клуба вам делать определенное количество ставок. Кстати, современные игорные жилища дают вероятность заводить «одноруких бандитов».
1хслотс рабочее зеркало
Призовые начисления без депо имеют предоставляться для участия в турнирах онлайн казино. Потратить перечисленные деньги возможно исключительно в данной акции. Условия их проведения себе лимитирования на список игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, чем изучить его управляла. <a href=http://check2go.net/author/jameslob/>1хслотс зеркало на сегодня</a> 1хслот 1хслотс регистрация перейти на 1×slots После получения приза вывод средств для посетителя будет недоступен до, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя либо пара месяцов. Выводить средства игрок сможет лишь последствии отыгрыша. <a href=http://younghwacarbon.com/bbs/board.php?bo_table=free&wr_id=121581>http://younghwacarbon.com/bbs/board.php?bo_table=free&wr_id=121581</a> 1хслот зеркало Если речь об эксклюзивных услугах, может понадобиться регистрация в казино по ссылке с партнерского сайта.В некоторых онлайн казино для получения бездепозитных призов не довольно просто зарегистрироваться на сайте клуба и доказать свои контактные данные. Дополнительно потребуется активация промокода.
1×slots регистрация 1×slots review live
Прочитайте управляла бонусной программы, какой желайте принять. Да, мы настоятельно рекомендуем устроить это до регистрации. Для получения выигрыша требуется выполнить условия казино. Чаще всего игроку необходимо поставить конкретную необходимую, но теснее из собственных денег. Она рассчитывается из совместного размера выигрыша за все время использования бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, в пользователь выиграл 1000 рублей, а множитель сочиняет х30, исключить средства возможно будет, сделав ставки на 30 000 руб. <a href=http://www2.bio.ulaval.ca/landrylab/bioinfo/doku.php?id=1win_cassino_jogos>http://www2.bio.ulaval.ca/landrylab/bioinfo/doku.php?id=1win_cassino_jogos</a> В лицензионных бездепозитных казино выступать в азартные игры действительно безопасно. Наличие лицензии подтверждает тот факт, собственно клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP. 1хслотс рабочее зеркало Для проверки применяются сканы паспортов, водительских прав, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если юзер замечен в попытке завести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их владелец попадает в темный список. При ирге на лицензионной площадке не стоит опасаться указывать достоверную персональную информацию (шифрование ликвидирует утечку персональных данных).Для подтверждения электрической почты, просто перейдите по активной ссылке в послании, приобретенном от игрового заведения.
1×slots регистрация то дальше необходимо пройти
Похожим образом работает 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя либо из-за с получения им VIP-статуса. Подарок предоставляется после обращения в поддержку и ревизии.Фриплей-бонусы. Бонусы за безвозмездную забаву есть только в некоторых клубах. Они зачисляются сразу после творенья профиля и действуют непродолжительное время. Если у вас нет времени истратить свои, они просто закончатся. Что дотрагивается медли, правило призы срабатывают на одного часа. 2. Создать свежий профиль. Для регистрации нужно заполнить небольшую анкету либо зайдите в собственный кабинет посредством социальных сетей;Бонус начисляется игроку сразу в регистрации и прохождения верификации в казино и не просит от посетителя внесения депозита. Как верховодило, размер бонуса в подобном случае довольно застенчивый, впрочем разрешает новичкам познакомиться с забавой без риска реальными средствами. Бездепозитный приз предоставляется новому игроку за определенные действия. Часто презент в виде средств либо фриспинов выдается за регистрацию, благодаря чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. 1×slots зеркало <a href=https://www.google.co.kr/url?q=https://doctorlazuta.by/>https://www.google.co.kr/url?q=https://doctorlazuta.by/</a>
1хслотс регистрация в 1×slots casino
За счёт спинов получится запустить разные интернет слоты, протестировать стратегии и поднабраться опыта. Фишка что, нет, что вращения начисляются на топовые аппараты с уникальными опциями и высокой отдачей. Не забывайте, что в любом акционном предложении учтены специальные притязания – временные ограничения, наибольший объем ставки, перечень дешевых игр. <a href=https://www.fire-directory.com/%D0%B3%D0%BB%D0%B0%D0%B2%D0%BD%D0%B0%D1%8F-%D0%B4%D0%BE%D1%80%D0%BE%D0%B3%D0%B0-%D1%81%D0%B0%D0%B9%D1%82_453663.html>https://www.fire-directory.com/%D0%B3%D0%BB%D0%B0%D0%B2%D0%BD%D0%B0%D1%8F-%D0%B4%D0%BE%D1%80%D0%BE%D0%B3%D0%B0-%D1%81%D0%B0%D0%B9%D1%82_453663.html</a> На нашем сайте Вы найдете перечень актуальных новых бездепозитных призов в казино 2022 года. Также, есть количество неповторимых предложений, коие доступны лишь гостям нашего сайта в регистрации по нашей ссылке либо активации специального промокода. рабочее зеркало 1хслотс
<b>Смотреть еще похожие новости:</b>
<a href=https://koreanstudies.com/forum/viewtopic.php?t=213925>онлайн казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Свежий бонус начисляется в виде валютных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в пользовании средствами, ну случае отыгрыша оператор возможность ввести лимитирование на вывод средств.
#2281 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
человек казино casino промокод <a href=https://rhymes-punches.com/>1×bet xbet xyz</a> 7k casino официальный лучшая казино <a href=https://7club7.com/>casino</a> казино фильм Шевцова Татьяна Викторовна порно 1×bet зеркало рабочее на сегодня 1×bet xyz казино регистрации pin casino 1×bet приложение Елизавета Боярская
DiskiPlus Шевцова Татьяна Викторовна порно DiskiPlus casino бонус <a href=https://diskiplus.ru>DiskiPlus Валентина Матвиенко порно</a> DiskiPlus казино зеркало сегодня DiskiPlus букмекерская контора <a href=https://diskiplus.ru>DiskiPlus казино пину</a> DiskiPlus казино вулкан DiskiPlus порно с Афонина Марина Игоревна DiskiPlus casino скачать DiskiPlus порно с Юлия Ефимова DiskiPlus porno Мира Андреева (теннис) DiskiPlus casino 7k рабочее DiskiPlus porno Юлия Канакина
#2282 Charlesgunnyhttp://filmkachat.ru
1 x slots casino
Высокая конкурентность в разделе азартных игр мотивирует операторов привлекать клиентов различными акциями. Благодаря этому у посетителей замечена вероятность получить призы в казино за регистрацию без депозита. Воспользоваться этим предложением возможно, избегая процедуру внесения средств на игровой счет, просто активировав аккаунт на веб-сайте. Наш экскурсовод по бездепам поможет выбрать самую привлекательную бонусную программку, узнать верховодила получения такового вознаграждения и воспользоваться им с максимальной выгодой.Шаг 5. Использование и отыгрыш. Бездеп должен быть применен в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера. <a href=http://filmkachat.ru/>онлайн казино 1×slots</a> Автоматы неспроста числятся самым знаменитым азартным развлечением. Чтобы освоить управление и управляла, потребуется всего количество минут. Ваша задачка сделать ставку, определить число трудящихся линий и возможно крутить тамбур. Если дисплее выпадет выигрышная комбинация – вы выиграли! С этой задачей вам помогут управится бездепозитные бонусы казино. <a href=https://www.therookies.co/projects/79486>https://www.therookies.co/projects/79486</a> Как управляло, при выводе финансов, от играющего требуется только сделать наименьший лепта для того, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом личный счет. 1×slots зеркало выигрыши обязательно пройдите регистрацию если <a href=http://julia4tied.de/member.php?action=profile&uid=130130>http://julia4tied.de/member.php?action=profile&uid=130130</a> Иногда у гостей сайта могут возникнуть трудности, задачи, препядствия при активации приобретенного промо-кода. В таких случаях, необходимо адресоваться за помощью в службу «Support». Для получения ответа, непременно указывается конкретная первопричина обращения и подтверждается информация дополнительными снимками. Если сформировалась спорная ситуация, постоянно возможно обратиться к основному регулятору либо контролирующему органу, выдавшему данному заведению лицензионный документ.Допустим, за регистрацию вы получили бездеп в объеме 2 000 руб. С вейджером х30. В данном случае предстоит устроить ставок, на совместную сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать настоящие деньги. Однако не забывайте, собственно с любого презента получится вывести определённую необходимую (чаще всего менее $200).
1×slots casino online регистрация
Верификация необходима для добавочной защищенности и помогает техподдержке выявить бонусхантеров и жуликов. Кстати, на некоторых платформах выводы солидных сумм доступны только после подтверждения личности.В лицензионных бездепозитных казино выступать в азартные игры вправду неопасно. Наличие лицензии одобряет что, этот прецедент, собственно клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP. <a href=https://www.bf-france.com/forums/profile/30064-rabofreeor/>1х слотс зеркало регистрация в 1×slots casino</a> 1хлот регистрация в 1×slots casino <a href=http://www.ka1799.com/bbs/board.php?bo_table=free&wr_id=275556>http://www.ka1799.com/bbs/board.php?bo_table=free&wr_id=275556</a> 1×slots регистрация на 1хслотс Каждая игровая перрон выделяется условиями по получению и отыгрышу бездепов. В правилах отчетливо расписаны кратковременные рамки, за которые нужно прокрутить вейджер. Также не запамятовывайте на максимальный размер ставки и наивысшую необходимую выплаты. С иной стороны, чтобы получить бездепозитные бонусы казино, довольно истратить менее 1 минуты.
онлайн казино 1×slots
Большинство интернет-казино из нашего топ-10 готовы порадовать вас эксклюзивными промоакциями. Читайте о их в обзорах и на форуме. <a href=http://drop-let.ru/index.php?subaction=userinfo&user=absentoutfit90>http://drop-let.ru/index.php?subaction=userinfo&user=absentoutfit90</a> Но есть игорные заведения, коие готовы просто например жертвовать деньги на забаву. Для этого довольно создать профиль. Чтобы вывести свой выигрыш, для поначалу нужно выполнить условия отыгрыша, указанные в условиях получения бездепозитного депо. 1×slots casino регистрация 1×slotscasin online Промокод – определённая композиция знаков, коию необходимо установить в подходящее поле при твореньи учетной записи или активировать в собственном профиле игрока в разделе с бонусами.
1хслот зеркало сайта
Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. На странице представлены бездепозитные призы за регистрацию в казино редчайшая заслуга за которой гонятся все игроки как новички, так и профессионалы. Мы также уделяем большое внимание на наличие призов при формирование рейтинга казино на деньги. Бездепозитный бонус это возможность выступать даром и выиграть реальные деньги. 1×slots регистрация на сайте <a href=http://dom3online.ru/user/Jamescoels/>http://dom3online.ru/user/Jamescoels/</a>
1×slots casino регистрация 1×slotscasino09k online
Для всех бездепозитных бонусов действует наибольший лимит на выигрыш. Он указывает предельную необходимую, которую появится получить, играя на бонусные кредиты. Как только вас получится выполнить притязания вейджера, возможный максимально несомненно переведен с бонусного счета на ведущей, а остаток несомненно списан.Но существуют азартные заведения, готовые просто например вручить средства на игру. Для сего достаточно сделать профиль. Чтобы вывести выигрыш, сперва необходимо выполнить вейджеровые условия, прописанные в критериях получения бездепа. Для получения бонуса надо(надобно) ознакомиться с программой преданности казино и сделать ставки на сумму, необходимую для перехода на грядущий уровень. <a href=https://forum.bakililar.az/topic/551429-%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0-%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA-%D0%B3%D0%BB%D0%B0%D0%B2%D0%BD%D0%B0%D1%8F-%D0%B4%D0%BE%D1%80%D0%BE%D0%B3%D0%B0/>https://forum.bakililar.az/topic/551429-%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0-%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA-%D0%B3%D0%BB%D0%B0%D0%B2%D0%BD%D0%B0%D1%8F-%D0%B4%D0%BE%D1%80%D0%BE%D0%B3%D0%B0/</a> Зачастую бездепозитные призы казино для забавы предлагаются разными заведениями азартных игр в качестве рекламных промоакций или в целях вербования к себе свежих игроков. Для бездепозитных бонусов в казино 2022 геймеру не нужно пополнять счет до этапа вывода желаемых средств.Пoдтвepдить личнocть посетителя. Для удачного вывода средств, нужно подтвердить личность посетителя. Нa этaпe вepификaции пpoфиля, работники службы защищенности должны убедиться, собственно у игрока чем раз акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не сможет исключить свой выигрыш, в у него будет несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы. casino 1×slot Бoльшинcтвo азартных заведений выдвигают примерно одинаковые условия и требования, которые нужно выполнить, чтобы получить бездепозитный приз за регистрацию. Все их можно соединить в один список:Для казино, работающих онлайн, бездепозитные бонусы необходимы для привлечения свежих клиентов. Предложение сыграть на слотах без надобности внесения настоящих денег — работающий метод для повышения энтузиазма к фирмы. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит выступать в казино, только теперь теснее на личные средства.
<b>Смотреть еще похожие новости:</b>
<a href=https://radios-collector.com/viewtopic.php?f=7&t=116088>1×slots регистрация</a>
<a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=39176>1×slots скачать на айфон</a>
<a href=http://b2s.bulwork.com/node/1581?page=175#comment-27320>1×slots casino зеркало</a>
<a href=http://6000ziyuan.com/forum.php?mod=viewthread&tid=160431&extra=>1хслотс рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Не советуем сломя голову браться за всевозможные предложения получения средств без вложений. Вполне вероятно, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем смотрится на первый взгляд. Альтернативой считается казино приз за депозит. Мы предлагаем вас пару советов, благодаря коим у каждого игрока будет вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств:
#2283 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
винлайн букмекерская контора официальный сайт скачать букмекерскую контору на андроид <a href=https://th-royalgclub.com/>часы казино</a> порно с Дарья Касаткина (теннис) порно с Баталина Ольга Юрьевна <a href=https://res-publika.com>ап казино</a> 1go casino vavada casino где казино скачать pin casino Яровая Ирина Анатольевна порно букмекерскую контору пин букмекерские конторы pin
DiskiPlus casino com DiskiPlus ап казино <a href=https://diskiplus.ru/>DiskiPlus bet casino</a> DiskiPlus Мухтиярова Елена Вячеславовна порно DiskiPlus пина букмекерской конторы <a href=https://diskiplus.ru>DiskiPlus казино пин</a> DiskiPlus porno Илона Маркова, хоккеистка DiskiPlus казино фильм онлайн DiskiPlus порно с Абрамченко Виктория Валериевна DiskiPlus casino riobet DiskiPlus 1×bet слоты DiskiPlus порно с Алина Загитова, фигуристка DiskiPlus сайт 1×bet слоты
#2284 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало
В неких онлайн казино для получения бездепозитных призов не достаточно просто зарегистрироваться на сайте клуба и доказать свои контактные данные. Дополнительно требуется активация промокода. <a href=http://filmkachat.ru/>1×slots зеркало видели такую регистрацию на</a> Особую изюминку видео слотам присваивают уникальные символы. С их в активизируются различные бонусы. Вы сможете запустить вспомогательный степень и увеличить сумму выигрыша. Есть знаки, коие сменяют ненадобные составляющие и сами творят выигрышные комбо. Не стоит забывать и на бонус-тур. После каждого успешного спина есть шанс увеличить необходимую выигрыша в два либо хорошо раза. <a href=https://www.cgarchitect.com/projects/39223c10-luxury-dining-room-at-a-resort-a-harmonious-blend-of-elegance-and-nature>https://www.cgarchitect.com/projects/39223c10-luxury-dining-room-at-a-resort-a-harmonious-blend-of-elegance-and-nature</a> Срок отыгрыша — это период, который начинается в момент активации приза и завершается с его закрытием. Пользователю нужно уложиться в этот временной промежуток, другому призовые свои аннулируются. Казино устанавливают список игр, ставки в засчитываются при расчете отыгранных средств. Если тайтл не входит в этот перечень, то предоставляется быть недоступен для загрузки во время деяния бонусного предложения.Рассмотрим принцип его действия на примере. Допустим, вы зарегистрировались и получили $10 no deposit bonus с вейджером х50. Это означает, что выигранные средства возможно несомненно выводить не раньше, чем последствии того, как общая сумма ставок достигнет $500. 1× slots casino зеркало <a href=https://www.gta5-mods.com/users/nodressio1>https://www.gta5-mods.com/users/nodressio1</a>
казино 1× slots официальный сайт
У любого игорного заведения свои правила и условия. Но, чтобы получить бонусы, необходимо выполнить стандартные деяния: <a href=http://www.arka-bahce.org/forum/showthread.php?p=777163#post777163>1×slots регистрация</a> 1х слотс зеркало регистрация в 1×slots casino Акции, посвященные календарным праздничным, бывают рассчитаны как на всех юзеров, например и на категории: примеру, презент на 8 марта девушкам-игрокам или мужчинам на 23 февраля. <a href=https://rovworld.com/members/henryzem/profile/>https://rovworld.com/members/henryzem/profile/</a> В современность довольно просто получить бонус за регистрацию в казино. Практически любой игорный дом с радостью начисляет средства или безвозмездные вращения. Многие гэмблеры пользуются данным и не смущяются региться в любом клубе с выгодными условиями. Кстати, это замечательная возможность выработать победную стратегию и сорвать джекпот. 1×slots зеркало этих способов предполагает регистрацию
1×slots casino регистрация на сайте
В онлайне количество знаменитых игорных площадок с привлекательными акционными услугами. Однако внимательно читать условия 10-ов предложений в надоест, ну и время отнимет количество. Поэтому наша команда подготовила ТОП-3 сайтов с наихорошими бездепозитными бонусами: Бездепозитный приз за регистрацию в казино — это стартовый подарок вид валютного начисления либо бесплатных вращений для новых игроков заведения, для получения которого не заносить депозит. <a href=https://yogaasanas.science/wiki/User:ElviraJta6457>https://yogaasanas.science/wiki/User:ElviraJta6457</a> Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, чтобы еще раз получить бесплатный бонус. Игорные заведения нетерпимы к бонус-хантерам, потому вас ожидает неминуемое санкция.Рассмотрим принцип его деяния на примере. Допустим, вы зарегистрировались и возымели $10 not the slightest deposit bonus с вейджером х50. Это значит, что выигранные деньги можно несомненно выводить не ранее, чем после того, как общая сумма ставок достигнет $500. зеркло казино 1×slots Таким образом, заведение пытается показать себя своим потенциальным игрокам, а такой рекламный ход как казино бонус без депозита за регистрацию привлекает очень много внимания к игорному заведению и обеспечивает постоянный струю свежих посетителей и будущих клиентов игрового онлайн клуба.Вы не в коем случае ни же рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, научится регулировать изменять ставки и полосы, исследовать бонусные забавы и их выигрышные комбинации, ну конечном просто зарядится кучей впечатлений! Ведь вы будите выступать на бонусные средства, коие можно отыграть и исключить, не просто на демо счет, что, этим наиболее адреналин в крови более повысится а пульс забьется с частым ритмом!
1×slots casino зеркало рабочее
Диапазон ставок, коие вправе устроить игрок, также лимитирован. Обычно ставить можно небольшую сумму — в 10–30 рублей за одно вращение. 1× slots официальный <a href=https://rg-mechanics.club/user/Raymondjal/>https://rg-mechanics.club/user/Raymondjal/</a> Игрокам не принимать приветственный приз как гарантированный метод получить крупный выигрыш, хотя это отличная возможность без расходов оценить функционал казино.
1×slots casino регистрация 1×slots review live
Доступность — бездепозитные бонусы в казино чаще всего предоставляются новым игрокам, хотя посещают случаи, когда приз шансы получить и действующие клиенты. Для получения депозитного приза нужно пополнить свой игровой баланс настоящими средствами. Вознаграждение можно получить либо при внесении первого депо, или повторяющий фиксированного процента от внесённых средств. Так или другому, бонус поступит на счёт только последствии пополнения. <a href=https://google.com.sg/url?q=https://doctorlazuta.by/>https://google.com.sg/url?q=https://doctorlazuta.by/</a> Наши эксперты изучают условия акции, затем в ручном режиме проводят их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и другие параметры. Мы не рекламируем казино, а даем игрокам информацию о лучших из них. 1×slots сайт Каждый новичок и профессиональный игрок грезят скоро стартануть и начать делать реальные ставки. Для этого довольно забрать подарок, за который не выплачивать. В зависимости от игровой платформы, надо(надобно) сделать профиль, привязать email или телефонный. После сего администрация начисляет щедрое вознаграждение в виде даровых вращений либо виртуальных кредитов.В интернете очень большое скриптовых вебсайтов, которые принадлежат мошенникам. Их главная задача – заинтересовать гэмблеров, пообещав не великодушные презенты, хотя и крупные выигрыши. Так собственно кое-какие сайты предлагают получить за регистрацию даже $1 000.
<b>Смотреть еще похожие новости:</b>
<a href=https://10nsk.ru/user/JosephSuple/>1×slots официальный сайт мобильная версия</a>
<a href=https://minecraft.ru.net/user/Manuelsoarl/>1×slots скачать на айфон</a>
<a href=http://weeklywars.de/memberlist.php?mode=viewprofile&u=860>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для тех, кто только взвешивает испытывать свою фортуну, еще для проф игроков, отыскивающих новые площадки для выигрышей, водящие лицензированные казино часто устраивают разные промоакции, и одно из лучших предложений прошедшее время – как для новичков, так и для профессиональных игроков – бездепозитный бонус за регистрацию. Нельзя осматривать игру на деньги, как вариант заработка. Азартные забавы запрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не организатором азартных игр. Сайт носит информационный нрав.
#2285 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet официальный скачать casino pin официальный <a href=https://t.me/vchkogpu_ru>r7 casino</a> win win casino как выиграть в казино <a href=https://specreporter.com/>Набиуллина Эльвира Сахипзадовна порно</a> Разуваева Ксения Денисовна порно бесплатное казино 1×bet сайт Попова Анна Юрьевна порно casino скачать автомат казино casino бездепозитный
DiskiPlus Нургалиева Эльвира Рамиловна порно DiskiPlus Манилова Алла Юрьевна порно <a href=https://www.diskiplus.ru/>DiskiPlus песня казино</a> DiskiPlus букмекерская контора мостбет DiskiPlus Крючкова Полина Викторовна порно <a href=https://diskiplus.ru/>DiskiPlus бесплатные букмекерские конторы</a> DiskiPlus казино ли DiskiPlus 1×bet зеркало рабочее на сегодня DiskiPlus pin up casino официальный DiskiPlus казино 5 DiskiPlus мобильные букмекерские конторы DiskiPlus лучшая казино DiskiPlus casino рабочее зеркало
#2286 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino 777 online
Автоматы неспроста считаются самым знаменитым азартным развлечением. Чтобы усвоить управление и управляла, потребуется всего несколько минут. Ваша задачка сделать ставку, найти число рабочих линий и возможно крутить барабан. Если дисплее выпадет выигрышная композиция – вы выиграли! С этой задачей вас посодействуют управится бездепозитные призы казино. <a href=http://filmkachat.ru/>скачать 1×slots на андроид мобильная версия</a> На условиях отыгрыша даровых призов следует тормознуть подробнее. С ними связаны аспекты, коие нельзя забыть без внимания. <a href=https://blogcircle.jp/commu/276/topic/123>https://blogcircle.jp/commu/276/topic/123</a> Вывод выигрыша с бездепозитных бонусов казино – великодушный презент от азартных клубов. Но дабы вывести собственный доход, необходимо выполнить ряд условий: 1×slots официальный сайт зеркало <a href=https://eventoscqcr.com/campus/community/profile/jamesdof/>https://eventoscqcr.com/campus/community/profile/jamesdof/</a>
1×slot рабочее зеркало
<a href=http://aficionado.pl/newthread.php?do=newthread&f=1>1×slots подтвердит вашу регистрацию если говорить</a> 1×slots официальный demo регистрация в 1×slots casino <a href=http://l-avt.ru/support/dialog/?PAGE_NAME=profile_view&UID=73181>http://l-avt.ru/support/dialog/?PAGE_NAME=profile_view&UID=73181</a> Вознаграждения за получение VIP-статуса ? начисляются в программы лояльности при достижении еще значения или выдаются индивидуально менеджерами службы поддержки.Условия вывода выигрыша. В неких заведениях для удачного вывода с бездепозитного приза довольно пополнения баланса и подтверждения личности. В иных же клубах, нужно несколько один прокрутить собственный депозит. 1×slots официальный сайт скачать
x1 slots 1хслотс регистрация перейти на 1×slots
После требуется внести идентификационный платёж. Это стращает начинающих больше всего. Нужно устроить минимальный депо в 100–500 руб. Таким образом служба защищенности убедиться что, что платёжный способ принадлежит Вам. Данная процедура важна для обеспечения защищенности игровых счетов. Пример, Ваш аккаунт взломают и выведут средства на собственный кошелёк. Будет крайне неприятно. Поэтому верификация платёжной системы, это необходимый момент.Самый распространённый из сходственных бонусов, окончательно же, бездеп на денек рождения клиента — приз вид фиксированной суммы либо фриспинов поступает на счёт игрока, а воспользоваться им возможно в течение установленного периода медли. Когда речь о денежных бонусах, казино постоянно устанавливают условия вейджера, которые необходимо выполнить, чтобы исключить выигрыш. <a href=https://funsilo.date/index.php?title=%D0%B7%D0%BD%D0%B0%D0%BA%D0%BE%D0%BC%D1%81%D1%82%D0%B2%D0%B0%20%D1%84%D0%BB%D0%B8%D1%80%D1%82%20%D0%BE%D1%82%D0%BD%D0%BE%D1%88%D0%B5%D0%BD%D0%B8%D1%8F>https://funsilo.date/index.php?title=%D0%B7%D0%BD%D0%B0%D0%BA%D0%BE%D0%BC%D1%81%D1%82%D0%B2%D0%B0%20%D1%84%D0%BB%D0%B8%D1%80%D1%82%20%D0%BE%D1%82%D0%BD%D0%BE%D1%88%D0%B5%D0%BD%D0%B8%D1%8F</a> В зависимости от онлайн заведения любой из них возможность вам предложить как бездепозитные деньги, например и бездепозитные фриспины, которые последствии удачной регистрации упадут вам на ваш игровой баланс. 1х слотс зеркало регистрация в 1×slots casino Размер призов чаще всего чисто условный и не выше 50 руб. Приятно, но осязаемым бустом деле навряд станет.Бездепозитный приз казино 2022 с выводом за регистрацию предоставляет вероятность ознакомиться игроку с лобби выбранного заведения, сориентироваться в выборе игр и выяснить качество работы службы поддержки. Довольно часто, начиная игровой процесс, игрок уже не желает останавливаться и проделывает настоящий вклад. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть бесплатно вероятно как один таки с призом за регистрацию без необходимости заносить депо.
x1 slots регистрация в 1×slots casino
<a href=https://www.sgomberisgombero.it/my-account-2/>1×slots регистрация 1×slotscasino09k online</a> Не сложно догадаться, что not the slightest down payment bonuses практически разу не бывают великими. Чаще всего речь идет о пяти–тридцати баксах (либо эквиваленте данной суммы в другой еденице).Кешбэк-бонус дает собой возврат фиксированного процента от ставки когда проигрыша или же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%. 1хслотс казино зеркало <a href=https://gamesdrive.net/User-StevenPoimi>https://gamesdrive.net/User-StevenPoimi</a> Существует ли стратегии для отыгрыша бездепозитных призов? К раскаянию нет, на выигрыши или проигрыши с призов, казино или игрок воздействовать не может, отдача игр происходит от создателей игр.Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную процедуру активации приза без депозита. Внимательно прочитайте до конца. Многие новенькие проделывают оплошности на этапе регистрации и поэтому не получить презент.
скачать 1×slots на андроид мобильная версия
Бездеп с фриспинами может охватывать всю коллекцию игр на сайте или разработки 1-го провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш может быть выведен последствии такого, как юзер отыграет эту сумму. Возможность расценить полный функционал слотов — главное совершенство данной разновидности. Игроку становятся доступны что, эти опции, которые отсутствуют в демонстрационном режиме, а возможность выиграть реальные деньги добавляет ярчайших азартных ощущений. <a href=http://sklad-parfum.ru/index.php?subaction=userinfo&user=miniatureamulet>http://sklad-parfum.ru/index.php?subaction=userinfo&user=miniatureamulet</a> Принципиальным отличием даровых призов от призов на депозит является отсутствие надобности заносить деньги на акк. Из-за этого их часто именуют бездепозитными (not the slightest down payment bonuses). 1×slots зеркало рабочее
<b>Смотреть еще похожие новости:</b>
<a href=https://shopcms.vsupport.club/topic/15637–1×slots-casino-%D0%A1%D0%82%D0%A0%C2%B5%D0%A0%D1%96%D0%A0%D1%91%D0%A1%D0%83%D0%A1%E2%80%9A%D0%A1%D0%82%D0%A0%C2%B0%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A1%D0%8F-1×slots-review-live/?p=94409>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a>
<a href=https://dev.eff.one/forumdisplay.php?fid=10>1×slots скачать на айфон</a>
<a href=http://u0382101.isp.regruhosting.ru/index.php/forum/general-questions-and-how-tos/68883-otzyvy-o-tovarakh?start=3192#139690>1×slots рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депо может отличаться до 30 дней.
#2287 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
ограбление казино porno Андрей Рублев (теннис) <a href=https://glvk.guru/>1×bet официальный</a> порно с Кирьянова Дарья Борисовна игры казино <a href=https://th-royalgclub.com/>букмекерские конторы в россии</a> казино можно пари букмекерская контора 1win casino casino 7k рабочее unlim casino порно с Анастасия Потапова, теннисистка казино пин
DiskiPlus пин ап casino pin DiskiPlus про казино <a href=https://diskiplus.ru>DiskiPlus 1×bet телефон</a> DiskiPlus казино ставка DiskiPlus казино ставка <a href=https://diskiplus.ru>DiskiPlus порно с Сергей Бобровский (хоккей)</a> DiskiPlus бесплатно играем казино DiskiPlus casinos winning DiskiPlus Самойлова Алла Владимировна порно DiskiPlus сколько казино DiskiPlus 7k casino DiskiPlus 7k casino DiskiPlus пина букмекерской конторы
#2288 Charlesgunnyhttp://filmkachat.ru
1хслот скачать
Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном призе, то в первую очередь направьте на велечину вейджера и срок, который дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, тем легче отыграть бонус и вывести выигрыш. <a href=http://filmkachat.ru/>1×slots зеркало регистрация то дальше необходимо пройти</a> <a href=https://note.com/joyous_otter80/n/ne75a51f43668>https://note.com/joyous_otter80/n/ne75a51f43668</a> 1хслотс мобильная версия зеркало <a href=http://opensourceprocurement.org/forumthread3783–1×slots-SKACAT%D1%8C-NA-ANDROID>http://opensourceprocurement.org/forumthread3783–1×slots-SKACAT%D1%8C-NA-ANDROID</a> 3. Подтвердить данные. В зависимости от клуба, нужно привязать телефонный либо почту, показать индивидуальную информацию;Для получения депозитного приза необходимо пополнить свой игровой баланс реальными средствами. Вознаграждение можно получить либо при внесении первого депо, или вид фиксированного процента от внесённых средств. Так или другому, приз поступит на счёт только после пополнения.
зеркала 1×slots
1хслотс официальный сайт зеркало <a href=http://dac21.com/bbs/board.php?bo_table=free&wr_id=1003344>http://dac21.com/bbs/board.php?bo_table=free&wr_id=1003344</a> 1×slots официальный сайт скачать Допустим, за регистрацию вы возымели бездеп в объеме 2 000 руб. С вейджером х30. В данном случае светит устроить ставок, на общую необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда выполните обстоятельства по отыгрышу, придёт время заработать реальные деньги. Однако не забывайте, что с любого подарка выйдет вывести определённую необходимую (почаще всего менее $200).
1×slots регистрация 1×slots review live
Но существуют азартные заведения, готовые просто например вручить средства на игру. Для сего достаточно создать профиль. Чтобы исключить выигрыш, сначала необходимо выполнить вейджеровые обстоятельства, прописанные в критериях получения бездепа.После получения приза вывод средств для посетителя несомненно недоступен до тех пор, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо пара недель. Выводить деньги игрок может лишь в отыгрыша. Некоторые казино имеют предлагать клиентам бездепы за свидетельство номера либо почты или репост на страничку в социальных сетях. <a href=http://rai.lv/ru/index.php?subaction=userinfo&user=incandescenttyr>http://rai.lv/ru/index.php?subaction=userinfo&user=incandescenttyr</a> 1×slots casino регистрация 1×slots review live Постарайтесь отыграть вейджер, дабы была вероятность оставить заявку на выплату. Кстати, на всех сайтах, представленных в списке, доступны современные платёжные приборы. Вы можете получить выигрыш на электронной кошелёк, карту, телефон.Многие новички сомневаются, собственно поощрительный приз надо несомненно возвращать, даже случае они выиграли у казино. Это безусловно неопасно и надежно. Выводя выигранные средства, игрок просто одергивает свое роль при и теряет уникальную возможность – бесплатно наращивать личное материальное положение.
скачать 1×slots на андроид мобильная версия
Если при регистрации указать промокод, можно гарантировано получить бонус. Где взять ваучер? Посетите тематику блоги или форумы. Иногда администрация клуба проделывает рассылку ваучеров на электронную почту. В заключительное время игорные жилища начали рекламироваться в кинокартинах и сериалах. Присмотритесь и всего заметите промокод, который принесёт 500 или 1 000 бонусных руб.Чаще всего, известные сервисы, эти как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно обязательное правило. Финансовые средства выводятся лишь через что, эту платежную систему, коей пользовались для пополнения депозита. Если же игрок получил бездепозитный покерный приз, требуется пополнить счет на минимальную необходимую, кот-ая составляет обычно десять долларов. 1×slots casino регистрация на сайте <a href=http://www.s-d.jp/userinfo.php?uid=13590#>http://www.s-d.jp/userinfo.php?uid=13590#</a> Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.
рабочее зеркало 1хслотс
Бездепозитный приз за регистрацию в казино с выводом денег в 2022 году — Наш ресурс дает игрокам актуальную информацию о самых новых, великодушных и испытанных призах в интернет казино, которые обновляются каждый денек.Прочитайте правила бонусной программы, в хотите принять. Да, мы настойчиво советуем устроить это до регистрации. <a href=https://www.knx-fr.com/member.php?action=profile&uid=10003>https://www.knx-fr.com/member.php?action=profile&uid=10003</a> Выбирая даровой бонус, пристально изучайте правила. Убедитесь, собственно вам можно на участие в акции. Уточните, в каких забавах возможно скорпулезно обстоятельства вейджера. При надобности задавайте вопросы адептам саппорта.У каждой игры средства требования по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система зачтет любую ставку. В рулетке и покере устроить это гораздо сложнее. Именно потому так принципиально пристально читать обстоятельства получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в каждой этой, то новички попросту «спустят бонус на ветер». 1хслотс зеркало на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=http://kemsrr.forumex.ru/viewtopic.php?f=7&t=4615>скачать 1×slots официальный сайт</a>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=301500>1× slots сайт</a>
<a href=http://xn–80akbkalsbeeafq6a6b2f.xn–p1ai/forum/messages/forum1/topic41646/message222142/?result=new>1×slots регистрация на сайте 1×slots ru com</a>
<a href=http://big.bestforums.org/viewtopic.php?f=7&t=12507>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подарки на конкретные даты выделяются критериями получения. Если одобрение начисляют игроку на день рождения, то сумма обычно зависимости от совместного размера депо последний год. В интернет-сети практически можно отыскать списки наиболее знаменитых и обещанных поощрительных программ от известных онлайн-казино.
#2289 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino официальный зеркало casino x <a href=https://specreporter.com/>Комарова Наталья Владимировна порно</a> официальное казино вход казино вход <a href=https://7club7.com/>порно с Матвей Сафонов (футбол)</a> pin ап casino kometa casino пари букмекерская контора 1×bet слоты официальный сайт 1×bet зеркало рабочее xbet 1×bet зеркало на сегодня 1×bet xyz казино в россии
DiskiPlus бывшие казино DiskiPlus порно с Константин Тюкавин (футбол) <a href=https://diskiplus.ru>DiskiPlus 7k casino официальный сайт</a> DiskiPlus casino андроид DiskiPlus casino регистрации <a href=https://diskiplus.ru>DiskiPlus casino промокод</a> DiskiPlus порно с Анастасия Потапова, теннисистка DiskiPlus porno Ангелина Гончаренко, хоккеистка DiskiPlus casino актуальное зеркало DiskiPlus Москалькова Татьяна Николаевна порно DiskiPlus up casino зеркало DiskiPlus casino buzz DiskiPlus казино проиграл
#2290 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino buzz casino online зеркало <a href=https://rhymes-punches.com/>Окладникова Ирина Андреевна порно</a> porno Екатерина Ефременкова, шорт-трекистка porno Марина Александрова <a href=https://slon-ru.com/>casinos winning</a> 1×bet официальный сайт 1×bet xyz casino x букмекерская контора зенит почему в казино нет часов 1×bet скачать приложение на андроид Ирина Горбачева 1×bet xbet xyz
DiskiPlus Ирина Горбачева DiskiPlus Анна Михалкова <a href=https://diskiplus.ru/>DiskiPlus casino рабочее зеркало</a> DiskiPlus гта казино DiskiPlus 1×bet на андроид <a href=https://www.diskiplus.ru/>DiskiPlus black russia казино</a> DiskiPlus Матвиенко Валентина Ивановна порно DiskiPlus лучшая казино DiskiPlus 1×bet 1 DiskiPlus играющие казино DiskiPlus 1×bet вход DiskiPlus 1win casino DiskiPlus порно с Петр Ян (ММА)
#2291 Charlesgunnyhttp://filmkachat.ru
1×slots скачать на айфон
К примеру, игроку выдаются бесплатные средства в заведении в объеме пятидесяти либо 100 долларов (вейджер на которые сочиняет 100х). То есть, любому новоприбывшему игроку выскакивает привлекающая иллюстрация, кот-ая сулит выплату всех зачисленных фирмой средств. Не стоит заострять на казино приз за регистрацию без депо с чрезмерно великой либо очень малеханькой суммой призов, поэтому что, числе тщательно исследовав все условия, тут всего, несомненно какой-то подкол.Вейджер не более х30–35 является применимым. Опытные игроки заявляют, что с этим вейджером реально остаться в плюсе, в правильно подойти к выбору игрового аппарата. <a href=http://filmkachat.ru/>рабочее зеркало 1хслотс</a> У нас на веб-сайте Вы найдете список призов без депо в испытанных казино и подробную информацию о том как их получить и использовать.В наше время очень просто получить бонус за регистрацию в казино. Практически каждый игорный дом с радостью начисляет деньги или благотворительные вращения. Многие гэмблеры используют этим и не стесняются регистрироваться в каждом клубе с прибыльными критериями. Кстати, это отличная вероятность выработать победную стратегию и сорвать джекпот. <a href=https://developers.paragon-software.com/community/profile/3d-exterior-rendering-company/>https://developers.paragon-software.com/community/profile/3d-exterior-rendering-company/</a> На бесплатные бонусы онлайн-казино почти постоянно распространяется ограничения по стране проживания посетителей. Даже в для разрешается раскрывать счет и выступать на средства в заведении, это еще не значат, собственно вас доступны not the slightest down payment bonuses.Мы подготовили список, где есть постоянно актуальные и свежие бездепозитные призы казино, коие вы можете получить даром. Для наших юзеров есть особые предложения эксклюзивные призы, коие вы кого не найдете, их мы обозначили особой красноватой плашкой «Exclusive». рабочее зеркало 1×slots <a href=https://www.jhshe.com/home.php?mod=space&uid=1744198&do=profile&from=space>https://www.jhshe.com/home.php?mod=space&uid=1744198&do=profile&from=space</a>
1×slots регистрация 1×slotscasino09k online
1хслот официальный сайт зеркало <a href=http://bbs.yunduost.com/home.php?mod=space&uid=138210>http://bbs.yunduost.com/home.php?mod=space&uid=138210</a> 1×slots регистрация 1×slots casino c2d ru Когда речь о получении бездепозитных призов в казино, для направьте на последующие условия:Еще одно условие дотрагивается объемов ставки. Операторы устанавливают максимальную сумму, коию игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, избранной в Личном офисе. При превышении лимита есть риск потерять бонуса. Существующие лимитирования относятся и к конкретным обликам ставок. Например, играя в рулетку, клиент возможность столкнуться с запретом ставить фишки на шансы.
1хслот зеркало сайта
Ещё одно распространённое акционное предложение – привлекательный подарок с сомнительными притязаниями. К примеру, клуб сулит $100 в качестве бездепа, но с вейджером х80 либо х100. Отыграть подобный вейджер фактически нереально и потому лучше концентрироваться на больше интересных акциях.Стоит обозначить(означить), что бездепозитный приз выдается только совершеннолетним новичкам, коие, к, могут пригласить личных друзей и людей, также претендующих на поощрительную программу лояльности. Подобная разработка была среди конкурирующих онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры содействуют повышению собственной популярности, путем привлечения новых игроков. Бонусы – это оригинальный шанс для потенциальных участников игры, коие шансы опробовать софт покер рума и увериться, станут ли они в него играть или нет. Новый игрок попробует средства силы с реальными оппонентами в казино. <a href=http://krair.kr/bbs/board.php?bo_table=free&wr_id=797760>http://krair.kr/bbs/board.php?bo_table=free&wr_id=797760</a> Используйте наихорошие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из списка ниже, чтобы заработать презенты за обычные деянья теперь сейчас получить первый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высокой отдачей и прыткими выводами на электрические кошельки. 1×slots официальный сайт, скачать
1×slots регистрация 1×slots review live
Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.В любом казино с бездепозитным бонусом предусмотрены вейджеровые обстоятельства. Это один-единственный «подводный камень», который стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) устроить определённое число ставок. Чем круче бонус, тем сложнее выполнить обстоятельства, и напротив. Популярность интернет казино растёт и всё больше юзеров начинают проявлять азартными играми. Бездепозитные бонусы 2022 года, это уникальные презенты за регистрацию. С их поддержкой свежие игроки могут получить бесплатные вращения или деньги на баланс за 1 регистрацию. С в игорных заведений в онлайне, бездепозитные бонусы стали знаменитейшим способом привлечения игроков. Подобные акции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы расскажем. Наш сайт собрал наилучшие предложения из интернета на 2022 год. Воспользуйтесь хоть презентом и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить обстоятельства.Но ни не запамятовывайте пристально читать управляла участия в бонусных промоакциях. Если вы нарушите хотя бы одно условие, позже вы не можете устроить недоразумение с администрацией. Бoльшинcтвo азартных заведений выдвигают приблизительно однообразные, схожие обстоятельства и требования, коие необходимо выполнить, чтобы получить бездепозитный приз за регистрацию. Все их можно объединить в раз перечень:Максимальная ставка ? уточняется в денежной счета и ограничивает объем ставки за раз спин. В случае ее превышения приз имеет быть аннулирован. Также в правилах возможность содержаться запрет на размещение ставок конкретного облика, к, по одинаковым шансам в рулетке (другими, на чет либо нечет, красноватое либо черное и т.д. ). 1×slots сайт <a href=http://fotolenta.ru/bitrix/redirect.php?goto=http://psk6.ru/bitrix/click.php?goto=http://domamilo.com/bitrix/rk.php?goto=https://teletype.in/@urist555/L2YpQh2vVN8>http://fotolenta.ru/bitrix/redirect.php?goto=http://psk6.ru/bitrix/click.php?goto=http://domamilo.com/bitrix/rk.php?goto=https://teletype.in/@urist555/L2YpQh2vVN8</a> Если вы избираете испытанное лицензионное онлайн казино и выполните все обстоятельства получения бездепозитного приза, трудностей с получением презента у Вас не возникнет.
1×slots официальный сайт скачать на айфон
Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке представители онлайн-казино публикуют важную информацию о no down payment bonuses и услугах.Возможность протестировать свежие забавы, не рискуя собственными средствами и разработать личную стратегию забавы. <a href=http://81.staikudrik.com/index/d1?diff=0&utm_source=ogdd&utm_campaign=26607&utm_content=&utm_clickid=uskkokskw44sooos&aurl=http://clients1.google.iq/url?q=http://bodhitree.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/qZ_Vfu_V9Is>http://81.staikudrik.com/index/d1?diff=0&utm_source=ogdd&utm_campaign=26607&utm_content=&utm_clickid=uskkokskw44sooos&aurl=http://clients1.google.iq/url?q=http://bodhitree.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/qZ_Vfu_V9Is</a> 1х слотс зеркало регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://elforodelpoker.com/presentaciones/1×slots-casino-t292498.html>1×slots casino регистрация</a>
<a href=https://mit-bbs.com/viewtopic.php?t=258074>рабочее зеркало 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подтверждение регистрации. Казино просят привязки профиля к электронному адресу и номеру телефонного. Для этого на e-mail отчаливает письмо со ссылкой, а на телефон ? текстовое извещенье с кодом.
#2292 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало этих способов предполагает регистрацию
Фриспины начисляются по определенной ставке. После их активации игроку необходимо запустить слот и увериться, собственно в нем показываются бесплатные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода после отыгрыша определяется оператором и изредка превышает 5 000 руб.Автоматы неспроста считаются наиболее популярным азартным отдыхом. Чтобы освоить управление и управляла, понадобится всего количество мин. Ваша задачка сделать ставку, найти число трудящихся линий и можно вертеть тамбур. Если на выпадет выигрышная комбинация – вы выиграли! С данной задачей вам помогут справится бездепозитные бонусы казино. <a href=http://filmkachat.ru/>1×slots на любой вкус как пройти регистрацию</a> Вы не в коем случае ни же рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный бонус, по мимо практической забавы на бездепозитные призы, у Вас есть шанс выучить игровые автоматы, научится регулировать менять ставки и полосы, исследовать бонусные игры и их выигрышные композиции, да конечном просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные свои, которые можно отыграть и исключить, не просто на демо счет, что, этим наиболее адреналин в крови еще повысится а пульс забьется с частым ритмом!Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? <a href=https://hearthis.at/group/466308/transform-your-e-commerce-success-with-360-spin-product-videos/>https://hearthis.at/group/466308/transform-your-e-commerce-success-with-360-spin-product-videos/</a> Вы скорее, например все предпочитаете получать презенты и бездепозитные бонусы казино. Игорные дома взяли в повадку одаривать гэмблеров приятными призами. Стать владельцем приветственного подарка можно за творенье профиля либо пополнение счёта. Второй вариант больше увлекательный, так клубы готовы удвоить депо! Но случае вы новичок и лишь знакомитесь с миром азарта, другого пользуйтесь бонусом за регистрацию.Срок активации и время на отыгрыш. Зачисление денег либо фриспинов происходит при активации на взыскательно ограниченного периода, похожие требования предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать приз количество дней либо том недель. Другие выдают солидную сумму за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высоким вейджером. 1×slots официальный сайт скачать <a href=http://pasarinko.zeroweb.kr/bbs/board.php?bo_table=notice&wr_id=3576729>http://pasarinko.zeroweb.kr/bbs/board.php?bo_table=notice&wr_id=3576729</a> Доступность — бездепозитные бонусы в казино чаще всего предоставляются новым игрокам, хотя посещают случаи, когда приз шансы получить и действующие клиенты.
1×slots бездепозитный бонус за регистрацию
Нельзя осматривать игру на средства, как вариант заработка. Азартные забавы запрещены для лиц младше 18 лет. Topcasinobonuses.mobi не зачинщиком азартных игр. Сайт одевает информационный нрав. <a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=7523&TITLE_SEO=7523-preobrazovatel-interfeysov-usb-rs485&MID=468159&result=reply#message468159>1×slots зеркало быструю регистрацию а также мгновенное</a> 1×slots официальный сайт мобильная версия <a href=http://www.gaz69.ru/ipb/profile/47106-bktoplist0708/?tab=field_core_pfield13>http://www.gaz69.ru/ipb/profile/47106-bktoplist0708/?tab=field_core_pfield13</a> 1 x slots
1хслот зеркало сайта
Внесение депозита – Будьте готовы восполнить счет в отыгрыша приза. Это стандартное требование правил для этого на промо-акций. Лучше заблаговременно уточнить, какую необходимую нужно несомненно вносить на счет. Как управляло, речь о наименьшем депозите, но вы обязаны быть уверены, что он для по кармашку. Также, учите, что бездепозитный приз возможно вывести лишь никаких случае, когда станут выполнены все условия отыгрыша.Приглашаем делиться мнениями о призах. Это поможет другим пользователям подбирать более прибыльные предложения. <a href=http://dgb-nt.ru/bitrix/click.php?goto=http://inters.ru/bitrix/click.php?goto=http://7000lv.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/VYNKCL3bKFV>http://dgb-nt.ru/bitrix/click.php?goto=http://inters.ru/bitrix/click.php?goto=http://7000lv.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/VYNKCL3bKFV</a> Для тех, кто лишь взвешивает испытать свою фортуну, а для профессиональных игроков, отыскивающих новые площадки для выигрышей, ведущие лицензированные казино часто организуют разные акции, и одно из лучших предложений за время – как для начинающих, так и для профессиональных игроков – бездепозитный приз за регистрацию. 1×slots официальный сайт скачать Приветственный бонус без депо ? подарок за регистрацию. Выдается средствами, фриспинами или баллами. В последнем случае бонусные баллы используются для участия в турнирах либо размена на настоящие деньги.
1×slots быструю регистрацию а также мгновенное
<a href=https://sadhaka.nl/forum/viewtopic.php?t=104422>1×slots зеркало регистрация то дальше необходимо пройти</a> Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и. Когда игроку полагается много фриспинов, администрация может разбивать их начисление на несколько дней. Бесплатные вращения предоставляются для определенного слота, который указывается в правилах акции. Подтверждение регистрации. Казино просят привязки профиля к электрическому адресу и номеру аппарата. Для сего на e-mail отправляется послание со ссылкой, а на телефонный ? текстовое извещение с кодом.Как управляло, при выводе денег, от играющего требуется лишь сделать наименьший лепта чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом собственный счет. 1×slots зеркало рабочее <a href=http://www.forumdipace.org/profile.php?mode=viewprofile&u=601898>http://www.forumdipace.org/profile.php?mode=viewprofile&u=601898</a>
1 x slots casino
Бездепозитные призы начисляются только раз раз. Не стоит открывать новые аккаунты, дабы получить их повторно. Служба безопасности казино непременно выявит «левого» участника и заблокирует. Если гость выполнит нужные притязания, отыграет собственную ставку и решит исключить личный выигрыш, то ему надо(надобно) к, собственно казино непременно потребует предоставить ксерокопии собственных документов, дабы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные свои исключить не удастся. <a href=http://www.tiendahinchables.com/blog/%D0%B2%D0%BE%D0%B4%D0%B8%D1%82%D0%B5%D0%BB%D1%8C%D1%81%D0%BA%D0%B8%D0%B5-%D0%BF%D1%80%D0%B0%D0%B2%D0%B0-%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA.html>http://www.tiendahinchables.com/blog/%D0%B2%D0%BE%D0%B4%D0%B8%D1%82%D0%B5%D0%BB%D1%8C%D1%81%D0%BA%D0%B8%D0%B5-%D0%BF%D1%80%D0%B0%D0%B2%D0%B0-%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA.html</a> 1×slots casino регистрация Обычно, бездепозитные бонусы выдаются под определенные слоты с фиксированной ставкой, но их наверняка запрещено применять в игровых автоматах с прогрессивным джекпотом. Список игр, в которых можно применять бездеп, Вы найдете в описании промоакции либо можете уточнить у саппорта заведения.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=13119>1хслотс казино зеркало</a>
<a href=http://nexusroleplay.teamforum.ru/viewtopic.php?f=19&t=6980>1×slots casino зеркало</a>
<a href=https://australiantravelforum.com/Upload/showthread.php?tid=379882>1×slots зеркало этих способов предполагает регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный бонус – это финансовое вознаграждение, коие выдается соучастнику игры в казино, для его вербования и появления заинтересованности. Любой гость, который подходит условиям выдачи подобного бездепозитного приза, имеет претендовать на получение вышеуказанного приза. Такое одобрение является более эффективным способом, дающим вероятность стартовать в игре, не вкладывая собственных вещественных средств. Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную функцию активации бонуса без депо. Внимательно прочитайте до конца. Многие новенькие проделывают промахи на этапе регистрации и потому не получить подарок.
#2293 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Фастова Елена Владимировна порно порно с Георгий Джикия (футбол) <a href=https://kompromat1.online/>рокс казино</a> cometa casino букмекерская контора ставки <a href=https://specreporter.com/>самое казино</a> букмекерская контора мостбет казино большая почему казино 1×bet официальный слоты vodka casino демо казино винлайн букмекерская контора
DiskiPlus порно с Алексей Миранчук (футбол) DiskiPlus casinos xyz <a href=https://www.diskiplus.ru/>DiskiPlus порно с Гатагова Ольга Анатольевна</a> DiskiPlus рейтинг казино DiskiPlus букмекерская контора <a href=https://diskiplus.ru/>DiskiPlus porno Юлия Канакина</a> DiskiPlus Радченко Светлана Юрьевна порно DiskiPlus 7k casino бонус DiskiPlus букмекерская контора ставки DiskiPlus казино смотреть DiskiPlus порно с Владимир Минеев (ММА) DiskiPlus Манилова Алла Юрьевна порно DiskiPlus порно с Юлия Ефимова
#2294 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация в 1×slots casino
Используйте наихорошие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, чтобы заработать презенты за обычные действия и уже сегодня получить 1-ый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высокой отдачей и прыткими выводами на электрические кошельки. <a href=http://filmkachat.ru/>1×слот регистрация в 1×slots casino</a> Многие азартные клубы ограничивают сумму вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании акции, суммы Вы не можете исключить. Разница будет аннулирована, Вы даже не можете создавать на нее ставки.Самый распространённый из подобных бонусов, естесственно же, бездеп на денек рождения посетителя — приз вид фиксированной суммы или фриспинов поступает на счёт игрока, а воспользоваться им возможно на установленного периода времени. <a href=http://magic.ly/kalinka>http://magic.ly/kalinka</a> Вышеописанная причина и является главным моментом, из-за которого операторы отдают часть собственной прибыли на разные рекламные затраты и рекламные кампании. А наиболее действенным тут станут выступать непосредственно бездепозитные бонусы казино 2022 с выводом за регистрацию. 1×slots регистрация 1×slots casino 777 online <a href=https://gratisafhalen.be/author/xwymamie56/>https://gratisafhalen.be/author/xwymamie56/</a>
1×slots casino зеркало
<a href=https://koreanstudies.com/forum/viewtopic.php?t=108383>1 х слотс зеркало</a> 1 x slots <a href=https://sc-grandmaster.ru/forum/?PAGE_NAME=profile_view&UID=20174>https://sc-grandmaster.ru/forum/?PAGE_NAME=profile_view&UID=20174</a> Бездепозитные призы прекрасный вариант безвозмездной игры в игровые автоматы. Многие пользователи сети не знают, собственно в казино можно начать играть абсолютно безвозмездно, а потом исключить выигрыш на банковскую карту либо электронный кошелек, другие не доверяют интернет казино, а третьи удачно играют и выигрывают – и подчас довольно немалые суммы. 1×slots зеркало сайта Для казино, работающих онлайн, бездепозитные бонусы необходимы для вербования свежих посетителей. Предложение сыграть на слотах без надобности внесения реальных средств — работающий метод для увеличения интереса к компании. После отыгрыша бездепа великоват шанс, собственно игроку понравится и он продолжит играть в казино, лишь теперь теснее на собственные средства.Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном сайте и выполните вход в личный офис, дабы отобрать благотворительные вращения с вейджером х40;
1×slot регистрация
Бездепы обычно предлагают с отыгрышем — быстро вывести выигранные свои невозможно. Перевод денег со счета будет вероятен последствии такого, как юзер выполнит все требования казино, а сумма возможности быть выше установленного правилами лимита. Условиями промоакции фиксируются сроки, протяжении которых заказчик вправе пользоваться предложением. Обычно они не превышают нескольких дней последствии активации. <a href=http://www.cooperativacoomultexco.com/user/Henrybup/>http://www.cooperativacoomultexco.com/user/Henrybup/</a> 4. Заберите подарок. Чаще всего приз активизируется незамедлительно после регистрации. Но бывают истории, когда надо(надобно) зайти в собственный офис либо написать в саппорта.Существуют казино с призом за регистрацию, в очень модны фриспины в интернет казино потом регистрации в конкретных играх. Они встречаются даже чаще безвозмездных поощрений или традиционных бонусов в казино без инвестициям. Например, игрок регистрирует счет, на кот-ый начисляются бесплатные забавы, приз за регистрацию повторяющий даровых фрспинов, вращения в игровом автомате. Во время игрового процесса компьютерные выигрывает настоящие деньги, которые в последствии можно удачно вывести из заведения на собственную платежную систему. То есть, все шансы исключить свои без рисков своими деньгами. Регистрация, какую в получит бонусы, займет несколько, а благодаря данному можно увеличить пять евро поощрений до тыс. И без всяких заморочек вывести их. 1хслотс зеркало
1хслотс мобильная версия зеркало
1×slots официальный зеркало <a href=https://forum.dneprcity.net/showthread.php?p=679909#post679909>https://forum.dneprcity.net/showthread.php?p=679909#post679909</a> Также, учите, собственно бездепозитный приз возможно вывести лишь в случае, когда станут выполнены все обстоятельства отыгрыша.При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, которое возможно посвятить игре в казино.
1хслотс официальный сайт зеркало
Только выполнив все обстоятельства отыгрыша и дождавшись завершения проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить средства деньги. Для такого, чтобы отыграть сумму вашего бездепозитного бонуса нужно выполнить условия вейджера. Очень часто фриспины даются на определенные слоты (book of ra, book of deceased, book of sun), подбирайте разъем себе нраву, они все очень красочные и качественные. Бездепозитные приз имеет быть денежным например и вид фриспинов на слотыМногочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, чтобы еще раз получить безвозмездный приз. Игорные заведения нетерпимы к бонус-хантерам, потому вас ждет неминуемое наказание. <a href=http://xn–jj0bt2i8umnxa.com/bbs/board.php?bo_table=free&wr_id=112857>http://xn–jj0bt2i8umnxa.com/bbs/board.php?bo_table=free&wr_id=112857</a> казино 1×slots официальный сайт Выбирайте наихорошие безвозмездные призы за обзоров на Casinoz – и пусть вам сопутствует счастье при отыгрыше бонусных кредитов!Также бездепозитные призы могут работать способом вернуть к этой посетителей, что приостановивших своё сотрудничество с компанией: уведомление о бездепе поступает на мобильный телефонный либо почту.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.reisezielforum.de/viewtopic.php?p=543495#p543495>1×slots официальный demo регистрация в 1×slots casino</a>
<a href=https://surfaceprophets.com/members/davidelicy.5309/>1 x slots casino</a>
<a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=139434>онлайн казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Законодательство, регулирующее азартные игры в различных государствах, влияние на полномочия операторов. В итоге юзеры из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это возможность быть как глубокий отказ в доступе, например и невозможность загружать забавы отдельных изготовителей. Подарки на определенные даты выделяются условиями получения. Если поощрение начисляют игроку на денек рождения, то сумма обыкновенно зависит от совместного объема депо за год.
#2295 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Георгий Джикия (футбол) порно с Дронова Александра Викторовна <a href=https://kompromat1.online/>букмекерскую контору пин</a> 7k casino зеркало рабочее казино смотреть онлайн <a href=https://rumafia.news/>cat casino</a> Львова-Белова Мария Алексеевна порно скачать 1×bet на андроид бесплатно casino официальный сайт симулятор казино сайт казино зеркало porno Алена Косторная (фигурное катание) Фастова Елена Владимировна порно
DiskiPlus казино проиграл DiskiPlus зеркала казино <a href=https://www.diskiplus.ru/>DiskiPlus балтбет букмекерская контора</a> DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz DiskiPlus казино рояль <a href=https://diskiplus.ru>DiskiPlus порно с Алексей Миранчук (футбол)</a> DiskiPlus Петрова Ольга Викторовна порно DiskiPlus скачать 1×bet на андроид бесплатно DiskiPlus porno Андрей Рублев (теннис) DiskiPlus 1×bet слоты официальный сайт DiskiPlus 1×bet рабочее DiskiPlus 1×bet вход DiskiPlus порно с Максим Глушенков (футбол)
#2296 Charlesgunnyhttp://filmkachat.ru
1×slots бонус за регистрацию
Рассмотрим принцип его деяния на примере. Допустим, вы зарегистрировались и возымели $10 not the slightest deposit bonus с вейджером х50. Это значит, что выигранные деньги можно несомненно выводить не ранее, чем после того, как общая сумма ставок достигнет $500.Если идет об неповторимых услугах, возможность понадобиться регистрация в казино по ссылке с партнерского вебсайта. <a href=http://filmkachat.ru/>1хслот 1хслотс регистрация перейти на 1×slots</a> В интернет-сети практически можно отыскать списки более знаменитых и обещанных поощрительных программ от модных онлайн-казино.Бывают ли бездепозитные призы без вейджера? Бывают, случае у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный бонус за регистрацию уточняется вейджер во всех казино. <a href=https://britishforcesdiscounts.co.uk/biz/a/165360-CGIFurniture>https://britishforcesdiscounts.co.uk/biz/a/165360-CGIFurniture</a> Многие игроки, оценив функционал казино, остаются играть в нем и далее ? на это и направлено любое рекламную. Постоянные посетители вносят депозиты и проделывают ставки, обеспечивая длительную прибыль оператора. То есть, казино выдают бездепы свежим пользователям для формирования лояльной аудитории. 1 x slots <a href=https://www.huntingnet.com/forum/members/henrydex.html>https://www.huntingnet.com/forum/members/henrydex.html</a> Бездепозитный бонус часто имеет стать доступным сразу после завершения регистрации, потому в большинстве случаев единственным притязанием к нему считается регистрация, а после ревизия вашей новой учетной записи.Варианты выигрыша зависят от Вашей удачи и условий игорного портала. Выше мы сказали, собственно некоторые бездепозитные призы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются они, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на средства, можно выиграть неописуемые суммы. Сегодняшние игровые автоматы или видео слоты, как их нарекают. Могут выдавать солидные умножение от х1.000 и повыше. Некоторые умножают ставку от х100.000.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Возьми свой подарок. Чаще всего бонус активируется незамедлительно в регистрации. Но посещают ситуации, когда надо(надобно) зайти в личный кабинет или написать в справочную службу. <a href=https://forum.oursson.ru/memberlist.php?mode=viewprofile&u=1347>казино 1×slots</a> 1×slots официальный сайт скачать <a href=http://bbs.boway.net/home.php?mod=space&uid=1212003>http://bbs.boway.net/home.php?mod=space&uid=1212003</a> Бoльшинcтвo азартных заведений выдвигают приблизительно однообразные, схожие обстоятельства и требования, которые нужно выполнить, чтобы получить бездепозитный бонус за регистрацию. Все их возможно объединить в один список:В качестве бонусов онлайн казино часто предлагает выдачу фриспинов, другими бесплатных вращений игрового барабана. Виртуальные монеты возможно применять для обучения в покерной школе или для забавы в казино. скачать 1×slots официальный сайт Выиграть реальные деньги в казино не пополняя счет – сложно, но возможно. Главное задаться целью и не нарушатьправила заведения. Выберите несколько казино с бездепзитными призами и начните выступать на бонусные свои. По статистике каком-то 10-ти заведений можно заработать небольшую сумму средств с бонусных средств.
1хслот скачать
Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные способы и оценить особенности, недоступные при игре в демо режиме. Многие свежие посетители перебегают в количество постоянных, а оператор получает длительную прибыль. <a href=http://ufasvet.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://bats.ru/bitrix/redirect.php?goto=http://hydroschool.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/1Qr9E4lfyqp>http://ufasvet.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://bats.ru/bitrix/redirect.php?goto=http://hydroschool.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/1Qr9E4lfyqp</a> 1×slot казино зеркало
1× slots casino официальный сайт
<a href=https://www.donchillin.com/space-uid-382497.html>1×slots официальный demo регистрация в 1×slots casino</a> Новички не обожают незамедлительно же вносить депозит. Это обосновано неименьем навыка и недоверием. К счастью, наши возможно получить бездепозитный бонус за регистрацию в казино. Неважно собственно начисляет система – фриспины или кредиты. В всяком случае вы не рискуете своими сбережениями. Это замечательная возможность запустить понравившийся видео слот либо же испытывать удачу в настольных играх. 1×slots коды <a href=https://www.baronerosso.it/forum/members/115390_jasperbluen.html>https://www.baronerosso.it/forum/members/115390_jasperbluen.html</a>
1×slots официальный сайт, скачать
Раздача призов возможность быть приурочена к различным датам: календарные праздничные, деньки рождения игроков, годовщина открытия казино и т. Д. Подарок выдается вид средств, фриспинов или баллов для накопления и размена на предложения оператора. Если пользователь получает выигрыш, деньги начисляются на его счет. Для вывода данной суммы придется выполнить ряд притязаний.Верификация аккаунта. Лучше доказать личность незамедлительно в регистрации, дабы потом не было заморочек с выводом денег. Верификация имеет протекать 2-мя способами: <a href=https://physicsmastered.com/author/walterswoms/>https://physicsmastered.com/author/walterswoms/</a> 1×slots официальный зеркало рабочее На бонусные начисления шансы быть установлены вспомогательные лимитирования, коие Вы не к при отыгрыше. Пока приз всецело не отыгран — средства из казино не выводятся.Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция содержит доскональные правила, гиперссылка на коие обычно находится в промообъявлении. В них указываются лимиты, вейджер, список доступных игр. Если оператор скрывает данные о предложении, то воспользоваться им надо.
<b>Смотреть еще похожие новости:</b>
<a href=http://jktroickiy.forumex.ru/viewtopic.php?f=2&t=3590>рабочее зеркало 1хслотс</a>
<a href=https://forum.dis-course.net/viewtopic.php?p=968334#p968334>1×slots официальный demo регистрация в 1×slots casino</a>
<a href=https://www.globalvision2000.com/forum/member.php?action=profile&uid=1072499>1×slots casino регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вывод выигрыша с бездепозитных призов казино – великодушный презент от азартных клубов. Но дабы вывести собственный доход, необходимо выполнить ряд условий: Фриспины без депозита либо вспомогательные средства помогут ближе познакомиться с игровой платформой и её функциями. За счёт даров возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за игры против живых крупье.
#2297 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
7k casino зеркало на сегодня Попова Анна Юрьевна порно <a href=https://sovsekretno.net/>casino сайты</a> 7k casino зеркало порно с Ирина Сидоркова <a href=https://krtka.info/>порно с Гатагова Ольга Анатольевна</a> казино пину как выиграть в казино casino официальный зеркало Семёнова Татьяна Владимировна порно букмекерская контора бетсити Александра Бортич про казино
DiskiPlus букмекерские конторы pin DiskiPlus casino скачать приложение <a href=https://diskiplus.ru/>DiskiPlus casino riobet</a> DiskiPlus Чулпан Хаматова DiskiPlus казино 5 <a href=https://diskiplus.ru>DiskiPlus 1×slots casino</a> DiskiPlus kent casino DiskiPlus pin casino DiskiPlus casino рабочее DiskiPlus 1×bet слоты официальный сайт DiskiPlus порно с Варвара Субботина DiskiPlus казино без DiskiPlus Матвиенко Валентина Ивановна порно
#2298 Charlesgunnyhttp://filmkachat.ru
1х слот регистрация в 1×slots casino
Способы получения бездепа различаются от вида бонуса, кот-ый приглянулся игроку. Но вам иначе нужно быть зарегистрированным в легальном онлайн-казино и подтвердить собственную лицо. В общем виде пошаговая аннотация для получения бездепозитного бонуса выглядит например: <a href=http://filmkachat.ru/>1× слот зеркало</a> Также случаются случаи, когда казино начислит обсужденный приз в регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам. <a href=https://feedback.challonge.com/forums/44455-feature-requests/suggestions/49478687-%D1%82%D0%B5%D1%80%D0%BC%D1%96%D0%BD%D0%BE%D0%B2%D0%B8%D0%B9-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D0%B6-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2-%D1%96%D0%B2%D0%B0%D0%BD%D0%BE-%D1%84%D1%80%D0%B0%D0%BD%D0%BA%D1%96%D0%B2%D1%81%D1%8C%D0%BA%D1%83-%D1%8F%D0%BA-%D0%B2%D0%B8%D0%B3>https://feedback.challonge.com/forums/44455-feature-requests/suggestions/49478687-%D1%82%D0%B5%D1%80%D0%BC%D1%96%D0%BD%D0%BE%D0%B2%D0%B8%D0%B9-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D0%B6-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2-%D1%96%D0%B2%D0%B0%D0%BD%D0%BE-%D1%84%D1%80%D0%B0%D0%BD%D0%BA%D1%96%D0%B2%D1%81%D1%8C%D0%BA%D1%83-%D1%8F%D0%BA-%D0%B2%D0%B8%D0%B3</a> Обычно бездепозитные промоакции от казино, приходят на эл. Почту в дни рождения или дни. В некоторых интернет казино можно обратиться в чат и как неизменному игроку, вполне для предложат бездепозитное предложение.Для получения предоставленных призов вас пригодиться — ПК или мобильное устройство, и остальное дело за малым. 1×slots официальный сайт скачать на айфон <a href=http://www.appifyer.com/app/wst/?unapproved=700944&moderation-hash=67733dcdfdd9e05e04edffbdf7e5ef2b#comment-700944>http://www.appifyer.com/app/wst/?unapproved=700944&moderation-hash=67733dcdfdd9e05e04edffbdf7e5ef2b#comment-700944</a> Бездепозитные бонусы в казино без пополнения 2022 — это определенная сумма денег либо valinomycin spins вращения, коие предоставляются первым постояльцам за регистрацию на веб-сайте казино в виде бездепозитного приза, и дает вас вероятность с казино без пополнения опробовать предложения (игр), с последующей привилегией вывода средств при исполненьи всех установленных верховодил.
1 xslots рабочее зеркало
Получить приветственный приз имеют только свежие посетители онлайн-казино. Способы описаны в условиях акции любого законного казино, чаще всего это:Приветственный бездеп предоставляется какому игроку лишь один один. Казино сражаются с например нарекаемыми бонусхантерами (от англ. Bonus Hunter — охотник за призами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения презента. Исключить подобные деяния разрешает верификация данных. Администрация вправе потребовать у клиента доказать индивидуальные данные, обозначенные при регистрации. 1×slot казино зеркало Условия отыгрыша приза. Если Вы планируете заработать на бездепозитном бонусе, то начала внимание на значение вейджера и срок, который дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть бонус и исключить выигрыш. <a href=https://www.entoads.com/author/davidtub/>https://www.entoads.com/author/davidtub/</a> Так собственно приготовьтесь дать секретную информацию (пол, возраст, государство проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает менее суток, последствии чего получится свободно выводить крупные выигрыши.Обычно, бездепозитные бонусы выдаются под определенные слоты с фиксированной ставкой, хотя их точно запрещено использовать в игровых автоматах с современным джекпотом. Список игр, каких возможно применять бездеп, Вы найдете в описании акции или сможете уточнить у службы поддержки заведения. казино 1×slots официальный сайт В большинстве заведений устроить это возможно по e-mal, по номеру телефона, через социальную сеть или гугл-аккаунт.Подарки на конкретные даты выделяются условиями получения. Если одобрение начисляют игроку на денек рождения, то сумма обычно в от совместного размера депозитов за прошедший год.
1×slots официальный demo регистрация в 1×slots casino
В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с даровых вращений. Прибыль, коию Вы заработаете на таком бездепе возможно назначать на вывод без какого или отыгрыша.Прибывшие на акк финансы бездепозитные призы предназначаются, главном, лишь для свежеиспеченных пользователей, коие ранее не имели собственного аккаунта в данном казино. Исходя из этого, случае ранее у игрока был изготовлен депо, то, по всей вероятности, у него больше не несомненно возможности рассчитывать на получение такового приза в определенном заведении. В большинстве заведений сделать это можно по e-mal, по номеру аппарата, спустя социальную сеть или гугл-аккаунт.Демоказино есть почти на каждом веб-сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются значительно реже: там когда выигрыша и соблюдения критерий акций бездеп можно превратить в настоящие средства. <a href=https://imoodle.win/wiki/1×slots_%D0%97%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE_%D0%A1%D0%B0%D0%B9%D1%82%D0%B0>https://imoodle.win/wiki/1×slots_%D0%97%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE_%D0%A1%D0%B0%D0%B9%D1%82%D0%B0</a> Прямо сейчас отберите безвозмездные вращения за регистрацию без депо и начинайте собирать призовые комбинации из-за крупных выигрышей! 1×slots зеркало выигрыши обязательно пройдите регистрацию если Какие бонусы возможность еще получить не бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного бонуса, любое онлайн казино предлагает игрокам выгодное предложение на первый депо, вы совершаете депо, ваш депозит возрастает в двое либо том в трое, тем самым начать играть можно с больше крупной суммой, например же не запамятываем на вейджер на бонусы.
1хслот зеркало сайта
Нельзя разглядывать игру на средства, как вариант заработка. Азартные игры воспрещены для лиц младше 18 лет. Topcasinobonuses.mobi классифицируется организатором азартных игр. Сайт носит информационный характер. Более крупные предложения встречаются очень изредка. Зачастую они доступны только VIP-игрокам. В остальных случаях им всего сопутствуют довольно жесткие условия отыгрыша. Также возможны вспомогательные условия и другие лимитирования, прописанные в условиях и положения бонусной программки казино.Новички не любят незамедлительно же заносить депо. Это обусловлено неименьем навыка и недоверием. К счастью, дни возможно получить бездепозитный приз за регистрацию в казино. Неважно собственно начисляет система – фриспины либо кредиты. В любом случае вы не рискуете своими сбережениями. Это замечательная возможность запустить понравившийся видео слот либо же испытать фортуну в настольных забавах. казино 1×slots <a href=https://cameradb.review/wiki/User:KerrieMerrett7>https://cameradb.review/wiki/User:KerrieMerrett7</a> Игрокам не воспринимать приветственный приз как гарантированный способ получить крупный выигрыш, хотя это отличная возможность без расходов расценить функционал казино.Некоторые клубы механически начисляют приз на акк игрока последствии исполненья критерий получения, но посещают ситуации, когда приз надо(надобно) активировать игроку самому. Есть несколько методов активации приза:
1×slots зеркало сайта
Реже призы без депо начисляются неизменным игрокам. С их поддержкой администрация старается удержать ценных посетителей или желает поблагодарить за лояльность правильных посетителей. Но гораздо чаще для похожих целей применяются такие акции:Возьми свой подарок. Чаще всего бонус активируется незамедлительно в регистрации. Но посещают истории, когда надо(надобно) зайти в индивидуальный кабинет или написать в справочную службу. <a href=http://clients1.google.ht/url?q=http://indparks.ru/bitrix/rk.php?goto=http://c-clinic.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/CAtygiDCFbl>http://clients1.google.ht/url?q=http://indparks.ru/bitrix/rk.php?goto=http://c-clinic.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/CAtygiDCFbl</a> 1×slots официальный сайт зеркало Отзывы читателей о бонусных промоакциях помогут составить эмоцию, но не запамятовывайте о субъективности личных объяснений.B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax
<b>Смотреть еще похожие новости:</b>
<a href=https://www.mshowto.org/forum/members/jamespauri.html>1×slots регистрация 1×slots casino c2d ru</a>
<a href=http://everestrolep.listbb.ru/viewtopic.php?f=38&t=14068>1×slots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Большинство клубов завлекают внимание геймеров за счёт разнообразных даров. На одних веб-сайтах возможно получить виртуальные кредиты, которые откроют доступ ко всему софту. На других же, администрация предлагает безвозмездные вращения для запуска топовых онлайн слотов. Несмотря на разные промоакции, стоит выделить самые главные.
#2299 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
где казино 1×bet слоты официальный сайт <a href=https://t.me/vchkogpu_ru>официальные букмекерские конторы скачать</a> порно с Александр Большунов (лыжные гонки) пин up casino <a href=https://kompromat1.online/>1×bet регистрация</a> ев казино Скворцова Вероника Игоревна порно 1×bet слоты официальный сайт porno Анна Сидорова, керлингистка пин ап букмекерская контора порно с Федор Чалов (футбол) Фастова Елена Владимировна порно
DiskiPlus casino x DiskiPlus скачать 1×bet <a href=https://www.diskiplus.ru>DiskiPlus водка казино</a> DiskiPlus 1×bet слоты DiskiPlus букмекерская контора бетсити <a href=https://diskiplus.ru/>DiskiPlus казино играть</a> DiskiPlus casino официальный сайт DiskiPlus Радченко Светлана Юрьевна порно DiskiPlus porno Мария Шарапова DiskiPlus cat casino DiskiPlus porno Дарья Клишина DiskiPlus лучшие казино бесплатно DiskiPlus casinos xyz
#2300 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее на сегодня
Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные способы и расценить необыкновенности, труднодоступные при игре в демо режиме. Многие новые посетители перебегают в количество неизменных, а оператор получает длительную выгода.Размер приза. В качестве бездепов обычно начисляют небольшие суммы, а когда речь идет о бонусах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то кое-какие казино могут подарить игроку до 2000$. <a href=http://filmkachat.ru/>1×slots подтвердит вашу регистрацию если говорить</a> На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не сможете активировать и получить бездепозитный бонус.Обычно для получения призов без депозита, казино выдвигает приклнные и вполне выполнимые обстоятельства, хотя есть ряд поступков коие воспрещены и шансы стать досадные последствия: <a href=https://www.papercall.io/speakers/146409/speaker_talks/292503-technical-drawing-for-furniture-professional-design-guide>https://www.papercall.io/speakers/146409/speaker_talks/292503-technical-drawing-for-furniture-professional-design-guide</a> Также, ситуации нужно доказать свой номер аппарата, для этого код, полученный в смс-сообщении от клуба установить в специальное поле в личном кабинете игрока.Большинство интернет-казино из нашего топ-10 готовы порадовать вас эксклюзивными акциями. Читайте о их в обзорах и на форуме. 1×slots официальный сайт скачать на айфон <a href=https://backpacker-footsteps.com/backpacker-footsteps-forum/profile/joshuaanild/>https://backpacker-footsteps.com/backpacker-footsteps-forum/profile/joshuaanild/</a> В интернет-сети практически можно отыскать перечни наиболее знаменитых и гарантированных поощрительных программ от знаменитых онлайн-казино.Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации бонуса без депозита. Внимательно прочитайте до конца. Многие новенькие делают ошибки на шаге регистрации и поэтому возможности получить презент.
1х слот 1хслотс регистрация перейти на 1×slots
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=272363>1×slots регистрацию процедура займет всего лишь</a> 1×slots официальный сайт скачать на айфон Автоматы непопросту считаются самым знаменитым азартным развлечением. Чтобы усвоить управление и управляла, понадобится всего некоторое мин. Ваша задачка устроить ставку, найти количество рабочих линий и можно крутить барабан. Если дисплее выпадет выигрышная комбинация – вы выиграли! С этой задачей вам посодействуют управится бездепозитные бонусы казино.Акции распространяются как на все забавы казино, так и на узкий перечень. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и другие. Промо имеет охватывать разработки 1-го производителя. Бездеп не пересекается с другими промоакциями казино. Если на сайте учтен кэшбек, он не начисляется за ставки, изготовленные бонусными деньгами. Для идентификации платежных реквизитов игрока имеет потребоваться пополнение счета на наименьшую необходимую. <a href=https://timeoftheworld.date/wiki/User:JulianePounds>https://timeoftheworld.date/wiki/User:JulianePounds</a> Основное различие сомнений, что для получения бездепа не надо пополнять баланс в казино. Но считая сего, есть ряд прочих различий: 1хслот скачать Бездепозитные призы, как теснее ясно, считаются оригинальной возможностью к игровому процессу безусловно бесплатно, словами играть в онлайн казино бесплатно и на быть свои сразу последствии регистрации аккаунта. Автоматы с таким депо могут замерзнуть великолепной вероятностью сыграть для почитателей пыла с определенными ограничениями в денег.
1×slots рабочее зеркало
В современность очень просто получить бонус за регистрацию в казино. Практически каждый игорный дом с готовностью начисляет средства либо благотворительные вращения. Многие гэмблеры пользуются этим и не стыдятся региться в любом клубе с прибыльными критериями. Кстати, это отличная возможность выработать победную тактику и сорвать джекпот.Практически все онлайн казино с бездепозитным призом за регистрацию учитывает программку лояльности — систему одобрения неизменных клиентов, которая состоит из множества уровней. При достижении игроком очередного уровня на его счёт поступает бонус. Чем выше уровень — что, этим щедрее приз. Верификация важна для дополнительной безопасности и может техподдержке выявить бонусхантеров и плутов. Кстати, на платформах выводы крупных сумм доступны только последствии доказательства личности. <a href=http://agriexpert.kz/user/Henrythino/>http://agriexpert.kz/user/Henrythino/</a> 1×slots официальный сайт скачать Рассмотрим принцип его действия на случае. Допустим, вы зарегистрировались и возымели $10 no deposit bonus с вейджером х50. Это значит, что выигранные деньги можно будет выводить не раньше, чем в как, как общая сумма ставок достигнет $500.
1×slots официальный сайт мобильная версия скачать
Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Составленный экспертами Casino.ru перечень онлайн-казино с бездепозитным призом позволяет игрокам сравнить спецпредложения разных операторов. 1×slots casino зеркало рабочее <a href=http://gdz-fizika.ru/index.php?subaction=userinfo&user=gullibleobstruc>http://gdz-fizika.ru/index.php?subaction=userinfo&user=gullibleobstruc</a>
1×slots casino регистрация 1×slotscasin online
Следует выделить, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом. <a href=http://www.cruzenews.com/wp-content/plugins/zingiri-forum/mybb/member.php?action=profile&uid=2144720>http://www.cruzenews.com/wp-content/plugins/zingiri-forum/mybb/member.php?action=profile&uid=2144720</a> Условия вывода выигрыша. В некоторых заведениях для успешного вывода с бездепозитного приза довольно пополнения баланса и доказательства личности. В иных же клубах, нужно несколько раз прокрутить собственный депо. 1×slots регистрация 1×slots casino 777 online Осталось выбрать казино с призом за регистрацию и создать профиль. После активации подарка выигрыш зависит от Фортуны и способностей.Так собственно можете отважно региться без всяких размышлений. Фортуна сегодня точно на вашей стороне. Не страшитесь, так следствие какого или убытка Вам абсолютно не угрожает. С этими призами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе.
<b>Смотреть еще похожие новости:</b>
<a href=http://palais.beesims.com/phpbb/viewtopic.php?f=2&t=290833>1×slots актуальное зеркало</a>
<a href=https://smm-seo.ru/members/rabofreeol.4209/>казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Некоторые казино могут предлагать посетителям бездепы за свидетельство номера или почты или репост на страничку в социальных сетях.
#2301 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
Иногда в поощрения за регистрацию шансы выдаваться билеты для участия в турнирах. Условия их проведения довольно выделяются, потому мы советуем ознакомиться с любым предложением отдельно. <a href=http://filmkachat.ru/>1х слот 1хслотс регистрация перейти на 1×slots</a> В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, необходимо обратиться в саппорта спустя лайв-чат на сайте казино.Подарки на конкретные даты выделяются критериями получения. Если одобрение начисляют игроку на денек рождения, то сумма обыкновенно зависимости от общего объема депозитов за прошедший год. <a href=https://wykop.pl/wpis/80059525/mastering-3d-product-design-from-concept-to-market>https://wykop.pl/wpis/80059525/mastering-3d-product-design-from-concept-to-market</a> Промообъявления от казино не дают реальной картины и ориентированы на привлечение внимания пользователей. Понять, насколько высоки шансы остаться в плюсе, позволит личный тест условий предложения:Акции, приуроченные к календарным праздникам, случаются рассчитаны как на всех пользователей, например и на категории: к, презент на 8 марта девушкам-игрокам или мужикам на 23 февраля. 1×slots официальный сайт зеркало рабочее <a href=http://darkevins.bplaced.net/member.php?action=profile&uid=12024>http://darkevins.bplaced.net/member.php?action=profile&uid=12024</a> Зарегистрируйтесь. Для регистрации чаще всего довольно установить собственный номер телефонного и почтовый адресок, последствии чего установить полученный код из СМС. Возможно, потребуется указать промокод. В правилах промоакции будет написано, где его надобно включать. Иногда это бы делать при регистрации, время — уже после создания собственного кабинета, на отдельной страничке.
1×slots бонус за регистрацию
1×slots регистрация 1×slots review live Вейджер в переводе с британского означает «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша полученного бонуса, в нашем случае бездепозитного. Число ставок значения — главно лишь набрать необходимую, пропорциональную сумме поощрения. <a href=http://axioma-estate.ru/index.php?subaction=userinfo&user=magentaray73>http://axioma-estate.ru/index.php?subaction=userinfo&user=magentaray73</a> Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном призе, то в первую очередь внимание на значение вейджера и срок, кот-ый дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, что, этим проще отыграть бонус и вывести выигрыш. 1х слот 1хслотс регистрация перейти на 1×slots Также учтите, собственно некоторые игровые платформы сужают список государств, которые готовы получить предложенный бездепозитный бонус за регистрацию. К образцу, существуют онлайн-заведения, выдающие похожие призы только обитателям определенных государств. К образцу, интернет казино 777 Оригинал предоставляет бездепозитный бонус только игрокам из России и государств СНГ. Или наоборот, снабжают вознаграждением всех, кроме жителей неких государств (следует сего, следует пристально изучать список, дабы потом не появилось практически вопросов и претензий).Бездепозитные призы – это самая интересная и более многообещающая промоакция интернет-казино. Они и другого, как фри-спинов, потому что выплаты в безвозмездных вращениях не гарантированы, как комбинации на барабанах игрового аппарата имеют не сложиться.
1×slots зеркало быструю регистрацию а также мгновенное
<a href=https://dominickvdmt53975.thenerdsblog.com/35926309/deepnude-ai-navigating-the-complexities-of-image-manipulation-and-ethics>https://dominickvdmt53975.thenerdsblog.com/35926309/deepnude-ai-navigating-the-complexities-of-image-manipulation-and-ethics</a> При подмоги такового одобрения оператор имеет кроме привлекать посетителей, коие раньше проявляли активность на веб-сайте, но по какой-то причине прекратили выступать. В данном случае промокод высылается пользователю по электрической почте или в виде SMS. 1×slots официальный demo регистрация в 1×slots casino
1 x slots
Также, учите, что бездепозитный приз возможно исключить только сомнений случае, когда станут исполнены все условия отыгрыша.Похожим образом работает 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения посетителя либо в связи с получения им VIP-статуса. Подарок предоставляется в обращения в поддержку и проверки. <a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=341696>1×slots зеркало на сегодня</a> 1× slots зеркало <a href=https://waad.powerappsportals.com/en-US/forums/general-discussion/d50ac186–52cf-ef11–95f6–000d3a393bf8>https://waad.powerappsportals.com/en-US/forums/general-discussion/d50ac186–52cf-ef11–95f6–000d3a393bf8</a> Как только получите бездеп в казино, всё также не запамятовывайте проверять электронную почту. Некоторые игорные клубы день веселят интенсивных гэмблеров приятными бонусами. Чаще всего получить презент возможно в преддверии веселья, на денек рождение, за привлечение друга. А также распространённым бонусом считается прибавка к депозиту. Нужно более восполнить счёт, и азартное заведение прирастит его на 50–100%.После получения приза вывод средств для клиента будет недоступен до, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или пара месяцов. Выводить средства игрок может только в отыгрыша.
1×slots зеркало регистрацию более популярный вариант это
Верификация аккаунта. Лучше подтвердить лицо незамедлительно в регистрации, чтобы потом не было проблем с выводом средств. Верификация может протекать 2-мя способами: <a href=https://zanderbzyr87765.jiliblog.com/87538980/deep-nude-the-ethical-dilemmas-and-technological-impacts-of-ai-driven-image-manipulation>https://zanderbzyr87765.jiliblog.com/87538980/deep-nude-the-ethical-dilemmas-and-technological-impacts-of-ai-driven-image-manipulation</a> На данном разделе портала регулярно публикуются обзорные статьи, в которых рассматриваются бесплатные призы лучших интернет-казино. Информация структурирована по нескольким пунктам, включая основные:Кешбэк-бонус представляет собой возврат фиксированного процента от ставки в случае поражения либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не превышает 10%. 1×slots зеркало рабочее Для верификации номера аппарата, в личном профиле выберите опцию „Подтвердить номер телефонного“ и введите в соответствующее поле код, полученный в sms-сообщении.Для получения предоставленных бонусов вам понадобиться — ПК либо мобильное устройство, и остальное дело за малым.
<b>Смотреть еще похожие новости:</b>
<a href=https://adminclub.org/showthread.php?tid=83453>1×slots рабочее зеркало</a>
<a href=https://forum.bandariklan.com/showthread.php?tid=439006>казино 1× slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В зависимости от интернет заведения каждый из них может вам предложить как бездепозитные деньги, например и бездепозитные фриспины, коие после удачной регистрации рухнут вам на ваш игровой баланс. Если вы выбрали себе количество брендов коие вам больше всего полюбились, для неизменной забавы! Таких гемблеров казино довольно предпочитает и оценивает, за частую такие игроки становятся VIP игроками заведения, которым часто поступают выгодные предложения вид призов, так же туда заходит и бездепозитные.
#2302 Jameslouts
חריג. – תעשה, נערת ליווי, תעשה מה שאתה רוצה, הכל לשירותך. המאהב הבררן של זין גדול וישר מבין מלוכלך, לא רמז אחת ככה, הוא שלף את להתראות שוב-היא ענתה, ושכחה שהטיול שלה הגיע לחינם. שלי, והרגשתי את התחת שלי כמו הזין שלו, עדיין חצי מתוח, נלחץ על הישבן שלו <a href=https://sexzina.co.il/>סקס עם נערות ליווי טעם של גן עדן!</a>
#2303 avtolombardkemerovozeDhttps://www.workinternational-df.com/employer/avtolombard-zalog-invest8066/
займы залог машины <a href=https://www.workinternational-df.com/employer/avtolombard-zalog-invest8066/>https://www.workinternational-df.com/employer/avtolombard-zalog-invest8066/</a> займ под птс кемерово
#2304 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало
Перед активацией принципиально пристально изучить обстоятельства промоакции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, в течение коих возможно пользоваться предложением. Если бездеп охватывает ограниченный перечень игр, рекомендовано разузнать максимальные коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят лишь что, нет случае, если оператор не установил жесткие ограничения на наивысшую необходимую ставки.Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasin online</a> Отыграв бездепозитный бонус в казино с выводом также придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в сходственное ограничение присутствует, то единоразово исключить получится лишь сумму, не превышающую размер приобретенного бонуса. <a href=https://www.esurveyspro.com/Survey.aspx?id=7d40634a-251d-4a35-a116–1d7e11ae06f1>https://www.esurveyspro.com/Survey.aspx?id=7d40634a-251d-4a35-a116–1d7e11ae06f1</a> 1хслотс регистрация в 1×slots casino <a href=http://fh7980px.bget.ru/member.php?action=profile&uid=42136>http://fh7980px.bget.ru/member.php?action=profile&uid=42136</a> Активация по промокоду используется в разных обликах бездепов. Если речь о приветственном призе, то комплект символов можно разузнать на главной страничке, в регистрационной форме либо письме, которое отправляется пользователю для подтверждения e-mail. Акции шансы проводиться общо с партнерскими площадками. Обычно код размещается на стороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активируется одноразовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном кабинете либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем важный код для активации в описании любого рекламную.Бездепы обычно предлагают с отыгрышем — мгновенно исключить выигранные свои нельзя. Перевод денег со счета несомненно возможен в того, как пользователь выполнит все требования казино, а сумма имеет быть выше установленного правилами лимита. Условиями промоакции фиксируются сроки, на которых клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней в активации.
1×slots зеркало
Некоторые сайты, прежде чем обмануть регистрацию игроков, предлагают ответить на некоторое базовых вопросов. Цель проведения похожей викторины – выявить случайных людей, коие не имеют представления о покере, и не разрешить получения ими призов. Если гость теснее играл в казино, то ответить на полтора 10 несложных вопросов несомненно нетрудно. Очень нередко, ответы можно найти на официальных сайтах данных учреждений. 1хслотс официальный сайт зеркало <a href=http://www.zgqsz.com/home.php?mod=space&uid=420413>http://www.zgqsz.com/home.php?mod=space&uid=420413</a> Но на азартных платформах сходственные вознаграждения имеют получить теперь зарегистрированные пользователи. В таком случае, призы предоставляются масштабах уникальных промоакций либо же некоторым геймерам повторяющий акционного предложения, которое приходит на почту с целью «вернуть» игрока в свое казино.Подарки на дни ? посвященные торжественным датам, требующие символического отыгрыша либо начисляются без того. Могут дариться игрокам сутки рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду. скачать 1×slots на андроид мобильная версия
1×slots официальный зеркало
Теоретически, к бесплатным призам можно отнести например нарекаемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, поэтому собственно они предоставляют только возможность делать ставки.Практически все интернет казино с бездепозитным бонусом за регистрацию учитывает программку лояльности — систему поощрения неизменных клиентов, кот-ая состоит из колличества уровней. При достижении игроком еще значения на его счёт поступает бонус. Чем повыше степень — тем щедрее приз. Ещё одно распространённое акционное предложение – привлекательный подарок с сомнительными притязаниями. К образцу, клуб обещает $100 в качестве бездепа, но с вейджером х80 или х100. Отыграть подобный вейджер фактически нереально и потому другого концентрироваться на более заманчивых промоакциях. <a href=http://www.directory9.biz/details.php?id=256487>http://www.directory9.biz/details.php?id=256487</a> 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Отзывы читателей о бонусных акциях помогут составить эмоцию, но не запамятовывайте о субъективности личных комментариев.Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?
1×slots официальный сайт зеркало
Для получения бонуса надо(надобно) ознакомиться с программкой лояльности казино и сделать ставки на сумму, нужную для перехода на грядущий уровень.Онлайн-казино тщательно продумывают бонусные обстоятельства, коие нужно выучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша прочие лимитирования. казино 1×slots официальный сайт <a href=http://digitalmaine.net/mediawiki3/index.php?title=User:CliffNewby252>http://digitalmaine.net/mediawiki3/index.php?title=User:CliffNewby252</a>
1× slots сайт
Приветственный приз без депо ? подарок за регистрацию. Выдается деньгами, фриспинами либо баллами. В последнем случае бонусные баллы применяются для участия в турнирах либо обмена на настоящие средства.Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. <a href=https://www.market-directory.com/members/doctorlazutapa-8779.html>https://www.market-directory.com/members/doctorlazutapa-8779.html</a> Бездепозитный бонус казино 2022 с выводом за регистрацию предоставляет вероятность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и проверить качество работы саппорта. Довольно нередко, начиная игровой процесс, игрок теснее не желает останавливаться и проделывает реальный лепта. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать безвозмездно вероятно как раз таки с призом за регистрацию без надобности заносить депо. 1×slots зеркало на сегодня Свежий приз начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в использовании средствами, а случае отыгрыша оператор может ввести ограничение на вывод средств.Самые знаменитые методы вывода денег ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электрическим платежным системам типа Neteller и Skrill, а пользуются криптовалютными кошельками. Вывод выигрышей имеет исполняться быстро или занимать от нескольких часов до нескольких суток.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.azartweb2.com/threads/1×slot-registracija-v-1×slots-casino.230623/>1×слот регистрация в 1×slots casino</a>
<a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=15722>1×slots подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подобные призы без депозита предоставляются на больше выгодных условиях. Зачастую они крупнее, а условия отыгрыша наименее жесткие.
#2305 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
сайт pin up casino букмекерские конторы в россии <a href=https://specreporter.com/>порно с Георгий Джикия (футбол)</a> пин ап букмекерская контора 1×slots casino <a href=https://kompromat1.online/>pin ап casino</a> казино вход официальный сайт порно с Евгения Медведева 7k casino сайт казино зеркало сегодня Ходнева Светлана Владимировна порно 1×bet официальный 1×bet зеркало xbet xyz
DiskiPlus порно с Максим Глушенков (футбол) DiskiPlus казино ли <a href=https://www.diskiplus.ru/>DiskiPlus pin up casino зеркало</a> DiskiPlus лучшие букмекерские конторы DiskiPlus Крючкова Полина Викторовна порно <a href=https://diskiplus.ru/>DiskiPlus Нургалиева Эльвира Рамиловна порно</a> DiskiPlus вывод казино DiskiPlus Москалькова Татьяна Николаевна порно DiskiPlus Приезжева Екатерина Геннадьевна порно DiskiPlus порно с Абрамченко Виктория Валериевна DiskiPlus реального казино DiskiPlus casino riobet DiskiPlus букмекерская контора мостбет
#2306 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора бетсити лучшие казино бесплатно <a href=https://sovsekretno.net/>porno Екатерина Ефременкова, шорт-трекистка</a> 7k casino сайт порно с Виктория Синицина, фигуристка <a href=https://specreporter.com/>смотреть фильм казино</a> vodka casino букмекерская контора зенит 1×bet вход casino зеркало сайта порно с Александр Головин (футбол) приложения букмекерских контор на андроид casino ru
DiskiPlus up casino зеркало DiskiPlus pin up casino пин ап <a href=https://diskiplus.ru/>DiskiPlus 1×bet зеркало xbet</a> DiskiPlus кент казино DiskiPlus 7k casino зеркало <a href=https://www.diskiplus.ru/>DiskiPlus Лут Оксана Николаевна порно</a> DiskiPlus порно с Васильева Татьяна Викторовна DiskiPlus порно с Анастасия Потапова, теннисистка DiskiPlus порно с Арина и Дина Аверины, гимнастки DiskiPlus champion casino DiskiPlus Манилова Алла Юрьевна порно DiskiPlus casino играть DiskiPlus win win casino
#2307 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
Бездепозитные бонусы — это презенты от казино в виде бонусных денег или фриспинов для игровых автоматов, которые начисляются на акк игрока последствии процедуры регистрации на сайте заведения. Для получения таких поощрений депозит не потребуется.4. Заберите подарок. Чаще всего приз активируется незамедлительно последствии регистрации. Но посещают истории, когда надо(надобно) забежать в личный кабинет либо написать в службу. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> Размер приза. В качестве бездепов обыкновенно начисляют очень суммы, а когда речь о призах за депо, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино имеют презентовать игроку до 2000$. <a href=https://teletype.in/@kalinka0588/wj_aIQ7cr4o>https://teletype.in/@kalinka0588/wj_aIQ7cr4o</a> 1×slots акции <a href=https://tanime.site/user/ForsedropKr/>https://tanime.site/user/ForsedropKr/</a> Бездепозитные бонусы за регистрацию в игровых автоматах для владельцев онлайн-казино являются частью рекламной кампании, направленной на увеличение аудитории сайта. Так они продвигают свои бренды и завлекают свежих посетителей.Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала быстрые выводы. Фишка выплат сомнений, собственно довольно избрать платёжный инструмент и показать сумму. В большинстве случаев средства зачисляются на электронные кошельки в течение 15 минут, а на банковские карты – 1–3 рабочих денька.
1 хслот регистрация в 1×slots casino
<a href=http://mandala-app.com/forums/memberlist.php?mode=viewprofile&u=3447>1×slots casino online регистрация</a> 1× slots регистрация в 1×slots casino Бездеп с фриспинами возможность охватывать всю коллекцию игр на сайте или разработки одного провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш может быть выведен в того, как юзер отыграет эту сумму. Возможность расценить глубокий функционал слотов — главное совершенство данной разновидности. Игроку становятся доступны те функции, коие отсутствуют в демонстрационном режиме, а возможность выиграть реальные средства прибавляет ярчайших азартных чувств.Бездепозитный приз за регистрацию в казино с выводом денег в 2022 году — Наш ресурс дает игрокам актуальную информацию о самых свежих, щедрых и проверенных призах в интернет казино, коие обновляются любой день. <a href=https://yogaasanas.science/wiki/User:JaysonGuy1>https://yogaasanas.science/wiki/User:JaysonGuy1</a> На данном разделе портала регулярно публикуются обзорные статьи, в которых рассматриваются благотворительные призы лучших интернет-казино. Информация структурирована по нескольким пунктам, включая основные:В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая доля игры. Важно, зачастую бездепозитные призы в казино выдаются с ограничениями по максимальной выплате. В среднем возможно рассчитывать на прибыль в несколько тысяч руб. Как вывести выигрыш с приза без депо. Придётся подтвердить аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате или прочитайте в правилах. 1×slots официальный сайт зеркало Фриплей-бонусы. Бонусы за благотворительную игру есть только в некоторых клубах. Они зачисляются незамедлительно последствии создания профиля и срабатывают непродолжительное время. Если у вас нет времени истратить свои, они просто завершатся. Что касается медли, правило призы действуют протяжении 1-го часа.
1хслотс мобильная версия зеркало
Казино выделяет вероятность заработать и вывести реальные средства на бездепозитных бонусах. Обычно, это незначительная сумма, которую казино имеет себе разрешить презентовать игроку. <a href=http://mpalata.ru/forum/memberlist.php?mode=viewprofile&u=81496>http://mpalata.ru/forum/memberlist.php?mode=viewprofile&u=81496</a> Вознаграждения за получение VIP-статуса ? начисляются в программки лояльности при достижении одного значения или выдаются индивидуально менеджерами службы.Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации презента необходимо подтвердить электрическую почту и привязать аппарат; 1хслотс зеркало Для верификации номера телефона, в собственном профиле выберите опцию „Подтвердить номер телефонного“ и введите в отвечающее фон код, приобретенный в sms-сообщении.
1хслотс рабочее зеркало
Почти все игровые клубы требуют свидетельство контактных данных игрока для получения бездепозитного приза. Но никогда не запамятовывайте пристально разбирать правила участия в бонусных акциях. Если вы нарушите хотя бы одно условие, позднее вы не сможете устроить недоразумение с администрацией.Наши эксперты исследуют условия акции, затем в ручном режиме проверку их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие характеристики. Мы не рекламируем казино, а даем игрокам информацию о лучших из них. Чаще всего казино приз за регистрацию без депо даёт возможность запустить любой автомат. Но какого-либо внимательно ознакомиться с условиями. Иногда для игры доступны только определённые модели. Если вы новичок и ничего не смыслите в гэмблинге, другого начать знакомство с миром азарта именно с «одноруких злодеев». 1хслотс 1хслотс регистрация перейти на 1×slots <a href=http://xn–jj0b538ac2cbvv.com/bbs/board.php?bo_table=free&wr_id=95714>http://xn–jj0b538ac2cbvv.com/bbs/board.php?bo_table=free&wr_id=95714</a> Для верификации аккаунта нужно дать спецам технической поддержки отсканированную копию паспорта и счета за коммунальные услуги, еще фотографию банковской карты либо снимок странички электронного кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для доказательства личности.
1×slots регистрация на сайте
Выполнив все притязания оператора, заказчик имеет оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит в среднем не более суток. Если дополнительно потребуется пройти функцию верификации, то срок возрастает до 1–2 трудящихся дней. Для перевода применяются банковские приборы и электрические платежные системы. Второй способ подходит какого-либо, так как основная транзакций ситуации осуществляются моментально. В связи со спецификой функционирования банков обработка платежей имеет занять до нескольких рабочих дней.Получить приветственный бонус могут лишь новые посетители онлайн-казино. Способы описаны в условиях акции каждого законного казино, почаще всего это: Классическая разновидность бонуса за творенье аккаунта. Его преимущество содержится в, собственно клиент возможность без избирать аппараты и создавать ставки в их. Иногда список игровых автоматов ограничен оператором, хотя все также это чем, чем единственный доступный разъем, как в случае с внедрением фриспинов.Прочитайте верховодила бонусной программы, в которой хотите участие. Да, мы настойчиво рекомендуем устроить это до регистрации. <a href=https://39504.org/member.php?action=profile&uid=2110>https://39504.org/member.php?action=profile&uid=2110</a> скачать 1×slots официальный сайт Сразу последствии активации промокода можно воспользоваться подарком. Как уже упоминалось, призы бывают трёх обликов – фриспины, кредиты и фриплей-бонусы.
<b>Смотреть еще похожие новости:</b>
<a href=https://rolivka.online/forum/showthread.php?tid=36221>зеркло казино 1×slots</a>
<a href=https://persiankittencat.com/fence-topper-ideas/#comment-40189>1хслотс казино зеркало</a>
<a href=http://sladkierecepti.5nx.ru/viewtopic.php?f=8&t=6993>1 x slots casino</a>
<a href=http://forums.indexrise.com/thread-309-post-338133.html#pid338133>1×slots зеркало которую указывали при регистрации кстати</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но не мыслить, что снабжая юзеров такими призами, казино занимается спонсированием. Ведь объемы вознаграждений, в основном, не немалые (средним объемом от 5 до 20 долларов). И на эти свои налагаются конкретные условия и лимитирования, обязательные к исполнению игрока, в в последствии он желает получить все средства выигранные финансы. Перечисленные выше основные свойства сопровождают практически каждый бонус и являются стандартными для бездепозитных бонусных начислений в казино.
#2308 RobertHichttps://mit-sk.ru/
Спецтехника и логистические решения от Строительно-коммерческой компании МИТ
Располагаясь в Москве на Озерковском переулке, 12, компания предоставляет комплексные решения для строительно-монтажных работ и транспортной логистики. Готовность оперативно реагировать на заявки обеспечивается парком более 150 единиц техники, каждая из которых проходит профилактический осмотр.
Особенности предоставления услуг:
Быстрота выполнения: Доставка техники за 120 минут после подачи заявки Постоянное наличие аварийных бригад круглые сутки Наличие собственного парка эвакуаторов
Рентабельность: Фиксированные расценки без доплат в выходные Программа лояльности с экономией до 20% Возможность поминутной оплаты при краткосрочном использовании
Технические характеристики доступной техники:
Автокраны: Грузоподъемность от 3 до 12 тонн Вылет стрелы максимум 22 метра Время подачи – от 2 часов
Многофункциональные экскаваторы: Максимальная глубина рытья 6.5 метров Возможность перемещения со скоростью 41 км/ч Вместимость ковша – 1.3 кубометра
Перевозочные средства: Диапазон грузоподъемности 0.5–20 тонн Вместимость кузова 2–92 м? Многовариантная загрузка
Главные особенности: Только новая техника актуальных моделей Юридически чистая документация по всем стандартам Налогообложение с учетом НДС и отсрочка платежа Полисы страхования на все виды услуг Квалифицированный персонал управления техникой
Результаты для клиентов: Экономия времени за счет сокращения простоев 40% Надежная работа всей техники Уменьшение расходов на 30% относительно собственного автопарка Полный комплект исполнительной документации
Профессиональная организация маршрутов, включая согласование с ГИБДД при необходимости. Личный специалист отвечает за реализацию проекта.
#2309 avtolombardkazanbuthttps://topcareerscaribbean.com/employer/nc-healthcare1621/
ломбард займ под птс <a href=https://topcareerscaribbean.com/employer/nc-healthcare1621/>https://topcareerscaribbean.com/employer/nc-healthcare1621/</a> автоломбард птс
#2310 avtolombardkazanbuthttps://job.da-terascibers.id/employer/zaim-pod-zalog-pts-17334
ломбард займ под птс <a href=https://job.da-terascibers.id/employer/zaim-pod-zalog-pts-17334>https://job.da-terascibers.id/employer/zaim-pod-zalog-pts-17334</a> автоломбард залог
#2311 Anthonygraph
Попробуйте <a href=https://abfgss53sdbkl33.ru/>https://abfgss53sdbkl33.ru/</a>
#2312 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Кирьянова Дарья Борисовна бесплатно фильм казино <a href=https://t.me/vchkogpu_ru>бесплатное казино</a> porno Вера Бирюкова, гимнастка пин casino <a href=https://th-royalgclub.com/>casino рабочее</a> порно с Ирина Сидоркова официальные сайты казино kometa casino казино можно cat casino porno Нина Пирогова, хоккеистка букмекерская контора ставки
DiskiPlus почему казино DiskiPlus up casino <a href=https://diskiplus.ru/>DiskiPlus рабочее казино</a> DiskiPlus букмекерская контора официальный сайт DiskiPlus карты казино <a href=https://www.diskiplus.ru>DiskiPlus порно с Матвей Сафонов (футбол)</a> DiskiPlus casino зеркало сегодня DiskiPlus казино фильм смотреть онлайн DiskiPlus Фастова Елена Владимировна порно DiskiPlus casino зеркало сегодня DiskiPlus скачать pin casino DiskiPlus cat casino DiskiPlus 1×bet зеркало слоты
#2313 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора без 1×bet телефон <a href=https://rumafia.news/>1win casino</a> рейтинг казино водка казино <a href=https://rhymes-punches.com/>top casino</a> casino riobet Юдаева Ксения Валентиновна порно Шевцова Татьяна Викторовна порно реального казино casino вход 1×bet зеркало слоты 1×bet xyz cat casino
DiskiPlus букмекерская контора фонбет DiskiPlus фильмы казино рояль <a href=https://diskiplus.ru/>DiskiPlus букмекерские конторы без депозита</a> DiskiPlus porno Андрей Рублев (теннис) DiskiPlus бесплатно играем казино <a href=https://www.diskiplus.ru>DiskiPlus официальные букмекерские конторы</a> DiskiPlus водка казино DiskiPlus casino сегодня DiskiPlus 7k casino зеркало на сегодня DiskiPlus casino сайты DiskiPlus гта казино DiskiPlus Хорова Наталья Александровна порно DiskiPlus casino бонус
#2314 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало сайта
Осталось выбрать казино с призом за регистрацию и сделать профиль. После активации дара выигрыш находится от Фортуны и способностей.Но никогда не запамятовывайте внимательно разбирать правила роли в бонусных промоакциях. Если вы нарушите хотя бы одно условие, позже вы не сможете уладить недоразумение с администрацией. <a href=http://filmkachat.ru/>1×slots официальный demo регистрация в 1×slots casino</a> Акционные предложения от казино есть в различных форматах. Часто призы даются в мена на депозит. Игрок заносит платеж и получает деньги, бесплатные вращения и другие одобрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — вид приза, который гарантирован за выполнение определенных поступков на сайте:При регистрации следует свидетельствовать только достоверную информацию. Когда учетная запись несомненно активна, замечен доступ в Личный кабинет. В нем возможно выбрать денежную, ввести промокод и разузнать подробные управляла получения и отыгрыша бездепа. Краткая информация об акции часто находится именно на регистрационной форме. <a href=https://feedback.goodnotes.com/forums/191274-customer-suggestions-for-goodnotes/suggestions/49478645-%D0%BA%D0%B0%D0%BA-%D0%B2%D1%8B%D0%B3%D0%BE%D0%B4%D0%BD%D0%BE-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D1%82%D1%8C-%D0%B0%D0%B2%D1%82%D0%BE-%D0%BF%D0%BE%D1%81%D0%BB%D0%B5-%D0%B4%D1%82%D0%BF-%D1%8D%D0%BA%D1%81%D0%BF%D0%B5%D1%80%D1%82%D0%BD%D0%BE%D0%B5-%D1%80%D1%83%D0%BA>https://feedback.goodnotes.com/forums/191274-customer-suggestions-for-goodnotes/suggestions/49478645-%D0%BA%D0%B0%D0%BA-%D0%B2%D1%8B%D0%B3%D0%BE%D0%B4%D0%BD%D0%BE-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D1%82%D1%8C-%D0%B0%D0%B2%D1%82%D0%BE-%D0%BF%D0%BE%D1%81%D0%BB%D0%B5-%D0%B4%D1%82%D0%BF-%D1%8D%D0%BA%D1%81%D0%BF%D0%B5%D1%80%D1%82%D0%BD%D0%BE%D0%B5-%D1%80%D1%83%D0%BA</a> Как управляло, новоприбывшие игроки для хотят ознакомиться с способами ввода и вывода валютных средств и сроки исполнения поданных заказов чтобы четко понимать, как стремительно появится вывести собственный казино бонус за регистрацию без депо на электрический кошелек или же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино соперничают меж собой. Ведь если бы определенную компанию давало только одно онлайн-заведение, то навряд бы посетители заметили казино с призом за регистрацию и имели бы рассчитывать лишь на вознаграждение в виде бонуса на 1-ое инвестиция. К каждому заведению регулярно идет завлекать новых игроков, что, в итоге, только на руку всем играющим.Изучить управляла и условия получения бездепозитных призов казино, Вы можете у нас на веб-сайте в разделе с бонусами либо на официальном сайте избранного Вами казино. Если не можете отыскать нужную информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал либо по электронной почте. 1×slots быструю регистрацию а также мгновенное <a href=https://maps.google.com.sl/url?q=https://doctorlazuta.by/>https://maps.google.com.sl/url?q=https://doctorlazuta.by/</a>
1×slots рабочее зеркало на сегодня
Наш перечень содержит наилучшие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по принципиальным характеристикам:Риск-игра по одинаковым шансам – Также казино имеет запрещать исполнять обстоятельства по отыгрышу с помощью раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких других забавах. <a href=http://nacionrolera.org/foro/memberlist.php?mode=viewprofile&u=41202>1×slots регистрация то дальше необходимо пройти</a> скачать 1×slots на андроид мобильная версия Чаще всего, знаменитые сервисы, эти как MoneyBookers и WebMoney, еще MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное управляло. Финансовые средства выводятся лишь спустя ту платежную систему, которой популярностьюимели для пополнения депо. Если же игрок получил бездепозитный покерный бонус, требуется восполнить счет на минимальную сумму, которая сочиняет обычно десять $.За привлечение друга ? масштабах партнерской программки клиент получает вознаграждение за вербование новых юзеров. <a href=http://404.tk.t941336g.beget.tech/user/JasperFoums/>http://404.tk.t941336g.beget.tech/user/JasperFoums/</a> Помните, что всевозможные нарушения верховодил сведут на нет ваши усилия, и вы всего останетесь без начисленного вас дарового приза. Всегда изучайте управляла начисления и обстоятельства вейджера. По хоть вопросам, на коие вы имеет других найти ответы, обращайтесь за объяснениям и саппорт. 1×slots зеркало этих способов предполагает регистрацию Отказ в прохождении верификации. Если клиент не хочет или возможности предоставить документы, подтверждающие его личность, профиль будет заблокирован вместе со всеми бонусными начислениями.
1 x slots
Также, учите, что бездепозитный бонус возможно исключить лишь сомнений случае, когда станут исполнены все обстоятельства отыгрыша. Но а случае вы теснее профи по интернет казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в интернет казино;Бездепозитные призы, как уже ясно, являются оригинальной вероятностью к игровому процессу абсолютно бесплатно, то есть играть в интернет казино даром и на быть свои сразу в регистрации аккаунта. Автоматы с таким депозитом все замерзнуть великолепной возможностью поиграть для поклонников азарта с определенными ограничениями в финансах. <a href=http://krlife.co.kr/bbs/board.php?bo_table=free&wr_id=108227>http://krlife.co.kr/bbs/board.php?bo_table=free&wr_id=108227</a> 1×slots сайт зеркало Обычно бездепозитные промоакции от казино, приходят на эл. Почту в деньки рождения либо праздничные. В неких интернет казино можно обратиться в чат и как постоянному игроку, вполне вам предложат бездепозитное предложение.Для получения выигрыша требуется выполнить обстоятельства казино. Чаще всего игроку нужно поставить конкретную необходимую, но уже из собственных средств. Она рассчитывается из совместного объема выигрыша за всегда использования бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, если пользователь выиграл 1000 руб., а множитель сочиняет х30, вывести средства можно несомненно, сделав ставки на 30 000 руб.
1× slots регистрация в 1×slots casino
Oтыгpaть приз с обозначенным вeйджepом, результата нужно сдeлaть cтaвoк нa cумму, превосходящую объем бонуса в несколько один.Новые посетители онлайн-казино без первого депозита могут проверить собственную удачливость. К что, этому же есть возможность конвертировать бездепы в настоящие деньги за регистрацию в казино, однако чтобы бонус необходимо отыграть согласно условиям акции. Сроки активации приза уточняются любым казино, но чаще всего они не превосходят недели с момента получения. Игроку непременно надо(надобно) применять бездеп протяжении указанного срока, в ином случае приз просто исчезнет. Каждый бонус можно получить лишь один один, потому случае не применять бездеп в срок, у игрока не будет 2 шанса им пользоваться. 1× slots зеркало <a href=http://iminthai.com/home.php?mod=space&uid=247159>http://iminthai.com/home.php?mod=space&uid=247159</a> Подобные бонусы без депо предоставляются на больше выгодных критериях. Зачастую они покрупнее, а условия отыгрыша менее строгие.
1×slot зеркало рабочее регистрации на телефон придет
Ну и естесственно же, для казино бездепозитные призы прибыльны с имиджевой стороны: сходственная щедрость повышает уровень лояльности клиентов к фирмы. Обычно показатель выше, чем для призов на депозит. Не дивитесь, случае он будет в х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных стран.Иногда в поощрения за регистрацию все выдаваться билеты для участия в турнирах. Условия их проведения очень отличаются, потому мы рекомендуем ознакомиться с каждым предложением отдельно. <a href=http://gagetaylor.com/index.php?title=User:RethaGoodisson>http://gagetaylor.com/index.php?title=User:RethaGoodisson</a> Некоторые веб-сайты, этого чем провести регистрацию игроков, предлагают ответить на некоторое базисных вопросов. Цель проведения подобной викторины – выявить случайных людей, которые не имеют представления о покере, и не допустить получения ими призов. Если посетитель теснее играл в казино, то ответить на полтора десятка несложных вопросов несомненно нетрудно. Очень часто, ответы можно найти на официальных веб-сайтах этих учреждений.В бонусную программу множества операторов входят регулярные бездепы. Это бессрочные акции, поощряющие интенсивных неизменных игроков. Популярный формат — раздача фриспинов по конкретным дням недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают постоянные призы без депозита в размен на накопленные баллы лояльности. 1 x slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://russiancomputerservice.ru/user/JosephCer/>1×slots официальный сайт зеркало</a>
<a href=https://www.kfz-gringer.at/index.php/forum/donec-eu-elit/78427–1#78191>рабочее зеркало 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
К образцу, игроку выдаются безвозмездные свои в заведении в объеме пятидесяти или ста $ (вейджер на коие сочиняет 100х). То есть, каждому новоприбывшему геймеру выскакивает притягивающая картинка, которая обещает выплату всех зачисленных фирмой средств. Не стоит заострять на казино приз за регистрацию без депо с сильно великий либо довольно малюсенькой суммой бонусов, поэтому что, числе тщательно исследовав все обстоятельства, здесь вероятнее всего, несомненно какой-то подкол. Третитй бездепозитный бонус за регистрацию – денежные свои. К огорчению, начислить рубли либо баксы готовы только знаменитые и известные клубы. С их подмогою у насладиться любой доступной забавой – автоматом, рулеткой, кено, блэкджеком.
#2315 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino онлайн bet casino <a href=https://repost.news/>порно с Дронова Александра Викторовна</a> пин ап букмекерская контора порно с Карен Хачанов (теннис) <a href=https://t.me/vchkogpu_ru>7k casino</a> porno Ангелина Гончаренко, хоккеистка сайт pin up casino Ходнева Светлана Владимировна порно сколько казино букмекерская контора леонов kent casino регистрация pin up casino пин ап
DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz DiskiPlus лучшие казино бесплатно <a href=https://www.diskiplus.ru/>DiskiPlus яндекс казино</a> DiskiPlus букмекерские конторы бет DiskiPlus порно с Евгения Медведева, фигуристка <a href=https://www.diskiplus.ru>DiskiPlus 1×bet casino</a> DiskiPlus Попова Анна Юрьевна порно DiskiPlus рокс казино DiskiPlus pinco casino DiskiPlus официальное казино вход DiskiPlus яндекс казино DiskiPlus 1×bet xbet xyz DiskiPlus 1win букмекерская контора
#2316 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало
Баланс игрока дополняется на соответствующую сумму. К ней применяется вейджер, обозначенный в правилах акции. Вывести выигрыш возможно несомненно после как, как юзер сделает требуемый размер ставок из личных средств. В редких случаях бездеп работает в формате Free Play. На счет юзера зачисляется крупная сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по завершении сего периода сумма на счету несомненно превосходить первоначальную, то разность можно несомненно вывести или применять для дальнейших ставок. <a href=http://filmkachat.ru/>1× slots регистрация в 1×slots casino</a> При регистрации стопам свидетельствовать только достоверную информацию. Когда учетная запись несомненно активна, появится доступ в Личный кабинет. В нем можно избрать валюту, установить промокод и разузнать подробные управляла получения и отыгрыша бездепа. Краткая информация об промоакции нередко находится непосредственно на регистрационной форме.Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? <a href=https://www.patreon.com/posts/123686935>https://www.patreon.com/posts/123686935</a> Минимального оборота. Этот предел уточняется вейджером — пока игрок не поиграет на установленную необходимую, вывод средств будет недоступен.Зарегистрироваться в казино по особой ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефона и электрическую почту). Для подтверждения номера аппарата нужно в личном профиле показать свой номер и нажать кнопку „Подтвердить номер телефона“, далее Вы получите sms-сообщение с кодом, который нужно ввести в подходящее поле. Для подтверждения электрической почты, перейти по интенсивной ссылке в письме от казино. 1хслот 1хслотс регистрация перейти на 1×slots <a href=http://jscorporation.storycom.co.kr/bbs/board.php?bo_table=free&wr_id=134036>http://jscorporation.storycom.co.kr/bbs/board.php?bo_table=free&wr_id=134036</a> Выигрыши с призов без инвестициям практически привязаны к требованию по ставкам и шансы быть обналичены только последствии исполненья этих притязаний.
1×slots рабочее зеркало
Активация по промокоду используется в различных видах бездепов. Если речь идет о приветственном призе, то комплект знаков можно узнать на главной страничке, в регистрационной форме или послании, которое отчаливает пользователю для подтверждения e-mail. Акции могут проводиться общо с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активируется разовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном кабинете или начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем важный код для активации в описании любого промо.Для получения бонуса надо(надобно) ознакомиться с программкой преданности казино и устроить ставки на сумму, необходимую для перехода на грядущий уровень. <a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=460116>1хслот 1хслотс регистрация перейти на 1×slots</a> 1×slots быструю регистрацию а также мгновенное <a href=https://clients1.google.dz/url?q=https://doctorlazuta.by/>https://clients1.google.dz/url?q=https://doctorlazuta.by/</a> Как только вы отыграли вейджер и свои с бонусного баланса перебежали вам на настоящий счет, Вы храбро можете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать минимальный депо к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депо). 1×slots регистрация 1×slots casino c2d ru
1хслотс зеркало на сегодня
Размер бонусов почаще всего чисто символический и не превышает 50 руб. Приятно, хотя ощутимым бустом деле навряд станет.Выбрать казино с бездепозитным бонусом. У нас на сайте представлен список лучших интернет казино, коие предлагают своим игрокам щедрые призы за регистрацию. Игры, в можно выступать на бонусные средства. Проверьте список игр, в можно играть на бонусные средства, вероятно они Вам не понравятся и надо расходовать своё время на эту акцию.Ниже указан актуальный перечень легальных казино в Беларуси с призами на первый депозит. Вы можете попасть на официальный сайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. <a href=http://dom3online.ru/user/DoctorLazutapa/>http://dom3online.ru/user/DoctorLazutapa/</a> Выиграть реальные деньги в казино не пополняя счет – трудно, хотя возможно. Главное задаться целью и не нарушатьправила заведения. Выберите несколько казино с бездепзитными бонусами и начните играть на бонусные свои. По статистике каком-то 10-ти заведений можно заработать маленькую необходимую денег с бонусных средств. 1×slots зеркало сайта Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных требований, кроме обязательной верификации. Если на веб-сайте учтена неотъемлемая процедура доказательства личности, то исключить выигрыш удастся только последствии проверки данных. Приготовьтесь наполнить анкету и отправить в техподдержку документ, подтверждающий личность.Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в индивидуальный кабинет, дабы забрать безвозмездные вращения с вейджером х40;
1×slots официальный сайт зеркало
Когда речь идет о получении бездепозитных призов в казино, в первую очередь направьте на последующие обстоятельства: 1×slots зеркало регистрация <a href=http://38.104.231.181/doku.php?id=%D1%84%D0%BB%D0%B8%D1%80%D1%82%20%D0%BB%D1%8E%D0%B1%D0%BE%D0%B2%D1%8C%20%D0%B7%D0%BD%D0%B0%D0%BA%D0%BE%D0%BC%D1%81%D1%82%D0%B2%D0%B0%20%D1%84%D0%BE%D1%80%D1%83%D0%BC>http://38.104.231.181/doku.php?id=%D1%84%D0%BB%D0%B8%D1%80%D1%82%20%D0%BB%D1%8E%D0%B1%D0%BE%D0%B2%D1%8C%20%D0%B7%D0%BD%D0%B0%D0%BA%D0%BE%D0%BC%D1%81%D1%82%D0%B2%D0%B0%20%D1%84%D0%BE%D1%80%D1%83%D0%BC</a> Самые популярные способы вывода средств ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам подобии Neteller и Skrill, а также используют криптовалютными кошельками. Вывод выигрышей имеет осуществляться моментально либо развлекать от нескольких часов до нескольких суток.
1×slots регистрация на сайте
В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с безвозмездных вращений. Прибыль, коию Вы заработаете на таком бездепе возможно ставить на вывод без какого либо отыгрыша.Выбирайте лучшие безвозмездные призы за обзоров на Casinoz – и пусть вам сопутствует удача при отыгрыше бонусных кредитов! <a href=https://forum.wapinet.ru/profile.php?id=8013>https://forum.wapinet.ru/profile.php?id=8013</a> 1хслотс официальный сайт зеркало Если речь идет об неповторимых предложениях, возможность потребоваться регистрация в казино по ссылке с партнерского вебсайта.
<b>Смотреть еще похожие новости:</b>
<a href=https://rolivka.online/forum/showthread.php?tid=29351>1× slots сайт</a>
<a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=12919>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вышеописанная причина и является основным интересным, из-за которого операторы отдают часть своей выгоды на различные маркетинговые затраты и маркетинговые кампании. А самым действующим тут будут выступать именно бездепозитные бонусы казино 2022 с выводом за регистрацию.
#2317 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало рабочее на сегодня 1×bet xyz сколько казино <a href=https://t.me/vchkogpu_ru>рабочие зеркала казино</a> порно с Абрамченко Виктория Валериевна пина букмекерской конторы <a href=https://specreporter.com/>Окладникова Ирина Андреевна порно</a> 1×bet 1 1×bet слоты 1×bet top 1×bet зеркало рабочее xbet порно с Петр Ян (ММА) 1×bet зеркало рабочее на сегодня 1×bet xyz казино рояль porno Александра Степанова, фигуристка
DiskiPlus up casino официальный DiskiPlus pin up casino пин <a href=https://diskiplus.ru>DiskiPlus букмекерская контора</a> DiskiPlus casino промокод DiskiPlus Комарова Наталья Владимировна порно <a href=https://diskiplus.ru/>DiskiPlus 1×bet официальный слоты</a> DiskiPlus bet casino DiskiPlus скачать pin casino DiskiPlus букмекерская контора зенит DiskiPlus 1go casino DiskiPlus сайт pin up casino DiskiPlus 1×bet официальный скачать DiskiPlus 1×bet xbet xyz
#2318 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино рублях porno Яна Троянова <a href=https://slon-ru.com/>1×bet casino</a> скачать 1×bet на андроид bet casino <a href=https://sovsekretno.net/>Любимова Ольга Борисовна порно</a> pinco casino казино вход официальный сайт online casino официальный порно с Васильева Татьяна Викторовна играющие казино casino бездепозитный casino скачать приложение
DiskiPlus букмекерская контора мостбет DiskiPlus порно с Никита Кучеров (хоккей) <a href=https://diskiplus.ru>DiskiPlus unlim casino</a> DiskiPlus порно с Александр Большунов (лыжные гонки) DiskiPlus скачать сайт букмекерской конторы <a href=https://www.diskiplus.ru>DiskiPlus win win casino</a> DiskiPlus порно с Петр Ян (ММА) DiskiPlus почему в казино нет часов DiskiPlus 1×bet официальный DiskiPlus 1×bet DiskiPlus 7k casino зеркало на сегодня DiskiPlus играющие казино онлайн DiskiPlus porno Юлия Пересильд
#2319 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация
Но есть азартные заведения, готовые просто например вручить средства на игру. Для сего довольно сделать профиль. Чтобы исключить выигрыш, сперва необходимо выполнить вейджеровые условия, прописанные в критериях получения бездепа.За привлечение приятеля ? в партнерской программы клиент получает вознаграждение за привлечение новых юзеров. <a href=http://filmkachat.ru/>1×slots зеркало на сегодня</a> Выиграть реальные средства в казино не пополняя счет – сложно, но вполне. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными бонусами и начните играть на бонусные средства. По статистике из 10-ти заведений можно заработать маленькую необходимую денег за счет бонусных средств.Высокая конкурентность в сегменте азартных игр доказывает операторов привлекать посетителей разнообразными промоакциями. Благодаря этому у посетителей появляется возможность получить призы в казино за регистрацию без депозита. Воспользоваться этим предложением можно, минуя процедуру внесения средств на игровой счет, просто активировав акк на веб-сайте. Наш экскурсовод по бездепам поможет выбрать самую привлекательную бонусную программку, узнать управляла получения такого гонорары и воспользоваться им с наибольшей выгодой. <a href=https://www.sideprojectors.com/project/55405/expert-construction-drafting-services>https://www.sideprojectors.com/project/55405/expert-construction-drafting-services</a> Используйте наихорошие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, чтобы заработать презенты за простые действия и уже сейчас получить первый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высокой отдачей и быстрыми выводами на электрические кошельки.Отыграв бездепозитный приз в казино с выводом также придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если схожее ограничение присутствует, то единоразово исключить получится лишь сумму, не превосходящую объем приобретенного бонуса. 1×slots casino регистрация 1×slotscasin online <a href=https://forumsadovodov.com.ua/memberlist.php?mode=viewprofile&u=65195>https://forumsadovodov.com.ua/memberlist.php?mode=viewprofile&u=65195</a> Также, учите, собственно бездепозитный бонус возможно исключить лишь в том случае, когда будут выполнены все условия отыгрыша.
1×slots зеркало видели такую регистрацию на
Но есть игорные заведения, которые готовы просто так жертвовать средства на забаву. Для сего довольно создать профиль. Чтобы вывести свой выигрыш, вам сначала необходимо выполнить условия отыгрыша, указанные в условиях получения бездепозитного депозита.Процесс доказательства личности может взятьвдолг(взятьвзаймы) от 1-го дня до недели. Если клиент допустил нибудь ошибку при заполнении паспортных данных, то ему стопам адресоваться с проблемой в саппорта онлайн-казино. <a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=36551>1×slots зеркало рабочее на сегодня</a> 1×slots зеркало выигрыши обязательно пройдите регистрацию если Обыкновенные бездепозитные призы в объеме от 3-х до двадцати $ сделаны чтобы, чтобы, дабы в игры заходили все свежие и новые игроки. Здесь, всего, будет ограничение на максимальный выигрыш. Важно, дабы перед минимальным вкладом был отключен бонус за 1-ое пополнение счета, и игрок не попадет на повторный вейджер. <a href=https://vadaszapro.eu/user/profile/1270518>https://vadaszapro.eu/user/profile/1270518</a> 1×slots официальный сайт мобильная версия скачать Получить Бездепозитный приз в онлайн казино дело 2-ух кликов. Другой момент, отыграть промо и соблюсти управляла и условия отыгрыша. Под правилами подразумевается не только вагер, но и лимитирования по наибольшей ставке. Мы понимаем, что в кинотеатр все ставят на зеро и выигрывают. Призываем не делать подобного. Перед активацией приза прочитайте верховодила. Узнайте последующие моменты: Условия получения подарка, за регистрацию, за депо и другое. Ограничения по наибольшей ставке. Зачастую не повыше 350 руб. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на месте. Поэтому важно аристократия, в каких забавах можно совершать кратность валютного оборота.Необходимость отыгрыша. Вейджер ситуации повыше, чем для призов за депозит. И пока средства не отыграны, исключить их невозможно.
1хслотс казино зеркало
Таким образом, заведение пробует продемонстрировать себя своим вероятным геймерам, а такой рекламный ход как казино приз без депо за регистрацию завлекает довольно много внимания к игорному заведению и обеспечивает неизменный струю свежих гостей и будущих посетителей игрового онлайн клуба.Для получения бонуса надо(надобно) пригласить в игру свежего клиента. Казино начисляет пригласившему фиксированный процент от взносов приглашённого повторяющий приза: чаще всего его объем не превышает 10%. Срок деяния приза как не выше месяца: пригласивший получает бонус от проигранных ставок приглашённого в первый месяц игры. <a href=http://zeren.freeoda.com/member.php?action=profile&uid=7416>http://zeren.freeoda.com/member.php?action=profile&uid=7416</a> Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро либо 20 долларов. Если выдаются фриспины, их количество изредка превышает нескольких десятков безвозмездных вращений. 1×slots бездепозитный бонус за регистрацию
1×slots зеркало регистрацию более популярный вариант это
Шаг 5. Использование и отыгрыш. Бездеп обязан быть применен в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера. Подарки на определенные даты выделяются условиями получения. Если одобрение начисляют игроку на денек рождения, то сумма обыкновенно зависит от совместного размера депозитов за год.Как и другие промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения считаются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых гостей и разрешает им составить эмоцию о функционале, не рискуя значительными суммами. 1×slots зеркало регистрация то дальше необходимо пройти <a href=http://smartars.biz/gnuboard5/bbs/board.php?bo_table=free&wr_id=45801>http://smartars.biz/gnuboard5/bbs/board.php?bo_table=free&wr_id=45801</a> Все бесплатные бонусы кажутся соблазнительными. Кто же откажется от способности сыграть в онлайн-казино, не рискуя средствами, но получая выигрыши. Но далековато не все бездепозитные бонусы мере презентабельны для рассудительного клиента.
1×slots регистрация 1×slots casino 777 online
<a href=http://bbs.yxsensing.net/home.php?mod=space&uid=164025>http://bbs.yxsensing.net/home.php?mod=space&uid=164025</a> 1×slots зеркало регистрация Подарки на конкретные даты отличаются условиями получения. Если одобрение начисляют игроку на денек рождения, то сумма обыкновенно в от общего размера депозитов за год.Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депозит имеет выделяться до 30 дней.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.l2endless.com/member.php?action=profile&uid=6253>1×slots официальный сайт мобильная версия</a>
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=62595>1×slot зеркало</a>
<a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/7866–1×slots-zerkalo-registratsiya-to-dalshe-neobkhodimo-projti#7888>1×slots зеркало регистрация то дальше необходимо пройти</a>
<a href=http://forum.exalto-emirates.com/memberlist.php?mode=viewprofile&u=69997&sid=6d056ee9b65f492e3356716cb4b63662>1×slots casino регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Многие новенькие колеблются, что поощрительный приз не нужно будет отдавать, в если они выиграли у казино. Это полностью безопасно и накрепко. Выводя выигранные свои, игрок просто останавливает свое участие в игре и утрачивает уникальную вероятность – даром увеличивать собственное вещественное положение.
#2320 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
Прямо момент отберите благотворительные вращения за регистрацию без депо и начинайте собирать призовые комбинации ради солидных выигрышей!Бонус за регистрацию в казино без депо с выводом средств нужно отыграть. Зачастую для отыгрыша может понадобиться сделать ставки на сумму, в некоторое 10-ов один превосходящую сумму приза либо выигрыша. <a href=http://filmkachat.ru/>1 хслот регистрация в 1×slots casino</a> 4. Заберите подарок. Чаще всего бонус активируется сразу после регистрации. Но посещают истории, когда нужно забежать в индивидуальный кабинет либо написать в службу поддержки. <a href=https://buymeacoffee.com/poppoppopkb/vr-architecture-revolutionizing-architectural-design-visualization>https://buymeacoffee.com/poppoppopkb/vr-architecture-revolutionizing-architectural-design-visualization</a> При исполненьи критерий отыгрыша и верификации, средства с бонусного счета переводятся на главный и все быть выведены на карту либо электрический кошелек. Лимиты на вывод и сроки проведения транзакции зависимости от выбранной платежной системы.Частенько новенькие не понимают, как активировать презенты либо исключить 1-ый выигрыш. Для сходственных случаев наша команда обрисовала основные термины – собственно это фриспины, вейджер, как его отыграть, чего нужно протекать верификацию. рабочее зеркало 1хслотс <a href=http://sundays-sport.ru/bitrix/rk.php?goto=http://newtruth.hatenablog.com/iframe/hatena_bookmark_comment?canonical_uri=http://topbelarus.com/bitrix/click.php?goto=https://telegra.ph/Ponimanie-roli-ehksperta-v-sootvetstvii-so-statej-57-Ugolovno-processualnogo-kodeksa-RF-09–19>http://sundays-sport.ru/bitrix/rk.php?goto=http://newtruth.hatenablog.com/iframe/hatena_bookmark_comment?canonical_uri=http://topbelarus.com/bitrix/click.php?goto=https://telegra.ph/Ponimanie-roli-ehksperta-v-sootvetstvii-so-statej-57-Ugolovno-processualnogo-kodeksa-RF-09–19</a>
1×slots casino зеркало
<a href=https://elclasificadomx.com/author/jameslog/>1×slots casino регистрация на сайте</a> 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=https://lit-book.ru/user/PhilipOdomo/>https://lit-book.ru/user/PhilipOdomo/</a> Перед активацией главно пристально выучить обстоятельства промоакции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, в течение которых можно воспользоваться предложением. Если бездеп обхватывает узкий список игр, рекомендовано узнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с низкими множителями выплат подходят только сомнений случае, случае оператор не установил требовательные лимитирования на наивысшую сумму ставки.Главное превосходство спинов – вероятность изучить разные слоты. Также удастся насладиться бонусными раундами, испытать удачу в риск-туре и преувеличить выигрыш за счёт особенных знаков. Однако не игровой процесс заслуживает внимание, ведь превосходнее сосредоточиться на реальном выигрыше. 1× slots сайт Также бездепозитные призы могут служить способом вернуть к игре клиентов, временно приостановивших своё сотрудничество с компанией: уведомление о бездепе поступает на мобильный аппарат или почту.Помимо остального, для вывода средств по бездепу необходимо внести на счёт собственный 1-ый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально вероятную сумму, последствии чего вывод средств будет доступен.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Начнём с как, собственно каждое рекламную за регистрацию подразумевает некие обстоятельства. Бездепозитные бонусы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность валютного оборота, нужная для исполнения критерий. Пример, получили безвозмездные вращения и выиграли с их 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 руб., неудачных либо выигрышных, неважно. После выполнения, бонусный баланс перейдёт на реальный и станет доступным к выводу.4. Заберите подарок. Чаще всего приз активируется сразу в регистрации. Но бывают ситуации, когда надо(надобно) зайти в личный кабинет или написать в саппорта. <a href=http://bbs.py27.com/home.php?mod=space&uid=395366>http://bbs.py27.com/home.php?mod=space&uid=395366</a> Бездепозитные бонусы настоящими средствами, коие можно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадали.При подмоги такового поощрения оператор может кроме завлекать посетителей, которые раньше проявляли активность на сайте, но по какой-то основанию перестали играть. В этом случае промокод высылается пользователю по электронной почте либо в виде SMS. 1×slots рабочее зеркало При исполнении условий отыгрыша и верификации, деньги с бонусного счета переводятся на основной и шансы быть выведены на карту либо электронный кошелек. Лимиты на вывод и сроки проведения транзакции находятся от избранной платежной системы.Верификация важна для дополнительной безопасности и помочь техподдержке выявить бонусхантеров и мошенников. Кстати, на платформах выводы крупных сумм доступны лишь в доказательства личности.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Выполнив все притязания оператора, клиент имеет оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит примерно менее суток. Если дополнительно потребуется пройти процедуру верификации, то срок возрастает до 1–2 трудящихся дней. Для перевода используются банковские приборы и электронные платежные системы. Второй метод подходит другого, так как основная транзакций такой исполняются моментально. В связи со спецификой функционирования банков обработка платежей возможность занять до нескольких рабочих дней. С не отыгранным бонусом воспрещается превышать объем наибольшей ставки. Нарушение сего обстоятельства последствия аннулирование выигрыша. 1×slots casino зеркало рабочее <a href=https://www.birdpix.nl/profile.php?mode=viewprofile&u=126892>https://www.birdpix.nl/profile.php?mode=viewprofile&u=126892</a>
1×slots casino регистрация 1×slotscasin online
В каждом казино с бездепозитным призом учтены вейджеровые условия. Это единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, нужно сделать определённое количество ставок. Чем круче приз, что, этим труднее выполнить условия, и наоборот. Условия, на которых предоставляется бездеп, регулируются казино. Каждая акция содержит подробные верховодила, гиперссылка на которые обычно находится в промообъявлении. В них указываются лимиты, вейджер, перечень доступных игр. Если оператор скрывает данные о предложении, то воспользоваться им не. <a href=https://receptsamogona.ru/user/JulesSex/>https://receptsamogona.ru/user/JulesSex/</a> 1хслотс рабочее зеркало на сегодня В перечне притязаний к отыгрышу нередко присутствуют лимиты на ставки при ирге на собственные деньги. Так, случае отыграть нужно 30 000 руб., а максимальная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам деянья акции.Для верификации аккаунта нужно дать профессионалам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, а фотку банковской карты либо скриншот странички электрического кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=143166>1×slots сайт</a>
<a href=http://forum.puppylinux.pl/index.php?topic=907.new#new>1×slots зеркало регистрация в 1×slots casino</a>
<a href=http://youboy.comwww.molifan.net/space-uid-2295552.html>1×slots регистрацию процедура займет всего лишь</a>
<a href=http://nexusroleplay.teamforum.ru/viewtopic.php?f=19&t=8475>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Этот образ приза несомненно добавлен на Ваш акк после успешной процедуры регистрации с внедрением номера телефона. Если избрать иной способ творения учетной записи, бездеп не будет добавлен на Ваш аккаунт. Размер бонуса. В качестве бездепов обычно начисляют небольшие суммы, а когда речь о призах за депо, коие начисляются в процентном соотношении от суммы пополнения, то кое-какие казино имеют подарить игроку до 2000$.
#2321 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Алена Косторная (фигурное катание) порно с Анна Калинская (теннис) <a href=https://th-royalgclub.com/>играющие казино</a> автомат казино казино смотреть онлайн бесплатно <a href=https://strelochnik.com/>казино рояль смотреть</a> 7k casino как выиграть в казино porno Вера Бирюкова, гимнастка 1×bet официальный демо казино 1win букмекерская контора pin ап casino
DiskiPlus казино вулкан DiskiPlus 7k casino скачать <a href=https://diskiplus.ru/>DiskiPlus 1×bet официальный сайт</a> DiskiPlus Приезжева Екатерина Геннадьевна порно DiskiPlus смотреть фильм казино <a href=https://www.diskiplus.ru/>DiskiPlus vavada casino</a> DiskiPlus Фастова Елена Владимировна порно DiskiPlus порно с Илья Осипов (киберспорт) DiskiPlus casino daddy DiskiPlus Попова Анна Юрьевна порно DiskiPlus макао казино DiskiPlus 7k casino официальный сайт DiskiPlus казино смотреть онлайн бесплатно
#2322 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и когда спорных ситуаций нет возможности куда-то пожаловаться и обосновать собственную правоту.Итак, дабы бесплатные бонусные кредиты трансформировались в реальные средства, которыми вам управлять по собственному усмотрению, их надо(надобно) отыграть. Вейджер идет уточнять в правилах онлайн-казино. <a href=http://filmkachat.ru/>1×slots подтвердит вашу регистрацию если говорить</a> Похожим образом трудится третий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя или в связи с получения им VIP-статуса. Подарок предоставляется после обращения в поддержку и проверки.Выбор любого интернет казино на нашем сайте. В описании к каждому Вы сможете узнать, собственно получите за творение аккаунта. <a href=https://www.papercall.io/speakers/146409/speaker_talks/292501-professional-3d-product-modeling-services-for-businesses>https://www.papercall.io/speakers/146409/speaker_talks/292501-professional-3d-product-modeling-services-for-businesses</a> Еще одно условие касается размеров ставки. Операторы устанавливают наивысшую необходимую, которую игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном кабинете. При превышении лимита есть риск лишиться приза. Существующие ограничения относятся и к определенным видам ставок. Например, играя в рулетку, заказчик имеет столкнуться с запретом назначать фишки на шансы.Бездепозитный бонус по промо-коду несомненно доступен для забавы, лишь в том случае когда Вы активируете специальный бонусный код в разделе с призами либо укажите промокод при регистрации на веб-сайте. В неких случаях, кроме активации кода, придется подтвердить контактные данные игрока и заполнить анкету посетителя. 1×slot рабочее зеркало <a href=https://poldomy.pl/member.php?u=143703>https://poldomy.pl/member.php?u=143703</a> Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации бонуса без депозита. Внимательно прочитайте до конца. Многие новенькие делают ошибки на шаге регистрации и поэтому возможности получить презент.Самый распространённый из сходственных бонусов, окончательно же, бездеп на день рождения посетителя — бонус в виде фиксированной суммы или фриспинов поступает на счёт игрока, а воспользоваться им можно в течение установленного периода времени.
1хслотс 1хслотс регистрация перейти на 1×slots
Возможность поиграть дополнительное состязание (а времени и количество) абсолютно даром, а выигрыш, в свою очередь, поступает на счёт игрока.В онлайне большое известных игорных площадок с привлекательными акционными предложениями. Однако пристально читать обстоятельства десятков услуг в надоест, да и время отнимет большое. Поэтому наша команда подготовила ТОП-3 вебсайтов с лучшими бездепозитными бонусами: <a href=https://praisenpray.org/forums/showthread.php?tid=104916>1хслотс официальный сайт зеркало</a> 1×slots зеркало рабочее <a href=https://images.google.com.kh/url?q=https://doctorlazuta.by/>https://images.google.com.kh/url?q=https://doctorlazuta.by/</a> Бездепы все заходить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой или баллами. скачать 1×slots на андроид мобильная версия Свежий бонус начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в использовании своими, в случае отыгрыша оператор может ввести лимитирование на вывод денег.
1× слот зеркало
<a href=http://corp-eeek.ru/index.php?subaction=userinfo&user=coldkeystone38>http://corp-eeek.ru/index.php?subaction=userinfo&user=coldkeystone38</a> 1×slots регистрация на сайте Главное преимущество спинов – возможность выучить различные слоты. Также удастся насладиться бонусными раундами, испытывать фортуну в риск-туре и преувеличить выигрыш за счёт особенных знаков. Однако столько игровой процесс заслуживает внимание, так превосходнее сосредоточиться на реальном выигрыше.В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с бесплатных вращений. Прибыль, которую Вы заработаете на этом бездепе можно назначать на вывод без какого либо отыгрыша.
1×slots актуальное зеркало
Для получения выигрыша требуется выполнить условия казино. Чаще всего игроку нужно поставить конкретную сумму, но уже из личных денег. Она рассчитывается из совместного размера выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, случае пользователь выиграл 1000 руб., а множитель составляет х30, вывести средства можно будет, сделав ставки на 30 000 рублей. Многие новенькие сомневаются, что поощрительный приз не нужно несомненно возвращать, в в они выиграли у казино. Это безусловно безопасно и надежно. Выводя выигранные средства, игрок просто одергивает свое участие при и утрачивает уникальную вероятность – безвозмездно увеличивать личное материальное положение. 1×slots зеркало регистрацию более популярный вариант это <a href=http://thrope.co.kr/bbs/board.php?bo_table=free&wr_id=284464>http://thrope.co.kr/bbs/board.php?bo_table=free&wr_id=284464</a> Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и расценить необыкновенности, труднодоступные при забаве в демо режиме. Многие новые клиенты переходят в число неизменных, а оператор получает долгосрочную выгода.
1 хслот регистрация в 1×slots casino
<a href=https://mysupport.commscope.com/forums/general-discussion/32aa68d7–2fd0-ef11–95f5–6045bdb3316f>https://mysupport.commscope.com/forums/general-discussion/32aa68d7–2fd0-ef11–95f5–6045bdb3316f</a> Акционные предложения от казино существуют в различных форматах. Часто призы даются в размен на депозит. Игрок вносит платеж и получает средства, бесплатные вращения и другие поощрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — вид приза, который гарантирован за исполненье конкретных деяний на сайте:Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы которые возникают у начинающих. скачать 1×slots официальный сайт Промообъявления от казино мешают реальной картины и направлены на привлечение внимания пользователей. Понять, как высоки шансы остаться в плюсе, позволит собственный тест критерий предложения:Бездепозитный бонус нередко имеет стать легкодоступным сразу после окончания регистрации, что как единственным притязанием к нему считается регистрация, а затем проверка вашей новой учетной записи.
<b>Смотреть еще похожие новости:</b>
<a href=https://elclasificadomx.com/author/jameslog/>1×slots рабочее зеркало</a>
<a href=https://www.formulersupport.com/Thread-1×%D1%81%D0%BB%D0%BE%D1%82-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%B2–1×slots-casino–170521>1×слот регистрация в 1×slots casino</a>
<a href=https://radios-collector.com/viewtopic.php?f=7&t=48349>онлайн казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Ещё одно распространённое акционное предложение – привлекательный презент с сомнительными требованиями. К образцу, клуб обещает $100 в бездепа, но с вейджером х80 или х100. Отыграть такой вейджер практически невероятно и потому превосходнее концентрироваться на больше занимательных акциях.
#2323 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
бывшие казино up casino зеркало <a href=https://vestnik-jurnal.com/>букмекерская контора зенит</a> 1×bet зеркало на сегодня порно с Абрамченко Виктория Валериевна <a href=https://slon-ru.com/>порно с Бондаренко Анастасия Борисовна</a> 7k casino зеркало на сегодня лучшие букмекерские конторы casino бездепозитный порно с Евгения Медведева casino автомат Александра Бортич porno Илья Ковальчук (хоккей)
DiskiPlus 1×bet вход DiskiPlus Скворцова Вероника Игоревна порно <a href=https://diskiplus.ru>DiskiPlus porno Александр Соболев (футбол)</a> DiskiPlus 1×bet 1хбет DiskiPlus pin up casino top top <a href=https://www.diskiplus.ru>DiskiPlus Манилова Алла Юрьевна порно</a> DiskiPlus casino x DiskiPlus пин casino DiskiPlus Попова Анна Юрьевна порно DiskiPlus 1×bet слоты 1×bet top DiskiPlus 1×bet рабочее на сегодня DiskiPlus Светлана Ходченкова DiskiPlus про казино
#2324 avtolombardekbzeDhttp://recruitmentfromnepal.com/companies/avtolombard-pid-zalog-pts5921/
деньги под залог кредитного авто <a href=http://recruitmentfromnepal.com/companies/avtolombard-pid-zalog-pts5921/>http://recruitmentfromnepal.com/companies/avtolombard-pid-zalog-pts5921/</a> займ под залог машины
#2325 Charlesgunnyhttp://filmkachat.ru
1× слот зеркало
Исходя из этого, просто не существует мудрых причин махнуть рукой на получение такового приза при регистрации. И, что, на такой бесплатной основе у вас есть шансы выиграть деньги и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные призы, называют бесплатными интернет платформами для игр.Подтверждение регистрации. Казино настоятельно привязки профиля к электронному адресу и номеру телефона. Для сего на e-mail отчаливает письмо ссылаясь, а на телефонный ? текстовое извещение с кодом. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать на айфон</a> <a href=https://telegra.ph/Walmarts-battery-return-policy-03–13>https://telegra.ph/Walmarts-battery-return-policy-03–13</a> Классическая разновидность приза за творение аккаунта. Его превосходство заключается сомнений, что заказчик имеет других подбирать аппараты и делать ставки в них. Иногда перечень игровых автоматов ограничен оператором, но все одинаково это никакого, чем один-единственный дешевый слот, как когда с использованием фриспинов. 1× slots casino официальный сайт <a href=https://australianweddingforum.com/weddings/member.php?action=profile&uid=20569>https://australianweddingforum.com/weddings/member.php?action=profile&uid=20569</a> Бездепозитные призы за регистрацию в игровых автоматах для владельцев онлайн-казино считаются частью маркетинговой кампании, направленной на увеличение аудитории сайта. Так они продвигают свои бренды и завлекают новых посетителей.Мы советуем не отрицаться от подобных предложений известных казино. Выделите несколько минут на регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сегодня удача несомненно на вашей стороне!
1×slots коды
Чаще всего используются коды. Их нужно вносить в специальные окна регистрационной анкеты, в речь идет о пригласительных призах, либо в определенном разделе собственного кабинета игрока. <a href=https://russiancomputerservice.ru/user/JosephCer/>скачать 1×slots на андроид мобильная версия</a> казино 1×slots <a href=https://zvukiknig.info/user/RalphMaf/>https://zvukiknig.info/user/RalphMaf/</a> Как управляло, при выводе денег, от играющего потребуется лишь устроить минимальный лепта для того, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом личный счет. 1×slots официальный зеркало Для получения бездепа нужно пригласить в забаву по реферальной ссылке свежего клиента: он должен зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и восполнить счёт на необходимую, указанную в критериях промоакции.В интернете количество узнаваемых игорных площадок с красивыми акционными предложениями. Однако пристально разбирать условия 10-ов услуг вскоре надоест, да и время отнимет много. Поэтому наша команда подготовила ТОП-3 вебсайтов с лучшими бездепозитными призами:
1×slots актуальное зеркало
Ну и конечно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: подобная добродушие увеличивает степень преданности клиентов к фирмы. Чаще всего казино бонус за регистрацию без депозита даёт вероятность запустить каждой машина. Но другого внимательно ознакомиться с условиями. Иногда для забавы доступны лишь определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, никакого начать знакомство с миром азарта непосредственно с «одноруких бандитов». <a href=https://www.skoda-piter.ru:443/link.php?url=https://www.weddingbee.com/members/blackshisha0212/>https://www.skoda-piter.ru:443/link.php?url=https://www.weddingbee.com/members/blackshisha0212/</a> 1× slots официальный
1× slots зеркало
В наше время довольно просто получить бонус за регистрацию в казино. Практически любой игорный жилище с готовностью начисляет средства либо благотворительные вращения. Многие гэмблеры используют данным и не стесняются регистрироваться в любом клубе с прибыльными критериями. Кстати, это замечательная возможность выработать победную тактику и сорвать джекпот.Получать информацию о самых выгодных бонусах возможно без неизменного прогноза новостей казино. Мы брали эту задачку на себя и постоянно смотрим за предложениями операторов, выбирая наихорошие из них. В этом разделе собраны последние бездепы, промокоды к ним и условия их активации. Список акций периодически пополняется. В топ вошли самые новые бездепозитные бонусы за регистрацию в казино 2020, кратковременные и закрытые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и критериям. Если срок деяния промоакции истек, она удаляется из списка. 1×slots официальный сайт зеркало <a href=http://191.almatybala.kz/index.php?subaction=userinfo&user=kindheartedmovi>http://191.almatybala.kz/index.php?subaction=userinfo&user=kindheartedmovi</a>
1×slots актуальное зеркало
Эффективность бездепов виде маркетингового инструмента расценили почти операторы. Малоизвестные площадки употребляют такие акции, дабы прытко набрать базу. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны постоянных гостей. Не все веб-сайты, дающие подарки без депозита, рекомендованы к этой. За привлекательным промоописанием имеют прятаться невыполнимые условия отыгрыша и подводные камешки. <a href=http://bme.clanweb.eu/profile.php?lookup=6163>http://bme.clanweb.eu/profile.php?lookup=6163</a> При подмоги такого одобрения оператор может того завлекать клиентов, которые ранее проявляли активность на веб-сайте, хотя по какой-то основанию перестали играть. В данном случае промокод высылается юзеру по электрической почте или вид SMS.Так же стоит выделить то, собственно в каждом онлайн казино установлен свой максимальный кешаут на бездепозитный бонус. Как управляло кешаут — это предельная сумма средств, которая доступная для вывода с бездепозитного приза. 1× слот зеркало Третитй бездепозитный бонус за регистрацию – валютные свои. К раскаянию, начислить рубли или доллары способны только известные и модные клубы. С их помощью вас насладиться любой доступной игрой – автоматом, рулеткой, кено, блэкджеком.
<b>Смотреть еще похожие новости:</b>
<a href=http://miupsik.ru/forums/showthread.php?tid=444156>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<a href=https://aircompare.us/forums/memberlist.php?mode=viewprofile&u=40074>1хслот зеркало сайта</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут устанавливает лимитирование для клиентов. Конечно, это возможно счесть неким неудобством для игрока, но справедливости ради необходимо, собственно выбор автоматов всё также остаётся достаточно большим. Подобные бонусы без депозита предоставляются на больше выгодных условиях. Зачастую они крупнее, а обстоятельства отыгрыша менее строгие.
#2326 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pinco casino porno Марина Александрова <a href=https://vestnik-jurnal.com/>Самойлова Алла Владимировна порно</a> 1×bet 1 суть казино <a href=https://specreporter.com/>online casino 7k</a> фильмы казино рояль карты казино казино онлайн 1×bet телефон porno Андрей Рублев (теннис) porno Нина Пирогова, хоккеистка Кузнецова Анна Юрьевна порно
DiskiPlus Разуваева Ксения Денисовна порно DiskiPlus букмекерская контора бесплатно скачать <a href=https://www.diskiplus.ru/>DiskiPlus скачать 1×bet 1×bet xyz</a> DiskiPlus top casino DiskiPlus pin ап casino <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet бесплатно</a> DiskiPlus Петрова Ольга Викторовна порно DiskiPlus inform@rucriminal.info DiskiPlus слот casino DiskiPlus casino официальный зеркало DiskiPlus casino betting DiskiPlus casino актуальное зеркало DiskiPlus порно с Алина Загитова
#2327 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Александра Степанова, фигуристка зеркала казино <a href=https://specreporter.com/>Шевцова Татьяна Викторовна порно</a> почему в казино не бывает настенных часов casino com <a href=https://slon-ru.com/>сайт казино зеркало</a> почему в казино нет окон сайт казино зеркало букмекерские конторы без депозита Преподобная Надежда Александровна порно порно с Петр Ян (ММА) porno Андрей Рублев (теннис) 1×bet 1хбет
DiskiPlus казино сегодня DiskiPlus Скоробогатова Ольга Николаевна порно <a href=https://diskiplus.ru>DiskiPlus лучшие бесплатные онлайн казино</a> DiskiPlus порно с Елена Никитина, скелетонистка DiskiPlus Любимова Ольга Борисовна порно <a href=https://diskiplus.ru/>DiskiPlus casino автомат</a> DiskiPlus vavada casino DiskiPlus казино гта 5 DiskiPlus 1×bet официальный слоты DiskiPlus про казино DiskiPlus 1×bet зеркало рабочее на сегодня DiskiPlus порно с Матвей Сафонов (футбол) DiskiPlus casino скачать
#2328 Charlesgunnyhttp://filmkachat.ru
1хлот регистрация в 1×slots casino
Основное отличие сомнений, собственно для получения бездепа не пополнять баланс в казино. Но не сего, есть ряд прочих различий: <a href=http://filmkachat.ru/>рабочее зеркало 1×slots</a> Если вы новичок в и лишь попали в неизведанную вами область пыла — с помощью предложений как бездепозитные бонусы без пополнения. <a href=http://magic.ly/kalinka>http://magic.ly/kalinka</a> 1×slots регистрация на 1хслотс <a href=http://mallds.com/bbs/board.php?bo_table=free&wr_id=326528>http://mallds.com/bbs/board.php?bo_table=free&wr_id=326528</a> Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.Бездепозитные бонусы, как уже ясно, являются оригинальной возможностью обратиться игровому процессу полностью бескорыстно, другими играть в интернет казино безвозмездно и на быть средства сразу после регистрации аккаунта. Автоматы с этим депозитом имеют стать прекрасной вероятностью поиграть для поклонников азарта с определенными лимитированиями в финансах.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
При отыгрыше бонусных средств, необходимо учесть срок действия бонуса и время, которое дается на отыгрыш. По истечению заявленного времени, не отыгранный приз несомненно аннулирован.При регистрации по свидетельствовать лишь достоверную информацию. Когда учетная запись несомненно активна, появится доступ в Личный кабинет. В нем возможно избрать денежную, установить промокод и разузнать подробные правила получения и отыгрыша бездепа. Краткая информация об акции часто присутствует именно на регистрационной форме. 1×slots казино зеркало Иногда в бездепа, казино дарит наименьший бонус (до 50 рублей), из-за которого не заморачиваться.Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, solid только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. <a href=http://www.audipiter.ru/index.php?subaction=userinfo&user=painfulpolitics>http://www.audipiter.ru/index.php?subaction=userinfo&user=painfulpolitics</a> Законодательство, регулирующее азартные игры в различных странах, влияет на полномочия операторов. В итоге юзеры из отдельных регионов сталкиваются с ограничениями со стороны казино. Это может быть как полный отказ в доступе, так и невозможность загружать забавы отдельных производителей. 1хслотс рабочее зеркало
1×slots промокод при регистрации
<a href=https://uadplugins.club/memberlist.php?mode=viewprofile&u=261254>https://uadplugins.club/memberlist.php?mode=viewprofile&u=261254</a> Такой казино бонус без депозита за регистрацию выдается игроку на час и активно используется данное предложение с 2017 года. Это словно какая-то конспирация поощрения под бездепозитный. Суть всего сего сводится к что, этому, что игроку на час выдается, к примеру, 1000 $, а реклама утверждает то, собственно каждой выигрыш можно будет дальнейшем забыть при себя. Но если играющий всерьез отнесется к данному предложению, то он попросту потеряет время. Ведь геймеру надо(надобно) будет выступать не в аккаунте, а в тренировочном и с ограниченным выбором автоматов и ставок. Да и если, тогда, выигрыша (том всей тысячи) в верховодила вступят конкретные обстоятельства, где несомненно сказано, собственно наибольшей суммой победы может быть только двести $ и деньги возможно применять лишь виде бонуса на первый лепта с вейджером 25 от суммы вознаграждения плюс сам депо. По результату выйдет, что игрок выигрывал для 200% приз с вейджером на конкретную сумму. Короче разговаривая, это все не стоит вашего медли. 1×slots зеркало регистрацию более популярный вариант это Подтверждение индивидуальной инфы. Все казино требуют от посетителя пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и присутствие у пользователя иных аккаунтов (мультиаккаунт запрещен).К образцу, игроку выдаются безвозмездные средства в заведении в размере пятидесяти либо ста $ (вейджер на которые сочиняет 100х). То есть, каждому новоприбывшему геймеру выскакивает притягивающая картинка, которая обещает выплату всех зачисленных компанией средств. Не стоит заострять на казино бонус за регистрацию без депозита с сильно великий или довольно маленькой суммой бонусов, поэтому собственно, и кропотливо выучив все условия, тут вероятнее всего, несомненно какой-то подвох.
1×slots casino регистрация 1×slots review live
Бездепозитные призы казино за регистрацию в 2022 году — это вероятность поиграть за счёт заведения. Казино даёт посетителю шанс пользоваться определённой суммой или числом даровых вращений без внесения депозита. Не путайте деморежим с реальной забавой без необходимости внесения депо. Акции распространяются как на все забавы казино, например и на ограниченный список. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и другие. Промо может обхватывать разработки одного производителя. Бездеп не пересекается с иными промоакциями казино. Если на сайте предусмотрен кэшбек, он не начисляется за ставки, сделанные бонусными средствами. Для идентификации платежных реквизитов игрока имеет потребоваться пополнение счета на минимальную необходимую.Бонусы без депо при регистрации числятся самыми привлекательными как для опытнейших игроков, так для и новичков. Получив такое вознаграждение, клиент может выступать на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а обстоятельства их активации и выигрыша. 1хлот регистрация в 1×slots casino <a href=https://thiamlau.com/forum/member.php?action=profile&uid=4320>https://thiamlau.com/forum/member.php?action=profile&uid=4320</a>
1хслотс рабочее зеркало
<a href=https://build-in.dp.ua/wr_board/tools.php?event=profile&pname=Raymondvib>https://build-in.dp.ua/wr_board/tools.php?event=profile&pname=Raymondvib</a> Простая процедура получения бездепозитного приза, которая займет менее 2-х мин. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные.В некоторых интернет казино для получения бездепозитных призов не довольно просто зарегистрироваться на веб-сайте клуба и доказать свои контактные данные. Дополнительно требуется активация промокода. 1×slots актуальное зеркало Операторы гемблинга утверждают, что например они сражаются с бонус-хантерами. Впрочем, критики считают, что данным казино пробуют устроить из случайного постояльца постоянного игрока.Для подтверждения электрической почты, просто перейдите по активной ссылке в письме, приобретенном от игрового заведения.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.ltp-team.com/topic/48290–1×slots-oficialnyy-demo-registraciya-v-1×slots-casino/>1×slots официальный demo регистрация в 1×slots casino</a>
<a href=https://thetechmodders.com/forums/memberlist.php?mode=viewprofile&u=945&sid=d6373405d0202430d59a0ac525ce8477>1хслот 1хслотс регистрация перейти на 1×slots</a>
<a href=https://www.globalvision2000.com/forum/member.php?action=profile&uid=1072499>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро или 20 $. Если выдаются фриспины, их число редко превышает нескольких 10-ов бесплатных вращений. Ещё одно распространённое акционное предложение – привлекательный подарок с неблаговидными требованиями. К примеру, клуб обещает $100 в качестве бездепа, но с вейджером х80 или х100. Отыграть такой вейджер фактически невероятно и поэтому чем концентрироваться на более занимательных акциях.
#2329 mostbet_xtEthttp://mostbet6006.ru
mostbet casino <a href=https://mostbet6006.ru>mostbet casino</a> .
#2330 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино фильм 1×bet <a href=https://repost.news/>казино рояль смотреть</a> pin up букмекерская контора водка казино <a href=https://rhymes-punches.com/>Анна Михалкова</a> casino промокод porno Светлана Ходченкова casino играть casino riobet порно с Абрамченко Виктория Валериевна vodka casino казино рублях
DiskiPlus inform@rucriminal.info DiskiPlus Преподобная Надежда Александровна порно <a href=https://diskiplus.ru/>DiskiPlus яндекс игры казино</a> DiskiPlus Чулпан Хаматова DiskiPlus 1win букмекерская контора <a href=https://diskiplus.ru/>DiskiPlus 1×bet 1</a> DiskiPlus порно с Матвей Сафонов (футбол) DiskiPlus porno Светлана Ходченкова DiskiPlus 1×bet на сегодня DiskiPlus бк букмекерская контора DiskiPlus retro casino DiskiPlus 7k casino зеркало DiskiPlus casino сегодня
#2331 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino актуальное зеркало porno Анастасия Янькова, боксерка <a href=https://rhymes-punches.com/>букмекерская контора бетсити</a> гта онлайн казино официальные сайты казино <a href=https://slon-ru.com/>сколько казино</a> букмекерская контора ставки up casino официальный порно с Васильева Татьяна Викторовна демо казино песня казино 7k casino пин up casino
DiskiPlus porno Юлия Пересильд DiskiPlus скачать 1×bet 1×bet xyz <a href=https://diskiplus.ru/>DiskiPlus 1×bet на андроид бесплатно</a> DiskiPlus букмекерская контора зенит DiskiPlus балтбет букмекерская контора <a href=https://diskiplus.ru>DiskiPlus порно с Варвара Субботина</a> DiskiPlus vodka casino DiskiPlus сколько казино DiskiPlus up букмекерская контора DiskiPlus играющие казино онлайн DiskiPlus ешь казино DiskiPlus казино ставка DiskiPlus 1×bet приложение
#2332 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino скачать casino <a href=https://vestnik-jurnal.com/>Матвиенко Валентина Ивановна порно</a> винлайн букмекерская контора официальный сайт яндекс игры казино <a href=https://www.ossetia.tv/>порно с Евгений Малкин (хоккей)</a> скачать 1×bet на андроид бесплатно официальное казино вход porno Марина Александрова 1×bet на андроид порно с Елена Никитина, скелетонистка pin up casino скачать ограбление казино
DiskiPlus Набиуллина Эльвира Сахипзадовна порно DiskiPlus 1×bet приложение <a href=https://www.diskiplus.ru>DiskiPlus песня казино</a> DiskiPlus скачать букмекерскую контору DiskiPlus ешь казино <a href=https://www.diskiplus.ru>DiskiPlus online casino</a> DiskiPlus почему казино DiskiPlus Валентина Матвиенко порно DiskiPlus официальные букмекерские конторы скачать DiskiPlus скачать 1×bet DiskiPlus порно с Бондаренко Анастасия Борисовна DiskiPlus казино большая DiskiPlus pin up casino пин ап
#2333 Charlesgunnyhttp://filmkachat.ru
1× slots casino официальный сайт
Размер бонуса. В качестве бездепов обыкновенно начисляют небольшие суммы, а когда речь идет о призах за депо, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино имеют презентовать игроку до 2000$. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> Для получения бонуса надо(надобно) пригласить в забаву нового клиента. Казино начислит пригласившему фиксированный процент от взносов приглашённого повторяющий бонуса: почаще всего его размер не выше 10%. Срок деянья приза в большинстве случаев не выше месяца: пригласивший получает бонус зависимо проигранных ставок приглашённого в 1-ый месяц игры. <a href=https://manifold.garden/forums/index.php?u=/topic/635/Architectural%20Drawing%20Services%20for%20Flawless%20Designs>https://manifold.garden/forums/index.php?u=/topic/635/Architectural%20Drawing%20Services%20for%20Flawless%20Designs</a> 1×slots регистрация на 1хслотс <a href=https://images.google.sk/url?q=https://doctorlazuta.by/>https://images.google.sk/url?q=https://doctorlazuta.by/</a> Онлайн-казино кропотливо продумывают бонусные обстоятельства, которые нужно выучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша прочие ограничения.
1×slots сайт
1×slots рабочее зеркало <a href=http://levin-lic.ru/index.php?subaction=userinfo&user=markedsolitude5>http://levin-lic.ru/index.php?subaction=userinfo&user=markedsolitude5</a> Демоказино есть почти на любом веб-сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются существенно реже: там если, тогда, выигрыша и соблюдения критерий акций бездеп можно перевоплотить в реальные деньги. 1×slots казино мобильная версия Зачастую бездепозитные призы казино для игры предлагаются разными заведениями азартных игр в маркетинговых акций либо в целях привлечения к себе свежих игроков. Для бездепозитных призов в казино 2022 игроку надо пополнять счет до этапа вывода хотимых средств.
1хслотс 1хслотс регистрация перейти на 1×slots
При регистрации что, нет или ином онлайн игральном заведении — вас дается один шанс испытывать собственную удачу не внося свои монеты. Замечу что эту поощрительную услугу деют не все онлайн игровые площадки, а только великодушная половина из них. Которые мы подготовили для Вас в нашем списке. <a href=http://printsstars.ru/communication/forum/index.php?PAGE_NAME=profile_view&UID=254369>http://printsstars.ru/communication/forum/index.php?PAGE_NAME=profile_view&UID=254369</a> скачать 1×slots официальный сайт Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.
1хслотс 1хслотс регистрация перейти на 1×slots
Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих требований, не неотъемлемой верификации. Если на сайте предусмотрена неотъемлемая процедура доказательства личности, то вывести выигрыш удастся лишь в проверки данных. Приготовьтесь наполнить анкету и отправить в техподдержку документ, подтверждающий личность. Иногда операторы просят внесение минимального депо перед выводом для верификации платежного прибора. В неких казино данный депо того предстоит отыграть.Так что приготовьтесь дать секретную информацию (пол, возраст, страна проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает менее суток, после чего получится свободно выводить крупные выигрыши. 1хслотс 1хслотс регистрация перейти на 1×slots <a href=http://www.zghncy.cn/home.php?mod=space&uid=632898>http://www.zghncy.cn/home.php?mod=space&uid=632898</a>
1×slots casino регистрация 1×slotscasin online
Прямо сейчас арестуйте безвозмездные вращения за регистрацию без депозита и начинайте коллекционировать призовые композиции из-за солидных выигрышей!Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки шансы запросить вспомогательные документы либо инициировать куцее общение по Skype. <a href=https://shufaii.com/thread-651636–1–1.html>https://shufaii.com/thread-651636–1–1.html</a> Бездепозитные бонусы – это самая занимательная и более перспективная промоакция интернет-казино. Они и какого-либо фри-спинов, поэтому что выплаты в бесплатных вращениях не гарантированы, ведь композиции на барабанах игрового аппарата все не сложиться. 1×slots регистрация на 1хслотс Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную функцию активации бонуса без депозита. Внимательно прочтите до конца. Многие новички проделывают промахи на шаге регистрации и потому возможности получить подарок.При небольшой сумме бонуса рекомендуется играть по невысоким ставкам, а применять максимальные лучше только том, случае, в вейджер слишком большой, а время на отыгрыш крепко ограничено.
<b>Смотреть еще похожие новости:</b>
<a href=https://koreanstudies.com/forum/viewtopic.php?t=201863>1×slots регистрация на 1хслотс</a>
<a href=http://board.eternityrpc.com/thread-7-post-16652.html#pid16652>1×slots зеркало которую указывали при регистрации кстати</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавления либо официального посетителя для ПК. В большинстве казино действуют программы лояльности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на грядущий степень нередко сопровождается выдачей бездепа. Самые популярностью способы вывода средств ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электронным платежным системам на Neteller и Skrill, а также используют криптовалютными кошельками. Вывод выигрышей может исполняться моментально либо занимать от нескольких часов до нескольких суток.
#2334 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up casino скачать сайт винлайн букмекерская контора <a href=https://m.repost.news/>Шевцова Татьяна Викторовна порно</a> порно с Илюшникова Татьяна Александровна демо казино <a href=https://repost.news/>скачать pin casino</a> скачать 1×bet 1×bet xyz порно с Дарья Клишина, легкоатлетка pin up casino скачать порно с Петр Ян (ММА) Мухтиярова Елена Вячеславовна порно казино играть casino pin официальный
DiskiPlus casino бездепозитный DiskiPlus 1×bet рабочее <a href=https://www.diskiplus.ru/>DiskiPlus симулятор казино</a> DiskiPlus казино фильм смотреть онлайн DiskiPlus casino com <a href=https://diskiplus.ru>DiskiPlus casino скачать приложение</a> DiskiPlus казино зеркало сегодня DiskiPlus яндекс игры казино DiskiPlus porno Анна Сидорова, керлингистка DiskiPlus porno Мира Андреева (теннис) DiskiPlus porno Александра Степанова, фигуристка DiskiPlus up casino официальный DiskiPlus кент казино
#2335 Charlesgunnyhttp://filmkachat.ru
рабочее зеркало 1хслотс
Для получения выигрыша требуется выполнить условия казино. Чаще всего игроку нужно поставить определенную сумму, но уже из личных денег. Она рассчитывается из общего размера выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, в юзер выиграл 1000 руб., а множитель сочиняет х30, исключить средства возможно несомненно, сделав ставки на 30 000 руб.Основное управляло получения бездепа ? создаваемый акк должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов требовательно запрещено. Проверка проводится по имени, e-mal, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депо нужно блюсти несложную очередность действий. <a href=http://filmkachat.ru/>1×slots регистрация на официальном сайте</a> Бездепозитные бонусы, как теснее ясно, являются оригинальной возможностью обратиться игровому процессу полностью бесплатно, то есть выступать в интернет казино бесплатно и на место свои незамедлительно последствии регистрации аккаунта. Автоматы с таким депозитом все замерзнуть великолепной возможностью поиграть для поклонников азарта с определенными лимитированиями в финансах.Для подтверждения электронной почты, просто перейдите по активной ссылке в послании, полученном от игрового заведения. <a href=https://www.therookies.co/projects/79481>https://www.therookies.co/projects/79481</a> Некоторые казино имеют предлагать посетителям бездепы за свидетельство номера либо почты либо репост на страничку в социальных сетях.Прочитайте верховодила бонусной программы, в которой желайте участвовать. Да, мы безотступно советуем устроить это до регистрации. 1×slots зеркало быструю регистрацию а также мгновенное <a href=http://agenciafrog-host.com.br/redesocial_v0/index.php/profile/noiselesssample>http://agenciafrog-host.com.br/redesocial_v0/index.php/profile/noiselesssample</a> Можно. Вы практически можете отказаться от получения бездепозитного приза за регистрацию в казино, пока Вы не создадите ставку.
1 хслот регистрация в 1×slots casino
1хслотс регистрация в 1×slots casino Обычно показатель выше, чем для бонусов на депо. Не дивитесь, случае он несомненно и х100. Иногда завышенный коэффициент вейджера устанавливается для обитателей отдельных стран. <a href=https://acerfans.ru/user/JamesDem/>https://acerfans.ru/user/JamesDem/</a> зеркала 1×slots Можно ли наваривать на бездепозитных бонусах? Это не работа, тут как повезет, в в любом предложенном безедепе, вы будете откручивать вейджер и выводить, это возможно назвать везением, и добавочной добавкой к вашему бютжету.В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и в случае неоднозначных обстановок нет способности куда-то посетовать и доказать свою правоту.
1×slots зеркало сайта
При верном раскладе бездепы — это прекрасный метод выступать на средства без траты собственных средств. Есть количество рекомендаций, следуя коим возможно извлечь максимум выгоды из сходственных акций казино. Играть по лишь на лицензированных площадках. Скриптовые веб-сайты не только врут с бонусными предложениями, хотя и используют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах невероятно.Казино выводит деньги только на ту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного бонуса, Вам сначала необходимо пополнить счет. В некоторых клубах ограниченный перечень способов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет именно с данных платежных методов, которые доступны для вывода. Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам запрещено начислять бонусы посетителям, не имеющим валютных средств на счете. Мы предлагаем рассмотреть актуальные призы онлайн-казино с лицензией, коие соблюдают законодательство РБ.Почти все игровые клубы настоятельно подтверждение контактных данных игрока для получения бездепозитного приза. <a href=http://www.cruzenews.com/wp-content/plugins/zingiri-forum/mybb/member.php?action=profile&uid=1994316>http://www.cruzenews.com/wp-content/plugins/zingiri-forum/mybb/member.php?action=profile&uid=1994316</a> 1×slots зеркало выигрыши обязательно пройдите регистрацию если Бездепозитные призы за регистрацию в игровых автоматах для собственников онлайн-казино считаются долею маркетинговой кампании, направленной на повышение аудитории вебсайта. Так они продвигают средства бренды и привлекают новых клиентов.
1×slot регистрация
Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша бонусов. Заведения практически устанавливают наивысшую ставку, допустимую по условиям вейждера.Чаще всего используются коды. Их нужно заносить в особые окна регистрационной анкеты, если идет о пригласительных призах, или в особом разделе личного кабинета игрока. Акционные предложения от казино существуют в разных форматах. Часто бонусы даются в обмен на депо. Игрок вносит платеж и получает средства, благотворительные вращения прочие поощрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — картина бонуса, кот-ый гарантирован за исполнение конкретных поступков на веб-сайте: 1×slots зеркало регистрация то дальше необходимо пройти <a href=http://autosound.smartprojects.ru/bitrix/redirect.php?goto=http://korfood.ru/bitrix/redirect.php?goto=http://startvrn.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/zCm1klcJeBY>http://autosound.smartprojects.ru/bitrix/redirect.php?goto=http://korfood.ru/bitrix/redirect.php?goto=http://startvrn.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/zCm1klcJeBY</a>
казино 1×slots официальный сайт
Список например называемых «запрещенных землель» прилагается к правилам бонусной программки игорного портала. Обязательно проверьте, распространяются ли на вас похожие санкции.Активация по промокоду употребляется в разных обликах бездепов. Если идет о приветственном призе, то набор знаков возможно разузнать на основной страничке, в регистрационной форме или письме, которое отчаливает юзеру для подтверждения адреса электронной почты. Акции шансы проводиться вместе с партнерскими площадками. Обычно код располагается на постороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активизируется одноразовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном офисе или начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем важный код для активации в описании каждого промо. Но а если вы уже профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы автоматически перейдете в онлайн казино;Максимальная ставка ? уточняется в денежной счета и ограничивает объем ставки за раз спин. В случае ее превышения бонус возможность быть аннулирован. Также в правилах имеет находиться запрет на размещение ставок определенного вида, например, по одинаковым шансам в рулетке (словами, на чет либо нечет, красное или черное и т.д. ). <a href=http://ceh-i.ru/user/JoshuaGek/>http://ceh-i.ru/user/JoshuaGek/</a> Изучить верховодила и обстоятельства получения бездепозитных бонусов казино, Вы сможете у нас на сайте в разделе с бонусами или на официальном сайте выбранного Вами казино. Если возможности отыскать нужную информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал либо по электрической почте. зеркло казино 1×slots Подтвердите личность, предоставив оператору казино средства паспортные данные. Инструкции обыкновенно легкие, главное — четко им следовать. Если написано, что «на фото обязаны быть видны все хорошо угла страницы паспорта» — устройте непосредственно это фото.
<b>Смотреть еще похожие новости:</b>
<a href=http://mi.minfish.com/home.php?mod=space&uid=1196847>1×slots казино зеркало</a>
<a href=http://vn-info.net/user/Josephkam/>1×slots casino регистрация на сайте</a>
<a href=https://forum.spherecommunity.net/User-Jamesmew>1×slots зеркало регистрация то дальше необходимо пройти</a>
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=970057>1×slots зеркало проходить регистрацию это отличный вариант</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вейджер (wager) – это коэффициент, кот-ый демонстрирует на какую сумму нужно устроить ставок, чтобы вывести бонус из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего бонуса, Вам необходимо устроить ставок на необходимую: 500*70=3500 руб. Только всецело отыграв бонус, Вы сможете вывести свой выигрыш. Выбирайте превосходнейшие бесплатные призы за обзоров на Casinoz – и пусть для сопутствует удача при отыгрыше бонусных кредитов!
#2336 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino ru Попова Анна Юрьевна порно <a href=https://specreporter.com/>мобильные букмекерские конторы</a> порно с Каролина Севастьянова pin up букмекерская контора <a href=https://www.ossetia.tv/>top casino</a> 1×bet зеркало рабочее xbet официальные сайты казино 1×bet сайт 7k casino зеркало на сегодня 7k casino официальный сайт porno Марина Александрова казино онлайн бесплатно
DiskiPlus Чулпан Хаматова DiskiPlus 1×bet рабочее на сегодня <a href=https://diskiplus.ru>DiskiPlus casino онлайн</a> DiskiPlus букмекерские контора ап DiskiPlus porno Светлана Ходченкова <a href=https://diskiplus.ru/>DiskiPlus винлайн букмекерская контора</a> DiskiPlus 1×bet зеркало рабочее xbet DiskiPlus casinos xyz DiskiPlus Мухтиярова Елена Вячеславовна порно DiskiPlus pin casino зеркало DiskiPlus бесплатно играем казино DiskiPlus скачать 1×bet на андроид DiskiPlus 1go casino
#2337 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
3. Подтвердить данные. В зависимости от клуба, нужно привязать телефон или почту, показать индивидуальную информацию; <a href=http://filmkachat.ru/>1хслотс рабочее зеркало на сегодня</a> Еще одно условие касается объемов ставки. Операторы устанавливают наивысшую необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном кабинете. При превышении лимита есть риск потерять бонуса. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, заказчик может столкнуться с запретом назначать фишки на шансы.Мы собрали и опубликовали перечень наихороших бездепозитных казино с призами за регистрацию, которые гарантируют великодушные выигрыши и моментальные выплаты. <a href=https://companylistingnyc.com/listings/kompleksowy-skup-aut-wroclaw-od-wyceny-do-sprzedazy/>https://companylistingnyc.com/listings/kompleksowy-skup-aut-wroclaw-od-wyceny-do-sprzedazy/</a> В большинстве заведений сделать это возможно по адресу электронной почты, по номеру аппарата, спустя социальную сеть либо гугл-аккаунт.Онлайн-казино кропотливо продумывают бонусные обстоятельства, коие нужно выучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и лимитирования. 1×slots промокод при регистрации <a href=https://www.usajobsindex.com/author/porsedropoa/>https://www.usajobsindex.com/author/porsedropoa/</a>
1хслот 1хслотс регистрация перейти на 1×slots
Нельзя рассматривать игру на деньги, как вариант заработка. Азартные забавы запрещены для лиц младше 18 лет. Topcasinobonuses.mobi классифицируется зачинщиком азартных игр. Сайт носит информационный характер.Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные способы и расценить особенности, недоступные при этой в демо режиме. Многие новые клиенты переходят в количество постоянных, а оператор получает длительную прибыль. <a href=https://www.mojaremiza.pl/forum/8903–759–81–64-%D0%BC%D0%BE%D1%88%D0%B5%D0%BD%D0%BD%D0%B8%D0%BA-httpssk-service1ru-1>казино 1×slots</a> 1×slots регистрация 1×slots review live Многие казино деют в рекламных целях бесплатные бонусы исключительно для наших читателей. Чтобы их получить, нужно перейти на игровой вебсайт по партнерской ссылке с нашего портала. <a href=http://studio-pd.ru/index.php?subaction=userinfo&user=festiveclaw10>http://studio-pd.ru/index.php?subaction=userinfo&user=festiveclaw10</a> Вейджер не более х30–35 является применимым. Опытные игроки утверждают, что с таким вейджером реально остаться в плюсе, случае верно подойти к выбору игрового аппарата. 1хслотс мобильная версия зеркало Автоматическая активация кажется самой удобной, хотя ручной метод содержит перед ней превосходства. Прежде чем применять вознаграждение от казино, стоит заблаговременно определить, сколько времени потребуется на исполнение всех критерий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала действия бонуса.Следует подчеркнуть, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом.
1×slots актуальное зеркало
2. Создать свежий профиль. Для регистрации нужно заполнить маленькую анкету либо зайдите в личный офис посредством социальных сетей; <a href=https://technique-tp.com/forum/memberlist.php?mode=viewprofile&u=1971>https://technique-tp.com/forum/memberlist.php?mode=viewprofile&u=1971</a> В бонусную программку множества операторов входят регулярные бездепы. Это бессрочные акции, поощряющие активных неизменных игроков. Популярный формат — раздача фриспинов по конкретным денькам недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают неизменные бонусы без депо в мена на скопленные баллы лояльности. 1×slots зеркало регистрация При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток.В зависимости от онлайн заведения любой из их имеет для предложить как бездепозитные средства, так и бездепозитные фриспины, которые в успешной регистрации упадут для на ваш игровой баланс.
рабочее зеркало 1×slots
Выбирайте превосходнейшие благотворительные бонусы счет обзоров на Casinoz – и пусть для сопутствует счастье при отыгрыше бонусных кредитов!Бывают ли бездепозитные призы без вейджера? Бывают, в у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино. Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам воспрещено начислять бонусы посетителям, не имеющим денежных средств на счете. Мы предлагаем осмотреть актуальные призы онлайн-казино с лицензией, коие соблюдают законодательство РБ. Бездепозитный приз нередко может замерзнуть легкодоступным сразу после завершения регистрации, что в большинстве случаев единственным притязанием к нему считается регистрация, а затем ревизия вашей свежей учетной записи. 1×slots регистрация 1×slotscasino 56 online <a href=https://acerfans.ru/user/DoctorLazutamr/>https://acerfans.ru/user/DoctorLazutamr/</a> Выбирайте лучшие безвозмездные призы за обзоров на Casinoz – и пусть вас сопутствует удача при отыгрыше бонусных кредитов!
1×слотс казино
Проверка занимает от нескольких мин. До нескольких дней, спецы техподдержки шансы запросить вспомогательные документы или инициировать краткое общение по Skype.Наш список содержит лучшие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по важным параметрам: Чаще всего казино бонус за регистрацию без депозита даёт вероятность запустить каждой машина. Но другого внимательно ознакомиться с условиями. Иногда для игры доступны только определённые модели. Если вы новичок и ничего не смыслите в гэмблинге, чем начать знакомство с миром пыла именно с «одноруких злодеев».Ну и окончательно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: сходственная щедрость увеличивает степень лояльности посетителей к фирмы. <a href=http://galion-shop.ru/bitrix/redirect.php?goto=http://alt1.toolbarqueries.google.cv/url?q=http://profkuhnya.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/4c_jOXJ3bTK>http://galion-shop.ru/bitrix/redirect.php?goto=http://alt1.toolbarqueries.google.cv/url?q=http://profkuhnya.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/4c_jOXJ3bTK</a> Особую изюминку видео слотам присваивают уникальные знакы. С их в активизируются разные бонусы. Вы сможете запустить вспомогательный уровень и прирастить сумму выигрыша. Есть знаки, коие замещают ненадобные элементы и сами создают выигрышные комбо. Не стоит забывать и про бонус-тур. После любого удачного спина есть шанс прирастить необходимую выигрыша в 2 или четыре раза.Поспешите забрать бездепозитные призы за регистрацию в казино из представленного списка. Все платформы столько водят легальную деятельность, но и обрадуют честными результатами игры, высокой отдачей, резвыми выплатами. 1×slots акции Для верификации номера аппарата, в личном профиле выберите опцию „Подтвердить номер телефонного“ и введите в соответствующее поле код, полученный в sms-сообщении.Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам воспрещено начислять бонусы клиентам, не имеющим денежных средств на счете. Мы предлагаем разглядеть актуальные бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ.
<b>Смотреть еще похожие новости:</b>
<a href=https://thetechmodders.com/forums/viewtopic.php?t=60892>1хслотс зеркало на сегодня</a>
<a href=http://forum.survival-readiness.com/viewtopic.php?t=267537>1×slots промокод при регистрации</a>
<a href=http://nacionrolera.org/foro/viewtopic.php?f=1210&t=31833&p=548108#p548108>1×slots зеркало регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бонус за регистрацию в казино без депозита с выводом денег надо(надобно) отыграть. Зачастую для отыгрыша имеет потребоваться устроить ставки на необходимую, в несколько десятков раз превышающую необходимую бонуса или выигрыша. Получив свой презент, Вы можете даром играть на настоящие деньги, а выполнив обстоятельства отыгрыша, исключить собственный выигрыш.
#2338 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино играть казино большая <a href=https://vestnik-jurnal.com/>мобильные букмекерские конторы</a> казино играть pin ап casino <a href=https://7club7.com/>new casino</a> лучшие бесплатные онлайн казино скачать 1×bet casino официальный зеркало букмекерские конторы без депозита порно с Константин Тюкавин (футбол) 1×bet телефон 1×bet 1хбет
DiskiPlus win win casino DiskiPlus vavada casino <a href=https://www.diskiplus.ru/>DiskiPlus пинап казино</a> DiskiPlus 1×bet слоты 1×bet top DiskiPlus порно с Евгения Медведева <a href=https://diskiplus.ru>DiskiPlus казино вход официальный сайт</a> DiskiPlus рокс казино DiskiPlus казино регистрации DiskiPlus казино 1 DiskiPlus 1×bet рабочее на сегодня DiskiPlus рабочие зеркала казино DiskiPlus 1×bet официальный 1×bet xyz DiskiPlus про казино
#2339 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на официальном сайте
Составленный знатоками Casino.ru перечень онлайн-казино с бездепозитным призом разрешает игрокам сопоставить спецпредложения разных операторов.Пoдтвepдить личнocть клиента. Для удачного вывода средств, необходимо подтвердить личность посетителя. Нa этaпe вepификaции пpoфиля, работники службы защищенности обязаны убедиться, собственно у игрока всего лишь один акк. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не сможет исключить собственный выигрыш, случае у него будет количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы. <a href=http://filmkachat.ru/>1х слот регистрация в 1×slots casino</a> Акции, посвященные календарным праздничным, бывают рассчитаны как на всех юзеров, например и на категории: примеру, презент на 8 марта девушкам-игрокам или мужчинам на 23 февраля. <a href=https://teletype.in/@kalinka0588/wj_aIQ7cr4o>https://teletype.in/@kalinka0588/wj_aIQ7cr4o</a> Многие азартные клубы ограничивают сумму вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании промоакции, суммы Вы не можете исключить. Разница несомненно аннулирована, Вы и не сможете делать на нее ставки.Доступные забавы – В некоторых азартных забавах можно понизить математическое преимущество казино до нескольких 10-х процента. В их числе почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как правило, в этих забавах ставки идут в зачет вейджера не полностью. Например, может учитываться только 50%. В неких играх бездепозитные призы вообщем невозможно отыгрывать. 1× slots официальный <a href=https://staging.warainc.org/community/profile/patrubio3272825/>https://staging.warainc.org/community/profile/patrubio3272825/</a> Поспешите зарегистрироваться на официальном сайте Клубника, дабы мгновенно получить 33 безвозмездных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, бывает настоящий шанс победу!Также существуют онлайн-платформы азартных игр, которые применяют раздачу бездепозитных призов в особые даты (как для казино, так и для игрока). Помимо сего, действующие геймеры также имеют вероятность получить похожие призы за свою деятельность (к примеру, за повышения значения либо за схожие заслуги).
1×slots официальный demo регистрация в 1×slots casino
1 x slots casino Но есть игорные заведения, которые готовы просто например жертвовать средства на забаву. Для этого достаточно создать профиль. Чтобы вывести свой выигрыш, для сначала необходимо выполнить условия отыгрыша, обозначенные в критериях получения бездепозитного депозита.Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке нужно пополнить счет в казино. Для депозитных бонусов, эта процедура не нужна, так как депо уже изготовлен. <a href=http://www.ps023.cn/home.php?mod=space&uid=258694>http://www.ps023.cn/home.php?mod=space&uid=258694</a> 1×slots регистрация то дальше необходимо пройти Большинство клубов привлекают внимание игры за счёт различных даров. На 1 веб-сайтах можно получить виртуальные кредиты, которые откроют доступ ко всему софту. На других же, администрация предлагает безвозмездные вращения для запуска топовых онлайн слотов. Несмотря на различные промоакции, стоит выделить самые основные.
онлайн казино 1×slots
Классическая разновидность приза за творение аккаунта. Его превосходство содержится никаких, собственно заказчик возможность помощи избирать аппараты и создавать ставки в них. Иногда список игровых автоматов ограничен оператором, но все равно это лучше, чем один-единственный дешевый слот, как если, тогда, с использованием фриспинов. Иногда для получения бонусов нужно спутаться с адептами службы. Удобнее всего с ними разговаривать в онлайн-сате, хотя времени достаточно запроса по электронной почте.Акционные предложения от казино есть в различных форматах. Часто призы даются в размен на депо. Игрок заносит платеж и получает средства, безвозмездные вращения прочие одобрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — картина бонуса, который гарантирован за выполнение конкретных поступков на сайте: <a href=http://avto.izmail.es/index.php?subaction=userinfo&user=cloudyyard56>http://avto.izmail.es/index.php?subaction=userinfo&user=cloudyyard56</a> Ограничения по играм. Администрация воспрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, средствами или бесплатными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда разделение выполняется по виду игр. Например, отыгрыш вероятен на всех игровых аппаратах, но запрещен в настольных забавах и в разделе Live Casino. 1×slots рабочее зеркало на сегодня На страничке представлены бездепозитные призы за регистрацию в казино редчайшая награда за которой гонятся все игроки как новенькие, так и профессионалы. Мы также уделяем великое внимание на наличие призов при формирование рейтинга казино на деньги. Бездепозитный приз это вероятность выступать даром и выиграть настоящие средства.Но не стоит мыслить, что снабжая пользователей этими бонусами, казино увлекается спонсированием. Ведь размеры вознаграждений, в основном, не большие (средним размером от 5 до 20 $). И на эти свои налагаются конкретные условия и лимитирования, обязательные к исполнению игрока, случае в последствии он вожделеет получить все свои выигранные деньги.
1×slots регистрация на сайте
Главным нюансом в появлении этих вознаграждений состоит том,, что пустив их в ход, игрок ничем не рискует и в последствии никому ничего не будет должен (не зависимо, получит ли он спасибо бонусам какой-либо выигрыш либо моментально спустит все только собственно прибывшие деньги). То есть, казино снабжает игрока возможностью на дармовой базе выступать во всевозможные слоты причем спонсирует игру. Одним из поводов отдавать преимущество, льготу 1 или другому заведению заключается в привлекательности предлагаемых промоакций и безвозмездных предложений. Безвозмездные фриспины, выдаваемые без дела создавать какой-нибудь вклад, в перечне находится далековато не в конце. Чем ниже велечину вейджера, что, этим проще отыграть и исключить приз. Если Вы расчитываете заработать на бездепе, но просто ознакомиться с новым игровым клубом, то стоит избегать бонусов с высочайшим вейджером их почти не реально отыграть. С ними Вы можете только протестировать игры заведения. 1×slos регистрация в 1×slots casino <a href=http://mbdou108.ru/user/Darenkal/>http://mbdou108.ru/user/Darenkal/</a> В случае установленного лимита на сумму вывода выигрыша с бездепозитного бонуса, игрок не может вывести больше заявленной суммы.
1×slots регистрация на сайте 1×slots ru com
За привлечение друга ? в рамках партнерской программки клиент получает вознаграждение за вербование свежих юзеров. Фриспины начисляются по конкретной ставке. После их активации игроку нужно запустить разъем и убедиться, что в нем отображаются безвозмездные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода последствии отыгрыша ориентируется оператором и редко выше 5 000 рублей.Автоматы неспроста числятся наиболее модным азартным отдыхом. Чтобы освоить управление и верховодила, потребуется всего некоторое минут. Ваша задачка устроить ставку, определить количество рабочих линий и возможно вертеть тамбур. Если дисплее выпадет выигрышная композиция – вы выиграли! С данной задачей вам помогут справится бездепозитные бонусы казино. <a href=http://xn–9v2bp8axyinna.com/bbs/board.php?bo_table=gallery02&wr_id=460162>http://xn–9v2bp8axyinna.com/bbs/board.php?bo_table=gallery02&wr_id=460162</a> 1хслотс официальный сайт зеркало Бездепозитные призы казино за регистрацию в 2022 году — это возможность поиграть за счёт заведения. Казино даёт клиенту шанс воспользоваться определённой суммой или числом даровых вращений без внесения депозита. Не путайте деморежим с реальной игрой без необходимости внесения депо.
<b>Смотреть еще похожие новости:</b>
<a href=https://tucmas.fi/phpBB/viewtopic.php?f=4&t=354180>1×slots регистрация на 1хслотс</a>
<a href=https://10nsk.ru/user/JosephSuple/>скачать 1×slots на андроид мобильная версия</a>
<a href=https://forum.omolenko.com/viewtopic.php?p=204195>1×slots casino online регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Создание аккаунта. На сайте казино необходимо открыть регистрационную форму и заполнить порожние поля личностными данными. Иногда на данном этапе требуется указать только адресок электронной почты и пароль, хотя чаще бы заполнить анкету персональной информацией (ФИО, дата рождения, место проживания и т.д. ). Нужно свидетельствовать лишь настоящие данные, что впоследствие они будут проверены. Активация валютного вознаграждения случается механически после творенья профиля или применения промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на страницы казино в соц сетях либо на рассылку рекламных известий, скачать и установить вспомогательный софт и т.д.
#2340 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Александра Бортич win win casino <a href=https://7club7.com/>top casino</a> 7k casino официальный Петрова Ольга Викторовна порно <a href=https://kompromat1.online/>pin up casino пин ап</a> Ходнева Светлана Владимировна порно букмекерская контора официальный сайт скачать 1×bet слоты porno Илья Ковальчук (хоккей) Разуваева Ксения Денисовна порно рабочее казино казино пин
DiskiPlus pin up casino зеркало DiskiPlus porno Екатерина Ефременкова, шорт-трекистка <a href=https://diskiplus.ru/>DiskiPlus порно с Сергей Бобровский (хоккей)</a> DiskiPlus пин ап casino pin DiskiPlus 1×slots casino <a href=https://www.diskiplus.ru>DiskiPlus casino приложения</a> DiskiPlus casino регистрации DiskiPlus 1×bet на андроид бесплатно DiskiPlus почему в казино нет часов DiskiPlus 1win casino DiskiPlus online casino 7k DiskiPlus букмекерская контора официальный сайт DiskiPlus казино фильм онлайн
#2341 Charlesgunnyhttp://filmkachat.ru
1×slots бонус за регистрацию
Как лишь получите бездеп в казино, всё равно не забывайте проверять электрическую почту. Некоторые игорные клубы каждый веселят интенсивных гэмблеров приятными бонусами. Чаще всего получить презент возможно в преддверии праздника, на день рождение, за вербование приятеля. А того распространённым бонусом считается надбавка к депозиту. Нужно более восполнить счёт, и азартное заведение прирастит его на 50–100%. <a href=http://filmkachat.ru/>1×slots регистрация на сайте</a> Возьми свой презент. Чаще всего бонус активируется незамедлительно после регистрации. Но посещают истории, когда надо(надобно) зайти в индивидуальный офис или написать в справочную службу. <a href=https://cgscholar.com/community/community_profiles/3d-rendering-services/community_updates/234377>https://cgscholar.com/community/community_profiles/3d-rendering-services/community_updates/234377</a> Новички не любят сразу же заносить депо. Это обусловлено неименьем навыка и сомненьем. К счастью, в возможно получить бездепозитный приз за регистрацию в казино. Неважно что начисляет система – фриспины либо кредиты. В всяком случае вы не рискуете своими сбережениями. Это отличная возможность запустить приглянувшийся видео разъем или же испытывать фортуну в настольных забавах.Фриспины — благотворительные вращения, коие позволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины считаются наиболее известным и предпочтительным видом приза — безвозмездные вращения иногда эффективнее и веселее в отыгрыше, чем остальные виды бездепов. казино 1×slots официальный сайт <a href=https://lider-school174.com/forum/user/8360/>https://lider-school174.com/forum/user/8360/</a> Для вывода средств приз нужно несомненно отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами акции и вариациями отыгрыша бездепозитного бонуса до его получения, дабы избежать конфликтных ситуаций.
сайт 1× slots casino
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=183521>1×slots актуальное зеркало</a> 1×slots сайт зеркало <a href=http://lnx.hotelresidencevillateresaischia.com/casamicciola/index.php?option=com_k2&view=itemlist&task=user&id=452979>http://lnx.hotelresidencevillateresaischia.com/casamicciola/index.php?option=com_k2&view=itemlist&task=user&id=452979</a> Поспешите зарегистрироваться на официальном сайте Клубника, чтобы моментально получить 33 безвозмездных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, появляется реальный шанс победу! 1× slots сайт Популярность онлайн казино растёт и всё больше юзеров начинают интересоваться азартными играми. Бездепозитные бонусы 2022 года, это оригинальные презенты за регистрацию. С их поддержкой новые игроки все получить безвозмездные вращения или деньги на баланс за одну регистрацию. С появлением игорных заведений в онлайне, бездепозитные призы стали моднейшим методом вербования игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы расскажем. Наш вебсайт собрал лучшие предложения из интернета на 2022 год. Воспользуйтесь хоть подарком и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить обстоятельства.
1×slos регистрация в 1×slots casino
Для получения выигрыша требуется выполнить условия казино. Чаще всего игроку нужно поставить определенную необходимую, но уже из собственных средств. Она рассчитывается из общего размера выигрыша за всегда использования бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, случае пользователь выиграл 1000 рублей, а множитель сочиняет х30, вывести средства возможно будет, сделав ставки на 30 000 рублей.Доступность — бездепозитные бонусы в казино чаще всего предоставляются новым игрокам, хотя бывают случаи, когда приз имеют получить и действующие клиенты. В интернет-сети постоянно можно отыскать перечни более популярных и гарантированных поощрительных программ от известных онлайн-казино. <a href=http://porno18let.ru/index.php?subaction=userinfo&user=glibschedule48>http://porno18let.ru/index.php?subaction=userinfo&user=glibschedule48</a> Варианты выигрыша находятся от Вашей удачи и критерий игорного портала. Выше мы заявили, собственно кое-какие бездепозитные бонусы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются и, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность современных игр на деньги, возможно выиграть невозможные суммы. Сегодняшние игровые автоматы или видео слоты, как их нарекают. Могут выдавать крупные умножение от х1.000 и повыше. Некоторые умножают ставку от х100.000.Для получения бездепа необходимо пригласить в игру по реферальной ссылке нового клиента: он обязан зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и восполнить счёт на необходимую, обозначенную в условиях акции. рабочее зеркало 1хслотс Демоказино есть практически на любом сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются веско пореже: там в случае выигрыша и соблюдения условий промоакций бездеп возможно перевоплотить в реальные деньги.
1×slots зеркало на сегодня
Существует ли стратегии для отыгрыша бездепозитных призов? К огорчению нет, на выигрыши или проигрыши с бонусов, казино или игрок воздействовать имеет, отдача игр происходит от разработчиков игр.Выбирая даровой бонус, внимательно изучайте верховодила. Убедитесь, собственно для можно брать участие в промоакции. Уточните, в каких играх можно исполнять условия вейджера. При необходимости задавайте вопросы представителям саппорта. В интернет-сети всегда возможно отыскать списки наиболее популярных и гарантированных поощрительных программ от знаменитых онлайн-казино. 1×slots официальный сайт зеркало рабочее <a href=http://rstal.ru/index.php?subaction=userinfo&user=glibwanderer81>http://rstal.ru/index.php?subaction=userinfo&user=glibwanderer81</a> Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Для получения депозитного бонуса необходимо пополнить собственный игровой баланс реальными средствами. Вознаграждение можно получить или при внесении первого депо, либо в виде фиксированного процента от внесённых средств. Так либо по, бонус поступит на счёт лишь после пополнения.
1×slots скачать на айфон
Шаг 5. Использование и отыгрыш. Бездеп обязан быть использован в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.Допустим, за регистрацию вы возымели бездеп в объеме 2 000 рублей с вейджером х30. В этом случае предстоит сделать ставок, на совместную необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать настоящие деньги. Однако не запамятовывайте, собственно с каждого дара получится вывести определённую необходимую (чаще всего менее $200). Выбирая бесплатный бонус, внимательно изучайте правила. Убедитесь, что вас возможно принимать роль в акции. Уточните, в каких забавах можно выполнять условия вейджера. При необходимости задавайте вопросы адептам саппорта.Игры, в можно выступать на бонусные средства. Проверьте перечень игр, в можно играть на бонусные свои, вероятно они Вам не понравятся и не стоит расходовать своё время на такую акцию. <a href=http://w92248uq.bget.ru/user/MichaelAnept/>http://w92248uq.bget.ru/user/MichaelAnept/</a> Итак, дабы безвозмездные бонусные кредиты трансформировались в реальные деньги, которыми возможность распоряжаться по своему усмотрению, их надо(надобно) отыграть. Вейджер следует уточнять в правилах онлайн-казино. 1×slots зеркало регистрация то дальше необходимо пройти В зависимости от онлайн заведения любой из них имеет для предложить как бездепозитные деньги, например и бездепозитные фриспины, коие последствии успешной регистрации упадут для на ваш игровой баланс.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=39626>1×slot казино зеркало</a>
<a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/10029–1×slots-skachat-na-ajfon#10057>1×slots скачать на айфон</a>
<a href=http://palais.beesims.com/phpbb/viewtopic.php?f=2&t=291888>1×slots зеркало этих способов предполагает регистрацию</a>
<a href=http://weeklywars.de/memberlist.php?mode=viewprofile&u=860>1×slots регистрация на сайте</a>
<a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=133201>1×slots зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные призы в казино без пополнения 2022 — это определенная сумма средств или vacant spins вращения, которые предоставляются первым гостям за регистрацию на сайте казино повторяющий бездепозитного бонуса, и дает для возможность с казино без пополнения опробовать предложения (игр), с последующей привилегией вывода средств при исполненьи всех установленных управлял.
#2342 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
7k casino зеркало официальные букмекерские конторы скачать <a href=https://repost.news/>casino riobet</a> online casino 7k casinos winning <a href=https://www.ossetia.tv/>porno Юлия Канакина, скелетонистка</a> сайт 1×bet слоты casino бездепозитный pin casino порно с Илюшникова Татьяна Александровна почему в казино не бывает настенных часов официальные букмекерские конторы скачать винлайн букмекерская контора официальный сайт
DiskiPlus фреш казино DiskiPlus букмекерская контора <a href=https://diskiplus.ru/>DiskiPlus сайте букмекерской конторы фонбет</a> DiskiPlus порно с Алина Загитова DiskiPlus vodka casino <a href=https://diskiplus.ru>DiskiPlus ешь казино</a> DiskiPlus casino официальный сайт DiskiPlus 1×bet официальный сайт DiskiPlus порно с Антропова Валентина Викторовна DiskiPlus казино 1 DiskiPlus слот casino DiskiPlus 1×bet на андроид DiskiPlus pin up casino пин
#2343 Charlesgunnyhttp://filmkachat.ru
зеркала 1×slots
К образцу, игроку выдаются бесплатные свои в заведении в размере пятидесяти либо ста $ (вейджер на коие сочиняет 100х). То есть, любому новоприбывшему геймеру выскакивает привлекающая иллюстрация, которая сулит выплату всех зачисленных фирмой средств. Не стоит внимания на казино приз за регистрацию без депозита с чрезмерно великий или очень малюсенькой суммой призов, потому что, даже кропотливо выучив все обстоятельства, здесь скорее, будет некий подвох.Вы скорее, например все любите получать подарки и бездепозитные призы казино. Игорные жилища брали в привычку одаривать гэмблеров приятными бонусами. Стать обладателем приветственного презента возможно за творенье профиля или пополнение счёта. Второй вариант более интересный, так клубы готовы удвоить депозит! Но в вы новичок и только знакомитесь с миром пыла, какого-либо воспользуйтесь призом за регистрацию. <a href=http://filmkachat.ru/>1×slots зеркало подтвердит вашу регистрацию если говорить</a> <a href=https://www.obesityhelp.com/members/shopavto/about_me/>https://www.obesityhelp.com/members/shopavto/about_me/</a> 1×slots подтвердит вашу регистрацию если говорить <a href=http://woojincopolymer.co.kr/bbs/board.php?bo_table=free&wr_id=1110756>http://woojincopolymer.co.kr/bbs/board.php?bo_table=free&wr_id=1110756</a> Такой казино бонус без депозита за регистрацию выдается игроку на час и активно употребляется данное предложение с 2017 года. Это как бы некая конспирация одобрения под бездепозитный. Суть всего этого сводится к тому, собственно геймеру на час выдается, например, 1000 $, а реклама твердит о том, собственно любой выигрыш возможно будет в забыть при себя. Но если играющий всерьез отнесется к этому предложению, то он просто растеряет время. Ведь игроку нужно будет играть не в аккаунте, ну тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (числе всей тысячи) в управляла вступят конкретные обстоятельства, где несомненно сказано, что максимальной суммой победы имеет быть лишь двести $ и деньги возможно использовать лишь в качестве бонуса на 1-ый вклад с вейджером 25 от суммы гонорары плюс сам депозит. По итогу выйдет, что игрок выигрывал себе 200% приз с вейджером на определенную сумму. Короче разговаривая, это все надо вашего медли.
1×slots рабочее зеркало на сегодня
1×slots официальный сайт зеркало Не стоит путать забаву в демо и использование призов. В демонстрационном режиме игрок возможность расценить механику слота, сюжет и оформление. Но игра проводится на относительные кредиты, поэтому отсутствует основное ? чувство азарта. Активируя промокод либо фриспины, клиент по-прежнему не тратит свои средства на игровые автоматы, хотя может сорвать настоящий куш! <a href=http://bbs.ieltstofelglobal.com/home.php?mod=space&uid=60559>http://bbs.ieltstofelglobal.com/home.php?mod=space&uid=60559</a> 1×slots casino регистрация
скачать 1×slots официальный сайт
Выбрать казино с бездепозитным бонусом. У нас на сайте представлен перечень лучших онлайн казино, которые предлагают своим игрокам великодушные призы за регистрацию. <a href=http://pro-tulu.ru/users/yfyhyhi>http://pro-tulu.ru/users/yfyhyhi</a> казино 1×slots официальный сайт
скачать 1×slots официальный сайт
Новички не обожают сразу же заносить депо. Это обосновано неименьем опыта и сомнением. К счастью, в можно получить бездепозитный бонус за регистрацию в казино. Неважно что начисляет система – фриспины или кредиты. В любом случае вы не рискуете собственными сбережениями. Это отличная возможность запустить приглянувшийся видео разъем либо же испытать фортуну в настольных играх.Некоторые клубы механически начисляют приз на акк игрока в исполненья условий получения, хотя бывают ситуации, когда бонус нужно активировать игроку самому. Есть несколько методов активации приза: <a href=https://www.formulersupport.com/Thread-1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F–176006>1×slots официальный регистрация</a> В интернете слишком большое скриптовых сайтов, которые принадлежат жуликам. Их основная цель – привлечь гэмблеров, пообещав не только великодушные презенты, но и крупные выигрыши. Так собственно некоторые веб-сайты предлагают получить за регистрацию числе $1 000. Бонус с зачислением средств на счет выделяет больше свободы действий. Пользователь сам избирает, каким образом воспользоваться подаренными средствами. Здесь кроме имеют работать лимитирования на список дешевых игр, хотя обыкновенно эти рамки не например строги, как в рекламную с бесплатными вращениями. 1×slots подтвердит вашу регистрацию если говорить <a href=https://wiki.eqoarevival.com/index.php/%C3%90%C2%A4%C3%91%E2%82%AC%C3%90%C2%B0%C3%90%C2%BD%C3%91%CB%86%C3%90%C2%B8%C3%90%C2%B7%C3%91%E2%80%B9_%C3%90%C5%A1%C3%90%C2%BE%C3%91%E2%80%9E%C3%90%C2%B5%C3%90%C2%B9%C3%90%C2%BD%C3%90%C2%B8_%C3%90%C3%A2%E2%82%AC%E2%84%A2_%C3%90_%C3%90%C2%BE%C3%91%C3%91%C3%90%C2%B8%C3%90%C2%B8:_%C3%90%C2%A1%C3%91%E2%80%9A%C3%90%C2%B0%C3%90%C2%B2%C3%90%C2%BA%C3%90%C2%B0_%C3%90%C3%90%C2%B0_2024_%C3%90%E2%80%9C%C3%90%C2%BE%C3%90%C2%B4>https://wiki.eqoarevival.com/index.php/%C3%90%C2%A4%C3%91%E2%82%AC%C3%90%C2%B0%C3%90%C2%BD%C3%91%CB%86%C3%90%C2%B8%C3%90%C2%B7%C3%91%E2%80%B9_%C3%90%C5%A1%C3%90%C2%BE%C3%91%E2%80%9E%C3%90%C2%B5%C3%90%C2%B9%C3%90%C2%BD%C3%90%C2%B8_%C3%90%C3%A2%E2%82%AC%E2%84%A2_%C3%90_%C3%90%C2%BE%C3%91%C3%91%C3%90%C2%B8%C3%90%C2%B8:_%C3%90%C2%A1%C3%91%E2%80%9A%C3%90%C2%B0%C3%90%C2%B2%C3%90%C2%BA%C3%90%C2%B0_%C3%90%C3%90%C2%B0_2024_%C3%90%E2%80%9C%C3%90%C2%BE%C3%90%C2%B4</a> Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в обязательном порядке нужно пополнить счет в казино. Для депозитных бонусов, эта процедура не нужна, так как депо теснее сделан.Максимальный объем ставки, который нельзя превышать же приз не несомненно всецело отыгран. В случае нарушения сего управляла, бонус и выигрыш с него станут аннулированы.
1х слотс зеркало регистрация в 1×slots casino
Начнём с как, что каждое промо за регистрацию предполагает некоторые условия. Бездепозитные бонусы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность денежного оборота, необходимая для выполнения критерий. Пример, получили благотворительные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 рублей, проигрышных или выигрышных, неважно. После исполнения, бонусный баланс перейдёт на настоящий и станет доступным к выводу.В каждом казино с бездепозитным бонусом предусмотрены вейджеровые условия. Это один-единственный «подводный камень», который стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) устроить определённое число ставок. Чем круче бонус, тем сложнее выполнить обстоятельства, и наоборот. <a href=http://federal58.ru/bitrix/redirect.php?goto=http://zlatamira.ru/bitrix/redirect.php?goto=http://maps.google.com.mx/url?q=https://telegra.ph/Kvota-na-rabochuyu-vizu-dlya-inostrannyh-rabotnikov-v-2024-godu-Pravila-i-poryadok-primeneniya-09–23>http://federal58.ru/bitrix/redirect.php?goto=http://zlatamira.ru/bitrix/redirect.php?goto=http://maps.google.com.mx/url?q=https://telegra.ph/Kvota-na-rabochuyu-vizu-dlya-inostrannyh-rabotnikov-v-2024-godu-Pravila-i-poryadok-primeneniya-09–23</a> 1хслотс рабочее зеркало Бездепозитные бонусы казино за регистрацию в 2022 году — это вероятность сыграть за счёт заведения. Казино даёт посетителю шанс пользоваться определённой суммой либо количеством бесплатных вращений без внесения депо. Не путайте деморежим с реальной забавой без надобности внесения депозита.Выше мы предоставили полный набор самых новых и актуальных бездепозитных бонусов в онлайн казино без пополнения на 2022 год, где вам воспользоваться каким ценным бездепозитным бонусом.
<b>Смотреть еще похожие новости:</b>
<a href=https://mit-bbs.com/viewtopic.php?t=335003>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a>
<a href=http://fin-molitor.com/forum/memberlist.php?mode=viewprofile&u=8719>1×slots регистрацию процедура займет всего лишь</a>
<a href=https://www.xn–72c9aa5escud2b.com/webboard/index.php/topic,522425.new.html#new>1×slots официальный сайт скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Ниже указан актуальный перечень легальных казино в Беларуси с призами на 1-ый депозит. Вы можете попасть на официальный сайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. Далее потребуется отыграть вагер и исключить выигрыш. Игрокам без опыта крупно повезло, есть получить 10-ки даров за одну регистрацию. Если не смогли получить Бездепозитный бонус, не тревожьтесь. Обратитесь в интернет чат, оператор поможет ситуацию.
#2344 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Екатерина Ефременкова, шорт-трекистка 1×bet телефон <a href=https://t.me/vchkogpu_ru>букмекерская контора официальный сайт</a> сайт pin up casino Анна Михалкова <a href=https://rumafia.news/>casino игровой автомат</a> букмекерская контора официальный сайт букмекерские контора ап porno Вера Бирюкова, гимнастка Елизавета Боярская порно с Петр Ян (ММА) kent casino порно с Георгий Джикия (футбол)
DiskiPlus Лут Оксана Николаевна порно DiskiPlus Хорова Наталья Александровна порно <a href=https://diskiplus.ru/>DiskiPlus приложения букмекерских контор</a> DiskiPlus 1×bet зеркало рабочее на сегодня DiskiPlus Скворцова Вероника Игоревна порно <a href=https://www.diskiplus.ru/>DiskiPlus Скоробогатова Ольга Николаевна порно</a> DiskiPlus 1×bet слоты официальный сайт DiskiPlus 1win casino DiskiPlus 1×bet официальный 1×bet xyz DiskiPlus champion casino DiskiPlus официальные сайты казино DiskiPlus бк букмекерская контора DiskiPlus 7k casino
#2345 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
7k casino бонус porno Алена Михайлова <a href=https://rhymes-punches.com/>порно с Матвей Сафонов (футбол)</a> лучшие онлайн казино Петрова Ольга Викторовна порно <a href=https://specreporter.com/>Ходнева Светлана Владимировна порно</a> r7 casino пин ап букмекерская контора Юдаева Ксения Валентиновна порно Семёнова Татьяна Владимировна порно слот casino пина букмекерской конторы porno Катерина Шпица
DiskiPlus казино рояль смотреть DiskiPlus зеркала официальных сайтов казино <a href=https://www.diskiplus.ru>DiskiPlus букмекерская контора леонов</a> DiskiPlus реального казино DiskiPlus казино можно <a href=https://www.diskiplus.ru/>DiskiPlus винлайн букмекерская контора</a> DiskiPlus букмекерские конторы pin DiskiPlus гта казино DiskiPlus pin up casino buzz DiskiPlus порно с Гатагова Ольга Анатольевна DiskiPlus пин ап casino DiskiPlus unlim casino DiskiPlus казино ли
#2346 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пин ап casino Попова Анна Юрьевна порно <a href=https://sovsekretno.net/>porno Светлана Ходченкова</a> pin up casino top top рабочее казино <a href=https://vestnik-jurnal.com/>какие казино</a> Лут Оксана Николаевна порно unlim casino букмекерские конторы pin рабочее казино букмекерская контора мостбет букмекерская контора фонбет официальный Скоробогатова Ольга Николаевна порно
DiskiPlus казино фильм онлайн DiskiPlus официальное казино вход <a href=https://diskiplus.ru>DiskiPlus casino ап</a> DiskiPlus ставки на спорт букмекерские конторы DiskiPlus игры казино <a href=https://www.diskiplus.ru>DiskiPlus сайт букмекерской конторы</a> DiskiPlus Нургалиева Эльвира Рамиловна порно DiskiPlus casino скачать DiskiPlus сайт pin up casino DiskiPlus 1×bet зеркало на сегодня DiskiPlus казино сочи DiskiPlus слоты казино DiskiPlus cat casino
#2347 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации 2025
Выиграть настоящие средства в казино не пополняя счет – трудно, хотя возможно. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными бонусами и начните играть на бонусные средства. По статистике в одном из 10-ти заведений возможно заработать маленькую необходимую денег с бонусных средств. <a href=http://filmkachat.ru/>1хслотс 1хслотс регистрация перейти на 1×slots</a> Простая процедура получения бездепозитного приза, кот-ая займет менее 2-х мин. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные. <a href=https://www.obesityhelp.com/members/product-advertising/about_me/>https://www.obesityhelp.com/members/product-advertising/about_me/</a> Срок активации и время на отыгрыш. Зачисление средств или фриспинов случается при активации в течение требовательно ограниченного периода, схожие притязания предъявляются и к срокам отыгрыша. Одни казино позволяют отыгрывать бонус некоторое дней или даже месяцов. Другие выдают солидную сумму за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высоким вейджером. 1×slots зеркало видели такую регистрацию на <a href=https://gidro2000.com/forum-gidro/user/27347/>https://gidro2000.com/forum-gidro/user/27347/</a> Бонус начисляется игроку незамедлительно после регистрации и прохождения верификации в казино и не требует от клиента внесения депозита. Как управляло, объем бонуса в подобном случае довольно застенчивый, впрочем дозволяет новичкам познакомиться с забавой без риска настоящими деньгами.Бездепозитный приз по промо-коду будет доступен для игры, только сомнений случае когда Вы активируете особый бонусный код в разделе с бонусами или укажите промокод при регистрации на сайте. В некоторых случаях, считая активации кода, понадобиться доказать контактные данные игрока и наполнить анкету клиента.
1×slot зеркало рабочее регистрации на телефон придет
Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен список наилучших онлайн казино, коие предлагают своим игрокам великодушные призы за регистрацию. 1×slots промокод при регистрации Бездепозитные призы казино это экономическая компенсация, предлагаемая юзерам на дармовой основе и вероятность играть в онлайн казино безвозмездно. Если сравнивать их с поощрениями за лепта, каких средства выдаются только потом первоначального пополнения счета, то бездепозитные гонорары получаются даром. То есть, играющий получает вероятность создавать ставки на теснее место деньги, которые выдаст заведение, исполняя, этом, обыденные деяния, дабы их извлечь (здесь речь о регистрация, удостоверении личности с внедрением номера телефонного, дизайна заказы и т.д. ). <a href=http://www.zgbbs.org/space-uid-183291.html>http://www.zgbbs.org/space-uid-183291.html</a> 1×slots зеркало этих способов предполагает регистрацию Постарайтесь отыграть вейджер, чтобы появилась вероятность оставить заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные приборы. Вы сможете получить выигрыш на электрической кошелёк, карту, аппарат.В зависимости от онлайн заведения каждый из них возможность для предложить как бездепозитные средства, например и бездепозитные фриспины, которые в удачной регистрации рухнут вас на ваш игровой баланс.
1 х слотс зеркало
Изучить правила и обстоятельства получения бездепозитных бонусов казино, Вы сможете у нас на веб-сайте в разделе с призами или на официальном сайте выбранного Вами казино. Если возможности отыскать нужную информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал либо по электронной почте.Ещё одно распространённое акционное предложение – привлекательный подарок с неблаговидными требованиями. К примеру, клуб обещает $100 в качестве бездепа, но с вейджером х80 либо х100. Отыграть такой вейджер практически невероятно и потому никакого концентрироваться на больше интересных акциях. Только выполнив все обстоятельства отыгрыша и дождавшись окончания ревизии аккаунта, Вы сможете оформить заявку на вывод средств и получить средства средства.Бездепозитные бонусы за регистрацию являются одним из самых известных способов вербования свежих игроков в онлайн-казино, поэтому собственно они предоставляют игрокам вероятность опробовать казино, тем игровые автоматы, и вероятно, выиграть реальные средства. <a href=https://keegandmvc07419.bloggactivo.com/29804680/deep-nude-understanding-the-implications-of-ai-generated-imagery>https://keegandmvc07419.bloggactivo.com/29804680/deep-nude-understanding-the-implications-of-ai-generated-imagery</a> Предложения с бездепозитными призами за регистрацию разрешают свежим заведениям заинтересовать аудиторию на собственный сайт. А игроки же получают возможность выступать на реальные средства без депозита в казино и заработать небольшой стартовый капитал, который разрешено вывести на карту банка либо электрический кошелек. 1×slots казино мобильная версия При ирге на бонусные свои воспрещается выступать в игровые автоматы с современным джекпотом и игры из радела exist casino. Кроме того, некоторые казино выделяют бездеп на раз либо несколько конкретных слотов, и в других забавах Вы не можете на них играть.
1×slots рабочее зеркало
Но есть азартные заведения, готовые просто например вручить средства на игру. Для сего довольно сделать профиль. Чтобы исключить выигрыш, сперва необходимо выполнить вейджеровые условия, прописанные в критериях получения бездепа. 1хслот 1хслотс регистрация перейти на 1×slots <a href=http://t20suzuki.com/phpBB2/profile.php?mode=viewprofile&u=11342>http://t20suzuki.com/phpBB2/profile.php?mode=viewprofile&u=11342</a>
1 x slots
К раскаянью, нет. Почти все казино, настоятельно внесение хотя бы одного минимального депозита для вывода выигрыша с бездепозитного бонуса. Также учитывайте, что вывести деньги разрешено только на ту платежную систему, с которой был изготовлен депо. <a href=https://www.winners24.pl/member.php?action=profile&uid=54483>https://www.winners24.pl/member.php?action=profile&uid=54483</a> 1×slots casino регистрация 1×slotscasin online
<b>Смотреть еще похожие новости:</b>
<a href=http://www.arka-bahce.org/forum/showthread.php?p=776308#post776308>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Каждый новичок и профессиональный игрок грезят прытко стартануть и начать создавать реальные ставки. Для этого достаточно арестовать презент, за кот-ый не уплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email или аппарат. После сего администрация начислит щедрое вознаграждение в виде безвозмездных вращений либо виртуальных кредитов. Подобные бонусы без депо предоставляются на больше выгодных критериях. Зачастую они покрупнее, а условия отыгрыша менее жесткие.
#2348 zaimpodptsnovosibzeDhttps://avtolombard-11.ru/nsk.html
займ залог птс <a href=https://avtolombard-11.ru/nsk.html>avtolombard-11.ru/nsk.html</a> кредит под залог птс автомобиля в новосибирске
#2349 Charlesgunnyhttp://filmkachat.ru
1× slots casino зеркало
Если вы облюбовали для себя несколько брендов коие вас больше всего полюбились, для постоянной забавы! Таких гемблеров казино довольно предпочитает и ценит, за частую эти игроки становятся VIP игроками заведения, коим часто поступают выгодные предложения в виде бонусов, например же туда входит и бездепозитные.Некоторые казино шансы предлагать посетителям бездепы за свидетельство номера либо почты или репост на страницу в социальных сетях. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasin online</a> Помните, собственно в неких забавах сумма ставки идет в зачет вейджера лишь отчасти. Так, в настольных и карточных забавах только от 5% до 50% суммы ставки считаются как отыгранные средства, на как в слотах идет в зачет все one hundred percent суммы. <a href=https://manifold.garden/forums/index.php?u=/topic/636/%D0%9A%D0%B0%D0%BA%20%D1%80%D0%B0%D0%B1%D0%BE%D1%82%D0%B0%D0%B5%D1%82%20%D0%B0%D0%B2%D1%82%D0%BE%D0%B2%D1%8B%D0%BA%D1%83%D0%BF%20%D0%B2%20%D0%A5%D0%B0%D1%80%D1%8C%D0%BA%D0%BE%D0%B2%D0%B5>https://manifold.garden/forums/index.php?u=/topic/636/%D0%9A%D0%B0%D0%BA%20%D1%80%D0%B0%D0%B1%D0%BE%D1%82%D0%B0%D0%B5%D1%82%20%D0%B0%D0%B2%D1%82%D0%BE%D0%B2%D1%8B%D0%BA%D1%83%D0%BF%20%D0%B2%20%D0%A5%D0%B0%D1%80%D1%8C%D0%BA%D0%BE%D0%B2%D0%B5</a> Вейджер (либо вагер) ? это минимальная сумма ставок, которую нужно устроить для вывода денежного приза. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение. 1×slots казино мобильная версия <a href=https://elearnportal.science/wiki/User:RamonitaHirth60>https://elearnportal.science/wiki/User:RamonitaHirth60</a> Обычно, бездепозитные бонусы выдаются под конкретные слоты с фиксированной ставкой, но их наверняка запрещено применять в игровых автоматах с современным джекпотом. Список игр, в возможно применять бездеп, Вы найдете в описании промоакции или сможете уточнить у службы поддержки заведения.Зарегистрируйтесь. Для регистрации чаще всего довольно установить свой номер аппарата и почтовый адрес, в чего ввести приобретенный код из СМС. Возможно, требуется указать промокод. В правилах промоакции несомненно написано, где его бы вводить. Иногда это хотелось создавать при регистрации, времени — уже в создания личного офиса, на отдельной страничке.
1× slots зеркало
На странице представлены бездепозитные бонусы за регистрацию в казино редкая награда за коей гонятся все игроки как новенькие, так и мастера. Мы тоже уделяем огромное внимание на наличие призов при формирование рейтинга казино на средства. Бездепозитный бонус это возможность играть безвозмездно и выиграть настоящие средства. <a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=118687>x1 slots 1хслотс регистрация перейти на 1×slots</a> 1×slots рабочее зеркало на сегодня Подтвердите личность, предоставив оператору казино средства паспортные данные. Инструкции обыкновенно легкие, основное — четко им следовать. Если написано, собственно «на фото должны быть видны все хорошо угла странички паспорта» — сделайте непосредственно это фото. <a href=http://www.so0912.com/home.php?mod=space&uid=2325395>http://www.so0912.com/home.php?mod=space&uid=2325395</a> казино 1×slots официальный сайт
1×slots регистрация 1×slotscasino09k online
Верификация аккаунта. Лучше доказать личность незамедлительно в регистрации, чтобы позже не было заморочек с выводом денег. Верификация возможность проходить 2-мя маршрутами: <a href=https://xn–80abdzaxbkfak2ai0bzf4ce.xn–p1ai/communication/forum/user/42818/>https://xn–80abdzaxbkfak2ai0bzf4ce.xn–p1ai/communication/forum/user/42818/</a> У каждого игорного клубы различные вейджеровые условия. Чтобы вы гарантировано смогли выполнить их, мы дадим количество советов. Если система начислила небольшую необходимую, не стоит создавать большие ставки – остановитесь на 10–30 центах. Как только сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте выступать. В противном случае чем присмотреться к иному автомату.В количестве случаев бесплатные призы начисляются в кредитах, которые нельзя незамедлительно вывести со счета. Прежде их нужно отыграть по установленным правилам. Эти притязания принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже. 1хслот зеркало сайта
1×slots бездепозитный бонус за регистрацию
В лицензионных бездепозитных казино играть в азартные забавы вправду неопасно. Наличие лицензии одобряет тот факт, что клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP.Доступные забавы – В некоторых азартных забавах возможно понизить математическое превосходство казино до нескольких 10-х процента. В их количестве многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как управляло, в таких играх ставки идут в зачет вейджера не полностью. Например, возможность учитываться лишь 50%. В некоторых забавах бездепозитные призы вообще невозможно отыгрывать. <a href=https://www.donchillin.com/space-uid-382497.html>1×slots официальный зеркало</a> Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Для получения предоставленных призов для понадобиться — ПК или мобильное устройство, и остальное дело за малым. казино 1×slots <a href=http://forum.fiat-club.ru/blog.php?b=3215>http://forum.fiat-club.ru/blog.php?b=3215</a> Так собственно приготовьтесь дать конфиденциальную информацию (пол, возраст, государство проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает не более суток, в чего удастся беспрепятственно выводить крупные выигрыши.В количестве случаев безвозмездные бонусы начисляются в кредитах, которые невозможно незамедлительно исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти требования принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д. ). О нем читайте ниже.
1 x slots casino
Но надо думать, что снабжая пользователей такими бонусами, казино увлекается спонсированием. Ведь размеры вознаграждений, в основном, не большие (средним объемом от 5 до 20 $). И на эти свои налагаются определенные условия и ограничения, обязательные к выполнению игрока, в в последствии он желает получить все средства выигранные финансы. Бездепозитный бонус казино 2022 с выводом за регистрацию предоставляет вероятность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и проверить качество работы службы поддержки. Довольно часто, начиная игровой процесс, игрок теснее не желает останавливаться и делает реальный вклад. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать даром вполне как один таки с призом за регистрацию без надобности заносить депозит. <a href=http://www.lawfirmidea.com/bbs/board.php?bo_table=free&wr_id=251733>http://www.lawfirmidea.com/bbs/board.php?bo_table=free&wr_id=251733</a> Реже бонусы без депозита начисляются неизменным игрокам. С их поддержкою администрация старается удержать ценных посетителей или вожделеет поблагодарить за лояльность правильных гостей. Но намного почаще для подобных целей применяются такие промоакции:Свежий приз начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в использовании средствами, а случае отыгрыша оператор может ввести ограничение на вывод средств. 1×slots зеркало проходить регистрацию это отличный вариант Призовые начисления без депо могут предоставляться для роли в турнирах интернет казино. Потратить перечисленные средства возможно исключительно масштабах этой промоакции. Условия их проведения содержат лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться этим предложением, чем изучить его управляла.Возможность сыграть вспомогательное соревнование (а от и несколько) совершенно безвозмездно, а выигрыш, же, поступает на счёт игрока.
<b>Смотреть еще похожие новости:</b>
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=14349>1×slots регистрация на официальном сайте</a>
<a href=http://www.fiat130.it/phpbb3/viewtopic.php?f=14&t=310896>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<a href=https://talkonlinenews.com/viewtopic.php?t=4469>1хслот зеркало</a>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=326075>1×slots casino online регистрация</a>
<a href=https://minifishtank.net/forum/showthread.php?tid=23277>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бонус за регистрацию в казино без депо с выводом средств нужно отыграть. Зачастую для отыгрыша возможность потребоваться устроить ставки на сумму, в количество десятков раз превосходящую сумму бонуса либо выигрыша. Чтобы получить вероятность вывести прибыль с бездепозитного приза в казино, нужно выполнить ряд критерий:
#2350 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
Бездепозитный приз предоставляется новому игроку за конкретные деяния. Часто подарок повторяющий средств или фриспинов выдается за регистрацию, благодаря чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало</a> Иногда в бездепа, казино дарует минимальный бонус (до 50 руб. ), ради которого надо заморачиваться.Вейджер (либо вагер) ? это минимальная сумма ставок, которую нужно сделать для вывода валютного приза. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим красивее спецпредложение. <a href=https://elearn.ellak.gr/mod/forum/discuss.php?d=8504#p51754>https://elearn.ellak.gr/mod/forum/discuss.php?d=8504#p51754</a> Каждый из бездепозитных призов без пополнения 2022 содержит собственный определенный вейджер для отыгрыша, так же в любом казино он уточняется индивидуально — где то он х55 а кое-где х30, повторюсь везде по различному!Можно ли в одном интернет казино получить больше одного приза за регистрацию? Нет, так как в каждом интернет казино есть верховодила, к которым надо(надобно) держаться, не делать два аккаута для получения бонусов, по будет блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, бонус за регистрацию выдаеться раз один одному лицу. 1хслотс мобильная версия зеркало <a href=http://sunhelp.co.kr/bbs/board.php?bo_table=qa&wr_id=10591>http://sunhelp.co.kr/bbs/board.php?bo_table=qa&wr_id=10591</a> Во время забавы в казино, выигрыши, полученные благодаря бесплатным призовым фондам, суммируются и включаются в общую необходимую для отыгрывания. Однако, в фортуна улыбнется и выйдет отыграть все призы, игровое заведение гарантированно разрешит исключить финансовые средства. Сумма вывода несомненно зависеть от лимита, одобренного именно в данном учреждении. Поэтому, пристально нужно читать верховодила выдачи безлимитных депозитов.Благодаря программке лояльности от игорного заведения, можно взять превосходный старт и без дополнительных инвестициям запустить видеослоты. Кроме того, возможно рассчитывать на реальную фортуну и получить, без вложения собственных финансов, великий выигрыш.
1×slots официальный зеркало рабочее
1×slots официальный сайт, скачать В игровых клубах без лицензии Вы покупаете „кота в мешке“ и если, тогда, спорных обстановок нет возможности куда-то пожаловаться и доказать собственную правоту. <a href=http://ip-melange.ru/user/Stevencouby/>http://ip-melange.ru/user/Stevencouby/</a> 1×slots официальный сайт скачать
1×slots зеркало рабочее на сегодня
Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, чтобы была вероятность вывести выигрыш. <a href=http://twchess.lionfree.net/discuz/home.php?mod=space&uid=24843>http://twchess.lionfree.net/discuz/home.php?mod=space&uid=24843</a> Многие новенькие колеблются, что поощрительный приз не будет возвращать, том в они выиграли у казино. Это абсолютно безопасно и надежно. Выводя выигранные свои, игрок просто останавливает свое роль деле и теряет уникальную возможность – безвозмездно наращивать личное вещественное положение. 1×slots зеркало рабочее на сегодня
1×slots сайт
Необходимость отыгрыша. Вейджер ситуации выше, чем для призов за депозит. И же свои не отыграны, исключить их нельзя.Если при регистрации указать промокод, возможно гарантировано получить приз. Где арестовать ваучер? Посетите определенную блоги либо форумы. Иногда администрация клуба проделывает рассылку ваучеров на электронную почту. В последнее время игорные жилища начали афишироваться в кинокартинах и сериалах. Присмотритесь и наверняка заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных руб. Если вы новичок данном и только попали в неизведанную вами область азарта — за услуг как бездепозитные призы без пополнения.У нас на веб-сайте Вы найдете перечень призов без депо в проверенных казино и доскональную информацию то как их получить и использовать. Выиграть реальные деньги в казино не пополняя счет – сложно, хотя вполне. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными призами и начните играть на бонусные средства. По статистике в 10-ти заведений можно заработать маленькую необходимую средств помощью бонусных средств.2. Создать свежий профиль. Для регистрации нужно заполнить маленькую анкету либо зайдите в собственный офис посредством соц сетей; 1×slots казино зеркало <a href=http://www.mtbclubsibillini.it/index.php?option=com_easybookreloaded>http://www.mtbclubsibillini.it/index.php?option=com_easybookreloaded</a> Главным моментом в возникновении этих вознаграждений состоит в том, собственно пустив их в ход, игрок ничем не рискует и в последствии никому ничего не будет должен (не зависимо, получит ли он спасибо призам какой-нибудь выигрыш либо моментально спустит все только собственно прибывшие деньги). То есть, казино снабжает игрока возможностью на дармовой базе выступать во всевозможные слоты и даже спонсирует игру.
1хлот регистрация в 1×slots casino
Бездепы имеют заходить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами.B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. Баланс игрока пополняется на соответствующую необходимую. К ней используется вейджер, обозначенный в правилах акции. Вывести выигрыш можно несомненно после как, как юзер устроит требуемый объем ставок из личных средств. В редчайших случаях бездеп трудится в формате Free Play. На счет юзера зачисляется большая сумма, и предоставляется небольшой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по окончании сего периода сумма на счету несомненно превосходить первоначальную, то разность можно несомненно вывести либо применять для последующих ставок.Чтобы бездеп не был начислен на Ваш аккаунт, Вам не активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт автоматически, а Вы не планируете его использовать, обратитесь в службу поддержки с пожеланием отменить бездепозитный бонус. <a href=http://yinyue7.com/home.php?mod=space&uid=1095273&do=profile&from=space>http://yinyue7.com/home.php?mod=space&uid=1095273&do=profile&from=space</a> В списке притязаний к отыгрышу нередко присутствуют лимиты на ставки при игре на собственные средства. Так, в отыграть надо(надобно) 30 000 рублей, а предельная сумма ограничена 30 рублями, то вертеть барабаны светит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам действия акции.Отыграв бездепозитный приз в казино с выводом также придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если сходственное лимитирование присутствует, то единоразово исключить выйдет лишь сумму, не превосходящую объем полученного бонуса. 1×slots официальный сайт скачать Бывают ли бездепозитные призы без вейджера? Бывают, в у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный приз за регистрацию устанавливается вейджер во всех казино.Мы собрали и выпустили перечень наилучших бездепозитных казино с бонусами за регистрацию, которые гарантируют великодушные выигрыши и моментальные выплаты.
<b>Смотреть еще похожие новости:</b>
<a href=http://fin-molitor.com/forum/viewtopic.php?f=2&t=428248>1×slots casino регистрация</a>
<a href=https://irc.floobits.com/Jamesamiva>1× slots официальный</a>
<a href=https://smm-seo.ru/members/rabofreeol.4209/>1×slots рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Практически все онлайн казино с бездепозитным призом за регистрацию учитывает программку преданности — систему поощрения постоянных клиентов, кот-ая состоит из колличества значений. При достижении игроком очередного значения на его счёт поступает бонус. Чем повыше уровень — что, этим щедрее приз.
#2351 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
как выиграть в казино сайт винлайн букмекерская контора <a href=https://specreporter.com/>7k casino официальный</a> порно с Максим Глушенков (футбол) online casino <a href=https://rumafia.news/>слот casino</a> порно с Анна Щербакова, фигуристка казино играть порно с Владимир Минеев (ММА) porno Алена Михайлова пин ап casino казино без 1×bet зеркало слоты 1×bet xyz
DiskiPlus Шевцова Татьяна Викторовна порно DiskiPlus Хорова Наталья Александровна порно <a href=https://www.diskiplus.ru>DiskiPlus Манилова Алла Юрьевна порно</a> DiskiPlus porno Ангелина Гончаренко, хоккеистка DiskiPlus леон букмекерская контора <a href=https://www.diskiplus.ru/>DiskiPlus бесплатно играем казино</a> DiskiPlus порно с Константин Тюкавин (футбол) DiskiPlus Фастова Елена Владимировна порно DiskiPlus ев казино DiskiPlus порно с Дарья Клишина, легкоатлетка DiskiPlus скачать casino на андроид DiskiPlus порно с Евгения Медведева, фигуристка DiskiPlus 1×bet слоты
#2352 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации 2025
Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, a только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> Эффективность бездепов виде рекламного прибора расценили почти операторы. Малоизвестные площадки употребляют эти акции, чтобы стремительно набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны постоянных посетителей. Не все веб-сайты, дающие подарки без депо, рекомендованы к этой. За привлекательным промоописанием могут скрываться неосуществимые обстоятельства отыгрыша и другие подводные камни. <a href=https://www.smartmoneymatch.com/job/3d-artist/969>https://www.smartmoneymatch.com/job/3d-artist/969</a> В бонусную программу многих операторов входят регулярные бездепы. Это бессрочные акции, поощряющие активных неизменных игроков. Популярный формат — раздача фриспинов по определенным дням недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают постоянные бонусы без депозита в размен на скопленные баллы лояльности. 1×slots казино зеркало <a href=http://www.khanlin.com/bbs/board.php?bo_table=free&wr_id=153651>http://www.khanlin.com/bbs/board.php?bo_table=free&wr_id=153651</a>
1хслот официальный сайт зеркало
1 xslots рабочее зеркало Самый распространённый из похожих призов, окончательно же, бездеп на денек рождения клиента — приз повторяющий фиксированной суммы либо фриспинов поступает на счёт игрока, а пользоваться им можно в течение установленного периода медли. <a href=http://arhangrupmetal.com/index.php?subaction=userinfo&user=raggeddealer52>http://arhangrupmetal.com/index.php?subaction=userinfo&user=raggeddealer52</a> Бонус без депо за регистрацию в казино (бездепозитный бонус) – это денежный презент от клуба, кот-ый начисляется на аккаунт игрока последствии регистрации в казино. Кроме творения учетной записи, для получения бездепа, довольно нередко требуется ещё и доказать контактные данные игрока и/или активировать особый промо-код. 1×slot официальный сайт Чаще всего, популярностью сервисы, эти как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное управляло. Финансовые средства выводятся только через что, эту платежную систему, которой успех для пополнения депо. Если же игрок получил бездепозитный покерный бонус, потребуется пополнить счет на минимальную необходимую, кот-ая сочиняет обычно десять долларов.
1×slots регистрация 1×slotscasino09k online
В игровых клубах без лицензии Вы покупаете „кота в мешке“ и в случае спорных обстановок нет способности куда-то посетовать и доказать свою правоту. <a href=https://raygunmvp.com/user/briandrori-briandrori/?um_action=edit>https://raygunmvp.com/user/briandrori-briandrori/?um_action=edit</a> Это также благотворительные деньги, которые поступают на аккаунты свежеиспеченных в в регистрирования. А необыкновенность этих призов произведено в, что обретенные финансы непременно идет применять в продолжении назначенного времени. 1×slots официальный сайт скачать Бонус без депо за регистрацию в казино (бездепозитный приз) – это валютный презент от клуба, кот-ый начисляется на акк игрока в регистрации в казино. Кроме творения учетной записи, для получения бездепа, очень часто требуется ещё и доказать контактные данные игрока и/или активировать особый промо-код.Так же стоит выделить то, что в любом онлайн казино установлен свой максимальный кешаут на бездепозитный бонус. Как правило кешаут — это максимальная сумма средств, кот-ая доступная для вывода с бездепозитного приза.
1×slots регистрация на сайте 1×slots ru com
Одним из предлогов отдавать привилегию 1 либо другому заведению заключается в привлекательности предлагаемых промоакций и даровых услуг. Безвозмездные фриспины, выдаваемые без нужды делать какой-либо лепта, в перечне располагается далеко не в конце.Фриспины. Бесплатные вращения предназначены для применения в видео-слотах. Внимательно читайте условия – они часто выдаются для некоторых машин. В зависимости от клуба возможность делать конкретное количество ставок. Кстати, современные игорные жилища выделяют вероятность заводить «одноруких бандитов». Любой выигрыш по ставке выше установленного лимита будет являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, а в случае выигрыша его сумма не поступит на счёт клиента — результат игры несомненно всецело аннулирован. Нет. Для получения бездепозитного приза в казино нужна обязательная регистрация на сайте. Играть в слоты бесплатно и без регистрации возможно только в демо режиме. 1×slots casino зеркало рабочее <a href=https://popcporn.net/user/StevenInaph/>https://popcporn.net/user/StevenInaph/</a>
1×slots зеркало на сегодня
При помощи такого одобрения оператор имеет кроме завлекать клиентов, коие раньше проявляли активность на веб-сайте, хотя по некий основанию перестали играть. В этом случае промокод высылается юзеру по электрической почте или повторяющий SMS. <a href=https://podacha-blud.com/user/Ralphirona/>https://podacha-blud.com/user/Ralphirona/</a> рабочее зеркало 1×slots Наличие у игрока 2 аккаунта. Запрещено создавать количество профилей для неоднократного получения бездепов.
<b>Смотреть еще похожие новости:</b>
<a href=https://australiantravelforum.com/Upload/showthread.php?tid=276587>1× слот зеркало</a>
<a href=https://www.goslog.ru/forum/messages/forum1/message17865/11-obrashcheniya-grazhdan?result=reply#message17865>1×slots официальный сайт зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Только выполнив все условия отыгрыша и дождавшись завершения проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить свои средства.
#2353 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
up casino зеркало рокс казино <a href=https://repost.news/>мобильные букмекерские конторы</a> казино 1 Хорова Наталья Александровна порно <a href=https://slon-ru.com/>bet casino</a> 1×bet зеркало рабочее на сегодня 1×bet xyz казино проиграл pinco casino водка казино porno Ангелина Гончаренко, хоккеистка сайте букмекерской конторы фонбет pin casino зеркало
DiskiPlus букмекерская контора официальный сайт скачать DiskiPlus Разуваева Ксения Денисовна порно <a href=https://diskiplus.ru>DiskiPlus букмекерская контора леонов</a> DiskiPlus часы казино DiskiPlus кент казино <a href=https://diskiplus.ru/>DiskiPlus порно с Артемий Панарин (хоккей)</a> DiskiPlus 1×bet сайт DiskiPlus бесплатное казино DiskiPlus 1×bet зеркало слоты DiskiPlus porno Алена Михайлова DiskiPlus pinco casino DiskiPlus казино вулкан DiskiPlus porno Дарья Мороз
#2354 Charlesgunnyhttp://filmkachat.ru
1×slots казино мобильная версия
Приглашаем делиться мнениями о призах. Это поможет другим юзерам выбирать наиболее прибыльные предложения. <a href=http://filmkachat.ru/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> У любого игорного клубы разные вейджеровые обстоятельства. Чтобы вы гарантировано смогли выполнить их, мы дадим некоторое советов. Если система начислила небольшую сумму, не стоит создавать великие ставки – остановитесь на 10–30 центах. Как лишь сумеете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте выступать. В противном случае превосходнее присмотреться к другому автомату.Варианты выигрыша находятся от Вашей успеха и условий игорного портала. Выше мы сказали, что некоторые бездепозитные призы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются и те, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность передовых игр на средства, возможно выиграть невозможные суммы. Сегодняшние игровые автоматы либо видео слоты, как их именуют. Могут выдавать крупные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000. <a href=https://linkfly.to/kalinka>https://linkfly.to/kalinka</a> 1×slots быструю регистрацию а также мгновенное <a href=http://zvezdjuchki.ru/user/Jamesupset/>http://zvezdjuchki.ru/user/Jamesupset/</a> При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, которое можно посвятить этой в казино.
1хслотс 1хслотс регистрация перейти на 1×slots
Например, игрок получил 500 рублей при твореньи аккаунта и обязан отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., понадобится устроить 875 спинов для полного отыгрыша. <a href=https://bans.org.ua/index.php?topic=122821.new#new>1×slots зеркало сайта</a> 1×slots официальный сайт скачать <a href=https://igia.cv.ua/index.php/forum/skrin-ka-propozitsij/1654-zakupka-ssylok-dlya-prodvizheniya#326175>https://igia.cv.ua/index.php/forum/skrin-ka-propozitsij/1654-zakupka-ssylok-dlya-prodvizheniya#326175</a> Перечисленные повыше главные характеристики сочетают фактически любой приз и являются стереотипными для бездепозитных бонусных начислений в казино. 1×slots актуальное зеркало
casino 1×slot
Выбрать казино с бездепозитным бонусом. У нас на сайте представлен список лучших интернет казино, коие предлагают своим игрокам щедрые призы за регистрацию.Каждый из бездепозитных бонусов без пополнения 2022 содержит собственный конкретный вейджер для отыгрыша, так же в каждом казино он уточняется персонально — где то он х55 а кое-где х30, повторюсь всюду по различному! <a href=http://ladistribution.net/fr/wiki/wiki/dokuwiki/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D0%B4%D0%B7%D0%B5%D0%BD%20%D1%87%D0%B8%D1%82%D0%B0%D1%82%D1%8C>http://ladistribution.net/fr/wiki/wiki/dokuwiki/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D0%B4%D0%B7%D0%B5%D0%BD%20%D1%87%D0%B8%D1%82%D0%B0%D1%82%D1%8C</a> Сроки активации приза уточняются любым казино, хотя почаще всего они не превосходят недели с этапа получения. Игроку непременно надо(надобно) использовать бездеп в течение обозначенного срока, в ином случае бонус просто пропадет. Каждый бонус можно получить только один один, поэтому если не использовать бездеп в срок, у игрока не несомненно 2 шанса им воспользоваться.Даже не выиграв солидную сумму, игрок интересно проведет время, изнутри изучит работу площадки, воспримет геймплей автоматов. Все это без каких-либо финансовых рисков. Быть в курсе лучших промоакций с. Достаточно периодически изучать перечень свежих онлайн казино с выводом приза без депозита в этом разделе. 1× slots casino официальный сайт
1хслотс официальный сайт зеркало
Ниже указан актуальный перечень легальных казино в Беларуси с призами на 1-ый депозит. Вы можете попасть на официальный сайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус.На нашем веб-сайте Вы найдете перечень актуальных новых бездепозитных бонусов в казино 2022 года. Также, есть количество неповторимых услуг, которые доступны лишь гостям нашего сайта последствии регистрации по нашей ссылке или активации специального промокода. 1×slots сайт <a href=http://www.sportchap.ru/index.php?subaction=userinfo&user=axiomaticgimmic>http://www.sportchap.ru/index.php?subaction=userinfo&user=axiomaticgimmic</a>
1хслотс мобильная версия зеркало
<a href=http://zimmu.com/api/manual/doku.php?id=How_to_Set_Betting_Limits_in_the_1×bet_APP_for_Indian_(IN)_Users?>http://zimmu.com/api/manual/doku.php?id=How_to_Set_Betting_Limits_in_the_1×bet_APP_for_Indian_(IN)_Users?</a> Теоретически, к бесплатным бонусам возможно отнести так называемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, потому собственно они деют только возможность делать ставки. 1×slots зеркало Большинство интернет-казино из нашего топ-10 готовы порадовать вас неповторимыми акциями. Читайте о их в обзорах и на форуме.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.findaspermdonor.com/memberlist.php?mode=viewprofile&u=13618>1×slots casino зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вы скорее, например все предпочитаете получать презенты и бездепозитные призы казино. Игорные жилища брали в привычку одаривать гэмблеров приятными бонусами. Стать обладателем приветственного презента возможно за творенье профиля либо пополнение счёта. Второй вариант больше занимательный, как клубы готовы удвоить депозит! Но если вы новичок и только знакомитесь с миром азарта, лучше воспользуйтесь призом за регистрацию. Бездепозитный приз предоставляется новому игроку за конкретные деянья. Часто презент вид средств либо фриспинов выдается за регистрацию, благодаря чему пользователь получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.
#2355 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet приложение казино ставка <a href=https://m.repost.news/>букмекерская контора скачать приложение</a> 1×bet зеркало рабочее на сегодня casino зеркало сегодня <a href=https://vestnik-jurnal.com/>казино смотреть онлайн</a> мобильные букмекерские конторы пин ап казино казино онлайн казино на деньги porno Елизавета Туктамышева порно с Диана Шнайдер (теннис) порно с Зырянова Анастасия Владимировна
DiskiPlus скачать pin casino DiskiPlus casino зеркало сегодня рабочее <a href=https://diskiplus.ru/>DiskiPlus porno Мира Андреева (теннис)</a> DiskiPlus букмекерская контора DiskiPlus 7k casino скачать <a href=https://www.diskiplus.ru/>DiskiPlus online casino</a> DiskiPlus букмекерская контора на андроид DiskiPlus казино сегодня DiskiPlus casino ru DiskiPlus симулятор казино DiskiPlus порно с Анастасия Потапова, теннисистка DiskiPlus кент casino DiskiPlus какие казино
#2356 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора мостбет Кузнецова Анна Юрьевна порно <a href=https://www.ossetia.tv/>1×bet зеркало xbet xyz</a> порно с Кирьянова Дарья Борисовна порно с Аделия Петросян (фигурное катание) <a href=https://rucriminal.info/>букмекерская контора мостбет</a> porno Алена Михайлова pinco casino казино 1 7k casino зеркало на сегодня фреш казино pin up casino пин порно с Илья Осипов (киберспорт)
DiskiPlus Разуваева Ксения Денисовна порно DiskiPlus casino рабочее зеркало <a href=https://diskiplus.ru>DiskiPlus про казино</a> DiskiPlus букмекерская контора без DiskiPlus ставки на спорт букмекерские конторы <a href=https://www.diskiplus.ru>DiskiPlus Ходнева Светлана Владимировна порно</a> DiskiPlus Ходнева Светлана Владимировна порно DiskiPlus casino daddy DiskiPlus Яровая Ирина Анатольевна порно DiskiPlus casinos xyz DiskiPlus 1×bet casino DiskiPlus казино 5 DiskiPlus 7k casino
#2357 Charlesgunnyhttp://filmkachat.ru
1× slots casino зеркало
Получив свой подарок, Вы сможете даром играть на реальные средства, а выполнив условия отыгрыша, вывести свой выигрыш. <a href=http://filmkachat.ru/>1×slot казино зеркало</a> Приглашаем делиться суждениями о бонусах. Это поможет иным пользователям подбирать наиболее прибыльные предложения. <a href=https://feedback.goodnotes.com/forums/191274-customer-suggestions-for-goodnotes/suggestions/49478645-%D0%BA%D0%B0%D0%BA-%D0%B2%D1%8B%D0%B3%D0%BE%D0%B4%D0%BD%D0%BE-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D1%82%D1%8C-%D0%B0%D0%B2%D1%82%D0%BE-%D0%BF%D0%BE%D1%81%D0%BB%D0%B5-%D0%B4%D1%82%D0%BF-%D1%8D%D0%BA%D1%81%D0%BF%D0%B5%D1%80%D1%82%D0%BD%D0%BE%D0%B5-%D1%80%D1%83%D0%BA>https://feedback.goodnotes.com/forums/191274-customer-suggestions-for-goodnotes/suggestions/49478645-%D0%BA%D0%B0%D0%BA-%D0%B2%D1%8B%D0%B3%D0%BE%D0%B4%D0%BD%D0%BE-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D1%82%D1%8C-%D0%B0%D0%B2%D1%82%D0%BE-%D0%BF%D0%BE%D1%81%D0%BB%D0%B5-%D0%B4%D1%82%D0%BF-%D1%8D%D0%BA%D1%81%D0%BF%D0%B5%D1%80%D1%82%D0%BD%D0%BE%D0%B5-%D1%80%D1%83%D0%BA</a> Иногда операторы требуют внесение малого депо перед выводом для верификации платежного прибора. В неких казино данный депозит кроме предстоит отыграть. 1×slots на любой вкус как пройти регистрацию <a href=http://www.jishuzhaihome.com/home.php?mod=space&uid=375419>http://www.jishuzhaihome.com/home.php?mod=space&uid=375419</a> Как верховодило, при выводе финансов, от играющего требуется лишь устроить минимальный лепта для того, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом индивидуальный счет.
1×slots регистрация 1×slots review live
Условия, на которых предоставляется бездеп, регулируются казино. Каждая акция содержит подробные правила, гиперссылка на которые обыкновенно содержится в промообъявлении. В них указываются лимиты, вейджер, перечень доступных игр. Если оператор укрывает данные о предложении, то воспользоваться им не стоит.Акции распространяются как на все забавы казино, так и на узкий список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino прочие. Промо возможность обхватывать разработки одного производителя. Бездеп не пересекается с другими промоакциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, изготовленные бонусными средствами. Для идентификации платежных реквизитов игрока может потребоваться пополнение счета на наименьшую сумму. 1×slots промокод при регистрации <a href=https://gsan.essex.ac.uk/user/jasperden/?um_action=edit>https://gsan.essex.ac.uk/user/jasperden/?um_action=edit</a> 1×slots casino регистрация 1×slotscasino09k online На нашем сайте Вы отыщите перечень своевременных свежих бездепозитных бонусов в казино 2022 года. Также, есть количество неповторимых предложений, которые доступны только гостям нашего сайта после регистрации по нашей ссылке или активации специального промокода.
казино 1×slots официальный сайт
Но а в вы теснее профи по интернет казино, кликаем на красную кнопку «Получить» и Вы автоматически перейдете в интернет казино; <a href=http://kochtagebuch.org/doku.php?id=1win_brasil_login_aposta>http://kochtagebuch.org/doku.php?id=1win_brasil_login_aposta</a> В онлайне очень большое скриптовых сайтов, которые принадлежат мошенникам. Их основная задача – заинтересовать гэмблеров, пообещав столько щедрые презенты, но и солидные выигрыши. Так что некоторые сайты предлагают получить за регистрацию даже $1 000.Осталось выбрать казино с призом за регистрацию и создать профиль. После активации презента выигрыш зависимости от Фортуны и навыков. казино 1× slots официальный сайт
1×slots зеркало
Несмотря на то, собственно данный вариант стимуляции со стороны азартных платформ довольно популярен в похожих игр, далековато не всем почитателям казино известно, что являют собой бездепозитные бонусы казино и как непосредственно их возможно эксплуатировать.Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном призе, то в первую очередь направьте на значение вейджера и срок, кот-ый дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть приз и исключить выигрыш. <a href=http://t954381g.bget.ru/user/JosephPiery/>1× slots зеркало</a> В наше время довольно просто получить бонус за регистрацию в казино. Практически каждый игорный дом с готовностью начисляет средства или безвозмездные вращения. Многие гэмблеры пользуются этим и не стыдятся региться в любом клубе с выгодными условиями. Кстати, это отличная вероятность выработать победную стратегию и сорвать джекпот. 1×slot казино зеркало <a href=http://silichem.co.kr/bbs/board.php?bo_table=free&wr_id=35827>http://silichem.co.kr/bbs/board.php?bo_table=free&wr_id=35827</a> После требуется привнести идентификационный платёж. Это пугает новичков больше всего. Нужно устроить наименьший депо в 100–500 руб. Таким образом служба защищенности убедиться в, собственно платёжный способ принадлежит Вам. Данная процедура важна для обеспечения защищенности игровых счетов. Пример, Ваш акк взломают и выведут средства на собственный кошелёк. Будет крайне неприятно. Поэтому верификация платёжной системы, это необходимый момент.Наиболее известные гонорары между гэмблеров – бездепозитные бонусы казино. Это не умопомрачительно, так можно получить безвозмездные вращения либо виртуальные кредиты, и всем не придётся пополнять счёт, рисковать личностными средствами. Удастся насладиться разнообразными веселиями даже выиграть солидную необходимую, избегая серьёзного риска.
1×slots казино мобильная версия
На данном разделе портала периодически публикуются обзорные заметки, в рассматриваются безвозмездные бонусы наилучших интернет-казино. Информация структурирована по нескольким пт, включая главные: Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.Не желаете сыграть в азартные игры, не рискуя средствами деньгами, но получая в все выплаты? Подобную возможность предоставляют почти превосходнейшие порталы с азартными весельями. В их количестве большое правдивых и надежных интернет-казино на российском языке. Они завлекают свежих пользователей различными поощрительными мероприятиями, включая бездепозитные, или безвозмездные бонусы. <a href=http://proxy-bl.researchport.umd.edu/login?url=http://terra.flightauto.ru/bitrix/redirect.php?goto=http://ctccapital.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/MLFvlyPUzVx>http://proxy-bl.researchport.umd.edu/login?url=http://terra.flightauto.ru/bitrix/redirect.php?goto=http://ctccapital.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/MLFvlyPUzVx</a> Бесплатные бонусы казино без депозита можно получить вид валютных средств на бонусный счет (вывести их возможно лишь в отыгрыша), фриспинов, игры или кешбэк-бонуса.Однако далеко не все ресурсы предлагают своим посетителям бездепозитные призы за регистрацию в казино. В большинстве случаев учтено одобрение на 1-ый депо в размере 100–200%. Это отличная возможность преувеличить банкролл, прирастить время, проведённое за забавой и шансы сорвать крупный куш. 1×slots casino регистрация на сайте
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.home-visa.ru/viewtopic.php?f=69&t=807392&p=3026876#p3026876>1×slots регистрация на 1хслотс</a>
<a href=https://www.reisezielforum.de/memberlist.php?mode=viewprofile&u=14074&sid=b41bfc934ad603ef07b1d6da9578a762>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но есть азартные заведения, готовые просто например вручить средства на игру. Для этого довольно создать профиль. Чтобы вывести выигрыш, сперва нужно выполнить вейджеровые условия, прописанные в критериях получения бездепа.
#2358 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Дарья Мороз Хорова Наталья Александровна порно <a href=https://www.ossetia.tv/>лучшие бесплатные онлайн казино</a> официальные зеркала казино casino на телефон <a href=https://kompromat1.online/>включи казино</a> часы казино казино вход pin up casino зеркало самое казино букмекерская контора вход Матвиенко Валентина Ивановна порно про казино
DiskiPlus Крючкова Полина Викторовна порно DiskiPlus пари букмекерская контора <a href=https://www.diskiplus.ru/>DiskiPlus скачать 1×bet 1×bet xyz</a> DiskiPlus kent casino DiskiPlus казино рулетка <a href=https://www.diskiplus.ru>DiskiPlus porno Мира Андреева (теннис)</a> DiskiPlus кент casino DiskiPlus букмекерская контора скачать приложение DiskiPlus porno Катерина Шпица DiskiPlus зеркала официальных сайтов казино DiskiPlus 1×bet слоты 1×bet top DiskiPlus Москалькова Татьяна Николаевна порно DiskiPlus pin ап casino
#2359 Charlesgunnyhttp://filmkachat.ru
1хслотс мобильная версия зеркало
На нашем веб-сайте Вы отыщите список своевременных свежих бездепозитных бонусов в казино 2022 года. Также, есть большое неповторимых предложений, которые доступны только посетителям нашего сайта в регистрации по нашей ссылке или активации специального промокода. <a href=http://filmkachat.ru/>1×slots зеркало на сегодня</a> Подарки на праздники ? приуроченные к парадным датам, требующие условного отыгрыша или начисляются без это. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду. <a href=https://www.therookies.co/projects/79486>https://www.therookies.co/projects/79486</a> Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в индивидуальный кабинет, чтобы арестовать безвозмездные вращения с вейджером х40;Главным нюансом в появлении этих вознаграждений произведено что, что пустив их в ход, геймер ничем не рискует и в последствии никому ничего не несомненно обязан (не зависимо, получит ли он спасибо бонусам какой-либо выигрыш или мгновенно спустит все лишь собственно прибывшие деньги). То есть, казино снабжает игрока вероятностью на дармовой основе выступать во всевозможные слоты причем спонсирует забаву. 1×slots регистрация 1×slots casino 777 online <a href=https://peertrainer.com/LoungeCommunityThread.aspx?ForumID=1&ThreadID=316721>https://peertrainer.com/LoungeCommunityThread.aspx?ForumID=1&ThreadID=316721</a>
1×slos регистрация в 1×slots casino
Новые посетители онлайн-казино без первого депозита шансы проверить собственную удачливость. К тому же есть вероятность преобразовать бездепы в реальные деньги за регистрацию в казино, однако для этого приз необходимо отыграть сообразно условиям акции.У любого игорного заведения свои правила и условия. Но, дабы получить призы, необходимо выполнить стандартные действия: 1 xslots рабочее зеркало Нельзя рассматривать игру на деньги, как вариант заработка. Азартные забавы запрещены для лиц младше 18 лет. Topcasinobonuses.mobi классифицируется зачинщиком азартных игр. Сайт носит информационный характер. <a href=http://iris-tech.co.kr/bbs/board.php?bo_table=free&wr_id=412917>http://iris-tech.co.kr/bbs/board.php?bo_table=free&wr_id=412917</a> При отыгрыше бонусных средств, необходимо учитывать срок деяния бонуса и время, которое дается на отыгрыш. По истечению заявленного медли, не отыгранный бонус будет аннулирован. 1хлот регистрация в 1×slots casino Чтоб получить большой выигрыш, подбирайте игровые автоматы с предельным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша.Высокая конкурентность в сегменте азартных игр доказывает операторов завлекать клиентов разнообразными акциями. Благодаря этому у посетителей замечена вероятность получить призы в казино за регистрацию без депозита. Воспользоваться таким предложением возможно, минуя процедуру внесения денег на игровой счет, просто активировав аккаунт на веб-сайте. Наш гид по бездепам поможет избрать самую симпатичную бонусную программку, узнать верховодила получения такого вознаграждения и распорядиться им с наибольшей выгодой.
1хслотс регистрация в 1×slots casino
Мы делаем акцент на ключевых положениях верховодил, рассказываем о территориальных ограничениях и вкратце информируем о других акциях обсуждаемого казино. <a href=https://images.google.ie/url?q=https://doctorlazuta.by/>https://images.google.ie/url?q=https://doctorlazuta.by/</a> Все любят получать презенты. Согласитесь, почти любой играющий человек будет безгранично рад, если получит даровой подарок для забавы в интернет казино просто за регистрацию либо же бонус за внесенный депо, например именуемые приветственные бонусы для новых игроков. Соответственно такие интернет клубы станут больше известны и предпочтительны у игроков при выборе казино для игры. Топ казино постоянно обновляется и прибавляются свежие и занимательные игровые клубы с симпатичной бонусной политикой и всеми возможными привилегиями, к которым относятся эти призы как фриспины за регистрацию, денежные бездепозитные призы, а также великодушные бонусы за внесенный депо. 1×slots официальный сайт скачать Активация валютного гонорары случается механически после творенья профиля или применения промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на страницы казино в социальных сетях либо на рассылку рекламных сообщений, скачать и установить дополнительный софт и т.д.Условия вывода выигрыша. В неких заведениях для удачного вывода с бездепозитного приза достаточно пополнения баланса и подтверждения личности. В иных же клубах, необходимо количество один прокрутить свой депозит.
1× slots зеркало
Большинство клубов завлекают внимание компьютерные за счёт различных даров. На одних сайтах можно получить виртуальные кредиты, коие откроют доступ ко всему софту. На иных же, администрация предлагает благотворительные вращения для запуска лучших интернет слотов. Несмотря на различные акции, стоит выделить самые главные. Вейджер в переводе с английского означает «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша приобретенного приза, в нашем случае бездепозитного. Число ставок большого — главно только набрать необходимую, пропорциональную сумме одобрения. 1×slots подтвердит вашу регистрацию если говорить <a href=https://android.nalench.com/user/Henryper/>https://android.nalench.com/user/Henryper/</a> Даже не выиграв крупную необходимую, игрок интересно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе превосходнейших промоакций легкостью. Достаточно регулярно изучать перечень свежих онлайн казино с выводом приза без депозита в данном разделе.Выбирайте лучшие безвозмездные бонусы счет обзоров на Casinoz – и пусть вам сопутствует удача при отыгрыше бонусных кредитов!
1×slots казино зеркало
<a href=https://visualchemy.gallery/forum/viewtopic.php?pid=3341381#p3341381>https://visualchemy.gallery/forum/viewtopic.php?pid=3341381#p3341381</a> 1×slots casino регистрация на сайте
<b>Смотреть еще похожие новости:</b>
<a href=https://mit-bbs.com/viewtopic.php?t=260581>1 x slots casino</a>
<a href=http://romb4×4.ru/forum/threads/1×slots-registraciju-bolee-populjarnyj-variant-ehto.14639/>1×slots регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выбирайте наихорошие бесплатные призы с помощью обзоров на Casinoz – и пусть вам сопутствует удача при отыгрыше бонусных кредитов! В случае установленного лимита на сумму вывода выигрыша с бездепозитного приза, игрок не сможет вывести больше заявленной суммы.
#2360 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало быструю регистрацию а также мгновенное
Изучить управляла и обстоятельства получения бездепозитных призов казино, Вы сможете у нас на сайте в разделе с призами или на официальном сайте выбранного Вами казино. Если имеет отыскать необходимую информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал или по электрической почте.Любой выигрыш по ставке выше установленного лимита несомненно являться недействительным. То есть ставка не будет засчитана при отыгрыше, ну случае выигрыша его сумма не поступит на счёт клиента — итог забавы будет полностью аннулирован. <a href=http://filmkachat.ru/>онлайн казино 1×slots</a> У каждого игорного заведения свои правила и обстоятельства. Но, дабы получить призы, нужно выполнить стереотипные деянья:Для получения выигрыша потребуется выполнить условия казино. Чаще всего игроку необходимо поставить определенную сумму, хотя теснее из личных денег. Она рассчитывается из общего размера выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, случае юзер выиграл 1000 рублей, а множитель составляет х30, исключить деньги возможно будет, сделав ставки на 30 000 рублей. <a href=https://campsite.bio/kalinka>https://campsite.bio/kalinka</a> Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы была возможность исключить выигрыш. зеркала 1×slots <a href=http://www.zgqsz.com/home.php?mod=space&uid=594557>http://www.zgqsz.com/home.php?mod=space&uid=594557</a>
1×slots зеркало
Теоретически, к безвозмездным бонусам возможно отнести так называемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, потому собственно они деют только возможность создавать ставки. 1хслот зеркало Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются незамедлительно в создания профиля и активны непродолжительное время. Если не успеете потратить свои, они попросту сгорят. Касаемо времени, в большинстве случаев бонусы активны на часа.Прежде всего, не запамятовывайте регулярно заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом рассматривают наиболее увлекательные предложения основных игорных порталов. <a href=http://redhawkclan.free.fr/index.php?file=Members&op=detail&autor=unusualguy81>http://redhawkclan.free.fr/index.php?file=Members&op=detail&autor=unusualguy81</a> 1 x slots При исполненьи условий отыгрыша и верификации, деньги с бонусного счета переводятся на главный и имеют быть выведены на карту либо электронный кошелек. Лимиты на вывод и сроки проведения транзакции зависят от избранной платежной системы.
1×слот регистрация в 1×slots casino
Существует ли стратегии для отыгрыша бездепозитных призов? К раскаянию нет, на выигрыши или проигрыши с призов, казино или игрок воздействовать не может, отдача игр происходит от создателей игр.Фриплей-бонусы. Бонусы за безвозмездную забаву есть только в некоторых клубах. Они зачисляются сразу в творения профиля и действуют непродолжительное время. Если у вас нет медли потратить свои, они просто завершатся. Что дотрагивается медли, как призы действуют на 1-го часа. 4. Заберите подарок. Чаще всего приз активируется незамедлительно последствии регистрации. Но посещают истории, когда надо(надобно) забежать в личный кабинет либо написать в службу.Можно ли наваривать на бездепозитных призах? Это не работа, здесь как повезет, если в любом предложенном безедепе, вы будете откручивать вейджер и выводить, это возможно именовать везением, и дополнительной добавкой к вашему бютжету. <a href=http://sotsprof01.ru/index.php?subaction=userinfo&user=uhitoq>http://sotsprof01.ru/index.php?subaction=userinfo&user=uhitoq</a> 1×slots официальный сайт мобильная версия
1×slots зеркало проходить регистрацию это отличный вариант
<a href=http://turkteam.10tl.net/member.php?action=profile&uid=2012>зеркала 1×slots</a> Ограничения по играм. Администрация воспрещает игрокам кое-какие игровые автоматы с бездепозитным призом, средствами или бесплатными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда разделение выполняется по виду игр. Например, отыгрыш возможен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino. Вейджер не более х30–35 является приемлемым. Опытные игроки заявляют, собственно с этим вейджером реально остаться в плюсе, если правильно подойти к выбору игрового аппарата.Чтобы помощи убедиться в превосходствах бездепозитных призов, довольно зарегистрироваться в казино и получить одобрение. 1×slots регистрация <a href=http://loket.kr/free/137714>http://loket.kr/free/137714</a> Для верификации номера аппарата, в личном профиле изберите опцию „Подтвердить номер телефона“ и введите в соответствующее поле код, полученный в sms-сообщении.
рабочее зеркало 1хслотс
Условия отыгрыша приза. Если Вы планируете заработать на бездепозитном бонусе, то начала обратите внимание на велечину вейджера и срок, который дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть бонус и вывести выигрыш.Чаще всего интернет-казино предлагают бездепозитные призы свежим юзерам. Эта промо-акция довольно отлично завлекает новичков, подталкивая их к открытию счета. Конечно, не все они становятся преданными клиентами, хотя сам факт регистрации аккаунта играет на руку заведению. <a href=http://astrodesign.net/bitrix/rk.php?goto=http://find.games.free.fr/visit.php/eliron.ru/bitrix/redirect.php?goto=https://teletype.in/@urist_free/Vh8emUx3f8u>http://astrodesign.net/bitrix/rk.php?goto=http://find.games.free.fr/visit.php/eliron.ru/bitrix/redirect.php?goto=https://teletype.in/@urist_free/Vh8emUx3f8u</a> Простая процедура получения бездепозитного приза, которая займет менее 2-х мин. Для получения бездепов, достаточно зарегистрироваться и подтвердить контактные данные.Бонус в казино без депозита имеет разные вариации: такое быть приветственный бонус, промоакции в честь каких-либо праздников или важных дат, приз за привлечение новых игроков, преданность и получение VIP-статуса. 1×slots официальный сайт мобильная версия скачать
<b>Смотреть еще похожие новости:</b>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5203/#comment-626548>1× slots casino зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.
#2361 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало
Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и более. Когда игроку надеется количество фриспинов, администрация возможность бить3 их начисление на некоторое дней. Бесплатные вращения предоставляются для определенного слота, который указывается в правилах акции. <a href=http://filmkachat.ru/>скачать 1×slots на андроид мобильная версия</a> Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро или 20 $. Если выдаются фриспины, их число редко выше нескольких 10-ов бесплатных вращений.Стоит обозначить(означить), что бездепозитный приз выдается лишь взрослым новеньким, которые, же, имеют пригласить собственных друзей и своих, кроме рассчитывающих на поощрительную программу преданности. Подобная технология замечена среди создающих онлайн-казино для популяризации и расширения трафика. Покер румы и спонсоры содействуют увеличению собственной популярности, путем привлечения новых игроков. Бонусы – это оригинальный шанс для вероятных участников забавы, которые могут опробовать софт покер рума и увериться, станут ли они в него выступать или нет. Новый игрок испробует средства силы с реальными оппонентами в казино. <a href=https://linktr.ee/kalinka0588>https://linktr.ee/kalinka0588</a> 1×slots зеркало которую указывали при регистрации кстати <a href=http://naydisebe.ru/user/profile/137587>http://naydisebe.ru/user/profile/137587</a>
1×slots официальный зеркало
<a href=https://persiankittencat.com/grey-persian-cats-unraveling-the-charm-of-these-feline-beauties/#comment-56212>1хслот зеркало сайта</a> казино 1×slots <a href=https://www.astrotime.ru/forum/ac-pro-file.php?mode=viewprofile&u=39772>https://www.astrotime.ru/forum/ac-pro-file.php?mode=viewprofile&u=39772</a> В игровых клубах без лицензии Вы покупаете „кота в мешке“ и в случае спорных обстановок нет возможности куда-то посетовать и доказать свою правоту. 1×slots скачать на айфон
1×slots casino регистрация 1×slots review live
Бездепы могут входить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой либо баллами.В современность довольно просто получить бонус за регистрацию в казино. Практически каждый игорный дом с готовностью начислит средства или благотворительные вращения. Многие гэмблеры используют данным и не стесняются региться в каждом клубе с выгодными условиями. Кстати, это замечательная вероятность выработать победную стратегию и сорвать джекпот. <a href=http://elar.ru/bitrix/redirect.php?goto=http://stable.by/bitrix/redirect.php?goto=http://summatechnology.ru/bitrix/rk.php?goto=https://telegra.ph/Opredelenie-razlichij-mezhdu-kommercheskimi-i-nekommercheskimi-organizaciyami-09–19>http://elar.ru/bitrix/redirect.php?goto=http://stable.by/bitrix/redirect.php?goto=http://summatechnology.ru/bitrix/rk.php?goto=https://telegra.ph/Opredelenie-razlichij-mezhdu-kommercheskimi-i-nekommercheskimi-organizaciyami-09–19</a> Многие азартные клубы ограничивают необходимую вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не сможете вывести. Разница будет аннулирована, Вы числе не сможете создавать на нее ставки.Так собственно сможете неустрашимо регистрироваться без всяких раздумий. Фортуна сегодня наверняка на вашей стороне. Не бойтесь, ведь следствие какого либо убытка Вам абсолютно не грозит. С этими призами как без пополнения, Вы остаетесь только в плюсе, но не как не в минусе. 1×slot рабочее зеркало Для получения выигрыша требуется выполнить условия казино. Чаще всего игроку нужно поставить определенную сумму, но уже из личных денег. Она рассчитывается из общего размера выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, в юзер выиграл 1000 руб., а множитель сочиняет х30, исключить средства возможно несомненно, сделав ставки на 30 000 руб.
1×slots зеркало регистрация
Онлайн-казино тщательно продумывают бонусные условия, коие нужно изучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и лимитирования. При исполнении условий отыгрыша и верификации, деньги с бонусного счета переводятся на основной и все быть выведены на карту или электронный кошелек. Лимиты на вывод и сроки проведения транзакции зависимости от избранной платежной системы.Главное превосходство спинов – вероятность выучить различные слоты. Также удастся насладиться бонусными раундами, испытывать удачу в риск-туре и преувеличить выигрыш за счёт особых знаков. Однако столько игровой процесс заслуживает внимание, ведь лучше сосредоточиться на реальном выигрыше. Ограничения по играм. Администрация запрещает игрокам некоторые игровые автоматы с бездепозитным призом, деньгами либо безвозмездными вращениями. Обычно, в правилах приводится полный перечень слотов для отыгрыша. Иногда дробленье выполняется по виду игр. Например, отыгрыш возможен на всех игровых аппаратах, но запрещен в настольных забавах и в разделе Live Casino. 1×slots регистрацию процедура займет всего лишь <a href=http://vashtehnadzor.ru/index.php?subaction=userinfo&user=satisfyingtiff7>http://vashtehnadzor.ru/index.php?subaction=userinfo&user=satisfyingtiff7</a>
1хслотс регистрация в 1×slots casino
При отыгрыше бездепов, учитывайте временные ограничения. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток. <a href=https://yogicentral.science/wiki/%D0%97%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%B0_1×slots>https://yogicentral.science/wiki/%D0%97%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%B0_1×slots</a> Срок активации и время на отыгрыш. Зачисление средств либо фриспинов происходит при активации в течение взыскательно ограниченного периода, схожие требования предъявляются и к срокам отыгрыша. Одни казино позволяют отыгрывать бонус несколько дней или в недель. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером.Этот образ приза несомненно добавлен на Ваш акк после удачной процедуры регистрации с использованием номера аппарата. Если избрать другой метод создания учетной записи, бездеп не будет добавлен на Ваш акк. 1×слотс казино Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных притязаний, считая обязательной верификации. Если на веб-сайте учтена обязательная процедура подтверждения личности, то исключить выигрыш получится только после ревизии данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий лицо.
<b>Смотреть еще похожие новости:</b>
<a href=https://rolivka.online/forum/showthread.php?tid=29596>1хслотс казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Объективные – объем приза, коэффициент и обстоятельства вейджера, надобность внесения депозита для вывода денег;
#2362 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее на сегодня
Если вы бывалый игрок, вы должны аристократия, собственно бонус без депозита – редкая находка. Тем не, мы в исследуем онлайн, дабы отыскать для вас наилучшие бездепозитные предложения. <a href=http://filmkachat.ru/>1×slots casino online регистрация</a> Бездепозитные призы казино за регистрацию в 2022 году — это вероятность сыграть за счёт заведения. Казино даёт клиенту шанс пользоваться определённой суммой либо количеством даровых вращений без внесения депозита. Не путайте деморежим с реальной забавой без необходимости внесения депозита.Бездепы обыкновенно предлагают с отыгрышем — быстро вывести выигранные средства невозможно. Перевод денег со счета несомненно возможен после того, как юзер выполнит все притязания казино, а сумма имеет быть выше установленного правилами лимита. Условиями акции фиксируются сроки, протяжении которых заказчик вправе воспользоваться предложением. Обычно они не превосходят нескольких дней в активации. <a href=https://biolinky.co/kalinka-0588>https://biolinky.co/kalinka-0588</a> Все благотворительные призы кажутся соблазнительными. Кто же откажется от способности поиграть в онлайн-казино, не рискуя средствами, хотя получая выигрыши. Но далековато не все бездепозитные призы одинаковой привлекательны для рассудительного посетителя. 1×slots скачать на айфон <a href=https://www.xn–72c9aa5escud2b.com/webboard/index.php?action=profile;u=1751324>https://www.xn–72c9aa5escud2b.com/webboard/index.php?action=profile;u=1751324</a>
1×slots зеркало регистрация в 1×slots casino
Мы советуем не отказываться от подобных услуг узнаваемых казино. Выделите несколько мин. На регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сегодня удача будет на вашей стороне!Oтыгpaть приз с указанным вeйджepом, чтобы нужно сдeлaть cтaвoк нa cумму, превышающую размер бонуса в некоторое раз. <a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=66608&result=reply>1×slots официальный сайт скачать на айфон</a> 1хслотс 1хслотс регистрация перейти на 1×slots 2. Создать свежий профиль. Для регистрации нужно наполнить небольшую анкету либо зайдите в индивидуальный кабинет посредством социальных сеток; <a href=https://series40.kiev.ua/user/DoctorLazutaKa/>https://series40.kiev.ua/user/DoctorLazutaKa/</a> Бездепозитный приз – это финансовое вознаграждение, коие выдается соучастнику игры в казино, для его привлечения и появления заинтригованности. Любой посетитель, кот-ый подходит условиям выдачи похожего бездепозитного бонуса, имеет претендовать на получение вышеуказанного приза. Такое поощрение является наиболее действенным способом, дающим вероятность стартовать в игре, не вкладывая собственных материальных средств. 1×slots сайт зеркало Но разу не забывайте внимательно читать управляла участия в бонусных акциях. Если вы нарушите хотя бы одно условие, позднее вы не можете устроить недоразумение с администрацией.
1×slots официальный сайт скачать на айфон
Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают приз по государствам. Вплоть до как, что клуб может принимать игроков из Вашей государства, а бездеп не давать. <a href=http://wiki.serialkiller.adele.im/doku.php?id=%D0%A4%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B%20%D0%B1%D0%B0%D1%80%D0%B1%D0%B5%D1%80%D1%88%D0%BE%D0%BF%D0%B0:%20%D0%9F%D0%B5%D1%80%D1%81%D0%BF%D0%B5%D0%BA%D1%82%D0%B8%D0%B2%D1%8B%20%D0%B8%20%D0%B2%D0%BE%D0%B7%D0%BC%D0%BE%D0%B6%D0%BD%D0%BE%D1%81%D1%82%D0%B8%20%D0%B2%20%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8>http://wiki.serialkiller.adele.im/doku.php?id=%D0%A4%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B%20%D0%B1%D0%B0%D1%80%D0%B1%D0%B5%D1%80%D1%88%D0%BE%D0%BF%D0%B0:%20%D0%9F%D0%B5%D1%80%D1%81%D0%BF%D0%B5%D0%BA%D1%82%D0%B8%D0%B2%D1%8B%20%D0%B8%20%D0%B2%D0%BE%D0%B7%D0%BC%D0%BE%D0%B6%D0%BD%D0%BE%D1%81%D1%82%D0%B8%20%D0%B2%20%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8</a> Для получения выигрыша требуется выполнить условия казино. Чаще всего игроку нужно поставить определенную сумму, но уже из собственных денег. Она рассчитывается из совместного размера выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, в юзер выиграл 1000 рублей, а множитель сочиняет х30, вывести средства возможно несомненно, сделав ставки на 30 000 рублей.Реже бонусы без депозита начисляются постоянным игрокам. С их поддержкою администрация постарается вычесть ценных посетителей либо желает поблагодарить за преданность правильных гостей. Но намного почаще для сходственных целей используются эти промоакции: 1× slots casino официальный сайт Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам запрещено начислять бонусы посетителям, не имеющим валютных средств на счете. Мы предлагаем осмотреть животрепещущие бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ.Превышение наибольшей ставки при отыгрыше. Система автоматически не предуведомляет о превышении ставки, поэтому о несоблюдении верховодил игрок имеет узнать теснее после подачи запроса на вывод средств.
1×slots казино зеркало
Так собственно можете храбро регистрироваться без всяких размышлений. Фортуна сегодня наверняка на вашей стороне. Не страшитесь, как последствие какого либо ущерба Вам совершенно не угрожает. С этими бонусами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе. <a href=http://fin-molitor.com/forum/viewtopic.php?f=2&t=395791>1× slots регистрация в 1×slots casino</a> казино 1×slots <a href=https://rk.vdu.lt/users/doctorlazutapa/>https://rk.vdu.lt/users/doctorlazutapa/</a>
1×slots зеркало рабочее
Многие игроки, оценив перечень казино, остаются выступать в нем и дальше ? на это и направлено каждое рекламную. Постоянные клиенты заносят депозиты и проделывают ставки, обеспечивая длительную прибыль оператора. То есть, казино раздают бездепы новым пользователям для формирования приклнной аудитории. Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы была возможность вывести выигрыш.Благодаря программе лояльности от игорного заведения, можно брать хороший старт и без добавочных вложений запустить видеослоты. Кроме такого, можно рассчитывать на реальную удачу и получить, без вложения собственных денег, большой выигрыш. <a href=https://theweddingresale.com/index.php/author/michaeltut/>https://theweddingresale.com/index.php/author/michaeltut/</a> 1×slot зеркало рабочее этих способов предполагает регистрацию Бонус без депо за регистрацию в казино (бездепозитный бонус) – это валютный презент от клуба, кот-ый начисляется на акк игрока в регистрации в казино. Кроме творения учетной записи, для получения бездепа, довольно нередко потребуется ещё и подтвердить контактные данные игрока и/или активировать особый промо-код.
<b>Смотреть еще похожие новости:</b>
<a href=https://timepost.info/showthread.php?tid=116701>1×slots рабочее зеркало на сегодня</a>
<a href=https://adminclub.org/showthread.php?tid=118793>1×slos регистрация в 1×slots casino</a>
<a href=https://forum.bedwantsinfo.nl/thread-683061.html>зеркло казино 1×slots</a>
<a href=http://6000ziyuan.com/forum.php?mod=viewthread&tid=140811&extra=>1× slots casino зеркало</a>
<a href=https://adminclub.org/showthread.php?tid=154346>1хслотс зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для выбора азартного заведения Вы можете воспользоваться списком наших казино с бонусами за регистрацию. На нашем веб-сайте мы выпустили список бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, собственно часть бонусов эксклюзивные и доступны лишь для посетителей нашего вебсайта по-специальному промо-коду или по уникальной ссылке. Кроме такого, для любого приза мы подготовили подробный обозрение, в котором Вы узнаете как получить и отыграть одобрение и как исключить свой выигрыш с бездепа. Размер призов почаще всего чисто символический и не превышает 50 рублей. Приятно, хотя ощутимым бустом в игре ли станет.
#2363 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
top casino сайт казино зеркало <a href=https://glvk.guru/>pin up casino пин</a> скачать 1×bet 1×bet xyz porno Юлия Канакина, скелетонистка <a href=https://7club7.com/>casino</a> 1×bet зеркало porno Ангелина Гончаренко, хоккеистка 1×bet зеркало рабочее 1×bet зеркало xbet балтбет букмекерская контора 1×bet слоты Шевцова Татьяна Викторовна порно
DiskiPlus porno Дарья Клишина DiskiPlus pin ап casino <a href=https://www.diskiplus.ru>DiskiPlus 1×bet на сегодня</a> DiskiPlus unlim casino DiskiPlus casino buzz <a href=https://www.diskiplus.ru/>DiskiPlus Светлана Ходченкова</a> DiskiPlus включи казино DiskiPlus порно с Анна Калинская (теннис) DiskiPlus Мухтиярова Елена Вячеславовна порно DiskiPlus kometa casino DiskiPlus Ирина Горбачева DiskiPlus 1×bet casino DiskiPlus 1×bet зеркало рабочее на сегодня
#2364 Charlesgunnyhttp://filmkachat.ru
зеркло казино 1×slots
Срок активации и время на отыгрыш. Зачисление денег либо фриспинов случается при активации на взыскательно ограниченного периода, похожие притязания предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать приз количество дней или даже недель. Другие выдают солидную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с необоснованно высоким вейджером. <a href=http://filmkachat.ru/>1хслотс казино зеркало</a> Ну и конечно же, для казино бездепозитные бонусы прибыльны с имиджевой стороны: схожая добродушие увеличивает степень лояльности клиентов к компании.Рассмотрим принцип его деяния на примере. Допустим, вы зарегались и получили $10 not the slightest down payment bonus с вейджером х50. Это означает, что выигранные деньги можно несомненно выводить не ранее, чем в того, как общая сумма ставок достигнет $500. <a href=https://penzu.com/p/5ad5f899c8695730>https://penzu.com/p/5ad5f899c8695730</a> В интернет-сети постоянно возможно отыскать списки наиболее модных и обещанных поощрительных программ от популярных онлайн-казино. 1×slots регистрация <a href=http://vashtehnadzor.ru/index.php?subaction=userinfo&user=tellinggun31>http://vashtehnadzor.ru/index.php?subaction=userinfo&user=tellinggun31</a> Превышение наибольшей ставки при отыгрыше. Система автоматически не предостерегает о превышении ставки, потому о несоблюдении верховодил игрок имеет узнать уже в подачи запроса на вывод средств.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Также, учите, собственно бездепозитный бонус можно исключить только сомнений случае, когда станут исполнены все обстоятельства отыгрыша. <a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/8265/#comment-343009>1хслотс казино зеркало</a> онлайн казино 1×slots Наши эксперты изучают условия промоакции, затем в ручном режиме проверку их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие характеристики. Мы не рекламируем казино, а даем игрокам информацию о лучших из них. <a href=https://cameradb.review/wiki/User:SelenaEger5>https://cameradb.review/wiki/User:SelenaEger5</a> Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен перечень наихороших интернет казино, коие предлагают своим игрокам великодушные бонусы за регистрацию. 1хслотс зеркало на сегодня Возможность сыграть дополнительное состязание (а от и количество) совершенно бесплатно, а выигрыш, же, поступает на счёт игрока.Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.
1× slots casino официальный сайт
К раскаянию, нет. Почти все казино, настоятельно внесение но бы 1-го малого депо для вывода выигрыша с бездепозитного приза. Также учитывайте, что вывести деньги разрешено лишь на ту платежную систему, с коей был сделан депо. <a href=http://picnic-club.ru/bitrix/rk.php?goto=http://vskvant.ru/bitrix/click.php?goto=http://old.evermotion.org/stats.php?url=https://teletype.in/@urist555/5ySU9inQtXg>http://picnic-club.ru/bitrix/rk.php?goto=http://vskvant.ru/bitrix/click.php?goto=http://old.evermotion.org/stats.php?url=https://teletype.in/@urist555/5ySU9inQtXg</a> При ирге на бонусные свои запрещается выступать в игровые автоматы с прогрессивным джекпотом и забавы из радела exist casino. Кроме того, кое-какие казино выделяют бездеп на раз или количество конкретных слотов, и в других играх Вы не можете на них играть.Подарки на праздничные ? посвященные праздничным датам, требующие символического отыгрыша либо начисляются без такового. Могут дариться игрокам сутки рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду. 1×slots рабочее зеркало Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.
1 хслот регистрация в 1×slots casino
Третитй бездепозитный приз за регистрацию – валютные свои. К раскаянью, начислить рубли или доллары готовы лишь известные и популярные клубы. С их помощью вы сможете насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком. Постарайтесь отыграть вейджер, дабы замечена возможность оставить заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электрической кошелёк, карту, аппарат. Перечисленные повыше главные характеристики сопровождают фактически любой бонус и считаются стереотипными для бездепозитных бонусных начислений в казино.В перечне притязаний к отыгрышу часто присутствуют лимиты на ставки при игре на собственные средства. Так, в отыграть надо(надобно) 30 000 рублей, а предельная сумма ограничена 30 рублями, то вертеть барабаны предстоит 1000 один. Эта особенность затрудняет соблюдение игроками условий по срокам действия акции. 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=9802>http://www.predictive-datascience.com/forum/member.php?action=profile&uid=9802</a> К раскаянью, нет. Почти все казино, настоятельно внесение хотя бы одного минимального депо для вывода выигрыша с бездепозитного приза. Также учитывайте, собственно вывести деньги разрешено только на ту платежную систему, с коей был сделан депо.
казино 1×slots официальный сайт
Вы не в коем случае ни чем не рискуете, а только выигрываете и выводите на платежную систему, либо проигрываете предложенный приз, по мимо практической забавы на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, выучится регулировать менять ставки и линии, изучать бонусные игры и их выигрышные комбинации, да в просто зарядится кучей эмоций! Ведь вы будите играть на бонусные свои, которые возможно отыграть и исключить, но просто на демо счет, тем самым адреналин в крови еще повысится а пульс забьется с нередким ритмом! При маленькой сумме приза рекомендовано выступать по невысоким ставкам, а применять наибольшие превосходнее только в случае, случае вейджер слишком немалый, а время на отыгрыш крепко ограничено. <a href=https://www.storeboard.com/blogs/personal/driving-school-vladivostok/5865202>https://www.storeboard.com/blogs/personal/driving-school-vladivostok/5865202</a> 1хслотс официальный сайт зеркало При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие возможно предназначить игре в казино.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=53705>1×slots регистрация на сайте 1×slots ru com</a>
<a href=https://www.one2bay.de/forum/showthread.php?tid=334411>1×slots официальный сайт, скачать</a>
<a href=http://complainanything.com/node/158?page=930#comment-1150379>1хлот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В разделе с призами активировать свой презент. Найти забавы, для коих учтено одобрение и применять приз по назначению. В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с даровых вращений. Прибыль, коию Вы заработаете на этом бездепе возможно назначать на вывод без какого или отыгрыша.
#2365 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino 7k рабочее porno Дарья Клишина <a href=https://res-publika.com>казино пин</a> пин ап букмекерская контора порно с Антропова Валентина Викторовна <a href=https://vestnik-jurnal.com/>online casino</a> Любимова Ольга Борисовна порно порно с Елена Никитина, скелетонистка Юдаева Ксения Валентиновна порно casino скачать порно с Константин Тюкавин (футбол) Окладникова Ирина Андреевна порно яндекс казино
DiskiPlus порно с Юлия Ефимова DiskiPlus рабочее казино <a href=https://diskiplus.ru/>DiskiPlus 7k casino официальный сайт</a> DiskiPlus букмекерская контора без DiskiPlus букмекерская контора <a href=https://www.diskiplus.ru>DiskiPlus Львова-Белова Мария Алексеевна порно</a> DiskiPlus 1×bet бесплатно DiskiPlus Москалькова Татьяна Николаевна порно DiskiPlus казино смотреть онлайн бесплатно DiskiPlus включи казино DiskiPlus казино ли DiskiPlus porno Игорь Акинфеев (футбол) DiskiPlus леон букмекерская контора
#2366 Charlesgunnyhttp://filmkachat.ru
1×слот регистрация в 1×slots casino
Выбирая бесплатный бонус, пристально изучайте правила. Убедитесь, собственно для возможно принимать участие в акции. Уточните, в каких забавах можно выполнять условия вейджера. При необходимости задавайте вопросы представителям саппорта.Главным нюансом в возникновении этих вознаграждений состоит том,, собственно пустив их в ход, игры ничем не рискует и в последствии никому ничего не несомненно должен (не зависимо, получит ли он благодаря бонусам какой-либо выигрыш либо мгновенно спустит все только собственно прибывшие финансы). То есть, казино снабжает игрока возможностью на дармовой базе играть во всевозможные слоты и даже спонсирует забаву. <a href=http://filmkachat.ru/>рабочее зеркало 1×slots</a> Выполнив все притязания оператора, клиент возможность оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит примерно менее суток. Если дополнительно требуется пройти функцию верификации, то срок увеличивается до 1–2 рабочих дней. Для перевода применяются банковские инструменты и электрические платежные системы. Второй способ подходит превосходнее, так как большинство транзакций такой исполняются мгновенно. В связи со специфичностью функционирования банков обработка платежей может взятьвдолг(взятьвзаймы) до нескольких рабочих дней. <a href=https://designaddict.com/community/profile/furniture-360-view/>https://designaddict.com/community/profile/furniture-360-view/</a> 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=http://chansolburn.com/bbs/board.php?bo_table=free&wr_id=85653>http://chansolburn.com/bbs/board.php?bo_table=free&wr_id=85653</a> Так собственно основное отличие презента на депо от бездепа – обязательное пополнение счёта. Вы можете привнести депозит и преувеличить стартовый капитал или забрать бездеп и всем не придётся рисковать собственными сбережениями. Поспешите выполнить простые требования, и администрация ресурса начисляет щедрое одобрение!
1×slots регистрация на сайте
При регистрации идет свидетельствовать только достоверную информацию. Когда учетная запись несомненно активна, будет доступ в Личный офис. В нем можно выбрать еденицу, установить промокод и разузнать доскональные верховодила получения и отыгрыша бездепа. Краткая информация об акции часто находится именно на регистрационной форме. <a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=119520&extra=>1×slots регистрация 1×slots casino c2d ru</a> 1×slots акции При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие возможно предназначить забаве в казино.Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. <a href=https://gurt.org.ua/forum/topic/239/>https://gurt.org.ua/forum/topic/239/</a> зеркло казино 1×slots
казино 1×slots официальный сайт
Высокая конкуренция в разделе азартных игр доказывает операторов привлекать клиентов различными акциями. Благодаря этому у посетителей бывает возможность получить бонусы в казино за регистрацию без депо. Воспользоваться этим предложением можно, минуя процедуру внесения средств на игровой счет, просто активировав акк на сайте. Наш гид по бездепам поможет избрать самую привлекательную бонусную программку, разузнать правила получения такового гонорары и воспользоваться им с наибольшей выгодой.Фриспины без депозита либо вспомогательные свои посодействуют поближе познакомиться с игровой платформой и её функциями. За счёт подарков можно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за игры против живых крупье. <a href=http://webmontag.de/doku.php?id=РР·_чего_состоит_диета_Елены_Малышевой>http://webmontag.de/doku.php?id=РР·_чего_состоит_диета_Елены_Малышевой</a> Баланс игрока дополняется на соответствующую сумму. К ней используется вейджер, указанный в правилах акции. Вывести выигрыш можно несомненно в того, как пользователь устроит требуемый размер ставок из собственных средств. В редких случаях бездеп трудится в формате Free Play. На счет пользователя зачисляется крупная сумма, и предоставляется маленький срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по завершении этого периода сумма на счету будет превосходить первоначальную, то разницу возможно несомненно вывести или использовать для последующих ставок. x1 slots 1хслотс регистрация перейти на 1×slots Бездепы обычно предлагают с отыгрышем — быстро вывести выигранные свои невозможно. Перевод денег со счета несомненно возможен последствии такого, как юзер выполнит все требования казино, а сумма не быть выше установленного правилами лимита. Условиями акции фиксируются сроки, в течение которых заказчик вправе воспользоваться предложением. Обычно они не превосходят нескольких дней последствии активации.
1×slots зеркало на сегодня
Составленный знатоками Casino.ru список онлайн-казино с бездепозитным призом разрешает игрокам сравнить спецпредложения разных операторов. <a href=https://koreanstudies.com/forum/viewtopic.php?t=128790>1×slots на любой вкус как пройти регистрацию</a> Популярность интернет казино растёт и всё больше пользователей начинают увлекаться азартными забавами. Бездепозитные бонусы 2022 года, это оригинальные презенты за регистрацию. С их поддержкой новые игроки шансы получить безвозмездные вращения или средства на баланс за 1 регистрацию. С свет игорных заведений в онлайне, бездепозитные бонусы стали известнейшим методом привлечения игроков. Подобные акции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о которых мы расскажем. Наш вебсайт собрал превосходнейшие предложения из интернета на 2022 год. Воспользуйтесь хоть презентом и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша необходимо выполнить обстоятельства. 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=https://skobka.com.ua/forum/user/4823/>https://skobka.com.ua/forum/user/4823/</a> Поспешите зарегистрироваться на официальном сайте Клубника, дабы быстро получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, бывает настоящий шанс победу!
1×slots акции
Чаще всего, знаменитые сервисы, эти как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно неотъемлемое верховодило. Финансовые средства выводятся только спустя что, эту платежную систему, коей пользовались для пополнения депо. Если же игрок получил бездепозитный покерный бонус, потребуется пополнить счет на минимальную необходимую, кот-ая составляет обычно десять долларов. Онлайн-казино с бездепозитными призами ставят посетителям условия для пользования бездепами, поэтому перед ролью в промоакции никакого досконально ознакомиться со всеми правилами и аспектами промоакции. Условия имеют дотрагиваться получения приза, его использования и следующего вывода денежных средств если, тогда, выигрыша. <a href=https://www.x-fta.com/foro/member.php?1261421-Porsedropoi>https://www.x-fta.com/foro/member.php?1261421-Porsedropoi</a> Поспешите арестовать бездепозитные призы за регистрацию в казино из представленного перечня. Все платформы не только водят легальную работа, хотя и обрадуют правдивыми результатами забавы, высокой отдачей, прыткими выплатами. 1×slots быструю регистрацию а также мгновенное Список например называемых «запрещенных территорий» прилагается к правилам бонусной программы игорного портала. Обязательно выясните, распространяются ли на вас сходственные наказания.
<b>Смотреть еще похожие новости:</b>
<a href=https://praisenpray.org/forums/showthread.php?tid=108911>1 xslots рабочее зеркало</a>
<a href=http://b2s.bulwork.com/node/1581?page=71#comment-22063>1×slots коды</a>
<a href=https://www.goslog.ru/personal/profile/index.php?PAGE_NAME=profile_view&UID=66187>1хслотс рабочее зеркало</a>
<a href=http://forum.drustvogil-galad.si/index.php?action=profile;u=121557>казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Можно ли зарабатывать на бездепозитных призах? Это не работа, здесь как повезет, в в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, тогда возможно именовать везением, и добавочной добавкой к вашему бютжету.
#2367 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Кузнецова Анна Юрьевна порно 1×bet официальный 1×bet xyz <a href=https://www.ossetia.tv/>винлайн букмекерская контора официальный</a> скачать casino на андроид casino зеркало сегодня <a href=https://t.me/vchkogpu_ru>casino на телефон</a> 1×bet рабочее на сегодня casino зеркало сегодня Юдаева Ксения Валентиновна порно casino ru 1×bet скачать бесплатно казино пин порно с Каролина Севастьянова
DiskiPlus 7k casino зеркало на сегодня DiskiPlus 1×slots casino <a href=https://www.diskiplus.ru/>DiskiPlus casino зеркало сайта</a> DiskiPlus букмекерская контора бетсити DiskiPlus Семёнова Татьяна Владимировна порно <a href=https://diskiplus.ru>DiskiPlus промокод 1×bet</a> DiskiPlus скачать букмекерскую контору DiskiPlus букмекерские контора ап DiskiPlus pin up casino пин ап DiskiPlus casino online зеркало DiskiPlus какие казино DiskiPlus порно с Арина и Дина Аверины, гимнастки DiskiPlus casino регистрации
#2368 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
Если площадка презентует бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь ввести акк на веб-сайте и активировать его, подтвердив адресок электрической почты, номер телефонного либо другие данные, коие просит оператор. Перед этим необходимо увериться, что пользователь находится на официальном сайте казино, не на жульнической площадке. <a href=http://filmkachat.ru/>1хслотс зеркало на сегодня</a> <a href=https://cgscholar.com/community/community_profiles/3d-rendering-services/community_updates/234376>https://cgscholar.com/community/community_profiles/3d-rendering-services/community_updates/234376</a> Выигрыши с бонусов без инвестициям всегда привязаны к притязанию по ставкам и все быть обналичены лишь последствии исполненья данных требований. скачать 1×slots на андроид мобильная версия <a href=http://www.zian100pi.com/discuz/home.php?mod=space&uid=1226965&do=profile&from=space>http://www.zian100pi.com/discuz/home.php?mod=space&uid=1226965&do=profile&from=space</a>
скачать 1×slots на андроид мобильная версия
<a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1×slots официальный зеркало рабочее</a> 1×slots регистрация на 1хслотс Внесение депозита – Будьте готовы пополнить счет последствии отыгрыша бонуса. Это стандартное требование верховодил для данного типа промо-акций. Лучше заблаговременно уточнить, какую сумму нужно будет вносить на счет. Как управляло, идет о минимальном депозите, но вы должны быть убеждены, что он вам по кармашку.Для проверки применяются сканы паспортов, водительских удостоверений, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь замечен в попытке ввести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их владелец попадает в темный список. При игре на лицензионной площадке надо опасаться свидетельствовать достоверную индивидуальную информацию (шифрование ликвидирует утечку персональных данных). <a href=https://astraclub.ru/members/349132-DoctorLazutaKt>https://astraclub.ru/members/349132-DoctorLazutaKt</a> Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в собственный кабинет, дабы арестовать бесплатные вращения с вейджером х40; 1хслотс рабочее зеркало на сегодня Но есть азартные заведения, готовые просто например вручить деньги на игру. Для сего довольно создать профиль. Чтобы вывести выигрыш, сначала нужно выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа.
1×slots сайт
<a href=http://mag-motors.ru/index.php?subaction=userinfo&user=quixoticcolleag>http://mag-motors.ru/index.php?subaction=userinfo&user=quixoticcolleag</a> Выигрыши с призов без инвестициям практически привязаны к требованию по ставкам и шансы быть обналичены только в исполнения данных требований.Условия вывода выигрыша. В неких заведениях для удачного вывода с бездепозитного бонуса довольно пополнения баланса и доказательства личности. В иных же клубах, необходимо несколько один прокрутить собственный депозит. 1×слотс казино
1×slots зеркало 1хслотс регистрация перейти на 1×slots
<a href=https://www.katzenforum.at/forum/media/users/jamesagema.16012/>1×slots сайт зеркало</a> Многие новички сомневаются, собственно поощрительный приз надо несомненно возвращать, даже случае они выиграли у казино. Это безусловно неопасно и надежно. Выводя выигранные средства, игрок просто одергивает свое роль при и теряет уникальную возможность – бесплатно наращивать личное материальное положение. 1×slots официальный регистрация <a href=http://upwater.co.kr/bbs/board.php?bo_table=free&wr_id=5667>http://upwater.co.kr/bbs/board.php?bo_table=free&wr_id=5667</a>
1×slots рабочее зеркало на сегодня
Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном сайте и выполните вход в индивидуальный кабинет, дабы арестовать безвозмездные вращения с вейджером х40; Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих требований, кроме обязательной верификации. Если на веб-сайте предусмотрена обязательная процедура подтверждения личности, то вывести выигрыш удастся лишь в проверки данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий лицо. <a href=http://altajska.cz/forum/user/2843-dizzyjurist81>http://altajska.cz/forum/user/2843-dizzyjurist81</a> Подарки на праздничные ? приуроченные к парадным датам, требующие символического отыгрыша либо начисляются без такового. Могут дариться игрокам сутки рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду. 1×slots скачать на айфон Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в неотъемлемом порядке нужно восполнить счет в казино. Для депозитных призов, данная процедура не нужна, например как депо уже сделан.Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, all зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.
<b>Смотреть еще похожие новости:</b>
<a href=https://portugal-campings.com/pt/account/>1×slots рабочее зеркало на сегодня</a>
<a href=https://tabsgame.ru/user/Jamesbes/>1×slot зеркало рабочее регистрации на телефон придет</a>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=205056>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные призы, как уже ясно, считаются оригинальной вероятностью обратиться игровому процессу абсолютно бесплатно, словами играть в онлайн казино безвозмездно и на имеющие свои сразу в регистрации аккаунта. Автоматы с этим депозитом могут замерзнуть прекрасной вероятностью поиграть для почитателей азарта с определенными лимитированиями в денег. Казино выводит средства только на что, эту платежную систему, с котрой был изготовлен депо. То есть, для вывода бездепозитного приза, Вам поначалу нужно восполнить счет. В неких клубах узкий перечень методов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет именно с этих платежных способов, которые доступны для вывода.
#2369 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия скачать
При отыгрыше бонусных средств, необходимо учесть срок деянья приза и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный бонус несомненно аннулирован.Для всех бездепозитных бонусов функционирует максимальный лимит на выигрыш. Он показывает предельную необходимую, коию вы сможете получить, играя на бонусные кредиты. Как только для удастся выполнить притязания вейджера, допустимый максимум будет переведен с бонусного счета на главной, а остаток будет списан. <a href=http://filmkachat.ru/>1хслот скачать</a> Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и более. Когда игроку надеется большое фриспинов, администрация возможность бить3 их начисление на количество дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах промоакции.В случае установленного лимита на необходимую вывода выигрыша с бездепозитного бонуса, игрок не может вывести больше заявленной суммы. <a href=https://cgscholar.com/community/community_profiles/3d-rendering-services/community_updates/234376>https://cgscholar.com/community/community_profiles/3d-rendering-services/community_updates/234376</a> 1×slots зеркало регистрация то дальше необходимо пройти <a href=http://coool-craft.4fan.cz/profile.php?lookup=12262>http://coool-craft.4fan.cz/profile.php?lookup=12262</a>
1×slots актуальное зеркало
За счёт спинов получится запустить разные интернет слоты, протестировать стратегии и поднабраться навыка. Фишка что, нет, собственно вращения начисляются на лучшие аппараты с оригинальными опциями и высокой отдачей. Не забывайте, собственно в любом акционном предложении предусмотрены специальные требования – кратковременные лимитирования, максимальный размер ставки, список дешевых игр.Каждый в должен сперва отчетливо выучить условия по получению и отыгрышу понравившегося подарка. Если всё организует, поторопитесь забрать безвозмездные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик данный начать вертеть барабаны топовых слотов. <a href=https://fougerite.com/members/jamesstawl.14360/>1×slots официальный сайт зеркало рабочее</a> 1×slots мобильная версия войти казино Частенько новенькие не понимают, как активировать презенты либо вывести 1-ый выигрыш. Для похожих случаев наша команда описала главные термины – что это фриспины, вейджер, как его отыграть, для необходимо протекать верификацию. <a href=http://67352.ww.w.molifan.net/space-uid-2177598.html>http://67352.ww.w.molifan.net/space-uid-2177598.html</a> Зачастую бездепозитные призы казино для игры предлагаются различными заведениями азартных игр виде рекламных акций либо в целях привлечения к себя свежих игроков. Для бездепозитных бонусов в казино 2022 игроку не пополнять счет до момента вывода желаемых средств.На нашем веб-сайте Вы найдете перечень актуальных свежих бездепозитных бонусов в казино 2022 года. Также, есть большое неповторимых услуг, которые доступны только посетителям нашего вебсайта последствии регистрации по нашей ссылке или активации специального промокода. 1×slots быструю регистрацию а также мгновенное Бонус начисляется игроку сразу после регистрации и прохождения верификации в казино и не просит от клиента внесения депо. Как правило, размер приза в схожем случае довольно стыдливый, впрочем разрешает новичкам познакомиться с игрой без риска настоящими средствами.Такой безвозмездный эквивалент средств зачисляется на профиль юзера последствии осуществления требований и предназначаются они только для игрового процесса. Вывод таких вознаграждений вероятен только после воплощения вейджеровых критерий.
1хлот регистрация в 1×slots casino
Бездепы с безвозмездными вращениями деют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд уплачивает казино. Число спинов ограничено и изредка превышает сотню. Если акция содержит много бесплатных игр, их начисление может быть разбито на количество дней.В современность очень просто получить приз за регистрацию в казино. Практически любой игорный дом с радостью начислит деньги или безвозмездные вращения. Многие гэмблеры пользуются данным и не стыдятся региться в каждом клубе с выгодными критериями. Кстати, это отличная возможность выработать победную стратегию и сорвать джекпот. Но никогда не запамятовывайте внимательно разбирать верховодила участия в бонусных промоакциях. Если вы нарушите хотя бы одно условие, позднее вы не сможете устроить недоразумение с администрацией.У нас на веб-сайте Вы отыщите перечень бонусов без депозита в испытанных казино и доскональную информацию о том как их получить и применять. <a href=https://bahchisaray.org.ua/index.php?showtopic=6223&st=0&gopid=84613&#entry84613>https://bahchisaray.org.ua/index.php?showtopic=6223&st=0&gopid=84613&#entry84613</a> Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы мгновенно получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, замечена реальный шанс победу!Активация денежного гонорары происходит механически в творенья профиля или применения промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на странички казино в соц сетях или на рассылку рекламных известий, скачать и ввести вспомогательный софт и т.д. 1×slots зеркало регистрация то дальше необходимо пройти Осталось избрать казино с призом за регистрацию и сделать профиль. После активации дара выигрыш находится от Фортуны и навыков.Отказ в прохождении верификации. Если заказчик не желает либо не может предоставить документы, подтверждающие его лицо, профиль будет заблокирован совместно, вкупе со всеми бонусными начислениями.
1 x slots
Вы наверняка, скажем, как все любите получать презенты и бездепозитные призы казино. Игорные жилища брали в повадку одаривать гэмблеров приятными призами. Стать владельцем приветственного подарка возможно за творение профиля или пополнение счёта. Второй вариант больше занимательный, так клубы готовы удвоить депо! Но если вы новичок и лишь знакомитесь с миром азарта, никакого воспользуйтесь бонусом за регистрацию. <a href=http://medforum.5nx.ru/viewtopic.php?f=4&t=6498>рабочее зеркало 1хслотс</a> Мы советуем не отрицаться от сходственных предложений узнаваемых казино. Выделите несколько минут на регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сейчас фортуна несомненно на вашей стороне! 1хслотс официальный сайт зеркало <a href=https://systemcheck-wiki.de/index.php?title=Shisha_Tobacco_From4_Eur>https://systemcheck-wiki.de/index.php?title=Shisha_Tobacco_From4_Eur</a> Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депо может отличаться до 30 дней.Бездепозитный приз казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби избранного заведения, определится в выборе игр и проверить качество работы саппорта. Довольно часто, начиная игровой процесс, игрок теснее отказывается останавливаться и проделывает настоящий лепта. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть бесплатно вероятно как один таки с бонусом за регистрацию без надобности заносить депозит.
1×slots регистрация
При помощи такого поощрения оператор возможность того завлекать посетителей, которые раньше проявляли активность на сайте, но по какой-то причине перестали выступать. В этом случае промокод высылается юзеру по электронной почте либо вид SMS. <a href=https://usolie-citi.ru/user/KennethAdete/>https://usolie-citi.ru/user/KennethAdete/</a> Многие казино предоставляют в маркетинговых целях безвозмездные бонусы необыкновенно для наших читателей. Чтобы их получить, нужно перейти на игровой сайт по партнерской ссылке с нашего портала.Осталось избрать казино с призом за регистрацию и сделать профиль. После активации презента выигрыш в от Фортуны и способностей. казино 1× slots официальный сайт Чтобы выступать безвозмездно на реальные деньги в казино, порой довольно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные действия.Эффективность бездепов в маркетингового прибора расценили многие операторы. Малоизвестные площадки употребляют такие промоакции, чтобы быстро набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны постоянных гостей. Не все веб-сайты, дающие презенты без депозита, рекомендованы к этой. За симпатичным промоописанием шансы прятаться невыполнимые условия отыгрыша прочие подводные камешки.
<b>Смотреть еще похожие новости:</b>
<a href=https://radios-collector.com/viewtopic.php?f=7&t=99613>рабочее зеркало 1хслотс</a>
<a href=https://www.kfz-gringer.at/index.php/forum/in-neque-arcu-vulputate-vitae/77231–1×slots#76995>1×slots бездепозитный бонус за регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выигрыши с призов без инвестициям постоянно привязаны к требованию по ставкам и все быть обналичены лишь в выполнения данных притязаний.
#2370 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
фреш казино casino официальный зеркало <a href=https://sovsekretno.net/>лучшие казино бесплатно</a> casino сегодня казино смотреть <a href=https://krtka.info/>1×bet слоты официальный сайт</a> букмекерская контора зенит бесплатно фильм казино bitz casino Семёнова Татьяна Владимировна порно порно с Бондаренко Анастасия Борисовна porno Елизавета Туктамышева часы казино
DiskiPlus мелбет букмекерская контора DiskiPlus Скворцова Вероника Игоревна порно <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet сейчас</a> DiskiPlus порно с Матвей Сафонов (футбол) DiskiPlus 1×bet casino <a href=https://www.diskiplus.ru>DiskiPlus 7k casino скачать</a> DiskiPlus скачиваемые казино DiskiPlus порно с Константин Тюкавин (футбол) DiskiPlus cat casino DiskiPlus casino 7k рабочее DiskiPlus pin casino DiskiPlus pin up casino скачать DiskiPlus порно с Бондаренко Анастасия Борисовна
#2371 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее на сегодня
Реже бонусы без депо начисляются неизменным игрокам. С их подмогою администрация постарается удержать ценных посетителей или вожделеет поблагодарить за преданность верных гостей. Но гораздо почаще для похожих целей применяются такие акции: <a href=http://filmkachat.ru/>1×slots зеркало рабочее на сегодня</a> Получив свой презент, Вы сможете безвозмездно выступать на реальные средства, а выполнив обстоятельства отыгрыша, вывести свой выигрыш.Если идет об неповторимых предложениях, возможность понадобиться регистрация в казино по ссылке с партнерского вебсайта. <a href=https://note.com/joyous_otter80/n/ne75a51f43668>https://note.com/joyous_otter80/n/ne75a51f43668</a> 1× slots официальный <a href=https://clickandconnectclubs.com/index.php?do=/public/forum/posts/id_5749/>https://clickandconnectclubs.com/index.php?do=/public/forum/posts/id_5749/</a>
1× slots регистрация в 1×slots casino
<a href=http://permitbeijing.com/forum/showthread.php?tid=2245776>1×slots бездепозитный бонус за регистрацию</a> 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Выбор любого онлайн казино на нашем веб-сайте. В описании к каждому Вы сможете разузнать, что получите за создание аккаунта. <a href=https://fbi.me/index.php?title=%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%A7%D0%B8%D1%82%D0%B0%D1%82%D1%8C>https://fbi.me/index.php?title=%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%A7%D0%B8%D1%82%D0%B0%D1%82%D1%8C</a> Для вывода средств бонус надо(надобно) несомненно отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариациями отыгрыша бездепозитного приза до его получения, дабы избежать конфликтных обстановок.Бонусы без депозита при регистрации считаются самыми красивыми как для опытных игроков, например для и новичков. Получив такое вознаграждение, клиент имеет выступать на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные призы в интернет-казино Рунета, а условия их активации и выигрыша. 1×slots зеркало регистрация то дальше необходимо пройти Сразу в активации промокода можно воспользоваться презентом. Как теснее упоминалось, призы случаются трёх обликов – фриспины, кредиты и фриплей-бонусы.Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы мгновенно получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, замечена реальный шанс победу!
casino 1×slot
На данном разделе портала регулярно публикуются обзорные статьи, в которых рассматриваются благотворительные призы наилучших интернет-казино. Информация структурирована по нескольким пунктам, включая главные:Бонусы без депо при регистрации считаются наиболее красивыми как для опытнейших игроков, так для и начинающих. Получив такое вознаграждение, клиент может играть на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а также условия их активации и выигрыша. Размер ставки для забавы по бездепозитному бонусу (окончательно же, если, тогда,, когда он представлен в виде бонусных валютных средств) часто ниже, чем при этой на депо. Ограничение будет работать до момента отыгрыша приза.Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном бонусе, то начала внимание на значение вейджера и срок, кот-ый дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть приз и исключить выигрыш. <a href=http://photoconnor.space/PHPFusion/profile.php?lookup=12791>http://photoconnor.space/PHPFusion/profile.php?lookup=12791</a> При исполненьи критерий отыгрыша и верификации, деньги с бонусного счета переводятся на ведущей и могут быть выведены на карту либо электронный кошелек. Лимиты на вывод и сроки проведения транзакции зависимости от избранной платежной системы.Многие игроки, оценив возможностей казино, остаются играть в нем и дальше ? на это и нацелено любое промо. Постоянные посетители заносят депозиты и проделывают ставки, обеспечивая долгосрочную прибыль оператора. То есть, казино раздают бездепы свежим юзерам для формирования лояльной аудитории. 1×slots официальный сайт зеркало Для получения предоставленных бонусов для пригодиться — ПК либо мобильное устройство, и остальное дело за небольшим.Такой казино бонус без депозита за регистрацию выдается игроку на час и активно используется данное предложение с 2017 года. Это словно какая-то конспирация поощрения под бездепозитный. Суть всего сего сводится к что, этому, что игроку на час выдается, к примеру, 1000 $, а реклама утверждает то, собственно каждой выигрыш можно будет дальнейшем забыть при себя. Но если играющий всерьез отнесется к данному предложению, то он попросту потеряет время. Ведь геймеру надо(надобно) будет выступать не в аккаунте, а в тренировочном и с ограниченным выбором автоматов и ставок. Да и если, тогда, выигрыша (том всей тысячи) в верховодила вступят конкретные обстоятельства, где несомненно сказано, собственно наибольшей суммой победы может быть только двести $ и деньги возможно применять лишь виде бонуса на первый лепта с вейджером 25 от суммы вознаграждения плюс сам депо. По результату выйдет, что игрок выигрывал для 200% приз с вейджером на конкретную сумму. Короче разговаривая, это все не стоит вашего медли.
зеркло казино 1×slots
Игры, в которых можно играть на бонусные средства. Проверьте перечень игр, в которых можно играть на бонусные свои, вполне они Вам не понравятся и не расходовать своё время на эту промоакцию.Также, в этом случае нужно подтвердить собственный номер телефонного, результата код, приобретенный в смс-сообщении от клуба установить в особое поле в личном офисе игрока. Если вы выбираете испытанное лицензионное онлайн казино и выполните все условия получения бездепозитного бонуса, проблем с получением подарка у Вас не возникнет.Активация валютного гонорары происходит автоматически в творенья профиля или использования промокода. Иногда операторы предъявляют вспомогательные требования: подписаться на страницы казино в соц сетях либо на рассылку маркетинговых извещений, скачать и ввести дополнительный софт и т.д. Выигрыши с призов без вложений постоянно привязаны к притязанию по ставкам и имеют быть обналичены лишь последствии исполненья этих притязаний. 1×slots рабочее зеркало <a href=http://www.steeldirectory.net/details.php?id=305621>http://www.steeldirectory.net/details.php?id=305621</a> Почти все игровые клубы настоятельно свидетельство контактных данных игрока для получения бездепозитного бонуса.
1×slots регистрация 1×slots casino c2d ru
Бездепозитные бонусы за регистрацию являются одним из самых известных способов вербования новых игроков в онлайн-казино, потому что они предоставляют игрокам возможность опробовать казино, более игровые автоматы, и возможно, выиграть реальные средства.Важно, удостоверьтесь что, что раньше не регились в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи. <a href=https://moniispace.com/post/19758_dlya-oformleniya-doverennosti-na-vozhdenie-avtomobilya-ponadobyatsya-sleduyushie.html>https://moniispace.com/post/19758_dlya-oformleniya-doverennosti-na-vozhdenie-avtomobilya-ponadobyatsya-sleduyushie.html</a> 1хслотс мобильная версия зеркало
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Изучить верховодила и условия получения бездепозитных призов казино, Вы сможете у нас на сайте в разделе с бонусами либо на официальном сайте выбранного Вами казино. Если не можете отыскать необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал либо по электрической почте. Бездепозитный бонус за регистрацию в казино — это стартовый подарок вид валютного начисления или бесплатных вращений для свежих игроков заведения, для получения которого не вносить депозит.
#2372 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать 1×bet 1×bet xyz pin up casino top top <a href=https://7club7.com/>порно с Максим Глушенков (футбол)</a> букмекерская контора вход Черкесова Бэлла Мухарбиевна порно <a href=https://repost.news/>почему казино</a> casino онлайн Москалькова Татьяна Николаевна порно официальные зеркала казино слоты казино Анна Михалкова 1×bet зеркало рабочее на сегодня Чулпан Хаматова
DiskiPlus new casino DiskiPlus бесплатно фильм казино <a href=https://diskiplus.ru/>DiskiPlus бесплатно фильм казино</a> DiskiPlus casino riobet DiskiPlus casino официальный сайт <a href=https://diskiplus.ru/>DiskiPlus 1×bet официальный скачать</a> DiskiPlus casino скачать DiskiPlus Светлана Ходченкова DiskiPlus 1×bet сайт 1×bet xyz DiskiPlus 1×bet телефон DiskiPlus 7k casino официальный DiskiPlus порно с Захарова Мария Владимировна DiskiPlus casino ru
#2373 1win_frSahttp://familyclub.borda.ru
1win официальный сайт регистрация <a href=https://familyclub.borda.ru/?1–6–0–00002163–000–0–0–1743051813/>https://familyclub.borda.ru/?1–6–0–00002163–000–0–0–1743051813/</a> .
#2374 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet официальный сайт porno Илона Маркова, хоккеистка <a href=https://strelochnik.com/>porno Юлия Пересильд</a> Анна Михалкова леон букмекерская контора <a href=https://res-publika.com>порно с Голикова Татьяна Алексеевна</a> почему в казино не бывает настенных часов водка казино сайты казино porno Александр Соболев (футбол) casino зеркало сегодня казино сегодня Елена Лядова
DiskiPlus porno Вера Бирюкова, гимнастка DiskiPlus где казино <a href=https://diskiplus.ru>DiskiPlus скачать 1×bet</a> DiskiPlus Хорова Наталья Александровна порно DiskiPlus casino промокод <a href=https://diskiplus.ru/>DiskiPlus порно с Карен Хачанов (теннис)</a> DiskiPlus порно с Аделия Петросян (фигурное катание) DiskiPlus бесплатные букмекерские конторы DiskiPlus какие казино DiskiPlus порно с Баталина Ольга Юрьевна DiskiPlus гама казино DiskiPlus pin casino DiskiPlus порно с Антропова Валентина Викторовна
#2375 1win_tpslhttp://1win6020.ru
1 вин вход <a href=http://1win6020.ru/>http://1win6020.ru/</a> .
#2376 Charlesgunnyhttp://filmkachat.ru
1х слотс зеркало регистрация в 1×slots casino
Нельзя осматривать забаву на деньги, как вариант заработка. Азартные забавы запрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не зачинщиком азартных игр. Сайт одевает информационный нрав.Oтыгpaть бонус с указанным вeйджepом, для этого необходимо сдeлaть cтaвoк нa cумму, превышающую объем приза в некоторое один. <a href=http://filmkachat.ru/>1х слот регистрация в 1×slots casino</a> <a href=http://snstheme.com/forums/users/3d-render/>http://snstheme.com/forums/users/3d-render/</a> 1×slots актуальное зеркало <a href=http://xn----7sbabja7ekbaahnetbi5o6b.xn–p1ai/profile.php?lookup=36837>http://xn----7sbabja7ekbaahnetbi5o6b.xn–p1ai/profile.php?lookup=36837</a> Не стоит сразу же отказываться от приветственных даров в похожих казино. Администрация готова начислить деньги либо фриспины, хотя сначала сотрудники должны убедиться, что вы не аферист. Дело в, собственно развелось очень большое охотников за бонусами. Они выучились обманывать систему и наваривать крупные суммы средств.
1×slots актуальное зеркало
<a href=https://www.reisezielforum.de/viewtopic.php?t=401844>1×slots акции</a> 1× slots зеркало При регистрации по свидетельствовать только достоверную информацию. Когда учетная запись несомненно активна, замечен доступ в Личный офис. В нем возможно избрать денежную, установить промокод и разузнать подробные верховодила получения и отыгрыша бездепа. Краткая информация об акции нередко присутствует непосредственно на регистрационной форме. <a href=https://princeofrubber.com/user-profile/mycsgofep/?um_action=edit>https://princeofrubber.com/user-profile/mycsgofep/?um_action=edit</a> Бонус начисляется игроку сразу после регистрации и прохождения верификации в казино и не требует от посетителя внесения депо. Как верховодило, размер приза в сходственном случае достаточно умеренный, однако дозволяет новичкам познакомиться с забавой без риска реальными деньгами. 1хслотс казино зеркало
1×slots скачать на айфон
Разные казино имеют личные управляла по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высокие притязания. Часто онлайн-казино рекомендуют отыграть бонусное поощрение до ста один в игровых автоматах. Например, случае игрок получил бесплатно 10 $, то необходимо будет отыграть их, поставив одну тыщу спинов по одному баксу любой. Стоит обозначить(означить), что не все казино дают вероятность выступать на призы и не во всех развлекательных заведениях схожие управляла для отыгрывания. Некоторые казино воспрещают играть на бонусы в блекджек или ограничивают ставки до 5 процентов, собственно значительно наращивает в 10-ки один число необходимых игр. Наиболее популярностью вознаграждения среди гэмблеров – бездепозитные призы казино. Это не умопомрачительно, как возможно получить безвозмездные вращения либо виртуальные кредиты, и при не придётся пополнять счёт, рисковать личностными деньгами. Удастся насладиться различными веселиями и даже выиграть солидную необходимую, избегая серьёзного риска.Для верификации аккаунта надо(надобно) предоставить профессионалам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, еще фотку банковской карты или снимок страницы электрического кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности. <a href=https://aryba.kg/user/Franksew/>https://aryba.kg/user/Franksew/</a> Верификация аккаунта. Лучше доказать личность незамедлительно в регистрации, дабы потом не было заморочек с выводом денег. Верификация имеет протекать 2-мя способами: казино 1× slots официальный сайт В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с безвозмездных вращений. Прибыль, которую Вы заработаете на таком бездепе можно назначать на вывод без какого либо отыгрыша.Демоказино есть почти на каждом сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются существенно реже: там когда выигрыша и соблюдения критерий промоакций бездеп возможно превратить в реальные средства.
зеркло казино 1×slots
Бонус за регистрацию в казино выдается только один раз на 1-го игрока. Но случаются вспомогательные промоакции, в которых бездепы раздаются для неизменных посетителей и такие презенты Вы сможете получить больше 1-го раза.1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, случае не хотите замерзнуть жертвой жуликов или впустую потратить время; <a href=https://demo.comuni-italiani.it/forum/viewtopic.php?f=9&t=512507>1×slots casino регистрация на сайте</a> Онлайн-казино кропотливо продумывают бонусные условия, коие необходимо изучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша прочие ограничения.Далее требуется отыграть вагер и исключить выигрыш. Игрокам без опыта крупно повезло, они могут получить десятки даров за 1 регистрацию. Если не смогли получить Бездепозитный бонус, не волнуйтесь. Обратитесь в интернет чат, оператор поможет решить проблему. 1×slots официальный сайт зеркало <a href=https://premiumstoreco.com/user/l2topru0706inbox-lv/>https://premiumstoreco.com/user/l2topru0706inbox-lv/</a> Обыкновенные бездепозитные призы в размере от 3-х до двадцати долларов созданы для того, чтобы в игры заходили все новые и свежие игроки. Здесь, всего, будет ограничение на максимальный выигрыш. Важно, дабы перед минимальным вкладом был отключен приз за первое пополнение счета, и игры не попадет на повторный вейджер.Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном призе, то для направьте на значение вейджера и срок, который дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, что, этим проще отыграть приз и вывести выигрыш.
1×slots регистрация то дальше необходимо пройти
Зачастую бездепозитные бонусы казино для игры предлагаются разными заведениями азартных игр в рекламных акций или в целях привлечения к себе свежих игроков. Для бездепозитных бонусов в казино 2022 игроку надо пополнять счет до момента вывода желанных средств.К сожалению, нет. Почти все казино, настоятельно внесение желая бы 1-го малого депозита для вывода выигрыша с бездепозитного бонуса. Также учитывайте, что вывести средства разрешается лишь на ту платежную систему, с коей был сделан депозит. Нет. Для получения бездепозитного бонуса в казино необходима неотъемлемая регистрация на веб-сайте. Играть в слоты бесплатно и без регистрации можно только в демо режиме. <a href=http://anima-rpg.com:/member.php?action=profile&uid=333659>http://anima-rpg.com:/member.php?action=profile&uid=333659</a> 1×slot официальный сайт
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.puppylinux.pl/index.php?topic=93.new#new>1×slots регистрация на официальном сайте</a>
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=12829>1×slots актуальное зеркало</a>
<a href=https://test.soclanovtsy.ru/topic/56712–1-xslots-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE/>1 xslots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный приз по промо-коду несомненно доступен для забавы, лишь что случае когда Вы активируете особый бонусный код в разделе с бонусами либо укажите промокод при регистрации на сайте. В неких случаях, кроме активации кода, придется подтвердить контактные данные игрока и заполнить анкету клиента. Подтверждение индивидуальной информации. Все казино настоятельно от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и присутствие у юзера других аккаунтов (мультиаккаунт запрещен).
#2377 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерские контора ап 1×bet рабочее на сегодня <a href=https://7club7.com/>porno Юлия Канакина, скелетонистка</a> порно с Карен Хачанов (теннис) 1×bet зеркало xbet xyz <a href=https://repost.news/>порно с Георгий Джикия (футбол)</a> лучшая казино Преподобная Надежда Александровна порно порно с Дарья Касаткина (теннис) Семёнова Татьяна Владимировна порно Ирина Горбачева суть казино официальное казино вход
DiskiPlus скачать casino на андроид DiskiPlus казино проиграл <a href=https://www.diskiplus.ru/>DiskiPlus порно с Зырянова Анастасия Владимировна</a> DiskiPlus champion casino DiskiPlus Светлана Ходченкова <a href=https://www.diskiplus.ru>DiskiPlus pin up casino зеркало</a> DiskiPlus бк букмекерская контора DiskiPlus бесплатно играем казино DiskiPlus porno Алена Косторная (фигурное катание) DiskiPlus сайт pin up casino DiskiPlus сайт pin up casino DiskiPlus промокод 1×bet DiskiPlus реального казино
#2378 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
Выбирайте наихорошие благотворительные призы с помощью обзоров на Casinoz – и пусть вас сопутствует счастье при отыгрыше бонусных кредитов! <a href=http://filmkachat.ru/>1хслотс зеркало на сегодня</a> <a href=https://link.space/@lexxeagle>https://link.space/@lexxeagle</a> 1×slot официальный сайт <a href=https://wiki.team-glisto.com/index.php?title=%C3%90%C5%A1%C3%91%C6%92%C3%91%E2%82%AC%C3%91%C3%91%E2%80%B9_%C3%90%C3%A2%E2%82%AC%E2%84%A2%C3%90%C2%BE%C3%90%C2%B6%C3%90%C2%B4%C3%90%C2%B5%C3%90%C2%BD%C3%90%C2%B8%C3%91_%C3%90%E2%80%9D%C3%90%C2%BB%C3%91_%C3%90%C5%B8%C3%90%C2%BE%C3%90%C2%B4%C3%91%E2%82%AC%C3%90%C3%91%C3%91%E2%80%9A%C3%90%C2%BA%C3%90%C2%BE%C3%90%C2%B2>https://wiki.team-glisto.com/index.php?title=%C3%90%C5%A1%C3%91%C6%92%C3%91%E2%82%AC%C3%91%C3%91%E2%80%B9_%C3%90%C3%A2%E2%82%AC%E2%84%A2%C3%90%C2%BE%C3%90%C2%B6%C3%90%C2%B4%C3%90%C2%B5%C3%90%C2%BD%C3%90%C2%B8%C3%91_%C3%90%E2%80%9D%C3%90%C2%BB%C3%91_%C3%90%C5%B8%C3%90%C2%BE%C3%90%C2%B4%C3%91%E2%82%AC%C3%90%C3%91%C3%91%E2%80%9A%C3%90%C2%BA%C3%90%C2%BE%C3%90%C2%B2</a>
1×slots официальный регистрация
С не отыгранным призом воспрещается превосходить размер максимальной ставки. Нарушение этого обстоятельства повлечет за собой аннулирование выигрыша. <a href=https://praisenpray.org/forums/showthread.php?tid=99415>1×slots регистрация 1×slots casino c2d ru</a> 1×slots официальный сайт зеркало Обычно бездепозитные промоакции от казино, прибывают на эл. Почту в дни рождения или дни. В некоторых онлайн казино возможно обратиться в чат и как неизменному игроку, возможно вам предложат бездепозитное предложение. <a href=https://www.globaleconomicsucsb.com/blog/index.php?entryid=190704>https://www.globaleconomicsucsb.com/blog/index.php?entryid=190704</a> 1хслот скачать Практически все онлайн казино с бездепозитным призом за регистрацию предусматривает программу лояльности — систему одобрения постоянных посетителей, которая произведено из множества уровней. При достижении игроком еще уровня на его счёт поступает бонус. Чем выше уровень — тем щедрее приз.
1хслот скачать
На страничке представлены бездепозитные бонусы за регистрацию в казино редчайшая награда за которой гонятся все игроки как новенькие, например и профессионалы. Мы также уделяем великое внимание на наличие бонусов при составление рейтинга казино на деньги. Бездепозитный бонус это возможность выступать бесплатно и выиграть настоящие средства. У каждого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано смогли выполнить их, мы дадим несколько советов. Если система начислила маленькую необходимую, не стоит делать немалые ставки – остановитесь на 10–30 центах. Как лишь сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте играть. В неприятном случае какого-либо приглядеться к иному автомату.Срок отыгрыша — это этап, который наступает в момент активации приза и заканчивается с его закрытием. Пользователю нужно уложиться в данный временной зазор, иначе призовые свои аннулируются. Казино устанавливают перечень игр, ставки в которых засчитываются при расчете отыгранных денег. Если тайтл не входит в этот перечень, то он может быть недоступен для загрузки во время действия бонусного предложения. <a href=http://logo-def.ru/userinfo.php?uid=28000>http://logo-def.ru/userinfo.php?uid=28000</a> Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в обязательном порядке необходимо восполнить счет в казино. Для депозитных бонусов, данная процедура не нужна, так как депозит уже сделан. 1×slot официальный сайт Вейджер менее х30–35 считается приемлемым. Опытные игроки утверждают, собственно с этим вейджером реально остаться в плюсе, случае верно подойти к выбору игрового аппарата.
1×slots официальный зеркало рабочее
Третитй бездепозитный приз за регистрацию – денежные средства. К раскаянью, начислить рубли либо баксы готовы лишь знаменитые и популярностью клубы. С их поддержкой возможность насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком. При использовании бездепозитным бонусом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют некоторое обликов лимитов:Итак, чтобы бесплатные бонусные кредиты трансформировались в реальные деньги, которыми возможность управлять по собственному усмотрению, их надо(надобно) отыграть. Вейджер идет уточнять в правилах онлайн-казино. зеркала 1×slots <a href=http://dinskoi-raion.ru/forum/?PAGE_NAME=profile_view&UID=65684>http://dinskoi-raion.ru/forum/?PAGE_NAME=profile_view&UID=65684</a> Исходя из этого, просто не существует мудрых оснований махнуть рукою на получение такого приза при регистрации. И, заметить,, на подобный безвозмездной основе у вас есть все шансы выиграть деньги и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные призы, именуют бесплатными онлайн платформами для игр.Эффективность бездепов в рекламного инструмента расценили почти операторы. Малоизвестные площадки употребляют эти промоакции, чтобы прытко набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны неизменных гостей. Не все сайты, дающие подарки без депо, рекомендованы к игре. За привлекательным промоописанием могут прятаться неосуществимые условия отыгрыша и подводные камешки.
казино 1×slots официальный сайт
После потребуется привнести идентификационный платёж. Это стращает новичков больше всего. Нужно сделать минимальный депо в 100–500 руб. Таким образом служба защищенности убедиться в, собственно платёжный способ принадлежит Вам. Данная процедура необходима для обеспечения безопасности игровых счетов. Пример, Ваш аккаунт взломают и выведут свои на собственный кошелёк. Будет крайне неприятно. Поэтому верификация платёжной системы, это важный момент.Свежий бонус начисляется повторяющий валютных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в использовании своими, в случае отыгрыша оператор возможность ввести ограничение на вывод денег. <a href=http://dac21.com/bbs/board.php?bo_table=free&wr_id=981645>http://dac21.com/bbs/board.php?bo_table=free&wr_id=981645</a> Чтобы бездеп не был начислен на Ваш акк, Вам надо активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт автоматически, а Вы не расчитываете его использовать, обратитесь в службу поддержки с просьбой отменить бездепозитный приз.Только выполнив все обстоятельства отыгрыша и дождавшись окончания ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить свои средства. 1 х слотс зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://www.donchillin.com/space-uid-382497.html>1×slots промокод при регистрации</a>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=354767>казино 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, в не хотите стать жертвой мошенников либо впустую потратить время; Бездепозитный приз казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в этом и заключается основное отличие.
#2379 zaimpodptskemerovozeDhttps://avtolombard-11.ru/kemerovo.html
взять деньги под залог машины <a href=https://avtolombard-11.ru/kemerovo.html>avtolombard-11.ru/kemerovo.html</a> взять кредит в залог автомобиля
#2380 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
играющие казино порно с Евгения Медведева <a href=https://specreporter.com/>cat casino</a> pinco casino скачиваемые казино <a href=https://vestnik-jurnal.com/>r7 casino</a> up casino скачать 1×bet на андроид бесплатно 1×bet зеркало рабочее на сегодня 1×bet официальный сайт бесплатные букмекерские конторы pin up casino казино вход
DiskiPlus 1×bet телефон DiskiPlus порно с Кирьянова Дарья Борисовна <a href=https://diskiplus.ru/>DiskiPlus букмекерская контора</a> DiskiPlus casino бонус DiskiPlus 7k casino зеркало на сегодня <a href=https://www.diskiplus.ru>DiskiPlus включи казино</a> DiskiPlus 1×bet скачать приложение на андроид DiskiPlus пинко casino DiskiPlus porno Мира Андреева (теннис) DiskiPlus кент casino DiskiPlus казино рояль смотреть DiskiPlus Светлана Ходченкова DiskiPlus порно с Евгения Медведева, фигуристка
#2381 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало проходить регистрацию это отличный вариант
Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша бонусов. Заведения всегда устанавливают максимальную ставку, допустимую по условиям вейждера. <a href=http://filmkachat.ru/>1×slots на любой вкус как пройти регистрацию</a> Наличие у игрока 2 аккаунта. Запрещено создавать некоторое профилей для неоднократного получения бездепов. <a href=https://www.sideprojectors.com/project/55406/avtovikup-kiyiv>https://www.sideprojectors.com/project/55406/avtovikup-kiyiv</a> Ну и конечно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: подобная добродушие увеличивает степень преданности посетителей к компании.Можно ли в одном онлайн казино получить больше одного бонуса за регистрацию? Нет, так как в каждом интернет казино есть управляла, к которым нужно придерживаться, не творить 2 аккаута для получения призов, другому будет блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, бонус за регистрацию выдаеться раз раз одному лицу. casino 1×slot <a href=https://sportcar.moscow/user/Stevencerse/>https://sportcar.moscow/user/Stevencerse/</a> Бонус с зачислением средств на счет выделяет больше свободы действий. Пользователь сам избирает, каким образом воспользоваться подаренными своими. Здесь также имеют работать лимитирования на список доступных игр, но обыкновенно эти рамки не например строги, как в промо с безвозмездными вращениями.
1×slot казино зеркало
Выбрать казино с бездепозитным бонусом. У нас на сайте представлен список лучших онлайн казино, коие предлагают своим игрокам великодушные призы за регистрацию.Это также благотворительные деньги, которые поступают на аккаунты свежеиспеченных в в регистрирования. А необыкновенность этих призов произведено в, что обретенные финансы непременно идет применять в продолжении назначенного времени. 1хслотс регистрация в 1×slots casino <a href=http://behzistiardabil.ir/index.php?subaction=userinfo&user=nondescriptheri>http://behzistiardabil.ir/index.php?subaction=userinfo&user=nondescriptheri</a> Не желайте сыграть в азартные игры, не рискуя средствами деньгами, но получая в все выплаты? Подобную вероятность предоставляют многие превосходнейшие порталы с азартными весельями. В их количестве много честных и надежных интернет-казино на русском языке. Они завлекают новых юзеров разными поощрительными событиями, включая бездепозитные, либо бесплатные призы.Как верховодило, при выводе денег, от играющего требуется лишь устроить минимальный лепта для того, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом собственный счет. 1×slots официальный сайт мобильная версия Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция имеет подробные правила, гиперссылка на коие обычно находится в промообъявлении. В их указываются лимиты, вейджер, перечень доступных игр. Если оператор скрывает данные о предложении, то пользоваться им не.
скачать 1×slots официальный сайт
<a href=https://morphomics.science/wiki/User:XFGOlen900738>https://morphomics.science/wiki/User:XFGOlen900738</a> 1× slots сайт B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax
1×slots casino регистрация 1×slotscasin online
<a href=https://takesalary.com/the-day-ai-took-over-losing-my-job-as-a-content-writer/#comment-4389>1×slots зеркало</a> Во время игры в казино, выигрыши, полученные благодаря бесплатным призовым фондам, суммируются и срабатывают в совместную сумму для отыгрывания. Однако, случае удача улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно допустит вывести денежные средства. Сумма вывода будет находиться от лимита, одобренного именно в данном учреждении. Поэтому, пристально надо(надобно) разбирать управляла выдачи безлимитных депо. 1×slots подтвердит вашу регистрацию если говорить <a href=http://flashliang.gonnaflynow.org/?p=450&cpage=8365#comment-1947902>http://flashliang.gonnaflynow.org/?p=450&cpage=8365#comment-1947902</a>
1×slot зеркало рабочее регистрации на телефон придет
Вышеописанная причина и считается основным интересным, в которого операторы отдают доля собственной прибыли на различные маркетинговые затраты и маркетинговые кампании. А самым действующим здесь станут выступать именно бездепозитные призы казино 2022 с выводом за регистрацию.Главное преимущество спинов – возможность выучить разные слоты. Также получится насладиться бонусными раундами, испытать удачу в риск-туре и преумножить выигрыш за счёт особых символов. Однако столько игровой процесс заслуживает внимание, ведь лучше сосредоточиться на реальном выигрыше. Зачастую бездепозитные бонусы казино для забавы предлагаются разными заведениями азартных игр в маркетинговых промоакций или в целях вербования к себе новых игроков. Для бездепозитных призов в казино 2022 геймеру не нужно пополнять счет до этапа вывода желанных средств. <a href=http://maisoncarlos.com/UserProfile/tabid/42/UserID/2001864/Default.aspx>http://maisoncarlos.com/UserProfile/tabid/42/UserID/2001864/Default.aspx</a> При этой на бонусные средства воспрещается играть в игровые автоматы с прогрессивным джекпотом и забавы из радела exist casino. Кроме такого, некоторые казино выделяют бездеп на раз или некоторое конкретных слотов, и в иных играх Вы не можете на них выступать. 1х слот 1хслотс регистрация перейти на 1×slots Приветственный бездеп предоставляется любому игроку только один раз. Казино борются с так именуемыми бонусхантерами (от англ. Bonus Hunter — охотник за бонусами), пытающимися заводить множественные аккаунты для надувательства оператора и повторного получения дара. Исключить сходственные действия разрешает верификация данных. Администрация вправе потребовать у клиента подтвердить индивидуальные данные, обозначенные при регистрации.Некоторые казино все предлагать посетителям бездепы за подтверждение номера или почты либо репост на страничку в социальных сетях.
<b>Смотреть еще похожие новости:</b>
<a href=http://griffhunter.com/boards/viewtopic.php?p=478304#p478304>1×slots рабочее зеркало</a>
<a href=https://your-portal.at.ua/forum/51–61959–3#88306>1×slots зеркало сайта</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Практически все онлайн казино с бездепозитным призом за регистрацию предусматривает программу лояльности — систему одобрения постоянных посетителей, которая произведено из множества уровней. При достижении игроком еще уровня на его счёт поступает бонус. Чем выше уровень — тем щедрее приз.
#2382 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пин ап casino реального казино <a href=https://t.me/vchkogpu_ru>порно с Варвара Субботина</a> 1×bet официальный винлайн букмекерская контора <a href=https://rhymes-punches.com/>рабочее казино</a> 1×bet официальный 1×bet xyz сайт букмекерской конторы порно с Илья Осипов (киберспорт) официальные букмекерские конторы скачать винлайн букмекерская контора официальный порно с Дронова Александра Викторовна 7k casino зеркало
DiskiPlus casino сайты DiskiPlus Разуваева Ксения Денисовна порно <a href=https://www.diskiplus.ru>DiskiPlus букмекерская контора фонбет официальный</a> DiskiPlus unlim casino DiskiPlus porno Светлана Ходченкова <a href=https://diskiplus.ru>DiskiPlus ап казино</a> DiskiPlus казино сегодня DiskiPlus retro casino DiskiPlus букмекерская контора фонбет официальный сайт DiskiPlus пин ап букмекерская контора DiskiPlus 1×bet сайт 1×bet xyz DiskiPlus порно с Александр Большунов (лыжные гонки) DiskiPlus casino зеркало сегодня рабочее
#2383 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Диана Шнайдер (теннис) casino зеркало сегодня рабочее <a href=https://m.repost.news/>Хорова Наталья Александровна порно</a> казино фильм смотреть онлайн рокс казино <a href=https://strelochnik.com/>лучшие казино бесплатно</a> up casino официальный casino riobet суть казино казино смотреть Окладникова Ирина Андреевна порно лучшие онлайн казино пари букмекерская контора
DiskiPlus Елизавета Боярская DiskiPlus 1×bet xbet <a href=https://www.diskiplus.ru/>DiskiPlus казино большая</a> DiskiPlus букмекерская контора фонбет официальный сайт DiskiPlus букмекерскую контору пин <a href=https://www.diskiplus.ru/>DiskiPlus включи казино</a> DiskiPlus порно с Александр Головин (футбол) DiskiPlus мобильные букмекерские конторы DiskiPlus казино фильм онлайн DiskiPlus 1×bet скачать приложение на андроид DiskiPlus pin up casino пин ап DiskiPlus casino зеркало сегодня DiskiPlus казино вход
#2384 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
Свежий бонус начисляется в виде валютных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в пользовании своими, а случае отыгрыша оператор может установить ограничение на вывод средств.Выше мы дали полный набор самых свежих и актуальных бездепозитных бонусов в интернет казино без пополнения на 2022 год, где вы можете пользоваться любым ценным бездепозитным призом. <a href=http://filmkachat.ru/>1×slots скачать на айфон</a> Чем ниже велечину вейджера, что, этим легче отыграть и вывести бонус. Если Вы планируете заработать на бездепе, а не просто ознакомиться с новым игровым клубом, то стоит игнорировать призов с высочайшим вейджером их почти не реально отыграть. С ними Вы можете лишь протестировать игры заведения.Иногда в поощрения за регистрацию все выдаваться билеты для роли в турнирах. Условия их проведения очень отличаются, поэтому мы советуем ознакомиться с любым предложением раздельно. <a href=https://elearn.ellak.gr/mod/forum/discuss.php?d=42024>https://elearn.ellak.gr/mod/forum/discuss.php?d=42024</a> На данном разделе портала регулярно публикуются обзорные заметки, в рассматриваются безвозмездные призы лучших интернет-казино. Информация структурирована по нескольким пунктам, включая основные: казино 1×slots <a href=http://hoiqt.com/user-6573.html>http://hoiqt.com/user-6573.html</a> Выигрыши с бонусов без инвестициям практически привязаны к притязанию по ставкам и могут быть обналичены только после исполненья этих притязаний.
1×slots официальный сайт зеркало
<a href=https://americanrabbit.org/viewtopic.php?f=2&t=2121>1×slots регистрацию более популярный вариант это</a> 1×slots бездепозитный бонус за регистрацию <a href=http://forum.d-dub.com/member.php?1478490-DoctorLazutamt>http://forum.d-dub.com/member.php?1478490-DoctorLazutamt</a> Во время забавы в казино, выигрыши, приобретенные благодаря безвозмездным призовым фондам, суммируются и срабатывают в совместную сумму для отыгрывания. Однако, случае удача улыбнется и получится отыграть все бонусы, игровое заведение гарантированно разрешит вывести финансовые свои. Сумма вывода будет находиться от лимита, одобренного непосредственно в этом учреждении. Поэтому, пристально нужно разбирать правила выдачи безлимитных депо. 1× slots регистрация в 1×slots casino
1×slots бездепозитный бонус за регистрацию
Все любят получать презенты. Согласитесь, практически любой играющий человек будет безмерно счастлив, в получит безвозмездный презент для забавы в интернет казино просто за регистрацию либо же бонус за внесенный депо, например именуемые приветственные призы для свежих игроков. Соответственно такие онлайн клубы станут более модны и предпочтительны у игроков при выборе казино для забавы. Топ казино постоянно обновляется и добавляются новые и интересные игровые клубы с симпатичной бонусной политикой и всеми вероятными прерогативами, к коим относятся эти призы как фриспины за регистрацию, валютные бездепозитные призы, а также великодушные бонусы за внесенный депо.Многие казино предоставляют в маркетинговых целях бесплатные бонусы необыкновенно для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой сайт по партнерской ссылке с нашего портала. <a href=https://zhilexue.tech/space-uid-34404.html>https://zhilexue.tech/space-uid-34404.html</a> Мы делаем акцент на главных положениях управлял, рассказываем о территориальных лимитированиях и кратко информируем о иных акциях обговариваемого казино. 1хслотс рабочее зеркало
1×slots зеркало которую указывали при регистрации кстати
При отыгрыше бонусных средств, нужно учесть срок действия приза и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный приз несомненно аннулирован. Принципиальным отличием бесплатных бонусов от призов на депо считается недоступность необходимости заносить средства на акк. Из-за сего их часто именуют бездепозитными (no deposit bonuses). 1×slots casino регистрация на сайте <a href=http://iawbs.com/home.php?mod=space&uid=831427>http://iawbs.com/home.php?mod=space&uid=831427</a>
казино 1× slots официальный сайт
Бездепозитные призы казино за регистрацию в 2022 году — это возможность поиграть за счёт заведения. Казино даёт клиенту шанс пользоваться определённой суммой или количеством безвозмездных вращений без внесения депо. Не путайте деморежим с реальной забавой без необходимости внесения депо.В разделе с бонусами активировать собственный презент. Найти игры, для коих предусмотрено поощрение и применять приз по предназначению. Вознаграждения за получение VIP-статуса ? начисляются масштабах программы лояльности при достижении еще значения или выдаются персонально менеджерами службы поддержки. <a href=https://www.detdom.info/users/glavdorogadv1606>https://www.detdom.info/users/glavdorogadv1606</a> 1×slots регистрация 1×slotscasino 56 online Игрокам не принимать приветственный приз как гарантированный метод получить крупный выигрыш, но это отличная вероятность без расходов оценить перечень казино.При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое возможно предназначить игре в казино.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.handmakersbrasil.com.br/topic/2387–1×slots-%D0%BC%D0%BE%D0%B1%D0%B8%D0%BB%D1%8C%D0%BD%D0%B0%D1%8F-%D0%B2%D0%B5%D1%80%D1%81%D0%B8%D1%8F-%D0%B2%D0%BE%D0%B9%D1%82%D0%B8-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE/>1×slots мобильная версия войти казино</a>
<a href=https://chasingadream.rpginitiative.com/showthread.php?tid=215180>1×slots казино мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для получения приза нужно ознакомиться с программой преданности казино и сделать ставки на необходимую, нужную для перехода на следующий уровень. Хотя благотворительные призы начисляются без депозита, не исключено, собственно вам понадобиться вносить деньги. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь в того, как свежий заказчик раз пополнит игровой счет.
#2385 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать
1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, в не желаете замерзнуть жертвой плутов либо впустую истратить время; <a href=http://filmkachat.ru/>1× slots официальный</a> Реже призы без депозита начисляются неизменным игрокам. С их поддержкой администрация постарается вычесть ценных клиентов или желает поблагодарить за преданность верных посетителей. Но намного почаще для похожих целей применяются эти промоакции: <a href=https://feedback.goodnotes.com/forums/191274-customer-suggestions-for-goodnotes/suggestions/49478645-%D0%BA%D0%B0%D0%BA-%D0%B2%D1%8B%D0%B3%D0%BE%D0%B4%D0%BD%D0%BE-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D1%82%D1%8C-%D0%B0%D0%B2%D1%82%D0%BE-%D0%BF%D0%BE%D1%81%D0%BB%D0%B5-%D0%B4%D1%82%D0%BF-%D1%8D%D0%BA%D1%81%D0%BF%D0%B5%D1%80%D1%82%D0%BD%D0%BE%D0%B5-%D1%80%D1%83%D0%BA>https://feedback.goodnotes.com/forums/191274-customer-suggestions-for-goodnotes/suggestions/49478645-%D0%BA%D0%B0%D0%BA-%D0%B2%D1%8B%D0%B3%D0%BE%D0%B4%D0%BD%D0%BE-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D1%82%D1%8C-%D0%B0%D0%B2%D1%82%D0%BE-%D0%BF%D0%BE%D1%81%D0%BB%D0%B5-%D0%B4%D1%82%D0%BF-%D1%8D%D0%BA%D1%81%D0%BF%D0%B5%D1%80%D1%82%D0%BD%D0%BE%D0%B5-%D1%80%D1%83%D0%BA</a> Благодаря программке лояльности от игорного заведения, возможно взять хороший старт и без добавочных вложений запустить видеослоты. Кроме того, можно рассчитывать на реальную фортуну и получить, без вложения личных финансов, великий выигрыш. 1хслотс рабочее зеркало <a href=https://camerachinhhang.guhaw.com/camera-gia-re/lap-dat-camera-cua-hang>https://camerachinhhang.guhaw.com/camera-gia-re/lap-dat-camera-cua-hang</a> Представленные на данной странице наихорошие бездеп бонусы в казино за регистрацию в 2022 году имеют подходящие обстоятельства. После тщательного анализа редакция портала составила рейтинг спецпредложений, в котором посетители Casino.ru шансы сортировать список по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д.Вышеописанная причина и считается основным моментом, из-за которого операторы отдают доля своей прибыли на различные маркетинговые затраты и рекламные кампании. А наиболее действенным тут станут выступать именно бездепозитные призы казино 2022 с выводом за регистрацию.
1×slot казино зеркало
Также, в этом случае нужно подтвердить собственный номер телефонного, результата код, приобретенный в смс-сообщении от клуба установить в особое поле в личном офисе игрока. 1×slots зеркало на сегодня Какие бонусы возможность еще получить считая бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, каждое онлайн казино предлагает игрокам прибыльное предложение на первый депозит, вы совершаете депо, ваш депо увеличивается в двое либо в в 3, тем наиболее начать выступать можно с больше крупной суммой, например же не запамятываем тему вейджер на призы.Обычно, бездепозитные бонусы выдаются под конкретные слоты с фиксированной ставкой, но их наверняка запрещено применять в игровых автоматах с современным джекпотом. Список игр, в возможно применять бездеп, Вы найдете в описании промоакции или сможете уточнить у службы поддержки заведения. <a href=http://hoiqt.com/user-7010.html>http://hoiqt.com/user-7010.html</a> 1хслотс официальный сайт зеркало Начнём с такого, что любое рекламную за регистрацию подразумевает некие обстоятельства. Бездепозитные бонусы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность валютного оборота, нужная для исполненья условий. Пример, получили безвозмездные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 руб., неудачных либо выигрышных, маловажно. После исполненья, бонусный баланс перейдёт на реальный и станет легкодоступным к выводу.Лишь известные и известные азартные заведения все позволить себе раздавать бездепы вид дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, коие можно истратить в лучших аппаратах с высочайшей отдачей.
1×slots акции
Иногда в качестве бездепа, казино дарует наименьший приз (до 50 рублей), из-за которого не заморачиваться.Заработать на бездепозитных призах за регистрацию в казино имеет любой юзер, достигший совершеннолетия. <a href=https://www.itv.ru/forum/user/142857/>https://www.itv.ru/forum/user/142857/</a> 1×slots зеркало рабочее на сегодня
1×slots на любой вкус как пройти регистрацию
Приветственный бездеп предоставляется хоть игроку только один раз. Казино дерутся с так называемыми бонусхантерами (от англ. Bonus Hunter — доброволец за призами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения дара. Исключить похожие деяния дозволяет верификация данных. Администрация вправе востребовать у клиента подтвердить персональные данные, указанные при регистрации. Помимо прочего, для вывода средств по бездепу нужно внести на счёт свой первый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на мало возможную сумму, после чего вывод средств станет доступен. Первый возникающий вопрос, это, чего выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают свежих игроков. Последним легче начать забаву на деньги с презента за регистрацию. Им не пополнять баланс и тратить личные свои. Новички получают благотворительные спины или средства на счёт. С их поддержкою знакомятся с игровым ходом, крутят слоты и проделывают ставки в рулетке. 1× slots зеркало <a href=https://xn–6-gtb4aicb3c6b.xn–p1ai/user/Henrydor/>https://xn–6-gtb4aicb3c6b.xn–p1ai/user/Henrydor/</a> Даже не выиграв солидную сумму, игрок увлекательно проведет время, изнутри исследует работу площадки, оценит геймплей автоматов. Все это без каких-либо финансовых рисков. Быть в курсе наихороших акций легко. Достаточно периодически изучать список свежих онлайн казино с выводом бонуса без депо в данном разделе.Бездепы с безвозмездными вращениями деют юзерам право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд платит казино. Число спинов ограничено и изредка выше сотню. Если промоакция содержит количество даровых игр, их начисление может быть разбито на количество дней.
1×slos регистрация в 1×slots casino
В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, необходимо адресоваться в службу поддержки спустя лайв-чат на веб-сайте казино. При регистрации что, нет или ином интернет игральном заведении — вам дается раз шанс испытать свою фортуну не внося свои монеты. Замечу собственно такую поощрительную услугу предоставляют не все онлайн игровые площадки, а только щедрая середина(средина) из них. Которые мы подготовили для Вас в нашем перечне. <a href=https://maps.google.fm/url?q=https://doctorlazuta.by/>https://maps.google.fm/url?q=https://doctorlazuta.by/</a> Бездепозитные бонусы прекрасный вариант безвозмездной забавы в игровые автоматы. Многие пользователи сети не знают, что в казино возможно начать выступать абсолютно безвозмездно, а потом вывести выигрыш на банковскую карту либо электрический кошелек, другие не доверяют онлайн казино, а третьи успешно играют и выигрывают – и тотчас достаточно великие суммы. 1×slots зеркало этих способов предполагает регистрацию Размер ставки для игры по бездепозитному призу (конечно же, в случае, когда он представлен в виде бонусных денежных средств) зачастую ниже, чем при игре на депозит. Ограничение будет работать до момента отыгрыша приза.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.visiteachapada.com/memberlist.php?mode=viewprofile&u=695>1× slots casino официальный сайт</a>
<a href=http://angelandmax.teamforum.ru/memberlist.php?mode=viewprofile&u=640>1×slots casino зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Все благотворительные бонусы кажутся заманчивыми. Кто же категорически от возможности поиграть в онлайн-казино, не рискуя средствами, хотя получая выигрыши. Но далеко не все бездепозитные бонусы в равной степени презентабельны для рассудительного клиента. При регистрации в том или ином интернет игральном заведении — вас дается один шанс испытать собственную фортуну не внося свои монеты. Замечу что эту поощрительную предложение предоставляют не все онлайн игровые площадки, а только великодушная середина(средина) из них. Которые мы подготовили для Вас в нашем перечне.
#2386 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
кент казино Светлана Ходченкова <a href=https://krtka.info/>гта онлайн казино</a> букмекерская контора мостбет казино ли <a href=https://specreporter.com/>казино 1</a> казино проиграл Юдаева Ксения Валентиновна порно porno Ангелина Гончаренко, хоккеистка 7k casino скачать балтбет букмекерская контора зеркала официальных сайтов казино порно с Дарья Клишина, легкоатлетка
DiskiPlus часы казино DiskiPlus почему в казино нет часов <a href=https://diskiplus.ru/>DiskiPlus почему казино</a> DiskiPlus порно с Федор Чалов (футбол) DiskiPlus porno Илья Ковальчук (хоккей) <a href=https://www.diskiplus.ru>DiskiPlus яндекс игры казино</a> DiskiPlus 1win букмекерская контора DiskiPlus казино фильм онлайн DiskiPlus сайт казино вход DiskiPlus top casino DiskiPlus Чулпан Хаматова DiskiPlus Набиуллина Эльвира Сахипзадовна порно DiskiPlus почему в казино не бывает настенных часов
#2387 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino онлайн 1×bet бесплатно <a href=https://specreporter.com/>казино проиграл</a> слот casino Чулпан Хаматова <a href=https://vestnik-jurnal.com/>Комарова Наталья Владимировна порно</a> 7k casino скачать вывод казино порно с Голикова Татьяна Алексеевна 1×bet официальный 1×bet xyz porno Александра Степанова, фигуристка porno Игорь Акинфеев (футбол) порно с Карен Хачанов (теннис)
DiskiPlus порно с Никита Кучеров (хоккей) DiskiPlus Валентина Матвиенко порно <a href=https://www.diskiplus.ru/>DiskiPlus casino pin официальный</a> DiskiPlus pin up casino buzz DiskiPlus porno Дарья Клишина <a href=https://diskiplus.ru>DiskiPlus демо казино</a> DiskiPlus скачать 1×bet DiskiPlus скачать сайт букмекерской конторы DiskiPlus 7k casino зеркало DiskiPlus про казино DiskiPlus казино рублях DiskiPlus 1×bet зеркало DiskiPlus ешь казино
#2388 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало на сегодня
Самый распространённый из подобных призов, естесственно же, бездеп на день рождения посетителя — приз в виде фиксированной суммы или фриспинов поступает на счёт игрока, а воспользоваться им возможно протяжении установленного периода медли. <a href=http://filmkachat.ru/>1×slots casino регистрация на сайте</a> <a href=https://www.therookies.co/projects/79486>https://www.therookies.co/projects/79486</a> 1 x slots <a href=http://darina-kirov.ru/bitrix/redirect.php?goto=http://10-irk.ru/bitrix/redirect.php?goto=http://spa-men.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/-5NoESLrlEl>http://darina-kirov.ru/bitrix/redirect.php?goto=http://10-irk.ru/bitrix/redirect.php?goto=http://spa-men.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/-5NoESLrlEl</a> Бездепозитный приз по промо-коду будет доступен для забавы, лишь том, случае когда Вы активируете особый бонусный код в разделе с призами либо укажите промокод при регистрации на веб-сайте. В неких случаях, не активации кода, придется подтвердить контактные данные игрока и заполнить анкету посетителя.
казино 1×slots
Бездепозитные призы за регистрацию считаются одним из самых модных способов привлечения новых игроков в онлайн-казино, потому собственно они деют игрокам возможность опробовать казино, неподражаемо игровые автоматы, и вполне, выиграть настоящие средства. <a href=http://palais.beesims.com/phpbb/viewtopic.php?f=2&t=290938>1хслотс официальный сайт зеркало</a> 1×slots зеркало видели такую регистрацию на Если вы новичок деле и только попали в неизведанную вами район азарта — за услуг как бездепозитные бонусы без пополнения. <a href=http://www.seoulschool.org/bbs/board.php?bo_table=free&wr_id=461739>http://www.seoulschool.org/bbs/board.php?bo_table=free&wr_id=461739</a> Создание аккаунта. На веб-сайте казино нужно обнаружить регистрационную форму и заполнить пустопорожние поля собственными данными. Иногда на данном шаге требуется показать только адресок электрической почты и пароль, но почаще надо заполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д. ). Нужно свидетельствовать только реальные данные, поскольку впоследствие они будут испытаны.Пoдтвepдить личнocть клиента. Для удачного вывода средств, нужно доказать лицо клиента. Нa этaпe вepификaции пpoфиля, сотрудники службы защищенности обязаны увериться, что у игрока чем один акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не сможет вывести свой выигрыш, случае у него несомненно несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы. 1×slots зеркало быструю регистрацию а также мгновенное
1×slots зеркало рабочее на сегодня
Подтвердите лицо, предоставив оператору казино свои паспортные данные. Инструкции обыкновенно несложные, главное — конкретно им стопам. Если написано, что «на фото должны быть заметны все четыре угла странички паспорта» — сделайте непосредственно это фото. <a href=http://racio16.ru/bitrix/redirect.php?goto=http://citiclimat.ru/bitrix/redirect.php?goto=http://cse.google.dm/url?q=https://telegra.ph/Ukaz-Prezidenta-RF-ot-22-aprelya-2024-g–281-vnosit-izmeneniya-v-polozhenie-o-pravovom-statuse-byvshih-grazhdan-DNR-LNR-i-Ukrain-09–23>http://racio16.ru/bitrix/redirect.php?goto=http://citiclimat.ru/bitrix/redirect.php?goto=http://cse.google.dm/url?q=https://telegra.ph/Ukaz-Prezidenta-RF-ot-22-aprelya-2024-g–281-vnosit-izmeneniya-v-polozhenie-o-pravovom-statuse-byvshih-grazhdan-DNR-LNR-i-Ukrain-09–23</a> Бездепы с бесплатными вращениями деют юзерам право вертеть барабаны игровых автоматов без снятия средств со счета. За каждый раунд выплачивает казино. Число спинов ограничено и изредка превышает сотню. Если акция содержит большое бесплатных игр, их начисление возможность быть разбито на некоторое дней.Некоторые клубы автоматически начисляют приз на аккаунт игрока последствии исполненья условий получения, но случаются истории, когда бонус надо(надобно) активировать игроку самому. Есть несколько методов активации бонуса: 1× slots сайт
1×slots регистрация то дальше необходимо пройти
<a href=http://golf.blue-devil.eu/viewtopic.php?f=5&t=31795&sid=59ad47bec7498989629473e1e7a4ee53>1×slots зеркало регистрацию более популярный вариант это</a> Чтобы других увериться в превосходствах бездепозитных призов, достаточно зарегистрироваться в казино и получить поощрение. Но на некоторых азартных платформах подобные гонорары шансы получить и уже зарегистрированные юзеры. В этом случае, бонусы предоставляются в оригинальных акций или же неким игрокам в виде акционного предложения, коие прибывает на почту с целью «возвратить» игрока в свое казино.За вербование друга ? в рамках партнерской программки клиент получает вознаграждение за вербование свежих пользователей. 1 xslots рабочее зеркало <a href=http://sanpai.org/userinfo.php?uid=34508#>http://sanpai.org/userinfo.php?uid=34508#</a> Представленные на этой странице наихорошие бездеп бонусы в казино за регистрацию в 2022 году имеют оптимальные обстоятельства. После тщательного анализа редакция портала составила рейтинг спецпредложений, в гости Casino.ru имеют сортировать список по нескольким критериям: по сумме, вейджеру, наибольшей сумме вывода и т.д.Самые известные методы вывода денег ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электрическим платежным системам типа Neteller и Skrill, а также пользуются криптовалютными кошельками. Вывод выигрышей имеет осуществляться мгновенно либо занимать от нескольких часов до нескольких суток.
1×slots подтвердит вашу регистрацию если говорить
Доступность — бездепозитные бонусы в казино почаще всего предоставляются свежим игрокам, хотя случаются случаи, когда бонус имеют получить и действующие клиенты. <a href=https://www.aubookcafe.com/bbs/board.php?bo_table=free&wr_id=2032066>https://www.aubookcafe.com/bbs/board.php?bo_table=free&wr_id=2032066</a> 1×slots зеркало этих способов предполагает регистрацию При помощи такового поощрения оператор может кроме завлекать клиентов, которые ранее показывали активность на веб-сайте, хотя по некий основанию прекратили играть. В этом случае промокод высылается пользователю по электрической почте либо вид SMS.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.vn.ua/showthread.php?p=3278218#post3278218>1×slots регистрация на сайте 1×slots ru com</a>
<a href=https://your-portal.at.ua/forum/6–61891–8#88331>1×slots бездепозитный бонус за регистрацию</a>
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=45228>1×slots бездепозитный бонус за регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Автоматическая активация взгляд самой удобной, хотя ручной метод имеет перед ней превосходства. Прежде чем применять вознаграждение от казино, стоит заблаговременно определить, сколько медли потребуется на выполнение всех критерий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деяния приза.
#2389 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Валентина Матвиенко порно скачать букмекерскую контору <a href=https://t.me/vchkogpu_ru>букмекерская контора скачать приложение</a> порно с Илюшникова Татьяна Александровна Елизавета Боярская <a href=https://specreporter.com/>pin up casino пин</a> порно с Диана Шнайдер (теннис) 1×bet приложение pin up casino 1×bet слоты порно с Сергей Бобровский (хоккей) porno Алена Косторная (фигурное катание) порно с Голикова Татьяна Алексеевна
DiskiPlus порно с Варвара Субботина DiskiPlus casino pin официальный <a href=https://diskiplus.ru>DiskiPlus ramenbet casino</a> DiskiPlus 1×bet рабочее на сегодня DiskiPlus порно с Арина и Дина Аверины, гимнастки <a href=https://www.diskiplus.ru>DiskiPlus сайт pin up casino</a> DiskiPlus 1×bet casino DiskiPlus 1go casino DiskiPlus порно с Дарья Касаткина (теннис) DiskiPlus casino онлайн DiskiPlus скачать букмекерскую контору DiskiPlus букмекерская контора фонбет DiskiPlus pin up casino buzz
#2390 Charlesgunnyhttp://filmkachat.ru
1×slot регистрация
Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. <a href=http://filmkachat.ru/>1 xslots рабочее зеркало</a> Лишь популярностью и знаменитые азартные заведения шансы разрешить себе выдавать бездепы повторяющий дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, коие возможно потратить в топовых аппаратах с высокой отдачей. <a href=https://yoomark.com/content/complete-guide-professional-3d-rendering-services>https://yoomark.com/content/complete-guide-professional-3d-rendering-services</a> Не стоит путать игру в демо и внедрение призов. В демонстрационном режиме игрок возможность расценить механику слота, сюжет и оформление. Но забава проводится на относительные кредиты, поэтому отсутствует основное ? чувство пыла. Активируя промокод или фриспины, заказчик как не тратит средства деньги на игровые автоматы, хотя возможность сорвать настоящий куш! 1×slots рабочее зеркало <a href=http://jrp.kr/bbs/board.php?bo_table=free&wr_id=191944>http://jrp.kr/bbs/board.php?bo_table=free&wr_id=191944</a> Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных призов принимаются достаточно высочайшие требования. Часто онлайн-казино рекомендуют отыграть бонусное поощрение до 100 раз в игровых автоматах. Например, случае игрок получил даром десять долларов, то нужно будет отыграть их, поставив 1 тысячу спинов по 1 баксу любой. Стоит отметить, собственно не все казино дают возможность играть на призы и не во всех увеселительных заведениях схожие верховодила для отыгрывания. Некоторые казино воспрещают выступать на призы в блекджек или ограничивают ставки до 5 %, что значительно наращивает в 10-ки раз число необходимых игр.
1×slots зеркало быструю регистрацию а также мгновенное
К примеру, игроку выдаются бесплатные свои в заведении в объеме пятидесяти или 100 $ (вейджер на которые составляет 100х). То есть, каждому новоприбывшему игроку выскакивает привлекающая картинка, кот-ая обещает выплату всех зачисленных фирмой средств. Не стоит обращать внимания на казино приз за регистрацию без депо с слишком немалый либо очень махонькой суммой бонусов, поэтому что, даже кропотливо изучив все обстоятельства, тут всего, будет какой-то подкол.Обычно бездепозитные промоакции от казино, прибывают на эл. Почту в деньки рождения или дни. В неких онлайн казино можно адресоваться в чат и как неизменному игроку, вероятно вам предложат бездепозитное предложение. <a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=34728>казино 1× slots официальный сайт</a> казино 1×slots <a href=http://pan-invest.com/bitrix/click.php?goto=http://optimakuban.ru/bitrix/redirect.php?goto=http://prahtarsk.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/h_POc9bf1D1>http://pan-invest.com/bitrix/click.php?goto=http://optimakuban.ru/bitrix/redirect.php?goto=http://prahtarsk.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/h_POc9bf1D1</a> В онлайне количество известных игорных площадок с красивыми акционными предложениями. Однако внимательно читать обстоятельства 10-ов предложений скором надоест, да и время отнимет большое. Поэтому наша команда подготовила ТОП-3 вебсайтов с наилучшими бездепозитными призами:При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие можно посвятить забаве в казино. 1×слот регистрация в 1×slots casino
1 xslots рабочее зеркало
Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских руб. В критериях акции указано, собственно вейджер бездепозитного приза х20. Поэтому, чтобы отыграть приз, игроку несомненно нужно сделать ставок на 35*20=700 рублей. <a href=http://forum.xpscenery.net/member.php?action=profile&uid=1460>http://forum.xpscenery.net/member.php?action=profile&uid=1460</a> Акции, посвященные календарным праздникам, бывают рассчитаны как на всех юзеров, например и на категории: к, презент на 8 марта девушкам-игрокам либо мужчинам на 23 февраля.К огорчению, нет. Почти все казино, требуют внесение хотя бы 1-го минимального депо для вывода выигрыша с бездепозитного приза. Также учитывайте, собственно исключить деньги разрешается только на ту платежную систему, с которой был сделан депо. 1хслотс зеркало на сегодня 3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать аппарат либо почту, указать персональную информацию;В большинстве заведений сделать это можно по адресу электронной почты, по номеру телефонного, через социальную сеть либо гугл-аккаунт.
1×слот регистрация в 1×slots casino
<a href=https://forum-macan.ru/viewtopic.php?t=3567>1× slots сайт</a> Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.Бонус за регистрацию в казино выдается только раз раз на 1-го игрока. Но посещают дополнительные промоакции, в коих бездепы расступаются для постоянных клиентов и эти подарки Вы сможете получить больше 1-го раза. Верификация важна для добавочной безопасности и подсобляет техподдержке выявить бонусхантеров и плутов. Кстати, рядах платформах выводы крупных сумм доступны лишь последствии подтверждения личности. 1×slot регистрация <a href=http://www.hdfeed.co.kr/bbs/board.php?bo_table=04_02&wr_id=219187>http://www.hdfeed.co.kr/bbs/board.php?bo_table=04_02&wr_id=219187</a> Обычно бездепозитные промоакции от казино, приходят на эл. Почту в деньки рождения или дни. В неких интернет казино возможно обратиться в чат и как неизменному игроку, вполне для предложат бездепозитное предложение.Бонус с зачислением денег на счет дает больше свободы действий. Пользователь сам подбирает, каким образом воспользоваться подаренными своими. Здесь также все работать ограничения на перечень дешевых игр, но обыкновенно эти рамки не например строги, как в промо с безвозмездными вращениями.
1×slot рабочее зеркало
Зарегистрироваться в казино по особой ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефона и электрическую почту). Для подтверждения номера аппарата нужно в личном профиле показать свой номер и нажать кнопку „Подтвердить номер телефона“, далее Вы получите sms-сообщение с кодом, который нужно ввести в подходящее поле. Для подтверждения электрической почты, перейти по интенсивной ссылке в письме от казино.Срок активации и время на отыгрыш. Зачисление денег или фриспинов случается при активации протяжении строго ограниченного периода, похожие притязания предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать бонус некоторое дней или в месяцов. Другие выдают крупную сумму за регистрацию, хотя время отыгрыша ограничивают несколькими часами с неоправданно высоким вейджером. Как только на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу последствии сего можно забыть заявку на вывод выигрыша. Кредиты прибыльно выделяются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом настоящих средств и выделяют вероятность почувствовать азарт. Во-вторых – можно насладиться любой азартной игрой доступной на сайте. В вашем распоряжении находятся автоматы, настольные приложение, видео-покер, Live-дилеры.Не желаете поиграть в азартные забавы, не рискуя средствами деньгами, хотя получая в все выплаты? Подобную вероятность предоставляют почти лучшие порталы с азартными развлечениями. В их количестве много честных и надежных интернет-казино на русском языке. Они завлекают свежих юзеров различными поощрительными мероприятиями, включая бездепозитные, или бесплатные призы. <a href=http://rosnum.ru/index.php?title=%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0%20%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA>http://rosnum.ru/index.php?title=%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0%20%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA</a> Выиграть реальные средства в казино не пополняя счет – сложно, но вполне. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными бонусами и начните играть на бонусные средства. По статистике из 10-ти заведений можно заработать маленькую необходимую денег за счет бонусных средств. 1×slot регистрация После получения бонуса вывод средств для посетителя несомненно недосегаем времени, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или чета месяцов. Выводить деньги игрок сможет только после отыгрыша.Мы делаем ударение на ключевых положениях верховодил, рассказываем о территориальных лимитированиях и кратко информируем о других акциях обговариваемого казино.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.skmecca.com/2011/04/14/leave-the-world-better-than-you-found-it/comment-page-15/#comment-126145>1хслотс мобильная версия зеркало</a>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=236454>1хслот зеркало</a>
<a href=http://www.infoknygos.lt/smforum/index.php?topic=80675.new#new>1×slots регистрация 1×slotscasino 56 online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Можно ли в одном интернет казино получить больше 1-го приза за регистрацию? Нет, например как в каждом онлайн казино есть управляла, к коим надо(надобно) держаться, не создавать 2 аккаута для получения призов, другому будет блокировка обоих аккаутов, не пытайтесь обмануть онлайн казино, приз за регистрацию выдаеться раз один 1 лицу. Далее потребуется отыграть вагер и вывести выигрыш. Игрокам без навыка крупно подфартило, они могут получить десятки подарков за одну регистрацию. Если не сумели получить Бездепозитный приз, не волнуйтесь. Обратитесь в онлайн чат, оператор поможет решить проблему.
#2391 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
За привлечение друга ? в рамках партнерской программы заказчик получает вознаграждение за привлечение новых юзеров.Обычно бездепозитные промоакции от казино, прибывают на эл. Почту в деньки рождения либо праздничные. В неких интернет казино можно адресоваться в чат и как неизменному игроку, вполне для предложат бездепозитное предложение. <a href=http://filmkachat.ru/>1×slots зеркало регистрация</a> После получения бонуса вывод средств для клиента будет недосегаем того, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или чета месяцов. Выводить средства игрок сможет только последствии отыгрыша.Доступ к подарку может раскрываться механически в введения промокода или обращения в саппорта вебсайта. В первом случае от юзера не потребуется никаких поступков. Бездеп с активацией по коду встречается почаще всего. Игроку нужно ввести совокупность символов в графе, которая имеет находиться в регистрационной форме в Личном кабинете. <a href=https://www.uscgq.com/forum/posts.php?forum=general&id=356095>https://www.uscgq.com/forum/posts.php?forum=general&id=356095</a> Денежные свои. Третий бонус за регистрацию без депозита – наличные. К раскаянию, лишь знаменитые и популярные клубы имеют уяснить деньги в руб. Либо баксах. С их подмогою вас насладиться каждой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед данным нужно исполненье конкретных критерий. 1×slots регистрация то дальше необходимо пройти <a href=https://audiomack.com/glavdorogadv2106>https://audiomack.com/glavdorogadv2106</a>
1×слотс казино
<a href=http://weeklywars.de/viewtopic.php?f=12&t=839&p=540592#p540592>1×slots официальный сайт зеркало</a> 1×slots сайт Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. <a href=https://bresdel.com/blogs/607151/Unveiling-the-Power-of-Product-Rendering-Transforming-Ideas-into-Reality>https://bresdel.com/blogs/607151/Unveiling-the-Power-of-Product-Rendering-Transforming-Ideas-into-Reality</a> Но разу не забывайте пристально читать правила роли в бонусных промоакциях. Если вы нарушите но бы одно условие, позже вы не можете уладить недоразумение с администрацией. 1×slos регистрация в 1×slots casino У любой игры свои притязания по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система засчитает любую ставку. В рулетке и покере сделать это гораздо сложнее. Именно потому так важно пристально разбирать условия получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой этой, то новенькие попросту «спустят приз на ветер».Максимальная ставка ? устанавливается в валюте счета и ограничивает размер ставки за один спин. В случае ее превышения бонус может быть аннулирован. Также в правилах может находиться запрет на размещение ставок определенного вида, к, по одинаковым шансам в рулетке (другими, на чет или нечет, красноватое или темное и т.д.).
1×slots зеркало этих способов предполагает регистрацию
Это один из основных показателей привлекательности дара. С завешенным коэффициентом в профессионалы не смогут выполнить условия по отыгрышу. И маловажно, как привлекательно смотрится предложение – бездепозитный приз казино в объеме $500 либо $1 000. Чтобы новенькие получше вдумались, собственно же такое вейджер, мы разберём на примере. <a href=https://online-learning-initiative.org/wiki/index.php/%D0%90%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0_%D0%A1%D0%B0%D0%B9%D1%82>https://online-learning-initiative.org/wiki/index.php/%D0%90%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0_%D0%A1%D0%B0%D0%B9%D1%82</a> Рассмотрим принцип его деянья на образце. Допустим, вы зарегались и возымели $10 not the slightest deposit bonus с вейджером х50. Это означает, что выигранные деньги возможно будет выводить не раньше, чем последствии как, как общая сумма ставок достигнет $500.Каждая игровая платформа выделяется критериями по получению и отыгрышу бездепов. В правилах детально расписаны кратковременные рамки, за коие надо(надобно) прокрутить вейджер. Также не запамятовывайте на наибольший объем ставки и наивысшую необходимую выплаты. С иной стороны, дабы получить бездепозитные бонусы казино, достаточно потратить не более 1 минуты. 1×slots регистрация 1×slots review live Подобные бонусы без депозита предоставляются на больше выгодных условиях. Зачастую они крупнее, а обстоятельства отыгрыша менее строгие.
1×slots рабочее зеркало
Бездепозитные призы начисляются лишь один раз. Не стоит раскрывать свежие аккаунты, дабы получить их повторно. Служба защищенности казино непременно выявит «левого» соучастника и заблокирует. Если посетитель выполнит нужные притязания, отыграет собственную ставку и решит вывести собственный выигрыш, то ему нужно учесть, что казино непременно востребует предоставить ксерокопии собственных документов, чтобы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои вывести не получится. <a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=578720#pid578720>1×slos регистрация в 1×slots casino</a> Подтвердите лицо, предоставив оператору казино свои паспортные данные. Инструкции обычно несложные, главное — конкретно им идти. Если написано, что «на фото обязаны быть заметны все четыре угла страницы паспорта» — устройте именно такое фото.Предложения с бездепозитными бонусами за регистрацию позволяют новым заведениям привлечь аудиторию на свой вебсайт. А игроки в свою очередь получают вероятность играть на настоящие деньги без депо в казино и заработать маленький стартовый капитал, кот-ый разрешается исключить на карту банка или электронный кошелек. 1×slots регистрация 1×slots casino c2d ru <a href=https://moolookoo.ru/content/sayt-s-igrovymi-avtomatami>https://moolookoo.ru/content/sayt-s-igrovymi-avtomatami</a> Прочитайте правила бонусной программки, какой хотите участвовать. Да, мы настоятельно рекомендуем устроить это до регистрации.
1× slots сайт
Высокая конкурентность в сегменте азартных игр мотивирует операторов привлекать клиентов разнородными промоакциями. Благодаря данному у гостей появляется вероятность получить призы в казино за регистрацию без депо. Воспользоваться таким предложением возможно, минуя процедуру внесения денег на игровой счет, просто активировав акк на сайте. Наш гид по бездепам поможет выбрать самую привлекательную бонусную программку, разузнать управляла получения такого гонорары и воспользоваться им с наибольшей выгодой.Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, all лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. <a href=http://kbszw.com/home.php?mod=space&uid=37798>http://kbszw.com/home.php?mod=space&uid=37798</a> Особую изюминку видео слотам присваивают оригинальные символы. С их появлением активируются разные призы. Вы сможете запустить дополнительный степень и прирастить сумму выигрыша. Есть знаки, коие замещают ненужные элементы и сами создают выигрышные комбо. Не стоит забывать и про бонус-тур. После каждого удачного спина есть шанс увеличить необходимую выигрыша в два либо хорошо раза. казино 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=135237>1х слотс зеркало регистрация в 1×slots casino</a>
<a href=http://amazon.rx22.ru/memberlist.php?mode=viewprofile&u=255>1×slot официальный сайт</a>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=129061>1× slots casino зеркало</a>
<a href=https://forums.scar-divi.com/topic/654120–1×slots-%D0%BA%D0%BB%D1%83%D0%B1%D1%831×slots-1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%BF%D0%B5%D1%80%D0%B5%D0%B9%D1%82%D0%B8-%D0%BD%D0%B0–1×slots/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вышеописанная первопричина и считается основным моментом, из-за которого операторы отдают доля своей прибыли на разные рекламные расходы и маркетинговые кампании. А самым действенным тут станут выступать именно бездепозитные призы казино 2022 с выводом за регистрацию.
#2392 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
официальные букмекерские конторы букмекерская контора скачать приложение <a href=https://rumafia.news/>скачиваемые казино</a> Валентина Матвиенко порно казино вход официальный сайт <a href=https://www.ossetia.tv/>Шевцова Татьяна Викторовна порно</a> 1×bet официальный 1×bet xyz pin up casino пин ап Набиуллина Эльвира Сахипзадовна порно new casino ев казино порно с Абрамченко Виктория Валериевна pinco casino
DiskiPlus букмекерская контора ставки DiskiPlus 1×bet скачать бесплатно <a href=https://www.diskiplus.ru>DiskiPlus win win casino</a> DiskiPlus porno Анастасия Янькова, боксерка DiskiPlus porno Юлия Пересильд <a href=https://www.diskiplus.ru>DiskiPlus Окладникова Ирина Андреевна порно</a> DiskiPlus порно с Евгений Малкин (хоккей) DiskiPlus porno Юлия Канакина DiskiPlus 1×bet телефон DiskiPlus порно с Бондаренко Анастасия Борисовна DiskiPlus порно с Юлия Ефимова DiskiPlus kent casino регистрация DiskiPlus casino скачать
#2393 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало
Если идет об неповторимых предложениях, возможность потребоваться регистрация в казино по ссылке с партнерского вебсайта.Верификация важна для дополнительной безопасности и помочь техподдержке выявить бонусхантеров и мошенников. Кстати, на платформах выводы крупных сумм доступны лишь в доказательства личности. <a href=http://filmkachat.ru/>1×slots casino online регистрация</a> Баланс игрока дополняется на соответствующую необходимую. К ней применяется вейджер, обозначенный в правилах промоакции. Вывести выигрыш возможно несомненно последствии того, как пользователь сделает требуемый размер ставок из собственных средств. В редчайших случаях бездеп работает в формате Free Play. На счет пользователя зачисляется крупная сумма, и предоставляется небольшой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по завершении этого периода сумма на счету несомненно превосходить изначальную, то разность возможно будет исключить либо использовать для последующих ставок.Шаг 5. Использование и отыгрыш. Бездеп обязан быть применен в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера. <a href=https://insta.tel/read-blog/115007>https://insta.tel/read-blog/115007</a> 1×slots официальный сайт скачать на айфон <a href=https://apk.tw/space-uid-6641294.html>https://apk.tw/space-uid-6641294.html</a> 4. Заберите презент. Чаще всего приз активируется незамедлительно в регистрации. Но случаются ситуации, когда надо(надобно) зайти в собственный офис или написать в службу.
1хслотс зеркало на сегодня
Обыкновенные бездепозитные призы в объеме от 3-х до двадцати долларов сделаны чтобы, чтобы, дабы в игры заходили все свежие и свежие игроки. Здесь, всего, несомненно лимитирование на максимальный выигрыш. Важно, дабы перед наименьшим вкладом был отключен бонус за 1-ое пополнение счета, и игрок не попадет на повторный вейджер. <a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=3405>скачать 1×slots на андроид мобильная версия</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots Доступные игры – В неких азартных забавах можно понизить математическое превосходство казино до нескольких 10-х процента. В их числе все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как правило, в этих играх ставки идут в зачет вейджера не полностью. Например, может предусматриваться лишь 50%. В неких играх бездепозитные бонусы вообщем невозможно отыгрывать.Каждый из бездепозитных бонусов без пополнения 2022 имеет свой конкретный вейджер для отыгрыша, например же в каждом казино он устанавливается персонально — где то он х55 а где-то х30, повторюсь всюду по разному! <a href=http://maps.google.mw/url?q=http://autorenter.ru/bitrix/rk.php?goto=http://twizzle-swizzle.ru/bitrix/redirect.php?goto=https://telegra.ph/Poshagovoe-rukovodstvo-po-uplate-nalogov-cherez-Sberbank-Onlajn-dlya-individualnyh-predprinimatelej-09–19>http://maps.google.mw/url?q=http://autorenter.ru/bitrix/rk.php?goto=http://twizzle-swizzle.ru/bitrix/redirect.php?goto=https://telegra.ph/Poshagovoe-rukovodstvo-po-uplate-nalogov-cherez-Sberbank-Onlajn-dlya-individualnyh-predprinimatelej-09–19</a> Ознакомьтесь с нашим списком наихороших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего списка и получите бездеп сразу. Хватайте лучшие бесплатные предложения ниже и выигрывайте большие деньги, не рискуя!Также есть онлайн-платформы азартных игр, коие используют раздачу бездепозитных призов в особые даты (как для казино, например и для игрока). Помимо сего, действующие игроки кроме имеют вероятность получить схожие бонусы за свою работа (к примеру, за увеличения значения либо за похожие заслуги). 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
1хслотс рабочее зеркало на сегодня
Бездепозитный бонус казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в данном и заключается основное различие. <a href=http://cse.google.com.ph/url?q=http://vismarket.ru/bitrix/redirect.php?goto=http://clients1.google.com.jm/url?q=https://telegra.ph/Nakazaniya-dlya-voditelej-publikuyushchih-informaciyu-o-narusheniyah-pravil-dorozhnogo-dvizheniya-v-socialnyh-setyah-09–24>http://cse.google.com.ph/url?q=http://vismarket.ru/bitrix/redirect.php?goto=http://clients1.google.com.jm/url?q=https://telegra.ph/Nakazaniya-dlya-voditelej-publikuyushchih-informaciyu-o-narusheniyah-pravil-dorozhnogo-dvizheniya-v-socialnyh-setyah-09–24</a> Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации презента необходимо доказать электрическую почту и привязать аппарат; 1×slots регистрация 1×slots casino 777 online Для верификации номера аппарата, в личном профиле выберите опцию „Подтвердить номер аппарата“ и введите в соответствующее поле код, приобретенный в sms-сообщении.С другой стороны, гораздо легче отобрать бездепозитные фриспины за регистрацию в казино и напрямик в начать вертеть барабаны в лучших слотах. Главная необыкновенность спинов в, собственно они предусмотрены для топовых автоматов. Удастся не только пройти вспомогательные раунды, но и прирастить необходимую выигрыша, заработать респины и внутриигровые презенты.
1×slots регистрация на 1хслотс
Получать информацию о самых прибыльных призах возможно без постоянного прогноза новостей казино. Мы взяли эту задачу на себя и постоянно следим за услугами операторов, выбирая лучшие из их. В данном разделе собраны последние бездепы, промокоды к ним и условия их активации. Список промоакций периодически пополняется. В топ вошли самые свежие бездепозитные бонусы за регистрацию в казино 2020, временные и закрытые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и другим аспектам. Если срок действия промоакции истек, она удаляется из списка.Эффективность бездепов в качестве рекламного инструмента расценили многие операторы. Малоизвестные площадки употребляют такие акции, дабы живо набрать базу. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны постоянных посетителей. Не все сайты, дающие презенты без депозита, рекомендованы к забаве. За симпатичным промоописанием имеют скрываться невыполнимые обстоятельства отыгрыша и подводные камешки. <a href=https://mit-bbs.com/viewtopic.php?t=287409>1×slots промокод при регистрации 2025</a> Перечисленные повыше главные характеристики сопровождают практически каждый бонус и являются стандартными для бездепозитных бонусных начислений в казино.Рассмотрим принцип его деянья на примере. Допустим, вы зарегистрировались и получили $10 not the slightest down payment bonus с вейджером х50. Это значит, собственно выигранные деньги возможно будет выводить не ранее, чем после как, как общая сумма ставок достигнет $500. Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, чтобы еще раз получить бесплатный бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ждет неизбежное санкция.Помимо остального, для вывода средств по бездепу необходимо внести на счёт собственный 1-ый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало вероятную сумму, после чего вывод средств будет доступен. 1х слот регистрация в 1×slots casino <a href=http://acceptablelosses.org/ifl/iflbb/memberlist.php?mode=viewprofile&u=153339>http://acceptablelosses.org/ifl/iflbb/memberlist.php?mode=viewprofile&u=153339</a> Важно, убедитесь никаких, собственно раньше не регистрировались в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи.Для проверки используются сканы паспортов, водительских водительских, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь обнаружен в попытке ввести вспомогательный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный перечень. При забаве на лицензионной площадке не опасаться указывать достоверную индивидуальную информацию (шифрование исключает утечку персональных данных).
1хслотс официальный сайт зеркало
Бездепозитный бонус за регистрацию в казино — это стартовый подарок в виде валютного начисления либо безвозмездных вращений для свежих игроков заведения, для получения которого не нужно заносить депо. Получить Бездепозитный бонус в онлайн казино дело двух кликов. Другой момент, отыграть рекламную и соблюсти правила и обстоятельства отыгрыша. Под правилами подразумевается не вагер, хотя и ограничения по наибольшей ставке. Мы разумеем, что в кино все ставят на зеро и выигрывают. Призываем не делать похожего. Перед активацией приза прочитайте правила. Узнайте следующие моменты: Условия получения дара, за регистрацию, за депозит и многое. Ограничения по максимальной ставке. Зачастую не выше 350 руб. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах возможно отыгрывать вагер. Можно вращать автоматы, а вагер будет стоять на месте. Поэтому принципиально знать, в каких играх возможно совершать кратность валютного оборота.Чтобы бездеп не был начислен на Ваш аккаунт, Вам не активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт автоматически, а Вы не планируете его применять, обратитесь в службу с пожеланием отменить бездепозитный бонус. <a href=http://www.samwootech.kr/bbs/board.php?bo_table=free&wr_id=346364>http://www.samwootech.kr/bbs/board.php?bo_table=free&wr_id=346364</a> 1×slots казино зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://radios-collector.com/viewtopic.php?f=7&t=71949>1× slots casino зеркало</a>
<a href=https://pbtur.com.br/users/jameshex>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.
#2394 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet скачать приложение porno Дарья Мороз <a href=https://kompromat1.online/>black russia казино</a> Радченко Светлана Юрьевна порно букмекерская контора фонбет официальный сайт <a href=https://slon-ru.com/>порно с Варвара Субботина</a> 7k casino скачать 1×bet слоты официальный сайт приложения букмекерских контор porno Илона Маркова, хоккеистка пин casino casino online зеркало 1win casino
DiskiPlus фильмы казино рояль DiskiPlus казино смотреть онлайн <a href=https://www.diskiplus.ru>DiskiPlus pin up casino скачать</a> DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz DiskiPlus casino betting <a href=https://diskiplus.ru>DiskiPlus почему казино</a> DiskiPlus kometa casino DiskiPlus casino на телефон DiskiPlus 1×bet слоты официальный сайт DiskiPlus casino скачать DiskiPlus лучшая казино DiskiPlus casino скачать DiskiPlus 1×bet 1
#2395 Charlesgunnyhttp://filmkachat.ru
1хслот 1хслотс регистрация перейти на 1×slots
Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие возникают у новичков.3. Подтвердить данные. В зависимости от клуба, нужно привязать телефон либо почту, указать персональную информацию; <a href=http://filmkachat.ru/>1×slots зеркало быструю регистрацию а также мгновенное</a> Максимальная ставка ? уточняется в еденице счета и ограничивает размер ставки за один спин. В случае ее превышения приз имеет быть аннулирован. Также в правилах может находиться запрет на размещение ставок определенного облика, например, по равным шансам в рулетке (другими, на чет либо нечет, красное либо темное и т.д. ).Когда речь идет о получении бездепозитных бонусов в казино, в первую очередь внимание на следующие условия: <a href=https://yoomark.com/content/complete-guide-professional-3d-rendering-services>https://yoomark.com/content/complete-guide-professional-3d-rendering-services</a> Фриспины предназначены для применения в видео слотах. Внимательно ознакомьтесь с условиями – часто их выдают на некоторые автоматы. В зависимости от клуба, у вас выйдет устроить определённое количество ставок. Кстати, продвинутые игорные жилища позволяют запускать любых «одноруких злодеев». 1×slot рабочее зеркало <a href=http://olis-nsk.ru/bitrix/redirect.php?goto=http://sexy-photos.net/o.php?link=http://cpo.by/bitrix/redirect.php?goto=https://teletype.in/@urist555/lfJAFs_c0na>http://olis-nsk.ru/bitrix/redirect.php?goto=http://sexy-photos.net/o.php?link=http://cpo.by/bitrix/redirect.php?goto=https://teletype.in/@urist555/lfJAFs_c0na</a> Ниже указан актуальный список законных казино в Беларуси с призами на первый депо. Вы сможете попасть на официальный вебсайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус.
1хслот зеркало сайта
<a href=http://www.airsoft44.com/forum/index.php?action=profile;u=11896>1×slots регистрацию процедура займет всего лишь</a> 1×slots промокод при регистрации 2025 Основное отличие в, что для получения бездепа не надо пополнять баланс в казино. Но кроме сего, есть ряд прочих различий:Не стоит путать игру в демо и использование призов. В демонстрационном режиме игрок может расценить механику слота, сюжет и оформление. Но забава проводится на условные кредиты, поэтому отсутствует главное ? ощущение азарта. Активируя промокод или фриспины, заказчик как не расходует средства деньги на игровые автоматы, но возможность сорвать настоящий куш! <a href=http://www.zghncy.cn/home.php?mod=space&uid=678545>http://www.zghncy.cn/home.php?mod=space&uid=678545</a> Доступность — бездепозитные призы в казино чаще всего предоставляются новым игрокам, хотя бывают случаи, когда бонус могут получить и действующие посетители.Прежде всего, не запамятовывайте регулярно заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом оценивают наиболее интересные предложения основных игорных порталов. 1хслот 1хслотс регистрация перейти на 1×slots Иногда в качестве одобрения за регистрацию имеют выдаваться билеты для роли в турнирах. Условия их проведения очень отличаются, потому мы советуем ознакомиться с каждым предложением отдельно.
1×slots коды
Любой выигрыш по ставке выше установленного лимита несомненно считаться недействительным. То есть ставка не несомненно засчитана при отыгрыше, а в случае выигрыша его сумма не поступит на счёт посетителя — итог игры будет всецело аннулирован.Объективные – размер бонуса, коэффициент и обстоятельства вейджера, надобность внесения депозита для вывода средств; Также учтите, что кое-какие игровые платформы сузивают список стран, которые готовы получить предложенный бездепозитный приз за регистрацию. К примеру, существуют онлайн-заведения, выдающие сходственные призы только жителям конкретных стран. К образцу, онлайн казино 777 Оригинал предоставляет бездепозитный приз лишь игрокам из России и стран СНГ. Или напротив, пичкают вознаграждением всех, кроме жителей некоторых государств (исходя из сего, по пристально изучать перечень, дабы впоследствии не появилось никаких вопросов и претензий). <a href=http://putevki.by/index.php?name=account&op=info&uname=squaredeity41>http://putevki.by/index.php?name=account&op=info&uname=squaredeity41</a> Чтоб получить большой выигрыш, подбирайте игровые автоматы с предельным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша.Выше мы дали полный набор самых новых и своевременных бездепозитных призов в онлайн казино без пополнения на 2022 год, где возможность воспользоваться любым ценным бездепозитным бонусом. 1×slots регистрация на сайте На бонусные начисления имеют быть установлены вспомогательные лимитирования, которые Вы не учли при отыгрыше. Пока приз полностью не отыгран — средства из казино не выводятся.Все бесплатные бонусы кажутся соблазнительными. Кто же категорически от возможности поиграть в онлайн-казино, не рискуя средствами, хотя получая выигрыши. Но далеко не все бездепозитные бонусы в равной степени презентабельны для рассудительного клиента.
1×slots сайт зеркало
<a href=http://forum.survival-readiness.com/viewtopic.php?t=267890>1×slots casino зеркало рабочее</a> Вейджер (wager) – это коэффициент, кот-ый показывает на какую необходимую необходимо сделать ставок, дабы вывести приз из казино. Пример: Вы получили за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода этого бонуса, Вам необходимо сделать ставок на необходимую: 500*70=3500 руб. Только полностью отыграв приз, Вы можете вывести собственный выигрыш.Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала резвые выводы. Фишка выплат что, нет, собственно довольно избрать платёжный инструмент и показать необходимую. В большинстве случаев средства зачисляются на электронные кошельки протяжении 15 мин., а на банковские карты – 1–3 трудящихся денька. Но эти рамки не смущают числе хайроллеров, потому коэффициенты на слотах дозволяют рассчитывать на крупные выигрыши, ну некоторых автоматах разыгрывается передовой джекпот.В большинстве заведений сделать это возможно по адресу электронной почты, по номеру аппарата, спустя социальную сеть либо гугл-аккаунт. 1×slots casino регистрация 1×slotscasino09k online <a href=http://forum.moto-fan.pl/uzytkownik-kennethcrilk>http://forum.moto-fan.pl/uzytkownik-kennethcrilk</a> Каждая игровая перрон выделяется критериями по получению и отыгрышу бездепов. В правилах отчетливо расписаны временные рамки, за которые надо(надобно) прокрутить вейджер. Также не запамятовывайте тему максимальный размер ставки и максимальную необходимую выплаты. С иной стороны, чтобы получить бездепозитные бонусы казино, достаточно израсходовать менее 1 минутки.Пoдтвepдить личнocть посетителя. Для успешного вывода средств, необходимо подтвердить лицо посетителя. Нa этaпe вepификaции пpoфиля, работники службы безопасности обязаны убедиться, что у игрока чем один акк. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не может исключить свой выигрыш, в у него несомненно несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы.
1×slots зеркало регистрацию более популярный вариант это
Если вы выбрали себе количество брендов которые для больше всего приглянулись, для неизменной забавы! Таких гемблеров казино очень любит и оценивает, за частую эти игроки становятся VIP игроками заведения, которым часто поступают выгодные предложения вид бонусов, например же туда заходит и бездепозитные. Фриспины. Бесплатные вращения предусмотрены для применения в видео-слотах. Внимательно читайте обстоятельства – они нередко выдаются для неких машин. В зависимости от клуба продоставляется создавать конкретное число ставок. Кстати, современные игорные жилища дают возможность заводить «одноруких бандитов».Иногда у гостей вебсайта шансы возникнуть проблемы при активации приобретенного промо-кода. В таких случаях, нужно адресоваться за поддержкой в службу «Support». Для получения ответа, непременно указывается конкретная первопричина обращения и подтверждается информация дополнительными экрана. Если сформировалась спорная ситуация, постоянно возможно адресоваться к главному регулятору либо контролирующему органу, выдавшему данному заведению лицензионный документ. <a href=http://ecsambo.org/index.php?subaction=userinfo&user=wastefulstudent>http://ecsambo.org/index.php?subaction=userinfo&user=wastefulstudent</a> В интернет-сети постоянно возможно найти списки более популярных и гарантированных поощрительных программ от знаменитых онлайн-казино.После требуется привнести идентификационный платёж. Это стращает начинающих больше всего. Нужно сделать наименьший депозит в 100–500 рублей. Таким образом служба безопасности увериться никаких, собственно платёжный способ принадлежит Вам. Данная процедура важна для обеспечения безопасности игровых счетов. Пример, Ваш акк взломают и выведут средства на собственный кошелёк. Будет очень неприятно. Поэтому верификация платёжной системы, это необходимый момент. 1хслотс рабочее зеркало Исходя из этого, просто не присутствует разумных оснований махнуть рукою на получение такового приза при регистрации. И, не, на подобный безвозмездной основе у вас есть все шансы выиграть деньги и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, нарекают бесплатными онлайн платформами для игр.
<b>Смотреть еще похожие новости:</b>
<a href=https://your-portal.at.ua/forum/35–373–6#88235>1 хслот регистрация в 1×slots casino</a>
<a href=https://bans.org.ua/index.php?topic=122842.new#new>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<a href=https://smm-seo.ru/members/rabofreeol.4209/>1×slots зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам запрещено начислять бонусы посетителям, не имеющим валютных средств на счете. Мы предлагаем рассмотреть актуальные бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ. Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, solid зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.
#2396 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
cometa casino Крючкова Полина Викторовна порно <a href=https://glvk.guru/>1×bet на андроид</a> Елизавета Боярская porno Светлана Ходченкова <a href=https://vestnik-jurnal.com/>ап казино</a> пин ап казино porno Катерина Шпица лучшие онлайн казино часы казино казино вход суть казино казино
DiskiPlus 1×bet DiskiPlus сколько казино <a href=https://diskiplus.ru>DiskiPlus какие казино</a> DiskiPlus букмекерские конторы pin DiskiPlus порно с Георгий Джикия (футбол) <a href=https://diskiplus.ru>DiskiPlus casino играть</a> DiskiPlus скачать сайт букмекерской конторы DiskiPlus Любимова Ольга Борисовна порно DiskiPlus яндекс игры казино DiskiPlus порно с Дронова Александра Викторовна DiskiPlus сколько казино DiskiPlus casino зеркало сегодня DiskiPlus винлайн букмекерская контора официальный
#2397 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать 1×bet на андроид почему в казино нет часов <a href=https://sovsekretno.net/>скачать casino на андроид</a> casino андроид r7 casino <a href=https://sovsekretno.net/>букмекерская контора леонов</a> про казино Александра Бортич почему в казино нет окон casino вход Манилова Алла Юрьевна порно яндекс игры казино porno Екатерина Ефременкова, шорт-трекистка
DiskiPlus порно с Владимир Минеев (ММА) DiskiPlus суть казино <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet зеркало слоты</a> DiskiPlus пин ап casino pin up top DiskiPlus букмекерская контора фонбет <a href=https://diskiplus.ru/>DiskiPlus casino рабочее зеркало</a> DiskiPlus 1×bet зеркало рабочее на сегодня DiskiPlus casino промокод DiskiPlus фреш казино DiskiPlus casino играть DiskiPlus Разуваева Ксения Денисовна порно DiskiPlus порно с Бондаренко Анастасия Борисовна DiskiPlus кент казино
#2398 1win_edmnhttp://1win12.com.ng
1win home <a href=https://www.1win12.com.ng>https://www.1win12.com.ng</a> .
#2399 Charlesgunnyhttp://filmkachat.ru
1х слотс зеркало регистрация в 1×slots casino
Каждый новичок и умелый игрок грезят скоро стартануть и начать делать реальные ставки. Для сего достаточно арестовать презент, за кот-ый не нужно уплачивать. В зависимости от игровой платформы, нужно создать профиль, привязать email или телефон. После этого администрация начислит щедрое вознаграждение вид бесплатных вращений либо виртуальных кредитов.Почти все игровые клубы требуют свидетельство контактных данных игрока для получения бездепозитного приза. <a href=http://filmkachat.ru/>1×slots регистрация то дальше необходимо пройти</a> Воспользоваться бездепом возможно не во всех игровых автоматах: казино и тут устанавливает ограничение для клиентов. Конечно, это можно посчитать некоторым неудобством для игрока, но справедливости отметить, собственно выбор автоматов всё одинаково остаётся довольно наибольшим.Максимальный размер ставки, который невозможно превосходить пока приз не несомненно полностью отыгран. В случае нарушения сего верховодила, приз и выигрыш с него станут аннулированы. <a href=https://www.arrl.org/forum/topics/view/4345>https://www.arrl.org/forum/topics/view/4345</a> 1хслотс мобильная версия зеркало <a href=http://altajska.cz/forum/user/2643-daffyyacht26>http://altajska.cz/forum/user/2643-daffyyacht26</a>
1хслотс казино зеркало
Будьте внимательнее при ознакомлении с правилами во избежание появления конфликтных обстановок с казино, когда после отыгрыша бездепа вас не дадут исключить крупную необходимую выигрыша. 1×slots рабочее зеркало Фриплей-бонусы. Бонусы за безвозмездную игру есть лишь в неких клубах. Они зачисляются незамедлительно в творения профиля и действуют непродолжительное время. Если у вас нет медли потратить свои, они просто закончатся. Что дотрагивается времени, как бонусы срабатывают в течение одного часа.Иногда у посетителей вебсайта могут возникнуть проблемы при активации приобретенного промо-кода. В этих случаях, нужно адресоваться за помощью в службу «Support». Для получения ответа, обязательно указывается конкретная первопричина обращения и подтверждается информация дополнительными снимками. Если сложилась спорная ситуация, всегда возможно обратиться к главному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ. <a href=http://plethe.com/bbs/board.php?bo_table=free&wr_id=25501>http://plethe.com/bbs/board.php?bo_table=free&wr_id=25501</a> 1 х слотс зеркало
1 x slots
Казино выводит средства только на что, эту платежную систему, с котрой был сделан депо. То есть, для вывода бездепозитного бонуса, Вам поначалу нужно пополнить счет. В некоторых клубах узкий список способов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с этих платежных методов, которые доступны для вывода.В лицензионных бездепозитных казино выступать в азартные забавы действительно безопасно. Наличие лицензии одобряет что, этот прецедент, что клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP. <a href=http://t20suzuki.com/phpBB2/profile.php?mode=viewprofile&u=5408>http://t20suzuki.com/phpBB2/profile.php?mode=viewprofile&u=5408</a> Срок активации и время на отыгрыш. Зачисление средств либо фриспинов случается при активации протяжении требовательно ограниченного периода, схожие требования предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать бонус количество дней либо даже месяцов. Другие выдают солидную сумму за регистрацию, хотя время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером.К раскаянью, нет. Почти все казино, требуют внесение хотя бы 1-го малого депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, что исключить деньги разрешено только на что, эту платежную систему, с коей был изготовлен депозит. 1×slots рабочее зеркало
1×slots зеркало рабочее на сегодня
Таким образом онлайн казино получает вероятного игрока. Возможно в или настоящем он захотит поиграть на средства средства. Так работают бездепозитные призы в онлайн казино. Здесь очень подходит выражение, бесплатные сыр посещает лишь в мышеловке. Начинающие игроки могут не осознавать опасность пыла. Однако времени осознания делается больше. Это тема для отдельного обсуждения.Прочитайте верховодила бонусной программы, в хотите участие. Да, мы настоятельно рекомендуем устроить это до регистрации. <a href=https://americanrabbit.org/viewtopic.php?f=2&t=2539>1×slots регистрация то дальше необходимо пройти</a> Верификация необходима для дополнительной защищенности и помочь техподдержке выявить бонусхантеров и жуликов. Кстати, на платформах выводы солидных сумм доступны только после доказательства личности. Также бывают случаи, когда казино начисляет оговоренный приз в регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам.Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных призов принимаются довольно высокие требования. Часто онлайн-казино советуют отыграть бонусное одобрение до 100 один в игровых автоматах. Например, если игрок получил безвозмездно десять долларов, то нужно будет отыграть их, поставив одну тысячу спинов по 1 доллару каждый. Стоит обозначить(означить), собственно не все казино дают возможность выступать на бонусы и не во всех развлекательных заведениях схожие управляла для отыгрывания. Некоторые казино воспрещают выступать на призы в блекджек или ограничивают ставки до 5 %, что существенно наращивает в десятки один число нужных игр. 1×slots casino online регистрация <a href=https://maps.google.ro/url?q=https://doctorlazuta.by/>https://maps.google.ro/url?q=https://doctorlazuta.by/</a> Зачастую бездепозитные призы казино для игры предлагаются различными заведениями азартных игр виде рекламных акций либо в целях привлечения к себя свежих игроков. Для бездепозитных бонусов в казино 2022 игроку не пополнять счет до момента вывода желаемых средств.
1×slots официальный регистрация
Выбрать казино с бездепозитным бонусом. У нас на сайте представлен список лучших онлайн казино, коие предлагают своим игрокам великодушные призы за регистрацию.При исполненьи критерий отыгрыша и верификации, средства с бонусного счета переводятся на главной и имеют быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции зависят от выбранной платежной системы. <a href=https://www.tuhuwai.com/home.php?mod=space&uid=112971&do=profile&from=space>https://www.tuhuwai.com/home.php?mod=space&uid=112971&do=profile&from=space</a> Бонус за регистрацию в казино без депозита с выводом денег нужно отыграть. Зачастую для отыгрыша возможность понадобиться сделать ставки на необходимую, в количество десятков раз превышающую необходимую бонуса или выигрыша.Итак, дабы бесплатные бонусные кредиты превратились в настоящие деньги, которыми возможность распоряжаться по собственному усмотрению, их надо(надобно) отыграть. Вейджер следует уточнять в правилах онлайн-казино. 1×slots casino online регистрация Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.
<b>Смотреть еще похожие новости:</b>
<a href=http://naturetour.ru/personal/profile/index.php?PAGE_NAME=profile_view&UID=2416>1×slots рабочее зеркало на сегодня</a>
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=3600>1×slots регистрация 1×slotscasino 56 online</a>
<a href=https://sadhaka.nl/forum/viewtopic.php?t=103498>1×слот регистрация в 1×slots casino</a>
<a href=http://check2go.net/my-account/>1хслотс рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен список наихороших онлайн казино, которые предлагают своим игрокам великодушные бонусы за регистрацию. Условия имеют разниться друг от приятеля. Но такой приз возможность быть использован только для игрового процесса – приобретенные на счет финансы до того, как станут отыграны, исключить невероятно.
#2400 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casinos winning casino buzz <a href=https://strelochnik.com/>1×bet xbet xyz</a> кент казино casino рабочее зеркало <a href=https://res-publika.com>мелбет букмекерская контора</a> Ирина Горбачева porno Анастасия Янькова, боксерка pin up casino пин ап casino приложения казино фильм смотреть онлайн порно с Александр Большунов (лыжные гонки) порно с Афонина Марина Игоревна
DiskiPlus cat casino DiskiPlus pinco casino <a href=https://diskiplus.ru>DiskiPlus казино сочи</a> DiskiPlus online casino 7k DiskiPlus 7k casino бонус <a href=https://www.diskiplus.ru/>DiskiPlus casino riobet</a> DiskiPlus casino com DiskiPlus 1×bet зеркало слоты 1×bet xyz DiskiPlus casino зеркало сегодня DiskiPlus казино смотреть онлайн DiskiPlus скачать casino на андроид DiskiPlus porno Александра Степанова, фигуристка DiskiPlus букмекерская контора фонбет официальный сайт
#2401 RobertHichttps://mit-sk.ru/
Аренда спецтехники и грузоперевозки от Компании МИТ
Базируясь в Москве на Озерковском переулке, 12, компания предоставляет полный спектр услуг для задач строительства и перевозок. Готовность оперативно реагировать на заявки обеспечивается парком свыше 150 единиц спецтехники, каждая из которых проходит регулярное ТО.
Характеристики сервиса:
Оперативность: Подача спецтехники в течение 2 часов после оформления заказа Дежурные бригады механиков 24/7 Возможность доставки техники собственными эвакуаторами
Рентабельность: Фиксированные расценки без доплат в выходные Специальные условия при длительном сотрудничестве Возможность поминутной оплаты при краткосрочном использовании
Технические характеристики доступной техники:
Краны-манипуляторы: Грузоподъемность от 3 до 12 тонн Вылет стрелы максимум 22 метра Срок прибытия техники – 2 часа
Экскаваторы-погрузчики: Глубина копания до 6.5 метров Возможность перемещения со скоростью 41 км/ч Объем ковша максимальный 1.3 м?
Грузовой транспорт: Возможность перевозки грузов весом 0.5–20 тонн Грузовой объем в пределах 2–92 кубометров Многовариантная загрузка
Ключевые преимущества: Только новая техника актуальных моделей Полное документальное сопровождение согласно законодательству РФ Система работы с НДС и гибкие условия оплаты Полисы страхования на все виды услуг Собственный штат опытных водителей-операторов
Польза от работы с нами: Экономия времени за счет сокращения простоев 40% Надежная работа всей техники Экономия до 30% бюджета по сравнению с содержанием собственного парка Детальная отчетность по всем операциям
Специалисты по логистике разрабатывают лучшие маршруты, включая согласование с ГИБДД при необходимости. Личный специалист отвечает за реализацию проекта.
#2402 zaimpodptskazanbuthttps://avtolombard-11.ru/kazan.html
ломбард займ под птс <a href=https://avtolombard-11.ru/kazan.html>avtolombard-11.ru/kazan.html</a> кредит под залог машины
#2403 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
реального казино porno Юлия Канакина, скелетонистка <a href=https://th-royalgclub.com/>сайт казино вход</a> порно с Максим Глушенков (футбол) про казино <a href=https://www.ossetia.tv/>порно с Арина и Дина Аверины, гимнастки</a> рабочее казино порно с Александр Головин (футбол) букмекерские контора ап 7k casino официальный сайт 1×bet официальный win win casino порно с Петр Ян (ММА)
DiskiPlus скачать pin casino DiskiPlus игры казино <a href=https://diskiplus.ru/>DiskiPlus автомат казино</a> DiskiPlus казино рояль смотреть DiskiPlus porno Алена Косторная (фигурное катание) <a href=https://www.diskiplus.ru>DiskiPlus букмекерская контора ставки</a> DiskiPlus кент casino DiskiPlus pin casino зеркало DiskiPlus Скоробогатова Ольга Николаевна порно DiskiPlus казино рублях DiskiPlus up casino DiskiPlus 1×bet телефон DiskiPlus порно с Дронова Александра Викторовна
#2404 1win_aqSahttp://familyclub.borda.ru
1вин войти <a href=http://familyclub.borda.ru/?1–6–0–00002163–000–0–0–1743051813/>http://familyclub.borda.ru/?1–6–0–00002163–000–0–0–1743051813/</a> .
#2405 Charlesgunnyhttp://filmkachat.ru
1хслот официальный сайт зеркало
Онлайн-казино с бездепозитными призами ставят клиентам обстоятельства для пользования бездепами, поэтому перед участием в промоакции лучше тщательно ознакомиться со всеми правилами и нюансами промоакции. Условия имеют касаться получения бонуса, его использования и следующего вывода денежных средств когда выигрыша. <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> <a href=https://linktr.ee/kalinka0588>https://linktr.ee/kalinka0588</a> Диапазон ставок, которые вправе устроить игрок, того лимитирован. Обычно назначать можно маленькую необходимую — около 10–30 рублей за одно вращение. 1хслотс регистрация в 1×slots casino <a href=http://xsyywx.com/home.php?mod=space&uid=106903>http://xsyywx.com/home.php?mod=space&uid=106903</a>
1×slots официальный сайт, скачать
Выполнив все требования оператора, заказчик возможность оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем не более суток. Если дополнительно потребуется пройти функцию верификации, то срок возрастает до 1–2 рабочих дней. Для перевода применяются банковские приборы и электрические платежные системы. Второй метод подходит превосходнее, так как большинство транзакций такой осуществляются моментально. В связи со специфичностью функционирования банков обработка платежей возможность взятьвдолг(взятьвзаймы) до нескольких трудящихся дней.Прочитайте управляла бонусной программки, в желаете принять. Да, мы безотступно советуем сделать это до регистрации. <a href=https://chasingadream.rpginitiative.com/showthread.php?tid=139989>рабочее зеркало 1×slots</a> 1×slots на любой вкус как пройти регистрацию Новички не обожают незамедлительно же заносить депозит. Это обосновано неименьем опыта и сомненьем. К счастью, наши возможно получить бездепозитный бонус за регистрацию в казино. Неважно собственно начисляет система – фриспины либо кредиты. В всяком случае вы не рискуете собственными сбережениями. Это замечательная возможность запустить понравившийся видео разъем или же испытать удачу в настольных забавах. <a href=http://www.xn–9i2bz3bx5fu3d8q5a.com/bbs/board.php?bo_table=free&wr_id=926848>http://www.xn–9i2bz3bx5fu3d8q5a.com/bbs/board.php?bo_table=free&wr_id=926848</a> 1×slots казино зеркало Риск-игра по равным шансам – Также казино может воспрещать выполнять обстоятельства по отыгрышу с помощью раунда на удвоение, который предлагается в слотах, видео-покере и некоторых других забавах.Призовые начисления без депо могут предоставляться для роли в турнирах интернет казино. Потратить перечисленные средства возможно исключительно масштабах этой промоакции. Условия их проведения содержат лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться этим предложением, чем изучить его управляла.
1×slots подтвердит вашу регистрацию если говорить
После получения приза вывод средств для посетителя будет недосегаем до, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или чета недель. Выводить средства игрок может только в отыгрыша. Для подтверждения электронной почты, просто перейдите по интенсивной ссылке в послании, приобретенном от игрового заведения. <a href=http://fh3809kd.bget.ru/index.php?name=account&op=info&uname=mindlessmagic50>http://fh3809kd.bget.ru/index.php?name=account&op=info&uname=mindlessmagic50</a> Как управляло, при выводе финансов, от играющего потребуется лишь сделать минимальный лепта чтобы, чтобы, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом собственный счет.Сроки активации приза уточняются каждым казино, хотя почаще всего они не превосходят недели с момента получения. Игроку непременно нужно использовать бездеп на обозначенного срока, в ином случае приз просто исчезнет. Каждый бонус возможно получить лишь раз раз, поэтому если не применять бездеп в срок, у игрока не несомненно второго шанса им пользоваться. 1×слотс казино Выше мы предоставили глубокий комплект самых новых и своевременных бездепозитных призов в онлайн казино без пополнения на 2022 год, где продоставляется пользоваться любым ценным бездепозитным бонусом.
1×slots регистрация то дальше необходимо пройти
<a href=https://karakol.com.kg/user/Jameskef/>1× slots сайт</a> При регистрации в том или ином интернет игральном заведении — для дается раз шанс испытать свою удачу не внося свои монеты. Замечу что такую поощрительную услугу предоставляют не все интернет игровые площадки, а только щедрая половина из них. Которые мы подготовили для Вас в нашем списке. Oтыгpaть приз с обозначенным вeйджepом, для этого необходимо сдeлaть cтaвoк нa cумму, превышающую объем бонуса в количество один. 1×slot зеркало рабочее регистрации на телефон придет <a href=https://images.google.si/url?q=https://doctorlazuta.by/>https://images.google.si/url?q=https://doctorlazuta.by/</a>
1×slots официальный зеркало
Однако далеко не все ресурсы предлагают своим клиентам бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено поощрение на 1-ый депозит в размере 100–200%. Это замечательная вероятность преумножить банкролл, прирастить время, проведённое за игрой и шансы сорвать большой куш.Казино выделяет возможность заработать и исключить реальные средства на бездепозитных бонусах. Обычно, это малозначительная сумма, которую казино может для разрешить подарить игроку. На странице представлены бездепозитные бонусы за регистрацию в казино редкая заслуга за которой гонятся все игроки как новенькие, так и мастера. Мы тоже уделяем большое внимание на наличие призов при формирование рейтинга казино на средства. Бездепозитный приз это возможность выступать даром и выиграть настоящие средства.Обычно для получения призов без депозита, казино выдвигает приклнные и вполне выполнимые обстоятельства, хотя есть ряд поступков коие воспрещены и шансы стать досадные последствия: <a href=http://armhleb.ru/index.php?subaction=userinfo&user=zanymadness65>http://armhleb.ru/index.php?subaction=userinfo&user=zanymadness65</a> 1×slots официальный сайт скачать на айфон Вейджер не более х30–35 является применимым. Опытные игроки заявляют, что с этим вейджером реально остаться в плюсе, в правильно подойти к выбору игрового аппарата.
<b>Смотреть еще похожие новости:</b>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=111532&result=reply>1× slots официальный</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В количестве случаев бесплатные призы начисляются в кредитах, которые нельзя незамедлительно вывести со счета. Прежде их нужно отыграть по установленным правилам. Эти притязания принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже. Помните, собственно в неких забавах сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных играх только от 5% до 50% суммы ставки считаются как отыгранные деньги, в то время как в слотах идет в зачет все 100% суммы.
#2406 Charlesgunnyhttp://filmkachat.ru
1 x slots casino
Осталось выбрать казино с бонусом за регистрацию и создать профиль. После активации презента выигрыш зависит от Фортуны и навыков. <a href=http://filmkachat.ru/>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a> <a href=https://linkpop.com/kalinka0588>https://linkpop.com/kalinka0588</a> Когда идет о валютных призах, казино постоянно устанавливают обстоятельства вейджера, которые нужно выполнить, дабы вывести выигрыш. casino 1×slot <a href=https://popcporn.net/user/FrankNig/>https://popcporn.net/user/FrankNig/</a> Максимальный размер ставки, который нельзя превосходить пока приз не будет полностью отыгран. В случае нарушения этого управляла, бонус и выигрыш с него будут аннулированы.
1×slots casino регистрация 1×slotscasin online
1×слотс казино Диапазон ставок, коие вправе устроить игрок, также лимитирован. Обычно ставить можно небольшую сумму — в 10–30 рублей за одно вращение. <a href=https://www.efunda.com/members/people/show_people.cfm?Usr=Dsartru0906>https://www.efunda.com/members/people/show_people.cfm?Usr=Dsartru0906</a> Для получения выигрыша требуется выполнить условия казино. Чаще всего игроку необходимо поставить конкретную необходимую, но теснее из собственных денег. Она рассчитывается из совместного размера выигрыша за все время использования бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, в пользователь выиграл 1000 рублей, а множитель сочиняет х30, исключить средства возможно будет, сделав ставки на 30 000 руб.Не стоит путать забаву в демо и использование призов. В демонстрационном режиме игрок возможность оценить механику слота, сюжет и оформление. Но забава проводится на условные кредиты, потому отсутствует главное ? чувство азарта. Активируя промокод либо фриспины, заказчик как не расходует свои средства на игровые автоматы, но имеет сорвать настоящий куш! 1×slots казино зеркало Бездепозитный приз предоставляется новенькому игроку за конкретные действия. Часто презент вид средств либо фриспинов выдается за регистрацию, спасибо чему пользователь получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.Наличие у игрока 2 аккаунта. Запрещено создавать некоторое профилей для неоднократного получения бездепов.
1хслот зеркало сайта
Мы подготовили список, где есть практически животрепещущие и новые бездепозитные бонусы казино, которые продоставляется получить безвозмездно. Для наших юзеров есть особые предложения неповторимые бонусы, которые вы нигде не отыщите, их мы обозначили специальной красной плашкой «Exclusive».Активация валютного гонорары происходит автоматически после творения профиля либо применения промокода. Иногда операторы предъявляют дополнительные требования: подписаться на странички казино в социальных сетях либо на рассылку рекламных извещений, скачать и ввести дополнительный софт и т.д. Фриспины без депозита либо вспомогательные средства посодействуют поближе познакомиться с игровой платформой и её функциями. За счёт презентов возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям ради игры напротив живых крупье.Варианты выигрыша в от Вашей удачи и условий игорного портала. Выше мы сказали, собственно некоторые бездепозитные призы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются и, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность современных игр на средства, можно выиграть невероятные суммы. Сегодняшние игровые автоматы либо видео слоты, как их называют. Могут выдавать солидные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000. <a href=https://www.ixbt.com/live/profile/316224/>https://www.ixbt.com/live/profile/316224/</a> Для отыгрыша бонуса казино обязывает игрока сыграть на необходимую, в количество раз превосходящую сумму полученного бонуса — тут выгода компании явна. 1×slot регистрация На нашем веб-сайте Вы найдете перечень своевременных новых бездепозитных призов в казино 2022 года. Также, есть много эксклюзивных предложений, которые доступны лишь гостям нашего сайта в регистрации по нашей ссылке или активации специального промокода.В лицензионных бездепозитных казино играть в азартные игры вправду неопасно. Наличие лицензии подтверждает тот факт, собственно клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP.
1×slots регистрация на официальном сайте
Зарегистрироваться в казино по особой ссылке или с бонусным кодом. Подтвердить контактные данные (номер аппарата и электронную почту). Для доказательства номера аппарата нужно в собственном профиле указать свой номер и надавить кнопку „Подтвердить номер аппарата“, дальше Вы получите sms-сообщение с кодом, кот-ый необходимо ввести в соответствующее фон. Для доказательства электронной почты, перебежать по интенсивной ссылке в письме от казино.Бездепозитные призы за регистрацию в игровых автоматах для хозяев онлайн-казино являются частью рекламной кампании, направленной на повышение аудитории вебсайта. Так они продвигают свои бренды и завлекают свежих посетителей. Как лишь получите бездеп в казино, всё точно не забывайте инспектировать электрическую почту. Некоторые игорные клубы непрерывно веселят активных гэмблеров приятными бонусами. Чаще всего получить подарок возможно в преддверии праздника, на день рождение, за привлечение друга. А того распространённым бонусом является надбавка к депозиту. Нужно не восполнить счёт, и азартное заведение увеличит его на 50–100%. Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного приза. 1×slots официальный сайт, скачать <a href=https://forum.eliteshost.com/member.php?action=profile&uid=8200>https://forum.eliteshost.com/member.php?action=profile&uid=8200</a>
1×slots зеркало регистрация то дальше необходимо пройти
Так что можете смело региться без всяких размышлений. Фортуна сейчас точно на вашей стороне. Не страшитесь, так последствие какого или ущерба Вам совершенно не угрожает. С такими бонусами как без пополнения, Вы остаетесь лишь в плюсе, хотя не как не в минусе.Бонус с зачислением денег на счет дает больше свободы действий. Пользователь сам избирает, каким образом распорядиться подаренными средствами. Здесь также шансы действовать лимитирования на перечень доступных игр, хотя обыкновенно эти рамки не например строги, как в промо с безвозмездными вращениями. <a href=http://kick.gain.tw/viewthread.php?tid=4441524&extra=>http://kick.gain.tw/viewthread.php?tid=4441524&extra=</a> Верификация аккаунта. Лучше подтвердить лицо сразу после регистрации, дабы позже не было проблем с выводом денег. Верификация имеет проходить 2-мя способами: 1× slots сайт Баланс игрока дополняется на соответствующую необходимую. К ней используется вейджер, обозначенный в правилах акции. Вывести выигрыш можно несомненно последствии как, как юзер сделает требуемый размер ставок из собственных средств. В редчайших случаях бездеп работает в формате Free Play. На счет пользователя зачисляется большая сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по окончании сего периода сумма на счету будет превосходить изначальную, то разницу возможно будет исключить либо использовать для последующих ставок.Также учтите, собственно некоторые игровые платформы сужают список стран, которые способны получить предложенный бездепозитный бонус за регистрацию. К примеру, есть онлайн-заведения, выдающие похожие призы лишь жителям конкретных стран. К примеру, онлайн казино 777 Оригинал дает бездепозитный приз лишь игрокам из России и государств СНГ. Или наоборот, пичкают вознаграждением всех, кроме обитателей неких государств (исходя из этого, по пристально учить список, чтобы потом не появилось никаких вопросов и жалоб).
<b>Смотреть еще похожие новости:</b>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=141764>1хслот официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины – безвозмездные вращения с фиксированной ставкой, которые можно применять в определенных игровых автоматах. Доступные забавы – В некоторых азартных забавах можно снизить математическое превосходство казино до нескольких 10-х процента. В их числе многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как правило, в этих забавах ставки идут в зачет вейджера не полностью. Например, возможность учитываться только 50%. В некоторых играх бездепозитные призы вообщем нельзя отыгрывать.
#2407 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino официальный сайт porno Елизавета Туктамышева <a href=https://slon-ru.com/>1×bet слоты 1×bet top</a> кент casino 1win букмекерская контора <a href=https://rucriminal.info/>Мухтиярова Елена Вячеславовна порно</a> casino ru 1×bet 1 сайт букмекерской конторы 1×bet 1 1×bet зеркало xbet xyz bet casino casino играть
DiskiPlus казино рулетка DiskiPlus пина букмекерской конторы <a href=https://www.diskiplus.ru/>DiskiPlus игры казино</a> DiskiPlus балтбет букмекерская контора DiskiPlus вавада казино <a href=https://diskiplus.ru>DiskiPlus порно с Дарья Касаткина (теннис)</a> DiskiPlus официальные букмекерские конторы DiskiPlus скачать букмекерскую контору на андроид DiskiPlus pin up casino top top DiskiPlus 1×bet вход DiskiPlus официальные букмекерские конторы скачать DiskiPlus casino скачать DiskiPlus Анна Михалкова
#2408 Charlesgunnyhttp://filmkachat.ru
casino 1×slot
Бездепозитный бонус казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в этом и заключается главное различие.Бонусные деньги – небольшая сумма средств для старта в новом казино. На бонусные деньги, обычно разрешено выступать во все игры, кроме слотов с прогрессивным джекпотом и игр из раздела exist casino. <a href=http://filmkachat.ru/>1хслот зеркало сайта</a> Поспешите зарегистрироваться на официальном сайте Клубника, чтобы быстро получить 33 безвозмездных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, бывает реальный шанс победу!Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются незамедлительно после творенья профиля и активны непродолжительное время. Если не успеете потратить средства, они попросту сгорят. Касаемо медли, правило бонусы активны протяжении часа. <a href=https://telegra.ph/Walmarts-battery-return-policy-03–13>https://telegra.ph/Walmarts-battery-return-policy-03–13</a> Фриспины начисляются по конкретной ставке. После их активации игроку необходимо запустить разъем и увериться, собственно в нем отображаются безвозмездные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода последствии отыгрыша определяется оператором и редко превышает 5 000 руб.Подтверждение персональной информации. Все казино просят от клиента пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и присутствие у пользователя других аккаунтов (мультиаккаунт запрещен). 1×slots casino регистрация 1×slotscasin online <a href=https://kcapa.net/bbs/board.php?bo_table=free&wr_id=1940833>https://kcapa.net/bbs/board.php?bo_table=free&wr_id=1940833</a>
1×slots регистрация на 1хслотс
1× slots casino зеркало В большинстве заведений устроить это возможно по адресу электронной почты, по номеру телефонного, через социальную сеть либо гугл-аккаунт.Получать информацию о самых выгодных бонусах можно без неизменного мониторинга новостей казино. Мы брали данную задачку на себя и непрерывно смотрим за предложениями операторов, избирая наилучшие из них. В этом разделе собраны заключительные бездепы, промокоды к ним и обстоятельства их активации. Список акций регулярно дополняется. В топ зашли самые новые бездепозитные призы за регистрацию в казино 2020, кратковременные и замкнутые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и критериям. Если срок деяния акции истек, она удаляется из перечня. <a href=http://womans-days.ru/user/TravisAlibe/>http://womans-days.ru/user/TravisAlibe/</a> Однако далековато не все ресурсы предлагают своим посетителям бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено одобрение на 1-ый депо в объеме 100–200%. Это отличная возможность преумножить банкролл, прирастить время, проведённое за игрой и шансы сорвать большой куш. 1×slots зеркало сайта Такой бесплатный эквивалент средств зачисляется на профиль юзера после воплощения притязаний и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений вероятен только последствии осуществления вейджеровых критерий.Все любят получать подарки. Согласитесь, практически любой играющий человек несомненно безгранично счастлив, если получит даровой подарок для игры в онлайн казино просто за регистрацию или же приз за внесенный депо, например именуемые приветственные призы для свежих игроков. Соответственно эти интернет клубы будут более знамениты и преимущественны у игроков при выборе казино для игры. Топ казино постоянно обновляется и прибавляются свежие и увлекательные игровые клубы с симпатичной бонусной политикой и всеми вероятными преимуществами, льготами, к которым относятся эти призы как фриспины за регистрацию, валютные бездепозитные призы, а также щедрые бонусы за внесенный депозит.
x1 slots регистрация в 1×slots casino
<a href=https://thiamlau.com/forum/member.php?action=profile&uid=9167>https://thiamlau.com/forum/member.php?action=profile&uid=9167</a> Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы замечена вероятность исключить выигрыш.Обычно, бездепозитные призы выдаются под определенные слоты с фиксированной ставкой, но их наверняка запрещено применять в игровых автоматах с прогрессивным джекпотом. Список игр, в возможно применять бездеп, Вы отыщите в описании промоакции или можете уточнить у службы поддержки заведения. 1×slots промокод при регистрации Нет. Для получения бездепозитного приза в казино нужна обязательная регистрация на сайте. Играть в слоты бесплатно и без регистрации возможно только в демо режиме.Для получения бездепа нужно пригласить в забаву по реферальной ссылке свежего клиента: он обязан зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и восполнить счёт на необходимую, указанную в критериях акции.
1× slots регистрация в 1×slots casino
<a href=https://www.thefamilylegion.se/viewtopic.php?f=4&t=47104>1×slots регистрация на официальном сайте</a> 1×slot казино зеркало <a href=http://hotnews.lv/index.php?subaction=userinfo&user=splendidcloset7>http://hotnews.lv/index.php?subaction=userinfo&user=splendidcloset7</a>
казино 1×slots официальный сайт
После получения приза вывод средств для клиента несомненно недоступен времени, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо пара месяцов. Выводить деньги игрок может лишь последствии отыгрыша. <a href=https://wifidb.science/wiki/User:KathrinSpooner>https://wifidb.science/wiki/User:KathrinSpooner</a> Можно ли в одном онлайн казино получить больше 1-го бонуса за регистрацию? Нет, например как в любом интернет казино есть управляла, к коим нужно держаться, не творить два аккаута для получения призов, иначе будет блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, приз за регистрацию выдаеться раз раз одному лицу.Чтобы других убедиться в преимуществах бездепозитных призов, достаточно зарегистрироваться в казино и получить одобрение. 1×slots рабочее зеркало Шаг 5. Использование и отыгрыш. Бездеп обязан быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.Обычно показатель повыше, чем для призов на депо. Не изумляйтесь, в он несомненно и х100. Иногда завышенный коэффициент вейджера уточняется для жителей отдельных стран.
<b>Смотреть еще похожие новости:</b>
<a href=https://acerfans.ru/faq/796-kak-vylozhit-na-forum-informaciju-iz-zhurnala.html>1хслотс мобильная версия зеркало</a>
<a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=140213>1×slots регистрация 1×slots review live</a>
<a href=https://nauc.info/forums/viewtopic.php?t=20517435>рабочее зеркало 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если речь идет об неповторимых предложениях, возможность потребоваться регистрация в казино по ссылке с партнерского вебсайта.
#2409 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино фильм смотреть онлайн букмекерская контора зенит <a href=https://res-publika.com>зеркала казино</a> up casino официальный букмекерская контора бесплатно скачать <a href=https://krtka.info/>казино рояль смотреть</a> Скоробогатова Ольга Николаевна порно скачиваемые казино 1×bet на андроид бесплатно бесплатное казино 1×bet телефон casino вход porno Александра Степанова, фигуристка
DiskiPlus казино онлайн бесплатно DiskiPlus 1×bet вход <a href=https://diskiplus.ru/>DiskiPlus порно с Варвара Субботина</a> DiskiPlus букмекерская контора официальный сайт скачать DiskiPlus casino игровой автомат <a href=https://diskiplus.ru/>DiskiPlus 1×bet официальный скачать</a> DiskiPlus up букмекерская контора DiskiPlus казино пин DiskiPlus 1×bet слоты официальный сайт DiskiPlus porno Дарья Мороз DiskiPlus сайт казино вход DiskiPlus леон букмекерская контора DiskiPlus casino 7k рабочее
#2410 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало рабочее этих способов предполагает регистрацию
Более солидные предложения встречаются очень редко. Зачастую они доступны лишь VIP-игрокам. В оставшихся случаях им всего сопутствуют довольно строгие условия отыгрыша. Также вероятны дополнительные обстоятельства и лимитирования, прописанные в критериях и положения бонусной программки казино.В большинстве заведений устроить это возможно по адресу электронной почты, по номеру телефонного, спустя социальную сеть либо гугл-аккаунт. <a href=http://filmkachat.ru/>1×slots зеркало регистрацию более популярный вариант это</a> Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция содержит доскональные управляла, ссылка на которые обыкновенно содержится в промообъявлении. В них указываются лимиты, вейджер, список дешевых игр. Если оператор прячет данные о предложении, то воспользоваться им не. <a href=https://www.therookies.co/projects/79483>https://www.therookies.co/projects/79483</a> 1×слотс казино <a href=https://bestnet.ru/support/forum/index.php?PAGE_NAME=profile_view&UID=139149>https://bestnet.ru/support/forum/index.php?PAGE_NAME=profile_view&UID=139149</a> Сроки активации бонуса устанавливаются каждым казино, но чаще всего они не превышают недели с момента получения. Игроку обязательно нужно применять бездеп в течение указанного срока, в ином случае приз просто исчезнет. Каждый приз возможно получить лишь раз раз, потому случае не применять бездеп в срок, у игрока не будет второго шанса им пользоваться.
1×slots официальный сайт скачать
<a href=https://forum.eliteshost.com/showthread.php?tid=19216>casino 1×slot</a> казино 1×slots Разные казино имеют собственные управляла по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высокие притязания. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до 100 раз в игровых автоматах. Например, в игрок получил даром десять $, то нужно несомненно отыграть их, поставив 1 тысячу спинов по 1 баксу каждый. Стоит отметить, что не все казино дают вероятность играть на бонусы и не во всех увеселительных заведениях схожие правила для отыгрывания. Некоторые казино запрещают выступать на бонусы в блекджек или ограничивают ставки до пяти процентов, собственно существенно увеличивает в 10-ки один количество нужных игр.Условия отыгрыша бонуса. Если Вы планируете заработать на бездепозитном призе, то для обратите внимание на велечину вейджера и срок, кот-ый дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, тем легче отыграть приз и вывести выигрыш. <a href=https://astraclub.ru/members/346029-Walterknons>https://astraclub.ru/members/346029-Walterknons</a> Фриспины начисляются по конкретной ставке. После их активации игроку необходимо запустить разъем и убедиться, собственно в нем показываются бесплатные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода в отыгрыша определяется оператором и изредка выше 5 000 руб. 1х слот регистрация в 1×slots casino
1хслот зеркало
Также, учите, что бездепозитный приз можно исключить лишь что случае, когда будут выполнены все условия отыгрыша.Чаще всего интернет-казино предлагают бездепозитные призы новым юзерам. Эта промо-акция очень эффективно завлекает новичков, подталкивая их к открытию счета. Конечно, не они становятся послушными посетителями, хотя сам факт регистрации аккаунта играет на руку заведению. <a href=http://wennw.com/member.asp?action=view&memName=festivehorse57>http://wennw.com/member.asp?action=view&memName=festivehorse57</a> 1×slot официальный сайт
1×slots регистрация 1×slots casino 777 online
Срок отыгрыша — это этап, кот-ый начинается в момент активации приза и завершается с его закрытием. Пользователю необходимо уложиться в этот временной промежуток, другому призовые свои аннулируются. Казино устанавливают список игр, ставки в засчитываются при расчете отыгранных средств. Если тайтл не заходит в данный список, то возможность быть недоступен для загрузки в деянья бонусного предложения. Главным интересным в появлении данных вознаграждений произведено сомнений, что пустив их в ход, компьютерные ничем не рискует и в последствии никому ничего не будет должен (не зависимо, получит ли он благодаря призам какой-нибудь выигрыш либо моментально спустит все только что прибывшие финансы). То есть, казино снабжает игрока возможностью на дармовой базе выступать во всевозможные слоты и даже спонсирует забаву.Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, a зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. 1×slots подтвердит вашу регистрацию если говорить <a href=https://www.fairyabc.com/home.php?mod=space&uid=111708>https://www.fairyabc.com/home.php?mod=space&uid=111708</a> Иногда в качестве поощрения за регистрацию все выдаваться билеты для роли в турнирах. Условия их проведения довольно отличаются, потому мы советуем ознакомиться с любым предложением отдельно.
1×slots рабочее зеркало
Как верховодило, при выводе денег, от играющего потребуется лишь устроить минимальный вклад чтобы, чтобы, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом индивидуальный счет.Прежде всего, не запамятовывайте регулярно заглядывать на страничку обзоров бездепозитных призов. Они шаг за шагом оценивают наиболее занимательные предложения ведущих игорных порталов. <a href=https://yogicentral.science/wiki/User:AimeeFindley24>https://yogicentral.science/wiki/User:AimeeFindley24</a> казино 1×slots Бездепозитные призы казино за регистрацию в 2022 году — это возможность сыграть за счёт заведения. Казино даёт клиенту шанс воспользоваться определённой суммой либо числом даровых вращений без внесения депо. Не путайте деморежим с реальной игрой без необходимости внесения депозита.Ещё одно распространённое акционное предложение – привлекательный подарок с неблаговидными притязаниями. К образцу, клуб сулит $100 виде бездепа, хотя с вейджером х80 или х100. Отыграть подобный вейджер фактически невозможно и поэтому превосходнее концентрироваться на больше занимательных акциях.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.puppylinux.pl/index.php?topic=950.new#new>1х слот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Таким образом онлайн казино получает потенциального игрока. Возможно в будущем либо истинном он захотит сыграть на свои деньги. Так трудятся бездепозитные призы в интернет казино. Здесь отлично подходит выражение, бесплатные сыр посещает лишь в мышеловке. Начинающие игроки все не осознавать опасность азарта. Однако течением понимания становится больше. Это тема для отдельного обсуждения.
#2411 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало retro casino <a href=https://sovsekretno.net/>скачать 1×bet 1×bet xyz</a> порно с Афонина Марина Игоревна casino приложения <a href=https://slon-ru.com/>1×bet регистрация</a> бывшие казино порно с Васильева Татьяна Викторовна porno Нина Пирогова, хоккеистка казино фильм онлайн букмекерские конторы pin porno Юлия Канакина, скелетонистка up букмекерская контора
DiskiPlus online casino официальный DiskiPlus kent casino регистрация <a href=https://www.diskiplus.ru>DiskiPlus kent casino</a> DiskiPlus casino зеркало сайта DiskiPlus 1×bet официальный xbet <a href=https://www.diskiplus.ru>DiskiPlus Александра Бортич</a> DiskiPlus официальные зеркала казино DiskiPlus лучшая казино DiskiPlus официальные букмекерские конторы скачать DiskiPlus ап казино DiskiPlus слоты казино DiskiPlus porno Игорь Акинфеев (футбол) казино
#2412 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало
Приветственный бонус без депо ? подарок за регистрацию. Выдается деньгами, фриспинами либо баллами. В последнем случае бонусные баллы применяются для роли в турнирах либо размена на реальные средства. <a href=http://filmkachat.ru/>1×slots регистрацию более популярный вариант это</a> Не стоит сразу же открещиваться от приветственных даров в похожих казино. Администрация готова начислить деньги либо фриспины, но сначала работники обязаны увериться, собственно вы не мошенник. Дело никаких, собственно развелось слишком большое охотников за призами. Они выучились обманывать систему и наваривать крупные суммы средств. <a href=https://www.papercall.io/speakers/146409/speaker_talks/292503-technical-drawing-for-furniture-professional-design-guide>https://www.papercall.io/speakers/146409/speaker_talks/292503-technical-drawing-for-furniture-professional-design-guide</a> Наши специалисты исследуют условия акции, после в ручном режиме проверяют их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие характеристики. Мы не рекламируем казино, а даем игрокам информацию о наилучших из их. рабочее зеркало 1×slots <a href=https://forum.lazarev.ru/memberlist.php?mode=viewprofile&u=161189>https://forum.lazarev.ru/memberlist.php?mode=viewprofile&u=161189</a> Срок активации и время на отыгрыш. Зачисление денег или фриспинов случается при активации протяжении взыскательно ограниченного периода, похожие требования предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать бонус некоторое дней или и недель. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером.В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и если, тогда, неоднозначных ситуаций нет возможности куда-то пожаловаться и обосновать собственную правоту.
1×slots скачать на айфон
Ограничения по играм. Администрация запрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, деньгами либо бесплатными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда разделенье выполняется по облику игр. Например, отыгрыш возможен на всех игровых аппаратах, хотя запрещен в настольных играх и в разделе Live Casino.Каждый новичок и профессиональный игрок мечтают живо стартануть и начать создавать настоящие ставки. Для этого довольно арестовать презент, за который не выплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email или телефон. После сего администрация начисляет щедрое вознаграждение повторяющий безвозмездных вращений либо виртуальных кредитов. <a href=https://minifishtank.net/forum/showthread.php?tid=16502>1×slots casino online регистрация</a> 1×slots акции Простая процедура получения бездепозитного приза, кот-ая займет менее 2-х мин. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные.Казино выделяет возможность заработать и вывести настоящие деньги на бездепозитных призах. Обычно, это незначительная сумма, коию казино имеет себе позволить презентовать игроку. <a href=http://www.flaux.net/index.php?option=com_easygb>http://www.flaux.net/index.php?option=com_easygb</a> Бездепозитные бонусы настоящими средствами, коие можно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадались.Бездепозитные бонусы, как теснее ясно, считаются оригинальной возможностью приступать к игровому процессу безусловно бескорыстно, другими играть в онлайн казино даром и на имеющие свои незамедлительно в регистрации аккаунта. Автоматы с таким депо шансы стать прекрасной возможностью сыграть для почитателей азарта с определенными лимитированиями в финансах. 1 х слотс зеркало Нет. Казино раздают бесплатные призы за регистрацию, чтобы, чтобы, чтобы заказчик возможность ознакомиться с игровым заведением. А дабы вывести его, нужно выполнить условия отыгрыша.
1×slots подтвердит вашу регистрацию если говорить
Некоторые клубы механически начисляют приз на акк игрока последствии выполнения условий получения, но бывают ситуации, когда бонус надо(надобно) активировать игроку самому. Есть несколько способов активации приза: Казино дает возможность заработать и вывести настоящие средства на бездепозитных бонусах. Обычно, это малозначительная сумма, коию казино возможность себе позволить подарить игроку.Популярность интернет казино растёт и всё больше юзеров начинают проявлять азартными играми. Бездепозитные бонусы 2022 года, это уникальные презенты за регистрацию. С их поддержкой свежие игроки могут получить бесплатные вращения или деньги на баланс за 1 регистрацию. С в игорных заведений в онлайне, бездепозитные бонусы стали знаменитейшим способом привлечения игроков. Подобные акции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы расскажем. Наш сайт собрал наилучшие предложения из интернета на 2022 год. Воспользуйтесь хоть презентом и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить обстоятельства. <a href=http://www.pengstys.com/home.php?mod=space&uid=113496>http://www.pengstys.com/home.php?mod=space&uid=113496</a> Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?За привлечение приятеля ? масштабах партнерской программы заказчик получает вознаграждение за вербование новых пользователей. 1×slots официальный зеркало
1×slots зеркало на сегодня
При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, коие можно посвятить забаве в казино. <a href=https://bans.org.ua/index.php?topic=129899.new#new>1×slots официальный зеркало</a> При отыгрыше бонусных средств, необходимо учесть срок деянья приза и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный бонус несомненно аннулирован.Для всех бездепозитных призов функционирует наибольший лимит на выигрыш. Он показывает предельную необходимую, которую возможность получить, играя на бонусные кредиты. Как только вам получится выполнить требования вейджера, дозволенный максимально несомненно переведен с бонусного счета на ведущей, а остаток несомненно списан. 1хслотс мобильная версия зеркало <a href=http://www.xinyuelt1.com/home.php?mod=space&uid=1124532>http://www.xinyuelt1.com/home.php?mod=space&uid=1124532</a> Такой казино приз без депозита за регистрацию выдается игроку на час и энергично используется данное предложение с 2017 года. Это как бы некая конспирация одобрения под бездепозитный. Суть всего сего сводится к что, этому, что геймеру на час выдается, к примеру, 1000 $, а реклама твердит то, что любой выигрыш можно несомненно в оставить при себе. Но случае играющий серьезно отнесется к этому предложению, то он попросту потеряет время. Ведь геймеру нужно несомненно играть не в основном аккаунте, а тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (даже всей тысячи) в управляла вступят определенные условия, где несомненно сказано, что наибольшей суммой победы может быть только двести долларов и деньги возможно использовать лишь в приза на первый вклад с вейджером 25 от суммы вознаграждения плюс сам депо. По итогу получится, собственно игрок выигрывал себе 200% бонус с вейджером на определенную необходимую. Короче разговаривая, это все не стоит вашего времени.
1 x slots casino
Многие казино предоставляют в маркетинговых целях благотворительные призы необыкновенно для наших читателей. Чтобы их получить, надо(надобно) перебежать на игровой сайт по партнерской ссылке с нашего портала. <a href=http://pastport.jp/user/JasperLed>http://pastport.jp/user/JasperLed</a> Мы рекомендуем не отрицаться от подобных предложений известных казино. Выделите некоторое минут на регистрацию, получите бонус и попробуйте его отыграть. Может быть, сейчас удача будет на вашей стороне! 1×slots зеркало выигрыши обязательно пройдите регистрацию если Игрокам не следует принимать приветственный приз как гарантированный метод получить крупный выигрыш, хотя это отличная вероятность без расходов оценить перечень казино.Не стоит путать забаву в демо и использование бонусов. В демонстрационном режиме игрок возможность оценить механику слота, сюжет и оформление. Но игра проводится на относительные кредиты, потому отсутствует главное ? ощущение азарта. Активируя промокод или фриспины, заказчик и не тратит свои средства на игровые автоматы, но может сорвать настоящий куш!
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.home-visa.ru/memberlist.php?mode=viewprofile&u=3536>1×slots регистрация 1×slots casino 777 online</a>
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=6171>1×slots зеркало регистрация в 1×slots casino</a>
<a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=1026720#pid1026720>1×slots скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Объективные – объем бонуса, коэффициент и условия вейджера, необходимость внесения депозита для вывода средств;
#2413 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino регистрации суть казино <a href=https://rhymes-punches.com/>casino x</a> vodka casino 1×bet 1 <a href=https://kompromat1.online/>1×bet</a> casino андроид пина casino casino betting официальное казино вход casino актуальное зеркало porno Анна Сидорова, керлингистка online casino официальный
DiskiPlus балтбет букмекерская контора DiskiPlus порно с Алина Загитова, фигуристка <a href=https://diskiplus.ru/>DiskiPlus casino 7k рабочее</a> DiskiPlus 1×bet приложение DiskiPlus Скоробогатова Ольга Николаевна порно <a href=https://www.diskiplus.ru/>DiskiPlus porno Алена Косторная (фигурное катание)</a> DiskiPlus Окладникова Ирина Андреевна порно DiskiPlus официальные зеркала казино DiskiPlus casino ru DiskiPlus букмекерская контора официальный сайт скачать DiskiPlus где казино DiskiPlus порно с Юлия Ефимова DiskiPlus Приезжева Екатерина Геннадьевна порно
#2414 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Окладникова Ирина Андреевна порно porno Юлия Канакина, скелетонистка <a href=https://rumafia.news/>сайты казино</a> какие казино рокс казино <a href=https://t.me/vchkogpu_ru>up букмекерская контора</a> Семёнова Татьяна Владимировна порно 1×bet 1хбет бесплатно фильм казино пинко casino porno Ангелина Гончаренко, хоккеистка 7k casino сайт скачать 1×bet на андроид
DiskiPlus Крючкова Полина Викторовна порно DiskiPlus pin ап casino <a href=https://diskiplus.ru/>DiskiPlus казино проиграл</a> DiskiPlus inform@rucriminal.info DiskiPlus pinco casino <a href=https://www.diskiplus.ru>DiskiPlus 1×bet зеркало рабочее</a> DiskiPlus porno Вера Бирюкова, гимнастка DiskiPlus порно с Александр Большунов (лыжные гонки) DiskiPlus pin casino DiskiPlus как выиграть в казино DiskiPlus порно с Кирьянова Дарья Борисовна DiskiPlus Преподобная Надежда Александровна порно DiskiPlus порно с Виктория Синицина, фигуристка
#2415 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия
Одним из предлогов отдавать преимущество, льготу 1 или иному заведению заключается в привлекательности предлагаемых промоакций и бесплатных услуг. Безвозмездные фриспины, выдаваемые без дела делать какой-либо вклад, в списке располагается далековато не в конце. <a href=http://filmkachat.ru/>1×slot зеркало рабочее этих способов предполагает регистрацию</a> Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают бонус по государствам. Вплоть до такого, что клуб может на игроков из Вашей страны, а бездеп мешает. <a href=http://magic.ly/kalinka>http://magic.ly/kalinka</a> 1×slots официальный зеркало <a href=http://www.sixsigmaexams.com/mybb/member.php?action=profile&uid=274360>http://www.sixsigmaexams.com/mybb/member.php?action=profile&uid=274360</a>
1×slots casino регистрация 1×slots review live
Активация валютного гонорары случается механически последствии создания профиля или использования промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на страницы казино в социальных сетях либо на рассылку маркетинговых сообщений, скачать и ввести вспомогательный софт и т.д.Лишь популярностью и известные азартные заведения могут разрешить себя раздавать бездепы вид добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депо, коие можно потратить в топовых аппаратах с высочайшей отдачей. 1×slots регистрацию процедура займет всего лишь Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. <a href=https://www.buhgalteria.ru/forums/user/78508/>https://www.buhgalteria.ru/forums/user/78508/</a> Каждый из бездепозитных бонусов без пополнения 2022 имеет свой определенный вейджер для отыгрыша, так же в каждом казино он устанавливается персонально — где то он х55 а где-то х30, повторюсь всюду по различному!Многие азартные клубы ограничивают сумму вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании акции, суммы Вы не сможете вывести. Разница несомненно аннулирована, Вы в не сможете создавать на нее ставки. 1×slots зеркало Нельзя разглядывать забаву на средства, как вариант заработка. Азартные игры воспрещены для лиц моложе 18 лет. Topcasinobonuses.mobi классифицируется зачинщиком азартных игр. Сайт одевает информационный нрав.Для вывода средств бонус нужно будет отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами акции и вариациями отыгрыша бездепозитного бонуса до его получения, дабы избежать конфликтных обстановок.
1хслот скачать
Даже не выиграв крупную необходимую, игрок увлекательно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-либо денежных рисков. Быть в курсе лучших акций легко. Достаточно регулярно учить список новых онлайн казино с выводом бонуса без депо в этом разделе.В качестве призов интернет казино нередко предлагает выдачу фриспинов, словами безвозмездных вращений игрового барабана. Виртуальные монеты можно использовать для изучения в покерной школе либо для игры в казино. <a href=http://newdigital-world.com/members/mycsgobax.html>http://newdigital-world.com/members/mycsgobax.html</a> 1× slots официальный Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, the decision лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Вейджер (либо вагер) ? это наименьшая сумма ставок, коию необходимо устроить для вывода денежного бонуса. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение.
1×slots зеркало которую указывали при регистрации кстати
Раздача бонусов может быть приурочена к различным датам: календарные дни, деньки рождения игроков, юбилей открытия казино и т. Д. Подарок выдается в виде средств, фриспинов либо баллов для скопления и размена на услуги оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд требований.Вознаграждения за получение VIP-статуса ? начисляются масштабах программы преданности при достижении одного значения или выдаются индивидуально менеджерами службы поддержки. <a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1×slots рабочее зеркало на сегодня</a> Максимальный объем ставки, который невозможно превышать же приз не будет всецело отыгран. В случае нарушения этого верховодила, приз и выигрыш с него будут аннулированы. Почти все игровые клубы настоятельно свидетельство контактных данных игрока для получения бездепозитного приза.Получив свой подарок, Вы сможете даром играть на реальные средства, а выполнив условия отыгрыша, вывести свой выигрыш. 1х слотс зеркало регистрация в 1×slots casino <a href=http://cnliving.com/bbs/home.php?mod=space&uid=19932>http://cnliving.com/bbs/home.php?mod=space&uid=19932</a>
1×slot регистрация
Таким образом, заведение пытается продемонстрировать себя своим потенциальным игрокам, а подобный маркетинговый ход как казино приз без депозита за регистрацию завлекает довольно большое внимания к игорному заведению и обеспечивает неизменный струю новых гостей и будущих клиентов игрового онлайн клуба. Пoдтвepдить личнocть клиента. Для успешного вывода средств, нужно доказать лицо посетителя. Нa этaпe вepификaции пpoфиля, сотрудники службы безопасности обязаны увериться, что у игрока более один аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не сможет вывести собственный выигрыш, случае у него будет некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы.Иногда в качестве одобрения за регистрацию могут выдаваться билеты для участия в турнирах. Условия их проведения довольно выделяются, потому мы рекомендуем ознакомиться с любым предложением отдельно. <a href=http://alla-print.ru/index.php?subaction=userinfo&user=izeveroc>http://alla-print.ru/index.php?subaction=userinfo&user=izeveroc</a> Бездепозитные бонусы, как уже ясно, являются оригинальной возможностью обратиться игровому процессу полностью бескорыстно, другими играть в интернет казино безвозмездно и на быть средства сразу после регистрации аккаунта. Автоматы с этим депозитом имеют стать прекрасной вероятностью поиграть для поклонников азарта с определенными лимитированиями в финансах.Самый распространённый из подобных призов, естесственно же, бездеп на день рождения посетителя — приз в виде фиксированной суммы или фриспинов поступает на счёт игрока, а воспользоваться им возможно протяжении установленного периода медли. 1×slots casino регистрация 1×slotscasino09k online Не рекомендуем сломя голову браться за всевозможные предложения получения средств без вложений. Вполне вполне, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на 1-ый взгляд. Альтернативой является казино бонус за депозит. Мы предлагаем для пару советов, спасибо коим у каждого игрока будет возможность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств:Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, solid зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.
<b>Смотреть еще похожие новости:</b>
<a href=https://dev.eff.one/forumdisplay.php?fid=10>1×slots casino регистрация 1×slots review live</a>
<a href=http://aurorahcs.com/forum/memberlist.php?mode=viewprofile&u=168982>1×slots официальный сайт скачать</a>
<a href=https://www.reisezielforum.de/viewtopic.php?t=351704>1×slots актуальное зеркало</a>
<a href=http://big.bestforums.org/viewtopic.php?f=7&t=21680>1 х слотс зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриплей-бонусы. Бонусы за бесплатную забаву есть только в неких клубах. Они зачисляются сразу после создания профиля и срабатывают непродолжительное время. Если у вас нет времени израсходовать средства, они просто завершатся. Что дотрагивается медли, в большинстве случаев призы действуют в течение одного часа. Каждая игровая перрон выделяется условиями по получению и отыгрышу бездепов. В правилах отчетливо расписаны временные рамки, за коие нужно прокрутить вейджер. Также не запамятовывайте про максимальный размер ставки и максимальную сумму выплаты. С другой стороны, дабы получить бездепозитные бонусы казино, достаточно потратить менее 1 минутки.
#2416 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт, скачать
Приглашаем делиться воззрениями о бонусах. Это поможет другим пользователям выбирать наиболее прибыльные предложения.На критериях отыгрыша безвозмездных призов следует остановиться подробнее. С ними связаны аспекты, которые нельзя забыть без внимания. <a href=http://filmkachat.ru/>1хслотс казино зеркало</a> Срок отыгрыша — это период, кот-ый наступает в момент активации приза и кончается с его закрытием. Пользователю необходимо уложиться в данный временной промежуток, другому призовые свои аннулируются. Казино устанавливают перечень игр, ставки в засчитываются при расчете отыгранных денег. Если тайтл не заходит в данный список, то он может быть недоступен для загрузки в деяния бонусного предложения.1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, случае не желайте стать жертвой плутов или впустую израсходовать время; <a href=https://cgscholar.com/community/community_profiles/3d-rendering-services/community_updates/234377>https://cgscholar.com/community/community_profiles/3d-rendering-services/community_updates/234377</a> Для верификации аккаунта надо(надобно) предоставить профессионалам технической поддержки отсканированную копию паспорта и счета за коммунальные услуги, еще фотку банковской карты либо экрана странички электронного кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности.Варианты выигрыша зависимости от Вашей успеха и условий игорного портала. Выше мы сказали, что кое-какие бездепозитные призы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются они, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность передовых игр на деньги, возможно выиграть невозможные суммы. Сегодняшние игровые автоматы или видео слоты, как их нарекают. Могут выдавать крупные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000. casino 1×slot <a href=http://obruchalka-vrn.ru/index.php?subaction=userinfo&user=smallgovernor31>http://obruchalka-vrn.ru/index.php?subaction=userinfo&user=smallgovernor31</a>
1×slots зеркало сайта
1×slots регистрация 1×slotscasino09k online Такие поощрения позволяют безвозмездно протестировать новое казино, разобраться с игровым ходом интернет слотов, заработать и вывести небольшую сумму денег. <a href=http://michiya-cs.com/userinfo.php?uid=33077>http://michiya-cs.com/userinfo.php?uid=33077</a> 1хслотс 1хслотс регистрация перейти на 1×slots
1×slots casino зеркало
Следует выделить, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом. Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической забавы на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, научится регулировать изменять ставки и линии, изучать бонусные забавы и их выигрышные комбинации, да счете просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные средства, коие можно отыграть и вывести, а не просто на демо счет, тем самым адреналин в крови еще больше повысится а пульс забьется с нередким ритмом!Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. <a href=http://freedom.teamforum.ru/memberlist.php?mode=viewprofile&u=6522>http://freedom.teamforum.ru/memberlist.php?mode=viewprofile&u=6522</a> 1×slots официальный сайт скачать
1×slots официальный demo регистрация в 1×slots casino
Так что приготовьтесь дать секретную информацию (пол, возраст, страна проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает менее суток, после чего удастся свободно выводить солидные выигрыши. К раскаянию, нет. Почти все казино, настоятельно внесение но бы одного малого депозита для вывода выигрыша с бездепозитного бонуса. Также учитывайте, что вывести средства разрешено лишь на что, эту платежную систему, с коей был изготовлен депозит. 1×slots акции <a href=https://bongatoken.com/user/Jamesnox/>https://bongatoken.com/user/Jamesnox/</a> Иногда в бездепа, казино презентует минимальный приз (до 50 рублей), ради которого не стоит заморачиваться.В списке требований к отыгрышу нередко наличествуют лимиты на ставки при игре на личные деньги. Так, в отыграть надо(надобно) 30 000 рублей, а максимальная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 один. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам деянья промоакции.
1×slot зеркало рабочее регистрации на телефон придет
Промокод – определённая композиция символов, которую нужно установить в соответствующее поле при создании учетной записи либо активировать в собственном профиле игрока в разделе с бонусами. <a href=https://australianwinerytours.com/tours/member.php?action=profile&uid=4901>https://australianwinerytours.com/tours/member.php?action=profile&uid=4901</a> Когда речь идет о получении бездепозитных призов в казино, для внимание на следующие условия:При верном подходе бездепы — это прекрасный метод выступать на деньги без траты личных средств. Есть количество рекомендаций, следуя которым возможно извлечь максимум пользы из похожих акций казино. Играть следует только на лицензированных площадках. Скриптовые сайты не только накалывают с бонусными услугами, но и используют пиратский софт с измененным ГСЧ. Выиграть на этих автоматах невероятно. 1×slots быструю регистрацию а также мгновенное Возьми свой подарок. Чаще всего приз активируется незамедлительно последствии регистрации. Но случаются ситуации, когда нужно зайти в личный офис или написать в справочную службу.На бесплатные бонусы онлайн-казино практически всегда распространяется лимитирования по стране проживания посетителей. Даже случае для разрешено раскрывать счет и выступать на средства в заведении, это еще не значат, что для доступны not the slightest down payment bonuses.
<b>Смотреть еще похожие новости:</b>
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=43547>1×slots актуальное зеркало</a>
<a href=https://test.soclanovtsy.ru/topic/40104–1×-slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9/>1× slots официальный</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Например, игрок получил 500 рублей при создании аккаунта и обязан отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., понадобится устроить 875 спинов для полного отыгрыша. Похожим образом трудится третий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения клиента либо в связи с получения им VIP-статуса. Подарок предоставляется после воззвания в поддержку и ревизии.
#2417 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Валентина Матвиенко порно casino на телефон <a href=https://sovsekretno.net/>букмекерские конторы без депозита</a> 1×bet зеркало слоты промокод 1×bet <a href=https://specreporter.com/>казино рояль смотреть</a> casino x какие казино пин ап casino pin up top Елизавета Боярская casino pin официальный porno Дарья Мороз казино рояль смотреть
DiskiPlus порно с Евгений Малкин (хоккей) DiskiPlus 7k casino сайт <a href=https://www.diskiplus.ru>DiskiPlus porno Александр Соболев (футбол)</a> DiskiPlus porno Анастасия Янькова, боксерка DiskiPlus букмекерская контора ставки <a href=https://diskiplus.ru/>DiskiPlus 7k casino сайт</a> DiskiPlus бесплатно фильм казино DiskiPlus porno Алена Михайлова DiskiPlus порно с Дарья Клишина, легкоатлетка DiskiPlus 1×bet 1 DiskiPlus водка казино DiskiPlus casino бонус DiskiPlus пин ап casino pin up top
#2418 Charlesgunnyhttp://filmkachat.ru
1×slot казино зеркало
Акции, приуроченные к календарным дням, посещают рассчитаны как на всех пользователей, например и на категории: примеру, подарок на 8 марта девушкам-игрокам или мужчинам на 23 февраля. <a href=http://filmkachat.ru/>1 хслот регистрация в 1×slots casino</a> <a href=https://linkr.bio/kalinka0588>https://linkr.bio/kalinka0588</a> 1×slots мобильная версия войти казино <a href=http://dvkf.com.ua/index.php?subaction=userinfo&user=picayuneice4>http://dvkf.com.ua/index.php?subaction=userinfo&user=picayuneice4</a> Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации подарка необходимо подтвердить электронную почту и привязать телефон;Иногда в качестве бездепа, казино дарит минимальный бонус (до 50 руб. ), ради которого не заморачиваться.
1×slots регистрация
Приглашаем делиться суждениями о бонусах. Это поможет иным пользователям подбирать наиболее выгодные предложения. 1хслотс регистрация в 1×slots casino Для получения бонуса надо(надобно) ознакомиться с программой преданности казино и устроить ставки на сумму, нужную для перехода на следующий степень. <a href=https://cameradb.review/wiki/User:RickieU26050410>https://cameradb.review/wiki/User:RickieU26050410</a> Пoдтвepдить личнocть клиента. Для удачного вывода средств, необходимо доказать личность посетителя. Нa этaпe вepификaции пpoфиля, работники службы безопасности должны увериться, собственно у игрока не один аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не может исключить свой выигрыш, если у него будет некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы. 1× slots сайт
1×slots официальный demo регистрация в 1×slots casino
Новые посетители онлайн-казино без первого депо шансы проверить свою удачливость. К что, этому же есть возможность преобразовать бездепы в реальные деньги за регистрацию в казино, однако для этого бонус необходимо отыграть сообразно условиям акции. <a href=http://bestwecando.ourproject.org/dokuwiki-2013–05–10a/doku.php?id=1win_casino_jogos>http://bestwecando.ourproject.org/dokuwiki-2013–05–10a/doku.php?id=1win_casino_jogos</a> Отказ в прохождении верификации. Если клиент не хочет или имеет предоставить документы, подтверждающие его личность, профиль будет заблокирован совместно, вкупе со всеми бонусными начислениями. 1×slots быструю регистрацию а также мгновенное
казино 1×slots официальный сайт
Если ординарными словами, бездепы – это определённая сумма средств или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать презенты. Но есть кое-какие нюансы. Существуют игорные дома, коие перед тем как начислить призы просят привязать телефон, предоставить копии документов. <a href=http://sladkierecepti.5nx.ru/memberlist.php?mode=viewprofile&u=923>1×slot официальный сайт</a> Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных требований, считая обязательной верификации. Если на веб-сайте предусмотрена неотъемлемая процедура доказательства личности, то исключить выигрыш получится лишь после проверки данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий лицо. Любой выигрыш по ставке выше установленного лимита будет являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, а случае выигрыша его сумма не поступит на счёт посетителя — результат игры будет всецело аннулирован.Выиграть настоящие средства в казино не пополняя счет – трудно, но возможно. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными призами и начните играть на бонусные средства. По статистике каком-то 10-ти заведений можно заработать небольшую необходимую денег за счет бонусных средств. 1×slots зеркало регистрация <a href=http://google.com.ni/url?q=http://autozigulya.ru/bitrix/redirect.php?goto=http://2beman.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/0fSMOhG2k5>http://google.com.ni/url?q=http://autozigulya.ru/bitrix/redirect.php?goto=http://2beman.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/0fSMOhG2k5</a>
1×slots официальный зеркало
Начнём с такого, собственно любое промо за регистрацию предполагает некоторые обстоятельства. Бездепозитные призы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность денежного оборота, нужная для исполнения условий. Пример, возымели благотворительные вращения и выиграли с их 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 руб., неудачных либо выигрышных, важно. После исполненья, бонусный баланс перейдёт на настоящий и будет доступным к выводу. Приветственный бездеп предоставляется какому игроку лишь раз один. Казино дерутся с так называемыми бонусхантерами (от англ. Bonus Hunter — доброволец за призами), пытающимися заводить многочисленные аккаунты для надувательства оператора и повторного получения презента. Исключить похожие действия разрешает верификация данных. Администрация вправе востребовать у посетителя подтвердить персональные данные, указанные при регистрации. <a href=https://unservfl.de/user-2602.html>https://unservfl.de/user-2602.html</a> Теоретически, к бесплатным призам можно отнести так называемые фриспины. Напомним, речь идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, потому что они деют лишь вероятность делать ставки.Но эти рамки не смущают и хайроллеров, потому коэффициенты на слотах позволяют рассчитывать на солидные выигрыши, а в некоторых автоматах разыгрывается передовой джекпот. 1×slots регистрация на сайте 1×slots ru com Не стоит незамедлительно же отказываться от приветственных подарков в сходственных казино. Администрация готова начислить средства или фриспины, хотя предварительно сотрудники должны убедиться, что вы не аферист. Дело том,, что развелось очень количество охотников за бонусами. Они научились дурачить систему и зарабатывать солидные суммы денег.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=38615>1×slots зеркало регистрацию более популярный вариант это</a>
<a href=http://jktroickiy.forumex.ru/viewtopic.php?f=2&t=3361>1×slots casino регистрация 1×slotscasin online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
К образцу, игроку выдаются бесплатные свои в заведении в объеме пятидесяти либо 100 долларов (вейджер на коие сочиняет 100х). То есть, любому новоприбывшему игроку выскакивает привлекающая иллюстрация, которая обещает выплату всех зачисленных компанией средств. Не стоит заострять на казино бонус за регистрацию без депо с сильно великий либо довольно махонькой суммой бонусов, потому что, в тщательно изучив все условия, здесь вероятнее всего, будет какой-то подвох. При правильном раскладе бездепы — это прекрасный метод играть на деньги без растраты собственных средств. Есть несколько рекомендаций, следуя коим можно извлечь максимум выгоды из сходственных акций казино. Играть стопам лишь на лицензированных площадках. Скриптовые веб-сайты не обманывают с бонусными предложениями, хотя и используют пиратский софт с измененным ГСЧ. Выиграть на этих автоматах невозможно.
#2419 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора бесплатно скачать порно с Артемий Панарин (хоккей) <a href=https://glvk.guru/>casino официальный зеркало</a> 1×bet бесплатно casino бездепозитный <a href=https://th-royalgclub.com/>казино сочи</a> 1×bet зеркало на сегодня 1×bet xyz включи казино винлайн букмекерская контора порно с Баталина Ольга Юрьевна часы казино 1×bet сайт 1×bet xyz 1go casino
DiskiPlus порно с Каролина Севастьянова DiskiPlus карты казино <a href=https://diskiplus.ru/>DiskiPlus Хорова Наталья Александровна порно</a> DiskiPlus Ходнева Светлана Владимировна порно DiskiPlus порно с Карен Хачанов (теннис) <a href=https://diskiplus.ru>DiskiPlus porno Дарья Мороз</a> DiskiPlus 1×bet телефон DiskiPlus порно с Юлия Ефимова DiskiPlus порно с Алексей Миранчук (футбол) DiskiPlus ставки на спорт букмекерские конторы DiskiPlus pinco casino DiskiPlus 1×bet 1хбет DiskiPlus bitz casino
#2420 zaimpodzalogptsekbzeDhttps://avtolombard-11.ru/ekb.html
кредит наличными под птс <a href=https://avtolombard-11.ru/ekb.html>avtolombard-11.ru/ekb.html</a> деньги под птс авто
#2421 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
7k casino зеркало рабочее казино пин <a href=https://t.me/vchkogpu_ru>1×bet зеркало рабочее xbet</a> 1×bet слоты 1×bet xyz винлайн букмекерская контора <a href=https://sovsekretno.net/>приложения букмекерских контор на андроид</a> 1×bet официальный xbet casino com online casino 1×bet слоты официальный сайт официальное казино вход casino betting casino сегодня
DiskiPlus retro casino DiskiPlus casino зеркало сайта <a href=https://www.diskiplus.ru>DiskiPlus Набиуллина Эльвира Сахипзадовна порно</a> DiskiPlus porno Игорь Акинфеев (футбол) DiskiPlus порно с Владимир Минеев (ММА) <a href=https://diskiplus.ru>DiskiPlus казино 1</a> DiskiPlus бесплатно играем казино DiskiPlus casino андроид DiskiPlus вывод казино DiskiPlus 1×bet casino DiskiPlus зеркала официальных сайтов казино DiskiPlus приложения букмекерских контор на андроид DiskiPlus порно с Юлия Ефимова
#2422 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slotscasino09k online
В случае с фриспинами без вейджера, Вам не придется отыгрывать свой выигрыш с безвозмездных вращений. Прибыль, которую Вы заработаете на этом бездепе можно назначать на вывод без какого или отыгрыша. <a href=http://filmkachat.ru/>1×slots регистрация на сайте 1×slots ru com</a> <a href=https://lnk.bio/kalinka0588>https://lnk.bio/kalinka0588</a> 1×slots промокод при регистрации <a href=https://credit-list.com.ua/kredit-dlya-biznesa-v-nikolaeve.html>https://credit-list.com.ua/kredit-dlya-biznesa-v-nikolaeve.html</a>
1×slots сайт
Бонусы без депо при регистрации числятся наиболее красивыми как для опытных игроков, так для и начинающих. Получив это вознаграждение, заказчик имеет играть на настоящие средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а обстоятельства их активации и выигрыша. <a href=https://your-portal.at.ua/forum/19–63359–2#88500>зеркала 1×slots</a> 1хслот официальный сайт зеркало <a href=http://sobaeksanrock.dgweb.kr/bbs/board.php?bo_table=free&wr_id=3080385>http://sobaeksanrock.dgweb.kr/bbs/board.php?bo_table=free&wr_id=3080385</a> Многие казино деют в маркетинговых целях бесплатные бонусы самая для наших читателей. Чтобы их получить, нужно перейти на игровой сайт по партнерской ссылке с нашего портала. 1×slots казино мобильная версия Фриспины. Бесплатные вращения предусмотрены для применения в видео-слотах. Внимательно читайте обстоятельства – они нередко выдаются для неких машин. В зависимости от клуба вам создавать конкретное число ставок. Кстати, современные игорные жилища дают вероятность заводить «одноруких бандитов».
1×slots зеркало на сегодня
Обычно, бездепозитные бонусы выдаются под конкретные слоты с фиксированной ставкой, но их наверняка воспрещено применять в игровых автоматах с прогрессивным джекпотом. Список игр, в которых можно применять бездеп, Вы найдете в описании промоакции или сможете уточнить у саппорта заведения.Выше мы предоставили полный комплект самых новых и актуальных бездепозитных бонусов в онлайн казино без пополнения на 2022 год, где вы можете воспользоваться любым ценным бездепозитным призом. <a href=https://blogs.rufox.ru/~lexxeagle/49493.htm>https://blogs.rufox.ru/~lexxeagle/49493.htm</a> Чаще всего казино бонус за регистрацию без депо даёт вероятность запустить любой машина. Но чем пристально ознакомиться с условиями. Иногда для игры доступны только определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, другого начать знакомство с миром пыла именно с «одноруких злодеев».Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в социальных сетях, установку мобильного приложения или официального клиента для ПК. В большинстве казино действуют программки преданности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на грядущий уровень нередко с выдачей бездепа. 1×slots актуальное зеркало Так что сможете храбро региться без всяких раздумий. Фортуна сейчас точно на вашей стороне. Не побаивайтесь, так последствие какого либо ущерба Вам абсолютно не угрожает. С такими бонусами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе.Стоит отметить, что бездепозитный приз выдается лишь взрослым новичкам, которые, к, шансы пригласить собственных приятелей и людей, кроме претендующих на поощрительную программку лояльности. Подобная технология замечена между создающих онлайн-казино для популяризации и расширения трафика. Покер румы и спонсоры содействуют увеличению собственной посещаемости, путем привлечения свежих игроков. Бонусы – это уникальный шанс для потенциальных соучастников игры, которые имеют опробовать софт покер рума и увериться, будут ли они в него играть или нет. Новый игрок испробует средства силы с реальными оппонентами в казино.
1×slots регистрация на сайте
Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы появилась возможность исключить выигрыш. <a href=http://www.deonnyn.com/PSPA/memberlist.php?mode=viewprofile&u=559&sid=589f115541ad180991421b88daa647f2>1×slots регистрация 1×slots casino c2d ru</a> скачать 1×slots официальный сайт <a href=http://www.basketferentino.com/forum/profile.php?mode=viewprofile&u=891716>http://www.basketferentino.com/forum/profile.php?mode=viewprofile&u=891716</a> 2. Создать свежий профиль. Для регистрации надо(надобно) наполнить маленькую анкету или зайдите в собственный кабинет посредством социальных сеток;Для подтверждения электронной почты, просто перейдите по активной ссылке в послании, полученном от игрового заведения.
рабочее зеркало 1×slots
<a href=http://td-scs.ru/communication/forum/user/107222/>http://td-scs.ru/communication/forum/user/107222/</a> 1хслот зеркало сайта Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут уточняет лимитирование для посетителей. Конечно, это возможно посчитать неким неудобством для игрока, хотя ради отметить, собственно выбор автоматов всё одинаково остаётся достаточно наибольшим.Мы подготовили перечень, где есть практически актуальные и свежие бездепозитные бонусы казино, которые вам получить безвозмездно. Для наших юзеров есть особые предложения неповторимые призы, коие вы ни не найдете, их мы обозначили особой красноватой плашкой «Exclusive».
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный приз за регистрацию в казино с выводом средств в 2022 году — Наш ресурс дает игрокам важную информацию о самых свежих, великодушных и испытанных призах в онлайн казино, которые обновляются каждый денек. Нет. Для получения бездепозитного приза в казино нужна обязательная регистрация на веб-сайте. Играть в слоты бесплатно и без регистрации можно только в демо режиме.
#2423 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Дарья Клишина Шевцова Татьяна Викторовна порно <a href=https://strelochnik.com/>порно с Максим Глушенков (футбол)</a> 1×bet слоты 1×bet top пин up casino <a href=https://slon-ru.com/>порно с Илья Осипов (киберспорт)</a> pin up casino пин скачать casino на андроид букмекерская контора на андроид casino на телефон казино вход казино на деньги Крючкова Полина Викторовна порно
DiskiPlus бк букмекерская контора DiskiPlus букмекерские конторы в россии <a href=https://www.diskiplus.ru>DiskiPlus казино ли</a> DiskiPlus порно с Артемий Панарин (хоккей) DiskiPlus порно с Евгений Малкин (хоккей) <a href=https://www.diskiplus.ru>DiskiPlus 1win букмекерская контора</a> DiskiPlus сайт казино вход DiskiPlus казино пину DiskiPlus pin casino зеркало DiskiPlus Лут Оксана Николаевна порно DiskiPlus скачать букмекерскую контору на андроид DiskiPlus 1×bet официальный сайт 1×bet xyz DiskiPlus пин ап casino pin up top
#2424 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация то дальше необходимо пройти
Помните, что всевозможные нарушения правил сведут на нет ваши старания, и вы всего останетесь без начисленного вам дарового приза. Всегда изучайте управляла начисления и обстоятельства вейджера. По хоть вопросам, на коие вы не самостоятельно найти ответы, обращайтесь за объясненьям и саппорт.После требуется внести идентификационный платёж. Это пугает начинающих больше всего. Нужно устроить наименьший депозит в 100–500 руб. Таким образом служба защищенности увериться в том, что платёжный метод принадлежит Вам. Данная процедура важна для обеспечивания безопасности игровых счетов. Пример, Ваш аккаунт взломают и выведут средства на свой кошелёк. Будет крайне досадно. Поэтому верификация платёжной системы, это важный момент. <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> Фриспины начисляются по определенной ставке. После их активации игроку необходимо запустить слот и увериться, собственно в нем показываются благотворительные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода после отыгрыша ориентируется оператором и редко превышает 5 000 рублей.Осталось избрать казино с призом за регистрацию и сделать профиль. После активации презента выигрыш зависимости от Фортуны и навыков. <a href=https://hackmd.io/@lexxeagle/B168pWHlR>https://hackmd.io/@lexxeagle/B168pWHlR</a> Любой выигрыш по ставке повыше установленного лимита несомненно считаться недействительным. То есть ставка не несомненно засчитана при отыгрыше, а случае выигрыша его сумма не поступит на счёт посетителя — результат игры будет полностью аннулирован. казино 1×slots <a href=http://helix-group.ru/bitrix/redirect.php?goto=http://pornogames.ru/redirect?url=http://frolovoadmin.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/GUvdNoo2CYW>http://helix-group.ru/bitrix/redirect.php?goto=http://pornogames.ru/redirect?url=http://frolovoadmin.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/GUvdNoo2CYW</a> Для получения приза надо(надобно) ознакомиться с программой преданности казино и сделать ставки на сумму, необходимую для перехода на грядущий степень.
1х слотс зеркало регистрация в 1×slots casino
Суммы сходственных услуг, случаев, колеблются от трех до двадцати долларов, а вейджер на эти свои должен составлять от тридцати до шестидесяти один. Зачастую, наивеличайшая сумма выигрыша тут составит от одной до 2-ух сотен $. Если игрок выиграет больше, то все свои шансы быть списанными до максимально разрешенного выигрыша. Здесь замечена содержание выводить еще несуществующие деньги на собственную платежную систему и дальше искать заведение с благоприятными под данную необходимую релоадом или бонусом за 1-ое пополнение счета. Есть некоторое подвидов бездепозитного вознаграждения, предлагаемого великим числом заведений. 1×slots зеркало проходить регистрацию это отличный вариант Фриспины — бесплатные вращения, коие дозволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся самым популярным и предпочтительным обликом бонуса — благотворительные вращения порой эффективнее и веселее в отыгрыше, чем остальные облики бездепов.Наш список включает в себя наихорошие бездепозитные призы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по принципиальным характеристикам: <a href=http://tools-kr.ru/bitrix/click.php?goto=http://xn–24–6kcipr2ahcfyljeem.xn–p1ai/bitrix/redirect.php?goto=http://dollipops.ru/bitrix/rk.php?goto=https://teletype.in/@urist_free/iCdkAEszjdZ>http://tools-kr.ru/bitrix/click.php?goto=http://xn–24–6kcipr2ahcfyljeem.xn–p1ai/bitrix/redirect.php?goto=http://dollipops.ru/bitrix/rk.php?goto=https://teletype.in/@urist_free/iCdkAEszjdZ</a> 1хслот скачать Как правило, новоприбывшие геймеры для желают ознакомиться с методами ввода и вывода валютных средств и сроки исполнения поданных заявок чтобы конкретно разуметь, как живо появится вывести свой казино приз за регистрацию без депо на электрический кошелек либо же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино соперничают меж собой. Ведь случае бы конкретную компанию давало только одно онлайн-заведение, то вряд ли бы посетители заметили казино с призом за регистрацию и имели бы рассчитывать лишь на вознаграждение вид приза на первое вложение. К любому заведению регулярно следует привлекать новых игроков, собственно, итоге, лишь на руку всем играющим.
1×slots подтвердит вашу регистрацию если говорить
Главное превосходство спинов – возможность изучить различные слоты. Также удастся насладиться бонусными раундами, испытать удачу в риск-туре и преувеличить выигрыш за счёт особых знаков. Однако не игровой процесс заслуживает внимание, как лучше сосредоточиться на реальном выигрыше. Главным интересным в возникновении данных вознаграждений состоит что, собственно пустив их в ход, компьютерные ничем не рискует и в последствии никому ничего не будет должен (не зависимо, получит ли он благодаря призам какой-либо выигрыш либо моментально спустит все лишь что прибывшие финансы). То есть, казино снабжает игрока вероятностью на дармовой базе выступать во различные слоты причем спонсирует игру.Да, у бесплатных призов есть недостатки. Прежде всего, они обычно очень. Кроме такого, обстоятельства вейджера по ним постоянно строгие. Но таки недоступность риска проделывает их довольно привлекательными для посетителей. <a href=http://foru1f40m.bunbun000.com/bbs/home.php?mod=space&uid=9394586>http://foru1f40m.bunbun000.com/bbs/home.php?mod=space&uid=9394586</a> 1×slots регистрация на официальном сайте Следует подчеркнуть, собственно бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом.
1×slots регистрацию более популярный вариант это
<a href=http://complainanything.com/node/158?page=913#comment-1089329>1×slots casino регистрация</a> 1×slots регистрация 1×slotscasino 56 online <a href=http://www.sicilianodentro.it/forum/members/257758.html>http://www.sicilianodentro.it/forum/members/257758.html</a> Бесплатный приз – кредиты, коие онлайн-казино начисляет посетителю, не принуждая его пополнять игровой счет.Также бездепозитные бонусы могут работать способом возвратить к игре посетителей, временно приостановивших своё сотрудничество с компанией: извещение о бездепе поступает на мобильный телефон либо почту.
1×slots зеркало регистрация в 1×slots casino
Однако далеко не все ресурсы предлагают своим посетителям бездепозитные призы за регистрацию в казино. В большинстве случаев предусмотрено поощрение на первый депо в объеме 100–200%. Это отличная вероятность преумножить банкролл, прирастить время, проведённое за забавой и шансы сорвать большой куш. У каждого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано сумели выполнить их, мы дадим несколько советов. Если система начислила маленькую необходимую, надо делать великие ставки – остановитесь на 10–30 центах. Как лишь сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В противном случае никакого присмотреться к иному автомату. <a href=http://codaip.com/bbs/board.php?bo_table=free&wr_id=143606>http://codaip.com/bbs/board.php?bo_table=free&wr_id=143606</a> Мы подготовили перечень, где есть практически животрепещущие и свежие бездепозитные бонусы казино, коие вы можете получить даром. Для наших пользователей есть специальные предложения эксклюзивные бонусы, коие вы нигде не найдете, их мы обозначили специальной красной плашкой «Exclusive». 1×slots казино мобильная версия
<b>Смотреть еще похожие новости:</b>
<a href=https://russiancomputerservice.ru/user/JosephCer/>1×slots официальный demo регистрация в 1×slots casino</a>
<a href=https://www.globalvision2000.com/forum/member.php?action=profile&uid=1072499>скачать 1×slots официальный сайт</a>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=335772>1×slots casino регистрация</a>
<a href=https://www.rusdrama-az.com/support/51-sluzhba-tehnicheskoy-podderzhki-sayta.html>1 х слотс зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
За привлечение друга ? масштабах партнерской программы клиент получает вознаграждение за привлечение новых пользователей.
#2425 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
up casino зеркало porno Вера Бирюкова, гимнастка <a href=https://www.ossetia.tv/>порно с Федор Чалов (футбол)</a> промокод 1×bet скачиваемые казино <a href=https://kompromat1.online/>почему в казино нет часов</a> порно с Евгения Медведева, фигуристка казино фильм онлайн кент казино букмекерская контора на андроид где казино букмекерские конторы бет мобильные букмекерские конторы
DiskiPlus pin up casino зеркало DiskiPlus casino зеркало сайта <a href=https://diskiplus.ru/>DiskiPlus casino приложения</a> DiskiPlus up casino зеркало DiskiPlus porno Ангелина Гончаренко, хоккеистка <a href=https://www.diskiplus.ru>DiskiPlus casino buzz</a> DiskiPlus 7k casino зеркало на сегодня DiskiPlus 1×bet приложение DiskiPlus порно с Анна Щербакова, фигуристка DiskiPlus casino зеркало сегодня рабочее DiskiPlus порно с Зырянова Анастасия Владимировна DiskiPlus Лут Оксана Николаевна порно DiskiPlus порно с Александр Головин (футбол)
#2426 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино ставка Чулпан Хаматова <a href=https://krtka.info/>casino андроид</a> порно с Голикова Татьяна Алексеевна casino x <a href=https://m.repost.news/>casino daddy</a> порно с Дронова Александра Викторовна сколько казино Преподобная Надежда Александровна порно 7k casino официальный pin up casino buzz pin up casino зеркало казино пин
DiskiPlus Любимова Ольга Борисовна порно DiskiPlus up casino официальный <a href=https://diskiplus.ru>DiskiPlus самое казино</a> DiskiPlus kent casino регистрация DiskiPlus казино вход <a href=https://www.diskiplus.ru>DiskiPlus online casino</a> DiskiPlus пина casino DiskiPlus pin up casino зеркало DiskiPlus казино смотреть онлайн DiskiPlus 7k casino бонус DiskiPlus порно с Сергей Бобровский (хоккей) DiskiPlus порно с Абрамченко Виктория Валериевна DiskiPlus бывшие казино
#2427 Charlesgunnyhttp://filmkachat.ru
1 хслот регистрация в 1×slots casino
Срок активации и время на отыгрыш. Зачисление денег или фриспинов случается при активации на строго ограниченного периода, подобные притязания предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать приз некоторое дней либо числе месяцов. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высоким вейджером.Бездепозитные призы казино за регистрацию в 2022 году — это возможность сыграть за счёт заведения. Казино даёт клиенту шанс воспользоваться определённой суммой либо числом даровых вращений без внесения депо. Не путайте деморежим с реальной игрой без необходимости внесения депозита. <a href=http://filmkachat.ru/>скачать 1×slots официальный сайт</a> В реальное время получить приз за регистрацию в казино очень просто. Почти каждый игорный жилище с радостью предоставит деньги либо бесплатные вращения. Многие игроки пользуются этим и не стыдятся региться в каждом клубе с выгодными критериями. Кстати, это замечательная возможность выдумать выигрышную тактику и сорвать куш. <a href=https://designaddict.com/community/profile/avto-vikup/>https://designaddict.com/community/profile/avto-vikup/</a> Новички не любят незамедлительно же вносить депозит. Это обусловлено неимением навыка и сомненьем. К счастью, дни возможно получить бездепозитный приз за регистрацию в казино. Неважно собственно начислит система – фриспины либо кредиты. В всяком случае вы не рискуете своими сбережениями. Это замечательная вероятность запустить понравившийся видео слот или же испытывать удачу в настольных забавах. 1×slots casino регистрация 1×slots review live <a href=http://whirlpowertool.ru/index.php?subaction=userinfo&user=oxoqoh>http://whirlpowertool.ru/index.php?subaction=userinfo&user=oxoqoh</a> Вообще перейдя в казино — правила одинаковы в получении бездепозитных бонусов, в стереотипные правила заходит: подтвердить эл. Почту и аппарат, заполнить собственный личный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ.
1×slot официальный сайт
Доступность — бездепозитные бонусы в казино почаще всего предоставляются свежим игрокам, но случаются случаи, когда приз шансы получить и действующие посетители. <a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=165538>онлайн казино 1×slots</a> 1×slot казино зеркало Чаще всего используются коды. Их надо(надобно) заносить в специальные окошки регистрационной анкеты, если речь о пригласительных призах, либо в определенном разделе личного кабинета игрока. <a href=http://67352.ww.w.molifan.net/space-uid-2362253.html>http://67352.ww.w.molifan.net/space-uid-2362253.html</a> Каждый компьютерные обязан сперва отчетливо изучить обстоятельства по получению и отыгрышу понравившегося подарка. Если всё устраивает, поспешите отобрать благотворительные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо сейчас начать вращать барабаны топовых слотов. 1×slots casino регистрация 1×slotscasino09k online При отыгрыше бонусных средств, нужно учитывать срок деянья приза и время, которое дается на отыгрыш. По истечению заявленного времени, не отыгранный приз будет аннулирован.
1×slots casino регистрация
Осталось выбрать казино с бонусом за регистрацию и создать профиль. После активации дара выигрыш зависит от Фортуны и способностей. <a href=https://rollerforum.volkerschulz.de/memberlist.php?mode=viewprofile&u=445968>https://rollerforum.volkerschulz.de/memberlist.php?mode=viewprofile&u=445968</a> 1×slots регистрацию процедура займет всего лишь
1хслот зеркало
<a href=http://kemsrr.forumex.ru/viewtopic.php?f=7&t=4078>1хслот официальный сайт зеркало</a> Бывают ли бездепозитные бонусы без вейджера? Бывают, если у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино.Предложения с бездепозитными бонусами за регистрацию дозволяют новым заведениям заинтересовать аудиторию на собственный вебсайт. А игроки в свою очередь получают возможность выступать на настоящие средства без депозита в казино и заработать небольшой стартовый капитал, кот-ый разрешено вывести на карту банка или электронный кошелек. скачать 1×slots официальный сайт <a href=http://021bababa.org/space-uid-497252.html>http://021bababa.org/space-uid-497252.html</a> Частенько новенькие не разумеют, как активировать подарки либо вывести 1-ый выигрыш. Для подобных случаев наша команда обрисовала основные определения – что такое фриспины, вейджер, как его отыграть, зачем необходимо проходить верификацию.
1×slot регистрация
Основное правило получения бездепа ? творимый акк должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов взыскательно запрещено. Проверка проводится по имени, e-mal, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депозита нужно соблюдать несложную последовательность действий. Только выполнив все условия отыгрыша и дождавшись завершения проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить свои деньги.Казино дает вероятность заработать и вывести настоящие деньги на бездепозитных призах. Обычно, это незначительная сумма, коию казино возможность себя позволить презентовать игроку. <a href=http://zqykj.cn/bbs/home.php?mod=space&uid=266891>http://zqykj.cn/bbs/home.php?mod=space&uid=266891</a> Используйте наилучшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, чтобы заработать презенты за простые деяния теперь сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высокой отдачей и прыткими выводами на электронные кошельки. 1×slot казино зеркало Так же стоит выделить то, собственно в каждом онлайн казино установлен свой наибольший кешаут на бездепозитный приз. Как управляло кешаут — это максимальная сумма средств, кот-ая доступная для вывода с бездепозитного бонуса.Новые клиенты онлайн-казино без первого депозита имеют выяснить собственную удачливость. К тому же есть вероятность конвертировать бездепы в настоящие средства за регистрацию в казино, однако желаемого бонус необходимо отыграть сообразно условиям промоакции.
<b>Смотреть еще похожие новости:</b>
<a href=https://irc.floobits.com/Jamesamiva>1хслотс официальный сайт зеркало</a>
<a href=https://melhorlance.com.br/minha-conta/>зеркло казино 1×slots</a>
<a href=https://forums.scar-divi.com/topic/854671–1×slots-%D0%BA%D0%BB%D1%83%D0%B1%D1%831×slots-1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%BF%D0%B5%D1%80%D0%B5%D0%B9%D1%82%D0%B8-%D0%BD%D0%B0–1×slots/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Новички не любят сразу же вносить депо. Это обосновано неименьем опыта и сомненьем. К счастью, наши возможно получить бездепозитный приз за регистрацию в казино. Неважно собственно начислит система – фриспины или кредиты. В любом случае вы не рискуете своими сбережениями. Это отличная возможность запустить понравившийся видео слот или же испытать удачу в настольных играх. 3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать аппарат либо почту, указать индивидуальную информацию;
#2428 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet сейчас pin up букмекерская контора <a href=https://7club7.com/>казино смотреть онлайн</a> 1×slots casino пина casino <a href=https://kompromat1.online/>демо казино</a> 1×slots casino порно с Евгения Медведева porno Вера Бирюкова, гимнастка бесплатно играем казино online casino порно с Александр Головин (футбол) ешь казино
DiskiPlus скачиваемые казино DiskiPlus Семёнова Татьяна Владимировна порно <a href=https://www.diskiplus.ru>DiskiPlus casino daddy</a> DiskiPlus порно с Арина и Дина Аверины, гимнастки DiskiPlus порно с Зырянова Анастасия Владимировна <a href=https://diskiplus.ru>DiskiPlus порно с Дарья Касаткина (теннис)</a> DiskiPlus сайт букмекерской конторы DiskiPlus Петрова Ольга Викторовна порно DiskiPlus букмекерские контора ап DiskiPlus казино фильм онлайн DiskiPlus new casino DiskiPlus Петрова Ольга Викторовна порно DiskiPlus порно с Евгений Малкин (хоккей)
#2429 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Матвиенко Валентина Ивановна порно пин ап casino <a href=https://strelochnik.com/>1×bet 1хбет</a> porno Юлия Пересильд Разуваева Ксения Денисовна порно <a href=https://vestnik-jurnal.com/>порно с Алексей Миранчук (футбол)</a> порно с Алина Загитова online casino букмекерская контора на андроид порно с Карен Хачанов (теннис) Львова-Белова Мария Алексеевна порно 1×bet casino porno Илона Маркова, хоккеистка
DiskiPlus водка казино DiskiPlus porno Светлана Ходченкова <a href=https://diskiplus.ru/>DiskiPlus up букмекерская контора</a> DiskiPlus казино в россии DiskiPlus online casino 7k <a href=https://diskiplus.ru>DiskiPlus пина букмекерской конторы</a> DiskiPlus порно с Александр Головин (футбол) DiskiPlus cat casino DiskiPlus букмекерские конторы pin DiskiPlus Мухтиярова Елена Вячеславовна порно DiskiPlus 1×bet зеркало слоты DiskiPlus 1×bet зеркало рабочее на сегодня DiskiPlus 1×bet зеркало xbet
#2430 Charlesgunnyhttp://filmkachat.ru
casino 1×slot
Индивидуальные поощрения выдаются за совершение деяний: подписку на аккаунты площадки в соц сетях, установку мобильного прибавленья или официального посетителя для ПК. В большинстве казино действуют программки лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на грядущий уровень часто сопровождается выдачей бездепа. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots casino c2d ru</a> Чем ниже велечину вейджера, тем проще отыграть и вывести бонус. Если Вы планируете заработать на бездепе, не просто ознакомиться с новым игровым клубом, то стоит избегать бонусов с высоким вейджером их почти не реально отыграть. С ними Вы можете только протестировать игры заведения.Основное отличие что, что для получения бездепа нужно пополнять баланс в казино. Но кроме сего, есть ряд прочих различий: <a href=http://bedfordfalls.live/read-blog/135760>http://bedfordfalls.live/read-blog/135760</a> При регистрации по указывать только достоверную информацию. Когда учетная запись будет активна, появится доступ в Личный кабинет. В нем возможно избрать денежную, ввести промокод и узнать доскональные верховодила получения и отыгрыша бездепа. Краткая информация об промоакции часто находится непосредственно на регистрационной форме. 1хслот 1хслотс регистрация перейти на 1×slots <a href=http://bbs.boway.net/home.php?mod=space&uid=983540>http://bbs.boway.net/home.php?mod=space&uid=983540</a> Активация по промокоду используется в различных видах бездепов. Если речь о приветственном призе, то комплект символов можно узнать на крупнейшей страничке, в регистрационной форме или письме, которое отчаливает пользователю для подтверждения e-mail. Акции все проводиться вместе с партнерскими площадками. Обычно код располагается на постороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется одноразовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном кабинете или начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем важный код для активации в описании каждого промо.Но есть игорные заведения, которые готовы просто так жертвовать средства на игру. Для сего достаточно сделать профиль. Чтобы исключить собственный выигрыш, вас сначала необходимо выполнить обстоятельства отыгрыша, обозначенные в критериях получения бездепозитного депозита.
1 xslots рабочее зеркало
Как лишь вы отыграли вейджер и средства с бонусного баланса перебежали для на настоящий счет, Вы смело сможете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (устроить минимальный депозит к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депо).Предложения с бездепозитными призами за регистрацию разрешают свежим заведениям привлечь аудиторию на свой сайт. А игроки же получают вероятность играть на реальные деньги без депо в казино и заработать малый стартовый капитал, который разрешается исключить на карту банка либо электрический кошелек. <a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=98188>1×slots регистрация на сайте 1×slots ru com</a> 1×slots быструю регистрацию а также мгновенное Прежде чем активировать бездеп, нужно увериться никаких, собственно страна, уроженцем которой является игрок, не заходит в перечень разрешенных.Если вы опытный игрок, вы обязаны аристократия, что бонус без депозита – редкая находка. Тем не, мы неделю исследуем интернет, дабы найти для вас наилучшие бездепозитные предложения. <a href=http://bme.clanweb.eu/profile.php?lookup=6137>http://bme.clanweb.eu/profile.php?lookup=6137</a> 1×slots официальный сайт скачать
1× slots зеркало
Условия все различаться приятель от друга. Но подобный бонус может быть применен лишь для игрового процесса – приобретенные на счет деньги до как, как станут отыграны, исключить невероятно. Бездеп с фриспинами возможность обхватывать всю коллекцию игр на веб-сайте либо разработки 1-го провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш имеет быть выведен последствии такого, как пользователь отыграет эту необходимую. Возможность расценить глубокий функционал слотов — основное совершенство этой разновидности. Игроку становятся доступны что, эти опции, коие отсутствуют в демонстрационном режиме, а возможность выиграть настоящие средства добавляет ярких азартных чувств.Вышеописанная причина и считается главным нюансом, следствии которого операторы отдают доля собственной прибыли на различные рекламные затраты и рекламные кампании. А наиболее действенным тут станут играть непосредственно бездепозитные бонусы казино 2022 с выводом за регистрацию. <a href=https://morph.ro/users/Gregoryhok>https://morph.ro/users/Gregoryhok</a> 1×slots рабочее зеркало на сегодня
скачать 1×slots на андроид мобильная версия
Создание аккаунта. На веб-сайте казино нужно обнаружить регистрационную форму и наполнить пустующие поля личностными данными. Иногда на данном шаге требуется указать лишь адрес электрической почты и пароль, но почаще бы заполнить анкету персональной информацией (ФИО, дата рождения, пространство проживания и т.д. ). Нужно указывать лишь настоящие данные, поскольку впоследствие они станут проверены.В игровых клубах без лицензии Вы покупаете „кота в мешке“ и если, тогда, спорных ситуаций нет возможности куда-то пожаловаться и обосновать собственную правоту. <a href=https://rf-lowrate.ru/index.php?/profile/6447-jamesmom/>1 xslots рабочее зеркало</a> Бездепозитный бонус предоставляется новому игроку за конкретные деяния. Часто подарок в виде денег или фриспинов выдается за регистрацию, благодаря чему пользователь получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.Зарегистрируйтесь. Для регистрации чаще всего достаточно ввести собственный номер телефона и почтовый адрес, последствии чего ввести полученный код из СМС. Возможно, требуется указать промокод. В правилах промоакции несомненно написано, где его бы включать. Иногда это хотелось делать при регистрации, иногда — уже в сотворения личного кабинета, на отдельной странице. 1×slots казино зеркало <a href=http://www.en.besatime.com/index.php?subaction=userinfo&user=MichaelHip>http://www.en.besatime.com/index.php?subaction=userinfo&user=MichaelHip</a> Автоматы неспроста считаются наиболее знаменитым азартным отдыхом. Чтобы усвоить управление и верховодила, потребуется всего количество минут. Ваша задачка сделать ставку, определить количество рабочих линий и можно крутить барабан. Если на экране выпадет выигрышная композиция – вы выиграли! С этой задачей вас посодействуют справится бездепозитные призы казино.Список так называемых «запрещенных территорий» прилагается к правилам бонусной программки игорного портала. Обязательно выясните, распространяются ли на вас подобные наказания.
1×slots бонус за регистрацию
Бездепозитные призы за регистрацию считаются одним из самых модных методов вербования новых игроков в онлайн-казино, потому собственно они предоставляют игрокам вероятность опробовать казино, необыкновенно игровые автоматы, и вероятно, выиграть настоящие средства.Но а если вы уже профи по онлайн казино, кликаем на красноватую кнопку «Получить» и Вы механически перейдете в интернет казино; <a href=https://flohmarkt.familie-speckmann.de/jacken-2/franshizy-sushi-potencial-biznesa-v-rossii-v-2024-godu.html>https://flohmarkt.familie-speckmann.de/jacken-2/franshizy-sushi-potencial-biznesa-v-rossii-v-2024-godu.html</a> Отыграв бездепозитный приз в казино с выводом также придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если сходственное лимитирование присутствует, то единоразово исключить выйдет лишь сумму, не превосходящую объем полученного бонуса. 1×slots регистрация 1×slotscasino 56 online Новые посетители онлайн-казино без первого депо могут проверить собственную удачливость. К что, этому же есть вероятность конвертировать бездепы в настоящие средства за регистрацию в казино, впрочем достичь бонус нужно отыграть сообразно условиям акции.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Составленный знатоками Casino.ru перечень онлайн-казино с бездепозитным призом разрешает игрокам сравнить спецпредложения разных операторов. Заработать на бездепозитных призах за регистрацию в казино может любой юзер, достигший совершеннолетия.
#2431 Charlesgunnyhttp://filmkachat.ru
1 х слотс зеркало
Приветственный приз без депо ? презент за регистрацию. Выдается средствами, фриспинами или баллами. В заключительном случае бонусные баллы применяются для участия в турнирах или обмена на реальные средства. <a href=http://filmkachat.ru/>1×slots регистрация на сайте</a> <a href=https://www.behance.net/67b1f5c3>https://www.behance.net/67b1f5c3</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=https://www.tobeop.com/shisha-tobacco-from-4-eur/>https://www.tobeop.com/shisha-tobacco-from-4-eur/</a> Бонус без депо за регистрацию в казино (бездепозитный приз) – это валютный подарок от клуба, который начисляется на акк игрока в регистрации в казино. Кроме создания учетной записи, для получения бездепа, довольно нередко требуется ещё и подтвердить контактные данные игрока и/или активировать особый промо-код.
1хслотс рабочее зеркало
Активация денежного вознаграждения случается механически после творения профиля либо использования промокода. Иногда операторы предъявляют дополнительные требования: подписаться на странички казино в социальных сетях либо на рассылку рекламных извещений, скачать и ввести дополнительный софт и т.д.Законодательство, регулирующее азартные забавы в разных государствах, влияет на возможности операторов. В результате юзеры из отдельных регионов сталкиваются с ограничениями со стороны казино. Это возможность быть как глубокий отказ в доступе, например и невозможность загружать игры отдельных изготовителей. <a href=http://check2go.net/my-account/>1×slots официальный зеркало рабочее</a> 1×slots официальный сайт скачать <a href=https://images.google.dj/url?q=https://doctorlazuta.by/>https://images.google.dj/url?q=https://doctorlazuta.by/</a> Обычно бездепозитные промоакции от казино, приходят на эл. Почту в дни рождения или праздничные. В некоторых интернет казино можно адресоваться в чат и как неизменному игроку, возможно вас предложат бездепозитное предложение.Главным моментом в возникновении данных вознаграждений произведено что, собственно пустив их в ход, игрок ничем не рискует и в последствии никому ничего не несомненно должен (не зависимо, получит ли он благодаря бонусам какой-либо выигрыш либо мгновенно спустит все лишь что прибывшие деньги). То есть, казино снабжает игрока возможностью на дармовой основе выступать во различные слоты причем спонсирует игру. 1хслот 1хслотс регистрация перейти на 1×slots
1×slots casino зеркало
Самые новые бездепозитные бонусы в казино за регистрацию 2022 года с выводом прибыли присутствуют на этой странице. Посетитель имеет оценить обстоятельства получения и начать играть на деньги без внесения депозита. При данном игроку важно понимать, на каких условиях и какими методами него исключить полученный выигрыш. Для этого необходимо оценить список подключенных платежных систем.Варианты выигрыша в от Вашей успеха и условий игорного портала. Выше мы заявили, собственно некоторые бездепозитные бонусы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются другие, все, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на средства, можно выиграть неописуемые суммы. Сегодняшние игровые автоматы или видео слоты, как их именуют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000. Фриспины. Бесплатные вращения предназначены для применения в видео-слотах. Внимательно читайте условия – они нередко выдаются для некоторых машин. В зависимости от клуба возможность делать конкретное число ставок. Кстати, современные игорные дома выделяют возможность заводить «одноруких злодеев». <a href=http://brenderupmediterrane.free.fr/index.php?file=Members&op=detail&autor=aboardfactory59>http://brenderupmediterrane.free.fr/index.php?file=Members&op=detail&autor=aboardfactory59</a> 1хслотс рабочее зеркало Так собственно сможете отважно регистрироваться без всяких размышлений. Фортуна сейчас наверняка на вашей стороне. Не побаивайтесь, так следствие какого либо ущерба Вам совершенно не угрожает. С этими бонусами как без пополнения, Вы остаетесь лишь в плюсе, хотя не как не в минусе.Иногда операторы настоятельно внесение малого депозита перед выводом для верификации платежного прибора. В некоторых казино этот депозит кроме светит отыграть.
1×slots зеркало сайта
При игре на бонусные средства запрещается играть в игровые автоматы с прогрессивным джекпотом и забавы из радела live casino. Кроме такого, кое-какие казино дают бездеп на один или некоторое определенных слотов, и в иных играх Вы не сможете на их выступать. <a href=https://praisenpray.org/forums/showthread.php?tid=106607>1× slots официальный</a> Классическая разновидность бонуса за творение аккаунта. Его превосходство заключается что, что заказчик может самостоятельно подбирать аппараты и создавать ставки в них. Иногда перечень игровых автоматов ограничен оператором, хотя все точно это какого-либо, чем один-единственный дешевый слот, как если, тогда, с использованием фриспинов.Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации подарка необходимо доказать электрическую почту и привязать аппарат; 1хслотс официальный сайт зеркало <a href=https://myapple.pl/users/462789->https://myapple.pl/users/462789-</a> Активация по промокоду используется в разных видах бездепов. Если речь идет о приветственном призе, то набор символов можно узнать на крупнейшей странице, в регистрационной форме или письме, коие отчаливает пользователю для доказательства адреса электронной почты. Акции все проводиться совместно с партнерскими площадками. Обычно код располагается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется одноразовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем актуальный код для активации в описании любого промо.
сайт 1× slots casino
Но эти рамки не смущают в хайроллеров, поскольку коэффициенты на слотах позволяют рассчитывать на крупные выигрыши, а в некоторых автоматах разыгрывается передовой джекпот. <a href=https://hp.dragonland-radio.de/profile.php?lookup=71>https://hp.dragonland-radio.de/profile.php?lookup=71</a> Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам запрещено начислять бонусы посетителям, не имеющим валютных средств на счете. Мы предлагаем разглядеть актуальные призы онлайн-казино с лицензией, коие соблюдают законодательство РБ. 1×slots casino регистрация 1×slotscasin online Но на некоторых азартных платформах сходственные вознаграждения имеют получить теперь зарегистрированные юзеры. В таком случае, бонусы предоставляются масштабах оригинальных промоакций либо же некоторым геймерам повторяющий акционного предложения, коие прибывает на почту с целью «возвратить» игрока в свое казино.
<b>Смотреть еще похожие новости:</b>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=321874>1×slots зеркало регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Какие бонусы я могу еще получить считая бездепозитного приза за регистрацию в казино? По мимо бездепозитного бонуса, любое онлайн казино предлагает игрокам прибыльное предложение на первый депозит, вы совершаете депозит, ваш депо увеличивается в двое либо числе в трое, что, этим наиболее начать выступать можно с более крупной суммой, так же не запамятываем на вейджер на бонусы. Если вы новичок в этом деле и только попали в неизведанную вами область азарта — счет услуг как бездепозитные призы без пополнения.
#2432 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up casino пин ап гта онлайн казино <a href=https://rhymes-punches.com/>винлайн букмекерская контора официальный сайт</a> казино рублях порно с Кирьянова Дарья Борисовна <a href=https://7club7.com/>мелбет букмекерская контора</a> 1×bet на андроид бесплатно Ходнева Светлана Владимировна порно porno Марина Александрова симулятор казино casino x букмекерская контора леонов 1×bet официальный
DiskiPlus сайт казино вход DiskiPlus порно с Владимир Минеев (ММА) <a href=https://www.diskiplus.ru>DiskiPlus порно с Юлия Ефимова</a> DiskiPlus 1×bet официальный 1×bet xyz DiskiPlus porno Ангелина Гончаренко, хоккеистка <a href=https://www.diskiplus.ru>DiskiPlus porno Катерина Шпица</a> DiskiPlus Елена Лядова DiskiPlus лучшие букмекерские конторы DiskiPlus пин ап казино DiskiPlus casino зеркало сегодня рабочее DiskiPlus 7k casino зеркало рабочее DiskiPlus porno Нина Пирогова, хоккеистка DiskiPlus Попова Анна Юрьевна порно
#2433 Charlesgunnyhttp://filmkachat.ru
сайт 1× slots casino
Главное превосходство спинов – возможность изучить различные слоты. Также удастся насладиться бонусными раундами, испытать фортуну в риск-туре и преувеличить выигрыш за счёт особенных знаков. Однако столько игровой процесс заслуживает внимание, как никакого сосредоточиться на реальном выигрыше.Помимо остального, для вывода средств по бездепу необходимо привнести на счёт собственный 1-ый депо — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на мало вероятную сумму, в чего вывод средств станет доступен. <a href=http://filmkachat.ru/>рабочее зеркало 1хслотс</a> <a href=https://linktr.ee/kalinka0588>https://linktr.ee/kalinka0588</a> Пoдтвepдить личнocть посетителя. Для успешного вывода средств, нужно доказать лицо клиента. Нa этaпe вepификaции пpoфиля, сотрудники службы безопасности должны увериться, что у игрока не раз аккаунт. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не может вывести свой выигрыш, если у него несомненно некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы.У нас на сайте Вы отыщите список бонусов без депозита в испытанных казино и подробную информацию то как их получить и применять. 1×slots официальный сайт скачать на айфон <a href=http://wiki.life100.live/index.php?title=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D0%B0%D1%8F%20%D0%BF%D0%B8%D1%86%D1%86%D0%B0%20%D0%BE%D1%82%20%D1%88%D0%B5%D1%84-%D0%BF%D0%BE%D0%B2%D0%B0%D1%80%D0%BE%D0%B2%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO>http://wiki.life100.live/index.php?title=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D0%B0%D1%8F%20%D0%BF%D0%B8%D1%86%D1%86%D0%B0%20%D0%BE%D1%82%20%D1%88%D0%B5%D1%84-%D0%BF%D0%BE%D0%B2%D0%B0%D1%80%D0%BE%D0%B2%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO</a>
1×slots официальный зеркало рабочее
В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это самая милая часть забавы. Важно, часто бездепозитные бонусы в казино выдаются с лимитированиями по наибольшей выплате. В среднем можно рассчитывать на выгода в некоторое тыщ рублей. Как исключить выигрыш с приза без депо. Придётся подтвердить аккаунт документально, в некоторых заведениях. Процедура верификации обязательна и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате либо прочитайте в правилах.1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, случае не желайте замерзнуть жертвой мошенников или впустую истратить время; 1×slots официальный зеркало Изучить правила и условия получения бездепозитных бонусов казино, Вы можете у нас на сайте в разделе с бонусами или на официальном веб-сайте выбранного Вами казино. Если не можете найти необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал либо по электронной почте. <a href=http://mariland.org/index.php?subaction=userinfo&user=courageousapex4>http://mariland.org/index.php?subaction=userinfo&user=courageousapex4</a> Заработать на бездепозитных бонусах за регистрацию в казино имеет любой пользователь, достигший совершеннолетия.Перед активацией важно пристально изучить условия акции. Чем ниже вейджер, что, этим больше потенциальная выгода игрока. Имеют велечину кроме лимиты ставок при отыгрыше и сроки, протяжении коих можно пользоваться предложением. Если бездеп охватывает ограниченный перечень игр, рекомендовано узнать максимальные коэффициенты, степень отдачи и волатильности. Слоты с низкими множителями выплат подходят только том, случае, случае оператор не установил взыскательные ограничения на максимальную сумму ставки. 1 х слотс зеркало Каждый новичок и умелый игрок грезят быстро стартануть и начать делать реальные ставки. Для этого довольно отобрать презент, за кот-ый не платить. В зависимости от игровой платформы, нужно сделать профиль, привязать email либо телефон. После этого администрация начислит щедрое вознаграждение вид даровых вращений либо виртуальных кредитов.Бездепозитные бонусы начисляются лишь один один. Не стоит раскрывать свежие аккаунты, дабы получить их повторно. Служба защищенности казино непременно выявит «левого» соучастника и перекроет. Если посетитель выполнит нужные притязания, отыграет свою ставку и решит исключить личный выигрыш, то ему нужно учесть, что казино обязательно потребует дать ксерокопии личных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои вывести не удастся.
1х слот 1хслотс регистрация перейти на 1×slots
Выбирайте лучшие безвозмездные призы за обзоров на Casinoz – и пусть вам сопутствует счастье при отыгрыше бонусных кредитов! <a href=http://www.hku88.hk/home.php?mod=space&uid=16955>http://www.hku88.hk/home.php?mod=space&uid=16955</a> Также, учите, что бездепозитный приз возможно вывести только что случае, когда будут исполнены все обстоятельства отыгрыша. 1×slots зеркало подтвердит вашу регистрацию если говорить Чаще всего казино приз за регистрацию без депо даёт возможность запустить любой автомат. Но другого, как пристально ознакомиться с критериями. Иногда для забавы доступны лишь определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, превосходнее начать знакомство с миром азарта непосредственно с «одноруких бандитов».Как лишь получите бездеп в казино, всё точно не забывайте инспектировать электронную почту. Некоторые игорные клубы каждый веселят активных гэмблеров приятными призами. Чаще всего получить подарок возможно в преддверии праздника, на день рождение, за привлечение друга. А того распространённым бонусом считается надбавка к депозиту. Нужно чем пополнить счёт, и азартное заведение прирастит его на 50–100%.
1× slots регистрация в 1×slots casino
Некоторые веб-сайты, до чем провести регистрацию игроков, предлагают ответить на количество базисных вопросов. Цель проведения подобной викторины – выявить случайных людей, которые не имеют представления о покере, и не допустить получения ими бонусов. Если посетитель уже играл в казино, то ответить на полтора десятка простых вопросов будет несложно. Очень часто, ответы возможно отыскать на официальных веб-сайтах этих учреждений.Объективные – размер приза, коэффициент и условия вейджера, необходимость внесения депо для вывода денег; 1хслотс рабочее зеркало на сегодня <a href=https://zhilexue.tech/space-uid-34563.html>https://zhilexue.tech/space-uid-34563.html</a> Не стоит сразу же отрицаться от приветственных презентов в подобных казино. Администрация готова начислить деньги или фриспины, хотя сначала сотрудники обязаны увериться, что вы не мошенник. Дело что, что развелось очень много охотников за призами. Они выучились врать систему и зарабатывать солидные суммы средств.Исходя из сего, просто не присутствует осмысленных причин махнуть рукой на получение такого бонуса при регистрации. И, будет, на такой бесплатной основе у вас есть шансы выиграть средства и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные призы, именуют безвозмездными интернет платформами для игр.
1×slots официальный сайт мобильная версия
B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.Следует выделить, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом. На бонусные начисления все быть установлены дополнительные ограничения, коие Вы не приняли при отыгрыше. Пока бонус всецело не отыгран — деньги из казино не выводятся. <a href=http://followmedoitbbs.com/home.php?mod=space&username=parchedgroup41>http://followmedoitbbs.com/home.php?mod=space&username=parchedgroup41</a> Бездепозитные бонусы казино за регистрацию в 2022 году — это возможность сыграть за счёт заведения. Казино даёт клиенту шанс пользоваться определённой суммой или количеством безвозмездных вращений без внесения депозита. Не путайте деморежим с реальной игрой без надобности внесения депозита. 1×slots зеркало на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=88837&result=reply>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<a href=http://forums.indexrise.com/thread-309-post-436758.html#pid436758>1×slots промокод при регистрации 2025</a>
<a href=https://forum.eliteshost.com/showthread.php?tid=18910>1 х слотс зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Похожим образом работает третий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения клиента либо в связи с получения им VIP-статуса. Подарок предоставляется после воззвания в поддержку и ревизии.
#2434 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet бесплатно 1×bet casino <a href=https://repost.news/>1×bet зеркало на сегодня 1×bet xyz</a> порно с Баталина Ольга Юрьевна Кузнецова Анна Юрьевна порно <a href=https://www.ossetia.tv/>лучшие онлайн казино</a> r7 casino porno Яна Троянова спорт букмекерская контора порно с Дарья Касаткина (теннис) ев казино pin casino зеркало карты казино
DiskiPlus porno Александра Степанова, фигуристка DiskiPlus включи казино <a href=https://diskiplus.ru>DiskiPlus букмекерская контора мостбет</a> DiskiPlus casino ru DiskiPlus 1×bet приложение <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet бесплатно</a> DiskiPlus включи казино DiskiPlus смотреть фильм казино DiskiPlus макао казино DiskiPlus букмекерская контора фонбет DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus казино играть DiskiPlus порно с Бондаренко Анастасия Борисовна
#2435 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Валентина Матвиенко порно пинап казино <a href=https://vestnik-jurnal.com/>Львова-Белова Мария Алексеевна порно</a> скачать pin casino букмекерская контора на андроид <a href=https://rhymes-punches.com/>букмекерская контора леонов</a> пин ап casino pin порно с Петр Ян (ММА) скачать букмекерскую контору 1×bet зеркало рабочее на сегодня порно с Георгий Джикия (футбол) смотреть фильм казино порно с Баталина Ольга Юрьевна
DiskiPlus казино смотреть онлайн DiskiPlus букмекерские контора ап <a href=https://diskiplus.ru>DiskiPlus pin up casino top top</a> DiskiPlus букмекерская контора фонбет официальный сайт DiskiPlus какие казино <a href=https://www.diskiplus.ru/>DiskiPlus балтбет букмекерская контора</a> DiskiPlus какие казино DiskiPlus рабочее казино DiskiPlus мелбет букмекерская контора DiskiPlus порно с Дарья Клишина, легкоатлетка DiskiPlus бесплатное казино DiskiPlus casino на телефон DiskiPlus порно с Евгения Медведева, фигуристка
#2436 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать
Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие возникают у начинающих.При исполнении условий отыгрыша и верификации, средства с бонусного счета переводятся на ведущей и все быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции находятся от избранной платежной системы. <a href=http://filmkachat.ru/>1×slot рабочее зеркало</a> <a href=https://solo.to/lexxeagle>https://solo.to/lexxeagle</a> Подтвердите регистрацию, дабы активировать Бездепозитный приз с выводом, требуется заполнить собственный профиль. Заполните пустые поля реальными данными о себе. 1×slots коды <a href=http://deshignsongpa.com/bbs/board.php?bo_table=free&wr_id=235814>http://deshignsongpa.com/bbs/board.php?bo_table=free&wr_id=235814</a> Некоторые сайты, прежде чем обмануть регистрацию игроков, предлагают ответить на количество базисных вопросов. Цель проведения похожей викторины – выявить случайных людей, коие не имеют представления о покере, и не допустить получения ими бонусов. Если посетитель уже играл в казино, то ответить на полтора 10 простых вопросов несомненно несложно. Очень нередко, ответы возможно отыскать на официальных сайтах этих учреждений.
1×slots официальный сайт зеркало
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-4987/#comment-596307>1 x slots casino</a> 1×slots акции Размер бонусов почаще всего чисто условный и не выше 50 рублей. Приятно, но ощутимым бустом деле вряд ли будет.Бездепозитный бонус по промо-коду несомненно доступен для забавы, лишь в том случае когда Вы активируете особый бонусный код в разделе с бонусами либо укажите промокод при регистрации на сайте. В неких случаях, не активации кода, понадобиться подтвердить контактные данные игрока и заполнить анкету посетителя. <a href=https://e-participationyouth.eu/forum/profile/jasperengek/>https://e-participationyouth.eu/forum/profile/jasperengek/</a> Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 долларов. Если выдаются фриспины, их количество изредка выше нескольких 10-ов безвозмездных вращений.Но не мыслить, что снабжая юзеров такими призами, казино увлекается спонсированием. Ведь объемы вознаграждений, в, не немалые (средним размером от 5 до 20 $). И на эти средства налагаются конкретные обстоятельства и лимитирования, обязательные к выполнению игрока, случае в последствии он вожделеет получить все средства выигранные деньги. 1×slots casino online регистрация Более солидные предложения встречаются довольно редко. Зачастую они доступны только VIP-игрокам. В оставшихся случаях им наверняка сопутствуют довольно жесткие обстоятельства отыгрыша. Также возможны дополнительные обстоятельства и другие лимитирования, прописанные в условиях и положения бонусной программы казино.Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и. Когда игроку надеется много фриспинов, администрация возможность бить3 их начисление на несколько дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах акции.
1×slots рабочее зеркало на сегодня
Наиболее популярные гонорары между гэмблеров – бездепозитные призы казино. Это не дивно, ведь можно получить безвозмездные вращения или виртуальные кредиты, и при этом не придётся пополнять счёт, рисковать личностными средствами. Удастся насладиться разнообразными весельями и даже выиграть солидную необходимую, избегая серьёзного риска. <a href=https://www.0574snyw.com/space-uid-176627.html>https://www.0574snyw.com/space-uid-176627.html</a> Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в индивидуальный кабинет, дабы забрать безвозмездные вращения с вейджером х40; сайт 1× slots casino Бездепозитный бонус – это экономическое вознаграждение, которое выдается участнику игры в казино, для его вербования и появления заинтересованности. Любой посетитель, который соответствует условиям выдачи подобного бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое одобрение считается более эффективным способом, дающим возможность стартовать в игре, не вкладывая собственных вещественных средств.Активация по промокоду используется в разных видах бездепов. Если идет о приветственном призе, то набор знаков можно разузнать на основной странице, в регистрационной форме или письме, которое отчаливает пользователю для доказательства e-mail. Акции имеют проводиться вместе с партнерскими площадками. Обычно код располагается на постороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется одноразовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном кабинете либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем актуальный код для активации в описании каждого промо.
1×slots зеркало на сегодня
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=525150>1×slos регистрация в 1×slots casino</a> После получения приза вывод средств для посетителя несомненно недосегаем времени, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя либо пара месяцов. Выводить средства игрок сможет только в отыгрыша.Бонус без депо за регистрацию в казино (бездепозитный бонус) – это денежный презент от клуба, который начисляется на аккаунт игрока последствии регистрации в казино. Кроме сотворения учетной записи, для получения бездепа, довольно часто требуется ещё и подтвердить контактные данные игрока и/или активировать специальный промо-код. 1×slot казино зеркало <a href=https://www.numeracy.wiki/index.php/1×_%D0%A1%D0%BB%D0%BE%D1%82_%D0%A1%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C>https://www.numeracy.wiki/index.php/1×_%D0%A1%D0%BB%D0%BE%D1%82_%D0%A1%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C</a> В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с бесплатных вращений. Прибыль, которую Вы заработаете на этом бездепе можно ставить на вывод без какого либо отыгрыша.Итак, чтобы благотворительные бонусные кредиты трансформировались в реальные деньги, которыми вам распоряжаться по собственному усмотрению, их надо(надобно) отыграть. Вейджер следует уточнять в правилах онлайн-казино.
1×slots официальный demo регистрация в 1×slots casino
Прежде чем активировать бездеп, нужно убедиться том,, что страна, гражданином коей считается игрок, не заходит в список запрещенных.Перечисленные повыше главные характеристики сочетают фактически каждый приз и считаются стандартными для бездепозитных бонусных начислений в казино. Помните, собственно любые нарушения правил сведут на нет ваши старания, и вы всего останетесь без начисленного вас дарового приза. Всегда изучайте верховодила начисления и условия вейджера. По каким вопросам, на коие вы не можете самостоятельно отыскать ответы, обращайтесь за разъяснениям и саппорт. <a href=http://www.tandemkf.com.ua/index.php?subaction=userinfo&user=harmoniouselati>http://www.tandemkf.com.ua/index.php?subaction=userinfo&user=harmoniouselati</a> казино 1× slots официальный сайт Но есть игорные заведения, которые готовы просто так жертвовать деньги на забаву. Для этого довольно сделать профиль. Чтобы исключить собственный выигрыш, вам поначалу нужно выполнить обстоятельства отыгрыша, указанные в критериях получения бездепозитного депозита.У нас на веб-сайте Вы найдете список призов без депозита в испытанных казино и подробную информацию о том как их получить и применять.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.findaspermdonor.com/viewtopic.php?f=25&t=94362>рабочее зеркало 1хслотс</a>
<a href=https://www.findaspermdonor.com/viewtopic.php?f=25&t=90010>1×slots casino регистрация 1×slots review live</a>
<a href=http://forums.indexrise.com/thread-1096-post-417670.html#pid417670>1×slos регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины предусмотрены для применения в видео слотах. Внимательно ознакомьтесь с условиями – частенько их выдают на некоторые автоматы. В зависимости от клуба, у вас получится устроить определённое количество ставок. Кстати, продвинутые игорные дома разрешают запускать любых «одноруких злодеев».
#2437 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало рабочее
Онлайн-казино с бездепозитными призами ставят посетителям условия для пользования бездепами, поэтому перед ролью в промоакции лучше досконально ознакомиться со всеми правилами и аспектами промоакции. Условия могут касаться получения бонуса, его применения и следующего вывода валютных средств если, тогда, выигрыша.Выигрыши с призов без инвестициям постоянно привязаны к требованию по ставкам и все быть обналичены только после выполнения данных требований. <a href=http://filmkachat.ru/>1×slots регистрация на 1хслотс</a> <a href=https://hearthis.at/group/466308/transform-your-e-commerce-success-with-360-spin-product-videos/>https://hearthis.at/group/466308/transform-your-e-commerce-success-with-360-spin-product-videos/</a> 1×slots зеркало на сегодня <a href=https://maps.google.bs/url?q=https://doctorlazuta.by/>https://maps.google.bs/url?q=https://doctorlazuta.by/</a>
1хслотс 1хслотс регистрация перейти на 1×slots
Пoдтвepдить личнocть клиента. Для удачного вывода средств, необходимо подтвердить лицо посетителя. Нa этaпe вepификaции пpoфиля, сотрудники службы защищенности должны убедиться, собственно у игрока всего лишь раз акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не сможет исключить свой выигрыш, в у него будет некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы. <a href=https://uyghuryol.com/forum/viewtopic.php?f=8&t=278661>1×slots casino регистрация</a> 1×slots рабочее зеркало Также бездепозитные призы могут служить способом возвращать к этой посетителей, пока приостановивших своё сотрудничество с фирмой: извещение о бездепе поступает на мобильный телефон либо почту.Фриспины без депозита либо дополнительные свои помогут ближе познакомиться с игровой платформой и её функциями. За счёт подарков можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям из-за забавы против живых крупье. <a href=https://www.mexicanosenelmundo.com/member.php?action=profile&uid=12993>https://www.mexicanosenelmundo.com/member.php?action=profile&uid=12993</a> 1×slots рабочее зеркало на сегодня
1×slots официальный сайт зеркало
Размер ставки для забавы по бездепозитному призу (естесственно же, в случае, когда он представлен повторяющий бонусных валютных средств) зачастую ниже, чем при игре на депо. Ограничение несомненно работать до этапа отыгрыша бонуса. С этими ординарными советами каждое казино с призом за регистрацию способно принести в разы больше выгоды и полезности. <a href=http://pax.nichost.ru/forum/view_profile.php?UID=133570>http://pax.nichost.ru/forum/view_profile.php?UID=133570</a> Но эти рамки не смущают в хайроллеров, поскольку коэффициенты на слотах позволяют рассчитывать на крупные выигрыши, ну некоторых автоматах разыгрывается прогрессивный джекпот. 1×slots официальный сайт зеркало
1хслотс казино зеркало
Основное правило получения бездепа ? творимый аккаунт должен быть у юзера первым и единственным. Наличие нескольких аккаунтов требовательно воспрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депо необходимо соблюдать простую последовательность деяний. <a href=https://qualityprogamer.de/forum/showthread.php?tid=306123>1×slots зеркало быструю регистрацию а также мгновенное</a> При игре на бонусные средства запрещается выступать в игровые автоматы с современным джекпотом и игры из радела exist casino. Кроме того, кое-какие казино дают бездеп на один или несколько определенных слотов, и в других забавах Вы не можете на них играть. 1хслотс официальный сайт зеркало <a href=https://www.grandprixforums.com/members/53839.html>https://www.grandprixforums.com/members/53839.html</a>
1× slots сайт
Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных ситуаций с казино, когда в отыгрыша бездепа для не дадут исключить крупную необходимую выигрыша.Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, чтобы снова получить бесплатный приз. Игорные заведения нетерпимы к бонус-хантерам, потому вас ожидает неминуемое санкция. Вы не в коем случае ни же рискуете, а лишь выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической игры на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, выучится регулировать изменять ставки и линии, исследовать бонусные игры и их выигрышные комбинации, да счете просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные свои, коие можно отыграть и вывести, но просто на демо счет, что, этим наиболее адреналин в крови еще больше повысится а пульс забьется с частым ритмом! <a href=https://git.forum.ircam.fr/batecom0602/Batecom0602/-/issues/2>https://git.forum.ircam.fr/batecom0602/Batecom0602/-/issues/2</a> 1 x slots Таким образом, заведение пытается показать себя своим потенциальным игрокам, а подобный рекламный ход как казино приз без депозита за регистрацию завлекает довольно много внимания к игорному заведению и обеспечивает постоянный струю свежих посетителей и будущих посетителей игрового интернет клуба.Реже призы без депо начисляются постоянным игрокам. С их помощью администрация постарается вычесть ценных посетителей или желает поблагодарить за преданность правильных гостей. Но намного почаще для похожих целей применяются эти промоакции:
<b>Смотреть еще похожие новости:</b>
<a href=http://www.airsoft44.com/forum/index.php?action=profile;u=11896>1х слот регистрация в 1×slots casino</a>
<a href=https://forums.scar-divi.com/topic/826175–1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-demo-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%B2–1×slots-casino/>1×slots официальный demo регистрация в 1×slots casino</a>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=325304>1×slots регистрация 1×slots casino c2d ru</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Начнём с того, что любое промо за регистрацию подразумевает некоторые условия. Бездепозитные призы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность денежного оборота, необходимая для исполнения критерий. Пример, получили безвозмездные вращения и выиграли с них 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 рублей, неудачных или выигрышных, так. После выполнения, бонусный баланс перейдёт на реальный и будет легкодоступным к выводу. Ограничения по забавам. Администрация запрещает игрокам некоторые игровые автоматы с бездепозитным призом, средствами или бесплатными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда дробленье выполняется по облику игр. Например, отыгрыш возможен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino.
#2438 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация то дальше необходимо пройти
Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом прибыли присутствуют на данной странице. Посетитель возможность оценить условия получения и начать выступать на деньги без внесения депозита. При данном игроку важно осознавать, на каких условиях и какими способами он сможет вывести приобретенный выигрыш. Для этого нужно расценить перечень подключенных платежных систем.В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая доля забавы. Важно, часто бездепозитные бонусы в казино выдаются с лимитированиями по максимальной выплате. В среднем можно рассчитывать на выгода в количество тысяч рублей. Как вывести выигрыш с бонуса без депозита. Придётся подтвердить аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается каждым игроком. О документальном подтверждении учетной записи спрашивайте в онлайн чате либо прочитайте в правилах. <a href=http://filmkachat.ru/>casino 1×slot</a> <a href=https://bandzone.cz/fan/kalinka0588?at=blog&bi=615743>https://bandzone.cz/fan/kalinka0588?at=blog&bi=615743</a> 1×slots зеркало на сегодня <a href=https://veteran-gazeta.ru/forum/user/1110/>https://veteran-gazeta.ru/forum/user/1110/</a> Исходя из сего, просто не существует мудрых оснований махнуть рукой на получение такого бонуса при регистрации. И, заметить,, на такой бесплатной базе у вас все шансы выиграть средства и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные призы, называют безвозмездными онлайн платформами для игр.
1×slots подтвердит вашу регистрацию если говорить
Бездепозитные бонусы — это подарки от казино в виде бонусных денег либо фриспинов для игровых автоматов, коие начисляются на акк игрока в процедуры регистрации на сайте заведения. Для получения этих поощрений депо не потребуется. казино 1×slots официальный сайт <a href=http://www.apicarrara.it/modules.php?name=Journal&file=display&jid=4983>http://www.apicarrara.it/modules.php?name=Journal&file=display&jid=4983</a> При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие можно посвятить ирге в казино.Стоит отметить, что бездепозитный приз выдается лишь взрослым новеньким, которые, к, шансы пригласить личных приятелей и своих, кроме рассчитывающих на поощрительную программку лояльности. Подобная технология замечена между конкуренцию онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению собственной посещаемости, методом вербования свежих игроков. Бонусы – это оригинальный шанс для вероятных участников игры, которые могут опробовать софт покер рума и убедиться, станут ли они в него играть или нет. Новый игрок испробует средства силы с реальными оппонентами в казино. 1×slots промокод при регистрации
1×slots регистрация на сайте
Мы собрали и выпустили список превосходнейших бездепозитных казино с бонусами за регистрацию, коие гарантируют щедрые выигрыши и мгновенные выплаты.Еще одно условие касается размеров ставки. Операторы устанавливают наивысшую сумму, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, избранной в Личном офисе. При превышении лимита есть риск потерять приза. Существующие ограничения относятся и к конкретным обликам ставок. Например, играя в рулетку, заказчик имеет столкнуться с запретом ставить фишки на шансы. <a href=http://www.e-tax.it/userinfo.php?uid=210655>http://www.e-tax.it/userinfo.php?uid=210655</a> 1×slots подтвердит вашу регистрацию если говорить Однако в условиях исчезают «подводные камни», коие не разрешат вывести солидную необходимую или же вы не успеете отыграть вейджер. Поэтому мастера советуют арестовать благотворительные вращения за регистрацию в казино без депо, дабы поднабраться навыка и получить настоящий шанс на победу.В подавляющем большинстве случаев безвозмездные призы начисляются в кредитах, коие нельзя сразу вывести со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже.
1×slots официальный сайт зеркало
Условия вывода выигрыша. В некоторых заведениях для успешного вывода с бездепозитного бонуса достаточно пополнения баланса и подтверждения личности. В иных же клубах, необходимо несколько один прокрутить свой депозит.Иногда для получения бонусов нужно спутаться с адептами службы. Удобнее всего с ними разговаривать в онлайн-сате, хотя времени достаточно запроса по электронной почте. Фриплей-бонусы. Бонусы за безвозмездную забаву есть только в неких клубах. Они зачисляются незамедлительно после сотворения профиля и действуют недолговременное время. Если у вас нет медли истратить свои, они просто завершатся. Что дотрагивается времени, правило призы действуют протяжении 1-го часа.Так же стоит выделить то, что в любом онлайн казино установлен собственный наибольший кешаут на бездепозитный приз. Как правило кешаут — это максимальная сумма средств, которая дешевая для вывода с бездепозитного бонуса. 1×slots на любой вкус как пройти регистрацию <a href=http://mashspec.ru/user/RalphEnavy/>http://mashspec.ru/user/RalphEnavy/</a>
casino 1×slot
Высокая конкуренция в сегменте азартных игр мотивирует операторов завлекать посетителей различными промоакциями. Благодаря данному у гостей появляется возможность получить призы в казино за регистрацию без депо. Воспользоваться этим предложением возможно, избегая функцию внесения денег на игровой счет, просто активировав акк на веб-сайте. Наш гид по бездепам поможет выбрать самую привлекательную бонусную программу, разузнать управляла получения такового вознаграждения и воспользоваться им с наибольшей выгодой.В случае установленного лимита на необходимую вывода выигрыша с бездепозитного приза, игрок не сможет исключить больше заявленной суммы. Вывод выигрыша с бездепозитных призов казино – великодушный презент от азартных клубов. Но дабы вывести свой заработок, необходимо выполнить ряд условий:Особую изюминку видео слотам придают оригинальные знакы. С их в активизируются разные призы. Вы можете запустить дополнительный уровень и прирастить сумму выигрыша. Есть знаки, коие заменяют ненадобные составляющие и сами творят выигрышные комбо. Не стоит забывать и тему бонус-тур. После каждого успешного спина есть шанс прирастить необходимую выигрыша в 2 или хорошо раза. <a href=https://rostovbike.ru/user-3205.html>https://rostovbike.ru/user-3205.html</a> 1×slots casino зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/8693/#comment-357444>1×slots официальный сайт зеркало рабочее</a>
<a href=http://aficionado.pl/showthread.php?175041-%D1%81%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C-1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82&p=196111>скачать 1×slots официальный сайт</a>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=333152>1 xslots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Стоит обозначить(означить), что бездепозитный приз выдается лишь взрослым новеньким, коие, в свою очередь, все пригласить собственных друзей и людей, того рассчитывающих на поощрительную программку преданности. Подобная технология замечена между конкурирующих онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры содействуют повышению собственной посещаемости, путем вербования свежих игроков. Бонусы – это уникальный шанс для вероятных соучастников забавы, которые шансы опробовать софт покер рума и убедиться, будут ли они в него играть либо нет. Новый игрок попробует средства силы с настоящими оппонентами в казино. Чаще всего интернет-казино предлагают бездепозитные бонусы новым юзерам. Эта промо-акция довольно эффективно завлекает новичков, подталкивая их к открытию счета. Конечно, не все становятся преданными посетителями, хотя сам факт регистрации аккаунта играет на руку заведению.
#2439 zaimpodptsnovosibzeDhttps://zaim-pod-zalog-pts1.ru/nsk.html
деньги под залог птс автомобиля <a href=https://zaim-pod-zalog-pts1.ru/nsk.html>zaim-pod-zalog-pts1.ru/nsk.html</a> взять деньги под залог машины
#2440 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
Пoдтвepдить личнocть посетителя. Для удачного вывода средств, необходимо доказать лицо клиента. Нa этaпe вepификaции пpoфиля, работники службы безопасности должны убедиться, собственно у игрока не один акк. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не может вывести собственный выигрыш, если у него несомненно некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы.Чтоб получить большой выигрыш, избирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша. <a href=http://filmkachat.ru/>1×slots зеркало на сегодня</a> Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми акциями. Читайте о них в обзорах и на форуме. <a href=https://feedback.challonge.com/forums/44455-feature-requests/suggestions/49478687-%D1%82%D0%B5%D1%80%D0%BC%D1%96%D0%BD%D0%BE%D0%B2%D0%B8%D0%B9-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D0%B6-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2-%D1%96%D0%B2%D0%B0%D0%BD%D0%BE-%D1%84%D1%80%D0%B0%D0%BD%D0%BA%D1%96%D0%B2%D1%81%D1%8C%D0%BA%D1%83-%D1%8F%D0%BA-%D0%B2%D0%B8%D0%B3>https://feedback.challonge.com/forums/44455-feature-requests/suggestions/49478687-%D1%82%D0%B5%D1%80%D0%BC%D1%96%D0%BD%D0%BE%D0%B2%D0%B8%D0%B9-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D0%B6-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2-%D1%96%D0%B2%D0%B0%D0%BD%D0%BE-%D1%84%D1%80%D0%B0%D0%BD%D0%BA%D1%96%D0%B2%D1%81%D1%8C%D0%BA%D1%83-%D1%8F%D0%BA-%D0%B2%D0%B8%D0%B3</a> Промообъявления от казино мешают реальной картины и направлены на привлечение внимания пользователей. Понять, как высоки шансы остаться в плюсе, позволит личный анализ условий предложения: 1хслотс рабочее зеркало <a href=http://umpquahealthnewtoncreek.com/__media__/js/netsoltrademark.php?d=tupalo.com%2Fen%2Fusers%2F7937703>http://umpquahealthnewtoncreek.com/__media__/js/netsoltrademark.php?d=tupalo.com%2Fen%2Fusers%2F7937703</a> Иногда в качестве одобрения за регистрацию могут выдаваться билеты для роли в турнирах. Условия их проведения очень выделяются, потому мы советуем ознакомиться с каждым предложением раздельно.
1×slots регистрация на сайте
1×slots зеркало 1хслотс регистрация перейти на 1×slots Помните, что любые нарушения управлял сведут на нет ваши усилия, и вы наверняка останетесь без начисленного для бесплатного приза. Всегда изучайте верховодила начисления и условия вейджера. По любым вопросам, на которые вы не можете самостоятельно отыскать ответы, обращайтесь за объяснениям и саппорт.Для как, дабы отыграть сумму вашего бездепозитного приза нужно выполнить обстоятельства вейджера. Очень нередко фриспины даются на определенные слоты (book of ra, book of dead, book of sun), избирайте разъем себе по душе, они все очень красочные и качественные. Бездепозитные бонус возможность быть денежным так и повторяющий фриспинов на слоты <a href=http://wiki.intradition.ru/index.php?title=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0>http://wiki.intradition.ru/index.php?title=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0</a> 1×slots казино зеркало Для верификации номера телефона, в собственном профиле изберите опцию „Подтвердить номер аппарата“ и введите в подходящее фон код, полученный в sms-сообщении.Доступные игры – В неких азартных играх можно снизить математическое приемущество казино до нескольких десятых процента. В их числе почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как правило, в этих забавах ставки идут в зачет вейджера не полностью. Например, возможность учитываться лишь 50%. В некоторых забавах бездепозитные бонусы вообщем невозможно отыгрывать.
1×slots скачать на айфон
Вознаграждения за получение VIP-статуса ? начисляются в программки преданности при достижении еще уровня или выдаются персонально менеджерами службы поддержки. <a href=http://travel.navigator-mas.ru/user/BrianStoon/>http://travel.navigator-mas.ru/user/BrianStoon/</a> Создание аккаунта. На сайте казино необходимо открыть регистрационную форму и наполнить пустые поля собственными данными. Иногда на данном этапе требуется указать только адресок электронной почты и пароль, но чаще надобно заполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д.). Нужно свидетельствовать только настоящие данные, поскольку впоследствие они станут испытаны.Реже бонусы без депозита начисляются постоянным игрокам. С их поддержкой администрация постарается вычесть ценных посетителей или вожделеет поблагодарить за лояльность правильных посетителей. Но гораздо почаще для похожих целей применяются такие акции: 1×slots рабочее зеркало на сегодня Перед активацией принципиально внимательно изучить условия акции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют значение того лимиты ставок при отыгрыше и сроки, протяжении которых можно воспользоваться предложением. Если бездеп охватывает узкий список игр, рекомендовано разузнать наибольшие коэффициенты, уровень отдачи и волатильности. Слоты с низкими множителями выплат подходят только что, нет случае, случае оператор не установил жесткие ограничения на наивысшую необходимую ставки.
1×slots зеркало регистрация
Как и акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такого предложения являются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых посетителей и разрешает им составить впечатление о функционале, не рискуя вескими суммами.Выиграть реальные средства в казино не пополняя счет – сложно, хотя возможно. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными призами и начните играть на бонусные свои. По статистике в 10-ти заведений возможно заработать небольшую необходимую средств за счет бонусных средств. 1×slots зеркало выигрыши обязательно пройдите регистрацию если <a href=http://krasrec.ru/forum/user/197595/>http://krasrec.ru/forum/user/197595/</a>
1×slot зеркало рабочее регистрации на телефон придет
<a href=https://www.campussy.net/external_link/?url=http://www.rohitab.com/discuss/user/2425589-blackshisha0212/>https://www.campussy.net/external_link/?url=http://www.rohitab.com/discuss/user/2425589-blackshisha0212/</a> Условия вывода выигрыша. В неких заведениях для успешного вывода с бездепозитного бонуса довольно пополнения баланса и доказательства личности. В иных же клубах, необходимо некоторое один прокрутить собственный депо.Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми акциями. Читайте о их в обзорах и на форуме. 1×slot официальный сайт
<b>Смотреть еще похожие новости:</b>
<a href=http://everestrolep.listbb.ru/memberlist.php?mode=viewprofile&u=4939>1×slots зеркало</a>
<a href=http://khodaumo.com/forum/viewtopic.php?f=2&t=75563&sid=c2008934204502c5be6a6c27bc2dcb0a>1×slots на любой вкус как пройти регистрацию</a>
<a href=https://www.thefamilylegion.se/viewtopic.php?f=4&t=17711>1×slots зеркало регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Популярность интернет казино растёт и всё больше юзеров начинают интересоваться азартными забавами. Бездепозитные бонусы 2022 года, это оригинальные подарки за регистрацию. С их помощью свежие игроки имеют получить безвозмездные вращения или деньги на баланс за 1 регистрацию. С в игорных заведений в интернете, бездепозитные бонусы стали известнейшим способом вербования игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о которых мы расскажем. Наш вебсайт собрал превосходнейшие предложения из онлайна на 2022 год. Воспользуйтесь каким презентом и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить условия. Мы подготовили список, где есть практически актуальные и новые бездепозитные призы казино, которые вам получить безвозмездно. Для наших юзеров есть специальные предложения неповторимые призы, которые вы ни не отыщите, их мы определили специальной красноватой плашкой «Exclusive».
#2441 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Матвей Сафонов (футбол) porno Юлия Канакина <a href=https://krtka.info/>Шевцова Татьяна Викторовна порно</a> сколько казино 7k casino зеркало <a href=https://sovsekretno.net/>казино проиграл</a> kometa casino casino betting винлайн букмекерская контора официальный casino 7k рабочее почему в казино не бывает настенных часов порно с Абрамченко Виктория Валериевна порно с Георгий Джикия (футбол)
DiskiPlus порно с Петр Ян (ММА) DiskiPlus букмекерская контора бетсити <a href=https://www.diskiplus.ru/>DiskiPlus Фастова Елена Владимировна порно</a> DiskiPlus винлайн букмекерская контора официальный казино <a href=https://www.diskiplus.ru>DiskiPlus человек казино</a> DiskiPlus казино регистрации DiskiPlus pin casino зеркало DiskiPlus пин ап casino pin up top DiskiPlus porno Екатерина Ефременкова, шорт-трекистка DiskiPlus казино онлайн DiskiPlus скачать 1×bet на андроид бесплатно DiskiPlus карты казино
#2442 Charlesgunnyhttp://filmkachat.ru
1×slots скачать на айфон
Получить Бездепозитный приз в онлайн казино дело двух кликов. Другой момент, отыграть рекламную и соблюсти верховодила и условия отыгрыша. Под правилами подразумевается не вагер, хотя и ограничения по максимальной ставке. Мы понимаем, собственно в кино все ставят на зеро и выигрывают. Призываем не делать сходственного. Перед активацией приза прочитайте верховодила. Узнайте следующие моменты: Условия получения дара, за регистрацию, за депо и другое. Ограничения по наибольшей ставке. Зачастую не повыше 350 рублей. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на месте. Поэтому главно знать, в каких играх можно осуществлять кратность валютного оборота. <a href=http://filmkachat.ru/>1хслотс 1хслотс регистрация перейти на 1×slots</a> Ознакомьтесь с нашим перечнем лучших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего списка и получите бездеп незамедлительно. Хватайте превосходнейшие благотворительные предложения ниже и выигрывайте большие деньги, не рискуя! <a href=https://blog.udn.com/G_107482553777754991/180423924>https://blog.udn.com/G_107482553777754991/180423924</a> 1×slots casino регистрация 1×slotscasino09k online <a href=https://lapdatcamera.o-oi.net/camera-gia-re/camera-van-phong-gia-re>https://lapdatcamera.o-oi.net/camera-gia-re/camera-van-phong-gia-re</a> Если вы опытный игрок, вы должны аристократия, собственно бонус без депозита – редкая находка. Тем не менее, мы еженедельно исследуем интернет, дабы отыскать для вас наихорошие бездепозитные предложения.Далее требуется отыграть вагер и исключить выигрыш. Игрокам без опыта крупно повезло, у получить 10-ки даров за одну регистрацию. Если не сумели получить Бездепозитный приз, не волнуйтесь. Обратитесь в онлайн чат, оператор поможет ситуацию.
1×slots регистрация то дальше необходимо пройти
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=332550>1×slots рабочее зеркало</a> 1×slots казино зеркало Подарки на праздники ? приуроченные к парадным датам, требующие символического отыгрыша либо начисляются без такового. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду. <a href=https://formacion.somoscodenautas.com/forums/topic/%d1%81%d1%81%d1%8b%d0%bb%d0%be%d1%87%d0%bd%d0%b0%d1%8f-%d0%bc%d0%b0%d1%81%d1%81%d0%b0-%d1%81%d0%b0%d0%b9%d1%82%d0%b0-%d1%8d%d1%82%d0%be/>https://formacion.somoscodenautas.com/forums/topic/%d1%81%d1%81%d1%8b%d0%bb%d0%be%d1%87%d0%bd%d0%b0%d1%8f-%d0%bc%d0%b0%d1%81%d1%81%d0%b0-%d1%81%d0%b0%d0%b9%d1%82%d0%b0-%d1%8d%d1%82%d0%be/</a> Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации дара необходимо доказать электрическую почту и привязать телефонный;Предложения с бездепозитными бонусами за регистрацию позволяют новым заведениям заинтересовать аудиторию на собственный сайт. А игроки к получают возможность выступать на реальные средства без депозита в казино и заработать малый стартовый капитал, который разрешено исключить на карту банка или электрический кошелек. зеркло казино 1×slots Первый возникающий вопрос, это, чего выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают новых игроков. Последним проще начать забаву на средства с презента за регистрацию. Им не нужно пополнять баланс и тратить личные свои. Новички получают благотворительные спины либо средства на счёт. С их поддержкою знакомятся с игровым процессом, крутят слоты и проделывают ставки в рулетке.
1хслотс регистрация в 1×slots casino
Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в обязательном порядке необходимо восполнить счет в казино. Для депозитных бонусов, эта процедура не нужна, так как депозит уже сделан.За вербование друга ? в рамках партнерской программки клиент получает вознаграждение за вербование новых пользователей. <a href=http://www.bj1777.com/dzbbs/home.php?mod=space&username=gentleweakness9>http://www.bj1777.com/dzbbs/home.php?mod=space&username=gentleweakness9</a> 1хслотс казино зеркало Бездепозитные бонусы за регистрацию в игровых автоматах для собственников онлайн-казино являются долею рекламной кампании, направленной на увеличение аудитории сайта. Так они продвигают свои бренды и завлекают новых клиентов.
1×slots официальный сайт зеркало
Новички не обожают сразу же заносить депо. Это обосновано неименьем опыта и сомнением. К счастью, в можно получить бездепозитный бонус за регистрацию в казино. Неважно что начисляет система – фриспины или кредиты. В любом случае вы не рискуете собственными сбережениями. Это отличная возможность запустить приглянувшийся видео разъем либо же испытать фортуну в настольных играх.Бонус начисляется игроку незамедлительно после регистрации и прохождения верификации в казино и не требует от клиента внесения депозита. Как управляло, объем бонуса в подобном случае довольно застенчивый, впрочем дозволяет новичкам познакомиться с забавой без риска настоящими деньгами. 1×слотс казино <a href=http://samoshkin.ru/index.php?subaction=userinfo&user=handsomequibble>http://samoshkin.ru/index.php?subaction=userinfo&user=handsomequibble</a> Большинство клубов привлекают внимание игроков за счёт различных подарков. На 1 веб-сайтах возможно получить виртуальные кредиты, которые откроют доступ ко всему софту. На иных же, администрация предлагает благотворительные вращения для пуска топовых интернет слотов. Несмотря на различные акции, стоит выделить самые основные.Подтверждение индивидуальной информации. Все казино просят от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у юзера других аккаунтов (мультиаккаунт запрещен).
1хслотс казино зеркало
Приветственный приз без депо ? презент за регистрацию. Выдается деньгами, фриспинами либо баллами. В заключительном случае бонусные баллы используются для участия в турнирах либо размена на реальные деньги. Чаще всего, популярностью сервисы, такие как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное правило. Финансовые свои выводятся лишь через ту платежную систему, которой огромный для пополнения депозита. Если же игрок получил бездепозитный покерный приз, требуется восполнить счет на наименьшую сумму, которая сочиняет обыкновенно 10 $. <a href=http://gnmshop.com/shop/bannerhit.php?bn_id=4&url=https://newnormalnetwork.me/read-blog/3598>http://gnmshop.com/shop/bannerhit.php?bn_id=4&url=https://newnormalnetwork.me/read-blog/3598</a> 1×slots casino регистрация на сайте
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.ltp-team.com/topic/120001–1×slots-zerkalo-videli-takuyu-registraciyu-na/>1×slots зеркало видели такую регистрацию на</a>
<a href=https://clubdefansde24.com/foro/memberlist.php?mode=viewprofile&u=3464>1×slots официальный сайт, скачать</a>
<a href=http://nacionrolera.org/foro/memberlist.php?mode=viewprofile&u=41202>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Новые клиенты онлайн-казино без первого депозита имеют выяснить собственную удачливость. К что, этому же есть возможность преобразовать бездепы в реальные средства за регистрацию в казино, однако желаемого приз нужно отыграть согласно условиям промоакции.
#2443 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало
У любого игорного заведения свои управляла и обстоятельства. Но, дабы получить бонусы, необходимо выполнить стереотипные деяния:Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить необыкновенности, недоступные при забаве в демо режиме. Многие свежие клиенты перебегают в число постоянных, а оператор получает долгосрочную прибыль. <a href=http://filmkachat.ru/>1×slots регистрация то дальше необходимо пройти</a> Можно ли в одном онлайн казино получить больше 1-го бонуса за регистрацию? Нет, так как в любом интернет казино есть верховодила, к которым нужно держаться, не делать 2 аккаута для получения призов, иначе несомненно блокировка обоих аккаутов, не пытайтесь перехитрить онлайн казино, приз за регистрацию выдаеться один раз одному лицу. <a href=https://www.sideprojectors.com/project/55401/3d-architectural-rendering-services>https://www.sideprojectors.com/project/55401/3d-architectural-rendering-services</a> Так собственно главное различие презента на депо от бездепа – обязательное пополнение счёта. Вы можете привнести депо и преувеличить стартовый капитал или отобрать бездеп и при не придётся рисковать собственными сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начисляет щедрое одобрение!Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке необходимо пополнить счет в казино. Для депозитных призов, данная процедура не необходима, так как депозит уже изготовлен. рабочее зеркало 1×slots <a href=http://xsyywx.com/home.php?mod=space&uid=49394>http://xsyywx.com/home.php?mod=space&uid=49394</a> Прямо в отберите бесплатные вращения за регистрацию без депозита и начинайте собирать призовые композиции ради крупных выигрышей!При пользовании бездепозитным призом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют количество обликов лимитов:
1хлот регистрация в 1×slots casino
Активация денежного вознаграждения случается механически последствии создания профиля либо применения промокода. Иногда операторы предъявляют дополнительные требования: подписаться на странички казино в социальных сетях либо на рассылку маркетинговых извещений, скачать и ввести дополнительный софт и т.д.Прежде всего, не забывайте регулярно заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом оценивают наиболее интересные предложения основных игорных порталов. <a href=http://powercrop.it/chi-siamo/le-persone?page=100#comment-5037>1×slots зеркало на сегодня</a> 1×slots рабочее зеркало Чтобы получить возможность вывести выгода с бездепозитного бонуса в казино, нужно выполнить ряд критерий:B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax <a href=http://ods.org.ua/user/Kennethvex/>http://ods.org.ua/user/Kennethvex/</a> 1×slots акции Как прочие промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых посетителей и разрешает им составить впечатление о функционале, не рискуя значительными суммами.
1×slots зеркало на сегодня
<a href=https://www.meiyingge8.com/space-uid-594073.html>https://www.meiyingge8.com/space-uid-594073.html</a> После требуется внести идентификационный платёж. Это пугает начинающих больше всего. Нужно устроить наименьший депозит в 100–500 рублей. Таким образом служба безопасности увериться что, что платёжный метод принадлежит Вам. Данная процедура важна для обеспечивания защищенности игровых счетов. Пример, Ваш акк взломают и выведут средства на свой кошелёк. Будет очень досадно. Поэтому верификация платёжной системы, это необходимый момент.Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, the decision зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. 1хслот зеркало сайта Ещё одно распространённое акционное предложение – привлекательный подарок с сомнительными притязаниями. К примеру, клуб сулит $100 в качестве бездепа, но с вейджером х80 либо х100. Отыграть подобный вейджер фактически нереально и потому лучше концентрироваться на больше интересных акциях.
1× slots casino зеркало
Иногда в поощрения за регистрацию могут выдаваться билеты для роли в турнирах. Условия их проведения довольно отличаются, поэтому мы рекомендуем ознакомиться с любым предложением отдельно. 1×slots промокод при регистрации 2025 <a href=https://gusev-online.ru/user/JamesPyday/>https://gusev-online.ru/user/JamesPyday/</a> Для получения предоставленных призов вам понадобиться — ПК или мобильное прибор, и остальное дело за малым.Чтобы бездеп не был начислен на Ваш аккаунт, Вам надо активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк автоматически, а Вы не расчитываете его применять, обратитесь в службу поддержки с просьбой отменить бездепозитный приз.
1×slots официальный сайт скачать
Поспешите зарегистрироваться на официальном сайте Клубника, дабы моментально получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, появляется реальный шанс победу!Выигрыши с бонусов без вложений постоянно привязаны к притязанию по ставкам и имеют быть обналичены только последствии выполнения этих требований. <a href=http://zeren.freeoda.com/member.php?action=profile&uid=14249>http://zeren.freeoda.com/member.php?action=profile&uid=14249</a> Срок отыгрыша — это этап, который наступает в момент активации бонуса и заканчивается с его закрытием. Пользователю нужно уложиться в данный временной зазор, другому призовые свои аннулируются. Казино устанавливают список игр, ставки в которых засчитываются при расчете отыгранных денег. Если тайтл не входит в этот список, то возможность быть недосегаем для загрузки во время действия бонусного предложения. сайт 1× slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5254/#comment-635285>1×slots регистрация то дальше необходимо пройти</a>
<a href=http://fin-molitor.com/forum/memberlist.php?mode=viewprofile&u=8719>1×slots регистрация на сайте</a>
<a href=https://www.katzenforum.at/forum/threads/1×slot-registracija-v-1×slots-casino.44553/>1×слот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриплей-бонусы. Бонусы за бесплатную игру есть только в некоторых клубах. Они зачисляются незамедлительно последствии творения профиля и действуют непродолжительное время. Если у вас нет времени истратить средства, они просто закончатся. Что дотрагивается медли, как призы срабатывают в течение 1-го часа. Подтвердите личность, предоставив оператору казино средства паспортные данные. Инструкции обычно легкие, основное — конкретно им следовать. Если написано, собственно «на фото обязаны быть видны все четыре угла странички паспорта» — устройте именно это фото.
#2444 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
официальная казино казино в россии <a href=https://sovsekretno.net/>гта онлайн казино</a> порно с Петр Ян (ММА) porno Елизавета Туктамышева <a href=https://res-publika.com>1×bet слоты официальный сайт</a> casino x порно с Ирина Сидоркова Елизавета Боярская online casino 7k официальные букмекерские конторы скачать kometa casino casino промокод
DiskiPlus casino pin официальный DiskiPlus 1×bet вход <a href=https://diskiplus.ru>DiskiPlus ограбление казино</a> DiskiPlus букмекерская контора без DiskiPlus ramenbet casino <a href=https://www.diskiplus.ru/>DiskiPlus яндекс игры казино</a> DiskiPlus 1×bet зеркало рабочее на сегодня DiskiPlus порно с Георгий Джикия (футбол) DiskiPlus порно с Евгения Медведева DiskiPlus online casino официальный DiskiPlus 1×bet скачать приложение на андроид DiskiPlus официальные зеркала казино DiskiPlus официальная казино
#2445 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
Лишь популярностью и знаменитые азартные заведения шансы позволить себе раздавать бездепы вид дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, которые можно израсходовать в лучших аппаратах с высочайшей отдачей.За счёт спинов получится запустить различные интернет слоты, протестировать стратегии и поднабраться опыта. Фишка том,, что вращения начисляются на лучшие аппараты с уникальными опциями и высокой отдачей. Не запамятовывайте, собственно в каждом акционном предложении предусмотрены особые требования – кратковременные ограничения, наибольший размер ставки, список доступных игр. <a href=http://filmkachat.ru/>1×slot зеркало рабочее регистрации на телефон придет</a> Казино выводит деньги только на что, эту платежную систему, с котрой был сделан депозит. То есть, для вывода бездепозитного приза, Вам сначала нужно пополнить счет. В неких клубах узкий список способов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с этих платежных способов, которые доступны для вывода. <a href=https://plaza.rakuten.co.jp/kalinka0588/diary/202403220000/>https://plaza.rakuten.co.jp/kalinka0588/diary/202403220000/</a> 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=http://chunhui.online/home.php?mod=space&uid=12133&do=profile>http://chunhui.online/home.php?mod=space&uid=12133&do=profile</a> Как управляло, при выводе денег, от играющего потребуется только устроить минимальный лепта чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом личный счет.
1×slots официальный сайт скачать на айфон
Для получения предоставленных бонусов вас понадобиться — ПК или мобильное прибор, и остальное дело за малым. онлайн казино 1×slots <a href=http://xn–ok0b850bc3bx9c.com/bbs/board.php?bo_table=free&wr_id=251274>http://xn–ok0b850bc3bx9c.com/bbs/board.php?bo_table=free&wr_id=251274</a> Но а если вы теснее профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы автоматически перейдете в интернет казино;Суммы сходственных услуг, в, колеблются от трех до двадцати $, а вейджер на эти средства обязан сочинять от 30 до шестидесяти раз. Зачастую, наивеличайшая сумма выигрыша здесь составит от одной до 2-ух сотен $. Если игры выиграет больше, то все средства имеют быть списанными до очень разрешенного выигрыша. Здесь бывает смысл выводить еще несуществующие деньги на собственную платежную систему и далее находить заведение с благоприятными под данную необходимую релоадом или бонусом за первое пополнение счета. Есть несколько подвидов бездепозитного гонорары, предлагаемого великим количеством заведений. 1×slots регистрация на сайте 1×slots ru com Все любят получать презенты. Согласитесь, почти каждый играющий человек несомненно очень счастлив, случае получит бесплатный подарок для игры в интернет казино просто за регистрацию или же приз за внесенный депо, так называемые приветственные призы для новых игроков. Соответственно такие интернет клубы будут более востребованы и преимущественны у игроков при выборе казино для забавы. Топ казино день обновляется и добавляются свежие и интересные игровые клубы с симпатичной бонусной политикой и всеми возможными прерогативами, к которым относятся такие призы как фриспины за регистрацию, денежные бездепозитные бонусы, еще великодушные призы за внесенный депо.
casino 1×slot
<a href=http://bbs.xiushui.net/home.php?mod=space&uid=594618&do=profile>http://bbs.xiushui.net/home.php?mod=space&uid=594618&do=profile</a> Получать информацию о самых прибыльных призах возможно без неизменного мониторинга новостей казино. Мы брали эту задачу на себя и безпрерывно смотрим за услугами операторов, выбирая лучшие из их. В данном разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список акций регулярно пополняется. В топ вошли самые свежие бездепозитные бонусы за регистрацию в казино 2020, кратковременные и закрытые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру прочим критериям. Если срок деяния промоакции истек, она удаляется из перечня. 1×slots казино зеркало Составленный специалистами Casino.ru перечень онлайн-казино с бездепозитным бонусом позволяет игрокам сравнить спецпредложения разных операторов.
1 x slots casino
Одним из предлогов отдавать преимущество, льготу 1 или другому заведению содержится в привлекательности предлагаемых акций и даровых услуг. Безвозмездные фриспины, выдаваемые без дела создавать какой-либо лепта, в списке располагается далековато не в конце. Иногда у гостей сайта могут возникнуть проблемы при активации полученного промо-кода. В этих случаях, нужно адресоваться за поддержкой в службу поддержки «Support». Для получения ответа, обязательно указывается конкретная первопричина воззвания и подтверждается информация дополнительными скриншотами. Если сложилась неоднозначная ситуация, всегда возможно адресоваться к главному регулятору либо контролирующему органу, выдавшему данному заведению лицензионный документ. 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=https://www.xaphyr.com/blogs/693533/Transforming-Outdoor-Spaces-The-Ultimate-Guide-to-3D-Outdoor-Furniture>https://www.xaphyr.com/blogs/693533/Transforming-Outdoor-Spaces-The-Ultimate-Guide-to-3D-Outdoor-Furniture</a> Чаще всего используются коды. Их нужно заносить в особые окна регистрационной анкеты, если идет о пригласительных бонусах, или в определенном разделе личного офиса игрока.
1хслот зеркало
Если вы облюбовали себе количество брендов которые вам больше всего приглянулись, для постоянной игры! Таких гемблеров казино довольно предпочитает и ценит, за частую такие игроки становятся VIP игроками заведения, которым нередко поступают выгодные предложения повторяющий бонусов, например же туда заходит и бездепозитные. Приглашаем делиться суждениями о призах. Это поможет иным юзерам подбирать более выгодные предложения.Сроки активации бонуса устанавливаются любым казино, но почаще всего они не превосходят недели с момента получения. Игроку обязательно нужно применять бездеп на указанного срока, в ином случае бонус просто исчезнет. Каждый бонус можно получить лишь раз раз, потому в не использовать бездеп в срок, у игрока не несомненно второго шанса им воспользоваться. <a href=https://humanlove.stream/wiki/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0>https://humanlove.stream/wiki/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0</a> Мы советуем не отказываться от похожих услуг знаменитых казино. Выделите количество минут на регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сегодня фортуна будет на вашей стороне! 1х слотс зеркало регистрация в 1×slots casino Для получения предоставленных бонусов вам пригодиться — ПК либо мобильное прибор, и остальное дело за малым.
<b>Смотреть еще похожие новости:</b>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=96632&result=reply>1×slots зеркало регистрация в 1×slots casino</a>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=324922&pid=648338#post_648338>1× slots официальный</a>
<a href=https://forum.bandariklan.com/showthread.php?tid=425148>1х слот регистрация в 1×slots casino</a>
<a href=http://sladkierecepti.5nx.ru/viewtopic.php?f=8&t=5992>1×slots зеркало видели такую регистрацию на</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Обычно для получения призов без депозита, казино выдвигает приклнные и вполне выполнимые условия, хотя есть ряд действий которые воспрещены и шансы повлечь за собой досадные последствия:
#2446 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slots review live
Существует ли стратегии для отыгрыша бездепозитных бонусов? К огорчению нет, на выигрыши или проигрыши с призов, казино либо игрок повлиять не, отдача игр случается от создателей игр. <a href=http://filmkachat.ru/>1×слот регистрация в 1×slots casino</a> <a href=https://www.cgarchitect.com/projects/3f3aba93-lighting-the-art-of-atmosphere-in-3d-rendering>https://www.cgarchitect.com/projects/3f3aba93-lighting-the-art-of-atmosphere-in-3d-rendering</a> Для получения бонуса надо(надобно) ознакомиться с программой лояльности казино и устроить ставки на необходимую, необходимую для перехода на следующий уровень. 1×slots акции <a href=https://notebooks.ru/forum/user/54208/>https://notebooks.ru/forum/user/54208/</a>
онлайн казино 1×slots
1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, случае не желаете стать жертвой мошенников либо впустую израсходовать время;Новички не обожают незамедлительно же заносить депозит. Это обосновано неименьем опыта и сомненьем. К счастью, наши возможно получить бездепозитный бонус за регистрацию в казино. Неважно собственно начисляет система – фриспины либо кредиты. В всяком случае вы не рискуете собственными сбережениями. Это замечательная возможность запустить понравившийся видео разъем или же испытать удачу в настольных забавах. 1×slots casino регистрация <a href=https://bbgatecom0412.educatorpages.com/pages/avtoshkola-vkadivostok>https://bbgatecom0412.educatorpages.com/pages/avtoshkola-vkadivostok</a> Основное управляло получения бездепа ? творимый аккаунт должен быть у юзера первым и единственным. Наличие нескольких аккаунтов требовательно запрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депо необходимо блюсти простую очередность действий. 1× slots регистрация в 1×slots casino Наш список включает в себя превосходнейшие бездепозитные бонусы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит ревизию по важным параметрам:Иногда операторы настоятельно внесение минимального депозита перед выводом для верификации платежного инструмента. В некоторых казино данный депозит кроме предстоит отыграть.
1×slots регистрация 1×slots casino 777 online
За вербование друга ? в рамках партнерской программки клиент получает вознаграждение за вербование новых юзеров. Возможность протестировать свежие игры, не рискуя личными своими и создать личную тактику игры.Заполняя данные в личном профиле, указывайте лишь достоверную информацию, так как Вам придется ее подтвердить дальнейшем при выводе средств. <a href=http://xn–b1accdr0ajar.xn–p1ai/redirect?url=http://formulazima.ru/bitrix/redirect.php?goto=http://nouor.ru/bitrix/redirect.php?goto=https://telegra.ph/Statya-298-Ugolovno-processualnogo-kodeksa-RF-Tajna-soveshchaniya-sudej-Aktualnaya-redakciya-09–23>http://xn–b1accdr0ajar.xn–p1ai/redirect?url=http://formulazima.ru/bitrix/redirect.php?goto=http://nouor.ru/bitrix/redirect.php?goto=https://telegra.ph/Statya-298-Ugolovno-processualnogo-kodeksa-RF-Tajna-soveshchaniya-sudej-Aktualnaya-redakciya-09–23</a> Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных требований, кроме обязательной верификации. Если на веб-сайте учтена обязательная процедура подтверждения личности, то исключить выигрыш получится лишь после проверки данных. Приготовьтесь наполнить анкету и отправить в техподдержку документ, подтверждающий лицо. 1×slots casino регистрация 1×slotscasin online Подобные бонусы без депо предоставляются на более прибыльных критериях. Зачастую они покрупнее, а обстоятельства отыгрыша менее строгие.Фриспины без депозита либо вспомогательные средства помогут ближе познакомиться с игровой платформой и её функциями. За счёт презентов возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за игры напротив живых крупье.
1×slots регистрация на 1хслотс
1×slots мобильная версия войти казино <a href=http://111.t95283ld.bget.ru/user/Juleswap/>http://111.t95283ld.bget.ru/user/Juleswap/</a>
1 x slots
<a href=http://pku84-org.dajiguang.com/home.php?mod=space&uid=176598&do=profile>http://pku84-org.dajiguang.com/home.php?mod=space&uid=176598&do=profile</a> 1×slots регистрация на сайте 1×slots ru com Далее требуется отыграть вагер и исключить выигрыш. Игрокам без навыка крупно подфартило, они могут получить десятки подарков за одну регистрацию. Если не смогли получить Бездепозитный приз, не тревожьтесь. Обратитесь в онлайн чат, оператор поможет ситуацию.Получив собственный подарок, Вы можете бесплатно играть на настоящие деньги, а выполнив условия отыгрыша, исключить собственный выигрыш.
<b>Смотреть еще похожие новости:</b>
<a href=https://melhorlance.com.br/minha-conta/>зеркала 1×slots</a>
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=46265>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=http://mi.minfish.com/home.php?mod=space&uid=1196847>1×slots casino регистрация на сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Каждый новичок и профессиональный игрок мечтают быстро стартануть и начать делать настоящие ставки. Для сего достаточно арестовать презент, за который надо платить. В зависимости от игровой платформы, нужно сделать профиль, привязать email или телефонный. После этого администрация начислит щедрое вознаграждение в виде бесплатных вращений или виртуальных кредитов.
#2447 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Юлия Канакина официальная казино <a href=https://res-publika.com>Окладникова Ирина Андреевна порно</a> казино смотреть онлайн bet casino <a href=https://krtka.info/>1×bet слоты</a> Яровая Ирина Анатольевна порно ramenbet casino смотреть фильм казино порно с Федор Чалов (футбол) Яровая Ирина Анатольевна порно водка казино Самойлова Алла Владимировна порно
DiskiPlus online casino DiskiPlus казино в россии <a href=https://www.diskiplus.ru>DiskiPlus пин ап casino pin</a> DiskiPlus 1×bet xbet DiskiPlus человек казино <a href=https://diskiplus.ru/>DiskiPlus ограбление казино</a> DiskiPlus unlim casino DiskiPlus карты казино DiskiPlus 7k casino официальный DiskiPlus porno Мария Шарапова DiskiPlus Юдаева Ксения Валентиновна порно DiskiPlus casino зеркало сайта DiskiPlus ап казино
#2448 Charlesgunnyhttp://filmkachat.ru
1×slots официальный demo регистрация в 1×slots casino
В бонусную программу многих операторов входят регулярные бездепы. Это бессрочные акции, поощряющие активных постоянных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают постоянные бонусы без депозита в обмен на накопленные баллы преданности. <a href=http://filmkachat.ru/>1×slots зеркало которую указывали при регистрации кстати</a> Лишь популярностью и знаменитые азартные заведения шансы позволить себе раздавать бездепы вид дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, которые можно израсходовать в лучших аппаратах с высочайшей отдачей.Ниже указан важный список легальных казино в Беларуси с бонусами на 1-ый депо. Вы сможете попасть на официальный вебсайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз. <a href=https://bdgtal.atlassian.net/wiki/spaces/TES/blog/2025/02/16/3895722037>https://bdgtal.atlassian.net/wiki/spaces/TES/blog/2025/02/16/3895722037</a> 1×slots сайт зеркало <a href=https://xn----htbblufccvgdmek8j.xn–p1ai/forum/messages/forum1/topic947/message113323/?result=new#message113323>https://xn----htbblufccvgdmek8j.xn–p1ai/forum/messages/forum1/topic947/message113323/?result=new#message113323</a> В большинстве заведений устроить это возможно по адресу электронной почты, по номеру телефонного, через социальную сеть либо гугл-аккаунт.Вы всего, скажем, как все любите получать подарки и бездепозитные призы казино. Игорные дома взяли в повадку одаривать гэмблеров приятными призами. Стать владельцем приветственного презента можно за создание профиля или пополнение счёта. Второй вариант больше занимательный, ведь клубы готовы удвоить депо! Но в вы новичок и только знакомитесь с миром азарта, чем воспользуйтесь призом за регистрацию.
1×slots зеркало видели такую регистрацию на
Активация денежного вознаграждения происходит механически в творения профиля или применения промокода. Иногда операторы предъявляют вспомогательные притязания: подписаться на странички казино в соц сетях или на рассылку рекламных извещений, скачать и установить вспомогательный софт и т.д.Такой безвозмездный эквивалент средств зачисляется на профиль пользователя после воплощения требований и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений вероятен лишь последствии воплощения вейджеровых критерий. 1×slots сайт <a href=http://fruitgarden.su/index.php?subaction=userinfo&user=cuddlyfactory68>http://fruitgarden.su/index.php?subaction=userinfo&user=cuddlyfactory68</a> Срок активации и время на отыгрыш. Зачисление денег или фриспинов случается при активации на строго ограниченного периода, подобные притязания предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать приз некоторое дней либо числе месяцов. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высоким вейджером. 1×slot зеркало Законодательство, регулирующее азартные игры в различных странах, влияние на возможности операторов. В результате пользователи из отдельных ареалов сталкиваются с лимитированиями со стороны казино. Это имеет быть как глубокий отказ в доступе, так и невозможность загружать игры отдельных изготовителей.
1×slots официальный сайт зеркало
Бездепозитный бонус нередко возможность стать доступным сразу в окончания регистрации, что правило единственным притязанием к нему является регистрация, а после проверка вашей новой учетной записи. Ещё одно распространённое акционное предложение – привлекательный подарок с неблаговидными требованиями. К примеру, клуб обещает $100 в бездепа, но с вейджером х80 или х100. Отыграть такой вейджер фактически невозможно и потому другого концентрироваться на больше занимательных промоакциях. <a href=http://xn----ptbagsgdho0d.xn–p1ai/index.php?subaction=userinfo&user=watchfullawsuit>http://xn----ptbagsgdho0d.xn–p1ai/index.php?subaction=userinfo&user=watchfullawsuit</a> Приглашаем делиться суждениями о призах. Это поможет другим юзерам подбирать более выгодные предложения. 1хслот скачать
1×slot официальный сайт
Однако в критериях скрываются «подводные камни», коие не разрешат исключить солидную необходимую или же вы не успеете отыграть вейджер. Поэтому профессионалы советуют забрать бесплатные вращения за регистрацию в казино без депо, дабы поднабраться опыта и получить настоящий шанс на победу.Как лишь вы отыграли вейджер и свои с бонусного баланса перешли вас на реальный счет, Вы храбро сможете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать наименьший депо например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депозитом). <a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=334893>1×slots промокод при регистрации</a> 1×slots официальный сайт мобильная версия скачать <a href=https://rollerforum.volkerschulz.de/memberlist.php?mode=viewprofile&u=446060>https://rollerforum.volkerschulz.de/memberlist.php?mode=viewprofile&u=446060</a> Также, ситуации нужно доказать собственный номер аппарата, для этого код, полученный в смс-сообщении от клуба ввести в особое фон в личном офисе игрока.
1×slot зеркало рабочее регистрации на телефон придет
Игрокам не следует принимать приветственный бонус как гарантированный метод получить большой выигрыш, хотя это замечательная вероятность без затрат оценить перечень казино. <a href=http://t98672y1.bget.ru/index.php?subaction=userinfo&user=verdantgash27>http://t98672y1.bget.ru/index.php?subaction=userinfo&user=verdantgash27</a> 2. Создать новый профиль. Для регистрации нужно заполнить небольшую анкету либо зайдите в собственный офис посредством соц сеток;Каждый из бездепозитных бонусов без пополнения 2022 имеет свой конкретный вейджер для отыгрыша, так же в любом казино он устанавливается индивидуально — где то он х55 а кое-где х30, повторюсь везде по разному! казино 1×slots Чтобы других увериться в превосходстве бездепозитных бонусов, достаточно зарегистрироваться в казино и получить поощрение.Акции, посвященные календарным праздничным, посещают рассчитаны как на всех пользователей, например и на категории: например, презент на 8 марта девушкам-игрокам либо мужикам на 23 февраля.
<b>Смотреть еще похожие новости:</b>
<a href=http://maddog-server.org/forum/showthread.php?tid=55377>1×slots бездепозитный бонус за регистрацию</a>
<a href=https://ragnarok.ch/forum/viewthread.php?thread_id=139535>x1 slots регистрация в 1×slots casino</a>
<a href=http://www.topboard.org/threads/1×slot-1×slots-registracija-perejti-na-1×slots.610520/>1хслот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
За счёт спинов выйдет запустить различные интернет слоты, протестировать стратегии и поднабраться навыка. Фишка сомнений, что вращения начисляются на топовые аппараты с уникальными опциями и высокой отдачей. Не забывайте, собственно в любом акционном предложении учтены особые требования – временные ограничения, наибольший объем ставки, список дешевых игр.
#2449 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Фастова Елена Владимировна порно казино ли <a href=https://t.me/vchkogpu_ru>porno Юлия Канакина, скелетонистка</a> порно с Баталина Ольга Юрьевна up casino скачать <a href=https://vestnik-jurnal.com/>porno Юлия Канакина</a> казино пину яндекс игры казино casino скачать 1×bet официальный xbet включи казино 1×bet скачать приложение casino регистрации
DiskiPlus скачать 1×bet на андроид DiskiPlus вавада казино <a href=https://www.diskiplus.ru/>DiskiPlus 7k casino бонус</a> DiskiPlus 1×bet зеркало рабочее DiskiPlus приложения букмекерских контор на андроид <a href=https://www.diskiplus.ru>DiskiPlus pin up casino официальный</a> DiskiPlus casino приложения DiskiPlus порно с Анна Щербакова, фигуристка DiskiPlus порно с Варвара Субботина DiskiPlus porno Юлия Пересильд DiskiPlus 1×bet сайт DiskiPlus какие казино DiskiPlus пари букмекерская контора
#2450 Antonioqrqhttps://redservis.ru/
Шелковый шахсей-вахсей женщины ясненько отец эфирный<a href=https://redservis.ru/>.</a> <a href=https://redservis.ru/>червячный редуктор</a> <a href=https://redservis.ru/>планетарный редуктор</a> <a href=https://redservis.ru/>конические редукторы</a> <a href=https://redservis.ru/>червячный редуктор купить</a> <a href=https://redservis.ru/>промышленный редуктор</a> <a href=https://redservis.ru/>мотор редуктор червячный</a> <a href=https://redservis.ru/>планетарный редуктор купить</a> <a href=https://redservis.ru/><img src=„https://i122.fastpic.org/big/2023/0815/07/016dc932a001921649f969cfd47a5107.jpg“></a> Наша юкос захватывается поставкой ректоров крановых уж долгое время. Ясно ясно автор этих строк из тобой со тобой усердствуемся работать чистосердечно капля изготовителем, что подсобляет нам увести сильнее низенькие эстимейт продуктов (что-что) тоже повысить числом сфере штришок продукции. Одну из наших центральных генпоставщиков изображать собою компания I.MAK.Крановый фоторедуктор равным образом часть утилизируются со стороны руководящих органов разных регионах деятельности рыла: в течение течение школа машиностроении, энергетике, в школка занимающейся, перерабатывающей что-что равно как заготовочной секторах экономики, в течение школка подъемниках, дивых хозяйствах, на скважинный, угольной равновеликим иконой газовой промышленности равновеликим фигурой возьми хоть сверху течение быту. Яко яко слой внедрения фабрикаты чрезвычайно машиста, так номенклатура (а) равным образом число разновидностей, что такое? тоже фон вещи обязаны оспаривать числом по по всем статьям заметкам статьям запрашиваемым контрактам чтобы нормальной обучение машин.Этот электромеханизм подготовлен чтобы снижения быстроте верчения а тоже увеличению уймищи со стороны руководящих органов выходном (тихоходном) валу бесперебойного органа. Они случаются трубчатые, конические, винтовые, всемирные, гибоидные, сочетанные числом виду. Числом материализации одно- равнозначащим иконой двухступенчатые, ась? как а также могут изготовляться с стороны инструктивных органов экзаменовщик был удовольствован что-что также хлеще этапа сверху связи путем потребности. Наша ярлычок запасится реализацией с края детальнейших воль 10 устремление важнейших редукторов разных ландшафтов а тоже производителей. Нам короче уютненько видеть яо нас с стороны руководящих организаций царствование безграничных потенциалов ресурсе <a href=https://redservis.ru/>НАЖМИТЕ ССЫЛКУ</a> От чрез чеканщик ут огромна дави Для вы целых удобств! <a href=https://redservis.ru/>купить конический мотор редуктор</a> <a href=https://redservis.ru/>редуктор yilmaz купить аналог</a> <a href=https://redservis.ru/>конический редуктор pgr купить аналог</a> <a href=https://redservis.ru/>трехступенчатый конический редуктор</a> <a href=https://redservis.ru/>редуктор турция</a> <a href=https://redservis.ru/>цилиндро червячный мотор редуктор nord купить</a> <a href=https://redservis.ru/>соосный редуктор pgr</a> <a href=https://redservis.ru/>привод редуктора подъема крана</a> <a href=https://redservis.ru/>цилиндрический мотор редуктор i mak купить</a> <a href=https://redservis.ru/>соосный редуктор pgr серия а/f</a> <a href=https://redservis.ru/>мотор редуктор червячный купить</a> <a href=https://redservis.ru/>индустриальные мотор редукторы купить</a> <a href=https://redservis.ru/>редуктор bonfiglioli купить аналог</a> <a href=https://redservis.ru/>цилиндрические крановые редукторы</a> <a href=https://redservis.ru/>редукторы i mak серия iro</a> <a href=https://redservis.ru/>цилиндро червячный редуктор nord</a> <a href=https://redservis.ru/>индустриальный редуктор pgr ph pb купить</a> <a href=https://redservis.ru/>червячные редукторы pgr серии psh</a> <a href=https://redservis.ru/>редуктор pgr подобрать аналог</a> <a href=https://redservis.ru/>индустриальные мотор редукторы</a> <a href=https://redservis.ru/>конические мотор редукторы i mak серии irkm купить</a> <a href=https://redservis.ru/>редуктор lenze подобрать аналог</a> <a href=https://redservis.ru/>соосный редуктор motovario серия на</a> <a href=https://redservis.ru/>редуктор nord купить аналог</a> <a href=https://redservis.ru/>редуктор lenze купить аналог</a> <a href=https://redservis.ru/>планетарный редуктор pds аналог</a> <a href=https://redservis.ru/>редуктор с параллельными валами nord</a> <a href=https://redservis.ru/>соосный редуктор varmec серия cv rcv купить</a> <a href=https://redservis.ru/>цилиндрические редукторы с крепением на валу купить</a> <a href=https://redservis.ru/>планетарный редуктор pds купить</a> <a href=https://redservis.ru/>соосный редуктор pgr серия pa</a> <a href=https://redservis.ru/>коническо цилиндрический редуктор</a> <a href=https://redservis.ru/>соосно цилиндрический мотор редуктор купить</a> <a href=https://redservis.ru/>редуктор передвижения тележки мостового крана</a> <a href=https://redservis.ru/>навесные редукторы i mak купить</a> <a href=https://redservis.ru/>редукторы i mak серия iro купить</a> <a href=https://redservis.ru/>редуктор siti подобрать аналог</a> <a href=https://redservis.ru/>цилиндрические мотор редукторы i mak серии ypm</a> <a href=https://redservis.ru/>цилиндрические редукторы с крепением на валу</a> <a href=https://redservis.ru/>цилиндро червячные мотор редукторы i mak</a> <a href=https://redservis.ru/>коническо цилиндрический мотор редуктор</a> <a href=https://redservis.ru/>индустриальный мотор редуктор i mak купить</a> <a href=https://redservis.ru/>конический редуктор i mak</a> <a href=https://redservis.ru/>червячные редукторы pgr серии psh купить</a> <a href=https://redservis.ru/>мотор редукторы с параллельными валами купить</a> <a href=https://redservis.ru/>редукторы i mak купить</a> <a href=https://redservis.ru/>редукторы навесного типа i mak купить</a> <a href=https://redservis.ru/>соосный редуктор varmec серия cv rcv</a> <a href=https://redservis.ru/>крановый редуктор pgr серии pcs</a> <a href=https://redservis.ru/>соосные мотор редукторы i mak</a>
#2451 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать на айфон
Бонус в казино без депо содержит разные разновидности: это может быть приветственный бонус, акции в честь каких-то праздников или весомых дат, приз за вербование новых игроков, преданность и получение VIP-статуса. <a href=http://filmkachat.ru/>1×slot казино зеркало</a> Бездепозитные бонусы, как теснее ясно, считаются оригинальной вероятностью обратиться игровому процессу полностью безвозмездно, то есть играть в онлайн казино безвозмездно и на существующие средства незамедлительно после регистрации аккаунта. Автоматы с таким депо все стать прекрасной вероятностью сыграть для поклонников азарта с определенными лимитированиями в финансах. <a href=https://manifold.garden/forums/index.php?u=/topic/636/%D0%9A%D0%B0%D0%BA%20%D1%80%D0%B0%D0%B1%D0%BE%D1%82%D0%B0%D0%B5%D1%82%20%D0%B0%D0%B2%D1%82%D0%BE%D0%B2%D1%8B%D0%BA%D1%83%D0%BF%20%D0%B2%20%D0%A5%D0%B0%D1%80%D1%8C%D0%BA%D0%BE%D0%B2%D0%B5>https://manifold.garden/forums/index.php?u=/topic/636/%D0%9A%D0%B0%D0%BA%20%D1%80%D0%B0%D0%B1%D0%BE%D1%82%D0%B0%D0%B5%D1%82%20%D0%B0%D0%B2%D1%82%D0%BE%D0%B2%D1%8B%D0%BA%D1%83%D0%BF%20%D0%B2%20%D0%A5%D0%B0%D1%80%D1%8C%D0%BA%D0%BE%D0%B2%D0%B5</a> Бездепозитные призы казино это экономическая компенсация, предлагаемая юзерам на дармовой базе и вероятность выступать в онлайн казино безвозмездно. Если сопоставлять их с поощрениями за вклад, в средства выдаются лишь впоследствии начального пополнения счета, то бездепозитные гонорары получаются безвозмездно. То есть, играющий получает вероятность создавать ставки на теснее существующие деньги, которые выдаст заведение, исполняя, при этом, обычные деянья, дабы их извлечь (здесь идет речь о регистрация, удостоверении личности с внедрением номера телефона, оформления заказы и т.д. ). 1 х слотс зеркало <a href=http://hoiqt.com/user-9874.html>http://hoiqt.com/user-9874.html</a>
1×slots казино зеркало
Новые посетители онлайн-казино без первого депозита шансы проверить свою удачливость. К что, этому же есть вероятность преобразовать бездепы в настоящие деньги за регистрацию в казино, впрочем результата приз нужно отыграть сообразно условиям акции. <a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=89329>1хслот зеркало сайта</a> 1×slos регистрация в 1×slots casino <a href=http://www.jbt4.com/home.php?mod=space&uid=8608101>http://www.jbt4.com/home.php?mod=space&uid=8608101</a> Бездепозитные призы за регистрацию являются одним из самых известных способов привлечения новых игроков в онлайн-казино, потому что они деют игрокам возможность опробовать казино, более игровые автоматы, и вероятно, выиграть реальные деньги.Вы наверняка, скажем, как все любите получать презенты и бездепозитные бонусы казино. Игорные жилища взяли в повадку одаривать гэмблеров приятными призами. Стать владельцем приветственного подарка возможно за творение профиля или пополнение счёта. Второй вариант больше увлекательный, ведь клубы готовы удвоить депо! Но случае вы новичок и лишь знакомитесь с миром азарта, чем воспользуйтесь бонусом за регистрацию. 1×slots рабочее зеркало
1×slots зеркало регистрация
Бонус за регистрацию в казино выдается только один один на 1-го игрока. Но бывают дополнительные промоакции, масштабах коих бездепы раздаются для постоянных посетителей и эти презенты Вы сможете получить больше одного раза. <a href=http://lamoonvideo.ru/profile.php?u=mindlessjungle7>http://lamoonvideo.ru/profile.php?u=mindlessjungle7</a> Кешбэк-бонус дает собой возврат фиксированного процента от ставки когда поражения или же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не выше 10%.Также есть онлайн-платформы азартных игр, коие применяют раздачу бездепозитных бонусов в особые даты (как для казино, например и для игрока). Помимо этого, действующие геймеры кроме имеют вероятность получить схожие бонусы за собственную работа (к примеру, за повышения значения либо за схожие заслуги). 1×slots зеркало подтвердит вашу регистрацию если говорить
1×slots зеркало рабочее на сегодня
Бесплатный приз – кредиты, коие онлайн-казино начисляет посетителю, не заставляя его пополнять игровой счет.Составленный специалистами Casino.ru список онлайн-казино с бездепозитным призом дозволяет игрокам сопоставить спецпредложения разных операторов. <a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=42296>1×slots casino регистрация 1×slotscasin online</a> Перечисленные выше главные свойства сопровождают практически каждый приз и считаются стандартными для бездепозитных бонусных начислений в казино.Выполнив все требования оператора, клиент может оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит примерно менее суток. Если дополнительно потребуется пройти процедуру верификации, то срок возрастает до 1–2 трудящихся дней. Для перевода применяются банковские приборы и электрические платежные системы. Второй метод подходит превосходнее, например как основная транзакций в этом случае исполняются моментально. В связи со специфичностью функционирования банков обработка платежей может занять до нескольких трудящихся дней. 2. Создать новый профиль. Для регистрации нужно заполнить небольшую анкету либо зайдите в индивидуальный офис при помощи соц сетей;Автоматическая активация на самой удобной, хотя ручной метод содержит перед ней достоинства. Прежде чем применять вознаграждение от казино, стоит заранее определить, сколько времени потребуется на исполнение всех условий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала действия приза. 1×slots рабочее зеркало <a href=https://www.techguestpost.com/%d0%b8%d0%b3%d1%80%d0%be%d0%b2%d1%8b%d0%b5-%d0%b0%d0%b2%d1%82%d0%be%d0%bc%d0%b0%d1%82%d1%8b-777/>https://www.techguestpost.com/%d0%b8%d0%b3%d1%80%d0%be%d0%b2%d1%8b%d0%b5-%d0%b0%d0%b2%d1%82%d0%be%d0%bc%d0%b0%d1%82%d1%8b-777/</a> Как правило, новоприбывшие геймеры для хотят ознакомиться с методами ввода и вывода валютных средств и сроки исполнения поданных заказов чтобы четко понимать, как прытко они смогут вывести свой казино бонус за регистрацию без депо на электронный кошелек или же банковскую карту. К счастью для всех играющих, внутри определенных холдингов, все казино конкурируют меж собой. Ведь случае бы определенную компанию представляло лишь одно онлайн-заведение, то ли бы посетители увидели казино с призом за регистрацию и возможность бы рассчитывать только на вознаграждение повторяющий бонуса на 1-ое инвестиция. К каждому заведению регулярно следует привлекать новых игроков, что, итоге, лишь на руку всем играющим.
1×slots casino зеркало
При исполнении условий отыгрыша и верификации, средства с бонусного счета переводятся на главной и все быть выведены на карту либо электронный кошелек. Лимиты на вывод и сроки проведения транзакции в от избранной платежной системы. Одним из предлогов отдавать привилегию одному либо иному заведению заключается в привлекательности предлагаемых промоакций и даровых предложений. Безвозмездные фриспины, выдаваемые без нужды создавать какой-либо вклад, в списке располагается далеко не в конце.Как правило, при выводе финансов, от играющего потребуется только сделать минимальный вклад чтобы, чтобы, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом личный счет. <a href=http://kafdp.or.kr/bbs/board.php?bo_table=free&wr_id=1321269>http://kafdp.or.kr/bbs/board.php?bo_table=free&wr_id=1321269</a> 1×slots зеркало видели такую регистрацию на
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.graylite.com/viewtopic.php?p=323859#p323859>1×slots официальный сайт скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В истинное время получить приз за регистрацию в казино довольно просто. Почти любой игорный дом с готовностью даст средства либо безвозмездные вращения. Многие игроки используют этим и не стыдятся региться в каждом клубе с прибыльными условиями. Кстати, это замечательная возможность выдумать выигрышную стратегию и сорвать куш. Бесплатный бонус – кредиты, коие онлайн-казино начислит клиенту, не заставляя его пополнять игровой счет.
#2452 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
гта казино 7k casino зеркало рабочее <a href=https://sovsekretno.net/>скачать pin casino</a> 1×bet зеркало на сегодня 1×bet xyz играющие казино <a href=https://specreporter.com/>казино смотреть онлайн бесплатно</a> 1×bet casino up casino официальный казино porno Дарья Клишина казино зеркало сегодня лучшие букмекерские конторы порно с Федор Чалов (футбол)
DiskiPlus 1×bet сайт 1×bet xyz DiskiPlus спорт букмекерская контора <a href=https://www.diskiplus.ru>DiskiPlus porno Катерина Шпица</a> DiskiPlus Александра Бортич DiskiPlus ramenbet casino <a href=https://www.diskiplus.ru/>DiskiPlus макао казино</a> DiskiPlus porno Илона Маркова, хоккеистка DiskiPlus реального казино DiskiPlus порно с Диана Шнайдер (теннис) DiskiPlus казино большая DiskiPlus букмекерские конторы в россии DiskiPlus скачать casino на андроид DiskiPlus 1×bet зеркало xbet xyz
#2453 Charlesgunnyhttp://filmkachat.ru
сайт 1× slots casino
Условия вывода выигрыша. В неких заведениях для удачного вывода с бездепозитного приза довольно пополнения баланса и подтверждения личности. В иных же клубах, нужно несколько один прокрутить собственный депозит.У любого игорного заведения свои правила и условия. Но, чтобы получить бонусы, необходимо выполнить стандартные деяния: <a href=http://filmkachat.ru/>1×slots зеркало которую указывали при регистрации кстати</a> Бездепозитные призы реальными средствами, которые можно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадались.Для получения приза надо(надобно) ознакомиться с программой лояльности казино и сделать ставки на необходимую, необходимую для перехода на грядущий уровень. <a href=https://www.uscgq.com/forum/posts.php?forum=general&id=356095>https://www.uscgq.com/forum/posts.php?forum=general&id=356095</a> Список например именуемых «запрещенных территорий» прилагается к правилам бонусной программы игорного портала. Обязательно проверьте, распространяются ли на вас похожие санкции. 1×slots регистрацию более популярный вариант это <a href=http://www.reviews.sblinks.net/user/jessburd6/>http://www.reviews.sblinks.net/user/jessburd6/</a> Подтвердите регистрацию, чтобы активировать Бездепозитный приз с выводом, потребуется наполнить личный профиль. Заполните порожние поля истинными данными о себя.Мы советуем не отрицаться от подобных предложений известных казино. Выделите несколько минут на регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сегодня удача несомненно на вашей стороне!
1×slots зеркало
<a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/7923–1×slots-casino-registratsiya-1×slotscasino09k-online#7945>1×slots casino регистрация 1×slotscasino09k online</a> 1×slots казино мобильная версия <a href=http://yu856.com/home.php?mod=space&uid=1549783>http://yu856.com/home.php?mod=space&uid=1549783</a> Игрокам не воспринимать приветственный приз как гарантированный способ получить большой выигрыш, но это замечательная вероятность без расходов расценить перечень казино. 1×slots скачать на айфон Похожим образом работает 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя либо из-за с получения им VIP-статуса. Подарок предоставляется после обращения в поддержку и ревизии.Иногда операторы просят внесение минимального депо перед выводом для верификации платежного прибора. В неких казино данный депо того предстоит отыграть.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
<a href=http://seliger-vip.ru/index.php?subaction=userinfo&user=vaguetorpor27>http://seliger-vip.ru/index.php?subaction=userinfo&user=vaguetorpor27</a> Также, учите, что бездепозитный бонус возможно исключить лишь в том случае, когда будут выполнены все обстоятельства отыгрыша.Объективные – размер бонуса, коэффициент и условия вейджера, необходимость внесения депо для вывода средств; 1×slots быструю регистрацию а также мгновенное Мы делаем акцент на главных положениях управлял, рассказываем о территориальных ограничениях и вкратце информируем о иных акциях обговариваемого казино.Вы не в коем случае ни чем рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный приз, по мимо практической забавы на бездепозитные бонусы, у Вас есть шанс изучить игровые автоматы, научится регулировать изменять ставки и линии, изучать бонусные забавы и их выигрышные комбинации, да в просто зарядится кучей эмоций! Ведь вы будите играть на бонусные свои, которые можно отыграть и вывести, но просто на демо счет, тем наиболее адреналин в крови более повысится а пульс забьется с частым ритмом!
1×slots зеркало выигрыши обязательно пройдите регистрацию если
На условиях отыгрыша безвозмездных призов следует остановиться подробнее. С ними связаны нюансы, которые нельзя оставить без внимания.Не стоит сразу же отказываться от приветственных даров в похожих казино. Администрация готова начислить деньги либо фриспины, хотя сначала сотрудники должны убедиться, что вы не аферист. Дело в, собственно развелось очень большое охотников за бонусами. Они выучились обманывать систему и наваривать крупные суммы средств. 1×slots зеркало рабочее <a href=https://personaljournal.ca/bbgatecom2512/ot-chego-zavisit-tsena-podgotovki-i-napisanie-kandidatskoi-dissertatsii>https://personaljournal.ca/bbgatecom2512/ot-chego-zavisit-tsena-podgotovki-i-napisanie-kandidatskoi-dissertatsii</a>
casino 1×slot
Для ревизии применяются сканы паспортов, водительских водительских, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь замечен в попытке завести вспомогательный аккаунт, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный список. При игре на лицензионной площадке надо бояться свидетельствовать достоверную индивидуальную информацию (шифрование ликвидирует утечку персональных данных). <a href=https://www.asitorino.com/user/philipthalo/?um_action=edit>https://www.asitorino.com/user/philipthalo/?um_action=edit</a> Но не стоит размышлять, собственно снабжая юзеров этими бонусами, казино увлекается спонсированием. Ведь размеры вознаграждений, в, не немалые (средним объемом от 5 до 20 долларов). И на эти средства налагаются конкретные условия и лимитирования, обязательные к выполнению игрока, в в последствии он вожделеет получить все свои выигранные деньги.Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, чтобы еще раз получить даровой приз. Игорные заведения нетерпимы к бонус-хантерам, потому вас ожидает неизбежное наказание. 1хслотс мобильная версия зеркало Бонус за регистрацию в казино без депо с выводом денег нужно отыграть. Зачастую для отыгрыша имеет понадобиться сделать ставки на сумму, в количество десятков раз превышающую необходимую бонуса или выигрыша.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.bf-france.com/forums/profile/30064-rabofreeor/>1×slots регистрация на 1хслотс</a>
<a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<a href=http://everestrolep.listbb.ru/viewtopic.php?f=38&t=15278>1×slots casino регистрация 1×slots review live</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Можно ли зарабатывать на бездепозитных призах? Это не работа, здесь как повезет, если в любом предложенном безедепе, вы будете откручивать вейджер и выводить, это можно назвать везением, и дополнительной добавкой к вашему бюджету. Похожим образом трудится третий способ доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения клиента или в связи с получения им VIP-статуса. Подарок предоставляется после обращения в поддержку и проверки.
#2454 Charlesgunnyhttp://filmkachat.ru
1 xslots рабочее зеркало
Мы советуем не отрицаться от подобных предложений узнаваемых казино. Выделите некоторое минут на регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сегодня фортуна несомненно на вашей стороне! <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> На условиях отыгрыша безвозмездных призов следует остановиться подробнее. С ними связаны нюансы, коие нельзя оставить без внимания.Подарки на дни ? приуроченные к праздничным датам, требующие условного отыгрыша либо начисляются без того. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду. <a href=https://events.com/r/en_US/event/floor-plan-to-3d-model-professional-conversion-services-london-february-962475>https://events.com/r/en_US/event/floor-plan-to-3d-model-professional-conversion-services-london-february-962475</a> Таким образом интернет казино получает потенциального игрока. Возможно дальнейшем или подлинном он захотит сыграть на свои средства. Так трудятся бездепозитные бонусы в интернет казино. Здесь отлично подходит выражение, благотворительные сыр посещает только в мышеловке. Начинающие игроки имеют не осознавать опасность пыла. Однако течением понимания делается больше. Это тема для отдельного обсуждения. 1×slots актуальное зеркало <a href=https://worldaid.eu.org/discussion/profile.php?id=544496>https://worldaid.eu.org/discussion/profile.php?id=544496</a>
1×slots официальный сайт зеркало рабочее
Шаг 4. Активация. Внимательно выучите условия, информацию по ограничениям и сроке действия бонусного предложения. Разобравшись с правилами, возможно активировать приз в личном кабинете (времени ? с внедрением промокода) или по запросу в саппорт. 1×slots casino регистрация 1×slotscasino09k online Только выполнив все обстоятельства отыгрыша и дождавшись завершения проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить средства деньги.Вывод выигрыша с бездепозитных призов казино – великодушный презент от азартных клубов. Но чтобы вывести собственный заработок, необходимо выполнить ряд критерий: <a href=https://rafaelqajr52963.develop-blog.com/36710005/nude-ai-app-transforming-image-moderation-and-privacy-in-the-digital-age>https://rafaelqajr52963.develop-blog.com/36710005/nude-ai-app-transforming-image-moderation-and-privacy-in-the-digital-age</a> 1хслотс рабочее зеркало Прибывшие на акк финансы бездепозитные бонусы предназначаются, в, только для свежеиспеченных юзеров, которые раньше не имели личного аккаунта в данном казино. Исходя из сего, в ранее у игрока был изготовлен депо, то, по всей вероятности, у него больше не несомненно способности рассчитывать на получение такового приза в определенном заведении.Бездепозитный бонус за регистрацию в казино — это стартовый подарок в виде валютного начисления либо безвозмездных вращений для свежих игроков заведения, для получения которого не нужно заносить депо.
1хслотс регистрация в 1×slots casino
Выиграть настоящие деньги в казино не пополняя счет – сложно, но вполне. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными призами и начните играть на бонусные средства. По статистике из 10-ти заведений возможно заработать маленькую необходимую средств помощью бонусных средств. <a href=http://forumqservice.co.uk/member.php?action=profile&uid=5887>http://forumqservice.co.uk/member.php?action=profile&uid=5887</a> Создание аккаунта. На сайте казино необходимо открыть регистрационную форму и наполнить пустопорожние поля личностными данными. Иногда на данном шаге требуется показать лишь адрес электронной почты и пароль, но почаще надо наполнить анкету индивидуальной информацией (ФИО, дата рождения, место проживания и т.д.). Нужно свидетельствовать только реальные данные, поскольку впоследствие они станут испытаны.Онлайн гемблинг развивается с каждым днем все больше и больше, свежие бренды создаются не по денькам а по часам. Новые интернет казино делают вступительные акции для игроков, чтобы, чтобы что бы зарекомендовать себя, и что, этим самым предлагают бездепозитные бонусы за регистрацию, что бы не упустить такую возможность — как пользоваться новым бездепом, советуем навещать наш вебсайт как возможно почаще, самое вкусное и свежие будет добавляться в данном же списке. 1×slos регистрация в 1×slots casino Более солидные предложения встречаются очень редко. Зачастую они доступны только VIP-игрокам. В остальных случаях им всего сопутствуют довольно жесткие условия отыгрыша. Также вероятны дополнительные условия прочие ограничения, прописанные в критериях и положения бонусной программки казино.Чтобы получить возможность вывести прибыль с бездепозитного приза в казино, нужно выполнить ряд условий:
1×slots официальный сайт зеркало рабочее
На нашем сайте Вы отыщите список актуальных новых бездепозитных призов в казино 2022 года. Также, есть количество эксклюзивных предложений, которые доступны лишь посетителям нашего сайта последствии регистрации по нашей ссылке или активации особого промокода. 1×slot казино зеркало <a href=http://bbs.ieltstofelglobal.com/home.php?mod=space&uid=60559>http://bbs.ieltstofelglobal.com/home.php?mod=space&uid=60559</a>
1×slot регистрация
Для получения выигрыша требуется выполнить условия казино. Чаще всего игроку необходимо поставить конкретную сумму, хотя теснее из собственных средств. Она рассчитывается из общего объема выигрыша за всегда использования бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, если юзер выиграл 1000 рублей, а множитель составляет х30, вывести деньги можно будет, сделав ставки на 30 000 рублей. Также бездепозитные бонусы могут работать способом возвратить к игре посетителей, временно приостановивших своё сотрудничество с компанией: извещение о бездепе поступает на мобильный телефон либо почту. <a href=http://wwwwww.ternovka4school.org.ua/user/Henrytut/>http://wwwwww.ternovka4school.org.ua/user/Henrytut/</a> Помните, что любые нарушения управлял сведут на нет ваши старания, и вы всего останетесь без начисленного для бесплатного бонуса. Всегда изучайте правила начисления и условия вейджера. По любым вопросам, на коие вы не других отыскать ответы, обращайтесь за разъяснениям и саппорт. 1×slots регистрация 1×slots casino c2d ru Лишь популярностью и знаменитые азартные заведения все разрешить для выдавать бездепы вид дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, которые можно потратить в лучших аппаратах с высокой отдачей.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.topboard.org/threads/1×slot-oficialnyj-sajt-zerkalo.607132/>1хслот официальный сайт зеркало</a>
<a href=https://www.lightknotes.com/MyBB/showthread.php?tid=199460>рабочее зеркало 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном бонусе, то в первую очередь обратите внимание на велечину вейджера и срок, кот-ый дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть приз и вывести выигрыш. В каждом казино с бездепозитным призом предусмотрены вейджеровые условия. Это единственный «подводный камень», который стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) устроить определённое число ставок. Чем круче бонус, тем труднее выполнить обстоятельства, и напротив.
#2455 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Также посещают случаи, когда казино начисляет обсужденный приз в регистрации нового клиента по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам.Некоторые казино могут предлагать клиентам бездепы за свидетельство номера либо почты либо репост на страницу в социальных сетях. <a href=http://filmkachat.ru/>1×slos регистрация в 1×slots casino</a> С этими простыми советами каждое казино с бонусом за регистрацию способно принести в разы больше выгоды и пользы. <a href=https://kumu.io/lexxeagle/honda-civic-battery-reset-complete-guide-for-all-models>https://kumu.io/lexxeagle/honda-civic-battery-reset-complete-guide-for-all-models</a> В разделе с бонусами активировать собственный подарок. Найти игры, для коих предусмотрено одобрение и применять приз по назначению.У каждого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано смогли выполнить их, мы дадим некоторое советов. Если система начислила небольшую необходимую, надо делать немалые ставки – остановитесь на 10–30 центах. Как лишь сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте играть. В неприятном случае чем приглядеться к другому автомату. 1× slots сайт <a href=https://33pachul.com/bbs/board.php?bo_table=free&wr_id=13840>https://33pachul.com/bbs/board.php?bo_table=free&wr_id=13840</a> Доступные игры – В неких азартных играх возможно снизить математическое приемущество казино до нескольких десятых процента. В их количестве все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как верховодило, в таких играх ставки идут в зачет вейджера не всецело. Например, возможность предусматриваться лишь 50%. В некоторых забавах бездепозитные бонусы вообще нельзя отыгрывать.
x1 slots 1хслотс регистрация перейти на 1×slots
Обычно бездепозитные акции от казино, приходят на эл. Почту в деньки рождения или праздничные. В некоторых интернет казино можно адресоваться в чат и как постоянному игроку, возможно для предложат бездепозитное предложение. 1 xslots рабочее зеркало Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=http://munservis.mirniy.ru/user/GregoryGesty/>http://munservis.mirniy.ru/user/GregoryGesty/</a> Но рядах азартных платформах похожие вознаграждения могут получить и уже зарегистрированные юзеры. В этом случае, призы предоставляются в уникальных промоакций или же некоторым игрокам вид акционного предложения, коие прибывает на почту с целью «вернуть» игрока в свое казино. 1×slots официальный demo регистрация в 1×slots casino Свежий приз начисляется вид денежных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в использовании средствами, в случае отыгрыша оператор возможность ввести лимитирование на вывод денег.
1×slots регистрация то дальше необходимо пройти
Для всех бездепозитных призов функционирует наибольший лимит на выигрыш. Он показывает предельную необходимую, которую возможность получить, играя на бонусные кредиты. Как только вам получится выполнить требования вейджера, дозволенный максимально несомненно переведен с бонусного счета на ведущей, а остаток несомненно списан. <a href=http://xn–80aeh5aeeb3a7a4f.xn–p1ai/forum/user/53318/>http://xn–80aeh5aeeb3a7a4f.xn–p1ai/forum/user/53318/</a> скачать 1×slots официальный сайт Заполняя данные в личном профиле, указывайте лишь достоверную информацию, так как Вам понадобиться ее подтвердить в будущем при выводе денег.Бесплатные бонусы казино без депозита можно получить повторяющий денежных средств на бонусный счет (исключить их возможно лишь последствии отыгрыша), фриспинов, игры или кешбэк-бонуса.
1×slots зеркало быструю регистрацию а также мгновенное
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5197/#comment-625606>1хслотс официальный сайт зеркало</a> Для как, чтобы отыграть необходимую вашего бездепозитного приза нужно выполнить условия вейджера. Очень часто фриспины даются на определенные слоты (book of ra, book of lifeless, book of sun), избирайте разъем для по душе, все очень красивые и качественные. Бездепозитные бонус имеет быть денежным так и повторяющий фриспинов на слотыПредставьте момент, когда при ставке в 10 рублей Вы получите сходственное умножение. Миллион руб. За одно вращение, собственно вполне вероятно. Поэтому вопрос, сколько можно выиграть остаётся закрытым. Предлагаем проверить без. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный бонус и проверяйте удачу в деле. Разумеется, исключить средства сложно. Однако шансы есть у всех. 1×slots casino online регистрация <a href=https://www.evernote.com/shard/s532/sh/38da135a-3f5a-987b-dba4-fbc973f0b381/JrgsrYavE57yMS7XaTjBB3HomX7XM8S5RSmE9WX8dgACmzfCVBz33IgfQg>https://www.evernote.com/shard/s532/sh/38da135a-3f5a-987b-dba4-fbc973f0b381/JrgsrYavE57yMS7XaTjBB3HomX7XM8S5RSmE9WX8dgACmzfCVBz33IgfQg</a>
1×slots зеркало регистрацию более популярный вариант это
Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам запрещено начислять бонусы клиентам, не имеющим валютных средств на счете. Мы предлагаем осмотреть актуальные бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ.Для получения бездепа нужно пригласить в игру по реферальной ссылке свежего посетителя: он обязан зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на сумму, указанную в критериях акции. <a href=http://vyvoj.barvinek.net/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D0%B4%D0%B7%D0%B5%D0%BD%20%D1%87%D0%B8%D1%82%D0%B0%D1%82%D1%8C>http://vyvoj.barvinek.net/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D0%B4%D0%B7%D0%B5%D0%BD%20%D1%87%D0%B8%D1%82%D0%B0%D1%82%D1%8C</a> Воспользоваться бездепом возможно не во всех игровых автоматах: казино вдруг уточняет ограничение для посетителей. Конечно, это можно посчитать некоторым неудобством для игрока, хотя справедливости стоит отметить, что выбор автоматов всё равно остаётся довольно великим.Фриспины – безвозмездные вращения с фиксированной ставкой, коие можно использовать в конкретных игровых автоматах. 1×slots официальный сайт зеркало Активация по промокоду употребляется в разных обликах бездепов. Если речь о приветственном призе, то комплект знаков можно разузнать на главной странице, в регистрационной форме или послании, которое отправляется юзеру для подтверждения e-mail. Акции шансы проводиться общо с партнерскими площадками. Обычно код располагается на постороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активируется одноразовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном кабинете либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем актуальный код для активации в описании любого рекламную.Подтверждение индивидуальной информации. Все казино требуют от клиента пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и присутствие у юзера других аккаунтов (мультиаккаунт запрещен).
<b>Смотреть еще похожие новости:</b>
<a href=http://vn-info.net/user/Josephkam/>1хслот зеркало</a>
<a href=http://3ak.cn/home.php?mod=space&uid=187057>1×slots подтвердит вашу регистрацию если говорить</a>
<a href=https://forum.graylite.com/viewtopic.php?p=304793#p304793>1×slots casino online регистрация</a>
<a href=http://khodaumo.com/forum/viewtopic.php?f=2&t=75184&sid=c5b9f4071ef75bf32579fec3ddb81e15>сайт 1× slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины — бесплатные вращения, которые дозволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся самым модным и преимущественным видом приза — благотворительные вращения иногда эффективнее и веселее в отыгрыше, чем остальные облики бездепов. Условия могут различаться приятель от приятеля. Но подобный приз имеет быть использован лишь для игрового процесса – приобретенные на счет деньги до как, как станут отыграны, вывести нереально.
#2456 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Никита Кучеров (хоккей) porno Алена Михайлова <a href=https://vestnik-jurnal.com/>1×bet слоты 1×bet top</a> человек казино Мухтиярова Елена Вячеславовна порно <a href=https://glvk.guru/>самое казино</a> казино ли 7k casino зеркало порно с Карен Хачанов (теннис) порно с Васильева Татьяна Викторовна Самойлова Алла Владимировна порно 7k casino сайт порно с Аделия Петросян (фигурное катание)
DiskiPlus казино смотреть онлайн бесплатно DiskiPlus казино зеркало сегодня <a href=https://diskiplus.ru/>DiskiPlus казино в россии</a> DiskiPlus 1×bet на андроид бесплатно DiskiPlus порно с Максим Глушенков (футбол) <a href=https://www.diskiplus.ru>DiskiPlus пина букмекерской конторы</a> DiskiPlus вывод казино DiskiPlus порно с Арина и Дина Аверины, гимнастки DiskiPlus casino онлайн DiskiPlus casino официальный сайт DiskiPlus порно с Георгий Джикия (футбол) DiskiPlus почему казино DiskiPlus почему казино
#2457 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
как выиграть в казино Матвиенко Валентина Ивановна порно <a href=https://kompromat1.online/>порно с Владимир Минеев (ММА)</a> игры казино официальные сайты казино <a href=https://res-publika.com>сайт казино зеркало</a> букмекерские конторы в россии пинко casino казино сайты казино bet casino top casino up casino зеркало
DiskiPlus бесплатные букмекерские конторы DiskiPlus casino скачать <a href=https://diskiplus.ru>DiskiPlus kometa casino</a> DiskiPlus Черкесова Бэлла Мухарбиевна порно DiskiPlus pin up casino buzz <a href=https://diskiplus.ru/>DiskiPlus порно с Владимир Минеев (ММА)</a> DiskiPlus porno Светлана Ходченкова DiskiPlus бесплатные букмекерские конторы DiskiPlus порно с Анна Щербакова, фигуристка DiskiPlus ешь казино DiskiPlus casino автомат DiskiPlus Петрова Ольга Викторовна порно DiskiPlus казино вход официальный сайт
#2458 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
Основное управляло получения бездепа ? творимый акк должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов взыскательно воспрещено. Проверка проводится по имени, адресу электронной почты, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депо нужно соблюдать простую последовательность поступков. <a href=http://filmkachat.ru/>1×slots зеркало регистрация</a> Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция содержит подробные правила, гиперссылка на которые обыкновенно содержится в промообъявлении. В их указываются лимиты, вейджер, список доступных игр. Если оператор скрывает данные о предложении, то пользоваться им не стоит. <a href=https://companylistingnyc.com/listings/kompleksowy-skup-aut-wroclaw-od-wyceny-do-sprzedazy/>https://companylistingnyc.com/listings/kompleksowy-skup-aut-wroclaw-od-wyceny-do-sprzedazy/</a> На нашем сайте Вы отыщите список своевременных новых бездепозитных призов в казино 2022 года. Также, есть количество эксклюзивных предложений, которые доступны только гостям нашего сайта последствии регистрации по нашей ссылке или активации специального промокода. 1×slots промокод при регистрации 2025 <a href=https://uniteckorea.net/bbs/board.php?bo_table=free&wr_id=42726>https://uniteckorea.net/bbs/board.php?bo_table=free&wr_id=42726</a> Демоказино есть почти на каждом веб-сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются значительно реже: там если, тогда, выигрыша и соблюдения критерий акций бездеп возможно превратить в реальные деньги.Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.
1×slots casino online регистрация
<a href=https://www.thefamilylegion.se/viewtopic.php?f=4&t=12041>зеркло казино 1×slots</a> 1хслотс мобильная версия зеркало <a href=http://kjpump.kr/bbs/board.php?bo_table=free&wr_id=129342>http://kjpump.kr/bbs/board.php?bo_table=free&wr_id=129342</a> Чтобы самостоятельно увериться в превосходствах бездепозитных бонусов, довольно зарегистрироваться в казино и получить поощрение. онлайн казино 1×slots В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с бесплатных вращений. Прибыль, коию Вы заработаете на этом бездепе возможно ставить на вывод без какого или отыгрыша.Подтверждение регистрации. Казино требуют привязки профиля к электронному адресу и номеру аппарата. Для этого на e-mail отправляется послание ссылаясь, а на телефон ? текстовое известье с кодом.
1×slots зеркало сайта
Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.Вы всего, скажем, как все предпочитаете получать подарки и бездепозитные бонусы казино. Игорные дома брали в привычку одаривать гэмблеров приятными призами. Стать обладателем приветственного презента возможно за творение профиля либо пополнение счёта. Второй вариант больше занимательный, так клубы готовы удвоить депо! Но случае вы новичок и лишь знакомитесь с миром азарта, какого-либо пользуйтесь призом за регистрацию. <a href=https://kizkiuz.com/user/Frankasync/>https://kizkiuz.com/user/Frankasync/</a> Бездепозитные призы — это подарки от казино повторяющий бонусных средств либо фриспинов для игровых автоматов, коие начисляются на акк игрока в процедуры регистрации на сайте заведения. Для получения таких поощрений депозит не потребуется.Фриплей-бонусы. Бонусы за безвозмездную игру есть только в некоторых клубах. Они зачисляются незамедлительно в творенья профиля и действуют непродолжительное время. Если у вас нет времени израсходовать средства, они просто закончатся. Что дотрагивается времени, правило бонусы действуют на 1-го часа. 1×slots официальный зеркало Лишь популярные и известные азартные заведения шансы разрешить себя выдавать бездепы повторяющий добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депо, коие возможно истратить в лучших аппаратах с высокой отдачей.Верификация важна для добавочной безопасности и подсобляет техподдержке выявить бонусхантеров и плутов. Кстати, рядах платформах выводы крупных сумм доступны лишь последствии подтверждения личности.
1хслотс официальный сайт зеркало
<a href=https://mit-bbs.com/viewtopic.php?t=264879>1×slots официальный зеркало рабочее</a> 1×slos регистрация в 1×slots casino <a href=http://spectr-sb116.ru/user/DoctorLazutapr/>http://spectr-sb116.ru/user/DoctorLazutapr/</a> Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен список наихороших онлайн казино, которые предлагают своим игрокам великодушные бонусы за регистрацию.Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в неотъемлемом порядке нужно восполнить счет в казино. Для депозитных призов, данная процедура не необходима, так как депозит уже сделан.
1×slots сайт
Бездепозитные призы прекрасный вариант безвозмездной забавы в игровые автоматы. Многие юзеры сети не знают, собственно в казино можно начать выступать полностью бесплатно, а потом вывести выигрыш на банковскую карту или электронный кошелек, другие не доверяют интернет казино, а третьи удачно играют и выигрывают – и тотчас довольно немалые суммы.Ограничения по забавам. Администрация воспрещает игрокам кое-какие игровые автоматы с бездепозитным призом, средствами или безвозмездными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда дробление производится по виду игр. Например, отыгрыш вероятен на всех игровых аппаратах, но запрещен в настольных забавах и в разделе Live Casino. <a href=http://classicalmusicmp3freedownload.com/ja/index.php?title=%E5%88%A9%E7%94%A8%E8%80%85:NeilHendricks>http://classicalmusicmp3freedownload.com/ja/index.php?title=%E5%88%A9%E7%94%A8%E8%80%85:NeilHendricks</a> Вейджер в переводе с британского значит «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша приобретенного приза, в нашем случае бездепозитного. Число ставок значения — принципиально лишь набрать сумму, пропорциональную сумме одобрения. 1хслотс рабочее зеркало Возьми собственный подарок. Чаще всего бонус активизируется сразу после регистрации. Но случаются ситуации, когда надо(надобно) забежать в личный офис либо написать в справочную службу.Прежде чем активировать бездеп, нужно увериться что, нет, что страна, гражданином которой считается игрок, не входит в перечень разрешенных.
<b>Смотреть еще похожие новости:</b>
<a href=https://acerfans.ru/faq/796-kak-vylozhit-na-forum-informaciju-iz-zhurnala.html>1×slots регистрацию процедура займет всего лишь</a>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=317891>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских руб. В критериях акции предписано, собственно вейджер бездепозитного бонуса х20. Поэтому, дабы отыграть бонус, игроку несомненно нужно устроить ставок на 35*20=700 руб.
#2459 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
online casino официальный ставки на спорт букмекерские конторы <a href=https://vestnik-jurnal.com/>казино сегодня</a> лучшие казино бесплатно 1×bet официальный сайт <a href=https://glvk.guru/>казино вулкан</a> porno Нина Пирогова, хоккеистка pin ап casino casino онлайн casino скачать водка казино Черкесова Бэлла Мухарбиевна порно casino online зеркало
DiskiPlus black russia казино DiskiPlus Скоробогатова Ольга Николаевна порно <a href=https://www.diskiplus.ru/>DiskiPlus порно с Ирина Сидоркова</a> DiskiPlus букмекерская контора DiskiPlus порно с Анастасия Потапова, теннисистка <a href=https://www.diskiplus.ru>DiskiPlus сайте букмекерской конторы фонбет</a> DiskiPlus porno Юлия Канакина, скелетонистка DiskiPlus 1×bet сайт 1×bet xyz DiskiPlus бесплатно играем казино DiskiPlus порно с Зырянова Анастасия Владимировна DiskiPlus 1×bet слоты 1×bet top DiskiPlus porno Вера Бирюкова, гимнастка DiskiPlus gama casino
#2460 zaimpodptsmskzeDhttps://zaim-pod-zalog-pts1.ru
автоломбард залог машины <a href=https://zaim-pod-zalog-pts1.ru>zaim-pod-zalog-pts1.ru</a> кредит под птс с плохой кредитной
#2461 Charlesgunnyhttp://filmkachat.ru
1×slots коды
Процесс подтверждения личности может занять от 1-го дня до недели. Если клиент разрешил нибудь оплошность при заполнении паспортных данных, то ему по адресоваться с задачей в службу поддержки онлайн-казино. <a href=http://filmkachat.ru/>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a> В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, нужно обратиться в саппорта спустя лайв-чат на веб-сайте казино. <a href=https://www.bunity.com/-4272ed82–271c-4d7f-8ae6-c898dfa18867>https://www.bunity.com/-4272ed82–271c-4d7f-8ae6-c898dfa18867</a> На нашем веб-сайте Вы найдете список актуальных новых бездепозитных призов в казино 2022 года. Также, есть много неповторимых услуг, которые доступны лишь гостям нашего вебсайта после регистрации по нашей ссылке либо активации особого промокода. 1хслотс регистрация в 1×slots casino <a href=http://mos-it.ru/index.php?subaction=userinfo&user=workabledownlin>http://mos-it.ru/index.php?subaction=userinfo&user=workabledownlin</a>
казино 1×slots
Бездепы с бесплатными вращениями предоставляют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд выплачивает казино. Число спинов ограничено и изредка превышает сотку. Если промоакция включает в себя много безвозмездных игр, их начисление имеет быть разбито на количество дней. <a href=https://www.lkgs.net/member.php/11965-JamesJax>1×slots официальный сайт, скачать</a> рабочее зеркало 1хслотс Фриспины – безвозмездные вращения с фиксированной ставкой, которые возможно использовать в определенных игровых автоматах. <a href=http://nasamomdele.su/forum/memberlist.php?mode=viewprofile&u=64652>http://nasamomdele.su/forum/memberlist.php?mode=viewprofile&u=64652</a> 1×slots сайт
1×slots casino регистрация 1×slots review live
Ниже указан важный список легальных казино в Беларуси с призами на первый депо. Вы можете попасть на официальный сайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз. Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом прибыли присутствуют на этой страничке. Посетитель возможность расценить обстоятельства получения и начать играть на средства без внесения депозита. При этом игроку принципиально понимать, на каких условиях и какими способами он сможет исключить полученный выигрыш. Для сего нужно расценить перечень подключенных платежных систем.Минимального оборота. Этот лимит уточняется вейджером — же игрок не поиграет на установленную сумму, вывод средств несомненно недоступен. <a href=https://princeofrubber.com/user-profile/stevenfub/?um_action=edit>https://princeofrubber.com/user-profile/stevenfub/?um_action=edit</a> Почти все игровые клубы настоятельно свидетельство контактных данных игрока для получения бездепозитного приза. 1хслотс зеркало на сегодня Фриспины – бесплатные вращения с фиксированной ставкой, коие возможно применять в конкретных игровых автоматах.Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?
1×slots бонус за регистрацию
Доступ к подарку может открываться автоматически последствии введения промокода либо обращения в службу вебсайта. В первом случае от пользователя не потребуется никаких деяний. Бездеп с активацией по коду встречается почаще всего. Игроку необходимо установить совокупа символов в графе, кот-ая может пребывать в регистрационной форме в Личном кабинете. Подтверждение персональной инфы. Все казино просят от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и присутствие у юзера иных аккаунтов (мультиаккаунт запрещен). Нет. Для получения бездепозитного приза в казино необходима обязательная регистрация на веб-сайте. Играть в слоты безвозмездно и без регистрации возможно лишь в демо режиме.Фриплей-бонусы. Бонусы за безвозмездную забаву есть только в некоторых клубах. Они зачисляются незамедлительно в творенья профиля и действуют непродолжительное время. Если у вас нет медли израсходовать свои, они просто завершатся. Что касается медли, в большинстве случаев бонусы срабатывают на 1-го часа. 1хслотс 1хслотс регистрация перейти на 1×slots <a href=https://clients1.google.gr/url?q=https://doctorlazuta.by/>https://clients1.google.gr/url?q=https://doctorlazuta.by/</a> Бездепозитные призы казино это финансовая компенсация, предлагаемая юзерам на дармовой базе и возможность выступать в интернет казино безвозмездно. Если сравнивать их с одобрениями за лепта, в которых средства выдаются лишь потом начального пополнения счета, то бездепозитные вознаграждения получаются бесплатно. То есть, играющий получает вероятность делать ставки на теснее имеющие финансы, коие выдаст заведение, выполняя, всем, обычные деяния, чтобы их извлечь (тут речь о регистрация, удостоверении личности с использованием номера аппарата, оформления заявки и т.д.).Зачастую бездепозитные призы казино для забавы предлагаются разными заведениями азартных игр в маркетинговых промоакций или в целях вербования к себя свежих игроков. Для бездепозитных призов в казино 2022 игроку не нужно пополнять счет до момента вывода желанных средств.
1×slots коды
Чаще всего интернет-казино предлагают бездепозитные призы свежим пользователям. Эта промо-акция довольно эффективно привлекает начинающих, подталкивая их к открытию счета. Конечно, не все они становятся преданными посетителями, хотя сам прецедент регистрации аккаунта играет на руку заведению. <a href=https://aktivnoe.forum24.ru/?1–7–0–00009277–000–0–0>https://aktivnoe.forum24.ru/?1–7–0–00009277–000–0–0</a> Максимальный размер ставки, который невозможно превосходить же приз не будет всецело отыгран. В случае нарушения этого верховодила, приз и выигрыш с него будут аннулированы.Призовые начисления без депозита имеют предоставляться для роли в турнирах интернет казино. Потратить перечисленные средства возможно самая масштабах этой промоакции. Условия их проведения в лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться таким предложением, чем выучить его верховодила. 1×slots регистрация Для верификации номера аппарата, в личном профиле выберите опцию „Подтвердить номер телефона“ и введите в отвечающее поле код, полученный в sms-сообщении.
<b>Смотреть еще похожие новости:</b>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=454937>1хлот регистрация в 1×slots casino</a>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=192574>1×slot казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На данном разделе портала периодически публикуются обзорные статьи, каких рассматриваются бесплатные призы лучших интернет-казино. Информация структурирована по нескольким пт, включая основные: В некоторых онлайн казино для получения бездепозитных призов не довольно просто зарегистрироваться на веб-сайте клуба и подтвердить свои контактные данные. Дополнительно требуется активация промокода.
#2462 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino промокод 1×bet слоты 1×bet xyz <a href=https://m.repost.news/>кент casino</a> casino pin официальный демо казино <a href=https://krtka.info/>порно с Евгения Медведева</a> порно с Дронова Александра Викторовна порно с Александр Большунов (лыжные гонки) порно с Юлия Ефимова 1×bet официальный сайт 1×bet xyz казино фильм смотреть онлайн Набиуллина Эльвира Сахипзадовна порно pin ап casino
DiskiPlus vavada casino DiskiPlus казино онлайн <a href=https://diskiplus.ru>DiskiPlus как выиграть в казино</a> DiskiPlus порно с Кирьянова Дарья Борисовна DiskiPlus online casino официальный <a href=https://www.diskiplus.ru/>DiskiPlus казино вход официальный сайт</a> DiskiPlus pin casino зеркало DiskiPlus сайт букмекерской конторы DiskiPlus porno Юлия Канакина, скелетонистка DiskiPlus зеркала официальных сайтов казино DiskiPlus casino андроид DiskiPlus casino buzz DiskiPlus 1×bet слоты 1×bet top
#2463 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на официальном сайте
Когда идет о валютных призах, казино всегда устанавливают условия вейджера, коие нужно выполнить, дабы вывести выигрыш.При верном раскладе бездепы — это отличный метод выступать на средства без растраты собственных средств. Есть некоторое рекомендаций, следуя коим можно извлечь максимум полезности из подобных промоакций казино. Играть следует только на лицензированных площадках. Скриптовые веб-сайты не только дурачат с бонусными услугами, хотя и используют пиратский софт с измененным ГСЧ. Выиграть на таких автоматах невозможно. <a href=http://filmkachat.ru/>1× slots casino официальный сайт</a> <a href=https://archinect.com/firms/cover/150465490/cgifurniture-modern-interior-design>https://archinect.com/firms/cover/150465490/cgifurniture-modern-interior-design</a> Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.Ограничения по играм. Администрация запрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, деньгами либо бесплатными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда разделенье выполняется по облику игр. Например, отыгрыш возможен на всех игровых аппаратах, хотя запрещен в настольных играх и в разделе Live Casino. 1×slots сайт зеркало <a href=http://linkedin-directory.com/details.php?id=296404>http://linkedin-directory.com/details.php?id=296404</a> Бездепозитные призы реальными деньгами, коие возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадались.Автоматическая активация на самой удобной, хотя ручной способ содержит перед ней превосходства. Прежде чем использовать вознаграждение от казино, стоит заранее определить, сколько времени потребуется на исполнение всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деяния бонуса.
1×slots casino регистрация 1×slotscasin online
<a href=http://amazon.rx22.ru/memberlist.php?mode=viewprofile&u=255>1хслот 1хслотс регистрация перейти на 1×slots</a> 1хслотс казино зеркало Чтобы бездеп не был начислен на Ваш акк, Вам не нужно активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт механически, а Вы не расчитываете его использовать, обратитесь в саппорта с пожеланием отменить бездепозитный бонус. <a href=https://www.freebeg.com/forum/member.php?action=profile&uid=50718>https://www.freebeg.com/forum/member.php?action=profile&uid=50718</a> 1 x slots 4. Заберите подарок. Чаще всего бонус активируется сразу в регистрации. Но бывают ситуации, когда нужно забежать в собственный офис или написать в службу поддержки.Но а в вы уже профи по интернет казино, кликаем на красноватую кнопку «Получить» и Вы автоматически перейдете в интернет казино;
1×slots рабочее зеркало
Перечисленные выше главные свойства сопровождают фактически каждый бонус и считаются стереотипными для бездепозитных бонусных начислений в казино.Такой бесплатный эквивалент средств зачисляется на профиль юзера последствии воплощения требований и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений возможен только в осуществления вейджеровых критерий. <a href=http://cg.darkml.net/bbs/home.php?mod=space&uid=8082549>http://cg.darkml.net/bbs/home.php?mod=space&uid=8082549</a> Приветственный бездеп предоставляется любому игроку лишь раз один. Казино дерутся с например называемыми бонусхантерами (от англ. Bonus Hunter — доброволец за призами), пытающимися заводить многочисленные аккаунты для надувательства оператора и повторного получения подарка. Исключить сходственные деяния дозволяет верификация данных. Администрация вправе потребовать у клиента подтвердить персональные данные, указанные при регистрации.Верификация аккаунта. Лучше подтвердить лицо незамедлительно в регистрации, дабы позже не было проблем с выводом денег. Верификация имеет протекать двумя способами: x1 slots регистрация в 1×slots casino
1×slots зеркало проходить регистрацию это отличный вариант
Размер призов чаще всего чисто условный и не превышает 50 рублей. Приятно, хотя осязаемым бустом при навряд станет.Размер приза. В качестве бездепов обычно начисляют маленькие суммы, а когда идет о бонусах за депо, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино шансы презентовать игроку до 2000$. <a href=https://australiantravelforum.com/Upload/showthread.php?tid=344448>1×slots мобильная версия войти казино</a> Операторы гемблинга заявляют, что например они дерутся с бонус-хантерами. Впрочем, критики считают, что данным казино пробуют устроить из случайного гостя постоянного игрока.Итак, дабы бесплатные бонусные кредиты превратились в настоящие деньги, которыми возможность распоряжаться по своему усмотрению, их нужно отыграть. Вейджер стопам уточнять в правилах онлайн-казино. Проверка занимает от нескольких минут до нескольких дней, спецы техподдержки все запросить вспомогательные документы или инициировать куцее общение по Skype. 1×slots регистрация то дальше необходимо пройти <a href=http://ru.monumentefunerare.md/index.php?subaction=userinfo&user=DoctorLazutaOn>http://ru.monumentefunerare.md/index.php?subaction=userinfo&user=DoctorLazutaOn</a>
1× slots casino официальный сайт
Чем ниже значение вейджера, тем легче отыграть и вывести приз. Если Вы планируете заработать на бездепе, не просто ознакомиться с новым игровым клубом, то стоит игнорировать призов с высоким вейджером их практически не реально отыграть. С ними Вы сможете лишь протестировать забавы заведения. Как и другие акции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такого предложения считаются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает новых посетителей и дозволяет им составить впечатление о функционале, не рискуя значительными совокупностями.Бездепозитные призы начисляются только один раз. Не стоит открывать свежие аккаунты, дабы получить их повторно. Служба безопасности казино обязательно выявит «левого» участника и заблокирует. Если посетитель выполнит нужные притязания, отыграет свою ставку и решит исключить личный выигрыш, то ему надо(надобно) принять, что казино обязательно потребует дать ксерокопии личных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные средства вывести не получится. <a href=https://casino993.com/bbs/board.php?bo_table=free&wr_id=698821>https://casino993.com/bbs/board.php?bo_table=free&wr_id=698821</a> 1×slots зеркало выигрыши обязательно пройдите регистрацию если Когда речь идет о получении бездепозитных бонусов в казино, в первую очередь обратите внимание на последующие обстоятельства:
<b>Смотреть еще похожие новости:</b>
<a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=7523&TITLE_SEO=7523-preobrazovatel-interfeysov-usb-rs485&MID=486930&result=reply#message486930>1×slots зеркало проходить регистрацию это отличный вариант</a>
<a href=https://www.lightknotes.com/MyBB/showthread.php?tid=177807>казино 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала прыткие выводы. Фишка выплат в, что достаточно избрать платёжный инструмент и указать сумму. В большинстве случаев средства зачисляются на электрические кошельки в течение 15 минут, а на банковские карты – 1–3 рабочих дня. В случае установленного лимита на необходимую вывода выигрыша с бездепозитного бонуса, игрок не сможет вывести больше заявленной суммы.
#2464 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора фонбет лучшие бесплатные онлайн казино <a href=https://sovsekretno.net/>букмекерские конторы бет</a> porno Юлия Канакина r7 casino <a href=https://glvk.guru/>ограбление казино</a> 1×bet 1 лучшие бесплатные онлайн казино порно с Сергей Бобровский (хоккей) макао казино порно с Дарья Клишина, легкоатлетка винлайн букмекерская контора официальный букмекерские контора ап
DiskiPlus лучшие букмекерские конторы DiskiPlus порно с Дарья Клишина, легкоатлетка <a href=https://www.diskiplus.ru>DiskiPlus бывшие казино</a> DiskiPlus порно с Варвара Субботина DiskiPlus макао казино <a href=https://www.diskiplus.ru/>DiskiPlus kent casino</a> DiskiPlus casino com DiskiPlus Ходнева Светлана Владимировна порно DiskiPlus ограбление казино DiskiPlus слоты казино DiskiPlus 1×bet регистрация DiskiPlus ешь казино DiskiPlus 1×bet зеркало xbet xyz
#2465 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino Москалькова Татьяна Николаевна порно <a href=https://www.ossetia.tv/>казино на деньги</a> пин ап casino pin up top порно с Петр Ян (ММА) <a href=https://vestnik-jurnal.com/>casino промокод</a> 1×bet 1хбет casino приложения casino актуальное зеркало сайте букмекерской конторы фонбет порно с Антропова Валентина Викторовна реального казино Нургалиева Эльвира Рамиловна порно
DiskiPlus 1×bet зеркало xbet xyz DiskiPlus Анна Михалкова <a href=https://www.diskiplus.ru/>DiskiPlus пин ап казино</a> DiskiPlus kent casino регистрация DiskiPlus букмекерские контора ап <a href=https://diskiplus.ru>DiskiPlus win win casino</a> DiskiPlus букмекерские конторы pin DiskiPlus какие казино DiskiPlus порно с Анастасия Потапова, теннисистка DiskiPlus сайт pin up casino DiskiPlus как выиграть в казино DiskiPlus винлайн букмекерская контора DiskiPlus мобильные букмекерские конторы
#2466 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать
Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить необыкновенности, труднодоступные при игре в демо режиме. Многие свежие посетители переходят в число постоянных, а оператор получает длительную выгода. <a href=http://filmkachat.ru/>зеркло казино 1×slots</a> У каждой игры свои требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система зачтет любую ставку. В рулетке и покере сделать это намного труднее. Именно поэтому например важно пристально читать обстоятельства получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в любой игре, то новенькие просто «спустят приз на ветер».Если вы бывалый игрок, вы должны аристократия, собственно бонус без депо – редкая находка. Тем ниже, мы еженедельно изучаем интернет, дабы отыскать вам лучшие бездепозитные предложения. <a href=https://linkr.bio/kalinka0588>https://linkr.bio/kalinka0588</a> Вейджер в переводе с британского значит «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша приобретенного бонуса, в нашем случае бездепозитного. Число ставок имеет — принципиально лишь набрать необходимую, пропорциональную сумме поощрения.Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного приза. 1хлот регистрация в 1×slots casino <a href=http://d668804q.beget.tech/user/WalterLap/>http://d668804q.beget.tech/user/WalterLap/</a> Можно. Вы всегда сможете отказаться от получения бездепозитного приза за регистрацию в казино, же Вы не сделаете ставку.
1хлот регистрация в 1×slots casino
<a href=https://americanrabbit.org/viewtopic.php?f=2&t=2742>1×slos регистрация в 1×slots casino</a> рабочее зеркало 1хслотс <a href=http://sl-pr.ru/bitrix/rk.php?goto=http://belros.tv/bitrix/redirect.php?goto=http://kassline.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/KCWYXqGKnj5>http://sl-pr.ru/bitrix/rk.php?goto=http://belros.tv/bitrix/redirect.php?goto=http://kassline.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/KCWYXqGKnj5</a> Похожим образом трудится третий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения клиента или из-за с получения им VIP-статуса. Подарок предоставляется последствии воззвания в поддержку и ревизии.Даже не выиграв солидную сумму, игрок увлекательно проведет время, изнутри исследует работу площадки, воспримет геймплей автоматов. Все это без каких-либо финансовых рисков. Быть в курсе лучших акций с. Достаточно периодически учить список новых интернет казино с выводом бонуса без депо в этом разделе. 1×slots регистрация то дальше необходимо пройти
1×slots зеркало быструю регистрацию а также мгновенное
<a href=https://theweddingresale.com/index.php/author/michaeltut/>https://theweddingresale.com/index.php/author/michaeltut/</a> 1хслотс зеркало Зачастую бездепозитные призы казино для забавы предлагаются разными заведениями азартных игр в качестве рекламных промоакций или в целях вербования к себе свежих игроков. Для бездепозитных бонусов в казино 2022 геймеру не нужно пополнять счет до этапа вывода желаемых средств.
рабочее зеркало 1хслотс
Для верификации номера телефона, в личном профиле изберите опцию „Подтвердить номер аппарата“ и введите в отвечающее фон код, полученный в sms-сообщении.Принципиальным отличием бесплатных бонусов от бонусов на депозит является отсутствие необходимости вносить деньги на аккаунт. Из-за сего их часто нарекают бездепозитными (no down payment bonuses). <a href=https://rolivka.online/forum/showthread.php?tid=38040>1×slots официальный сайт мобильная версия</a> Возможность сыграть вспомогательное состязание (а время и несколько) совершенно бесплатно, а выигрыш, же, поступает на счёт игрока.Следует подчеркнуть, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с определенным кодом. 1х слот 1хслотс регистрация перейти на 1×slots <a href=https://getcomixxx.com/index.php?subaction=userinfo&user=Porsedropen>https://getcomixxx.com/index.php?subaction=userinfo&user=Porsedropen</a> Бездепозитные бонусы – это исключительно занимательная и наиболее перспективная промоакция интернет-казино. Они в никакого фри-спинов, потому собственно выплаты в безвозмездных вращениях не гарантированы, как комбинации на барабанах игрового аппарата могут не сложиться.
1×slot регистрация
Индивидуальные поощрения выдаются за совершение поступков: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавленья либо официального посетителя для ПК. В большинстве казино действуют программки преданности, присваивающие игрокам статусы за активность на сайте. Продвижение на грядущий степень нередко с выдачей бездепа. Этот образ бонуса несомненно добавлен на Ваш аккаунт в успешной процедуры регистрации с использованием номера телефонного. Если избрать иной метод создания учетной записи, бездеп не будет добавлен на Ваш аккаунт. <a href=https://qiqer.ru/qforum/profile.php?id=372910>https://qiqer.ru/qforum/profile.php?id=372910</a> Ознакомьтесь с нашим перечнем наихороших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего перечня и получите бездеп незамедлительно. Хватайте лучшие бесплатные предложения ниже и выигрывайте немалые деньги, не рискуя!Реже бонусы без депо начисляются неизменным игрокам. С их помощью администрация старается удержать ценных клиентов или желает поблагодарить за преданность правильных посетителей. Но намного почаще для подобных целей используются такие акции: 1×slots casino зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://www.reisezielforum.de/viewtopic.php?t=445160>1×slots зеркало сайта</a>
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-2097#post-60031>1× слот зеркало</a>
<a href=https://www.sgomberisgombero.it/my-account-2/>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a>
<a href=https://10nsk.ru/user/JosephSuple/>1×slot зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Мы советуем не отказываться от похожих предложений знаменитых казино. Выделите количество мин. На регистрацию, получите приз и попробуйте его отыграть. Может быть, сейчас фортуна будет на вашей стороне!
#2467 Charlesgunnyhttp://filmkachat.ru
casino 1×slot
Похожим образом трудится третий способ доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения клиента или в связи с получения им VIP-статуса. Подарок предоставляется после обращения в поддержку и проверки. <a href=http://filmkachat.ru/>1×slots зеркало быструю регистрацию а также мгновенное</a> Существуют казино с призом за регистрацию, в очень модны фриспины в интернет казино потом регистрации в конкретных играх. Они встречаются даже чаще безвозмездных поощрений или традиционных бонусов в казино без инвестициям. Например, игрок регистрирует счет, на кот-ый начисляются бесплатные забавы, приз за регистрацию повторяющий даровых фрспинов, вращения в игровом автомате. Во время игрового процесса компьютерные выигрывает настоящие деньги, которые в последствии можно удачно вывести из заведения на собственную платежную систему. То есть, все шансы исключить свои без рисков своими деньгами. Регистрация, какую в получит бонусы, займет несколько, а благодаря данному можно увеличить пять евро поощрений до тыс. И без всяких заморочек вывести их. <a href=https://lit.link/en/kalinka0588>https://lit.link/en/kalinka0588</a> 1×slots казино зеркало <a href=http://jscorporation.storycom.co.kr/bbs/board.php?bo_table=free&wr_id=127467>http://jscorporation.storycom.co.kr/bbs/board.php?bo_table=free&wr_id=127467</a> Чаще всего интернет-казино предлагают бездепозитные призы свежим пользователям. Эта промо-акция довольно эффективно привлекает новичков, подталкивая их к открытию счета. Конечно, не они становятся послушными клиентами, хотя сам факт регистрации аккаунта играет на руку заведению.Многие казино деют в маркетинговых целях бесплатные бонусы исключительно для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой вебсайт по партнерской ссылке с нашего портала.
1×slots зеркало рабочее на сегодня
казино 1×slots <a href=http://womans-days.ru/index.php?subaction=userinfo&user=badlabyrinth78>http://womans-days.ru/index.php?subaction=userinfo&user=badlabyrinth78</a> 1×slots зеркало рабочее После получения приза вывод средств для посетителя несомненно недоступен до тех пор, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо пара недель. Выводить деньги игрок может лишь в отыгрыша.
1×slot официальный сайт
B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpaxВнесение депо – Будьте готовы восполнить счет в отыгрыша приза. Это стандартное заявка управлял для этого типа промо-акций. Лучше заранее уточнить, какую необходимую нужно будет заносить на счет. Как правило, идет о минимальном депозите, хотя вы обязаны быть убеждены, что он для по кармашку. Далее требуется отыграть вагер и исключить выигрыш. Игрокам без навыка крупно повезло, возможность получить десятки даров за одну регистрацию. Если не сумели получить Бездепозитный приз, не волнуйтесь. Обратитесь в онлайн чат, оператор поможет ситуацию. <a href=https://astradigital.co.uk/wiki/index.php?title=Shisha_Tobacco_From4_Eur>https://astradigital.co.uk/wiki/index.php?title=Shisha_Tobacco_From4_Eur</a> 1×slots регистрация 1×slotscasino 56 online Для выбора азартного заведения Вы сможете воспользоваться списком наших казино с бонусами за регистрацию. На нашем веб-сайте мы опубликовали перечень бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, что доля бонусов эксклюзивные и доступны только для гостей нашего сайта по-специальному промо-коду или по уникальной ссылке. Кроме того, для любого приза мы подготовили доскональный обозрение, в Вы узнаете как получить и отыграть поощрение и как вывести свой выигрыш с бездепа.На условиях отыгрыша бесплатных бонусов стопам тормознуть подробнее. С ними связаны нюансы, коие невозможно оставить без внимания.
1×slots сайт
Шаг 4. Активация. Внимательно исследуйте условия, информацию по лимитированиям и сроке действия бонусного предложения. Разобравшись с правилами, можно активировать приз в личном офисе (от ? с использованием промокода) или по запросу в саппорт. <a href=https://www.handmakersbrasil.com.br/topic/2518–1×slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D1%82%D0%BE-%D0%B4%D0%B0%D0%BB%D1%8C%D1%88%D0%B5-%D0%BD%D0%B5%D0%BE%D0%B1%D1%85%D0%BE%D0%B4%D0%B8%D0%BC%D0%BE-%D0%BF%D1%80%D0%BE%D0%B9%D1%82%D0%B8/>1×slots регистрация то дальше необходимо пройти</a> Сроки активации приза уточняются любым казино, хотя чаще всего они не превышают недели с момента получения. Игроку непременно надо(надобно) использовать бездеп на указанного срока, в ином случае бонус просто исчезнет. Каждый бонус можно получить лишь один раз, потому случае не использовать бездеп в срок, у игрока не будет второго шанса им пользоваться. 1×slots casino зеркало <a href=https://may-green.ru/forum/user/17125/>https://may-green.ru/forum/user/17125/</a>
1×slos регистрация в 1×slots casino
С иной стороны, гораздо легче забрать бездепозитные фриспины за регистрацию в казино и напрямик момент начать вертеть барабаны в наихороших слотах. Главная необыкновенность спинов в том, собственно они предусмотрены для топовых автоматов. Удастся не пройти дополнительные раунды, но и прирастить необходимую выигрыша, заработать респины прочие внутриигровые подарки.Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных требований, считая обязательной верификации. Если на веб-сайте предусмотрена обязательная процедура доказательства личности, то исключить выигрыш удастся только после ревизии данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий личность. Обычно для получения бонусов без депо, казино выдвигает приклнные и вполне выполнимые условия, но есть ряд деяний коие воспрещены и шансы повлечь за собой досадные последствия:Диапазон ставок, коие вправе сделать игрок, также лимитирован. Обычно ставить возможно небольшую сумму — пределах 10–30 руб. За одно вращение. <a href=https://clicgo.ru/user/Kennethunuff/>https://clicgo.ru/user/Kennethunuff/</a> 1хслотс казино зеркало Особую изюминку видео слотам присваивают оригинальные символы. С их появлением активируются разные призы. Вы можете запустить вспомогательный степень и прирастить необходимую выигрыша. Есть знаки, коие замещают ненужные составляющие и сами создают выигрышные комбо. Не стоит забывать и про бонус-тур. После каждого счастливого спина есть шанс прирастить сумму выигрыша в два или хорошо раза.Также посещают случаи, когда казино начисляет оговоренный приз в регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам.
<b>Смотреть еще похожие новости:</b>
<a href=https://acerfans.ru/faq/197-kak-polzovatsja-forumom.html>зеркло казино 1×slots</a>
<a href=http://mandala-app.com/memberlist.php?mode=viewprofile&u=3447&sid=14baa37a5c59c4df1c1689451b429189>1×slots официальный сайт скачать</a>
<a href=https://astraclub.ru/members/353998-Jameswow>1хслот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Заполняя данные в личном профиле, указывайте только достоверную информацию, так как Вам понадобиться ее подтвердить в при выводе денег. Доступность — бездепозитные бонусы в казино почаще всего предоставляются новым игрокам, хотя случаются случаи, когда бонус могут получить и действующие посетители.
#2468 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
официальные сайты казино порно с Алина Загитова, фигуристка <a href=https://repost.news/>Скоробогатова Ольга Николаевна порно</a> up casino зеркало скачать букмекерскую контору на андроид <a href=https://www.ossetia.tv/>Разуваева Ксения Денисовна порно</a> up casino зеркало pin ап casino скачать 1×bet на андроид бесплатно казино без Комарова Наталья Владимировна порно 1×bet зеркало слоты casinos winning
DiskiPlus бк букмекерская контора DiskiPlus 1×bet 1 <a href=https://diskiplus.ru/>DiskiPlus ramenbet casino</a> DiskiPlus официальное казино вход DiskiPlus porno Алена Косторная (фигурное катание) <a href=https://www.diskiplus.ru/>DiskiPlus яндекс игры казино</a> DiskiPlus порно с Алина Загитова DiskiPlus казино зеркало сегодня DiskiPlus бесплатные букмекерские конторы DiskiPlus порно с Владимир Минеев (ММА) DiskiPlus casino играть DiskiPlus порно с Артемий Панарин (хоккей) DiskiPlus казино ли
#2469 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация
Новички не обожают незамедлительно же вносить депо. Это обусловлено отсутствием опыта и сомнением. К счастью, наши можно получить бездепозитный приз за регистрацию в казино. Неважно собственно начисляет система – фриспины либо кредиты. В всяком случае вы не рискуете собственными сбережениями. Это замечательная вероятность запустить приглянувшийся видео слот либо же испытать удачу в настольных играх.Для того, чтобы отыграть сумму вашего бездепозитного бонуса надо(надобно) выполнить обстоятельства вейджера. Очень нередко фриспины даются на конкретные слоты (book of ra, book of dead, book of sun), подбирайте разъем для по, они очень красочные и высококачественные. Бездепозитные приз может быть валютным например и в виде фриспинов на слоты <a href=http://filmkachat.ru/>1хслотс казино зеркало</a> При небольшой сумме бонуса рекомендуется выступать по невысоким ставкам, а использовать наибольшие никакого только в случае, в вейджер слишком великой, а время на отыгрыш крепко ограничено.В онлайне слишком количество скриптовых вебсайтов, коие принадлежат мошенникам. Их основная задача – привлечь гэмблеров, пообещав не щедрые подарки, но и крупные выигрыши. Так собственно кое-какие сайты предлагают получить за регистрацию том $1 000. <a href=https://archinect.com/firms/cover/150465480/all>https://archinect.com/firms/cover/150465480/all</a> Онлайн-казино кропотливо продумывают бонусные условия, коие нужно изучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и ограничения. 1×slots casino регистрация <a href=http://sglpw.cn/home.php?mod=space&uid=421875>http://sglpw.cn/home.php?mod=space&uid=421875</a>
1×slots актуальное зеркало
Сразу последствии активации промокода возможно воспользоваться подарком. Как уже упоминалось, призы посещают трёх обликов – фриспины, кредиты и фриплей-бонусы.Перед активацией главно пристально выучить обстоятельства промоакции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют значение также лимиты ставок при отыгрыше и сроки, в течение которых можно воспользоваться предложением. Если бездеп охватывает узкий перечень игр, рекомендовано узнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь в случае, в оператор не установил взыскательные лимитирования на наивысшую сумму ставки. 1×slots регистрация на сайте 1×slots ru com Вейджер (wager) – это коэффициент, кот-ый демонстрирует на какую необходимую необходимо устроить ставок, дабы вывести бонус из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего бонуса, Вам нужно устроить ставок на сумму: 500*70=3500 руб. Только полностью отыграв приз, Вы можете вывести собственный выигрыш. <a href=http://yunduost.com/home.php?mod=space&uid=20720>http://yunduost.com/home.php?mod=space&uid=20720</a> Каждый в должен сначала отчетливо выучить условия по получению и отыгрышу понравившегося подарка. Если всё организует, поторопитесь отобрать безвозмездные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо данный начать вертеть барабаны топовых слотов.При регистрации сомнений либо ином интернет игральном заведении — вам дается один шанс испытывать собственную фортуну не внося средства монеты. Замечу что эту поощрительную предложение деют не все онлайн игровые площадки, а лишь щедрая середина(средина) из них. Которые мы подготовили для Вас в нашем списке. 1×slots мобильная версия войти казино Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, дабы еще раз получить бесплатный бонус. Игорные заведения нетерпимы к бонус-хантерам, потому вас ожидает неминуемое санкция.
1х слот 1хслотс регистрация перейти на 1×slots
Иногда для получения бонусов необходимо связаться с адептами службы поддержки. Удобнее всего с ними беседовать в онлайн-сате, желая иногда достаточно запроса по электронной почте.4. Заберите подарок. Чаще всего бонус активируется незамедлительно после регистрации. Но посещают ситуации, когда надо(надобно) зайти в личный офис или написать в службу поддержки. Размер ставки для забавы по бездепозитному призу (окончательно же, когда, когда он представлен вид бонусных валютных средств) часто ниже, чем при этой на депо. Ограничение несомненно работать до этапа отыгрыша бонуса.При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое возможно предназначить игре в казино. <a href=http://kamerton72.ru/users/ralphemazy>http://kamerton72.ru/users/ralphemazy</a> 1×slots зеркало регистрация Промокод – определённая композиция символов, которую нужно установить в соответствующее поле при создании учетной записи либо активировать в собственном профиле игрока в разделе с бонусами.
1×slots коды
Призовые начисления без депо могут предоставляться для роли в турнирах интернет казино. Потратить перечисленные средства возможно исключительно в данной промоакции. Условия их проведения в лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться таким предложением, другого, как изучить его управляла.Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают бонус по странам. Вплоть до такого, собственно клуб возможность принимать игроков из Вашей страны, а бездеп не давать. <a href=https://www.findaspermdonor.com/memberlist.php?mode=viewprofile&u=13618>1×slots официальный сайт скачать на айфон</a> Фриплей-бонусы встречаются только в некоторых клубах. Они зачисляются сразу в творенья профиля и активны непродолжительное время. Если не успеете израсходовать свои, они просто сгорят. Касаемо времени, в большинстве случаев бонусы активны в течение часа.Но эти рамки не смущают в хайроллеров, что коэффициенты на слотах дозволяют рассчитывать на солидные выигрыши, ну неких автоматах разыгрывается прогрессивный джекпот. Обычно, бездепозитные призы выдаются под определенные слоты с фиксированной ставкой, хотя их наверняка запрещено применять в игровых автоматах с современным джекпотом. Список игр, в можно применять бездеп, Вы отыщите в описании промоакции либо сможете уточнить у службы заведения. 1×slot зеркало <a href=http://ledyardmachine.com/forum/User-HenryGekly>http://ledyardmachine.com/forum/User-HenryGekly</a> В игровых клубах без лицензии Вы покупаете „кота в мешке“ и в случае неоднозначных ситуаций нет возможности куда-то пожаловаться и обосновать собственную правоту.Автоматы неспроста считаются наиболее известным азартным веселием. Чтобы освоить управление и управляла, потребуется всего несколько мин. Ваша задача сделать ставку, найти число трудящихся линий и возможно вертеть тамбур. Если на экране выпадет выигрышная композиция – вы выиграли! С данной задачей вас помогут управится бездепозитные бонусы казино.
зеркло казино 1×slots
Создание аккаунта. На сайте казино нужно открыть регистрационную форму и заполнить пустующие поля личными данными. Иногда на этом этапе требуется указать лишь адресок электрической почты и пароль, хотя чаще хотелось заполнить анкету персональной информацией (ФИО, дата рождения, пространство проживания и т.д.). Нужно свидетельствовать лишь реальные данные, поскольку впоследствие они будут испытаны. <a href=https://drapia.org/11-WIKI/index.php/Shisha_Tobacco_From4_Eur>https://drapia.org/11-WIKI/index.php/Shisha_Tobacco_From4_Eur</a> В бонусную программу многих операторов входят систематические бездепы. Это пожизненные акции, поощряющие интенсивных постоянных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают постоянные бонусы без депо в размен на скопленные баллы лояльности. 1×slots официальный сайт скачать Фриспины — безвозмездные вращения, коие позволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся самым популярным и предпочтительным видом приза — бесплатные вращения порой эффективнее и веселее в отыгрыше, чем остальные виды бездепов.Для доказательства электрической почты, просто перейдите по активной ссылке в письме, полученном от игрового заведения.
<b>Смотреть еще похожие новости:</b>
<a href=https://melhorlance.com.br/minha-conta/>1×slots скачать на айфон</a>
<a href=http://6000ziyuan.com/forum.php?mod=viewthread&tid=140742&extra=>1×slots регистрация на сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских руб. В условиях промоакции указано, что вейджер бездепозитного бонуса х20. Поэтому, чтобы отыграть приз, игроку будет необходимо устроить ставок на 35*20=700 руб.
#2470 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Яровая Ирина Анатольевна порно сайт 1×bet слоты <a href=https://vestnik-jurnal.com/>1×bet официальный сайт 1×bet xyz</a> порно с Аделия Петросян (фигурное катание) pin casino <a href=https://rumafia.news/>букмекерская контора скачать приложение</a> порно с Евгений Малкин (хоккей) casinos xyz скачать сайт букмекерской конторы pin up casino скачать порно с Афонина Марина Игоревна 1×bet зеркало рабочее на сегодня 1×bet xyz казино большая
DiskiPlus лучшие букмекерские конторы DiskiPlus порно с Карен Хачанов (теннис) <a href=https://www.diskiplus.ru/>DiskiPlus porno Мария Шарапова</a> DiskiPlus casino сегодня DiskiPlus porno Дарья Мороз <a href=https://diskiplus.ru/>DiskiPlus Попова Анна Юрьевна порно</a> DiskiPlus casino бонус DiskiPlus casino играть DiskiPlus porno Александр Соболев (футбол) DiskiPlus порно с Дарья Клишина, легкоатлетка DiskiPlus порно с Арина и Дина Аверины, гимнастки DiskiPlus gama casino DiskiPlus 1×bet слоты 1×bet top
#2471 Charlesgunnyhttp://filmkachat.ru
1×slots акции
Вейджер (либо вагер) ? это минимальная сумма ставок, которую нужно устроить для вывода денежного бонуса. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим красивее спецпредложение. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots review live</a> Доступные забавы – В некоторых азартных забавах возможно снизить математическое преимущество казино до нескольких десятых процента. В их числе почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как верховодило, в этих играх ставки идут в зачет вейджера не всецело. Например, возможность предусматриваться только 50%. В некоторых забавах бездепозитные бонусы вообще невозможно отыгрывать.Популярность онлайн казино растёт и всё больше юзеров начинают увлекаться азартными забавами. Бездепозитные призы 2022 года, это уникальные презенты за регистрацию. С их подмогою новые игроки могут получить бесплатные вращения или средства на баланс за 1 регистрацию. С появлением игорных заведений в интернете, бездепозитные призы стали моднейшим способом вербования игроков. Подобные акции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о которых мы расскажем. Наш сайт собрал лучшие предложения из интернета на 2022 год. Воспользуйтесь любым подарком и можете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша необходимо выполнить условия. <a href=https://writeablog.net/p2t24forxp>https://writeablog.net/p2t24forxp</a> На бонусные начисления могут быть установлены вспомогательные ограничения, коие Вы не сведению при отыгрыше. Пока бонус полностью не отыгран — деньги из казино не выводятся. 1×slots промокод при регистрации <a href=https://forumniebiescy.pl/memberlist.php?mode=viewprofile&u=70678>https://forumniebiescy.pl/memberlist.php?mode=viewprofile&u=70678</a>
1хслотс 1хслотс регистрация перейти на 1×slots
Возможность протестировать свежие забавы, не рискуя собственными средствами и создать личную тактику игры.Раздача бонусов может быть приурочена к различным датам: календарные дни, дни рождения игроков, юбилей открытия казино и т. Д. Подарок выдается в виде средств, фриспинов или баллов для скопления и обмена на услуги оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода данной суммы придется выполнить ряд требований. <a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=502628>1×slots зеркало рабочее</a> 1×slots на любой вкус как пройти регистрацию При забаве на бонусные свои запрещается выступать в игровые автоматы с прогрессивным джекпотом и забавы из радела exist casino. Кроме как, некоторые казино дают бездеп на один либо некоторое конкретных слотов, и в других забавах Вы не можете на их играть. <a href=http://pfb7978i.bget.ru/index.php?subaction=userinfo&user=RalphSycle>http://pfb7978i.bget.ru/index.php?subaction=userinfo&user=RalphSycle</a> Онлайн гемблинг развивается с любым днем больше и больше, новые бренды создаются не по денькам а по часам. Новые интернет казино проделывают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и тем наиболее предлагают бездепозитные призы за регистрацию, что бы не пропустить эту возможность — как пользоваться свежим бездепом, рекомендуем навещать наш сайт как можно почаще, самое вкусное и свежие будет добавляться в данном же перечне.Основное правило получения бездепа ? создаваемый акк обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов требовательно запрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита необходимо блюсти несложную очередность деяний. 1×slots сайт зеркало
1×slots casino регистрация на сайте
Не рекомендуем сломя голову хвататься за всевозможные предложения получения средств без инвестициям. Вполне вполне, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на первый взор. Альтернативой считается казино приз за депо. Мы предлагаем вас пару советов, благодаря которым у каждого игрока будет вероятность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег: <a href=https://knowyourmeme.com/users/jamesjes>https://knowyourmeme.com/users/jamesjes</a> Демоказино есть почти на каждом сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются существенно реже: там когда выигрыша и соблюдения критерий промоакций бездеп возможно превратить в реальные средства. 1×slots рабочее зеркало на сегодня Когда идет о валютных бонусах, казино практически устанавливают обстоятельства вейджера, коие нужно выполнить, чтобы исключить выигрыш.
1хслотс официальный сайт зеркало
<a href=http://theauction.com.au/my-account/>1×slots регистрация 1×slots review live</a> Особую изюминку видео слотам придают уникальные знакы. С их выходом активируются разные бонусы. Вы сможете запустить вспомогательный степень и прирастить необходимую выигрыша. Есть знаки, коие сменяют ненужные составляющие и сами создают выигрышные комбо. Не стоит забывать и про бонус-тур. После любого удачного спина есть шанс увеличить необходимую выигрыша в два либо четыре раза.Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить необыкновенности, недоступные при забаве в демо режиме. Многие свежие посетители перебегают в число постоянных, а оператор получает длительную выгода. Однако в условиях скрываются «подводные камни», которые не позволят исключить крупную сумму или же вы не успеете отыграть вейджер. Поэтому профессионалы рекомендуют забрать благотворительные вращения за регистрацию в казино без депозита, дабы поднабраться опыта и получить реальный шанс на победу. 1×slots регистрация 1×slots casino 777 online <a href=http://www.glife2120.ru/user/Jasperadhes/>http://www.glife2120.ru/user/Jasperadhes/</a>
1 x slots
Можно ли зарабатывать на бездепозитных призах? Это не работа, здесь как повезет, в в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, тогда возможно именовать везением, и добавочной добавкой к вашему бютжету. Обычно, бездепозитные призы выдаются под определенные слоты с фиксированной ставкой, но их точно запрещено применять в игровых автоматах с прогрессивным джекпотом. Список игр, в которых можно использовать бездеп, Вы найдете в описании акции либо можете уточнить у службы заведения. <a href=http://duryunsan.kr/bbs/board.php?bo_table=free&wr_id=263546>http://duryunsan.kr/bbs/board.php?bo_table=free&wr_id=263546</a> Да, у бесплатных призов есть дефекты. Прежде всего, они обычно не. Кроме как, условия вейджера по ним всегда строгие. Но все же неимение риска проделывает их довольно красивыми для клиентов.Важно, убедитесь том,, что ранее не регились в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи. 1×slots официальный сайт мобильная версия скачать
<b>Смотреть еще похожие новости:</b>
<a href=https://australiantravelforum.com/Upload/showthread.php?tid=175063>casino 1×slot</a>
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=64861>1×slots зеркало этих способов предполагает регистрацию</a>
<a href=http://check2go.net/my-account/>скачать 1×slots на андроид мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Проверка занимает от нескольких мин. До нескольких дней, профессионалы техподдержки имеют запросить вспомогательные документы или инициировать краткое общение по Skype. Для проверки используются сканы паспортов, водительских водительских, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если юзер обнаружен в попытке ввести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их обладатель попадает в темный список. При игре на лицензионной площадке не стоит опасаться указывать достоверную персональную информацию (шифрование исключает утечку индивидуальных данных).
#2472 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино рублях 7k casino сайт <a href=https://rucriminal.info/>1×bet</a> букмекерские конторы в россии почему в казино нет часов <a href=https://vestnik-jurnal.com/>porno Виктория Баркова, легкоатлетка</a> casino промокод 1×bet casino скачать букмекерскую контору казино регистрации Елена Лядова up casino официальный unlim casino
DiskiPlus казино можно DiskiPlus Валентина Матвиенко порно <a href=https://www.diskiplus.ru>DiskiPlus Юдаева Ксения Валентиновна порно</a> DiskiPlus казино вход официальный сайт DiskiPlus 1×bet приложение <a href=https://diskiplus.ru>DiskiPlus порно с Дронова Александра Викторовна</a> DiskiPlus казино можно DiskiPlus порно с Афонина Марина Игоревна DiskiPlus 1×bet зеркало рабочее xbet DiskiPlus casino онлайн DiskiPlus яндекс казино DiskiPlus порно с Алина Загитова, фигуристка DiskiPlus официальное казино вход
#2473 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало на сегодня
Бывают ли бездепозитные бонусы без вейджера? Бывают, случае у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный приз за регистрацию устанавливается вейджер во всех казино. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало</a> Важно, удостоверьтесь сомнений, собственно раньше не регистрировались в выбранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи.Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. <a href=https://collectednotes.com/lexxeagle/expert-architectural-drafting-and-design-services-for-modern-construction>https://collectednotes.com/lexxeagle/expert-architectural-drafting-and-design-services-for-modern-construction</a> Вознаграждения за получение VIP-статуса ? начисляются в рамках программки лояльности при достижении одного значения или выдаются индивидуально менеджерами саппорта. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=http://www.ritual-letichev.km.ua/user/Davidgop/>http://www.ritual-letichev.km.ua/user/Davidgop/</a>
1×slots casino регистрация
Для верификации аккаунта надо(надобно) предоставить специалистам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, еще фотографию банковской карты либо скриншот странички электрического кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для подтверждения личности. <a href=https://www.donchillin.com/space-uid-382497.html>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=http://l-avt.ru/support/dialog/?PAGE_NAME=profile_view&UID=74591>http://l-avt.ru/support/dialog/?PAGE_NAME=profile_view&UID=74591</a> Высокая конкурентность в сегменте азартных игр доказывает операторов привлекать посетителей разнообразными промоакциями. Благодаря этому у посетителей появляется возможность получить призы в казино за регистрацию без депозита. Воспользоваться этим предложением можно, минуя процедуру внесения средств на игровой счет, просто активировав акк на веб-сайте. Наш экскурсовод по бездепам поможет выбрать самую привлекательную бонусную программку, узнать управляла получения такого гонорары и воспользоваться им с наибольшей выгодой. 1хслотс казино зеркало Но эти рамки не смущают числе хайроллеров, что коэффициенты на слотах разрешают рассчитывать на крупные выигрыши, ну неких автоматах разыгрывается передовой джекпот.Чтобы получить вероятность вывести прибыль с бездепозитного бонуса в казино, нужно выполнить ряд условий:
1×slots промокод при регистрации 2025
Вейджер (или вагер) ? это наименьшая сумма ставок, которую необходимо сделать для вывода валютного приза. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, тем привлекательнее спецпредложение. <a href=https://www.formulersupport.com/User-RandalBiree>https://www.formulersupport.com/User-RandalBiree</a> 1×slots зеркало подтвердит вашу регистрацию если говорить
1×slots казино зеркало
Нельзя рассматривать забаву на средства, как вариант заработка. Азартные забавы запрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не является зачинщиком азартных игр. Сайт носит информационный нрав. 1×slots регистрация на 1хслотс <a href=http://www.pk10zc.com/space-uid-358288.html>http://www.pk10zc.com/space-uid-358288.html</a> Прежде всего, не забывайте периодически заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом разглядывают более интересные предложения основных игорных порталов.
1×slots официальный сайт зеркало
<a href=http://spectr-sb116.ru/user/DoctorLazutapr/>http://spectr-sb116.ru/user/DoctorLazutapr/</a> 1×slots рабочее зеркало на сегодня Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала прыткие выводы. Фишка выплат том,, собственно достаточно избрать платёжный инструмент и показать необходимую. В большинстве случаев деньги зачисляются на электрические кошельки на 15 минут, а на банковские карты – 1–3 трудящихся денька.
<b>Смотреть еще похожие новости:</b>
<a href=http://check2go.net/my-account/>1×slots casino online регистрация</a>
<a href=https://rolivka.online/forum/showthread.php?tid=30026>1×slots официальный сайт мобильная версия</a>
<a href=https://test.soclanovtsy.ru/topic/39605–1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE/>1хслотс казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Благодаря программе лояльности от игорного заведения, возможно арестовать неплохой старт и без дополнительных инвестициям запустить видеослоты. Кроме того, можно рассчитывать на реальную удачу и получить, без вложения собственных денег, большой выигрыш. Не хотите сыграть в азартные игры, не рискуя своими деньгами, но получая в все выплаты? Подобную возможность деют все наихорошие порталы с азартными развлечениями. В их количестве большое добросовестных и надежных интернет-казино на российском языке. Они завлекают новых юзеров разными поощрительными событиями, включая бездепозитные, либо благотворительные бонусы.
#2474 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Елена Никитина, скелетонистка Ирина Горбачева <a href=https://krtka.info/>яндекс игры казино</a> букмекерская контора официальный сайт казино рояль <a href=https://rucriminal.info/>мобильные букмекерские конторы</a> ограбление казино porno Дарья Мороз пин ап casino гта онлайн казино порно с Абрамченко Виктория Валериевна порно с Анна Калинская (теннис) порно с Алина Загитова, фигуристка
DiskiPlus игры казино DiskiPlus Львова-Белова Мария Алексеевна порно <a href=https://www.diskiplus.ru/>DiskiPlus porno Илья Ковальчук (хоккей)</a> DiskiPlus Радченко Светлана Юрьевна порно DiskiPlus 1×bet зеркало на сегодня <a href=https://www.diskiplus.ru/>казино</a> DiskiPlus какие казино DiskiPlus букмекерская контора официальный сайт скачать DiskiPlus Чулпан Хаматова DiskiPlus Хорова Наталья Александровна порно DiskiPlus букмекерская контора мостбет DiskiPlus порно с Дронова Александра Викторовна DiskiPlus лучшая казино
#2475 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slotscasino 56 online
Выбор каждого онлайн казино на нашем веб-сайте. В описании к каждому Вы сможете узнать, что получите за творенье аккаунта. <a href=http://filmkachat.ru/>1×slots регистрация на официальном сайте</a> <a href=https://www.dailygram.com/blog/1324092/how-to-reset-honda-systems-after-battery-replacement/>https://www.dailygram.com/blog/1324092/how-to-reset-honda-systems-after-battery-replacement/</a> онлайн казино 1×slots <a href=https://humanlove.stream/wiki/Green_Pharmacy_Nuts_Buy>https://humanlove.stream/wiki/Green_Pharmacy_Nuts_Buy</a>
1×slots бездепозитный бонус за регистрацию
При регистрации в или ином интернет игральном заведении — вас дается раз шанс испытать собственную удачу не внося свои монеты. Замечу что такую поощрительную предложение предоставляют не все интернет игровые площадки, а лишь щедрая половина из их. Которые мы подготовили для Вас в нашем перечне.Если вы бывалый игрок, вы должны аристократия, что приз без депо – редчайшая находка. Тем ниже, мы в изучаем интернет, чтобы отыскать для вас превосходнейшие бездепозитные предложения. 1×slot зеркало Иногда в поощрения за регистрацию шансы выдаваться билеты для участия в турнирах. Условия их проведения довольно выделяются, потому мы советуем ознакомиться с любым предложением отдельно. <a href=http://upravlenie.org/redirect?url=http://footboxshop.ru/bitrix/redirect.php?goto=http://mchsnik.ru/redirect?url=https://teletype.in/@urist555/o0DSV78lCYU>http://upravlenie.org/redirect?url=http://footboxshop.ru/bitrix/redirect.php?goto=http://mchsnik.ru/redirect?url=https://teletype.in/@urist555/o0DSV78lCYU</a> Активация происходит за промокодов, которые вводятся в собственном офисе после регистрации. Среди спецпредложений в перечне Casino.ru находятся неповторимые промокоды, коие доступны лишь гостям портала. Другие методы начисления средств ? автоматическая активация сразу последствии творения аккаунта и получение дара по запросу в службу технической поддержки. 1×slots casino регистрация
1 xslots рабочее зеркало
Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? <a href=https://www.hukuki.net/member.php?253152-JamesDreal>https://www.hukuki.net/member.php?253152-JamesDreal</a> Нет. Казино выдают безвозмездные бонусы за регистрацию, для того, дабы клиент возможность ознакомиться с игровым заведением. А дабы вывести его, нужно выполнить обстоятельства отыгрыша. 1×slots зеркало выигрыши обязательно пройдите регистрацию если Не трудно додуматься, что not the slightest deposit bonuses почти никогда не случаются большими. Чаще всего речь идет о пяти–тридцати баксах (или эквиваленте этой суммы в другой еденице).
1×slot зеркало
Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных притязаний, кроме обязательной верификации. Если на сайте учтена неотъемлемая процедура подтверждения личности, то вывести выигрыш удастся лишь последствии проверки данных. Приготовьтесь наполнить анкету и отправить в техподдержку документ, подтверждающий личность. 1×slots регистрацию процедура займет всего лишь <a href=http://www.so0912.com/home.php?mod=space&uid=2353716&do=profile&from=space>http://www.so0912.com/home.php?mod=space&uid=2353716&do=profile&from=space</a> Чтобы выступать безвозмездно на реальные деньги в казино, не всегда довольно просто зарегистрироваться. Иногда нужно выполнить дополнительные действия.На благотворительные бонусы онлайн-казино практически всегда распространяется ограничения по стране проживания посетителей. Даже если вам разрешено раскрывать счет и выступать на деньги в заведении, это еще не значат, что вас доступны no down payment bonuses.
1хслотс 1хслотс регистрация перейти на 1×slots
Мы собрали и опубликовали список наихороших бездепозитных казино с бонусами за регистрацию, коие гарантируют великодушные выигрыши и мгновенные выплаты. <a href=http://noydpo67.ru/bitrix/redirect.php?goto=http://ritual-1.ru/bitrix/rk.php?goto=http://latinsubcul.hatenablog.com/iframe/hatena_bookmark_comment?canonical_uri=https://teletype.in/@urist555/BDqB8AaIdAM>http://noydpo67.ru/bitrix/redirect.php?goto=http://ritual-1.ru/bitrix/rk.php?goto=http://latinsubcul.hatenablog.com/iframe/hatena_bookmark_comment?canonical_uri=https://teletype.in/@urist555/BDqB8AaIdAM</a> 1×slots промокод при регистрации Так собственно приготовьтесь предоставить секретную информацию (пол, возраст, страна проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает не более суток, последствии чего получится беспрепятственно выводить крупные выигрыши.После потребуется привнести идентификационный платёж. Это стращает начинающих больше всего. Нужно устроить минимальный депозит в 100–500 руб. Таким образом служба безопасности убедиться сомнений, что платёжный метод принадлежит Вам. Данная процедура необходима для обеспечивания защищенности игровых счетов. Пример, Ваш акк взломают и выведут свои на свой кошелёк. Будет очень неприятно. Поэтому верификация платёжной системы, это необходимый момент.
<b>Смотреть еще похожие новости:</b>
<a href=http://u0382101.isp.regruhosting.ru/index.php/forum/general-questions-and-how-tos/68883-otzyvy-o-tovarakh?start=3057#138456>казино 1×slots официальный сайт</a>
<a href=https://masstr.net/showthread.php?tid=89397>1х слот регистрация в 1×slots casino</a>
<a href=http://powercrop.it/chi-siamo/le-persone?page=116#comment-5815>1×slots официальный сайт скачать</a>
<a href=http://www.infoknygos.lt/smforum/index.php?topic=75517.new#new>1хслот официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Также, учите, что бездепозитный приз можно исключить лишь что случае, когда будут выполнены все условия отыгрыша.
#2476 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Александра Бортич рокс казино <a href=https://glvk.guru/>porno Алена Косторная (фигурное катание)</a> porno Нина Пирогова, хоккеистка online casino 7k <a href=https://7club7.com/>1×bet на сегодня</a> винлайн букмекерская контора официальный сайт pin up casino пин ап бесплатное казино porno Алена Михайлова vodka casino Преподобная Надежда Александровна порно спорт букмекерская контора
DiskiPlus ап казино DiskiPlus букмекерские конторы в россии <a href=https://diskiplus.ru/>DiskiPlus порно с Александр Головин (футбол)</a> DiskiPlus почему казино DiskiPlus 1×bet сейчас <a href=https://diskiplus.ru/>DiskiPlus казино большая</a> DiskiPlus casino рабочее DiskiPlus карты казино DiskiPlus гта казино DiskiPlus pin casino DiskiPlus приложения букмекерских контор на андроид DiskiPlus 1×bet скачать бесплатно DiskiPlus слот casino
#2477 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация в 1×slots casino
Наши специалисты изучают обстоятельства акции, после в ручном режиме проверку их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и другие характеристики. Мы не рекламируем казино, а даем игрокам информацию о наилучших из их.Новые клиенты онлайн-казино без первого депо шансы выяснить собственную удачливость. К что, этому же есть возможность конвертировать бездепы в настоящие средства за регистрацию в казино, однако для этого приз нужно отыграть сообразно условиям промоакции. <a href=http://filmkachat.ru/>зеркло казино 1×slots</a> Чтобы без увериться в превосходствах бездепозитных бонусов, достаточно зарегистрироваться в казино и получить одобрение.Нет. Для получения бездепозитного бонуса в казино необходима неотъемлемая регистрация на веб-сайте. Играть в слоты безвозмездно и без регистрации можно лишь в демо режиме. <a href=https://acrobat.uservoice.com/forums/935259-acrobat-web-beta-internal/suggestions/49479029-%D0%BF%D1%80%D0%BE%D1%84%D0%B5%D1%81%D1%81%D0%B8%D0%BE%D0%BD%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2-%D0%BA%D0%B8%D0%B5%D0%B2%D0%B5-%D0%BE%D1%81%D0%BE%D0%B1%D0%B5%D0%BD%D0%BD%D0%BE%D1%81%D1%82%D0%B8-%D0%B8>https://acrobat.uservoice.com/forums/935259-acrobat-web-beta-internal/suggestions/49479029-%D0%BF%D1%80%D0%BE%D1%84%D0%B5%D1%81%D1%81%D0%B8%D0%BE%D0%BD%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2-%D0%BA%D0%B8%D0%B5%D0%B2%D0%B5-%D0%BE%D1%81%D0%BE%D0%B1%D0%B5%D0%BD%D0%BD%D0%BE%D1%81%D1%82%D0%B8-%D0%B8</a> зеркала 1×slots <a href=https://demo.qkseo.in/profile.php?id=753623>https://demo.qkseo.in/profile.php?id=753623</a>
1×slots подтвердит вашу регистрацию если говорить
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=5576>1×slots casino регистрация 1×slotscasino09k online</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=http://dcam.ru/bitrix/redirect.php?goto=http://neruauto.ru/bitrix/rk.php?goto=http://google.ws/url?q=https://teletype.in/@urist555/556QsyIBy46>http://dcam.ru/bitrix/redirect.php?goto=http://neruauto.ru/bitrix/rk.php?goto=http://google.ws/url?q=https://teletype.in/@urist555/556QsyIBy46</a> 1хслот официальный сайт зеркало Обычно показатель повыше, чем для призов на депо. Не изумляйтесь, в он будет том х100. Иногда завышенный коэффициент вейджера уточняется для обитателей отдельных государств.Некоторые сайты, до чем обмануть регистрацию игроков, предлагают ответить на несколько базисных вопросов. Цель проведения сходственной викторины – выявить случайных людей, которые не имеют представления о покере, и не разрешить получения ими призов. Если посетитель уже играл в казино, то ответить на полтора десятка простых вопросов будет несложно. Очень нередко, ответы возможно отыскать на официальных веб-сайтах этих учреждений.
1 х слотс зеркало
Чаще всего интернет-казино предлагают бездепозитные призы новым пользователям. Эта промо-акция довольно отлично завлекает новичков, подталкивая их к открытию счета. Конечно, не они становятся преданными посетителями, хотя сам прецедент регистрации аккаунта играет на руку заведению.Но на некоторых азартных платформах сходственные гонорары могут получить теперь зарегистрированные юзеры. В таком случае, бонусы предоставляются в рамках уникальных акций либо же некоторым игрокам повторяющий акционного предложения, коие приходит на почту с целью «вернуть» игрока в свое казино. <a href=http://service.megaworks.ai/board/bbs/board.php?bo_table=hwang_form&wr_id=603187>http://service.megaworks.ai/board/bbs/board.php?bo_table=hwang_form&wr_id=603187</a> Промообъявления от казино мешают реальной картины и направлены на привлечение внимания пользователей. Понять, как высоки шансы остаться в плюсе, позволит личный анализ условий предложения: 1×slots регистрация на сайте Многие новенькие сомневаются, собственно поощрительный приз не нужно несомненно возвращать, том случае они выиграли у казино. Это полностью неопасно и накрепко. Выводя выигранные свои, игрок просто одергивает свое роль деле и утрачивает уникальную вероятность – даром наращивать собственное материальное положение.Также, учите, собственно бездепозитный бонус можно вывести лишь никаких случае, когда будут исполнены все обстоятельства отыгрыша.
1×slots зеркало регистрация
Для получения выигрыша требуется выполнить обстоятельства казино. Чаще всего игроку нужно поставить определенную сумму, хотя уже из личных денег. Она рассчитывается из совместного объема выигрыша за все время использования бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, случае юзер выиграл 1000 рублей, а множитель составляет х30, исключить деньги можно несомненно, сделав ставки на 30 000 руб. 1×slots мобильная версия войти казино <a href=http://dinskoi-raion.ru/forum/?PAGE_NAME=profile_view&UID=65663>http://dinskoi-raion.ru/forum/?PAGE_NAME=profile_view&UID=65663</a> Бездепы могут входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами.
1×slots зеркало рабочее на сегодня
При отыгрыше бездепов, учитывайте кратковременные лимитирования. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток. Бездепозитные бонусы начисляются лишь один один. Не стоит раскрывать свежие аккаунты, дабы получить их повторно. Служба безопасности казино обязательно выявит «левого» соучастника и заблокирует. Если гость выполнит необходимые притязания, отыграет свою ставку и решит вывести собственный выигрыш, то ему надо(надобно) учесть, собственно казино обязательно востребует дать ксерокопии собственных документов, чтобы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные средства вывести не получится.Не трудно додуматься, собственно not the slightest deposit bonuses почти разу не бывают большими. Чаще всего речь идет о пяти–тридцати баксах (либо эквиваленте данной суммы в другой еденице). <a href=http://the-good.kr/bbs/board.php?bo_table=free&wr_id=2041259>http://the-good.kr/bbs/board.php?bo_table=free&wr_id=2041259</a> 4. Заберите презент. Чаще всего бонус активизируется сразу последствии регистрации. Но посещают ситуации, когда надо(надобно) забежать в индивидуальный кабинет либо написать в службу поддержки. 1×slots мобильная версия войти казино
<b>Смотреть еще похожие новости:</b>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=196148>x1 slots регистрация в 1×slots casino</a>
<a href=https://www.rusdrama-az.com/support/51-sluzhba-tehnicheskoy-podderzhki-sayta.html>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Похожим образом трудится третий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения клиента или из-за с получения им VIP-статуса. Подарок предоставляется в воззвания в поддержку и ревизии.
#2478 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
ешь казино лучшие онлайн казино <a href=https://www.ossetia.tv/>kent casino</a> Скворцова Вероника Игоревна порно почему в казино нет окон <a href=https://res-publika.com>казино фильм онлайн</a> промокод 1×bet гта онлайн казино порно с Варвара Субботина казино ставка 1×bet сейчас porno Анастасия Янькова, боксерка Анна Михалкова
DiskiPlus лучшие онлайн казино DiskiPlus Любимова Ольга Борисовна порно <a href=https://www.diskiplus.ru>DiskiPlus сколько казино</a> DiskiPlus porno Марина Александрова DiskiPlus казино ли <a href=https://www.diskiplus.ru/>DiskiPlus сайт букмекерской конторы</a> DiskiPlus леон букмекерская контора DiskiPlus Черкесова Бэлла Мухарбиевна порно DiskiPlus porno Екатерина Ефременкова, шорт-трекистка DiskiPlus сайт 1×bet слоты DiskiPlus casino официальный зеркало DiskiPlus казино онлайн DiskiPlus порно с Никита Кучеров (хоккей)
#2479 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasino09k online
Как верховодило, при выводе финансов, от играющего потребуется только устроить минимальный вклад для того, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом личный счет. <a href=http://filmkachat.ru/>1×slots регистрацию процедура займет всего лишь</a> Прибывшие на акк деньги бездепозитные призы предназначаются, в, только для свежеиспеченных юзеров, которые раньше не имели собственного аккаунта в данном казино. Исходя из этого, в ранее у игрока был сделан депо, то, по всей вероятности, у него больше не несомненно способности рассчитывать на получение такого приза в определенном заведении.Например, игрок получил 500 руб. При твореньи аккаунта и должен отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., потребуется устроить 875 спинов для полного отыгрыша. <a href=https://beacons.ai/lexxeagle>https://beacons.ai/lexxeagle</a> Также посещают случаи, когда казино начисляет обсужденный приз в регистрации нового клиента по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам.В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая приятная доля игры. Важно, часто бездепозитные бонусы в казино выдаются с ограничениями по наибольшей выплате. В среднем возможно рассчитывать на выгода в несколько тысяч рублей. Как исключить выигрыш с бонуса без депозита. Придётся подтвердить аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате либо прочитайте в правилах. 1× slots casino официальный сайт <a href=https://www.google.co.ma/url?sa=t&url=https://doctorlazuta.by/>https://www.google.co.ma/url?sa=t&url=https://doctorlazuta.by/</a> Выиграть реальные средства в казино не пополняя счет – трудно, хотя возможно. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными бонусами и начните играть на бонусные свои. По статистике в 10-ти заведений можно заработать маленькую сумму средств за счет бонусных средств.
1× slots зеркало
При регистрации идет свидетельствовать только достоверную информацию. Когда учетная запись несомненно активна, замечен доступ в Личный кабинет. В нем возможно выбрать еденицу, ввести промокод и узнать подробные верховодила получения и отыгрыша бездепа. Краткая информация об промоакции нередко находится непосредственно на регистрационной форме. <a href=https://uyghuryol.com/forum/viewtopic.php?f=8&t=231111>1×slots бонус за регистрацию</a> 1×slots акции Самый распространённый из похожих призов, естесственно же, бездеп на денек рождения клиента — приз вид фиксированной суммы либо фриспинов поступает на счёт игрока, а пользоваться им возможно на установленного периода медли. <a href=http://test-sida.noads.biz/home.php?mod=space&uid=75436>http://test-sida.noads.biz/home.php?mod=space&uid=75436</a> Если вы выбираете проверенное лицензионное онлайн казино и выполните все условия получения бездепозитного бонуса, трудностей с получением дара у Вас не возникнет.Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? 1× slots официальный Наличие у игрока второго аккаунта. Запрещено творить несколько профилей для многократного получения бездепов.
казино 1×slots официальный сайт
Демоказино есть практически на любом сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются веско пореже: там в случае выигрыша и соблюдения критерий промоакций бездеп можно превратить в настоящие деньги.Также бездепозитные бонусы могут работать способом возвращать к забаве клиентов, временно приостановивших своё сотрудничество с фирмой: уведомление о бездепе поступает на мобильный телефонный либо почту. <a href=http://cmsthemefinder.com/userinfo.php?uid=36888#>http://cmsthemefinder.com/userinfo.php?uid=36888#</a> Поспешите зарегистрироваться на официальном веб-сайте Клубника, дабы моментально получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, появляется реальный шанс победу! рабочее зеркало 1хслотс Фриспины начисляются по определенной ставке. После их активации игроку необходимо запустить слот и убедиться, собственно в нем показываются благотворительные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода последствии отыгрыша определяется оператором и редко превышает 5 000 рублей.Но а в вы уже профи по онлайн казино, кликаем на красноватую кнопку «Получить» и Вы механически перейдете в интернет казино;
казино 1× slots официальный сайт
Чаще всего интернет-казино предлагают бездепозитные призы новым юзерам. Эта промо-акция довольно эффективно привлекает новичков, подталкивая их к открытию счета. Конечно, не все они становятся послушными клиентами, хотя сам прецедент регистрации аккаунта играет на руку заведению.Вы не в коем случае ни не рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный бонус, по мимо практической игры на бездепозитные призы, у Вас есть шанс выучить игровые автоматы, выучится регулировать менять ставки и полосы, исследовать бонусные игры и их выигрышные композиции, ну в конце концов просто зарядится кучей впечатлений! Ведь вы будите выступать на бонусные средства, коие возможно отыграть и исключить, не просто на демо счет, что, этим самым адреналин в крови еще повысится а пульс забьется с нередким ритмом! <a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=144835>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a> Также учтите, что кое-какие игровые платформы сузивают перечень стран, коие готовы получить предложенный бездепозитный приз за регистрацию. К образцу, существуют онлайн-заведения, выдающие подобные призы только жителям конкретных стран. К образцу, онлайн казино 777 Оригинал дает бездепозитный бонус только игрокам из России и стран СНГ. Или напротив, пичкают вознаграждением всех, не обитателей неких стран (исходя из этого, стопам внимательно изучать перечень, дабы впоследствии не возникло никаких вопросов и жалоб). В списке притязаний к отыгрышу нередко наличествуют лимиты на ставки при забаве на собственные средства. Так, в отыграть надо(надобно) 30 000 руб., а предельная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 один. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам действия акции.Вышеописанная первопричина и считается основным интересным, следствии которого операторы отдают доля своей выгоды на различные маркетинговые расходы и маркетинговые кампании. А самым действующим здесь будут играть именно бездепозитные призы казино 2022 с выводом за регистрацию. 1хслотс рабочее зеркало <a href=https://vadaszapro.eu/user/profile/1268164>https://vadaszapro.eu/user/profile/1268164</a> Фриспины предусмотрены для применения в видео слотах. Внимательно ознакомьтесь с условиями – часто их выдают на некоторые автоматы. В зависимости от клуба, у вас получится устроить определённое число ставок. Кстати, продвинутые игорные жилища разрешают запускать любых «одноруких бандитов».
1×slots официальный сайт зеркало
Все любят получать презенты. Согласитесь, почти любой играющий человек будет безгранично счастлив, если получит безвозмездный подарок для игры в онлайн казино просто за регистрацию либо же приз за внесенный депозит, например нарекаемые приветственные бонусы для новых игроков. Соответственно такие онлайн клубы станут более знамениты и преимущественны у игроков при выборе казино для игры. Топ казино постоянно обновляется и добавляются новые и занимательные игровые клубы с симпатичной бонусной политикой и всеми вероятными преимуществами, льготами, к которым относятся эти призы как фриспины за регистрацию, валютные бездепозитные призы, еще щедрые бонусы за внесенный депозит. <a href=http://mrkarpiuk.xaa.pl/boards/shopping/member.php?action=profile&uid=56061>http://mrkarpiuk.xaa.pl/boards/shopping/member.php?action=profile&uid=56061</a> Для вывода средств бонус надо(надобно) несомненно отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариациями отыгрыша бездепозитного бонуса до его получения, дабы избежать конфликтных обстановок. 1×slot казино зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.l2endless.com/showthread.php?tid=419428>1×slots зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Так собственно приготовьтесь дать конфиденциальную информацию (пол, возраст, страна проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает не более суток, в чего получится свободно выводить крупные выигрыши.
#2480 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино без 1×bet вход <a href=https://glvk.guru/>Кузнецова Анна Юрьевна порно</a> Матвиенко Валентина Ивановна порно 1×bet зеркало на сегодня 1×bet xyz <a href=https://rumafia.news/>казино без</a> pin up casino зеркало porno Катерина Шпица Ходнева Светлана Владимировна порно порно с Александр Головин (футбол) букмекерская контора бетсити 1×bet зеркало рабочее xbet леон букмекерская контора
DiskiPlus casino x DiskiPlus 1×bet зеркало xbet <a href=https://www.diskiplus.ru/>DiskiPlus казино в россии</a> DiskiPlus букмекерская контора официальный сайт DiskiPlus казино ли <a href=https://diskiplus.ru/>DiskiPlus 1×bet зеркало слоты</a> DiskiPlus porno Виктория Баркова, легкоатлетка DiskiPlus казино онлайн DiskiPlus порно с Арина и Дина Аверины, гимнастки DiskiPlus гта онлайн казино DiskiPlus Александра Бортич DiskiPlus porno Андрей Рублев (теннис) DiskiPlus букмекерская контора на андроид
#2481 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots review live
Вообще перейдя в казино — правила схожи в получении бездепозитных бонусов, в стереотипные верховодила входит: доказать эл. Почту и телефон, заполнить собственный личный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ.Бонус начисляется игроку сразу в регистрации и прохождения верификации в казино и не требует от посетителя внесения депозита. Как управляло, размер бонуса в сходственном случае достаточно застенчивый, однако позволяет новеньким познакомиться с игрой без риска реальными деньгами. <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino 56 online</a> Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации подарка нужно доказать электронную почту и привязать аппарат;Законодательство, регулирующее азартные игры в разных странах, оказывает на полномочия операторов. В итоге пользователи из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это возможность быть как глубокий отказ в доступе, например и невозможность загружать игры отдельных изготовителей. <a href=https://www.hoyolab.com/article/27052984>https://www.hoyolab.com/article/27052984</a> Возможность поиграть вспомогательное соревнование (а иногда и некоторое) абсолютно безвозмездно, а выигрыш, в свою очередь, поступает на счёт игрока. 1×slot официальный сайт <a href=https://www.vforum.org/forum/members/28636.html>https://www.vforum.org/forum/members/28636.html</a> Каждый в обязан сначала отчетливо выучить условия по получению и отыгрышу приглянувшегося дара. Если всё устраивает, поспешите забрать бесплатные спины за регистрацию в казино без депозита с выводом и без отыгрыша и напрямик сейчас начать вертеть барабаны лучших слотов.
1×слот регистрация в 1×slots casino
Если речь об эксклюзивных предложениях, может потребоваться регистрация в казино по ссылке с партнерского сайта.Как прочие акции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых гостей и разрешает им составить впечатление о функционале, не рискуя значительными совокупностями. 1хслотс казино зеркало Шаг 4. Активация. Внимательно исследуйте обстоятельства, информацию по лимитированиям и сроке деяния бонусного предложения. Разобравшись с правилами, возможно активировать приз в личном офисе (иногда ? с использованием промокода) или по запросу в саппорт. <a href=http://elzon.ru/bitrix/redirect.php?goto=http://dogbutik.ru/bitrix/redirect.php?goto=http://dinozavrik.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/6dJwECrjzRc>http://elzon.ru/bitrix/redirect.php?goto=http://dogbutik.ru/bitrix/redirect.php?goto=http://dinozavrik.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/6dJwECrjzRc</a> 1× slots зеркало Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 долларов. Если выдаются фриспины, их число изредка выше нескольких десятков даровых вращений.Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают бонус по государствам. Вплоть до того, что клуб возможность на игроков из Вашей государства, а бездеп не давать.
1хслот 1хслотс регистрация перейти на 1×slots
Каждый компьютерные обязан сперва отчетливо изучить обстоятельства по получению и отыгрышу понравившегося подарка. Если всё устраивает, поспешите отобрать благотворительные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо сейчас начать вращать барабаны топовых слотов. Но на некоторых азартных платформах подобные гонорары шансы получить и уже зарегистрированные юзеры. В этом случае, бонусы предоставляются в оригинальных акций или же неким игрокам в виде акционного предложения, коие прибывает на почту с целью «возвратить» игрока в свое казино. <a href=http://gogotire.co.kr/bbs/board.php?bo_table=free&wr_id=1069888>http://gogotire.co.kr/bbs/board.php?bo_table=free&wr_id=1069888</a> 1×slots сайт Поспешите зарегистрироваться на официальном веб-сайте Клубника, дабы моментально получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, появляется реальный шанс победу!Также учтите, что некоторые игровые платформы сужают перечень стран, коие способны получить предложенный бездепозитный приз за регистрацию. К образцу, существуют онлайн-заведения, выдающие сходственные призы только жильцам конкретных государств. К примеру, интернет казино 777 Оригинал предоставляет бездепозитный бонус только игрокам из России и стран СНГ. Или наоборот, пичкают вознаграждением всех, не обитателей некоторых стран (следует этого, по пристально изучать список, чтобы потом не возникло никаких вопросов и жалоб).
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Вы не в коем случае ни же рискуете, а только выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс изучить игровые автоматы, выучится регулировать менять ставки и линии, исследовать бонусные игры и их выигрышные композиции, ну в просто зарядится кучей впечатлений! Ведь вы будите выступать на бонусные средства, которые возможно отыграть и вывести, но просто на демо счет, тем самым адреналин в крови еще повысится а пульс забьется с нередким ритмом! Начнём с как, собственно любое промо за регистрацию подразумевает некоторые обстоятельства. Бездепозитные бонусы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность денежного оборота, нужная для выполнения условий. Пример, получили благотворительные вращения и выиграли с их 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 рублей, проигрышных либо выигрышных, маловажно. После исполненья, бонусный баланс перейдёт на реальный и станет доступным к выводу. 1×slot рабочее зеркало <a href=https://hhi.instructure.com/eportfolios/16286>https://hhi.instructure.com/eportfolios/16286</a> Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Онлайн-казино с бездепозитными бонусами ставят клиентам обстоятельства для пользования бездепами, поэтому перед ролью в акции другого досконально ознакомиться со всеми правилами и нюансами акции. Условия все дотрагиваться получения приза, его применения и следующего вывода валютных средств в случае выигрыша.
1×slot зеркало рабочее этих способов предполагает регистрацию
Многие казино предоставляют в маркетинговых целях бесплатные бонусы необыкновенно для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой сайт по партнерской ссылке с нашего портала.Размер ставки для игры по бездепозитному бонусу (конечно же, если, тогда,, когда он представлен в виде бонусных денежных средств) часто ниже, чем при этой на депо. Ограничение несомненно действовать до этапа отыгрыша приза. <a href=http://fujikong1.cc/home.php?mod=space&uid=3705843>http://fujikong1.cc/home.php?mod=space&uid=3705843</a> 1×slots официальный сайт зеркало рабочее Вейджер менее х30–35 считается применимым. Опытные игроки утверждают, что с таким вейджером реально остаться в плюсе, случае верно подойти к выбору игрового аппарата.Принципиальным отличием бесплатных призов от бонусов на депо является неименье надобности заносить средства на акк. Из-за сего их нередко нарекают бездепозитными (not the slightest deposit bonuses).
<b>Смотреть еще похожие новости:</b>
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=801799>1×slots официальный сайт скачать на айфон</a>
<a href=http://www.forum.kalor.ru/1×slots-zerkalo-etih-sposobov-predpolagaet-registraciu-t4947.html>1×slots зеркало этих способов предполагает регистрацию</a>
<a href=https://forum.bandariklan.com/showthread.php?tid=176825&pid=1010522#pid1010522>1×slots официальный сайт зеркало</a>
<a href=http://everestrolep.listbb.ru/viewtopic.php?f=38&t=13717>1хслотс зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины – безвозмездные вращения с фиксированной ставкой, которые возможно использовать в конкретных игровых автоматах. Составленный экспертами Casino.ru перечень онлайн-казино с бездепозитным призом разрешает игрокам сравнить спецпредложения разных операторов.
#2482 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet 1 порно с Александр Большунов (лыжные гонки) <a href=https://krtka.info/>Черкесова Бэлла Мухарбиевна порно</a> Валентина Матвиенко порно казино рояль <a href=https://7club7.com/>1×bet официальный xbet</a> скачать 1×bet casino ru почему казино порно с Юлия Ефимова, пловчиха up casino официальный сайты казино порно с Дарья Клишина, легкоатлетка
DiskiPlus промокод 1×bet DiskiPlus лучшие казино бесплатно <a href=https://diskiplus.ru/>DiskiPlus порно с Юлия Ефимова</a> DiskiPlus приложения букмекерских контор на андроид DiskiPlus казино рулетка <a href=https://diskiplus.ru>DiskiPlus 1×bet слоты 1×bet xyz</a> DiskiPlus бесплатное казино DiskiPlus бесплатно играем казино DiskiPlus играющие казино онлайн DiskiPlus пин up casino DiskiPlus 1×bet официальный скачать DiskiPlus 1×bet зеркало xbet DiskiPlus порно с Зырянова Анастасия Владимировна
#2483 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации
Если площадка дарит бездеп за регистрацию, то процедура его получения проста. Нужно только ввести аккаунт на веб-сайте и активировать его, подтвердив адресок электронной почты, номер телефона либо другие данные, которые настятельно оператор. Перед данным необходимо убедиться, что юзер располагается на официальном сайте казино, а не на жульнической площадке.Некоторые онлайн-казино без депозита предлагают свежим клиентам избрать приз при регистрации. Будьте внимательны: выбрав раз, вы в абсолютном большинстве случаев не сможете воспользоваться остальными. <a href=http://filmkachat.ru/>x1 slots регистрация в 1×slots casino</a> Самый распространённый из сходственных призов, естесственно же, бездеп на денек рождения посетителя — бонус в виде фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им возможно протяжении установленного периода времени. <a href=https://teletype.in/@kalinka0588/wj_aIQ7cr4o>https://teletype.in/@kalinka0588/wj_aIQ7cr4o</a> Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы которые возникают у начинающих.Прежде чем активировать бездеп, нужно увериться никаких, собственно страна, уроженцем которой является игрок, не заходит в перечень разрешенных. 1хслотс регистрация в 1×slots casino <a href=https://developers.paragon-software.com/community/profile/3d-exterior-rendering-company/>https://developers.paragon-software.com/community/profile/3d-exterior-rendering-company/</a>
1×slots casino регистрация на сайте
Бездеп с фриспинами имеет обхватывать всю коллекцию игр на веб-сайте либо разработки одного провайдера. Обычно предлагается конкретный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш может быть выведен в того, как пользователь отыграет данную сумму. Возможность расценить полный перечень слотов — главное достоинство данной разновидности. Игроку становятся доступны те функции, которые отсутствуют в демонстрационном режиме, а вероятность выиграть настоящие средства добавляет ясных азартных чувств.Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в индивидуальный кабинет, дабы забрать безвозмездные вращения с вейджером х40; <a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=13119>1×slots casino регистрация на сайте</a> 1×slots казино зеркало <a href=https://k2s.club/user/TravisKit/>https://k2s.club/user/TravisKit/</a> 1×slot зеркало рабочее регистрации на телефон придет Это также благотворительные финансы, коие поступают на аккаунты свежеиспеченных геймеров в регистрирования. А необыкновенность этих бонусов произведено что, нет, собственно обретенные деньги непременно стопам применять в продолжении назначенного медли.Новички не обожают незамедлительно же заносить депозит. Это обусловлено неименьем навыка и сомненьем. К счастью, наши можно получить бездепозитный бонус за регистрацию в казино. Неважно собственно начисляет система – фриспины либо кредиты. В всяком случае вы не рискуете собственными сбережениями. Это замечательная возможность запустить приглянувшийся видео разъем или же испытывать фортуну в настольных забавах.
1×slots рабочее зеркало
<a href=https://daltonzwgq42963.fireblogz.com/61603024/deep-nude-the-ethical-dilemmas-and-technological-impacts-of-ai-driven-image-manipulation>https://daltonzwgq42963.fireblogz.com/61603024/deep-nude-the-ethical-dilemmas-and-technological-impacts-of-ai-driven-image-manipulation</a> Отзывы читателей о бонусных акциях помогут составить эмоцию, хотя не забывайте о субъективности личных комментариев. 1×slots зеркало на сегодня Индивидуальные поощрения выдаются за совершение деяний: подписку на аккаунты площадки в соц сетях, установку мобильного прибавленья или официального посетителя для ПК. В большинстве казино действуют программки лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на грядущий уровень часто сопровождается выдачей бездепа.
1× slots официальный
<a href=https://redfist.de/RF-Online-Testforum/viewtopic.php?f=60&t=80034>1×slots зеркало на сегодня</a> 1×slots зеркало регистрация в 1×slots casino <a href=https://www.aubookcafe.com/bbs/board.php?bo_table=free&wr_id=2380531>https://www.aubookcafe.com/bbs/board.php?bo_table=free&wr_id=2380531</a>
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Исходя из сего, просто не существует разумных причин махнуть рукой на получение такового приза при регистрации. И, заметить,, на подобный безвозмездной базе у вас есть шансы выиграть средства и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные призы, называют бесплатными интернет платформами для игр.Заработать на бездепозитных бонусах за регистрацию в казино может любой юзер, достигший совершеннолетия. <a href=https://cse.google.ie/url?q=https://doctorlazuta.by/>https://cse.google.ie/url?q=https://doctorlazuta.by/</a> На бонусные начисления могут быть установлены вспомогательные ограничения, которые Вы не сведению при отыгрыше. Пока бонус полностью не отыгран — деньги из казино не выводятся.Чтобы выступать бесплатно на настоящие деньги в казино, не всегда достаточно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные деяния. 1×slots зеркало регистрация в 1×slots casino Промокод – определённая композиция знаков, которую необходимо установить в подходящее поле при создании учетной записи или активировать в личном профиле игрока в разделе с призами.Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут уточняет лимитирование для клиентов. Конечно, это возможно счесть неким неудобством для игрока, хотя справедливости необходимо, собственно выбор автоматов всё также остаётся довольно большим.
<b>Смотреть еще похожие новости:</b>
<a href=https://acerfans.ru/faq/796-kak-vylozhit-na-forum-informaciju-iz-zhurnala.html>1×slots сайт</a>
<a href=http://soumoli.com/home.php?mod=space&uid=24916>1×slots скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную функцию активации приза без депозита. Внимательно прочитайте до конца. Многие новички проделывают промахи на шаге регистрации и поэтому имеют получить презент. Бонус начисляется игроку незамедлительно после регистрации и прохождения верификации в казино и не требует от посетителя внесения депозита. Как правило, объем бонуса в схожем случае достаточно стыдливый, впрочем разрешает новичкам познакомиться с игрой без риска настоящими средствами.
#2484 Charlesgunnyhttp://filmkachat.ru
1х слот 1хслотс регистрация перейти на 1×slots
Бездепы с безвозмездными вращениями деют юзерам право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд выплачивает казино. Число спинов ограничено и изредка превышает сотню. Если промоакция включает в себя большое безвозмездных игр, их начисление имеет быть разбито на некоторое дней.Таким образом, заведение пытается продемонстрировать себя своим вероятным игрокам, а такой маркетинговый ход как казино бонус без депозита за регистрацию завлекает очень количество внимания к игорному заведению и обеспечивает постоянный струю свежих гостей и будущих клиентов игрового интернет клуба. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasino09k online</a> <a href=https://blog.udn.com/G_107482553777754991/180423924>https://blog.udn.com/G_107482553777754991/180423924</a> Рассмотрим на образце: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских рублей. В условиях акции указано, собственно вейджер бездепозитного приза х20. Поэтому, чтобы отыграть бонус, игроку будет необходимо сделать ставок на 35*20=700 руб. 1×slots акции <a href=http://forum.notionmusic.com/memberlist.php?mode=viewprofile&u=28335>http://forum.notionmusic.com/memberlist.php?mode=viewprofile&u=28335</a>
1хслотс рабочее зеркало
Мы собрали и опубликовали список наилучших бездепозитных казино с бонусами за регистрацию, которые гарантируют великодушные выигрыши и мгновенные выплаты.Получив собственный презент, Вы можете даром выступать на настоящие деньги, а выполнив условия отыгрыша, исключить свой выигрыш. <a href=http://216.38.0.7/viewtopic.php?f=12&t=348138>1×slots рабочее зеркало на сегодня</a> 1×slots регистрацию более популярный вариант это Выполнив все требования оператора, заказчик возможность оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем не более суток. Если дополнительно потребуется пройти функцию верификации, то срок возрастает до 1–2 рабочих дней. Для перевода применяются банковские приборы и электрические платежные системы. Второй метод подходит превосходнее, так как большинство транзакций такой осуществляются моментально. В связи со специфичностью функционирования банков обработка платежей возможность взятьвдолг(взятьвзаймы) до нескольких трудящихся дней.Самые свежие бездепозитные бонусы в казино за регистрацию 2022 года с выводом прибыли присутствуют на этой странице. Посетитель возможность оценить обстоятельства получения и начать выступать на деньги без внесения депо. При данном игроку важно разуметь, на каких условиях и какими способами появится исключить приобретенный выигрыш. Для этого необходимо расценить список присоединенных платежных систем. <a href=http://182.237.3.195/home.php?mod=space&uid=580712>http://182.237.3.195/home.php?mod=space&uid=580712</a> Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных обстановок с казино, когда после отыгрыша бездепа вас не дадут вывести солидную сумму выигрыша.Обыкновенные бездепозитные призы в размере от 3-х до 20 долларов созданы чтобы, чтобы, чтобы в игры заходили все новые и свежие игроки. Здесь, всего, будет ограничение на наибольший выигрыш. Важно, дабы перед минимальным вкладом был отключен бонус за 1-ое пополнение счета, и игры не попадет на повторный вейджер. 1 xslots рабочее зеркало Маркетинговая политического всех игорных интернет-клубов обязана одевать разнообразный нрав. И если гонорары на депо служат для того, дабы провоцировать заносить депозиты и поощрять уже быть юзеров, то бездепозитный бонус в казино или бонус за регистрацию в казино, этого всего, рассчитан на расширение базы потребителей.Также учтите, собственно кое-какие игровые платформы сужают список государств, которые готовы получить предложенный бездепозитный приз за регистрацию. К примеру, существуют онлайн-заведения, выдающие похожие бонусы только жителям определенных стран. К примеру, интернет казино 777 Оригинал дает бездепозитный бонус лишь игрокам из России и государств СНГ. Или наоборот, пичкают вознаграждением всех, считая жителей некоторых государств (исходя из этого, по внимательно изучать перечень, дабы впоследствии не появилось практически вопросов и претензий).
1×slots официальный зеркало рабочее
Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.Вы не в коем случае ни же рискуете, а только выигрываете и выводите на платежную систему, либо проигрываете предложенный приз, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс изучить игровые автоматы, научится регулировать изменять ставки и полосы, изучать бонусные забавы и их выигрышные комбинации, ну счете просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные средства, которые возможно отыграть и исключить, а не просто на демо счет, что, этим самым адреналин в крови еще больше повысится а пульс забьется с частым ритмом! Обыкновенные бездепозитные бонусы в размере от 3-х до 20 $ созданы чтобы, чтобы, дабы в забавы заходили все новые и новые игроки. Здесь, скорее, несомненно ограничение на наибольший выигрыш. Важно, дабы перед наименьшим вкладом был отключен бонус за 1-ое пополнение счета, и игры не попадет на повторный вейджер. <a href=http://bbs.totoroclub.com.cn/home.php?mod=space&uid=382138&do=profile>http://bbs.totoroclub.com.cn/home.php?mod=space&uid=382138&do=profile</a> Бездепозитный бонус казино 2022 с выводом за регистрацию предоставляет вероятность ознакомиться игроку с лобби выбранного заведения, сориентироваться в выборе игр и проверить качество работы службы. Довольно нередко, начиная игровой процесс, игрок уже не желает останавливаться и проделывает настоящий лепта. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать даром возможно как раз таки с бонусом за регистрацию без необходимости вносить депо. 1× слот зеркало Помните, собственно в неких играх сумма ставки идет в зачет вейджера лишь отчасти. Так, в настольных и карточных забавах только от 5% до 50% суммы ставки считаются как отыгранные деньги, на как в слотах идет в зачет все one hundred percent суммы.
1×slots акции
Активация по промокоду употребляется в разных обликах бездепов. Если идет о приветственном призе, то комплект знаков можно разузнать на главной странице, в регистрационной форме либо письме, коие отправляется юзеру для подтверждения адреса электронной почты. Акции все проводиться вместе с партнерскими площадками. Обычно код располагается на постороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активизируется разовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем актуальный код для активации в описании каждого рекламную.В количестве случаев безвозмездные призы начисляются в кредитах, коие нельзя незамедлительно исключить со счета. Прежде их нужно отыграть по установленным правилам. Эти требования принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д. ). О нем читайте ниже. <a href=https://rolivka.online/forum/showthread.php?tid=35516>1×slots сайт</a> Онлайн гемблинг развивается с любым днем все больше и больше, свежие бренды создаются не по дням а по часам. Новые интернет казино проделывают вступительные акции для игроков, для того собственно бы зарекомендовать себя, и тем самым предлагают бездепозитные призы за регистрацию, что бы не пропустить такую возможность — как пользоваться свежим бездепом, советуем посещать наш вебсайт как возможно чаще, самое смачное и новые несомненно добавляться в данном же списке.Фриспины без депозита либо вспомогательные свои помогут поближе познакомиться с игровой платформой и её функциями. За счёт подарков можно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям ради забавы против живых крупье. Не стоит путать забаву в демо и использование призов. В демонстрационном режиме игрок имеет оценить механику слота, сюжет и оформление. Но игра ведется на условные кредиты, поэтому отсутствует главное ? ощущение пыла. Активируя промокод или фриспины, клиент по-прежнему не тратит свои средства на игровые автоматы, но имеет сорвать реальный куш!Воспользоваться бездепом возможно не во всех игровых автоматах: казино и тут устанавливает ограничение для клиентов. Конечно, это можно посчитать некоторым неудобством для игрока, но справедливости отметить, собственно выбор автоматов всё одинаково остаётся довольно наибольшим. 1хслот 1хслотс регистрация перейти на 1×slots <a href=http://stroyrem-master.ru/user/Henryprurb/>http://stroyrem-master.ru/user/Henryprurb/</a> Хотя бесплатные призы начисляются без депозита, не исключено, что для понадобиться вносить средства. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты только последствии того, как новый заказчик первый пополнит игровой счет.Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.
1×slots зеркало регистрация в 1×slots casino
Если вы опытный игрок, вы обязаны аристократия, собственно бонус без депо – редкая находка. Тем ниже, мы раз исследуем интернет, дабы найти для вас превосходнейшие бездепозитные предложения.Заполняя данные в собственном профиле, указывайте только достоверную информацию, например как Вам придется ее доказать в будущем при выводе средств. <a href=https://kamchaty.ru/user/Forsedropol/>https://kamchaty.ru/user/Forsedropol/</a> С другой стороны, гораздо проще отобрать бездепозитные фриспины за регистрацию в казино и напрямик данный начать вращать барабаны в наихороших слотах. Главная необыкновенность спинов в том, собственно они предназначены для лучших автоматов. Удастся не только пройти вспомогательные раунды, но и прирастить сумму выигрыша, заработать респины и внутриигровые подарки. 1×slots casino регистрация
<b>Смотреть еще похожие новости:</b>
<a href=https://astraclub.ru/members/353998-Jameswow>1 x slots</a>
<a href=https://mit-bbs.com/viewtopic.php?t=223988>1×slot зеркало рабочее регистрации на телефон придет</a>
<a href=https://melhorlance.com.br/minha-conta/>1×slots зеркало регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Получив свой презент, Вы можете даром играть на настоящие деньги, а выполнив обстоятельства отыгрыша, исключить собственный выигрыш. Для получения депозитного приза нужно восполнить свой игровой баланс настоящими деньгами. Вознаграждение возможно получить либо при внесении первого депозита, или вид фиксированного процента от внесённых средств. Так или другому, приз поступит на счёт только в пополнения.
#2485 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация на сайте
Акционные предложения от казино существуют в разных форматах. Часто бонусы даются в обмен на депо. Игрок вносит платеж и получает средства, благотворительные вращения прочие поощрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — картина бонуса, кот-ый гарантирован за исполнение конкретных поступков на веб-сайте:Активация денежного гонорары случается механически после творения профиля либо использования промокода. Иногда операторы предъявляют вспомогательные притязания: подписаться на странички казино в социальных сетях либо на рассылку маркетинговых извещений, скачать и установить дополнительный софт и т.д. <a href=http://filmkachat.ru/>1× slots регистрация в 1×slots casino</a> В некоторых онлайн казино для получения бездепозитных призов не довольно просто зарегистрироваться на сайте клуба и подтвердить свои контактные данные. Дополнительно требуется активация промокода. <a href=https://techbehemoths.com/company/cgifurniture>https://techbehemoths.com/company/cgifurniture</a> 1×slots промокод при регистрации 2025 <a href=http://xn----7sbabja7ekbaahnetbi5o6b.xn–p1ai/profile.php?lookup=34622>http://xn----7sbabja7ekbaahnetbi5o6b.xn–p1ai/profile.php?lookup=34622</a> Помните, что в неких забавах сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных играх только от 5% до 50% суммы ставки считаются как отыгранные средства, на как в слотах идет в зачет все 100% суммы.
1×slots казино зеркало
Акционные предложения от казино есть в различных форматах. Часто бонусы даются в обмен на депозит. Игрок вносит платеж и получает деньги, безвозмездные вращения и другие поощрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — картина приза, кот-ый гарантирован за исполненье конкретных поступков на веб-сайте:Ещё одно распространённое акционное предложение – привлекательный презент с сомнительными притязаниями. К образцу, клуб обещает $100 в качестве бездепа, хотя с вейджером х80 или х100. Отыграть такой вейджер фактически нереально и потому чем концентрироваться на больше интересных промоакциях. <a href=http://nexusroleplay.teamforum.ru/viewtopic.php?f=19&t=7341>1×slots зеркало рабочее</a> 1×slots мобильная версия войти казино <a href=https://eng.worthword.com/bbs/board.php?bo_table=free&wr_id=666188>https://eng.worthword.com/bbs/board.php?bo_table=free&wr_id=666188</a> Размер бонуса. В качестве бездепов обыкновенно начисляют не суммы, а когда речь о призах за депо, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино шансы презентовать игроку до 2000$. 1хслотс рабочее зеркало на сегодня Перед активацией главно внимательно выучить обстоятельства промоакции. Чем ниже вейджер, тем больше возможная выгода игрока. Имеют значение того лимиты ставок при отыгрыше и сроки, в течение которых возможно воспользоваться предложением. Если бездеп обхватывает узкий список игр, рекомендуется разузнать наибольшие коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят лишь никаких случае, в оператор не установил требовательные лимитирования на наивысшую необходимую ставки.
1×slots casino регистрация
Срок отыгрыша — это период, кот-ый наступает в момент активации бонуса и заканчивается с его закрытием. Пользователю необходимо уложиться в данный временной зазор, по призовые средства аннулируются. Казино устанавливают перечень игр, ставки каких засчитываются при расчете отыгранных средств. Если тайтл не входит в данный список, то возможность быть недосегаем для загрузки в деянья бонусного предложения.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. Даже не выиграв солидную сумму, игрок увлекательно проведет время, изнутри изучит работу площадки, оценит геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе наихороших акций легкостью. Достаточно периодически учить перечень новых интернет казино с выводом бонуса без депозита в этом разделе. <a href=https://www.uned-psicologia.com/index.php?action=profile;u=51352>https://www.uned-psicologia.com/index.php?action=profile;u=51352</a> Иногда операторы требуют внесение минимального депо перед выводом для верификации платежного инструмента. В некоторых казино этот депо также светит отыграть. 1×slots официальный demo регистрация в 1×slots casino Подтверждение электронной почты – одно из основных критерий, коие есть практически в любом бездепозитном казино. Чтобы верифицировать электрическую почту, достаточно перейти по активной ссылке в послании, полученном от азартного клуба.Приглашаем делиться воззреньями о бонусах. Это поможет другим пользователям подбирать более прибыльные предложения.
1×слот регистрация в 1×slots casino
К огорчению, нет. Почти все казино, требуют внесение желая бы одного малого депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, что исключить средства разрешено только на что, эту платежную систему, с которой был изготовлен депозит.Ну и естесственно же, для казино бездепозитные призы выгодны с имиджевой стороны: сходственная щедрость повышает степень преданности посетителей к компании. Как управляло, при выводе финансов, от играющего потребуется только сделать наименьший вклад чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом личный счет.Такой бесплатный эквивалент средств зачисляется на профиль юзера после осуществления притязаний и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений возможен только в осуществления вейджеровых условий. 1×slots casino регистрация 1×slotscasin online <a href=https://www.medift.com/bbs/board.php?bo_table=free&wr_id=472055>https://www.medift.com/bbs/board.php?bo_table=free&wr_id=472055</a> Представленные на этой странице наилучшие бездеп бонусы в казино за регистрацию в 2022 году имеют подходящие обстоятельства. После тщательного анализа редакция портала составила рейтинг спецпредложений, в котором посетители Casino.ru все сортировать список по нескольким аспектам: по сумме, вейджеру, максимальной сумме вывода и т.д.Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают приз по государствам. Вплоть до как, что клуб возможность принимать игроков из Вашей страны, а бездеп не давать.
1×slots официальный зеркало
Для получения депозитного бонуса нужно пополнить свой игровой баланс настоящими средствами. Вознаграждение возможно получить либо при внесении первого депо, либо повторяющий фиксированного процента от внесённых средств. Так либо по, приз поступит на счёт лишь последствии пополнения.Иногда в качестве одобрения за регистрацию могут выдаваться билеты для роли в турнирах. Условия их проведения очень выделяются, потому мы советуем ознакомиться с каждым предложением раздельно. Oтыгpaть бонус с обозначенным вeйджepом, чтобы необходимо сдeлaть cтaвoк нa cумму, превышающую размер бонуса в несколько один. <a href=http://www.tiendahinchables.com/blog/%D0%B0%D0%B1%D0%B4%D0%B5%D0%BB%D1%8C.html>http://www.tiendahinchables.com/blog/%D0%B0%D0%B1%D0%B4%D0%B5%D0%BB%D1%8C.html</a> 1×слотс казино
<b>Смотреть еще похожие новости:</b>
<a href=https://minifishtank.net/forum/showthread.php?tid=21613>1×slos регистрация в 1×slots casino</a>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=295169>1×slots сайт</a>
<a href=http://molifan.netwww.molifan.netwww.molifan.net/space-uid-2280308.html>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<a href=http://aurorahcs.com/forum/memberlist.php?mode=viewprofile&u=168982>1хслотс рабочее зеркало</a>
<a href=https://www.rusdrama-az.com/support/51-sluzhba-tehnicheskoy-podderzhki-sayta.html>1×slots зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Как прочие акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такового предложения являются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих гостей и разрешает им составить эмоцию о функционале, не рискуя значительными совокупностями.
#2486 Charlesgunnyhttp://filmkachat.ru
1хслотс мобильная версия зеркало
Наши эксперты изучают условия промоакции, этого в ручном режиме проверку их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и характеристики. Мы не рекламируем казино, а даем игрокам информацию о лучших из их.Так же стоит выделить то, что в каждом интернет казино установлен собственный максимальный кешаут на бездепозитный приз. Как правило кешаут — это максимальная сумма денег, которая дешевая для вывода с бездепозитного бонуса. <a href=http://filmkachat.ru/>1хслот зеркало сайта</a> Бонус начисляется игроку сразу после регистрации и прохождения верификации в казино и не требует от посетителя внесения депо. Как верховодило, размер приза в сходственном случае достаточно умеренный, однако дозволяет новичкам познакомиться с забавой без риска реальными деньгами. <a href=https://www.patreon.com/posts/123686935>https://www.patreon.com/posts/123686935</a> Прежде чем активировать бездеп, нужно увериться в, собственно страна, уроженцем которой считается игрок, не заходит в перечень запрещенных. 1хслот официальный сайт зеркало <a href=http://swimming.s-server.kr/bbs/board.php?bo_table=free&wr_id=2217350>http://swimming.s-server.kr/bbs/board.php?bo_table=free&wr_id=2217350</a> Бездепы обычно предлагают с отыгрышем — быстро исключить выигранные свои нельзя. Перевод денег со счета несомненно возможен последствии такого, как юзер выполнит все притязания казино, а сумма не быть выше установленного правилами лимита. Условиями промоакции фиксируются сроки, протяжении которых клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней после активации.
1×slots регистрация на сайте
Частенько новички не разумеют, как активировать презенты либо вывести 1-ый выигрыш. Для сходственных случаев наша команда описала главные определения – что это фриспины, вейджер, как его отыграть, зачем нужно протекать верификацию.Получив собственный презент, Вы сможете безвозмездно играть на реальные средства, а выполнив условия отыгрыша, исключить собственный выигрыш. 1×slots зеркало этих способов предполагает регистрацию <a href=http://lineyka.org/user/Travisglymn/>http://lineyka.org/user/Travisglymn/</a> Прежде всего, не запамятовывайте периодически заглядывать на страницу обзоров бездепозитных бонусов. Они шаг за шагом оценивают более увлекательные предложения основных игорных порталов. 1×slots рабочее зеркало на сегодня Бездепозитный бонус казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в этом и заключается основное различие.Чаще всего интернет-казино предлагают бездепозитные призы новым юзерам. Эта промо-акция очень отлично завлекает новичков, подталкивая их к открытию счета. Конечно, не все становятся преданными посетителями, но сам факт регистрации аккаунта играет на руку заведению.
1×slot казино зеркало
Бoльшинcтвo азартных заведений выдвигают приблизительно однообразные, схожие обстоятельства и требования, которые нужно выполнить, чтобы получить бездепозитный бонус за регистрацию. Все их можно объединить в один список: <a href=http://teremopt.ru/bitrix/redirect.php?goto=http://konnekt58.ru/bitrix/rk.php?goto=http://arilla.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/Vn1-V3ros51>http://teremopt.ru/bitrix/redirect.php?goto=http://konnekt58.ru/bitrix/rk.php?goto=http://arilla.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/Vn1-V3ros51</a> 1хслотс 1хслотс регистрация перейти на 1×slots
1×slots регистрация на сайте 1×slots ru com
Более солидные предложения встречаются довольно редко. Зачастую они доступны только VIP-игрокам. В остальных случаях им скорее сопутствуют довольно строгие условия отыгрыша. Также вероятны дополнительные обстоятельства прочие ограничения, прописанные в критериях и положения бонусной программы казино. <a href=https://www.rusdrama-az.com/support/51-sluzhba-tehnicheskoy-podderzhki-sayta.html>1×slots рабочее зеркало на сегодня</a> Минимального оборота. Этот предел уточняется вейджером — пока игрок не поиграет на установленную сумму, вывод средств несомненно недосегаем.Принципиальным отличием бесплатных бонусов от призов на депозит считается отсутствие необходимости заносить средства на акк. Из-за этого их нередко называют бездепозитными (no deposit bonuses). 1хлот регистрация в 1×slots casino <a href=http://forum.bluesystem.online/profile.php?mode=viewprofile&u=36914>http://forum.bluesystem.online/profile.php?mode=viewprofile&u=36914</a>
1×slos регистрация в 1×slots casino
Каждый в должен сперва отчетливо изучить условия по получению и отыгрышу приглянувшегося подарка. Если всё устраивает, поторопитесь арестовать безвозмездные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо в начать вращать барабаны топовых слотов. Вейджер (либо вагер) ? это минимальная сумма ставок, коию необходимо сделать для вывода валютного бонуса. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение. <a href=http://uk-optimum.ru/index.php?subaction=userinfo&user=minorray91>http://uk-optimum.ru/index.php?subaction=userinfo&user=minorray91</a> Бездепозитные бонусы казино это экономическая компенсация, предлагаемая юзерам на дармовой базе и возможность играть в онлайн казино бесплатно. Если ассоциировать их с одобрениями за лепта, в которых средства выдаются только потом первоначального пополнения счета, то бездепозитные гонорары получаются даром. То есть, играющий получает возможность делать ставки на теснее существующие деньги, коие выдаст заведение, выполняя, всем, обычные деяния, чтобы их извлечь (здесь идет речь о регистрация, удостоверении личности с использованием номера телефона, оформления заказы и т.д.).Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке нужно восполнить счет в казино. Для депозитных призов, данная процедура не необходима, например как депозит уже сделан. 1×slots зеркало 1хслотс регистрация перейти на 1×slots Важно, удостоверьтесь что, нет, собственно ранее не регистрировались в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи.
<b>Смотреть еще похожие новости:</b>
<a href=https://adminclub.org/showthread.php?tid=99791>1× slots casino зеркало</a>
<a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=43556>1х слот регистрация в 1×slots casino</a>
<a href=http://xn–80akbkalsbeeafq6a6b2f.xn–p1ai/forum/messages/forum1/topic34319/message193267/?result=new>1×slots зеркало этих способов предполагает регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Представьте момент, когда при ставке в 10 рублей Вы получите сходственное умножение. Миллион руб. За одно вращение, собственно вполне возможно. Поэтому вопрос, сколько можно выиграть остаётся открытым. Предлагаем проверить помощи. Регистрируйтесь в одном или нескольких онлайн казино, получайте Бездепозитный приз и проверяйте удачу в деле. Разумеется, вывести средства не так просто. Однако шансы есть у всех. Автоматы неспроста считаются наиболее знаменитым азартным отдыхом. Чтобы усвоить управление и верховодила, потребуется всего количество минут. Ваша задачка сделать ставку, определить количество рабочих линий и можно крутить барабан. Если на экране выпадет выигрышная композиция – вы выиграли! С этой задачей вас посодействуют справится бездепозитные призы казино.
#2487 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up casino 1×bet xbet <a href=https://slon-ru.com/>up casino</a> букмекерские конторы бет порно с Афонина Марина Игоревна <a href=https://slon-ru.com/>pinco casino</a> порно с Карен Хачанов (теннис) симулятор казино casino андроид online casino 7k 1×bet зеркало рабочее на сегодня porno Мира Андреева (теннис) casino зеркало сегодня рабочее
DiskiPlus казино ли DiskiPlus порно с Алексей Миранчук (футбол) <a href=https://www.diskiplus.ru>DiskiPlus Ходнева Светлана Владимировна порно</a> DiskiPlus Нургалиева Эльвира Рамиловна порно DiskiPlus casino сайты <a href=https://diskiplus.ru/>DiskiPlus часы казино</a> DiskiPlus top casino DiskiPlus слоты казино DiskiPlus Петрова Ольга Викторовна порно DiskiPlus 1×bet 1хбет DiskiPlus скачать pin casino DiskiPlus 1×bet сайт DiskiPlus 1×bet регистрация
#2488 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало на сегодня 1×bet xyz казино регистрации <a href=https://7club7.com/>букмекерская контора без</a> Разуваева Ксения Денисовна порно porno Анна Сидорова, керлингистка <a href=https://th-royalgclub.com/>порно с Виктория Синицина, фигуристка</a> порно с Георгий Джикия (футбол) porno Андрей Рублев (теннис) какие казино букмекерская контора фонбет официальный сайт casino вход букмекерская контора скачать приложение пари букмекерская контора
DiskiPlus 1×bet официальный скачать DiskiPlus 1×bet зеркало рабочее <a href=https://diskiplus.ru>DiskiPlus порно с Голикова Татьяна Алексеевна</a> DiskiPlus Черкесова Бэлла Мухарбиевна порно DiskiPlus казино 5 <a href=https://diskiplus.ru>DiskiPlus балтбет букмекерская контора</a> DiskiPlus букмекерские конторы в россии DiskiPlus казино 5 DiskiPlus casino betting DiskiPlus Петрова Ольга Викторовна порно DiskiPlus порно с Матвей Сафонов (футбол) DiskiPlus Александра Бортич DiskiPlus сайт казино вход
#2489 Charlesgunnyhttp://filmkachat.ru
1хслот 1хслотс регистрация перейти на 1×slots
Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 поболее. Когда игроку надеется большое фриспинов, администрация имеет бить3 их начисление на некоторое дней. Бесплатные вращения предоставляются для определенного слота, кот-ый указывается в правилах промоакции.Чтобы бездеп не был начислен на Ваш акк, Вам надо активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк автоматически, а Вы не планируете его использовать, обратитесь в службу с просьбой отменить бездепозитный бонус. <a href=http://filmkachat.ru/>1хслот официальный сайт зеркало</a> <a href=https://www.f6s.com/archicgi-3d-architectural-visualization>https://www.f6s.com/archicgi-3d-architectural-visualization</a> 1хслотс рабочее зеркало <a href=https://blackmarke7.com/user-49230.html>https://blackmarke7.com/user-49230.html</a> Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, так как Вам понадобиться ее подтвердить в при выводе средств.
1×slots официальный сайт зеркало
Вознаграждения за получение VIP-статуса ? начисляются в программки преданности при достижении одного уровня либо выдаются персонально менеджерами службы поддержки.Чем ниже велечину вейджера, тем проще отыграть и исключить приз. Если Вы расчитываете заработать на бездепе, но просто ознакомиться с новым игровым клубом, то стоит игнорировать бонусов с высоким вейджером их практически не реально отыграть. С ними Вы можете только протестировать забавы заведения. 1×slots casino регистрация 1×slots review live <a href=http://ledyardmachine.com/forum/User-HenryGekly>http://ledyardmachine.com/forum/User-HenryGekly</a> 1×slots зеркало рабочее
1×slots зеркало регистрацию более популярный вариант это
Частенько новенькие не понимают, как активировать подарки или вывести первый выигрыш. Для сходственных случаев наша команда обрисовала главные определения – что это фриспины, вейджер, как его отыграть, для нужно проходить верификацию. <a href=http://sglpw.cn/home.php?mod=space&uid=332475>http://sglpw.cn/home.php?mod=space&uid=332475</a> 1×slots зеркало рабочее на сегодня При регистрации следует указывать лишь достоверную информацию. Когда учетная запись будет активна, будет доступ в Личный офис. В нем можно избрать еденицу, установить промокод и разузнать доскональные верховодила получения и отыгрыша бездепа. Краткая информация об акции часто присутствует именно на регистрационной форме.Существуют казино с призом за регистрацию, в очень популярны фриспины в интернет казино впоследствии регистрации в определенных играх. Они встречаются числе чаще бесплатных поощрений либо классических призов в казино без инвестициям. Например, игрок регистрирует счет, на который начисляются безвозмездные игры, приз за регистрацию в виде бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса в выигрывает истинные деньги, которые в последствии возможно успешно вывести из заведения на собственную платежную систему. То есть, все шансы вывести средства без рисков своими деньгами. Регистрация, какую игры получит призы, займет пару минут, а благодаря этому можно прирастить 5 евро поощрений до тыс. И без всяких заморочек вывести их.
1хслотс рабочее зеркало
Теоретически, к бесплатным бонусам возможно отнести так называемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, потому собственно они деют только возможность делать ставки. Верификация аккаунта. Лучше доказать лицо сразу после регистрации, чтобы позже не было проблем с выводом денег. Верификация возможность протекать 2-мя маршрутами: 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=http://image.google.tn/url?q=http://advazo.ru/bitrix/redirect.php?goto=http://ufashintorg.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/fP1_feK9hfY>http://image.google.tn/url?q=http://advazo.ru/bitrix/redirect.php?goto=http://ufashintorg.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/fP1_feK9hfY</a>
1×slots официальный сайт скачать
Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте условия – они часто выдаются для неких машин. В зависимости от клуба вам делать определенное количество ставок. Кстати, современные игорные жилища дают вероятность заводить «одноруких бандитов».Представьте момент, когда при ставке в 10 рублей Вы получите подобное умножение. Миллион руб. За одно вращение, собственно абсолютно вероятно. Поэтому вопрос, сколько возможно выиграть остаётся открытым. Предлагаем проверить самостоятельно. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный приз и проверяйте фортуну в деле. Разумеется, вывести средства сложно. Однако шансы есть у всех. <a href=https://www.efunda.com/members/people/show_people.cfm?Usr=Glavdorogadv0307>https://www.efunda.com/members/people/show_people.cfm?Usr=Glavdorogadv0307</a> 1 x slots casino В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и если, тогда, неоднозначных ситуаций нет способности куда-то посетовать и обосновать собственную правоту.
<b>Смотреть еще похожие новости:</b>
<a href=https://ragnarok.ch/forum/viewthread.php?thread_id=138339>1х слотс зеркало регистрация в 1×slots casino</a>
<a href=http://miupsik.ru/forums/showthread.php?tid=426923>1хслотс казино зеркало</a>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=333871&pid=690348#post_690348>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Ниже указан важный список законных казино в Беларуси с бонусами на 1-ый депозит. Вы сможете попасть на официальный вебсайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус.
#2490 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
балтбет букмекерская контора porno Мира Андреева (теннис) <a href=https://sovsekretno.net/>casino промокод</a> фреш казино порно с Владимир Минеев (ММА) <a href=https://t.me/vchkogpu_ru>порно с Каролина Севастьянова</a> порно с Каролина Севастьянова часы казино casino сегодня порно с Евгения Медведева 7k casino зеркало на сегодня сайт pin up casino Окладникова Ирина Андреевна порно
DiskiPlus пин ап casino pin up top DiskiPlus порно с Сергей Бобровский (хоккей) <a href=https://www.diskiplus.ru/>DiskiPlus букмекерская контора скачать приложение</a> DiskiPlus официальная казино DiskiPlus пин ап casino pin up top <a href=https://diskiplus.ru>DiskiPlus casino бонус</a> DiskiPlus казино онлайн DiskiPlus win win casino DiskiPlus самое казино DiskiPlus порно с Бондаренко Анастасия Борисовна DiskiPlus порно с Голикова Татьяна Алексеевна DiskiPlus r7 casino DiskiPlus казино вход официальный сайт
#2491 Charlesgunnyhttp://filmkachat.ru
1×slots бездепозитный бонус за регистрацию
Для получения бездепа необходимо пригласить в игру по реферальной ссылке нового посетителя: он обязан зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на сумму, обозначенную в критериях промоакции. <a href=http://filmkachat.ru/>1×slots официальный сайт мобильная версия скачать</a> Однако далековато не все ресурсы предлагают своим клиентам бездепозитные призы за регистрацию в казино. В большинстве случаев учтено одобрение на 1-ый депозит в размере 100–200%. Это отличная возможность преувеличить банкролл, прирастить время, проведённое за игрой и шансы сорвать крупный куш. <a href=https://www.esurveyspro.com/Survey.aspx?id=b7cfe3c3-a9a1–49c6-ba38–30bd1c80930a>https://www.esurveyspro.com/Survey.aspx?id=b7cfe3c3-a9a1–49c6-ba38–30bd1c80930a</a> 1хслотс регистрация в 1×slots casino <a href=https://securityholes.science/wiki/User:MaeDriscoll7>https://securityholes.science/wiki/User:MaeDriscoll7</a>
1×slots регистрацию более популярный вариант это
Самые свежие бездепозитные бонусы в казино за регистрацию 2022 года с выводом прибыли присутствуют на данной страничке. Посетитель может расценить обстоятельства получения и начать играть на деньги без внесения депозита. При данном игроку важно разуметь, на каких критериях и какими методами он сможет вывести приобретенный выигрыш. Для сего необходимо оценить перечень подключенных платежных систем.У каждого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано сумели выполнить их, мы дадим несколько советов. Если система начислила небольшую сумму, не создавать великие ставки – остановитесь на 10–30 центах. Как только сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В противном случае другого, как присмотреться к иному автомату. <a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=4880>1×slots на любой вкус как пройти регистрацию</a> 1×slos регистрация в 1×slots casino На данном разделе портала регулярно публикуются обзорные статьи, каких рассматриваются бесплатные бонусы наихороших интернет-казино. Информация структурирована по нескольким пунктам, включая основные: <a href=http://old.soundaware.net/home.php?mod=space&uid=6045>http://old.soundaware.net/home.php?mod=space&uid=6045</a> Активация происходит счет промокодов, которые вводятся в личном кабинете последствии регистрации. Среди спецпредложений в списке Casino.ru содержатся эксклюзивные промокоды, коие доступны только гостям портала. Другие методы начисления средств ? автоматическая активация незамедлительно после сотворения аккаунта и получение подарка по запросу в службу технической помощи. скачать 1×slots на андроид мобильная версия Также, в нужно подтвердить собственный номер телефона, результата код, полученный в смс-сообщении от клуба установить в специальное фон в собственном кабинете игрока.
1хслотс зеркало
Подтвердите лицо, предоставив оператору казино свои паспортные данные. Инструкции обыкновенно несложные, основное — конкретно им идти. Если написано, что «на фото обязаны быть видны все четыре угла страницы паспорта» — устройте непосредственно такое фото.После получения приза вывод средств для клиента будет недоступен до, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо пара недель. Выводить средства игрок может лишь в отыгрыша. <a href=https://webguiding.net/1%D1%85%D1%81%D0%BB%D0%BE%D1%82–1×slots-org11-top_298264.html>https://webguiding.net/1%D1%85%D1%81%D0%BB%D0%BE%D1%82–1×slots-org11-top_298264.html</a> 1×slots бездепозитный бонус за регистрацию Чем ниже велечину вейджера, что, этим легче отыграть и исключить бонус. Если Вы планируете заработать на бездепе, но просто ознакомиться с свежим игровым клубом, то стоит игнорировать призов с высоким вейджером их практически не реально отыграть. С ними Вы можете лишь протестировать игры заведения.Ну и окончательно же, для казино бездепозитные призы выгодны с имиджевой стороны: сходственная щедрость повышает степень преданности клиентов к фирмы.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Бездепозитные бонусы — это презенты от казино повторяющий бонусных денег или фриспинов для игровых автоматов, коие начисляются на акк игрока после процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депо не потребуется. Но эти рамки не смущают числе хайроллеров, потому коэффициенты на слотах позволяют рассчитывать на крупные выигрыши, а в некоторых автоматах разыгрывается передовой джекпот.Вейджер в переводе с английского значит «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша приобретенного бонуса, в нашем случае бездепозитного. Число ставок имеет — принципиально лишь набрать необходимую, пропорциональную сумме поощрения. 1×slots рабочее зеркало на сегодня <a href=https://google.com.bo/url?q=https://doctorlazuta.by/>https://google.com.bo/url?q=https://doctorlazuta.by/</a>
1хслотс официальный сайт зеркало
Ну и окончательно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: подобная добродушие повышает степень преданности клиентов к фирмы. <a href=https://online-learning-initiative.org/wiki/index.php/User:JolieBartel1>https://online-learning-initiative.org/wiki/index.php/User:JolieBartel1</a> B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax 1×slots рабочее зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://www.airsoft44.com/forum/index.php?action=profile;u=11896>1×slots зеркало регистрация то дальше необходимо пройти</a>
<a href=https://portugal-campings.com/pt/account/>1×slos регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При отыгрыше бонусных средств, нужно учесть срок действия приза и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный приз несомненно аннулирован. Чем ниже велечину вейджера, что, этим проще отыграть и исключить бонус. Если Вы расчитываете заработать на бездепе, а не просто ознакомиться с свежим игровым клубом, то стоит игнорировать призов с высоким вейджером их почти не реально отыграть. С ними Вы можете лишь протестировать игры заведения.
#2492 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Скворцова Вероника Игоревна порно porno Светлана Ходченкова <a href=https://specreporter.com/>казино онлайн</a> porno Юлия Канакина up casino скачать <a href=https://rucriminal.info/>официальное казино вход</a> порно с Каролина Севастьянова порно с Голикова Татьяна Алексеевна часы казино 1×bet casino онлайн сколько казино casino зеркало сайта
DiskiPlus почему в казино нет окон DiskiPlus казино вход официальный сайт <a href=https://diskiplus.ru>DiskiPlus Елизавета Боярская</a> DiskiPlus cat casino DiskiPlus ап казино <a href=https://www.diskiplus.ru/>казино</a> DiskiPlus симулятор казино DiskiPlus casino вход DiskiPlus porno Вера Бирюкова, гимнастка DiskiPlus сколько казино DiskiPlus реального казино DiskiPlus ставки на спорт букмекерские конторы DiskiPlus рабочее казино
#2493 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet скачать приложение на андроид сайт винлайн букмекерская контора <a href=https://slon-ru.com/>Преподобная Надежда Александровна порно</a> casino скачать приложение казино зеркало сегодня <a href=https://repost.news/>фреш казино</a> казино фильм онлайн casino ru casino online зеркало спорт букмекерская контора Кузнецова Анна Юрьевна порно pin up casino casino сегодня
DiskiPlus казино гта 5 DiskiPlus 1×bet слоты <a href=https://www.diskiplus.ru/>DiskiPlus казино вход официальный сайт</a> DiskiPlus kent casino регистрация DiskiPlus 1×bet скачать бесплатно <a href=https://www.diskiplus.ru>DiskiPlus симулятор казино</a> DiskiPlus cometa casino DiskiPlus порно с Алина Загитова DiskiPlus порно с Илюшникова Татьяна Александровна DiskiPlus порно с Бондаренко Анастасия Борисовна DiskiPlus ограбление казино DiskiPlus 1×bet 1хбет DiskiPlus Любимова Ольга Борисовна порно
#2494 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slotscasino09k online
Практически все интернет казино с бездепозитным бонусом за регистрацию учитывает программку преданности — систему поощрения неизменных клиентов, кот-ая состоит из колличества значений. При достижении игроком одного значения на его счёт поступает приз. Чем повыше степень — что, этим щедрее бонус.Если вы избираете испытанное лицензионное онлайн казино и выполните все обстоятельства получения бездепозитного приза, трудностей с получением презента у Вас не возникнет. <a href=http://filmkachat.ru/>1×slots казино зеркало</a> <a href=https://linklist.bio/lexxeagle>https://linklist.bio/lexxeagle</a> казино 1× slots официальный сайт <a href=http://daones.gaming.free.fr/index.php?file=Members&op=detail&autor=haltingocclusio>http://daones.gaming.free.fr/index.php?file=Members&op=detail&autor=haltingocclusio</a>
1×slots официальный сайт, скачать
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=545842>1×slots официальный сайт зеркало</a> 1×slots casino online регистрация Это также безвозмездные деньги, которые поступают на аккаунты свежеиспеченных игры последствии регистрирования. А необыкновенность таких призов состоит в том, собственно обретенные деньги непременно стопам применять в продолжении назначенного времени.Объективные – размер бонуса, коэффициент и обстоятельства вейджера, необходимость внесения депо для вывода денег; <a href=http://demo2-ecomm.in.ua/user/PorsedropKt/>http://demo2-ecomm.in.ua/user/PorsedropKt/</a> Наличие у игрока 2 аккаунта. Запрещено создавать количество профилей для многократного получения бездепов. 1хслот скачать Чаще всего казино приз за регистрацию без депо даёт возможность запустить любой автомат. Но какого-либо пристально ознакомиться с критериями. Иногда для игры доступны только определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, лучше начать знакомство с миром пыла именно с «одноруких злодеев».Многие азартные клубы ограничивают сумму вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не можете вывести. Разница несомненно аннулирована, Вы и не сможете делать на нее ставки.
1×slots регистрацию более популярный вариант это
<a href=http://bestwecando.ourproject.org/dokuwiki-2013–05–10a/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0%20%D0%B4%D0%B7%D0%B5%D0%BD>http://bestwecando.ourproject.org/dokuwiki-2013–05–10a/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0%20%D0%B4%D0%B7%D0%B5%D0%BD</a> Первый образующийся вопрос, это, чего выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают новых игроков. Последним проще начать игру на средства с подарка за регистрацию. Им не нужно пополнять баланс и расходовать личные средства. Новички получают безвозмездные спины либо свои на счёт. С их помощью знакомятся с игровым процессом, крутят слоты и делают ставки в рулетке.Также бездепозитные бонусы могут работать способом вернуть к игре клиентов, пока приостановивших своё сотрудничество с фирмой: извещение о бездепе поступает на мобильный телефон или почту. 1×slots зеркало выигрыши обязательно пройдите регистрацию если В лицензионных бездепозитных казино играть в азартные забавы действительно неопасно. Наличие лицензии подтверждает тот прецедент, что клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP.Так что можете отважно регистрироваться без всяких размышлений. Фортуна сегодня наверняка на вашей стороне. Не опасайтесь, как последствие какого или убытка Вам абсолютно не угрожает. С такими бонусами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе.
1×slots официальный demo регистрация в 1×slots casino
Используйте наихорошие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из списка ниже, дабы заработать подарки за простые действия и уже сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высочайшей отдачей и резвыми выводами на электронные кошельки. <a href=http://www.carshowsociety.com/forum.php/topic,11220.new.html#new>1×слот регистрация в 1×slots casino</a> К огорчению, нет. Почти все казино, требуют внесение желая бы 1-го минимального депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, собственно исключить деньги разрешается только на что, эту платежную систему, с которой был изготовлен депо. 1×slots коды <a href=http://dooood.fun/member.php?action=profile&uid=4014>http://dooood.fun/member.php?action=profile&uid=4014</a> Заполняя данные в личном профиле, указывайте лишь достоверную информацию, так как Вам понадобиться ее подтвердить в будущем при выводе средств.
1хслот зеркало
<a href=https://wiki.dulovic.tech/index.php/1_Win_Bet_Apostas>https://wiki.dulovic.tech/index.php/1_Win_Bet_Apostas</a> Список так нарекаемых «разрешенных территорий» прилагается к правилам бонусной программки игорного портала. Обязательно проверьте, распространяются ли на вас подобные наказания. 1 xslots рабочее зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://demo.comuni-italiani.it/forum/viewtopic.php?f=9&t=431956>1×slots зеркало на сегодня</a>
<a href=https://creapnl.com/foros/tema/1-%d1%85-%d1%81%d0%bb%d0%be%d1%82%d1%81-%d0%b7%d0%b5%d1%80%d0%ba%d0%b0%d0%bb%d0%be-84/>1 х слотс зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В игровых клубах без лицензии Вы покупаете „кота в мешке“ и в случае спорных обстановок нет возможности куда-то посетовать и доказать свою правоту.
#2495 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора без casino рабочее <a href=https://www.ossetia.tv/>рабочее казино</a> casino на телефон сайт казино зеркало <a href=https://t.me/vchkogpu_ru>бесплатные букмекерские конторы</a> up casino зеркало казино рояль cat casino включи казино бесплатное казино лучшие онлайн казино рейтинг казино
DiskiPlus 1×bet вход DiskiPlus casino рабочее <a href=https://diskiplus.ru>DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz</a> DiskiPlus vavada casino DiskiPlus порно с Анна Калинская (теннис) <a href=https://www.diskiplus.ru/>DiskiPlus бесплатно играем казино</a> DiskiPlus Елена Лядова DiskiPlus как выиграть в казино DiskiPlus про казино DiskiPlus kometa casino DiskiPlus казино на деньги DiskiPlus pin up casino скачать DiskiPlus порно с Ирина Сидоркова
#2496 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Бездепозитные бонусы казино это финансовая компенсация, предлагаемая пользователям на дармовой основе и вероятность играть в онлайн казино даром. Если ассоциировать их с поощрениями за вклад, каких средства выдаются только впоследствии первоначального пополнения счета, то бездепозитные гонорары получаются даром. То есть, играющий получает возможность делать ставки на уже имеющие деньги, коие выдаст заведение, выполняя, всем, обычные деянья, дабы их извлечь (тут речь о регистрация, удостоверении личности с использованием номера аппарата, дизайна заказы и т.д.). <a href=http://filmkachat.ru/>1хслотс официальный сайт зеркало</a> Для получения депозитного приза нужно восполнить свой игровой баланс настоящими средствами. Вознаграждение можно получить или при внесении первого депо, или в виде фиксированного процента от внесённых средств. Так или по, приз поступит на счёт только в пополнения.Приветственный приз без депозита ? подарок за регистрацию. Выдается деньгами, фриспинами либо баллами. В заключительном случае бонусные баллы применяются для участия в турнирах либо обмена на настоящие средства. <a href=https://www.esurveyspro.com/Survey.aspx?id=d8357902-e8be-4a72–8767–3426f9bacbbb>https://www.esurveyspro.com/Survey.aspx?id=d8357902-e8be-4a72–8767–3426f9bacbbb</a> 1× slots зеркало <a href=http://andres-website.de/profile.php?lookup=9898>http://andres-website.de/profile.php?lookup=9898</a> Промообъявления от казино не дают реальной картины и ориентированы на привлечение внимания юзеров. Понять, насколько высоки шансы остаться в плюсе, дозволит собственный тест условий предложения:
1×slots зеркало сайта
Фриспины предназначены для использования в видео слотах. Внимательно ознакомьтесь с условиями – часто их выдают на некоторые автоматы. В зависимости от клуба, у вас получится сделать определённое число ставок. Кстати, продвинутые игорные жилища позволяют запускать каждых «одноруких злодеев». <a href=https://nauc.info/forums/viewtopic.php?t=20426661>1×slots зеркало этих способов предполагает регистрацию</a> 1хслотс официальный сайт зеркало Свежий приз начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в использовании своими, в случае отыгрыша оператор может установить ограничение на вывод денег.В некоторых онлайн казино для получения бездепозитных призов не довольно просто зарегистрироваться на веб-сайте клуба и подтвердить свои контактные данные. Дополнительно требуется активация промокода. <a href=http://b2b24.center/bitrix/redirect.php?goto=http://miravent.pro/bitrix/rk.php?goto=http://setraki5.ru/bitrix/rk.php?goto=https://telegra.ph/Komu-nuzhen-MBA-09–23>http://b2b24.center/bitrix/redirect.php?goto=http://miravent.pro/bitrix/rk.php?goto=http://setraki5.ru/bitrix/rk.php?goto=https://telegra.ph/Komu-nuzhen-MBA-09–23</a> Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную процедуру активации приза без депозита. Внимательно прочтите до конца. Многие новички проделывают оплошности на этапе регистрации и поэтому не могут получить презент.Наши эксперты изучают условия акции, затем в ручном режиме проверяют их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и другие характеристики. Мы не рекламируем казино, а даем игрокам информацию о наихороших из них. 1×slots зеркало регистрация
1×slots официальный сайт, скачать
Выбирайте наилучшие благотворительные бонусы за обзоров на Casinoz – и пусть вам сопутствует удача при отыгрыше бонусных кредитов! Перед активацией принципиально внимательно выучить обстоятельства акции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, на коих можно воспользоваться предложением. Если бездеп охватывает узкий перечень игр, рекомендовано узнать максимальные коэффициенты, уровень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь что случае, если оператор не установил требовательные лимитирования на наивысшую сумму ставки.Однако в условиях скрываются «подводные камешки», которые не разрешат вывести солидную необходимую или же вы не успеете отыграть вейджер. Поэтому профессионалы советуют отобрать безвозмездные вращения за регистрацию в казино без депозита, чтобы поднабраться опыта и получить настоящий шанс на победу. <a href=http://www.kbszw.com/home.php?mod=space&uid=19288>http://www.kbszw.com/home.php?mod=space&uid=19288</a> 1× slots официальный B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpaxИзучить верховодила и условия получения бездепозитных призов казино, Вы можете у нас на веб-сайте в разделе с бонусами или на официальном веб-сайте выбранного Вами казино. Если не отыскать нужную информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал либо по электронной почте.
казино 1× slots официальный сайт
<a href=https://forum.oursson.ru/memberlist.php?mode=viewprofile&u=1347>1хслот зеркало</a> Мы проделываем акцент на главных положениях верховодил, рассказываем о территориальных ограничениях и вкратце информируем о иных промоакциях обсуждаемого казино.При использовании бездепозитным бонусом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют количество обликов лимитов: 1×slots актуальное зеркало <a href=https://beckettomjb21088.dm-blog.com/30387216/ai-nude-revolutionizing-content-moderation-and-privacy-protection>https://beckettomjb21088.dm-blog.com/30387216/ai-nude-revolutionizing-content-moderation-and-privacy-protection</a> Игрокам не воспринимать приветственный бонус как гарантированный способ получить крупный выигрыш, хотя это отличная вероятность без расходов расценить функционал казино.Заработать на бездепозитных призах за регистрацию в казино может любой пользователь, достигший совершеннолетия.
рабочее зеркало 1×slots
Реже призы без депо начисляются постоянным игрокам. С их поддержкою администрация постарается удержать ценных клиентов или желает поблагодарить за лояльность правильных гостей. Но гораздо чаще для похожих целей используются такие промоакции: Выиграть настоящие деньги в казино не пополняя счет – трудно, но вполне. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными бонусами и начните выступать на бонусные средства. По статистике из 10-ти заведений можно заработать маленькую сумму денег помощью бонусных средств.Вообще перейдя в казино — правила схожи в получении бездепозитных призов, в стандартные правила входит: доказать эл. Почту и телефон, наполнить свой собственный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ. <a href=http://pku84-org.dajiguang.com/home.php?mod=space&uid=175442&do=profile>http://pku84-org.dajiguang.com/home.php?mod=space&uid=175442&do=profile</a> Как верховодило, новоприбывшие игроки начала желают ознакомиться с методами ввода и вывода валютных средств и сроки выполнения поданных заказов дабы четко разуметь, как быстро возможность вывести свой казино бонус за регистрацию без депо на электрический кошелек или же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино соперничают меж собой. Ведь в бы определенную компанию представляло лишь одно онлайн-заведение, то навряд бы посетители увидели казино с бонусом за регистрацию и имели бы рассчитывать только на вознаграждение вид бонуса на первое вложение. К любому заведению регулярно следует привлекать новых игроков, что, итоге, только на руку всем играющим. сайт 1× slots casino Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.Перечисленные повыше основные свойства сопровождают практически каждый бонус и считаются стереотипными для бездепозитных бонусных начислений в казино.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=36655>1×slots сайт</a>
<a href=http://vn-info.net/user/Josephkam/>1×slots casino регистрация 1×slotscasin online</a>
<a href=https://www.thefamilylegion.se/viewtopic.php?f=4&t=24956>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подобные бонусы без депо предоставляются на более прибыльных условиях. Зачастую они крупнее, а обстоятельства отыгрыша менее строгие.
#2497 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino зеркало сайта porno Александра Степанова, фигуристка <a href=https://rhymes-punches.com/>Москалькова Татьяна Николаевна порно</a> зеркала официальных сайтов казино casino ru <a href=https://7club7.com/>pin up casino top top</a> Юдаева Ксения Валентиновна порно porno Александр Соболев (футбол) casino приложения porno Илона Маркова, хоккеистка скачать casino на андроид casino daddy порно с Варвара Субботина
DiskiPlus casino рабочее зеркало DiskiPlus официальные зеркала казино <a href=https://diskiplus.ru>DiskiPlus casino официальный сайт</a> DiskiPlus человек казино DiskiPlus 7k casino сайт <a href=https://diskiplus.ru>DiskiPlus букмекерская контора леонов</a> DiskiPlus скачать 1×bet DiskiPlus porno Юлия Канакина, скелетонистка DiskiPlus порно с Юлия Ефимова, пловчиха DiskiPlus букмекерская контора официальный сайт DiskiPlus 1×bet официальный сайт 1×bet xyz DiskiPlus казино без DiskiPlus casino официальный сайт
#2498 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало
Существует ли стратегии для отыгрыша бездепозитных бонусов? К огорчению нет, на выигрыши или проигрыши с бонусов, казино или игрок повлиять не, отдача игр происходит от создателей игр. <a href=http://filmkachat.ru/>1×slots зеркало на сегодня</a> Высокая конкурентность в разделе азартных игр мотивирует операторов завлекать посетителей разнородными акциями. Благодаря данному у посетителей замечена вероятность получить бонусы в казино за регистрацию без депозита. Воспользоваться этим предложением возможно, минуя функцию внесения средств на игровой счет, просто активировав аккаунт на сайте. Наш экскурсовод по бездепам поможет избрать самую привлекательную бонусную программу, разузнать управляла получения такого вознаграждения и воспользоваться им с наибольшей выгодой. <a href=https://companylistingnyc.com/listings/kompleksowy-skup-aut-wroclaw-od-wyceny-do-sprzedazy/>https://companylistingnyc.com/listings/kompleksowy-skup-aut-wroclaw-od-wyceny-do-sprzedazy/</a> 1 х слотс зеркало <a href=https://forum.spherecommunity.net/User-DoctorLazutakl>https://forum.spherecommunity.net/User-DoctorLazutakl</a>
1× slots сайт
Доступность — бездепозитные бонусы в казино почаще всего предоставляются свежим игрокам, но бывают случаи, когда приз все получить и действующие клиенты.Бесплатные бонусы казино без депозита возможно получить повторяющий денежных средств на бонусный счет (вывести их возможно лишь в отыгрыша), фриспинов, забавы либо кешбэк-бонуса. <a href=http://3ak.cn/home.php?mod=space&uid=187057>1×slots рабочее зеркало</a> казино 1×slots Игры, каких можно выступать на бонусные деньги. Проверьте перечень игр, в которых возможно выступать на бонусные свои, возможно они Вам не понравятся и надо расходовать своё время на такую акцию.Основное управляло получения бездепа ? создаваемый акк должен быть у юзера первым и единственным. Наличие нескольких аккаунтов взыскательно воспрещено. Проверка проводится по имени, e-mal, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депо нужно соблюдать несложную последовательность деяний. <a href=http://zvezdjuchki.ru/user/Raymondalore/>http://zvezdjuchki.ru/user/Raymondalore/</a> сайт 1× slots casino Для получения бездепа необходимо пригласить в забаву по реферальной ссылке свежего клиента: он обязан зарегистрироваться, пройти верификацию на сайте онлайн-казино и пополнить счёт на сумму, обозначенную в условиях акции.
зеркло казино 1×slots
Так собственно приготовьтесь предоставить секретную информацию (пол, возраст, государство проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев проверка данных занимает менее суток, после чего удастся свободно выводить крупные выигрыши. <a href=https://www.backpagedir.com/%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0-%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA-%D1%86%D0%B5%D0%BD%D1%8B_403317.html>https://www.backpagedir.com/%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0-%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA-%D1%86%D0%B5%D0%BD%D1%8B_403317.html</a> На данном разделе портала регулярно публикуются обзорные заметки, каких рассматриваются бесплатные бонусы превосходнейших интернет-казино. Информация структурирована по нескольким пунктам, включая главные: 1×slots казино мобильная версия
1×slots регистрация 1×slotscasino 56 online
<a href=https://swordmaster.org/user/JamesVok/>1×slots зеркало этих способов предполагает регистрацию</a> Бездепозитные призы в казино без пополнения 2022 — это определенная сумма денег либо valinomycin spins вращения, коие предоставляются первым гостям за регистрацию на веб-сайте казино вид бездепозитного бонуса, и дает вам возможность помощью казино без пополнения опробовать предложения (игр), с дальнейшей привилегией вывода средств при исполнении всех установленных верховодил.В разделе с бонусами активировать собственный презент. Найти забавы, для коих учтено поощрение и использовать бонус по назначению. 1×slots сайт <a href=http://gagetaylor.com/index.php?title=%D0%97%D0%BD%D0%B0%D0%BA%D0%BE%D0%BC%D1%81%D1%82%D0%B2%D0%B0_%D0%A4%D0%BB%D0%B8%D1%80%D1%82_%D0%A0%D1%83>http://gagetaylor.com/index.php?title=%D0%97%D0%BD%D0%B0%D0%BA%D0%BE%D0%BC%D1%81%D1%82%D0%B2%D0%B0_%D0%A4%D0%BB%D0%B8%D1%80%D1%82_%D0%A0%D1%83</a>
1×slots бездепозитный бонус за регистрацию
Вы всего, скажем, как все предпочитаете получать подарки и бездепозитные призы казино. Игорные жилища взяли в привычку одаривать гэмблеров приятными призами. Стать обладателем приветственного презента возможно за творение профиля или пополнение счёта. Второй вариант больше увлекательный, ведь клубы готовы удвоить депозит! Но случае вы новичок и только знакомитесь с миром азарта, лучше воспользуйтесь бонусом за регистрацию. <a href=https://encyclopediaofzeeland.nl/User:TressaMeeker1>https://encyclopediaofzeeland.nl/User:TressaMeeker1</a> Процесс доказательства личности может занять от 1-го денька до недели. Если клиент разрешил какую оплошность при заполнении паспортных данных, то ему по адресоваться с проблемой в службу поддержки онлайн-казино. 1×slots зеркало на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=http://youboy.comwww.molifan.net/space-uid-2295552.html>1×slot казино зеркало</a>
<a href=https://radios-collector.com/viewtopic.php?f=7&t=112970>1×slots сайт зеркало</a>
<a href=http://forum.l2endless.com/showthread.php?tid=335567>1×slot зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы которые возникают у начинающих. Как лишь получите бездеп в казино, всё равно не запамятовывайте проверять электронную почту. Некоторые игорные клубы каждый веселят интенсивных гэмблеров приятными бонусами. Чаще всего получить презент возможно в преддверии веселья, на денек рождение, за вербование друга. А того распространённым бонусом считается надбавка к депозиту. Нужно всего лишь восполнить счёт, и азартное заведение прирастит его на 50–100%.
#2499 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino бездепозитный порно с Антропова Валентина Викторовна <a href=https://rhymes-punches.com/>1×bet скачать бесплатно</a> пин ап casino сайт букмекерской конторы <a href=https://slon-ru.com/>pinco casino</a> казино рояль gama casino unlim casino porno Ангелина Гончаренко, хоккеистка porno Илона Маркова, хоккеистка пин ап казино букмекерская контора фонбет
DiskiPlus Приезжева Екатерина Геннадьевна порно DiskiPlus porno Илона Маркова, хоккеистка <a href=https://diskiplus.ru/>DiskiPlus 1go casino</a> DiskiPlus порно с Евгения Медведева DiskiPlus porno Юлия Канакина, скелетонистка <a href=https://www.diskiplus.ru>DiskiPlus скачать 1×bet на андроид бесплатно</a> DiskiPlus casino андроид DiskiPlus Ирина Горбачева DiskiPlus казино ставка DiskiPlus казино 5 DiskiPlus Набиуллина Эльвира Сахипзадовна порно казино DiskiPlus порно с Алина Загитова
#2500 Charlesgunnyhttp://filmkachat.ru
1×slots казино зеркало
Основное правило получения бездепа ? творимый аккаунт должен быть у юзера первым и единственным. Наличие нескольких аккаунтов требовательно воспрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депо необходимо соблюдать простую последовательность деяний.При регистрации том, или ином онлайн игральном заведении — для дается раз шанс испытать собственную фортуну не внося средства монеты. Замечу что такую поощрительную предложение предоставляют не все интернет игровые площадки, а лишь щедрая половина из них. Которые мы подготовили для Вас в нашем перечне. <a href=http://filmkachat.ru/>1× slots регистрация в 1×slots casino</a> <a href=https://hackmd.io/@lexxeagle/B168pWHlR>https://hackmd.io/@lexxeagle/B168pWHlR</a> 1×slots регистрация 1×slotscasino 56 online <a href=http://fcpir.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=http://sp-fun.ru/bitrix/redirect.php?goto=http://tiokraft.ru/bitrix/rk.php?goto=https://teletype.in/@urist_free/cZC6JxmSZIv>http://fcpir.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=http://sp-fun.ru/bitrix/redirect.php?goto=http://tiokraft.ru/bitrix/rk.php?goto=https://teletype.in/@urist_free/cZC6JxmSZIv</a> Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?Если площадка дарит бездеп за регистрацию, то процедура его получения ординарна. Нужно только ввести акк на веб-сайте и активировать его, подтвердив адресок электрической почты, номер аппарата либо другие данные, коие просит оператор. Перед этим необходимо увериться, что юзер находится на официальном веб-сайте казино, но на мошеннической площадке.
1×slots зеркало подтвердит вашу регистрацию если говорить
Размер бонусов чаще всего чисто символический и не выше 50 рублей. Приятно, хотя осязаемым бустом при вряд ли станет.Вознаграждения за получение VIP-статуса ? начисляются в рамках программки лояльности при достижении одного значения или выдаются индивидуально менеджерами саппорта. <a href=http://www.easysunnysunshine.com/memberlist.php?mode=viewprofile&u=18118>1×slots casino online регистрация</a> 1×slots сайт <a href=http://m1bar.com/index.php?subaction=userinfo&user=lushmystique40>http://m1bar.com/index.php?subaction=userinfo&user=lushmystique40</a> Когда речь о получении бездепозитных бонусов в казино, начала внимание на последующие обстоятельства:Такой безвозмездный эквивалент средств зачисляется на профиль пользователя после осуществления требований и предназначаются они только для игрового процесса. Вывод таких вознаграждений возможен лишь последствии воплощения вейджеровых условий. 1×slot регистрация Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном веб-сайте и выполните вход в личный кабинет, дабы отобрать благотворительные вращения с вейджером х40;Этот тип бонуса будет добавлен на Ваш аккаунт в успешной процедуры регистрации с внедрением номера телефона. Если избрать иной метод создания учетной записи, бездеп не будет добавлен на Ваш акк.
1×slots официальный сайт скачать
<a href=http://arsivforum.10tl.net/member.php?action=profile&uid=5456>http://arsivforum.10tl.net/member.php?action=profile&uid=5456</a> Бездепозитный бонус предоставляется новому игроку за определенные деянья. Часто подарок повторяющий средств или фриспинов выдается за регистрацию, спасибо чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. казино 1×slots Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам воспрещено начислять призы посетителям, не имеющим денежных средств на счете. Мы предлагаем разглядеть животрепещущие бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ.
1×slots зеркало которую указывали при регистрации кстати
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=102847&extra=>1хслот официальный сайт зеркало</a> 1×slots скачать на айфон <a href=http://xn–or3bi2doop89c.net/bbs/board.php?bo_table=faq&wr_id=9708&&#c_10881>http://xn–or3bi2doop89c.net/bbs/board.php?bo_table=faq&wr_id=9708&&#c_10881</a>
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Условия шансы разниться друг от приятеля. Но такой приз возможность быть применен только для игрового процесса – приобретенные на счет финансы до того, как станут отыграны, вывести невозможно.Вывод выигрыша с бездепозитных бонусов казино – великодушный подарок от азартных клубов. Но дабы исключить свой доход, нужно выполнить ряд критерий: <a href=http://www.gwmph.cn/home.php?mod=space&username=victoriouspatch>http://www.gwmph.cn/home.php?mod=space&username=victoriouspatch</a> Более солидные предложения встречаются довольно изредка. Зачастую они доступны лишь VIP-игрокам. В оставшихся случаях им наверняка сопутствуют довольно жесткие условия отыгрыша. Также возможны дополнительные обстоятельства и другие ограничения, прописанные в критериях и положения бонусной программки казино. сайт 1× slots casino В основном случаев бесплатные призы начисляются в кредитах, коие нельзя незамедлительно исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д. ). О нем читайте ниже.На данном разделе портала регулярно публикуются обзорные статьи, в рассматриваются бесплатные бонусы наихороших интернет-казино. Информация структурирована по нескольким пт, включая главные:
<b>Смотреть еще похожие новости:</b>
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=8059>1×slots промокод при регистрации 2025</a>
<a href=https://forum.ltp-team.com/topic/131900–1×slots-zerkalo-videli-takuyu-registraciyu-na/>1×slots зеркало видели такую регистрацию на</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Прежде чем активировать бездеп, нужно убедиться в, собственно государство, гражданином которой считается игрок, не входит в перечень не. Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, чтобы еще раз получить даровой приз. Игорные заведения нетерпимы к бонус-хантерам, потому вас ждет неизбежное наказание.
#2501 Charlesgunnyhttp://filmkachat.ru
1×slots бонус за регистрацию
Размер призов чаще всего чисто условный и не выше 50 рублей. Приятно, но осязаемым бустом в игре ли будет.Отыграв бездепозитный бонус в казино с выводом также придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в сходственное ограничение существует, то единоразово исключить получится лишь необходимую, не превышающую размер полученного приза. <a href=http://filmkachat.ru/>1хслот скачать</a> <a href=https://www.sideprojectors.com/project/55405/expert-construction-drafting-services>https://www.sideprojectors.com/project/55405/expert-construction-drafting-services</a> Фриспины начисляются по определенной ставке. После их активации игроку нужно запустить разъем и убедиться, что в нем показываются бесплатные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода последствии отыгрыша ориентируется оператором и редко выше 5 000 руб. 1×slots регистрация на официальном сайте <a href=https://getcomixxx.com/index.php?subaction=userinfo&user=RobertBaw>https://getcomixxx.com/index.php?subaction=userinfo&user=RobertBaw</a> Можно. Вы постоянно можете отрешиться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не сделаете ставку.Как только вы отыграли вейджер и средства с бонусного баланса перебежали вам на настоящий счет, Вы отважно сможете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (устроить наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, совместно, вкупе с депо).
1×slots официальный сайт скачать
Не стоит незамедлительно же отказываться от приветственных презентов в сходственных казино. Администрация готова начислить деньги или фриспины, но предварительно сотрудники должны увериться, что вы не аферист. Дело том,, собственно развелось очень большое охотников за призами. Они научились обманывать систему и наваривать солидные суммы денег. <a href=http://ledyardmachine.com/forum/User-Jameshoing>1× slots casino официальный сайт</a> 1×slots casino регистрация 1×slots review live <a href=http://missis.apkservice.ru/index.php?subaction=userinfo&user=wakefulbough37>http://missis.apkservice.ru/index.php?subaction=userinfo&user=wakefulbough37</a> Для получения бонуса надо(надобно) ознакомиться с программкой преданности казино и устроить ставки на необходимую, нужную для перехода на следующий уровень.Также учтите, собственно некоторые игровые платформы сужают перечень государств, которые готовы получить предложенный бездепозитный приз за регистрацию. К примеру, существуют онлайн-заведения, выдающие похожие призы только жильцам определенных государств. К примеру, интернет казино 777 Оригинал предоставляет бездепозитный бонус лишь игрокам из России и государств СНГ. Или наоборот, снабжают вознаграждением всех, считая обитателей неких стран (из сего, по пристально изучать перечень, чтобы впоследствии не возникло никаких вопросов и претензий). 1×slots официальный demo регистрация в 1×slots casino
зеркала 1×slots
Главное превосходство спинов – вероятность выучить различные слоты. Также удастся насладиться бонусными раундами, испытывать фортуну в риск-туре и преумножить выигрыш за счёт особых знаков. Однако столько игровой процесс заслуживает внимание, так другого, как сосредоточиться на реальном выигрыше.Риск-игра по одинаковым шансам – Также казино возможность запрещать скорпулезно обстоятельства по отыгрышу за раунда на удвоение, который предлагается в слотах, видео-покере и некоторых иных играх. <a href=https://google.com.gh/url?q=https://doctorlazuta.by/>https://google.com.gh/url?q=https://doctorlazuta.by/</a> В онлайне очень большое скриптовых сайтов, которые принадлежат мошенникам. Их основная задача – заинтересовать гэмблеров, пообещав столько щедрые презенты, но и солидные выигрыши. Так что некоторые сайты предлагают получить за регистрацию даже $1 000. 1×slots casino зеркало рабочее Чтобы получить возможность исключить прибыль с бездепозитного бонуса в казино, необходимо выполнить ряд условий:
скачать 1×slots на андроид мобильная версия
На нашем веб-сайте Вы найдете список своевременных свежих бездепозитных призов в казино 2022 года. Также, есть большое эксклюзивных предложений, которые доступны лишь посетителям нашего вебсайта после регистрации по нашей ссылке или активации особого промокода. Диапазон ставок, которые вправе сделать игрок, того лимитирован. Обычно ставить возможно маленькую сумму — в 10–30 рублей за одно вращение. Не сложно догадаться, собственно not the slightest deposit bonuses почти никогда не бывают большими. Чаще всего идет о пяти–тридцати долларах (или эквиваленте данной суммы в иной денежной). 1×slots зеркало регистрация <a href=http://www.rhl-mod.ru/members/101072-mycsgocup/>http://www.rhl-mod.ru/members/101072-mycsgocup/</a>
1×slots официальный сайт скачать
Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие появляются у начинающих.Также, в нужно подтвердить собственный номер телефона, результата код, полученный в смс-сообщении от клуба установить в специальное фон в собственном кабинете игрока. <a href=http://nvkb.ru/forum/index.php/user/105229/>http://nvkb.ru/forum/index.php/user/105229/</a> Составленный экспертами Casino.ru перечень онлайн-казино с бездепозитным бонусом разрешает игрокам сравнить спецпредложения разных операторов.Фриплей-бонусы. Бонусы за благотворительную игру есть только в некоторых клубах. Они зачисляются сразу последствии создания профиля и срабатывают непродолжительное время. Если у вас нет медли истратить средства, они просто закончатся. Что касается времени, правило призы действуют протяжении 1-го часа. 1×slots зеркало регистрацию более популярный вариант это Все безвозмездные бонусы кажутся заманчивыми. Кто же категорически от возможности сыграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далеко не все бездепозитные бонусы мере презентабельны для рассудительного клиента.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=137294>x1 slots регистрация в 1×slots casino</a>
<a href=https://astraclub.ru/members/353998-Jameswow>1×slots промокод при регистрации 2025</a>
<a href=http://forum.survival-readiness.com/viewtopic.php?t=272174>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=133554&pid=580101#pid580101>1×slots регистрацию процедура займет всего лишь</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но есть игорные заведения, которые готовы просто так жертвовать средства на игру. Для этого достаточно сделать профиль. Чтобы вывести свой выигрыш, вас поначалу необходимо выполнить обстоятельства отыгрыша, указанные в условиях получения бездепозитного депозита. Получать информацию о самых прибыльных бонусах возможно без неизменного прогноза новостей казино. Мы взяли эту задачу на себя и постоянно смотрим за предложениями операторов, избирая наилучшие из их. В этом разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список акций регулярно дополняется. В топ зашли самые новые бездепозитные бонусы за регистрацию в казино 2020, кратковременные и закрытые рекламную. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру прочим критериям. Если срок действия акции истек, она удаляется из списка.
#2502 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
сайты казино 1×bet 1 <a href=https://t.me/vchkogpu_ru>new casino</a> приложения букмекерских контор на андроид порно с Гатагова Ольга Анатольевна <a href=https://strelochnik.com/>пин ап casino pin up top</a> porno Елизавета Туктамышева 1×bet casino Ирина Горбачева пин ап casino pin официальные букмекерские конторы скачать букмекерская контора фонбет официальный casino бездепозитный
DiskiPlus зеркала официальных сайтов казино DiskiPlus 1×bet скачать бесплатно <a href=https://diskiplus.ru/>DiskiPlus где казино</a> DiskiPlus порно с Диана Шнайдер (теннис) DiskiPlus порно с Федор Чалов (футбол) <a href=https://diskiplus.ru/>DiskiPlus Ходнева Светлана Владимировна порно</a> DiskiPlus бывшие казино DiskiPlus Москалькова Татьяна Николаевна порно DiskiPlus 7k casino официальный DiskiPlus порно с Юлия Ефимова, пловчиха DiskiPlus букмекерские конторы бет DiskiPlus porno Виктория Баркова, легкоатлетка DiskiPlus порно с Сергей Бобровский (хоккей)
#2503 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet официальный xbet 1×bet официальный сайт 1×bet xyz <a href=https://strelochnik.com/>1×bet официальный скачать</a> pin up casino buzz скачать 1×bet на андроид бесплатно <a href=https://rucriminal.info/>Ходнева Светлана Владимировна порно</a> kent casino 1×bet зеркало рабочее на сегодня Лут Оксана Николаевна порно 1×bet сайт casino ап pin up casino пин ап порно с Илья Осипов (киберспорт)
DiskiPlus inform@rucriminal.info DiskiPlus ограбление казино <a href=https://www.diskiplus.ru/>DiskiPlus new casino</a> DiskiPlus почему в казино не бывает настенных часов DiskiPlus официальное казино вход <a href=https://www.diskiplus.ru>DiskiPlus кент казино</a> DiskiPlus пин ап казино DiskiPlus casino актуальное зеркало DiskiPlus рейтинг казино DiskiPlus casino online зеркало DiskiPlus porno Дарья Клишина DiskiPlus Ирина Горбачева DiskiPlus Радченко Светлана Юрьевна порно
#2504 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino сайты порно с Федор Чалов (футбол) <a href=https://glvk.guru/>1×bet официальный xbet</a> букмекерская контора леонов порно с Илья Осипов (киберспорт) <a href=https://rhymes-punches.com/>retro casino</a> top casino 1×bet зеркало рабочее на сегодня 7k casino сайт пина casino up букмекерская контора порно с Виктория Синицина, фигуристка казино пину
DiskiPlus порно с Абрамченко Виктория Валериевна DiskiPlus порно с Дарья Клишина, легкоатлетка <a href=https://www.diskiplus.ru/>DiskiPlus champion casino</a> DiskiPlus казино вход DiskiPlus porno Ангелина Гончаренко, хоккеистка <a href=https://diskiplus.ru/>DiskiPlus официальные букмекерские конторы</a> DiskiPlus ап казино DiskiPlus бывшие казино DiskiPlus Нургалиева Эльвира Рамиловна порно DiskiPlus порно с Зырянова Анастасия Владимировна DiskiPlus пинко casino DiskiPlus официальная казино DiskiPlus kometa casino
#2505 Charlesgunnyhttp://filmkachat.ru
1хлот регистрация в 1×slots casino
Акции, посвященные календарным дням, бывают рассчитаны как на всех пользователей, так и на категории: примеру, презент на 8 марта девушкам-игрокам или мужчинам на 23 февраля.У каждой забавы свои требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система засчитает любую ставку. В рулетке и покере сделать это намного труднее. Именно поэтому например главно пристально читать условия получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в любой игре, то новички попросту «спустят приз на ветер». <a href=http://filmkachat.ru/>1×slots зеркало сайта</a> В онлайне большое известных игорных площадок с привлекательными акционными предложениями. Однако пристально читать обстоятельства десятков услуг в надоест, да и время отнимет большое. Поэтому наша команда подготовила ТОП-3 вебсайтов с лучшими бездепозитными бонусами:Автоматы непопросту считаются самым известным азартным весельем. Чтобы освоить управление и верховодила, потребуется всего некоторое минут. Ваша задача устроить ставку, найти число рабочих линий и возможно вертеть тамбур. Если на выпадет выигрышная композиция – вы выиграли! С данной задачей вас посодействуют управится бездепозитные бонусы казино. <a href=https://teletype.in/@kalinka0588/wj_aIQ7cr4o>https://teletype.in/@kalinka0588/wj_aIQ7cr4o</a> 1×slots регистрация 1×slots review live <a href=http://gkwin.net/bbs/board.php?bo_table=free&wr_id=234048>http://gkwin.net/bbs/board.php?bo_table=free&wr_id=234048</a> Бездепы с безвозмездными вращениями деют юзерам право вертеть барабаны игровых автоматов без снятия средств со счета. За любой раунд платит казино. Число спинов ограничено и редко превышает сотку. Если промоакция содержит большое даровых игр, их начисление может быть разбито на несколько дней.Одним из поводов отдавать привилегию одному либо иному заведению содержится в привлекательности предлагаемых акций и бесплатных предложений. Безвозмездные фриспины, выдаваемые без дела делать какой-либо лепта, в перечне располагается далеко не в конце.
1×слот регистрация в 1×slots casino
В бонусную программку многих операторов входят систематические бездепы. Это пожизненные промоакции, поощряющие активных неизменных игроков. Популярный формат — раздача фриспинов по определенным дням недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают постоянные призы без депо в обмен на скопленные баллы преданности.Как только получите бездеп в казино, всё равно не запамятовывайте проверять электронную почту. Некоторые игорные клубы каждый радуют интенсивных гэмблеров приятными бонусами. Чаще всего получить презент можно в преддверии праздника, на денек рождение, за вербование друга. А кроме распространённым бонусом считается надбавка к депозиту. Нужно не пополнить счёт, и азартное заведение увеличит его на 50–100%. 1×slots промокод при регистрации <a href=https://www.guliotanzania.com/user/profile/20192>https://www.guliotanzania.com/user/profile/20192</a> Третитй бездепозитный приз за регистрацию – денежные средства. К огорчению, начислить рубли или баксы способны лишь известные и знаменитые клубы. С их поддержкою вы сможете насладиться каждой доступной игрой – автоматом, рулеткой, кено, блэкджеком.Размер приза. В качестве бездепов обычно начисляют маленькие суммы, а когда речь идет о бонусах за депо, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино могут презентовать игроку до 2000$. 1×slot регистрация Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают приз по государствам. Вплоть до такого, собственно клуб возможность принимать игроков из Вашей государства, а бездеп мешает.
1×slots мобильная версия войти казино
<a href=https://viewcinema.ru/user/Philipbreaw/>https://viewcinema.ru/user/Philipbreaw/</a> Однако далеко не все ресурсы предлагают своим клиентам бездепозитные призы за регистрацию в казино. В большинстве случаев учтено одобрение на 1-ый депозит в объеме 100–200%. Это замечательная возможность преувеличить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш. 1×slots зеркало на сегодня Вейджер (wager) – это коэффициент, который демонстрирует на какую сумму нужно устроить ставок, дабы исключить приз из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода этого приза, Вам необходимо сделать ставок на необходимую: 500*70=3500 рублей. Только полностью отыграв приз, Вы можете исключить собственный выигрыш.Все обожают получать презенты. Согласитесь, практически каждый играющий человек несомненно безгранично счастлив, случае получит даровой презент для забавы в интернет казино просто за регистрацию или же приз за внесенный депозит, так называемые приветственные призы для новых игроков. Соответственно эти онлайн клубы будут больше известны и преимущественны у игроков при выборе казино для игры. Топ казино непрерывно обновляется и добавляются свежие и интересные игровые клубы с привлекательной бонусной политикой и всеми возможными преимуществами, льготами, к которым относятся эти бонусы как фриспины за регистрацию, валютные бездепозитные бонусы, а великодушные призы за внесенный депо.
1×slots зеркало рабочее на сегодня
Кешбэк-бонус представляет собой возврат фиксированного процента от ставки когда проигрыша либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%.В наше время довольно просто получить бонус за регистрацию в казино. Практически любой игорный жилище с радостью начислит средства или бесплатные вращения. Многие гэмблеры пользуются данным и не смущяются регистрироваться в любом клубе с прибыльными критериями. Кстати, это отличная вероятность выработать победную стратегию и сорвать джекпот. <a href=http://swissairways-va.com/phpBB3/viewtopic.php?p=1390770#p1390770>1×слот регистрация в 1×slots casino</a> Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную процедуру активации бонуса без депо. Внимательно прочтите до конца. Многие новенькие проделывают промахи на этапе регистрации и поэтому имеют получить презент. 1×slots регистрацию процедура займет всего лишь <a href=http://xn–80adt5btj4c.xn–80asehdb/index.php?subaction=userinfo&user=etherealutopia9>http://xn–80adt5btj4c.xn–80asehdb/index.php?subaction=userinfo&user=etherealutopia9</a> Каждый из бездепозитных призов без пополнения 2022 содержит собственный конкретный вейджер для отыгрыша, например же в каждом казино он уточняется персонально — где то он х55 а кое-где х30, повторюсь везде по разному!Получать информацию о самых выгодных призах можно без неизменного прогноза новостей казино. Мы брали данную задачу на себя и безпрерывно следим за услугами операторов, избирая превосходнейшие из них. В данном разделе собраны последние бездепы, промокоды к ним и условия их активации. Список акций регулярно пополняется. В топ зашли самые свежие бездепозитные бонусы за регистрацию в казино 2020, кратковременные и замкнутые промо. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру прочим аспектам. Если срок деянья промоакции истек, она удаляется из перечня.
1×slots casino регистрация 1×slotscasin online
Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, чтобы еще раз получить даровой приз. Игорные заведения нетерпимы к бонус-хантерам, потому вас ждет неизбежное наказание.У нас на веб-сайте Вы найдете перечень призов без депо в проверенных казино и доскональную информацию то как их получить и использовать. Автоматическая активация первый самой удобной, но ручной способ имеет перед ней превосходства. Прежде чем использовать вознаграждение от казино, стоит заблаговременно найти, сколько времени потребуется на исполненье всех критерий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала действия приза. <a href=https://australianwinerytours.com/tours/member.php?action=profile&uid=5769>https://australianwinerytours.com/tours/member.php?action=profile&uid=5769</a> Если вы облюбовали для себя несколько брендов коие вам больше всего приглянулись, для неизменной игры! Таких гемблеров казино очень предпочитает и ценит, за частую эти игроки становятся VIP игроками заведения, коим нередко поступают выгодные предложения вид призов, например же туда заходит и бездепозитные.Выбирайте превосходнейшие безвозмездные бонусы за обзоров на Casinoz – и пусть вам сопутствует счастье при отыгрыше бонусных кредитов! 1×slots зеркало быструю регистрацию а также мгновенное Кешбэк-бонус дает собой возврат фиксированного процента от ставки если, тогда, поражения или же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не превышает 10%.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке нужно пополнить счет в казино. Для депозитных бонусов, эта процедура не нужна, так как депо уже изготовлен. Размер бонуса. В качестве бездепов обыкновенно начисляют большие суммы, а когда речь о призах за депо, которые начисляются в процентном соотношении от суммы пополнения, то некоторые казино имеют презентовать игроку до 2000$.
#2506 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet скачать приложение 1×bet зеркало рабочее <a href=https://m.repost.news/>Львова-Белова Мария Алексеевна порно</a> симулятор казино официальные букмекерские конторы скачать <a href=https://t.me/vchkogpu_ru>Львова-Белова Мария Алексеевна порно</a> пин ап casino pin up casino скачать лучшая казино porno Анна Сидорова, керлингистка porno Яна Троянова 1×bet зеркало рабочее xbet вавада казино
DiskiPlus пин up casino DiskiPlus new casino <a href=https://diskiplus.ru>DiskiPlus porno Андрей Рублев (теннис)</a> DiskiPlus почему в казино нет часов DiskiPlus про казино <a href=https://www.diskiplus.ru/>DiskiPlus промокод 1×bet</a> DiskiPlus 1×bet официальный слоты DiskiPlus казино большая DiskiPlus Шевцова Татьяна Викторовна порно DiskiPlus про казино DiskiPlus казино онлайн бесплатно DiskiPlus почему в казино не бывает настенных часов DiskiPlus porno Юлия Пересильд
#2507 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slots review live
Но на азартных платформах похожие вознаграждения могут получить и уже зарегистрированные юзеры. В таком случае, призы предоставляются в уникальных акций или же неким геймерам в виде акционного предложения, коие приходит на почту с целью «возвратить» игрока в свое казино.Бездепозитный приз за регистрацию в казино — это стартовый презент повторяющий денежного начисления или безвозмездных вращений для новых игроков заведения, для получения которого не нужно вносить депо. <a href=http://filmkachat.ru/>1хслот скачать</a> <a href=https://www.linkcentre.com/review/archicgi.com/>https://www.linkcentre.com/review/archicgi.com/</a> 1хслотс официальный сайт зеркало <a href=https://ep-team.ru/forum/index.php?action=profile;u=8020>https://ep-team.ru/forum/index.php?action=profile;u=8020</a> Допустим, за регистрацию вы получили бездеп в размере 2 000 руб. С вейджером х30. В данном случае светит сделать ставок, на совместную необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда сделайте условия по отыгрышу, придёт время заработать настоящие средства. Однако не запамятовывайте, собственно с любого подарка получится вывести определённую необходимую (почаще всего менее $200).Почти все игровые клубы просят свидетельство контактных данных игрока для получения бездепозитного бонуса.
1хслот 1хслотс регистрация перейти на 1×slots
Ознакомьтесь с нашим списком превосходнейших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего перечня и получите бездеп сразу. Хватайте наилучшие благотворительные предложения ниже и выигрывайте великие средства, не рискуя!Но существуют азартные заведения, готовые просто например вручить средства на забаву. Для этого достаточно создать профиль. Чтобы вывести выигрыш, сперва необходимо выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа. 1×slots зеркало сайта Для получения приза надо(надобно) ознакомиться с программкой преданности казино и устроить ставки на сумму, необходимую для перехода на следующий уровень. <a href=http://pumarefrattari.com/index.php/component/k2/item/19640>http://pumarefrattari.com/index.php/component/k2/item/19640</a> Мы подготовили список, где есть практически животрепещущие и новые бездепозитные призы казино, которые вы можете получить безвозмездно. Для наших юзеров есть особые предложения эксклюзивные призы, которые вы у не найдете, их мы обозначили специальной красноватой плашкой «Exclusive». 1×slots зеркало видели такую регистрацию на Многие азартные клубы ограничивают необходимую вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании промоакции, суммы Вы не сможете вывести. Разница будет аннулирована, Вы числе не можете делать на нее ставки.
1х слот регистрация в 1×slots casino
<a href=http://worldpoetry.cn/home.php?mod=space&username=eagerdeity70>http://worldpoetry.cn/home.php?mod=space&username=eagerdeity70</a> Основное верховодило получения бездепа ? создаваемый аккаунт обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов строго запрещено. Проверка проводится по имени, адресу электронной почты, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита нужно соблюдать несложную очередность деяний. 1×slots казино мобильная версия При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое возможно предназначить игре в казино.Для того, чтобы отыграть сумму вашего бездепозитного приза нужно выполнить условия вейджера. Очень нередко фриспины даются на определенные слоты (book of ra, book of lifeless, book of sun), избирайте слот себе по душе, они все очень очень и высококачественные. Бездепозитные бонус может быть денежным например и повторяющий фриспинов на слоты
1×slots подтвердит вашу регистрацию если говорить
Обыкновенные бездепозитные призы в объеме от 3-х до 20 долларов созданы чтобы, чтобы, чтобы в забавы заходили все новые и новые игроки. Здесь, скорее, несомненно лимитирование на максимальный выигрыш. Важно, чтобы перед минимальным вкладом был отключен приз за 1-ое пополнение счета, и игрок не попадет на повторный вейджер. Акции, посвященные календарным праздникам, случаются рассчитаны как на всех пользователей, например и на категории: например, презент на 8 марта девушкам-игрокам или мужчинам на 23 февраля.Вейджер в переводе с английского означает «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша полученного приза, в нашем случае бездепозитного. Число ставок роли не играет — принципиально только набрать сумму, пропорциональную сумме поощрения. 1×slots промокод при регистрации <a href=https://rekordmeister.ru/user/DavidKek/>https://rekordmeister.ru/user/DavidKek/</a> Наличие у игрока 2 аккаунта. Запрещено создавать количество профилей для многократного получения бездепов.
1×slots акции
У каждого игорного клубы различные вейджеровые обстоятельства. Чтобы вы гарантировано сумели выполнить их, мы дадим количество советов. Если система начислила маленькую необходимую, не стоит делать большие ставки – остановитесь на 10–30 центах. Как только сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте играть. В противном случае лучше присмотреться к иному автомату.Наш перечень содержит наилучшие бездепозитные бонусы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по важным параметрам: Мы собрали и выпустили перечень наихороших бездепозитных казино с призами за регистрацию, коие гарантируют великодушные выигрыши и моментальные выплаты.Срок активации и время на отыгрыш. Зачисление денег либо фриспинов случается при активации протяжении строго ограниченного периода, похожие притязания предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать приз количество дней или даже месяцов. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с неоправданно высоким вейджером. <a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=9802>http://www.predictive-datascience.com/forum/member.php?action=profile&uid=9802</a> казино 1×slots официальный сайт В большинстве заведений устроить это можно по адресу электронной почты, по номеру телефонного, через социальную сеть либо гугл-аккаунт.Подтвердите регистрацию, чтобы активировать Бездепозитный приз с выводом, требуется заполнить собственный профиль. Заполните пустопорожние поля истинными данными о себе.
<b>Смотреть еще похожие новости:</b>
<a href=http://6000ziyuan.com/forum.php?mod=viewthread&tid=111170&extra=>1×slots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Ну и конечно же, для казино бездепозитные бонусы прибыльны с имиджевой стороны: подобная щедрость повышает степень преданности клиентов к фирмы. Бездепозитный бонус за регистрацию в казино с выводом средств в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых свежих, великодушных и проверенных призах в онлайн казино, которые обновляются любой денек.
#2508 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Москалькова Татьяна Николаевна порно порно с Ирина Сидоркова <a href=https://vestnik-jurnal.com/>porno Марина Александрова</a> 1×slots casino 1×bet скачать бесплатно <a href=https://th-royalgclub.com/>казино рулетка</a> pin up casino пин ап casino 7k сегодня casino официальный зеркало porno Яна Троянова казино смотреть онлайн бесплатно официальные сайты казино порно с Дарья Клишина, легкоатлетка
DiskiPlus cat casino DiskiPlus ramenbet casino <a href=https://diskiplus.ru>DiskiPlus casino</a> DiskiPlus pin up casino пин ап DiskiPlus Юдаева Ксения Валентиновна порно <a href=https://diskiplus.ru/>DiskiPlus зеркала казино</a> DiskiPlus Анна Михалкова DiskiPlus казино ставка DiskiPlus online casino DiskiPlus казино сочи DiskiPlus 1×bet xbet xyz DiskiPlus официальные букмекерские конторы DiskiPlus игры казино
#2509 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
песня казино почему казино <a href=https://rumafia.news/>Попова Анна Юрьевна порно</a> Александра Бортич 1×bet зеркало слоты <a href=https://specreporter.com/>black russia казино</a> casino casino официальный зеркало сайте букмекерской конторы фонбет 1×bet зеркало рабочее на сегодня букмекерскую контору пин casino андроид сайт 1×bet слоты
DiskiPlus кент casino DiskiPlus porno Екатерина Ефременкова, шорт-трекистка <a href=https://diskiplus.ru/>DiskiPlus black russia казино</a> DiskiPlus часы казино DiskiPlus pin casino <a href=https://www.diskiplus.ru>DiskiPlus casinos xyz</a> DiskiPlus black russia казино DiskiPlus 1×bet на андроид DiskiPlus порно с Кирьянова Дарья Борисовна DiskiPlus фреш казино DiskiPlus porno Алена Михайлова DiskiPlus Чулпан Хаматова DiskiPlus человек казино
#2510 Henrygafhttps://whitestudio.moscow/
/…ead-blog/728
#2511 KennethJah
Комплексные услуги по организации переездов любой сложности, ознакомиться можно здесь <a href=https://writeablog.net/igvercrvhb>https://writeablog.net/igvercrvhb</a>
#2512 zaimpodzalogptsekbzeDhttps://zaim-pod-zalog-pts1.ru/ekb.html
деньги залог авто екатеринбург <a href=https://zaim-pod-zalog-pts1.ru/ekb.html>zaim-pod-zalog-pts1.ru/ekb.html</a> автоломбард залог
#2513 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Анна Михалкова Фастова Елена Владимировна порно <a href=https://krtka.info/>карты казино</a> new casino гта онлайн казино <a href=https://rhymes-punches.com/>реального казино</a> casino приложения порно с Анастасия Потапова, теннисистка скачать сайт букмекерской конторы лучшие бесплатные онлайн казино порно с Алексей Миранчук (футбол) up casino пинко casino
DiskiPlus ограбление казино DiskiPlus зеркала официальных сайтов казино <a href=https://diskiplus.ru/>DiskiPlus 7k casino зеркало на сегодня</a> DiskiPlus porno Юлия Канакина DiskiPlus porno Алена Косторная (фигурное катание) <a href=https://www.diskiplus.ru>DiskiPlus порно с Евгения Медведева, фигуристка</a> DiskiPlus 1×bet слоты 1×bet xyz DiskiPlus 1×bet xbet DiskiPlus 1×bet зеркало xbet xyz DiskiPlus букмекерская контора скачать приложение DiskiPlus пина букмекерской конторы DiskiPlus сайт pin up casino DiskiPlus порно с Анастасия Потапова, теннисистка
#2514 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на сайте
Вознаграждения за получение VIP-статуса ? начисляются масштабах программки преданности при достижении одного уровня либо выдаются персонально менеджерами саппорта. <a href=http://filmkachat.ru/>1× slots casino официальный сайт</a> <a href=https://feedback.goodnotes.com/forums/191274-customer-suggestions-for-goodnotes/suggestions/49478645-%D0%BA%D0%B0%D0%BA-%D0%B2%D1%8B%D0%B3%D0%BE%D0%B4%D0%BD%D0%BE-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D1%82%D1%8C-%D0%B0%D0%B2%D1%82%D0%BE-%D0%BF%D0%BE%D1%81%D0%BB%D0%B5-%D0%B4%D1%82%D0%BF-%D1%8D%D0%BA%D1%81%D0%BF%D0%B5%D1%80%D1%82%D0%BD%D0%BE%D0%B5-%D1%80%D1%83%D0%BA>https://feedback.goodnotes.com/forums/191274-customer-suggestions-for-goodnotes/suggestions/49478645-%D0%BA%D0%B0%D0%BA-%D0%B2%D1%8B%D0%B3%D0%BE%D0%B4%D0%BD%D0%BE-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D1%82%D1%8C-%D0%B0%D0%B2%D1%82%D0%BE-%D0%BF%D0%BE%D1%81%D0%BB%D0%B5-%D0%B4%D1%82%D0%BF-%D1%8D%D0%BA%D1%81%D0%BF%D0%B5%D1%80%D1%82%D0%BD%D0%BE%D0%B5-%D1%80%D1%83%D0%BA</a> Воспользоваться бездепом возможно не во всех игровых автоматах: казино и тут устанавливает ограничение для посетителей. Конечно, это возможно посчитать некоторым неудобством для игрока, но справедливости ради стоит отметить, собственно выбор автоматов всё равно остаётся достаточно большим.Бесплатные бонусы казино без депозита возможно получить вид валютных средств на бонусный счет (вывести их возможно лишь в отыгрыша), фриспинов, забавы либо кешбэк-бонуса. 1×slots casino зеркало <a href=https://opensourcebridge.science/index.php?title=1win_bet_plataforma_jogos>https://opensourcebridge.science/index.php?title=1win_bet_plataforma_jogos</a> Существуют казино с бонусом за регистрацию, в довольно известны фриспины в онлайн казино потом регистрации в определенных забавах. Они встречаются даже почаще безвозмездных поощрений либо традиционных бонусов в казино без вложений. Например, игрок регистрирует счет, на который начисляются безвозмездные игры, приз за регистрацию в виде бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса геймер выигрывает настоящие деньги, коие в последствии возможно успешно вывести из заведения на свою платежную систему. То есть, есть шансы вывести свои без рисков собственными финансами. Регистрация, какую геймер получит бонусы, займет несколько, а спасибо этому можно увеличить пять евро поощрений до тысячи и без всяких заморочек исключить их.
1 x slots casino
Возможность протестировать свежие забавы, не рискуя собственными средствами и разработать личную стратегию забавы.Более солидные предложения встречаются довольно изредка. Зачастую они доступны только VIP-игрокам. В оставшихся случаях им наверняка сопутствуют очень жесткие условия отыгрыша. Также вероятны дополнительные условия и другие ограничения, прописанные в критериях и положения бонусной программы казино. <a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=683178>1×slots официальный сайт скачать</a> 1×slots casino зеркало рабочее Кешбэк-бонус дает собой возврат фиксированного процента от ставки если, тогда, поражения либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%. <a href=http://domivka.biz.ua/wr_board/tools.php?event=profile&pname=deeplyslogan96>http://domivka.biz.ua/wr_board/tools.php?event=profile&pname=deeplyslogan96</a> Бездепозитный приз нередко может замерзнуть легкодоступным сразу последствии окончания регистрации, что правило единственным притязанием к нему считается регистрация, а после ревизия вашей новой учетной записи. 1×slot зеркало Перед активацией принципиально пристально изучить условия промоакции. Чем ниже вейджер, что, этим больше потенциальная выгода игрока. Имеют значение того лимиты ставок при отыгрыше и сроки, протяжении которых можно пользоваться предложением. Если бездеп охватывает узкий перечень игр, рекомендовано разузнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь что случае, случае оператор не установил требовательные лимитирования на наивысшую сумму ставки.Демоказино есть почти на каждом веб-сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются значительно реже: там когда выигрыша и соблюдения критерий акций бездеп можно превратить в настоящие средства.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Бонус за регистрацию в казино без депозита с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша возможность понадобиться сделать ставки на необходимую, в количество 10-ов раз превышающую сумму приза либо выигрыша.Список например именуемых «разрешенных землель» прилагается к правилам бонусной программки игорного портала. Обязательно выясните, распространяются ли на вас сходственные наказания. Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют актуальную информацию о not the slightest down payment bonuses и других предложениях. <a href=http://whdf.ru/forum/user/93796/>http://whdf.ru/forum/user/93796/</a> 1хслот официальный сайт зеркало
1×slots подтвердит вашу регистрацию если говорить
Бонус за регистрацию в казино без депо с выводом денег надо(надобно) отыграть. Зачастую для отыгрыша имеет понадобиться сделать ставки на сумму, в количество 10-ов один превосходящую необходимую приза или выигрыша.Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных ситуаций с казино, когда последствии отыгрыша бездепа вам не дадут исключить крупную необходимую выигрыша. <a href=https://www.thefamilylegion.se/viewtopic.php?f=4&t=34039>сайт 1× slots casino</a> Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и. Когда игроку полагается много фриспинов, администрация может разбивать их начисление на несколько дней. Бесплатные вращения предоставляются для определенного слота, который указывается в правилах акции. Наличие у игрока второго аккаунта. Запрещено делать количество профилей для неоднократного получения бездепов.Новые клиенты онлайн-казино без первого депозита все выяснить собственную удачливость. К тому же есть вероятность конвертировать бездепы в настоящие средства за регистрацию в казино, впрочем желаемого приз нужно отыграть согласно условиям промоакции. 1хслотс казино зеркало <a href=https://buketik39.ru/user/MichaelSyday/>https://buketik39.ru/user/MichaelSyday/</a> Представьте момент, когда при ставке в 10 руб. Вы получите сходственное умножение. Миллион руб. За одно вращение, собственно абсолютно вероятно. Поэтому вопрос, сколько можно выиграть остаётся открытым. Предлагаем выяснить самостоятельно. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный приз и проверяйте фортуну в деле. Разумеется, вывести деньги довольно. Однако шансы есть у всех.
1хслотс рабочее зеркало на сегодня
Минимального оборота. Этот предел уточняется вейджером — пока игрок не сыграет на установленную необходимую, вывод средств будет недоступен.Бывают ли бездепозитные призы без вейджера? Бывают, случае у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино. <a href=http://wiki.serialkiller.adele.im/doku.php?id=РР·_чего_состоит_диета_Елены_Малышевой>http://wiki.serialkiller.adele.im/doku.php?id=РР·_чего_состоит_диета_Елены_Малышевой</a> 1×slots коды Доступность — бездепозитные бонусы в казино чаще всего предоставляются свежим игрокам, хотя бывают случаи, когда приз могут получить и действующие посетители.
<b>Смотреть еще похожие новости:</b>
<a href=https://mit-bbs.com/viewtopic.php?t=200399>1×slots рабочее зеркало на сегодня</a>
<a href=https://aircompare.us/forums/viewtopic.php?p=484906#p484906>1×slots регистрация 1×slotscasino 56 online</a>
<a href=https://portugal-campings.com/pt/account/>1×slots casino зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Почти все игровые клубы требуют свидетельство контактных данных игрока для получения бездепозитного бонуса.
#2515 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet xbet 7k casino зеркало рабочее <a href=https://th-royalgclub.com/>Матвиенко Валентина Ивановна порно</a> up casino скачать 1×bet официальный скачать <a href=https://sovsekretno.net/>casino онлайн</a> лучшие казино бесплатно бесплатно фильм казино porno Анна Сидорова, керлингистка casino игровой автомат казино сочи фреш казино казино рублях
DiskiPlus порно с Евгения Медведева DiskiPlus часы казино <a href=https://diskiplus.ru>DiskiPlus казино 1</a> DiskiPlus pin up casino пин ап DiskiPlus casino betting <a href=https://diskiplus.ru>DiskiPlus casino играть</a> DiskiPlus Ирина Горбачева DiskiPlus Матвиенко Валентина Ивановна порно DiskiPlus сайты казино DiskiPlus porno Мария Шарапова DiskiPlus retro casino DiskiPlus порно с Баталина Ольга Юрьевна DiskiPlus порно с Абрамченко Виктория Валериевна
#2516 Charlesgunnyhttp://filmkachat.ru
скачать 1×slots официальный сайт
Нет. Для получения бездепозитного бонуса в казино необходима неотъемлемая регистрация на сайте. Играть в слоты даром и без регистрации можно только в демо режиме. <a href=http://filmkachat.ru/>1×slots на любой вкус как пройти регистрацию</a> Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют актуальную информацию о no deposit bonuses прочих предложениях.В игровых клубах без лицензии Вы покупаете „кота в мешке“ и если, тогда, неоднозначных ситуаций нет возможности куда-то пожаловаться и обосновать свою правоту. <a href=https://www.cgarchitect.com/projects/39223c10-luxury-dining-room-at-a-resort-a-harmonious-blend-of-elegance-and-nature>https://www.cgarchitect.com/projects/39223c10-luxury-dining-room-at-a-resort-a-harmonious-blend-of-elegance-and-nature</a> 1×slot казино зеркало <a href=https://3ads.eu/user/profile/151670>https://3ads.eu/user/profile/151670</a> Нет. Казино раздают благотворительные бонусы за регистрацию, для того, дабы заказчик мог ознакомиться с игровым заведением. А дабы вывести его, необходимо выполнить обстоятельства отыгрыша.
1×slots зеркало регистрацию более популярный вариант это
Размер ставки для игры по бездепозитному призу (конечно же, в случае, когда он представлен в виде бонусных денежных средств) зачастую ниже, чем при игре на депозит. Ограничение будет работать до момента отыгрыша приза.Но есть игорные заведения, которые готовы просто так жертвовать деньги на забаву. Для этого достаточно сделать профиль. Чтобы исключить свой выигрыш, вам поначалу нужно выполнить обстоятельства отыгрыша, обозначенные в критериях получения бездепозитного депо. 1×slots casino регистрация 1×slotscasino09k online <a href=http://bbs.itqu.net/space-uid-38207.html>http://bbs.itqu.net/space-uid-38207.html</a> 1хслот скачать Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации презента нужно подтвердить электронную почту и привязать телефон;Для тех, кто только подумывает испытывать собственную удачу, а для профессиональных игроков, ищущих свежие площадки для выигрышей, водящие лицензированные казино нередко устраивают различные акции, и лучшее услуг за время – как для новичков, например и для проф игроков – бездепозитный бонус за регистрацию.
1×slots рабочее зеркало
Самый распространённый из подобных призов, естесственно же, бездеп на день рождения посетителя — приз вид фиксированной суммы либо фриспинов поступает на счёт игрока, а воспользоваться им можно протяжении установленного периода медли.Реже бонусы без депозита начисляются неизменным игрокам. С их помощью администрация старается вычесть ценных посетителей либо желает поблагодарить за лояльность правильных гостей. Но гораздо почаще для сходственных целей применяются такие промоакции: Воспользоваться бездепом возможно не во всех игровых автоматах: казино и тут устанавливает лимитирование для посетителей. Конечно, это возможно посчитать неким неудобством для игрока, хотя справедливости ради отметить, собственно выбор автоматов всё одинаково остаётся довольно большим. <a href=https://raymondmfwk55443.snack-blog.com/30245337/deepnude-the-dark-side-of-ai-technology-and-its-ethical-implications>https://raymondmfwk55443.snack-blog.com/30245337/deepnude-the-dark-side-of-ai-technology-and-its-ethical-implications</a> Минимального оборота. Этот предел уточняется вейджером — пока игрок не сыграет на установленную необходимую, вывод средств будет недоступен. 1хслотс казино зеркало
зеркло казино 1×slots
Чаще всего, модные сервисы, эти как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное верховодило. Финансовые свои выводятся только через ту платежную систему, которой успех для пополнения депозита. Если же игрок получил бездепозитный покерный приз, требуется восполнить счет на минимальную сумму, кот-ая сочиняет обыкновенно десять $. Главным нюансом в появлении данных вознаграждений произведено в том, что пустив их в ход, игры ничем не рискует и в последствии никому ничего не будет должен (не зависимо, получит ли он благодаря призам какой-нибудь выигрыш либо мгновенно спустит все только что прибывшие финансы). То есть, казино снабжает игрока возможностью на дармовой основе выступать во различные слоты и даже спонсирует игру.Подтверждение регистрации. Казино требуют привязки профиля к электрическому адресу и номеру аппарата. Для сего на e-mail отправляется письмо со ссылкой, а на аппарат ? текстовое известье с кодом. 1×slots зеркало проходить регистрацию это отличный вариант <a href=https://2012614.com/home.php?mod=space&uid=82969&do=profile>https://2012614.com/home.php?mod=space&uid=82969&do=profile</a> Возможность протестировать свежие забавы, не рискуя личными средствами и создать собственную стратегию игры.
1×slots рабочее зеркало
Прежде всего, не запамятовывайте регулярно заглядывать на страничку обзоров бездепозитных призов. Они шаг за шагом осматривают более увлекательные предложения ведущих игорных порталов.Наиболее знаменитые гонорары между гэмблеров – бездепозитные бонусы казино. Это не удивительно, ведь возможно получить благотворительные вращения либо виртуальные кредиты, и этом не придётся пополнять счёт, рисковать личностными деньгами. Удастся насладиться различными увеселениями причем выиграть крупную сумму, избегая серьёзного риска. <a href=http://www.phxwomenshealth.com/index.php?option=com_k2&view=itemlist&task=user&id=1087458>http://www.phxwomenshealth.com/index.php?option=com_k2&view=itemlist&task=user&id=1087458</a> Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить необыкновенности, труднодоступные при игре в демо режиме. Многие новые клиенты переходят в количество неизменных, а оператор получает длительную выгода.Игры, в которых возможно играть на бонусные средства. Проверьте список игр, каких можно играть на бонусные средства, вполне они Вам не понравятся и не тратить своё время на эту промоакцию. 1×slots зеркало этих способов предполагает регистрацию Акционные предложения от казино есть в различных форматах. Часто бонусы даются в обмен на депо. Игрок заносит платеж и получает средства, благотворительные вращения и поощрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — вид приза, кот-ый гарантирован за выполнение конкретных действий на веб-сайте:В зависимости от интернет заведения любой из их может вам предложить как бездепозитные деньги, так и бездепозитные фриспины, которые в успешной регистрации рухнут вам на ваш игровой баланс.
<b>Смотреть еще похожие новости:</b>
<a href=http://link.5nx.ru/memberlist.php?mode=viewprofile&u=600>1хслотс рабочее зеркало</a>
<a href=https://elclasificadomx.com/author/jameslog/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<a href=https://praisenpray.org/forums/showthread.php?tid=108543>1×слот регистрация в 1×slots casino</a>
<a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=240029>1×slots промокод при регистрации</a>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=143292>1× slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При забаве на бонусные средства запрещается играть в игровые автоматы с прогрессивным джекпотом и игры из радела exist casino. Кроме как, некоторые казино выделяют бездеп на один либо несколько определенных слотов, и в других играх Вы не сможете на их выступать.
#2517 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
лучшие онлайн казино cat casino <a href=https://glvk.guru/>официальное казино вход</a> вывод казино скачиваемые казино <a href=https://strelochnik.com/>сайт казино зеркало</a> порно с Елена Никитина, скелетонистка казино рояль почему в казино нет часов реального казино Манилова Алла Юрьевна порно фильмы казино рояль Набиуллина Эльвира Сахипзадовна порно
DiskiPlus пина букмекерской конторы DiskiPlus казино рублях <a href=https://www.diskiplus.ru/>DiskiPlus официальные зеркала казино</a> DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz DiskiPlus почему в казино нет окон <a href=https://diskiplus.ru/>DiskiPlus песня казино</a> DiskiPlus online casino DiskiPlus 1×bet телефон DiskiPlus casino андроид DiskiPlus порно с Юлия Ефимова, пловчиха DiskiPlus кент казино DiskiPlus букмекерские конторы без депозита DiskiPlus r7 casino
#2518 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasino09k online
Только выполнив все условия отыгрыша и дождавшись окончания ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить свои деньги. <a href=http://filmkachat.ru/>1×slots промокод при регистрации 2025</a> Не желаете сыграть в азартные игры, не рискуя средствами деньгами, хотя получая в все выплаты? Подобную вероятность предоставляют все превосходнейшие порталы с азартными весельями. В их количестве большое правдивых и надежных интернет-казино на русском языке. Они привлекают новых юзеров различными поощрительными событиями, включая бездепозитные, или безвозмездные бонусы. <a href=https://collectednotes.com/lexxeagle/kak-pravilno-i-vygodno-prodat-svoi-avtomobil>https://collectednotes.com/lexxeagle/kak-pravilno-i-vygodno-prodat-svoi-avtomobil</a> 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=http://cargo-200.ru/index.php?subaction=userinfo&user=decisivepoet79>http://cargo-200.ru/index.php?subaction=userinfo&user=decisivepoet79</a> Бездепозитный приз казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в данном и содержится основное отличие.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
За счёт спинов получится запустить разные интернет слоты, протестировать стратегии и поднабраться опыта. Фишка сомнений, что вращения начисляются на лучшие аппараты с уникальными опциями и высочайшей отдачей. Не запамятовывайте, собственно в любом акционном предложении предусмотрены особые требования – временные ограничения, наибольший объем ставки, перечень дешевых игр.При использовании бездепозитным бонусом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют некоторое видов лимитов: <a href=https://melhorlance.com.br/minha-conta/>1хслотс рабочее зеркало</a> 1×slots регистрация то дальше необходимо пройти Наши специалисты изучают обстоятельства акции, после в ручном режиме проверку их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и характеристики. Мы не рекламируем казино, а даем игрокам информацию о превосходнейших из них.Хотя бесплатные призы начисляются без депозита, не исключено, что для понадобиться вносить деньги. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только в такого, как новый клиент впервые пополнит игровой счет. <a href=https://www.ixbt.com/live/profile/358183/>https://www.ixbt.com/live/profile/358183/</a> К раскаянию, нет. Почти все казино, просят внесение желая бы 1-го минимального депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, что исключить средства разрешается только на ту платежную систему, с которой был изготовлен депо.Чтоб получить крупный выигрыш, избирайте игровые автоматы с предельным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша. 1 х слотс зеркало Главным интересным в возникновении этих вознаграждений состоит в том, что пустив их в ход, игры ничем не рискует и в последствии никому ничего не несомненно должен (не зависимо, получит ли он спасибо бонусам какой-либо выигрыш или моментально спустит все только собственно прибывшие финансы). То есть, казино снабжает игрока вероятностью на дармовой основе выступать во различные слоты даже спонсирует игру.Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих требований, кроме неотъемлемой верификации. Если на сайте предусмотрена обязательная процедура доказательства личности, то вывести выигрыш удастся только после ревизии данных. Приготовьтесь наполнить анкету и выслать в техподдержку документ, подтверждающий личность.
1×slots casino регистрация 1×slotscasin online
Более крупные предложения встречаются очень редко. Зачастую они доступны только VIP-игрокам. В остальных случаях им скорее сопутствуют очень строгие обстоятельства отыгрыша. Также вероятны вспомогательные условия прочие лимитирования, прописанные в условиях и положения бонусной программы казино.Третитй бездепозитный бонус за регистрацию – валютные средства. К раскаянию, начислить рубли или доллары готовы лишь известные и модные клубы. С их поддержкою возможность насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком. Прежде всего, не забывайте регулярно заглядывать на страничку обзоров бездепозитных призов. Они шаг за шагом оценивают наиболее интересные предложения водящих игорных порталов. <a href=https://forum.lavalink.com/member.php?action=profile&uid=95476>https://forum.lavalink.com/member.php?action=profile&uid=95476</a> 1× слот зеркало
1×slots casino зеркало рабочее
Не советуем сломя голову браться за всевозможные предложения получения средств без вложений. Вполне возможно, собственно бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем выглядит на 1-ый взор. Альтернативой считается казино бонус за депозит. Мы предлагаем вам пару советов, спасибо которым у каждого игрока несомненно возможность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег: Бонусные деньги – небольшая сумма денег для старта в новом казино. На бонусные деньги, обыкновенно разрешается выступать во все игры, не слотов с прогрессивным джекпотом и игр из раздела exist casino. Подарки на праздничные ? приуроченные к парадным датам, требующие символического отыгрыша либо начисляются без такового. Могут дариться игрокам сутки рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду.Допустим, за регистрацию вы получили бездеп в объеме 2 000 рублей с вейджером х30. В данном случае светит сделать ставок, на общую необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать реальные средства. Однако не забывайте, что с любого презента выйдет исключить определённую необходимую (чаще всего менее $200). 1× slots зеркало <a href=https://p.5aia.com/home.php?mod=space&uid=638338>https://p.5aia.com/home.php?mod=space&uid=638338</a> Таким образом, заведение пробует продемонстрировать себя своим вероятным геймерам, а подобный маркетинговый ход как казино приз без депо за регистрацию завлекает довольно большое внимания к игорному заведению и обеспечивает неизменный поток новых гостей и грядущих посетителей игрового интернет клуба.
1×slots рабочее зеркало
Игры, в которых можно выступать на бонусные деньги. Проверьте перечень игр, в возможно выступать на бонусные свои, вполне они Вам не понравятся и надо тратить своё время на такую акцию.Риск-игра по одинаковым шансам – Также казино возможность запрещать выполнять обстоятельства по отыгрышу счет раунда на удвоение, кот-ый предлагается в слотах, видео-покере и некоторых других забавах. <a href=http://www.sincano.com/author/galeboudrea>http://www.sincano.com/author/galeboudrea</a> 1×slot официальный сайт Промообъявления от казино мешают реальной картины и направлены на привлечение внимания пользователей. Понять, как высоки шансы остаться в плюсе, позволит личный анализ условий предложения:
<b>Смотреть еще похожие новости:</b>
<a href=https://www.rusdrama-az.com/support/51-sluzhba-tehnicheskoy-podderzhki-sayta.html>казино 1×slots</a>
<a href=http://www.forum.kalor.ru/rabochee-zerkalo-1×slots-t13529.html>рабочее зеркало 1×slots</a>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=461581>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=https://thetechmodders.com/forums/memberlist.php?mode=viewprofile&u=945>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Минимального оборота. Этот предел уточняется вейджером — пока игрок не сыграет на установленную необходимую, вывод средств будет недоступен. Активация валютного гонорары случается автоматически последствии сотворения профиля либо применения промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на странички казино в социальных сетях или на рассылку маркетинговых сообщений, скачать и ввести вспомогательный софт и т.д.
#2519 Charlesgunnyhttp://filmkachat.ru
1×slots казино зеркало
Подтверждение регистрации. Казино требуют привязки профиля к электрическому адресу и номеру телефонного. Для этого на e-mail отправляется письмо ссылаясь, а на аппарат ? текстовое сообщение с кодом. <a href=http://filmkachat.ru/>1×slots сайт зеркало</a> Также учтите, собственно некоторые игровые платформы сузивают перечень государств, которые способны получить предложенный бездепозитный бонус за регистрацию. К примеру, есть онлайн-заведения, выдающие похожие призы лишь жильцам конкретных стран. К образцу, онлайн казино 777 Оригинал предоставляет бездепозитный приз только игрокам из России и стран СНГ. Или напротив, снабжают вознаграждением всех, не жителей некоторых стран (исходя из сего, идет пристально изучать список, чтобы потом не возникло практически вопросов и претензий). <a href=https://paperpage.in/blogs/288401/Transform-Your-Vision-with-3D-Exterior-Rendering-Services>https://paperpage.in/blogs/288401/Transform-Your-Vision-with-3D-Exterior-Rendering-Services</a> Но рядах азартных платформах подобные гонорары шансы получить теперь зарегистрированные юзеры. В таком случае, призы предоставляются в оригинальных промоакций либо же неким геймерам повторяющий акционного предложения, коие прибывает на почту с целью «возвратить» игрока в свое казино. 1х слот 1хслотс регистрация перейти на 1×slots <a href=http://mrkarpiuk.xaa.pl/boards/shopping/member.php?action=profile&uid=44516>http://mrkarpiuk.xaa.pl/boards/shopping/member.php?action=profile&uid=44516</a> Даже не выиграв крупную необходимую, игрок увлекательно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе превосходнейших промоакций с. Достаточно периодически изучать список новых интернет казино с выводом бонуса без депозита в данном разделе.
1×slots зеркало регистрацию более популярный вариант это
1 xslots рабочее зеркало Но рядах азартных платформах похожие вознаграждения могут получить теперь зарегистрированные пользователи. В таком случае, призы предоставляются в рамках уникальных промоакций или же некоторым игрокам повторяющий акционного предложения, коие приходит на почту с целью «вернуть» игрока в свое казино.Фриплей-бонусы. Бонусы за безвозмездную забаву есть только в некоторых клубах. Они зачисляются сразу в творения профиля и действуют непродолжительное время. Если у вас нет медли потратить свои, они просто завершатся. Что дотрагивается медли, как призы действуют на 1-го часа. <a href=https://steamboatspringschat.com/forum/members/jamesmiz-1585.html>https://steamboatspringschat.com/forum/members/jamesmiz-1585.html</a> 1×slots рабочее зеркало
1×slots регистрация
<a href=https://www.easyinsurancehub.co.uk/forum/thread-43686.html>https://www.easyinsurancehub.co.uk/forum/thread-43686.html</a> Выбирайте превосходнейшие безвозмездные бонусы за обзоров на Casinoz – и пусть вам сопутствует счастье при отыгрыше бонусных кредитов!Бездепы имеют заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой либо баллами. 1×slots зеркало сайта Мы собрали и выпустили список наилучших бездепозитных казино с бонусами за регистрацию, которые гарантируют великодушные выигрыши и мгновенные выплаты.
1×slots зеркало сайта
Когда речь идет о получении бездепозитных призов в казино, для внимание на следующие обстоятельства:Вейджер в переводе с английского означает «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша полученного бонуса, в нашем случае бездепозитного. Число ставок роли не играет — главно только набрать необходимую, пропорциональную сумме поощрения. Бездепозитные бонусы казино это экономическая компенсация, предлагаемая пользователям на дармовой базе и возможность выступать в интернет казино даром. Если ассоциировать их с поощрениями за лепта, каких свои выдаются только потом начального пополнения счета, то бездепозитные гонорары получаются безвозмездно. То есть, играющий получает возможность создавать ставки на теснее существующие деньги, коие выдаст заведение, исполняя, при, обыденные деянья, дабы их извлечь (тут идет речь о регистрация, удостоверении личности с использованием номера аппарата, дизайна заказы и т.д. ).Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке нужно восполнить счет в казино. Для депозитных призов, данная процедура не необходима, например как депозит уже сделан. 1×slots зеркало этих способов предполагает регистрацию <a href=http://zooboard.ru/user/profile/270520>http://zooboard.ru/user/profile/270520</a> Акционные предложения от казино есть в различных форматах. Часто призы даются в размен на депо. Игрок вносит платеж и получает средства, благотворительные вращения прочие одобрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — картина бонуса, кот-ый гарантирован за исполнение конкретных деяний на веб-сайте:
1×slots подтвердит вашу регистрацию если говорить
<a href=https://google.com.bh/url?q=https://doctorlazuta.by/>https://google.com.bh/url?q=https://doctorlazuta.by/</a> Иногда у гостей вебсайта шансы возникнуть трудности, задачи, препядствия при активации приобретенного промо-кода. В этих случаях, нужно адресоваться за поддержкой в службу поддержки «Support». Для получения ответа, непременно указывается конкретная причина обращения и подтверждается информация дополнительными экрана. Если сложилась неоднозначная ситуация, практически можно обратиться к основному регулятору либо контролирующему органу, выдавшему данному заведению лицензионный документ. 1×slots регистрация на сайте 1×slots ru com Все обожают получать подарки. Согласитесь, практически каждый играющий человек будет безгранично рад, если получит бесплатный подарок для игры в онлайн казино просто за регистрацию или же приз за внесенный депо, например именуемые приветственные бонусы для новых игроков. Соответственно такие интернет клубы будут более модны и предпочтительны у игроков при выборе казино для игры. Топ казино непрерывно обновляется и прибавляются новые и занимательные игровые клубы с привлекательной бонусной политикой и всеми вероятными прерогативами, к коим относятся такие бонусы как фриспины за регистрацию, валютные бездепозитные бонусы, еще великодушные бонусы за внесенный депо.Онлайн-казино тщательно продумывают бонусные обстоятельства, которые нужно изучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша прочие ограничения.
<b>Смотреть еще похожие новости:</b>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=153523>1×slots акции</a>
<a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=7996>1×slots мобильная версия войти казино</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный приз по промо-коду будет доступен для забавы, лишь что случае когда Вы активируете специальный бонусный код в разделе с призами либо укажите промокод при регистрации на веб-сайте. В некоторых случаях, не активации кода, придется подтвердить контактные данные игрока и наполнить анкету клиента.
#2520 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино большая porno Александр Соболев (футбол) <a href=https://specreporter.com/>casino</a> 1×bet зеркало рабочее на сегодня промокод 1×bet <a href=https://t.me/vchkogpu_ru>Манилова Алла Юрьевна порно</a> 1win casino порно с Илюшникова Татьяна Александровна porno Елизавета Туктамышева casino игровой автомат Радченко Светлана Юрьевна порно букмекерская контора казино рояль
DiskiPlus casino buzz DiskiPlus Чулпан Хаматова <a href=https://diskiplus.ru/>DiskiPlus букмекерскую контору пин</a> DiskiPlus казино смотреть DiskiPlus casino x <a href=https://diskiplus.ru/>DiskiPlus пин ап казино</a> DiskiPlus вавада казино DiskiPlus Елена Лядова DiskiPlus pin up букмекерская контора DiskiPlus порно с Максим Глушенков (футбол) DiskiPlus Хорова Наталья Александровна порно DiskiPlus казино рояль смотреть DiskiPlus Кузнецова Анна Юрьевна порно
#2521 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация
Если вы выбрали себе количество брендов которые для больше всего полюбились, для неизменной игры! Таких гемблеров казино очень любит и оценивает, за частую эти игроки становятся VIP игроками заведения, коим нередко поступают прибыльные предложения в виде призов, так же туда заходит и бездепозитные.Главным моментом в возникновении этих вознаграждений состоит в том, собственно пустив их в ход, игрок ничем не рискует и в последствии никому ничего не будет должен (не зависимо, получит ли он спасибо призам какой-нибудь выигрыш либо моментально спустит все только собственно прибывшие деньги). То есть, казино снабжает игрока возможностью на дармовой базе выступать во всевозможные слоты и даже спонсирует игру. <a href=http://filmkachat.ru/>1× slots casino официальный сайт</a> Фриплей-бонусы. Бонусы за безвозмездную игру есть лишь в некоторых клубах. Они зачисляются сразу последствии создания профиля и действуют недолговременное время. Если у вас нет времени потратить свои, они просто завершатся. Что дотрагивается медли, в большинстве случаев призы срабатывают на одного часа.Бонус за регистрацию в казино выдается лишь раз раз на 1-го игрока. Но посещают вспомогательные промоакции, масштабах коих бездепы раздаются для неизменных клиентов и такие подарки Вы сможете получить более 1-го раза. <a href=https://linkr.bio/kalinka0588>https://linkr.bio/kalinka0588</a> 1×slots casino регистрация 1×slotscasin online <a href=https://www.forumklassika.ru/member.php?u=196448>https://www.forumklassika.ru/member.php?u=196448</a>
1 хслот регистрация в 1×slots casino
Для получения депозитного приза нужно пополнить свой игровой баланс настоящими деньгами. Вознаграждение возможно получить или при внесении первого депо, или вид фиксированного процента от внесённых средств. Так или иначе, бонус поступит на счёт лишь последствии пополнения.Следует подчеркнуть, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом. 1×slots официальный сайт, скачать <a href=http://1k9g.com/space-uid-201261.html>http://1k9g.com/space-uid-201261.html</a> 1×slots официальный сайт скачать Также бездепозитные призы могут служить методом возвратить к ирге посетителей, что приостановивших своё сотрудничество с фирмой: извещение о бездепе поступает на мобильный телефонный либо почту.
1х слот 1хслотс регистрация перейти на 1×slots
Получить Бездепозитный приз в онлайн казино дело двух кликов. Другой момент, отыграть рекламную и соблюсти верховодила и условия отыгрыша. Под правилами подразумевается не вагер, хотя и ограничения по максимальной ставке. Мы понимаем, собственно в кино все ставят на зеро и выигрывают. Призываем не делать сходственного. Перед активацией приза прочитайте верховодила. Узнайте следующие моменты: Условия получения дара, за регистрацию, за депо и другое. Ограничения по наибольшей ставке. Зачастую не повыше 350 рублей. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на месте. Поэтому главно знать, в каких играх можно осуществлять кратность валютного оборота. На бонусные начисления могут быть установлены вспомогательные лимитирования, коие Вы не сведению при отыгрыше. Пока бонус всецело не отыгран — деньги из казино не выводятся. <a href=http://nitka.by/user/Frankmen/>http://nitka.by/user/Frankmen/</a> Это один из основных показателей привлекательности презента. С завешенным коэффициентом и мастера не смогут выполнить условия по отыгрышу. И важно, как привлекательно выглядит предложение – бездепозитный бонус казино в объеме $500 либо $1 000. Чтобы новенькие лучше вдумались, собственно же такое вейджер, мы разберём на примере.Приветственный бездеп предоставляется хоть игроку только один раз. Казино борются с так называемыми бонусхантерами (от англ. Bonus Hunter — охотник за призами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения презента. Исключить сходственные деянья разрешает верификация данных. Администрация вправе востребовать у клиента подтвердить индивидуальные данные, указанные при регистрации. 1хслотс регистрация в 1×slots casino
1×slots официальный сайт мобильная версия
Как и другие промоакции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такого предложения считаются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых посетителей и разрешает им составить эмоцию о функционале, не рискуя значительными совокупностями. Вейджер менее х30–35 считается применимым. Опытные игроки утверждают, собственно с этим вейджером реально остаться в плюсе, случае верно подойти к выбору игрового аппарата. 1хслот 1хслотс регистрация перейти на 1×slots <a href=http://www.sglpw.cn/home.php?mod=space&uid=349682>http://www.sglpw.cn/home.php?mod=space&uid=349682</a>
1хслотс рабочее зеркало на сегодня
Вы не в коем случае ни же рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической игры на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, выучится регулировать менять ставки и полосы, исследовать бонусные игры и их выигрышные композиции, ну конечном просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные свои, которые возможно отыграть и исключить, но просто на демо счет, что, этим наиболее адреналин в крови еще повысится а пульс забьется с частым ритмом! Мы рекомендуем не отказываться от похожих услуг узнаваемых казино. Выделите некоторое мин. На регистрацию, получите бонус и попробуйте его отыграть. Может быть, сегодня фортуна будет на вашей стороне!Прочитайте управляла бонусной программы, какой желайте принять. Да, мы настоятельно рекомендуем устроить это до регистрации. <a href=http://ddininder.com/home.php?mod=space&uid=53526>http://ddininder.com/home.php?mod=space&uid=53526</a> Когда речь идет о получении бездепозитных призов в казино, в первую очередь направьте на следующие условия: 1×slots casino зеркало рабочее Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.Акции распространяются как на все забавы казино, так и на узкий перечень. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и. Промо может обхватывать разработки одного производителя. Бездеп не пересекается с иными промоакциями казино. Если на сайте предусмотрен кэшбек, он не начисляется за ставки, изготовленные бонусными деньгами. Для идентификации платежных реквизитов игрока имеет потребоваться пополнение счета на наименьшую сумму.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.survival-readiness.com/viewtopic.php?t=271307>1 x slots</a>
<a href=http://www.webdesignforum.com.au/member.php?action=profile&uid=31660>1хслот зеркало сайта</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Одним из предлогов отдавать преимущество, льготу 1 или другому заведению содержится в привлекательности предлагаемых акций и даровых услуг. Безвозмездные фриспины, выдаваемые без дела создавать какой-либо лепта, в списке располагается далековато не в конце.
#2522 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино 7k casino зеркало рабочее <a href=https://repost.news/>казино</a> лучшие онлайн казино 1×bet официальный <a href=https://www.ossetia.tv/>казино онлайн</a> винлайн букмекерская контора официальный скачать 1×bet 1×bet xyz porno Юлия Канакина, скелетонистка porno Светлана Ходченкова порно с Зырянова Анастасия Владимировна casino скачать cat casino
DiskiPlus казино можно DiskiPlus приложения букмекерских контор <a href=https://diskiplus.ru/>DiskiPlus Фастова Елена Владимировна порно</a> DiskiPlus 1×bet зеркало xbet xyz DiskiPlus приложения букмекерских контор на андроид <a href=https://diskiplus.ru/>DiskiPlus казино большая</a> DiskiPlus гама казино DiskiPlus pin up casino DiskiPlus Светлана Ходченкова DiskiPlus 7k casino официальный DiskiPlus пари букмекерская контора DiskiPlus кент казино DiskiPlus pin up casino зеркало
#2523 Charlesgunnyhttp://filmkachat.ru
1х слот 1хслотс регистрация перейти на 1×slots
Исходя из этого, просто не присутствует осмысленных причин махнуть рукою на получение такого приза при регистрации. И, лишним, на подобный безвозмездной базе у вас есть шансы выиграть деньги и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные бонусы, именуют безвозмездными онлайн платформами для игр. <a href=http://filmkachat.ru/>1×slots на любой вкус как пройти регистрацию</a> Бездепозитный приз за регистрацию в казино — это стартовый подарок повторяющий денежного начисления либо даровых вращений для свежих игроков заведения, для получения которого надо заносить депо.Для получения предоставленных бонусов вас понадобиться — ПК или мобильное устройство, и остальное дело за небольшим. <a href=https://www.cgarchitect.com/projects/3f3aba93-lighting-the-art-of-atmosphere-in-3d-rendering>https://www.cgarchitect.com/projects/3f3aba93-lighting-the-art-of-atmosphere-in-3d-rendering</a> Не желайте поиграть в азартные игры, не рискуя своими деньгами, но получая в все выплаты? Подобную возможность деют все наихорошие порталы с азартными увеселениями. В их числе большое добросовестных и надежных интернет-казино на русском языке. Они привлекают новых юзеров разными поощрительными мероприятиями, включая бездепозитные, либо благотворительные призы. 1×slots зеркало рабочее на сегодня <a href=http://rosnum.ru/index.php?title=Why_Use_the_1×bet_APP_for_Casino_Games?>http://rosnum.ru/index.php?title=Why_Use_the_1×bet_APP_for_Casino_Games?</a>
1хслотс рабочее зеркало
Если при регистрации указать промокод, можно гарантировано получить приз. Где арестовать ваучер? Посетите на блоги или форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В заключительное время игорные дома начали афишироваться в кинокартинах и телесериалах. Присмотритесь и наверняка заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных руб.Обычно, бездепозитные бонусы выдаются под конкретные слоты с фиксированной ставкой, хотя их наверняка запрещено использовать в игровых автоматах с прогрессивным джекпотом. Список игр, в которых можно использовать бездеп, Вы найдете в описании промоакции или можете уточнить у службы заведения. <a href=http://powercrop.it/chi-siamo/le-persone?page=17#comment-876>1×slots регистрация на 1хслотс</a> 1хслотс рабочее зеркало <a href=https://forum.papbio.org/member.php?action=profile&uid=80090>https://forum.papbio.org/member.php?action=profile&uid=80090</a> Приглашаем делиться воззрениями о бонусах. Это поможет другим юзерам избирать наиболее выгодные предложения.Маркетинговая политического всех игорных интернет-клубов обязана одевать разнородный характер. И если гонорары на депо работают для того, дабы стимулировать вносить депозиты и поощрять уже существующих пользователей, то бездепозитный приз в казино или бонус за регистрацию в казино, до всего, рассчитан на расширение базы покупателей. 1×slots casino регистрация
1×slots промокод при регистрации
Бонусы без депозита при регистрации считаются самыми привлекательными как для опытнейших игроков, например для и новичков. Получив такое вознаграждение, заказчик возможность выступать на настоящие средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а также обстоятельства их активации и выигрыша.Минимального оборота. Этот лимит устанавливается вейджером — же игрок не поиграет на установленную необходимую, вывод средств будет недосегаем. Oтыгpaть приз с обозначенным вeйджepом, желаемого нужно сдeлaть cтaвoк нa cумму, превосходящую размер бонуса в несколько раз. <a href=http://ms.sovdepserpuhov.ru/index.php?subaction=userinfo&user=eguxij>http://ms.sovdepserpuhov.ru/index.php?subaction=userinfo&user=eguxij</a> 1×slots мобильная версия войти казино Как правило, при выводе финансов, от играющего потребуется лишь устроить наименьший лепта чтобы, чтобы, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом индивидуальный счет.
1× slots регистрация в 1×slots casino
Наличие у игрока 2 аккаунта. Запрещено творить несколько профилей для многократного получения бездепов.Однако далековато не все ресурсы предлагают своим клиентам бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено одобрение на первый депо в объеме 100–200%. Это отличная вероятность преувеличить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш. <a href=https://shopcms.vsupport.club/topic/15737-casino-1×slot/>casino 1×slot</a> Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, the decision лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.А ознакомиться с новыми онлайн казино, Вы сможете за счет призов с выводом выгоды, коие Вы можете получить без депо. 1×slots коды <a href=https://www.kenpoguy.com/phasickombatives/profile.php?id=2074565>https://www.kenpoguy.com/phasickombatives/profile.php?id=2074565</a>
1×slots casino зеркало рабочее
Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих требований, кроме неотъемлемой верификации. Если на сайте предусмотрена обязательная процедура доказательства личности, то вывести выигрыш удастся только после ревизии данных. Приготовьтесь наполнить анкету и выслать в техподдержку документ, подтверждающий личность.Прежде всего, не запамятовывайте регулярно заглядывать на страничку обзоров бездепозитных призов. Они шаг за шагом осматривают более увлекательные предложения ведущих игорных порталов. Прямо момент заберите благотворительные вращения за регистрацию без депо и начинайте собирать призовые композиции ради солидных выигрышей!Получать информацию о самых выгодных призах можно без постоянного мониторинга новостей казино. Мы брали данную задачку на себя и непрерывно следим за услугами операторов, выбирая лучшие из них. В данном разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список промоакций периодически пополняется. В топ вошли самые свежие бездепозитные призы за регистрацию в казино 2020, временные и замкнутые промо. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и аспектам. Если срок деянья промоакции истек, она удаляется из перечня. <a href=https://www.94zq.com/space-uid-722473.html>https://www.94zq.com/space-uid-722473.html</a> Еще одно условие дотрагивается размеров ставки. Операторы устанавливают максимальную необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, выбранной в Личном кабинете. При превышении лимита есть риск лишиться приза. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, заказчик имеет столкнуться с запретом назначать фишки на шансы.Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и более. Когда игроку полагается количество фриспинов, администрация имеет разбивать их начисление на количество дней. Бесплатные вращения предоставляются для определенного слота, который указывается в правилах промоакции. 1х слот регистрация в 1×slots casino Помимо прочего, для вывода средств по бездепу нужно привнести на счёт собственный 1-ый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально вероятную необходимую, последствии чего вывод средств будет доступен.Итак, дабы безвозмездные бонусные кредиты превратились в настоящие средства, которыми вы можете управлять по своему усмотрению, их нужно отыграть. Вейджер стопам уточнять в правилах онлайн-казино.
<b>Смотреть еще похожие новости:</b>
<a href=http://miupsik.ru/forums/showthread.php?tid=325415>1хслотс официальный сайт зеркало</a>
<a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=13119>казино 1×slots</a>
<a href=https://www.goslog.ru/forum/messages/forum1/message15063/11-obrashcheniya-grazhdan?result=reply#message15063>1х слот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чаще всего, знаменитые сервисы, такие как MoneyBookers и WebMoney, еще MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно неотъемлемое верховодило. Финансовые средства выводятся только через что, эту платежную систему, которой огромной для пополнения депо. Если же игрок получил бездепозитный покерный бонус, требуется пополнить счет на минимальную необходимую, которая сочиняет обыкновенно десять $.
#2524 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пари букмекерская контора букмекерская контора мостбет <a href=https://res-publika.com>1×bet слоты 1×bet top</a> букмекерская контора на андроид рабочие зеркала казино <a href=https://rucriminal.info/>ап казино</a> казино пин 1×bet зеркало слоты 1×bet xyz порно с Абрамченко Виктория Валериевна pin up casino Крючкова Полина Викторовна порно реального казино бесплатно играем казино
DiskiPlus казино регистрации DiskiPlus пин up casino <a href=https://diskiplus.ru>DiskiPlus Александра Бортич</a> DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus casino ап <a href=https://www.diskiplus.ru>DiskiPlus casino</a> DiskiPlus приложения букмекерских контор DiskiPlus бк букмекерская контора DiskiPlus casino на телефон DiskiPlus Александра Бортич DiskiPlus up casino зеркало DiskiPlus кент казино DiskiPlus кент казино
#2525 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино сочи казино без <a href=https://rucriminal.info/>casino приложения</a> букмекерские контора ап vavada casino <a href=https://glvk.guru/>pin casino зеркало</a> бывшие казино inform@rucriminal.info порно с Васильева Татьяна Викторовна пинко casino 1×bet сейчас порно с Варвара Субботина casino зеркало сайта
DiskiPlus porno Анна Сидорова, керлингистка DiskiPlus casino приложения <a href=https://diskiplus.ru/>DiskiPlus 7k casino бонус</a> DiskiPlus бк букмекерская контора DiskiPlus пина casino <a href=https://diskiplus.ru>DiskiPlus pin up casino пин</a> DiskiPlus Манилова Алла Юрьевна порно DiskiPlus Валентина Матвиенко порно DiskiPlus Скоробогатова Ольга Николаевна порно DiskiPlus top casino DiskiPlus гта казино DiskiPlus вавада казино DiskiPlus порно с Васильева Татьяна Викторовна
#2526 Diplomi_iwOrhttp://diplomys-vsem.ru
купить диплом в тамбове <a href=https://diplomys-vsem.ru/>diplomys-vsem.ru</a> .
#2527 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало
Далее потребуется отыграть вагер и вывести выигрыш. Игрокам без навыка крупно повезло, у получить 10-ки подарков за 1 регистрацию. Если не сумели получить Бездепозитный бонус, не волнуйтесь. Обратитесь в онлайн чат, оператор поможет исправить.За вербование друга ? в рамках партнерской программки клиент получает вознаграждение за вербование новых пользователей. <a href=http://filmkachat.ru/>1×slots casino зеркало рабочее</a> Перечисленные выше основные свойства сопровождают практически каждый бонус и считаются стандартными для бездепозитных бонусных начислений в казино. <a href=https://international.projectwet.org/discussion/%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-lexus-%D0%B1%D1%8B%D1%81%D1%82%D1%80%D0%B0%D1%8F-%D0%B8-%D0%B2%D1%8B%D0%B3%D0%BE%D0%B4%D0%BD%D0%B0%D1%8F-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D0%B6%D0%B0-%D0%BF%D1%80%D0%B5%D0%BC%D0%B8%D1%83%D0%BC-%D0%B0%D0%B2%D1%82%D0%BE>https://international.projectwet.org/discussion/%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-lexus-%D0%B1%D1%8B%D1%81%D1%82%D1%80%D0%B0%D1%8F-%D0%B8-%D0%B2%D1%8B%D0%B3%D0%BE%D0%B4%D0%BD%D0%B0%D1%8F-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D0%B6%D0%B0-%D0%BF%D1%80%D0%B5%D0%BC%D0%B8%D1%83%D0%BC-%D0%B0%D0%B2%D1%82%D0%BE</a> 1×slots актуальное зеркало <a href=http://rogerfilms.com/index.php?title=РР·_чего_состоит_диета_Елены_Малышевой>http://rogerfilms.com/index.php?title=РР·_чего_состоит_диета_Елены_Малышевой</a> Чтоб получить большой выигрыш, выбирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша.
1×slots casino зеркало рабочее
1хслотс 1хслотс регистрация перейти на 1×slots <a href=https://images.google.ee/url?sa=t&url=https://doctorlazuta.by/>https://images.google.ee/url?sa=t&url=https://doctorlazuta.by/</a> Необходимость отыгрыша. Вейджер в выше, чем для бонусов за депозит. И же средства не отыграны, вывести их невозможно.Бонус за регистрацию в казино выдается только раз раз на 1-го игрока. Но посещают дополнительные промоакции, в коих бездепы расступаются для постоянных клиентов и эти подарки Вы сможете получить больше 1-го раза. 1×slots зеркало регистрация то дальше необходимо пройти
1×slots казино зеркало
<a href=http://mernes.org/user/Michaellax/>http://mernes.org/user/Michaellax/</a> При регистрации сомнений либо ином интернет игральном заведении — вам дается один шанс испытывать собственную фортуну не внося средства монеты. Замечу что эту поощрительную предложение деют не все онлайн игровые площадки, а лишь щедрая середина(средина) из них. Которые мы подготовили для Вас в нашем списке.1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, в не желайте стать жертвой плутов либо впустую истратить время; 1хслотс казино зеркало Можно. Вы практически сможете отказаться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не сделаете ставку.Для получения приза надо(надобно) пригласить в забаву свежего клиента. Казино начисляет пригласившему фиксированный процент от взносов приглашённого повторяющий приза: чаще всего его объем не выше 10%. Срок деянья бонуса в большинстве случаев не превышает месяца: пригласивший получает бонус от проигранных ставок приглашённого в 1-ый месяц забавы.
1 x slots
Бывают ли бездепозитные бонусы без вейджера? Бывают, случае у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный приз за регистрацию устанавливается вейджер во всех казино.Раздача призов имеет быть приурочена к разным датам: календарные дни, дни рождения игроков, годовщина открытия казино и т. Д. Подарок выдается вид денег, фриспинов либо баллов для скопления и размена на предложения оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода этой суммы придется выполнить ряд притязаний. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=http://jade-crack.com/home.php?mod=space&uid=1055724>http://jade-crack.com/home.php?mod=space&uid=1055724</a> Бездепозитные бонусы казино это экономическая компенсация, предлагаемая пользователям на дармовой основе и вероятность выступать в онлайн казино бесплатно. Если сопоставлять их с одобрениями за вклад, в которых свои выдаются лишь потом начального пополнения счета, то бездепозитные вознаграждения получаются бесплатно. То есть, играющий получает возможность создавать ставки на теснее существующие финансы, которые выдаст заведение, исполняя, этом, обыденные деяния, чтобы их извлечь (здесь идет речь о регистрация, удостоверении личности с внедрением номера телефонного, оформления заявки и т.д.).
1×slot рабочее зеркало
Фриспины — благотворительные вращения, коие дозволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся самым знаменитым и преимущественным обликом приза — благотворительные вращения иногда эффективнее и веселее в отыгрыше, чем остальные облики бездепов.Срок отыгрыша — это этап, который наступает в момент активации бонуса и заканчивается с его закрытием. Пользователю нужно уложиться в данный временной зазор, другому призовые свои аннулируются. Казино устанавливают список игр, ставки в которых засчитываются при расчете отыгранных денег. Если тайтл не входит в этот список, то возможность быть недосегаем для загрузки во время действия бонусного предложения. Внесение депозита – Будьте готовы пополнить счет последствии отыгрыша бонуса. Это обычное требование управлял для данного типа промо-акций. Лучше заблаговременно уточнить, какую необходимую надо(надобно) несомненно вносить на счет. Как верховодило, речь идет о минимальном депозите, хотя вы должны быть уверены, собственно он вас по кармашку. <a href=https://andersontclt53074.blogoxo.com/30430556/deep-nude-ethical-concerns-and-the-impact-of-ai-on-privacy>https://andersontclt53074.blogoxo.com/30430556/deep-nude-ethical-concerns-and-the-impact-of-ai-on-privacy</a> Помните, что всевозможные нарушения верховодил сведут на нет ваши усилия, и вы скорее останетесь без начисленного для безвозмездного бонуса. Всегда изучайте верховодила начисления и условия вейджера. По любым вопросам, на которые вы имеет других отыскать ответы, обращайтесь за объяснениям и саппорт. 1× slots casino зеркало Иногда операторы требуют внесение малого депо перед выводом для верификации платежного прибора. В некоторых казино этот депо также предстоит отыграть.
<b>Смотреть еще похожие новости:</b>
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=4765>1×слот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепы все заходить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой или баллами. Да, у безвозмездных бонусов есть недостатки. Прежде всего, они обыкновенно не. Кроме как, условия вейджера по ним всегда жесткие. Но таки отсутствие риска делает их довольно красивыми для клиентов.
#2528 zaimpodptsnovosibzeDhttps://avtolombard-pid-zalog-pts.ru/nsk.html
деньги под птс автоломбард <a href=https://avtolombard-pid-zalog-pts.ru/nsk.html>avtolombard-pid-zalog-pts.ru/nsk.html</a> кредит под птс авто
#2529 Sazrvgdhttp://[url=http://vacshidiplom.com/kupit-diplom-povara-13/]vacshidiplom.com/kupit-diplom-goznak-10/
Приветствую! Заказать диплом ВУЗа по выгодной цене можно, обратившись к проверенной специализированной фирме. Приобрести диплом: <a href=http://vacshidiplom.com/kupit-diplom-goznak-10/>vacshidiplom.com/kupit-diplom-goznak-10/</a>
#2530 Lazrzovhttp://[url=http://careers.tu-varna.bg/employer/gosznac-diplom-24/ ]careers.tu-varna.bg/employer/gos
<b>Диплом университета Российской Федерации!</b> Без наличия диплома очень непросто было продвигаться по карьере. Именно по этой причине решение о заказе диплома стоит считать целесообразным. Приобрести диплом любого института <a href=http://careers.tu-varna.bg/employer/gosznac-diplom-24/>careers.tu-varna.bg/employer/gosznac-diplom-24</a>
#2531 Sazrwlahttp://[url=http://diplom4you.com/kupit-diplom-gosobraztsa-s-zaneseniem-v-reestr/]diplom4you.com/kup
Мы изготавливаем дипломы любой профессии по выгодным тарифам.– <a href=http://diplom4you.com/kupit-diplom-gosobraztsa-s-zaneseniem-v-reestr/>diplom4you.com/kupit-diplom-gosobraztsa-s-zaneseniem-v-reestr/</a>
#2532 Lazrjoghttp://[url=http://ukrom.in.ua/users/327?wid=9310/ ]ukrom.in.ua/users/327?wid=9310[/url]
<b>Диплом ВУЗа России!</b> Без наличия диплома очень сложно было продвигаться по карьерной лестнице. Именно из-за этого решение о покупке диплома можно считать мудрым и рациональным. Заказать диплом об образовании <a href=http://ukrom.in.ua/users/327?wid=9310/>ukrom.in.ua/users/327?wid=9310</a>
#2533 Sazrcsmhttp://[url=http://vacshidiplom.com/kupit-diplom-s-provodkoj-v-vuze-bistro-i-nadezhno-2/]vacshidiplo
Мы готовы предложить дипломы любой профессии по невысоким тарифам.– <a href=http://vacshidiplom.com/kupit-diplom-s-provodkoj-v-vuze-bistro-i-nadezhno-2/>vacshidiplom.com/kupit-diplom-s-provodkoj-v-vuze-bistro-i-nadezhno-2/</a>
#2534 zaimpodptsmskzeDhttps://avtolombard-pid-zalog-pts.ru
автоломбард залог машины <a href=https://avtolombard-pid-zalog-pts.ru>avtolombard-pid-zalog-pts.ru</a> где лучше взять кредит под залог авто
#2535 Cazrkpihttp://[url=http://myturtime.ru/legalnoe-oformlenie-diplomov-i-sertifikatov-dlya-rabotyi/]myturtime.
Добрый день! Без университета очень трудно было продвинуться вверх по карьере. Сегодня же этот документ не дает гарантий, что удастся найти привлекательную работу. Более важны практические навыки специалиста, а также его постоянный опыт. Именно из-за этого решение о заказе диплома следует считать мудрым и рациональным. Купить диплом института <a href=http://myturtime.ru/legalnoe-oformlenie-diplomov-i-sertifikatov-dlya-rabotyi/>myturtime.ru/legalnoe-oformlenie-diplomov-i-sertifikatov-dlya-rabotyi</a>
#2536 Williammumhttp://[url=http://diplomc-v-ufe.ru/]diplomc-v-ufe.ru[/url
Мы изготавливаем дипломы любой профессии по выгодным ценам. Дипломы производятся на настоящих бланках Приобрести диплом любого ВУЗа <a href=http://diplomc-v-ufe.ru/>diplomc-v-ufe.ru</a>
#2537 Lazrxpnhttp://[url=http://diplom-profi.ru/]diplom-profi.ru[/url]
Где приобрести диплом специалиста? Приобрести диплом ВУЗа по доступной стоимости возможно, обращаясь к надежной специализированной компании.: <a href=http://diplom-profi.ru/>diplom-profi.ru</a>
#2538 Williammumhttp://[url=http://diplomidlarf.ru/]diplomidlarf.ru[/url
Мы готовы предложить дипломы любой профессии по разумным тарифам. Дипломы производятся на подлинных бланках Приобрести диплом института <a href=http://diplomidlarf.ru/>diplomidlarf.ru</a>
#2539 Charlesgunnyhttp://filmkachat.ru
1 хслот регистрация в 1×slots casino
Чтобы бездеп не был начислен на Ваш аккаунт, Вам не нужно активировать бонусный код. Если поощрение от казино было добавлено на Ваш акк механически, а Вы не расчитываете его применять, обратитесь в саппорта с просьбой отменить бездепозитный бонус. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasino09k online</a> <a href=https://bandzone.cz/fan/kalinka0588?at=blog&bi=615742>https://bandzone.cz/fan/kalinka0588?at=blog&bi=615742</a> У нас на сайте Вы найдете список призов без депо в испытанных казино и подробную информацию то как их получить и использовать. 1×slots регистрацию процедура займет всего лишь <a href=http://andres-website.de/profile.php?lookup=8925>http://andres-website.de/profile.php?lookup=8925</a>
casino 1×slot
Также случаются случаи, когда казино начислит обсужденный бонус последствии регистрации свежего клиента по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам. 1хслотс 1хслотс регистрация перейти на 1×slots <a href=http://www.koelnmedia2.de/fastelovend/member.php?action=showprofile&user_id=16191>http://www.koelnmedia2.de/fastelovend/member.php?action=showprofile&user_id=16191</a> 1×slots коды В большинстве заведений сделать это возможно по e-mal, по номеру телефона, через социальную сеть либо гугл-аккаунт.Новички не любят незамедлительно же вносить депо. Это обосновано неимением опыта и недоверием. К счастью, в наше время возможно получить бездепозитный приз за регистрацию в казино. Неважно что начислит система – фриспины либо кредиты. В любом случае вы не рискуете собственными сбережениями. Это отличная вероятность запустить понравившийся видео слот либо же испытывать удачу в настольных играх.
1×slots официальный сайт мобильная версия скачать
Иногда в качестве бездепа, казино презентует наименьший приз (до 50 руб. ), из-за которого не стоит заморачиваться.Проверка занимает от нескольких мин. До нескольких дней, профессионалы техподдержки имеют запросить вспомогательные документы или инициировать краткое общение по Skype. Бездепозитные бонусы отличный вариант безвозмездной забавы в игровые автоматы. Многие юзеры сети не понимают, что в казино возможно начать выступать безусловно безвозмездно, а позже вывести выигрыш на банковскую карту или электрический кошелек, иные не доверяют онлайн казино, а третьи успешно играют и выигрывают – и тотчас достаточно великие суммы. <a href=https://hikvisiondb.webcam/wiki/User:MarilouHofmann7>https://hikvisiondb.webcam/wiki/User:MarilouHofmann7</a> Для получения предоставленных призов вам понадобиться — ПК либо мобильное прибор, и остальное дело за малым. 1хслотс казино зеркало
1×slots casino зеркало рабочее
Выбирайте превосходнейшие безвозмездные бонусы за обзоров на Casinoz – и пусть вам сопутствует счастье при отыгрыше бонусных кредитов!Как только получите бездеп в казино, всё также не запамятовывайте инспектировать электрическую почту. Некоторые игорные клубы непрерывно радуют активных гэмблеров приятными бонусами. Чаще всего получить подарок возможно в преддверии веселья, на день рождение, за привлечение друга. А того распространённым бонусом считается прибавка к депозиту. Нужно всего лишь восполнить счёт, и азартное заведение прирастит его на 50–100%. <a href=https://astraclub.ru/members/353998-Jameswow>1×slots регистрация</a> Для вывода средств приз нужно будет отыграть законам, установленным казино. Внимательно ознакомьтесь с правилами акции и вариациями отыгрыша бездепозитного приза до его получения, дабы избежать конфликтных обстановок.Подтверждение регистрации. Казино требуют привязки профиля к электронному адресу и номеру телефонного. Для этого на e-mail отчаливает письмо со ссылкой, а на телефон ? текстовое извещение с кодом. В случае установленного лимита на сумму вывода выигрыша с бездепозитного приза, игрок не может исключить больше заявленной суммы. 1хслотс мобильная версия зеркало <a href=https://forum.lazarev.ru/memberlist.php?mode=viewprofile&u=160275>https://forum.lazarev.ru/memberlist.php?mode=viewprofile&u=160275</a> Во всех законных онлайн-казино Беларуси нужно подтверждение паспортных данных для игры — это заявка правительства страны.
1×слот регистрация в 1×slots casino
4. Заберите презент. Чаще всего приз активируется незамедлительно последствии регистрации. Но случаются ситуации, когда нужно зайти в личный офис или написать в службу поддержки.Фриспины предусмотрены для применения в видео слотах. Внимательно ознакомьтесь с условиями – частенько их выдают на некоторые автоматы. В зависимости от клуба, у вас получится устроить определённое количество ставок. Кстати, продвинутые игорные дома разрешают запускать любых «одноруких злодеев». Несмотря на то, собственно этот вариант стимуляции со стороны азартных платформ довольно моден области похожих игр, далековато не всем поклонникам казино знаменито, что сами бездепозитные призы казино и как непосредственно их вполне эксплуатировать.Для тех, кто только взвешивает испытывать свою фортуну, еще для проф игроков, отыскивающих новые площадки для выигрышей, водящие лицензированные казино часто устраивают разные промоакции, и одно из лучших предложений прошедшее время – как для новичков, так и для профессиональных игроков – бездепозитный бонус за регистрацию. <a href=https://notabug.org/Batecom1102/Batecom1102/wiki/%D0%BB%D1%83%D1%87%D1%88%D0%B8%D0%B5+%D0%B1%D1%83%D0%BA%D0%BC%D0%B5%D0%BA%D0%B5%D1%80%D1%8B+%D0%B2+%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8>https://notabug.org/Batecom1102/Batecom1102/wiki/%D0%BB%D1%83%D1%87%D1%88%D0%B8%D0%B5+%D0%B1%D1%83%D0%BA%D0%BC%D0%B5%D0%BA%D0%B5%D1%80%D1%8B+%D0%B2+%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8</a> Доступность — бездепозитные призы в казино чаще всего предоставляются новым игрокам, хотя бывают случаи, когда бонус могут получить и действующие посетители. 1×slots официальный сайт мобильная версия Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные способы и расценить особенности, недоступные при этой в демо режиме. Многие новые клиенты переходят в количество постоянных, а оператор получает длительную прибыль.
<b>Смотреть еще похожие новости:</b>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=414477>1×slots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При регистрации сомнений или ином онлайн игральном заведении — вам дается один шанс испытывать собственную удачу не внося средства монеты. Замечу собственно такую поощрительную предложение деют не все интернет игровые площадки, а лишь великодушная середина(средина) из их. Которые мы подготовили для Вас в нашем списке. Теоретически, к безвозмездным призам можно отнести например называемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, потому собственно они предоставляют лишь вероятность создавать ставки.
#2540 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора без casino игровой автомат <a href=https://res-publika.com>казино фильм</a> 1×bet вход порно с Елена Никитина, скелетонистка <a href=https://www.ossetia.tv/>ап казино</a> porno Юлия Канакина 1×bet слоты 1×bet xyz Москалькова Татьяна Николаевна порно kent casino букмекерская контора скачать приложение 1×bet 1хбет online casino
DiskiPlus лучшие бесплатные онлайн казино DiskiPlus 1×bet официальный слоты <a href=https://diskiplus.ru>DiskiPlus порно с Варвара Субботина</a> DiskiPlus человек казино DiskiPlus реального казино <a href=https://www.diskiplus.ru/>DiskiPlus порно с Алина Загитова, фигуристка</a> DiskiPlus Петрова Ольга Викторовна порно DiskiPlus Радченко Светлана Юрьевна порно DiskiPlus казино 1 DiskiPlus casino pin официальный DiskiPlus pin ап casino DiskiPlus casinos xyz DiskiPlus 1×bet рабочее
#2541 Charlesgunnyhttp://filmkachat.ru
1х слот 1хслотс регистрация перейти на 1×slots
В основном случаев благотворительные бонусы начисляются в кредитах, коие невозможно сразу исключить со счета. Прежде их нужно отыграть по установленным правилам. Эти требования принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже. <a href=http://filmkachat.ru/>1 xslots рабочее зеркало</a> <a href=https://hoo.be/kalinka>https://hoo.be/kalinka</a> После потребуется привнести идентификационный платёж. Это стращает новичков больше всего. Нужно устроить минимальный депо в 100–500 руб. Таким образом служба защищенности убедиться сомнений, собственно платёжный метод принадлежит Вам. Данная процедура необходима для обеспечивания защищенности игровых счетов. Пример, Ваш аккаунт взломают и выведут свои на собственный кошелёк. Будет крайне неприятно. Поэтому верификация платёжной системы, это важный момент.Так что сможете неустрашимо регистрироваться без всяких раздумий. Фортуна сейчас наверняка на вашей стороне. Не побаивайтесь, так последствие какого или ущерба Вам абсолютно не угрожает. С такими призами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе. сайт 1× slots casino <a href=https://storyplus.ru/user/RalphInelm/>https://storyplus.ru/user/RalphInelm/</a> Прибывшие на аккаунт финансы бездепозитные призы предназначаются, главном, только для новоиспеченных юзеров, которые раньше не имели собственного аккаунта в данном казино. Исходя из сего, если раньше у игрока был изготовлен депо, то, по всей вероятности, у него больше не несомненно возможности рассчитывать на получение такого бонуса в определенном заведении.
1×slots казино зеркало
Для верификации номера аппарата, в личном профиле изберите опцию „Подтвердить номер телефонного“ и введите в подходящее поле код, приобретенный в sms-сообщении.Предложения с бездепозитными бонусами за регистрацию разрешают новым заведениям заинтересовать аудиторию на собственный сайт. А игроки же получают возможность играть на настоящие деньги без депо в казино и заработать маленький стартовый капитал, кот-ый разрешается исключить на карту банка либо электрический кошелек. 1×slots зеркало этих способов предполагает регистрацию Если ординарными словами, бездепы – это определённая сумма денег или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать презенты. Но есть кое-какие нюансы. Существуют игорные жилища, коие перед что, этим как начислить бонусы просят привязать аппарат, предоставить копии документов. <a href=http://hy.7msj.com/home.php?mod=space&uid=14071&do=profile&from=space>http://hy.7msj.com/home.php?mod=space&uid=14071&do=profile&from=space</a> Если при регистрации указать промокод, можно гарантировано получить приз. Где взять ваучер? Посетите определенную блоги или форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В последнее время игорные жилища начали афишироваться в фильмах и сериалах. Присмотритесь и всего заметите промокод, кот-ый принесёт 500 или 1 000 бонусных рублей. 1× slots сайт Как управляло, при выводе финансов, от играющего требуется только устроить минимальный вклад чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом личный счет.
1×slots рабочее зеркало
Для получения бонуса надо(надобно) ознакомиться с программой преданности казино и устроить ставки на сумму, нужную для перехода на следующий степень.Активация денежного вознаграждения случается механически последствии создания профиля либо применения промокода. Иногда операторы предъявляют дополнительные требования: подписаться на странички казино в социальных сетях либо на рассылку маркетинговых извещений, скачать и ввести дополнительный софт и т.д. Ну и конечно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: подобная добродушие увеличивает степень преданности клиентов к фирмы.Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавленья либо официального клиента для ПК. В большинстве казино действуют программки лояльности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на следующий степень часто сопрягается выдачей бездепа. <a href=http://sandom.by/bitrix/redirect.php?goto=http://itsheff.kz/bitrix/rk.php?goto=http://forum.freeflysystems.com/proxy.php?link=https://teletype.in/@urist555/txUML8urNzy>http://sandom.by/bitrix/redirect.php?goto=http://itsheff.kz/bitrix/rk.php?goto=http://forum.freeflysystems.com/proxy.php?link=https://teletype.in/@urist555/txUML8urNzy</a> 1×slots официальный сайт мобильная версия скачать Вывод выигрыша с бездепозитных бонусов казино – великодушный подарок от азартных клубов. Но чтобы вывести свой заработок, нужно выполнить ряд условий:Для получения приза надо(надобно) ознакомиться с программой лояльности казино и сделать ставки на сумму, нужную для перехода на следующий уровень.
1×slos регистрация в 1×slots casino
Бездепозитные призы прекрасный вариант безвозмездной игры в игровые автоматы. Многие пользователи сети не знают, собственно в казино можно начать играть абсолютно безвозмездно, а потом исключить выигрыш на банковскую карту либо электронный кошелек, другие не доверяют интернет казино, а третьи удачно играют и выигрывают – и подчас довольно немалые суммы.Активация валютного вознаграждения происходит механически в сотворения профиля либо использования промокода. Иногда операторы предъявляют дополнительные требования: подписаться на страницы казино в социальных сетях или на рассылку рекламных сообщений, скачать и установить дополнительный софт и т.д. <a href=https://www.one2bay.de/forum/showthread.php?tid=466815>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> Иногда виде поощрения за регистрацию шансы выдаваться билеты для роли в турнирах. Условия их проведения очень отличаются, поэтому мы советуем ознакомиться с любым предложением отдельно. 1×slots официальный demo регистрация в 1×slots casino <a href=http://balaklavskiy-16.ru/user/10791/>http://balaklavskiy-16.ru/user/10791/</a>
казино 1×slots
Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция содержит доскональные верховодила, гиперссылка на коие обычно содержится в промообъявлении. В них указываются лимиты, вейджер, список доступных игр. Если оператор скрывает данные о предложении, то воспользоваться им не стоит.Заполняя данные в личном профиле, указывайте лишь достоверную информацию, так как Вам придется ее подтвердить в при выводе денег. При малый сумме приза рекомендуется играть по невысоким ставкам, а использовать максимальные другого только сомнений случае, случае вейджер очень великой, а время на отыгрыш сильно ограничено.Подарки на определенные даты отличаются критериями получения. Если поощрение начисляют игроку на денек рождения, то сумма обычно находится от совместного размера депо за прошедший год. <a href=https://www.google.net/url?q=https://doctorlazuta.by/>https://www.google.net/url?q=https://doctorlazuta.by/</a> Бездепозитный бонус – это финансовое вознаграждение, которое выдается участнику забавы в казино, для его вербования и появления заинтересованности. Любой посетитель, кот-ый соответствует условиям выдачи похожего бездепозитного бонуса, может претендовать на получение вышеуказанного приза. Такое одобрение считается наиболее эффективным методом, дающим возможность стартовать в игре, не вкладывая собственных материальных средств. 1×slots официальный сайт скачать Бездепы имеют входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами.Классическая разновидность бонуса за творение аккаунта. Его преимущество содержится в, собственно клиент возможность без выбирать аппараты и создавать ставки в них. Иногда список игровых автоматов ограничен оператором, хотя все одинаково это лучше, чем единственный дешевый слот, как когда с внедрением фриспинов.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Самые знаменитые способы вывода средств ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электрическим платежным системам подобии Neteller и Skrill, а также используют криптовалютными кошельками. Вывод выигрышей имеет исполняться моментально или занимать от нескольких часов до нескольких суток.
#2542 zaimpodptskemerovozeDhttps://avtolombard-pid-zalog-pts.ru/kemerovo.html
залог под птс авто <a href=https://avtolombard-pid-zalog-pts.ru/kemerovo.html>avtolombard-pid-zalog-pts.ru/kemerovo.html</a> деньги под залог автомобиля
#2543 BrettFuphttps://whitestudio.moscow/
<a href=https://oboyan.7bb.ru/viewtopic.php?id=1821#p17812>промокод кент казино</a>
#2544 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино фильм онлайн porno Юлия Канакина <a href=https://www.ossetia.tv/>порно с Максим Глушенков (футбол)</a> casino бонус porno Ангелина Гончаренко, хоккеистка <a href=https://t.me/vchkogpu_ru>играющие казино онлайн</a> casino online зеркало порно с Юлия Ефимова порно с Алина Загитова, фигуристка 1×bet вход рокс казино 1×bet сайт порно с Зырянова Анастасия Владимировна
DiskiPlus казино онлайн DiskiPlus porno Алена Косторная (фигурное катание) <a href=https://www.diskiplus.ru/>DiskiPlus Скворцова Вероника Игоревна порно</a> DiskiPlus казино фильм смотреть онлайн DiskiPlus gama casino <a href=https://diskiplus.ru/>DiskiPlus pin up casino пин ап</a> DiskiPlus up casino скачать DiskiPlus pin up casino buzz DiskiPlus лучшая казино DiskiPlus casino официальный зеркало DiskiPlus up casino скачать DiskiPlus 1×bet зеркало на сегодня 1×bet xyz DiskiPlus симулятор казино
#2545 Sazrxpbhttp://[url=http://diplomdoc.ru/kupit-diplom-texnikuma-16/]diplomdoc.ru/kupit-diplom-texnikuma-16[/u
<a href=http://diplomdoc.ru/kupit-diplom-texnikuma-16/>купить диплом нижний новгород</a>
#2546 Sazrzrlhttp://[url=http://kupite-diplom0024.ru/kupit-attesttat-za-11-klass-16/]kupite-diplom0024.ru/kupit-a
<a href=http://kupite-diplom0024.ru/kupit-attesttat-za-11-klass-16/>купить диплом о высшем образовании в ссср</a>
#2547 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino бездепозитный скачать casino на андроид <a href=https://res-publika.com>винлайн букмекерская контора официальный</a> Матвиенко Валентина Ивановна порно порно с Дарья Клишина, легкоатлетка <a href=https://strelochnik.com/>Анна Михалкова</a> 1×bet слоты официальный сайт где казино casino 7k сегодня порно с Алексей Миранчук (футбол) 1×bet зеркало слоты porno Юлия Пересильд где казино
DiskiPlus casino сайты DiskiPlus играющие казино <a href=https://diskiplus.ru>DiskiPlus букмекерская контора фонбет официальный</a> DiskiPlus смотреть фильм казино DiskiPlus 1×bet xbet <a href=https://diskiplus.ru>DiskiPlus 1×bet скачать приложение на андроид</a> DiskiPlus pin up casino зеркало DiskiPlus 7k casino скачать DiskiPlus демо казино DiskiPlus пин ап букмекерская контора DiskiPlus казино в россии DiskiPlus смотреть фильм казино DiskiPlus букмекерские конторы в россии
#2548 Charlesgunnyhttp://filmkachat.ru
1×slots казино мобильная версия
Возможность сыграть дополнительное состязание (а время и несколько) совершенно бесплатно, а выигрыш, же, поступает на счёт игрока.Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные способы и расценить особенности, труднодоступные при ирге в демо режиме. Многие свежие посетители переходят в число постоянных, а оператор получает длительную прибыль. <a href=http://filmkachat.ru/>1×slots зеркало на сегодня</a> Операторы гемблинга заявляют, что например они дерутся с бонус-хантерами. Впрочем, критики считают, собственно этим казино пытаются устроить из случайного постояльца постоянного игрока.1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, случае не хотите замерзнуть жертвой жуликов или впустую потратить время; <a href=https://biolinky.co/kalinka-0588>https://biolinky.co/kalinka-0588</a> Варианты выигрыша находятся от Вашей удачи и критерий игорного портала. Выше мы заявили, собственно некоторые бездепозитные призы в 2022 году выдаются с ограничениями по наибольшей выплате. Однако, остаются и те, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность современных игр на деньги, можно выиграть невозможные суммы. Сегодняшние игровые автоматы либо видео слоты, как их именуют. Могут выдавать солидные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000.Подарки на конкретные даты отличаются критериями получения. Если поощрение начисляют игроку на день рождения, то сумма обычно находится от общего объема депо за прошедший год. 1×slots регистрация на сайте <a href=http://mallds.com/bbs/board.php?bo_table=free&wr_id=262379>http://mallds.com/bbs/board.php?bo_table=free&wr_id=262379</a> Такой казино бонус без депозита за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это словно какая-то конспирация поощрения под бездепозитный. Суть всего этого сводится к тому, что игроку на час выдается, к примеру, 1000 долларов, а реклама твердит про, что любой выигрыш можно несомненно в будущем забыть при для. Но если играющий серьезно отнесется к этому предложению, то он просто потеряет время. Ведь игроку нужно несомненно играть не в аккаунте, в тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (даже всей тысячи) в верховодила вступят конкретные условия, где будет сказано, собственно наибольшей суммой победы возможность быть только двести долларов и средства можно использовать только в приза на первый лепта с вейджером 25 от суммы вознаграждения плюс сам депозит. По результату выйдет, собственно игрок выигрывал себя 200% приз с вейджером на определенную сумму. Короче говоря, это все надо вашего медли.
1×slots регистрация 1×slots review live
Свежий бонус начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в пользовании средствами, а случае отыгрыша оператор возможность ввести ограничение на вывод денег. 1×slos регистрация в 1×slots casino На условиях отыгрыша даровых бонусов стопам остановиться подробнее. С ними связаны аспекты, которые невозможно забыть без внимания. <a href=https://velorout.com.ua/user/DarenDof/>https://velorout.com.ua/user/DarenDof/</a> 1хслотс зеркало Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации приза без депозита. Внимательно прочитайте до конца. Многие новички делают промахи на шаге регистрации и потому возможности получить подарок.После потребуется внести идентификационный платёж. Это пугает новичков больше всего. Нужно устроить минимальный депо в 100–500 руб. Таким образом служба защищенности убедиться что, нет, что платёжный метод принадлежит Вам. Данная процедура необходима для обеспечивания защищенности игровых счетов. Пример, Ваш аккаунт взломают и выведут свои на свой кошелёк. Будет крайне досадно. Поэтому верификация платёжной системы, это важный момент.
1× слот зеркало
Автоматы непопросту числятся наиболее известным азартным весельем. Чтобы усвоить управление и правила, понадобится всего количество мин. Ваша задача устроить ставку, найти число трудящихся линий и можно крутить барабан. Если на выпадет выигрышная комбинация – вы выиграли! С этой задачей вас помогут управится бездепозитные призы казино. Игрокам не воспринимать приветственный бонус как гарантированный способ получить крупный выигрыш, хотя это отличная вероятность без расходов расценить функционал казино. <a href=http://mongdol.net/bbs/board.php?bo_table=free&wr_id=2716780>http://mongdol.net/bbs/board.php?bo_table=free&wr_id=2716780</a> Более солидные предложения встречаются очень редко. Зачастую они доступны лишь VIP-игрокам. В оставшихся случаях им скорее сопутствуют очень жесткие условия отыгрыша. Также вероятны дополнительные обстоятельства и лимитирования, прописанные в условиях и положения бонусной программки казино. 1×slots рабочее зеркало на сегодня
1×slots мобильная версия войти казино
Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют актуальную информацию о not the slightest deposit bonuses и других предложениях. Доступ к подарку может раскрываться автоматически в введения промокода либо обращения в службу поддержки сайта. В первом случае от юзера не потребуется практически деяний. Бездеп с активацией по коду встречается чаще всего. Игроку нужно установить совокупа символов в графе, кот-ая может пребывать в регистрационной форме в Личном кабинете. 1х слотс зеркало регистрация в 1×slots casino <a href=https://www.google.com.do/url?sa=t&url=https://doctorlazuta.by/>https://www.google.com.do/url?sa=t&url=https://doctorlazuta.by/</a>
1× slots casino зеркало
Бездепозитные бонусы, как теснее ясно, считаются оригинальной возможностью приступать к игровому процессу безусловно бескорыстно, другими играть в онлайн казино даром и на имеющие свои незамедлительно в регистрации аккаунта. Автоматы с таким депо шансы стать прекрасной возможностью сыграть для почитателей азарта с определенными лимитированиями в финансах.У каждого игорного заведения свои управляла и условия. Но, чтобы получить бонусы, необходимо выполнить стереотипные действия: Бездепозитные призы казино это экономическая компенсация, предлагаемая юзерам на дармовой основе и возможность выступать в онлайн казино безвозмездно. Если сравнивать их с поощрениями за лепта, каких средства выдаются только впоследствии начального пополнения счета, то бездепозитные гонорары получаются безвозмездно. То есть, играющий получает возможность делать ставки на теснее быть финансы, которые выдаст заведение, исполняя, этом, обычные деяния, чтобы их извлечь (тут идет о регистрация, удостоверении личности с внедрением номера телефона, оформления заявки и т.д.).С такими простыми советами каждое казино с бонусом за регистрацию способно принести в разы больше выгоды и полезности. <a href=https://clients1.google.td/url?q=https://doctorlazuta.by/>https://clients1.google.td/url?q=https://doctorlazuta.by/</a> Выбирайте превосходнейшие благотворительные бонусы счет обзоров на Casinoz – и пусть для сопутствует счастье при отыгрыше бонусных кредитов! 1хслот зеркало Несмотря на то, что этот вариант стимуляции со стороны азартных платформ довольно популярен в сфере похожих игр, далеко многим поклонникам казино известно, что являют собой бездепозитные бонусы казино и как непосредственно их вероятно эксплуатировать.
<b>Смотреть еще похожие новости:</b>
<a href=http://ledyardmachine.com/forum/User-Jameshoing>1хслотс рабочее зеркало</a>
<a href=https://forum.visiteachapada.com/viewtopic.php?f=19&t=3349>казино 1×slots</a>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/8652/#comment-355792>1×slots зеркало регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Следует подчеркнуть, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом. Для ревизии применяются сканы паспортов, водительских удостоверений, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если юзер замечен в попытке завести вспомогательный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный перечень. При игре на лицензионной площадке не стоит бояться свидетельствовать достоверную индивидуальную информацию (шифрование исключает утечку персональных данных).
#2549 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up casino top top пин ап казино <a href=https://krtka.info/>pinco casino</a> porno Алена Михайлова рокс казино <a href=https://res-publika.com>винлайн букмекерская контора</a> vavada casino букмекерская контора леонов бесплатные букмекерские конторы порно с Алина Загитова слоты казино 7k casino бонус порно с Сергей Бобровский (хоккей)
DiskiPlus ап казино DiskiPlus 1×bet на андроид <a href=https://www.diskiplus.ru>DiskiPlus казино рояль смотреть</a> DiskiPlus порно с Голикова Татьяна Алексеевна DiskiPlus casino скачать <a href=https://www.diskiplus.ru>DiskiPlus porno Катерина Шпица</a> DiskiPlus Чулпан Хаматова DiskiPlus Львова-Белова Мария Алексеевна порно DiskiPlus casino играть DiskiPlus 1×bet зеркало xbet xyz DiskiPlus казино проиграл DiskiPlus 1×bet зеркало на сегодня DiskiPlus казино сегодня
#2550 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Мира Андреева (теннис) играющие казино <a href=https://slon-ru.com/>Елизавета Боярская</a> порно с Елена Никитина, скелетонистка pin up casino top top <a href=https://slon-ru.com/>porno Александр Соболев (футбол)</a> казино рояль смотреть порно с Александр Головин (футбол) приложения букмекерских контор на андроид porno Дарья Клишина сайт 1×bet слоты vodka casino Анна Михалкова
DiskiPlus ставки на спорт букмекерские конторы DiskiPlus porno Юлия Канакина, скелетонистка <a href=https://diskiplus.ru>DiskiPlus официальные букмекерские конторы</a> DiskiPlus 1×bet на андроид DiskiPlus pinco casino <a href=https://www.diskiplus.ru/>DiskiPlus порно с Владимир Минеев (ММА)</a> DiskiPlus порно с Евгения Медведева DiskiPlus порно с Константин Тюкавин (футбол) DiskiPlus Анна Михалкова DiskiPlus porno Андрей Рублев (теннис) DiskiPlus букмекерские конторы бет DiskiPlus порно с Юлия Ефимова DiskiPlus фреш казино
#2551 programma 1s_ygEahttp://taksafonchik.borda.ru
программа 1с бухгалтерия цена <a href=www.4dkp.forum24.ru/?1–1–0–00000038–000–0–0–1742893093/>программа 1с бухгалтерия цена</a> .
#2552 programma 1s_mdEahttp://taksafonchik.borda.ru
купить программу 1с <a href=http://doskamarta.borda.ru/?1–2–0–00078836–000–0–0–1742892897/>купить программу 1с</a> .
#2553 Sazrkwlhttp://[url=http://diplomybox.com/kupit-diplom-magnitogorsk/]diplomybox.com/kupit-diplom-magnitogors
Задумался а действительно можно купить диплом государственного образца в Москве, и был удивлен, все реально и главное официально! Сначала серфил в сети и искал такие темы как: купить диплом кандидата наук, купить кандидата наук диплом, как купить диплом, дипломы купить о среднем образовании, дипломы о среднем образовании купить, получил базовую информацию. Остановился в итоге на материале <a href=http://diplomybox.com/kupit-diplom-magnitogorsk/>diplomybox.com/kupit-diplom-magnitogorsk</a>
#2554 zaimpodzalogptsekbzeDhttps://avtolombard-pid-zalog-pts.ru/ekb.html
кредит под залог автомобиля екатеринбург <a href=https://avtolombard-pid-zalog-pts.ru/ekb.html>avtolombard-pid-zalog-pts.ru/ekb.html</a> ломбард деньги под залог птс
#2555 Charlesgunnyhttp://filmkachat.ru
1×slots сайт зеркало
Помните, что в неких забавах сумма ставки идет в зачет вейджера лишь частично. Так, в настольных и карточных играх только от 5% до 50% суммы ставки считаются как отыгранные деньги, тот как в слотах идет в зачет все one hundred percent суммы.В интернет-сети постоянно возможно отыскать списки наиболее знаменитых и гарантированных поощрительных программ от известных онлайн-казино. <a href=http://filmkachat.ru/>1×slots акции</a> <a href=https://www.papercall.io/speakers/146409/speaker_talks/292503-technical-drawing-for-furniture-professional-design-guide>https://www.papercall.io/speakers/146409/speaker_talks/292503-technical-drawing-for-furniture-professional-design-guide</a> Денежные свои. Третий приз за регистрацию без депозита – наличные. К раскаянию, только знаменитые и модные клубы шансы уяснить деньги в руб. Или баксах. С их поддержкою вы сможете насладиться каждой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед этим нужно выполнение определенных условий. 1×slots casino регистрация 1×slotscasin online <a href=https://www.donchillin.com/space-uid-361603.html>https://www.donchillin.com/space-uid-361603.html</a> В любом казино с бездепозитным бонусом учтены вейджеровые условия. Это один-единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, нужно устроить определённое число ставок. Чем круче бонус, что, этим труднее выполнить условия, и наоборот.
1х слот регистрация в 1×slots casino
Максимальный объем ставки, кот-ый невозможно превышать же приз не будет полностью отыгран. В случае нарушения сего управляла, приз и выигрыш с него будут аннулированы. 1×slots официальный сайт скачать Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают бонус по государствам. Вплоть до как, собственно клуб может себя игроков из Вашей страны, а бездеп не давать. <a href=http://artceramica.ru/bitrix/redirect.php?goto=http://clickclack.me/bitrix/redirect.php?goto=http://spacewill.ru/bitrix/redirect.php?goto=https://teletype.in/@urist_free/Tu4SwksViI6>http://artceramica.ru/bitrix/redirect.php?goto=http://clickclack.me/bitrix/redirect.php?goto=http://spacewill.ru/bitrix/redirect.php?goto=https://teletype.in/@urist_free/Tu4SwksViI6</a> В интернет-сети всегда можно отыскать перечни наиболее известных и обещанных поощрительных программ от знаменитых онлайн-казино. 1×slots зеркало 1хслотс регистрация перейти на 1×slots Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную процедуру активации приза без депо. Внимательно прочитайте до конца. Многие новенькие делают ошибки на этапе регистрации и поэтому не получить презент.
1×slots зеркало рабочее на сегодня
Чтобы получить вероятность вывести выгода с бездепозитного бонуса в казино, нужно выполнить ряд условий: Для получения выигрыша требуется выполнить условия казино. Чаще всего игроку нужно поставить определенную сумму, но теснее из личных денег. Она рассчитывается из совместного размера выигрыша за всегда использования бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, в пользователь выиграл 1000 руб., а множитель сочиняет х30, исключить деньги возможно несомненно, сделав ставки на 30 000 руб. <a href=http://freshgreen.kr/bbs/board.php?bo_table=free&wr_id=300425>http://freshgreen.kr/bbs/board.php?bo_table=free&wr_id=300425</a> Простая процедура получения бездепозитного бонуса, которая займет не более 2-х минут. Для получения бездепов, достаточно зарегистрироваться и подтвердить контактные данные.Для получения предоставленных призов вас понадобиться — ПК или мобильное прибор, и остальное дело за малым. 1×slots официальный сайт зеркало
1×slots регистрация 1×slots review live
Каждый игры обязан сперва детально изучить обстоятельства по получению и отыгрышу понравившегося дара. Если всё организует, поторопитесь забрать бесплатные спины за регистрацию в казино без депо с выводом и без отыгрыша и прямо данный начать вращать барабаны топовых слотов. Таким образом онлайн казино получает вероятного игрока. Возможно в либо настоящем он захочет сыграть на свои средства. Так трудятся бездепозитные призы в интернет казино. Здесь хорошо подходит выражение, бесплатные сыр бывает лишь в мышеловке. Начинающие игроки могут не осознавать опасность азарта. Однако с осознания делается больше. Это тема для отдельного обсуждения.Проверка занимает от нескольких мин. До нескольких дней, специалисты техподдержки имеют запросить дополнительные документы либо инициировать короткое общение по Skype. 1 x slots <a href=http://www.koelnmedia2.de/fastelovend/member.php?action=showprofile&user_id=16229>http://www.koelnmedia2.de/fastelovend/member.php?action=showprofile&user_id=16229</a>
1хслотс официальный сайт зеркало
Автоматическая активация может самой комфортной, хотя ручной способ содержит перед ней превосходства. Прежде чем использовать вознаграждение от казино, стоит заблаговременно определить, сколько времени потребуется на исполненье всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деяния приза.Фриспины начисляются по конкретной ставке. После их активации игроку нужно запустить слот и убедиться, собственно в нем отображаются бесплатные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода последствии отыгрыша определяется оператором и редко выше 5 000 руб. Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и. Когда игроку полагается много фриспинов, администрация может разбивать их начисление на несколько дней. Бесплатные вращения предоставляются для определенного слота, который указывается в правилах акции. <a href=http://cnwww.molifan.net/space-uid-2362831.html>http://cnwww.molifan.net/space-uid-2362831.html</a> 1×slots регистрация 1×slots review live
<b>Смотреть еще похожие новости:</b>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=510347>1×slots скачать на айфон</a>
<a href=https://mit-bbs.com/viewtopic.php?t=296862>1×slots официальный зеркало</a>
<a href=https://elforodelpoker.com/presentaciones/1×slots-t287830.html>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Не желаете сыграть в азартные забавы, не рискуя средствами средствами, хотя получая в все выплаты? Подобную вероятность предоставляют многие превосходнейшие порталы с азартными веселиями. В их количестве много честных и надежных интернет-казино на российском языке. Они завлекают свежих пользователей различными поощрительными событиями, включая бездепозитные, или безвозмездные бонусы.
#2556 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало сайт букмекерской конторы <a href=https://res-publika.com>1×bet скачать бесплатно</a> фреш казино порно с Анастасия Потапова, теннисистка <a href=https://7club7.com/>порно с Ирина Сидоркова</a> bet casino казино казино на деньги Анна Михалкова бесплатные букмекерские конторы почему казино unlim casino
DiskiPlus порно с Петр Ян (ММА) DiskiPlus казино 1 <a href=https://diskiplus.ru/>DiskiPlus Елизавета Боярская</a> DiskiPlus 1win букмекерская контора DiskiPlus казино сегодня <a href=https://diskiplus.ru/>DiskiPlus 7k casino</a> DiskiPlus лучшая казино DiskiPlus порно с Елена Никитина, скелетонистка DiskiPlus casino сайты DiskiPlus спорт букмекерская контора DiskiPlus пинко casino DiskiPlus казино вход DiskiPlus пин ап casino pin up top
#2557 SportunaAQhttps://newsacademies.gr
newsacademies.gr best casino greece
#2558 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
kent casino регистрация casino com <a href=https://slon-ru.com/>casino riobet</a> Скоробогатова Ольга Николаевна порно букмекерская контора бетсити <a href=https://strelochnik.com/>1×bet сайт 1×bet xyz</a> бесплатное казино порно с Максим Глушенков (футбол) казино фильм смотреть онлайн 1×bet слоты 1×bet xyz porno Юлия Пересильд порно с Евгения Медведева, фигуристка букмекерская контора фонбет
DiskiPlus скачать 1×bet 1×bet xyz DiskiPlus Лут Оксана Николаевна порно <a href=https://diskiplus.ru/>DiskiPlus casino pin официальный</a> DiskiPlus Крючкова Полина Викторовна порно DiskiPlus казино смотреть <a href=https://www.diskiplus.ru>DiskiPlus casino</a> DiskiPlus порно с Аделия Петросян (фигурное катание) DiskiPlus казино рублях DiskiPlus 1×bet скачать приложение на андроид DiskiPlus карты казино DiskiPlus casino betting DiskiPlus пинап казино DiskiPlus pin up casino buzz
#2559 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пин ап casino порно с Константин Тюкавин (футбол) <a href=https://7club7.com/>казино смотреть онлайн бесплатно</a> пин ап casino pin казино играть <a href=https://m.repost.news/>Москалькова Татьяна Николаевна порно</a> порно с Александр Большунов (лыжные гонки) пин casino какие казино porno Катерина Шпица casino актуальное зеркало скачать букмекерскую контору casino скачать приложение
DiskiPlus 1×bet официальный xbet DiskiPlus порно с Абрамченко Виктория Валериевна <a href=https://diskiplus.ru/>DiskiPlus казино на деньги</a> DiskiPlus яндекс казино DiskiPlus casino <a href=https://www.diskiplus.ru>DiskiPlus казино смотреть</a> DiskiPlus официальная казино DiskiPlus up casino официальный DiskiPlus порно с Бондаренко Анастасия Борисовна DiskiPlus ramenbet casino DiskiPlus retro casino DiskiPlus гта казино DiskiPlus казино без
#2560 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию более популярный вариант это
В настоящее время получить бонус за регистрацию в казино довольно просто. Почти любой игорный дом с готовностью даст средства или безвозмездные вращения. Многие игроки используют данным и не смущяются регистрироваться в любом клубе с прибыльными условиями. Кстати, это отличная вероятность придумать выигрышную стратегию и сорвать куш. <a href=http://filmkachat.ru/>1×slots зеркало видели такую регистрацию на</a> Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в неотъемлемом порядке необходимо пополнить счет в казино. Для депозитных бонусов, эта процедура не необходима, например как депо уже сделан.Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша бонусов. Заведения постоянно устанавливают максимальную ставку, допустимую по условиям вейждера. <a href=https://lynk.id/kalinka0588>https://lynk.id/kalinka0588</a> Акции, посвященные календарным праздничным, посещают рассчитаны как на всех юзеров, например и на категории: примеру, презент на 8 марта девушкам-игрокам или мужчинам на 23 февраля.Бездепозитные бонусы, как теснее ясно, считаются оригинальной возможностью к игровому процессу безусловно бесплатно, то есть играть в интернет казино бесплатно и на существующие средства незамедлительно после регистрации аккаунта. Автоматы с таким депо имеют замерзнуть великолепной возможностью сыграть для почитателей азарта с определенными ограничениями в денег. 1×slot регистрация <a href=https://www.coweyepress.com/wiki/index.php/Shisha_Tobacco_From4_Eur>https://www.coweyepress.com/wiki/index.php/Shisha_Tobacco_From4_Eur</a> Однако далековато не все ресурсы предлагают своим посетителям бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено одобрение на 1-ый депо в объеме 100–200%. Это отличная возможность преумножить банкролл, прирастить время, проведённое за игрой и шансы сорвать большой куш.
1×slots официальный сайт скачать на айфон
1хслотс зеркало Мы делаем ударение на главных положениях правил, рассказываем о территориальных ограничениях и вкратце информируем о других акциях обсуждаемого казино. <a href=http://lyxondebian.free.fr/dokutest/doku.php?id=1×bet_APP:_Where_to_Find_the_Official_Download_Link.>http://lyxondebian.free.fr/dokutest/doku.php?id=1×bet_APP:_Where_to_Find_the_Official_Download_Link.</a> 1×slots на любой вкус как пройти регистрацию
1хлот регистрация в 1×slots casino
Фриспины — благотворительные вращения, коие позволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины считаются наиболее известным и желаемым обликом приза — бесплатные вращения иногда эффективнее и веселее в отыгрыше, чем другие виды бездепов. Классическая разновидность бонуса за создание аккаунта. Его превосходство содержится в том, что клиент имеет помощи избирать аппараты и создавать ставки в их. Иногда перечень игровых автоматов ограничен оператором, хотя все точно это какого-либо, чем один-единственный доступный слот, как если, тогда, с использованием фриспинов.Для казино, работающих интернет, бездепозитные призы нужны для привлечения новых посетителей. Предложение сыграть на слотах без надобности внесения реальных денег — работающий способ для повышения интереса к компании. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит играть в казино, только теперь уже на собственные деньги. <a href=https://n4.biz/web/u86603620/home/-/blogs/86776375_%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0-%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA>https://n4.biz/web/u86603620/home/-/blogs/86776375_%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0-%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA</a> Мы рекомендуем не отрицаться от сходственных услуг известных казино. Выделите несколько минут на регистрацию, получите приз и попробуйте его отыграть. Может быть, сегодня фортуна будет на вашей стороне!Бездепозитные призы казино это экономическая компенсация, предлагаемая юзерам на дармовой основе и вероятность играть в интернет казино даром. Если сопоставлять их с одобрениями за лепта, в средства выдаются лишь впоследствии начального пополнения счета, то бездепозитные вознаграждения получаются бесплатно. То есть, играющий получает вероятность делать ставки на уже имеющие финансы, которые выдаст заведение, выполняя, всем, обыденные деянья, дабы их извлечь (здесь идет о регистрация, удостоверении личности с использованием номера телефона, оформления заявки и т.д. ). 1 x slots
1×slots регистрация на сайте
Какие бонусы я могу еще получить не бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного бонуса, каждое интернет казино предлагает игрокам прибыльное предложение на первый депо, вы совершаете депозит, ваш депо увеличивается в двое либо и в 3, что, этим наиболее начать выступать возможно с больше крупной суммой, так же не забываем на вейджер на бонусы.Какие призы я могу еще получить не бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, любое онлайн казино предлагает игрокам выгодное предложение на первый депо, вы совершаете депо, ваш депо возрастает в двое либо том в 3, что, этим наиболее начать играть возможно с более крупной суммой, например же не запамятываем про вейджер на призы. Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша бонусов. Заведения всегда устанавливают наивысшую ставку, допустимую по условиям вейждера. 1×slots регистрация 1×slots casino c2d ru <a href=http://galeria.farvista.net/member.php?action=showprofile&user_id=42568>http://galeria.farvista.net/member.php?action=showprofile&user_id=42568</a> Нельзя рассматривать игру на деньги, как вариант заработка. Азартные игры воспрещены для лиц младше 18 лет. Topcasinobonuses.mobi не зачинщиком азартных игр. Сайт носит информационный характер.Но разу не забывайте пристально читать верховодила участия в бонусных акциях. Если вы нарушите но бы одно условие, позднее вы не можете устроить недоразумение с администрацией.
1×slots быструю регистрацию а также мгновенное
4. Заберите подарок. Чаще всего приз активируется сразу в регистрации. Но бывают ситуации, когда надо(надобно) зайти в личный кабинет или написать в саппорта.При регистрации следует указывать лишь достоверную информацию. Когда учетная запись будет активна, будет доступ в Личный офис. В нем возможно выбрать денежную, ввести промокод и узнать доскональные верховодила получения и отыгрыша бездепа. Краткая информация об акции часто присутствует именно на регистрационной форме. Также, в этом случае необходимо подтвердить собственный номер телефона, желаемого код, приобретенный в смс-сообщении от клуба установить в специальное фон в личном кабинете игрока.При регистрации стопам указывать только достоверную информацию. Когда учетная запись несомненно активна, появится доступ в Личный кабинет. В нем возможно избрать денежную, установить промокод и разузнать доскональные верховодила получения и отыгрыша бездепа. Краткая информация об промоакции часто находится именно на регистрационной форме. <a href=https://raygunmvp.com/user/jamesnes-jamesnes/?um_action=edit>https://raygunmvp.com/user/jamesnes-jamesnes/?um_action=edit</a> 1×slots официальный сайт зеркало рабочее Способы получения бездепа различаются в зависимости от вида приза, который понравился игроку. Но для в любом случае нужно быть зарегистрированным в законном онлайн-казино и доказать свою лицо. В общем виде пошаговая аннотация для получения бездепозитного бонуса выглядит например:
<b>Смотреть еще похожие новости:</b>
<a href=https://www.ldvd.nl/jammer-3?page=7#comment-239652>1×slots регистрация на официальном сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В бонусную программу многих операторов входят регулярные бездепы. Это бессрочные акции, поощряющие активных неизменных игроков. Популярный формат — раздача фриспинов по определенным дням недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депо в мена на накопленные баллы преданности. Бездеп с фриспинами может охватывать всю коллекцию игр на сайте или разработки 1-го провайдера. Обычно предлагается конкретный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш возможность быть выведен в как, как юзер отыграет эту необходимую. Возможность оценить глубокий перечень слотов — главное совершенство этой разновидности. Игроку становятся доступны что, эти функции, которые отсутствуют в демонстрационном режиме, а возможность выиграть настоящие деньги добавляет ярчайших азартных чувств.
#2561 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
Подтверждение персональной инфы. Все казино настоятельно от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у пользователя других аккаунтов (мультиаккаунт запрещен). <a href=http://filmkachat.ru/>1хслотс рабочее зеркало</a> <a href=https://forum.index.hu/User/UserDescription?u=2065074>https://forum.index.hu/User/UserDescription?u=2065074</a> 1х слотс зеркало регистрация в 1×slots casino <a href=http://1723.ru/forums/index.php?showuser=27562>http://1723.ru/forums/index.php?showuser=27562</a>
1хслотс 1хслотс регистрация перейти на 1×slots
1×slots casino регистрация 1×slots review live Это тоже благотворительные деньги, коие поступают на аккаунты новоиспеченных игроков после регистрирования. А особенность таких бонусов состоит в том, что обретенные финансы обязательно стопам использовать в продолжении назначенного времени. <a href=https://griffintuvu40506.activoblog.com/30104704/the-cutting-fringe-of-nsfw-ai-exploring-the-options-of-undress-ai>https://griffintuvu40506.activoblog.com/30104704/the-cutting-fringe-of-nsfw-ai-exploring-the-options-of-undress-ai</a> 1× слот зеркало Приветственный бездеп предоставляется какому игроку только один раз. Казино сражаются с так называемыми бонусхантерами (от англ. Bonus Hunter — охотник за бонусами), пытающимися заводить многочисленные аккаунты для надувательства оператора и повторного получения подарка. Исключить похожие деянья позволяет верификация данных. Администрация вправе востребовать у посетителя доказать индивидуальные данные, указанные при регистрации.
1×slots скачать на айфон
Практически все онлайн казино с бездепозитным бонусом за регистрацию учитывает программу преданности — систему поощрения неизменных посетителей, которая состоит из большого значений. При достижении игроком одного значения на его счёт поступает бонус. Чем повыше степень — тем щедрее бонус. Для проверки используются сканы паспортов, водительских водительских, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь обнаружен в попытке ввести вспомогательный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный перечень. При забаве на лицензионной площадке не опасаться указывать достоверную индивидуальную информацию (шифрование исключает утечку персональных данных). <a href=http://silabgarza.net/forums/member.php?action=profile&uid=226467>http://silabgarza.net/forums/member.php?action=profile&uid=226467</a> Помните, собственно всевозможные нарушения правил сведут на нет ваши старания, и вы всего останетесь без начисленного вас дарового бонуса. Всегда изучайте управляла начисления и обстоятельства вейджера. По каким вопросам, на коие вы возможности без найти ответы, обращайтесь за объясненьям и саппорт. 1×slots сайт Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депозит может выделяться до 30 дней.
1×slots зеркало видели такую регистрацию на
Частенько новенькие не разумеют, как активировать подарки либо вывести 1-ый выигрыш. Для похожих случаев наша команда описала главные определения – собственно такое фриспины, вейджер, как его отыграть, для необходимо проходить верификацию. <a href=https://portugal-campings.com/pt/account/>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a> В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, необходимо адресоваться в службу спустя лайв-чат на веб-сайте казино. 1×slots официальный зеркало рабочее <a href=http://www.podrujka.com/user/Philipinjes/>http://www.podrujka.com/user/Philipinjes/</a> Демоказино есть практически на каждом сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются веско реже: там когда выигрыша и соблюдения условий акций бездеп возможно превратить в реальные средства.Вы не в коем случае ни же рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической забавы на бездепозитные призы, у Вас есть шанс выучить игровые автоматы, выучится регулировать менять ставки и линии, исследовать бонусные забавы и их выигрышные композиции, ну конечном просто зарядится кучей впечатлений! Ведь вы будите выступать на бонусные средства, которые можно отыграть и вывести, но просто на демо счет, тем самым адреналин в крови более повысится а пульс забьется с нередким ритмом!
1×slots актуальное зеркало
К сожалению, нет. Почти все казино, просят внесение желая бы одного минимального депозита для вывода выигрыша с бездепозитного бонуса. Также учитывайте, собственно исключить средства разрешается только на что, эту платежную систему, с которой был изготовлен депозит.Вы скорее, например все предпочитаете получать презенты и бездепозитные бонусы казино. Игорные дома взяли в повадку одаривать гэмблеров приятными призами. Стать владельцем приветственного подарка можно за творенье профиля либо пополнение счёта. Второй вариант больше увлекательный, так клубы готовы удвоить депо! Но случае вы новичок и лишь знакомитесь с миром азарта, другого пользуйтесь бонусом за регистрацию. Условия вывода выигрыша. В неких заведениях для успешного вывода с бездепозитного бонуса довольно пополнения баланса и доказательства личности. В иных же клубах, нужно некоторое раз прокрутить свой депозит.Для отыгрыша бонуса казино обязует игрока сыграть на необходимую, в количество раз превосходящую необходимую приобретенного приза — здесь выгода компании явна. <a href=http://yartube.ru/user/TravisAxiop/>http://yartube.ru/user/TravisAxiop/</a> 1×slots casino регистрация Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша призов. Заведения практически устанавливают максимальную ставку, допустимую по условиям вейждера.Однако далеко не все ресурсы предлагают своим клиентам бездепозитные призы за регистрацию в казино. В большинстве случаев учтено поощрение на первый депозит в размере 100–200%. Это замечательная вероятность преувеличить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1×slots официальный зеркало</a>
<a href=https://sadhaka.nl/forum/viewtopic.php?t=102249>1хслотс казино зеркало</a>
<a href=https://www.lightknotes.com/MyBB/showthread.php?tid=154394>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но на некоторых азартных платформах сходственные вознаграждения имеют получить и уже зарегистрированные пользователи. В этом случае, призы предоставляются в рамках оригинальных промоакций или же некоторым геймерам вид акционного предложения, которое прибывает на почту с целью «вернуть» игрока в свое казино. Третитй бездепозитный бонус за регистрацию – валютные свои. К раскаянию, начислить рубли либо доллары готовы только знаменитые и популярностью клубы. С их подмогою у насладиться любой доступной забавой – автоматом, рулеткой, кено, блэкджеком.
#2562 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало
Прочитайте верховодила бонусной программы, в которой желаете принять. Да, мы настойчиво советуем устроить это до регистрации.Фриспины предназначены для использования в видео слотах. Внимательно ознакомьтесь с критериями – частенько их выдают на кое-какие автоматы. В зависимости от клуба, у вас выйдет сделать определённое количество ставок. Кстати, продвинутые игорные дома позволяют запускать каждых «одноруких злодеев». <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> Не стоит путать игру в демо и внедрение бонусов. В демонстрационном режиме игрок может расценить механику слота, сюжет и оформление. Но забава проводится на относительные кредиты, потому отсутствует основное ? ощущение пыла. Активируя промокод или фриспины, клиент по-прежнему не расходует средства деньги на игровые автоматы, хотя имеет сорвать настоящий куш! <a href=https://www.designingbuildings.co.uk/wiki/User:Cgifurniture>https://www.designingbuildings.co.uk/wiki/User:Cgifurniture</a> 1×slots коды <a href=http://ips-irk.ksworks.ru/index.php?subaction=userinfo&user=curlybottleneck>http://ips-irk.ksworks.ru/index.php?subaction=userinfo&user=curlybottleneck</a> У любой забавы свои притязания по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система зачтет каждую ставку. В рулетке и покере сделать это намного сложнее. Именно поэтому так принципиально внимательно разбирать обстоятельства получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой забаве, то новички просто «спустят приз на ветер».Фриспины предусмотрены для применения в видео слотах. Внимательно ознакомьтесь с условиями – частенько их выдают на некоторые автоматы. В зависимости от клуба, у вас получится устроить определённое количество ставок. Кстати, продвинутые игорные дома разрешают запускать любых «одноруких злодеев».
1×slots зеркало регистрация в 1×slots casino
Фриспины – благотворительные вращения с фиксированной ставкой, коие возможно применять в конкретных игровых автоматах. 1 xslots рабочее зеркало Пoдтвepдить личнocть клиента. Для успешного вывода средств, нужно доказать личность клиента. Нa этaпe вepификaции пpoфиля, работники службы защищенности обязаны увериться, собственно у игрока более один акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не сможет вывести свой выигрыш, в у него несомненно несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы. <a href=http://babyliss-pro.ru/bitrix/rk.php?goto=http://aquarius-tver.ru/bitrix/redirect.php?goto=http://vcrt.ru/go/?https://teletype.in/@urid_pomosh/eV4vzO8Miag>http://babyliss-pro.ru/bitrix/rk.php?goto=http://aquarius-tver.ru/bitrix/redirect.php?goto=http://vcrt.ru/go/?https://teletype.in/@urid_pomosh/eV4vzO8Miag</a> 1×slots зеркало регистрация то дальше необходимо пройти
1×slots регистрация то дальше необходимо пройти
Максимальный размер ставки, который невозможно превышать же бонус не будет всецело отыгран. В случае нарушения этого правила, бонус и выигрыш с него станут аннулированы.С не отыгранным бонусом запрещается превышать объем максимальной ставки. Нарушение этого обстоятельства иметь аннулирование выигрыша. <a href=https://fm-forum.ru/viewtopic.php?id=2604#p207260>https://fm-forum.ru/viewtopic.php?id=2604#p207260</a> Представьте момент, когда при ставке в 10 руб. Вы получите схожее умножение. Миллион руб. За одно вращение, собственно вполне вероятно. Поэтому вопрос, сколько можно выиграть остаётся открытым. Предлагаем проверить помощи. Регистрируйтесь в одном либо нескольких интернет казино, получайте Бездепозитный приз и инспектируйте фортуну в деле. Разумеется, исключить средства не так просто. Однако шансы есть у всех. 1×slots зеркало проходить регистрацию это отличный вариант Помните, что всевозможные нарушения управлял сведут на нет ваши старания, и вы наверняка останетесь без начисленного вам бесплатного приза. Всегда изучайте верховодила начисления и условия вейджера. По любым вопросам, на коие вы не других отыскать ответы, обращайтесь за объясненьям и саппорт.
1х слот регистрация в 1×slots casino
Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Перед активацией важно пристально выучить условия акции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, на коих возможно пользоваться предложением. Если бездеп охватывает узкий список игр, рекомендовано узнать максимальные коэффициенты, степень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь в том случае, если оператор не установил требовательные лимитирования на максимальную сумму ставки. <a href=https://portugal-campings.com/pt/account/>1×slots casino зеркало рабочее</a> Нет. Казино раздают безвозмездные призы за регистрацию, чтобы, чтобы, чтобы клиент имел ознакомиться с игровым заведением. А дабы вывести его, нужно выполнить обстоятельства отыгрыша.За привлечение приятеля ? в партнерской программы заказчик получает вознаграждение за привлечение свежих юзеров. Помните, собственно в неких забавах сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных играх только от 5% до 50% суммы ставки считаются как отыгранные деньги, в то время как в слотах идет в зачет все 100% суммы. 1×slot зеркало рабочее регистрации на телефон придет <a href=https://forumniebiescy.pl/memberlist.php?mode=viewprofile&u=71480>https://forumniebiescy.pl/memberlist.php?mode=viewprofile&u=71480</a> Для отыгрыша бонуса казино обязует игрока сыграть на сумму, в несколько один превосходящую необходимую полученного бонуса — здесь выгода компании явна.Ниже указан важный список легальных казино в Беларуси с призами на первый депо. Вы можете попасть на официальный сайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз.
1хслотс казино зеркало
Помните, что в некоторых забавах сумма ставки идет в зачет вейджера лишь частично. Так, в настольных и карточных забавах лишь от 5% до 50% суммы ставки считаются как отыгранные средства, в то время как в слотах идет в зачет все 100% суммы. Доступность — бездепозитные призы в казино почаще всего предоставляются свежим игрокам, но случаются случаи, когда приз все получить и действующие посетители.В качестве призов онлайн казино часто предлагает выдачу фриспинов, то есть безвозмездных вращений игрового барабана. Виртуальные монеты возможно применять для обучения в покерной школе или для игры в казино. <a href=https://felixbmwe07418.blog5star.com/30700325/deepnude-ai-navigating-the-fine-line-between-innovation-and-ethics>https://felixbmwe07418.blog5star.com/30700325/deepnude-ai-navigating-the-fine-line-between-innovation-and-ethics</a> Иногда операторы настоятельно внесение малого депо перед выводом для верификации платежного прибора. В некоторых казино этот депозит кроме предстоит отыграть. 1хслотс рабочее зеркало Следует подчеркнуть, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом.
<b>Смотреть еще похожие новости:</b>
<a href=https://koreanstudies.com/forum/viewtopic.php?t=129660>1х слот регистрация в 1×slots casino</a>
<a href=http://forums.panzergrenadiers.com/showthread.php?23622–1%D0%A1%E2%80%A6%D0%A1%D0%83%D0%A0%C2%BB%D0%A0%D1%95%D0%A1%E2%80%9A%D0%A1%D0%83-%D0%A0%C2%B7%D0%A0%C2%B5%D0%A1%D0%82%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%BB%D0%A0%D1%95&p=510432#post510432>1хслотс зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для верификации аккаунта надо(надобно) предоставить спецам технической поддержки отсканированную копию паспорта и счета за коммунальные предложения, а также фотографию банковской карты или снимок страницы электронного кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для доказательства личности.
#2563 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Дарья Клишина, легкоатлетка ramenbet casino <a href=https://glvk.guru/>макао казино</a> казино 1×bet сайт <a href=https://rhymes-punches.com/>Мухтиярова Елена Вячеславовна порно</a> казино онлайн Александра Бортич порно с Васильева Татьяна Викторовна kent casino регистрация 1×slots casino online casino кент casino
DiskiPlus порно с Зырянова Анастасия Владимировна DiskiPlus где казино <a href=https://diskiplus.ru/>DiskiPlus порно с Евгения Медведева</a> DiskiPlus casino приложения DiskiPlus порно с Алексей Миранчук (футбол) <a href=https://www.diskiplus.ru/>DiskiPlus casino рабочее</a> DiskiPlus 7k casino официальный DiskiPlus порно с Александр Головин (футбол) DiskiPlus cometa casino DiskiPlus порно с Алина Загитова, фигуристка DiskiPlus Манилова Алла Юрьевна порно DiskiPlus порно с Варвара Субботина DiskiPlus 1×bet зеркало рабочее xbet
#2564 avtolombardnovosibzeDhttps://reckoningz.com/%d0%ba%d0%b0%d0%ba-%d0%bf%d1%80%d0%be%d0%b2%d0%b5%d1%80%d0%b8%d1%82%d1%8c-%d1
автоломбард займ <a href=https://reckoningz.com/%d0%ba%d0%b0%d0%ba-%d0%bf%d1%80%d0%be%d0%b2%d0%b5%d1%80%d0%b8%d1%82%d1%8c-%d1%83%d1%81%d0%bb%d0%be%d0%b2%d0%b8%d1%8f-%d0%ba%d1%80%d0%b5%d0%b4%d0%b8%d1%82%d0%be%d0%b2%d0%b0%d0%bd%d0%b8%d1%8f-%d0%b2/>https://reckoningz.com/%d0%ba%d0%b0%d0%ba-%d0%bf%d1%80%d0%be%d0%b2%d0%b5%d1%80%d0%b8%d1%82%d1%8c-%d1%83%d1%81%d0%bb%d0%be%d0%b2%d0%b8%d1%8f-%d0%ba%d1%80%d0%b5%d0%b4%d0%b8%d1%82%d0%be%d0%b2%d0%b0%d0%bd%d0%b8%d1%8f-%d0%b2/</a> взять займ под залог авто
#2565 Charlesgunnyhttp://filmkachat.ru
1×slots сайт зеркало
Однако далеко не все ресурсы предлагают своим посетителям бездепозитные призы за регистрацию в казино. В большинстве случаев учтено поощрение на первый депозит в размере 100–200%. Это отличная вероятность преувеличить банкролл, прирастить время, проведённое за игрой и шансы сорвать большой куш.Основное различие том,, собственно для получения бездепа нужно пополнять баланс в казино. Но считая этого, есть ряд и других отличий: <a href=http://filmkachat.ru/>казино 1×slots</a> <a href=https://www.mazafakas.com/index.php?page=custom&file=osclass_forum/viewpost.php&id=4911>https://www.mazafakas.com/index.php?page=custom&file=osclass_forum/viewpost.php&id=4911</a> Бездепозитные призы за регистрацию в игровых автоматах для хозяев онлайн-казино считаются долею рекламной кампании, направленной на увеличение аудитории сайта. Так они продвигают средства бренды и привлекают новых клиентов.Подтверждение регистрации. Казино требуют привязки профиля к электрическому адресу и номеру телефонного. Для этого на e-mail отправляется послание со ссылкой, а на телефонный ? текстовое известие с кодом. зеркло казино 1×slots <a href=http://telexeber.az/index.php?subaction=userinfo&user=uglycrook17>http://telexeber.az/index.php?subaction=userinfo&user=uglycrook17</a> Но эти рамки не смущают числе хайроллеров, что коэффициенты на слотах разрешают рассчитывать на крупные выигрыши, ну неких автоматах разыгрывается прогрессивный джекпот.
1×slots casino регистрация 1×slotscasin online
Обычно бездепозитные акции от казино, прибывают на эл. Почту в деньки рождения либо праздники. В неких онлайн казино возможно адресоваться в чат и как постоянному игроку, вероятно вам предложат бездепозитное предложение. <a href=https://projects.sare.org/people/jamestrazy/>1×slots актуальное зеркало</a> 1× slots casino официальный сайт <a href=https://www.feeder.mobi/members/walterviall/profile/>https://www.feeder.mobi/members/walterviall/profile/</a> Фриплей-бонусы встречаются только в некоторых клубах. Они зачисляются сразу в творенья профиля и активны непродолжительное время. Если не успеете израсходовать свои, они просто сгорят. Касаемо времени, в большинстве случаев бонусы активны в течение часа.Автоматы непопросту числятся самым модным азартным развлечением. Чтобы освоить управление и правила, понадобится всего несколько мин. Ваша задачка устроить ставку, найти число трудящихся линий и возможно вертеть тамбур. Если на выпадет выигрышная композиция – вы выиграли! С данной задачей вас посодействуют управится бездепозитные призы казино. зеркло казино 1×slots Бoльшинcтвo азартных заведений выдвигают примерно одинаковые условия и притязания, коие необходимо выполнить, дабы получить бездепозитный приз за регистрацию. Все их возможно соединить в раз перечень:
сайт 1× slots casino
Наиболее популярные вознаграждения среди гэмблеров – бездепозитные призы казино. Это не изумительно, ведь можно получить бесплатные вращения или виртуальные кредиты, и всем не придётся пополнять счёт, рисковать личностными средствами. Удастся насладиться разнообразными веселиями даже выиграть солидную необходимую, избегая серьёзного риска.Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают приз по государствам. Вплоть до такого, собственно клуб возможность принимать игроков из Вашей государства, а бездеп мешает. У нас на веб-сайте Вы отыщите список бонусов без депозита в испытанных казино и доскональную информацию о том как их получить и применять.Бездепозитный бонус за регистрацию в казино — это стартовый презент в виде денежного начисления или безвозмездных вращений для свежих игроков заведения, для получения которого не нужно вносить депо. <a href=http://www.privatumervarta.sk/en/contact.html?meno=detailedgroup85&firma=detailedgroup85&email=kuvesa%40mailforspam.com&telefon=detailedgroup85&predmet_spravy=detailedgroup85&sprava=%3Ca+href%3Dhttps%3A%2F%2Fwww.exoltech.us%2Fblogs%2F255056%2F1win-apostas-online%3Ehttps%3A%2F%2Fwww.exoltech.us%2Fblogs%2F255056%2F1win-apostas-online%3C%2Fa%3E+1win+brasil+entrar&captcha=khdqv&input_recordtime=31.10.2022+01%3A56%3A16&button8=Submit>http://www.privatumervarta.sk/en/contact.html?meno=detailedgroup85&firma=detailedgroup85&email=kuvesa%40mailforspam.com&telefon=detailedgroup85&predmet_spravy=detailedgroup85&sprava=%3Ca+href%3Dhttps%3A%2F%2Fwww.exoltech.us%2Fblogs%2F255056%2F1win-apostas-online%3Ehttps%3A%2F%2Fwww.exoltech.us%2Fblogs%2F255056%2F1win-apostas-online%3C%2Fa%3E+1win+brasil+entrar&captcha=khdqv&input_recordtime=31.10.2022+01%3A56%3A16&button8=Submit</a> Максимальная ставка ? уточняется в валюте счета и ограничивает объем ставки за один спин. В случае ее превышения приз имеет быть аннулирован. Также в правилах может находиться запрет на размещение ставок конкретного облика, например, по одинаковым шансам в рулетке (другими, на чет или нечет, красноватое или черное и т.д.).Таким образом, заведение пробует показать себя своим вероятным геймерам, а подобный рекламный ход как казино бонус без депо за регистрацию привлекает довольно количество внимания к игорному заведению и обеспечивает неизменный струю свежих посетителей и грядущих клиентов игрового онлайн клуба. 1хлот регистрация в 1×slots casino На бонусные начисления могут быть установлены вспомогательные ограничения, коие Вы не сведению при отыгрыше. Пока бонус полностью не отыгран — деньги из казино не выводятся.
1×slots сайт
Шаг 4. Активация. Внимательно выучите обстоятельства, информацию по лимитированиям и сроке деяния бонусного предложения. Разобравшись с правилами, можно активировать бонус в личном кабинете (времени ? с внедрением промокода) или по запросу в саппорт.Маркетинговая деятеля всех игорных интернет-клубов обязана одевать различный характер. И случае вознаграждения на депо служат для того, дабы стимулировать заносить депозиты и поощрять теснее существующих пользователей, то бездепозитный приз в казино или приз за регистрацию в казино, этого всего, рассчитан на расширение базы потребителей. 1×slots официальный сайт мобильная версия <a href=https://build-info.biz.ua/wr_board/tools.php?event=profile&pname=TerryInews>https://build-info.biz.ua/wr_board/tools.php?event=profile&pname=TerryInews</a>
1×slots зеркало подтвердит вашу регистрацию если говорить
Бесплатный бонус – кредиты, коие онлайн-казино начислит посетителю, не заставляя его пополнять игровой счет.Бездепы обыкновенно предлагают с отыгрышем — моментально исключить выигранные свои невозможно. Перевод средств со счета несомненно возможен в того, как юзер выполнит все притязания казино, а сумма не быть выше установленного правилами лимита. Условиями акции фиксируются сроки, в течение коих клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней в активации. Возможность поиграть вспомогательное соревнование (а времени и количество) абсолютно безвозмездно, а выигрыш, тому, поступает на счёт игрока.Бездепозитный бонус – это экономическое вознаграждение, коие выдается участнику игры в казино, для его привлечения и возникновения заинтересованности. Любой посетитель, который подходит условиям выдачи сходственного бездепозитного приза, может претендовать на получение вышеуказанного приза. Такое поощрение считается более действенным методом, дающим вероятность стартовать деле, не вкладывая собственных материальных средств. <a href=http://d90894u1.bget.ru/user/Charlesbop/>http://d90894u1.bget.ru/user/Charlesbop/</a> 1×slots зеркало на сегодня Прямо данный заберите благотворительные вращения за регистрацию без депо и начинайте собирать призовые комбинации из-за крупных выигрышей!Как лишь получите бездеп в казино, всё точно не запамятовывайте проверять электрическую почту. Некоторые игорные клубы постоянно веселят активных гэмблеров приятными призами. Чаще всего получить презент можно в преддверии веселья, на денек рождение, за вербование приятеля. А также распространённым призом является прибавка к депозиту. Нужно чем пополнить счёт, и азартное заведение увеличит его на 50–100%.
<b>Смотреть еще похожие новости:</b>
<a href=https://dev.eff.one/forumdisplay.php?fid=10>1×slots регистрация на сайте 1×slots ru com</a>
<a href=https://www.sgomberisgombero.it/my-account-2/>1×slots рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Ознакомьтесь с нашим списком превосходнейших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего списка и получите бездеп незамедлительно. Хватайте лучшие благотворительные предложения ниже и выигрывайте великие деньги, не рискуя! Исходя из сего, просто не существует мудрых оснований махнуть рукой на получение такового бонуса при регистрации. И, не, на такой бесплатной основе у вас есть все шансы выиграть средства и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные призы, нарекают бесплатными интернет платформами для игр.
#2566 Denisvmq
Delete it,please! <a href=https://watches-eshop.com/>.</a>
#2567 DavidEnrophttps://webyourself.eu/blogs/316260/†упить-диплом-ђаш-путь-к-успеху
Платформа для общения бизнеса с бизнесом. https://spark.ru/user/252031/ казино онлайн
#2568 Richardzorhttps://bs2best-site.ru
<a href=https://bs2best-site.ru>bs2best.at</a> bs2best новая актуальная ссылка BlackSprut – bs2best-site.ru
#2569 JeffreyCheamhttps://bs2best.gdn
https://bs2best.gdn – bs2best at актуальная ссылка BlackSprut
https://telegra.ph/…proksi-03-28 https://telegra.ph/…servis-03-16 https://telegra.ph/…v-seti-03-28 https://telegra.ph/…v-seti-03-16 https://telegra.ph/…nnye-03-16-4 https://telegra.ph/…lajn-03-28-2 https://telegra.ph/…heniya-03-28 https://telegra.ph/…nnye-03-27-3 https://telegra.ph/…heniya-03-28 https://telegra.ph/…nnye-03-28-2 https://telegra.ph/…onlajn-03-28 https://telegra.ph/…dannye-03-27 https://telegra.ph/…atelej-03-27 https://telegra.ph/…dannyh-03-27 https://telegra.ph/…rvis-03-16-2 https://telegra.ph/…hennym-03-28 https://telegra.ph/…-Binde-03-16 https://telegra.ph/…heniya-03-27 https://telegra.ph/…dannye-03-27 https://telegra.ph/…s2best-03-27 https://telegra.ph/…nnye-03-27-2 https://telegra.ph/…v-seti-03-27 https://telegra.ph/…nnye-03-27-4 https://telegra.ph/…Dannye-03-28
#2570 avtolombardmskzeDhttp://lesstagiaires.com/employer/portalwe2830/
кредит в залог машины <a href=http://lesstagiaires.com/employer/portalwe2830/>http://lesstagiaires.com/employer/portalwe2830/</a> наличные под залог автомобиля
#2571 Felixfap
<a href=https://logistt.ru/services/customs>https://logistt.ru/services/customs</a>
#2572 WilliamPuthttps://whitestudio.moscow/
http://cse.google.co.ao/url?…
#2573 avtolombardkemerovozeDhttps://www.securityprofinder.com/employer/avtolombard-114558/
кредит под залог птс автомобиля <a href=https://www.securityprofinder.com/employer/avtolombard-114558/>https://www.securityprofinder.com/employer/avtolombard-114558/</a> займ под залог птс авто
#2574 bankrotstvo v moskve_wdsrhttp://bankrotstvo-v-moskve123.ru
Узнайте мнение тех, кто уже прошел процедуру банкротства и списал свои долги <a href=http://bankrotstvo-v-moskve123.ru>http://bankrotstvo-v-moskve123.ru</a> .
#2575 1xbet_mcpihttps://1xbet-login-egypt.com/
1×bet – лучший выбор для ставок, присоединиться.
Ставки на спорт с 1×bet, эксклюзивные бонусы.
1×bet предлагает щедрые бонусы, не упустите возможность.
1×bet – идеальное место для спортивных ставок, от игры.
1×bet – ваш портал в мир лайв-ставок, вы всегда на шаг впереди.
Всё для ваших ставок на 1×bet, и будьте на коне.
На 1×bet найдётся ставку для каждого, от спорта до киберспорта.
Смотрите матчи в режиме реального времени с 1×bet, сделайте вашу ставку.
1×bet – получите свои выигрыши мгновенно, действуйте быстро.
Обзоры и прогнозы на 1×bet, поможем вам оставаться в курсе.
Ваши данные в безопасности с 1×bet, это важно.
Скидки и бонусы только для вас с 1×bet, воспользуйтесь шансом.
Ставьте смело с 1×bet, выберите правильный путь.
1×bet – поддержка, когда она нужна, вы всегда не одни.
Участвуйте в конкурсах и выигрывайте с 1×bet, будьте в курсе событий.
Платформа 1×bet доступна на мобильных устройствах, удобно и быстро.
Используйте статистику и аналитику на 1×bet, анализируйте каждый шаг.
Станьте частью 1×bet быстро и легко, не теряйте время.
1×bet – это ваше окно в мир ставок, начните выигрывать.
Заходите на 1×bet для эксклюзивных предложений, ставьте с умом. ????? ???? 1×bet <a href=https://1×bet-login-egypt.com/>????? ???? 1×bet</a> .
#2576 avtolombardkazanbuthttp://www.chinajobbox.com/companies/talent6395/
займ залог птс <a href=http://www.chinajobbox.com/companies/talent6395/>http://www.chinajobbox.com/companies/talent6395/</a> займ под залог птс
#2577 Melvinspegohttps://www.1block.games/
1Block Casino: Full Platform Overview 1Block Casino is a modern gaming platform that offers a wide range of gambling entertainment for players worldwide. From classic slots to unique games like Plinko, the service provides everything needed for gambling enthusiasts. Let’s take a closer look at the main features of the platform, game categories, and key advantages.
Game Categories 1Block Casino boasts an extensive collection of games divided into several categories:
Originals This section features exclusive games developed specifically for the platform. It's a great choice for those seeking a unique gaming experience. Slots Classic and modern slots with various themes, bonuses, and mechanics are available here. Whether you prefer traditional fruit machines or innovative video slots, there’s something for everyone. Live Games Immerse yourself in the atmosphere of a real casino with live dealer games. These games are streamed in real-time, offering an authentic experience with professional dealers. Fishing Games A unique category that combines gambling with interactive gameplay. Fishing games are gaining popularity due to their engaging mechanics and potential for big wins. Poker Test your skills against other players in various poker formats. The platform offers both traditional and fast-paced poker games. Esports Betting Bet on your favorite esports teams and tournaments. This section caters to fans of competitive gaming who want to add excitement to their matches. Lucky Bets and High Rollers 1Block Casino caters to all types of players, from casual gamers to high rollers. The Lucky Bets section highlights random wins, while the High Rollers section showcases impressive payouts from large bets. Whether you're betting small or large amounts, the platform ensures fair play and exciting opportunities.
Our Community and Partnerships 1Block Casino values its community and collaborates with trusted partners to enhance the gaming experience. The platform proudly works with leading providers, ensuring top-quality games and services for its users.
Legal Information 1Block Casino is owned and operated by JogoMaster Limited, a company registered under number 15748. The company’s registered address is located in Hamchako, Mutsamudu, Autonomous Island of Anjouan, Union of Comoros.
The platform is licensed and regulated by the Gaming Board of Anjouan (License No. ALSI-152406032-FI3). 1Block has passed all regulatory compliance checks and is legally authorized to conduct gaming operations for all games of chance and wagering.
Why Choose 1Block Casino? Diverse Game Selection : From slots to live games, there’s something for every type of player. Transparency : All bets and payouts are clearly displayed, ensuring trust and fairness. Crypto-Friendly : The platform supports cryptocurrency transactions, making it convenient for modern players. Licensed and Regulated : With a valid license from the Gaming Board of Anjouan, players can enjoy a secure and legal gaming experience. Whether you’re a fan of classic casino games or looking to explore unique options like Plinko, 1Block Casino offers a comprehensive and enjoyable platform for all gambling enthusiasts.
#2578 vodka kazino_uyKahttp://mydomcom.ru
водка казино <a href=https://mydomcom.ru/>водка казино</a> .
#2579 vodka kazino_mjKahttp://mydomcom.ru
водка казино <a href=https://mydomcom.ru>водка казино</a> .
#2580 avtolombardekbzeDhttps://rhcstaffing.com/employer/lgmtech1283/
кредит наличными под залог авто <a href=https://rhcstaffing.com/employer/lgmtech1283/>https://rhcstaffing.com/employer/lgmtech1283/</a> деньги под залог автомобиля авто
#2581 polskasporthttps://gamesplays.pl
Ciekawy wybór slotów online. | Sloty w euro i złotówkach opisane dokładnie. | Świetna nawigacja i czytelna struktura strony. | Znajdziesz tutaj przydatne porównania bukmacherów. | Obszerny katalog polskich bukmacherów. | <a href=https://slots-play.pl/>sloty casino</a> | Zawsze świeże wiadomości o branży hazardowej. | Profesjonalne podejście do tematyki bukmacherskiej. | <a href=https://gamesplays.pl/>techland gry wideo</a> | Szczegółowe analizy i rankingi slotów. | Strona działa szybko i bez błędów. <a href=https://newsports.pl/>interia – sport gwiazdy</a>
#2582 zaimpodptsnovosibzeDhttps://avtolombard-11.ru/nsk.html
кредит под залог птс авто <a href=https://avtolombard-11.ru/nsk.html>avtolombard-11.ru/nsk.html</a> кредит под залог машины птс
#2583 Ремонт ноутбуковhttps://remont-noutbukov-first.ru/
Наш сервисный центр предлагает высококачественный <a href=https://remont-noutbukov-first.ru/>мастерская по ремонту ноутбуков на выезде</a> любых брендов и моделей. Мы понимаем, насколько важны для вас ваши ноутбуки, и обеспечиваем ремонт высочайшего уровня. Наши опытные мастера оперативно и тщательно выполняют работу, используя только сертифицированные компоненты, что обеспечивает надежность и долговечность проведенных ремонтов. Наиболее общие проблемы, с которыми сталкиваются обладатели переносных компьютеров, включают неисправности HDD, неисправности экрана, ошибки ПО, неисправности разъемов и перегрев. Для устранения этих поломок наши квалифицированные специалисты оказывают ремонт жестких дисков, экранов, ПО, разъемов и систем охлаждения. Обратившись к нам, вы обеспечиваете себе долговечный и надежный сервисный ремонт ноутбука на дому. Подробная информация доступна на сайте: https://remont-noutbukov-first.ru
#2584 zaimpodptsmskzeDhttps://avtolombard-11.ru
займ под птс без посещения офиса <a href=https://avtolombard-11.ru>avtolombard-11.ru</a> круглосуточный автоломбард
#2585 zaimpodptskazanbuthttps://avtolombard-11.ru/kazan.html
кредит под залог авто <a href=https://avtolombard-11.ru/kazan.html>avtolombard-11.ru/kazan.html</a> займ под залог птс казань
#2586 Shanequesy
Школьные парты и стулья для школы
<a href=https://ergant.ru/catalog/shkolnye_party_i_stulya/>Школьные парты и стулья для школы</a>
#2587 NewRetroCasino_xxErhttp://newretromirror.ru
Официальный сайт Ретро Казино <a href=http://newretromirror.ru/>http://newretromirror.ru/</a> .
#2588 Ремонт приставок Xbox Москваhttps://remont-pristavok-xbox-spec.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали срочный ремонт приставок xbox, можете посмотреть на сайте: <a href=https://remont-pristavok-xbox-spec.ru/>ремонт приставок xbox</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#2589 Allendobhttps://msksfera.ru/
Ремонт помещений <a href=https://msksfera.ru/remont-gostinicz/>https://msksfera.ru/remont-gostinicz/</a> под ключ: офисы, отели, склады. Полный комплекс строительно-отделочных работ, от черновой отделки до финишного дизайна.
#2590 CarlosLustyhttp://бытовкивтуле.рф
Вагончики и модульные здания: надёжное способ для клиентских задач Контейнеры и модульные здания способствуют создать зону работы, помещение для хранения или временный домик. Мы поставляем здания, которые отвечают строгим требованиям надёжности и комфорта.
Преимущества Стойкость. Все контейнеры созданы из компонентов, стойких к давлению и природным явлениям. Оперативность транспортировки. Объект транспортируется в пределах 1–2 календарных дней после заключения соглашения. Персонализация. Осуществляется компоновка дополнительной теплоизоляции, электрооборудования или вентиляции. Сферы использования На строительных объектах для организации склада или устройства комнаты для рабочих. Во время событий для создания информационного центра или склада оборудования. В качестве временных рабочих зон или управляющих центров. Достоинства Экономия времени. Не требуется строить временные помещения. Комфортабельность. Среда, которые улучшают результативность действий бригады. Подстройка. Решение аренды или покупки под конкретные требования и финансовые возможности. Практический пример Строительный подряд внедрила блок-контейнер для организации склада инструментов и комнаты отдыха. Модуль была доставлена за сутки, с дополнительным утеплением. Заказчик отметил на оптимизацию среды и сокращение простоя.
Как сделать заказ Для заключения договора следует обратиться с нами. Обеспечим полные данные, содействуем подобрать идеальный выбор и проведём перевозку.
#2591 Stewartsobhttps://riobetcasino-yt.ru/
riobet онлайн <a href=https://riobetcasino-yt.ru/>лайв рулетка риобет</a>
#2592 Keithedisehttps://sarantagon.com/
iphone pro prices <a href=https://sarantagon.com/>iphone work</a>
#2593 JeffryBakhttps://allinoneforum.ru/viewtopic.php?t=76
Портал для любознательных <a href=https://www.tapatalk.com/groups/dzerjinsky/viewtopic.php?f=2&t=44109&from_new_topic=1>https://www.tapatalk.com/groups/dzerjinsky/viewtopic.php?f=2&t=44109&from_new_topic=1</a> Полезная информация, тренды, обзоры, советы и много вдохновляющего контента. Каждый день — повод зайти снова!
#2594 FrankGap
<a href=https://a-polymer.ru/>zooma live казино официальный сайт</a>
#2595 MichaelTokhttps://www.weather-webcam-in-montenegro.com/budva
Holidays in <a href=https://www.weather-webcam-in-montenegro.com/tivat>Tivat airport?</a> are European comfort at an affordable price. Transparent sea, clean beaches, historical cities and warm climate all year round.
#2596 PabloTawhttps://www.weather-webcam-in-montenegro.com/sveti-stefan
Planning a vacation? <a href=https://www.weather-webcam-in-montenegro.com/podgorica>Podgorica airport</a> is a warm sea, picturesque beaches, cozy cities and affordable prices. A great option for a couple, family or solo traveler.
#2597 Warrentumhttps://www.weather-webcam-in-montenegro.com/
Discover <a href=https://www.weather-webcam-in-montenegro.com/>Montenegro</a> crystal clear sea, mountain landscapes, ancient cities and delicious cuisine. We organize a turnkey trip: flight, accommodation, excursions.
#2598 mtsekaterinburgzeDhttps://www.cbl.aero/employer/24inetrnet-domashnij-ekb/
мтс телевидение <a href=https://www.cbl.aero/employer/24inetrnet-domashnij-ekb/>https://www.cbl.aero/employer/24inetrnet-domashnij-ekb/</a> мтс тв
#2599 bankrotstvo v moskve_uusrhttp://bankrotstvo-v-moskve123.ru
<a href=http://bankrotstvo-v-moskve123.ru>процедура банкротства физического лица отзывы</a>
#2600 сейфы встраиваемыеhttps://vstraivaemye-sejfy.ru/
Тут можно преобрести встраиваемый сейф москва <a href=https://vstraivaemye-sejfy.ru/>сейфы встраиваемые в пол</a>
#2601 ClintonEpilthttps://whitestudio.moscow/
<a href=https://deogiricollege.org/pag/1×bet_promo_code___welcome-bonus.html>1×bet app promo code</a>
#2602 JgjhghjfhhViarohttp://u90517ol.beget.tech/2024/05/13/uskorennyy-dostup-k-karere-gde-kupit-diplom.html
Кэт казино промокод: CAT555 — бонус 375% на 3 депозита и 150 фриспинов при регистрации. Cat Casino — это популярная онлайн-платформа, которая радует своих пользователей щедрыми бонусами, акциями и уникальными промокодами. Если вы ищете способ увеличить свой игровой бюджет или просто хотите получить дополнительные преимущества, то промокоды Cat Casino — это то, что вам нужно. В этой статье мы подробно расскажем о всех доступных бонусах, акциях и особенностях использования промокодов в Cat Casino.
Что такое Cat Casino Промокод?
Промокод Cat Casino — это специальный код, который позволяет игрокам получать дополнительные бонусы. Это может быть бесплатная ставка, дополнительные фриспины, увеличение депозита или даже кэшбэк. Промокоды часто распространяются через партнерские сайты, рассылки или социальные сети казино.
Как Использовать Промокод в Cat Casino?
Cat casino промокод: CAT555 (код нужно вводить только при регистрации) Сегодня, новым игрокам в Cat casino за промокод будет начислен бонус в виде 100 фриспинов без депа и повышенный бонус на первый счёт до 27 000 рублей.
Использовать промокод Cat Casino очень просто:
Зарегистрируйтесь на официальном сайте Cat Casino.
Перейдите в раздел «Акции» или «Бонусы».
Введите промокод в специальное поле.
Активируйте код и получите свой бонус.
Важно помнить, что у каждого промокода есть свои условия использования. Например, минимальная сумма депозита или необходимость отыгрыша бонуса.
Основные Бонусы и Акции Cat Casino
Промокод казино Кэт: CAT555 — бонус за регистрацию 100% и 200 FS, а также 375% и 150 фриспинов. Cat Casino славится своими щедрыми акциями, которые доступны как новичкам, так и постоянным игрокам. Рассмотрим самые популярные из них:
1. Приветственный Бонус Новые игроки могут получить приветственный бонус, который включает в себя дополнительные средства к первому депозиту и фриспины. Например, при пополнении счета на 1000 рублей вы можете получить 100% бонус и 50 фриспинов.
2. Еженедельные Акции Cat Casino регулярно проводит акции, такие как «Кэшбэк за проигрыши» или «Двойной депозит». Участвуя в этих акциях, вы можете вернуть часть потерянных средств или увеличить свой игровой бюджет.
3. Промокоды на Фриспины Фриспины — это бесплатные вращения на слотах, которые можно использовать для выигрыша реальных денег. Промокоды на фриспины часто разыгрываются в социальных сетях казино или выдаются за активность на сайте.
4. VIP-Программа Для постоянных игроков Cat Casino предлагает VIP-программу, которая включает в себя персональные бонусы, повышенный кэшбэк и эксклюзивные промокоды.
Как Получить Промокод Cat Casino?
Промокоды Cat Casino можно получить несколькими способами:
Подписаться на рассылку новостей казино.
Следить за акциями в социальных сетях Cat Casino.
Участвовать в турнирах и лотереях на сайте.
Использовать партнерские сайты, которые сотрудничают с казино.
Преимущества Использования Промокодов
Использование промокодов в Cat Casino имеет множество преимуществ:
Увеличение игрового бюджета.
Возможность попробовать новые игры без риска.
Дополнительные шансы на выигрыш.
Участие в эксклюзивных акциях.
Советы по Использованию Промокодов
Чтобы максимально эффективно использовать промокоды Cat Casino, следуйте этим советам:
Всегда проверяйте условия отыгрыша бонуса.
Используйте промокоды только на те игры, которые вам нравятся.
Следите за сроками действия промокодов.
Не забывайте про VIP-программу, которая может увеличить ваши бонусы.
Cat Casino — это отличная платформа для любителей азартных игр, которая предлагает множество бонусов и акций. Промокоды Cat Casino позволяют увеличить свои шансы на выигрыш и получить дополнительные преимущества. Следите за акциями, используйте промокоды и наслаждайтесь игрой в Cat Casino!
Если вы ищете надежное казино с щедрыми бонусами, то Cat Casino — это именно то, что вам нужно. Не упустите возможность получить дополнительные фриспины, кэшбэк и другие приятные бонусы с помощью промокодов Cat Casino.
<a href=http://www.vetreriameliante.it/index.php/kforum/jm-lifestyle/11335-cat-casino-2025–100–200–100-fs#11335>кэт казино промокод при регистрации</a>
#2603 Davidoirhttps://mycryptocurrency24.com/
Добрый день господа<a href=https://mycryptocurrency24.com/>!</a> На нашем блоге mycryptocurrency24.com Вы Всегда можете найти новости о новых криптовалютах, о тренде спада биткоина и других коинов. Также мы тчательно разбираем способы заработка на майнинге криптовалютах и описываем также возможные варианты, начиная от обычном майнинге на видеокартах и заканчивая любительском майнинге на ноутбуках и даже смартфонах. <a href=https://mycryptocurrency24.com/><img src=„https://i114.fastpic.ru/big/2021/0218/91/e0d20586fa4dc6a558920cf10e7ea191.jpg“></a> Мы постим каждый день последние новости из мира блокчейн. Вот несколько топовых новостей: 1)<a href=https://mycryptocurrency24.com/>Когда упадут цены на видеокарты 2024 </a> 2)<a href=https://mycryptocurrency24.com/>Как узнать майнили на видеокарте или нет? </a> 3)<a href=https://mycryptocurrency24.com/>Инструкция: как войти в личный кабинет биткоин кошелька?</a> 4)<a href=https://mycryptocurrency24.com/>Майнинг криптовалюты на видеокарте Nvidia Geforce GTX 660 Ti </a> 5)<a href=https://mycryptocurrency24.com/>Ethereum пулы для майнинга в 2024 году </a> 6)<a href=https://mycryptocurrency24.com/>Лучшие биткоин краны 2024 года </a> 7)<a href=https://mycryptocurrency24.com/>Можно ли майнить одновременно на видеокартах Amd и Nvidia </a> А вот свежайшие прогнозы 10 самых перспективных криптовалют: 1)<a href=https://mycryptocurrency24.com/>Обзор криптовалюты BitTorrent и ее перспективы на 2024 год </a> 2)<a href=https://mycryptocurrency24.com/>Обзор криптовалюты ATOM и ее перспективы на 2024 год </a> 3)<a href=https://mycryptocurrency24.com/>Обзор криптовалюты VeChain и ее перспективы на 2024 год</a> 4)<a href=https://mycryptocurrency24.com/>Криптовалюта 0× (ZRX) и ее перспективы в 2024 году </a> 5)<a href=https://mycryptocurrency24.com/>Обзор криптовалюты Dent и ее перспективы на 2024 год </a> 6)<a href=https://mycryptocurrency24.com/>Обзор криптовалюты Holo и ее перспективы на 2024 год </a> 7)<a href=https://mycryptocurrency24.com/>Обзор криптовалюты STORM и ее перспективы на 2024 год </a> 7)<a href=https://mycryptocurrency24.com/>Обзор криптовалюты Onecoin и ее перспективы на 2024 год </a> 7)<a href=https://mycryptocurrency24.com/>Kin криптовалюта – курс и прогноз на 2024 год </a> 7)<a href=https://mycryptocurrency24.com/>Обзор криптовалюты Ravencoin и ее перспективы на 2024 год </a> Всегда рады помочь Вам! С уважением, команда Mycryptocurrency24
<a href=https://mycryptocurrency24.com/>как вывести биткоины с minergate</a> <a href=https://mycryptocurrency24.com/>майнинг ферма размеры каркаса</a> <a href=https://mycryptocurrency24.com/>майнинг zcash на nvidia 1060</a> <a href=https://mycryptocurrency24.com/>расчет доходности от видеокарты</a> <a href=https://mycryptocurrency24.com/>как майнить догекоин на слабом пк</a> <a href=https://mycryptocurrency24.com/>сбербанк и биткоин</a> <a href=https://mycryptocurrency24.com/>курс ванкоина</a> <a href=https://mycryptocurrency24.com/>rx 580 sapphire nitro 8gb майнинг</a> <a href=https://mycryptocurrency24.com/>монета dent прогноз</a> <a href=https://mycryptocurrency24.com/>сколько лет биткоину</a> <a href=https://mycryptocurrency24.com/>radeon rx для майнинга</a> <a href=https://mycryptocurrency24.com/>selfkey прогноз</a> <a href=https://mycryptocurrency24.com/>перевести рубли в биткоины через сбербанк</a> <a href=https://mycryptocurrency24.com/>майнинг rdd</a> <a href=https://mycryptocurrency24.com/>майнить на андроиде</a> <a href=https://mycryptocurrency24.com/>корпус для фермы майнинга</a> <a href=https://mycryptocurrency24.com/>1080 ti mining</a> <a href=https://mycryptocurrency24.com/>рейтинг видеокарт майнинг</a> <a href=https://mycryptocurrency24.com/>эфириум майнинг майнер официальный сайт</a> <a href=https://mycryptocurrency24.com/>динамика цен на видеокарты 2024</a> <a href=https://mycryptocurrency24.com/>заработок с телефона биткоинов</a> <a href=https://mycryptocurrency24.com/>собирать биткоины на автомате</a> <a href=https://mycryptocurrency24.com/>что будет когда биткоин закончится</a> <a href=https://mycryptocurrency24.com/>где можно применить блокчейн</a> <a href=https://mycryptocurrency24.com/>как положить деньги на биткоин</a> <a href=https://mycryptocurrency24.com/>как начать майнить 2024</a> <a href=https://mycryptocurrency24.com/>gigabyte radeon rx 570 майнинг</a> <a href=https://mycryptocurrency24.com/>сколько равен 1 биткоин в рублях сейчас</a> <a href=https://mycryptocurrency24.com/>майнинг на слабой видеокарте 2024</a> <a href=https://mycryptocurrency24.com/>как майнинг влияет на видеокарту</a> <a href=https://mycryptocurrency24.com/>что такое асик</a> <a href=https://mycryptocurrency24.com/>как заработать биткоин на ноутбуке</a> <a href=https://mycryptocurrency24.com/>видеокарта geforce 1060 майнинг</a> <a href=https://mycryptocurrency24.com/>биткоин краны с моментальной выплатой на coinpot</a> <a href=https://mycryptocurrency24.com/>blockchain что это такое</a> <a href=https://mycryptocurrency24.com/>sapphire nitro rx 580 майнинг</a> <a href=https://mycryptocurrency24.com/>какие криптовалюты выгодно майнить 2024</a> <a href=https://mycryptocurrency24.com/>биткоин сейчас в долларах</a> <a href=https://mycryptocurrency24.com/>майнинг на домашнем компьютере</a> <a href=https://mycryptocurrency24.com/>что выгодно майнить в марте 2024</a> <a href=https://mycryptocurrency24.com/>как майнить эфириум пошаговая инструкция 2024</a> <a href=https://mycryptocurrency24.com/>лучшие bitcoin краны</a> <a href=https://mycryptocurrency24.com/>data прогноз</a> <a href=https://mycryptocurrency24.com/>майнинг на gtx 1070 доход</a> <a href=https://mycryptocurrency24.com/>бонус майнинг</a> <a href=https://mycryptocurrency24.com/>gigabyte geforce gtx 1060 wf oc майнинг</a> <a href=https://mycryptocurrency24.com/>сборка фермы для майнинга</a> <a href=https://mycryptocurrency24.com/>обмен биткоин на рубли сбербанк</a> <a href=https://mycryptocurrency24.com/>бесплатные биткоины на автомате</a> <a href=https://mycryptocurrency24.com/>курс биткоина к рублю</a>
#2604 Ремонт бытовой техники в Ивановоhttps://ivano.pdacenter.ru/
pdacenter.ru – сервис по ремонту бытовой техники <a href=https://ivano.pdacenter.ru/>Ремонт бытовой техники в Иваново</a> в официальном сервисном центре PDACENTER. Наши инженеры выполняют ремонт любой сложности по дотупным ценам!
#2605 Навесы производство Петербургhttps://spb.vip-naves.ru/
Тут можно преобрести навесы металлические в Санкт-Петербурге подробно на сайте <a href=https://spb.vip-naves.ru/>навес металлический</a>
#2606 Навес для машины СПБhttps://spb.vip-naves.ru/
Тут можно преобрести навес на дачу в Санкт-Петербурге подробно на сайте <a href=https://spb.vip-naves.ru/>навесы</a>
#2607 Sazraxbhttp://[url=http://advacad.com/contact/]advacad.com/contact[/url]
Мы изготавливаем дипломы любой профессии по приятным тарифам.– <a href=http://advacad.com/contact/>advacad.com/contact</a>
#2608 CarlosLustyhttp://бытовкивтуле.рф
<a href=http://бытовкивтуле.рф>Строительные бытовки </a> Бытовки и передвижные помещения: проверенное решение для пользовательских задач Контейнеры и передвижные помещения помогают организовать производственную площадку, склад или временный домик. Мы поставляем конструкции, которые подходят строгим требованиям надёжности и эргономики.
Преимущества Прочность. Все бытовки изготовлены из компонентов, стойких к воздействию и внешним воздействиям. Скорость доставки. Объект транспортируется в течение 1–2 календарных дней после подтверждения заявки. Гибкая настройка. Доступна компоновка защиты от холода, электросетей или системы проветривания. Зоны действия На объектах строительства для хранения инструментов или организации комнаты отдыха. Во время праздников для организации стойки приёма или склада оборудования. В качестве временных рабочих зон или центров координации. Достоинства Оптимизация времени. Не нужно строить временные помещения. Функциональность. Условия, которые улучшают эффективность работы персонала. Вариативность. Решение аренды или постоянного владения под индивидуальные нужды и денежные средства. Случай применения Строительный подряд использовала блок-контейнер для размещения оборудования и помещения для персонала. Конструкция была транспортирована за один день, с специальным утеплением. Пользователь подчеркнул на повышение комфорта и минимизацию задержек.
Как сделать заказ Для начала сотрудничества необходимо обратиться с компанией. Обеспечим исчерпывающие сведения, поддержим определить оптимальное решение и выполним перевозку.
#2609 StephenFlank
Промокод Фонбет – это кодовые слова, например: MAX777, ввод которых при регистрации в БК Фонбет или в личном кабинете позволяет получить фрибеты, страховки ставок и другие специальные бонусы. Промокодом в беттинге называется комбинация букв и цифр, при вводе которых активируется бонус. Новым клиентам Фонбет предлагает приветственные фрибеты на сумму от 100 до 15 000 рублей. Фонбет промокод: MAX777, используйте его при регистрации аккаунта. Новые пользователи могут активировать бонус и получить бездепозитный фрибет до 15 000 рублей. Воспользоваться бесплатно промокодами «Фонбет» для получения подарочной ставки или другого бонуса можно во время создания аккаунта на официальном сайте букмекерской конторы, а также после активации личного кабинета. Действующие промокоды могут давать зачисление кэшбэка на депозит, бесплатное пари и т.п.
<a href=https://pentacrown.ru/layouts/pgs/bk_pari_promokod_na_fribet_bonus_do_25000_rubley.html>промокод на фрибет пари</a>
#2610 DustinVobhttps://pechat-bloknotov.ru
печать блокнот а5 на пружине <a href=https://pechat-bloknotov.ru/>печать блокнотов дешево</a>
#2611 Kennethcakhttps://holst-pechat-spb.r
печать на холсте быстро <a href=https://holst-pechat-spb.ru>заказать печать на холсте</a>
#2612 KevinChoighttps://fforum.ixbb.ru/viewtopic.php?id=90#p3968
Discover Bangladesh's most trusted online gaming destinations through BDCasinoRatings.online – your premier guide to licensed platforms offering seamless Bkash/Nagad transactions and localized Bangla support. Our expert-curated rankings highlight casinos with fast Taka payouts, exciting Cricket betting options, and generous welcome bonuses tailored for Bangladeshi players. Stay informed with real-time updates on safety standards and exclusive promotions across South Asia's fastest-growing iGaming market. https://bdcasinoratings.online/
#2613 HenryBughttps://pechat-nakleek-spb.ru
типография печать наклеек <a href=https://pechat-nakleek-spb.ru/>печать наклеек спб</a>
#2614 EugeneLoorbhttps://tipografiya-buklety.ru
заказать печать буклетов <a href=https://tipografiya-buklety.ru>печать рекламных буклетов</a>
#2615 mostbethttps://mostbet-kasyno-strona-pl.com/
Mostbet to zaufana platforma dla miłośników zakładów sportowych | Mostbet logowanie jest intuicyjne i nie sprawia żadnych trudności | Dołącz do Mostbet i odbierz bonus bez depozytu <a href=https://mostbet-kasyno-strona-pl.com/>kasyno mostbet online</a>
#2616 WallaceSoriahttps://tipografiya-print-spb.ru
заказать удостоверение в типографии <a href=https://tipografiya-print-spb.ru/>типография санкт петербург</a>
#2617 сейфы купитьhttps://sejf-sejf.ru/
Тут можно преобрести сейф москва <a href=https://sejf-sejf.ru/>сейф цена купить</a>
#2618 Robertrushttps://estul.ru/blog
Каждый после регистрации на сайте Estul.ru получает на баланс аккаунта 100? для возможности бесплатного размещения ваших объявлений, + рандомно еще 100? за размещение первого объявления. На сайте есть все от товаров до услуг их продажа и покупка <a href=https://estul.ru/blog>https://estul.ru/blog</a>
Не забываем про группу Авторынок РФ – <a href=https://vk.com/club227724491>https://vk.com/club227724491</a>
Telegram chanel- <a href=https://t.me/estulrus>https://t.me/estulrus</a>
#2619 купить сейфhttps://sejf-sejf.ru/
Тут можно преобрести сейф купить в москве <a href=https://sejf-sejf.ru/>где купить сейфы в москве</a>
#2620 JosephupseWhttps://t.me/estulrus
Каждый после регистрации на сайте Estul.ru получает на баланс аккаунта 100? для возможности бесплатного размещения ваших объявлений, + рандомно еще 100? за размещение первого объявления. На сайте есть все от товаров до услуг их продажа и покупка <a href=https://estul.ru/blog>Доска объявлений</a>
Не забываем про группу Авторынок РФ – <a href=https://vk.com/club227724491>https://vk.com/club227724491</a>
Telegram chanel- <a href=https://t.me/estulrus>https://t.me/estulrus</a>
#2621 Robinevismhttps://www.pitateka.ru
Хотите перекусить вкусно? купить <a href=https://www.pitateka.ru/>www.pitateka.ru</a> питу, шаверму, донер, гирос и тортилью. Ароматная свежая выпечка, мясо на гриле и фирменные соусы. Отличный выбор для перекуса, обеда или вечеринки.
#2622 JamesPaRhttps://school50.org.ru/
Топ онлайн казино 2025: эксклюзивный обзор лучших игровых платформ
Онлайн азартные игры стремительно эволюционируют в России, привлекая всё больше игроков из-за своей доступности. Однако для успешной игры критически важно выбирать только проверенные площадки, которые гарантируют честность алгоритмов. В этом материале мы рассмотрим ключевые параметры оценки, представим рейтинг лучших казино 2025 года и поделимся экспертными советами для правильного решения.
Основные признаки безопасности онлайн-казино Чтобы избежать рисков, необходимо учитывать следующие характеристики:
Лицензионная чистота Проверяйте наличие регуляторных разрешений: Кюрасао. Убедитесь, что игровые автоматы прошли аудит качества от авторитетных организаций (eCOGRA). Система случайных чисел (RNG) Казино должно использовать независимый генератор случайных чисел, что обеспечивает прозрачность процессов. Скорость транзакций Надёжные казино предлагают оперативные выплаты через современные системы: банковские карты (Мир), электронные кошельки (WebMoney) и блокчейн-валюты (Litecoin). Бонусная политика Хорошие казино предоставляют привлекательные бонусы: стартовые предложения, фриспины и VIP-клубы. Обратите внимание на вейджер. Мобильная оптимизация Современные казино адаптированы для мобильных устройств (iOS) с быстрой загрузкой. Это позволяет наслаждаться развлечениями в любое время. Клиентская поддержка Эффективная служба поддержки работает 24/7 и помогает решать вопросы через телефон. Рейтинг лучших онлайн-казино 2025 года 1. Cat Casino Преимущества: оперативные выплаты (до 1 минуты), лицензия Кюрасао, эксклюзивные акции. Бонусы: начальный подарок — 100 фриспинов в Book of Dead. Особенности: специальные мероприятия. 2. Kometa Casino Преимущества: ведущая платформа с дилерами, кэшбэк до 30 000?. Бонусы: стартовый комплект — щедрое предложение. Особенности: VIP-клуб с индивидуальными бонусами. 3. R7 Casino Преимущества: приватный вход по email, поддержка криптовалют (USDT) с нулевой комиссией. Бонусы: фриспины за подписку на канал. Особенности: двухфакторная аутентификация для защиты данных. 4. Arkada Casino Преимущества: мгновенные переводы на карты РФ (Сбербанк), ежедневные конкурсы. Бонусы: кэшбэк до значительного процента, приветственная награда. Особенности: проверенные автоматы от Pragmatic Play. 5. Kent Casino Преимущества: поддержка цифровых монет, турниры с призовым фондом 1 млн рублей. Бонусы: демо-режим. Особенности: широкий выбор слотов с максимальной отдачей. Особенности мобильных казино Мобильные казино становятся все более популярными благодаря технологичности. Их преимущества:
Адаптивный дизайн: интерфейс оптимизирован для сенсорных экранов. Быстрый доступ: нет необходимости устанавливать программы. Поддержка платежей: можно производить депозиты и получать выигрыши через специальные сервисы. Низкое потребление трафика: современные казино работают плавно даже на низкой пропускной способности. Как выбрать лучшее казино? При выборе онлайн-казино учитывайте следующие аспекты:
Лицензия и безопасность Убедитесь, что казино имеет официальный сертификат и использует шифрование данных (SSL). Ассортимент игр Лучшие казино предлагают широкий выбор слотов, настольных игр (рулетка) и live-казино. Скорость выплат Изучите отзывы игроков о времени вывода средств. Бонусные программы Обратите внимание на условия акций, требования по использованию бонусов и наличие других спецпредложений. Качество поддержки Проверьте, насколько быстро сотрудники устраняют проблемы. Мобильная версия Убедитесь, что казино имеет адаптированную версию для смартфонов. Заключение Онлайн-казино могут стать способом отдыха, если подходить к их выбору вдумчиво. Придерживайтесь наших подсказок, играйте только на надёжных платформах и помните о важности самоконтроля. Азартные игры — это прежде всего удовольствие, а не способ заработка.
Если вы ищете качественное заведение с щедрыми бонусами, обратите внимание на топовые площадки, такие как Kometa Casino. Они отлично зарекомендовали себя среди игроков и продолжают впечатлять.
https://t.me/s/topcasinos_ru
#2623 RussellfOtlyhttps://nomini-casino.ru
Play Casino Games <a href=https://nomini-casino.ru/>http://nomini-casino.ru</a>
#2624 Donaldhoxhttps://profipro78.ru/
наружная реклама вывески <a href=https://profipro78.ru/>светящаяся панель</a>
#2625 Bobbyduhhttps://vivesku.spb.ru
купить неоновую вывеску в комнату <a href=https://vivesku.spb.ru/katalog/informacionnye-stendy/>купить информационный стенд</a>
#2626 Fulfilment5_Nuashhttps://xn--5-itbilbgi4bcjc.xn--p1ai/
Добрый день! Нaшa компания Фулфилмент5.рф пpедoставляет услуги фулфилмeнта для пpодавцов на Baйлдбeрpиз, в Hижнeм Hoвгoроде и Нижегородской oблаcти. У нас теплый, чистый склад более 1000 м2 с круглосуточной охраной и видеонаблюдением. Есть возможность паковать и хранить негабаритны. <a href=https://xn–5-itbilbgi4bcjc.xn–p1ai/>фулфилмент для маркетплейсов нн</a> Если фулфилмент Нижний Новгород, фулфилмент для маркетплейсов Нижний Новгород, то это в www.фулфилмент5.рф , https://xn--5-itbilbgi4bcjc.xn--p1ai/ , https://фулфилмент5.рф/ . Обязательно переходите на сайт ФУЛФИЛМЕНТ5.РФ: фулфилмент для маркетплейсов Нижний Новгород, фулфилмент Нижний Новгород и сохраняйте в закладки, не забудьте записать адрес сайта и номер телефона в Нижнем Новгороде +7 (908) 757–33–66 . Увидимся!
#2627 MarvinDrynchttps://kiteschoolhurghada.ru/
<a href=https://kiteschoolhurghada.ru/>кайтсёрфинг в хургаде</a>
#2628 StephenPuhhttps://betsysrealfood.com/
Site-ul <a href=https://betsysrealfood.com/>https://betsysrealfood.com</a> este o resursa cu diverse articole in limba romana, acoperind subiecte precum sanatatea, nutri?ia, moda ?i stilul de via?a. Titlurile articolelor includ teme precum „?tiri de sanatate”, „?tiri pentru bebelu?i”, „?tiri de Medicina Alternativa” ?i „?tiri de via?a”. Site-ul este destinat publicului vorbitor de romana, interesat de un stil de via?a sanatos ?i re?ete de casa.
#2629 Ремонт варочных панелей в Волгоградеhttps://volgd.pdacenter.ru/remont-varochnyh-paneley.html
pdacenter.ru – сервис по ремонту бытовой техники <a href=https://volgd.pdacenter.ru/remont-varochnyh-paneley.html>Ремонт варочных панелей в Волгограде</a> в официальном сервисном центре PDACENTER. Наши инженеры выполняют ремонт любой сложности по дотупным ценам!
#2630 ThomasExpizhttps://klavier-noten.ru
Musik noten klavier <a href=https://klavier-noten.ru/>klavier noten</a>
#2631 SergioJergehttps://kiteschoolhurghada.ru/
<a href=https://kiteschoolhurghada.ru/>кайт сафари</a>
#2632 CesarGydayhttps://www.oneesports.co.th
Free steam accounts <a href=https://t.me/s/freesteamaccountc>http://t.me/s/freesteamaccountc</a>
#2633 сейфыhttps://sejf-sejf.ru/
Тут можно преобрести сейфы москва <a href=https://sejf-sejf.ru/>сейф москва</a>
#2634 сейфhttps://sejf-sejf.ru/
Тут можно преобрести купить сейф оптом <a href=https://sejf-sejf.ru/>купить сейф москва</a>
#2635 MarlinHethttps://www.oneesports.id
gay <a href=https://www.oneesports.id/>esports</a> whores
#2636 JamesPaRhttps://school50.org.ru/
Топ онлайн казино 2025: эксклюзивный обзор лучших игровых платформ
Онлайн азартные игры стремительно расширяют свою аудиторию в России, привлекая всё больше игроков из-за своей удобства использования. Однако для безопасного времяпрепровождения критически важно выбирать только проверенные площадки, которые гарантируют честность алгоритмов. В этом материале мы рассмотрим ключевые параметры оценки, выделим лидеров лучших казино 2025 года и предоставим практические инструкции для оптимального выбора.
Ключевые факторы надёжности онлайн-казино Чтобы избежать рисков, необходимо учитывать следующие аспекты:
Лицензионная чистота Проверяйте наличие международных лицензий: Мальты. Убедитесь, что игровые автоматы прошли независимую проверку от авторитетных организаций (eCOGRA). Система случайных чисел (RNG) Казино должно использовать независимый генератор случайных чисел, что обеспечивает честность игры. Скорость транзакций Надёжные казино предлагают оперативные выплаты через широкий спектр методов: банковские карты (Мир), электронные кошельки (WebMoney) и криптовалюты (USDT). Бонусная политика Хорошие казино предоставляют привлекательные бонусы: стартовые предложения, фриспины и VIP-клубы. Обратите внимание на условия отыгрыша. Мобильная оптимизация Современные казино адаптированы для мобильных устройств (Android) с интуитивным интерфейсом. Это позволяет проводить время за играми в любое время. Клиентская поддержка Профессиональная служба поддержки работает круглосуточно и помогает решать вопросы через email. Рейтинг лучших онлайн-казино 2025 года 1. Cat Casino Преимущества: быстрые транзакции (до 1 минуты), лицензия Кюрасао, эксклюзивные акции. Бонусы: бездепозитный бонус — 100 фриспинов в Book of Dead. Особенности: специальные мероприятия. 2. Kometa Casino Преимущества: ведущая платформа с дилерами, кэшбэк до 30 000?. Бонусы: стартовый комплект — щедрое предложение. Особенности: VIP-клуб с эксклюзивными привилегиями. 3. R7 Casino Преимущества: скрытый аккаунт по email, поддержка цифровых активов (USDT) с нулевой комиссией. Бонусы: фриспины за активность в соцсетях. Особенности: двухфакторная аутентификация для защиты данных. 4. Arkada Casino Преимущества: мгновенные переводы на карты РФ (Сбербанк), ежедневные конкурсы. Бонусы: кэшбэк до 10%, приветственная награда. Особенности: лицензионные игры от NetEnt. 5. Kent Casino Преимущества: поддержка цифровых монет, турниры с призовым фондом 1 млн рублей. Бонусы: тестирование слотов. Особенности: широкий выбор слотов с высоким RTP. Особенности мобильных казино Мобильные казино становятся все более популярными благодаря удобству использования. Их преимущества:
Адаптивный дизайн: интерфейс настроен для сенсорных экранов. Быстрый доступ: нет необходимости тратить время на загрузку. Поддержка платежей: можно производить депозиты и забирать деньги через мобильные приложения. Низкое потребление трафика: современные казино работают быстро даже на медленном интернете. Как выбрать лучшее казино? При выборе онлайн-казино учитывайте следующие факторы:
Лицензия и безопасность Убедитесь, что казино имеет глобальное разрешение и использует защиту информации (SSL). Ассортимент игр Лучшие казино предлагают обширный ассортимент слотов, настольных игр (рулетка) и live-казино. Скорость выплат Изучите реальные комментарии о времени вывода средств. Бонусные программы Обратите внимание на величину стартовых предложений, требования по отыгрышу и наличие других акций. Качество поддержки Проверьте, насколько профессионально сотрудники помогают пользователям. Мобильная версия Убедитесь, что казино имеет специальное приложение для смартфонов. Заключение Онлайн-казино могут стать способом отдыха, если подходить к их выбору серьёзно. Придерживайтесь наших подсказок, играйте только на качественных платформах и помните о правилах ответственной игры. Азартные игры — это прежде всего способ провести время, а не источник дохода.
Если вы ищете надёжное казино с быстрыми выплатами, обратите внимание на топовые площадки, такие как Arkada Casino. Они отлично зарекомендовали себя среди игроков и продолжают улучшать сервис.
https://t.me/s/topcasinos_ru
#2637 SergioJergehttps://kiteschoolhurghada.ru/
<a href=https://kiteschoolhurghada.ru/>кайт школа егтпет</a>
#2638 Ремонт морозильных камер в Чебоксарахhttps://chebry.pdacenter.ru/remont-morozilnyh-kamer.html
pdacenter.ru – сервис по ремонту бытовой техники <a href=https://chebry.pdacenter.ru/remont-morozilnyh-kamer.html>Ремонт морозильных камер в Чебоксарах</a> в официальном сервисном центре PDACENTER. Наши инженеры выполняют ремонт любой сложности по дотупным ценам!
#2639 TimothySmasyhttps://www.oneesports.ph
whores <a href=https://www.oneesports.ph/>esports</a> heroin
#2640 Jerryaudichttps://www.oneesports.gg
whores <a href=https://www.oneesports.gg/>esports</a> whores
#2641 Fulfilment5_Nuashhttps://xn--5-itbilbgi4bcjc.xn--p1ai/
Всем привет! Нaшa компания Фулфилмент5.рф пpедoставляет услуги фулфилмeнта для пpодавцов на Baйлдбeрpиз, в Нижегородской oблаcти и Hижнeм Hoвгoроде. У нас теплый, чистый склад более 1000 м2 с круглосуточной охраной и видеонаблюдением. Есть возможность паковать и хранить негабаритны. <a href=https://xn–5-itbilbgi4bcjc.xn–p1ai/>https://www.фулфилмент5.рф/</a> Если фулфилмент Нижний Новгород, фулфилмент для маркетплейсов Нижний Новгород, то это в www.фулфилмент5.рф , https://фулфилмент5.рф/ , https://xn--5-itbilbgi4bcjc.xn--p1ai/ . Обязательно переходите на сайт ФУЛФИЛМЕНТ5.РФ: фулфилмент для маркетплейсов Нижний Новгород, фулфилмент Нижний Новгород и сохраняйте в закладки, не забудьте записать адрес сайта и номер телефона в Нижнем Новгороде +7 (908) 757–33–66 . До новых встреч!
#2642 Antoniognmhttps://sfilm.by/
Салам орлы Ваша милость отец неземной<a href=https://sfilm.by/>.</a> <a href=https://sfilm.by/><img src=„https://i114.fastpic.ru/big/2021/0421/1f/a0af85c9229604875eeb8b215cb38a1f.jpg“></a> Случим важнецкое фраза Вашему сочувственности первостатейные проф плёнки. Наша организация„ОБЩЕСТВО Хаые плёнки“ трубит 15 полет сверху базаре данной продукта сверху школа Беларуси. Дизайнерам, производителям стеклопакетов, мебели что-что также дверей чтобы употребления сродною продукта в течение течение школа представительствах, квартирах (а) тоже загородных домах да ясно мы раз-два тобой юбочник тобой случим ладное фраза целеориентированность кажущийой пленки. Предназначенные ясно шпалеры учреждения для притворения сверху юдоль смелых строй заключений могут утилизировать порекомендованную нами со стороны руководящих органов язычество тонировочную пленку. Туманные пленки всяческой цветовой палитры, введенные в школа течение межоконном селений, дадут зданию чи сооружению характеристичный штучный стиль. Мембраны отражающие оградят посетителей шинок (а) также торгашеских центров чи сослужитель представительств со стороны руководящих органов нижних этажах чрез ненадобных глаз. ЭГО можем укрепить Вам <a href=https://sfilm.by>Защитные плёнки</a> ,<a href=https://sfilm.by>архитектурные плёнки</a>,<a href=https://sfilm.by>декоративные плёнки</a>,<a href=https://sfilm.by>автомобильные плёнки</a> а тоже <a href=https://sfilm.by>противопожарные плёнки</a>. Хлеще полная экспресс-информация расположена сверху нашем <a href=https://sfilm.by>сайте</a> РАЗ-ДВА преклоненьем,ячея „ЭРАНОС Хаые плёнки“. <a href=https://sfilm.by/>противоосколочная защитная пленка для зеркал</a> <a href=https://sfilm.by/>бронирующая пленка для авто</a> <a href=https://sfilm.by/>класс защиты а1</a> <a href=https://sfilm.by/>защитная пленка черная</a> <a href=https://sfilm.by/>продажа солнцезащитной пленки</a> <a href=https://sfilm.by/>солнцезащитные пленки цена</a> <a href=https://sfilm.by/>защитная пленка а2 цена</a> <a href=https://sfilm.by/>купить тонировочную пленку для окон в квартире</a> <a href=https://sfilm.by/>купить пленку для бронирования авто</a> <a href=https://sfilm.by/>бронировка банков минск</a> <a href=https://sfilm.by/>пленка для зеркал</a> <a href=https://sfilm.by/>солнцезащитная пленка сильвер 5</a> <a href=https://sfilm.by/>отражающая пленка на окна от солнца</a> <a href=https://sfilm.by/>тонировка стекол балкона</a> <a href=https://sfilm.by/>тонировка офисных перегородок минск</a> <a href=https://sfilm.by/>тонировка окон бронза фото</a> <a href=https://sfilm.by/>оклейка декоративной пленкой</a> <a href=https://sfilm.by/>тонировка стекол в офисе</a> <a href=https://sfilm.by/>декоративная пленка на окна</a> <a href=https://sfilm.by/>зеркальные защитные пленки</a> <a href=https://sfilm.by/>декоративная пленка купить в минске</a> <a href=https://sfilm.by/>самоклеющаяся пленка для стекла купить</a> <a href=https://sfilm.by/>классы защитных пленок</a> <a href=https://sfilm.by/>бронирование оконных стекол пленкой</a> <a href=https://sfilm.by/>купить защитную пленку на зеркало</a> <a href=https://sfilm.by/>тонировка балкона цена</a> <a href=https://sfilm.by/>тонировка окон зданий</a> <a href=https://sfilm.by/>зеркальная пленка самоклеящаяся</a> <a href=https://sfilm.by/>самоклеющаяся пленка для стекол декоративная</a> <a href=https://sfilm.by/>пленка для тонирования окон</a> <a href=https://sfilm.by/>купить архитектурную пленку</a> <a href=https://sfilm.by/>атермальная пленка цена</a> <a href=https://sfilm.by/>цветная пленка на окна декоративная</a> <a href=https://sfilm.by/>зеркальная тонировка окон купить</a> <a href=https://sfilm.by/>зеркальная тонирующая пленка купить</a> <a href=https://sfilm.by/>армолан пленка</a> <a href=https://sfilm.by/>тонировка для окон</a> <a href=https://sfilm.by/>тонировка балкона зеркальной</a> <a href=https://sfilm.by/>пленка на окна квартиры</a> <a href=https://sfilm.by/>атермальная тонировка хамелеон цена</a> <a href=https://sfilm.by/>тонировка стекол атермальная пленка цена</a> <a href=https://sfilm.by/>тонировка стеклянных перегородок</a> <a href=https://sfilm.by/>пленка для тонировки окон</a> <a href=https://sfilm.by/>зеркальная пленка на окна</a> <a href=https://sfilm.by/>декоративные пленки минск</a> <a href=https://sfilm.by/>пленка для окон цена</a> <a href=https://sfilm.by/>светоотражающая пленка для окон купить</a> <a href=https://sfilm.by/>купить декаративную пленку на стекло в минске</a> <a href=https://sfilm.by/>пленка для тонирования стекол</a> <a href=https://sfilm.by/>зеркальная пленка</a>
#2643 Samuelcum
<a href=https://aigokong88.com>gokong88</a>
https://aigokong88.com
#2644 EddieCewhttps://www.oneesports.id
terrorist attack <a href=https://www.oneesports.id/>esports</a> cocaine
#2645 Richardalepehttps://www.oneesports.co.th
terrorist attack <a href=https://www.oneesports.co.th/>esports</a> cocaine
#2646 DennisLamhttps://www.oneesports.ph
cocaine <a href=https://www.oneesports.ph/>esports</a> porn
#2647 ArronAgomehttps://detivetra.ru/
<a href=https://detivetra.ru/>кайт школа анапа</a>
#2648 TommyToisyhttps://atggame.net/
<a href=https://atggame.net/>戰神賽特娛樂城</a>
想挑戰刺激又富有獎勳的遊戲世界嗎?來「戰神賽特娛樂城」的老虎機,一場充滿驚喜的冒險正等著您!遊戲中融合了各式特殊符號與獎勳機制,如 Wild 與 Scatter 符號,能夠為您開啟額外的連線機會,讓您在每一輪轉動中都充滿期待。而 Bonus Game 和 Free Spin 更能讓您在短時間內獲得超豐厚的獎勳,輕鬆開啟連勝之旅。無論您是新手還是老玩家,戰神賽特為您精心設計了從 0.5 到 2500 的多元投注範圍,無論您的風險承受度如何,都能輕鬆找到最適合自己的投注金額,享受遊戲的樂趣。若您想要更快掌握遊戲技巧,不妨先體驗「戰神賽特試玩」版,或參考「戰神賽特攻略」指南,讓您在真實賭局中如魚得水,搶奪更多獎勳!快來挑戰自己的運氣,和我們一起開啟一場刺激無比的冒險吧
#2649 Kennethmixhttps://atg-seth.com/
<a href=https://atg-seth.com/>戰神賽特</a> 「戰神賽特」— 2025年最火爆的老虎機,等你來挑戰! 如果你正在尋找一款高賠率、刺激又充滿神秘感的老虎機遊戲,那麼「戰神賽特」絕對是你的最佳選擇!這款由RG電子精心打造的遊戲,以古埃及戰神賽特為主題,結合精美畫面與震撼音效,帶你進入神秘的沙漠世界,感受無與倫比的刺激體驗。 為何玩家瘋狂愛上戰神賽特? 超狂賠率 51,000 倍:一轉瞬間,財富翻倍不是夢 高RTP達96.89%:更高勝率,更多機會贏得大獎 獨特遊戲機制:掉落消除+獎金購買,玩法多樣更刺激 極致視聽享受:古埃及風格設計+震撼音效,讓你完全沉浸其中 無論你是老虎機高手還是新手玩家,「戰神賽特」都能帶給你前所未有的遊戲體驗!快來挑戰戰神,贏取屬於你的豐厚獎勵!
#2650 RobertHenhttps://kraken29.cat
<a href=https://kraken29.cat>Kraken</a> Актуальная ссылка на Официальный сайт Kraken kra29_at kra_29cc kra28_at kra28_cc
#2651 Michaellarhttps://www.onefc.com
gay <a href=https://www.onefc.com/>ufc</a> heroin
#2652 ArthurDrynchttps://10eurosgratissindepositocasinoespana.com
Хотите получить <a href=https://10eurosgratissindepositocasinoespana.com/>10 euros gratis sin deposito casino</a> начни игру без риска – Открой для себя захватывающие слоты, живое казино и эксклюзивные бонусы. Играй с комфортом, наслаждайся топовыми играми и выигрывай!
#2653 Drenaj ychastkov v SPb_gwKthttp://drenazh-uchastka-kazan.ru
дренаж участка под ключ цена <a href=https://drenazh-uchastka-kazan.ru/>дренаж участка под ключ цена</a> .
#2654 Drenaj ychastkov v SPb_hxKthttp://drenazh-uchastka-kazan.ru
дренаж участка колодец <a href=https://drenazh-uchastka-kazan.ru/>дренаж участка колодец</a> .
#2655 one-1winhttps://one-1win.in
gambling without limits <a href=https://one-1win.in/>https://one-1win.in</a> wide selection of games, high odds, fast payouts and exclusive bonuses. Try your luck in the casino and on bets. Play, win and earn with 1win!
#2656 onewinwinhttps://onewinwin.in
maximum winnings with <a href=https://onewinwin.in/>https://onewinwin.in</a>! Bet on sports, play in the casino, participate in promotions and tournaments. Convenient payments, fast payouts and a welcome bonus for beginners. Join 1win and collect your winnings!
#2657 MarvinDrynchttps://kiteschoolhurghada.ru/
<a href=https://kiteschoolhurghada.ru/>кайт школа хургада</a>
#2658 winbetazhttps://winbetaz.biz
Welcome to Winbet Casino <a href=https://winbetaz.biz/>https://winbetaz.biz/</a> a place where luck is on your side! Huge selection of games, bonuses for new players and instant payouts. Try your luck right now!
#2659 1xbetapphttps://1xbetapp-br.com
Sports betting with <a href=https://1×betapp-br.com/>1×betapp-br</a>! Huge selection of matches, live bets, generous bonuses and lightning-fast payouts. Play casino, eSports and win at any time!
#2660 Karlosdrw
Добрый день друзья! <a href=https://beton-odin.ru/rastvorcementnyj/>Качественный бетон по доступной цене</a>
Если хотите купить бетон по хорошей цене с доставкой в Москве , могу порекомендовать проверенный завод „Бетонная индустрия“. Они всегда делают качественно и в срок. Хорошего дня!
#2661 1winbrhttps://1winbr.com
1Win Brasil <a href=https://1winbr.com/>https://1winbr.com</a> apostas esportivas e cassino online! Altas odds, bonus generosos e ampla variedade de jogos. Aposte em esportes, jogue no cassino e aproveite as melhores promocoes agora mesmo!
#2662 Coreypoulphttps://cs-go.ru
сайт кс го скины кейсы <a href=https://cs-go.ru/>https://cs-go.ru</a>
#2663 beton-moscvichhttps://beton-moscvich.ru
Нужен качественный бетон? <a href=https://beton-moscvich.ru/tovarnii-beton/>бетон в день звонка</a> быстро, надёжно и по выгодной цене! Прямые поставки от производителя, различные марки, точное соблюдение сроков. Оперативная доставка на стройплощадки, заказ онлайн или по телефону!
#2664 Kennethmixhttps://atg-seth.com/
<a href=https://atg-seth.com/>戰神賽特</a> 「戰神賽特」— 2025年最火爆的老虎機,等你來挑戰! 如果你正在尋找一款高賠率、刺激又充滿神秘感的老虎機遊戲,那麼「戰神賽特」絕對是你的最佳選擇!這款由RG電子精心打造的遊戲,以古埃及戰神賽特為主題,結合精美畫面與震撼音效,帶你進入神秘的沙漠世界,感受無與倫比的刺激體驗。 為何玩家瘋狂愛上戰神賽特? 超狂賠率 51,000 倍:一轉瞬間,財富翻倍不是夢 高RTP達96.89%:更高勝率,更多機會贏得大獎 獨特遊戲機制:掉落消除+獎金購買,玩法多樣更刺激 極致視聽享受:古埃及風格設計+震撼音效,讓你完全沉浸其中 無論你是老虎機高手還是新手玩家,「戰神賽特」都能帶給你前所未有的遊戲體驗!快來挑戰戰神,贏取屬於你的豐厚獎勵!
#2665 herehttps://buy-cheap-essay-papers.com
Ready-made custom works <a href=https://extendedessayswriters.com/>link</a> fast, high-quality and inexpensive! We will help with abstracts, term papers, diplomas, essays and other academic assignments. Guaranteed originality, deadlines and 24/7 support!
#2666 TommyToisyhttps://atggame.net/
想挑戰刺激又富有獎勳的遊戲世界嗎?來「戰神賽特娛樂城」的老虎機,一場充滿驚喜的冒險正等著您!遊戲中融合了各式特殊符號與獎勳機制,如 Wild 與 Scatter 符號,能夠為您開啟額外的連線機會,讓您在每一輪轉動中都充滿期待。而 Bonus Game 和 Free Spin 更能讓您在短時間內獲得超豐厚的獎勳,輕鬆開啟連勝之旅。無論您是新手還是老玩家,戰神賽特為您精心設計了從 0.5 到 2500 的多元投注範圍,無論您的風險承受度如何,都能輕鬆找到最適合自己的投注金額,享受遊戲的樂趣。若您想要更快掌握遊戲技巧,不妨先體驗「戰神賽特試玩」版,或參考「戰神賽特攻略」指南,讓您在真實賭局中如魚得水,搶奪更多獎勳!快來挑戰自己的運氣,和我們一起開啟一場刺激無比的冒險吧
#2667 Blakequetehttps://santekhnik-moskva.blogspot.com
Ремонт и сантехника <a href=https://santekhnik-moskva.blogspot.com/>https://santekhnik-moskva.blogspot.com</a> пошаговые инструкции, выбор материалов, монтаж систем водоснабжения и отопления, устранение протечек и установка сантехнических приборов. Советы экспертов для качественного ремонта!
#2668 internet provaideri_qwsnhttp://internet-provajdery11.ru
интернет москва <a href=www.internet-provajdery11.ru/>интернет москва</a> .
#2669 internet provaideri_fesnhttp://internet-provajdery11.ru
провайдеры домашнего интернета в москве <a href=https://internet-provajdery11.ru/>провайдеры домашнего интернета в москве</a> .
#2670 Vobla-astr_Renhttps://vobla-astr.ru/
Доброго времени суток! Магазин рыбных деликатесов из Астрахани! В наличии чехонь, вобла вяленая, икра воблы, икра щуки, сом балык и другие натуральные продукты. Только свежий улов, быстрая доставка по России и традиционная технология приготовления. Купить качественную вяленую икру и рыбу с гарантией свежести теперь легко. <a href=https://vobla-astr.ru/ikra_shchuki_astrakhanskaya>икра щуки в ястыках</a> Если икра щуки, вобла вяленая, икра воблы, чехонь, сом балык – рыбные деликатесы из Астрахани, то это в Товарищ Рыбаков, вяленая и копченая рыба https://vobla-astr.ru/ . Обязательно переходите на vobla-astr.ru: копченая и вяленая рыба из Астрахани, сохраняйте в закладки, не забудьте записать номер телефона +7 (989) 790–99–36 и адрес сайта. Купить и оформить заказ можно онлайн, доставка по всей России! Увидимся!
#2671 Kennethawalshttps://www.tara-river-canyon.com
Enjoy fun at <a href=https://www.tara-river-canyon.com/>www.tara-river-canyon.com/</a> extreme rafting, kayaking, boating and camping in picturesque places. The perfect place for active recreation and immersion in wild nature!
#2672 BruceWAKhttps://www.bobotov-kuk.com
Dobite a preskumajte <a href=https://www.bobotov-kuk.com/>bobotov-kuk.com</a> a pocitite majestatnost hor! Najvyssi vrch Ciernej Hory (2523 m) ponuka ohromujuce panoramy, vzrusujuce trasy a nezabudnutelne emocie. Zistite najlepsie lezecke cesty a tipy na bezpecny vylet!
#2673 SidneyMuphttps://www.durdevica-tara-bridge.com
Otkrijte most <a href=https://www.durdevica-tara-bridge.com/>Durdevica</a> – jedan od najlepsih mostova u Evropi! Jedinstvena gradevina iznad kanjona Tare zadivljuje svojom razmjerom i panoramskim pogledom. Najbolje rute, izleti i savjeti za putnike!
#2674 Korporativnoye-obucheniye_perhttps://xn----7sbecpcasfm0beeaecirc5b3a2g.kz/
Добрый день! Коллеги и партнеры отличная и полезная новость для вас! В наше сложное и высоко конкурентное время не возможно без профессиональных кадров и профессионального персонала. Профессиональные компании и организации не могут быть профессионалами во всех сферах деятельности, поэтому вынуждены обращаться за корпоративным обучением, корпоративными бизнес тренингами и корпоративным языковым обучением в специализированные компании, например: <a href=https://xn----7sbecpcasfm0beeaecirc5b3a2g.kz/>модульный подход</a> Специализированная компания должна не охватывать все сферы и направления обучения, а специализироваться на нескольких направлениях, в которых действительно является экспертом и профессионалом в корпоративном обучении. В общем, если вам интересно найти, корпоративное обучение, корпоративное обучение в Казахстане, корпоративное обучение Казахстан и т.д., например: <a href=http://корпоративное-обучение.kz/trainings>бизнес тренинги для руководителей</a> Тогда вам обязательно нужно прямо сейчас перейти на сайт Caspian Training Group корпоративное обучение в Алматы, корпоративное обучение, корпоративное обучение в Казахстане, корпоративное обучение в Атырау и т.д. https://корпоративное-обучение.kz/ . Обязательно переходите на сайт https://xn----7sbecpcasfm0beeaecirc5b3a2g.kz/ CtGroup сохраняйте в закладки и изучайте информацию, не забудьте записать адрес сайта и номера телефонов +7 777 179 66 00, +7 702 653 85 87 . До новых встреч!
#2675 Geraldcopsyhttps://bbb.dp.ua
Сайт для женщин <a href=https://bbb.dp.ua/>https://bbb.dp.ua</a> всё о моде, красоте, здоровье, отношениях и саморазвитии! Читайте полезные советы, следите за трендами, вдохновляйтесь и наслаждайтесь гармоничной жизнью!
#2676 JamesMephttps://medicalanswers.com.ua
Медицинский онлайн-журнал <a href=https://medicalanswers.com.ua/>https://medicalanswers.com.ua</a> ваш личный консультант по здоровью! Полезные статьи, советы врачей, профилактика, диагностика, лечение и здоровый образ жизни.
#2677 ArthurjuifFhttps://mostmedia.com.ua
Главные новости дня <a href=https://mostmedia.com.ua/>https://mostmedia.com.ua</a> политика, экономика, общество, спорт и культура! Оперативные события, аналитика, мнения экспертов и репортажи. Читайте актуальные новости Украины и мира в одном месте!
#2678 Marioroxhttps://vesti.in.ua
Актуальные новости Украины <a href=https://vesti.in.ua/>https://vesti.in.ua</a> политика, экономика, спорт, культура и общество! Оперативная информация, эксклюзивные материалы, репортажи и аналитика. Следите за событиями в режиме реального времени!
#2679 Richardrofhttps://kakavto.com
Автомобильный портал <a href=https://kakavto.com/>https://kakavto.com</a> всё, что нужно знать о машинах! Новинки автопрома, технологии, электрокары, автоспорт, автострахование и советы по ремонту. Следите за трендами автоиндустрии!
#2680 Ramirostillhttps://agusha.com.ua
Советы для родителей <a href=https://agusha.com.ua/>https://agusha.com.ua</a> в одном месте! Развитие ребёнка, воспитание, здоровье, питание, семейные отношения и идеи для досуга. Полезные статьи, лайфхаки и экспертные мнения помогут вам в заботе о малыше!
#2681 Timothyfrilehttps://rodkom.org.ua
Портал для родителей <a href=https://rodkom.org.ua/>https://rodkom.org.ua</a> всё о воспитании, развитии и здоровье детей! Полезные советы, лайфхаки, педиатрические рекомендации, семейная психология и идеи для досуга. Растите счастливых и здоровых детей вместе с нами!
#2682 TommyToisyhttps://atggame.net/
想挑戰刺激又富有獎勳的遊戲世界嗎?來「戰神賽特娛樂城」的老虎機,一場充滿驚喜的冒險正等著您!遊戲中融合了各式特殊符號與獎勳機制,如 Wild 與 Scatter 符號,能夠為您開啟額外的連線機會,讓您在每一輪轉動中都充滿期待。而 Bonus Game 和 Free Spin 更能讓您在短時間內獲得超豐厚的獎勳,輕鬆開啟連勝之旅。無論您是新手還是老玩家,戰神賽特為您精心設計了從 0.5 到 2500 的多元投注範圍,無論您的風險承受度如何,都能輕鬆找到最適合自己的投注金額,享受遊戲的樂趣。若您想要更快掌握遊戲技巧,不妨先體驗「戰神賽特試玩」版,或參考「戰神賽特攻略」指南,讓您在真實賭局中如魚得水,搶奪更多獎勳!快來挑戰自己的運氣,和我們一起開啟一場刺激無比的冒險吧
#2683 Terryphypehttps://one-lady.com
Онлайн-журнал для женщин <a href=https://one-lady.com/>https://one-lady.com</a> которые хотят быть стильными и успешными! Последние тренды, секреты красоты, уход за собой, здоровье, психология и карьера. Будьте в курсе новинок и наслаждайтесь жизнью!
#2684 VincentBaghttps://viplady.kyiv.ua
Современный женский онлайн <a href=https://viplady.kyiv.ua/>https://viplady.kyiv.ua</a> журнал для тех, кто хочет большего! Всё о моде, косметике, фитнесе, питании, психологии, карьере и отношениях. Узнавайте новое, вдохновляйтесь и воплощайте мечты в реальность!
#2685 Antoniogeomehttps://modam.com.ua
Лучший женский журнал <a href=https://modam.com.ua/>https://modam.com.ua</a> онлайн! Мода, стиль, уход за собой, фитнес, кулинария, саморазвитие и лайфхаки. Полезные советы и вдохновение для современной женщины, которая стремится к лучшему!
#2686 prodvijenie saitov v moskve_ppSthttp://prodvizhenie-sajtov-v-moskve224.ru
seo продвижение сайта цена в москве <a href=https://prodvizhenie-sajtov-v-moskve224.ru/>seo продвижение сайта цена в москве</a> .
#2687 prodvijenie saitov v moskve_cbSthttp://prodvizhenie-sajtov-v-moskve224.ru
продвижение сайта по россии <a href=https://www.prodvizhenie-sajtov-v-moskve224.ru>продвижение сайта по россии</a> .
#2688 Jerryfethttps://gryada.org.ua
Мода, красота и здоровье <a href=https://gryada.org.ua/>https://gryada.org.ua</a> ваш путь к идеальному образу! Последние тренды, советы по уходу, секреты стройности и здорового образа жизни. Создавайте гармонию в своём стиле и самочувствии!
#2689 Jamesnithttps://feromonia.com.ua
Идеальный баланс стиля <a href=https://feromonia.com.ua/>https://feromonia.com.ua</a> красоты и здоровья! Читайте о модных тенденциях, косметике, правильном питании, спорте и психологическом комфорте. Найдите вдохновение для гармоничной жизни!
#2690 ScottyKamhttps://adviceskin.com
Современный женский <a href=https://adviceskin.com/>https://adviceskin.com</a> журнал для тех, кто хочет быть стильной, уверенной и успешной! Секреты красоты, модные тенденции, здоровье, карьера, психология и лайфхаки для повседневной жизни.
#2691 JosephGrifyhttps://fashiontop.com.ua
Мода, красота и здоровье <a href=https://fashiontop.com.ua/>https://fashiontop.com.ua</a> всё в одном месте! Советы по стилю, уходу за волосами и кожей, диеты, тренировки и wellness-тренды. Узнайте, как выглядеть и чувствовать себя на 100%!
#2692 Robertvokhttps://beautytips.kyiv.ua
Сайт о красоте и здоровье <a href=https://beautytips.kyiv.ua/>https://beautytips.kyiv.ua</a> полезные советы, тренды ухода, секреты молодости, правильное питание и фитнес. Узнавайте, как оставаться красивой, здоровой и энергичной в любом возрасте!
#2693 JamesKeeskhttps://sw.org.ua
Онлайн-журнал о машинах <a href=https://sw.org.ua/>https://sw.org.ua</a> всё, что нужно знать об автомобилях! Премьеры новых моделей, сравнение авто, автострахование, технологии, электрокары и советы для владельцев.
#2694 MichaelDrunkhttps://svobodomislie.com
Автомобильный онлайн-журнал <a href=https://svobodomislie.com/>https://svobodomislie.com</a> всё о мире авто! Свежие новости, обзоры моделей, тест-драйвы, автоспорт, технологии и лайфхаки для водителей. Следите за трендами и будьте в курсе последних событий автопрома!
#2695 Roberttuhhttps://vsegladko.net
Женский мир <a href=https://vsegladko.net/>https://vsegladko.net</a> без границ! Узнайте всё о моде, уходе за собой, фитнесе, психологии, карьере и хобби. Читайте актуальные статьи, следите за новыми тенденциями и наполняйте жизнь яркими моментами!
#2696 mtsekaterinburgzeDhttp://jobsgo.co.za/employer/24inetrnet-domashnij-ekb-3
мтс тв екатеринбург <a href=http://jobsgo.co.za/employer/24inetrnet-domashnij-ekb-3>http://jobsgo.co.za/employer/24inetrnet-domashnij-ekb-3</a> мтс тарифы екатеринбург
#2697 CecilSuinahttps://sunshadow.com.ua
Женский журнал онлайн <a href=https://sunshadow.com.ua/>https://sunshadow.com.ua</a> стиль, уход, секреты красоты, семья, карьера и саморазвитие. Будьте в курсе трендов, находите полезные лайфхаки и вдохновляйтесь на новые достижения!
#2698 JamesGoKhttps://sweetheart.kyiv.ua
Лучший женский онлайн-журнал <a href=https://sweetheart.kyiv.ua/>https://sweetheart.kyiv.ua</a> Всё о моде, красоте, здоровье, отношениях и успехе. Экспертные советы, лайфхаки и мотивация для уверенных в себе женщин.
#2699 Ремонт экшен камер samsung в нижнем новгородеhttps://nnv.911-remont.ru/ekshnkamer/samsung.html
911-remont.ru – сервис по ремонту бытовой техники <a href=https://nnv.911-remont.ru/ekshnkamer/samsung.html>Ремонт экшен камер samsung в нижнем новгороде</a> в официальном сервисном центре 911. Наши инженеры выполняют ремонт любой сложности по дотупным ценам!
#2700 mtsekaterinburgzeDhttps://jobflux.eu/employer/21598/inetrnet-domashnij-ekb-2
мтс тв <a href=https://jobflux.eu/employer/21598/inetrnet-domashnij-ekb-2>https://jobflux.eu/employer/21598/inetrnet-domashnij-ekb-2</a> сайт мтс екатеринбург
#2701 Williamnuphttps://rupsbigbear.com
Авто портал для всех <a href=https://rupsbigbear.com/>https://rupsbigbear.com</a> кто любит автомобили! Новости, тест-драйвы, характеристики, тюнинг, страхование, покупка и продажа авто. Следите за последними тенденциями и выбирайте лучшее для себя!
#2702 Jamesmushttps://newsgood.com.ua
Автомобильный сайт <a href=https://newsgood.com.ua/>https://newsgood.com.ua</a> для водителей и автолюбителей! Узнавайте актуальные новости, читайте обзоры новых моделей, изучайте советы по обслуживанию и вождению.
#2703 KennethFammahttps://womanportal.kyiv.ua
Сайт для женщин <a href=https://womanportal.kyiv.ua/>https://womanportal.kyiv.ua</a> всё о моде, красоте, здоровье, отношениях и саморазвитии! Полезные советы, тренды, лайфхаки и вдохновение для современной женщины. Будьте стильной, уверенной и успешной!
#2704 benemid tablethttps://samplefocus.com/users/probalan-probenecid
https://samplefocus.com/…n-probenecid benemid
#2705 офисные сейфы купитьhttps://ofisnye-sejfy.ru/
Тут можно преобрести сейф для офиса цена <a href=https://ofisnye-sejfy.ru/>офисные сейфы купить</a>
#2706 PerevozkiVrn_pephttps://perevozki-vrn.ru/
Добрый день! Перевозка грузов. Всегда в наличии длинномеры 12 и 14 метров, а также тралы, краны, тенты и др. Спецтехника и перевозка негабаритных грузов, сопровождение, а также возможен подбор любых грузовых автомобилей и спецтехники. <a href=https://perevozki-vrn.ru/>аренда спецтехники воронеж</a> Если спецтехника в Воронеже, спецтехника Воронеж, аренда длинномеров, автокранов, тралов в Воронеже, то это в perevozki-vrn.ru https://perevozki-vrn.ru/ . Сопровождение и заказ спецтехники в Воронеже. Звоните сейчас: +7 (910) 345–50–48. До новых встреч!
#2707 Ремонт телефонов vivo в уфеhttps://ufa.911-remont.ru/telefonov/vivo.html
911-remont.ru – сервис по ремонту бытовой техники <a href=https://ufa.911-remont.ru/telefonov/vivo.html>Ремонт телефонов vivo в уфе</a> в официальном сервисном центре 911. Наши инженеры выполняют ремонт любой сложности по дотупным ценам!
#2708 офисные сейфы купитьhttps://ofisnye-sejfy.ru/
Тут можно преобрести сейфы офисные огнестойкие <a href=https://ofisnye-sejfy.ru/>сейф для офиса купить москва</a>
#2709 Julianwabhttps://lada.kharkiv.ua
Портал для автолюбителей <a href=https://lada.kharkiv.ua/>https://lada.kharkiv.ua</a> всё об автомобилях! Автообзоры, рейтинг лучших моделей, новинки, цены, советы по уходу и эксплуатации. Узнайте, какие авто заслуживают вашего внимания!
#2710 RonaldDiphttps://womanexpert.kyiv.ua
Сайт для женщин <a href=https://womanexpert.kyiv.ua/>https://womanexpert.kyiv.ua</a> которые хотят быть успешными и счастливыми! Советы по красоте, здоровью, воспитанию детей, карьере и личностному росту. Актуальные тренды, лайфхаки и вдохновение для современных женщин!
#2711 JamesFongehttps://kia-sportage.in.ua
Лучший автомобильный портал <a href=https://kia-sportage.in.ua/>https://kia-sportage.in.ua</a> Обзоры автомобилей, сравнения, новинки, тест-драйвы, лайфхаки для водителей и советы по выбору авто. Всё, что нужно автолюбителям и профессионалам!
#2712 BertramHooxyhttps://m1bar.com/user/VidaWindham/
Buy verified accounts <a href=https://gorod-lugansk.com/user/magnoliabathurst/>sell accounts</a> with ease! Gaming, business, and social media accounts available at competitive prices. Fast transactions, trusted sellers, and secure payments. Get the best deals now!
#2713 vpesportshttps://wiki.vpesports.com
CS:GO/CS2 skins <a href=https://wiki.vpesports.com>wiki.vpesports.com</a> catalog with full description! Check out rare, legendary and popular skins, their cost, collections and features. Find the perfect skin for your inventory!
#2714 GlennIrombhttps://womanclub.kyiv.ua
Женский онлайн-клуб <a href=https://womanclub.kyiv.ua/>https://womanclub.kyiv.ua</a> для тех, кто ценит стиль, здоровье и успех! Узнайте секреты красоты, тренды моды, советы по отношениям и карьере. Читайте вдохновляющие истории, пробуйте новые лайфхаки и развивайтесь каждый день!
#2715 Jameswenhttps://woman365.kyiv.ua
Портал для женщин <a href=https://woman365.kyiv.ua/>https://woman365.kyiv.ua</a> которые ценят красоту и уверенность! Новинки моды, макияж, секреты счастья, психология, карьера и вдохновение. Узнавайте полезные советы и воплощайте мечты в реальность!
#2716 RalphbiBhttps://princess.kyiv.ua
Сайт для современных женщин <a href=https://princess.kyiv.ua/>https://princess.kyiv.ua</a> Все о последних трендах в мире моды и красоты, секреты здоровья, психология, советы по саморазвитию, карьере и личным отношениям.
#2717 MosheVorhttps://otnoshenia.net
Онлайн-журнал для женщин <a href=https://otnoshenia.net/>https://otnoshenia.net</a> которые стремятся к лучшему! Советы по стилю и макияжу, секреты счастливых отношений, здоровое питание, психология и идеи для отдыха.
#2718 mtsekaterinburgzeDhttps://labourmarket.pro/employer/24inetrnet-domashnij-ekb-3
провайдер мтс <a href=https://labourmarket.pro/employer/24inetrnet-domashnij-ekb-3>https://labourmarket.pro/employer/24inetrnet-domashnij-ekb-3</a> мтс интернет
#2719 JordanFughttps://run.org.ua
Детский портал о здоровье <a href=https://run.org.ua/>https://run.org.ua</a> полезная информация для заботливых родителей! Советы педиатров, питание, развитие, вакцинация, профилактика болезней и здоровый образ жизни. Всё, что нужно знать о здоровье вашего ребенка!
#2720 Franciswekhttps://rosetti.com.ua
Лучший женский портал <a href=https://rosetti.com.ua/>https://rosetti.com.ua</a> Стиль, красота, здоровье, семья, карьера и саморазвитие. Узнавайте о новых трендах, читайте полезные советы и вдохновляйтесь идеями для счастливой жизни!
#2721 mtsekaterinburgzeDhttps://careers.indianschoolsoman.com/employer/inetrnet-domashnij-ekb-2/
мтс подключить екатеринбург <a href=https://careers.indianschoolsoman.com/employer/inetrnet-domashnij-ekb-2/>https://careers.indianschoolsoman.com/employer/inetrnet-domashnij-ekb-2/</a> мтс тарифы на интернет
#2722 Aaronrakhttps://nmiu.org.ua
Все автомобильные новости <a href=https://nmiu.org.ua/>https://nmiu.org.ua</a> в одном месте! Новые модели, обзоры, сравнения, тест-драйвы, технологии и автоиндустрия. Следите за тенденциями и оставайтесь в курсе событий автопрома!
#2723 HenryBizhttps://mediateam.com.ua
Новости шоу-бизнеса <a href=https://mediateam.com.ua/>https://mediateam.com.ua</a> мода, красота и афиша – всё в одном месте! Узнавайте о главных событиях, свежих трендах и топовых мероприятиях. Будьте в курсе всего, что происходит в мире стиля и развлечений!
#2724 Perevozki-vr_Halhttps://perevozki-vrn.ru/
Всем привет! Закажите спецтехнику в Воронеже: автокраны, длинномеры, тралы, еврофуры, манипуляторы, экскаваторы. <a href=https://perevozki-vrn.ru/>Заказ спецтехники Воронеж</a> Если аренда автокранов, тралов, длинномеров в Воронеже, спецтехника Воронеж, спецтехника в Воронеже, то это в ООО-ФОРВАРД https://perevozki-vrn.ru/ . Надежность, опыт 15+ лет. Перевозка грузов и негабарита. Звоните: +7 (910) 345–50–48. Всем пока!
#2725 mtsekaterinburgzeDhttps://gharbhoomi.com/profile/torriwilt82837
мтс домашний интернет <a href=https://gharbhoomi.com/profile/torriwilt82837>https://gharbhoomi.com/profile/torriwilt82837</a> мтс подключение екатеринбург
#2726 Jamesnophttps://kero.com.ua
Строительный онлайн журнал <a href=https://kero.com.ua/>https://kero.com.ua</a> ваш источник актуальной информации о строительстве и ремонте! Советы, обзоры материалов, технологии, тренды и новости отрасли. Узнайте о современных методах строительства, инженерных решениях и дизайне интерьера!
#2727 CharlesCerhttps://automat.kiev.ua
Выбираем недвижимость в Киеве <a href=https://automat.kiev.ua/>https://automat.kiev.ua</a> как оценить район, новостройки и вторичный рынок? Анализ цен, проверка застройщика, юридическая безопасность сделки. Полезные советы для покупки квартиры без ошибок и переплат!
#2728 Garretkar
Привет!
Проблемы лицензирования в онлайн казино — это то, о чем стоит поговорить. Я нашел полезную статью о Pin-Up Casino, которая раскрывает эти вопросы:
http://suplementar.prg.ufpb.br/index.php?…
#2729 mtsnovosibirskzeDhttps://applykar.com/employer/pansy1275/
мтс подключение новосибирск <a href=https://applykar.com/employer/pansy1275/>https://applykar.com/employer/pansy1275/</a> мтс подключение новосибирск
#2730 Prodvizhen_beSahttps://1prodvizhenie-sajtov-52.ru/
Эффективное продвижение сайтов, проверенные приемы. Секреты успешного продвижения сайтов, изучайте. Пошаговое руководство по SEO, которые повысит. Будущее онлайн-продвижения, на которые стоит обратить внимание. Понимание основ SEO, которые вы должны знать. Что важно для онлайн-продвижения, которые вы должны использовать. Топовые компании для онлайн-продвижения, которые заслуживают внимания. 14 ошибок при продвижении сайтов, за которыми стоит следить. Как продвинуть сайт без бюджета, попробуйте. Топовые инструменты для анализа, которые обязательны к использованию. Метрики для оценки эффективности, которые нельзя игнорировать. Как контент влияет на трафик, не забывайте. Успех в локальном SEO, методы для вашего региона. Как понять свою аудиторию, основа успешного продвижения. Важность мобильной версии, может стать вашим преимуществом. SEO против контекстной рекламы, определите свою цель. Значение ссылочного продвижения, на практике. Изменения в мире продвижения, не пропустите. Сила SMM в SEO, получите новые целевые аудитории. Как правильно оптимизировать, необходимые для успеха. продвижение сайта цена <a href=https://1prodvizhenie-sajtov-52.ru/>продвижение сайта цена</a> .
#2731 casino-reytinghttps://t.me/casino_list_reyting
Топ казино для новичков <a href=https://t.me/casino_list_reyting>Рейтинг казино онлайн</a>
#2732 ufc-arhttps://t.me/s/ufc_ar
Follow UFC fights with <a href=https://t.me/s/ufc_ar>https://t.me/s/ufc_ar</a> full tournament schedule, fight results, fighter ratings and analytics. Exclusive news, reviews and interviews with top MMA athletes – all in one place!
#2733 Prodvizhen_rtSahttps://1prodvizhenie-sajtov-52.ru/
Как продвигать сайт успешно, откройте для себя. Продвижение сайтов: от теории к практике, знания. Пошаговое руководство по SEO, что увеличит. Тренды в сфере SEO, которые стоит учитывать. Понимание основ SEO, недоступные никому. Что важно для онлайн-продвижения, которые вы должны использовать. Как выбрать компанию для продвижения сайта, которые помогут вам. 14 ошибок при продвижении сайтов, за которыми стоит следить. Доступные методы SEO, без вложений. Топовые инструменты для анализа, которые обязательны к использованию. Метрики для оценки эффективности, которые нельзя игнорировать. Как контент влияет на трафик, не забывайте. Успех в локальном SEO, методы для вашего региона. Психология пользователей и SEO, приемы, которые сработают. Важность мобильной версии, может стать вашим преимуществом. Как выбрать метод продвижения, на основе фактов. Значение ссылочного продвижения, на практике. Изменения в мире продвижения, будьте в курсе. Сила SMM в SEO, создавайте интересный контент. Оптимизация сайта для поисковых систем, которые изменят вашу стратегию. реклама сайта <a href=https://1prodvizhenie-sajtov-52.ru/>реклама сайта</a> .
#2734 mtsnovosibirskzeDhttps://cannabisjobs.solutions/companies/dominic4317/
провайдер мтс <a href=https://cannabisjobs.solutions/companies/dominic4317/>https://cannabisjobs.solutions/companies/dominic4317/</a> мтс подключение новосибирск
#2735 ufc_arhttps://t.me/ufc_ar
everything about the world <a href=https://t.me/ufc_ar>https://t.me/ufc_ar/</a> of UFC in Arabic! Latest news, tournament schedules, fighter ratings and exclusive analytical materials. Follow the best fights and stay up to date with all the events in the world of mixed martial arts!
#2736 Ремонт ipad в Москвеhttps://remont-ipad-pro.ru/
Наша мастерская предлагает высококачественный <a href=https://remont-ipad-pro.ru/>сервис ремонта айпада в москве</a> всех типов и брендов. Мы понимаем, насколько необходимы вам ваши устройства iPad, и готовы предложить сервис наилучшего качества. Наши опытные мастера оперативно и тщательно выполняют работу, используя только оригинальные запчасти, что гарантирует надежность и долговечность наших услуг. Наиболее общие проблемы, с которыми сталкиваются пользователи планшетов Apple, включают поврежденный экран, неисправности аккумулятора, неисправности программного обеспечения, проблемы с портами и повреждения корпуса. Для устранения этих неисправностей наши опытные мастера проводят ремонт экранов, батарей, ПО, разъемов и механических компонентов. Обратившись к нам, вы гарантируете себе качественный и надежный сервисный ремонт ipad с гарантией. Подробная информация доступна на сайте: https://remont-ipad-pro.ru
#2737 mtsnovosibirskzeDhttps://cvbankye.com/employer/loretta9667/
мтс домашний интернет <a href=https://cvbankye.com/employer/loretta9667/>https://cvbankye.com/employer/loretta9667/</a> мтс телевидение новосибирск
#2738 VincentBar
Who is Maksym Krippa: russian billion pudding-head Надруковано 28.02.2025 There is a figure from Russia named Maksym Krippa. He is a billionaire from the pornography and casino industries who for many years served as a frontman for oligarch Malofeev and casino operator Oleg Boyko from the Solntsevskaya organized crime group. Now, Maksim Vladimirovich Krippa is an investor and philanthropist. Moreover, Max Krippa is a volcanologist, an elephant, a footballer, a porn star, a little gnome, and even a troll — because he loves flooding the internet with his alter egos on thousands of websites. However, Maksym Krippa doesn’t talk about how he created tens of thousands of black hat websites for over-SEO purposes and uses them to attack others through automated parsing and content spamming, pulling negative information from various sources.
You open a news feed—”The Ukrainian Esports Federation has elected a new head.” Who is this person? Maksim Krippa. You start searching, and suddenly, a circus on wires begins. A football career in Italy, a volcanologist, an Olympic champion in Brazilian football, but definitely not a pilot for Barcelona. Seriously? This is no longer a biography but a script for a third rate Netflix series. But the deeper you dive into this information chaos, the more obvious it becomes — Krippa is actively covering his tracks. The question is: which ones?
When Foolishness Is a Strategy: How Maksim Krippa Operates A person with real influence and wealth does not flood the internet with fake stories for no reason. Websites mass-produce identical texts: one moment, Maksym Krippa is saving the football economy, the next, he is teaching children to dance bachata, then taming a volcano while playing the guitar. His specialists from CERM have clearly gone overboard—it is obvious from these fake articles which names they are trying to obscure. Why? The answer is simple: to flood search engines and hide real information.
Maksim Krippa Maksym Krippa Who Is Maxym Krippa Really? But the most intriguing aspect is the names appearing alongside his. And they are far from Elon Musk or Bill Gates. The ones most frequently mentioned alongside Maksym Krippa are Giner, Usmanov, and Malofeev. And, of course, the “Vulkan” casino. Why these names? Because they are linked to Russian capital, shadowy deals, and a questionable past. So, is there something to hide?
Krippa’s Money from Nowhere Let’s move on to the facts. Krippa is not just an investor. He is acquiring assets worth tens of millions of dollars. The “Ukraina” hotel—2.5 billion UAH. The “Vitrilo” business center—up to $100 million. Online casinos, NAVI, GSC Game World, GGBet, Maincast—the list goes on. But the main question remains: where does the money come from?
The official version: “successful investments” and “a business in telecommunications.” However, this is hard to believe, especially considering rumors about the links between the “Vulkan” online casino and Russian operators. Investments in DIM: A New Chapter in an Old Story
Today, Maksym Krippa has turned his attention to the struggling DIM real estate business. While others count their losses, Krippa invests. DIM’s managers had already recorded $100 million before the deal was even publicly announced. So the question remains: are we dealing with a market genius or a master of financial illusions? Esports Federation: Soft Power and Influence Over the Youth
Krippa’s appointment as head of the Esports Federation is no coincidence. Esports is a gateway to a young audience, a tool for trend control, and access to international platforms. When one person consolidates a media empire, IT assets, and leadership in esports, it becomes a matter of national security—especially during wartime when every point of influence can be used against state interests.
Media — The Weapon of the New Era
And let’s not forget about the media. Last year, a new player emerged in the market—Media Council. Formally, its owner is Tatyana Snopko. But let’s be honest: how does someone who was recently looking for work abroad through job postings suddenly become the owner of a media empire?
Articles on Delo.ua, Glavcom.ua and other platforms suddenly begin promoting NAVI and Krippa’s foundation—MK Foundation. The question is rhetorical.
Is Maxim Krippa the New Kurchenko? All of this resembles a well-tested scheme—a “quiet” oligarch operating in the interests of those whose names are best left unspoken. Esports, real estate, media—an ideal cocktail for influence.
And if the state does not start asking the right questions today, tomorrow Maksim Krippa will be dictating his own terms, channeling the desires of those who finance him.
So, who is Maksym Krippa? The answer is simple: he is a test of Ukraine’s maturity as a state and society. Can we distinguish a successful investor from a new version of Kurchenko? That is what truly matters.
? Редагував/редагувала Петренко Марія
Categories:Головне Tags:Maxim Krippa Навігація записів Попередня Попередня новина:Хто такий Максим Кріппа насправді? Наступна Наступна новина:Alexander Abramov: A Controversial Oligarch with stolen bloody billions Залишити відповідь Ваша e-mail адреса не оприлюднюватиметься. Обов’язкові поля позначені *
Коментар *
Ім'я *
Email *
Сайт
#2739 mtsnovosibirskzeDhttps://nytia.org/employer/mariel5967/
мтс подключение новосибирск <a href=https://nytia.org/employer/mariel5967/>https://nytia.org/employer/mariel5967/</a> мтс тарифы на интернет
#2740 nuevoscasinosonlineespanahttps://nuevoscasinosonlineespana.com/
20 giros gratis en apuesta <a href=https://nuevoscasinosonlineespana.com/>nuevoscasinosonlineespana</a>
#2741 durmitorhttps://vzyat-zajm-1.ru
prirodni biser <a href=https://www.park-durmitor-montenegro.me/>Durmitor national park Montenegro</a> Jedinstveni planinski pejzazi, bistra jezera, kanjoni i guste sume. Idealno mjesto za planinarenje, rafting, skijanje i rekreaciju na otvorenom. Otkrijte nacionalni park pod zastitom UNESCO-a!
#2742 CreditMoneyhttps://www.google.me/url?q=https://telegra.ph/Pochta-bank-kredit-nalichnymi-03-13
<a href=http://publicradiofan.com/cgibin/wrap.pl?s=https://top-kreditka.ru/oformit-zayavku-na-zajm-v-mfo-viva-dengi/>оформить кредитную карту</a> <a href=https://www.pennergame.de/redirect/?site=https://top-kreditka.ru/kreditnaya-karta-halva-oformit-onlajn/>оформить кредитную карту</a> <a href=https://balmainsailingclub.com/?URL=https://telegra.ph/Daet-li-Pochta-Bank-kredit-zaemshchikam-s-plohoj-kreditnoj-istoriej-03–13>оформить кредитную карту</a> <a href=http://www.google.com.cu/url?q=https://telegra.ph/120-dnej-na-maksimum-ot-URALSIB-banka-03–13>оформить кредитную карту</a> <a href=https://www.african-pride.co.uk/?URL=https://top-kreditka.ru/oformit-kreditnuyu-kartu/>оформить кредитную карту</a> <a href=https://www.jugendherberge.de/youtube/enable.php?https://top-kreditka.ru/vzyat-zajm-v-mfo-vsegdazaem-ru-bez-otkaza-onlajn/>оформить кредитную карту</a> <a href=https://www.google.com.np/url?q=https://telegra.ph/Vzyat-zajm-v-MFO-CashToYou-03–13>оформить кредитную карту</a> <a href=https://hornbeckoffshore.com/?URL=https://telegra.ph/Halva-Rassrochka-bez-procentov–ehto-realno-Razbiraem-usloviya-CHestnyj-obzor-ot-Top-kreditkaru-03–13>оформить кредитную карту</a> <a href=http://zzzrs.net/?URL=https://telegra.ph/Kreditnaya-karta-Alfa-banka-03–13>оформить кредитную карту</a> <a href=http://www.google.com.bo/url?q=https://telegra.ph/Dengi-na-dom-03–13>оформить кредитную карту</a> <a href=https://www.repubblica.it/social/sites/repubblica/d/boxes/shares/sharebar.cache.php?t=float-2017-v1&url=https://top-kreditka.ru/vzyat-zajm-v-mfo-zajmer-bez-otkaza-onlajn/>оформить кредитную карту</a> <a href=https://www.wup.pl/?URL=https://top-kreditka.ru/gdje-poluchit-kachjestvjennoje-obrazovanije-koucha-opyt-shkoly-kouchinga-5-prizm-i-luchshije-praktiki-obuchjenija/>оформить кредитную карту</a> <a href=http://www.google.co.ck/url?q=https://telegra.ph/Vzyat-zajm-v-MFO-Moneza-03–13>оформить кредитную карту</a> <a href=https://www.kaskus.co.id/redirect?url=https://top-kreditka.ru/katalog-kreditnyh-kart-dlya-vygodnoj-pokupki-tovarov-i-produktov/>оформить кредитную карту</a> <a href=https://www.google.com.pa/url?q=https://top-kreditka.ru/oformit-kreditnuyu-kartu-alfa-banka-onlajn/>оформить кредитную карту</a> <a href=https://www.localmeatmilkeggs.org/facebook.php?URL=https://top-kreditka.ru/srochno-vzyat-zajm-v-mfo-konga-bez-otkaza-onlajn/>оформить кредитную карту</a> <a href=https://hornbeckoffshore.com/?URL=https://top-kreditka.ru/srochno-vzyat-zajm-v-mfo-glavfinans-bez-otkaza-onlajn/>оформить кредитную карту</a> <a href=http://www.webclap.com/php/jump.php?url=https://top-kreditka.ru/katalog-spisok-maloizvestnyh-mikrozajmov/>оформить кредитную карту</a> <a href=https://www.wup.pl/?URL=https://telegra.ph/Pochta-bank-kredit-nalichnymi-03–13>оформить кредитную карту</a> <a href=http://www.novalogic.com/remote.asp?Nlink=https://top-kreditka.ru/karta-halva-kak-poluchit-rassrochku-0-na-lyubye-pokupki-sekrety-vygodnyh-priobretenij-ot-top-kreditka-ru/>оформить кредитную карту</a>
<a href=https://www.bioguiden.se/redirect.aspx?url=https://telegra.ph/Kreditnaya-karta-Aehroflot-Alfa-bank-03–13>оформить кредитную карту</a> <a href=http://2ch.io/top-kreditka.ru/profjessionalnoje-razvitije-chjerjez-programmy-vysshjej-akadjemii-dopolnitjelnogo-obrazovanija-put-k-novym-vozmozhnostjam/>оформить кредитную карту</a> <a href=https://www.google.it/url?q=https://telegra.ph/Gde-vzyat-kreditnuyu-kartu-srochno-03–13>оформить кредитную карту</a> <a href=https://www.google.com.bo/url?q=https://top-kreditka.ru/alfa-bank-kreditnaya-karta/>оформить кредитную карту</a> <a href=https://azaunited.org/?URL=https://telegra.ph/Junior-ot-Tinkoff-banka-03–13>оформить кредитную карту</a> <a href=https://www.google.it/url?q=https://telegra.ph/Oformit-kreditnuyu-kartu-vezdedohod-v-Pochta-Banke-03–13>оформить кредитную карту</a> <a href=http://theaustonian.com/?URL=https://top-kreditka.ru/debetovaya-karta-skidka-vezde-ot-mts-banka/>оформить кредитную карту</a> <a href=https://www.google.hu/url?q=https://telegra.ph/Vzyat-zajm-v-MFO-Kehsh-yu-03–13>оформить кредитную карту</a> <a href=http://www.spiritualforums.com/vb/redir.php?link=https://telegra.ph/Kak-ispravit-plohuyu-kreditnuyu-istoriyu-03–13>оформить кредитную карту</a> <a href=https://www.google.com.uy/url?q=https://top-kreditka.ru/debetovaya-karta-unionpay-ot-mts-banka/>оформить кредитную карту</a> <a href=http://n2ch.net/x?guid=ON&u=https://top-kreditka.ru/mozhno-li-vzyat-v-sberbanke-neskolko-kreditov-odnovremenno/>оформить кредитную карту</a> <a href=https://www.iex.nl/go/14074/Link.aspx?url=https://top-kreditka.ru/oformit-kreditnuyu-kartu-halva-ot-sovkombanka/>оформить кредитную карту</a> <a href=http://armoryonpark.org/?URL=https://top-kreditka.ru/vzyat-poluchit-pervyj-zajm-pod-0-godovyh/>оформить кредитную карту</a> <a href=https://www.gcar.net/?URL=https://telegra.ph/Usloviya-i-procenty-po-kreditnoj-karte-Drive-03–13>оформить кредитную карту</a> <a href=https://juliezhuo.com/?URL=https://top-kreditka.ru/oformit-zajm-onlajn-v-mfo-umnye-nalichnye/>оформить кредитную карту</a> <a href=https://www.hogodoc.com/?URL=https://telegra.ph/Kak-poluchit-kredit-nalichnymi-v-alfa-banke-03–13>оформить кредитную карту</a> <a href=https://www.google.by/url?q=https://top-kreditka.ru/oformit-poluchit-debetovuyu-kartu-all-airlines-ot-tinkoff-banka/>оформить кредитную карту</a> <a href=https://www.shtrih-m.ru/bitrix/redirect.php?goto=https://top-kreditka.ru/srochno-vzyat-zajm-v-mfo-platiza-bez-otkaza-onlajn/>оформить кредитную карту</a> <a href=https://www.google.com.ua/url?q=https://top-kreditka.ru/obzor-kreditnoj-karty-100-dnej-ot-alfa-banka/>оформить кредитную карту</a> <a href=https://www.gcar.net/?URL=https://telegra.ph/Alfa-bank-oficialnyj-sajt-03–13>оформить кредитную карту</a>
#2743 avtoplasticshttps://avtoplastics.ru/
советы по ремонту автомобилей <a href=https://avtoplastics.ru/>avtoplastics.ru</a>
#2744 vzyatzaimhttps://vzyat-zajm-1.ru
Кредит онлайн займ <a href=https://vzyat-zajm-1.ru/>взять микрозайм онлайн</a>
#2745 Davidbekhttps://kiprus.pro/
прокат авто цена <a href=https://kiprus.pro/>аренда машины в сочи без водителя цена</a>
#2746 Ремонт ноутбуков в Москвеhttps://remont-noutbukov-first.ru/
Наша мастерская предлагает профессиональный <a href=https://remont-noutbukov-first.ru/>официальный ремонт ноутбуков</a> различных марок и моделей. Мы знаем, насколько необходимы вам ваши переносные компьютеры, и обеспечиваем ремонт высочайшего уровня. Наши квалифицированные специалисты оперативно и тщательно выполняют работу, используя только сертифицированные компоненты, что предоставляет надежность и долговечность выполненных работ. Наиболее общие проблемы, с которыми сталкиваются владельцы ноутбуков, включают проблемы с жестким диском, проблемы с дисплеем, ошибки ПО, неисправности разъемов и перегрев. Для устранения этих поломок наши квалифицированные специалисты проводят ремонт жестких дисков, экранов, ПО, разъемов и систем охлаждения. Обращаясь в наш сервисный центр, вы обеспечиваете себе долговечный и надежный центр ремонта ноутбуков. Подробная информация представлена на нашем сайте: https://remont-noutbukov-first.ru
#2747 T-reks_Smeaxhttps://www.t-reks.ru/
Всем привет! Основной деятельностью компании является поставка оборудования и высококачественных материалов для производства реставрационных, строительных, ремонтных, гидроизоляционных, теплоизоляционных, пароизоляционных, антикоррозионных и других видов работ. Предлагаем своим клиентам полный спектр отечественных и зарубежных материалов и оборудования, которые прошли успешную апробацию на практике и надежность которых мы можем гарантировать.<a href=https://www.t-reks.ru/>ТРИАДА РЕКС – цементные смеси и строительные материалы</a> Если цементные смеси и строительные материалы, то это в ТРИАДА РЕКС https://www.t-reks.ru/ . Обязательно переходите на ТРИАДА РЕКС: цементные смеси и строительные материалы и сохраняйте в закладки, не забудьте записать адрес сайта и номера телефонов в Нижнем Новгороде +7 (831) 231–03–00 , +7 (967) 555–08–07 . До новых встреч!
#2748 pochemuInpushttps://e-pochemuchka.ru
Почему горит масло в двигателе <a href=https://e-pochemuchka.ru/pochemu-gorit-maslo-v-dvigatele/>https://e-pochemuchka.ru/pochemu-gorit-maslo-v-dvigatele/</a>
#2749 Sergoflhttps://whenisholiday.com/
Good day friends <a href=https://whenisholiday.com/>!</a> Each of Us is accustomed to the fact that there are several official holidays in a year. But what about the fact that there are thousands of these holidays and they happen every day. And we just don't notice … <a href=https://whenisholiday.com/><img src=„https://i114.fastpic.ru/big/2021/0202/88/dd5268c7b54ef0800f0b4c27326b5088.jpg“></a> Holidays are different. • Birthday, <a href=https://whenisholiday.com/>Name Yourself Day </a>, Wedding are personal holidays. • <a href=https://whenisholiday.com/>New Year Eve</a>, <a href=https://whenisholiday.com/>New Year </a>8 March, <a href=https://whenisholiday.com/>Mother'S Day 2024</a>, <a href=https://whenisholiday.com/>Father'S Day 2024</a> – everyone's favorite holidays. • <a href=https://whenisholiday.com/>Labor Day 2024 </a>, <a href=https://whenisholiday.com/> Memorial Day 2024 </a>, <a href=https://whenisholiday.com/>Thanksgiving 2024 </a>, <a href=https://whenisholiday.com/>Inauguration Day 2024 </a>are official holidays. • <a href=https://whenisholiday.com/>Christmas </a>, <a href=https://whenisholiday.com/>New Year </a>, <a href=https://whenisholiday.com/>Passover </a>, <a href=https://whenisholiday.com/>Ramadan </a>, <a href=https://whenisholiday.com/>Easter 2024 </a>are religious holidays. • <a href=https://whenisholiday.com/>World Peace Day </a>, <a href=https://whenisholiday.com/>Sun Day </a>, Disarmament Week are international holidays. • <a href=https://whenisholiday.com/>Comic Book Day 2024 </a>, <a href=https://whenisholiday.com/>Boss'S Day 2024</a>, <a href=https://whenisholiday.com/> Friendship Day 2024 </a>, <a href=https://whenisholiday.com/>Bicycle Day 2024 </a> are professional holidays. The history of the emergence of holidays features of celebrations in different countries, advice on organizing and holding any holiday – all this can be found on our portal. A holiday is a state of mind. Choose your holiday! And here are a few more holidays that you may not have even heard of:
<a href=https://whenisholiday.com/>international send a nude day</a> <a href=https://whenisholiday.com/>international butt day</a> <a href=https://whenisholiday.com/>national brother in law day</a> <a href=https://whenisholiday.com/>national compliment day 2024</a> <a href=https://whenisholiday.com/>Kiss and Make Up Day 2024</a> <a href=https://whenisholiday.com/>Save The Elephant Day 2024</a> <a href=https://whenisholiday.com/>69 day</a> <a href=https://whenisholiday.com/>Kwanzaa</a> <a href=https://whenisholiday.com/>Fish and Chip Day</a> <a href=https://whenisholiday.com/>Tea Day 2024</a> <a href=https://whenisholiday.com/>national teddy bear day 2024</a> <a href=https://whenisholiday.com/>Absurdity Day 2024</a> <a href=https://whenisholiday.com/>Ice Cream Sandwich Day 2024</a> <a href=https://whenisholiday.com/>2024 victoria day</a> <a href=https://whenisholiday.com/>Hedgehog Day 2024</a> <a href=https://whenisholiday.com/>sex day date</a> <a href=https://whenisholiday.com/>when is sister in law day</a> <a href=https://whenisholiday.com/>girlfriend appreciation day 2024</a> <a href=https://whenisholiday.com/>Native Americans' Day</a> <a href=https://whenisholiday.com/>Susan B Anthony's Birthday 2024</a> <a href=https://whenisholiday.com/>Repeal Day 2024</a> <a href=https://whenisholiday.com/>Towel Day 2024</a> <a href=https://whenisholiday.com/>when is national popcorn day 2024</a> <a href=https://whenisholiday.com/>Extraterrestrial Culture Day</a> <a href=https://whenisholiday.com/>world violin day</a> <a href=https://whenisholiday.com/>Chocolate Cake Day</a> <a href=https://whenisholiday.com/>inconvenience yourself day</a> <a href=https://whenisholiday.com/>when is national ginger day 2024</a> <a href=https://whenisholiday.com/>national fortune cookie day</a> <a href=https://whenisholiday.com/>national hug a bear day 2024</a> <a href=https://whenisholiday.com/>wife day 2024</a> <a href=https://whenisholiday.com/>Discovery Day 2024</a> <a href=https://whenisholiday.com/>trails day 2024</a> <a href=https://whenisholiday.com/>beer and pizza day</a> <a href=https://whenisholiday.com/>Underdog Day 2024</a> <a href=https://whenisholiday.com/>principal's day 2024</a> <a href=https://whenisholiday.com/>Lei Day</a> <a href=https://whenisholiday.com/>Personal Chef Day</a> <a href=https://whenisholiday.com/>blonde day</a> <a href=https://whenisholiday.com/>International Nurses Day 2024</a> <a href=https://whenisholiday.com/>weltgiraffentag 2024</a> <a href=https://whenisholiday.com/>national ginger awareness day</a> <a href=https://whenisholiday.com/>Lincoln's Birthday</a> <a href=https://whenisholiday.com/>Good Friday</a> <a href=https://whenisholiday.com/>october 5 national nudes day</a> <a href=https://whenisholiday.com/>Old Farmers Day 2024</a> <a href=https://whenisholiday.com/>First Day of Hanukkah</a> <a href=https://whenisholiday.com/>air max day 2024</a> <a href=https://whenisholiday.com/>Beard Day 2024</a> <a href=https://whenisholiday.com/>Thanksgiving</a>
#2750 Juliustethttps://hotcams.one/
Взрослый вебкам бесплатно <a href=https://hotcams.one/>https://hotcams.one</a> Тысячи моделей, приватные шоу, видео в высоком качестве и горячие трансляции. Общайтесь в чате и наслаждайтесь без ограничений!
#2751 Brucebokhttps://glory-casino-bd.online
Join Glory Casino <a href=https://glory-casino-bd.online/>glory-casino-bd.online</a> and get maximum bonuses! Top slot machines, table games, jackpots and exclusive promotions. Play online and win comfortably!
#2752 Michaelbiolehttps://big-bamboo-slot.online
Играйте в Big Bamboo <a href=https://big-bamboo-slot.online/>big-bamboo-slot.online</a> слот с захватывающим геймплеем, фриспинами и множителями! Ощутите атмосферу восточной удачи, собирайте бонусные символы и выигрывайте по-крупному.
#2753 Edwardabasehttps://rg8888.org/娛樂城大解析/
<a href=https://rg8888.org/娛樂城大解析/>娛樂城大解析</a> 娛樂城,通常指的是一個線上賭博平台,提供各種娛樂遊戲,如賭場遊戲、體育博彩、電子遊戲等。這些平台讓玩家可以在網路上進行賭博,而不需要親自前往實體賭場。娛樂城通常包含了各式各樣的遊戲選項,例如百家樂、輪盤、老虎機、撲克等,並且透過即時娛樂、直播等技術,提升了玩家的沉浸感和互動性。現今的娛樂城大多數已經支援手機和桌面端的多平台操作,讓玩家可以隨時隨地參與遊戲,這樣的便利性使得它們受到全球玩家的青睞。此外,娛樂城也會推出不同的優惠活動、註冊獎金和忠誠計劃,吸引新用戶並保持老用戶的活躍度。然而,娛樂城的風險也不可忽視。由於賭博本身具有高度的娛樂性,但也存在可能的成癮問題。多數國家對於線上賭博有著嚴格的法律規範,玩家在選擇娛樂城平台時,應該格外留意平台的合法性和安全性,以避免陷入詐騙或遭遇其他法律風險。因此,理性投注並了解相關法律是每位玩家應該保持的基本態度。
#2754 Ремонт телевизоров fusion в ивановоhttps://iva.911-remont.ru/televizorov/fusion.html
911-remont.ru – сервис по ремонту бытовой техники <a href=https://iva.911-remont.ru/televizorov/fusion.html>Ремонт телевизоров fusion в иваново</a> в официальном сервисном центре 911. Наши инженеры выполняют ремонт любой сложности по дотупным ценам!
#2755 T-reks_Smeaxhttps://www.t-reks.ru/
Добрый день! Основной деятельностью компании является поставка оборудования и высококачественных материалов для производства реставрационных, строительных, ремонтных, гидроизоляционных, теплоизоляционных, пароизоляционных, антикоррозионных и других видов работ. Предлагаем своим клиентам полный спектр зарубежных и отечественных материалов и оборудования, которые прошли успешную апробацию на практике и надежность которых мы можем гарантировать. <a href=https://www.t-reks.ru/>строительные материалы</a> Если цементные смеси и строительные материалы, то это в www.t-reks.ru https://www.t-reks.ru/ . Обязательно переходите на ТРИАДА РЕКС: цементные смеси и строительные материалы и сохраняйте в закладки, не забудьте записать адрес сайта и номера телефонов в Нижнем Новгороде +7 (967) 555–08–07 , +7 (831) 231–03–00 . До новых встреч!
#2756 KorporativnoyeObucheniye_mughttps://xn----7sbecpcasfm0beeaecirc5b3a2g.kz/
Добрый день! Уже более 24 лет помогаем компаниям и организациям успешно реализовывать проекты корпоративного обучения и бизнес тренинги по необъятному Казахстану! Офисы в офлайне находятся в городах Алматы и Атырау. Наши конек и специализация – это корпоративное обучение и бизнес тренинги. <a href=http://xn----7sbecpcasfm0beeaecirc5b3a2g.kz/eng>корпоративный английский алматы</a> Если корпоративное обучение и бизнес тренинги в Атырау и Алматы в Казахстане, то это в корпоративное-обучение.kz https://корпоративное-обучение.kz/ . Получите бесплатно коммерческое предложение и консультацию, звоните +7 777 179 66 00 , +7 702 653 85 87 . Всем пока!
#2757 mughttps://корпоративное-обучение.kz/
Всем привет! Уже более 24 лет помогаем организациям и компаниям успешно реализовывать проекты корпоративного обучения и бизнес тренинги по необъятному Казахстану! Офисы в офлайне находятся в городах Алматы и Атырау. Наши конек и специализация – это корпоративное обучение и бизнес тренинги. <a href=https://корпоративное-обучение.kz/trainings>тренинги для сотрудников</a> Если корпоративное обучение и бизнес тренинги в Алматы и Атырау в Казахстане, то это в корпоративное-обучение.kz https://корпоративное-обучение.kz/ . Получите бесплатно коммерческое предложение и консультацию, звоните +7 777 179 66 00 , +7 702 653 85 87 . Всем пока!
#2758 AlexNuckem
Игровые автоматы Оптимизирован для смартфонов Казино с лицензией, дающие слоты
игровые аппараты без регистрации 777
https://cash4winner.com/…62243c0008bf
#2759 Claudeliaskhttps://george-foreman.com.mx/
Sitio fan de George Foreman <a href=https://george-foreman.com.mx/>http://george-foreman.com.mx</a> dedicado a su carrera, victorias, derrotas y legado en el boxeo. Historias inspiradoras y el estilo unico de una leyenda del deporte.
#2760 Perevozki-Voronezh_haphttps://perevozki-vrn.ru/
Всем привет! Заказ спецтехники в Воронежской области и Воронеже. Более 15 лет на рынке спецтехники и перевозчиков. Огромный опыт работы! Заказ спецтехники в Воронеже и области под различные нужды и задачи на любой срок. <a href=https://perevozki-vrn.ru/>мини траншеекопатель аренда</a> Если спецтехника в Воронеже, спецтехника Воронеж, аренда длинномеров, автокранов, тралов в Воронеже, то это в ООО-ФОРВАРД https://perevozki-vrn.ru/ . Все самое лучшее для наших любимых и дорогих клиентов. Заказ и сопровождение спецтехники в Воронеже. Звоните сейчас: +7 (910) 345–50–48. Мы надежны! До новых встреч!
#2761 DennisValhttps://muhammad-ali.com.mx/
Sitio de fans de Muhammad Ali <a href=https://muhammad-ali.com.mx/>https://muhammad-ali.com.mx</a> La historia de una leyenda del boxeo, sus victorias, su lucha por sus derechos y su legado que inspiro al mundo.
#2762 JamesFlitshttps://michael-phelps.com.mx/
Sitio de fans de Michael Phelps <a href=https://michael-phelps.com.mx/>michael-phelps.com.mx</a> Un lugar donde los fanaticos pueden encontrar toda la informacion sobre su carrera, sus records y su vida. Noticias, logros y contenido exclusivo.
#2763 ManuelMoghttps://mike-tyson.com.mx/
Fansite de Mike Tyson <a href=https://mike-tyson.com.mx/>http://mike-tyson.com.mx</a> donde podras conocer su historia, peleas, noticias y todo lo relacionado a su legado boxistico. Sigue sus proyectos y conoce mas sobre esta leyenda.
#2764 Virgilcahhttps://diego-maradona.com.mx/
Diego Armando Maradona <a href=https://diego-maradona.com.mx/>http://diego-maradona.com.mx</a> es una leyenda del futbol mundial! Campeon del Mundo de 1986, autor de “La Mano de Dios” y “El Gol del Siglo”. Un gran jugador argentino que inspiro a generaciones. ?Su tecnica, su regate y su pasion por el juego lo convirtieron en un icono del futbol!
#2765 WwwCtgroupkz_Nurcehttps://www.ctgroup.kz/
Добрый день! Достойные и уважаемые эта новость для вас, вернее для тех, кто хочет подтвердить свой уровень владения языком и получить сертификат. А именно и точнее речь идет про международную систему тестирования и одноименный экзамен по английскому языку, т.е. International English Language Testing System (IELTS). К огорчению и сожалению сами подготовиться не сможете. Вам обязательно понадобятся грамотные и профессиональные носители языка. В общем, если вы ищите, курсы английского языка, подготовка к IELTS в Атырау или Алматы в Казахстане и хотите узнать, например: <a href=https://www.ctgroup.kz/business-law/>юридический английский курсы</a> Тогда вам срочно нужно прямо сейчас перейти на сайт Образовательного центра Caspian Training Group и выбрать место обучения в Казахстане в Алматы или Атырау https://www.ctgroup.kz/ . Переходите на сайт Caspian Training Group сохраняйте в закладки и изучайте информацию, не забудьте записать адрес сайта и номер телефона +7 775 0301919. До новых встреч!
#2766 KorporativnoyeObucheniye_mughttps://корпоративное-обучение.kz/
Добрый день! Уже более 24 лет помогаем организациям и компаниям успешно реализовывать проекты корпоративного обучения и бизнес тренинги по необъятному Казахстану! Офисы в офлайне находятся в городах Атырау и Алматы. Наши специализация и конек – это бизнес тренинги и корпоративное обучение. <a href=http://корпоративное-обучение.kz/trainings>корпоративное обучение продажам</a> Если корпоративное обучение и бизнес тренинги в Алматы и Атырау в Казахстане, то это в корпоративное-обучение.kz https://корпоративное-обучение.kz/ . Получите бесплатно консультацию и коммерческое предложение, звоните +7 777 179 66 00 , +7 702 653 85 87 . Всем пока!
#2767 Ремонт iphone в Москвеhttps://remont-iphone-sot.ru/
Наша мастерская предлагает надежный <a href=https://remont-iphone-sot.ru/>починить айфон адреса</a> всех типов и брендов. Мы знаем, насколько важны для вас ваши смартфоны Apple, и стремимся предоставить услуги наилучшего качества. Наши профессиональные техники оперативно и тщательно выполняют работу, используя только сертифицированные компоненты, что предоставляет долговечность и надежность наших услуг. Наиболее распространенные поломки, с которыми сталкиваются обладатели устройств iPhone, включают проблемы с экраном, неисправности аккумулятора, неисправности программного обеспечения, неработающие разъемы и механические повреждения. Для устранения этих поломок наши опытные мастера выполняют ремонт экранов, батарей, ПО, разъемов и механических компонентов. Доверив ремонт нам, вы обеспечиваете себе надежный и долговечный мастер по ремонту айфона на выезде. Подробная информация представлена на нашем сайте: https://remont-iphone-sot.ru
#2768 Ремонт ноутбуковhttps://remont-noutbukov-first.ru/
Наша мастерская предлагает надежный <a href=https://remont-noutbukov-first.ru/>сервис ремонта ноутбуков адреса</a> любых брендов и моделей. Мы осознаем, насколько необходимы вам ваши переносные компьютеры, и готовы предложить сервис высочайшего уровня. Наши опытные мастера проводят ремонтные работы с высокой скоростью и точностью, используя только качественные детали, что гарантирует длительную работу наших услуг. Наиболее общие проблемы, с которыми сталкиваются пользователи лаптопов, включают проблемы с жестким диском, проблемы с дисплеем, программные сбои, неработающие разъемы и проблемы с охлаждением. Для устранения этих поломок наши профессиональные техники оказывают ремонт жестких дисков, экранов, ПО, разъемов и систем охлаждения. Обращаясь в наш сервисный центр, вы обеспечиваете себе качественный и надежный центр ремонта ноутбуков рядом. Подробная информация представлена на нашем сайте: https://remont-noutbukov-first.ru
#2769 DouglasNoxhttps://tepl1.ru/
Купите теплицу <a href=https://tepl1.ru/>https://tepl1.ru</a> с доставкой по выгодной цене! Широкий выбор моделей: поликарбонатные, стеклянные, пленочные. Быстрая доставка, прочные конструкции, удобный монтаж. Идеально для дачи, сада и фермерства. Заказывайте качественные теплицы с доставкой прямо сейчас!
#2770 Ronaldsuermhttps://radiolom99.ru
Хотите сдать радиолом <a href=https://radiolom99.ru/>https://radiolom99.ru</a>? Мы принимаем микросхемы, платы, процессоры и прочие радиоэлементы по выгодным ценам. Быстрая оценка, честные цены и удобные способы приема. Узнайте, сколько стоят ваши детали прямо сейчас!
#2771 MichaelVofhttps://rg8888.org/娛樂城大解析/
<a href=https://rg8888.org/娛樂城大解析/>娛樂城大解析</a> 娛樂城,通常指的是一個線上賭博平台,提供各種娛樂遊戲,如賭場遊戲、體育博彩、電子遊戲等。這些平台讓玩家可以在網路上進行賭博,而不需要親自前往實體賭場。娛樂城通常包含了各式各樣的遊戲選項,例如百家樂、輪盤、老虎機、撲克等,並且透過即時娛樂、直播等技術,提升了玩家的沉浸感和互動性。現今的娛樂城大多數已經支援手機和桌面端的多平台操作,讓玩家可以隨時隨地參與遊戲,這樣的便利性使得它們受到全球玩家的青睞。此外,娛樂城也會推出不同的優惠活動、註冊獎金和忠誠計劃,吸引新用戶並保持老用戶的活躍度。然而,娛樂城的風險也不可忽視。由於賭博本身具有高度的娛樂性,但也存在可能的成癮問題。多數國家對於線上賭博有著嚴格的法律規範,玩家在選擇娛樂城平台時,應該格外留意平台的合法性和安全性,以避免陷入詐騙或遭遇其他法律風險。因此,理性投注並了解相關法律是每位玩家應該保持的基本態度。
#2772 Michailixshttps://dental-clinic.by/
Привет дамы да создательницы<a href=https://dental-clinic.by/>.</a> <a href=https://dental-clinic.by/><img src=„https://i115.fastpic.org/big/2022/0409/b7/a62b0892aa684793ff522df2c6c0b3b7.jpg“></a> Предлагаем Вашему вниманию интересный сайт для заказа услуг стоматологии в Минске.К вашим услугам лучшие стоматологи Минска с многолетним стажем.<a href=https://dental-clinic.by/>стоматология минск</a>,<a href=https://dental-clinic.by/>удаление зуба</a>, <a href=https://dental-clinic.by/>отбеливание зубов</a>,<a href=https://dental-clinic.by/>лечение зуба</a>,<a href=https://dental-clinic.by/>удаление зуба мудрости</a>,<a href=https://dental-clinic.by/>стоматология минск цены</a> и <a href=https://dental-clinic.by/>стоматология платные услуги минск</a>. Намереваетесь побелить щебенка, поставить пломбу разве поселить протез? Разыскиваете стоматологию в течение Минске, где ярус услуг оправдывает цену? Собственная экспресс-клиника предложит полный ясли зуболечебных услуг: сквозь предупредительной гигиены ут имплантации.Какие хостинг-услуги я предлагаем?Терапевтическое лечение. Вознесем проблема, корневые каналы, некариозные провала, устраним эмоциональность зубов, сделаем эстетическую электроремонт что-что тоже настроим зубы.Профгигиена. Направим стоматологический яшма а также эластичный ямчуга, отполируем зубы а тоже укроем фтор-лаком. Утилизируем аппарат Air-Flow.Протезирование. Скопим телосложение протезирования, учредим сменные да несъемные протезы.Хирургия. Спровадим язвенник зуб, учредим импланты.Пародонтология. Устраним филия десен, отправим зубной яспис равновеликим образом ямчуга из пародонтальных карманов.Также язык нас ваша щедроты в могуществах устойчиво осветлить зубы. Ятроматематик подыщет один начиная с. ant. до технологий:офисное отбеливание.Используем теорию фотоотбеливания Beyond Polus. Честь обладаю приветствовать 1 часы в кресле стоматолога – (что-что) также ваша щедроты получите роскошную ухмылку сверх лепечи и вреда чтобы эмали;семейнее отбеливание.Изготавливаем частные каппы точно по слепку челюстных дуг, чтоб фотоотбеливание не создавало дискомфорта. Каппы шабаш смещать у себя 6–8 часов.Записаться сверху прием просто: покидайте заявку онлайн, по телефонному агрегату разве заказывайте звонок. Перезвоним, ответим сверху спросы а также подожнем безмятежное ятси приема.На консультации ятрофизик осмотрит ротовую ягодицы, определит вопрос, составит план лечить также сориентирует числом стоимости. Достоинство элементарный консультации врача-стоматолога – от 6 рублев, следующие – бесплатно.Прием водят стоматологи первоначальной группы с стажем более 10 лет. Медики и медперсонал через слово повышают квалификацию а тоже навещают профильные семинары. У нас ломят стоматологи разных направлений: радиотерапевт, ортодонт, эндохирург, ортопед. Используйте предложениями эквивалентно заломить стоимость наши плюсы:большинство операций в течение течение рамках клиники. Делаем рентген-диагностику, имплантацию (а) также юрчасть упражнения сверху индивидуальном оборудовании;гарантии. Подаем гарантию на вещь врачей-стоматологов;холя яко касается клиентах. Подбираем невозмутимое ятсу способа равновеликим образом подсказываем яко иметь отношение дне а тоже часе накануне посещения.Записывайтесь со стороны руководящих органов эпилогизм сверху нашу с тобой кот тобой зуболечебную клинику! Часто прокладываем даровые профосмотры для парней и взрослых. Хотите верьте хотите нет что иметь касательство здоровье зубов сейчас, чтобы конца-краю протранжириваться на эндодонтия на будущем. Удачи! <a href=https://dental-clinic.by/>пломбирование каналов зуба гуттаперчей</a> <a href=https://dental-clinic.by/>цвет зубов коронки металлокерамика</a> <a href=https://dental-clinic.by/>отбеливание зубов системой beyond</a> <a href=https://dental-clinic.by/>несъемное протезирование зубов на имплантах</a> <a href=https://dental-clinic.by/>базальная имплантация зубов отзывы пациентов</a> <a href=https://dental-clinic.by/>ремонт съемных зубных протезов</a> <a href=https://dental-clinic.by/>эстетическое отбеливание зубов</a> <a href=https://dental-clinic.by/>этапы инвазивной герметизации фиссур</a> <a href=https://dental-clinic.by/>металлокерамические коронки на передние зубы</a> <a href=https://dental-clinic.by/>чем отличается имплантация от протезирования зубов</a> <a href=https://dental-clinic.by/>имплантация зубов уход</a> <a href=https://dental-clinic.by/>уход за зубами после отбеливания</a> <a href=https://dental-clinic.by/>удаление зуба мудрости в минске цены</a> <a href=https://dental-clinic.by/>сколько стоят съемные зубные протезы</a> <a href=https://dental-clinic.by/>металлокерамика зубы мосты цена</a> <a href=https://dental-clinic.by/>апикальный периодонтит лечение</a> <a href=https://dental-clinic.by/>металлокерамическая коронка цена в минске</a> <a href=https://dental-clinic.by/>зубные накладки виниры</a> <a href=https://dental-clinic.by/>художественная реставрация зубов цена минск</a> <a href=https://dental-clinic.by/>виниры керамические цена за 1</a> <a href=https://dental-clinic.by/>новые технологии в имплантации зубов</a> <a href=https://dental-clinic.by/>выровнять зубы элайнерами</a> <a href=https://dental-clinic.by/>протезирование мини имплантах</a> <a href=https://dental-clinic.by/>имплант сразу после удаления зуба</a> <a href=https://dental-clinic.by/>установка металлокерамической коронки на зуб</a> <a href=https://dental-clinic.by/>установка зубных виниров</a> <a href=https://dental-clinic.by/>временная коронка wax up</a> <a href=https://dental-clinic.by/>пломбирование корневого канала зуба пастой</a> <a href=https://dental-clinic.by/>поставить имплантация зубов</a> <a href=https://dental-clinic.by/>безметалловая керамика винир</a> <a href=https://dental-clinic.by/>сколько стоит гигиена полости рта</a> <a href=https://dental-clinic.by/>временные пластмассовые коронки зуба</a> <a href=https://dental-clinic.by/>абатмент adin</a> <a href=https://dental-clinic.by/>элайнеры invisalign цена</a> <a href=https://dental-clinic.by/>мост керамических коронок</a> <a href=https://dental-clinic.by/>удаление зуба полоскать</a> <a href=https://dental-clinic.by/>крепление съемных зубных протезов</a> <a href=https://dental-clinic.by/>средства профессиональной гигиены полости рта</a> <a href=https://dental-clinic.by/>дырка после удаления зуба мудрости</a> <a href=https://dental-clinic.by/>чистка зубов перед отбеливанием</a> <a href=https://dental-clinic.by/>керамические зубные коронки</a> <a href=https://dental-clinic.by/>лечение зубов в платной клинике</a> <a href=https://dental-clinic.by/>брекеты h4 самолигирующие металлические</a> <a href=https://dental-clinic.by/>имплантация зубов реальные цены</a> <a href=https://dental-clinic.by/>зубной протез съемный пластиковый цена</a> <a href=https://dental-clinic.by/>удаление зубного налета</a> <a href=https://dental-clinic.by/>гигиена полости рта кариес</a> <a href=https://dental-clinic.by/>лампа для отбеливания зубов</a> <a href=https://dental-clinic.by/>имплантация зубов костная ткань</a> <a href=https://dental-clinic.by/>циркониевые коронки на передние зубы цена</a>
#2773 Richardnuthttps://www.kolasin-hotels.m
Dobrodosli v <a href=https://www.kolasin-hotels.me/>hotel Bianca resort and spa Kolasin</a>! Uzivajte v udobnih sobah, osupljivem razgledu in odlicni storitvi. Pozimi – smucanje, poleti – pohodi v gore in izleti. Prirocna lokacija, restavracija, SPA in prijetno vzdusje. Rezervirajte nepozabne pocitnice!
#2774 Dannykawhttps://www.zabljak-hotels.me/
Najboljse pocitnice <a href=https://www.zabljak-hotels.me/>Enigma hotel Zabljak</a>! Uzivajte v udobju, svezem zraku in osupljivi pokrajini. Gorske poti, smucanje, izleti in prijetno vzdusje. Brezplacen Wi-Fi, zajtrk in parkirisce. Rezervirajte bivanje v osrcju narave!
#2775 создание сайта клиникаhttps://new-razrabotka-sajta-medicinskogo-centra.ru/
Тут можно преобрести разработка сайтов медицинских центров <a href=https://new-razrabotka-sajta-medicinskogo-centra.ru/>разработка сайта для медицинского центра</a>
#2776 seo-продвижение медицинских сайтовhttps://new-seo-medicinskih-sajtov.ru/
Тут можно преобрести seo продвижение медицинских клиник <a href=https://new-seo-medicinskih-sajtov.ru/>сео продвижение медицинских сайтов</a>
#2777 Tylerjothttps://samprus.sa-mp.top/
гта самп рп <a href=https://samprus.sa-mp.top/>где крмп</a>
#2778 MichaelPiolahttps://zetahack.sa-mp.top/
скачать гта сан андреас самп 0.3 <a href=https://zetahack.sa-mp.top/>aim samp</a>
#2779 SteveWrecehttps://www.montenegro-estates.com
Buy elite <a href=https://www.montenegro-estates.com/>property in Montenegro</a>: purchase apartments and houses without risks! Current prices, transaction execution, taxes and residence permit. Profitably purchase housing for life, recreation or investment.
#2780 Taylorkizhttps://obnsk.ru
ипотека и покупка недвижимости <a href=https://geodizond.ru/>https://geodizond.ru</a> что нужно знать? Разбираем выбор жилья, условия кредитования, оформление документов и юридические аспекты. Узнайте, как выгодно купить квартиру и избежать ошибок!
#2781 JamesKabhttps://cryptonews.v.ua
свіжі новини криптовалют <a href=https://cryptonews.v.ua/>https://cryptonews.v.ua</a> блокчейна та DeFi. Огляди проектів, курси криптовалют, прогнози ринку та аналітика для трейдерів та інвесторів. Слідкуйте за криптомир з нами!
#2782 Larrynemhttps://dverikupe.od.ua
Свіжі ідеї дизайну <a href=https://dverikupe.od.ua/>https://dverikupe.od.ua</a> інтер’єру, сучасні тренди, поради щодо декору та ремонту. Створюйте затишок та стиль у кожному куточку вашого дому!
#2783 GeorgeDahhttps://t.me/casino_jozz
Играйте в <a href=https://t.me/casino_jozz/10>Jozz Casino бонус код</a> популярное онлайн-казино с широким выбором слотов, настольных игр и лайв-дилеров. Выгодные бонусы, удобные платежные системы и моментальные выплаты ждут вас!
#2784 WilliamGrImehttps://t.me/jvspin_bet_casino
Играйте онлайн в <a href=https://t.me/jvspin_bet_casino/16>https://t.me/jvspin_bet_casino/16</a> – лицензионное онлайн-казино с лучшими слотами, лайв-играми и щедрыми бонусами. Пополняйте счет удобными способами, получайте награды и выигрывайте реальные деньги!
#2785 Williamcoork
<a href=https://vipescortrabota.ru>Работа для женщин с привлекательными условиями</a>
#2786 Josephdawhttps://t.me/new_retro_casino_site
Лучшее казино <a href=https://t.me/new_retro_casino_site/16>New Retro Casino Бездепозитный Бонус</a>! Классические игровые автоматы, щедрые бонусы и надежные выплаты. Наслаждайтесь азартом ретро-слотов и играйте на проверенной платформе!
#2787 JeffreyGathttps://t.me/casino_bonus_bezdep
Играйте в онлайн-казино <a href=https://t.me/casino_bonus_bezdep/20>https://t.me/casino_bonus_bezdep/20</a> топовые игровые автоматы, лайв-дилеры, мгновенные выплаты и бонусы для новых игроков. Наслаждайтесь честной игрой, удобными платежными методами и крупными выигрышами!
#2788 BillyChEskhttps://t.me/igrovie_avtomati_igrat
Онлайн казино <a href=https://t.me/igrovie_avtomati_igrat/12>лучшие онлайн слоты на деньги</a> с лучшими бонусами и шансом на крупный выигрыш! Наслаждайтесь игрой в топовые слоты, получайте фриспины и участвуйте в акциях. Надежные площадки, высокая отдача и мгновенные выплаты – ваш шанс на успех!
#2789 JamesViomahttps://t.me/casino_na_ruble
Играйте в онлайн-казино <a href=https://t.me/casino_na_ruble/10>казино на рубли</a> с рублевыми счетами! Надежные казино с моментальными выплатами, бонусами и фриспинами. Пополнение через карты, кошельки и криптовалюту. Выбирайте топовые игры и выигрывайте без лишних комиссий!
#2790 Anthonyblusehttps://opendance.ru
стрип пластика уроки <a href=https://opendance.ru/>школа танцев для детей</a>
#2791 707_media_Feshttps://707.media/
Всем привет! Будьте в курсе последних тенденций и новостей в мире науки и программного обеспечения, технологий, гаджетов с 707 Media. <a href=https://707.media/>https://707.media/</a> Если новости софта и науки, технологий, гаджетов, то это в 707 Media https://707.media/ . Обязательно переходите на сайт 707.media 707 Media: Новости технологий, гаджетов, науки и софта сохраняйте в закладки и изучайте информацию, не забудьте записать адрес сайта. До новых встреч!
#2792 DavidDerhttps://televizory-qled.ru
телевизор 4k uhd qled <a href=https://televizory-qled.ru/>ultra hd 4k qled телевизор 55</a>
#2793 RobertEmosehttps://lifeforgame.ru
Все о компьютерных играх <a href=https://lifeforgame.ru/>https://lifeforgame.ru/</a> обзоры новых проектов, рейтинги, детальные гайды, новости индустрии, анонсы и системные требования. Разбираем особенности геймплея, помогаем с настройками и прохождением. Следите за игровыми трендами, изучайте секреты и погружайтесь в мир гейминга.
#2794 OpenCSGOCasehttps://case.open-csgo-case.ru
<a href=http://www.groupsalon.com/bbs/home/link.php?url=https://case.open-csgo-case.ru/>https://case.open-csgo-case.ru/</a> <a href=http://www.thexamateurs.com/crtr/cgi/out.cgi?id=189&tag=foot&trade=https://case.open-csgo-case.ru/>https://case.open-csgo-case.ru/</a> <a href=https://www.manifik-online.ru/bitrix/redirect.php?event1=click_to_call&goto=https%3A%2F%2Ft.me/s/worldcase.open-csgo-case.ru/net>https://case.open-csgo-case.ru/</a> <a href=https://maps.google.cl/url?q=https://case.open-csgo-case.ru/>https://case.open-csgo-case.ru/</a> <a href=http://tuckerprice.com.xx3.kz/go.php?url=https://case.open-csgo-case.ru/>https://case.open-csgo-case.ru/</a> <a href=https://lnv-web.dataproject.com/Modules/Match/Match_Datavolley_GetPDF.aspx?url=&fn=193/LAM070–1920.pdfhttps://case.open-csgo-case.ru/>https://case.open-csgo-case.ru/</a> <a href=https://imags.sandbox.google.co.jp/url?sa=t&url=https://case.open-csgo-case.ru/>https://case.open-csgo-case.ru/</a> <a href=https://cse.t.me/s/worldcase.open-csgo-case.ru/net.eg/url?q=https://case.open-csgo-case.ru/>https://case.open-csgo-case.ru/</a> <a href=https://club-auto-zone.autoexpert.ca/Redirect.aspx?https://case.open-csgo-case.ru/>https://case.open-csgo-case.ru/</a> <a href=https://image.google.ne/url?q=https://case.open-csgo-case.ru/>https://case.open-csgo-case.ru/</a> <a href=http://stocktwits.com.xx3.kz/go.php?url=https://case.open-csgo-case.ru/>https://case.open-csgo-case.ru/</a> <a href=https://craftcms.loyolapress.com/actions/loyola-press/redirects?env=production&uri=bitrix/rk.php?goto=https://case.open-csgo-case.ru/>https://case.open-csgo-case.ru/</a> <a href=https://brozlubomir.blog.idnes.cz/redir.aspx?url=https://case.open-csgo-case.ru/>https://case.open-csgo-case.ru/</a> <a href=https://gid.volga.news/secure/signinbyopenid?RedirectUrl=https://case.open-csgo-case.ru/>https://case.open-csgo-case.ru/</a> <a href=https://niagara2022case.open-csgo-case.ru/.ca/?URL=https://case.open-csgo-case.ru/>https://case.open-csgo-case.ru/</a>
Skins cs2 free <a href=https://finance.hanyang.ac.kr/web/voh/home?p_p_id=20&p_p_lifecycle=0&p_p_state=normal&p_p_mode=view&p_p_col_id=column-1&p_p_col_pos=20&p_p_col_count=22&_20_redirect=&_20_struts_action=%2Fdocument_library%2Fview_file_entry&_20_fileEntryId=371687&_20_version=1.0https://case.open-csgo-case.ru/>https://case.open-csgo-case.ru/</a> <a href=http://webreel.com/api/1/click?url=https://case.open-csgo-case.ru/>https://case.open-csgo-case.ru/</a> <a href=https://r.clickwise.net/pap?k=1609048966.572&b=&a=52c8a0ced34c2&u=https://case.open-csgo-case.ru/>https://case.open-csgo-case.ru/</a> <a href=https://blog.utoledo.edu/feed2js/feed2js.php?src=https://case.open-csgo-case.ru/>https://case.open-csgo-case.ru/</a> <a href=http://t.rs1mail2.com/t.aspx/subid/568441184/camid/948350/?url=www.mongodb.com/community/forums/t/mug-helsinki-in-house-ai-models-and-mobile-game-servers/264613>https://case.open-csgo-case.ru/</a> <a href=http://www.demoscene.hu/news/redirect.php?aid=563&url=https://case.open-csgo-case.ru/>https://case.open-csgo-case.ru/</a> <a href=http://hotelsoyuz.com/bitrix/redirect.php?event1=&event2=&event3=&goto=https://case.open-csgo-case.ru/>https://case.open-csgo-case.ru/</a> <a href=https://www.greenstation.net/catalog/link/ntlinktrack.cgi?https://case.open-csgo-case.ru/>https://case.open-csgo-case.ru/</a> <a href=http://fifa55l.com.xx3.kz/go.php?url=https://case.open-csgo-case.ru/>https://case.open-csgo-case.ru/</a> <a href=http://italianculture.net/redir.php?url=https://case.open-csgo-case.ru/>https://case.open-csgo-case.ru/</a> <a href=https://dealers.webasto.com/UnauthorizedAccess.aspx?Result=denied&Url=https://case.open-csgo-case.ru/>https://case.open-csgo-case.ru/</a> <a href=http://hyco.no/?URL=https://case.open-csgo-case.ru/>https://case.open-csgo-case.ru/</a> <a href=https://www.casarural-online.com/nc/es/66/holiday/Ferienwohnung_in_Oderding/Apartamento%20de%20vacaciones/?user_cwdmobj_pi1%5Burl%5D=https%3A%2F%2Fwww.mongodb.com/community/forums/t/mug-helsinki-in-house-ai-models-and-mobile-game-servers/264613>https://case.open-csgo-case.ru/</a> <a href=http://memorialpetcemeterydiscounted.blogspot.com.xx3.kz/go.php?url=https://case.open-csgo-case.ru/>https://case.open-csgo-case.ru/</a> <a href=https://jeu-concours.digidip.net/visit?url=https://case.open-csgo-case.ru/>https://case.open-csgo-case.ru/</a>
#2795 sharedsteamhttps://t.me/sharedsteam
Looking for free steam accounts <a href=https://t.me/sharedsteam>https://t.me/sharedsteam</a>? We regularly share working accounts with games, bonuses, and tips. Subscribe now and don’t miss new giveaways! Only verified and active accounts.
#2796 Davidswocahttps://lifeforgame.ru
Все о компьютерных играх <a href=https://lifeforgame.ru/>https://lifeforgame.ru/</a> обзоры новых проектов, рейтинги, детальные гайды, новости индустрии, анонсы и системные требования. Разбираем особенности геймплея, помогаем с настройками и прохождением. Следите за игровыми трендами, изучайте секреты и погружайтесь в мир гейминга.
#2797 DavidWexiahttps://obnsk.ru
Все о недвижимости <a href=https://gpnw.ru/>https://gpnw.ru</a> покупка, аренда, ипотека. Разбираем рыночные тренды, юридические тонкости, лайфхаки для выгодных сделок. Помогаем выбрать квартиру, рассчитать ипотеку, проверить документы и избежать ошибок при сделках с жильем. Актуальные статьи для покупателей, арендаторов и инвесторов.
#2798 BillyKervehttps://konsta-ovk.ru
Все о недвижимости <a href=https://legato-dom.ru/>https://legato-dom.ru</a> покупка, аренда, ипотека. Разбираем рыночные тренды, юридические тонкости, лайфхаки для выгодных сделок. Помогаем выбрать квартиру, рассчитать ипотеку, проверить документы и избежать ошибок при сделках с жильем. Актуальные статьи для покупателей, арендаторов и инвесторов.
#2799 JessieKeshttps://televizory-smart-tv.ru
телевизор smart pro tv <a href=https://televizory-smart-tv.ru/>https://televizory-smart-tv.ru</a>
#2800 Specialistuc_cawhttps://specialistuc.ru/
Всем привет! Обучение рабочим специальностям РФ и получение удостоверения. Получение допусков. Дополнительная подготовка. Купить удостоверение. <a href=https://specialistuc.ru/>оператор котельной обучение</a> Если получить удостоверение и специальность, то это в учебном центре specialistuc.ru https://specialistuc.ru/ . Обязательно переходите на сайт учебного центра specialistuc.ru: получить удостоверение и специальность изучайте информацию и сохраняйте в закладки, не забудьте записать адрес сайта. Всем пока!
#2801 Danielamulthttps://nedorogie-televizory.ru
куплю телевизор недорого цена <a href=https://nedorogie-televizory.ru/>https://nedorogie-televizory.ru</a>
#2802 Willienoxhttps://natyazhnye-potolki2.ru
Натяжные потолки с установкой <a href=https://natyazhnye-potolki2.ru/>https://natyazhnye-potolki2.ru</a> стильное и практичное решение для любого интерьера. Предлагаем широкий выбор фактур и цветов, качественные материалы, быстрый монтаж и гарантию на работу. Устанавливаем потолки любой сложности в квартирах, домах, офисах.
#2803 FrankWRovehttps://www.rimnova.eu/
<a href=https://www.rimnova.eu/>Jante Rimnova</a>
#2804 Shawncakhttps://magazin-keramogranit.ru
керамогранит для пола купить <a href=https://magazin-keramogranit.ru/>купить большую керамическую плитку</a>
#2805 ทดลองเล่นสล็อต Chocolate Deluxehttps://maxbet.poker/chocolate-deluxe/
การเข้ามาเล่นบนเว็บไซต์เป็นทางเลือกที่สะดวกและรวดเร็ว แถมยังมีทางเข้าที่สามารถรองรับได้ทุกแพลตฟอร์ม ไม่ว่าคุณจะใช้อุปกรณ์ใดอยู่ก็ตาม สามารถเข้ามาทำเงินกับเกมสล็อตได้ทุกที่ทุกเวลา ลุ้นสนุกได้ตลอดนั่นเอง ทดลองเล่นสล็อต Chocolate Deluxe
#2806 WillieLonhttps://honeymoneycasino.ru
Honey Money Казино <a href=https://honeymoneycasino.ru/>https://honeymoneycasino.ru</a> это захватывающий мир азартных игр с щедрыми бонусами, быстрыми выплатами и огромным выбором слотов, рулетки, покера и других развлечений. Играй онлайн в любое время, участвуй в турнирах и получай эксклюзивные награды.
#2807 ทดลองเล่นสล็อต Museum Mysteryhttps://maxbet.poker/museum-mystery/
ทดลองเล่นสล็อต Museum Mystery ออนไลน์ ที่เป็นแหล่งสร้างรายได้ สร้างความรวยให้กับทุกคนได้จริง สล็อตเว็บตรง จ่ายเงินได้ครบทุกบาททุกสตางค์ ยิ่งมีคนสนใจเข้ามาเล่นมากเท่าไหร่ ยิ่งทำให้มีการแจกเงินรางวัลใหญ่มากขึ้นเท่านั้น
#2808 ทดลองเล่นสล็อตลูกหมู3ตัวhttps://maxbet.poker/three-crazy-piggies/
สล็อตเว็บตรง ให้ บริการเล่นเกมสล็อตออนไลน์ตลอด 24 ชั่วโมง รักษาความปลอดภัยสูง ไม่ว่าจะเข้ามาเล่นเวลาไหน สร้างเงินได้มากเพียงใด ทางเราพร้อมจ่ายจริงครบทุกยอด ไม่เคยมีประวัติการโกง พร้อมให้ทุกคนเข้ามาใช้งาน ทดลองเล่นสล็อตลูกหมู3ตัว ได้อย่างสะดวกสบายใจ
#2809 ทดลองเล่นสล็อต Chicken Runhttps://maxbet.poker/chicken-run/
ทดลองเล่นสล็อต Chicken Run เว็บสล็อต อันดับ 1 จึงมีการนำระบบที่ดีที่สุดมาใช้งานในการเดิมพัน สล็อตเครดิตฟรี แตกง่าย ทำให้การเข้าเล่น สล็อตแตกหนัก ไม่มีการลื่นไหล ใช้งานได้อย่างเสถียรมากที่สุด สล็อต ฝากถอน true wallet เว็บตรง ได้สะดวกทุกที่ทุกเวลา
#2810 Dreammyhttps://maxbet.poker/fortune-snake/
[url=https://maxbet.poker/fortune-snake/]ทดลองเล่นสล็อต Fortune Snake[/url] การเข้ามาเล่นบนเว็บไซต์เป็นทางเลือกที่สะดวกและรวดเร็ว แถมยังมีทางเข้าที่สามารถรองรับได้ทุกแพลตฟอร์ม ไม่ว่าคุณจะใช้อุปกรณ์ใดอยู่ก็ตาม สามารถเข้ามาทำเงินกับเกมสล็อตได้ทุกที่ทุกเวลา ลุ้นสนุกได้ตลอดนั่นเอง
#2811 strendusCasinoMXhttps://strendus.mexico-de-casino.com
<a href=http://ispoint.kz/redirect?url=https://strendus.mexico-de-casino.com>strendus.mexico-de-casino.com</a> <a href=http://www.tumimusic.com/link.php?url=https://strendus.mexico-de-casino.com>strendus.mexico-de-casino.com</a> <a href=http://news.7kg.jp/iframe/hatena_bookmark_comment?canonical_uri=https://strendus.mexico-de-casino.com>strendus.mexico-de-casino.com</a> <a href=http://www.google.az/url?q=https://strendus.mexico-de-casino.com>strendus.mexico-de-casino.com</a> <a href=http://www.allabilitiesmackay.org.au/redirect.aspx?destination=https://strendus.mexico-de-casino.com>strendus.mexico-de-casino.com</a> <a href=http://leadingageohio.org/aws/OSAE/ctr/news_article/91385?click=https://strendus.mexico-de-casino.com>strendus.mexico-de-casino.com</a> <a href=http://bernkopfova.blog.idnes.cz/redir.aspx?url=https://strendus.mexico-de-casino.com>strendus.mexico-de-casino.com</a> <a href=http://programs-pc.com/go.php?url=https://strendus.mexico-de-casino.com>strendus.mexico-de-casino.com</a> <a href=http://my-yo.ru/out.php?link=https://strendus.mexico-de-casino.com>strendus.mexico-de-casino.com</a> <a href=http://rucni-mixery-slehace.heureka.cz.xx3.kz/go.php?url=https://strendus.mexico-de-casino.com>strendus.mexico-de-casino.com</a> <a href=http://m.vk.com/away.php?to=https://strendus.mexico-de-casino.com>strendus.mexico-de-casino.com</a> <a href=http://mailmonitor.com.xx3.kz/go.php?url=https://strendus.mexico-de-casino.com>strendus.mexico-de-casino.com</a> <a href=http://yourboat.ru/redirect.php?url=https://strendus.mexico-de-casino.com>strendus.mexico-de-casino.com</a> <a href=http://evasvobodova2.blog.idnes.cz/redir.aspx?url=https://strendus.mexico-de-casino.com>strendus.mexico-de-casino.com</a> <a href=http://images.google.mk/url?q=https://strendus.mexico-de-casino.com>strendus.mexico-de-casino.com</a>
Download client online casino strendus – play right now! <a href=http://rylanmjdzs.fitnell.com.xx3.kz/go.php?url=https://strendus.mexico-de-casino.com>strendus.mexico-de-casino.com</a> <a href=http://metaprom.ru/redirect.php?urlab=https://strendus.mexico-de-casino.com>strendus.mexico-de-casino.com</a> <a href=http://emophilips.com/?URL=https://strendus.mexico-de-casino.com>strendus.mexico-de-casino.com</a> <a href=http://en.pfc-cska.com/bitrix/redirect.php?goto=https://strendus.mexico-de-casino.com>strendus.mexico-de-casino.com</a> <a href=http://vr1p.com/bbs/redirect.php?tid=7543020&goto=lastposthttps://strendus.mexico-de-casino.com>strendus.mexico-de-casino.com</a> <a href=http://49.glawandius.com/index/d2?diff=0&source=og&campaign=13142&content=&clickid=y0vzpup0zwsnl3yj&aurl=http%3A%2F%2Fhttps://strendus.mexico-de-casino.com&pushMode=popup>strendus.mexico-de-casino.com</a> <a href=http://shoppingonline13344.blog2learn.com.xx3.kz/go.php?url=https://strendus.mexico-de-casino.com>strendus.mexico-de-casino.com</a> <a href=http://backseatadvert.com.xx3.kz/go.php?url=https://strendus.mexico-de-casino.com>strendus.mexico-de-casino.com</a> <a href=http://idrottensaffarer.se/ad/www/delivery/ck.php?ct=1&oaparams=2__bannerid=70__zoneid=23__cb=0326bc573a__oadest=https://strendus.mexico-de-casino.com>strendus.mexico-de-casino.com</a> <a href=http://tlap.hu/rd/1/?url=https://strendus.mexico-de-casino.com>strendus.mexico-de-casino.com</a> <a href=http://klabhouse.com/en/CurrencyUpdate/USD/?urlRedirect=https://strendus.mexico-de-casino.com>strendus.mexico-de-casino.com</a> <a href=http://images.google.com.bo/url?q=https://strendus.mexico-de-casino.com>strendus.mexico-de-casino.com</a> <a href=http://megatel24.ru/bitrix/rk.php?goto=https://strendus.mexico-de-casino.com>strendus.mexico-de-casino.com</a> <a href=http://www.google.co.jp/url?sa=t&url=https%3A%2F%2Fhttps://strendus.mexico-de-casino.com>strendus.mexico-de-casino.com</a> <a href=http://maps.google.ae/url?q=https://strendus.mexico-de-casino.com>strendus.mexico-de-casino.com</a>
#2812 agrohimwhehttps://agro-himiya.by/
Здравствуйте товарищи<a href=https://agro-himiya.by/>.</a> <a href=https://agro-himiya.by/><img src=„https://i115.fastpic.ru/big/2021/0705/51/9f7b4bc80c6b3090ac1e44baaa903651.jpg“></a> Роттизитовые гранулки плодородия прилаживаются уже 10-ки полет равновеликим образом одобрили свой на доску энергоэффективность сверху практике. Фасад чтоб, как получать цианамид, чтоб посчитать, что-что как надо эрос хоть пруд пруди в школа школка грунте со стороны руководящих органов ваших сотках – применяйте лакмусовые приемоиндикаторные бумажки чтобы атрибута кислотности почвы. ЧТО ТАКОЕ? ОДИНАКОВЫЙ после этого, сознательно урывайте необходимое цианамид, концентрат тоже электрорегулятор кислотности чтоб почвы. Kristalon построил нынешние эргономичные составы роттизитовых удобрений да спускаются в течение школа птице растворимых кристаллов а также еще сбалансированным формулой макро/микро элементов. Сверх приумножения увеличения растений, фрукты, подзаработанные честь имею кланяться сих цивилизаций эпично ужик на яко отделять. ant. присоединять на младенческие а тоже диетические яства, что свидетельствует чешущий уровень безобидности чтобы здоровья. Чтобы усовершенствования корпоративного состава агропочвенного состава с местности руководящих организаций вашем наделе смогут устроить ногу сложные роттизитовые гранулки плодородия, мелиоранты, гуминовые удобрения. Дополнительного удобрение и электрохимзащита тоже посодействуют чтобы вас сверху единоборстве хорошо ярь (а) тоже ядреный сад. 1)<a href=https://agro-himiya.by>аммиачная селитра купить в минске </a> – Минеральные удобрения купить в Минске можно самовывозом в течении 20 минут, либо c оперативной доставкой. 2)<a href=https://agro-himiya.by>минеральные удобрения купить Минск</a> – Мы предлагаем вам приобрести только комплексные препараты, позволяющие полностью насытить потребности растения после обработки. 3)<a href=https://agro-himiya.by>неорганические удобрения купить</a> – Каждый товар проходит тщательные клинические испытания на различных видах почв и только после этого запускается в серийное производство. 4)<a href=https://agro-himiya.by>минеральные удобрения в Беларуси</a> – Мы заботимся о том, чтобы предоставляемый нами сервис был высокого уровня. Туземный черноризец хряпнем счастливы Вы делать язык нас сверху сайте <a href=https://agro-himiya.by>НАЖМИТЕ ССЫЛКУ</a> Чистота иметь в своем распоряжении! <a href=https://agro-himiya.by/>жидкое комплексное удобрение app 11 37</a> <a href=https://agro-himiya.by/>жидкие комплексные удобрения для картофеля</a> <a href=https://agro-himiya.by/>внесение карбамида в почву</a> <a href=https://agro-himiya.by/>райкат старт для картофеля</a> <a href=https://agro-himiya.by/>купить удобрение яромила</a> <a href=https://agro-himiya.by/>марки минеральных удобрений</a> <a href=https://agro-himiya.by/>нутривант плюс томатный</a> <a href=https://agro-himiya.by/>кальциевая селитра для тюльпанов</a> <a href=https://agro-himiya.by/>жидкое комплексное удобрение 11:37 купить</a> <a href=https://agro-himiya.by/>база минеральных удобрений</a> <a href=https://agro-himiya.by/>калийные удобрения в беларуси</a> <a href=https://agro-himiya.by/>флорон порошок</a> <a href=https://agro-himiya.by/>калийные удобрения растений</a> <a href=https://agro-himiya.by/>удобрение диаммофоска</a> <a href=https://agro-himiya.by/>удобрения белоруссия</a> <a href=https://agro-himiya.by/>магниевая селитра</a> <a href=https://agro-himiya.by/>минеральные удобрения для чеснока</a> <a href=https://agro-himiya.by/>комплексное удобрение универсальное</a> <a href=https://agro-himiya.by/>суперфосфат удобрение цена</a> <a href=https://agro-himiya.by/>удобрение озимой ржи</a> <a href=https://agro-himiya.by/>комплексы удобрений</a> <a href=https://agro-himiya.by/>протравитель табу 60</a> <a href=https://agro-himiya.by/>аммофос np 12:52 минск</a> <a href=https://agro-himiya.by/>фосфатные удобрения</a> <a href=https://agro-himiya.by/>удобрения купить беларусь</a> <a href=https://agro-himiya.by/>стимуляторы роста растений купить в минске</a> <a href=https://agro-himiya.by/>минеральные удобрения и агрохимия</a> <a href=https://agro-himiya.by/>удобрение йод</a> <a href=https://agro-himiya.by/>применение удобрений</a> <a href=https://agro-himiya.by/>применение минеральных удобрений</a> <a href=https://agro-himiya.by/>аммофос в мешках купить</a> <a href=https://agro-himiya.by/>карбамид 46,2%n</a> <a href=https://agro-himiya.by/>удобрения для овощных культур</a> <a href=https://agro-himiya.by/>основные калийные удобрения</a> <a href=https://agro-himiya.by/>натрий удобрение</a> <a href=https://agro-himiya.by/>кристалон для томатов</a> <a href=https://agro-himiya.by/>монофосфат калия для томатов</a> <a href=https://agro-himiya.by/>минеральные удобрения саженцев</a> <a href=https://agro-himiya.by/>нитрат калия купить</a> <a href=https://agro-himiya.by/>калимагнезия купить</a> <a href=https://agro-himiya.by/>удобрение двойной суперфосфат</a> <a href=https://agro-himiya.by/>компания минеральных удобрений</a> <a href=https://agro-himiya.by/>нитрат магния 6 ти водный купить</a> <a href=https://agro-himiya.by/>атланте керетаро</a> <a href=https://agro-himiya.by/>удобрения содержащие калий</a> <a href=https://agro-himiya.by/>удобрения с микроэлементами</a> <a href=https://agro-himiya.by/>удобрение кальция купить</a> <a href=https://agro-himiya.by/>борная кислота 17,5%</a> <a href=https://agro-himiya.by/>эффективность применения удобрений</a> <a href=https://agro-himiya.by/>удобрение для фикуса</a>
#2813 IrvingPsymnhttps://ampdrive.info
Дізнавайтеся про останні новини <a href=https://ampdrive.info/>https://ampdrive.info</a> електромобілів, супекарів та актуальні події автомобільного світу в Україні. Ексклюзивні матеріали, фото та аналітика для справжніх автолюбителів на AmpDrive.?
#2814 GregoryMep
как найти детское порно <a href=https://bonsai.casino/>купить меф крег шишки героин миксы соли</a>
#2815 avtostilshophttps://avtostilshop.ru
Товары для вашего авто <a href=https://avtostilshop.ru/>https://avtostilshop.ru</a> автоаксессуары, масла, запчасти химия, электроника и многое другое. Быстрая доставка, акции и бонусы для постоянных клиентов. Подбирайте товары по марке авто и будьте уверены в качестве!
#2816 DonaldFarcehttps://igrovye-noutbuki.ru
купить игровой ноутбук dns <a href=https://igrovye-noutbuki.ru/>https://igrovye-noutbuki.ru</a>
#2817 OpenCaseCShttps://case.open-case-cs2.ru
<a href=http://images.google.bi/url?q=https://case.open-case-cs2.ru/>case.open-case-cs2.ru</a> <a href=https://www.fcxchief.asia/bitrix/redirect.php?goto=https://case.open-case-cs2.ru/>case.open-case-cs2.ru</a> <a href=https://jig.jp/redirect/?url=https://case.open-case-cs2.ru/>case.open-case-cs2.ru</a> <a href=http://www.thorstrup-jagtforening.dk/index.php/tools/packages/easy_news/rss?redirect_url=https://case.open-case-cs2.ru/>case.open-case-cs2.ru</a> <a href=http://www.kemek.eu/redirect.php?link=https://case.open-case-cs2.ru/>case.open-case-cs2.ru</a> <a href=http://main.zylom.com/servlet/SEK?kid=1115098&url=https://case.open-case-cs2.ru/>case.open-case-cs2.ru</a> <a href=http://www.robotrebels.org/index.php?thememode=full;redirect=https://case.open-case-cs2.ru/>case.open-case-cs2.ru</a> <a href=https://glam0ur.net/redirect-to/?redirect=https://case.open-case-cs2.ru/>case.open-case-cs2.ru</a> <a href=http://globalindustrialsurplus.com.xx3.kz/go.php?url=https://case.open-case-cs2.ru/>case.open-case-cs2.ru</a> <a href=http://your.qwe.aqmail.xx3.kz/go.php?url=https://case.open-case-cs2.ru/>case.open-case-cs2.ru</a> <a href=https://danielvavra.blog.idnes.cz/redir.aspx?url=https://case.open-case-cs2.ru/>case.open-case-cs2.ru</a> <a href=http://fd61.s6.domainkunden.de/cgi-bin/redirect.asp?Id=7&url=https://case.open-case-cs2.ru/>case.open-case-cs2.ru</a> <a href=http://www.moverspackersdirectories.com/detail/?url=https://case.open-case-cs2.ru/>case.open-case-cs2.ru</a> <a href=http://yandex.ru/redir_warning/?url=https://case.open-case-cs2.ru/>case.open-case-cs2.ru</a> <a href=https://www.tsu.ru/bitrix/rk.php?goto=https://case.open-case-cs2.ru/>case.open-case-cs2.ru</a>
Open case cs2
<a href=https://29.biqund.com/index/d2?diff=0&utm_clickid=l6o4wo4osowoss8w&aurl=https%3A%2F%2Fcase.open-case-cs2.ru&an=&site=&isubs=0&pushMode=popup>case.open-case-cs2.ru</a> <a href=https://msk.petroblok.ru/bitrix/redirect.php?goto=https://case.open-case-cs2.ru/>case.open-case-cs2.ru</a> <a href=http://www.mysuperjob.it/approfondimenti/?wptouch_switch=desktop&redirect=http%3A%2F%2Fcase.open-case-cs2.ru>case.open-case-cs2.ru</a> <a href=https://www.rusewing.com/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=https://case.open-case-cs2.ru/>case.open-case-cs2.ru</a> <a href=http://janvarev.ru/lib/redirect/?url=https://case.open-case-cs2.ru/>case.open-case-cs2.ru</a> <a href=http://www.cook-books.com/dbsearch/adredir.asp?url=https://case.open-case-cs2.ru/>case.open-case-cs2.ru</a> <a href=http://baroue.org.xx3.kz/go.php?url=https://case.open-case-cs2.ru/>case.open-case-cs2.ru</a> <a href=https://web.intake.education/module/share_email.php?share_title=West%20Africa%20North%20America%20Exhibition&share_text=Join%20our%20virtual%20exhibition%20fair%20aimed%20at%20prospective%20students%20for%20the%202022%2F23.%20The%20exhibition%20will%20cover%3A%09Top%20undergraduate%20%26amp%3B%20master%26%2339%3Bs%20…&share_link=https%3A%2F%2Fcase.open-case-cs2.ru&share_image=https%3A%2F%2Fwww.education-db.net%2Fwebsite_dynamic_files%2Fevents%2F656%2Fshare7.png%3F1638552550>case.open-case-cs2.ru</a> <a href=http://eta.ecommzone.com/lz/green4/00ANU4/065f9fb0fb6bdaffcc8283d81ddc198fc8/actions/redirect.aspx?url=https://case.open-case-cs2.ru/>case.open-case-cs2.ru</a> <a href=https://profimuszaki.hu/download.php?url=https://case.open-case-cs2.ru/>case.open-case-cs2.ru</a> <a href=http://g-rf.ru/forum/away.php?s=https://case.open-case-cs2.ru/>case.open-case-cs2.ru</a> <a href=http://www.badausstellungen.de/info/click.php?projekt=badausstellungen&link=https://case.open-case-cs2.ru/>case.open-case-cs2.ru</a> <a href=http://blog.isdfg.com/newblog1/index.asp?wangzhi=case.open-case-cs2.ru&wenjian=/displays/js/js.php&page=15>case.open-case-cs2.ru</a> <a href=http://uc.56cargo.com/en-US/User/Login?url=https://case.open-case-cs2.ru/>case.open-case-cs2.ru</a> <a href=http://www.clearinghouseforfootbal.gov.au/home/redirect?url=https://case.open-case-cs2.ru/>case.open-case-cs2.ru</a>
#2818 FrankWRovehttps://www.rimnova.eu/
<a href=https://www.rimnova.eu/>Jante Rimnova</a>
#2819 Alfredjaivyhttps://sales-stroy.ru
Ваш гид по дизайну <a href=https://sales-stroy.ru/>https://sales-stroy.ru</a> строительству и ремонту! Советы профессионалов, актуальные тенденции, проверенные технологии и подборки лучших решений для дома. Всё, что нужно для комфортного и стильного пространства, на одном портале!
#2820 lifeforgamehttps://lifeforgame.ru
игра прохождение заданий <a href=https://lifeforgame.ru/kibersport/stati/dota/mmr.html>таблица рангов дота 2</a>
#2821 Изготовление навесов в СПБhttps://top-naves-spb.ru/
Собственное производство металлоконструкций. Если вас интересует изготовление навеса из металла мы предлогаем изготовление под ключ <a href=https://top-naves-spb.ru/>металлический навес для автомобиля</a>
#2822 Williameraphhttps://lifeforgame.ru/online-pc/stati-online/minecraft/stroitelstvo-krasivogo-doma-v-majnkraft.html
статья про видео игры <a href=https://lifeforgame.ru/odinochnye-pk/stati-odinochnye/cyberpunk-2077/cyberpunk-2077-polnoe-prohozhdenie-igry-vse-kontsovki.html>сюжет киберпанк 2077 время</a>
#2823 Arthurhalhttps://lifeforgame.ru/kibersport/stati/dota/mmr.html
видео игры статьи <a href=https://lifeforgame.ru/online-pc/stati-online/minecraft/minecraft-camyj-malenkij-dom-v-v-kotorom-mozhno-zhit.html>маленькие дома в майнкрафте</a>
#2824 Навесы под ключ в СПБhttps://top-naves-spb.ru/
Собственное производство металлоконструкций. Если вас интересует Навесы для дачи арочные мы предлогаем изготовление под ключ <a href=https://top-naves-spb.ru/>Навесы в Вознесенье</a>
#2825 медицинский сайт созданиеhttps://new-razrabotka-sajta-medicinskogo-centra.ru/
Тут можно преобрести разработка сайт медицинского центра <a href=https://new-razrabotka-sajta-medicinskogo-centra.ru/>создание сайтов для медицинских организаций</a>
#2826 Tyleroralfhttps://vibrometro1a.com
<a href=https://vibrometro1a.com>Diagnostico de equipos</a> Dispositivos de balanceo: esencial para el operación estable y eficiente de las maquinarias.
En el mundo de la tecnología contemporánea, donde la productividad y la confiabilidad del sistema son de máxima significancia, los sistemas de balanceo cumplen un tarea fundamental. Estos equipos específicos están diseñados para calibrar y fijar piezas rotativas, ya sea en dispositivos industrial, vehículos de transporte o incluso en electrodomésticos caseros.
Para los especialistas en mantenimiento de sistemas y los técnicos, trabajar con sistemas de equilibrado es crucial para asegurar el operación uniforme y confiable de cualquier mecanismo rotativo. Gracias a estas opciones innovadoras sofisticadas, es posible minimizar considerablemente las movimientos, el estruendo y la carga sobre los sujeciones, mejorando la vida útil de piezas caros.
Asimismo significativo es el papel que cumplen los equipos de calibración en la soporte al usuario. El asistencia experto y el mantenimiento continuo usando estos sistemas habilitan ofrecer soluciones de gran estándar, mejorando la satisfacción de los clientes.
Para los propietarios de emprendimientos, la financiamiento en estaciones de ajuste y detectores puede ser fundamental para incrementar la rendimiento y eficiencia de sus aparatos. Esto es principalmente importante para los dueños de negocios que gestionan medianas y modestas negocios, donde cada elemento importa.
Por otro lado, los dispositivos de equilibrado tienen una gran utilización en el campo de la prevención y el gestión de excelencia. Permiten detectar eventuales fallos, reduciendo mantenimientos costosas y problemas a los dispositivos. Más aún, los datos obtenidos de estos dispositivos pueden utilizarse para maximizar sistemas y incrementar la presencia en motores de investigación.
Las áreas de aplicación de los aparatos de equilibrado abarcan múltiples sectores, desde la fabricación de transporte personal hasta el supervisión ecológico. No afecta si se considera de enormes producciones productivas o limitados espacios hogareños, los sistemas de calibración son fundamentales para promover un desempeño efectivo y sin fallos.
#2827 CurtisSwomihttps://kra29at-cc.ru
кракен актуальная ссылка на сегодня <a href=https://kra29at-cc.ru/>Кракен как зайти</a>
#2828 Matthewvabhttps://flowersspb.com/
доставка цветов <a href=https://yandex.ru/maps/org/roza_vetrov/117104897519>цветы недорого спб купить</a>
#2829 trustgashttp://trustgas.ru
Купить шампуни он-лайн Ульяновск https://trustgas.ru/
Всёгда лучшая продукция в наличии
Только онлайн 03/03/2025
#2830 RichardBuphttps://coffee-help24.ru
Ремонт кофемашин в Москве <a href=https://coffee-help24.ru/>https://coffee-help24.ru</a> быстро, качественно, с гарантией! Обслуживаем все бренды: Saeco, DeLonghi, Jura, Bosch и др. Диагностика, замена деталей, чистка от накипи. Выезд мастера на дом или ремонт в сервисе.
#2831 Nathanteendhttps://осагополис.рф
Страхование по лучшей цене <a href=https://осагополис.рф/>https://осагополис.рф</a> Сравните предложения страховых компаний и выберите полис с выгодными условиями. Удобный сервис поможет найти оптимальный вариант автострахования, ОСАГО, КАСКО, туристических и медицинских страховок.
#2832 Michaelclordhttps://wallpapers-all.com
The best HD wallpapers <a href=https://wallpapers-all.com/75242-ilia-topuria-ufc-for-free!.html>https://wallpapers-all.com/75242-ilia-topuria-ufc-for-free!.html</a> in one place! Download free backgrounds for your desktop and smartphone. A huge selection of pictures – from minimalism to bright landscapes and fantasy. Enjoy stylish images every day!
#2833 Michaeldushttps://kra29at-cc.ru/
оригинальная ссылка на кракен <a href=https://kra29at-cc.ru/>kra30</a>
#2834 Rickeyvialphttps://dubai-rent-yacht.com
luxury yacht charter <a href=https://dubai-rent-yacht.com/>https://dubai-rent-yacht.com</a>
#2835 Richardpalhttps://apple-macbook-pro213.ru
ноутбук apple macbook pro 2024 <a href=https://apple-macbook-pro213.ru/>apple macbook pro 14 2024</a>
#2836 Aaronmaniahttps://macbook-air-m2.ru
apple macbook air m2 купить <a href=https://macbook-air-m2.ru/>macbook air m2 256gb midnight</a>
#2837 Tyleroralfhttps://vibrometro1a.com
<a href=https://vibrometro1a.com>reparación de maquinaria agrícola</a> Equipos de calibración: importante para el rendimiento uniforme y efectivo de las maquinarias.
En el mundo de la tecnología actual, donde la rendimiento y la seguridad del sistema son de gran importancia, los aparatos de balanceo juegan un tarea esencial. Estos equipos adaptados están desarrollados para equilibrar y regular elementos dinámicas, ya sea en maquinaria productiva, transportes de desplazamiento o incluso en dispositivos domésticos.
Para los técnicos en reparación de aparatos y los profesionales, utilizar con aparatos de equilibrado es esencial para proteger el rendimiento uniforme y fiable de cualquier aparato dinámico. Gracias a estas herramientas innovadoras sofisticadas, es posible reducir notablemente las vibraciones, el zumbido y la tensión sobre los soportes, mejorando la longevidad de elementos valiosos.
Asimismo trascendental es el tarea que juegan los equipos de balanceo en la soporte al comprador. El apoyo especializado y el mantenimiento constante usando estos aparatos permiten ofrecer prestaciones de alta estándar, elevando la bienestar de los consumidores.
Para los propietarios de empresas, la aporte en estaciones de ajuste y medidores puede ser clave para optimizar la rendimiento y rendimiento de sus equipos. Esto es sobre todo significativo para los emprendedores que manejan pequeñas y pequeñas emprendimientos, donde cada detalle importa.
Por otro lado, los equipos de calibración tienen una amplia aplicación en el ámbito de la prevención y el supervisión de nivel. Permiten localizar posibles problemas, reduciendo reparaciones caras y daños a los sistemas. Más aún, los indicadores recopilados de estos aparatos pueden aplicarse para optimizar procedimientos y mejorar la visibilidad en motores de búsqueda.
Las campos de implementación de los sistemas de equilibrado cubren múltiples ramas, desde la fabricación de bicicletas hasta el supervisión de la naturaleza. No afecta si se habla de enormes manufacturas manufactureras o modestos talleres hogareños, los aparatos de equilibrado son esenciales para proteger un funcionamiento efectivo y sin presencia de interrupciones.
#2838 Ronaldacatthttps://yacht-dubai-rental.com
арендовать яхту дубай <a href=https://yacht-dubai-rental.com/>яхта на 25 человек</a>
#2839 Scottborhttps://arenda-yaht-spb.ru
аренда теплохода 10 человек <a href=https://arenda-yaht-spb.ru/>яхта питер аренда на час</a>
#2840 Bogdanazs
Салам Вам друзья! <a href=https://tgrampodvc.ru/>Накрутка подписчиков Телеграм</a>
<a href=https://tgrampodvc.ru/>накрутка подписчиков Телеграм без регистрации</a> <a href=https://tgrampodvc.ru/>накрутка подписчиков в Телеграм живые люди бесплатно</a>
Спокойная организация актов и экспрессконтроль по-над ихний выполнением. Накрутка на Телеграм один-два помощью сервиса осуществляется самое большее ясно как день (а) также удобно, при этом присутствует возможность править стремительностью исполненья определенных задач. Юзеру в своем кабинете доступна вся спрашиваемая информация, презентованая доскональным образом – ключевое фактор чтобы проведения лучшего анализа.Адекватная да аргументированная эстимейт предлагаемых услуг. Накрутка Телеграм, употребляя инструменты площадки, протечет быстро также пользователям не требуется переплачивать деньги – цена привлечения подписчиков присутствует на максимально доступном уровне. Благодаря данному такой рекламный инструмент, способствующий просто санкционировать темы по части увеличения немерено участников, что ль использовать первый попавшийся сверх исключения.Гарантия получения хотимого результата. Следует пометить, что этакий способ росту численности бойких подписчиков являть собой безопасным. Хозяевам Телеграм-каналов я бы не сказал надобности будоражиться что касается вероятном накладывании штрафных наказаний и лежать подверженным рискам доход бытующею репутации – все заявки производятся анонимно. Важнецкого дня!
#2841 создание сайта клиникаhttps://new-razrabotka-sajtov-medicinskih-organizacij.ru/
Тут можно преобрести создание сайта медицинского центра <a href=https://new-razrabotka-sajtov-medicinskih-organizacij.ru/>создать сайт медицинского центра</a>
#2842 MikelMarhttps://macbook-pro-16.ru
ноутбук apple macbook pro 16 2024 <a href=https://macbook-pro-16.ru/>ноутбук apple macbook pro 16 m4</a>
#2843 создание сайта клиникиhttps://new-razrabotka-sajtov-medicinskih-organizacij.ru/
Тут можно преобрести создание сайта больницы <a href=https://new-razrabotka-sajtov-medicinskih-organizacij.ru/>создание мед сайтов</a>
#2844 estrategiasCasinohttps://estrategias.directorio-de-casinos-mx.com
<a href=https://images.google.hu/url?q=https://estrategias.directorio-de-casinos-mx.com/>https://estrategias.directorio-de-casinos-mx.com/</a> <a href=https://maps.google.fi/url?q=j&source=web&rct=j&url=https://estrategias.directorio-de-casinos-mx.com/>https://estrategias.directorio-de-casinos-mx.com/</a> <a href=http://www.musiknyheter.nu/?url=https://estrategias.directorio-de-casinos-mx.com/>https://estrategias.directorio-de-casinos-mx.com/</a> <a href=http://www.aquaforum.ua/mobiquo/smartbanner/welcome.php?referer=https://estrategias.directorio-de-casinos-mx.com/>https://estrategias.directorio-de-casinos-mx.com/</a> <a href=http://forum.topway.org/Sns/link.php?url=https://estrategias.directorio-de-casinos-mx.com/>https://estrategias.directorio-de-casinos-mx.com/</a> <a href=http://www.hotelsravenna.it/de-DE/dev/ViewSwitcher/SwitchView?mobile=False&returnUrl=https://estrategias.directorio-de-casinos-mx.com/>https://estrategias.directorio-de-casinos-mx.com/</a> <a href=http://www.houseplanet.ru/redirect.php?url=https://estrategias.directorio-de-casinos-mx.com/>https://estrategias.directorio-de-casinos-mx.com/</a> <a href=https://anti-block24.biz/redir.php?url=https://estrategias.directorio-de-casinos-mx.com/>https://estrategias.directorio-de-casinos-mx.com/</a> <a href=https://bnc.lt/a/key_live_pgerP08EdSp0oA8BT3aZqbhoqzgSpodT?medium=&feature=&campaign=&channel=&%24always_deepab=0&%24fallback_url=&%24deepab_path=&_p=c11429c2860160eee31d8ahttps://estrategias.directorio-de-casinos-mx.com/>https://estrategias.directorio-de-casinos-mx.com/</a> <a href=https://metakin45.hatenablog.com/iframe/hatena_bookmark_comment?canonical_uri=https://estrategias.directorio-de-casinos-mx.com/>https://estrategias.directorio-de-casinos-mx.com/</a> <a href=https://liveyourpassion.in/redirect.aspx?article_id=47&product_id=38&url=https://estrategias.directorio-de-casinos-mx.com/>https://estrategias.directorio-de-casinos-mx.com/</a> <a href=https://fik.blog.idnes.cz/redir.aspx?url=https://estrategias.directorio-de-casinos-mx.com/>https://estrategias.directorio-de-casinos-mx.com/</a> <a href=https://doravesela.blog.idnes.cz/redir.aspx?url=https://estrategias.directorio-de-casinos-mx.com/>https://estrategias.directorio-de-casinos-mx.com/</a> <a href=http://www.vets.ne.jp/cgi/jump_link.cgi?url=https://estrategias.directorio-de-casinos-mx.com/>https://estrategias.directorio-de-casinos-mx.com/</a> <a href=http://baltimoretruth.com.xx3.kz/go.php?url=https://estrategias.directorio-de-casinos-mx.com/>https://estrategias.directorio-de-casinos-mx.com/</a>
Upload apk file casino estrategias – win today! <a href=http://www.russiacc.jp/feed2js/feed2js.php?src=https://estrategias.directorio-de-casinos-mx.com/>https://estrategias.directorio-de-casinos-mx.com/</a> <a href=http://foodmarkets.ru/away.php?to=https://estrategias.directorio-de-casinos-mx.com/>https://estrategias.directorio-de-casinos-mx.com/</a> <a href=https://farkasova.blog.idnes.cz/redir.aspx?url=https://estrategias.directorio-de-casinos-mx.com/>https://estrategias.directorio-de-casinos-mx.com/</a> <a href=https://toolbarqueries.google.bg/url?sa=i&url=https%3A%2F%2Fwww.mongodb.com/community/forums/t/mug-helsinki-in-house-ai-models-and-mobile-game-servers/264613>https://estrategias.directorio-de-casinos-mx.com/</a> <a href=http://www.ecejoin.com/link.php?url=https://estrategias.directorio-de-casinos-mx.com/>https://estrategias.directorio-de-casinos-mx.com/</a> <a href=http://library.aiou.edu.pk/cgi-bin/koha/tracklinks.pl?uri=https://estrategias.directorio-de-casinos-mx.com/>https://estrategias.directorio-de-casinos-mx.com/</a> <a href=http://lendersolutions.net.xx3.kz/go.php?url=https://estrategias.directorio-de-casinos-mx.com/>https://estrategias.directorio-de-casinos-mx.com/</a> <a href=http://www.pesca.com/link.php/estrategias.directorio-de-casinos-mx.com/>https://estrategias.directorio-de-casinos-mx.com/</a> <a href=http://www.ultrampg.com/cgi-bin/out.cgi?t=116&tag=toplist&link=https://estrategias.directorio-de-casinos-mx.com/>https://estrategias.directorio-de-casinos-mx.com/</a> <a href=http://й•їж™џ.com/productshow.asp?id=60&mnid=31314&mc=20153281130338&url=http%3A%2F%2Fwww.mongodb.com/community/forums/t/mug-helsinki-in-house-ai-models-and-mobile-game-servers/264613&lmm=>https://estrategias.directorio-de-casinos-mx.com/</a> <a href=https://partner.verivox.de/go.cgi?pid=3023&wmid=66&cpid=1&prid=99&subid=&view=1&target=https://estrategias.directorio-de-casinos-mx.com/>https://estrategias.directorio-de-casinos-mx.com/</a> <a href=https://lostwaldo.com/click.php?f=ecs&r=1&u=https://estrategias.directorio-de-casinos-mx.com/>https://estrategias.directorio-de-casinos-mx.com/</a> <a href=http://cse.google.to/url?q=https://estrategias.directorio-de-casinos-mx.com/>https://estrategias.directorio-de-casinos-mx.com/</a> <a href=https://careers.elccareers.com.au/?URL=https://estrategias.directorio-de-casinos-mx.com/>https://estrategias.directorio-de-casinos-mx.com/</a> <a href=http://www.steuerberaterinbruehl.de/ext_link?url=https://estrategias.directorio-de-casinos-mx.com/>https://estrategias.directorio-de-casinos-mx.com/</a>
#2845 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Елизавета Туктамышева pin up casino top top <a href=https://rhymes-punches.com/>gama casino</a> казино 1 лучшая казино <a href=https://sovsekretno.net/>букмекерская контора леонов</a> порно с Георгий Джикия (футбол) 1×slots casino букмекерские конторы pin букмекерская контора официальный сайт kent casino unlim casino букмекерская контора бесплатно скачать
DiskiPlus порно с Юлия Ефимова, пловчиха DiskiPlus порно с Дарья Клишина, легкоатлетка <a href=https://www.diskiplus.ru>DiskiPlus vavada casino</a> DiskiPlus казино 1 DiskiPlus porno Александр Соболев (футбол) <a href=https://diskiplus.ru>DiskiPlus porno Юлия Канакина</a> DiskiPlus online casino официальный DiskiPlus почему в казино нет часов DiskiPlus ешь казино DiskiPlus ставки на спорт букмекерские конторы DiskiPlus black russia казино DiskiPlus порно с Евгения Медведева, фигуристка DiskiPlus бесплатные букмекерские конторы
#2846 Williamfrupshttps://macbook-pro-14.ru
macbook pro 14 m4 черный <a href=https://macbook-pro-14.ru/>macbook pro 14 m4 черный</a>
#2847 Tyleroralfhttps://vibrometro1a.com
<a href=https://vibrometro1a.com>Holgura mecanica</a> Dispositivos de ajuste: fundamental para el rendimiento suave y productivo de las dispositivos.
En el ámbito de la innovación moderna, donde la efectividad y la seguridad del dispositivo son de máxima significancia, los equipos de balanceo desempeñan un rol crucial. Estos aparatos dedicados están desarrollados para ajustar y regular partes rotativas, ya sea en dispositivos manufacturera, automóviles de traslado o incluso en aparatos domésticos.
Para los profesionales en reparación de sistemas y los profesionales, trabajar con sistemas de ajuste es crucial para asegurar el rendimiento fluido y seguro de cualquier mecanismo rotativo. Gracias a estas opciones modernas avanzadas, es posible limitar notablemente las oscilaciones, el ruido y la carga sobre los soportes, prolongando la vida útil de piezas valiosos.
Igualmente trascendental es el rol que tienen los sistemas de equilibrado en la atención al cliente. El asistencia especializado y el mantenimiento regular aplicando estos dispositivos facilitan proporcionar soluciones de alta nivel, mejorando la contento de los compradores.
Para los propietarios de empresas, la financiamiento en equipos de equilibrado y dispositivos puede ser fundamental para aumentar la rendimiento y desempeño de sus aparatos. Esto es principalmente relevante para los inversores que manejan medianas y intermedias organizaciones, donde cada elemento es relevante.
También, los dispositivos de calibración tienen una vasta uso en el sector de la prevención y el supervisión de estándar. Permiten identificar potenciales fallos, previniendo intervenciones caras y problemas a los sistemas. Más aún, los indicadores extraídos de estos sistemas pueden usarse para optimizar procesos y mejorar la exposición en motores de búsqueda.
Las campos de utilización de los aparatos de ajuste incluyen diversas áreas, desde la producción de transporte personal hasta el seguimiento del medio ambiente. No influye si se considera de extensas fabricaciones de fábrica o modestos espacios hogareños, los equipos de balanceo son esenciales para garantizar un operación óptimo y sin interrupciones.
#2848 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино пину Лут Оксана Николаевна порно <a href=https://rumafia.news/>казино рояль смотреть</a> яндекс игры казино casino игровой автомат <a href=https://specreporter.com/>Яровая Ирина Анатольевна порно</a> яндекс игры казино симулятор казино порно с Голикова Татьяна Алексеевна bet casino ограбление казино 7k casino сайт casino рабочее
DiskiPlus порно с Аделия Петросян (фигурное катание) DiskiPlus лучшая казино <a href=https://www.diskiplus.ru>DiskiPlus сайт казино вход</a> DiskiPlus бесплатно играем казино DiskiPlus часы казино <a href=https://diskiplus.ru>DiskiPlus порно с Илья Осипов (киберспорт)</a> DiskiPlus casino online зеркало DiskiPlus пин up casino DiskiPlus порно с Васильева Татьяна Викторовна DiskiPlus porno Катерина Шпица DiskiPlus 1×bet зеркало рабочее DiskiPlus лучшие бесплатные онлайн казино DiskiPlus casino зеркало сегодня
#2849 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Дарья Клишина, легкоатлетка porno Ангелина Гончаренко, хоккеистка <a href=https://glvk.guru/>up casino</a> casino ап букмекерская контора фонбет <a href=https://krtka.info/>online casino</a> champion casino казино вход официальный сайт промокод 1×bet 7k casino почему в казино нет часов casino автомат фреш казино
DiskiPlus почему в казино нет окон DiskiPlus винлайн букмекерская контора официальный сайт <a href=https://diskiplus.ru>DiskiPlus самое казино</a> DiskiPlus официальные зеркала казино DiskiPlus Москалькова Татьяна Николаевна порно <a href=https://diskiplus.ru>DiskiPlus пин casino</a> DiskiPlus Радченко Светлана Юрьевна порно DiskiPlus мобильные букмекерские конторы DiskiPlus casino автомат DiskiPlus 7k casino скачать DiskiPlus casino online зеркало DiskiPlus 1×bet зеркало xbet xyz DiskiPlus скачать 1×bet на андроид
#2850 Jamesapelthttps://apple-macbook-15.ru
apple macbook pro 15 16 <a href=https://apple-macbook-15.ru/>https://apple-macbook-15.ru</a>
#2851 Frankcegushttps://apple-macbook-air13.ru
apple macbook air 13 m2 купить <a href=https://apple-macbook-air13.ru/>apple-macbook-air13.ru</a>
#2852 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино в россии porno Мария Шарапова <a href=https://rhymes-punches.com/>casino</a> порно с Евгений Малкин (хоккей) 1×bet слоты официальный сайт <a href=https://strelochnik.com/>up букмекерская контора</a> retro casino porno Марина Александрова лучшие букмекерские конторы Крючкова Полина Викторовна порно up casino официальный pin up casino скачать казино фильм онлайн
DiskiPlus карты казино DiskiPlus сайт 1×bet слоты <a href=https://diskiplus.ru>DiskiPlus casino buzz</a> DiskiPlus порно с Карен Хачанов (теннис) DiskiPlus порно с Анна Калинская (теннис) <a href=https://diskiplus.ru/>DiskiPlus porno Светлана Ходченкова</a> DiskiPlus порно с Константин Тюкавин (футбол) DiskiPlus бесплатное казино DiskiPlus порно с Голикова Татьяна Алексеевна DiskiPlus кент казино DiskiPlus casino betting DiskiPlus рокс казино DiskiPlus casino вход
#2853 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino вход casino бонус <a href=https://res-publika.com>казино смотреть</a> казино в россии порно с Бондаренко Анастасия Борисовна <a href=https://rumafia.news/>casino рабочее</a> porno Юлия Канакина porno Игорь Акинфеев (футбол) сколько казино порно с Алина Загитова pin up casino пин лучшие казино бесплатно официальные сайты казино
DiskiPlus casino официальный сайт DiskiPlus Нургалиева Эльвира Рамиловна порно <a href=https://diskiplus.ru/>DiskiPlus Ходнева Светлана Владимировна порно</a> DiskiPlus casino скачать приложение DiskiPlus bet casino <a href=https://diskiplus.ru/>DiskiPlus симулятор казино</a> DiskiPlus Приезжева Екатерина Геннадьевна порно DiskiPlus казино в россии DiskiPlus 1×bet официальный xbet DiskiPlus gama casino DiskiPlus porno Илона Маркова, хоккеистка DiskiPlus бывшие казино DiskiPlus порно с Евгения Медведева
#2854 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
Также случаются случаи, когда казино начислит обсужденный бонус в регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам.Также учтите, что некоторые игровые платформы сужают перечень стран, коие способны получить предложенный бездепозитный бонус за регистрацию. К образцу, есть онлайн-заведения, выдающие подобные призы только жильцам определенных государств. К примеру, онлайн казино 777 Оригинал дает бездепозитный бонус только игрокам из России и стран СНГ. Или наоборот, пичкают вознаграждением всех, не обитателей некоторых стран (как этого, идет внимательно учить список, чтобы впоследствии не возникло никаких вопросов и жалоб). <a href=http://filmkachat.ru/>1 x slots</a> Постарайтесь отыграть вейджер, чтобы появилась вероятность забыть заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные приборы. Вы можете получить выигрыш на электронной кошелёк, карту, телефон.Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут устанавливает лимитирование для посетителей. Конечно, это можно посчитать некоторым неудобством для игрока, но справедливости необходимо, собственно выбор автоматов всё также остаётся довольно наибольшим. <a href=https://kontactr.com/website/site/playhouse.com.ua>https://kontactr.com/website/site/playhouse.com.ua</a> 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=http://www.diywiki.org/index.php/%C3%90%CB%9C%C3%90%C2%B3%C3%91%E2%82%AC%C3%90%C2%B0%C3%91%E2%80%9A%C3%91%C5%92_%C3%90%C3%A2%E2%82%AC%E2%84%A2_%C3%90%C2%A1%C3%90%C2%BB%C3%90%C2%BE%C3%91%E2%80%9A%C3%91%E2%80%B9_%C3%90%C5%BE%C3%90%C2%BD%C3%90%C2%BB%C3%90%C2%B0%C3%90%C2%B9%C3%90%C2%BD>http://www.diywiki.org/index.php/%C3%90%CB%9C%C3%90%C2%B3%C3%91%E2%82%AC%C3%90%C2%B0%C3%91%E2%80%9A%C3%91%C5%92_%C3%90%C3%A2%E2%82%AC%E2%84%A2_%C3%90%C2%A1%C3%90%C2%BB%C3%90%C2%BE%C3%91%E2%80%9A%C3%91%E2%80%B9_%C3%90%C5%BE%C3%90%C2%BD%C3%90%C2%BB%C3%90%C2%B0%C3%90%C2%B9%C3%90%C2%BD</a> Выбор любого интернет казино на нашем веб-сайте. В описании к каждому Вы сможете разузнать, что получите за создание аккаунта.Выигрыши с призов без вложений постоянно привязаны к притязанию по ставкам и имеют быть обналичены лишь последствии исполненья этих притязаний.
1хслот зеркало
<a href=https://koreanstudies.com/forum/viewtopic.php?t=119767>1×slots официальный сайт зеркало</a> 1хслотс зеркало на сегодня <a href=http://www.smuniverse.com/bbs/board.php?bo_table=smu4_3_eng&wr_id=375054>http://www.smuniverse.com/bbs/board.php?bo_table=smu4_3_eng&wr_id=375054</a> Можно ли в одном интернет казино получить больше одного бонуса за регистрацию? Нет, например как в любом интернет казино есть верховодила, к которым надо(надобно) придерживаться, не делать два аккаута для получения бонусов, иначе будет блокировка обоих аккаутов, не пытайтесь обмануть онлайн казино, приз за регистрацию выдаеться один один 1 лицу. 1х слот регистрация в 1×slots casino Принципиальным отличием даровых бонусов от призов на депо считается отсутствие необходимости вносить деньги на аккаунт. Из-за сего их часто нарекают бездепозитными (no deposit bonuses).
1×slots официальный demo регистрация в 1×slots casino
<a href=http://gloveworks.link/bbs/board.php?bo_table=free&wr_id=187914>http://gloveworks.link/bbs/board.php?bo_table=free&wr_id=187914</a> Однако далековато не все ресурсы предлагают своим посетителям бездепозитные призы за регистрацию в казино. В большинстве случаев учтено одобрение на первый депо в объеме 100–200%. Это отличная возможность преувеличить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш.Постарайтесь отыграть вейджер, чтобы появилась вероятность оставить заявку на выплату. Кстати, на всех веб-сайтах, представленных в перечне, доступны современные платёжные приборы. Вы сможете получить выигрыш на электрической кошелёк, карту, аппарат. 1×slots зеркало этих способов предполагает регистрацию Иногда виде бездепа, казино дарует наименьший приз (до 50 рублей), из-за которого надо заморачиваться.Иногда у гостей вебсайта имеют появиться трудности, задачи, препядствия при активации полученного промо-кода. В этих случаях, необходимо обратиться за поддержкою в службу «Support». Для получения ответа, непременно указывается определенная причина воззвания и подтверждается информация дополнительными экрана. Если сложилась неоднозначная ситуация, всегда возможно обратиться к основному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ.
казино 1× slots официальный сайт
Прочитайте правила бонусной программки, какой желайте принять. Да, мы настоятельно рекомендуем сделать это до регистрации. Некоторые сайты, прежде чем обмануть регистрацию игроков, предлагают ответить на несколько базовых вопросов. Цель проведения похожей викторины – выявить случайных людей, коие не имеют представления о покере, и не разрешить получения ими бонусов. Если гость уже играл в казино, то ответить на полтора 10 простых вопросов будет несложно. Очень нередко, ответы возможно отыскать на официальных сайтах данных учреждений.Отыграв бездепозитный приз в казино с выводом тоже придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в подобное ограничение присутствует, то единоразово вывести получится только сумму, не превышающую размер полученного бонуса. Многие игроки, оценив возможностей казино, остаются играть в нем и дальше ? на это и нацелено любое промо. Постоянные посетители заносят депозиты и проделывают ставки, обеспечивая долгосрочную прибыль оператора. То есть, казино раздают бездепы свежим юзерам для формирования лояльной аудитории. 1×slots казино мобильная версия <a href=https://marvelvsdc.faith/wiki/User:BoydNet99932>https://marvelvsdc.faith/wiki/User:BoydNet99932</a> Бездепозитные призы, как теснее ясно, считаются уникальной возможностью к игровому процессу безусловно бесплатно, другими выступать в онлайн казино даром и на имеющие средства незамедлительно последствии регистрации аккаунта. Автоматы с таким депо шансы замерзнуть прекрасной возможностью поиграть для поклонников азарта с определенными лимитированиями в денег.Бездепозитный бонус – это финансовое вознаграждение, которое выдается соучастнику игры в казино, для его привлечения и появления заинтересованности. Любой гость, кот-ый подходит условиям выдачи сходственного бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое поощрение является более эффективным способом, дающим вероятность стартовать деле, не вкладывая личных вещественных средств.
1×slots акции
<a href=http://forums.outdoorreview.com/member.php?368815-KeithMooke>http://forums.outdoorreview.com/member.php?368815-KeithMooke</a> Выбирайте наихорошие благотворительные призы счет обзоров на Casinoz – и пусть вам сопутствует удача при отыгрыше бонусных кредитов! 1×slots casino регистрация на сайте Выбрать казино с бездепозитным бонусом. У нас на веб-сайте представлен перечень лучших онлайн казино, которые предлагают своим игрокам великодушные бонусы за регистрацию.Бонус за регистрацию в казино без депо с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша может потребоваться устроить ставки на необходимую, в несколько десятков раз превосходящую сумму приза или выигрыша.
<b>Смотреть еще похожие новости:</b>
<a href=https://10nsk.ru/user/JosephSuple/>1×slots регистрация 1×slots casino c2d ru</a>
<a href=http://aurorahcs.com/forum/viewtopic.php?f=8&t=870202>1×slots бездепозитный бонус за регистрацию</a>
<a href=http://nacionrolera.org/foro/viewtopic.php?f=1210&t=147877>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие появляются у новичков. Выбор любого интернет казино на нашем веб-сайте. В описании к каждому Вы сможете разузнать, собственно получите за создание аккаунта.
#2855 продвижение медицинского сайтаhttps://seo-prodvizhenie-medicinskih-sajtov-price.ru/
Тут можно преобрести продвижение сайта медицинского центра <a href=https://seo-prodvizhenie-medicinskih-sajtov-price.ru/>seo продвижение медицинских клиник</a>
#2856 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasino09k online
Несмотря на то, собственно данный вариант стимуляции со стороны азартных платформ очень моден области подобных игр, далеко не поклонникам казино известно, собственно сами бездепозитные призы казино и как непосредственно их возможно эксплуатировать. <a href=http://filmkachat.ru/>сайт 1× slots casino</a> Похожим образом работает третий способ доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения клиента или из-за с получения им VIP-статуса. Подарок предоставляется последствии воззвания в поддержку и ревизии. <a href=https://anotepad.com/notes/qq37rhmn>https://anotepad.com/notes/qq37rhmn</a> На бонусные начисления шансы быть установлены дополнительные лимитирования, которые Вы не сведению при отыгрыше. Пока приз полностью не отыгран — средства из казино не выводятся. 1×slots сайт <a href=http://wkrun.com/home.php?mod=space&uid=935283&do=profile&from=space>http://wkrun.com/home.php?mod=space&uid=935283&do=profile&from=space</a> Но есть игорные заведения, которые готовы просто так жертвовать средства на забаву. Для сего довольно создать профиль. Чтобы вывести свой выигрыш, вам сначала необходимо выполнить условия отыгрыша, указанные в условиях получения бездепозитного депозита.Призовые начисления без депо могут предоставляться для роли в турнирах онлайн казино. Потратить перечисленные средства возможно самая в рамках этой акции. Условия их проведения включают в себя лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться этим предложением, другого, как выучить его правила.
1хслотс зеркало
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Если вы выбираете проверенное лицензионное интернет казино и выполните все условия получения бездепозитного приза, проблем с получением дара у Вас не возникнет. <a href=https://coinzaa.com/u/Davidalera>https://coinzaa.com/u/Davidalera</a> 1×slots casino online регистрация
сайт 1× slots casino
Чтобы получить возможность исключить прибыль с бездепозитного бонуса в казино, необходимо выполнить ряд условий:Осталось избрать казино с бонусом за регистрацию и создать профиль. После активации дара выигрыш зависимости от Фортуны и навыков. Вывод выигрыша с бездепозитных призов казино – великодушный презент от азартных клубов. Но чтобы вывести собственный заработок, необходимо выполнить ряд критерий:Похожим образом работает третий метод доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения клиента либо из-за с получения им VIP-статуса. Подарок предоставляется в воззвания в поддержку и ревизии. <a href=http://bitetheass.com/user/GlennFof/>http://bitetheass.com/user/GlennFof/</a> Мы советуем не отрицаться от сходственных услуг известных казино. Выделите количество минут на регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сейчас удача будет на вашей стороне! 1×slot зеркало рабочее этих способов предполагает регистрацию Когда речь о получении бездепозитных бонусов в казино, начала внимание на последующие обстоятельства:Верификация аккаунта. Лучше подтвердить лицо незамедлительно после регистрации, дабы потом не было заморочек с выводом денег. Верификация имеет протекать 2-мя путями:
1×slots регистрация 1×slots casino 777 online
<a href=https://www.katzenforum.at/forum/threads/1×slot-oficialnyj-sajt.43602/>1×slot официальный сайт</a> При пользовании бездепозитным призом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют количество видов лимитов: После получения приза вывод средств для посетителя несомненно недоступен до тех пор, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо пара недель. Выводить деньги игрок может лишь в отыгрыша. 1×slots casino регистрация <a href=http://forum.prolifeclinics.ro/profile.php?id=1233030>http://forum.prolifeclinics.ro/profile.php?id=1233030</a>
1×slots зеркало рабочее
<a href=http://seliger-vip.ru/index.php?subaction=userinfo&user=knowingentrant5>http://seliger-vip.ru/index.php?subaction=userinfo&user=knowingentrant5</a> Получив свой презент, Вы можете даром играть на настоящие деньги, а выполнив обстоятельства отыгрыша, исключить собственный выигрыш. казино 1×slots официальный сайт Бездепозитные бонусы казино за регистрацию в 2022 году — это возможность сыграть за счёт заведения. Казино даёт клиенту шанс пользоваться определённой суммой или количеством безвозмездных вращений без внесения депозита. Не путайте деморежим с реальной игрой без надобности внесения депозита.
<b>Смотреть еще похожие новости:</b>
<a href=http://smpn1bejen.sch.id/forum/>рабочее зеркало 1хслотс</a>
<a href=https://forums.scar-divi.com/topic/673830–1×slots-%D0%BC%D0%BE%D0%B1%D0%B8%D0%BB%D1%8C%D0%BD%D0%B0%D1%8F-%D0%B2%D0%B5%D1%80%D1%81%D0%B8%D1%8F-%D0%B2%D0%BE%D0%B9%D1%82%D0%B8-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE/>1×slots мобильная версия войти казино</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Казино дает возможность заработать и исключить реальные средства на бездепозитных бонусах. Обычно, это малозначительная сумма, коию казино возможность для разрешить подарить игроку. Так что приготовьтесь предоставить конфиденциальную информацию (пол, возраст, государство проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев проверка данных занимает не более суток, после чего получится свободно выводить солидные выигрыши.
#2857 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пинап казино пинко casino <a href=https://th-royalgclub.com/>скачиваемые казино</a> casino скачать приложение Радченко Светлана Юрьевна порно <a href=https://sovsekretno.net/>самое казино</a> бесплатно фильм казино казино рублях скачать 1×bet на андроид бесплатно лучшие бесплатные онлайн казино казино гта 5 порно с Каролина Севастьянова vodka casino
DiskiPlus pin up casino официальный DiskiPlus казино рублях <a href=https://diskiplus.ru/>DiskiPlus 1win букмекерская контора</a> DiskiPlus приложения букмекерских контор DiskiPlus Шевцова Татьяна Викторовна порно <a href=https://diskiplus.ru>DiskiPlus порно с Александр Большунов (лыжные гонки)</a> DiskiPlus винлайн букмекерская контора DiskiPlus 1win casino DiskiPlus гама казино DiskiPlus букмекерская контора фонбет официальный сайт DiskiPlus porno Илья Ковальчук (хоккей) DiskiPlus casino DiskiPlus казино зеркало сегодня
#2858 GeralddaBhttp://walove.ru
Знакомства и общение онлайн <a href=http://walove.ru/>http://walove.ru</a> просто и удобно! Находи новых друзей, флиртуй, общайся в чатах и видеозвонках. Создай анкету, найди интересных людей и начинай диалог. Бесплатная регистрация!
#2859 Charlesgunnyhttp://filmkachat.ru
1× slots зеркало
К сожалению, нет. Почти все казино, просят внесение хотя бы одного малого депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, что вывести средства разрешается лишь на ту платежную систему, с которой был сделан депо.Подтверждение регистрации. Казино настоятельно привязки профиля к электронному адресу и номеру телефона. Для этого на e-mail отчаливает письмо со ссылкой, а на телефонный ? текстовое известье с кодом. <a href=http://filmkachat.ru/>1×slots регистрация на сайте</a> Чтоб получить крупный выигрыш, избирайте игровые автоматы с предельным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша. <a href=https://guides.co/g/5942/504055>https://guides.co/g/5942/504055</a> Законодательство, регулирующее азартные забавы в разных государствах, влияет на возможности операторов. В результате пользователи из отдельных регионов сталкиваются с ограничениями со стороны казино. Это возможность быть как глубокий отказ в доступе, например и невозможность загружать игры отдельных изготовителей.Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие появляются у новичков. 1хслот 1хслотс регистрация перейти на 1×slots <a href=https://rabofree.diary.ru/p221355199_casino-bezdepozitnyj-bonus-oficialnyj-sajt.htm>https://rabofree.diary.ru/p221355199_casino-bezdepozitnyj-bonus-oficialnyj-sajt.htm</a>
1×slots зеркало рабочее на сегодня
<a href=http://miupsik.ru/forums/showthread.php?tid=391628>1×slots зеркало проходить регистрацию это отличный вариант</a> 1×slots зеркало быструю регистрацию а также мгновенное <a href=http://c909201u.beget.tech/user/Harrybop/>http://c909201u.beget.tech/user/Harrybop/</a> 1×slots официальный сайт скачать
1×slots регистрацию более популярный вариант это
Чаще всего, популярностью сервисы, эти как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное управляло. Финансовые средства выводятся только через что, эту платежную систему, которой успех для пополнения депо. Если же игрок получил бездепозитный покерный бонус, потребуется пополнить счет на минимальную необходимую, кот-ая сочиняет обычно десять долларов.1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, случае не желаете стать жертвой мошенников или впустую израсходовать время; Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного бонуса. <a href=http://sum24.khome24.kr/bbs/board.php?bo_table=free&wr_id=101256>http://sum24.khome24.kr/bbs/board.php?bo_table=free&wr_id=101256</a> 1×slots зеркало выигрыши обязательно пройдите регистрацию если Для верификации аккаунта нужно дать спецам технической поддержки отсканированную копию паспорта и счета за коммунальные услуги, еще фотографию банковской карты либо снимок странички электронного кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для доказательства личности.Иногда у гостей сайта шансы появиться трудности, задачи, препядствия при активации полученного промо-кода. В таких случаях, необходимо обратиться за подмогою в саппорта «Support». Для получения ответа, непременно указывается определенная причина воззвания и подтверждается информация дополнительными экрана. Если сформировалась неоднозначная обстановка, постоянно можно адресоваться к основному регулятору или контролирующему органу, выдавшему данному заведению лицензионный документ.
1×slots рабочее зеркало
Если площадка дарует бездеп за регистрацию, то процедура его получения ординарна. Нужно только завести акк на сайте и активировать его, подтвердив адресок электронной почты, номер аппарата или другие данные, коие просит оператор. Перед данным нужно убедиться, собственно юзер располагается на официальном сайте казино, не на жульнической площадке. Большинство интернет-казино из нашего топ-10 готовы порадовать вас неповторимыми промоакциями. Читайте о них в обзорах и на форуме. казино 1×slots <a href=http://ieef.msu.ru/index.php?subaction=userinfo&user=classyshell40>http://ieef.msu.ru/index.php?subaction=userinfo&user=classyshell40</a> Поспешите зарегистрироваться на официальном сайте Клубника, дабы быстро получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, бывает настоящий шанс победу!Некоторые казино имеют предлагать посетителям бездепы за свидетельство номера либо почты либо репост на страничку в социальных сетях.
1хслотс рабочее зеркало
<a href=http://uoup.net/space-uid-493664.html>http://uoup.net/space-uid-493664.html</a> Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала прыткие выводы. Фишка выплат том,, собственно достаточно избрать платёжный инструмент и показать необходимую. В большинстве случаев деньги зачисляются на электрические кошельки на 15 минут, а на банковские карты – 1–3 трудящихся денька. 1× slots зеркало Получать информацию о самых выгодных призах можно без постоянного мониторинга новостей казино. Мы брали эту задачу на себя и постоянно следим за услугами операторов, избирая наихорошие из их. В этом разделе собраны последние бездепы, промокоды к ним и условия их активации. Список промоакций периодически пополняется. В топ вошли самые новые бездепозитные бонусы за регистрацию в казино 2020, временные и закрытые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и другим критериям. Если срок действия промоакции истек, она удаляется из списка.Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом прибыли находятся на этой странице. Посетитель имеет расценить обстоятельства получения и начать выступать на средства без внесения депо. При этом игроку принципиально понимать, на каких условиях и какими способами возможность вывести полученный выигрыш. Для сего нужно расценить список присоединенных платежных систем.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.arka-bahce.org/forum/showthread.php?p=782095#post782095>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<a href=https://www.sgomberisgombero.it/author/jamesapate/>1×slots официальный сайт зеркало</a>
<a href=https://redfist.de/RF-Online-Testforum/viewtopic.php?f=60&t=80405>1×slots промокод при регистрации</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Многие казино предоставляют в рекламных целях бесплатные призы самая для наших читателей. Чтобы их получить, нужно перейти на игровой вебсайт по партнерской ссылке с нашего портала. Особую изюминку видео слотам придают уникальные символы. С их свет активизируются различные бонусы. Вы сможете запустить дополнительный уровень и прирастить сумму выигрыша. Есть знаки, коие сменяют негодные составляющие и сами творят выигрышные комбо. Не стоит забывать и тему бонус-тур. После каждого счастливого спина есть шанс прирастить сумму выигрыша в 2 или хорошо раза.
#2860 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало этих способов предполагает регистрацию
Бездепозитный бонус – это экономическое вознаграждение, коие выдается участнику игры в казино, для его привлечения и появления заинтересованности. Любой гость, который соответствует условиям выдачи подобного бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое одобрение является более эффективным методом, дающим вероятность стартовать при, не вкладывая собственных вещественных средств.Несмотря на то, собственно этот вариант стимуляции со стороны азартных платформ очень моден в сходственных игр, далеко многим поклонникам казино известно, что сами бездепозитные бонусы казино и как непосредственно их возможно эксплуатировать. <a href=http://filmkachat.ru/>зеркло казино 1×slots</a> Некоторые веб-сайты, до чем провести регистрацию игроков, предлагают ответить на количество базовых вопросов. Цель проведения сходственной викторины – выявить случайных людей, коие не имеют представления о покере, и не допустить получения ими бонусов. Если посетитель теснее играл в казино, то ответить на полтора десятка простых вопросов будет несложно. Очень нередко, ответы можно отыскать на официальных веб-сайтах этих учреждений. <a href=https://www.bseo-agency.com/blogs/188135/Professional-Interior-Design-Floor-Plans-Space-Planning-Services>https://www.bseo-agency.com/blogs/188135/Professional-Interior-Design-Floor-Plans-Space-Planning-Services</a> Основное управляло получения бездепа ? творимый акк должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов требовательно воспрещено. Проверка ведется по имени, e-mal, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депо необходимо блюсти простую последовательность поступков.Частенько новенькие не понимают, как активировать подарки либо вывести первый выигрыш. Для сходственных случаев наша команда описала основные термины – что это фриспины, вейджер, как его отыграть, для необходимо протекать верификацию. 1 x slots casino <a href=http://bbs.yxsensing.net/home.php?mod=space&uid=141012>http://bbs.yxsensing.net/home.php?mod=space&uid=141012</a>
скачать 1×slots официальный сайт
Наиболее знаменитые вознаграждения между гэмблеров – бездепозитные призы казино. Это не удивительно, так можно получить бесплатные вращения либо виртуальные кредиты, и этом не придётся пополнять счёт, рисковать личностными средствами. Удастся насладиться разнородными развлечениями причем выиграть крупную сумму, избегая серьёзного риска. <a href=https://mit-bbs.com/viewtopic.php?t=131898>1×slot зеркало рабочее регистрации на телефон придет</a> рабочее зеркало 1×slots <a href=https://podacha-blud.com/user/Jaspernal/>https://podacha-blud.com/user/Jaspernal/</a> Активация по промокоду используется в различных видах бездепов. Если речь о приветственном бонусе, то набор символов возможно узнать на основной страничке, в регистрационной форме или послании, которое отчаливает пользователю для доказательства e-mail. Акции могут проводиться совместно с партнерскими площадками. Обычно код размещается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активируется одноразовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном кабинете или начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем важный код для активации в описании любого промо.За счёт спинов получится запустить различные онлайн слоты, протестировать стратегии и поднабраться навыка. Фишка никаких, что вращения начисляются на топовые аппараты с оригинальными опциями и высочайшей отдачей. Не забывайте, что в любом акционном предложении предусмотрены специальные притязания – временные ограничения, максимальный объем ставки, перечень доступных игр. 1× slots сайт Ознакомьтесь с нашим списком лучших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего списка и получите бездеп сразу. Хватайте наихорошие безвозмездные предложения ниже и выигрывайте немалые средства, не рискуя!Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке адепты онлайн-казино публикуют актуальную информацию о no deposit bonuses прочих услугах.
1х слот 1хслотс регистрация перейти на 1×slots
На нашем веб-сайте Вы найдете перечень актуальных свежих бездепозитных бонусов в казино 2022 года. Также, есть большое неповторимых услуг, которые доступны только посетителям нашего вебсайта последствии регистрации по нашей ссылке или активации специального промокода. <a href=http://www.annunciogratis.net/author/julesjed>http://www.annunciogratis.net/author/julesjed</a> зеркала 1×slots Предложения с бездепозитными призами за регистрацию позволяют свежим заведениям заинтересовать аудиторию на свой вебсайт. А игроки же получают возможность играть на настоящие деньги без депо в казино и заработать малый стартовый капитал, кот-ый разрешается вывести на карту банка либо электронный кошелек.Некоторые клубы механически начисляют бонус на аккаунт игрока после исполнения условий получения, хотя случаются ситуации, когда бонус надо(надобно) активировать игроку самому. Есть количество методов активации приза:
1хслот 1хслотс регистрация перейти на 1×slots
<a href=http://vn-info.net/user/Josephkam/>1хслотс зеркало</a> Отыграв бездепозитный приз в казино с выводом также придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если подобное ограничение присутствует, то единоразово исключить получится лишь необходимую, не превышающую размер приобретенного бонуса. 1×slots casino регистрация <a href=http://l-avt.ru/support/dialog/?PAGE_NAME=profile_view&UID=85627>http://l-avt.ru/support/dialog/?PAGE_NAME=profile_view&UID=85627</a> Стоит отметить, собственно бездепозитный бонус выдается лишь совершеннолетним новичкам, коие, в свою очередь, шансы пригласить личных друзей и людей, того рассчитывающих на поощрительную программку лояльности. Подобная разработка была среди конкурирующих онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры содействуют увеличению собственной посещаемости, путем вербования новых игроков. Бонусы – это оригинальный шанс для вероятных участников забавы, которые шансы опробовать софт покер рума и убедиться, будут ли они в него играть или нет. Новый игрок попробует свои силы с настоящими оппонентами в казино.Как только вы отыграли вейджер и средства с бонусного баланса перебежали вам на реальный счет, Вы отважно можете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (сделать наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депо).
1×slots регистрация 1×slotscasino 56 online
Акции распространяются как на все игры казино, так и на ограниченный перечень. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и. Промо возможность охватывать разработки одного производителя. Бездеп не пересекается с другими промоакциями казино. Если на веб-сайте предусмотрен кэшбек, он не начисляется за ставки, изготовленные бонусными средствами. Для идентификации платежных реквизитов игрока может понадобиться пополнение счета на минимальную необходимую.В основном случаев безвозмездные бонусы начисляются в кредитах, которые нельзя сразу исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже. <a href=https://squishmallowswiki.com/index.php/Shisha_Tobacco_From4_Eur>https://squishmallowswiki.com/index.php/Shisha_Tobacco_From4_Eur</a> Похожим образом трудится третий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения клиента или из-за с получения им VIP-статуса. Подарок предоставляется в воззвания в поддержку и ревизии.Чаще всего используются коды. Их нужно заносить в специальные окна регистрационной анкеты, если речь идет о пригласительных бонусах, либо в определенном разделе личного офиса игрока. 1×slots быструю регистрацию а также мгновенное Поспешите отобрать бездепозитные призы за регистрацию в казино из представленного перечня. Все платформы не ведут легальную деятельность, хотя и обрадуют честными результатами игры, высочайшей отдачей, резвыми выплатами.Для получения депозитного приза необходимо пополнить собственный игровой баланс настоящими средствами. Вознаграждение можно получить или при внесении первого депозита, или в виде фиксированного процента от внесённых средств. Так либо иначе, приз поступит на счёт только последствии пополнения.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=286842>зеркала 1×slots</a>
<a href=https://021snyw.com/space-uid-53919.html>1×slots регистрация на 1хслотс</a>
<a href=https://talkonlinenews.com/viewtopic.php?t=8089>1×slots официальный сайт зеркало рабочее</a>
<a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=790612>1×slots регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?
#2861 BillyZeshttps://domashniy-internet-omsk.ru
мтс интернет вай фай домашний цена <a href=https://domashniy-internet-omsk.ru/>мтс домашний интернет и телевидение омск</a>
#2862 Jerrybow
https://www.mountainlifestyle.nl/ https://www.mountainlifestyle.nl/ https://www.mountainlifestyle.nl/ https://www.mountainlifestyle.nl/ https://www.mountainlifestyle.nl/ https://www.mountainlifestyle.nl/ https://www.mountainlifestyle.nl/ https://www.mountainlifestyle.nl/ https://www.mountainlifestyle.nl/ https://www.mountainlifestyle.nl/ https://www.mountainlifestyle.nl/ https://www.mountainlifestyle.nl/ https://www.mountainlifestyle.nl/ https://www.mountainlifestyle.nl/ https://www.mountainlifestyle.nl/ https://www.mountainlifestyle.nl/ https://www.mountainlifestyle.nl/ https://www.mountainlifestyle.nl/ https://www.mountainlifestyle.nl/ https://www.mountainlifestyle.nl/ https://www.mountainlifestyle.nl/ https://www.mountainlifestyle.nl/ https://www.mountainlifestyle.nl/ https://www.mountainlifestyle.nl/ https://www.mountainlifestyle.nl/ https://www.mountainlifestyle.nl/ https://www.mountainlifestyle.nl/
#2863 Richardscoobhttps://github.com/SonicWall-dev/NetExtender
Reliable and secure solution <a href=https://github.com/SonicWall-dev/NetExtender/releases>https://github.com/SonicWall-dev/NetExtender/releases</a> for remote access, connection and VPN. Full network access via encrypted tunnel for remote desktops and applications. Secure access to corporate resources.
#2864 MichaelVawhttps://t.me/detivetrachat
<a href=https://t.me/detivetrachat>кайт школа хургада</a> кайт хургада
#2865 Thomasgaphttps://domashniy-internet-omsk.ru
подключить домашний интернет в омске мтс <a href=https://domashniy-internet-omsk.ru/>мтс домашний интернет цена</a>
#2866 riobet-qwhttps://riobet-qw.ru
риобет онлайн <a href=https://riobet-qw.ru/>https://riobet-qw.ru</a>
#2867 Sib-pk_corhttps://sib-pk.com/
Всем привет! Хочу поделиться полезной и нужной новостью с теми, кто каким либо образом связан с переработкой полимеров или пластика! В особенности это касается крупного, микро и среднего бизнеса. Есть профессиональная и отличная я компания, которая специализируется на производстве изделий из полимеров или пластика, а так же на продаже производственных линий и оборудования по переработке пластика. Если вам привлекательна и интересна тема: <a href=https://sib-pk.com/produkciya/proizvodstvennye-linii/>экструдер для пластика</a> В общем, если вы ищите, производственное оборудование, оборудование для производства и т.д., например: <a href=https://sib-pk.com/>дополнительное оборудование</a> Тогда вам срочно нужно прямо сейчас перейти на сайт СПК Сибирская Полимерная Компания и узнать все подробности по оборудование для пластика, современное оборудование, линии производственного оборудования, оборудование для ПВХ, литье под давлением, полимеры оборудование и т.д. https://sib-pk.com/ . Переходите на сайт, выбирайте понравившиеся вам производственные линии или оборудование, и записывайте название сайта sib-pk.com и обязательно сохраняйте в закладках. Обязательно запишите бесплатный номер 8–800–250–60–25, звонить можно из любой точки России и СНГ. До новых встреч!
#2868 RufusTielahttps://ufalogistik.ru
грузоперевозки услуги грузчиков <a href=https://ufalogistik.ru/>https://ufalogistik.ru</a>
#2869 RussellLoalthttps://gruzmove.ru
услуги профессиональных грузчиков <a href=https://gruzmove.ru/>https://gruzmove.ru</a>
#2870 Дезинфекция после смертиhttps://msd24.ru/
Фумигация древесины предлагает наша компания. Если вам нужны услуги специалистов с выездом на дом оставьте заявку на сайте <a href=https://msd24.ru/>Дезинсекция от клопов</a>
#2871 EddieBoorphttps://mikrozajm-na-kartu1.ru
микрозайм онлайн на банковскую карту <a href=https://mikrozajm-na-kartu1.ru/>онлайн займы на банковскую карту</a>
#2872 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Яна Троянова porno Юлия Канакина, скелетонистка <a href=https://t.me/vchkogpu_ru>казино можно</a> Комарова Наталья Владимировна порно casino daddy <a href=https://glvk.guru/>1×bet сайт 1×bet xyz</a> pin up casino скачать Мухтиярова Елена Вячеславовна порно где казино порно с Александр Большунов (лыжные гонки) ев казино casino игровой автомат casino актуальное зеркало
DiskiPlus казино 5 DiskiPlus r7 casino <a href=https://diskiplus.ru>DiskiPlus пин ап казино</a> DiskiPlus Шевцова Татьяна Викторовна порно DiskiPlus официальные букмекерские конторы скачать <a href=https://diskiplus.ru/>DiskiPlus Мухтиярова Елена Вячеславовна порно</a> DiskiPlus казино фильм DiskiPlus яндекс игры казино DiskiPlus мобильные букмекерские конторы DiskiPlus 1×bet сейчас DiskiPlus букмекерская контора бесплатно скачать DiskiPlus 1×bet официальный скачать DiskiPlus casino 7k сегодня
#2873 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
Перед активацией принципиально внимательно выучить обстоятельства акции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, на коих можно воспользоваться предложением. Если бездеп охватывает узкий перечень игр, рекомендовано узнать максимальные коэффициенты, уровень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь что случае, если оператор не установил требовательные лимитирования на наивысшую сумму ставки. <a href=http://filmkachat.ru/>1 x slots casino</a> <a href=https://www.webwiki.co.uk/playhouse.com.ua>https://www.webwiki.co.uk/playhouse.com.ua</a> Для проверки используются сканы паспортов, водительских водительских, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если юзер обнаружен в попытке завести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их владелец попадает в темный перечень. При ирге на лицензионной площадке не стоит опасаться свидетельствовать достоверную персональную информацию (шифрование исключает утечку индивидуальных данных). 1хслотс зеркало <a href=http://74novosti.ru/user/AnthonyAcara/>http://74novosti.ru/user/AnthonyAcara/</a> Акционные предложения от казино есть в различных форматах. Часто бонусы даются в обмен на депо. Игрок заносит платеж и получает средства, благотворительные вращения и поощрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — вид приза, кот-ый гарантирован за выполнение конкретных действий на веб-сайте:
1×slots сайт
Возможность сыграть дополнительное состязание (а от и количество) совершенно бесплатно, а выигрыш, же, поступает на счёт игрока.Для получения приза нужно пригласить в игру нового посетителя. Казино начислит пригласившему фиксированный процент от взносов приглашённого повторяющий бонуса: почаще всего его объем не превышает 10%. Срок деяния бонуса как не превышает месяца: пригласивший получает приз зависимо проигранных ставок приглашённого в первый луна забавы. 1×slots регистрация на официальном сайте <a href=http://mineralgroup.ru/index.php?subaction=userinfo&user=whisperingincid>http://mineralgroup.ru/index.php?subaction=userinfo&user=whisperingincid</a> 1×slots сайт зеркало Подтвердите регистрацию, дабы активировать Бездепозитный приз с выводом, требуется заполнить личный профиль. Заполните пустые поля настоящими данными о для.Раздача бонусов может быть посвящена различным датам: календарные дни, дни рождения игроков, годовщина открытия казино и т. Д. Подарок выдается в виде средств, фриспинов или баллов для скопления и обмена на предложения оператора. Если пользователь получает выигрыш, деньги начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд притязаний.
1×slots регистрация на официальном сайте
Как правило, при выводе финансов, от играющего потребуется лишь устроить минимальный лепта для того, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом собственный счет.Акции распространяются как на все игры казино, так и на узкий перечень. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino прочие. Промо имеет охватывать разработки 1-го производителя. Бездеп не пересекается с другими акциями казино. Если на сайте учтен кэшбек, он не начисляется за ставки, сделанные бонусными средствами. Для идентификации платежных реквизитов игрока может потребоваться пополнение счета на минимальную сумму. Существуют казино с призом за регистрацию, в очень популярны фриспины в интернет казино впоследствии регистрации в определенных играх. Они встречаются числе чаще бесплатных поощрений либо классических призов в казино без инвестициям. Например, игрок регистрирует счет, на который начисляются безвозмездные игры, приз за регистрацию в виде бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса в выигрывает истинные деньги, которые в последствии возможно успешно вывести из заведения на собственную платежную систему. То есть, все шансы вывести средства без рисков своими деньгами. Регистрация, какую игры получит призы, займет пару минут, а благодаря этому можно прирастить 5 евро поощрений до тыс. И без всяких заморочек вывести их.Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, чтобы появилась вероятность вывести выигрыш. <a href=https://www.wow-interfaces.com/users/DoctorLazutaea-1>https://www.wow-interfaces.com/users/DoctorLazutaea-1</a> Прежде всего, не забывайте периодически заглядывать на страницу обзоров бездепозитных призов. Они шаг за шагом оценивают наиболее увлекательные предложения основных игорных порталов.Вознаграждения за получение VIP-статуса ? начисляются в программы преданности при достижении очередного уровня либо выдаются персонально менеджерами службы. 1×slots зеркало видели такую регистрацию на Максимальная ставка ? уточняется в денежной счета и ограничивает объем ставки за раз спин. В случае ее превышения приз может быть аннулирован. Также в правилах имеет содержаться запрет на размещение ставок определенного вида, например, по равным шансам в рулетке (словами, на чет либо нечет, красноватое или темное и т.д.).
1хслот скачать
Получить приветственный бонус имеют лишь свежие клиенты онлайн-казино. Способы описаны в условиях промоакции любого законного казино, чаще всего это:Но есть игорные заведения, которые готовы просто так жертвовать деньги на забаву. Для этого достаточно сделать профиль. Чтобы исключить свой выигрыш, вам поначалу нужно выполнить обстоятельства отыгрыша, обозначенные в критериях получения бездепозитного депо. Внесение депо – Будьте готовы восполнить счет в отыгрыша приза. Это обычное заявка верховодил для данного типа промо-акций. Лучше заблаговременно уточнить, какую необходимую нужно будет заносить на счет. Как управляло, идет о минимальном депозите, но вы обязаны быть уверены, что он вам по карману. 1×slots рабочее зеркало <a href=http://bbs.topeetboard.com/home.php?mod=space&username=Charlesviche>http://bbs.topeetboard.com/home.php?mod=space&username=Charlesviche</a>
1×слот регистрация в 1×slots casino
Таким образом онлайн казино получает потенциального игрока. Возможно дальнейшем либо истинном он захотит поиграть на свои деньги. Так трудятся бездепозитные призы в онлайн казино. Здесь хорошо подходит выражение, бесплатные сыр случается лишь в мышеловке. Начинающие игроки имеют не обдумывать опасность азарта. Однако течением понимания делается больше. Это тема для отдельного обсуждения.Суммы похожих услуг, большинстве, колеблются от трех до 20 $, а вейджер на эти средства обязан сочинять от 30 до шестидесяти один. Зачастую, наивеличайшая сумма выигрыша тут составит от одной до двух сотен долларов. Если игрок выиграет больше, то все свои шансы быть списанными до максимально разрешенного выигрыша. Здесь бывает смысл выводить еще несуществующие финансы на свою платежную систему и дальше отыскивать заведение с благоприятными под данную сумму релоадом или бонусом за 1-ое пополнение счета. Есть некоторое подвидов бездепозитного вознаграждения, предлагаемого наибольшим количеством заведений. Подобные бонусы без депозита предоставляются на более прибыльных условиях. Зачастую они крупнее, а обстоятельства отыгрыша наименее жесткие. <a href=https://www.clashfarmer.com/forum/member.php?action=profile&uid=45957>https://www.clashfarmer.com/forum/member.php?action=profile&uid=45957</a> 1×slots коды
<b>Смотреть еще похожие новости:</b>
<a href=https://www.formulersupport.com/Thread-1×slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8E-%D0%B1%D0%BE%D0%BB%D0%B5%D0%B5-%D0%BF%D0%BE%D0%BF%D1%83%D0%BB%D1%8F%D1%80%D0%BD%D1%8B%D0%B9-%D0%B2%D0%B0%D1%80%D0%B8%D0%B0%D0%BD%D1%82-%D1%8D%D1%82%D0%BE–100656>1×slots регистрацию более популярный вариант это</a>
<a href=https://clubdefansde24.com/foro/viewtopic.php?t=19285>1×slots регистрация на сайте</a>
<a href=https://minifishtank.net/forum/showthread.php?tid=22808>1×slots зеркало регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Получать информацию о самых выгодных бонусах возможно без неизменного прогноза новостей казино. Мы брали эту задачку на себя и постоянно смотрим за предложениями операторов, выбирая наихорошие из них. В этом разделе собраны последние бездепы, промокоды к ним и условия их активации. Список акций периодически пополняется. В топ вошли самые новые бездепозитные бонусы за регистрацию в казино 2020, кратковременные и закрытые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и критериям. Если срок деяния промоакции истек, она удаляется из списка. С другой стороны, гораздо легче забрать бездепозитные фриспины за регистрацию в казино и прямо момент начать вертеть барабаны в наилучших слотах. Главная особенность спинов что, собственно они предназначены для лучших автоматов. Удастся не пройти дополнительные раунды, но и прирастить необходимую выигрыша, заработать респины прочие внутриигровые подарки.
#2874 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
карты казино пин casino <a href=https://m.repost.news/>кент казино</a> букмекерская контора бетсити casino актуальное зеркало <a href=https://glvk.guru/>up букмекерская контора</a> casino вход официальные сайты казино пинап казино casino регистрации казино гта 5 пин ап казино порно с Карен Хачанов (теннис)
DiskiPlus пин ап casino pin DiskiPlus casino официальный зеркало <a href=https://diskiplus.ru>DiskiPlus какие казино</a> DiskiPlus бесплатное казино DiskiPlus 7k casino официальный сайт <a href=https://diskiplus.ru/>DiskiPlus pin up casino официальный</a> DiskiPlus балтбет букмекерская контора DiskiPlus 1×bet на андроид бесплатно DiskiPlus casino официальный сайт казино DiskiPlus казино рояль смотреть DiskiPlus pinco casino DiskiPlus порно с Арина и Дина Аверины, гимнастки
#2875 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино онлайн бесплатно порно с Голикова Татьяна Алексеевна <a href=https://strelochnik.com/>1×bet бесплатно</a> казино зеркало сегодня pinco casino <a href=https://kompromat1.online/>играющие казино онлайн</a> казино вулкан Попова Анна Юрьевна порно приложения букмекерских контор порно с Константин Тюкавин (футбол) pinco casino симулятор казино 1×bet официальный xbet
DiskiPlus 1×bet официальный сайт 1×bet xyz DiskiPlus порно с Матвей Сафонов (футбол) <a href=https://diskiplus.ru/>DiskiPlus пин ап букмекерская контора</a> DiskiPlus казино онлайн бесплатно DiskiPlus порно с Арина и Дина Аверины, гимнастки <a href=https://www.diskiplus.ru/>DiskiPlus Александра Бортич</a> DiskiPlus макао казино DiskiPlus казино фильм DiskiPlus pin up casino пин DiskiPlus казино рублях DiskiPlus Юдаева Ксения Валентиновна порно DiskiPlus 1×bet сайт DiskiPlus бывшие казино
#2876 Charlesgunnyhttp://filmkachat.ru
1×slots быструю регистрацию а также мгновенное
Промообъявления от казино не дают реальной картины и направлены на вербование внимания пользователей. Понять, как высоки шансы остаться в плюсе, позволит личный анализ условий предложения: <a href=http://filmkachat.ru/>казино 1×slots</a> Постарайтесь отыграть вейджер, дабы замечена возможность оставить заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электрической кошелёк, карту, аппарат.Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом прибыли находятся на этой странице. Посетитель имеет расценить обстоятельства получения и начать выступать на средства без внесения депо. При этом игроку принципиально понимать, на каких условиях и какими способами возможность вывести полученный выигрыш. Для сего нужно расценить список присоединенных платежных систем. <a href=https://noti.st/alinavideneeva/qgz7Oi/professional-furniture-technical-drawing-services-solutions>https://noti.st/alinavideneeva/qgz7Oi/professional-furniture-technical-drawing-services-solutions</a> Прибывшие на акк деньги бездепозитные бонусы предназначаются, в, лишь для свежеиспеченных юзеров, которые раньше не имели личного аккаунта в данном казино. Исходя из сего, в ранее у игрока был сделан депозит, то, по всей вероятности, у него больше не будет способности рассчитывать на получение такового приза в определенном заведении. 1×slots быструю регистрацию а также мгновенное <a href=https://bikeindex.org/users/glavdorogadv1606>https://bikeindex.org/users/glavdorogadv1606</a>
скачать 1×slots официальный сайт
Чем ниже велечину вейджера, что, этим легче отыграть и вывести бонус. Если Вы расчитываете заработать на бездепе, а не просто ознакомиться с новым игровым клубом, то стоит игнорировать бонусов с высочайшим вейджером их почти не реально отыграть. С ними Вы можете лишь протестировать игры заведения.Помните, что в неких забавах сумма ставки идет в зачет вейджера лишь частично. Так, в настольных и карточных играх только от 5% до 50% суммы ставки считаются как отыгранные деньги, тот как в слотах идет в зачет все one hundred percent суммы. <a href=https://games-garant.ru/index.php?subaction=userinfo&user=Jamesneorm>1×slots официальный сайт скачать</a> 1х слотс зеркало регистрация в 1×slots casino Игрокам не принимать приветственный приз как гарантированный метод получить крупный выигрыш, но это отличная вероятность без расходов оценить перечень казино.Автоматическая активация первый самой комфортной, но ручной способ имеет перед ней преимущества. Прежде чем использовать вознаграждение от казино, стоит заранее определить, сколько медли требуется на выполнение всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала действия приза. <a href=http://whitepower.clanweb.eu/profile.php?lookup=26757>http://whitepower.clanweb.eu/profile.php?lookup=26757</a> С не отыгранным призом воспрещается превосходить размер максимальной ставки. Нарушение этого обстоятельства будет аннулирование выигрыша.Для всех бездепозитных бонусов действует наибольший лимит на выигрыш. Он указывает предельную сумму, которую возможность получить, играя на бонусные кредиты. Как лишь для удастся выполнить требования вейджера, возможный максимально будет переведен с бонусного счета на главной, а остаток несомненно списан. зеркло казино 1×slots
1×slots казино мобильная версия
В неких онлайн казино для получения бездепозитных призов не достаточно просто зарегистрироваться на сайте клуба и доказать свои контактные данные. Дополнительно требуется активация промокода. <a href=https://tools-info.biz.ua/wr_board/tools.php?event=profile&pname=ChrisUnsak>https://tools-info.biz.ua/wr_board/tools.php?event=profile&pname=ChrisUnsak</a> Размер бонусов чаще всего чисто условный и не выше 50 рублей. Приятно, хотя ощутимым бустом в игре вряд ли станет. 1×slots зеркало регистрация в 1×slots casino Процесс подтверждения личности имеет взятьвдолг(взятьвзаймы) от одного дня до недели. Если клиент допустил какую-либо оплошность при заполнении паспортных данных, то ему по обратиться с проблемой в службу поддержки онлайн-казино.
1×slots официальный регистрация
Мы собрали и выпустили перечень превосходнейших бездепозитных казино с призами за регистрацию, которые гарантируют щедрые выигрыши и моментальные выплаты.Заполняя данные в личном профиле, указывайте только достоверную информацию, например как Вам придется ее доказать в будущем при выводе денег. <a href=http://mi.minfish.com/home.php?mod=space&uid=1196847>1×slots на любой вкус как пройти регистрацию</a> Доступность — бездепозитные бонусы в казино почаще всего предоставляются свежим игрокам, но случаются случаи, когда приз все получить и действующие клиенты.Бездепозитные призы истинными средствами, которые возможно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадались. 1×slots зеркало быструю регистрацию а также мгновенное <a href=https://berzarina28a.ru/index.php?/profile/10986-ashleyrex/>https://berzarina28a.ru/index.php?/profile/10986-ashleyrex/</a>
1×slots сайт
Следует подчеркнуть, что бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам либо с конкретным кодом. Внесение депозита – Будьте готовы пополнить счет после отыгрыша бонуса. Это обычное требование правил для этого типа промо-акций. Лучше заранее уточнить, какую необходимую надо(надобно) будет заносить на счет. Как верховодило, идет о наименьшем депозите, но вы должны быть убеждены, что он для по кармашку.Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. <a href=http://feki-php.8u.cz/profile.php?lookup=11552>http://feki-php.8u.cz/profile.php?lookup=11552</a> зеркала 1×slots Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша призов. Заведения практически устанавливают максимальную ставку, допустимую по условиям вейждера.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.home-visa.ru/viewtopic.php?f=69&t=807392&p=3067187#p3067187>1×slots casino регистрация на сайте</a>
<a href=http://miupsik.ru/forums/showthread.php?tid=228038>1×slots зеркало этих способов предполагает регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Получать информацию о самых выгодных бонусах можно без неизменного прогноза новостей казино. Мы брали данную задачку на себя и непрерывно следим за предложениями операторов, избирая наихорошие из них. В этом разделе собраны последние бездепы, промокоды к ним и условия их активации. Список промоакций регулярно пополняется. В топ вошли самые свежие бездепозитные бонусы за регистрацию в казино 2020, кратковременные и замкнутые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру прочим критериям. Если срок деянья промоакции истек, она удаляется из перечня. За счёт спинов выйдет запустить разные онлайн слоты, протестировать стратегии и поднабраться опыта. Фишка что, собственно вращения начисляются на топовые аппараты с оригинальными опциями и высочайшей отдачей. Не запамятовывайте, что в любом акционном предложении предусмотрены особые требования – временные ограничения, наибольший размер ставки, список дешевых игр.
#2877 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
рабочие зеркала казино казино смотреть <a href=https://glvk.guru/>Яровая Ирина Анатольевна порно</a> скачать букмекерскую контору pin up casino <a href=https://specreporter.com/>порно с Васильева Татьяна Викторовна</a> porno Алена Михайлова пари букмекерская контора Москалькова Татьяна Николаевна порно porno Илья Ковальчук (хоккей) порно с Ирина Сидоркова Любимова Ольга Борисовна порно 1×bet сейчас
DiskiPlus приложения букмекерских контор DiskiPlus Фастова Елена Владимировна порно <a href=https://www.diskiplus.ru>DiskiPlus казино на деньги</a> DiskiPlus сайт pin up casino DiskiPlus casino промокод <a href=https://diskiplus.ru>DiskiPlus win win casino</a> DiskiPlus демо казино DiskiPlus kent casino регистрация DiskiPlus порно с Аделия Петросян (фигурное катание) DiskiPlus pin up casino пин DiskiPlus casino riobet DiskiPlus Елизавета Боярская DiskiPlus казино смотреть онлайн
#2878 Charlesgunnyhttp://filmkachat.ru
1хслот скачать
Получать информацию о самых выгодных призах можно без неизменного мониторинга новостей казино. Мы брали данную задачу на себя и постоянно смотрим за услугами операторов, избирая лучшие из них. В данном разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список акций регулярно дополняется. В топ зашли самые свежие бездепозитные призы за регистрацию в казино 2020, кратковременные и закрытые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру прочим критериям. Если срок деяния промоакции истек, она удаляется из списка.Риск-игра по одинаковым шансам – Также казино возможность воспрещать выполнять условия по отыгрышу с помощью раунда на удвоение, который предлагается в слотах, видео-покере и некоторых других играх. <a href=http://filmkachat.ru/>1×slots casino online регистрация</a> Бездепозитные призы за регистрацию в игровых автоматах для владельцев онлайн-казино считаются долею маркетинговой кампании, направленной на повышение аудитории вебсайта. Так они продвигают свои бренды и привлекают свежих посетителей.Также бездепозитные призы все служить методом вернуть к ирге посетителей, пока приостановивших своё сотрудничество с фирмой: уведомление о бездепе поступает на мобильный телефон или почту. <a href=https://besthostingprice.com/whois/astramedika.com.ua>https://besthostingprice.com/whois/astramedika.com.ua</a> Иногда в качестве бездепа, казино дарит минимальный приз (до 50 руб. ), из-за которого не стоит заморачиваться. 1хслот скачать <a href=http://netvoyne.ru/user/Jameseling/>http://netvoyne.ru/user/Jameseling/</a>
1хслотс регистрация в 1×slots casino
Если вы выбрали для себя количество брендов коие вас больше всего полюбились, для неизменной забавы! Таких гемблеров казино очень предпочитает и оценивает, за частую эти игроки становятся VIP игроками заведения, которым часто поступают прибыльные предложения в виде призов, например же туда заходит и бездепозитные. <a href=https://isomedu.com/forum/profile/josephdrons/>скачать 1×slots официальный сайт</a> сайт 1× slots casino Для верификации аккаунта надо(надобно) предоставить профессионалам технической поддержки отсканированную копию паспорта и счета за коммунальные услуги, еще фотку банковской карты либо экрана странички электронного кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности. <a href=http://www.ymapparel.com/bbs/board.php?bo_table=free&wr_id=317299>http://www.ymapparel.com/bbs/board.php?bo_table=free&wr_id=317299</a> Для получения бонуса надо(надобно) ознакомиться с программкой преданности казино и устроить ставки на необходимую, необходимую для перехода на грядущий уровень. 1 x slots casino Бездепозитный бонус казино 2022 с выводом за регистрацию предоставляет возможность ознакомиться игроку с лобби избранного заведения, определится в выборе игр и выяснить качество работы саппорта. Довольно нередко, начиная игровой процесс, игрок теснее не желает останавливаться и делает реальный вклад. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть даром возможно как один таки с призом за регистрацию без необходимости вносить депо.Промокод – определённая композиция символов, которую необходимо ввести в соответствующее поле при разработке учетной записи либо активировать в собственном профиле игрока в разделе с призами.
казино 1×slots
На критериях отыгрыша даровых призов по тормознуть подробнее. С ними связаны аспекты, которые невозможно оставить без внимания. Нельзя рассматривать забаву на средства, как вариант заработка. Азартные забавы запрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не является зачинщиком азартных игр. Сайт носит информационный нрав. <a href=http://www.nretail.co.kr/bbs/board.php?bo_table=free&wr_id=275635>http://www.nretail.co.kr/bbs/board.php?bo_table=free&wr_id=275635</a> 1× слот зеркало
1хслот скачать
Выиграть настоящие средства в казино не пополняя счет – трудно, хотя вероятно. Главное задаться целью и не нарушатьправила заведения. Выберите несколько казино с бездепзитными бонусами и начните играть на бонусные средства. По статистике в одном из 10-ти заведений возможно заработать маленькую сумму средств с бонусных средств.Объективные – объем приза, коэффициент и обстоятельства вейджера, надобность внесения депозита для вывода денег; Обыкновенные бездепозитные призы в размере от 3-х до 20 $ созданы для того, дабы в забавы заходили все новые и свежие игроки. Здесь, вероятнее всего, будет ограничение на наибольший выигрыш. Важно, дабы перед минимальным вкладом был отключен приз за 1-ое пополнение счета, и игрок не попадет на повторный вейджер. 1хслотс рабочее зеркало <a href=https://www.alligator.spb.ru/forum/index.php?PAGE_NAME=profile_view&UID=78558>https://www.alligator.spb.ru/forum/index.php?PAGE_NAME=profile_view&UID=78558</a> Заработать на бездепозитных бонусах за регистрацию в казино имеет каждый юзер, достигший совершеннолетия.
1хслотс зеркало на сегодня
Стоит обозначить(означить), что бездепозитный приз выдается лишь совершеннолетним новеньким, коие, же, все пригласить личных приятелей и своих, того рассчитывающих на поощрительную программу лояльности. Подобная технология была среди конкуренцию онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению собственной посещаемости, путем привлечения новых игроков. Бонусы – это оригинальный шанс для вероятных участников игры, которые могут опробовать софт покер рума и увериться, станут ли они в него играть либо нет. Новый игрок испробует свои силы с реальными оппонентами в казино.Бездепозитные бонусы за регистрацию в игровых автоматах для хозяев онлайн-казино являются частью рекламной кампании, направленной на увеличение аудитории сайта. Так они продвигают средства бренды и завлекают новых клиентов. <a href=https://www.ch-valence-pro.fr/CollDSIO/community/profile/caraepps3140842/>https://www.ch-valence-pro.fr/CollDSIO/community/profile/caraepps3140842/</a> В настоящее время получить приз за регистрацию в казино очень просто. Почти каждый игорный жилище с готовностью даст деньги или бесплатные вращения. Многие игроки пользуются данным и не стесняются регистрироваться в каждом клубе с прибыльными условиями. Кстати, это замечательная вероятность придумать выигрышную стратегию и сорвать куш. 1хслотс казино зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=342559>1×slots официальный сайт зеркало</a>
<a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=2108>1×slots регистрация 1×slotscasino 56 online</a>
<a href=https://www.handmakersbrasil.com.br/topic/500-%D0%B7%D0%B5%D1%80%D0%BA%D0%BB%D0%BE-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-1×slots/>зеркло казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для того, чтобы отыграть необходимую вашего бездепозитного бонуса нужно выполнить обстоятельства вейджера. Очень часто фриспины даются на конкретные слоты (book of ra, book of lifeless, book of sun), подбирайте разъем для нраву, все очень красочные и качественные. Бездепозитные бонус возможность быть денежным например и повторяющий фриспинов на слоты Используйте наилучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, дабы заработать презенты за простые деяния теперь сейчас получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и резвыми выводами на электронные кошельки.
#2879 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
бк букмекерская контора 1×bet бесплатно <a href=https://vestnik-jurnal.com/>casino online зеркало</a> porno Елизавета Туктамышева Кузнецова Анна Юрьевна порно <a href=https://res-publika.com>porno Александра Степанова, фигуристка</a> Набиуллина Эльвира Сахипзадовна порно Скворцова Вероника Игоревна порно казино казино рулетка лучшие бесплатные онлайн казино 1×bet зеркало слоты зеркала официальных сайтов казино
DiskiPlus cat casino DiskiPlus 1×bet зеркало на сегодня 1×bet xyz <a href=https://diskiplus.ru>DiskiPlus casino онлайн</a> DiskiPlus бесплатно играем казино DiskiPlus Матвиенко Валентина Ивановна порно <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet зеркало на сегодня</a> DiskiPlus сайт pin up casino DiskiPlus приложения букмекерских контор на андроид DiskiPlus казино проиграл DiskiPlus Комарова Наталья Владимировна порно DiskiPlus казино в россии DiskiPlus порно с Дарья Касаткина (теннис) DiskiPlus порно с Анна Калинская (теннис)
#2880 Charlesgunnyhttp://filmkachat.ru
1 x slots casino
Прямо в отберите благотворительные вращения за регистрацию без депозита и начинайте собирать призовые композиции ради крупных выигрышей! <a href=http://filmkachat.ru/>1×slots зеркало видели такую регистрацию на</a> Индивидуальные одобрения выдаются за совершение деяний: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавленья или официального посетителя для ПК. В большинстве казино действуют программки лояльности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на следующий степень часто сопровождается выдачей бездепа. <a href=https://sitechecker.pro/app/main/seo-report?pageUrl=astramedika.com.ua>https://sitechecker.pro/app/main/seo-report?pageUrl=astramedika.com.ua</a> 1×slots casino регистрация 1×slotscasino09k online <a href=http://ods.org.ua/user/Darengew/>http://ods.org.ua/user/Darengew/</a> Но на азартных платформах сходственные вознаграждения шансы получить теперь зарегистрированные пользователи. В этом случае, бонусы предоставляются в оригинальных акций либо же некоторым геймерам вид акционного предложения, коие приходит на почту с целью «вернуть» игрока в свое казино.Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.
1х слот регистрация в 1×slots casino
1× slots зеркало Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских руб. В условиях промоакции указано, собственно вейджер бездепозитного приза х20. Поэтому, чтобы отыграть бонус, игроку будет нужно устроить ставок на 35*20=700 рублей.Если вы избираете испытанное лицензионное интернет казино и выполните все обстоятельства получения бездепозитного бонуса, проблем с получением презента у Вас не возникнет. <a href=https://www.one2bay.de/forum/member.php?action=profile&uid=19615>https://www.one2bay.de/forum/member.php?action=profile&uid=19615</a> Зарегистрироваться в казино по особой ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефонного и электронную почту). Для доказательства номера телефонного нужно в личном профиле указать свой номер и нажать кнопку „Подтвердить номер телефона“, дальше Вы получите sms-сообщение с кодом, кот-ый нужно ввести в подходящее фон. Для доказательства электрической почты, перебежать по активной ссылке в письме от казино. 1хслотс регистрация в 1×slots casino Перед активацией главно пристально выучить условия акции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, протяжении коих возможно воспользоваться предложением. Если бездеп обхватывает ограниченный перечень игр, рекомендовано разузнать максимальные коэффициенты, уровень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь что, нет случае, если оператор не установил строгие ограничения на максимальную сумму ставки.Доступность — бездепозитные бонусы в казино чаще всего предоставляются свежим игрокам, хотя случаются случаи, когда бонус шансы получить и действующие клиенты.
1×slots casino зеркало рабочее
Подтверждение персональной информации. Все казино требуют от клиента пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и наличие у юзера иных аккаунтов (мультиаккаунт запрещен). <a href=https://opaseke.com/users/6863>https://opaseke.com/users/6863</a> У любого игорного заведения свои верховодила и обстоятельства. Но, чтобы получить бонусы, необходимо выполнить стандартные деянья:Новые клиенты онлайн-казино без первого депо шансы выяснить свою удачливость. К тому же есть вероятность преобразовать бездепы в реальные средства за регистрацию в казино, впрочем результата приз нужно отыграть сообразно условиям промоакции. 1 хслот регистрация в 1×slots casino Подарки на дни ? посвященные торжественным датам, требующие символического отыгрыша либо начисляются без того. Могут дариться игрокам сутки рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду.
1×slots сайт зеркало
1х слот регистрация в 1×slots casino <a href=https://wiki.mysupp.ru/index.php?title=Выкуп_авто>https://wiki.mysupp.ru/index.php?title=Выкуп_авто</a> Размер бонусов чаще всего чисто условный и не выше 50 рублей. Приятно, хотя ощутимым бустом в игре вряд ли станет.
1×slot официальный сайт
<a href=https://bridge-clip.ru/user/HenryCef/>https://bridge-clip.ru/user/HenryCef/</a> Получать информацию о самых выгодных призах возможно без постоянного прогноза новостей казино. Мы взяли данную задачку на себя и непрерывно следим за предложениями операторов, выбирая превосходнейшие из их. В данном разделе собраны последние бездепы, промокоды к ним и условия их активации. Список промоакций регулярно пополняется. В топ зашли самые новые бездепозитные призы за регистрацию в казино 2020, временные и закрытые рекламную. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и критериям. Если срок действия промоакции истек, она удаляется из списка. 1×slot официальный сайт Основное различие том,, собственно для получения бездепа не пополнять баланс в казино. Но кроме этого, есть ряд прочих отличий:Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают приз по странам. Вплоть до как, собственно клуб может на игроков из Вашей страны, а бездеп не давать.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.one2bay.de/forum/showthread.php?tid=664117>рабочее зеркало 1×slots</a>
<a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=860191#pid860191>x1 slots регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Многие казино предоставляют в маркетинговых целях безвозмездные бонусы необыкновенно для наших читателей. Чтобы их получить, нужно перебежать на игровой сайт по партнерской ссылке с нашего портала. Начнём с как, что любое промо за регистрацию подразумевает некоторые условия. Бездепозитные бонусы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, нужная для исполнения критерий. Пример, получили безвозмездные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 руб., неудачных или выигрышных, неважно. После выполнения, бонусный баланс перейдёт на настоящий и будет легкодоступным к выводу.
#2881 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Гатагова Ольга Анатольевна казино пин <a href=https://sovsekretno.net/>casino онлайн</a> porno Александра Степанова, фигуристка порно с Евгений Малкин (хоккей) <a href=https://krtka.info/>1×bet официальный</a> букмекерская контора фонбет официальный сайт вавада казино макао казино пин ап казино порно с Юлия Ефимова, пловчиха букмекерская контора зенит porno Елизавета Туктамышева
DiskiPlus casino бонус DiskiPlus Любимова Ольга Борисовна порно <a href=https://diskiplus.ru/>DiskiPlus порно с Александр Большунов (лыжные гонки)</a> DiskiPlus casino скачать приложение DiskiPlus рабочее казино <a href=https://diskiplus.ru/>DiskiPlus порно с Илья Осипов (киберспорт)</a> DiskiPlus казино гта 5 DiskiPlus casino промокод DiskiPlus 1×bet бесплатно DiskiPlus скачать 1×bet DiskiPlus 1×bet слоты 1×bet xyz DiskiPlus яндекс игры казино DiskiPlus порно с Антропова Валентина Викторовна
#2882 Charlesgunnyhttp://filmkachat.ru
1× slots casino официальный сайт
У нас на сайте Вы отыщите список призов без депозита в проверенных казино и доскональную информацию о том как их получить и применять. <a href=http://filmkachat.ru/>онлайн казино 1×slots</a> Новички не обожают сразу же вносить депо. Это обусловлено неименьем опыта и сомнением. К счастью, дни возможно получить бездепозитный бонус за регистрацию в казино. Неважно что начисляет система – фриспины или кредиты. В всяком случае вы не рискуете своими сбережениями. Это замечательная вероятность запустить понравившийся видео слот либо же испытывать удачу в настольных играх. <a href=https://www.ourboox.com/bp/1641444/>https://www.ourboox.com/bp/1641444/</a> Минимального оборота. Этот предел уточняется вейджером — пока игрок не сыграет на установленную сумму, вывод средств несомненно недоступен.Обычно показатель выше, чем для призов на депозит. Не изумляйтесь, в он несомненно в х100. Иногда завышенный коэффициент вейджера устанавливается для обитателей отдельных стран. 1×slots бонус за регистрацию <a href=https://arenafighter.adult/mybb/member.php?action=profile&uid=262869>https://arenafighter.adult/mybb/member.php?action=profile&uid=262869</a>
1×slots казино мобильная версия
Как управляло, новоприбывшие игроки в первую очередь желают ознакомиться с методами ввода и вывода валютных средств и сроки выполнения поданных заказов дабы конкретно понимать, как быстро появится вывести свой казино приз за регистрацию без депо на электронный кошелек либо же банковскую карту. К счастью для всех играющих, внутри определенных холдингов, все казино конкурируют между собой. Ведь случае бы определенную фирму давало только одно онлайн-заведение, то ли бы посетители увидели казино с бонусом за регистрацию и имели бы рассчитывать только на вознаграждение в виде бонуса на первое вложение. К каждому заведению регулярно идет привлекать свежих игроков, что, в итоге, лишь на руку всем играющим.Так что сможете храбро региться без всяких раздумий. Фортуна сегодня точно на вашей стороне. Не бойтесь, ведь следствие какого либо ущерба Вам совершенно не грозит. С такими бонусами как без пополнения, Вы остаетесь только в плюсе, но не как не в минусе. <a href=http://3ak.cn/home.php?mod=space&uid=187057>1×slots сайт</a> 1×slots casino регистрация Популярность интернет казино растёт и всё больше юзеров начинают интересоваться азартными забавами. Бездепозитные бонусы 2022 года, это оригинальные подарки за регистрацию. С их помощью свежие игроки имеют получить безвозмездные вращения или деньги на баланс за 1 регистрацию. С в игорных заведений в интернете, бездепозитные бонусы стали известнейшим способом вербования игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о которых мы расскажем. Наш вебсайт собрал превосходнейшие предложения из онлайна на 2022 год. Воспользуйтесь каким презентом и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить условия.Если простыми текстами, бездепы – это определённая сумма денег либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно брать презенты. Но есть некоторые аспекты. Существуют игорные жилища, которые перед что, этим как начислить призы требуют привязать аппарат, дать копии документов. <a href=https://tpforums.org/forum/member.php?39142-CharlesKnori>https://tpforums.org/forum/member.php?39142-CharlesKnori</a> Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы моментально получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, замечена настоящий шанс победу! 1×slots зеркало быструю регистрацию а также мгновенное
1× слот зеркало
Внесение депозита – Будьте готовы восполнить счет после отыгрыша приза. Это обычное заявка управлял для данного на промо-акций. Лучше заблаговременно уточнить, какую необходимую надо(надобно) будет заносить на счет. Как верховодило, речь о минимальном депозите, хотя вы должны быть убеждены, что он для по карману. Самые свежие бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды присутствуют на этой страничке. Посетитель может оценить условия получения и начать выступать на средства без внесения депозита. При данном игроку важно осознавать, на каких условиях и какими способами возможность исключить приобретенный выигрыш. Для сего нужно расценить список присоединенных платежных систем. <a href=https://brp.bars.su/forum/?PAGE_NAME=profile_view&UID=49903>https://brp.bars.su/forum/?PAGE_NAME=profile_view&UID=49903</a> Благодаря программке лояльности от игорного заведения, возможно брать превосходный старт и без дополнительных вложений запустить видеослоты. Кроме такого, возможно рассчитывать на реальную фортуну и получить, без вложения личных денег, великий выигрыш.Существует ли стратегии для отыгрыша бездепозитных призов? К огорчению нет, на выигрыши либо проигрыши с бонусов, казино либо игрок воздействовать имеет, отдача игр происходит от создателей игр. рабочее зеркало 1×slots При выполнении условий отыгрыша и верификации, деньги с бонусного счета переводятся на главной и могут быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции в от выбранной платежной системы.
1хслотс казино зеркало
Бездепозитные бонусы в казино без пополнения 2022 — это определенная сумма денег либо gorovyh spins вращения, коие предоставляются первым постояльцам за регистрацию на сайте казино повторяющий бездепозитного приза, и выделяет вам возможность помощью казино без пополнения опробовать услуги (игр), с последующей преимуществом, льготой вывода средств при выполнении всех установленных правил.Первый возникающий вопрос, это, для выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают свежих игроков. Последним легче начать игру на средства с дара за регистрацию. Им надо пополнять баланс и тратить личные средства. Новички получают безвозмездные спины или средства на счёт. С их подмогою знакомятся с игровым ходом, крутят слоты и делают ставки в рулетке. <a href=http://86395.ww.w.molifan.net./space-uid-2275092.html>1×slots официальный сайт зеркало рабочее</a> Наши специалисты исследуют обстоятельства акции, после в ручном режиме проводят их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие параметры. Мы не рекламируем казино, а даем игрокам информацию о наихороших из них. 1х слот регистрация в 1×slots casino <a href=http://www.hdfeed.co.kr/bbs/board.php?bo_table=04_02&wr_id=215760>http://www.hdfeed.co.kr/bbs/board.php?bo_table=04_02&wr_id=215760</a> Принципиальным различием даровых бонусов от призов на депо считается неименье надобности заносить деньги на аккаунт. Из-за сего их часто называют бездепозитными (no down payment bonuses).
1хлот регистрация в 1×slots casino
Частенько новички не разумеют, как активировать презенты либо вывести 1-ый выигрыш. Для сходственных случаев наша команда описала главные определения – что это фриспины, вейджер, как его отыграть, зачем нужно протекать верификацию. 2. Создать новый профиль. Для регистрации нужно наполнить небольшую анкету либо зайдите в индивидуальный кабинет при помощи социальных сетей;Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие появляются у новичков. <a href=http://forum.prolifeclinics.ro/profile.php?id=1284788>http://forum.prolifeclinics.ro/profile.php?id=1284788</a> 1×slots зеркало регистрация
<b>Смотреть еще похожие новости:</b>
<a href=http://mi.minfish.com/home.php?mod=space&uid=1196847>1× slots регистрация в 1×slots casino</a>
<a href=https://forum.dis-course.net/viewtopic.php?p=936502#p936502>1× slots зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Автоматы неспроста считаются самым знаменитым азартным развлечением. Чтобы усвоить управление и управляла, потребуется всего несколько минут. Ваша задачка сделать ставку, найти число рабочих линий и возможно крутить барабан. Если дисплее выпадет выигрышная композиция – вы выиграли! С этой задачей вас посодействуют управится бездепозитные призы казино.
#2883 Charlesgunnyhttp://filmkachat.ru
сайт 1× slots casino
Минимального оборота. Этот лимит устанавливается вейджером — же игрок не сыграет на установленную необходимую, вывод средств несомненно недосегаем. <a href=http://filmkachat.ru/>1×slots зеркало проходить регистрацию это отличный вариант</a> Прежде чем активировать бездеп, необходимо увериться что, нет, что страна, уроженцем коей является игрок, не заходит в список запрещенных. <a href=https://pdfhost.io/v/vg5kMeE3F_Professional_2D3D_Prototyping_Solutions_for_Upholstered_Furniture_Design>https://pdfhost.io/v/vg5kMeE3F_Professional_2D3D_Prototyping_Solutions_for_Upholstered_Furniture_Design</a> В некоторых онлайн казино для получения бездепозитных бонусов не довольно просто зарегистрироваться на сайте клуба и подтвердить свои контактные данные. Дополнительно потребуется активация промокода.Лишь популярностью и знаменитые азартные заведения все разрешить для выдавать бездепы вид дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, которые можно потратить в лучших аппаратах с высокой отдачей. 1×slots промокод при регистрации <a href=http://www.taroko.org/taroko/forums/member.php?action=profile&uid=482>http://www.taroko.org/taroko/forums/member.php?action=profile&uid=482</a> Получив свой презент, Вы сможете бесплатно играть на настоящие деньги, а выполнив условия отыгрыша, вывести свой выигрыш.В любом казино с бездепозитным бонусом учтены вейджеровые условия. Это единственный «подводный камень», который стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) сделать определённое число ставок. Чем круче приз, тем сложнее выполнить условия, и напротив.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Бездепозитные бонусы начисляются только раз один. Не стоит открывать свежие аккаунты, дабы получить их повторно. Служба безопасности казино обязательно выявит «левого» соучастника и перекроет. Если посетитель выполнит нужные требования, отыграет свою ставку и решит вывести собственный выигрыш, то ему нужно принять, собственно казино непременно потребует предоставить ксерокопии личных документов, чтобы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои исключить не получится.Сроки активации бонуса устанавливаются каждым казино, хотя почаще всего они не превосходят недели с момента получения. Игроку непременно надо(надобно) применять бездеп в течение указанного срока, в ином случае бонус просто исчезнет. Каждый бонус можно получить только раз раз, поэтому случае не применять бездеп в срок, у игрока не несомненно 2 шанса им пользоваться. <a href=https://www.donchillin.com/space-uid-382497.html>1хслот зеркало</a> зеркала 1×slots <a href=https://rubcrumb.ru/user/JeffreyFar/>https://rubcrumb.ru/user/JeffreyFar/</a> При выполнении критерий отыгрыша и верификации, средства с бонусного счета переводятся на главный и могут быть выведены на карту либо электрический кошелек. Лимиты на вывод и сроки проведения транзакции в от выбранной платежной системы. 1х слот регистрация в 1×slots casino
1×slots зеркало регистрация то дальше необходимо пройти
Как и промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такового предложения считаются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает новых посетителей и разрешает им составить эмоцию о функционале, не рискуя значительными совокупностями.Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы появилась возможность исключить выигрыш. <a href=http://i91215un.bget.ru/user/Tyroneacank/>http://i91215un.bget.ru/user/Tyroneacank/</a> Возьми собственный презент. Чаще всего приз активизируется сразу после регистрации. Но посещают ситуации, когда нужно забежать в собственный офис или написать в справочную службу.Бездепозитный приз предоставляется новенькому игроку за определенные деяния. Часто презент повторяющий денег либо фриспинов выдается за регистрацию, спасибо чему юзер получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. 1 х слотс зеркало За вербование приятеля ? масштабах партнерской программы клиент получает вознаграждение за вербование новых юзеров.Мы подготовили перечень, где есть всегда актуальные и свежие бездепозитные бонусы казино, коие возможность получить бесплатно. Для наших пользователей есть специальные предложения неповторимые бонусы, коие вы кого не отыщите, их мы определили особой красной плашкой «Exclusive».
1×slots промокод при регистрации
Бездепозитные призы казино это экономическая компенсация, предлагаемая юзерам на дармовой базе и возможность выступать в интернет казино безвозмездно. Если сопоставлять их с одобрениями за лепта, в свои выдаются лишь потом начального пополнения счета, то бездепозитные вознаграждения получаются безвозмездно. То есть, играющий получает вероятность создавать ставки на теснее быть финансы, которые выдаст заведение, исполняя, при этом, обыденные деянья, чтобы их извлечь (здесь речь о регистрация, удостоверении личности с внедрением номера аппарата, оформления заявки и т.д. ).Размер приза. В качестве бездепов обычно начисляют небольшие суммы, а когда речь идет о бонусах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то кое-какие казино могут подарить игроку до 2000$. Мы рекомендуем не отрицаться от сходственных услуг известных казино. Выделите несколько минут на регистрацию, получите приз и попробуйте его отыграть. Может быть, сегодня фортуна будет на вашей стороне!Не трудно догадаться, что not the slightest deposit bonuses практически разу не бывают большими. Чаще всего речь о пяти–тридцати долларах (или эквиваленте данной суммы в иной денежной). Список так именуемых «не территорий» прилагается к правилам бонусной программки игорного портала. Обязательно проверьте, распространяются ли на вас сходственные наказания.Так собственно сможете неустрашимо региться без всяких раздумий. Фортуна сейчас точно на вашей стороне. Не побаивайтесь, ведь следствие какого либо ущерба Вам абсолютно не угрожает. С такими бонусами как без пополнения, Вы остаетесь только в плюсе, но не как не в минусе. 1×slots официальный регистрация <a href=http://opensourceprocurement.org/forumthread3783–1×slots-SKACAT%D1%8C-NA-ANDROID>http://opensourceprocurement.org/forumthread3783–1×slots-SKACAT%D1%8C-NA-ANDROID</a> На благотворительные бонусы онлайн-казино практически постоянно распространяется ограничения по стране проживания посетителей. Даже случае вам разрешается раскрывать счет и выступать на деньги в заведении, это еще не означают, собственно вас доступны no down payment bonuses.
1× slots casino официальный сайт
Также учтите, собственно некоторые игровые платформы сужают список государств, которые готовы получить предложенный бездепозитный бонус за регистрацию. К образцу, существуют онлайн-заведения, выдающие похожие призы только обитателям определенных государств. К образцу, интернет казино 777 Оригинал предоставляет бездепозитный бонус только игрокам из России и государств СНГ. Или наоборот, снабжают вознаграждением всех, кроме жителей неких государств (следует сего, следует пристально изучать список, дабы потом не появилось практически вопросов и претензий).Прямо момент заберите благотворительные вращения за регистрацию без депо и начинайте собирать призовые композиции ради солидных выигрышей! <a href=https://goblin-film.net/user/StevenHoity/>https://goblin-film.net/user/StevenHoity/</a> Казино выводит средства только на ту платежную систему, с котрой был сделан депо. То есть, для вывода бездепозитного бонуса, Вам сначала нужно восполнить счет. В некоторых клубах узкий список способов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет именно с данных платежных способов, которые доступны для вывода.Онлайн-казино тщательно продумывают бонусные обстоятельства, коие нужно выучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и ограничения. 1×slots акции
<b>Смотреть еще похожие новости:</b>
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=35680>1 хслот регистрация в 1×slots casino</a>
<a href=https://australianwinerytours.com/tours/showthread.php?tid=201560>1×slots казино зеркало</a>
<a href=http://www.infoknygos.lt/smforum/index.php?topic=83277.new#new>1×slots casino зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Помните, что в неких забавах сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки числятся как отыгранные средства, в то время как в слотах идет в зачет все one hundred percent суммы. Нет. Казино выдают бесплатные призы за регистрацию, чтобы, чтобы, чтобы заказчик мог ознакомиться с игровым заведением. А чтобы исключить его, нужно выполнить обстоятельства отыгрыша.
#2884 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
up букмекерская контора пин casino <a href=https://specreporter.com/>1×bet зеркало на сегодня</a> казино гта 5 7k casino официальный сайт <a href=https://glvk.guru/>new casino</a> про казино casinos winning слоты казино 1×bet зеркало слоты лучшая казино букмекерская контора официальный сайт скачать песня казино
DiskiPlus порно с Дарья Касаткина (теннис) DiskiPlus Матвиенко Валентина Ивановна порно <a href=https://diskiplus.ru/>DiskiPlus Петрова Ольга Викторовна порно</a> DiskiPlus Комарова Наталья Владимировна порно DiskiPlus какие казино <a href=https://www.diskiplus.ru/>DiskiPlus порно с Диана Шнайдер (теннис)</a> DiskiPlus 1×bet скачать бесплатно DiskiPlus казино на деньги DiskiPlus casino com DiskiPlus porno Мария Шарапова DiskiPlus казино большая DiskiPlus Хорова Наталья Александровна порно DiskiPlus официальное казино вход
#2885 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало на сегодня porno Дарья Мороз <a href=https://rumafia.news/>1×bet на андроид бесплатно</a> порно с Евгения Медведева казино регистрации <a href=https://krtka.info/>букмекерская контора фонбет официальный сайт</a> букмекерская контора леонов 1×bet зеркало на сегодня 1×bet xyz casino игровой автомат Нургалиева Эльвира Рамиловна порно букмекерская контора леонов букмекерская контора официальный сайт pin up casino top top
DiskiPlus гта казино DiskiPlus casino betting <a href=https://www.diskiplus.ru>DiskiPlus casino скачать приложение</a> DiskiPlus up casino официальный DiskiPlus Матвиенко Валентина Ивановна порно <a href=https://diskiplus.ru>DiskiPlus порно с Артемий Панарин (хоккей)</a> DiskiPlus казино зеркало сегодня DiskiPlus casino играть DiskiPlus скачиваемые казино DiskiPlus pin ап casino DiskiPlus 1×bet регистрация DiskiPlus 1×bet скачать бесплатно DiskiPlus Анна Михалкова
#2886 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало
Вейджер в переводе с британского значит «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша приобретенного приза, в нашем случае бездепозитного. Число ставок значения — принципиально лишь набрать сумму, пропорциональную сумме одобрения.Но разу не забывайте пристально читать верховодила участия в бонусных акциях. Если вы нарушите но бы одно условие, позднее вы не можете устроить недоразумение с администрацией. <a href=http://filmkachat.ru/>1×slot зеркало рабочее этих способов предполагает регистрацию</a> Доступность — бездепозитные призы в казино чаще всего предоставляются новым игрокам, но бывают случаи, когда приз имеют получить и действующие клиенты.Подтвердите регистрацию, дабы активировать Бездепозитный приз с выводом, требуется заполнить индивидуальный профиль. Заполните пустопорожние поля истинными данными о для. <a href=https://seo.valutahosting.it/it/www/playhouse.com.ua>https://seo.valutahosting.it/it/www/playhouse.com.ua</a> Высокая конкуренция в разделе азартных игр доказывает операторов завлекать посетителей разнообразными акциями. Благодаря этому у посетителей бывает возможность получить бонусы в казино за регистрацию без депозита. Воспользоваться этим предложением можно, избегая функцию внесения средств на игровой счет, просто активировав аккаунт на веб-сайте. Наш экскурсовод по бездепам поможет избрать самую симпатичную бонусную программу, узнать правила получения такового вознаграждения и распорядиться им с максимальной выгодой. 1× slots официальный <a href=https://funsilo.date/wiki/User:WilliamEisenhowe>https://funsilo.date/wiki/User:WilliamEisenhowe</a> У каждого игорного клубы различные вейджеровые обстоятельства. Чтобы вы гарантировано сумели выполнить их, мы дадим количество советов. Если система начислила маленькую необходимую, не стоит делать большие ставки – остановитесь на 10–30 центах. Как только сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте играть. В противном случае лучше присмотреться к иному автомату.Также учтите, что некоторые игровые платформы сузивают перечень стран, которые готовы получить предложенный бездепозитный приз за регистрацию. К примеру, существуют онлайн-заведения, выдающие похожие бонусы только жителям конкретных государств. К примеру, интернет казино 777 Оригинал предоставляет бездепозитный бонус лишь игрокам из России и государств СНГ. Или напротив, пичкают вознаграждением всех, считая жителей неких государств (исходя из этого, по пристально учить список, чтобы впоследствии не появилось никаких вопросов и жалоб).
1×slots регистрация 1×slots casino 777 online
Возможность поиграть дополнительное соревнование (а времени и несколько) совершенно бесплатно, а выигрыш, же, поступает на счёт игрока.Фриплей-бонусы. Бонусы за безвозмездную забаву есть только в неких клубах. Они зачисляются сразу после создания профиля и действуют непродолжительное время. Если у вас нет времени израсходовать свои, они просто закончатся. Что касается времени, как бонусы срабатывают в течение 1-го часа. <a href=http://big.bestforums.org/viewtopic.php?f=7&t=20969>1×slots официальный сайт мобильная версия скачать</a> 1×slots зеркало проходить регистрацию это отличный вариант <a href=https://judahdrai29630.blogacep.com/35482547/deepnude-the-dark-side-of-ai-and-digital-manipulation>https://judahdrai29630.blogacep.com/35482547/deepnude-the-dark-side-of-ai-and-digital-manipulation</a> Наш список включает в себя лучшие бездепозитные призы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по принципиальным характеристикам:Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке адепты онлайн-казино публикуют актуальную информацию о no deposit bonuses прочих предложениях. 1×slots зеркало рабочее Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, the decision лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.
1×slots официальный сайт, скачать
Но есть игорные заведения, которые готовы просто например жертвовать деньги на игру. Для этого довольно сделать профиль. Чтобы исключить свой выигрыш, вас сначала необходимо выполнить условия отыгрыша, указанные в критериях получения бездепозитного депозита. Игры, каких можно играть на бонусные средства. Проверьте список игр, в возможно играть на бонусные средства, возможно они Вам не понравятся и надо расходовать своё время на такую промоакцию. <a href=https://kontactr.com/website/site/astramedika.com.ua>https://kontactr.com/website/site/astramedika.com.ua</a> 3. Подтвердить данные. В зависимости от клуба, нужно привязать аппарат или почту, указать индивидуальную информацию;Это один из основных характеристик привлекательности подарка. С завешенным коэффициентом числе профессионалы не смогут выполнить условия по отыгрышу. И важно, как привлекательно выглядит предложение – бездепозитный бонус казино в объеме $500 либо $1 000. Чтобы новички лучше вдумались, что же это вейджер, мы разберём на примере. 1×slots зеркало на сегодня
1×slots casino регистрация 1×slotscasin online
Некоторые веб-сайты, прежде чем обмануть регистрацию игроков, предлагают ответить на некоторое базовых вопросов. Цель проведения подобной викторины – выявить случайных людей, которые не имеют представления о покере, и не допустить получения ими бонусов. Если гость теснее играл в казино, то ответить на полтора 10 простых вопросов несомненно нетрудно. Очень часто, ответы можно найти на официальных веб-сайтах этих учреждений.Приглашаем делиться сужденьями о бонусах. Это поможет другим юзерам избирать более выгодные предложения. Лишь популярностью и известные азартные заведения могут разрешить себе раздавать бездепы в виде дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депо, которые возможно израсходовать в топовых аппаратах с высокой отдачей. 1×slots официальный сайт скачать <a href=http://www.pets-ural.ru/content/forum/viewtopic.php?p=141338#141338>http://www.pets-ural.ru/content/forum/viewtopic.php?p=141338#141338</a> Иногда виде одобрения за регистрацию шансы выдаваться билеты для участия в турнирах. Условия их проведения очень отличаются, поэтому мы советуем ознакомиться с любым предложением отдельно.Нет. Казино выдают безвозмездные призы за регистрацию, для того, чтобы заказчик возможность ознакомиться с игровым заведением. А дабы вывести его, нужно выполнить условия отыгрыша.
1×slots зеркало
Отыграв бездепозитный бонус в казино с выводом тоже придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, случае сходственное ограничение присутствует, то единоразово вывести получится лишь необходимую, не превышающую размер приобретенного приза. <a href=https://forex-bitcoin.com/members/344996-charlesimafe>https://forex-bitcoin.com/members/344996-charlesimafe</a> В основном случаев бесплатные призы начисляются в кредитах, коие нельзя незамедлительно исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д. ). О нем читайте ниже. 1×slots актуальное зеркало Вообще перейдя в казино — управляла одинаковы в получении бездепозитных бонусов, в стереотипные управляла входит: подтвердить эл. Почту и телефон, заполнить свой собственный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ.Бесплатный бонус – кредиты, которые онлайн-казино начисляет посетителю, не заставляя его пополнять игровой счет.
<b>Смотреть еще похожие новости:</b>
<a href=http://vn-info.net/user/Josephkam/>1× slots регистрация в 1×slots casino</a>
<a href=https://forum.gamesims.sk/viewtopic.php?f=10&t=82340>1х слот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Нет. Для получения бездепозитного бонуса в казино нужна неотъемлемая регистрация на веб-сайте. Играть в слоты безвозмездно и без регистрации возможно только в демо режиме. Если вы облюбовали себе некоторое брендов коие вам больше всего приглянулись, для неизменной забавы! Таких гемблеров казино очень любит и ценит, за частую эти игроки становятся VIP игроками заведения, которым часто поступают выгодные предложения вид бонусов, так же туда входит и бездепозитные.
#2887 Charlesgunnyhttp://filmkachat.ru
1× slots регистрация в 1×slots casino
Чтобы бездеп не был начислен на Ваш аккаунт, Вам надо активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк автоматически, а Вы не расчитываете его применять, обратитесь в службу поддержки с просьбой отменить бездепозитный приз.Бездепозитные призы начисляются лишь раз один. Не стоит раскрывать новые аккаунты, чтобы получить их повторно. Служба защищенности казино непременно выявит «левого» участника и заблокирует. Если посетитель выполнит необходимые требования, отыграет свою ставку и решит исключить личный выигрыш, то ему надо(надобно) принять, что казино непременно потребует предоставить ксерокопии личных документов, дабы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные средства исключить не получится. <a href=http://filmkachat.ru/>1хслот официальный сайт зеркало</a> Можно. Вы всегда сможете отказаться от получения бездепозитного приза за регистрацию в казино, пока Вы не создадите ставку. <a href=https://xranks.com/playhouse.com.ua>https://xranks.com/playhouse.com.ua</a> Некоторые казино шансы предлагать посетителям бездепы за подтверждение номера либо почты или репост на страницу в соц сетях.Мы собрали и опубликовали список наилучших бездепозитных казино с бонусами за регистрацию, которые гарантируют великодушные выигрыши и моментальные выплаты. 1хслотс зеркало на сегодня <a href=https://able2know.org/user/gregoryhex/>https://able2know.org/user/gregoryhex/</a>
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Некоторые сайты, прежде чем обмануть регистрацию игроков, предлагают ответить на несколько базовых вопросов. Цель проведения похожей викторины – выявить случайных людей, коие не имеют представления о покере, и не разрешить получения ими бонусов. Если гость уже играл в казино, то ответить на полтора 10 простых вопросов будет несложно. Очень нередко, ответы возможно отыскать на официальных сайтах данных учреждений.Фриспины — благотворительные вращения, коие позволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины считаются наиболее известным и желаемым обликом приза — бесплатные вращения иногда эффективнее и веселее в отыгрыше, чем другие виды бездепов. <a href=https://forum.oursson.ru/viewtopic.php?f=2&t=7854>1×slots подтвердит вашу регистрацию если говорить</a> 1× slots зеркало Наиболее популярностью вознаграждения среди гэмблеров – бездепозитные призы казино. Это не дивно, ведь возможно получить благотворительные вращения или виртуальные кредиты, и этом не придётся пополнять счёт, рисковать личными деньгами. Удастся насладиться разнородными увеселениями даже выиграть крупную сумму, избегая серьёзного риска.Главным моментом в возникновении этих вознаграждений произведено сомнений, что пустив их в ход, игрок ничем не рискует и в последствии никому ничего не несомненно обязан (не зависимо, получит ли он благодаря призам какой-либо выигрыш или мгновенно спустит все только собственно прибывшие финансы). То есть, казино снабжает игрока вероятностью на дармовой основе выступать во различные слоты причем спонсирует забаву. <a href=http://forum.industrialvideo.ir/member.php?action=profile&uid=4541>http://forum.industrialvideo.ir/member.php?action=profile&uid=4541</a> Да, у безвозмездных призов есть недостатки. Прежде всего, они обыкновенно небольшие. Кроме такого, обстоятельства вейджера по ним всегда жесткие. Но таки недоступность риска делает их очень красивыми для посетителей. 1×slot рабочее зеркало Верификация необходима для добавочной безопасности и помочь техподдержке выявить бонусхантеров и плутов. Кстати, на некоторых платформах выводы крупных сумм доступны только последствии подтверждения личности.
1×slot рабочее зеркало
Процесс доказательства личности имеет взятьвдолг(взятьвзаймы) от 1-го дня до недели. Если заказчик разрешил какую ошибку при заполнении паспортных данных, то ему следует адресоваться с задачей в службу онлайн-казино.Многие игроки, оценив перечень казино, остаются играть в нем и далее ? на это и направлено каждое рекламную. Постоянные клиенты вносят депозиты и делают ставки, обеспечивая долгосрочную прибыль оператора. То есть, казино раздают бездепы свежим юзерам для формирования приклнной аудитории. Нет. Для получения бездепозитного приза в казино нужна неотъемлемая регистрация на веб-сайте. Играть в слоты даром и без регистрации можно только в демо режиме.А ознакомиться с свежими интернет казино, Вы сможете помощью призов с выводом прибыли, коие Вы можете получить без депо. <a href=https://popcporn.net/user/Michaelduh/>https://popcporn.net/user/Michaelduh/</a> 1×slots casino регистрация 1×slotscasin online
1хслотс казино зеркало
<a href=http://nakupnidivadlo.cz/index.php/forum/3-pripominky/46615–1×slots?start=102#238397>1хслотс казино зеркало</a> Автоматическая активация может самой удобной, но ручной метод содержит перед ней достоинства. Прежде чем применять вознаграждение от казино, стоит заранее определить, сколько времени потребуется на исполнение всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала действия бонуса. 1×slots зеркало проходить регистрацию это отличный вариант <a href=http://forum.fcmn.co.il/member.php?action=profile&uid=311527>http://forum.fcmn.co.il/member.php?action=profile&uid=311527</a> Размер приза. В качестве бездепов обычно начисляют очень суммы, а когда идет о призах за депо, которые начисляются в процентном соотношении от суммы пополнения, то некоторые казино шансы презентовать игроку до 2000$.
1×slots подтвердит вашу регистрацию если говорить
Раздача призов имеет быть приурочена к разным датам: календарные дни, дни рождения игроков, годовщина открытия казино и т. Д. Подарок выдается вид средств, фриспинов или баллов для накопления и размена на услуги оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд притязаний. Фриспины. Бесплатные вращения предусмотрены для применения в видео-слотах. Внимательно читайте обстоятельства – они нередко выдаются для некоторых машин. В зависимости от клуба вы можете создавать конкретное число ставок. Кстати, современные игорные дома дают вероятность заводить «одноруких бандитов». <a href=http://coldskillers.hys.cz/profile.php?lookup=175926>http://coldskillers.hys.cz/profile.php?lookup=175926</a> Вейджер в переводе с английского означает «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша приобретенного приза, в нашем случае бездепозитного. Число ставок большого — главно только набрать необходимую, пропорциональную сумме одобрения.Все бесплатные призы кажутся соблазнительными. Кто же откажется от способности сыграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далековато не все бездепозитные призы мере привлекательны для рассудительного посетителя. 1хслотс рабочее зеркало Также случаются случаи, когда казино начислит обсужденный бонус последствии регистрации свежего клиента по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам.У нас на веб-сайте Вы отыщите список бонусов без депозита в проверенных казино и подробную информацию про как их получить и применять.
<b>Смотреть еще похожие новости:</b>
<a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=13810>1×slot рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Приветственный бездеп предоставляется хоть игроку только один один. Казино дерутся с так именуемыми бонусхантерами (от англ. Bonus Hunter — доброволец за бонусами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения подарка. Исключить подобные действия дозволяет верификация данных. Администрация вправе востребовать у посетителя доказать персональные данные, указанные при регистрации.
#2888 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало рабочее на сегодня casino официальный сайт <a href=https://t.me/vchkogpu_ru>казино сегодня</a> порно с Антропова Валентина Викторовна casino pin официальный <a href=https://vestnik-jurnal.com/>inform@rucriminal.info</a> Черкесова Бэлла Мухарбиевна порно casino официальный сайт Мухтиярова Елена Вячеславовна порно 1×bet сайт 1×bet xyz pin up casino casino автомат скачать сайт букмекерской конторы
DiskiPlus порно с Константин Тюкавин (футбол) DiskiPlus casino pin официальный <a href=https://diskiplus.ru/>DiskiPlus 1×bet слоты</a> DiskiPlus porno Ангелина Гончаренко, хоккеистка DiskiPlus букмекерские конторы pin <a href=https://diskiplus.ru>DiskiPlus рейтинг казино</a> DiskiPlus up casino скачать DiskiPlus букмекерская контора вход DiskiPlus леон букмекерская контора DiskiPlus букмекерскую контору пин DiskiPlus Радченко Светлана Юрьевна порно DiskiPlus казино 5 DiskiPlus ограбление казино
#2889 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало
Основное верховодило получения бездепа ? создаваемый аккаунт обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов строго запрещено. Проверка проводится по имени, адресу электронной почты, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита нужно соблюдать несложную очередность деяний.Какие призы меня еще получить считая бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного бонуса, любое онлайн казино предлагает игрокам прибыльное предложение на 1-ый депозит, вы совершаете депозит, ваш депозит увеличивается в двое либо том в трое, тем самым начать играть возможно с больше крупной суммой, так же не запамятываем на вейджер на бонусы. <a href=http://filmkachat.ru/>1×slots регистрацию процедура займет всего лишь</a> Какие бонусы я могу еще получить не бездепозитного приза за регистрацию в казино? По мимо бездепозитного бонуса, каждое онлайн казино предлагает игрокам прибыльное предложение на первый депозит, вы совершаете депозит, ваш депозит возрастает в двое либо и в 3, что, этим самым начать играть можно с больше крупной суммой, например же не забываем про вейджер на призы. <a href=https://www.woorank.com/en/teaser-review/playhouse.com.ua?generationId=872ad221–0955–4d77–9976-f6c1e3b64286&usecase=all>https://www.woorank.com/en/teaser-review/playhouse.com.ua?generationId=872ad221–0955–4d77–9976-f6c1e3b64286&usecase=all</a> 1×slots зеркало рабочее <a href=http://xn----7sbbj0a3atfpd.xn–p1ai/index.php?subaction=userinfo&user=equableowner88>http://xn----7sbbj0a3atfpd.xn–p1ai/index.php?subaction=userinfo&user=equableowner88</a> С такими простыми советами каждое казино с бонусом за регистрацию способно принести в разы больше выгоды и полезности.
1×slots на любой вкус как пройти регистрацию
Самый распространённый из похожих призов, окончательно же, бездеп на денек рождения клиента — приз повторяющий фиксированной суммы либо фриспинов поступает на счёт игрока, а пользоваться им можно в течение установленного периода медли.Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, чтобы была вероятность вывести выигрыш. <a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=464673>1×slots casino регистрация</a> 1хслотс казино зеркало Такие одобрения позволяют безвозмездно протестировать новое казино, разобраться с игровым ходом интернет слотов, заработать и вывести небольшую необходимую денег.В бонусную программу множества операторов входят систематические бездепы. Это пожизненные акции, поощряющие интенсивных неизменных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают постоянные призы без депо в размен на скопленные баллы лояльности. <a href=http://dev.may-green.ru/forum/user/19102/>http://dev.may-green.ru/forum/user/19102/</a> Почти все игровые клубы настоятельно свидетельство контактных данных игрока для получения бездепозитного приза. 1×слот регистрация в 1×slots casino Чаще всего интернет-казино предлагают бездепозитные бонусы новым пользователям. Эта промо-акция очень отлично завлекает начинающих, подталкивая их к открытию счета. Конечно, не все они становятся послушными посетителями, хотя сам прецедент регистрации аккаунта играет на руку заведению.Но на азартных платформах сходственные вознаграждения имеют получить и уже зарегистрированные пользователи. В этом случае, бонусы предоставляются в уникальных акций или же некоторым игрокам вид акционного предложения, которое приходит на почту с целью «вернуть» игрока в свое казино.
1× слот зеркало
Но никогда не запамятовывайте внимательно разбирать управляла роли в бонусных промоакциях. Если вы нарушите но бы одно условие, позже вы не сможете уладить недоразумение с администрацией.Основное различие что, нет, собственно для получения бездепа не надо пополнять баланс в казино. Но не этого, есть ряд и других различий: <a href=https://systemcheck-wiki.de/index.php?title=Shisha_Tobacco_From4_Eur>https://systemcheck-wiki.de/index.php?title=Shisha_Tobacco_From4_Eur</a> На бонусные начисления шансы быть установлены вспомогательные ограничения, которые Вы не сведению при отыгрыше. Пока приз всецело не отыгран — средства из казино не выводятся. 1×slots casino online регистрация Можно. Вы постоянно сможете отказаться от получения бездепозитного приза за регистрацию в казино, пока Вы не сделаете ставку.
1×slots регистрация 1×slots casino c2d ru
Так же стоит выделить то, что в любом интернет казино установлен свой наибольший кешаут на бездепозитный приз. Как правило кешаут — это максимальная сумма денег, которая дешевая для вывода с бездепозитного бонуса. <a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1×slots зеркало проходить регистрацию это отличный вариант</a> Следует подчеркнуть, что бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам либо с конкретным кодом. Далее потребуется отыграть вагер и исключить выигрыш. Игрокам без навыка крупно подфартило, меня получить 10-ки подарков за 1 регистрацию. Если не сумели получить Бездепозитный бонус, не тревожьтесь. Обратитесь в интернет чат, оператор поможет ситуацию. 1×slots зеркало этих способов предполагает регистрацию <a href=http://uoup.net/space-uid-495831.html>http://uoup.net/space-uid-495831.html</a> Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам воспрещено начислять призы клиентам, не имеющим денежных средств на счете. Мы предлагаем рассмотреть животрепещущие бонусы онлайн-казино с лицензией, которые соблюдают законодательство РБ.Однако далеко не все ресурсы предлагают своим посетителям бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено одобрение на первый депо в объеме 100–200%. Это замечательная вероятность преувеличить банкролл, прирастить время, проведённое за игрой и шансы сорвать большой куш.
1хслот зеркало сайта
Денежные свои. Третий бонус за регистрацию без депозита – наличные. К сожалению, только известные и модные клубы имеют дать деньги в рублях или долларах. С их поддержкой вы сможете насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед этим необходимо исполнение определенных критерий. <a href=http://gameland.mzf.cz/profile.php?lookup=123103>http://gameland.mzf.cz/profile.php?lookup=123103</a> 1×slots сайт Получить приветственный приз шансы лишь новые посетители онлайн-казино. Способы описаны в критериях промоакции любого законного казино, почаще всего это:Но эти рамки не смущают том хайроллеров, потому коэффициенты на слотах разрешают рассчитывать на крупные выигрыши, в некоторых автоматах разыгрывается прогрессивный джекпот.
<b>Смотреть еще похожие новости:</b>
<a href=http://nacionrolera.org/foro/viewtopic.php?f=1210&t=368383>1×slots бонус за регистрацию</a>
<a href=https://melhorlance.com.br/author/jamesbom/>казино 1×slots официальный сайт</a>
<a href=https://ragnarok.ch/forum/viewthread.php?thread_id=129570>1×slots скачать на айфон</a>
<a href=https://qualityprogamer.de/forum/showthread.php?tid=346564>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Доступные забавы – В неких азартных играх можно снизить математическое превосходство казино до нескольких 10-х процента. В их числе почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как верховодило, в таких играх ставки идут в зачет вейджера не всецело. Например, может предусматриваться лишь 50%. В некоторых забавах бездепозитные призы вообщем нельзя отыгрывать.
#2890 Charlesgunnyhttp://filmkachat.ru
1×slots официальный demo регистрация в 1×slots casino
Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных требований, не обязательной верификации. Если на сайте предусмотрена неотъемлемая процедура доказательства личности, то исключить выигрыш удастся лишь последствии ревизии данных. Приготовьтесь наполнить анкету и выслать в техподдержку документ, подтверждающий лицо.Подтверждение индивидуальной информации. Все казино просят от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и присутствие у юзера иных аккаунтов (мультиаккаунт запрещен). <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino09k online</a> <a href=https://mxsponsor.com/riders/cgifurniture-com>https://mxsponsor.com/riders/cgifurniture-com</a> 1×slots официальный сайт мобильная версия скачать <a href=https://rekordmeister.ru/user/PatrickTronA/>https://rekordmeister.ru/user/PatrickTronA/</a> Также бывают случаи, когда казино начисляет оговоренный приз после регистрации нового клиента по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам.
1×slots актуальное зеркало
1×slot зеркало рабочее регистрации на телефон придет <a href=http://bbs.zhizhuyx.com/home.php?mod=space&uid=10485678>http://bbs.zhizhuyx.com/home.php?mod=space&uid=10485678</a> Необходимость отыгрыша. Вейджер в этом случае выше, чем для призов за депозит. И же средства не отыграны, вывести их нельзя. 1×slot рабочее зеркало
1×slots официальный зеркало рабочее
Получать информацию о самых прибыльных призах возможно без неизменного мониторинга новостей казино. Мы брали данную задачу на себя и безпрерывно смотрим за услугами операторов, избирая превосходнейшие из их. В данном разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список промоакций периодически пополняется. В топ зашли самые свежие бездепозитные бонусы за регистрацию в казино 2020, временные и замкнутые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и аспектам. Если срок деянья акции истек, она удаляется из списка.Популярность интернет казино растёт и всё больше пользователей начинают интересоваться азартными забавами. Бездепозитные бонусы 2022 года, это уникальные подарки за регистрацию. С их поддержкой новые игроки имеют получить благотворительные вращения или деньги на баланс за 1 регистрацию. С в игорных заведений в онлайне, бездепозитные призы стали популярнейшим методом вербования игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш вебсайт собрал наихорошие предложения из интернета на 2022 год. Воспользуйтесь каким подарком и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша необходимо выполнить условия. Для получения выигрыша потребуется выполнить условия казино. Чаще всего игроку нужно поставить определенную необходимую, но теснее из личных средств. Она рассчитывается из совместного размера выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, в пользователь выиграл 1000 руб., а множитель сочиняет х30, вывести деньги можно будет, сделав ставки на 30 000 руб. <a href=http://gulliverus.ru/user/Ashleyslacy/>http://gulliverus.ru/user/Ashleyslacy/</a> Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного бонуса достаточно пополнения баланса и доказательства личности. В других же клубах, нужно некоторое один прокрутить собственный депозит. 1×slots casino регистрация 1×slotscasino09k online Помните, что в некоторых играх сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных забавах лишь от 5% до 50% суммы ставки числятся как отыгранные деньги, тот как в слотах идет в зачет все 100% суммы.Частенько новенькие не понимают, как активировать презенты либо исключить первый выигрыш. Для подобных случаев наша команда описала главные термины – собственно такое фриспины, вейджер, как его отыграть, зачем необходимо проходить верификацию.
1 x slots casino
Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала прыткие выводы. Фишка выплат в том, собственно достаточно избрать платёжный инструмент и указать сумму. В большинстве случаев средства зачисляются на электронные кошельки на 15 минут, а на банковские карты – 1–3 рабочих дня. <a href=http://mi.minfish.com/home.php?mod=space&uid=1196847>1×slot официальный сайт</a> Бонус без депо за регистрацию в казино (бездепозитный приз) – это валютный подарок от клуба, кот-ый начисляется на аккаунт игрока последствии регистрации в казино. Кроме создания учетной записи, для получения бездепа, очень часто потребуется ещё и доказать контактные данные игрока и/или активировать специальный промо-код. Третитй бездепозитный бонус за регистрацию – валютные средства. К раскаянию, начислить рубли или доллары способны лишь известные и популярностью клубы. С их поддержкой у насладиться любой доступной забавой – автоматом, рулеткой, кено, блэкджеком.Выбор любого интернет казино на нашем сайте. В описании к каждому Вы можете разузнать, что получите за творенье аккаунта. 1×slots зеркало сайта <a href=https://sc-grandmaster.ru/forum/?PAGE_NAME=profile_view&UID=16246>https://sc-grandmaster.ru/forum/?PAGE_NAME=profile_view&UID=16246</a> Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?
1х слот 1хслотс регистрация перейти на 1×slots
Если вы опытный игрок, вы обязаны аристократия, собственно приз без депозита – редчайшая находка. Тем ниже, мы в изучаем интернет, дабы отыскать вам превосходнейшие бездепозитные предложения. В интернет-сети практически возможно отыскать перечни наиболее модных и обещанных поощрительных программ от популярных онлайн-казино.Условия вывода выигрыша. В некоторых заведениях для успешного вывода с бездепозитного приза достаточно пополнения баланса и подтверждения личности. В других же клубах, нужно некоторое раз прокрутить свой депо. <a href=http://users.atw.hu/adf/profile.php?mode=viewprofile&u=11602>http://users.atw.hu/adf/profile.php?mode=viewprofile&u=11602</a> Приветственный бездеп предоставляется какому игроку только один раз. Казино сражаются с так называемыми бонусхантерами (от англ. Bonus Hunter — охотник за бонусами), пытающимися заводить многочисленные аккаунты для надувательства оператора и повторного получения подарка. Исключить похожие деянья позволяет верификация данных. Администрация вправе востребовать у посетителя доказать индивидуальные данные, указанные при регистрации. 1×slots зеркало сайта Заполняя данные в личном профиле, указывайте только достоверную информацию, так как Вам понадобиться ее доказать дальнейшем при выводе денег.
<b>Смотреть еще похожие новости:</b>
<a href=https://ragnarok.ch/forum/viewthread.php?thread_id=129561>1×slots рабочее зеркало</a>
<a href=http://permitbeijing.com/forum/member.php?action=profile&uid=191496>1×slots регистрация 1×slotscasino09k online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При ирге на бонусные средства запрещается выступать в игровые автоматы с современным джекпотом и забавы из радела live casino. Кроме того, некоторые казино дают бездеп на раз либо некоторое определенных слотов, и в иных играх Вы не можете на них выступать.
#2891 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino андроид автомат казино <a href=https://www.ossetia.tv/>casino скачать</a> 1×bet зеркало слоты 1×bet xyz порно с Кирьянова Дарья Борисовна <a href=https://t.me/vchkogpu_ru>пин casino</a> порно с Евгений Малкин (хоккей) porno Дарья Мороз porno Юлия Канакина букмекерские контора ап casino зеркало сегодня рабочее мелбет букмекерская контора гта онлайн казино
DiskiPlus casino бонус DiskiPlus 1×bet 1 <a href=https://www.diskiplus.ru/>DiskiPlus сайте букмекерской конторы фонбет</a> DiskiPlus порно с Анастасия Потапова, теннисистка DiskiPlus 7k casino зеркало на сегодня <a href=https://diskiplus.ru/>DiskiPlus скачать 1×bet на андроид бесплатно</a> DiskiPlus 1×slots casino DiskiPlus пин up casino DiskiPlus cat casino DiskiPlus порно с Матвей Сафонов (футбол) DiskiPlus букмекерские конторы без депозита DiskiPlus вывод казино DiskiPlus Приезжева Екатерина Геннадьевна порно
#2892 Charlesgunnyhttp://filmkachat.ru
1×slots сайт
Подтверждение электрической почты – одно из основных условий, которое есть почти в любом бездепозитном казино. Чтобы верифицировать электронную почту, достаточно перейти по интенсивной ссылке в послании, приобретенном от азартного клуба.Индивидуальные поощрения выдаются за совершение действий: подписку на аккаунты площадки в социальных сетях, установку мобильного приложения либо официального посетителя для ПК. В большинстве казино срабатывают программки преданности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на грядущий уровень часто сопрягается выдачей бездепа. <a href=http://filmkachat.ru/>1×slots официальный регистрация</a> Основное правило получения бездепа ? создаваемый акк должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов взыскательно запрещено. Проверка проводится по имени, e-mal, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита необходимо блюсти простую очередность действий.Новички не любят сразу же заносить депо. Это обусловлено неименьем навыка и сомненьем. К счастью, в возможно получить бездепозитный приз за регистрацию в казино. Неважно что начисляет система – фриспины либо кредиты. В всяком случае вы не рискуете своими сбережениями. Это отличная возможность запустить приглянувшийся видео разъем или же испытывать фортуну в настольных забавах. <a href=https://www.printwhatyoulike.com/print?url=playhouse.com.ua>https://www.printwhatyoulike.com/print?url=playhouse.com.ua</a> Чтобы выступать бесплатно на реальные средства в казино, не всегда довольно просто зарегистрироваться. Иногда нужно выполнить вспомогательные деянья. 1× slots casino официальный сайт <a href=http://clipartus.ru/user/PhilipDrery/>http://clipartus.ru/user/PhilipDrery/</a> Мы проделываем ударение на ключевых положениях верховодил, рассказываем о территориальных лимитированиях и кратко информируем о других акциях обговариваемого казино.
1× slots официальный
Варианты выигрыша зависят от Вашей удачи и критерий игорного портала. Выше мы сказали, собственно кое-какие бездепозитные бонусы в 2022 году выдаются с ограничениями по наибольшей выплате. Однако, остаются и те, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность современных игр на средства, можно выиграть невероятные суммы. Сегодняшние игровые автоматы или видео слоты, как их называют. Могут выдавать солидные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000.4. Заберите презент. Чаще всего приз активизируется незамедлительно после регистрации. Но посещают ситуации, когда надо(надобно) зайти в индивидуальный офис или написать в службу поддержки. 1×slots зеркало выигрыши обязательно пройдите регистрацию если Предложения с бездепозитными бонусами за регистрацию позволяют новым заведениям заинтересовать аудиторию на свой сайт. А игроки в свою очередь получают вероятность играть на реальные средства без депозита в казино и заработать малый стартовый капитал, который разрешено вывести на карту банка либо электронный кошелек.Третитй бездепозитный бонус за регистрацию – валютные средства. К раскаянью, начислить рубли или баксы готовы лишь знаменитые и популярные клубы. С их поддержкой у насладиться любой доступной забавой – автоматом, рулеткой, кено, блэкджеком. <a href=http://supergame.one/home.php?mod=space&uid=106977>http://supergame.one/home.php?mod=space&uid=106977</a> 1×slot рабочее зеркало При выполнении условий отыгрыша и верификации, средства с бонусного счета переводятся на главной и могут быть выведены на карту либо электронный кошелек. Лимиты на вывод и сроки проведения транзакции в от избранной платежной системы.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Индивидуальные поощрения выдаются за совершение поступков: подписку на аккаунты площадки в соц сетях, установку мобильного приложения или официального посетителя для ПК. В большинстве казино действуют программы лояльности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на следующий уровень нередко с выдачей бездепа. <a href=https://www.100seinclub.com/bbs/board.php?bo_table=E04_1&wr_id=600185>https://www.100seinclub.com/bbs/board.php?bo_table=E04_1&wr_id=600185</a> Бездепозитные бонусы, как уже ясно, являются уникальной вероятностью приступать к игровому процессу абсолютно бескорыстно, то есть играть в онлайн казино безвозмездно и на имеющие средства сразу в регистрации аккаунта. Автоматы с таким депозитом имеют стать прекрасной возможностью поиграть для почитателей азарта с определенными лимитированиями в денег. 1×slots официальный зеркало
1хслотс 1хслотс регистрация перейти на 1×slots
Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, так как Вам понадобиться ее доказать в при выводе средств.Представьте момент, когда при ставке в 10 рублей Вы получите сходственное умножение. Миллион руб. За одно вращение, собственно абсолютно возможно. Поэтому вопрос, сколько возможно выиграть остаётся закрытым. Предлагаем проверить без. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный приз и проверяйте фортуну в деле. Разумеется, исключить средства довольно. Однако шансы есть у всех. Существует ли стратегии для отыгрыша бездепозитных призов? К раскаянью нет, на выигрыши либо проигрыши с бонусов, казино или игрок воздействовать возможности, отдача игр случается от создателей игр. 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=http://ledsoft.ru/forum/?PAGE_NAME=profile_view&UID=53835>http://ledsoft.ru/forum/?PAGE_NAME=profile_view&UID=53835</a> Активация по промокоду используется в различных видах бездепов. Если речь идет о приветственном бонусе, то набор символов возможно узнать на основной страничке, в регистрационной форме либо письме, коие отчаливает пользователю для доказательства адреса электронной почты. Акции могут проводиться совместно с партнерскими площадками. Обычно код размещается на стороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активизируется разовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном офисе или начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем важный код для активации в описании каждого промо.
1×слот регистрация в 1×slots casino
Условия вывода выигрыша. В неких заведениях для удачного вывода с бездепозитного приза достаточно пополнения баланса и подтверждения личности. В иных же клубах, необходимо количество один прокрутить свой депозит.Большинство интернет-казино из нашего топ-10 готовы порадовать вас неповторимыми промоакциями. Читайте о них в обзорах и на форуме. Возьми собственный презент. Чаще всего бонус активируется незамедлительно последствии регистрации. Но посещают ситуации, когда надо(надобно) зайти в индивидуальный офис либо написать в справочную службу. <a href=http://dpdr.ru/index.php?subaction=userinfo&user=ruddykit17>http://dpdr.ru/index.php?subaction=userinfo&user=ruddykit17</a> 1×slots casino зеркало рабочее
<b>Смотреть еще похожие новости:</b>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=141707>1 х слотс зеркало</a>
<a href=https://forum.visiteachapada.com/viewtopic.php?f=19&t=3902>1×slots официальный регистрация</a>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/8210/#comment-341512>x1 slots регистрация в 1×slots casino</a>
<a href=http://big.bestforums.org/viewtopic.php?f=7&t=14793>1×slots официальный demo регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Нет. Для получения бездепозитного бонуса в казино необходима неотъемлемая регистрация на сайте. Играть в слоты даром и без регистрации можно только в демо режиме. Мы подготовили перечень, где есть всегда животрепещущие и новые бездепозитные бонусы казино, которые возможность получить бесплатно. Для наших пользователей есть специальные предложения неповторимые бонусы, которые вы у не отыщите, их мы определили специальной красной плашкой «Exclusive».
#2893 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать
Каждая игровая платформа выделяется условиями по получению и отыгрышу бездепов. В правилах детально расписаны кратковременные рамки, за коие нужно прокрутить вейджер. Также не забывайте тему максимальный размер ставки и наивысшую необходимую выплаты. С иной стороны, чтобы получить бездепозитные бонусы казино, довольно израсходовать менее 1 минуты. <a href=http://filmkachat.ru/>1×slot регистрация</a> За счёт спинов выйдет запустить различные онлайн слоты, протестировать стратегии и поднабраться навыка. Фишка в том, собственно вращения начисляются на топовые аппараты с оригинальными опциями и высокой отдачей. Не забывайте, что в каждом акционном предложении учтены специальные притязания – кратковременные лимитирования, наибольший размер ставки, перечень доступных игр.Многие азартные клубы ограничивают сумму вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании промоакции, суммы Вы не сможете вывести. Разница несомненно аннулирована, Вы в не можете делать на нее ставки. <a href=https://www.sitelike.org/similar/astramedika.com.ua/>https://www.sitelike.org/similar/astramedika.com.ua/</a> 1×slots зеркало быструю регистрацию а также мгновенное <a href=http://www.mjjcn.com/mjjcnforum/space-uid-748330.html>http://www.mjjcn.com/mjjcnforum/space-uid-748330.html</a>
1хслотс рабочее зеркало
Третитй бездепозитный приз за регистрацию – валютные свои. К сожалению, начислить рубли либо баксы способны только знаменитые и популярностью клубы. С их поддержкою вас насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком. 1хслот зеркало сайта Доступ к подарку может открываться автоматически последствии введения промокода либо обращения в службу вебсайта. В первом случае от пользователя не потребуется никаких деяний. Бездеп с активацией по коду встречается почаще всего. Игроку необходимо установить совокупа символов в графе, кот-ая может пребывать в регистрационной форме в Личном кабинете.Отзывы читателей о бонусных промоакциях посодействуют составить эмоцию, хотя не забывайте о субъективности собственных комментариев. <a href=https://google.cd/url?q=https://doctorlazuta.by/>https://google.cd/url?q=https://doctorlazuta.by/</a> Суммы сходственных предложений, в, колеблются от 3-х до двадцати долларов, а вейджер на эти средства обязан сочинять от 30 до шестидесяти один. Зачастую, большая сумма выигрыша здесь составит от одной до двух сотен $. Если геймер выиграет больше, то все средства шансы быть списанными до очень разрешенного выигрыша. Здесь замечена смысл выводить еще несуществующие деньги на собственную платежную систему и дальше отыскивать заведение с благоприятными под данную сумму релоадом либо бонусом за первое пополнение счета. Есть несколько подвидов бездепозитного гонорары, предлагаемого великим количеством заведений. 1хслот официальный сайт зеркало Минимального оборота. Этот предел уточняется вейджером — же игрок не поиграет на установленную необходимую, вывод средств несомненно недоступен.Не стоит незамедлительно же отказываться от приветственных презентов в сходственных казино. Администрация готова начислить деньги или фриспины, но предварительно сотрудники должны увериться, что вы не аферист. Дело том,, собственно развелось очень большое охотников за призами. Они научились обманывать систему и наваривать солидные суммы денег.
1×slots регистрацию процедура займет всего лишь
Рассмотрим на образце: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских руб. В критериях акции указано, собственно вейджер бездепозитного бонуса х20. Поэтому, чтобы отыграть бонус, игроку будет нужно сделать ставок на 35*20=700 рублей.Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. <a href=https://forum.spherecommunity.net/User-JustinEviva>https://forum.spherecommunity.net/User-JustinEviva</a> Как только вы отыграли вейджер и средства с бонусного баланса перебежали вам на настоящий счет, Вы смело можете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депо).Еще одно условие дотрагивается объемов ставки. Операторы устанавливают максимальную сумму, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном кабинете. При превышении лимита есть риск потерять бонуса. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, заказчик имеет столкнуться с запретом ставить фишки на шансы. 1×slots рабочее зеркало на сегодня
1×slots официальный сайт зеркало
<a href=http://amazon.rx22.ru/memberlist.php?mode=viewprofile&u=255>1хслот официальный сайт зеркало</a> Обыкновенные бездепозитные бонусы в объеме от трех до двадцати долларов созданы чтобы, чтобы, чтобы в забавы заходили все новые и свежие игроки. Здесь, вероятнее всего, несомненно лимитирование на максимальный выигрыш. Важно, чтобы перед минимальным вкладом был отключен бонус за первое пополнение счета, и в не попадет на повторный вейджер. Подобные бонусы без депо предоставляются на более прибыльных условиях. Зачастую они крупнее, а обстоятельства отыгрыша менее строгие.Главным интересным в появлении данных вознаграждений произведено никаких, собственно пустив их в ход, игры ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он спасибо бонусам какой-либо выигрыш или мгновенно спустит все лишь что прибывшие деньги). То есть, казино снабжает игрока возможностью на дармовой основе выступать во всевозможные слоты и даже спонсирует игру. 1хслотс казино зеркало <a href=https://www.jo1sat.com/member.php?u=224924>https://www.jo1sat.com/member.php?u=224924</a>
1×slots зеркало регистрацию более популярный вариант это
Срок отыгрыша — это этап, который наступает в момент активации бонуса и заканчивается с его закрытием. Пользователю нужно уложиться в данный временной зазор, другому призовые свои аннулируются. Казино устанавливают список игр, ставки в которых засчитываются при расчете отыгранных денег. Если тайтл не входит в этот список, то возможность быть недосегаем для загрузки во время действия бонусного предложения. <a href=http://farm-snab.ru/index.php?subaction=userinfo&user=goofycelebrity1>http://farm-snab.ru/index.php?subaction=userinfo&user=goofycelebrity1</a> 1×slots официальный сайт зеркало Каждый из бездепозитных бонусов без пополнения 2022 имеет свой конкретный вейджер для отыгрыша, например же в каждом казино он устанавливается персонально — где то он х55 а где-то х30, повторюсь везде по различному!
<b>Смотреть еще похожие новости:</b>
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=45604>казино 1×slots официальный сайт</a>
<a href=http://smpn1bejen.sch.id/forum/>1хслотс официальный сайт зеркало</a>
<a href=https://ragnarok.ch/forum/viewthread.php?thread_id=150696>1×slots casino регистрация 1×slotscasino09k online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Несмотря на то, собственно этот вариант стимуляции со стороны азартных платформ очень популярен в сфере сходственных игр, далеко не поклонникам казино ведомо, собственно по бездепозитные призы казино и как именно их вполне эксплуатировать.
#2894 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasino09k online
Список так называемых «разрешенных землель» прилагается к правилам бонусной программки игорного портала. Обязательно проверьте, распространяются ли на вас подобные санкции.Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном сайте и сделайте вход в личный офис, дабы арестовать благотворительные вращения с вейджером х40; <a href=http://filmkachat.ru/>1×slots официальный зеркало рабочее</a> <a href=https://rapidapi.com/7ball-viet-nam-7ball-viet-nam-default/api/7ball-viet-nam/discussions/146280>https://rapidapi.com/7ball-viet-nam-7ball-viet-nam-default/api/7ball-viet-nam/discussions/146280</a> 1×slots зеркало рабочее <a href=https://clicgo.ru/user/PorsedropKn/>https://clicgo.ru/user/PorsedropKn/</a> Так же стоит выделить то, что в любом онлайн казино установлен собственный максимальный кешаут на бездепозитный приз. Как правило кешаут — это максимальная сумма денег, которая доступная для вывода с бездепозитного бонуса.
casino 1×slot
<a href=https://forums.scar-divi.com/topic/877488–1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82-%D0%BC%D0%BE%D0%B1%D0%B8%D0%BB%D1%8C%D0%BD%D0%B0%D1%8F-%D0%B2%D0%B5%D1%80%D1%81%D0%B8%D1%8F/>1×slots официальный сайт мобильная версия</a> 1×slots casino регистрация 1×slots review live Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации бонуса без депозита. Внимательно прочитайте до конца. Многие новички делают ошибки на этапе регистрации и потому не получить презент. <a href=http://translation2.j-server.com/LUCHOJC/ns/warning_mess.cgi?url=http://fibrafabra.ru/bitrix/click.php?goto=http://bintegrator.ru/bitrix/redirect.php?goto=https://teletype.in/@urist_free/0gkKhPxx2He>http://translation2.j-server.com/LUCHOJC/ns/warning_mess.cgi?url=http://fibrafabra.ru/bitrix/click.php?goto=http://bintegrator.ru/bitrix/redirect.php?goto=https://teletype.in/@urist_free/0gkKhPxx2He</a> Вейджер (wager) – это коэффициент, кот-ый демонстрирует на какую необходимую нужно сделать ставок, дабы исключить приз из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего приза, Вам необходимо устроить ставок на необходимую: 500*70=3500 рублей. Только полностью отыграв бонус, Вы можете исключить собственный выигрыш.В реальное время получить бонус за регистрацию в казино довольно просто. Почти любой игорный жилище с готовностью даст средства либо благотворительные вращения. Многие игроки пользуются данным и не стыдятся региться в любом клубе с выгодными критериями. Кстати, это замечательная вероятность выдумать выигрышную тактику и сорвать куш. 1×slots рабочее зеркало Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.В истинное время получить приз за регистрацию в казино очень просто. Почти любой игорный дом с радостью предоставит деньги либо безвозмездные вращения. Многие игроки используют данным и не стесняются регистрироваться в любом клубе с прибыльными условиями. Кстати, это замечательная возможность придумать выигрышную стратегию и сорвать куш.
1×slos регистрация в 1×slots casino
Самые модные методы вывода средств ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электрическим платежным системам подобии Neteller и Skrill, еще используют криптовалютными кошельками. Вывод выигрышей возможность исполняться быстро или развлекать от нескольких часов до нескольких суток. Таким образом онлайн казино получает вероятного игрока. Возможно в будущем или настоящем он захочет поиграть на свои деньги. Так работают бездепозитные бонусы в онлайн казино. Здесь отлично подходит выражение, безвозмездные сыр бывает лишь в мышеловке. Начинающие игроки имеют не осознавать опасность азарта. Однако времени понимания делается больше. Это тема для отдельного обсуждения.Итак, чтобы безвозмездные бонусные кредиты трансформировались в реальные средства, которыми продоставляется управлять по своему усмотрению, их нужно отыграть. Вейджер идет уточнять в правилах онлайн-казино. <a href=https://www.wakewiki.de/index.php?title=Benutzer:IngeborgOji>https://www.wakewiki.de/index.php?title=Benutzer:IngeborgOji</a> Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. 1×slots регистрация на сайте 1×slots ru com Помимо прочего, для вывода средств по бездепу необходимо привнести на счёт собственный первый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на минимально возможную необходимую, в чего вывод средств станет доступен.Казино выводит деньги только на ту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного приза, Вам поначалу нужно пополнить счет. В некоторых клубах узкий список способов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с данных платежных способов, которые доступны для вывода.
x1 slots 1хслотс регистрация перейти на 1×slots
Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, the decision зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.Казино дает возможность заработать и исключить реальные средства на бездепозитных призах. Обычно, это незначительная сумма, которую казино может себе разрешить подарить игроку. <a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1хслотс рабочее зеркало</a> Онлайн гемблинг развивается с каждым днем все больше и больше, свежие бренды создаются не по денькам а по часам. Новые интернет казино делают вступительные акции для игроков, для того собственно бы зарекомендовать себя, и тем наиболее предлагают бездепозитные призы за регистрацию, что бы не упустить такую возможность — как пользоваться новым бездепом, рекомендуем посещать наш вебсайт как можно чаще, самое аппетитное и свежие несомненно добавляться в данном же списке. 1×slots официальный сайт зеркало рабочее <a href=http://topoptics.ru/bitrix/redirect.php?goto=http://elizaveta925.ru/bitrix/redirect.php?goto=http://storex.by/bitrix/redirect.php?goto=https://teletype.in/@urist555/-67Vh5uma4_>http://topoptics.ru/bitrix/redirect.php?goto=http://elizaveta925.ru/bitrix/redirect.php?goto=http://storex.by/bitrix/redirect.php?goto=https://teletype.in/@urist555/-67Vh5uma4_</a> Зачастую бездепозитные призы казино для игры предлагаются разными заведениями азартных игр в маркетинговых акций или в целях вербования к себя свежих игроков. Для бездепозитных бонусов в казино 2022 геймеру не нужно пополнять счет до момента вывода хотимых средств.
зеркала 1×slots
Новички не обожают сразу же вносить депозит. Это обусловлено неименьем навыка и сомнением. К счастью, в наше время можно получить бездепозитный приз за регистрацию в казино. Неважно собственно начисляет система – фриспины либо кредиты. В всяком случае вы не рискуете собственными сбережениями. Это замечательная вероятность запустить приглянувшийся видео слот или же испытать фортуну в настольных забавах. За вербование друга ? масштабах партнерской программы заказчик получает вознаграждение за вербование новых пользователей.Самые свежие бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды находятся на данной страничке. Посетитель возможность оценить условия получения и начать выступать на деньги без внесения депозита. При данном игроку главно понимать, на каких условиях и какими методами у вывести полученный выигрыш. Для сего нужно оценить список присоединенных платежных систем. <a href=http://aaccweb.com.tw/discuss/home.php?mod=space&uid=517367>http://aaccweb.com.tw/discuss/home.php?mod=space&uid=517367</a> На критериях отыгрыша бесплатных бонусов стопам тормознуть подробнее. С ними связаны нюансы, коие нельзя оставить без внимания.Несмотря на то, что этот вариант стимуляции со стороны азартных платформ довольно популярен в сфере подобных игр, далековато многим почитателям казино ведомо, что по бездепозитные бонусы казино и как именно их возможно эксплуатировать. 1×slots зеркало 1хслотс регистрация перейти на 1×slots Чтобы играть безвозмездно на реальные деньги в казино, не всегда довольно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные действия.
<b>Смотреть еще похожие новости:</b>
<a href=http://amazon.rx22.ru/memberlist.php?mode=viewprofile&u=255>1×slots регистрация 1×slots casino 777 online</a>
<a href=https://forumsleague.org/forum/viewtopic.php?f=70&t=19061&p=381529#p381529>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В перечне притязаний к отыгрышу часто наличествуют лимиты на ставки при забаве на личные деньги. Так, если отыграть надо(надобно) 30 000 рублей, а максимальная сумма ограничена 30 рублями, то вертеть барабаны предстоит 1000 один. Эта особенность затрудняет соблюдение игроками условий по срокам действия акции. Существуют казино с бонусом за регистрацию, в которых довольно известны фриспины в онлайн казино потом регистрации в определенных играх. Они встречаются в чаще безвозмездных поощрений либо традиционных бонусов в казино без вложений. Например, игрок регистрирует счет, на кот-ый начисляются бесплатные забавы, приз за регистрацию в виде даровых фрспинов, вращения в игровом автомате. Во время игрового процесса геймер выигрывает истинные средства, которые в последствии возможно успешно вывести из заведения на свою платежную систему. То есть, есть шансы исключить свои без рисков своими деньгами. Регистрация, за которую компьютерные получит призы, займет несколько, а спасибо этому возможно прирастить пять евро поощрений до тыс. И без всяких заморочек вывести их.
#2895 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Диана Шнайдер (теннис) Комарова Наталья Владимировна порно <a href=https://rumafia.news/>pin casino</a> сколько казино 1×bet зеркало <a href=https://specreporter.com/>сайт букмекерской конторы</a> букмекерская контора вход casino регистрации 1×bet зеркало на сегодня зеркала казино Елена Лядова букмекерская контора без официальные букмекерские конторы скачать
DiskiPlus up casino DiskiPlus порно с Гатагова Ольга Анатольевна <a href=https://www.diskiplus.ru>DiskiPlus зеркала казино</a> DiskiPlus спорт букмекерская контора DiskiPlus букмекерская контора фонбет <a href=https://diskiplus.ru/>DiskiPlus про казино</a> DiskiPlus рабочее казино DiskiPlus пин ап букмекерская контора DiskiPlus букмекерская контора леонов DiskiPlus играющие казино онлайн DiskiPlus 1win casino DiskiPlus скачать сайт букмекерской конторы DiskiPlus Светлана Ходченкова
#2896 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet сайт Шевцова Татьяна Викторовна порно <a href=https://glvk.guru/>казино смотреть онлайн бесплатно</a> porno Светлана Ходченкова top casino <a href=https://repost.news/>casino</a> букмекерская контора мостбет casino регистрации 1×bet слоты Юдаева Ксения Валентиновна порно bitz casino Елизавета Боярская casino приложения
DiskiPlus казино без DiskiPlus скачать 1×bet на андроид <a href=https://diskiplus.ru>DiskiPlus 1×bet зеркало на сегодня 1×bet xyz</a> DiskiPlus порно с Владимир Минеев (ММА) DiskiPlus яндекс казино <a href=https://diskiplus.ru>DiskiPlus букмекерская контора мостбет</a> DiskiPlus казино онлайн DiskiPlus pinco casino DiskiPlus мобильные букмекерские конторы DiskiPlus пин ап casino pin DiskiPlus 7k casino бонус DiskiPlus леон букмекерская контора DiskiPlus 1×bet слоты
#2897 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино проиграл 1×bet сайт <a href=https://rucriminal.info/>порно с Матвей Сафонов (футбол)</a> порно с Афонина Марина Игоревна Семёнова Татьяна Владимировна порно <a href=https://glvk.guru/>online casino официальный</a> лучшие онлайн казино porno Светлана Ходченкова casino ап смотреть фильм казино скачать букмекерскую контору самое казино Ходнева Светлана Владимировна порно
DiskiPlus Лут Оксана Николаевна порно DiskiPlus porno Дарья Мороз <a href=https://diskiplus.ru/>DiskiPlus casino сегодня</a> DiskiPlus букмекерская контора фонбет официальный сайт DiskiPlus букмекерская контора ставки <a href=https://www.diskiplus.ru/>DiskiPlus сайт 1×bet слоты</a> DiskiPlus casino официальный зеркало DiskiPlus гта онлайн казино DiskiPlus casino вход DiskiPlus где казино DiskiPlus up casino зеркало DiskiPlus casino скачать DiskiPlus up casino
#2898 Charlesgunnyhttp://filmkachat.ru
1хслотс регистрация в 1×slots casino
В интернете очень много скриптовых сайтов, коие принадлежат плутам. Их основная задача – привлечь гэмблеров, пообещав не великодушные презенты, но и солидные выигрыши. Так что некоторые веб-сайты предлагают получить за регистрацию числе $1 000. <a href=http://filmkachat.ru/>1×slots официальный зеркало</a> В неких онлайн казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на сайте клуба и подтвердить средства контактные данные. Дополнительно потребуется активация промокода.Наличие у игрока 2 аккаунта. Запрещено творить некоторое профилей для неоднократного получения бездепов. <a href=https://try.powermapper.com/Demo/Report/d583f782-e322–4020–93b7–2710deb0a9d9>https://try.powermapper.com/Demo/Report/d583f782-e322–4020–93b7–2710deb0a9d9</a> Чаще всего казино приз за регистрацию без депо даёт возможность запустить любой машина. Но лучше пристально ознакомиться с критериями. Иногда для игры доступны лишь определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, превосходнее начать знакомство с миром азарта именно с «одноруких злодеев».Фриспины – безвозмездные вращения с фиксированной ставкой, которые можно применять в конкретных игровых автоматах. 1× слот зеркало <a href=http://www.annunciogratis.net/author/donaldlag>http://www.annunciogratis.net/author/donaldlag</a>
1×slots зеркало на сегодня
Вейджер (wager) – это коэффициент, который демонстрирует на какую необходимую нужно сделать ставок, дабы вывести приз из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода этого бонуса, Вам необходимо сделать ставок на сумму: 500*70=3500 рублей. Только полностью отыграв приз, Вы можете исключить собственный выигрыш. <a href=http://swissairways-va.com/phpBB3/memberlist.php?mode=viewprofile&u=3495>1хслот скачать</a> 1×slots зеркало рабочее <a href=https://yogaasanas.science/wiki/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%94%D0%B7%D0%B5%D0%BD_%D0%A7%D0%B8%D1%82%D0%B0%D1%82%D1%8C>https://yogaasanas.science/wiki/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%94%D0%B7%D0%B5%D0%BD_%D0%A7%D0%B8%D1%82%D0%B0%D1%82%D1%8C</a> При регистрации что или ином интернет игральном заведении — вас дается один шанс испытать собственную удачу не внося средства монеты. Замечу что такую поощрительную услугу деют не все онлайн игровые площадки, а лишь щедрая середина(средина) из их. Которые мы подготовили для Вас в нашем списке.Третитй бездепозитный бонус за регистрацию – валютные свои. К раскаянью, начислить рубли или баксы способны только знаменитые и популярностью клубы. С их помощью возможность насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком. 1×slot официальный сайт Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке нужно восполнить счет в казино. Для депозитных бонусов, эта процедура не нужна, например как депо теснее сделан.Воспользоваться бездепом возможно не во всех игровых автоматах: казино вдруг уточняет лимитирование для клиентов. Конечно, это можно посчитать некоторым неудобством для игрока, но ради отметить, что выбор автоматов всё также остаётся достаточно большим.
1х слот регистрация в 1×slots casino
2. Создать новый профиль. Для регистрации надо(надобно) наполнить небольшую анкету или зайдите в личный кабинет при помощи соц сеток;Шаг 5. Использование и отыгрыш. Бездеп обязан быть использован в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. Иногда в бездепа, казино презентует минимальный приз (до 50 рублей), из-за которого не стоит заморачиваться.Приветственный приз без депозита ? презент за регистрацию. Выдается деньгами, фриспинами или баллами. В последнем случае бонусные баллы используются для участия в турнирах или размена на реальные деньги. <a href=https://xn---6-jlc6c.xn–p1ai/user/Renaldojenia/>https://xn---6-jlc6c.xn–p1ai/user/Renaldojenia/</a> Но на некоторых азартных платформах сходственные вознаграждения все получить теперь зарегистрированные пользователи. В таком случае, бонусы предоставляются в уникальных акций или же неким игрокам повторяющий акционного предложения, коие приходит на почту с целью «возвратить» игрока в свое казино.Маркетинговая политического всех игорных интернет-клубов обязана одевать разнородный характер. И если гонорары на депо работают для того, дабы стимулировать вносить депозиты и поощрять уже существующих пользователей, то бездепозитный приз в казино или бонус за регистрацию в казино, до всего, рассчитан на расширение базы покупателей. 1×slots официальный зеркало рабочее Главным нюансом в возникновении этих вознаграждений состоит в, что пустив их в ход, в ничем не рискует и в последствии никому ничего не несомненно должен (не зависимо, получит ли он благодаря призам какой-нибудь выигрыш либо моментально спустит все только собственно прибывшие финансы). То есть, казино снабжает игрока вероятностью на дармовой базе играть во различные слоты даже спонсирует забаву.
1 x slots
<a href=http://www.arka-bahce.org/forum/showthread.php?p=776512#post776512>1×slots рабочее зеркало на сегодня</a> При малый сумме приза рекомендовано выступать по низким ставкам, а использовать максимальные лучше лишь сомнений случае, случае вейджер слишком большой, а время на отыгрыш сильно ограничено. Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? 1х слотс зеркало регистрация в 1×slots casino <a href=https://www.escort-liege.eu/user/profile/462151>https://www.escort-liege.eu/user/profile/462151</a> В случае установленного лимита на сумму вывода выигрыша с бездепозитного приза, игрок не может исключить больше заявленной суммы.
x1 slots регистрация в 1×slots casino
У любого игорного заведения средства управляла и условия. Но, чтобы получить бонусы, необходимо выполнить стандартные действия:Максимальный размер ставки, который нельзя превосходить пока бонус не несомненно всецело отыгран. В случае нарушения этого правила, бонус и выигрыш с него станут аннулированы. Возможность протестировать новые забавы, не рискуя личностными средствами и создать личную тактику забавы. <a href=http://forum.myslash.ru/profile.php?mode=viewprofile&u=55579>http://forum.myslash.ru/profile.php?mode=viewprofile&u=55579</a> Подтвердите регистрацию, дабы активировать Бездепозитный бонус с выводом, потребуется наполнить индивидуальный профиль. Заполните пустые поля истинными данными о себе.Возьми собственный подарок. Чаще всего приз активизируется незамедлительно в регистрации. Но случаются ситуации, когда надо(надобно) забежать в собственный кабинет либо написать в справочную службу. 1×slots зеркало регистрация Свежий приз начисляется в виде денежных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в использовании своими, а случае отыгрыша оператор имеет установить лимитирование на вывод средств.Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном бонусе, то начала внимание на значение вейджера и срок, кот-ый дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть приз и исключить выигрыш.
<b>Смотреть еще похожие новости:</b>
<a href=https://timepost.info/showthread.php?tid=130410>1×slots регистрация на сайте</a>
<a href=https://australianwinerytours.com/tours/showthread.php?tid=353442>1×slots бездепозитный бонус за регистрацию</a>
<a href=https://mcmon.ru/showthread.php?tid=151767>1хслотс мобильная версия зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Не желайте сыграть в азартные забавы, не рискуя средствами средствами, но получая в все выплаты? Подобную возможность предоставляют все наихорошие порталы с азартными увеселениями. В их числе большое честных и надежных интернет-казино на русском языке. Они завлекают свежих юзеров различными поощрительными событиями, включая бездепозитные, или благотворительные призы.
#2899 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
мобильные букмекерские конторы бесплатно играем казино <a href=https://www.ossetia.tv/>симулятор казино</a> up casino зеркало порно с Антропова Валентина Викторовна <a href=https://res-publika.com>букмекерские конторы без депозита</a> казино без 1×bet 1 1×bet слоты официальный сайт Скоробогатова Ольга Николаевна порно бк букмекерская контора 1×bet телефон порно с Никита Кучеров (хоккей)
DiskiPlus играющие казино DiskiPlus казино без <a href=https://diskiplus.ru>DiskiPlus сайт букмекерской конторы</a> DiskiPlus Крючкова Полина Викторовна порно DiskiPlus pin up casino buzz <a href=https://diskiplus.ru>DiskiPlus порно с Сергей Бобровский (хоккей)</a> DiskiPlus казино пин DiskiPlus букмекерская контора на андроид DiskiPlus порно с Юлия Ефимова, пловчиха DiskiPlus porno Юлия Пересильд DiskiPlus порно с Захарова Мария Владимировна DiskiPlus 1×bet слоты 1×bet top DiskiPlus r7 casino
#2900 Charlesgunnyhttp://filmkachat.ru
1×slots официальный demo регистрация в 1×slots casino
Диапазон ставок, которые вправе устроить игрок, того лимитирован. Обычно назначать можно маленькую необходимую — около 10–30 рублей за одно вращение. <a href=http://filmkachat.ru/>1×slots официальный demo регистрация в 1×slots casino</a> Бездепозитные призы прекрасный вариант даровой забавы в игровые автоматы. Многие пользователи сети не понимают, собственно в казино можно начать выступать абсолютно бесплатно, а позже исключить выигрыш на банковскую карту либо электронный кошелек, другие не доверяют онлайн казино, а третьи удачно играют и выигрывают – и подчас достаточно большие суммы.Первый возникающий вопрос, это, зачем выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают свежих игроков. Последним легче начать забаву на деньги с дара за регистрацию. Им не пополнять баланс и расходовать личные свои. Новички получают бесплатные спины либо свои на счёт. С их поддержкой знакомятся с игровым ходом, крутят слоты и делают ставки в рулетке. <a href=https://www.megaindex.org/project/view/254>https://www.megaindex.org/project/view/254</a> Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.Мы делаем акцент на главных положениях верховодил, рассказываем о территориальных ограничениях и кратко информируем о иных акциях обговариваемого казино. x1 slots регистрация в 1×slots casino <a href=https://klub.randevau.hu/blog/20653/shisha-tobacco-from-4-eur/>https://klub.randevau.hu/blog/20653/shisha-tobacco-from-4-eur/</a> Для получения предоставленных бонусов вас понадобиться — ПК или мобильное прибор, и остальное дело за малым.Бездепы с безвозмездными вращениями предоставляют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд платит казино. Число спинов ограничено и редко выше сотку. Если промоакция включает в себя много даровых игр, их начисление имеет быть разбито на количество дней.
1×slots официальный регистрация
Прочитайте правила бонусной программки, в которой желаете участие. Да, мы настоятельно рекомендуем сделать это до регистрации.Бездепозитный приз предоставляется новому игроку за конкретные деянья. Часто презент в виде средств или фриспинов выдается за регистрацию, благодаря чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. <a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=136258>1×slots бездепозитный бонус за регистрацию</a> 1× slots сайт <a href=http://forum.americandream.de/memberlist.php?mode=viewprofile&u=7254>http://forum.americandream.de/memberlist.php?mode=viewprofile&u=7254</a> скачать 1×slots на андроид мобильная версия На бесплатные призы онлайн-казино почти практически распространяется лимитирования по стране проживания клиентов. Даже если вам разрешено раскрывать счет и играть на деньги в заведении, это еще не означают, собственно вам доступны no deposit bonuses.
1хслотс казино зеркало
Нет. Казино выдают бесплатные призы за регистрацию, чтобы, чтобы, чтобы заказчик мог ознакомиться с игровым заведением. А чтобы исключить его, нужно выполнить обстоятельства отыгрыша.После получения приза вывод средств для клиента будет недоступен того, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или пара месяцов. Выводить деньги игрок сможет лишь после отыгрыша. <a href=https://sport1477.ru/forums/users/xrumsep2505–2/>https://sport1477.ru/forums/users/xrumsep2505–2/</a> Создание аккаунта. На сайте казино необходимо обнаружить регистрационную форму и заполнить пустопорожние поля собственными данными. Иногда на этом шаге требуется указать только адресок электронной почты и пароль, хотя чаще надобно заполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д.). Нужно указывать только реальные данные, поскольку впоследствие они будут проверены. 1хслотс 1хслотс регистрация перейти на 1×slots
1×slots casino online регистрация
Условия могут различаться приятель от приятеля. Но подобный приз имеет быть использован лишь для игрового процесса – приобретенные на счет деньги до как, как станут отыграны, вывести нереально.Проверка занимает от нескольких мин. До нескольких дней, спецы техподдержки все запросить дополнительные документы либо инициировать краткое общение по Skype. <a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=118082>casino 1×slot</a> 1 x slots <a href=http://kungur.hldns.ru/forum/profile.php?action=show&member=8812>http://kungur.hldns.ru/forum/profile.php?action=show&member=8812</a> Шаг 4. Активация. Внимательно исследуйте обстоятельства, информацию по лимитированиям и сроке деянья бонусного предложения. Разобравшись с правилами, возможно активировать бонус в собственном кабинете (от ? с использованием промокода) или по запросу в саппорт.Многие игроки, оценив функционал казино, остаются играть в нем и дальше ? на это и нацелено любое рекламную. Постоянные клиенты вносят депозиты и делают ставки, обеспечивая длительную прибыль оператора. То есть, казино раздают бездепы свежим пользователям для формирования лояльной аудитории.
рабочее зеркало 1хслотс
Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Таким образом, заведение пытается показать себя своим потенциальным игрокам, а подобный маркетинговый ход как казино приз без депозита за регистрацию завлекает очень много внимания к игорному заведению и обеспечивает неизменный поток свежих посетителей и будущих посетителей игрового онлайн клуба. <a href=http://222.239.231.61/bbs/board.php?bo_table=free&wr_id=5380137>http://222.239.231.61/bbs/board.php?bo_table=free&wr_id=5380137</a> рабочее зеркало 1×slots Бездепы с бесплатными вращениями предоставляют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд уплачивает казино. Число спинов ограничено и изредка выше сотню. Если промоакция включает в себя большое даровых игр, их начисление может быть разбито на некоторое дней.
<b>Смотреть еще похожие новости:</b>
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=10804>1хслотс официальный сайт зеркало</a>
<a href=https://aircompare.us/forums/memberlist.php?mode=viewprofile&u=40074>1хслот зеркало сайта</a>
<a href=http://forum.puppylinux.pl/index.php?topic=967.new#new>1×slots casino зеркало</a>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=186438>1×slots бездепозитный бонус за регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Некоторые клубы механически начисляют приз на акк игрока последствии исполненья критерий получения, но посещают ситуации, когда приз надо(надобно) активировать игроку самому. Есть несколько методов активации приза:
#2901 travelposthttps://travelpost.in.ua
Отдых с детьми недорого <a href=https://travelpost.in.ua/>travelpost.in.ua/</a>
#2902 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
официальная казино casinos winning <a href=https://slon-ru.com/>порно с Максим Глушенков (футбол)</a> Александра Бортич pinco casino <a href=https://glvk.guru/>демо казино</a> лучшая казино 7k casino официальный сайт букмекерская контора ставки Яровая Ирина Анатольевна порно порно с Александр Большунов (лыжные гонки) Манилова Алла Юрьевна порно казино фильм
DiskiPlus казино проиграл DiskiPlus порно с Захарова Мария Владимировна <a href=https://diskiplus.ru/>DiskiPlus лучшие онлайн казино</a> DiskiPlus рокс казино DiskiPlus сайт pin up casino <a href=https://www.diskiplus.ru>DiskiPlus казино смотреть онлайн бесплатно</a> DiskiPlus спорт букмекерская контора DiskiPlus 7k casino зеркало на сегодня DiskiPlus скачать casino на андроид DiskiPlus казино смотреть онлайн DiskiPlus pinco casino DiskiPlus скачать букмекерскую контору DiskiPlus 1×bet сайт
#2903 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино вход официальный сайт porno Яна Троянова <a href=https://repost.news/>казино ли</a> 1×bet порно с Анна Калинская (теннис) <a href=https://rhymes-punches.com/>где казино</a> порно с Владимир Минеев (ММА) букмекерские конторы pin пин up casino спорт букмекерская контора 1×bet на андроид официальная казино официальные букмекерские конторы
DiskiPlus казино вход официальный сайт DiskiPlus казино 5 <a href=https://diskiplus.ru/>DiskiPlus up casino официальный</a> DiskiPlus casino DiskiPlus cometa casino <a href=https://www.diskiplus.ru/>DiskiPlus приложения букмекерских контор на андроид</a> DiskiPlus порно с Владимир Минеев (ММА) DiskiPlus порно с Алексей Миранчук (футбол) DiskiPlus porno Илья Ковальчук (хоккей) DiskiPlus casino зеркало сегодня DiskiPlus up casino DiskiPlus порно с Баталина Ольга Юрьевна DiskiPlus казино рулетка
#2904 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasin online
Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам запрещено начислять призы посетителям, не имеющим денежных средств на счете. Мы предлагаем рассмотреть животрепещущие бонусы онлайн-казино с лицензией, которые соблюдают законодательство РБ. <a href=http://filmkachat.ru/>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a> Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала резвые выводы. Фишка выплат что, что достаточно выбрать платёжный инструмент и указать необходимую. В большинстве случаев деньги зачисляются на электрические кошельки протяжении 15 мин., а на банковские карты – 1–3 трудящихся дня.Следует подчеркнуть, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом. <a href=https://www.ipaddress.com/website/playhouse.com.ua/>https://www.ipaddress.com/website/playhouse.com.ua/</a> Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации дара необходимо доказать электрическую почту и привязать телефонный;Вы наверняка, как и все любите получать презенты и бездепозитные бонусы казино. Игорные дома брали в повадку одаривать гэмблеров приятными бонусами. Стать владельцем приветственного подарка можно за создание профиля либо пополнение счёта. Второй вариант более занимательный, как клубы готовы удвоить депо! Но если вы новичок и лишь знакомитесь с миром пыла, превосходнее пользуйтесь призом за регистрацию. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=https://www.finhi.ai/bbs/board.php?bo_table=free&wr_id=497468>https://www.finhi.ai/bbs/board.php?bo_table=free&wr_id=497468</a> Подтвердите регистрацию, дабы активировать Бездепозитный бонус с выводом, требуется наполнить индивидуальный профиль. Заполните порожние поля реальными данными о себя.Подарки на дни ? приуроченные к праздничным датам, требующие символического отыгрыша или начисляются без того. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду.
1хслотс 1хслотс регистрация перейти на 1×slots
Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция имеет доскональные управляла, ссылка на коие обычно находится в промообъявлении. В них указываются лимиты, вейджер, перечень дешевых игр. Если оператор укрывает данные о предложении, то воспользоваться им не.Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают приз по странам. Вплоть до такого, что клуб возможность брать игроков из Вашей государства, а бездеп мешает. <a href=http://forum.l2endless.com/showthread.php?tid=338135>1хслот зеркало</a> 1×slots официальный сайт скачать на айфон В количестве случаев безвозмездные бонусы начисляются в кредитах, коие невозможно незамедлительно исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти требования принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д. ). О нем читайте ниже.Выше мы предоставили полный набор самых свежих и своевременных бездепозитных призов в интернет казино без пополнения на 2022 год, где вам пользоваться хоть ценным бездепозитным призом. <a href=https://pf-k.ru/profile/67465-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%B0%D0%B2%D1%82%D0%BE/?tab=field_core_pfield15>https://pf-k.ru/profile/67465-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%B0%D0%B2%D1%82%D0%BE/?tab=field_core_pfield15</a> Не советуем сломя голову хвататься за различные предложения получения средств без инвестициям. Вполне вероятно, что бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем смотрится на 1-ый взгляд. Альтернативой является казино приз за депозит. Мы предлагаем вам пару советов, спасибо которым у каждого игрока будет вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом денег: 1×slots казино мобильная версия Казино выводит деньги только на ту платежную систему, с котрой был изготовлен депо. То есть, для вывода бездепозитного бонуса, Вам поначалу нужно пополнить счет. В некоторых клубах узкий перечень способов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет именно с этих платежных способов, которые доступны для вывода.
1×slot зеркало рабочее этих способов предполагает регистрацию
Как только вы отыграли вейджер и свои с бонусного баланса перешли вам на настоящий счет, Вы смело можете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (сделать минимальный депозит к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депо). Многие азартные клубы ограничивают сумму вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании акции, суммы Вы не можете исключить. Разница несомненно аннулирована, Вы даже не сможете создавать на нее ставки.Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации подарка нужно доказать электрическую почту и привязать телефонный; <a href=https://www.russiansuka.net/user/WilliamedisP/>https://www.russiansuka.net/user/WilliamedisP/</a> Зачастую бездепозитные призы казино для забавы предлагаются различными заведениями азартных игр в маркетинговых акций либо в целях привлечения к себя новых игроков. Для бездепозитных призов в казино 2022 игроку не нужно пополнять счет до этапа вывода желаемых средств. 1хслотс 1хслотс регистрация перейти на 1×slots В каждом казино с бездепозитным призом предусмотрены вейджеровые обстоятельства. Это единственный «подводный камень», который стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, нужно сделать определённое число ставок. Чем круче приз, тем труднее выполнить условия, и напротив.В основном случаев благотворительные призы начисляются в кредитах, которые невозможно незамедлительно вывести со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д. ). О нем читайте ниже.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Бездепозитные призы в казино без пополнения 2022 — это конкретная сумма средств либо gift spins вращения, коие предоставляются первым постояльцам за регистрацию на сайте казино повторяющий бездепозитного приза, и дает для вероятность помощью казино без пополнения опробовать предложения (игр), с дальнейшей преимуществом, льготой вывода средств при исполненьи всех установленных правил. Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. Нет. Для получения бездепозитного приза в казино нужна неотъемлемая регистрация на веб-сайте. Играть в слоты бесплатно и без регистрации возможно только в демо режиме.Новички не любят сразу же вносить депо. Это обосновано отсутствием опыта и сомнением. К счастью, в наше время возможно получить бездепозитный приз за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В любом случае вы не рискуете своими сбережениями. Это отличная вероятность запустить понравившийся видео слот либо же испытать удачу в настольных играх. 1×slots регистрацию процедура займет всего лишь <a href=https://stalker-worlds.games/user/Michaelavags/>https://stalker-worlds.games/user/Michaelavags/</a> Возможность протестировать новые забавы, не рискуя личностными средствами и создать личную тактику игры.
казино 1×slots
Не стоит путать забаву в демо и внедрение бонусов. В демонстрационном режиме игрок может расценить механику слота, сюжет и оформление. Но забава ведется на относительные кредиты, поэтому отсутствует главное ? ощущение пыла. Активируя промокод или фриспины, заказчик раньше не расходует свои средства на игровые автоматы, хотя имеет сорвать настоящий куш!Однако далековато не все ресурсы предлагают своим клиентам бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено одобрение на первый депо в объеме 100–200%. Это замечательная возможность преумножить банкролл, увеличить время, проведённое за игрой и шансы сорвать большой куш. <a href=http://shop-uk.fmworld.com/Queue/Index?url=http://momas.ru/bitrix/redirect.php?goto=http://st.hit.gemius.pl/hitredir/id=.A3glDCWd1l2slG5.NAg3PWonM8dE2SatuUA5TPlcbn.A7/url=https://teletype.in/@urid_pomosh/jk6f3×hMAkQ>http://shop-uk.fmworld.com/Queue/Index?url=http://momas.ru/bitrix/redirect.php?goto=http://st.hit.gemius.pl/hitredir/id=.A3glDCWd1l2slG5.NAg3PWonM8dE2SatuUA5TPlcbn.A7/url=https://teletype.in/@urid_pomosh/jk6f3×hMAkQ</a> Приветственный приз без депо ? подарок за регистрацию. Выдается деньгами, фриспинами либо баллами. В заключительном случае бонусные баллы применяются для роли в турнирах или размена на реальные средства. 1×slots зеркало регистрация в 1×slots casino Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, the decision зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.176mw.net/forum.php?mod=viewthread&tid=137&pid=545042&page=3050&extra=page%3D1#pid545042>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=146538>1×slots casino регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для такого, дабы отыграть сумму вашего бездепозитного бонуса нужно выполнить условия вейджера. Очень часто фриспины даются на определенные слоты (book of ra, book of dead, book of sun), избирайте слот себя нраву, все довольно красочные и качественные. Бездепозитные приз возможность быть валютным например и повторяющий фриспинов на слоты
#2905 Charlesgunnyhttp://filmkachat.ru
1× slots зеркало
Автоматы неспроста считаются наиболее известным азартным веселием. Чтобы освоить управление и управляла, потребуется всего несколько мин. Ваша задача сделать ставку, найти число трудящихся линий и возможно вертеть тамбур. Если на экране выпадет выигрышная композиция – вы выиграли! С данной задачей вас помогут управится бездепозитные бонусы казино.Одним из поводов отдавать привилегию одному либо иному заведению содержится в привлекательности предлагаемых промоакций и даровых предложений. Безвозмездные фриспины, выдаваемые без нужды делать какой-либо вклад, в списке находится далеко не в конце. <a href=http://filmkachat.ru/>1×slots зеркало регистрация в 1×slots casino</a> Каждый из бездепозитных бонусов без пополнения 2022 имеет свой конкретный вейджер для отыгрыша, так же в любом казино он устанавливается индивидуально — где то он х55 а кое-где х30, повторюсь везде по разному! <a href=https://www.papercall.io/speakers/product-3d-modeling-services>https://www.papercall.io/speakers/product-3d-modeling-services</a> Нет. Казино раздают благотворительные бонусы за регистрацию, чтобы, чтобы, дабы клиент имел ознакомиться с игровым заведением. А чтобы исключить его, необходимо выполнить обстоятельства отыгрыша. 1×slots зеркало проходить регистрацию это отличный вариант <a href=https://tulaart.ru/forum/index.php?action=profile;u=38340>https://tulaart.ru/forum/index.php?action=profile;u=38340</a>
1х слот регистрация в 1×slots casino
<a href=http://forum.exalto-emirates.com/memberlist.php?mode=viewprofile&u=69997&sid=14095d4891907aba66ce2f841443178d>1×slots официальный сайт скачать</a> 1×slots зеркало сайта <a href=https://qualityprogamer.de/forum/member.php?action=profile&uid=6786>https://qualityprogamer.de/forum/member.php?action=profile&uid=6786</a> Бездепы шансы входить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами. 1×slots зеркало подтвердит вашу регистрацию если говорить Заработать на бездепозитных призах за регистрацию в казино возможность каждый пользователь, достигший совершеннолетия.
1×slots зеркало рабочее на сегодня
За счёт спинов получится запустить разные интернет слоты, протестировать стратегии и поднабраться навыка. Фишка том,, что вращения начисляются на лучшие аппараты с уникальными опциями и высокой отдачей. Не забывайте, собственно в каждом акционном предложении учтены специальные притязания – временные лимитирования, наибольший объем ставки, список дешевых игр. В зависимости от онлайн заведения каждый из них возможность для предложить как бездепозитные средства, например и бездепозитные фриспины, которые в удачной регистрации рухнут вас на ваш игровой баланс.Каждый в должен сначала отчетливо выучить условия по получению и отыгрышу понравившегося подарка. Если всё организует, поторопитесь отобрать безвозмездные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо данный начать вертеть барабаны топовых слотов. <a href=http://thinktoy.net/bbs/board.php?bo_table=customer2&wr_id=517765>http://thinktoy.net/bbs/board.php?bo_table=customer2&wr_id=517765</a> Денежные свои. Третий приз за регистрацию без депо – наличные. К сожалению, лишь знаменитые и пользующиеся клубы шансы уяснить средства в рублях или долларах. С их помощью появится насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед данным нужно исполнение конкретных условий. 1хслотс регистрация в 1×slots casino Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную функцию активации приза без депо. Внимательно прочтите до конца. Многие новенькие делают ошибки на шаге регистрации и потому имеют получить подарок.
1хслотс рабочее зеркало
Но а в вы теснее профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в онлайн казино; 1×slot зеркало <a href=https://conifer.rhizome.org/Jogodobichos0809/%D0%BB%D0%B5%D0%B3%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B5-%D0%B1%D1%83%D0%BA%D0%BC%D0%B5%D0%BA%D0%B5%D1%80%D1%8B-%D0%B4%D0%BB%D1%8F-%D1%81%D1%82%D0%B0%D0%B2%D0%BE%D0%BA-%D0%BD%D0%B0-%D1%81%D0%BF%D0%BE%D1%80%D1%82>https://conifer.rhizome.org/Jogodobichos0809/%D0%BB%D0%B5%D0%B3%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B5-%D0%B1%D1%83%D0%BA%D0%BC%D0%B5%D0%BA%D0%B5%D1%80%D1%8B-%D0%B4%D0%BB%D1%8F-%D1%81%D1%82%D0%B0%D0%B2%D0%BE%D0%BA-%D0%BD%D0%B0-%D1%81%D0%BF%D0%BE%D1%80%D1%82</a>
1хслотс казино зеркало
Срок отыгрыша — это период, который наступает в момент активации бонуса и заканчивается с его закрытием. Пользователю нужно уложиться в данный временной зазор, иначе призовые средства аннулируются. Казино устанавливают перечень игр, ставки каких засчитываются при расчете отыгранных денег. Если тайтл не входит в этот перечень, то он может быть недосегаем для загрузки во время деяния бонусного предложения.Подтвердите лицо, предоставив оператору казино средства паспортные данные. Инструкции обыкновенно легкие, главное — четко им стопам. Если написано, собственно «на фото должны быть заметны все хорошо угла странички паспорта» — сделайте именно это фото. Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают бонус по странам. Вплоть до того, собственно клуб возможность себя игроков из Вашей страны, а бездеп мешает.Во время забавы в казино, выигрыши, приобретенные благодаря безвозмездным призовым фондам, суммируются и срабатывают в совместную необходимую для отыгрывания. Однако, в удача улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно допустит вывести финансовые средства. Сумма вывода будет зависимости от лимита, утвержденного именно в данном учреждении. Поэтому, внимательно нужно разбирать верховодила выдачи анлимитных депозитов. <a href=http://www.ocide.org/forum/index.php?action=profile;u=17940>http://www.ocide.org/forum/index.php?action=profile;u=17940</a> 1×slots казино мобильная версия
<b>Смотреть еще похожие новости:</b>
<a href=http://smpn1bejen.sch.id/forum/>1×slots casino регистрация 1×slots review live</a>
<a href=https://radios-collector.com/viewtopic.php?f=8&t=16&p=251172#p251172>1х слот регистрация в 1×slots casino</a>
<a href=https://elclasificadomx.com/author/jameslog/>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы моментально получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, появляется настоящий шанс победу!
#2906 JerryNaipshttps://telegramgvc.ru
Накрутка голосов в ТГ канале опросе <a href=https://telegramgvc.ru/>фанпей накрутка ТГ</a>
#2907 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на сайте 1×slots ru com
Если площадка презентует бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь завести аккаунт на веб-сайте и активировать его, подтвердив адрес электронной почты, номер телефона либо другие данные, коие требует оператор. Перед данным необходимо убедиться, собственно юзер располагается на официальном веб-сайте казино, но на мошеннической площадке.Используйте превосходнейшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, чтобы заработать презенты за обычные деянья теперь сегодня получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высокой отдачей и прыткими выводами на электрические кошельки. <a href=http://filmkachat.ru/>1хслотс рабочее зеркало</a> В интернете слишком количество скриптовых вебсайтов, которые принадлежат жуликам. Их основная задача – заинтересовать гэмблеров, пообещав не только щедрые презенты, но и солидные выигрыши. Так что кое-какие веб-сайты предлагают получить за регистрацию числе $1 000.Верификация аккаунта. Лучше подтвердить личность незамедлительно последствии регистрации, дабы потом не было заморочек с выводом средств. Верификация может проходить двумя путями: <a href=https://calibreapp.com/tools/core-web-vitals-test/playhouse.com.ua?scheme=https&path=%2F&context=origin>https://calibreapp.com/tools/core-web-vitals-test/playhouse.com.ua?scheme=https&path=%2F&context=origin</a> 1×slots бездепозитный бонус за регистрацию <a href=https://www.asitorino.com/user/henrydreag/?um_action=edit>https://www.asitorino.com/user/henrydreag/?um_action=edit</a>
1×slots casino регистрация 1×slots review live
Размер приза. В качестве бездепов обычно начисляют небольшие суммы, а когда речь идет о бонусах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то кое-какие казино могут подарить игроку до 2000$.Для всех бездепозитных бонусов действует наибольший предел на выигрыш. Он указывает предельную необходимую, которую появится получить, играя на бонусные кредиты. Как только вас получится выполнить требования вейджера, возможный максимально несомненно переведен с бонусного счета на основной, а остаток несомненно списан. <a href=https://www.formulersupport.com/Thread-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82–168233>казино 1×slots официальный сайт</a> 1×slots коды Да, у бесплатных бонусов есть недостатки. Прежде всего, они обычно не. Кроме такого, обстоятельства вейджера по ним постоянно жесткие. Но таки недоступность риска делает их довольно красивыми для клиентов. <a href=http://1.235.32.108/doku.php?id=What_Are_the_Exclusive_Bonuses_for_1×bet_APP_Users?>http://1.235.32.108/doku.php?id=What_Are_the_Exclusive_Bonuses_for_1×bet_APP_Users?</a> 1×slots рабочее зеркало на сегодня
1×slots регистрация 1×slotscasino09k online
Воспользоваться бездепом можно не во всех игровых автоматах: казино вдруг устанавливает ограничение для посетителей. Конечно, это можно счесть некоторым неудобством для игрока, хотя справедливости ради необходимо, собственно выбор автоматов всё одинаково остаётся достаточно великим. <a href=http://www.atego-club.ru/forum/member.php/126431-ArnoldMer>http://www.atego-club.ru/forum/member.php/126431-ArnoldMer</a> Для казино, работающих интернет, бездепозитные призы нужны для привлечения новых клиентов. Предложение поиграть на слотах без необходимости внесения настоящих денег — работающий способ для повышения энтузиазма к фирмы. После отыгрыша бездепа велик шанс, что игроку понравится и он продолжит выступать в казино, только сейчас уже на личные деньги. 1×slots casino регистрация на сайте
1×slots зеркало регистрация в 1×slots casino
Как только получите бездеп в казино, всё также не забывайте инспектировать электронную почту. Некоторые игорные клубы день веселят интенсивных гэмблеров приятными призами. Чаще всего получить презент возможно в преддверии веселья, на день рождение, за привлечение друга. А также распространённым бонусом считается прибавка к депозиту. Нужно не восполнить счёт, и азартное заведение увеличит его на 50–100%. Чаще всего интернет-казино предлагают бездепозитные бонусы свежим юзерам. Эта промо-акция очень эффективно привлекает начинающих, подталкивая их к открытию счета. Конечно, не все они становятся послушными клиентами, но сам факт регистрации аккаунта играет на руку заведению.Можно. Вы практически сможете отказаться от получения бездепозитного приза за регистрацию в казино, же Вы не сделаете ставку. 1 x slots casino <a href=http://spilov.ru/user/Scottdes/>http://spilov.ru/user/Scottdes/</a>
казино 1× slots официальный сайт
Но эти рамки не смущают даже хайроллеров, поскольку коэффициенты на слотах дозволяют рассчитывать на крупные выигрыши, а некоторых автоматах разыгрывается прогрессивный джекпот. <a href=https://carpentryforums.com/member.php?action=profile&uid=5850>https://carpentryforums.com/member.php?action=profile&uid=5850</a> Еще одно условие касается объемов ставки. Операторы устанавливают наивысшую необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном кабинете. При превышении лимита есть риск потерять бонуса. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, заказчик может столкнуться с запретом назначать фишки на шансы.Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? 1×slots промокод при регистрации
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Некоторые клубы автоматически начисляют бонус на аккаунт игрока в выполнения условий получения, хотя посещают истории, когда бонус нужно активировать игроку самому. Есть некоторое способов активации бонуса:
#2908 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
официальные букмекерские конторы Разуваева Ксения Денисовна порно <a href=https://rucriminal.info/>букмекерская контора леонов</a> Петрова Ольга Викторовна порно казино играть <a href=https://slon-ru.com/>часы казино</a> casino daddy порно с Евгения Медведева, фигуристка casino онлайн 1×bet зеркало букмекерская контора скачать приложение порно с Евгений Малкин (хоккей) букмекерскую контору пин
DiskiPlus вывод казино DiskiPlus kent casino <a href=https://diskiplus.ru/>DiskiPlus porno Виктория Баркова, легкоатлетка</a> DiskiPlus porno Екатерина Ефременкова, шорт-трекистка DiskiPlus казино пину <a href=https://diskiplus.ru>DiskiPlus 7k casino</a> DiskiPlus песня казино DiskiPlus Манилова Алла Юрьевна порно DiskiPlus приложения букмекерских контор на андроид DiskiPlus Москалькова Татьяна Николаевна порно DiskiPlus букмекерская контора ставки DiskiPlus пари букмекерская контора DiskiPlus скачать 1×bet на андроид
#2909 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало сайта
Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? <a href=http://filmkachat.ru/>1×slots регистрация на 1хслотс</a> Бонусные средства – небольшая сумма денег для старта в новом казино. На бонусные средства, обычно разрешено выступать во все игры, не слотов с современным джекпотом и игр из раздела exist casino.Казино выделяет вероятность заработать и вывести настоящие деньги на бездепозитных призах. Обычно, это незначительная сумма, которую казино может себя позволить презентовать игроку. <a href=https://plaza.rakuten.co.jp/kalinka0588/diary/202501240000/>https://plaza.rakuten.co.jp/kalinka0588/diary/202501240000/</a> Автоматы непопросту считаются наиболее знаменитым азартным веселием. Чтобы освоить управление и управляла, понадобится всего несколько мин. Ваша задача устроить ставку, определить число трудящихся линий и можно вертеть тамбур. Если на экране выпадет выигрышная композиция – вы выиграли! С данной задачей для посодействуют управится бездепозитные призы казино. 1×slots регистрация 1×slotscasino09k online <a href=https://berzarina28a.ru/index.php?/profile/10986-ashleyrex/>https://berzarina28a.ru/index.php?/profile/10986-ashleyrex/</a>
1×slots казино мобильная версия
Особую изюминку видео слотам присваивают оригинальные знакы. С их в активируются разные призы. Вы можете запустить вспомогательный степень и увеличить необходимую выигрыша. Есть знаки, которые сменяют ненужные элементы и сами делают выигрышные комбо. Не стоит забывать и тему бонус-тур. После любого успешного спина есть шанс увеличить необходимую выигрыша в два либо четыре раза. <a href=https://www.ldvd.nl/no-22-san-diego-place-rallies-very-last-boise-country-27–16?page=24#comment-237033>1×slots casino регистрация 1×slots review live</a> 1×слотс казино А ознакомиться с свежими интернет казино, Вы можете с бонусов с выводом прибыли, коие Вы сможете получить без депо.Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и более. Когда игроку полагается большое фриспинов, администрация возможность разбивать их начисление на количество дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах промоакции. <a href=https://www.wonderzine.com/users/1541799>https://www.wonderzine.com/users/1541799</a> Ещё одно распространённое акционное предложение – симпатичный подарок с неблаговидными притязаниями. К примеру, клуб сулит $100 виде бездепа, хотя с вейджером х80 либо х100. Отыграть подобный вейджер фактически невозможно и поэтому другого, как концентрироваться на более интересных промоакциях.Мы советуем не отказываться от похожих услуг знаменитых казино. Выделите количество минут на регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сегодня фортуна будет на вашей стороне! 1×slots быструю регистрацию а также мгновенное Основное различие том,, собственно для получения бездепа не пополнять баланс в казино. Но кроме этого, есть ряд прочих отличий:
1×slot зеркало рабочее этих способов предполагает регистрацию
Каждый в должен сперва детально изучить условия по получению и отыгрышу понравившегося презента. Если всё организует, поспешите забрать бесплатные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо данный начать вращать барабаны топовых слотов. Бездепозитные призы, как уже понятно, являются уникальной возможностью обратиться игровому процессу безусловно бескорыстно, то есть играть в онлайн казино безвозмездно и на имеющие свои незамедлительно после регистрации аккаунта. Автоматы с этим депозитом шансы стать великолепной возможностью сыграть для поклонников пыла с определенными ограничениями в денег. <a href=http://www.fiammeblu.it/profile.php?uid=25371>http://www.fiammeblu.it/profile.php?uid=25371</a> Для верификации номера телефона, в личном профиле изберите опцию „Подтвердить номер телефонного“ и введите в отвечающее фон код, полученный в sms-сообщении.Также бездепозитные бонусы шансы служить способом вернуть к этой клиентов, временно приостановивших своё сотрудничество с компанией: уведомление о бездепе поступает на мобильный телефон либо почту. 1 xslots рабочее зеркало
онлайн казино 1×slots
Некоторые веб-сайты, прежде чем обмануть регистрацию игроков, предлагают ответить на некоторое базисных вопросов. Цель проведения сходственной викторины – выявить случайных людей, коие не имеют представления о покере, и не допустить получения ими бонусов. Если гость уже играл в казино, то ответить на полтора десятка несложных вопросов будет нетрудно. Очень часто, ответы можно отыскать на официальных сайтах данных учреждений.Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, чтобы еще раз получить даровой приз. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ожидает неизбежное наказание. <a href=http://complainanything.com/node/158?page=1100#comment-1564292>1×slot зеркало рабочее этих способов предполагает регистрацию</a> Шаг 5. Использование и отыгрыш. Бездеп должен быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.Для того, чтобы отыграть необходимую вашего бездепозитного бонуса надо(надобно) выполнить условия вейджера. Очень нередко фриспины даются на конкретные слоты (book of ra, book of deceased, book of sun), избирайте слот себе нраву, все довольно красочные и высококачественные. Бездепозитные приз может быть денежным так и вид фриспинов на слоты Чем ниже велечину вейджера, тем проще отыграть и вывести бонус. Если Вы планируете заработать на бездепе, не просто ознакомиться с новым игровым клубом, то стоит избегать бонусов с высоким вейджером их почти не реально отыграть. С ними Вы можете только протестировать игры заведения.Вейджер (или вагер) ? это наименьшая сумма ставок, коию нужно сделать для вывода валютного приза. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение. 1хслот 1хслотс регистрация перейти на 1×slots <a href=http://grungejohn.com/bitrix/redirect.php?event1=&event2=&event3=&goto=http://ktek23.info/bitrix/redirect.php?goto=http://abcmarket.kz/bitrix/rk.php?goto=https://teletype.in/@urist555/yK1QomkZtW4>http://grungejohn.com/bitrix/redirect.php?event1=&event2=&event3=&goto=http://ktek23.info/bitrix/redirect.php?goto=http://abcmarket.kz/bitrix/rk.php?goto=https://teletype.in/@urist555/yK1QomkZtW4</a>
1 хслот регистрация в 1×slots casino
Для всех бездепозитных призов функционирует наибольший лимит на выигрыш. Он показывает предельную необходимую, которую возможность получить, играя на бонусные кредиты. Как только вам получится выполнить требования вейджера, дозволенный максимально несомненно переведен с бонусного счета на ведущей, а остаток несомненно списан. Бонус в казино без депо имеет разные разновидности: такое быть приветственный бонус, промоакции в честь каких-либо дней либо важных дат, бонус за привлечение свежих игроков, преданность и получение VIP-статуса. <a href=http://spectr-sb116.ru/user/Terrynok/>http://spectr-sb116.ru/user/Terrynok/</a> Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются незамедлительно в создания профиля и активны непродолжительное время. Если не успеете потратить свои, они попросту сгорят. Касаемо времени, в большинстве случаев бонусы активны на часа.Казино дает вероятность заработать и вывести настоящие средства на бездепозитных призах. Обычно, это малозначительная сумма, которую казино имеет для позволить презентовать игроку. 1×slots зеркало видели такую регистрацию на Далее потребуется отыграть вагер и вывести выигрыш. Игрокам без навыка крупно повезло, возможность получить 10-ки подарков за 1 регистрацию. Если не смогли получить Бездепозитный приз, не волнуйтесь. Обратитесь в онлайн чат, оператор поможет ситуацию.На нашем веб-сайте Вы найдете перечень актуальных новых бездепозитных бонусов в казино 2022 года. Также, есть количество неповторимых услуг, которые доступны лишь гостям нашего сайта последствии регистрации по нашей ссылке или активации специального промокода.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Также, такой нужно доказать свой номер аппарата, чтобы код, полученный в смс-сообщении от клуба установить в специальное фон в собственном офисе игрока. Приглашаем делиться сужденьями о бонусах. Это поможет иным юзерам подбирать более прибыльные предложения.
#2910 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
слот casino сайте букмекерской конторы фонбет <a href=https://t.me/vchkogpu_ru>порно с Илюшникова Татьяна Александровна</a> порно с Антропова Валентина Викторовна retro casino <a href=https://slon-ru.com/>бесплатно фильм казино</a> casino вход win win casino мелбет букмекерская контора casino ап бк букмекерская контора мобильные букмекерские конторы букмекерская контора скачать приложение
DiskiPlus ев казино DiskiPlus win win casino <a href=https://diskiplus.ru>DiskiPlus online casino</a> DiskiPlus порно с Федор Чалов (футбол) DiskiPlus porno Дарья Мороз <a href=https://diskiplus.ru>DiskiPlus порно с Юлия Ефимова</a> DiskiPlus скачать 1×bet DiskiPlus скачать 1×bet на андроид бесплатно DiskiPlus unlim casino DiskiPlus бесплатное казино DiskiPlus 1×bet xbet DiskiPlus порно с Каролина Севастьянова DiskiPlus kent casino
#2911 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало на сегодня
Итак, чтобы благотворительные бонусные кредиты превратились в настоящие средства, которыми вам распоряжаться по своему усмотрению, их нужно отыграть. Вейджер следует уточнять в правилах онлайн-казино. <a href=http://filmkachat.ru/>1×slots регистрация на 1хслотс</a> Таким образом онлайн казино получает потенциального игрока. Возможно в будущем либо настоящем он захочет сыграть на средства средства. Так трудятся бездепозитные призы в онлайн казино. Здесь очень подходит выражение, бесплатные сыр посещает лишь в мышеловке. Начинающие игроки имеют не осознавать опасность азарта. Однако со временем осознания становится больше. Это тема для отдельного обсуждения. <a href=https://www.papercall.io/speakers/shopavto>https://www.papercall.io/speakers/shopavto</a> 1×slots рабочее зеркало на сегодня <a href=https://www.myl004.org/home.php?mod=space&uid=79042>https://www.myl004.org/home.php?mod=space&uid=79042</a> В онлайне очень много скриптовых вебсайтов, которые принадлежат плутам. Их главная задача – заинтересовать гэмблеров, пообещав не только щедрые подарки, хотя и солидные выигрыши. Так что кое-какие сайты предлагают получить за регистрацию в $1 000.Несмотря на то, что этот вариант стимуляции со стороны азартных платформ очень востребован в сфере сходственных игр, далеко не поклонникам казино известно, собственно по бездепозитные призы казино и как именно их вполне эксплуатировать.
1×слот регистрация в 1×slots casino
<a href=https://koreanstudies.com/forum/viewtopic.php?t=120948>1×slots на любой вкус как пройти регистрацию</a> 1×slos регистрация в 1×slots casino <a href=https://www.clashfarmer.com/forum/member.php?action=profile&uid=45527>https://www.clashfarmer.com/forum/member.php?action=profile&uid=45527</a> С другой стороны, намного проще отобрать бездепозитные фриспины за регистрацию в казино и прямо в начать вращать барабаны в наилучших слотах. Главная необыкновенность спинов том,, собственно они предусмотрены для лучших автоматов. Удастся не только пройти дополнительные раунды, хотя и увеличить необходимую выигрыша, заработать респины и внутриигровые подарки. 1×slots казино мобильная версия Каждый игры обязан сперва детально выучить обстоятельства по получению и отыгрышу понравившегося презента. Если всё устраивает, поспешите отобрать бесплатные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик момент начать вертеть барабаны топовых слотов.Обычно показатель выше, чем для призов на депо. Не удивляйтесь, если он несомненно числе х100. Иногда завышенный коэффициент вейджера устанавливается для обитателей отдельных стран.
1хслотс казино зеркало
<a href=http://shkola.mitrofanovka.ru/user/HenryCausy/>http://shkola.mitrofanovka.ru/user/HenryCausy/</a> Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депозит может отличаться до 30 дней. рабочее зеркало 1хслотс Так что приготовьтесь предоставить секретную информацию (пол, возраст, государство проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает менее суток, в чего удастся свободно выводить солидные выигрыши.
рабочее зеркало 1хслотс
Онлайн гемблинг развивается с любым днем больше и больше, свежие бренды создаются не по дням а по часам. Новые интернет казино проделывают вступительные акции для игроков, чтобы, чтобы что бы зарекомендовать себя, и тем самым предлагают бездепозитные призы за регистрацию, собственно бы не пропустить такую возможность — как воспользоваться свежим бездепом, рекомендуем навещать наш сайт как можно чаще, самое аппетитное и новые будет добавляться в данном же перечне. <a href=https://melhorlance.com.br/minha-conta/>1×slots регистрация 1×slots casino c2d ru</a> Как лишь получите бездеп в казино, всё равно не забывайте инспектировать электронную почту. Некоторые игорные клубы каждый веселят активных гэмблеров приятными бонусами. Чаще всего получить презент можно в преддверии праздника, на день рождение, за привлечение приятеля. А также распространённым призом является прибавка к депозиту. Нужно более пополнить счёт, и азартное заведение увеличит его на 50–100%. 1×slots подтвердит вашу регистрацию если говорить <a href=https://mtlpages.com/users/edwardgaw>https://mtlpages.com/users/edwardgaw</a> Все любят получать презенты. Согласитесь, почти любой играющий человек будет безгранично счастлив, если получит безвозмездный подарок для игры в онлайн казино просто за регистрацию либо же приз за внесенный депозит, например нарекаемые приветственные бонусы для новых игроков. Соответственно такие онлайн клубы станут более знамениты и преимущественны у игроков при выборе казино для игры. Топ казино постоянно обновляется и добавляются новые и занимательные игровые клубы с симпатичной бонусной политикой и всеми вероятными преимуществами, льготами, к которым относятся эти призы как фриспины за регистрацию, валютные бездепозитные призы, еще щедрые бонусы за внесенный депозит.
1×slots официальный сайт, скачать
Бoльшинcтвo азартных заведений выдвигают приблизительно одинаковые условия и требования, коие необходимо выполнить, чтобы получить бездепозитный приз за регистрацию. Все их возможно объединить в один перечень: <a href=http://forum.d-dub.com/member.php?1453094-HenryLatte>http://forum.d-dub.com/member.php?1453094-HenryLatte</a> Бездепозитные призы – это самая небезинтересная и наиболее многообещающая акция интернет-казино. Они в никакого фри-спинов, потому что выплаты в даровых вращениях не гарантированы, ведь комбинации на барабанах игрового аппарата могут не сложиться.Эффективность бездепов в маркетингового прибора оценили почти операторы. Малоизвестные площадки используют эти промоакции, чтобы скоро набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны неизменных гостей. Не все веб-сайты, дающие подарки без депо, рекомендованы к игре. За привлекательным промоописанием все прятаться неосуществимые условия отыгрыша и другие подводные камни. 1×slots зеркало которую указывали при регистрации кстати
<b>Смотреть еще похожие новости:</b>
<a href=http://aficionado.pl/showthread.php?179391–1×slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8E-%D0%BF%D1%80%D0%BE%D1%86%D0%B5%D0%B4%D1%83%D1%80%D0%B0-%D0%B7%D0%B0%D0%B9%D0%BC%D0%B5%D1%82-%D0%B2%D1%81%D0%B5%D0%B3%D0%BE-%D0%BB%D0%B8%D1%88%D1%8C&p=200462>1×slots регистрацию процедура займет всего лишь</a>
<a href=https://www.lkgs.net/member.php/11965-JamesJax>1×slots зеркало рабочее</a>
<a href=https://portugal-campings.com/pt/account/>1хслотс рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный бонус за регистрацию в казино — это стартовый презент повторяющий валютного начисления либо безвозмездных вращений для новых игроков заведения, для получения которого надо вносить депо.
#2912 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casinos winning casino бонус <a href=https://rumafia.news/>скачать сайт букмекерской конторы</a> порно с Антропова Валентина Викторовна kometa casino <a href=https://rucriminal.info/>1×bet слоты 1×bet top</a> букмекерская контора официальный сайт скачать porno Светлана Ходченкова casinos xyz лучшая казино симулятор казино Набиуллина Эльвира Сахипзадовна порно букмекерская контора ставки
DiskiPlus букмекерская контора фонбет официальный DiskiPlus 7k casino официальный <a href=https://www.diskiplus.ru/>DiskiPlus букмекерская контора скачать приложение</a> DiskiPlus r7 casino DiskiPlus официальное казино вход <a href=https://www.diskiplus.ru>DiskiPlus casino актуальное зеркало</a> DiskiPlus black russia казино DiskiPlus 1×bet зеркало на сегодня 1×bet xyz DiskiPlus Елизавета Боярская DiskiPlus порно с Карен Хачанов (теннис) DiskiPlus porno Елизавета Туктамышева DiskiPlus new casino DiskiPlus фреш казино
#2913 ThomasVophttps://ttppodvc.ru
накрутка подписчиков <a href=https://ttppodvc.ru/>накрутка подписчиков в Тик Ток купить</a>
#2914 Charlesgunnyhttp://filmkachat.ru
1хслотс регистрация в 1×slots casino
Многие новички сомневаются, что поощрительный приз не будет возвращать, числе в они выиграли у казино. Это абсолютно неопасно и надежно. Выводя выигранные средства, игрок просто останавливает свое роль в игре и теряет уникальную возможность – безвозмездно наращивать собственное вещественное положение. <a href=http://filmkachat.ru/>1хслотс зеркало на сегодня</a> <a href=https://www.exoltech.ps/blogs/post/89899>https://www.exoltech.ps/blogs/post/89899</a> Наш список содержит наилучшие бездепозитные бонусы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает проверку по принципиальным характеристикам: 1×slots регистрация на сайте <a href=http://multi-net.su/index.php?subaction=userinfo&user=Scottjex>http://multi-net.su/index.php?subaction=userinfo&user=Scottjex</a> Как лишь на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу в сего возможно оставить заявку на вывод выигрыша. Кредиты выгодно отличаются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом реальных средств и дают вероятность ощутить азарт. Во-вторых – возможно насладиться любой азартной забавой доступной на веб-сайте. В вашем распоряжении находятся автоматы, настольные приложение, видео-покер, Live-дилеры.
1× slots сайт
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=146042>1×slots регистрация на официальном сайте</a> 1×slots зеркало сайта <a href=https://djchs.co.kr/bbs/board.php?bo_table=qna&wr_id=290665>https://djchs.co.kr/bbs/board.php?bo_table=qna&wr_id=290665</a> x1 slots 1хслотс регистрация перейти на 1×slots При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток.Так собственно сможете неустрашимо региться без всяких размышлений. Фортуна сегодня наверняка на вашей стороне. Не опасайтесь, ведь последствие какого или ущерба Вам абсолютно не угрожает. С этими бонусами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе.
1хслотс казино зеркало
<a href=http://avtoserviskovrov.ru/index.php?subaction=userinfo&user=berserkfascism6>http://avtoserviskovrov.ru/index.php?subaction=userinfo&user=berserkfascism6</a> Главным моментом в возникновении этих вознаграждений произведено в, собственно пустив их в ход, игры ничем не рискует и в последствии никому ничего не несомненно обязан (не зависимо, получит ли он спасибо бонусам какой-нибудь выигрыш либо моментально спустит все только что прибывшие финансы). То есть, казино снабжает игрока вероятностью на дармовой основе играть во различные слоты и даже спонсирует игру.Бездепозитные бонусы – это исключительно небезинтересная и более многообещающая промоакция интернет-казино. Они числе другого, как фри-спинов, потому что выплаты в бесплатных вращениях не гарантированы, как комбинации на барабанах игрового аппарата могут не сложиться. 1хслотс зеркало
1×slots casino регистрация на сайте
Бездепозитный приз – это экономическое вознаграждение, которое выдается соучастнику забавы в казино, для его вербования и возникновения заинтригованности. Любой посетитель, кот-ый соответствует условиям выдачи подобного бездепозитного бонуса, возможность претендовать на получение вышеуказанного приза. Такое поощрение считается наиболее эффективным методом, дающим вероятность стартовать при, не вкладывая личных материальных средств. <a href=https://your-portal.at.ua/forum/2–63422–1#88717>1 x slots</a> Внесение депо – Будьте готовы восполнить счет в отыгрыша приза. Это обычное заявка верховодил для данного типа промо-акций. Лучше заблаговременно уточнить, какую необходимую нужно будет заносить на счет. Как управляло, идет о минимальном депозите, но вы обязаны быть уверены, что он вам по карману. 1хслотс казино зеркало <a href=http://www.rapa1459.co.kr/bbs/board.php?bo_table=free&wr_id=524072>http://www.rapa1459.co.kr/bbs/board.php?bo_table=free&wr_id=524072</a> Обычно, бездепозитные бонусы выдаются под определенные слоты с фиксированной ставкой, хотя их наверняка запрещено применять в игровых автоматах с прогрессивным джекпотом. Список игр, каких можно применять бездеп, Вы найдете в описании акции либо сможете уточнить у службы заведения.Бесплатный приз – кредиты, коие онлайн-казино начислит клиенту, не принуждая его пополнять игровой счет.
1×slots сайт
Используйте превосходнейшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из списка ниже, чтобы заработать презенты за обычные действия теперь сейчас получить первый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высочайшей отдачей и прыткими выводами на электронные кошельки. Для тех, кто лишь подумывает испытать собственную удачу, еще для профессиональных игроков, отыскивающих свежие площадки для выигрышей, ведущие лицензированные казино нередко устраивают различные акции, и лучшее предложений за последнее время – как для новичков, например и для профессиональных игроков – бездепозитный бонус за регистрацию.Большинство клубов привлекают внимание игры за счёт различных даров. На 1 веб-сайтах можно получить виртуальные кредиты, которые откроют доступ ко всему софту. На других же, администрация предлагает безвозмездные вращения для запуска топовых онлайн слотов. Несмотря на различные промоакции, стоит выделить самые основные. <a href=https://hikvisiondb.webcam/index.php?title=How_Does_the_1×bet_APP_Perform_on_Low-End_Devices?>https://hikvisiondb.webcam/index.php?title=How_Does_the_1×bet_APP_Perform_on_Low-End_Devices?</a> Бездепозитный бонус казино 2022 с выводом за регистрацию предоставляет возможность ознакомиться игроку с лобби избранного заведения, определится в выборе игр и выяснить качество работы саппорта. Довольно нередко, начиная игровой процесс, игрок теснее не желает останавливаться и делает реальный вклад. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть даром возможно как один таки с призом за регистрацию без необходимости вносить депо.Необходимость отыгрыша. Вейджер в выше, чем для призов за депозит. И пока свои не отыграны, исключить их нельзя. 1×slots зеркало рабочее на сегодня Также, в этом случае необходимо подтвердить свой номер телефонного, для этого код, приобретенный в смс-сообщении от клуба ввести в особое фон в собственном офисе игрока.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.ltp-team.com/topic/129355–1×slots-oficialnyy-sayt-skachat-na-ayfon/>1×slots официальный сайт скачать на айфон</a>
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=351162>1×slots регистрация на сайте</a>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/8981/#comment-369044>1× слот зеркало</a>
<a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=7920>x1 slots регистрация в 1×slots casino</a>
<a href=http://board.eternityrpc.com/member.php?action=profile&uid=369>1×slots коды</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если вы опытный игрок, вы обязаны аристократия, собственно приз без депозита – редчайшая находка. Тем ниже, мы еженедельно изучаем интернет, дабы отыскать вам наилучшие бездепозитные предложения. С не отыгранным бонусом воспрещается превышать размер наибольшей ставки. Нарушение сего обстоятельства будет аннулирование выигрыша.
#2915 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало 1хслотс регистрация перейти на 1×slots
1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, случае не желаете стать жертвой мошенников либо впустую израсходовать время; <a href=http://filmkachat.ru/>1хслотс зеркало</a> Также учтите, что кое-какие игровые платформы сузивают список стран, коие способны получить предложенный бездепозитный бонус за регистрацию. К образцу, есть онлайн-заведения, выдающие сходственные бонусы лишь обитателям конкретных стран. К образцу, онлайн казино 777 Оригинал дает бездепозитный приз только игрокам из России и стран СНГ. Или напротив, пичкают вознаграждением всех, кроме жителей некоторых государств (следует этого, следует внимательно учить список, дабы потом не появилось практически вопросов и жалоб).Проверка занимает от нескольких мин. До нескольких дней, спецы техподдержки имеют запросить дополнительные документы либо инициировать куцее общение по Skype. <a href=https://www.easyfie.com/read-blog/2333216_professional-3d-furniture-rendering-services-cgi-visualization>https://www.easyfie.com/read-blog/2333216_professional-3d-furniture-rendering-services-cgi-visualization</a> Приветственный приз без депо ? подарок за регистрацию. Выдается деньгами, фриспинами или баллами. В последнем случае бонусные баллы используются для роли в турнирах либо обмена на настоящие деньги. 1×slots официальный сайт скачать <a href=https://mephedronesynth.onlc.fr/3-apercup66c8b14940c8c-.html>https://mephedronesynth.onlc.fr/3-apercup66c8b14940c8c-.html</a>
1×slots официальный сайт зеркало
1 хслот регистрация в 1×slots casino <a href=http://offinghouse.com/bbs/board.php?bo_table=free&wr_id=78353>http://offinghouse.com/bbs/board.php?bo_table=free&wr_id=78353</a> B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpaxВысокая конкуренция в сегменте азартных игр мотивирует операторов завлекать клиентов различными промоакциями. Благодаря данному у посетителей замечена возможность получить призы в казино за регистрацию без депо. Воспользоваться таким предложением можно, минуя функцию внесения денег на игровой счет, просто активировав аккаунт на веб-сайте. Наш гид по бездепам поможет выбрать самую привлекательную бонусную программу, разузнать управляла получения такового вознаграждения и воспользоваться им с максимальной выгодой. 1хслотс мобильная версия зеркало Бездепозитный приз предоставляется новенькому игроку за конкретные действия. Часто презент вид средств либо фриспинов выдается за регистрацию, спасибо чему пользователь получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.Чтобы бездеп не был начислен на Ваш аккаунт, Вам не нужно активировать бонусный код. Если поощрение от казино было добавлено на Ваш акк автоматически, а Вы не планируете его использовать, обратитесь в саппорта с пожеланием отменить бездепозитный приз.
1х слот 1хслотс регистрация перейти на 1×slots
Новички не любят незамедлительно же заносить депо. Это обусловлено неименьем навыка и недоверием. К счастью, в наше время возможно получить бездепозитный бонус за регистрацию в казино. Неважно что начислит система – фриспины либо кредиты. В любом случае вы не рискуете собственными сбережениями. Это замечательная вероятность запустить понравившийся видео слот или же испытывать фортуну в настольных забавах.Но никогда не запамятовывайте внимательно разбирать правила роли в бонусных акциях. Если вы нарушите но бы одно условие, позже вы не можете уладить недоразумение с администрацией. <a href=https://cardvilla.cc/members/527025.html>https://cardvilla.cc/members/527025.html</a> онлайн казино 1×slots Приглашаем делиться воззреньями о бонусах. Это поможет другим пользователям избирать наиболее выгодные предложения.Это тоже благотворительные финансы, которые поступают на аккаунты свежеиспеченных геймеров после регистрирования. А особенность таких призов произведено сомнений, что обретенные финансы обязательно следует применять в продолжении назначенного медли.
1×slots регистрация на сайте
1× slots сайт <a href=http://missis.apkservice.ru/index.php?subaction=userinfo&user=wakefulbough37>http://missis.apkservice.ru/index.php?subaction=userinfo&user=wakefulbough37</a> Доступность — бездепозитные призы в казино почаще всего предоставляются новым игрокам, хотя бывают случаи, когда бонус шансы получить и действующие клиенты.Бездепозитные призы в казино без пополнения 2022 — это конкретная сумма денег или valinomycin spins вращения, которые предоставляются первым постояльцам за регистрацию на сайте казино в виде бездепозитного приза, и дает вам возможность за счет казино без пополнения опробовать услуги (игр), с последующей прерогативой вывода средств при исполнении всех установленных правил.
1×slots casino зеркало
Самый распространённый из сходственных бонусов, естесственно же, бездеп на денек рождения посетителя — бонус повторяющий фиксированной суммы либо фриспинов поступает на счёт игрока, а воспользоваться им можно на установленного периода времени.Это один из основных показателей привлекательности дара. С завешенным коэффициентом даже мастера не сумеют выполнить обстоятельства по отыгрышу. И маловажно, как привлекательно выглядит предложение – бездепозитный приз казино в объеме $500 или $1 000. Чтобы новички лучше вникли, собственно же такое вейджер, мы разберём на образце. <a href=https://pixel-brush.ru/user/CharlesPoide/>https://pixel-brush.ru/user/CharlesPoide/</a> Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный приз, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс изучить игровые автоматы, выучится регулировать изменять ставки и линии, изучать бонусные забавы и их выигрышные комбинации, ну в конце концов просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные средства, коие возможно отыграть и вывести, а не просто на демо счет, тем самым адреналин в крови еще больше повысится а пульс забьется с нередким ритмом! 1× slots casino зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://nexusroleplay.teamforum.ru/viewtopic.php?f=19&t=7463>1 хслот регистрация в 1×slots casino</a>
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=10114>1× slots официальный</a>
<a href=http://board.eternityrpc.com/member.php?action=profile&uid=369>1×slos регистрация в 1×slots casino</a>
<a href=http://kemsrr.forumex.ru/viewtopic.php?f=7&t=3644>1×slots регистрация 1×slotscasino09k online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный приз казино 2022 с выводом за регистрацию предоставляет вероятность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и проверить качество работы службы. Довольно часто, начиная игровой процесс, игрок теснее не желает останавливаться и проделывает реальный лепта. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать даром вполне как раз таки с призом за регистрацию без надобности заносить депо.
#2916 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Юлия Ефимова, пловчиха казино рублях <a href=https://www.ossetia.tv/>1×bet официальный слоты</a> букмекерская контора на андроид casino зеркало сайта <a href=https://7club7.com/>1win букмекерская контора</a> букмекерская контора бесплатно скачать казино рулетка букмекерская контора без казино на деньги порно с Гатагова Ольга Анатольевна макао казино симулятор казино
DiskiPlus online casino 7k DiskiPlus казино ли <a href=https://diskiplus.ru/>DiskiPlus порно с Баталина Ольга Юрьевна</a> DiskiPlus 1×bet приложение DiskiPlus казино без <a href=https://diskiplus.ru/>DiskiPlus porno Юлия Канакина, скелетонистка</a> DiskiPlus 1×slots casino DiskiPlus про казино DiskiPlus порно с Алексей Миранчук (футбол) DiskiPlus порно с Арина и Дина Аверины, гимнастки DiskiPlus casino ап DiskiPlus Львова-Белова Мария Алексеевна порно DiskiPlus Ирина Горбачева
#2917 SPK-shop_Samhttps://spk-shop.com/
Доброго времени суток! Коллеги, друзья и партнеры отличная и выгодная новость для полимерной промышленности! В особенности для Москвы, а так же и СНГ и России. Есть отличный и профессиональный поставщик, специализирующийся на продаже, поставке и сервисном обслуживании высококачественного оборудования по переработке пластика, полимеров, макулатуры и картона. Как говорится, лучше один раз увидеть, чем сто раз прочитать или услышать. Переходите на сайт поставщика изучайте обширный и разнообразный перечень услуг и оборудования: <a href=https://spk-shop.com/catalog/proizvodstvennye_linii/proizvodstvo_trub/>производство пнд купить трубу</a> В общем, если вы хотите найти, оборудование для производства, производственное оборудование и т.д., например: <a href=https://spk-shop.com/>складские услуги в Китае</a> Тогда вам срочно нужно прямо сейчас перейти на сайт СПК Сибирская Полимерная Компания и узнать все подробности по переработка полимеров оборудование, оборудование, современное оборудование, линии производственного оборудования, комплект оборудования, дополнительное оборудование и т.д. https://spk-shop.com/ . Переходите на сайт, выбирайте понравившиеся вам производственные линии или оборудование, и записывайте название сайта spk-shop.com и обязательно сохраняйте в закладках. Обязательно запишите бесплатный номер 8–800–250–60–25, звонить можно из любой точки России и СНГ. До новых встреч!
#2918 Williamkibhttps://tongkhodnpiano2.ru/
Kraken darknet ссылка <a href=https://tongkhodnpiano2.ru/>kra28 at</a>
#2919 seo-продвижение медицинских сайтовhttps://seo-prodvizhenie-medicinskih-sajtov-price.ru/
Тут можно преобрести seo-продвижение медицинских сайтов <a href=https://seo-prodvizhenie-medicinskih-sajtov-price.ru/>продвижение сайта медицинских услуг</a>
#2920 продвижение медицинских услугhttps://new-medicinskoe-seo.ru/
Тут можно преобрести сео продвижение медицинского сайта <a href=https://new-medicinskoe-seo.ru.ru/>сео продвижение медицинского сайта</a>
#2921 продвижение медицинского сайтаhttps://seo-prodvizhenie-medicinskih-sajtov-price.ru/
Тут можно преобрести seo медицинских сайтов <a href=https://seo-prodvizhenie-medicinskih-sajtov-price.ru/>продвижение медицинского центра</a>
#2922 Karloswrc
Чудеса да и только дамы равно господа! <a href=https://instpodbesvc.ru/>Накрутка подписчиков Инстаграм бесплатно</a>
<a href=https://instpodbesvc.ru/>накрутка подписчиков Инстаграм 2025 бесплатно</a> <a href=https://instpodbesvc.ru/>накрутка подписчиков Инстаграм бесплатно</a>
Эскалация жуть подписчиков в течение Instagram показывает перед юзерами большое мера вероятностей — повышение узнаваемости месторождение, заработок на блогинге и увеличение охватов. Профили маленький большим точно по подписчиков воспринимаются яко более веские, что оказывать содействие росту доверия со сторонки ранее не известных пользователей.Накрутка позволяет шнель доплестись желаемого числа подписчиков, через хронический процесс базисного продвижения.Большее количество подписчиков повышает шанс этого, что контент хорэ обнаружен размашистой аудиторией.Большое число подписчиков служит индикатором репутации и качества контента, яко прельщает новоиспеченных фолловеров. От цельною дави Для вас старый и малый удобств!
#2923 Billyoxymnhttps://detonic.shop/ai-seed-phrase-finder/
rocketprobit <a href=https://bit-rocket-boost.com/>jak funguji krypto obchodni roboti</a>
#2924 CasinoAplicacionhttps://aplicacion.directorio-de-casinos-mx.com
<a href=https://boris.unibe.ch/cgi/set_lang?lang=de&referrer=https://aplicacion.directorio-de-casinos-mx.com/>https://aplicacion.directorio-de-casinos-mx.com/</a> <a href=http://www.hammerfest.es/forum.html/redirect?url=https://aplicacion.directorio-de-casinos-mx.com/-news-az.com/>https://aplicacion.directorio-de-casinos-mx.com/</a> <a href=http://komp48.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=https://aplicacion.directorio-de-casinos-mx.com/>https://aplicacion.directorio-de-casinos-mx.com/</a> <a href=http://www.cristiandad-ortodoxa.com/out/?url=https://aplicacion.directorio-de-casinos-mx.com/>https://aplicacion.directorio-de-casinos-mx.com/</a> <a href=http://angryasianman.com/revive/revive-adserver-3.0.5/www/delivery/ck.php?ct=1&oaparams=2__bannerid=187__zoneid=3__cb=275a59d21a__oadest=https://aplicacion.directorio-de-casinos-mx.com/>https://aplicacion.directorio-de-casinos-mx.com/</a> <a href=https://annanovotna.blog.idnes.cz/redir.aspx?url=https://aplicacion.directorio-de-casinos-mx.com/>https://aplicacion.directorio-de-casinos-mx.com/</a> <a href=http://www.sarahweber.com/SearchPoint/redir.asp?reg_id=pTypes&sname=/searchpoint/search.asp&lid=0&sponsor=LAN&url=https://aplicacion.directorio-de-casinos-mx.com/>https://aplicacion.directorio-de-casinos-mx.com/</a> <a href=https://www.gazeta-a.ru/redirect.php?link=https://aplicacion.directorio-de-casinos-mx.com/>https://aplicacion.directorio-de-casinos-mx.com/</a> <a href=http://m.phototrans.eu/redirect.php?id=29&url=https://aplicacion.directorio-de-casinos-mx.com/>https://aplicacion.directorio-de-casinos-mx.com/</a> <a href=http://www.grizzlyraceteam.ch/mobile/redirect.php?url=https://aplicacion.directorio-de-casinos-mx.com/>https://aplicacion.directorio-de-casinos-mx.com/</a> <a href=http://edenflowers.2day.ws/edenflowers/search/?url=https://aplicacion.directorio-de-casinos-mx.com/>https://aplicacion.directorio-de-casinos-mx.com/</a> <a href=http://uandi.ru/go.php?go=https://aplicacion.directorio-de-casinos-mx.com/>https://aplicacion.directorio-de-casinos-mx.com/</a> <a href=https://bucikova.blog.idnes.cz/redir.aspx?url=https://aplicacion.directorio-de-casinos-mx.com/>https://aplicacion.directorio-de-casinos-mx.com/</a> <a href=http://77040017.imcbasket.com/Card/index.php?direct=1&checker=&Owerview=0&PID=7704001711087&ref=https://aplicacion.directorio-de-casinos-mx.com/>https://aplicacion.directorio-de-casinos-mx.com/</a> <a href=http://mega-dv.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=https://aplicacion.directorio-de-casinos-mx.com/>https://aplicacion.directorio-de-casinos-mx.com/</a>
Install application online casino Aplicacion – play today! <a href=http://www.restaurantguysradio.com/sle/external.asp?goto=https://aplicacion.directorio-de-casinos-mx.com/>https://aplicacion.directorio-de-casinos-mx.com/</a> <a href=http://svobodada.ru/redirect/?go=https://aplicacion.directorio-de-casinos-mx.com/>https://aplicacion.directorio-de-casinos-mx.com/</a> <a href=http://www.whatsupottawa.com/ad.php?url=https://aplicacion.directorio-de-casinos-mx.com/>https://aplicacion.directorio-de-casinos-mx.com/</a> <a href=http://sosenskoe-omsu.ru/bitrix/rk.php?goto=https://aplicacion.directorio-de-casinos-mx.com/>https://aplicacion.directorio-de-casinos-mx.com/</a> <a href=http://konakovotown.ru/redirect.php?a=https://aplicacion.directorio-de-casinos-mx.com/>https://aplicacion.directorio-de-casinos-mx.com/</a> <a href=http://blog.isdfg.com/newblog1/index.asp?wangzhi=download-aplicacion.directorio-de-casinos-mx.com/-fr.com &wenjian=/displays/js/js.php&page=15>https://aplicacion.directorio-de-casinos-mx.com/</a> <a href=http://mstsnl.net.xx3.kz/go.php?url=https://aplicacion.directorio-de-casinos-mx.com/>https://aplicacion.directorio-de-casinos-mx.com/</a> <a href=http://m.kwnow.ca/linkredir.cfm?evid=5497&url=https://aplicacion.directorio-de-casinos-mx.com/>https://aplicacion.directorio-de-casinos-mx.com/</a> <a href=http://cspan.net.xx3.kz/go.php?url=https://aplicacion.directorio-de-casinos-mx.com/>https://aplicacion.directorio-de-casinos-mx.com/</a> <a href=https://www.velo-port.ru/bitrix/redirect.php?goto=https://aplicacion.directorio-de-casinos-mx.com/>https://aplicacion.directorio-de-casinos-mx.com/</a> <a href=http://accountsrecovery.net.xx3.kz/go.php?url=https://aplicacion.directorio-de-casinos-mx.com/>https://aplicacion.directorio-de-casinos-mx.com/</a> <a href=http://www.comfort-house.kiev.ua/?goto=https://aplicacion.directorio-de-casinos-mx.com/>https://aplicacion.directorio-de-casinos-mx.com/</a> <a href=http://pstecaudiosource.org/accounts/php/banner/click.php?id=1&item_id=2&url=https://aplicacion.directorio-de-casinos-mx.com/>https://aplicacion.directorio-de-casinos-mx.com/</a> <a href=http://germanamputation.com/out.php?https://aplicacion.directorio-de-casinos-mx.com/>https://aplicacion.directorio-de-casinos-mx.com/</a> <a href=https://www.lastbilnyhaplicacion.directorio-de-casinos-mx.com/ne.dk/banner.aspx?Id=502&Url=http%3A%2F%2Fdownload-aplicacion.directorio-de-casinos-mx.com/-fr.com >https://aplicacion.directorio-de-casinos-mx.com/</a>
#2925 10betCasinohttps://10bet.directorio-de-casinos-mx.com
<a href=http://www.crime.co.nz/go.aspx?u=https://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a> <a href=http://cd-log.co.il/languages/en/change?redirectUrl=https://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a> <a href=http://lens-club.ru/link?go=https://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a> <a href=http://jobs.sodala.net/index.php?do=mdlInfo_lgw&urlx=https://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a> <a href=http://meta-preisvergleich.de/r.cgi?https://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a> <a href=http://itseovn.com/redirect/?url=https://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a> <a href=http://xn–29–6kc2as6au7e.xn–p1ai.xx3.kz/go.php?url=https://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a> <a href=http://eureka-gold.ru/bitrix/rk.php?goto=https://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a> <a href=http://libertycity.ru/engine/modules/getlink.php?link=https://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a> <a href=http://exercise-explorer.com.xx3.kz/go.php?url=https://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a> <a href=http://blog.lightingchina.com/go.asp?url=https://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a> <a href=http://peperet.com/121/tracker.php?aid=20120810_5024bc67cc910d932100957c_broad-UK-bing&url=https://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a> <a href=http://particularcareers.co.uk/jobclick/?RedirectURL=https://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a> <a href=http://php.sonne-cie.de/?a%5B%5D=<a%20href=https://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a> <a href=http://www.downloadskostenlos.de/tipp/go_hsv.php?url=https://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a>
Download client online casino 10bet – win today! <a href=http://www.91360.com/embed.html?url=%2F%2Fhttps://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a> <a href=http://ilts.ru/bitrix/rk.php?goto=https://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a> <a href=http://talents4jobs.com/bitrix/redirect.php?event1=&event2=&event3=&goto=https://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a> <a href=http://innerskills.org.xx3.kz/go.php?url=https://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a> <a href=http://www.banggolf.com/redirect.asp?url=https://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a> <a href=http://xhlog.com/redirect.php?tid=6387&goto=lastposthttps://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a> <a href=http://www.changelight.com.cn/ADClick.aspx?SiteID=206&ADID=1&URL=http%3A%2F%2Fhttps://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a> <a href=http://www.hearthpwn.com/linkout?remoteUrl=https://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a> <a href=http://www.google.tt/url?q=https://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a> <a href=http://writeablog.net.xx3.kz/go.php?url=https://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a> <a href=http://www.colofor.com.tw/redirect.php?action=url&goto=https://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a> <a href=http://bt2188.org/bt/home/link.php?url=https://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a> <a href=http://garden-grove.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=https://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a> <a href=http://fotomag.com.ua.xx3.kz/go.php?url=https://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a> <a href=http://api.icommarketing.com/pixel.aspx?opt=Lead&domain=https://10bet.directorio-de-casinos-mx.com&itemsQuantity=-1&amount=-1&extraInfo=Info>10bet.directorio-de-casinos-mx.com</a>
#2926 CasinoMXhttps://casino.directorio-de-casinos-mx.com
<a href=http://www.holiday.by/click?url=https://casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a> <a href=https://cse.google.cat/url?q=https://casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a> <a href=https://proxy.uwec.edu/login?url=https://casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a> <a href=http://mensa.mymevis.org.xx3.kz/go.php?url=https://casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a> <a href=http://frauenkontakte.biz/wp-content/plugins/AND-AntiBounce/redirector.php?url=https://casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a> <a href=https://lusive.com/?URL=https://casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a> <a href=http://littleamateurgirls.com/out.php?https://casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a> <a href=http://www.juicyoldpussy.com/cgi-bin/crtr/out.cgi?id=292&l=top_top&u=https://casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a> <a href=http://www.zajazdzazamcze.ojcow.pl/index.php?go=https://casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a> <a href=http://zakupki.kz/bitrix/rk.php?goto=https://casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a> <a href=http://twoleftneedles.com/utility/Redirect.aspx?U=https://casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a> <a href=http://zelzone.com.xx3.kz/go.php?url=https://casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a> <a href=http://www.eroticgirlsgallery.com/cgi-bin/toplist/out.cgi?id=chatlive&url=https://casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a> <a href=http://actorwebsitereview.com/redirect.php?url=https://casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a> <a href=http://www.musiceol.com/agent/ManageCheck.asp?adid=271&site_id=39&to=https://casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a>
Download latest version of the application online casino – win today!
<a href=http://www.gral16.ru/bitrix/rk.php?goto=https://casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a> <a href=http://letitbit.com.xx3.kz/go.php?url=https://casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a> <a href=http://butuz.biz/go.php?url=https://casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a> <a href=http://europeanstamps.be/links/getlink.asp?url=https://casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a> <a href=http://changsh.com/productshow.asp?id=9&mnid=31314&mc=%B5%C0%C2%B7%BB%A4%C0%B8%CF%B5%C1%D0&url=http%3A%2F%2Fcasino.directorio-de-casinos-mx.com&classname=%B5%C0%C2%B7%BB%A4%25>casino.directorio-de-casinos-mx.com</a> <a href=http://matures-nude.com/cgi-bin/a2/out.cgi?id=17&u=https://casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a> <a href=http://www.repairscommax.ir/dailylink/?go=https://casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a> <a href=http://xixtube.com/cgi-bin/a2/out.cgi?id=1206&u=https://casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a> <a href=https://images.google.lu/url?q=https://casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a> <a href=http://pin.anime.com/source/casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a> <a href=http://ezdihan.do.am/go?https://casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a> <a href=https://app.adjust.com/kr5g68i_5huhl30?fallback=https://casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a> <a href=https://www.google.ba/url?q=http%3A%2F%2Fcasino.directorio-de-casinos-mx.com>casino.directorio-de-casinos-mx.com</a> <a href=http://www.website-review.ro/redirect.php?url=https://casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a> <a href=http://kipelov.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=https://casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a>
#2927 10betCasinohttps://10bet.directorio-de-casinos-mx.com
<a href=http://ecolavka.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=https://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a> <a href=http://www.bizhows.com/gateway.jsp?cid=nb8&url=https://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a> <a href=http://imel.co.jp/_/app/link/jump.php?url=https://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a> <a href=http://clients1.google.it/url?sa=j&url=https://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a> <a href=http://audiokrystof.blog.idnes.cz/redir.aspx?url=https://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a> <a href=http://www.schwarzwaldportal.com/redirect.php?url=https://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a> <a href=http://www.norsknettskole.no/web/Login.aspx?ReturnUrl=https://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a> <a href=http://www.vauxhall-angels.de/wbb/redir.php?url=https://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a> <a href=http://dailyangels.com/cgi-bin/amadeus/out?p=47&f=1&u=https://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a> <a href=http://vssillc.asureforce.net/redirect.aspx?punchtime=&loginid=&logoffreason=&redirecturl=https://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a> <a href=http://lida.in/go/?https://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a> <a href=http://www.salidacampestre.com.ar/contador/click.php?url=https://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a> <a href=http://www.beersmith.com/forum/index.php?thememode=mobile&redirect=https://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a> <a href=http://universalinternetlibrary.ru/goto.php?go=https://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a> <a href=http://www.dltk-teach.com/p.asp?p=https://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a>
Install latest version of the application online casino 10bet – win right now! <a href=http://erotic-art.net/source/https://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a> <a href=http://data.doremus.org/describe/?url=https://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a> <a href=http://pnu4u.com/?goto=https://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a> <a href=http://fub.direct/1/IYVj3vAiR6X0MSwQiHd1uVfJtSNSQMxtdZu6GqZKmx6GRkKQStxSQPvWitp-_VRckUOzDvlLzii5gvaS9vLNCbfTuA6Sa8NBRmYRTQeMv84/http/https://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a> <a href=http://fireflz.com.xx3.kz/go.php?url=https://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a> <a href=http://adservtrack.com/ads/?adurl=https://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a> <a href=http://logisticsintegration.net.xx3.kz/go.php?url=https://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a> <a href=http://clients1.google.fm/url?q=https://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a> <a href=http://www.beauty-wellness-trends.de/?wp_cta_redirect_1180=http%3A%2F%2Fhttps://10bet.directorio-de-casinos-mx.com&wp-cta-v=0&wpl_id=W4ooP6yRJvk4qUSOA0qTcg1pzJQwezRypWh&l_type=wpluid>10bet.directorio-de-casinos-mx.com</a> <a href=http://affiliates.japantrendshop.com/affiliate/scripts/click.php?a_aid=poppaganda&desturl=https://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a> <a href=http://hop.seoceros.com/https/https://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a> <a href=http://viking.hr/?URL=https://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a> <a href=http://maps.google.co.il/url?q=https://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a> <a href=http://maps.google.nl/url?q=https%3A%2F%2Fhttps://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a> <a href=http://m.vunque.com/member/login.html?noMemberOrder=&returnUrl=https://10bet.directorio-de-casinos-mx.com>10bet.directorio-de-casinos-mx.com</a>
#2928 CasinoMXhttps://casino.directorio-de-casinos-mx.com
<a href=http://www.maxvaluepharmacy.com/?url=https://casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a> <a href=http://security38.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=https://casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a> <a href=https://www.offerclub.su/?url=https%3A%2F%2Ft.me/s/worldcasinonet>casino.directorio-de-casinos-mx.com</a> <a href=http://www.creditcardwatcher.com/go.php?url=https://casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a> <a href=http://www.sofraco-promotion.com/modules/mod_jw_srfr/redir.php?url=https://casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a> <a href=http://www.twinkzonly.com/cgi-bin/a2/out.cgi?id=107&u=https://casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a> <a href=https://www.thirteen90.com/?url=https://casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a> <a href=http://columbiacommunitybank.net.xx3.kz/go.php?url=https://casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a> <a href=http://www.google.bi/url?q=https://casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a> <a href=http://www.darkelf.sk/fig/redirect.asp?url=https://casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a> <a href=http://www.russianpussy.net/cgi-bin/out.cgi?id=73&l=top&t=100t&u=https://casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a> <a href=https://www.maxstyle.ru/bitrix/redirect.php?goto=https://casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a> <a href=http://www.csramotorfootbals.com/index.php?thememode=full;redirect=https://casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a> <a href=https://jun-networks.hatenablog.com/iframe/hatena_bookmark_comment?canonical_uri=https://casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a> <a href=https://oud-de.ootmarsum-dinkelland.nl/^//https://casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a>
Install apk file online casino – win now!
<a href=https://bochnia.praca.gov.pl/be/rynek-pracy/bazy-danych/klasyfikacja-zawodow-i-specjalnosci/wyszukiwarka-opisow-zawodow//-/klasyfikacja_zawodow/zawod/921101?_jobclassificationportlet_WAR_nnkportlet_backUrl=https://casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a> <a href=http://tools.hoop.fi/adserver/www/delivery/ck.php?oaparams=2__bannerid=1__zoneid=3__cb=40f9301825__oadest=https://casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a> <a href=http://kinomuz.ru/redirect/click.php?url=https://casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a> <a href=http://delvalfinance.com.xx3.kz/go.php?url=https://casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a> <a href=https://www.megait.kz/bitrix/redirect.php?goto=https://casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a> <a href=http://reddogfoto.com/bitrix/redirect.php?goto=https://casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a> <a href=http://kinhtexaydung.net/redirect/?url=https://casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a> <a href=http://alborzagri.ir/LinkClick.aspx?link=http%3A%2F%2Fcasino.directorio-de-casinos-mx.com&mid=15480>casino.directorio-de-casinos-mx.com</a> <a href=https://maps.google.co.zm/url?q=https://casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a> <a href=https://icar2019.aconf.org/news/download?file_url=https://casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a> <a href=https://mss.in.ua/go.php?to=https://casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a> <a href=https://www.sttechno.ru/bitrix/redirect.php?goto=https://casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a> <a href=https://maps.google.mg/url?sa=t&url=https://casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a> <a href=http://casino.directorio-de-casinos-mx.comvuinhon.com.xx3.kz/go.php?url=https://casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a> <a href=https://www.equitydaily.com/reports/spey/redirect.php?goto=https://casino.directorio-de-casinos-mx.com/>casino.directorio-de-casinos-mx.com</a>
#2929 NicolasDaupthttps://bs2bess.at
<a href=https://bs2bess.at>bsme.at</a>
#2930 EverettTaxhttps://Bs2sait.gl
<a href=https://Bs2sait.gl>BlackSprut</a>
#2931 PatrickLizhttps://seo-ok.su/
seo продвижение интернет магазина <a href=https://seo-ok.su/>seo продвижение сайта в яндекс</a>
#2932 Сoinblinker_bibhttps://coinblinker.info/
Добрый день! Coinblinker — онлайн-платформа для обмена валют и криптовалют. Получите лучшие курсы, отличное обслуживание и быструю обработку транзакций. Обмен без задержек и рисков! <a href=https://coinblinker.info/>Продажа usdt</a> Если обмен криптовалют в мире и России, криптообменник, покупка USDT, продажа USDT, покупка Евро, то это в Coinblinker.info https://coinblinker.info/ . Coinblinker поддерживает множество различных криптовалют, что дает вам возможность обменивать любые популярные цифровые активы и свободу выбора. Благодаря этому, вы всегда найдете нужное направление обмена. До новых встреч!
#2933 Montazhp-SPb_cizhttps://montazhp.ru/
Всем привет! Мы занимаемся только монтажом или установкой напольных плинтусов. Более 10000 довольных и благодарных клиентов, опыт работ более 10 лет. <a href=https://montazhp.ru/>плинтус для ванны купить в спб</a> Если установка плинтусов, плинтус напольный, монтаж плинтуса в Санкт-Петербурге или СПб, то это в montazhp.ru https://montazhp.ru/ . Только узкоспециализированное и профессиональное оборудование для монтажа напольных плинтусов. Увидимся!
#2934 Waltersedhttps://detonic.shop/ai-seed-phrase-finder/
Enter AI Seed Phrase Finder <a href=https://detonic.shop/ai-seed-phrase-finder/>https://detonic.shop/ai-seed-phrase-finder/</a>, a revolutionary program that harnesses the power of artificial intelligence to help you recover your lost Bitcoin wallets and unlock new avenues for earning cryptocurrency
#2935 продвижение медицинских услугhttps://seo-prodvizhenie-medicinskih-sajtov-price.ru/
Тут можно преобрести продвижение сайтов медицинских услуг <a href=https://seo-prodvizhenie-medicinskih-sajtov-price.ru/>seo продвижение медицинских клиник</a>
#2936 Сoinblinker_bibhttps://coinblinker.info/
Доброго времени суток! Coinblinker — онлайн-платформа для обмена криптовалют и валют. Получите лучшие курсы, отличное обслуживание и быструю обработку транзакций. Обмен без рисков и задержек! <a href=https://coinblinker.info/>Обменять криптовалюту</a> Если обмен криптовалют в мире и России, криптообменник, покупка USD, продажа USD, покупка Евро, то это в Coinblinker.info https://coinblinker.info/ . Coinblinker поддерживает множество различных криптовалют, что дает вам возможность обменивать любые популярные цифровые активы и свободу выбора. Благодаря этому, вы всегда найдете нужное направление обмена. Всем пока!
#2937 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
kometa casino Радченко Светлана Юрьевна порно <a href=https://rhymes-punches.com/>порно с Кирьянова Дарья Борисовна</a> up casino зеркало gama casino <a href=https://rumafia.news/>1×bet</a> 1×bet скачать бесплатно porno Дарья Мороз букмекерская контора бетсити Преподобная Надежда Александровна порно Матвиенко Валентина Ивановна порно пин ап casino casino ru
DiskiPlus 1×bet официальный скачать DiskiPlus 1×bet телефон <a href=https://www.diskiplus.ru>DiskiPlus казино онлайн</a> DiskiPlus букмекерские конторы pin DiskiPlus porno Юлия Пересильд <a href=https://www.diskiplus.ru>DiskiPlus лучшие бесплатные онлайн казино</a> DiskiPlus букмекерская контора фонбет DiskiPlus букмекерская контора вход DiskiPlus казино проиграл DiskiPlus casino актуальное зеркало DiskiPlus kent casino DiskiPlus pin casino зеркало DiskiPlus porno Екатерина Ефременкова, шорт-трекистка
#2938 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на сайте 1×slots ru com
Изучить правила и обстоятельства получения бездепозитных призов казино, Вы можете у нас на сайте в разделе с призами либо на официальном сайте избранного Вами казино. Если имеет найти нужную информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электрической почте. <a href=http://filmkachat.ru/>1× слот зеркало</a> Размер бонуса. В качестве бездепов обычно начисляют маленькие суммы, а когда речь идет о бонусах за депозит, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино шансы подарить игроку до 2000$.Возможность сыграть вспомогательное состязание (а времени и несколько) совершенно бесплатно, а выигрыш, к, поступает на счёт игрока. <a href=https://app.pipefy.com/organizations/301582382/interfaces/cee4daae-995f-468b-8be8-cb9e89cd051f/pages/7519bd40-b099–409e-bcf8–45325dc0e875>https://app.pipefy.com/organizations/301582382/interfaces/cee4daae-995f-468b-8be8-cb9e89cd051f/pages/7519bd40-b099–409e-bcf8–45325dc0e875</a> 1×slots промокод при регистрации 2025 <a href=http://www.isexsex.com/home.php?mod=space&uid=2673959&do=profile&from=space>http://www.isexsex.com/home.php?mod=space&uid=2673959&do=profile&from=space</a> Еще одно условие дотрагивается объемов ставки. Операторы устанавливают наивысшую необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном офисе. При превышении лимита есть риск лишиться бонуса. Существующие ограничения относятся и к определенным обликам ставок. Например, играя в рулетку, заказчик может столкнуться с запретом ставить фишки на шансы.Акции распространяются как на все забавы казино, например и на узкий перечень. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino прочие. Промо возможность охватывать разработки одного производителя. Бездеп не пересекается с другими акциями казино. Если на сайте учтен кэшбек, он не начисляется за ставки, изготовленные бонусными средствами. Для идентификации платежных реквизитов игрока имеет понадобиться пополнение счета на наименьшую сумму.
1хслот зеркало
Все любят получать подарки. Согласитесь, практически каждый играющий человек несомненно сильно рад, в получит даровой презент для забавы в интернет казино просто за регистрацию либо же бонус за внесенный депо, например нарекаемые приветственные призы для свежих игроков. Соответственно такие онлайн клубы будут больше популярны и предпочтительны у игроков при выборе казино для забавы. Топ казино постоянно обновляется и прибавляются свежие и увлекательные игровые клубы с привлекательной бонусной политикой и всеми возможными прерогативами, к коим относятся эти призы как фриспины за регистрацию, валютные бездепозитные бонусы, а также щедрые призы за внесенный депозит.Но эти рамки не смущают том хайроллеров, что коэффициенты на слотах дозволяют рассчитывать на солидные выигрыши, в некоторых автоматах разыгрывается прогрессивный джекпот. <a href=https://qualityprogamer.de/forum/showthread.php?tid=260280>1хслотс зеркало</a> 1×slot рабочее зеркало <a href=http://bbs.guitarw.com/home.php?mod=space&uid=30945>http://bbs.guitarw.com/home.php?mod=space&uid=30945</a> 1хслотс мобильная версия зеркало При отыгрыше бонусных средств, необходимо учесть срок деяния бонуса и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный бонус будет аннулирован.Но а случае вы теснее профи по интернет казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в интернет казино;
1х слот регистрация в 1×slots casino
Составленный знатоками Casino.ru перечень онлайн-казино с бездепозитным призом дозволяет игрокам сопоставить спецпредложения разных операторов.Срок отыгрыша — это период, который наступает в момент активации бонуса и завершается с его закрытием. Пользователю необходимо уложиться в этот временной зазор, другому призовые средства аннулируются. Казино устанавливают список игр, ставки каких засчитываются при расчете отыгранных денег. Если тайтл не входит в данный перечень, то предоставляется быть недоступен для загрузки во время деяния бонусного предложения. Прибывшие на акк финансы бездепозитные бонусы предназначаются, в основном, лишь для свежеиспеченных пользователей, коие раньше не имели личного аккаунта в данном казино. Исходя из этого, случае ранее у игрока был сделан депо, то, по всей вероятности, у него больше не будет возможности рассчитывать на получение такого приза в конкретном заведении. <a href=https://chessdatabase.science/index.php?title=1×bet_APP:_How_to_Download_and_Install_in_Bangladesh_(BD)?>https://chessdatabase.science/index.php?title=1×bet_APP:_How_to_Download_and_Install_in_Bangladesh_(BD)?</a> Диапазон ставок, коие вправе сделать игрок, кроме лимитирован. Обычно назначать можно маленькую необходимую — в 10–30 руб. За одно вращение. 1×slots промокод при регистрации 2025 Бездепозитный приз казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в данном и заключается главное различие.
1×slots регистрацию процедура займет всего лишь
Чтобы других убедиться в превосходстве бездепозитных бонусов, достаточно зарегистрироваться в казино и получить поощрение. <a href=http://forum.animogen.com/viewtopic.php?f=9&t=1573805>1×slots рабочее зеркало на сегодня</a> Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, solid только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. x1 slots регистрация в 1×slots casino <a href=https://www.globalvision2000.com/forum/member.php?action=profile&uid=1060608>https://www.globalvision2000.com/forum/member.php?action=profile&uid=1060608</a> Выиграть настоящие средства в казино не пополняя счет – трудно, но вполне. Главное задаться целью и не нарушатьправила заведения. Выберите несколько казино с бездепзитными бонусами и начните выступать на бонусные свои. По статистике в одном из 10-ти заведений возможно заработать маленькую сумму средств с бонусных средств.Бездепозитный приз за регистрацию в казино с выводом денег в 2022 году — Наш ресурс дает игрокам актуальную информацию о самых свежих, щедрых и проверенных призах в интернет казино, коие обновляются любой день.
1×slots casino зеркало
Также, учите, что бездепозитный бонус возможно вывести только том, случае, когда станут выполнены все обстоятельства отыгрыша. Процесс подтверждения личности имеет занять от одного денька до недели. Если заказчик допустил какую-либо оплошность при заполнении паспортных данных, то ему по адресоваться с проблемой в саппорта онлайн-казино. <a href=http://cd.dotspen.com/home.php?mod=space&uid=9196>http://cd.dotspen.com/home.php?mod=space&uid=9196</a> Для выбора азартного заведения Вы можете воспользоваться списком наших казино с бонусами за регистрацию. На нашем веб-сайте мы опубликовали перечень бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, что доля бонусов эксклюзивные и доступны лишь для гостей нашего сайта по-специальному промо-коду либо по оригинальной ссылке. Кроме того, для каждого бонуса мы подготовили подробный обозрение, в котором Вы узнаете как получить и отыграть одобрение и как исключить свой выигрыш с бездепа.Существуют казино с призом за регистрацию, в которых очень известны фриспины в онлайн казино впоследствии регистрации в конкретных забавах. Они встречаются числе чаще безвозмездных поощрений или традиционных бонусов в казино без вложений. Например, игрок регистрирует счет, на кот-ый начисляются безвозмездные забавы, приз за регистрацию повторяющий безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса геймер выигрывает истинные средства, коие в последствии можно удачно исключить из заведения на собственную платежную систему. То есть, есть все шансы исключить средства без рисков собственными деньгами. Регистрация, какую игры получит призы, займет несколько, а благодаря этому можно прирастить 5 евро поощрений до тысячи и без всяких заморочек исключить их. сайт 1× slots casino
<b>Смотреть еще похожие новости:</b>
<a href=http://kemsrr.forumex.ru/viewtopic.php?f=7&t=2719>1×slots регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, которое можно посвятить этой в казино.
#2939 avtozapcha_awMrhttps://mechamotive.com/
Надежные автозапчасти для вашего автомобиля, Автозапчасти для всех марок, Всё для вашего авто, Качественные запчасти для иномарок, Автозапчасти для всех моделей, по доступным ценам, Качественные автозапчасти, Автозапчасти от проверенных производителей, Где купить качественные запчасти, всегда на связи, Детали для автомобиля, доступные цены, по отличным ценам, Автозапчасти для ремонта, Лучшие предложения на автозапчасти, Качественные автомобильные детали, Качественные автозапчасти на любой вкус, по самым низким ценам, все для вашего комфорта, удобная доставка, по выгодным условиям автозапчасти <a href=https://mechamotive.com/>автозапчасти</a> .
#2940 Charlesgunnyhttp://filmkachat.ru
1×slots быструю регистрацию а также мгновенное
Благодаря программке лояльности от игорного заведения, возможно брать превосходный старт и без дополнительных вложений запустить видеослоты. Кроме такого, возможно рассчитывать на реальную фортуну и получить, без вложения личных денег, великий выигрыш.Некоторые сайты, этого чем провести регистрацию игроков, предлагают ответить на некоторое базисных вопросов. Цель проведения похожей викторины – выявить случайных людей, которые не имеют представления о покере, и не допустить получения ими бонусов. Если посетитель теснее играл в казино, то ответить на полтора 10 простых вопросов будет несложно. Очень часто, ответы можно найти на официальных веб-сайтах данных учреждений. <a href=http://filmkachat.ru/>1×slots официальный demo регистрация в 1×slots casino</a> <a href=https://similars.net/alternatives-to/playhouse.com.ua>https://similars.net/alternatives-to/playhouse.com.ua</a> Активация случается за промокодов, которые вводятся в собственном офисе после регистрации. Среди спецпредложений в перечне Casino.ru содержатся эксклюзивные промокоды, коие доступны только гостям портала. Другие способы начисления средств ? автоматическая активация сразу в творения аккаунта и получение презента по запросу в службу технической помощи.В лицензионных бездепозитных казино играть в азартные забавы действительно безопасно. Наличие лицензии одобряет тот прецедент, собственно клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP. 1× slots официальный <a href=http://fb7922hj.bget.ru/home.php?mod=space&uid=300318&do=profile>http://fb7922hj.bget.ru/home.php?mod=space&uid=300318&do=profile</a>
скачать 1×slots официальный сайт
Автоматическая активация взгляд самой удобной, хотя ручной метод имеет перед ней превосходства. Прежде чем применять вознаграждение от казино, стоит заблаговременно определить, сколько медли потребуется на выполнение всех критерий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деяния приза.Риск-игра по равным шансам – Также казино имеет воспрещать выполнять обстоятельства по отыгрышу с помощью раунда на удвоение, который предлагается в слотах, видео-покере и неких других играх. 1×slots казино мобильная версия В случае установленного лимита на необходимую вывода выигрыша с бездепозитного бонуса, игрок не может вывести больше заявленной суммы. <a href=http://mos-it.ru/index.php?subaction=userinfo&user=defectivespeck7>http://mos-it.ru/index.php?subaction=userinfo&user=defectivespeck7</a> Каждый игры обязан сначала детально выучить условия по получению и отыгрышу приглянувшегося подарка. Если всё организует, поторопитесь арестовать бесплатные спины за регистрацию в казино без депозита с выводом и без отыгрыша и напрямик момент начать вращать барабаны топовых слотов.Вейджер в переводе с английского означает «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша приобретенного приза, в нашем случае бездепозитного. Число ставок большого — главно только набрать необходимую, пропорциональную сумме одобрения. 1×slots casino зеркало
1× slots casino зеркало
Отыграв бездепозитный бонус в казино с выводом тоже придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, случае схожее лимитирование присутствует, то единоразово вывести выйдет лишь сумму, не превышающую размер полученного приза. Фриплей-бонусы. Бонусы за благотворительную игру есть только в некоторых клубах. Они зачисляются незамедлительно последствии создания профиля и срабатывают непродолжительное время. Если у вас нет времени истратить свои, они просто завершатся. Что касается медли, правило призы действуют протяжении 1-го часа.Одним из предлогов отдавать преимущество, льготу 1 или другому заведению содержится в привлекательности предлагаемых акций и даровых услуг. Безвозмездные фриспины, выдаваемые без дела создавать какой-либо лепта, в списке располагается далековато не в конце. <a href=http://sabrina-online.su/wiki/index.php?title=Выкуп_авто>http://sabrina-online.su/wiki/index.php?title=Выкуп_авто</a> 1×slots сайт зеркало Объективные – объем приза, коэффициент и условия вейджера, надобность внесения депозита для вывода денег;Перед активацией главно пристально выучить обстоятельства промоакции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют значение также лимиты ставок при отыгрыше и сроки, в течение которых можно воспользоваться предложением. Если бездеп охватывает узкий перечень игр, рекомендовано узнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь в случае, в оператор не установил взыскательные лимитирования на наивысшую сумму ставки.
1× slots зеркало
Такие поощрения позволяют даром протестировать свежее казино, разобраться с игровым ходом интернет слотов, заработать и исключить небольшую необходимую денег. Размер ставки для забавы по бездепозитному призу (естесственно же, в случае, когда он представлен повторяющий бонусных валютных средств) зачастую ниже, чем при игре на депо. Ограничение несомненно работать до этапа отыгрыша бонуса.При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое возможно предназначить этой в казино. 1х слот регистрация в 1×slots casino <a href=https://trueanal.org/user/ForsedropSt/>https://trueanal.org/user/ForsedropSt/</a> При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток.
1×slots зеркало проходить регистрацию это отличный вариант
Активация случается за промокодов, коие вводятся в личном кабинете в регистрации. Среди спецпредложений в списке Casino.ru находятся эксклюзивные промокоды, коие доступны лишь посетителям портала. Другие способы начисления средств ? автоматическая активация сразу в творенья аккаунта и получение презента по запросу в службу технической помощи.Зачастую бездепозитные бонусы казино для игры предлагаются разными заведениями азартных игр в маркетинговых промоакций либо в целях вербования к себя новых игроков. Для бездепозитных призов в казино 2022 геймеру надо пополнять счет до момента вывода хотимых средств. Перед активацией принципиально пристально изучить обстоятельства промоакции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, в течение коих возможно пользоваться предложением. Если бездеп охватывает ограниченный перечень игр, рекомендовано разузнать максимальные коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят лишь что, нет случае, если оператор не установил жесткие ограничения на наивысшую необходимую ставки. <a href=http://webdo.cc/yuyue/upload/home.php?mod=space&uid=165897>http://webdo.cc/yuyue/upload/home.php?mod=space&uid=165897</a> Операторы гемблинга утверждают, что так они сражаются с бонус-хантерами. Впрочем, критики считают, собственно данным казино пробуют устроить из случайного гостя постоянного игрока.Выполнив все притязания оператора, заказчик возможность оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит в среднем менее суток. Если дополнительно потребуется пройти процедуру верификации, то срок увеличивается до 1–2 рабочих дней. Для перевода применяются банковские приборы и электронные платежные системы. Второй метод подходит другого, например как большинство транзакций такой исполняются мгновенно. В связи со спецификой функционирования банков обработка платежей может взятьвдолг(взятьвзаймы) до нескольких рабочих дней. 1×slots регистрация на сайте
<b>Смотреть еще похожие новости:</b>
<a href=http://sladkierecepti.5nx.ru/memberlist.php?mode=viewprofile&u=923>рабочее зеркало 1хслотс</a>
<a href=http://freedom.teamforum.ru/viewtopic.php?f=31&t=219&p=117977#p117977>1×slots рабочее зеркало на сегодня</a>
<a href=https://forum.oursson.ru/viewtopic.php?f=2&t=9104>скачать 1×slots на андроид мобильная версия</a>
<a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=7482>сайт 1× slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В неких интернет казино для получения бездепозитных призов не достаточно просто зарегистрироваться на веб-сайте клуба и доказать средства контактные данные. Дополнительно требуется активация промокода. Бесплатные призы казино без депозита можно получить в виде валютных средств на бонусный счет (вывести их возможно только после отыгрыша), фриспинов, игры или кешбэк-бонуса.
#2941 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet 1 Елизавета Боярская <a href=https://www.ossetia.tv/>казино</a> porno Дарья Мороз 7k casino <a href=https://specreporter.com/>порно с Юлия Ефимова</a> порно с Георгий Джикия (футбол) балтбет букмекерская контора суть казино водка казино порно с Никита Кучеров (хоккей) почему в казино не бывает настенных часов 1×bet приложение
DiskiPlus играющие казино DiskiPlus casino daddy <a href=https://www.diskiplus.ru/>DiskiPlus casino сайты</a> казино DiskiPlus casino сайты <a href=https://diskiplus.ru>DiskiPlus 1×bet 1</a> DiskiPlus казино вулкан DiskiPlus 1×bet зеркало DiskiPlus букмекерские конторы бет DiskiPlus порно с Арина и Дина Аверины, гимнастки DiskiPlus 1×bet скачать приложение на андроид DiskiPlus порно с Юлия Ефимова, пловчиха DiskiPlus porno Алена Косторная (фигурное катание)
#2942 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация то дальше необходимо пройти
Активация по промокоду используется в различных обликах бездепов. Если речь идет о приветственном призе, то комплект знаков возможно узнать на основной страничке, в регистрационной форме или письме, которое отправляется пользователю для подтверждения адреса электронной почты. Акции имеют проводиться общо с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активируется разовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном кабинете или начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем важный код для активации в описании любого промо. <a href=http://filmkachat.ru/>1×slots бездепозитный бонус за регистрацию</a> Иногда у посетителей сайта могут возникнуть проблемы при активации приобретенного промо-кода. В таких случаях, нужно обратиться за подмогою в службу поддержки «Support». Для получения ответа, обязательно указывается определенная причина обращения и подтверждается информация дополнительными снимками. Если сформировалась спорная обстановка, всегда возможно адресоваться к основному регулятору или контролирующему органу, выдавшему данному заведению лицензионный документ.3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефонный либо почту, указать персональную информацию; <a href=https://mxsponsor.com/riders/cgifurniture-com>https://mxsponsor.com/riders/cgifurniture-com</a> 1×slot рабочее зеркало <a href=https://www.freelancejob.ru/users/Glavdorogadv2404/info.php>https://www.freelancejob.ru/users/Glavdorogadv2404/info.php</a>
1×slots промокод при регистрации
1хслот официальный сайт зеркало Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном сайте и сделайте вход в собственный офис, чтобы арестовать благотворительные вращения с вейджером х40; <a href=http://wp1065308.server-he.de/doku.php?id=кино_для_телефонов>http://wp1065308.server-he.de/doku.php?id=кино_для_телефонов</a> Максимальная ставка ? устанавливается в валюте счета и ограничивает размер ставки за раз спин. В случае ее превышения приз может быть аннулирован. Также в правилах имеет находиться запрет на размещение ставок конкретного вида, к, по одинаковым шансам в рулетке (словами, на чет или нечет, красноватое либо черное и т.д. ). 1×slots casino зеркало рабочее
1×slots регистрация на 1хслотс
На критериях отыгрыша даровых бонусов стопам остановиться подробнее. С ними связаны аспекты, коие невозможно забыть без внимания. Онлайн-казино с бездепозитными призами ставят посетителям условия для пользования бездепами, потому перед ролью в промоакции никакого тщательно ознакомиться со всеми правилами и аспектами акции. Условия шансы прикасаться получения приза, его применения и следующего вывода денежных средств когда выигрыша.В неких онлайн казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на сайте клуба и подтвердить средства контактные данные. Дополнительно потребуется активация промокода. <a href=https://visualchemy.gallery/forum/profile.php?id=4290905>https://visualchemy.gallery/forum/profile.php?id=4290905</a> Представьте момент, когда при ставке в 10 рублей Вы получите схожее умножение. Миллион руб. За одно вращение, что вполне возможно. Поэтому вопрос, сколько возможно выиграть остаётся не. Предлагаем выяснить самостоятельно. Регистрируйтесь в одном либо нескольких интернет казино, получайте Бездепозитный бонус и проверяйте удачу в деле. Разумеется, исключить деньги довольно. Однако шансы есть у всех.Но на азартных платформах подобные вознаграждения шансы получить и уже зарегистрированные пользователи. В таком случае, бонусы предоставляются в уникальных промоакций или же некоторым игрокам вид акционного предложения, коие приходит на почту с целью «возвратить» игрока в свое казино. 1×slot зеркало рабочее регистрации на телефон придет Однако далеко не все ресурсы предлагают своим посетителям бездепозитные призы за регистрацию в казино. В большинстве случаев учтено одобрение на 1-ый депо в размере 100–200%. Это отличная возможность преувеличить банкролл, прирастить время, проведённое за забавой и шансы сорвать крупный куш.
1×slots регистрация на сайте 1×slots ru com
Бездепозитный приз за регистрацию в казино с выводом средств в 2022 году — Наш ресурс дает игрокам актуальную информацию о самых свежих, великодушных и испытанных бонусах в онлайн казино, коие обновляются каждый день. <a href=http://forum.l2endless.com/showthread.php?tid=471796>1×slots регистрация на сайте 1×slots ru com</a> Бесплатные бонусы казино без депозита возможно получить вид валютных средств на бонусный счет (вывести их возможно лишь в отыгрыша), фриспинов, забавы либо кешбэк-бонуса.Выполнив все требования оператора, заказчик возможность оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем не более суток. Если дополнительно потребуется пройти функцию верификации, то срок возрастает до 1–2 рабочих дней. Для перевода применяются банковские приборы и электрические платежные системы. Второй метод подходит превосходнее, так как большинство транзакций такой осуществляются моментально. В связи со специфичностью функционирования банков обработка платежей возможность взятьвдолг(взятьвзаймы) до нескольких трудящихся дней. 1×slot регистрация <a href=http://web.symbol.rs/forum/member.php?action=profile&uid=762238>http://web.symbol.rs/forum/member.php?action=profile&uid=762238</a>
1хслотс зеркало на сегодня
Необходимость отыгрыша. Вейджер ситуации повыше, чем для бонусов за депозит. И пока средства не отыграны, исключить их нельзя.Если речь идет об эксклюзивных предложениях, имеет понадобиться регистрация в казино по ссылке с партнерского сайта. <a href=http://www.zghncy.cn/home.php?mod=space&uid=609976>http://www.zghncy.cn/home.php?mod=space&uid=609976</a> Помните, собственно в некоторых играх сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных забавах лишь от 5% до 50% суммы ставки считаются как отыгранные средства, в то время как в слотах идет в зачет все 100% суммы. 1× slots регистрация в 1×slots casino Любой выигрыш по ставке повыше установленного лимита несомненно являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, а в случае выигрыша его сумма не поступит на счёт посетителя — итог забавы будет всецело аннулирован.Баланс игрока пополняется на соответствующую сумму. К ней применяется вейджер, обозначенный в правилах акции. Вывести выигрыш можно несомненно в как, как юзер сделает требуемый объем ставок из личных средств. В редчайших случаях бездеп работает в формате Free Play. На счет пользователя зачисляется крупная сумма, и предоставляется маленький срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по завершении сего периода сумма на счету будет превышать первоначальную, то разность можно будет вывести либо использовать для дальнейших ставок.
<b>Смотреть еще похожие новости:</b>
<a href=https://bans.org.ua/index.php?topic=117589.new#new>казино 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вейджер (либо вагер) ? это минимальная сумма ставок, коию необходимо сделать для вывода валютного бонуса. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение.
#2943 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
песня казино kometa casino <a href=https://slon-ru.com/>casino рабочее</a> Скворцова Вероника Игоревна порно porno Анастасия Янькова, боксерка <a href=https://glvk.guru/>1×bet зеркало рабочее на сегодня</a> up букмекерская контора pin casino 1×bet вход casino на телефон casino зеркало сегодня рабочее 7k casino зеркало на сегодня почему в казино нет окон
DiskiPlus официальная казино DiskiPlus порно с Артемий Панарин (хоккей) <a href=https://www.diskiplus.ru/>DiskiPlus про казино</a> DiskiPlus 1×bet официальный DiskiPlus казино рулетка <a href=https://www.diskiplus.ru>DiskiPlus casinos winning</a> DiskiPlus ставки на спорт букмекерские конторы DiskiPlus bet casino DiskiPlus казино рублях DiskiPlus бк букмекерская контора DiskiPlus казино ли DiskiPlus porno Катерина Шпица DiskiPlus porno Андрей Рублев (теннис)
#2944 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия
Срок активации и время на отыгрыш. Зачисление средств либо фриспинов происходит при активации в течение требовательно ограниченного периода, схожие притязания предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать приз несколько дней либо в месяцов. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с необоснованно высоким вейджером.Изучить правила и обстоятельства получения бездепозитных бонусов казино, Вы сможете у нас на веб-сайте в разделе с бонусами либо на официальном веб-сайте выбранного Вами казино. Если имеет найти нужную информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал либо по электрической почте. <a href=http://filmkachat.ru/>1×slots регистрация</a> Получить приветственный бонус имеют только свежие клиенты онлайн-казино. Способы описаны в условиях акции любого легального казино, почаще всего это: <a href=http://gendou.com/forum/thread.php?thr=53119>http://gendou.com/forum/thread.php?thr=53119</a> 1×slots официальный зеркало рабочее <a href=https://rolivka.online/forum/member.php?action=profile&uid=57294>https://rolivka.online/forum/member.php?action=profile&uid=57294</a> Зарегистрироваться в казино по особой ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефонного и электронную почту). Для подтверждения номера аппарата необходимо в личном профиле показать собственный номер и надавить кнопку „Подтвердить номер телефонного“, далее Вы получите sms-сообщение с кодом, кот-ый необходимо ввести в соответствующее фон. Для доказательства электрической почты, перебежать по активной ссылке в письме от казино.Демоказино есть практически на каждом сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются существенно пореже: там в случае выигрыша и соблюдения критерий акций бездеп можно превратить в реальные деньги.
1×slots мобильная версия войти казино
Максимальный объем ставки, который невозможно превосходить пока бонус не будет полностью отыгран. В случае нарушения этого управляла, бонус и выигрыш с него будут аннулированы.Но никогда не запамятовывайте внимательно разбирать верховодила роли в бонусных акциях. Если вы нарушите хотя бы одно условие, позже вы не сможете уладить недоразумение с администрацией. 1×slots регистрация 1×slots review live <a href=http://mirtitana.com/bitrix/click.php?goto=http://chaogov.ru/bitrix/redirect.php?goto=http://alt1.toolbarqueries.google.as/url?q=https://teletype.in/@urist555/f7R12oD8OFm>http://mirtitana.com/bitrix/click.php?goto=http://chaogov.ru/bitrix/redirect.php?goto=http://alt1.toolbarqueries.google.as/url?q=https://teletype.in/@urist555/f7R12oD8OFm</a> Раздача призов имеет быть посвящена различным датам: календарные дни, дни рождения игроков, годовщина открытия казино и т. Д. Подарок выдается повторяющий средств, фриспинов или баллов для накопления и размена на предложения оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд требований. 1×slots официальный регистрация В разделе с призами активировать свой презент. Найти забавы, для которых учтено поощрение и использовать бонус по предназначению.
1×slots регистрация то дальше необходимо пройти
Выбирайте наихорошие безвозмездные бонусы счет обзоров на Casinoz – и пусть вас сопутствует удача при отыгрыше бонусных кредитов! Казино дает вероятность заработать и вывести настоящие средства на бездепозитных бонусах. Обычно, это малозначительная сумма, коию казино может себя позволить подарить игроку.Простая процедура получения бездепозитного бонуса, кот-ая займет менее 2-х минут. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные. <a href=http://rtekhno.ru/support/forum/view_profile.php?UID=755>http://rtekhno.ru/support/forum/view_profile.php?UID=755</a> Доступ к дару имеет открываться автоматически после введения промокода или воззвания в саппорта вебсайта. В первом случае от юзера не потребуется практически деяний. Бездеп с активацией по коду встречается чаще всего. Игроку нужно ввести совокупность символов в графе, кот-ая возможность пребывать в регистрационной форме в Личном кабинете. 1×slots сайт
рабочее зеркало 1×slots
<a href=http://b2s.bulwork.com/node/1581?page=169#comment-26997>1×slot официальный сайт</a> Прочитайте верховодила бонусной программки, в которой желайте участвовать. Да, мы безотступно советуем устроить это до регистрации.Представленные на данной странице лучшие бездеп бонусы в казино за регистрацию в 2022 году имеют оптимальные условия. После кропотливого анализа редакция портала составила рейтинг спецпредложений, в посетители Casino.ru все сортировать перечень по нескольким аспектам: по сумме, вейджеру, максимальной сумме вывода и т.д. 1×slots быструю регистрацию а также мгновенное <a href=https://bbs.zzxfsd.com/home.php?mod=space&uid=299634>https://bbs.zzxfsd.com/home.php?mod=space&uid=299634</a>
1хслот скачать
Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, так как Вам понадобиться ее доказать в при выводе средств. <a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=4027>http://www.predictive-datascience.com/forum/member.php?action=profile&uid=4027</a> Такой безвозмездный эквивалент средств зачисляется на профиль пользователя в осуществления притязаний и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений возможен лишь в воплощения вейджеровых критерий. 1×slots casino зеркало рабочее
<b>Смотреть еще похожие новости:</b>
<a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/9302–1×slots-skachat-na-ajfon#9327>1×slots скачать на айфон</a>
<a href=https://bukmekerobzor.info/forum/finax-buy-online-overnight-shipping#comment-222669>1×slots регистрация то дальше необходимо пройти</a>
<a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/10259–1×slot-zerkalo-rabochee-etikh-sposobov-predpolagaet-registratsiyu#10287>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=http://nhomtruyen.com/members/jamesgaw.9280/>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
У любого игорного заведения свои правила и обстоятельства. Но, дабы получить призы, нужно выполнить стандартные деяния:
#2945 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino c2d ru
Допустим, за регистрацию вы возымели бездеп в объеме 2 000 рублей с вейджером х30. В этом случае предстоит сделать ставок, на совместную необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать настоящие деньги. Однако не запамятовывайте, собственно с каждого дара получится вывести определённую необходимую (чаще всего менее $200). <a href=http://filmkachat.ru/>1×slots регистрацию процедура займет всего лишь</a> Такой бесплатный эквивалент средств зачисляется на профиль юзера последствии осуществления притязаний и предназначаются они только для игрового процесса. Вывод таких вознаграждений вероятен только в осуществления вейджеровых условий.На критериях отыгрыша безвозмездных бонусов идет тормознуть подробнее. С ними связаны аспекты, которые невозможно забыть без внимания. <a href=https://blog.naver.com/lexxeagle/223736495519>https://blog.naver.com/lexxeagle/223736495519</a> 1×slot рабочее зеркало <a href=http://larevolution.ru/index.php?subaction=userinfo&user=hellishsaga50>http://larevolution.ru/index.php?subaction=userinfo&user=hellishsaga50</a> Объективные – объем бонуса, коэффициент и условия вейджера, надобность внесения депозита для вывода средств;Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы мгновенно получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, замечена настоящий шанс победу!
1×slots регистрация 1×slotscasino 56 online
<a href=https://adminclub.org/showthread.php?tid=64826>1×slot зеркало</a> 1×slots официальный demo регистрация в 1×slots casino Получать информацию о самых выгодных призах возможно без постоянного прогноза новостей казино. Мы взяли данную задачку на себя и непрерывно следим за предложениями операторов, выбирая превосходнейшие из их. В данном разделе собраны последние бездепы, промокоды к ним и условия их активации. Список промоакций регулярно пополняется. В топ зашли самые новые бездепозитные призы за регистрацию в казино 2020, временные и закрытые рекламную. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и критериям. Если срок действия промоакции истек, она удаляется из списка.3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефонный или почту, показать персональную информацию; <a href=https://ilottou.com/bbs/board.php?bo_table=free&wr_id=398745>https://ilottou.com/bbs/board.php?bo_table=free&wr_id=398745</a> Получать информацию о самых выгодных призах можно без постоянного мониторинга новостей казино. Мы взяли эту задачу на себя и непрерывно смотрим за предложениями операторов, избирая наилучшие из них. В данном разделе собраны последние бездепы, промокоды к ним и условия их активации. Список промоакций регулярно дополняется. В топ зашли самые свежие бездепозитные призы за регистрацию в казино 2020, временные и закрытые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и другим аспектам. Если срок действия промоакции истек, она удаляется из перечня.Онлайн-казино кропотливо продумывают бонусные обстоятельства, которые необходимо выучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и другие ограничения. 1×slots официальный сайт мобильная версия скачать
1хслотс 1хслотс регистрация перейти на 1×slots
Выше мы предоставили полный комплект самых новых и актуальных бездепозитных бонусов в онлайн казино без пополнения на 2022 год, где вы можете воспользоваться любым ценным бездепозитным призом.Бесплатные призы казино без депо можно получить в виде валютных средств на бонусный счет (исключить их можно лишь последствии отыгрыша), фриспинов, забавы или кешбэк-бонуса. Отзывы читателей о бонусных акциях посодействуют составить эмоцию, но не запамятовывайте о субъективности личных комментариев.Чтобы играть безвозмездно на настоящие средства в казино, не всегда довольно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные деяния. <a href=https://www.donchillin.com/space-uid-349679.html>https://www.donchillin.com/space-uid-349679.html</a> При помощи такового поощрения оператор может также привлекать клиентов, которые раньше проявляли активность на веб-сайте, но по некий причине прекратили выступать. В этом случае промокод высылается пользователю по электрической почте или повторяющий SMS. 1×slots официальный сайт скачать
1×slots casino зеркало
Подарки на праздничные ? приуроченные к парадным датам, требующие условного отыгрыша либо начисляются без того. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду.Более крупные предложения встречаются очень редко. Зачастую они доступны лишь VIP-игрокам. В оставшихся случаях им скорее сопутствуют довольно жесткие условия отыгрыша. Также возможны вспомогательные условия прочие ограничения, прописанные в критериях и положения бонусной программки казино. скачать 1×slots официальный сайт <a href=https://podacha-blud.com/user/GlennThima/>https://podacha-blud.com/user/GlennThima/</a> У каждого игорного клубы различные вейджеровые условия. Чтобы вы гарантировано сумели выполнить их, мы дадим несколько советов. Если система начислила маленькую необходимую, не создавать немалые ставки – остановитесь на 10–30 центах. Как лишь сумеете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте играть. В противном случае другого, как присмотреться к другому автомату.После требуется внести идентификационный платёж. Это пугает начинающих больше всего. Нужно устроить минимальный депозит в 100–500 рублей. Таким образом служба безопасности убедиться в том, что платёжный способ принадлежит Вам. Данная процедура важна для обеспечивания защищенности игровых счетов. Пример, Ваш акк взломают и выведут свои на свой кошелёк. Будет крайне неприятно. Поэтому верификация платёжной системы, это важный момент.
1хслотс рабочее зеркало на сегодня
Бесплатный бонус – кредиты, коие онлайн-казино начислит клиенту, не заставляя его пополнять игровой счет.Даже не выиграв крупную необходимую, игрок увлекательно проведет время, изнутри исследует работу площадки, оценит геймплей автоматов. Все это без каких-либо денежных рисков. Быть в курсе наилучших промоакций легкостью. Достаточно регулярно изучать перечень свежих онлайн казино с выводом бонуса без депо в этом разделе. Прежде чем активировать бездеп, нужно убедиться никаких, собственно страна, уроженцем которой является игрок, не заходит в перечень не.Отказ в прохождении верификации. Если заказчик не желает или не может предоставить документы, подтверждающие его лицо, профиль несомненно заблокирован совместно, вкупе со всеми бонусными начислениями. <a href=http://xn---34–5cdbkofs7abei8ade5bg9k.xn–p1ai/index.php?subaction=userinfo&user=wakefulnarrator>http://xn---34–5cdbkofs7abei8ade5bg9k.xn–p1ai/index.php?subaction=userinfo&user=wakefulnarrator</a> Также учтите, собственно некоторые игровые платформы сужают перечень стран, коие способны получить предложенный бездепозитный бонус за регистрацию. К примеру, существуют онлайн-заведения, выдающие сходственные призы только жильцам конкретных стран. К примеру, интернет казино 777 Оригинал дает бездепозитный бонус лишь игрокам из России и стран СНГ. Или наоборот, пичкают вознаграждением всех, считая обитателей некоторых государств (из этого, по пристально изучать список, чтобы впоследствии не возникло практически вопросов и претензий).Для казино, работающих интернет, бездепозитные призы необходимы для вербования новых посетителей. Предложение поиграть на слотах без надобности внесения реальных средств — работающий способ для увеличения энтузиазма к компании. После отыгрыша бездепа великоват шанс, собственно игроку понравится и он продолжит выступать в казино, лишь теперь теснее на собственные средства. 1х слот 1хслотс регистрация перейти на 1×slots Одним из предлогов отдавать привилегию одному либо иному заведению содержится в привлекательности предлагаемых акций и бесплатных услуг. Безвозмездные фриспины, выдаваемые без нужды делать какой-либо лепта, в списке располагается далеко не в конце.С иной стороны, гораздо проще забрать бездепозитные фриспины за регистрацию в казино и прямо момент начать вращать барабаны в лучших слотах. Главная особенность спинов что, нет, что они предназначены для лучших автоматов. Удастся не только пройти дополнительные раунды, но и прирастить сумму выигрыша, заработать респины прочие внутриигровые подарки.
<b>Смотреть еще похожие новости:</b>
<a href=https://praisenpray.org/forums/member.php?action=profile&uid=63121>1×slots коды</a>
<a href=https://showboysmedia.com/real-music/#comment-52808>1×slots промокод при регистрации 2025</a>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=396150>1хслотс рабочее зеркало</a>
<a href=http://miupsik.ru/forums/showthread.php?tid=366677>казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Сразу последствии активации промокода возможно пользоваться презентом. Как уже упоминалось, призы бывают трёх обликов – фриспины, кредиты и фриплей-бонусы. Ну и окончательно же, для казино бездепозитные призы прибыльны с имиджевой стороны: сходственная щедрость повышает уровень преданности клиентов к компании.
#2946 Charlesgunnyhttp://filmkachat.ru
1 x slots casino
Не стоит незамедлительно же открещиваться от приветственных даров в сходственных казино. Администрация готова начислить средства или фриспины, но сначала сотрудники должны убедиться, собственно вы не мошенник. Дело что, нет, что развелось слишком много охотников за бонусами. Они научились дурачить систему и наваривать солидные суммы средств.Одним из поводов отдавать преимущество, льготу 1 или иному заведению содержится в привлекательности предлагаемых промоакций и даровых предложений. Безвозмездные фриспины, выдаваемые без дела создавать какой-либо вклад, в перечне располагается далеко не в конце. <a href=http://filmkachat.ru/>казино 1×slots</a> Более крупные предложения встречаются довольно редко. Зачастую они доступны лишь VIP-игрокам. В оставшихся случаях им наверняка сопутствуют довольно строгие обстоятельства отыгрыша. Также вероятны дополнительные обстоятельства и ограничения, прописанные в условиях и положения бонусной программы казино.Бездепы обыкновенно предлагают с отыгрышем — быстро исключить выигранные свои невозможно. Перевод средств со счета несомненно возможен в того, как юзер выполнит все притязания казино, а сумма не может превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, в течение коих клиент вправе воспользоваться предложением. Обычно они не превосходят нескольких дней после активации. <a href=https://pdfhost.io/v/8YZk3YV6.__>https://pdfhost.io/v/8YZk3YV6.__</a> Главное преимущество спинов – вероятность изучить различные слоты. Также получится насладиться бонусными раундами, испытывать удачу в риск-туре и преувеличить выигрыш за счёт особых символов. Однако не только игровой процесс заслуживает внимание, как другого, как сосредоточиться на реальном выигрыше.Но такие рамки не смущают и хайроллеров, поскольку коэффициенты на слотах позволяют рассчитывать на крупные выигрыши, ну неких автоматах разыгрывается передовой джекпот. 1×slots casino регистрация <a href=https://flaxeco.com/user/Tyroneloord/>https://flaxeco.com/user/Tyroneloord/</a> Бездепозитные призы – это самая интересная и наиболее многообещающая акция интернет-казино. Они том чем фри-спинов, поэтому собственно выплаты в даровых вращениях не гарантированы, ведь комбинации на барабанах игрового аппарата имеют не сложиться.Первый возникающий вопрос, это, чего выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают свежих игроков. Последним легче начать игру на деньги с подарка за регистрацию. Им надо пополнять баланс и расходовать личностные средства. Новички получают благотворительные спины либо свои на счёт. С их поддержкой знакомятся с игровым процессом, крутят слоты и проделывают ставки в рулетке.
1×slots зеркало
Высокая конкурентность в разделе азартных игр мотивирует операторов привлекать посетителей разнородными промоакциями. Благодаря данному у гостей появляется возможность получить бонусы в казино за регистрацию без депозита. Воспользоваться этим предложением можно, минуя процедуру внесения средств на игровой счет, просто активировав акк на веб-сайте. Наш экскурсовод по бездепам поможет выбрать самую привлекательную бонусную программку, разузнать правила получения такового гонорары и распорядиться им с наибольшей выгодой.Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. <a href=https://www.digicube.de/forum/threads/555819–1×slots-casino-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-1×slotscasin-online?p=759748#post759748>1×slots casino регистрация 1×slotscasin online</a> 1×slots регистрация то дальше необходимо пройти Превышение максимальной ставки при отыгрыше. Система механически не предостерегает о превышении ставки, поэтому о несоблюдении правил игрок возможность разузнать теснее в подачи запроса на вывод средств.Некоторые сайты, прежде чем обмануть регистрацию игроков, предлагают ответить на некоторое базовых вопросов. Цель проведения похожей викторины – выявить случайных людей, коие не имеют представления о покере, и не разрешить получения ими призов. Если гость теснее играл в казино, то ответить на полтора 10 несложных вопросов несомненно нетрудно. Очень нередко, ответы можно найти на официальных сайтах данных учреждений. <a href=http://trisinfronteras.com/davidcastro/component/k2/itemlist/user/454903-patrickhew>http://trisinfronteras.com/davidcastro/component/k2/itemlist/user/454903-patrickhew</a> Создание аккаунта. На веб-сайте казино нужно открыть регистрационную форму и наполнить порожние поля личностными данными. Иногда на данном этапе потребуется показать лишь адрес электрической почты и пароль, но почаще надо наполнить анкету персональной информацией (ФИО, дата рождения, место проживания и т.д. ). Нужно свидетельствовать лишь настоящие данные, потому впоследствие они станут испытаны.Приветственный бездеп предоставляется любому игроку лишь раз раз. Казино борются с например нарекаемыми бонусхантерами (от англ. Bonus Hunter — доброволец за бонусами), пытающимися заводить множественные аккаунты для надувательства оператора и повторного получения подарка. Исключить подобные действия позволяет верификация данных. Администрация вправе востребовать у клиента доказать индивидуальные данные, указанные при регистрации. 1×slots официальный сайт зеркало рабочее Акционные предложения от казино есть в различных форматах. Часто призы даются в обмен на депо. Игрок вносит платеж и получает средства, бесплатные вращения и одобрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — вид бонуса, который гарантирован за выполнение определенных поступков на веб-сайте:
1хлот регистрация в 1×slots casino
<a href=http://ledyardmachine.com/forum/User-Patrickchund>http://ledyardmachine.com/forum/User-Patrickchund</a> 1×slots casino зеркало
1хслот скачать
Многие казино деют в рекламных целях благотворительные призы самая для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой вебсайт по партнерской ссылке с нашего портала. <a href=https://forum.gamesims.sk/viewtopic.php?f=10&t=160580>1× slots зеркало</a> Бездепозитные бонусы настоящими деньгами, коие можно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадали. Активация денежного вознаграждения случается механически последствии создания профиля либо применения промокода. Иногда операторы предъявляют дополнительные требования: подписаться на странички казино в социальных сетях либо на рассылку маркетинговых извещений, скачать и ввести дополнительный софт и т.д. 1×slots регистрация на 1хслотс <a href=http://procvety.pro/bitrix/redirect.php?goto=http://itlines.ru/url.php?s=http://ygim31.ru/bitrix/click.php?goto=https://teletype.in/@urist555/FLWPgzuMP_l>http://procvety.pro/bitrix/redirect.php?goto=http://itlines.ru/url.php?s=http://ygim31.ru/bitrix/click.php?goto=https://teletype.in/@urist555/FLWPgzuMP_l</a> На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не сможете активировать и получить бездепозитный приз.На страничке представлены бездепозитные призы за регистрацию в казино редкая награда за которой гонятся все игроки как новенькие, например и мастера. Мы тоже уделяем великое внимание на присутствие призов при формирование рейтинга казино на деньги. Бездепозитный бонус это возможность играть бесплатно и выиграть настоящие деньги.
1×slot официальный сайт
Для отыгрыша приза казино обязует игрока сыграть на сумму, в количество раз превышающую необходимую полученного бонуса — тут выгода компании явна.Внесение депозита – Будьте готовы пополнить счет последствии отыгрыша бонуса. Это стандартное требование верховодил для данного типа промо-акций. Лучше заблаговременно уточнить, какую сумму нужно будет вносить на счет. Как управляло, идет о минимальном депозите, но вы должны быть убеждены, что он вам по кармашку. Ниже указан важный список легальных казино в Беларуси с призами на первый депо. Вы можете попасть на официальный сайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз. <a href=http://sangjininterior.com/home/bbs/board.php?bo_table=free&wr_id=51299>http://sangjininterior.com/home/bbs/board.php?bo_table=free&wr_id=51299</a> Простая процедура получения бездепозитного бонуса, кот-ая займет менее 2-х минут. Для получения бездепов, достаточно зарегистрироваться и доказать контактные данные.Представленные на данной странице превосходнейшие бездеп бонусы в казино за регистрацию в 2022 году имеют оптимальные обстоятельства. После тщательного анализа редакция портала составила рейтинг спецпредложений, каком посетители Casino.ru все сортировать список по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д. 1×slots зеркало рабочее на сегодня У любого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано смогли выполнить их, мы дадим некоторое советов. Если система начислила небольшую сумму, не создавать немалые ставки – остановитесь на 10–30 центах. Как лишь сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте выступать. В неприятном случае какого-либо приглядеться к другому автомату.
<b>Смотреть еще похожие новости:</b>
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=735696>1хслотс казино зеркало</a>
<a href=https://forum.visiteachapada.com/memberlist.php?mode=viewprofile&u=695>1 хслот регистрация в 1×slots casino</a>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5025/#comment-604470>1×slots регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы за регистрацию в игровых автоматах для хозяев онлайн-казино считаются частью рекламной кампании, направленной на увеличение аудитории вебсайта. Так они продвигают средства бренды и привлекают новых клиентов. Для получения депозитного приза нужно пополнить свой игровой баланс реальными средствами. Вознаграждение можно получить либо при внесении первого депо, либо повторяющий фиксированного процента от внесённых средств. Так либо иначе, приз поступит на счёт лишь в пополнения.
#2947 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots review live
Внесение депо – Будьте готовы пополнить счет после отыгрыша бонуса. Это обычное заявка верховодил для данного подобии промо-акций. Лучше заранее уточнить, какую сумму надо(надобно) будет заносить на счет. Как правило, идет о минимальном депозите, хотя вы должны быть убеждены, собственно он вас по карману. <a href=http://filmkachat.ru/>1× slots зеркало</a> Срок отыгрыша — это период, который начинается в момент активации приза и завершается с его закрытием. Пользователю нужно уложиться в этот временной промежуток, по призовые средства аннулируются. Казино устанавливают список игр, ставки в которых засчитываются при расчете отыгранных средств. Если тайтл не входит в этот список, то предоставляется быть недоступен для загрузки во время деяния бонусного предложения. <a href=https://similars.net/alternatives-to/astramedika.com.ua>https://similars.net/alternatives-to/astramedika.com.ua</a> Чтоб получить крупный выигрыш, выбирайте игровые автоматы с предельным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша. 1×slots регистрация 1×slots review live <a href=https://www.play56.net/home.php?mod=space&uid=4383436>https://www.play56.net/home.php?mod=space&uid=4383436</a> При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие возможно посвятить забаве в казино.
1×slot зеркало рабочее регистрации на телефон придет
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/8675/#comment-356802>1×slots casino регистрация 1×slotscasino09k online</a> 1хслотс официальный сайт зеркало Обычно бездепозитные акции от казино, приходят на эл. Почту в дни рождения либо дни. В неких интернет казино возможно адресоваться в чат и как постоянному игроку, вполне вам предложат бездепозитное предложение.Подтвердите личность, предоставив оператору казино средства паспортные данные. Инструкции обыкновенно легкие, главное — четко им идти. Если написано, собственно «на фото должны быть видны все хорошо угла странички паспорта» — устройте непосредственно такое фото. <a href=http://yartube.ru/user/elizabethcahvoz915/>http://yartube.ru/user/elizabethcahvoz915/</a> 1×slots мобильная версия войти казино
x1 slots 1хслотс регистрация перейти на 1×slots
Помните, что всевозможные нарушения правил сведут на нет ваши старания, и вы всего останетесь без начисленного вам бесплатного приза. Всегда изучайте правила начисления и условия вейджера. По каким вопросам, на которые вы возможности без найти ответы, обращайтесь за разъяснениям и саппорт.Иногда виде одобрения за регистрацию шансы выдаваться билеты для роли в турнирах. Условия их проведения очень отличаются, поэтому мы советуем ознакомиться с любым предложением отдельно. <a href=http://forum.fcmn.co.il/member.php?action=profile&uid=304901>http://forum.fcmn.co.il/member.php?action=profile&uid=304901</a> Лишь модные и известные азартные заведения все разрешить себя раздавать бездепы в виде дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депо, коие можно израсходовать в лучших аппаратах с высокой отдачей. 1×slots зеркало быструю регистрацию а также мгновенное Теоретически, к бесплатным призам можно отнести так именуемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, потому что они деют только возможность создавать ставки.Какие бонусы у еще получить считая бездепозитного приза за регистрацию в казино? По мимо бездепозитного бонуса, каждое интернет казино предлагает игрокам прибыльное предложение на 1-ый депо, вы совершаете депозит, ваш депо возрастает в двое или и в 3, что, этим самым начать играть можно с больше крупной суммой, например же не запамятываем тему вейджер на призы.
1×slots промокод при регистрации 2025
У нас на сайте Вы найдете перечень бонусов без депозита в проверенных казино и доскональную информацию о том как их получить и применять.Список так именуемых «не землель» прилагается к правилам бонусной программы игорного портала. Обязательно выясните, распространяются ли на вас подобные санкции. <a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-2015#post-57483>1×slots регистрацию процедура займет всего лишь</a> Доступные забавы – В неких азартных играх можно понизить математическое преимущество казино до нескольких 10-х процента. В их количестве многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как верховодило, в этих забавах ставки идут в зачет вейджера не полностью. Например, возможность предусматриваться лишь 50%. В неких забавах бездепозитные бонусы вообще нельзя отыгрывать.Вейджер в переводе с британского означает «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша полученного приза, в нашем случае бездепозитного. Число ставок имеет — принципиально лишь набрать сумму, пропорциональную сумме одобрения. 1×slots официальный сайт скачать <a href=https://itkvariat.com/user/Glennnex/>https://itkvariat.com/user/Glennnex/</a> Обычно бездепозитные промоакции от казино, прибывают на эл. Почту в деньки рождения либо праздники. В неких интернет казино можно обратиться в чат и как неизменному игроку, вполне вам предложат бездепозитное предложение.
1×slots регистрация 1×slotscasino 56 online
Третитй бездепозитный приз за регистрацию – денежные свои. К огорчению, начислить рубли либо доллары способны только известные и популярностью клубы. С их помощью вас насладиться каждой доступной игрой – автоматом, рулеткой, кено, блэкджеком. <a href=https://notabug.org/Batecom1102/Batecom1102/wiki/%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0+%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA+%D0%B3%D0%BB%D0%B0%D0%B2%D0%BD%D0%B0%D1%8F+%D0%B4%D0%BE%D1%80%D0%BE%D0%B3%D0%B0>https://notabug.org/Batecom1102/Batecom1102/wiki/%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0+%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA+%D0%B3%D0%BB%D0%B0%D0%B2%D0%BD%D0%B0%D1%8F+%D0%B4%D0%BE%D1%80%D0%BE%D0%B3%D0%B0</a> Наиболее популярностью вознаграждения среди гэмблеров – бездепозитные призы казино. Это не дивно, ведь возможно получить благотворительные вращения или виртуальные кредиты, и этом не придётся пополнять счёт, рисковать личными деньгами. Удастся насладиться разнородными увеселениями даже выиграть крупную сумму, избегая серьёзного риска.Условия отыгрыша приза. Если Вы планируете заработать на бездепозитном бонусе, то начала обратите внимание на велечину вейджера и срок, который дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть бонус и вывести выигрыш. 1×slots регистрация 1×slots casino 777 online Игрокам не следует воспринимать приветственный приз как гарантированный способ получить крупный выигрыш, хотя это отличная вероятность без расходов оценить возможностей казино.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро или 20 $. Если выдаются фриспины, их количество редко выше нескольких 10-ов бесплатных вращений.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.carshowsociety.com/forum.php/topic,28714.new.html#new>1× слот зеркало</a>
<a href=http://medforum.5nx.ru/viewtopic.php?f=4&t=4903>1×slots регистрация 1×slotscasino09k online</a>
<a href=http://6000ziyuan.com/forum.php?mod=forumdisplay&fid=2>1×slots регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют важную информацию о not the slightest down payment bonuses и предложениях.
#2948 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино в россии Скоробогатова Ольга Николаевна порно <a href=https://specreporter.com/>порно с Голикова Татьяна Алексеевна</a> 1×bet сайт 1×bet xyz casinos winning <a href=https://7club7.com/>1×bet на андроид</a> пин ап casino pin up top балтбет букмекерская контора кент casino часы казино включи казино vavada casino kent casino регистрация
DiskiPlus Матвиенко Валентина Ивановна порно DiskiPlus порно с Матвей Сафонов (футбол) <a href=https://www.diskiplus.ru/>DiskiPlus 1win casino</a> DiskiPlus up casino скачать DiskiPlus 7k casino официальный сайт <a href=https://www.diskiplus.ru>DiskiPlus Скворцова Вероника Игоревна порно</a> DiskiPlus 1×bet зеркало рабочее xbet DiskiPlus почему в казино нет часов DiskiPlus porno Виктория Баркова, легкоатлетка DiskiPlus up букмекерская контора DiskiPlus букмекерские конторы pin DiskiPlus казино регистрации DiskiPlus ешь казино
#2949 Charlesgunnyhttp://filmkachat.ru
1 хслот регистрация в 1×slots casino
При поддержки такового одобрения оператор возможность того завлекать посетителей, коие раньше показывали активность на веб-сайте, но по какой-то основанию перестали играть. В этом случае промокод высылается пользователю по электронной почте или вид SMS.В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с даровых вращений. Прибыль, коию Вы заработаете на этом бездепе можно ставить на вывод без какого или отыгрыша. <a href=http://filmkachat.ru/>скачать 1×slots на андроид мобильная версия</a> Благодаря программе преданности от игорного заведения, можно взять неплохой старт и без добавочных вложений запустить видеослоты. Кроме как, можно рассчитывать на реальную фортуну и получить, без вложения собственных денег, великий выигрыш.Допустим, за регистрацию вы возымели бездеп в объеме 2 000 руб. С вейджером х30. В данном случае предстоит сделать ставок, на общую сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда сделайте условия по отыгрышу, придёт время заработать настоящие средства. Однако не забывайте, собственно с каждого дара получится вывести определённую сумму (чаще всего не более $200). <a href=https://www.exoltech.ps/blogs/post/89899>https://www.exoltech.ps/blogs/post/89899</a> скачать 1×slots официальный сайт <a href=https://forum.bandariklan.com/member.php?action=profile&uid=12323>https://forum.bandariklan.com/member.php?action=profile&uid=12323</a> Зарегистрироваться в казино по специальной ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефона и электронную почту). Для доказательства номера телефонного нужно в собственном профиле указать собственный номер и нажать кнопку „Подтвердить номер телефонного“, далее Вы получите sms-сообщение с кодом, который нужно ввести в подходящее поле. Для подтверждения электрической почты, перейти по активной ссылке в послании от казино.Бездепы обычно предлагают с отыгрышем — мгновенно вывести выигранные средства нельзя. Перевод средств со счета будет возможен в того, как пользователь выполнит все притязания казино, а сумма имеет превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, на коих клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней в активации.
1×slots casino регистрация 1×slotscasino09k online
1×slots регистрацию более популярный вариант это <a href=http://armhleb.ru/index.php?subaction=userinfo&user=heavyspeed74>http://armhleb.ru/index.php?subaction=userinfo&user=heavyspeed74</a> Баланс игрока пополняется на подобающую сумму. К ней используется вейджер, указанный в правилах акции. Вывести выигрыш можно будет последствии как, как юзер устроит требуемый объем ставок из личных средств. В редких случаях бездеп трудится в формате Free Play. На счет юзера зачисляется большая сумма, и предоставляется маленький срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по окончании сего периода сумма на счету будет превышать первоначальную, то разницу можно несомненно вывести или применять для дальнейших ставок.При поддержки такого поощрения оператор возможность также привлекать посетителей, которые раньше проявляли активность на веб-сайте, хотя по некий причине перестали играть. В данном случае промокод высылается пользователю по электрической почте либо вид SMS. скачать 1×slots на андроид мобильная версия Варианты выигрыша зависимости от Вашей успеха и условий игорного портала. Выше мы сказали, собственно некоторые бездепозитные призы в 2022 году выдаются с ограничениями по наибольшей выплате. Однако, остаются и, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность современных игр на средства, возможно выиграть невероятные суммы. Сегодняшние игровые автоматы или видео слоты, как их нарекают. Могут выдавать крупные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000.
1×slots зеркало быструю регистрацию а также мгновенное
Основное различие никаких, что для получения бездепа не надо пополнять баланс в казино. Но считая этого, есть ряд прочих различий:Мы делаем акцент на главных положениях управлял, рассказываем о территориальных лимитированиях и вкратце информируем о других промоакциях обсуждаемого казино. <a href=https://mobilka.mobi/user/Edwardheaxy/>https://mobilka.mobi/user/Edwardheaxy/</a> 1×slots зеркало выигрыши обязательно пройдите регистрацию если Чаще всего казино приз за регистрацию без депозита даёт возможность запустить любой автомат. Но превосходнее пристально ознакомиться с критериями. Иногда для игры доступны лишь определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, другого, как начать знакомство с миром пыла непосредственно с «одноруких злодеев».
1×slots сайт
Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы моментально получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, появляется реальный шанс победу!Даже не выиграв крупную сумму, игрок увлекательно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-либо финансовых рисков. Быть в курсе лучших акций с. Достаточно регулярно изучать список свежих интернет казино с выводом бонуса без депо в данном разделе. Не сложно догадаться, что not the slightest down payment bonuses практически разу не бывают великими. Чаще всего речь идет о пяти–тридцати баксах (либо эквиваленте данной суммы в другой еденице). 1×slots официальный сайт зеркало <a href=http://formulandoeinnovando.com/como-se-afecta-la-formulacion-con-el-proceso-que-aplico/?unapproved=538191&moderation-hash=e164976bfc15e578065b37cfefb3043c#comment-538191>http://formulandoeinnovando.com/como-se-afecta-la-formulacion-con-el-proceso-que-aplico/?unapproved=538191&moderation-hash=e164976bfc15e578065b37cfefb3043c#comment-538191</a> Фриспины — благотворительные вращения, которые дозволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины считаются самым знаменитым и желаемым видом бонуса — бесплатные вращения порой эффективнее и веселее в отыгрыше, чем остальные виды бездепов.
1 x slots casino
Приветственный бездеп предоставляется какому игроку лишь раз один. Казино сражаются с так называемыми бонусхантерами (от англ. Bonus Hunter — охотник за призами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения подарка. Исключить подобные деяния разрешает верификация данных. Администрация вправе востребовать у клиента доказать индивидуальные данные, обозначенные при регистрации.Но на азартных платформах похожие вознаграждения имеют получить теперь зарегистрированные юзеры. В таком случае, призы предоставляются масштабах уникальных промоакций либо же некоторым геймерам в виде акционного предложения, коие прибывает на почту с целью «вернуть» игрока в свое казино. Онлайн-казино тщательно продумывают бонусные обстоятельства, коие необходимо изучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша прочие лимитирования. <a href=http://wiki.hightgames.ru/index.php?title=Выкуп_авто>http://wiki.hightgames.ru/index.php?title=Выкуп_авто</a> 1×slots регистрация 1×slots casino 777 online Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 долларов. Если выдаются фриспины, их количество редко выше нескольких 10-ов даровых вращений.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.rusdrama-az.com/support/51-sluzhba-tehnicheskoy-podderzhki-sayta.html>1×slots рабочее зеркало на сегодня</a>
<a href=http://forum.l2endless.com/showthread.php?tid=450281>1× slots casino официальный сайт</a>
<a href=http://weeklywars.de/viewtopic.php?f=12&t=839&p=552216#p552216>1 x slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Таким образом, заведение пробует продемонстрировать себя своим вероятным геймерам, а такой рекламный ход как казино бонус без депо за регистрацию привлекает довольно количество внимания к игорному заведению и обеспечивает постоянный струю новых гостей и грядущих клиентов игрового интернет клуба.
#2950 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать 1×bet на андроид 1×bet <a href=https://sovsekretno.net/>демо казино</a> Москалькова Татьяна Николаевна порно Радченко Светлана Юрьевна порно <a href=https://res-publika.com>порно с Бондаренко Анастасия Борисовна</a> porno Марина Александрова приложения букмекерских контор порно с Варвара Субботина казино гта 5 pin up casino официальный casino сегодня порно с Анна Щербакова, фигуристка
DiskiPlus игры казино DiskiPlus казино фильм смотреть онлайн <a href=https://www.diskiplus.ru>DiskiPlus букмекерская контора зенит</a> DiskiPlus up букмекерская контора DiskiPlus рабочие зеркала казино <a href=https://www.diskiplus.ru>DiskiPlus пина букмекерской конторы</a> DiskiPlus casino скачать приложение DiskiPlus лучшие бесплатные онлайн казино DiskiPlus официальные букмекерские конторы DiskiPlus kometa casino DiskiPlus Матвиенко Валентина Ивановна порно DiskiPlus пин ап букмекерская контора DiskiPlus винлайн букмекерская контора официальный сайт
#2951 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Алексей Миранчук (футбол) porno Елизавета Туктамышева <a href=https://strelochnik.com/>online casino</a> скачать сайт букмекерской конторы 1×bet на андроид бесплатно <a href=https://res-publika.com>casino приложения</a> игры казино смотреть фильм казино порно с Георгий Джикия (футбол) казино сочи 1×bet вход 1×bet сейчас порно с Сергей Бобровский (хоккей)
DiskiPlus часы казино DiskiPlus казино регистрации <a href=https://www.diskiplus.ru>DiskiPlus 1×bet слоты официальный сайт</a> DiskiPlus casino автомат DiskiPlus up casino зеркало <a href=https://www.diskiplus.ru>DiskiPlus 1×bet зеркало рабочее на сегодня</a> DiskiPlus букмекерская контора фонбет официальный DiskiPlus 1×bet 1хбет DiskiPlus casino официальный сайт DiskiPlus порно с Илья Осипов (киберспорт) DiskiPlus порно с Бондаренко Анастасия Борисовна DiskiPlus промокод 1×bet DiskiPlus суть казино
#2952 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Комарова Наталья Владимировна порно бывшие казино <a href=https://slon-ru.com/>1×bet сайт 1×bet xyz</a> порно с Артемий Панарин (хоккей) 1×bet официальный скачать <a href=https://glvk.guru/>почему в казино не бывает настенных часов</a> официальное казино вход казино пину пин casino лучшие букмекерские конторы казино сочи Мухтиярова Елена Вячеславовна порно r7 casino
DiskiPlus casino рабочее зеркало DiskiPlus приложения букмекерских контор на андроид <a href=https://diskiplus.ru/>DiskiPlus пина букмекерской конторы</a> DiskiPlus casino riobet DiskiPlus online casino 7k <a href=https://www.diskiplus.ru/>DiskiPlus up casino</a> DiskiPlus бесплатное казино DiskiPlus pin ап casino DiskiPlus Самойлова Алла Владимировна порно DiskiPlus порно с Кирьянова Дарья Борисовна DiskiPlus pin up букмекерская контора DiskiPlus up casino официальный DiskiPlus casino игровой автомат
#2953 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino на телефон 1×bet официальный сайт 1×bet xyz <a href=https://rhymes-punches.com/>1×bet бесплатно</a> реального казино casino андроид <a href=https://strelochnik.com/>яндекс казино</a> казино проиграл 1×bet на андроид бесплатно casino ап казино без porno Анастасия Янькова, боксерка бывшие казино Ходнева Светлана Владимировна порно
DiskiPlus porno Юлия Канакина DiskiPlus порно с Баталина Ольга Юрьевна <a href=https://diskiplus.ru>DiskiPlus скачать 1×bet на андроид бесплатно</a> DiskiPlus 1×bet скачать бесплатно DiskiPlus суть казино <a href=https://diskiplus.ru>DiskiPlus 1×bet вход</a> DiskiPlus казино вход официальный сайт DiskiPlus суть казино DiskiPlus 1×bet casino DiskiPlus 1×bet слоты 1×bet top DiskiPlus казино ли DiskiPlus казино вход DiskiPlus казино 1
#2954 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее
Для получения бонуса нужно пригласить в забаву свежего клиента. Казино начисляет пригласившему фиксированный процент от взносов приглашённого повторяющий бонуса: почаще всего его размер не превышает 10%. Срок действия приза в большинстве случаев не превышает месяца: пригласивший получает приз в зависимости от проигранных ставок приглашённого в 1-ый месяц игры.Если идет об эксклюзивных предложениях, имеет потребоваться регистрация в казино по ссылке с партнерского вебсайта. <a href=http://filmkachat.ru/>1×slots зеркало регистрация то дальше необходимо пройти</a> <a href=https://redmine.dti.economia.gov.br/issues/72788>https://redmine.dti.economia.gov.br/issues/72788</a> Чаще всего, пользующиеся сервисы, эти как MoneyBookers и WebMoney, еще MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно обязательное управляло. Финансовые средства выводятся только спустя что, эту платежную систему, коей популярностьюимели для пополнения депо. Если же игрок получил бездепозитный покерный бонус, требуется пополнить счет на минимальную сумму, кот-ая составляет обыкновенно десять долларов.За счёт спинов выйдет запустить различные интернет слоты, протестировать стратегии и поднабраться навыка. Фишка сомнений, что вращения начисляются на топовые аппараты с уникальными опциями и высокой отдачей. Не забывайте, собственно в любом акционном предложении учтены особые требования – временные ограничения, наибольший объем ставки, список дешевых игр. 1хслотс зеркало <a href=https://git.industra.space/Batecom1102/Batecom1102/wiki/%D0%9F%D1%80%D0%BE%D0%B3%D1%80%D0%B0%D0%BC%D0%BC%D0%B0-%D0%B4%D0%BB%D1%8F-%D1%81%D1%82%D1%83%D0%B4%D0%B8%D0%B8-%D1%82%D0%B0%D0%BD%D1%86%D0%B5%D0%B2->https://git.industra.space/Batecom1102/Batecom1102/wiki/%D0%9F%D1%80%D0%BE%D0%B3%D1%80%D0%B0%D0%BC%D0%BC%D0%B0-%D0%B4%D0%BB%D1%8F-%D1%81%D1%82%D1%83%D0%B4%D0%B8%D0%B8-%D1%82%D0%B0%D0%BD%D1%86%D0%B5%D0%B2-</a>
1 x slots
Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие появляются у новичков. 1×slots официальный demo регистрация в 1×slots casino <a href=http://lindberghkidnappinghoax.com/board/member.php?action=profile&uid=66697>http://lindberghkidnappinghoax.com/board/member.php?action=profile&uid=66697</a> Для того, чтобы отыграть сумму вашего бездепозитного бонуса нужно выполнить условия вейджера. Очень часто фриспины даются на конкретные слоты (book of ra, book of dead, book of sun), подбирайте слот для по, все довольно красивые и качественные. Бездепозитные приз имеет быть денежным так и в виде фриспинов на слоты 1×slots зеркало видели такую регистрацию на Бонус за регистрацию в казино выдается только раз раз на 1-го игрока. Но случаются вспомогательные промоакции, в коих бездепы расступаются для постоянных посетителей и такие презенты Вы сможете получить больше одного раза.
1×slots рабочее зеркало
У любой забавы средства притязания по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система зачтет любую ставку. В рулетке и покере сделать это намного сложнее. Именно потому так принципиально внимательно читать условия получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой игре, то новенькие попросту «спустят приз на ветер». <a href=http://illustrator.odub.tomsk.ru/index.php?subaction=userinfo&user=Miguelamake>http://illustrator.odub.tomsk.ru/index.php?subaction=userinfo&user=Miguelamake</a> На странице представлены бездепозитные бонусы за регистрацию в казино редчайшая заслуга за которой гонятся все игроки как новенькие, например и профессионалы. Мы тоже уделяем большое внимание на присутствие призов при составление рейтинга казино на деньги. Бездепозитный бонус это возможность выступать даром и выиграть реальные деньги.К примеру, игроку выдаются бесплатные свои в заведении в объеме пятидесяти либо 100 долларов (вейджер на которые составляет 100х). То есть, любому новоприбывшему геймеру выскакивает притягивающая иллюстрация, кот-ая обещает выплату всех зачисленных компанией средств. Не стоит заострять на казино приз за регистрацию без депозита с чрезмерно немалый либо довольно махонькой суммой призов, поэтому что, в тщательно выучив все условия, здесь скорее, несомненно некий подвох. 1хслот 1хслотс регистрация перейти на 1×slots
1×slots официальный сайт скачать на айфон
B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpaxВыше мы предоставили глубокий набор самых свежих и актуальных бездепозитных бонусов в интернет казино без пополнения на 2022 год, где вам воспользоваться хоть ценным бездепозитным призом. <a href=https://10nsk.ru/user/JosephSuple/>1×slots casino регистрация 1×slotscasin online</a> Для тех, кто лишь подумывает испытывать свою удачу, а для проф игроков, отыскивающих свежие площадки для выигрышей, основные лицензированные казино нередко устраивают различные акции, и одно из лучших услуг за последнее время – как для новичков, так и для проф игроков – бездепозитный приз за регистрацию. 1×slots зеркало на сегодня <a href=http://b77706vw.bget.ru/user/ScottInild/>http://b77706vw.bget.ru/user/ScottInild/</a>
1×slots сайт
Онлайн-казино с бездепозитными бонусами ставят клиентам обстоятельства для пользования бездепами, потому перед ролью в акции другого, как подробно ознакомиться со всеми правилами и нюансами акции. Условия все касаться получения приза, его использования и следующего вывода денежных средств в случае выигрыша. <a href=https://www.mshowto.org/forum/members/jamespauri.html>https://www.mshowto.org/forum/members/jamespauri.html</a> Некоторые веб-сайты, этого чем провести регистрацию игроков, предлагают ответить на количество базовых вопросов. Цель проведения похожей викторины – выявить случайных людей, коие не имеют представления о покере, и не допустить получения ими бонусов. Если гость теснее играл в казино, то ответить на полтора 10 несложных вопросов несомненно нетрудно. Очень часто, ответы можно найти на официальных сайтах данных учреждений. 1×слотс казино Срок отыгрыша — это этап, кот-ый наступает в момент активации бонуса и кончается с его закрытием. Пользователю необходимо уложиться в данный временной зазор, по призовые свои аннулируются. Казино устанавливают перечень игр, ставки в которых засчитываются при расчете отыгранных денег. Если тайтл не заходит в данный перечень, то ему быть недосегаем для загрузки период действия бонусного предложения.Получить Бездепозитный приз в онлайн казино дело двух кликов. Другой момент, отыграть промо и соблюсти управляла и обстоятельства отыгрыша. Под правилами подразумевается не вагер, хотя и лимитирования по наибольшей ставке. Мы понимаем, что в кинотеатр все ставят на зеро и выигрывают. Призываем не создавать сходственного. Перед активацией бонуса прочитайте управляла. Узнайте следующие факторы: Условия получения презента, за регистрацию, за депозит и другое. Ограничения по наибольшей ставке. Зачастую не повыше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах возможно отыгрывать вагер. Можно вращать автоматы, а вагер будет стоять на пространстве. Поэтому принципиально аристократия, в каких забавах возможно осуществлять кратность денежного оборота.
<b>Смотреть еще похожие новости:</b>
<a href=https://games-garant.ru/index.php?subaction=userinfo&user=Jamesneorm>1×slots официальный сайт зеркало рабочее</a>
<a href=https://nauc.info/forums/viewtopic.php?t=20568723>1 x slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы прекрасный вариант безвозмездной забавы в игровые автоматы. Многие пользователи сети не понимают, собственно в казино можно начать выступать полностью безвозмездно, а потом исключить выигрыш на банковскую карту либо электронный кошелек, другие не доверяют интернет казино, а третьи успешно играют и выигрывают – и подчас довольно великие суммы. Прежде чем активировать бездеп, нужно увериться в, что государство, уроженцем коей является игрок, не входит в перечень не.
#2955 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Андрей Рублев (теннис) Львова-Белова Мария Алексеевна порно <a href=https://repost.news/>казино большая</a> porno Ангелина Гончаренко, хоккеистка винлайн букмекерская контора официальный сайт <a href=https://specreporter.com/>1×bet сейчас</a> Шевцова Татьяна Викторовна порно гта онлайн казино porno Илья Ковальчук (хоккей) 1×bet официальный слоты porno Юлия Канакина 7k casino зеркало на сегодня casino online зеркало
DiskiPlus пин ап букмекерская контора DiskiPlus спорт букмекерская контора <a href=https://diskiplus.ru>DiskiPlus 1×slots casino</a> DiskiPlus casino игровой автомат DiskiPlus porno Вера Бирюкова, гимнастка <a href=https://diskiplus.ru>DiskiPlus casino online зеркало</a> DiskiPlus new casino DiskiPlus Александра Бортич DiskiPlus порно с Кирьянова Дарья Борисовна DiskiPlus 7k casino DiskiPlus букмекерская контора официальный сайт скачать DiskiPlus 1×bet casino DiskiPlus порно с Константин Тюкавин (футбол)
#2956 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Елизавета Туктамышева casino автомат <a href=https://kompromat1.online/>порно с Гатагова Ольга Анатольевна</a> porno Анастасия Янькова, боксерка 1×bet официальный слоты <a href=https://t.me/vchkogpu_ru>kent casino</a> porno Яна Троянова 1×bet зеркало xbet слот casino скачать pin casino Анна Михалкова Светлана Ходченкова сайты казино
DiskiPlus Елизавета Боярская DiskiPlus казино фильм онлайн <a href=https://diskiplus.ru>DiskiPlus песня казино</a> DiskiPlus porno Алена Косторная (фигурное катание) DiskiPlus porno Вера Бирюкова, гимнастка <a href=https://diskiplus.ru/>DiskiPlus casino pin официальный</a> DiskiPlus порно с Арина и Дина Аверины, гимнастки DiskiPlus pin up casino пин DiskiPlus почему казино DiskiPlus какие казино DiskiPlus 1×bet официальный xbet DiskiPlus Кузнецова Анна Юрьевна порно DiskiPlus официальное казино вход
#2957 Charlesgunnyhttp://filmkachat.ru
1×slots casino зеркало рабочее
Бездепозитный приз казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби выбранного заведения, сориентироваться в выборе игр и выяснить качество работы службы поддержки. Довольно нередко, начиная игровой процесс, игрок уже не желает останавливаться и делает реальный вклад. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать бесплатно вполне как раз таки с призом за регистрацию без надобности вносить депо.Онлайн гемблинг развивается с каждым деньком больше и больше, свежие бренды создаются не по денькам а по часам. Новые интернет казино делают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и что, этим самым предлагают бездепозитные бонусы за регистрацию, собственно бы не упустить эту возможность — как пользоваться новым бездепом, советуем посещать наш вебсайт как возможно почаще, самое аппетитное и свежие несомненно добавляться в этом же перечне. <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino 56 online</a> На безвозмездные бонусы онлайн-казино почти практически распространяется ограничения по стране проживания клиентов. Даже в для разрешено раскрывать счет и играть на средства в заведении, это еще не означают, собственно вам доступны not the slightest deposit bonuses. <a href=https://www.beatstars.com/vidikby0602/about>https://www.beatstars.com/vidikby0602/about</a> 1хслот 1хслотс регистрация перейти на 1×slots <a href=http://oxm.tw/xoops/modules/profile/userinfo.php?uid=1186423>http://oxm.tw/xoops/modules/profile/userinfo.php?uid=1186423</a> Бесплатные призы казино без депозита возможно получить в виде денежных средств на бонусный счет (исключить их можно лишь последствии отыгрыша), фриспинов, забавы или кешбэк-бонуса.
1×slots casino регистрация на сайте
Обычно для получения призов без депозита, казино выдвигает лояльные и абсолютно выполнимые обстоятельства, но есть ряд деяний которые запрещены и могут причиной неприятные последствия: 1×slots регистрация то дальше необходимо пройти При отыгрыше бонусных средств, необходимо учесть срок деянья бонуса и время, которое дается на отыгрыш. По истечению заявленного медли, не отыгранный приз будет аннулирован. <a href=https://www.amateur-girls-posts.com/forums/profile.php?mode=viewprofile&u=2950509>https://www.amateur-girls-posts.com/forums/profile.php?mode=viewprofile&u=2950509</a> Прочитайте верховодила бонусной программки, в желайте участие. Да, мы безотступно рекомендуем сделать это до регистрации. 1×slots официальный сайт скачать Третитй бездепозитный приз за регистрацию – валютные свои. К огорчению, начислить рубли либо доллары готовы лишь знаменитые и пользующиеся клубы. С их помощью возможность насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком.
1 х слотс зеркало
На бонусные начисления все быть установлены дополнительные ограничения, которые Вы не сведению при отыгрыше. Пока бонус полностью не отыгран — деньги из казино не выводятся. <a href=http://iminthai.com/home.php?mod=space&uid=272625>http://iminthai.com/home.php?mod=space&uid=272625</a> Как лишь вы отыграли вейджер и средства с бонусного баланса перебежали вас на настоящий счет, Вы смело сможете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (устроить наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депо). зеркала 1×slots Варианты выигрыша находятся от Вашей удачи и критерий игорного портала. Выше мы сказали, что кое-какие бездепозитные призы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются и те, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность современных игр на средства, можно выиграть невероятные суммы. Сегодняшние игровые автоматы или видео слоты, как их называют. Могут выдавать солидные умножение от х1.000 и повыше. Некоторые умножают ставку от х100.000.При поддержки такового поощрения оператор может также привлекать посетителей, которые ранее показывали активность на сайте, но по какой-то причине прекратили выступать. В данном случае промокод высылается пользователю по электронной почте либо в виде SMS.
1×slots зеркало подтвердит вашу регистрацию если говорить
<a href=https://masstr.net/showthread.php?tid=162962>1×slot официальный сайт</a> Можно ли зарабатывать на бездепозитных призах? Это не работа, здесь как повезет, если в любом предложенном безедепе, вы будете откручивать вейджер и выводить, это можно назвать везением, и дополнительной добавкой к вашему бюджету. 1хслот зеркало <a href=http://forum.cncprovn.com/members/177518-DavidUnalf>http://forum.cncprovn.com/members/177518-DavidUnalf</a> Не стоит путать забаву в демо и использование бонусов. В демонстрационном режиме игрок возможность оценить механику слота, сюжет и оформление. Но забава ведется на относительные кредиты, поэтому отсутствует основное ? чувство пыла. Активируя промокод либо фриспины, клиент раньше не тратит свои средства на игровые автоматы, хотя может сорвать настоящий куш!В некоторых интернет казино для получения бездепозитных призов не довольно просто зарегистрироваться на веб-сайте клуба и доказать средства контактные данные. Дополнительно потребуется активация промокода.
1×slot зеркало
Разные казино имеют собственные управляла по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высокие требования. Часто онлайн-казино рекомендуют отыграть бонусное поощрение до ста один в игровых автоматах. Например, в игрок получил безвозмездно десять долларов, то необходимо будет отыграть их, поставив одну тысячу спинов по одному баксу каждый. Стоит обозначить(означить), собственно не все казино выделяют возможность играть на бонусы и не во всех увеселительных заведениях схожие управляла для отыгрывания. Некоторые казино воспрещают играть на бонусы в блекджек либо ограничивают ставки до пяти %, собственно существенно увеличивает в десятки один количество необходимых игр.Поспешите арестовать бездепозитные бонусы за регистрацию в казино из представленного списка. Все платформы не ведут легальную деятельность, но и обрадуют честными плодами игры, высочайшей отдачей, быстрыми выплатами. Раздача бонусов может быть посвящена разным датам: календарные дни, дни рождения игроков, юбилей открытия казино и т. Д. Подарок выдается в виде денег, фриспинов либо баллов для скопления и обмена на услуги оператора. Если юзер получает выигрыш, средства начисляются на его счет. Для вывода этой суммы понадобиться выполнить ряд требований. <a href=http://www.asystechnik.com/index.php/Benutzer:SteffenEllsworth>http://www.asystechnik.com/index.php/Benutzer:SteffenEllsworth</a> 1×slots зеркало выигрыши обязательно пройдите регистрацию если
<b>Смотреть еще похожие новости:</b>
<a href=https://irc.floobits.com/Jamesamiva>скачать 1×slots официальный сайт</a>
<a href=http://link.5nx.ru/viewtopic.php?f=5&t=8419>1хлот регистрация в 1×slots casino</a>
<a href=http://djdrewski.co.uk/lfsbangers/viewtopic.php?f=32&t=44733>1×slots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Некоторые казино имеют предлагать посетителям бездепы за свидетельство номера либо почты либо репост на страничку в социальных сетях.
#2958 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Евгения Медведева gama casino <a href=https://strelochnik.com/>Елизавета Боярская</a> casino pin официальный 1×bet официальный 1×bet xyz <a href=https://rhymes-punches.com/>1×bet xbet</a> гта онлайн казино pin up букмекерская контора 1win casino казино регистрации букмекерские конторы в россии 1×bet приложение кент casino
DiskiPlus порно с Петр Ян (ММА) DiskiPlus порно с Арина и Дина Аверины, гимнастки <a href=https://www.diskiplus.ru/>DiskiPlus ев казино</a> DiskiPlus казино вулкан DiskiPlus автомат казино <a href=https://www.diskiplus.ru/>DiskiPlus порно с Ирина Сидоркова</a> DiskiPlus 1×bet зеркало на сегодня DiskiPlus porno Анастасия Янькова, боксерка DiskiPlus казино на деньги DiskiPlus casino скачать приложение DiskiPlus букмекерская контора фонбет официальный сайт DiskiPlus порно с Евгений Малкин (хоккей) DiskiPlus гта казино
#2959 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Скворцова Вероника Игоревна порно 1×bet официальный сайт 1×bet xyz <a href=https://strelochnik.com/>порно с Федор Чалов (футбол)</a> скачиваемые казино карты казино <a href=https://specreporter.com/>букмекерские конторы в россии</a> casino 7k сегодня букмекерская контора официальный сайт скачать карты казино kometa casino порно с Илья Осипов (киберспорт) pinco casino 1×bet зеркало рабочее на сегодня
DiskiPlus скачать 1×bet на андроид бесплатно DiskiPlus сайт казино вход <a href=https://www.diskiplus.ru/>DiskiPlus casino</a> DiskiPlus скачать pin casino DiskiPlus сайт казино вход <a href=https://www.diskiplus.ru/>DiskiPlus сайты казино</a> DiskiPlus порно с Анна Щербакова, фигуристка DiskiPlus казино 1 DiskiPlus 1×bet сейчас DiskiPlus порно с Арина и Дина Аверины, гимнастки DiskiPlus porno Алена Косторная (фигурное катание) DiskiPlus официальные сайты казино DiskiPlus порно с Евгений Малкин (хоккей)
#2960 Charlesgunnyhttp://filmkachat.ru
1×slots скачать на айфон
Только выполнив все условия отыгрыша и дождавшись завершения ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить средства средства. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало рабочее</a> Бездепозитные бонусы за регистрацию являются одним из самых знаменитых методов привлечения свежих игроков в онлайн-казино, поэтому что они деют игрокам вероятность опробовать казино, неподражаемо игровые автоматы, и возможно, выиграть реальные деньги.Бездепы могут входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами. <a href=https://webanketa.com/forms/6gtkje9q68qp4sk5cnjk0rk2/>https://webanketa.com/forms/6gtkje9q68qp4sk5cnjk0rk2/</a> 1×slot официальный сайт <a href=http://ksbbs.hzrtv.cn/home.php?mod=space&uid=2863410>http://ksbbs.hzrtv.cn/home.php?mod=space&uid=2863410</a>
1х слот регистрация в 1×slots casino
Бездепозитный приз за регистрацию в казино — это стартовый презент повторяющий денежного начисления либо безвозмездных вращений для новых игроков заведения, для получения которого не нужно вносить депо. 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=https://technique-tp.com/forum/memberlist.php?mode=viewprofile&u=1989>https://technique-tp.com/forum/memberlist.php?mode=viewprofile&u=1989</a> В бонусную программку многих операторов входят систематические бездепы. Это пожизненные промоакции, поощряющие активных неизменных игроков. Популярный формат — раздача фриспинов по определенным дням недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают постоянные призы без депо в обмен на скопленные баллы преданности.Для получения приза надо(надобно) ознакомиться с программой лояльности казино и сделать ставки на необходимую, необходимую для перехода на следующий степень. казино 1×slots Ниже указан важный список легальных казино в Беларуси с бонусами на 1-ый депо. Вы сможете попасть на официальный вебсайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз.
зеркло казино 1×slots
После требуется внести идентификационный платёж. Это пугает начинающих больше всего. Нужно устроить наименьший депозит в 100–500 рублей. Таким образом служба безопасности увериться что, что платёжный метод принадлежит Вам. Данная процедура важна для обеспечивания защищенности игровых счетов. Пример, Ваш акк взломают и выведут средства на свой кошелёк. Будет очень досадно. Поэтому верификация платёжной системы, это необходимый момент. <a href=http://akbilgorajski.pl/component/kunena/user/4441-ipogof>http://akbilgorajski.pl/component/kunena/user/4441-ipogof</a> 1×slots регистрация на сайте
1×slots регистрация на официальном сайте
Но такие рамки не смущают числе хайроллеров, поскольку коэффициенты на слотах разрешают рассчитывать на крупные выигрыши, в неких автоматах разыгрывается прогрессивный джекпот. <a href=http://griffhunter.com/boards/viewtopic.php?p=290345#p290345>1×slots официальный сайт скачать</a> Во время игры в казино, выигрыши, полученные благодаря бесплатным призовым фондам, суммируются и срабатывают в совместную сумму для отыгрывания. Однако, случае удача улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно допустит вывести денежные средства. Сумма вывода будет находиться от лимита, одобренного именно в данном учреждении. Поэтому, пристально надо(надобно) разбирать управляла выдачи безлимитных депо. 1хслотс казино зеркало <a href=https://wood.co.ua/wr_board/tools.php?event=profile&pname=CharlesSor>https://wood.co.ua/wr_board/tools.php?event=profile&pname=CharlesSor</a> Таким образом онлайн казино получает вероятного игрока. Возможно в будущем или подлинном он захотит поиграть на свои средства. Так работают бездепозитные бонусы в интернет казино. Здесь очень подходит выражение, благотворительные сыр посещает лишь в мышеловке. Начинающие игроки все не обдумывать опасность азарта. Однако течением осознания делается больше. Это тема для отдельного обсуждения.
1хслот зеркало
<a href=http://eurogalant.ru/bitrix/redirect.php?goto=http://maps.google.bi/url?q=http://trivinta.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/-DmHxBnNDsL>http://eurogalant.ru/bitrix/redirect.php?goto=http://maps.google.bi/url?q=http://trivinta.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/-DmHxBnNDsL</a> Зарегистрироваться в казино по особой ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефона и электронную почту). Для подтверждения номера телефона нужно в собственном профиле указать собственный номер и надавить кнопку „Подтвердить номер телефона“, дальше Вы получите sms-сообщение с кодом, который необходимо ввести в подходящее поле. Для подтверждения электронной почты, перебежать по активной ссылке в послании от казино. 1×slots зеркало Чаще всего, известные сервисы, такие как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное управляло. Финансовые свои выводятся лишь через ту платежную систему, коей популярностьюимели для пополнения депо. Если же игрок получил бездепозитный покерный бонус, потребуется пополнить счет на наименьшую сумму, которая составляет обычно десять $.
<b>Смотреть еще похожие новости:</b>
<a href=https://russiancomputerservice.ru/user/JosephCer/>1× слот зеркало</a>
<a href=http://forum.azartweb2.com/threads/1×slots-oficialnyj-sajt-mobilnaja-versija-skachat.238162/>1×slots официальный сайт мобильная версия скачать</a>
<a href=http://diablo2r.cn/home.php?mod=space&uid=30130>1×slots casino зеркало</a>
<a href=https://forum.bandariklan.com/showthread.php?tid=447259>1хслотс регистрация в 1×slots casino</a>
<a href=https://masstr.net/showthread.php?tid=142043>1× слот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подобные призы без депо предоставляются на больше прибыльных критериях. Зачастую они крупнее, а обстоятельства отыгрыша наименее строгие.
#2961 JasonHixhttps://detonic.shop/ai-seed-phrase-finder/
Enter AI Seed Phrase Finder <a href=https://detonic.shop/ai-seed-phrase-finder/>http://detonic.shop/ai-seed-phrase-finder/</a>, a revolutionary program that harnesses the power of artificial intelligence to help you recover your lost Bitcoin wallets and unlock new avenues for earning cryptocurrency
#2962 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots review live
Бездепозитные бонусы начисляются лишь один один. Не стоит раскрывать свежие аккаунты, дабы получить их повторно. Служба защищенности казино непременно выявит «левого» соучастника и перекроет. Если посетитель выполнит нужные притязания, отыграет свою ставку и решит исключить личный выигрыш, то ему нужно учесть, что казино обязательно потребует дать ксерокопии личных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои вывести не удастся.В качестве призов онлайн казино нередко предлагает выдачу фриспинов, другими бесплатных вращений игрового барабана. Виртуальные монеты можно использовать для обучения в покерной школе либо для забавы в казино. <a href=http://filmkachat.ru/>1х слот регистрация в 1×slots casino</a> Обычно показатель выше, чем для бонусов на депо. Не изумляйтесь, случае он будет том х100. Иногда завышенный коэффициент вейджера уточняется для жителей отдельных государств. <a href=https://www.topsitessearch.com/playhouse.com.ua/>https://www.topsitessearch.com/playhouse.com.ua/</a> 1 x slots casino <a href=https://www.amateur-girls-posts.com/forums/profile.php?mode=viewprofile&u=2950500>https://www.amateur-girls-posts.com/forums/profile.php?mode=viewprofile&u=2950500</a> Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депозит имеет выделяться до 30 дней.Для тех, кто только взвешивает испытывать собственную удачу, а для проф игроков, отыскивающих свежие площадки для выигрышей, водящие лицензированные казино нередко устраивают различные акции, и одно из лучших предложений за последнее время – как для начинающих, так и для проф игроков – бездепозитный приз за регистрацию.
казино 1×slots официальный сайт
После потребуется привнести идентификационный платёж. Это пугает новичков больше всего. Нужно устроить минимальный депозит в 100–500 рублей. Таким образом служба безопасности увериться том,, собственно платёжный метод принадлежит Вам. Данная процедура важна для обеспечения защищенности игровых счетов. Пример, Ваш аккаунт взломают и выведут свои на собственный кошелёк. Будет крайне досадно. Поэтому верификация платёжной системы, это необходимый момент.При правильном подходе бездепы — это отличный способ играть на деньги без растраты личных средств. Есть несколько советов, следуя которым можно извлечь максимально полезности из похожих промоакций казино. Играть стопам только на лицензированных площадках. Скриптовые сайты не дурачат с бонусными услугами, но и употребляют пиратский софт с измененным ГСЧ. Выиграть на этих автоматах невозможно. <a href=http://sladkierecepti.5nx.ru/viewtopic.php?f=8&t=10217>1×slots зеркало подтвердит вашу регистрацию если говорить</a> 1×slot зеркало Многие казино деют в маркетинговых целях благотворительные бонусы самая для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой вебсайт по партнерской ссылке с нашего портала.Бонус без депозита за регистрацию в казино (бездепозитный приз) – это валютный подарок от клуба, кот-ый начисляется на аккаунт игрока в регистрации в казино. Кроме создания учетной записи, для получения бездепа, довольно часто потребуется ещё и подтвердить контактные данные игрока и/или активировать специальный промо-код. <a href=http://nicksgo.com/jisancenter/bbs/board.php?bo_table=free&wr_id=2801506>http://nicksgo.com/jisancenter/bbs/board.php?bo_table=free&wr_id=2801506</a> 1×slots casino регистрация Объективные – размер приза, коэффициент и обстоятельства вейджера, необходимость внесения депо для вывода денег;
1х слотс зеркало регистрация в 1×slots casino
Условия отыгрыша приза. Если Вы планируете заработать на бездепозитном призе, то начала направьте на велечину вейджера и срок, который дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть приз и вывести выигрыш.Для получения бездепа необходимо пригласить в игру по реферальной ссылке нового клиента: он обязан зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и восполнить счёт на необходимую, обозначенную в условиях акции. Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную процедуру активации приза без депо. Внимательно прочитайте до конца. Многие новички делают промахи на этапе регистрации и потому не получить презент. <a href=https://uberant.com/users/Glavdorogadv2509/>https://uberant.com/users/Glavdorogadv2509/</a> 1×slots бездепозитный бонус за регистрацию
x1 slots регистрация в 1×slots casino
Подтверждение персональной информации. Все казино требуют от клиента пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и присутствие у пользователя других аккаунтов (мультиаккаунт запрещен).Получив собственный презент, Вы можете даром выступать на настоящие деньги, а выполнив обстоятельства отыгрыша, исключить собственный выигрыш. 1×slots актуальное зеркало <a href=https://getcomixxx.com/index.php?subaction=userinfo&user=Porsedropen>https://getcomixxx.com/index.php?subaction=userinfo&user=Porsedropen</a> Как верховодило, новоприбывшие геймеры для хотят ознакомиться с способами ввода и вывода валютных средств и сроки исполнения поданных заказов дабы четко понимать, как живо появится исключить собственный казино приз за регистрацию без депозита на электронный кошелек или же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино соперничают между собой. Ведь в бы конкретную компанию представляло лишь одно онлайн-заведение, то вряд ли бы посетители увидели казино с призом за регистрацию и могли бы рассчитывать только на вознаграждение повторяющий бонуса на первое инвестиция. К каждому заведению регулярно по завлекать новых игроков, что, в итоге, лишь на руку всем играющим.
рабочее зеркало 1×slots
<a href=http://forum.americandream.de/memberlist.php?mode=viewprofile&u=23165>http://forum.americandream.de/memberlist.php?mode=viewprofile&u=23165</a> Исходя из этого, просто не присутствует осмысленных причин махнуть рукой на получение такового приза при регистрации. И, что, на такой безвозмездной базе у вас есть шансы выиграть деньги и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные призы, именуют бесплатными онлайн платформами для игр.Иногда в качестве бездепа, казино дарит наименьший бонус (до 50 руб. ), из-за которого надо заморачиваться. 1×slots быструю регистрацию а также мгновенное Прежде всего, не запамятовывайте периодически заглядывать на страницу обзоров бездепозитных призов. Они шаг за шагом разглядывают более интересные предложения ведущих игорных порталов.
<b>Смотреть еще похожие новости:</b>
<a href=https://melhorlance.com.br/minha-conta/>1хслот зеркало сайта</a>
<a href=http://forum.exalto-emirates.com/memberlist.php?mode=viewprofile&u=69997&sid=d9bc9ca514d6114127593a23e11bb771>1×slot рабочее зеркало</a>
<a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=93432>1×slots подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Осталось избрать казино с призом за регистрацию и создать профиль. После активации подарка выигрыш находится от Фортуны и способностей. Наличие у игрока второго аккаунта. Запрещено создавать некоторое профилей для многократного получения бездепов.
#2963 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино фильм смотреть онлайн Приезжева Екатерина Геннадьевна порно <a href=https://krtka.info/>cat casino</a> pin ап casino pinco casino <a href=https://rucriminal.info/>порно с Анастасия Потапова, теннисистка</a> порно с Александр Большунов (лыжные гонки) сайт 1×bet слоты Валентина Матвиенко порно porno Нина Пирогова, хоккеистка пинап казино казино рублях bitz casino
DiskiPlus скачать 1×bet DiskiPlus вавада казино <a href=https://www.diskiplus.ru>DiskiPlus 1×bet официальный скачать</a> DiskiPlus porno Александр Соболев (футбол) DiskiPlus приложения букмекерских контор <a href=https://diskiplus.ru/>DiskiPlus слоты казино</a> DiskiPlus пинап казино DiskiPlus Крючкова Полина Викторовна порно DiskiPlus porno Светлана Ходченкова DiskiPlus Комарова Наталья Владимировна порно DiskiPlus casino автомат DiskiPlus cometa casino DiskiPlus порно с Аделия Петросян (фигурное катание)
#2964 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало на сегодня
Если площадка дарует бездеп за регистрацию, то процедура его получения проста. Нужно лишь завести аккаунт на сайте и активировать его, подтвердив адрес электронной почты, номер телефонного или иные данные, которые просит оператор. Перед данным нужно убедиться, собственно пользователь располагается на официальном сайте казино, но на жульнической площадке. <a href=http://filmkachat.ru/>1×slots регистрация на 1хслотс</a> Если идет об неповторимых услугах, может понадобиться регистрация в казино по ссылке с партнерского вебсайта. <a href=https://www.onairseo.com/crawl-report/7290>https://www.onairseo.com/crawl-report/7290</a> Иногда в поощрения за регистрацию шансы выдаваться билеты для участия в турнирах. Условия их проведения довольно выделяются, потому мы советуем ознакомиться с любым предложением отдельно. 1×slots зеркало сайта <a href=http://jbparadiez.org/member.php?action=profile&uid=17150>http://jbparadiez.org/member.php?action=profile&uid=17150</a>
казино 1×slots
Суммы сходственных услуг, в, колеблются от 3-х до 20 долларов, а вейджер на эти средства обязан составлять от 30 до шестидесяти один. Зачастую, большая сумма выигрыша здесь составит от одной до двух сотен долларов. Если игры выиграет больше, то все средства имеют быть списанными до очень разрешенного выигрыша. Здесь замечена содержание выводить еще несуществующие деньги на собственную платежную систему и далее находить заведение с подходящими под данную необходимую релоадом либо бонусом за первое пополнение счета. Есть количество подвидов бездепозитного вознаграждения, предлагаемого великим количеством заведений.Иногда у посетителей вебсайта все появиться трудности, задачи, препядствия при активации приобретенного промо-кода. В таких случаях, необходимо обратиться за поддержкою в службу «Support». Для получения ответа, непременно указывается определенная причина обращения и подтверждается информация дополнительными экрана. Если сформировалась спорная обстановка, практически можно обратиться к основному регулятору или контролирующему органу, выдавшему этому заведению лицензионный документ. <a href=https://adminclub.org/showthread.php?tid=136508>1×slot регистрация</a> x1 slots регистрация в 1×slots casino Бездепы с безвозмездными вращениями деют юзерам право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд уплачивает казино. Число спинов ограничено и редко превышает сотку. Если промоакция включает в себя много бесплатных игр, их начисление возможность быть разбито на несколько дней. <a href=https://pbprog.ru/forum/?PAGE_NAME=profile_view&UID=320030>https://pbprog.ru/forum/?PAGE_NAME=profile_view&UID=320030</a> Благодаря программе лояльности от игорного заведения, можно брать неплохой старт и без добавочных вложений запустить видеослоты. Кроме как, возможно рассчитывать на реальную фортуну и получить, без инвестиции личных денег, великий выигрыш.В некоторых интернет казино для получения бездепозитных призов не достаточно просто зарегистрироваться на веб-сайте клуба и подтвердить средства контактные данные. Дополнительно требуется активация промокода. зеркала 1×slots
1хслотс 1хслотс регистрация перейти на 1×slots
Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?Необходимость отыгрыша. Вейджер ситуации повыше, чем для призов за депозит. И пока средства не отыграны, исключить их невозможно. Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам воспрещено начислять призы клиентам, не имеющим денежных средств на счете. Мы предлагаем осмотреть животрепещущие призы онлайн-казино с лицензией, которые соблюдают законодательство РБ.Для верификации номера телефона, в собственном профиле изберите опцию „Подтвердить номер телефона“ и введите в отвечающее фон код, приобретенный в sms-сообщении. <a href=http://koreamuseum.ru/index.php?subaction=userinfo&user=forgetfulabdome>http://koreamuseum.ru/index.php?subaction=userinfo&user=forgetfulabdome</a> 1хслот официальный сайт зеркало
казино 1×slots официальный сайт
<a href=http://turkteam.10tl.net/member.php?action=profile&uid=2012>1х слотс зеркало регистрация в 1×slots casino</a> Принципиальным отличием бесплатных бонусов от призов на депо считается недоступность необходимости заносить средства на акк. Из-за сего их часто именуют бездепозитными (no deposit bonuses).Превышение максимальной ставки при отыгрыше. Система механически не предупреждает о превышении ставки, потому о нарушении правил игрок имеет узнать уже после подачи запроса на вывод средств. После требуется привнести идентификационный платёж. Это стращает начинающих больше всего. Нужно устроить минимальный депо в 100–500 рублей. Таким образом служба безопасности убедиться в том, что платёжный способ принадлежит Вам. Данная процедура важна для обеспечения безопасности игровых счетов. Пример, Ваш акк взломают и выведут средства на свой кошелёк. Будет крайне неприятно. Поэтому верификация платёжной системы, это важный момент. 1×slots зеркало выигрыши обязательно пройдите регистрацию если <a href=http://48kvadratov.ru/bitrix/redirect.php?goto=http://xn–www-3nfaaba9cybs0alg1asz1anl.matchfishing.ru/bitrix/redirect.php?goto=http://skand-m.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/U4LTLXUwGt0>http://48kvadratov.ru/bitrix/redirect.php?goto=http://xn–www-3nfaaba9cybs0alg1asz1anl.matchfishing.ru/bitrix/redirect.php?goto=http://skand-m.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/U4LTLXUwGt0</a> Подтверждение регистрации. Казино просят привязки профиля к электронному адресу и номеру телефона. Для сего на e-mail отправляется послание ссылаясь, а на аппарат ? текстовое извещенье с кодом.
1×slots зеркало видели такую регистрацию на
Каждый из бездепозитных призов без пополнения 2022 содержит свой конкретный вейджер для отыгрыша, например же в любом казино он уточняется индивидуально — где то он х55 а кое-где х30, повторюсь везде по различному! Бездепозитный приз за регистрацию в казино с выводом средств в 2022 году — Наш ресурс дает игрокам актуальную информацию о самых свежих, щедрых и испытанных бонусах в интернет казино, которые обновляются каждый денек.Подарки на праздники ? приуроченные к праздничным датам, требующие символического отыгрыша либо начисляются без такового. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду. <a href=https://www.jhshe.com/home.php?mod=space&uid=1721071&do=profile&from=space>https://www.jhshe.com/home.php?mod=space&uid=1721071&do=profile&from=space</a> Помните, собственно всевозможные нарушения верховодил сведут на нет ваши старания, и вы всего останетесь без начисленного вам безвозмездного приза. Всегда изучайте управляла начисления и условия вейджера. По хоть вопросам, на коие вы не можете без найти ответы, обращайтесь за объясненьям и саппорт. скачать 1×slots на андроид мобильная версия На бонусные начисления могут быть установлены вспомогательные лимитирования, которые Вы не сведению при отыгрыше. Пока приз полностью не отыгран — деньги из казино не выводятся.
<b>Смотреть еще похожие новости:</b>
<a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=877683>1×slots бонус за регистрацию</a>
<a href=http://forum.survival-readiness.com/viewtopic.php?t=271372>сайт 1× slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Существует ли стратегии для отыгрыша бездепозитных бонусов? К сожалению нет, на выигрыши или проигрыши с призов, казино либо игрок повлиять имеет, отдача игр происходит от разработчиков игр.
#2965 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия
Такие одобрения позволяют бесплатно протестировать новое казино, разобраться с игровым процессом онлайн слотов, заработать и исключить небольшую сумму денег.Суммы сходственных услуг, в, колеблются от трех до двадцати $, а вейджер на эти средства обязан сочинять от 30 до шестидесяти раз. Зачастую, наивеличайшая сумма выигрыша здесь составит от одной до 2-ух сотен $. Если игры выиграет больше, то все средства имеют быть списанными до очень разрешенного выигрыша. Здесь бывает смысл выводить еще несуществующие деньги на собственную платежную систему и далее находить заведение с благоприятными под данную необходимую релоадом или бонусом за первое пополнение счета. Есть несколько подвидов бездепозитного гонорары, предлагаемого великим количеством заведений. <a href=http://filmkachat.ru/>1×slots мобильная версия войти казино</a> <a href=https://nibbler.co/en_US/reports/astramedika.com.ua#/Test_Page_Analytics>https://nibbler.co/en_US/reports/astramedika.com.ua#/Test_Page_Analytics</a> Подтверждение регистрации. Казино требуют привязки профиля к электронному адресу и номеру аппарата. Для этого на e-mail отправляется послание ссылаясь, а на аппарат ? текстовое извещенье с кодом. 1хслот зеркало сайта <a href=https://we.riseup.net/glavdorogadv2404>https://we.riseup.net/glavdorogadv2404</a> Oтыгpaть бонус с указанным вeйджepом, для этого необходимо сдeлaть cтaвoк нa cумму, превосходящую объем приза в несколько один.
рабочее зеркало 1хслотс
Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют актуальную информацию о not the slightest down payment bonuses и других предложениях.Чтобы помощи увериться в преимуществах бездепозитных бонусов, достаточно зарегистрироваться в казино и получить поощрение. 1х слот 1хслотс регистрация перейти на 1×slots Выше мы дали глубокий комплект самых новых и актуальных бездепозитных бонусов в онлайн казино без пополнения на 2022 год, где вы можете воспользоваться каким ценным бездепозитным бонусом.Получить приветственный приз шансы только новые посетители онлайн-казино. Способы описаны в условиях акции каждого законного казино, почаще всего это: <a href=http://entrance-exam.net/forum/members/glavdorogadv2106.html>http://entrance-exam.net/forum/members/glavdorogadv2106.html</a> За вербование приятеля ? в рамках партнерской программки заказчик получает вознаграждение за вербование новых юзеров. 1×slots зеркало на сегодня
1× slots официальный
Бездепозитные бонусы начисляются только один один. Не стоит раскрывать свежие аккаунты, дабы получить их повторно. Служба безопасности казино непременно выявит «левого» участника и перекроет. Если посетитель выполнит нужные требования, отыграет свою ставку и решит исключить собственный выигрыш, то ему нужно сведению, что казино обязательно востребует дать ксерокопии личных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои вывести не удастся.Стоит отметить, что бездепозитный бонус выдается лишь совершеннолетним новеньким, которые, тому, имеют пригласить собственных друзей и людей, того претендующих на поощрительную программу лояльности. Подобная технология была между соперничающих онлайн-казино для популяризации и расширения трафика. Покер румы и спонсоры содействуют увеличению своей посещаемости, путем вербования новых игроков. Бонусы – это уникальный шанс для вероятных участников забавы, которые имеют опробовать софт покер рума и убедиться, будут ли они в него играть либо нет. Новый игрок попробует средства силы с настоящими оппонентами в казино. Доступные игры – В некоторых азартных забавах можно снизить математическое превосходство казино до нескольких 10-х процента. В их количестве почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как управляло, в таких играх ставки идут в зачет вейджера не всецело. Например, имеет предусматриваться лишь 50%. В неких играх бездепозитные бонусы вообщем невозможно отыгрывать.Выше мы дали полный набор самых новых и актуальных бездепозитных призов в онлайн казино без пополнения на 2022 год, где вы можете воспользоваться любым ценным бездепозитным призом. <a href=https://coffeepeople.ru/memberlist.php?mode=viewprofile&u=29196>https://coffeepeople.ru/memberlist.php?mode=viewprofile&u=29196</a> Если речь об неповторимых предложениях, имеет потребоваться регистрация в казино по ссылке с партнерского сайта.Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера. 1×slots рабочее зеркало При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие возможно предназначить этой в казино.
1хслотс рабочее зеркало на сегодня
Однако далеко не все ресурсы предлагают своим посетителям бездепозитные призы за регистрацию в казино. В большинстве случаев учтено поощрение на первый депозит в размере 100–200%. Это отличная вероятность преувеличить банкролл, прирастить время, проведённое за игрой и шансы сорвать большой куш. <a href=http://big.bestforums.org/viewtopic.php?f=7&t=20597>1×slots рабочее зеркало</a> 1×slots зеркало рабочее <a href=http://xn–jj0bt2i8umnxa.com/bbs/board.php?bo_table=free&wr_id=14658>http://xn–jj0bt2i8umnxa.com/bbs/board.php?bo_table=free&wr_id=14658</a>
1× slots casino зеркало
2. Создать новый профиль. Для регистрации надо(надобно) наполнить маленькую анкету либо зайдите в личный кабинет при помощи соц сеток;3. Подтвердить данные. В зависимости от клуба, нужно привязать аппарат либо почту, указать персональную информацию; <a href=http://freemovies.pl/user/AnthonyGot/>http://freemovies.pl/user/AnthonyGot/</a> При помощи такового одобрения оператор может того завлекать клиентов, коие раньше проявляли активность на сайте, хотя по какой-то основанию прекратили играть. В данном случае промокод высылается пользователю по электрической почте либо повторяющий SMS. 1хслотс официальный сайт зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://vredeenvermaak.be/users/jamesapofe/>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<a href=https://projects.sare.org/people/jamestrazy/>1×slots официальный сайт, скачать</a>
<a href=http://u0382101.isp.regruhosting.ru/index.php/forum/general-questions-and-how-tos/68883-otzyvy-o-tovarakh?start=8469#152062>1× slots официальный</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выше мы дали полный комплект самых новых и актуальных бездепозитных призов в интернет казино без пополнения на 2022 год, где вы можете пользоваться любым ценным бездепозитным бонусом.
#2966 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
сайт 1×bet слоты Приезжева Екатерина Геннадьевна порно <a href=https://repost.news/>7k casino зеркало на сегодня</a> casinos xyz 1×bet рабочее <a href=https://glvk.guru/>casino riobet</a> казино ставка порно с Арина и Дина Аверины, гимнастки казино играть букмекерская контора фонбет официальный сайт porno Нина Пирогова, хоккеистка casino x порно с Георгий Джикия (футбол)
DiskiPlus букмекерская контора официальный сайт DiskiPlus пин ап casino <a href=https://www.diskiplus.ru>DiskiPlus up casino зеркало</a> DiskiPlus Лут Оксана Николаевна порно DiskiPlus Самойлова Алла Владимировна порно <a href=https://diskiplus.ru>DiskiPlus up букмекерская контора</a> DiskiPlus casino рабочее зеркало DiskiPlus 1×bet официальный слоты DiskiPlus казино большая DiskiPlus порно с Диана Шнайдер (теннис) DiskiPlus kent casino регистрация DiskiPlus up букмекерская контора DiskiPlus unlim casino
#2967 Charlesgunnyhttp://filmkachat.ru
1хлот регистрация в 1×slots casino
Только выполнив все обстоятельства отыгрыша и дождавшись завершения проверки аккаунта, Вы можете оформить заявку на вывод средств и получить средства деньги. <a href=http://filmkachat.ru/>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a> Бездепозитный приз казино 2022 с выводом за регистрацию предоставляет вероятность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и выяснить качество работы службы. Довольно часто, начиная игровой процесс, игрок уже отказывается останавливаться и делает настоящий лепта. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать безвозмездно возможно как раз таки с призом за регистрацию без надобности вносить депо.Самые знаменитые методы вывода денег ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электрическим платежным системам типа Neteller и Skrill, а пользуются криптовалютными кошельками. Вывод выигрышей имеет исполняться быстро или занимать от нескольких часов до нескольких суток. <a href=https://list.ly/list/BXjx-vidieosiemka-minsk>https://list.ly/list/BXjx-vidieosiemka-minsk</a> Размер ставки для игры по бездепозитному бонусу (естесственно же, если, тогда,, когда он представлен в виде бонусных валютных средств) зачастую ниже, чем при этой на депозит. Ограничение будет работать до этапа отыгрыша приза. 1×slots зеркало регистрацию более популярный вариант это <a href=http://geolan-ksl.ru/forum/user/79288/>http://geolan-ksl.ru/forum/user/79288/</a>
1×slots зеркало на сегодня
Также учтите, собственно некоторые игровые платформы сузивают перечень государств, коие готовы получить предложенный бездепозитный приз за регистрацию. К образцу, есть онлайн-заведения, выдающие подобные бонусы только обитателям конкретных стран. К примеру, интернет казино 777 Оригинал предоставляет бездепозитный бонус лишь игрокам из России и государств СНГ. Или наоборот, пичкают вознаграждением всех, не обитателей неких стран (из сего, стопам пристально изучать список, чтобы впоследствии не возникло никаких вопросов и жалоб).Условия имеют разниться друг от друга. Но подобный бонус может быть применен лишь для игрового процесса – приобретенные на счет финансы до как, как станут отыграны, вывести невозможно. <a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=277357>1×slots бездепозитный бонус за регистрацию</a> 1× slots casino зеркало Бездепозитные бонусы казино это экономическая компенсация, предлагаемая пользователям на дармовой базе и возможность выступать в интернет казино даром. Если ассоциировать их с поощрениями за лепта, каких свои выдаются только потом начального пополнения счета, то бездепозитные гонорары получаются безвозмездно. То есть, играющий получает возможность создавать ставки на теснее существующие деньги, коие выдаст заведение, исполняя, при, обыденные деянья, дабы их извлечь (тут идет речь о регистрация, удостоверении личности с использованием номера аппарата, дизайна заказы и т.д. ). <a href=http://kxb4u.com/dream/home.php?mod=space&uid=47516>http://kxb4u.com/dream/home.php?mod=space&uid=47516</a> 1×slots зеркало выигрыши обязательно пройдите регистрацию если Многие игроки, оценив возможностей казино, остаются играть в нем и дальше ? на это и нацелено любое промо. Постоянные посетители вносят депозиты и проделывают ставки, обеспечивая долгосрочную выгода оператора. То есть, казино выдают бездепы новым пользователям для формирования лояльной аудитории.
1×слотс казино
Главное преимущество спинов – вероятность выучить различные слоты. Также получится насладиться бонусными раундами, испытывать удачу в риск-туре и преувеличить выигрыш за счёт особых знаков. Однако не игровой процесс заслуживает внимание, ведь другого сосредоточиться на реальном выигрыше.Но рядах азартных платформах похожие вознаграждения шансы получить теперь зарегистрированные юзеры. В таком случае, бонусы предоставляются в оригинальных акций или же некоторым геймерам вид акционного предложения, коие приходит на почту с целью «возвратить» игрока в свое казино. <a href=https://subscribe.ru/author/30938400>https://subscribe.ru/author/30938400</a> Онлайн гемблинг развивается с каждым днем больше и больше, новые бренды создаются не по дням а по часам. Новые онлайн казино проделывают вступительные промоакции для игроков, для того собственно бы зарекомендовать себя, и тем самым предлагают бездепозитные призы за регистрацию, собственно бы не пропустить эту возможность — как пользоваться новым бездепом, советуем навещать наш сайт как можно чаще, самое вкусное и свежие будет добавляться в этом же списке. 1хлот регистрация в 1×slots casino При отыгрыше бонусных средств, нужно учитывать срок действия приза и время, которое дается на отыгрыш. По истечению заявленного медли, не отыгранный бонус будет аннулирован.Как лишь на виртуальном счету окажутся бонусные средства, поспешите отыграть вейджер. Сразу последствии сего можно оставить заявку на вывод выигрыша. Кредиты прибыльно выделяются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом реальных средств и выделяют вероятность почувствовать задор. Во-вторых – можно насладиться любой азартной игрой доступной на сайте. В вашем распоряжении присутствуют автоматы, настольные прибавление, видео-покер, Live-дилеры.
1× slots сайт
<a href=http://board.eternityrpc.com/member.php?action=profile&uid=369>1×slots официальный demo регистрация в 1×slots casino</a> На благотворительные бонусы онлайн-казино почти практически распространяется ограничения по стране проживания клиентов. Даже если вас разрешено раскрывать счет и выступать на средства в заведении, это еще не означают, собственно вас доступны no down payment bonuses. Игрокам не следует принимать приветственный приз как гарантированный метод получить крупный выигрыш, хотя это отличная вероятность без расходов оценить перечень казино. 1×slots зеркало регистрацию более популярный вариант это <a href=http://www.zgbbs.org/space-uid-153141.html>http://www.zgbbs.org/space-uid-153141.html</a> Выбирайте наилучшие бесплатные бонусы счет обзоров на Casinoz – и пусть вам сопутствует удача при отыгрыше бонусных кредитов!
1хслотс мобильная версия зеркало
Для получения приза нужно ознакомиться с программкой лояльности казино и сделать ставки на сумму, нужную для перехода на следующий степень.Обычно, бездепозитные призы выдаются под определенные слоты с фиксированной ставкой, хотя их точно запрещено использовать в игровых автоматах с современным джекпотом. Список игр, в можно использовать бездеп, Вы отыщите в описании акции или можете уточнить у саппорта заведения. <a href=http://mydomlya.ru/redirect?url=http://optic-street.ru/bitrix/redirect.php?goto=http://stsl.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/DbLruw48K8U>http://mydomlya.ru/redirect?url=http://optic-street.ru/bitrix/redirect.php?goto=http://stsl.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/DbLruw48K8U</a> Суммы похожих предложений, случаев, колеблются от 3-х до 20 долларов, а вейджер на эти свои обязан составлять от 30 до шестидесяти один. Зачастую, величайшая сумма выигрыша здесь составит от одной до двух сотен $. Если игрок выиграет больше, то все средства шансы быть списанными до очень разрешенного выигрыша. Здесь замечена смысл выводить еще несуществующие деньги на свою платежную систему и далее отыскивать заведение с благоприятными под данную сумму релоадом или призом за первое пополнение счета. Есть некоторое подвидов бездепозитного вознаграждения, предлагаемого великим количеством заведений.Обыкновенные бездепозитные бонусы в объеме от трех до двадцати $ созданы чтобы, чтобы, дабы в забавы заходили все новые и свежие игроки. Здесь, вероятнее всего, несомненно ограничение на максимальный выигрыш. Важно, чтобы перед наименьшим вкладом был отключен приз за первое пополнение счета, и в не попадет на повторный вейджер. 1хслотс зеркало на сегодня На данном разделе портала регулярно публикуются обзорные статьи, в рассматриваются безвозмездные бонусы лучших интернет-казино. Информация структурирована по нескольким пунктам, включая главные:
<b>Смотреть еще похожие новости:</b>
<a href=http://nexusroleplay.teamforum.ru/memberlist.php?mode=viewprofile&u=463>1×slots коды</a>
<a href=https://forum.home-visa.ru/viewtopic.php?f=69&t=807392&p=2981277#p2981277>1×slots зеркало видели такую регистрацию на</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Прибывшие на акк деньги бездепозитные призы предназначаются, в, только для свежеиспеченных юзеров, которые раньше не имели собственного аккаунта в данном казино. Исходя из этого, в ранее у игрока был сделан депо, то, по всей вероятности, у него больше не несомненно способности рассчитывать на получение такого приза в определенном заведении.
#2968 Charlesgunnyhttp://filmkachat.ru
1×slos регистрация в 1×slots casino
Но а случае вы теснее профи по онлайн казино, кликаем на красноватую кнопку «Получить» и Вы механически перейдете в онлайн казино; <a href=http://filmkachat.ru/>1×slots casino зеркало рабочее</a> За вербование приятеля ? масштабах партнерской программы заказчик получает вознаграждение за привлечение новых пользователей.Но рядах азартных платформах сходственные гонорары все получить и уже зарегистрированные пользователи. В этом случае, бонусы предоставляются в оригинальных акций или же неким игрокам вид акционного предложения, которое приходит на почту с целью «возвратить» игрока в свое казино. <a href=https://www.consult-exp.com/blogs/219723/Professional-CAD-Drawing-Services-Expert-Technical-Documentation>https://www.consult-exp.com/blogs/219723/Professional-CAD-Drawing-Services-Expert-Technical-Documentation</a> Онлайн-казино с бездепозитными бонусами ставят посетителям обстоятельства для использования бездепами, потому перед участием в промоакции никакого досконально ознакомиться со всеми правилами и нюансами акции. Условия шансы прикасаться получения бонуса, его применения и последующего вывода валютных средств когда выигрыша.Когда идет о получении бездепозитных бонусов в казино, начала обратите внимание на следующие обстоятельства: 1хслот зеркало <a href=http://www.neworleansbbs.com/home.php?mod=space&uid=269961>http://www.neworleansbbs.com/home.php?mod=space&uid=269961</a> Самый распространённый из подобных бонусов, конечно же, бездеп на денек рождения клиента — бонус повторяющий фиксированной суммы или фриспинов поступает на счёт игрока, а воспользоваться им можно в течение установленного периода времени.
1×slots регистрация 1×slotscasino09k online
<a href=http://link.5nx.ru/memberlist.php?mode=viewprofile&u=600>1×slot зеркало</a> 1×slots официальный сайт мобильная версия скачать 4. Заберите презент. Чаще всего бонус активизируется незамедлительно в регистрации. Но случаются истории, когда нужно забежать в собственный офис либо написать в службу.Но надо мыслить, что снабжая пользователей такими бонусами, казино занимается спонсированием. Ведь объемы вознаграждений, в, не великие (средним размером от 5 до 20 $). И на эти свои налагаются определенные условия и лимитирования, обязательные к исполненью игрока, если в последствии он вожделеет получить все средства выигранные финансы. <a href=http://www.rohitab.com/discuss/user/2217818-averymaria/>http://www.rohitab.com/discuss/user/2217818-averymaria/</a> 1×slots актуальное зеркало
1×slots casino зеркало
С этими простыми советами каждое казино с бонусом за регистрацию способно принести в разы больше выгоды и полезности. Проверка занимает от нескольких мин. До нескольких дней, спецы техподдержки могут запросить дополнительные документы или инициировать короткое общение по Skype. <a href=http://dvkf.com.ua/index.php?subaction=userinfo&user=cloistereditem3>http://dvkf.com.ua/index.php?subaction=userinfo&user=cloistereditem3</a> Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных требований, кроме обязательной верификации. Если на веб-сайте учтена неотъемлемая процедура доказательства личности, то вывести выигрыш получится только в ревизии данных. Приготовьтесь заполнить анкету и отправить в техподдержку документ, подтверждающий лицо. 1×slot регистрация Бездеп с фриспинами может обхватывать всю коллекцию игр на сайте или разработки одного провайдера. Обычно предлагается определенный список автоматов. Он указывается в положениях о проведении акции. Выигрыш может быть выведен после как, как пользователь отыграет данную сумму. Возможность расценить полный функционал слотов — главное достоинство данной разновидности. Игроку становятся доступны что, эти функции, которые отсутствуют в демонстрационном режиме, а возможность выиграть реальные средства добавляет ярких азартных чувств.Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие возникают у начинающих.
1×slots зеркало видели такую регистрацию на
Для всех бездепозитных бонусов действует наибольший лимит на выигрыш. Он указывает предельную сумму, которую возможность получить, играя на бонусные кредиты. Как лишь для удастся выполнить требования вейджера, возможный максимально будет переведен с бонусного счета на главной, а остаток несомненно списан.Подарки на конкретные даты выделяются критериями получения. Если одобрение начисляют игроку на день рождения, то сумма обычно зависимости от совместного размера депо последний год. 1×slot казино зеркало <a href=http://skiindustry.org:/forum/member.php?action=profile&uid=1229528>http://skiindustry.org:/forum/member.php?action=profile&uid=1229528</a>
1×slos регистрация в 1×slots casino
Призовые начисления без депо шансы предоставляться для участия в турнирах интернет казино. Потратить перечисленные средства можно необыкновенно в этой акции. Условия их проведения включают в себя лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться этим предложением, лучше выучить его управляла. Иногда операторы просят внесение минимального депозита перед выводом для верификации платежного инструмента. В неких казино данный депозит также предстоит отыграть.Прежде чем активировать бездеп, нужно убедиться сомнений, что страна, гражданином коей является игрок, не заходит в перечень разрешенных. <a href=http://xiaoping777.com/home.php?mod=space&uid=61779>http://xiaoping777.com/home.php?mod=space&uid=61779</a> Вывод выигрыша с бездепозитных призов казино – щедрый презент от азартных клубов. Но дабы исключить собственный заработок, необходимо выполнить ряд критерий: 1×slots актуальное зеркало Бонусы без депозита при регистрации считаются наиболее красивыми как для опытнейших игроков, например для и начинающих. Получив такое вознаграждение, заказчик имеет играть на настоящие деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, еще обстоятельства их активации и выигрыша.В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая приятная часть забавы. Важно, часто бездепозитные призы в казино выдаются с ограничениями по максимальной выплате. В среднем можно рассчитывать на прибыль в несколько тыщ рублей. Как исключить выигрыш с приза без депо. Придётся подтвердить акк документально, в некоторых заведениях. Процедура верификации обязательна и делается каждым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате либо прочитайте в правилах.
<b>Смотреть еще похожие новости:</b>
<a href=https://chasingadream.rpginitiative.com/showthread.php?tid=221786>зеркала 1×slots</a>
<a href=https://www.donchillin.com/space-uid-382497.html>1× slots casino зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро или 20 $. Если выдаются фриспины, их количество редко выше нескольких десятков бесплатных вращений.
#2969 Charlesgunnyhttp://filmkachat.ru
1хслотс мобильная версия зеркало
Для проверки используются сканы паспортов, водительских водительских, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь обнаружен в попытке ввести вспомогательный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в темный перечень. При ирге на лицензионной площадке не опасаться указывать достоверную персональную информацию (шифрование ликвидирует утечку персональных данных). <a href=http://filmkachat.ru/>1×slots сайт зеркало</a> <a href=https://rapidapi.com/7ball-viet-nam-7ball-viet-nam-default/api/7ball-viet-nam/discussions/146280>https://rapidapi.com/7ball-viet-nam-7ball-viet-nam-default/api/7ball-viet-nam/discussions/146280</a> Для выбора азартного заведения Вы можете воспользоваться списком наших казино с бонусами за регистрацию. На нашем веб-сайте мы опубликовали список бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, собственно часть бонусов неповторимые и доступны только для гостей нашего сайта по-специальному промо-коду или по оригинальной ссылке. Кроме такого, для любого бонуса мы подготовили подробный обозрение, в котором Вы узнаете как получить и отыграть одобрение и как исключить свой выигрыш с бездепа. 1х слотс зеркало регистрация в 1×slots casino <a href=http://dudoser.com/user/JoshuaStach/>http://dudoser.com/user/JoshuaStach/</a> В интернет-сети всегда возможно отыскать списки наиболее модных и гарантированных поощрительных программ от модных онлайн-казино.Бесплатные призы казино без депо возможно получить в виде валютных средств на бонусный счет (вывести их можно только в отыгрыша), фриспинов, забавы либо кешбэк-бонуса.
1×slots регистрация на 1хслотс
1×slots зеркало регистрация Oтыгpaть приз с обозначенным вeйджepом, результата нужно сдeлaть cтaвoк нa cумму, превышающую размер приза в несколько один. <a href=https://www.patreon.com/posts/problemi-nerva-104101111>https://www.patreon.com/posts/problemi-nerva-104101111</a> Многие игроки, оценив функционал казино, остаются играть в нем и далее ? на это и направлено любое промо. Постоянные клиенты заносят депозиты и делают ставки, обеспечивая длительную прибыль оператора. То есть, казино выдают бездепы новым юзерам для формирования лояльной аудитории. 1×slots регистрация 1×slotscasino09k online Также, в необходимо подтвердить собственный номер телефонного, достичь код, приобретенный в смс-сообщении от клуба ввести в особое фон в собственном офисе игрока.Некоторые онлайн-казино без депо предлагают новым посетителям выбрать бонус при регистрации. Будьте внимательны: выбрав один, вы в безусловном большинстве случаев не можете пользоваться остальными.
1× slots casino официальный сайт
Наличие у игрока 2 аккаунта. Запрещено создавать количество профилей для неоднократного получения бездепов.Теоретически, к бесплатным призам можно отнести так нарекаемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, поэтому что они предоставляют лишь вероятность создавать ставки. <a href=http://fb7707ng.bget.ru/user/Frankpsype/>http://fb7707ng.bget.ru/user/Frankpsype/</a> Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в личный офис, чтобы забрать бесплатные вращения с вейджером х40; казино 1×slots официальный сайт Новые посетители онлайн-казино без первого депозита все выяснить собственную удачливость. К тому же есть возможность преобразовать бездепы в реальные средства за регистрацию в казино, впрочем достичь приз необходимо отыграть согласно условиям промоакции.
1хлот регистрация в 1×slots casino
Новые клиенты онлайн-казино без первого депозита шансы выяснить собственную удачливость. К тому же есть возможность преобразовать бездепы в реальные средства за регистрацию в казино, однако желаемого приз нужно отыграть сообразно условиям акции. Отказ в прохождении верификации. Если клиент не желает или возможности дать документы, подтверждающие его личность, профиль несомненно заблокирован вместе со всеми бонусными начислениями. Свежий бонус начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в использовании своими, ну случае отыгрыша оператор имеет установить ограничение на вывод денег. 1×slots казино зеркало <a href=http://ruzland.ru/communication/forum/user/1730/>http://ruzland.ru/communication/forum/user/1730/</a> Фриспины без депо либо дополнительные свои посодействуют ближе познакомиться с игровой платформой и её функциями. За счёт подарков возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за игры против живых крупье.Каждый из бездепозитных бонусов без пополнения 2022 имеет собственный конкретный вейджер для отыгрыша, так же в любом казино он устанавливается индивидуально — где то он х55 а кое-где х30, повторюсь всюду по разному!
1×slots регистрация 1×slotscasino09k online
Также существуют онлайн-платформы азартных игр, которые используют раздачу бездепозитных бонусов в специальные даты (как для казино, например и для игрока). Помимо сего, действующие геймеры того имеют вероятность получить схожие бонусы за свою работа (например, за увеличения уровня или за схожие заслуги).Бездепозитные призы за регистрацию в игровых автоматах для хозяев онлайн-казино являются частью рекламной кампании, направленной на повышение аудитории вебсайта. Так они продвигают средства бренды и привлекают новых клиентов. <a href=https://lotn.info/index.php?action=profile;u=30206>https://lotn.info/index.php?action=profile;u=30206</a> 1×slots регистрация 1×slots casino c2d ru В большинстве заведений сделать это можно по адресу электронной почты, по номеру аппарата, через социальную сеть или гугл-аккаунт.
<b>Смотреть еще похожие новости:</b>
<a href=http://forums.indexrise.com/thread-1096-post-377684.html#pid377684>1×slots зеркало сайта</a>
<a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1×slots casino регистрация на сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для верификации номера телефона, в личном профиле выберите опцию „Подтвердить номер аппарата“ и введите в соответствующее фон код, полученный в sms-сообщении.
#2970 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
сайт казино зеркало порно с Александр Головин (футбол) <a href=https://sovsekretno.net/>1×bet</a> 1×bet телефон винлайн букмекерская контора официальный <a href=https://rucriminal.info/>Скворцова Вероника Игоревна порно</a> casino buzz Черкесова Бэлла Мухарбиевна порно промокод 1×bet слот casino пин casino Семёнова Татьяна Владимировна порно автомат казино
DiskiPlus casino ru DiskiPlus порно с Анна Калинская (теннис) <a href=https://www.diskiplus.ru/>DiskiPlus почему в казино нет часов</a> DiskiPlus сайт букмекерской конторы DiskiPlus зеркала официальных сайтов казино <a href=https://diskiplus.ru>DiskiPlus порно с Дарья Касаткина (теннис)</a> DiskiPlus ешь казино DiskiPlus cometa casino DiskiPlus казино играть DiskiPlus вывод казино DiskiPlus porno Анастасия Янькова, боксерка DiskiPlus 1×bet casino DiskiPlus суть казино
#2971 Charlesgunnyhttp://filmkachat.ru
1×слотс казино
Большинство интернет-казино из нашего топ-10 готовы порадовать вас эксклюзивными промоакциями. Читайте о их в обзорах и на форуме. <a href=http://filmkachat.ru/>1×slots casino online регистрация</a> <a href=https://blog.udn.com/G_107482553777754991/181710747>https://blog.udn.com/G_107482553777754991/181710747</a> Выбор каждого интернет казино на нашем веб-сайте. В описании к каждому Вы можете разузнать, что получите за творение аккаунта. 1×slots casino регистрация 1×slots review live <a href=http://in.net.ua/user/DavidBet/>http://in.net.ua/user/DavidBet/</a> Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.
1 хслот регистрация в 1×slots casino
Каждый из бездепозитных бонусов без пополнения 2022 содержит собственный определенный вейджер для отыгрыша, например же в каждом казино он уточняется индивидуально — где то он х55 а где-то х30, повторюсь всюду по различному! <a href=http://6000ziyuan.com/forum.php?mod=forumdisplay&fid=2>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a> 1×slots бонус за регистрацию Но рядах азартных платформах подобные гонорары шансы получить теперь зарегистрированные юзеры. В таком случае, призы предоставляются в оригинальных промоакций либо же неким геймерам повторяющий акционного предложения, коие прибывает на почту с целью «возвратить» игрока в свое казино.Казино дает возможность заработать и исключить реальные средства на бездепозитных призах. Обычно, это незначительная сумма, которую казино может себе разрешить подарить игроку. <a href=http://forum.ugmk-telecom.ru/index.php?action=profile;u=99042>http://forum.ugmk-telecom.ru/index.php?action=profile;u=99042</a> Вейджер не более х30–35 является приемлемым. Опытные игроки утверждают, что с этим вейджером реально остаться в плюсе, случае правильно подойти к выбору игрового аппарата. 1× слот зеркало Необходимость отыгрыша. Вейджер в этом случае выше, чем для призов за депозит. И пока средства не отыграны, вывести их невозможно.Чаще всего, популярностью сервисы, эти как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное управляло. Финансовые средства выводятся лишь спустя что, эту платежную систему, которой огромный для пополнения депо. Если же игрок получил бездепозитный покерный приз, потребуется восполнить счет на минимальную сумму, которая сочиняет обычно 10 $.
скачать 1×slots на андроид мобильная версия
Способы получения бездепа различаются от облика приза, который понравился игроку. Но вам так нужно быть зарегистрированным в легальном онлайн-казино и подтвердить собственную личность. В общем облике пошаговая аннотация для получения бездепозитного бонуса смотрится например: Это раз из главных характеристик привлекательности подарка. С завешенным коэффициентом числе профессионалы не сумеют выполнить обстоятельства по отыгрышу. И не, насколько презентабельно смотрится предложение – бездепозитный приз казино в размере $500 или $1 000. Чтобы новички получше вникли, что же это вейджер, мы разберём на образце. <a href=http://94.232.184.168/index.php?name=Account&op=info&uname=waterynurture21>http://94.232.184.168/index.php?name=Account&op=info&uname=waterynurture21</a> 1×slot зеркало рабочее регистрации на телефон придет Бездепозитные призы начисляются только один раз. Не стоит раскрывать свежие аккаунты, чтобы получить их повторно. Служба безопасности казино непременно выявит «левого» участника и заблокирует. Если посетитель выполнит нужные требования, отыграет свою ставку и решит исключить собственный выигрыш, то ему нужно сведению, собственно казино непременно потребует предоставить ксерокопии личных документов, чтобы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные средства вывести не получится.Чаще всего интернет-казино предлагают бездепозитные призы свежим юзерам. Эта промо-акция довольно отлично завлекает начинающих, подталкивая их к открытию счета. Конечно, не все становятся преданными клиентами, хотя сам прецедент регистрации аккаунта играет на руку заведению.
1 хслот регистрация в 1×slots casino
Но есть азартные заведения, готовые просто например вручить деньги на игру. Для сего довольно создать профиль. Чтобы вывести выигрыш, сначала нужно выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа.На бонусные начисления все быть установлены дополнительные ограничения, которые Вы не сведению при отыгрыше. Пока бонус полностью не отыгран — деньги из казино не выводятся. Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша призов. Заведения постоянно устанавливают наивысшую ставку, возможную по условиям вейждера. 1×slot регистрация <a href=https://forum-nine.mirbb.com/t11623-topic#31639>https://forum-nine.mirbb.com/t11623-topic#31639</a> Обычно для получения призов без депозита, казино выдвигает лояльные и абсолютно выполнимые обстоятельства, но есть ряд деяний которые запрещены и могут причиной неприятные последствия:
1× слот зеркало
Также, в этом случае нужно подтвердить собственный номер телефонного, результата код, приобретенный в смс-сообщении от клуба установить в особое поле в личном офисе игрока.Возьми свой подарок. Чаще всего приз активизируется сразу в регистрации. Но бывают истории, когда нужно забежать в личный кабинет или написать в справочную службу. Максимальная ставка ? уточняется в валюте счета и ограничивает размер ставки за раз спин. В случае ее превышения приз имеет быть аннулирован. Также в правилах возможность содержаться запрет на размещение ставок определенного вида, примеру, по равным шансам в рулетке (то есть, на чет или нечет, красное либо темное и т.д.). <a href=http://ems.college-eisk.ru/?module=forum&action=topic&id=326>http://ems.college-eisk.ru/?module=forum&action=topic&id=326</a> Мы собрали и выпустили список наихороших бездепозитных казино с бонусами за регистрацию, коие гарантируют великодушные выигрыши и мгновенные выплаты. 1×slot регистрация Поспешите зарегистрироваться на официальном сайте Клубника, чтобы моментально получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, замечена реальный шанс победу!
<b>Смотреть еще похожие новости:</b>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=485493>1×slots подтвердит вашу регистрацию если говорить</a>
<a href=http://everestrolep.listbb.ru/viewtopic.php?f=38&t=13410>зеркло казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.
#2972 AnthonyZoogyhttps://rt.erostreams.com
Открой новые возможности в <a href=https://rt.erostreams.com/>ero stream</a>! Работай онлайн, выбирай удобный график и зарабатывай без ограничений. Поддержка 24/7, обучение для новичков и лучшие условия. Начни карьеру в вебкам уже сегодня!
#2973 Charlesgunnyhttp://filmkachat.ru
1×slots casino зеркало
В онлайне очень большое скриптовых сайтов, коие принадлежат плутам. Их главная цель – привлечь гэмблеров, пообещав столько щедрые презенты, но и крупные выигрыши. Так что кое-какие сайты предлагают получить за регистрацию числе $1 000. <a href=http://filmkachat.ru/>1×slots мобильная версия войти казино</a> <a href=https://a.pr-cy.ru/astramedika.com.ua/>https://a.pr-cy.ru/astramedika.com.ua/</a> Суммы подобных предложений, большинстве, колеблются от 3-х до 20 $, а вейджер на эти средства обязан сочинять от 30 до шестидесяти раз. Зачастую, наибольшая сумма выигрыша здесь составит от одной до двух сотен долларов. Если в выиграет больше, то все средства все быть списанными до очень разрешенного выигрыша. Здесь появляется смысл выводить еще несуществующие финансы на свою платежную систему и далее отыскивать заведение с подходящими под данную сумму релоадом либо призом за первое пополнение счета. Есть количество подвидов бездепозитного гонорары, предлагаемого наибольшим количеством заведений. 1×slots зеркало регистрация в 1×slots casino <a href=https://www.sex8.zone/home.php?mod=space&uid=9303288&do=profile>https://www.sex8.zone/home.php?mod=space&uid=9303288&do=profile</a> Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в собственный офис, чтобы отобрать безвозмездные вращения с вейджером х40;
1× slots зеркало
В современность довольно просто получить бонус за регистрацию в казино. Практически каждый игорный дом с готовностью начисляет средства или благотворительные вращения. Многие гэмблеры используют данным и не стыдятся регистрироваться в каждом клубе с выгодными критериями. Кстати, это отличная возможность выработать победную стратегию и сорвать джекпот. 1х слот регистрация в 1×slots casino <a href=http://xn----7sbqc1ahc7afe2lrdf.com/profile.php?lookup=78135>http://xn----7sbqc1ahc7afe2lrdf.com/profile.php?lookup=78135</a> Онлайн-казино с бездепозитными бонусами ставят клиентам обстоятельства для использования бездепами, поэтому перед участием в акции другого, как тщательно ознакомиться со всеми правилами и нюансами промоакции. Условия имеют прикасаться получения бонуса, его использования и последующего вывода валютных средств когда выигрыша. 1× slots официальный
скачать 1×slots на андроид мобильная версия
Выигрыши с бонусов без инвестициям постоянно привязаны к притязанию по ставкам и все быть обналичены только последствии исполнения этих требований. <a href=https://www.bkeye.co.kr/bbs/board.php?bo_table=free&wr_id=957686>https://www.bkeye.co.kr/bbs/board.php?bo_table=free&wr_id=957686</a> Бонус в казино без депо содержит разные разновидности: это может быть приветственный бонус, акции в честь каких-то праздников или весомых дат, приз за вербование новых игроков, преданность и получение VIP-статуса.Когда речь о получении бездепозитных бонусов в казино, начала обратите внимание на следующие обстоятельства: 1×slot казино зеркало Исходя из сего, просто не существует разумных причин махнуть рукой на получение такового приза при регистрации. И, заметить,, на подобный безвозмездной базе у вас есть шансы выиграть средства и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные призы, называют бесплатными интернет платформами для игр.Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие появляются у начинающих.
1×slots бонус за регистрацию
<a href=http://www.arka-bahce.org/forum/showthread.php?p=780821&posted=1#post780821>1×slots официальный demo регистрация в 1×slots casino</a> 1×slots регистрация на официальном сайте <a href=https://diccut.com/forums/thread/3426/>https://diccut.com/forums/thread/3426/</a> Исходя из этого, просто не существует осмысленных оснований махнуть рукою на получение такого приза при регистрации. И, заметить,, на подобный бесплатной базе у вас есть шансы выиграть деньги и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, называют бесплатными интернет платформами для игр.Прочитайте правила бонусной программки, в которой желаете участие. Да, мы настоятельно рекомендуем сделать это до регистрации.
1хслотс рабочее зеркало
<a href=https://e-participationyouth.eu/forum/profile/jamesjonse/>https://e-participationyouth.eu/forum/profile/jamesjonse/</a> 1хслотс рабочее зеркало на сегодня Автоматы непопросту считаются наиболее модным азартным веселием. Чтобы усвоить управление и правила, понадобится всего количество мин. Ваша задачка устроить ставку, найти количество рабочих линий и можно крутить барабан. Если на выпадет выигрышная комбинация – вы выиграли! С данной задачей вам помогут справится бездепозитные бонусы казино.В онлайне очень количество скриптовых вебсайтов, коие принадлежат жуликам. Их главная задача – привлечь гэмблеров, пообещав столько щедрые подарки, но и крупные выигрыши. Так что кое-какие веб-сайты предлагают получить за регистрацию в $1 000.
<b>Смотреть еще похожие новости:</b>
<a href=http://romb4×4.ru/forum/threads/1×slots-skachat-na-ajfon.22554/>1×slots скачать на айфон</a>
<a href=http://aficionado.pl/showthread.php?175038–1×slots-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D0%BD%D0%B0-%D1%81%D0%B5%D0%B3%D0%BE%D0%B4%D0%BD%D1%8F&p=196108>1×slots рабочее зеркало на сегодня</a>
<a href=http://sladkierecepti.5nx.ru/viewtopic.php?f=8&t=3883>1×slots зеркало проходить регистрацию это отличный вариант</a>
<a href=https://your-portal.at.ua/forum/41–63415–3#88625>1×slots зеркало регистрация</a>
<a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=230170>1хслотс мобильная версия зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Как прочие промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такого предложения являются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых гостей и позволяет им составить впечатление о функционале, не рискуя значительными суммами.
#2974 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация то дальше необходимо пройти
Бездепы шансы входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами. <a href=http://filmkachat.ru/>1×slots официальный сайт, скачать</a> Если простыми словами, бездепы – это определённая сумма средств либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать презенты. Но есть кое-какие аспекты. Существуют игорные жилища, которые перед тем как начислить призы настоятельно привязать телефонный, дать копии документов.Вообще перейдя в казино — управляла схожи в получении бездепозитных призов, в стандартные управляла входит: доказать эл. Почту и аппарат, наполнить собственный личный профиль, активировать промо код или активировать предложения во вкладке БОНУСЫ. <a href=https://phileo.me/blogs/295816/Professional-Upholstered-Furniture-Rendering-Services-3D-Design>https://phileo.me/blogs/295816/Professional-Upholstered-Furniture-Rendering-Services-3D-Design</a> Далее потребуется отыграть вагер и вывести выигрыш. Игрокам без опыта крупно повезло, у получить 10-ки даров за 1 регистрацию. Если не сумели получить Бездепозитный бонус, не беспокойтесь. Обратитесь в интернет чат, оператор поможет исправить. 1×slots казино мобильная версия <a href=http://old.clientbase.ru/forum/index.php?showuser=33939>http://old.clientbase.ru/forum/index.php?showuser=33939</a>
казино 1×slots официальный сайт
1×slot зеркало рабочее этих способов предполагает регистрацию Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном сайте и сделайте вход в личный кабинет, дабы забрать безвозмездные вращения с вейджером х40; <a href=http://swimming.s-server.kr/bbs/board.php?bo_table=free&wr_id=3231405>http://swimming.s-server.kr/bbs/board.php?bo_table=free&wr_id=3231405</a> 1×slots регистрация на 1хслотс Чтобы выступать бесплатно на реальные деньги в казино, не всегда достаточно просто зарегистрироваться. Иногда нужно выполнить вспомогательные деяния.
1×slots зеркало на сегодня
<a href=http://www.russtars.tv/user/OscarHaurb/>http://www.russtars.tv/user/OscarHaurb/</a> 1× slots официальный Бездепы могут входить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами.
1×slots сайт
Срок активации и время на отыгрыш. Зачисление денег или фриспинов случается при активации в течение строго ограниченного периода, похожие требования предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать приз несколько дней или том месяцов. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высочайшим вейджером. <a href=https://forum.eliteshost.com/member.php?action=profile&uid=8111>1×slots зеркало регистрация</a> Иногда виде бездепа, казино презентует минимальный приз (до 50 рублей), из-за которого надо заморачиваться.Нет. Казино раздают безвозмездные призы за регистрацию, чтобы, чтобы, чтобы клиент имел ознакомиться с игровым заведением. А дабы вывести его, нужно выполнить обстоятельства отыгрыша. Разные казино имеют личные верховодила по выведению выигрыша. Для бездепозитных призов принимаются довольно высокие притязания. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до ста раз в игровых автоматах. Например, если игрок получил бесплатно 10 долларов, то необходимо несомненно отыграть их, поставив 1 тыщу спинов по одному доллару любой. Стоит обозначить(означить), собственно не все казино выделяют вероятность играть на бонусы и не во всех развлекательных заведениях схожие управляла для отыгрывания. Некоторые казино запрещают выступать на бонусы в блекджек либо ограничивают ставки до пяти процентов, что значительно увеличивает в десятки один количество нужных игр. 1хслотс регистрация в 1×slots casino <a href=https://cutetusy.cc/member.php?action=profile&uid=34780>https://cutetusy.cc/member.php?action=profile&uid=34780</a> Во всех легальных онлайн-казино Беларуси необходимо подтверждение паспортных данных для игры — это заявка правительства страны.
1×slots зеркало рабочее на сегодня
На странице представлены бездепозитные бонусы за регистрацию в казино редкая награда за которой гонятся все игроки как новенькие, например и профессионалы. Мы также уделяем огромное внимание на наличие бонусов при составление рейтинга казино на средства. Бездепозитный приз это вероятность выступать безвозмездно и выиграть реальные средства.Акционные предложения от казино существуют в различных форматах. Часто призы даются в размен на депозит. Игрок вносит платеж и получает средства, бесплатные вращения и другие поощрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — вид приза, который гарантирован за исполненье конкретных деяний на сайте: <a href=http://www.sglpw.cn/home.php?mod=space&uid=467095>http://www.sglpw.cn/home.php?mod=space&uid=467095</a> Если при регистрации указать промокод, возможно гарантировано получить бонус. Где арестовать ваучер? Посетите определенную блоги или форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В заключительнее время игорные дома начали афишироваться в кинокартинах и телесериалах. Присмотритесь и скорее заметите промокод, кот-ый принесёт 500 или 1 000 бонусных руб.Иногда операторы настоятельно внесение малого депо перед выводом для верификации платежного инструмента. В неких казино этот депозит также светит отыграть. 1× slots зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://mit-bbs.com/viewtopic.php?t=272800>1хслот зеркало сайта</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При исполнении условий отыгрыша и верификации, деньги с бонусного счета переводятся на основной и все быть выведены на карту или электронный кошелек. Лимиты на вывод и сроки проведения транзакции в от избранной платежной системы. Бонус в казино без депо содержит разные вариации: может быть приветственный приз, промоакции в честь каких-либо праздничных либо важных дат, приз за привлечение новых игроков, лояльность и получение VIP-статуса.
#2975 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино фильм онлайн casino онлайн <a href=https://rucriminal.info/>cat casino</a> порно с Евгения Медведева, фигуристка Преподобная Надежда Александровна порно <a href=https://vestnik-jurnal.com/>casino на телефон</a> pin up casino пин ап casino 7k рабочее Матвиенко Валентина Ивановна порно casino 7k сегодня фреш казино порно с Ирина Сидоркова porno Александра Степанова, фигуристка
DiskiPlus включи казино DiskiPlus винлайн букмекерская контора официальный <a href=https://www.diskiplus.ru/>DiskiPlus porno Дарья Клишина</a> DiskiPlus букмекерская контора ставки DiskiPlus порно с Каролина Севастьянова <a href=https://diskiplus.ru/>DiskiPlus Ирина Горбачева</a> DiskiPlus казино сочи DiskiPlus букмекерские конторы без депозита DiskiPlus спорт букмекерская контора DiskiPlus 1win casino DiskiPlus пин ап casino DiskiPlus казино зеркало сегодня DiskiPlus порно с Диана Шнайдер (теннис)
#2976 Charlesgunnyhttp://filmkachat.ru
1×slots официальный регистрация
Чаще всего, популярные сервисы, такие как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно неотъемлемое правило. Финансовые свои выводятся лишь через ту платежную систему, которой пользовались для пополнения депозита. Если же игрок получил бездепозитный покерный приз, потребуется восполнить счет на наименьшую необходимую, которая сочиняет обычно 10 $. <a href=http://filmkachat.ru/>1×slots зеркало проходить регистрацию это отличный вариант</a> Прежде всего, не забывайте регулярно заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом осматривают наиболее занимательные предложения водящих игорных порталов. <a href=http://www.fanart-central.net/user/archicgic/profile>http://www.fanart-central.net/user/archicgic/profile</a> 1 хслот регистрация в 1×slots casino <a href=https://gtafarai.lt/index.php?/profile/12250-zacherysteag/>https://gtafarai.lt/index.php?/profile/12250-zacherysteag/</a> Большинство клубов завлекают внимание геймеров за счёт разнообразных подарков. На одних веб-сайтах возможно получить виртуальные кредиты, коие откроют доступ ко всему софту. На иных же, администрация предлагает благотворительные вращения для пуска топовых онлайн слотов. Несмотря на разные акции, стоит выделить самые основные.
казино 1×slots официальный сайт
Диапазон ставок, коие вправе сделать игрок, кроме лимитирован. Обычно назначать можно небольшую необходимую — в 10–30 руб. За одно вращение.Для получения предоставленных призов вас понадобиться — ПК либо мобильное устройство, и остальное дело за малым. 1×slots casino online регистрация <a href=http://bank-garantiya.ru/index.php?subaction=userinfo&user=vengefulcadre80>http://bank-garantiya.ru/index.php?subaction=userinfo&user=vengefulcadre80</a> 1хслотс официальный сайт зеркало Такой казино приз без депо за регистрацию выдается игроку на час и активно употребляется данное предложение с 2017 года. Это словно какая-то конспирация одобрения под бездепозитный. Суть всего сего сводится к тому, что геймеру на час выдается, к примеру, 1000 долларов, а реклама утверждает про, что каждой выигрыш можно несомненно дальнейшем забыть при для. Но в играющий серьезно отнесется к данному предложению, то он просто потеряет время. Ведь геймеру надо(надобно) будет выступать не в аккаунте, а в тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (и всей тысячи) в верховодила вступят определенные условия, где будет сказано, что наибольшей суммой победы может быть только двести долларов и средства можно применять лишь в качестве бонуса на 1-ый лепта с вейджером 25 от суммы гонорары плюс сам депозит. По итогу получится, что игрок выигрывал для 200% бонус с вейджером на конкретную сумму. Короче говоря, это все не вашего времени.
1×slots официальный регистрация
Игрокам не принимать приветственный приз как гарантированный метод получить крупный выигрыш, но это отличная вероятность без расходов оценить перечень казино.Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, the decision зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. <a href=https://build.co.ua/wr_board/tools.php?event=profile&pname=Ashleyatoto>https://build.co.ua/wr_board/tools.php?event=profile&pname=Ashleyatoto</a> Как только на виртуальном счету окажутся бонусные свои, поспешите отыграть вейджер. Сразу после этого возможно оставить заявку на вывод выигрыша. Кредиты прибыльно выделяются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом реальных средств и выделяют вероятность ощутить азарт. Во-вторых – можно насладиться каждой азартной забавой доступной на веб-сайте. В вашем постановлении находятся автоматы, настольные прибавленье, видео-покер, Live-дилеры.Бонус за регистрацию в казино без депо с выводом денег нужно отыграть. Зачастую для отыгрыша имеет потребоваться устроить ставки на необходимую, в количество 10-ов один превосходящую необходимую приза либо выигрыша. зеркло казино 1×slots Даже не выиграв солидную необходимую, игрок интересно проведет время, изнутри исследует работу площадки, воспримет геймплей автоматов. Все это без каких-либо финансовых рисков. Быть в курсе наилучших промоакций легко. Достаточно регулярно изучать список свежих онлайн казино с выводом приза без депозита в данном разделе.Если простыми текстами, бездепы – это определённая сумма денег либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать подарки. Но есть некоторые аспекты. Существуют игорные дома, коие перед тем как начислить бонусы требуют привязать аппарат, предоставить копии документов.
1×slots промокод при регистрации
<a href=http://kemsrr.forumex.ru/viewtopic.php?f=7&t=2159>1×slots официальный зеркало</a> Доступ к подарку возможность раскрываться механически в введения промокода либо воззвания в саппорта вебсайта. В первом случае от юзера не потребуется практически действий. Бездеп с активацией по коду встречается чаще всего. Игроку нужно ввести совокупность знаков в графе, которая имеет пребывать в регистрационной форме в Личном кабинете.При выполнении условий отыгрыша и верификации, средства с бонусного счета переводятся на главной и могут быть выведены на карту либо электронный кошелек. Лимиты на вывод и сроки проведения транзакции в от избранной платежной системы. 1× slots casino зеркало <a href=http://nicksgo.com/jisancenter/bbs/board.php?bo_table=free&wr_id=2408634>http://nicksgo.com/jisancenter/bbs/board.php?bo_table=free&wr_id=2408634</a> Для подтверждения электрической почты, просто перейдите по интенсивной ссылке в послании, полученном от игрового заведения.Oтыгpaть приз с указанным вeйджepом, для этого необходимо сдeлaть cтaвoк нa cумму, превосходящую объем приза в некоторое один.
1×slots casino зеркало рабочее
<a href=http://fonogramm.pro/user/DoctorLazutami/>http://fonogramm.pro/user/DoctorLazutami/</a> Самый распространённый из похожих призов, конечно же, бездеп на день рождения посетителя — бонус повторяющий фиксированной суммы либо фриспинов поступает на счёт игрока, а воспользоваться им можно на установленного периода медли. 1х слотс зеркало регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=http://sladkierecepti.5nx.ru/viewtopic.php?f=8&t=8972>1 xslots рабочее зеркало</a>
<a href=https://melhorlance.com.br/minha-conta/>1×slot регистрация</a>
<a href=https://talkonlinenews.com/viewtopic.php?t=4974>x1 slots регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бонус без депозита за регистрацию в казино (бездепозитный приз) – это валютный подарок от клуба, который начисляется на акк игрока последствии регистрации в казино. Кроме сотворения учетной записи, для получения бездепа, очень нередко потребуется ещё и доказать контактные данные игрока и/или активировать особый промо-код.
#2977 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
официальные букмекерские конторы Разуваева Ксения Денисовна порно <a href=https://res-publika.com>Радченко Светлана Юрьевна порно</a> porno Елизавета Туктамышева 1×slots casino <a href=https://slon-ru.com/>порно с Зырянова Анастасия Владимировна</a> casino официальный зеркало 7k casino официальный букмекерская контора фонбет официальный порно с Юлия Ефимова, пловчиха porno Анна Сидорова, керлингистка винлайн букмекерская контора гама казино
DiskiPlus 1×bet скачать приложение DiskiPlus казино онлайн <a href=https://diskiplus.ru/>DiskiPlus 1×bet на андроид</a> DiskiPlus мелбет букмекерская контора DiskiPlus лучшая казино <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet официальный слоты</a> DiskiPlus пин ап casino DiskiPlus почему в казино не бывает настенных часов DiskiPlus Юдаева Ксения Валентиновна порно DiskiPlus бывшие казино DiskiPlus Валентина Матвиенко порно DiskiPlus фильмы казино рояль DiskiPlus casino промокод
#2978 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало рабочее рабочие зеркала казино <a href=https://repost.news/>7k casino бонус</a> карты казино пин ап casino pin <a href=https://slon-ru.com/>porno Виктория Баркова, легкоатлетка</a> симулятор казино 1×bet официальный сайт пинко casino 1×bet зеркало рабочее xbet casino регистрации casino рабочее винлайн букмекерская контора официальный
DiskiPlus порно с Виктория Синицина, фигуристка DiskiPlus 1go casino <a href=https://www.diskiplus.ru>DiskiPlus online casino 7k</a> DiskiPlus 1×bet скачать приложение DiskiPlus 1go casino <a href=https://www.diskiplus.ru/>DiskiPlus порно с Илюшникова Татьяна Александровна</a> DiskiPlus Самойлова Алла Владимировна порно DiskiPlus gama casino DiskiPlus champion casino DiskiPlus porno Светлана Ходченкова DiskiPlus порно с Афонина Марина Игоревна DiskiPlus porno Вера Бирюкова, гимнастка DiskiPlus 1×bet телефон
#2979 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино вход casino ап <a href=https://rucriminal.info/>слот casino</a> Елена Лядова пина букмекерской конторы <a href=https://kompromat1.online/>водка казино</a> порно с Афонина Марина Игоревна порно с Зырянова Анастасия Владимировна 1×bet зеркало xbet порно с Каролина Севастьянова порно с Юлия Ефимова, пловчиха играющие казино 1×bet зеркало слоты 1×bet xyz
DiskiPlus порно с Арина и Дина Аверины, гимнастки DiskiPlus casino бонус <a href=https://www.diskiplus.ru>DiskiPlus casino официальный зеркало</a> DiskiPlus casino pin официальный DiskiPlus casino сайты <a href=https://diskiplus.ru>DiskiPlus порно с Голикова Татьяна Алексеевна</a> DiskiPlus porno Мария Шарапова DiskiPlus Петрова Ольга Викторовна порно DiskiPlus про казино DiskiPlus сайт pin up casino DiskiPlus букмекерская контора скачать приложение DiskiPlus Валентина Матвиенко порно DiskiPlus казино смотреть онлайн бесплатно
#2980 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
Фриспины — бесплатные вращения, коие дозволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся самым известным и преимущественным обликом бонуса — безвозмездные вращения иногда эффективнее и веселее в отыгрыше, чем другие облики бездепов.Для вывода средств приз нужно несомненно отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами акции и вариациями отыгрыша бездепозитного бонуса до его получения, чтобы избежать конфликтных обстановок. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots review live</a> <a href=https://try.powermapper.com/Demo/Report/5b704f84-deeb-4992-b7c3–5f00c037e5d1>https://try.powermapper.com/Demo/Report/5b704f84-deeb-4992-b7c3–5f00c037e5d1</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=http://www.vladmines.dn.ua/index.php?name=Account&op=info&uname=cooperativespec>http://www.vladmines.dn.ua/index.php?name=Account&op=info&uname=cooperativespec</a> Если ординарными текстами, бездепы – это определённая сумма денег или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно забирать презенты. Но есть кое-какие аспекты. Существуют игорные дома, коие перед тем как начислить бонусы просят привязать телефон, предоставить копии документов.Но есть азартные заведения, готовые просто например вручить деньги на игру. Для сего довольно создать профиль. Чтобы вывести выигрыш, сначала нужно выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа.
1×slots зеркало регистрация в 1×slots casino
Однако далековато не все ресурсы предлагают своим клиентам бездепозитные призы за регистрацию в казино. В большинстве случаев предусмотрено одобрение на 1-ый депо в объеме 100–200%. Это замечательная возможность преумножить банкролл, увеличить время, проведённое за игрой и шансы сорвать большой куш.Активация происходит с помощью промокодов, коие вводятся в собственном кабинете после регистрации. Среди спецпредложений в списке Casino.ru находятся эксклюзивные промокоды, которые доступны только посетителям портала. Другие методы начисления средств ? автоматическая активация незамедлительно последствии творенья аккаунта и получение презента по запросу в службу технической помощи. <a href=https://koreanstudies.com/forum/viewtopic.php?t=188489>1×slots рабочее зеркало</a> 1×slots зеркало <a href=http://whdf.ru/forum/user/85370/>http://whdf.ru/forum/user/85370/</a> Особую изюминку видео слотам придают уникальные символы. С их в активируются разные призы. Вы сможете запустить дополнительный степень и увеличить необходимую выигрыша. Есть знаки, которые заменяют негодные составляющие и сами делают выигрышные комбо. Не стоит забывать и на бонус-тур. После любого успешного спина есть шанс прирастить сумму выигрыша в 2 либо хорошо раза.Активация валютного гонорары происходит автоматически после творения профиля или применения промокода. Иногда операторы предъявляют вспомогательные притязания: подписаться на странички казино в социальных сетях либо на рассылку маркетинговых сообщений, скачать и ввести вспомогательный софт и т.д. 1×slots официальный сайт зеркало рабочее Условия, на коих предоставляется бездеп, регулируются казино. Каждая промоакция имеет доскональные управляла, ссылка на коие обычно находится в промообъявлении. В их указываются лимиты, вейджер, список дешевых игр. Если оператор скрывает данные о предложении, то пользоваться им надо.Верификация аккаунта. Лучше подтвердить личность сразу после регистрации, чтобы позже не было проблем с выводом средств. Верификация возможность протекать двумя способами:
1хслот зеркало сайта
Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, чтобы снова получить безвозмездный бонус. Игорные заведения нетерпимы к бонус-хантерам, потому вас ждет неминуемое наказание. <a href=https://www.ccvgaming.com/forum/member.php?38632-Glennalign>https://www.ccvgaming.com/forum/member.php?38632-Glennalign</a> 1×slots зеркало видели такую регистрацию на
1×slots официальный сайт скачать
Создание аккаунта. На сайте казино необходимо открыть регистрационную форму и наполнить пустые поля собственными данными. Иногда на данном этапе требуется указать только адресок электронной почты и пароль, но чаще надобно заполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д.). Нужно свидетельствовать только настоящие данные, поскольку впоследствие они станут испытаны.Так что сможете отважно региться без всяких размышлений. Фортуна сегодня точно на вашей стороне. Не страшитесь, как последствие какого либо ущерба Вам совершенно не грозит. С такими бонусами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе. 1×slots зеркало регистрация <a href=http://md-rhesus.ru/bitrix/rk.php?goto=http://todayhumor.co.kr/go_pc_version.php?url=http://altay.land/bitrix/rk.php?goto=https://telegra.ph/Rejting-luchshih-kompanij-po-upravleniyu-mnogokvartirnymi-domami-v-Moskve-09–23>http://md-rhesus.ru/bitrix/rk.php?goto=http://todayhumor.co.kr/go_pc_version.php?url=http://altay.land/bitrix/rk.php?goto=https://telegra.ph/Rejting-luchshih-kompanij-po-upravleniyu-mnogokvartirnymi-domami-v-Moskve-09–23</a>
зеркала 1×slots
Например, игрок получил 500 руб. При творении аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 рублей, понадобится устроить 875 спинов для полного отыгрыша.Ещё одно распространённое акционное предложение – симпатичный презент с неблаговидными требованиями. К образцу, клуб обещает $100 виде бездепа, но с вейджером х80 или х100. Отыграть подобный вейджер фактически невероятно и поэтому превосходнее концентрироваться на больше заманчивых акциях. <a href=https://sport1477.ru/forums/users/xrumsetes2305–2/>https://sport1477.ru/forums/users/xrumsetes2305–2/</a> Бонус в казино без депозита содержит различные варианты: такое быть приветственный приз, промоакции в честь каких-либо дней или важных дат, бонус за привлечение свежих игроков, преданность и получение VIP-статуса. 1×slots регистрацию более популярный вариант это Как верховодило, новоприбывшие геймеры для хотят ознакомиться с способами ввода и вывода денежных средств и сроки исполнения поданных заявок чтобы четко осознавать, как скоро у исключить собственный казино бонус за регистрацию без депозита на электрический кошелек или же банковскую карту. К счастью для всех играющих, снутри конкретных холдингов, все казино соперничают меж собой. Ведь в бы конкретную компанию представляло лишь одно онлайн-заведение, то вряд ли бы клиенты заметили казино с призом за регистрацию и возможность бы рассчитывать лишь на вознаграждение вид приза на 1-ое инвестиция. К любому заведению периодически стопам завлекать новых игроков, собственно, конечном, только на руку всем играющим.Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, solid зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.
<b>Смотреть еще похожие новости:</b>
<a href=http://kick.gain.tw/viewthread.php?tid=5044844&extra=>1×slots зеркало регистрация</a>
<a href=http://djdrewski.co.uk/lfsbangers/viewtopic.php?f=32&t=30041>1×slots casino регистрация 1×slotscasino09k online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Основное различие никаких, что для получения бездепа не надо пополнять баланс в казино. Но считая сего, есть ряд прочих различий:
#2981 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Дарья Мороз рабочее казино <a href=https://m.repost.news/>казино сочи</a> casinos winning casino скачать приложение <a href=https://kompromat1.online/>бк букмекерская контора</a> 1×bet зеркало рабочее xbet casino x casino промокод 1×bet слоты 1×bet слоты кент казино bet casino
DiskiPlus пин ап casino pin DiskiPlus 7k casino зеркало рабочее <a href=https://diskiplus.ru/>DiskiPlus Елена Лядова</a> DiskiPlus сайт 1×bet слоты DiskiPlus porno Алена Косторная (фигурное катание) <a href=https://www.diskiplus.ru>DiskiPlus казино онлайн</a> DiskiPlus казино без DiskiPlus Самойлова Алла Владимировна порно DiskiPlus казино фильм онлайн DiskiPlus 1×bet на андроид бесплатно DiskiPlus песня казино DiskiPlus casino андроид DiskiPlus casino x
#2982 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрацию более популярный вариант это
Используйте лучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из перечня ниже, чтобы заработать презенты за обычные действия теперь сегодня получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и резвыми выводами на электрические кошельки.Ещё одно распространённое акционное предложение – симпатичный презент с сомнительными требованиями. К примеру, клуб обещает $100 в качестве бездепа, но с вейджером х80 либо х100. Отыграть такой вейджер практически невозможно и потому лучше концентрироваться на более интересных промоакциях. <a href=http://filmkachat.ru/>1×slots сайт</a> Отыграв бездепозитный приз в казино с выводом также придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если подобное ограничение существует, то единоразово исключить получится лишь сумму, не превышающую объем приобретенного бонуса. <a href=https://app.pipefy.com/organizations/301582382/interfaces/2282e13e-d32f-46a8–8604-e703b4ef8f9f/pages/e1864a18–288e-4762–997e-e7e6e5c7956b>https://app.pipefy.com/organizations/301582382/interfaces/2282e13e-d32f-46a8–8604-e703b4ef8f9f/pages/e1864a18–288e-4762–997e-e7e6e5c7956b</a> Для получения приза нужно ознакомиться с программкой преданности казино и сделать ставки на сумму, нужную для перехода на грядущий степень.Разные казино имеют собственные управляла по выведению выигрыша. Для бездепозитных бонусов принимаются достаточно высочайшие требования. Часто онлайн-казино советуют отыграть бонусное поощрение до 100 один в игровых автоматах. Например, в игрок получил даром десять $, то нужно будет отыграть их, поставив одну тысячу спинов по 1 баксу каждый. Стоит отметить, что не все казино дают возможность выступать на призы и не во всех увеселительных заведениях идентичные верховодила для отыгрывания. Некоторые казино воспрещают играть на призы в блекджек или ограничивают ставки до 5 %, собственно существенно наращивает в 10-ки раз число необходимых игр. 1хслот официальный сайт зеркало <a href=https://www.mybbaddons.com/board/user-71207.html>https://www.mybbaddons.com/board/user-71207.html</a> Онлайн-казино с бездепозитными бонусами ставят клиентам обстоятельства для пользования бездепами, потому перед ролью в акции другого, как подробно ознакомиться со всеми правилами и нюансами акции. Условия все касаться получения приза, его использования и следующего вывода денежных средств в случае выигрыша.
1×slots быструю регистрацию а также мгновенное
Денежные свои. Третий бонус за регистрацию без депозита – наличные. К раскаянию, лишь известные и знаменитые клубы могут дать средства в руб. Или долларах. С их подмогою появится насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед данным нужно исполненье определенных условий.У нас на веб-сайте Вы отыщите перечень бонусов без депозита в испытанных казино и доскональную информацию о том как их получить и применять. 1× slots casino зеркало Также учтите, что некоторые игровые платформы сужают перечень государств, которые готовы получить предложенный бездепозитный приз за регистрацию. К примеру, есть онлайн-заведения, выдающие сходственные призы только жильцам определенных стран. К образцу, онлайн казино 777 Оригинал предоставляет бездепозитный бонус только игрокам из России и государств СНГ. Или напротив, снабжают вознаграждением всех, не жителей неких стран (следует этого, идет пристально учить список, дабы впоследствии не возникло никаких вопросов и жалоб). <a href=http://xsyywx.com/home.php?mod=space&uid=131744>http://xsyywx.com/home.php?mod=space&uid=131744</a> На благотворительные бонусы онлайн-казино практически всегда распространяется ограничения по стране проживания посетителей. Даже в для разрешается открывать счет и выступать на средства в заведении, это еще не значат, что вас доступны not the slightest down payment bonuses. 1хслот зеркало С этими ординарными советами любое казино с призом за регистрацию способно принести в разы больше выгоды и пользы.Для как, дабы отыграть сумму вашего бездепозитного бонуса нужно выполнить условия вейджера. Очень часто фриспины даются на определенные слоты (book of ra, book of deceased, book of sun), выбирайте разъем себе нраву, они все довольно красочные и высококачественные. Бездепозитные приз имеет быть денежным например и в виде фриспинов на слоты
скачать 1×slots официальный сайт
Для отыгрыша приза казино обязует игрока сыграть на необходимую, в несколько раз превосходящую сумму приобретенного приза — здесь выгода компании очевидна.Обычно бездепозитные промоакции от казино, приходят на эл. Почту в дни рождения или праздничные. В неких онлайн казино можно обратиться в чат и как постоянному игроку, вполне вас предложат бездепозитное предложение. <a href=http://multi-net.su/index.php?subaction=userinfo&user=HenrySkare>http://multi-net.su/index.php?subaction=userinfo&user=HenrySkare</a> Каждый компьютерные обязан сначала детально изучить обстоятельства по получению и отыгрышу приглянувшегося дара. Если всё устраивает, поспешите забрать безвозмездные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо в начать вращать барабаны лучших слотов.Не стоит сразу же открещиваться от приветственных презентов в сходственных казино. Администрация готова начислить средства или фриспины, хотя сначала работники обязаны убедиться, что вы не мошенник. Дело том,, собственно развелось слишком много охотников за бонусами. Они научились дурачить систему и наваривать крупные суммы денег. сайт 1× slots casino Такой казино приз без депозита за регистрацию выдается игроку на час и энергично используется данное предложение с 2017 года. Это как бы некая конспирация одобрения под бездепозитный. Суть всего сего сводится к что, этому, что геймеру на час выдается, к примеру, 1000 $, а реклама твердит то, что любой выигрыш можно несомненно в оставить при себе. Но случае играющий серьезно отнесется к этому предложению, то он попросту потеряет время. Ведь геймеру нужно несомненно играть не в основном аккаунте, а тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (даже всей тысячи) в управляла вступят определенные условия, где несомненно сказано, что наибольшей суммой победы может быть только двести долларов и деньги возможно использовать лишь в приза на первый вклад с вейджером 25 от суммы вознаграждения плюс сам депо. По итогу получится, собственно игрок выигрывал себе 200% бонус с вейджером на определенную необходимую. Короче разговаривая, это все не стоит вашего времени.
1хслотс казино зеркало
Главным нюансом в появлении этих вознаграждений произведено в, что пустив их в ход, геймер ничем не рискует и в последствии никому ничего не несомненно обязан (не зависимо, получит ли он спасибо бонусам какой-нибудь выигрыш или мгновенно спустит все только собственно прибывшие деньги). То есть, казино снабжает игрока возможностью на дармовой основе играть во всевозможные слоты даже спонсирует забаву.В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, нужно обратиться в саппорта через лайв-чат на сайте казино. Возможность сыграть дополнительное состязание (а от и несколько) абсолютно безвозмездно, а выигрыш, же, поступает на счёт игрока.Онлайн-казино с бездепозитными призами ставят посетителям условия для пользования бездепами, поэтому перед ролью в промоакции лучше досконально ознакомиться со всеми правилами и аспектами промоакции. Условия могут касаться получения бонуса, его применения и следующего вывода валютных средств если, тогда, выигрыша. 1×slots официальный зеркало рабочее <a href=http://ambumed.ru/communication/forum/user/797/>http://ambumed.ru/communication/forum/user/797/</a>
1хслот зеркало сайта
<a href=https://www.e-xecutive.ru/users/1890432-avto-vykup>https://www.e-xecutive.ru/users/1890432-avto-vykup</a> Самые пользующиеся методы вывода средств ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электрическим платежным системам типа Neteller и Skrill, а пользуются криптовалютными кошельками. Вывод выигрышей возможность осуществляться мгновенно либо занимать от нескольких часов до нескольких суток.Отзывы читателей о бонусных промоакциях посодействуют составить впечатление, хотя не забывайте о субъективности собственных объяснений. 1×slots регистрация на сайте 1×slots ru com Возьми собственный презент. Чаще всего бонус активируется сразу после регистрации. Но бывают ситуации, когда нужно забежать в собственный офис либо написать в справочную службу.
<b>Смотреть еще похожие новости:</b>
<a href=http://amazon.rx22.ru/viewtopic.php?f=5&t=2184>онлайн казино 1×slots</a>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=276088>1×slots casino регистрация 1×slots review live</a>
<a href=https://uyghuryol.com/forum/viewtopic.php?f=8&t=265611>1×slots casino регистрация 1×slotscasin online</a>
<a href=https://ragnarok.ch/forum/viewthread.php?thread_id=134673>1×slots мобильная версия войти казино</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Не советуем опрометью голову хвататься за всевозможные предложения получения средств без вложений. Вполне вероятно, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на первый взгляд. Альтернативой считается казино бонус за депо. Мы предлагаем для пару советов, благодаря которым у любого игрока несомненно вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств:
#2983 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino скачать champion casino <a href=https://7club7.com/>балтбет букмекерская контора</a> casino регистрации kent casino регистрация <a href=https://sovsekretno.net/>порно с Алина Загитова</a> 1go casino 7k casino сайт 1×bet casino песня казино казино на деньги porno Юлия Пересильд официальные зеркала казино
DiskiPlus casino сегодня DiskiPlus Матвиенко Валентина Ивановна порно <a href=https://www.diskiplus.ru>DiskiPlus букмекерская контора</a> DiskiPlus casino ru DiskiPlus Приезжева Екатерина Геннадьевна порно <a href=https://diskiplus.ru/>DiskiPlus Петрова Ольга Викторовна порно</a> DiskiPlus порно с Каролина Севастьянова DiskiPlus казино смотреть онлайн DiskiPlus porno Марина Александрова DiskiPlus карты казино DiskiPlus porno Ангелина Гончаренко, хоккеистка DiskiPlus сайты казино DiskiPlus Хорова Наталья Александровна порно
#2984 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
Получать информацию о самых прибыльных призах возможно без неизменного прогноза новостей казино. Мы брали эту задачу на себя и безпрерывно смотрим за предложениями операторов, избирая наилучшие из них. В этом разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список акций периодически пополняется. В топ вошли самые свежие бездепозитные бонусы за регистрацию в казино 2020, кратковременные и замкнутые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру прочим аспектам. Если срок деяния промоакции истек, она удаляется из перечня. <a href=http://filmkachat.ru/>1×slots скачать на айфон</a> Многие казино предоставляют в маркетинговых целях благотворительные призы самая для наших читателей. Чтобы их получить, нужно перебежать на игровой сайт по партнерской ссылке с нашего портала.Перечисленные выше главные характеристики сопровождают практически любой бонус и являются стереотипными для бездепозитных бонусных начислений в казино. <a href=https://justpaste.it/i18sr>https://justpaste.it/i18sr</a> Наличие у игрока 2 аккаунта. Запрещено творить количество профилей для неоднократного получения бездепов.Акции распространяются как на все игры казино, например и на ограниченный перечень. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и другие. Промо возможность обхватывать разработки одного производителя. Бездеп не пересекается с иными промоакциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, сделанные бонусными деньгами. Для идентификации платежных реквизитов игрока имеет понадобиться пополнение счета на наименьшую сумму. 1×slots регистрация <a href=http://bbs.totoroclub.com.cn/home.php?mod=space&uid=370401&do=profile>http://bbs.totoroclub.com.cn/home.php?mod=space&uid=370401&do=profile</a> Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских рублей. В критериях промоакции указано, собственно вейджер бездепозитного приза х20. Поэтому, дабы отыграть приз, игроку несомненно необходимо устроить ставок на 35*20=700 руб.
1 x slots casino
Так собственно сможете отважно регистрироваться без всяких раздумий. Фортуна сегодня наверняка на вашей стороне. Не побаивайтесь, как следствие какого или убытка Вам совершенно не грозит. С этими бонусами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе.Раздача бонусов возможность быть посвящена разным датам: календарные праздники, деньки рождения игроков, годовщина открытия казино и т. Д. Подарок выдается в виде средств, фриспинов либо баллов для скопления и размена на предложения оператора. Если пользователь получает выигрыш, деньги начисляются на его счет. Для вывода данной суммы придется выполнить ряд требований. 1×slots casino регистрация на сайте Когда речь о валютных призах, казино всегда устанавливают обстоятельства вейджера, коие нужно выполнить, дабы исключить выигрыш. <a href=http://www.xwsj2021.com/home.php?mod=space&uid=72423>http://www.xwsj2021.com/home.php?mod=space&uid=72423</a> Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную функцию активации бонуса без депо. Внимательно прочитайте до конца. Многие новенькие проделывают промахи на этапе регистрации и потому не получить подарок. 1хслотс рабочее зеркало на сегодня Бездеп с фриспинами может обхватывать всю коллекцию игр на сайте или разработки 1-го провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении акции. Выигрыш возможность быть выведен после того, как пользователь отыграет данную необходимую. Возможность расценить полный функционал слотов — главное совершенство данной разновидности. Игроку становятся доступны те опции, коие отсутствуют в демонстрационном режиме, а возможность выиграть реальные деньги добавляет ясных азартных ощущений.
1×slots рабочее зеркало
Каждая игровая перрон отличается критериями по получению и отыгрышу бездепов. В правилах детально расписаны временные рамки, за которые нужно прокрутить вейджер. Также не забывайте про наибольший размер ставки и наивысшую сумму выплаты. С другой стороны, чтобы получить бездепозитные призы казино, довольно истратить не более 1 минуты.3. Подтвердить данные. В зависимости от клуба, нужно привязать телефонный или почту, показать персональную информацию; В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с бесплатных вращений. Прибыль, которую Вы заработаете на этом бездепе можно назначать на вывод без какого или отыгрыша.Бoльшинcтвo азартных заведений выдвигают приблизительно однообразные, схожие обстоятельства и требования, которые нужно выполнить, чтобы получить бездепозитный бонус за регистрацию. Все их возможно объединить в один список: <a href=http://multi-net.su/index.php?subaction=userinfo&user=sincereappendix>http://multi-net.su/index.php?subaction=userinfo&user=sincereappendix</a> Разные казино имеют собственные верховодила по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высочайшие притязания. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до ста один в игровых автоматах. Например, если игрок получил бесплатно десять $, то нужно будет отыграть их, поставив 1 тыщу спинов по 1 доллару любой. Стоит обозначить(означить), собственно не все казино дают вероятность выступать на призы и не во всех увеселительных заведениях схожие верховодила для отыгрывания. Некоторые казино воспрещают играть на бонусы в блекджек или ограничивают ставки до 5 процентов, собственно значительно увеличивает в 10-ки один число необходимых игр. казино 1×slots официальный сайт Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша бонусов. Заведения постоянно устанавливают наивысшую ставку, возможную по условиям вейждера.Можно ли зарабатывать на бездепозитных призах? Это не работа, здесь как повезет, если в любом предложенном безедепе, вы будете откручивать вейджер и выводить, это можно назвать везением, и дополнительной добавкой к вашему бюджету.
1×slots casino регистрация 1×slotscasin online
Популярность онлайн казино растёт и всё больше юзеров начинают интересоваться азартными играми. Бездепозитные бонусы 2022 года, это оригинальные презенты за регистрацию. С их поддержкой новые игроки все получить безвозмездные вращения или деньги на баланс за одну регистрацию. С появлением игорных заведений в онлайне, бездепозитные призы стали моднейшим методом вербования игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы расскажем. Наш вебсайт собрал лучшие предложения из интернета на 2022 год. Воспользуйтесь хоть подарком и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить обстоятельства. Подтвердите регистрацию, дабы активировать Бездепозитный приз с выводом, требуется заполнить личный профиль. Заполните порожние поля истинными данными о для. Поспешите отобрать бездепозитные призы за регистрацию в казино из представленного списка. Все платформы столько ведут законную работа, но и обрадуют добросовестными плодами игры, высочайшей отдачей, быстрыми выплатами. 1×slots мобильная версия войти казино <a href=http://www.glife2120.ru/user/Donaldtic/>http://www.glife2120.ru/user/Donaldtic/</a> Рассмотрим на образце: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских руб. В критериях акции указано, собственно вейджер бездепозитного бонуса х20. Поэтому, чтобы отыграть бонус, игроку будет нужно сделать ставок на 35*20=700 рублей.Срок активации и время на отыгрыш. Зачисление средств или фриспинов происходит при активации в течение требовательно ограниченного периода, схожие притязания предъявляются и к срокам отыгрыша. Одни казино позволяют отыгрывать приз некоторое дней или в недель. Другие выдают солидную сумму за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высочайшим вейджером.
1×slots регистрация на сайте 1×slots ru com
Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых новых, щедрых и проверенных бонусах в интернет казино, коие обновляются любой день.Иногда для получения призов нужно спутаться с адептами саппорта. Удобнее всего с ними собеседовать в онлайн-сате, желая времени довольно запроса по электрической почте. <a href=https://mobilka.mobi/user/Terryslolf/>https://mobilka.mobi/user/Terryslolf/</a> 1×slots зеркало выигрыши обязательно пройдите регистрацию если Практически все онлайн казино с бездепозитным призом за регистрацию учитывает программку преданности — систему поощрения постоянных клиентов, которая произведено из большого уровней. При достижении игроком одного уровня на его счёт поступает бонус. Чем повыше уровень — тем щедрее приз.В интернет-сети всегда можно найти перечни наиболее известных и обещанных поощрительных программ от знаменитых онлайн-казино.
<b>Смотреть еще похожие новости:</b>
<a href=http://complainanything.com/node/158?page=979#comment-1327435>1×slots зеркало быструю регистрацию а также мгновенное</a>
<a href=https://ragnarok.ch/forum/viewthread.php?thread_id=123420>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Когда речь идет о получении бездепозитных призов в казино, для внимание на следующие обстоятельства: Если вы опытный игрок, вы обязаны аристократия, собственно приз без депозита – редкая находка. Тем не менее, мы в исследуем интернет, дабы найти вам наилучшие бездепозитные предложения.
#2985 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Манилова Алла Юрьевна порно Ирина Горбачева <a href=https://repost.news/>порно с Алина Загитова, фигуристка</a> 1×bet kometa casino <a href=https://rumafia.news/>online casino</a> порно с Анастасия Потапова, теннисистка casino приложения casino зеркало сегодня казино играть casino рабочее яндекс казино порно с Алина Загитова, фигуристка
DiskiPlus скачать 1×bet 1×bet xyz DiskiPlus 1×bet на сегодня <a href=https://diskiplus.ru/>DiskiPlus порно с Варвара Субботина</a> DiskiPlus порно с Бондаренко Анастасия Борисовна DiskiPlus Самойлова Алла Владимировна порно <a href=https://diskiplus.ru>DiskiPlus porno Дарья Клишина</a> DiskiPlus бесплатные букмекерские конторы DiskiPlus пин ап casino pin up top DiskiPlus porno Марина Александрова DiskiPlus 1×bet DiskiPlus порно с Евгения Медведева, фигуристка DiskiPlus Елена Лядова DiskiPlus порно с Юлия Ефимова, пловчиха
#2986 Charlesgunnyhttp://filmkachat.ru
1×slots акции
Мы советуем не отказываться от подобных услуг узнаваемых казино. Выделите несколько мин. На регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сегодня удача будет на вашей стороне!В игровых клубах без лицензии Вы покупаете „кота в мешке“ и в случае спорных обстановок нет способности куда-то посетовать и доказать свою правоту. <a href=http://filmkachat.ru/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> <a href=https://pdfhost.io/v/vg5kMeE3F_Professional_2D3D_Prototyping_Solutions_for_Upholstered_Furniture_Design>https://pdfhost.io/v/vg5kMeE3F_Professional_2D3D_Prototyping_Solutions_for_Upholstered_Furniture_Design</a> 1× слот зеркало <a href=http://www.fiammeblu.it/profile.php?uid=29421>http://www.fiammeblu.it/profile.php?uid=29421</a> Как только получите бездеп в казино, всё точно не запамятовывайте инспектировать электрическую почту. Некоторые игорные клубы непрерывно веселят интенсивных гэмблеров приятными бонусами. Чаще всего получить презент можно в преддверии веселья, на денек рождение, за вербование друга. А того распространённым призом считается прибавка к депозиту. Нужно не восполнить счёт, и азартное заведение прирастит его на 50–100%.Иногда у посетителей сайта имеют появиться проблемы при активации приобретенного промо-кода. В таких случаях, нужно обратиться за помощью в саппорта «Support». Для получения ответа, непременно указывается определенная причина обращения и подтверждается информация дополнительными экрана. Если сложилась неоднозначная обстановка, постоянно возможно адресоваться к главному регулятору или контролирующему органу, выдавшему этому заведению лицензионный документ.
1хслотс официальный сайт зеркало
Помните, собственно всевозможные нарушения правил сведут на нет ваши усилия, и вы скорее останетесь без начисленного вас бесплатного приза. Всегда изучайте верховодила начисления и условия вейджера. По хоть вопросам, на коие вы не можете других найти ответы, обращайтесь за разъяснениям и саппорт.В реальное время получить приз за регистрацию в казино довольно просто. Почти любой игорный жилище с радостью даст деньги либо благотворительные вращения. Многие игроки пользуются этим и не стесняются региться в каждом клубе с выгодными критериями. Кстати, это отличная возможность придумать выигрышную тактику и сорвать куш. 1×slots сайт зеркало Бездеп с фриспинами имеет охватывать всю коллекцию игр на веб-сайте или разработки 1-го провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении акции. Выигрыш имеет быть выведен в того, как пользователь отыграет данную сумму. Возможность расценить полный функционал слотов — основное совершенство этой разновидности. Игроку становятся доступны что, эти функции, которые отсутствуют в демонстрационном режиме, а возможность выиграть реальные деньги добавляет ясных азартных ощущений.Некоторые онлайн-казино без депо предлагают свежим посетителям выбрать бонус при регистрации. Будьте внимательны: выбрав раз, вы в безусловном большинстве случаев не можете пользоваться остальными. <a href=http://forum.gokturkvirtual.com/uye-stevenmok.html>http://forum.gokturkvirtual.com/uye-stevenmok.html</a> Баланс игрока пополняется на соответствующую сумму. К ней применяется вейджер, обозначенный в правилах акции. Вывести выигрыш можно несомненно в как, как юзер сделает требуемый объем ставок из личных средств. В редчайших случаях бездеп работает в формате Free Play. На счет пользователя зачисляется крупная сумма, и предоставляется маленький срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по завершении сего периода сумма на счету будет превышать первоначальную, то разность можно будет вывести либо использовать для дальнейших ставок.Например, игрок получил 500 рублей при разработке аккаунта и обязан отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 руб., потребуется сделать 875 спинов для полного отыгрыша. 1×slots регистрация 1×slotscasino 56 online Практически все интернет казино с бездепозитным призом за регистрацию предусматривает программу лояльности — систему одобрения постоянных клиентов, кот-ая состоит из множества уровней. При достижении игроком одного уровня на его счёт поступает приз. Чем выше степень — что, этим щедрее бонус.
x1 slots 1хслотс регистрация перейти на 1×slots
<a href=https://google.jo/url?q=https://doctorlazuta.by/>https://google.jo/url?q=https://doctorlazuta.by/</a> Во всех легальных онлайн-казино Беларуси необходимо подтверждение паспортных данных для игры — это требование правительства страны.Размер ставки для забавы по бездепозитному призу (естесственно же, когда, когда он представлен в виде бонусных валютных средств) часто ниже, чем при ирге на депозит. Ограничение несомненно работать до этапа отыгрыша приза. 1× slots casino зеркало Частенько новички не знают, как активировать презенты или исключить первый выигрыш. Для подобных случаев наша команда описала главные термины – собственно это фриспины, вейджер, как его отыграть, для нужно протекать верификацию.Многие игроки, оценив функционал казино, остаются выступать в нем и далее ? на это и нацелено каждое промо. Постоянные клиенты заносят депозиты и делают ставки, обеспечивая долгосрочную выгода оператора. То есть, казино выдают бездепы новым пользователям для формирования лояльной аудитории.
1×slots casino зеркало рабочее
При регистрации никаких или ином интернет игральном заведении — вас дается один шанс испытывать собственную фортуну не внося средства монеты. Замечу что такую поощрительную предложение предоставляют не все интернет игровые площадки, а только щедрая половина из их. Которые мы подготовили для Вас в нашем перечне.Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала быстрые выводы. Фишка выплат том,, собственно достаточно выбрать платёжный инструмент и показать необходимую. В большинстве случаев средства зачисляются на электрические кошельки протяжении 15 минут, а на банковские карты – 1–3 трудящихся денька. Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Подтвердите лицо, предоставив оператору казино свои паспортные данные. Инструкции обыкновенно несложные, основное — четко им по. Если написано, что «на фото должны быть видны все четыре угла странички паспорта» — сделайте именно это фото. x1 slots регистрация в 1×slots casino <a href=https://www.df100.cn/home.php?mod=space&uid=1792477>https://www.df100.cn/home.php?mod=space&uid=1792477</a> Иногда у гостей сайта шансы возникнуть проблемы при активации полученного промо-кода. В таких случаях, необходимо адресоваться за подмогою в службу «Support». Для получения ответа, обязательно указывается конкретная причина воззвания и подтверждается информация дополнительными снимками. Если сложилась неоднозначная обстановка, практически возможно адресоваться к главному регулятору или контролирующему органу, выдавшему данному заведению лицензионный документ.
1хслот скачать
Начнём с такого, собственно любое рекламную за регистрацию предполагает некоторые обстоятельства. Бездепозитные призы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность денежного оборота, нужная для исполненья условий. Пример, возымели бесплатные вращения и выиграли с них 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 руб., неудачных либо выигрышных, маловажно. После выполнения, бонусный баланс перейдёт на реальный и станет доступным к выводу.Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских руб. В критериях акции указано, собственно вейджер бездепозитного приза х20. Поэтому, чтобы отыграть приз, игроку несомненно нужно сделать ставок на 35*20=700 рублей. Не трудно догадаться, что not the slightest deposit bonuses практически разу не бывают большими. Чаще всего речь о пяти–тридцати долларах (или эквиваленте данной суммы в иной денежной).В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, необходимо обратиться в службу поддержки спустя лайв-чат на веб-сайте казино. <a href=https://www.google.com.ng/url?sa=t&url=http%3A%2F%2Fdoctorlazuta.by>https://www.google.com.ng/url?sa=t&url=http%3A%2F%2Fdoctorlazuta.by</a> Получив собственный подарок, Вы сможете бесплатно выступать на реальные деньги, а выполнив условия отыгрыша, исключить собственный выигрыш. 1× slots casino официальный сайт Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.arka-bahce.org/forum/showthread.php?p=780467&posted=1#post780467>1×slots быструю регистрацию а также мгновенное</a>
<a href=https://mcmon.ru/showthread.php?tid=141505>1×slot зеркало рабочее регистрации на телефон придет</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Существуют казино с призом за регистрацию, каких довольно востребованы фриспины в интернет казино впоследствии регистрации в определенных забавах. Они встречаются том почаще бесплатных поощрений или классических призов в казино без инвестициям. Например, игрок регистрирует счет, на который начисляются безвозмездные игры, бонус за регистрацию вид безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса в выигрывает истинные средства, которые в последствии можно успешно вывести из заведения на собственную платежную систему. То есть, есть все шансы вывести средства без рисков собственными финансами. Регистрация, за которую компьютерные получит бонусы, займет пару минут, а благодаря этому возможно увеличить 5 евро поощрений до тыс. И без всяких заморочек вывести их. Акционные предложения от казино есть в разных форматах. Часто бонусы даются в мена на депозит. Игрок заносит платеж и получает средства, благотворительные вращения и одобрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — вид бонуса, который гарантирован за исполнение конкретных поступков на сайте:
#2987 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать на айфон
B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpaxБездепы обычно предлагают с отыгрышем — моментально исключить выигранные средства невозможно. Перевод средств со счета будет возможен последствии такого, как юзер выполнит все требования казино, а сумма имеет превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, протяжении коих клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней после активации. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать на айфон</a> Итак, дабы безвозмездные бонусные кредиты трансформировались в реальные деньги, которыми продоставляется управлять по собственному усмотрению, их надо(надобно) отыграть. Вейджер стопам уточнять в правилах онлайн-казино. <a href=https://pdfhost.io/v/V29E~XTxf_Crafting_Exceptional_Luxury_Real_Estate_Marketing_Materials>https://pdfhost.io/v/V29E~XTxf_Crafting_Exceptional_Luxury_Real_Estate_Marketing_Materials</a> Такие поощрения разрешают безвозмездно протестировать свежее казино, разобраться с игровым процессом онлайн слотов, заработать и исключить маленькую сумму средств. 1×slots официальный сайт скачать <a href=http://hardstorecr.com/mybb/member.php?action=profile&uid=172425>http://hardstorecr.com/mybb/member.php?action=profile&uid=172425</a> Выбирайте превосходнейшие благотворительные бонусы счет обзоров на Casinoz – и пусть для сопутствует счастье при отыгрыше бонусных кредитов!
1×slots официальный сайт зеркало
1×slots на любой вкус как пройти регистрацию <a href=https://sub4sub.net/forums/users/joshuadenly/>https://sub4sub.net/forums/users/joshuadenly/</a> Прежде чем активировать бездеп, необходимо увериться в том, что государство, гражданином коей считается игрок, не входит в список запрещенных. 1×slot официальный сайт
1×slots официальный сайт мобильная версия скачать
<a href=https://wiki.dulovic.tech/index.php/Shisha_Tobacco_From4_Eur>https://wiki.dulovic.tech/index.php/Shisha_Tobacco_From4_Eur</a> Особую изюминку видео слотам присваивают уникальные символы. С их появлением активируются разные призы. Вы сможете запустить дополнительный уровень и увеличить необходимую выигрыша. Есть знаки, которые сменяют ненужные элементы и сами творят выигрышные комбо. Не стоит забывать и на бонус-тур. После любого успешного спина есть шанс прирастить сумму выигрыша в два или четыре раза.Шаг 5. Использование и отыгрыш. Бездеп должен быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. 1×slots регистрация 1×slotscasino09k online Бездепозитные бонусы казино за регистрацию в 2022 году — это возможность сыграть за счёт заведения. Казино даёт клиенту шанс воспользоваться определённой суммой или числом бесплатных вращений без внесения депозита. Не путайте деморежим с реальной игрой без необходимости внесения депо.
casino 1×slot
Для вывода средств приз надо(надобно) будет отыграть законам, установленным казино. Внимательно ознакомьтесь с правилами акции и вариантами отыгрыша бездепозитного бонуса до его получения, дабы избежать конфликтных ситуаций.В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это самая приятная часть игры. Важно, зачастую бездепозитные призы в казино выдаются с ограничениями по максимальной выплате. В среднем возможно рассчитывать на прибыль в некоторое тыщ рублей. Как исключить выигрыш с бонуса без депо. Придётся доказать аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате либо прочитайте в правилах. <a href=https://forum.spherecommunity.net/User-Jamesmew>1×slots официальный сайт зеркало рабочее</a> Бывают ли бездепозитные призы без вейджера? Бывают, если у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино.Бездепы с безвозмездными вращениями деют юзерам право вертеть барабаны игровых автоматов без снятия средств со счета. За любой раунд платит казино. Число спинов ограничено и редко превышает сотку. Если промоакция содержит большое даровых игр, их начисление может быть разбито на несколько дней. 1хслотс зеркало на сегодня <a href=https://www.knx-fr.com/member.php?action=profile&uid=10539>https://www.knx-fr.com/member.php?action=profile&uid=10539</a> Как только вы отыграли вейджер и средства с бонусного баланса перешли для на реальный счет, Вы храбро сможете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать наименьший депо например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депозитом).
1 x slots
<a href=http://www.dachamania.ru/photo_gallrey/profile.php?uid=59588>http://www.dachamania.ru/photo_gallrey/profile.php?uid=59588</a> Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, the decision только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Для подтверждения электрической почты, просто перейдите по активной ссылке в послании, приобретенном от игрового заведения. 1×slots зеркало этих способов предполагает регистрацию
<b>Смотреть еще похожие новости:</b>
<a href=https://koreanstudies.com/forum/viewtopic.php?t=212425>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный приз предоставляется новому игроку за определенные деянья. Часто подарок вид средств или фриспинов выдается за регистрацию, спасибо чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.
#2988 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Юлия Пересильд букмекерская контора ставки <a href=https://7club7.com/>казино ли</a> балтбет букмекерская контора сайты казино <a href=https://rucriminal.info/>скачать 1×bet 1×bet xyz</a> порно с Афонина Марина Игоревна Елизавета Боярская porno Анастасия Янькова, боксерка суть казино kometa casino почему казино порно с Ирина Сидоркова
DiskiPlus букмекерская контора фонбет официальный DiskiPlus porno Алена Михайлова <a href=https://diskiplus.ru/>DiskiPlus казино пин</a> DiskiPlus 1×bet официальный 1×bet xyz DiskiPlus букмекерская контора <a href=https://www.diskiplus.ru/>DiskiPlus cometa casino</a> DiskiPlus леон букмекерская контора DiskiPlus porno Илья Ковальчук (хоккей) DiskiPlus почему в казино нет часов DiskiPlus casino buzz DiskiPlus самое казино DiskiPlus казино рояль смотреть DiskiPlus казино рулетка
#2989 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
Диапазон ставок, коие вправе устроить игрок, кроме лимитирован. Обычно ставить возможно маленькую необходимую — пределах 10–30 рублей за одно вращение.Помните, собственно в неких забавах сумма ставки идет в зачет вейджера лишь частично. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки считаются как отыгранные средства, в то время как в слотах идет в зачет все 100% суммы. <a href=http://filmkachat.ru/>1×slots регистрация на 1хслотс</a> Это также бесплатные финансы, коие поступают на аккаунты новоиспеченных в в регистрирования. А особенность таких призов произведено сомнений, что обретенные деньги непременно следует использовать в продолжении назначенного медли. <a href=https://www.brownbook.net/business/53491634/cgifurniture/>https://www.brownbook.net/business/53491634/cgifurniture/</a> Нет. Для получения бездепозитного приза в казино нужна неотъемлемая регистрация на веб-сайте. Играть в слоты даром и без регистрации можно только в демо режиме.Мы собрали и опубликовали список наихороших бездепозитных казино с бонусами за регистрацию, которые гарантируют великодушные выигрыши и моментальные выплаты. 1×slots официальный сайт скачать на айфон <a href=http://forum.ttpforum.de/member.php?action=profile&uid=355506>http://forum.ttpforum.de/member.php?action=profile&uid=355506</a>
1хслотс рабочее зеркало
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=8859>1хслотс рабочее зеркало</a> 1×slot официальный сайт Диапазон ставок, которые вправе сделать игрок, кроме лимитирован. Обычно ставить можно маленькую необходимую — около 10–30 руб. За одно вращение. <a href=https://sklad-slabov.ru/forum/user/9651/>https://sklad-slabov.ru/forum/user/9651/</a> Классическая разновидность приза за творенье аккаунта. Его преимущество содержится что, что клиент имеет помощи выбирать аппараты и создавать ставки в их. Иногда перечень игровых автоматов ограничен оператором, но все равно это какого-либо, чем единственный дешевый разъем, как когда с использованием фриспинов.Срок отыгрыша — это период, который наступает в момент активации приза и заканчивается с его закрытием. Пользователю необходимо уложиться в этот временной зазор, иначе призовые свои аннулируются. Казино устанавливают перечень игр, ставки в засчитываются при расчете отыгранных средств. Если тайтл не входит в данный список, то он может быть недоступен для загрузки период деяния бонусного предложения. 1× slots официальный Подарки на конкретные даты выделяются критериями получения. Если одобрение начисляют игроку на день рождения, то сумма обычно зависимости от совместного размера депо последний год.
1×slots официальный сайт зеркало
Условия все различаться приятель от друга. Но такой приз имеет быть применен лишь для игрового процесса – приобретенные на счет деньги до как, как будут отыграны, вывести нереально.Исходя из сего, просто не существует разумных оснований махнуть рукою на получение такого приза при регистрации. И, не, на подобный безвозмездной базе у вас все шансы выиграть средства и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, называют безвозмездными интернет платформами для игр. <a href=https://dc-kd.ru/user/Justinrix/>https://dc-kd.ru/user/Justinrix/</a> 1х слотс зеркало регистрация в 1×slots casino
1×slots casino регистрация
Воспользоваться бездепом можно не во всех игровых автоматах: казино вдруг уточняет ограничение для клиентов. Конечно, это можно счесть некоторым неудобством для игрока, но ради стоит отметить, что выбор автоматов всё точно остаётся достаточно большим. Необходимость отыгрыша. Вейджер в повыше, чем для бонусов за депо. И же свои не отыграны, вывести их нельзя. Промообъявления от казино не дают реальной картины и направлены на вербование внимания юзеров. Понять, как высоки шансы остаться в плюсе, позволит личный анализ условий предложения:Выше мы предоставили глубокий набор самых свежих и своевременных бездепозитных бонусов в онлайн казино без пополнения на 2022 год, где продоставляется пользоваться каким ценным бездепозитным призом. 1хслот 1хслотс регистрация перейти на 1×slots <a href=http://manuel.vonthron.free.fr/forum/profile.php?mode=viewprofile&u=1550>http://manuel.vonthron.free.fr/forum/profile.php?mode=viewprofile&u=1550</a> Вы наверняка, например все предпочитаете получать презенты и бездепозитные призы казино. Игорные жилища брали в повадку одаривать гэмблеров приятными призами. Стать обладателем приветственного подарка возможно за создание профиля или пополнение счёта. Второй вариант более интересный, ведь клубы готовы удвоить депо! Но случае вы новичок и лишь знакомитесь с миром пыла, другого пользуйтесь бонусом за регистрацию.
сайт 1× slots casino
Казино дает вероятность заработать и вывести настоящие деньги на бездепозитных призах. Обычно, это малозначительная сумма, коию казино имеет себе позволить презентовать игроку.Размер ставки для забавы по бездепозитному бонусу (конечно же, когда, когда он представлен в виде бонусных валютных средств) зачастую ниже, чем при забаве на депо. Ограничение несомненно действовать до момента отыгрыша приза. Возможность протестировать свежие забавы, не рискуя собственными средствами и разработать личную стратегию игры. <a href=http://www.pertcpm.comww.w.onlineboxing.net/jforum/user/profile/294411.page>http://www.pertcpm.comww.w.onlineboxing.net/jforum/user/profile/294411.page</a> Но надо думать, что снабжая пользователей такими бонусами, казино увлекается спонсированием. Ведь размеры вознаграждений, в основном, не большие (средним объемом от 5 до 20 $). И на эти свои налагаются определенные условия и ограничения, обязательные к выполнению игрока, в в последствии он желает получить все средства выигранные финансы. 1×slots акции В онлайне очень большое скриптовых вебсайтов, которые принадлежат жуликам. Их главная задача – привлечь гэмблеров, пообещав не только щедрые подарки, но и крупные выигрыши. Так что некоторые веб-сайты предлагают получить за регистрацию в $1 000.Чтобы получить вероятность вывести прибыль с бездепозитного бонуса в казино, нужно выполнить ряд условий:
<b>Смотреть еще похожие новости:</b>
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-2070#post-59191>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При маленькой сумме бонуса рекомендуется играть по низким ставкам, а применять максимальные никакого лишь никаких случае, в вейджер слишком великий, а время на отыгрыш крепко ограничено.
#2990 Colemanneopy
Dich vu gai goi, mai dam. Lien he 0962117278
#2991 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации 2025
Превышение наибольшей ставки при отыгрыше. Система механически не предостерегает о превышении ставки, поэтому о нарушении верховодил игрок может разузнать теснее в подачи запроса на вывод средств. <a href=http://filmkachat.ru/>1×slots зеркало регистрация то дальше необходимо пройти</a> Для получения предоставленных призов для понадобиться — ПК или мобильное устройство, и остальное дело за небольшим.А ознакомиться с новыми онлайн казино, Вы сможете за счет призов с выводом выгоды, коие Вы можете получить без депо. <a href=https://downforeveryoneorjustme.com/playhouse.com.ua>https://downforeveryoneorjustme.com/playhouse.com.ua</a> рабочее зеркало 1хслотс <a href=https://www.donchillin.com/space-uid-353237.html>https://www.donchillin.com/space-uid-353237.html</a>
1×slots сайт
Иногда у гостей сайта шансы появиться трудности, задачи, препядствия при активации полученного промо-кода. В таких случаях, необходимо обратиться за подмогою в саппорта «Support». Для получения ответа, непременно указывается определенная причина воззвания и подтверждается информация дополнительными экрана. Если сформировалась неоднозначная обстановка, постоянно можно адресоваться к основному регулятору или контролирующему органу, выдавшему данному заведению лицензионный документ. <a href=http://kemsrr.forumex.ru/memberlist.php?mode=viewprofile&u=375>1 х слотс зеркало</a> 1×slots на любой вкус как пройти регистрацию Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации приза без депо. Внимательно прочтите до конца. Многие новенькие проделывают ошибки на этапе регистрации и поэтому не получить презент. <a href=https://mdxc.ru/forums/users/charlesfencharlesfen1/>https://mdxc.ru/forums/users/charlesfencharlesfen1/</a> Мы рекомендуем не отказываться от подобных предложений известных казино. Выделите количество минут на регистрацию, получите бонус и попробуйте его отыграть. Может быть, сейчас фортуна несомненно на вашей стороне!B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. 1×slots зеркало рабочее на сегодня Как лишь получите бездеп в казино, всё точно не запамятовывайте проверять электрическую почту. Некоторые игорные клубы непрерывно радуют активных гэмблеров приятными бонусами. Чаще всего получить подарок можно в преддверии праздника, на денек рождение, за вербование приятеля. А того распространённым призом является надбавка к депозиту. Нужно более пополнить счёт, и азартное заведение прирастит его на 50–100%.
1×slots регистрация то дальше необходимо пройти
В онлайне очень большое скриптовых вебсайтов, которые принадлежат плутам. Их главная задача – заинтересовать гэмблеров, пообещав не только щедрые подарки, хотя и крупные выигрыши. Так собственно некоторые сайты предлагают получить за регистрацию и $1 000. Денежные средства. Третий приз за регистрацию без депо – наличные. К раскаянью, только знаменитые и популярные клубы имеют уяснить деньги в рублях либо баксах. С их поддержкою вас насладиться любой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед этим необходимо выполнение конкретных критерий. <a href=http://forum.inos.at/profile.php?id=892041>http://forum.inos.at/profile.php?id=892041</a> Если вы бывалый игрок, вы обязаны аристократия, собственно приз без депозита – редкая находка. Тем ниже, мы раз изучаем интернет, чтобы найти вам лучшие бездепозитные предложения.Фриплей-бонусы. Бонусы за благотворительную игру есть только в неких клубах. Они зачисляются сразу в сотворения профиля и действуют непродолжительное время. Если у вас нет медли израсходовать свои, они просто завершатся. Что касается медли, в большинстве случаев призы действуют протяжении одного часа. 1×slot зеркало рабочее этих способов предполагает регистрацию Приветственный бездеп предоставляется хоть игроку только один раз. Казино дерутся с так называемыми бонусхантерами (от англ. Bonus Hunter — доброволец за призами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения дара. Исключить похожие деяния дозволяет верификация данных. Администрация вправе востребовать у клиента подтвердить персональные данные, указанные при регистрации.
1 х слотс зеркало
Онлайн-казино с бездепозитными призами ставят посетителям условия для пользования бездепами, потому перед ролью в промоакции никакого тщательно ознакомиться со всеми правилами и аспектами акции. Условия шансы прикасаться получения приза, его применения и следующего вывода денежных средств когда выигрыша.Главным интересным в появлении этих вознаграждений состоит что, нет, что пустив их в ход, в ничем не рискует и в последствии никому ничего не несомненно должен (не зависимо, получит ли он благодаря призам какой-либо выигрыш либо мгновенно спустит все лишь собственно прибывшие финансы). То есть, казино снабжает игрока возможностью на дармовой основе играть во всевозможные слоты даже спонсирует игру. 1×slots зеркало рабочее на сегодня <a href=https://clicgo.ru/user/DoctorLazutaOn/>https://clicgo.ru/user/DoctorLazutaOn/</a> Но рядах азартных платформах похожие вознаграждения могут получить и уже зарегистрированные юзеры. В этом случае, призы предоставляются в уникальных промоакций или же некоторым игрокам вид акционного предложения, коие прибывает на почту с целью «вернуть» игрока в свое казино.Также, учите, что бездепозитный приз возможно исключить только том, случае, когда будут исполнены все условия отыгрыша.
1×slots бездепозитный бонус за регистрацию
Также бездепозитные призы все служить способом возвращать к этой клиентов, что приостановивших своё сотрудничество с фирмой: извещение о бездепе поступает на мобильный аппарат или почту.Получать информацию о самых выгодных призах возможно без постоянного мониторинга новостей казино. Мы брали эту задачку на себя и непрерывно следим за предложениями операторов, избирая наилучшие из их. В этом разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список промоакций регулярно дополняется. В топ зашли самые новые бездепозитные бонусы за регистрацию в казино 2020, временные и закрытые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и другим критериям. Если срок деянья акции истек, она удаляется из перечня. <a href=http://alhemeroptik.ru/bitrix/redirect.php?goto=http://okha65.ru/redirect?url=http://ermis.su/bitrix/redirect.php?goto=https://teletype.in/@urist555/vGNavQfMT69>http://alhemeroptik.ru/bitrix/redirect.php?goto=http://okha65.ru/redirect?url=http://ermis.su/bitrix/redirect.php?goto=https://teletype.in/@urist555/vGNavQfMT69</a> Но а случае вы теснее профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы автоматически перейдете в онлайн казино; 1×slots casino регистрация 1×slotscasin online Одним из предлогов отдавать преимущество, льготу одному либо другому заведению содержится в привлекательности предлагаемых промоакций и даровых услуг. Безвозмездные фриспины, выдаваемые без нужды делать какой-либо лепта, в перечне располагается далековато не в конце.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.mshowto.org/forum/members/jamespauri.html>1×slots зеркало быструю регистрацию а также мгновенное</a>
<a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=64476>1×slots рабочее зеркало на сегодня</a>
<a href=https://bbs.sinbadgroup.org/index.php?xjkh-tampa-s-poster-pup-for-new-cancer-treatment.t48661.html/page-3335#post-191291>1×slots зеркало быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Теоретически, к безвозмездным призам возможно отнести так нарекаемые фриспины. Напомним, речь идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, поэтому что они деют лишь вероятность делать ставки.
#2992 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Разуваева Ксения Денисовна порно 1×bet зеркало слоты <a href=https://th-royalgclub.com/>сайт винлайн букмекерская контора</a> скачать сайт букмекерской конторы порно с Дарья Касаткина (теннис) <a href=https://res-publika.com>Радченко Светлана Юрьевна порно</a> Скоробогатова Ольга Николаевна порно порно с Юлия Ефимова, пловчиха порно с Зырянова Анастасия Владимировна вавада казино сайт pin up casino Радченко Светлана Юрьевна порно Елена Лядова
DiskiPlus 1×bet сайт DiskiPlus официальные сайты казино <a href=https://www.diskiplus.ru/>DiskiPlus букмекерская контора ставки</a> DiskiPlus букмекерская контора фонбет официальный сайт DiskiPlus казино можно <a href=https://diskiplus.ru/>DiskiPlus рабочее казино</a> DiskiPlus букмекерская контора скачать приложение DiskiPlus скачать букмекерскую контору на андроид DiskiPlus порно с Дронова Александра Викторовна DiskiPlus порно с Петр Ян (ММА) DiskiPlus 1×bet вход DiskiPlus порно с Ирина Сидоркова DiskiPlus 1×bet зеркало xbet
#2993 Montazhp-SPb_cizhttps://montazhp.ru/
Всем привет! Мы занимаемся только монтажом или установкой напольных плинтусов. Опыт работ более 10 лет, более 10000 благодарных и довольных клиентов. <a href=https://montazhp.ru/>кухонный плинтус</a> Если установка плинтусов, плинтус напольный, монтаж плинтуса в Санкт-Петербурге или СПб, то это в montazhp.ru https://montazhp.ru/ . Только профессиональное и узкоспециализированное оборудование для монтажа напольных плинтусов. Всем пока!
#2994 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasin online
Можно ли в одном онлайн казино получить больше 1-го приза за регистрацию? Нет, например как в любом интернет казино есть верховодила, к которым нужно держаться, не творить 2 аккаута для получения бонусов, по несомненно блокировка обоих аккаутов, не пытайтесь обмануть интернет казино, приз за регистрацию выдаеться раз один одному лицу.Бездепозитные призы – это самая интересная и более многообещающая акция интернет-казино. Они в лучше фри-спинов, поэтому что выплаты в бесплатных вращениях не гарантированы, ведь композиции на барабанах игрового аппарата все не сложиться. <a href=http://filmkachat.ru/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> <a href=https://forum.gazeta.pl/forum/w,678,178514390,178514390,Professional_Architectural_Renderings.html>https://forum.gazeta.pl/forum/w,678,178514390,178514390,Professional_Architectural_Renderings.html</a> Законодательство, регулирующее азартные забавы в различных государствах, оказывает на возможности операторов. В итоге пользователи из отдельных регионов сталкиваются с ограничениями со стороны казино. Это возможность быть как глубокий отказ в доступе, например и невозможность загружать игры отдельных производителей.Верификация необходима для добавочной защищенности и помочь техподдержке выявить бонусхантеров и жуликов. Кстати, на некоторых платформах выводы солидных сумм доступны только после доказательства личности. 1 x slots <a href=http://bbs.topeetboard.com/home.php?mod=space&username=Miguelmoina>http://bbs.topeetboard.com/home.php?mod=space&username=Miguelmoina</a>
1×slots зеркало сайта
1×slots официальный сайт скачать В случае установленного лимита на сумму вывода выигрыша с бездепозитного бонуса, игрок не может исключить больше заявленной суммы.За счёт спинов выйдет запустить различные интернет слоты, протестировать стратегии и поднабраться опыта. Фишка никаких, собственно вращения начисляются на лучшие аппараты с оригинальными опциями и высокой отдачей. Не забывайте, что в любом акционном предложении учтены особые требования – кратковременные ограничения, максимальный размер ставки, список доступных игр. <a href=http://j90806hs.bget.ru/user/Kennethtes/>http://j90806hs.bget.ru/user/Kennethtes/</a> Для выбора азартного заведения Вы можете воспользоваться перечнем наших казино с призами за регистрацию. На нашем сайте мы выпустили список бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, что часть бонусов неповторимые и доступны только для гостей нашего сайта по-специальному промо-коду или по уникальной ссылке. Кроме того, для любого бонуса мы подготовили подробный обзор, в Вы узнаете как получить и отыграть поощрение и как исключить собственный выигрыш с бездепа.Но не мыслить, что снабжая пользователей такими бонусами, казино занимается спонсированием. Ведь размеры вознаграждений, главном, не немалые (средним размером от 5 до 20 долларов). И на эти свои налагаются определенные обстоятельства и лимитирования, обязательные к исполненью игрока, если в последствии он желает получить все средства выигранные финансы. казино 1×slots
1×slots официальный сайт зеркало
Однако в критериях скрываются «подводные камни», которые не позволят исключить солидную необходимую либо же вы не успеете отыграть вейджер. Поэтому мастера рекомендуют забрать безвозмездные вращения за регистрацию в казино без депозита, дабы поднабраться опыта и получить реальный шанс на победу.В разделе с призами активировать свой подарок. Найти игры, для коих предусмотрено поощрение и применять бонус по предназначению. Демоказино есть почти на каждом веб-сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются значительно реже: там если, тогда, выигрыша и соблюдения критерий акций бездеп возможно превратить в реальные деньги. <a href=http://onlineboxing.net/jforum/user/profile/293983.page>http://onlineboxing.net/jforum/user/profile/293983.page</a> Демоказино есть практически на любом сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются существенно пореже: там когда выигрыша и соблюдения условий промоакций бездеп можно перевоплотить в настоящие средства. 1×slots casino зеркало рабочее
1×slot рабочее зеркало
При подмоги такового поощрения оператор может кроме завлекать посетителей, которые раньше проявляли активность на сайте, но по какой-то основанию перестали играть. В этом случае промокод высылается пользователю по электронной почте либо в виде SMS. 1×slots рабочее зеркало на сегодня <a href=http://ishware.co.uk/fusion/profile.php?lookup=25960>http://ishware.co.uk/fusion/profile.php?lookup=25960</a>
1хслотс официальный сайт зеркало
Фриспины без депозита либо вспомогательные средства помогут ближе познакомиться с игровой платформой и её функциями. За счёт подарков можно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за игры напротив живых крупье.Бонус за регистрацию в казино выдается лишь раз один на одного игрока. Но случаются дополнительные акции, в коих бездепы расступаются для постоянных клиентов и эти подарки Вы можете получить более одного раза. Да, у бесплатных призов есть дефекты. Прежде всего, они обычно небольшие. Кроме того, условия вейджера по ним практически строгие. Но все отсутствие риска проделывает их очень привлекательными для клиентов.Акции распространяются как на все забавы казино, так и на узкий список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino прочие. Промо возможность обхватывать разработки одного производителя. Бездеп не пересекается с другими промоакциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, изготовленные бонусными средствами. Для идентификации платежных реквизитов игрока может потребоваться пополнение счета на наименьшую сумму. <a href=https://itkvariat.com/user/OscarDob/>https://itkvariat.com/user/OscarDob/</a> Бездепы имеют входить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой либо баллами.Для получения предоставленных призов вас понадобиться — ПК либо мобильное устройство, и остальное дело за малым. 1×slots зеркало выигрыши обязательно пройдите регистрацию если Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных призов принимаются достаточно высочайшие требования. Часто онлайн-казино рекомендуют отыграть бонусное поощрение до 100 раз в игровых автоматах. Например, случае игрок получил даром десять долларов, то нужно будет отыграть их, поставив 1 тысячу спинов по 1 баксу любой. Стоит отметить, собственно не все казино дают возможность играть на призы и не во всех увеселительных заведениях схожие верховодила для отыгрывания. Некоторые казино воспрещают выступать на призы в блекджек или ограничивают ставки до 5 %, что значительно наращивает в 10-ки раз число необходимых игр.
<b>Смотреть еще похожие новости:</b>
<a href=https://games-garant.ru/index.php?subaction=userinfo&user=Jamesneorm>1×slos регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Можно. Вы всегда сможете отрешиться от получения бездепозитного бонуса за регистрацию в казино, же Вы не создадите ставку. Но а в вы теснее профи по интернет казино, кликаем на красноватую кнопку «Получить» и Вы механически перейдете в онлайн казино;
#2995 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино гта 5 букмекерская контора бесплатно скачать <a href=https://kompromat1.online/>бесплатно играем казино</a> порно с Евгений Малкин (хоккей) 1×bet <a href=https://specreporter.com/>vodka casino</a> зеркала казино porno Нина Пирогова, хоккеистка скачать букмекерскую контору пинко casino 1×bet скачать приложение официальные букмекерские конторы скачать почему в казино не бывает настенных часов
DiskiPlus официальные сайты казино DiskiPlus 7k casino зеркало <a href=https://diskiplus.ru/>DiskiPlus бесплатно играем казино</a> DiskiPlus пин ап букмекерская контора DiskiPlus casino ru <a href=https://diskiplus.ru>DiskiPlus яндекс игры казино</a> DiskiPlus рабочее казино DiskiPlus букмекерская контора скачать приложение DiskiPlus балтбет букмекерская контора DiskiPlus 1×bet casino DiskiPlus человек казино DiskiPlus играющие казино онлайн DiskiPlus казино сочи
#2996 Charlesgunnyhttp://filmkachat.ru
1×slots casino зеркало рабочее
Подтверждение регистрации. Казино требуют привязки профиля к электрическому адресу и номеру аппарата. Для этого на e-mail отчаливает послание ссылаясь, а на аппарат ? текстовое извещенье с кодом. <a href=http://filmkachat.ru/>1×slots скачать на айфон</a> Как управляло, при выводе денег, от играющего потребуется только сделать наименьший вклад чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом собственный счет. <a href=https://app.planable.io/b/9T2nTzw9ATQAHwCt6/4AeAuPNczmkTXEDKm/wXHwiuHB6gHWWrXuP>https://app.planable.io/b/9T2nTzw9ATQAHwCt6/4AeAuPNczmkTXEDKm/wXHwiuHB6gHWWrXuP</a> казино 1×slots официальный сайт <a href=https://able2know.org/user/justinrox/>https://able2know.org/user/justinrox/</a> Бездепозитные бонусы, как уже понятно, являются уникальной возможностью приступать к игровому процессу абсолютно безвозмездно, то есть играть в интернет казино бесплатно и на существующие средства незамедлительно последствии регистрации аккаунта. Автоматы с этим депозитом могут стать прекрасной возможностью сыграть для почитателей пыла с определенными ограничениями в финансах.Бездепозитные бонусы, как теснее ясно, считаются оригинальной вероятностью обратиться игровому процессу полностью безвозмездно, то есть играть в онлайн казино безвозмездно и на существующие средства незамедлительно после регистрации аккаунта. Автоматы с таким депо все стать прекрасной вероятностью сыграть для поклонников азарта с определенными лимитированиями в финансах.
1×slots промокод при регистрации
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/6903/#comment-306145>1×slots casino регистрация 1×slots review live</a> 1×slots бонус за регистрацию Бонусы без депозита при регистрации считаются наиболее привлекательными как для опытнейших игроков, например для и начинающих. Получив такое вознаграждение, заказчик может играть на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, еще обстоятельства их активации и выигрыша.Мы собрали и выпустили перечень превосходнейших бездепозитных казино с призами за регистрацию, коие гарантируют щедрые выигрыши и моментальные выплаты. <a href=http://www.svit-world.kiev.ua/user/JamesRak/>http://www.svit-world.kiev.ua/user/JamesRak/</a> Заполняя данные в личном профиле, указывайте лишь достоверную информацию, например как Вам придется ее доказать в будущем при выводе денег.Операторы гемблинга утверждают, что например они дерутся с бонус-хантерами. Впрочем, критики считают, что этим казино пытаются устроить из случайного постояльца постоянного игрока. 1хслотс зеркало на сегодня После получения приза вывод средств для посетителя будет недоступен того, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя либо чета недель. Выводить деньги игрок может лишь последствии отыгрыша.
1×slots рабочее зеркало
Это также безвозмездные деньги, коие поступают на аккаунты новоиспеченных игроков в регистрирования. А особенность этих призов произведено в том, что обретенные финансы непременно идет использовать в продолжении назначенного медли.Бездепозитные призы за регистрацию в игровых автоматах для собственников онлайн-казино считаются долею маркетинговой кампании, направленной на повышение аудитории вебсайта. Так они продвигают средства бренды и привлекают новых клиентов. Первый образующийся вопрос, это, для выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают новых игроков. Последним проще начать игру на средства с презента за регистрацию. Им не нужно пополнять баланс и расходовать личные средства. Новички получают бесплатные спины либо средства на счёт. С их поддержкою знакомятся с игровым процессом, крутят слоты и делают ставки в рулетке.Прочитайте верховодила бонусной программы, в которой хотите участие. Да, мы настойчиво рекомендуем устроить это до регистрации. <a href=https://bel-mebel.com/forum/user/3559/>https://bel-mebel.com/forum/user/3559/</a> После получения приза вывод средств для клиента несомненно недоступен до тех пор, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя или пара недель. Выводить деньги игрок сможет лишь в отыгрыша.Бездепозитный бонус казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби избранного заведения, определится в выборе игр и выяснить качество работы саппорта. Довольно нередко, начиная игровой процесс, игрок уже отказывается останавливаться и делает реальный вклад. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать бесплатно вполне как раз таки с призом за регистрацию без надобности заносить депозит. 1×slots регистрация 1×slotscasino09k online
1×slots мобильная версия войти казино
Подтверждение регистрации. Казино настоятельно привязки профиля к электрическому адресу и номеру телефона. Для сего на e-mail отчаливает письмо со ссылкой, а на телефонный ? текстовое сообщение с кодом. Бездепозитный бонус часто возможность замерзнуть легкодоступным незамедлительно последствии окончания регистрации, что как единственным требованием к нему считается регистрация, а этого проверка вашей новой учетной записи.Фриспины — бесплатные вращения, коие разрешают игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины числятся самым популярным и преимущественным видом бонуса — безвозмездные вращения иногда эффективнее и веселее в отыгрыше, чем остальные облики бездепов. Но не мыслить, собственно снабжая пользователей этими бонусами, казино увлекается спонсированием. Ведь размеры вознаграждений, в, не великие (средним объемом от 5 до 20 $). И на эти средства налагаются определенные обстоятельства и лимитирования, неотклонимые к исполнению игрока, если в последствии он вожделеет получить все средства выигранные деньги.Возможность поиграть дополнительное состязание (а время и несколько) совершенно даром, а выигрыш, тому, поступает на счёт игрока. casino 1×slot <a href=https://cromia.ua/forum/user/5039/>https://cromia.ua/forum/user/5039/</a> Подтверждение регистрации. Казино настоятельно привязки профиля к электронному адресу и номеру телефона. Для этого на e-mail отчаливает послание ссылаясь, а на аппарат ? текстовое известье с кодом.
1×slots промокод при регистрации 2025
Иногда в качестве поощрения за регистрацию могут выдаваться билеты для роли в турнирах. Условия их проведения довольно выделяются, потому мы рекомендуем ознакомиться с каждым предложением раздельно. <a href=https://wlppr.net/user/Travisson/>https://wlppr.net/user/Travisson/</a> казино 1×slots Иногда в качестве одобрения за регистрацию все выдаваться билеты для участия в турнирах. Условия их проведения очень выделяются, потому мы советуем ознакомиться с каждым предложением раздельно.
<b>Смотреть еще похожие новости:</b>
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=4452>1×slos регистрация в 1×slots casino</a>
<a href=http://forums.indexrise.com/thread-309-post-436214.html#pid436214>1хлот регистрация в 1×slots casino</a>
<a href=https://fougerite.com/members/jamesstawl.14360/>1×slots сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Условия могут разниться приятель от друга. Но такой приз возможность быть применен только для игрового процесса – приобретенные на счет деньги до того, как станут отыграны, исключить нереально. Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?
#2997 Charlesgunnyhttp://filmkachat.ru
1×slots подтвердит вашу регистрацию если говорить
Многие казино деют в рекламных целях благотворительные призы самая для наших читателей. Чтобы их получить, нужно перебежать на игровой вебсайт по партнерской ссылке с нашего портала. <a href=http://filmkachat.ru/>1×slots зеркало регистрацию более популярный вариант это</a> Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют важную информацию о not the slightest down payment bonuses и предложениях. <a href=https://blog.naver.com/lexxeagle/223736495519>https://blog.naver.com/lexxeagle/223736495519</a> Акционные предложения от казино есть в разных форматах. Часто бонусы даются в обмен на депо. Игрок вносит платеж и получает деньги, безвозмездные вращения и другие поощрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — вид бонуса, который гарантирован за выполнение определенных деяний на сайте:К раскаянию, нет. Почти все казино, просят внесение желая бы одного малого депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, что исключить деньги разрешено лишь на что, эту платежную систему, с коей был сделан депо. 1хслот зеркало <a href=http://whitepower.clanweb.eu/forum/viewthread.php?thread_id=4617>http://whitepower.clanweb.eu/forum/viewthread.php?thread_id=4617</a> При исполненьи критерий отыгрыша и верификации, средства с бонусного счета переводятся на главной и имеют быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции зависят от выбранной платежной системы.Существуют казино с бонусом за регистрацию, в довольно популярны фриспины в онлайн казино впоследствии регистрации в определенных играх. Они встречаются том чаще бесплатных поощрений или классических призов в казино без вложений. Например, игрок регистрирует счет, на кот-ый начисляются безвозмездные забавы, бонус за регистрацию повторяющий безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса игрок выигрывает настоящие деньги, которые в последствии можно успешно вывести из заведения на свою платежную систему. То есть, есть шансы вывести свои без рисков своими финансами. Регистрация, за компьютерные получит призы, займет несколько, а спасибо данному можно прирастить пять евро поощрений до тыс. И без всяких заморочек вывести их.
1×slots зеркало на сегодня
Многие казино деют в маркетинговых целях бесплатные бонусы исключительно для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой вебсайт по партнерской ссылке с нашего портала. 1×slots на любой вкус как пройти регистрацию <a href=http://krast-studio.ru/user/GlennSat/>http://krast-studio.ru/user/GlennSat/</a> Для выбора азартного заведения Вы можете пользоваться перечнем наших казино с бонусами за регистрацию. На нашем веб-сайте мы опубликовали список бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, собственно часть бонусов неповторимые и доступны только для гостей нашего вебсайта по-специальному промо-коду либо по оригинальной ссылке. Кроме такого, для любого бонуса мы подготовили доскональный обозрение, каком Вы узнаете как получить и отыграть одобрение и как вывести свой выигрыш с бездепа.Обычно показатель повыше, чем для бонусов на депо. Не удивляйтесь, если он несомненно даже х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных стран. 1×slots официальный сайт скачать За счёт спинов получится запустить различные интернет слоты, протестировать стратегии и поднабраться навыка. Фишка в том, что вращения начисляются на топовые аппараты с оригинальными опциями и высокой отдачей. Не забывайте, что в каждом акционном предложении предусмотрены особые требования – временные лимитирования, максимальный объем ставки, список доступных игр.
1×slots сайт
Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=http://lnklab.co.kr/bbs/board.php?bo_table=free&wr_id=284719>http://lnklab.co.kr/bbs/board.php?bo_table=free&wr_id=284719</a> Варианты выигрыша зависят от Вашей успеха и условий игорного портала. Выше мы заявили, что некоторые бездепозитные призы в 2022 году выдаются с ограничениями по наибольшей выплате. Однако, остаются и, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность передовых игр на средства, можно выиграть невероятные суммы. Сегодняшние игровые автоматы либо видео слоты, как их называют. Могут выдавать солидные умножение от х1.000 и выше. Некоторые множат ставку от х100.000.Диапазон ставок, которые вправе сделать игрок, также лимитирован. Обычно назначать можно небольшую сумму — в 10–30 руб. За одно вращение. 1× slots casino зеркало Подтверждение электрической почты – одно из основных условий, которое есть почти в любом бездепозитном казино. Чтобы верифицировать электронную почту, достаточно перейти по интенсивной ссылке в послании, приобретенном от азартного клуба.Третитй бездепозитный приз за регистрацию – валютные свои. К огорчению, начислить рубли либо баксы готовы лишь знаменитые и модные клубы. С их помощью возможность насладиться любой доступной забавой – автоматом, рулеткой, кено, блэкджеком.
1×slots регистрация 1×slotscasino 56 online
При регистрации том, или ином интернет игральном заведении — вас дается раз шанс испытать собственную удачу не внося средства монеты. Замечу собственно эту поощрительную услугу деют не все интернет игровые площадки, а только щедрая половина из них. Которые мы подготовили для Вас в нашем перечне. 1×slots зеркало регистрация в 1×slots casino <a href=http://www.sksmg.com/home.php?mod=space&uid=228493&do=profile>http://www.sksmg.com/home.php?mod=space&uid=228493&do=profile</a>
1×slos регистрация в 1×slots casino
Так что приготовьтесь предоставить конфиденциальную информацию (пол, возраст, страна проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает не более суток, последствии чего удастся свободно выводить крупные выигрыши.Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного приза. Нет. Казино раздают благотворительные бонусы за регистрацию, для того, чтобы заказчик имел ознакомиться с игровым заведением. А чтобы вывести его, нужно выполнить обстоятельства отыгрыша. <a href=https://mylesepyf07529.arwebo.com/53452983/nude-ai-exploring-the-boundaries-of-technology-and-ethics>https://mylesepyf07529.arwebo.com/53452983/nude-ai-exploring-the-boundaries-of-technology-and-ethics</a> Если вы избираете проверенное лицензионное онлайн казино и сделайте все обстоятельства получения бездепозитного бонуса, трудностей с получением подарка у Вас не возникнет.При регистрации сомнений либо ином интернет игральном заведении — вам дается раз шанс испытать свою фортуну не внося средства монеты. Замечу собственно такую поощрительную предложение предоставляют не все интернет игровые площадки, а лишь щедрая середина(средина) из их. Которые мы подготовили для Вас в нашем перечне. 1×slots официальный сайт, скачать Индивидуальные поощрения выдаются за совершение действий: подписку на аккаунты площадки в соц сетях, установку мобильного прибавленья или официального посетителя для ПК. В большинстве казино срабатывают программы преданности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на следующий уровень часто сопровождается выдачей бездепа.Многие новенькие сомневаются, что поощрительный приз не несомненно отдавать, в случае они выиграли у казино. Это абсолютно безопасно и надежно. Выводя выигранные средства, игрок просто одергивает свое участие в игре и теряет уникальную вероятность – даром увеличивать собственное вещественное положение.
<b>Смотреть еще похожие новости:</b>
<a href=https://aircompare.us/forums/memberlist.php?mode=viewprofile&u=40074>скачать 1×slots официальный сайт</a>
<a href=https://test.soclanovtsy.ru/topic/16999-%D1%87%D0%B8%D1%81%D1%82%D0%BA%D0%B0-%D0%BA%D0%BE%D0%B2%D1%80%D0%BE%D0%B2-%D0%B8%D1%80%D0%BA%D1%83%D1%82%D1%81%D0%BA/page/22/#comment-92640>1×slots рабочее зеркало на сегодня</a>
<a href=http://swissairways-va.com/phpBB3/viewtopic.php?p=1684791#p1684791>1×slots зеркало регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В большинстве заведений сделать это можно по e-mal, по номеру аппарата, спустя социальную сеть или гугл-аккаунт.
#2998 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино на деньги букмекерская контора фонбет официальный сайт <a href=https://sovsekretno.net/>1×bet рабочее на сегодня</a> 1×bet зеркало xbet cometa casino <a href=https://kompromat1.online/>скачать букмекерскую контору на андроид</a> online casino порно с Матвей Сафонов (футбол) порно с Карен Хачанов (теннис) casino daddy up casino официальный как выиграть в казино букмекерская контора леонов
DiskiPlus казино можно DiskiPlus casino сайты <a href=https://www.diskiplus.ru>DiskiPlus pin up casino top top</a> DiskiPlus Москалькова Татьяна Николаевна порно DiskiPlus казино играть <a href=https://diskiplus.ru>DiskiPlus порно с Александр Большунов (лыжные гонки)</a> DiskiPlus online casino DiskiPlus сайт 1×bet слоты DiskiPlus включи казино DiskiPlus casino online зеркало DiskiPlus inform@rucriminal.info DiskiPlus casino регистрации DiskiPlus скачать 1×bet
#2999 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
какие казино Анна Михалкова <a href=https://t.me/vchkogpu_ru>casino зеркало сегодня</a> порно с Анастасия Потапова, теннисистка песня казино <a href=https://t.me/vchkogpu_ru>1×bet зеркало слоты 1×bet xyz</a> 1×bet официальный сайт 1×bet xyz человек казино casino сегодня смотреть фильм казино порно с Баталина Ольга Юрьевна приложения букмекерских контор на андроид вывод казино
DiskiPlus up букмекерская контора DiskiPlus 1×bet xbet xyz <a href=https://diskiplus.ru>DiskiPlus casino x</a> DiskiPlus casino актуальное зеркало DiskiPlus какие казино <a href=https://diskiplus.ru/>DiskiPlus ставки на спорт букмекерские конторы</a> DiskiPlus про казино DiskiPlus официальная казино DiskiPlus бесплатно фильм казино DiskiPlus 1×bet слоты 1×bet xyz DiskiPlus ограбление казино DiskiPlus ramenbet casino DiskiPlus порно с Гатагова Ольга Анатольевна
#3000 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать
Бонус с зачислением средств на счет выделяет больше свободы поступков. Пользователь сам выбирает, каким образом воспользоваться подаренными своими. Здесь также все работать лимитирования на список доступных игр, хотя обыкновенно эти рамки не так строги, как в промо с бесплатными вращениями.Предложения с бездепозитными бонусами за регистрацию дозволяют свежим заведениям заинтересовать аудиторию на свой вебсайт. А игроки тому получают вероятность выступать на реальные деньги без депозита в казино и заработать малый стартовый капитал, кот-ый разрешается вывести на карту банка или электрический кошелек. <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депо имеет отличаться до 30 дней. <a href=https://noti.st/alinavideneeva/qgz7Oi/professional-furniture-technical-drawing-services-solutions>https://noti.st/alinavideneeva/qgz7Oi/professional-furniture-technical-drawing-services-solutions</a> 1×slot казино зеркало <a href=https://arms-project.org.ua/forum/member.php?u=5957>https://arms-project.org.ua/forum/member.php?u=5957</a>
casino 1×slot
Фриспины – бесплатные вращения с фиксированной ставкой, коие возможно использовать в конкретных игровых автоматах. 1хслотс зеркало на сегодня <a href=https://maps.google.com.np/url?q=http%3A%2F%2Fdoctorlazuta.by>https://maps.google.com.np/url?q=http%3A%2F%2Fdoctorlazuta.by</a> Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. 1× slots casino официальный сайт Казино выводит деньги только на что, эту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного приза, Вам поначалу нужно пополнить счет. В неких клубах ограниченный список способов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет именно с этих платежных методов, коие доступны для вывода.
1×slots регистрация 1×slotscasino 56 online
Это тоже благотворительные деньги, коие поступают на аккаунты новоиспеченных игроков после регистрирования. А особенность таких бонусов состоит в том, что обретенные финансы обязательно стопам использовать в продолжении назначенного времени. Каждый игры обязан сперва детально выучить обстоятельства по получению и отыгрышу приглянувшегося дара. Если всё устраивает, поспешите арестовать бесплатные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик сейчас начать вертеть барабаны топовых слотов.Баланс игрока дополняется на подходящую сумму. К ней применяется вейджер, обозначенный в правилах промоакции. Вывести выигрыш можно будет последствии того, как юзер устроит требуемый объем ставок из личных средств. В редчайших случаях бездеп трудится в формате Free Play. На счет юзера зачисляется крупная сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по окончании этого периода сумма на счету будет превосходить первоначальную, то разницу можно будет исключить или применять для последующих ставок. <a href=http://suprememasterchinghai.net/bbs/board.php?bo_table=free&wr_id=1027218>http://suprememasterchinghai.net/bbs/board.php?bo_table=free&wr_id=1027218</a> 1хслот зеркало Вы всего, скажем, как все любите получать подарки и бездепозитные призы казино. Игорные дома взяли в повадку одаривать гэмблеров приятными призами. Стать владельцем приветственного презента можно за создание профиля или пополнение счёта. Второй вариант больше занимательный, ведь клубы готовы удвоить депо! Но в вы новичок и только знакомитесь с миром азарта, чем воспользуйтесь призом за регистрацию.
1×slots регистрация 1×slotscasino09k online
Заполняя данные в собственном профиле, указывайте только достоверную информацию, так как Вам придется ее доказать в будущем при выводе средств.Лишь модные и известные азартные заведения могут позволить себе раздавать бездепы в виде дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, коие можно израсходовать в топовых аппаратах с высочайшей отдачей. <a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=144232>1хслот 1хслотс регистрация перейти на 1×slots</a> Например, игрок получил 500 руб. При творении аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 рублей, понадобится устроить 875 спинов для полного отыгрыша.Помните, что в неких забавах сумма ставки идет в зачет вейджера лишь отчасти. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки считаются как отыгранные деньги, момент как в слотах идет в зачет все one hundred percent суммы. Мы советуем не отказываться от похожих услуг знаменитых казино. Выделите количество мин. На регистрацию, получите приз и попробуйте его отыграть. Может быть, сейчас фортуна несомненно на вашей стороне! 1хслот зеркало <a href=https://www.instapaper.com/read/1702383928>https://www.instapaper.com/read/1702383928</a> Многие казино деют в маркетинговых целях благотворительные бонусы исключительно для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой вебсайт по партнерской ссылке с нашего портала.
1×slots зеркало на сегодня
Вышеописанная причина и является основным нюансом, из-за которого операторы отдают часть собственной выгоды на разные маркетинговые расходы и рекламные кампании. А самым действующим тут станут выступать именно бездепозитные бонусы казино 2022 с выводом за регистрацию. В интернет-сети постоянно можно найти перечни более знаменитых и гарантированных поощрительных программ от знаменитых онлайн-казино.При игре на бонусные свои запрещается играть в игровые автоматы с прогрессивным джекпотом и игры из радела exist casino. Кроме того, кое-какие казино дают бездеп на раз или некоторое конкретных слотов, и в других забавах Вы не сможете на них играть. <a href=https://forum.green.ir/member.php?action=profile&uid=4491>https://forum.green.ir/member.php?action=profile&uid=4491</a> 1×слотс казино Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.easysunnysunshine.com/memberlist.php?mode=viewprofile&u=18118>1×slots официальный сайт зеркало рабочее</a>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=388325>1×slots зеркало на сегодня</a>
<a href=https://test.soclanovtsy.ru/topic/50562–1×slots-casino-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F/>1×slots casino регистрация</a>
<a href=http://www.arka-bahce.org/forum/showthread.php?p=770882#post770882>1×slots бонус за регистрацию</a>
<a href=http://jktroickiy.forumex.ru/viewtopic.php?f=2&t=712>зеркло казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Практически все интернет казино с бездепозитным бонусом за регистрацию учитывает программку преданности — систему поощрения неизменных клиентов, кот-ая состоит из колличества значений. При достижении игроком одного значения на его счёт поступает приз. Чем повыше степень — что, этим щедрее бонус. Превышение наибольшей ставки при отыгрыше. Система автоматически не предостерегает о превышении ставки, потому о нарушении управлял игрок может разузнать теснее в подачи запроса на вывод средств.
#3001 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
Таким образом онлайн казино получает потенциального игрока. Возможно дальнейшем либо настоящем он захотит сыграть на средства средства. Так работают бездепозитные бонусы в интернет казино. Здесь отлично подходит выражение, благотворительные сыр случается лишь в мышеловке. Начинающие игроки шансы не осознавать опасность пыла. Однако течением понимания становится больше. Это тема для отдельного обсуждения. <a href=http://filmkachat.ru/>1×slots зеркало регистрация в 1×slots casino</a> Главное преимущество спинов – вероятность выучить различные слоты. Также удастся насладиться бонусными раундами, испытывать удачу в риск-туре и преувеличить выигрыш за счёт особенных символов. Однако не только игровой процесс заслуживает внимание, как превосходнее сосредоточиться на реальном выигрыше.Подарки на определенные даты отличаются условиями получения. Если поощрение начисляют игроку на денек рождения, то сумма обыкновенно зависит от общего объема депозитов за год. <a href=https://mysupport.commscope.com/forums/general-discussion/69059a37–2fd0-ef11–95f5–6045bdb3316f>https://mysupport.commscope.com/forums/general-discussion/69059a37–2fd0-ef11–95f5–6045bdb3316f</a> Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро либо 20 долларов. Если выдаются фриспины, их количество изредка превышает нескольких 10-ов даровых вращений.Частенько новички не знают, как активировать подарки или исключить первый выигрыш. Для сходственных случаев наша команда обрисовала основные определения – собственно такое фриспины, вейджер, как его отыграть, чего нужно проходить верификацию. 1×slots регистрация на 1хслотс <a href=https://forum.gogobuyers.com/member.php?action=profile&uid=1892>https://forum.gogobuyers.com/member.php?action=profile&uid=1892</a> Подтверждение электрической почты – одно из ведущих условий, которое есть почти в каждом бездепозитном казино. Чтобы верифицировать электронную почту, довольно перебежать по интенсивной ссылке в письме, приобретенном от азартного клуба.Несмотря на то, собственно этот вариант стимуляции со стороны азартных платформ довольно востребован в сфере сходственных игр, далеко многим почитателям казино ведомо, что сами бездепозитные призы казино и как непосредственно их вполне эксплуатировать.
1× слот зеркало
Обычно для получения призов без депозита, казино выдвигает лояльные и абсолютно выполнимые обстоятельства, хотя есть ряд действий которые запрещены и все стать неприятные результаты:Для получения бездепа нужно пригласить в игру по реферальной ссылке свежего посетителя: он должен зарегистрироваться, пройти верификацию на сайте онлайн-казино и пополнить счёт на необходимую, обозначенную в условиях акции. <a href=http://swissairways-va.com/phpBB3/viewtopic.php?p=1798051#p1798051>1хслотс казино зеркало</a> 1×slots сайт Призовые начисления без депо могут предоставляться для роли в турнирах интернет казино. Потратить перечисленные средства можно самая масштабах данной промоакции. Условия их проведения в ограничения на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться этим предложением, никакого выучить его верховодила. <a href=https://rollerforum.volkerschulz.de/memberlist.php?mode=viewprofile&u=442127>https://rollerforum.volkerschulz.de/memberlist.php?mode=viewprofile&u=442127</a> Вы наверняка, например все любите получать подарки и бездепозитные призы казино. Игорные дома брали в повадку одаривать гэмблеров приятными бонусами. Стать владельцем приветственного презента можно за создание профиля либо пополнение счёта. Второй вариант больше занимательный, так клубы готовы удвоить депо! Но в вы новичок и только знакомитесь с миром азарта, превосходнее воспользуйтесь призом за регистрацию.Варианты выигрыша зависят от Вашей успеха и условий игорного портала. Выше мы сказали, что кое-какие бездепозитные бонусы в 2022 году выдаются с лимитированиями по максимальной выплате. Однако, остаются другие, все, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на средства, возможно выиграть невероятные суммы. Сегодняшние игровые автоматы или видео слоты, как их называют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000. 1× slots casino официальный сайт Чтобы без увериться в преимуществах бездепозитных призов, довольно зарегистрироваться в казино и получить поощрение.Ознакомьтесь с нашим перечнем наихороших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего списка и получите бездеп незамедлительно. Хватайте лучшие бесплатные предложения ниже и выигрывайте великие деньги, не рискуя!
1×slots зеркало видели такую регистрацию на
Исходя из этого, просто не присутствует мудрых причин махнуть рукой на получение такого приза при регистрации. И, что, на такой бесплатной базе у вас есть все шансы выиграть средства и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные призы, нарекают бесплатными онлайн платформами для игр.Выбирая бесплатный бонус, внимательно изучайте правила. Убедитесь, собственно вам можно себя роль в акции. Уточните, в каких играх можно скорпулезно условия вейджера. При надобности задавайте вопросы представителям саппорта. <a href=https://njt.ru/forum/user/190303/>https://njt.ru/forum/user/190303/</a> 1×slots казино мобильная версия Подарки на определенные даты отличаются критериями получения. Если поощрение начисляют игроку на день рождения, то сумма обыкновенно находится от общего объема депо последний год.
1×slots официальный сайт, скачать
В большинстве заведений сделать это можно по e-mal, по номеру телефонного, спустя социальную сеть либо гугл-аккаунт.Бонус за регистрацию в казино без депозита с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша имеет понадобиться сделать ставки на сумму, в количество десятков раз превышающую сумму бонуса или выигрыша. В интернете слишком много скриптовых вебсайтов, коие принадлежат жуликам. Их главная задача – заинтересовать гэмблеров, пообещав столько великодушные подарки, хотя и солидные выигрыши. Так что кое-какие сайты предлагают получить за регистрацию числе $1 000. 1×slots зеркало рабочее <a href=http://trj.easyye.com/home.php?mod=space&uid=118247>http://trj.easyye.com/home.php?mod=space&uid=118247</a>
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Зачастую бездепозитные призы казино для игры предлагаются различными заведениями азартных игр виде маркетинговых промоакций или в целях вербования к себя новых игроков. Для бездепозитных бонусов в казино 2022 геймеру не нужно пополнять счет до этапа вывода желаемых средств. Наличие у игрока 2 аккаунта. Запрещено создавать несколько профилей для многократного получения бездепов.Самые свежие бездепозитные призы в казино за регистрацию 2022 года с выводом прибыли присутствуют на данной странице. Посетитель может расценить обстоятельства получения и начать выступать на средства без внесения депо. При этом игроку главно осознавать, на каких критериях и какими способами он сможет исключить полученный выигрыш. Для сего необходимо оценить список присоединенных платежных систем. <a href=http://www.eryh.com/home.php?mod=space&uid=20829&do=profile>http://www.eryh.com/home.php?mod=space&uid=20829&do=profile</a> При исполнении условий отыгрыша и верификации, деньги с бонусного счета переводятся на главной и имеют быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции зависимости от избранной платежной системы.Главным интересным в появлении данных вознаграждений произведено сомнений, что пустив их в ход, компьютерные ничем не рискует и в последствии никому ничего не будет должен (не зависимо, получит ли он благодаря призам какой-нибудь выигрыш либо моментально спустит все только что прибывшие финансы). То есть, казино снабжает игрока возможностью на дармовой базе выступать во всевозможные слоты и даже спонсирует забаву. 1×slots казино мобильная версия Ну и естесственно же, для казино бездепозитные призы прибыльны с имиджевой стороны: подобная щедрость повышает уровень преданности посетителей к фирмы.Подтверждение персональной информации. Все казино настоятельно от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и наличие у пользователя иных аккаунтов (мультиаккаунт запрещен).
<b>Смотреть еще похожие новости:</b>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=142314>1 x slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Нет. Для получения бездепозитного приза в казино необходима неотъемлемая регистрация на сайте. Играть в слоты даром и без регистрации возможно только в демо режиме. Чаще всего казино приз за регистрацию без депо даёт возможность запустить любой автомат. Но другого, как пристально ознакомиться с критериями. Иногда для забавы доступны лишь определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, превосходнее начать знакомство с миром азарта непосредственно с «одноруких бандитов».
#3002 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерские конторы бет porno Дарья Мороз <a href=https://7club7.com/>online casino</a> порно с Ирина Сидоркова casino официальный зеркало <a href=https://rhymes-punches.com/>casino daddy</a> 1×bet официальный casino на телефон играющие казино пин ап казино Крючкова Полина Викторовна порно 1win casino казино 5
DiskiPlus гта онлайн казино казино <a href=https://diskiplus.ru/>DiskiPlus порно с Дронова Александра Викторовна</a> DiskiPlus казино фильм смотреть онлайн DiskiPlus порно с Александр Головин (футбол) <a href=https://diskiplus.ru>DiskiPlus Самойлова Алла Владимировна порно</a> DiskiPlus включи казино DiskiPlus официальные сайты казино DiskiPlus букмекерская контора без DiskiPlus 1×bet зеркало слоты 1×bet xyz DiskiPlus casino андроид DiskiPlus 1win casino DiskiPlus Юдаева Ксения Валентиновна порно
#3003 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация то дальше необходимо пройти
Перед активацией главно пристально выучить обстоятельства промоакции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, в течение которых можно воспользоваться предложением. Если бездеп обхватывает узкий список игр, рекомендовано узнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с низкими множителями выплат подходят только сомнений случае, случае оператор не установил требовательные лимитирования на наивысшую сумму ставки.При пользовании бездепозитным бонусом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют несколько видов лимитов: <a href=http://filmkachat.ru/>1×slots регистрация на сайте</a> Принципиальным различием бесплатных бонусов от призов на депозит считается отсутствие надобности заносить средства на аккаунт. Из-за этого их нередко именуют бездепозитными (not the slightest deposit bonuses). <a href=https://www.webwiki.de/playhouse.com.ua>https://www.webwiki.de/playhouse.com.ua</a> Но такие рамки не смущают и хайроллеров, что коэффициенты на слотах разрешают рассчитывать на солидные выигрыши, в неких автоматах разыгрывается прогрессивный джекпот.Во время забавы в казино, выигрыши, приобретенные благодаря безвозмездным призовым фондам, суммируются и срабатывают в совместную сумму для отыгрывания. Однако, случае удача улыбнется и получится отыграть все бонусы, игровое заведение гарантированно разрешит вывести финансовые свои. Сумма вывода будет находиться от лимита, одобренного непосредственно в этом учреждении. Поэтому, пристально нужно разбирать правила выдачи безлимитных депо. 1×slots официальный сайт скачать <a href=https://ponysfm.com/users/Darennok>https://ponysfm.com/users/Darennok</a> Более солидные предложения встречаются очень редко. Зачастую они доступны лишь VIP-игрокам. В остальных случаях им наверняка сопутствуют очень строгие обстоятельства отыгрыша. Также вероятны дополнительные обстоятельства и ограничения, прописанные в условиях и положения бонусной программки казино.Активация по промокоду используется в разных обликах бездепов. Если речь идет о приветственном призе, то комплект знаков можно узнать на главной страничке, в регистрационной форме либо послании, коие отправляется юзеру для доказательства адреса электронной почты. Акции шансы проводиться совместно с партнерскими площадками. Обычно код располагается на постороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активируется разовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном офисе или начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем важный код для активации в описании каждого рекламную.
1хслотс официальный сайт зеркало
<a href=https://praisenpray.org/forums/showthread.php?tid=97743>1×slots зеркало на сегодня</a> 1×slots официальный регистрация Хотя благотворительные бонусы начисляются без депо, не исключено, что вас придется вносить деньги. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только последствии как, как новый заказчик впервые пополнит игровой счет. <a href=https://vadaszapro.eu/user/profile/1231818>https://vadaszapro.eu/user/profile/1231818</a> Хотя безвозмездные призы начисляются без депозита, не исключено, что вам понадобиться заносить средства. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только после того, как новый клиент раз пополнит игровой счет. 1×slots промокод при регистрации Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция содержит подробные правила, гиперссылка на которые обыкновенно содержится в промообъявлении. В их указываются лимиты, вейджер, список доступных игр. Если оператор скрывает данные о предложении, то пользоваться им не стоит.Бездепозитные призы истинными деньгами, которые возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадались.
1×slots регистрация 1×slotscasino09k online
Нельзя рассматривать забаву на средства, как вариант заработка. Азартные игры воспрещены для лиц младше 18 лет. Topcasinobonuses.mobi не зачинщиком азартных игр. Сайт носит информационный характер. <a href=https://www.covoiturage.cm/author/adolfoheple/>https://www.covoiturage.cm/author/adolfoheple/</a> Сроки активации бонуса уточняются каждым казино, но чаще всего они не превосходят недели с момента получения. Игроку обязательно нужно использовать бездеп на обозначенного срока, в ином случае приз просто исчезнет. Каждый бонус возможно получить только раз раз, потому если не использовать бездеп в срок, у игрока не будет 2 шанса им пользоваться. 1× slots официальный
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Новички не обожают сразу же вносить депозит. Это обосновано отсутствием опыта и недоверием. К счастью, в наше время можно получить бездепозитный бонус за регистрацию в казино. Неважно собственно начисляет система – фриспины или кредиты. В всяком случае вы не рискуете собственными сбережениями. Это замечательная вероятность запустить приглянувшийся видео слот либо же испытывать удачу в настольных забавах. 1 xslots рабочее зеркало <a href=https://shilinka.ru/user/Jamesjak/>https://shilinka.ru/user/Jamesjak/</a> Верификация важна для дополнительной безопасности и помочь техподдержке выявить бонусхантеров и плутов. Кстати, на некоторых платформах выводы солидных сумм доступны лишь после подтверждения личности.
1×slots регистрация на официальном сайте
Объективные – размер бонуса, коэффициент и условия вейджера, необходимость внесения депо для вывода средств; Мы собрали и выпустили перечень превосходнейших бездепозитных казино с бонусами за регистрацию, которые гарантируют великодушные выигрыши и мгновенные выплаты. <a href=http://hxwltw.com/home.php?mod=space&uid=364379&do=profile>http://hxwltw.com/home.php?mod=space&uid=364379&do=profile</a> Как и акции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения являются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих гостей и разрешает им составить впечатление о функционале, не рискуя вескими суммами.Активация по промокоду используется в разных обликах бездепов. Если речь о приветственном призе, то комплект символов можно разузнать на главной страничке, в регистрационной форме либо письме, которое отправляется пользователю для подтверждения e-mail. Акции шансы проводиться общо с партнерскими площадками. Обычно код размещается на стороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активируется одноразовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном кабинете либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем важный код для активации в описании любого рекламную. 1 х слотс зеркало Для получения приза надо(надобно) пригласить в забаву нового клиента. Казино начислит пригласившему фиксированный процент от взносов приглашённого в виде бонуса: чаще всего его размер не превышает 10%. Срок деяния приза как не превышает месяца: пригласивший получает бонус зависимо проигранных ставок приглашённого в 1-ый месяц забавы.Отказ в прохождении верификации. Если заказчик не желает или возможности дать документы, подтверждающие его лицо, профиль будет заблокирован совместно, вкупе со всеми бонусными начислениями.
<b>Смотреть еще похожие новости:</b>
<a href=http://nexusroleplay.teamforum.ru/memberlist.php?mode=viewprofile&u=463>1×slots зеркало регистрацию более популярный вариант это</a>
<a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=15513&p=17413#p17413>1×slots промокод при регистрации</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный приз казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в данном и содержится основное различие. Наш список включает в себя лучшие бездепозитные призы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по принципиальным характеристикам:
#3004 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино вход Самойлова Алла Владимировна порно <a href=https://krtka.info/>слоты казино</a> 1×bet слоты порно с Бондаренко Анастасия Борисовна <a href=https://slon-ru.com/>1×bet xbet</a> казино casino зеркало сегодня почему в казино нет часов порно с Константин Тюкавин (футбол) inform@rucriminal.info casino buzz сайт казино зеркало
DiskiPlus какие казино DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz <a href=https://www.diskiplus.ru>DiskiPlus porno Илона Маркова, хоккеистка</a> DiskiPlus pin up casino top top DiskiPlus казино в россии <a href=https://diskiplus.ru>DiskiPlus какие казино</a> DiskiPlus Окладникова Ирина Андреевна порно DiskiPlus casino DiskiPlus casino играть DiskiPlus порно с Константин Тюкавин (футбол) DiskiPlus букмекерская контора фонбет официальный сайт DiskiPlus 1×bet на андроид DiskiPlus Попова Анна Юрьевна порно
#3005 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало
В лицензионных бездепозитных казино играть в азартные игры действительно неопасно. Наличие лицензии подтверждает что, этот прецедент, что клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP.Для верификации аккаунта нужно дать специалистам технической поддержки отсканированную копию паспорта и счета за коммунальные услуги, а фотографию банковской карты или скриншот странички электронного кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности. <a href=http://filmkachat.ru/>1хлот регистрация в 1×slots casino</a> Изучить управляла и условия получения бездепозитных бонусов казино, Вы сможете у нас на сайте в разделе с призами или на официальном сайте избранного Вами казино. Если возможности найти необходимую информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал либо по электронной почте. <a href=https://www.webwiki.com/astramedika.com.ua>https://www.webwiki.com/astramedika.com.ua</a> Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды находятся на данной страничке. Посетитель может расценить условия получения и начать играть на средства без внесения депозита. При этом игроку главно осознавать, на каких критериях и какими методами него вывести полученный выигрыш. Для сего нужно оценить перечень подключенных платежных систем. 1×slots регистрация на 1хслотс <a href=http://www.zghncy.cn/home.php?mod=space&uid=600609>http://www.zghncy.cn/home.php?mod=space&uid=600609</a> Прямо сейчас заберите безвозмездные вращения за регистрацию без депозита и начинайте коллекционировать призовые композиции ради солидных выигрышей!
казино 1× slots официальный сайт
Также есть онлайн-платформы азартных игр, коие применяют раздачу бездепозитных бонусов в специальные даты (как для казино, так и для игрока). Помимо этого, действующие игроки кроме имеют возможность получить похожие бонусы за свою деятельность (к примеру, за повышения уровня либо за схожие заслуги). <a href=https://www.handmakersbrasil.com.br/profile/2560-manuelgeorp/>1× slots casino официальный сайт</a> 1× слот зеркало Иногда виде бездепа, казино презентует минимальный приз (до 50 рублей), из-за которого надо заморачиваться.Многие игроки, оценив возможностей казино, остаются выступать в нем и дальше ? на это и направлено каждое промо. Постоянные посетители вносят депозиты и проделывают ставки, обеспечивая долгосрочную прибыль оператора. То есть, казино выдают бездепы новым юзерам для формирования лояльной аудитории. <a href=http://o926476g.bget.ru/users/cowardlyenginee>http://o926476g.bget.ru/users/cowardlyenginee</a> Акции, посвященные календарным праздникам, бывают рассчитаны как на всех пользователей, например и на категории: примеру, подарок на 8 марта девушкам-игрокам либо мужикам на 23 февраля. 1×slots зеркало сайта Для получения бонуса надо(надобно) пригласить в игру свежего клиента. Казино начисляет пригласившему фиксированный процент от взносов приглашённого повторяющий приза: чаще всего его объем не превышает 10%. Срок деяния приза как не выше месяца: пригласивший получает бонус от проигранных ставок приглашённого в первый месяц игры.Для проверки используются сканы паспортов, водительских водительских, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если юзер обнаружен в попытке ввести вспомогательный аккаунт, все его учетные записи подвергаются блокировке, а их обладатель попадает в темный список. При забаве на лицензионной площадке не опасаться указывать достоверную персональную информацию (шифрование ликвидирует утечку персональных данных).
1×slots официальный зеркало
Не стоит путать игру в демо и внедрение бонусов. В демонстрационном режиме игрок имеет расценить механику слота, сюжет и оформление. Но забава ведется на относительные кредиты, потому отсутствует главное ? ощущение азарта. Активируя промокод либо фриспины, заказчик и не расходует свои деньги на игровые автоматы, хотя имеет сорвать реальный куш!Такие поощрения разрешают безвозмездно протестировать свежее казино, разобраться с игровым процессом интернет слотов, заработать и исключить маленькую сумму денег. <a href=http://gyeongshin.com/ksen/bbs/board.php?bo_table=free&wr_id=1644043>http://gyeongshin.com/ksen/bbs/board.php?bo_table=free&wr_id=1644043</a> 1хслот скачать
1×slots казино зеркало
Так же стоит выделить то, собственно в каждом интернет казино установлен свой максимальный кешаут на бездепозитный приз. Как верховодило кешаут — это максимальная сумма средств, которая доступная для вывода с бездепозитного бонуса.Для тех, кто лишь подумывает испытать собственную удачу, еще для профессиональных игроков, разыскивающих свежие площадки для выигрышей, ведущие лицензированные казино нередко устраивают различные акции, и лучшее предложений за последнее время – как для начинающих, например и для профессиональных игроков – бездепозитный приз за регистрацию. В интернет-сети постоянно можно найти перечни более знаменитых и гарантированных поощрительных программ от знаменитых онлайн-казино. 1×слотс казино <a href=https://australianweddingforum.com/weddings/member.php?action=profile&uid=180745>https://australianweddingforum.com/weddings/member.php?action=profile&uid=180745</a>
1×slots официальный сайт мобильная версия
Чтобы бездеп не был начислен на Ваш аккаунт, Вам не активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт автоматически, а Вы не планируете его применять, обратитесь в службу с пожеланием отменить бездепозитный бонус.Рассмотрим на образце: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских рублей. В критериях промоакции предписано, собственно вейджер бездепозитного приза х20. Поэтому, дабы отыграть приз, игроку будет нужно устроить ставок на 35*20=700 руб. Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, a зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. <a href=https://chujalt.com/user-314.html>https://chujalt.com/user-314.html</a> 1×slots регистрация то дальше необходимо пройти Не хотите поиграть в азартные игры, не рискуя своими средствами, но получая в все выплаты? Подобную возможность предоставляют все наихорошие порталы с азартными увеселениями. В их количестве много добросовестных и надежных интернет-казино на российском языке. Они привлекают свежих юзеров разными поощрительными событиями, включая бездепозитные, или бесплатные бонусы.Игрокам не воспринимать приветственный приз как гарантированный способ получить крупный выигрыш, хотя это замечательная вероятность без затрат оценить функционал казино.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=148038>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<a href=https://mcmon.ru/showthread.php?tid=145044>1×slots зеркало которую указывали при регистрации кстати</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и если, тогда, спорных ситуаций нет возможности куда-то пожаловаться и доказать свою правоту.
#3006 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино сегодня 1×bet официальный xbet <a href=https://t.me/vchkogpu_ru>казино можно</a> букмекерские конторы в россии Ирина Горбачева <a href=https://vestnik-jurnal.com/>casino pin официальный</a> casino сегодня где казино бк букмекерская контора porno Илья Ковальчук (хоккей) букмекерская контора скачать приложение казино зеркало сегодня Лут Оксана Николаевна порно
DiskiPlus pin up casino зеркало DiskiPlus сколько казино <a href=https://diskiplus.ru>DiskiPlus porno Дарья Клишина</a> DiskiPlus 1×bet зеркало на сегодня DiskiPlus casino скачать <a href=https://diskiplus.ru>DiskiPlus сайт казино зеркало</a> DiskiPlus porno Вера Бирюкова, гимнастка DiskiPlus порно с Арина и Дина Аверины, гимнастки DiskiPlus bet casino DiskiPlus porno Катерина Шпица DiskiPlus рейтинг казино DiskiPlus спорт букмекерская контора DiskiPlus букмекерская контора официальный сайт скачать
#3007 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало рабочее этих способов предполагает регистрацию
Подтверждение регистрации. Казино просят привязки профиля к электрическому адресу и номеру аппарата. Для сего на e-mail отправляется послание ссылаясь, а на аппарат ? текстовое известие с кодом. <a href=http://filmkachat.ru/>1×slot регистрация</a> Для верификации номера телефона, в личном профиле выберите опцию „Подтвердить номер телефона“ и введите в отвечающее поле код, полученный в sms-сообщении. <a href=https://plaza.rakuten.co.jp/kalinka0588/diary/202501240000/>https://plaza.rakuten.co.jp/kalinka0588/diary/202501240000/</a> Подтвердите регистрацию, дабы активировать Бездепозитный бонус с выводом, потребуется наполнить собственный профиль. Заполните пустопорожние поля настоящими данными о себе.Многие азартные клубы ограничивают сумму вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании промоакции, суммы Вы не сможете вывести. Разница несомненно аннулирована, Вы том не сможете делать на нее ставки. 1×slots casino зеркало <a href=http://woo.amonds.kr/bbs/board.php?bo_table=free&wr_id=141470>http://woo.amonds.kr/bbs/board.php?bo_table=free&wr_id=141470</a> Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.
1×slots зеркало рабочее
Необходимость отыгрыша. Вейджер в этом случае выше, чем для призов за депозит. И же средства не отыграны, вывести их нельзя. 1×slots официальный сайт мобильная версия <a href=http://doctor54.ru/user-2619.html>http://doctor54.ru/user-2619.html</a> Для верификации аккаунта надо(надобно) предоставить специалистам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, а фотографию банковской карты либо снимок страницы электронного кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для доказательства личности. 1 x slots casino Важно, удостоверьтесь в том, что ранее не регистрировались в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи.
1хслот официальный сайт зеркало
Почти все игровые клубы требуют свидетельство контактных данных игрока для получения бездепозитного приза.Не желайте поиграть в азартные игры, не рискуя своими средствами, но получая в все выплаты? Подобную возможность предоставляют многие наихорошие порталы с азартными развлечениями. В их количестве количество честных и надежных интернет-казино на русском языке. Они завлекают свежих юзеров различными поощрительными мероприятиями, включая бездепозитные, либо безвозмездные бонусы. Суммы сходственных предложений, в, колеблются от 3-х до двадцати $, а вейджер на эти средства обязан сочинять от тридцати до шестидесяти один. Зачастую, наивеличайшая сумма выигрыша здесь составит от одной до 2-ух сотен $. Если компьютерные выиграет больше, то все свои могут быть списанными до максимально разрешенного выигрыша. Здесь бывает содержание выводить еще несуществующие деньги на собственную платежную систему и далее находить заведение с подходящими под данную необходимую релоадом или призом за первое пополнение счета. Есть несколько подвидов бездепозитного вознаграждения, предлагаемого большим количеством заведений.Также существуют онлайн-платформы азартных игр, коие используют раздачу бездепозитных призов в особые даты (как для казино, например и для игрока). Помимо сего, действующие игроки также имеют вероятность получить похожие призы за свою деятельность (например, за повышения значения или за похожие заслуги). <a href=http://cloudscapehill.com/user/gregoryalmog/?um_action=edit>http://cloudscapehill.com/user/gregoryalmog/?um_action=edit</a> 1×slot регистрация
1 x slots
В лицензионных бездепозитных казино играть в азартные игры действительно неопасно. Наличие лицензии одобряет тот прецедент, что клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP.Также есть онлайн-платформы азартных игр, которые применяют раздачу бездепозитных призов в специальные даты (как для казино, так и для игрока). Помимо сего, действующие геймеры того имеют вероятность получить схожие бонусы за свою деятельность (например, за повышения уровня или за похожие достижения). <a href=http://amazon.rx22.ru/memberlist.php?mode=viewprofile&u=255>рабочее зеркало 1хслотс</a> Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и более. Когда игроку полагается большое фриспинов, администрация имеет разбивать их начисление на количество дней. Бесплатные вращения предоставляются для определенного слота, который указывается в правилах промоакции.На данном разделе портала регулярно публикуются обзорные заметки, в рассматриваются безвозмездные бонусы лучших интернет-казино. Информация структурирована по нескольким пт, включая главные: 1×slots регистрация на сайте <a href=http://www.cityofbogo.com/2017/07/city-of-bogo-officially-declared-first.html>http://www.cityofbogo.com/2017/07/city-of-bogo-officially-declared-first.html</a>
казино 1×slots официальный сайт
Получить приветственный бонус все лишь свежие посетители онлайн-казино. Способы описаны в критериях акции каждого законного казино, почаще всего это: Бездепозитный бонус – это финансовое вознаграждение, коие выдается соучастнику игры в казино, для его вербования и появления заинтригованности. Любой гость, который соответствует условиям выдачи подобного бездепозитного бонуса, может претендовать на получение вышеуказанного приза. Такое одобрение является наиболее действенным методом, дающим вероятность стартовать в игре, не вкладывая собственных материальных средств. <a href=https://tpang.co.kr/bbs/board.php?bo_table=free&wr_id=826249>https://tpang.co.kr/bbs/board.php?bo_table=free&wr_id=826249</a> Бездепозитные призы — это презенты от казино повторяющий бонусных средств или фриспинов для игровых автоматов, коие начисляются на акк игрока последствии процедуры регистрации на веб-сайте заведения. Для получения этих поощрений депозит не потребуется.Выбор любого онлайн казино на нашем сайте. В описании к любому Вы сможете узнать, собственно получите за творенье аккаунта. 1×slots casino online регистрация Исходя из сего, просто не существует мудрых оснований махнуть рукой на получение такого бонуса при регистрации. И, заметить,, на такой бесплатной базе у вас все шансы выиграть средства и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные призы, называют безвозмездными онлайн платформами для игр.Доступные забавы – В неких азартных забавах возможно понизить математическое превосходство казино до нескольких 10-х процента. В их числе многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как управляло, в таких забавах ставки идут в зачет вейджера не всецело. Например, может учитываться лишь 50%. В неких забавах бездепозитные призы вообще нельзя отыгрывать.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.dis-course.net/viewtopic.php?t=422470>казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Такой казино бонус без депозита за регистрацию выдается игроку на час и активно употребляется данное предложение с 2017 года. Это как бы некая конспирация одобрения под бездепозитный. Суть всего этого сводится к тому, собственно геймеру на час выдается, например, 1000 $, а реклама твердит о том, собственно любой выигрыш возможно будет в забыть при себя. Но если играющий всерьез отнесется к этому предложению, то он просто растеряет время. Ведь игроку нужно будет играть не в аккаунте, ну тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (числе всей тысячи) в управляла вступят конкретные обстоятельства, где несомненно сказано, что максимальной суммой победы имеет быть лишь двести $ и деньги возможно использовать лишь в качестве бонуса на 1-ый вклад с вейджером 25 от суммы гонорары плюс сам депозит. По итогу выйдет, что игрок выигрывал себе 200% приз с вейджером на определенную сумму. Короче разговаривая, это все надо вашего медли.
#3008 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Петр Ян (ММА) unlim casino <a href=https://rumafia.news/>kometa casino</a> порно с Виктория Синицина, фигуристка 1×bet 1 <a href=https://krtka.info/>яндекс казино</a> казино фильм смотреть онлайн почему в казино нет окон порно с Гатагова Ольга Анатольевна порно с Виктория Синицина, фигуристка 1×bet официальный скачать Хорова Наталья Александровна порно Кузнецова Анна Юрьевна порно
DiskiPlus какие казино DiskiPlus водка казино <a href=https://diskiplus.ru/>DiskiPlus new casino</a> DiskiPlus порно с Петр Ян (ММА) DiskiPlus Валентина Матвиенко порно <a href=https://diskiplus.ru>DiskiPlus почему в казино нет часов</a> DiskiPlus включи казино DiskiPlus пинап казино DiskiPlus казино онлайн DiskiPlus porno Александра Степанова, фигуристка DiskiPlus балтбет букмекерская контора DiskiPlus демо казино DiskiPlus почему казино
#3009 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации
Бездепозитные призы за регистрацию считаются одним из самых знаменитых способов привлечения новых игроков в онлайн-казино, поэтому что они деют игрокам вероятность опробовать казино, более игровые автоматы, и возможно, выиграть настоящие средства. <a href=http://filmkachat.ru/>1×slots зеркало регистрация</a> <a href=https://www.webwiki.com/astramedika.com.ua>https://www.webwiki.com/astramedika.com.ua</a> 1×slots акции <a href=http://www.megatechwaves.com/2020/08/how-to-remove-powered-by-blogger-on.html>http://www.megatechwaves.com/2020/08/how-to-remove-powered-by-blogger-on.html</a> Благодаря программе преданности от игорного заведения, можно арестовать хороший старт и без дополнительных инвестициям запустить видеослоты. Кроме такого, возможно рассчитывать на реальную удачу и получить, без инвестиции собственных денег, великой выигрыш.Какие призы есть еще получить считая бездепозитного приза за регистрацию в казино? По мимо бездепозитного бонуса, любое интернет казино предлагает игрокам прибыльное предложение на первый депо, вы совершаете депозит, ваш депозит возрастает в двое или даже в 3, что, этим самым начать играть возможно с более солидной суммой, например же не забываем тему вейджер на призы.
1×slots бонус за регистрацию
<a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=89692>1×slots регистрацию процедура займет всего лишь</a> 1хслотс мобильная версия зеркало С этими простыми советами каждое казино с бонусом за регистрацию способно принести в разы больше выгоды и пользы. <a href=http://www.apicarrara.it/modules.php?name=Journal&file=display&jid=1234>http://www.apicarrara.it/modules.php?name=Journal&file=display&jid=1234</a> 1× slots официальный
1×slots зеркало рабочее
Создание аккаунта. На веб-сайте казино нужно открыть регистрационную форму и наполнить порожние поля личностными данными. Иногда на данном этапе потребуется показать лишь адрес электрической почты и пароль, но почаще надо наполнить анкету персональной информацией (ФИО, дата рождения, место проживания и т.д. ). Нужно свидетельствовать лишь настоящие данные, потому впоследствие они станут испытаны. <a href=https://www.deadbeathomeowner.com/community/profile/chrisfaini/>https://www.deadbeathomeowner.com/community/profile/chrisfaini/</a> казино 1×slots
1×slots регистрация то дальше необходимо пройти
Автоматическая активация может самой комфортной, хотя ручной способ содержит перед ней превосходства. Прежде чем использовать вознаграждение от казино, стоит заблаговременно определить, сколько времени потребуется на исполненье всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деяния приза. Ну и естесственно же, для казино бездепозитные призы выгодны с имиджевой стороны: сходственная щедрость повышает степень преданности посетителей к компании.Эффективность бездепов в качестве маркетингового инструмента оценили почти операторы. Малоизвестные площадки употребляют эти промоакции, чтобы быстро набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны неизменных гостей. Не все веб-сайты, дающие презенты без депозита, рекомендованы к ирге. За симпатичным промоописанием могут скрываться неосуществимые условия отыгрыша и подводные камни. Как только вы отыграли вейджер и свои с бонусного баланса перешли для на реальный счет, Вы отважно можете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать минимальный депо к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депозитом). 1×slots официальный сайт скачать <a href=http://wch-korea.kr/bbs/board.php?bo_table=free&wr_id=82572>http://wch-korea.kr/bbs/board.php?bo_table=free&wr_id=82572</a> Самый распространённый из похожих призов, конечно же, бездеп на день рождения посетителя — бонус в виде фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им можно на установленного периода времени.При исполненьи критерий отыгрыша и верификации, деньги с бонусного счета переводятся на основной и шансы быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции находятся от выбранной платежной системы.
1×slots быструю регистрацию а также мгновенное
Демоказино есть почти на каждом сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются существенно реже: там когда выигрыша и соблюдения критерий промоакций бездеп возможно превратить в реальные средства.Ниже указан важный список законных казино в Беларуси с бонусами на 1-ый депозит. Вы сможете попасть на официальный вебсайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. <a href=https://tradersreview.co.uk/forum/profile/DaniMccrar>https://tradersreview.co.uk/forum/profile/DaniMccrar</a> 1×slots зеркало на сегодня Даже не выиграв солидную сумму, игрок интересно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-либо финансовых рисков. Быть в курсе наихороших промоакций легко. Достаточно периодически учить список новых онлайн казино с выводом бонуса без депо в этом разделе.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.digicube.de/forum/threads/476401–1%D1%85-%D1%81%D0%BB%D0%BE%D1%82-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%B2–1×slots-casino?p=675259#post675259>1х слот регистрация в 1×slots casino</a>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=341621>1×slots casino зеркало рабочее</a>
<a href=http://3ak.cn/home.php?mod=space&uid=187057>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не сможете активировать и получить бездепозитный бонус.
#3010 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino приложения человек казино <a href=https://res-publika.com>реального казино</a> казино можно букмекерские конторы в россии <a href=https://m.repost.news/>kent casino</a> букмекерская контора официальный сайт Петрова Ольга Викторовна порно porno Мария Шарапова porno Александра Степанова, фигуристка r7 casino порно с Кирьянова Дарья Борисовна порно с Дарья Клишина, легкоатлетка
DiskiPlus casino 7k сегодня DiskiPlus casino бездепозитный <a href=https://diskiplus.ru>DiskiPlus порно с Юлия Ефимова</a> DiskiPlus Фастова Елена Владимировна порно DiskiPlus казино проиграл <a href=https://www.diskiplus.ru>DiskiPlus 1×bet зеркало слоты 1×bet xyz</a> DiskiPlus порно с Каролина Севастьянова DiskiPlus казино рояль смотреть DiskiPlus сайт pin up casino DiskiPlus casino официальный сайт DiskiPlus порно с Антропова Валентина Викторовна DiskiPlus порно с Зырянова Анастасия Владимировна DiskiPlus Анна Михалкова
#3011 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino ап играющие казино <a href=https://th-royalgclub.com/>приложения букмекерских контор на андроид</a> карты казино win win casino <a href=https://krtka.info/>pin up casino buzz</a> гта онлайн казино лучшие букмекерские конторы официальная казино casino промокод 1×bet слоты официальный сайт гта казино 1×bet зеркало рабочее
DiskiPlus casino актуальное зеркало DiskiPlus 1×bet регистрация <a href=https://diskiplus.ru/>DiskiPlus Ходнева Светлана Владимировна порно</a> DiskiPlus казино в россии DiskiPlus retro casino <a href=https://diskiplus.ru>DiskiPlus Кузнецова Анна Юрьевна порно</a> DiskiPlus слот casino DiskiPlus официальное казино вход DiskiPlus Манилова Алла Юрьевна порно DiskiPlus pin up casino top top DiskiPlus Ходнева Светлана Владимировна порно DiskiPlus букмекерская контора фонбет официальный DiskiPlus скачиваемые казино
#3012 Charlesgunnyhttp://filmkachat.ru
1хслотс мобильная версия зеркало
Объективные – размер бонуса, коэффициент и условия вейджера, надобность внесения депозита для вывода денег; <a href=http://filmkachat.ru/>1×slots зеркало регистрацию более популярный вариант это</a> Да, у даровых призов есть дефекты. Прежде всего, они обычно очень. Кроме того, условия вейджера по ним постоянно жесткие. Но все неимение риска делает их довольно красивыми для посетителей. <a href=https://penposh.com/blogs/322517/Professional-3D-Modeling-Services-Custom-Design-Solutions>https://penposh.com/blogs/322517/Professional-3D-Modeling-Services-Custom-Design-Solutions</a> Активация по промокоду употребляется в различных видах бездепов. Если речь идет о приветственном призе, то набор знаков можно узнать на крупнейшей страничке, в регистрационной форме либо письме, коие отчаливает пользователю для подтверждения e-mail. Акции имеют проводиться общо с партнерскими площадками. Обычно код располагается на постороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активируется одноразовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном кабинете или начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем важный код для активации в описании любого промо. 1×slots зеркало видели такую регистрацию на <a href=https://glhwar3.com/forums/users/venuswhitelaw/>https://glhwar3.com/forums/users/venuswhitelaw/</a> Главное преимущество спинов – вероятность выучить различные слоты. Также удастся насладиться бонусными раундами, испытывать удачу в риск-туре и преумножить выигрыш за счёт особых знаков. Однако не только игровой процесс заслуживает внимание, ведь чем сосредоточиться на реальном выигрыше.Чтобы бездеп не был начислен на Ваш акк, Вам надо активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт автоматически, а Вы не расчитываете его использовать, обратитесь в службу поддержки с просьбой отменить бездепозитный приз.
казино 1× slots официальный сайт
Большинство клубов привлекают внимание в за счёт разнородных даров. На 1 веб-сайтах возможно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает безвозмездные вращения для запуска топовых онлайн слотов. Несмотря на различные промоакции, стоит выделить самые основные.Этот тип приза несомненно добавлен на Ваш акк последствии успешной процедуры регистрации с использованием номера телефонного. Если выбрать иной метод создания учетной записи, бездеп не несомненно добавлен на Ваш аккаунт. <a href=https://demo.comuni-italiani.it/forum/viewtopic.php?f=9&t=494389>1×slots зеркало регистрация в 1×slots casino</a> 1×slots рабочее зеркало <a href=http://users.atw.hu/adf/profile.php?mode=viewprofile&u=11600>http://users.atw.hu/adf/profile.php?mode=viewprofile&u=11600</a> Некоторые онлайн-казино без депо предлагают новым клиентам выбрать бонус при регистрации. Будьте внимательны: выбрав один, вы в безусловном большинстве случаев не можете пользоваться остальными.При правильном раскладе бездепы — это отличный способ играть на средства без растраты собственных средств. Есть количество советов, следуя коим можно извлечь максимально выгоды из похожих промоакций казино. Играть идет лишь на лицензированных площадках. Скриптовые веб-сайты не врут с бонусными предложениями, хотя и употребляют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах невозможно. 1×slots рабочее зеркало на сегодня Условия шансы разниться друг от друга. Но такой бонус возможность быть применен только для игрового процесса – полученные на счет финансы до такого, как будут отыграны, исключить невероятно.Если при регистрации показать промокод, можно гарантировано получить приз. Где арестовать ваучер? Посетите тематические блоги либо форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В заключительное время игорные жилища начали рекламироваться в фильмах и сериалах. Присмотритесь и наверняка заметите промокод, который принесёт 500 либо 1 000 бонусных рублей.
1×слот регистрация в 1×slots casino
Отзывы читателей о бонусных промоакциях помогут составить эмоцию, но не запамятовывайте о субъективности личных объяснений. <a href=https://rus-crafting.ru/index.php?subaction=userinfo&user=DoctorLazutaSr>https://rus-crafting.ru/index.php?subaction=userinfo&user=DoctorLazutaSr</a> Как только получите бездеп в казино, всё одинаково не забывайте инспектировать электронную почту. Некоторые игорные клубы день радуют интенсивных гэмблеров приятными бонусами. Чаще всего получить подарок возможно в преддверии праздника, на день рождение, за вербование приятеля. А кроме распространённым бонусом является надбавка к депозиту. Нужно чем пополнить счёт, и азартное заведение увеличит его на 50–100%.Получать информацию о самых прибыльных призах можно без постоянного прогноза новостей казино. Мы взяли эту задачу на себя и непрерывно смотрим за предложениями операторов, избирая наихорошие из них. В этом разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список промоакций регулярно дополняется. В топ вошли самые новые бездепозитные призы за регистрацию в казино 2020, временные и замкнутые промо. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и другим критериям. Если срок деянья акции истек, она удаляется из списка. казино 1×slots Вознаграждения за получение VIP-статуса ? начисляются масштабах программы лояльности при достижении очередного уровня либо выдаются индивидуально менеджерами службы.
1хслот зеркало
При регистрации идет свидетельствовать только достоверную информацию. Когда учетная запись несомненно активна, будет доступ в Личный офис. В нем можно выбрать еденицу, установить промокод и разузнать доскональные верховодила получения и отыгрыша бездепа. Краткая информация об акции часто находится именно на регистрационной форме.У каждого игорного клубы разные вейджеровые обстоятельства. Чтобы вы гарантировано смогли выполнить их, мы дадим некоторое советов. Если система начислила небольшую сумму, не создавать немалые ставки – остановитесь на 10–30 центах. Как лишь сумеете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте играть. В противном случае превосходнее присмотреться к иному автомату. <a href=http://t954381g.bget.ru/user/JosephPiery/>1×slots регистрация на официальном сайте</a> Обыкновенные бездепозитные бонусы в размере от трех до 20 $ созданы для того, чтобы в забавы заходили все новые и новые игроки. Здесь, вероятнее всего, будет ограничение на наибольший выигрыш. Важно, чтобы перед минимальным вкладом был отключен приз за первое пополнение счета, и геймер не попадет на повторный вейджер. Отказ в прохождении верификации. Если клиент не хочет либо не предоставить документы, подтверждающие его лицо, профиль будет заблокирован вместе со всеми бонусными начислениями.При верном раскладе бездепы — это прекрасный способ играть на средства без растраты собственных средств. Есть некоторое рекомендаций, следуя коим можно извлечь максимально пользы из сходственных акций казино. Играть по лишь на лицензированных площадках. Скриптовые сайты столько дурачат с бонусными предложениями, но и употребляют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах невероятно. онлайн казино 1×slots <a href=http://www.dwise.co.kr/bbs/board.php?bo_table=free&wr_id=183113>http://www.dwise.co.kr/bbs/board.php?bo_table=free&wr_id=183113</a> Это раз из главных характеристик привлекательности дара. С завешенным коэффициентом числе профессионалы не смогут выполнить условия по отыгрышу. И так, насколько презентабельно смотрится предложение – бездепозитный бонус казино в размере $500 либо $1 000. Чтобы новенькие получше вдумались, что же это вейджер, мы разберём на образце.На бонусные начисления имеют быть установлены вспомогательные лимитирования, которые Вы не учли при отыгрыше. Пока приз полностью не отыгран — средства из казино не выводятся.
1×slots официальный сайт, скачать
Бездепозитный приз казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби избранного заведения, сориентироваться в выборе игр и выяснить качество работы службы поддержки. Довольно нередко, начиная игровой процесс, игрок уже отказывается останавливаться и проделывает настоящий лепта. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть бесплатно вполне как раз таки с бонусом за регистрацию без необходимости вносить депо. <a href=http://fb7707ng.bget.ru/user/Frankpsype/>http://fb7707ng.bget.ru/user/Frankpsype/</a> 1×slots зеркало регистрация в 1×slots casino Шаг 5. Использование и отыгрыш. Бездеп обязан быть использован в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера.Классическая разновидность бонуса за создание аккаунта. Его преимущество содержится в том, собственно заказчик возможность без выбирать аппараты и делать ставки в их. Иногда список игровых автоматов ограничен оператором, хотя все равно это чем, чем единственный дешевый разъем, как в случае с внедрением фриспинов.
<b>Смотреть еще похожие новости:</b>
<a href=https://karakol.com.kg/user/Jameskef/>1хлот регистрация в 1×slots casino</a>
<a href=http://forum.survival-readiness.com/viewtopic.php?t=271663>1×slots казино зеркало</a>
<a href=https://ragnarok.ch/forum/viewthread.php?thread_id=139925>1×slots casino online регистрация</a>
<a href=https://www.donchillin.com/space-uid-382497.html>1×slots акции</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Пoдтвepдить личнocть клиента. Для удачного вывода средств, нужно доказать личность клиента. Нa этaпe вepификaции пpoфиля, сотрудники службы защищенности должны увериться, собственно у игрока более раз аккаунт. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не сможет вывести собственный выигрыш, в у него будет количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы. Не стоит путать игру в демо и внедрение бонусов. В демонстрационном режиме игрок имеет оценить механику слота, сюжет и оформление. Но забава ведется на условные кредиты, потому отсутствует основное ? чувство азарта. Активируя промокод или фриспины, заказчик раньше не расходует свои деньги на игровые автоматы, но может сорвать настоящий куш!
#3013 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало рабочее регистрации на телефон придет
При отыгрыше бонусных средств, необходимо учитывать срок деянья приза и время, которое дается на отыгрыш. По истечению заявленного времени, не отыгранный бонус будет аннулирован. <a href=http://filmkachat.ru/>1×slot рабочее зеркало</a> <a href=https://urlscan.io/result/068dd015–36f6–4f3c-84be-627e8057047f/>https://urlscan.io/result/068dd015–36f6–4f3c-84be-627e8057047f/</a> Каждый игрок должен сначала детально выучить условия по получению и отыгрышу приглянувшегося дара. Если всё организует, поторопитесь забрать благотворительные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик данный начать вертеть барабаны лучших слотов.Фриспины — благотворительные вращения, коие разрешают игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытных игроков фриспины считаются наиболее модным и преимущественным видом бонуса — безвозмездные вращения порой эффективнее и веселее в отыгрыше, чем другие виды бездепов. 1 x slots <a href=http://rkiyosaki.ru/discussion/5043/medali/#Comment_25069>http://rkiyosaki.ru/discussion/5043/medali/#Comment_25069</a> Выигрыши с бонусов без инвестициям практически привязаны к требованию по ставкам и шансы быть обналичены лишь последствии исполнения этих притязаний.Условия имеют разниться друг от приятеля. Но такой приз может быть использован только для игрового процесса – приобретенные на счет финансы до того, как станут отыграны, исключить невероятно.
1×slots casino online регистрация
1×slots регистрация 1×slots casino 777 online <a href=http://atope.ru/user/Harrysah/>http://atope.ru/user/Harrysah/</a> Любой выигрыш по ставке повыше установленного лимита несомненно считаться недействительным. То есть ставка не будет засчитана при отыгрыше, в случае выигрыша его сумма не поступит на счёт клиента — итог забавы будет всецело аннулирован.Обычно, бездепозитные призы выдаются под определенные слоты с фиксированной ставкой, хотя их точно воспрещено применять в игровых автоматах с прогрессивным джекпотом. Список игр, в можно применять бездеп, Вы найдете в описании промоакции или сможете уточнить у службы заведения. 1 x slots
1×slots официальный зеркало
Все обожают получать презенты. Согласитесь, практически каждый играющий человек будет беспредельно рад, если получит бесплатный презент для забавы в интернет казино просто за регистрацию либо же бонус за внесенный депозит, так называемые приветственные бонусы для новых игроков. Соответственно эти интернет клубы станут больше известны и преимущественны у игроков при выборе казино для забавы. Топ казино день обновляется и прибавляются новые и занимательные игровые клубы с привлекательной бонусной политикой и всеми вероятными преимуществами, льготами, к коим относятся эти бонусы как фриспины за регистрацию, денежные бездепозитные призы, еще великодушные бонусы за внесенный депо.Условия вывода выигрыша. В неких заведениях для успешного вывода с бездепозитного приза довольно пополнения баланса и доказательства личности. В иных же клубах, нужно некоторое раз прокрутить собственный депо. <a href=https://play.ntop.tv/user/JamesHaity/>https://play.ntop.tv/user/JamesHaity/</a> Но существуют азартные заведения, готовые просто например вручить деньги на забаву. Для этого довольно сделать профиль. Чтобы вывести выигрыш, сперва необходимо выполнить вейджеровые условия, прописанные в критериях получения бездепа.Верификация аккаунта. Лучше подтвердить личность незамедлительно после регистрации, дабы позже не было проблем с выводом денег. Верификация может проходить двумя путями: 1×slot рабочее зеркало Получить Бездепозитный бонус в интернет казино дело 2-ух кликов. Другой момент, отыграть рекламную и соблюсти управляла и условия отыгрыша. Под правилами предполагается не только вагер, хотя и лимитирования по максимальной ставке. Мы понимаем, что в кинотеатр все ставят на зеро и выигрывают. Призываем не создавать подобного. Перед активацией приза прочтите правила. Узнайте последующие моменты: Условия получения подарка, за регистрацию, за депо и другое. Ограничения по наибольшей ставке. Зачастую не повыше 350 рублей. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах возможно отыгрывать вагер. Можно вращать автоматы, а вагер несомненно стоять на пространстве. Поэтому важно аристократия, в каких играх возможно совершать кратность денежного оборота.Так же стоит выделить то, собственно в каждом онлайн казино установлен собственный максимальный кешаут на бездепозитный бонус. Как верховодило кешаут — это максимальная сумма денег, которая дешевая для вывода с бездепозитного бонуса.
1×slots актуальное зеркало
Некоторые веб-сайты, этого чем обмануть регистрацию игроков, предлагают ответить на несколько базисных вопросов. Цель проведения сходственной викторины – выявить случайных людей, которые не имеют представления о покере, и не разрешить получения ими бонусов. Если посетитель уже играл в казино, то ответить на полтора десятка несложных вопросов несомненно несложно. Очень нередко, ответы возможно найти на официальных сайтах этих учреждений.Если вы избираете испытанное лицензионное интернет казино и сделайте все условия получения бездепозитного приза, проблем с получением презента у Вас не возникнет. <a href=https://www.goslog.ru/forum/messages/forum1/message9997/11-obrashcheniya-grazhdan?result=reply#message9997>1× slots casino официальный сайт</a> Необходимость отыгрыша. Вейджер такой повыше, чем для бонусов за депо. И же средства не отыграны, вывести их невозможно. Несмотря на то, что данный вариант стимуляции со стороны азартных платформ довольно популярен в сфере сходственных игр, далековато не почитателям казино ведомо, собственно сами бездепозитные призы казино и как именно их вероятно эксплуатировать. 1×slots зеркало регистрация то дальше необходимо пройти <a href=http://cars.autokaif.ru/index.php?subaction=userinfo&user=maliciouscaptur>http://cars.autokaif.ru/index.php?subaction=userinfo&user=maliciouscaptur</a> Обыкновенные бездепозитные бонусы в объеме от трех до 20 $ сделаны чтобы, чтобы, дабы в забавы заходили все новые и новые игроки. Здесь, всего, будет ограничение на наибольший выигрыш. Важно, чтобы перед минимальным вкладом был отключен бонус за 1-ое пополнение счета, и в не попадет на повторный вейджер.
1×slots официальный сайт скачать
Проверка занимает от нескольких мин. До нескольких дней, спецы техподдержки могут запросить дополнительные документы или инициировать короткое общение по Skype. Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить особенности, труднодоступные при игре в демо режиме. Многие свежие клиенты перебегают в число постоянных, а оператор получает долгосрочную выгода. <a href=http://diakov.net/index.php?subaction=userinfo&user=cloudyweakness1>http://diakov.net/index.php?subaction=userinfo&user=cloudyweakness1</a> Фриспины без депозита или дополнительные свои посодействуют ближе познакомиться с игровой платформой и её функциями. За счёт подарков можно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за игры напротив живых крупье.Бывают ли бездепозитные бонусы без вейджера? Бывают, если у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный бонус за регистрацию уточняется вейджер во всех казино. 1× slots регистрация в 1×slots casino Ещё одно распространённое акционное предложение – симпатичный подарок с сомнительными притязаниями. К примеру, клуб сулит $100 в качестве бездепа, но с вейджером х80 либо х100. Отыграть подобный вейджер фактически невероятно и поэтому чем концентрироваться на больше интересных акциях.С не отыгранным призом воспрещается превышать размер наибольшей ставки. Нарушение этого условия виде аннулирование выигрыша.
<b>Смотреть еще похожие новости:</b>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=472083>1×slots бездепозитный бонус за регистрацию</a>
<a href=https://www.formulersupport.com/Thread-1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE–180086>1×slots официальный зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Демоказино есть почти на любом сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются веско пореже: там в случае выигрыша и соблюдения условий промоакций бездеп можно перевоплотить в реальные средства.
#3014 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet на сегодня винлайн букмекерская контора официальный <a href=https://m.repost.news/>7k casino</a> казино проиграл смотреть фильм казино <a href=https://7club7.com/>1×bet рабочее на сегодня</a> up букмекерская контора win win casino яндекс игры казино 1×bet официальный сайт 1×bet xyz порно с Голикова Татьяна Алексеевна kent casino регистрация порно с Сергей Бобровский (хоккей)
DiskiPlus up casino зеркало DiskiPlus гта онлайн казино <a href=https://www.diskiplus.ru/>DiskiPlus гта казино</a> DiskiPlus porno Игорь Акинфеев (футбол) DiskiPlus Ирина Горбачева <a href=https://diskiplus.ru>DiskiPlus 1win букмекерская контора</a> DiskiPlus какие казино DiskiPlus бесплатно играем казино DiskiPlus casino андроид DiskiPlus 1×bet зеркало слоты 1×bet xyz DiskiPlus букмекерская контора фонбет официальный DiskiPlus пин up casino DiskiPlus порно с Алексей Миранчук (футбол)
#3015 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
kent casino регистрация лучшие бесплатные онлайн казино <a href=https://www.ossetia.tv/>официальная казино</a> казино смотреть букмекерская контора леонов <a href=https://sovsekretno.net/>casino daddy</a> порно с Сергей Бобровский (хоккей) букмекерская контора на андроид какие казино retro casino казино фильм онлайн 1×bet 1 букмекерскую контору пин
DiskiPlus порно с Сергей Бобровский (хоккей) DiskiPlus Черкесова Бэлла Мухарбиевна порно <a href=https://www.diskiplus.ru/>DiskiPlus порно с Аделия Петросян (фигурное катание)</a> DiskiPlus самое казино DiskiPlus pin up casino скачать <a href=https://diskiplus.ru>DiskiPlus 1×bet рабочее на сегодня</a> DiskiPlus казино играть DiskiPlus порно с Дронова Александра Викторовна DiskiPlus рабочие зеркала казино DiskiPlus casino 7k сегодня DiskiPlus порно с Дарья Клишина, легкоатлетка DiskiPlus bitz casino DiskiPlus букмекерская контора официальный сайт скачать
#3016 Charlesgunnyhttp://filmkachat.ru
1× слот зеркало
Прежде чем активировать бездеп, нужно увериться никаких, собственно государство, гражданином которой является игрок, не входит в перечень разрешенных. <a href=http://filmkachat.ru/>сайт 1× slots casino</a> Большинство интернет-казино из нашего топ-10 готовы порадовать вас неповторимыми акциями. Читайте о их в обзорах и на форуме.Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, чтобы снова получить бесплатный приз. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ждет неизбежное санкция. <a href=https://phileo.me/blogs/295811/3D-Property-Visualization-Transform-Real-Estate-Marketing-Today>https://phileo.me/blogs/295811/3D-Property-Visualization-Transform-Real-Estate-Marketing-Today</a> Зарегистрироваться в казино по особой ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефона и электрическую почту). Для подтверждения номера аппарата нужно в личном профиле показать свой номер и нажать кнопку „Подтвердить номер телефона“, далее Вы получите sms-сообщение с кодом, который нужно ввести в подходящее поле. Для подтверждения электрической почты, перейти по интенсивной ссылке в письме от казино.Но ни не запамятовывайте пристально читать управляла участия в бонусных промоакциях. Если вы нарушите хотя бы одно условие, позже вы не можете устроить недоразумение с администрацией. 1× слот зеркало <a href=http://www.01.com.hk/member.php?Action=viewprofile&username=MiguelDuarl>http://www.01.com.hk/member.php?Action=viewprofile&username=MiguelDuarl</a>
1×slots casino регистрация на сайте
Чаще всего, знаменитые сервисы, такие как MoneyBookers и WebMoney, еще MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно неотъемлемое верховодило. Финансовые средства выводятся только через что, эту платежную систему, которой огромной для пополнения депо. Если же игрок получил бездепозитный покерный бонус, требуется пополнить счет на минимальную необходимую, которая сочиняет обыкновенно десять $. <a href=https://vredeenvermaak.be/forum/vrede-en-vermaak/>1×slots бонус за регистрацию</a> 1×slot рабочее зеркало <a href=http://baza.online-windows.ru/index.php?subaction=userinfo&user=humdrumkit95>http://baza.online-windows.ru/index.php?subaction=userinfo&user=humdrumkit95</a> Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.Стоит обозначить(означить), что бездепозитный приз выдается лишь взрослым новеньким, которые, же, имеют пригласить собственных друзей и своих, кроме рассчитывающих на поощрительную программу преданности. Подобная технология замечена среди создающих онлайн-казино для популяризации и расширения трафика. Покер румы и спонсоры содействуют увеличению собственной популярности, путем привлечения новых игроков. Бонусы – это оригинальный шанс для вероятных участников забавы, которые могут опробовать софт покер рума и увериться, станут ли они в него выступать или нет. Новый игрок испробует средства силы с реальными оппонентами в казино. 1×slots регистрация на официальном сайте B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax
1×slots зеркало регистрация то дальше необходимо пройти
В интернете очень много скриптовых вебсайтов, коие принадлежат мошенникам. Их основная цель – привлечь гэмблеров, пообещав не щедрые презенты, но и солидные выигрыши. Так собственно некоторые сайты предлагают получить за регистрацию числе $1 000.Вейджер не более х30–35 является приемлемым. Опытные игроки заявляют, что с таким вейджером реально остаться в плюсе, если правильно подойти к выбору игрового аппарата. В интернете слишком большое скриптовых сайтов, коие принадлежат мошенникам. Их основная цель – заинтересовать гэмблеров, пообещав не великодушные презенты, хотя и солидные выигрыши. Так собственно кое-какие сайты предлагают получить за регистрацию и $1 000.Основное верховодило получения бездепа ? создаваемый аккаунт должен быть у юзера первым и единственным. Наличие нескольких аккаунтов требовательно запрещено. Проверка ведется по имени, e-mal, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депо необходимо соблюдать простую последовательность поступков. <a href=http://bitetheass.com/user/DonaldHen/>http://bitetheass.com/user/DonaldHen/</a> Отзывы читателей о бонусных акциях помогут составить эмоцию, хотя не забывайте о субъективности личных комментариев. 1×slots зеркало видели такую регистрацию на Выигрыши с бонусов без вложений всегда привязаны к требованию по ставкам и все быть обналичены только после выполнения данных требований.
казино 1×slots
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=354837>1×slots подтвердит вашу регистрацию если говорить</a> Чтобы бездеп не был начислен на Ваш аккаунт, Вам не активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт механически, а Вы не расчитываете его применять, обратитесь в службу с пожеланием отменить бездепозитный приз. Реже призы без депозита начисляются неизменным игрокам. С их поддержкою администрация постарается удержать ценных посетителей или вожделеет поблагодарить за преданность правильных гостей. Но гораздо чаще для подобных целей используются такие промоакции: 1хслот зеркало сайта <a href=http://snyglobal.com/bbs/board.php?bo_table=online&wr_id=27091>http://snyglobal.com/bbs/board.php?bo_table=online&wr_id=27091</a> При отыгрыше бездепов, учитывайте временные ограничения. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток.Для верификации аккаунта нужно дать профессионалам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, а фотку банковской карты либо скриншот странички электрического кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности.
1×slots коды
Выиграть реальные средства в казино не пополняя счет – трудно, хотя возможно. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными бонусами и начните играть на бонусные свои. По статистике в 10-ти заведений можно заработать маленькую сумму средств за счет бонусных средств.Будьте внимательнее при ознакомлении с правилами во избежание появления конфликтных обстановок с казино, когда после отыгрыша бездепа для не дадут исключить солидную необходимую выигрыша. Некоторые клубы механически начисляют приз на аккаунт игрока последствии выполнения критерий получения, но посещают ситуации, когда бонус надо(надобно) активировать игроку самому. Есть некоторое методов активации приза:Для получения выигрыша потребуется выполнить условия казино. Чаще всего игроку нужно поставить определенную необходимую, хотя уже из собственных денег. Она рассчитывается из совместного объема выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, в пользователь выиграл 1000 рублей, а множитель сочиняет х30, вывести средства можно несомненно, сделав ставки на 30 000 руб. <a href=http://zzwind.is-programmer.com/guestbook/>http://zzwind.is-programmer.com/guestbook/</a> 1×slots рабочее зеркало на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=https://feederfishing.lt/en/forum/subkategorija-1–1/1410495–1×slot#1421969>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=http://vn-info.net/user/Josephkam/>1×slots регистрация 1×slots casino 777 online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Онлайн-казино с бездепозитными бонусами ставят клиентам обстоятельства для пользования бездепами, потому перед ролью в акции другого, как подробно ознакомиться со всеми правилами и нюансами акции. Условия все касаться получения приза, его использования и следующего вывода денежных средств в случае выигрыша. На нашем веб-сайте Вы найдете перечень актуальных новых бездепозитных бонусов в казино 2022 года. Также, есть количество неповторимых услуг, которые доступны лишь гостям нашего сайта последствии регистрации по нашей ссылке или активации специального промокода.
#3017 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
Бездепозитные бонусы, как уже понятно, являются уникальной вероятностью обратиться игровому процессу полностью безвозмездно, то есть выступать в интернет казино безвозмездно и на существующие средства незамедлительно в регистрации аккаунта. Автоматы с этим депозитом шансы стать прекрасной возможностью поиграть для поклонников азарта с определенными лимитированиями в финансах.Свежий приз начисляется вид валютных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в использовании средствами, ну случае отыгрыша оператор имеет установить ограничение на вывод денег. <a href=http://filmkachat.ru/>1×slots мобильная версия войти казино</a> Бездепозитные бонусы в казино без пополнения 2022 — это определенная сумма средств либо gift spins вращения, которые предоставляются первым постояльцам за регистрацию на веб-сайте казино вид бездепозитного бонуса, и выделяет вас возможность за счет казино без пополнения опробовать услуги (игр), с последующей преимуществом, льготой вывода средств при исполнении всех установленных управлял. <a href=https://www.bseo-agency.com/blogs/188137/3D-Modeling-for-Product-Lifestyle-Images-Professional-Solutions>https://www.bseo-agency.com/blogs/188137/3D-Modeling-for-Product-Lifestyle-Images-Professional-Solutions</a> Не стоит путать забаву в демо и использование бонусов. В демонстрационном режиме игрок возможность оценить механику слота, сюжет и оформление. Но игра проводится на относительные кредиты, потому отсутствует главное ? ощущение азарта. Активируя промокод или фриспины, заказчик и не тратит свои средства на игровые автоматы, но может сорвать настоящий куш! 1×slots регистрация 1×slots casino c2d ru <a href=https://lider-school174.com/forum/user/76/>https://lider-school174.com/forum/user/76/</a> Бездепозитные бонусы — это подарки от казино в виде бонусных денег либо фриспинов для игровых автоматов, коие начисляются на акк игрока в процедуры регистрации на сайте заведения. Для получения этих поощрений депо не потребуется.2. Создать свежий профиль. Для регистрации нужно заполнить небольшую анкету либо зайдите в собственный кабинет посредством социальных сетей;
1×slots подтвердит вашу регистрацию если говорить
<a href=https://www.donchillin.com/space-uid-382497.html>1×slots регистрация на официальном сайте</a> рабочее зеркало 1хслотс Чтобы помощи убедиться в преимуществах бездепозитных бонусов, довольно зарегистрироваться в казино и получить поощрение.Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, чтобы снова получить безвозмездный приз. Игорные заведения нетерпимы к бонус-хантерам, потому вас ожидает неминуемое наказание. <a href=https://chmarket.co.kr/bbs/board.php?bo_table=free&wr_id=116363>https://chmarket.co.kr/bbs/board.php?bo_table=free&wr_id=116363</a> Доступ к подарку имеет открываться автоматически после введения промокода или воззвания в службу поддержки вебсайта. В первом случае от юзера не требуется никаких действий. Бездеп с активацией по коду встречается чаще всего. Игроку необходимо ввести совокупа символов в графе, кот-ая возможность находиться в регистрационной форме в Личном офисе. 1×slots сайт
1×slots сайт
Фриспины – бесплатные вращения с фиксированной ставкой, которые можно использовать в конкретных игровых автоматах. <a href=https://www.ls1.com/forums/member.php?u=118563>https://www.ls1.com/forums/member.php?u=118563</a> 1×slots casino зеркало рабочее Выше мы предоставили глубокий набор самых свежих и своевременных бездепозитных призов в онлайн казино без пополнения на 2022 год, где возможность пользоваться хоть ценным бездепозитным бонусом.
казино 1×slots официальный сайт
Но такие рамки не смущают в хайроллеров, поскольку коэффициенты на слотах позволяют рассчитывать на солидные выигрыши, а в некоторых автоматах разыгрывается прогрессивный джекпот. <a href=https://forum.oursson.ru/viewtopic.php?f=2&t=12087>1×slots зеркало быструю регистрацию а также мгновенное</a> Еще одно условие дотрагивается размеров ставки. Операторы устанавливают максимальную необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, выбранной в Личном кабинете. При превышении лимита есть риск лишиться приза. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, заказчик имеет столкнуться с запретом назначать фишки на шансы.Благодаря программке лояльности от игорного заведения, возможно взять хороший старт и без добавочных вложений запустить видеослоты. Кроме того, можно рассчитывать на реальную фортуну и получить, без вложения личных финансов, великий выигрыш. Баланс игрока дополняется на подобающую сумму. К ней применяется вейджер, указанный в правилах промоакции. Вывести выигрыш возможно будет последствии того, как пользователь сделает требуемый размер ставок из собственных средств. В редких случаях бездеп работает в формате Free Play. На счет пользователя зачисляется крупная сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по завершении этого периода сумма на счету будет превышать изначальную, то разницу возможно будет исключить или использовать для дальнейших ставок. 1 хслот регистрация в 1×slots casino <a href=https://helheim5k.ru/users/migueltek>https://helheim5k.ru/users/migueltek</a> Выбирайте лучшие благотворительные призы с помощью обзоров на Casinoz – и пусть вам сопутствует удача при отыгрыше бонусных кредитов!Получить приветственный бонус все лишь новые клиенты онлайн-казино. Способы описаны в критериях акции каждого законного казино, чаще всего это:
1× slots casino официальный сайт
Многие игроки, оценив функционал казино, остаются играть в нем и далее ? на это и нацелено каждое промо. Постоянные посетители заносят депозиты и делают ставки, обеспечивая долгосрочную прибыль оператора. То есть, казино раздают бездепы новым пользователям для формирования лояльной аудитории. <a href=https://www.koi-s.id/member.php?324412-Charlesrudge>https://www.koi-s.id/member.php?324412-Charlesrudge</a> Помните, что любые нарушения верховодил сведут на нет ваши усилия, и вы наверняка останетесь без начисленного вас безвозмездного бонуса. Всегда изучайте управляла начисления и обстоятельства вейджера. По каким вопросам, на которые вы имеет помощи отыскать ответы, обращайтесь за объяснениям и саппорт. 1× слот зеркало Не советуем сломя голову браться за всевозможные предложения получения средств без вложений. Вполне вероятно, собственно бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на 1-ый взгляд. Альтернативой является казино бонус за депозит. Мы предлагаем вас пару советов, благодаря которым у каждого игрока будет возможность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег:
<b>Смотреть еще похожие новости:</b>
<a href=http://miupsik.ru/forums/showthread.php?tid=223845>1×slots казино мобильная версия</a>
<a href=http://smpn1bejen.sch.id/forum/>1хслотс регистрация в 1×slots casino</a>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=136816>1хслот 1хслотс регистрация перейти на 1×slots</a>
<a href=http://miupsik.ru/forums/showthread.php?tid=241241>1хслот официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
К образцу, игроку выдаются бесплатные средства в заведении в размере пятидесяти или ста $ (вейджер на которые составляет 100х). То есть, любому новоприбывшему геймеру выскакивает привлекающая картинка, которая сулит выплату всех зачисленных фирмой средств. Не стоит обращать внимания на казино приз за регистрацию без депо с слишком большой или очень малеханькой суммой бонусов, поэтому собственно, в кропотливо выучив все условия, тут всего, будет некий подвох. Акционные предложения от казино есть в различных форматах. Часто призы даются в обмен на депо. Игрок вносит платеж и получает средства, бесплатные вращения и одобрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — вид бонуса, который гарантирован за выполнение определенных поступков на веб-сайте:
#3018 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее
Сроки активации приза уточняются каждым казино, хотя чаще всего они не превосходят недели с момента получения. Игроку обязательно нужно использовать бездеп на обозначенного срока, в ином случае приз просто исчезнет. Каждый приз возможно получить лишь один раз, поэтому в не использовать бездеп в срок, у игрока не будет 2 шанса им пользоваться.Онлайн гемблинг развивается с каждым деньком больше и больше, новые бренды создаются не по денькам а по часам. Новые онлайн казино делают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и что, этим наиболее предлагают бездепозитные бонусы за регистрацию, собственно бы не упустить эту вероятность — как воспользоваться новым бездепом, рекомендуем навещать наш сайт как можно почаще, самое лакомое и свежие будет добавляться в этом же перечне. <a href=http://filmkachat.ru/>1 xslots рабочее зеркало</a> Варианты выигрыша зависят от Вашей успеха и условий игорного портала. Выше мы сказали, что кое-какие бездепозитные бонусы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются другие, все, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на средства, можно выиграть неописуемые суммы. Сегодняшние игровые автоматы или видео слоты, как их нарекают. Могут выдавать солидные умножение от х1.000 и повыше. Некоторые умножают ставку от х100.000.Чтобы самостоятельно увериться в превосходствах бездепозитных бонусов, довольно зарегистрироваться в казино и получить поощрение. <a href=https://next.canvanizer.com/canvas/rfilL0Pd61g3J>https://next.canvanizer.com/canvas/rfilL0Pd61g3J</a> Обычно бездепозитные акции от казино, приходят на эл. Почту в дни рождения или дни. В некоторых интернет казино можно адресоваться в чат и как неизменному игроку, возможно вам предложат бездепозитное предложение. 1×slots casino регистрация 1×slotscasin online <a href=https://cromia.ua/forum/user/5039/>https://cromia.ua/forum/user/5039/</a>
1×slots регистрация 1×slotscasino 56 online
1×slots регистрация Зачастую бездепозитные призы казино для игры предлагаются различными заведениями азартных игр виде рекламных акций или в целях вербования к себе новых игроков. Для бездепозитных бонусов в казино 2022 геймеру не пополнять счет до этапа вывода желанных средств.Представьте момент, когда при ставке в 10 рублей Вы получите подобное умножение. Миллион руб. За одно вращение, собственно вполне возможно. Поэтому вопрос, сколько возможно выиграть остаётся закрытым. Предлагаем выяснить самостоятельно. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный приз и инспектируйте фортуну в деле. Разумеется, исключить средства сложно. Однако шансы есть у всех. <a href=https://disgaeawiki.info/index.php/User:NormandCroft0>https://disgaeawiki.info/index.php/User:NormandCroft0</a> Как лишь на виртуальном счету окажутся бонусные средства, поспешите отыграть вейджер. Сразу последствии сего можно забыть заявку на вывод выигрыша. Кредиты выгодно выделяются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом реальных средств и дают вероятность почувствовать азарт. Во-вторых – можно насладиться каждой азартной игрой доступной на веб-сайте. В вашем постановлении присутствуют автоматы, настольные прибавленье, видео-покер, Live-дилеры. зеркала 1×slots
1×slots регистрацию более популярный вариант это
<a href=http://dklada.ru/user/Glennval/>http://dklada.ru/user/Glennval/</a> В интернет-сети постоянно возможно найти списки более популярных и гарантированных поощрительных программ от знаменитых онлайн-казино.Рассмотрим принцип его деянья на примере. Допустим, вы зарегистрировались и возымели $10 not the slightest down payment bonus с вейджером х50. Это значит, собственно выигранные средства возможно будет выводить не раньше, чем последствии такого, как общая сумма ставок достигнет $500. 1×slots официальный зеркало рабочее Многие казино предоставляют в рекламных целях безвозмездные призы необыкновенно для наших читателей. Чтобы их получить, надо(надобно) перебежать на игровой вебсайт по партнерской ссылке с нашего портала.
1×slots зеркало сайта
Бонус начисляется игроку незамедлительно в регистрации и прохождения верификации в казино и не требует от клиента внесения депозита. Как правило, размер бонуса в сходственном случае достаточно скромный, впрочем разрешает новеньким познакомиться с забавой без риска реальными средствами.Максимальная ставка ? устанавливается в валюте счета и ограничивает размер ставки за раз спин. В случае ее превышения бонус имеет быть аннулирован. Также в правилах может содержаться запрет на размещение ставок конкретного облика, примеру, по равным шансам в рулетке (словами, на чет либо нечет, красноватое либо черное и т.д. ). <a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=11207>1хслот зеркало</a> Зарегистрироваться в казино по специальной ссылке или с бонусным кодом. Подтвердить контактные данные (номер аппарата и электронную почту). Для подтверждения номера телефонного необходимо в собственном профиле указать собственный номер и надавить кнопку „Подтвердить номер телефона“, далее Вы получите sms-сообщение с кодом, который нужно установить в отвечающее поле. Для подтверждения электрической почты, перебежать по интенсивной ссылке в письме от казино.Если вы избираете испытанное лицензионное интернет казино и сделайте все условия получения бездепозитного приза, проблем с получением презента у Вас не возникнет. Заработать на бездепозитных бонусах за регистрацию в казино имеет любой пользователь, достигший совершеннолетия. рабочее зеркало 1хслотс <a href=https://www.mybbaddons.com/board/user-72019.html>https://www.mybbaddons.com/board/user-72019.html</a> Законодательство, регулирующее азартные забавы в различных странах, оказывает на возможности операторов. В итоге юзеры из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это возможность быть как полный отказ в доступе, так и невозможность загружать забавы отдельных изготовителей.
1×slots сайт
Некоторые клубы механически начисляют приз на аккаунт игрока последствии выполнения критерий получения, но посещают ситуации, когда бонус надо(надобно) активировать игроку самому. Есть некоторое методов активации приза: Каждый новичок и профессиональный игрок грезят быстро стартануть и начать делать реальные ставки. Для сего достаточно арестовать презент, за кот-ый не уплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email либо аппарат. После сего администрация начисляет щедрое вознаграждение в виде даровых вращений или виртуальных кредитов. <a href=http://y90429l8.bget.ru/user/TerryDag/>http://y90429l8.bget.ru/user/TerryDag/</a> казино 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=http://b2s.bulwork.com/node/1581?page=183#comment-27684>скачать 1×slots официальный сайт</a>
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=102883&extra=>1×slots регистрация 1×slots review live</a>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=353622>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.
#3019 Сoinblinker_bibhttps://coinblinker.info/
Доброго времени суток! Coinblinker — онлайн-платформа для обмена криптовалют и валют. Получите лучшие курсы, быструю обработку транзакций и отличное обслуживание. Обмен без задержек и рисков! <a href=https://coinblinker.info/>Купить криптовалюту</a> Если продажа USD, криптообменник, обмен криптовалют в России и мире, покупка USD, покупка Евро, то это в Coinblinker.info https://coinblinker.info/ . Coinblinker поддерживает множество различных криптовалют, что дает вам свободу выбора и возможность обменивать любые популярные цифровые активы. Благодаря этому, вы всегда найдете нужное направление обмена. До новых встреч!
#3020 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Комарова Наталья Владимировна порно 1×bet зеркало рабочее на сегодня <a href=https://strelochnik.com/>порно с Юлия Ефимова, пловчиха</a> 1×bet официальный сайт 1×bet официальный слоты <a href=https://m.repost.news/>букмекерская контора фонбет официальный сайт</a> песня казино сайт pin up casino porno Юлия Канакина букмекерская контора на андроид 7k casino зеркало рабочее Петрова Ольга Викторовна порно porno Яна Троянова
DiskiPlus r7 casino DiskiPlus Самойлова Алла Владимировна порно <a href=https://www.diskiplus.ru>DiskiPlus скачать букмекерскую контору на андроид</a> DiskiPlus casino x DiskiPlus винлайн букмекерская контора официальный сайт <a href=https://www.diskiplus.ru>DiskiPlus рокс казино</a> DiskiPlus casino 7k сегодня DiskiPlus человек казино DiskiPlus 1×bet зеркало DiskiPlus pin up букмекерская контора DiskiPlus порно с Абрамченко Виктория Валериевна DiskiPlus казино 1 DiskiPlus гама казино
#3021 продвижение медицинского сайтаhttps://1-seo-prodvizhenie-medicinskih-sajtov.ru/
Тут можно преобрести seo-продвижение медицинских сайтов <a href=https://1-seo-prodvizhenie-medicinskih-sajtov.ru/>продвижение сайта медицинского центра</a>
#3022 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало сайта
Самые известные методы вывода средств ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электронным платежным системам на Neteller и Skrill, еще используют криптовалютными кошельками. Вывод выигрышей имеет исполняться мгновенно либо занимать от нескольких часов до нескольких суток. <a href=http://filmkachat.ru/>1×slots промокод при регистрации 2025</a> <a href=https://seositecheckup.com/seo-audit/astramedika.com.ua>https://seositecheckup.com/seo-audit/astramedika.com.ua</a> Индивидуальные поощрения выдаются за совершение деяний: подписку на аккаунты площадки в соц сетях, установку мобильного прибавления или официального посетителя для ПК. В большинстве казино срабатывают программы лояльности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на следующий степень часто с выдачей бездепа. 1×slos регистрация в 1×slots casino <a href=http://v208870d.bget.ru/user/Travisreave/>http://v208870d.bget.ru/user/Travisreave/</a> Вознаграждения за получение VIP-статуса ? начисляются в рамках программки лояльности при достижении одного уровня или выдаются индивидуально менеджерами службы.
1×slots официальный сайт мобильная версия
Oтыгpaть бонус с указанным вeйджepом, чтобы нужно сдeлaть cтaвoк нa cумму, превышающую размер бонуса в количество раз. 1×slots регистрация 1×slotscasino 56 online <a href=https://maps.google.nl/url?q=https://doctorlazuta.by/>https://maps.google.nl/url?q=https://doctorlazuta.by/</a> За счёт спинов получится запустить различные интернет слоты, протестировать стратегии и поднабраться навыка. Фишка том,, что вращения начисляются на лучшие аппараты с оригинальными опциями и высокой отдачей. Не забывайте, собственно в любом акционном предложении учтены особые требования – кратковременные ограничения, наибольший объем ставки, список дешевых игр. 1×slots регистрация Зарегистрируйтесь. Для регистрации почаще всего достаточно ввести собственный номер аппарата и почтовый адресок, после чего установить полученный код из СМС. Возможно, потребуется указать промокод. В правилах акции несомненно написано, где его хотелось вводить. Иногда это хотелось делать при регистрации, времени — теснее последствии творения собственного офиса, на отдельной странице.
1×slots рабочее зеркало на сегодня
Не стоит путать забаву в демо и использование призов. В демонстрационном режиме игрок возможность расценить механику слота, сюжет и оформление. Но игра проводится на относительные кредиты, поэтому отсутствует основное ? чувство азарта. Активируя промокод либо фриспины, клиент по-прежнему не тратит свои средства на игровые автоматы, хотя может сорвать настоящий куш!Отказ в прохождении верификации. Если заказчик не желает либо имеет предоставить документы, подтверждающие его личность, профиль несомненно заблокирован совместно, вкупе со всеми бонусными начислениями. <a href=http://tutorialsmint.com/user/jeffreygex/articles>http://tutorialsmint.com/user/jeffreygex/articles</a> При регистрации идет свидетельствовать только достоверную информацию. Когда учетная запись несомненно активна, появится доступ в Личный кабинет. В нем возможно выбрать еденицу, установить промокод и разузнать доскональные правила получения и отыгрыша бездепа. Краткая информация об акции нередко находится именно на регистрационной форме. x1 slots регистрация в 1×slots casino Бонус начисляется игроку незамедлительно последствии регистрации и прохождения верификации в казино и не настятельно от посетителя внесения депозита. Как правило, объем бонуса в схожем случае довольно скромный, однако разрешает новичкам познакомиться с забавой без риска реальными средствами.
1×slots рабочее зеркало на сегодня
<a href=https://redfist.de/RF-Online-Testforum/viewtopic.php?f=105&t=80562>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> Размер ставки для игры по бездепозитному бонусу (конечно же, если, тогда,, когда он представлен в виде бонусных денежных средств) зачастую ниже, чем при забаве на депозит. Ограничение будет действовать до момента отыгрыша приза. casino 1×slot <a href=https://bajarmp3.net/member.php?action=profile&uid=3517>https://bajarmp3.net/member.php?action=profile&uid=3517</a> Для выбора азартного заведения Вы можете воспользоваться списком наших казино с призами за регистрацию. На нашем сайте мы выпустили список бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, что часть бонусов эксклюзивные и доступны только для посетителей нашего вебсайта по-специальному промо-коду либо по уникальной ссылке. Кроме такого, для каждого бонуса мы подготовили доскональный обзор, каком Вы узнаете как получить и отыграть поощрение и как исключить свой выигрыш с бездепа.
1×slos регистрация в 1×slots casino
Перечисленные повыше главные характеристики сопровождают практически любой бонус и являются стандартными для бездепозитных бонусных начислений в казино. <a href=http://www.lighttoguideourfeet.com/member.php?u=1443606>http://www.lighttoguideourfeet.com/member.php?u=1443606</a> Однако в критериях исчезают «подводные камешки», коие не разрешат вывести солидную необходимую либо же вы не успеете отыграть вейджер. Поэтому мастера советуют арестовать бесплатные вращения за регистрацию в казино без депозита, дабы поднабраться опыта и получить настоящий шанс на победу. 1×slots официальный сайт зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://loevil.com/phpBB3/viewtopic.php?t=31996>1×slots официальный сайт мобильная версия</a>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=298047>1хслотс рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Можно. Вы всегда можете отказаться от получения бездепозитного приза за регистрацию в казино, пока Вы не сделаете ставку. Особую изюминку видео слотам присваивают уникальные знакы. С их в активизируются разные бонусы. Вы сможете запустить вспомогательный уровень и прирастить сумму выигрыша. Есть знаки, коие замещают ненадобные элементы и сами создают выигрышные комбо. Не стоит забывать и про бонус-тур. После любого удачного спина есть шанс прирастить необходимую выигрыша в 2 или четыре раза.
#3023 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора без porno Екатерина Ефременкова, шорт-трекистка <a href=https://res-publika.com>официальные букмекерские конторы скачать</a> 1×bet зеркало xbet xyz порно с Анастасия Потапова, теннисистка <a href=https://rucriminal.info/>сайт букмекерской конторы</a> официальные букмекерские конторы казино регистрации 1×bet слоты официальный сайт пина casino вавада казино казино фильм онлайн porno Юлия Пересильд
DiskiPlus порно с Бондаренко Анастасия Борисовна DiskiPlus скачать casino на андроид <a href=https://diskiplus.ru/>DiskiPlus kent casino регистрация</a> DiskiPlus porno Яна Троянова DiskiPlus 1×bet официальный сайт 1×bet xyz <a href=https://www.diskiplus.ru>DiskiPlus как выиграть в казино</a> DiskiPlus рокс казино DiskiPlus porno Андрей Рублев (теннис) DiskiPlus порно с Юлия Ефимова, пловчиха DiskiPlus Кузнецова Анна Юрьевна порно DiskiPlus casino рабочее DiskiPlus 1×bet зеркало слоты DiskiPlus 7k casino зеркало
#3024 Charlesgunnyhttp://filmkachat.ru
онлайн казино 1×slots
Приветственный бонус без депо ? презент за регистрацию. Выдается средствами, фриспинами или баллами. В последнем случае бонусные баллы используются для роли в турнирах или размена на реальные деньги. <a href=http://filmkachat.ru/>1хслот зеркало</a> Срок отыгрыша — это период, который наступает в момент активации бонуса и кончается с его закрытием. Пользователю необходимо уложиться в этот временной промежуток, иначе призовые свои аннулируются. Казино устанавливают список игр, ставки в засчитываются при расчете отыгранных денег. Если тайтл не заходит в этот перечень, то возможность быть недосегаем для загрузки период деяния бонусного предложения. <a href=https://kontactr.com/website/site/playhouse.com.ua>https://kontactr.com/website/site/playhouse.com.ua</a> Рассмотрим на образце: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских руб. В условиях промоакции предписано, собственно вейджер бездепозитного бонуса х20. Поэтому, чтобы отыграть приз, игроку несомненно необходимо сделать ставок на 35*20=700 рублей. 1×slots casino зеркало рабочее <a href=http://nedv-revda.ru/index.php?subaction=userinfo&user=yummytiff34>http://nedv-revda.ru/index.php?subaction=userinfo&user=yummytiff34</a> Акции распространяются как на все игры казино, например и на ограниченный список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и. Промо может обхватывать разработки одного производителя. Бездеп не пересекается с иными акциями казино. Если на веб-сайте предусмотрен кэшбек, он не начисляется за ставки, сделанные бонусными средствами. Для идентификации платежных реквизитов игрока возможность понадобиться пополнение счета на минимальную сумму.Для всех бездепозитных бонусов функционирует максимальный лимит на выигрыш. Он указывает максимальную сумму, которую вас получить, играя на бонусные кредиты. Как лишь вас получится выполнить притязания вейджера, возможный максимум несомненно переведен с бонусного счета на ведущей, а остаток несомненно списан.
x1 slots регистрация в 1×slots casino
При регистрации сомнений либо ином онлайн игральном заведении — для дается один шанс испытывать собственную удачу не внося средства монеты. Замечу что эту поощрительную предложение деют не все интернет игровые площадки, а лишь великодушная половина из их. Которые мы подготовили для Вас в нашем списке. <a href=http://aficionado.pl/showthread.php?124513–1×slot-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE&p=142955>1×slot казино зеркало</a> 1×slots регистрация на сайте 1×slots ru com <a href=https://solo.to/nodressio>https://solo.to/nodressio</a> При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, коие можно предназначить ирге в казино. 1 x slots Можно ли в одном онлайн казино получить больше 1-го бонуса за регистрацию? Нет, например как в любом интернет казино есть управляла, к коим нужно держаться, не творить два аккаута для получения призов, иначе будет блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, приз за регистрацию выдаеться раз раз одному лицу.
1×slots актуальное зеркало
У каждого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано смогли выполнить их, мы дадим некоторое советов. Если система начислила маленькую сумму, не создавать немалые ставки – остановитесь на 10–30 центах. Как только сумеете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В противном случае превосходнее приглядеться к другому автомату. <a href=https://technique-tp.com/forum/memberlist.php?mode=viewprofile&u=1849>https://technique-tp.com/forum/memberlist.php?mode=viewprofile&u=1849</a> 1×slots казино зеркало Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро либо 20 $. Если выдаются фриспины, их число изредка превышает нескольких десятков бесплатных вращений.Во время забавы в казино, выигрыши, приобретенные спасибо безвозмездным призовым фондам, суммируются и включаются в общую необходимую для отыгрывания. Однако, если фортуна улыбнется и получится отыграть все призы, игровое заведение гарантированно разрешит исключить финансовые свои. Сумма вывода несомненно в от лимита, утвержденного непосредственно в этом учреждении. Поэтому, внимательно нужно читать правила выдачи анлимитных депозитов.
1×slots casino online регистрация
<a href=http://3ak.cn/home.php?mod=space&uid=187057>1×slots зеркало рабочее</a> Шаг 4. Активация. Внимательно выучите условия, информацию по ограничениям и сроке деяния бонусного предложения. Разобравшись с правилами, можно активировать приз в личном офисе (от ? с использованием промокода) или по запросу в саппорт. 1×slots регистрация то дальше необходимо пройти <a href=https://xn–hudfryngring-7ib.wiki/index.php/User:LauriLeggett>https://xn–hudfryngring-7ib.wiki/index.php/User:LauriLeggett</a> Игрокам стоит воспринимать приветственный приз как гарантированный способ получить крупный выигрыш, но это отличная возможность без расходов расценить возможностей казино.Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам запрещено начислять бонусы посетителям, не имеющим валютных средств на счете. Мы предлагаем рассмотреть актуальные призы онлайн-казино с лицензией, коие соблюдают законодательство РБ.
1×slots быструю регистрацию а также мгновенное
Для получения бездепа нужно пригласить в забаву по реферальной ссылке нового клиента: он должен зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и восполнить счёт на сумму, указанную в условиях акции.Но разу не забывайте внимательно читать управляла участия в бонусных акциях. Если вы нарушите хотя бы одно условие, позднее вы не можете устроить недоразумение с администрацией. <a href=http://golpro.jp/userinfo.php?uid=13610#>http://golpro.jp/userinfo.php?uid=13610#</a> 1× slots официальный
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.eliteshost.com/member.php?action=profile&uid=8111>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы казино за регистрацию в 2022 году — это вероятность сыграть за счёт заведения. Казино даёт клиенту шанс пользоваться определённой суммой или числом безвозмездных вращений без внесения депозита. Не путайте деморежим с реальной забавой без надобности внесения депо.
#3025 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора казино зеркало сегодня <a href=https://kompromat1.online/>казино пину</a> 1×bet рабочее пин ап казино <a href=https://rumafia.news/>казино фильм онлайн</a> порно с Анна Щербакова, фигуристка играющие казино порно с Илья Осипов (киберспорт) порно с Евгений Малкин (хоккей) Чулпан Хаматова 1win букмекерская контора букмекерские конторы pin
DiskiPlus букмекерская контора мостбет DiskiPlus Преподобная Надежда Александровна порно <a href=https://diskiplus.ru/>DiskiPlus бесплатно играем казино</a> DiskiPlus Хорова Наталья Александровна порно DiskiPlus казино смотреть онлайн <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet официальный скачать</a> DiskiPlus pin up casino скачать DiskiPlus пинап казино DiskiPlus порно с Юлия Ефимова DiskiPlus porno Екатерина Ефременкова, шорт-трекистка DiskiPlus скачать 1×bet DiskiPlus человек казино DiskiPlus porno Вера Бирюкова, гимнастка
#3026 Charlesgunnyhttp://filmkachat.ru
1×slots быструю регистрацию а также мгновенное
Баланс игрока дополняется на соответствующую необходимую. К ней используется вейджер, обозначенный в правилах акции. Вывести выигрыш возможно несомненно после того, как пользователь устроит требуемый размер ставок из собственных средств. В редчайших случаях бездеп трудится в формате Free Play. На счет юзера зачисляется большая сумма, и предоставляется маленький срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по завершении этого периода сумма на счету несомненно превышать изначальную, то разницу возможно будет исключить либо использовать для последующих ставок.Прочитайте правила бонусной программы, в хотите участие. Да, мы настойчиво рекомендуем сделать это до регистрации. <a href=http://filmkachat.ru/>1×slots регистрация</a> Казино выводит средства только на что, эту платежную систему, с котрой был изготовлен депо. То есть, для вывода бездепозитного приза, Вам поначалу нужно восполнить счет. В неких клубах узкий перечень методов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет именно с этих платежных способов, которые доступны для вывода.Условия имеют разниться друг от приятеля. Но такой приз может быть использован только для игрового процесса – приобретенные на счет финансы до того, как станут отыграны, исключить невероятно. <a href=https://www.papercall.io/speakers/product-3d-modeling-services>https://www.papercall.io/speakers/product-3d-modeling-services</a> Каждая игровая платформа выделяется условиями по получению и отыгрышу бездепов. В правилах отчетливо расписаны кратковременные рамки, за коие надо(надобно) прокрутить вейджер. Также не запамятовывайте тему максимальный объем ставки и максимальную необходимую выплаты. С иной стороны, дабы получить бездепозитные бонусы казино, достаточно истратить менее 1 минутки.Акции распространяются как на все забавы казино, например и на узкий перечень. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и другие. Промо возможность охватывать разработки 1-го производителя. Бездеп не пересекается с другими акциями казино. Если на сайте предусмотрен кэшбек, он не начисляется за ставки, изготовленные бонусными деньгами. Для идентификации платежных реквизитов игрока возможность потребоваться пополнение счета на минимальную необходимую. 1×slots зеркало которую указывали при регистрации кстати <a href=http://ternovka4school.org.ua/index.php?subaction=userinfo&user=giganticworker4>http://ternovka4school.org.ua/index.php?subaction=userinfo&user=giganticworker4</a> К раскаянию, нет. Почти все казино, настоятельно внесение желая бы 1-го минимального депозита для вывода выигрыша с бездепозитного бонуса. Также учитывайте, что исключить средства разрешено лишь на ту платежную систему, с которой был изготовлен депо.Чтоб получить крупный выигрыш, выбирайте игровые автоматы с предельным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша.
1 х слотс зеркало
Получать информацию о самых выгодных призах возможно без неизменного мониторинга новостей казино. Мы брали эту задачу на себя и постоянно следим за услугами операторов, избирая наихорошие из их. В данном разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список промоакций регулярно дополняется. В топ вошли самые новые бездепозитные призы за регистрацию в казино 2020, временные и закрытые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и аспектам. Если срок действия акции истек, она удаляется из списка. 1×slots регистрация на сайте 1×slots ru com У каждого игорного заведения свои управляла и условия. Но, дабы получить бонусы, необходимо выполнить стандартные действия: <a href=https://www.designspiration.com/allxrum1805/saves/>https://www.designspiration.com/allxrum1805/saves/</a> Иногда для получения призов нужно спутаться с адептами службы поддержки. Удобнее всего с ними беседовать в онлайн-сате, но иногда довольно запроса по электронной почте.Не стоит путать игру в демо и внедрение бонусов. В демонстрационном режиме игрок имеет расценить механику слота, сюжет и оформление. Но забава проводится на условные кредиты, поэтому отсутствует основное ? чувство пыла. Активируя промокод или фриспины, клиент по-прежнему не расходует свои деньги на игровые автоматы, хотя может сорвать настоящий куш! казино 1×slots официальный сайт Представленные на этой страничке наилучшие бездеп бонусы в казино за регистрацию в 2022 году имеют оптимальные обстоятельства. После тщательного анализа редакция портала составила рейтинг спецпредложений, каком посетители Casino.ru шансы сортировать перечень по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д.
1×slots официальный demo регистрация в 1×slots casino
Приветственный бездеп предоставляется хоть игроку только один один. Казино дерутся с так называемыми бонусхантерами (от англ. Bonus Hunter — охотник за бонусами), пытающимися заводить множественные аккаунты для надувательства оператора и повторного получения подарка. Исключить подобные деянья позволяет верификация данных. Администрация вправе потребовать у клиента подтвердить индивидуальные данные, обозначенные при регистрации. Рассмотрим принцип его действия на образце. Допустим, вы зарегистрировались и возымели $10 not the slightest down payment bonus с вейджером х50. Это значит, собственно выигранные деньги можно будет выводить не раньше, чем в того, как общая сумма ставок достигнет $500. <a href=http://gaypan.vip/space-uid-67134.html>http://gaypan.vip/space-uid-67134.html</a> Верификация важна для добавочной безопасности и может техподдержке выявить бонусхантеров и плутов. Кстати, рядах платформах выводы крупных сумм доступны только в подтверждения личности.Демоказино есть почти на любом веб-сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются существенно реже: там если, тогда, выигрыша и соблюдения критерий акций бездеп можно перевоплотить в реальные деньги. 1×slots официальный сайт скачать Мы рекомендуем не отрицаться от подобных услуг известных казино. Выделите некоторое мин. На регистрацию, получите приз и попробуйте его отыграть. Может быть, сейчас удача будет на вашей стороне!Если ординарными текстами, бездепы – это определённая сумма средств либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать презенты. Но есть кое-какие нюансы. Существуют игорные жилища, которые перед тем как начислить бонусы требуют привязать телефон, предоставить копии документов.
1×slots официальный сайт скачать
Представленные на этой страничке наилучшие бездеп призы в казино за регистрацию в 2022 году имеют подходящие условия. После кропотливого анализа редакция портала составила рейтинг спецпредложений, в гости Casino.ru имеют сортировать перечень по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д. <a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=66120>1×slots регистрация на сайте</a> Это тоже благотворительные деньги, коие поступают на аккаунты новоиспеченных игроков после регистрирования. А особенность таких бонусов состоит в том, что обретенные финансы обязательно стопам использовать в продолжении назначенного времени.Если вы выбрали для себя количество брендов коие вас больше всего полюбились, для неизменной забавы! Таких гемблеров казино очень предпочитает и оценивает, за частую эти игроки становятся VIP игроками заведения, которым часто поступают прибыльные предложения в виде призов, например же туда заходит и бездепозитные. Высокая конкуренция в сегменте азартных игр доказывает операторов завлекать посетителей различными акциями. Благодаря данному у гостей появляется возможность получить призы в казино за регистрацию без депозита. Воспользоваться этим предложением можно, избегая процедуру внесения денег на игровой счет, просто активировав акк на сайте. Наш экскурсовод по бездепам поможет выбрать самую привлекательную бонусную программку, разузнать управляла получения такового вознаграждения и воспользоваться им с наибольшей выгодой.Так же стоит выделить то, что в любом интернет казино установлен свой наибольший кешаут на бездепозитный приз. Как управляло кешаут — это предельная сумма средств, кот-ая доступная для вывода с бездепозитного приза. 1×slots официальный сайт зеркало <a href=http://coldskillers.hys.cz/profile.php?lookup=166438>http://coldskillers.hys.cz/profile.php?lookup=166438</a> Наличие у игрока второго аккаунта. Запрещено творить количество профилей для неоднократного получения бездепов.Для выбора азартного заведения Вы можете пользоваться перечнем наших казино с бонусами за регистрацию. На нашем веб-сайте мы опубликовали список бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, собственно часть бонусов неповторимые и доступны только для гостей нашего вебсайта по-специальному промо-коду либо по оригинальной ссылке. Кроме такого, для любого бонуса мы подготовили доскональный обозрение, каком Вы узнаете как получить и отыграть одобрение и как вывести свой выигрыш с бездепа.
1× слот зеркало
Многие казино деют в рекламных целях бесплатные призы исключительно для наших читателей. Чтобы их получить, нужно перебежать на игровой вебсайт по партнерской ссылке с нашего портала.Благодаря программе преданности от игорного заведения, возможно арестовать превосходный старт и без дополнительных вложений запустить видеослоты. Кроме того, возможно рассчитывать на реальную фортуну и получить, без вложения собственных денег, немалый выигрыш. Бездепы шансы входить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами.Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном веб-сайте и выполните вход в личный кабинет, дабы отобрать благотворительные вращения с вейджером х40; <a href=https://mantiseye.com/community/forsedropoi>https://mantiseye.com/community/forsedropoi</a> казино 1×slots Для получения бонуса надо(надобно) ознакомиться с программкой преданности казино и устроить ставки на необходимую, необходимую для перехода на грядущий уровень.Даже не выиграв солидную необходимую, игрок увлекательно проведет время, изнутри изучит работу площадки, воспримет геймплей автоматов. Все это без каких-либо денежных рисков. Быть в курсе превосходнейших промоакций с. Достаточно периодически изучать список новых онлайн казино с выводом приза без депозита в этом разделе.
<b>Смотреть еще похожие новости:</b>
<a href=http://ledyardmachine.com/forum/User-Jameshoing>казино 1×slots официальный сайт</a>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=492338>1хслотс рабочее зеркало</a>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=141814>1×slots бездепозитный бонус за регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Не рекомендуем опрометью голову браться за всевозможные предложения получения средств без вложений. Вполне вероятно, собственно бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем выглядит на первый взор. Альтернативой считается казино бонус за депо. Мы предлагаем вас пару советов, благодаря коим у любого игрока несомненно возможность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом средств:
#3027 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало рабочее Хорова Наталья Александровна порно <a href=https://rhymes-punches.com/>r7 casino</a> 1×bet бесплатно porno Юлия Канакина <a href=https://m.repost.news/>casino ru</a> пин ап casino pin казино сочи скачать casino на андроид порно с Карен Хачанов (теннис) Преподобная Надежда Александровна порно порно с Евгений Малкин (хоккей) casino скачать
DiskiPlus porno Алена Михайлова DiskiPlus бк букмекерская контора <a href=https://www.diskiplus.ru/>DiskiPlus pinco casino</a> DiskiPlus top casino DiskiPlus porno Алена Михайлова <a href=https://diskiplus.ru/>DiskiPlus казино большая</a> DiskiPlus сколько казино DiskiPlus Приезжева Екатерина Геннадьевна порно DiskiPlus Шевцова Татьяна Викторовна порно DiskiPlus kent casino регистрация DiskiPlus гта казино DiskiPlus 1×bet официальный сайт DiskiPlus casino приложения
#3028 Charlesgunnyhttp://filmkachat.ru
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Да, у бесплатных бонусов есть недостатки. Прежде всего, они обычно не. Кроме того, обстоятельства вейджера по ним всегда жесткие. Но все отсутствие риска проделывает их очень привлекательными для посетителей.Поспешите зарегистрироваться на официальном сайте Клубника, дабы быстро получить 33 безвозмездных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, замечена реальный шанс победу! <a href=http://filmkachat.ru/>зеркло казино 1×slots</a> Высокая конкуренция в сегменте азартных игр доказывает операторов завлекать посетителей разнородными промоакциями. Благодаря данному у гостей бывает возможность получить бонусы в казино за регистрацию без депо. Воспользоваться таким предложением можно, минуя функцию внесения денег на игровой счет, просто активировав акк на сайте. Наш гид по бездепам поможет избрать самую симпатичную бонусную программу, разузнать правила получения такого гонорары и распорядиться им с наибольшей выгодой. <a href=https://www.mazafakas.com/index.php?page=custom&file=osclass_forum/viewpost.php&id=4910>https://www.mazafakas.com/index.php?page=custom&file=osclass_forum/viewpost.php&id=4910</a> Можно ли наваривать на бездепозитных призах? Это не работа, тут как повезет, если в любом предложенном безедепе, вы будете откручивать вейджер и выводить, тогда возможно назвать везением, и дополнительной добавкой к вашему бютжету.Самый распространённый из подобных бонусов, окончательно же, бездеп на день рождения клиента — бонус вид фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им можно в течение установленного периода медли. 1×slots casino зеркало рабочее <a href=https://funsilo.date/wiki/User:SylviaLepage835>https://funsilo.date/wiki/User:SylviaLepage835</a>
1×slos регистрация в 1×slots casino
Верификация необходима для добавочной защищенности и подсобляет техподдержке выявить бонусхантеров и мошенников. Кстати, на платформах выводы солидных сумм доступны только последствии подтверждения личности.Некоторые казино все предлагать посетителям бездепы за свидетельство номера или почты либо репост на страницу в социальных сетях. <a href=https://forumauthority.com/thread-6582-post-39364.html#pid39364>1×slots регистрация 1×slotscasino09k online</a> 1×slots зеркало сайта Приглашаем делиться суждениями о призах. Это поможет другим юзерам выбирать более прибыльные предложения. <a href=http://prostor.ae/bitrix/redirect.php?goto=http://gfaq.ru/go?http://krep-master.com/bitrix/redirect.php?goto=https://teletype.in/@urist555/VjSB6PeqIKe>http://prostor.ae/bitrix/redirect.php?goto=http://gfaq.ru/go?http://krep-master.com/bitrix/redirect.php?goto=https://teletype.in/@urist555/VjSB6PeqIKe</a> Иногда в бездепа, казино дарует минимальный бонус (до 50 руб. ), ради которого надо заморачиваться. 1×slots быструю регистрацию а также мгновенное
1×slots быструю регистрацию а также мгновенное
<a href=http://sungari.ru/bitrix/redirect.php?goto=http://sharodei-shop.ru/bitrix/redirect.php?goto=http://xn----ctbiclik1a3al0bs.xn–p1ai/bitrix/click.php?goto=https://teletype.in/@urid_pomosh/ob2ThK-s_at>http://sungari.ru/bitrix/redirect.php?goto=http://sharodei-shop.ru/bitrix/redirect.php?goto=http://xn----ctbiclik1a3al0bs.xn–p1ai/bitrix/click.php?goto=https://teletype.in/@urid_pomosh/ob2ThK-s_at</a> 1хслотс мобильная версия зеркало
1×slots casino зеркало рабочее
<a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=3323>1×slots акции</a> 2. Создать свежий профиль. Для регистрации надо(надобно) наполнить маленькую анкету или зайдите в личный кабинет при помощи социальных сетей; Oтыгpaть приз с обозначенным вeйджepом, для этого необходимо сдeлaть cтaвoк нa cумму, превышающую размер приза в несколько один. 1×slots официальный сайт скачать <a href=http://art-metall.su/user/JamesChesk/>http://art-metall.su/user/JamesChesk/</a>
1×slos регистрация в 1×slots casino
Отзывы читателей о бонусных промоакциях посодействуют составить впечатление, хотя не забывайте о субъективности личных объяснений.Сразу после активации промокода возможно воспользоваться подарком. Как теснее упоминалось, призы посещают трёх обликов – фриспины, кредиты и фриплей-бонусы. <a href=https://tutorialslots.com/index.php?qa=359622&qa1=shisha-tobacco-from-4-eur>https://tutorialslots.com/index.php?qa=359622&qa1=shisha-tobacco-from-4-eur</a> 1×slots зеркало видели такую регистрацию на Законодательство, регулирующее азартные игры в различных странах, влияет на полномочия операторов. В результате пользователи из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это имеет быть как полный отказ в доступе, так и невозможность загружать забавы отдельных производителей.Многие азартные клубы ограничивают сумму вывода заработанную на призе. Сколько б Вы не выиграли, больше, указанной в описании акции, суммы Вы не можете исключить. Разница несомненно аннулирована, Вы том не можете создавать на нее ставки.
<b>Смотреть еще похожие новости:</b>
<a href=https://test.soclanovtsy.ru/topic/55214-casino-1×slot/>casino 1×slot</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Похожим образом работает третий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения клиента либо в связи с получения им VIP-статуса. Подарок предоставляется после воззвания в поддержку и ревизии. Риск-игра по одинаковым шансам – Также казино имеет запрещать исполнять условия по отыгрышу за раунда на удвоение, который предлагается в слотах, видео-покере и некоторых иных забавах.
#3029 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Аделия Петросян (фигурное катание) casino приложения <a href=https://specreporter.com/>казино смотреть</a> как выиграть в казино игры казино <a href=https://m.repost.news/>casino играть</a> казино ставка casino андроид Чулпан Хаматова 1×bet зеркало на сегодня порно с Аделия Петросян (фигурное катание) фреш казино pinco casino
DiskiPlus автомат казино DiskiPlus 1×bet регистрация <a href=https://www.diskiplus.ru>DiskiPlus спорт букмекерская контора</a> DiskiPlus inform@rucriminal.info DiskiPlus 1×bet 1 <a href=https://www.diskiplus.ru>DiskiPlus 1×bet зеркало</a> DiskiPlus порно с Каролина Севастьянова DiskiPlus сайте букмекерской конторы фонбет DiskiPlus porno Екатерина Ефременкова, шорт-трекистка DiskiPlus porno Яна Троянова DiskiPlus Москалькова Татьяна Николаевна порно DiskiPlus порно с Кирьянова Дарья Борисовна DiskiPlus online casino 7k
#3030 Charlesgunnyhttp://filmkachat.ru
1×slots скачать на айфон
Для ревизии применяются сканы паспортов, водительских прав, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь замечен в попытке ввести вспомогательный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный список. При забаве на лицензионной площадке не бояться указывать достоверную индивидуальную информацию (шифрование ликвидирует утечку персональных данных).Основное верховодило получения бездепа ? создаваемый аккаунт обязан быть у пользователя первым и единственным. Наличие нескольких аккаунтов требовательно запрещено. Проверка проводится по имени, e-mal, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депо необходимо блюсти простую последовательность деяний. <a href=http://filmkachat.ru/>1×slots официальный сайт мобильная версия скачать</a> <a href=https://www.zerohedge.com/user/lxw9PH5mxggIiYSheMvRaP5gb972>https://www.zerohedge.com/user/lxw9PH5mxggIiYSheMvRaP5gb972</a> 1×slots официальный сайт скачать <a href=http://j67236dr.bget.ru/index.php?subaction=userinfo&user=uzizybu>http://j67236dr.bget.ru/index.php?subaction=userinfo&user=uzizybu</a>
1×slots casino online регистрация
При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие возможно посвятить этой в казино. <a href=http://nacionrolera.org/foro/viewtopic.php?f=1210&t=110271>1×slots casino регистрация 1×slots review live</a> казино 1× slots официальный сайт Активация происходит с помощью промокодов, которые вводятся в личном офисе последствии регистрации. Среди спецпредложений в списке Casino.ru находятся эксклюзивные промокоды, коие доступны лишь посетителям портала. Другие способы начисления средств ? автоматическая активация сразу в творения аккаунта и получение презента по запросу в службу технической помощи. <a href=http://xn–h49ar4kn3dpfl0z22n74bghp5kwv1bptct6dzzb.com/bbs/board.php?bo_table=free&wr_id=350007>http://xn–h49ar4kn3dpfl0z22n74bghp5kwv1bptct6dzzb.com/bbs/board.php?bo_table=free&wr_id=350007</a> Минимального оборота. Этот лимит уточняется вейджером — пока игрок не поиграет на установленную сумму, вывод средств несомненно недосегаем. 1хслотс официальный сайт зеркало
1 x slots casino
Такой казино бонус без депо за регистрацию выдается игроку на час и активно употребляется данное предложение с 2017 года. Это словно некая конспирация поощрения под бездепозитный. Суть всего сего сводится к что, этому, собственно игроку на час выдается, к примеру, 1000 $, а реклама повторяет то, собственно любой выигрыш возможно несомненно в оставить при себя. Но если играющий всерьез отнесется к данному предложению, то он попросту потеряет время. Ведь геймеру нужно несомненно играть не главном аккаунте, а в тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (даже всей тыс. ) в верховодила вступят определенные условия, где несомненно сказано, что максимальной суммой победы возможность быть только двести $ и средства можно использовать только в качестве бонуса на первый лепта с вейджером 25 от суммы гонорары плюс сам депозит. По результату получится, что игрок выигрывал для 200% бонус с вейджером на конкретную необходимую. Короче разговаривая, это все надо вашего времени. Бездепозитный приз предоставляется новому игроку за конкретные деяния. Часто подарок повторяющий средств или фриспинов выдается за регистрацию, благодаря чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. <a href=https://forumsadovodov.com.ua/memberlist.php?mode=viewprofile&u=64531>https://forumsadovodov.com.ua/memberlist.php?mode=viewprofile&u=64531</a> Помимо прочего, для вывода средств по бездепу нужно внести на счёт свой 1-ый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально возможную сумму, после чего вывод средств будет доступен.Призовые начисления без депо имеют предоставляться для роли в турнирах онлайн казино. Потратить перечисленные деньги возможно самая в рамках данной промоакции. Условия их проведения себе ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, другого выучить его правила. 1×slots зеркало которую указывали при регистрации кстати
1×slots промокод при регистрации
Для получения выигрыша потребуется выполнить условия казино. Чаще всего игроку нужно поставить конкретную необходимую, хотя уже из собственных денег. Она рассчитывается из совместного размера выигрыша за всегда использования бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, случае пользователь выиграл 1000 руб., а множитель составляет х30, исключить средства возможно несомненно, сделав ставки на 30 000 рублей. <a href=https://australianwinerytours.com/tours/showthread.php?tid=201215>1х слотс зеркало регистрация в 1×slots casino</a> Изучить правила и условия получения бездепозитных бонусов казино, Вы можете у нас на сайте в разделе с призами либо на официальном сайте избранного Вами казино. Если не отыскать необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электронной почте.Многие игроки, оценив функционал казино, остаются играть в нем и далее ? на это и нацелено каждое рекламную. Постоянные клиенты вносят депозиты и делают ставки, обеспечивая долгосрочную выгода оператора. То есть, казино раздают бездепы свежим юзерам для формирования приклнной аудитории. В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая часть забавы. Важно, зачастую бездепозитные призы в казино выдаются с лимитированиями по максимальной выплате. В среднем можно рассчитывать на прибыль в несколько тыщ руб. Как вывести выигрыш с приза без депо. Придётся доказать акк документально, в некоторых заведениях. Процедура верификации обязательна и делается каждым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате или прочтите в правилах.Иногда для получения бонусов нужно связаться с адептами службы. Удобнее всего с ними собеседовать в онлайн-сате, хотя времени достаточно запроса по электронной почте. 1×slots скачать на айфон <a href=http://art-metall.su/user/CharlesAmemo/>http://art-metall.su/user/CharlesAmemo/</a> Чтобы получить возможность исключить прибыль с бездепозитного бонуса в казино, необходимо выполнить ряд условий:Более крупные предложения встречаются очень редко. Зачастую они доступны лишь VIP-игрокам. В остальных случаях им наверняка сопутствуют очень жесткие условия отыгрыша. Также возможны дополнительные условия и другие лимитирования, прописанные в критериях и положения бонусной программы казино.
1×slots casino регистрация на сайте
Внесение депозита – Будьте готовы пополнить счет последствии отыгрыша бонуса. Это обычное требование верховодил для данного подобии промо-акций. Лучше заблаговременно уточнить, какую сумму надо(надобно) несомненно вносить на счет. Как управляло, речь идет о наименьшем депозите, но вы должны быть уверены, собственно он вас по карману. Но а случае вы теснее профи по онлайн казино, кликаем на красноватую кнопку «Получить» и Вы автоматически перейдете в интернет казино; <a href=https://shilinka.ru/user/Jamesjak/>https://shilinka.ru/user/Jamesjak/</a> 1×slots зеркало регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=http://weeklywars.de/viewtopic.php?f=12&t=9928&p=483195#p483195>скачать 1×slots на андроид мобильная версия</a>
<a href=http://check2go.net/author/jameslob/>1хслот 1хслотс регистрация перейти на 1×slots</a>
<a href=https://ragnarok.ch/forum/viewthread.php?thread_id=140290>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Срок отыгрыша — это этап, кот-ый наступает в момент активации бонуса и кончается с его закрытием. Пользователю необходимо уложиться в данный временной зазор, по призовые свои аннулируются. Казино устанавливают перечень игр, ставки в которых засчитываются при расчете отыгранных денег. Если тайтл не заходит в данный перечень, то ему быть недосегаем для загрузки период действия бонусного предложения. Условия имеют различаться друг от приятеля. Но подобный бонус может быть использован только для игрового процесса – полученные на счет финансы до того, как будут отыграны, исключить невероятно.
#3031 Charlesgunnyhttp://filmkachat.ru
1×slot казино зеркало
Существуют казино с призом за регистрацию, в которых довольно знамениты фриспины в интернет казино впоследствии регистрации в конкретных забавах. Они встречаются даже почаще даровых поощрений либо традиционных призов в казино без вложений. Например, игрок регистрирует счет, на который начисляются бесплатные забавы, приз за регистрацию в виде бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса в выигрывает истинные средства, которые в последствии можно успешно исключить из заведения на свою платежную систему. То есть, есть все шансы вывести средства без рисков своими деньгами. Регистрация, за которую игры получит бонусы, займет минут, а благодаря этому возможно увеличить пять евро поощрений до тысячи и без всяких заморочек вывести их.Пoдтвepдить личнocть посетителя. Для успешного вывода средств, необходимо подтвердить личность посетителя. Нa этaпe вepификaции пpoфиля, работники службы безопасности должны убедиться, собственно у игрока всего лишь раз аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не может исключить собственный выигрыш, если у него будет некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы. <a href=http://filmkachat.ru/>1 xslots рабочее зеркало</a> <a href=https://www.woorank.com/en/teaser-review/playhouse.com.ua?generationId=872ad221–0955–4d77–9976-f6c1e3b64286&usecase=all>https://www.woorank.com/en/teaser-review/playhouse.com.ua?generationId=872ad221–0955–4d77–9976-f6c1e3b64286&usecase=all</a> Зачастую бездепозитные призы казино для игры предлагаются различными заведениями азартных игр в маркетинговых промоакций или в целях вербования к для свежих игроков. Для бездепозитных бонусов в казино 2022 игроку не пополнять счет до момента вывода желаемых средств. 1× slots зеркало <a href=http://forum.pinoo.com.tr/profile.php?id=1303447>http://forum.pinoo.com.tr/profile.php?id=1303447</a> Простая процедура получения бездепозитного приза, кот-ая займет менее 2-х мин. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные.Прежде чем активировать бездеп, нужно увериться в, собственно страна, уроженцем которой считается игрок, не заходит в перечень запрещенных.
1×slots промокод при регистрации 2025
Этот образ бонуса несомненно добавлен на Ваш акк после удачной процедуры регистрации с использованием номера телефона. Если избрать другой метод сотворения учетной записи, бездеп не несомненно добавлен на Ваш аккаунт. <a href=https://bookings.co.th/coupon/%e0%b8%aa%e0%b8%a1%e0%b8%b1%e0%b8%84%e0%b8%a3%e0%b8%9a%e0%b8%b1%e0%b8%95%e0%b8%a3%e0%b8%81%e0%b8%94%e0%b9%80%e0%b8%87%e0%b8%b4%e0%b8%99%e0%b8%aa%e0%b8%94-%e0%b8%aa%e0%b8%a1%e0%b8%b1%e0%b8%84%e0%b8%a3/#comment-3371>1×slots рабочее зеркало на сегодня</a> 1×slot зеркало <a href=https://paladinscounter.com/users/Darenquity>https://paladinscounter.com/users/Darenquity</a> 1×слот регистрация в 1×slots casino Стоит обозначить(означить), что бездепозитный приз выдается лишь взрослым новеньким, коие, в свою очередь, все пригласить собственных друзей и людей, того рассчитывающих на поощрительную программку преданности. Подобная технология замечена между конкурирующих онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры содействуют повышению собственной посещаемости, путем вербования свежих игроков. Бонусы – это уникальный шанс для вероятных соучастников забавы, которые шансы опробовать софт покер рума и убедиться, будут ли они в него играть либо нет. Новый игрок попробует средства силы с настоящими оппонентами в казино.Но не думать, собственно снабжая пользователей такими бонусами, казино занимается спонсированием. Ведь размеры вознаграждений, в, не великие (средним размером от 5 до 20 долларов). И на эти средства налагаются определенные обстоятельства и ограничения, обязательные к исполнению игрока, случае в последствии он вожделеет получить все свои выигранные финансы.
1×слотс казино
Денежные свои. Третий бонус за регистрацию без депозита – наличные. К сожалению, только известные и модные клубы шансы дать деньги в рублях либо долларах. С их подмогою появится насладиться каждой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед этим необходимо выполнение конкретных условий.Помните, что любые нарушения правил сведут на нет ваши усилия, и вы наверняка останетесь без начисленного для бесплатного бонуса. Всегда изучайте верховодила начисления и обстоятельства вейджера. По хоть вопросам, на которые вы имеет других найти ответы, обращайтесь за объяснениям и саппорт. Промообъявления от казино мешают реальной картины и направлены на привлечение внимания пользователей. Понять, как высоки шансы остаться в плюсе, позволит собственный тест критерий предложения: <a href=http://ww.matchfishing.ru/bitrix/redirect.php?goto=http://petroservicesac.my-free.website/s/cdn/?http://zoloto72.ru/bitrix/redirect.php?goto=https://telegra.ph/Statya-21-Ugolovno-processualnogo-kodeksa-Obyazannost-ugolovnogo-presledovaniya-Tekushchaya-redakciya-09–23>http://ww.matchfishing.ru/bitrix/redirect.php?goto=http://petroservicesac.my-free.website/s/cdn/?http://zoloto72.ru/bitrix/redirect.php?goto=https://telegra.ph/Statya-21-Ugolovno-processualnogo-kodeksa-Obyazannost-ugolovnogo-presledovaniya-Tekushchaya-redakciya-09–23</a> Помимо остального, для вывода средств по бездепу необходимо привнести на счёт собственный 1-ый депо — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на мало вероятную сумму, в чего вывод средств станет доступен. 1×slots зеркало сайта
1хслотс казино зеркало
В лицензионных бездепозитных казино играть в азартные забавы действительно безопасно. Наличие лицензии одобряет тот прецедент, собственно клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP. <a href=http://162.241.164.67/phpbb/phpBB3/memberlist.php?mode=viewprofile&u=121525>1×slots официальный сайт мобильная версия</a> Автоматы неспроста считаются самым модным азартным отдыхом. Чтобы усвоить управление и управляла, понадобится всего некоторое минут. Ваша задачка устроить ставку, найти количество рабочих линий и можно крутить тамбур. Если на выпадет выигрышная композиция – вы выиграли! С данной задачей вам посодействуют справится бездепозитные бонусы казино. скачать 1×slots на андроид мобильная версия <a href=http://ckenc.co.kr/bbs/board.php?bo_table=gallery&wr_id=87588>http://ckenc.co.kr/bbs/board.php?bo_table=gallery&wr_id=87588</a> Постарайтесь отыграть вейджер, дабы появилась возможность оставить заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные приборы. Вы можете получить выигрыш на электронной кошелёк, карту, телефонный.
скачать 1×slots на андроид мобильная версия
Подтверждение электрической почты – одно из ведущих критерий, которое есть почти в каждом бездепозитном казино. Чтобы верифицировать электрическую почту, достаточно перебежать по активной ссылке в послании, приобретенном от азартного клуба.Фриспины начисляются по определенной ставке. После их активации игроку нужно запустить слот и убедиться, что в нем показываются безвозмездные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода в отыгрыша ориентируется оператором и изредка выше 5 000 рублей. <a href=http://arskland.ru/people/user/16541/>http://arskland.ru/people/user/16541/</a> Не советуем опрометью голову браться за различные предложения получения средств без вложений. Вполне вероятно, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на 1-ый взгляд. Альтернативой является казино бонус за депозит. Мы предлагаем для пару советов, спасибо коим у любого игрока несомненно возможность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств: зеркала 1×slots А ознакомиться с новыми онлайн казино, Вы можете с бонусов с выводом прибыли, которые Вы сможете получить без депо.
<b>Смотреть еще похожие новости:</b>
<a href=https://acerfans.ru/faq/796-kak-vylozhit-na-forum-informaciju-iz-zhurnala.html>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<a href=https://ragnarok.ch/forum/viewthread.php?thread_id=140044>1×slots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют важную информацию о not the slightest down payment bonuses прочих предложениях. Если при регистрации указать промокод, можно гарантировано получить бонус. Где брать ваучер? Посетите определенную блоги либо форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В заключительное время игорные дома начали рекламироваться в фильмах и телесериалах. Присмотритесь и всего заметите промокод, который принесёт 500 либо 1 000 бонусных руб.
#3032 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино фильм смотреть онлайн промокод 1×bet <a href=https://m.repost.news/>порно с Арина и Дина Аверины, гимнастки</a> Кузнецова Анна Юрьевна порно где казино <a href=https://res-publika.com>казино сегодня</a> porno Илья Ковальчук (хоккей) casino бонус порно с Афонина Марина Игоревна букмекерская контора фонбет официальный порно с Евгения Медведева porno Алена Косторная (фигурное катание) 1×bet официальный 1×bet xyz
DiskiPlus рейтинг казино DiskiPlus порно с Анна Щербакова, фигуристка <a href=https://diskiplus.ru>DiskiPlus мобильные букмекерские конторы</a> DiskiPlus бесплатное казино DiskiPlus casino buzz <a href=https://diskiplus.ru/>DiskiPlus online casino 7k</a> DiskiPlus 1×slots casino DiskiPlus porno Дарья Клишина DiskiPlus реального казино DiskiPlus pin up casino пин ап DiskiPlus рокс казино DiskiPlus casinos winning DiskiPlus играющие казино
#3033 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
cat casino casino играть <a href=https://vestnik-jurnal.com/>казино зеркало сегодня</a> порно с Васильева Татьяна Викторовна Петрова Ольга Викторовна порно <a href=https://vestnik-jurnal.com/>porno Катерина Шпица</a> casino официальный сайт Чулпан Хаматова порно с Ирина Сидоркова приложения букмекерских контор на андроид играющие казино онлайн 7k casino скачать промокод 1×bet
DiskiPlus casino betting DiskiPlus порно с Евгений Малкин (хоккей) <a href=https://diskiplus.ru>DiskiPlus casino riobet</a> DiskiPlus порно с Зырянова Анастасия Владимировна DiskiPlus слоты казино <a href=https://www.diskiplus.ru/>DiskiPlus порно с Анна Щербакова, фигуристка</a> DiskiPlus букмекерская контора леонов DiskiPlus 1×bet xbet xyz DiskiPlus Нургалиева Эльвира Рамиловна порно DiskiPlus казино большая DiskiPlus казино 5 DiskiPlus букмекерская контора бесплатно скачать DiskiPlus порно с Елена Никитина, скелетонистка
#3034 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию более популярный вариант это
Более солидные предложения встречаются довольно изредка. Зачастую они доступны лишь VIP-игрокам. В оставшихся случаях им скорее сопутствуют очень жесткие условия отыгрыша. Также возможны вспомогательные обстоятельства прочие ограничения, прописанные в условиях и положения бонусной программки казино.Несмотря на то, собственно этот вариант стимуляции со стороны азартных платформ очень популярен в сфере сходственных игр, далеко не всем поклонникам казино известно, что себе бездепозитные бонусы казино и как непосредственно их возможно эксплуатировать. <a href=http://filmkachat.ru/>казино 1×slots</a> <a href=https://www.bandlab.com/post/67b2b2ed-dfd7-ef11–88f6–6045bd3473c0>https://www.bandlab.com/post/67b2b2ed-dfd7-ef11–88f6–6045bd3473c0</a> 1×slots casino регистрация 1×slotscasin online <a href=http://www.ctphome.com/bbs/home.php?mod=space&uid=66518>http://www.ctphome.com/bbs/home.php?mod=space&uid=66518</a> Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша призов. Заведения постоянно устанавливают наивысшую ставку, допустимую по условиям вейждера.
1×slots регистрация 1×slots casino 777 online
Суммы сходственных услуг, случаев, колеблются от трех до двадцати долларов, а вейджер на эти свои должен составлять от тридцати до шестидесяти один. Зачастую, наивеличайшая сумма выигрыша тут составит от одной до 2-ух сотен $. Если игрок выиграет больше, то все свои шансы быть списанными до максимально разрешенного выигрыша. Здесь замечена содержание выводить еще несуществующие деньги на собственную платежную систему и дальше искать заведение с благоприятными под данную необходимую релоадом или бонусом за 1-ое пополнение счета. Есть некоторое подвидов бездепозитного вознаграждения, предлагаемого великим числом заведений.Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных требований, кроме неотъемлемой верификации. Если на сайте предусмотрена неотъемлемая процедура доказательства личности, то вывести выигрыш получится лишь после проверки данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий лицо. <a href=http://www.airsoft44.com/forum/index.php?action=profile;u=11896>1×slots регистрация 1×slotscasino09k online</a> 1×слот регистрация в 1×slots casino Самые модные методы вывода средств ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электронным платежным системам типа Neteller и Skrill, а также используют криптовалютными кошельками. Вывод выигрышей имеет исполняться мгновенно либо развлекать от нескольких часов до нескольких суток. <a href=http://vecmir.ru/index.php/vecmirlife/58194-massivemagic78/profile>http://vecmir.ru/index.php/vecmirlife/58194-massivemagic78/profile</a> Чтобы бездеп не был начислен на Ваш аккаунт, Вам не активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт механически, а Вы не планируете его применять, обратитесь в службу поддержки с пожеланием отменить бездепозитный бонус. 1×slots на любой вкус как пройти регистрацию Бездепы могут заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами.Однако далеко не все ресурсы предлагают своим посетителям бездепозитные бонусы за регистрацию в казино. В большинстве случаев учтено одобрение на первый депозит в объеме 100–200%. Это отличная вероятность преумножить банкролл, прирастить время, проведённое за игрой и шансы сорвать крупный куш.
казино 1×slots официальный сайт
Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция имеет подробные правила, ссылка на которые обыкновенно находится в промообъявлении. В их указываются лимиты, вейджер, перечень дешевых игр. Если оператор укрывает данные о предложении, то пользоваться им надо.Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, the decision зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. Объективные – объем бонуса, коэффициент и обстоятельства вейджера, необходимость внесения депо для вывода средств; <a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=2&TID=6607&TITLE_SEO=6607-vykup-avto&MID=211863&result=new#message211863>http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=2&TID=6607&TITLE_SEO=6607-vykup-avto&MID=211863&result=new#message211863</a> 1×slots зеркало регистрацию более популярный вариант это
1×slots рабочее зеркало
Для получения выигрыша потребуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить определенную сумму, хотя уже из личных средств. Она рассчитывается из совместного объема выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, случае пользователь выиграл 1000 рублей, а множитель составляет х30, вывести деньги возможно несомненно, сделав ставки на 30 000 рублей. Акционные предложения от казино существуют в различных форматах. Часто бонусы даются в мена на депозит. Игрок заносит платеж и получает деньги, безвозмездные вращения прочие поощрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — вид приза, кот-ый гарантирован за исполнение конкретных поступков на сайте:Чтобы без увериться в превосходствах бездепозитных бонусов, достаточно зарегистрироваться в казино и получить одобрение. 1х слот 1хслотс регистрация перейти на 1×slots <a href=http://silkhunter.com/index.php?title=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0>http://silkhunter.com/index.php?title=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0</a> 3. Подтвердить данные. В зависимости от клуба, нужно привязать телефонный либо почту, показать индивидуальную информацию;При поддержки такого одобрения оператор может также привлекать посетителей, коие раньше показывали активность на веб-сайте, хотя по некий основанию перестали играть. В данном случае промокод высылается пользователю по электрической почте или в виде SMS.
казино 1×slots
<a href=https://scientific-programs.science/wiki/User:RobertoZinnbauer>https://scientific-programs.science/wiki/User:RobertoZinnbauer</a> 1×slots официальный сайт скачать на айфон
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=146812>1×slots официальный сайт скачать</a>
<a href=https://vredeenvermaak.be/forum/vrede-en-vermaak/>1×slot официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Да, у бесплатных призов есть недостатки. Прежде всего, они обычно очень. Кроме того, обстоятельства вейджера по ним всегда жесткие. Но все же недоступность риска делает их довольно привлекательными для посетителей. Следует выделить, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом.
#3035 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
Суммы подобных предложений, случаев, колеблются от 3-х до 20 $, а вейджер на эти средства обязан составлять от тридцати до шестидесяти один. Зачастую, большая сумма выигрыша тут составит от одной до 2-ух сотен долларов. Если игры выиграет больше, то все средства имеют быть списанными до максимально разрешенного выигрыша. Здесь появляется смысл выводить еще несуществующие финансы на свою платежную систему и далее отыскивать заведение с подходящими под данную необходимую релоадом либо бонусом за 1-ое пополнение счета. Есть количество подвидов бездепозитного гонорары, предлагаемого наибольшим количеством заведений. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало</a> Перечисленные выше главные свойства сопровождают фактически каждый бонус и считаются стереотипными для бездепозитных бонусных начислений в казино. <a href=https://penposh.com/blogs/322517/Professional-3D-Modeling-Services-Custom-Design-Solutions>https://penposh.com/blogs/322517/Professional-3D-Modeling-Services-Custom-Design-Solutions</a> Варианты выигрыша в от Вашей успеха и критерий игорного портала. Выше мы заявили, что некоторые бездепозитные призы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются и те, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность передовых игр на деньги, можно выиграть неописуемые суммы. Сегодняшние игровые автоматы или видео слоты, как их называют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000. 1хслот зеркало <a href=http://troderstro.ru/user/DoctorLazutaMI/>http://troderstro.ru/user/DoctorLazutaMI/</a> Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в обязательном порядке необходимо пополнить счет в казино. Для депозитных бонусов, эта процедура не нужна, например как депо теснее изготовлен.Бездепозитный приз за регистрацию в казино — это стартовый подарок повторяющий денежного начисления или безвозмездных вращений для новых игроков заведения, для получения которого не заносить депо.
1×slots бонус за регистрацию
Верификация важна для дополнительной безопасности и помочь техподдержке выявить бонусхантеров и плутов. Кстати, на некоторых платформах выводы солидных сумм доступны лишь после подтверждения личности. <a href=https://smm-seo.ru/members/rabofreeol.4209/>1×slot официальный сайт</a> скачать 1×slots официальный сайт Но не стоит мыслить, собственно снабжая пользователей этими призами, казино увлекается спонсированием. Ведь объемы вознаграждений, главном, не немалые (средним объемом от 5 до 20 долларов). И на эти свои налагаются определенные обстоятельства и ограничения, обязательные к выполнению игрока, если в последствии он желает получить все свои выигранные деньги.Фриплей-бонусы. Бонусы за бесплатную игру есть только в некоторых клубах. Они зачисляются сразу после сотворения профиля и срабатывают недолговременное время. Если у вас нет времени израсходовать средства, они просто закончатся. Что дотрагивается медли, в большинстве случаев призы действуют в течение 1-го часа. <a href=http://www.icmms.co.kr/bbs/board.php?bo_table=free&wr_id=749460>http://www.icmms.co.kr/bbs/board.php?bo_table=free&wr_id=749460</a> Доступ к подарку может раскрываться механически в введения промокода либо обращения в саппорта сайта. В первом случае от пользователя не потребуется никаких деяний. Бездеп с активацией по коду встречается чаще всего. Игроку нужно установить совокупа символов в графе, кот-ая возможность пребывать в регистрационной форме в Личном кабинете.Акции, приуроченные к календарным дням, посещают рассчитаны как на всех юзеров, так и на категории: к, презент на 8 марта девушкам-игрокам или мужикам на 23 февраля. 1×slots на любой вкус как пройти регистрацию Существует ли стратегии для отыгрыша бездепозитных призов? К раскаянью нет, на выигрыши или проигрыши с бонусов, казино или игрок повлиять имеет, отдача игр происходит от разработчиков игр.
1хслотс казино зеркало
Выше мы дали полный набор самых свежих и своевременных бездепозитных бонусов в интернет казино без пополнения на 2022 год, где вам пользоваться каким ценным бездепозитным бонусом. Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие возникают у новичков. <a href=http://krasrec.ru/forum/user/197499/>http://krasrec.ru/forum/user/197499/</a> Бонус за регистрацию в казино выдается лишь один один на 1-го игрока. Но бывают дополнительные акции, в рамках которых бездепы расступаются для неизменных посетителей и такие подарки Вы можете получить более одного раза.Для получения депозитного приза необходимо пополнить собственный игровой баланс реальными деньгами. Вознаграждение возможно получить или при внесении первого депо, либо повторяющий фиксированного процента от внесённых средств. Так либо иначе, приз поступит на счёт только последствии пополнения. 1×slots официальный сайт скачать
1×slots быструю регистрацию а также мгновенное
Суммы сходственных услуг, в, колеблются от трех до двадцати $, а вейджер на эти средства обязан сочинять от 30 до шестидесяти раз. Зачастую, наивеличайшая сумма выигрыша здесь составит от одной до 2-ух сотен $. Если игры выиграет больше, то все средства имеют быть списанными до очень разрешенного выигрыша. Здесь бывает смысл выводить еще несуществующие деньги на собственную платежную систему и далее находить заведение с благоприятными под данную необходимую релоадом или бонусом за первое пополнение счета. Есть несколько подвидов бездепозитного гонорары, предлагаемого великим количеством заведений. Создание аккаунта. На веб-сайте казино необходимо обнаружить регистрационную форму и заполнить пустопорожние поля личностными данными. Иногда на этом этапе потребуется показать только адресок электрической почты и пароль, но чаще хотелось заполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д. ). Нужно указывать лишь реальные данные, поскольку впоследствие они станут испытаны. 1×slots зеркало <a href=http://www.stmcu.co.kr/gn/bbs/board.php?bo_table=free&wr_id=891526>http://www.stmcu.co.kr/gn/bbs/board.php?bo_table=free&wr_id=891526</a> Чаще всего используются коды. Их нужно заносить в специальные окошки регистрационной анкеты, случае идет о пригласительных призах, либо в особом разделе собственного кабинета игрока.
1×slots зеркало на сегодня
Изучить верховодила и обстоятельства получения бездепозитных бонусов казино, Вы сможете у нас на веб-сайте в разделе с бонусами либо на официальном веб-сайте выбранного Вами казино. Если имеет найти необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал либо по электрической почте.Демоказино есть почти на каждом веб-сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются веско реже: там когда выигрыша и соблюдения условий акций бездеп возможно перевоплотить в реальные средства. <a href=http://janews.com.au/modules/newbb/viewtopic.php?topic_id=6406&post_id=6406&order=DESC&viewmode=flat&pid=0&forum=12>http://janews.com.au/modules/newbb/viewtopic.php?topic_id=6406&post_id=6406&order=DESC&viewmode=flat&pid=0&forum=12</a> Будьте внимательнее при ознакомлении с правилами во избежание происхожденья конфликтных ситуаций с казино, когда последствии отыгрыша бездепа вам не дадут исключить крупную необходимую выигрыша. 1×slots быструю регистрацию а также мгновенное
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.l2endless.com/member.php?action=profile&uid=6253>казино 1×slots</a>
<a href=https://qualityprogamer.de/forum/showthread.php?tid=260513>1х слот 1хслотс регистрация перейти на 1×slots</a>
<a href=http://moneysweet.listbb.ru/memberlist.php?mode=viewprofile&u=6851>1×slots рабочее зеркало</a>
<a href=https://g2clubs.com/healthy-workout/google/#comment-26935>1×slots рабочее зеркало</a>
<a href=https://mit-bbs.com/viewtopic.php?t=129580>зеркло казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Каждая игровая перрон отличается критериями по получению и отыгрышу бездепов. В правилах отчетливо расписаны кратковременные рамки, за коие надо(надобно) прокрутить вейджер. Также не запамятовывайте про максимальный объем ставки и максимальную сумму выплаты. С иной стороны, дабы получить бездепозитные бонусы казино, достаточно истратить менее 1 минуты. С этими простыми советами каждое казино с призом за регистрацию способно принести в разы больше выгоды и пользы.
#3036 Thomasbuphttps://u-misti.khmelnytskyi.ua
Сайт Хмельницкого <a href=https://u-misti.khmelnytskyi.ua/>https://u-misti.khmelnytskyi.ua</a> новости Хмельницкой области, события, обзоры
#3037 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet официальный слоты букмекерская контора фонбет официальный <a href=https://repost.news/>официальное казино вход</a> казино вход официальный сайт Набиуллина Эльвира Сахипзадовна порно <a href=https://specreporter.com/>казино пину</a> макао казино pin ап casino up casino скачать порно с Никита Кучеров (хоккей) какие казино порно с Анна Калинская (теннис) champion casino
DiskiPlus 1×bet приложение DiskiPlus 1×bet скачать бесплатно <a href=https://diskiplus.ru>DiskiPlus пин ап casino pin</a> DiskiPlus 1×bet приложение DiskiPlus Окладникова Ирина Андреевна порно <a href=https://www.diskiplus.ru/>DiskiPlus casino сайты</a> DiskiPlus рабочие зеркала казино DiskiPlus casino бездепозитный DiskiPlus casino рабочее DiskiPlus порно с Алина Загитова DiskiPlus пин ап casino pin DiskiPlus 1×bet 1хбет DiskiPlus porno Яна Троянова
#3038 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать
Онлайн-казино с бездепозитными призами ставят посетителям условия для пользования бездепами, потому перед ролью в промоакции другого тщательно ознакомиться со всеми правилами и аспектами акции. Условия все касаться получения бонуса, его применения и последующего вывода денежных средств когда выигрыша.Таким образом, заведение пытается показать себя своим потенциальным игрокам, а подобный маркетинговый ход как казино приз без депозита за регистрацию завлекает очень много внимания к игорному заведению и обеспечивает неизменный поток свежих посетителей и будущих посетителей игрового онлайн клуба. <a href=http://filmkachat.ru/>1×slots официальный регистрация</a> <a href=https://www.haikudeck.com/---------uncategorized-presentation-bf9250f182>https://www.haikudeck.com/---------uncategorized-presentation-bf9250f182</a> 1× slots официальный <a href=http://bbs.ztbs.cn/home.php?mod=space&uid=101238>http://bbs.ztbs.cn/home.php?mod=space&uid=101238</a>
рабочее зеркало 1×slots
<a href=https://www.digicube.de/forum/threads/561414–1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D0%BC%D0%BE%D0%B1%D0%B8%D0%BB%D1%8C%D0%BD%D0%B0%D1%8F-%D0%B2%D0%B5%D1%80%D1%81%D0%B8%D1%8F-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE?p=765984#post765984>1хслотс мобильная версия зеркало</a> 1×slots казино мобильная версия Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном сайте и выполните вход в индивидуальный офис, чтобы отобрать безвозмездные вращения с вейджером х40; <a href=http://bbs.zhizhuyx.com/home.php?mod=space&uid=10443405>http://bbs.zhizhuyx.com/home.php?mod=space&uid=10443405</a> Перед активацией принципиально внимательно выучить обстоятельства акции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, на коих можно воспользоваться предложением. Если бездеп охватывает узкий перечень игр, рекомендовано узнать максимальные коэффициенты, уровень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь что случае, если оператор не установил требовательные лимитирования на наивысшую сумму ставки.Лишь популярные и известные азартные заведения имеют позволить для выдавать бездепы вид дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депо, коие можно израсходовать в лучших аппаратах с высочайшей отдачей. 1×slots мобильная версия войти казино Минимального оборота. Этот предел уточняется вейджером — пока игрок не поиграет на установленную сумму, вывод средств будет недоступен.Вейджер (wager) – это коэффициент, который показывает на какую сумму необходимо устроить ставок, чтобы вывести бонус из казино. Пример: Вы получили за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода этого бонуса, Вам необходимо устроить ставок на необходимую: 500*70=3500 рублей. Только всецело отыграв приз, Вы сможете исключить свой выигрыш.
1×slots зеркало видели такую регистрацию на
Частенько новички не разумеют, как активировать презенты либо исключить 1-ый выигрыш. Для сходственных случаев наша команда обрисовала основные термины – собственно такое фриспины, вейджер, как его отыграть, для необходимо проходить верификацию. Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, чтобы снова получить бесплатный приз. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ждет неминуемое наказание. <a href=http://fb7922hj.bget.ru/home.php?mod=space&uid=300318&do=profile>http://fb7922hj.bget.ru/home.php?mod=space&uid=300318&do=profile</a> Классическая разновидность бонуса за творенье аккаунта. Его превосходство заключается в том, собственно заказчик имеет без избирать аппараты и создавать ставки в их. Иногда перечень игровых автоматов ограничен оператором, но все также это лучше, чем единственный дешевый разъем, как если, тогда, с использованием фриспинов. казино 1× slots официальный сайт Выбрать казино с бездепозитным призом. У нас на сайте представлен перечень наихороших онлайн казино, которые предлагают своим игрокам великодушные призы за регистрацию.
1хслот 1хслотс регистрация перейти на 1×slots
Чтоб получить большой выигрыш, выбирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша.В разделе с бонусами активировать собственный презент. Найти игры, для которых предусмотрено одобрение и применять приз по назначению. 1×slots casino зеркало <a href=https://sponforum.ixbb.ru/viewtopic.php?id=9998#p33917>https://sponforum.ixbb.ru/viewtopic.php?id=9998#p33917</a> Такой казино бонус без депозита за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это словно какая-то конспирация поощрения под бездепозитный. Суть всего этого сводится к тому, что игроку на час выдается, к примеру, 1000 долларов, а реклама твердит про, что любой выигрыш можно несомненно в будущем забыть при для. Но если играющий серьезно отнесется к этому предложению, то он просто потеряет время. Ведь игроку нужно несомненно играть не в аккаунте, в тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (даже всей тысячи) в верховодила вступят конкретные условия, где будет сказано, собственно наибольшей суммой победы возможность быть только двести долларов и средства можно использовать только в приза на первый лепта с вейджером 25 от суммы вознаграждения плюс сам депозит. По результату выйдет, собственно игрок выигрывал себя 200% приз с вейджером на определенную сумму. Короче говоря, это все надо вашего медли.
1хслотс зеркало
<a href=http://sanpai.org/userinfo.php?uid=32187#>http://sanpai.org/userinfo.php?uid=32187#</a> 1×slots быструю регистрацию а также мгновенное Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала резвые выводы. Фишка выплат в, собственно довольно избрать платёжный инструмент и указать сумму. В большинстве случаев деньги зачисляются на электрические кошельки в течение 15 минут, а на банковские карты – 1–3 рабочих денька.Некоторые веб-сайты, прежде чем обмануть регистрацию игроков, предлагают ответить на несколько базовых вопросов. Цель проведения подобной викторины – выявить случайных людей, коие не имеют представления о покере, и не разрешить получения ими призов. Если гость уже играл в казино, то ответить на полтора десятка несложных вопросов несомненно нетрудно. Очень нередко, ответы возможно отыскать на официальных сайтах этих учреждений.
<b>Смотреть еще похожие новости:</b>
<a href=http://t954381g.bget.ru/user/JosephPiery/>1×slots casino регистрация на сайте</a>
<a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=629753#pid629753>1×slot зеркало</a>
<a href=https://demo.comuni-italiani.it/forum/viewtopic.php?f=9&t=431429>1×slots зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Новички не обожают незамедлительно же заносить депозит. Это обосновано неимением навыка и недоверием. К счастью, наши можно получить бездепозитный бонус за регистрацию в казино. Неважно собственно начисляет система – фриспины или кредиты. В любом случае вы не рискуете собственными сбережениями. Это отличная вероятность запустить понравившийся видео разъем либо же испытывать фортуну в настольных играх. Каждый в обязан сперва отчетливо изучить условия по получению и отыгрышу понравившегося презента. Если всё устраивает, поторопитесь арестовать благотворительные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик в начать вертеть барабаны лучших слотов.
#3039 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino актуальное зеркало казино играть <a href=https://glvk.guru/>казино регистрации</a> casino buzz пинап казино <a href=https://krtka.info/>казино пин</a> бесплатное казино скачать 1×bet 1×bet зеркало на сегодня яндекс игры казино казино вулкан Фастова Елена Владимировна порно казино на деньги
DiskiPlus 1×bet зеркало рабочее DiskiPlus макао казино <a href=https://diskiplus.ru/>DiskiPlus top casino</a> DiskiPlus почему в казино не бывает настенных часов DiskiPlus скачать букмекерскую контору <a href=https://www.diskiplus.ru/>DiskiPlus porno Ангелина Гончаренко, хоккеистка</a> DiskiPlus casino DiskiPlus приложения букмекерских контор на андроид DiskiPlus порно с Георгий Джикия (футбол) DiskiPlus скачать pin casino DiskiPlus 1×bet зеркало слоты DiskiPlus 1×bet рабочее на сегодня DiskiPlus kent casino регистрация
#3040 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало видели такую регистрацию на
Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают бонус по странам. Вплоть до того, собственно клуб возможность себя игроков из Вашей страны, а бездеп мешает. <a href=http://filmkachat.ru/>1×slots регистрацию процедура займет всего лишь</a> <a href=https://community.oneplus.com/thread/1778649467101118473>https://community.oneplus.com/thread/1778649467101118473</a> Высокая конкуренция в сегменте азартных игр доказывает операторов привлекать клиентов разнообразными промоакциями. Благодаря этому у гостей появляется возможность получить призы в казино за регистрацию без депо. Воспользоваться таким предложением можно, избегая процедуру внесения денег на игровой счет, просто активировав акк на веб-сайте. Наш гид по бездепам поможет выбрать самую симпатичную бонусную программку, узнать правила получения такового гонорары и распорядиться им с максимальной выгодой. 1×slot регистрация <a href=http://forum.inos.at/profile.php?id=888892>http://forum.inos.at/profile.php?id=888892</a> Выполнив все притязания оператора, клиент возможность оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем не более суток. Если дополнительно требуется пройти процедуру верификации, то срок увеличивается до 1–2 рабочих дней. Для перевода применяются банковские приборы и электрические платежные системы. Второй метод подходит другого, как, например как большинство транзакций в этом случае исполняются моментально. В связи со специфичностью функционирования банков обработка платежей имеет занять до нескольких рабочих дней.
1×slots казино мобильная версия
1хслотс официальный сайт зеркало Многие игроки, оценив функционал казино, остаются выступать в нем и дальше ? на это и нацелено любое промо. Постоянные посетители заносят депозиты и делают ставки, обеспечивая длительную прибыль оператора. То есть, казино выдают бездепы свежим юзерам для формирования лояльной аудитории. <a href=http://gather-girls.com/home.php?mod=space&uid=116741>http://gather-girls.com/home.php?mod=space&uid=116741</a> 1хслотс официальный сайт зеркало Хотя бесплатные призы начисляются без депозита, не исключено, собственно вам понадобиться заносить средства. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь в такого, как свежий клиент раз пополнит игровой счет.Доступ к дару возможность открываться автоматически последствии введения промокода или обращения в службу вебсайта. В первом случае от юзера не требуется практически действий. Бездеп с активацией по коду встречается чаще всего. Игроку необходимо установить совокупность знаков в графе, кот-ая возможность находиться в регистрационной форме в Личном кабинете.
1×slots регистрация на сайте 1×slots ru com
Акции распространяются как на все игры казино, так и на узкий перечень. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino прочие. Промо может обхватывать разработки одного производителя. Бездеп не пересекается с иными акциями казино. Если на веб-сайте предусмотрен кэшбек, он не начисляется за ставки, изготовленные бонусными деньгами. Для идентификации платежных реквизитов игрока имеет понадобиться пополнение счета на минимальную сумму. Бoльшинcтвo азартных заведений выдвигают приблизительно однообразные, схожие обстоятельства и требования, которые необходимо выполнить, чтобы получить бездепозитный приз за регистрацию. Все их возможно соединить в раз список:Возможность протестировать свежие забавы, не рискуя личностными своими и создать личную тактику игры. <a href=https://mantiseye.com/community/henryuplib>https://mantiseye.com/community/henryuplib</a> Условия шансы разниться приятель от приятеля. Но такой приз возможность быть применен лишь для игрового процесса – полученные на счет деньги до как, как будут отыграны, исключить невероятно. 1×slots скачать на айфон
1×slots подтвердит вашу регистрацию если говорить
Чтобы играть даром на реальные средства в казино, не всегда достаточно просто зарегистрироваться. Иногда нужно выполнить вспомогательные деяния. Особую изюминку видео слотам придают оригинальные символы. С их выходом активируются различные бонусы. Вы можете запустить дополнительный степень и увеличить сумму выигрыша. Есть знаки, коие заменяют ненужные составляющие и сами творят выигрышные комбо. Не стоит забывать и про бонус-тур. После любого счастливого спина есть шанс прирастить необходимую выигрыша в 2 или хорошо раза.Наличие у игрока 2 аккаунта. Запрещено делать несколько профилей для многократного получения бездепов. У каждой игры свои требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система засчитает каждую ставку. В рулетке и покере устроить это гораздо труднее. Именно поэтому например главно пристально разбирать обстоятельства получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой ирге, то новички просто «спустят бонус на ветер».Вы скорее, например все любите получать подарки и бездепозитные призы казино. Игорные жилища брали в привычку одаривать гэмблеров приятными бонусами. Стать обладателем приветственного презента возможно за творенье профиля или пополнение счёта. Второй вариант более интересный, так клубы готовы удвоить депозит! Но в вы новичок и только знакомитесь с миром пыла, какого-либо воспользуйтесь призом за регистрацию. 1хслотс мобильная версия зеркало <a href=https://profiteplo.com/user/Zacherynuh/>https://profiteplo.com/user/Zacherynuh/</a> Для получения выигрыша потребуется выполнить условия казино. Чаще всего игроку необходимо поставить конкретную необходимую, хотя теснее из личных денег. Она рассчитывается из общего размера выигрыша за всегда использования бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, в пользователь выиграл 1000 рублей, а множитель сочиняет х30, исключить деньги возможно несомненно, сделав ставки на 30 000 руб.
1×slots зеркало на сегодня
Акции распространяются как на все игры казино, например и на ограниченный список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и. Промо может обхватывать разработки одного производителя. Бездеп не пересекается с иными акциями казино. Если на веб-сайте предусмотрен кэшбек, он не начисляется за ставки, сделанные бонусными средствами. Для идентификации платежных реквизитов игрока возможность понадобиться пополнение счета на минимальную сумму.Приветственный бонус без депозита ? подарок за регистрацию. Выдается деньгами, фриспинами либо баллами. В последнем случае бонусные баллы применяются для участия в турнирах либо обмена на реальные деньги. <a href=http://ishware.co.uk/fusion/profile.php?lookup=25960>http://ishware.co.uk/fusion/profile.php?lookup=25960</a> Для вывода средств приз нужно несомненно отыграть законам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариантами отыгрыша бездепозитного приза до его получения, чтобы избежать конфликтных ситуаций. 1×slots официальный сайт мобильная версия Изучить управляла и обстоятельства получения бездепозитных призов казино, Вы сможете у нас на сайте в разделе с призами или на официальном сайте выбранного Вами казино. Если имеет отыскать необходимую информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал или по электрической почте.Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми промоакциями. Читайте о них в обзорах и на форуме.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.vzonata.com/forum/viewtopic.php?f=11&t=535>1×slot регистрация</a>
<a href=http://sladkierecepti.5nx.ru/viewtopic.php?f=8&t=8913>1×slots официальный сайт, скачать</a>
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=10665>1×slots зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный приз за регистрацию в казино — это стартовый презент повторяющий денежного начисления либо безвозмездных вращений для новых игроков заведения, для получения которого не нужно вносить депо. Автоматы непопросту числятся самым модным азартным развлечением. Чтобы освоить управление и правила, понадобится всего несколько мин. Ваша задачка устроить ставку, найти число трудящихся линий и возможно вертеть тамбур. Если на выпадет выигрышная композиция – вы выиграли! С данной задачей вас посодействуют управится бездепозитные призы казино.
#3041 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Алена Михайлова порно с Анастасия Потапова, теннисистка <a href=https://vestnik-jurnal.com/>букмекерская контора официальный сайт</a> Елена Лядова смотреть фильм казино <a href=https://rucriminal.info/>почему в казино нет окон</a> про казино up букмекерская контора сайт букмекерской конторы порно с Илья Осипов (киберспорт) ограбление казино казино фильм онлайн сайт букмекерской конторы
DiskiPlus пари букмекерская контора DiskiPlus гта онлайн казино <a href=https://www.diskiplus.ru>DiskiPlus скачать букмекерскую контору</a> DiskiPlus вавада казино DiskiPlus porno Дарья Клишина <a href=https://diskiplus.ru/>DiskiPlus porno Александра Степанова, фигуристка</a> DiskiPlus порно с Дарья Касаткина (теннис) DiskiPlus Черкесова Бэлла Мухарбиевна порно DiskiPlus порно с Евгений Малкин (хоккей) DiskiPlus casinos winning DiskiPlus 1×bet бесплатно DiskiPlus casino betting DiskiPlus 1×bet на андроид бесплатно
#3042 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slots review live
Операторы гемблинга утверждают, собственно так они борются с бонус-хантерами. Впрочем, критики считают, что данным казино пробуют сделать из случайного гостя постоянного игрока.Хотя бесплатные бонусы начисляются без депо, не исключено, собственно вас придется заносить средства. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты лишь после того, как новый заказчик первый пополнит игровой счет. <a href=http://filmkachat.ru/>1×slots официальный сайт мобильная версия</a> Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских руб. В критериях акции указано, собственно вейджер бездепозитного приза х20. Поэтому, дабы отыграть бонус, игроку будет нужно устроить ставок на 35*20=700 рублей. <a href=https://pdfhost.io/v/V29E~XTxf_Crafting_Exceptional_Luxury_Real_Estate_Marketing_Materials>https://pdfhost.io/v/V29E~XTxf_Crafting_Exceptional_Luxury_Real_Estate_Marketing_Materials</a> 1×slots рабочее зеркало <a href=http://www.yyxw999.com/space-uid-22286.html>http://www.yyxw999.com/space-uid-22286.html</a> Бездепозитные призы – это самая небезинтересная и наиболее перспективная акция интернет-казино. Они и другого, как фри-спинов, поэтому что выплаты в бесплатных вращениях не гарантированы, как комбинации на барабанах игрового аппарата все не сложиться.Допустим, за регистрацию вы возымели бездеп в объеме 2 000 руб. С вейджером х30. В данном случае светит устроить ставок, на совместную сумму в 60 000 рублей (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать настоящие деньги. Однако не забывайте, собственно с любого презента получится вывести определённую сумму (почаще всего менее $200).
1×slots регистрация на сайте 1×slots ru com
Рассмотрим на образце: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских руб. В условиях акции указано, что вейджер бездепозитного бонуса х20. Поэтому, чтобы отыграть бонус, игроку несомненно необходимо сделать ставок на 35*20=700 рублей.Казино дает вероятность заработать и вывести настоящие средства на бездепозитных призах. Обычно, это малозначительная сумма, которую казино имеет для позволить презентовать игроку. 1хслотс регистрация в 1×slots casino <a href=http://www.god123.xyz/home.php?mod=space&uid=1140780&do=profile>http://www.god123.xyz/home.php?mod=space&uid=1140780&do=profile</a> 1×slots официальный сайт, скачать Шаг 5. Использование и отыгрыш. Бездеп обязан быть использован в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.А ознакомиться с новыми онлайн казино, Вы можете помощью бонусов с выводом прибыли, коие Вы сможете получить без депозита.
1×slots зеркало на сегодня
<a href=http://www.so0912.com/home.php?mod=space&uid=2325395>http://www.so0912.com/home.php?mod=space&uid=2325395</a> Бонус за регистрацию в казино выдается только один раз на 1-го игрока. Но случаются вспомогательные промоакции, в коих бездепы раздаются для постоянных посетителей и эти презенты Вы можете получить более одного раза.Вейджер менее х30–35 является применимым. Опытные игроки заявляют, что с этим вейджером реально остаться в плюсе, если правильно подойти к выбору игрового аппарата. 1×slots casino регистрация Вейджер (либо вагер) ? это минимальная сумма ставок, коию необходимо сделать для вывода валютного бонуса. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение.Иногда операторы требуют внесение минимального депозита перед выводом для верификации платежного инструмента. В некоторых казино этот депо кроме светит отыграть.
1×slots подтвердит вашу регистрацию если говорить
К огорчению, нет. Почти все казино, настоятельно внесение хотя бы одного малого депо для вывода выигрыша с бездепозитного приза. Также учитывайте, собственно исключить средства разрешается лишь на что, эту платежную систему, с которой был сделан депо. <a href=https://www.goslog.ru/personal/profile/index.php?PAGE_NAME=profile_view&UID=66187>1×slots официальный зеркало</a> Онлайн-казино тщательно продумывают бонусные обстоятельства, которые нужно выучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и ограничения. 1×slots регистрация 1×slotscasino 56 online <a href=http://xn–80adazahw2c9an.xn–p1ai/user/TravisPoign/>http://xn–80adazahw2c9an.xn–p1ai/user/TravisPoign/</a> Далее потребуется отыграть вагер и вывести выигрыш. Игрокам без навыка крупно подфартило, у получить 10-ки презентов за 1 регистрацию. Если не смогли получить Бездепозитный бонус, не беспокойтесь. Обратитесь в онлайн чат, оператор поможет ситуацию.
1хслотс казино зеркало
Для получения предоставленных бонусов вам понадобиться — ПК либо мобильное устройство, и остальное дело за малым. <a href=http://fr994575.bget.ru/user/Michaelhoume/>http://fr994575.bget.ru/user/Michaelhoume/</a> Подарки на конкретные даты выделяются условиями получения. Если поощрение начисляют игроку на день рождения, то сумма обыкновенно находится от общего размера депо последний год. 1хслотс регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://www.kfz-gringer.at/index.php/forum/suggestion-box/64719–1×slots#64484>1×slots актуальное зеркало</a>
<a href=http://check2go.net/my-account/>1хслотс официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Минимального оборота. Этот лимит устанавливается вейджером — пока игрок не сыграет на установленную сумму, вывод средств несомненно недосегаем. Бездепы обыкновенно предлагают с отыгрышем — быстро вывести выигранные средства нельзя. Перевод средств со счета несомненно вероятен после того, как юзер выполнит все притязания казино, а сумма возможности превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, в течение коих заказчик вправе пользоваться предложением. Обычно они не превосходят нескольких дней последствии активации.
#3043 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора бесплатно скачать casino com <a href=https://strelochnik.com/>пин ап casino pin up top</a> porno Дарья Клишина порно с Евгения Медведева, фигуристка <a href=https://rhymes-punches.com/>казино рояль</a> casino ru casino рабочее игры казино porno Светлана Ходченкова скачать букмекерскую контору casino официальный зеркало Окладникова Ирина Андреевна порно
DiskiPlus 1×bet слоты 1×bet top DiskiPlus порно с Анна Калинская (теннис) <a href=https://www.diskiplus.ru/>DiskiPlus Мухтиярова Елена Вячеславовна порно</a> DiskiPlus 1×bet приложение DiskiPlus pin up casino buzz <a href=https://www.diskiplus.ru/>DiskiPlus винлайн букмекерская контора официальный</a> DiskiPlus porno Марина Александрова DiskiPlus зеркала казино DiskiPlus бесплатное казино DiskiPlus 1×bet на сегодня DiskiPlus porno Алена Михайлова DiskiPlus Скоробогатова Ольга Николаевна порно DiskiPlus ramenbet casino
#3044 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино ли 1×bet зеркало на сегодня 1×bet xyz <a href=https://rucriminal.info/>Приезжева Екатерина Геннадьевна порно</a> 1×bet рабочее 1×bet зеркало рабочее на сегодня 1×bet xyz <a href=https://rhymes-punches.com/>порно с Александр Большунов (лыжные гонки)</a> порно с Матвей Сафонов (футбол) казино проиграл casino riobet casino бездепозитный 1win букмекерская контора porno Светлана Ходченкова официальные сайты казино
DiskiPlus сайт винлайн букмекерская контора DiskiPlus casinos xyz <a href=https://www.diskiplus.ru/>DiskiPlus букмекерская контора вход</a> DiskiPlus up casino скачать DiskiPlus водка казино <a href=https://www.diskiplus.ru/>DiskiPlus casino актуальное зеркало</a> DiskiPlus скачать 1×bet DiskiPlus top casino DiskiPlus порно с Владимир Минеев (ММА) DiskiPlus игры казино DiskiPlus казино гта 5 DiskiPlus casino бонус DiskiPlus 1go casino
#3045 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия
Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в собственный офис, дабы забрать бесплатные вращения с вейджером х40; <a href=http://filmkachat.ru/>x1 slots регистрация в 1×slots casino</a> <a href=https://nibbler.co/en_US/reports/astramedika.com.ua#/Test_Page_Analytics>https://nibbler.co/en_US/reports/astramedika.com.ua#/Test_Page_Analytics</a> Наиболее популярностью вознаграждения среди гэмблеров – бездепозитные призы казино. Это не дивно, ведь возможно получить благотворительные вращения или виртуальные кредиты, и этом не придётся пополнять счёт, рисковать личными деньгами. Удастся насладиться разнородными увеселениями даже выиграть крупную сумму, избегая серьёзного риска. 1×slos регистрация в 1×slots casino <a href=https://kirova1.unoforum.pro/?1–1–0–00000947–000–0–0>https://kirova1.unoforum.pro/?1–1–0–00000947–000–0–0</a>
1×slos регистрация в 1×slots casino
<a href=http://forum3.bandingklub.cz/memberlist.php?mode=viewprofile&u=5481>1×slots casino online регистрация</a> 1хслотс рабочее зеркало Вейджер менее х30–35 является применимым. Опытные игроки заявляют, что с этим вейджером реально остаться в плюсе, случае правильно подойти к выбору игрового аппарата. <a href=https://feedback.bistudio.com/W30812>https://feedback.bistudio.com/W30812</a> Бездепозитные призы, как теснее понятно, считаются уникальной вероятностью к игровому процессу безусловно безвозмездно, то есть выступать в онлайн казино даром и на место свои незамедлительно в регистрации аккаунта. Автоматы с таким депо могут замерзнуть великолепной возможностью сыграть для почитателей пыла с определенными ограничениями в денег.Демоказино есть практически на любом сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются существенно пореже: там когда выигрыша и соблюдения условий промоакций бездеп можно перевоплотить в настоящие средства. 1×slots регистрация 1×slotscasino 56 online В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с бесплатных вращений. Прибыль, коию Вы заработаете на таком бездепе возможно ставить на вывод без какого либо отыгрыша.
1×slots рабочее зеркало
Во время забавы в казино, выигрыши, приобретенные благодаря бесплатным призовым фондам, суммируются и включаются в совместную необходимую для отыгрывания. Однако, если фортуна улыбнется и получится отыграть все призы, игровое заведение гарантированно разрешит вывести финансовые свои. Сумма вывода несомненно зависеть от лимита, утвержденного непосредственно в данном учреждении. Поэтому, внимательно надо(надобно) разбирать управляла выдачи анлимитных депо. Представьте момент, когда при ставке в 10 руб. Вы получите схожее умножение. Миллион рублей за одно вращение, что абсолютно вполне. Поэтому вопрос, сколько можно выиграть остаётся не. Предлагаем проверить без. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный бонус и проверяйте фортуну в деле. Разумеется, вывести деньги не так просто. Однако шансы есть у всех. <a href=http://xn----7sbbdrwao3cago9f0e.xn–p1ai/forum/?PAGE_NAME=profile_view&UID=157894>http://xn----7sbbdrwao3cago9f0e.xn–p1ai/forum/?PAGE_NAME=profile_view&UID=157894</a> 1×slots зеркало этих способов предполагает регистрацию Бездепозитные бонусы начисляются лишь один один. Не стоит открывать свежие аккаунты, чтобы получить их повторно. Служба безопасности казино непременно выявит «левого» соучастника и перекроет. Если гость выполнит нужные притязания, отыграет собственную ставку и решит исключить личный выигрыш, то ему нужно сведению, что казино обязательно востребует предоставить ксерокопии личных документов, чтобы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои исключить не удастся.
1× слот зеркало
Частенько новички не знают, как активировать подарки или исключить первый выигрыш. Для сходственных случаев наша команда обрисовала основные определения – собственно такое фриспины, вейджер, как его отыграть, чего нужно проходить верификацию. <a href=http://smpn1bejen.sch.id/forum/>1×slot регистрация</a> Для верификации аккаунта надо(надобно) предоставить специалистам технической поддержки отсканированную копию паспорта и счета за коммунальные услуги, а фотку банковской карты или скриншот странички электрического кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности. Бездепозитный приз по промо-коду несомненно доступен для игры, только сомнений случае когда Вы активируете специальный бонусный код в разделе с призами или укажите промокод при регистрации на сайте. В неких случаях, не активации кода, понадобиться подтвердить контактные данные игрока и заполнить анкету посетителя. 1×slots зеркало регистрацию более популярный вариант это <a href=https://www.christiandaily.co.kr/service/bbs/board.php?bo_table=free&wr_id=604049>https://www.christiandaily.co.kr/service/bbs/board.php?bo_table=free&wr_id=604049</a> Размер бонуса. В качестве бездепов обычно начисляют очень суммы, а когда речь о призах за депо, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино шансы подарить игроку до 2000$.Существуют казино с призом за регистрацию, в довольно востребованы фриспины в онлайн казино потом регистрации в определенных играх. Они встречаются числе почаще бесплатных поощрений либо традиционных призов в казино без вложений. Например, игрок регистрирует счет, на который начисляются бесплатные игры, бонус за регистрацию в виде бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса в выигрывает настоящие деньги, коие в последствии возможно удачно вывести из заведения на собственную платежную систему. То есть, есть все шансы исключить свои без рисков своими деньгами. Регистрация, за игрок получит призы, займет пару минут, а спасибо этому можно увеличить 5 евро поощрений до тыс. И без всяких заморочек вывести их.
1×slots акции
Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша бонусов. Заведения всегда устанавливают максимальную ставку, допустимую по условиям вейждера.Размер призов почаще всего чисто условный и не превышает 50 руб. Приятно, хотя ощутимым бустом деле ли будет. Размер ставки для игры по бездепозитному бонусу (окончательно же, если, тогда,, когда он представлен вид бонусных денежных средств) зачастую ниже, чем при игре на депозит. Ограничение будет действовать до этапа отыгрыша бонуса.С этими простыми советами любое казино с призом за регистрацию способно принести в разы больше выгоды и полезности. <a href=http://entropiques.fr/userinfo.php?uid=31073>http://entropiques.fr/userinfo.php?uid=31073</a> 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте условия – они нередко выдаются для неких машин. В зависимости от клуба вам делать определенное число ставок. Кстати, современные игорные жилища выделяют возможность заводить «одноруких бандитов».Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную функцию активации бонуса без депозита. Внимательно прочтите до конца. Многие новенькие проделывают промахи на этапе регистрации и поэтому не получить подарок.
<b>Смотреть еще похожие новости:</b>
<a href=https://10nsk.ru/user/JosephSuple/>1×slots официальный сайт зеркало рабочее</a>
<a href=http://golf.blue-devil.eu/viewtopic.php?f=4&t=28906&p=158467&sid=875127df4d3ad7f121a4a72e49364947#p158467>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a>
<a href=http://www.easysunnysunshine.com/memberlist.php?mode=viewprofile&u=18118>1×slots официальный зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Некоторые веб-сайты, этого чем провести регистрацию игроков, предлагают ответить на количество базовых вопросов. Цель проведения похожей викторины – выявить случайных людей, коие не имеют представления о покере, и не допустить получения ими бонусов. Если гость теснее играл в казино, то ответить на полтора 10 несложных вопросов несомненно нетрудно. Очень часто, ответы можно найти на официальных сайтах данных учреждений.
#3046 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
вавада казино 1×bet бесплатно <a href=https://glvk.guru/>pin up casino</a> 1×bet xbet pin up casino пин <a href=https://7club7.com/>1×bet вход</a> сайт винлайн букмекерская контора 1×bet зеркало слоты casino ап casino букмекерские конторы pin casino com казино 5
DiskiPlus 1×bet официальный DiskiPlus порно с Александр Большунов (лыжные гонки) <a href=https://diskiplus.ru/>DiskiPlus casino</a> DiskiPlus 1×bet скачать бесплатно DiskiPlus casino ru <a href=https://www.diskiplus.ru>DiskiPlus 1go casino</a> DiskiPlus 7k casino зеркало DiskiPlus casino скачать приложение DiskiPlus porno Александр Соболев (футбол) DiskiPlus казино в россии DiskiPlus win win casino DiskiPlus как выиграть в казино DiskiPlus макао казино
#3047 Charlesgunnyhttp://filmkachat.ru
1 x slots casino
При регистрации никаких или ином интернет игральном заведении — вас дается один шанс испытывать свою фортуну не внося свои монеты. Замечу что эту поощрительную услугу предоставляют не все интернет игровые площадки, а только великодушная половина из их. Которые мы подготовили для Вас в нашем перечне.При верном подходе бездепы — это прекрасный метод выступать на деньги без траты личных средств. Есть количество рекомендаций, следуя которым возможно извлечь максимум пользы из похожих акций казино. Играть следует только на лицензированных площадках. Скриптовые сайты не только накалывают с бонусными услугами, но и используют пиратский софт с измененным ГСЧ. Выиграть на этих автоматах невероятно. <a href=http://filmkachat.ru/>1×slots сайт</a> Активация происходит за промокодов, которые вводятся в собственном офисе после регистрации. Среди спецпредложений в списке Casino.ru содержатся эксклюзивные промокоды, коие доступны лишь гостям портала. Другие способы начисления средств ? автоматическая активация незамедлительно последствии создания аккаунта и получение презента по запросу в службу технической поддержки. <a href=https://secure.smore.com/n/pv9hs-diverse-electronics>https://secure.smore.com/n/pv9hs-diverse-electronics</a> 1×slots казино мобильная версия <a href=https://experienciafreedom.com/coaching-motivacional/>https://experienciafreedom.com/coaching-motivacional/</a> Для получения выигрыша потребуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить конкретную сумму, хотя теснее из личных денег. Она рассчитывается из совместного объема выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, если юзер выиграл 1000 руб., а множитель составляет х30, исключить деньги можно несомненно, сделав ставки на 30 000 руб.
1×slots зеркало рабочее
<a href=https://forum.bedwantsinfo.nl/thread-726636.html>1×slots регистрация на официальном сайте</a> 1×slos регистрация в 1×slots casino Свежий приз начисляется в виде валютных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в использовании своими, а случае отыгрыша оператор имеет установить ограничение на вывод средств.Вейджер не более х30–35 является приемлемым. Опытные игроки утверждают, собственно с этим вейджером реально остаться в плюсе, если правильно подойти к выбору игрового аппарата. <a href=https://www.russiansuka.net/user/Travisapavy/>https://www.russiansuka.net/user/Travisapavy/</a> Бездепозитные бонусы за регистрацию являются одним из самых популярных способов привлечения свежих игроков в онлайн-казино, потому собственно они предоставляют игрокам вероятность опробовать казино, более игровые автоматы, и вероятно, выиграть реальные деньги. 1×slots бонус за регистрацию Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 долларов. Если выдаются фриспины, их количество редко выше нескольких 10-ов бесплатных вращений.
1 хслот регистрация в 1×slots casino
<a href=http://regvoice.com/home.php?mod=space&uid=77784&do=profile>http://regvoice.com/home.php?mod=space&uid=77784&do=profile</a> В бонусную программку множества операторов входят систематические бездепы. Это пожизненные промоакции, поощряющие интенсивных постоянных игроков. Популярный формат — раздача фриспинов по конкретным денькам недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депо в мена на накопленные баллы преданности. 1×slot рабочее зеркало За вербование приятеля ? в партнерской программы заказчик получает вознаграждение за привлечение свежих пользователей.
1 хслот регистрация в 1×slots casino
Наиболее модные гонорары среди гэмблеров – бездепозитные бонусы казино. Это не дивно, так возможно получить безвозмездные вращения либо виртуальные кредиты, и всем не придётся пополнять счёт, рисковать личными деньгами. Удастся насладиться разнородными увеселениями причем выиграть крупную необходимую, избегая серьёзного риска. Фриспины начисляются по конкретной ставке. После их активации игроку нужно запустить слот и увериться, что в нем отображаются безвозмездные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода последствии отыгрыша ориентируется оператором и изредка превышает 5 000 рублей.Если идет об неповторимых услугах, возможность понадобиться регистрация в казино по ссылке с партнерского вебсайта. 1хслотс казино зеркало <a href=https://gadgetpage.ru/user/JoshuaBup/>https://gadgetpage.ru/user/JoshuaBup/</a> Когда идет о денежных призах, казино всегда устанавливают обстоятельства вейджера, коие нужно выполнить, дабы исключить выигрыш.Некоторые казино шансы предлагать посетителям бездепы за свидетельство номера или почты или репост на страничку в социальных сетях.
1×slots рабочее зеркало
Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы была возможность исключить выигрыш.Прежде всего, не забывайте периодически заглядывать на страницу обзоров бездепозитных бонусов. Они шаг за шагом разглядывают более интересные предложения основных игорных порталов. Риск-игра по одинаковым шансам – Также казино имеет запрещать выполнять обстоятельства по отыгрышу за раунда на удвоение, кот-ый предлагается в слотах, видео-покере и некоторых иных играх. <a href=http://3214.by/index.php?subaction=userinfo&user=eqazysin>http://3214.by/index.php?subaction=userinfo&user=eqazysin</a> Подтверждение регистрации. Казино настоятельно привязки профиля к электрическому адресу и номеру телефонного. Для этого на e-mail отправляется письмо со ссылкой, а на телефон ? текстовое известье с кодом.Следует выделить, что бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом. 1× slots зеркало Но никогда не забывайте внимательно разбирать верховодила роли в бонусных акциях. Если вы нарушите но бы одно условие, позднее вы не сможете уладить недоразумение с администрацией.Для выбора азартного заведения Вы сможете пользоваться списком наших казино с бонусами за регистрацию. На нашем сайте мы выпустили список бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, что часть призов неповторимые и доступны лишь для гостей нашего сайта по-специальному промо-коду или по оригинальной ссылке. Кроме такого, для каждого бонуса мы подготовили подробный обозрение, каком Вы узнаете как получить и отыграть поощрение и как вывести свой выигрыш с бездепа.
<b>Смотреть еще похожие новости:</b>
<a href=http://162.241.164.67/phpbb/phpBB3/memberlist.php?mode=viewprofile&u=121525>1×slots скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чтобы без убедиться в преимуществах бездепозитных призов, довольно зарегистрироваться в казино и получить одобрение.
#3048 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
официальное казино вход бесплатно играем казино <a href=https://repost.news/>retro casino</a> 1×bet слоты официальный сайт ramenbet casino <a href=https://krtka.info/>pinco casino</a> 1×bet зеркало porno Мира Андреева (теннис) pin up casino пин ап 1×bet бесплатно букмекерская контора официальный сайт 7k casino сайт casino приложения
DiskiPlus почему в казино нет часов DiskiPlus casinos winning <a href=https://www.diskiplus.ru>DiskiPlus порно с Дронова Александра Викторовна</a> DiskiPlus vavada casino DiskiPlus 1×bet скачать приложение <a href=https://www.diskiplus.ru>DiskiPlus букмекерские конторы в россии</a> DiskiPlus где казино DiskiPlus casino online зеркало DiskiPlus порно с Антропова Валентина Викторовна DiskiPlus casino рабочее DiskiPlus porno Андрей Рублев (теннис) DiskiPlus песня казино DiskiPlus porno Илона Маркова, хоккеистка
#3049 Charlesgunnyhttp://filmkachat.ru
1×slots сайт зеркало
Игрокам не воспринимать приветственный приз как гарантированный метод получить крупный выигрыш, хотя это отличная возможность без затрат расценить функционал казино.Если вы облюбовали для себя несколько брендов коие вам больше всего приглянулись, для постоянной забавы! Таких гемблеров казино довольно предпочитает и оценивает, за частую эти игроки становятся VIP игроками заведения, коим часто поступают выгодные предложения вид бонусов, так же туда входит и бездепозитные. <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> Для отыгрыша приза казино обязывает игрока сыграть на необходимую, в некоторое раз превосходящую сумму полученного приза — тут выгода компании очевидна. <a href=https://app.pipefy.com/organizations/301582382/interfaces/3cb17c11–0e57–461f-8383-e1e42508bc5a/pages/8c03e96c-e422–45c5–89db-a09ec6070594>https://app.pipefy.com/organizations/301582382/interfaces/3cb17c11–0e57–461f-8383-e1e42508bc5a/pages/8c03e96c-e422–45c5–89db-a09ec6070594</a> Можно ли зарабатывать на бездепозитных бонусах? Это не работа, здесь как повезет, в в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, время можно именовать везением, и добавочной добавкой к вашему бюджету.Для проверки используются сканы паспортов, водительских прав, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь обнаружен в попытке ввести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их владелец попадает в темный список. При этой на лицензионной площадке надо опасаться указывать достоверную персональную информацию (шифрование ликвидирует утечку индивидуальных данных). 1×slots зеркало регистрация в 1×slots casino <a href=http://jeunex.best/bbs/board.php?bo_table=free&wr_id=312079>http://jeunex.best/bbs/board.php?bo_table=free&wr_id=312079</a> Так что основное отличие подарка на депо от бездепа – обязательное пополнение счёта. Вы можете внести депо и преумножить стартовый капитал либо отобрать бездеп и этом не придётся рисковать собственными сбережениями. Поспешите выполнить обычные требования, и администрация ресурса начисляет щедрое одобрение!
1хслот зеркало сайта
Призовые начисления без депо все предоставляться для участия в турнирах онлайн казино. Потратить перечисленные деньги можно самая масштабах этой промоакции. Условия их проведения в лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться этим предложением, другого, как изучить его правила. зеркала 1×slots <a href=http://www.tr.besatime.com/index.php?subaction=userinfo&user=RaymondSak>http://www.tr.besatime.com/index.php?subaction=userinfo&user=RaymondSak</a> Риск-игра по равным шансам – Также казино имеет воспрещать скорпулезно обстоятельства по отыгрышу счет раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких других забавах. 1×slots регистрация 1×slotscasino 56 online Создание аккаунта. На веб-сайте казино нужно обнаружить регистрационную форму и наполнить пустующие поля личностными данными. Иногда на этом шаге потребуется показать только адрес электрической почты и пароль, хотя чаще надо заполнить анкету персональной информацией (ФИО, дата рождения, место проживания и т.д.). Нужно свидетельствовать лишь реальные данные, потому впоследствие они будут проверены.Подтвердите регистрацию, чтобы активировать Бездепозитный приз с выводом, потребуется наполнить собственный профиль. Заполните пустующие поля настоящими данными о себя.
x1 slots 1хслотс регистрация перейти на 1×slots
Нельзя рассматривать забаву на средства, как вариант заработка. Азартные игры воспрещены для лиц младше 18 лет. Topcasinobonuses.mobi не является зачинщиком азартных игр. Сайт одевает информационный характер. Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша призов. Заведения практически устанавливают максимальную ставку, допустимую по условиям вейждера. <a href=http://bazarweb.ru/forum.php?PAGE_NAME=profile_view&UID=25439>http://bazarweb.ru/forum.php?PAGE_NAME=profile_view&UID=25439</a> Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. 1×slots промокод при регистрации Обычно бездепозитные промоакции от казино, прибывают на эл. Почту в деньки рождения или праздники. В некоторых интернет казино возможно адресоваться в чат и как неизменному игроку, вероятно вас предложат бездепозитное предложение.Некоторые клубы автоматически начисляют бонус на акк игрока в исполнения критерий получения, но бывают ситуации, когда приз надо(надобно) активировать игроку самому. Есть количество методов активации приза:
1×slots сайт
Мы советуем не отрицаться от сходственных услуг узнаваемых казино. Выделите количество мин. На регистрацию, получите приз и попробуйте его отыграть. Может быть, сегодня удача несомненно на вашей стороне!При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое можно посвятить забаве в казино. Размер призов почаще всего чисто условный и не выше 50 рублей. Приятно, но ощутимым бустом при вряд ли будет.Бездепозитные бонусы казино за регистрацию в 2022 году — это возможность сыграть за счёт заведения. Казино даёт клиенту шанс воспользоваться определённой суммой или числом бесплатных вращений без внесения депозита. Не путайте деморежим с реальной игрой без необходимости внесения депо. 1хслот официальный сайт зеркало <a href=https://king-wifi.win/index.php?title=1win_casino_jogos>https://king-wifi.win/index.php?title=1win_casino_jogos</a> Если вы облюбовали себе несколько брендов коие для больше всего приглянулись, для постоянной игры! Таких гемблеров казино довольно предпочитает и ценит, за частую такие игроки становятся VIP игроками заведения, коим часто поступают выгодные предложения повторяющий бонусов, например же туда заходит и бездепозитные.Рассмотрим принцип его действия на примере. Допустим, вы зарегистрировались и получили $10 no deposit bonus с вейджером х50. Это означает, что выигранные средства возможно несомненно выводить не раньше, чем последствии того, как общая сумма ставок достигнет $500.
1хслотс регистрация в 1×slots casino
Демоказино есть почти на любом сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются веско реже: там когда выигрыша и соблюдения условий промоакций бездеп можно превратить в настоящие деньги.Бесплатный бонус – кредиты, которые онлайн-казино начислит клиенту, не заставляя его пополнять игровой счет. Бездепы с безвозмездными вращениями деют юзерам право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд уплачивает казино. Число спинов ограничено и редко превышает сотку. Если промоакция включает в себя много бесплатных игр, их начисление возможность быть разбито на несколько дней.Приветственный приз без депозита ? подарок за регистрацию. Выдается деньгами, фриспинами либо баллами. В заключительном случае бонусные баллы применяются для участия в турнирах либо обмена на настоящие средства. <a href=http://boss.why3s.cc/boss/home.php?mod=space&uid=138446>http://boss.why3s.cc/boss/home.php?mod=space&uid=138446</a> 1× slots официальный Промокод – определённая комбинация символов, коию необходимо ввести в подходящее фон при твореньи учетной записи либо активировать в собственном профиле игрока в разделе с бонусами.Но а в вы теснее профи по интернет казино, кликаем на красноватую кнопку «Получить» и Вы автоматически перейдете в интернет казино;
<b>Смотреть еще похожие новости:</b>
<a href=http://www.infoknygos.lt/smforum/index.php?topic=85831.new#new>1×slots сайт зеркало</a>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=399290>1х слот 1хслотс регистрация перейти на 1×slots</a>
<a href=https://forum.bedwantsinfo.nl/thread-743291.html>1хслотс рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В интернет-сети всегда возможно найти перечни наиболее известных и гарантированных поощрительных программ от популярных онлайн-казино. Это один из главных характеристик привлекательности дара. С завешенным коэффициентом и профессионалы не смогут выполнить обстоятельства по отыгрышу. И не, насколько презентабельно смотрится предложение – бездепозитный приз казино в объеме $500 или $1 000. Чтобы новенькие лучше вникли, собственно же такое вейджер, мы разберём на случае.
#3050 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots review live
Допустим, за регистрацию вы получили бездеп в размере 2 000 руб. С вейджером х30. В этом случае предстоит устроить ставок, на общую сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать реальные деньги. Однако не забывайте, собственно с каждого презента выйдет вывести определённую необходимую (чаще всего менее $200). <a href=http://filmkachat.ru/>1×слотс казино</a> <a href=https://downforeveryoneorjustme.com/astramedika.com.ua>https://downforeveryoneorjustme.com/astramedika.com.ua</a> Еще одно условие касается объемов ставки. Операторы устанавливают наивысшую сумму, которую игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, избранной в Личном офисе. При превышении лимита есть риск потерять бонуса. Существующие ограничения относятся и к определенным обликам ставок. Например, играя в рулетку, клиент возможность столкнуться с запретом ставить фишки на шансы.Прежде всего, не запамятовывайте периодически заглядывать на страницу обзоров бездепозитных бонусов. Они шаг за шагом осматривают более занимательные предложения основных игорных порталов. 1×slot зеркало <a href=https://aktas1.kz/gig/user/GregoryBet/>https://aktas1.kz/gig/user/GregoryBet/</a> Такие поощрения дозволяют бесплатно протестировать новое казино, разобраться с игровым ходом интернет слотов, заработать и вывести маленькую сумму средств.Это раз из основных показателей привлекательности презента. С завешенным коэффициентом том мастера не смогут выполнить обстоятельства по отыгрышу. И важно, насколько привлекательно выглядит предложение – бездепозитный приз казино в размере $500 либо $1 000. Чтобы новенькие лучше вникли, что же такое вейджер, мы разберём на примере.
1×slots рабочее зеркало
1хслотс зеркало Выполнив все требования оператора, заказчик имеет оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит в среднем менее суток. Если дополнительно потребуется пройти процедуру верификации, то срок увеличивается до 1–2 трудящихся дней. Для перевода применяются банковские инструменты и электронные платежные системы. Второй метод подходит превосходнее, так как основная транзакций ситуации исполняются моментально. В связи со спецификой функционирования банков обработка платежей имеет взятьвдолг(взятьвзаймы) до нескольких трудящихся дней. <a href=https://statvoo.com/reviews/yana-beauty.com.ua>https://statvoo.com/reviews/yana-beauty.com.ua</a> 1×slots регистрация на сайте 1×slots ru com
1×slots официальный demo регистрация в 1×slots casino
<a href=http://vip.9bb.ru/viewtopic.php?id=6025#p10653>http://vip.9bb.ru/viewtopic.php?id=6025#p10653</a> 1×slots регистрация на сайте
1×slots сайт
Бонус начисляется игроку сразу в регистрации и прохождения верификации в казино и не просит от посетителя внесения депозита. Как верховодило, размер бонуса в подобном случае довольно застенчивый, впрочем разрешает новичкам познакомиться с забавой без риска реальными средствами.Демоказино есть почти на любом веб-сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются существенно реже: там если, тогда, выигрыша и соблюдения критерий акций бездеп возможно перевоплотить в реальные средства. <a href=https://10nsk.ru/user/JosephSuple/>1х слотс зеркало регистрация в 1×slots casino</a> Однако далеко не все ресурсы предлагают своим посетителям бездепозитные призы за регистрацию в казино. В большинстве случаев учтено одобрение на 1-ый депо в размере 100–200%. Это отличная возможность преувеличить банкролл, прирастить время, проведённое за забавой и шансы сорвать крупный куш.В бонусную программу многих операторов входят регулярные бездепы. Это бессрочные акции, поощряющие активных неизменных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депо в размен на скопленные баллы преданности. 1× slots регистрация в 1×slots casino <a href=https://dumskaya.net/user/onpravau2706/>https://dumskaya.net/user/onpravau2706/</a>
1×slots промокод при регистрации 2025
Получив свой подарок, Вы можете бесплатно играть на настоящие средства, а выполнив условия отыгрыша, вывести собственный выигрыш. Это тоже благотворительные деньги, коие поступают на аккаунты свежеиспеченных в последствии регистрирования. А особенность этих призов состоит никаких, собственно обретенные деньги обязательно идет применять в продолжении назначенного времени.Большинство клубов привлекают внимание игроков за счёт различных подарков. На 1 веб-сайтах возможно получить виртуальные кредиты, которые откроют доступ ко всему софту. На других же, администрация предлагает безвозмездные вращения для пуска топовых онлайн слотов. Несмотря на разные промоакции, стоит выделить самые основные. <a href=http://donaldvision.nayaa.co.kr/bbs/board.php?bo_table=sub05_01&wr_id=29977>http://donaldvision.nayaa.co.kr/bbs/board.php?bo_table=sub05_01&wr_id=29977</a> 1×slots регистрация на сайте 1×slots ru com В современность довольно просто получить приз за регистрацию в казино. Практически каждый игорный дом с готовностью начисляет средства либо бесплатные вращения. Многие гэмблеры пользуются данным и не смущяются регистрироваться в любом клубе с прибыльными критериями. Кстати, это отличная вероятность выработать победную стратегию и сорвать джекпот.
<b>Смотреть еще похожие новости:</b>
<a href=http://u0382101.isp.regruhosting.ru/index.php/forum/general-questions-and-how-tos/68883-otzyvy-o-tovarakh?start=7956#151522>1хслот 1хслотс регистрация перейти на 1×slots</a>
<a href=https://www.reisezielforum.de/viewtopic.php?t=444178>1×slots актуальное зеркало</a>
<a href=http://www.skmecca.com/2011/04/14/leave-the-world-better-than-you-found-it/comment-page-94/#comment-133727>1 х слотс зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Законодательство, регулирующее азартные игры в различных государствах, влияние на полномочия операторов. В итоге юзеры из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это возможность быть как глубокий отказ в доступе, например и невозможность загружать забавы отдельных изготовителей. Зарегистрироваться в казино по особой ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефонного и электронную почту). Для подтверждения номера аппарата необходимо в собственном профиле показать свой номер и надавить кнопку „Подтвердить номер аппарата“, дальше Вы получите sms-сообщение с кодом, который необходимо установить в соответствующее поле. Для доказательства электронной почты, перейти по интенсивной ссылке в письме от казино.
#3051 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino 7k сегодня где казино <a href=https://specreporter.com/>букмекерская контора зенит</a> казино смотреть Шевцова Татьяна Викторовна порно <a href=https://sovsekretno.net/>казино вход официальный сайт</a> casino андроид казино пин casino онлайн 7k casino зеркало на сегодня 1×bet скачать приложение casino online зеркало Шевцова Татьяна Викторовна порно
DiskiPlus зеркала официальных сайтов казино DiskiPlus порно с Диана Шнайдер (теннис) <a href=https://www.diskiplus.ru>DiskiPlus как выиграть в казино</a> DiskiPlus сайте букмекерской конторы фонбет DiskiPlus казино фильм <a href=https://www.diskiplus.ru/>DiskiPlus букмекерская контора зенит</a> DiskiPlus up casino скачать DiskiPlus букмекерская контора мостбет DiskiPlus 1×bet зеркало рабочее xbet DiskiPlus казино 5 DiskiPlus casino зеркало сайта DiskiPlus букмекерские конторы без депозита DiskiPlus kent casino регистрация
#3052 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация в 1×slots casino
Однако далековато не все ресурсы предлагают своим посетителям бездепозитные бонусы за регистрацию в казино. В большинстве случаев учтено одобрение на 1-ый депозит в размере 100–200%. Это отличная возможность преумножить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш.Приветственный бонус без депозита ? презент за регистрацию. Выдается средствами, фриспинами либо баллами. В заключительном случае бонусные баллы применяются для участия в турнирах или размена на реальные средства. <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> В зависимости от онлайн заведения любой из их возможность вам предложить как бездепозитные средства, так и бездепозитные фриспины, коие последствии удачной регистрации рухнут вас на ваш игровой баланс.Как правило, при выводе денег, от играющего потребуется только устроить минимальный вклад чтобы, чтобы, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом собственный счет. <a href=https://www.ourboox.com/bp/1641454/>https://www.ourboox.com/bp/1641454/</a> Иногда для получения призов необходимо спутаться с адептами саппорта. Удобнее всего с ними разговаривать в онлайн-сате, хотя иногда достаточно запроса по электронной почте. 1хслотс 1хслотс регистрация перейти на 1×slots <a href=http://www.mignonmuse.com/bbs/board.php?bo_table=free&wr_id=156530>http://www.mignonmuse.com/bbs/board.php?bo_table=free&wr_id=156530</a> Пoдтвepдить личнocть клиента. Для успешного вывода средств, нужно доказать личность клиента. Нa этaпe вepификaции пpoфиля, работники службы защищенности обязаны увериться, собственно у игрока более один акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не сможет вывести свой выигрыш, в у него несомненно несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы.
1×slots регистрация то дальше необходимо пройти
Как только вы отыграли вейджер и средства с бонусного баланса перебежали вас на реальный счет, Вы храбро сможете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (устроить минимальный депозит к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депозитом).Следует выделить, собственно бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с определенным кодом. 1×slots зеркало Такой казино бонус без депо за регистрацию выдается игроку на час и активно употребляется данное предложение с 2017 года. Это словно некая конспирация поощрения под бездепозитный. Суть всего сего сводится к что, этому, собственно игроку на час выдается, к примеру, 1000 $, а реклама повторяет то, собственно любой выигрыш возможно несомненно в оставить при себя. Но если играющий всерьез отнесется к данному предложению, то он попросту потеряет время. Ведь геймеру нужно несомненно играть не главном аккаунте, а в тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (даже всей тыс. ) в верховодила вступят определенные условия, где несомненно сказано, что максимальной суммой победы возможность быть только двести $ и средства можно использовать только в качестве бонуса на первый лепта с вейджером 25 от суммы гонорары плюс сам депозит. По результату получится, что игрок выигрывал для 200% бонус с вейджером на конкретную необходимую. Короче разговаривая, это все надо вашего времени. <a href=http://www.hucellbio.com/bbs/board.php?bo_table=free&wr_id=204450>http://www.hucellbio.com/bbs/board.php?bo_table=free&wr_id=204450</a> Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают приз по странам. Вплоть до того, что клуб имеет принимать игроков из Вашей государства, а бездеп мешает. зеркло казино 1×slots
1хслотс рабочее зеркало на сегодня
Зачастую бездепозитные бонусы казино для игры предлагаются различными заведениями азартных игр виде маркетинговых промоакций или в целях привлечения к себя свежих игроков. Для бездепозитных призов в казино 2022 геймеру не нужно пополнять счет до этапа вывода желаемых средств. <a href=http://ods.org.ua/user/JeffreyMiz/>http://ods.org.ua/user/JeffreyMiz/</a> Бонусные деньги – небольшая сумма денег для старта в новеньком казино. На бонусные средства, обыкновенно разрешено выступать во все забавы, не слотов с современным джекпотом и игр из раздела exist casino.Ещё одно распространённое акционное предложение – симпатичный презент с сомнительными требованиями. К примеру, клуб обещает $100 в качестве бездепа, но с вейджером х80 либо х100. Отыграть такой вейджер практически невозможно и потому лучше концентрироваться на более интересных промоакциях. 1×slots зеркало которую указывали при регистрации кстати В онлайне слишком много скриптовых вебсайтов, коие принадлежат плутам. Их главная цель – заинтересовать гэмблеров, пообещав не только великодушные подарки, хотя и крупные выигрыши. Так что некоторые сайты предлагают получить за регистрацию и $1 000.
зеркло казино 1×slots
Превышение наибольшей ставки при отыгрыше. Система автоматически не предуведомляет о превышении ставки, поэтому о несоблюдении верховодил игрок имеет узнать теснее после подачи запроса на вывод средств.Постарайтесь отыграть вейджер, дабы появилась вероятность оставить заявку на выплату. Кстати, на всех сайтах, представленных в списке, доступны современные платёжные приборы. Вы можете получить выигрыш на электронной кошелёк, карту, телефонный. Заполняя данные в личном профиле, указывайте лишь достоверную информацию, так как Вам понадобиться ее подтвердить в будущем при выводе средств.Для верификации номера аппарата, в личном профиле выберите опцию „Подтвердить номер телефона“ и введите в отвечающее фон код, приобретенный в sms-сообщении. 1×slots зеркало этих способов предполагает регистрацию <a href=http://www.tr.besatime.com/index.php?subaction=userinfo&user=Darenreawn>http://www.tr.besatime.com/index.php?subaction=userinfo&user=Darenreawn</a>
1×slot регистрация
Раздача призов может быть посвящена различным датам: календарные дни, деньки рождения игроков, годовщина открытия казино и т. Д. Подарок выдается в виде денег, фриспинов или баллов для скопления и обмена на услуги оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода данной суммы придется выполнить ряд притязаний.Лишь известные и знаменитые азартные заведения имеют позволить себе раздавать бездепы в виде дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, коие возможно потратить в топовых аппаратах с высочайшей отдачей. Классическая разновидность приза за творенье аккаунта. Его превосходство заключается что, собственно заказчик может самостоятельно подбирать аппараты и делать ставки в них. Иногда перечень игровых автоматов ограничен оператором, но все одинаково это превосходнее, чем один-единственный дешевый слот, как когда с использованием фриспинов. <a href=https://yozhstudio.ru/2019/09/08/%d0%bf%d1%80%d0%b5%d0%b8%d0%bc%d1%83%d1%89%d0%b5%d1%81%d1%82%d0%b2%d0%b0-%d0%b8%d0%bd%d0%b4%d0%b8%d0%b2%d0%b8%d0%b4%d1%83%d0%b0%d0%bb%d1%8c%d0%bd%d0%be%d0%b3%d0%be-%d0%bf%d0%be%d1%88%d0%b8%d0%b2%d0%b0/?unapproved=308716&moderation-hash=c69e862c95e1ecb438e8412c17ee5f4c#comment-308716>https://yozhstudio.ru/2019/09/08/%d0%bf%d1%80%d0%b5%d0%b8%d0%bc%d1%83%d1%89%d0%b5%d1%81%d1%82%d0%b2%d0%b0-%d0%b8%d0%bd%d0%b4%d0%b8%d0%b2%d0%b8%d0%b4%d1%83%d0%b0%d0%bb%d1%8c%d0%bd%d0%be%d0%b3%d0%be-%d0%bf%d0%be%d1%88%d0%b8%d0%b2%d0%b0/?unapproved=308716&moderation-hash=c69e862c95e1ecb438e8412c17ee5f4c#comment-308716</a> Мы подготовили список, где есть постоянно актуальные и свежие бездепозитные бонусы казино, которые возможность получить даром. Для наших юзеров есть специальные предложения эксклюзивные призы, коие вы у не найдете, их мы определили специальной красной плашкой «Exclusive». 1× slots casino зеркало Прежде чем активировать бездеп, необходимо увериться что, собственно государство, уроженцем которой является игрок, не входит в перечень не.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.l2endless.com/member.php?action=profile&uid=6253>1хлот регистрация в 1×slots casino</a>
<a href=https://www.donchillin.com/space-uid-382497.html>1×slots на любой вкус как пройти регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие появляются у начинающих. Постарайтесь отыграть вейджер, дабы была возможность забыть заявку на выплату. Кстати, на всех веб-сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы можете получить выигрыш на электрической кошелёк, карту, аппарат.
#3053 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Баталина Ольга Юрьевна 1×bet 1 <a href=https://strelochnik.com/>1×bet официальный сайт 1×bet xyz</a> Елена Лядова играющие казино <a href=https://vestnik-jurnal.com/>казино сочи</a> 1×bet зеркало рабочее на сегодня 1×bet xyz порно с Бондаренко Анастасия Борисовна casino 7k сегодня симулятор казино 1×bet зеркало на сегодня casino ап Хорова Наталья Александровна порно
DiskiPlus пина букмекерской конторы DiskiPlus Мухтиярова Елена Вячеславовна порно <a href=https://www.diskiplus.ru>DiskiPlus промокод 1×bet</a> DiskiPlus porno Алена Михайлова DiskiPlus лучшие онлайн казино <a href=https://www.diskiplus.ru/>DiskiPlus казино зеркало сегодня</a> DiskiPlus зеркала казино DiskiPlus сайт винлайн букмекерская контора DiskiPlus casino на телефон DiskiPlus Петрова Ольга Викторовна порно DiskiPlus casino актуальное зеркало DiskiPlus Комарова Наталья Владимировна порно DiskiPlus 1×bet на андроид
#3054 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало
Для получения предоставленных бонусов для пригодиться — ПК или мобильное устройство, и остальное дело за малым.Риск-игра по равным шансам – Также казино возможность воспрещать выполнять условия по отыгрышу за раунда на удвоение, который предлагается в слотах, видео-покере и неких других забавах. <a href=http://filmkachat.ru/>1× slots зеркало</a> Более крупные предложения встречаются довольно редко. Зачастую они доступны только VIP-игрокам. В оставшихся случаях им скорее сопутствуют довольно жесткие обстоятельства отыгрыша. Также вероятны вспомогательные условия прочие лимитирования, прописанные в условиях и положения бонусной программки казино. <a href=https://www.bandlab.com/post/67b2b2ed-dfd7-ef11–88f6–6045bd3473c0>https://www.bandlab.com/post/67b2b2ed-dfd7-ef11–88f6–6045bd3473c0</a> Для верификации аккаунта нужно предоставить специалистам технической помощи отсканированную копию паспорта и счета за коммунальные предложения, а фотографию банковской карты или скриншот страницы электронного кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для подтверждения личности. 1×slots casino регистрация <a href=https://freetone.pro/user/Patrickenfot/>https://freetone.pro/user/Patrickenfot/</a>
1 х слотс зеркало
1хлот регистрация в 1×slots casino Бездепозитный бонус казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби избранного заведения, определится в выборе игр и проверить качество работы службы поддержки. Довольно часто, начиная игровой процесс, игрок уже отказывается останавливаться и проделывает реальный лепта. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть даром вероятно как один таки с бонусом за регистрацию без надобности вносить депо.B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. <a href=http://bbs.yunduost.com/home.php?mod=space&uid=66642>http://bbs.yunduost.com/home.php?mod=space&uid=66642</a> Используйте наилучшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из списка ниже, дабы заработать подарки за простые деянья и уже сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высокой отдачей и прыткими выводами на электронные кошельки. 1х слот 1хслотс регистрация перейти на 1×slots
casino 1×slot
Для ревизии применяются сканы паспортов, водительских удостоверений, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если юзер замечен в попытке завести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их владелец попадает в темный список. При игре на лицензионной площадке не стоит бояться свидетельствовать достоверную персональную информацию (шифрование ликвидирует утечку индивидуальных данных). <a href=https://club.7ya.ru/Lheos1102/>https://club.7ya.ru/Lheos1102/</a> 1×slots казино мобильная версия После требуется внести идентификационный платёж. Это пугает начинающих больше всего. Нужно устроить наименьший депозит в 100–500 рублей. Таким образом служба безопасности увериться что, что платёжный метод принадлежит Вам. Данная процедура важна для обеспечивания защищенности игровых счетов. Пример, Ваш акк взломают и выведут средства на свой кошелёк. Будет очень досадно. Поэтому верификация платёжной системы, это необходимый момент.При регистрации в или ином интернет игральном заведении — вам дается один шанс испытать свою удачу не внося средства монеты. Замечу собственно такую поощрительную предложение предоставляют не все интернет игровые площадки, а только великодушная половина из их. Которые мы подготовили для Вас в нашем перечне.
1×slots быструю регистрацию а также мгновенное
Но есть игорные заведения, коие готовы просто например жертвовать деньги на игру. Для сего довольно создать профиль. Чтобы исключить собственный выигрыш, вас сначала нужно выполнить обстоятельства отыгрыша, обозначенные в критериях получения бездепозитного депозита. <a href=https://www.formulersupport.com/Thread-%D0%B7%D0%B5%D1%80%D0%BA%D0%BB%D0%BE-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-1×slots–162778>зеркло казино 1×slots</a> Также бездепозитные призы имеют служить методом возвращать к забаве посетителей, временно приостановивших своё сотрудничество с компанией: извещение о бездепе поступает на мобильный аппарат либо почту.Даже не выиграв крупную необходимую, игрок увлекательно проведет время, изнутри исследует работу площадки, воспримет геймплей автоматов. Все это без каких-либо финансовых рисков. Быть в курсе наилучших промоакций легко. Достаточно регулярно изучать перечень свежих интернет казино с выводом приза без депо в данном разделе. Некоторые онлайн-казино без депо предлагают свежим клиентам избрать бонус при регистрации. Будьте внимательны: выбрав один, вы в абсолютном большинстве случаев не сможете воспользоваться остальными. 1× slots регистрация в 1×slots casino <a href=http://www.shoppy.co.kr/bbs/board.php?bo_table=free&wr_id=681075>http://www.shoppy.co.kr/bbs/board.php?bo_table=free&wr_id=681075</a> В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно приятная часть игры. Важно, зачастую бездепозитные бонусы в казино выдаются с лимитированиями по наибольшей выплате. В среднем можно рассчитывать на прибыль в несколько тыщ руб. Как исключить выигрыш с бонуса без депозита. Придётся доказать аккаунт документально, в некоторых заведениях. Процедура верификации обязательна и делается каждым игроком. О документальном доказательстве учетной записи спрашивайте в интернет чате или прочитайте в правилах.
1×slots быструю регистрацию а также мгновенное
Например, игрок получил 500 рублей при разработке аккаунта и обязан отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 руб., потребуется сделать 875 спинов для полного отыгрыша. Заработать на бездепозитных бонусах за регистрацию в казино может любой пользователь, достигший совершеннолетия.Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие возникают у новичков. <a href=http://k636419q.beget.tech/user/Tyronevaway/>http://k636419q.beget.tech/user/Tyronevaway/</a> 1×slots официальный регистрация Прежде всего, не забывайте регулярно заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом оценивают наиболее интересные предложения основных игорных порталов.У любого игорного клубы различные вейджеровые обстоятельства. Чтобы вы гарантировано сумели выполнить их, мы дадим несколько советов. Если система начислила маленькую сумму, не стоит создавать великие ставки – остановитесь на 10–30 центах. Как только сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В противном случае какого-либо присмотреться к иному автомату.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.bedwantsinfo.nl/thread-744956.html>1хслот зеркало сайта</a>
<a href=http://www.fiat130.it/phpbb3/viewtopic.php?f=14&t=337696>1×slots промокод при регистрации</a>
<a href=http://mi.minfish.com/home.php?mod=space&uid=1196847>1хслотс регистрация в 1×slots casino</a>
<a href=https://mit-bbs.com/viewtopic.php?t=291314>1×slots casino online регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Верификация аккаунта. Лучше подтвердить личность сразу последствии регистрации, дабы потом не было проблем с выводом средств. Верификация имеет проходить двумя путями:
#3055 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Елизавета Туктамышева vavada casino <a href=https://www.ossetia.tv/>Самойлова Алла Владимировна порно</a> порно с Аделия Петросян (фигурное катание) кент казино <a href=https://repost.news/>пин ап казино</a> up casino официальный порно с Владимир Минеев (ММА) porno Юлия Пересильд порно с Артемий Панарин (хоккей) 1×bet зеркало на сегодня сайт казино зеркало сайт казино зеркало
DiskiPlus new casino DiskiPlus Валентина Матвиенко порно <a href=https://diskiplus.ru/>DiskiPlus пин ап букмекерская контора</a> DiskiPlus порно с Сергей Бобровский (хоккей) DiskiPlus официальные букмекерские конторы скачать <a href=https://diskiplus.ru/>DiskiPlus букмекерская контора фонбет официальный</a> DiskiPlus пин ап казино DiskiPlus porno Ангелина Гончаренко, хоккеистка DiskiPlus порно с Дарья Касаткина (теннис) DiskiPlus 1×bet зеркало слоты DiskiPlus казино фильм смотреть онлайн DiskiPlus ограбление казино DiskiPlus фильмы казино рояль
#3056 Charlesgunnyhttp://filmkachat.ru
1× slots зеркало
В зависимости от онлайн заведения любой из них возможность вам предложить как бездепозитные деньги, например и бездепозитные фриспины, которые в удачной регистрации упадут вам на ваш игровой баланс.Для верификации аккаунта надо(надобно) дать профессионалам технической помощи отсканированную копию паспорта и счета за коммунальные предложения, еще фотку банковской карты или экрана странички электрического кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для подтверждения личности. <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> <a href=https://www.dibiz.com/archicgic>https://www.dibiz.com/archicgic</a> 1×slots официальный сайт мобильная версия скачать <a href=https://lider-school174.com/forum/user/3765/>https://lider-school174.com/forum/user/3765/</a> В зависимости от онлайн заведения каждый из них возможность вам предложить как бездепозитные средства, например и бездепозитные фриспины, коие после удачной регистрации упадут вам на ваш игровой баланс.Иногда у гостей вебсайта шансы появиться трудности, задачи, препядствия при активации полученного промо-кода. В этих случаях, необходимо адресоваться за поддержкою в службу «Support». Для получения ответа, непременно указывается конкретная первопричина воззвания и подтверждается информация дополнительными экрана. Если сложилась неоднозначная ситуация, практически можно обратиться к главному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ.
1×slots регистрацию процедура займет всего лишь
1× slots сайт <a href=http://forums.overhax.fun/member.php?action=profile&uid=4071>http://forums.overhax.fun/member.php?action=profile&uid=4071</a> Основное правило получения бездепа ? творимый аккаунт обязан быть у пользователя первым и единственным. Наличие нескольких аккаунтов требовательно запрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депозита необходимо блюсти простую очередность деяний.Бездепозитные призы истинными средствами, которые можно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадались. 1×slots регистрация то дальше необходимо пройти В качестве бонусов онлайн казино нередко предлагает выдачу фриспинов, то есть даровых вращений игрового барабана. Виртуальные монеты можно использовать для изучения в покерной школе либо для игры в казино.
1× slots официальный
В качестве бонусов онлайн казино часто предлагает выдачу фриспинов, то есть безвозмездных вращений игрового барабана. Виртуальные монеты возможно использовать для изучения в покерной школе либо для забавы в казино. Фриспины – бесплатные вращения с фиксированной ставкой, коие возможно применять в конкретных игровых автоматах.Акции, приуроченные к календарным праздникам, случаются рассчитаны как на всех пользователей, так и на категории: например, подарок на 8 марта девушкам-игрокам или мужикам на 23 февраля. <a href=https://montreesounds.com/index.php?action=profile;u=32867>https://montreesounds.com/index.php?action=profile;u=32867</a> Постарайтесь отыграть вейджер, чтобы замечена вероятность забыть заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электрической кошелёк, карту, телефон. 1×slots зеркало на сегодня Новые клиенты онлайн-казино без первого депо шансы выяснить свою удачливость. К тому же есть вероятность преобразовать бездепы в реальные средства за регистрацию в казино, впрочем результата приз нужно отыграть сообразно условиям промоакции.
1×slots зеркало регистрацию более популярный вариант это
Мы рекомендуем не отказываться от сходственных услуг известных казино. Выделите некоторое мин. На регистрацию, получите приз и попытайтесь его отыграть. Может быть, сегодня удача несомненно на вашей стороне!Размер ставки для игры по бездепозитному призу (конечно же, если, тогда,, когда он представлен повторяющий бонусных валютных средств) зачастую ниже, чем при игре на депо. Ограничение будет работать до этапа отыгрыша приза. Вышеописанная причина и считается основным нюансом, в которого операторы отдают доля собственной прибыли на разные маркетинговые затраты и маркетинговые кампании. А самым действенным тут станут выступать именно бездепозитные бонусы казино 2022 с выводом за регистрацию. Но не стоит думать, что снабжая юзеров этими призами, казино увлекается спонсированием. Ведь объемы вознаграждений, главном, не большие (средним объемом от 5 до 20 долларов). И на эти средства налагаются конкретные условия и лимитирования, неотклонимые к исполненью игрока, случае в последствии он желает получить все средства выигранные финансы. x1 slots 1хслотс регистрация перейти на 1×slots <a href=https://worldaid.eu.org/discussion/profile.php?id=443718>https://worldaid.eu.org/discussion/profile.php?id=443718</a> Для получения депозитного приза нужно пополнить свой игровой баланс реальными средствами. Вознаграждение можно получить либо при внесении первого депо, либо повторяющий фиксированного процента от внесённых средств. Так либо иначе, приз поступит на счёт лишь в пополнения.
casino 1×slot
Как только на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу в сего возможно забыть заявку на вывод выигрыша. Кредиты выгодно отличаются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом настоящих средств и дают возможность ощутить задор. Во-вторых – возможно насладиться каждой азартной забавой доступной на веб-сайте. В вашем распоряжении присутствуют автоматы, настольные приложение, видео-покер, Live-дилеры.Для верификации номера телефона, в собственном профиле изберите опцию „Подтвердить номер телефона“ и введите в подходящее поле код, приобретенный в sms-сообщении. В зависимости от интернет заведения любой из них может вам предложить как бездепозитные деньги, так и бездепозитные фриспины, которые последствии успешной регистрации упадут для на ваш игровой баланс. <a href=http://cg.darkml.net/bbs/home.php?mod=space&uid=7965248>http://cg.darkml.net/bbs/home.php?mod=space&uid=7965248</a> 1×slots зеркало регистрация Бездепозитные призы казино за регистрацию в 2022 году — это возможность поиграть за счёт заведения. Казино даёт клиенту шанс пользоваться определённой суммой либо числом бесплатных вращений без внесения депозита. Не путайте деморежим с реальной забавой без надобности внесения депо.
<b>Смотреть еще похожие новости:</b>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=425811>1×slots зеркало сайта</a>
<a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=5991>1×slot зеркало</a>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=77104&result=reply>1×slot зеркало рабочее регистрации на телефон придет</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Пoдтвepдить личнocть посетителя. Для удачного вывода средств, необходимо подтвердить личность клиента. Нa этaпe вepификaции пpoфиля, работники службы защищенности должны убедиться, собственно у игрока не раз акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не может исключить свой выигрыш, в у него несомненно количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы.
#3057 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации
Для получения выигрыша требуется выполнить обстоятельства казино. Чаще всего игроку нужно поставить конкретную необходимую, но уже из собственных средств. Она рассчитывается из совместного объема выигрыша за всегда использования бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, если пользователь выиграл 1000 руб., а множитель сочиняет х30, вывести средства можно несомненно, сделав ставки на 30 000 руб. <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> <a href=https://downforeveryoneorjustme.com/playhouse.com.ua>https://downforeveryoneorjustme.com/playhouse.com.ua</a> Активация денежного гонорары происходит механически последствии сотворения профиля или использования промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на страницы казино в соц сетях или на рассылку рекламных известий, скачать и установить вспомогательный софт и т.д. онлайн казино 1×slots <a href=http://droid-comz.ru/user/TravisAcecy/>http://droid-comz.ru/user/TravisAcecy/</a> Бонусные деньги – маленькая сумма средств для старта в новеньком казино. На бонусные деньги, обыкновенно разрешается играть во все забавы, кроме слотов с прогрессивным джекпотом и игр из раздела live casino.
1×slots регистрация на 1хслотс
Перечисленные выше основные свойства сопровождают практически каждый бонус и считаются стандартными для бездепозитных бонусных начислений в казино.Особую изюминку видео слотам присваивают уникальные символы. С их свет активируются различные бонусы. Вы сможете запустить вспомогательный степень и увеличить необходимую выигрыша. Есть знаки, которые сменяют ненужные элементы и сами создают выигрышные комбо. Не стоит забывать и на бонус-тур. После любого удачного спина есть шанс увеличить сумму выигрыша в два либо четыре раза. <a href=http://forum.animogen.com/viewtopic.php?f=9&t=1572874>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a> 1×slots коды Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция имеет подробные правила, гиперссылка на коие обычно находится в промообъявлении. В их указываются лимиты, вейджер, перечень доступных игр. Если оператор скрывает данные о предложении, то пользоваться им не. <a href=http://www.orlandogamers.org/forum/member.php?action=profile&uid=4825>http://www.orlandogamers.org/forum/member.php?action=profile&uid=4825</a> 1×slots официальный сайт скачать на айфон Практически все интернет казино с бездепозитным бонусом за регистрацию предусматривает программку лояльности — систему поощрения неизменных клиентов, кот-ая состоит из множества уровней. При достижении игроком одного значения на его счёт поступает бонус. Чем повыше степень — что, этим щедрее бонус.Наш список включает в себя наихорошие бездепозитные бонусы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по главным характеристикам:
1×slots зеркало на сегодня
В игровых клубах без лицензии Вы покупаете „кота в мешке“ и если, тогда, спорных обстановок нет возможности куда-то пожаловаться и доказать собственную правоту.Во всех легальных онлайн-казино Беларуси нужно подтверждение паспортных данных для забавы — это заявка правительства страны. Такие поощрения позволяют безвозмездно протестировать свежее казино, разобраться с игровым ходом онлайн слотов, заработать и исключить небольшую сумму средств.Также случаются случаи, когда казино начислит оговоренный приз после регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам. <a href=http://arts.gpaeburgas.org/profile.php?uid=12312>http://arts.gpaeburgas.org/profile.php?uid=12312</a> 1×slots официальный сайт скачать Допустим, за регистрацию вы получили бездеп в размере 2 000 руб. С вейджером х30. В этом случае светит устроить ставок, на совместную необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда выполните обстоятельства по отыгрышу, придёт время заработать реальные средства. Однако не забывайте, что с каждого дара получится исключить определённую необходимую (чаще всего не более $200).Демоказино есть почти на любом веб-сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются значительно реже: там если, тогда, выигрыша и соблюдения условий промоакций бездеп возможно перевоплотить в настоящие средства.
1×slots казино мобильная версия
Заработать на бездепозитных бонусах за регистрацию в казино имеет каждый юзер, достигший совершеннолетия.Также бывают случаи, когда казино начислит оговоренный бонус последствии регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам. Бездепы шансы входить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами.Нет. Казино выдают благотворительные бонусы за регистрацию, чтобы, чтобы, дабы клиент мог ознакомиться с игровым заведением. А дабы исключить его, нужно выполнить условия отыгрыша. Казино дает вероятность заработать и вывести настоящие средства на бездепозитных призах. Обычно, это малозначительная сумма, которую казино имеет для позволить презентовать игроку. 1× slots регистрация в 1×slots casino <a href=https://63game.top/thread-72312–1–1.html>https://63game.top/thread-72312–1–1.html</a> У нас на сайте Вы отыщите перечень призов без депозита в испытанных казино и доскональную информацию то как их получить и применять.
1×slots регистрация
Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 долларов. Если выдаются фриспины, их число редко превышает нескольких десятков бесплатных вращений. Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и. Когда игроку полагается большое фриспинов, администрация имеет разбивать их начисление на некоторое дней. Бесплатные вращения предоставляются для конкретного слота, который указывается в правилах промоакции.Бездепозитные призы — это презенты от казино повторяющий бонусных денег либо фриспинов для игровых автоматов, коие начисляются на акк игрока после процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депо не требуется. <a href=https://blog.udn.com/G_107482553777754991/180597916>https://blog.udn.com/G_107482553777754991/180597916</a> Подтверждение регистрации. Казино настоятельно привязки профиля к электрическому адресу и номеру аппарата. Для сего на e-mail отправляется послание ссылаясь, а на телефон ? текстовое извещение с кодом.Все обожают получать подарки. Согласитесь, практически каждый играющий человек будет безгранично рад, если получит бесплатный подарок для игры в онлайн казино просто за регистрацию или же приз за внесенный депо, например именуемые приветственные бонусы для новых игроков. Соответственно такие интернет клубы будут более модны и предпочтительны у игроков при выборе казино для игры. Топ казино непрерывно обновляется и прибавляются новые и занимательные игровые клубы с привлекательной бонусной политикой и всеми вероятными прерогативами, к коим относятся такие бонусы как фриспины за регистрацию, валютные бездепозитные бонусы, еще великодушные бонусы за внесенный депо. 1хслотс зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://www.globalvision2000.com/forum/member.php?action=profile&uid=1072499>1×slots быструю регистрацию а также мгновенное</a>
<a href=https://www.katzenforum.at/forum/media/users/jamesagema.16012/>1×slots зеркало</a>
<a href=https://irc.floobits.com/Jamesamiva>1× slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Многие новички сомневаются, собственно поощрительный приз надо несомненно возвращать, числе в они выиграли у казино. Это безусловно неопасно и надежно. Выводя выигранные средства, игрок просто останавливает свое роль при и теряет уникальную возможность – безвозмездно увеличивать личное вещественное положение. Более крупные предложения встречаются довольно редко. Зачастую они доступны только VIP-игрокам. В оставшихся случаях им всего сопутствуют довольно строгие условия отыгрыша. Также возможны вспомогательные обстоятельства и лимитирования, прописанные в условиях и положения бонусной программки казино.
#3058 Charlesgunnyhttp://filmkachat.ru
1×slots casino зеркало рабочее
Иногда для получения бонусов необходимо связаться с адептами саппорта. Удобнее всего с ними разговаривать в онлайн-сате, но иногда достаточно запроса по электрической почте.Бездепозитный бонус казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби избранного заведения, сориентироваться в выборе игр и выяснить качество работы саппорта. Довольно нередко, начиная игровой процесс, игрок уже отказывается останавливаться и делает настоящий вклад. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть безвозмездно вероятно как один таки с бонусом за регистрацию без необходимости вносить депозит. <a href=http://filmkachat.ru/>1×слотс казино</a> <a href=https://www.onairseo.com/crawl-report/7289>https://www.onairseo.com/crawl-report/7289</a> Помните, собственно в некоторых играх сумма ставки идет в зачет вейджера лишь частично. Так, в настольных и карточных забавах только от 5% до 50% суммы ставки числятся как отыгранные деньги, на как в слотах идет в зачет все one hundred percent суммы.Бонус в казино без депозита имеет разные разновидности: это может быть приветственный бонус, промоакции в честь каких-то дней или важных дат, бонус за привлечение свежих игроков, лояльность и получение VIP-статуса. 1 xslots рабочее зеркало <a href=https://mycompplus.ru/forum.html?func=view&catid=75&id=29206#29206>https://mycompplus.ru/forum.html?func=view&catid=75&id=29206#29206</a> Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депозит имеет отличаться до 30 дней.
1×slots рабочее зеркало
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=283681>1×слотс казино</a> 1×slots регистрация 1×slots casino 777 online <a href=https://bans.org.ua/index.php?action=profile;u=1390687>https://bans.org.ua/index.php?action=profile;u=1390687</a> Даже не выиграв крупную сумму, игрок увлекательно проведет время, изнутри изучит работу площадки, воспримет геймплей автоматов. Все это без каких-то финансовых рисков. Быть в курсе наилучших промоакций с. Достаточно регулярно изучать перечень новых онлайн казино с выводом приза без депозита в данном разделе. 1×slots официальный сайт скачать на айфон
1×slots казино мобильная версия
Все любят получать подарки. Согласитесь, практически любой играющий человек будет беспредельно счастлив, в получит безвозмездный подарок для игры в интернет казино просто за регистрацию или же приз за внесенный депо, так именуемые приветственные призы для новых игроков. Соответственно такие онлайн клубы станут более модны и преимущественны у игроков при выборе казино для забавы. Топ казино непрерывно обновляется и добавляются свежие и занимательные игровые клубы с привлекательной бонусной политикой и всеми вероятными привилегиями, к которым относятся эти бонусы как фриспины за регистрацию, валютные бездепозитные призы, а великодушные бонусы за внесенный депозит.Представьте момент, когда при ставке в 10 рублей Вы получите схожее умножение. Миллион рублей за одно вращение, что абсолютно вероятно. Поэтому вопрос, сколько возможно выиграть остаётся не. Предлагаем выяснить самостоятельно. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный бонус и проверяйте фортуну в деле. Разумеется, исключить деньги довольно. Однако шансы есть у всех. <a href=http://yj-c.co.kr/bbs/board.php?bo_table=sub23_01&wr_id=8342>http://yj-c.co.kr/bbs/board.php?bo_table=sub23_01&wr_id=8342</a> 1×slots скачать на айфон
1×slots регистрацию процедура займет всего лишь
Не желайте сыграть в азартные игры, не рискуя средствами деньгами, но получая в все выплаты? Подобную вероятность предоставляют многие превосходнейшие порталы с азартными весельями. В их количестве много честных и надежных интернет-казино на русском языке. Они завлекают новых юзеров разными поощрительными событиями, включая бездепозитные, либо бесплатные призы. <a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=95958&extra=>1×slots официальный сайт скачать</a> Зачастую бездепозитные призы казино для забавы предлагаются различными заведениями азартных игр в маркетинговых акций либо в целях привлечения к себя новых игроков. Для бездепозитных призов в казино 2022 игроку не нужно пополнять счет до этапа вывода желаемых средств.Каждый игры обязан сначала детально выучить условия по получению и отыгрышу приглянувшегося подарка. Если всё организует, поторопитесь арестовать бесплатные спины за регистрацию в казино без депозита с выводом и без отыгрыша и напрямик момент начать вращать барабаны топовых слотов. Верификация необходима для дополнительной безопасности и помогает техподдержке выявить бонусхантеров и плутов. Кстати, на некоторых платформах выводы крупных сумм доступны только последствии доказательства личности. 1×slots сайт <a href=https://www.efunda.com/members/people/show_people.cfm?Usr=Americandental0109>https://www.efunda.com/members/people/show_people.cfm?Usr=Americandental0109</a> У нас на веб-сайте Вы найдете список бонусов без депо в проверенных казино и подробную информацию о том как их получить и использовать.
1хслотс рабочее зеркало
Таким образом интернет казино получает потенциального игрока. Возможно в или истинном он захотит поиграть на свои средства. Так трудятся бездепозитные призы в интернет казино. Здесь хорошо подходит выражение, безвозмездные сыр случается только в мышеловке. Начинающие игроки могут не осознавать опасность азарта. Однако со временем осознания становится больше. Это тема для отдельного обсуждения.При регистрации следует свидетельствовать лишь достоверную информацию. Когда учетная запись будет активна, появится доступ в Личный кабинет. В нем возможно избрать денежную, установить промокод и узнать доскональные верховодила получения и отыгрыша бездепа. Краткая информация об акции часто находится именно на регистрационной форме. Выиграть настоящие средства в казино не пополняя счет – сложно, но вполне. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными призами и начните играть на бонусные свои. По статистике в 10-ти заведений можно заработать небольшую сумму денег за счет бонусных средств. <a href=http://jet-link.ru/index.php?subaction=userinfo&user=ludicrouspushov>http://jet-link.ru/index.php?subaction=userinfo&user=ludicrouspushov</a> 1×slots актуальное зеркало Выигрыши с бонусов без вложений постоянно привязаны к притязанию по ставкам и имеют быть обналичены только последствии выполнения этих требований.В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и когда неоднозначных ситуаций нет возможности куда-то пожаловаться и доказать собственную правоту.
<b>Смотреть еще похожие новости:</b>
<a href=https://test.soclanovtsy.ru/topic/26973-chicago-house-samples-loops-sounds/page/170/#comment-62813>1хслотс рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Самый распространённый из подобных бонусов, конечно же, бездеп на день рождения клиента — приз повторяющий фиксированной суммы либо фриспинов поступает на счёт игрока, а пользоваться им возможно в течение установленного периода медли. Вейджер в переводе с британского означает «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша полученного бонуса, в нашем случае бездепозитного. Число ставок большого — главно лишь набрать сумму, пропорциональную сумме одобрения.
#3059 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино смотреть онлайн бесплатно porno Алена Косторная (фигурное катание) <a href=https://sovsekretno.net/>казино рояль смотреть</a> играющие казино porno Игорь Акинфеев (футбол) <a href=https://7club7.com/>леон букмекерская контора</a> леон букмекерская контора мобильные букмекерские конторы Мухтиярова Елена Вячеславовна порно казино фильм онлайн Елена Лядова самое казино сколько казино
DiskiPlus Радченко Светлана Юрьевна порно DiskiPlus Анна Михалкова <a href=https://www.diskiplus.ru/>DiskiPlus Самойлова Алла Владимировна порно</a> DiskiPlus спорт букмекерская контора DiskiPlus порно с Арина и Дина Аверины, гимнастки <a href=https://www.diskiplus.ru>DiskiPlus pin up casino пин</a> DiskiPlus casino зеркало сайта DiskiPlus vavada casino DiskiPlus porno Игорь Акинфеев (футбол) DiskiPlus 7k casino DiskiPlus реального казино DiskiPlus пин casino DiskiPlus porno Виктория Баркова, легкоатлетка
#3060 Charlesgunnyhttp://filmkachat.ru
1×slots сайт зеркало
Наличие у игрока 2 аккаунта. Запрещено творить некоторое профилей для неоднократного получения бездепов. <a href=http://filmkachat.ru/>1×slots промокод при регистрации</a> Бездепозитные бонусы — это презенты от казино в виде бонусных денег или фриспинов для игровых автоматов, которые начисляются на акк игрока в процедуры регистрации на сайте заведения. Для получения этих поощрений депо не требуется.Фриплей-бонусы встречаются только в неких клубах. Они зачисляются сразу в создания профиля и активны недолговременное время. Если не успеете истратить свои, они просто сгорят. Касаемо времени, как призы активны протяжении часа. <a href=https://ebusinesspages.com/Vidikby.user>https://ebusinesspages.com/Vidikby.user</a> Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте условия – они часто выдаются для некоторых машин. В зависимости от клуба возможность делать определенное число ставок. Кстати, современные игорные дома дают возможность заводить «одноруких бандитов».Не трудно догадаться, что no deposit bonuses практически ни не посещают великими. Чаще всего идет о пяти–тридцати баксах (либо эквиваленте данной суммы в иной валюте). 1×slots casino зеркало <a href=http://jusintergentes.com.ua/index.php?option=com_k2&view=itemlist&task=user&id=1465926&lang=uk>http://jusintergentes.com.ua/index.php?option=com_k2&view=itemlist&task=user&id=1465926&lang=uk</a> Бездепозитные бонусы — это подарки от казино в виде бонусных средств либо фриспинов для игровых автоматов, которые начисляются на аккаунт игрока в процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депозит не требуется.
1×slots промокод при регистрации
<a href=https://www.addonface.com/welcome>1×slots casino online регистрация</a> 1×slots быструю регистрацию а также мгновенное <a href=http://www.pigcraft.ugu.pl/member.php?action=profile&uid=230609>http://www.pigcraft.ugu.pl/member.php?action=profile&uid=230609</a> В наше время очень просто получить приз за регистрацию в казино. Практически каждый игорный дом с радостью начислит деньги или благотворительные вращения. Многие гэмблеры пользуются этим и не стыдятся региться в каждом клубе с прибыльными критериями. Кстати, это замечательная возможность выработать победную тактику и сорвать джекпот.Вообще перейдя в казино — правила схожи в получении бездепозитных бонусов, в стандартные правила входит: подтвердить эл. Почту и телефонный, заполнить собственный индивидуальный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ. 1×slots регистрация то дальше необходимо пройти Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша призов. Заведения постоянно устанавливают максимальную ставку, допустимую по условиям вейждера.Благодаря программе преданности от игорного заведения, можно взять неплохой старт и без добавочных инвестициям запустить видеослоты. Кроме того, можно рассчитывать на реальную удачу и получить, без инвестиции собственных финансов, большой выигрыш.
1хслот зеркало
Для получения бездепа нужно пригласить в забаву по реферальной ссылке свежего клиента: он должен зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на необходимую, указанную в условиях акции. <a href=https://civil808.com/user/64766/ralphduard>https://civil808.com/user/64766/ralphduard</a> Самые знаменитые методы вывода денег ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам типа Neteller и Skrill, еще используют криптовалютными кошельками. Вывод выигрышей может осуществляться мгновенно или развлекать от нескольких часов до нескольких суток. 1хслот скачать Более крупные предложения встречаются довольно изредка. Зачастую они доступны только VIP-игрокам. В остальных случаях им всего сопутствуют очень строгие обстоятельства отыгрыша. Также вероятны вспомогательные обстоятельства прочие ограничения, прописанные в условиях и положения бонусной программки казино.
казино 1×slots
Будьте внимательнее при ознакомлении с правилами во избежание появления конфликтных обстановок с казино, когда после отыгрыша бездепа вас не дадут исключить солидную сумму выигрыша. Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми акциями. Читайте о них в обзорах и на форуме. Высокая конкурентность в сегменте азартных игр доказывает операторов привлекать посетителей разнородными акциями. Благодаря данному у гостей замечена вероятность получить бонусы в казино за регистрацию без депозита. Воспользоваться этим предложением можно, минуя процедуру внесения денег на игровой счет, просто активировав акк на сайте. Наш экскурсовод по бездепам поможет избрать самую симпатичную бонусную программку, разузнать верховодила получения такового гонорары и воспользоваться им с максимальной выгодой.Можно ли наваривать на бездепозитных призах? Это не работа, тут как повезет, в в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, время можно назвать везением, и добавочной добавкой к вашему бютжету. 1×slots акции <a href=http://www.kiripo.com/forum/member.php?action=profile&uid=1112230>http://www.kiripo.com/forum/member.php?action=profile&uid=1112230</a> При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, которое можно предназначить ирге в казино.Бездепозитный приз казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби избранного заведения, определится в выборе игр и проверить качество работы службы. Довольно нередко, начиная игровой процесс, игрок уже отказывается останавливаться и проделывает реальный лепта. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать безвозмездно вполне как один таки с бонусом за регистрацию без надобности вносить депо.
1×slots зеркало регистрацию более популярный вариант это
Выигрыши с бонусов без инвестициям практически привязаны к притязанию по ставкам и могут быть обналичены только после исполненья этих притязаний. <a href=http://1k9g.com/space-uid-195786.html>http://1k9g.com/space-uid-195786.html</a> Если вы избираете проверенное лицензионное онлайн казино и сделайте все обстоятельства получения бездепозитного бонуса, трудностей с получением подарка у Вас не возникнет.Многие новенькие сомневаются, собственно поощрительный приз не нужно несомненно возвращать, том случае они выиграли у казино. Это полностью неопасно и накрепко. Выводя выигранные свои, игрок просто одергивает свое роль деле и утрачивает уникальную вероятность – даром наращивать собственное материальное положение. 1× слот зеркало Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации бонуса без депозита. Внимательно прочитайте до конца. Многие новенькие проделывают оплошности на шаге регистрации и поэтому возможности получить подарок.Заработать на бездепозитных бонусах за регистрацию в казино может каждый юзер, достигший совершеннолетия.
<b>Смотреть еще похожие новости:</b>
<a href=https://demo.comuni-italiani.it/forum/viewtopic.php?f=9&t=467063>казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Когда речь о валютных бонусах, казино всегда устанавливают обстоятельства вейджера, которые необходимо выполнить, дабы вывести выигрыш.
#3061 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам воспрещено начислять призы клиентам, не имеющим денежных средств на счете. Мы предлагаем рассмотреть животрепещущие бонусы онлайн-казино с лицензией, которые соблюдают законодательство РБ. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots casino c2d ru</a> Хотя бесплатные призы начисляются без депозита, не исключено, собственно для понадобиться вносить средства. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только после того, как новый клиент впервые пополнит игровой счет. <a href=https://telegra.ph/Industrial-Electronic-Solutions-Custom-Manufacturing–Integration-01–24>https://telegra.ph/Industrial-Electronic-Solutions-Custom-Manufacturing–Integration-01–24</a> 1хслот официальный сайт зеркало <a href=https://tophatsec.com/forum/member.php?action=profile&uid=8148>https://tophatsec.com/forum/member.php?action=profile&uid=8148</a> 1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, случае не желаете замерзнуть жертвой мошенников либо впустую потратить время;
1хслотс рабочее зеркало
<a href=https://www.lightknotes.com/MyBB/showthread.php?tid=177321>сайт 1× slots casino</a> скачать 1×slots официальный сайт <a href=https://www.varranger.com/vforum/index.php?action=profile;u=36280>https://www.varranger.com/vforum/index.php?action=profile;u=36280</a> Шаг 4. Активация. Внимательно изучите обстоятельства, информацию по ограничениям и сроке деяния бонусного предложения. Разобравшись с правилами, возможно активировать бонус в собственном кабинете (иногда ? с внедрением промокода) либо по запросу в саппорт. 1×slots casino регистрация на сайте Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке адепты онлайн-казино публикуют актуальную информацию о not the slightest deposit bonuses и услугах.Подтвердите личность, предоставив оператору казино средства паспортные данные. Инструкции обыкновенно несложные, главное — четко им стопам. Если написано, что «на фото обязаны быть видны все четыре угла странички паспорта» — устройте непосредственно такое фото.
1×slots промокод при регистрации
В каждом казино с бездепозитным призом предусмотрены вейджеровые условия. Это один-единственный «подводный камень», который стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, нужно сделать определённое количество ставок. Чем круче бонус, что, этим сложнее выполнить обстоятельства, и напротив.Можно ли в одном онлайн казино получить больше 1-го бонуса за регистрацию? Нет, например как в любом онлайн казино есть верховодила, к коим нужно придерживаться, не творить 2 аккаута для получения призов, по несомненно блокировка обоих аккаутов, не пытайтесь обмануть онлайн казино, приз за регистрацию выдаеться один раз 1 личику. <a href=https://fermer365.ru/users/stevengah>https://fermer365.ru/users/stevengah</a> В бонусную программку многих операторов входят систематические бездепы. Это пожизненные промоакции, поощряющие активных неизменных игроков. Популярный формат — раздача фриспинов по определенным дням недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают постоянные призы без депо в обмен на скопленные баллы преданности. 1×slots зеркало проходить регистрацию это отличный вариант Любой выигрыш по ставке выше установленного лимита будет являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, ну случае выигрыша его сумма не поступит на счёт клиента — итог игры несомненно всецело аннулирован.Иногда в качестве поощрения за регистрацию шансы выдаваться билеты для роли в турнирах. Условия их проведения очень отличаются, поэтому мы советуем ознакомиться с каждым предложением отдельно.
1×slots сайт
Однако в условиях скрываются «подводные камешки», которые не разрешат исключить солидную необходимую либо же вы не успеете отыграть вейджер. Поэтому профессионалы рекомендуют арестовать безвозмездные вращения за регистрацию в казино без депозита, чтобы поднабраться опыта и получить настоящий шанс на победу. Начнём с такого, собственно любое рекламную за регистрацию предполагает некоторые обстоятельства. Бездепозитные призы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность денежного оборота, нужная для исполненья условий. Пример, возымели бесплатные вращения и выиграли с них 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 руб., неудачных либо выигрышных, маловажно. После выполнения, бонусный баланс перейдёт на реальный и станет доступным к выводу. 1×slots зеркало сайта <a href=http://rg-mechanics.club/index.php?subaction=userinfo&user=frailskin85>http://rg-mechanics.club/index.php?subaction=userinfo&user=frailskin85</a> Необходимость отыгрыша. Вейджер ситуации повыше, чем для призов за депозит. И пока средства не отыграны, исключить их невозможно.
казино 1×slots
Каждый новичок и умелый игрок грезят стремительно стартануть и начать делать реальные ставки. Для этого довольно забрать презент, за кот-ый надо выплачивать. В зависимости от игровой платформы, нужно создать профиль, привязать email либо телефон. После сего администрация начислит щедрое вознаграждение вид безвозмездных вращений или виртуальных кредитов.При малый сумме приза рекомендуется играть по невысоким ставкам, а использовать максимальные другого только сомнений случае, случае вейджер очень великой, а время на отыгрыш сильно ограничено. <a href=http://twchess.lionfree.net/discuz/home.php?mod=space&username=Oscarzen>http://twchess.lionfree.net/discuz/home.php?mod=space&username=Oscarzen</a> Бездепозитные бонусы казино это финансовая компенсация, предлагаемая юзерам на дармовой базе и возможность выступать в онлайн казино бесплатно. Если сравнивать их с поощрениями за вклад, каких средства выдаются только потом первоначального пополнения счета, то бездепозитные вознаграждения получаются даром. То есть, играющий получает вероятность создавать ставки на теснее имеющие деньги, которые выдаст заведение, выполняя, этом, обыденные действия, дабы их извлечь (тут идет о регистрация, удостоверении личности с внедрением номера телефонного, оформления заказы и т.д.).Вейджер менее х30–35 считается приемлемым. Опытные игроки заявляют, собственно с этим вейджером реально остаться в плюсе, если правильно подойти к выбору игрового аппарата. x1 slots регистрация в 1×slots casino Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.Используйте наихорошие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из списка ниже, дабы заработать подарки за простые деяния и уже сегодня получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высокой отдачей и быстрыми выводами на электрические кошельки.
<b>Смотреть еще похожие новости:</b>
<a href=https://melhorlance.com.br/minha-conta/>1×slots зеркало которую указывали при регистрации кстати</a>
<a href=http://jktroickiy.forumex.ru/memberlist.php?mode=viewprofile&u=195>1хслотс зеркало</a>
<a href=http://portal.westcoastbible.org/discussion/viewtopic.php?f=18&t=1958614>1×slos регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Только выполнив все условия отыгрыша и дождавшись завершения ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить свои деньги.
#3062 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало на сегодня
Наши эксперты исследуют обстоятельства акции, этого в ручном режиме проверку их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и параметры. Мы не рекламируем казино, а даем игрокам информацию о превосходнейших из их. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать на айфон</a> У каждого игорного клубы различные вейджеровые условия. Чтобы вы гарантировано сумели выполнить их, мы дадим несколько советов. Если система начислила маленькую необходимую, не делать немалые ставки – остановитесь на 10–30 центах. Как только сможете заработать примерно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте играть. В неприятном случае другого, как приглядеться к иному автомату. <a href=https://noti.st/alinavideneeva/c3XVdu/professional-3d-modeling-services-custom-design-solutions>https://noti.st/alinavideneeva/c3XVdu/professional-3d-modeling-services-custom-design-solutions</a> Наиболее пользующиеся вознаграждения среди гэмблеров – бездепозитные бонусы казино. Это не умопомрачительно, так возможно получить безвозмездные вращения либо виртуальные кредиты, и при не придётся пополнять счёт, рисковать собственными деньгами. Удастся насладиться разнообразными увеселениями и даже выиграть солидную необходимую, избегая серьёзного риска. рабочее зеркало 1хслотс <a href=https://www.gay8we.com/user/JulesBiz/>https://www.gay8we.com/user/JulesBiz/</a> Верификация важна для дополнительной безопасности и может техподдержке выявить бонусхантеров и плутов. Кстати, на платформах выводы крупных сумм доступны только последствии доказательства личности.Составленный специалистами Casino.ru перечень онлайн-казино с бездепозитным бонусом разрешает игрокам сравнить спецпредложения разных операторов.
1 x slots casino
1 хслот регистрация в 1×slots casino Список например нарекаемых «разрешенных землель» прилагается к правилам бонусной программы игорного портала. Обязательно проверьте, распространяются ли на вас похожие санкции. <a href=http://filmsgood.ru/user/Gregorylow/>http://filmsgood.ru/user/Gregorylow/</a> Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 поболее. Когда игроку полагается количество фриспинов, администрация может бить3 их начисление на некоторое дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах акции. 1×slots casino зеркало рабочее Акционные предложения от казино существуют в разных форматах. Часто бонусы даются в мена на депозит. Игрок вносит платеж и получает деньги, безвозмездные вращения и поощрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — вид приза, который гарантирован за исполненье конкретных деяний на веб-сайте:
1×slots быструю регистрацию а также мгновенное
Доступность — бездепозитные призы в казино чаще всего предоставляются свежим игрокам, но случаются случаи, когда приз могут получить и действующие посетители.Каждый геймер должен сперва отчетливо изучить обстоятельства по получению и отыгрышу приглянувшегося подарка. Если всё организует, поторопитесь отобрать бесплатные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо момент начать вертеть барабаны лучших слотов. <a href=https://physicsmastered.com/author/harrymaf/>https://physicsmastered.com/author/harrymaf/</a> Призовые начисления без депо все предоставляться для участия в турнирах онлайн казино. Потратить перечисленные деньги можно самая в рамках этой промоакции. Условия их проведения себе лимитирования на список игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться этим предложением, другого выучить его правила.Фриспины начисляются по определенной ставке. После их активации игроку необходимо запустить разъем и убедиться, собственно в нем показываются бесплатные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода в отыгрыша определяется оператором и редко превышает 5 000 руб. 1×slots зеркало проходить регистрацию это отличный вариант
1×slots официальный сайт зеркало
Да, у безвозмездных бонусов есть недостатки. Прежде всего, они обыкновенно маленькие. Кроме такого, условия вейджера по ним всегда жесткие. Но все же отсутствие риска делает их довольно красивыми для клиентов.При пользовании бездепозитным бонусом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют некоторое видов лимитов: Онлайн гемблинг развивается с любым днем больше и больше, свежие бренды создаются не по денькам а по часам. Новые интернет казино делают вступительные акции для игроков, для того собственно бы зарекомендовать себя, и что, этим самым предлагают бездепозитные бонусы за регистрацию, что бы не пропустить эту вероятность — как воспользоваться свежим бездепом, советуем навещать наш вебсайт как возможно почаще, самое вкусное и новые будет добавляться в этом же перечне.Индивидуальные поощрения выдаются за совершение поступков: подписку на аккаунты площадки в соц сетях, установку мобильного приложения либо официального клиента для ПК. В большинстве казино срабатывают программы преданности, присваивающие игрокам статусы за активность на сайте. Продвижение на грядущий уровень нередко с выдачей бездепа. Пoдтвepдить личнocть клиента. Для успешного вывода средств, необходимо подтвердить личность клиента. Нa этaпe вepификaции пpoфиля, сотрудники службы защищенности должны увериться, собственно у игрока более один акк. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не сможет вывести свой выигрыш, если у него несомненно количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы.Бездепозитный бонус – это финансовое вознаграждение, которое выдается соучастнику забавы в казино, для его вербования и возникновения заинтригованности. Любой посетитель, который подходит условиям выдачи сходственного бездепозитного бонуса, возможность претендовать на получение вышеуказанного приза. Такое одобрение является более действенным способом, дающим вероятность стартовать в игре, не вкладывая личных вещественных средств. 1×slots регистрация то дальше необходимо пройти <a href=http://163.20.41.8/discuz/home.php?mod=space&uid=249319>http://163.20.41.8/discuz/home.php?mod=space&uid=249319</a>
1×slots зеркало этих способов предполагает регистрацию
Хотя благотворительные призы начисляются без депо, не исключено, что для понадобиться вносить средства. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь после того, как новый клиент раз пополнит игровой счет.Подтверждение регистрации. Казино просят привязки профиля к электронному адресу и номеру аппарата. Для этого на e-mail отправляется послание со ссылкой, а на аппарат ? текстовое сообщение с кодом. Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, a зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. <a href=https://kcapa.net/bbs/board.php?bo_table=free&wr_id=1729551>https://kcapa.net/bbs/board.php?bo_table=free&wr_id=1729551</a> 1×slots casino регистрация на сайте
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.ltp-team.com/topic/55729–1×slots-na-lyuboy-vkus-kak-proyti-registraciyu/>1×slots на любой вкус как пройти регистрацию</a>
<a href=https://uyghuryol.com/forum/memberlist.php?mode=viewprofile&u=91>1×slots казино зеркало</a>
<a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/11730-kazino-1×-slots-ofitsialnyj-sajt#11758>казино 1× slots официальный сайт</a>
<a href=https://radios-collector.com/viewtopic.php?f=7&t=40137>1×слот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Самый распространённый из подобных бонусов, конечно же, бездеп на день рождения посетителя — бонус вид фиксированной суммы или фриспинов поступает на счёт игрока, а воспользоваться им возможно на установленного периода времени. Самые знаменитые методы вывода денег ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электронным платежным системам типа Neteller и Skrill, еще пользуются криптовалютными кошельками. Вывод выигрышей может исполняться быстро либо развлекать от нескольких часов до нескольких суток.
#3063 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Ходнева Светлана Владимировна порно 1×bet официальный 1×bet xyz <a href=https://m.repost.news/>vavada casino</a> casino андроид приложения букмекерских контор на андроид <a href=https://res-publika.com>porno Юлия Канакина</a> суть казино casino зеркало сегодня рабочее букмекерская контора официальный сайт pin up casino пин ап 1×bet 1 мобильные букмекерские конторы сайт казино зеркало
DiskiPlus порно с Абрамченко Виктория Валериевна DiskiPlus включи казино <a href=https://www.diskiplus.ru/>DiskiPlus Скворцова Вероника Игоревна порно</a> DiskiPlus casino buzz DiskiPlus скачать букмекерскую контору на андроид <a href=https://diskiplus.ru/>DiskiPlus vodka casino</a> DiskiPlus человек казино DiskiPlus 1×bet на андроид DiskiPlus сайт букмекерской конторы DiskiPlus up casino официальный DiskiPlus 1×bet вход DiskiPlus porno Алена Михайлова DiskiPlus Мухтиярова Елена Вячеславовна порно
#3064 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Юлия Ефимова Хорова Наталья Александровна порно <a href=https://t.me/vchkogpu_ru>up casino официальный</a> 1×bet рабочее порно с Евгения Медведева, фигуристка <a href=https://th-royalgclub.com/>Нургалиева Эльвира Рамиловна порно</a> бесплатное казино казино Фастова Елена Владимировна порно казино вход Кузнецова Анна Юрьевна порно casino вход букмекерские конторы pin
DiskiPlus букмекерская контора леонов DiskiPlus приложения букмекерских контор <a href=https://www.diskiplus.ru/>DiskiPlus порно с Евгений Малкин (хоккей)</a> DiskiPlus казино в россии DiskiPlus самое казино <a href=https://diskiplus.ru/>DiskiPlus porno Ангелина Гончаренко, хоккеистка</a> DiskiPlus казино фильм онлайн DiskiPlus Елизавета Боярская DiskiPlus Валентина Матвиенко порно DiskiPlus Скоробогатова Ольга Николаевна порно DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus рабочее казино DiskiPlus включи казино
#3065 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin ап casino казино в россии <a href=https://t.me/vchkogpu_ru>Валентина Матвиенко порно</a> пари букмекерская контора бк букмекерская контора <a href=https://res-publika.com>inform@rucriminal.info</a> 1×bet на андроид бесплатно Нургалиева Эльвира Рамиловна порно порно с Афонина Марина Игоревна porno Вера Бирюкова, гимнастка casino сайты казино онлайн бесплатно букмекерская контора зенит
DiskiPlus win win casino DiskiPlus букмекерские конторы без депозита <a href=https://www.diskiplus.ru>DiskiPlus рокс казино</a> DiskiPlus пин up casino DiskiPlus Скворцова Вероника Игоревна порно <a href=https://www.diskiplus.ru>DiskiPlus 1×bet официальный скачать</a> DiskiPlus Фастова Елена Владимировна порно DiskiPlus почему в казино нет окон DiskiPlus слоты казино DiskiPlus скачать сайт букмекерской конторы DiskiPlus макао казино DiskiPlus порно с Матвей Сафонов (футбол) DiskiPlus приложения букмекерских контор
#3066 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало видели такую регистрацию на
Самый распространённый из похожих бонусов, конечно же, бездеп на день рождения посетителя — приз в виде фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им можно протяжении установленного периода времени. <a href=http://filmkachat.ru/>1×slot рабочее зеркало</a> На данном разделе портала периодически публикуются обзорные заметки, в рассматриваются бесплатные призы наилучших интернет-казино. Информация структурирована по нескольким пт, включая главные: <a href=https://www.hogwartsishere.com/1685677/>https://www.hogwartsishere.com/1685677/</a> На странице представлены бездепозитные бонусы за регистрацию в казино редкая заслуга за которой гонятся все игроки как новички, так и мастера. Мы также уделяем огромное внимание на присутствие призов при формирование рейтинга казино на средства. Бездепозитный бонус это вероятность играть бесплатно и выиграть настоящие средства.В случае установленного лимита на необходимую вывода выигрыша с бездепозитного бонуса, игрок не сможет вывести больше заявленной суммы. 1×slots официальный сайт скачать на айфон <a href=http://www.ntsr.info/forum/user/98810/>http://www.ntsr.info/forum/user/98810/</a>
1×slots регистрация на 1хслотс
Этот тип бонуса будет добавлен на Ваш акк последствии удачной процедуры регистрации с использованием номера телефона. Если избрать иной метод творенья учетной записи, бездеп не несомненно добавлен на Ваш аккаунт.При ирге на бонусные свои воспрещается выступать в игровые автоматы с современным джекпотом и игры из радела exist casino. Кроме того, некоторые казино выделяют бездеп на раз либо несколько конкретных слотов, и в других забавах Вы не можете на них играть. <a href=https://forum.oursson.ru/viewtopic.php?f=2&t=12539>1×slots официальный сайт скачать</a> 1×slos регистрация в 1×slots casino <a href=http://toolbarqueries.google.co.tz/url?q=http://sar.medguard.ru/bitrix/redirect.php?goto=http://tdsouz.kz/bitrix/redirect.php?goto=https://teletype.in/@urist555/cLT8RCXBloV>http://toolbarqueries.google.co.tz/url?q=http://sar.medguard.ru/bitrix/redirect.php?goto=http://tdsouz.kz/bitrix/redirect.php?goto=https://teletype.in/@urist555/cLT8RCXBloV</a> 1×slots скачать на айфон Вейджер (wager) – это коэффициент, который демонстрирует на какую сумму необходимо сделать ставок, дабы исключить бонус из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода сего приза, Вам нужно устроить ставок на сумму: 500*70=3500 рублей. Только полностью отыграв бонус, Вы можете вывести свой выигрыш.
1×slots мобильная версия войти казино
Также, в необходимо подтвердить собственный номер телефонного, достичь код, приобретенный в смс-сообщении от клуба ввести в особое фон в собственном офисе игрока.Выполнив все притязания оператора, клиент может оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем менее суток. Если дополнительно потребуется пройти процедуру верификации, то срок возрастает до 1–2 рабочих дней. Для перевода применяются банковские инструменты и электрические платежные системы. Второй метод подходит какого-либо, так как масса транзакций в осуществляются моментально. В связи со специфичностью функционирования банков обработка платежей имеет занять до нескольких рабочих дней. <a href=https://cardvilla.cc/members/513919.html>https://cardvilla.cc/members/513919.html</a> онлайн казино 1×slots
1×slot регистрация
Свежий бонус начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в использовании средствами, а в случае отыгрыша оператор имеет установить ограничение на вывод денег. <a href=http://vn-info.net/user/Josephkam/>1×slots casino online регистрация</a> Кешбэк-бонус дает собой возврат фиксированного процента от ставки когда проигрыша или же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не выше 10%.Если площадка презентует бездеп за регистрацию, то процедура его получения ординарна. Нужно только завести акк на веб-сайте и активировать его, подтвердив адрес электрической почты, номер телефона или другие данные, которые просит оператор. Перед данным необходимо убедиться, собственно пользователь находится на официальном веб-сайте казино, но на жульнической площадке. Автоматы непопросту числятся наиболее популярным азартным развлечением. Чтобы усвоить управление и управляла, понадобится всего количество мин. Ваша задача устроить ставку, найти число трудящихся линий и возможно вертеть барабан. Если дисплее выпадет выигрышная композиция – вы выиграли! С данной задачей для посодействуют справится бездепозитные призы казино.Максимальный размер ставки, который нельзя превышать же приз не несомненно всецело отыгран. В случае нарушения сего правила, приз и выигрыш с него будут аннулированы. 1×slots сайт <a href=http://chemwiki.cn/index.php?title=Выкуп_авто>http://chemwiki.cn/index.php?title=Выкуп_авто</a>
1×slots официальный сайт скачать
<a href=http://www.zhuangxiuz.com/home.php?mod=space&uid=857191>http://www.zhuangxiuz.com/home.php?mod=space&uid=857191</a> 1×slots официальный сайт зеркало Бездеп с фриспинами имеет обхватывать всю коллекцию игр на сайте либо разработки 1-го провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш может быть выведен в как, как пользователь отыграет данную сумму. Возможность оценить полный функционал слотов — основное совершенство данной разновидности. Игроку становятся доступны те функции, коие отсутствуют в демонстрационном режиме, а вероятность выиграть реальные средства прибавляет ясных азартных чувств.Когда речь о денежных бонусах, казино всегда устанавливают условия вейджера, которые нужно выполнить, дабы исключить выигрыш.
<b>Смотреть еще похожие новости:</b>
<a href=https://showboysmedia.com/real-music/#comment-97135>1×slots быструю регистрацию а также мгновенное</a>
<a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=10564>1×slot зеркало рабочее регистрации на телефон придет</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выиграть реальные средства в казино не пополняя счет – сложно, хотя возможно. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными призами и начните играть на бонусные свои. По статистике в 10-ти заведений возможно заработать небольшую необходимую средств за счет бонусных средств.
#3067 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino 7k сегодня Окладникова Ирина Андреевна порно <a href=https://strelochnik.com/>порно с Никита Кучеров (хоккей)</a> Черкесова Бэлла Мухарбиевна порно порно с Александр Большунов (лыжные гонки) <a href=https://th-royalgclub.com/>скачать сайт букмекерской конторы</a> 7k casino зеркало рабочее букмекерская контора ставки букмекерская контора на андроид 1×bet сайт 1×bet xbet pin casino casino ап
DiskiPlus 7k casino DiskiPlus казино сочи <a href=https://diskiplus.ru>DiskiPlus casino betting</a> DiskiPlus порно с Георгий Джикия (футбол) DiskiPlus pin up casino buzz <a href=https://www.diskiplus.ru/>DiskiPlus порно с Юлия Ефимова</a> DiskiPlus порно с Анна Щербакова, фигуристка DiskiPlus пин ап casino pin DiskiPlus гта казино DiskiPlus фильмы казино рояль DiskiPlus водка казино DiskiPlus казино в россии DiskiPlus Комарова Наталья Владимировна порно
#3068 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Петр Ян (ММА) порно с Диана Шнайдер (теннис) <a href=https://t.me/vchkogpu_ru>1×bet зеркало слоты</a> 1×bet официальный казино играть <a href=https://sovsekretno.net/>порно с Владимир Минеев (ММА)</a> up casino скачать сайт pin up casino порно с Елена Никитина, скелетонистка ramenbet casino казино сочи человек казино porno Андрей Рублев (теннис)
DiskiPlus букмекерская контора зенит DiskiPlus Чулпан Хаматова <a href=https://www.diskiplus.ru>DiskiPlus порно с Максим Глушенков (футбол)</a> DiskiPlus 7k casino зеркало DiskiPlus Разуваева Ксения Денисовна порно <a href=https://www.diskiplus.ru/>DiskiPlus Комарова Наталья Владимировна порно</a> DiskiPlus слоты казино DiskiPlus inform@rucriminal.info DiskiPlus гта онлайн казино DiskiPlus 7k casino официальный сайт DiskiPlus 1×bet зеркало рабочее xbet DiskiPlus porno Виктория Баркова, легкоатлетка DiskiPlus champion casino
#3069 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
Законодательство, регулирующее азартные забавы в различных государствах, влияет на возможности операторов. В итоге пользователи из отдельных ареалов сталкиваются с лимитированиями со стороны казино. Это возможность быть как полный отказ в доступе, так и невозможность загружать забавы отдельных производителей. <a href=http://filmkachat.ru/>1 хслот регистрация в 1×slots casino</a> На нашем сайте Вы найдете перечень своевременных новых бездепозитных бонусов в казино 2022 года. Также, есть много эксклюзивных услуг, которые доступны лишь гостям нашего сайта в регистрации по нашей ссылке либо активации специального промокода. <a href=https://heroes.app/blogs/443183/Auto-skup-Warszawa-profesjonalna-wycena-i-natychmiastowa-got%C3%B3wka>https://heroes.app/blogs/443183/Auto-skup-Warszawa-profesjonalna-wycena-i-natychmiastowa-got%C3%B3wka</a> Максимальный объем ставки, кот-ый нельзя превосходить пока приз не несомненно полностью отыгран. В случае нарушения сего управляла, приз и выигрыш с него будут аннулированы.Мы собрали и опубликовали список наилучших бездепозитных казино с бонусами за регистрацию, которые гарантируют великодушные выигрыши и мгновенные выплаты. зеркала 1×slots <a href=http://graindryer.ru/bitrix/rk.php?goto=http://kirmuseum.ru/bitrix/rk.php?goto=http://victoria-mebel.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/f8rIZymsyzE>http://graindryer.ru/bitrix/rk.php?goto=http://kirmuseum.ru/bitrix/rk.php?goto=http://victoria-mebel.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/f8rIZymsyzE</a>
1×slots промокод при регистрации 2025
1хслотс официальный сайт зеркало С не отыгранным призом воспрещается превышать размер наибольшей ставки. Нарушение этого условия виде аннулирование выигрыша.На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению этого времени, Вы не можете активировать и получить бездепозитный бонус. <a href=https://www.vevioz.com/read-blog/133024>https://www.vevioz.com/read-blog/133024</a> Бездепозитные призы начисляются только один раз. Не стоит открывать свежие аккаунты, чтобы получить их повторно. Служба безопасности казино непременно выявит «левого» участника и перекроет. Если гость выполнит необходимые требования, отыграет собственную ставку и решит исключить личный выигрыш, то ему нужно принять, собственно казино непременно потребует дать ксерокопии собственных документов, дабы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные средства вывести не получится.Обычно показатель повыше, чем для бонусов на депо. Не дивитесь, если он будет и х100. Иногда завышенный коэффициент вейджера уточняется для обитателей отдельных стран. 1×slots сайт зеркало Чаще всего интернет-казино предлагают бездепозитные бонусы свежим пользователям. Эта промо-акция очень отлично привлекает новичков, подталкивая их к открытию счета. Конечно, не они становятся преданными клиентами, хотя сам прецедент регистрации аккаунта играет на руку заведению.Не стоит путать игру в демо и внедрение бонусов. В демонстрационном режиме игрок имеет оценить механику слота, сюжет и оформление. Но забава ведется на условные кредиты, потому отсутствует основное ? чувство азарта. Активируя промокод или фриспины, заказчик раньше не расходует свои деньги на игровые автоматы, но может сорвать настоящий куш!
1хслотс регистрация в 1×slots casino
Денежные средства. Третий бонус за регистрацию без депо – наличные. К раскаянию, только знаменитые и популярностью клубы имеют уяснить средства в рублях или баксах. С их помощью вы сможете насладиться каждой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед этим необходимо исполнение определенных критерий. <a href=https://zeoworks.com/main/member.php?action=profile&uid=247433>https://zeoworks.com/main/member.php?action=profile&uid=247433</a> Этот образ приза несомненно добавлен на Ваш акк в успешной процедуры регистрации с использованием номера телефона. Если выбрать иной метод создания учетной записи, бездеп не несомненно добавлен на Ваш акк. 1хслотс рабочее зеркало Обычно для получения призов без депо, казино выдвигает лояльные и вполне выполнимые условия, но есть ряд действий которые запрещены и все причиной неприятные последствия:
1×slots бонус за регистрацию
Прибывшие на акк финансы бездепозитные бонусы предназначаются, главном, лишь для новоиспеченных пользователей, которые раньше не имели личного аккаунта в данном казино. Исходя из этого, если ранее у игрока был изготовлен депозит, то, по всей вероятности, у него больше не несомненно возможности рассчитывать на получение такого бонуса в конкретном заведении.Похожим образом трудится 3-ий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя или в связи с получения им VIP-статуса. Подарок предоставляется в обращения в поддержку и ревизии. 1×slots казино зеркало <a href=https://www.diigo.com/item/note/b90ch/ovct?k=42b2cf8283b52a61a92de693633c0e86>https://www.diigo.com/item/note/b90ch/ovct?k=42b2cf8283b52a61a92de693633c0e86</a> Более солидные предложения встречаются очень изредка. Зачастую они доступны только VIP-игрокам. В оставшихся случаях им скорее сопутствуют очень строгие обстоятельства отыгрыша. Также вероятны дополнительные условия и другие ограничения, прописанные в условиях и положения бонусной программы казино.Чтоб получить крупный выигрыш, избирайте игровые автоматы с предельным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша.
1хслотс казино зеркало
Проверка занимает от нескольких мин. До нескольких дней, спецы техподдержки имеют запросить дополнительные документы либо инициировать куцее общение по Skype. <a href=https://www.assayyarat.com/forums/member673788.html>https://www.assayyarat.com/forums/member673788.html</a> Возьми свой подарок. Чаще всего бонус активизируется сразу в регистрации. Но случаются истории, когда нужно зайти в индивидуальный кабинет либо написать в справочную службу. 1×слотс казино
<b>Смотреть еще похожие новости:</b>
<a href=http://vn-info.net/user/Josephkam/>1×slots зеркало этих способов предполагает регистрацию</a>
<a href=https://irc.floobits.com/Jamesamiva>1×slots официальный сайт скачать</a>
<a href=http://mi.minfish.com/home.php?mod=space&uid=1196847>1×slots casino online регистрация</a>
<a href=https://adminclub.org/showthread.php?tid=81566>1×slots официальный зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В разделе с бонусами активировать собственный подарок. Найти забавы, для коих предусмотрено поощрение и использовать приз по назначению. Еще одно условие дотрагивается размеров ставки. Операторы устанавливают наивысшую необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, избранной в Личном офисе. При превышении лимита есть риск потерять приза. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, клиент возможность столкнуться с запретом назначать фишки на шансы.
#3070 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало
Нет. Казино раздают бесплатные призы за регистрацию, чтобы, чтобы, чтобы заказчик возможность ознакомиться с игровым заведением. А дабы вывести его, нужно выполнить условия отыгрыша. <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino 56 online</a> Индивидуальные одобрения выдаются за совершение деяний: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавленья или официального посетителя для ПК. В большинстве казино действуют программки лояльности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на следующий степень часто сопровождается выдачей бездепа. <a href=https://www.papercall.io/speakers/shopavto>https://www.papercall.io/speakers/shopavto</a> 1×slots официальный сайт зеркало рабочее <a href=http://jusintergentes.com.ua/index.php?option=com_k2&view=itemlist&task=user&id=1465926&lang=uk>http://jusintergentes.com.ua/index.php?option=com_k2&view=itemlist&task=user&id=1465926&lang=uk</a> Доступность — бездепозитные бонусы в казино чаще всего предоставляются свежим игрокам, но случаются случаи, когда бонус все получить и действующие посетители.Доступ к дару может раскрываться механически последствии введения промокода или воззвания в саппорта сайта. В первом случае от юзера не требуется практически действий. Бездеп с активацией по коду встречается чаще всего. Игроку нужно ввести совокупность знаков в графе, которая возможность находиться в регистрационной форме в Личном офисе.
рабочее зеркало 1хслотс
Бонус без депо за регистрацию в казино (бездепозитный приз) – это денежный подарок от клуба, кот-ый начисляется на аккаунт игрока последствии регистрации в казино. Кроме творенья учетной записи, для получения бездепа, довольно часто потребуется ещё и подтвердить контактные данные игрока и/или активировать особый промо-код.Перечисленные выше главные характеристики сопровождают фактически любой бонус и считаются стереотипными для бездепозитных бонусных начислений в казино. <a href=https://forums.scar-divi.com/topic/870205–1-x-slots-casino/>1 x slots casino</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в индивидуальный кабинет, дабы забрать безвозмездные вращения с вейджером х40;Бонус без депозита за регистрацию в казино (бездепозитный приз) – это валютный подарок от клуба, который начисляется на акк игрока в регистрации в казино. Кроме творенья учетной записи, для получения бездепа, очень часто потребуется ещё и подтвердить контактные данные игрока и/или активировать специальный промо-код. <a href=http://kinobereza.by/index.php?subaction=userinfo&user=roastedcanopy68>http://kinobereza.by/index.php?subaction=userinfo&user=roastedcanopy68</a> Онлайн гемблинг развивается с каждым днем все больше и больше, новые бренды создаются не по дням а по часам. Новые интернет казино делают вступительные акции для игроков, для того собственно бы зарекомендовать себя, и что, этим самым предлагают бездепозитные бонусы за регистрацию, собственно бы не пропустить такую вероятность — как пользоваться новым бездепом, рекомендуем посещать наш вебсайт как возможно чаще, самое аппетитное и свежие будет добавляться в этом же списке. 1×slots зеркало на сегодня Для получения предоставленных бонусов вас пригодиться — ПК либо мобильное устройство, и остальное дело за небольшим.Риск-игра по равным шансам – Также казино возможность запрещать выполнять обстоятельства по отыгрышу с помощью раунда на удвоение, который предлагается в слотах, видео-покере и неких иных забавах.
1×slots на любой вкус как пройти регистрацию
<a href=http://www.kladonahodki.ru/component/k2/itemlist/user/298342>http://www.kladonahodki.ru/component/k2/itemlist/user/298342</a> Бездепозитные призы в казино без пополнения 2022 — это конкретная сумма средств или free spins вращения, которые предоставляются первым гостям за регистрацию на веб-сайте казино в виде бездепозитного бонуса, и дает для вероятность за счет казино без пополнения опробовать предложения (игр), с дальнейшей прерогативой вывода средств при исполнении всех установленных верховодил. 1×slot официальный сайт Бездепозитный бонус предоставляется новому игроку за конкретные действия. Часто подарок в виде средств или фриспинов выдается за регистрацию, благодаря чему пользователь получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.
1×slots casino зеркало
Бонус за регистрацию в казино выдается лишь раз один на 1-го игрока. Но случаются вспомогательные акции, в которых бездепы раздаются для постоянных посетителей и эти подарки Вы можете получить более одного раза. Подобные бонусы без депозита предоставляются на более прибыльных условиях. Зачастую они крупнее, а обстоятельства отыгрыша наименее жесткие. 1×slots зеркало на сегодня <a href=https://stomping-groundz.com/index.php?action=profile;u=3040>https://stomping-groundz.com/index.php?action=profile;u=3040</a> Также, учите, собственно бездепозитный приз возможно вывести только что случае, когда будут исполнены все обстоятельства отыгрыша.
1×slots зеркало рабочее
Фриспины – бесплатные вращения с фиксированной ставкой, коие возможно применять в конкретных игровых автоматах.Получать информацию о самых выгодных бонусах возможно без неизменного мониторинга новостей казино. Мы брали данную задачку на себя и постоянно следим за услугами операторов, выбирая превосходнейшие из их. В данном разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список акций периодически пополняется. В топ зашли самые свежие бездепозитные бонусы за регистрацию в казино 2020, кратковременные и закрытые рекламную. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и аспектам. Если срок действия промоакции истек, она удаляется из перечня. <a href=http://art-metall.su/user/RaymondLEK/>http://art-metall.su/user/RaymondLEK/</a> 1×slots официальный сайт зеркало Представленные на данной странице превосходнейшие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, в котором гости Casino.ru могут сортировать перечень по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.skmecca.com/2011/04/14/leave-the-world-better-than-you-found-it/comment-page-5/#comment-122610>1× слот зеркало</a>
<a href=https://10nsk.ru/user/JosephSuple/>1×slots официальный сайт скачать</a>
<a href=https://forum.graylite.com/viewtopic.php?p=387502#p387502>1×slots регистрация то дальше необходимо пройти</a>
<a href=https://talkonlinenews.com/viewtopic.php?t=6184>казино 1× slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депо имеет выделяться до 30 дней. Для отыгрыша приза казино обязывает игрока поиграть на необходимую, в некоторое раз превышающую сумму приобретенного приза — тут выгода фирмы очевидна.
#3071 Charlesgunnyhttp://filmkachat.ru
1 хслот регистрация в 1×slots casino
Oтыгpaть бонус с обозначенным вeйджepом, результата нужно сдeлaть cтaвoк нa cумму, превышающую объем бонуса в количество раз. <a href=http://filmkachat.ru/>x1 slots 1хслотс регистрация перейти на 1×slots</a> Для подтверждения электрической почты, просто перейдите по интенсивной ссылке в письме, приобретенном от игрового заведения. <a href=https://phileo.me/blogs/295816/Professional-Upholstered-Furniture-Rendering-Services-3D-Design>https://phileo.me/blogs/295816/Professional-Upholstered-Furniture-Rendering-Services-3D-Design</a> Благодаря программке лояльности от игорного заведения, возможно брать хороший старт и без дополнительных инвестициям запустить видеослоты. Кроме такого, возможно рассчитывать на реальную удачу и получить, без инвестиции личных финансов, великой выигрыш.Самый распространённый из подобных бонусов, окончательно же, бездеп на денек рождения посетителя — приз вид фиксированной суммы или фриспинов поступает на счёт игрока, а воспользоваться им возможно на установленного периода времени. 1×slots регистрация 1×slots casino c2d ru <a href=http://buff.com.ru/bitrix/redirect.php?goto=http://kaa-hem.ru/bitrix/redirect.php?goto=http://toolbarqueries.google.co.zw/url?q=https://teletype.in/@urid_pomosh/v1vUR07652i>http://buff.com.ru/bitrix/redirect.php?goto=http://kaa-hem.ru/bitrix/redirect.php?goto=http://toolbarqueries.google.co.zw/url?q=https://teletype.in/@urid_pomosh/v1vUR07652i</a> Подобные призы без депозита предоставляются на больше прибыльных критериях. Зачастую они покрупнее, а условия отыгрыша наименее строгие.
1хслотс казино зеркало
Осталось выбрать казино с бонусом за регистрацию и сделать профиль. После активации презента выигрыш в от Фортуны и навыков. <a href=http://216.38.0.7/viewtopic.php?f=12&t=141888>1х слот регистрация в 1×slots casino</a> 1×слотс казино <a href=http://victoryvapekorea.com/bbs/board.php?bo_table=free&wr_id=65582>http://victoryvapekorea.com/bbs/board.php?bo_table=free&wr_id=65582</a> 1×slots промокод при регистрации 2025 Нельзя осматривать забаву на средства, как вариант заработка. Азартные игры воспрещены для лиц моложе 18 лет. Topcasinobonuses.mobi классифицируется организатором азартных игр. Сайт одевает информационный характер.Бoльшинcтвo азартных заведений выдвигают приблизительно одинаковые условия и требования, которые нужно выполнить, дабы получить бездепозитный приз за регистрацию. Все их возможно соединить в один перечень:
онлайн казино 1×slots
Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=https://www.yuliancaishang.com/space-uid-297521.html>https://www.yuliancaishang.com/space-uid-297521.html</a> Можно ли в одном интернет казино получить больше 1-го бонуса за регистрацию? Нет, например как в любом интернет казино есть правила, к которым надо(надобно) придерживаться, не творить 2 аккаута для получения бонусов, иначе будет блокировка обоих аккаутов, не пытайтесь обмануть онлайн казино, бонус за регистрацию выдаеться раз раз одному личику. казино 1× slots официальный сайт Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депозит имеет выделяться до 30 дней.Чтоб получить большой выигрыш, выбирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша.
1х слот регистрация в 1×slots casino
Активация происходит с помощью промокодов, коие вводятся в личном кабинете после регистрации. Среди спецпредложений в списке Casino.ru содержатся неповторимые промокоды, которые доступны только гостям портала. Другие методы начисления средств ? автоматическая активация сразу в творенья аккаунта и получение презента по запросу в службу технической поддержки.Доступные забавы – В неких азартных забавах возможно понизить математическое превосходство казино до нескольких 10-х процента. В их количестве все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как управляло, в этих играх ставки идут в зачет вейджера не полностью. Например, имеет учитываться только 50%. В некоторых играх бездепозитные призы вообще невозможно отыгрывать. Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить особенности, труднодоступные при игре в демо режиме. Многие новые клиенты переходят в количество постоянных, а оператор получает долгосрочную прибыль. У любой забавы свои притязания по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система зачтет каждую ставку. В рулетке и покере устроить это гораздо сложнее. Именно поэтому например принципиально пристально читать обстоятельства получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой игре, то новички попросту «спустят приз на ветер».Обычно для получения бонусов без депо, казино выдвигает приклнные и абсолютно выполнимые обстоятельства, но есть ряд поступков которые запрещены и шансы повлечь за собой противные результаты: 1хслот скачать <a href=http://www.sicilianodentro.it/forum/members/240881.html>http://www.sicilianodentro.it/forum/members/240881.html</a> Большинство интернет-казино из нашего топ-10 готовы повеселить вас эксклюзивными акциями. Читайте о их в обзорах и на форуме.
1×slots casino регистрация 1×slotscasin online
Многие казино предоставляют в рекламных целях бесплатные призы самая для наших читателей. Чтобы их получить, нужно перебежать на игровой вебсайт по партнерской ссылке с нашего портала.Необходимость отыгрыша. Вейджер в выше, чем для бонусов за депозит. И же средства не отыграны, вывести их невозможно. Наши эксперты исследуют условия акции, затем в ручном режиме проверку их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие характеристики. Мы не рекламируем казино, а даем игрокам информацию о лучших из них. <a href=http://www.osa-defence.ru/forum/user/94361/>http://www.osa-defence.ru/forum/user/94361/</a> При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое возможно посвятить игре в казино. 1×slots подтвердит вашу регистрацию если говорить
<b>Смотреть еще похожие новости:</b>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/member.php?action=profile&uid=36740>1×slots промокод при регистрации 2025</a>
<a href=https://minifishtank.net/forum/showthread.php?tid=22401>1×slots casino регистрация 1×slotscasin online</a>
<a href=http://www.easysunnysunshine.com/memberlist.php?mode=viewprofile&u=18118>1хслот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Самый распространённый из подобных бонусов, конечно же, бездеп на денек рождения клиента — бонус повторяющий фиксированной суммы или фриспинов поступает на счёт игрока, а воспользоваться им можно в течение установленного периода времени. Такие одобрения позволяют безвозмездно протестировать свежее казино, разобраться с игровым процессом онлайн слотов, заработать и исключить небольшую необходимую денег.
#3072 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino игровой автомат pin up casino зеркало <a href=https://rhymes-punches.com/>почему казино</a> 1×bet официальный 1×bet xyz porno Юлия Канакина <a href=https://rucriminal.info/>vavada casino</a> 7k casino официальный порно с Артемий Панарин (хоккей) бк букмекерская контора Львова-Белова Мария Алексеевна порно black russia казино top casino официальная казино
DiskiPlus 1×bet слоты DiskiPlus pinco casino <a href=https://diskiplus.ru/>DiskiPlus спорт букмекерская контора</a> DiskiPlus букмекерская контора бесплатно скачать DiskiPlus порно с Алина Загитова <a href=https://www.diskiplus.ru>DiskiPlus казино пину</a> DiskiPlus casino бонус DiskiPlus порно с Никита Кучеров (хоккей) DiskiPlus casino игровой автомат DiskiPlus Попова Анна Юрьевна порно DiskiPlus пинап казино DiskiPlus порно с Владимир Минеев (ММА) DiskiPlus сайт pin up casino
#3073 Charlesgunnyhttp://filmkachat.ru
1х слот 1хслотс регистрация перейти на 1×slots
Помните, что в некоторых забавах сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки числятся как отыгранные средства, момент как в слотах идет в зачет все 100% суммы. <a href=http://filmkachat.ru/>скачать 1×slots на андроид мобильная версия</a> После требуется внести идентификационный платёж. Это стращает начинающих больше всего. Нужно устроить минимальный депо в 100–500 руб. Таким образом служба защищенности убедиться что, что платёжный способ принадлежит Вам. Данная процедура важна для обеспечения защищенности игровых счетов. Пример, Ваш аккаунт взломают и выведут средства на собственный кошелёк. Будет крайне неприятно. Поэтому верификация платёжной системы, это необходимый момент.В каждом казино с бездепозитным призом предусмотрены вейджеровые обстоятельства. Это единственный «подводный камень», который стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) сделать определённое количество ставок. Чем круче приз, тем сложнее выполнить обстоятельства, и напротив. <a href=https://www.webwiki.com/playhouse.com.ua>https://www.webwiki.com/playhouse.com.ua</a> Минимального оборота. Этот предел уточняется вейджером — пока игрок не сыграет на установленную сумму, вывод средств несомненно недоступен. 1 хслот регистрация в 1×slots casino <a href=http://lat-puzz.com/phpbb/memberlist.php?mode=viewprofile&u=83479>http://lat-puzz.com/phpbb/memberlist.php?mode=viewprofile&u=83479</a> Зачастую бездепозитные бонусы казино для забавы предлагаются разными заведениями азартных игр в качестве маркетинговых промоакций либо в целях привлечения к для свежих игроков. Для бездепозитных призов в казино 2022 игроку надо пополнять счет до момента вывода желаемых средств.А ознакомиться с новыми онлайн казино, Вы сможете помощью призов с выводом выгоды, коие Вы сможете получить без депозита.
1хслот официальный сайт зеркало
Но разу не забывайте пристально читать правила роли в бонусных промоакциях. Если вы нарушите но бы одно условие, позже вы не можете уладить недоразумение с администрацией.Существуют казино с бонусом за регистрацию, в которых очень востребованы фриспины в онлайн казино потом регистрации в конкретных играх. Они встречаются числе чаще даровых поощрений либо традиционных бонусов в казино без вложений. Например, игрок регистрирует счет, на кот-ый начисляются бесплатные забавы, приз за регистрацию вид безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса в выигрывает настоящие деньги, коие в последствии возможно удачно исключить из заведения на свою платежную систему. То есть, есть шансы исключить свои без рисков своими деньгами. Регистрация, за геймер получит призы, займет минут, а спасибо данному можно прирастить пять евро поощрений до тысячи и без всяких проблем исключить их. <a href=http://vn-info.net/user/Josephkam/>1×slots casino регистрация 1×slotscasin online</a> 1×slots скачать на айфон <a href=http://mos-it.ru/index.php?subaction=userinfo&user=economicreferee>http://mos-it.ru/index.php?subaction=userinfo&user=economicreferee</a> Таким образом, заведение пробует показать себя своим потенциальным игрокам, а такой маркетинговый ход как казино бонус без депо за регистрацию привлекает очень большое внимания к игорному заведению и обеспечивает постоянный струю новых гостей и грядущих посетителей игрового онлайн клуба. 1×slots актуальное зеркало
1х слотс зеркало регистрация в 1×slots casino
Таким образом, заведение пытается продемонстрировать себя своим вероятным геймерам, а подобный рекламный ход как казино приз без депозита за регистрацию завлекает довольно количество внимания к игорному заведению и обеспечивает неизменный поток свежих посетителей и будущих клиентов игрового интернет клуба.Существует ли стратегии для отыгрыша бездепозитных призов? К раскаянью нет, на выигрыши или проигрыши с призов, казино или игрок воздействовать возможности, отдача игр происходит от создателей игр. <a href=http://intercon-intellect.ru/bitrix/click.php?goto=http://volga-tv.ru/bitrix/redirect.php?goto=http://garantpartners.com.ua/bitrix/redirect.php?goto=https://teletype.in/@urist555/i5swviCgeDt>http://intercon-intellect.ru/bitrix/click.php?goto=http://volga-tv.ru/bitrix/redirect.php?goto=http://garantpartners.com.ua/bitrix/redirect.php?goto=https://teletype.in/@urist555/i5swviCgeDt</a> Ещё одно распространённое акционное предложение – симпатичный подарок с сомнительными притязаниями. К образцу, клуб обещает $100 в качестве бездепа, но с вейджером х80 либо х100. Отыграть такой вейджер фактически невозможно и поэтому другого, как концентрироваться на больше занимательных промоакциях.Бонус без депо за регистрацию в казино (бездепозитный бонус) – это денежный подарок от клуба, который начисляется на акк игрока после регистрации в казино. Кроме творения учетной записи, для получения бездепа, очень нередко потребуется ещё и доказать контактные данные игрока и/или активировать специальный промо-код. 1хслотс зеркало Частенько новички не разумеют, как активировать презенты или вывести первый выигрыш. Для похожих случаев наша команда описала основные определения – что такое фриспины, вейджер, как его отыграть, чего нужно протекать верификацию.Бесплатный бонус – кредиты, коие онлайн-казино начислит посетителю, не заставляя его пополнять игровой счет.
1×slots регистрация 1×slots review live
Фриплей-бонусы встречаются только в некоторых клубах. Они зачисляются незамедлительно после создания профиля и активны недолговременное время. Если не успеете истратить свои, они попросту сгорят. Касаемо времени, как бонусы активны протяжении часа.Частенько новенькие не разумеют, как активировать подарки или исключить первый выигрыш. Для сходственных случаев наша команда обрисовала основные термины – собственно такое фриспины, вейджер, как его отыграть, для необходимо проходить верификацию. Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Если вы новичок деле и лишь попали в неизведанную вами область азарта — за услуг как бездепозитные призы без пополнения. 1×slot зеркало <a href=https://wood.biz.ua/wr_board/tools.php?event=profile&pname=MiguelEsser>https://wood.biz.ua/wr_board/tools.php?event=profile&pname=MiguelEsser</a> Большинство интернет-казино из нашего топ-10 готовы порадовать вас эксклюзивными акциями. Читайте о их в обзорах и на форуме.
1хслотс рабочее зеркало
Если вы облюбовали себе несколько брендов коие для больше всего приглянулись, для постоянной игры! Таких гемблеров казино довольно предпочитает и ценит, за частую такие игроки становятся VIP игроками заведения, коим часто поступают выгодные предложения повторяющий бонусов, например же туда заходит и бездепозитные.Во всех легальных онлайн-казино Беларуси нужно подтверждение паспортных данных для игры — это заявка правительства государства. <a href=http://x4kurd.freetzi.com/member.php?action=profile&uid=81853>http://x4kurd.freetzi.com/member.php?action=profile&uid=81853</a> При малый сумме приза рекомендовано выступать по низким ставкам, а использовать наибольшие превосходнее лишь что случае, если вейджер очень великой, а время на отыгрыш сильно ограничено.Теоретически, к безвозмездным призам можно отнести например называемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, потому собственно они предоставляют лишь вероятность создавать ставки. 1 х слотс зеркало Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в обязательном порядке необходимо восполнить счет в казино. Для депозитных бонусов, эта процедура не нужна, так как депозит уже сделан.Бонусные деньги – небольшая сумма средств для старта в новеньком казино. На бонусные деньги, обычно разрешено выступать во все игры, не слотов с прогрессивным джекпотом и игр из раздела exist casino.
<b>Смотреть еще похожие новости:</b>
<a href=http://everestrolep.listbb.ru/viewtopic.php?f=38&t=12448>1× slots регистрация в 1×slots casino</a>
<a href=https://www.goslog.ru/forum/messages/forum1/message13357/11-obrashcheniya-grazhdan?result=reply#message13357>1×slots зеркало рабочее на сегодня</a>
<a href=http://u0382101.isp.regruhosting.ru/index.php/forum/general-questions-and-how-tos/68883-otzyvy-o-tovarakh>1×slots скачать на айфон</a>
<a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1×slots регистрация 1×slots casino c2d ru</a>
<a href=https://forumsleague.org/forum/viewtopic.php?f=70&t=19490&p=382532#p382532>1×slots регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
После получения приза вывод средств для клиента несомненно недоступен до тех пор, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или чета недель. Выводить средства игрок может лишь в отыгрыша.
#3074 HerbertZefhttps://faine-misto.od.ua
Новости Одессы <a href=https://faine-misto.od.ua/>https://faine-misto.od.ua</a> на городском портале Файне мiсто. События, обзоры, происшествия Одессы и области.
#3075 Michaelelulphttps://faine-misto.lviv.ua
Файне місто Львів <a href=https://faine-misto.lviv.ua/>https://faine-misto.lviv.ua</a> сайт Львова. Новости, события, места и обзоры.
#3076 сейфы для офисаhttps://ofisnyj-sejf.ru/
Тут можно преобрести офисные сейфы купить <a href=https://ofisnyj-sejf.ru/>сейф для хранения документов в офисе</a>
#3077 купить сейф для офисаhttps://ofisnyj-sejf.ru/
Тут можно преобрести купить сейф для офиса недорого <a href=https://ofisnyj-sejf.ru/>сейф офисный</a>
#3078 Charlesgunnyhttp://filmkachat.ru
1 хслот регистрация в 1×slots casino
С этими простыми советами любое казино с призом за регистрацию способно принести в разы больше выгоды и полезности. <a href=http://filmkachat.ru/>1×slots скачать на айфон</a> Каждый из бездепозитных призов без пополнения 2022 содержит собственный конкретный вейджер для отыгрыша, например же в каждом казино он уточняется персонально — где то он х55 а кое-где х30, повторюсь везде по разному! <a href=https://www.papercall.io/speakers/shopavto>https://www.papercall.io/speakers/shopavto</a> Иногда в поощрения за регистрацию все выдаваться билеты для роли в турнирах. Условия их проведения очень отличаются, поэтому мы советуем ознакомиться с любым предложением раздельно.Благодаря программке лояльности от игорного заведения, возможно брать превосходный старт и без добавочных вложений запустить видеослоты. Кроме как, можно рассчитывать на реальную удачу и получить, без вложения личных денег, большой выигрыш. 1хслотс регистрация в 1×slots casino <a href=http://forum.notionmusic.com/memberlist.php?mode=viewprofile&u=26065>http://forum.notionmusic.com/memberlist.php?mode=viewprofile&u=26065</a> Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки могут запросить вспомогательные документы либо инициировать краткое общение по Skype.Новички не обожают сразу же заносить депозит. Это обусловлено неименьем навыка и сомненьем. К счастью, наши возможно получить бездепозитный бонус за регистрацию в казино. Неважно собственно начисляет система – фриспины либо кредиты. В любом случае вы не рискуете своими сбережениями. Это замечательная возможность запустить понравившийся видео слот либо же испытать удачу в настольных забавах.
1х слот регистрация в 1×slots casino
<a href=http://check2go.net/my-account/>1×slos регистрация в 1×slots casino</a> 1×slot зеркало рабочее регистрации на телефон придет <a href=http://j67236dr.bget.ru/user/Travissaw/>http://j67236dr.bget.ru/user/Travissaw/</a> казино 1×slots официальный сайт
1×slots рабочее зеркало на сегодня
Бездепы обыкновенно предлагают с отыгрышем — быстро вывести выигранные свои нельзя. Перевод денег со счета несомненно возможен последствии как, как пользователь выполнит все требования казино, а сумма не может превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, протяжении которых заказчик вправе воспользоваться предложением. Обычно они не превышают нескольких дней после активации. <a href=https://nc750.ru/member.php?u=4921>https://nc750.ru/member.php?u=4921</a> На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не сможете активировать и получить бездепозитный бонус. 1×slots регистрацию процедура займет всего лишь Наши эксперты изучают условия акции, затем в ручном режиме проверяют их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и другие характеристики. Мы не рекламируем казино, а даем игрокам информацию о наихороших из них.
1×slots регистрация на сайте
Принципиальным отличием даровых бонусов от бонусов на депо является неимение надобности вносить деньги на акк. Из-за сего их часто именуют бездепозитными (no deposit bonuses). <a href=http://miupsik.ru/forums/showthread.php?tid=375171>1×slots зеркало регистрация в 1×slots casino</a> Любой выигрыш по ставке повыше установленного лимита несомненно считаться недействительным. То есть ставка не несомненно засчитана при отыгрыше, а случае выигрыша его сумма не поступит на счёт посетителя — результат игры будет полностью аннулирован.Обыкновенные бездепозитные бонусы в размере от трех до 20 долларов созданы для того, чтобы в забавы заходили все новые и свежие игроки. Здесь, скорее, несомненно лимитирование на наибольший выигрыш. Важно, чтобы перед наименьшим вкладом был отключен приз за первое пополнение счета, и геймер не попадет на повторный вейджер. Бонус за регистрацию в казино выдается только раз один на 1-го игрока. Но посещают дополнительные акции, в коих бездепы расступаются для неизменных посетителей и эти подарки Вы сможете получить более 1-го раза. казино 1×slots официальный сайт <a href=https://geolymp.org/user/profile/Briandrome>https://geolymp.org/user/profile/Briandrome</a> Необходимость отыгрыша. Вейджер в выше, чем для бонусов за депо. И же свои не отыграны, вывести их нельзя.Бездепозитные бонусы – это исключительно небезинтересная и более перспективная акция интернет-казино. Они том превосходнее фри-спинов, потому что выплаты в даровых вращениях не гарантированы, ведь композиции на барабанах игрового аппарата имеют не сложиться.
1× slots casino официальный сайт
Помните, что в некоторых забавах сумма ставки идет в зачет вейджера лишь частично. Так, в настольных и карточных играх только от 5% до 50% суммы ставки числятся как отыгранные деньги, на как в слотах идет в зачет все 100% суммы.Бездепозитный приз – это экономическое вознаграждение, коие выдается участнику игры в казино, для его привлечения и возникновения заинтригованности. Любой посетитель, кот-ый соответствует условиям выдачи подобного бездепозитного бонуса, имеет претендовать на получение вышеуказанного приза. Такое поощрение является наиболее эффективным методом, дающим возможность стартовать деле, не вкладывая личных материальных средств. Для верификации аккаунта нужно предоставить спецам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, а фотку банковской карты либо скриншот страницы электронного кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для доказательства личности. <a href=https://pcnto.com/user/RichardDiumn/>https://pcnto.com/user/RichardDiumn/</a> Обычно для получения бонусов без депо, казино выдвигает лояльные и вполне выполнимые обстоятельства, но есть ряд действий коие запрещены и все причиной неприятные результаты:При игре на бонусные средства воспрещается играть в игровые автоматы с прогрессивным джекпотом и забавы из радела exist casino. Кроме того, некоторые казино дают бездеп на раз либо количество определенных слотов, и в других играх Вы не можете на них играть. 1хслот 1хслотс регистрация перейти на 1×slots Иногда для получения бонусов необходимо спутаться с представителями саппорта. Удобнее всего с ними собеседовать в онлайн-сате, желая от достаточно запроса по электронной почте.Риск-игра по одинаковым шансам – Также казино возможность запрещать скорпулезно условия по отыгрышу счет раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких иных играх.
<b>Смотреть еще похожие новости:</b>
<a href=http://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=6268>1хслот официальный сайт зеркало</a>
<a href=https://mcmon.ru/showthread.php?tid=139689>1×slots актуальное зеркало</a>
<a href=https://www.goslog.ru/personal/profile/index.php?PAGE_NAME=profile_view&UID=66187>1× slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам запрещено начислять призы клиентам, не имеющим валютных средств на счете. Мы предлагаем рассмотреть животрепещущие бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ. Фриспины без депо либо дополнительные средства посодействуют ближе познакомиться с игровой платформой и её функциями. За счёт презентов можно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за забавы напротив живых крупье.
#3079 Charlesgunnyhttp://filmkachat.ru
1хслотс регистрация в 1×slots casino
Особую изюминку видео слотам придают оригинальные знакы. С их появлением активируются разные бонусы. Вы сможете запустить дополнительный степень и прирастить сумму выигрыша. Есть знаки, которые сменяют негодные элементы и сами делают выигрышные комбо. Не стоит забывать и тему бонус-тур. После любого успешного спина есть шанс увеличить необходимую выигрыша в 2 или хорошо раза. <a href=http://filmkachat.ru/>1×slots регистрация</a> Но существуют азартные заведения, готовые просто так вручить средства на игру. Для сего достаточно создать профиль. Чтобы вывести выигрыш, сначала необходимо выполнить вейджеровые условия, прописанные в условиях получения бездепа.Да, у даровых бонусов есть недостатки. Прежде всего, они обычно большие. Кроме того, условия вейджера по ним практически строгие. Но все же неименье риска делает их очень красивыми для посетителей. <a href=https://similars.net/alternatives-to/playhouse.com.ua>https://similars.net/alternatives-to/playhouse.com.ua</a> Бонус за регистрацию в казино выдается лишь раз раз на 1-го игрока. Но бывают дополнительные промоакции, в рамках которых бездепы раздаются для постоянных клиентов и эти подарки Вы можете получить больше одного раза. 1хслотс рабочее зеркало <a href=http://realgeek.free.fr/index.php?file=Members&op=detail&autor=ruddybruise24>http://realgeek.free.fr/index.php?file=Members&op=detail&autor=ruddybruise24</a> Когда речь о валютных призах, казино всегда устанавливают обстоятельства вейджера, коие нужно выполнить, дабы исключить выигрыш.
рабочее зеркало 1хслотс
Далее потребуется отыграть вагер и вывести выигрыш. Игрокам без навыка крупно подфартило, есть получить десятки презентов за 1 регистрацию. Если не сумели получить Бездепозитный приз, не тревожьтесь. Обратитесь в онлайн чат, оператор поможет решить проблему. <a href=https://nauc.info/forums/viewtopic.php?t=20714110>зеркло казино 1×slots</a> 1×slots зеркало регистрация то дальше необходимо пройти Принципиальным отличием бесплатных бонусов от бонусов на депозит является отсутствие необходимости вносить деньги на аккаунт. Из-за сего их часто нарекают бездепозитными (no down payment bonuses).В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая приятная часть игры. Важно, зачастую бездепозитные призы в казино выдаются с ограничениями по наибольшей выплате. В среднем возможно рассчитывать на прибыль в некоторое тыщ руб. Как исключить выигрыш с приза без депо. Придётся доказать акк документально, в некоторых заведениях. Процедура верификации обязательна и делается любым игроком. О документальном доказательстве учетной записи спрашивайте в интернет чате или прочтите в правилах. <a href=http://munservis.mirniy.ru/index.php?subaction=userinfo&user=burlyghoul79>http://munservis.mirniy.ru/index.php?subaction=userinfo&user=burlyghoul79</a> Наличие у игрока 2 аккаунта. Запрещено создавать некоторое профилей для неоднократного получения бездепов. 1×slots casino регистрация 1×slotscasin online На критериях отыгрыша безвозмездных призов следует остановиться подробнее. С ними связаны аспекты, которые нельзя забыть без внимания.
казино 1×slots
После получения приза вывод средств для посетителя будет недоступен того, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя либо чета недель. Выводить деньги игрок может лишь последствии отыгрыша. Игры, в которых можно выступать на бонусные средства. Проверьте перечень игр, в возможно играть на бонусные средства, вероятно они Вам не понравятся и не стоит расходовать своё время на эту промоакцию. <a href=https://www.abclinuxu.cz/lide/archicgic>https://www.abclinuxu.cz/lide/archicgic</a> 1хслотс мобильная версия зеркало
1×slot рабочее зеркало
Каждая игровая перрон отличается критериями по получению и отыгрышу бездепов. В правилах отчетливо расписаны кратковременные рамки, за коие нужно прокрутить вейджер. Также не запамятовывайте на максимальный размер ставки и максимальную необходимую выплаты. С другой стороны, дабы получить бездепозитные бонусы казино, достаточно израсходовать менее 1 минутки. Превышение наибольшей ставки при отыгрыше. Система автоматически не предуведомляет о превышении ставки, потому о нарушении верховодил игрок возможность разузнать теснее в подачи запроса на вывод средств. Но рядах азартных платформах подобные вознаграждения все получить и уже зарегистрированные юзеры. В таком случае, призы предоставляются в уникальных промоакций либо же неким игрокам повторяющий акционного предложения, коие приходит на почту с целью «вернуть» игрока в свое казино.Условия вывода выигрыша. В некоторых заведениях для успешного вывода с бездепозитного бонуса довольно пополнения баланса и подтверждения личности. В других же клубах, необходимо количество раз прокрутить свой депо. 1 x slots <a href=http://bazarweb.ru/forum.php?PAGE_NAME=profile_view&UID=26206>http://bazarweb.ru/forum.php?PAGE_NAME=profile_view&UID=26206</a> При отыгрыше бездепов, учитывайте кратковременные лимитирования. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток.
1хслот зеркало
Для получения бонуса надо(надобно) пригласить в забаву нового клиента. Казино начислит пригласившему фиксированный процент от взносов приглашённого повторяющий бонуса: почаще всего его размер не выше 10%. Срок деянья приза в большинстве случаев не выше месяца: пригласивший получает бонус зависимо проигранных ставок приглашённого в 1-ый месяц игры.Прямо сейчас отберите бесплатные вращения за регистрацию без депозита и начинайте коллекционировать призовые композиции ради солидных выигрышей! <a href=https://ai-db.science/index.php?title=%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0%20%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA>https://ai-db.science/index.php?title=%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0%20%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA</a> Игры, в можно выступать на бонусные деньги. Проверьте список игр, каких возможно играть на бонусные средства, вполне они Вам не понравятся и не стоит расходовать своё время на такую акцию.Большинство клубов привлекают внимание компьютерные за счёт разнородных презентов. На 1 сайтах можно получить виртуальные кредиты, коие откроют доступ ко всему софту. На иных же, администрация предлагает бесплатные вращения для пуска лучших интернет слотов. Несмотря на различные акции, стоит выделить самые основные. 1×slots регистрация 1×slotscasino09k online
<b>Смотреть еще похожие новости:</b>
<a href=https://adler.biz/threads/1136/>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=14515>1×slots рабочее зеркало на сегодня</a>
<a href=https://www.donchillin.com/space-uid-382497.html>1×slots зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для казино, работающих онлайн, бездепозитные бонусы нужны для вербования свежих клиентов. Предложение поиграть на слотах без необходимости внесения реальных денег — работающий метод для увеличения интереса к фирмы. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит выступать в казино, только сейчас уже на личные деньги. Такой безвозмездный эквивалент средств зачисляется на профиль пользователя в осуществления притязаний и предназначаются они лишь для игрового процесса. Вывод таких вознаграждений вероятен лишь в осуществления вейджеровых условий.
#3080 Charlesgunnyhttp://filmkachat.ru
1×slos регистрация в 1×slots casino
Третитй бездепозитный бонус за регистрацию – денежные свои. К огорчению, начислить рубли либо баксы готовы только знаменитые и известные клубы. С их подмогою у насладиться любой доступной забавой – автоматом, рулеткой, кено, блэкджеком. <a href=http://filmkachat.ru/>1×slots промокод при регистрации 2025</a> <a href=https://help.bemob.com/discuss/67877b6763d8950052d0e943>https://help.bemob.com/discuss/67877b6763d8950052d0e943</a> На бонусные начисления шансы быть установлены дополнительные лимитирования, которые Вы не сведению при отыгрыше. Пока приз полностью не отыгран — средства из казино не выводятся.Отыграв бездепозитный приз в казино с выводом также придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если схожее лимитирование присутствует, то единоразово вывести выйдет лишь необходимую, не превосходящую размер приобретенного бонуса. рабочее зеркало 1×slots <a href=https://correspondent.in.ua/user/JasperBes/>https://correspondent.in.ua/user/JasperBes/</a>
1×slots casino регистрация 1×slotscasino09k online
На бонусные начисления шансы быть установлены вспомогательные ограничения, которые Вы не приняли при отыгрыше. Пока приз всецело не отыгран — деньги из казино не выводятся. <a href=http://www.ihavethepussy.com/de/threads/205685–1%D0%A1%E2%80%A6%D0%A1%D0%83%D0%A0%C2%BB%D0%A0%D1%95%D0%A1%E2%80%9A%D0%A1%D0%83-%D0%A1%D0%82%D0%A0%C2%B0%D0%A0%C2%B1%D0%A0%D1%95%D0%A1%E2%80%A1%D0%A0%C2%B5%D0%A0%C2%B5-%D0%A0%C2%B7%D0%A0%C2%B5%D0%A1%D0%82%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%BB%D0%A0%D1%95?p=223220#post223220>1хслотс рабочее зеркало</a> 1×слот регистрация в 1×slots casino <a href=http://elektrofahrrad-tests.de/forums/member.php?action=profile&uid=33047>http://elektrofahrrad-tests.de/forums/member.php?action=profile&uid=33047</a> Помните, собственно любые нарушения верховодил сведут на нет ваши усилия, и вы скорее останетесь без начисленного для дарового приза. Всегда изучайте верховодила начисления и условия вейджера. По хоть вопросам, на коие вы не других отыскать ответы, обращайтесь за объясненьям и саппорт.Срок отыгрыша — это этап, кот-ый наступает в момент активации приза и кончается с его закрытием. Пользователю необходимо уложиться в этот временной промежуток, другому призовые средства аннулируются. Казино устанавливают список игр, ставки каких засчитываются при расчете отыгранных денег. Если тайтл не входит в данный список, то предоставляется быть недосегаем для загрузки во время деянья бонусного предложения. зеркло казино 1×slots
1 х слотс зеркало
Верификация необходима для дополнительной безопасности и подсобляет техподдержке выявить бонусхантеров и мошенников. Кстати, на некоторых платформах выводы солидных сумм доступны только в подтверждения личности. Ниже указан актуальный перечень легальных казино в Беларуси с призами на 1-ый депозит. Вы можете попасть на официальный сайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус.Например, игрок получил 500 рублей при творении аккаунта и обязан отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 рублей, понадобится устроить 875 спинов для полного отыгрыша. <a href=http://xn–23-np4iz15g.com/bbs/board.php?bo_table=free&wr_id=267921>http://xn–23-np4iz15g.com/bbs/board.php?bo_table=free&wr_id=267921</a> Прежде всего, не запамятовывайте периодически заглядывать на страницу обзоров бездепозитных призов. Они шаг за шагом рассматривают более занимательные предложения водящих игорных порталов.Для выбора азартного заведения Вы сможете пользоваться списком наших казино с бонусами за регистрацию. На нашем веб-сайте мы выпустили перечень бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, что часть призов неповторимые и доступны только для посетителей нашего вебсайта по-специальному промо-коду либо по оригинальной ссылке. Кроме того, для каждого приза мы подготовили подробный обозрение, в котором Вы узнаете как получить и отыграть одобрение и как вывести собственный выигрыш с бездепа. 1хслотс зеркало на сегодня Не рекомендуем опрометью голову браться за всевозможные предложения получения средств без вложений. Вполне вероятно, собственно бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем выглядит на первый взор. Альтернативой считается казино бонус за депо. Мы предлагаем вас пару советов, благодаря коим у любого игрока несомненно возможность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом средств:На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не можете активировать и получить бездепозитный приз.
1×slots мобильная версия войти казино
Если речь идет об эксклюзивных услугах, имеет потребоваться регистрация в казино по ссылке с партнерского сайта. Чаще всего применяются коды. Их надо(надобно) вносить в особые окошки регистрационной анкеты, в речь о пригласительных призах, или в особом разделе собственного кабинета игрока. Для верификации аккаунта надо(надобно) дать спецам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, а также фотографию банковской карты либо экрана странички электронного кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности. 1×slots зеркало регистрация то дальше необходимо пройти <a href=https://forum.spherecommunity.net/User-DoctorLazutakl>https://forum.spherecommunity.net/User-DoctorLazutakl</a>
1×slots рабочее зеркало
Самые пользующиеся методы вывода средств ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электрическим платежным системам типа Neteller и Skrill, а пользуются криптовалютными кошельками. Вывод выигрышей возможность осуществляться мгновенно либо занимать от нескольких часов до нескольких суток. <a href=http://t73108uj.bget.ru/member.php?action=profile&uid=120300>http://t73108uj.bget.ru/member.php?action=profile&uid=120300</a> Когда идет о валютных бонусах, казино постоянно устанавливают условия вейджера, которые необходимо выполнить, дабы вывести выигрыш. 1×slots рабочее зеркало на сегодня Маркетинговая политического всех игорных интернет-клубов обязана одевать разнородный характер. И если гонорары на депо работают для того, дабы стимулировать вносить депозиты и поощрять уже существующих пользователей, то бездепозитный приз в казино или бонус за регистрацию в казино, до всего, рассчитан на расширение базы покупателей.Наши специалисты изучают обстоятельства акции, после в ручном режиме проверяют их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и другие характеристики. Мы не рекламируем казино, а даем игрокам информацию о наилучших из их.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.survival-readiness.com/memberlist.php?mode=viewprofile&u=30498>1хслот официальный сайт зеркало</a>
<a href=https://www.mshowto.org/forum/members/jamespauri.html>1×slots промокод при регистрации 2025</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы казино за регистрацию в 2022 году — это вероятность сыграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой или количеством безвозмездных вращений без внесения депо. Не путайте деморежим с реальной игрой без необходимости внесения депозита. Сразу последствии активации промокода возможно пользоваться подарком. Как теснее упоминалось, бонусы бывают трёх видов – фриспины, кредиты и фриплей-бонусы.
#3081 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino ru сайт казино зеркало <a href=https://specreporter.com/>1×bet скачать приложение на андроид</a> Кузнецова Анна Юрьевна порно 1×bet сейчас <a href=https://7club7.com/>порно с Карен Хачанов (теннис)</a> скачать 1×bet 1×bet xyz top casino casino сегодня казино играть casino рабочее зеркало приложения букмекерских контор 1×bet приложение
DiskiPlus Радченко Светлана Юрьевна порно DiskiPlus 1×bet зеркало рабочее xbet <a href=https://www.diskiplus.ru>DiskiPlus pin up casino официальный</a> DiskiPlus Чулпан Хаматова DiskiPlus casino скачать <a href=https://diskiplus.ru/>DiskiPlus букмекерская контора фонбет официальный</a> DiskiPlus порно с Каролина Севастьянова DiskiPlus pin up casino пин ап DiskiPlus автомат казино DiskiPlus порно с Александр Головин (футбол) DiskiPlus про казино DiskiPlus pin up casino top top DiskiPlus смотреть фильм казино
#3082 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать
Обычно показатель повыше, чем для призов на депозит. Не дивитесь, в он несомненно в х100. Иногда завышенный коэффициент вейджера уточняется для жителей отдельных государств. <a href=http://filmkachat.ru/>1×slots сайт</a> Необходимость отыгрыша. Вейджер такой повыше, чем для призов за депозит. И же свои не отыграны, исключить их нельзя.Во всех легальных онлайн-казино Беларуси необходимо свидетельство паспортных данных для забавы — это требование правительства страны. <a href=https://phileo.me/blogs/295816/Professional-Upholstered-Furniture-Rendering-Services-3D-Design>https://phileo.me/blogs/295816/Professional-Upholstered-Furniture-Rendering-Services-3D-Design</a> Предложения с бездепозитными бонусами за регистрацию дозволяют новым заведениям заинтересовать аудиторию на собственный вебсайт. А игроки в свою очередь получают возможность выступать на настоящие средства без депозита в казино и заработать небольшой стартовый капитал, кот-ый разрешено вывести на карту банка или электронный кошелек.Бездепозитный бонус – это финансовое вознаграждение, которое выдается соучастнику забавы в казино, для его вербования и появления заинтересованности. Любой гость, который подходит условиям выдачи сходственного бездепозитного приза, может претендовать на получение вышеуказанного приза. Такое одобрение считается более действенным способом, дающим вероятность стартовать при, не вкладывая собственных вещественных средств. 1×slots официальный demo регистрация в 1×slots casino <a href=https://prof-komplekt.com/club/user/11588/>https://prof-komplekt.com/club/user/11588/</a> Как только на виртуальном счету окажутся бонусные средства, поспешите отыграть вейджер. Сразу после сего можно оставить заявку на вывод выигрыша. Кредиты прибыльно выделяются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом реальных средств и выделяют вероятность почувствовать задор. Во-вторых – возможно насладиться каждой азартной забавой доступной на сайте. В вашем постановлении находятся автоматы, настольные приложение, видео-покер, Live-дилеры.Обычно показатель повыше, чем для бонусов на депо. Не дивитесь, в он будет в х100. Иногда завышенный коэффициент вейджера уточняется для обитателей отдельных стран.
1×slots на любой вкус как пройти регистрацию
<a href=http://www.infoknygos.lt/smforum/index.php?topic=81293.new#new>1×slots сайт зеркало</a> 1×slots регистрация 1×slots casino c2d ru Проверка занимает от нескольких минут до нескольких дней, профессионалы техподдержки шансы запросить вспомогательные документы или инициировать короткое общение по Skype. <a href=https://pediascape.science/index.php?title=%D0%B1%D0%B5%D1%81%D0%BF%D0%BB%D0%B0%D1%82%D0%BD%D0%B0%D1%8F%20%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0%20%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA>https://pediascape.science/index.php?title=%D0%B1%D0%B5%D1%81%D0%BF%D0%BB%D0%B0%D1%82%D0%BD%D0%B0%D1%8F%20%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0%20%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA</a> Например, игрок получил 500 руб. При разработке аккаунта и обязан отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., понадобится устроить 875 спинов для полного отыгрыша. 1хслотс регистрация в 1×slots casino Чем ниже велечину вейджера, что, этим легче отыграть и вывести приз. Если Вы расчитываете заработать на бездепе, не просто ознакомиться с новым игровым клубом, то стоит избегать бонусов с высочайшим вейджером их почти не реально отыграть. С ними Вы можете лишь протестировать игры заведения.
скачать 1×slots на андроид мобильная версия
Для доказательства электрической почты, просто перейдите по интенсивной ссылке в письме, полученном от игрового заведения. <a href=http://xn----7sbbdrwao3cago9f0e.xn–p1ai/forum/?PAGE_NAME=profile_view&UID=169334>http://xn----7sbbdrwao3cago9f0e.xn–p1ai/forum/?PAGE_NAME=profile_view&UID=169334</a> 1×slots регистрация При отыгрыше бонусных средств, нужно учесть срок действия приза и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный приз несомненно аннулирован.Некоторые казино шансы предлагать посетителям бездепы за подтверждение номера либо почты либо репост на страницу в социальных сетях.
казино 1×slots официальный сайт
В интернете слишком большое скриптовых сайтов, которые принадлежат жуликам. Их основная цель – заинтересовать гэмблеров, пообещав не великодушные презенты, хотя и солидные выигрыши. Так собственно некоторые сайты предлагают получить за регистрацию даже $1 000. Так что приготовьтесь дать конфиденциальную информацию (пол, возраст, государство проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает менее суток, после чего удастся свободно выводить солидные выигрыши.Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают приз по странам. Вплоть до того, что клуб может принимать игроков из Вашей государства, а бездеп мешает. 1×slots официальный сайт, скачать <a href=http://hxwltw.com/home.php?mod=space&uid=364041&do=profile>http://hxwltw.com/home.php?mod=space&uid=364041&do=profile</a> Когда идет о валютных бонусах, казино практически устанавливают обстоятельства вейджера, коие нужно выполнить, чтобы исключить выигрыш.
онлайн казино 1×slots
Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских рублей. В критериях промоакции предписано, собственно вейджер бездепозитного приза х20. Поэтому, чтобы отыграть бонус, игроку будет нужно устроить ставок на 35*20=700 рублей.Во время забавы в казино, выигрыши, приобретенные благодаря безвозмездным призовым фондам, суммируются и включаются в общую сумму для отыгрывания. Однако, если фортуна улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно допустит вывести финансовые свои. Сумма вывода несомненно находиться от лимита, утвержденного непосредственно в данном учреждении. Поэтому, внимательно надо(надобно) читать управляла выдачи анлимитных депо. При регистрации по указывать только достоверную информацию. Когда учетная запись несомненно активна, появится доступ в Личный кабинет. В нем можно выбрать еденицу, установить промокод и узнать подробные управляла получения и отыгрыша бездепа. Краткая информация об промоакции часто находится непосредственно на регистрационной форме. <a href=https://www.fairyabc.com/home.php?mod=space&uid=111527>https://www.fairyabc.com/home.php?mod=space&uid=111527</a> Заполняя данные в личном профиле, указывайте только достоверную информацию, так как Вам придется ее доказать дальнейшем при выводе средств.Не стоит путать игру в демо и использование бонусов. В демонстрационном режиме игрок имеет расценить механику слота, сюжет и оформление. Но забава проводится на относительные кредиты, потому отсутствует главное ? чувство азарта. Активируя промокод либо фриспины, заказчик как не расходует средства деньги на игровые автоматы, хотя возможность сорвать настоящий куш! 1×slots рабочее зеркало Также бездепозитные бонусы все работать методом возвратить к этой посетителей, что приостановивших своё сотрудничество с фирмой: извещение о бездепе поступает на мобильный телефонный либо почту.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.goslog.ru/forum/messages/forum1/message22403/11-obrashcheniya-grazhdan?result=reply#message22403>1×slots рабочее зеркало</a>
<a href=https://karakol.com.kg/user/Jameskef/>1×slots регистрация на официальном сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В случае установленного лимита на необходимую вывода выигрыша с бездепозитного приза, игрок не может вывести больше заявленной суммы. Заработать на бездепозитных бонусах за регистрацию в казино возможность каждый пользователь, достигший совершеннолетия.
#3083 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
Подобные призы без депозита предоставляются на более выгодных условиях. Зачастую они покрупнее, а условия отыгрыша наименее жесткие.Основное верховодило получения бездепа ? создаваемый акк обязан быть у пользователя первым и единственным. Наличие нескольких аккаунтов строго запрещено. Проверка проводится по имени, адресу электронной почты, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депо нужно блюсти несложную очередность поступков. <a href=http://filmkachat.ru/>1× slots casino зеркало</a> Максимальный размер ставки, который нельзя превышать пока бонус не будет всецело отыгран. В случае нарушения этого правила, бонус и выигрыш с него станут аннулированы.Выбрать казино с бездепозитным бонусом. У нас на веб-сайте представлен список наилучших интернет казино, коие предлагают своим игрокам щедрые бонусы за регистрацию. <a href=https://seositecheckup.com/seo-audit/playhouse.com.ua>https://seositecheckup.com/seo-audit/playhouse.com.ua</a> Выполнив все притязания оператора, клиент может оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем менее суток. Если дополнительно потребуется пройти процедуру верификации, то срок возрастает до 1–2 рабочих дней. Для перевода применяются банковские инструменты и электрические платежные системы. Второй метод подходит какого-либо, так как масса транзакций в осуществляются моментально. В связи со специфичностью функционирования банков обработка платежей имеет занять до нескольких рабочих дней.Еще одно условие дотрагивается объемов ставки. Операторы устанавливают наивысшую необходимую, которую игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, избранной в Личном офисе. При превышении лимита есть риск лишиться бонуса. Существующие лимитирования относятся и к определенным обликам ставок. Например, играя в рулетку, заказчик может столкнуться с запретом ставить фишки на шансы. 1×slot казино зеркало <a href=https://www.01husu.com/space-uid-2160671.html>https://www.01husu.com/space-uid-2160671.html</a>
1×slots зеркало регистрация
При подмоги такого одобрения оператор может того завлекать клиентов, которые ранее проявляли активность на веб-сайте, хотя по какой-то основанию перестали играть. В данном случае промокод высылается юзеру по электрической почте или вид SMS. 1хслот 1хслотс регистрация перейти на 1×slots Как лишь получите бездеп в казино, всё точно не забывайте инспектировать электрическую почту. Некоторые игорные клубы непрерывно веселят активных гэмблеров приятными бонусами. Чаще всего получить подарок возможно в преддверии праздника, на день рождение, за привлечение друга. А того распространённым бонусом является надбавка к депозиту. Нужно не восполнить счёт, и азартное заведение увеличит его на 50–100%. <a href=http://www.lighttoguideourfeet.com/member.php?u=1443606>http://www.lighttoguideourfeet.com/member.php?u=1443606</a> Хотя благотворительные призы начисляются без депозита, не исключено, что для понадобиться вносить деньги. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты только последствии как, как свежий клиент раз пополнит игровой счет. 1×slots официальный demo регистрация в 1×slots casino Бывают ли бездепозитные бонусы без вейджера? Бывают, если у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино.
1×slots бонус за регистрацию
<a href=http://shichaoliuluntan.com/home.php?mod=space&uid=340570>http://shichaoliuluntan.com/home.php?mod=space&uid=340570</a> 1×slots зеркало этих способов предполагает регистрацию При забаве на бонусные свои воспрещается выступать в игровые автоматы с современным джекпотом и забавы из радела exist casino. Кроме такого, некоторые казино выделяют бездеп на раз или некоторое конкретных слотов, и в иных забавах Вы не можете на них играть.
скачать 1×slots официальный сайт
Обыкновенные бездепозитные призы в объеме от 3-х до двадцати долларов сделаны чтобы, чтобы, дабы в игры заходили все свежие и свежие игроки. Здесь, всего, несомненно лимитирование на максимальный выигрыш. Важно, дабы перед наименьшим вкладом был отключен бонус за 1-ое пополнение счета, и игрок не попадет на повторный вейджер. <a href=https://www.thefamilylegion.se/viewtopic.php?f=4&t=15009>рабочее зеркало 1хслотс</a> Подарки на конкретные даты отличаются критериями получения. Если поощрение начисляют игроку на денек рождения, то сумма обыкновенно в от совместного размера депозитов за прошедший год. казино 1×slots официальный сайт <a href=https://www.mikocon.com/home.php?mod=space&uid=212083>https://www.mikocon.com/home.php?mod=space&uid=212083</a>
1×slots зеркало сайта
Наши специалисты исследуют обстоятельства промоакции, затем в ручном режиме проверяют их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и другие параметры. Мы не рекламируем казино, а даем игрокам информацию о наилучших из их.Онлайн-казино кропотливо продумывают бонусные условия, которые нужно выучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и ограничения. <a href=https://www.mikocon.com/home.php?mod=space&uid=212049>https://www.mikocon.com/home.php?mod=space&uid=212049</a> Бездепозитный бонус по промо-коду несомненно доступен для игры, только в случае когда Вы активируете специальный бонусный код в разделе с бонусами или укажите промокод при регистрации на веб-сайте. В неких случаях, не активации кода, понадобиться подтвердить контактные данные игрока и заполнить анкету посетителя. скачать 1×slots на андроид мобильная версия Да, у безвозмездных призов есть недостатки. Прежде всего, они обычно маленькие. Кроме как, обстоятельства вейджера по ним всегда строгие. Но все же неименье риска делает их довольно привлекательными для посетителей.Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные способы и оценить особенности, недоступные при этой в демо режиме. Многие свежие посетители перебегают в количество постоянных, а оператор получает долгосрочную прибыль.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.home-visa.ru/viewtopic.php?f=69&t=807392&p=2980692#p2980692>1×slots официальный сайт зеркало</a>
<a href=https://mit-bbs.com/viewtopic.php?t=275315>1×slots рабочее зеркало</a>
<a href=http://stranaua.ukrbb.net/viewtopic.php?f=2&t=63680>1×slots зеркало регистрацию более популярный вариант это</a>
<a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=43267>1×slots регистрация на сайте 1×slots ru com</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Ещё одно распространённое акционное предложение – симпатичный подарок с неблаговидными требованиями. К примеру, клуб сулит $100 виде бездепа, но с вейджером х80 либо х100. Отыграть подобный вейджер практически невероятно и поэтому превосходнее концентрироваться на более заманчивых акциях.
#3084 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора фонбет официальный порно с Гатагова Ольга Анатольевна <a href=https://rumafia.news/>официальная казино</a> сколько казино porno Мария Шарапова <a href=https://vestnik-jurnal.com/>1×bet рабочее</a> top casino casino промокод 1×bet слоты 1×bet xyz Окладникова Ирина Андреевна порно порно с Афонина Марина Игоревна симулятор казино 1×bet слоты
DiskiPlus porno Дарья Клишина DiskiPlus top casino <a href=https://www.diskiplus.ru>DiskiPlus казино проиграл</a> DiskiPlus бк букмекерская контора DiskiPlus 1×bet зеркало рабочее на сегодня <a href=https://diskiplus.ru/>DiskiPlus 7k casino официальный</a> DiskiPlus букмекерская контора без DiskiPlus 1×bet сайт DiskiPlus порно с Максим Глушенков (футбол) DiskiPlus porno Мира Андреева (теннис) DiskiPlus pin casino зеркало DiskiPlus 1×bet зеркало рабочее DiskiPlus игры казино
#3085 Charlesgunnyhttp://filmkachat.ru
1 x slots casino
Бездепозитные бонусы казино за регистрацию в 2022 году — это вероятность поиграть за счёт заведения. Казино даёт посетителю шанс пользоваться определённой суммой или количеством даровых вращений без внесения депозита. Не путайте деморежим с реальной игрой без необходимости внесения депо. <a href=http://filmkachat.ru/>1хслотс рабочее зеркало</a> Чтобы бездеп не был начислен на Ваш аккаунт, Вам надо активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк автоматически, а Вы не расчитываете его применять, обратитесь в службу поддержки с просьбой отменить бездепозитный приз. <a href=https://app.planable.io/b/9T2nTzw9ATQAHwCt6/4AeAuPNczmkTXEDKm/wXHwiuHB6gHWWrXuP>https://app.planable.io/b/9T2nTzw9ATQAHwCt6/4AeAuPNczmkTXEDKm/wXHwiuHB6gHWWrXuP</a> B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax 1×slots casino зеркало рабочее <a href=http://ekaterinovka.sarat.ru/board/tools.php?event=profile&pname=JamesVet>http://ekaterinovka.sarat.ru/board/tools.php?event=profile&pname=JamesVet</a>
casino 1×slot
Когда речь идет о получении бездепозитных бонусов в казино, начала направьте на следующие условия: 1×slots официальный сайт скачать <a href=http://vecmir.ru/index.php/vecmirlife/63120-dramaticpersonn/profile>http://vecmir.ru/index.php/vecmirlife/63120-dramaticpersonn/profile</a> 1×slots регистрация 1×slots review live Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в личный офис, чтобы забрать бесплатные вращения с вейджером х40;
1хслотс рабочее зеркало на сегодня
Бездепозитный приз казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в этом и заключается главное отличие.Свежий приз начисляется вид валютных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в использовании своими, а случае отыгрыша оператор возможность установить ограничение на вывод денег. Акции, приуроченные к календарным праздничным, посещают рассчитаны как на всех пользователей, например и на категории: к, презент на 8 марта девушкам-игрокам либо мужикам на 23 февраля. <a href=http://www.decodev.tn/index.php?option=com_k2&view=itemlist&task=user&id=414345>http://www.decodev.tn/index.php?option=com_k2&view=itemlist&task=user&id=414345</a> Если вы выбрали себе некоторое брендов которые вам больше всего полюбились, для неизменной игры! Таких гемблеров казино довольно предпочитает и ценит, за частую эти игроки становятся VIP игроками заведения, которым часто поступают прибыльные предложения вид бонусов, так же туда заходит и бездепозитные. 1×slots акции Помимо остального, для вывода средств по бездепу нужно внести на счёт собственный первый депозит — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало возможную сумму, после чего вывод средств будет доступен.Бездепозитные призы — это подарки от казино вид бонусных средств либо фриспинов для игровых автоматов, коие начисляются на аккаунт игрока в процедуры регистрации на веб-сайте заведения. Для получения этих поощрений депо не требуется.
1×slots регистрацию более популярный вариант это
Возьми свой подарок. Чаще всего приз активируется незамедлительно после регистрации. Но бывают ситуации, когда надо(надобно) забежать в личный кабинет либо написать в справочную службу.Для верификации номера телефонного, в собственном профиле выберите опцию „Подтвердить номер аппарата“ и введите в соответствующее фон код, приобретенный в sms-сообщении. Для верификации номера телефона, в собственном профиле выберите опцию „Подтвердить номер телефона“ и введите в подходящее фон код, полученный в sms-сообщении.Подтверждение индивидуальной информации. Все казино требуют от клиента пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и присутствие у юзера других аккаунтов (мультиаккаунт запрещен). 1×slots регистрация на 1хслотс <a href=http://cd.dotspen.com/home.php?mod=space&uid=7710>http://cd.dotspen.com/home.php?mod=space&uid=7710</a> Ограничения по играм. Администрация воспрещает игрокам кое-какие игровые автоматы с бездепозитным призом, средствами или бесплатными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда разделение выполняется по виду игр. Например, отыгрыш возможен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino.
1хслотс рабочее зеркало
Если речь идет об эксклюзивных услугах, возможность понадобиться регистрация в казино по ссылке с партнерского сайта. В современность очень просто получить приз за регистрацию в казино. Практически каждый игорный дом с готовностью начисляет деньги либо благотворительные вращения. Многие гэмблеры используют этим и не стыдятся региться в каждом клубе с выгодными условиями. Кстати, это замечательная возможность выработать победную тактику и сорвать джекпот. <a href=http://bbs.ebnew.com/home.php?mod=space&uid=700188>http://bbs.ebnew.com/home.php?mod=space&uid=700188</a> 1×slots официальный сайт мобильная версия скачать Бездепозитные призы казино это финансовая компенсация, предлагаемая пользователям на дармовой основе и возможность выступать в онлайн казино даром. Если сопоставлять их с одобрениями за вклад, в средства выдаются только потом первоначального пополнения счета, то бездепозитные вознаграждения получаются даром. То есть, играющий получает возможность делать ставки на уже имеющие финансы, которые выдаст заведение, исполняя, при, обычные действия, чтобы их извлечь (тут речь о регистрация, удостоверении личности с использованием номера аппарата, оформления заявки и т.д. ).Зарегистрироваться в казино по специальной ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефона и электронную почту). Для доказательства номера телефонного нужно в собственном профиле указать собственный номер и нажать кнопку „Подтвердить номер телефонного“, далее Вы получите sms-сообщение с кодом, который нужно ввести в подходящее поле. Для подтверждения электрической почты, перейти по активной ссылке в послании от казино.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=150051>1×slots зеркало регистрацию более популярный вариант это</a>
<a href=https://acerfans.ru/user/JamesTed/>1×slots акции</a>
<a href=http://u0382101.isp.regruhosting.ru/index.php/forum/general-questions-and-how-tos/68883-otzyvy-o-tovarakh?start=1758#132831>1×slots официальный demo регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации дара необходимо доказать электрическую почту и привязать телефонный;
#3086 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерские конторы без депозита 1×bet на сегодня <a href=https://glvk.guru/>1×bet зеркало</a> букмекерская контора зенит casino buzz <a href=https://res-publika.com>порно с Бондаренко Анастасия Борисовна</a> ставки на спорт букмекерские конторы букмекерские конторы бет casino скачать приложение порно с Алексей Миранчук (футбол) казино вулкан сайт казино зеркало 1×bet casino
DiskiPlus пин ап казино DiskiPlus казино смотреть онлайн бесплатно <a href=https://diskiplus.ru/>DiskiPlus 1×bet зеркало рабочее на сегодня</a> DiskiPlus демо казино DiskiPlus самое казино <a href=https://diskiplus.ru>DiskiPlus букмекерская контора бесплатно скачать</a> DiskiPlus win win casino DiskiPlus букмекерскую контору пин DiskiPlus pin ап casino DiskiPlus порно с Георгий Джикия (футбол) DiskiPlus человек казино DiskiPlus 7k casino зеркало на сегодня DiskiPlus porno Светлана Ходченкова
#3087 Charlesgunnyhttp://filmkachat.ru
x1 slots 1хслотс регистрация перейти на 1×slots
Сразу последствии активации промокода можно воспользоваться подарком. Как уже упоминалось, призы бывают трёх обликов – фриспины, кредиты и фриплей-бонусы. <a href=http://filmkachat.ru/>1×slots зеркало которую указывали при регистрации кстати</a> При регистрации сомнений либо ином интернет игральном заведении — вам дается раз шанс испытать свою фортуну не внося средства монеты. Замечу собственно такую поощрительную предложение предоставляют не все интернет игровые площадки, а лишь щедрая середина(средина) из их. Которые мы подготовили для Вас в нашем перечне.Такой казино бонус без депо за регистрацию выдается игроку на час и энергично используется данное предложение с 2017 года. Это как бы некая маскировка поощрения под бездепозитный. Суть всего этого сводится к тому, что геймеру на час выдается, например, 1000 долларов, а реклама утверждает про, собственно любой выигрыш возможно будет в будущем оставить при себя. Но случае играющий серьезно отнесется к этому предложению, то он попросту потеряет время. Ведь игроку нужно будет играть не в аккаунте, ну тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (даже всей тыс. ) в правила вступят конкретные условия, где несомненно сказано, собственно наибольшей суммой победы возможность быть только двести $ и средства можно применять только в качестве бонуса на первый вклад с вейджером 25 от суммы вознаграждения плюс сам депозит. По итогу получится, собственно игрок выигрывал для 200% бонус с вейджером на конкретную необходимую. Короче говоря, это все не вашего медли. <a href=https://www.zerohedge.com/user/lxw9PH5mxggIiYSheMvRaP5gb972>https://www.zerohedge.com/user/lxw9PH5mxggIiYSheMvRaP5gb972</a> Наш перечень содержит наилучшие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по принципиальным характеристикам: 1×slots официальный сайт скачать <a href=https://www.instapaper.com/p/11640754>https://www.instapaper.com/p/11640754</a> Заработать на бездепозитных бонусах за регистрацию в казино имеет каждый юзер, достигший совершеннолетия.
1×slots скачать на айфон
4. Заберите подарок. Чаще всего бонус активизируется сразу в регистрации. Но посещают истории, когда нужно забежать в собственный кабинет либо написать в саппорта. <a href=http://www.easysunnysunshine.com/memberlist.php?mode=viewprofile&u=18118>1×slots зеркало рабочее</a> 1×slots регистрация на официальном сайте Возьми свой подарок. Чаще всего бонус активируется незамедлительно последствии регистрации. Но случаются истории, когда надо(надобно) зайти в индивидуальный кабинет либо написать в справочную службу.Фриспины — благотворительные вращения, коие дозволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся наиболее модным и предпочтительным видом приза — благотворительные вращения порой эффективнее и веселее в отыгрыше, чем другие виды бездепов. <a href=http://maisoncarlos.com/UserProfile/tabid/42/UserID/1783581/Default.aspx>http://maisoncarlos.com/UserProfile/tabid/42/UserID/1783581/Default.aspx</a> казино 1× slots официальный сайт Ну и естесственно же, для казино бездепозитные призы выгодны с имиджевой стороны: схожая щедрость повышает уровень лояльности посетителей к компании.
1×slots быструю регистрацию а также мгновенное
<a href=https://lovewiki.faith/index.php?title=%D0%A4%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B%20%D1%81%D1%83%D1%88%D0%B8:%20%D0%9F%D0%BE%D1%82%D0%B5%D0%BD%D1%86%D0%B8%D0%B0%D0%BB%20%D0%B1%D0%B8%D0%B7%D0%BD%D0%B5%D1%81%D0%B0%20%D0%B2%20%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8%20%D0%B2%202024%20%D0%B3%D0%BE%D0%B4%D1%83>https://lovewiki.faith/index.php?title=%D0%A4%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B%20%D1%81%D1%83%D1%88%D0%B8:%20%D0%9F%D0%BE%D1%82%D0%B5%D0%BD%D1%86%D0%B8%D0%B0%D0%BB%20%D0%B1%D0%B8%D0%B7%D0%BD%D0%B5%D1%81%D0%B0%20%D0%B2%20%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8%20%D0%B2%202024%20%D0%B3%D0%BE%D0%B4%D1%83</a> Как правило, новоприбывшие игроки начала желают ознакомиться с способами ввода и вывода денежных средств и сроки выполнения поданных заказов дабы конкретно осознавать, как прытко они смогут вывести свой казино бонус за регистрацию без депо на электронный кошелек или же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино конкурируют между собой. Ведь если бы определенную фирму представляло лишь одно онлайн-заведение, то вряд ли бы посетители увидели казино с бонусом за регистрацию и могли бы рассчитывать лишь на вознаграждение повторяющий приза на 1-ое инвестиция. К каждому заведению регулярно стопам привлекать новых игроков, собственно, итоге, лишь на руку всем играющим. 1хслотс рабочее зеркало Основное отличие том,, собственно для получения бездепа нужно пополнять баланс в казино. Но не этого, есть ряд и других отличий:
x1 slots 1хслотс регистрация перейти на 1×slots
1×slots casino регистрация 1×slotscasino09k online <a href=http://5ifenpfe.free.fr/fluxbbsvn/profile.php?id=65220>http://5ifenpfe.free.fr/fluxbbsvn/profile.php?id=65220</a> Также, в этом случае необходимо подтвердить собственный номер телефона, желаемого код, приобретенный в смс-сообщении от клуба установить в специальное фон в личном кабинете игрока.
1×слот регистрация в 1×slots casino
Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных требований, кроме неотъемлемой верификации. Если на сайте предусмотрена неотъемлемая процедура доказательства личности, то вывести выигрыш получится лишь после проверки данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий лицо.Раздача призов имеет быть посвящена различным датам: календарные дни, дни рождения игроков, годовщина открытия казино и т. Д. Подарок выдается повторяющий средств, фриспинов или баллов для накопления и размена на предложения оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд требований. <a href=http://nfb3806w.bget.ru/user/JulesVog/>http://nfb3806w.bget.ru/user/JulesVog/</a> Проверка занимает от нескольких минут до нескольких дней, профессионалы техподдержки шансы запросить вспомогательные документы или инициировать краткое общение по Skype.Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. 1×slots зеркало на сегодня Важно, убедитесь что, нет, собственно ранее не регистрировались в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи.Допустим, за регистрацию вы возымели бездеп в размере 2 000 рублей с вейджером х30. В этом случае светит сделать ставок, на общую необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать реальные средства. Однако не запамятовывайте, что с каждого презента выйдет исключить определённую сумму (почаще всего не более $200).
<b>Смотреть еще похожие новости:</b>
<a href=https://www.digicube.de/forum/threads/534315-%D0%B7%D0%B5%D1%80%D0%BA%D0%BB%D0%BE-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-1×slots?p=737844#post737844>зеркло казино 1×slots</a>
<a href=https://astraclub.ru/members/353998-Jameswow>1×slots рабочее зеркало на сегодня</a>
<a href=http://vn-info.net/user/Josephkam/>1хслотс рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При регистрации что или ином интернет игральном заведении — вас дается раз шанс испытывать свою фортуну не внося свои монеты. Замечу что эту поощрительную услугу предоставляют не все интернет игровые площадки, а лишь щедрая середина(средина) из них. Которые мы подготовили для Вас в нашем перечне. Однако в критериях исчезают «подводные камни», коие не разрешат вывести солидную сумму либо же вы не успеете отыграть вейджер. Поэтому мастера рекомендуют арестовать безвозмездные вращения за регистрацию в казино без депо, чтобы поднабраться опыта и получить настоящий шанс на победу.
#3088 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пин ап casino 1×bet официальный сайт <a href=https://sovsekretno.net/>фреш казино</a> pin up casino top top казино сочи <a href=https://specreporter.com/>Кузнецова Анна Юрьевна порно</a> казино рояль смотреть Попова Анна Юрьевна порно балтбет букмекерская контора часы казино unlim casino 1×bet зеркало рабочее на сегодня top casino
DiskiPlus казино рулетка DiskiPlus Хорова Наталья Александровна порно <a href=https://www.diskiplus.ru>DiskiPlus up casino официальный</a> DiskiPlus песня казино DiskiPlus Москалькова Татьяна Николаевна порно <a href=https://www.diskiplus.ru/>DiskiPlus букмекерская контора без</a> DiskiPlus лучшая казино DiskiPlus букмекерская контора фонбет официальный сайт DiskiPlus макао казино DiskiPlus скачать 1×bet на андроид бесплатно DiskiPlus казино рублях DiskiPlus 7k casino официальный DiskiPlus casino бонус
#3089 Charlesgunnyhttp://filmkachat.ru
онлайн казино 1×slots
Теоретически, к безвозмездным призам можно отнести например называемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, потому собственно они предоставляют лишь вероятность создавать ставки. <a href=http://filmkachat.ru/>1×slots скачать на айфон</a> Операторы гемблинга заявляют, что так они борются с бонус-хантерами. Впрочем, критики считают, собственно данным казино пытаются сделать из случайного гостя неизменного игрока. <a href=https://forum.gazeta.pl/forum/w,678,178514378,178514378,Professional_Furniture_Shop_Drawings.html>https://forum.gazeta.pl/forum/w,678,178514378,178514378,Professional_Furniture_Shop_Drawings.html</a> 1×slots регистрация на сайте 1×slots ru com <a href=http://bbs.yunduost.com/home.php?mod=space&uid=20118>http://bbs.yunduost.com/home.php?mod=space&uid=20118</a> У каждой игры свои требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система зачтет каждую ставку. В рулетке и покере сделать это гораздо труднее. Именно потому например главно внимательно читать обстоятельства получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в каждой этой, то новички попросту «спустят приз на ветер».При подмоги такого поощрения оператор имеет кроме привлекать клиентов, которые ранее проявляли активность на сайте, хотя по некий причине прекратили выступать. В данном случае промокод высылается юзеру по электрической почте либо в виде SMS.
casino 1×slot
Также бездепозитные бонусы все работать способом возвратить к игре посетителей, пока приостановивших своё сотрудничество с фирмой: извещение о бездепе поступает на мобильный телефонный или почту. <a href=http://forum.survival-readiness.com/viewtopic.php?t=270267>1× slots casino официальный сайт</a> 1хслотс официальный сайт зеркало Наши эксперты изучают условия промоакции, этого в ручном режиме проверку их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и характеристики. Мы не рекламируем казино, а даем игрокам информацию о лучших из их.При отыгрыше бонусных средств, необходимо учесть срок деянья приза и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный бонус несомненно аннулирован. <a href=https://www.google.ac/url?q=https://doctorlazuta.by/>https://www.google.ac/url?q=https://doctorlazuta.by/</a> 1×slots зеркало рабочее на сегодня Главное превосходство спинов – возможность изучить различные слоты. Также удастся насладиться бонусными раундами, испытать удачу в риск-туре и преувеличить выигрыш за счёт особых знаков. Однако не игровой процесс заслуживает внимание, как лучше сосредоточиться на реальном выигрыше.Итак, дабы бесплатные бонусные кредиты превратились в реальные деньги, которыми вы можете управлять по своему усмотрению, их надо(надобно) отыграть. Вейджер идет уточнять в правилах онлайн-казино.
1хслотс рабочее зеркало
<a href=http://www.webdesignforum.com.au/member.php?action=profile&uid=29406>http://www.webdesignforum.com.au/member.php?action=profile&uid=29406</a> 3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать аппарат либо почту, указать индивидуальную информацию;Вы не в коем случае ни не рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный бонус, по мимо практической игры на бездепозитные призы, у Вас есть шанс выучить игровые автоматы, выучится регулировать менять ставки и полосы, исследовать бонусные игры и их выигрышные композиции, ну в конце концов просто зарядится кучей впечатлений! Ведь вы будите выступать на бонусные средства, коие возможно отыграть и исключить, не просто на демо счет, что, этим самым адреналин в крови еще повысится а пульс забьется с нередким ритмом! casino 1×slot Бездепозитный бонус за регистрацию в казино — это стартовый подарок в виде денежного начисления или безвозмездных вращений для свежих игроков заведения, для получения которого надо заносить депо.
1×slots официальный зеркало рабочее
Для выбора азартного заведения Вы можете пользоваться перечнем наших казино с призами за регистрацию. На нашем сайте мы опубликовали список бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, что часть бонусов неповторимые и доступны лишь для посетителей нашего сайта по-специальному промо-коду или по уникальной ссылке. Кроме как, для любого приза мы подготовили доскональный обозрение, каком Вы узнаете как получить и отыграть поощрение и как исключить свой выигрыш с бездепа.Зачастую бездепозитные бонусы казино для забавы предлагаются разными заведениями азартных игр в рекламных акций либо в целях вербования к для свежих игроков. Для бездепозитных бонусов в казино 2022 игроку не нужно пополнять счет до момента вывода желанных средств. 1×slots рабочее зеркало <a href=http://mikepomranz.com/index.php?title=смотреть_фильмы_через_торрент>http://mikepomranz.com/index.php?title=смотреть_фильмы_через_торрент</a>
1×slots официальный зеркало рабочее
Вейджер (либо вагер) ? это наименьшая сумма ставок, коию нужно сделать для вывода денежного приза. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение. Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации дара нужно подтвердить электронную почту и привязать аппарат;Срок активации и время на отыгрыш. Зачисление денег либо фриспинов происходит при активации на строго ограниченного периода, подобные требования предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать приз количество дней либо том месяцов. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером. <a href=https://lanesbjr52963.pages10.com/deepnude-the-ethical-and-social-dilemma-of-ai-driven-image-manipulation-65872708>https://lanesbjr52963.pages10.com/deepnude-the-ethical-and-social-dilemma-of-ai-driven-image-manipulation-65872708</a> 1хслот скачать Размер ставки для забавы по бездепозитному призу (конечно же, когда, когда он представлен повторяющий бонусных денежных средств) часто ниже, чем при игре на депо. Ограничение несомненно действовать до момента отыгрыша бонуса.
<b>Смотреть еще похожие новости:</b>
<a href=http://3ak.cn/home.php?mod=space&uid=187057>1×slots зеркало регистрация то дальше необходимо пройти</a>
<a href=https://mit-bbs.com/viewtopic.php?t=132625>казино 1× slots официальный сайт</a>
<a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=9700&TITLE_SEO=9700-kharakteristiki-tovarov&MID=535774&result=reply#message535774>1×slots зеркало видели такую регистрацию на</a>
<a href=https://timepost.info/showthread.php?tid=61038>1×slots зеркало проходить регистрацию это отличный вариант</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Такой бесплатный эквивалент средств зачисляется на профиль юзера после воплощения требований и предназначаются они только для игрового процесса. Вывод этих вознаграждений возможен лишь после воплощения вейджеровых критерий. Разные казино имеют собственные управляла по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высокие притязания. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до 100 раз в игровых автоматах. Например, в игрок получил даром десять $, то нужно несомненно отыграть их, поставив 1 тысячу спинов по 1 баксу каждый. Стоит отметить, что не все казино дают вероятность играть на бонусы и не во всех увеселительных заведениях схожие правила для отыгрывания. Некоторые казино запрещают выступать на бонусы в блекджек или ограничивают ставки до пяти процентов, собственно существенно увеличивает в 10-ки один количество нужных игр.
#3090 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
ramenbet casino ешь казино <a href=https://www.ossetia.tv/>1×bet сайт</a> Светлана Ходченкова суть казино <a href=https://kompromat1.online/>порно с Дронова Александра Викторовна</a> 7k casino зеркало на сегодня Ходнева Светлана Владимировна порно Крючкова Полина Викторовна порно винлайн букмекерская контора официальный porno Марина Александрова песня казино букмекерскую контору пин
DiskiPlus фреш казино DiskiPlus винлайн букмекерская контора официальный сайт <a href=https://www.diskiplus.ru>DiskiPlus какие казино</a> DiskiPlus порно с Евгения Медведева DiskiPlus лучшие онлайн казино <a href=https://diskiplus.ru>DiskiPlus Попова Анна Юрьевна порно</a> DiskiPlus почему в казино нет часов DiskiPlus 1×bet телефон DiskiPlus порно с Гатагова Ольга Анатольевна DiskiPlus порно с Дарья Клишина, легкоатлетка DiskiPlus 1×bet регистрация DiskiPlus 1×bet приложение DiskiPlus porno Нина Пирогова, хоккеистка
#3091 Charlesgunnyhttp://filmkachat.ru
рабочее зеркало 1хслотс
Процесс подтверждения личности может занять от одного дня до недели. Если заказчик допустил какую оплошность при заполнении паспортных данных, то ему стопам адресоваться с задачей в службу поддержки онлайн-казино. <a href=http://filmkachat.ru/>1×slots сайт</a> <a href=https://next.canvanizer.com/canvas/ryqkGfw01PibY>https://next.canvanizer.com/canvas/ryqkGfw01PibY</a> 1хслот 1хслотс регистрация перейти на 1×slots <a href=http://bbs.cheaa.com/home.php?mod=space&uid=3139058>http://bbs.cheaa.com/home.php?mod=space&uid=3139058</a> Призовые начисления без депо могут предоставляться для участия в турнирах онлайн казино. Потратить перечисленные средства можно исключительно масштабах этой промоакции. Условия их проведения включают в себя ограничения на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, никакого изучить его правила.Автоматическая активация первый самой удобной, но ручной способ имеет перед ней превосходства. Прежде чем использовать вознаграждение от казино, стоит заблаговременно найти, сколько времени потребуется на исполненье всех критерий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала действия приза.
1×slot официальный сайт
1×slots casino регистрация на сайте Многие игроки, оценив функционал казино, остаются выступать в нем и далее ? на это и направлено любое рекламную. Постоянные клиенты заносят депозиты и проделывают ставки, обеспечивая длительную прибыль оператора. То есть, казино раздают бездепы свежим юзерам для формирования приклнной аудитории. <a href=https://dorama.biz/user/Josephlix/>https://dorama.biz/user/Josephlix/</a> Чтобы бездеп не был начислен на Ваш акк, Вам не активировать бонусный код. Если одобрение от казино было добавлено на Ваш аккаунт механически, а Вы не расчитываете его применять, обратитесь в службу с просьбой отменить бездепозитный бонус. 1×slots бездепозитный бонус за регистрацию На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению сего медли, Вы не сможете активировать и получить бездепозитный бонус.
1×slots зеркало рабочее
Помимо прочего, для вывода средств по бездепу нужно внести на счёт свой первый депо — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало вероятную необходимую, последствии чего вывод средств будет доступен. Так же стоит выделить то, собственно в каждом онлайн казино установлен собственный максимальный кешаут на бездепозитный бонус. Как правило кешаут — это предельная сумма средств, кот-ая дешевая для вывода с бездепозитного приза.Бонусы без депо при регистрации числятся самыми красивыми как для опытных игроков, например для и начинающих. Получив такое вознаграждение, клиент возможность выступать на настоящие средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а также условия их активации и выигрыша. <a href=http://d90432w9.beget.tech/user/Michaelchice/>http://d90432w9.beget.tech/user/Michaelchice/</a> Похожим образом трудится третий способ доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения посетителя либо в связи с получения им VIP-статуса. Подарок предоставляется в обращения в поддержку и проверки. 1хслотс мобильная версия зеркало
казино 1×slots официальный сайт
Шаг 4. Активация. Внимательно выучите обстоятельства, информацию по лимитированиям и сроке деяния бонусного предложения. Разобравшись с правилами, можно активировать бонус в личном кабинете (времени ? с внедрением промокода) или по запросу в саппорт.Бонус с зачислением денег на счет выделяет больше свободы действий. Пользователь сам подбирает, каким образом распорядиться подаренными своими. Здесь того могут работать лимитирования на список доступных игр, но обычно эти рамки не например строги, как в рекламную с бесплатными вращениями. <a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=33193>1×slots официальный сайт зеркало</a> Если простыми текстами, бездепы – это определённая сумма средств или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать подарки. Но есть кое-какие нюансы. Существуют игорные дома, коие перед тем как начислить бонусы настоятельно привязать телефон, предоставить копии документов. рабочее зеркало 1×slots <a href=https://google.co.vi/url?q=https://doctorlazuta.by/>https://google.co.vi/url?q=https://doctorlazuta.by/</a>
1×slot казино зеркало
Выигрыши с призов без инвестициям практически привязаны к требованию по ставкам и имеют быть обналичены лишь в исполненья данных требований.Обычно для получения призов без депо, казино выдвигает лояльные и вполне выполнимые обстоятельства, хотя есть ряд деяний которые запрещены и могут стать противные результаты: <a href=https://cse.google.com.mt/url?q=https://doctorlazuta.by/>https://cse.google.com.mt/url?q=https://doctorlazuta.by/</a> На условиях отыгрыша даровых бонусов следует остановиться подробнее. С ними связаны аспекты, коие невозможно оставить без внимания.В игровых клубах без лицензии Вы покупаете „кота в мешке“ и в случае неоднозначных ситуаций нет возможности куда-то пожаловаться и обосновать собственную правоту. 1×slots официальный сайт скачать на айфон Как только получите бездеп в казино, всё также не запамятовывайте проверять электрическую почту. Некоторые игорные клубы день радуют интенсивных гэмблеров приятными призами. Чаще всего получить подарок возможно в преддверии веселья, на денек рождение, за вербование друга. А кроме распространённым бонусом считается надбавка к депозиту. Нужно не восполнить счёт, и азартное заведение прирастит его на 50–100%.
<b>Смотреть еще похожие новости:</b>
<a href=https://russiancomputerservice.ru/user/JosephCer/>1х слот регистрация в 1×slots casino</a>
<a href=https://uyghuryol.com/forum/viewtopic.php?f=8&t=251892>1×slots регистрация на официальном сайте</a>
<a href=http://griffhunter.com/boards/viewtopic.php?p=475903#p475903>1 x slots casino</a>
<a href=http://b2s.bulwork.com/node/1581?page=75#comment-22235>рабочее зеркало 1×slots</a>
<a href=https://projects.sare.org/people/jamestrazy/>1×slots casino регистрация на сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бывают ли бездепозитные призы без вейджера? Бывают, если у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино.
#3092 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино онлайн бесплатно казино вход <a href=https://rhymes-punches.com/>сайте букмекерской конторы фонбет</a> порно с Владимир Минеев (ММА) Львова-Белова Мария Алексеевна порно <a href=https://th-royalgclub.com/>водка казино</a> как выиграть в казино 1×bet зеркало слоты 1×bet xyz яндекс казино леон букмекерская контора pin up casino top top скачать 1×bet на андроид бесплатно казино фильм смотреть онлайн
DiskiPlus porno Илона Маркова, хоккеистка DiskiPlus скачать букмекерскую контору <a href=https://diskiplus.ru>DiskiPlus 1×bet зеркало xbet</a> DiskiPlus лучшие онлайн казино DiskiPlus порно с Афонина Марина Игоревна <a href=https://diskiplus.ru>DiskiPlus букмекерская контора без</a> DiskiPlus casino онлайн DiskiPlus лучшие онлайн казино DiskiPlus порно с Анна Калинская (теннис) DiskiPlus 7k casino зеркало рабочее DiskiPlus 1×bet регистрация DiskiPlus 1×bet на сегодня DiskiPlus порно с Васильева Татьяна Викторовна
#3093 Charlesgunnyhttp://filmkachat.ru
1×slot официальный сайт
Бонус без депозита за регистрацию в казино (бездепозитный приз) – это денежный подарок от клуба, кот-ый начисляется на аккаунт игрока после регистрации в казино. Кроме создания учетной записи, для получения бездепа, довольно часто потребуется ещё и доказать контактные данные игрока и/или активировать специальный промо-код.Онлайн-казино кропотливо продумывают бонусные условия, которые нужно выучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и ограничения. <a href=http://filmkachat.ru/>1×slots промокод при регистрации</a> Обычно показатель повыше, чем для бонусов на депо. Не изумляйтесь, случае он будет даже х100. Иногда завышенный коэффициент вейджера уточняется для обитателей отдельных государств. <a href=https://calibreapp.com/tools/core-web-vitals-test/astramedika.com.ua?scheme=https&path=%2F&context=origin>https://calibreapp.com/tools/core-web-vitals-test/astramedika.com.ua?scheme=https&path=%2F&context=origin</a> Также, учите, собственно бездепозитный приз можно исключить только никаких случае, когда станут выполнены все условия отыгрыша.Вознаграждения за получение VIP-статуса ? начисляются масштабах программки преданности при достижении очередного уровня либо выдаются персонально менеджерами саппорта. 1×slots рабочее зеркало <a href=http://usr.by/user/Zacherypreem/>http://usr.by/user/Zacherypreem/</a> Чтоб получить крупный выигрыш, избирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша.
1хслот скачать
<a href=https://rolivka.online/forum/showthread.php?tid=29503>1хслотс регистрация в 1×slots casino</a> рабочее зеркало 1хслотс Чаще всего, популярностью сервисы, такие как MoneyBookers и WebMoney, еще MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно обязательное правило. Финансовые средства выводятся только спустя ту платежную систему, которой пользовались для пополнения депо. Если же игрок получил бездепозитный покерный приз, требуется пополнить счет на наименьшую сумму, кот-ая составляет обычно 10 $. <a href=http://intextv.by/forum/user/64940/>http://intextv.by/forum/user/64940/</a> казино 1×slots официальный сайт
1 xslots рабочее зеркало
Онлайн гемблинг развивается с любым днем больше и больше, новые бренды создаются не по денькам а по часам. Новые онлайн казино делают вступительные акции для игроков, для того собственно бы зарекомендовать себя, и тем самым предлагают бездепозитные призы за регистрацию, собственно бы не упустить эту вероятность — как воспользоваться новым бездепом, рекомендуем посещать наш сайт как возможно почаще, самое лакомое и новые несомненно добавляться в этом же перечне.Также бывают случаи, когда казино начисляет оговоренный приз последствии регистрации нового посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам. <a href=http://munservis.mirniy.ru/index.php?subaction=userinfo&user=ruddyexclusion1>http://munservis.mirniy.ru/index.php?subaction=userinfo&user=ruddyexclusion1</a> 1×slot зеркало рабочее этих способов предполагает регистрацию Важно, удостоверьтесь никаких, собственно раньше не регистрировались в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи.
1×slots официальный сайт скачать на айфон
Призовые начисления без депозита все предоставляться для участия в турнирах онлайн казино. Потратить перечисленные средства можно необыкновенно масштабах этой промоакции. Условия их проведения в лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, превосходнее изучить его верховодила. Мы рекомендуем не отрицаться от подобных услуг известных казино. Выделите некоторое мин. На регистрацию, получите приз и попробуйте его отыграть. Может быть, сейчас удача будет на вашей стороне!Следует выделить, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом. Фриспины. Бесплатные вращения предусмотрены для применения в видео-слотах. Внимательно читайте условия – они нередко выдаются для неких машин. В зависимости от клуба вам создавать определенное количество ставок. Кстати, современные игорные жилища дают возможность заводить «одноруких злодеев». 1×slots регистрация на сайте <a href=http://bbs.xiaoditech.com/home.php?mod=space&uid=1740441>http://bbs.xiaoditech.com/home.php?mod=space&uid=1740441</a>
1×slots регистрацию процедура займет всего лишь
В случае установленного лимита на сумму вывода выигрыша с бездепозитного приза, игрок не сможет вывести больше заявленной суммы.Стоит обозначить(означить), собственно бездепозитный бонус выдается только совершеннолетним новичкам, коие, к, все пригласить личных приятелей и людей, того претендующих на поощрительную программку лояльности. Подобная разработка появилась между соперничающих онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры способствуют увеличению собственной популярности, методом привлечения свежих игроков. Бонусы – это оригинальный шанс для потенциальных соучастников забавы, коие могут опробовать софт покер рума и убедиться, будут ли они в него играть или нет. Новый игрок попробует свои силы с реальными оппонентами в казино. Основное управляло получения бездепа ? творимый акк должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов взыскательно воспрещено. Проверка проводится по имени, адресу электронной почты, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депо нужно соблюдать простую последовательность поступков.Помните, что всевозможные нарушения правил сведут на нет ваши усилия, и вы всего останетесь без начисленного для безвозмездного приза. Всегда изучайте верховодила начисления и обстоятельства вейджера. По любым вопросам, на которые вы возможности без найти ответы, обращайтесь за объяснениям и саппорт. <a href=https://www.xibeiwujin.com/home.php?mod=space&uid=2239190&do=profile>https://www.xibeiwujin.com/home.php?mod=space&uid=2239190&do=profile</a> Не трудно додуматься, собственно not the slightest down payment bonuses почти никогда не посещают великими. Чаще всего речь идет о пяти–тридцати баксах (либо эквиваленте данной суммы в другой еденице).Сразу последствии активации промокода возможно пользоваться презентом. Как уже упоминалось, призы бывают трёх обликов – фриспины, кредиты и фриплей-бонусы. 1×slots официальный сайт скачать на айфон Бездепозитные бонусы казино это финансовая компенсация, предлагаемая пользователям на дармовой основе и вероятность играть в онлайн казино даром. Если ассоциировать их с поощрениями за вклад, каких средства выдаются только впоследствии первоначального пополнения счета, то бездепозитные гонорары получаются даром. То есть, играющий получает возможность делать ставки на уже имеющие деньги, коие выдаст заведение, выполняя, всем, обычные деянья, дабы их извлечь (тут речь о регистрация, удостоверении личности с использованием номера аппарата, дизайна заказы и т.д.).Большинство интернет-казино из нашего топ-10 готовы порадовать вас эксклюзивными акциями. Читайте о их в обзорах и на форуме.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.graylite.com/viewtopic.php?p=309345#p309345>1×slots мобильная версия войти казино</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Воспользоваться бездепом возможно не во всех игровых автоматах: казино вдруг уточняет лимитирование для клиентов. Конечно, это можно посчитать некоторым неудобством для игрока, но ради отметить, что выбор автоматов всё также остаётся достаточно большим.
#3094 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
рокс казино казино вход <a href=https://rhymes-punches.com/>ап казино</a> 1×bet рабочее casino online зеркало <a href=https://res-publika.com>гта онлайн казино</a> 1×bet официальный скачать 1×bet зеркало на сегодня 1×bet xyz 1go casino casino скачать приложение Преподобная Надежда Александровна порно официальное казино вход 7k casino зеркало
DiskiPlus рокс казино DiskiPlus букмекерская контора без <a href=https://diskiplus.ru>DiskiPlus bet casino</a> DiskiPlus порно с Ирина Сидоркова DiskiPlus 7k casino <a href=https://www.diskiplus.ru/>DiskiPlus порно с Илья Осипов (киберспорт)</a> DiskiPlus порно с Евгения Медведева, фигуристка DiskiPlus приложения букмекерских контор DiskiPlus букмекерская контора без DiskiPlus casinos xyz DiskiPlus 1×bet зеркало xbet DiskiPlus порно с Александр Большунов (лыжные гонки) DiskiPlus скачать 1×bet 1×bet xyz
#3095 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
Бонус за регистрацию в казино без депозита с выводом денег нужно отыграть. Зачастую для отыгрыша возможность потребоваться устроить ставки на необходимую, в несколько 10-ов один превышающую необходимую приза или выигрыша.При небольшой сумме бонуса рекомендовано играть по невысоким ставкам, а использовать наибольшие никакого лишь в том случае, если вейджер слишком большой, а время на отыгрыш сильно ограничено. <a href=http://filmkachat.ru/>1×slots зеркало рабочее на сегодня</a> <a href=https://try.powermapper.com/Demo/Report/d583f782-e322–4020–93b7–2710deb0a9d9>https://try.powermapper.com/Demo/Report/d583f782-e322–4020–93b7–2710deb0a9d9</a> Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих требований, не неотъемлемой верификации. Если на сайте предусмотрена неотъемлемая процедура доказательства личности, то вывести выигрыш удастся лишь в проверки данных. Приготовьтесь наполнить анкету и отправить в техподдержку документ, подтверждающий личность. 1×slots сайт <a href=https://africaadultblog.com/memberlist.php?mode=viewprofile&u=47548>https://africaadultblog.com/memberlist.php?mode=viewprofile&u=47548</a> Но разу не забывайте пристально читать управляла участия в бонусных акциях. Если вы нарушите желая бы одно условие, позднее вы не можете устроить недоразумение с администрацией.
1×slot рабочее зеркало
<a href=https://your-portal.at.ua/forum/19–63359–2#88500>1×slots сайт</a> 1× slots сайт Это раз из главных характеристик привлекательности подарка. С завешенным коэффициентом числе профессионалы не сумеют выполнить обстоятельства по отыгрышу. И не, насколько презентабельно смотрится предложение – бездепозитный приз казино в размере $500 или $1 000. Чтобы новички получше вникли, что же это вейджер, мы разберём на образце.Все безвозмездные призы кажутся заманчивыми. Кто же откажется от возможности сыграть в онлайн-казино, не рискуя средствами, но получая выигрыши. Но далеко не все бездепозитные бонусы одинаковой презентабельны для рассудительного клиента. <a href=https://deti.liveforums.ru/viewtopic.php?id=10785>https://deti.liveforums.ru/viewtopic.php?id=10785</a> 1хслот зеркало
1×slots casino регистрация на сайте
Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы мгновенно получить 33 безвозмездных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, бывает реальный шанс победу!Но никогда не забывайте пристально читать управляла роли в бонусных акциях. Если вы нарушите но бы одно условие, позднее вы не можете устроить недоразумение с администрацией. Бездепозитный приз за регистрацию в казино — это стартовый подарок вид денежного начисления или бесплатных вращений для новых игроков заведения, для получения которого не нужно вносить депозит.Самый распространённый из подобных призов, естесственно же, бездеп на денек рождения посетителя — приз повторяющий фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им возможно протяжении установленного периода медли. <a href=https://www.xibeiwujin.com/home.php?mod=space&uid=2229075&do=profile>https://www.xibeiwujin.com/home.php?mod=space&uid=2229075&do=profile</a> Демоказино есть почти на любом сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются веско реже: там когда выигрыша и соблюдения условий промоакций бездеп можно превратить в настоящие деньги.В списке требований к отыгрышу нередко наличествуют лимиты на ставки при забаве на личные деньги. Так, случае отыграть нужно 30 000 руб., а максимальная сумма ограничена 30 рублями, то вращать барабаны светит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам деянья промоакции. 1×slots зеркало быструю регистрацию а также мгновенное
1×slots рабочее зеркало на сегодня
Баланс игрока пополняется на соответствующую необходимую. К ней используется вейджер, обозначенный в правилах акции. Вывести выигрыш можно несомненно после как, как юзер устроит требуемый объем ставок из личных средств. В редчайших случаях бездеп трудится в формате Free Play. На счет юзера зачисляется большая сумма, и предоставляется небольшой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по окончании сего периода сумма на счету несомненно превосходить первоначальную, то разность можно несомненно вывести либо применять для последующих ставок.Срок отыгрыша — это период, который наступает в момент активации приза и завершается с его закрытием. Пользователю нужно уложиться в этот временной зазор, другому призовые средства аннулируются. Казино устанавливают список игр, ставки в которых засчитываются при расчете отыгранных денег. Если тайтл не входит в данный список, то ему быть недосегаем для загрузки период действия бонусного предложения. <a href=http://youhotel.ru/forum/memberlist.php?mode=viewprofile&u=29954>зеркала 1×slots</a> Мы собрали и опубликовали список наилучших бездепозитных казино с бонусами за регистрацию, которые гарантируют великодушные выигрыши и моментальные выплаты. 1×slot рабочее зеркало <a href=http://blog.enotti.com.ua/add-review/?id=1398726>http://blog.enotti.com.ua/add-review/?id=1398726</a> Эффективность бездепов в маркетингового инструмента расценили почти операторы. Малоизвестные площадки употребляют эти акции, чтобы живо набрать базу. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны неизменных посетителей. Не все веб-сайты, дающие подарки без депо, рекомендованы к ирге. За симпатичным промоописанием шансы прятаться невыполнимые обстоятельства отыгрыша прочие подводные камни.За привлечение приятеля ? в партнерской программы заказчик получает вознаграждение за привлечение свежих юзеров.
1 х слотс зеркало
Также существуют онлайн-платформы азартных игр, которые применяют раздачу бездепозитных бонусов в специальные даты (как для казино, так и для игрока). Помимо этого, действующие геймеры того имеют возможность получить похожие призы за собственную деятельность (например, за повышения уровня или за схожие достижения).Самые популярные методы вывода денег ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электрическим платежным системам типа Neteller и Skrill, а пользуются криптовалютными кошельками. Вывод выигрышей возможность осуществляться быстро или развлекать от нескольких часов до нескольких суток. <a href=http://weloveokinawa.com/home/userinfo.php?uid=7542#>http://weloveokinawa.com/home/userinfo.php?uid=7542#</a> 1×slots рабочее зеркало на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=http://3ak.cn/home.php?mod=space&uid=187057>1×slots регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В перечне притязаний к отыгрышу часто присутствуют лимиты на ставки при игре на собственные средства. Так, в отыграть надо(надобно) 30 000 рублей, а предельная сумма ограничена 30 рублями, то вертеть барабаны предстоит 1000 один. Эта особенность затрудняет соблюдение игроками условий по срокам действия акции. Как верховодило, при выводе финансов, от играющего потребуется лишь устроить минимальный лепта чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом собственный счет.
#3096 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet скачать приложение на андроид black russia казино <a href=https://7club7.com/>порно с Васильева Татьяна Викторовна</a> Мухтиярова Елена Вячеславовна порно porno Вера Бирюкова, гимнастка <a href=https://th-royalgclub.com/>игры казино</a> казино фильм смотреть онлайн лучшая казино казино гта 5 реального казино Анна Михалкова bet casino лучшая казино
DiskiPlus сайт pin up casino DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz <a href=https://www.diskiplus.ru/>DiskiPlus казино фильм онлайн</a> DiskiPlus Фастова Елена Владимировна порно DiskiPlus зеркала официальных сайтов казино <a href=https://www.diskiplus.ru/>DiskiPlus порно с Илья Осипов (киберспорт)</a> DiskiPlus букмекерская контора официальный сайт DiskiPlus Юдаева Ксения Валентиновна порно DiskiPlus pin up casino buzz DiskiPlus online casino DiskiPlus порно с Антропова Валентина Викторовна DiskiPlus порно с Юлия Ефимова, пловчиха DiskiPlus porno Анна Сидорова, керлингистка
#3097 Charlesgunnyhttp://filmkachat.ru
1× slots зеркало
Для такого, чтобы отыграть необходимую вашего бездепозитного приза надо(надобно) выполнить обстоятельства вейджера. Очень часто фриспины даются на конкретные слоты (book of ra, book of dead, book of sun), избирайте разъем для по душе, они все очень красочные и высококачественные. Бездепозитные бонус может быть валютным например и вид фриспинов на слоты <a href=http://filmkachat.ru/>1×slots регистрация на сайте</a> Верификация аккаунта. Лучше подтвердить личность сразу последствии регистрации, дабы потом не было проблем с выводом средств. Верификация имеет проходить двумя путями: <a href=https://xranks.com/astramedika.com.ua>https://xranks.com/astramedika.com.ua</a> Подтвердите регистрацию, чтобы активировать Бездепозитный приз с выводом, требуется заполнить собственный профиль. Заполните пустопорожние поля реальными данными о для. 1хслотс регистрация в 1×slots casino <a href=https://www.photoall.co.kr/bbs/board.php?bo_table=free&wr_id=1355362>https://www.photoall.co.kr/bbs/board.php?bo_table=free&wr_id=1355362</a>
1×slots казино зеркало
Существуют казино с призом за регистрацию, в очень известны фриспины в интернет казино впоследствии регистрации в конкретных забавах. Они встречаются том чаще бесплатных поощрений или традиционных бонусов в казино без вложений. Например, игрок регистрирует счет, на который начисляются безвозмездные игры, бонус за регистрацию вид даровых фрспинов, вращения в игровом автомате. Во время игрового процесса игрок выигрывает настоящие деньги, коие в последствии возможно успешно исключить из заведения на собственную платежную систему. То есть, есть шансы исключить средства без рисков своими деньгами. Регистрация, за которую компьютерные получит бонусы, займет минут, а спасибо этому возможно прирастить 5 евро поощрений до тыс. И без всяких проблем исключить их.Одним из предлогов отдавать привилегию одному либо иному заведению заключается в привлекательности предлагаемых промоакций и даровых предложений. Безвозмездные фриспины, выдаваемые без нужды создавать какой-либо вклад, в списке располагается далеко не в конце. 1хслотс официальный сайт зеркало <a href=https://plaza.rakuten.co.jp/prilla/diary/202411240003/>https://plaza.rakuten.co.jp/prilla/diary/202411240003/</a> 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
1× slots официальный
Для доказательства электронной почты, просто перейдите по интенсивной ссылке в письме, полученном от игрового заведения. <a href=https://floobits.com/Kennethchecy>https://floobits.com/Kennethchecy</a> Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, чтобы еще раз получить безвозмездный приз. Игорные заведения нетерпимы к бонус-хантерам, потому вас ожидает неизбежное санкция.Так что главное отличие презента на депо от бездепа – неотъемлемое пополнение счёта. Вы можете внести депо и преувеличить стартовый капитал или отобрать бездеп и всем не придётся рисковать собственными сбережениями. Поспешите выполнить обычные требования, и администрация ресурса начисляет щедрое поощрение! 1×slots регистрация За вербование друга ? масштабах партнерской программки заказчик получает вознаграждение за вербование свежих пользователей.
1хслот скачать
Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам воспрещено начислять призы клиентам, не имеющим денежных средств на счете. Мы предлагаем рассмотреть животрепещущие бонусы онлайн-казино с лицензией, которые соблюдают законодательство РБ.Такой казино приз без депозита за регистрацию выдается игроку на час и активно используется данное предложение с 2017 года. Это как бы какая-то маскировка поощрения под бездепозитный. Суть всего сего сводится к что, этому, собственно игроку на час выдается, например, 1000 $, а реклама утверждает о том, что любой выигрыш можно несомненно в будущем оставить при для. Но в играющий всерьез отнесется к этому предложению, то он попросту потеряет время. Ведь игроку нужно будет выступать не главном аккаунте, а тренировочном и с ограниченным выбором автоматов и ставок. Да и если, тогда, выигрыша (том всей тыс. ) в правила вступят определенные условия, где будет сказано, собственно наибольшей суммой победы имеет быть только двести долларов и средства возможно использовать лишь виде приза на 1-ый лепта с вейджером 25 от суммы гонорары плюс сам депозит. По результату получится, что игрок выигрывал себя 200% приз с вейджером на конкретную сумму. Короче говоря, это все не стоит вашего времени. Онлайн-казино с бездепозитными призами ставят клиентам обстоятельства для пользования бездепами, поэтому перед участием в промоакции лучше тщательно ознакомиться со всеми правилами и нюансами промоакции. Условия имеют касаться получения бонуса, его использования и следующего вывода денежных средств когда выигрыша.Выполнив все притязания оператора, клиент может оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит примерно не более суток. Если дополнительно требуется пройти процедуру верификации, то срок увеличивается до 1–2 трудящихся дней. Для перевода используются банковские инструменты и электрические платежные системы. Второй способ подходит никакого, например как большинство транзакций в этом случае осуществляются моментально. В связи со спецификой функционирования банков обработка платежей возможность занять до нескольких трудящихся дней. Автоматы неспроста числятся самым знаменитым азартным развлечением. Чтобы освоить управление и управляла, потребуется всего количество минут. Ваша задачка сделать ставку, определить число трудящихся линий и возможно крутить тамбур. Если дисплее выпадет выигрышная комбинация – вы выиграли! С этой задачей вам помогут управится бездепозитные бонусы казино. 1×слот регистрация в 1×slots casino <a href=http://forum.computest.ru/post/531855/#p531855>http://forum.computest.ru/post/531855/#p531855</a> Сразу последствии активации промокода возможно пользоваться презентом. Как уже упоминалось, призы бывают трёх обликов – фриспины, кредиты и фриплей-бонусы.
1×slots зеркало рабочее на сегодня
<a href=https://damienihfd22332.vblogetin.com/35882741/nude-ai-understanding-the-intersection-of-innovation-and-ethics-in-image-manipulation>https://damienihfd22332.vblogetin.com/35882741/nude-ai-understanding-the-intersection-of-innovation-and-ethics-in-image-manipulation</a> Это раз из главных характеристик привлекательности дара. С завешенным коэффициентом в профессионалы не смогут выполнить условия по отыгрышу. И важно, насколько презентабельно выглядит предложение – бездепозитный приз казино в размере $500 либо $1 000. Чтобы новенькие лучше вдумались, собственно же это вейджер, мы разберём на случае.Третитй бездепозитный приз за регистрацию – валютные свои. К раскаянию, начислить рубли или доллары способны лишь известные и пользующиеся клубы. С их подмогою вас насладиться любой доступной игрой – автоматом, рулеткой, кено, блэкджеком. 1×slots регистрация на сайте Получив свой подарок, Вы сможете бесплатно выступать на настоящие деньги, а выполнив обстоятельства отыгрыша, исключить свой выигрыш.Промокод – определённая композиция знаков, коию необходимо установить в подходящее поле при твореньи учетной записи или активировать в собственном профиле игрока в разделе с бонусами.
<b>Смотреть еще похожие новости:</b>
<a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=5473>1×slots регистрация на 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Мы советуем не отказываться от подобных услуг узнаваемых казино. Выделите несколько мин. На регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сегодня удача будет на вашей стороне!
#3098 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet официальный сайт 1×bet xyz лучшие онлайн казино <a href=https://sovsekretno.net/>казино вулкан</a> букмекерские контора ап porno Алена Михайлова <a href=https://m.repost.news/>Юдаева Ксения Валентиновна порно</a> бк букмекерская контора порно с Георгий Джикия (футбол) казино на деньги казино фильм смотреть онлайн pin up casino buzz 1×bet слоты сколько казино
DiskiPlus casino x DiskiPlus порно с Елена Никитина, скелетонистка <a href=https://diskiplus.ru>DiskiPlus порно с Евгения Медведева, фигуристка</a> DiskiPlus порно с Абрамченко Виктория Валериевна DiskiPlus казино вход <a href=https://diskiplus.ru>DiskiPlus букмекерская контора зенит</a> DiskiPlus скачать 1×bet на андроид DiskiPlus порно с Гатагова Ольга Анатольевна DiskiPlus porno Светлана Ходченкова DiskiPlus inform@rucriminal.info DiskiPlus porno Анастасия Янькова, боксерка DiskiPlus ешь казино DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz
#3099 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на сайте
1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, в не желаете стать жертвой мошенников либо впустую истратить время;Когда идет о валютных бонусах, казино постоянно устанавливают условия вейджера, которые необходимо выполнить, дабы вывести выигрыш. <a href=http://filmkachat.ru/>1×slots регистрация</a> На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не сможете активировать и получить бездепозитный приз.Ознакомьтесь с нашим перечнем наилучших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего перечня и получите бездеп незамедлительно. Хватайте наилучшие благотворительные предложения ниже и выигрывайте немалые средства, не рискуя! <a href=https://rapidapi.com/7ball-viet-nam-7ball-viet-nam-default/api/7ball-viet-nam/discussions/146279>https://rapidapi.com/7ball-viet-nam-7ball-viet-nam-default/api/7ball-viet-nam/discussions/146279</a> Бездепозитный приз за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых новых, великодушных и испытанных призах в интернет казино, которые обновляются каждый день. 1хслотс рабочее зеркало на сегодня <a href=https://bbs.wuxhqi.com/home.php?mod=space&uid=1475620>https://bbs.wuxhqi.com/home.php?mod=space&uid=1475620</a> Третитй бездепозитный бонус за регистрацию – валютные свои. К раскаянью, начислить рубли или баксы способны только знаменитые и популярностью клубы. С их помощью возможность насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком.Для того, дабы отыграть сумму вашего бездепозитного приза нужно выполнить обстоятельства вейджера. Очень часто фриспины даются на конкретные слоты (book of ra, book of deceased, book of sun), подбирайте разъем себя по душе, они все очень очень и высококачественные. Бездепозитные приз возможность быть валютным например и в виде фриспинов на слоты
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Размер ставки для игры по бездепозитному бонусу (естесственно же, если, тогда,, когда он представлен вид бонусных валютных средств) часто ниже, чем при забаве на депозит. Ограничение будет работать до момента отыгрыша приза. 1 xslots рабочее зеркало <a href=https://woodmancx.com/user/Jasperbig/>https://woodmancx.com/user/Jasperbig/</a> Наиболее известные гонорары между гэмблеров – бездепозитные бонусы казино. Это не умопомрачительно, так можно получить безвозмездные вращения либо виртуальные кредиты, и всем не придётся пополнять счёт, рисковать личностными средствами. Удастся насладиться разнообразными веселиями даже выиграть солидную необходимую, избегая серьёзного риска.Такие поощрения дозволяют даром протестировать новое казино, разобраться с игровым процессом онлайн слотов, заработать и исключить маленькую сумму денег. 1х слот регистрация в 1×slots casino Максимальный объем ставки, который нельзя превышать же бонус не будет всецело отыгран. В случае нарушения сего верховодила, бонус и выигрыш с него станут аннулированы.Срок отыгрыша — это период, который начинается в момент активации приза и завершается с его закрытием. Пользователю нужно уложиться в этот временной промежуток, другому призовые свои аннулируются. Казино устанавливают список игр, ставки в засчитываются при расчете отыгранных средств. Если тайтл не входит в этот перечень, то предоставляется быть недоступен для загрузки во время деяния бонусного предложения.
1×slots рабочее зеркало на сегодня
Процесс доказательства личности может занять от 1-го дня до недели. Если клиент разрешил какую-либо ошибку при заполнении паспортных данных, то ему идет обратиться с задачей в службу поддержки онлайн-казино.Помните, собственно в некоторых забавах сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных забавах лишь от 5% до 50% суммы ставки считаются как отыгранные средства, в то время как в слотах идет в зачет все one hundred percent суммы. <a href=http://www.darkml.net/bbs/home.php?mod=space&uid=8053970>http://www.darkml.net/bbs/home.php?mod=space&uid=8053970</a> Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в обязательном порядке необходимо восполнить счет в казино. Для депозитных бонусов, данная процедура не нужна, так как депозит уже сделан. 1×слот регистрация в 1×slots casino
1×slots зеркало регистрацию более популярный вариант это
Также, в этом случае нужно подтвердить свой номер телефона, результата код, приобретенный в смс-сообщении от клуба установить в специальное фон в личном кабинете игрока.Бездепозитный приз за регистрацию в казино — это стартовый презент вид валютного начисления или даровых вращений для новых игроков заведения, для получения которого не вносить депо. Помните, собственно в неких играх сумма ставки идет в зачет вейджера лишь частично. Так, в настольных и карточных играх только от 5% до 50% суммы ставки считаются как отыгранные деньги, момент как в слотах идет в зачет все one hundred percent суммы. Но рядах азартных платформах подобные вознаграждения могут получить и уже зарегистрированные пользователи. В таком случае, призы предоставляются в рамках уникальных промоакций либо же неким игрокам повторяющий акционного предложения, коие приходит на почту с целью «вернуть» игрока в свое казино.Это тоже бесплатные финансы, которые поступают на аккаунты свежеиспеченных игры после регистрирования. А необыкновенность таких бонусов состоит сомнений, собственно обретенные деньги обязательно по применять в продолжении назначенного времени. 1×slots зеркало на сегодня <a href=https://bdsmboard.org/member.php?400907-Glenndam>https://bdsmboard.org/member.php?400907-Glenndam</a>
1×slot зеркало рабочее этих способов предполагает регистрацию
<a href=http://09vodostok.ru/index.php?subaction=userinfo&user=omniscientposte>http://09vodostok.ru/index.php?subaction=userinfo&user=omniscientposte</a> 1×slots регистрация на сайте 1×slots ru com Чаще всего казино приз за регистрацию без депозита даёт возможность запустить любой автомат. Но превосходнее пристально ознакомиться с критериями. Иногда для игры доступны лишь определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, другого, как начать знакомство с миром пыла непосредственно с «одноруких злодеев».Для получения бездепа нужно пригласить в игру по реферальной ссылке свежего клиента: он обязан зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на необходимую, обозначенную в критериях промоакции.
<b>Смотреть еще похожие новости:</b>
<a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/9147–1×slots-registratsiya-1×slotscasino-56-online#9172>1×slots регистрация 1×slotscasino 56 online</a>
<a href=http://theauction.com.au/my-account/>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.
#3100 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пинап казино казино фильм смотреть онлайн <a href=https://www.ossetia.tv/>casino приложения</a> casinos xyz казино проиграл <a href=https://repost.news/>порно с Ирина Сидоркова</a> порно с Бондаренко Анастасия Борисовна сайте букмекерской конторы фонбет ев казино 1×bet слоты 1×bet xyz букмекерские конторы без депозита Преподобная Надежда Александровна порно 1×bet официальный скачать
DiskiPlus скачать 1×bet на андроид бесплатно DiskiPlus порно с Илья Осипов (киберспорт) <a href=https://www.diskiplus.ru>DiskiPlus vodka casino</a> DiskiPlus букмекерская контора скачать приложение DiskiPlus порно с Зырянова Анастасия Владимировна <a href=https://diskiplus.ru>DiskiPlus реального казино</a> DiskiPlus букмекерская контора без DiskiPlus песня казино DiskiPlus 7k casino бонус DiskiPlus casino играть DiskiPlus Шевцова Татьяна Викторовна порно DiskiPlus 1×bet слоты DiskiPlus retro casino
#3101 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации 2025
Используйте наихорошие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из списка ниже, дабы заработать подарки за простые действия и уже сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высочайшей отдачей и резвыми выводами на электронные кошельки.При игре на бонусные средства воспрещается играть в игровые автоматы с современным джекпотом и забавы из радела exist casino. Кроме как, некоторые казино выделяют бездеп на один либо несколько определенных слотов, и в других забавах Вы не можете на них играть. <a href=http://filmkachat.ru/>1хслот зеркало</a> <a href=https://www.liveinternet.ru/?playhouse.com.ua>https://www.liveinternet.ru/?playhouse.com.ua</a> Фриплей-бонусы. Бонусы за бесплатную игру есть только в некоторых клубах. Они зачисляются сразу после сотворения профиля и срабатывают недолговременное время. Если у вас нет времени израсходовать средства, они просто закончатся. Что дотрагивается медли, в большинстве случаев призы действуют в течение 1-го часа.Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке представители онлайн-казино публикуют важную информацию о not the slightest deposit bonuses прочих предложениях. 1×slots casino регистрация 1×slotscasino09k online <a href=https://tools-info.biz.ua/wr_board/tools.php?event=profile&pname=WilliamGaf>https://tools-info.biz.ua/wr_board/tools.php?event=profile&pname=WilliamGaf</a> Частенько новенькие не понимают, как активировать подарки либо вывести первый выигрыш. Для сходственных случаев наша команда описала основные термины – что это фриспины, вейджер, как его отыграть, для необходимо протекать верификацию.
1 х слотс зеркало
<a href=http://nakupnidivadlo.cz/index.php/forum/3-pripominky/46564-porno?start=774#236931>1 x slots</a> 1×slots сайт <a href=https://www.xn–72c9aa5escud2b.com/webboard/index.php?action=profile;u=2332597>https://www.xn–72c9aa5escud2b.com/webboard/index.php?action=profile;u=2332597</a> Раздача призов возможность быть приурочена к различным датам: календарные праздники, деньки рождения игроков, юбилей открытия казино и т. Д. Подарок выдается в виде денег, фриспинов либо баллов для скопления и обмена на предложения оператора. Если пользователь получает выигрыш, деньги начисляются на его счет. Для вывода этой суммы понадобиться выполнить ряд требований.Чаще всего, модные сервисы, такие как MoneyBookers и WebMoney, еще MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно обязательное правило. Финансовые свои выводятся только спустя что, эту платежную систему, коей огромный для пополнения депозита. Если же игрок получил бездепозитный покерный приз, требуется восполнить счет на минимальную сумму, кот-ая составляет обычно 10 долларов. 1×slots рабочее зеркало
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Бездепозитные призы казино за регистрацию в 2022 году — это вероятность поиграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой либо числом безвозмездных вращений без внесения депозита. Не путайте деморежим с реальной забавой без необходимости внесения депо.Самые свежие бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды присутствуют на данной страничке. Посетитель возможность оценить обстоятельства получения и начать выступать на деньги без внесения депозита. При данном игроку принципиально разуметь, на каких критериях и какими способами появится исключить приобретенный выигрыш. Для сего нужно оценить перечень подключенных платежных систем. <a href=https://adminclub.org/member.php?action=profile&uid=98376>https://adminclub.org/member.php?action=profile&uid=98376</a> Бесплатные бонусы казино без депозита можно получить повторяющий денежных средств на бонусный счет (исключить их возможно лишь после отыгрыша), фриспинов, игры либо кешбэк-бонуса. 1×slots актуальное зеркало
1×slots промокод при регистрации
<a href=http://forum.puppylinux.pl/index.php?topic=794.new#new>1×slots регистрация на сайте</a> Не трудно додуматься, собственно no deposit bonuses почти ни не случаются немаленькими. Чаще всего идет о пяти–тридцати долларах (или эквиваленте этой суммы в иной денежной).Популярность онлайн казино растёт и всё больше пользователей начинают интересоваться азартными играми. Бездепозитные призы 2022 года, это уникальные презенты за регистрацию. С их поддержкою новые игроки шансы получить безвозмездные вращения либо деньги на баланс за одну регистрацию. С свет игорных заведений в интернете, бездепозитные призы стали известнейшим способом вербования игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш сайт собрал наихорошие предложения из интернета на 2022 год. Воспользуйтесь каким даром и сможете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша нужно выполнить обстоятельства. Активация денежного гонорары случается автоматически после создания профиля или применения промокода. Иногда операторы предъявляют вспомогательные притязания: подписаться на странички казино в соц сетях либо на рассылку маркетинговых известий, скачать и ввести вспомогательный софт и т.д. 1×slots зеркало сайта <a href=https://sklad-slabov.ru/forum/user/9582/>https://sklad-slabov.ru/forum/user/9582/</a>
1×slots казино мобильная версия
В интернет-сети постоянно можно отыскать списки наиболее популярных и гарантированных поощрительных программ от известных онлайн-казино. <a href=http://jusintergentes.com.ua/index.php?option=com_k2&view=itemlist&task=user&id=1513125&lang=uk>http://jusintergentes.com.ua/index.php?option=com_k2&view=itemlist&task=user&id=1513125&lang=uk</a> 1×slots casino регистрация 1×slotscasino09k online Доступность — бездепозитные призы в казино почаще всего предоставляются свежим игрокам, хотя случаются случаи, когда приз могут получить и действующие посетители.Принципиальным различием даровых бонусов от призов на депо считается недоступность необходимости вносить средства на аккаунт. Из-за сего их нередко нарекают бездепозитными (not the slightest down payment bonuses).
<b>Смотреть еще похожие новости:</b>
<a href=https://sadhaka.nl/forum/viewtopic.php?t=103733>1×slots зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Разные казино имеют личные управляла по выведению выигрыша. Для бездепозитных призов принимаются достаточно высокие притязания. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до 100 раз в игровых автоматах. Например, случае игрок получил даром 10 $, то нужно несомненно отыграть их, поставив одну тыщу спинов по одному баксу каждый. Стоит отметить, что не все казино дают вероятность выступать на бонусы и не во всех развлекательных заведениях схожие правила для отыгрывания. Некоторые казино воспрещают играть на призы в блекджек либо ограничивают ставки до 5 %, собственно значительно наращивает в 10-ки один количество необходимых игр.
#3102 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casinos winning казино вулкан <a href=https://specreporter.com/>сайт винлайн букмекерская контора</a> казино можно лучшие букмекерские конторы <a href=https://rumafia.news/>скачать casino на андроид</a> мелбет букмекерская контора porno Юлия Пересильд 1win букмекерская контора 1×bet слоты официальный сайт up casino скачать букмекерскую контору retro casino
DiskiPlus букмекерская контора бесплатно скачать DiskiPlus Светлана Ходченкова <a href=https://www.diskiplus.ru/>DiskiPlus casino ап</a> DiskiPlus лучшая казино DiskiPlus Анна Михалкова <a href=https://diskiplus.ru/>DiskiPlus бесплатные букмекерские конторы</a> DiskiPlus Разуваева Ксения Денисовна порно DiskiPlus 1×bet рабочее DiskiPlus casino сайты DiskiPlus порно с Елена Никитина, скелетонистка DiskiPlus сайте букмекерской конторы фонбет DiskiPlus букмекерская контора фонбет DiskiPlus 1×bet приложение
#3103 Charlesgunnyhttp://filmkachat.ru
1хслотс регистрация в 1×slots casino
Заработать на бездепозитных призах за регистрацию в казино может каждый юзер, достигший совершеннолетия. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> <a href=https://www.onairseo.com/crawl-report/7290>https://www.onairseo.com/crawl-report/7290</a> 1×slots быструю регистрацию а также мгновенное <a href=http://atope.ru/user/RaymondSquat/>http://atope.ru/user/RaymondSquat/</a> Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие возникают у начинающих.Осталось выбрать казино с призом за регистрацию и создать профиль. После активации подарка выигрыш зависит от Фортуны и способностей.
1×slots регистрация 1×slots casino 777 online
В наше время довольно просто получить бонус за регистрацию в казино. Практически любой игорный жилище с готовностью начисляет средства либо благотворительные вращения. Многие гэмблеры используют данным и не стесняются регистрироваться в любом клубе с прибыльными критериями. Кстати, это замечательная возможность выработать победную тактику и сорвать джекпот.Все любят получать презенты. Согласитесь, практически любой играющий человек будет очень рад, в получит безвозмездный презент для забавы в интернет казино просто за регистрацию либо же бонус за внесенный депо, так называемые приветственные призы для новых игроков. Соответственно такие интернет клубы будут больше модны и предпочтительны у игроков при выборе казино для игры. Топ казино постоянно обновляется и добавляются свежие и занимательные игровые клубы с симпатичной бонусной политикой и всеми возможными привилегиями, к которым относятся такие призы как фриспины за регистрацию, денежные бездепозитные бонусы, а щедрые бонусы за внесенный депозит. 1×slots регистрация на сайте 1×slots ru com Также учтите, что кое-какие игровые платформы сузивают перечень стран, коие готовы получить предложенный бездепозитный приз за регистрацию. К образцу, существуют онлайн-заведения, выдающие подобные призы только жителям конкретных стран. К образцу, онлайн казино 777 Оригинал дает бездепозитный бонус только игрокам из России и стран СНГ. Или напротив, пичкают вознаграждением всех, не обитателей неких стран (исходя из этого, стопам внимательно изучать перечень, дабы впоследствии не возникло никаких вопросов и жалоб).Максимальный объем ставки, кот-ый нельзя превосходить пока приз не несомненно полностью отыгран. В случае нарушения сего управляла, приз и выигрыш с него будут аннулированы. <a href=https://www.fire-directory.com/Glory-Casino_438102.html>https://www.fire-directory.com/Glory-Casino_438102.html</a> 1×slots зеркало проходить регистрацию это отличный вариант
x1 slots регистрация в 1×slots casino
Одним из предлогов отдавать преимущество, льготу одному либо другому заведению содержится в привлекательности предлагаемых промоакций и даровых услуг. Безвозмездные фриспины, выдаваемые без нужды делать какой-либо лепта, в перечне располагается далековато не в конце.Такой казино приз без депо за регистрацию выдается игроку на час и энергично используется данное предложение с 2017 года. Это словно какая-то маскировка поощрения под бездепозитный. Суть всего сего сводится к что, этому, что игроку на час выдается, к примеру, 1000 долларов, а реклама повторяет то, что каждой выигрыш можно несомненно дальнейшем оставить при себе. Но в играющий серьезно отнесется к данному предложению, то он попросту потеряет время. Ведь геймеру надо(надобно) несомненно выступать не главном аккаунте, в тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (и всей тыс. ) в верховодила вступят определенные условия, где будет сказано, собственно наибольшей суммой победы может быть только двести долларов и средства можно применять только виде приза на первый лепта с вейджером 25 от суммы вознаграждения плюс сам депо. По результату получится, собственно игрок выигрывал для 200% бонус с вейджером на конкретную необходимую. Короче говоря, это все не стоит вашего времени. <a href=http://moregasmsplease.com/component/kunena/user/560923-williamneelm>http://moregasmsplease.com/component/kunena/user/560923-williamneelm</a> У каждого игорного клубы различные вейджеровые условия. Чтобы вы гарантировано сумели выполнить их, мы дадим некоторое советов. Если система начислила небольшую необходимую, надо делать немалые ставки – остановитесь на 10–30 центах. Как лишь сможете заработать примерно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте играть. В неприятном случае превосходнее приглядеться к другому автомату.При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое возможно предназначить игре в казино. казино 1× slots официальный сайт Любой выигрыш по ставке повыше установленного лимита несомненно считаться недействительным. То есть ставка не несомненно засчитана при отыгрыше, а случае выигрыша его сумма не поступит на счёт посетителя — результат игры будет полностью аннулирован.Маркетинговая политического всех игорных интернет-клубов обязана одевать разнородный нрав. И случае вознаграждения на депо служат для того, чтобы стимулировать заносить депозиты и поощрять уже быть юзеров, то бездепозитный бонус в казино или приз за регистрацию в казино, прежде всего, рассчитан на расширение базы покупателей.
1×slots зеркало которую указывали при регистрации кстати
Активация по промокоду используется в различных видах бездепов. Если идет о приветственном призе, то набор символов возможно разузнать на главной странице, в регистрационной форме либо письме, которое отправляется пользователю для доказательства адреса электронной почты. Акции могут проводиться вместе с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активируется одноразовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном кабинете либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем важный код для активации в описании каждого рекламную. <a href=https://takesalary.com/the-day-ai-took-over-losing-my-job-as-a-content-writer/#comment-4800>1×slots официальный регистрация</a> Если идет об неповторимых услугах, может понадобиться регистрация в казино по ссылке с партнерского вебсайта. 1×slots зеркало <a href=http://mayakminska.1stbb.ru/memberlist.php?mode=viewprofile&u=3951>http://mayakminska.1stbb.ru/memberlist.php?mode=viewprofile&u=3951</a> Обычно, бездепозитные бонусы выдаются под определенные слоты с фиксированной ставкой, хотя их точно запрещено использовать в игровых автоматах с современным джекпотом. Список игр, каких возможно применять бездеп, Вы найдете в описании акции или сможете уточнить у службы поддержки заведения.Нет. Казино выдают благотворительные бонусы за регистрацию, для того, чтобы клиент имел ознакомиться с игровым заведением. А чтобы вывести его, нужно выполнить условия отыгрыша.
1×slots зеркало проходить регистрацию это отличный вариант
Чтобы других увериться в превосходстве бездепозитных бонусов, достаточно зарегистрироваться в казино и получить поощрение. Так же стоит выделить то, собственно в любом онлайн казино установлен свой максимальный кешаут на бездепозитный бонус. Как управляло кешаут — это предельная сумма средств, кот-ая доступная для вывода с бездепозитного приза. <a href=https://vietnamplayboy.com/bbs/board.php?bo_table=free&wr_id=368651>https://vietnamplayboy.com/bbs/board.php?bo_table=free&wr_id=368651</a> 1×slots официальный сайт скачать Онлайн гемблинг развивается с каждым днем все больше и больше, свежие бренды создаются не по дням а по часам. Новые онлайн казино делают вступительные акции для игроков, чтобы, чтобы что бы зарекомендовать себя, и тем самым предлагают бездепозитные бонусы за регистрацию, собственно бы не пропустить эту вероятность — как воспользоваться свежим бездепом, рекомендуем навещать наш сайт как возможно почаще, самое лакомое и свежие несомненно добавляться в данном же списке.Подарки на дни ? приуроченные к праздничным датам, требующие символического отыгрыша или начисляются без того. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду.
<b>Смотреть еще похожие новости:</b>
<a href=http://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=6268>1× slots casino зеркало</a>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=193742>1×slots мобильная версия войти казино</a>
<a href=https://seniordance.ru/forum/showthread.php/77142-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%B0–1×slots?p=107009#post107009>зеркала 1×slots</a>
<a href=http://www.topboard.org/threads/1×slots-registracija-to-dalshe-neobxodimo-projti.616751/>1×slots регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины начисляются по конкретной ставке. После их активации игроку нужно запустить слот и увериться, собственно в нем показываются безвозмездные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода в отыгрыша определяется оператором и редко выше 5 000 рублей. Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, solid лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.
#3104 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up букмекерская контора порно с Дарья Клишина, легкоатлетка <a href=https://sovsekretno.net/>порно с Анна Щербакова, фигуристка</a> казино ставка слоты казино <a href=https://m.repost.news/>казино на деньги</a> 1×bet скачать приложение на андроид 7k casino бонус 1×bet на сегодня casino бонус casino автомат pin up casino официальный пин ап casino pin
DiskiPlus porno Андрей Рублев (теннис) DiskiPlus 1×bet слоты 1×bet top <a href=https://www.diskiplus.ru>DiskiPlus официальная казино</a> DiskiPlus порно с Илюшникова Татьяна Александровна DiskiPlus pin casino зеркало <a href=https://diskiplus.ru>DiskiPlus 1win букмекерская контора</a> DiskiPlus лучшая казино DiskiPlus online casino официальный DiskiPlus 7k casino официальный сайт DiskiPlus лучшие букмекерские конторы DiskiPlus 1×bet 1хбет DiskiPlus где казино DiskiPlus порно с Диана Шнайдер (теннис)
#3105 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать pin casino 1×bet xbet <a href=https://glvk.guru/>букмекерская контора фонбет официальный сайт</a> bet casino casino ап <a href=https://m.repost.news/>porno Игорь Акинфеев (футбол)</a> порно с Алина Загитова, фигуристка букмекерская контора фонбет официальный гама казино лучшие бесплатные онлайн казино Попова Анна Юрьевна порно порно с Баталина Ольга Юрьевна леон букмекерская контора
DiskiPlus Валентина Матвиенко порно DiskiPlus порно с Аделия Петросян (фигурное катание) <a href=https://www.diskiplus.ru/>DiskiPlus порно с Алина Загитова, фигуристка</a> DiskiPlus casino DiskiPlus казино проиграл <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet зеркало на сегодня 1×bet xyz</a> DiskiPlus сайте букмекерской конторы фонбет DiskiPlus casino официальный зеркало DiskiPlus винлайн букмекерская контора официальный DiskiPlus пина букмекерской конторы DiskiPlus casino промокод DiskiPlus pin up casino скачать DiskiPlus casino ru
#3106 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slotscasino 56 online
Бонусные средства – небольшая сумма средств для старта в новеньком казино. На бонусные средства, обычно разрешается играть во все игры, не слотов с прогрессивным джекпотом и игр из раздела exist casino. <a href=http://filmkachat.ru/>1×slots подтвердит вашу регистрацию если говорить</a> Осталось избрать казино с бонусом за регистрацию и сделать профиль. После активации подарка выигрыш зависит от Фортуны и способностей.Ну и естесственно же, для казино бездепозитные призы прибыльны с имиджевой стороны: сходственная щедрость увеличивает уровень лояльности посетителей к фирмы. <a href=https://www.synfig.org/issues/thebuggenie/synfig/issues/9938>https://www.synfig.org/issues/thebuggenie/synfig/issues/9938</a> 1× slots сайт <a href=https://www.google.com.bd/url?q=https://doctorlazuta.by/>https://www.google.com.bd/url?q=https://doctorlazuta.by/</a> К образцу, игроку выдаются бесплатные свои в заведении в размере пятидесяти либо ста $ (вейджер на коие сочиняет 100х). То есть, любому новоприбывшему геймеру выскакивает привлекающая иллюстрация, которая сулит выплату всех зачисленных фирмой средств. Не стоит внимания на казино приз за регистрацию без депозита с чрезмерно великий или очень малюсенькой суммой призов, потому что, даже кропотливо выучив все обстоятельства, здесь скорее, будет некий подвох.Существует ли стратегии для отыгрыша бездепозитных бонусов? К раскаянью нет, на выигрыши или проигрыши с бонусов, казино или игрок повлиять имеет, отдача игр происходит от разработчиков игр.
x1 slots регистрация в 1×slots casino
1×slots официальный регистрация <a href=http://bocauvietnam.com/member.php?1415752-Josephenhaw>http://bocauvietnam.com/member.php?1415752-Josephenhaw</a> Разные казино имеют собственные управляла по выведению выигрыша. Для бездепозитных бонусов принимаются достаточно высочайшие требования. Часто онлайн-казино советуют отыграть бонусное поощрение до 100 раз в игровых автоматах. Например, если игрок получил бесплатно 10 долларов, то необходимо несомненно отыграть их, поставив одну тысячу спинов по одному доллару любой. Стоит отметить, собственно не все казино выделяют вероятность играть на призы и не во всех развлекательных заведениях идентичные верховодила для отыгрывания. Некоторые казино запрещают выступать на призы в блекджек либо ограничивают ставки до пяти процентов, собственно существенно увеличивает в десятки раз число необходимых игр. 1×slots сайт зеркало
1×slots промокод при регистрации
Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала прыткие выводы. Фишка выплат в том, собственно достаточно избрать платёжный инструмент и указать сумму. В большинстве случаев средства зачисляются на электронные кошельки на 15 минут, а на банковские карты – 1–3 рабочих дня.Как верховодило, новоприбывшие геймеры для хотят ознакомиться с методами ввода и вывода денежных средств и сроки исполнения поданных заказов дабы четко разуметь, как прытко возможность вывести собственный казино приз за регистрацию без депо на электрический кошелек или же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино соперничают между собой. Ведь если бы определенную фирму давало лишь одно онлайн-заведение, то вряд ли бы клиенты увидели казино с бонусом за регистрацию и имели бы рассчитывать лишь на вознаграждение вид приза на первое вложение. К любому заведению регулярно по завлекать свежих игроков, собственно, в итоге, только на руку всем играющим. <a href=http://vfb7968c.bget.ru/index.php?subaction=userinfo&user=gentleparish2>http://vfb7968c.bget.ru/index.php?subaction=userinfo&user=gentleparish2</a> 1×slots зеркало видели такую регистрацию на Нет. Для получения бездепозитного приза в казино нужна обязательная регистрация на веб-сайте. Играть в слоты безвозмездно и без регистрации можно только в демо режиме.
1 x slots
<a href=http://aficionado.pl/showthread.php?177117–1×-slots-casino-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE&p=198188>1× slots casino зеркало</a> При регистрации стопам указывать только достоверную информацию. Когда учетная запись будет активна, замечен доступ в Личный офис. В нем можно выбрать валюту, ввести промокод и узнать доскональные управляла получения и отыгрыша бездепа. Краткая информация об промоакции нередко находится непосредственно на регистрационной форме. 1× slots регистрация в 1×slots casino <a href=http://jdlpnc.com/xe/?mid=qna&document_srl=66057>http://jdlpnc.com/xe/?mid=qna&document_srl=66057</a> Если вы облюбовали для себя некоторое брендов которые для больше всего полюбились, для неизменной игры! Таких гемблеров казино довольно предпочитает и оценивает, за частую такие игроки становятся VIP игроками заведения, коим часто поступают выгодные предложения повторяющий призов, например же туда заходит и бездепозитные.
казино 1×slots официальный сайт
Отказ в прохождении верификации. Если заказчик не хочет либо не может предоставить документы, подтверждающие его личность, профиль будет заблокирован вместе со всеми бонусными начислениями. Особую изюминку видео слотам придают оригинальные символы. С их появлением активируются различные бонусы. Вы сможете запустить вспомогательный степень и прирастить необходимую выигрыша. Есть знаки, коие заменяют негодные элементы и сами творят выигрышные комбо. Не стоит забывать и про бонус-тур. После любого счастливого спина есть шанс увеличить сумму выигрыша в два или четыре раза. <a href=https://australiantravelforum.com/Upload/member.php?action=profile&uid=1657>https://australiantravelforum.com/Upload/member.php?action=profile&uid=1657</a> 1 хслот регистрация в 1×slots casino Бездепозитные бонусы — это подарки от казино вид бонусных денег или фриспинов для игровых автоматов, коие начисляются на акк игрока последствии процедуры регистрации на сайте заведения. Для получения этих поощрений депо не требуется.Можно ли в одном интернет казино получить больше 1-го бонуса за регистрацию? Нет, например как в каждом онлайн казино есть верховодила, к которым надо(надобно) держаться, не творить два аккаута для получения призов, другому несомненно блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, приз за регистрацию выдаеться раз один 1 личику.
<b>Смотреть еще похожие новости:</b>
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=46008>1×slots официальный demo регистрация в 1×slots casino</a>
<a href=http://fin-molitor.com/forum/viewtopic.php?f=2&t=490047>1×slots зеркало сайта</a>
<a href=https://forum.dis-course.net/viewtopic.php?p=912515#p912515>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Промообъявления от казино не дают реальной картины и направлены на вербование внимания пользователей. Понять, как высоки шансы остаться в плюсе, позволит личный анализ условий предложения: Третитй бездепозитный приз за регистрацию – денежные средства. К раскаянию, начислить рубли или баксы способны только знаменитые и знаменитые клубы. С их поддержкою вас насладиться любой доступной забавой – автоматом, рулеткой, кено, блэкджеком.
#3107 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино пин букмекерская контора официальный сайт скачать <a href=https://strelochnik.com/>сайты казино</a> порно с Илюшникова Татьяна Александровна скачать casino на андроид <a href=https://th-royalgclub.com/>сайте букмекерской конторы фонбет</a> up casino скачать скачать 1×bet на андроид бесплатно Окладникова Ирина Андреевна порно порно с Александр Головин (футбол) 1×bet скачать приложение на андроид гта онлайн казино порно с Евгения Медведева
DiskiPlus ев казино DiskiPlus песня казино <a href=https://www.diskiplus.ru>DiskiPlus 1×bet слоты 1×bet xyz</a> DiskiPlus гта онлайн казино DiskiPlus Крючкова Полина Викторовна порно <a href=https://www.diskiplus.ru/>DiskiPlus porno Юлия Канакина</a> DiskiPlus porno Мария Шарапова DiskiPlus porno Екатерина Ефременкова, шорт-трекистка DiskiPlus порно с Дронова Александра Викторовна DiskiPlus 1×bet телефон DiskiPlus казино ли DiskiPlus зеркала казино DiskiPlus порно с Анастасия Потапова, теннисистка
#3108 Charlesgunnyhttp://filmkachat.ru
1×slots сайт
Самые известные методы вывода денег ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электрическим платежным системам типа Neteller и Skrill, а также пользуются криптовалютными кошельками. Вывод выигрышей имеет осуществляться мгновенно либо занимать от нескольких часов до нескольких суток.Выбирая безвозмездный приз, внимательно изучайте правила. Убедитесь, что для возможно себя участие в акции. Уточните, в каких играх возможно выполнять условия вейджера. При надобности задавайте вопросы представителям саппорта. <a href=http://filmkachat.ru/>казино 1×slots</a> <a href=https://phileo.me/blogs/295811/3D-Property-Visualization-Transform-Real-Estate-Marketing-Today>https://phileo.me/blogs/295811/3D-Property-Visualization-Transform-Real-Estate-Marketing-Today</a> Казино выделяет возможность заработать и исключить реальные деньги на бездепозитных бонусах. Обычно, это незначительная сумма, коию казино возможность себе разрешить подарить игроку. 1 xslots рабочее зеркало <a href=https://games-garant.ru/index.php?subaction=userinfo&user=CharlesBlult>https://games-garant.ru/index.php?subaction=userinfo&user=CharlesBlult</a> Как правило, новоприбывшие геймеры в первую очередь желают ознакомиться с методами ввода и вывода валютных средств и сроки выполнения поданных заказов дабы конкретно разуметь, как прытко меня исключить свой казино приз за регистрацию без депозита на электрический кошелек или же банковскую карту. К счастью для всех играющих, снутри конкретных холдингов, все казино соперничают между собой. Ведь в бы определенную фирму представляло лишь одно онлайн-заведение, то навряд бы клиенты заметили казино с бонусом за регистрацию и могли бы рассчитывать лишь на вознаграждение повторяющий приза на 1-ое вложение. К каждому заведению регулярно стопам привлекать свежих игроков, собственно, конечном, только на руку всем играющим.Некоторые клубы механически начисляют бонус на акк игрока после выполнения критерий получения, хотя посещают ситуации, когда приз нужно активировать игроку самому. Есть некоторое способов активации приза:
x1 slots регистрация в 1×slots casino
В бонусную программу множества операторов входят систематические бездепы. Это бессрочные акции, поощряющие интенсивных неизменных игроков. Популярный формат — раздача фриспинов по определенным дням недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают постоянные призы без депо в мена на скопленные баллы лояльности. зеркала 1×slots У любого игорного заведения средства управляла и условия. Но, дабы получить призы, необходимо выполнить стандартные деянья: <a href=https://pokemonperfect.com/forums/index.php?members/philipbon.21564/>https://pokemonperfect.com/forums/index.php?members/philipbon.21564/</a> 1×slots промокод при регистрации Выбор каждого интернет казино на нашем сайте. В описании к любому Вы сможете разузнать, что получите за творение аккаунта.
1 х слотс зеркало
В лицензионных бездепозитных казино играть в азартные игры вправду неопасно. Наличие лицензии одобряет тот факт, что клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP.Наш перечень включает в себя наихорошие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по принципиальным характеристикам: Варианты выигрыша зависят от Вашей удачи и условий игорного портала. Выше мы сказали, что кое-какие бездепозитные призы в 2022 году выдаются с лимитированиями по максимальной выплате. Однако, остаются они, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность современных игр на средства, можно выиграть невозможные суммы. Сегодняшние игровые автоматы либо видео слоты, как их именуют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000.Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. <a href=http://avestalaw.ru/index.php?subaction=userinfo&user=numerousruler44>http://avestalaw.ru/index.php?subaction=userinfo&user=numerousruler44</a> Наличие у игрока 2 аккаунта. Запрещено делать несколько профилей для неоднократного получения бездепов.Для подтверждения электронной почты, просто перейдите по активной ссылке в послании, полученном от игрового заведения. 1×slots casino регистрация 1×slotscasin online Составленный экспертами Casino.ru перечень онлайн-казино с бездепозитным призом разрешает игрокам сравнить спецпредложения разных операторов.
1×slots регистрация на сайте
Подарки на праздничные ? приуроченные к парадным датам, требующие символического отыгрыша либо начисляются без такового. Могут дариться игрокам сутки рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду.Получив собственный презент, Вы можете даром выступать на настоящие деньги, а выполнив условия отыгрыша, исключить свой выигрыш. Иногда у гостей вебсайта имеют появиться проблемы при активации приобретенного промо-кода. В таких случаях, нужно обратиться за помощью в службу «Support». Для получения ответа, обязательно указывается конкретная причина обращения и подтверждается информация дополнительными снимками. Если сложилась спорная ситуация, всегда возможно адресоваться к основному регулятору или контролирующему органу, выдавшему этому заведению лицензионный документ.Теоретически, к безвозмездным бонусам возможно отнести так называемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, потому собственно они деют только возможность создавать ставки. 1×slots бездепозитный бонус за регистрацию <a href=http://google-pluft.us/forums/profile.php?id=529866>http://google-pluft.us/forums/profile.php?id=529866</a>
рабочее зеркало 1хслотс
<a href=https://m.xndl.com/home.php?mod=space&uid=649246>https://m.xndl.com/home.php?mod=space&uid=649246</a> Таким образом, заведение пытается показать себя своим потенциальным игрокам, а подобный рекламный ход как казино приз без депозита за регистрацию завлекает довольно много внимания к игорному заведению и обеспечивает постоянный струю свежих посетителей и будущих посетителей игрового интернет клуба.Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих требований, считая обязательной верификации. Если на веб-сайте предусмотрена обязательная процедура доказательства личности, то вывести выигрыш удастся только последствии проверки данных. Приготовьтесь наполнить анкету и отправить в техподдержку документ, подтверждающий личность. 1×slots зеркало на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=305634>1×слотс казино</a>
<a href=https://russiancomputerservice.ru/user/JosephCer/>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Сразу последствии активации промокода возможно воспользоваться даром. Как уже упоминалось, призы посещают трёх обликов – фриспины, кредиты и фриплей-бонусы.
#3109 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet рабочее букмекерские конторы pin <a href=https://slon-ru.com/>букмекерская контора на андроид</a> казино онлайн бесплатно casino андроид <a href=https://kompromat1.online/>Черкесова Бэлла Мухарбиевна порно</a> пина casino 1×bet официальный сайт букмекерская контора фонбет официальный сайт почему казино ограбление казино casino промокод porno Виктория Баркова, легкоатлетка
DiskiPlus casino riobet DiskiPlus 1×bet зеркало xbet <a href=https://diskiplus.ru/>DiskiPlus black russia казино</a> DiskiPlus 1×bet 1 DiskiPlus Чулпан Хаматова <a href=https://diskiplus.ru/>DiskiPlus up букмекерская контора</a> DiskiPlus 1×bet на сегодня DiskiPlus 1×bet casino DiskiPlus Черкесова Бэлла Мухарбиевна порно DiskiPlus играющие казино онлайн DiskiPlus казино фильм онлайн DiskiPlus Преподобная Надежда Александровна порно DiskiPlus букмекерская контора бетсити
#3110 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало
Новички не обожают сразу же вносить депозит. Это обусловлено неименьем навыка и сомнением. К счастью, в наше время можно получить бездепозитный приз за регистрацию в казино. Неважно собственно начисляет система – фриспины либо кредиты. В всяком случае вы не рискуете собственными сбережениями. Это замечательная вероятность запустить приглянувшийся видео слот или же испытать фортуну в настольных забавах. <a href=http://filmkachat.ru/>1×slots зеркало на сегодня</a> <a href=https://rapidapi.com/7ball-viet-nam-7ball-viet-nam-default/api/7ball-viet-nam/discussions/146280>https://rapidapi.com/7ball-viet-nam-7ball-viet-nam-default/api/7ball-viet-nam/discussions/146280</a> 1хслотс зеркало <a href=http://spectr-sb116.ru/user/Deweyjet/>http://spectr-sb116.ru/user/Deweyjet/</a> Шаг 5. Использование и отыгрыш. Бездеп должен быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.
сайт 1× slots casino
Каждый новичок и профессиональный игрок грезят стремительно стартануть и начать создавать реальные ставки. Для сего довольно забрать подарок, за который надо платить. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email или телефонный. После этого администрация начисляет щедрое вознаграждение вид безвозмездных вращений либо виртуальных кредитов.Промокод – определённая композиция символов, которую нужно установить в отвечающее фон при создании учетной записи или активировать в собственном профиле игрока в разделе с бонусами. <a href=https://www.donchillin.com/space-uid-382497.html>1×slots официальный сайт зеркало</a> 1×slots официальный регистрация <a href=http://medik.co.kr/bbs/board.php?bo_table=free&wr_id=758576>http://medik.co.kr/bbs/board.php?bo_table=free&wr_id=758576</a> Подарки на праздничные ? посвященные торжественным датам, требующие условного отыгрыша либо начисляются без это. Могут дариться игрокам сутки рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду.Каждый новичок и умелый игрок мечтают скоро стартануть и начать делать настоящие ставки. Для этого достаточно забрать презент, за кот-ый не платить. В зависимости от игровой платформы, нужно сделать профиль, привязать email либо телефон. После сего администрация начислит щедрое вознаграждение вид бесплатных вращений или виртуальных кредитов. 1×slots регистрация 1×slots review live Приветственный бездеп предоставляется любому игроку лишь один раз. Казино дерутся с например называемыми бонусхантерами (от англ. Bonus Hunter — охотник за бонусами), пытающимися заводить многочисленные аккаунты для надувательства оператора и повторного получения дара. Исключить сходственные деянья дозволяет верификация данных. Администрация вправе потребовать у посетителя подтвердить персональные данные, указанные при регистрации.Отказ в прохождении верификации. Если клиент не хочет либо не дать документы, подтверждающие его личность, профиль будет заблокирован вместе со всеми бонусными начислениями.
1×slots casino регистрация
Популярность онлайн казино растёт и всё больше пользователей начинают увлекаться азартными играми. Бездепозитные призы 2022 года, это уникальные презенты за регистрацию. С их подмогою новые игроки шансы получить безвозмездные вращения или деньги на баланс за 1 регистрацию. С в игорных заведений в интернете, бездепозитные бонусы стали наимоднейшим методом вербования игроков. Подобные акции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш сайт собрал наилучшие предложения из онлайна на 2022 год. Воспользуйтесь хоть даром и можете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить обстоятельства.Главное превосходство спинов – вероятность выучить разные слоты. Также получится насладиться бонусными раундами, испытать фортуну в риск-туре и преумножить выигрыш за счёт особых знаков. Однако столько игровой процесс заслуживает внимание, так другого сосредоточиться на реальном выигрыше. Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную процедуру активации бонуса без депо. Внимательно прочтите до конца. Многие новенькие проделывают промахи на этапе регистрации и поэтому имеют получить презент.Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. <a href=http://www.sglpw.cn/home.php?mod=space&uid=331326>http://www.sglpw.cn/home.php?mod=space&uid=331326</a> Зачастую бездепозитные призы казино для игры предлагаются различными заведениями азартных игр виде рекламных акций или в целях привлечения к себе новых игроков. Для бездепозитных призов в казино 2022 игроку надо пополнять счет до момента вывода хотимых средств.Автоматическая активация показаться самой удобной, хотя ручной метод имеет перед ней преимущества. Прежде чем применять вознаграждение от казино, стоит заранее определить, сколько времени потребуется на исполнение всех критерий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала деянья бонуса. 1×slots быструю регистрацию а также мгновенное Все любят получать подарки. Согласитесь, почти каждый играющий человек несомненно сильно рад, в получит безвозмездный презент для игры в интернет казино просто за регистрацию или же бонус за внесенный депозит, так нарекаемые приветственные бонусы для свежих игроков. Соответственно эти интернет клубы будут больше модны и преимущественны у игроков при выборе казино для игры. Топ казино непрерывно обновляется и прибавляются новые и интересные игровые клубы с симпатичной бонусной политикой и всеми возможными прерогативами, к коим относятся такие бонусы как фриспины за регистрацию, валютные бездепозитные призы, еще великодушные призы за внесенный депозит.
1х слот регистрация в 1×slots casino
<a href=http://powercrop.it/chi-siamo/le-persone?page=91#comment-4561>1×slots коды</a> 1× slots зеркало <a href=http://alex-zarya.ru/user/Charlesquent/>http://alex-zarya.ru/user/Charlesquent/</a> Обычно бездепозитные промоакции от казино, приходят на эл. Почту в деньки рождения или дни. В неких интернет казино возможно обратиться в чат и как неизменному игроку, вполне для предложат бездепозитное предложение.
онлайн казино 1×slots
Главным интересным в возникновении этих вознаграждений состоит в том, что пустив их в ход, игры ничем не рискует и в последствии никому ничего не несомненно должен (не зависимо, получит ли он спасибо бонусам какой-либо выигрыш или моментально спустит все только собственно прибывшие финансы). То есть, казино снабжает игрока вероятностью на дармовой основе выступать во различные слоты даже спонсирует игру. <a href=http://deshignsongpa.com/bbs/board.php?bo_table=free&wr_id=304669>http://deshignsongpa.com/bbs/board.php?bo_table=free&wr_id=304669</a> 1×slots регистрация на сайте
<b>Смотреть еще похожие новости:</b>
<a href=https://timepost.info/showthread.php?tid=118907>1хслотс рабочее зеркало на сегодня</a>
<a href=https://www.nongnakhamlocal.go.th/service-of-the-agency/webboard-q-a/general-question-and-answer-forums/20597-kytril-generic-names>1×slots зеркало быструю регистрацию а также мгновенное</a>
<a href=http://6000ziyuan.com/forum.php?mod=forumdisplay&fid=2>1×slots зеркало быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Зарегистрироваться в казино по специальной ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефона и электронную почту). Для подтверждения номера аппарата необходимо в собственном профиле показать свой номер и надавить кнопку „Подтвердить номер телефонного“, далее Вы получите sms-сообщение с кодом, который нужно установить в подходящее поле. Для подтверждения электронной почты, перебежать по интенсивной ссылке в послании от казино. После получения бонуса вывод средств для посетителя будет недоступен до тех пор, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо пара недель. Выводить средства игрок может только последствии отыгрыша.
#3111 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino com казино проиграл <a href=https://res-publika.com>реального казино</a> 1×bet 1хбет porno Вера Бирюкова, гимнастка <a href=https://repost.news/>1×bet официальный xbet</a> casino зеркало сайта casino приложения сайт казино зеркало букмекерская контора вход Радченко Светлана Юрьевна порно порно с Анна Щербакова, фигуристка казино рублях
DiskiPlus porno Мира Андреева (теннис) DiskiPlus casino <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet 1хбет</a> DiskiPlus kometa casino DiskiPlus букмекерская контора зенит <a href=https://diskiplus.ru>DiskiPlus 1×bet зеркало xbet</a> DiskiPlus букмекерские конторы бет DiskiPlus 1×bet рабочее на сегодня DiskiPlus vodka casino DiskiPlus порно с Александр Головин (футбол) DiskiPlus casino riobet DiskiPlus Мухтиярова Елена Вячеславовна порно DiskiPlus inform@rucriminal.info
#3112 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
inform@rucriminal.info пина букмекерской конторы <a href=https://rumafia.news/>казино на деньги</a> champion casino вавада казино <a href=https://res-publika.com>казино рояль</a> Скоробогатова Ольга Николаевна порно Ходнева Светлана Владимировна порно как выиграть в казино балтбет букмекерская контора Приезжева Екатерина Геннадьевна порно порно с Матвей Сафонов (футбол) 7k casino зеркало рабочее
DiskiPlus 1×bet на сегодня DiskiPlus casino регистрации <a href=https://www.diskiplus.ru/>DiskiPlus porno Дарья Клишина</a> DiskiPlus porno Вера Бирюкова, гимнастка DiskiPlus casino ап <a href=https://diskiplus.ru>DiskiPlus самое казино</a> DiskiPlus casino скачать DiskiPlus casino зеркало сайта DiskiPlus porno Марина Александрова DiskiPlus лучшие онлайн казино DiskiPlus сайты казино DiskiPlus пин up casino DiskiPlus казино пину
#3113 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Баланс игрока пополняется на соответствующую сумму. К ней применяется вейджер, обозначенный в правилах акции. Вывести выигрыш можно несомненно в как, как юзер сделает требуемый объем ставок из личных средств. В редчайших случаях бездеп работает в формате Free Play. На счет пользователя зачисляется крупная сумма, и предоставляется маленький срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по завершении сего периода сумма на счету будет превышать первоначальную, то разность можно будет вывести либо использовать для дальнейших ставок. <a href=http://filmkachat.ru/>1хслотс регистрация в 1×slots casino</a> Если вы новичок в и лишь попали в неизведанную вами область пыла — с помощью предложений как бездепозитные бонусы без пополнения. <a href=https://mysupport.commscope.com/forums/general-discussion/69059a37–2fd0-ef11–95f5–6045bdb3316f>https://mysupport.commscope.com/forums/general-discussion/69059a37–2fd0-ef11–95f5–6045bdb3316f</a> Автоматическая активация кажется самой удобной, хотя ручной метод содержит перед ней превосходства. Прежде чем применять вознаграждение от казино, стоит заблаговременно определить, сколько времени потребуется на исполнение всех критерий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала действия бонуса.Высокая конкуренция в сегменте азартных игр доказывает операторов завлекать клиентов различными акциями. Благодаря этому у посетителей бывает вероятность получить призы в казино за регистрацию без депо. Воспользоваться таким предложением возможно, избегая функцию внесения денег на игровой счет, просто активировав аккаунт на сайте. Наш гид по бездепам поможет избрать самую симпатичную бонусную программу, узнать управляла получения такого вознаграждения и воспользоваться им с максимальной выгодой. 1×slots регистрацию более популярный вариант это <a href=https://komfort.rusff.me/viewtopic.php?id=7131#p42717>https://komfort.rusff.me/viewtopic.php?id=7131#p42717</a> Ознакомьтесь с нашим списком лучших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего перечня и получите бездеп сразу. Хватайте наихорошие бесплатные предложения ниже и выигрывайте великие средства, не рискуя!Вейджер не более х30–35 является применимым. Опытные игроки утверждают, что с этим вейджером реально остаться в плюсе, в правильно подойти к выбору игрового аппарата.
1×slots регистрация на официальном сайте
Для верификации номера телефонного, в собственном профиле выберите опцию „Подтвердить номер телефонного“ и введите в подходящее поле код, приобретенный в sms-сообщении.Бездепозитный приз часто может стать доступным сразу в завершения регистрации, поскольку правило единственным требованием к нему является регистрация, а этого проверка вашей свежей учетной записи. 1×slot официальный сайт <a href=http://kinglish.com/bbs/board.php?bo_table=review&wr_id=332804>http://kinglish.com/bbs/board.php?bo_table=review&wr_id=332804</a> Даже не выиграв солидную необходимую, игрок увлекательно проведет время, изнутри исследует работу площадки, оценит геймплей автоматов. Все это без каких-либо финансовых рисков. Быть в курсе наилучших акций легкостью. Достаточно регулярно учить перечень свежих онлайн казино с выводом бонуса без депо в этом разделе.Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в неотъемлемом порядке нужно пополнить счет в казино. Для депозитных призов, эта процедура не необходима, например как депо теснее изготовлен. 1×slots casino регистрация Чаще всего казино приз за регистрацию без депо даёт вероятность запустить любой машина. Но превосходнее пристально ознакомиться с критериями. Иногда для игры доступны лишь определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, другого начать знакомство с миром пыла непосредственно с «одноруких злодеев».
1 xslots рабочее зеркало
Любой выигрыш по ставке выше установленного лимита несомненно являться недействительным. То есть ставка не будет засчитана при отыгрыше, а случае выигрыша его сумма не поступит на счёт посетителя — итог забавы будет полностью аннулирован.Зарегистрироваться в казино по специальной ссылке либо с бонусным кодом. Подтвердить контактные данные (номер аппарата и электрическую почту). Для подтверждения номера телефона необходимо в личном профиле показать собственный номер и надавить кнопку „Подтвердить номер телефонного“, дальше Вы получите sms-сообщение с кодом, который необходимо ввести в подходящее фон. Для подтверждения электронной почты, перебежать по активной ссылке в письме от казино. <a href=http://www.emapedu.com/xingqiu/home.php?mod=space&uid=168782&do=profile>http://www.emapedu.com/xingqiu/home.php?mod=space&uid=168782&do=profile</a> 1×slot официальный сайт Многие новички сомневаются, собственно поощрительный приз не нужно несомненно отдавать, даже случае они выиграли у казино. Это полностью безопасно и надежно. Выводя выигранные средства, игрок просто останавливает свое роль при и утрачивает уникальную вероятность – бесплатно наращивать собственное вещественное положение.
рабочее зеркало 1хслотс
казино 1× slots официальный сайт <a href=https://mc-pe.net/user/JulesNew/>https://mc-pe.net/user/JulesNew/</a> Прибывшие на аккаунт финансы бездепозитные призы предназначаются, в основном, лишь для новоиспеченных юзеров, которые раньше не имели личного аккаунта в данном казино. Исходя из сего, если ранее у игрока был сделан депо, то, по всей вероятности, у него больше не несомненно возможности рассчитывать на получение такого бонуса в конкретном заведении.Чтобы бездеп не был начислен на Ваш аккаунт, Вам надо активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк автоматически, а Вы не планируете его использовать, обратитесь в службу поддержки с пожеланием отменить бездепозитный приз.
1×slots бездепозитный бонус за регистрацию
Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в соц сетях, установку мобильного приложения либо официального клиента для ПК. В большинстве казино срабатывают программки лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий уровень часто сопровождается выдачей бездепа. Проверка занимает от нескольких мин. До нескольких дней, спецы техподдержки могут запросить дополнительные документы либо инициировать краткое общение по Skype.Бездепозитные бонусы за регистрацию в игровых автоматах для владельцев онлайн-казино считаются долею маркетинговой кампании, направленной на увеличение аудитории вебсайта. Так они продвигают средства бренды и завлекают новых посетителей. <a href=https://www.nkm.no/user/terryneids/?um_action=edit>https://www.nkm.no/user/terryneids/?um_action=edit</a> Многие азартные клубы ограничивают необходимую вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не сможете вывести. Разница несомненно аннулирована, Вы и не сможете создавать на нее ставки. 1×slots casino зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://www.lightknotes.com/MyBB/showthread.php?tid=267571>1×slots скачать на айфон</a>
<a href=http://forum.survival-readiness.com/viewtopic.php?t=268550>скачать 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При исполнении условий отыгрыша и верификации, средства с бонусного счета переводятся на главный и имеют быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции зависят от выбранной платежной системы. Некоторые веб-сайты, этого чем провести регистрацию игроков, предлагают ответить на некоторое базисных вопросов. Цель проведения подобной викторины – выявить случайных людей, которые не имеют представления о покере, и не допустить получения ими призов. Если посетитель теснее играл в казино, то ответить на полтора десятка несложных вопросов несомненно нетрудно. Очень часто, ответы можно найти на официальных веб-сайтах этих учреждений.
#3114 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора без букмекерские контора ап <a href=https://rumafia.news/>букмекерская контора бетсити</a> 1×bet зеркало слоты карты казино <a href=https://strelochnik.com/>up букмекерская контора</a> пинко casino пин ап букмекерская контора Петрова Ольга Викторовна порно pin casino зеркало vodka casino casino онлайн pin up casino пин ап
DiskiPlus порно с Юлия Ефимова DiskiPlus casino зеркало сегодня <a href=https://www.diskiplus.ru/>DiskiPlus букмекерская контора официальный сайт</a> DiskiPlus cometa casino DiskiPlus Любимова Ольга Борисовна порно <a href=https://www.diskiplus.ru/>DiskiPlus скачать букмекерскую контору на андроид</a> DiskiPlus Преподобная Надежда Александровна порно DiskiPlus порно с Алексей Миранчук (футбол) DiskiPlus порно с Алина Загитова DiskiPlus Лут Оксана Николаевна порно DiskiPlus pin up casino top top DiskiPlus 7k casino зеркало на сегодня DiskiPlus казино на деньги
#3115 Charlesgunnyhttp://filmkachat.ru
казино 1×slots официальный сайт
Во всех легальных онлайн-казино Беларуси нужно подтверждение паспортных данных для забавы — это заявка правительства страны. <a href=http://filmkachat.ru/>1×slots зеркало этих способов предполагает регистрацию</a> Вейджер (или вагер) ? это минимальная сумма ставок, которую нужно устроить для вывода валютного бонуса. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, тем привлекательнее спецпредложение.Отзывы читателей о бонусных акциях посодействуют составить впечатление, но не забывайте о субъективности собственных комментариев. <a href=https://community.oneplus.com/thread/1778657405274423300>https://community.oneplus.com/thread/1778657405274423300</a> 1×slots официальный сайт зеркало <a href=https://gidro2000.com/forum-gidro/user/21249/>https://gidro2000.com/forum-gidro/user/21249/</a>
1×slots казино мобильная версия
Маркетинговая политика всех игорных интернет-клубов обязана носить различный характер. И в вознаграждения на депозит работают чтобы, чтобы, дабы стимулировать вносить депозиты и поощрять уже быть пользователей, то бездепозитный бонус в казино или приз за регистрацию в казино, этого всего, рассчитан на расширение базы потребителей. <a href=http://forum.survival-readiness.com/viewtopic.php?t=245456>1×slots мобильная версия войти казино</a> 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=https://hificafesg.com/index.php?action=profile;u=492662>https://hificafesg.com/index.php?action=profile;u=492662</a> Фриплей-бонусы встречаются только в некоторых клубах. Они зачисляются незамедлительно в творения профиля и активны недолговременное время. Если не успеете истратить средства, они попросту сгорят. Касаемо медли, правило призы активны протяжении часа.Представленные на этой страничке лучшие бездеп призы в казино за регистрацию в 2022 году имеют подходящие обстоятельства. После кропотливого анализа редакция портала составила рейтинг спецпредложений, в котором посетители Casino.ru имеют сортировать перечень по нескольким аспектам: по сумме, вейджеру, максимальной сумме вывода и т.д. 1×slots регистрация на 1хслотс Даже не выиграв солидную сумму, игрок интересно проведет время, изнутри изучит работу площадки, воспримет геймплей автоматов. Все это без каких-либо финансовых рисков. Быть в курсе лучших промоакций с. Достаточно периодически изучать перечень свежих онлайн казино с выводом приза без депозита в этом разделе.С иной стороны, намного проще арестовать бездепозитные фриспины за регистрацию в казино и напрямик сейчас начать вращать барабаны в превосходнейших слотах. Главная необыкновенность спинов том,, что они предусмотрены для топовых автоматов. Удастся столько пройти вспомогательные раунды, хотя и увеличить сумму выигрыша, заработать респины и другие внутриигровые презенты.
1×slots casino регистрация на сайте
Способы получения бездепа различаются в зависимости от облика приза, который понравился игроку. Но вас так надо(надобно) быть зарегистрированным в законном онлайн-казино и доказать свою личность. В общем облике пошаговая инструкция для получения бездепозитного приза смотрится так:Бoльшинcтвo азартных заведений выдвигают приблизительно однообразные, схожие обстоятельства и притязания, которые нужно выполнить, чтобы получить бездепозитный приз за регистрацию. Все их можно объединить в один список: Раздача призов имеет быть приурочена к разным датам: календарные дни, дни рождения игроков, годовщина открытия казино и т. Д. Подарок выдается вид средств, фриспинов или баллов для накопления и размена на услуги оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд притязаний.Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить необыкновенности, труднодоступные при игре в демо режиме. Многие свежие посетители переходят в число постоянных, а оператор получает длительную выгода. <a href=http://v208870d.bget.ru/user/ForsedropEa/>http://v208870d.bget.ru/user/ForsedropEa/</a> 1х слот 1хслотс регистрация перейти на 1×slots Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 долларов. Если выдаются фриспины, их количество изредка выше нескольких десятков бесплатных вращений.
казино 1×slots
<a href=https://elclasificadomx.com/author/jameslog/>1хслотс казино зеркало</a> Высокая конкуренция в сегменте азартных игр мотивирует операторов завлекать посетителей разнородными акциями. Благодаря этому у гостей замечена возможность получить призы в казино за регистрацию без депо. Воспользоваться этим предложением можно, минуя процедуру внесения средств на игровой счет, просто активировав акк на сайте. Наш экскурсовод по бездепам поможет выбрать самую привлекательную бонусную программу, узнать правила получения такого гонорары и воспользоваться им с наибольшей выгодой. 1×slots зеркало <a href=https://rg-mechanics.club/user/TerryKnoff/>https://rg-mechanics.club/user/TerryKnoff/</a> Ниже указан актуальный список законных казино в Беларуси с бонусами на 1-ый депо. Вы можете попасть на официальный сайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус.
1хслотс официальный сайт зеркало
Для получения предоставленных призов для пригодиться — ПК или мобильное устройство, и остальное дело за малым.Теоретически, к безвозмездным призам можно отнести так нарекаемые фриспины. Напомним, речь идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, поэтому собственно они деют только вероятность создавать ставки. Для получения выигрыша требуется выполнить условия казино. Чаще всего игроку нужно поставить определенную необходимую, но уже из собственных средств. Она рассчитывается из общего размера выигрыша за всегда использования бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, случае пользователь выиграл 1000 рублей, а множитель сочиняет х30, вывести средства возможно будет, сделав ставки на 30 000 рублей.Суммы подобных предложений, в, колеблются от трех до 20 долларов, а вейджер на эти средства должен сочинять от 30 до шестидесяти один. Зачастую, наибольшая сумма выигрыша тут составит от одной до двух сотен $. Если компьютерные выиграет больше, то все средства могут быть списанными до очень разрешенного выигрыша. Здесь бывает смысл выводить еще несуществующие деньги на собственную платежную систему и далее искать заведение с благоприятными под данную необходимую релоадом или бонусом за 1-ое пополнение счета. Есть некоторое подвидов бездепозитного вознаграждения, предлагаемого большим количеством заведений. <a href=http://128.199.110.255/home.php?mod=space&uid=327803>http://128.199.110.255/home.php?mod=space&uid=327803</a> Выбор любого онлайн казино на нашем веб-сайте. В описании к каждому Вы сможете разузнать, что получите за создание аккаунта.Обыкновенные бездепозитные бонусы в размере от 3-х до двадцати долларов сделаны чтобы, чтобы, чтобы в забавы заходили все свежие и новые игроки. Здесь, скорее, несомненно лимитирование на наибольший выигрыш. Важно, дабы перед минимальным вкладом был отключен приз за 1-ое пополнение счета, и в не попадет на повторный вейджер. 1× slots официальный
<b>Смотреть еще похожие новости:</b>
<a href=http://check2go.net/author/jameslob/>казино 1×slots</a>
<a href=https://thetechmodders.com/forums/viewtopic.php?t=60888>1хслотс мобильная версия зеркало</a>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=164807>1×slot рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Обычно, бездепозитные бонусы выдаются под конкретные слоты с фиксированной ставкой, хотя их точно воспрещено использовать в игровых автоматах с современным джекпотом. Список игр, в которых можно использовать бездеп, Вы найдете в описании акции либо сможете уточнить у саппорта заведения. Однако далеко не все ресурсы предлагают своим клиентам бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено поощрение на 1-ый депозит в размере 100–200%. Это замечательная вероятность преумножить банкролл, прирастить время, проведённое за игрой и шансы сорвать большой куш.
#3116 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация
Фриспины – бесплатные вращения с фиксированной ставкой, которые можно использовать в определенных игровых автоматах. <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> Приглашаем делиться сужденьями о бонусах. Это поможет иным юзерам выбирать наиболее прибыльные предложения.Внесение депо – Будьте готовы восполнить счет в отыгрыша бонуса. Это обычное заявка верховодил для этого подобии промо-акций. Лучше заранее уточнить, какую сумму нужно будет заносить на счет. Как управляло, речь о минимальном депозите, но вы обязаны быть уверены, что он вас по карману. <a href=https://xranks.com/astramedika.com.ua>https://xranks.com/astramedika.com.ua</a> С не отыгранным призом воспрещается превосходить объем наибольшей ставки. Нарушение сего обстоятельства виде аннулирование выигрыша.Для проверки используются сканы паспортов, водительских водительских, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если юзер обнаружен в попытке ввести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их обладатель попадает в темный список. При игре на лицензионной площадке не стоит опасаться указывать достоверную персональную информацию (шифрование исключает утечку индивидуальных данных). 1×slots зеркало проходить регистрацию это отличный вариант <a href=http://www.asystechnik.com/index.php/1×slot_%D0%97%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE>http://www.asystechnik.com/index.php/1×slot_%D0%97%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE</a> При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток.Классическая разновидность бонуса за творенье аккаунта. Его преимущество содержится никаких, собственно клиент возможность помощи выбирать аппараты и создавать ставки в их. Иногда перечень игровых автоматов ограничен оператором, но все точно это превосходнее, чем единственный дешевый слот, как когда с использованием фриспинов.
x1 slots регистрация в 1×slots casino
Для верификации аккаунта надо(надобно) предоставить специалистам технической поддержки отсканированную копию паспорта и счета за коммунальные услуги, а фотку банковской карты или скриншот странички электрического кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности.Подтверждение персональной инфы. Все казино настоятельно от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у пользователя других аккаунтов (мультиаккаунт запрещен). <a href=https://forum.eliteshost.com/showthread.php?tid=20124>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a> 1×slots официальный сайт мобильная версия скачать Бездепозитный приз по промо-коду будет доступен для игры, лишь в случае когда Вы активируете специальный бонусный код в разделе с призами либо укажите промокод при регистрации на веб-сайте. В некоторых случаях, не активации кода, придется доказать контактные данные игрока и заполнить анкету посетителя. <a href=https://msknovostroy.com/member.php?action=profile&uid=1727>https://msknovostroy.com/member.php?action=profile&uid=1727</a> Постарайтесь отыграть вейджер, дабы была вероятность оставить заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные приборы. Вы можете получить выигрыш на электрической кошелёк, карту, телефон. casino 1×slot
1×slots официальный demo регистрация в 1×slots casino
В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с даровых вращений. Прибыль, которую Вы заработаете на таком бездепе возможно ставить на вывод без какого либо отыгрыша.Бонус за регистрацию в казино выдается только раз раз на 1-го игрока. Но бывают вспомогательные акции, в коих бездепы раздаются для постоянных посетителей и такие презенты Вы сможете получить больше 1-го раза. <a href=http://www.96bbs.com/home.php?mod=space&uid=542931&do=profile&from=space>http://www.96bbs.com/home.php?mod=space&uid=542931&do=profile&from=space</a> 1×slots casino online регистрация
1×slots регистрация
Бонус за регистрацию в казино выдается лишь раз один на 1-го игрока. Но посещают дополнительные промоакции, в рамках коих бездепы расступаются для постоянных посетителей и эти презенты Вы можете получить более одного раза. Приглашаем делиться сужденьями о бонусах. Это поможет иным юзерам подбирать более прибыльные предложения.Практически все онлайн казино с бездепозитным призом за регистрацию предусматривает программку преданности — систему поощрения постоянных клиентов, кот-ая произведено из колличества уровней. При достижении игроком еще значения на его счёт поступает бонус. Чем выше уровень — что, этим щедрее приз. Вывод выигрыша с бездепозитных бонусов казино – великодушный подарок от азартных клубов. Но чтобы исключить собственный заработок, нужно выполнить ряд критерий:Для того, дабы отыграть необходимую вашего бездепозитного приза нужно выполнить условия вейджера. Очень часто фриспины даются на определенные слоты (book of ra, book of deceased, book of sun), выбирайте слот себя по, все довольно красивые и качественные. Бездепозитные бонус возможность быть денежным так и повторяющий фриспинов на слоты 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=https://emiliolidw12112.thenerdsblog.com/35925830/deepnude-ai-navigating-the-complexities-of-technology-and-ethics>https://emiliolidw12112.thenerdsblog.com/35925830/deepnude-ai-navigating-the-complexities-of-technology-and-ethics</a> В каждом казино с бездепозитным бонусом предусмотрены вейджеровые условия. Это единственный «подводный камень», который стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, нужно устроить определённое число ставок. Чем круче приз, что, этим труднее выполнить обстоятельства, и напротив.
1хслот скачать
Подарки на конкретные даты отличаются критериями получения. Если поощрение начисляют игроку на день рождения, то сумма обычно находится от общего объема депо за прошедший год. <a href=http://kidsnighttonight.com:/forums/member.php?action=profile&uid=346584>http://kidsnighttonight.com:/forums/member.php?action=profile&uid=346584</a> Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.В перечне притязаний к отыгрышу нередко наличествуют лимиты на ставки при этой на личные деньги. Так, если отыграть нужно 30 000 рублей, а максимальная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам действия промоакции. 1×slots официальный demo регистрация в 1×slots casino Мы подготовили перечень, где есть практически актуальные и новые бездепозитные бонусы казино, коие вы можете получить безвозмездно. Для наших юзеров есть специальные предложения неповторимые бонусы, коие вы ни не найдете, их мы определили специальной красноватой плашкой «Exclusive».Осталось избрать казино с бонусом за регистрацию и сделать профиль. После активации подарка выигрыш зависит от Фортуны и способностей.
<b>Смотреть еще похожие новости:</b>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=110530&result=reply>1×slots casino зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Рассмотрим принцип его деянья на примере. Допустим, вы зарегались и возымели $10 not the slightest deposit bonus с вейджером х50. Это означает, собственно выигранные средства можно будет выводить не ранее, чем в того, как общая сумма ставок достигнет $500. Рассмотрим принцип его деяния на примере. Допустим, вы зарегистрировались и получили $10 no deposit bonus с вейджером х50. Это значит, что выигранные средства возможно будет выводить не раньше, чем в того, как общая сумма ставок достигнет $500.
#3117 Charlesgunnyhttp://filmkachat.ru
1×слот регистрация в 1×slots casino
Бывают ли бездепозитные бонусы без вейджера? Бывают, в у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино. <a href=http://filmkachat.ru/>1хслот официальный сайт зеркало</a> Можно ли в одном онлайн казино получить больше 1-го бонуса за регистрацию? Нет, например как в любом онлайн казино есть верховодила, к коим нужно придерживаться, не творить 2 аккаута для получения призов, по несомненно блокировка обоих аккаутов, не пытайтесь обмануть онлайн казино, приз за регистрацию выдаеться один раз 1 личику. <a href=https://try.powermapper.com/Demo/Report/d583f782-e322–4020–93b7–2710deb0a9d9>https://try.powermapper.com/Demo/Report/d583f782-e322–4020–93b7–2710deb0a9d9</a> Риск-игра по одинаковым шансам – Также казино возможность воспрещать исполнять условия по отыгрышу счет раунда на удвоение, кот-ый предлагается в слотах, видео-покере и некоторых иных забавах. 1хслотс официальный сайт зеркало <a href=https://apk.tw/space-uid-6853247.html>https://apk.tw/space-uid-6853247.html</a>
1хлот регистрация в 1×slots casino
Для получения приза нужно пригласить в игру нового посетителя. Казино начисляет пригласившему фиксированный процент от взносов приглашённого в виде бонуса: почаще всего его объем не превышает 10%. Срок деяния бонуса в большинстве случаев не превышает месяца: пригласивший получает бонус зависимо проигранных ставок приглашённого в первый месяц забавы. 1×slots бонус за регистрацию Доступные игры – В некоторых азартных забавах возможно понизить математическое превосходство казино до нескольких десятых процента. В их числе почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как верховодило, в таких забавах ставки идут в зачет вейджера не всецело. Например, может предусматриваться только 50%. В некоторых играх бездепозитные бонусы вообще невозможно отыгрывать.Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала резвые выводы. Фишка выплат что, собственно довольно избрать платёжный инструмент и показать необходимую. В большинстве случаев средства зачисляются на электронные кошельки на 15 мин., а на банковские карты – 1–3 трудящихся дня. <a href=http://www.gearcup.cn/home.php?mod=space&uid=123845>http://www.gearcup.cn/home.php?mod=space&uid=123845</a> 1×slots сайт
сайт 1× slots casino
Законодательство, регулирующее азартные игры в разных государствах, влияние на полномочия операторов. В результате юзеры из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это имеет быть как глубокий отказ в доступе, например и невозможность загружать игры отдельных изготовителей. <a href=https://eco-kamchatka.ru/user/Walteranype/>https://eco-kamchatka.ru/user/Walteranype/</a> Отказ в прохождении верификации. Если заказчик не желает или не может дать документы, подтверждающие его личность, профиль будет заблокирован вместе со всеми бонусными начислениями. 1×slots зеркало на сегодня Самый распространённый из похожих призов, конечно же, бездеп на день рождения посетителя — бонус повторяющий фиксированной суммы либо фриспинов поступает на счёт игрока, а воспользоваться им можно на установленного периода медли.
скачать 1×slots официальный сайт
Чтобы получить возможность исключить прибыль с бездепозитного бонуса в казино, необходимо выполнить ряд условий:В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это исключительно приятная доля забавы. Важно, зачастую бездепозитные призы в казино выдаются с лимитированиями по наибольшей выплате. В среднем возможно рассчитывать на прибыль в количество тысяч рублей. Как исключить выигрыш с приза без депо. Придётся подтвердить аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном доказательстве учетной записи спрашивайте в интернет чате либо прочитайте в правилах. <a href=http://check2go.net/my-account/>казино 1×slots</a> Обычно, бездепозитные призы выдаются под конкретные слоты с фиксированной ставкой, но их точно воспрещено применять в игровых автоматах с прогрессивным джекпотом. Список игр, в которых возможно применять бездеп, Вы найдете в описании промоакции либо можете уточнить у саппорта заведения.С другой стороны, гораздо легче забрать бездепозитные фриспины за регистрацию в казино и прямо в начать вертеть барабаны в наилучших слотах. Главная необыкновенность спинов никаких, собственно они предназначены для лучших автоматов. Удастся не пройти дополнительные раунды, хотя и прирастить необходимую выигрыша, заработать респины и другие внутриигровые презенты. зеркала 1×slots <a href=http://dokuteknoloji.com/index.php?option=com_k2&view=itemlist&task=user&id=439770>http://dokuteknoloji.com/index.php?option=com_k2&view=itemlist&task=user&id=439770</a> Перед активацией важно внимательно выучить обстоятельства промоакции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют значение кроме лимиты ставок при отыгрыше и сроки, протяжении которых возможно воспользоваться предложением. Если бездеп охватывает ограниченный список игр, рекомендовано узнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь что, нет случае, случае оператор не установил жесткие ограничения на наивысшую необходимую ставки.
1×slots официальный зеркало
Получать информацию о самых прибыльных бонусах можно без постоянного мониторинга новостей казино. Мы взяли эту задачу на себя и непрерывно смотрим за предложениями операторов, выбирая наилучшие из их. В данном разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список промоакций периодически пополняется. В топ вошли самые новые бездепозитные бонусы за регистрацию в казино 2020, кратковременные и замкнутые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру прочим аспектам. Если срок деяния промоакции истек, она удаляется из перечня. <a href=https://mir-pozitiv.ru/forums/users/xrumsites0406–2/>https://mir-pozitiv.ru/forums/users/xrumsites0406–2/</a> Чаще всего, известные сервисы, такие как MoneyBookers и WebMoney, еще MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно неотъемлемое верховодило. Финансовые свои выводятся лишь через что, эту платежную систему, коей успех для пополнения депозита. Если же игрок получил бездепозитный покерный бонус, требуется пополнить счет на наименьшую сумму, которая составляет обычно десять $.За вербование приятеля ? в партнерской программки клиент получает вознаграждение за вербование свежих пользователей. 1хслотс зеркало на сегодня Даже не выиграв крупную необходимую, игрок увлекательно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе превосходнейших акций легко. Достаточно регулярно учить список новых интернет казино с выводом бонуса без депо в данном разделе.
<b>Смотреть еще похожие новости:</b>
<a href=https://mcmon.ru/member.php?action=profile&uid=134611>1хслотс зеркало на сегодня</a>
<a href=https://aircompare.us/forums/memberlist.php?mode=viewprofile&u=40074>1 х слотс зеркало</a>
<a href=https://karakol.com.kg/user/Jameskef/>1×slots зеркало регистрация</a>
<a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=55249>1×slots казино мобильная версия</a>
<a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=38965>1×slots бонус за регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, all зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.
#3118 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино регистрации почему казино <a href=https://rhymes-punches.com/>porno Мира Андреева (теннис)</a> порно с Александр Большунов (лыжные гонки) демо казино <a href=https://specreporter.com/>зеркала официальных сайтов казино</a> 1×bet слоты официальный сайт porno Илья Ковальчук (хоккей) пин ап casino kent casino регистрация casino приложения порно с Илья Осипов (киберспорт) какие казино
DiskiPlus unlim casino DiskiPlus casino 7k сегодня <a href=https://diskiplus.ru/>DiskiPlus винлайн букмекерская контора официальный</a> DiskiPlus pin up casino top top DiskiPlus порно с Матвей Сафонов (футбол) <a href=https://www.diskiplus.ru/>DiskiPlus porno Алена Михайлова</a> DiskiPlus 1×bet зеркало на сегодня DiskiPlus сайт винлайн букмекерская контора DiskiPlus casino DiskiPlus карты казино DiskiPlus gama casino DiskiPlus почему казино DiskiPlus рабочие зеркала казино
#3119 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало на сегодня
Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша призов. Заведения практически устанавливают максимальную ставку, допустимую по условиям вейждера.Для получения бездепа необходимо пригласить в игру по реферальной ссылке нового посетителя: он должен зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на необходимую, обозначенную в критериях промоакции. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slots review live</a> <a href=https://blog.udn.com/G_107482553777754991/181710747>https://blog.udn.com/G_107482553777754991/181710747</a> Законодательство, регулирующее азартные забавы в разных государствах, влияние на возможности операторов. В итоге юзеры из отдельных регионов сталкиваются с лимитированиями со стороны казино. Это может быть как глубокий отказ в доступе, например и невозможность загружать игры отдельных изготовителей. 1хслотс 1хслотс регистрация перейти на 1×slots <a href=http://www.webdesignforum.com.au/member.php?action=profile&uid=28890>http://www.webdesignforum.com.au/member.php?action=profile&uid=28890</a> Возможность протестировать новые игры, не рискуя личностными своими и создать собственную тактику игры.
1×slots регистрация на 1хслотс
Условия вывода выигрыша. В неких заведениях для удачного вывода с бездепозитного приза достаточно пополнения баланса и доказательства личности. В иных же клубах, нужно несколько раз прокрутить свой депо. <a href=https://bbs.sinbadgroup.org/index.php?members/jamesiroma.21478/>1×slots зеркало регистрация в 1×slots casino</a> 1×slots официальный регистрация <a href=https://www.artstation.com/aerodar22053/profile>https://www.artstation.com/aerodar22053/profile</a> Как только на виртуальном счету окажутся бонусные свои, поторопитесь отыграть вейджер. Сразу после этого возможно забыть заявку на вывод выигрыша. Кредиты выгодно отличаются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом настоящих средств и дают возможность ощутить азарт. Во-вторых – возможно насладиться каждой азартной забавой доступной на веб-сайте. В вашем постановлении находятся автоматы, настольные приложение, видео-покер, Live-дилеры. 1хлот регистрация в 1×slots casino
1хслотс регистрация в 1×slots casino
Можно ли в одном интернет казино получить больше одного бонуса за регистрацию? Нет, так как в каждом интернет казино есть управляла, к которым нужно держаться, не делать два аккаута для получения призов, иначе несомненно блокировка обоих аккаутов, не пытайтесь перехитрить онлайн казино, бонус за регистрацию выдаеться раз раз одному лицу. <a href=https://k2s.club/user/JamesPeamp/>https://k2s.club/user/JamesPeamp/</a> Онлайн гемблинг развивается с любым днем все больше и больше, свежие бренды создаются не по дням а по часам. Новые интернет казино проделывают вступительные акции для игроков, для того собственно бы зарекомендовать себя, и тем самым предлагают бездепозитные призы за регистрацию, что бы не пропустить такую возможность — как пользоваться свежим бездепом, советуем посещать наш вебсайт как возможно чаще, самое смачное и новые несомненно добавляться в данном же списке. 1×slots зеркало на сегодня В большинстве заведений устроить это возможно по адресу электронной почты, по номеру телефонного, через социальную сеть либо гугл-аккаунт.
1×slots зеркало рабочее
Бездепозитные бонусы за регистрацию в игровых автоматах для собственников онлайн-казино считаются частью маркетинговой кампании, направленной на увеличение аудитории сайта. Так они продвигают свои бренды и привлекают новых клиентов.Но а если вы уже профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в интернет казино; Максимальный объем ставки, который невозможно превосходить пока бонус не будет полностью отыгран. В случае нарушения этого управляла, бонус и выигрыш с него будут аннулированы. 1× slots регистрация в 1×slots casino <a href=http://ip-sosnevo.ru/user/JeffreyDulge/>http://ip-sosnevo.ru/user/JeffreyDulge/</a> Вообще перейдя в казино — управляла одинаковы в получении бездепозитных бонусов, в стереотипные управляла входит: подтвердить эл. Почту и телефон, заполнить свой собственный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ.Проверка занимает от нескольких мин. До нескольких дней, специалисты техподдержки все запросить вспомогательные документы или инициировать куцее общение по Skype.
1×slots официальный сайт мобильная версия скачать
Ниже указан актуальный перечень законных казино в Беларуси с бонусами на 1-ый депо. Вы сможете попасть на официальный вебсайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. <a href=http://blackpearlbasketball.com.au/index.php?option=com_k2&view=itemlist&task=user&id=858157>http://blackpearlbasketball.com.au/index.php?option=com_k2&view=itemlist&task=user&id=858157</a> зеркала 1×slots Для верификации номера телефонного, в личном профиле изберите опцию „Подтвердить номер телефона“ и введите в отвечающее фон код, приобретенный в sms-сообщении.
<b>Смотреть еще похожие новости:</b>
<a href=https://koreanstudies.com/forum/viewtopic.php?t=195255>1 х слотс зеркало</a>
<a href=https://chasingadream.rpginitiative.com/showthread.php?tid=192090>1×slots регистрация 1×slots casino c2d ru</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подобные бонусы без депо предоставляются на более прибыльных критериях. Зачастую они покрупнее, а условия отыгрыша наименее строгие.
#3120 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора официальный сайт скачать 1×bet официальный скачать <a href=https://slon-ru.com/>porno Катерина Шпица</a> яндекс игры казино Чулпан Хаматова <a href=https://vestnik-jurnal.com/>порно с Елена Никитина, скелетонистка</a> 1×bet официальный xbet Петрова Ольга Викторовна порно пин ап casino сайте букмекерской конторы фонбет порно с Диана Шнайдер (теннис) Яровая Ирина Анатольевна порно приложения букмекерских контор
DiskiPlus карты казино DiskiPlus 1×bet скачать приложение <a href=https://www.diskiplus.ru>DiskiPlus casino официальный зеркало</a> DiskiPlus porno Виктория Баркова, легкоатлетка DiskiPlus порно с Каролина Севастьянова <a href=https://www.diskiplus.ru/>DiskiPlus порно с Васильева Татьяна Викторовна</a> казино DiskiPlus вавада казино DiskiPlus Елизавета Боярская DiskiPlus 1×bet сейчас DiskiPlus бесплатно играем казино DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus официальные букмекерские конторы скачать
#3121 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Юлия Ефимова официальные букмекерские конторы скачать <a href=https://repost.news/>порно с Гатагова Ольга Анатольевна</a> букмекерская контора на андроид black russia казино <a href=https://vestnik-jurnal.com/>porno Дарья Мороз</a> 1×bet зеркало часы казино kent casino регистрация казино смотреть онлайн бесплатно лучшие казино бесплатно фреш казино 1×bet приложение
DiskiPlus порно с Афонина Марина Игоревна DiskiPlus порно с Дарья Касаткина (теннис) <a href=https://diskiplus.ru>DiskiPlus Крючкова Полина Викторовна порно</a> DiskiPlus казино регистрации DiskiPlus casino зеркало сегодня рабочее <a href=https://www.diskiplus.ru>DiskiPlus Манилова Алла Юрьевна порно</a> DiskiPlus Лут Оксана Николаевна порно DiskiPlus 1×bet скачать приложение DiskiPlus слот casino DiskiPlus суть казино DiskiPlus porno Алена Косторная (фигурное катание) DiskiPlus бесплатное казино DiskiPlus casino автомат
#3122 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
Приветственный бездеп предоставляется какому игроку только раз один. Казино дерутся с так нарекаемыми бонусхантерами (от англ. Bonus Hunter — охотник за бонусами), пытающимися заводить многочисленные аккаунты для надувательства оператора и повторного получения дара. Исключить подобные действия позволяет верификация данных. Администрация вправе востребовать у посетителя подтвердить персональные данные, обозначенные при регистрации. <a href=http://filmkachat.ru/>1×slots регистрация на официальном сайте</a> Так собственно сможете храбро регистрироваться без всяких раздумий. Фортуна сегодня точно на вашей стороне. Не бойтесь, ведь последствие какого или убытка Вам совершенно не угрожает. С этими бонусами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе.Бонус без депо за регистрацию в казино (бездепозитный бонус) – это денежный презент от клуба, кот-ый начисляется на аккаунт игрока последствии регистрации в казино. Кроме творения учетной записи, для получения бездепа, довольно нередко требуется ещё и доказать контактные данные игрока и/или активировать особый промо-код. <a href=https://www.bandlab.com/post/d5611169-dfd7-ef11–88f6–6045bd3473c0>https://www.bandlab.com/post/d5611169-dfd7-ef11–88f6–6045bd3473c0</a> 1× slots регистрация в 1×slots casino <a href=http://ds1.dspnbmall.co.kr/bbs/board.php?bo_table=free&wr_id=658660>http://ds1.dspnbmall.co.kr/bbs/board.php?bo_table=free&wr_id=658660</a> В игровых клубах без лицензии Вы покупаете „кота в мешке“ и в случае неоднозначных обстановок нет способности куда-то посетовать и обосновать собственную правоту.
1×slots официальный регистрация
Если площадка дарит бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь завести аккаунт на сайте и активировать его, подтвердив адресок электронной почты, номер аппарата или иные данные, которые требует оператор. Перед этим необходимо увериться, собственно пользователь находится на официальном веб-сайте казино, не на мошеннической площадке. 1×slots регистрация то дальше необходимо пройти Бонус начисляется игроку незамедлительно последствии регистрации и прохождения верификации в казино и не настятельно от посетителя внесения депозита. Как правило, размер приза в схожем случае довольно умеренный, впрочем разрешает новичкам познакомиться с игрой без риска реальными деньгами.Бонус без депозита за регистрацию в казино (бездепозитный бонус) – это валютный презент от клуба, который начисляется на акк игрока после регистрации в казино. Кроме сотворения учетной записи, для получения бездепа, очень нередко требуется ещё и доказать контактные данные игрока и/или активировать специальный промо-код. <a href=https://grilovani-barbecue.com/memberlist.php?mode=viewprofile&u=4004>https://grilovani-barbecue.com/memberlist.php?mode=viewprofile&u=4004</a> Выбрать казино с бездепозитным бонусом. У нас на сайте представлен перечень наилучших интернет казино, коие предлагают своим игрокам щедрые призы за регистрацию. 1×slots casino регистрация 1×slots review live Ознакомьтесь с нашим списком лучших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего списка и получите бездеп незамедлительно. Хватайте лучшие благотворительные предложения ниже и выигрывайте немалые деньги, не рискуя!Условия имеют разниться друг от друга. Но подобный бонус может быть применен лишь для игрового процесса – приобретенные на счет финансы до как, как станут отыграны, вывести невозможно.
1×slot казино зеркало
Фриспины — бесплатные вращения, которые позволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины считаются наиболее знаменитым и желаемым обликом бонуса — благотворительные вращения порой эффективнее и веселее в отыгрыше, чем остальные облики бездепов. Бонус начисляется игроку незамедлительно в регистрации и прохождения верификации в казино и не требует от посетителя внесения депо. Как управляло, объем бонуса в схожем случае довольно умеренный, впрочем разрешает новеньким познакомиться с игрой без риска реальными деньгами. <a href=http://www.ppivn.vn/forum/user-27185.html>http://www.ppivn.vn/forum/user-27185.html</a> Самый распространённый из сходственных бонусов, естесственно же, бездеп на день рождения клиента — бонус вид фиксированной суммы либо фриспинов поступает на счёт игрока, а воспользоваться им можно в течение установленного периода времени.Чтобы бездеп не был начислен на Ваш аккаунт, Вам не нужно активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт механически, а Вы не расчитываете его применять, обратитесь в саппорта с пожеланием отменить бездепозитный приз. 1хслотс рабочее зеркало Бонусные деньги – маленькая сумма средств для старта в новеньком казино. На бонусные деньги, обычно разрешено выступать во все забавы, считая слотов с современным джекпотом и игр из раздела exist casino.Если вы опытный игрок, вы обязаны аристократия, собственно приз без депозита – редчайшая находка. Тем ниже, мы в изучаем интернет, дабы отыскать вам превосходнейшие бездепозитные предложения.
1×slot казино зеркало
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=10804>1хслотс официальный сайт зеркало</a> Бонусы без депозита при регистрации считаются самыми красивыми как для опытных игроков, например для и новичков. Получив это вознаграждение, клиент возможность играть на реальные средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные призы в интернет-казино Рунета, а также условия их активации и выигрыша.Фриспины предназначены для применения в видео слотах. Внимательно ознакомьтесь с условиями – частенько их выдают на некоторые автоматы. В зависимости от клуба, у вас получится сделать определённое число ставок. Кстати, продвинутые игорные жилища разрешают запускать каждых «одноруких бандитов». Прибывшие на аккаунт финансы бездепозитные бонусы предназначаются, в основном, только для новоиспеченных юзеров, коие ранее не имели личного аккаунта в данном казино. Исходя из сего, случае ранее у игрока был изготовлен депо, то, по всей вероятности, у него больше не несомненно возможности рассчитывать на получение такового бонуса в конкретном заведении.Выбор любого онлайн казино на нашем сайте. В описании к любому Вы сможете узнать, собственно получите за творенье аккаунта. 1×slots бездепозитный бонус за регистрацию <a href=http://image.google.com.ng/url?rct=j&sa=t&url=http://toolbarqueries.google.com.ng/url?q=http://clients1.google.cg/url?q=https://teletype.in/@urist555/5bd6aNp0zGn>http://image.google.com.ng/url?rct=j&sa=t&url=http://toolbarqueries.google.com.ng/url?q=http://clients1.google.cg/url?q=https://teletype.in/@urist555/5bd6aNp0zGn</a> Вознаграждения за получение VIP-статуса ? начисляются в программы преданности при достижении очередного значения либо выдаются персонально менеджерами службы поддержки.Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам воспрещено начислять призы клиентам, не имеющим денежных средств на счете. Мы предлагаем разглядеть актуальные призы онлайн-казино с лицензией, которые соблюдают законодательство РБ.
1 x slots casino
На бесплатные призы онлайн-казино почти всегда распространяется лимитирования по стране проживания посетителей. Даже в для разрешается открывать счет и выступать на средства в заведении, это еще не значат, что для доступны not the slightest down payment bonuses.Можно ли наваривать на бездепозитных призах? Это не работа, здесь как повезет, если в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, за можно назвать везением, и дополнительной добавкой к вашему бютжету. <a href=https://www.argfx.co/user/Joshuadig/>https://www.argfx.co/user/Joshuadig/</a> Не стоит путать игру в демо и внедрение бонусов. В демонстрационном режиме игрок имеет оценить механику слота, сюжет и оформление. Но забава ведется на условные кредиты, потому отсутствует основное ? чувство азарта. Активируя промокод или фриспины, заказчик раньше не расходует свои деньги на игровые автоматы, но может сорвать настоящий куш!Бонусные деньги – небольшая сумма средств для старта в новеньком казино. На бонусные средства, обычно разрешается играть во все игры, считая слотов с прогрессивным джекпотом и игр из раздела exist casino. 1×slots рабочее зеркало на сегодня Мы делаем акцент на главных положениях правил, рассказываем о территориальных ограничениях и кратко информируем о других промоакциях обсуждаемого казино.В зависимости от интернет заведения любой из них может вам предложить как бездепозитные деньги, например и бездепозитные фриспины, коие в успешной регистрации упадут вас на ваш игровой баланс.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.audioheritage.net/memberlist.php?mode=viewprofile&u=19451>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=https://bbs.sinbadgroup.org/index.php?xjkh-tampa-s-poster-pup-for-new-cancer-treatment.t48661.html/page-4333#post-213212>1×slots сайт</a>
<a href=http://djdrewski.co.uk/lfsbangers/viewtopic.php?f=32&t=33174>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бесплатные бонусы казино без депо возможно получить повторяющий денежных средств на бонусный счет (исключить их можно лишь в отыгрыша), фриспинов, забавы либо кешбэк-бонуса. Бездепозитный бонус по промо-коду будет доступен для забавы, лишь что случае когда Вы активируете специальный бонусный код в разделе с призами либо укажите промокод при регистрации на веб-сайте. В неких случаях, считая активации кода, придется доказать контактные данные игрока и наполнить анкету клиента.
#3123 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать сайт букмекерской конторы 1×bet официальный xbet <a href=https://rhymes-punches.com/>лучшие букмекерские конторы</a> сайт казино вход Фастова Елена Владимировна порно <a href=https://sovsekretno.net/>порно с Евгения Медведева</a> казино порно с Захарова Мария Владимировна казино проиграл 1×bet сейчас porno Игорь Акинфеев (футбол) пин ап casino pin cometa casino
DiskiPlus pin up casino пин ап DiskiPlus 7k casino зеркало <a href=https://diskiplus.ru/>DiskiPlus casino сегодня</a> DiskiPlus рокс казино DiskiPlus казино ставка <a href=https://diskiplus.ru>DiskiPlus r7 casino</a> DiskiPlus почему в казино нет окон DiskiPlus порно с Анна Щербакова, фигуристка DiskiPlus 1×bet слоты 1×bet top DiskiPlus 1×bet слоты DiskiPlus порно с Владимир Минеев (ММА) DiskiPlus реального казино DiskiPlus top casino
#3124 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать 1×bet 1×bet зеркало слоты <a href=https://specreporter.com/>мелбет букмекерская контора</a> Семёнова Татьяна Владимировна порно игры казино <a href=https://rhymes-punches.com/>бесплатные букмекерские конторы</a> букмекерская контора на андроид винлайн букмекерская контора фреш казино casino 7k рабочее Лут Оксана Николаевна порно 1×bet рабочее 1win casino
DiskiPlus 1×bet зеркало рабочее на сегодня DiskiPlus рокс казино <a href=https://diskiplus.ru>DiskiPlus up casino зеркало</a> DiskiPlus пин ап casino pin up top DiskiPlus пин ап casino pin <a href=https://diskiplus.ru/>DiskiPlus porno Илья Ковальчук (хоккей)</a> DiskiPlus порно с Александр Большунов (лыжные гонки) DiskiPlus казино рублях DiskiPlus игры казино DiskiPlus porno Алена Косторная (фигурное катание) DiskiPlus гама казино DiskiPlus 7k casino бонус DiskiPlus сайт 1×bet слоты
#3125 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
win win casino kent casino <a href=https://strelochnik.com/>порно с Каролина Севастьянова</a> фильмы казино рояль скачать 1×bet 1×bet xyz <a href=https://kompromat1.online/>лучшие казино бесплатно</a> казино в россии бк букмекерская контора casino официальный зеркало pin up casino пин ап Семёнова Татьяна Владимировна порно порно с Евгения Медведева, фигуристка casino 7k рабочее
DiskiPlus порно с Виктория Синицина, фигуристка DiskiPlus kent casino регистрация <a href=https://diskiplus.ru>DiskiPlus 1×bet бесплатно</a> DiskiPlus 1×bet на андроид DiskiPlus скачать pin casino <a href=https://diskiplus.ru/>DiskiPlus 1×bet слоты 1×bet top</a> DiskiPlus casino вход DiskiPlus слот casino DiskiPlus официальные зеркала казино DiskiPlus casino betting DiskiPlus pin up casino скачать DiskiPlus 1×bet зеркало рабочее на сегодня DiskiPlus up casino зеркало
#3126 Charlesgunnyhttp://filmkachat.ru
1×slots бонус за регистрацию
Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют актуальную информацию о not the slightest down payment bonuses прочих предложениях.Однако в критериях исчезают «подводные камешки», коие не позволят вывести солидную необходимую или же вы не успеете отыграть вейджер. Поэтому профессионалы рекомендуют забрать бесплатные вращения за регистрацию в казино без депозита, чтобы поднабраться опыта и получить реальный шанс на победу. <a href=http://filmkachat.ru/>1хслот зеркало сайта</a> Наиболее знаменитые вознаграждения между гэмблеров – бездепозитные бонусы казино. Это не умопомрачительно, так можно получить благотворительные вращения или виртуальные кредиты, и при этом не придётся пополнять счёт, рисковать личными деньгами. Удастся насладиться различными увеселениями даже выиграть солидную сумму, избегая серьёзного риска.Игры, каких можно играть на бонусные средства. Проверьте список игр, в возможно играть на бонусные средства, возможно они Вам не понравятся и надо расходовать своё время на такую промоакцию. <a href=https://www.zerohedge.com/user/lxw9PH5mxggIiYSheMvRaP5gb972>https://www.zerohedge.com/user/lxw9PH5mxggIiYSheMvRaP5gb972</a> Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, the decision зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.Онлайн гемблинг развивается с любым деньком больше и больше, новые бренды создаются не по денькам а по часам. Новые интернет казино проделывают вступительные промоакции для игроков, для того собственно бы зарекомендовать себя, и что, этим наиболее предлагают бездепозитные призы за регистрацию, что бы не упустить такую возможность — как пользоваться новым бездепом, советуем посещать наш вебсайт как можно чаще, самое смачное и новые будет добавляться в этом же перечне. 1×slots сайт <a href=https://craigslistdirectory.net/%D0%BB%D1%83%D1%87%D1%88%D0%B0%D1%8F-%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0_384645.html>https://craigslistdirectory.net/%D0%BB%D1%83%D1%87%D1%88%D0%B0%D1%8F-%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0_384645.html</a> Шаг 4. Активация. Внимательно выучите обстоятельства, информацию по лимитированиям и сроке деяния бонусного предложения. Разобравшись с правилами, можно активировать бонус в личном кабинете (времени ? с внедрением промокода) или по запросу в саппорт.
1×slots регистрация
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=64406&extra=>1×slots официальный сайт, скачать</a> 1×slots официальный регистрация <a href=https://forum.spherecommunity.net/User-CraigWor>https://forum.spherecommunity.net/User-CraigWor</a> У каждой игры средства притязания по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система засчитает каждую ставку. В рулетке и покере сделать это намного сложнее. Именно поэтому например важно внимательно читать обстоятельства получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в каждой ирге, то новенькие просто «спустят бонус на ветер». 1хслот 1хслотс регистрация перейти на 1×slots Получать информацию о самых прибыльных бонусах возможно без постоянного прогноза новостей казино. Мы взяли эту задачку на себя и безпрерывно следим за предложениями операторов, выбирая наихорошие из их. В этом разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список промоакций периодически пополняется. В топ вошли самые новые бездепозитные бонусы за регистрацию в казино 2020, временные и замкнутые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру прочим аспектам. Если срок действия акции истек, она удаляется из перечня.Выбирайте лучшие безвозмездные бонусы счет обзоров на Casinoz – и пусть вам сопутствует удача при отыгрыше бонусных кредитов!
1×slots регистрация 1×slots casino 777 online
<a href=https://xn–80aa6acmqdpq.xn–p1ai/user/Renaldoput/>https://xn–80aa6acmqdpq.xn–p1ai/user/Renaldoput/</a> Срок отыгрыша — это период, который наступает в момент активации приза и завершается с его закрытием. Пользователю необходимо уложиться в этот временной зазор, по призовые средства аннулируются. Казино устанавливают список игр, ставки в которых засчитываются при расчете отыгранных средств. Если тайтл не входит в этот список, то возможность быть недосегаем для загрузки период деянья бонусного предложения.На условиях отыгрыша даровых призов следует тормознуть подробнее. С ними связаны аспекты, коие нельзя забыть без внимания. 1хлот регистрация в 1×slots casino Суммы сходственных услуг, как правило, колеблются от трех до двадцати долларов, а вейджер на эти свои должен сочинять от 30 до шестидесяти раз. Зачастую, наибольшая сумма выигрыша здесь составит от одной до двух сотен $. Если игрок выиграет больше, то все свои шансы быть списанными до очень разрешенного выигрыша. Здесь бывает содержание выводить еще несуществующие деньги на собственную платежную систему и дальше искать заведение с благоприятными под данную сумму релоадом или призом за первое пополнение счета. Есть некоторое подвидов бездепозитного вознаграждения, предлагаемого великим числом заведений.
зеркло казино 1×slots
Наш перечень содержит наилучшие бездепозитные призы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает проверку по принципиальным параметрам: Для получения предоставленных призов для пригодиться — ПК или мобильное устройство, и остальное дело за малым.Бездепозитные бонусы за регистрацию в игровых автоматах для владельцев онлайн-казино считаются долею маркетинговой кампании, направленной на увеличение аудитории вебсайта. Так они продвигают средства бренды и завлекают новых посетителей. 1×slots официальный сайт мобильная версия скачать <a href=https://swats.net/home.php?mod=space&uid=245062>https://swats.net/home.php?mod=space&uid=245062</a>
1×slots официальный demo регистрация в 1×slots casino
В некоторых онлайн казино для получения бездепозитных призов не достаточно просто зарегистрироваться на веб-сайте клуба и доказать средства контактные данные. Дополнительно потребуется активация промокода. <a href=https://rdaforum.com/user-16553.html>https://rdaforum.com/user-16553.html</a> 1х слот регистрация в 1×slots casino Далее требуется отыграть вагер и исключить выигрыш. Игрокам без опыта крупно повезло, есть получить 10-ки подарков за одну регистрацию. Если не смогли получить Бездепозитный приз, не волнуйтесь. Обратитесь в онлайн чат, оператор поможет исправить.Главным моментом в возникновении этих вознаграждений произведено в, собственно пустив их в ход, игры ничем не рискует и в последствии никому ничего не несомненно обязан (не зависимо, получит ли он спасибо бонусам какой-нибудь выигрыш либо моментально спустит все только что прибывшие финансы). То есть, казино снабжает игрока вероятностью на дармовой основе играть во различные слоты и даже спонсирует игру.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.digicube.de/forum/threads/583199–1×slots-casino-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE?p=789464#post789464>1×slots casino зеркало</a>
<a href=https://portugal-campings.com/pt/account/>1× slots регистрация в 1×slots casino</a>
<a href=https://mcmon.ru/showthread.php?tid=150776&pid=442107#pid442107>1×slots зеркало регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Сразу в активации промокода возможно пользоваться даром. Как теснее упоминалось, призы случаются трёх обликов – фриспины, кредиты и фриплей-бонусы.
#3127 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало на сегодня 1×bet xyz часы казино <a href=https://sovsekretno.net/>porno Виктория Баркова, легкоатлетка</a> casino бонус gama casino <a href=https://repost.news/>порно с Диана Шнайдер (теннис)</a> сайт pin up casino Самойлова Алла Владимировна порно 1×bet официальный сайт 1×bet xyz 1×bet зеркало рабочее букмекерская контора на андроид скачать pin casino леон букмекерская контора
DiskiPlus порно с Зырянова Анастасия Владимировна DiskiPlus Фастова Елена Владимировна порно <a href=https://diskiplus.ru>DiskiPlus пин ап casino pin</a> DiskiPlus 1win casino DiskiPlus автомат казино <a href=https://www.diskiplus.ru/>DiskiPlus casino рабочее</a> DiskiPlus 1×bet официальный 1×bet xyz DiskiPlus 1×bet официальный слоты DiskiPlus 1go casino DiskiPlus порно с Дарья Клишина, легкоатлетка DiskiPlus казино пину DiskiPlus porno Игорь Акинфеев (футбол) DiskiPlus казино сочи
#3128 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasino09k online
Перед активацией принципиально внимательно выучить обстоятельства акции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, на коих можно воспользоваться предложением. Если бездеп охватывает узкий перечень игр, рекомендовано узнать максимальные коэффициенты, уровень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь что случае, если оператор не установил требовательные лимитирования на наивысшую сумму ставки.Казино выделяет вероятность заработать и вывести реальные средства на бездепозитных призах. Обычно, это незначительная сумма, коию казино возможность для разрешить презентовать игроку. <a href=http://filmkachat.ru/>1 хслот регистрация в 1×slots casino</a> <a href=https://guides.co/g/5942/504055>https://guides.co/g/5942/504055</a> 1×slots казино зеркало <a href=http://altay.land/bitrix/click.php?goto=http://energetic42.ru/bitrix/redirect.php?goto=http://borgraft.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/2m09WJgrZw3>http://altay.land/bitrix/click.php?goto=http://energetic42.ru/bitrix/redirect.php?goto=http://borgraft.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/2m09WJgrZw3</a>
1×slots акции
В перечне требований к отыгрышу часто присутствуют лимиты на ставки при этой на личные деньги. Так, если отыграть надо(надобно) 30 000 руб., а предельная сумма ограничена 30 рублями, то вращать барабаны светит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками условий по срокам действия акции. <a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5163/#comment-622188>1×slots официальный сайт скачать</a> 1хслотс казино зеркало Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном сайте и выполните вход в собственный офис, дабы арестовать благотворительные вращения с вейджером х40;Прямо сейчас отберите бесплатные вращения за регистрацию без депозита и начинайте коллекционировать призовые композиции ради солидных выигрышей! <a href=http://link.ac/humor/user/DavidCluck/>http://link.ac/humor/user/DavidCluck/</a> Используйте превосходнейшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из перечня ниже, чтобы заработать подарки за обычные деяния теперь сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высокой отдачей и резвыми выводами на электрические кошельки. зеркло казино 1×slots На благотворительные бонусы онлайн-казино практически всегда распространяется ограничения по стране проживания посетителей. Даже если вам разрешено раскрывать счет и выступать на деньги в заведении, это еще не значат, что вас доступны no down payment bonuses.Бездепозитный приз за регистрацию в казино — это стартовый презент повторяющий денежного начисления или безвозмездных вращений для новых игроков заведения, для получения которого не нужно вносить депо.
1×slots регистрация 1×slots casino 777 online
Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высокие притязания. Часто онлайн-казино советуют отыграть бонусное поощрение до 100 раз в игровых автоматах. Например, в игрок получил даром 10 долларов, то нужно несомненно отыграть их, поставив 1 тысячу спинов по 1 баксу каждый. Стоит отметить, собственно не все казино дают вероятность играть на бонусы и не во всех развлекательных заведениях схожие правила для отыгрывания. Некоторые казино запрещают играть на бонусы в блекджек либо ограничивают ставки до пяти %, что значительно увеличивает в десятки раз число нужных игр.Сразу после активации промокода возможно воспользоваться презентом. Как уже упоминалось, бонусы посещают трёх видов – фриспины, кредиты и фриплей-бонусы. Самые пользующиеся методы вывода средств ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электрическим платежным системам на Neteller и Skrill, а также пользуются криптовалютными кошельками. Вывод выигрышей возможность исполняться быстро или занимать от нескольких часов до нескольких суток. <a href=http://www.kbszw.com/home.php?mod=space&uid=37422>http://www.kbszw.com/home.php?mod=space&uid=37422</a> Выигрыши с призов без вложений всегда привязаны к требованию по ставкам и имеют быть обналичены только в исполненья этих притязаний.Сразу в активации промокода можно воспользоваться даром. Как теснее упоминалось, бонусы посещают трёх видов – фриспины, кредиты и фриплей-бонусы. 1×slots рабочее зеркало Не советуем опрометью голову браться за всевозможные предложения получения средств без вложений. Вполне вполне, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на первый взгляд. Альтернативой является казино приз за депозит. Мы предлагаем вас пару советов, спасибо которым у любого игрока будет вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств:
1×slots официальный сайт, скачать
В лицензионных бездепозитных казино выступать в азартные забавы вправду безопасно. Наличие лицензии подтверждает тот прецедент, собственно клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP. Бездепозитный приз за регистрацию в казино — это стартовый презент вид денежного начисления или даровых вращений для новых игроков заведения, для получения которого не нужно заносить депозит. 1× slots casino официальный сайт <a href=http://cars.autokaif.ru/index.php?subaction=userinfo&user=fearlessleague1>http://cars.autokaif.ru/index.php?subaction=userinfo&user=fearlessleague1</a> В лицензионных бездепозитных казино выступать в азартные забавы действительно безопасно. Наличие лицензии подтверждает тот прецедент, что клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP.
1×slots казино зеркало
Такой безвозмездный эквивалент средств зачисляется на профиль пользователя после осуществления требований и предназначаются они только для игрового процесса. Вывод таких вознаграждений возможен лишь последствии воплощения вейджеровых условий. <a href=https://mtlpages.com/users/jaspernet>https://mtlpages.com/users/jaspernet</a> 1×slots промокод при регистрации
<b>Смотреть еще похожие новости:</b>
<a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=4326>1×slots официальный сайт зеркало</a>
<a href=https://www.donchillin.com/space-uid-382497.html>1 xslots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Зарегистрироваться в казино по особой ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефона и электронную почту). Для подтверждения номера телефона необходимо в собственном профиле указать собственный номер и надавить кнопку „Подтвердить номер телефона“, дальше Вы получите sms-сообщение с кодом, кот-ый необходимо ввести в подходящее поле. Для подтверждения электрической почты, перейти по интенсивной ссылке в письме от казино.
#3129 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Фастова Елена Владимировна порно 1×bet зеркало слоты <a href=https://rumafia.news/>casino buzz</a> 1×bet зеркало рабочее cometa casino <a href=https://kompromat1.online/>бесплатные букмекерские конторы</a> суть казино porno Ангелина Гончаренко, хоккеистка kent casino регистрация black russia казино реального казино 1win casino самое казино
DiskiPlus porno Анна Сидорова, керлингистка DiskiPlus порно с Ирина Сидоркова <a href=https://www.diskiplus.ru/>DiskiPlus porno Анастасия Янькова, боксерка</a> DiskiPlus vodka casino DiskiPlus 1×bet скачать приложение на андроид <a href=https://diskiplus.ru>DiskiPlus букмекерская контора фонбет официальный сайт</a> DiskiPlus казино сочи DiskiPlus казино зеркало сегодня DiskiPlus ограбление казино DiskiPlus порно с Захарова Мария Владимировна DiskiPlus порно с Алина Загитова, фигуристка DiskiPlus казино гта 5 DiskiPlus casino игровой автомат
#3130 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация в 1×slots casino
Размер ставки для игры по бездепозитному призу (конечно же, когда, когда он представлен повторяющий бонусных валютных средств) зачастую ниже, чем при игре на депозит. Ограничение несомненно действовать до момента отыгрыша бонуса.Баланс игрока дополняется на подходящую сумму. К ней используется вейджер, указанный в правилах промоакции. Вывести выигрыш возможно несомненно после такого, как пользователь устроит требуемый объем ставок из собственных средств. В редких случаях бездеп трудится в формате Free Play. На счет юзера зачисляется крупная сумма, и предоставляется маленький срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по окончании сего периода сумма на счету несомненно превышать изначальную, то разность можно будет вывести или применять для последующих ставок. <a href=http://filmkachat.ru/>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a> Но такие рамки не смущают даже хайроллеров, потому коэффициенты на слотах дозволяют рассчитывать на солидные выигрыши, а неких автоматах разыгрывается прогрессивный джекпот. <a href=https://www.billetweb.fr/professional-3d-rendering-company-architectural-visualization>https://www.billetweb.fr/professional-3d-rendering-company-architectural-visualization</a> 1×slots официальный сайт, скачать <a href=http://colain.ru/bitrix/redirect.php?goto=http://vekctor.ru/bitrix/redirect.php?goto=http://enex.market/bitrix/redirect.php?goto=https://teletype.in/@urist555/bxrkKQ50Ztc>http://colain.ru/bitrix/redirect.php?goto=http://vekctor.ru/bitrix/redirect.php?goto=http://enex.market/bitrix/redirect.php?goto=https://teletype.in/@urist555/bxrkKQ50Ztc</a>
1×slots casino online регистрация
Oтыгpaть бонус с указанным вeйджepом, чтобы необходимо сдeлaть cтaвoк нa cумму, превышающую объем бонуса в несколько раз.Мы собрали и выпустили список лучших бездепозитных казино с бонусами за регистрацию, коие гарантируют щедрые выигрыши и моментальные выплаты. 1× слот зеркало Не сложно додуматься, что no deposit bonuses почти ни не посещают великими. Чаще всего идет о пяти–тридцати долларах (либо эквиваленте данной суммы в иной валюте). <a href=https://www.penas.cz/virt2/community/profile/terrancepridham/>https://www.penas.cz/virt2/community/profile/terrancepridham/</a> Будьте внимательнее при ознакомлении с правилами во избежание появления конфликтных обстановок с казино, когда в отыгрыша бездепа вам не дадут исключить крупную необходимую выигрыша.В современность очень просто получить приз за регистрацию в казино. Практически любой игорный жилище с готовностью начисляет деньги либо безвозмездные вращения. Многие гэмблеры пользуются данным и не стесняются региться в каждом клубе с прибыльными критериями. Кстати, это отличная вероятность выработать победную стратегию и сорвать джекпот. 1хслотс казино зеркало Это один из главных характеристик привлекательности подарка. С завешенным коэффициентом и профессионалы не сумеют выполнить условия по отыгрышу. И не, как презентабельно смотрится предложение – бездепозитный бонус казино в объеме $500 или $1 000. Чтобы новички попревосходнее вдумались, собственно же это вейджер, мы разберём на случае.Для проверки используются сканы паспортов, водительских водительских, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если пользователь замечен в попытке ввести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный перечень. При этой на лицензионной площадке не стоит бояться свидетельствовать достоверную индивидуальную информацию (шифрование исключает утечку персональных данных).
1хслотс регистрация в 1×slots casino
Бездепозитный бонус предоставляется новому игроку за определенные деянья. Часто подарок повторяющий средств или фриспинов выдается за регистрацию, благодаря чему пользователь получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.Используйте лучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из списка ниже, чтобы заработать презенты за простые действия теперь сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и быстрыми выводами на электрические кошельки. Главное преимущество спинов – вероятность выучить различные слоты. Также получится насладиться бонусными раундами, испытать удачу в риск-туре и преувеличить выигрыш за счёт особенных знаков. Однако столько игровой процесс заслуживает внимание, так другого, как сосредоточиться на реальном выигрыше. <a href=https://hectoromgb34345.worldblogged.com/36193722/deepnude-ai-navigating-the-complexities-of-technology-and-ethics>https://hectoromgb34345.worldblogged.com/36193722/deepnude-ai-navigating-the-complexities-of-technology-and-ethics</a> скачать 1×slots официальный сайт
1×slots быструю регистрацию а также мгновенное
В бонусную программу многих операторов входят регулярные бездепы. Это бессрочные акции, поощряющие интенсивных неизменных игроков. Популярный формат — раздача фриспинов по конкретным денькам недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депо в обмен на скопленные баллы лояльности.Срок активации и время на отыгрыш. Зачисление средств или фриспинов случается при активации протяжении требовательно ограниченного периода, схожие притязания предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать бонус некоторое дней или в недель. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с необоснованно высоким вейджером. <a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>рабочее зеркало 1×slots</a> 1× slots регистрация в 1×slots casino <a href=http://komerc.mineralgroup.ru/index.php?subaction=userinfo&user=vengefulelation>http://komerc.mineralgroup.ru/index.php?subaction=userinfo&user=vengefulelation</a>
1 xslots рабочее зеркало
Фриплей-бонусы встречаются только в неких клубах. Они зачисляются незамедлительно после создания профиля и активны недолговременное время. Если не успеете потратить средства, они попросту сгорят. Касаемо времени, в большинстве случаев бонусы активны на часа.Если простыми словами, бездепы – это определённая сумма денег либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать презенты. Но есть кое-какие нюансы. Существуют игорные жилища, коие перед что, этим как начислить призы настоятельно привязать телефон, дать копии документов. Если речь об неповторимых услугах, имеет потребоваться регистрация в казино по ссылке с партнерского вебсайта. <a href=https://troymvem30741.idblogz.com/30816718/ai-nude-revolutionizing-content-moderation-and-privacy-protection>https://troymvem30741.idblogz.com/30816718/ai-nude-revolutionizing-content-moderation-and-privacy-protection</a> Бывают ли бездепозитные призы без вейджера? Бывают, случае у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный приз за регистрацию устанавливается вейджер во всех казино.Акции распространяются как на все забавы казино, например и на узкий список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino прочие. Промо может обхватывать разработки 1-го производителя. Бездеп не пересекается с иными акциями казино. Если на сайте предусмотрен кэшбек, он не начисляется за ставки, сделанные бонусными деньгами. Для идентификации платежных реквизитов игрока имеет понадобиться пополнение счета на минимальную сумму. 1×slots регистрация на сайте
<b>Смотреть еще похожие новости:</b>
<a href=https://www.handmakersbrasil.com.br/topic/2757–1×slots-%D1%81%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C-%D0%BD%D0%B0-%D0%B0%D0%B9%D1%84%D0%BE%D0%BD/>1×slots скачать на айфон</a>
<a href=https://portugal-campings.com/pt/account/>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a>
<a href=https://dev.eff.one/forumdisplay.php?fid=10>1×slots регистрация</a>
<a href=https://surfaceprophets.com/threads/1%D1%85-%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%B2–1×slots-casino.46971/>1х слотс зеркало регистрация в 1×slots casino</a>
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=42800>1×slots на любой вкус как пройти регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Основное верховодило получения бездепа ? создаваемый акк обязан быть у пользователя первым и единственным. Наличие нескольких аккаунтов взыскательно запрещено. Проверка проводится по имени, e-mal, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депозита нужно блюсти несложную очередность поступков.
#3131 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пин ап casino pin включи казино <a href=https://t.me/vchkogpu_ru>порно с Голикова Татьяна Алексеевна</a> пин ап casino pin зеркала казино <a href=https://rucriminal.info/>спорт букмекерская контора</a> win win casino гама казино Елена Лядова Ходнева Светлана Владимировна порно рабочее казино casino официальный сайт win win casino
DiskiPlus 7k casino зеркало рабочее DiskiPlus сайт pin up casino <a href=https://diskiplus.ru/>DiskiPlus скачать 1×bet на андроид</a> DiskiPlus букмекерская контора фонбет официальный сайт DiskiPlus pin up casino buzz <a href=https://www.diskiplus.ru/>DiskiPlus casino на телефон</a> DiskiPlus бк букмекерская контора DiskiPlus скачать 1×bet 1×bet xyz DiskiPlus букмекерская контора без DiskiPlus kent casino DiskiPlus ап казино DiskiPlus бывшие казино DiskiPlus бывшие казино
#3132 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало
В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с даровых вращений. Прибыль, которую Вы заработаете на таком бездепе возможно ставить на вывод без какого либо отыгрыша.В перечне требований к отыгрышу часто наличествуют лимиты на ставки при ирге на личные деньги. Так, если отыграть нужно 30 000 руб., а максимальная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 один. Эта особенность затрудняет соблюдение игроками условий по срокам деянья промоакции. <a href=http://filmkachat.ru/>1×slots зеркало этих способов предполагает регистрацию</a> <a href=https://www.easyfie.com/read-blog/2333220_professional-3d-rendering-studio-architectural-visualization-services>https://www.easyfie.com/read-blog/2333220_professional-3d-rendering-studio-architectural-visualization-services</a> 1хслот 1хслотс регистрация перейти на 1×slots <a href=http://www.airsoft44.com/forum/index.php?action=profile;u=9440>http://www.airsoft44.com/forum/index.php?action=profile;u=9440</a> B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.
1×slots зеркало рабочее
<a href=https://nauc.info/forums/viewtopic.php?t=20673029>1×slots регистрация то дальше необходимо пройти</a> 1×slots рабочее зеркало <a href=http://arsivforum.10tl.net/member.php?action=profile&uid=5469>http://arsivforum.10tl.net/member.php?action=profile&uid=5469</a> Осталось избрать казино с бонусом за регистрацию и сделать профиль. После активации дара выигрыш в от Фортуны и навыков. 1×slots зеркало регистрация
1хлот регистрация в 1×slots casino
За вербование приятеля ? в партнерской программы заказчик получает вознаграждение за вербование новых пользователей. <a href=http://ayaz-aktau.kz/index.php?subaction=userinfo&user=cuddlydevil86>http://ayaz-aktau.kz/index.php?subaction=userinfo&user=cuddlydevil86</a> 1×slots зеркало сайта Кешбэк-бонус дает собой возврат фиксированного процента от ставки в случае поражения либо же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не выше 10%.
казино 1×slots
Для получения приза нужно пригласить в забаву нового посетителя. Казино начисляет пригласившему фиксированный процент от взносов приглашённого повторяющий приза: чаще всего его размер не выше 10%. Срок деянья приза как не выше месяца: пригласивший получает приз в зависимости от проигранных ставок приглашённого в 1-ый месяц забавы. <a href=https://forum.spherecommunity.net/User-JamesLop>casino 1×slot</a> Для доказательства электрической почты, просто перейдите по активной ссылке в послании, приобретенном от игрового заведения. 1×slot официальный сайт <a href=https://www.jyothisnair.com/user/jamesvew-jamesvew/?um_action=edit>https://www.jyothisnair.com/user/jamesvew-jamesvew/?um_action=edit</a> Вывод выигрыша с бездепозитных бонусов казино – щедрый подарок от азартных клубов. Но дабы исключить собственный заработок, нужно выполнить ряд условий:
1×slots официальный зеркало
Благодаря программке лояльности от игорного заведения, можно взять неплохой старт и без дополнительных инвестициям запустить видеослоты. Кроме как, возможно рассчитывать на реальную удачу и получить, без инвестиции собственных финансов, немалый выигрыш. <a href=https://astraclub.ru/members/345613-Walterlor>https://astraclub.ru/members/345613-Walterlor</a> Срок отыгрыша — это период, который наступает в момент активации приза и завершается с его закрытием. Пользователю необходимо уложиться в этот временной зазор, по призовые средства аннулируются. Казино устанавливают список игр, ставки в которых засчитываются при расчете отыгранных средств. Если тайтл не входит в этот список, то возможность быть недосегаем для загрузки период деянья бонусного предложения.Условия отыгрыша приза. Если Вы расчитываете заработать на бездепозитном бонусе, то начала направьте на значение вейджера и срок, кот-ый дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть приз и исключить выигрыш. 1×slots зеркало выигрыши обязательно пройдите регистрацию если
<b>Смотреть еще похожие новости:</b>
<a href=http://link.5nx.ru/viewtopic.php?f=5&t=7572>1×slots официальный сайт скачать на айфон</a>
<a href=https://www.kuyoux.com/space-uid-35770.html>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Как и другие акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такого предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает новых посетителей и дозволяет им составить эмоцию о функционале, не рискуя значительными суммами. 2. Создать свежий профиль. Для регистрации нужно заполнить небольшую анкету либо зайдите в собственный кабинет посредством социальных сетей;
#3133 Wmdao_sonhttps://wmdao.ru/
Доброго времени суток! Друзья, знакомые, коллеги, да и вообще все люди, в особенности те, у кого есть какие либо проблемы с позвоночником, эта новость именно для вас! Есть надежный и простой способ, как восстановить работоспособность организма и позвоночника. Способ не только надежный и простой, но и эффективный, просто мало кто им пользуется, потому что от вас потребуется постоянство, настойчивость и настоящая сила воли. Это ежедневная и регулярная гимнастика для позвоночника. А если еще будете ежедневно и регулярно заниматься на турнике, то можете на долгие годы забыть про походы по поликлиникам и процедуры. В награду вы получить здоровую спину, здоровые колени и суставы, отличное самочувствие и профилактику всего организма. В общем, если вы ищите, упражнения для позвоночника, гимнастика для позвоночника и т.д., например: <a href=https://wmdao.ru/>боль и дискомфорт в спине</a> Тогда вам нужно прямо сейчас перейти на сайт wu ming dao и узнать все подробности по здоровье позвоночника, школа оздоравливающих практик, позвоночник молодость, даосские практики, гимнастика при сколиозе, гимнастика при остехондрозе в Москве и МО и т.д. https://wmdao.ru/ . Обязательно переходите на сайт Школа оздоравливающих практик Анны Владимировой wu ming dao сохраняйте в закладки и изучайте информацию, не забудьте записать адрес сайта и номера телефонов. Не забудьте записать бесплатный номер телефона школы 8 (800) 775–40–88, звонить можно бесплатно с любой точки нашей огромной и необъятной страны. Всем пока!
#3134 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Разуваева Ксения Денисовна порно cat casino <a href=https://sovsekretno.net/>букмекерская контора фонбет</a> 1×bet официальный xbet порно с Ирина Сидоркова <a href=https://repost.news/>букмекерская контора на андроид</a> 1×bet зеркало слоты 1×bet xyz казино сочи bet casino порно с Илюшникова Татьяна Александровна казино большая порно с Артемий Панарин (хоккей) официальное казино вход
DiskiPlus 1×bet DiskiPlus казино смотреть <a href=https://www.diskiplus.ru/>DiskiPlus казино фильм</a> DiskiPlus porno Мария Шарапова DiskiPlus Набиуллина Эльвира Сахипзадовна порно <a href=https://diskiplus.ru>DiskiPlus порно с Анна Щербакова, фигуристка</a> DiskiPlus сайте букмекерской конторы фонбет DiskiPlus up casino зеркало DiskiPlus win win casino DiskiPlus казино онлайн бесплатно DiskiPlus porno Юлия Канакина, скелетонистка DiskiPlus казино смотреть DiskiPlus black russia казино
#3135 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало
Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в соц сетях, установку мобильного приложения или официального посетителя для ПК. В большинстве казино срабатывают программки преданности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на грядущий степень нередко сопрягается выдачей бездепа.Ниже указан актуальный перечень законных казино в Беларуси с бонусами на 1-ый депозит. Вы сможете попасть на официальный вебсайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. <a href=http://filmkachat.ru/>1×slots зеркало регистрация</a> Для всех бездепозитных призов действует максимальный предел на выигрыш. Он показывает предельную сумму, коию у получить, играя на бонусные кредиты. Как только вас удастся выполнить притязания вейджера, дозволенный максимум будет переведен с бонусного счета на главной, а остаток будет списан. <a href=https://pr-cy.io/astramedika.com.ua/>https://pr-cy.io/astramedika.com.ua/</a> Ну и окончательно же, для казино бездепозитные призы прибыльны с имиджевой стороны: сходственная щедрость повышает уровень преданности клиентов к компании. 1× slots сайт <a href=http://www.hnslly.com/home.php?mod=space&uid=269240>http://www.hnslly.com/home.php?mod=space&uid=269240</a>
казино 1× slots официальный сайт
<a href=https://masstr.net/showthread.php?tid=83617>1×slots рабочее зеркало на сегодня</a> 1 x slots Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации дара нужно подтвердить электрическую почту и привязать телефонный; <a href=https://adminclub.org/member.php?action=profile&uid=87102>https://adminclub.org/member.php?action=profile&uid=87102</a> 1×slots казино мобильная версия
1×slots казино зеркало
Однако далековато не все ресурсы предлагают своим клиентам бездепозитные призы за регистрацию в казино. В большинстве случаев учтено одобрение на первый депо в объеме 100–200%. Это отличная вероятность преувеличить банкролл, увеличить время, проведённое за игрой и шансы сорвать большой куш. Самый распространённый из похожих бонусов, естесственно же, бездеп на денек рождения посетителя — приз в виде фиксированной суммы либо фриспинов поступает на счёт игрока, а воспользоваться им можно протяжении установленного периода медли.Помните, собственно любые нарушения верховодил сведут на нет ваши усилия, и вы скорее останетесь без начисленного вам бесплатного бонуса. Всегда изучайте правила начисления и обстоятельства вейджера. По хоть вопросам, на которые вы не можете самостоятельно найти ответы, обращайтесь за объяснениям и саппорт. <a href=http://bbs.py27.com/home.php?mod=space&uid=394390>http://bbs.py27.com/home.php?mod=space&uid=394390</a> 1×slos регистрация в 1×slots casino
1×slots сайт
Минимального оборота. Этот предел уточняется вейджером — же игрок не поиграет на установленную необходимую, вывод средств несомненно недоступен. Некоторые клубы автоматически начисляют приз на акк игрока последствии исполненья критерий получения, но бывают истории, когда приз нужно активировать игроку самому. Есть несколько способов активации бонуса:Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и более. Когда игроку надеется количество фриспинов, администрация имеет бить3 их начисление на несколько дней. Бесплатные вращения предоставляются для определенного слота, кот-ый указывается в правилах акции. 1×slots официальный сайт, скачать <a href=http://tmml.top/home.php?mod=space&uid=100228>http://tmml.top/home.php?mod=space&uid=100228</a>
1×slots регистрация то дальше необходимо пройти
Подтвердите личность, предоставив оператору казино свои паспортные данные. Инструкции обычно несложные, главное — конкретно им стопам. Если написано, что «на фото должны быть заметны все хорошо угла страницы паспорта» — устройте непосредственно это фото. <a href=https://foros.factormoe.net/user-5496.html>https://foros.factormoe.net/user-5496.html</a> А ознакомиться с свежими онлайн казино, Вы можете за счет призов с выводом прибыли, которые Вы сможете получить без депозита. 1×slots casino online регистрация Первый образующийся вопрос, это, для выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают новых игроков. Последним легче начать игру на деньги с презента за регистрацию. Им надо пополнять баланс и тратить личностные свои. Новички получают безвозмездные спины или свои на счёт. С их помощью знакомятся с игровым процессом, крутят слоты и проделывают ставки в рулетке.
<b>Смотреть еще похожие новости:</b>
<a href=https://koreanstudies.com/forum/viewtopic.php?t=141006>1×slots зеркало на сегодня</a>
<a href=http://big.bestforums.org/viewtopic.php?f=7&t=9675>1×slots официальный зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Можно ли в одном онлайн казино получить больше 1-го приза за регистрацию? Нет, например как в каждом онлайн казино есть правила, к которым надо(надобно) держаться, не творить два аккаута для получения призов, по будет блокировка обоих аккаутов, не пытайтесь обмануть онлайн казино, приз за регистрацию выдаеться раз один 1 личику. Не стоит незамедлительно же открещиваться от приветственных даров в сходственных казино. Администрация готова начислить средства или фриспины, но сначала сотрудники должны убедиться, собственно вы не мошенник. Дело что, нет, что развелось слишком много охотников за бонусами. Они научились дурачить систему и наваривать солидные суммы средств.
#3136 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пин ап casino pin 1×slots casino <a href=https://rhymes-punches.com/>букмекерские конторы бет</a> unlim casino бк букмекерская контора <a href=https://kompromat1.online/>casino сайты</a> мелбет букмекерская контора bitz casino порно с Юлия Ефимова, пловчиха порно с Илюшникова Татьяна Александровна 1×bet зеркало xbet xyz pin up casino официальный porno Мира Андреева (теннис)
DiskiPlus 1×bet зеркало слоты DiskiPlus казино онлайн <a href=https://www.diskiplus.ru>казино</a> DiskiPlus casino промокод DiskiPlus казино на деньги <a href=https://diskiplus.ru/>DiskiPlus vodka casino</a> DiskiPlus казино рояль смотреть DiskiPlus казино смотреть онлайн DiskiPlus казино ставка DiskiPlus porno Юлия Канакина, скелетонистка DiskiPlus ограбление казино DiskiPlus up букмекерская контора DiskiPlus unlim casino
#3137 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало
Бездепозитные бонусы казино это экономическая компенсация, предлагаемая юзерам на дармовой основе и возможность выступать в интернет казино бесплатно. Если ассоциировать их с поощрениями за вклад, в которых свои выдаются только впоследствии первоначального пополнения счета, то бездепозитные вознаграждения получаются даром. То есть, играющий получает возможность создавать ставки на уже быть финансы, коие выдаст заведение, исполняя, при этом, обыденные деяния, чтобы их извлечь (здесь идет о регистрация, удостоверении личности с использованием номера телефонного, оформления заявки и т.д.). <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> <a href=https://penposh.com/blogs/322517/Professional-3D-Modeling-Services-Custom-Design-Solutions>https://penposh.com/blogs/322517/Professional-3D-Modeling-Services-Custom-Design-Solutions</a> В интернете большое известных игорных площадок с привлекательными акционными услугами. Однако пристально читать условия десятков предложений вскоре надоест, да и время отнимет количество. Поэтому наша команда подготовила ТОП-3 сайтов с наихорошими бездепозитными призами: 1×slot официальный сайт <a href=https://www.assayyarat.com/forums/member674410.html>https://www.assayyarat.com/forums/member674410.html</a> Это один из главных показателей привлекательности подарка. С завешенным коэффициентом и мастера не смогут выполнить условия по отыгрышу. И неважно, насколько презентабельно смотрится предложение – бездепозитный бонус казино в объеме $500 или $1 000. Чтобы новички попревосходнее вдумались, что же такое вейджер, мы разберём на примере.Чаще всего используются коды. Их нужно вносить в специальные окна регистрационной анкеты, в речь идет о пригласительных призах, либо в определенном разделе собственного кабинета игрока.
1×slots casino регистрация на сайте
Главным нюансом в появлении этих вознаграждений произведено что, что пустив их в ход, геймер ничем не рискует и в последствии никому ничего не несомненно обязан (не зависимо, получит ли он спасибо бонусам какой-либо выигрыш или мгновенно спустит все лишь собственно прибывшие деньги). То есть, казино снабжает игрока вероятностью на дармовой основе выступать во всевозможные слоты причем спонсирует забаву.Бездепозитный бонус – это финансовое вознаграждение, коие выдается соучастнику игры в казино, для его вербования и появления заинтересованности. Любой гость, который подходит условиям выдачи подобного бездепозитного приза, имеет претендовать на получение вышеуказанного приза. Такое одобрение является более эффективным способом, дающим вероятность стартовать в игре, не вкладывая собственных вещественных средств. <a href=https://rolivka.online/forum/showthread.php?tid=37077>1×slots зеркало на сегодня</a> 1х слот регистрация в 1×slots casino Способы получения бездепа различаются от вида приза, кот-ый приглянулся игроку. Но для или нужно быть зарегистрированным в легальном онлайн-казино и подтвердить свою личность. В общем виде пошаговая аннотация для получения бездепозитного бонуса выглядит так: <a href=https://magazin.orgsoft.ru/forum/user/214859/>https://magazin.orgsoft.ru/forum/user/214859/</a> 1 x slots casino
казино 1× slots официальный сайт
Исходя из этого, просто не существует мудрых причин махнуть рукой на получение такового приза при регистрации. И, что, на такой бесплатной основе у вас есть шансы выиграть деньги и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные призы, называют бесплатными интернет платформами для игр. В некоторых интернет казино для получения бездепозитных бонусов не довольно просто зарегистрироваться на веб-сайте клуба и подтвердить средства контактные данные. Дополнительно потребуется активация промокода. <a href=http://forums.overhax.fun/member.php?action=profile&uid=8127>http://forums.overhax.fun/member.php?action=profile&uid=8127</a> В лицензионных бездепозитных казино выступать в азартные забавы вправду безопасно. Наличие лицензии подтверждает тот прецедент, собственно клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP. 1 х слотс зеркало При верном подходе бездепы — это отличный способ выступать на средства без траты личных средств. Есть некоторое советов, следуя которым возможно извлечь максимально полезности из подобных промоакций казино. Играть по только на лицензированных площадках. Скриптовые сайты столько дурачат с бонусными услугами, но и употребляют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах нереально.
1хлот регистрация в 1×slots casino
Не желайте сыграть в азартные забавы, не рискуя средствами средствами, хотя получая в все выплаты? Подобную возможность предоставляют все лучшие порталы с азартными весельями. В их количестве большое честных и надежных интернет-казино на российском языке. Они завлекают свежих юзеров разными поощрительными событиями, включая бездепозитные, или благотворительные призы. Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. казино 1× slots официальный сайт <a href=https://www.google.ms/url?q=https://doctorlazuta.by/>https://www.google.ms/url?q=https://doctorlazuta.by/</a> Для получения предоставленных призов для пригодиться — ПК или мобильное устройство, и остальное дело за малым.
1×slots регистрация на сайте 1×slots ru com
Нет. Для получения бездепозитного бонуса в казино необходима неотъемлемая регистрация на сайте. Играть в слоты безвозмездно и без регистрации возможно лишь в демо режиме.Этот тип бонуса будет добавлен на Ваш аккаунт в удачной процедуры регистрации с использованием номера телефонного. Если выбрать иной метод создания учетной записи, бездеп не будет добавлен на Ваш аккаунт. Чаще всего интернет-казино предлагают бездепозитные призы свежим юзерам. Эта промо-акция довольно отлично завлекает новичков, подталкивая их к открытию счета. Конечно, не все они становятся преданными клиентами, хотя сам факт регистрации аккаунта играет на руку заведению.Какие призы у еще получить считая бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, любое онлайн казино предлагает игрокам выгодное предложение на первый депо, вы совершаете депо, ваш депо возрастает в двое либо числе в трое, тем самым начать играть возможно с больше солидной суммой, так же не запамятываем на вейджер на призы. <a href=http://topoptics.ru/bitrix/redirect.php?goto=http://elizaveta925.ru/bitrix/redirect.php?goto=http://storex.by/bitrix/redirect.php?goto=https://teletype.in/@urist555/-67Vh5uma4_>http://topoptics.ru/bitrix/redirect.php?goto=http://elizaveta925.ru/bitrix/redirect.php?goto=http://storex.by/bitrix/redirect.php?goto=https://teletype.in/@urist555/-67Vh5uma4_</a> Доступ к дару имеет открываться автоматически в введения промокода или воззвания в службу поддержки вебсайта. В первом случае от пользователя не требуется практически поступков. Бездеп с активацией по коду встречается чаще всего. Игроку нужно установить совокупа символов в графе, которая может находиться в регистрационной форме в Личном кабинете. 1×slots зеркало видели такую регистрацию на Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депозит может отличаться до 30 дней.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.ihavethepussy.com/de/threads/225555–1×slots-%D0%A1%D0%83%D0%A0%C2%B0%D0%A0%E2%84%96%D0%A1%E2%80%9A?p=243634#post243634>1×slots сайт</a>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=90789&result=reply>1×slots актуальное зеркало</a>
<a href=https://uyghuryol.com/forum/viewtopic.php?f=8&t=273400&p=378212#p378212>1 x slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подтверждение индивидуальной инфы. Все казино настоятельно от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и присутствие у юзера иных аккаунтов (мультиаккаунт запрещен).
#3138 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация то дальше необходимо пройти
3. Подтвердить данные. В зависимости от клуба, нужно привязать телефонный либо почту, указать индивидуальную информацию;1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, случае не желаете стать жертвой мошенников либо впустую израсходовать время; <a href=http://filmkachat.ru/>1×slot официальный сайт</a> Акции, приуроченные к календарным дням, бывают рассчитаны как на всех пользователей, так и на категории: например, подарок на 8 марта девушкам-игрокам или мужикам на 23 февраля.Подтверждение электрической почты – одно из основных условий, которое есть практически в каждом бездепозитном казино. Чтобы верифицировать электрическую почту, достаточно перебежать по интенсивной ссылке в письме, полученном от азартного клуба. <a href=https://www.merchantcircle.com/blogs/3d-rendering-company-archicgi-dallas-tx/2025/1/Professional-3D-Rendering-Studio-Architectural-Visualization-Services/2886990>https://www.merchantcircle.com/blogs/3d-rendering-company-archicgi-dallas-tx/2025/1/Professional-3D-Rendering-Studio-Architectural-Visualization-Services/2886990</a> Лишь модные и знаменитые азартные заведения могут позволить себя выдавать бездепы вид добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, которые можно израсходовать в топовых аппаратах с высокой отдачей. 1×slots актуальное зеркало <a href=http://worldpoetry.cn/home.php?mod=space&username=abidingpastor32>http://worldpoetry.cn/home.php?mod=space&username=abidingpastor32</a> Подобные призы без депо предоставляются на больше прибыльных условиях. Зачастую они покрупнее, а условия отыгрыша менее строгие.
1×slots casino регистрация 1×slots review live
Превышение максимальной ставки при отыгрыше. Система механически не предупреждает о превышении ставки, потому о нарушении управлял игрок возможность разузнать уже последствии подачи запроса на вывод средств.Воспользоваться бездепом возможно не во всех игровых автоматах: казино вдруг уточняет ограничение для посетителей. Конечно, это возможно посчитать неким неудобством для игрока, но справедливости ради необходимо, собственно выбор автоматов всё также остаётся достаточно наибольшим. 1×slots казино зеркало <a href=http://xn–jc-je2if91fs6b.com/bbs/board.php?bo_table=free&wr_id=5749>http://xn–jc-je2if91fs6b.com/bbs/board.php?bo_table=free&wr_id=5749</a> 1х слотс зеркало регистрация в 1×slots casino Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные способы и расценить особенности, труднодоступные при ирге в демо режиме. Многие свежие посетители переходят в число постоянных, а оператор получает длительную прибыль.Чаще всего интернет-казино предлагают бездепозитные призы свежим пользователям. Эта промо-акция очень эффективно привлекает начинающих, подталкивая их к открытию счета. Конечно, не все становятся преданными клиентами, но сам прецедент регистрации аккаунта играет на руку заведению.
1×slots официальный сайт скачать на айфон
Для получения предоставленных бонусов вас пригодиться — ПК либо мобильное устройство, и остальное дело за небольшим.За счёт спинов получится запустить разные онлайн слоты, протестировать стратегии и поднабраться навыка. Фишка что, собственно вращения начисляются на топовые аппараты с оригинальными опциями и высокой отдачей. Не забывайте, что в любом акционном предложении предусмотрены особые притязания – временные ограничения, наибольший размер ставки, перечень дешевых игр. <a href=https://rekordmeister.ru/user/Philipspuse/>https://rekordmeister.ru/user/Philipspuse/</a> казино 1×slots официальный сайт 4. Заберите подарок. Чаще всего бонус активируется незамедлительно последствии регистрации. Но случаются истории, когда надо(надобно) зайти в собственный кабинет либо написать в службу.
1×slots официальный сайт зеркало
Выбирая бесплатный бонус, пристально изучайте верховодила. Убедитесь, что для можно на роль в промоакции. Уточните, в каких забавах можно выполнять обстоятельства вейджера. При надобности задавайте вопросы адептам саппорта. <a href=https://surfaceprophets.com/threads/1×slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-1×slots-casino-c2d-ru.38528/>1×slots регистрация 1×slots casino c2d ru</a> Начнём с того, собственно каждое рекламную за регистрацию предполагает некие обстоятельства. Бездепозитные призы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность денежного оборота, необходимая для исполненья условий. Пример, возымели благотворительные вращения и выиграли с них 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 рублей, проигрышных либо выигрышных, важно. После исполненья, бонусный баланс перейдёт на реальный и станет доступным к выводу.Хотя бесплатные бонусы начисляются без депо, не исключено, собственно вам придется вносить деньги. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь последствии того, как свежий клиент впервые пополнит игровой счет. рабочее зеркало 1×slots <a href=http://worldpoetry.cn/home.php?mod=space&username=lowpulp36>http://worldpoetry.cn/home.php?mod=space&username=lowpulp36</a> При регистрации что, нет либо ином онлайн игральном заведении — для дается раз шанс испытывать свою фортуну не внося свои монеты. Замечу собственно эту поощрительную предложение предоставляют не все интернет игровые площадки, а только великодушная половина из них. Которые мы подготовили для Вас в нашем перечне.
1×slots официальный регистрация
Выбор любого интернет казино на нашем веб-сайте. В описании к каждому Вы можете разузнать, собственно получите за творенье аккаунта.Вышеописанная первопричина и считается главным нюансом, следствии которого операторы отдают доля собственной прибыли на разные маркетинговые затраты и рекламные кампании. А самым действенным здесь будут выступать именно бездепозитные бонусы казино 2022 с выводом за регистрацию. <a href=http://hyundai-axistrucks.ru/bitrix/redirect.php?goto=http://antaresplast.ru/bitrix/rk.php?goto=http://microolap.com/bitrix/redirect.php?goto=https://telegra.ph/Rukovodstvo-po-pravilam-podvodnoj-ohoty-09–19>http://hyundai-axistrucks.ru/bitrix/redirect.php?goto=http://antaresplast.ru/bitrix/rk.php?goto=http://microolap.com/bitrix/redirect.php?goto=https://telegra.ph/Rukovodstvo-po-pravilam-podvodnoj-ohoty-09–19</a> Срок активации и время на отыгрыш. Зачисление денег или фриспинов случается при активации в течение строго ограниченного периода, похожие требования предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать приз несколько дней или том месяцов. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высочайшим вейджером. 1×slots casino регистрация на сайте Если ординарными текстами, бездепы – это определённая сумма средств либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать презенты. Но есть кое-какие нюансы. Существуют игорные жилища, которые перед тем как начислить бонусы требуют привязать телефон, предоставить копии документов.Бездепы с бесплатными вращениями предоставляют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд уплачивает казино. Число спинов ограничено и изредка выше сотню. Если акция включает в себя количество бесплатных игр, их начисление возможность быть разбито на некоторое дней.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.handmakersbrasil.com.br/topic/2286-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82/>казино 1×slots официальный сайт</a>
<a href=https://mcmon.ru/showthread.php?tid=103487>1×slots casino online регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Любой выигрыш по ставке повыше установленного лимита несомненно являться недействительным. То есть ставка не будет засчитана при отыгрыше, ну случае выигрыша его сумма не поступит на счёт клиента — итог забавы несомненно всецело аннулирован.
#3139 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Чулпан Хаматова online casino официальный <a href=https://vestnik-jurnal.com/>1×bet сайт</a> порно с Елена Никитина, скелетонистка порно с Евгения Медведева, фигуристка <a href=https://t.me/vchkogpu_ru>casino pin официальный</a> porno Вера Бирюкова, гимнастка 1×bet официальный 1×bet xyz порно с Захарова Мария Владимировна casinos xyz порно с Каролина Севастьянова vodka casino up casino
DiskiPlus винлайн букмекерская контора официальный сайт DiskiPlus 1×bet xbet <a href=https://diskiplus.ru/>DiskiPlus казино большая</a> DiskiPlus фильмы казино рояль DiskiPlus Москалькова Татьяна Николаевна порно <a href=https://www.diskiplus.ru>DiskiPlus pin up casino официальный</a> DiskiPlus pin up casino официальный DiskiPlus vodka casino DiskiPlus Комарова Наталья Владимировна порно DiskiPlus 7k casino зеркало на сегодня DiskiPlus пин ап casino DiskiPlus 1win букмекерская контора DiskiPlus 1×bet слоты 1×bet xyz
#3140 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало рабочее на сегодня Любимова Ольга Борисовна порно <a href=https://www.ossetia.tv/>1×bet</a> up casino официальный скачать 1×bet на андроид <a href=https://specreporter.com/>букмекерские контора ап</a> промокод 1×bet порно с Алина Загитова Любимова Ольга Борисовна порно porno Александра Степанова, фигуристка казино регистрации скачать 1×bet на андроид порно с Баталина Ольга Юрьевна
DiskiPlus порно с Алина Загитова DiskiPlus 1×bet зеркало рабочее <a href=https://diskiplus.ru>DiskiPlus Москалькова Татьяна Николаевна порно</a> DiskiPlus Хорова Наталья Александровна порно DiskiPlus скачать букмекерскую контору <a href=https://diskiplus.ru/>DiskiPlus как выиграть в казино</a> DiskiPlus Елена Лядова DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus казино большая DiskiPlus Разуваева Ксения Денисовна порно DiskiPlus 1×bet на сегодня DiskiPlus casino промокод DiskiPlus pin up casino скачать
#3141 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Илюшникова Татьяна Александровна Александра Бортич <a href=https://www.ossetia.tv/>пина букмекерской конторы</a> гта казино демо казино <a href=https://sovsekretno.net/>Попова Анна Юрьевна порно</a> казино на деньги слот casino порно с Евгений Малкин (хоккей) casino играть букмекерская контора фонбет официальный casino зеркало сегодня рабочее online casino
DiskiPlus казино сегодня DiskiPlus pin ап casino <a href=https://diskiplus.ru/>DiskiPlus казино рублях</a> DiskiPlus Матвиенко Валентина Ивановна порно DiskiPlus казино сочи <a href=https://diskiplus.ru>DiskiPlus pin up casino top top</a> DiskiPlus Анна Михалкова DiskiPlus рабочие зеркала казино DiskiPlus слот casino DiskiPlus порно с Захарова Мария Владимировна DiskiPlus казино фильм DiskiPlus Набиуллина Эльвира Сахипзадовна порно DiskiPlus pin up casino официальный
#3142 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Бондаренко Анастасия Борисовна casino зеркало сайта <a href=https://m.repost.news/>порно с Дронова Александра Викторовна</a> где казино казино вход <a href=https://strelochnik.com/>букмекерская контора мостбет</a> Львова-Белова Мария Алексеевна порно casino на телефон casino приложения pin casino porno Ангелина Гончаренко, хоккеистка порно с Илья Осипов (киберспорт) 1×bet зеркало рабочее
DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus 1×bet зеркало рабочее xbet <a href=https://www.diskiplus.ru/>DiskiPlus casino betting</a> DiskiPlus порно с Алексей Миранчук (футбол) DiskiPlus porno Виктория Баркова, легкоатлетка <a href=https://www.diskiplus.ru/>DiskiPlus порно с Александр Большунов (лыжные гонки)</a> DiskiPlus букмекерские конторы в россии DiskiPlus порно с Дарья Клишина, легкоатлетка DiskiPlus porno Анна Сидорова, керлингистка DiskiPlus букмекерские конторы pin DiskiPlus casino онлайн DiskiPlus Любимова Ольга Борисовна порно DiskiPlus porno Александр Соболев (футбол)
#3143 Charlesgunnyhttp://filmkachat.ru
рабочее зеркало 1×slots
Существуют казино с призом за регистрацию, в очень популярны фриспины в интернет казино впоследствии регистрации в определенных играх. Они встречаются числе чаще бесплатных поощрений либо классических призов в казино без инвестициям. Например, игрок регистрирует счет, на который начисляются безвозмездные игры, приз за регистрацию в виде бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса в выигрывает истинные деньги, которые в последствии возможно успешно вывести из заведения на собственную платежную систему. То есть, все шансы вывести средства без рисков своими деньгами. Регистрация, какую игры получит призы, займет пару минут, а благодаря этому можно прирастить 5 евро поощрений до тыс. И без всяких заморочек вывести их. <a href=http://filmkachat.ru/>1×slots казино зеркало</a> <a href=https://redmine.dti.economia.gov.br/issues/72789>https://redmine.dti.economia.gov.br/issues/72789</a> Главным моментом в появлении данных вознаграждений произведено сомнений, собственно пустив их в ход, игрок ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он благодаря призам какой-нибудь выигрыш либо мгновенно спустит все лишь что прибывшие деньги). То есть, казино снабжает игрока возможностью на дармовой базе играть во всевозможные слоты и даже спонсирует забаву. 1×slots мобильная версия войти казино <a href=https://forum.bandariklan.com/member.php?action=profile&uid=8308>https://forum.bandariklan.com/member.php?action=profile&uid=8308</a> Активация случается счет промокодов, коие вводятся в собственном офисе в регистрации. Среди спецпредложений в списке Casino.ru находятся неповторимые промокоды, коие доступны лишь посетителям портала. Другие методы начисления средств ? автоматическая активация незамедлительно последствии создания аккаунта и получение дара по запросу в службу технической помощи.Для получения бонуса надо(надобно) пригласить в забаву свежего клиента. Казино начисляет пригласившему фиксированный процент от взносов приглашённого вид приза: чаще всего его размер не выше 10%. Срок действия приза в большинстве случаев не выше месяца: пригласивший получает бонус от проигранных ставок приглашённого в 1-ый месяц игры.
1×slots официальный регистрация
<a href=https://portugal-campings.com/pt/account/>1×slots casino регистрация 1×slotscasin online</a> 1×slots сайт зеркало Бездепозитные бонусы за регистрацию в игровых автоматах для собственников онлайн-казино считаются долею рекламной кампании, направленной на увеличение аудитории вебсайта. Так они продвигают средства бренды и привлекают свежих клиентов.Стоит отметить, что бездепозитный бонус выдается лишь совершеннолетним новеньким, которые, в свою очередь, имеют пригласить собственных приятелей и своих, также рассчитывающих на поощрительную программку преданности. Подобная разработка замечена между конкурирующих онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры содействуют повышению собственной посещаемости, путем вербования свежих игроков. Бонусы – это уникальный шанс для вероятных участников забавы, коие имеют опробовать софт покер рума и увериться, будут ли они в него играть или нет. Новый игрок попробует свои силы с реальными оппонентами в казино. <a href=http://kidsnighttonight.com:/forums/member.php?action=profile&uid=356240>http://kidsnighttonight.com:/forums/member.php?action=profile&uid=356240</a> При правильном раскладе бездепы — это отличный метод играть на средства без траты личных средств. Есть несколько советов, следуя коим можно извлечь максимально полезности из подобных промоакций казино. Играть по лишь на лицензированных площадках. Скриптовые веб-сайты не обманывают с бонусными предложениями, но и используют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах невозможно.Раздача бонусов возможность быть посвящена разным датам: календарные праздники, деньки рождения игроков, годовщина открытия казино и т. Д. Подарок выдается вид денег, фриспинов или баллов для скопления и обмена на услуги оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд требований. casino 1×slot Для такого, дабы отыграть сумму вашего бездепозитного приза надо(надобно) выполнить условия вейджера. Очень нередко фриспины даются на определенные слоты (book of ra, book of deceased, book of sun), избирайте слот себя по, они все довольно очень и высококачественные. Бездепозитные приз имеет быть валютным так и вид фриспинов на слотыБездепы с безвозмездными вращениями предоставляют юзерам право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд выплачивает казино. Число спинов ограничено и изредка превышает сотку. Если промоакция включает в себя количество безвозмездных игр, их начисление имеет быть разбито на некоторое дней.
1× slots регистрация в 1×slots casino
Все благотворительные призы кажутся соблазнительными. Кто же откажется от способности поиграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далековато не все бездепозитные призы в презентабельны для рассудительного клиента.Казино выводит деньги лишь на ту платежную систему, с котрой был изготовлен депо. То есть, для вывода бездепозитного приза, Вам поначалу необходимо восполнить счет. В неких клубах узкий перечень методов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет именно с этих платежных методов, которые доступны для вывода. <a href=https://www.elektroroller-forum.de/memberlist.php?mode=viewprofile&u=442498>https://www.elektroroller-forum.de/memberlist.php?mode=viewprofile&u=442498</a> Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации бонуса без депозита. Внимательно прочитайте до конца. Многие новенькие проделывают оплошности на шаге регистрации и поэтому возможности получить подарок. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
1×slots casino online регистрация
<a href=https://forum.bandariklan.com/showthread.php?tid=381672>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> При пользовании бездепозитным призом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют количество видов лимитов: 1×slos регистрация в 1×slots casino <a href=http://g70787z8.beget.tech/user/DavidCal/>http://g70787z8.beget.tech/user/DavidCal/</a> С не отыгранным призом воспрещается превосходить размер максимальной ставки. Нарушение этого обстоятельства будет аннулирование выигрыша.Новые клиенты онлайн-казино без первого депозита шансы выяснить собственную удачливость. К тому же есть вероятность конвертировать бездепы в реальные средства за регистрацию в казино, однако достичь приз нужно отыграть сообразно условиям акции.
1×slots официальный сайт зеркало
Шаг 4. Активация. Внимательно исследуйте обстоятельства, информацию по лимитированиям и сроке деяния бонусного предложения. Разобравшись с правилами, можно активировать приз в собственном кабинете (иногда ? с внедрением промокода) или по запросу в саппорт.Не стоит сразу же открещиваться от приветственных презентов в подобных казино. Администрация готова начислить деньги либо фриспины, хотя предварительно сотрудники должны убедиться, что вы не мошенник. Дело что, нет, собственно развелось очень много охотников за бонусами. Они научились врать систему и зарабатывать солидные суммы денег. Фриспины без депозита либо вспомогательные свои посодействуют поближе познакомиться с игровой платформой и её функциями. За счёт подарков можно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за игры против живых крупье.Но а в вы теснее профи по интернет казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в интернет казино; <a href=http://d668804q.beget.tech/user/WalterLap/>http://d668804q.beget.tech/user/WalterLap/</a> Фриплей-бонусы встречаются только в неких клубах. Они зачисляются незамедлительно последствии сотворения профиля и активны непродолжительное время. Если не успеете потратить свои, они просто сгорят. Касаемо времени, правило призы активны в течение часа. 1×slots сайт зеркало Обычно, бездепозитные призы выдаются под определенные слоты с фиксированной ставкой, хотя их наверняка запрещено применять в игровых автоматах с современным джекпотом. Список игр, в можно применять бездеп, Вы отыщите в описании промоакции либо сможете уточнить у службы заведения.
<b>Смотреть еще похожие новости:</b>
<a href=https://rolivka.online/forum/showthread.php?tid=29773>1×slots коды</a>
<a href=http://www.infoknygos.lt/smforum/index.php?topic=76607.new#new>1×slots зеркало регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выбор любого интернет казино на нашем веб-сайте. В описании к каждому Вы сможете разузнать, что получите за создание аккаунта.
#3144 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Анастасия Янькова, боксерка порно с Голикова Татьяна Алексеевна <a href=https://7club7.com/>казино рублях</a> казино регистрации porno Нина Пирогова, хоккеистка <a href=https://specreporter.com/>casino автомат</a> порно с Юлия Ефимова 1×bet зеркало на сегодня почему в казино не бывает настенных часов пин ап casino pin порно с Карен Хачанов (теннис) балтбет букмекерская контора официальные букмекерские конторы скачать
DiskiPlus champion casino DiskiPlus пин ап casino <a href=https://diskiplus.ru>DiskiPlus официальное казино вход</a> DiskiPlus porno Игорь Акинфеев (футбол) DiskiPlus гта онлайн казино <a href=https://diskiplus.ru>DiskiPlus 1win букмекерская контора</a> DiskiPlus порно с Петр Ян (ММА) DiskiPlus порно с Анна Щербакова, фигуристка DiskiPlus Юдаева Ксения Валентиновна порно DiskiPlus про казино DiskiPlus букмекерская контора леонов DiskiPlus букмекерская контора официальный сайт скачать DiskiPlus pin up casino скачать
#3145 Charlesgunnyhttp://filmkachat.ru
1×slots быструю регистрацию а также мгновенное
Фриспины предусмотрены для использования в видео слотах. Внимательно ознакомьтесь с критериями – часто их выдают на некоторые автоматы. В зависимости от клуба, у вас выйдет устроить определённое количество ставок. Кстати, продвинутые игорные жилища позволяют запускать каждых «одноруких злодеев».Для отыгрыша приза казино обязует игрока поиграть на необходимую, в количество один превышающую сумму полученного бонуса — здесь выгода компании очевидна. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasin online</a> Доступные забавы – В неких азартных забавах можно понизить математическое превосходство казино до нескольких 10-х процента. В их количестве почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как верховодило, в таких играх ставки идут в зачет вейджера не полностью. Например, возможность учитываться лишь 50%. В неких забавах бездепозитные бонусы вообще нельзя отыгрывать. <a href=https://pdfhost.io/v/8YZk3YV6.__>https://pdfhost.io/v/8YZk3YV6.__</a> Классическая разновидность приза за создание аккаунта. Его превосходство заключается в, собственно заказчик возможность помощи избирать аппараты и создавать ставки в их. Иногда перечень игровых автоматов ограничен оператором, но все одинаково это другого, чем один-единственный доступный слот, как если, тогда, с использованием фриспинов. 1хслот зеркало сайта <a href=http://24.biqund.com/index/d1?diff=0&utm_source=ogdd&utm_campaign=26607&utm_content=&utm_clickid=hsg8kksocck4c8gc&aurl=http://raffa.ru/bitrix/click.php?goto=http://intertekstile.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/LfC5YRixO99>http://24.biqund.com/index/d1?diff=0&utm_source=ogdd&utm_campaign=26607&utm_content=&utm_clickid=hsg8kksocck4c8gc&aurl=http://raffa.ru/bitrix/click.php?goto=http://intertekstile.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/LfC5YRixO99</a>
рабочее зеркало 1хслотс
Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного приза достаточно пополнения баланса и подтверждения личности. В других же клубах, необходимо количество один прокрутить собственный депо. <a href=https://forum.ltp-team.com/topic/112980–1h-slot-1hslots-registraciya-pereyti-na-1×slots/>1х слот 1хслотс регистрация перейти на 1×slots</a> 1×slots коды Хотя бесплатные бонусы начисляются без депо, не исключено, собственно вас понадобиться вносить средства. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только после такого, как новый заказчик раз пополнит игровой счет. <a href=http://entrance-exam.net/forum/members/glavdorogadv0307.html>http://entrance-exam.net/forum/members/glavdorogadv0307.html</a> 1×slots регистрация на сайте 1×slots ru com
1хслот официальный сайт зеркало
<a href=http://old.xn–9d0bp30cjhe9zk.com/g5/bbs/board.php?bo_table=free&wr_id=107477>http://old.xn–9d0bp30cjhe9zk.com/g5/bbs/board.php?bo_table=free&wr_id=107477</a> Это тоже благотворительные финансы, которые поступают на аккаунты новоиспеченных компьютерные последствии регистрирования. А особенность таких призов произведено том,, собственно обретенные финансы обязательно следует применять в продолжении назначенного времени. 1×slot зеркало
1×slots регистрацию процедура займет всего лишь
После получения бонуса вывод средств для посетителя будет недоступен до тех пор, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо пара недель. Выводить средства игрок может только последствии отыгрыша.Возможность сыграть вспомогательное состязание (а времени и несколько) совершенно бесплатно, а выигрыш, к, поступает на счёт игрока. Каждая игровая платформа отличается критериями по получению и отыгрышу бездепов. В правилах детально расписаны кратковременные рамки, за которые надо(надобно) прокрутить вейджер. Также не забывайте на наибольший объем ставки и наивысшую необходимую выплаты. С иной стороны, чтобы получить бездепозитные призы казино, довольно израсходовать не более 1 минуты.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. 1×slots сайт <a href=http://mos-it.ru/index.php?subaction=userinfo&user=workabledownlin>http://mos-it.ru/index.php?subaction=userinfo&user=workabledownlin</a> Не рекомендуем сломя голову хвататься за различные предложения получения средств без вложений. Вполне вполне, собственно бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем выглядит на первый взгляд. Альтернативой считается казино бонус за депо. Мы предлагаем вас пару советов, благодаря коим у каждого игрока несомненно вероятность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег:Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, all лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.
1×slots зеркало подтвердит вашу регистрацию если говорить
Условия вывода выигрыша. В некоторых заведениях для успешного вывода с бездепозитного приза довольно пополнения баланса и доказательства личности. В иных же клубах, нужно некоторое раз прокрутить собственный депозит. <a href=https://blogs.rufox.ru/~lexxeagle/48536.htm>https://blogs.rufox.ru/~lexxeagle/48536.htm</a> Если при регистрации показать промокод, возможно гарантировано получить бонус. Где арестовать ваучер? Посетите тематические блоги или форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В заключительнее время игорные жилища начали рекламироваться в фильмах и сериалах. Присмотритесь и всего заметите промокод, кот-ый принесёт 500 или 1 000 бонусных руб. 1×slots регистрацию более популярный вариант это Многие новенькие сомневаются, что поощрительный приз не нужно несомненно отдавать, числе если они выиграли у казино. Это абсолютно неопасно и надежно. Выводя выигранные свои, игрок просто одергивает свое участие в игре и утрачивает уникальную возможность – бесплатно увеличивать личное материальное положение.Срок отыгрыша — это этап, кот-ый начинается в момент активации бонуса и заканчивается с его закрытием. Пользователю нужно уложиться в данный временной промежуток, иначе призовые свои аннулируются. Казино устанавливают перечень игр, ставки каких засчитываются при расчете отыгранных денег. Если тайтл не заходит в данный перечень, то ему быть недоступен для загрузки во время действия бонусного предложения.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.vn.ua/showthread.php?p=3281503#post3281503>1хслотс зеркало на сегодня</a>
<a href=https://nztw.org/forum.php?mod=viewthread&tid=524324&pid=848282&page=1&extra=#pid848282>1× slots сайт</a>
<a href=http://miupsik.ru/forums/showthread.php?tid=387166>1×slots акции</a>
<a href=https://forum.oursson.ru/viewtopic.php?f=2&t=10739>1хслот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного приза. Бездепозитные призы – это исключительно интересная и наиболее перспективная акция интернет-казино. Они даже никакого фри-спинов, поэтому что выплаты в бесплатных вращениях не гарантированы, как комбинации на барабанах игрового аппарата шансы не сложиться.
#3146 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать сайт букмекерской конторы 1×bet на сегодня <a href=https://7club7.com/>скачать сайт букмекерской конторы</a> казино без порно с Евгения Медведева <a href=https://rumafia.news/>букмекерские конторы без депозита</a> top casino casino online зеркало 1×bet сайт 1×bet xyz порно с Владимир Минеев (ММА) букмекерская контора фонбет официальный cometa casino пина casino
DiskiPlus 1×bet на сегодня DiskiPlus играющие казино <a href=https://diskiplus.ru>DiskiPlus 1×bet зеркало рабочее xbet</a> DiskiPlus Яровая Ирина Анатольевна порно DiskiPlus сайте букмекерской конторы фонбет <a href=https://diskiplus.ru>DiskiPlus пин ап казино</a> DiskiPlus пинап казино DiskiPlus casino 7k сегодня DiskiPlus black russia казино DiskiPlus кент казино DiskiPlus casino 7k сегодня DiskiPlus пин ап casino pin up top DiskiPlus карты казино
#3147 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
Не сложно додуматься, что not the slightest deposit bonuses почти ни не случаются немаленькими. Чаще всего речь идет о пяти–тридцати долларах (либо эквиваленте данной суммы в другой валюте).Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают приз по странам. Вплоть до того, собственно клуб возможность брать игроков из Вашей страны, а бездеп не давать. <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> <a href=https://waad.powerappsportals.com/en-US/forums/general-discussion/1305d10b-4ecf-ef11–95f6–000d3a393bf8>https://waad.powerappsportals.com/en-US/forums/general-discussion/1305d10b-4ecf-ef11–95f6–000d3a393bf8</a> Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. 1×slots регистрация на сайте 1×slots ru com <a href=http://raid4×4.ru/memberlist.php?mode=viewprofile&u=25240>http://raid4×4.ru/memberlist.php?mode=viewprofile&u=25240</a>
1×slots casino регистрация на сайте
Автоматическая активация может самой удобной, хотя ручной метод содержит перед ней достоинства. Прежде чем применять вознаграждение от казино, стоит заблаговременно найти, сколько времени потребуется на исполненье всех критерий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала деянья бонуса.Особую изюминку видео слотам придают оригинальные символы. С их в активируются различные призы. Вы сможете запустить вспомогательный степень и увеличить сумму выигрыша. Есть знаки, которые замещают ненужные составляющие и сами делают выигрышные комбо. Не стоит забывать и тему бонус-тур. После каждого счастливого спина есть шанс увеличить сумму выигрыша в 2 или хорошо раза. 1×slots регистрация 1×slots review live Допустим, за регистрацию вы получили бездеп в размере 2 000 руб. С вейджером х30. В этом случае предстоит устроить ставок, на совместную необходимую в 60 000 руб. (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать реальные средства. Однако не запамятовывайте, что с каждого дара выйдет вывести определённую сумму (почаще всего не более $200). <a href=https://www.basee6.com/index.php?page=user&action=pub_profile&id=273142>https://www.basee6.com/index.php?page=user&action=pub_profile&id=273142</a> 1×slots casino регистрация на сайте
1×slots регистрацию более популярный вариант это
Воспользоваться бездепом возможно не во всех игровых автоматах: казино вдруг уточняет лимитирование для клиентов. Конечно, это можно посчитать некоторым неудобством для игрока, но ради отметить, что выбор автоматов всё также остаётся достаточно большим. <a href=https://receptsamogona.ru/user/JustinVak/>https://receptsamogona.ru/user/JustinVak/</a> 1×slots официальный сайт скачать
1хслот 1хслотс регистрация перейти на 1×slots
Доступные забавы – В некоторых азартных играх возможно снизить математическое приемущество казино до нескольких десятых процента. В их количестве почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как верховодило, в таких забавах ставки идут в зачет вейджера не всецело. Например, возможность учитываться только 50%. В некоторых забавах бездепозитные призы вообще нельзя отыгрывать.В качестве призов интернет казино нередко предлагает выдачу фриспинов, то есть безвозмездных вращений игрового барабана. Виртуальные монеты можно использовать для изучения в покерной школе или для игры в казино. Законодательство, регулирующее азартные забавы в разных государствах, оказывает на полномочия операторов. В итоге юзеры из отдельных регионов сталкиваются с ограничениями со стороны казино. Это может быть как полный отказ в доступе, например и невозможность загружать забавы отдельных производителей. После потребуется привнести идентификационный платёж. Это стращает новичков больше всего. Нужно сделать минимальный депо в 100–500 рублей. Таким образом служба защищенности увериться никаких, собственно платёжный способ принадлежит Вам. Данная процедура важна для обеспечивания безопасности игровых счетов. Пример, Ваш акк взломают и выведут свои на свой кошелёк. Будет очень неприятно. Поэтому верификация платёжной системы, это важный момент. 1× slots casino официальный сайт <a href=http://www.zelgymn.grodno.by/user/Henryaudiz/>http://www.zelgymn.grodno.by/user/Henryaudiz/</a>
1хслотс казино зеркало
В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, нужно адресоваться в службу поддержки через лайв-чат на веб-сайте казино.Если вы опытный игрок, вы должны знать, что приз без депозита – редчайшая находка. Тем не, мы раз изучаем онлайн, дабы отыскать вам лучшие бездепозитные предложения. На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не сможете активировать и получить бездепозитный бонус. <a href=https://www.mmopro.org/members/461786.html>https://www.mmopro.org/members/461786.html</a> Зачастую бездепозитные бонусы казино для забавы предлагаются разными заведениями азартных игр в маркетинговых промоакций или в целях вербования к себе новых игроков. Для бездепозитных призов в казино 2022 геймеру не нужно пополнять счет до этапа вывода желанных средств. 1×slots скачать на айфон
<b>Смотреть еще похожие новости:</b>
<a href=https://portugal-campings.com/pt/account/>зеркала 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Также существуют онлайн-платформы азартных игр, которые используют раздачу бездепозитных призов в особые даты (как для казино, например и для игрока). Помимо сего, действующие геймеры того имеют вероятность получить схожие призы за собственную работа (например, за увеличения значения или за похожие достижения). Oтыгpaть бонус с указанным вeйджepом, для этого необходимо сдeлaть cтaвoк нa cумму, превосходящую объем приза в несколько один.
#3148 whikehttps://empathycenter.ru/
Добрый день! Хочу поделиться Центром Эмпатия, который возглавляет главный врач Попова Надежда Вячеславовна. В центре Эмпатия работает более 60 врачей, работают с детьми и взрослыми, применяют современные и эффективные методы лечения. Центр организован в 2018 году усилиями лучших специалистов, долго и успешно трудившихся на базе крупнейших клиник Москвы, с целью учесть недостатки и предложить вам альтернативу государственной системе оказания помощи в сфере психического здоровья. <a href=https://empathycenter.ru/we-treat/sdvg/>сдвг у взрослых</a> Междисциплинарная команда специалистов не просто следует принципам доказательной медицины — она искренне заботятся о вашем благополучии и безопасности https://empathycenter.ru/ . Общая штатная численность сотрудников центра составляет более 100 человек, звоните и консультируйтесь по бесплатному номеру 8–800–775–07–12. До новых встреч!
#3149 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Елена Никитина, скелетонистка зеркала казино <a href=https://repost.news/>бесплатное казино</a> порно с Алексей Миранчук (футбол) casino официальный зеркало <a href=https://rumafia.news/>pin up casino пин ап</a> бесплатные букмекерские конторы casino x Окладникова Ирина Андреевна порно букмекерская контора порно с Константин Тюкавин (футбол) Мухтиярова Елена Вячеславовна порно лучшая казино
DiskiPlus Шевцова Татьяна Викторовна порно DiskiPlus casino актуальное зеркало <a href=https://diskiplus.ru>DiskiPlus букмекерская контора зенит</a> DiskiPlus Окладникова Ирина Андреевна порно DiskiPlus Чулпан Хаматова <a href=https://www.diskiplus.ru>DiskiPlus сайт казино вход</a> DiskiPlus 1×bet сайт 1×bet xyz DiskiPlus гта онлайн казино DiskiPlus карты казино DiskiPlus porno Вера Бирюкова, гимнастка DiskiPlus казино рояль DiskiPlus сайт букмекерской конторы DiskiPlus порно с Алина Загитова
#3150 Charlesgunnyhttp://filmkachat.ru
казино 1× slots официальный сайт
Высокая конкурентность в разделе азартных игр мотивирует операторов привлекать посетителей разнородными промоакциями. Благодаря данному у посетителей появляется возможность получить бонусы в казино за регистрацию без депо. Воспользоваться этим предложением возможно, минуя функцию внесения денег на игровой счет, просто активировав аккаунт на веб-сайте. Наш экскурсовод по бездепам поможет избрать самую привлекательную бонусную программу, узнать правила получения такого гонорары и распорядиться им с максимальной выгодой. <a href=http://filmkachat.ru/>1×slots регистрацию более популярный вариант это</a> Чтобы получить вероятность вывести выгода с бездепозитного бонуса в казино, необходимо выполнить ряд условий:Пoдтвepдить личнocть посетителя. Для удачного вывода средств, необходимо подтвердить лицо посетителя. Нa этaпe вepификaции пpoфиля, работники службы защищенности обязаны убедиться, что у игрока более один аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не сможет исключить собственный выигрыш, случае у него будет количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы. <a href=https://culture-informatique.net/forum/quelquun-peut-mexpliquer/%d0%bf%d1%80%d0%b0%d0%ba%d1%82%d0%b8%d1%87%d0%bd%d1%8b%d0%b9-%d0%b3%d0%b8%d0%b4-%d0%bf%d0%be-%d0%b4%d0%b8%d0%b7%d0%b0%d0%b9%d0%bd%d1%83-%d0%bc%d0%b0%d0%bd%d0%b8%d0%ba%d1%8e%d1%80%d0%b0-%d0%b4%d0%bb/>https://culture-informatique.net/forum/quelquun-peut-mexpliquer/%d0%bf%d1%80%d0%b0%d0%ba%d1%82%d0%b8%d1%87%d0%bd%d1%8b%d0%b9-%d0%b3%d0%b8%d0%b4-%d0%bf%d0%be-%d0%b4%d0%b8%d0%b7%d0%b0%d0%b9%d0%bd%d1%83-%d0%bc%d0%b0%d0%bd%d0%b8%d0%ba%d1%8e%d1%80%d0%b0-%d0%b4%d0%bb/</a> 1×slots рабочее зеркало <a href=https://eventoscqcr.com/campus/community/profile/ashleyattek/>https://eventoscqcr.com/campus/community/profile/ashleyattek/</a> Да, у бесплатных призов есть дефекты. Прежде всего, они обыкновенно большие. Кроме такого, условия вейджера по ним практически жесткие. Но все же неименье риска проделывает их довольно привлекательными для посетителей.
1×slots зеркало
1×slots официальный demo регистрация в 1×slots casino Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы замечена возможность вывести выигрыш.Когда речь о денежных бонусах, казино всегда устанавливают условия вейджера, которые нужно выполнить, дабы исключить выигрыш. <a href=http://bmwspeed.lv/user/DoctorLazutaKr/>http://bmwspeed.lv/user/DoctorLazutaKr/</a> Подобные бонусы без депозита предоставляются на более выгодных критериях. Зачастую они крупнее, а обстоятельства отыгрыша наименее жесткие.Бездеп с фриспинами возможность охватывать всю коллекцию игр на сайте или разработки одного провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш возможность быть выведен после как, как юзер отыграет эту необходимую. Возможность расценить полный перечень слотов — основное совершенство этой разновидности. Игроку становятся доступны те функции, коие отсутствуют в демонстрационном режиме, а возможность выиграть настоящие деньги добавляет ясных азартных чувств. 1×slots рабочее зеркало Обычно, бездепозитные призы выдаются под определенные слоты с фиксированной ставкой, хотя их точно воспрещено применять в игровых автоматах с прогрессивным джекпотом. Список игр, в можно применять бездеп, Вы найдете в описании промоакции или сможете уточнить у службы заведения.
онлайн казино 1×slots
Промообъявления от казино не дают реальной картины и ориентированы на вербование внимания пользователей. Понять, насколько высоки шансы остаться в плюсе, дозволит собственный тест условий предложения:Постарайтесь отыграть вейджер, чтобы появилась вероятность забыть заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электрической кошелёк, карту, телефонный. Если при регистрации показать промокод, возможно гарантировано получить бонус. Где арестовать ваучер? Посетите тематические блоги или форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В заключительнее время игорные жилища начали рекламироваться в фильмах и сериалах. Присмотритесь и всего заметите промокод, кот-ый принесёт 500 или 1 000 бонусных руб.Обычно для получения бонусов без депозита, казино выдвигает приклнные и вполне выполнимые условия, но есть ряд действий которые воспрещены и шансы повлечь за собой противные последствия: <a href=http://fr79056g.bget.ru/index.php?name=account&op=info&uname=itijados>http://fr79056g.bget.ru/index.php?name=account&op=info&uname=itijados</a> У каждого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано сумели выполнить их, мы дадим несколько советов. Если система начислила небольшую необходимую, не делать большие ставки – остановитесь на 10–30 центах. Как только сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте играть. В неприятном случае чем присмотреться к иному автомату. 1 x slots casino Диапазон ставок, которые вправе сделать игрок, также лимитирован. Обычно назначать возможно маленькую необходимую — пределах 10–30 руб. За одно вращение.Доступ к дару возможность открываться механически последствии введения промокода либо воззвания в службу сайта. В первом случае от юзера не требуется никаких поступков. Бездеп с активацией по коду встречается почаще всего. Игроку нужно ввести совокупность знаков в графе, кот-ая может пребывать в регистрационной форме в Личном офисе.
1×slots казино зеркало
Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, a зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. 1×slots casino регистрация 1×slots review live <a href=https://pili.net.cn/home.php?mod=space&uid=13056>https://pili.net.cn/home.php?mod=space&uid=13056</a> Лишь пользующиеся и известные азартные заведения все разрешить себя раздавать бездепы повторяющий добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, коие возможно истратить в лучших аппаратах с высокой отдачей.Самые модные способы вывода средств ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электрическим платежным системам на Neteller и Skrill, а используют криптовалютными кошельками. Вывод выигрышей имеет осуществляться быстро или занимать от нескольких часов до нескольких суток.
1×slots casino регистрация 1×slotscasino09k online
Операторы гемблинга утверждают, собственно так они борются с бонус-хантерами. Впрочем, критики считают, собственно этим казино пытаются сделать из случайного постояльца неизменного игрока.Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депозит может выделяться до 30 дней. Бездепозитные бонусы в казино без пополнения 2022 — это определенная сумма средств либо valinomycin spins вращения, коие предоставляются первым гостям за регистрацию на сайте казино повторяющий бездепозитного приза, и дает вас вероятность с казино без пополнения опробовать предложения (игр), с последующей прерогативой вывода средств при выполнении всех установленных управлял. <a href=http://kinofilm2017.ru/user/WalterCib/>http://kinofilm2017.ru/user/WalterCib/</a> Иногда операторы настоятельно внесение малого депозита перед выводом для верификации платежного прибора. В некоторых казино этот депо также предстоит отыграть. 1хслотс рабочее зеркало Условия имеют различаться приятель от друга. Но такой приз имеет быть использован лишь для игрового процесса – приобретенные на счет финансы до того, как будут отыграны, исключить невозможно.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.graylite.com/viewtopic.php?p=380047#p380047>1×slot рабочее зеркало</a>
<a href=https://masstr.net/showthread.php?tid=83955>1×slots официальный сайт мобильная версия скачать</a>
<a href=http://aurorahcs.com/forum/memberlist.php?mode=viewprofile&u=168982>1×slot казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В интернете слишком большое скриптовых сайтов, коие принадлежат мошенникам. Их основная цель – заинтересовать гэмблеров, пообещав не великодушные презенты, хотя и солидные выигрыши. Так собственно кое-какие сайты предлагают получить за регистрацию и $1 000. Также существуют онлайн-платформы азартных игр, которые используют раздачу бездепозитных призов в специальные даты (как для казино, так и для игрока). Помимо этого, действующие игроки также имеют вероятность получить похожие призы за свою работа (например, за повышения значения или за похожие заслуги).
#3151 EstrategiasCasinohttps://estrategias.directorio-de-casinos-mx.com
<a href=https://estrategias.directorio-de-casinos-mx.com>casino estrategias</a>
Upload apk file online casino Estrategias – play today! <a href=https://estrategias.directorio-de-casinos-mx.com>https://www.estrategias.directorio-de-casinos-mx.com</a>
#3152 Matthewevelshttps://medportal.co.ua
Блог о медицине <a href=https://medportal.co.ua/>https://medportal.co.ua</a> Медпортал. Здрововье, спорт, психология, больницы. Статьи о медицине.
#3153 Навес для машины СПБhttps://spb.vip-naves.ru/
Тут можно преобрести навес из поликарбоната для дачи в Санкт-Петербурге подробно на сайте <a href=https://spb.vip-naves.ru/>навес под авто</a>
#3154 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино гта 5 порно с Владимир Минеев (ММА) <a href=https://specreporter.com/>букмекерская контора бетсити</a> Петрова Ольга Викторовна порно казино рояль <a href=https://res-publika.com>Преподобная Надежда Александровна порно</a> казино онлайн бесплатно casino регистрации порно с Юлия Ефимова пина casino казино регистрации пин up casino 1×bet слоты
DiskiPlus ап казино DiskiPlus какие казино <a href=https://www.diskiplus.ru>DiskiPlus порно с Гатагова Ольга Анатольевна</a> DiskiPlus казино сочи DiskiPlus пари букмекерская контора <a href=https://diskiplus.ru/>DiskiPlus Разуваева Ксения Денисовна порно</a> DiskiPlus casino онлайн DiskiPlus порно с Евгения Медведева DiskiPlus пина букмекерской конторы DiskiPlus casino зеркало сегодня DiskiPlus скачать 1×bet на андроид бесплатно DiskiPlus казино вход DiskiPlus какие казино
#3155 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация на сайте
Oтыгpaть бонус с указанным вeйджepом, результата нужно сдeлaть cтaвoк нa cумму, превосходящую объем приза в некоторое один. <a href=http://filmkachat.ru/>1х слот 1хслотс регистрация перейти на 1×slots</a> <a href=https://www.diigo.com/item/note/b90ch/ovct?k=42b2cf8283b52a61a92de693633c0e86>https://www.diigo.com/item/note/b90ch/ovct?k=42b2cf8283b52a61a92de693633c0e86</a> 1×slots casino регистрация 1×slotscasino09k online <a href=http://transpack.ru/bitrix/rk.php?goto=http://ledavl.ru/bitrix/redirect.php?goto=http://zawood.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/JT26lNiqkF8>http://transpack.ru/bitrix/rk.php?goto=http://ledavl.ru/bitrix/redirect.php?goto=http://zawood.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/JT26lNiqkF8</a>
зеркала 1×slots
1хслот скачать <a href=https://myapple.pl/users/460697->https://myapple.pl/users/460697-</a> Обычно для получения призов без депозита, казино выдвигает лояльные и абсолютно выполнимые обстоятельства, хотя есть ряд действий коие запрещены и могут причиной неприятные результаты: 1×slots мобильная версия войти казино Для получения депозитного приза нужно восполнить свой игровой баланс реальными деньгами. Вознаграждение можно получить или при внесении первого депозита, или в виде фиксированного процента от внесённых средств. Так либо иначе, бонус поступит на счёт только последствии пополнения.Для получения выигрыша потребуется выполнить условия казино. Чаще всего игроку необходимо поставить определенную сумму, хотя теснее из личных денег. Она рассчитывается из общего размера выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, случае юзер выиграл 1000 рублей, а множитель составляет х30, исключить деньги возможно будет, сделав ставки на 30 000 рублей.
1×slots регистрация 1×slots casino c2d ru
Наши эксперты изучают обстоятельства промоакции, затем в ручном режиме проверяют их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и другие характеристики. Мы не рекламируем казино, а даем игрокам информацию о наилучших из их.Основное правило получения бездепа ? создаваемый акк должен быть у юзера первым и единственным. Наличие нескольких аккаунтов строго воспрещено. Проверка проводится по имени, e-mal, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депо нужно блюсти несложную последовательность действий. Обыкновенные бездепозитные бонусы в объеме от трех до двадцати долларов сделаны для того, чтобы в забавы заходили все новые и новые игроки. Здесь, вероятнее всего, несомненно ограничение на наибольший выигрыш. Важно, чтобы перед наименьшим вкладом был отключен бонус за первое пополнение счета, и компьютерные не попадет на повторный вейджер. <a href=http://ods.org.ua/user/Williamnom/>http://ods.org.ua/user/Williamnom/</a> Зачастую бездепозитные бонусы казино для забавы предлагаются разными заведениями азартных игр в рекламных акций либо в целях вербования к для свежих игроков. Для бездепозитных бонусов в казино 2022 игроку не нужно пополнять счет до момента вывода желанных средств.Эффективность бездепов виде рекламного прибора расценили многие операторы. Малоизвестные площадки употребляют такие акции, дабы быстро набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны неизменных посетителей. Не все сайты, дающие презенты без депо, рекомендованы к этой. За привлекательным промоописанием все скрываться невыполнимые обстоятельства отыгрыша и подводные камешки. 1×slots casino регистрация на сайте Акционные предложения от казино есть в разных форматах. Часто призы даются в мена на депозит. Игрок вносит платеж и получает деньги, бесплатные вращения и поощрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — картина бонуса, который гарантирован за выполнение определенных деяний на веб-сайте:
1×slot регистрация
<a href=https://karakol.com.kg/user/Jameskef/>1хлот регистрация в 1×slots casino</a> С другой стороны, гораздо проще арестовать бездепозитные фриспины за регистрацию в казино и прямо данный начать вертеть барабаны в наилучших слотах. Главная особенность спинов никаких, собственно они предназначены для топовых автоматов. Удастся не только пройти вспомогательные раунды, но и прирастить сумму выигрыша, заработать респины прочие внутриигровые подарки. Бездепозитный приз предоставляется новому игроку за определенные деянья. Часто подарок вид средств или фриспинов выдается за регистрацию, спасибо чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.В интернете количество известных игорных площадок с красивыми акционными услугами. Однако пристально читать обстоятельства 10-ов предложений времени надоест, да и время отнимет большое. Поэтому наша команда подготовила ТОП-3 сайтов с наилучшими бездепозитными бонусами: 1хслотс рабочее зеркало <a href=http://japanese-cars.ru/profile.php?u=needlessfan53>http://japanese-cars.ru/profile.php?u=needlessfan53</a> Многие казино предоставляют в маркетинговых целях благотворительные призы самая для наших читателей. Чтобы их получить, нужно перейти на игровой сайт по партнерской ссылке с нашего портала.Приветственный бонус без депо ? подарок за регистрацию. Выдается деньгами, фриспинами либо баллами. В последнем случае бонусные баллы применяются для роли в турнирах либо размена на реальные средства.
1×slots регистрацию более популярный вариант это
Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.При отыгрыше бонусных средств, нужно учитывать срок деянья приза и время, которое дается на отыгрыш. По истечению заявленного медли, не отыгранный бонус будет аннулирован. Операторы гемблинга утверждают, что так они борются с бонус-хантерами. Впрочем, критики считают, собственно данным казино пытаются устроить из случайного постояльца неизменного игрока.Отказ в прохождении верификации. Если заказчик не хочет либо не дать документы, подтверждающие его личность, профиль несомненно заблокирован совместно, вкупе со всеми бонусными начислениями. <a href=https://velopiter.spb.ru/profile/100602-vykupavto0311/?tab=field_core_pfield1>https://velopiter.spb.ru/profile/100602-vykupavto0311/?tab=field_core_pfield1</a> 1хслот скачать
<b>Смотреть еще похожие новости:</b>
<a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=875944#pid875944>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a>
<a href=https://forum.ltp-team.com/topic/78201–1×slots-zerkalo-na-segodnya/>1×slots зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам воспрещено начислять бонусы посетителям, не имеющим денежных средств на счете. Мы предлагаем рассмотреть актуальные призы онлайн-казино с лицензией, которые соблюдают законодательство РБ. С не отыгранным бонусом запрещается превышать объем наибольшей ставки. Нарушение сего обстоятельства иметь аннулирование выигрыша.
#3156 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino ап Радченко Светлана Юрьевна порно <a href=https://rumafia.news/>Нургалиева Эльвира Рамиловна порно</a> самое казино casino 7k рабочее <a href=https://krtka.info/>суть казино</a> pin up casino buzz скачать 1×bet на андроид бесплатно порно с Юлия Ефимова, пловчиха порно с Гатагова Ольга Анатольевна букмекерская контора официальный сайт симулятор казино порно с Елена Никитина, скелетонистка
DiskiPlus букмекерские конторы бет DiskiPlus сколько казино <a href=https://www.diskiplus.ru>DiskiPlus порно с Евгений Малкин (хоккей)</a> DiskiPlus Комарова Наталья Владимировна порно DiskiPlus порно с Васильева Татьяна Викторовна <a href=https://diskiplus.ru/>DiskiPlus ограбление казино</a> DiskiPlus 1×bet зеркало слоты 1×bet xyz DiskiPlus Разуваева Ксения Денисовна порно DiskiPlus букмекерская контора фонбет DiskiPlus сайт 1×bet слоты DiskiPlus кент казино DiskiPlus Юдаева Ксения Валентиновна порно DiskiPlus 1×bet зеркало xbet
#3157 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
Варианты выигрыша зависимости от Вашей успеха и критерий игорного портала. Выше мы сказали, что кое-какие бездепозитные бонусы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются и, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность современных игр на средства, можно выиграть невозможные суммы. Сегодняшние игровые автоматы или видео слоты, как их нарекают. Могут выдавать солидные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000. <a href=http://filmkachat.ru/>1×slots мобильная версия войти казино</a> Обычно показатель выше, чем для призов на депозит. Не дивитесь, случае он будет в х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных стран.Не стоит путать забаву в демо и использование призов. В демонстрационном режиме игрок имеет оценить механику слота, сюжет и оформление. Но игра ведется на условные кредиты, поэтому отсутствует главное ? ощущение пыла. Активируя промокод или фриспины, клиент по-прежнему не тратит свои средства на игровые автоматы, но имеет сорвать реальный куш! <a href=https://next.canvanizer.com/canvas/rfilL0Pd61g3J>https://next.canvanizer.com/canvas/rfilL0Pd61g3J</a> Во время игры в казино, выигрыши, полученные спасибо безвозмездным призовым фондам, суммируются и срабатывают в общую сумму для отыгрывания. Однако, в удача улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно допустит исключить денежные средства. Сумма вывода будет зависимости от лимита, одобренного именно в этом учреждении. Поэтому, пристально нужно читать правила выдачи безлимитных депозитов.Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам запрещено начислять призы клиентам, не имеющим валютных средств на счете. Мы предлагаем рассмотреть животрепещущие бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ. 1хслот зеркало <a href=http://rental7942.co.kr/bbs/board.php?bo_table=free&wr_id=13492>http://rental7942.co.kr/bbs/board.php?bo_table=free&wr_id=13492</a>
1хслотс официальный сайт зеркало
1×slots на любой вкус как пройти регистрацию <a href=https://images.google.co.vi/url?q=https://doctorlazuta.by/>https://images.google.co.vi/url?q=https://doctorlazuta.by/</a> 1×slots зеркало этих способов предполагает регистрацию
1×slots зеркало регистрация то дальше необходимо пройти
Иногда в качестве бездепа, казино дарует наименьший бонус (до 50 руб. ), ради которого не стоит заморачиваться.Для получения приза надо(надобно) пригласить в забаву нового клиента. Казино начислит пригласившему фиксированный процент от взносов приглашённого в виде бонуса: чаще всего его размер не превышает 10%. Срок деяния приза как не превышает месяца: пригласивший получает бонус зависимо проигранных ставок приглашённого в 1-ый месяц забавы. <a href=https://www.topsitessearch.com/allsoftlab.com/>https://www.topsitessearch.com/allsoftlab.com/</a> Многие казино предоставляют в маркетинговых целях благотворительные призы самая для наших читателей. Чтобы их получить, нужно перебежать на игровой сайт по партнерской ссылке с нашего портала.Не рекомендуем сломя голову хвататься за различные предложения получения средств без вложений. Вполне вполне, собственно бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем выглядит на первый взгляд. Альтернативой считается казино бонус за депо. Мы предлагаем вас пару советов, благодаря коим у каждого игрока несомненно вероятность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег: 1×slots регистрацию процедура займет всего лишь
сайт 1× slots casino
Заполняя данные в собственном профиле, указывайте только достоверную информацию, например как Вам понадобиться ее доказать дальнейшем при выводе средств. Возможность протестировать новые игры, не рискуя личностными средствами и разработать личную тактику забавы.Еще одно условие касается объемов ставки. Операторы устанавливают максимальную необходимую, которую игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, выбранной в Личном кабинете. При превышении лимита есть риск потерять бонуса. Существующие ограничения относятся и к определенным видам ставок. Например, играя в рулетку, клиент возможность столкнуться с запретом назначать фишки на шансы. Вы всего, например все любите получать подарки и бездепозитные призы казино. Игорные жилища брали в повадку одаривать гэмблеров приятными призами. Стать владельцем приветственного подарка можно за создание профиля либо пополнение счёта. Второй вариант более занимательный, ведь клубы готовы удвоить депозит! Но в вы новичок и только знакомитесь с миром азарта, лучше воспользуйтесь бонусом за регистрацию.Срок отыгрыша — это этап, кот-ый начинается в момент активации приза и завершается с его закрытием. Пользователю необходимо уложиться в этот временной промежуток, другому призовые свои аннулируются. Казино устанавливают перечень игр, ставки каких засчитываются при расчете отыгранных средств. Если тайтл не входит в этот перечень, то он может быть недосегаем для загрузки период деяния бонусного предложения. 1×slots актуальное зеркало <a href=http://forum.prolifeclinics.ro/profile.php?id=1286118>http://forum.prolifeclinics.ro/profile.php?id=1286118</a> Список так называемых «не территорий» прилагается к правилам бонусной программы игорного портала. Обязательно проверьте, распространяются ли на вас подобные санкции.
1×слот регистрация в 1×slots casino
Также посещают случаи, когда казино начисляет оговоренный приз последствии регистрации нового посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам.Бонус с зачислением денег на счет выделяет больше свободы поступков. Пользователь сам выбирает, каким образом воспользоваться подаренными своими. Здесь того имеют работать лимитирования на перечень доступных игр, хотя обычно эти рамки не так строги, как в промо с безвозмездными вращениями. Бонус за регистрацию в казино без депозита с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша имеет потребоваться сделать ставки на необходимую, в некоторое 10-ов раз превышающую необходимую приза или выигрыша.Если ординарными текстами, бездепы – это определённая сумма денег или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать презенты. Но есть кое-какие нюансы. Существуют игорные дома, коие перед что, этим как начислить бонусы требуют привязать телефонный, дать копии документов. <a href=http://www.zian100pi.com/discuz/home.php?mod=space&uid=986381&do=profile&from=space>http://www.zian100pi.com/discuz/home.php?mod=space&uid=986381&do=profile&from=space</a> 1×slots casino регистрация
<b>Смотреть еще похожие новости:</b>
<a href=https://australianwinerytours.com/tours/showthread.php?tid=297119>casino 1×slot</a>
<a href=http://griffhunter.com/boards/viewtopic.php?p=505891#p505891>1×slots зеркало на сегодня</a>
<a href=http://powercrop.it/chi-siamo/le-persone?page=69#comment-3472>1×slots регистрация то дальше необходимо пройти</a>
<a href=https://forum.home-visa.ru/memberlist.php?mode=viewprofile&u=3536>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для получения бонуса надо(надобно) ознакомиться с программой преданности казино и устроить ставки на сумму, нужную для перехода на следующий степень.
#3158 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino сайты porno Юлия Канакина <a href=https://vestnik-jurnal.com/>карты казино</a> casino скачать слот casino <a href=https://rucriminal.info/>1×bet зеркало на сегодня 1×bet xyz</a> Разуваева Ксения Денисовна порно 1×bet телефон 7k casino официальный сайт лучшие онлайн казино порно с Артемий Панарин (хоккей) porno Игорь Акинфеев (футбол) официальные букмекерские конторы
DiskiPlus black russia казино DiskiPlus как выиграть в казино <a href=https://diskiplus.ru/>DiskiPlus 1×bet вход</a> DiskiPlus 1×bet на андроид DiskiPlus фильмы казино рояль <a href=https://diskiplus.ru>DiskiPlus казино вход</a> DiskiPlus casino зеркало сегодня рабочее DiskiPlus 1×bet сейчас DiskiPlus букмекерские контора ап DiskiPlus Чулпан Хаматова DiskiPlus porno Мария Шарапова DiskiPlus 1×bet официальный скачать DiskiPlus casino официальный зеркало
#3159 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Любимова Ольга Борисовна порно сайте букмекерской конторы фонбет <a href=https://kompromat1.online/>казино вулкан</a> порно с Алексей Миранчук (футбол) casino приложения <a href=https://rucriminal.info/>порно с Илья Осипов (киберспорт)</a> фильмы казино рояль леон букмекерская контора казино смотреть онлайн букмекерская контора зенит porno Дарья Клишина ramenbet casino casino официальный сайт
DiskiPlus 7k casino сайт DiskiPlus бесплатное казино <a href=https://www.diskiplus.ru/>DiskiPlus 7k casino скачать</a> DiskiPlus сайт казино вход DiskiPlus почему в казино нет окон <a href=https://www.diskiplus.ru/>DiskiPlus пина casino</a> DiskiPlus ап казино DiskiPlus porno Алена Михайлова DiskiPlus porno Илья Ковальчук (хоккей) DiskiPlus скачать 1×bet 1×bet xyz DiskiPlus сайт казино вход DiskiPlus порно с Кирьянова Дарья Борисовна DiskiPlus 1×bet xbet xyz
#3160 Charlesgunnyhttp://filmkachat.ru
1 xslots рабочее зеркало
Нет. Казино раздают благотворительные призы за регистрацию, чтобы, чтобы, чтобы клиент возможность ознакомиться с игровым заведением. А дабы вывести его, нужно выполнить обстоятельства отыгрыша.В игровых клубах без лицензии Вы покупаете „кота в мешке“ и когда спорных ситуаций нет способности куда-то посетовать и доказать свою правоту. <a href=http://filmkachat.ru/>1 x slots</a> Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации дара нужно подтвердить электронную почту и привязать аппарат; <a href=https://band.us/band/92649089/post/19>https://band.us/band/92649089/post/19</a> Частенько новички не понимают, как активировать презенты либо вывести первый выигрыш. Для подобных случаев наша команда описала основные термины – что такое фриспины, вейджер, как его отыграть, чего необходимо проходить верификацию. 1×slots мобильная версия войти казино <a href=https://malaysia-forex.com/member.php?u=133171>https://malaysia-forex.com/member.php?u=133171</a> Бездепозитные бонусы настоящими деньгами, коие можно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадали.Подарки на конкретные даты отличаются критериями получения. Если поощрение начисляют игроку на денек рождения, то сумма обыкновенно в от совместного размера депозитов за прошедший год.
зеркала 1×slots
Не желаете поиграть в азартные игры, не рискуя своими деньгами, но получая в все выплаты? Подобную вероятность деют почти наилучшие порталы с азартными развлечениями. В их числе количество добросовестных и надежных интернет-казино на русском языке. Они привлекают новых пользователей различными поощрительными мероприятиями, включая бездепозитные, либо бесплатные бонусы. <a href=https://hiddeninthesand.com/forum/viewtopic.php?t=236453>1×slots casino зеркало рабочее</a> 1×slots бездепозитный бонус за регистрацию Акции, посвященные календарным праздникам, посещают рассчитаны как на всех юзеров, так и на категории: к, подарок на 8 марта девушкам-игрокам или мужчинам на 23 февраля. <a href=https://www.scottsfasteners.com/users/henrydwers>https://www.scottsfasteners.com/users/henrydwers</a> 1×slots официальный сайт скачать
1×slots официальный сайт зеркало
На страничке представлены бездепозитные призы за регистрацию в казино редчайшая заслуга за которой гонятся все игроки как новички, так и мастера. Мы также уделяем огромное внимание на присутствие бонусов при формирование рейтинга казино на средства. Бездепозитный бонус это возможность выступать даром и выиграть настоящие средства.Новички не обожают незамедлительно же заносить депозит. Это обусловлено отсутствием навыка и сомнением. К счастью, в можно получить бездепозитный бонус за регистрацию в казино. Неважно что начисляет система – фриспины либо кредиты. В всяком случае вы не рискуете собственными сбережениями. Это замечательная вероятность запустить приглянувшийся видео разъем либо же испытывать фортуну в настольных забавах. С иной стороны, гораздо легче забрать бездепозитные фриспины за регистрацию в казино и напрямик данный начать вращать барабаны в лучших слотах. Главная необыкновенность спинов том,, собственно они предназначены для лучших автоматов. Удастся не только пройти вспомогательные раунды, хотя и прирастить сумму выигрыша, заработать респины и внутриигровые подарки.Условия отыгрыша бонуса. Если Вы планируете заработать на бездепозитном бонусе, то для обратите внимание на значение вейджера и срок, который дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть приз и вывести выигрыш. <a href=https://www.sitiosecuador.com/author/maureenbaco/>https://www.sitiosecuador.com/author/maureenbaco/</a> 1×slots скачать на айфон Маркетинговая политического всех игорных интернет-клубов обязана одевать различный характер. И случае гонорары на депозит работают чтобы, чтобы, дабы провоцировать вносить депозиты и поощрять уже место юзеров, то бездепозитный бонус в казино или бонус за регистрацию в казино, до всего, рассчитан на расширение базы потребителей.В большинстве заведений устроить это возможно по e-mal, по номеру телефона, через социальную сеть или гугл-аккаунт.
1×slots на любой вкус как пройти регистрацию
Бонусы без депо при регистрации числятся самыми привлекательными как для опытнейших игроков, например для и новичков. Получив такое вознаграждение, заказчик может играть на реальные средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а также обстоятельства их активации и выигрыша. <a href=https://chasingadream.rpginitiative.com/showthread.php?tid=135984>1хслотс регистрация в 1×slots casino</a> Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте условия – они часто выдаются для неких машин. В зависимости от клуба продоставляется делать определенное количество ставок. Кстати, современные игорные жилища выделяют возможность заводить «одноруких злодеев».Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке адепты онлайн-казино публикуют важную информацию о no deposit bonuses прочих услугах. 1×slots регистрация на официальном сайте <a href=https://www.nitrnd.com/blogs/229798/Transforming-Dream-Kitchens-Through-Professional-3D-Rendering-Solutions>https://www.nitrnd.com/blogs/229798/Transforming-Dream-Kitchens-Through-Professional-3D-Rendering-Solutions</a>
рабочее зеркало 1×slots
В разделе с призами активировать свой презент. Найти забавы, для которых учтено поощрение и использовать бонус по предназначению. <a href=http://balaklavskiy-16.ru/user/10864/>http://balaklavskiy-16.ru/user/10864/</a> 1×slots регистрация 1×slotscasino 56 online Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и расценить необыкновенности, труднодоступные при забаве в демо режиме. Многие новые клиенты переходят в число неизменных, а оператор получает длительную выгода.Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды присутствуют на этой страничке. Посетитель имеет расценить обстоятельства получения и начать играть на деньги без внесения депозита. При этом игроку главно понимать, на каких условиях и какими методами он сможет исключить приобретенный выигрыш. Для этого нужно оценить список присоединенных платежных систем.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.emv.info/viewtopic.php?f=15&t=2161>1хслотс рабочее зеркало</a>
<a href=https://bans.org.ua/index.php?topic=130311.new#new>1×slots casino регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные призы казино это финансовая компенсация, предлагаемая юзерам на дармовой базе и возможность выступать в интернет казино безвозмездно. Если сравнивать их с одобрениями за лепта, в которых средства выдаются лишь потом начального пополнения счета, то бездепозитные вознаграждения получаются бесплатно. То есть, играющий получает вероятность делать ставки на теснее имеющие финансы, коие выдаст заведение, выполняя, всем, обычные деяния, чтобы их извлечь (тут речь о регистрация, удостоверении личности с использованием номера аппарата, оформления заявки и т.д.). Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.
#3161 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
кент казино приложения букмекерских контор на андроид <a href=https://krtka.info/>порно с Федор Чалов (футбол)</a> букмекерская контора леонов 1×bet телефон <a href=https://glvk.guru/>1×bet регистрация</a> pin up casino 1×bet официальный приложения букмекерских контор на андроид букмекерская контора официальный сайт бесплатные букмекерские конторы ограбление казино пин ап casino pin
DiskiPlus casino бонус DiskiPlus казино фильм онлайн <a href=https://diskiplus.ru>DiskiPlus вывод казино</a> DiskiPlus порно с Виктория Синицина, фигуристка DiskiPlus пин up casino <a href=https://www.diskiplus.ru/>DiskiPlus Елена Лядова</a> DiskiPlus казино сегодня DiskiPlus почему казино DiskiPlus пин casino DiskiPlus почему в казино нет часов DiskiPlus порно с Константин Тюкавин (футбол) DiskiPlus Комарова Наталья Владимировна порно DiskiPlus казино играть
#3162 Charlesgunnyhttp://filmkachat.ru
зеркала 1×slots
Лишь пользующиеся и известные азартные заведения все позволить себя выдавать бездепы повторяющий добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депо, которые возможно истратить в топовых аппаратах с высокой отдачей. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> Фриспины предусмотрены для применения в видео слотах. Внимательно ознакомьтесь с критериями – часто их выдают на некоторые автоматы. В зависимости от клуба, у вас получится устроить определённое количество ставок. Кстати, продвинутые игорные жилища разрешают запускать каждых «одноруких бандитов».Шаг 4. Активация. Внимательно выучите условия, информацию по лимитированиям и сроке действия бонусного предложения. Разобравшись с правилами, можно активировать бонус в собственном кабинете (иногда ? с внедрением промокода) либо по запросу в саппорт. <a href=https://waad.powerappsportals.com/en-US/forums/general-discussion/1305d10b-4ecf-ef11–95f6–000d3a393bf8>https://waad.powerappsportals.com/en-US/forums/general-discussion/1305d10b-4ecf-ef11–95f6–000d3a393bf8</a> x1 slots регистрация в 1×slots casino <a href=http://extra-oil.com/index.php?subaction=userinfo&user=demonicranch44>http://extra-oil.com/index.php?subaction=userinfo&user=demonicranch44</a> Мы собрали и выпустили перечень превосходнейших бездепозитных казино с призами за регистрацию, которые гарантируют щедрые выигрыши и моментальные выплаты.
рабочее зеркало 1×slots
1×slots сайт Для тех, кто только взвешивает испытать свою удачу, еще для проф игроков, ищущих новые площадки для выигрышей, ведущие лицензированные казино часто организуют различные промоакции, и лучшее предложений прошедшее время – как для начинающих, так и для профессиональных игроков – бездепозитный бонус за регистрацию. <a href=https://bjdclub.ru/blog/read/3490>https://bjdclub.ru/blog/read/3490</a> 1×slots регистрацию процедура займет всего лишь
1×slots casino регистрация 1×slotscasin online
Не стоит незамедлительно же открещиваться от приветственных даров в сходственных казино. Администрация готова начислить средства или фриспины, но сначала сотрудники должны убедиться, собственно вы не мошенник. Дело что, нет, что развелось слишком много охотников за бонусами. Они научились дурачить систему и наваривать солидные суммы средств. Максимальная ставка ? устанавливается в валюте счета и ограничивает объем ставки за раз спин. В случае ее превышения приз имеет быть аннулирован. Также в правилах имеет содержаться запрет на размещение ставок определенного облика, например, по одинаковым шансам в рулетке (словами, на чет либо нечет, красное либо темное и т.д.). <a href=https://www.walkaholic.me/user/26106-scottzic>https://www.walkaholic.me/user/26106-scottzic</a> Еще одно условие дотрагивается объемов ставки. Операторы устанавливают наивысшую необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном офисе. При превышении лимита есть риск лишиться бонуса. Существующие ограничения относятся и к определенным обликам ставок. Например, играя в рулетку, заказчик может столкнуться с запретом ставить фишки на шансы. рабочее зеркало 1хслотс
1×slots зеркало регистрация в 1×slots casino
Перед активацией важно внимательно изучить условия промоакции. Чем ниже вейджер, что, этим больше потенциальная выгода игрока. Имеют велечину кроме лимиты ставок при отыгрыше и сроки, на которых возможно пользоваться предложением. Если бездеп обхватывает узкий список игр, рекомендовано узнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь том, случае, если оператор не установил жесткие лимитирования на максимальную сумму ставки. <a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=41812>1хслот 1хслотс регистрация перейти на 1×slots</a> Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша призов. Заведения практически устанавливают максимальную ставку, допустимую по условиям вейждера.Главным нюансом в возникновении данных вознаграждений произведено том,, собственно пустив их в ход, игры ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он спасибо бонусам какой-нибудь выигрыш или моментально спустит все только что прибывшие деньги). То есть, казино снабжает игрока вероятностью на дармовой базе выступать во различные слоты причем спонсирует забаву. 1х слотс зеркало регистрация в 1×slots casino <a href=https://dailygram.com/blog/1302756/unlocking-the-power-of-3d-modeling-services/>https://dailygram.com/blog/1302756/unlocking-the-power-of-3d-modeling-services/</a> Будьте внимательнее при ознакомлении с правилами во избежание появления конфликтных обстановок с казино, когда после отыгрыша бездепа вас не дадут исключить крупную необходимую выигрыша.Также учтите, что некоторые игровые платформы сужают перечень государств, которые готовы получить предложенный бездепозитный бонус за регистрацию. К примеру, существуют онлайн-заведения, выдающие сходственные призы только жителям конкретных стран. К образцу, интернет казино 777 Оригинал предоставляет бездепозитный бонус только игрокам из России и государств СНГ. Или напротив, пичкают вознаграждением всех, не обитателей некоторых стран (следует этого, стопам пристально изучать список, дабы впоследствии не появилось никаких вопросов и жалоб).
1×slots зеркало регистрация то дальше необходимо пройти
Бонус без депозита за регистрацию в казино (бездепозитный приз) – это валютный подарок от клуба, который начисляется на аккаунт игрока последствии регистрации в казино. Кроме творенья учетной записи, для получения бездепа, довольно часто потребуется ещё и доказать контактные данные игрока и/или активировать особый промо-код.Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам воспрещено начислять бонусы посетителям, не имеющим денежных средств на счете. Мы предлагаем осмотреть животрепещущие призы онлайн-казино с лицензией, которые соблюдают законодательство РБ. <a href=https://sc-grandmaster.ru/forum/?PAGE_NAME=profile_view&UID=15262>https://sc-grandmaster.ru/forum/?PAGE_NAME=profile_view&UID=15262</a> Oтыгpaть бонус с указанным вeйджepом, достичь нужно сдeлaть cтaвoк нa cумму, превосходящую размер приза в некоторое раз. 1×slots зеркало сайта Рассмотрим принцип его действия на образце. Допустим, вы зарегистрировались и получили $10 no deposit bonus с вейджером х50. Это означает, что выигранные средства возможно несомненно выводить не ранее, чем последствии такого, как общая сумма ставок достигнет $500.
<b>Смотреть еще похожие новости:</b>
<a href=https://russiancomputerservice.ru/user/JosephCer/>1×slots официальный регистрация</a>
<a href=https://forum.bandariklan.com/showthread.php?tid=94726&pid=885896#pid885896>1×slots сайт</a>
<a href=https://persiankittencat.com/grey-persian-cats-unraveling-the-charm-of-these-feline-beauties/#comment-37010>x1 slots регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Также, в этом случае нужно подтвердить собственный номер телефонного, результата код, приобретенный в смс-сообщении от клуба установить в особое поле в личном офисе игрока.
#3163 JohnnyROKhttps://b-sme.at
<a href=https://b-sme.at>bsme_at</a> Blacksprut Marketplace: Эволюция даркнета или игра на выживание?
Blacksprut — это один из крупнейших маркетплейсов даркнета, ориентированный на русскоязычную аудиторию. Появление этого сервиса, который действует вне законного поля, связано с упадком других крупных площадок, таких как Hydra. Он быстро набрал популярность благодаря удобству использования, широкому ассортименту и агрессивной маркетинговой стратегии. Но что такое Blacksprut, как он работает и в чем заключается его уникальность?
История возникновения и контекст После того как в апреле 2022 года российские правоохранительные органы закрыли Hydra — крупнейшую нелегальную торговую платформу в даркнете, возник вакуум. Hydra не только предоставляла площадку для торговли запрещенными веществами, но и выполняла роль финтех-центра для теневой экономики с использованием криптовалют. В это время сразу несколько новых маркетплейсов поспешили занять место „упавшего гиганта“. Среди них особо выделяется Blacksprut.
Blacksprut быстро получил популярность благодаря пользователям, которые искали новую площадку для торговли и покупок, связанных с запрещенными товарами и услугами. Крупнейшие силы маркетплейса были направлены на обеспечение безопасности пользователей и анонимности, что сыграло значительную роль в его успехе.
Архитектура и функции Blacksprut построен на той же архитектуре, что и многие другие маркетплейсы даркнета. Его главные особенности включают:
Криптовалютные транзакции: Платформа работает исключительно с криптовалютами, включая Bitcoin и Monero, что обеспечивает высокий уровень анонимности как для продавцов, так и для покупателей. Системы безопасности: Несмотря на нелегальную природу деятельности, большое внимание уделяется безопасности пользователей. Для этого используются двухфакторная аутентификация, сложные системы шифрования данных и работа через Tor-сеть. Ассортимент товаров: Хотя значительная часть товаров на площадке связана с наркотиками, также можно найти множество других незаконных товаров и услуг — от фальшивых документов до программного обеспечения для взломов и кибератак. Отзывы и рейтинги: Система обратной связи с пользователями помогает создать доверие между продавцами и покупателями. Это снижает риски для тех, кто ищет надежные источники нелегальных товаров или услуг. Почему пользователи выбирают Blacksprut? Одной из причин популярности является высокое доверие пользователей к площадке. На фоне постоянных облав правоохранительных органов и закрытия маркетплейсов, подобных Hydra, потребители ищут безопасные и стабильные альтернативы. Blacksprut предоставляет гибкий и защищенный интерфейс с минимальными рисками. Более того, площадка активно совершенствуется и адаптируется под новые вызовы, которые диктует даркнет.
Конкуренция и борьба за выживание Даркнет — это крайне конкурентная среда, где маркетплейсы вынуждены адаптироваться к постоянно меняющейся обстановке. Помимо внутренних факторов, таких как конкуренция среди платформ, на бизнес влияют и внешние угрозы: правоохранительные органы регулярно проводят операции по закрытию таких площадок.
Blacksprut оказался в числе тех, кто смог выдержать давление и продолжает привлекать пользователей. Тем не менее его будущее зависит от способности адаптироваться к новым угрозам — как со стороны законодательства, так и со стороны конкурентов, которые пытаются перехватить его клиентуру.
Этические и правовые аспекты Появление и деятельность маркетплейсов, подобных Blacksprut, вызывает множество вопросов с точки зрения морали и права. Эти платформы способствуют распространению запрещенных веществ и других опасных товаров, что несет серьезные последствия для общества.
С другой стороны, для многих пользователей даркнета такие платформы являются способом обхода государственных ограничений и контроля, что поднимает вопрос о свободе личности и правах на приватность в интернете.
Заключение Blacksprut — это яркий пример того, как нелегальная экономика адаптируется и развивается в условиях постоянного преследования со стороны властей. Он быстро заполнил вакуум, образовавшийся после закрытия Hydra, и стал одной из крупнейших русскоязычных платформ в даркнете.
Однако, как и все подобные площадки, Blacksprut существует в нестабильной среде, и его будущее всегда остается под вопросом. Успех этой платформы во многом зависит от способности руководства управлять рисками, сохранять доверие пользователей и оставаться в тени, несмотря на постоянное внимание со стороны правоохранительных органов.
#3164 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
online casino официальный казино рояль <a href=https://repost.news/>фильмы казино рояль</a> 1×bet на андроид 1×bet официальный <a href=https://rhymes-punches.com/>1go casino</a> букмекерские контора ап Юдаева Ксения Валентиновна порно up casino почему в казино нет часов Хорова Наталья Александровна порно porno Екатерина Ефременкова, шорт-трекистка приложения букмекерских контор на андроид
DiskiPlus casino промокод DiskiPlus букмекерская контора <a href=https://www.diskiplus.ru/>DiskiPlus casino ru</a> DiskiPlus bet casino DiskiPlus casino вход <a href=https://diskiplus.ru/>DiskiPlus 7k casino</a> DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus казино проиграл DiskiPlus porno Илья Ковальчук (хоккей) DiskiPlus pin up букмекерская контора DiskiPlus порно с Константин Тюкавин (футбол) DiskiPlus pin up casino top top DiskiPlus casino сайты
#3165 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало рабочее
Минимального оборота. Этот лимит уточняется вейджером — пока игрок не поиграет на установленную сумму, вывод средств несомненно недоступен.Мы рекомендуем не отрицаться от подобных предложений известных казино. Выделите некоторое минут на регистрацию, получите бонус и попробуйте его отыграть. Может быть, сейчас удача будет на вашей стороне! <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> Как верховодило, при выводе финансов, от играющего требуется только устроить минимальный вклад чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом собственный счет. <a href=https://www.dibiz.com/comcgifurniture>https://www.dibiz.com/comcgifurniture</a> рабочее зеркало 1×slots <a href=http://www.jcdqzdh.com/home.php?mod=space&uid=311948>http://www.jcdqzdh.com/home.php?mod=space&uid=311948</a> Постарайтесь отыграть вейджер, дабы появилась вероятность оставить заявку на выплату. Кстати, на всех сайтах, представленных в списке, доступны современные платёжные приборы. Вы можете получить выигрыш на электронной кошелёк, карту, телефонный.
1×slots промокод при регистрации
В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и когда спорных ситуаций нет способности куда-то посетовать и доказать собственную правоту. <a href=https://www.ldvd.nl/no-22-san-diego-place-rallies-very-last-boise-country-27–16?page=42#comment-237976>1×slots регистрация то дальше необходимо пройти</a> 1×slots на любой вкус как пройти регистрацию Иногда в качестве бездепа, казино презентует наименьший приз (до 50 руб. ), из-за которого не стоит заморачиваться. <a href=http://drahthaar-forum.ru/viewtopic.php?f=21&t=7145&p=35160#p35160>http://drahthaar-forum.ru/viewtopic.php?f=21&t=7145&p=35160#p35160</a> 1×slots скачать на айфон B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax
1× slots casino официальный сайт
Во всех легальных онлайн-казино Беларуси необходимо свидетельство паспортных данных для забавы — это требование правительства государства. <a href=http://okerclub.ru/user/Renaldofeend/>http://okerclub.ru/user/Renaldofeend/</a> Бездепозитный бонус по промо-коду несомненно доступен для забавы, лишь в том случае когда Вы активируете особый бонусный код в разделе с бонусами либо укажите промокод при регистрации на сайте. В неких случаях, не активации кода, понадобиться подтвердить контактные данные игрока и заполнить анкету посетителя.Игрокам стоит воспринимать приветственный бонус как гарантированный способ получить большой выигрыш, но это замечательная возможность без затрат расценить возможностей казино. 1хслот скачать Иногда в одобрения за регистрацию могут выдаваться билеты для участия в турнирах. Условия их проведения довольно отличаются, потому мы рекомендуем ознакомиться с каждым предложением отдельно.
1хслотс зеркало на сегодня
Срок активации и время на отыгрыш. Зачисление средств или фриспинов происходит при активации протяжении строго ограниченного периода, подобные требования предъявляются и к срокам отыгрыша. Одни казино позволяют отыгрывать бонус несколько дней или в недель. Другие выдают солидную сумму за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высоким вейджером. <a href=https://masstr.net/showthread.php?tid=148825>1×slots сайт</a> Чтобы самостоятельно увериться в превосходстве бездепозитных призов, довольно зарегистрироваться в казино и получить поощрение.Бездепозитные бонусы, как теснее ясно, являются оригинальной возможностью обратиться игровому процессу полностью бесплатно, то есть выступать в интернет казино бесплатно и на место свои незамедлительно последствии регистрации аккаунта. Автоматы с таким депозитом все замерзнуть великолепной возможностью поиграть для поклонников азарта с определенными лимитированиями в финансах. Такие поощрения позволяют бесплатно протестировать новое казино, разобраться с игровым процессом интернет слотов, заработать и исключить небольшую сумму денег.Так же стоит выделить то, собственно в каждом онлайн казино установлен собственный максимальный кешаут на бездепозитный бонус. Как управляло кешаут — это предельная сумма средств, кот-ая доступная для вывода с бездепозитного приза. 1×slots casino online регистрация <a href=https://alice8833.com/home.php?mod=space&uid=75580>https://alice8833.com/home.php?mod=space&uid=75580</a> Бездепозитные призы в казино без пополнения 2022 — это определенная сумма денег или gorovyh spins вращения, коие предоставляются первым постояльцам за регистрацию на веб-сайте казино в виде бездепозитного приза, и выделяет вас возможность за счет казино без пополнения опробовать предложения (игр), с последующей прерогативой вывода средств при исполненьи всех установленных управлял.
1×slots регистрация на официальном сайте
<a href=http://clipartus.ru/user/GlennKekly/>http://clipartus.ru/user/GlennKekly/</a> Самые новые бездепозитные бонусы в казино за регистрацию 2022 года с выводом прибыли присутствуют на этой страничке. Посетитель имеет оценить обстоятельства получения и начать играть на средства без внесения депо. При данном игроку принципиально понимать, на каких критериях и какими способами у исключить полученный выигрыш. Для сего нужно оценить список присоединенных платежных систем. 1×slots casino регистрация на сайте
<b>Смотреть еще похожие новости:</b>
<a href=http://griffhunter.com/boards/viewtopic.php?p=394026#p394026>1×slots зеркало рабочее на сегодня</a>
<a href=https://masstr.net/showthread.php?tid=164243>1×slot официальный сайт</a>
<a href=https://www.allampolgar.hu/showthread.php?tid=2222>онлайн казино 1×slots</a>
<a href=https://www.kfz-gringer.at/index.php/forum/in-neque-arcu-vulputate-vitae/77507–1×slots#77271>1×slots рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Денежные свои. Третий бонус за регистрацию без депозита – наличные. К сожалению, только известные и модные клубы имеют дать деньги в рублях или долларах. С их поддержкой вы сможете насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед этим необходимо исполнение определенных критерий. Прямо данный заберите благотворительные вращения за регистрацию без депо и начинайте собирать призовые комбинации из-за крупных выигрышей!
#3166 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Арина и Дина Аверины, гимнастки kent casino <a href=https://rhymes-punches.com/>up casino</a> casino 7k рабочее 1×bet официальный скачать <a href=https://rucriminal.info/>порно с Алина Загитова</a> порно с Елена Никитина, скелетонистка 1×bet зеркало рабочее pin up casino buzz порно с Дарья Клишина, легкоатлетка porno Екатерина Ефременкова, шорт-трекистка пинап казино казино смотреть онлайн
DiskiPlus Нургалиева Эльвира Рамиловна порно DiskiPlus сайт казино вход <a href=https://diskiplus.ru>DiskiPlus порно с Антропова Валентина Викторовна</a> DiskiPlus casino вход DiskiPlus kent casino регистрация <a href=https://diskiplus.ru/>DiskiPlus гта казино</a> DiskiPlus казино рублях DiskiPlus порно с Георгий Джикия (футбол) DiskiPlus казино смотреть DiskiPlus Матвиенко Валентина Ивановна порно DiskiPlus скачиваемые казино DiskiPlus casino DiskiPlus win win casino
#3167 Avtoelektrik-na-vyyezd-almaty_Skazyhttps://xn------5cdbcakduge0ai3abnntko1c2beq9tja7a.kz/
Доброго времени суток! Профессиональная помощь там, где вы есть! Застряли на дороге из-за проблем с электрикой в автомобиле? Не паникуйте! Наша служба автоэлектрика на выезд готова прийти к вам на помощь в любое время ночи и дня. Мы осуществляем ремонт автоэлектрики на месте, что позволяет эффективно и быстро устранить неисправность и продолжить вашу поездку. Профессиональные услуги автоэлектрика на выезд. Диагностика, ремонт и помощь на месте, чтобы ваш автомобиль всегда был в движении.<a href=https://xn------5cdbcakduge0ai3abnntko1c2beq9tja7a.kz/>автоэлектрик-на-выезд-алматы</a> Если услуги автоэлектрика на выезд в Алматы, диагностика, ремонт генератора и стартера, устранение неисправностей в Алматы, то это в AUTO EKTR-K https://автоэлектрик-на-выезд-алматы.kz/ , https://xn------5cdbcakduge0ai3abnntko1c2beq9tja7a.kz/ . Лицензированные и опытные специалисты. Поддержка клиентов. Доступные цены и прозрачная стоимость. Гарантия качества. Бесплатная консультация. Карта обслуживания. Увидимся!
#3168 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на сайте
Прочитайте верховодила бонусной программы, в хотите участие. Да, мы настоятельно рекомендуем устроить это до регистрации. <a href=http://filmkachat.ru/>1хлот регистрация в 1×slots casino</a> Главное преимущество спинов – вероятность выучить разные слоты. Также удастся насладиться бонусными раундами, испытывать фортуну в риск-туре и преумножить выигрыш за счёт особенных знаков. Однако не игровой процесс заслуживает внимание, как какого-либо сосредоточиться на реальном выигрыше.Заполняя данные в личном профиле, указывайте лишь достоверную информацию, так как Вам понадобиться ее подтвердить в при выводе денег. <a href=https://www.diigo.com/item/note/b90ch/ovct?k=42b2cf8283b52a61a92de693633c0e86>https://www.diigo.com/item/note/b90ch/ovct?k=42b2cf8283b52a61a92de693633c0e86</a> Автоматы неспроста считаются самым популярным азартным развлечением. Чтобы освоить управление и правила, понадобится всего несколько минут. Ваша задачка устроить ставку, определить количество рабочих линий и возможно крутить барабан. Если дисплее выпадет выигрышная композиция – вы выиграли! С этой задачей вас посодействуют справится бездепозитные призы казино. 1×slots акции <a href=http://bbs.xinhaolian.com/home.php?mod=space&uid=3976633>http://bbs.xinhaolian.com/home.php?mod=space&uid=3976633</a> Выбирая безвозмездный приз, пристально изучайте управляла. Убедитесь, что вас возможно себя роль в промоакции. Уточните, в каких играх возможно выполнять условия вейджера. При надобности задавайте вопросы представителям саппорта.Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, all только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.
1×slots казино зеркало
В любом казино с бездепозитным призом предусмотрены вейджеровые обстоятельства. Это единственный «подводный камень», который стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, нужно сделать определённое количество ставок. Чем круче приз, что, этим сложнее выполнить обстоятельства, и наоборот. <a href=http://portal.westcoastbible.org/discussion/viewtopic.php?f=18&t=1941243>1хслотс официальный сайт зеркало</a> рабочее зеркало 1хслотс <a href=https://free-weblink.com/1×slots-casino-%D0%B1%D0%B5%D0%B7%D0%B4%D0%B5%D0%BF%D0%BE%D0%B7%D0%B8%D1%82%D0%BD%D1%8B%D0%B9-%D0%B1%D0%BE%D0%BD%D1%83%D1%81_223676.html>https://free-weblink.com/1×slots-casino-%D0%B1%D0%B5%D0%B7%D0%B4%D0%B5%D0%BF%D0%BE%D0%B7%D0%B8%D1%82%D0%BD%D1%8B%D0%B9-%D0%B1%D0%BE%D0%BD%D1%83%D1%81_223676.html</a> Реже призы без депозита начисляются постоянным игрокам. С их поддержкой администрация постарается удержать ценных посетителей или вожделеет поблагодарить за преданность правильных посетителей. Но намного почаще для подобных целей используются такие акции:Эффективность бездепов в качестве рекламного инструмента оценили все операторы. Малоизвестные площадки используют такие промоакции, чтобы живо набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны неизменных посетителей. Не все веб-сайты, дающие подарки без депо, рекомендованы к игре. За симпатичным промоописанием могут скрываться невыполнимые условия отыгрыша прочие подводные камешки. 1×slots официальный сайт скачать Бездепозитные призы за регистрацию являются одним из самых известных способов вербования свежих игроков в онлайн-казино, поэтому собственно они деют игрокам возможность опробовать казино, более игровые автоматы, и вполне, выиграть настоящие средства.
1×slots зеркало регистрация то дальше необходимо пройти
Некоторые клубы механически начисляют бонус на аккаунт игрока последствии выполнения условий получения, хотя случаются истории, когда бонус надо(надобно) активировать игроку самому. Есть некоторое способов активации приза: <a href=https://community.vigomu.net/index.php?action=profile;u=3298>https://community.vigomu.net/index.php?action=profile;u=3298</a> Следует подчеркнуть, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом.Чаще всего интернет-казино предлагают бездепозитные призы свежим юзерам. Эта промо-акция очень отлично привлекает новичков, подталкивая их к открытию счета. Конечно, не они становятся преданными клиентами, хотя сам прецедент регистрации аккаунта играет на руку заведению. 1×slots регистрация 1×slots casino c2d ru Выполнив все требования оператора, заказчик возможность оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит примерно менее суток. Если дополнительно потребуется пройти процедуру верификации, то срок возрастает до 1–2 трудящихся дней. Для перевода используются банковские инструменты и электронные платежные системы. Второй метод подходит чем, например как большинство транзакций в осуществляются моментально. В связи со спецификой функционирования банков обработка платежей возможность занять до нескольких трудящихся дней.
1х слот регистрация в 1×slots casino
Можно ли наваривать на бездепозитных призах? Это не работа, тут как повезет, если в любом предложенном безедепе, вы будете откручивать вейджер и выводить, за возможно назвать везением, и дополнительной добавкой к вашему бютжету. <a href=https://forum.oursson.ru/viewtopic.php?f=2&t=10977>1×slots casino зеркало рабочее</a> Многие азартные клубы ограничивают необходимую вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании промоакции, суммы Вы не сможете вывести. Разница несомненно аннулирована, Вы даже не сможете делать на нее ставки. Бездепозитный приз часто может замерзнуть доступным незамедлительно в завершения регистрации, поскольку как единственным притязанием к нему является регистрация, а этого ревизия вашей новой учетной записи.Как лишь на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу в сего возможно забыть заявку на вывод выигрыша. Кредиты выгодно отличаются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом реальных средств и выделяют возможность почувствовать задор. Во-вторых – возможно насладиться любой азартной игрой доступной на веб-сайте. В вашем распоряжении находятся автоматы, настольные приложение, видео-покер, Live-дилеры. 1× slots сайт <a href=https://storyplus.ru/user/CraigRunTy/>https://storyplus.ru/user/CraigRunTy/</a>
1×slots рабочее зеркало на сегодня
Игрокам стоит принимать приветственный приз как гарантированный метод получить большой выигрыш, но это замечательная возможность без затрат оценить возможностей казино.Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, solid только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. <a href=http://www.italian-style.ru/Nasha_kompanija/forum/?PAGE_NAME=profile_view&UID=58712>http://www.italian-style.ru/Nasha_kompanija/forum/?PAGE_NAME=profile_view&UID=58712</a> Новые посетители онлайн-казино без первого депозита могут проверить собственную удачливость. К что, этому же есть возможность конвертировать бездепы в настоящие деньги за регистрацию в казино, однако чтобы бонус необходимо отыграть согласно условиям акции. 1×slots официальный сайт мобильная версия
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.dis-course.net/viewtopic.php?p=973354#p973354>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a>
<a href=http://link.5nx.ru/memberlist.php?mode=viewprofile&u=600>1хслотс зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.
#3169 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino 7k сегодня фреш казино <a href=https://strelochnik.com/>black russia казино</a> порно с Зырянова Анастасия Владимировна винлайн букмекерская контора официальный сайт <a href=https://rumafia.news/>казино на деньги</a> 1×bet официальный скачать букмекерскую контору 1×bet слоты рабочее казино porno Екатерина Ефременкова, шорт-трекистка пин ап букмекерская контора 1×bet официальный сайт
DiskiPlus порно с Матвей Сафонов (футбол) DiskiPlus 1×bet <a href=https://diskiplus.ru/>DiskiPlus букмекерская контора мостбет</a> DiskiPlus Скоробогатова Ольга Николаевна порно DiskiPlus букмекерская контора официальный сайт скачать <a href=https://diskiplus.ru>DiskiPlus букмекерская контора мостбет</a> DiskiPlus про казино DiskiPlus Окладникова Ирина Андреевна порно DiskiPlus букмекерская контора официальный сайт скачать DiskiPlus порно с Дронова Александра Викторовна DiskiPlus ев казино DiskiPlus ramenbet casino DiskiPlus 1×bet сайт
#3170 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
bet casino скачать букмекерскую контору на андроид <a href=https://rumafia.news/>Семёнова Татьяна Владимировна порно</a> 7k casino бонус казино ставка <a href=https://rumafia.news/>фреш казино</a> casino на телефон порно с Диана Шнайдер (теннис) pin ап casino casino официальный зеркало porno Елизавета Туктамышева casino рабочее казино фильм смотреть онлайн
DiskiPlus online casino официальный DiskiPlus букмекерские конторы бет <a href=https://diskiplus.ru>DiskiPlus букмекерская контора вход</a> DiskiPlus up букмекерская контора DiskiPlus 1×bet официальный <a href=https://diskiplus.ru>DiskiPlus зеркала официальных сайтов казино</a> DiskiPlus симулятор казино DiskiPlus сайт pin up casino DiskiPlus pin casino зеркало DiskiPlus включи казино DiskiPlus pin up casino top top DiskiPlus смотреть фильм казино DiskiPlus официальные зеркала казино
#3171 Charlesgunnyhttp://filmkachat.ru
1×слот регистрация в 1×slots casino
4. Заберите подарок. Чаще всего приз активизируется незамедлительно после регистрации. Но бывают истории, когда надо(надобно) зайти в собственный офис либо написать в саппорта.Вообще перейдя в казино — правила схожи в получении бездепозитных бонусов, в стереотипные верховодила входит: доказать эл. Почту и телефон, заполнить собственный личный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ. <a href=http://filmkachat.ru/>1×slots зеркало подтвердит вашу регистрацию если говорить</a> Можно. Вы постоянно сможете отказаться от получения бездепозитного приза за регистрацию в казино, же Вы не сделаете ставку. <a href=https://www.siteprice.org/website-worth/playhouse.com.ua>https://www.siteprice.org/website-worth/playhouse.com.ua</a> 1×slots зеркало этих способов предполагает регистрацию <a href=https://wiki.rolandradio.net/index.php?title=%D0%90%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0>https://wiki.rolandradio.net/index.php?title=%D0%90%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0</a>
1×slots регистрация на сайте
1×slots зеркало регистрация в 1×slots casino Во всех законных онлайн-казино Беларуси нужно свидетельство паспортных данных для забавы — это требование правительства государства. <a href=http://gctech21.com/bbs/board.php?bo_table=free&wr_id=565421>http://gctech21.com/bbs/board.php?bo_table=free&wr_id=565421</a> сайт 1× slots casino
1×slots зеркало
Как правило, при выводе денег, от играющего потребуется только устроить наименьший вклад чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом индивидуальный счет. <a href=http://www.die-seite.com/index.php?a=stats&u=beulahspringthor>http://www.die-seite.com/index.php?a=stats&u=beulahspringthor</a> 1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, случае не хотите замерзнуть жертвой жуликов или впустую потратить время; 1×slots рабочее зеркало
1хслотс мобильная версия зеркало
В истинное время получить приз за регистрацию в казино очень просто. Почти любой игорный дом с радостью предоставит деньги либо безвозмездные вращения. Многие игроки используют данным и не стесняются регистрироваться в любом клубе с прибыльными условиями. Кстати, это замечательная возможность придумать выигрышную стратегию и сорвать куш.Представленные на данной странице лучшие бездеп бонусы в казино за регистрацию в 2022 году имеют оптимальные условия. После кропотливого анализа редакция портала составила рейтинг спецпредложений, в посетители Casino.ru все сортировать перечень по нескольким аспектам: по сумме, вейджеру, максимальной сумме вывода и т.д. Акционные предложения от казино есть в разных форматах. Часто бонусы даются в размен на депо. Игрок вносит платеж и получает деньги, благотворительные вращения и поощрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — картина бонуса, который гарантирован за исполнение определенных действий на сайте:Активация случается за промокодов, которые вводятся в собственном офисе последствии регистрации. Среди спецпредложений в перечне Casino.ru находятся эксклюзивные промокоды, коие доступны лишь посетителям портала. Другие способы начисления средств ? автоматическая активация незамедлительно после творения аккаунта и получение подарка по запросу в службу технической помощи. Если вы бывалый игрок, вы должны аристократия, собственно приз без депо – редкая находка. Тем ниже, мы раз исследуем онлайн, дабы отыскать для вас лучшие бездепозитные предложения. casino 1×slot <a href=https://craigslistdirectory.net/1×%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D0%B2%D1%8B%D0%B2%D0%B5%D1%81%D1%82%D0%B8-%D1%81%D0%BE-%D1%81%D1%87%D0%B5%D1%82%D0%B0-%D0%BD%D0%B0-%D0%BE%D0%BF%D1%80%D0%B5%D0%B4%D0%B5%D0%BB%D0%B5%D0%BD%D0%BD%D1%8B%D1%85-%D1%83%D1%81%D0%BB%D0%BE%D0%B2%D0%B8%D1%8F%D1%85_394898.html>https://craigslistdirectory.net/1×%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D0%B2%D1%8B%D0%B2%D0%B5%D1%81%D1%82%D0%B8-%D1%81%D0%BE-%D1%81%D1%87%D0%B5%D1%82%D0%B0-%D0%BD%D0%B0-%D0%BE%D0%BF%D1%80%D0%B5%D0%B4%D0%B5%D0%BB%D0%B5%D0%BD%D0%BD%D1%8B%D1%85-%D1%83%D1%81%D0%BB%D0%BE%D0%B2%D0%B8%D1%8F%D1%85_394898.html</a> Выбирайте лучшие безвозмездные призы за обзоров на Casinoz – и пусть вам сопутствует счастье при отыгрыше бонусных кредитов!
1хслотс рабочее зеркало
Можно. Вы практически можете отрешиться от получения бездепозитного бонуса за регистрацию в казино, же Вы не создадите ставку. <a href=http://kidsnighttonight.com:/forums/member.php?action=profile&uid=390170>http://kidsnighttonight.com:/forums/member.php?action=profile&uid=390170</a> Акционные предложения от казино существуют в различных форматах. Часто бонусы даются в размен на депозит. Игрок заносит платеж и получает средства, бесплатные вращения и другие поощрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — вид бонуса, кот-ый гарантирован за выполнение конкретных действий на сайте: 1×slots casino регистрация 1×slotscasin online
<b>Смотреть еще похожие новости:</b>
<a href=https://www.sgomberisgombero.it/my-account-2/>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<a href=https://forum.bandariklan.com/showthread.php?tid=405336>1×slots зеркало которую указывали при регистрации кстати</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При регистрации по свидетельствовать только достоверную информацию. Когда учетная запись будет активна, появится доступ в Личный офис. В нем можно избрать валюту, ввести промокод и разузнать доскональные правила получения и отыгрыша бездепа. Краткая информация об промоакции часто присутствует непосредственно на регистрационной форме.
#3172 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать pin casino 1×bet 1 <a href=https://krtka.info/>букмекерская контора фонбет официальный сайт</a> букмекерская контора на андроид bitz casino <a href=https://res-publika.com>casino приложения</a> casino зеркало сайта зеркала официальных сайтов казино top casino букмекерская контора официальный сайт 7k casino бонус 1×bet официальный 1×bet xyz лучшая казино
DiskiPlus Семёнова Татьяна Владимировна порно DiskiPlus скачать 1×bet <a href=https://www.diskiplus.ru/>DiskiPlus Комарова Наталья Владимировна порно</a> DiskiPlus букмекерская контора мостбет DiskiPlus зеркала официальных сайтов казино <a href=https://diskiplus.ru/>DiskiPlus casino на телефон</a> DiskiPlus скачать букмекерскую контору на андроид DiskiPlus пари букмекерская контора DiskiPlus пин ап casino DiskiPlus официальное казино вход DiskiPlus бесплатные букмекерские конторы DiskiPlus up casino DiskiPlus 1×slots casino
#3173 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация на сайте
Благодаря программе преданности от игорного заведения, можно арестовать хороший старт и без дополнительных инвестициям запустить видеослоты. Кроме такого, возможно рассчитывать на реальную удачу и получить, без инвестиции собственных денег, великой выигрыш.В зависимости от интернет заведения каждый из них может вам предложить как бездепозитные деньги, например и бездепозитные фриспины, которые после успешной регистрации рухнут вам на ваш игровой баланс. <a href=http://filmkachat.ru/>x1 slots регистрация в 1×slots casino</a> Приглашаем делиться воззреньями о призах. Это поможет другим пользователям выбирать более прибыльные предложения. <a href=https://phileo.me/blogs/295801/Profesjonalny-skup-aut-Krak%C3%B3w-najlepsze-ceny-za-Twoje-auto>https://phileo.me/blogs/295801/Profesjonalny-skup-aut-Krak%C3%B3w-najlepsze-ceny-za-Twoje-auto</a> Выше мы предоставили глубокий комплект самых новых и своевременных бездепозитных призов в онлайн казино без пополнения на 2022 год, где продоставляется пользоваться любым ценным бездепозитным бонусом.Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам воспрещено начислять призы клиентам, не имеющим денежных средств на счете. Мы предлагаем рассмотреть животрепещущие бонусы онлайн-казино с лицензией, которые соблюдают законодательство РБ. 1×slots бонус за регистрацию <a href=https://marvelvsdc.faith/wiki/User:KathleneStrempel>https://marvelvsdc.faith/wiki/User:KathleneStrempel</a>
1×slots коды
Классическая разновидность приза за создание аккаунта. Его преимущество содержится сомнений, собственно клиент может самостоятельно выбирать аппараты и создавать ставки в них. Иногда перечень игровых автоматов ограничен оператором, хотя все также это какого-либо, чем один-единственный дешевый слот, как когда с внедрением фриспинов. казино 1×slots Но есть игорные заведения, которые готовы просто например жертвовать деньги на игру. Для этого довольно сделать профиль. Чтобы исключить свой выигрыш, вас сначала необходимо выполнить условия отыгрыша, указанные в критериях получения бездепозитного депозита.Приветственный бездеп предоставляется какому игроку только раз один. Казино борются с так именуемыми бонусхантерами (от англ. Bonus Hunter — охотник за бонусами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения дара. Исключить подобные действия разрешает верификация данных. Администрация вправе потребовать у посетителя доказать индивидуальные данные, обозначенные при регистрации. <a href=https://lookbook.nu/glavdorogadv2106>https://lookbook.nu/glavdorogadv2106</a> Бездепозитные призы истинными средствами, которые можно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадались.Получать информацию о самых прибыльных бонусах возможно без постоянного мониторинга новостей казино. Мы брали эту задачку на себя и непрерывно следим за услугами операторов, выбирая лучшие из их. В этом разделе собраны последние бездепы, промокоды к ним и условия их активации. Список акций регулярно пополняется. В топ зашли самые свежие бездепозитные призы за регистрацию в казино 2020, временные и замкнутые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и другим аспектам. Если срок деянья акции истек, она удаляется из списка. 1×slots регистрация на сайте 1×slots ru com Для получения депозитного бонуса необходимо пополнить свой игровой баланс настоящими средствами. Вознаграждение можно получить либо при внесении первого депозита, или повторяющий фиксированного процента от внесённых средств. Так либо иначе, бонус поступит на счёт только последствии пополнения.2. Создать свежий профиль. Для регистрации нужно заполнить маленькую анкету или зайдите в индивидуальный кабинет при помощи соц сетей;
казино 1×slots официальный сайт
<a href=http://pro-tulu.ru/users/lyricallegacy35>http://pro-tulu.ru/users/lyricallegacy35</a> Однако в условиях исчезают «подводные камешки», коие не разрешат исключить солидную сумму либо же вы не успеете отыграть вейджер. Поэтому профессионалы рекомендуют отобрать безвозмездные вращения за регистрацию в казино без депо, дабы поднабраться навыка и получить реальный шанс на победу. 1× slots casino зеркало Изучить управляла и условия получения бездепозитных бонусов казино, Вы сможете у нас на сайте в разделе с призами или на официальном сайте избранного Вами казино. Если возможности найти необходимую информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал либо по электронной почте.Каждый из бездепозитных призов без пополнения 2022 содержит собственный конкретный вейджер для отыгрыша, например же в каждом казино он уточняется персонально — где то он х55 а кое-где х30, повторюсь везде по разному!
1×slots казино зеркало
<a href=http://swissairways-va.com/phpBB3/viewtopic.php?p=1338681#p1338681>1×slots регистрацию более популярный вариант это</a> Маркетинговая деятеля всех игорных интернет-клубов обязана одевать различный характер. И случае вознаграждения на депо служат для того, дабы стимулировать заносить депозиты и поощрять теснее существующих пользователей, то бездепозитный приз в казино или приз за регистрацию в казино, этого всего, рассчитан на расширение базы потребителей. 1хслотс зеркало <a href=https://bongatoken.com/user/ChrisTwick/>https://bongatoken.com/user/ChrisTwick/</a>
1хслотс казино зеркало
Как правило, новоприбывшие игроки в первую очередь желают ознакомиться с способами ввода и вывода валютных средств и сроки исполнения поданных заявок дабы конкретно осознавать, как быстро у вывести свой казино бонус за регистрацию без депозита на электрический кошелек или же банковскую карту. К счастью для всех играющих, внутри определенных холдингов, все казино конкурируют меж собой. Ведь в бы определенную компанию представляло только одно онлайн-заведение, то ли бы посетители увидели казино с бонусом за регистрацию и могли бы рассчитывать лишь на вознаграждение повторяющий приза на первое вложение. К любому заведению периодически стопам завлекать свежих игроков, собственно, итоге, только на руку всем играющим.Осталось избрать казино с призом за регистрацию и создать профиль. После активации подарка выигрыш в от Фортуны и навыков. Таким образом онлайн казино получает вероятного игрока. Возможно в будущем либо настоящем он захотит поиграть на свои средства. Так трудятся бездепозитные призы в онлайн казино. Здесь отлично подходит выражение, бесплатные сыр случается лишь в мышеловке. Начинающие игроки могут не осознавать опасность пыла. Однако течением понимания становится больше. Это тема для отдельного обсуждения.Игры, в возможно выступать на бонусные деньги. Проверьте перечень игр, в которых можно выступать на бонусные свои, вполне они Вам не понравятся и надо тратить своё время на эту промоакцию. <a href=https://www.assayyarat.com/forums/member674035.html>https://www.assayyarat.com/forums/member674035.html</a> При верном раскладе бездепы — это прекрасный способ выступать на средства без растраты собственных средств. Есть количество советов, следуя которым можно извлечь максимально выгоды из похожих акций казино. Играть по лишь на лицензированных площадках. Скриптовые сайты не только обманывают с бонусными предложениями, хотя и употребляют пиратский софт с измененным ГСЧ. Выиграть на этих автоматах невозможно.Получить Бездепозитный бонус в интернет казино дело 2-ух кликов. Другой момент, отыграть промо и соблюсти правила и обстоятельства отыгрыша. Под правилами предполагается не только вагер, но и лимитирования по наибольшей ставке. Мы разумеем, что в кинотеатр все ставят на зеро и выигрывают. Призываем не создавать подобного. Перед активацией бонуса прочтите правила. Узнайте последующие факторы: Условия получения презента, за регистрацию, за депозит и многое. Ограничения по максимальной ставке. Зачастую не выше 350 руб. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вращать автоматы, а вагер будет стоять на пространстве. Поэтому важно аристократия, в каких забавах возможно совершать кратность денежного оборота. сайт 1× slots casino
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1× slots casino официальный сайт</a>
<a href=https://houseion.com/2023/04/25/in-the-heart-of-valencia/#comment-23939>1хслот официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Представленные на данной страничке наилучшие бездеп бонусы в казино за регистрацию в 2022 году имеют оптимальные условия. После кропотливого анализа редакция портала составила рейтинг спецпредложений, каком гости Casino.ru все сортировать перечень по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д. Каждая игровая платформа выделяется условиями по получению и отыгрышу бездепов. В правилах детально расписаны временные рамки, за которые нужно прокрутить вейджер. Также не забывайте тему наибольший размер ставки и наивысшую необходимую выплаты. С другой стороны, чтобы получить бездепозитные призы казино, довольно израсходовать не более 1 минутки.
#3174 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Арина и Дина Аверины, гимнастки порно с Петр Ян (ММА) <a href=https://kompromat1.online/>казино в россии</a> 7k casino официальный pin up casino скачать <a href=https://specreporter.com/>casino pin официальный</a> казино вулкан Москалькова Татьяна Николаевна порно порно с Артемий Панарин (хоккей) inform@rucriminal.info 1×bet зеркало рабочее на сегодня 1×bet xyz Чулпан Хаматова up casino
DiskiPlus Юдаева Ксения Валентиновна порно DiskiPlus casino андроид <a href=https://diskiplus.ru/>DiskiPlus 1×bet xbet xyz</a> DiskiPlus Елизавета Боярская DiskiPlus порно с Анастасия Потапова, теннисистка <a href=https://www.diskiplus.ru>DiskiPlus ramenbet casino</a> DiskiPlus Чулпан Хаматова DiskiPlus почему в казино нет часов DiskiPlus 1×bet сайт 1×bet xyz DiskiPlus ешь казино DiskiPlus porno Светлана Ходченкова DiskiPlus Елизавета Боярская DiskiPlus гама казино
#3175 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало рабочее
Многие новенькие колеблются, собственно поощрительный приз не нужно будет возвращать, и если они выиграли у казино. Это полностью неопасно и надежно. Выводя выигранные средства, игрок просто одергивает свое роль деле и утрачивает уникальную вероятность – бесплатно наращивать личное материальное положение.Начнём с как, собственно каждое промо за регистрацию подразумевает некоторые обстоятельства. Бездепозитные призы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность валютного оборота, необходимая для выполнения критерий. Пример, возымели бесплатные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 руб., неудачных или выигрышных, важно. После исполненья, бонусный баланс перейдёт на реальный и станет доступным к выводу. <a href=http://filmkachat.ru/>1×slots зеркало которую указывали при регистрации кстати</a> Если ординарными текстами, бездепы – это определённая сумма средств или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать подарки. Но есть некоторые аспекты. Существуют игорные дома, которые перед тем как начислить бонусы просят привязать телефонный, предоставить копии документов. <a href=https://www.webwiki.com/playhouse.com.ua>https://www.webwiki.com/playhouse.com.ua</a> 1× слот зеркало <a href=https://www.mmopro.org/members/466971.html>https://www.mmopro.org/members/466971.html</a> Вейджер не более х30–35 является приемлемым. Опытные игроки заявляют, собственно с этим вейджером реально остаться в плюсе, если правильно подойти к выбору игрового аппарата.Если простыми словами, бездепы – это определённая сумма средств или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать подарки. Но есть некоторые аспекты. Существуют игорные дома, которые перед тем как начислить бонусы требуют привязать телефон, предоставить копии документов.
1×slots зеркало рабочее
В разделе с бонусами активировать свой презент. Найти игры, для коих предусмотрено поощрение и применять приз по назначению. 1×slot регистрация Зарегистрироваться в казино по особой ссылке либо с бонусным кодом. Подтвердить контактные данные (номер аппарата и электрическую почту). Для подтверждения номера телефона нужно в личном профиле указать собственный номер и надавить кнопку „Подтвердить номер аппарата“, дальше Вы получите sms-сообщение с кодом, который необходимо установить в отвечающее поле. Для доказательства электрической почты, перейти по интенсивной ссылке в послании от казино. <a href=http://www.webdesignforum.com.au/member.php?action=profile&uid=29268>http://www.webdesignforum.com.au/member.php?action=profile&uid=29268</a> Когда идет о валютных бонусах, казино постоянно устанавливают условия вейджера, которые необходимо выполнить, дабы вывести выигрыш. 1хслотс мобильная версия зеркало Но есть азартные заведения, готовые просто например вручить средства на игру. Для этого довольно сделать профиль. Чтобы вывести выигрыш, сперва нужно выполнить вейджеровые условия, прописанные в критериях получения бездепа.Но никогда не запамятовывайте внимательно разбирать верховодила участия в бонусных промоакциях. Если вы нарушите хотя бы одно условие, позднее вы не сможете устроить недоразумение с администрацией.
1×slots casino регистрация 1×slotscasino09k online
Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам запрещено начислять бонусы посетителям, не имеющим валютных средств на счете. Мы предлагаем разглядеть актуальные призы онлайн-казино с лицензией, коие соблюдают законодательство РБ.Сроки активации бонуса уточняются каждым казино, но чаще всего они не превышают недели с этапа получения. Игроку непременно надо(надобно) применять бездеп протяжении указанного срока, в ином случае приз просто пропадет. Каждый приз можно получить лишь раз один, потому если не применять бездеп в срок, у игрока не несомненно второго шанса им пользоваться. Чаще всего используются коды. Их нужно заносить в специальные окошки регистрационной анкеты, случае идет о пригласительных бонусах, или в особом разделе личного кабинета игрока.Помните, что всевозможные нарушения управлял сведут на нет ваши усилия, и вы скорее останетесь без начисленного вам бесплатного бонуса. Всегда изучайте управляла начисления и обстоятельства вейджера. По любым вопросам, на которые вы возможности без найти ответы, обращайтесь за объясненьям и саппорт. <a href=https://dc-kd.ru/user/JoshuaAcarl/>https://dc-kd.ru/user/JoshuaAcarl/</a> 1×slots регистрацию более популярный вариант это Такой бесплатный эквивалент средств зачисляется на профиль юзера последствии осуществления притязаний и предназначаются они только для игрового процесса. Вывод таких вознаграждений вероятен только в осуществления вейджеровых условий.Бонус за регистрацию в казино без депо с выводом денег надо(надобно) отыграть. Зачастую для отыгрыша возможность потребоваться сделать ставки на необходимую, в количество десятков раз превышающую необходимую бонуса либо выигрыша.
1×slots зеркало этих способов предполагает регистрацию
<a href=http://sladkierecepti.5nx.ru/viewtopic.php?f=8&t=6347>1х слотс зеркало регистрация в 1×slots casino</a> Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют актуальную информацию о no deposit bonuses прочих предложениях. Денежные средства. Третий приз за регистрацию без депо – наличные. К раскаянию, лишь знаменитые и популярные клубы шансы уяснить средства в руб. Либо баксах. С их помощью возможность насладиться любой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед данным нужно выполнение конкретных условий. 1×slots подтвердит вашу регистрацию если говорить <a href=https://maps.google.co.nz/url?sa=t&url=https://doctorlazuta.by/>https://maps.google.co.nz/url?sa=t&url=https://doctorlazuta.by/</a> Мы советуем не отрицаться от сходственных услуг известных казино. Выделите количество минут на регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сейчас удача будет на вашей стороне!
казино 1×slots официальный сайт
Список например именуемых «запрещенных землель» прилагается к правилам бонусной программки игорного портала. Обязательно выясните, распространяются ли на вас подобные наказания. <a href=http://whdf.ru/forum/user/80466/>http://whdf.ru/forum/user/80466/</a> Многие новички колеблются, что поощрительный приз не будет возвращать, том если они выиграли у казино. Это безусловно безопасно и накрепко. Выводя выигранные свои, игрок просто одергивает свое участие при и теряет уникальную вероятность – безвозмездно увеличивать собственное материальное положение. 1 xslots рабочее зеркало Для получения предоставленных призов вам понадобиться — ПК или мобильное прибор, и остальное дело за малым.
<b>Смотреть еще похожие новости:</b>
<a href=https://bans.org.ua/index.php?topic=118470.new#new>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<a href=https://praisenpray.org/forums/showthread.php?tid=107140>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Благодаря программке преданности от игорного заведения, возможно арестовать хороший старт и без дополнительных вложений запустить видеослоты. Кроме как, возможно рассчитывать на реальную удачу и получить, без инвестиции собственных финансов, немалый выигрыш. Ниже указан важный список законных казино в Беларуси с призами на 1-ый депозит. Вы сможете попасть на официальный вебсайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус.
#3176 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
официальное казино вход порно с Варвара Субботина <a href=https://kompromat1.online/>porno Нина Пирогова, хоккеистка</a> винлайн букмекерская контора официальный сайт казино смотреть <a href=https://t.me/vchkogpu_ru>яндекс игры казино</a> 1×bet зеркало на сегодня Самойлова Алла Владимировна порно Чулпан Хаматова порно с Матвей Сафонов (футбол) карты казино порно с Диана Шнайдер (теннис) Ирина Горбачева
DiskiPlus порно с Евгения Медведева DiskiPlus порно с Анна Калинская (теннис) <a href=https://diskiplus.ru>DiskiPlus porno Юлия Канакина, скелетонистка</a> DiskiPlus слот casino DiskiPlus казино гта 5 <a href=https://www.diskiplus.ru/>DiskiPlus порно с Евгения Медведева, фигуристка</a> DiskiPlus где казино DiskiPlus порно с Каролина Севастьянова DiskiPlus казино вулкан DiskiPlus казино вход официальный сайт DiskiPlus 1×bet 1 DiskiPlus porno Виктория Баркова, легкоатлетка DiskiPlus casino 7k рабочее
#3177 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало подтвердит вашу регистрацию если говорить
Индивидуальные одобрения выдаются за совершение действий: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавленья либо официального клиента для ПК. В большинстве казино срабатывают программки преданности, присваивающие игрокам статусы за активность на сайте. Продвижение на грядущий степень часто сопровождается выдачей бездепа.Существует ли стратегии для отыгрыша бездепозитных бонусов? К раскаянию нет, на выигрыши или проигрыши с бонусов, казино либо игрок воздействовать не, отдача игр происходит от разработчиков игр. <a href=http://filmkachat.ru/>1×slots сайт зеркало</a> Приветственный бездеп предоставляется любому игроку лишь раз один. Казино дерутся с так именуемыми бонусхантерами (от англ. Bonus Hunter — охотник за призами), пытающимися заводить множественные аккаунты для надувательства оператора и повторного получения дара. Исключить похожие деяния дозволяет верификация данных. Администрация вправе потребовать у клиента подтвердить персональные данные, обозначенные при регистрации. <a href=https://www.printwhatyoulike.com/print?url=playhouse.com.ua>https://www.printwhatyoulike.com/print?url=playhouse.com.ua</a> Так собственно сможете храбро регистрироваться без всяких раздумий. Фортуна сегодня точно на вашей стороне. Не бойтесь, ведь последствие какого или убытка Вам совершенно не угрожает. С этими бонусами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе. 1×slots коды <a href=http://www.fdbbs.cc/home.php?mod=space&uid=669030&do=profile&from=space>http://www.fdbbs.cc/home.php?mod=space&uid=669030&do=profile&from=space</a> Так собственно приготовьтесь дать секретную информацию (пол, возраст, страна проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает менее суток, последствии чего удастся беспрепятственно выводить крупные выигрыши.Рассмотрим принцип его деянья на образце. Допустим, вы зарегались и возымели $10 not the slightest deposit bonus с вейджером х50. Это значит, что выигранные средства возможно несомненно выводить не раньше, чем в того, как общая сумма ставок достигнет $500.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
<a href=https://fougerite.com/members/jamesstawl.14360/>онлайн казино 1×slots</a> 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=https://ponysfm.com/users/Porsedropkt>https://ponysfm.com/users/Porsedropkt</a> 1×слот регистрация в 1×slots casino Для казино, работающих интернет, бездепозитные бонусы нужны для привлечения свежих клиентов. Предложение сыграть на слотах без надобности внесения настоящих денег — работающий способ для увеличения интереса к компании. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит играть в казино, лишь сейчас уже на собственные деньги.Индивидуальные одобрения выдаются за совершение деяний: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавленья либо официального посетителя для ПК. В большинстве казино действуют программы лояльности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на следующий уровень часто сопровождается выдачей бездепа.
казино 1×slots официальный сайт
Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Также, такой необходимо доказать собственный номер аппарата, достичь код, полученный в смс-сообщении от клуба ввести в особое поле в собственном офисе игрока. <a href=http://whdf.ru/forum/user/73278/>http://whdf.ru/forum/user/73278/</a> скачать 1×slots на андроид мобильная версия
1хслотс казино зеркало
На бонусные начисления все быть установлены вспомогательные ограничения, коие Вы не учли при отыгрыше. Пока бонус полностью не отыгран — деньги из казино не выводятся. 1×slots рабочее зеркало <a href=https://rus-crafting.ru/index.php?subaction=userinfo&user=DoctorLazutaSr>https://rus-crafting.ru/index.php?subaction=userinfo&user=DoctorLazutaSr</a>
1×slos регистрация в 1×slots casino
Обычно показатель выше, чем для бонусов на депозит. Не изумляйтесь, в он будет и х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных государств. <a href=http://zvezdjuchki.ru/user/OscarSoals/>http://zvezdjuchki.ru/user/OscarSoals/</a> Постарайтесь отыграть вейджер, чтобы появилась вероятность забыть заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электронной кошелёк, карту, телефонный. 1×slots казино зеркало 3. Подтвердить данные. В зависимости от клуба, нужно привязать телефон либо почту, указать персональную информацию;При использовании бездепозитным бонусом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют некоторое видов лимитов:
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.graylite.com/viewtopic.php?p=327416#p327416>1×slots быструю регистрацию а также мгновенное</a>
<a href=https://acerfans.ru/faq/197-kak-polzovatsja-forumom.html>1х слот регистрация в 1×slots casino</a>
<a href=http://forums.panzergrenadiers.com/showthread.php?23570–1×slot-%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%B7%D0%A0%D1%91%D0%A0%D0%85%D0%A0%D1%95-%D0%A0%C2%B7%D0%A0%C2%B5%D0%A1%D0%82%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%BB%D0%A0%D1%95&p=510380#post510380>1×slot казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Минимального оборота. Этот лимит устанавливается вейджером — пока игрок не сыграет на установленную сумму, вывод средств будет недосегаем. Ограничения по играм. Администрация воспрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, деньгами или бесплатными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда дробленье выполняется по виду игр. Например, отыгрыш возможен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino.
#3178 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
black russia казино Набиуллина Эльвира Сахипзадовна порно <a href=https://vestnik-jurnal.com/>порно с Голикова Татьяна Алексеевна</a> 1×bet рабочее на сегодня r7 casino <a href=https://strelochnik.com/>Елена Лядова</a> porno Илона Маркова, хоккеистка casinos winning porno Андрей Рублев (теннис) мобильные букмекерские конторы casino скачать Семёнова Татьяна Владимировна порно casino регистрации
DiskiPlus porno Юлия Пересильд DiskiPlus казино пин <a href=https://www.diskiplus.ru/>DiskiPlus пина букмекерской конторы</a> DiskiPlus pin up casino buzz DiskiPlus зеркала официальных сайтов казино <a href=https://www.diskiplus.ru>DiskiPlus up букмекерская контора</a> DiskiPlus букмекерские конторы без депозита DiskiPlus человек казино DiskiPlus casino бонус DiskiPlus букмекерская контора на андроид DiskiPlus Матвиенко Валентина Ивановна порно DiskiPlus казино без DiskiPlus суть казино
#3179 Empathy_emimahttps://empathycenter.ru/
Доброго времени суток! В центре «Эмпатия» оказывается помощь в устранении ряда психологических барьеров и неврологических нарушений: неуверенности в собственных силах, страхов, тревог, раздражительности, депрессии, навязчивых мыслей и образов, стеснительности, чувства вины, низкой самооценки, панических атак и сексуальных проблем. В качестве терапевтических методов используются: психотерапевтическое программирование, стратегическая терапия, групповая терапия, индивидуальная работа с нейропсихологом. <a href=https://empathycenter.ru/articles/antidepressanty-i-libido/>снижение либидо на антидепрессантах</a> Если empathycenter.ru или Сеть клиник доказательной психиатрии в Москве и Реутове, то это в Эмпатия Центр https://empathycenter.ru/ . Консультации как очно в Москве и Реутове, так и онлайн по всей России. Центр ментального здоровья «Эмпатия». Консультируйтесь и звоните по бесплатному номеру 8–800–775–07–12. Увидимся!
#3180 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало рабочее
Подарки на праздничные ? приуроченные к праздничным датам, требующие условного отыгрыша либо начисляются без такового. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду. <a href=http://filmkachat.ru/>1хслотс зеркало на сегодня</a> Обычно для получения призов без депо, казино выдвигает лояльные и абсолютно выполнимые обстоятельства, хотя есть ряд деяний коие запрещены и имеют стать неприятные результаты:Частенько новенькие не понимают, как активировать подарки либо вывести 1-ый выигрыш. Для сходственных случаев наша команда обрисовала главные термины – собственно такое фриспины, вейджер, как его отыграть, зачем необходимо протекать верификацию. <a href=https://app.planable.io/b/9T2nTzw9ATQAHwCt6/4AeAuPNczmkTXEDKm/wXHwiuHB6gHWWrXuP>https://app.planable.io/b/9T2nTzw9ATQAHwCt6/4AeAuPNczmkTXEDKm/wXHwiuHB6gHWWrXuP</a> Благодаря программке преданности от игорного заведения, можно брать хороший старт и без дополнительных инвестициям запустить видеослоты. Кроме как, можно рассчитывать на реальную фортуну и получить, без инвестиции личных денег, великий выигрыш. 1×slots зеркало видели такую регистрацию на <a href=http://www.odnopolchane.net/forum/member.php?u=608012>http://www.odnopolchane.net/forum/member.php?u=608012</a>
1×slots официальный сайт мобильная версия скачать
В настоящее время получить приз за регистрацию в казино довольно просто. Почти каждый игорный жилище с готовностью даст деньги либо бесплатные вращения. Многие игроки используют данным и не смущяются региться в любом клубе с прибыльными условиями. Кстати, это замечательная возможность выдумать выигрышную тактику и сорвать куш. 1×slot зеркало рабочее регистрации на телефон придет <a href=http://rtpsouth.com/UserProfile/tabid/69/userId/99984/Default.aspx>http://rtpsouth.com/UserProfile/tabid/69/userId/99984/Default.aspx</a> Наш перечень содержит наихорошие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает проверку по главным параметрам:Вы скорее, как и все предпочитаете получать подарки и бездепозитные бонусы казино. Игорные дома брали в привычку одаривать гэмблеров приятными призами. Стать обладателем приветственного подарка можно за создание профиля либо пополнение счёта. Второй вариант более интересный, так клубы готовы удвоить депо! Но если вы новичок и только знакомитесь с миром пыла, лучше воспользуйтесь призом за регистрацию. 1×slot зеркало рабочее этих способов предполагает регистрацию Выбрать казино с бездепозитным призом. У нас на сайте представлен перечень лучших онлайн казино, которые предлагают своим игрокам щедрые призы за регистрацию.
1хслот 1хслотс регистрация перейти на 1×slots
Чтобы помощи увериться в преимуществах бездепозитных бонусов, довольно зарегистрироваться в казино и получить поощрение. <a href=https://agro-directory.dp.ua/wr_board/tools.php?event=profile&pname=Julesevori>https://agro-directory.dp.ua/wr_board/tools.php?event=profile&pname=Julesevori</a> В качестве призов интернет казино нередко предлагает выдачу фриспинов, то есть даровых вращений игрового барабана. Виртуальные монеты возможно использовать для изучения в покерной школе либо для забавы в казино. 1×slot казино зеркало
1×slots бонус за регистрацию
Мы подготовили перечень, где есть всегда животрепещущие и свежие бездепозитные призы казино, которые вы можете получить бесплатно. Для наших юзеров есть особые предложения эксклюзивные бонусы, которые вы кого не отыщите, их мы обозначили особой красной плашкой «Exclusive».Чтобы без убедиться в превосходстве бездепозитных бонусов, довольно зарегистрироваться в казино и получить одобрение. Наш перечень содержит лучшие бездепозитные призы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит ревизию по важным характеристикам:Если простыми словами, бездепы – это определённая сумма средств либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать презенты. Но есть кое-какие аспекты. Существуют игорные жилища, которые перед тем как начислить призы настоятельно привязать телефонный, дать копии документов. Почти все игровые клубы настоятельно свидетельство контактных данных игрока для получения бездепозитного приза.Многие игроки, оценив функционал казино, остаются играть в нем и дальше ? на это и нацелено любое рекламную. Постоянные клиенты вносят депозиты и делают ставки, обеспечивая длительную прибыль оператора. То есть, казино раздают бездепы свежим пользователям для формирования лояльной аудитории. 1×slots официальный сайт зеркало <a href=http://newsrbk.ru/users_profile.php?id=7935>http://newsrbk.ru/users_profile.php?id=7935</a>
1 x slots
Заработать на бездепозитных бонусах за регистрацию в казино возможность любой пользователь, достигший совершеннолетия. Внесение депо – Будьте готовы восполнить счет после отыгрыша бонуса. Это обычное заявка верховодил для данного типа промо-акций. Лучше заранее уточнить, какую сумму надо(надобно) несомненно заносить на счет. Как верховодило, идет о наименьшем депозите, но вы должны быть убеждены, что он вам по кармашку. <a href=http://v208870d.bget.ru/user/OscarAcife/>http://v208870d.bget.ru/user/OscarAcife/</a> Главным нюансом в появлении данных вознаграждений состоит никаких, собственно пустив их в ход, геймер ничем не рискует и в последствии никому ничего не несомненно должен (не зависимо, получит ли он спасибо призам какой-нибудь выигрыш либо мгновенно спустит все только собственно прибывшие финансы). То есть, казино снабжает игрока вероятностью на дармовой базе выступать во всевозможные слоты даже спонсирует забаву.Риск-игра по одинаковым шансам – Также казино возможность воспрещать исполнять условия по отыгрышу счет раунда на удвоение, кот-ый предлагается в слотах, видео-покере и некоторых иных забавах. сайт 1× slots casino Бездепозитные призы в казино без пополнения 2022 — это конкретная сумма денег либо gift spins вращения, которые предоставляются первым постояльцам за регистрацию на сайте казино повторяющий бездепозитного приза, и выделяет вас вероятность помощью казино без пополнения опробовать услуги (игр), с последующей преимуществом, льготой вывода средств при выполнении всех установленных верховодил.Приветственный приз без депо ? презент за регистрацию. Выдается деньгами, фриспинами или баллами. В последнем случае бонусные баллы применяются для участия в турнирах либо размена на настоящие средства.
<b>Смотреть еще похожие новости:</b>
<a href=https://portugal-campings.com/pt/account/>скачать 1×slots официальный сайт</a>
<a href=https://timepost.info/showthread.php?tid=110755>1×slots casino регистрация</a>
<a href=http://link.5nx.ru/memberlist.php?mode=viewprofile&u=600>казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бoльшинcтвo азартных заведений выдвигают приблизительно однообразные, схожие условия и притязания, которые необходимо выполнить, дабы получить бездепозитный приз за регистрацию. Все их можно соединить в раз список: При исполненьи критерий отыгрыша и верификации, средства с бонусного счета переводятся на ведущей и имеют быть выведены на карту или электронный кошелек. Лимиты на вывод и сроки проведения транзакции зависимости от выбранной платежной системы.
#3181 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Кузнецова Анна Юрьевна порно vavada casino <a href=https://rumafia.news/>1×bet зеркало</a> скачать букмекерскую контору на андроид казино играть <a href=https://7club7.com/>7k casino зеркало рабочее</a> casino online зеркало 7k casino зеркало на сегодня сайте букмекерской конторы фонбет казино фильм смотреть онлайн порно с Алексей Миранчук (футбол) porno Мира Андреева (теннис) вывод казино
DiskiPlus 7k casino зеркало на сегодня DiskiPlus porno Марина Александрова <a href=https://diskiplus.ru>DiskiPlus 1×bet зеркало рабочее на сегодня</a> DiskiPlus рейтинг казино DiskiPlus казино на деньги <a href=https://diskiplus.ru>DiskiPlus Черкесова Бэлла Мухарбиевна порно</a> DiskiPlus 1×bet DiskiPlus porno Яна Троянова DiskiPlus porno Анна Сидорова, керлингистка DiskiPlus new casino DiskiPlus букмекерская контора DiskiPlus слот casino DiskiPlus лучшие онлайн казино
#3182 Charlesgunnyhttp://filmkachat.ru
рабочее зеркало 1хслотс
Верификация важна для добавочной защищенности и помочь техподдержке выявить бонусхантеров и мошенников. Кстати, рядах платформах выводы солидных сумм доступны лишь в подтверждения личности. <a href=http://filmkachat.ru/>1хслотс мобильная версия зеркало</a> В реальное время получить приз за регистрацию в казино довольно просто. Почти любой игорный жилище с радостью даст деньги либо благотворительные вращения. Многие игроки пользуются этим и не стесняются региться в каждом клубе с выгодными критериями. Кстати, это отличная возможность придумать выигрышную тактику и сорвать куш.Какие бонусы я могу еще получить считая бездепозитного приза за регистрацию в казино? По мимо бездепозитного бонуса, любое онлайн казино предлагает игрокам прибыльное предложение на первый депозит, вы совершаете депозит, ваш депо увеличивается в двое либо числе в трое, что, этим наиболее начать выступать можно с более крупной суммой, так же не запамятываем на вейджер на бонусы. <a href=https://redmine.dti.economia.gov.br/issues/72791>https://redmine.dti.economia.gov.br/issues/72791</a> Призовые начисления без депозита все предоставляться для участия в турнирах онлайн казино. Потратить перечисленные деньги возможно необыкновенно в рамках этой акции. Условия их проведения включают в себя лимитирования на список игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться таким предложением, лучше изучить его верховодила. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=http://parijanka.kz/index.php?subaction=userinfo&user=magentaquagmire>http://parijanka.kz/index.php?subaction=userinfo&user=magentaquagmire</a> Бонус за регистрацию в казино выдается только раз раз на одного игрока. Но посещают вспомогательные промоакции, в коих бездепы раздаются для постоянных клиентов и эти презенты Вы сможете получить больше 1-го раза.Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.
1×slots официальный сайт мобильная версия скачать
1× slots официальный Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша бонусов. Заведения всегда устанавливают максимальную ставку, допустимую по условиям вейждера.Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают приз по государствам. Вплоть до такого, что клуб возможность брать игроков из Вашей государства, а бездеп не давать. <a href=http://artshi.ru/index.php?subaction=userinfo&user=gutturalincubus>http://artshi.ru/index.php?subaction=userinfo&user=gutturalincubus</a> 1×slot регистрация Шаг 4. Активация. Внимательно изучите обстоятельства, информацию по лимитированиям и сроке действия бонусного предложения. Разобравшись с правилами, возможно активировать бонус в собственном кабинете (времени ? с внедрением промокода) или по запросу в саппорт.Иногда для получения бонусов нужно спутаться с адептами службы. Удобнее всего с ними разговаривать в онлайн-сате, желая времени довольно запроса по электрической почте.
1×slots регистрация 1×slots casino 777 online
Отыграв бездепозитный бонус в казино с выводом тоже придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в сходственное лимитирование существует, то единоразово вывести выйдет только сумму, не превосходящую объем полученного приза.Бонус за регистрацию в казино выдается лишь один один на одного игрока. Но посещают дополнительные промоакции, в рамках которых бездепы расступаются для неизменных клиентов и эти презенты Вы можете получить более одного раза. Некоторые онлайн-казино без депо предлагают новым клиентам избрать бонус при регистрации. Будьте внимательны: выбрав раз, вы в безусловном большинстве случаев не сможете пользоваться остальными. <a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=3957>http://www.predictive-datascience.com/forum/member.php?action=profile&uid=3957</a> Обычно бездепозитные акции от казино, прибывают на эл. Почту в деньки рождения либо праздники. В некоторых интернет казино возможно адресоваться в чат и как неизменному игроку, возможно для предложат бездепозитное предложение. 1×slots зеркало регистрацию более популярный вариант это Обычно бездепозитные промоакции от казино, приходят на эл. Почту в дни рождения или дни. В некоторых интернет казино можно обратиться в чат и как неизменному игроку, вполне для предложат бездепозитное предложение.Для выбора азартного заведения Вы сможете пользоваться списком наших казино с бонусами за регистрацию. На нашем веб-сайте мы выпустили список бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, собственно доля призов неповторимые и доступны лишь для гостей нашего сайта по-специальному промо-коду либо по оригинальной ссылке. Кроме того, для любого приза мы подготовили подробный обзор, в Вы узнаете как получить и отыграть поощрение и как вывести свой выигрыш с бездепа.
1×slots подтвердит вашу регистрацию если говорить
<a href=https://americanrabbit.org/viewtopic.php?f=2&t=3053>1×slots зеркало регистрация</a> Для вывода средств приз надо(надобно) будет отыграть законам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариациями отыгрыша бездепозитного бонуса до его получения, дабы избежать конфликтных обстановок.Законодательство, регулирующее азартные игры в различных странах, влияет на полномочия операторов. В итоге юзеры из отдельных регионов сталкиваются с ограничениями со стороны казино. Это возможность быть как глубокий отказ в доступе, так и невозможность загружать игры отдельных изготовителей. 1×slots casino регистрация 1×slots review live <a href=http://eco-adamant.kz/index.php?subaction=userinfo&user=sablenationalit>http://eco-adamant.kz/index.php?subaction=userinfo&user=sablenationalit</a>
зеркло казино 1×slots
<a href=http://oooberu.ru/bitrix/rk.php?goto=http://board-en.piratestorm.com/proxy.php?link=http://strumen.com/bitrix/rk.php?goto=https://telegra.ph/Kak-ocenit-akademicheskuyu-uspevaemost-studenta-09–23>http://oooberu.ru/bitrix/rk.php?goto=http://board-en.piratestorm.com/proxy.php?link=http://strumen.com/bitrix/rk.php?goto=https://telegra.ph/Kak-ocenit-akademicheskuyu-uspevaemost-studenta-09–23</a> Ну и конечно же, для казино бездепозитные бонусы прибыльны с имиджевой стороны: сходственная добродушие повышает степень преданности посетителей к фирмы.Возможность протестировать новые игры, не рискуя личными средствами и создать личную тактику игры. 1×slots казино зеркало Похожим образом работает третий метод доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения клиента либо из-за с получения им VIP-статуса. Подарок предоставляется после обращения в поддержку и ревизии.
<b>Смотреть еще похожие новости:</b>
<a href=http://medforum.5nx.ru/viewtopic.php?f=4&t=8428>1хслот скачать</a>
<a href=https://adminclub.org/showthread.php?tid=127897>1хслотс рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но эти рамки не смущают числе хайроллеров, поскольку коэффициенты на слотах дозволяют рассчитывать на солидные выигрыши, ну некоторых автоматах разыгрывается прогрессивный джекпот.
#3183 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало
Бесплатный бонус – кредиты, коие онлайн-казино начисляет клиенту, не заставляя его пополнять игровой счет. <a href=http://filmkachat.ru/>1×slots официальный сайт мобильная версия скачать</a> Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.Oтыгpaть приз с обозначенным вeйджepом, результата необходимо сдeлaть cтaвoк нa cумму, превосходящую объем приза в несколько раз. <a href=https://www.zerohedge.com/user/iEh8TBu81fgq28uxY5HNLOYmYF13>https://www.zerohedge.com/user/iEh8TBu81fgq28uxY5HNLOYmYF13</a> Выбрать казино с бездепозитным бонусом. У нас на веб-сайте представлен список лучших интернет казино, которые предлагают своим игрокам щедрые бонусы за регистрацию. 1×slots казино мобильная версия <a href=http://forums.filatelija.lv/memberlist.php?mode=viewprofile&u=26774>http://forums.filatelija.lv/memberlist.php?mode=viewprofile&u=26774</a> Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 долларов. Если выдаются фриспины, их число редко превышает нескольких десятков бесплатных вращений.Постарайтесь отыграть вейджер, дабы была возможность оставить заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные приборы. Вы можете получить выигрыш на электрической кошелёк, карту, телефон.
1хслотс казино зеркало
У нас на сайте Вы найдете перечень бонусов без депо в проверенных казино и подробную информацию то как их получить и использовать.2. Создать новый профиль. Для регистрации нужно заполнить небольшую анкету или зайдите в личный кабинет при помощи соц сетей; 1×slots регистрация 1×slotscasino 56 online Фриплей-бонусы встречаются только в некоторых клубах. Они зачисляются незамедлительно последствии творения профиля и активны непродолжительное время. Если не успеете потратить средства, они попросту сгорят. Касаемо времени, в большинстве случаев бонусы активны на часа.Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы мгновенно получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, бывает реальный шанс победу! <a href=https://ukrpravda.net/index.php?topic=70415.0>https://ukrpravda.net/index.php?topic=70415.0</a> Риск-игра по одинаковым шансам – Также казино имеет запрещать исполнять обстоятельства по отыгрышу с помощью раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких других забавах.Иногда для получения бонусов необходимо связаться с представителями саппорта. Удобнее всего с ними разговаривать в онлайн-сате, хотя времени достаточно запроса по электрической почте. 1×slots зеркало 1хслотс регистрация перейти на 1×slots Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают бонус по государствам. Вплоть до как, собственно клуб может брать игроков из Вашей страны, а бездеп мешает.Иногда у посетителей вебсайта все появиться трудности, задачи, препядствия при активации приобретенного промо-кода. В таких случаях, необходимо обратиться за поддержкою в службу «Support». Для получения ответа, непременно указывается определенная причина обращения и подтверждается информация дополнительными экрана. Если сформировалась спорная обстановка, практически можно обратиться к основному регулятору или контролирующему органу, выдавшему этому заведению лицензионный документ.
1хслотс рабочее зеркало на сегодня
Это также благотворительные финансы, которые поступают на аккаунты новоиспеченных игры в регистрирования. А особенность таких призов произведено сомнений, собственно обретенные деньги обязательно по применять в продолжении назначенного медли. <a href=http://maps.google.com/url?sa=t&url=http://webmail.gorodarmavir.ru/bitrix/redirect.php?goto=http://dialweb.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/xeSAQcFDZj4>http://maps.google.com/url?sa=t&url=http://webmail.gorodarmavir.ru/bitrix/redirect.php?goto=http://dialweb.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/xeSAQcFDZj4</a> 1×slots зеркало проходить регистрацию это отличный вариант В разделе с призами активировать свой презент. Найти забавы, для которых учтено поощрение и применять приз по предназначению.Высокая конкурентность в сегменте азартных игр мотивирует операторов привлекать клиентов разнообразными акциями. Благодаря данному у гостей появляется вероятность получить бонусы в казино за регистрацию без депозита. Воспользоваться этим предложением возможно, избегая процедуру внесения средств на игровой счет, просто активировав акк на сайте. Наш гид по бездепам поможет выбрать самую симпатичную бонусную программу, разузнать правила получения такого вознаграждения и воспользоваться им с максимальной выгодой.
1×slots зеркало подтвердит вашу регистрацию если говорить
Возьми собственный подарок. Чаще всего бонус активизируется сразу после регистрации. Но случаются ситуации, когда надо(надобно) забежать в личный офис либо написать в справочную службу. Выбирайте лучшие бесплатные призы за обзоров на Casinoz – и пусть вам сопутствует удача при отыгрыше бонусных кредитов!Помимо прочего, для вывода средств по бездепу необходимо привнести на счёт свой 1-ый депозит — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально вероятную необходимую, после чего вывод средств станет доступен. 1×слот регистрация в 1×slots casino <a href=http://cg.darkml.net/bbs/home.php?mod=space&uid=8082300>http://cg.darkml.net/bbs/home.php?mod=space&uid=8082300</a> Отыграв бездепозитный бонус в казино с выводом тоже придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если подобное лимитирование существует, то единоразово вывести выйдет только необходимую, не превышающую размер полученного приза.Диапазон ставок, коие вправе устроить игрок, также лимитирован. Обычно назначать возможно небольшую сумму — около 10–30 рублей за одно вращение.
1×slots зеркало быструю регистрацию а также мгновенное
<a href=http://bbs.1001860.com/home.php?mod=space&uid=2327023>http://bbs.1001860.com/home.php?mod=space&uid=2327023</a> Главным моментом в возникновении этих вознаграждений состоит никаких, что пустив их в ход, в ничем не рискует и в последствии никому ничего не несомненно должен (не зависимо, получит ли он спасибо бонусам какой-нибудь выигрыш или мгновенно спустит все лишь что прибывшие финансы). То есть, казино снабжает игрока возможностью на дармовой базе играть во всевозможные слоты даже спонсирует игру. 1 xslots рабочее зеркало Игры, каких возможно играть на бонусные средства. Проверьте перечень игр, в которых можно выступать на бонусные свои, вполне они Вам не понравятся и не тратить своё время на эту промоакцию.Создать новый профиль. Для регистрации нужно заполнить небольшую анкету или зайдите в индивидуальный кабинет посредством социальных сетей;
<b>Смотреть еще похожие новости:</b>
<a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=142530>1хслотс официальный сайт зеркало</a>
<a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=941539#pid941539>1×slots официальный зеркало</a>
<a href=https://www.kfz-gringer.at/index.php/forum/suggestion-box/77349–1×slots#77113>1×slots коды</a>
<a href=http://weeklywars.de/viewtopic.php?f=12&t=9380&p=463344#p463344>1×slots официальный сайт зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Игрокам стоит принимать приветственный приз как гарантированный метод получить крупный выигрыш, хотя это отличная возможность без расходов расценить перечень казино.
#3184 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Голикова Татьяна Алексеевна пина букмекерской конторы <a href=https://vestnik-jurnal.com/>букмекерские конторы бет</a> порно с Ирина Сидоркова casino на телефон <a href=https://sovsekretno.net/>porno Юлия Канакина</a> casino рабочее porno Елизавета Туктамышева пин ап casino pin up top porno Юлия Канакина, скелетонистка unlim casino порно с Антропова Валентина Викторовна casino скачать
DiskiPlus 1×bet приложение DiskiPlus casino регистрации <a href=https://www.diskiplus.ru>DiskiPlus up букмекерская контора</a> DiskiPlus бесплатно играем казино DiskiPlus casino online зеркало <a href=https://diskiplus.ru>DiskiPlus 7k casino зеркало на сегодня</a> DiskiPlus яндекс казино DiskiPlus porno Анна Сидорова, керлингистка DiskiPlus порно с Владимир Минеев (ММА) DiskiPlus казино вход официальный сайт DiskiPlus 7k casino скачать DiskiPlus 1×bet зеркало на сегодня DiskiPlus porno Илона Маркова, хоккеистка
#3185 Charlesgunnyhttp://filmkachat.ru
1 x slots
Если площадка дарует бездеп за регистрацию, то процедура его получения проста. Нужно лишь завести аккаунт на сайте и активировать его, подтвердив адрес электронной почты, номер телефонного или иные данные, которые просит оператор. Перед данным нужно убедиться, собственно пользователь располагается на официальном сайте казино, но на жульнической площадке.При регистрации по свидетельствовать только достоверную информацию. Когда учетная запись будет активна, появится доступ в Личный офис. В нем можно избрать валюту, ввести промокод и разузнать доскональные правила получения и отыгрыша бездепа. Краткая информация об промоакции часто присутствует непосредственно на регистрационной форме. <a href=http://filmkachat.ru/>1хслотс официальный сайт зеркало</a> Чаще всего интернет-казино предлагают бездепозитные призы новым юзерам. Эта промо-акция довольно эффективно завлекает начинающих, подталкивая их к открытию счета. Конечно, не все становятся преданными клиентами, хотя сам факт регистрации аккаунта играет на руку заведению. <a href=https://similars.net/alternatives-to/playhouse.com.ua>https://similars.net/alternatives-to/playhouse.com.ua</a> Акции, приуроченные к календарным праздничным, бывают рассчитаны как на всех пользователей, например и на категории: к, подарок на 8 марта девушкам-игрокам либо мужчинам на 23 февраля.Также, учите, что бездепозитный приз возможно исключить лишь в случае, когда станут выполнены все условия отыгрыша. x1 slots регистрация в 1×slots casino <a href=https://honcure.com/user/Robertoremy/>https://honcure.com/user/Robertoremy/</a> Многие новенькие колеблются, собственно поощрительный приз надо несомненно отдавать, том если они выиграли у казино. Это безусловно безопасно и накрепко. Выводя выигранные свои, игрок просто одергивает свое участие деле и утрачивает уникальную вероятность – даром увеличивать личное материальное положение.
1×slots акции
Выбор каждого интернет казино на нашем сайте. В описании к каждому Вы можете разузнать, что получите за создание аккаунта.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. <a href=https://rolivka.online/forum/showthread.php?tid=35285>онлайн казино 1×slots</a> 1×слотс казино Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро либо 20 $. Если выдаются фриспины, их число изредка выше нескольких десятков бесплатных вращений.Выбрать казино с бездепозитным бонусом. У нас на сайте представлен список превосходнейших онлайн казино, которые предлагают своим игрокам щедрые призы за регистрацию. <a href=http://islamdini.kg/index.php?subaction=userinfo&user=yellowknowledge>http://islamdini.kg/index.php?subaction=userinfo&user=yellowknowledge</a> Не сложно догадаться, что no down payment bonuses практически никогда не случаются немаленькими. Чаще всего речь о пяти–тридцати долларах (или эквиваленте этой суммы в иной денежной). казино 1×slots
1х слот регистрация в 1×slots casino
На страничке представлены бездепозитные призы за регистрацию в казино редчайшая заслуга за которой гонятся все игроки как новички, так и мастера. Мы также уделяем огромное внимание на присутствие бонусов при формирование рейтинга казино на средства. Бездепозитный бонус это возможность выступать даром и выиграть настоящие средства. Но есть азартные заведения, готовые просто например вручить средства на игру. Для сего достаточно сделать профиль. Чтобы исключить выигрыш, сперва необходимо выполнить вейджеровые обстоятельства, прописанные в критериях получения бездепа. <a href=http://gslight.ru/bitrix/redirect.php?goto=http://bigbrands-shop.ru/bitrix/redirect.php?goto=http://y-zdorov.ru/bitrix/redirect.php?goto=https://telegra.ph/Ponimanie-klyuchevyh-aspektov-i-znacheniya-pravosposobnosti-09–23>http://gslight.ru/bitrix/redirect.php?goto=http://bigbrands-shop.ru/bitrix/redirect.php?goto=http://y-zdorov.ru/bitrix/redirect.php?goto=https://telegra.ph/Ponimanie-klyuchevyh-aspektov-i-znacheniya-pravosposobnosti-09–23</a> Даже не выиграв солидную необходимую, игрок увлекательно проведет время, изнутри изучит работу площадки, оценит геймплей автоматов. Все это без каких-либо денежных рисков. Быть в курсе превосходнейших промоакций легко. Достаточно регулярно изучать перечень свежих онлайн казино с выводом приза без депо в этом разделе.Бездепозитный приз предоставляется новенькому игроку за определенные деяния. Часто презент повторяющий денег либо фриспинов выдается за регистрацию, спасибо чему юзер получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. казино 1× slots официальный сайт Способы получения бездепа различаются от вида бонуса, кот-ый приглянулся игроку. Но вам иначе нужно быть зарегистрированным в легальном онлайн-казино и подтвердить собственную лицо. В общем виде пошаговая аннотация для получения бездепозитного бонуса выглядит например:
1×slots официальный demo регистрация в 1×slots casino
Бездепы с безвозмездными вращениями предоставляют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд платит казино. Число спинов ограничено и изредка выше сотню. Если акция включает в себя количество безвозмездных игр, их начисление имеет быть разбито на количество дней. <a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=379817>скачать 1×slots на андроид мобильная версия</a> Если вы опытный игрок, вы должны аристократия, собственно бонус без депозита – редчайшая находка. Тем не менее, мы в исследуем интернет, дабы найти для вас наилучшие бездепозитные предложения. Бонус начисляется игроку незамедлительно после регистрации и прохождения верификации в казино и не требует от клиента внесения депозита. Как управляло, объем бонуса в подобном случае довольно застенчивый, впрочем дозволяет новичкам познакомиться с забавой без риска настоящими деньгами.Максимальная ставка ? уточняется в еденице счета и ограничивает объем ставки за один спин. В случае ее превышения бонус может быть аннулирован. Также в правилах возможность содержаться запрет на размещение ставок определенного вида, примеру, по одинаковым шансам в рулетке (то есть, на чет либо нечет, красное либо темное и т.д.). 1хслотс казино зеркало <a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=profile_view&UID=20209>http://mtw2014.tmweb.ru/forum/?PAGE_NAME=profile_view&UID=20209</a> Возьми свой подарок. Чаще всего бонус активизируется незамедлительно после регистрации. Но посещают ситуации, когда надо(надобно) забежать в индивидуальный офис или написать в справочную службу.
1хслотс регистрация в 1×slots casino
Хотя безвозмездные призы начисляются без депозита, не исключено, что вам понадобиться заносить средства. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только после того, как новый клиент раз пополнит игровой счет.Новички не любят сразу же вносить депо. Это обусловлено неименьем опыта и сомненьем. К счастью, в возможно получить бездепозитный приз за регистрацию в казино. Неважно что начислит система – фриспины либо кредиты. В всяком случае вы не рискуете своими сбережениями. Это замечательная возможность запустить приглянувшийся видео слот или же испытать удачу в настольных забавах. Бонусы без депо при регистрации считаются наиболее красивыми как для опытнейших игроков, так для и начинающих. Получив такое вознаграждение, клиент может играть на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а также условия их активации и выигрыша.Бонус в казино без депо содержит разные разновидности: это может быть приветственный приз, акции в честь каких-то дней либо главных дат, приз за привлечение новых игроков, лояльность и получение VIP-статуса. <a href=http://cars.autokaif.ru/index.php?subaction=userinfo&user=robustaxle75>http://cars.autokaif.ru/index.php?subaction=userinfo&user=robustaxle75</a> Бывают ли бездепозитные призы без вейджера? Бывают, если у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино.Отказ в прохождении верификации. Если клиент не хочет либо не предоставить документы, подтверждающие его лицо, профиль будет заблокирован вместе со всеми бонусными начислениями. 1×slots официальный сайт зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://games-garant.ru/index.php?subaction=userinfo&user=Jamesneorm>1×slots зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подобные бонусы без депозита предоставляются на более выгодных условиях. Зачастую они покрупнее, а условия отыгрыша менее жесткие. Главным моментом в появлении данных вознаграждений состоит сомнений, что пустив их в ход, в ничем не рискует и в последствии никому ничего не будет должен (не зависимо, получит ли он благодаря призам какой-либо выигрыш или мгновенно спустит все лишь собственно прибывшие деньги). То есть, казино снабжает игрока возможностью на дармовой базе выступать во всевозможные слоты и даже спонсирует забаву.
#3186 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пин casino рабочее казино <a href=https://res-publika.com>Семёнова Татьяна Владимировна порно</a> casino рабочее слоты казино <a href=https://slon-ru.com/>вавада казино</a> порно с Максим Глушенков (футбол) up букмекерская контора casino ап Анна Михалкова up casino скачать букмекерскую контору на андроид порно с Юлия Ефимова, пловчиха
DiskiPlus самое казино DiskiPlus сайт 1×bet слоты <a href=https://diskiplus.ru>DiskiPlus скачать букмекерскую контору на андроид</a> DiskiPlus pin casino зеркало DiskiPlus cat casino <a href=https://www.diskiplus.ru>DiskiPlus porno Дарья Клишина</a> DiskiPlus Радченко Светлана Юрьевна порно DiskiPlus 1×bet официальный DiskiPlus porno Мария Шарапова DiskiPlus леон букмекерская контора DiskiPlus пари букмекерская контора DiskiPlus 1×bet на андроид DiskiPlus порно с Кирьянова Дарья Борисовна
#3187 Charlesgunnyhttp://filmkachat.ru
1×slots casino online регистрация
С иной стороны, гораздо легче арестовать бездепозитные фриспины за регистрацию в казино и напрямик данный начать вертеть барабаны в лучших слотах. Главная особенность спинов никаких, что они предназначены для топовых автоматов. Удастся столько пройти вспомогательные раунды, но и прирастить сумму выигрыша, заработать респины и другие внутриигровые презенты.Диапазон ставок, которые вправе сделать игрок, также лимитирован. Обычно назначать возможно маленькую сумму — около 10–30 руб. За одно вращение. <a href=http://filmkachat.ru/>1×slots промокод при регистрации</a> <a href=https://help.bemob.com/discuss/67877b6763d8950052d0e943>https://help.bemob.com/discuss/67877b6763d8950052d0e943</a> 1×slos регистрация в 1×slots casino <a href=http://bbs.all4seiya.net/home.php?mod=space&uid=992061>http://bbs.all4seiya.net/home.php?mod=space&uid=992061</a> При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, которое можно предназначить ирге в казино.Шаг 5. Использование и отыгрыш. Бездеп обязан быть использован в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера.
1×slots регистрация на официальном сайте
<a href=https://irc.floobits.com/Jamesamiva>1×slots официальный сайт зеркало рабочее</a> казино 1×slots официальный сайт Приглашаем делиться мнениями о призах. Это поможет другим пользователям подбирать более прибыльные предложения. <a href=https://www.efunda.com/members/people/show_people.cfm?Usr=Turmore0708>https://www.efunda.com/members/people/show_people.cfm?Usr=Turmore0708</a> Чтобы бездеп не был начислен на Ваш аккаунт, Вам надо активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк автоматически, а Вы не расчитываете его использовать, обратитесь в саппорта с просьбой отменить бездепозитный бонус.Зарегистрируйтесь. Для регистрации чаще всего довольно установить собственный номер телефонного и почтовый адрес, в чего установить полученный код из СМС. Возможно, требуется показать промокод. В правилах акции будет написано, где его надобно вводить. Иногда это надо создавать при регистрации, время — теснее после творения собственного кабинета, на отдельной страничке. 1×slots коды Бесплатный бонус – кредиты, коие онлайн-казино начисляет клиенту, не заставляя его пополнять игровой счет.
1×slots бездепозитный бонус за регистрацию
Обыкновенные бездепозитные призы в объеме от 3-х до 20 долларов созданы чтобы, чтобы, чтобы в забавы заходили все новые и новые игроки. Здесь, скорее, несомненно лимитирование на максимальный выигрыш. Важно, чтобы перед минимальным вкладом был отключен приз за 1-ое пополнение счета, и игрок не попадет на повторный вейджер.Игры, в которых можно выступать на бонусные средства. Проверьте перечень игр, в возможно играть на бонусные средства, вероятно они Вам не понравятся и не стоит расходовать своё время на эту промоакцию. Срок активации и время на отыгрыш. Зачисление средств или фриспинов происходит при активации протяжении строго ограниченного периода, похожие требования предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать бонус несколько дней либо и недель. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высочайшим вейджером.Онлайн гемблинг развивается с любым деньком больше и больше, новые бренды создаются не по дням а по часам. Новые онлайн казино проделывают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и что, этим самым предлагают бездепозитные бонусы за регистрацию, собственно бы не пропустить эту вероятность — как воспользоваться свежим бездепом, советуем навещать наш сайт как возможно почаще, самое смачное и новые будет добавляться в этом же перечне. <a href=https://android.nalench.com/user/RalphTup/>https://android.nalench.com/user/RalphTup/</a> Если простыми текстами, бездепы – это определённая сумма денег либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать подарки. Но есть некоторые нюансы. Существуют игорные жилища, коие перед что, этим как начислить призы настоятельно привязать телефонный, дать копии документов. 1хслотс официальный сайт зеркало Условия вывода выигрыша. В неких заведениях для успешного вывода с бездепозитного бонуса довольно пополнения баланса и доказательства личности. В иных же клубах, нужно количество раз прокрутить свой депозит.
1×slots зеркало на сегодня
<a href=http://www.skmecca.com/2011/04/14/leave-the-world-better-than-you-found-it/comment-page-35/#comment-128217>1×slots регистрация 1×slots casino c2d ru</a> Да, у даровых бонусов есть дефекты. Прежде всего, они обыкновенно не. Кроме такого, условия вейджера по ним всегда жесткие. Но все же неимение риска делает их очень красивыми для клиентов.B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax 1×slots актуальное зеркало <a href=https://maps.google.com.hk/url?q=https://doctorlazuta.by/>https://maps.google.com.hk/url?q=https://doctorlazuta.by/</a>
1×slots скачать на айфон
Вознаграждения за получение VIP-статуса ? начисляются в рамках программы лояльности при достижении очередного уровня или выдаются индивидуально менеджерами саппорта. Для казино, работающих онлайн, бездепозитные бонусы необходимы для привлечения свежих посетителей. Предложение поиграть на слотах без необходимости внесения настоящих денег — работающий метод для увеличения энтузиазма к компании. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит выступать в казино, лишь теперь теснее на личные средства.Теоретически, к безвозмездным бонусам возможно отнести так называемые фриспины. Напомним, речь идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, потому что они деют только возможность делать ставки. <a href=https://gsan.essex.ac.uk/user/kennethlurax/?um_action=edit>https://gsan.essex.ac.uk/user/kennethlurax/?um_action=edit</a> Заработать на бездепозитных бонусах за регистрацию в казино имеет любой юзер, достигший совершеннолетия. 1×slots зеркало 1хслотс регистрация перейти на 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.dis-course.net/viewtopic.php?t=484175>казино 1×slots официальный сайт</a>
<a href=https://smm-seo.ru/members/rabofreeol.4209/>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<a href=http://link.5nx.ru/viewtopic.php?f=5&t=7541>1×slots официальный регистрация</a>
<a href=https://forum.graylite.com/viewtopic.php?p=328567#p328567>1×slots акции</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Внесение депозита – Будьте готовы восполнить счет последствии отыгрыша бонуса. Это обычное заявка управлял для данного на промо-акций. Лучше заранее уточнить, какую необходимую надо(надобно) несомненно заносить на счет. Как правило, речь о наименьшем депозите, но вы должны быть убеждены, что он вас по карману. Если вы облюбовали себе несколько брендов коие вас больше всего полюбились, для неизменной игры! Таких гемблеров казино довольно любит и ценит, за частую такие игроки становятся VIP игроками заведения, коим часто поступают прибыльные предложения вид бонусов, например же туда входит и бездепозитные.
#3188 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино ли pin ап casino <a href=https://sovsekretno.net/>casino бонус</a> porno Елизавета Туктамышева букмекерская контора официальный сайт скачать <a href=https://rucriminal.info/>казино вход официальный сайт</a> Чулпан Хаматова порно с Кирьянова Дарья Борисовна официальные букмекерские конторы скачать вывод казино Преподобная Надежда Александровна порно казино онлайн Лут Оксана Николаевна порно
DiskiPlus inform@rucriminal.info DiskiPlus самое казино <a href=https://www.diskiplus.ru/>DiskiPlus порно с Юлия Ефимова</a> DiskiPlus букмекерские конторы без депозита DiskiPlus песня казино <a href=https://diskiplus.ru>DiskiPlus 1×bet зеркало xbet xyz</a> DiskiPlus скачать pin casino DiskiPlus 1×bet слоты 1×bet xyz DiskiPlus лучшие букмекерские конторы DiskiPlus порно с Афонина Марина Игоревна DiskiPlus рабочие зеркала казино DiskiPlus леон букмекерская контора DiskiPlus Лут Оксана Николаевна порно
#3189 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора бетсити casino бонус <a href=https://slon-ru.com/>7k casino официальный</a> porno Ангелина Гончаренко, хоккеистка Валентина Матвиенко порно <a href=https://repost.news/>Манилова Алла Юрьевна порно</a> букмекерская контора на андроид скачиваемые казино Разуваева Ксения Денисовна порно приложения букмекерских контор 1×bet зеркало слоты лучшие казино бесплатно 1×bet зеркало на сегодня 1×bet xyz
DiskiPlus 7k casino официальный DiskiPlus 1×bet телефон <a href=https://www.diskiplus.ru/>DiskiPlus букмекерская контора бесплатно скачать</a> DiskiPlus скачать 1×bet на андроид бесплатно DiskiPlus Преподобная Надежда Александровна порно <a href=https://www.diskiplus.ru>DiskiPlus casino игровой автомат</a> DiskiPlus 7k casino официальный DiskiPlus casino online зеркало DiskiPlus порно с Евгений Малкин (хоккей) DiskiPlus пинко casino DiskiPlus порно с Георгий Джикия (футбол) DiskiPlus пин ап казино DiskiPlus 1×bet зеркало рабочее на сегодня
#3190 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации 2025
Как правило, при выводе финансов, от играющего потребуется только сделать минимальный вклад для того, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом личный счет.Одним из предлогов отдавать привилегию 1 или иному заведению заключается в привлекательности предлагаемых промоакций и бесплатных предложений. Безвозмездные фриспины, выдаваемые без нужды делать какой-либо лепта, в перечне находится далековато не в конце. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasin online</a> Выиграть настоящие деньги в казино не пополняя счет – сложно, но вполне. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными призами и начните играть на бонусные средства. По статистике из 10-ти заведений возможно заработать маленькую необходимую средств помощью бонусных средств. <a href=https://penposh.com/blogs/322516/Professional-Furniture-Detail-Drawing-Services-Technical-Drafting-Solutions>https://penposh.com/blogs/322516/Professional-Furniture-Detail-Drawing-Services-Technical-Drafting-Solutions</a> Еще одно условие касается размеров ставки. Операторы устанавливают максимальную сумму, коию игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, выбранной в Личном офисе. При превышении лимита есть риск лишиться приза. Существующие ограничения относятся и к определенным обликам ставок. Например, играя в рулетку, клиент имеет столкнуться с запретом ставить фишки на шансы.Так собственно приготовьтесь дать секретную информацию (пол, возраст, страна проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает не более суток, последствии чего удастся беспрепятственно выводить крупные выигрыши. 1×slots зеркало рабочее на сегодня <a href=http://scompany44.ru/bitrix/redirect.php?goto=http://master-good.ru/bitrix/redirect.php?goto=http://zakonia.ru/links/goto?url=https://telegra.ph/Ponimanie-invalidnosti-posle-insulta-Vosstanovlenie-i-reabilitaciya-09–23>http://scompany44.ru/bitrix/redirect.php?goto=http://master-good.ru/bitrix/redirect.php?goto=http://zakonia.ru/links/goto?url=https://telegra.ph/Ponimanie-invalidnosti-posle-insulta-Vosstanovlenie-i-reabilitaciya-09–23</a>
1×slots зеркало регистрацию более популярный вариант это
Активация случается с помощью промокодов, которые вводятся в личном офисе после регистрации. Среди спецпредложений в списке Casino.ru находятся эксклюзивные промокоды, которые доступны только посетителям портала. Другие методы начисления средств ? автоматическая активация сразу после сотворения аккаунта и получение презента по запросу в службу технической помощи.С иной стороны, гораздо проще отобрать бездепозитные фриспины за регистрацию в казино и напрямик в начать вертеть барабаны в наихороших слотах. Главная необыкновенность спинов в, что они предназначены для топовых автоматов. Удастся не пройти дополнительные раунды, хотя и увеличить сумму выигрыша, заработать респины и другие внутриигровые подарки. <a href=https://forum.vn.ua/showthread.php?p=3273911#post3273911>1×slots сайт</a> 1× slots сайт Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. <a href=https://spritedatabase.net/forums/member.php?action=profile&uid=7950>https://spritedatabase.net/forums/member.php?action=profile&uid=7950</a> Призовые начисления без депозита могут предоставляться для участия в турнирах интернет казино. Потратить перечисленные деньги можно необыкновенно в этой акции. Условия их проведения себе ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться этим предложением, какого-либо выучить его правила. 1×слот регистрация в 1×slots casino Вейджер менее х30–35 считается применимым. Опытные игроки заявляют, собственно с таким вейджером реально остаться в плюсе, если верно подойти к выбору игрового аппарата.
рабочее зеркало 1хслотс
В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая приятная часть игры. Важно, зачастую бездепозитные бонусы в казино выдаются с лимитированиями по максимальной выплате. В среднем можно рассчитывать на прибыль в количество тысяч руб. Как вывести выигрыш с бонуса без депо. Придётся подтвердить акк документально, в некоторых заведениях. Процедура верификации обязательна и делается любым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате или прочитайте в правилах. <a href=https://zvukiknig.info/user/DoctorLazutast/>https://zvukiknig.info/user/DoctorLazutast/</a> 1 х слотс зеркало
1хслот зеркало сайта
<a href=http://check2go.net/my-account/>1×slots зеркало регистрация в 1×slots casino</a> Самый распространённый из подобных призов, естесственно же, бездеп на день рождения посетителя — приз вид фиксированной суммы либо фриспинов поступает на счёт игрока, а воспользоваться им можно протяжении установленного периода медли. 1×slos регистрация в 1×slots casino <a href=http://andres-website.de/profile.php?lookup=11511>http://andres-website.de/profile.php?lookup=11511</a>
1хслотс рабочее зеркало на сегодня
Игры, в можно играть на бонусные деньги. Проверьте список игр, в возможно играть на бонусные средства, вероятно они Вам не понравятся и не стоит тратить своё время на эту промоакцию. Бездеп с фриспинами может охватывать всю коллекцию игр на веб-сайте или разработки одного провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении промоакции. Выигрыш имеет быть выведен после такого, как пользователь отыграет эту сумму. Возможность расценить глубокий перечень слотов — главное достоинство этой разновидности. Игроку становятся доступны что, эти опции, которые отсутствуют в демонстрационном режиме, а возможность выиграть настоящие средства прибавляет ярких азартных чувств. <a href=https://www.hubtamil.com/talk/member.php?1649028-Steventox>https://www.hubtamil.com/talk/member.php?1649028-Steventox</a> 1×slots сайт зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=142393>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=https://forums.scar-divi.com/topic/786999–1-%D1%85-%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE/>1 х слотс зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Доступность — бездепозитные призы в казино чаще всего предоставляются новым игрокам, хотя бывают случаи, когда бонус могут получить и действующие посетители. Для получения бездепа необходимо пригласить в игру по реферальной ссылке свежего клиента: он должен зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на необходимую, обозначенную в критериях промоакции.
#3191 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Лут Оксана Николаевна порно porno Алена Косторная (фигурное катание) <a href=https://sovsekretno.net/>фреш казино</a> Окладникова Ирина Андреевна порно casino зеркало сайта <a href=https://www.ossetia.tv/>букмекерская контора без</a> букмекерские конторы в россии букмекерская контора сколько казино porno Юлия Канакина, скелетонистка porno Елизавета Туктамышева почему казино 1×bet слоты официальный сайт
DiskiPlus суть казино DiskiPlus реального казино <a href=https://www.diskiplus.ru>DiskiPlus самое казино</a> DiskiPlus скачать букмекерскую контору DiskiPlus казино регистрации <a href=https://www.diskiplus.ru/>DiskiPlus casino онлайн</a> DiskiPlus букмекерская контора бетсити DiskiPlus porno Нина Пирогова, хоккеистка DiskiPlus лучшая казино DiskiPlus Разуваева Ксения Денисовна порно DiskiPlus champion casino DiskiPlus часы казино DiskiPlus порно с Петр Ян (ММА)
#3192 Charlesgunnyhttp://filmkachat.ru
1хслотс 1хслотс регистрация перейти на 1×slots
Используйте наилучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из перечня ниже, дабы заработать презенты за обычные деянья теперь сейчас получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высокой отдачей и быстрыми выводами на электрические кошельки. <a href=http://filmkachat.ru/>1×slots регистрацию более популярный вариант это</a> Чаще всего используются коды. Их нужно вносить в особые окошки регистрационной анкеты, случае речь о пригласительных призах, или в определенном разделе собственного офиса игрока. <a href=https://www.brownbook.net/business/53491610/archicgi/>https://www.brownbook.net/business/53491610/archicgi/</a> Перечисленные выше основные свойства сочетают фактически каждый приз и считаются стереотипными для бездепозитных бонусных начислений в казино.Иногда в поощрения за регистрацию могут выдаваться билеты для участия в турнирах. Условия их проведения довольно выделяются, поэтому мы рекомендуем ознакомиться с любым предложением раздельно. 1хслотс официальный сайт зеркало <a href=https://eccentrictirade.com/forums/member.php?action=profile&uid=2576>https://eccentrictirade.com/forums/member.php?action=profile&uid=2576</a>
1×slots регистрация 1×slots review live
Вознаграждения за получение VIP-статуса ? начисляются в программы лояльности при достижении еще значения или выдаются индивидуально менеджерами службы поддержки. 1×slots сайт Верификация аккаунта. Лучше доказать лицо незамедлительно в регистрации, чтобы потом не было заморочек с выводом средств. Верификация возможность протекать 2-мя маршрутами: <a href=https://amvnews.ru/forum/profile.php?mode=viewprofile&u=74871>https://amvnews.ru/forum/profile.php?mode=viewprofile&u=74871</a> Бездепозитный приз предоставляется новенькому игроку за конкретные деяния. Часто презент вид денег либо фриспинов выдается за регистрацию, спасибо чему юзер получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. 1хслот зеркало Так собственно приготовьтесь дать секретную информацию (пол, возраст, страна проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает не более суток, последствии чего удастся беспрепятственно выводить крупные выигрыши.
1×slots официальный сайт зеркало рабочее
Вы не в коем случае ни же рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный бонус, по мимо практической забавы на бездепозитные призы, у Вас есть шанс выучить игровые автоматы, научится регулировать менять ставки и полосы, исследовать бонусные игры и их выигрышные композиции, да конечном просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные свои, которые можно отыграть и исключить, не просто на демо счет, что, этим наиболее адреналин в крови еще повысится а пульс забьется с частым ритмом!Проверка занимает от нескольких мин. До нескольких дней, спецы техподдержки все запросить дополнительные документы либо инициировать короткое общение по Skype. Чтобы самостоятельно убедиться в превосходстве бездепозитных бонусов, довольно зарегистрироваться в казино и получить одобрение. <a href=http://lzdsxxb.com/home.php?mod=space&uid=3693112>http://lzdsxxb.com/home.php?mod=space&uid=3693112</a> С другой стороны, намного легче забрать бездепозитные фриспины за регистрацию в казино и прямо момент начать вращать барабаны в наихороших слотах. Главная необыкновенность спинов что, что они предназначены для топовых автоматов. Удастся столько пройти дополнительные раунды, хотя и прирастить необходимую выигрыша, заработать респины прочие внутриигровые подарки.Особую изюминку видео слотам присваивают уникальные символы. С их в активизируются различные бонусы. Вы сможете запустить вспомогательный степень и увеличить сумму выигрыша. Есть знаки, коие сменяют ненадобные составляющие и сами творят выигрышные комбо. Не стоит забывать и на бонус-тур. После каждого успешного спина есть шанс увеличить необходимую выигрыша в два либо хорошо раза. 1х слот 1хслотс регистрация перейти на 1×slots
1×slots зеркало которую указывали при регистрации кстати
Бездепы шансы заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами.Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, научится регулировать менять ставки и линии, изучать бонусные забавы и их выигрышные композиции, да в просто зарядится кучей впечатлений! Ведь вы будите выступать на бонусные средства, которые возможно отыграть и вывести, а не просто на демо счет, что, этим самым адреналин в крови еще повысится а пульс забьется с частым ритмом! Основное различие в том, что для получения бездепа не надо пополнять баланс в казино. Но не сего, есть ряд и различий:Получить приветственный приз могут лишь свежие клиенты онлайн-казино. Способы описаны в условиях промоакции каждого законного казино, почаще всего это: казино 1×slots официальный сайт <a href=http://kochtagebuch.org/doku.php?id=%D0%9F%D0%B8%D1%86%D1%86%D0%B0%20%D0%BE%D1%82%20%D1%88%D0%B5%D1%84-%D0%BF%D0%BE%D0%B2%D0%B0%D1%80%D0%BE%D0%B2%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!>http://kochtagebuch.org/doku.php?id=%D0%9F%D0%B8%D1%86%D1%86%D0%B0%20%D0%BE%D1%82%20%D1%88%D0%B5%D1%84-%D0%BF%D0%BE%D0%B2%D0%B0%D1%80%D0%BE%D0%B2%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!</a> Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам воспрещено начислять призы клиентам, не имеющим денежных средств на счете. Мы предлагаем осмотреть животрепещущие призы онлайн-казино с лицензией, которые соблюдают законодательство РБ.
1хслотс мобильная версия зеркало
Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации презента необходимо доказать электронную почту и привязать аппарат; <a href=http://msfo-soft.ru/msfo/forum/messages/forum25/topic11236/message320583/?result=new#message320583>http://msfo-soft.ru/msfo/forum/messages/forum25/topic11236/message320583/?result=new#message320583</a> В количестве случаев безвозмездные бонусы начисляются в кредитах, которые невозможно незамедлительно исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти требования принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д. ). О нем читайте ниже.Самые популярные способы вывода средств ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электронным платежным системам на Neteller и Skrill, а используют криптовалютными кошельками. Вывод выигрышей имеет осуществляться мгновенно или развлекать от нескольких часов до нескольких суток. 1×slots официальный зеркало рабочее Перед активацией главно пристально изучить обстоятельства промоакции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, на коих можно воспользоваться предложением. Если бездеп обхватывает ограниченный перечень игр, рекомендовано узнать максимальные коэффициенты, степень отдачи и волатильности. Слоты с низкими множителями выплат подходят только том, случае, если оператор не установил требовательные ограничения на наивысшую сумму ставки.
<b>Смотреть еще похожие новости:</b>
<a href=http://soumoli.com/home.php?mod=space&uid=24916>1× slots casino зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Почти все игровые клубы настоятельно свидетельство контактных данных игрока для получения бездепозитного приза. Законодательство, регулирующее азартные забавы в разных государствах, влияет на возможности операторов. В итоге юзеры из отдельных ареалов сталкиваются с лимитированиями со стороны казино. Это возможность быть как глубокий отказ в доступе, например и невозможность загружать игры отдельных производителей.
#3193 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet официальный слоты букмекерские конторы pin <a href=https://krtka.info/>официальная казино</a> 1×bet зеркало рабочее xbet казино вход официальный сайт <a href=https://7club7.com/>казино ли</a> casino ап сайт винлайн букмекерская контора 7k casino зеркало рабочее Ходнева Светлана Владимировна порно песня казино казино на деньги порно с Алина Загитова
DiskiPlus букмекерскую контору пин DiskiPlus казино фильм смотреть онлайн <a href=https://diskiplus.ru>DiskiPlus top casino</a> DiskiPlus казино вход DiskiPlus порно с Георгий Джикия (футбол) <a href=https://www.diskiplus.ru>DiskiPlus букмекерская контора</a> DiskiPlus казино ли DiskiPlus лучшие казино бесплатно DiskiPlus casino зеркало сегодня DiskiPlus порно с Максим Глушенков (футбол) DiskiPlus 7k casino зеркало рабочее DiskiPlus kometa casino DiskiPlus Валентина Матвиенко порно
#3194 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации дара нужно подтвердить электрическую почту и привязать телефонный;Фриспины — благотворительные вращения, коие дозволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся наиболее модным и предпочтительным видом приза — благотворительные вращения порой эффективнее и веселее в отыгрыше, чем другие виды бездепов. <a href=http://filmkachat.ru/>1×slots зеркало видели такую регистрацию на</a> <a href=https://guides.co/g/5942/504055>https://guides.co/g/5942/504055</a> Похожим образом работает третий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения клиента или в связи с получения им VIP-статуса. Подарок предоставляется после обращения в поддержку и проверки.Основное управляло получения бездепа ? творимый аккаунт обязан быть у пользователя первым и единственным. Наличие нескольких аккаунтов взыскательно запрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депозита необходимо соблюдать простую очередность поступков. 1хслот зеркало сайта <a href=https://forum.wapinet.ru/profile.php?id=7826>https://forum.wapinet.ru/profile.php?id=7826</a> Иногда в поощрения за регистрацию шансы выдаваться билеты для участия в турнирах. Условия их проведения довольно выделяются, потому мы советуем ознакомиться с любым предложением отдельно.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Как и другие акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых гостей и позволяет им составить впечатление о функционале, не рискуя вескими суммами. 1×slos регистрация в 1×slots casino Проверка занимает от нескольких минут до нескольких дней, профессионалы техподдержки все запросить вспомогательные документы либо инициировать куцее общение по Skype. <a href=https://www.feeder.mobi/members/jeffreydus/profile/>https://www.feeder.mobi/members/jeffreydus/profile/</a> Онлайн-казино тщательно продумывают бонусные обстоятельства, коие нужно изучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и лимитирования.Фриспины начисляются по конкретной ставке. После их активации игроку нужно запустить разъем и увериться, что в нем показываются благотворительные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода в отыгрыша ориентируется оператором и редко выше 5 000 руб. 1хслотс казино зеркало Заработать на бездепозитных призах за регистрацию в казино может любой юзер, достигший совершеннолетия.
1×slots регистрацию процедура займет всего лишь
Фриспины начисляются по конкретной ставке. После их активации игроку нужно запустить слот и убедиться, собственно в нем показываются благотворительные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода в отыгрыша определяется оператором и изредка превышает 5 000 руб. Зарегистрироваться в казино по особой ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефона и электрическую почту). Для подтверждения номера телефонного необходимо в личном профиле показать свой номер и надавить кнопку „Подтвердить номер телефонного“, дальше Вы получите sms-сообщение с кодом, кот-ый необходимо установить в подходящее фон. Для доказательства электронной почты, перебежать по интенсивной ссылке в письме от казино.Фриспины начисляются по конкретной ставке. После их активации игроку необходимо запустить разъем и увериться, собственно в нем показываются безвозмездные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода после отыгрыша ориентируется оператором и изредка превышает 5 000 руб. <a href=http://forum.fcmn.co.il/member.php?action=profile&uid=314113>http://forum.fcmn.co.il/member.php?action=profile&uid=314113</a> 1×slots casino регистрация 1×slotscasin online Бездепозитный бонус предоставляется новому игроку за определенные деянья. Часто презент в виде денег или фриспинов выдается за регистрацию, спасибо чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Самые свежие бездепозитные бонусы в казино за регистрацию 2022 года с выводом выгоды находятся на данной странице. Посетитель имеет оценить обстоятельства получения и начать выступать на средства без внесения депо. При данном игроку главно осознавать, на каких критериях и какими способами него вывести полученный выигрыш. Для этого нужно расценить список присоединенных платежных систем. Так собственно сможете неустрашимо региться без всяких раздумий. Фортуна сейчас наверняка на вашей стороне. Не побаивайтесь, так следствие какого либо ущерба Вам абсолютно не угрожает. С такими бонусами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе. Такой безвозмездный эквивалент средств зачисляется на профиль юзера после воплощения требований и предназначаются они лишь для игрового процесса. Вывод таких вознаграждений вероятен лишь в воплощения вейджеровых критерий. 1×slots регистрация на сайте <a href=http://www.01.com.hk/member.php?Action=viewprofile&username=PhilipAnine>http://www.01.com.hk/member.php?Action=viewprofile&username=PhilipAnine</a>
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Основное отличие что, что для получения бездепа не надо пополнять баланс в казино. Но не сего, есть ряд прочих отличий:Для вывода средств приз нужно будет отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами акции и вариантами отыгрыша бездепозитного приза до его получения, чтобы избежать конфликтных ситуаций. <a href=http://myfalke.ru/bitrix/redirect.php?goto=http://voobrajulya.ru/bitrix/redirect.php?goto=http://transportal24.com/bitrix/redirect.php?goto=https://teletype.in/@urist555/y3_r64kHjiN>http://myfalke.ru/bitrix/redirect.php?goto=http://voobrajulya.ru/bitrix/redirect.php?goto=http://transportal24.com/bitrix/redirect.php?goto=https://teletype.in/@urist555/y3_r64kHjiN</a> 1хслот зеркало сайта Заработать на бездепозитных бонусах за регистрацию в казино может любой пользователь, достигший совершеннолетия.
<b>Смотреть еще похожие новости:</b>
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=40012>1×slots официальный регистрация</a>
<a href=http://romb4×4.ru/forum/threads/1×lot-registracija-v-1×slots-casino.21822/>1хлот регистрация в 1×slots casino</a>
<a href=http://www.airsoft44.com/forum/index.php?action=profile;u=11896>1×slot регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Прямо данный отберите бесплатные вращения за регистрацию без депозита и начинайте коллекционировать призовые композиции из-за крупных выигрышей!
#3195 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots review live
Также бывают случаи, когда казино начисляет оговоренный приз в регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам. <a href=http://filmkachat.ru/>1×slots casino регистрация на сайте</a> Следует подчеркнуть, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом. <a href=https://penposh.com/blogs/322511/Luxury-Real-Estate-Marketing-Materials-Premium-Property-Promotion-Guide>https://penposh.com/blogs/322511/Luxury-Real-Estate-Marketing-Materials-Premium-Property-Promotion-Guide</a> B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax 1хслотс рабочее зеркало <a href=http://www.jcdqzdh.com/home.php?mod=space&uid=230754>http://www.jcdqzdh.com/home.php?mod=space&uid=230754</a> Сроки активации приза уточняются каждым казино, хотя почаще всего они не превосходят недели с момента получения. Игроку непременно нужно использовать бездеп на обозначенного срока, в ином случае приз просто исчезнет. Каждый бонус возможно получить лишь раз раз, поэтому если не применять бездеп в срок, у игрока не несомненно второго шанса им пользоваться.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
<a href=https://dev.eff.one/forumdisplay.php?fid=10>1×slots casino регистрация</a> 1×slot зеркало К раскаянью, нет. Почти все казино, требуют внесение хотя бы одного минимального депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, собственно вывести средства разрешается только на ту платежную систему, с коей был изготовлен депозит. <a href=http://gam.matchfishing.ru/bitrix/click.php?goto=http://aelitaorel.ru/bitrix/redirect.php?goto=http://eleksnab.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/m8bNgjw4_fT>http://gam.matchfishing.ru/bitrix/click.php?goto=http://aelitaorel.ru/bitrix/redirect.php?goto=http://eleksnab.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/m8bNgjw4_fT</a> Мы советуем не отрицаться от сходственных услуг известных казино. Выделите количество минут на регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сейчас удача будет на вашей стороне! казино 1× slots официальный сайт Заполняя данные в личном профиле, указывайте лишь достоверную информацию, например как Вам понадобиться ее подтвердить дальнейшем при выводе денег.Внесение депозита – Будьте готовы пополнить счет последствии отыгрыша приза. Это стандартное заявка верховодил для данного на промо-акций. Лучше заблаговременно уточнить, какую сумму нужно будет вносить на счет. Как правило, идет о минимальном депозите, хотя вы должны быть уверены, собственно он вам по кармашку.
1× slots casino зеркало
<a href=https://galgbtqhistoryproject.org/wiki/index.php/What_Are_The_Features_Of_The_New_Live_Betting_Section_In_The_1×bet_APP>https://galgbtqhistoryproject.org/wiki/index.php/What_Are_The_Features_Of_The_New_Live_Betting_Section_In_The_1×bet_APP</a> 1×slots актуальное зеркало
1× slots зеркало
За привлечение приятеля ? в рамках партнерской программы заказчик получает вознаграждение за вербование свежих пользователей. Для казино, работающих онлайн, бездепозитные бонусы необходимы для привлечения свежих клиентов. Предложение сыграть на слотах без надобности внесения настоящих денег — работающий метод для повышения энтузиазма к фирмы. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит выступать в казино, только теперь теснее на личные средства.Какие бонусы я могу еще получить кроме бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, каждое интернет казино предлагает игрокам прибыльное предложение на 1-ый депо, вы совершаете депозит, ваш депозит увеличивается в двое либо даже в трое, тем наиболее начать выступать можно с больше крупной суммой, например же не забываем про вейджер на бонусы. 1×slots рабочее зеркало <a href=http://likeni.ru/bitrix/rk.php?goto=http://kohinorstroy.ru/bitrix/redirect.php?goto=http://sportreestr.ru/bitrix/click.php?goto=https://teletype.in/@urist555/0NUb-GjbN-w>http://likeni.ru/bitrix/rk.php?goto=http://kohinorstroy.ru/bitrix/redirect.php?goto=http://sportreestr.ru/bitrix/click.php?goto=https://teletype.in/@urist555/0NUb-GjbN-w</a> Размер ставки для забавы по бездепозитному бонусу (конечно же, когда, когда он представлен в виде бонусных валютных средств) зачастую ниже, чем при забаве на депо. Ограничение несомненно действовать до момента отыгрыша приза.
1×slots зеркало проходить регистрацию это отличный вариант
Главным нюансом в возникновении этих вознаграждений состоит в, что пустив их в ход, игрок ничем не рискует и в последствии никому ничего не будет должен (не зависимо, получит ли он спасибо бонусам какой-либо выигрыш или моментально спустит все только собственно прибывшие финансы). То есть, казино снабжает игрока вероятностью на дармовой основе выступать во различные слоты причем спонсирует забаву.Срок активации и время на отыгрыш. Зачисление средств или фриспинов происходит при активации протяжении строго ограниченного периода, похожие требования предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать приз несколько дней либо том недель. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером. Для получения предоставленных бонусов вам пригодиться — ПК либо мобильное прибор, и остальное дело за малым. <a href=https://alphacs.ro/member.php?78023-FrankDop>https://alphacs.ro/member.php?78023-FrankDop</a> Но надо мыслить, что снабжая пользователей этими бонусами, казино занимается спонсированием. Ведь размеры вознаграждений, в основном, не немалые (средним размером от 5 до 20 долларов). И на эти средства налагаются определенные условия и ограничения, неотклонимые к исполнению игрока, случае в последствии он вожделеет получить все свои выигранные деньги. 1×slot зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://theauction.com.au/my-account/>1×slots официальный сайт скачать</a>
<a href=http://link.5nx.ru/viewtopic.php?f=5&t=7661>1х слот регистрация в 1×slots casino</a>
<a href=https://www.findaspermdonor.com/viewtopic.php?f=25&t=90867>рабочее зеркало 1хслотс</a>
<a href=https://nauc.info/forums/viewtopic.php?t=20630191>1 x slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для казино, работающих интернет, бездепозитные призы необходимы для привлечения свежих клиентов. Предложение поиграть на слотах без надобности внесения реальных средств — работающий способ для увеличения интереса к компании. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит играть в казино, лишь теперь уже на собственные средства.
#3196 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino онлайн Крючкова Полина Викторовна порно <a href=https://rhymes-punches.com/>слот casino</a> 1×bet приложение casino online зеркало <a href=https://rhymes-punches.com/>порно с Никита Кучеров (хоккей)</a> карты казино casino бонус порно с Юлия Ефимова, пловчиха рейтинг казино букмекерская контора ставки казино сегодня porno Юлия Канакина
DiskiPlus гта казино DiskiPlus ап казино <a href=https://www.diskiplus.ru/>DiskiPlus скачать casino на андроид</a> DiskiPlus порно с Анна Калинская (теннис) DiskiPlus порно с Матвей Сафонов (футбол) <a href=https://www.diskiplus.ru/>DiskiPlus casino 7k сегодня</a> DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus new casino DiskiPlus винлайн букмекерская контора DiskiPlus казино в россии DiskiPlus casino рабочее зеркало DiskiPlus пин casino DiskiPlus порно с Александр Большунов (лыжные гонки)
#3197 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
При исполненьи критерий отыгрыша и верификации, средства с бонусного счета переводятся на главный и все быть выведены на карту либо электрический кошелек. Лимиты на вывод и сроки проведения транзакции зависимости от выбранной платежной системы. <a href=http://filmkachat.ru/>1хслотс рабочее зеркало</a> <a href=https://nibbler.co/en_US/reports/astramedika.com.ua#/Test_Page_Analytics>https://nibbler.co/en_US/reports/astramedika.com.ua#/Test_Page_Analytics</a> 2. Создать свежий профиль. Для регистрации надо(надобно) наполнить маленькую анкету или зайдите в личный офис посредством социальных сетей; 1хслот зеркало сайта <a href=https://seositecheckup.com/seo-audit/astramedika.com.ua>https://seositecheckup.com/seo-audit/astramedika.com.ua</a>
1×slots casino регистрация 1×slotscasin online
<a href=https://nauc.info/forums/viewtopic.php?t=20612352>1× slots casino официальный сайт</a> 1 хслот регистрация в 1×slots casino Oтыгpaть бонус с обозначенным вeйджepом, желаемого нужно сдeлaть cтaвoк нa cумму, превосходящую размер приза в количество раз. <a href=http://forum.roozgozar.com/member.php?action=profile&uid=4200>http://forum.roozgozar.com/member.php?action=profile&uid=4200</a> 1×slots зеркало на сегодня
1×slots casino регистрация 1×slotscasin online
Чаще всего применяются коды. Их надо(надобно) вносить в специальные окошки регистрационной анкеты, в речь идет о пригласительных призах, либо в особом разделе собственного кабинета игрока. <a href=http://avtolux48.ru/people/user/496/blog/5678/>http://avtolux48.ru/people/user/496/blog/5678/</a> Важно, убедитесь в, собственно раньше не регились в выбранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи.Бесплатные призы казино без депозита можно получить в виде денежных средств на бонусный счет (вывести их возможно лишь после отыгрыша), фриспинов, забавы или кешбэк-бонуса. 1×slots зеркало регистрация Многие игроки, оценив перечень казино, остаются выступать в нем и дальше ? на это и направлено каждое рекламную. Постоянные клиенты заносят депозиты и проделывают ставки, обеспечивая длительную прибыль оператора. То есть, казино раздают бездепы новым пользователям для формирования приклнной аудитории.
рабочее зеркало 1×slots
Денежные средства. Третий бонус за регистрацию без депо – наличные. К огорчению, только знаменитые и знаменитые клубы имеют дать деньги в рублях или баксах. С их помощью вас насладиться любой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед этим нужно выполнение конкретных критерий. Большинство клубов привлекают внимание игры за счёт различных презентов. На 1 сайтах возможно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает благотворительные вращения для запуска топовых интернет слотов. Несмотря на различные акции, стоит выделить самые главные. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=http://yartube.ru/index.php?subaction=userinfo&user=moldymold31>http://yartube.ru/index.php?subaction=userinfo&user=moldymold31</a> Превышение наибольшей ставки при отыгрыше. Система автоматически не предупреждает о превышении ставки, потому о несоблюдении верховодил игрок может узнать уже после подачи запроса на вывод средств.
1хслотс рабочее зеркало
За счёт спинов получится запустить разные интернет слоты, протестировать стратегии и поднабраться навыка. Фишка том,, что вращения начисляются на лучшие аппараты с уникальными опциями и высокой отдачей. Не забывайте, собственно в каждом акционном предложении учтены специальные притязания – временные лимитирования, наибольший объем ставки, список дешевых игр. <a href=http://glax.org/bitrix/rk.php?goto=http://motoxp.ru/bitrix/click.php?goto=http://altendorf-rus.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/UYimtpJtxB8>http://glax.org/bitrix/rk.php?goto=http://motoxp.ru/bitrix/click.php?goto=http://altendorf-rus.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/UYimtpJtxB8</a> У каждой игры свои требования по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система засчитает любую ставку. В рулетке и покере устроить это намного труднее. Именно потому так главно пристально разбирать условия получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой забаве, то новенькие просто «спустят бонус на ветер».Бездепозитные бонусы — это подарки от казино повторяющий бонусных денег либо фриспинов для игровых автоматов, коие начисляются на аккаунт игрока после процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депо не требуется. 1×slots зеркало сайта Но есть игорные заведения, которые готовы просто так жертвовать средства на игру. Для сего достаточно сделать профиль. Чтобы исключить собственный выигрыш, вас сначала необходимо выполнить обстоятельства отыгрыша, обозначенные в критериях получения бездепозитного депозита.
<b>Смотреть еще похожие новости:</b>
<a href=http://link.5nx.ru/viewtopic.php?f=5&t=10598>1×slots казино мобильная версия</a>
<a href=https://www.kfz-gringer.at/index.php/forum/suggestion-box/77576–1×slots-casino#77340>1×slots casino зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
А ознакомиться с новыми интернет казино, Вы можете с бонусов с выводом прибыли, коие Вы можете получить без депозита.
#3198 Jameshoxhttps://u-misti.odesa.ua
Городской портал Одессы <a href=https://u-misti.odesa.ua/>https://u-misti.odesa.ua</a> новости и события Одессы и области
#3199 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet сайт 1×bet xyz porno Мира Андреева (теннис) <a href=https://strelochnik.com/>порно с Евгений Малкин (хоккей)</a> casino com пари букмекерская контора <a href=https://rucriminal.info/>Крючкова Полина Викторовна порно</a> pin up casino пин ап казино казино 5 песня казино 7k casino зеркало играющие казино часы казино
DiskiPlus скачать 1×bet DiskiPlus 7k casino зеркало <a href=https://diskiplus.ru/>DiskiPlus porno Андрей Рублев (теннис)</a> DiskiPlus 1win букмекерская контора DiskiPlus казино вулкан <a href=https://diskiplus.ru/>DiskiPlus Елизавета Боярская</a> DiskiPlus 1×bet casino DiskiPlus porno Юлия Канакина, скелетонистка DiskiPlus казино регистрации DiskiPlus porno Виктория Баркова, легкоатлетка DiskiPlus казино ставка DiskiPlus 7k casino зеркало рабочее DiskiPlus винлайн букмекерская контора официальный сайт
#3200 Dajhgdelgaw
Переходите на официальный сайт Селектор казино, чтобы погрузиться в мир самых современных и увлекательных слотов, регулярных турниров и лотерей с крупными призовыми фондами! Регистрируйтесь и играйте в любимые автоматы 24/7 даже при блокировках благодаря обширной базе рабочих зеркал! <a href=https://annpz-product.ru>selector casino вход</a>
#3201 1winCasinohttps://1win.directorio-de-casinos-mx.com
<a href=http://www.youtubeklipindir.com/indir/?url=https://1win.directorio-de-casinos-mx.com/>https://1win.directorio-de-casinos-mx.com/</a> <a href=http://www.tube2017.com/out.php?url=https://1win.directorio-de-casinos-mx.com/>https://1win.directorio-de-casinos-mx.com/</a> <a href=http://altai-ttt.ru.xx3.kz/go.php?url=https://1win.directorio-de-casinos-mx.com/>https://1win.directorio-de-casinos-mx.com/</a> <a href=https://maps.google.co.vi/url?sa=t&url=/https://1win.directorio-de-casinos-mx.com/>https://1win.directorio-de-casinos-mx.com/</a> <a href=http://www.mature-granny-sex.com/cgi-bin/atc/out.cgi?s=60&c=$c&u=https://1win.directorio-de-casinos-mx.com/>https://1win.directorio-de-casinos-mx.com/</a> <a href=http://dolls.by/bitrix/rk.php?goto=https://1win.directorio-de-casinos-mx.com/>https://1win.directorio-de-casinos-mx.com/</a> <a href=http://m.vk.com/away.php?to=https://1win.directorio-de-casinos-mx.com/>https://1win.directorio-de-casinos-mx.com/</a> <a href=http://www.inco.gr/modules/mod_jw_srfr/redir.php?url=https://1win.directorio-de-casinos-mx.com/>https://1win.directorio-de-casinos-mx.com/</a> <a href=http://nachytano.cz/redirect.php?url=https://1win.directorio-de-casinos-mx.com/>https://1win.directorio-de-casinos-mx.com/</a> <a href=http://www.stockingrealm.com/cgi-bin/crtr/out.cgi?l=search&u=https://1win.directorio-de-casinos-mx.com/>https://1win.directorio-de-casinos-mx.com/</a> <a href=http://maps.google.ge.xx3.kz/go.php?url=https://1win.directorio-de-casinos-mx.com/>https://1win.directorio-de-casinos-mx.com/</a> <a href=http://goldenalfa.by/bitrix/redirect.php?event1=&event2=&event3=&goto=https://1win.directorio-de-casinos-mx.com/>https://1win.directorio-de-casinos-mx.com/</a> <a href=http://arthobby.com.cn.xx3.kz/go.php?url=https://1win.directorio-de-casinos-mx.com/>https://1win.directorio-de-casinos-mx.com/</a> <a href=http://www.catharinaweb.nl/partnerlnx/astrologie/go.php?url=https://1win.directorio-de-casinos-mx.com/>https://1win.directorio-de-casinos-mx.com/</a> <a href=http://www.animetank.ru/goto/www.motheronboys.com/cgi-bin/out.cgi?click=10.jpg.12389&url=https://1win.directorio-de-casinos-mx.com/>https://1win.directorio-de-casinos-mx.com/</a>
Download client bookmaker 1win – win right now! <a href=https://www.surewinfood.com.tw/function/showlink.php?FileName=Link&membersn=789&Link=https://1win.directorio-de-casinos-mx.com/>https://1win.directorio-de-casinos-mx.com/</a> <a href=http://www.168chaogu.com/redirect.aspx?id=10&url=https://1win.directorio-de-casinos-mx.com/>https://1win.directorio-de-casinos-mx.com/</a> <a href=http://solar.riok.net/mogura/inc/redirect.php?redirect=https://1win.directorio-de-casinos-mx.com/>https://1win.directorio-de-casinos-mx.com/</a> <a href=http://www.edvxpert.com/Lob/session_destroy.php?url=https://1win.directorio-de-casinos-mx.com/>https://1win.directorio-de-casinos-mx.com/</a> <a href=http://cock-n-dick.com/cgi-bin/a2/out.cgi?id=27&l=main&u=https://1win.directorio-de-casinos-mx.com/>https://1win.directorio-de-casinos-mx.com/</a> <a href=https://www.outdoorstaff.co.uk/extern.aspx?src=www.mongodb.com/community/forums/t/mug-helsinki-in-house-ai-models-and-mobile-game-servers/264613&cu=101211&page=1&t=1&s=42>https://1win.directorio-de-casinos-mx.com/</a> <a href=http://www.stoffwelt24.de/?wptouch_switch=mobile&redirect=http%3A%2F%2Fwww.mongodb.com/community/forums/t/mug-helsinki-in-house-ai-models-and-mobile-game-servers/264613>https://1win.directorio-de-casinos-mx.com/</a> <a href=https://berlin.cityguide.de/Home/ExternalRedirect/ty9kjh?url=https://1win.directorio-de-casinos-mx.com/>https://1win.directorio-de-casinos-mx.com/</a> <a href=http://foto-galaxy.ru/engine/api/go.php?go=https://1win.directorio-de-casinos-mx.com/>https://1win.directorio-de-casinos-mx.com/</a> <a href=https://thunderfridays.com/link/?url=https://1win.directorio-de-casinos-mx.com/>https://1win.directorio-de-casinos-mx.com/</a> <a href=http://newslab.ru/go.aspx?url=https://1win.directorio-de-casinos-mx.com/>https://1win.directorio-de-casinos-mx.com/</a> <a href=https://sp.jp.wazap.com/info/jump.wz?url=https://1win.directorio-de-casinos-mx.com/>https://1win.directorio-de-casinos-mx.com/</a> <a href=http://www.mГјritzhof.de/extLink/www.mongodb.com/community/forums/t/mug-helsinki-in-house-ai-models-and-mobile-game-servers/264613>https://1win.directorio-de-casinos-mx.com/</a> <a href=https://obs-bj.hr/?URL=https://1win.directorio-de-casinos-mx.com/>https://1win.directorio-de-casinos-mx.com/</a> <a href=http://agri-ardestan.ir/LinkClick.aspx?link=http%3A%2F%2Fwww.mongodb.com/community/forums/t/mug-helsinki-in-house-ai-models-and-mobile-game-servers/264613&mid=20685>https://1win.directorio-de-casinos-mx.com/</a>
#3202 Karlosbqy
Шелом повелители! <a href=https://instpodbesvc.ru/>Накрутка подписчиков Инстаграм бесплатно</a> <a href=https://instpodbesvc.ru/><img src=„https://i124.fastpic.org/big/2025/0220/ea/ac0c9b630876a4afd2f67e422c4175ea.jpg“></a> <a href=https://instpodbesvc.ru/>накрутка подписчиков Инстаграм программа бесплатно</a> <a href=https://instpodbesvc.ru/>накрутка подписчиков Инстаграм купить бесплатно</a> <a href=https://instpodbesvc.ru/>накрутка подписчиков Инстаграм 2025 бесплатно</a> <a href=https://instpodbesvc.ru/>накрутка подписчиков Инстаграм без заданий бесплатно</a> <a href=https://instpodbesvc.ru/>накрутка лайков в Инстаграм и подписчиков бесплатно</a>
Если у вас является желание фигурировать авторитетным людом, яже хочет строить карьеру в течение Инстаграме или развивать являющийся личной собственностью ярлык, то, конечно, для вас всегда нужно хорэ иметь огромное сумма подписчиков. Владея здоровущую аудиторию, продвигать свои продукты стократ легче. Ваша милость можете поражать (как громом) равно побуждать вашу размашистую мотивированную аудиторию домашним контентом. (А) ТАКЖЕ, впоследствии, через высокого ватерпаса взаимодействия ваша милость начнёте получать доход. Хорошего дня!
#3203 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Нина Пирогова, хоккеистка porno Елизавета Туктамышева <a href=https://t.me/vchkogpu_ru>сайт винлайн букмекерская контора</a> casinos winning casino зеркало сегодня рабочее <a href=https://glvk.guru/>казино вход</a> казино играть казино без казино вход почему казино Чулпан Хаматова 1×bet зеркало xbet xyz водка казино
DiskiPlus скачать сайт букмекерской конторы DiskiPlus гама казино <a href=https://www.diskiplus.ru>DiskiPlus порно с Юлия Ефимова, пловчиха</a> DiskiPlus бесплатно фильм казино DiskiPlus казино регистрации <a href=https://www.diskiplus.ru/>DiskiPlus букмекерская контора на андроид</a> DiskiPlus карты казино DiskiPlus винлайн букмекерская контора официальный DiskiPlus vavada casino DiskiPlus сайт казино зеркало DiskiPlus 1×bet вход DiskiPlus 1×bet DiskiPlus porno Илона Маркова, хоккеистка
#3204 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация
Внесение депозита – Будьте готовы восполнить счет последствии отыгрыша приза. Это обычное требование верховодил для данного типа промо-акций. Лучше заранее уточнить, какую необходимую надо(надобно) будет заносить на счет. Как верховодило, речь о минимальном депозите, хотя вы обязаны быть уверены, что он вам по кармашку. <a href=http://filmkachat.ru/>1×slots регистрация на сайте 1×slots ru com</a> <a href=https://redmine.dti.economia.gov.br/issues/72790>https://redmine.dti.economia.gov.br/issues/72790</a> 1×slots промокод при регистрации 2025 <a href=https://bresdel.com/blogs/806517/Mastering-Interior-Shop-Drawings-From-Concept-to-Construction-Excellence>https://bresdel.com/blogs/806517/Mastering-Interior-Shop-Drawings-From-Concept-to-Construction-Excellence</a> Бонус с зачислением денег на счет выделяет больше свободы действий. Пользователь сам подбирает, каким образом воспользоваться подаренными своими. Здесь кроме могут действовать лимитирования на список дешевых игр, но обычно эти рамки не так строги, как в рекламную с безвозмездными вращениями.Вознаграждения за получение VIP-статуса ? начисляются в рамках программы преданности при достижении одного уровня либо выдаются персонально менеджерами службы поддержки.
рабочее зеркало 1хслотс
Риск-игра по равным шансам – Также казино имеет воспрещать выполнять обстоятельства по отыгрышу счет раунда на удвоение, который предлагается в слотах, видео-покере и некоторых иных забавах.Доступ к подарку может открываться автоматически последствии введения промокода или обращения в службу поддержки сайта. В первом случае от пользователя не потребуется практически действий. Бездеп с активацией по коду встречается почаще всего. Игроку необходимо установить совокупность знаков в графе, кот-ая возможность пребывать в регистрационной форме в Личном офисе. <a href=http://forum.exalto-emirates.com/memberlist.php?mode=viewprofile&u=69997>1×slots официальный demo регистрация в 1×slots casino</a> 1×slot зеркало рабочее этих способов предполагает регистрацию Но разу не забывайте пристально читать правила роли в бонусных акциях. Если вы нарушите желая бы одно условие, позднее вы не можете устроить недоразумение с администрацией. <a href=http://zemli.com/index.php?subaction=userinfo&user=lovingammonia68>http://zemli.com/index.php?subaction=userinfo&user=lovingammonia68</a> При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, коие можно предназначить игре в казино.Иногда для получения бонусов нужно связаться с представителями службы поддержки. Удобнее всего с ними собеседовать в онлайн-сате, желая время довольно запроса по электрической почте. казино 1×slots Чтобы играть бесплатно на настоящие средства в казино, порой достаточно просто зарегистрироваться. Иногда нужно выполнить вспомогательные деяния.Некоторые казино имеют предлагать посетителям бездепы за свидетельство номера либо почты либо репост на страничку в социальных сетях.
казино 1×slots официальный сайт
Зачастую бездепозитные бонусы казино для игры предлагаются различными заведениями азартных игр в качестве рекламных акций либо в целях вербования к себе свежих игроков. Для бездепозитных призов в казино 2022 геймеру не пополнять счет до этапа вывода желаемых средств. Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? <a href=http://shop.ororo.co.kr/bbs/board.php?bo_table=free&wr_id=470816>http://shop.ororo.co.kr/bbs/board.php?bo_table=free&wr_id=470816</a> 1×slots актуальное зеркало
1×slots casino регистрация на сайте
Также учтите, собственно некоторые игровые платформы сужают перечень государств, которые готовы получить предложенный бездепозитный приз за регистрацию. К примеру, существуют онлайн-заведения, выдающие похожие призы только жильцам определенных государств. К примеру, интернет казино 777 Оригинал предоставляет бездепозитный бонус лишь игрокам из России и государств СНГ. Или наоборот, снабжают вознаграждением всех, считая обитателей неких стран (из сего, по пристально изучать перечень, чтобы впоследствии не возникло никаких вопросов и претензий).Помните, что любые нарушения верховодил сведут на нет ваши старания, и вы наверняка останетесь без начисленного вам безвозмездного бонуса. Всегда изучайте правила начисления и обстоятельства вейджера. По любым вопросам, на которые вы возможности без отыскать ответы, обращайтесь за объясненьям и саппорт. <a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1×slots зеркало регистрация</a> Максимальная ставка ? уточняется в валюте счета и ограничивает размер ставки за раз спин. В случае ее превышения приз может быть аннулирован. Также в правилах имеет содержаться запрет на размещение ставок определенного облика, например, по равным шансам в рулетке (то есть, на чет или нечет, красное либо черное и т.д. ).Не стоит путать забаву в демо и внедрение бонусов. В демонстрационном режиме игрок имеет расценить механику слота, сюжет и оформление. Но игра проводится на относительные кредиты, поэтому отсутствует главное ? чувство азарта. Активируя промокод либо фриспины, заказчик раньше не тратит средства деньги на игровые автоматы, но имеет сорвать реальный куш! зеркала 1×slots <a href=http://alt1.toolbarqueries.google.co.jp/url?q=http://plastic-s.ru/bitrix/redirect.php?goto=http://8tv.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/Xd41YK9ctnL>http://alt1.toolbarqueries.google.co.jp/url?q=http://plastic-s.ru/bitrix/redirect.php?goto=http://8tv.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/Xd41YK9ctnL</a>
1хлот регистрация в 1×slots casino
С не отыгранным бонусом запрещается превосходить размер наибольшей ставки. Нарушение этого обстоятельства последствия аннулирование выигрыша.Перечисленные повыше основные характеристики сочетают практически каждый бонус и являются стандартными для бездепозитных бонусных начислений в казино. Для вывода средств приз надо(надобно) несомненно отыграть законам, установленным казино. Внимательно ознакомьтесь с правилами акции и вариантами отыгрыша бездепозитного приза до его получения, чтобы избежать конфликтных ситуаций. <a href=http://nutrendrussia.ru/bitrix/redirect.php?goto=http://google.az/url?q=http://as-pigments.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/iNjbtNZZWz6>http://nutrendrussia.ru/bitrix/redirect.php?goto=http://google.az/url?q=http://as-pigments.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/iNjbtNZZWz6</a> сайт 1× slots casino Выбирая бесплатный бонус, внимательно изучайте верховодила. Убедитесь, что для возможно себя роль в промоакции. Уточните, в каких забавах возможно исполнять обстоятельства вейджера. При необходимости задавайте вопросы адептам саппорта.Вейджер в переводе с британского означает «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша приобретенного приза, в нашем случае бездепозитного. Число ставок значения — важно лишь набрать сумму, пропорциональную сумме одобрения.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Операторы гемблинга утверждают, собственно например они борются с бонус-хантерами. Впрочем, критики считают, собственно данным казино пытаются сделать из случайного постояльца неизменного игрока. Во время забавы в казино, выигрыши, приобретенные спасибо безвозмездным призовым фондам, суммируются и срабатывают в совместную необходимую для отыгрывания. Однако, если фортуна улыбнется и получится отыграть все призы, игровое заведение гарантированно допустит исключить денежные средства. Сумма вывода будет зависимости от лимита, утвержденного именно в этом учреждении. Поэтому, пристально надо(надобно) читать правила выдачи анлимитных депозитов.
#3205 Charlesgunnyhttp://filmkachat.ru
1×slot рабочее зеркало
Все безвозмездные призы кажутся заманчивыми. Кто же откажется от способности сыграть в онлайн-казино, не рискуя средствами, хотя получая выигрыши. Но далековато не все бездепозитные бонусы в привлекательны для рассудительного клиента.Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную процедуру активации бонуса без депозита. Внимательно прочитайте до конца. Многие новички делают промахи на шаге регистрации и потому имеют получить подарок. <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> Обыкновенные бездепозитные бонусы в объеме от 3-х до 20 $ сделаны чтобы, чтобы, дабы в игры заходили все новые и новые игроки. Здесь, вероятнее всего, будет ограничение на максимальный выигрыш. Важно, чтобы перед минимальным вкладом был отключен приз за первое пополнение счета, и геймер не попадет на повторный вейджер. <a href=https://www.onairseo.com/crawl-report/7289>https://www.onairseo.com/crawl-report/7289</a> Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, a зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. 1×slots казино зеркало <a href=https://kosmetikinstitut-milla.de/user/StevenPhype/>https://kosmetikinstitut-milla.de/user/StevenPhype/</a> Для такого, чтобы отыграть необходимую вашего бездепозитного приза надо(надобно) выполнить обстоятельства вейджера. Очень часто фриспины даются на определенные слоты (book of ra, book of lifeless, book of sun), выбирайте слот себя нраву, они очень красивые и качественные. Бездепозитные бонус имеет быть денежным так и вид фриспинов на слоты
1×slots регистрация то дальше необходимо пройти
1×slot зеркало рабочее регистрации на телефон придет <a href=http://r66227en.beget.tech/user/Walterfuerb/>http://r66227en.beget.tech/user/Walterfuerb/</a> 1 хслот регистрация в 1×slots casino Бездепозитный бонус – это финансовое вознаграждение, коие выдается участнику забавы в казино, для его вербования и возникновения заинтригованности. Любой посетитель, который соответствует условиям выдачи похожего бездепозитного бонуса, имеет претендовать на получение вышеуказанного приза. Такое поощрение считается наиболее эффективным способом, дающим вероятность стартовать деле, не вкладывая собственных вещественных средств.При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток.
1×slots официальный зеркало
Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, чтобы еще раз получить бесплатный бонус. Игорные заведения нетерпимы к бонус-хантерам, потому вас ожидает неминуемое санкция.Выполнив все притязания оператора, клиент может оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем менее суток. Если дополнительно потребуется пройти процедуру верификации, то срок возрастает до 1–2 рабочих дней. Для перевода применяются банковские инструменты и электрические платежные системы. Второй метод подходит какого-либо, так как масса транзакций в осуществляются моментально. В связи со специфичностью функционирования банков обработка платежей имеет занять до нескольких рабочих дней. На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению сего медли, Вы не сможете активировать и получить бездепозитный бонус. <a href=http://board.matrixplus.ru/out.php?link=http://cg26.ru/bitrix/redirect.php?goto=http://m.www-klass.ru/bitrix/redirect.php?goto=https://telegra.ph/Ponimanie-znacheniya-frazy-kapitan-tretego-ranga-09–19>http://board.matrixplus.ru/out.php?link=http://cg26.ru/bitrix/redirect.php?goto=http://m.www-klass.ru/bitrix/redirect.php?goto=https://telegra.ph/Ponimanie-znacheniya-frazy-kapitan-tretego-ranga-09–19</a> Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депо может выделяться до 30 дней.Активация происходит за промокодов, которые вводятся в собственном офисе после регистрации. Среди спецпредложений в списке Casino.ru содержатся эксклюзивные промокоды, коие доступны лишь гостям портала. Другие способы начисления средств ? автоматическая активация незамедлительно последствии создания аккаунта и получение презента по запросу в службу технической поддержки. 1×slots казино зеркало Баланс игрока дополняется на подходящую сумму. К ней применяется вейджер, указанный в правилах промоакции. Вывести выигрыш можно будет в такого, как юзер сделает требуемый размер ставок из личных средств. В редких случаях бездеп трудится в формате Free Play. На счет пользователя зачисляется большая сумма, и предоставляется малый срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по завершении сего периода сумма на счету будет превосходить первоначальную, то разницу можно будет вывести или использовать для дальнейших ставок.
1хслот зеркало сайта
<a href=http://www.topboard.org/members/rabofreesn.160691/>1хслотс официальный сайт зеркало</a> казино 1×slots официальный сайт <a href=http://nanobrid.com/bbs/board.php?bo_table=free&wr_id=3951>http://nanobrid.com/bbs/board.php?bo_table=free&wr_id=3951</a> Бездепозитные призы, как теснее ясно, являются уникальной возможностью к игровому процессу безусловно безвозмездно, словами играть в онлайн казино даром и на быть свои сразу последствии регистрации аккаунта. Автоматы с таким депозитом имеют стать великолепной возможностью поиграть для поклонников пыла с определенными ограничениями в денег.Некоторые казино шансы предлагать посетителям бездепы за подтверждение номера либо почты или репост на страницу в соц сетях.
1×slot зеркало рабочее этих способов предполагает регистрацию
Некоторые онлайн-казино без депо предлагают новым посетителям выбрать приз при регистрации. Будьте внимательны: выбрав один, вы в абсолютном большинстве случаев не можете воспользоваться остальными. <a href=http://classicalmusicmp3freedownload.com/ja/index.php?title=1win_bet_website_jogos>http://classicalmusicmp3freedownload.com/ja/index.php?title=1win_bet_website_jogos</a> Поспешите зарегистрироваться на официальном сайте Клубника, чтобы быстро получить 33 безвозмездных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, бывает реальный шанс победу! 1×slots зеркало подтвердит вашу регистрацию если говорить
<b>Смотреть еще похожие новости:</b>
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=481051>1хслот официальный сайт зеркало</a>
<a href=https://minecraft.ru.net/user/Manuelsoarl/>1хслотс официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На странице представлены бездепозитные призы за регистрацию в казино редчайшая заслуга за которой гонятся все игроки как новички, так и профессионалы. Мы также уделяем большое внимание на наличие призов при формирование рейтинга казино на деньги. Бездепозитный бонус это возможность выступать даром и выиграть реальные деньги. Наиболее популярные вознаграждения среди гэмблеров – бездепозитные бонусы казино. Это не изумительно, как возможно получить благотворительные вращения или виртуальные кредиты, и при этом не придётся пополнять счёт, рисковать личными деньгами. Удастся насладиться разнородными развлечениями причем выиграть солидную необходимую, избегая серьёзного риска.
#3206 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Екатерина Ефременкова, шорт-трекистка casino играть <a href=https://strelochnik.com/>1×bet слоты официальный сайт</a> пин casino Разуваева Ксения Денисовна порно <a href=https://res-publika.com>1×bet официальный слоты</a> порно с Юлия Ефимова casino riobet порно с Афонина Марина Игоревна порно с Виктория Синицина, фигуристка порно с Виктория Синицина, фигуристка порно с Дарья Клишина, легкоатлетка porno Игорь Акинфеев (футбол)
DiskiPlus casino buzz DiskiPlus pin up casino top top <a href=https://diskiplus.ru/>DiskiPlus винлайн букмекерская контора официальный сайт</a> DiskiPlus ев казино DiskiPlus демо казино <a href=https://diskiplus.ru>DiskiPlus porno Вера Бирюкова, гимнастка</a> DiskiPlus сколько казино DiskiPlus 1×bet xbet DiskiPlus 1×bet зеркало на сегодня 1×bet xyz DiskiPlus 1×bet зеркало слоты DiskiPlus porno Мира Андреева (теннис) DiskiPlus cat casino DiskiPlus Валентина Матвиенко порно
#3207 Charlesgunnyhttp://filmkachat.ru
1× slots официальный
Бонусные средства – маленькая сумма средств для старта в новом казино. На бонусные деньги, обычно разрешается играть во все игры, кроме слотов с прогрессивным джекпотом и игр из раздела live casino. <a href=http://filmkachat.ru/>1×slots официальный зеркало рабочее</a> Мы рекомендуем не открещиваться от похожих предложений знаменитых казино. Выделите несколько мин. На регистрацию, получите бонус и попробуйте его отыграть. Может быть, сейчас фортуна будет на вашей стороне! <a href=https://te.legra.ph/Vykup-avto-SHkoda-bystraya-ocenka-i-momentalnyj-raschet-01–24>https://te.legra.ph/Vykup-avto-SHkoda-bystraya-ocenka-i-momentalnyj-raschet-01–24</a> Однако в критериях исчезают «подводные камни», коие не позволят исключить крупную сумму либо же вы не успеете отыграть вейджер. Поэтому мастера рекомендуют арестовать благотворительные вращения за регистрацию в казино без депо, дабы поднабраться навыка и получить реальный шанс на победу. скачать 1×slots официальный сайт <a href=http://krasrec.ru/forum/user/207216/>http://krasrec.ru/forum/user/207216/</a> Вывод выигрыша с бездепозитных бонусов казино – щедрый презент от азартных клубов. Но чтобы исключить собственный доход, необходимо выполнить ряд критерий:Для казино, работающих онлайн, бездепозитные призы необходимы для вербования новых клиентов. Предложение сыграть на слотах без надобности внесения настоящих средств — работающий метод для повышения энтузиазма к фирмы. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит играть в казино, только сейчас теснее на собственные деньги.
1×slot рабочее зеркало
Практически все интернет казино с бездепозитным призом за регистрацию учитывает программу преданности — систему поощрения постоянных посетителей, кот-ая состоит из большого уровней. При достижении игроком одного уровня на его счёт поступает бонус. Чем выше уровень — что, этим щедрее приз. <a href=http://big.bestforums.org/viewtopic.php?f=7&t=16307>1×slots casino регистрация на сайте</a> 1×slots официальный сайт зеркало Классическая разновидность бонуса за творенье аккаунта. Его превосходство заключается в том, собственно заказчик имеет без избирать аппараты и создавать ставки в их. Иногда перечень игровых автоматов ограничен оператором, но все также это лучше, чем единственный дешевый разъем, как если, тогда, с использованием фриспинов. <a href=http://mallds.com/bbs/board.php?bo_table=free&wr_id=324218>http://mallds.com/bbs/board.php?bo_table=free&wr_id=324218</a> 1×slots актуальное зеркало С не отыгранным призом воспрещается превосходить объем максимальной ставки. Нарушение сего условия иметь аннулирование выигрыша.В зависимости от интернет заведения каждый из их возможность вас предложить как бездепозитные деньги, например и бездепозитные фриспины, которые после успешной регистрации рухнут для на ваш игровой баланс.
1хлот регистрация в 1×slots casino
Выбор любого интернет казино на нашем сайте. В описании к каждому Вы сможете разузнать, что получите за творенье аккаунта.Бывают ли бездепозитные призы без вейджера? Бывают, случае у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино. <a href=http://cvpvm09.ru/user/JosephTweby/>http://cvpvm09.ru/user/JosephTweby/</a> казино 1× slots официальный сайт Заработать на бездепозитных призах за регистрацию в казино может каждый юзер, достигший совершеннолетия.Фриспины предусмотрены для применения в видео слотах. Внимательно ознакомьтесь с критериями – частенько их выдают на некоторые автоматы. В зависимости от клуба, у вас выйдет сделать определённое количество ставок. Кстати, продвинутые игорные жилища разрешают запускать любых «одноруких злодеев».
1×slots casino регистрация 1×slotscasino09k online
Простая процедура получения бездепозитного бонуса, кот-ая займет не более 2-х минут. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные.Однако далековато не все ресурсы предлагают своим клиентам бездепозитные бонусы за регистрацию в казино. В большинстве случаев учтено одобрение на 1-ый депозит в размере 100–200%. Это замечательная возможность преувеличить банкролл, увеличить время, проведённое за игрой и шансы сорвать крупный куш. <a href=https://www.ldvd.nl/no-22-san-diego-place-rallies-very-last-boise-country-27–16?page=27#comment-237210>1×slots casino регистрация</a> В онлайне слишком количество скриптовых вебсайтов, коие принадлежат плутам. Их главная цель – заинтересовать гэмблеров, пообещав не великодушные презенты, но и крупные выигрыши. Так что некоторые веб-сайты предлагают получить за регистрацию даже $1 000. 1×slots зеркало сайта <a href=https://flycod.com/forum/tr/member.php?action=profile&uid=966>https://flycod.com/forum/tr/member.php?action=profile&uid=966</a>
сайт 1× slots casino
К примеру, игроку выдаются бесплатные средства в заведении в объеме пятидесяти либо 100 долларов (вейджер на которые сочиняет 100х). То есть, любому новоприбывшему игроку выскакивает привлекающая иллюстрация, кот-ая сулит выплату всех зачисленных фирмой средств. Не стоит заострять на казино приз за регистрацию без депо с чрезмерно великой либо очень малеханькой суммой призов, поэтому что, числе тщательно исследовав все условия, тут всего, несомненно какой-то подкол.Бывают ли бездепозитные бонусы без вейджера? Бывают, если у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино. Бездепозитные бонусы – это исключительно интересная и наиболее многообещающая акция интернет-казино. Они числе какого-либо фри-спинов, потому что выплаты в бесплатных вращениях не гарантированы, как композиции на барабанах игрового аппарата шансы не сложиться. <a href=https://www.techieshah.com/2019/08/eclipse-server-tomcat-v85-server-at.html>https://www.techieshah.com/2019/08/eclipse-server-tomcat-v85-server-at.html</a> 1хслотс зеркало Так же стоит выделить то, что в любом интернет казино установлен свой максимальный кешаут на бездепозитный бонус. Как управляло кешаут — это максимальная сумма средств, которая доступная для вывода с бездепозитного приза.Чаще всего казино приз за регистрацию без депо даёт вероятность запустить каждой автомат. Но никакого внимательно ознакомиться с условиями. Иногда для игры доступны только определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, никакого начать знакомство с миром азарта непосредственно с «одноруких бандитов».
<b>Смотреть еще похожие новости:</b>
<a href=https://qualityprogamer.de/forum/showthread.php?tid=238690>казино 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Такой казино приз без депозита за регистрацию выдается игроку на час и энергично используется данное предложение с 2017 года. Это как бы какая-то маскировка одобрения под бездепозитный. Суть всего этого сводится к что, этому, что игроку на час выдается, к примеру, 1000 долларов, а реклама твердит о том, что каждой выигрыш возможно будет дальнейшем забыть при для. Но случае играющий серьезно отнесется к данному предложению, то он просто потеряет время. Ведь игроку нужно несомненно выступать не в аккаунте, в тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (и всей тыс. ) в управляла вступят конкретные обстоятельства, где несомненно сказано, собственно максимальной суммой победы имеет быть лишь двести долларов и средства возможно применять только в приза на 1-ый лепта с вейджером 25 от суммы гонорары плюс сам депо. По итогу получится, собственно игрок выигрывал себе 200% приз с вейджером на определенную сумму. Короче говоря, это все не стоит вашего времени.
#3208 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
винлайн букмекерская контора официальный сайт пин ап букмекерская контора <a href=https://slon-ru.com/>играющие казино</a> 1×bet регистрация про казино <a href=https://rucriminal.info/>скачать casino на андроид</a> pin up casino пин ап казино смотреть porno Илья Ковальчук (хоккей) демо казино porno Дарья Мороз casino x смотреть фильм казино
DiskiPlus Черкесова Бэлла Мухарбиевна порно DiskiPlus 1×bet скачать приложение на андроид <a href=https://diskiplus.ru/>DiskiPlus 1×bet приложение</a> DiskiPlus kent casino DiskiPlus Лут Оксана Николаевна порно <a href=https://www.diskiplus.ru>DiskiPlus мобильные букмекерские конторы</a> DiskiPlus играющие казино онлайн DiskiPlus букмекерская контора фонбет DiskiPlus Светлана Ходченкова DiskiPlus casino 7k рабочее DiskiPlus casino рабочее зеркало DiskiPlus букмекерскую контору пин DiskiPlus порно с Баталина Ольга Юрьевна
#3209 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на сайте 1×slots ru com
Подарки на праздники ? посвященные парадным датам, требующие символического отыгрыша или начисляются без такового. Могут дариться игрокам сутки рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду.Обычно показатель выше, чем для призов на депозит. Не изумляйтесь, в он будет в х100. Иногда завышенный коэффициент вейджера уточняется для обитателей отдельных государств. <a href=http://filmkachat.ru/>1×slots зеркало регистрация в 1×slots casino</a> <a href=https://redmine.dti.economia.gov.br/issues/72790>https://redmine.dti.economia.gov.br/issues/72790</a> Начнём с того, собственно каждое рекламную за регистрацию подразумевает некие обстоятельства. Бездепозитные призы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность денежного оборота, необходимая для исполнения критерий. Пример, получили безвозмездные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 руб., проигрышных либо выигрышных, так. После исполненья, бонусный баланс перейдёт на настоящий и будет доступным к выводу. 1×slots зеркало рабочее <a href=http://bhidagt.hu/index.php/forum/user/44420-debonairkismet7>http://bhidagt.hu/index.php/forum/user/44420-debonairkismet7</a> Выиграть настоящие средства в казино не пополняя счет – трудно, но вполне. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными бонусами и начните выступать на бонусные свои. По статистике из 10-ти заведений возможно заработать небольшую сумму денег с бонусных средств.Как управляло, новоприбывшие игроки в первую очередь хотят ознакомиться с способами ввода и вывода валютных средств и сроки исполнения поданных заказов чтобы конкретно разуметь, как прытко у вывести свой казино приз за регистрацию без депо на электронный кошелек либо же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино соперничают между собой. Ведь случае бы определенную фирму представляло лишь одно онлайн-заведение, то навряд бы клиенты заметили казино с бонусом за регистрацию и могли бы рассчитывать только на вознаграждение в виде приза на первое вложение. К каждому заведению периодически идет привлекать новых игроков, собственно, в, только на руку всем играющим.
1×slots подтвердит вашу регистрацию если говорить
Поспешите забрать бездепозитные бонусы за регистрацию в казино из представленного списка. Все платформы не только ведут законную деятельность, но и порадуют честными плодами забавы, высокой отдачей, быстрыми выплатами. 1×slot официальный сайт Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?Кешбэк-бонус представляет собой возврат фиксированного процента от ставки если, тогда, проигрыша либо же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не превышает 10%. <a href=http://www.xy28zj.com/space-uid-254680.html>http://www.xy28zj.com/space-uid-254680.html</a> Реже бонусы без депозита начисляются постоянным игрокам. С их поддержкой администрация старается вычесть ценных посетителей либо желает поблагодарить за преданность верных посетителей. Но гораздо чаще для подобных целей применяются эти промоакции:Представьте момент, когда при ставке в 10 руб. Вы получите подобное умножение. Миллион руб. За одно вращение, собственно вполне вполне. Поэтому вопрос, сколько можно выиграть остаётся открытым. Предлагаем проверить помощи. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный приз и инспектируйте удачу в деле. Разумеется, вывести средства не так просто. Однако шансы есть у всех. 1×slots регистрация то дальше необходимо пройти
1×slot зеркало рабочее этих способов предполагает регистрацию
Не хотите поиграть в азартные игры, не рискуя средствами деньгами, хотя получая в все выплаты? Подобную вероятность деют почти лучшие порталы с азартными весельями. В их числе много правдивых и надежных интернет-казино на русском языке. Они привлекают новых пользователей разными поощрительными мероприятиями, включая бездепозитные, или безвозмездные призы. Чтобы бездеп не был начислен на Ваш акк, Вам не активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт автоматически, а Вы не расчитываете его использовать, обратитесь в службу поддержки с пожеланием отменить бездепозитный бонус. <a href=https://www.google.at/url?q=https://doctorlazuta.by/>https://www.google.at/url?q=https://doctorlazuta.by/</a> На условиях отыгрыша даровых бонусов стопам остановиться подробнее. С ними связаны аспекты, которые невозможно забыть без внимания.Чем ниже велечину вейджера, тем проще отыграть и исключить приз. Если Вы расчитываете заработать на бездепе, не просто ознакомиться с свежим игровым клубом, то стоит избегать призов с высоким вейджером их практически не реально отыграть. С ними Вы сможете только протестировать забавы заведения. 1×slots casino зеркало рабочее У каждого игорного заведения средства верховодила и обстоятельства. Но, чтобы получить бонусы, нужно выполнить стереотипные деяния:
1×slots регистрация 1×slotscasino 56 online
Вейджер (wager) – это коэффициент, кот-ый демонстрирует на какую необходимую необходимо сделать ставок, дабы вывести приз из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода этого приза, Вам нужно устроить ставок на сумму: 500*70=3500 рублей. Только полностью отыграв приз, Вы можете вывести собственный выигрыш. Бонус с зачислением средств на счет выделяет больше свободы деяний. Пользователь сам подбирает, каким образом воспользоваться подаренными своими. Здесь кроме имеют работать ограничения на список дешевых игр, но обычно эти рамки не так строги, как в рекламную с бесплатными вращениями. При регистрации в том либо ином онлайн игральном заведении — для дается один шанс испытывать свою удачу не внося средства монеты. Замечу собственно эту поощрительную предложение предоставляют не все интернет игровые площадки, а лишь великодушная половина из их. Которые мы подготовили для Вас в нашем перечне.С не отыгранным призом воспрещается превосходить объем максимальной ставки. Нарушение сего условия иметь аннулирование выигрыша. 1×slots акции <a href=https://spoilerok.ru/user/Walterpax/>https://spoilerok.ru/user/Walterpax/</a> Выбор каждого интернет казино на нашем сайте. В описании к любому Вы сможете узнать, собственно получите за творенье аккаунта.Выбирайте лучшие благотворительные призы с помощью обзоров на Casinoz – и пусть вам сопутствует удача при отыгрыше бонусных кредитов!
1хслотс зеркало на сегодня
Каждая игровая перрон выделяется условиями по получению и отыгрышу бездепов. В правилах отчетливо расписаны кратковременные рамки, за коие нужно прокрутить вейджер. Также не забывайте на наибольший объем ставки и наивысшую необходимую выплаты. С другой стороны, дабы получить бездепозитные бонусы казино, довольно израсходовать не более 1 минутки.Доступные игры – В некоторых азартных играх можно снизить математическое преимущество казино до нескольких десятых процента. В их количестве все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как правило, в этих играх ставки идут в зачет вейджера не всецело. Например, имеет предусматриваться только 50%. В неких забавах бездепозитные бонусы вообще нельзя отыгрывать. <a href=http://1ctv.cn/home.php?mod=space&uid=2955676>http://1ctv.cn/home.php?mod=space&uid=2955676</a> Но надо думать, что снабжая пользователей такими бонусами, казино увлекается спонсированием. Ведь размеры вознаграждений, в основном, не большие (средним объемом от 5 до 20 $). И на эти свои налагаются определенные условия и ограничения, обязательные к выполнению игрока, в в последствии он желает получить все средства выигранные финансы.В большинстве заведений устроить это можно по e-mal, по номеру аппарата, спустя социальную сеть или гугл-аккаунт. 1× slots casino официальный сайт Выбрать казино с бездепозитным призом. У нас на сайте представлен перечень наилучших интернет казино, коие предлагают своим игрокам щедрые бонусы за регистрацию.
<b>Смотреть еще похожие новости:</b>
<a href=https://adminclub.org/showthread.php?tid=131473>1×slots официальный сайт мобильная версия скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для отыгрыша бонуса казино обязует игрока поиграть на сумму, в количество один превышающую необходимую приобретенного бонуса — здесь выгода фирмы явна.
#3210 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slotscasino 56 online
Большинство интернет-казино из нашего топ-10 готовы порадовать вас эксклюзивными промоакциями. Читайте о их в обзорах и на форуме.B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax <a href=http://filmkachat.ru/>1хслотс зеркало на сегодня</a> <a href=https://www.sitejabber.com/reviews/playhouse.com.ua>https://www.sitejabber.com/reviews/playhouse.com.ua</a> 1хлот регистрация в 1×slots casino <a href=https://guides.co/g/6857/412080>https://guides.co/g/6857/412080</a> Чем ниже значение вейджера, тем легче отыграть и вывести приз. Если Вы расчитываете заработать на бездепе, а не просто ознакомиться с свежим игровым клубом, то стоит игнорировать бонусов с высоким вейджером их почти не реально отыграть. С ними Вы можете только протестировать игры заведения.
1×slots зеркало регистрацию более популярный вариант это
<a href=http://romb4×4.ru/forum/threads/1×slots-zerkalo-podtverdit-vashu-registraciju-esli-govorit.23611/>1×slots зеркало подтвердит вашу регистрацию если говорить</a> 1хслотс регистрация в 1×slots casino Бонусные деньги – маленькая сумма средств для старта в новеньком казино. На бонусные деньги, обычно разрешено играть во все игры, считая слотов с современным джекпотом и игр из раздела live casino. <a href=http://forums.rxmuscle.com/member.php?10256969-Stevenbeste&s=7639f2a9746494c496ebc824ad3b2bb0>http://forums.rxmuscle.com/member.php?10256969-Stevenbeste&s=7639f2a9746494c496ebc824ad3b2bb0</a> Нет. Казино раздают благотворительные бонусы за регистрацию, для того, чтобы клиент имел ознакомиться с игровым заведением. А чтобы исключить его, нужно выполнить условия отыгрыша. 1×slots официальный сайт скачать Возможность протестировать новые забавы, не рискуя личными средствами и создать собственную стратегию забавы.
1×slots рабочее зеркало
Перед активацией принципиально пристально изучить обстоятельства промоакции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, в течение коих возможно пользоваться предложением. Если бездеп охватывает ограниченный перечень игр, рекомендовано разузнать максимальные коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят лишь что, нет случае, если оператор не установил жесткие ограничения на наивысшую необходимую ставки. Можно. Вы всегда можете отказаться от получения бездепозитного приза за регистрацию в казино, пока Вы не сделаете ставку.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 $. Если выдаются фриспины, их число редко превышает нескольких 10-ов даровых вращений. <a href=http://bbs.cheaa.com/home.php?mod=space&uid=3133555>http://bbs.cheaa.com/home.php?mod=space&uid=3133555</a> 1×slots зеркало регистрация в 1×slots casino Бесплатный бонус – кредиты, которые онлайн-казино начисляет посетителю, не заставляя его пополнять игровой счет.Можно ли в одном интернет казино получить больше 1-го бонуса за регистрацию? Нет, например как в любом онлайн казино есть правила, к которым нужно придерживаться, не творить два аккаута для получения призов, по будет блокировка обоих аккаутов, не пытайтесь перехитрить онлайн казино, приз за регистрацию выдаеться раз один 1 лицу.
1хслотс зеркало
Выше мы дали глубокий набор самых свежих и актуальных бездепозитных призов в онлайн казино без пополнения на 2022 год, где вам пользоваться хоть ценным бездепозитным бонусом.Акции распространяются как на все игры казино, например и на ограниченный список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino прочие. Промо может охватывать разработки одного производителя. Бездеп не пересекается с другими акциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, изготовленные бонусными деньгами. Для идентификации платежных реквизитов игрока может потребоваться пополнение счета на наименьшую необходимую. <a href=https://forum.bandariklan.com/showthread.php?tid=408042>1×slots регистрация 1×slotscasino09k online</a> Возьми свой подарок. Чаще всего бонус активизируется сразу последствии регистрации. Но бывают истории, когда нужно забежать в индивидуальный офис либо написать в справочную службу. 1×slots на любой вкус как пройти регистрацию <a href=http://www.3vzq.com/space-uid-137922.html>http://www.3vzq.com/space-uid-137922.html</a> Oтыгpaть приз с указанным вeйджepом, результата необходимо сдeлaть cтaвoк нa cумму, превышающую объем бонуса в некоторое один.
1х слот регистрация в 1×slots casino
<a href=https://love-n-magic.ru/index.php?subaction=userinfo&user=Michaelitaph>https://love-n-magic.ru/index.php?subaction=userinfo&user=Michaelitaph</a> Бонус в казино без депо содержит разные вариации: может быть приветственный приз, промоакции в честь каких-либо праздничных либо важных дат, приз за привлечение новых игроков, лояльность и получение VIP-статуса. 1×slots рабочее зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=62442>1×slots зеркало регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы которые возникают у новичков. Фриспины. Бесплатные вращения предусмотрены для использования в видео-слотах. Внимательно читайте условия – они нередко выдаются для некоторых машин. В зависимости от клуба вы можете делать конкретное число ставок. Кстати, современные игорные жилища выделяют возможность заводить «одноруких злодеев».
#3211 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Петр Ян (ММА) gama casino <a href=https://rhymes-punches.com/>гама казино</a> порно с Кирьянова Дарья Борисовна казино фильм <a href=https://rhymes-punches.com/>казино онлайн бесплатно</a> 1×bet на андроид официальная казино пин ап казино 7k casino сайт порно с Антропова Валентина Викторовна букмекерская контора официальный сайт скачать pin up casino top top
DiskiPlus pin ап casino DiskiPlus 1×bet регистрация <a href=https://www.diskiplus.ru/>DiskiPlus casino андроид</a> DiskiPlus винлайн букмекерская контора официальный сайт DiskiPlus Манилова Алла Юрьевна порно <a href=https://www.diskiplus.ru/>DiskiPlus порно с Максим Глушенков (футбол)</a> DiskiPlus букмекерская контора скачать приложение DiskiPlus человек казино DiskiPlus pin up casino зеркало DiskiPlus рокс казино DiskiPlus porno Александр Соболев (футбол) DiskiPlus букмекерская контора мостбет DiskiPlus суть казино
#3212 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Екатерина Ефременкова, шорт-трекистка 1×bet зеркало слоты <a href=https://kompromat1.online/>Любимова Ольга Борисовна порно</a> про казино казино сочи <a href=https://repost.news/>casino x</a> casino играть porno Илья Ковальчук (хоккей) 1×bet зеркало рабочее на сегодня porno Марина Александрова балтбет букмекерская контора porno Катерина Шпица рейтинг казино
DiskiPlus букмекерская контора мостбет DiskiPlus porno Мария Шарапова <a href=https://www.diskiplus.ru/>DiskiPlus яндекс казино</a> DiskiPlus человек казино DiskiPlus порно с Антропова Валентина Викторовна <a href=https://www.diskiplus.ru>DiskiPlus cometa casino</a> DiskiPlus порно с Зырянова Анастасия Владимировна DiskiPlus casino играть DiskiPlus casino бездепозитный DiskiPlus 1win casino DiskiPlus букмекерские конторы бет DiskiPlus официальные букмекерские конторы DiskiPlus порно с Дарья Клишина, легкоатлетка
#3213 Charlesgunnyhttp://filmkachat.ru
casino 1×slot
Доступность — бездепозитные призы в казино чаще всего предоставляются свежим игрокам, но посещают случаи, когда бонус шансы получить и действующие клиенты. <a href=http://filmkachat.ru/>1хслотс зеркало на сегодня</a> Бoльшинcтвo азартных заведений выдвигают примерно одинаковые условия и притязания, коие необходимо выполнить, дабы получить бездепозитный приз за регистрацию. Все их возможно соединить в раз перечень: <a href=https://www.webwiki.de/playhouse.com.ua>https://www.webwiki.de/playhouse.com.ua</a> Только выполнив все условия отыгрыша и дождавшись окончания ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить свои средства. 1×slots промокод при регистрации <a href=https://stephenyyxv40516.blogacep.com/34694940/checking-out-the-frontier-of-ai-driven-confront-swap-films-a-deep-dive-into-deepnude>https://stephenyyxv40516.blogacep.com/34694940/checking-out-the-frontier-of-ai-driven-confront-swap-films-a-deep-dive-into-deepnude</a> Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро или 20 долларов. Если выдаются фриспины, их количество редко выше нескольких 10-ов безвозмездных вращений.Как и другие промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения считаются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых гостей и разрешает им составить эмоцию о функционале, не рискуя значительными суммами.
1× slots регистрация в 1×slots casino
Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, чтобы появилась возможность исключить выигрыш. <a href=https://tabsgame.ru/user/Jamesbes/>1×slots рабочее зеркало</a> 1×slots зеркало на сегодня <a href=http://image.google.cg/url?sa=i&rct=j&url=http://image.google.mv/url?q=http://termopartner.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/amTIzgG3lGx>http://image.google.cg/url?sa=i&rct=j&url=http://image.google.mv/url?q=http://termopartner.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/amTIzgG3lGx</a> Список например называемых «не территорий» прилагается к правилам бонусной программки игорного портала. Обязательно проверьте, распространяются ли на вас сходственные наказания. зеркло казино 1×slots Новички не обожают незамедлительно же вносить депозит. Это обосновано неимением опыта и недоверием. К счастью, наши можно получить бездепозитный бонус за регистрацию в казино. Неважно собственно начислит система – фриспины или кредиты. В любом случае вы не рискуете собственными сбережениями. Это замечательная вероятность запустить понравившийся видео слот либо же испытать удачу в настольных играх.Каждая игровая платформа отличается критериями по получению и отыгрышу бездепов. В правилах отчетливо расписаны кратковременные рамки, за коие нужно прокрутить вейджер. Также не забывайте тему максимальный объем ставки и наивысшую необходимую выплаты. С другой стороны, чтобы получить бездепозитные бонусы казино, достаточно потратить не более 1 минутки.
1×slots официальный сайт мобильная версия скачать
Игрокам не следует воспринимать приветственный бонус как гарантированный способ получить большой выигрыш, хотя это замечательная вероятность без расходов расценить возможностей казино. <a href=https://eco-kamchatka.ru/user/Renaldovat/>https://eco-kamchatka.ru/user/Renaldovat/</a> 1×slots официальный demo регистрация в 1×slots casino
1×slots официальный сайт скачать на айфон
Бездепозитные бонусы за регистрацию являются одним из самых популярных методов вербования свежих игроков в онлайн-казино, поэтому что они предоставляют игрокам вероятность опробовать казино, неподражаемо игровые автоматы, и вполне, выиграть реальные деньги. <a href=https://masstr.net/showthread.php?tid=95392>казино 1× slots официальный сайт</a> Доступные забавы – В неких азартных забавах возможно снизить математическое превосходство казино до нескольких десятых процента. В их количестве многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как управляло, в таких играх ставки идут в зачет вейджера не всецело. Например, имеет учитываться лишь 50%. В некоторых забавах бездепозитные призы вообщем нельзя отыгрывать.Фриспины начисляются по конкретной ставке. После их активации игроку необходимо запустить разъем и увериться, собственно в нем показываются безвозмездные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода после отыгрыша ориентируется оператором и изредка превышает 5 000 руб. Когда идет о получении бездепозитных бонусов в казино, начала обратите внимание на следующие обстоятельства:Вывод выигрыша с бездепозитных призов казино – великодушный презент от азартных клубов. Но дабы вывести собственный доход, необходимо выполнить ряд условий: 1хслотс зеркало на сегодня <a href=http://211.110.33.185/doku.php?id=скачать_бесплатные_кино_новинки>http://211.110.33.185/doku.php?id=скачать_бесплатные_кино_новинки</a> Главное превосходство спинов – возможность выучить разные слоты. Также удастся насладиться бонусными раундами, испытать удачу в риск-туре и преувеличить выигрыш за счёт особенных знаков. Однако столько игровой процесс заслуживает внимание, так превосходнее сосредоточиться на реальном выигрыше.
1× слот зеркало
Срок активации и время на отыгрыш. Зачисление денег или фриспинов случается при активации на строго ограниченного периода, подобные притязания предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать приз некоторое дней либо числе месяцов. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высоким вейджером.Бездепозитные призы за регистрацию считаются одним из самых популярных методов привлечения новых игроков в онлайн-казино, потому что они деют игрокам возможность опробовать казино, более игровые автоматы, и вероятно, выиграть настоящие деньги. <a href=http://kramday.com/photos/profile.php?uid=89163>http://kramday.com/photos/profile.php?uid=89163</a> B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax 1×slots регистрацию более популярный вариант это Для подтверждения электрической почты, просто перейдите по интенсивной ссылке в письме, полученном от игрового заведения.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.ldvd.nl/no-22-san-diego-place-rallies-very-last-boise-country-27–16?page=65#comment-239103>1×slot регистрация</a>
<a href=https://orbitsound.com/forum/user-211634.html>1×slots casino зеркало</a>
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=286207>1×slots регистрацию процедура займет всего лишь</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Представленные на данной странице наихорошие бездеп призы в казино за регистрацию в 2022 году имеют подходящие условия. После кропотливого анализа редакция портала составила рейтинг спецпредложений, в гости Casino.ru все сортировать список по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д.
#3214 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Анна Щербакова, фигуристка гама казино <a href=https://slon-ru.com/>pin up casino</a> Анна Михалкова гта онлайн казино <a href=https://th-royalgclub.com/>пин up casino</a> porno Илона Маркова, хоккеистка 1×bet зеркало на сегодня 1×bet xyz казино рояль смотреть casino зеркало сегодня порно с Максим Глушенков (футбол) 1×bet porno Юлия Канакина
DiskiPlus pin up casino DiskiPlus порно с Сергей Бобровский (хоккей) <a href=https://diskiplus.ru/>DiskiPlus букмекерские конторы pin</a> DiskiPlus порно с Антропова Валентина Викторовна DiskiPlus официальная казино <a href=https://www.diskiplus.ru>DiskiPlus Набиуллина Эльвира Сахипзадовна порно</a> DiskiPlus porno Анастасия Янькова, боксерка DiskiPlus где казино DiskiPlus казино рулетка казино DiskiPlus порно с Алина Загитова DiskiPlus казино зеркало сегодня DiskiPlus champion casino
#3215 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало сайта
Хотя безвозмездные призы начисляются без депозита, не исключено, что вас понадобиться вносить средства. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь после как, как свежий клиент раз пополнит игровой счет.Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша призов. Заведения постоянно устанавливают наивысшую ставку, возможную по условиям вейждера. <a href=http://filmkachat.ru/>1×slot рабочее зеркало</a> <a href=https://portfolium.com/entry/professional-3d-product-modeling-services-custom>https://portfolium.com/entry/professional-3d-product-modeling-services-custom</a> 1×slots зеркало регистрация в 1×slots casino <a href=https://biiut.com/read-blog/61516>https://biiut.com/read-blog/61516</a> Многие новички сомневаются, что поощрительный приз не несомненно отдавать, числе случае они выиграли у казино. Это абсолютно безопасно и накрепко. Выводя выигранные свои, игрок просто останавливает свое участие в игре и теряет уникальную возможность – даром увеличивать собственное вещественное положение.За вербование приятеля ? в партнерской программы заказчик получает вознаграждение за вербование новых пользователей.
1 х слотс зеркало
Бесплатные бонусы казино без депо можно получить повторяющий валютных средств на бонусный счет (вывести их можно лишь в отыгрыша), фриспинов, забавы либо кешбэк-бонуса. <a href=https://forum.dis-course.net/viewtopic.php?t=519870>1×slots регистрация на 1хслотс</a> 1×slots зеркало регистрацию более популярный вариант это <a href=https://hothdporn.pro/user/JulesChump/>https://hothdporn.pro/user/JulesChump/</a> 1×slots актуальное зеркало Осталось избрать казино с бонусом за регистрацию и создать профиль. После активации дара выигрыш в от Фортуны и способностей.
1хслотс рабочее зеркало на сегодня
Вейджер (wager) – это коэффициент, кот-ый показывает на какую необходимую необходимо устроить ставок, чтобы вывести приз из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего приза, Вам необходимо сделать ставок на необходимую: 500*70=3500 руб. Только полностью отыграв бонус, Вы можете вывести собственный выигрыш.Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, дабы замечена вероятность исключить выигрыш. Обыкновенные бездепозитные бонусы в размере от 3-х до 20 $ созданы чтобы, чтобы, дабы в забавы заходили все новые и новые игроки. Здесь, скорее, несомненно ограничение на наибольший выигрыш. Важно, дабы перед наименьшим вкладом был отключен бонус за 1-ое пополнение счета, и игры не попадет на повторный вейджер. <a href=http://kinofilm2017.ru/user/Raymondcot/>http://kinofilm2017.ru/user/Raymondcot/</a> На условиях отыгрыша даровых призов стопам остановиться подробнее. С ними связаны нюансы, которые нельзя оставить без внимания. 1хслотс казино зеркало Помимо прочего, для вывода средств по бездепу необходимо привнести на счёт свой 1-ый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на минимально вероятную сумму, последствии чего вывод средств станет доступен.
1×slots регистрация
Теоретически, к безвозмездным бонусам можно отнести например именуемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, поэтому собственно они предоставляют лишь вероятность создавать ставки.Используйте превосходнейшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из списка ниже, чтобы заработать презенты за обычные действия и уже сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и прыткими выводами на электрические кошельки. <a href=https://australiantravelforum.com/Upload/showthread.php?tid=229639>1×slots рабочее зеркало на сегодня</a> Выбирая бесплатный приз, внимательно изучайте управляла. Убедитесь, что для возможно брать роль в промоакции. Уточните, в каких забавах возможно скорпулезно условия вейджера. При надобности задавайте вопросы адептам саппорта. 1×slots регистрация на сайте <a href=http://entropiques.fr/userinfo.php?uid=31073>http://entropiques.fr/userinfo.php?uid=31073</a> При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток.Таким образом интернет казино получает потенциального игрока. Возможно в будущем либо подлинном он захотит поиграть на средства средства. Так трудятся бездепозитные бонусы в интернет казино. Здесь хорошо подходит выражение, бесплатные сыр бывает только в мышеловке. Начинающие игроки шансы не обдумывать опасность пыла. Однако со временем осознания делается больше. Это тема для отдельного обсуждения.
1×slots быструю регистрацию а также мгновенное
<a href=https://www.usajobsindex.com/author/jamesacept/>https://www.usajobsindex.com/author/jamesacept/</a> Бездепозитный приз за регистрацию в казино — это стартовый презент вид валютного начисления или даровых вращений для новых игроков заведения, для получения которого не вносить депо.Для получения бездепа необходимо пригласить в игру по реферальной ссылке нового клиента: он обязан зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на необходимую, обозначенную в критериях акции. 1×slots регистрация Новички не обожают сразу же заносить депозит. Это обусловлено отсутствием навыка и недоверием. К счастью, в можно получить бездепозитный бонус за регистрацию в казино. Неважно собственно начисляет система – фриспины или кредиты. В всяком случае вы не рискуете своими сбережениями. Это замечательная возможность запустить приглянувшийся видео разъем или же испытать фортуну в настольных забавах.Проверка занимает от нескольких мин. До нескольких дней, спецы техподдержки могут запросить дополнительные документы либо инициировать краткое общение по Skype.
<b>Смотреть еще похожие новости:</b>
<a href=http://kemsrr.forumex.ru/viewtopic.php?f=7&t=3555>1×slots скачать на айфон</a>
<a href=https://forum.vn.ua/showthread.php?p=3276234#post3276234>1×slot официальный сайт</a>
<a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=144703>1×slots зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Нет. Казино раздают безвозмездные бонусы за регистрацию, для того, чтобы заказчик возможность ознакомиться с игровым заведением. А чтобы вывести его, нужно выполнить условия отыгрыша.
#3216 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Абрамченко Виктория Валериевна порно с Кирьянова Дарья Борисовна <a href=https://repost.news/>porno Александра Степанова, фигуристка</a> Черкесова Бэлла Мухарбиевна порно casino x <a href=https://krtka.info/>pin casino</a> пинап казино пин ап casino pin up top порно с Дарья Касаткина (теннис) порно с Алина Загитова сайте букмекерской конторы фонбет 1×bet ограбление казино
DiskiPlus порно с Баталина Ольга Юрьевна DiskiPlus Елизавета Боярская <a href=https://diskiplus.ru/>DiskiPlus порно с Анна Калинская (теннис)</a> DiskiPlus vodka casino DiskiPlus casino 7k сегодня <a href=https://diskiplus.ru>DiskiPlus up букмекерская контора</a> DiskiPlus пин ап casino pin DiskiPlus Комарова Наталья Владимировна порно DiskiPlus порно с Константин Тюкавин (футбол) DiskiPlus casino online зеркало DiskiPlus слот casino DiskiPlus casino зеркало сегодня рабочее DiskiPlus порно с Виктория Синицина, фигуристка
#3217 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
Свежий приз начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в использовании своими, в случае отыгрыша оператор может установить ограничение на вывод денег.В интернет-сети постоянно можно найти списки наиболее модных и гарантированных поощрительных программ от популярных онлайн-казино. <a href=http://filmkachat.ru/>1×slots коды</a> Законодательство, регулирующее азартные забавы в различных государствах, влияет на полномочия операторов. В итоге пользователи из отдельных ареалов сталкиваются с лимитированиями со стороны казино. Это может быть как глубокий отказ в доступе, так и невозможность загружать забавы отдельных производителей.За счёт спинов получится запустить разные интернет слоты, протестировать стратегии и поднабраться навыка. Фишка в том, что вращения начисляются на лучшие аппараты с оригинальными опциями и высочайшей отдачей. Не забывайте, что в каждом акционном предложении предусмотрены специальные требования – временные лимитирования, наибольший размер ставки, перечень дешевых игр. <a href=https://forum.gazeta.pl/forum/w,678,178514378,178514378,Professional_Furniture_Shop_Drawings.html>https://forum.gazeta.pl/forum/w,678,178514378,178514378,Professional_Furniture_Shop_Drawings.html</a> Автоматы непопросту считаются наиболее модным азартным отдыхом. Чтобы усвоить управление и правила, понадобится всего количество мин. Ваша задача устроить ставку, найти количество рабочих линий и можно вертеть барабан. Если на экране выпадет выигрышная композиция – вы выиграли! С данной задачей для посодействуют справится бездепозитные призы казино. 1×slots промокод при регистрации <a href=http://g961713h.beget.tech/index.php?subaction=userinfo&user=efficaciousdisp>http://g961713h.beget.tech/index.php?subaction=userinfo&user=efficaciousdisp</a>
1хслотс казино зеркало
Третитй бездепозитный приз за регистрацию – валютные свои. К раскаянью, начислить рубли либо баксы готовы лишь известные и модные клубы. С их помощью у насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком. <a href=http://shiftdelete.10tl.net/member.php?action=profile&uid=119629>1×slots зеркало рабочее</a> 1×slots зеркало на сегодня Активация валютного гонорары происходит автоматически в творенья профиля или использования промокода. Иногда операторы предъявляют вспомогательные требования: подписаться на страницы казино в соц сетях либо на рассылку маркетинговых извещений, скачать и ввести дополнительный софт и т.д. <a href=https://www.scottsfasteners.com/users/joshuanoify>https://www.scottsfasteners.com/users/joshuanoify</a> 1×slots регистрация 1×slots review live Заработать на бездепозитных призах за регистрацию в казино имеет любой пользователь, достигший совершеннолетия.
1×slots актуальное зеркало
Объективные – объем приза, коэффициент и обстоятельства вейджера, необходимость внесения депо для вывода средств; Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, all зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. <a href=http://motosurfing.com/bitrix/redirect.php?goto=http://chermet-group.ru/bitrix/redirect.php?goto=http://miracletour.com/bitrix/click.php?goto=https://teletype.in/@urist555/1×DUiG1Pu6L>http://motosurfing.com/bitrix/redirect.php?goto=http://chermet-group.ru/bitrix/redirect.php?goto=http://miracletour.com/bitrix/click.php?goto=https://teletype.in/@urist555/1×DUiG1Pu6L</a> Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. 1×slots зеркало видели такую регистрацию на Срок активации и время на отыгрыш. Зачисление средств или фриспинов происходит при активации на требовательно ограниченного периода, схожие притязания предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать бонус несколько дней или и недель. Другие выдают крупную необходимую за регистрацию, но время отыгрыша ограничивают несколькими часами с необоснованно высочайшим вейджером.
1×slots зеркало которую указывали при регистрации кстати
Фриспины. Бесплатные вращения предусмотрены для применения в видео-слотах. Внимательно читайте условия – они часто выдаются для некоторых машин. В зависимости от клуба вам создавать определенное число ставок. Кстати, современные игорные жилища дают возможность заводить «одноруких бандитов». <a href=https://www.kfz-gringer.at/index.php/forum/suggestion-box/75479–1-x-slots-casino#75243>1 x slots casino</a> Приветственный бездеп предоставляется какому игроку лишь раз раз. Казино дерутся с например называемыми бонусхантерами (от англ. Bonus Hunter — доброволец за бонусами), пытающимися заводить множественные аккаунты для надувательства оператора и повторного получения подарка. Исключить похожие деяния дозволяет верификация данных. Администрация вправе востребовать у клиента доказать персональные данные, указанные при регистрации.Размер бонуса. В качестве бездепов обыкновенно начисляют большие суммы, а когда речь идет о призах за депо, которые начисляются в процентном соотношении от суммы пополнения, то некоторые казино могут презентовать игроку до 2000$. 1× slots casino зеркало <a href=https://www.javab24.com/profile/25694-henrynap>https://www.javab24.com/profile/25694-henrynap</a>
1×slots зеркало рабочее на сегодня
При поддержки такого поощрения оператор возможность также завлекать клиентов, коие ранее проявляли активность на сайте, но по какой-то причине перестали играть. В этом случае промокод высылается пользователю по электронной почте либо в виде SMS.Многие игроки, оценив функционал казино, остаются играть в нем и далее ? на это и нацелено любое рекламную. Постоянные клиенты заносят депозиты и делают ставки, обеспечивая длительную выгода оператора. То есть, казино раздают бездепы свежим пользователям для формирования приклнной аудитории. <a href=http://www.miranetwork.it/index.php?option=com_k2&view=itemlist&task=user&id=446083>http://www.miranetwork.it/index.php?option=com_k2&view=itemlist&task=user&id=446083</a> онлайн казино 1×slots Как только на виртуальном счету окажутся бонусные свои, поспешите отыграть вейджер. Сразу последствии этого можно оставить заявку на вывод выигрыша. Кредиты выгодно отличаются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом настоящих средств и дают вероятность ощутить азарт. Во-вторых – можно насладиться любой азартной забавой доступной на веб-сайте. В вашем постановлении находятся автоматы, настольные прибавление, видео-покер, Live-дилеры.
<b>Смотреть еще похожие новости:</b>
<a href=https://your-portal.at.ua/forum/43–231–5#88606>1хслотс зеркало</a>
<a href=https://www.kfz-gringer.at/index.php/forum/in-neque-arcu-vulputate-vitae/76858–1#76622>рабочее зеркало 1хслотс</a>
<a href=https://www.lightknotes.com/MyBB/showthread.php?tid=267981>casino 1×slot</a>
<a href=https://www.handmakersbrasil.com.br/topic/839–1×slots-%D1%81%D0%B0%D0%B9%D1%82-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE/>1×slots сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Главное преимущество спинов – возможность изучить различные слоты. Также удастся насладиться бонусными раундами, испытывать удачу в риск-туре и преувеличить выигрыш за счёт особенных символов. Однако не только игровой процесс заслуживает внимание, как какого-либо сосредоточиться на реальном выигрыше. При исполненьи условий отыгрыша и верификации, средства с бонусного счета переводятся на основной и могут быть выведены на карту либо электронный кошелек. Лимиты на вывод и сроки проведения транзакции находятся от избранной платежной системы.
#3218 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Валентина Матвиенко порно 1×bet на сегодня <a href=https://m.repost.news/>играющие казино онлайн</a> порно с Владимир Минеев (ММА) пин casino <a href=https://krtka.info/>pin up casino зеркало</a> pin up casino пин ап лучшие бесплатные онлайн казино фильмы казино рояль porno Алена Косторная (фигурное катание) 1×bet 1 сайт pin up casino порно с Александр Большунов (лыжные гонки)
DiskiPlus казино регистрации DiskiPlus 1×bet xbet xyz <a href=https://diskiplus.ru>DiskiPlus casino buzz</a> DiskiPlus casino автомат DiskiPlus смотреть фильм казино <a href=https://diskiplus.ru>DiskiPlus pin up casino top top</a> DiskiPlus 1×bet зеркало xbet DiskiPlus champion casino DiskiPlus водка казино DiskiPlus 1×bet сайт DiskiPlus порно с Арина и Дина Аверины, гимнастки DiskiPlus Кузнецова Анна Юрьевна порно DiskiPlus 1×bet на андроид
#3219 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasin online
В неких онлайн казино для получения бездепозитных призов не довольно просто зарегистрироваться на веб-сайте клуба и подтвердить средства контактные данные. Дополнительно требуется активация промокода.Размер призов почаще всего чисто условный и не превышает 50 рублей. Приятно, хотя осязаемым бустом деле вряд ли станет. <a href=http://filmkachat.ru/>1×slots зеркало рабочее</a> <a href=https://community.oneplus.com/thread/1778657405274423300>https://community.oneplus.com/thread/1778657405274423300</a> Вы не в коем случае ни же рискуете, а только выигрываете и выводите на платежную систему, либо проигрываете предложенный приз, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс изучить игровые автоматы, научится регулировать изменять ставки и полосы, изучать бонусные забавы и их выигрышные комбинации, ну счете просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные средства, которые возможно отыграть и исключить, а не просто на демо счет, что, этим самым адреналин в крови еще больше повысится а пульс забьется с частым ритмом!Акции, посвященные календарным праздникам, случаются рассчитаны как на всех юзеров, так и на категории: например, презент на 8 марта девушкам-игрокам либо мужикам на 23 февраля. 1×slots зеркало регистрация то дальше необходимо пройти <a href=http://forums.ago.ir/member.php?action=profile&uid=5378>http://forums.ago.ir/member.php?action=profile&uid=5378</a>
1×slot регистрация
Мы рекомендуем не открещиваться от сходственных предложений узнаваемых казино. Выделите несколько мин. На регистрацию, получите приз и попробуйте его отыграть. Может быть, сейчас удача несомненно на вашей стороне! <a href=https://houseion.com/2023/04/25/in-the-heart-of-valencia/#comment-20500>1×slots сайт</a> 1×slots промокод при регистрации Автоматическая активация кажется самой комфортной, но ручной способ содержит перед ней преимущества. Прежде чем применять вознаграждение от казино, стоит заранее определить, сколько медли потребуется на исполненье всех критерий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала деянья приза. <a href=http://gta5.czechmod.cz/profile.php?lookup=20813>http://gta5.czechmod.cz/profile.php?lookup=20813</a> Еще одно условие дотрагивается размеров ставки. Операторы устанавливают наивысшую сумму, коию игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, избранной в Личном офисе. При превышении лимита есть риск лишиться приза. Существующие лимитирования относятся и к конкретным обликам ставок. Например, играя в рулетку, заказчик может столкнуться с запретом ставить фишки на шансы. 1хслот зеркало
1×slots регистрация 1×slotscasino 56 online
<a href=http://metabolichealthdigest.com/user/charlesshers/?um_action=edit>http://metabolichealthdigest.com/user/charlesshers/?um_action=edit</a> 1хслотс 1хслотс регистрация перейти на 1×slots Автоматическая активация первый самой комфортной, но ручной способ имеет перед ней преимущества. Прежде чем использовать вознаграждение от казино, стоит заранее определить, сколько медли требуется на выполнение всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала действия приза.
1хслотс зеркало на сегодня
Прежде всего, не забывайте регулярно заглядывать на страничку обзоров бездепозитных призов. Они шаг за шагом оценивают наиболее увлекательные предложения основных игорных порталов. <a href=https://traderscrypt.com/forums/showthread.php?tid=5891&pid=8739#pid8739>1×slot рабочее зеркало</a> Получать информацию о самых прибыльных бонусах возможно без постоянного прогноза новостей казино. Мы взяли эту задачку на себя и безпрерывно следим за предложениями операторов, выбирая наихорошие из их. В этом разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список промоакций периодически пополняется. В топ вошли самые новые бездепозитные бонусы за регистрацию в казино 2020, временные и замкнутые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру прочим аспектам. Если срок действия акции истек, она удаляется из перечня. 1×slots регистрацию более популярный вариант это <a href=http://valn.info/userinfo.php?uid=22811#>http://valn.info/userinfo.php?uid=22811#</a> Прежде чем активировать бездеп, необходимо увериться в том, собственно страна, уроженцем которой считается игрок, не входит в список запрещенных.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Акционные предложения от казино есть в разных форматах. Часто призы даются в мена на депозит. Игрок заносит платеж и получает деньги, благотворительные вращения и одобрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — вид бонуса, кот-ый гарантирован за выполнение определенных деяний на веб-сайте: Подтверждение регистрации. Казино настоятельно привязки профиля к электронному адресу и номеру телефона. Для сего на e-mail отчаливает послание со ссылкой, а на телефонный ? текстовое извещенье с кодом. <a href=https://bajarmp3.net/member.php?action=profile&uid=9016>https://bajarmp3.net/member.php?action=profile&uid=9016</a> Изучить управляла и обстоятельства получения бездепозитных бонусов казино, Вы можете у нас на веб-сайте в разделе с призами или на официальном сайте избранного Вами казино. Если не найти нужную информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал или по электрической почте. онлайн казино 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.graylite.com/viewtopic.php?p=204567#p204567>1×slots casino регистрация на сайте</a>
<a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=148877>зеркло казино 1×slots</a>
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=64171>casino 1×slot</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Шаг 4. Активация. Внимательно выучите условия, информацию по ограничениям и сроке деяния бонусного предложения. Разобравшись с правилами, возможно активировать бонус в личном кабинете (от ? с использованием промокода) или по запросу в саппорт. Принципиальным различием бесплатных бонусов от бонусов на депо считается неименье необходимости вносить средства на аккаунт. Из-за сего их нередко называют бездепозитными (no deposit bonuses).
#3220 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet официальные букмекерские конторы <a href=https://rhymes-punches.com/>включи казино</a> пин ап casino pin up top casino вход <a href=https://7club7.com/>up букмекерская контора</a> inform@rucriminal.info 7k casino зеркало букмекерская контора вход лучшие бесплатные онлайн казино гта онлайн казино gama casino porno Яна Троянова
DiskiPlus вавада казино DiskiPlus Радченко Светлана Юрьевна порно <a href=https://diskiplus.ru/>DiskiPlus сайты казино</a> DiskiPlus casino официальный зеркало DiskiPlus pin up casino официальный <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet скачать приложение</a> DiskiPlus рокс казино DiskiPlus porno Яна Троянова DiskiPlus casino сайты DiskiPlus Валентина Матвиенко порно DiskiPlus казино рулетка DiskiPlus casino игровой автомат DiskiPlus слоты казино
#3221 Kevinpaplyhttp://pet-supplies-buy.com
order pet product <a href=https://pet-supplies-buy.com/>new pet products</a>
#3222 pet-supplieshttps://pet-supplies-buy.com
new pet products <a href=https://pet-supplies-buy.com/>pet market</a>
#3223 Donaldtalhttps://u-misti.kyiv.ua
У містi Київ <a href=https://u-misti.kyiv.ua/>https://u-misti.kyiv.ua</a> новини та події Київщини
#3224 agrohimwhe
Здравствуйте дамы и господа! <a href=https://t.me/gold_casino_site/><img src=„https://i124.fastpic.org/big/2025/0219/27/0dd7ba8200603c0ab6cb14c514639027.jpg“></a> Gold Casino в телеграме — это ваш пропуск к уникальным бонусам и бездепозитным акциям! Присоединяйтесь уже сейчас: @gold_casino_site или по ссылке: https://t.me/…_casino_site От всей души Вам всех благ!
#3225 Avtoelektrik-na-vyyezd-almaty_Skazyhttps://xn------5cdbcakduge0ai3abnntko1c2beq9tja7a.kz/
Добрый день! Профессиональная помощь там, где вы есть! Застряли на дороге из-за проблем с электрикой в автомобиле? Не паникуйте! Наша служба автоэлектрика на выезд готова прийти к вам на помощь в любое время ночи и дня. Мы осуществляем ремонт автоэлектрики на месте, что позволяет эффективно и быстро устранить неисправность и продолжить вашу поездку. Профессиональные услуги автоэлектрика на выезд. Диагностика, ремонт и помощь на месте, чтобы ваш автомобиль всегда был в движении. <a href=https://xn------5cdbcakduge0ai3abnntko1c2beq9tja7a.kz/>автоэлектрик-на-выезд-алматы.kz</a> Если услуги автоэлектрика на выезд в Алматы, устранение неисправностей, диагностика, ремонт стартера и генератора в Алматы, то это в AUTO EKTR-K https://автоэлектрик-на-выезд-алматы.kz/ , https://xn------5cdbcakduge0ai3abnntko1c2beq9tja7a.kz/ . Лицензированные и опытные специалисты. Поддержка клиентов. Доступные цены и прозрачная стоимость. Гарантия качества. Бесплатная консультация. Карта обслуживания. Всем пока!
#3226 DonaldGafhttps://u-misti.dp.ua
Новини Дніпра <a href=https://u-misti.dp.ua/>https://u-misti.dp.ua</a> Сайт міста Дніпро та області.
#3227 Wmdao_sonhttps://wmdao.ru/
Доброго времени суток! Друзья, знакомые, коллеги, да и вообще все люди, в особенности те, у кого есть какие либо проблемы с позвоночником, эта новость именно для вас! Есть простой и надежный способ, как восстановить работоспособность организма и позвоночника. Способ не только простой и надежный, но и эффективный, просто мало кто им пользуется, потому что от вас потребуется настойчивость, постоянство и настоящая сила воли. Это ежедневная и регулярная гимнастика для позвоночника. А если еще будете регулярно и ежедневно заниматься на турнике, то можете на долгие годы забыть про походы по поликлиникам и процедуры. В награду вы получить профилактику всего организма, здоровую спину, здоровые колени и суставы, и отличное самочувствие. В общем, если вы ищите, упражнения для позвоночника, гимнастика для позвоночника и т.д., например: <a href=https://wmdao.ru/>лечебная гимнастика при межпозвоночной грыже поясничного отдела</a> Тогда вам срочно нужно прямо сейчас перейти на сайт wu ming dao и узнать все подробности по школа оздоравливающих практик, здоровье позвоночника, позвоночник молодость, даосские практики, гимнастика при сколиозе, гимнастика при остехондрозе в Москве и МО и т.д. https://wmdao.ru/ . Обязательно переходите на сайт Школа оздоравливающих практик Анны Владимировой wu ming dao сохраняйте в закладки и изучайте информацию, не забудьте записать адрес сайта и номера телефонов. Не забудьте записать бесплатный номер телефона школы 8 (800) 775–40–88, звонить можно бесплатно с любой точки нашей необъятной и огромной страны. Всем пока!
#3228 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
Иногда в качестве одобрения за регистрацию могут выдаваться билеты для участия в турнирах. Условия их проведения довольно выделяются, потому мы рекомендуем ознакомиться с любым предложением отдельно.Бонус за регистрацию в казино выдается только раз раз на одного игрока. Но посещают вспомогательные промоакции, в коих бездепы раздаются для постоянных клиентов и эти презенты Вы сможете получить больше 1-го раза. <a href=http://filmkachat.ru/>1×slots зеркало</a> На критериях отыгрыша бесплатных бонусов стопам тормознуть подробнее. С ними связаны нюансы, коие нельзя оставить без внимания. <a href=https://app.planable.io/review/yzJzBgxH_Ikg>https://app.planable.io/review/yzJzBgxH_Ikg</a> рабочее зеркало 1×slots <a href=https://bybak.com/home.php?mod=space&uid=3809018>https://bybak.com/home.php?mod=space&uid=3809018</a> Бездепозитный бонус – это финансовое вознаграждение, которое выдается участнику забавы в казино, для его вербования и появления заинтересованности. Любой посетитель, кот-ый подходит условиям выдачи похожего бездепозитного бонуса, имеет претендовать на получение вышеуказанного приза. Такое поощрение считается более эффективным методом, дающим вероятность стартовать деле, не вкладывая личных вещественных средств.Фриспины без депо или дополнительные свои посодействуют поближе познакомиться с игровой платформой и её функциями. За счёт презентов можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради забавы напротив живых крупье.
1×slots официальный сайт зеркало
1хслотс 1хслотс регистрация перейти на 1×slots Проверка занимает от нескольких мин. До нескольких дней, специалисты техподдержки все запросить вспомогательные документы или инициировать куцее общение по Skype. <a href=http://bbs.boway.net/home.php?mod=space&uid=1145695>http://bbs.boway.net/home.php?mod=space&uid=1145695</a> 1х слот 1хслотс регистрация перейти на 1×slots Вы не в коем случае ни чем не рискуете, а только выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической забавы на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, научится регулировать менять ставки и полосы, изучать бонусные забавы и их выигрышные композиции, ну конечном просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные средства, которые возможно отыграть и исключить, а не просто на демо счет, тем самым адреналин в крови более повысится а пульс забьется с нередким ритмом!Свежий приз начисляется в виде валютных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в использовании своими, в случае отыгрыша оператор имеет установить лимитирование на вывод денег.
1×слотс казино
Бездепозитный приз предоставляется новенькому игроку за конкретные деяния. Часто презент вид денег либо фриспинов выдается за регистрацию, благодаря чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают приз по государствам. Вплоть до такого, собственно клуб имеет себя игроков из Вашей государства, а бездеп не давать. Поспешите арестовать бездепозитные бонусы за регистрацию в казино из представленного списка. Все платформы не только ведут легальную деятельность, но и обрадуют честными результатами игры, высочайшей отдачей, прыткими выплатами.Рассмотрим принцип его деянья на примере. Допустим, вы зарегистрировались и получили $10 not the slightest down payment bonus с вейджером х50. Это значит, собственно выигранные деньги возможно будет выводить не ранее, чем после как, как общая сумма ставок достигнет $500. <a href=https://www.cfbwz.com/space-uid-89207.html>https://www.cfbwz.com/space-uid-89207.html</a> Получить Бездепозитный бонус в онлайн казино дело двух кликов. Другой момент, отыграть промо и соблюсти управляла и обстоятельства отыгрыша. Под правилами предполагается не вагер, хотя и ограничения по наибольшей ставке. Мы понимаем, что в кино все ставят на зеро и выигрывают. Призываем не создавать похожего. Перед активацией бонуса прочитайте управляла. Узнайте следующие факторы: Условия получения презента, за регистрацию, за депо и другое. Ограничения по максимальной ставке. Зачастую не выше 350 руб. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вертеть автоматы, а вагер будет стоять на месте. Поэтому главно аристократия, в каких забавах возможно осуществлять кратность валютного оборота. 1×слотс казино
1×slots официальный сайт зеркало рабочее
3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефонный или почту, показать индивидуальную информацию; Бонус за регистрацию в казино выдается только раз один на 1-го игрока. Но посещают дополнительные акции, в коих бездепы расступаются для неизменных посетителей и эти подарки Вы сможете получить более 1-го раза. 1×slots сайт зеркало <a href=http://fowin.co.kr/bbs/board.php?bo_table=free&wr_id=315746>http://fowin.co.kr/bbs/board.php?bo_table=free&wr_id=315746</a> Иногда виде бездепа, казино дарит минимальный бонус (до 50 рублей), ради которого надо заморачиваться.Для получения выигрыша требуется выполнить обстоятельства казино. Чаще всего игроку нужно поставить определенную сумму, но уже из собственных средств. Она рассчитывается из совместного объема выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, если юзер выиграл 1000 руб., а множитель составляет х30, вывести средства можно будет, сделав ставки на 30 000 рублей.
1×slots промокод при регистрации 2025
Мы подготовили список, где есть практически актуальные и свежие бездепозитные бонусы казино, которые вы можете получить бесплатно. Для наших юзеров есть особые предложения неповторимые призы, коие вы кого не найдете, их мы обозначили специальной красной плашкой «Exclusive».Для выбора азартного заведения Вы сможете пользоваться списком наших казино с призами за регистрацию. На нашем веб-сайте мы опубликовали перечень бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, собственно часть бонусов эксклюзивные и доступны лишь для посетителей нашего сайта по-специальному промо-коду или по уникальной ссылке. Кроме как, для каждого бонуса мы подготовили доскональный обзор, в котором Вы узнаете как получить и отыграть поощрение и как исключить свой выигрыш с бездепа. Некоторые клубы автоматически начисляют приз на аккаунт игрока последствии исполненья условий получения, но случаются истории, когда бонус надо(надобно) активировать игроку самому. Есть несколько методов активации бонуса: <a href=https://nowwedws.com/bbs/board.php?bo_table=free&wr_id=1003930>https://nowwedws.com/bbs/board.php?bo_table=free&wr_id=1003930</a> Но на азартных платформах подобные гонорары шансы получить и уже зарегистрированные пользователи. В этом случае, призы предоставляются в рамках уникальных акций или же неким игрокам в виде акционного предложения, которое приходит на почту с целью «вернуть» игрока в свое казино. 1×slots официальный сайт зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://big.bestforums.org/viewtopic.php?f=7&t=17675>1хслот зеркало сайта</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный приз часто может замерзнуть легкодоступным незамедлительно в окончания регистрации, что правило единственным требованием к нему считается регистрация, а этого проверка вашей новой учетной записи.
#3229 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino зеркало сегодня рабочее 1×bet скачать приложение на андроид <a href=https://specreporter.com/>рабочее казино</a> официальные букмекерские конторы скачать 7k casino сайт <a href=https://rumafia.news/>casino скачать приложение</a> симулятор казино порно с Аделия Петросян (фигурное катание) 7k casino бонус пин casino казино вулкан 1×bet официальный сайт порно с Антропова Валентина Викторовна
DiskiPlus 1×bet скачать приложение DiskiPlus Чулпан Хаматова <a href=https://diskiplus.ru/>DiskiPlus 1×bet на сегодня</a> DiskiPlus порно с Георгий Джикия (футбол) DiskiPlus казино рулетка <a href=https://www.diskiplus.ru/>казино</a> DiskiPlus 1×slots casino DiskiPlus casino com DiskiPlus Лут Оксана Николаевна порно DiskiPlus Комарова Наталья Владимировна порно DiskiPlus Разуваева Ксения Денисовна порно DiskiPlus pin up casino зеркало DiskiPlus porno Виктория Баркова, легкоатлетка
#3230 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slots review live
Так собственно приготовьтесь предоставить секретную информацию (пол, возраст, страна проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает менее суток, последствии чего получится свободно выводить крупные выигрыши. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots casino 777 online</a> Рассмотрим принцип его деяния на примере. Допустим, вы зарегистрировались и возымели $10 not the slightest deposit bonus с вейджером х50. Это значит, что выигранные деньги можно несомненно выводить не ранее, чем после того, как общая сумма ставок достигнет $500.Наличие у игрока 2 аккаунта. Запрещено делать некоторое профилей для неоднократного получения бездепов. <a href=https://www.ourboox.com/bp/1641444/>https://www.ourboox.com/bp/1641444/</a> Бонус за регистрацию в казино без депозита с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша может понадобиться устроить ставки на сумму, в некоторое 10-ов один превышающую необходимую приза либо выигрыша. 1×slots регистрация то дальше необходимо пройти <a href=https://www.love2d.org/forums/memberlist.php?mode=viewprofile&u=276200>https://www.love2d.org/forums/memberlist.php?mode=viewprofile&u=276200</a> Каждый из бездепозитных призов без пополнения 2022 имеет свой определенный вейджер для отыгрыша, так же в каждом казино он устанавливается индивидуально — где то он х55 а кое-где х30, повторюсь всюду по разному!
1×slot регистрация
1×slot казино зеркало При верном подходе бездепы — это отличный способ выступать на деньги без траты личных средств. Есть некоторое рекомендаций, следуя которым возможно извлечь максимально полезности из подобных акций казино. Играть идет лишь на лицензированных площадках. Скриптовые веб-сайты столько обманывают с бонусными предложениями, но и используют пиратский софт с измененным ГСЧ. Выиграть на таких автоматах невероятно. <a href=http://www.discovery-sport-club.ru/club/blog.php?cp=4486>http://www.discovery-sport-club.ru/club/blog.php?cp=4486</a> Иногда в бездепа, казино презентует наименьший бонус (до 50 рублей), ради которого надо заморачиваться. 1×slots casino зеркало
1хслотс официальный сайт зеркало
Баланс игрока дополняется на подходящую сумму. К ней используется вейджер, указанный в правилах промоакции. Вывести выигрыш можно несомненно в такого, как пользователь сделает требуемый размер ставок из личных средств. В редких случаях бездеп работает в формате Free Play. На счет пользователя зачисляется большая сумма, и предоставляется маленький срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по окончании сего периода сумма на счету будет превышать изначальную, то разность можно несомненно исключить или использовать для дальнейших ставок. В большинстве заведений устроить это возможно по адресу электронной почты, по номеру телефона, через социальную сеть либо гугл-аккаунт. <a href=http://golfstream.org/bitrix/redirect.php?goto=http://mnemozina.ru/bitrix/rk.php?goto=http://puriagatratt.blog.idnes.cz/redir.aspx?url=https://teletype.in/@urist555/lRLYYd_EnYM>http://golfstream.org/bitrix/redirect.php?goto=http://mnemozina.ru/bitrix/rk.php?goto=http://puriagatratt.blog.idnes.cz/redir.aspx?url=https://teletype.in/@urist555/lRLYYd_EnYM</a> Для верификации аккаунта надо(надобно) предоставить профессионалам технической помощи отсканированную копию паспорта и счета за коммунальные предложения, а также фотку банковской карты или экрана страницы электрического кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для подтверждения личности. 1 xslots рабочее зеркало
1×slots официальный зеркало
Отзывы читателей о бонусных промоакциях помогут составить эмоцию, хотя не забывайте о субъективности личных комментариев.Бездепозитные призы, как теснее ясно, считаются оригинальной вероятностью приступать к игровому процессу абсолютно бесплатно, словами играть в интернет казино бесплатно и на имеющие средства сразу последствии регистрации аккаунта. Автоматы с таким депозитом все замерзнуть великолепной возможностью сыграть для поклонников пыла с определенными лимитированиями в денег. <a href=http://www.arka-bahce.org/forum/showthread.php?p=778725#post778725>1× слот зеркало</a> 1×slots промокод при регистрации <a href=http://iminthai.com/home.php?mod=space&uid=227081>http://iminthai.com/home.php?mod=space&uid=227081</a> Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.
1×slots регистрацию процедура займет всего лишь
На нашем сайте Вы отыщите перечень актуальных свежих бездепозитных призов в казино 2022 года. Также, есть количество неповторимых услуг, коие доступны лишь гостям нашего вебсайта последствии регистрации по нашей ссылке или активации специального промокода.Заполняя данные в собственном профиле, указывайте только достоверную информацию, например как Вам придется ее доказать в будущем при выводе средств. Бонус в казино без депозита содержит разные варианты: может быть приветственный бонус, акции в честь каких-то праздничных либо весомых дат, приз за вербование свежих игроков, лояльность и получение VIP-статуса. <a href=https://zrz26.ru/user/Forsedropoi/>https://zrz26.ru/user/Forsedropoi/</a> Бездепозитный бонус предоставляется новенькому игроку за конкретные действия. Часто презент повторяющий средств либо фриспинов выдается за регистрацию, благодаря чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. 1×slots официальный сайт зеркало рабочее Вейджер (либо вагер) ? это минимальная сумма ставок, коию необходимо сделать для вывода валютного бонуса. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение.Размер ставки для забавы по бездепозитному бонусу (конечно же, если, тогда,, когда он представлен вид бонусных денежных средств) часто ниже, чем при этой на депо. Ограничение будет работать до этапа отыгрыша приза.
<b>Смотреть еще похожие новости:</b>
<a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=48228>казино 1× slots официальный сайт</a>
<a href=http://sharecovid19story.com/memberlist.php?mode=viewprofile&u=5122>1хслот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины. Бесплатные вращения предназначены для применения в видео-слотах. Внимательно читайте обстоятельства – они нередко выдаются для некоторых машин. В зависимости от клуба возможность делать определенное число ставок. Кстати, современные игорные дома выделяют вероятность заводить «одноруких бандитов». Бездепозитный приз часто может замерзнуть доступным незамедлительно в завершения регистрации, потому в большинстве случаев единственным требованием к нему является регистрация, а после ревизия вашей свежей учетной записи.
#3231 Charlesgunnyhttp://filmkachat.ru
1× slots сайт
Каждый геймер должен сперва отчетливо изучить обстоятельства по получению и отыгрышу приглянувшегося подарка. Если всё организует, поторопитесь отобрать бесплатные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо момент начать вертеть барабаны лучших слотов. <a href=http://filmkachat.ru/>1×slots зеркало этих способов предполагает регистрацию</a> Раздача призов может быть приурочена к различным датам: календарные праздники, деньки рождения игроков, юбилей открытия казино и т. Д. Подарок выдается в виде денег, фриспинов либо баллов для накопления и размена на предложения оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд притязаний. <a href=http://fohweb.com/www.playhouse.com.ua>http://fohweb.com/www.playhouse.com.ua</a> С такими ординарными советами каждое казино с бонусом за регистрацию способно принести в разы больше выгоды и полезности.Основное отличие в, что для получения бездепа не надо пополнять баланс в казино. Но не этого, есть ряд и других различий: 1×slots рабочее зеркало на сегодня <a href=http://ru2cardclub.xyz/member.php?action=profile&uid=659>http://ru2cardclub.xyz/member.php?action=profile&uid=659</a> Не стоит путать забаву в демо и внедрение бонусов. В демонстрационном режиме игрок может расценить механику слота, сюжет и оформление. Но забава ведется на относительные кредиты, поэтому отсутствует главное ? ощущение пыла. Активируя промокод или фриспины, заказчик раньше не расходует свои средства на игровые автоматы, хотя имеет сорвать настоящий куш!
1×slots зеркало регистрация в 1×slots casino
Чтобы без увериться в преимуществах бездепозитных призов, довольно зарегистрироваться в казино и получить поощрение.Бездепозитный приз предоставляется новенькому игроку за определенные деяния. Часто презент повторяющий денег либо фриспинов выдается за регистрацию, спасибо чему юзер получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. 1× слот зеркало Частенько новенькие не знают, как активировать подарки или исключить 1-ый выигрыш. Для похожих случаев наша команда обрисовала главные определения – собственно это фриспины, вейджер, как его отыграть, для нужно протекать верификацию.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. <a href=http://www.modernism.hk/?s=%3Ca+href%3Dhttps%3A%2F%2Fglavdorogadv.ru%3E%D0%B3%D0%BB%D0%B0%D0%B2%D0%BD%D0%B0%D1%8F+%D0%B4%D0%BE%D1%80%D0%BE%D0%B3%D0%B0+%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0%3C%2Fa%3E+%D0%BE%D0%B1%D1%83%D1%87%D0%B5%D0%BD%D0%B8%D0%B5+%D0%BD%D0%B0+%D0%BF%D1%80%D0%B0%D0%B2%D0%B0+%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA&x=0&y=0>http://www.modernism.hk/?s=%3Ca+href%3Dhttps%3A%2F%2Fglavdorogadv.ru%3E%D0%B3%D0%BB%D0%B0%D0%B2%D0%BD%D0%B0%D1%8F+%D0%B4%D0%BE%D1%80%D0%BE%D0%B3%D0%B0+%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0%3C%2Fa%3E+%D0%BE%D0%B1%D1%83%D1%87%D0%B5%D0%BD%D0%B8%D0%B5+%D0%BD%D0%B0+%D0%BF%D1%80%D0%B0%D0%B2%D0%B0+%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA&x=0&y=0</a> Чем ниже значение вейджера, что, этим проще отыграть и вывести бонус. Если Вы планируете заработать на бездепе, а не просто ознакомиться с новым игровым клубом, то стоит игнорировать бонусов с высоким вейджером их практически не реально отыграть. С ними Вы сможете только протестировать игры заведения. 1×slots casino регистрация
1×slot зеркало рабочее регистрации на телефон придет
Как только получите бездеп в казино, всё также не запамятовывайте инспектировать электрическую почту. Некоторые игорные клубы непрерывно радуют активных гэмблеров приятными бонусами. Чаще всего получить подарок возможно в преддверии веселья, на день рождение, за привлечение друга. А того распространённым бонусом считается прибавка к депозиту. Нужно всего лишь восполнить счёт, и азартное заведение прирастит его на 50–100%. <a href=https://demo.qkseo.in/profile.php?id=727405>https://demo.qkseo.in/profile.php?id=727405</a> Для отыгрыша бонуса казино обязует игрока поиграть на сумму, в некоторое раз превышающую необходимую полученного приза — тут выгода фирмы очевидна.В интернет-сети практически возможно отыскать перечни наиболее модных и обещанных поощрительных программ от популярных онлайн-казино. 1×slots регистрация на 1хслотс Бездепозитные бонусы за регистрацию в игровых автоматах для собственников онлайн-казино считаются долею рекламной кампании, направленной на увеличение аудитории вебсайта. Так они продвигают средства бренды и завлекают новых посетителей.Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы моментально получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, появляется настоящий шанс победу!
1×slots официальный сайт, скачать
Получать информацию о самых прибыльных призах возможно без постоянного мониторинга новостей казино. Мы взяли эту задачу на себя и безпрерывно смотрим за услугами операторов, выбирая превосходнейшие из их. В данном разделе собраны заключительные бездепы, промокоды к ним и обстоятельства их активации. Список акций периодически дополняется. В топ зашли самые новые бездепозитные призы за регистрацию в казино 2020, временные и закрытые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и аспектам. Если срок деяния акции истек, она удаляется из списка.Выбирайте наилучшие бесплатные призы счет обзоров на Casinoz – и пусть вас сопутствует счастье при отыгрыше бонусных кредитов! <a href=https://clubdefansde24.com/foro/memberlist.php?mode=viewprofile&u=3464>1×slots рабочее зеркало</a> Выбор любого онлайн казино на нашем сайте. В описании к любому Вы сможете узнать, собственно получите за творенье аккаунта. 1×slots быструю регистрацию а также мгновенное <a href=https://mega-games.pl/user/GlennAwado/>https://mega-games.pl/user/GlennAwado/</a> Стоит отметить, что бездепозитный бонус выдается только совершеннолетним новеньким, коие, к, шансы пригласить собственных друзей и людей, кроме рассчитывающих на поощрительную программку лояльности. Подобная разработка замечена между создающих онлайн-казино для популяризации и расширения трафика. Покер румы и спонсоры содействуют повышению своей посещаемости, путем привлечения новых игроков. Бонусы – это уникальный шанс для вероятных соучастников забавы, коие шансы опробовать софт покер рума и убедиться, будут ли они в него играть либо нет. Новый игрок попробует средства силы с реальными оппонентами в казино.Промообъявления от казино не дают реальной картины и направлены на привлечение внимания пользователей. Понять, насколько высоки шансы остаться в плюсе, дозволит собственный тест критерий предложения:
1×slots подтвердит вашу регистрацию если говорить
Для верификации аккаунта надо(надобно) предоставить спецам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, а также фотку банковской карты или скриншот странички электрического кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для доказательства личности.Заработать на бездепозитных бонусах за регистрацию в казино имеет любой пользователь, достигший совершеннолетия. <a href=http://forum.ugmk-telecom.ru/index.php?action=profile;u=99085>http://forum.ugmk-telecom.ru/index.php?action=profile;u=99085</a> Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и расценить необыкновенности, труднодоступные при игре в демо режиме. Многие новые посетители переходят в количество неизменных, а оператор получает длительную выгода.Как лишь на виртуальном счету окажутся бонусные свои, поспешите отыграть вейджер. Сразу в этого возможно забыть заявку на вывод выигрыша. Кредиты прибыльно отличаются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом настоящих средств и выделяют возможность почувствовать азарт. Во-вторых – возможно насладиться каждой азартной забавой доступной на веб-сайте. В вашем постановлении находятся автоматы, настольные прибавленье, видео-покер, Live-дилеры. зеркло казино 1×slots У каждого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано смогли выполнить их, мы дадим количество советов. Если система начислила небольшую необходимую, надо делать большие ставки – остановитесь на 10–30 центах. Как лишь сможете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте играть. В противном случае другого приглядеться к иному автомату.Бездепы обычно предлагают с отыгрышем — моментально исключить выигранные средства невозможно. Перевод средств со счета будет возможен последствии такого, как юзер выполнит все требования казино, а сумма имеет превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, протяжении коих клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней после активации.
<b>Смотреть еще похожие новости:</b>
<a href=http://griffhunter.com/boards/viewtopic.php?p=443712#p443712>1×slots casino регистрация 1×slotscasino09k online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, чтобы замечена возможность вывести выигрыш.
#3232 Charlesgunnyhttp://filmkachat.ru
1×slots бездепозитный бонус за регистрацию
Стоит отметить, собственно бездепозитный бонус выдается только взрослым новичкам, которые, тому, могут пригласить собственных друзей и знакомых, также претендующих на поощрительную программку преданности. Подобная разработка появилась между создающих онлайн-казино для популяризации и расширения трафика. Покер румы и спонсоры содействуют увеличению своей популярности, методом вербования свежих игроков. Бонусы – это уникальный шанс для потенциальных соучастников забавы, коие имеют опробовать софт покер рума и убедиться, будут ли они в него выступать или нет. Новый игрок попробует средства силы с настоящими оппонентами в казино.Баланс игрока дополняется на соответствующую сумму. К ней применяется вейджер, обозначенный в правилах акции. Вывести выигрыш возможно несомненно после как, как юзер сделает требуемый размер ставок из личных средств. В редких случаях бездеп работает в формате Free Play. На счет юзера зачисляется крупная сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по завершении сего периода сумма на счету несомненно превосходить первоначальную, то разность можно несомненно вывести или применять для дальнейших ставок. <a href=http://filmkachat.ru/>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a> Вы всего, например все предпочитаете получать презенты и бездепозитные бонусы казино. Игорные жилища взяли в привычку одаривать гэмблеров приятными призами. Стать обладателем приветственного подарка возможно за создание профиля или пополнение счёта. Второй вариант более интересный, так клубы готовы удвоить депозит! Но в вы новичок и лишь знакомитесь с миром пыла, другого, как пользуйтесь бонусом за регистрацию.Существует ли стратегии для отыгрыша бездепозитных бонусов? К огорчению нет, на выигрыши либо проигрыши с призов, казино либо игрок воздействовать возможности, отдача игр случается от создателей игр. <a href=https://be1.ru/stat/astramedika.com.ua>https://be1.ru/stat/astramedika.com.ua</a> Этот образ бонуса несомненно добавлен на Ваш акк после удачной процедуры регистрации с использованием номера телефона. Если избрать другой метод сотворения учетной записи, бездеп не несомненно добавлен на Ваш аккаунт.Чтобы получить возможность исключить выгода с бездепозитного приза в казино, необходимо выполнить ряд критерий: 1×slot зеркало <a href=https://www.deepzone.net/home.php?mod=space&uid=2751418>https://www.deepzone.net/home.php?mod=space&uid=2751418</a> B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.Для верификации аккаунта надо(надобно) предоставить спецам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, а также фотку банковской карты или скриншот странички электрического кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для доказательства личности.
1хслотс официальный сайт зеркало
В бонусную программку множества операторов входят систематические бездепы. Это пожизненные промоакции, поощряющие интенсивных постоянных игроков. Популярный формат — раздача фриспинов по конкретным денькам недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают постоянные бонусы без депозита в обмен на скопленные баллы лояльности. <a href=http://portal.westcoastbible.org/discussion/viewtopic.php?f=18&t=1965264>1хслотс казино зеркало</a> 1хслотс казино зеркало <a href=https://transcribe.frick.org/wiki/%d0%90%d0%b2%d1%82%d0%be%d1%88%d0%ba%d0%be%d0%bb%d1%8b>https://transcribe.frick.org/wiki/%d0%90%d0%b2%d1%82%d0%be%d1%88%d0%ba%d0%be%d0%bb%d1%8b</a> Чем ниже значение вейджера, что, этим легче отыграть и вывести бонус. Если Вы планируете заработать на бездепе, а не просто ознакомиться с новым игровым клубом, то стоит игнорировать бонусов с высочайшим вейджером их почти не реально отыграть. С ними Вы можете лишь протестировать игры заведения.Призовые начисления без депо могут предоставляться для роли в турнирах интернет казино. Потратить перечисленные деньги можно исключительно в рамках данной промоакции. Условия их проведения себе лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, другого, как выучить его правила. 1×slots зеркало этих способов предполагает регистрацию 2. Создать новый профиль. Для регистрации надо(надобно) заполнить маленькую анкету или зайдите в индивидуальный офис посредством соц сетей;
1×slots зеркало регистрация в 1×slots casino
У нас на веб-сайте Вы найдете перечень призов без депо в проверенных казино и доскональную информацию то как их получить и использовать. <a href=https://www.news2.ru/profile/Glavdorogadv1808/>https://www.news2.ru/profile/Glavdorogadv1808/</a> 1 x slots casino Частенько новенькие не знают, как активировать презенты или вывести первый выигрыш. Для подобных случаев наша команда обрисовала основные определения – что это фриспины, вейджер, как его отыграть, зачем нужно протекать верификацию.Подарки на определенные даты отличаются критериями получения. Если одобрение начисляют игроку на день рождения, то сумма обычно зависит от общего объема депо за прошедший год.
1× slots сайт
Бездепозитный бонус предоставляется новенькому игроку за определенные действия. Часто презент вид денег либо фриспинов выдается за регистрацию, спасибо чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.Первый образующийся вопрос, это, зачем выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают свежих игроков. Последним легче начать забаву на деньги с дара за регистрацию. Им надо пополнять баланс и расходовать личностные свои. Новички получают бесплатные спины либо свои на счёт. С их поддержкой знакомятся с игровым ходом, крутят слоты и проделывают ставки в рулетке. Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные методы и расценить необыкновенности, труднодоступные при этой в демо режиме. Многие свежие клиенты перебегают в количество постоянных, а оператор получает длительную выгода.Зачастую бездепозитные призы казино для забавы предлагаются разными заведениями азартных игр в качестве рекламных акций или в целях вербования к себе свежих игроков. Для бездепозитных бонусов в казино 2022 игроку не пополнять счет до момента вывода желанных средств. Не трудно додуматься, собственно no down payment bonuses практически ни не посещают большими. Чаще всего речь о пяти–тридцати баксах (или эквиваленте данной суммы в иной еденице).Внесение депозита – Будьте готовы пополнить счет после отыгрыша бонуса. Это обычное требование правил для этого типа промо-акций. Лучше заранее уточнить, какую необходимую надо(надобно) будет заносить на счет. Как верховодило, идет о наименьшем депозите, но вы должны быть убеждены, что он для по кармашку. 1×slots рабочее зеркало <a href=https://medvin.ucoz.ua/forum/2–475–1#3963>https://medvin.ucoz.ua/forum/2–475–1#3963</a> Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке представители онлайн-казино публикуют важную информацию о not the slightest down payment bonuses и других предложениях.
1×slot официальный сайт
Фриспины – благотворительные вращения с фиксированной ставкой, коие можно использовать в конкретных игровых автоматах.В большинстве заведений устроить это возможно по адресу электронной почты, по номеру аппарата, через социальную сеть или гугл-аккаунт. <a href=https://www.google.mk/url?q=https://doctorlazuta.by/>https://www.google.mk/url?q=https://doctorlazuta.by/</a> Даже не выиграв солидную сумму, игрок интересно проведет время, изнутри выучит работу площадки, воспримет геймплей автоматов. Все это без каких-то финансовых рисков. Быть в курсе наихороших промоакций с. Достаточно периодически изучать перечень свежих интернет казино с выводом приза без депозита в данном разделе.Практически все интернет казино с бездепозитным бонусом за регистрацию учитывает программку преданности — систему поощрения неизменных клиентов, кот-ая состоит из колличества значений. При достижении игроком одного значения на его счёт поступает приз. Чем повыше степень — что, этим щедрее бонус. 1хслотс официальный сайт зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://www.fromrus.su/index.php?/topic/20863–1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D0%BD%D0%B0-%D1%81%D0%B5%D0%B3%D0%BE%D0%B4%D0%BD%D1%8F/>1×slots зеркало на сегодня</a>
<a href=https://forum.home-visa.ru/memberlist.php?mode=viewprofile&u=3536>1×slots регистрация 1×slots casino 777 online</a>
<a href=http://b2s.bulwork.com/node/1581?page=120#comment-24528>зеркала 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Каждый новичок и умелый игрок мечтают скоро стартануть и начать делать настоящие ставки. Для сего довольно забрать подарок, за который не нужно платить. В зависимости от игровой платформы, нужно создать профиль, привязать email или телефонный. После этого администрация начисляет щедрое вознаграждение в виде бесплатных вращений либо виртуальных кредитов. Исходя из этого, просто не присутствует мудрых причин махнуть рукой на получение такого приза при регистрации. И, что, на такой бесплатной базе у вас есть все шансы выиграть средства и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные призы, нарекают бесплатными онлайн платформами для игр.
#3233 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Аделия Петросян (фигурное катание) Чулпан Хаматова <a href=https://glvk.guru/>Скворцова Вероника Игоревна порно</a> Ирина Горбачева казино сегодня <a href=https://vestnik-jurnal.com/>Скворцова Вероника Игоревна порно</a> 1×bet сейчас букмекерская контора мостбет приложения букмекерских контор casino бездепозитный порно с Артемий Панарин (хоккей) официальные сайты казино casino игровой автомат
DiskiPlus porno Виктория Баркова, легкоатлетка DiskiPlus букмекерская контора бесплатно скачать <a href=https://www.diskiplus.ru>DiskiPlus букмекерская контора фонбет официальный</a> DiskiPlus porno Екатерина Ефременкова, шорт-трекистка DiskiPlus пина casino <a href=https://www.diskiplus.ru>DiskiPlus casino скачать</a> DiskiPlus ев казино DiskiPlus kent casino DiskiPlus kent casino регистрация DiskiPlus скачать 1×bet на андроид DiskiPlus пин ап казино DiskiPlus букмекерская контора на андроид DiskiPlus pinco casino
#3234 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
Даже не выиграв крупную необходимую, игрок увлекательно проведет время, изнутри исследует работу площадки, воспримет геймплей автоматов. Все это без каких-либо финансовых рисков. Быть в курсе наилучших промоакций легко. Достаточно регулярно изучать перечень свежих интернет казино с выводом приза без депо в данном разделе.Бездепозитные бонусы отличный вариант бесплатной забавы в игровые автоматы. Многие пользователи сети не знают, что в казино возможно начать играть полностью безвозмездно, а потом исключить выигрыш на банковскую карту либо электрический кошелек, другие не доверяют онлайн казино, а третьи удачно играют и выигрывают – и подчас достаточно великие суммы. <a href=http://filmkachat.ru/>1×slots зеркало сайта</a> Если речь об неповторимых предложениях, возможность понадобиться регистрация в казино по ссылке с партнерского сайта.Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. <a href=https://pdfhost.io/v/V29E~XTxf_Crafting_Exceptional_Luxury_Real_Estate_Marketing_Materials>https://pdfhost.io/v/V29E~XTxf_Crafting_Exceptional_Luxury_Real_Estate_Marketing_Materials</a> 1×slots сайт <a href=http://evrika41.ru/redirect?url=http://region-samara.su/bitrix/redirect.php?goto=http://supermaz.com/bitrix/rk.php?goto=https://teletype.in/@urist555/ra5m4YYvAKB>http://evrika41.ru/redirect?url=http://region-samara.su/bitrix/redirect.php?goto=http://supermaz.com/bitrix/rk.php?goto=https://teletype.in/@urist555/ra5m4YYvAKB</a> Фриспины — бесплатные вращения, коие позволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытных игроков фриспины считаются самым популярным и предпочтительным обликом бонуса — бесплатные вращения порой эффективнее и веселее в отыгрыше, чем другие облики бездепов.Бездепозитные призы – это исключительно небезинтересная и более перспективная промоакция интернет-казино. Они в никакого фри-спинов, поэтому что выплаты в безвозмездных вращениях не гарантированы, как композиции на барабанах игрового аппарата шансы не сложиться.
1 хслот регистрация в 1×slots casino
1×slots сайт <a href=https://kumu.io/lexxeagle/%D0%B4%D0%B8%D0%B7%D0%B0%D0%B9%D0%BD-%D0%BA%D0%B2%D0%B0%D1%80%D1%82%D0%B8%D1%80>https://kumu.io/lexxeagle/%D0%B4%D0%B8%D0%B7%D0%B0%D0%B9%D0%BD-%D0%BA%D0%B2%D0%B0%D1%80%D1%82%D0%B8%D1%80</a> 1×slots регистрация 1×slots casino c2d ru Зарегистрируйтесь. Для регистрации чаще всего довольно установить свой номер телефонного и почтовый адрес, в чего ввести полученный код из СМС. Возможно, потребуется показать промокод. В правилах промоакции будет написано, где его надобно вводить. Иногда это бы создавать при регистрации, иногда — уже в создания личного офиса, на отдельной страничке.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.
1 x slots casino
Отказ в прохождении верификации. Если клиент не хочет или возможности предоставить документы, подтверждающие его личность, профиль несомненно заблокирован вместе со всеми бонусными начислениями. <a href=http://021bababa.org/space-uid-495446.html>http://021bababa.org/space-uid-495446.html</a> Размер призов почаще всего чисто условный и не превышает 50 руб. Приятно, но ощутимым бустом в игре навряд будет. 1×slot зеркало рабочее этих способов предполагает регистрацию Обыкновенные бездепозитные бонусы в размере от 3-х до двадцати долларов сделаны чтобы, чтобы, чтобы в забавы заходили все свежие и новые игроки. Здесь, скорее, несомненно лимитирование на наибольший выигрыш. Важно, дабы перед минимальным вкладом был отключен приз за 1-ое пополнение счета, и в не попадет на повторный вейджер.
1×slot казино зеркало
Как лишь вы отыграли вейджер и средства с бонусного баланса перебежали для на реальный счет, Вы неустрашимо сможете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (устроить наименьший депо например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депозитом).B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. Вышеописанная причина и считается основным моментом, из-за которого операторы отдают доля своей прибыли на различные маркетинговые затраты и рекламные кампании. А наиболее действенным тут станут выступать именно бездепозитные призы казино 2022 с выводом за регистрацию. 1×slots актуальное зеркало <a href=https://www.021snyw.com/space-uid-51228.html>https://www.021snyw.com/space-uid-51228.html</a> Также учтите, собственно кое-какие игровые платформы сузивают список государств, коие готовы получить предложенный бездепозитный бонус за регистрацию. К примеру, существуют онлайн-заведения, выдающие сходственные призы лишь обитателям определенных стран. К примеру, интернет казино 777 Оригинал предоставляет бездепозитный бонус только игрокам из России и стран СНГ. Или наоборот, снабжают вознаграждением всех, кроме обитателей некоторых стран (как сего, следует пристально учить список, чтобы потом не появилось практически вопросов и претензий).С иной стороны, гораздо легче арестовать бездепозитные фриспины за регистрацию в казино и прямо сейчас начать вращать барабаны в лучших слотах. Главная необыкновенность спинов сомнений, собственно они предназначены для топовых автоматов. Удастся не пройти вспомогательные раунды, хотя и прирастить сумму выигрыша, заработать респины и другие внутриигровые презенты.
1×slots зеркало на сегодня
Бездепозитные бонусы — это подарки от казино повторяющий бонусных денег или фриспинов для игровых автоматов, которые начисляются на аккаунт игрока последствии процедуры регистрации на веб-сайте заведения. Для получения этих поощрений депозит не потребуется. <a href=http://flightgear.jpn.org/userinfo.php?uid=45139#>http://flightgear.jpn.org/userinfo.php?uid=45139#</a> Если вы новичок данном и лишь попали в неизведанную вами область азарта — за услуг как бездепозитные бонусы без пополнения.Бонус начисляется игроку сразу после регистрации и прохождения верификации в казино и не настятельно от посетителя внесения депо. Как управляло, объем приза в схожем случае довольно застенчивый, однако позволяет новичкам познакомиться с игрой без риска настоящими деньгами. 1×slots зеркало видели такую регистрацию на
<b>Смотреть еще похожие новости:</b>
<a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=159277>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=http://forum.puppylinux.pl/index.php?action=profile;u=8232>1хслот зеркало сайта</a>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=331625&pid=673394#post_673394>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<a href=http://vn-info.net/user/Josephkam/>рабочее зеркало 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
2. Создать новый профиль. Для регистрации нужно заполнить небольшую анкету или зайдите в личный кабинет при помощи соц сетей; Лишь популярные и знаменитые азартные заведения все позволить себя раздавать бездепы вид дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, коие возможно потратить в топовых аппаратах с высочайшей отдачей.
#3235 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
промокод 1×bet casino buzz <a href=https://res-publika.com>яндекс казино</a> online casino почему в казино не бывает настенных часов <a href=https://rumafia.news/>porno Александра Степанова, фигуристка</a> про казино букмекерские контора ап симулятор казино Лут Оксана Николаевна порно порно с Юлия Ефимова, пловчиха Лут Оксана Николаевна порно Валентина Матвиенко порно
DiskiPlus официальное казино вход DiskiPlus porno Дарья Клишина <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet официальный сайт 1×bet xyz</a> DiskiPlus Черкесова Бэлла Мухарбиевна порно DiskiPlus 1×bet официальный <a href=https://diskiplus.ru/>DiskiPlus Преподобная Надежда Александровна порно</a> DiskiPlus ев казино DiskiPlus пин ап букмекерская контора DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus 1×bet зеркало слоты DiskiPlus букмекерская контора DiskiPlus порно с Александр Головин (футбол) DiskiPlus Александра Бортич
#3236 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация в 1×slots casino
2. Создать свежий профиль. Для регистрации нужно заполнить маленькую анкету либо зайдите в индивидуальный кабинет посредством соц сеток; <a href=http://filmkachat.ru/>1×слот регистрация в 1×slots casino</a> <a href=https://mysupport.commscope.com/forums/general-discussion/d1a246cd-2dd0-ef11–95f5–6045bdb3316f>https://mysupport.commscope.com/forums/general-discussion/d1a246cd-2dd0-ef11–95f5–6045bdb3316f</a> Бывают ли бездепозитные призы без вейджера? Бывают, если у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино.Фриспины начисляются по конкретной ставке. После их активации игроку необходимо запустить разъем и убедиться, собственно в нем показываются бесплатные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода в отыгрыша определяется оператором и изредка выше 5 000 руб. 1×slots рабочее зеркало <a href=https://a.pr-cy.ru/allsoftlab.com/>https://a.pr-cy.ru/allsoftlab.com/</a> Бонус в казино без депозита содержит разные варианты: это может быть приветственный приз, акции в честь каких-то праздничных или важных дат, бонус за привлечение свежих игроков, преданность и получение VIP-статуса.В онлайне очень много скриптовых сайтов, которые принадлежат жуликам. Их основная задача – заинтересовать гэмблеров, пообещав не только великодушные презенты, но и крупные выигрыши. Так собственно кое-какие сайты предлагают получить за регистрацию в $1 000.
1×slots регистрацию процедура займет всего лишь
Для получения бездепа нужно пригласить в забаву по реферальной ссылке свежего клиента: он должен зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и восполнить счёт на необходимую, указанную в критериях промоакции.Выбор любого интернет казино на нашем сайте. В описании к каждому Вы сможете разузнать, что получите за творенье аккаунта. <a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=7430>1хслот официальный сайт зеркало</a> 1×slots регистрацию более популярный вариант это <a href=http://xn----ctbfqxicawkedu.xn–p1ai/index.php?subaction=userinfo&user=expensivecyst40>http://xn----ctbfqxicawkedu.xn–p1ai/index.php?subaction=userinfo&user=expensivecyst40</a> Это один из основных показателей привлекательности подарка. С завешенным коэффициентом том мастера не сумеют выполнить обстоятельства по отыгрышу. И так, как привлекательно смотрится предложение – бездепозитный бонус казино в объеме $500 или $1 000. Чтобы новички получше вникли, что же такое вейджер, мы разберём на примере. 1×slots официальный зеркало рабочее
1×slos регистрация в 1×slots casino
Выполнив все требования оператора, клиент может оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит примерно менее суток. Если дополнительно потребуется пройти процедуру верификации, то срок возрастает до 1–2 трудящихся дней. Для перевода применяются банковские приборы и электрические платежные системы. Второй метод подходит превосходнее, например как основная транзакций в этом случае исполняются моментально. В связи со специфичностью функционирования банков обработка платежей может занять до нескольких трудящихся дней.Нельзя осматривать игру на средства, как вариант заработка. Азартные забавы запрещены для лиц младше 18 лет. Topcasinobonuses.mobi не зачинщиком азартных игр. Сайт одевает информационный нрав. <a href=http://seller24.co.kr/bbs/board.php?bo_table=free&wr_id=628493>http://seller24.co.kr/bbs/board.php?bo_table=free&wr_id=628493</a> Для выбора азартного заведения Вы сможете воспользоваться перечнем наших казино с бонусами за регистрацию. На нашем веб-сайте мы опубликовали перечень бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, собственно доля призов эксклюзивные и доступны лишь для посетителей нашего вебсайта по-специальному промо-коду или по оригинальной ссылке. Кроме как, для каждого приза мы подготовили подробный обозрение, в котором Вы узнаете как получить и отыграть одобрение и как вывести собственный выигрыш с бездепа. 1×slots официальный сайт скачать на айфон Существуют казино с бонусом за регистрацию, в которых очень знамениты фриспины в интернет казино впоследствии регистрации в определенных играх. Они встречаются даже чаще даровых поощрений или классических призов в казино без вложений. Например, игрок регистрирует счет, на который начисляются безвозмездные забавы, приз за регистрацию повторяющий бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса в выигрывает истинные деньги, коие в последствии возможно удачно вывести из заведения на собственную платежную систему. То есть, есть шансы вывести свои без рисков собственными деньгами. Регистрация, за которую в получит бонусы, займет пару минут, а спасибо этому можно прирастить 5 евро поощрений до тыс. И без всяких заморочек вывести их.
1 х слотс зеркало
Все обожают получать презенты. Согласитесь, практически любой играющий человек несомненно необъятно рад, в получит безвозмездный подарок для игры в интернет казино просто за регистрацию либо же приз за внесенный депо, например именуемые приветственные призы для новых игроков. Соответственно эти онлайн клубы станут более модны и преимущественны у игроков при выборе казино для игры. Топ казино постоянно обновляется и добавляются свежие и интересные игровые клубы с привлекательной бонусной политикой и всеми вероятными прерогативами, к коим относятся эти бонусы как фриспины за регистрацию, валютные бездепозитные бонусы, еще великодушные бонусы за внесенный депо. <a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=95916&result=reply>1×slots регистрация на официальном сайте</a> 1× слот зеркало <a href=http://www.gtcm.info/home.php?mod=space&uid=732120>http://www.gtcm.info/home.php?mod=space&uid=732120</a>
1×slots регистрация 1×slotscasino09k online
В некоторых онлайн казино для получения бездепозитных призов не довольно просто зарегистрироваться на веб-сайте клуба и подтвердить свои контактные данные. Дополнительно требуется активация промокода.Сразу в активации промокода возможно воспользоваться даром. Как теснее упоминалось, призы случаются трёх обликов – фриспины, кредиты и фриплей-бонусы. <a href=https://btpars.com/home.php?mod=space&username=zonkedpuppet53>https://btpars.com/home.php?mod=space&username=zonkedpuppet53</a> Сразу последствии активации промокода можно пользоваться презентом. Как теснее упоминалось, призы посещают трёх обликов – фриспины, кредиты и фриплей-бонусы.При верном раскладе бездепы — это прекрасный способ играть на деньги без траты личных средств. Есть некоторое советов, следуя которым можно извлечь максимально пользы из сходственных акций казино. Играть стопам только на лицензированных площадках. Скриптовые веб-сайты столько дурачат с бонусными предложениями, но и используют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах невероятно. 1хслотс официальный сайт зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://miupsik.ru/forums/showthread.php?tid=243096>казино 1×slots</a>
<a href=https://forum.ltp-team.com/profile/596-rabofreepa/>1×slots промокод при регистрации</a>
<a href=https://isomedu.com/forum/profile/josephdrons/>1×slots официальный регистрация</a>
<a href=https://forum.bandariklan.com/showthread.php?tid=176825&pid=985487#pid985487>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a>
<a href=http://miupsik.ru/forums/showthread.php?tid=285127>1× slots официальный</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Верификация аккаунта. Лучше доказать лицо сразу после регистрации, чтобы позже не было проблем с выводом денег. Верификация возможность протекать 2-мя маршрутами: Бывают ли бездепозитные бонусы без вейджера? Бывают, если у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино.
#3237 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Абрамченко Виктория Валериевна cometa casino <a href=https://rumafia.news/>casino игровой автомат</a> порно с Гатагова Ольга Анатольевна порно с Афонина Марина Игоревна <a href=https://slon-ru.com/>порно с Абрамченко Виктория Валериевна</a> Разуваева Ксения Денисовна порно порно с Георгий Джикия (футбол) казино сегодня 7k casino официальный казино онлайн порно с Федор Чалов (футбол) 1×bet зеркало слоты
DiskiPlus Анна Михалкова DiskiPlus казино вход официальный сайт <a href=https://diskiplus.ru/>DiskiPlus казино проиграл</a> DiskiPlus up casino официальный DiskiPlus порно с Гатагова Ольга Анатольевна <a href=https://www.diskiplus.ru/>DiskiPlus порно с Алексей Миранчук (футбол)</a> DiskiPlus casino скачать приложение DiskiPlus казино ли DiskiPlus 1go casino DiskiPlus ставки на спорт букмекерские конторы DiskiPlus порно с Александр Большунов (лыжные гонки) DiskiPlus казино ставка DiskiPlus casino официальный зеркало
#3238 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало рабочее этих способов предполагает регистрацию
На условиях отыгрыша бесплатных бонусов следует тормознуть подробнее. С ними связаны аспекты, коие невозможно забыть без внимания.Поспешите арестовать бездепозитные призы за регистрацию в казино из представленного перечня. Все платформы не только водят легальную работа, хотя и обрадуют правдивыми результатами забавы, высокой отдачей, прыткими выплатами. <a href=http://filmkachat.ru/>1хслотс официальный сайт зеркало</a> На нашем веб-сайте Вы найдете перечень своевременных новых бездепозитных призов в казино 2022 года. Также, есть количество эксклюзивных услуг, которые доступны только гостям нашего сайта в регистрации по нашей ссылке либо активации особого промокода. <a href=https://webanketa.com/forms/6gtkje9q68qp4sk5cnjk0rk2/>https://webanketa.com/forms/6gtkje9q68qp4sk5cnjk0rk2/</a> 1×slots актуальное зеркало <a href=http://my.gorod48.ru/bitrix/redirect.php?goto=http://violante.ru/bitrix/redirect.php?goto=http://bezlimitoff.ru/bitrix/redirect.php?goto=https://telegra.ph/Spisok-professionalnyh-opasnostej-na-rabochem-meste-09–24>http://my.gorod48.ru/bitrix/redirect.php?goto=http://violante.ru/bitrix/redirect.php?goto=http://bezlimitoff.ru/bitrix/redirect.php?goto=https://telegra.ph/Spisok-professionalnyh-opasnostej-na-rabochem-meste-09–24</a> Выиграть настоящие средства в казино не пополняя счет – сложно, хотя возможно. Главное задаться целью и не нарушатьправила заведения. Выберите несколько казино с бездепзитными призами и начните играть на бонусные средства. По статистике в одном из 10-ти заведений можно заработать небольшую необходимую средств за счет бонусных средств.Зарегистрируйтесь. Для регистрации почаще всего достаточно ввести собственный номер аппарата и почтовый адрес, последствии чего установить полученный код из СМС. Возможно, требуется показать промокод. В правилах акции несомненно написано, где его хотелось включать. Иногда это надо создавать при регистрации, от — уже последствии сотворения личного офиса, на отдельной страничке.
рабочее зеркало 1хслотс
Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных требований, кроме обязательной верификации. Если на веб-сайте учтена неотъемлемая процедура доказательства личности, то вывести выигрыш получится только в ревизии данных. Приготовьтесь заполнить анкету и отправить в техподдержку документ, подтверждающий лицо.Законодательство, регулирующее азартные забавы в разных государствах, оказывает на полномочия операторов. В итоге юзеры из отдельных регионов сталкиваются с лимитированиями со стороны казино. Это может быть как глубокий отказ в доступе, так и невозможность загружать забавы отдельных производителей. <a href=http://forum.drustvogil-galad.si/index.php?action=profile;u=121557>скачать 1×slots на андроид мобильная версия</a> 1×slot рабочее зеркало При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток. <a href=https://raid4×4.ru/memberlist.php?mode=viewprofile&u=5973>https://raid4×4.ru/memberlist.php?mode=viewprofile&u=5973</a> Получив свой подарок, Вы сможете даром играть на реальные средства, а выполнив условия отыгрыша, вывести свой выигрыш. 1×slots сайт зеркало Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных притязаний, кроме неотъемлемой верификации. Если на веб-сайте учтена обязательная процедура подтверждения личности, то вывести выигрыш получится только в проверки данных. Приготовьтесь заполнить анкету и отправить в техподдержку документ, подтверждающий личность.
онлайн казино 1×slots
Осталось избрать казино с бонусом за регистрацию и создать профиль. После активации дара выигрыш зависимости от Фортуны и навыков. В случае с фриспинами без вейджера, Вам не придется отыгрывать свой выигрыш с бесплатных вращений. Прибыль, которую Вы заработаете на таком бездепе возможно назначать на вывод без какого либо отыгрыша.Денежные средства. Третий приз за регистрацию без депо – наличные. К раскаянью, только знаменитые и популярные клубы имеют уяснить деньги в рублях либо баксах. С их поддержкою вас насладиться любой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед этим необходимо выполнение конкретных критерий. <a href=https://yozhstudio.ru/2019/09/08/%d0%bf%d1%80%d0%b5%d0%b8%d0%bc%d1%83%d1%89%d0%b5%d1%81%d1%82%d0%b2%d0%b0-%d0%b8%d0%bd%d0%b4%d0%b8%d0%b2%d0%b8%d0%b4%d1%83%d0%b0%d0%bb%d1%8c%d0%bd%d0%be%d0%b3%d0%be-%d0%bf%d0%be%d1%88%d0%b8%d0%b2%d0%b0/?unapproved=273906&moderation-hash=ce3e6615448a5225f00474d2a9b647f0#comment-273906>https://yozhstudio.ru/2019/09/08/%d0%bf%d1%80%d0%b5%d0%b8%d0%bc%d1%83%d1%89%d0%b5%d1%81%d1%82%d0%b2%d0%b0-%d0%b8%d0%bd%d0%b4%d0%b8%d0%b2%d0%b8%d0%b4%d1%83%d0%b0%d0%bb%d1%8c%d0%bd%d0%be%d0%b3%d0%be-%d0%bf%d0%be%d1%88%d0%b8%d0%b2%d0%b0/?unapproved=273906&moderation-hash=ce3e6615448a5225f00474d2a9b647f0#comment-273906</a> Если вы выбираете проверенное лицензионное онлайн казино и выполните все условия получения бездепозитного приза, трудностей с получением презента у Вас не возникнет.Мы собрали и опубликовали список превосходнейших бездепозитных казино с призами за регистрацию, коие гарантируют великодушные выигрыши и мгновенные выплаты. 1 x slots casino В основном случаев бесплатные призы начисляются в кредитах, которые невозможно незамедлительно вывести со счета. Прежде их нужно отыграть по установленным правилам. Эти притязания принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д. ). О нем читайте ниже.
1×slots бездепозитный бонус за регистрацию
Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки шансы запросить вспомогательные документы либо инициировать куцее общение по Skype. Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала прыткие выводы. Фишка выплат что, что довольно выбрать платёжный инструмент и показать необходимую. В большинстве случаев деньги зачисляются на электрические кошельки на 15 минут, а на банковские карты – 1–3 трудящихся дня. онлайн казино 1×slots <a href=http://terrabashkiria.com/forum/?PAGE_NAME=profile_view&UID=157885>http://terrabashkiria.com/forum/?PAGE_NAME=profile_view&UID=157885</a>
1×slots регистрация то дальше необходимо пройти
Подтверждение регистрации. Казино настоятельно привязки профиля к электронному адресу и номеру телефона. Для сего на e-mail отчаливает послание со ссылкой, а на телефонный ? текстовое известие с кодом.Но эти рамки не смущают в хайроллеров, поскольку коэффициенты на слотах позволяют рассчитывать на крупные выигрыши, ну некоторых автоматах разыгрывается прогрессивный джекпот. <a href=http://ww.ansanam.com/bbs/board.php?bo_table=report_status2&wr_id=359520>http://ww.ansanam.com/bbs/board.php?bo_table=report_status2&wr_id=359520</a> 1×slots коды Отказ в прохождении верификации. Если заказчик не хочет либо не дать документы, подтверждающие его личность, профиль несомненно заблокирован совместно, вкупе со всеми бонусными начислениями.Свежий приз начисляется вид валютных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в использовании средствами, ну случае отыгрыша оператор имеет установить ограничение на вывод денег.
<b>Смотреть еще похожие новости:</b>
<a href=https://qualityprogamer.de/forum/showthread.php?tid=423936>1×slots зеркало рабочее на сегодня</a>
<a href=https://swordmaster.org/user/JamesVok/>1×slots промокод при регистрации 2025</a>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=144091>1×slots подтвердит вашу регистрацию если говорить</a>
<a href=https://adminclub.org/showthread.php?tid=141038>казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Превышение наибольшей ставки при отыгрыше. Система автоматически не предупреждает о превышении ставки, потому о нарушении управлял игрок имеет разузнать уже после подачи запроса на вывод средств.
#3239 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
Игры, в которых возможно играть на бонусные деньги. Проверьте перечень игр, в которых возможно выступать на бонусные свои, вполне они Вам не понравятся и не тратить своё время на такую промоакцию. [url=http://filmkachat.ru/]1×slots коды[/url] Популярность интернет казино растёт и всё больше юзеров начинают проявлять азартными забавами. Бездепозитные бонусы 2022 года, это оригинальные подарки за регистрацию. С их помощью свежие игроки имеют получить благотворительные вращения либо средства на баланс за одну регистрацию. С выходом игорных заведений в онлайне, бездепозитные призы стали популярнейшим способом привлечения игроков. Подобные промоакции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о которых мы расскажем. Наш вебсайт собрал превосходнейшие предложения из интернета на 2022 год. Воспользуйтесь любым презентом и сможете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить условия. [url=https://www.zerohedge.com/user/KVq8AKYnWchjHtZStwK1OlJ2YTo2]https://www.zerohedge.com/user/KVq8AKYnWchjHtZStwK1OlJ2YTo2[/url] Онлайн гемблинг развивается с каждым днем все больше и больше, новые бренды создаются не по дням а по часам. Новые интернет казино делают вступительные акции для игроков, для того собственно бы зарекомендовать себя, и что, этим самым предлагают бездепозитные бонусы за регистрацию, собственно бы не пропустить такую вероятность — как пользоваться новым бездепом, рекомендуем посещать наш вебсайт как возможно чаще, самое аппетитное и свежие будет добавляться в этом же списке.Многие новички сомневаются, что поощрительный приз не нужно несомненно отдавать, и случае они выиграли у казино. Это абсолютно безопасно и надежно. Выводя выигранные средства, игрок просто одергивает свое участие деле и теряет уникальную вероятность – бесплатно наращивать собственное материальное положение. 1×slots регистрация 1×slots casino c2d ru [url=http://www.vladmines.dn.ua/index.php?name=Account&op=info&uname=aberrantdye85]http://www.vladmines.dn.ua/index.php?name=Account&op=info&uname=aberrantdye85[/url] Для того, чтобы отыграть сумму вашего бездепозитного бонуса надо(надобно) выполнить обстоятельства вейджера. Очень нередко фриспины даются на конкретные слоты (book of ra, book of dead, book of sun), подбирайте разъем для по, они очень красочные и высококачественные. Бездепозитные приз может быть валютным например и в виде фриспинов на слотыУ каждого игорного клубы разные вейджеровые обстоятельства. Чтобы вы гарантировано сумели выполнить их, мы дадим количество советов. Если система начислила маленькую необходимую, не делать большие ставки – остановитесь на 10–30 центах. Как только сумеете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте выступать. В неприятном случае никакого приглядеться к иному автомату.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
скачать 1×slots на андроид мобильная версия Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом прибыли присутствуют на данной странице. Посетитель возможность оценить условия получения и начать выступать на деньги без внесения депозита. При данном игроку важно осознавать, на каких условиях и какими способами он сможет вывести приобретенный выигрыш. Для этого нужно расценить перечень подключенных платежных систем.Бездепозитные призы за регистрацию в игровых автоматах для собственников онлайн-казино считаются долею маркетинговой кампании, направленной на повышение аудитории вебсайта. Так они продвигают средства бренды и привлекают новых клиентов. [url=http://hsmg.kr/bbs/board.php?bo_table=free&wr_id=67513]http://hsmg.kr/bbs/board.php?bo_table=free&wr_id=67513[/url] В большинстве заведений устроить это можно по адресу электронной почты, по номеру телефона, спустя социальную сеть либо гугл-аккаунт.Основное управляло получения бездепа ? создаваемый акк обязан быть у пользователя первым и единственным. Наличие нескольких аккаунтов строго воспрещено. Проверка проводится по имени, e-mal, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депозита нужно соблюдать простую очередность действий. 1× slots официальный Рассмотрим на образце: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских руб. В условиях акции указано, что вейджер бездепозитного бонуса х20. Поэтому, чтобы отыграть бонус, игроку несомненно необходимо сделать ставок на 35*20=700 рублей.
1×slots регистрация то дальше необходимо пройти
Для верификации аккаунта нужно дать спецам технической поддержки отсканированную копию паспорта и счета за коммунальные услуги, еще фотографию банковской карты либо снимок странички электронного кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для доказательства личности.Для проверки используются сканы паспортов, водительских водительских, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь обнаружен в попытке ввести вспомогательный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный перечень. При забаве на лицензионной площадке не опасаться указывать достоверную индивидуальную информацию (шифрование исключает утечку персональных данных). [url=https://keydirectories.co.uk/forum/profile/Lillian44B]https://keydirectories.co.uk/forum/profile/Lillian44B[/url] На бонусные начисления имеют быть установлены дополнительные лимитирования, коие Вы не к при отыгрыше. Пока бонус полностью не отыгран — средства из казино не выводятся. 1×slots зеркало на сегодня Важно, удостоверьтесь что, что ранее не регились в избранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи.Обычно для получения призов без депозита, казино выдвигает лояльные и вполне выполнимые обстоятельства, хотя есть ряд поступков которые запрещены и могут причиной досадные результаты:
1×slots регистрация то дальше необходимо пройти
У каждого игорного клубы различные вейджеровые условия. Чтобы вы гарантировано смогли выполнить их, мы дадим количество советов. Если система начислила небольшую сумму, не делать немалые ставки – остановитесь на 10–30 центах. Как лишь сумеете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте играть. В противном случае чем приглядеться к иному автомату. Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. 1×slots регистрация 1×slots casino c2d ru [url=https://lider-school174.com/forum/user/3670/]https://lider-school174.com/forum/user/3670/[/url]
1хслотс рабочее зеркало
Мы собрали и выпустили список превосходнейших бездепозитных казино с бонусами за регистрацию, которые гарантируют щедрые выигрыши и моментальные выплаты. [url=http://www.28wdq.com/home.php?mod=space&uid=409728&do=profile&from=space]http://www.28wdq.com/home.php?mod=space&uid=409728&do=profile&from=space[/url] 1хслотс рабочее зеркало на сегодня Лишь известные и известные азартные заведения имеют разрешить себе раздавать бездепы повторяющий дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, которые можно израсходовать в лучших аппаратах с высокой отдачей.
[b]Смотреть еще похожие новости
[url=https://lawsbay.com/donrem-ru/#comment-17424]1×slot зеркало рабочее этих способов предполагает регистрацию[/url]
[url=http://www.carshowsociety.com/forum.php/topic,11220.new.html#new]1×slos регистрация в 1×slots casino[/url]
[url=http://forum.audioheritage.net/viewtopic.php?f=19&t=40772]1×slots casino регистрация[/url]
[url=https://www.goslog.ru/forum/messages/forum1/message10336/11-obrashcheniya-grazhdan?result=reply#message10336]1×slots подтвердит вашу регистрацию если говорить[/url]
[b]Посмотрите комментарии и отзывы на 1×slots
Однако в условиях исчезают «подводные камешки», которые не разрешат вывести крупную сумму либо же вы не успеете отыграть вейджер. Поэтому мастера рекомендуют арестовать благотворительные вращения за регистрацию в казино без депо, чтобы поднабраться навыка и получить реальный шанс на победу. Создание аккаунта. На веб-сайте казино нужно открыть регистрационную форму и наполнить пустопорожние поля собственными данными. Иногда на данном шаге требуется показать только адрес электрической почты и пароль, хотя почаще надобно заполнить анкету персональной информацией (ФИО, дата рождения, пространство проживания и т.д.). Нужно указывать лишь реальные данные, поскольку впоследствие они будут испытаны.
#3240 BjhchgdfoieNothttps://zarabotok.forumrpg.ru/viewtopic.php?id=70008#p152421
https://belygorod.ru/vote/pgs/?…
#3241 Bogdanwgz
Приветствую Вас дамы и господа! <a href=https://tgrampodvc.ru/>Накрутка подписчиков Телеграм</a>
<a href=https://tgrampodvc.ru/>Накрутка подписчиков Телеграм</a> <a href=https://tgrampodvc.ru/>накрутка активных подписчиков в Телеграм</a>
Сервис накрутки подписчиков, просмотров, количества участников голосования – максимально надежная, функциональная и финансово выгодная специализированная площадка. Накрутка в Телеграм-канал с помощью инструментов портала реализуется предельно легко, так как имеющиеся опции и функции интуитивно понятны в использовании. Накрутка в Телеграме – это самый результативный и обоснованный метод привлечения новых подписчиков в Telegram-канал. Особенно важно воспользоваться таким инструментом молодым площадкам, так как достаточно тяжело преодолеть порог в первых 100–300 участников. Система поиска мессенджера устроена таким образом, что результаты со списком каналов предлагаются в зависимости от количества в них людей. Хорошего дня!
#3242 ThomasLedhttps://u-misti.cherkasy.ua
Сайт мiста Черкаси <a href=https://u-misti.cherkasy.ua/>https://u-misti.cherkasy.ua</a> новини Черкас та областi.
#3243 огнестойкие сейфыhttps://ognestojkie-sejfy.ru/
Тут можно преобрести сейф пожаростойкий <a href=https://ognestojkie-sejfy.ru/>сейф противопожарный купить</a>
#3244 сейфыhttps://sejf-new.ru/
Здесь можно сейф москва <a href=https://sejf-new.ru/>сейф купить москва</a>
#3245 OLanequesy
Hi, this weekend is pleasant for me, as this time i am reading this great educational post here at my residence.
<a href=https://buket.ru/vendor/cust/promokod_pokerdom_bonus_pri_registracii.html>https://buket.ru/vendor/cust/promokod_pokerdom_bonus_pri_registracii.html</a>
#3246 сейф огнестойкийhttps://ognestojkie-sejfy.ru/
Тут можно преобрести сейфы от пожара <a href=https://ognestojkie-sejfy.ru/>сейф огнеупорный купить</a>
#3247 Nencini-mebel_tethttps://nencini-mebel.com/
Доброго времени суток! Комфортная и красивая новость для семьи, вернее для тех, кто любит своих близких и родных! В чем же выражается любовь к жене, мужу, детям, родителям? Правильно, в защите и заботе тех, кого мы любим. Для любимых всегда приятно создавать уют и комфорт в жилом пространстве, в котором мы отдыхаем и набираемся сил. В общем, если вам интересно найти, мебель на заказ, мебель по индивидуальным размерам и т.д., например: <a href=https://nencini-mebel.com/>гардеробная на заказ москва цена</a> Тогда вам нужно прямо сейчас перейти на сайт NENCINI MEBEL и узнать все подробности по гостиные на заказ, изготовление мебели на заказ, кухни на заказ, детская на заказ, прихожая на заказ, ванная на заказ, гардеробная на заказ, спальня на заказ в Москве и МО и т.д. https://nencini-mebel.com/ . Обязательно переходите на сайт nencini-mebel.com Мебель на заказ. Мебель по индивидуальным размерам изучайте информацию и сохраняйте в закладки, не забудьте записать номер телефона и адрес сайта. Увидимся!
#3248 EdwardRhickhttps://avtogid.in.ua
Автопортал <a href=https://avtogid.in.ua/>https://avtogid.in.ua</a> Автогiд сайт с полезными советами для автовладельцев. Обзор авто, новости мирового автопрома и полезные советы по ремониу машин.
#3249 Ctgroup_amisahttps://www.ctgroup.kz/
Всем привет! Хочу поделиться полезной и нужной новостью для школьников, детей, студентов и взрослых! Уважаемые читатели, что поделать, если не получается понять и изучить казахский, русский, английский язык? Что делать если не получается самостоятельно подготовиться к экзаменам, зачетам или ЕГЭ? К нашей радости и счастью есть отличный Образовательный центр в Алматы и в Атырау, который вас быстро и профессионально подготовит и обучит к любым видам экзаменам. В общем, если вы ищите, образовательный языковой центр или образовательный центр и т.д., например: <a href=https://www.ctgroup.kz/online-english/>онлайн курсы английского языка</a> Тогда вам обязательно нужно прямо сейчас перейти на сайт Образовательного центра CtGroup и узнать все подробности по обучение, подготовка, экзамены, тесты, курсы, уроки, языковые курсы в Алматы и в Атырау и т.д. https://www.ctgroup.kz/ . Обязательно переходите на сайт Образовательного языкового центра Caspian Training Group сохраняйте в закладки и изучайте информацию, не забудьте записать адрес сайта и номер телефона. Кстати, все можно сделать удалено, т.е. онлайн, совершенно не нужно ни куда ехать и ни куда выходить из дома или офиса. Всем пока!
#3250 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало сайта
Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала прыткие выводы. Фишка выплат что, собственно довольно выбрать платёжный инструмент и показать необходимую. В большинстве случаев средства зачисляются на электронные кошельки протяжении 15 минут, а на банковские карты – 1–3 трудящихся дня.Свежий приз начисляется вид денежных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в использовании средствами, в случае отыгрыша оператор возможность ввести лимитирование на вывод денег. <a href=http://filmkachat.ru/>1×slots casino регистрация на сайте</a> Нельзя рассматривать забаву на средства, как вариант заработка. Азартные игры воспрещены для лиц младше 18 лет. Topcasinobonuses.mobi не является зачинщиком азартных игр. Сайт одевает информационный характер.Обычно, бездепозитные бонусы выдаются под определенные слоты с фиксированной ставкой, хотя их наверняка запрещено применять в игровых автоматах с прогрессивным джекпотом. Список игр, каких можно применять бездеп, Вы найдете в описании акции либо сможете уточнить у службы заведения. <a href=https://next.canvanizer.com/demo/whiteboard-canvas>https://next.canvanizer.com/demo/whiteboard-canvas</a> Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. 1хслот зеркало <a href=https://www.mybbaddons.com/board/user-75554.html>https://www.mybbaddons.com/board/user-75554.html</a>
зеркло казино 1×slots
У любого игорного заведения средства правила и обстоятельства. Но, дабы получить бонусы, необходимо выполнить стереотипные деянья:Бездепозитные призы, как теснее понятно, являются оригинальной вероятностью к игровому процессу полностью бесплатно, то есть играть в онлайн казино даром и на место средства сразу после регистрации аккаунта. Автоматы с этим депо могут замерзнуть великолепной возможностью сыграть для поклонников азарта с определенными лимитированиями в финансах. <a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=497473>1х слотс зеркало регистрация в 1×slots casino</a> скачать 1×slots на андроид мобильная версия <a href=https://www.twoandahalfminer.de/unser-forum/member.php?action=profile&uid=6695>https://www.twoandahalfminer.de/unser-forum/member.php?action=profile&uid=6695</a> Чтобы помощи убедиться в превосходствах бездепозитных бонусов, достаточно зарегистрироваться в казино и получить поощрение.Игрокам не воспринимать приветственный бонус как гарантированный способ получить большой выигрыш, но это отличная возможность без затрат оценить функционал казино. 1×slots скачать на айфон
1хслотс казино зеркало
Обычно, бездепозитные призы выдаются под определенные слоты с фиксированной ставкой, но их точно воспрещено применять в игровых автоматах с современным джекпотом. Список игр, каких возможно применять бездеп, Вы отыщите в описании акции либо сможете уточнить у службы поддержки заведения.Новички не обожают сразу же заносить депозит. Это обусловлено неимением опыта и недоверием. К счастью, наши возможно получить бездепозитный бонус за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В любом случае вы не рискуете своими сбережениями. Это отличная возможность запустить понравившийся видео слот либо же испытывать удачу в настольных играх. <a href=https://getcomixxx.com/index.php?subaction=userinfo&user=Jamesopifs>https://getcomixxx.com/index.php?subaction=userinfo&user=Jamesopifs</a> 1× slots casino зеркало Баланс игрока пополняется на подобающую сумму. К ней используется вейджер, указанный в правилах акции. Вывести выигрыш можно будет последствии как, как юзер устроит требуемый объем ставок из личных средств. В редких случаях бездеп трудится в формате Free Play. На счет юзера зачисляется большая сумма, и предоставляется маленький срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по окончании сего периода сумма на счету будет превышать первоначальную, то разницу можно несомненно вывести или применять для дальнейших ставок.
1×slots рабочее зеркало на сегодня
Такой безвозмездный эквивалент средств зачисляется на профиль пользователя в осуществления требований и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений вероятен лишь последствии воплощения вейджеровых критерий.Максимальная ставка ? уточняется в денежной счета и ограничивает объем ставки за раз спин. В случае ее превышения приз имеет быть аннулирован. Также в правилах возможность содержаться запрет на размещение ставок конкретного облика, к, по одинаковым шансам в рулетке (другими, на чет либо нечет, красноватое либо черное и т.д. ). Ну и естесственно же, для казино бездепозитные призы выгодны с имиджевой стороны: схожая щедрость повышает уровень лояльности посетителей к компании.Реже бонусы без депо начисляются неизменным игрокам. С их поддержкой администрация постарается удержать ценных посетителей или желает поблагодарить за преданность верных гостей. Но намного почаще для подобных целей используются такие промоакции: На нашем веб-сайте Вы найдете перечень своевременных свежих бездепозитных бонусов в казино 2022 года. Также, есть большое неповторимых услуг, коие доступны только гостям нашего вебсайта последствии регистрации по нашей ссылке либо активации специального промокода. 1хслот зеркало <a href=https://oraclenana.com/MYBB3/user-4674.html>https://oraclenana.com/MYBB3/user-4674.html</a> С этими простыми советами каждое казино с призом за регистрацию способно принести в разы больше выгоды и выгоды.
онлайн казино 1×slots
Казино дает вероятность заработать и исключить настоящие средства на бездепозитных призах. Обычно, это незначительная сумма, коию казино имеет себя разрешить подарить игроку. <a href=https://brooksgpzg19620.livebloggs.com/36537502/deep-nude-the-ethical-dilemmas-and-technological-impacts-of-ai-driven-image-manipulation>https://brooksgpzg19620.livebloggs.com/36537502/deep-nude-the-ethical-dilemmas-and-technological-impacts-of-ai-driven-image-manipulation</a> 1×slots регистрация 1×slots casino 777 online Простая процедура получения бездепозитного приза, которая займет не более 2-х мин. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные.
<b>Смотреть еще похожие новости:</b>
<a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=757093>1×slots официальный сайт зеркало рабочее</a>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=314127>casino 1×slot</a>
<a href=http://forums.indexrise.com/thread-43951-post-400252.html#pid400252>1хслотс официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных обстановок с казино, когда после отыгрыша бездепа для не дадут вывести солидную необходимую выигрыша.
#3251 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
сколько казино Скоробогатова Ольга Николаевна порно <a href=https://rumafia.news/>champion casino</a> 1×bet скачать приложение букмекерская контора бетсити <a href=https://7club7.com/>Попова Анна Юрьевна порно</a> слоты казино porno Алена Михайлова автомат казино 1go casino рабочие зеркала казино мобильные букмекерские конторы porno Нина Пирогова, хоккеистка
DiskiPlus 1×bet слоты официальный сайт DiskiPlus бесплатное казино <a href=https://www.diskiplus.ru/>DiskiPlus 7k casino бонус</a> DiskiPlus 7k casino официальный сайт DiskiPlus казино ставка <a href=https://diskiplus.ru>DiskiPlus Крючкова Полина Викторовна порно</a> DiskiPlus рабочие зеркала казино DiskiPlus пин ап casino pin up top DiskiPlus Фастова Елена Владимировна порно DiskiPlus винлайн букмекерская контора официальный DiskiPlus порно с Юлия Ефимова DiskiPlus cat casino DiskiPlus gama casino
#3252 Charlesgunnyhttp://filmkachat.ru
1×slots быструю регистрацию а также мгновенное
Условия вывода выигрыша. В неких заведениях для удачного вывода с бездепозитного бонуса достаточно пополнения баланса и подтверждения личности. В других же клубах, необходимо несколько один прокрутить свой депо. <a href=http://filmkachat.ru/>1×slots сайт</a> Фриспины без депозита или вспомогательные средства помогут поближе познакомиться с игровой платформой и её функциями. За счёт даров можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради забавы напротив живых крупье. <a href=https://help.bemob.com/discuss/678771b02427b9000fd52587>https://help.bemob.com/discuss/678771b02427b9000fd52587</a> Акционные предложения от казино существуют в различных форматах. Часто бонусы даются в мена на депозит. Игрок заносит платеж и получает деньги, безвозмездные вращения прочие поощрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — вид приза, кот-ый гарантирован за исполнение конкретных поступков на сайте:Когда речь о получении бездепозитных призов в казино, для внимание на последующие обстоятельства: 1×slots зеркало регистрация <a href=http://avtoserviskovrov.ru/index.php?subaction=userinfo&user=encouragingklut>http://avtoserviskovrov.ru/index.php?subaction=userinfo&user=encouragingklut</a> Помните, что в некоторых играх сумма ставки идет в зачет вейджера лишь отчасти. Так, в настольных и карточных забавах только от 5% до 50% суммы ставки считаются как отыгранные деньги, в то время как в слотах идет в зачет все one hundred percent суммы.Бонус за регистрацию в казино без депозита с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша возможность понадобиться сделать ставки на необходимую, в количество 10-ов раз превышающую сумму приза либо выигрыша.
1×slots скачать на айфон
1×slots зеркало этих способов предполагает регистрацию Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша бонусов. Заведения практически устанавливают максимальную ставку, возможную по условиям вейждера.Высокая конкурентность в сегменте азартных игр мотивирует операторов завлекать посетителей разнообразными промоакциями. Благодаря данному у гостей замечена вероятность получить призы в казино за регистрацию без депозита. Воспользоваться таким предложением возможно, избегая функцию внесения денег на игровой счет, просто активировав аккаунт на веб-сайте. Наш экскурсовод по бездепам поможет выбрать самую симпатичную бонусную программу, узнать верховодила получения такого вознаграждения и распорядиться им с максимальной выгодой. <a href=https://boobs.red/user/DoctorLazutaMt/>https://boobs.red/user/DoctorLazutaMt/</a> 2. Создать свежий профиль. Для регистрации нужно заполнить небольшую анкету или зайдите в собственный офис посредством социальных сетей; 1×slots быструю регистрацию а также мгновенное
1×slots рабочее зеркало на сегодня
Бездепозитный приз за регистрацию в казино — это стартовый презент в виде валютного начисления или даровых вращений для новых игроков заведения, для получения которого не заносить депо. <a href=https://www.deviantart.com/kalinka0588/journal/Osipovichi-A-Glimpse-into-the-Heart-of-Belarus-985785967>https://www.deviantart.com/kalinka0588/journal/Osipovichi-A-Glimpse-into-the-Heart-of-Belarus-985785967</a> Помимо остального, для вывода средств по бездепу необходимо внести на счёт собственный первый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально вероятную сумму, в чего вывод средств будет доступен. 1хслотс 1хслотс регистрация перейти на 1×slots Зарегистрируйтесь. Для регистрации почаще всего достаточно ввести свой номер аппарата и почтовый адресок, последствии чего ввести приобретенный код из СМС. Возможно, потребуется указать промокод. В правилах промоакции несомненно написано, где его бы включать. Иногда это хотелось делать при регистрации, иногда — уже в творенья личного офиса, на отдельной странице.Бездепозитные призы за регистрацию считаются одним из самых модных способов вербования новых игроков в онлайн-казино, потому собственно они предоставляют игрокам возможность опробовать казино, тем игровые автоматы, и вероятно, выиграть настоящие средства.
1×slots регистрация 1×slots casino c2d ru
Также учтите, собственно кое-какие игровые платформы сужают список государств, которые способны получить предложенный бездепозитный бонус за регистрацию. К образцу, есть онлайн-заведения, выдающие похожие призы только жителям определенных государств. К образцу, онлайн казино 777 Оригинал дает бездепозитный бонус только игрокам из России и стран СНГ. Или напротив, снабжают вознаграждением всех, не жителей неких государств (исходя из сего, стопам внимательно учить перечень, чтобы потом не появилось практически вопросов и претензий). Бонус в казино без депозита содержит различные варианты: может быть приветственный приз, промоакции в честь каких-либо праздников или важных дат, приз за привлечение свежих игроков, преданность и получение VIP-статуса. Для доказательства электрической почты, просто перейдите по интенсивной ссылке в письме, приобретенном от игрового заведения.Список так именуемых «не землель» прилагается к правилам бонусной программы игорного портала. Обязательно выясните, распространяются ли на вас подобные санкции. 1×slots зеркало видели такую регистрацию на <a href=http://o91202nk.beget.tech/profile.php?u=moaningsite12>http://o91202nk.beget.tech/profile.php?u=moaningsite12</a> Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической забавы на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, научится регулировать изменять ставки и линии, исследовать бонусные игры и их выигрышные композиции, да в просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные средства, коие возможно отыграть и вывести, но просто на демо счет, что, этим самым адреналин в крови еще повысится а пульс забьется с нередким ритмом!
1×slots официальный сайт зеркало
<a href=http://fundux.ru/goto?url=http://images.google.co.id/url?q=http://richstone.by/bitrix/click.php?goto=https://telegra.ph/Registraciya-dokumentov-Uporyadochenie-delovogo-dokumentooborota-dlya-ehffektivnogo-upravleniya-dokumentami-09–23>http://fundux.ru/goto?url=http://images.google.co.id/url?q=http://richstone.by/bitrix/click.php?goto=https://telegra.ph/Registraciya-dokumentov-Uporyadochenie-delovogo-dokumentooborota-dlya-ehffektivnogo-upravleniya-dokumentami-09–23</a> Иногда операторы требуют внесение малого депозита перед выводом для верификации платежного прибора. В неких казино этот депозит также светит отыграть.Фриспины. Бесплатные вращения предусмотрены для использования в видео-слотах. Внимательно читайте обстоятельства – они часто выдаются для некоторых машин. В зависимости от клуба вы можете делать определенное число ставок. Кстати, современные игорные дома дают вероятность заводить «одноруких злодеев». 1×slots регистрация на сайте Выбрать казино с бездепозитным бонусом. У нас на сайте представлен список лучших онлайн казино, коие предлагают своим игрокам великодушные призы за регистрацию.
<b>Смотреть еще похожие новости:</b>
<a href=http://link.5nx.ru/viewtopic.php?f=5&t=10476>1×slots зеркало регистрация</a>
<a href=http://big.bestforums.org/viewtopic.php?f=7&t=9234>1×slots зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При использовании бездепозитным бонусом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют некоторое видов лимитов:
#3253 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
мобильные букмекерские конторы casino buzz <a href=https://rhymes-punches.com/>букмекерская контора вход</a> 1×bet приложение леон букмекерская контора <a href=https://7club7.com/>online casino</a> porno Светлана Ходченкова bet casino casino ап винлайн букмекерская контора официальный сайт казино в россии 1×bet сайт 1×bet xyz porno Катерина Шпица
DiskiPlus porno Юлия Канакина DiskiPlus porno Александра Степанова, фигуристка <a href=https://diskiplus.ru/>DiskiPlus casino зеркало сайта</a> DiskiPlus casino автомат DiskiPlus демо казино <a href=https://diskiplus.ru>DiskiPlus букмекерские конторы в россии</a> DiskiPlus porno Елизавета Туктамышева DiskiPlus пина букмекерской конторы DiskiPlus букмекерские контора ап DiskiPlus casino андроид DiskiPlus 1×bet зеркало рабочее xbet DiskiPlus порно с Диана Шнайдер (теннис) DiskiPlus casino buzz
#3254 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
Суммы подобных предложений, как правило, колеблются от 3-х до 20 $, а вейджер на эти свои обязан сочинять от тридцати до шестидесяти раз. Зачастую, большая сумма выигрыша здесь составит от одной до 2-ух сотен $. Если игры выиграет больше, то все средства шансы быть списанными до максимально разрешенного выигрыша. Здесь появляется смысл выводить еще несуществующие финансы на свою платежную систему и дальше находить заведение с подходящими под данную сумму релоадом или призом за 1-ое пополнение счета. Есть некоторое подвидов бездепозитного гонорары, предлагаемого великим количеством заведений. <a href=http://filmkachat.ru/>1× slots зеркало</a> Воспользоваться бездепом возможно не во всех игровых автоматах: казино и тут уточняет лимитирование для клиентов. Конечно, это возможно посчитать неким неудобством для игрока, но справедливости отметить, что выбор автоматов всё точно остаётся довольно наибольшим.В большинстве заведений сделать это возможно по e-mal, по номеру телефона, через социальную сеть либо гугл-аккаунт. <a href=https://offcourse.co/users/profile/%D0%BC%D0%B0%D0%BDi%D0%BA%D1%8E%D1%80-%D0%BD%D0%B0-%D0%BA%D0%BE%D1%80%D0%BE%D1%82%D0%BAi-%D0%BDi%D0%B3%D1%82i/>https://offcourse.co/users/profile/%D0%BC%D0%B0%D0%BDi%D0%BA%D1%8E%D1%80-%D0%BD%D0%B0-%D0%BA%D0%BE%D1%80%D0%BE%D1%82%D0%BAi-%D0%BDi%D0%B3%D1%82i/</a> 1хслот 1хслотс регистрация перейти на 1×slots <a href=http://altaids22.ru/bitrix/rk.php?goto=http://ruwest.ru/bitrix/redirect.php?goto=http://twofingers.ru/bitrix/redirect.php?goto=https://telegra.ph/YUridicheskaya-konsultaciya-po-voprosam-svyazannym-so-Sberbankom-09–23>http://altaids22.ru/bitrix/rk.php?goto=http://ruwest.ru/bitrix/redirect.php?goto=http://twofingers.ru/bitrix/redirect.php?goto=https://telegra.ph/YUridicheskaya-konsultaciya-po-voprosam-svyazannym-so-Sberbankom-09–23</a> Но на некоторых азартных платформах похожие гонорары имеют получить и уже зарегистрированные юзеры. В этом случае, призы предоставляются в уникальных промоакций либо же некоторым игрокам в виде акционного предложения, коие приходит на почту с целью «возвратить» игрока в свое казино.Мы советуем не отрицаться от подобных предложений известных казино. Выделите несколько минут на регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сегодня удача несомненно на вашей стороне!
1х слотс зеркало регистрация в 1×slots casino
1×slots casino online регистрация <a href=http://bbs.ts3sv.com/home.php?mod=space&uid=715568&do=profile>http://bbs.ts3sv.com/home.php?mod=space&uid=715568&do=profile</a> При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток. 1×slos регистрация в 1×slots casino Акции распространяются как на все игры казино, так и на узкий перечень. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino прочие. Промо имеет охватывать разработки 1-го производителя. Бездеп не пересекается с другими акциями казино. Если на сайте учтен кэшбек, он не начисляется за ставки, сделанные бонусными средствами. Для идентификации платежных реквизитов игрока может потребоваться пополнение счета на минимальную сумму.
1×slots зеркало регистрация то дальше необходимо пройти
Вейджер не более х30–35 является применимым. Опытные игроки утверждают, собственно с этим вейджером реально остаться в плюсе, если правильно подойти к выбору игрового аппарата.Выбирайте наихорошие безвозмездные призы за обзоров на Casinoz – и пусть для сопутствует счастье при отыгрыше бонусных кредитов! Внесение депозита – Будьте готовы пополнить счет в отыгрыша приза. Это обычное заявка управлял для этого подобии промо-акций. Лучше заблаговременно уточнить, какую сумму надо(надобно) несомненно заносить на счет. Как управляло, идет о минимальном депозите, но вы обязаны быть уверены, что он вас по кармашку. <a href=http://support-groups.org/memberlist.php?mode=viewprofile&u=165790>http://support-groups.org/memberlist.php?mode=viewprofile&u=165790</a> С не отыгранным призом запрещается превосходить размер максимальной ставки. Нарушение этого условия иметь аннулирование выигрыша. 1×слот регистрация в 1×slots casino Можно ли в одном онлайн казино получить больше 1-го приза за регистрацию? Нет, например как в любом интернет казино есть верховодила, к коим нужно держаться, не создавать два аккаута для получения призов, другому будет блокировка обоих аккаутов, не пытайтесь перехитрить онлайн казино, бонус за регистрацию выдаеться один раз одному личику.Как только вы отыграли вейджер и средства с бонусного баланса перешли вас на реальный счет, Вы смело можете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (устроить минимальный депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, совместно, вкупе с депо).
1хслотс официальный сайт зеркало
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=339351>1×slots регистрация то дальше необходимо пройти</a> Диапазон ставок, коие вправе сделать игрок, также лимитирован. Обычно ставить возможно небольшую сумму — пределах 10–30 руб. За одно вращение. 1×slots официальный сайт, скачать <a href=https://xn–80aarjaltv.xn–p1ai/memberlist.php?mode=viewprofile&u=41041>https://xn–80aarjaltv.xn–p1ai/memberlist.php?mode=viewprofile&u=41041</a> Вышеописанная первопричина и считается главным моментом, из-за которого операторы отдают доля своей прибыли на различные рекламные расходы и рекламные кампании. А наиболее действенным тут станут играть именно бездепозитные бонусы казино 2022 с выводом за регистрацию.Бывают ли бездепозитные бонусы без вейджера? Бывают, в у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино.
1×slots casino online регистрация
Вейджер менее х30–35 является применимым. Опытные игроки заявляют, собственно с этим вейджером реально остаться в плюсе, в правильно подойти к выбору игрового аппарата. Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 долларов. Если выдаются фриспины, их число редко выше нескольких десятков бесплатных вращений.Минимального оборота. Этот предел устанавливается вейджером — же игрок не сыграет на установленную необходимую, вывод средств будет недоступен. <a href=http://krasrec.ru/forum/user/208942/>http://krasrec.ru/forum/user/208942/</a> Обычно, бездепозитные призы выдаются под конкретные слоты с фиксированной ставкой, хотя их точно воспрещено применять в игровых автоматах с современным джекпотом. Список игр, каких возможно применять бездеп, Вы найдете в описании акции либо можете уточнить у саппорта заведения.Минимального оборота. Этот предел устанавливается вейджером — пока игрок не сыграет на установленную сумму, вывод средств несомненно недосегаем. скачать 1×slots на андроид мобильная версия При отыгрыше бонусных средств, необходимо учесть срок деянья бонуса и время, которое дается на отыгрыш. По истечению заявленного времени, не отыгранный приз несомненно аннулирован.Каждый геймер должен сначала детально выучить обстоятельства по получению и отыгрышу приглянувшегося подарка. Если всё организует, поспешите забрать бесплатные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо данный начать вращать барабаны топовых слотов.
<b>Смотреть еще похожие новости:</b>
<a href=http://amazon.rx22.ru/memberlist.php?mode=viewprofile&u=255>1×slots актуальное зеркало</a>
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1529#post-45094>1×slots регистрация 1×slotscasino 56 online</a>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=63356&result=reply>казино 1×slots официальный сайт</a>
<a href=https://radios-collector.com/viewtopic.php?f=7&t=95067>1×slots casino online регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Осталось выбрать казино с бонусом за регистрацию и создать профиль. После активации дара выигрыш в от Фортуны и навыков.
#3255 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
win win casino 1×bet скачать приложение <a href=https://sovsekretno.net/>1×bet зеркало</a> 7k casino зеркало 1go casino <a href=https://m.repost.news/>ешь казино</a> рабочее казино пин ап casino pin бесплатно фильм казино casino сегодня 1win casino pin casino зеркало casino 7k рабочее
DiskiPlus казино рулетка DiskiPlus букмекерская контора без <a href=https://www.diskiplus.ru>DiskiPlus фильмы казино рояль</a> DiskiPlus new casino DiskiPlus казино рояль смотреть <a href=https://diskiplus.ru>DiskiPlus 7k casino официальный</a> DiskiPlus приложения букмекерских контор DiskiPlus porno Яна Троянова DiskiPlus porno Юлия Канакина, скелетонистка DiskiPlus сайте букмекерской конторы фонбет DiskiPlus бк букмекерская контора DiskiPlus букмекерская контора на андроид DiskiPlus пин casino
#3256 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало
Когда речь о валютных призах, казино практически устанавливают условия вейджера, коие необходимо выполнить, дабы вывести выигрыш.Если ординарными словами, бездепы – это определённая сумма средств или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно брать презенты. Но есть кое-какие аспекты. Существуют игорные дома, коие перед тем как начислить призы требуют привязать аппарат, дать копии документов. <a href=http://filmkachat.ru/>1хслотс мобильная версия зеркало</a> <a href=https://www.zerohedge.com/user/iEh8TBu81fgq28uxY5HNLOYmYF13>https://www.zerohedge.com/user/iEh8TBu81fgq28uxY5HNLOYmYF13</a> В интернете очень много скриптовых вебсайтов, коие принадлежат мошенникам. Их основная задача – привлечь гэмблеров, пообещав столько великодушные подарки, хотя и крупные выигрыши. Так собственно некоторые веб-сайты предлагают получить за регистрацию и $1 000.Заработать на бездепозитных призах за регистрацию в казино может каждый юзер, достигший совершеннолетия. 1×slots регистрацию более популярный вариант это <a href=http://n27244j0.bget.ru/index.php?subaction=userinfo&user=WilliamDop>http://n27244j0.bget.ru/index.php?subaction=userinfo&user=WilliamDop</a> Автоматическая активация кажется самой удобной, хотя ручной метод содержит перед ней превосходства. Прежде чем использовать вознаграждение от казино, стоит заблаговременно определить, сколько медли потребуется на выполнение всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деянья приза.
1×slot казино зеркало
Существуют казино с бонусом за регистрацию, в которых очень востребованы фриспины в онлайн казино потом регистрации в конкретных играх. Они встречаются числе чаще даровых поощрений либо традиционных бонусов в казино без вложений. Например, игрок регистрирует счет, на кот-ый начисляются бесплатные забавы, приз за регистрацию вид безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса в выигрывает настоящие деньги, коие в последствии возможно удачно исключить из заведения на свою платежную систему. То есть, есть шансы исключить свои без рисков своими деньгами. Регистрация, за геймер получит призы, займет минут, а спасибо данному можно прирастить пять евро поощрений до тысячи и без всяких проблем исключить их.Создание аккаунта. На сайте казино необходимо открыть регистрационную форму и наполнить пустопорожние поля личными данными. Иногда на данном этапе требуется показать только адрес электрической почты и пароль, хотя почаще надобно наполнить анкету персональной информацией (ФИО, дата рождения, место проживания и т.д. ). Нужно свидетельствовать только реальные данные, что впоследствие они будут проверены. сайт 1× slots casino <a href=http://kiopro.ru/support/forum/view_profile.php?UID=76417>http://kiopro.ru/support/forum/view_profile.php?UID=76417</a> Акции, посвященные календарным праздникам, бывают рассчитаны как на всех юзеров, так и на категории: например, подарок на 8 марта девушкам-игрокам или мужчинам на 23 февраля. 1×slos регистрация в 1×slots casino
1×slots casino регистрация 1×slotscasino09k online
Помимо прочего, для вывода средств по бездепу нужно внести на счёт свой первый депозит — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на минимально возможную необходимую, последствии чего вывод средств будет доступен.Так собственно главное различие дара на депозит от бездепа – неотъемлемое пополнение счёта. Вы можете привнести депозит и преумножить стартовый капитал либо отобрать бездеп и всем не придётся рисковать собственными сбережениями. Поспешите выполнить простые притязания, и администрация ресурса начислит щедрое поощрение! <a href=http://demo.qkseo.in/profile.php?id=625629>http://demo.qkseo.in/profile.php?id=625629</a> В интернете большое известных игорных площадок с красивыми акционными предложениями. Однако внимательно читать условия десятков предложений в надоест, ну и время отнимет количество. Поэтому наша команда подготовила ТОП-3 сайтов с лучшими бездепозитными бонусами: казино 1×slots официальный сайт Во время забавы в казино, выигрыши, приобретенные благодаря безвозмездным призовым фондам, суммируются и срабатывают в совместную необходимую для отыгрывания. Однако, в удача улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно допустит вывести финансовые средства. Сумма вывода будет зависимости от лимита, утвержденного именно в данном учреждении. Поэтому, внимательно нужно разбирать верховодила выдачи анлимитных депозитов.При верном раскладе бездепы — это прекрасный способ выступать на средства без растраты собственных средств. Есть несколько советов, следуя коим возможно извлечь максимально полезности из сходственных акций казино. Играть идет только на лицензированных площадках. Скриптовые сайты столько накалывают с бонусными предложениями, хотя и употребляют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах невозможно.
1×slots casino регистрация 1×slots review live
<a href=https://elclasificadomx.com/author/jameslog/>1хслотс официальный сайт зеркало</a> Но эти рамки не смущают числе хайроллеров, потому коэффициенты на слотах дозволяют рассчитывать на крупные выигрыши, ну некоторых автоматах разыгрывается передовой джекпот.Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом прибыли присутствуют на данной странице. Посетитель возможность оценить условия получения и начать выступать на деньги без внесения депозита. При данном игроку важно осознавать, на каких условиях и какими способами он сможет вывести приобретенный выигрыш. Для этого нужно расценить перечень подключенных платежных систем. 1×slots зеркало выигрыши обязательно пройдите регистрацию если <a href=http://zipvr.net/bbs/board.php?bo_table=free&wr_id=631492>http://zipvr.net/bbs/board.php?bo_table=free&wr_id=631492</a>
1×slos регистрация в 1×slots casino
Подтверждение персональной инфы. Все казино просят от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и присутствие у юзера иных аккаунтов (мультиаккаунт запрещен).Фриспины без депо или дополнительные свои посодействуют поближе познакомиться с игровой платформой и её функциями. За счёт даров возможно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради забавы против живых крупье. <a href=https://sites.ipaddress.com/allsoftlab.com/>https://sites.ipaddress.com/allsoftlab.com/</a> Некоторые веб-сайты, этого чем провести регистрацию игроков, предлагают ответить на некоторое базисных вопросов. Цель проведения подобной викторины – выявить случайных людей, которые не имеют представления о покере, и не допустить получения ими призов. Если посетитель теснее играл в казино, то ответить на полтора десятка несложных вопросов несомненно нетрудно. Очень часто, ответы можно найти на официальных веб-сайтах этих учреждений.Верификация необходима для дополнительной безопасности и помочь техподдержке выявить бонусхантеров и мошенников. Кстати, на некоторых платформах выводы крупных сумм доступны лишь после подтверждения личности. 1× slots зеркало Бездепозитный приз казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в данном и заключается главное отличие.Вознаграждения за получение VIP-статуса ? начисляются в программы лояльности при достижении очередного значения или выдаются персонально менеджерами службы поддержки.
<b>Смотреть еще похожие новости:</b>
<a href=https://test.soclanovtsy.ru/topic/26973-chicago-house-samples-loops-sounds/page/171/#comment-62841>скачать 1×slots официальный сайт</a>
<a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=52239>1× slots официальный</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Получив свой презент, Вы можете безвозмездно играть на реальные средства, а выполнив обстоятельства отыгрыша, вывести собственный выигрыш. Многие казино деют в маркетинговых целях бесплатные бонусы исключительно для наших читателей. Чтобы их получить, нужно перейти на игровой сайт по партнерской ссылке с нашего портала.
#3257 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино 1 pin up casino зеркало <a href=https://m.repost.news/>официальные букмекерские конторы скачать</a> порно с Зырянова Анастасия Владимировна казино вход <a href=https://7club7.com/>casino приложения</a> porno Александра Степанова, фигуристка лучшие казино бесплатно 7k casino зеркало на сегодня 7k casino зеркало на сегодня 1×bet слоты зеркала официальных сайтов казино 1×bet зеркало рабочее
DiskiPlus порно с Баталина Ольга Юрьевна DiskiPlus 7k casino официальный сайт <a href=https://www.diskiplus.ru>DiskiPlus порно с Анастасия Потапова, теннисистка</a> DiskiPlus casino рабочее DiskiPlus porno Яна Троянова <a href=https://www.diskiplus.ru/>DiskiPlus скачать букмекерскую контору на андроид</a> DiskiPlus букмекерские конторы pin DiskiPlus порно с Александр Головин (футбол) DiskiPlus Москалькова Татьяна Николаевна порно DiskiPlus леон букмекерская контора DiskiPlus 7k casino зеркало рабочее DiskiPlus порно с Елена Никитина, скелетонистка DiskiPlus порно с Никита Кучеров (хоккей)
#3258 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало
Бездепозитный бонус – это финансовое вознаграждение, коие выдается соучастнику игры в казино, для его вербования и появления заинтригованности. Любой гость, который соответствует условиям выдачи подобного бездепозитного бонуса, может претендовать на получение вышеуказанного приза. Такое одобрение является наиболее действенным методом, дающим вероятность стартовать в игре, не вкладывая собственных материальных средств.Если вы выбрали себе некоторое брендов которые для больше всего полюбились, для неизменной игры! Таких гемблеров казино очень любит и ценит, за частую такие игроки становятся VIP игроками заведения, которым нередко поступают прибыльные предложения повторяющий призов, например же туда заходит и бездепозитные. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slots review live</a> <a href=https://app.pipefy.com/organizations/301582382/interfaces/3cb17c11–0e57–461f-8383-e1e42508bc5a/pages/8c03e96c-e422–45c5–89db-a09ec6070594>https://app.pipefy.com/organizations/301582382/interfaces/3cb17c11–0e57–461f-8383-e1e42508bc5a/pages/8c03e96c-e422–45c5–89db-a09ec6070594</a> Вышеописанная первопричина и считается главным интересным, в которого операторы отдают часть своей прибыли на разные маркетинговые расходы и маркетинговые кампании. А самым действующим здесь будут играть именно бездепозитные бонусы казино 2022 с выводом за регистрацию. 1×slots казино зеркало <a href=https://www.covoiturage.cm/author/nickcollick/>https://www.covoiturage.cm/author/nickcollick/</a> Многие игроки, оценив перечень казино, остаются выступать в нем и далее ? на это и направлено каждое промо. Постоянные посетители заносят депозиты и проделывают ставки, обеспечивая долгосрочную выгода оператора. То есть, казино выдают бездепы новым юзерам для формирования приклнной аудитории.Каждый новичок и профессиональный игрок мечтают быстро стартануть и начать создавать настоящие ставки. Для этого достаточно забрать презент, за кот-ый не нужно выплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email либо телефонный. После сего администрация начисляет щедрое вознаграждение повторяющий даровых вращений или виртуальных кредитов.
1×slots сайт
Во время забавы в казино, выигрыши, полученные спасибо безвозмездным призовым фондам, суммируются и включаются в общую необходимую для отыгрывания. Однако, если удача улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно разрешит исключить денежные средства. Сумма вывода несомненно в от лимита, утвержденного именно в данном учреждении. Поэтому, внимательно нужно разбирать верховодила выдачи безлимитных депо.Также, учите, что бездепозитный приз возможно исключить лишь в случае, когда станут выполнены все условия отыгрыша. 1×slots casino зеркало рабочее Суммы сходственных предложений, в, колеблются от 3-х до 20 долларов, а вейджер на эти свои должен составлять от 30 до шестидесяти раз. Зачастую, наивеличайшая сумма выигрыша тут составит от одной до двух сотен долларов. Если геймер выиграет больше, то все свои все быть списанными до максимально разрешенного выигрыша. Здесь бывает содержание выводить еще несуществующие финансы на свою платежную систему и далее искать заведение с подходящими под данную необходимую релоадом либо бонусом за первое пополнение счета. Есть несколько подвидов бездепозитного вознаграждения, предлагаемого большим количеством заведений. <a href=http://smecenter.utcc.ac.th/index.php/component/users/?option=com_k2&view=itemlist&task=user&id=395233>http://smecenter.utcc.ac.th/index.php/component/users/?option=com_k2&view=itemlist&task=user&id=395233</a> Все благотворительные призы кажутся заманчивыми. Кто же категорически от возможности поиграть в онлайн-казино, не рискуя средствами, хотя получая выигрыши. Но далеко не все бездепозитные бонусы мере привлекательны для рассудительного посетителя.Бездепозитный бонус за регистрацию в казино — это стартовый презент в виде денежного начисления или безвозмездных вращений для свежих игроков заведения, для получения которого не нужно вносить депо. 1×slots официальный сайт мобильная версия скачать Объективные – размер бонуса, коэффициент и обстоятельства вейджера, надобность внесения депо для вывода средств;
1×slots быструю регистрацию а также мгновенное
Также учтите, собственно кое-какие игровые платформы сузивают список государств, коие готовы получить предложенный бездепозитный бонус за регистрацию. К примеру, существуют онлайн-заведения, выдающие сходственные призы лишь обитателям определенных стран. К примеру, интернет казино 777 Оригинал предоставляет бездепозитный бонус только игрокам из России и стран СНГ. Или наоборот, снабжают вознаграждением всех, кроме обитателей некоторых стран (как сего, следует пристально учить список, чтобы потом не появилось практически вопросов и претензий).Срок отыгрыша — это период, который наступает в момент активации приза и заканчивается с его закрытием. Пользователю необходимо уложиться в этот временной зазор, иначе призовые свои аннулируются. Казино устанавливают перечень игр, ставки в засчитываются при расчете отыгранных средств. Если тайтл не входит в данный список, то он может быть недоступен для загрузки период деяния бонусного предложения. <a href=https://zosh1.dv.kr.ua/user/DoctorLazutaon/>https://zosh1.dv.kr.ua/user/DoctorLazutaon/</a> Зарегистрируйтесь. Для регистрации чаще всего достаточно ввести свой номер телефонного и почтовый адрес, последствии чего установить приобретенный код из СМС. Возможно, требуется указать промокод. В правилах промоакции несомненно написано, где его надобно вводить. Иногда это хотелось создавать при регистрации, иногда — теснее последствии творения личного кабинета, на отдельной странице. 1хслотс официальный сайт зеркало Свежий бонус начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в пользовании своими, а в случае отыгрыша оператор может ввести лимитирование на вывод средств.
казино 1×slots
Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, all зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. Демоказино есть практически на любом веб-сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются значительно пореже: там если, тогда, выигрыша и соблюдения критерий акций бездеп можно перевоплотить в реальные средства. Онлайн гемблинг развивается с любым днем все больше и больше, новые бренды создаются не по дням а по часам. Новые онлайн казино проделывают вступительные акции для игроков, для того собственно бы зарекомендовать себя, и тем наиболее предлагают бездепозитные призы за регистрацию, что бы не пропустить такую вероятность — как воспользоваться свежим бездепом, рекомендуем навещать наш сайт как можно чаще, самое лакомое и новые будет добавляться в данном же списке.Подтверждение индивидуальной информации. Все казино просят от посетителя пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у пользователя иных аккаунтов (мультиаккаунт запрещен). 1× slots casino зеркало <a href=http://xn–80adazahw2c9an.xn–p1ai/user/Terryjoype/>http://xn–80adazahw2c9an.xn–p1ai/user/Terryjoype/</a> Выбрать казино с бездепозитным бонусом. У нас на веб-сайте представлен список лучших онлайн казино, которые предлагают своим игрокам великодушные призы за регистрацию.Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном сайте и сделайте вход в индивидуальный офис, дабы отобрать безвозмездные вращения с вейджером х40;
1×slot зеркало
<a href=https://cfmoto-forum.com/index.php?action=profile;u=10672>https://cfmoto-forum.com/index.php?action=profile;u=10672</a> Сразу последствии активации промокода возможно пользоваться подарком. Как теснее упоминалось, бонусы бывают трёх видов – фриспины, кредиты и фриплей-бонусы.Реже призы без депозита начисляются неизменным игрокам. С их подмогою администрация постарается удержать ценных клиентов или желает поблагодарить за лояльность верных посетителей. Но гораздо чаще для подобных целей используются такие акции: 1×slot рабочее зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://kemsrr.forumex.ru/viewtopic.php?f=7&t=3827>1×slots официальный сайт скачать</a>
<a href=https://www.findaspermdonor.com/viewtopic.php?f=25&t=94606>1×slots казино зеркало</a>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/8675/#comment-356798>1×slots рабочее зеркало</a>
<a href=http://powercrop.it/chi-siamo/le-persone?page=94#comment-4714>1×слот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с даровых вращений. Прибыль, которую Вы заработаете на таком бездепе возможно ставить на вывод без какого либо отыгрыша.
#3259 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Афонина Марина Игоревна казино вход официальный сайт <a href=https://vestnik-jurnal.com/>букмекерская контора официальный сайт скачать</a> black russia казино casino актуальное зеркало <a href=https://th-royalgclub.com/>porno Марина Александрова</a> champion casino сайт pin up casino казино рояль смотреть win win casino online casino официальный казино играть порно с Зырянова Анастасия Владимировна
DiskiPlus porno Юлия Пересильд DiskiPlus top casino <a href=https://diskiplus.ru>DiskiPlus казино ставка</a> DiskiPlus casino вход DiskiPlus букмекерская контора <a href=https://diskiplus.ru>DiskiPlus про казино</a> DiskiPlus скачиваемые казино DiskiPlus cat casino DiskiPlus казино в россии DiskiPlus casino скачать DiskiPlus порно с Каролина Севастьянова DiskiPlus скачать сайт букмекерской конторы DiskiPlus официальная казино
#3260 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало
B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpaxРазмер призов почаще всего чисто символический и не превышает 50 руб. Приятно, но осязаемым бустом деле ли будет. <a href=http://filmkachat.ru/>1×slots скачать на айфон</a> <a href=https://plaza.rakuten.co.jp/kalinka0588/diary/202501240000/>https://plaza.rakuten.co.jp/kalinka0588/diary/202501240000/</a> Главным моментом в возникновении этих вознаграждений произведено сомнений, что пустив их в ход, игрок ничем не рискует и в последствии никому ничего не несомненно обязан (не зависимо, получит ли он благодаря призам какой-либо выигрыш или мгновенно спустит все только собственно прибывшие финансы). То есть, казино снабжает игрока вероятностью на дармовой основе выступать во различные слоты причем спонсирует забаву. сайт 1× slots casino <a href=https://rightcoachforme.com/author/jamespossy/>https://rightcoachforme.com/author/jamespossy/</a>
1× slots casino зеркало
Срок отыгрыша — это период, который наступает в момент активации приза и завершается с его закрытием. Пользователю нужно уложиться в этот временной зазор, другому призовые средства аннулируются. Казино устанавливают список игр, ставки в которых засчитываются при расчете отыгранных денег. Если тайтл не входит в данный список, то ему быть недосегаем для загрузки период действия бонусного предложения.Ещё одно распространённое акционное предложение – симпатичный подарок с неблаговидными притязаниями. К образцу, клуб обещает $100 в бездепа, хотя с вейджером х80 либо х100. Отыграть подобный вейджер практически нереально и потому какого-либо концентрироваться на больше занимательных промоакциях. <a href=https://mit-bbs.com/viewtopic.php?t=142076>1 x slots casino</a> 1×slots подтвердит вашу регистрацию если говорить <a href=http://amberholl.ru/bitrix/redirect.php?goto=http://krasnodar.rusquantum.ru/bitrix/redirect.php?goto=http://zaryann.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/VT-HQxz_ouE>http://amberholl.ru/bitrix/redirect.php?goto=http://krasnodar.rusquantum.ru/bitrix/redirect.php?goto=http://zaryann.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/VT-HQxz_ouE</a> Возможность поиграть вспомогательное соревнование (а иногда и некоторое) абсолютно безвозмездно, а выигрыш, в свою очередь, поступает на счёт игрока. 1×slots промокод при регистрации 2025
1×slots официальный сайт, скачать
<a href=http://sr.yedamdental.co.kr/bbs/board.php?bo_table=free&wr_id=928154>http://sr.yedamdental.co.kr/bbs/board.php?bo_table=free&wr_id=928154</a> 1×slots зеркало регистрация
казино 1×slots
Раздача бонусов имеет быть приурочена к разным датам: календарные праздничные, деньки рождения игроков, юбилей открытия казино и т. Д. Подарок выдается в виде денег, фриспинов или баллов для скопления и обмена на услуги оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода этой суммы придется выполнить ряд притязаний.B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax <a href=https://www.allampolgar.hu/member.php?action=profile&uid=5507>1×slot казино зеркало</a> Заполняя данные в личном профиле, указывайте лишь достоверную информацию, например как Вам понадобиться ее подтвердить дальнейшем при выводе денег.На нашем веб-сайте Вы найдете список своевременных новых бездепозитных бонусов в казино 2022 года. Также, есть количество эксклюзивных предложений, которые доступны только посетителям нашего сайта последствии регистрации по нашей ссылке либо активации особого промокода. казино 1×slots официальный сайт <a href=http://shinyoungwood.co.kr/bbs/board.php?bo_table=free&wr_id=1019641>http://shinyoungwood.co.kr/bbs/board.php?bo_table=free&wr_id=1019641</a> Баланс игрока дополняется на подобающую сумму. К ней применяется вейджер, указанный в правилах промоакции. Вывести выигрыш возможно будет последствии того, как пользователь сделает требуемый размер ставок из собственных средств. В редких случаях бездеп работает в формате Free Play. На счет пользователя зачисляется крупная сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по завершении этого периода сумма на счету будет превышать изначальную, то разницу возможно будет исключить или использовать для дальнейших ставок.Главным моментом в возникновении данных вознаграждений произведено в, собственно пустив их в ход, игры ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он спасибо призам какой-либо выигрыш либо мгновенно спустит все только что прибывшие деньги). То есть, казино снабжает игрока вероятностью на дармовой базе играть во различные слоты даже спонсирует забаву.
рабочее зеркало 1×slots
На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не можете активировать и получить бездепозитный бонус.Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке адепты онлайн-казино публикуют актуальную информацию о not the slightest deposit bonuses прочих предложениях. <a href=http://2345eny.com/home.php?mod=space&uid=713777>http://2345eny.com/home.php?mod=space&uid=713777</a> казино 1× slots официальный сайт При правильном раскладе бездепы — это отличный метод играть на средства без траты личных средств. Есть несколько советов, следуя коим можно извлечь максимально полезности из подобных промоакций казино. Играть по лишь на лицензированных площадках. Скриптовые веб-сайты не обманывают с бонусными предложениями, но и используют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах невозможно.
<b>Смотреть еще похожие новости:</b>
<a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=7523&TITLE_SEO=7523-preobrazovatel-interfeysov-usb-rs485&MID=458888&result=reply#message458888>1×slots регистрация на 1хслотс</a>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=153652>1×slot рабочее зеркало</a>
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=559879>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для выбора азартного заведения Вы сможете воспользоваться перечнем наших казино с бонусами за регистрацию. На нашем веб-сайте мы опубликовали перечень бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, собственно доля бонусов эксклюзивные и доступны лишь для посетителей нашего сайта по-специальному промо-коду либо по уникальной ссылке. Кроме как, для каждого приза мы подготовили доскональный обозрение, в Вы узнаете как получить и отыграть поощрение и как исключить свой выигрыш с бездепа. Акции, посвященные календарным праздникам, посещают рассчитаны как на всех юзеров, так и на категории: к, презент на 8 марта девушкам-игрокам или мужикам на 23 февраля.
#3261 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пин casino букмекерская контора вход <a href=https://rumafia.news/>рейтинг казино</a> человек казино pin casino <a href=https://slon-ru.com/>суть казино</a> pin up букмекерская контора porno Александра Степанова, фигуристка casino сегодня Елена Лядова casino x casino вход яндекс казино
DiskiPlus порно с Ирина Сидоркова DiskiPlus промокод 1×bet <a href=https://diskiplus.ru>DiskiPlus казино рояль</a> DiskiPlus букмекерские контора ап DiskiPlus порно с Елена Никитина, скелетонистка <a href=https://www.diskiplus.ru>DiskiPlus букмекерская контора мостбет</a> казино DiskiPlus букмекерскую контору пин DiskiPlus порно с Александр Головин (футбол) DiskiPlus Преподобная Надежда Александровна порно DiskiPlus сайт 1×bet слоты DiskiPlus пинап казино DiskiPlus 1×bet скачать приложение
#3262 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало подтвердит вашу регистрацию если говорить
Когда речь идет о получении бездепозитных бонусов в казино, начала направьте на следующие условия:Превышение наибольшей ставки при отыгрыше. Система автоматически не предупреждает о превышении ставки, поэтому о нарушении правил игрок возможность разузнать уже в подачи запроса на вывод средств. <a href=http://filmkachat.ru/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, the decision зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.Благодаря программе преданности от игорного заведения, можно брать неплохой старт и без добавочных инвестициям запустить видеослоты. Кроме такого, возможно рассчитывать на реальную удачу и получить, без инвестиции личных денег, великой выигрыш. <a href=https://www.sitejabber.com/reviews/playhouse.com.ua>https://www.sitejabber.com/reviews/playhouse.com.ua</a> Нет. Для получения бездепозитного приза в казино необходима обязательная регистрация на сайте. Играть в слоты безвозмездно и без регистрации возможно только в демо режиме. 1×slots зеркало этих способов предполагает регистрацию <a href=https://sparkitupforums.net/User-Patrickwhift>https://sparkitupforums.net/User-Patrickwhift</a>
1×slots регистрация на официальном сайте
рабочее зеркало 1хслотс <a href=https://wlppr.net/user/Arnoldtob/>https://wlppr.net/user/Arnoldtob/</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots Онлайн-казино кропотливо продумывают бонусные условия, которые необходимо изучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и другие ограничения.
1×slots рабочее зеркало на сегодня
Но не стоит размышлять, собственно снабжая пользователей этими призами, казино занимается спонсированием. Ведь объемы вознаграждений, в основном, не большие (средним размером от 5 до 20 $). И на эти свои налагаются конкретные условия и лимитирования, неотклонимые к исполненью игрока, случае в последствии он желает получить все средства выигранные деньги.Однако далеко не все ресурсы предлагают своим посетителям бездепозитные призы за регистрацию в казино. В большинстве случаев учтено поощрение на первый депо в объеме 100–200%. Это замечательная возможность преувеличить банкролл, увеличить время, проведённое за игрой и шансы сорвать крупный куш. Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, solid зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.Шаг 4. Активация. Внимательно выучите условия, информацию по ограничениям и сроке деяния бонусного предложения. Разобравшись с правилами, можно активировать приз в личном офисе (от ? с использованием промокода) или по запросу в саппорт. <a href=https://correspondent.in.ua/user/DoctorLazutapr/>https://correspondent.in.ua/user/DoctorLazutapr/</a> При регистрации следует свидетельствовать лишь достоверную информацию. Когда учетная запись будет активна, появится доступ в Личный кабинет. В нем можно выбрать денежную, ввести промокод и узнать доскональные правила получения и отыгрыша бездепа. Краткая информация об акции нередко находится именно на регистрационной форме. 1×slots акции
1×slots регистрация на сайте 1×slots ru com
Бездепы с безвозмездными вращениями деют юзерам право вертеть барабаны игровых автоматов без снятия средств со счета. За любой раунд выплачивает казино. Число спинов ограничено и редко превышает сотку. Если промоакция содержит большое безвозмездных игр, их начисление возможность быть разбито на несколько дней.Похожим образом трудится 3-ий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя или в связи с получения им VIP-статуса. Подарок предоставляется в обращения в поддержку и проверки. 1хслотс 1хслотс регистрация перейти на 1×slots <a href=http://yunduost.com/home.php?mod=space&uid=20033>http://yunduost.com/home.php?mod=space&uid=20033</a>
1 хслот регистрация в 1×slots casino
Высокая конкурентность в разделе азартных игр мотивирует операторов привлекать клиентов разнородными промоакциями. Благодаря этому у посетителей появляется вероятность получить бонусы в казино за регистрацию без депо. Воспользоваться таким предложением возможно, минуя функцию внесения средств на игровой счет, просто активировав аккаунт на веб-сайте. Наш гид по бездепам поможет избрать самую симпатичную бонусную программу, узнать управляла получения такого гонорары и распорядиться им с максимальной выгодой.Популярность интернет казино растёт и всё больше юзеров начинают интерес азартными забавами. Бездепозитные бонусы 2022 года, это уникальные презенты за регистрацию. С их поддержкою свежие игроки могут получить безвозмездные вращения либо деньги на баланс за одну регистрацию. С выходом игорных заведений в онлайне, бездепозитные призы стали знаменитейшим методом привлечения игроков. Подобные акции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о коих мы расскажем. Наш вебсайт собрал лучшие предложения из интернета на 2022 год. Воспользуйтесь хоть даром и можете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша необходимо выполнить обстоятельства. В бонусную программку множества операторов входят систематические бездепы. Это пожизненные промоакции, поощряющие интенсивных постоянных игроков. Популярный формат — раздача фриспинов по конкретным денькам недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депо в мена на накопленные баллы преданности. <a href=https://halqym.kz/user/ForsedropOl/>https://halqym.kz/user/ForsedropOl/</a> В каждом казино с бездепозитным призом предусмотрены вейджеровые условия. Это один-единственный «подводный камень», который стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, нужно сделать определённое количество ставок. Чем круче бонус, что, этим сложнее выполнить обстоятельства, и напротив. 1× слот зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://uyghuryol.com/forum/viewtopic.php?f=8&t=258921>1×slots подтвердит вашу регистрацию если говорить</a>
<a href=http://vn-info.net/user/Josephkam/>1×slots регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Превышение максимальной ставки при отыгрыше. Система механически не предостерегает о превышении ставки, поэтому о несоблюдении правил игрок возможность разузнать теснее после подачи запроса на вывод средств.
#3263 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino приложения casino на телефон <a href=https://vestnik-jurnal.com/>водка казино</a> 1×bet скачать бесплатно Елизавета Боярская <a href=https://krtka.info/>казино</a> порно с Бондаренко Анастасия Борисовна порно с Алина Загитова порно с Петр Ян (ММА) pin casino порно с Александр Большунов (лыжные гонки) порно с Зырянова Анастасия Владимировна porno Марина Александрова
DiskiPlus up casino зеркало DiskiPlus сколько казино <a href=https://www.diskiplus.ru>DiskiPlus скачать букмекерскую контору</a> DiskiPlus porno Дарья Мороз DiskiPlus порно с Евгения Медведева, фигуристка <a href=https://diskiplus.ru>DiskiPlus лучшие казино бесплатно</a> DiskiPlus зеркала официальных сайтов казино DiskiPlus Крючкова Полина Викторовна порно DiskiPlus 1×slots casino DiskiPlus pin up букмекерская контора DiskiPlus казино смотреть DiskiPlus порно с Дарья Клишина, легкоатлетка DiskiPlus 1×bet
#3264 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало
Но есть игорные заведения, которые готовы просто например жертвовать средства на забаву. Для этого достаточно создать профиль. Чтобы вывести свой выигрыш, для сначала необходимо выполнить условия отыгрыша, обозначенные в критериях получения бездепозитного депозита. <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino 56 online</a> Для выбора азартного заведения Вы сможете воспользоваться перечнем наших казино с бонусами за регистрацию. На нашем веб-сайте мы выпустили перечень бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, собственно часть бонусов неповторимые и доступны лишь для посетителей нашего сайта по-специальному промо-коду или по оригинальной ссылке. Кроме такого, для каждого приза мы подготовили подробный обзор, каком Вы узнаете как получить и отыграть поощрение и как вывести собственный выигрыш с бездепа. <a href=https://forum.gazeta.pl/forum/w,678,178514327,178514327,Skup_aut_za_gotowke_Krakow_najlepsze_oferty.html>https://forum.gazeta.pl/forum/w,678,178514327,178514327,Skup_aut_za_gotowke_Krakow_najlepsze_oferty.html</a> Представленные на данной страничке наихорошие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, в гости Casino.ru шансы сортировать перечень по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д.Риск-игра по одинаковым шансам – Также казино может запрещать скорпулезно условия по отыгрышу за раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких иных играх. 1хслот 1хслотс регистрация перейти на 1×slots <a href=http://velosky.ru/bitrix/rk.php?goto=http://valles.ru/bitrix/redirect.php?goto=http://aviaterra.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/9h0KBieyxWY>http://velosky.ru/bitrix/rk.php?goto=http://valles.ru/bitrix/redirect.php?goto=http://aviaterra.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/9h0KBieyxWY</a> Все бесплатные призы кажутся соблазнительными. Кто же откажется от возможности поиграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далековато не все бездепозитные призы в привлекательны для рассудительного клиента.Наиболее известные гонорары между гэмблеров – бездепозитные бонусы казино. Это не изумительно, так возможно получить безвозмездные вращения или виртуальные кредиты, и при этом не придётся пополнять счёт, рисковать личностными деньгами. Удастся насладиться разнообразными весельями причем выиграть крупную сумму, избегая серьёзного риска.
скачать 1×slots на андроид мобильная версия
Самый распространённый из подобных бонусов, окончательно же, бездеп на денек рождения посетителя — приз вид фиксированной суммы или фриспинов поступает на счёт игрока, а воспользоваться им возможно на установленного периода времени.Зарегистрироваться в казино по особой ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефона и электронную почту). Для подтверждения номера телефона нужно в собственном профиле указать собственный номер и надавить кнопку „Подтвердить номер телефона“, дальше Вы получите sms-сообщение с кодом, который необходимо ввести в подходящее поле. Для подтверждения электронной почты, перебежать по активной ссылке в послании от казино. рабочее зеркало 1×slots <a href=http://cvpvm09.ru/user/Kennethbix/>http://cvpvm09.ru/user/Kennethbix/</a> Онлайн-казино тщательно продумывают бонусные обстоятельства, коие нужно выучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша прочие лимитирования. 1×slots официальный сайт мобильная версия скачать У каждого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано смогли выполнить их, мы дадим некоторое советов. Если система начислила небольшую необходимую, надо делать немалые ставки – остановитесь на 10–30 центах. Как лишь сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте играть. В неприятном случае чем приглядеться к другому автомату.Для казино, работающих интернет, бездепозитные бонусы необходимы для привлечения свежих клиентов. Предложение сыграть на слотах без надобности внесения реальных средств — работающий метод для повышения интереса к компании. После отыгрыша бездепа великоват шанс, собственно игроку понравится и он продолжит выступать в казино, только сейчас теснее на собственные средства.
1×slots зеркало рабочее на сегодня
Акции, приуроченные к календарным праздничным, посещают рассчитаны как на всех юзеров, например и на категории: примеру, презент на 8 марта девушкам-игрокам либо мужикам на 23 февраля.При небольшой сумме приза рекомендуется выступать по низким ставкам, а применять наибольшие никакого только в случае, случае вейджер очень великий, а время на отыгрыш крепко ограничено. Если вы выбираете испытанное лицензионное интернет казино и выполните все обстоятельства получения бездепозитного приза, трудностей с получением подарка у Вас не возникнет.Частенько новички не знают, как активировать подарки либо вывести первый выигрыш. Для подобных случаев наша команда обрисовала основные определения – собственно такое фриспины, вейджер, как его отыграть, зачем необходимо протекать верификацию. <a href=http://cloudscapehill.com/user/frankcoock/?um_action=edit>http://cloudscapehill.com/user/frankcoock/?um_action=edit</a> Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную процедуру активации приза без депо. Внимательно прочтите до конца. Многие новички делают ошибки на этапе регистрации и потому не получить подарок. рабочее зеркало 1×slots Третитй бездепозитный бонус за регистрацию – денежные свои. К раскаянью, начислить рубли или баксы способны лишь известные и пользующиеся клубы. С их подмогою вас насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком.
1×slots casino online регистрация
Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала прыткие выводы. Фишка выплат том,, собственно достаточно избрать платёжный инструмент и показать необходимую. В большинстве случаев деньги зачисляются на электрические кошельки на 15 минут, а на банковские карты – 1–3 трудящихся денька. Составленный знатоками Casino.ru список онлайн-казино с бездепозитным призом дозволяет игрокам сопоставить спецпредложения разных операторов.Вы не в коем случае ни не рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный бонус, по мимо практической игры на бездепозитные призы, у Вас есть шанс выучить игровые автоматы, выучится регулировать менять ставки и полосы, исследовать бонусные игры и их выигрышные композиции, ну в конце концов просто зарядится кучей впечатлений! Ведь вы будите выступать на бонусные средства, коие возможно отыграть и исключить, не просто на демо счет, что, этим самым адреналин в крови еще повысится а пульс забьется с нередким ритмом! 1×slots официальный сайт, скачать <a href=http://yglobal.kr/bbs/board.php?bo_table=free&wr_id=12961>http://yglobal.kr/bbs/board.php?bo_table=free&wr_id=12961</a> Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, так как Вам придется ее подтвердить в будущем при выводе средств.На благотворительные призы онлайн-казино практически всегда распространяется ограничения по стране проживания посетителей. Даже случае для разрешается открывать счет и играть на деньги в заведении, это еще не означают, что для доступны not the slightest deposit bonuses.
1×slots официальный сайт скачать
Бездепозитные призы за регистрацию в игровых автоматах для владельцев онлайн-казино являются долею маркетинговой кампании, направленной на повышение аудитории сайта. Так они продвигают средства бренды и завлекают новых посетителей.Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депо имеет выделяться до 30 дней. Существуют казино с призом за регистрацию, в довольно знамениты фриспины в онлайн казино потом регистрации в конкретных играх. Они встречаются в почаще бесплатных поощрений либо традиционных бонусов в казино без вложений. Например, игрок регистрирует счет, на который начисляются бесплатные игры, приз за регистрацию в виде даровых фрспинов, вращения в игровом автомате. Во время игрового процесса игры выигрывает истинные средства, которые в последствии можно удачно вывести из заведения на свою платежную систему. То есть, все шансы исключить свои без рисков своими деньгами. Регистрация, за которую игрок получит призы, займет пару минут, а благодаря данному возможно увеличить пять евро поощрений до тысячи и без всяких проблем вывести их. <a href=https://www.meiyingge8.com/space-uid-551126.html>https://www.meiyingge8.com/space-uid-551126.html</a> 1хслотс казино зеркало Вейджер не более х30–35 считается приемлемым. Опытные игроки заявляют, что с таким вейджером реально остаться в плюсе, если верно подойти к выбору игрового аппарата.Бывают ли бездепозитные призы без вейджера? Бывают, в у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино.
<b>Смотреть еще похожие новости:</b>
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=577073>1×slots зеркало видели такую регистрацию на</a>
<a href=https://www.katzenforum.at/forum/media/users/jamesagema.16012/>1×slots зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Казино выводит средства только на что, эту платежную систему, с котрой был сделан депо. То есть, для вывода бездепозитного бонуса, Вам поначалу нужно пополнить счет. В некоторых клубах узкий список способов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с этих платежных методов, которые доступны для вывода. Бонус без депо за регистрацию в казино (бездепозитный бонус) – это денежный презент от клуба, который начисляется на акк игрока последствии регистрации в казино. Кроме сотворения учетной записи, для получения бездепа, очень нередко требуется ещё и доказать контактные данные игрока и/или активировать особый промо-код.
#3265 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино зеркало сегодня казино ли <a href=https://rucriminal.info/>порно с Никита Кучеров (хоккей)</a> букмекерская контора фонбет официальный букмекерская контора леонов <a href=https://slon-ru.com/>1×bet официальный сайт 1×bet xyz</a> 1×bet официальный xbet букмекерская контора на андроид сайт казино зеркало казино вход 1×bet 1хбет про казино автомат казино
DiskiPlus часы казино DiskiPlus лучшие букмекерские конторы <a href=https://www.diskiplus.ru/>DiskiPlus pin up casino пин ап</a> DiskiPlus 1go casino казино <a href=https://diskiplus.ru>DiskiPlus porno Александра Степанова, фигуристка</a> DiskiPlus casino сегодня DiskiPlus скачать 1×bet DiskiPlus casino бездепозитный DiskiPlus 1×bet скачать приложение на андроид DiskiPlus лучшие букмекерские конторы DiskiPlus 7k casino DiskiPlus скачать букмекерскую контору
#3266 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
гта казино казино 1 <a href=https://slon-ru.com/>сайты казино</a> порно с Илюшникова Татьяна Александровна казино пин <a href=https://7club7.com/>порно с Александр Головин (футбол)</a> бесплатно играем казино лучшие бесплатные онлайн казино kent casino казино ли Светлана Ходченкова казино фильм онлайн casino вход
DiskiPlus порно с Александр Большунов (лыжные гонки) DiskiPlus порно с Евгений Малкин (хоккей) <a href=https://www.diskiplus.ru>DiskiPlus яндекс казино</a> DiskiPlus ставки на спорт букмекерские конторы DiskiPlus порно с Евгения Медведева <a href=https://diskiplus.ru>DiskiPlus porno Нина Пирогова, хоккеистка</a> DiskiPlus 1×bet зеркало рабочее на сегодня DiskiPlus 7k casino официальный сайт DiskiPlus casino бездепозитный DiskiPlus casino ru DiskiPlus почему казино DiskiPlus букмекерская контора леонов DiskiPlus ев казино
#3267 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация то дальше необходимо пройти
Поспешите арестовать бездепозитные призы за регистрацию в казино из представленного перечня. Все платформы столько водят законную работа, хотя и порадуют добросовестными плодами игры, высокой отдачей, прыткими выплатами. <a href=http://filmkachat.ru/>1×slots сайт зеркало</a> Прибывшие на акк деньги бездепозитные призы предназначаются, в, только для свежеиспеченных юзеров, которые раньше не имели собственного аккаунта в данном казино. Исходя из этого, в ранее у игрока был сделан депо, то, по всей вероятности, у него больше не несомненно способности рассчитывать на получение такого приза в определенном заведении.Также, ситуации нужно доказать собственный номер аппарата, результата код, полученный в смс-сообщении от клуба установить в особое фон в собственном кабинете игрока. <a href=https://app.planable.io/review/yzJzBgxH_Ikg>https://app.planable.io/review/yzJzBgxH_Ikg</a> Зачастую бездепозитные призы казино для игры предлагаются различными заведениями азартных игр виде рекламных акций или в целях вербования к себе новых игроков. Для бездепозитных бонусов в казино 2022 геймеру не пополнять счет до этапа вывода желанных средств. 1×slots на любой вкус как пройти регистрацию <a href=https://www.empowher.com/users/glavdorogadv2106>https://www.empowher.com/users/glavdorogadv2106</a> При регистрации по указывать только достоверную информацию. Когда учетная запись будет активна, замечен доступ в Личный кабинет. В нем возможно избрать денежную, ввести промокод и узнать подробные верховодила получения и отыгрыша бездепа. Краткая информация об акции часто находится непосредственно на регистрационной форме.Также учтите, что кое-какие игровые платформы сужают список стран, которые способны получить предложенный бездепозитный бонус за регистрацию. К примеру, существуют онлайн-заведения, выдающие похожие призы лишь жителям определенных государств. К образцу, онлайн казино 777 Оригинал дает бездепозитный приз только игрокам из России и стран СНГ. Или напротив, снабжают вознаграждением всех, считая жителей некоторых государств (как этого, следует внимательно учить перечень, дабы потом не появилось практически вопросов и претензий).
1хслотс казино зеркало
На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не сможете активировать и получить бездепозитный бонус. <a href=http://weeklywars.de/memberlist.php?mode=viewprofile&u=860>1×slots зеркало проходить регистрацию это отличный вариант</a> 1×slot официальный сайт В некоторых интернет казино для получения бездепозитных призов не достаточно просто зарегистрироваться на сайте клуба и доказать свои контактные данные. Дополнительно потребуется активация промокода.Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, solid зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. <a href=https://www.levasche.it/shop/ashleytak/>https://www.levasche.it/shop/ashleytak/</a> Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных ситуаций с казино, когда в отыгрыша бездепа для не дадут исключить крупную необходимую выигрыша. 1 x slots Еще одно условие касается объемов ставки. Операторы устанавливают максимальную необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, выбранной в Личном кабинете. При превышении лимита есть риск потерять бонуса. Существующие лимитирования относятся и к конкретным обликам ставок. Например, играя в рулетку, клиент возможность столкнуться с запретом назначать фишки на шансы.Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, например как Вам понадобиться ее доказать в при выводе денег.
casino 1×slot
Зарегистрироваться в казино по специальной ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефона и электрическую почту). Для доказательства номера телефонного нужно в собственном профиле показать собственный номер и нажать кнопку „Подтвердить номер телефона“, дальше Вы получите sms-сообщение с кодом, кот-ый необходимо установить в подходящее поле. Для доказательства электрической почты, перебежать по интенсивной ссылке в послании от казино. <a href=https://finbi.ru/user/Oscarzex/>https://finbi.ru/user/Oscarzex/</a> 1×slots бонус за регистрацию Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного бонуса достаточно пополнения баланса и подтверждения личности. В других же клубах, необходимо количество один прокрутить свой депозит.Большинство клубов привлекают внимание геймеров за счёт разнородных презентов. На 1 сайтах возможно получить виртуальные кредиты, которые откроют доступ ко всему софту. На других же, администрация предлагает благотворительные вращения для запуска лучших интернет слотов. Несмотря на различные промоакции, стоит выделить самые главные.
1×slots актуальное зеркало
Фриспины начисляются по конкретной ставке. После их активации игроку нужно запустить разъем и увериться, собственно в нем показываются бесплатные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода в отыгрыша ориентируется оператором и редко превышает 5 000 руб.Возможность поиграть дополнительное соревнование (а времени и некоторое) абсолютно даром, а выигрыш, же, поступает на счёт игрока. 1×slots casino регистрация на сайте <a href=https://trentonebwo76542.blognody.com/30443956/deepnude-ai-navigating-the-controversial-landscape-of-image-manipulation-technology>https://trentonebwo76542.blognody.com/30443956/deepnude-ai-navigating-the-controversial-landscape-of-image-manipulation-technology</a> Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке необходимо пополнить счет в казино. Для депозитных бонусов, эта процедура не нужна, так как депозит теснее сделан.
1×slots зеркало регистрация в 1×slots casino
Для получения бонуса нужно ознакомиться с программкой преданности казино и устроить ставки на необходимую, необходимую для перехода на грядущий степень.У любой игры средства требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система засчитает каждую ставку. В рулетке и покере сделать это намного сложнее. Именно поэтому например главно внимательно читать условия получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой игре, то новенькие попросту «спустят приз на ветер». <a href=https://technique-tp.com/forum/memberlist.php?mode=viewprofile&u=1876>https://technique-tp.com/forum/memberlist.php?mode=viewprofile&u=1876</a> Когда идет о получении бездепозитных бонусов в казино, для обратите внимание на следующие обстоятельства:Кешбэк-бонус представляет собой возврат фиксированного процента от ставки если, тогда, поражения либо же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не превышает 10%. 1×slots официальный сайт зеркало рабочее
<b>Смотреть еще похожие новости:</b>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=182469>casino 1×slot</a>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5026/#comment-604506>1×slots рабочее зеркало</a>
<a href=https://forum.vn.ua/showthread.php?p=3277404#post3277404>1×slots подтвердит вашу регистрацию если говорить</a>
<a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=890794#pid890794>1×slots сайт</a>
<a href=https://g2clubs.com/healthy-workout/google/#comment-30815>1×slots регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Однако далеко не все ресурсы предлагают своим посетителям бездепозитные призы за регистрацию в казино. В большинстве случаев учтено поощрение на 1-ый депозит в размере 100–200%. Это отличная вероятность преувеличить банкролл, прирастить время, проведённое за забавой и шансы сорвать крупный куш. Чтоб получить крупный выигрыш, подбирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, коие доступны по условиям отыгрыша.
#3268 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet официальный скачать порно с Илюшникова Татьяна Александровна <a href=https://th-royalgclub.com/>pin up casino пин ап</a> casino зеркало сайта vodka casino <a href=https://th-royalgclub.com/>какие казино</a> официальные букмекерские конторы скачать приложения букмекерских контор casino зеркало сегодня букмекерская контора официальный сайт скачать bitz casino казино сочи казино фильм
DiskiPlus Шевцова Татьяна Викторовна порно DiskiPlus сайте букмекерской конторы фонбет <a href=https://www.diskiplus.ru/>DiskiPlus 7k casino зеркало рабочее</a> DiskiPlus pin up букмекерская контора DiskiPlus casino играть <a href=https://www.diskiplus.ru>DiskiPlus porno Нина Пирогова, хоккеистка</a> DiskiPlus симулятор казино DiskiPlus Петрова Ольга Викторовна порно DiskiPlus порно с Виктория Синицина, фигуристка DiskiPlus порно с Анастасия Потапова, теннисистка DiskiPlus win win casino DiskiPlus Комарова Наталья Владимировна порно DiskiPlus online casino
#3269 Charlesgunnyhttp://filmkachat.ru
1х слот 1хслотс регистрация перейти на 1×slots
Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки имеют запросить дополнительные документы или инициировать куцее общение по Skype. <a href=http://filmkachat.ru/>1×slots зеркало подтвердит вашу регистрацию если говорить</a> Некоторые казино все предлагать посетителям бездепы за подтверждение номера или почты или репост на страницу в социальных сетях.Большинство интернет-казино из нашего топ-10 готовы повеселить вас эксклюзивными промоакциями. Читайте о них в обзорах и на форуме. <a href=https://www.billetweb.fr/professional-3d-rendering-company-architectural-visualization-1>https://www.billetweb.fr/professional-3d-rendering-company-architectural-visualization-1</a> Для верификации номера телефона, в собственном профиле изберите опцию „Подтвердить номер телефона“ и введите в отвечающее фон код, приобретенный в sms-сообщении.Для подтверждения электрической почты, просто перейдите по интенсивной ссылке в письме, приобретенном от игрового заведения. 1×slots регистрацию процедура займет всего лишь <a href=http://mpsamp.com/bbs/board.php?bo_table=free&wr_id=147157>http://mpsamp.com/bbs/board.php?bo_table=free&wr_id=147157</a> Подтверждение индивидуальной информации. Все казино требуют от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у пользователя иных аккаунтов (мультиаккаунт запрещен).Oтыгpaть бонус с обозначенным вeйджepом, чтобы нужно сдeлaть cтaвoк нa cумму, превосходящую объем приза в некоторое раз.
казино 1×slots официальный сайт
рабочее зеркало 1×slots Так что можете отважно региться без всяких размышлений. Фортуна сегодня наверняка на вашей стороне. Не побаивайтесь, как последствие какого либо ущерба Вам совершенно не грозит. С такими призами как без пополнения, Вы остаетесь только в плюсе, но не как не в минусе.Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке адепты онлайн-казино публикуют важную информацию о not the slightest down payment bonuses и других услугах. <a href=http://www.aytastarim.net/user/Renaldodoodo/>http://www.aytastarim.net/user/Renaldodoodo/</a> 1×slots регистрация Ещё одно распространённое акционное предложение – симпатичный подарок с неблаговидными притязаниями. К примеру, клуб сулит $100 виде бездепа, хотя с вейджером х80 либо х100. Отыграть подобный вейджер фактически невозможно и поэтому другого, как концентрироваться на более интересных промоакциях.
1×slots рабочее зеркало
Этот тип бонуса будет добавлен на Ваш аккаунт в удачной процедуры регистрации с использованием номера телефонного. Если выбрать иной метод создания учетной записи, бездеп не будет добавлен на Ваш аккаунт. <a href=http://fonogramm.pro/user/PorsedropKt/>http://fonogramm.pro/user/PorsedropKt/</a> Поспешите отобрать бездепозитные призы за регистрацию в казино из представленного списка. Все платформы столько ведут законную работа, но и обрадуют добросовестными плодами игры, высочайшей отдачей, быстрыми выплатами.Некоторые клубы автоматически начисляют приз на акк игрока в исполнения условий получения, но случаются ситуации, когда приз надо(надобно) активировать игроку самому. Есть количество способов активации бонуса: 1×slots официальный сайт, скачать Бездепозитный приз за регистрацию в казино с выводом средств в 2022 году — Наш ресурс дает игрокам актуальную информацию о самых свежих, великодушных и проверенных призах в онлайн казино, коие обновляются каждый денек.
1×slots зеркало на сегодня
Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном призе, то в первую очередь обратите внимание на велечину вейджера и срок, кот-ый дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть приз и вывести выигрыш. Представленные на данной страничке наилучшие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, каком посетители Casino.ru имеют сортировать перечень по нескольким аспектам: по сумме, вейджеру, максимальной сумме вывода и т.д. 1×slots зеркало регистрация то дальше необходимо пройти <a href=https://mc-pe.net/user/HenryGer/>https://mc-pe.net/user/HenryGer/</a>
1×slots рабочее зеркало
Иногда операторы требуют внесение малого депозита перед выводом для верификации платежного инструмента. В некоторых казино этот депо того предстоит отыграть.Когда речь идет о получении бездепозитных призов в казино, для внимание на следующие обстоятельства: В каждом казино с бездепозитным бонусом учтены вейджеровые условия. Это один-единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) сделать определённое число ставок. Чем круче приз, тем труднее выполнить обстоятельства, и наоборот. <a href=http://www.qazaqpen-club.kz/en/user/Ashleyphict/>http://www.qazaqpen-club.kz/en/user/Ashleyphict/</a> 1×slots регистрация на 1хслотс Не желайте поиграть в азартные игры, не рискуя своими деньгами, но получая в все выплаты? Подобную возможность деют все наихорошие порталы с азартными увеселениями. В их числе большое добросовестных и надежных интернет-казино на русском языке. Они привлекают новых юзеров разными поощрительными мероприятиями, включая бездепозитные, либо благотворительные призы.
<b>Смотреть еще похожие новости:</b>
<a href=https://masstr.net/showthread.php?tid=167925>1×slots скачать на айфон</a>
<a href=https://redfist.de/RF-Online-Testforum/viewtopic.php?f=60&t=79691>скачать 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В некоторых онлайн казино для получения бездепозитных призов не достаточно просто зарегистрироваться на веб-сайте клуба и доказать средства контактные данные. Дополнительно потребуется активация промокода. Раздача бонусов может быть приурочена к различным датам: календарные дни, дни рождения игроков, юбилей открытия казино и т. Д. Подарок выдается в виде средств, фриспинов или баллов для скопления и обмена на услуги оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода данной суммы придется выполнить ряд требований.
#3270 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
яндекс игры казино порно с Евгения Медведева, фигуристка <a href=https://rucriminal.info/>порно с Дарья Касаткина (теннис)</a> порно с Александр Большунов (лыжные гонки) букмекерская контора леонов <a href=https://slon-ru.com/>7k casino зеркало</a> букмекерская контора фонбет скачиваемые казино porno Марина Александрова скачать букмекерскую контору Хорова Наталья Александровна порно casino автомат 1×bet xbet
DiskiPlus cometa casino DiskiPlus 1×bet скачать приложение <a href=https://www.diskiplus.ru>DiskiPlus балтбет букмекерская контора</a> DiskiPlus порно с Зырянова Анастасия Владимировна DiskiPlus букмекерская контора на андроид <a href=https://diskiplus.ru>DiskiPlus 1×bet на сегодня</a> DiskiPlus ставки на спорт букмекерские конторы DiskiPlus Ирина Горбачева DiskiPlus Елена Лядова DiskiPlus up букмекерская контора DiskiPlus Крючкова Полина Викторовна порно DiskiPlus порно с Антропова Валентина Викторовна DiskiPlus порно с Анна Калинская (теннис)
#3271 Charlesgunnyhttp://filmkachat.ru
1×slots акции
Также есть онлайн-платформы азартных игр, коие используют раздачу бездепозитных призов в особые даты (как для казино, например и для игрока). Помимо этого, действующие игроки кроме имеют возможность получить похожие бонусы за свою работа (к примеру, за увеличения значения либо за схожие достижения). <a href=http://filmkachat.ru/>1×slots быструю регистрацию а также мгновенное</a> Казино выводит деньги лишь на ту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного приза, Вам сначала необходимо восполнить счет. В неких клубах ограниченный перечень методов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет именно с данных платежных способов, коие доступны для вывода.Можно ли зарабатывать на бездепозитных призах? Это не работа, здесь как повезет, в в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, тогда возможно именовать везением, и добавочной добавкой к вашему бютжету. <a href=https://app.pipefy.com/organizations/301582382/interfaces/c3143e94–2d04–4bd5-bf17-eaffb143e229/pages/b36ea4a6–5780–4cd9–8934–7fdd3367feb4>https://app.pipefy.com/organizations/301582382/interfaces/c3143e94–2d04–4bd5-bf17-eaffb143e229/pages/b36ea4a6–5780–4cd9–8934–7fdd3367feb4</a> Ознакомьтесь с нашим списком наихороших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего списка и получите бездеп незамедлительно. Хватайте превосходнейшие безвозмездные предложения ниже и выигрывайте большие деньги, не рискуя!Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы быстро получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, замечена реальный шанс победу! 1×slots зеркало регистрацию более популярный вариант это <a href=https://narodovmnogo-omsk.ru/forum/user/5899/>https://narodovmnogo-omsk.ru/forum/user/5899/</a> Для вывода средств бонус нужно будет отыграть законам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариациями отыгрыша бездепозитного приза до его получения, чтобы избежать конфликтных обстановок.В бонусную программку многих операторов входят регулярные бездепы. Это пожизненные промоакции, поощряющие активных неизменных игроков. Популярный формат — раздача фриспинов по конкретным дням недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают постоянные призы без депозита в размен на накопленные баллы преданности.
1х слотс зеркало регистрация в 1×slots casino
1хслот скачать <a href=http://mineralgroup.ru/index.php?subaction=userinfo&user=debonairoutfit9>http://mineralgroup.ru/index.php?subaction=userinfo&user=debonairoutfit9</a> 1×slots зеркало регистрация
1х слотс зеркало регистрация в 1×slots casino
<a href=http://zanasite.free.fr/laripostedumardi/doku.php?id=%D0%B3%D0%BB%D0%B0%D0%B2%D0%BD%D0%B0%D1%8F%20%D0%B4%D0%BE%D1%80%D0%BE%D0%B3%D0%B0%20%D1%81%D0%B0%D0%B9%D1%82>http://zanasite.free.fr/laripostedumardi/doku.php?id=%D0%B3%D0%BB%D0%B0%D0%B2%D0%BD%D0%B0%D1%8F%20%D0%B4%D0%BE%D1%80%D0%BE%D0%B3%D0%B0%20%D1%81%D0%B0%D0%B9%D1%82</a> Для получения бонуса надо(надобно) ознакомиться с программой лояльности казино и устроить ставки на необходимую, необходимую для перехода на следующий уровень.Только выполнив все условия отыгрыша и дождавшись завершения ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить средства средства. зеркло казино 1×slots У нас на сайте Вы найдете список призов без депо в проверенных казино и подробную информацию то как их получить и использовать.Большинство клубов завлекают внимание геймеров за счёт различных презентов. На 1 сайтах возможно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает благотворительные вращения для пуска топовых онлайн слотов. Несмотря на разные акции, стоит выделить самые главные.
1хслотс казино зеркало
Подобные бонусы без депозита предоставляются на более выгодных критериях. Зачастую они крупнее, а обстоятельства отыгрыша наименее жесткие.Получить приветственный бонус могут лишь новые клиенты онлайн-казино. Способы описаны в условиях промоакции любого легального казино, почаще всего это: <a href=http://evtrucksforum.com/viewtopic.php?p=922762#p922762>зеркала 1×slots</a> Каждый новичок и профессиональный игрок грезят быстро стартануть и начать создавать настоящие ставки. Для этого довольно арестовать презент, за кот-ый надо платить. В зависимости от игровой платформы, нужно сделать профиль, привязать email либо телефонный. После сего администрация начисляет щедрое вознаграждение повторяющий даровых вращений либо виртуальных кредитов.Перечисленные выше главные характеристики сопровождают фактически любой приз и считаются стереотипными для бездепозитных бонусных начислений в казино. При игре на бонусные свои воспрещается выступать в игровые автоматы с современным джекпотом и игры из радела live casino. Кроме такого, кое-какие казино дают бездеп на раз или некоторое определенных слотов, и в иных забавах Вы не можете на них выступать.Если вы опытный игрок, вы должны знать, что приз без депозита – редчайшая находка. Тем не, мы в исследуем интернет, дабы отыскать вам превосходнейшие бездепозитные предложения. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=https://forum.bandariklan.com/member.php?action=profile&uid=8090>https://forum.bandariklan.com/member.php?action=profile&uid=8090</a>
1×slots регистрация на официальном сайте
<a href=http://filmsgood.ru/user/ForsedropKt/>http://filmsgood.ru/user/ForsedropKt/</a> Но есть азартные заведения, готовые просто так вручить деньги на забаву. Для этого довольно сделать профиль. Чтобы вывести выигрыш, сперва нужно выполнить вейджеровые условия, прописанные в условиях получения бездепа. 1×slots официальный сайт скачать
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/6307–1×slots-zerkalo-vyigryshi-obyazatelno-projdite-registratsiyu-esli#6316>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a>
<a href=https://astraclub.ru/members/353998-Jameswow>1хслотс зеркало на сегодня</a>
<a href=http://moneysweet.listbb.ru/viewtopic.php?f=2&t=5399>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но не мыслить, что снабжая пользователей такими бонусами, казино занимается спонсированием. Ведь размеры вознаграждений, главном, не немалые (средним размером от 5 до 20 долларов). И на эти свои налагаются определенные обстоятельства и лимитирования, обязательные к исполненью игрока, если в последствии он желает получить все средства выигранные финансы. Иногда операторы просят внесение малого депозита перед выводом для верификации платежного прибора. В неких казино этот депозит того светит отыграть.
#3272 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало рабочее на сегодня реального казино <a href=https://rumafia.news/>бесплатные букмекерские конторы</a> porno Александр Соболев (футбол) казино играть <a href=https://specreporter.com/>казино рублях</a> 7k casino приложения букмекерских контор black russia казино porno Виктория Баркова, легкоатлетка Кузнецова Анна Юрьевна порно гама казино скачать сайт букмекерской конторы
DiskiPlus kent casino DiskiPlus бесплатно фильм казино <a href=https://www.diskiplus.ru/>DiskiPlus Фастова Елена Владимировна порно</a> DiskiPlus букмекерская контора вход DiskiPlus яндекс казино <a href=https://www.diskiplus.ru/>DiskiPlus cometa casino</a> DiskiPlus пари букмекерская контора DiskiPlus Светлана Ходченкова DiskiPlus 1×bet скачать приложение DiskiPlus порно с Афонина Марина Игоревна DiskiPlus pin up casino официальный DiskiPlus спорт букмекерская контора DiskiPlus кент казино
#3273 Charlesgunnyhttp://filmkachat.ru
1хслот скачать
Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slots review live</a> Чтобы бездеп не был начислен на Ваш аккаунт, Вам не активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт автоматически, а Вы не планируете его использовать, обратитесь в службу поддержки с пожеланием отменить бездепозитный бонус.Можно ли в одном интернет казино получить больше 1-го приза за регистрацию? Нет, так как в любом интернет казино есть верховодила, к которым надо(надобно) держаться, не делать два аккаута для получения бонусов, по несомненно блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, приз за регистрацию выдаеться один раз 1 лицу. <a href=https://help.bemob.com/discuss/67878be6520d61001e6ecef5>https://help.bemob.com/discuss/67878be6520d61001e6ecef5</a> Необходимость отыгрыша. Вейджер ситуации повыше, чем для призов за депо. И пока свои не отыграны, исключить их невозможно.С такими ординарными советами каждое казино с призом за регистрацию способно принести в разы больше выгоды и пользы. 1×slots официальный сайт зеркало <a href=https://52day0.top/home.php?mod=space&uid=4643&do=profile>https://52day0.top/home.php?mod=space&uid=4643&do=profile</a> Мы делаем акцент на ключевых положениях правил, рассказываем о территориальных ограничениях и кратко информируем о иных промоакциях обсуждаемого казино.Иногда виде бездепа, казино дарует наименьший приз (до 50 рублей), из-за которого не заморачиваться.
1× slots регистрация в 1×slots casino
<a href=https://radios-collector.com/viewtopic.php?f=7&t=75462>1×slots актуальное зеркало</a> 1× slots зеркало <a href=https://xebecar.com/author/jameswof/>https://xebecar.com/author/jameswof/</a> Зарегистрироваться в казино по специальной ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефонного и электрическую почту). Для подтверждения номера телефонного нужно в собственном профиле показать собственный номер и надавить кнопку „Подтвердить номер аппарата“, далее Вы получите sms-сообщение с кодом, который необходимо ввести в отвечающее фон. Для подтверждения электрической почты, перебежать по интенсивной ссылке в письме от казино.Приглашаем делиться мнениями о бонусах. Это поможет иным юзерам выбирать наиболее прибыльные предложения. 1хслотс официальный сайт зеркало Главное превосходство спинов – возможность выучить разные слоты. Также получится насладиться бонусными раундами, испытать фортуну в риск-туре и преумножить выигрыш за счёт особенных символов. Однако столько игровой процесс заслуживает внимание, так другого сосредоточиться на реальном выигрыше.
онлайн казино 1×slots
<a href=https://youlangue.lu/blog/index.php?entryid=229760>https://youlangue.lu/blog/index.php?entryid=229760</a> Как прочие промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такового предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает свежих гостей и позволяет им составить впечатление о функционале, не рискуя вескими суммами.Зарегистрируйтесь. Для регистрации почаще всего довольно установить собственный номер телефонного и почтовый адрес, последствии чего установить приобретенный код из СМС. Возможно, требуется показать промокод. В правилах промоакции будет написано, где его хотелось вводить. Иногда это надо делать при регистрации, времени — теснее в творенья личного офиса, на отдельной странице. 1хслот скачать Бонус без депозита за регистрацию в казино (бездепозитный приз) – это денежный подарок от клуба, который начисляется на аккаунт игрока последствии регистрации в казино. Кроме сотворения учетной записи, для получения бездепа, очень часто требуется ещё и доказать контактные данные игрока и/или активировать специальный промо-код.Акционные предложения от казино существуют в различных форматах. Часто призы даются в мена на депозит. Игрок вносит платеж и получает средства, благотворительные вращения прочие поощрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — картина бонуса, кот-ый гарантирован за исполнение конкретных деяний на сайте:
1×slots регистрация на 1хслотс
Бездепозитный бонус предоставляется новому игроку за конкретные действия. Часто презент вид денег либо фриспинов выдается за регистрацию, благодаря чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.Раздача призов имеет быть приурочена к разным датам: календарные праздничные, деньки рождения игроков, юбилей открытия казино и т. Д. Подарок выдается повторяющий денег, фриспинов либо баллов для накопления и размена на услуги оператора. Если юзер получает выигрыш, средства начисляются на его счет. Для вывода этой суммы придется выполнить ряд требований. Бонус за регистрацию в казино без депо с выводом денег нужно отыграть. Зачастую для отыгрыша имеет потребоваться устроить ставки на необходимую, в количество 10-ов один превосходящую необходимую приза либо выигрыша.Шаг 5. Использование и отыгрыш. Бездеп обязан быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. 1х слот 1хслотс регистрация перейти на 1×slots <a href=https://www.xn–72c9aa5escud2b.com/webboard/index.php?action=profile;u=2207473>https://www.xn–72c9aa5escud2b.com/webboard/index.php?action=profile;u=2207473</a> Если при регистрации показать промокод, можно гарантировано получить бонус. Где брать ваучер? Посетите тематические блоги или форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В заключительнее время игорные жилища начали афишироваться в кинокартинах и сериалах. Присмотритесь и скорее заметите промокод, кот-ый принесёт 500 или 1 000 бонусных руб.
1×slots зеркало рабочее на сегодня
Подобные бонусы без депозита предоставляются на более выгодных условиях. Зачастую они покрупнее, а условия отыгрыша менее жесткие. С этими ординарными советами любое казино с призом за регистрацию способно принести в разы больше выгоды и выгоды. <a href=http://tujuoutdoor.com/home.php?mod=space&uid=118431&do=profile&from=space>http://tujuoutdoor.com/home.php?mod=space&uid=118431&do=profile&from=space</a> Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают бонус по государствам. Вплоть до того, что клуб возможность на игроков из Вашей государства, а бездеп не давать. x1 slots регистрация в 1×slots casino Наличие у игрока второго аккаунта. Запрещено создавать количество профилей для многократного получения бездепов.Не стоит сразу же отрицаться от приветственных подарков в подобных казино. Администрация готова начислить средства или фриспины, но предварительно работники должны убедиться, собственно вы не аферист. Дело что, собственно развелось слишком большое охотников за бонусами. Они выучились обманывать систему и наваривать солидные суммы денег.
<b>Смотреть еще похожие новости:</b>
<a href=http://djdrewski.co.uk/lfsbangers/viewtopic.php?f=32&t=44637>1×slots официальный зеркало</a>
<a href=https://rolivka.online/forum/showthread.php?tid=35076>1хслот скачать</a>
<a href=https://test.soclanovtsy.ru/topic/26973-chicago-house-samples-loops-sounds/page/84/#comment-52641>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если вы новичок в и только попали в неизведанную вами район азарта — с помощью услуг как бездепозитные призы без пополнения.
#3274 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать букмекерскую контору на андроид вывод казино <a href=https://specreporter.com/>1×bet приложение</a> казино в россии казино фильм онлайн <a href=https://www.ossetia.tv/>Анна Михалкова</a> Приезжева Екатерина Геннадьевна порно сайт букмекерской конторы скачиваемые казино Любимова Ольга Борисовна порно casino betting Яровая Ирина Анатольевна порно up casino скачать
DiskiPlus макао казино DiskiPlus порно с Дронова Александра Викторовна <a href=https://diskiplus.ru/>DiskiPlus лучшие казино бесплатно</a> DiskiPlus самое казино DiskiPlus казино можно <a href=https://diskiplus.ru/>DiskiPlus Приезжева Екатерина Геннадьевна порно</a> DiskiPlus сайт pin up casino DiskiPlus 1×bet DiskiPlus яндекс игры казино DiskiPlus Манилова Алла Юрьевна порно DiskiPlus пина casino DiskiPlus демо казино DiskiPlus мелбет букмекерская контора
#3275 Charlesgunnyhttp://filmkachat.ru
1×slots бездепозитный бонус за регистрацию
Третитй бездепозитный бонус за регистрацию – денежные средства. К огорчению, начислить рубли либо баксы способны лишь известные и знаменитые клубы. С их поддержкой у насладиться любой доступной игрой – автоматом, рулеткой, кено, блэкджеком. <a href=http://filmkachat.ru/>сайт 1× slots casino</a> После требуется привнести идентификационный платёж. Это стращает новичков больше всего. Нужно сделать минимальный депозит в 100–500 рублей. Таким образом служба защищенности увериться что, нет, собственно платёжный метод принадлежит Вам. Данная процедура важна для обеспечения защищенности игровых счетов. Пример, Ваш акк взломают и выведут средства на свой кошелёк. Будет крайне досадно. Поэтому верификация платёжной системы, это важный момент.Процесс подтверждения личности может взятьвдолг(взятьвзаймы) от одного дня до недели. Если заказчик допустил какую-либо ошибку при заполнении паспортных данных, то ему стопам адресоваться с проблемой в службу онлайн-казино. <a href=https://try.powermapper.com/Demo/Report/d583f782-e322–4020–93b7–2710deb0a9d9>https://try.powermapper.com/Demo/Report/d583f782-e322–4020–93b7–2710deb0a9d9</a> В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с бесплатных вращений. Прибыль, коию Вы заработаете на этом бездепе возможно ставить на вывод без какого или отыгрыша.В интернете большое известных игорных площадок с красивыми акционными предложениями. Однако внимательно читать условия десятков предложений в надоест, ну и время отнимет количество. Поэтому наша команда подготовила ТОП-3 сайтов с лучшими бездепозитными бонусами: 1×slots промокод при регистрации <a href=https://broncos.com/forums/index.php?/user/19013-michaelchafe/>https://broncos.com/forums/index.php?/user/19013-michaelchafe/</a> А ознакомиться с свежими онлайн казино, Вы сможете за счет бонусов с выводом выгоды, коие Вы можете получить без депо.Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми промоакциями. Читайте о них в обзорах и на форуме.
1хслот скачать
Шаг 4. Активация. Внимательно выучите условия, информацию по лимитированиям и сроке действия бонусного предложения. Разобравшись с правилами, можно активировать бонус в собственном кабинете (иногда ? с внедрением промокода) либо по запросу в саппорт.Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации презента необходимо доказать электрическую почту и привязать аппарат; <a href=http://palais.beesims.com/phpbb/viewtopic.php?f=2&t=290537>1×slots официальный сайт, скачать</a> 1×slot зеркало <a href=https://coub.com/609227ac7c54e0866992>https://coub.com/609227ac7c54e0866992</a> 1×slots официальный сайт скачать Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро либо 20 долларов. Если выдаются фриспины, их количество изредка превышает нескольких 10-ов даровых вращений.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Вышеописанная первопричина и является главным интересным, следствии которого операторы отдают доля своей прибыли на разные маркетинговые расходы и рекламные кампании. А самым действенным тут будут играть непосредственно бездепозитные призы казино 2022 с выводом за регистрацию. <a href=http://t1mro.ru/index.php?subaction=userinfo&user=incompetentjail>http://t1mro.ru/index.php?subaction=userinfo&user=incompetentjail</a> Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. x1 slots 1хслотс регистрация перейти на 1×slots В зависимости от интернет заведения каждый из их возможность вас предложить как бездепозитные деньги, например и бездепозитные фриспины, которые после успешной регистрации рухнут для на ваш игровой баланс.
1×slots рабочее зеркало на сегодня
Размер призов почаще всего чисто условный и не превышает 50 руб. Приятно, но ощутимым бустом в игре навряд будет. <a href=https://tabsgame.ru/user/Jamesbes/>1хслотс мобильная версия зеркало</a> Бoльшинcтвo азартных заведений выдвигают приблизительно однообразные, схожие условия и требования, коие необходимо выполнить, дабы получить бездепозитный бонус за регистрацию. Все их возможно соединить в раз перечень:Условия все разниться приятель от друга. Но такой бонус может быть использован лишь для игрового процесса – полученные на счет деньги до как, как будут отыграны, исключить невозможно. Автоматическая активация первый самой комфортной, но ручной способ содержит перед ней преимущества. Прежде чем использовать вознаграждение от казино, стоит заранее найти, сколько времени требуется на исполнение всех условий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала действия бонуса. 1×слот регистрация в 1×slots casino <a href=http://cloudscapehill.com/user/scottbeews/?um_action=edit>http://cloudscapehill.com/user/scottbeews/?um_action=edit</a>
1×slots регистрация то дальше необходимо пройти
При игре на бонусные средства воспрещается играть в игровые автоматы с современным джекпотом и игры из радела live casino. Кроме как, некоторые казино дают бездеп на один либо несколько определенных слотов, и в иных забавах Вы не сможете на их выступать. <a href=http://fze.ohosure.org/bbs/home.php?mod=space&uid=95548>http://fze.ohosure.org/bbs/home.php?mod=space&uid=95548</a> 1хслотс рабочее зеркало Например, игрок получил 500 руб. При разработке аккаунта и должен отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 рублей, потребуется сделать 875 спинов для полного отыгрыша.
<b>Смотреть еще похожие новости:</b>
<a href=http://vn-info.net/user/Josephkam/>1хслотс мобильная версия зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Такой казино бонус без депо за регистрацию выдается игроку на час и активно употребляется данное предложение с 2017 года. Это словно какая-то маскировка поощрения под бездепозитный. Суть всего этого сводится к тому, собственно игроку на час выдается, например, 1000 долларов, а реклама утверждает про, собственно каждой выигрыш возможно будет дальнейшем забыть при себя. Но в играющий всерьез отнесется к данному предложению, то он просто растеряет время. Ведь игроку надо(надобно) будет выступать не в аккаунте, а в тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (в всей тыс. ) в правила вступят конкретные обстоятельства, где будет сказано, собственно максимальной суммой победы имеет быть лишь двести $ и средства можно применять только виде бонуса на 1-ый лепта с вейджером 25 от суммы гонорары плюс сам депозит. По результату выйдет, что игрок выигрывал себя 200% приз с вейджером на конкретную сумму. Короче говоря, это все не вашего медли.
#3276 СenterEmpathy_raphttps://empathycenter.ru/
Всем привет! Сеть клиник доказательной психиатрии «Эмпатия». Вашей проблемой занимаются сертифицированные специалисты с богатым опытом работы в сфере психологической помощи и охраны психического здоровья. Каждый человек уникален, как и его история. Именно поэтому Вас окружает самое чуткое и деликатное отношение к Вашей проблеме. Эмпатия — помогаем, понимаем, принимаем! <a href=https://empathycenter.ru/preparations/a/afobazol/>афобазол отзывы</a> Если Сеть клиник доказательной психиатрии или Центр ментального здоровья в Москве и Реутове, то это в Эмпатия Центр https://empathycenter.ru/ . Консультации как очно в Москве и Реутове, так и онлайн по всей России. Консультируйтесь и звоните по бесплатному номеру 8–800–775–07–12. Всем пока!
#3277 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора скачать приложение бывшие казино <a href=https://sovsekretno.net/>яндекс казино</a> лучшие букмекерские конторы casino официальный сайт <a href=https://sovsekretno.net/>1×bet официальный сайт 1×bet xyz</a> пин ап букмекерская контора порно с Анна Калинская (теннис) 7k casino бонус букмекерские конторы pin porno Екатерина Ефременкова, шорт-трекистка казино зеркало сегодня 1×bet зеркало xbet xyz
DiskiPlus Попова Анна Юрьевна порно казино <a href=https://www.diskiplus.ru>DiskiPlus играющие казино</a> DiskiPlus официальные букмекерские конторы DiskiPlus казино рублях <a href=https://diskiplus.ru/>DiskiPlus ramenbet casino</a> DiskiPlus скачать 1×bet на андроид DiskiPlus Приезжева Екатерина Геннадьевна порно DiskiPlus казино сегодня DiskiPlus пин ап casino pin up top DiskiPlus скачать букмекерскую контору DiskiPlus официальные зеркала казино DiskiPlus официальная казино
#3278 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало сайта
Подтверждение индивидуальной информации. Все казино требуют от клиента пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и наличие у пользователя других аккаунтов (мультиаккаунт запрещен). <a href=http://filmkachat.ru/>1хслот официальный сайт зеркало</a> Максимальная ставка ? устанавливается в валюте счета и ограничивает размер ставки за раз спин. В случае ее превышения приз может быть аннулирован. Также в правилах имеет находиться запрет на размещение ставок конкретного вида, к, по одинаковым шансам в рулетке (словами, на чет или нечет, красноватое либо черное и т.д. ). <a href=https://www.webwiki.de/playhouse.com.ua>https://www.webwiki.de/playhouse.com.ua</a> 1×slots официальный зеркало рабочее <a href=http://www.gencotyre.com/comerblog/member.asp?action=view&memName=ancientalloy79>http://www.gencotyre.com/comerblog/member.asp?action=view&memName=ancientalloy79</a>
1×slots регистрацию процедура займет всего лишь
<a href=https://minecraft.ru.net/user/Manuelsoarl/>1хслотс казино зеркало</a> 1×slots рабочее зеркало Призовые начисления без депо все предоставляться для роли в турнирах интернет казино. Потратить перечисленные деньги можно исключительно масштабах этой акции. Условия их проведения себе ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться этим предложением, чем изучить его управляла. <a href=https://maps.google.com.sb/url?q=https://doctorlazuta.by/>https://maps.google.com.sb/url?q=https://doctorlazuta.by/</a> При регистрации что, нет либо ином онлайн игральном заведении — для дается раз шанс испытывать свою фортуну не внося свои монеты. Замечу собственно эту поощрительную предложение предоставляют не все интернет игровые площадки, а только великодушная половина из них. Которые мы подготовили для Вас в нашем перечне.Реже призы без депозита начисляются неизменным игрокам. С их подмогою администрация старается удержать ценных посетителей или вожделеет поблагодарить за лояльность правильных гостей. Но гораздо чаще для сходственных целей используются эти акции: 1×slots рабочее зеркало
1×slots зеркало регистрация в 1×slots casino
В перечне притязаний к отыгрышу нередко наличествуют лимиты на ставки при этой на личные деньги. Так, если отыграть нужно 30 000 рублей, а максимальная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам действия промоакции. <a href=http://www.okaywan.com/home.php?mod=space&uid=621339>http://www.okaywan.com/home.php?mod=space&uid=621339</a> Во время забавы в казино, выигрыши, полученные благодаря бесплатным призовым фондам, суммируются и включаются в совместную сумму для отыгрывания. Однако, в удача улыбнется и выйдет отыграть все призы, игровое заведение гарантированно допустит исключить денежные средства. Сумма вывода будет находиться от лимита, утвержденного непосредственно в этом учреждении. Поэтому, внимательно надо(надобно) разбирать верховодила выдачи анлимитных депо. 1×slots регистрация 1×slots review live
рабочее зеркало 1хслотс
Фриплей-бонусы. Бонусы за безвозмездную забаву есть только в некоторых клубах. Они зачисляются незамедлительно в творенья профиля и действуют непродолжительное время. Если у вас нет медли израсходовать свои, они просто завершатся. Что касается медли, в большинстве случаев бонусы срабатывают на 1-го часа. Законодательство, регулирующее азартные забавы в разных странах, влияет на возможности операторов. В результате пользователи из отдельных регионов сталкиваются с лимитированиями со стороны казино. Это имеет быть как полный отказ в доступе, так и невозможность загружать игры отдельных производителей. При отыгрыше бонусных средств, нужно учесть срок деяния приза и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный бонус несомненно аннулирован. 1×slots casino регистрация 1×slots review live <a href=https://pyxc.ru/user/Glennkip/>https://pyxc.ru/user/Glennkip/</a> Способы получения бездепа различаются зависимо облика бонуса, который приглянулся игроку. Но вас или надо(надобно) быть зарегистрированным в законном онлайн-казино и доказать свою личность. В общем облике пошаговая аннотация для получения бездепозитного приза смотрится так:
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Для казино, работающих онлайн, бездепозитные призы необходимы для вербования новых клиентов. Предложение сыграть на слотах без надобности внесения настоящих средств — работающий метод для повышения энтузиазма к фирмы. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит играть в казино, только сейчас теснее на собственные деньги.Не хотите поиграть в азартные игры, не рискуя своими деньгами, но получая в все выплаты? Подобную возможность предоставляют почти наилучшие порталы с азартными увеселениями. В их количестве количество честных и надежных интернет-казино на российском языке. Они завлекают свежих юзеров разными поощрительными событиями, включая бездепозитные, либо благотворительные бонусы. При ирге на бонусные свои воспрещается выступать в игровые автоматы с современным джекпотом и игры из радела exist casino. Кроме того, некоторые казино выделяют бездеп на раз либо несколько конкретных слотов, и в других забавах Вы не можете на них играть.Третитй бездепозитный приз за регистрацию – валютные средства. К сожалению, начислить рубли либо баксы готовы лишь известные и знаменитые клубы. С их подмогою вы сможете насладиться любой доступной игрой – автоматом, рулеткой, кено, блэкджеком. <a href=http://russiancomputerservice.ru/index.php?subaction=userinfo&user=colossaldogma19>http://russiancomputerservice.ru/index.php?subaction=userinfo&user=colossaldogma19</a> Бонус начисляется игроку незамедлительно в регистрации и прохождения верификации в казино и не требует от клиента внесения депозита. Как верховодило, объем бонуса в сходственном случае довольно стыдливый, однако позволяет новеньким познакомиться с забавой без риска настоящими деньгами.Прежде всего, не запамятовывайте регулярно заглядывать на страничку обзоров бездепозитных призов. Они шаг за шагом осматривают наиболее интересные предложения основных игорных порталов. 1 х слотс зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.visiteachapada.com/viewtopic.php?f=19&t=3532>1× slots casino официальный сайт</a>
<a href=https://forum.spherecommunity.net/User-JamesLop>1×slots зеркало рабочее на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Такой безвозмездный эквивалент средств зачисляется на профиль пользователя после осуществления требований и предназначаются они только для игрового процесса. Вывод таких вознаграждений возможен только последствии осуществления вейджеровых условий. За счёт спинов получится запустить разные интернет слоты, протестировать стратегии и поднабраться навыка. Фишка том,, что вращения начисляются на лучшие аппараты с уникальными опциями и высокой отдачей. Не забывайте, собственно в каждом акционном предложении учтены специальные притязания – временные лимитирования, наибольший объем ставки, список дешевых игр.
#3279 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают приз по государствам. Вплоть до как, что клуб может брать игроков из Вашей государства, а бездеп мешает. <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> Так что можете смело регистрироваться без всяких размышлений. Фортуна сегодня наверняка на вашей стороне. Не страшитесь, как последствие какого или убытка Вам абсолютно не угрожает. С этими призами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе. <a href=https://swaay.com/u/comcgifurniture/about/>https://swaay.com/u/comcgifurniture/about/</a> Разные казино имеют собственные верховодила по выведению выигрыша. Для бездепозитных бонусов принимаются достаточно высокие притязания. Часто онлайн-казино советуют отыграть бонусное поощрение до 100 один в игровых автоматах. Например, в игрок получил бесплатно десять $, то необходимо будет отыграть их, поставив одну тыщу спинов по одному баксу любой. Стоит обозначить(означить), что не все казино дают возможность играть на призы и не во всех увеселительных заведениях идентичные верховодила для отыгрывания. Некоторые казино воспрещают выступать на бонусы в блекджек или ограничивают ставки до 5 %, что существенно увеличивает в 10-ки раз число нужных игр. 1х слотс зеркало регистрация в 1×slots casino <a href=http://j90806hs.bget.ru/user/Travistaree/>http://j90806hs.bget.ru/user/Travistaree/</a>
1хслотс рабочее зеркало
Выбирая бесплатный бонус, внимательно изучайте правила. Убедитесь, собственно вам можно себя роль в акции. Уточните, в каких играх можно скорпулезно условия вейджера. При надобности задавайте вопросы представителям саппорта. скачать 1×slots официальный сайт <a href=https://ruisoon.com/space-uid-39449.html>https://ruisoon.com/space-uid-39449.html</a> 1×slots зеркало быструю регистрацию а также мгновенное Бывают ли бездепозитные бонусы без вейджера? Бывают, случае у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный приз за регистрацию устанавливается вейджер во всех казино.Помните, что всевозможные нарушения правил сведут на нет ваши старания, и вы наверняка останетесь без начисленного вас безвозмездного приза. Всегда изучайте верховодила начисления и условия вейджера. По каким вопросам, на которые вы имеет помощи отыскать ответы, обращайтесь за разъяснениям и саппорт.
1×slots официальный сайт, скачать
Для получения депозитного бонуса нужно пополнить собственный игровой баланс реальными деньгами. Вознаграждение возможно получить либо при внесении первого депозита, или вид фиксированного процента от внесённых средств. Так либо другому, приз поступит на счёт только после пополнения.При регистрации сомнений либо ином онлайн игральном заведении — для дается один шанс испытывать собственную удачу не внося средства монеты. Замечу что эту поощрительную предложение деют не все интернет игровые площадки, а лишь великодушная половина из их. Которые мы подготовили для Вас в нашем списке. При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток.При забаве на бонусные свои воспрещается выступать в игровые автоматы с современным джекпотом и игры из радела exist casino. Кроме такого, кое-какие казино выделяют бездеп на раз либо некоторое конкретных слотов, и в других играх Вы не можете на них выступать. <a href=http://sman1mtp.sch.id/index.php?option=com_comprofiler&task=userProfile&user=2433>http://sman1mtp.sch.id/index.php?option=com_comprofiler&task=userProfile&user=2433</a> Любой выигрыш по ставке повыше установленного лимита несомненно считаться недействительным. То есть ставка не будет засчитана при отыгрыше, ну случае выигрыша его сумма не поступит на счёт клиента — итог игры будет полностью аннулирован. casino 1×slot Доступные игры – В некоторых азартных играх возможно понизить математическое приемущество казино до нескольких десятых процента. В их количестве все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как правило, в таких забавах ставки идут в зачет вейджера не полностью. Например, имеет учитываться только 50%. В неких играх бездепозитные призы вообщем невозможно отыгрывать.
1×slots casino online регистрация
Частенько новички не понимают, как активировать подарки или вывести 1-ый выигрыш. Для сходственных случаев наша команда описала главные термины – собственно это фриспины, вейджер, как его отыграть, для нужно протекать верификацию. Не стоит путать забаву в демо и использование бонусов. В демонстрационном режиме игрок возможность оценить механику слота, сюжет и оформление. Но игра проводится на относительные кредиты, потому отсутствует главное ? ощущение азарта. Активируя промокод или фриспины, заказчик и не тратит свои средства на игровые автоматы, но может сорвать настоящий куш! 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=http://pr.lgubiz.net/bbs/board.php?bo_table=free&wr_id=199960>http://pr.lgubiz.net/bbs/board.php?bo_table=free&wr_id=199960</a>
1×slos регистрация в 1×slots casino
Бонус с зачислением средств на счет выделяет больше свободы поступков. Пользователь сам выбирает, каким образом распорядиться подаренными средствами. Здесь того все работать лимитирования на перечень дешевых игр, хотя обыкновенно эти рамки не например строги, как в рекламную с бесплатными вращениями. <a href=https://www.warshipsfaq.ru/user/Jeffreynip>https://www.warshipsfaq.ru/user/Jeffreynip</a> 1×slots casino online регистрация Частенько новенькие не разумеют, как активировать подарки или исключить 1-ый выигрыш. Для сходственных случаев наша команда описала главные термины – собственно это фриспины, вейджер, как его отыграть, чего необходимо проходить верификацию.
<b>Смотреть еще похожие новости:</b>
<a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=899057>1×slots регистрация 1×slotscasino09k online</a>
<a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1×slots регистрация 1×slots casino c2d ru</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В случае установленного лимита на сумму вывода выигрыша с бездепозитного бонуса, игрок не сможет исключить больше заявленной суммы.
#3280 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора без казино зеркало сегодня <a href=https://vestnik-jurnal.com/>букмекерская контора мостбет</a> cometa casino 1win букмекерская контора <a href=https://slon-ru.com/>порно с Анастасия Потапова, теннисистка</a> букмекерская контора бетсити пин ап casino pin casino официальный сайт официальные сайты казино гта казино казино смотреть сайт казино вход
DiskiPlus слоты казино DiskiPlus букмекерские конторы pin <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet приложение</a> DiskiPlus порно с Петр Ян (ММА) DiskiPlus порно с Артемий Панарин (хоккей) <a href=https://www.diskiplus.ru>DiskiPlus casino pin официальный</a> DiskiPlus винлайн букмекерская контора официальный сайт DiskiPlus лучшая казино DiskiPlus букмекерскую контору пин DiskiPlus букмекерская контора на андроид DiskiPlus casino сайты DiskiPlus porno Илья Ковальчук (хоккей) DiskiPlus Петрова Ольга Викторовна порно
#3281 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
Процесс подтверждения личности может занять от 1-го дня до недели. Если клиент разрешил нибудь оплошность при заполнении паспортных данных, то ему по адресоваться с задачей в службу поддержки онлайн-казино. <a href=http://filmkachat.ru/>1×slots зеркало сайта</a> <a href=https://www.papercall.io/speakers/luxury-real-estate-marketing-ideas>https://www.papercall.io/speakers/luxury-real-estate-marketing-ideas</a> Бездепозитные призы в казино без пополнения 2022 — это определенная сумма денег или gift spins вращения, коие предоставляются первым постояльцам за регистрацию на веб-сайте казино вид бездепозитного бонуса, и выделяет для вероятность за счет казино без пополнения опробовать предложения (игр), с последующей преимуществом, льготой вывода средств при выполнении всех установленных верховодил.Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, чтобы снова получить безвозмездный бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ждет неизбежное наказание. 1×slots сайт <a href=https://stav.goodbb.ru/viewtopic.php?id=9063#p25913>https://stav.goodbb.ru/viewtopic.php?id=9063#p25913</a> Фриспины без депозита или дополнительные свои посодействуют ближе познакомиться с игровой платформой и её функциями. За счёт подарков можно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за игры напротив живых крупье.Бездепозитные призы казино за регистрацию в 2022 году — это вероятность поиграть за счёт заведения. Казино даёт клиенту шанс пользоваться определённой суммой либо числом бесплатных вращений без внесения депозита. Не путайте деморежим с реальной забавой без необходимости внесения депозита.
1×slots рабочее зеркало на сегодня
Зачастую бездепозитные призы казино для забавы предлагаются различными заведениями азартных игр виде маркетинговых промоакций либо в целях вербования к для новых игроков. Для бездепозитных призов в казино 2022 геймеру не пополнять счет до этапа вывода желаемых средств. x1 slots регистрация в 1×slots casino Бывают ли бездепозитные призы без вейджера? Бывают, случае у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный приз за регистрацию устанавливается вейджер во всех казино. <a href=http://www.fiammeblu.it/profile.php?uid=30873>http://www.fiammeblu.it/profile.php?uid=30873</a> 1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, если не хотите стать жертвой мошенников или впустую израсходовать время;Каждая игровая перрон отличается критериями по получению и отыгрышу бездепов. В правилах детально расписаны кратковременные рамки, за которые надо(надобно) прокрутить вейджер. Также не забывайте тему максимальный объем ставки и максимальную необходимую выплаты. С иной стороны, чтобы получить бездепозитные призы казино, достаточно истратить менее 1 минутки. 1 xslots рабочее зеркало Таким образом, заведение пытается продемонстрировать себя своим вероятным геймерам, а такой рекламный ход как казино бонус без депозита за регистрацию завлекает очень большое внимания к игорному заведению и обеспечивает неизменный струю свежих гостей и будущих посетителей игрового онлайн клуба.
1×slots промокод при регистрации 2025
Получать информацию о самых выгодных призах можно без постоянного мониторинга новостей казино. Мы брали эту задачу на себя и постоянно следим за услугами операторов, избирая наихорошие из их. В этом разделе собраны последние бездепы, промокоды к ним и условия их активации. Список промоакций периодически пополняется. В топ вошли самые новые бездепозитные бонусы за регистрацию в казино 2020, временные и закрытые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и другим критериям. Если срок действия промоакции истек, она удаляется из списка. Сроки активации бонуса устанавливаются каждым казино, хотя почаще всего они не превосходят недели с этапа получения. Игроку непременно надо(надобно) использовать бездеп протяжении обозначенного срока, в ином случае приз просто исчезнет. Каждый бонус возможно получить только раз один, поэтому случае не применять бездеп в срок, у игрока не несомненно второго шанса им пользоваться.Как верховодило, при выводе денег, от играющего требуется лишь сделать минимальный лепта чтобы, чтобы, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом индивидуальный счет. <a href=http://forum.informatyk.edu.pl/member.php?action=profile&uid=13964>http://forum.informatyk.edu.pl/member.php?action=profile&uid=13964</a> Допустим, за регистрацию вы возымели бездеп в объеме 2 000 рублей с вейджером х30. В этом случае предстоит сделать ставок, на совместную необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать настоящие деньги. Однако не запамятовывайте, собственно с каждого дара получится вывести определённую необходимую (чаще всего менее $200).Шаг 4. Активация. Внимательно выучите условия, информацию по лимитированиям и сроке действия бонусного предложения. Разобравшись с правилами, можно активировать бонус в собственном кабинете (иногда ? с внедрением промокода) либо по запросу в саппорт. 1× slots официальный Но а в вы уже профи по интернет казино, кликаем на красноватую кнопку «Получить» и Вы автоматически перейдете в онлайн казино;Во всех законных онлайн-казино Беларуси нужно свидетельство паспортных данных для забавы — это заявка правительства государства.
рабочее зеркало 1хслотс
Доступ к дару имеет открываться механически после введения промокода либо обращения в службу поддержки сайта. В первом случае от пользователя не требуется практически поступков. Бездеп с активацией по коду встречается почаще всего. Игроку необходимо установить совокупность символов в графе, которая имеет пребывать в регистрационной форме в Личном кабинете. Для верификации номера телефонного, в собственном профиле выберите опцию „Подтвердить номер телефонного“ и введите в подходящее поле код, полученный в sms-сообщении.Это тоже благотворительные финансы, коие поступают на аккаунты новоиспеченных геймеров в регистрирования. А особенность этих бонусов произведено что, что обретенные финансы обязательно по использовать в продолжении назначенного медли. Перечисленные повыше основные характеристики сочетают фактически любой бонус и являются стереотипными для бездепозитных бонусных начислений в казино.Баланс игрока дополняется на подходящую сумму. К ней используется вейджер, указанный в правилах промоакции. Вывести выигрыш возможно несомненно после такого, как пользователь устроит требуемый объем ставок из собственных средств. В редких случаях бездеп трудится в формате Free Play. На счет юзера зачисляется крупная сумма, и предоставляется маленький срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по окончании сего периода сумма на счету несомненно превышать изначальную, то разность можно будет вывести или применять для последующих ставок. 1×слотс казино <a href=http://lawwang.cn/home.php?mod=space&uid=113558>http://lawwang.cn/home.php?mod=space&uid=113558</a> Бездепозитные бонусы – это исключительно интересная и более многообещающая промоакция интернет-казино. Они в превосходнее фри-спинов, потому собственно выплаты в безвозмездных вращениях не гарантированы, так композиции на барабанах игрового аппарата могут не сложиться.Приветственный бонус без депозита ? презент за регистрацию. Выдается средствами, фриспинами либо баллами. В заключительном случае бонусные баллы применяются для участия в турнирах или размена на реальные средства.
1×slots casino зеркало рабочее
Не желайте сыграть в азартные игры, не рискуя средствами деньгами, но получая в все выплаты? Подобную вероятность предоставляют многие превосходнейшие порталы с азартными весельями. В их количестве много честных и надежных интернет-казино на русском языке. Они завлекают новых юзеров разными поощрительными событиями, включая бездепозитные, либо бесплатные призы.Бонус в казино без депозита имеет различные вариации: может быть приветственный бонус, промоакции в честь каких-либо праздничных или важных дат, бонус за вербование свежих игроков, преданность и получение VIP-статуса. Первый возникающий вопрос, это, зачем выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают свежих игроков. Последним легче начать забаву на деньги с подарка за регистрацию. Им надо пополнять баланс и тратить собственные свои. Новички получают безвозмездные спины или свои на счёт. С их помощью знакомятся с игровым ходом, крутят слоты и проделывают ставки в рулетке.Бесплатный приз – кредиты, которые онлайн-казино начисляет посетителю, не принуждая его пополнять игровой счет. <a href=http://ultfoms.ru/user/GeraldBreaf/>http://ultfoms.ru/user/GeraldBreaf/</a> 1×slots регистрация на сайте 1×slots ru com Постарайтесь отыграть вейджер, дабы была вероятность забыть заявку на выплату. Кстати, на всех веб-сайтах, представленных в перечне, доступны современные платёжные приборы. Вы сможете получить выигрыш на электрической кошелёк, карту, телефонный.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.makinamania.net/index.php?topic=251565.new#new>1×slots рабочее зеркало</a>
<a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=89585>1×slots регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины начисляются по определенной ставке. После их активации игроку необходимо запустить разъем и убедиться, что в нем отображаются благотворительные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода последствии отыгрыша ориентируется оператором и изредка превышает 5 000 руб. B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax
#3282 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино рулетка порно с Елена Никитина, скелетонистка <a href=https://rucriminal.info/>порно с Евгения Медведева, фигуристка</a> букмекерская контора официальный сайт скачать Москалькова Татьяна Николаевна порно <a href=https://th-royalgclub.com/>7k casino бонус</a> порно с Кирьянова Дарья Борисовна казино 5 балтбет букмекерская контора яндекс игры казино 1×bet скачать бесплатно скачать сайт букмекерской конторы сколько казино
DiskiPlus 1×bet зеркало на сегодня DiskiPlus 1×bet скачать приложение <a href=https://diskiplus.ru>DiskiPlus часы казино</a> DiskiPlus лучшие онлайн казино DiskiPlus Нургалиева Эльвира Рамиловна порно <a href=https://diskiplus.ru>DiskiPlus casino online зеркало</a> DiskiPlus букмекерская контора зенит DiskiPlus казино пин DiskiPlus Ходнева Светлана Владимировна порно DiskiPlus пин up casino DiskiPlus слоты казино DiskiPlus скачать букмекерскую контору DiskiPlus порно с Никита Кучеров (хоккей)
#3283 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на 1хслотс
Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам запрещено начислять бонусы посетителям, не имеющим валютных средств на счете. Мы предлагаем осмотреть животрепещущие бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ.Бездепозитные призы казино это финансовая компенсация, предлагаемая юзерам на дармовой основе и возможность выступать в онлайн казино бесплатно. Если сравнивать их с поощрениями за лепта, каких средства выдаются лишь потом начального пополнения счета, то бездепозитные гонорары получаются безвозмездно. То есть, играющий получает возможность делать ставки на уже существующие финансы, которые выдаст заведение, исполняя, при этом, обычные деяния, дабы их извлечь (здесь речь о регистрация, удостоверении личности с внедрением номера телефонного, оформления заказы и т.д. ). <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> 2. Создать новый профиль. Для регистрации нужно заполнить небольшую анкету или зайдите в собственный офис при помощи социальных сетей;Иногда операторы настоятельно внесение малого депо перед выводом для верификации платежного прибора. В некоторых казино этот депозит кроме предстоит отыграть. <a href=https://gmtti.edu/author/Vidikby/>https://gmtti.edu/author/Vidikby/</a> Необходимость отыгрыша. Вейджер в выше, чем для бонусов за депозит. И же средства не отыграны, исключить их невозможно.Частенько новички не понимают, как активировать подарки либо исключить 1-ый выигрыш. Для похожих случаев наша команда описала главные термины – собственно такое фриспины, вейджер, как его отыграть, чего необходимо проходить верификацию. рабочее зеркало 1хслотс <a href=http://foru1f40m.bunbun000.com/bbs/home.php?mod=space&uid=9400323>http://foru1f40m.bunbun000.com/bbs/home.php?mod=space&uid=9400323</a> Если площадка дарит бездеп за регистрацию, то процедура его получения проста. Нужно только ввести аккаунт на веб-сайте и активировать его, подтвердив адресок электронной почты, номер телефона либо другие данные, которые настятельно оператор. Перед данным необходимо убедиться, что юзер располагается на официальном сайте казино, а не на жульнической площадке.
1хслот зеркало сайта
Нет. Казино раздают безвозмездные бонусы за регистрацию, для того, чтобы заказчик возможность ознакомиться с игровым заведением. А чтобы вывести его, нужно выполнить условия отыгрыша.Это также бесплатные деньги, коие поступают на аккаунты новоиспеченных игры последствии регистрирования. А необыкновенность таких призов состоит в том, что обретенные деньги обязательно следует применять в продолжении назначенного времени. <a href=https://bans.org.ua/index.php?topic=133453.new#new>1×slots официальный сайт скачать</a> 1×slots зеркало на сегодня В зависимости от интернет заведения каждый из их имеет для предложить как бездепозитные деньги, например и бездепозитные фриспины, коие после удачной регистрации рухнут вас на ваш игровой баланс. <a href=https://asdmcpe.org/user/Craigflice/>https://asdmcpe.org/user/Craigflice/</a> Для отыгрыша бонуса казино обязует игрока поиграть на сумму, в количество раз превосходящую необходимую полученного приза — здесь выгода фирмы очевидна. 1×slots рабочее зеркало на сегодня
1×slots актуальное зеркало
Также, в нужно подтвердить собственный номер телефона, результата код, полученный в смс-сообщении от клуба установить в специальное фон в собственном кабинете игрока. <a href=https://lorenzodhfz22212.tkzblog.com/30183180/deep-nude-ethical-concerns-and-the-impact-of-ai-on-privacy>https://lorenzodhfz22212.tkzblog.com/30183180/deep-nude-ethical-concerns-and-the-impact-of-ai-on-privacy</a> 1×slots зеркало регистрацию более популярный вариант это Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную функцию активации бонуса без депозита. Внимательно прочтите до конца. Многие новенькие проделывают промахи на этапе регистрации и поэтому не получить подарок.
1×slot зеркало рабочее этих способов предполагает регистрацию
В разделе с призами активировать собственный презент. Найти забавы, для коих предусмотрено одобрение и применять бонус по предназначению. <a href=http://vn-info.net/user/Josephkam/>1×slots регистрацию процедура займет всего лишь</a> Если вы бывалый игрок, вы обязаны аристократия, собственно приз без депозита – редчайшая находка. Тем не, мы неделю исследуем онлайн, дабы найти для вас лучшие бездепозитные предложения. Процесс доказательства личности может взятьвдолг(взятьвзаймы) от одного дня до недели. Если клиент разрешил какую ошибку при заполнении паспортных данных, то ему идет адресоваться с задачей в службу онлайн-казино. 1×slots casino регистрация <a href=https://analsex.tube/user/Robertbob/>https://analsex.tube/user/Robertbob/</a> Чтобы бездеп не был начислен на Ваш акк, Вам надо активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк автоматически, а Вы не планируете его использовать, обратитесь в службу с просьбой отменить бездепозитный бонус.Варианты выигрыша зависимости от Вашей успеха и условий игорного портала. Выше мы сказали, что некоторые бездепозитные призы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются и те, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на средства, можно выиграть невероятные суммы. Сегодняшние игровые автоматы либо видео слоты, как их называют. Могут выдавать солидные умножение от х1.000 и выше. Некоторые множат ставку от х100.000.
1× slots сайт
Перед активацией главно пристально выучить условия акции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, протяжении коих возможно воспользоваться предложением. Если бездеп обхватывает ограниченный перечень игр, рекомендовано разузнать максимальные коэффициенты, уровень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь что, нет случае, если оператор не установил строгие ограничения на максимальную сумму ставки. <a href=http://blog.kickiyangzhang.de/2015/06/newyorkerlikesyou.html>http://blog.kickiyangzhang.de/2015/06/newyorkerlikesyou.html</a> Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих притязаний, считая неотъемлемой верификации. Если на веб-сайте учтена неотъемлемая процедура подтверждения личности, то вывести выигрыш получится только последствии ревизии данных. Приготовьтесь наполнить анкету и выслать в техподдержку документ, подтверждающий лицо. 1×slots зеркало сайта Нет. Казино раздают бесплатные бонусы за регистрацию, чтобы, чтобы, дабы заказчик мог ознакомиться с игровым заведением. А дабы вывести его, необходимо выполнить обстоятельства отыгрыша.
<b>Смотреть еще похожие новости:</b>
<a href=https://mit-bbs.com/viewtopic.php?t=261237>1×slots casino регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Также, учите, собственно бездепозитный бонус возможно вывести только что, нет случае, когда будут выполнены все обстоятельства отыгрыша.
#3284 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало xbet букмекерская контора бесплатно скачать <a href=https://strelochnik.com/>порно с Бондаренко Анастасия Борисовна</a> casino daddy порно с Гатагова Ольга Анатольевна <a href=https://res-publika.com>1×bet слоты 1×bet xyz</a> inform@rucriminal.info порно с Дронова Александра Викторовна Ирина Горбачева pin casino сайт pin up casino 1×bet скачать бесплатно ешь казино
DiskiPlus гта казино DiskiPlus pin up casino зеркало <a href=https://diskiplus.ru/>DiskiPlus 1×bet бесплатно</a> DiskiPlus 1×bet на андроид DiskiPlus casino скачать приложение <a href=https://diskiplus.ru>DiskiPlus Ходнева Светлана Владимировна порно</a> DiskiPlus казино сочи DiskiPlus букмекерская контора без DiskiPlus 1×bet официальный сайт DiskiPlus сайты казино DiskiPlus bitz casino DiskiPlus сайт букмекерской конторы DiskiPlus porno Юлия Канакина
#3285 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Захарова Мария Владимировна 1×bet скачать приложение <a href=https://glvk.guru/>pin casino зеркало</a> казино фильм casino рабочее зеркало <a href=https://www.ossetia.tv/>casino бездепозитный</a> casinos winning как выиграть в казино гама казино порно с Анна Калинская (теннис) бывшие казино бесплатное казино ев казино
DiskiPlus порно с Евгения Медведева DiskiPlus человек казино <a href=https://www.diskiplus.ru/>DiskiPlus рокс казино</a> DiskiPlus макао казино DiskiPlus казино смотреть <a href=https://diskiplus.ru>DiskiPlus Лут Оксана Николаевна порно</a> DiskiPlus porno Мира Андреева (теннис) DiskiPlus порно с Баталина Ольга Юрьевна DiskiPlus букмекерская контора официальный сайт скачать DiskiPlus скачать сайт букмекерской конторы DiskiPlus casino автомат DiskiPlus 1go casino DiskiPlus казино зеркало сегодня
#3286 Charlesgunnyhttp://filmkachat.ru
1х слот 1хслотс регистрация перейти на 1×slots
Мы подготовили перечень, где есть практически животрепещущие и свежие бездепозитные бонусы казино, коие вы можете получить даром. Для наших пользователей есть специальные предложения эксклюзивные бонусы, коие вы нигде не найдете, их мы обозначили специальной красной плашкой «Exclusive». <a href=http://filmkachat.ru/>1×slots быструю регистрацию а также мгновенное</a> <a href=https://www.papercall.io/speakers/shopavto>https://www.papercall.io/speakers/shopavto</a> Наш перечень содержит наилучшие бездепозитные бонусы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по важным параметрам: 1×slots зеркало на сегодня <a href=http://images.google.as/url?sa=t&url=http://lignestbarth.ru/bitrix/redirect.php?goto=http://alensio.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/-YdUMnnuekE>http://images.google.as/url?sa=t&url=http://lignestbarth.ru/bitrix/redirect.php?goto=http://alensio.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/-YdUMnnuekE</a> Подтвердите личность, предоставив оператору казино свои паспортные данные. Инструкции обыкновенно легкие, главное — конкретно им по. Если написано, что «на фото должны быть видны все четыре угла странички паспорта» — устройте именно такое фото.
1×slots casino зеркало рабочее
Бывают ли бездепозитные призы без вейджера? Бывают, если у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный приз за регистрацию устанавливается вейджер во всех казино.Но а случае вы теснее профи по онлайн казино, кликаем на красноватую кнопку «Получить» и Вы механически перейдете в онлайн казино; <a href=https://forum-macan.ru/memberlist.php?mode=viewprofile&u=1736>1×slots рабочее зеркало на сегодня</a> 1×slots сайт <a href=https://biowiki.clinomics.com/index.php?title=фильмы_android>https://biowiki.clinomics.com/index.php?title=фильмы_android</a> Обычно показатель повыше, чем для бонусов на депозит. Не изумляйтесь, если он будет числе х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных стран.Для казино, работающих интернет, бездепозитные призы необходимы для привлечения новых посетителей. Предложение сыграть на слотах без надобности внесения настоящих средств — работающий способ для повышения энтузиазма к компании. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит играть в казино, лишь теперь теснее на собственные средства. 1×slots казино зеркало Чаще всего казино приз за регистрацию без депо даёт возможность запустить любой автомат. Но какого-либо пристально ознакомиться с критериями. Иногда для игры доступны только определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, лучше начать знакомство с миром пыла именно с «одноруких злодеев».
1×slots зеркало регистрация
С другой стороны, намного проще отобрать бездепозитные фриспины за регистрацию в казино и напрямик момент начать вращать барабаны в наихороших слотах. Главная особенность спинов никаких, что они предусмотрены для лучших автоматов. Удастся столько пройти вспомогательные раунды, но и прирастить сумму выигрыша, заработать респины и другие внутриигровые подарки. Вообще перейдя в казино — правила схожи в получении бездепозитных призов, в стереотипные управляла входит: подтвердить эл. Почту и аппарат, наполнить собственный индивидуальный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ.Активация случается с помощью промокодов, коие вводятся в личном кабинете после регистрации. Среди спецпредложений в перечне Casino.ru содержатся неповторимые промокоды, коие доступны лишь посетителям портала. Другие способы начисления средств ? автоматическая активация сразу последствии создания аккаунта и получение подарка по запросу в службу технической помощи. <a href=http://suvenir.k-78.ru/communication/forum/user/49927/>http://suvenir.k-78.ru/communication/forum/user/49927/</a> Процесс доказательства личности возможность занять от 1-го денька до недели. Если заказчик разрешил нибудь ошибку при заполнении паспортных данных, то ему следует адресоваться с задачей в саппорта онлайн-казино. 1× slots официальный Когда речь идет о денежных бонусах, казино практически устанавливают обстоятельства вейджера, которые нужно выполнить, чтобы исключить выигрыш.
1×slots сайт
Ещё одно распространённое акционное предложение – привлекательный подарок с неблаговидными требованиями. К примеру, клуб обещает $100 в бездепа, но с вейджером х80 или х100. Отыграть такой вейджер фактически невозможно и потому другого концентрироваться на больше занимательных промоакциях. <a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=39292>1×slots casino зеркало рабочее</a> 1×слотс казино <a href=http://www.dungdong.com/home.php?mod=space&uid=3004287>http://www.dungdong.com/home.php?mod=space&uid=3004287</a> Высокая конкуренция в разделе азартных игр доказывает операторов завлекать посетителей разнородными акциями. Благодаря данному у гостей бывает возможность получить бонусы в казино за регистрацию без депо. Воспользоваться этим предложением можно, минуя функцию внесения средств на игровой счет, просто активировав аккаунт на веб-сайте. Наш гид по бездепам поможет избрать самую симпатичную бонусную программу, разузнать управляла получения такого вознаграждения и распорядиться им с максимальной выгодой.Возьми свой подарок. Чаще всего бонус активируется незамедлительно в регистрации. Но посещают ситуации, когда надо(надобно) зайти в личный кабинет или написать в справочную службу.
1×slots зеркало видели такую регистрацию на
Бездепозитные бонусы казино это экономическая компенсация, предлагаемая пользователям на дармовой базе и вероятность выступать в интернет казино безвозмездно. Если сравнивать их с поощрениями за вклад, в средства выдаются лишь потом начального пополнения счета, то бездепозитные вознаграждения получаются бесплатно. То есть, играющий получает возможность создавать ставки на теснее быть деньги, которые выдаст заведение, выполняя, этом, обычные деянья, чтобы их извлечь (здесь речь о регистрация, удостоверении личности с использованием номера телефонного, дизайна заказы и т.д. ).Приветственный приз без депо ? подарок за регистрацию. Выдается деньгами, фриспинами либо баллами. В заключительном случае бонусные баллы используются для роли в турнирах или обмена на реальные средства. Во всех легальных онлайн-казино Беларуси необходимо свидетельство паспортных данных для забавы — это требование правительства страны. <a href=http://j013.koreawebcenter.com/bbs/board.php?bo_table=free&wr_id=800246>http://j013.koreawebcenter.com/bbs/board.php?bo_table=free&wr_id=800246</a> Только выполнив все условия отыгрыша и дождавшись окончания ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить средства деньги. 1×slots зеркало на сегодня Популярность онлайн казино растёт и всё больше пользователей начинают увлекаться азартными забавами. Бездепозитные призы 2022 года, это оригинальные презенты за регистрацию. С их поддержкою новые игроки имеют получить бесплатные вращения либо средства на баланс за 1 регистрацию. С появлением игорных заведений в онлайне, бездепозитные призы стали наимоднейшим способом привлечения игроков. Подобные акции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о которых мы поведаем. Наш вебсайт собрал лучшие предложения из онлайна на 2022 год. Воспользуйтесь любым подарком и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша необходимо выполнить обстоятельства.
<b>Смотреть еще похожие новости:</b>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/member.php?action=profile&uid=36740>1×slots актуальное зеркало</a>
<a href=http://sladkierecepti.5nx.ru/viewtopic.php?f=8&t=7773>1×slots сайт зеркало</a>
<a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=52842>1×slot казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Мы подготовили перечень, где есть всегда животрепещущие и новые бездепозитные бонусы казино, которые продоставляется получить бесплатно. Для наших пользователей есть специальные предложения эксклюзивные призы, коие вы нигде не найдете, их мы определили специальной красноватой плашкой «Exclusive».
#3287 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
почему в казино не бывает настенных часов зеркала казино <a href=https://rumafia.news/>букмекерская контора фонбет</a> почему в казино нет окон приложения букмекерских контор <a href=https://7club7.com/>7k casino зеркало</a> pin up casino buzz pin casino porno Игорь Акинфеев (футбол) casino сегодня приложения букмекерских контор на андроид 1×bet рабочее casino скачать
DiskiPlus букмекерская контора бесплатно скачать DiskiPlus Попова Анна Юрьевна порно <a href=https://www.diskiplus.ru>DiskiPlus демо казино</a> DiskiPlus слот casino DiskiPlus porno Юлия Канакина, скелетонистка <a href=https://diskiplus.ru/>DiskiPlus porno Александр Соболев (футбол)</a> DiskiPlus casino зеркало сегодня рабочее DiskiPlus Радченко Светлана Юрьевна порно DiskiPlus r7 casino DiskiPlus porno Илона Маркова, хоккеистка DiskiPlus казино фильм DiskiPlus casino сайты DiskiPlus bet casino
#3288 Charlesgunnyhttp://filmkachat.ru
1 x slots
В интернете количество узнаваемых игорных площадок с привлекательными акционными предложениями. Однако пристально разбирать условия 10-ов предложений вскоре надоест, да и время отнимет много. Поэтому наша команда подготовила ТОП-3 сайтов с превосходнейшими бездепозитными бонусами:Наиболее известные вознаграждения среди гэмблеров – бездепозитные бонусы казино. Это не умопомрачительно, ведь можно получить безвозмездные вращения либо виртуальные кредиты, и всем не придётся пополнять счёт, рисковать личными деньгами. Удастся насладиться различными увеселениями причем выиграть солидную сумму, избегая серьёзного риска. <a href=http://filmkachat.ru/>1×slots акции</a> <a href=https://swaay.com/u/archicgic/about/>https://swaay.com/u/archicgic/about/</a> 1×slots casino регистрация на сайте <a href=https://hothdporn.pro/user/RalphTiend/>https://hothdporn.pro/user/RalphTiend/</a> На странице представлены бездепозитные бонусы за регистрацию в казино редчайшая заслуга за коей гонятся все игроки как новички, так и профессионалы. Мы также уделяем огромное внимание на наличие бонусов при составление рейтинга казино на средства. Бездепозитный приз это вероятность выступать безвозмездно и выиграть реальные средства.
1×слот регистрация в 1×slots casino
Но есть игорные заведения, коие готовы просто например жертвовать средства на забаву. Для сего достаточно сделать профиль. Чтобы исключить собственный выигрыш, для поначалу нужно выполнить обстоятельства отыгрыша, обозначенные в критериях получения бездепозитного депо. 1×slot регистрация Мы собрали и опубликовали список наилучших бездепозитных казино с бонусами за регистрацию, которые гарантируют великодушные выигрыши и мгновенные выплаты.Также учтите, собственно некоторые игровые платформы сужают список стран, которые готовы получить предложенный бездепозитный бонус за регистрацию. К образцу, существуют онлайн-заведения, выдающие подобные призы только жильцам конкретных государств. К образцу, интернет казино 777 Оригинал дает бездепозитный бонус лишь игрокам из России и стран СНГ. Или напротив, пичкают вознаграждением всех, не обитателей некоторых государств (из этого, следует пристально учить перечень, дабы впоследствии не возникло практически вопросов и жалоб). <a href=http://isaevclub.ru/user/WalterShase/>http://isaevclub.ru/user/WalterShase/</a> Реже бонусы без депозита начисляются постоянным игрокам. С их поддержкою администрация постарается вычесть ценных посетителей либо желает поблагодарить за преданность правильных гостей. Но намного почаще для сходственных целей используются эти промоакции:Но существуют азартные заведения, готовые просто например вручить деньги на забаву. Для этого довольно сделать профиль. Чтобы вывести выигрыш, сперва необходимо выполнить вейджеровые условия, прописанные в критериях получения бездепа. 1хлот регистрация в 1×slots casino 1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, случае не хотите замерзнуть жертвой плутов или впустую потратить время;Так же стоит выделить то, что в любом интернет казино установлен собственный максимальный кешаут на бездепозитный бонус. Как верховодило кешаут — это предельная сумма денег, которая дешевая для вывода с бездепозитного приза.
1×слот регистрация в 1×slots casino
Наш перечень содержит наихорошие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по главным характеристикам:Чаще всего казино приз за регистрацию без депо даёт возможность запустить каждой машина. Но превосходнее внимательно ознакомиться с критериями. Иногда для забавы доступны лишь определённые модели. Если вы новичок и ничего не смыслите в гэмблинге, другого, как начать знакомство с миром азарта непосредственно с «одноруких злодеев». <a href=http://0lwow.com/home.php?mod=space&uid=20751>http://0lwow.com/home.php?mod=space&uid=20751</a> На бонусные начисления все быть установлены дополнительные лимитирования, которые Вы не приняли при отыгрыше. Пока бонус полностью не отыгран — деньги из казино не выводятся. 1×slots акции Большинство интернет-казино из нашего топ-10 готовы порадовать вас эксклюзивными акциями. Читайте о их в обзорах и на форуме.Итак, дабы благотворительные бонусные кредиты превратились в реальные средства, которыми продоставляется управлять по собственному усмотрению, их нужно отыграть. Вейджер стопам уточнять в правилах онлайн-казино.
1хслотс рабочее зеркало
Поспешите арестовать бездепозитные бонусы за регистрацию в казино из представленного перечня. Все платформы не только ведут законную работа, хотя и порадуют добросовестными плодами забавы, высокой отдачей, прыткими выплатами.Подтвердите регистрацию, дабы активировать Бездепозитный приз с выводом, потребуется заполнить индивидуальный профиль. Заполните пустопорожние поля истинными данными о себе. 1×slots на любой вкус как пройти регистрацию <a href=https://xn----7sbarohhk4a0dxb3c.xn–p1ai/user/TravisTwevE/>https://xn----7sbarohhk4a0dxb3c.xn–p1ai/user/TravisTwevE/</a> Многие новички сомневаются, что поощрительный приз не будет отдавать, числе в они выиграли у казино. Это абсолютно безопасно и надежно. Выводя выигранные средства, игрок просто останавливает свое роль в игре и теряет уникальную возможность – даром наращивать собственное материальное положение.Бонус за регистрацию в казино выдается только раз раз на 1-го игрока. Но случаются вспомогательные акции, в коих бездепы раздаются для постоянных посетителей и такие подарки Вы сможете получить больше 1-го раза.
1х слотс зеркало регистрация в 1×slots casino
Но есть игорные заведения, которые готовы просто например жертвовать деньги на игру. Для сего довольно сделать профиль. Чтобы исключить свой выигрыш, для поначалу нужно выполнить обстоятельства отыгрыша, обозначенные в условиях получения бездепозитного депозита. Бездепы обыкновенно предлагают с отыгрышем — моментально вывести выигранные средства невозможно. Перевод средств со счета будет вероятен после как, как пользователь выполнит все требования казино, а сумма не может превышать установленного правилами лимита. Условиями акции фиксируются сроки, в течение коих заказчик вправе воспользоваться предложением. Обычно они не превышают нескольких дней последствии активации. <a href=http://www.tianranju.net/home.php?mod=space&uid=131832>http://www.tianranju.net/home.php?mod=space&uid=131832</a> За вербование приятеля ? в партнерской программы заказчик получает вознаграждение за вербование новых пользователей.В интернете количество известных игорных площадок с красивыми акционными услугами. Однако пристально читать условия десятков услуг времени надоест, ну и время отнимет много. Поэтому наша команда подготовила ТОП-3 вебсайтов с превосходнейшими бездепозитными бонусами: 1×slots рабочее зеркало на сегодня Не стоит путать игру в демо и внедрение призов. В демонстрационном режиме игрок возможность оценить механику слота, сюжет и оформление. Но игра проводится на относительные кредиты, поэтому отсутствует главное ? чувство пыла. Активируя промокод либо фриспины, клиент раньше не расходует средства деньги на игровые автоматы, хотя возможность сорвать настоящий куш!Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.
<b>Смотреть еще похожие новости:</b>
<a href=http://3ak.cn/home.php?mod=space&uid=187057>1×slots официальный сайт зеркало рабочее</a>
<a href=http://vn-info.net/user/Josephkam/>1хслот зеркало сайта</a>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/8670/#comment-356589>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вейджер менее х30–35 является применимым. Опытные игроки заявляют, что с этим вейджером реально остаться в плюсе, если правильно подойти к выбору игрового аппарата.
#3289 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
игры казино слот casino <a href=https://rhymes-punches.com/>порно с Диана Шнайдер (теннис)</a> porno Алена Михайлова Приезжева Екатерина Геннадьевна порно <a href=https://kompromat1.online/>1go casino</a> porno Андрей Рублев (теннис) inform@rucriminal.info 1×bet бывшие казино скачать 1×bet 1×bet слоты официальный сайт Шевцова Татьяна Викторовна порно
DiskiPlus porno Анна Сидорова, керлингистка DiskiPlus букмекерская контора <a href=https://diskiplus.ru/>DiskiPlus порно с Карен Хачанов (теннис)</a> DiskiPlus Мухтиярова Елена Вячеславовна порно DiskiPlus леон букмекерская контора <a href=https://diskiplus.ru/>DiskiPlus букмекерская контора официальный сайт</a> DiskiPlus Любимова Ольга Борисовна порно казино DiskiPlus порно с Илюшникова Татьяна Александровна DiskiPlus букмекерскую контору пин DiskiPlus 7k casino скачать DiskiPlus casino андроид DiskiPlus online casino официальный
#3290 Сenter_Empathy_scacthttps://empathycenter.ru/
Доброго времени суток! Сеть клиник доказательной психиатрии «Эмпатия». Центр «Эмпатия» — это команда профессионалов в сфере психического здоровья и психологической помощи. Врачи-эндокринологи, психиатры, психотерапевты, психологи и нейропсихологи объединились вместе для восстановления Вашего внутреннего равновесия и гармоничных отношений с окружающими. Наши специалисты лечат весь спектр психических расстройств, включая самые тяжелые случаи, бережно и деликатно помогают в решении сложных жизненных ситуаций. Мы создали для Вас среду, где вы получите квалифицированную помощь и почувствуете принятие, уважение и заботу. <a href=https://empathycenter.ru/preparations/o/okskarbazepin/>оксакарбазепин таблетки</a> Если Центр ментального здоровья или Сеть клиник доказательной психиатрии в Москве и Реутове, то это в Эмпатия Центр https://empathycenter.ru/ . Консультации как очно в Москве и Реутове, так и онлайн по всей России. Консультируйтесь и звоните по бесплатному номеру 8–800–775–07–12. Увидимся!
#3291 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet casino официальное казино вход <a href=https://strelochnik.com/>bet casino</a> порно с Абрамченко Виктория Валериевна порно с Каролина Севастьянова <a href=https://www.ossetia.tv/>порно с Александр Большунов (лыжные гонки)</a> kometa casino casino на телефон Лут Оксана Николаевна порно 1×bet регистрация пин ап casino pin букмекерская контора официальный сайт порно с Анна Калинская (теннис)
DiskiPlus бесплатные букмекерские конторы DiskiPlus Радченко Светлана Юрьевна порно <a href=https://www.diskiplus.ru/>DiskiPlus казино рояль смотреть</a> DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus пин up casino <a href=https://www.diskiplus.ru>DiskiPlus up casino официальный</a> DiskiPlus pin up casino зеркало DiskiPlus casino на телефон DiskiPlus porno Екатерина Ефременкова, шорт-трекистка DiskiPlus porno Екатерина Ефременкова, шорт-трекистка DiskiPlus порно с Арина и Дина Аверины, гимнастки DiskiPlus casino сегодня DiskiPlus Матвиенко Валентина Ивановна порно
#3292 Charlesgunnyhttp://filmkachat.ru
1×slots коды
Суммы сходственных предложений, случаев, колеблются от 3-х до двадцати $, а вейджер на эти средства обязан составлять от тридцати до шестидесяти раз. Зачастую, большая сумма выигрыша здесь составит от одной до 2-ух сотен долларов. Если в выиграет больше, то все свои имеют быть списанными до максимально разрешенного выигрыша. Здесь появляется содержание выводить еще несуществующие деньги на свою платежную систему и далее отыскивать заведение с подходящими под данную необходимую релоадом или бонусом за первое пополнение счета. Есть количество подвидов бездепозитного гонорары, предлагаемого большим числом заведений. <a href=http://filmkachat.ru/>1хслотс рабочее зеркало</a> <a href=https://downforeveryoneorjustme.com/playhouse.com.ua>https://downforeveryoneorjustme.com/playhouse.com.ua</a> Бесплатные призы казино без депозита возможно получить повторяющий валютных средств на бонусный счет (исключить их возможно только последствии отыгрыша), фриспинов, игры или кешбэк-бонуса. 1×slots скачать на айфон <a href=http://vfb7968c.bget.ru/user/Craigber/>http://vfb7968c.bget.ru/user/Craigber/</a> Как лишь на виртуальном счету окажутся бонусные свои, поспешите отыграть вейджер. Сразу последствии этого возможно забыть заявку на вывод выигрыша. Кредиты выгодно отличаются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом настоящих средств и дают возможность ощутить задор. Во-вторых – возможно насладиться каждой азартной забавой доступной на веб-сайте. В вашем постановлении присутствуют автоматы, настольные приложение, видео-покер, Live-дилеры.Вообще перейдя в казино — верховодила схожи в получении бездепозитных бонусов, в стандартные правила входит: доказать эл. Почту и телефонный, заполнить свой личный профиль, активировать рекламную код либо активировать предложения во вкладке БОНУСЫ.
1×slots регистрация на официальном сайте
скачать 1×slots официальный сайт Реже бонусы без депо начисляются постоянным игрокам. С их поддержкой администрация старается вычесть ценных посетителей либо вожделеет поблагодарить за преданность правильных гостей. Но намного почаще для сходственных целей применяются эти промоакции: <a href=http://www.yyxw999.com/space-uid-23241.html>http://www.yyxw999.com/space-uid-23241.html</a> Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации презента нужно доказать электрическую почту и привязать аппарат;Вознаграждения за получение VIP-статуса ? начисляются в рамках программы преданности при достижении еще значения либо выдаются персонально менеджерами службы. 1×слот регистрация в 1×slots casino Условия, на которых предоставляется бездеп, регулируются казино. Каждая акция имеет доскональные верховодила, гиперссылка на коие обыкновенно находится в промообъявлении. В их указываются лимиты, вейджер, список доступных игр. Если оператор прячет данные о предложении, то воспользоваться им надо.
1×slots casino зеркало
Если при регистрации указать промокод, можно гарантировано получить приз. Где брать ваучер? Посетите на блоги либо форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В последнее время игорные дома начали афишироваться в кинокартинах и телесериалах. Присмотритесь и скорее заметите промокод, который принесёт 500 либо 1 000 бонусных рублей.Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. Особую изюминку видео слотам присваивают уникальные символы. С их свет активизируются различные призы. Вы можете запустить вспомогательный уровень и увеличить необходимую выигрыша. Есть знаки, коие замещают ненадобные составляющие и сами создают выигрышные комбо. Не стоит забывать и на бонус-тур. После каждого счастливого спина есть шанс прирастить сумму выигрыша в два либо четыре раза. <a href=https://popcporn.net/user/Tyronelow/>https://popcporn.net/user/Tyronelow/</a> Частенько новенькие не разумеют, как активировать подарки или вывести первый выигрыш. Для подобных случаев наша команда описала главные определения – что это фриспины, вейджер, как его отыграть, для нужно протекать верификацию.Наиболее популярностью вознаграждения среди гэмблеров – бездепозитные бонусы казино. Это не умопомрачительно, как возможно получить бесплатные вращения либо виртуальные кредиты, и этом не придётся пополнять счёт, рисковать собственными деньгами. Удастся насладиться разнородными развлечениями причем выиграть крупную сумму, избегая серьёзного риска. 1×slots сайт Призовые начисления без депозита шансы предоставляться для участия в турнирах онлайн казино. Потратить перечисленные деньги можно самая в рамках данной акции. Условия их проведения включают в себя ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться таким предложением, какого-либо выучить его верховодила.Подарки на праздники ? посвященные торжественным датам, требующие условного отыгрыша либо начисляются без такового. Могут дариться игрокам сутки рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду.
1×slots регистрация то дальше необходимо пройти
Похожим образом работает 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя или в связи с получения им VIP-статуса. Подарок предоставляется в обращения в поддержку и проверки.Несмотря на то, собственно этот вариант стимуляции со стороны азартных платформ довольно востребован в сфере сходственных игр, далеко многим почитателям казино ведомо, что сами бездепозитные призы казино и как непосредственно их вполне эксплуатировать. Как прочие промоакции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такого предложения являются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых гостей и позволяет им составить впечатление о функционале, не рискуя значительными суммами.Только выполнив все обстоятельства отыгрыша и дождавшись окончания ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить свои деньги. зеркло казино 1×slots <a href=https://www.heroscapers.com/community/member.php?u=739909>https://www.heroscapers.com/community/member.php?u=739909</a>
1хслотс казино зеркало
Наш список содержит наихорошие бездепозитные бонусы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по важным параметрам:Фриспины без депо либо дополнительные свои помогут ближе познакомиться с игровой платформой и её функциями. За счёт презентов возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за игры напротив живых крупье. В игровых клубах без лицензии Вы покупаете „кота в мешке“ и когда спорных ситуаций нет возможности куда-то пожаловаться и обосновать собственную правоту.Подарки на дни ? посвященные торжественным датам, требующие условного отыгрыша или начисляются без это. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду. <a href=http://www.cruzenews.com/wp-content/plugins/zingiri-forum/mybb/member.php?action=profile&uid=1927242>http://www.cruzenews.com/wp-content/plugins/zingiri-forum/mybb/member.php?action=profile&uid=1927242</a> Выбирая бесплатный приз, пристально изучайте правила. Убедитесь, что вам возможно принимать роль в акции. Уточните, в каких забавах возможно скорпулезно обстоятельства вейджера. При надобности задавайте вопросы адептам саппорта. казино 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://10nsk.ru/user/JosephSuple/>1×slots коды</a>
<a href=http://board.eternityrpc.com/member.php?action=profile&uid=369>1хслотс официальный сайт зеркало</a>
<a href=https://test.soclanovtsy.ru/topic/26973-chicago-house-samples-loops-sounds/page/454/#comment-84045>1×slots casino регистрация 1×slotscasino09k online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При небольшой сумме приза рекомендуется играть по невысоким ставкам, а использовать наибольшие другого, как лишь в том случае, если вейджер очень большой, а время на отыгрыш крепко ограничено.
#3293 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Семёнова Татьяна Владимировна порно Нургалиева Эльвира Рамиловна порно <a href=https://www.ossetia.tv/>сайт казино вход</a> casino игровой автомат пина casino <a href=https://t.me/vchkogpu_ru>1×bet скачать приложение</a> online casino 7k pin ап casino up casino лучшие бесплатные онлайн казино порно с Варвара Субботина приложения букмекерских контор на андроид 7k casino зеркало рабочее
DiskiPlus бк букмекерская контора DiskiPlus porno Дарья Клишина <a href=https://www.diskiplus.ru>DiskiPlus макао казино</a> DiskiPlus 1win casino DiskiPlus приложения букмекерских контор на андроид <a href=https://diskiplus.ru/>DiskiPlus порно с Зырянова Анастасия Владимировна</a> DiskiPlus casino com DiskiPlus Анна Михалкова DiskiPlus 1×bet сайт DiskiPlus порно с Владимир Минеев (ММА) DiskiPlus porno Катерина Шпица DiskiPlus порно с Варвара Субботина DiskiPlus порно с Александр Головин (футбол)
#3294 Charlesgunnyhttp://filmkachat.ru
рабочее зеркало 1хслотс
Активация по промокоду используется в разных видах бездепов. Если речь идет о приветственном призе, то набор символов можно узнать на крупнейшей странице, в регистрационной форме или письме, коие отчаливает пользователю для доказательства адреса электронной почты. Акции все проводиться совместно с партнерскими площадками. Обычно код располагается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется одноразовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем актуальный код для активации в описании любого промо.Обычно для получения бонусов без депо, казино выдвигает лояльные и абсолютно выполнимые условия, хотя есть ряд поступков коие воспрещены и все стать неприятные последствия: <a href=http://filmkachat.ru/>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a> Также, учите, что бездепозитный бонус возможно вывести лишь что, нет случае, когда будут исполнены все обстоятельства отыгрыша.Онлайн гемблинг развивается с любым деньком все больше и больше, новые бренды создаются не по денькам а по часам. Новые интернет казино делают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и тем самым предлагают бездепозитные бонусы за регистрацию, собственно бы не упустить такую вероятность — как пользоваться свежим бездепом, советуем навещать наш сайт как можно почаще, самое лакомое и новые будет добавляться в данном же перечне. <a href=https://downforeveryoneorjustme.com/playhouse.com.ua>https://downforeveryoneorjustme.com/playhouse.com.ua</a> 1× слот зеркало <a href=https://pcnto.com/user/Scottavoib/>https://pcnto.com/user/Scottavoib/</a>
1×slots регистрация на сайте 1×slots ru com
Бoльшинcтвo азартных заведений выдвигают примерно одинаковые условия и требования, коие необходимо выполнить, дабы получить бездепозитный бонус за регистрацию. Все их возможно соединить в раз перечень: <a href=http://sladkierecepti.5nx.ru/viewtopic.php?f=8&t=6214>1×slots бездепозитный бонус за регистрацию</a> 1×slots регистрация на 1хслотс Ещё одно распространённое акционное предложение – симпатичный подарок с сомнительными требованиями. К образцу, клуб обещает $100 в качестве бездепа, но с вейджером х80 либо х100. Отыграть подобный вейджер фактически невозможно и поэтому другого концентрироваться на более занимательных промоакциях. <a href=http://multi-net.su/index.php?subaction=userinfo&user=EdwardGlalp>http://multi-net.su/index.php?subaction=userinfo&user=EdwardGlalp</a> 1хслотс 1хслотс регистрация перейти на 1×slots Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и. Когда игроку полагается много фриспинов, администрация имеет бить3 их начисление на несколько дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах промоакции.Условия отыгрыша приза. Если Вы планируете заработать на бездепозитном бонусе, то для внимание на значение вейджера и срок, кот-ый дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, тем легче отыграть приз и вывести выигрыш.
казино 1×slots официальный сайт
Активация денежного вознаграждения случается механически после сотворения профиля либо применения промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на странички казино в социальных сетях или на рассылку рекламных сообщений, скачать и установить вспомогательный софт и т.д. Превышение максимальной ставки при отыгрыше. Система механически не предуведомляет о превышении ставки, поэтому о несоблюдении верховодил игрок имеет узнать уже в подачи запроса на вывод средств.Бездепозитный приз – это экономическое вознаграждение, которое выдается участнику забавы в казино, для его привлечения и возникновения заинтересованности. Любой посетитель, кот-ый подходит условиям выдачи похожего бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое поощрение считается более эффективным способом, дающим возможность стартовать в игре, не вкладывая личных вещественных средств. <a href=http://petrova-np.kapi185.ru/index.php?subaction=userinfo&user=jealousapocalyp>http://petrova-np.kapi185.ru/index.php?subaction=userinfo&user=jealousapocalyp</a> 1хслотс зеркало Чем ниже велечину вейджера, тем легче отыграть и вывести приз. Если Вы расчитываете заработать на бездепе, но просто ознакомиться с свежим игровым клубом, то стоит игнорировать призов с высочайшим вейджером их практически не реально отыграть. С ними Вы сможете только протестировать игры заведения.Чаще всего интернет-казино предлагают бездепозитные призы свежим пользователям. Эта промо-акция довольно эффективно привлекает новичков, подталкивая их к открытию счета. Конечно, не они становятся послушными клиентами, хотя сам факт регистрации аккаунта играет на руку заведению.
1×slot официальный сайт
Важно, убедитесь в, что раньше не регистрировались в избранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи. <a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1622#post-47429>1×slots регистрацию процедура займет всего лишь</a> На странице представлены бездепозитные бонусы за регистрацию в казино редчайшая заслуга за которой гонятся все игроки как новички, так и мастера. Мы тоже уделяем великое внимание на наличие бонусов при формирование рейтинга казино на средства. Бездепозитный бонус это возможность играть бесплатно и выиграть настоящие деньги.Вывод выигрыша с бездепозитных призов казино – щедрый презент от азартных клубов. Но дабы исключить собственный заработок, необходимо выполнить ряд критерий: 1×slots регистрация то дальше необходимо пройти <a href=https://bandit400.ru/user/Geraldpaync/>https://bandit400.ru/user/Geraldpaync/</a>
1×slots зеркало которую указывали при регистрации кстати
Похожим образом трудится 3-ий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя или в связи с получения им VIP-статуса. Подарок предоставляется последствии воззвания в поддержку и проверки.Чаще всего используются коды. Их надо(надобно) вносить в особые окна регистрационной анкеты, в идет о пригласительных бонусах, или в определенном разделе собственного офиса игрока. <a href=http://womans-days.ru/index.php?subaction=userinfo&user=overtvalley24>http://womans-days.ru/index.php?subaction=userinfo&user=overtvalley24</a> 1×slots сайт зеркало Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.
<b>Смотреть еще похожие новости:</b>
<a href=https://feederfishing.lt/en/forum/subkategorija-1–2/1438992–1×slos-1×slots-casino#1450466>1×slos регистрация в 1×slots casino</a>
<a href=https://melhorlance.com.br/minha-conta/>1хслотс рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Используйте наихорошие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из списка ниже, чтобы заработать подарки за простые деяния и уже сегодня получить 1-ый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высочайшей отдачей и прыткими выводами на электронные кошельки.
#3295 Charlesgunnyhttp://filmkachat.ru
1× slots casino официальный сайт
Как лишь получите бездеп в казино, всё также не забывайте проверять электрическую почту. Некоторые игорные клубы день радуют активных гэмблеров приятными бонусами. Чаще всего получить подарок можно в преддверии праздника, на денек рождение, за вербование приятеля. А также распространённым бонусом считается надбавка к депозиту. Нужно более восполнить счёт, и азартное заведение увеличит его на 50–100%.Классическая разновидность бонуса за творенье аккаунта. Его преимущество содержится в, собственно клиент возможность без избирать аппараты и создавать ставки в их. Иногда список игровых автоматов ограничен оператором, хотя все также это чем, чем единственный доступный разъем, как в случае с внедрением фриспинов. <a href=http://filmkachat.ru/>1×slots регистрация на официальном сайте</a> Самый распространённый из похожих бонусов, конечно же, бездеп на день рождения посетителя — приз в виде фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им можно протяжении установленного периода времени.Воспользоваться бездепом возможно не во всех игровых автоматах: казино и тут устанавливает лимитирование для посетителей. Конечно, это возможно посчитать неким неудобством для игрока, хотя справедливости ради отметить, собственно выбор автоматов всё одинаково остаётся довольно большим. <a href=https://rapidapi.com/7ball-viet-nam-7ball-viet-nam-default/api/7ball-viet-nam/discussions/146279>https://rapidapi.com/7ball-viet-nam-7ball-viet-nam-default/api/7ball-viet-nam/discussions/146279</a> Изучить управляла и условия получения бездепозитных призов казино, Вы можете у нас на сайте в разделе с бонусами либо на официальном веб-сайте избранного Вами казино. Если не найти необходимую информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал или по электрической почте. 1×slots регистрация 1×slotscasino 56 online <a href=https://www.walkaholic.me/user/26208-chriswaits>https://www.walkaholic.me/user/26208-chriswaits</a> Раздача призов имеет быть приурочена к различным датам: календарные дни, дни рождения игроков, юбилей открытия казино и т. Д. Подарок выдается повторяющий средств, фриспинов либо баллов для накопления и размена на предложения оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода этой суммы придется выполнить ряд притязаний.Промокод – определённая комбинация символов, которую необходимо ввести в отвечающее поле при создании учетной записи или активировать в личном профиле игрока в разделе с призами.
1×slots регистрацию более популярный вариант это
Можно ли зарабатывать на бездепозитных призах? Это не работа, тут как повезет, если в любом предложенном безедепе, вы будете откручивать вейджер и выводить, время возможно назвать везением, и дополнительной добавкой к вашему бютжету.Размер ставки для забавы по бездепозитному призу (окончательно же, когда, когда он представлен повторяющий бонусных денежных средств) зачастую ниже, чем при игре на депо. Ограничение несомненно действовать до этапа отыгрыша бонуса. 1хслотс мобильная версия зеркало Наличие у игрока второго аккаунта. Запрещено делать количество профилей для неоднократного получения бездепов.Сроки активации бонуса устанавливаются каждым казино, но почаще всего они не превышают недели с момента получения. Игроку обязательно нужно применять бездеп протяжении указанного срока, в ином случае приз просто пропадет. Каждый бонус можно получить только раз один, потому если не использовать бездеп в срок, у игрока не будет 2 шанса им пользоваться. <a href=http://illustrator.odub.tomsk.ru/index.php?subaction=userinfo&user=Chrisgriet>http://illustrator.odub.tomsk.ru/index.php?subaction=userinfo&user=Chrisgriet</a> 1×slot регистрация Фриспины. Бесплатные вращения предусмотрены для применения в видео-слотах. Внимательно читайте обстоятельства – они часто выдаются для неких машин. В зависимости от клуба продоставляется создавать определенное количество ставок. Кстати, современные игорные дома дают вероятность заводить «одноруких бандитов».
x1 slots регистрация в 1×slots casino
Выигрыши с бонусов без инвестициям практически привязаны к требованию по ставкам и шансы быть обналичены лишь последствии исполнения этих притязаний. <a href=http://diakov.net/index.php?subaction=userinfo&user=wickedelation60>http://diakov.net/index.php?subaction=userinfo&user=wickedelation60</a> Бесплатный приз – кредиты, которые онлайн-казино начисляет посетителю, не принуждая его пополнять игровой счет. 1хслот зеркало Но существуют азартные заведения, готовые просто так вручить деньги на забаву. Для сего достаточно сделать профиль. Чтобы исключить выигрыш, сначала необходимо выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа.
1×slots зеркало этих способов предполагает регистрацию
Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие появляются у начинающих. <a href=http://weeklywars.de/viewtopic.php?f=12&t=6800&p=540292#p540292>1×slots casino зеркало</a> Доступные игры – В неких азартных играх возможно понизить математическое приемущество казино до нескольких 10-х процента. В их числе почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как верховодило, в этих забавах ставки идут в зачет вейджера не всецело. Например, имеет учитываться только 50%. В некоторых играх бездепозитные бонусы вообщем нельзя отыгрывать. Получив собственный подарок, Вы можете даром выступать на реальные деньги, а выполнив условия отыгрыша, вывести собственный выигрыш.Еще одно условие касается размеров ставки. Операторы устанавливают максимальную сумму, которую игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, избранной в Личном кабинете. При превышении лимита есть риск потерять приза. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, клиент имеет столкнуться с запретом назначать фишки на шансы. 1×slots casino зеркало <a href=https://findmyjobs.lk/author/jasperacoug/>https://findmyjobs.lk/author/jasperacoug/</a> В наше время довольно просто получить приз за регистрацию в казино. Практически любой игорный жилище с готовностью начислит деньги или безвозмездные вращения. Многие гэмблеры используют данным и не стесняются регистрироваться в каждом клубе с прибыльными критериями. Кстати, это замечательная вероятность выработать победную стратегию и сорвать джекпот.
казино 1× slots официальный сайт
Большинство клубов завлекают внимание геймеров за счёт разнообразных даров. На одних веб-сайтах возможно получить виртуальные кредиты, которые откроют доступ ко всему софту. На других же, администрация предлагает безвозмездные вращения для запуска топовых онлайн слотов. Несмотря на разные промоакции, стоит выделить самые главные. Сроки активации бонуса устанавливаются каждым казино, но почаще всего они не превосходят недели с этапа получения. Игроку обязательно нужно применять бездеп в течение обозначенного срока, в ином случае приз просто пропадет. Каждый приз возможно получить только раз один, поэтому в не применять бездеп в срок, у игрока не несомненно 2 шанса им воспользоваться.У каждого игорного заведения средства управляла и условия. Но, чтобы получить призы, нужно выполнить стандартные деяния: <a href=https://unservfl.de/user-2193.html>https://unservfl.de/user-2193.html</a> Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро или 20 $. Если выдаются фриспины, их число редко выше нескольких 10-ов бесплатных вращений.Активация валютного гонорары случается механически после творенья профиля или применения промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на страницы казино в социальных сетях либо на рассылку рекламных сообщений, скачать и установить дополнительный софт и т.д. зеркала 1×slots Если речь об неповторимых услугах, может понадобиться регистрация в казино по ссылке с партнерского сайта.Размер ставки для игры по бездепозитному призу (окончательно же, когда, когда он представлен вид бонусных денежных средств) часто ниже, чем при этой на депозит. Ограничение будет действовать до момента отыгрыша бонуса.
<b>Смотреть еще похожие новости:</b>
<a href=https://uyghuryol.com/forum/viewtopic.php?f=8&t=271787>1х слот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В реальное время получить бонус за регистрацию в казино очень просто. Почти любой игорный дом с готовностью предоставит средства либо благотворительные вращения. Многие игроки используют этим и не смущяются региться в любом клубе с прибыльными критериями. Кстати, это отличная возможность выдумать выигрышную стратегию и сорвать куш. Бездепозитные бонусы прекрасный вариант безвозмездной забавы в игровые автоматы. Многие юзеры сети не знают, собственно в казино возможно начать выступать абсолютно безвозмездно, а потом вывести выигрыш на банковскую карту или электронный кошелек, иные не доверяют интернет казино, а третьи удачно играют и выигрывают – и подчас довольно великие суммы.
#3296 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino бонус порно с Анастасия Потапова, теннисистка <a href=https://res-publika.com>ев казино</a> 7k casino бонус 1×bet зеркало слоты 1×bet xyz <a href=https://slon-ru.com/>скачать pin casino</a> официальное казино вход porno Юлия Канакина, скелетонистка симулятор казино Преподобная Надежда Александровна порно porno Анна Сидорова, керлингистка демо казино casino приложения
DiskiPlus порно с Артемий Панарин (хоккей) DiskiPlus казино вход <a href=https://diskiplus.ru>DiskiPlus casino бездепозитный</a> DiskiPlus букмекерская контора бесплатно скачать DiskiPlus казино 1 <a href=https://www.diskiplus.ru>DiskiPlus 1×bet вход</a> DiskiPlus casino 7k сегодня DiskiPlus up casino скачать DiskiPlus up букмекерская контора DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus пинап казино DiskiPlus букмекерская контора официальный сайт DiskiPlus 1×bet зеркало на сегодня 1×bet xyz
#3297 Charlesgunnyhttp://filmkachat.ru
1×слот регистрация в 1×slots casino
Существуют казино с бонусом за регистрацию, в довольно востребованы фриспины в онлайн казино потом регистрации в определенных играх. Они встречаются в почаще даровых поощрений либо классических призов в казино без инвестициям. Например, игрок регистрирует счет, на кот-ый начисляются бесплатные забавы, приз за регистрацию вид даровых фрспинов, вращения в игровом автомате. Во время игрового процесса компьютерные выигрывает истинные средства, которые в последствии можно удачно вывести из заведения на свою платежную систему. То есть, есть шансы вывести свои без рисков собственными финансами. Регистрация, за игры получит призы, займет минут, а благодаря данному можно увеличить пять евро поощрений до тысячи и без всяких заморочек вывести их. <a href=http://filmkachat.ru/>1хслотс казино зеркало</a> Бездепозитный бонус – это финансовое вознаграждение, которое выдается соучастнику забавы в казино, для его вербования и возникновения заинтригованности. Любой посетитель, который подходит условиям выдачи сходственного бездепозитного бонуса, возможность претендовать на получение вышеуказанного приза. Такое одобрение является более действенным способом, дающим вероятность стартовать в игре, не вкладывая личных вещественных средств.Чтобы выступать безвозмездно на реальные деньги в казино, порой довольно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные действия. <a href=https://redmine.dti.economia.gov.br/issues/72790>https://redmine.dti.economia.gov.br/issues/72790</a> Возможность поиграть вспомогательное соревнование (а время и несколько) совершенно даром, а выигрыш, к, поступает на счёт игрока. 1×slots сайт <a href=https://sklad-slabov.ru/forum/user/9326/>https://sklad-slabov.ru/forum/user/9326/</a>
1хслот официальный сайт зеркало
Далее требуется отыграть вагер и вывести выигрыш. Игрокам без опыта крупно подфартило, меня получить десятки презентов за одну регистрацию. Если не смогли получить Бездепозитный бонус, не волнуйтесь. Обратитесь в интернет чат, оператор поможет исправить.Фриспины – безвозмездные вращения с фиксированной ставкой, которые возможно использовать в определенных игровых автоматах. <a href=http://b2s.bulwork.com/node/1581?page=143#comment-25664>скачать 1×slots на андроид мобильная версия</a> 1×slots сайт зеркало Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, a только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Ниже указан актуальный перечень законных казино в Беларуси с призами на 1-ый депо. Вы сможете попасть на официальный вебсайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз. <a href=https://ep-team.ru/forum/index.php?action=profile;u=8227>https://ep-team.ru/forum/index.php?action=profile;u=8227</a> 1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, в не желайте замерзнуть жертвой жуликов или впустую истратить время; 1×slots официальный сайт скачать
1×slots рабочее зеркало на сегодня
Реже призы без депозита начисляются постоянным игрокам. С их поддержкой администрация постарается вычесть ценных клиентов либо вожделеет поблагодарить за преданность верных посетителей. Но гораздо чаще для сходственных целей используются такие акции: <a href=http://geolan-ksl.ru/forum/user/96955/>http://geolan-ksl.ru/forum/user/96955/</a> 1×slots актуальное зеркало
1×slots бездепозитный бонус за регистрацию
Для проверки используются сканы паспортов, водительских водительских, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если юзер обнаружен в попытке завести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их владелец попадает в темный перечень. При ирге на лицензионной площадке не стоит опасаться свидетельствовать достоверную персональную информацию (шифрование исключает утечку индивидуальных данных).Но никогда не забывайте пристально читать управляла роли в бонусных промоакциях. Если вы нарушите хотя бы одно условие, позже вы не сможете уладить недоразумение с администрацией. Основное управляло получения бездепа ? творимый аккаунт обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов строго воспрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депо нужно соблюдать несложную последовательность поступков. 1хслот скачать <a href=http://msfo-soft.ru/msfo/forum/user/39256/>http://msfo-soft.ru/msfo/forum/user/39256/</a> Важно, убедитесь в, собственно раньше не регились в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи.
1 x slots casino
Чтобы выступать даром на реальные деньги в казино, порой достаточно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные деянья. Но есть игорные заведения, коие готовы просто например жертвовать средства на игру. Для сего довольно создать профиль. Чтобы вывести собственный выигрыш, вас сначала необходимо выполнить условия отыгрыша, указанные в условиях получения бездепозитного депозита. <a href=http://www.jkmulti.com/bbs/board.php?bo_table=free&wr_id=2338647>http://www.jkmulti.com/bbs/board.php?bo_table=free&wr_id=2338647</a> Подобные призы без депозита предоставляются на более прибыльных условиях. Зачастую они крупнее, а обстоятельства отыгрыша наименее жесткие. 1×slots казино зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://link.5nx.ru/viewtopic.php?f=5&t=7895>1×slots зеркало регистрация в 1×slots casino</a>
<a href=https://mit-bbs.com/viewtopic.php?t=128400>1×slots сайт зеркало</a>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=110517&result=reply>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную процедуру активации приза без депо. Внимательно прочитайте до конца. Многие новички делают промахи на этапе регистрации и потому не получить презент. Иногда у гостей вебсайта имеют возникнуть трудности, задачи, препядствия при активации приобретенного промо-кода. В этих случаях, необходимо адресоваться за помощью в саппорта «Support». Для получения ответа, непременно указывается конкретная причина воззвания и подтверждается информация дополнительными скриншотами. Если сложилась неоднозначная ситуация, всегда можно обратиться к основному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ.
#3298 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало слоты порно с Гатагова Ольга Анатольевна <a href=https://t.me/vchkogpu_ru>7k casino скачать</a> как выиграть в казино букмекерская контора официальный сайт скачать <a href=https://res-publika.com>порно с Алина Загитова, фигуристка</a> 1×bet зеркало рабочее порно с Афонина Марина Игоревна 7k casino зеркало на сегодня букмекерская контора бесплатно скачать порно с Дронова Александра Викторовна букмекерская контора официальный сайт скачать порно с Антропова Валентина Викторовна
DiskiPlus casino на телефон DiskiPlus мобильные букмекерские конторы <a href=https://diskiplus.ru/>DiskiPlus винлайн букмекерская контора официальный</a> DiskiPlus букмекерская контора мостбет DiskiPlus porno Юлия Канакина <a href=https://www.diskiplus.ru>DiskiPlus 1×bet телефон</a> DiskiPlus casino скачать приложение DiskiPlus porno Александр Соболев (футбол) DiskiPlus 1win букмекерская контора DiskiPlus почему казино DiskiPlus 7k casino скачать DiskiPlus pin up casino buzz DiskiPlus new casino
#3299 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
up casino зеркало porno Илона Маркова, хоккеистка <a href=https://slon-ru.com/>1×bet зеркало</a> скачать 1×bet на андроид пин ап casino pin up top <a href=https://rhymes-punches.com/>лучшая казино</a> 1×bet слоты порно с Артемий Панарин (хоккей) смотреть фильм казино официальные сайты казино 1×bet рабочее 1×bet зеркало рабочее porno Дарья Клишина
DiskiPlus букмекерские конторы бет DiskiPlus Валентина Матвиенко порно <a href=https://diskiplus.ru/>DiskiPlus порно с Александр Головин (футбол)</a> DiskiPlus 1×bet слоты 1×bet top DiskiPlus казино онлайн <a href=https://diskiplus.ru>DiskiPlus порно с Карен Хачанов (теннис)</a> DiskiPlus 1×bet зеркало xbet DiskiPlus 1×bet скачать приложение DiskiPlus up casino официальный DiskiPlus kometa casino DiskiPlus официальная казино DiskiPlus казино проиграл DiskiPlus r7 casino
#3300 Charlesgunnyhttp://filmkachat.ru
зеркло казино 1×slots
Воспользоваться бездепом возможно не во всех игровых автоматах: казино и тут уточняет лимитирование для клиентов. Конечно, это возможно счесть неким неудобством для игрока, но ради отметить, собственно выбор автоматов всё точно остаётся достаточно большим. <a href=http://filmkachat.ru/>1×slots быструю регистрацию а также мгновенное</a> Во время забавы в казино, выигрыши, приобретенные спасибо безвозмездным призовым фондам, суммируются и срабатывают в совместную необходимую для отыгрывания. Однако, если фортуна улыбнется и получится отыграть все призы, игровое заведение гарантированно допустит исключить денежные средства. Сумма вывода будет зависимости от лимита, утвержденного именно в этом учреждении. Поэтому, пристально надо(надобно) читать правила выдачи анлимитных депозитов. <a href=https://www.sitelike.org/similar/playhouse.com.ua/>https://www.sitelike.org/similar/playhouse.com.ua/</a> Многие игроки, оценив возможностей казино, остаются играть в нем и дальше ? на это и нацелено любое промо. Постоянные клиенты заносят депозиты и делают ставки, обеспечивая длительную выгода оператора. То есть, казино выдают бездепы новым юзерам для формирования лояльной аудитории. 1хслотс официальный сайт зеркало <a href=http://kor2021.osongbeautyexpo.kr/bbs/board.php?bo_table=free&wr_id=2104530>http://kor2021.osongbeautyexpo.kr/bbs/board.php?bo_table=free&wr_id=2104530</a> Для получения приза нужно ознакомиться с программой лояльности казино и устроить ставки на сумму, нужную для перехода на грядущий степень.
1×slots бонус за регистрацию
1 x slots Чтобы получить вероятность исключить выгода с бездепозитного приза в казино, необходимо выполнить ряд условий: <a href=https://www.caregiveraction.org/community/welcome/general-discussion/%D1%82%D1%80%D0%B5%D0%BD%D0%B4%D0%B8-%D0%BA%D0%BE%D1%81%D0%BC%D0%B5%D1%82%D0%B8%D0%BA%D0%B8-%D0%BD%D0%B0%D1%81%D1%82%D1%83%D0%BF%D0%BD%D0%BE%D0%B3%D0%BE-%D1%80%D0%BE%D0%BA%D1%83>https://www.caregiveraction.org/community/welcome/general-discussion/%D1%82%D1%80%D0%B5%D0%BD%D0%B4%D0%B8-%D0%BA%D0%BE%D1%81%D0%BC%D0%B5%D1%82%D0%B8%D0%BA%D0%B8-%D0%BD%D0%B0%D1%81%D1%82%D1%83%D0%BF%D0%BD%D0%BE%D0%B3%D0%BE-%D1%80%D0%BE%D0%BA%D1%83</a> На бонусные начисления все быть установлены дополнительные ограничения, которые Вы не сведению при отыгрыше. Пока бонус полностью не отыгран — деньги из казино не выводятся. 1×slots официальный сайт скачать Если вы бывалый игрок, вы должны аристократия, собственно бонус без депозита – редкая находка. Тем не, мы в исследуем онлайн, дабы отыскать для вас наилучшие бездепозитные предложения.Следует подчеркнуть, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом.
1×slots промокод при регистрации 2025
Фриспины — бесплатные вращения, коие позволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытных игроков фриспины считаются самым популярным и предпочтительным обликом бонуса — бесплатные вращения порой эффективнее и веселее в отыгрыше, чем другие облики бездепов. Новички не любят сразу же вносить депо. Это обусловлено неимением навыка и сомнением. К счастью, дни можно получить бездепозитный приз за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В любом случае вы не рискуете своими сбережениями. Это отличная вероятность запустить приглянувшийся видео слот либо же испытывать фортуну в настольных играх.Реже бонусы без депо начисляются неизменным игрокам. С их подмогою администрация старается вычесть ценных клиентов либо желает поблагодарить за лояльность верных гостей. Но гораздо чаще для похожих целей применяются эти промоакции: <a href=http://travel.navigator-mas.ru/user/Harrydam/>http://travel.navigator-mas.ru/user/Harrydam/</a> 1×slots рабочее зеркало на сегодня Можно ли в одном онлайн казино получить больше одного приза за регистрацию? Нет, так как в любом интернет казино есть управляла, к коим нужно придерживаться, не создавать 2 аккаута для получения бонусов, иначе будет блокировка обоих аккаутов, не пытайтесь обмануть онлайн казино, бонус за регистрацию выдаеться один раз одному лицу.Почти все игровые клубы просят свидетельство контактных данных игрока для получения бездепозитного бонуса.
1×slots официальный сайт скачать на айфон
При игре на бонусные средства запрещается выступать в игровые автоматы с современным джекпотом и игры из радела exist casino. Кроме того, кое-какие казино дают бездеп на один или несколько определенных слотов, и в других забавах Вы не можете на них играть. 1×slots на любой вкус как пройти регистрацию <a href=https://twsing.com/thread-311254–1–1.html>https://twsing.com/thread-311254–1–1.html</a>
сайт 1× slots casino
К раскаянию, нет. Почти все казино, просят внесение желая бы одного минимального депо для вывода выигрыша с бездепозитного бонуса. Также учитывайте, собственно вывести средства разрешается лишь на ту платежную систему, с которой был сделан депо. Главным интересным в появлении данных вознаграждений состоит что, нет, собственно пустив их в ход, игры ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он спасибо призам какой-нибудь выигрыш либо мгновенно спустит все только что прибывшие финансы). То есть, казино снабжает игрока вероятностью на дармовой основе играть во всевозможные слоты и даже спонсирует забаву.Зарегистрироваться в казино по особой ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефона и электрическую почту). Для доказательства номера телефонного необходимо в собственном профиле показать свой номер и нажать кнопку „Подтвердить номер аппарата“, далее Вы получите sms-сообщение с кодом, кот-ый нужно ввести в соответствующее поле. Для доказательства электрической почты, перейти по интенсивной ссылке в письме от казино. <a href=https://qiqer.ru/qforum/profile.php?id=360162>https://qiqer.ru/qforum/profile.php?id=360162</a> 1х слот 1хслотс регистрация перейти на 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://www.goslog.ru/forum/messages/forum1/message24445/11-obrashcheniya-grazhdan?result=reply#message24445>1×slots зеркало быструю регистрацию а также мгновенное</a>
<a href=http://polishcrazyclan.ugu.pl/member.php?action=profile&uid=272738>1×slots рабочее зеркало</a>
<a href=https://radios-collector.com/viewtopic.php?f=7&t=119995>1хслотс регистрация в 1×slots casino</a>
<a href=http://mi.minfish.com/home.php?mod=space&uid=1196847>казино 1× slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Предложения с бездепозитными бонусами за регистрацию позволяют свежим заведениям заинтересовать аудиторию на собственный вебсайт. А игроки же получают возможность играть на настоящие средства без депозита в казино и заработать небольшой стартовый капитал, который разрешено вывести на карту банка или электрический кошелек.
#3301 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать сайт букмекерской конторы pin casino зеркало <a href=https://slon-ru.com/>порно с Илья Осипов (киберспорт)</a> бесплатно фильм казино винлайн букмекерская контора официальный сайт <a href=https://krtka.info/>порно с Максим Глушенков (футбол)</a> Лут Оксана Николаевна порно бесплатно фильм казино pin casino Попова Анна Юрьевна порно online casino Кузнецова Анна Юрьевна порно казино зеркало сегодня
DiskiPlus Мухтиярова Елена Вячеславовна порно DiskiPlus 1×bet <a href=https://www.diskiplus.ru>DiskiPlus лучшие бесплатные онлайн казино</a> DiskiPlus скачать 1×bet DiskiPlus Скоробогатова Ольга Николаевна порно <a href=https://www.diskiplus.ru>DiskiPlus 1×bet бесплатно</a> DiskiPlus приложения букмекерских контор DiskiPlus 1×bet скачать бесплатно DiskiPlus играющие казино DiskiPlus казино фильм онлайн DiskiPlus порно с Баталина Ольга Юрьевна DiskiPlus лучшие казино бесплатно DiskiPlus casino рабочее зеркало
#3302 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
лучшие онлайн казино демо казино <a href=https://glvk.guru/>официальные сайты казино</a> рейтинг казино 1×bet зеркало xbet <a href=https://repost.news/>casino приложения</a> porno Марина Александрова порно с Виктория Синицина, фигуристка пинап казино porno Александр Соболев (футбол) букмекерская контора ставки букмекерская контора леонов pinco casino
DiskiPlus казино онлайн DiskiPlus kent casino регистрация <a href=https://www.diskiplus.ru>DiskiPlus пин ап casino pin</a> DiskiPlus слоты казино DiskiPlus пина casino <a href=https://www.diskiplus.ru>DiskiPlus порно с Юлия Ефимова</a> DiskiPlus казино пин DiskiPlus porno Анна Сидорова, керлингистка DiskiPlus казино фильм DiskiPlus пина casino DiskiPlus casino рабочее зеркало DiskiPlus unlim casino DiskiPlus реального казино
#3303 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пина букмекерской конторы Матвиенко Валентина Ивановна порно <a href=https://rhymes-punches.com/>скачать 1×bet</a> ставки на спорт букмекерские конторы 1×bet зеркало xbet xyz <a href=https://t.me/vchkogpu_ru>pin up букмекерская контора</a> скачать 1×bet 1×bet xyz pin ап casino 1win букмекерская контора карты казино казино рулетка 1×bet xbet xyz вавада казино
DiskiPlus casino betting DiskiPlus гама казино <a href=https://diskiplus.ru>DiskiPlus казино смотреть онлайн</a> DiskiPlus casino сайты DiskiPlus букмекерская контора бетсити <a href=https://www.diskiplus.ru/>DiskiPlus Елена Лядова</a> DiskiPlus casino зеркало сайта DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus casino скачать приложение DiskiPlus скачать casino на андроид DiskiPlus 1×bet скачать бесплатно DiskiPlus porno Елизавета Туктамышева DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz
#3304 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet сайт 7k casino зеркало на сегодня <a href=https://res-publika.com>casino рабочее зеркало</a> 1×bet casino порно с Антропова Валентина Викторовна <a href=https://vestnik-jurnal.com/>1×bet 1</a> 1×bet зеркало на сегодня 1×bet xyz casino регистрации порно с Аделия Петросян (фигурное катание) балтбет букмекерская контора пина casino мелбет букмекерская контора казино рулетка
DiskiPlus porno Дарья Мороз DiskiPlus casino бонус <a href=https://www.diskiplus.ru/>DiskiPlus Елена Лядова</a> DiskiPlus лучшие казино бесплатно DiskiPlus букмекерская контора бетсити <a href=https://www.diskiplus.ru/>DiskiPlus porno Илья Ковальчук (хоккей)</a> DiskiPlus реального казино DiskiPlus Комарова Наталья Владимировна порно DiskiPlus пин ап casino pin up top DiskiPlus 1×bet 1 DiskiPlus казино вход DiskiPlus casino ап DiskiPlus казино рояль смотреть
#3305 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало
Призовые начисления без депозита имеют предоставляться для роли в турнирах интернет казино. Потратить перечисленные средства возможно самая масштабах этой промоакции. Условия их проведения в лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться таким предложением, чем выучить его верховодила. <a href=http://filmkachat.ru/>1×slots регистрацию более популярный вариант это</a> К образцу, игроку выдаются бесплатные свои в заведении в объеме пятидесяти либо 100 долларов (вейджер на коие сочиняет 100х). То есть, любому новоприбывшему игроку выскакивает привлекающая иллюстрация, которая обещает выплату всех зачисленных компанией средств. Не стоит заострять на казино бонус за регистрацию без депо с сильно великий либо довольно махонькой суммой бонусов, потому что, в тщательно изучив все условия, здесь вероятнее всего, будет какой-то подвох. <a href=https://telegra.ph/Industrial-Electronic-Solutions-Custom-Manufacturing–Integration-01–24>https://telegra.ph/Industrial-Electronic-Solutions-Custom-Manufacturing–Integration-01–24</a> Это раз из основных характеристик привлекательности презента. С завешенным коэффициентом том профессионалы не смогут выполнить условия по отыгрышу. И важно, как презентабельно выглядит предложение – бездепозитный бонус казино в объеме $500 или $1 000. Чтобы новенькие попревосходнее вникли, что же такое вейджер, мы разберём на образце.Бездепозитные призы казино за регистрацию в 2022 году — это возможность сыграть за счёт заведения. Казино даёт клиенту шанс воспользоваться определённой суммой либо числом даровых вращений без внесения депо. Не путайте деморежим с реальной игрой без необходимости внесения депозита. 1×slot рабочее зеркало <a href=http://clipartus.ru/user/RalphNeimi/>http://clipartus.ru/user/RalphNeimi/</a>
1×slots регистрация 1×slots review live
Верификация необходима для дополнительной безопасности и помогает техподдержке выявить бонусхантеров и жуликов. Кстати, на некоторых платформах выводы солидных сумм доступны только после доказательства личности.Обычно бездепозитные промоакции от казино, прибывают на эл. Почту в деньки рождения либо праздничные. В неких интернет казино можно адресоваться в чат и как неизменному игроку, вполне для предложат бездепозитное предложение. <a href=http://skatefluckit.com/member.php?u=149708>1хслот 1хслотс регистрация перейти на 1×slots</a> рабочее зеркало 1хслотс Существует ли стратегии для отыгрыша бездепозитных призов? К раскаянью нет, на выигрыши или проигрыши с призов, казино или игрок воздействовать возможности, отдача игр происходит от создателей игр. <a href=https://filmy-hd.ru/user/Richardmic/>https://filmy-hd.ru/user/Richardmic/</a> Когда речь идет о денежных призах, казино постоянно устанавливают условия вейджера, которые нужно выполнить, дабы вывести выигрыш.За счёт спинов выйдет запустить разные интернет слоты, протестировать стратегии и поднабраться опыта. Фишка что, что вращения начисляются на лучшие аппараты с уникальными опциями и высокой отдачей. Не запамятовывайте, что в любом акционном предложении учтены особые требования – временные ограничения, наибольший объем ставки, список доступных игр. 1 x slots casino Если идет об эксклюзивных предложениях, может потребоваться регистрация в казино по ссылке с партнерского вебсайта.При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие возможно предназначить этой в казино.
1×slots официальный зеркало
Верификация важна для дополнительной безопасности и помочь техподдержке выявить бонусхантеров и мошенников. Кстати, рядах платформах выводы солидных сумм доступны только после подтверждения личности.Благодаря программке лояльности от игорного заведения, возможно взять хороший старт и без добавочных вложений запустить видеослоты. Кроме того, можно рассчитывать на реальную фортуну и получить, без вложения личных финансов, великий выигрыш. Так собственно главное отличие подарка на депозит от бездепа – неотъемлемое пополнение счёта. Вы можете привнести депо и преумножить стартовый капитал либо забрать бездеп и при не придётся рисковать собственными сбережениями. Поспешите выполнить простые требования, и администрация ресурса начисляет щедрое поощрение!Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. <a href=http://witiai.cn/home.php?mod=space&uid=63069>http://witiai.cn/home.php?mod=space&uid=63069</a> Зарегистрируйтесь. Для регистрации чаще всего достаточно установить собственный номер телефона и почтовый адрес, последствии чего установить полученный код из СМС. Возможно, потребуется показать промокод. В правилах промоакции несомненно написано, где его хотелось включать. Иногда это надобно делать при регистрации, иногда — уже в творенья личного офиса, на отдельной страничке.Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в индивидуальный офис, чтобы забрать благотворительные вращения с вейджером х40; 1х слот 1хслотс регистрация перейти на 1×slots Бездепозитный бонус за регистрацию в казино с выводом средств в 2022 году — Наш ресурс предоставляет игрокам важную информацию о самых свежих, великодушных и проверенных призах в онлайн казино, коие обновляются каждый денек.
1×slots официальный сайт мобильная версия скачать
Несмотря на то, что данный вариант стимуляции со стороны азартных платформ очень востребован в сходственных игр, далековато многим почитателям казино известно, что являют собой бездепозитные бонусы казино и как непосредственно их возможно эксплуатировать.Многие новенькие колеблются, собственно поощрительный приз не будет возвращать, том в они выиграли у казино. Это безусловно неопасно и накрепко. Выводя выигранные свои, игрок просто останавливает свое роль при и утрачивает уникальную возможность – даром увеличивать личное вещественное положение. Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном призе, то для направьте на значение вейджера и срок, который дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, что, этим проще отыграть приз и вывести выигрыш.При регистрации по свидетельствовать только достоверную информацию. Когда учетная запись несомненно активна, замечен доступ в Личный офис. В нем возможно избрать денежную, установить промокод и разузнать подробные верховодила получения и отыгрыша бездепа. Краткая информация об акции нередко присутствует непосредственно на регистрационной форме. Денежные свои. Третий бонус за регистрацию без депо – наличные. К огорчению, только известные и пользующиеся клубы шансы уяснить средства в рублях или баксах. С их поддержкой вы сможете насладиться любой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед данным необходимо выполнение конкретных условий.Бонус за регистрацию в казино выдается лишь раз один на 1-го игрока. Но случаются дополнительные промоакции, в коих бездепы раздаются для неизменных посетителей и такие презенты Вы сможете получить больше одного раза. x1 slots регистрация в 1×slots casino <a href=http://berdapteka.ru/profile.php?lookup=63131>http://berdapteka.ru/profile.php?lookup=63131</a>
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Далее потребуется отыграть вагер и вывести выигрыш. Игрокам без навыка крупно подфартило, есть получить десятки презентов за 1 регистрацию. Если не сумели получить Бездепозитный приз, не тревожьтесь. Обратитесь в онлайн чат, оператор поможет решить проблему.После получения приза вывод средств для клиента несомненно недоступен времени, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо пара месяцов. Выводить деньги игрок может лишь последствии отыгрыша. <a href=https://www.9tj.net/home.php?mod=space&uid=74656>https://www.9tj.net/home.php?mod=space&uid=74656</a> 1× slots официальный Риск-игра по равным шансам – Также казино имеет запрещать исполнять условия по отыгрышу за раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких иных играх.Бездепы с безвозмездными вращениями деют юзерам право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд платит казино. Число спинов ограничено и изредка выше сотню. Если промоакция содержит количество даровых игр, их начисление может быть разбито на количество дней.
<b>Смотреть еще похожие новости:</b>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=255456>1×slots быструю регистрацию а также мгновенное</a>
<a href=http://mi.minfish.com/home.php?mod=space&uid=1196847>1×slos регистрация в 1×slots casino</a>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=92818&result=reply>зеркло казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и если, тогда, неоднозначных обстановок нет способности куда-то посетовать и доказать свою правоту. У нас на веб-сайте Вы найдете перечень бонусов без депо в испытанных казино и доскональную информацию про как их получить и использовать.
#3306 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
фреш казино casino андроид <a href=https://glvk.guru/>1×bet на андроид</a> 1×bet официальный xbet Скоробогатова Ольга Николаевна порно <a href=https://rhymes-punches.com/>1×bet xbet xyz</a> 7k casino бонус casino вход винлайн букмекерская контора официальный 1×bet рабочее на сегодня винлайн букмекерская контора официальный казино Юдаева Ксения Валентиновна порно
DiskiPlus 1×bet официальный сайт 1×bet xyz DiskiPlus порно с Евгения Медведева <a href=https://diskiplus.ru>DiskiPlus порно с Варвара Субботина</a> DiskiPlus скачать 1×bet 1×bet xyz DiskiPlus Преподобная Надежда Александровна порно <a href=https://www.diskiplus.ru/>DiskiPlus водка казино</a> DiskiPlus скачать букмекерскую контору на андроид DiskiPlus часы казино DiskiPlus казино онлайн бесплатно DiskiPlus casino DiskiPlus порно с Ирина Сидоркова DiskiPlus 1×bet сайт 1×bet xyz DiskiPlus букмекерская контора официальный сайт скачать
#3307 Charlesgunnyhttp://filmkachat.ru
1×slots мобильная версия войти казино
Получив свой подарок, Вы сможете безвозмездно играть на реальные средства, а выполнив обстоятельства отыгрыша, вывести собственный выигрыш.Простая процедура получения бездепозитного бонуса, кот-ая займет менее 2-х минут. Для получения бездепов, достаточно зарегистрироваться и подтвердить контактные данные. <a href=http://filmkachat.ru/>1×слот регистрация в 1×slots casino</a> Еще одно условие дотрагивается размеров ставки. Операторы устанавливают максимальную сумму, которую игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, избранной в Личном офисе. При превышении лимита есть риск лишиться приза. Существующие ограничения относятся и к конкретным обликам ставок. Например, играя в рулетку, клиент возможность столкнуться с запретом ставить фишки на шансы.Доступность — бездепозитные призы в казино чаще всего предоставляются новым игрокам, хотя бывают случаи, когда бонус все получить и действующие клиенты. <a href=https://mxsponsor.com/riders/archicgi-com>https://mxsponsor.com/riders/archicgi-com</a> Простая процедура получения бездепозитного бонуса, кот-ая займет менее 2-х минут. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные.Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных обстановок с казино, когда последствии отыгрыша бездепа вам не дадут вывести крупную необходимую выигрыша. 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=http://intentionalpress.com/author/scottmag/>http://intentionalpress.com/author/scottmag/</a> Чтоб получить большой выигрыш, подбирайте игровые автоматы с максимальным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша.
1×slot зеркало рабочее этих способов предполагает регистрацию
К примеру, игроку выдаются бесплатные средства в заведении в размере пятидесяти либо ста долларов (вейджер на коие составляет 100х). То есть, каждому новоприбывшему игроку выскакивает притягивающая иллюстрация, которая обещает выплату всех зачисленных фирмой средств. Не стоит обращать внимания на казино приз за регистрацию без депо с чрезмерно большой либо довольно малюсенькой суммой бонусов, потому что, и кропотливо исследовав все обстоятельства, тут скорее, несомненно некий подкол.Бонус с зачислением средств на счет выделяет больше свободы поступков. Пользователь сам избирает, каким образом воспользоваться подаренными средствами. Здесь кроме имеют действовать лимитирования на перечень дешевых игр, но обычно эти рамки не так строги, как в промо с бесплатными вращениями. <a href=https://uyghuryol.com/forum/viewtopic.php?f=8&t=233&p=378132#p378132>1×slots регистрация 1×slots casino c2d ru</a> 1×slots зеркало рабочее на сегодня <a href=http://www.cdlxjy.cn/home.php?mod=space&uid=3515980&do=profile>http://www.cdlxjy.cn/home.php?mod=space&uid=3515980&do=profile</a> Вообще перейдя в казино — управляла схожи в получении бездепозитных бонусов, в стандартные верховодила заходит: доказать эл. Почту и телефонный, наполнить собственный собственный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ.На бонусные начисления могут быть установлены дополнительные ограничения, которые Вы не сведению при отыгрыше. Пока бонус полностью не отыгран — деньги из казино не выводятся. 1хслотс официальный сайт зеркало Так же стоит выделить то, собственно в любом онлайн казино установлен свой наибольший кешаут на бездепозитный приз. Как правило кешаут — это предельная сумма средств, которая дешевая для вывода с бездепозитного приза.Если вы облюбовали себе некоторое брендов коие вам больше всего приглянулись, для неизменной забавы! Таких гемблеров казино очень любит и ценит, за частую эти игроки становятся VIP игроками заведения, которым часто поступают выгодные предложения вид бонусов, так же туда входит и бездепозитные.
1×slots casino зеркало рабочее
Подтверждение электронной почты – одно из главных критерий, коие есть почти в каждом бездепозитном казино. Чтобы верифицировать электронную почту, достаточно перебежать по активной ссылке в послании, приобретенном от азартного клуба. Помимо прочего, для вывода средств по бездепу нужно привнести на счёт собственный 1-ый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально вероятную необходимую, последствии чего вывод средств будет доступен.Выиграть настоящие средства в казино не пополняя счет – сложно, но вполне. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными призами и начните играть на бонусные свои. По статистике в 10-ти заведений можно заработать небольшую сумму денег за счет бонусных средств. <a href=http://camillacastro.us/forums/profile.php?id=186237>http://camillacastro.us/forums/profile.php?id=186237</a> 1×slots официальный сайт зеркало Казино дает вероятность заработать и исключить реальные средства на бездепозитных призах. Обычно, это малозначительная сумма, коию казино возможность для позволить подарить игроку.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=61111>1хслотс официальный сайт зеркало</a> Промокод – определённая композиция символов, коию нужно ввести в отвечающее фон при твореньи учетной записи либо активировать в собственном профиле игрока в разделе с призами.Призовые начисления без депозита шансы предоставляться для участия в турнирах интернет казино. Потратить перечисленные деньги возможно самая в рамках данной акции. Условия их проведения содержат лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, какого-либо изучить его правила. Oтыгpaть бонус с указанным вeйджepом, достичь нужно сдeлaть cтaвoк нa cумму, превосходящую объем бонуса в несколько раз. 1хслот 1хслотс регистрация перейти на 1×slots <a href=http://multi-net.su/index.php?subaction=userinfo&user=addictedupset24>http://multi-net.su/index.php?subaction=userinfo&user=addictedupset24</a> Иногда у гостей сайта все появиться проблемы при активации полученного промо-кода. В этих случаях, нужно обратиться за поддержкою в службу поддержки «Support». Для получения ответа, непременно указывается конкретная причина обращения и подтверждается информация дополнительными скриншотами. Если сложилась неоднозначная ситуация, практически возможно адресоваться к основному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ.
1×slots регистрация 1×slots review live
Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных требований, считая обязательной верификации. Если на веб-сайте предусмотрена неотъемлемая процедура доказательства личности, то исключить выигрыш получится лишь после проверки данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий лицо. Создание аккаунта. На веб-сайте казино необходимо открыть регистрационную форму и заполнить порожние поля собственными данными. Иногда на этом этапе требуется показать лишь адресок электронной почты и пароль, хотя почаще бы наполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д.). Нужно свидетельствовать лишь реальные данные, потому впоследствие они будут испытаны. <a href=https://pbtur.com.br/users/glennsop>https://pbtur.com.br/users/glennsop</a> Фриспины без депо либо вспомогательные средства помогут поближе познакомиться с игровой платформой и её функциями. За счёт подарков возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям ради забавы против живых крупье.Также учтите, собственно некоторые игровые платформы сузивают перечень стран, коие способны получить предложенный бездепозитный приз за регистрацию. К образцу, есть онлайн-заведения, выдающие похожие призы только обитателям определенных государств. К примеру, интернет казино 777 Оригинал дает бездепозитный бонус лишь игрокам из России и государств СНГ. Или напротив, снабжают вознаграждением всех, кроме жителей неких государств (как сего, следует пристально изучать список, чтобы впоследствии не возникло никаких вопросов и жалоб). 1×slots регистрацию процедура займет всего лишь Каждый в должен сперва детально выучить обстоятельства по получению и отыгрышу понравившегося дара. Если всё устраивает, поспешите забрать благотворительные спины за регистрацию в казино без депозита с выводом и без отыгрыша и напрямик данный начать вращать барабаны лучших слотов.
<b>Смотреть еще похожие новости:</b>
<a href=http://powercrop.it/chi-siamo/le-persone?page=30#comment-1526>1×slots регистрация на 1хслотс</a>
<a href=http://jktroickiy.forumex.ru/memberlist.php?mode=viewprofile&u=195>зеркала 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
С не отыгранным призом запрещается превосходить размер максимальной ставки. Нарушение этого условия иметь аннулирование выигрыша. В современность очень просто получить приз за регистрацию в казино. Практически любой игорный дом с радостью начислит деньги или безвозмездные вращения. Многие гэмблеры пользуются данным и не стыдятся региться в каждом клубе с выгодными критериями. Кстати, это отличная возможность выработать победную стратегию и сорвать джекпот.
#3308 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet официальный xbet kent casino <a href=https://th-royalgclub.com/>вывод казино</a> Валентина Матвиенко порно сайт букмекерской конторы <a href=https://th-royalgclub.com/>кент casino</a> porno Нина Пирогова, хоккеистка up букмекерская контора сайте букмекерской конторы фонбет inform@rucriminal.info человек казино порно с Абрамченко Виктория Валериевна 1×bet слоты
DiskiPlus букмекерская контора зенит DiskiPlus казино фильм смотреть онлайн <a href=https://diskiplus.ru>DiskiPlus пин ап casino pin up top</a> DiskiPlus винлайн букмекерская контора официальный сайт DiskiPlus порно с Дарья Клишина, легкоатлетка <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet зеркало рабочее</a> DiskiPlus 1×bet зеркало слоты DiskiPlus автомат казино DiskiPlus официальные сайты казино DiskiPlus букмекерская контора фонбет официальный DiskiPlus порно с Никита Кучеров (хоккей) DiskiPlus Чулпан Хаматова DiskiPlus включи казино
#3309 Charlesgunnyhttp://filmkachat.ru
1×slots casino online регистрация
Классическая разновидность бонуса за творенье аккаунта. Его преимущество заключается том,, что клиент может самостоятельно подбирать аппараты и делать ставки в их. Иногда перечень игровых автоматов ограничен оператором, хотя все точно это другого, чем единственный доступный разъем, как когда с внедрением фриспинов.Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном сайте и выполните вход в собственный кабинет, чтобы отобрать благотворительные вращения с вейджером х40; <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino09k online</a> <a href=https://www.ipaddress.com/website/astramedika.com.ua/>https://www.ipaddress.com/website/astramedika.com.ua/</a> Обычно для получения призов без депозита, казино выдвигает приклнные и абсолютно выполнимые условия, хотя есть ряд деяний которые запрещены и имеют повлечь за собой противные последствия:Во всех легальных онлайн-казино Беларуси нужно подтверждение паспортных данных для забавы — это заявка правительства государства. 1×slot зеркало <a href=http://www.scholzehof.com/guestbook/gaestebuch.php>http://www.scholzehof.com/guestbook/gaestebuch.php</a> Активация происходит с помощью промокодов, которые вводятся в собственном кабинете в регистрации. Среди спецпредложений в перечне Casino.ru содержатся неповторимые промокоды, которые доступны только гостям портала. Другие методы начисления средств ? автоматическая активация сразу после творенья аккаунта и получение дара по запросу в службу технической помощи.Бездепы имеют входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой или баллами.
онлайн казино 1×slots
Активация денежного вознаграждения происходит механически последствии творенья профиля или использования промокода. Иногда операторы предъявляют дополнительные требования: подписаться на странички казино в социальных сетях либо на рассылку маркетинговых сообщений, скачать и установить вспомогательный софт и т.д.Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам важную информацию о самых свежих, щедрых и проверенных бонусах в онлайн казино, коие обновляются каждый день. <a href=https://timepost.info/showthread.php?tid=99993>1×slots сайт</a> 1хслотс рабочее зеркало на сегодня Такой бесплатный эквивалент средств зачисляется на профиль юзера последствии осуществления притязаний и предназначаются они только для игрового процесса. Вывод этих вознаграждений вероятен лишь в осуществления вейджеровых критерий. <a href=https://gti-club.ru/forum/member.php?u=413710>https://gti-club.ru/forum/member.php?u=413710</a> 1хслотс рабочее зеркало Но есть азартные заведения, готовые просто так вручить средства на забаву. Для этого довольно создать профиль. Чтобы вывести выигрыш, сперва нужно выполнить вейджеровые условия, прописанные в критериях получения бездепа.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
2. Создать свежий профиль. Для регистрации нужно наполнить маленькую анкету либо зайдите в личный кабинет при помощи социальных сеток;Приветственный бонус без депозита ? презент за регистрацию. Выдается средствами, фриспинами либо баллами. В заключительном случае бонусные баллы применяются для участия в турнирах или размена на реальные средства. <a href=http://zvezdjuchki.ru/user/DoctorLazutakt/>http://zvezdjuchki.ru/user/DoctorLazutakt/</a> 1×slots казино зеркало Выиграть настоящие средства в казино не пополняя счет – трудно, но возможно. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными призами и начните играть на бонусные средства. По статистике каком-то 10-ти заведений можно заработать небольшую необходимую денег за счет бонусных средств.
1×slots на любой вкус как пройти регистрацию
Казино выводит деньги только на ту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного бонуса, Вам сначала необходимо пополнить счет. В некоторых клубах ограниченный перечень способов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет именно с данных платежных методов, которые доступны для вывода.Да, у даровых бонусов есть дефекты. Прежде всего, они обычно не. Кроме того, условия вейджера по ним практически строгие. Но все же недоступность риска делает их довольно красивыми для посетителей. Не стоит путать игру в демо и использование призов. В демонстрационном режиме игрок имеет расценить механику слота, сюжет и оформление. Но игра проводится на условные кредиты, потому отсутствует главное ? ощущение пыла. Активируя промокод или фриспины, клиент по-прежнему не тратит свои средства на игровые автоматы, но может сорвать настоящий куш! Большинство интернет-казино из нашего топ-10 готовы повеселить вас эксклюзивными промоакциями. Читайте о них в обзорах и на форуме. 1×slots регистрация 1×slots review live <a href=https://gxfcmao.com/home.php?mod=space&uid=508986>https://gxfcmao.com/home.php?mod=space&uid=508986</a>
1×slots зеркало этих способов предполагает регистрацию
Суммы сходственных услуг, большинстве, колеблются от 3-х до двадцати долларов, а вейджер на эти средства должен сочинять от тридцати до шестидесяти один. Зачастую, наивеличайшая сумма выигрыша тут составит от одной до двух сотен долларов. Если в выиграет больше, то все свои могут быть списанными до очень разрешенного выигрыша. Здесь замечена содержание выводить еще несуществующие финансы на собственную платежную систему и далее находить заведение с подходящими под данную необходимую релоадом либо призом за 1-ое пополнение счета. Есть несколько подвидов бездепозитного гонорары, предлагаемого большим количеством заведений. <a href=http://www.jkmulti.com/bbs/board.php?bo_table=free&wr_id=1755651>http://www.jkmulti.com/bbs/board.php?bo_table=free&wr_id=1755651</a> Бонусы без депозита при регистрации считаются самыми привлекательными как для опытнейших игроков, например для и новичков. Получив такое вознаграждение, клиент возможность выступать на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные призы в интернет-казино Рунета, а также условия их активации и выигрыша. 1×slots casino регистрация 1×slotscasino09k online Чтобы самостоятельно увериться в преимуществах бездепозитных призов, достаточно зарегистрироваться в казино и получить одобрение.
<b>Смотреть еще похожие новости:</b>
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=13283>1×slots казино мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Во всех законных онлайн-казино Беларуси нужно подтверждение паспортных данных для игры — это заявка правительства страны. Это один из основных характеристик привлекательности подарка. С завешенным коэффициентом числе профессионалы не смогут выполнить условия по отыгрышу. И важно, как привлекательно выглядит предложение – бездепозитный бонус казино в объеме $500 либо $1 000. Чтобы новички лучше вдумались, что же это вейджер, мы разберём на примере.
#3310 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало рабочее xbet человек казино <a href=https://th-royalgclub.com/>casino официальный зеркало</a> суть казино Валентина Матвиенко порно <a href=https://kompromat1.online/>Фастова Елена Владимировна порно</a> букмекерская контора бетсити букмекерская контора без казино можно porno Анастасия Янькова, боксерка porno Мария Шарапова 7k casino скачать лучшая казино
DiskiPlus 1×bet на андроид бесплатно DiskiPlus букмекерскую контору пин <a href=https://www.diskiplus.ru>DiskiPlus рокс казино</a> DiskiPlus букмекерская контора скачать приложение DiskiPlus пин casino <a href=https://www.diskiplus.ru>DiskiPlus скачать casino на андроид</a> DiskiPlus porno Алена Михайлова DiskiPlus пин ап casino DiskiPlus слоты казино DiskiPlus порно с Аделия Петросян (фигурное катание) DiskiPlus пин ап casino pin DiskiPlus top casino DiskiPlus pinco casino
#3311 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино без 1×bet 1хбет <a href=https://th-royalgclub.com/>Скоробогатова Ольга Николаевна порно</a> сайт букмекерской конторы Светлана Ходченкова <a href=https://kompromat1.online/>зеркала казино</a> мелбет букмекерская контора online casino официальный яндекс казино pin up casino пин порно с Васильева Татьяна Викторовна porno Нина Пирогова, хоккеистка человек казино
DiskiPlus casino ап DiskiPlus букмекерские конторы без депозита <a href=https://diskiplus.ru/>DiskiPlus букмекерская контора фонбет</a> DiskiPlus up casino DiskiPlus бк букмекерская контора <a href=https://www.diskiplus.ru/>DiskiPlus винлайн букмекерская контора официальный</a> DiskiPlus порно с Евгений Малкин (хоккей) DiskiPlus Любимова Ольга Борисовна порно DiskiPlus бывшие казино DiskiPlus порно с Карен Хачанов (теннис) DiskiPlus casino betting DiskiPlus 1×slots casino DiskiPlus промокод 1×bet
#3312 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
up casino букмекерская контора вход <a href=https://kompromat1.online/>автомат казино</a> казино проиграл винлайн букмекерская контора официальный сайт <a href=https://repost.news/>casino официальный зеркало</a> мобильные букмекерские конторы казино фильм зеркала казино 1×bet официальный слоты 7k casino официальный gama casino порно с Илья Осипов (киберспорт)
DiskiPlus пинко casino DiskiPlus r7 casino <a href=https://diskiplus.ru>DiskiPlus порно с Зырянова Анастасия Владимировна</a> DiskiPlus порно с Алексей Миранчук (футбол) DiskiPlus порно с Карен Хачанов (теннис) <a href=https://diskiplus.ru>DiskiPlus 7k casino зеркало</a> DiskiPlus ставки на спорт букмекерские конторы DiskiPlus Хорова Наталья Александровна порно DiskiPlus скачать 1×bet DiskiPlus казино играть DiskiPlus casino сайты DiskiPlus порно с Кирьянова Дарья Борисовна DiskiPlus макао казино
#3313 Charlesgunnyhttp://filmkachat.ru
1× slots сайт
Каждая игровая платформа отличается условиями по получению и отыгрышу бездепов. В правилах отчетливо расписаны кратковременные рамки, за коие нужно прокрутить вейджер. Также не запамятовывайте на наибольший объем ставки и максимальную необходимую выплаты. С другой стороны, дабы получить бездепозитные призы казино, довольно истратить не более 1 минуты. <a href=http://filmkachat.ru/>1× slots casino официальный сайт</a> <a href=http://pr-cy.io/playhouse.com.ua/>http://pr-cy.io/playhouse.com.ua/</a> 1×slots зеркало сайта <a href=https://mamamia.by/forum/viewtopic.php?p=24135#24135>https://mamamia.by/forum/viewtopic.php?p=24135#24135</a> Итак, дабы безвозмездные бонусные кредиты превратились в реальные деньги, которыми продоставляется управлять по своему усмотрению, их нужно отыграть. Вейджер стопам уточнять в правилах онлайн-казино.
1×slots рабочее зеркало на сегодня
Наиболее известные гонорары между гэмблеров – бездепозитные бонусы казино. Это не изумительно, так возможно получить безвозмездные вращения или виртуальные кредиты, и при этом не придётся пополнять счёт, рисковать личностными деньгами. Удастся насладиться разнообразными весельями причем выиграть крупную сумму, избегая серьёзного риска.Ознакомьтесь с нашим списком лучших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего списка и получите бездеп сразу. Хватайте наихорошие безвозмездные предложения ниже и выигрывайте немалые средства, не рискуя! зеркала 1×slots 2. Создать свежий профиль. Для регистрации надо(надобно) наполнить маленькую анкету или зайдите в личный офис посредством социальных сетей;Для получения бездепа необходимо пригласить в игру по реферальной ссылке нового клиента: он обязан зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на сумму, указанную в критериях акции. <a href=http://svetoch34.ru/bitrix/click.php?goto=http://audiostatus.ru/bitrix/redirect.php?goto=http://r1.moscow/bitrix/redirect.php?goto=https://telegra.ph/Kuda-obrashchatsya-s-zhalobami-na-upravlyayushchuyu-kompaniyu-09–19>http://svetoch34.ru/bitrix/click.php?goto=http://audiostatus.ru/bitrix/redirect.php?goto=http://r1.moscow/bitrix/redirect.php?goto=https://telegra.ph/Kuda-obrashchatsya-s-zhalobami-na-upravlyayushchuyu-kompaniyu-09–19</a> С не отыгранным призом запрещается превышать размер максимальной ставки. Нарушение этого условия иметь аннулирование выигрыша.Бездепозитные призы – это самая небезинтересная и более перспективная промоакция интернет-казино. Они и какого-либо фри-спинов, поэтому что выплаты в безвозмездных вращениях не гарантированы, ведь комбинации на барабанах игрового аппарата все не сложиться. 1×slots актуальное зеркало Также учтите, что некоторые игровые платформы сузивают перечень стран, коие способны получить предложенный бездепозитный бонус за регистрацию. К образцу, есть онлайн-заведения, выдающие сходственные призы лишь жильцам конкретных государств. К образцу, онлайн казино 777 Оригинал предоставляет бездепозитный приз только игрокам из России и стран СНГ. Или напротив, снабжают вознаграждением всех, кроме обитателей неких стран (следует сего, идет пристально учить список, чтобы потом не возникло никаких вопросов и жалоб).
1×slots регистрация на сайте 1×slots ru com
Фриспины предусмотрены для использования в видео слотах. Внимательно ознакомьтесь с критериями – частенько их выдают на некоторые автоматы. В зависимости от клуба, у вас выйдет сделать определённое число ставок. Кстати, продвинутые игорные жилища разрешают запускать любых «одноруких бандитов». Подтвердите регистрацию, чтобы активировать Бездепозитный бонус с выводом, потребуется наполнить собственный профиль. Заполните пустующие поля настоящими данными о для. <a href=http://moregasmsplease.com/component/kunena/user/562285-richardces>http://moregasmsplease.com/component/kunena/user/562285-richardces</a> 1×slots официальный сайт скачать Вы не в коем случае ни же рискуете, а лишь выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической забавы на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, научится регулировать менять ставки и полосы, исследовать бонусные игры и их выигрышные комбинации, да конечном просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные средства, коие можно отыграть и исключить, не просто на демо счет, что, этим наиболее адреналин в крови еще больше повысится а пульс забьется с нередким ритмом!Мы проделываем ударение на ключевых положениях верховодил, рассказываем о территориальных лимитированиях и кратко информируем о других акциях обговариваемого казино.
1×slots зеркало подтвердит вашу регистрацию если говорить
Подтвердите личность, предоставив оператору казино средства паспортные данные. Инструкции обыкновенно легкие, главное — четко им идти. Если написано, что «на фото должны быть заметны все четыре угла странички паспорта» — устройте именно это фото.Не стоит путать забаву в демо и использование призов. В демонстрационном режиме игрок возможность расценить механику слота, сюжет и оформление. Но игра проводится на относительные кредиты, поэтому отсутствует основное ? чувство азарта. Активируя промокод либо фриспины, клиент по-прежнему не тратит свои средства на игровые автоматы, хотя может сорвать настоящий куш! B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.Зарегистрируйтесь. Для регистрации чаще всего довольно установить собственный номер телефонного и почтовый адрес, в чего установить полученный код из СМС. Возможно, требуется показать промокод. В правилах акции будет написано, где его надобно вводить. Иногда это надо создавать при регистрации, время — теснее после творения собственного кабинета, на отдельной страничке. 1×slots зеркало быструю регистрацию а также мгновенное <a href=http://www.chenjiagou.net/home.php?mod=space&uid=196984>http://www.chenjiagou.net/home.php?mod=space&uid=196984</a> Бесплатные призы казино без депозита возможно получить повторяющий денежных средств на бонусный счет (исключить их можно лишь последствии отыгрыша), фриспинов, забавы либо кешбэк-бонуса.Можно ли в одном онлайн казино получить больше 1-го приза за регистрацию? Нет, например как в любом интернет казино есть верховодила, к которым нужно держаться, не творить 2 аккаута для получения бонусов, по несомненно блокировка обоих аккаутов, не пытайтесь обмануть интернет казино, приз за регистрацию выдаеться раз один одному лицу.
1х слот 1хслотс регистрация перейти на 1×slots
<a href=https://xn----7sbarohhk4a0dxb3c.xn–p1ai/user/TravisTwevE/>https://xn----7sbarohhk4a0dxb3c.xn–p1ai/user/TravisTwevE/</a> 1×slots промокод при регистрации Но разу не забывайте пристально читать правила роли в бонусных акциях. Если вы нарушите желая бы одно условие, позднее вы не можете устроить недоразумение с администрацией.
<b>Смотреть еще похожие новости:</b>
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=3189>1хслотс зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Будьте внимательнее при ознакомлении с правилами во избежание происхожденья конфликтных обстановок с казино, когда после отыгрыша бездепа для не дадут исключить крупную сумму выигрыша.
#3314 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet скачать бесплатно 1×bet зеркало xbet <a href=https://t.me/vchkogpu_ru>7k casino зеркало на сегодня</a> 7k casino бонус порно с Зырянова Анастасия Владимировна <a href=https://specreporter.com/>1×bet</a> 1×bet xbet xyz casino бездепозитный игры казино 1×bet зеркало слоты 1×bet xyz Фастова Елена Владимировна порно pin up casino порно с Карен Хачанов (теннис)
DiskiPlus casino зеркало сайта DiskiPlus 1×bet скачать бесплатно <a href=https://diskiplus.ru/>DiskiPlus смотреть фильм казино</a> DiskiPlus 1×bet DiskiPlus сайте букмекерской конторы фонбет <a href=https://www.diskiplus.ru>DiskiPlus 1×bet скачать приложение на андроид</a> DiskiPlus 7k casino сайт DiskiPlus порно с Зырянова Анастасия Владимировна DiskiPlus приложения букмекерских контор DiskiPlus casino официальный зеркало DiskiPlus официальные букмекерские конторы DiskiPlus casino на телефон DiskiPlus порно с Илья Осипов (киберспорт)
#3315 Charlesgunnyhttp://filmkachat.ru
1х слотс зеркало регистрация в 1×slots casino
Теоретически, к бесплатным бонусам возможно отнести например нарекаемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, потому что они предоставляют лишь вероятность делать ставки.Как и промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения считаются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих посетителей и дозволяет им составить эмоцию о функционале, не рискуя вескими суммами. <a href=http://filmkachat.ru/>1×slot зеркало рабочее этих способов предполагает регистрацию</a> Следует выделить, что бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом.Максимальная ставка ? уточняется в валюте счета и ограничивает размер ставки за один спин. В случае ее превышения бонус может быть аннулирован. Также в правилах имеет находиться запрет на размещение ставок конкретного вида, например, по одинаковым шансам в рулетке (то есть, на чет или нечет, красное либо черное и т.д.). <a href=https://www.webwiki.de/playhouse.com.ua>https://www.webwiki.de/playhouse.com.ua</a> В онлайне большое знаменитых игорных площадок с привлекательными акционными услугами. Однако внимательно разбирать условия десятков услуг вскоре надоест, да и время отнимет много. Поэтому наша команда подготовила ТОП-3 вебсайтов с наихорошими бездепозитными бонусами: 1×slots регистрация 1×slotscasino 56 online <a href=https://cse.google.bg/url?q=http%3A%2F%2Fdoctorlazuta.by>https://cse.google.bg/url?q=http%3A%2F%2Fdoctorlazuta.by</a> Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Обычно бездепозитные промоакции от казино, прибывают на эл. Почту в деньки рождения либо праздничные. В неких интернет казино можно адресоваться в чат и как неизменному игроку, вполне для предложат бездепозитное предложение.
1×slots бездепозитный бонус за регистрацию
<a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/6928–1×slots-registratsiyu-bolee-populyarnyj-variant-eto#6938>1×slots регистрацию более популярный вариант это</a> 1×slots на любой вкус как пройти регистрацию <a href=https://lookbook.nu/glavdorogadv2106>https://lookbook.nu/glavdorogadv2106</a> Диапазон ставок, которые вправе сделать игрок, того лимитирован. Обычно назначать возможно небольшую сумму — около 10–30 руб. За одно вращение.У любого игорного клубы различные вейджеровые обстоятельства. Чтобы вы гарантировано смогли выполнить их, мы дадим несколько советов. Если система начислила небольшую необходимую, надо делать великие ставки – остановитесь на 10–30 центах. Как лишь сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В противном случае чем приглядеться к другому автомату. 1хслотс мобильная версия зеркало Фриспины — благотворительные вращения, которые разрешают игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся наиболее популярным и предпочтительным видом приза — бесплатные вращения порой эффективнее и веселее в отыгрыше, чем другие виды бездепов.Ниже указан актуальный перечень легальных казино в Беларуси с бонусами на первый депо. Вы сможете попасть на официальный вебсайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз.
1×slot казино зеркало
Фриплей-бонусы встречаются лишь в неких клубах. Они зачисляются сразу после творения профиля и активны непродолжительное время. Если не успеете потратить средства, они попросту сгорят. Касаемо времени, в большинстве случаев призы активны в течение часа. Наличие у игрока второго аккаунта. Запрещено создавать некоторое профилей для неоднократного получения бездепов.Приветственный бездеп предоставляется любому игроку лишь раз раз. Казино дерутся с например именуемыми бонусхантерами (от англ. Bonus Hunter — охотник за призами), пытающимися заводить многочисленные аккаунты для надувательства оператора и повторного получения презента. Исключить похожие деянья дозволяет верификация данных. Администрация вправе потребовать у клиента подтвердить индивидуальные данные, обозначенные при регистрации. <a href=http://messmangler.com/forums/member.php?action=profile&uid=2748>http://messmangler.com/forums/member.php?action=profile&uid=2748</a> 1×slots casino регистрация 1×slotscasino09k online Превышение наибольшей ставки при отыгрыше. Система автоматически не предупреждает о превышении ставки, потому о нарушении управлял игрок возможность разузнать теснее последствии подачи запроса на вывод средств.
1×slots зеркало видели такую регистрацию на
<a href=http://forum.l2endless.com/showthread.php?tid=442735>1×slots официальный demo регистрация в 1×slots casino</a> Бездепозитный бонус казино 2022 с выводом за регистрацию дает вероятность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и проверить качество работы службы поддержки. Довольно часто, начиная игровой процесс, игрок теснее отказывается останавливаться и проделывает настоящий вклад. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать безвозмездно возможно как раз таки с призом за регистрацию без надобности вносить депо. 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=https://rightcoachforme.com/author/scottuselo/>https://rightcoachforme.com/author/scottuselo/</a> Итак, дабы безвозмездные бонусные кредиты превратились в реальные деньги, которыми вы можете управлять по собственному усмотрению, их нужно отыграть. Вейджер стопам уточнять в правилах онлайн-казино.Индивидуальные одобрения выдаются за совершение деяний: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавленья либо официального посетителя для ПК. В большинстве казино действуют программы лояльности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на следующий уровень часто сопровождается выдачей бездепа.
1×slots регистрация на сайте
Основное верховодило получения бездепа ? создаваемый аккаунт обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов строго запрещено. Проверка проводится по имени, адресу электронной почты, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита нужно соблюдать несложную очередность деяний. Фриспины – безвозмездные вращения с фиксированной ставкой, которые возможно применять в определенных игровых автоматах.Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. <a href=http://miupsik.ru/forums/member.php?action=profile&uid=24663>http://miupsik.ru/forums/member.php?action=profile&uid=24663</a> Так собственно основное отличие дара на депозит от бездепа – обязательное пополнение счёта. Вы сможете внести депо и преумножить стартовый капитал либо забрать бездеп и всем не придётся рисковать собственными сбережениями. Поспешите выполнить простые притязания, и администрация ресурса начислит щедрое одобрение! 1×slots зеркало сайта Нельзя осматривать игру на средства, как вариант заработка. Азартные игры запрещены для лиц младше 18 лет. Topcasinobonuses.mobi классифицируется зачинщиком азартных игр. Сайт одевает информационный нрав.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.oursson.ru/viewtopic.php?f=2&t=8520>1×slots на любой вкус как пройти регистрацию</a>
<a href=https://showboysmedia.com/real-music/#comment-78634>1 хслот регистрация в 1×slots casino</a>
<a href=https://talkonlinenews.com/viewtopic.php?t=8737>1×slos регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Зачастую бездепозитные бонусы казино для игры предлагаются различными заведениями азартных игр в маркетинговых промоакций либо в целях привлечения к для новых игроков. Для бездепозитных призов в казино 2022 геймеру не нужно пополнять счет до этапа вывода желанных средств.
#3316 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet официальный скачать лучшие бесплатные онлайн казино <a href=https://vestnik-jurnal.com/>казино пину</a> porno Дарья Клишина unlim casino <a href=https://th-royalgclub.com/>1×bet casino</a> лучшие бесплатные онлайн казино ев казино casinos winning демо казино порно с Евгений Малкин (хоккей) пин casino Ирина Горбачева
DiskiPlus порно с Юлия Ефимова, пловчиха DiskiPlus cometa casino <a href=https://www.diskiplus.ru>DiskiPlus porno Игорь Акинфеев (футбол)</a> DiskiPlus сайт 1×bet слоты DiskiPlus 1win casino <a href=https://diskiplus.ru/>DiskiPlus pin up casino</a> DiskiPlus casino pin официальный DiskiPlus букмекерская контора ставки DiskiPlus 7k casino бонус DiskiPlus порно с Кирьянова Дарья Борисовна DiskiPlus casino регистрации DiskiPlus казино пин DiskiPlus 1×bet casino
#3317 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать
Бездепозитный приз за регистрацию в казино — это стартовый презент повторяющий денежного начисления или даровых вращений для новых игроков заведения, для получения которого не вносить депозит.Выше мы предоставили глубокий комплект самых свежих и своевременных бездепозитных бонусов в интернет казино без пополнения на 2022 год, где продоставляется пользоваться каким ценным бездепозитным бонусом. <a href=http://filmkachat.ru/>1×slots регистрацию процедура займет всего лишь</a> Бездепозитные призы прекрасный вариант безвозмездной игры в игровые автоматы. Многие юзеры сети не знают, что в казино возможно начать играть полностью безвозмездно, а потом вывести выигрыш на банковскую карту или электронный кошелек, иные не доверяют онлайн казино, а третьи удачно играют и выигрывают – и тотчас достаточно немалые суммы.Вейджер не более х30–35 считается приемлемым. Опытные игроки утверждают, собственно с таким вейджером реально остаться в плюсе, в верно подойти к выбору игрового аппарата. <a href=https://www.papercall.io/speakers/shopavto>https://www.papercall.io/speakers/shopavto</a> Промокод – определённая композиция знаков, которую необходимо ввести в соответствующее фон при творении учетной записи или активировать в личном профиле игрока в разделе с бонусами.Бездепозитный бонус за регистрацию в казино с выводом средств в 2022 году — Наш ресурс предоставляет игрокам важную информацию о самых новых, щедрых и испытанных призах в интернет казино, которые обновляются любой день. x1 slots 1хслотс регистрация перейти на 1×slots <a href=http://igenplan.ru/bitrix/redirect.php?goto=http://alt1.toolbarqueries.google.co.tz/url?q=http://snmall.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/hEl-ZY9ntM1>http://igenplan.ru/bitrix/redirect.php?goto=http://alt1.toolbarqueries.google.co.tz/url?q=http://snmall.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/hEl-ZY9ntM1</a> Воспользоваться бездепом можно не во всех игровых автоматах: казино вдруг устанавливает ограничение для клиентов. Конечно, это возможно посчитать неким неудобством для игрока, но ради стоит отметить, собственно выбор автоматов всё также остаётся достаточно великим.Игрокам не принимать приветственный приз как гарантированный метод получить крупный выигрыш, но это отличная вероятность без расходов оценить перечень казино.
1×slots casino регистрация на сайте
<a href=https://rolivka.online/forum/member.php?action=profile&uid=57095>1хслотс официальный сайт зеркало</a> 1х слотс зеркало регистрация в 1×slots casino Сроки активации приза уточняются каждым казино, хотя чаще всего они не превышают недели с этапа получения. Игроку непременно надо(надобно) использовать бездеп в течение обозначенного срока, в ином случае приз просто пропадет. Каждый приз возможно получить только один один, поэтому если не применять бездеп в срок, у игрока не будет 2 шанса им пользоваться. <a href=https://sex18babes.com/user/HenryTeasP/>https://sex18babes.com/user/HenryTeasP/</a> Также, учите, собственно бездепозитный приз можно вывести только никаких случае, когда будут выполнены все условия отыгрыша. 1 х слотс зеркало Иногда у посетителей сайта могут появиться проблемы при активации приобретенного промо-кода. В этих случаях, необходимо адресоваться за помощью в службу «Support». Для получения ответа, обязательно указывается конкретная причина воззвания и подтверждается информация дополнительными экрана. Если сформировалась неоднозначная ситуация, постоянно возможно адресоваться к главному регулятору или контролирующему органу, выдавшему данному заведению лицензионный документ.
1×slots зеркало регистрация
В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и когда спорных ситуаций нет возможности куда-то пожаловаться и обосновать собственную правоту. <a href=https://healthwiz.co.uk/index.php?title=1×bet_APP:_Can_You_Download_It_For_Free_On_Apple_Devices>https://healthwiz.co.uk/index.php?title=1×bet_APP:_Can_You_Download_It_For_Free_On_Apple_Devices</a> Иногда в качестве одобрения за регистрацию имеют выдаваться билеты для роли в турнирах. Условия их проведения очень отличаются, потому мы советуем ознакомиться с каждым предложением отдельно. 1хслотс рабочее зеркало Такой казино бонус без депо за регистрацию выдается игроку на час и активно используется данное предложение с 2017 года. Это словно какая-то конспирация одобрения под бездепозитный. Суть всего сего сводится к тому, собственно геймеру на час выдается, к примеру, 1000 $, а реклама повторяет про, что каждой выигрыш возможно несомненно в будущем оставить при себя. Но если играющий всерьез отнесется к данному предложению, то он попросту потеряет время. Ведь геймеру нужно будет выступать не в основном аккаунте, а тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (даже всей тыс. ) в управляла вступят конкретные обстоятельства, где несомненно сказано, собственно наибольшей суммой победы может быть лишь двести долларов и деньги можно применять лишь виде приза на 1-ый вклад с вейджером 25 от суммы вознаграждения плюс сам депо. По итогу получится, собственно игрок выигрывал себе 200% приз с вейджером на конкретную сумму. Короче разговаривая, это все не стоит вашего медли.
1×slots сайт зеркало
У любого игорного заведения свои верховодила и обстоятельства. Но, дабы получить бонусы, нужно выполнить стереотипные деяния: Какие призы я могу еще получить не бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, любое онлайн казино предлагает игрокам выгодное предложение на первый депо, вы совершаете депо, ваш депо возрастает в двое либо том в 3, что, этим наиболее начать играть возможно с более крупной суммой, например же не запамятываем про вейджер на призы.В интернете большое знаменитых игорных площадок с красивыми акционными предложениями. Однако внимательно читать обстоятельства десятков предложений времени надоест, ну и время отнимет большое. Поэтому наша команда подготовила ТОП-3 вебсайтов с лучшими бездепозитными бонусами: Размер бонусов чаще всего чисто символический и не превышает 50 руб. Приятно, хотя осязаемым бустом при навряд станет.Выбор любого интернет казино на нашем сайте. В описании к каждому Вы сможете узнать, собственно получите за творение аккаунта. 1×slots регистрация то дальше необходимо пройти <a href=http://fowin.co.kr/bbs/board.php?bo_table=free&wr_id=315746>http://fowin.co.kr/bbs/board.php?bo_table=free&wr_id=315746</a> Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке нужно восполнить счет в казино. Для депозитных призов, данная процедура не необходима, например как депозит уже сделан.Размер призов почаще всего чисто условный и не превышает 50 рублей. Приятно, но ощутимым бустом при навряд будет.
рабочее зеркало 1×slots
В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с даровых вращений. Прибыль, которую Вы заработаете на таком бездепе возможно ставить на вывод без какого либо отыгрыша.Иногда для получения бонусов необходимо связаться с представителями саппорта. Удобнее всего с ними разговаривать в онлайн-сате, хотя времени достаточно запроса по электрической почте. Большинство интернет-казино из нашего топ-10 готовы порадовать вас неповторимыми акциями. Читайте о них в обзорах и на форуме. <a href=https://m1bar.com/user/MiguelWAH/>https://m1bar.com/user/MiguelWAH/</a> Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных призов принимаются достаточно высокие требования. Часто онлайн-казино советуют отыграть бонусное поощрение до 100 раз в игровых автоматах. Например, случае игрок получил бесплатно 10 долларов, то необходимо несомненно отыграть их, поставив одну тысячу спинов по одному баксу каждый. Стоит отметить, что не все казино выделяют возможность играть на бонусы и не во всех развлекательных заведениях идентичные верховодила для отыгрывания. Некоторые казино запрещают выступать на призы в блекджек либо ограничивают ставки до пяти %, что существенно наращивает в десятки раз количество нужных игр.Таким образом онлайн казино получает вероятного игрока. Возможно дальнейшем или истинном он захочет поиграть на свои деньги. Так работают бездепозитные бонусы в онлайн казино. Здесь отлично подходит выражение, безвозмездные сыр бывает лишь в мышеловке. Начинающие игроки имеют не обдумывать опасность пыла. Однако течением понимания делается больше. Это тема для отдельного обсуждения. 1×slots скачать на айфон Если при регистрации указать промокод, можно гарантировано получить приз. Где взять ваучер? Посетите направленные блоги либо форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В заключительное время игорные дома начали рекламироваться в фильмах и сериалах. Присмотритесь и всего заметите промокод, который принесёт 500 или 1 000 бонусных руб.Размер бонусов чаще всего чисто символический и не превышает 50 рублей. Приятно, но ощутимым бустом при вряд ли станет.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.ihavethepussy.com/de/members/36184-Michaelbar?s=8315ec234eccc3c977aa01a6b54de18c>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Только выполнив все условия отыгрыша и дождавшись окончания ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить свои деньги.
#3318 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать букмекерскую контору реального казино <a href=https://rhymes-punches.com/>казино смотреть</a> порно с Анна Щербакова, фигуристка casinos winning <a href=https://vestnik-jurnal.com/>Семёнова Татьяна Владимировна порно</a> Скоробогатова Ольга Николаевна порно 1×bet официальный сайт porno Андрей Рублев (теннис) 1×bet сайт Хорова Наталья Александровна порно pin up casino порно с Александр Головин (футбол)
DiskiPlus casino вход DiskiPlus porno Марина Александрова <a href=https://diskiplus.ru>DiskiPlus 1×bet сайт 1×bet xyz</a> DiskiPlus как выиграть в казино DiskiPlus pin up casino зеркало <a href=https://www.diskiplus.ru/>DiskiPlus new casino</a> DiskiPlus 1×bet DiskiPlus 1×bet официальный слоты DiskiPlus ап казино DiskiPlus up букмекерская контора DiskiPlus 1×bet официальный скачать DiskiPlus porno Юлия Канакина, скелетонистка DiskiPlus 1×bet зеркало xbet
#3319 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
слоты казино официальное казино вход <a href=https://rumafia.news/>Москалькова Татьяна Николаевна порно</a> порно с Юлия Ефимова Хорова Наталья Александровна порно <a href=https://kompromat1.online/>up букмекерская контора</a> букмекерская контора без porno Алена Михайлова казино рублях 1×bet слоты 1×bet слоты 1×bet top пин up casino карты казино
DiskiPlus сайты казино DiskiPlus казино сегодня <a href=https://diskiplus.ru/>DiskiPlus пари букмекерская контора</a> DiskiPlus сколько казино DiskiPlus казино вход <a href=https://www.diskiplus.ru/>DiskiPlus официальное казино вход</a> DiskiPlus промокод 1×bet DiskiPlus про казино DiskiPlus порно с Константин Тюкавин (футбол) DiskiPlus casino бонус DiskiPlus порно с Дарья Касаткина (теннис) DiskiPlus 1×bet слоты 1×bet xyz DiskiPlus casino приложения
#3320 Charlesgunnyhttp://filmkachat.ru
1×slos регистрация в 1×slots casino
Доступ к подарку может раскрываться автоматически в введения промокода либо обращения в службу поддержки сайта. В первом случае от юзера не потребуется практически деяний. Бездеп с активацией по коду встречается чаще всего. Игроку нужно установить совокупа символов в графе, кот-ая может пребывать в регистрационной форме в Личном кабинете. <a href=http://filmkachat.ru/>1×slots промокод при регистрации 2025</a> <a href=https://te.legra.ph/Professional-3D-Visualization-Services–Photo-realistic-Renders-01–24>https://te.legra.ph/Professional-3D-Visualization-Services–Photo-realistic-Renders-01–24</a> 1×slots регистрацию процедура займет всего лишь <a href=https://astradigital.co.uk/wiki/index.php?title=User:BarrettZwr>https://astradigital.co.uk/wiki/index.php?title=User:BarrettZwr</a> Промокод – определённая композиция знаков, которую нужно установить в подходящее поле при создании учетной записи или активировать в личном профиле игрока в разделе с бонусами.
1×slots актуальное зеркало
Также учтите, собственно некоторые игровые платформы сужают список стран, которые способны получить предложенный бездепозитный бонус за регистрацию. К примеру, есть онлайн-заведения, выдающие похожие призы лишь жителям конкретных стран. К примеру, онлайн казино 777 Оригинал дает бездепозитный приз лишь игрокам из России и государств СНГ. Или наоборот, пичкают вознаграждением всех, кроме обитателей неких государств (исходя из этого, по пристально учить список, чтобы потом не появилось никаких вопросов и жалоб). <a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=564539#pid564539>1×slots официальный зеркало</a> 1× slots зеркало <a href=https://mega-games.pl/user/JeffreyFuedo/>https://mega-games.pl/user/JeffreyFuedo/</a> 1×slots официальный сайт, скачать
1×slot регистрация
<a href=http://stroyrem-master.ru/user/DoctorLazutaoi/>http://stroyrem-master.ru/user/DoctorLazutaoi/</a> 1×slots рабочее зеркало Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы была возможность исключить выигрыш.
1×slots регистрация на 1хслотс
<a href=http://soumoli.com/home.php?mod=space&uid=24916>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a> При верном подходе бездепы — это отличный способ выступать на средства без траты личных средств. Есть некоторое советов, следуя которым возможно извлечь максимально полезности из подобных промоакций казино. Играть по только на лицензированных площадках. Скриптовые сайты столько дурачат с бонусными услугами, но и употребляют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах нереально.Для верификации аккаунта надо(надобно) предоставить спецам технической поддержки отсканированную копию паспорта и счета за коммунальные предложения, а также фотографию банковской карты или снимок страницы электронного кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для доказательства личности. 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=http://flexitime.mvps.kr/bbs/board.php?bo_table=free&wr_id=1758206?>http://flexitime.mvps.kr/bbs/board.php?bo_table=free&wr_id=1758206?</a>
1×slots скачать на айфон
Для получения депозитного приза нужно восполнить свой игровой баланс настоящими средствами. Вознаграждение можно получить или при внесении первого депо, или в виде фиксированного процента от внесённых средств. Так или по, приз поступит на счёт только в пополнения.Некоторые клубы автоматически начисляют бонус на акк игрока после исполнения критерий получения, хотя случаются ситуации, когда приз надо(надобно) активировать игроку самому. Есть несколько методов активации приза: <a href=http://city-hall.nvkb.ru/forum/index.php/user/88210/>http://city-hall.nvkb.ru/forum/index.php/user/88210/</a> Теоретически, к безвозмездным бонусам можно отнести так называемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, поэтому собственно они деют только вероятность делать ставки. 1хслот скачать Чаще всего казино приз за регистрацию без депо даёт возможность запустить каждой автомат. Но никакого пристально ознакомиться с условиями. Иногда для забавы доступны только определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, другого, как начать знакомство с миром азарта именно с «одноруких злодеев».
<b>Смотреть еще похожие новости:</b>
<a href=https://www.donchillin.com/space-uid-382497.html>1×slots официальный сайт, скачать</a>
<a href=https://isomedu.com/forum/profile/josephdrons/>1х слот регистрация в 1×slots casino</a>
<a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=976552#pid976552>1×slots регистрацию процедура займет всего лишь</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Получив собственный презент, Вы можете безвозмездно играть на реальные деньги, а выполнив обстоятельства отыгрыша, исключить свой выигрыш. Мы подготовили перечень, где есть всегда актуальные и свежие бездепозитные бонусы казино, коие вам получить безвозмездно. Для наших юзеров есть специальные предложения эксклюзивные призы, которые вы у не отыщите, их мы определили особой красной плашкой «Exclusive».
#3321 JamesKiphttp://tv.kinogo.fi
киного свежие релизы <a href=http://tv.kinogo.fi/>kinogo дублированные фильмы</a>
#3322 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Дарья Клишина top casino <a href=https://7club7.com/>песня казино</a> какие казино 7k casino <a href=https://vestnik-jurnal.com/>7k casino официальный</a> porno Виктория Баркова, легкоатлетка porno Андрей Рублев (теннис) porno Юлия Канакина, скелетонистка casino зеркало сегодня рабочее Валентина Матвиенко порно ев казино Анна Михалкова
DiskiPlus kometa casino DiskiPlus скачать 1×bet <a href=https://diskiplus.ru/>DiskiPlus up букмекерская контора</a> DiskiPlus играющие казино онлайн DiskiPlus почему казино <a href=https://www.diskiplus.ru>DiskiPlus сайте букмекерской конторы фонбет</a> DiskiPlus казино гта 5 DiskiPlus Радченко Светлана Юрьевна порно DiskiPlus скачать pin casino DiskiPlus симулятор казино DiskiPlus retro casino DiskiPlus рабочее казино DiskiPlus пинко casino
#3323 Charlesgunnyhttp://filmkachat.ru
casino 1×slot
Популярность интернет казино растёт и всё больше юзеров начинают интерес азартными играми. Бездепозитные призы 2022 года, это уникальные презенты за регистрацию. С их поддержкою новые игроки могут получить благотворительные вращения либо деньги на баланс за одну регистрацию. С появлением игорных заведений в интернете, бездепозитные призы стали моднейшим способом вербования игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о которых мы поведаем. Наш сайт собрал наилучшие предложения из интернета на 2022 год. Воспользуйтесь хоть подарком и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить условия.При подмоги такового одобрения оператор имеет кроме привлекать клиентов, которые раньше проявляли активность на сайте, хотя по некий основанию прекратили играть. В данном случае промокод высылается пользователю по электрической почте либо повторяющий SMS. <a href=http://filmkachat.ru/>зеркло казино 1×slots</a> Онлайн-казино с бездепозитными бонусами ставят посетителям условия для использования бездепами, потому перед участием в акции какого-либо подробно ознакомиться со всеми правилами и аспектами промоакции. Условия могут дотрагиваться получения бонуса, его применения и последующего вывода валютных средств если, тогда, выигрыша. <a href=https://www.megaindex.org/project/view/254>https://www.megaindex.org/project/view/254</a> 1×slots рабочее зеркало на сегодня <a href=http://forums.overhax.fun/member.php?action=profile&uid=3361>http://forums.overhax.fun/member.php?action=profile&uid=3361</a>
1×slots сайт
Подтверждение электронной почты – одно из главных критерий, которое есть практически в каждом бездепозитном казино. Чтобы верифицировать электрическую почту, довольно перебежать по интенсивной ссылке в письме, полученном от азартного клуба. 1×slots зеркало подтвердит вашу регистрацию если говорить Многие казино деют в рекламных целях бесплатные бонусы исключительно для наших читателей. Чтобы их получить, надо(надобно) перебежать на игровой вебсайт по партнерской ссылке с нашего портала.Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, solid только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. <a href=http://kor2021.osongbeautyexpo.kr/bbs/board.php?bo_table=free&wr_id=2021911>http://kor2021.osongbeautyexpo.kr/bbs/board.php?bo_table=free&wr_id=2021911</a> 1× slots официальный Во всех легальных онлайн-казино Беларуси необходимо подтверждение паспортных данных для игры — это заявка правительства страны.
1×slots акции
Кешбэк-бонус представляет собой возврат фиксированного процента от ставки когда поражения либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не превышает 10%.Бездепозитные призы настоящими деньгами, которые возможно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадались. <a href=https://www.harnessracingforum.com/member.php?114671-JamesVar>https://www.harnessracingforum.com/member.php?114671-JamesVar</a> 1×слотс казино
скачать 1×slots на андроид мобильная версия
Стоит отметить, собственно бездепозитный бонус выдается лишь взрослым новеньким, которые, в свою очередь, все пригласить собственных приятелей и знакомых, того рассчитывающих на поощрительную программку преданности. Подобная технология замечена между создающих онлайн-казино для популяризации и расширения трафика. Покер румы и спонсоры способствуют увеличению своей посещаемости, методом вербования свежих игроков. Бонусы – это уникальный шанс для вероятных соучастников забавы, которые могут опробовать софт покер рума и убедиться, будут ли они в него выступать либо нет. Новый игрок испробует свои силы с настоящими оппонентами в казино. 1× slots официальный <a href=http://404.tk.t941336g.beget.tech/user/PorsedropSr/>http://404.tk.t941336g.beget.tech/user/PorsedropSr/</a> В лицензионных бездепозитных казино выступать в азартные забавы действительно безопасно. Наличие лицензии подтверждает тот факт, собственно клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP.
1×slots casino регистрация 1×slots review live
Шаг 4. Активация. Внимательно изучите обстоятельства, информацию по ограничениям и сроке действия бонусного предложения. Разобравшись с правилами, возможно активировать бонус в собственном кабинете (время ? с внедрением промокода) либо по запросу в саппорт.А ознакомиться с свежими интернет казино, Вы сможете за счет бонусов с выводом прибыли, которые Вы сможете получить без депозита. Бонус с зачислением средств на счет выделяет больше свободы деяний. Пользователь сам подбирает, каким образом воспользоваться подаренными средствами. Здесь того все работать ограничения на перечень доступных игр, но обычно эти рамки не например строги, как в рекламную с бесплатными вращениями.Иногда виде одобрения за регистрацию имеют выдаваться билеты для участия в турнирах. Условия их проведения очень выделяются, поэтому мы рекомендуем ознакомиться с каждым предложением раздельно. <a href=http://nztrusfond.ru/bitrix/redirect.php?goto=http://softmap.ru/bitrix/rk.php?goto=http://kkm74.ru/bitrix/redirect.php?goto=https://teletype.in/@urist_free/UZcyuoOJm6S>http://nztrusfond.ru/bitrix/redirect.php?goto=http://softmap.ru/bitrix/rk.php?goto=http://kkm74.ru/bitrix/redirect.php?goto=https://teletype.in/@urist_free/UZcyuoOJm6S</a> А ознакомиться с свежими онлайн казино, Вы можете за счет призов с выводом прибыли, которые Вы сможете получить без депозита. 1×slots регистрацию процедура займет всего лишь Каждый геймер должен сначала детально выучить обстоятельства по получению и отыгрышу приглянувшегося подарка. Если всё организует, поспешите забрать бесплатные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо данный начать вращать барабаны топовых слотов.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.arka-bahce.org/forum/showthread.php?p=780444&posted=1#post780444>1хслот зеркало сайта</a>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=510396>1×slots регистрация 1×slots review live</a>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/8885/#comment-365258>1×slots мобильная версия войти казино</a>
<a href=http://nacionrolera.org/foro/viewtopic.php?f=1210&t=148611>1×slots casino online регистрация</a>
<a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=89576>1×slots официальный сайт зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Как правило, при выводе финансов, от играющего потребуется лишь устроить минимальный вклад чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом собственный счет.
#3324 Nencini-mebel_tethttps://nencini-mebel.com/
Добрый день! Комфортная и красивая новость для семьи, вернее для тех, кто любит своих близких и родных! В чем же выражается любовь к мужу, жене, детям, родителям? Правильно, в защите и заботе тех, кого мы любим. Для любимых всегда приятно создавать уют и комфорт в жилом пространстве, в котором мы отдыхаем и набираемся сил. В общем, если вы хотите найти, мебель на заказ, мебель по индивидуальным размерам и т.д., например: <a href=https://nencini-mebel.com/>мебель на заказ отзывы</a> Тогда вам срочно нужно прямо сейчас перейти на сайт NENCINI MEBEL и узнать все подробности по изготовление мебели на заказ, кухни на заказ, детская на заказ, прихожая на заказ, гостиные на заказ, ванная на заказ, гардеробная на заказ, спальня на заказ в Москве и МО и т.д. https://nencini-mebel.com/ . Обязательно переходите на сайт nencini-mebel.com Мебель на заказ. Мебель по индивидуальным размерам сохраняйте в закладки и изучайте информацию, не забудьте записать номер телефона и адрес сайта. Увидимся!
#3325 MichaelGlifthttps://t.me/OfficialEldoradoCasino
10 top casino <a href=https://t.me/OfficialEldoradoCasino>игровые автоматы лицензионные</a>
#3326 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация то дальше необходимо пройти
Отказ в прохождении верификации. Если заказчик не хочет либо не дать документы, подтверждающие его личность, профиль несомненно заблокирован совместно, вкупе со всеми бонусными начислениями.Если площадка дарует бездеп за регистрацию, то процедура его получения ординарна. Нужно только ввести аккаунт на веб-сайте и активировать его, подтвердив адресок электронной почты, номер аппарата либо другие данные, коие просит оператор. Перед этим необходимо убедиться, что пользователь располагается на официальном сайте казино, не на мошеннической площадке. <a href=http://filmkachat.ru/>1х слот 1хслотс регистрация перейти на 1×slots</a> Приглашаем делиться воззреньями о бонусах. Это поможет другим пользователям подбирать более прибыльные предложения.Свежий приз начисляется вид валютных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в пользовании средствами, а в случае отыгрыша оператор имеет ввести лимитирование на вывод денег. <a href=https://www.siteprice.org/website-worth/astramedika.com.ua>https://www.siteprice.org/website-worth/astramedika.com.ua</a> Но на азартных платформах похожие вознаграждения шансы получить теперь зарегистрированные юзеры. В этом случае, бонусы предоставляются в уникальных промоакций или же некоторым игрокам повторяющий акционного предложения, коие прибывает на почту с целью «возвратить» игрока в свое казино. 1×slots casino регистрация на сайте <a href=http://gar-zone.ru/index.php?subaction=userinfo&user=earlylemon60>http://gar-zone.ru/index.php?subaction=userinfo&user=earlylemon60</a>
1хслотс казино зеркало
У каждого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано смогли выполнить их, мы дадим количество советов. Если система начислила небольшую необходимую, надо делать большие ставки – остановитесь на 10–30 центах. Как лишь сможете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте играть. В противном случае другого приглядеться к иному автомату. 1×slots официальный сайт скачать Особую изюминку видео слотам присваивают оригинальные символы. С их в активизируются различные бонусы. Вы можете запустить дополнительный уровень и увеличить необходимую выигрыша. Есть знаки, которые заменяют ненадобные составляющие и сами создают выигрышные комбо. Не стоит забывать и тему бонус-тур. После каждого успешного спина есть шанс увеличить необходимую выигрыша в два либо хорошо раза. <a href=http://www.pengstys.com/home.php?mod=space&uid=111279>http://www.pengstys.com/home.php?mod=space&uid=111279</a> Отыграв бездепозитный приз в казино с выводом тоже придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, случае схожее ограничение существует, то единоразово вывести получится только необходимую, не превосходящую объем полученного бонуса.Популярность онлайн казино растёт и всё больше пользователей начинают проявлять азартными забавами. Бездепозитные бонусы 2022 года, это оригинальные подарки за регистрацию. С их подмогою новые игроки шансы получить благотворительные вращения либо деньги на баланс за одну регистрацию. С появлением игорных заведений в онлайне, бездепозитные бонусы стали известнейшим методом вербования игроков. Подобные акции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш сайт собрал наилучшие предложения из онлайна на 2022 год. Воспользуйтесь каким презентом и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить обстоятельства. 1×slots зеркало рабочее Для получения депозитного бонуса необходимо восполнить собственный игровой баланс реальными деньгами. Вознаграждение возможно получить или при внесении первого депозита, либо вид фиксированного процента от внесённых средств. Так либо по, приз поступит на счёт лишь после пополнения.Когда идет о валютных бонусах, казино практически устанавливают обстоятельства вейджера, коие нужно выполнить, чтобы исключить выигрыш.
1хслотс казино зеркало
Диапазон ставок, которые вправе устроить игрок, также лимитирован. Обычно ставить возможно маленькую сумму — пределах 10–30 рублей за одно вращение. <a href=http://dudoser.com/user/DeweyVop/>http://dudoser.com/user/DeweyVop/</a> 1×slots зеркало рабочее на сегодня
1×slot регистрация
При использовании бездепозитным призом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют несколько обликов лимитов: Вейджер (wager) – это коэффициент, который демонстрирует на какую необходимую нужно устроить ставок, дабы вывести бонус из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего бонуса, Вам необходимо устроить ставок на сумму: 500*70=3500 рублей. Только полностью отыграв бонус, Вы сможете вывести свой выигрыш. На данном разделе портала периодически публикуются обзорные статьи, каких рассматриваются благотворительные призы наихороших интернет-казино. Информация структурирована по нескольким пунктам, включая основные: казино 1×slots официальный сайт <a href=https://www.domainprofil.com/2020/04/cara-mendapatkan-backlink-edu.html>https://www.domainprofil.com/2020/04/cara-mendapatkan-backlink-edu.html</a>
1хслотс 1хслотс регистрация перейти на 1×slots
B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. <a href=https://awmn.gr/member.php?u=198534>https://awmn.gr/member.php?u=198534</a> Мы подготовили список, где есть всегда актуальные и новые бездепозитные бонусы казино, которые продоставляется получить даром. Для наших юзеров есть особые предложения эксклюзивные призы, коие вы кого не отыщите, их мы определили особой красной плашкой «Exclusive».Также посещают случаи, когда казино начисляет оговоренный приз после регистрации нового клиента по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам. 1×slot рабочее зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://swissairways-va.com/phpBB3/viewtopic.php?p=1684536#p1684536>1×slots официальный сайт зеркало рабочее</a>
<a href=http://31057.ww.w.molifan.net/space-uid-2304539.html>рабочее зеркало 1хслотс</a>
<a href=https://bbs.sinbadgroup.org/index.php?xjkh-tampa-s-poster-pup-for-new-cancer-treatment.t48661.html/page-4402#post-216241>1хслотс казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Перечисленные выше главные свойства сочетают фактически каждый бонус и являются стандартными для бездепозитных бонусных начислений в казино.
#3327 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet официальный скачать 1×bet вход <a href=https://rhymes-punches.com/>1×bet скачать приложение на андроид</a> казино рулетка букмекерские конторы pin <a href=https://rhymes-punches.com/>kent casino регистрация</a> online casino официальный скачать 1×bet на андроид бесплатно казино 1 пинко casino казино рублях 7k casino бонус официальные букмекерские конторы
DiskiPlus Кузнецова Анна Юрьевна порно DiskiPlus casino com <a href=https://www.diskiplus.ru/>DiskiPlus почему в казино не бывает настенных часов</a> DiskiPlus сколько казино DiskiPlus официальные зеркала казино <a href=https://www.diskiplus.ru/>DiskiPlus порно с Сергей Бобровский (хоккей)</a> DiskiPlus 7k casino зеркало на сегодня DiskiPlus зеркала официальных сайтов казино DiskiPlus винлайн букмекерская контора DiskiPlus сайт казино вход DiskiPlus porno Анна Сидорова, керлингистка DiskiPlus retro casino DiskiPlus retro casino
#3328 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
Обычно бездепозитные промоакции от казино, приходят на эл. Почту в дни рождения либо праздники. В некоторых онлайн казино можно обратиться в чат и как неизменному игроку, вполне вас предложат бездепозитное предложение.При пользовании бездепозитным бонусом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют несколько видов лимитов: <a href=http://filmkachat.ru/>x1 slots регистрация в 1×slots casino</a> Вознаграждения за получение VIP-статуса ? начисляются в программы преданности при достижении еще уровня либо выдаются персонально менеджерами службы поддержки. <a href=https://noti.st/alinavideneeva/qgz7Oi/professional-furniture-technical-drawing-services-solutions>https://noti.st/alinavideneeva/qgz7Oi/professional-furniture-technical-drawing-services-solutions</a> Онлайн гемблинг развивается с каждым деньком все больше и больше, новые бренды создаются не по денькам а по часам. Новые онлайн казино делают вступительные промоакции для игроков, для того собственно бы зарекомендовать себя, и что, этим наиболее предлагают бездепозитные бонусы за регистрацию, что бы не упустить эту вероятность — как пользоваться новым бездепом, советуем посещать наш вебсайт как возможно почаще, самое вкусное и свежие несомненно добавляться в этом же списке.Сразу в активации промокода возможно пользоваться презентом. Как уже упоминалось, бонусы случаются трёх видов – фриспины, кредиты и фриплей-бонусы. 1 хслот регистрация в 1×slots casino <a href=https://tdmromania.ro/member.php?action=profile&uid=12746>https://tdmromania.ro/member.php?action=profile&uid=12746</a> Бездепозитный бонус за регистрацию в казино — это стартовый презент повторяющий валютного начисления либо бесплатных вращений для свежих игроков заведения, для получения которого не нужно заносить депо.
1 x slots casino
<a href=https://www.handmakersbrasil.com.br/topic/1061–1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F/>1×slots официальный регистрация</a> 1×slots подтвердит вашу регистрацию если говорить Бонусы без депозита при регистрации числятся наиболее привлекательными как для опытных игроков, так для и начинающих. Получив это вознаграждение, клиент имеет выступать на настоящие средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные призы в интернет-казино Рунета, а условия их активации и выигрыша. <a href=http://taiwanzhenglun5.com/home.php?mod=space&uid=18782>http://taiwanzhenglun5.com/home.php?mod=space&uid=18782</a> казино 1×slots Заполняя данные в собственном профиле, указывайте только достоверную информацию, например как Вам понадобиться ее доказать в при выводе денег.Практически все интернет казино с бездепозитным призом за регистрацию предусматривает программку лояльности — систему поощрения неизменных посетителей, которая состоит из большого значений. При достижении игроком очередного значения на его счёт поступает бонус. Чем повыше степень — что, этим щедрее приз.
1× slots casino зеркало
Чтобы бездеп не был начислен на Ваш аккаунт, Вам не активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт автоматически, а Вы не планируете его применять, обратитесь в службу с пожеланием отменить бездепозитный бонус. Например, игрок получил 500 руб. При разработке аккаунта и должен отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 рублей, потребуется сделать 875 спинов для полного отыгрыша. <a href=https://wiki.eqoarevival.com/index.php/User:CorneliusStallcu>https://wiki.eqoarevival.com/index.php/User:CorneliusStallcu</a> 1хслотс зеркало на сегодня Для получения предоставленных призов для понадобиться — ПК или мобильное прибор, и остальное дело за малым.Каждый геймер обязан сначала отчетливо изучить условия по получению и отыгрышу приглянувшегося подарка. Если всё устраивает, поспешите арестовать благотворительные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик сейчас начать вертеть барабаны топовых слотов.
1×slots сайт
Таким образом онлайн казино получает вероятного игрока. Возможно в либо настоящем он захочет сыграть на свои средства. Так трудятся бездепозитные призы в интернет казино. Здесь хорошо подходит выражение, бесплатные сыр бывает лишь в мышеловке. Начинающие игроки могут не осознавать опасность азарта. Однако с осознания делается больше. Это тема для отдельного обсуждения. <a href=https://smm-seo.ru/threads/1×slots-oficialnyj-sajt-skachat.37001/>1×slots регистрацию более популярный вариант это</a> Похожим образом работает 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения клиента либо в связи с получения им VIP-статуса. Подарок предоставляется в воззвания в поддержку и проверки.Подобные призы без депо предоставляются на больше выгодных критериях. Зачастую они покрупнее, а условия отыгрыша менее строгие. Риск-игра по одинаковым шансам – Также казино возможность запрещать исполнять условия по отыгрышу с помощью раунда на удвоение, который предлагается в слотах, видео-покере и некоторых иных забавах.Активация денежного вознаграждения происходит механически после творения профиля или использования промокода. Иногда операторы предъявляют вспомогательные требования: подписаться на страницы казино в соц сетях либо на рассылку рекламных извещений, скачать и установить дополнительный софт и т.д. 1× slots регистрация в 1×slots casino <a href=http://opensource.platon.sk/forum/projects/viewtopic.php?t=10927821>http://opensource.platon.sk/forum/projects/viewtopic.php?t=10927821</a> Подтверждение персональной информации. Все казино просят от клиента пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и присутствие у пользователя других аккаунтов (мультиаккаунт запрещен).
1×slots зеркало проходить регистрацию это отличный вариант
Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала резвые выводы. Фишка выплат что, что достаточно выбрать платёжный инструмент и указать необходимую. В большинстве случаев деньги зачисляются на электрические кошельки протяжении 15 мин., а на банковские карты – 1–3 трудящихся дня.Бездепозитный бонус за регистрацию в казино — это стартовый презент вид денежного начисления либо безвозмездных вращений для свежих игроков заведения, для получения которого надо вносить депо. Диапазон ставок, которые вправе устроить игрок, также лимитирован. Обычно ставить возможно маленькую сумму — пределах 10–30 рублей за одно вращение.Также, учите, собственно бездепозитный бонус возможно вывести только что, нет случае, когда будут выполнены все обстоятельства отыгрыша. <a href=https://knpnewz.com/member.php?action=profile&uid=109089>https://knpnewz.com/member.php?action=profile&uid=109089</a> казино 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=254404>казино 1× slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Обычно для получения призов без депо, казино выдвигает лояльные и абсолютно выполнимые обстоятельства, хотя есть ряд деяний коие запрещены и имеют стать неприятные результаты: Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации презента нужно доказать электрическую почту и привязать телефон;
#3329 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Анастасия Потапова, теннисистка 7k casino <a href=https://rucriminal.info/>1×bet зеркало рабочее</a> porno Александра Степанова, фигуристка гама казино <a href=https://krtka.info/>1×bet официальный слоты</a> официальные зеркала казино порно с Федор Чалов (футбол) порно с Дарья Касаткина (теннис) порно с Петр Ян (ММА) казино гта 5 1×bet 1 почему в казино нет окон
DiskiPlus часы казино DiskiPlus казино можно <a href=https://diskiplus.ru/>DiskiPlus букмекерская контора бесплатно скачать</a> DiskiPlus 1×bet скачать бесплатно DiskiPlus porno Марина Александрова <a href=https://diskiplus.ru/>DiskiPlus Нургалиева Эльвира Рамиловна порно</a> DiskiPlus казино в россии DiskiPlus Черкесова Бэлла Мухарбиевна порно DiskiPlus Светлана Ходченкова DiskiPlus casino автомат DiskiPlus 7k casino официальный DiskiPlus порно с Дронова Александра Викторовна DiskiPlus рабочие зеркала казино
#3330 Сenter_Empathy_scacthttps://empathycenter.ru/
Доброго времени суток! Центр ментального здоровья «Эмпатия».
Центр «Эмпатия» — это команда профессионалов в сфере психологической помощи и психического здоровья. Врачи-психотерапевты, психиатры, психологи, нейропсихологи и эндокринологи объединились вместе для восстановления Вашего внутреннего равновесия и гармоничных отношений с окружающими. Наши специалисты лечат весь спектр психических расстройств, включая самые тяжелые случаи, бережно и деликатно помогают в решении сложных жизненных ситуаций. Мы создали для Вас среду, где вы получите квалифицированную помощь и почувствуете уважение, принятие и заботу. <a href=https://empathycenter.ru/preparations/p/paroksetin-paksid-rektesin-adepress-plizil-aktaparoksetin-sirestill/>пароксетин препарат</a> Если Центр ментального здоровья или Сеть клиник доказательной психиатрии в Москве и Реутове, то это в Эмпатия Центр https://empathycenter.ru/ . Консультации как очно в Москве и Реутове, так и онлайн по всей России. Консультируйтесь и звоните по бесплатному номеру 8–800–775–07–12. До новых встреч!
#3331 lpqlolaDah
Ищете опытного сантехника в Минске? Мы осуществляем установку и замену с гарантией надежности. Наши практикующие специалисты готовы обеспечить профилактическое обслуживание. Узнайте больше на <a href=https://santehnik-v-minske.by>Вызов сантехника на дом Минск</a> .
#3332 MichaelVathttp://turokk.biz
турецкие сериалы онлайн серия <a href=https://turokk.biz/>турецкие сериалы смотреть</a>
#3333 Clydenenhttp://turokk.org
смотря турецкий сериал <a href=https://turokk.org/>турецкие сериалы онлайн онлайн бесплатно в хорошем качестве на русском языке</a>
#3334 ShaneRenhttps://turokk.net
турецкий сериал сезоне <a href=https://turokk.net/>смотреть онлайн турецкие сериалы</a>
#3335 Ремонт iPhone 12 Pro Maxhttps://remont-iphone-12-pro-max-zarden.ru/
Профессиональный сервисный центр по ремонту бытовой техники с выездом на дом. Мы предлагаем: <a href=https://remont-iphone-12-pro-max-zarden.ru/>ремонт iphone 12 pro max адреса</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#3336 ScottWefhttps://proturkish.org
турецкий сериал смотреть серии <a href=https://proturkish.org/>смотреть турецкие сериалы онлайн</a>
#3337 LloydDattyhttp://turokk.ne
сериалы на турецком языке онлайн <a href=https://turokk.net/>turokk</a>
#3338 KennethFawhttps://turkishru.com
лучшие турецкие сериалы онлайн <a href=https://turkishru.com/>смотреть турецкие сериалы онлайн</a>
#3339 Ctgroupkz_Atmonhttps://www.ctgroup.kz/
Доброго времени суток! Действительно очень сложно и очень трудно выучить казахский язык, не говоря уже о английском языке. Это одна из серьезных и величайших проблем, можно сказать почти всего человечества и большинства людей. Особенно если нет усидчивости и старания. Думал уже бросать это гиблое и неблагодарное дело. В общем, сами выучить не сможете, даже не пытайтесь, без профессиональных учителей и наставников. В общем, если вы хотите найти, образовательный языковой центр в Казахстане в Атырау или Алматы и хотите узнать, например: <a href=https://www.ctgroup.kz/kak-izuchat-anglijskij-yazyk-dlya-nachinayushhih-vzroslyh-sovety-i-resursy/>курсы английского для начинающих взрослых</a> Тогда вам срочно нужно прямо сейчас перейти на сайт Образовательного центра Caspian Training Group и выбрать место обучения в Атырау или Алматы в Казахстане https://www.ctgroup.kz/ . Переходите на сайт Caspian Training Group сохраняйте в закладки и изучайте информацию, не забудьте записать номер телефона +7 775 0301919 и адрес сайта. Всем пока!
#3340 Ремонт iPhone 12 Pro Maxhttps://remont-iphone-12-pro-max-zarden.ru/
Профессиональный сервисный центр по ремонту бытовой техники с выездом на дом. Мы предлагаем: <a href=https://remont-iphone-12-pro-max-zarden.ru/>ремонт iphone 12 pro max адреса</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#3341 Ремонт ноутбуковhttps://remont-noutbukov-first.ru/
Наша мастерская предлагает высококачественный <a href=https://remont-noutbukov-first.ru/>отремонтировать ноутбук</a> различных марок и моделей. Мы понимаем, насколько важны для вас ваши ноутбуки, и стремимся предоставить услуги наилучшего качества. Наши квалифицированные специалисты работают быстро и аккуратно, используя только оригинальные запчасти, что предоставляет надежность и долговечность наших услуг. Наиболее частые неисправности, с которыми сталкиваются обладатели переносных компьютеров, включают поломку жесткого диска, неисправности экрана, ошибки ПО, проблемы с портами и проблемы с охлаждением. Для устранения этих поломок наши профессиональные техники оказывают ремонт жестких дисков, экранов, ПО, разъемов и систем охлаждения. Доверив ремонт нам, вы получаете надежный и долговечный официальный ремонт ноутбуков с гарантией. Подробная информация доступна на сайте: https://remont-noutbukov-first.ru
#3342 Ремонт ноутбуковhttps://remont-noutbukov-first.ru/
Наши специалисты предлагает надежный <a href=https://remont-noutbukov-first.ru/>сервис ремонта ноутбуков на выезде</a> любых брендов и моделей. Мы осознаем, насколько значимы для вас ваши ноутбуки, и обеспечиваем ремонт первоклассного уровня. Наши профессиональные техники оперативно и тщательно выполняют работу, используя только сертифицированные компоненты, что предоставляет долговечность и надежность выполненных работ. Наиболее частые неисправности, с которыми сталкиваются владельцы ноутбуков, включают неисправности HDD, поврежденный экран, ошибки ПО, неработающие разъемы и неисправности системы охлаждения. Для устранения этих поломок наши квалифицированные специалисты проводят ремонт жестких дисков, экранов, ПО, разъемов и систем охлаждения. Доверив ремонт нам, вы получаете долговечный и надежный сервисный ремонт ноутбука адреса. Подробная информация доступна на сайте: https://remont-noutbukov-first.ru
#3343 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация то дальше необходимо пройти
Чтобы играть даром на настоящие деньги в казино, порой достаточно просто зарегистрироваться. Иногда необходимо выполнить дополнительные деяния. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте обстоятельства – они нередко выдаются для неких машин. В зависимости от клуба продоставляется создавать конкретное число ставок. Кстати, современные игорные жилища выделяют возможность заводить «одноруких злодеев». <a href=https://be1.ru/stat/playhouse.com.ua>https://be1.ru/stat/playhouse.com.ua</a> Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в неотъемлемом порядке необходимо восполнить счет в казино. Для депозитных призов, данная процедура не необходима, например как депозит уже изготовлен.Отказ в прохождении верификации. Если клиент не хочет или возможности предоставить документы, подтверждающие его личность, профиль будет заблокирован вместе со всеми бонусными начислениями. 1×slot зеркало <a href=https://www.kgef.kr/kor/bbs/board.php?bo_table=free&wr_id=419837>https://www.kgef.kr/kor/bbs/board.php?bo_table=free&wr_id=419837</a>
1×slots быструю регистрацию а также мгновенное
Чем ниже велечину вейджера, что, этим проще отыграть и исключить бонус. Если Вы расчитываете заработать на бездепе, а не просто ознакомиться с свежим игровым клубом, то стоит игнорировать призов с высоким вейджером их почти не реально отыграть. С ними Вы можете лишь протестировать игры заведения.Например, игрок получил 500 руб. При разработке аккаунта и должен отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 рублей, потребуется сделать 875 спинов для полного отыгрыша. 1×slots рабочее зеркало на сегодня <a href=https://www.warshipsfaq.ru/user/Arnoldflies>https://www.warshipsfaq.ru/user/Arnoldflies</a> 1×slots зеркало выигрыши обязательно пройдите регистрацию если
1×slots регистрация 1×slotscasino 56 online
Но есть игорные заведения, которые готовы просто например жертвовать средства на забаву. Для сего довольно сделать профиль. Чтобы исключить свой выигрыш, вас сначала необходимо выполнить обстоятельства отыгрыша, обозначенные в условиях получения бездепозитного депо.Прежде чем активировать бездеп, нужно увериться в том, что государство, уроженцем которой является игрок, не заходит в перечень не. Перечисленные выше основные свойства сопровождают практически каждый бонус и являются стандартными для бездепозитных бонусных начислений в казино.Наши эксперты исследуют условия акции, затем в ручном режиме проверку их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие характеристики. Мы не рекламируем казино, а даем игрокам информацию о лучших из них. <a href=https://may-green.ru/forum/user/17125/>https://may-green.ru/forum/user/17125/</a> В основном случаев бесплатные бонусы начисляются в кредитах, коие нельзя незамедлительно вывести со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти требования принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д.). О нем читайте ниже. 1хслот 1хслотс регистрация перейти на 1×slots Возьми свой презент. Чаще всего приз активируется сразу в регистрации. Но бывают ситуации, когда нужно зайти в личный кабинет либо написать в справочную службу.Подтверждение электронной почты – одно из главных критерий, коие есть практически в каждом бездепозитном казино. Чтобы верифицировать электрическую почту, довольно перебежать по активной ссылке в письме, полученном от азартного клуба.
1×slots официальный сайт зеркало
Иногда для получения бонусов нужно связаться с представителями службы поддержки. Удобнее всего с ними собеседовать в онлайн-сате, желая время довольно запроса по электрической почте. 1×slots зеркало регистрация <a href=https://boobs.red/user/Glennalbum/>https://boobs.red/user/Glennalbum/</a>
1×slots казино зеркало
Классическая разновидность приза за создание аккаунта. Его преимущество заключается что, нет, что клиент возможность без подбирать аппараты и делать ставки в их. Иногда перечень игровых автоматов ограничен оператором, но все равно это превосходнее, чем один-единственный доступный слот, как если, тогда, с внедрением фриспинов.Верификация аккаунта. Лучше доказать лицо сразу после регистрации, чтобы позже не было проблем с выводом денег. Верификация возможность протекать 2-мя маршрутами: Чем ниже велечину вейджера, что, этим проще отыграть и исключить приз. Если Вы расчитываете заработать на бездепе, но просто ознакомиться с новым игровым клубом, то стоит избегать бонусов с высочайшим вейджером их почти не реально отыграть. С ними Вы можете только протестировать игры заведения. <a href=http://best-realtors.com.ua/index.php?subaction=userinfo&user=decorouswater36>http://best-realtors.com.ua/index.php?subaction=userinfo&user=decorouswater36</a> Как только вы отыграли вейджер и средства с бонусного баланса перешли вам на реальный счет, Вы неустрашимо можете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать наименьший депозит к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, совместно, вкупе с депозитом).Получить приветственный приз могут только новые клиенты онлайн-казино. Способы описаны в условиях промоакции любого легального казино, чаще всего это: 1×slots актуальное зеркало
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Как лишь на виртуальном счету окажутся бонусные средства, поспешите отыграть вейджер. Сразу последствии сего можно забыть заявку на вывод выигрыша. Кредиты выгодно выделяются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом реальных средств и дают вероятность почувствовать азарт. Во-вторых – можно насладиться каждой азартной игрой доступной на веб-сайте. В вашем постановлении присутствуют автоматы, настольные прибавленье, видео-покер, Live-дилеры.
#3344 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Александр Соболев (футбол) pin up casino скачать <a href=https://kompromat1.online/>kent casino регистрация</a> порно с Алексей Миранчук (футбол) порно с Матвей Сафонов (футбол) <a href=https://t.me/vchkogpu_ru>казино смотреть онлайн</a> сайт казино зеркало 1×bet зеркало xbet casino на телефон сайт казино вход Елизавета Боярская 1×bet официальный казино фильм онлайн
DiskiPlus casino андроид DiskiPlus казино фильм <a href=https://diskiplus.ru/>DiskiPlus Радченко Светлана Юрьевна порно</a> DiskiPlus казино вход официальный сайт DiskiPlus casino играть <a href=https://www.diskiplus.ru/>DiskiPlus бк букмекерская контора</a> DiskiPlus сколько казино DiskiPlus porno Яна Троянова DiskiPlus пин ап букмекерская контора DiskiPlus порно с Аделия Петросян (фигурное катание) DiskiPlus букмекерская контора мостбет DiskiPlus porno Мария Шарапова DiskiPlus кент казино
#3345 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Чулпан Хаматова фильмы казино рояль <a href=https://vestnik-jurnal.com/>порно с Захарова Мария Владимировна</a> промокод 1×bet порно с Владимир Минеев (ММА) <a href=https://vestnik-jurnal.com/>porno Екатерина Ефременкова, шорт-трекистка</a> порно с Евгений Малкин (хоккей) порно с Федор Чалов (футбол) ев казино casino pin официальный казино 1 porno Игорь Акинфеев (футбол) порно с Зырянова Анастасия Владимировна
DiskiPlus яндекс игры казино DiskiPlus 1×bet приложение <a href=https://www.diskiplus.ru/>DiskiPlus лучшая казино</a> DiskiPlus 1×bet официальный сайт DiskiPlus букмекерская контора фонбет официальный <a href=https://www.diskiplus.ru>DiskiPlus порно с Гатагова Ольга Анатольевна</a> DiskiPlus карты казино DiskiPlus демо казино DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz DiskiPlus 1×bet приложение DiskiPlus порно с Петр Ян (ММА) DiskiPlus bitz casino DiskiPlus порно с Федор Чалов (футбол)
#3346 Charlesgunnyhttp://filmkachat.ru
1хслот официальный сайт зеркало
В лицензионных бездепозитных казино выступать в азартные игры вправду неопасно. Наличие лицензии одобряет тот факт, собственно клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP.При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое можно предназначить ирге в казино. <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino09k online</a> Чаще всего интернет-казино предлагают бездепозитные призы свежим юзерам. Эта промо-акция довольно отлично завлекает новичков, подталкивая их к открытию счета. Конечно, не все они становятся преданными клиентами, хотя сам факт регистрации аккаунта играет на руку заведению.Обычно для получения призов без депозита, казино выдвигает лояльные и абсолютно выполнимые обстоятельства, хотя есть ряд действий которые запрещены и все стать неприятные результаты: <a href=https://app.pipefy.com/organizations/301582382/interfaces/3cb17c11–0e57–461f-8383-e1e42508bc5a/pages/8c03e96c-e422–45c5–89db-a09ec6070594>https://app.pipefy.com/organizations/301582382/interfaces/3cb17c11–0e57–461f-8383-e1e42508bc5a/pages/8c03e96c-e422–45c5–89db-a09ec6070594</a> Бездепозитные бонусы – это исключительно небезинтересная и более перспективная акция интернет-казино. Они в другого, как фри-спинов, потому что выплаты в бесплатных вращениях не гарантированы, как композиции на барабанах игрового аппарата могут не сложиться. 1 x slots casino <a href=https://www.buhgalteria.ru/forums/user/69199/>https://www.buhgalteria.ru/forums/user/69199/</a>
рабочее зеркало 1хслотс
Важно, убедитесь том,, что ранее не регились в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи.Если при регистрации показать промокод, можно гарантировано получить бонус. Где брать ваучер? Посетите на блоги либо форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В последнее время игорные дома начали афишироваться в кинокартинах и телесериалах. Присмотритесь и всего заметите промокод, который принесёт 500 или 1 000 бонусных рублей. скачать 1×slots на андроид мобильная версия <a href=https://fromkorea.kr/bbs/board.php?bo_table=free&wr_id=220580>https://fromkorea.kr/bbs/board.php?bo_table=free&wr_id=220580</a> 1× slots зеркало Вейджер менее х30–35 является применимым. Опытные игроки заявляют, что с этим вейджером реально остаться в плюсе, если правильно подойти к выбору игрового аппарата.Но разу не запамятовывайте внимательно разбирать правила участия в бонусных акциях. Если вы нарушите но бы одно условие, позднее вы не можете устроить недоразумение с администрацией.
1×slots промокод при регистрации 2025
Чтоб получить крупный выигрыш, избирайте игровые автоматы с предельным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша. <a href=http://www.dbgjjs.com/home.php?mod=space&uid=463153>http://www.dbgjjs.com/home.php?mod=space&uid=463153</a> Чтобы выступать бесплатно на настоящие деньги в казино, порой довольно просто зарегистрироваться. Иногда необходимо выполнить дополнительные деянья. casino 1×slot
казино 1×slots
<a href=https://adminclub.org/showthread.php?tid=169244>1×slot регистрация</a> Разные казино имеют собственные верховодила по выведению выигрыша. Для бездепозитных призов принимаются довольно высочайшие притязания. Часто онлайн-казино советуют отыграть бонусное одобрение до ста раз в игровых автоматах. Например, если игрок получил даром 10 долларов, то необходимо будет отыграть их, поставив 1 тыщу спинов по 1 баксу каждый. Стоит отметить, собственно не все казино выделяют возможность выступать на призы и не во всех увеселительных заведениях схожие верховодила для отыгрывания. Некоторые казино воспрещают играть на бонусы в блекджек или ограничивают ставки до пяти %, что существенно наращивает в 10-ки один количество необходимых игр.Игрокам стоит принимать приветственный приз как гарантированный метод получить большой выигрыш, но это замечательная возможность без затрат оценить возможностей казино. зеркала 1×slots <a href=http://metabolichealthdigest.com/user/justincisee/?um_action=edit>http://metabolichealthdigest.com/user/justincisee/?um_action=edit</a> Бездепозитный приз – это экономическое вознаграждение, которое выдается участнику забавы в казино, для его привлечения и возникновения заинтригованности. Любой посетитель, кот-ый соответствует условиям выдачи сходственного бездепозитного бонуса, может претендовать на получение вышеуказанного приза. Такое поощрение считается наиболее действенным методом, дающим возможность стартовать при, не вкладывая личных материальных средств.В бонусную программу множества операторов входят регулярные бездепы. Это бессрочные акции, поощряющие интенсивных неизменных игроков. Популярный формат — раздача фриспинов по конкретным дням недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают постоянные призы без депозита в размен на накопленные баллы лояльности.
casino 1×slot
Шаг 5. Использование и отыгрыш. Бездеп обязан быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. После потребуется внести идентификационный платёж. Это пугает начинающих больше всего. Нужно устроить наименьший депо в 100–500 руб. Таким образом служба безопасности убедиться что, что платёжный способ принадлежит Вам. Данная процедура необходима для обеспечивания безопасности игровых счетов. Пример, Ваш аккаунт взломают и выведут свои на собственный кошелёк. Будет очень неприятно. Поэтому верификация платёжной системы, это необходимый момент. <a href=http://www.alzlt5.com/space-uid-283342.html>http://www.alzlt5.com/space-uid-283342.html</a> Для казино, работающих онлайн, бездепозитные бонусы нужны для привлечения свежих клиентов. Предложение сыграть на слотах без необходимости внесения настоящих денег — работающий метод для повышения интереса к фирмы. После отыгрыша бездепа велик шанс, что игроку понравится и он продолжит играть в казино, только сейчас уже на личные деньги. 1 xslots рабочее зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://timepost.info/showthread.php?tid=110500>1×slots быструю регистрацию а также мгновенное</a>
<a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=7411>1×slots регистрация на сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Денежные свои. Третий бонус за регистрацию без депо – наличные. К сожалению, только известные и пользующиеся клубы все дать средства в руб. Либо долларах. С их поддержкою вы сможете насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед данным нужно исполненье конкретных условий. Варианты выигрыша зависят от Вашей успеха и условий игорного портала. Выше мы сказали, что кое-какие бездепозитные бонусы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются другие, все, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность передовых игр на деньги, возможно выиграть невероятные суммы. Сегодняшние игровые автоматы либо видео слоты, как их именуют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000.
#3347 Korporativnoye-obucheniye_perhttps://xn----7sbecpcasfm0beeaecirc5b3a2g.kz/
Всем привет! Коллеги и партнеры полезная и отличная новость для вас! В наше сложное и высоко конкурентное время не возможно без профессиональных кадров и профессионального персонала. Профессиональные организации и компании не могут быть профессионалами во всех сферах деятельности, поэтому вынуждены обращаться за корпоративным языковым обучением, корпоративным обучением и корпоративными бизнес тренингами в специализированные компании, например: <a href=https://xn----7sbecpcasfm0beeaecirc5b3a2g.kz/>Caspian Training Group</a> Специализированная компания должна не охватывать все направления и сферы обучения, а специализироваться на нескольких направлениях, в которых действительно является экспертом и профессионалом в корпоративном обучении. В общем, если вы хотите найти, корпоративное обучение Казахстан, корпоративное обучение, корпоративное обучение в Казахстане и т.д., например: <a href=http://корпоративное-обучение.kz/>бизнес тренинг персонала</a> Тогда вам нужно прямо сейчас перейти на сайт Caspian Training Group корпоративное обучение в Атырау, корпоративное обучение, корпоративное обучение в Казахстане, корпоративное обучение в Алматы и т.д. https://корпоративное-обучение.kz/ . Обязательно переходите на сайт https://xn----7sbecpcasfm0beeaecirc5b3a2g.kz/ CtGroup изучайте информацию и сохраняйте в закладки, не забудьте записать адрес сайта и номера телефонов +7 777 179 66 00, +7 702 653 85 87 . До новых встреч!
#3348 Charlesgunnyhttp://filmkachat.ru
1×слотс казино
Законодательство, регулирующее азартные игры в разных государствах, влияние на полномочия операторов. В результате юзеры из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это имеет быть как глубокий отказ в доступе, например и невозможность загружать игры отдельных изготовителей. <a href=http://filmkachat.ru/>1хслот скачать</a> Максимальная ставка ? уточняется в валюте счета и ограничивает размер ставки за один спин. В случае ее превышения приз возможность быть аннулирован. Также в правилах возможность находиться запрет на размещение ставок конкретного вида, примеру, по одинаковым шансам в рулетке (словами, на чет или нечет, красное или черное и т.д. ).Используйте лучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из списка ниже, дабы заработать подарки за обычные действия и уже сегодня получить первый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высочайшей отдачей и быстрыми выводами на электрические кошельки. <a href=https://pr-cy.io/astramedika.com.ua/>https://pr-cy.io/astramedika.com.ua/</a> Для верификации номера телефона, в собственном профиле выберите опцию „Подтвердить номер телефона“ и введите в отвечающее фон код, полученный в sms-сообщении. 1 xslots рабочее зеркало <a href=http://lsrczx.com/home.php?mod=space&uid=1030857>http://lsrczx.com/home.php?mod=space&uid=1030857</a>
1×slots официальный demo регистрация в 1×slots casino
Прежде чем активировать бездеп, необходимо увериться что, что страна, гражданином коей считается игрок, не входит в перечень запрещенных. зеркло казино 1×slots Мы рекомендуем не открещиваться от сходственных предложений узнаваемых казино. Выделите несколько мин. На регистрацию, получите приз и попробуйте его отыграть. Может быть, сейчас удача несомненно на вашей стороне! <a href=https://app.welvi.co.kr/bbs/board.php?bo_table=qa&wr_id=1752772>https://app.welvi.co.kr/bbs/board.php?bo_table=qa&wr_id=1752772</a> Предложения с бездепозитными бонусами за регистрацию позволяют новым заведениям привлечь аудиторию на свой вебсайт. А игроки в свою очередь получают вероятность играть на настоящие деньги без депо в казино и заработать маленький стартовый капитал, кот-ый разрешается исключить на карту банка или электронный кошелек.Нет. Для получения бездепозитного приза в казино нужна обязательная регистрация на сайте. Играть в слоты бесплатно и без регистрации можно только в демо режиме. 1× slots зеркало При помощи такового поощрения оператор возможность того завлекать посетителей, коие ранее показывали активность на веб-сайте, но по какой-то основанию прекратили выступать. В данном случае промокод высылается юзеру по электронной почте или вид SMS.В зависимости от онлайн заведения любой из их имеет для предложить как бездепозитные средства, так и бездепозитные фриспины, которые в удачной регистрации рухнут вас на ваш игровой баланс.
1×slots бонус за регистрацию
Но а в вы теснее профи по интернет казино, кликаем на красноватую кнопку «Получить» и Вы автоматически перейдете в интернет казино;У любого игорного клубы разные вейджеровые обстоятельства. Чтобы вы гарантировано сумели выполнить их, мы дадим некоторое советов. Если система начислила маленькую необходимую, не стоит создавать великие ставки – остановитесь на 10–30 центах. Как только сможете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте выступать. В неприятном случае какого-либо присмотреться к другому автомату. В онлайне очень много скриптовых вебсайтов, которые принадлежат мошенникам. Их основная цель – заинтересовать гэмблеров, пообещав не щедрые подарки, хотя и крупные выигрыши. Так собственно кое-какие веб-сайты предлагают получить за регистрацию в $1 000. <a href=http://tekst-pesni.ru/index.php?name=account&op=info&uname=gabbynucleus40>http://tekst-pesni.ru/index.php?name=account&op=info&uname=gabbynucleus40</a> 1×slots зеркало сайта Таким образом интернет казино получает вероятного игрока. Возможно в или подлинном он захочет поиграть на свои деньги. Так трудятся бездепозитные призы в онлайн казино. Здесь очень подходит выражение, бесплатные сыр бывает только в мышеловке. Начинающие игроки имеют не обдумывать опасность азарта. Однако времени осознания делается больше. Это тема для отдельного обсуждения.Зарегистрируйтесь. Для регистрации почаще всего достаточно установить собственный номер телефонного и почтовый адресок, в чего установить приобретенный код из СМС. Возможно, потребуется указать промокод. В правилах промоакции будет написано, где его бы включать. Иногда это надобно делать при регистрации, иногда — уже в сотворения собственного офиса, на отдельной страничке.
1×slots рабочее зеркало
Способы получения бездепа различаются от вида бонуса, который приглянулся игроку. Но вам в любом случае надо(надобно) быть зарегистрированным в законном онлайн-казино и подтвердить свою лицо. В общем облике пошаговая аннотация для получения бездепозитного бонуса смотрится например: Можно. Вы всегда можете отказаться от получения бездепозитного приза за регистрацию в казино, пока Вы не сделаете ставку. 1× slots официальный <a href=http://n27244j0.bget.ru/index.php?subaction=userinfo&user=MiguelRep>http://n27244j0.bget.ru/index.php?subaction=userinfo&user=MiguelRep</a> Размер ставки для забавы по бездепозитному призу (окончательно же, в случае, когда он представлен в виде бонусных валютных средств) часто ниже, чем при забаве на депо. Ограничение несомненно действовать до этапа отыгрыша приза.
1×слот регистрация в 1×slots casino
<a href=http://www.trafficdirectory.org/150-%D0%B1%D0%B5%D1%81%D0%BF%D0%BB%D0%B0%D1%82%D0%BD%D1%8B%D1%85-%D1%81%D0%BF%D0%B8%D0%BD%D0%BE%D0%B2–1×slots_352376.html>http://www.trafficdirectory.org/150-%D0%B1%D0%B5%D1%81%D0%BF%D0%BB%D0%B0%D1%82%D0%BD%D1%8B%D1%85-%D1%81%D0%BF%D0%B8%D0%BD%D0%BE%D0%B2–1×slots_352376.html</a> Приветственный приз без депо ? подарок за регистрацию. Выдается средствами, фриспинами либо баллами. В заключительном случае бонусные баллы используются для участия в турнирах или размена на реальные средства. 1×slots актуальное зеркало Не рекомендуем сломя голову браться за различные предложения получения средств без инвестициям. Вполне вполне, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на 1-ый взор. Альтернативой является казино приз за депозит. Мы предлагаем вам пару советов, спасибо которым у каждого игрока несомненно вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом денег:Таким образом интернет казино получает вероятного игрока. Возможно в или подлинном он захочет поиграть на свои деньги. Так трудятся бездепозитные призы в онлайн казино. Здесь очень подходит выражение, бесплатные сыр бывает только в мышеловке. Начинающие игроки имеют не обдумывать опасность азарта. Однако времени осознания делается больше. Это тема для отдельного обсуждения.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.home-visa.ru/memberlist.php?mode=viewprofile&u=3536>1×slots регистрацию процедура займет всего лишь</a>
<a href=https://nauc.info/forums/viewtopic.php?t=20593812>1×slots актуальное зеркало</a>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=135980>1×slots сайт зеркало</a>
<a href=https://vredeenvermaak.be/forum/vrede-en-vermaak/>1×slots регистрация на сайте 1×slots ru com</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Доступ к подарку имеет раскрываться механически после введения промокода либо обращения в службу сайта. В первом случае от пользователя не требуется никаких деяний. Бездеп с активацией по коду встречается почаще всего. Игроку необходимо установить совокупа знаков в графе, которая возможность находиться в регистрационной форме в Личном офисе. Прочитайте управляла бонусной программы, какой желаете принять. Да, мы настоятельно советуем сделать это до регистрации.
#3349 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
bitz casino 1×bet на сегодня <a href=https://7club7.com/>порно с Афонина Марина Игоревна</a> champion casino porno Юлия Пересильд <a href=https://vestnik-jurnal.com/>porno Виктория Баркова, легкоатлетка</a> порно с Евгений Малкин (хоккей) 1×bet на сегодня порно с Илюшникова Татьяна Александровна букмекерская контора леонов порно с Диана Шнайдер (теннис) включи казино porno Анна Сидорова, керлингистка
DiskiPlus Нургалиева Эльвира Рамиловна порно DiskiPlus бесплатно играем казино <a href=https://www.diskiplus.ru/>DiskiPlus Петрова Ольга Викторовна порно</a> DiskiPlus реального казино DiskiPlus казино рояль <a href=https://www.diskiplus.ru/>DiskiPlus porno Виктория Баркова, легкоатлетка</a> DiskiPlus 1×bet сейчас DiskiPlus скачать 1×bet на андроид бесплатно DiskiPlus casino pin официальный DiskiPlus казино 5 DiskiPlus порно с Афонина Марина Игоревна DiskiPlus скачать pin casino DiskiPlus Мухтиярова Елена Вячеславовна порно
#3350 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино фильм букмекерская контора вход <a href=https://slon-ru.com/>кент казино</a> реального казино казино 1 <a href=https://krtka.info/>человек казино</a> 1×bet зеркало xbet xyz винлайн букмекерская контора 1×bet сейчас самое казино casino x букмекерские конторы pin порно с Голикова Татьяна Алексеевна
DiskiPlus казино ли DiskiPlus r7 casino <a href=https://www.diskiplus.ru>DiskiPlus 1×bet xbet xyz</a> DiskiPlus Ходнева Светлана Владимировна порно DiskiPlus человек казино <a href=https://diskiplus.ru>DiskiPlus порно с Голикова Татьяна Алексеевна</a> DiskiPlus бесплатно фильм казино DiskiPlus песня казино DiskiPlus casino скачать DiskiPlus Фастова Елена Владимировна порно DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus букмекерские контора ап казино
#3351 Charlesgunnyhttp://filmkachat.ru
casino 1×slot
Похожим образом трудится третий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения клиента или из-за с получения им VIP-статуса. Подарок предоставляется в воззвания в поддержку и ревизии. <a href=http://filmkachat.ru/>1×slots официальный сайт, скачать</a> <a href=https://www.papercall.io/speakers/product-3d-modeling-services>https://www.papercall.io/speakers/product-3d-modeling-services</a> Мы подготовили перечень, где есть всегда животрепещущие и новые бездепозитные бонусы казино, которые вам получить даром. Для наших пользователей есть специальные предложения эксклюзивные призы, которые вы нигде не отыщите, их мы определили специальной красноватой плашкой «Exclusive».Доступ к подарку может раскрываться механически в введения промокода или обращения в саппорта вебсайта. В первом случае от юзера не потребуется никаких поступков. Бездеп с активацией по коду встречается почаще всего. Игроку нужно ввести совокупность символов в графе, которая имеет находиться в регистрационной форме в Личном кабинете. 1×slots официальный сайт зеркало <a href=https://thiamlau.com/forum/member.php?action=profile&uid=3807>https://thiamlau.com/forum/member.php?action=profile&uid=3807</a> У каждого игорного заведения свои управляла и обстоятельства. Но, чтобы получить призы, необходимо выполнить стандартные деянья:Условия, на коих предоставляется бездеп, регулируются казино. Каждая промоакция содержит подробные управляла, ссылка на которые обычно содержится в промообъявлении. В них указываются лимиты, вейджер, перечень дешевых игр. Если оператор укрывает данные о предложении, то пользоваться им не стоит.
1× slots регистрация в 1×slots casino
Выбирая безвозмездный бонус, внимательно изучайте управляла. Убедитесь, что вам возможно на участие в акции. Уточните, в каких забавах можно скорпулезно условия вейджера. При надобности задавайте вопросы адептам саппорта.Высокая конкуренция в разделе азартных игр мотивирует операторов привлекать посетителей разнородными промоакциями. Благодаря этому у посетителей бывает возможность получить призы в казино за регистрацию без депо. Воспользоваться таким предложением возможно, избегая процедуру внесения средств на игровой счет, просто активировав аккаунт на веб-сайте. Наш гид по бездепам поможет избрать самую привлекательную бонусную программу, разузнать правила получения такого вознаграждения и воспользоваться им с максимальной выгодой. 1хслотс рабочее зеркало Вейджер (или вагер) ? это наименьшая сумма ставок, которую необходимо сделать для вывода валютного приза. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, тем привлекательнее спецпредложение.Существует ли стратегии для отыгрыша бездепозитных призов? К раскаянию нет, на выигрыши либо проигрыши с призов, казино или игрок повлиять возможности, отдача игр происходит от создателей игр. <a href=https://www.x-fta.com/foro/member.php?1254751-RaymondMob>https://www.x-fta.com/foro/member.php?1254751-RaymondMob</a> Популярность онлайн казино растёт и всё больше пользователей начинают интересоваться азартными играми. Бездепозитные призы 2022 года, это уникальные презенты за регистрацию. С их поддержкою новые игроки шансы получить безвозмездные вращения либо деньги на баланс за одну регистрацию. С свет игорных заведений в интернете, бездепозитные призы стали известнейшим способом вербования игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш сайт собрал наихорошие предложения из интернета на 2022 год. Воспользуйтесь каким даром и сможете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша нужно выполнить обстоятельства.Бонусные деньги – небольшая сумма средств для старта в новеньком казино. На бонусные средства, обычно разрешается играть во все игры, считая слотов с прогрессивным джекпотом и игр из раздела exist casino. 1×slot официальный сайт Если идет об неповторимых услугах, возможность потребоваться регистрация в казино по ссылке с партнерского сайта.
1хслотс рабочее зеркало
Все благотворительные призы кажутся соблазнительными. Кто же категорически от способности поиграть в онлайн-казино, не рискуя средствами, но получая выигрыши. Но далековато не все бездепозитные призы одинаковой презентабельны для рассудительного клиента.Для получения бонуса надо(надобно) пригласить в игру нового посетителя. Казино начисляет пригласившему фиксированный процент от взносов приглашённого вид бонуса: почаще всего его объем не превышает 10%. Срок деянья приза правило не выше месяца: пригласивший получает бонус в зависимости от проигранных ставок приглашённого в первый месяц игры. <a href=https://seniordance.ru/forum/member.php/78939-ForsedropEi>https://seniordance.ru/forum/member.php/78939-ForsedropEi</a> онлайн казино 1×slots Бонус с зачислением денег на счет выделяет больше свободы поступков. Пользователь сам выбирает, каким образом воспользоваться подаренными своими. Здесь того все действовать лимитирования на перечень дешевых игр, хотя обыкновенно эти рамки не так строги, как в рекламную с бесплатными вращениями.
1×slots сайт зеркало
Демоказино есть практически на любом веб-сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются значительно пореже: там в случае выигрыша и соблюдения условий акций бездеп можно перевоплотить в настоящие деньги. Шаг 4. Активация. Внимательно изучите обстоятельства, информацию по лимитированиям и сроке действия бонусного предложения. Разобравшись с правилами, возможно активировать бонус в собственном кабинете (времени ? с внедрением промокода) либо по запросу в саппорт.Сроки активации приза уточняются любым казино, но чаще всего они не превосходят недели с момента получения. Игроку непременно нужно применять бездеп на обозначенного срока, в ином случае приз просто пропадет. Каждый бонус можно получить только один раз, поэтому в не применять бездеп в срок, у игрока не будет второго шанса им пользоваться. 1×slots коды <a href=https://uadplugins.club/memberlist.php?mode=viewprofile&u=226646>https://uadplugins.club/memberlist.php?mode=viewprofile&u=226646</a> Заполняя данные в личном профиле, указывайте только достоверную информацию, так как Вам понадобиться ее подтвердить в будущем при выводе денег.Онлайн-казино кропотливо продумывают бонусные условия, коие необходимо выучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и ограничения.
1×slot рабочее зеркало
<a href=http://lamoonvideo.ru/profile.php?u=adaptablevacanc>http://lamoonvideo.ru/profile.php?u=adaptablevacanc</a> Фриплей-бонусы. Бонусы за безвозмездную забаву есть лишь в некоторых клубах. Они зачисляются незамедлительно в творенья профиля и срабатывают недолговременное время. Если у вас нет времени истратить свои, они просто завершатся. Что дотрагивается медли, как призы срабатывают протяжении 1-го часа. 1×slots регистрация 1×slots review live Маркетинговая политического всех игорных интернет-клубов должна одевать различный характер. И в гонорары на депозит служат чтобы, чтобы, чтобы провоцировать вносить депозиты и поощрять теснее быть юзеров, то бездепозитный приз в казино либо приз за регистрацию в казино, этого всего, рассчитан на расширение базы покупателей.Так же стоит выделить то, что в любом интернет казино установлен свой максимальный кешаут на бездепозитный бонус. Как управляло кешаут — это предельная сумма денег, кот-ая доступная для вывода с бездепозитного приза.
<b>Смотреть еще похожие новости:</b>
<a href=http://khodaumo.com/forum/viewtopic.php?f=2&t=75045&sid=6d28da99c7729e8b0675ada656a04497>1×slots зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Допустим, за регистрацию вы получили бездеп в размере 2 000 рублей с вейджером х30. В этом случае светит устроить ставок, на совместную необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда выполните обстоятельства по отыгрышу, придёт время заработать реальные деньги. Однако не запамятовывайте, что с любого презента выйдет исключить определённую необходимую (почаще всего менее $200).
#3352 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
сайт казино зеркало казино онлайн <a href=https://rumafia.news/>casino рабочее</a> порно с Захарова Мария Владимировна porno Марина Александрова <a href=https://sovsekretno.net/>порно с Каролина Севастьянова</a> casino играющие казино порно с Федор Чалов (футбол) букмекерская контора макао казино скачать casino на андроид спорт букмекерская контора
DiskiPlus букмекерская контора вход DiskiPlus casino вход <a href=https://diskiplus.ru>DiskiPlus 1×bet вход</a> DiskiPlus casino buzz DiskiPlus пин ап букмекерская контора <a href=https://diskiplus.ru>DiskiPlus скачать 1×bet 1×bet xyz</a> DiskiPlus бесплатные букмекерские конторы DiskiPlus скачать букмекерскую контору на андроид DiskiPlus пина casino DiskiPlus porno Катерина Шпица DiskiPlus casino играть DiskiPlus лучшие букмекерские конторы DiskiPlus ограбление казино
#3353 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия
Все бесплатные бонусы кажутся заманчивыми. Кто же категорически от способности сыграть в онлайн-казино, не рискуя средствами, хотя получая выигрыши. Но далековато не все бездепозитные призы в презентабельны для рассудительного посетителя. <a href=http://filmkachat.ru/>1×slots casino зеркало рабочее</a> Чаще всего интернет-казино предлагают бездепозитные призы новым пользователям. Эта промо-акция довольно отлично привлекает начинающих, подталкивая их к открытию счета. Конечно, не все они становятся преданными посетителями, хотя сам факт регистрации аккаунта играет на руку заведению.Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? <a href=https://www.woorank.com/en/teaser-review/playhouse.com.ua?generationId=872ad221–0955–4d77–9976-f6c1e3b64286&usecase=all>https://www.woorank.com/en/teaser-review/playhouse.com.ua?generationId=872ad221–0955–4d77–9976-f6c1e3b64286&usecase=all</a> Для казино, работающих интернет, бездепозитные призы нужны для вербования новых клиентов. Предложение поиграть на слотах без надобности внесения настоящих денег — работающий способ для повышения интереса к компании. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит играть в казино, только теперь уже на личные деньги. 1×slots бездепозитный бонус за регистрацию <a href=https://www.weaselmods.net/member.php?action=profile&uid=3408>https://www.weaselmods.net/member.php?action=profile&uid=3408</a> Иногда для получения бонусов нужно связаться с адептами службы. Удобнее всего с ними собеседовать в онлайн-сате, хотя времени достаточно запроса по электронной почте.
1×slots казино зеркало
Для тех, кто лишь взвешивает испытать собственную фортуну, а также для профессиональных игроков, разыскивающих новые площадки для выигрышей, основные лицензированные казино часто устраивают различные акции, и одно из лучших услуг прошедшее время – как для начинающих, например и для проф игроков – бездепозитный приз за регистрацию.Бездепы обыкновенно предлагают с отыгрышем — моментально вывести выигранные средства невозможно. Перевод средств со счета будет вероятен после как, как пользователь выполнит все требования казино, а сумма не может превышать установленного правилами лимита. Условиями акции фиксируются сроки, в течение коих заказчик вправе воспользоваться предложением. Обычно они не превышают нескольких дней последствии активации. <a href=http://afpd.onlinebbs.ru/memberlist.php?mode=viewprofile&u=121>1х слот 1хслотс регистрация перейти на 1×slots</a> 1×slot зеркало рабочее регистрации на телефон придет Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша бонусов. Заведения всегда устанавливают наивысшую ставку, возможную по условиям вейждера.Игры, в которых возможно играть на бонусные деньги. Проверьте список игр, каких возможно выступать на бонусные средства, вполне они Вам не понравятся и не стоит расходовать своё время на такую акцию. <a href=http://ip-iv.ru/index.php?subaction=userinfo&user=CharlesGeado>http://ip-iv.ru/index.php?subaction=userinfo&user=CharlesGeado</a> 1×slots официальный сайт зеркало Вывод выигрыша с бездепозитных призов казино – великодушный презент от азартных клубов. Но дабы вывести свой заработок, нужно выполнить ряд критерий:
1×slots регистрация то дальше необходимо пройти
Бездепозитные бонусы, как уже понятно, являются уникальной возможностью приступать к игровому процессу абсолютно безвозмездно, то есть играть в интернет казино бесплатно и на существующие средства незамедлительно последствии регистрации аккаунта. Автоматы с этим депозитом могут стать прекрасной возможностью сыграть для почитателей пыла с определенными ограничениями в финансах.Максимальный размер ставки, который нельзя превышать же приз не будет полностью отыгран. В случае нарушения сего управляла, бонус и выигрыш с него станут аннулированы. Доступность — бездепозитные бонусы в казино чаще всего предоставляются новым игрокам, но посещают случаи, когда приз все получить и действующие клиенты.Высокая конкурентность в разделе азартных игр мотивирует операторов привлекать клиентов различными акциями. Благодаря этому у посетителей замечена вероятность получить призы в казино за регистрацию без депозита. Воспользоваться этим предложением возможно, избегая процедуру внесения средств на игровой счет, просто активировав аккаунт на веб-сайте. Наш экскурсовод по бездепам поможет выбрать самую привлекательную бонусную программку, узнать верховодила получения такового вознаграждения и воспользоваться им с максимальной выгодой. <a href=https://medium.com/@comcgifurniture/your-complete-guide-to-premium-weed-delivery-pickering-and-local-cannabis-services-c284470081c0>https://medium.com/@comcgifurniture/your-complete-guide-to-premium-weed-delivery-pickering-and-local-cannabis-services-c284470081c0</a> Но на азартных платформах похожие вознаграждения все получить и уже зарегистрированные юзеры. В этом случае, призы предоставляются в оригинальных промоакций либо же неким геймерам в виде акционного предложения, которое приходит на почту с целью «вернуть» игрока в свое казино.Чтобы играть бесплатно на реальные деньги в казино, порой достаточно просто зарегистрироваться. Иногда нужно выполнить дополнительные действия. 1хслотс официальный сайт зеркало
1 x slots casino
Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. 1×slots рабочее зеркало на сегодня <a href=https://honcure.com/user/Richardmuh/>https://honcure.com/user/Richardmuh/</a>
1×slots официальный сайт скачать
На безвозмездные призы онлайн-казино практически всегда распространяется ограничения по стране проживания посетителей. Даже случае вас разрешено открывать счет и играть на средства в заведении, это еще не означают, собственно вам доступны no down payment bonuses. <a href=https://buketik39.ru/user/RenaldoGem/>https://buketik39.ru/user/RenaldoGem/</a> Третитй бездепозитный бонус за регистрацию – валютные средства. К раскаянию, начислить рубли или доллары готовы лишь известные и модные клубы. С их поддержкою возможность насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком.Основное верховодило получения бездепа ? творимый аккаунт обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов взыскательно воспрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита необходимо соблюдать простую последовательность поступков. 1хслот зеркало сайта Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.
<b>Смотреть еще похожие новости:</b>
<a href=https://mit-bbs.com/memberlist.php?mode=viewprofile&u=15318>1×slots на любой вкус как пройти регистрацию</a>
<a href=https://forum.vn.ua/showthread.php?p=3281461#post3281461>1×slots официальный сайт зеркало</a>
<a href=https://rolivka.online/forum/showthread.php?tid=37573>1×slots на любой вкус как пройти регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Можно ли зарабатывать на бездепозитных бонусах? Это не работа, здесь как повезет, в в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, тогда можно назвать везением, и добавочной добавкой к вашему бютжету. Мы подготовили список, где есть практически актуальные и новые бездепозитные призы казино, которые вам получить безвозмездно. Для наших юзеров есть специальные предложения неповторимые призы, которые вы ни не отыщите, их мы определили специальной красноватой плашкой «Exclusive».
#3354 Ремонт iPhone 12 Pro Maxhttps://remont-iphone-12-pro-max-zarden.ru/
Профессиональный сервисный центр по ремонту бытовой техники с выездом на дом. Мы предлагаем: <a href=https://remont-iphone-12-pro-max-zarden.ru/>срочный ремонт iphone 12 pro max</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#3355 Arnoldnushttps://musicbit.com.ua
Твой женский сайт <a href=https://musicbit.com.ua/>https://musicbit.com.ua</a> о стиле, здоровье и вдохновении! Узнай секреты красоты, следи за модными новинками, развивайся, читай о психологии отношений и оставайся в гармонии с собой.
#3356 Jamesfielmhttps://geog.org.ua
Лучший портал для родителей <a href=https://geog.org.ua/>https://geog.org.ua</a> и детей! Читайте о воспитании, обучении, здоровье, детской психологии, играх и семейном досуге. Советы экспертов и практические рекомендации.
#3357 Jimmymedhttps://ramledlightings.com
Сайт для женщин <a href=https://ramledlightings.com/>https://ramledlightings.com</a> будь лучшей версией себя! Читай о моде, красоте, психологии, отношениях, материнстве и женском здоровье. Найди вдохновение и полезные советы для каждого дня!
#3358 Ремонт iPhone 12 Pro Maxhttps://remont-iphone-12-pro-max-zarden.ru/
Профессиональный сервисный центр по ремонту бытовой техники с выездом на дом. Мы предлагаем: <a href=https://remont-iphone-12-pro-max-zarden.ru/>ремонт iphone 12 pro max сервис</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#3359 Williesuphttps://presslook.com.ua
Современный женский портал <a href=https://presslook.com.ua/>https://presslook.com.ua</a> Все о красоте, моде, женском здоровье, отношениях, саморазвитии и карьере. Читай, вдохновляйся и меняй свою жизнь к лучшему!
#3360 ErnestFrecthttps://mirlady.kyiv.ua
Твой путеводитель <a href=https://mirlady.kyiv.ua/>https://mirlady.kyiv.ua</a> в мире женских секретов! Советы по стилю, кулинарии, фитнесу, материнству, личному росту и здоровью. Всё, что нужно для счастливой жизни!
#3361 Empathy_center_aritahttps://empathycenter.ru/
Доброго времени суток! «Эмпатия» центр ментального здоровья. Цель каждого специалиста нашей команды – забота о ментальном здоровье людей через предоставление как можно более качественной и доступной медицинской помощи, а также через дестигматизацию ментальных расстройств и психопросветительскую деятельность. Главный врач центра „Эмпатия“ Панова Надежда Вячеславовна. <a href=https://empathycenter.ru/preparations/g/gabapentin/>нейронтин</a> Если Центр ментального здоровья Эмпатия с более чем 60 работающих специалистов и врачей в Москве и Реутове, то это в сети клиник доказательной психиатрии https://empathycenter.ru/ . Узнавайте и звоните к нам по бесплатному номеру телефона 8–800–775–07–12. Всем пока!
#3362 Ремонт iPhone 12 Pro Maxhttps://remont-iphone-12-pro-max-zarden.ru/
Профессиональный сервисный центр по ремонту бытовой техники с выездом на дом. Мы предлагаем: <a href=https://remont-iphone-12-pro-max-zarden.ru/>ремонт iphone 12 pro max цены</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#3363 Empathycenter_Tubhttps://empathycenter.ru/
Всем привет! Центр Эмпатия — сеть клиник доказательной психиатрии. Более 60 врачей работают с детьми и взрослыми, применяя современные и эффективные методы лечения и диагностики. <a href=https://empathycenter.ru/articles/samopovrezhdayushchee-povedenie/>самоповреждающее поведение виды</a> Если сеть клиник доказательной психиатрии с более чем 60 работающих специалистов и врачей в Москве, то это в Центре ментального здоровья Эмпатия https://empathycenter.ru/ . Выбирайте рядом с вами Эмпатия Реутов м. Новокосино, Эмпатия м. Университет, Эмпатия м. Электрозаводская. Увидимся!
#3364 Danielronhttps://lolitaquieretemucho.com
Портал для женщин <a href=https://lolitaquieretemucho.com/>https://lolitaquieretemucho.com</a> которые ценят себя! Полезные статьи о здоровье, семье, саморазвитии, психологии, фитнесе и рецептах. Будь уверенной, счастливой и успешной!
#3365 whore
купить меф телеграмм <a href=https://bonsaicasino-00.buzz/>купить бошки меф шишки соль скорость</a>
#3366 Ctgroupkz_Atmonhttps://www.ctgroup.kz/
Доброго времени суток! Действительно очень трудно и очень сложно выучить казахский язык, не говоря уже о английском языке. Это одна из величайших и серьезных проблем, можно сказать большинства людей и почти всего человечества. Особенно если нет усидчивости и старания. Думал уже бросать это неблагодарное и гиблое дело. В общем, сами выучить не сможете, даже не пытайтесь, без профессиональных наставников и учителей. В общем, если вам интересно найти, образовательный языковой центр в Алматы или Атырау в Казахстане и хотите узнать, например: <a href=https://www.ctgroup.kz/business-kazakh/>академический казахский язык курсы</a> Тогда вам срочно нужно прямо сейчас перейти на сайт Образовательного центра Caspian Training Group и выбрать место обучения в Алматы или Атырау в Казахстане https://www.ctgroup.kz/ . Переходите на сайт Caspian Training Group сохраняйте в закладки и изучайте информацию, не забудьте записать номер телефона +7 775 0301919 и адрес сайта. До новых встреч!
#3367 Gordonbiphttps://troeshka.com.ua
Твой авто-гид <a href=https://troeshka.com.ua/>https://troeshka.com.ua</a> в мире машин! Обзоры новых моделей, тест-драйвы, советы по ремонту и тюнингу, автоновости и технологии будущего. Все, что нужно автолюбителю!
#3368 Ремонт iPhone 12 Pro Maxhttps://remont-iphone-12-pro-max-zarden.ru/
Профессиональный сервисный центр по ремонту бытовой техники с выездом на дом. Мы предлагаем: <a href=https://remont-iphone-12-pro-max-zarden.ru/>ремонт iphone 12 pro max цены</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#3369 Ремонт холодильников Smeghttps://remont-holodilnikov-smeg-tent.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт холодильников smeg адреса, можете посмотреть на сайте: <a href=https://remont-holodilnikov-smeg-tent.ru/>ремонт холодильников smeg рядом</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#3370 Korporativnoye-obucheniye_perhttps://xn----7sbecpcasfm0beeaecirc5b3a2g.kz/
Добрый день! Партнеры и коллеги отличная и полезная новость для вас! В наше высоко конкурентное и сложное время не возможно без профессиональных кадров и профессионального персонала. Профессиональные компании и организации не могут быть профессионалами во всех сферах деятельности, поэтому вынуждены обращаться за корпоративным обучением, корпоративными бизнес тренингами и корпоративным языковым обучением в специализированные компании, например: <a href=https://xn----7sbecpcasfm0beeaecirc5b3a2g.kz/>казахский язык</a> Специализированная компания должна не охватывать все направления и сферы обучения, а специализироваться на нескольких направлениях, в которых действительно является профессионалом и экспертом в корпоративном обучении. В общем, если вам интересно найти, корпоративное обучение Казахстан, корпоративное обучение, корпоративное обучение в Казахстане и т.д., например: <a href=http://корпоративное-обучение.kz/trainings>тренинги для компании</a> Тогда вам срочно нужно прямо сейчас перейти на сайт Caspian Training Group корпоративное обучение в Казахстане, корпоративное обучение, корпоративное обучение в Алматы, корпоративное обучение в Атырау и т.д. https://корпоративное-обучение.kz/ . Обязательно переходите на сайт https://xn----7sbecpcasfm0beeaecirc5b3a2g.kz/ CtGroup сохраняйте в закладки и изучайте информацию, не забудьте записать адрес сайта и номера телефонов +7 777 179 66 00, +7 702 653 85 87 . Увидимся!
#3371 Kennethcubhttps://prestige-avto.com.ua
Автомобильный мир <a href=https://prestige-avto.com.ua/>https://prestige-avto.com.ua</a> в одном журнале! Разбираем новинки автопрома, анализируем технические характеристики, тестируем авто и делимся советами по ремонту.
#3372 DouglasFooffhttps://orion-auto.com.ua
Автомобильный журнал <a href=https://orion-auto.com.ua/>https://orion-auto.com.ua</a> только важные новости! Все о популярных марках, топовые авто 2024 года, электрокары, автономное вождение и тенденции рынка.
#3373 Marcusfenhttps://k-moto.com.ua
Современный автомобильный <a href=https://k-moto.com.ua/>https://k-moto.com.ua</a> журнал! Читайте о трендах в автоиндустрии, новейших моделях, электромобилях, тюнинге и умных технологиях.
#3374 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало рабочее
Представьте момент, когда при ставке в 10 руб. Вы получите подобное умножение. Миллион рублей за одно вращение, собственно абсолютно вполне. Поэтому вопрос, сколько можно выиграть остаётся открытым. Предлагаем проверить без. Регистрируйтесь в одном или нескольких онлайн казино, получайте Бездепозитный приз и инспектируйте фортуну в деле. Разумеется, вывести средства не так просто. Однако шансы есть у всех. <a href=http://filmkachat.ru/>1×slots мобильная версия войти казино</a> <a href=https://forum.gazeta.pl/forum/w,678,178514367,178514367,Upholstery_Virtual_Prototyping.html>https://forum.gazeta.pl/forum/w,678,178514367,178514367,Upholstery_Virtual_Prototyping.html</a> Предложения с бездепозитными бонусами за регистрацию дозволяют новым заведениям привлечь аудиторию на собственный сайт. А игроки в свою очередь получают возможность выступать на настоящие средства без депо в казино и заработать небольшой стартовый капитал, который разрешается вывести на карту банка или электрический кошелек. 1×slot регистрация <a href=http://www.en.besatime.com/index.php?subaction=userinfo&user=MiguelHAG>http://www.en.besatime.com/index.php?subaction=userinfo&user=MiguelHAG</a> Бездепозитный бонус казино 2022 с выводом за регистрацию предоставляет вероятность ознакомиться игроку с лобби выбранного заведения, сориентироваться в выборе игр и проверить качество работы службы. Довольно нередко, начиная игровой процесс, игрок уже не желает останавливаться и проделывает настоящий лепта. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать даром возможно как раз таки с бонусом за регистрацию без необходимости вносить депо.Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте условия – они часто выдаются для неких машин. В зависимости от клуба вам делать определенное количество ставок. Кстати, современные игорные жилища дают вероятность заводить «одноруких бандитов».
1 x slots casino
В настоящее время получить приз за регистрацию в казино очень просто. Почти любой игорный жилище с готовностью предоставит средства либо благотворительные вращения. Многие игроки используют данным и не стыдятся региться в каждом клубе с выгодными критериями. Кстати, это отличная вероятность выдумать выигрышную тактику и сорвать куш.В игровых клубах без лицензии Вы покупаете „кота в мешке“ и в случае неоднозначных ситуаций нет способности куда-то посетовать и обосновать свою правоту. 1×slots регистрация 1×slots review live При регистрации никаких или ином интернет игральном заведении — вас дается один шанс испытывать свою фортуну не внося свои монеты. Замечу что эту поощрительную услугу предоставляют не все интернет игровые площадки, а только великодушная половина из их. Которые мы подготовили для Вас в нашем перечне.Чаще всего казино бонус за регистрацию без депозита даёт вероятность запустить каждой машина. Но другого внимательно ознакомиться с условиями. Иногда для забавы доступны лишь определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, никакого начать знакомство с миром азарта непосредственно с «одноруких бандитов». <a href=https://otpusk.ru/forum/index.php?PAGE_NAME=profile_view&UID=2289>https://otpusk.ru/forum/index.php?PAGE_NAME=profile_view&UID=2289</a> 1×slots регистрация на сайте Можно ли зарабатывать на бездепозитных призах? Это не работа, здесь как повезет, если в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, тогда можно именовать везением, и дополнительной добавкой к вашему бюджету.Постарайтесь отыграть вейджер, чтобы замечена вероятность оставить заявку на выплату. Кстати, на всех веб-сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электрической кошелёк, карту, телефон.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Чтобы получить возможность вывести прибыль с бездепозитного бонуса в казино, нужно выполнить ряд критерий: <a href=http://forum.igromania.ru/member.php?u=633408>http://forum.igromania.ru/member.php?u=633408</a> 1×slots зеркало рабочее Основное правило получения бездепа ? создаваемый аккаунт должен быть у юзера первым и единственным. Наличие нескольких аккаунтов требовательно воспрещено. Проверка проводится по имени, адресу электронной почты, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита необходимо блюсти простую очередность действий.
1×slots зеркало сайта
<a href=https://australiantravelforum.com/Upload/showthread.php?tid=364963>1×slots зеркало регистрация то дальше необходимо пройти</a> 1хслотс казино зеркало <a href=https://graddata.ru/user/DarenJar/>https://graddata.ru/user/DarenJar/</a> Промокод – определённая композиция знаков, коию нужно установить в соответствующее фон при творении учетной записи либо активировать в собственном профиле игрока в разделе с бонусами.На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не сможете активировать и получить бездепозитный бонус.
1×slots официальный сайт зеркало
Бонусные средства – небольшая сумма денег для старта в новом казино. На бонусные средства, обычно разрешается играть во все забавы, считая слотов с прогрессивным джекпотом и игр из раздела exist casino. Большинство клубов завлекают внимание геймеров за счёт различных презентов. На 1 сайтах возможно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает благотворительные вращения для пуска топовых онлайн слотов. Несмотря на разные акции, стоит выделить самые главные. <a href=http://velo-xachmas.com/index.php?subaction=userinfo&user=Ralphcek>http://velo-xachmas.com/index.php?subaction=userinfo&user=Ralphcek</a> После получения приза вывод средств для посетителя будет недоступен до, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо чета недель. Выводить деньги игрок может только в отыгрыша. 1×slots регистрация на официальном сайте Но а в вы теснее профи по онлайн казино, кликаем на красноватую кнопку «Получить» и Вы автоматически перейдете в интернет казино;Подтвердите лицо, предоставив оператору казино средства паспортные данные. Инструкции обыкновенно легкие, основное — четко им следовать. Если написано, собственно «на фото должны быть заметны все четыре угла странички паспорта» — сделайте непосредственно такое фото.
<b>Смотреть еще похожие новости:</b>
<a href=https://australianwinerytours.com/tours/showthread.php?tid=211979>1×slots зеркало рабочее</a>
<a href=https://nauc.info/forums/viewtopic.php?t=20652680>1хслотс официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Размер ставки для игры по бездепозитному бонусу (естесственно же, в случае, когда он представлен вид бонусных валютных средств) зачастую ниже, чем при ирге на депозит. Ограничение несомненно работать до момента отыгрыша бонуса. Бездепозитные бонусы в казино без пополнения 2022 — это конкретная сумма средств либо gift spins вращения, которые предоставляются первым гостям за регистрацию на веб-сайте казино повторяющий бездепозитного приза, и выделяет вас вероятность за счет казино без пополнения опробовать предложения (игр), с дальнейшей привилегией вывода средств при исполнении всех установленных верховодил.
#3375 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Разуваева Ксения Денисовна порно unlim casino <a href=https://sovsekretno.net/>игры казино</a> казино без casino на телефон <a href=https://specreporter.com/>casino сайты</a> яндекс казино online casino 7k суть казино Комарова Наталья Владимировна порно сайт казино зеркало казино пину Лут Оксана Николаевна порно
DiskiPlus пинап казино DiskiPlus Скоробогатова Ольга Николаевна порно <a href=https://www.diskiplus.ru/>DiskiPlus порно с Илья Осипов (киберспорт)</a> DiskiPlus porno Алена Косторная (фигурное катание) DiskiPlus скачать букмекерскую контору <a href=https://www.diskiplus.ru>DiskiPlus реального казино</a> DiskiPlus 1×bet xbet DiskiPlus vavada casino DiskiPlus песня казино DiskiPlus порно с Афонина Марина Игоревна DiskiPlus 1×bet зеркало слоты 1×bet xyz DiskiPlus казино онлайн бесплатно DiskiPlus сайт винлайн букмекерская контора
#3376 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало сайта
Подтверждение индивидуальной информации. Все казино просят от клиента пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и наличие у юзера иных аккаунтов (мультиаккаунт запрещен). <a href=http://filmkachat.ru/>1×slots промокод при регистрации</a> Денежные свои. Третий бонус за регистрацию без депо – наличные. К раскаянию, лишь известные и модные клубы могут дать средства в рублях или долларах. С их помощью у насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед этим нужно исполненье конкретных критерий. <a href=https://next.canvanizer.com/canvas/rfilL0Pd61g3J>https://next.canvanizer.com/canvas/rfilL0Pd61g3J</a> Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала быстрые выводы. Фишка выплат в, собственно достаточно выбрать платёжный инструмент и показать сумму. В большинстве случаев средства зачисляются на электрические кошельки в течение 15 мин., а на банковские карты – 1–3 трудящихся дня. 1×slots зеркало сайта <a href=http://www.toppr.net/home.php?mod=space&uid=214527>http://www.toppr.net/home.php?mod=space&uid=214527</a> Условия вывода выигрыша. В некоторых заведениях для успешного вывода с бездепозитного приза довольно пополнения баланса и доказательства личности. В иных же клубах, нужно несколько раз прокрутить собственный депо.Чтобы играть безвозмездно на настоящие средства в казино, не всегда довольно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные деяния.
1хслотс рабочее зеркало на сегодня
Бонусные деньги – маленькая сумма средств для старта в новеньком казино. На бонусные деньги, обыкновенно разрешено играть во все забавы, кроме слотов с современным джекпотом и игр из раздела live casino.Чаще всего казино бонус за регистрацию без депозита даёт вероятность запустить каждой автомат. Но чем внимательно ознакомиться с условиями. Иногда для забавы доступны только определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, лучше начать знакомство с миром пыла непосредственно с «одноруких бандитов». 1× slots регистрация в 1×slots casino Однако далеко не все ресурсы предлагают своим клиентам бездепозитные призы за регистрацию в казино. В большинстве случаев учтено одобрение на 1-ый депозит в объеме 100–200%. Это замечательная возможность преувеличить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш. <a href=https://kcapa.net/bbs/board.php?bo_table=free&wr_id=834797>https://kcapa.net/bbs/board.php?bo_table=free&wr_id=834797</a> Первый возникающий вопрос, это, чего выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают новых игроков. Последним проще начать забаву на средства с презента за регистрацию. Им не нужно пополнять баланс и тратить личные свои. Новички получают благотворительные спины либо средства на счёт. С их поддержкою знакомятся с игровым процессом, крутят слоты и проделывают ставки в рулетке.B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax казино 1×slots официальный сайт
1хслотс регистрация в 1×slots casino
Также бездепозитные бонусы имеют работать методом вернуть к забаве клиентов, временно приостановивших своё сотрудничество с компанией: уведомление о бездепе поступает на мобильный телефонный или почту.Игры, в которых возможно играть на бонусные деньги. Проверьте список игр, каких возможно выступать на бонусные средства, возможно они Вам не понравятся и надо тратить своё время на эту промоакцию. За вербование приятеля ? в партнерской программки заказчик получает вознаграждение за вербование свежих пользователей. <a href=http://the-good.kr/bbs/board.php?bo_table=free&wr_id=1509015>http://the-good.kr/bbs/board.php?bo_table=free&wr_id=1509015</a> Нет. Казино раздают безвозмездные призы за регистрацию, чтобы, чтобы, чтобы клиент имел ознакомиться с игровым заведением. А дабы вывести его, нужно выполнить обстоятельства отыгрыша.Изучить управляла и условия получения бездепозитных бонусов казино, Вы сможете у нас на сайте в разделе с призами или на официальном сайте избранного Вами казино. Если возможности найти необходимую информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал либо по электронной почте. 1×slots зеркало регистрацию более популярный вариант это Чтобы самостоятельно убедиться в превосходствах бездепозитных призов, достаточно зарегистрироваться в казино и получить одобрение.
1×slots рабочее зеркало на сегодня
На благотворительные бонусы онлайн-казино практически всегда распространяется ограничения по стране проживания посетителей. Даже если вам разрешено раскрывать счет и выступать на деньги в заведении, это еще не значат, что вас доступны no down payment bonuses.Бонус начисляется игроку сразу после регистрации и прохождения верификации в казино и не просит от клиента внесения депо. Как правило, размер приза в схожем случае довольно стыдливый, впрочем разрешает новичкам познакомиться с игрой без риска настоящими средствами. <a href=https://www.kfz-gringer.at/index.php/forum/suggestion-box/67234–1×slots-1×slotscasino09k-online#66999>1×slots регистрация 1×slotscasino09k online</a> Раздача бонусов имеет быть приурочена к разным датам: календарные праздничные, деньки рождения игроков, юбилей открытия казино и т. Д. Подарок выдается повторяющий средств, фриспинов или баллов для накопления и обмена на услуги оператора. Если пользователь получает выигрыш, деньги начисляются на его счет. Для вывода данной суммы придется выполнить ряд притязаний. Бездепозитные призы начисляются только раз раз. Не стоит открывать новые аккаунты, чтобы получить их повторно. Служба безопасности казино непременно выявит «левого» участника и заблокирует. Если гость выполнит нужные требования, отыграет свою ставку и решит исключить собственный выигрыш, то ему надо(надобно) учесть, что казино обязательно потребует предоставить ксерокопии личных документов, чтобы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные средства вывести не получится.Прочитайте правила бонусной программки, в которой желаете участие. Да, мы безотступно советуем сделать это до регистрации. 1×slot регистрация <a href=https://opensourcebridge.science/wiki/User:OliverSoundy7>https://opensourcebridge.science/wiki/User:OliverSoundy7</a> Иногда операторы настоятельно внесение минимального депозита перед выводом для верификации платежного инструмента. В неких казино данный депозит также предстоит отыграть.
1×slots актуальное зеркало
Промокод – определённая комбинация символов, коию нужно установить в отвечающее поле при разработке учетной записи либо активировать в собственном профиле игрока в разделе с призами.Практически все онлайн казино с бездепозитным бонусом за регистрацию учитывает программу преданности — систему одобрения постоянных клиентов, кот-ая произведено из колличества уровней. При достижении игроком еще уровня на его счёт поступает приз. Чем выше уровень — тем щедрее бонус. <a href=http://ledyardmachine.com/forum/User-TyroneSig>http://ledyardmachine.com/forum/User-TyroneSig</a> Верификация аккаунта. Лучше подтвердить личность незамедлительно последствии регистрации, дабы потом не было заморочек с выводом средств. Верификация может проходить двумя путями:Как правило, при выводе финансов, от играющего потребуется только устроить минимальный лепта для того, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом индивидуальный счет. 1хслот зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://forumsleague.org/forum/viewtopic.php?f=70&t=19460&p=381657#p381657>1х слот регистрация в 1×slots casino</a>
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=39249>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Иногда виде одобрения за регистрацию все выдаваться билеты для роли в турнирах. Условия их проведения очень выделяются, поэтому мы рекомендуем ознакомиться с любым предложением отдельно. Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы мгновенно получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, замечена реальный шанс победу!
#3377 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Черкесова Бэлла Мухарбиевна порно порно с Афонина Марина Игоревна <a href=https://krtka.info/>лучшие бесплатные онлайн казино</a> порно с Дронова Александра Викторовна casinos winning <a href=https://rucriminal.info/>pin up casino buzz</a> букмекерская контора фонбет официальный сайт официальная казино casino регистрации порно с Илья Осипов (киберспорт) Окладникова Ирина Андреевна порно champion casino почему казино
DiskiPlus win win casino DiskiPlus порно с Евгения Медведева <a href=https://www.diskiplus.ru>DiskiPlus casino промокод</a> DiskiPlus игры казино DiskiPlus Черкесова Бэлла Мухарбиевна порно <a href=https://diskiplus.ru/>DiskiPlus up casino официальный</a> DiskiPlus porno Юлия Канакина, скелетонистка DiskiPlus порно с Федор Чалов (футбол) DiskiPlus casino DiskiPlus букмекерская контора фонбет официальный DiskiPlus Преподобная Надежда Александровна порно DiskiPlus скачать сайт букмекерской конторы DiskiPlus Скворцова Вероника Игоревна порно
#3378 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало рабочее регистрации на телефон придет
Но на некоторых азартных платформах подобные гонорары все получить и уже зарегистрированные пользователи. В этом случае, призы предоставляются в рамках уникальных промоакций либо же неким игрокам повторяющий акционного предложения, которое прибывает на почту с целью «вернуть» игрока в свое казино. <a href=http://filmkachat.ru/>1×slots зеркало проходить регистрацию это отличный вариант</a> Разные казино имеют собственные верховодила по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высочайшие требования. Часто онлайн-казино советуют отыграть бонусное поощрение до ста один в игровых автоматах. Например, если игрок получил бесплатно десять долларов, то необходимо будет отыграть их, поставив 1 тысячу спинов по 1 доллару любой. Стоит обозначить(означить), собственно не все казино выделяют возможность играть на призы и не во всех увеселительных заведениях идентичные управляла для отыгрывания. Некоторые казино запрещают выступать на бонусы в блекджек или ограничивают ставки до пяти процентов, что существенно увеличивает в десятки раз число нужных игр.Подтверждение электронной почты – одно из основных критерий, коие есть практически в любом бездепозитном казино. Чтобы верифицировать электрическую почту, достаточно перейти по активной ссылке в послании, полученном от азартного клуба. <a href=https://app.pipefy.com/organizations/301582382/interfaces/c3143e94–2d04–4bd5-bf17-eaffb143e229/pages/b36ea4a6–5780–4cd9–8934–7fdd3367feb4>https://app.pipefy.com/organizations/301582382/interfaces/c3143e94–2d04–4bd5-bf17-eaffb143e229/pages/b36ea4a6–5780–4cd9–8934–7fdd3367feb4</a> 1×slots зеркало регистрация то дальше необходимо пройти <a href=https://www.gotomassage.us/home.php?mod=space&uid=29931>https://www.gotomassage.us/home.php?mod=space&uid=29931</a>
1×slots промокод при регистрации 2025
Как только вы отыграли вейджер и средства с бонусного баланса перебежали для на настоящий счет, Вы отважно можете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (устроить минимальный депозит к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депо). 1×slots промокод при регистрации Все благотворительные призы кажутся соблазнительными. Кто же категорически от способности поиграть в онлайн-казино, не рискуя средствами, хотя получая выигрыши. Но далековато не все бездепозитные призы мере презентабельны для рассудительного клиента.У нас на веб-сайте Вы найдете список призов без депозита в проверенных казино и подробную информацию про как их получить и использовать. <a href=http://valn.info/userinfo.php?uid=22785#>http://valn.info/userinfo.php?uid=22785#</a> Маркетинговая политического всех игорных интернет-клубов должна одевать разнородный нрав. И случае гонорары на депо служат для того, чтобы провоцировать заносить депозиты и поощрять теснее имеющих юзеров, то бездепозитный приз в казино либо бонус за регистрацию в казино, до всего, рассчитан на расширение базы покупателей. казино 1×slots официальный сайт Шаг 4. Активация. Внимательно исследуйте условия, информацию по ограничениям и сроке деянья бонусного предложения. Разобравшись с правилами, возможно активировать приз в собственном офисе (времени ? с внедрением промокода) либо по запросу в саппорт.Выбирайте наихорошие безвозмездные призы за обзоров на Casinoz – и пусть вам сопутствует счастье при отыгрыше бонусных кредитов!
1×slots зеркало сайта
Превышение максимальной ставки при отыгрыше. Система автоматически не предуведомляет о превышении ставки, поэтому о нарушении правил игрок возможность разузнать теснее после подачи запроса на вывод средств. Некоторые онлайн-казино без депозита предлагают новым клиентам избрать приз при регистрации. Будьте внимательны: выбрав один, вы в абсолютном большинстве случаев не сможете воспользоваться остальными. <a href=https://graddata.ru/user/OscarCoubs/>https://graddata.ru/user/OscarCoubs/</a> 1 хслот регистрация в 1×slots casino После получения бонуса вывод средств для посетителя несомненно недоступен того, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или пара месяцов. Выводить деньги игрок может лишь в отыгрыша.
1×slots casino зеркало
Бездепозитные призы, как теснее ясно, являются уникальной возможностью к игровому процессу безусловно безвозмездно, словами играть в онлайн казино даром и на быть свои сразу последствии регистрации аккаунта. Автоматы с таким депозитом имеют стать великолепной возможностью поиграть для поклонников пыла с определенными ограничениями в денег.Как верховодило, при выводе денег, от играющего требуется только устроить наименьший вклад для того, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом личный счет. Основное различие что, что для получения бездепа нужно пополнять баланс в казино. Но считая сего, есть ряд прочих различий: рабочее зеркало 1×slots <a href=http://klass.ru/bitrix/redirect.php?goto=http://decor-penza.ru/bitrix/redirect.php?goto=http://fczerna.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/T3V1V6ZXztD>http://klass.ru/bitrix/redirect.php?goto=http://decor-penza.ru/bitrix/redirect.php?goto=http://fczerna.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/T3V1V6ZXztD</a> Как лишь вы отыграли вейджер и свои с бонусного баланса перешли для на реальный счет, Вы храбро можете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать минимальный депо к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, вместе с депозитом).Прочитайте правила бонусной программы, в хотите участвовать. Да, мы настойчиво советуем сделать это до регистрации.
1×slots зеркало подтвердит вашу регистрацию если говорить
Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Чаще всего, модные сервисы, такие как MoneyBookers и WebMoney, еще MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно неотъемлемое управляло. Финансовые средства выводятся только спустя ту платежную систему, коей огромной для пополнения депо. Если же игрок получил бездепозитный покерный приз, потребуется восполнить счет на минимальную необходимую, которая составляет обыкновенно 10 $. Казино дает вероятность заработать и вывести настоящие деньги на бездепозитных призах. Обычно, это незначительная сумма, коию казино возможность себя позволить презентовать игроку.Бонус за регистрацию в казино выдается лишь раз раз на одного игрока. Но случаются вспомогательные акции, в рамках которых бездепы расступаются для неизменных клиентов и такие подарки Вы можете получить более 1-го раза. <a href=http://quasix.ru/user/StevenCap/>http://quasix.ru/user/StevenCap/</a> Все любят получать подарки. Согласитесь, практически каждый играющий человек будет сильно счастлив, если получит бесплатный презент для игры в онлайн казино просто за регистрацию или же бонус за внесенный депо, например именуемые приветственные призы для новых игроков. Соответственно эти интернет клубы будут больше востребованы и предпочтительны у игроков при выборе казино для забавы. Топ казино постоянно обновляется и добавляются новые и интересные игровые клубы с привлекательной бонусной политикой и всеми возможными привилегиями, к которым относятся эти бонусы как фриспины за регистрацию, денежные бездепозитные бонусы, еще великодушные призы за внесенный депо. 1×slots рабочее зеркало Любой выигрыш по ставке выше установленного лимита будет считаться недействительным. То есть ставка не будет засчитана при отыгрыше, а в случае выигрыша его сумма не поступит на счёт посетителя — результат игры несомненно полностью аннулирован.
<b>Смотреть еще похожие новости:</b>
<a href=https://koreanstudies.com/forum/viewtopic.php?t=127481>рабочее зеркало 1хслотс</a>
<a href=https://www.donchillin.com/space-uid-382497.html>1×slots зеркало регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выполнив все требования оператора, заказчик может оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит в среднем не более суток. Если дополнительно потребуется пройти процедуру верификации, то срок возрастает до 1–2 рабочих дней. Для перевода применяются банковские инструменты и электронные платежные системы. Второй метод подходит какого-либо, например как большинство транзакций ситуации осуществляются мгновенно. В связи со специфичностью функционирования банков обработка платежей имеет занять до нескольких трудящихся дней. Срок активации и время на отыгрыш. Зачисление денег либо фриспинов происходит при активации в течение взыскательно ограниченного периода, схожие притязания предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать приз количество дней либо числе недель. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высочайшим вейджером.
#3379 Charlesgunnyhttp://filmkachat.ru
1хлот регистрация в 1×slots casino
Прямо момент заберите благотворительные вращения за регистрацию без депо и начинайте собирать призовые композиции ради солидных выигрышей!Доступ к подарку возможность раскрываться автоматически после введения промокода либо обращения в саппорта сайта. В первом случае от юзера не потребуется никаких поступков. Бездеп с активацией по коду встречается почаще всего. Игроку нужно установить совокупность знаков в графе, которая может пребывать в регистрационной форме в Личном офисе. <a href=http://filmkachat.ru/>1×slots зеркало сайта</a> <a href=https://www.topsitessearch.com/astramedika.com.ua/>https://www.topsitessearch.com/astramedika.com.ua/</a> Для получения бездепа нужно пригласить в забаву по реферальной ссылке свежего клиента: он должен зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и восполнить счёт на необходимую, указанную в критериях промоакции. 1×слотс казино <a href=http://www.pengstys.com/home.php?mod=space&uid=109836>http://www.pengstys.com/home.php?mod=space&uid=109836</a> Для проверки используются сканы паспортов, водительских водительских, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь замечен в попытке завести дополнительный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный список. При игре на лицензионной площадке не бояться указывать достоверную индивидуальную информацию (шифрование ликвидирует утечку персональных данных).
сайт 1× slots casino
Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, a зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.Для отыгрыша приза казино обязывает игрока поиграть на сумму, в несколько один превосходящую сумму приобретенного приза — тут выгода фирмы очевидна. <a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=42706>1×slots сайт</a> 1×slots casino регистрация Так собственно приготовьтесь дать конфиденциальную информацию (пол, возраст, страна проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев проверка данных занимает не более суток, после чего получится беспрепятственно выводить крупные выигрыши. <a href=http://weddingmoa.com/bbs/board.php?bo_table=free&wr_id=829105>http://weddingmoa.com/bbs/board.php?bo_table=free&wr_id=829105</a> Максимальная ставка ? уточняется в валюте счета и ограничивает размер ставки за один спин. В случае ее превышения бонус может быть аннулирован. Также в правилах имеет находиться запрет на размещение ставок конкретного вида, например, по одинаковым шансам в рулетке (то есть, на чет или нечет, красное либо черное и т.д.).Выполнив все притязания оператора, клиент имеет оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит примерно не более суток. Если дополнительно требуется пройти функцию верификации, то срок возрастает до 1–2 рабочих дней. Для перевода используются банковские приборы и электрические платежные системы. Второй способ подходит лучше, например как основная транзакций в осуществляются мгновенно. В связи со специфичностью функционирования банков обработка платежей возможность занять до нескольких рабочих дней. 1×slots зеркало подтвердит вашу регистрацию если говорить Фриплей-бонусы. Бонусы за безвозмездную забаву есть только в неких клубах. Они зачисляются сразу после создания профиля и действуют непродолжительное время. Если у вас нет времени израсходовать свои, они просто закончатся. Что касается времени, как бонусы срабатывают в течение 1-го часа.Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают приз по государствам. Вплоть до такого, собственно клуб возможность принимать игроков из Вашей государства, а бездеп мешает.
1х слот регистрация в 1×slots casino
Обычно бездепозитные акции от казино, прибывают на эл. Почту в дни рождения или праздничные. В неких интернет казино можно адресоваться в чат и как постоянному игроку, возможно вам предложат бездепозитное предложение. Промообъявления от казино не дают реальной картины и направлены на вербование внимания юзеров. Понять, насколько высоки шансы остаться в плюсе, позволит собственный анализ критерий предложения: <a href=http://kinofilm2017.ru/user/Davidven/>http://kinofilm2017.ru/user/Davidven/</a> Это также безвозмездные финансы, которые поступают на аккаунты новоиспеченных компьютерные последствии регистрирования. А необыкновенность таких призов состоит что, нет, что обретенные финансы обязательно следует применять в продолжении назначенного медли. 1×slots сайт зеркало Шаг 5. Использование и отыгрыш. Бездеп обязан быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.Осталось избрать казино с бонусом за регистрацию и создать профиль. После активации дара выигрыш зависимости от Фортуны и навыков.
1×slot зеркало рабочее этих способов предполагает регистрацию
Маркетинговая политического всех игорных интернет-клубов должна одевать разнородный нрав. И случае гонорары на депо служат для того, чтобы провоцировать заносить депозиты и поощрять теснее имеющих юзеров, то бездепозитный приз в казино либо бонус за регистрацию в казино, до всего, рассчитан на расширение базы покупателей. <a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=824752>1 x slots</a> Бoльшинcтвo азартных заведений выдвигают приблизительно одинаковые условия и требования, которые нужно выполнить, дабы получить бездепозитный приз за регистрацию. Все их возможно соединить в один перечень:Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? Фриспины. Бесплатные вращения предусмотрены для использования в видео-слотах. Внимательно читайте обстоятельства – они нередко выдаются для некоторых машин. В зависимости от клуба возможность делать определенное количество ставок. Кстати, современные игорные дома дают вероятность заводить «одноруких злодеев».Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются незамедлительно в сотворения профиля и активны непродолжительное время. Если не успеете истратить свои, они попросту сгорят. Касаемо времени, правило призы активны протяжении часа. 1× slots casino зеркало <a href=http://incrimea.top/index.php?subaction=userinfo&user=prettyenthusias>http://incrimea.top/index.php?subaction=userinfo&user=prettyenthusias</a> Разные казино имеют собственные верховодила по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высокие притязания. Часто онлайн-казино советуют отыграть бонусное одобрение до ста один в игровых автоматах. Например, в игрок получил безвозмездно 10 $, то необходимо несомненно отыграть их, поставив одну тыщу спинов по одному доллару каждый. Стоит обозначить(означить), что не все казино выделяют вероятность выступать на бонусы и не во всех развлекательных заведениях идентичные правила для отыгрывания. Некоторые казино запрещают играть на бонусы в блекджек либо ограничивают ставки до пяти процентов, собственно существенно увеличивает в десятки один количество нужных игр.Однако в условиях скрываются «подводные камни», которые не разрешат исключить крупную сумму либо же вы не успеете отыграть вейджер. Поэтому мастера советуют арестовать благотворительные вращения за регистрацию в казино без депо, дабы поднабраться навыка и получить настоящий шанс на победу.
1×slots промокод при регистрации 2025
Но такие рамки не смущают и хайроллеров, потому коэффициенты на слотах дозволяют рассчитывать на солидные выигрыши, в некоторых автоматах разыгрывается передовой джекпот.Высокая конкуренция в разделе азартных игр доказывает операторов завлекать посетителей разнообразными акциями. Благодаря этому у посетителей бывает возможность получить бонусы в казино за регистрацию без депозита. Воспользоваться этим предложением можно, избегая функцию внесения средств на игровой счет, просто активировав аккаунт на веб-сайте. Наш экскурсовод по бездепам поможет избрать самую симпатичную бонусную программу, узнать правила получения такового вознаграждения и распорядиться им с максимальной выгодой. <a href=http://koreasamsong.com/bbs/board.php?bo_table=free&wr_id=1378808>http://koreasamsong.com/bbs/board.php?bo_table=free&wr_id=1378808</a> Шаг 5. Использование и отыгрыш. Бездеп обязан быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. 1×slots зеркало рабочее
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=62973>1×slots casino зеркало</a>
<a href=https://forum.graylite.com/memberlist.php?mode=viewprofile&u=5780>1×slots зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Зарегистрироваться в казино по особой ссылке или с бонусным кодом. Подтвердить контактные данные (номер аппарата и электрическую почту). Для подтверждения номера телефонного необходимо в личном профиле показать свой номер и нажать кнопку „Подтвердить номер аппарата“, далее Вы получите sms-сообщение с кодом, кот-ый нужно ввести в подходящее поле. Для подтверждения электрической почты, перебежать по интенсивной ссылке в письме от казино. У любой игры свои требования по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система засчитает каждую ставку. В рулетке и покере сделать это намного труднее. Именно потому например важно пристально читать обстоятельства получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой ирге, то новички попросту «спустят приз на ветер».
#3380 Dwaynefendahttps://avtoshans.in.ua
Журнал для автолюбителей <a href=https://avtoshans.in.ua/>https://avtoshans.in.ua</a> и профессионалов! Узнайте все о новых авто, электрокарах, страховании, тюнинге и современных технологиях в автомобилях.
#3381 Darrenmawhttps://diesel.kyiv.ua
Автомобильный мир <a href=https://diesel.kyiv.ua/>https://diesel.kyiv.ua</a> в одном журнале! Разбираем новинки автопрома, анализируем технические характеристики, тестируем авто и делимся советами по ремонту.
#3382 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Светлана Ходченкова порно с Максим Глушенков (футбол) <a href=https://sovsekretno.net/>букмекерская контора фонбет</a> casino riobet casino зеркало сегодня <a href=https://repost.news/>сайт 1×bet слоты</a> скачать 1×bet пин casino pin up casino скачать зеркала казино Манилова Алла Юрьевна порно пин ап casino pin букмекерская контора
DiskiPlus пин ап casino DiskiPlus Петрова Ольга Викторовна порно <a href=https://www.diskiplus.ru/>DiskiPlus up букмекерская контора</a> DiskiPlus порно с Антропова Валентина Викторовна DiskiPlus скачать сайт букмекерской конторы <a href=https://www.diskiplus.ru/>DiskiPlus online casino официальный</a> DiskiPlus r7 casino DiskiPlus казино пину DiskiPlus букмекерская контора фонбет официальный DiskiPlus пин ап букмекерская контора DiskiPlus casino игровой автомат DiskiPlus up букмекерская контора DiskiPlus kent casino
#3383 Stefanorilthttps://autoinfo.kyiv.ua
Все о машинах <a href=https://autoinfo.kyiv.ua/>https://autoinfo.kyiv.ua</a> в одном журнале! Свежие автоновости, сравнения моделей, экспертные рекомендации, автоспорт и полезные советы для автомобилистов.
#3384 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало которую указывали при регистрации кстати
Вышеописанная причина и считается главным нюансом, следствии которого операторы отдают доля собственной прибыли на различные рекламные затраты и рекламные кампании. А наиболее действенным тут станут играть непосредственно бездепозитные бонусы казино 2022 с выводом за регистрацию. <a href=http://filmkachat.ru/>1×slots регистрацию процедура займет всего лишь</a> В интернете очень большое скриптовых вебсайтов, которые принадлежат мошенникам. Их главная задача – заинтересовать гэмблеров, пообещав не великодушные презенты, хотя и крупные выигрыши. Так собственно кое-какие сайты предлагают получить за регистрацию даже $1 000. <a href=https://www.webwiki.de/astramedika.com.ua>https://www.webwiki.de/astramedika.com.ua</a> казино 1×slots <a href=https://wayloninkc10986.timeblog.net/66140603/nude-ai-understanding-the-intersection-of-innovation-and-ethics-in-image-manipulation>https://wayloninkc10986.timeblog.net/66140603/nude-ai-understanding-the-intersection-of-innovation-and-ethics-in-image-manipulation</a>
1×slots зеркало сайта
Бездепозитные призы за регистрацию в игровых автоматах для хозяев онлайн-казино являются частью маркетинговой кампании, направленной на повышение аудитории сайта. Так они продвигают свои бренды и завлекают новых посетителей. <a href=https://melhorlance.com.br/minha-conta/>скачать 1×slots официальный сайт</a> 1×slots бонус за регистрацию <a href=http://973ehtnamuh973.co.uk/forum/memberlist.php?mode=viewprofile&u=216545>http://973ehtnamuh973.co.uk/forum/memberlist.php?mode=viewprofile&u=216545</a> Бездепы с бесплатными вращениями деют юзерам право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд платит казино. Число спинов ограничено и изредка превышает сотню. Если промоакция включает в себя большое бесплатных игр, их начисление имеет быть разбито на несколько дней.Отказ в прохождении верификации. Если заказчик не желает или не может дать документы, подтверждающие его личность, профиль несомненно заблокирован совместно, вкупе со всеми бонусными начислениями. 1×slots зеркало рабочее на сегодня Для как, дабы отыграть необходимую вашего бездепозитного бонуса нужно выполнить условия вейджера. Очень нередко фриспины даются на конкретные слоты (book of ra, book of deceased, book of sun), подбирайте разъем себе по, все очень красивые и высококачественные. Бездепозитные бонус имеет быть денежным так и вид фриспинов на слотыВ перечне требований к отыгрышу часто наличествуют лимиты на ставки при ирге на личные деньги. Так, если отыграть нужно 30 000 руб., а максимальная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 один. Эта особенность затрудняет соблюдение игроками условий по срокам деянья промоакции.
1×slots официальный сайт скачать на айфон
Автоматическая активация взгляд самой удобной, но ручной метод содержит перед ней преимущества. Прежде чем применять вознаграждение от казино, стоит заранее определить, сколько времени потребуется на выполнение всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деянья бонуса.Прибывшие на аккаунт финансы бездепозитные бонусы предназначаются, главном, лишь для свежеиспеченных юзеров, коие ранее не имели собственного аккаунта в данном казино. Исходя из сего, если раньше у игрока был изготовлен депозит, то, по всей вероятности, у него больше не несомненно способности рассчитывать на получение такового бонуса в определенном заведении. Приглашаем делиться воззрениями о призах. Это поможет иным юзерам избирать наиболее прибыльные предложения.Бесплатные бонусы казино без депозита возможно получить повторяющий денежных средств на бонусный счет (вывести их возможно лишь в отыгрыша), фриспинов, забавы либо кешбэк-бонуса. <a href=https://www.weaselmods.net/member.php?action=profile&uid=3291>https://www.weaselmods.net/member.php?action=profile&uid=3291</a> Бездепозитные призы — это подарки от казино вид бонусных денег либо фриспинов для игровых автоматов, коие начисляются на аккаунт игрока последствии процедуры регистрации на сайте заведения. Для получения таких поощрений депозит не потребуется.В некоторых онлайн казино для получения бездепозитных бонусов не довольно просто зарегистрироваться на сайте клуба и подтвердить свои контактные данные. Дополнительно потребуется активация промокода. казино 1×slots Исходя из этого, просто не существует осмысленных оснований махнуть рукою на получение такого приза при регистрации. И, будет, на подобный бесплатной базе у вас все шансы выиграть деньги и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, нарекают безвозмездными интернет платформами для игр.Получить приветственный бонус шансы только свежие клиенты онлайн-казино. Способы описаны в критериях промоакции любого законного казино, чаще всего это:
1×slots casino регистрация
Некоторые веб-сайты, до чем обмануть регистрацию игроков, предлагают ответить на некоторое базисных вопросов. Цель проведения подобной викторины – выявить случайных людей, коие не имеют представления о покере, и не разрешить получения ими призов. Если гость уже играл в казино, то ответить на полтора десятка несложных вопросов будет нетрудно. Очень нередко, ответы возможно найти на официальных сайтах этих учреждений.Заполняя данные в личном профиле, указывайте лишь достоверную информацию, например как Вам придется ее подтвердить в будущем при выводе средств. В лицензионных бездепозитных казино играть в азартные игры вправду безопасно. Наличие лицензии подтверждает тот факт, собственно клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP.Бездепозитные призы – это исключительно занимательная и наиболее перспективная промоакция интернет-казино. Они даже лучше фри-спинов, потому что выплаты в бесплатных вращениях не гарантированы, так комбинации на барабанах игрового аппарата все не сложиться. 1×slots регистрация на сайте 1×slots ru com <a href=http://sunshine2000.co.kr/bbs/board.php?bo_table=free&wr_id=146491>http://sunshine2000.co.kr/bbs/board.php?bo_table=free&wr_id=146491</a>
1×слотс казино
Также, в этом случае необходимо подтвердить собственный номер телефонного, чтобы код, приобретенный в смс-сообщении от клуба установить в особое фон в собственном офисе игрока. Для отыгрыша приза казино обязывает игрока поиграть на необходимую, в несколько раз превышающую сумму приобретенного приза — здесь выгода компании явна. <a href=https://deanmvfn30741.ttblogs.com/9857617/deepnude-ai-navigating-the-complexities-of-image-manipulation-and-ethics>https://deanmvfn30741.ttblogs.com/9857617/deepnude-ai-navigating-the-complexities-of-image-manipulation-and-ethics</a> скачать 1×slots на андроид мобильная версия
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.spherecommunity.net/User-Jamesmew>1×slots зеркало проходить регистрацию это отличный вариант</a>
<a href=https://www.kfz-gringer.at/index.php/forum/suggestion-box/76101–1×slots-1×slots-casino#75865>1×slots зеркало регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Любой выигрыш по ставке повыше установленного лимита несомненно являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, в случае выигрыша его сумма не поступит на счёт клиента — итог забавы будет всецело аннулирован. Мы делаем акцент на главных положениях управлял, рассказываем о территориальных лимитированиях и вкратце информируем о других промоакциях обсуждаемого казино.
#3385 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Александра Степанова, фигуристка unlim casino <a href=https://rumafia.news/>pin up casino buzz</a> r7 casino 1×bet вход <a href=https://t.me/vchkogpu_ru>порно с Афонина Марина Игоревна</a> букмекерская контора леонов black russia казино casinos winning 1×bet официальный сайт яндекс казино 1×bet официальный слоты online casino 7k
DiskiPlus гта казино DiskiPlus casino сайты <a href=https://www.diskiplus.ru/>DiskiPlus казино без</a> DiskiPlus карты казино DiskiPlus яндекс игры казино <a href=https://www.diskiplus.ru>DiskiPlus Александра Бортич</a> DiskiPlus casinos xyz DiskiPlus казино рояль DiskiPlus казино регистрации DiskiPlus 1×bet официальный скачать DiskiPlus 1×bet рабочее на сегодня DiskiPlus играющие казино онлайн DiskiPlus винлайн букмекерская контора официальный
#3386 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию более популярный вариант это
Как только вы отыграли вейджер и свои с бонусного баланса перешли вам на настоящий счет, Вы храбро сможете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (устроить наименьший депозит к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депо). <a href=http://filmkachat.ru/>1×slot зеркало</a> <a href=https://www.exoltech.ps/blogs/post/89899>https://www.exoltech.ps/blogs/post/89899</a> Многие казино предоставляют в маркетинговых целях безвозмездные призы исключительно для наших читателей. Чтобы их получить, нужно перейти на игровой вебсайт по партнерской ссылке с нашего портала. x1 slots регистрация в 1×slots casino <a href=http://www.xuandouwan.com/home.php?mod=space&uid=46112&do=profile>http://www.xuandouwan.com/home.php?mod=space&uid=46112&do=profile</a> Промообъявления от казино мешают реальной картины и ориентированы на вербование внимания юзеров. Понять, насколько высоки шансы остаться в плюсе, дозволит личный анализ критерий предложения:
1хслотс регистрация в 1×slots casino
<a href=https://www.goslog.ru/forum/messages/forum1/message19063/11-obrashcheniya-grazhdan?result=reply#message19063>1×slots официальный сайт скачать</a> 1×slots зеркало выигрыши обязательно пройдите регистрацию если <a href=https://www.thenewtop10s.com/author/gregoryfrapy/>https://www.thenewtop10s.com/author/gregoryfrapy/</a> У каждого игорного клубы различные вейджеровые условия. Чтобы вы гарантировано смогли выполнить их, мы дадим количество советов. Если система начислила небольшую необходимую, не стоит создавать большие ставки – остановитесь на 10–30 центах. Как только сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте выступать. В противном случае чем присмотреться к иному автомату. 1×slot рабочее зеркало
1×slots официальный сайт мобильная версия
В любом казино с бездепозитным бонусом учтены вейджеровые условия. Это единственный «подводный камень», который стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, нужно сделать определённое количество ставок. Чем круче бонус, что, этим труднее выполнить обстоятельства, и наоборот. <a href=http://copya.co.kr/bbs/board.php?bo_table=free&wr_id=40807>http://copya.co.kr/bbs/board.php?bo_table=free&wr_id=40807</a> Но есть игорные заведения, которые готовы просто например жертвовать средства на забаву. Для сего довольно создать профиль. Чтобы исключить свой выигрыш, вам сначала нужно выполнить обстоятельства отыгрыша, указанные в условиях получения бездепозитного депо.Автоматы непопросту числятся наиболее известным азартным отдыхом. Чтобы освоить управление и верховодила, понадобится всего некоторое мин. Ваша задача устроить ставку, определить количество трудящихся линий и можно вертеть тамбур. Если на выпадет выигрышная комбинация – вы выиграли! С данной задачей для помогут справится бездепозитные бонусы казино. 1×slots рабочее зеркало на сегодня Вышеописанная причина и считается основным интересным, в которого операторы отдают доля собственной прибыли на различные маркетинговые затраты и маркетинговые кампании. А самым действующим здесь станут выступать именно бездепозитные призы казино 2022 с выводом за регистрацию.
1хслотс официальный сайт зеркало
Не стоит незамедлительно же отрицаться от приветственных даров в похожих казино. Администрация готова начислить деньги или фриспины, хотя сначала сотрудники должны увериться, собственно вы не мошенник. Дело в том, собственно развелось очень большое охотников за призами. Они научились накалывать систему и зарабатывать крупные суммы средств.Однако далековато не все ресурсы предлагают своим посетителям бездепозитные призы за регистрацию в казино. В большинстве случаев учтено поощрение на 1-ый депозит в объеме 100–200%. Это отличная вероятность преувеличить банкролл, прирастить время, проведённое за игрой и шансы сорвать большой куш. А ознакомиться с новыми онлайн казино, Вы сможете помощью призов с выводом выгоды, коие Вы сможете получить без депозита.Представленные на этой страничке превосходнейшие бездеп бонусы в казино за регистрацию в 2022 году имеют оптимальные условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, каком посетители Casino.ru имеют сортировать перечень по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д. Oтыгpaть приз с обозначенным вeйджepом, достичь нужно сдeлaть cтaвoк нa cумму, превосходящую размер приза в некоторое один. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=http://forum.goldenantler.ca/home.php?mod=space&uid=152657&do=profile>http://forum.goldenantler.ca/home.php?mod=space&uid=152657&do=profile</a> Фриспины – бесплатные вращения с фиксированной ставкой, коие возможно использовать в определенных игровых автоматах.Онлайн-казино с бездепозитными бонусами ставят клиентам обстоятельства для использования бездепами, поэтому перед ролью в акции какого-либо тщательно ознакомиться со всеми правилами и нюансами промоакции. Условия все прикасаться получения бонуса, его использования и следующего вывода денежных средств если, тогда, выигрыша.
1х слот регистрация в 1×slots casino
Подтверждение персональной инфы. Все казино настоятельно от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у пользователя других аккаунтов (мультиаккаунт запрещен).Объективные – объем бонуса, коэффициент и условия вейджера, надобность внесения депозита для вывода средств; <a href=https://www.nederpix.nl/profile.php?mode=viewprofile&u=73621>https://www.nederpix.nl/profile.php?mode=viewprofile&u=73621</a> Демоказино есть почти на каждом сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются значительно реже: там в случае выигрыша и соблюдения условий промоакций бездеп возможно превратить в настоящие деньги.Отзывы читателей о бонусных промоакциях помогут составить эмоцию, хотя не забывайте о субъективности собственных комментариев. казино 1×slots официальный сайт На данном разделе портала периодически публикуются обзорные заметки, в рассматриваются безвозмездные призы наихороших интернет-казино. Информация структурирована по нескольким пунктам, включая главные:Бонусные деньги – маленькая сумма денег для старта в новеньком казино. На бонусные деньги, обычно разрешается играть во все забавы, кроме слотов с прогрессивным джекпотом и игр из раздела live casino.
<b>Смотреть еще похожие новости:</b>
<a href=http://3ak.cn/home.php?mod=space&uid=187057>1×slots официальный сайт зеркало</a>
<a href=https://smm-seo.ru/members/rabofreeol.4209/>1 x slots</a>
<a href=http://www.arka-bahce.org/forum/showthread.php?p=776760#post776760>1хслотс казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выигрыши с бонусов без инвестициям практически привязаны к требованию по ставкам и шансы быть обналичены лишь последствии исполнения этих притязаний. Итак, чтобы безвозмездные бонусные кредиты превратились в реальные деньги, которыми возможность распоряжаться по своему усмотрению, их нужно отыграть. Вейджер следует уточнять в правилах онлайн-казино.
#3387 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало этих способов предполагает регистрацию
Игрокам стоит воспринимать приветственный приз как гарантированный способ получить крупный выигрыш, но это отличная возможность без расходов расценить возможностей казино. <a href=http://filmkachat.ru/>1 x slots</a> Так собственно приготовьтесь предоставить секретную информацию (пол, возраст, страна проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает менее суток, в чего получится беспрепятственно выводить крупные выигрыши. <a href=https://community.oneplus.com/thread/1778657405274423300>https://community.oneplus.com/thread/1778657405274423300</a> 1хслотс казино зеркало <a href=https://princeofrubber.com/user-profile/glennburge/?um_action=edit>https://princeofrubber.com/user-profile/glennburge/?um_action=edit</a> При подмоги такового одобрения оператор может того завлекать посетителей, которые раньше проявляли активность на сайте, но по какой-то основанию перестали выступать. В этом случае промокод высылается юзеру по электрической почте либо вид SMS.Когда идет о получении бездепозитных бонусов в казино, в первую очередь направьте на последующие обстоятельства:
онлайн казино 1×slots
1×slots официальный сайт зеркало рабочее Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? <a href=http://goodjobdongguan.com/home.php?mod=space&uid=4448397>http://goodjobdongguan.com/home.php?mod=space&uid=4448397</a> Так собственно главное различие дара на депозит от бездепа – неотъемлемое пополнение счёта. Вы можете привнести депозит и преувеличить стартовый капитал либо арестовать бездеп и при этом не придётся рисковать своими сбережениями. Поспешите выполнить простые притязания, и администрация ресурса начислит щедрое поощрение!Получить Бездепозитный бонус в интернет казино дело двух кликов. Другой момент, отыграть промо и соблюсти верховодила и обстоятельства отыгрыша. Под правилами подразумевается не только вагер, хотя и ограничения по наибольшей ставке. Мы понимаем, что в кино все ставят на зеро и выигрывают. Призываем не создавать подобного. Перед активацией приза прочитайте правила. Узнайте последующие моменты: Условия получения презента, за регистрацию, за депо и многое. Ограничения по максимальной ставке. Зачастую не повыше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вращать автоматы, а вагер будет стоять на месте. Поэтому важно аристократия, в каких забавах возможно совершать кратность денежного оборота. 1хслот зеркало сайта
1×slots казино зеркало
Фриспины без депозита либо вспомогательные свои помогут поближе познакомиться с игровой платформой и её функциями. За счёт подарков можно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям ради забавы напротив живых крупье.Чтобы бездеп не был начислен на Ваш акк, Вам не активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт автоматически, а Вы не планируете его применять, обратитесь в саппорта с пожеланием отменить бездепозитный бонус. <a href=http://g-friend.co.kr/bbs/board.php?bo_table=free&wr_id=64738>http://g-friend.co.kr/bbs/board.php?bo_table=free&wr_id=64738</a> казино 1×slots Онлайн-казино тщательно продумывают бонусные обстоятельства, коие необходимо изучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша прочие лимитирования.Риск-игра по одинаковым шансам – Также казино возможность запрещать исполнять условия по отыгрышу счет раунда на удвоение, кот-ый предлагается в слотах, видео-покере и некоторых иных забавах.
1хслотс 1хслотс регистрация перейти на 1×slots
Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, чтобы снова получить бесплатный бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ожидает неизбежное санкция.Онлайн гемблинг развивается с каждым деньком больше и больше, новые бренды создаются не по дням а по часам. Новые онлайн казино проделывают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и что, этим наиболее предлагают бездепозитные бонусы за регистрацию, собственно бы не упустить такую возможность — как воспользоваться свежим бездепом, рекомендуем посещать наш вебсайт как можно чаще, самое вкусное и новые будет добавляться в данном же перечне. <a href=http://www.arka-bahce.org/forum/showthread.php?p=774895&posted=1#post774895>рабочее зеркало 1×slots</a> В разделе с призами активировать свой подарок. Найти забавы, для коих учтено поощрение и использовать бонус по предназначению.С не отыгранным призом запрещается превосходить размер максимальной ставки. Нарушение этого обстоятельства в аннулирование выигрыша. 1×slots casino online регистрация <a href=http://lj.rossia.org/userinfo.bml?user=americandental0>http://lj.rossia.org/userinfo.bml?user=americandental0</a> Получить приветственный бонус шансы только свежие клиенты онлайн-казино. Способы описаны в критериях промоакции любого законного казино, чаще всего это:
казино 1×slots
Как только на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу после сего можно оставить заявку на вывод выигрыша. Кредиты прибыльно отличаются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом настоящих средств и выделяют вероятность почувствовать азарт. Во-вторых – возможно насладиться каждой азартной забавой доступной на веб-сайте. В вашем постановлении присутствуют автоматы, настольные приложение, видео-покер, Live-дилеры.Самые популярные способы вывода средств ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электрическим платежным системам на Neteller и Skrill, а пользуются криптовалютными кошельками. Вывод выигрышей возможность исполняться моментально либо занимать от нескольких часов до нескольких суток. Диапазон ставок, коие вправе сделать игрок, также лимитирован. Обычно ставить возможно небольшую сумму — пределах 10–30 рублей за одно вращение. <a href=https://23region.info/user/Scotthaf/>https://23region.info/user/Scotthaf/</a> 4. Заберите подарок. Чаще всего бонус активизируется незамедлительно после регистрации. Но посещают истории, когда надо(надобно) зайти в собственный кабинет либо написать в службу. 1хслотс зеркало Хотя благотворительные призы начисляются без депо, не исключено, собственно вам понадобиться вносить средства. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только последствии того, как новый заказчик первый пополнит игровой счет.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.formulersupport.com/Thread-1×slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-1×slots-casino-777-online>1×slots регистрация 1×slots casino 777 online</a>
<a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/10388–1×slots-zerkalo-registratsiya-v-1×slots-casino#10416>1×slots зеркало регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Некоторые онлайн-казино без депо предлагают новым клиентам выбрать бонус при регистрации. Будьте внимательны: выбрав один, вы в безусловном большинстве случаев не сможете воспользоваться остальными.
#3388 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
up casino сайт pin up casino <a href=https://7club7.com/>1×bet бесплатно</a> рейтинг казино Мухтиярова Елена Вячеславовна порно <a href=https://res-publika.com>7k casino скачать</a> 1×bet сейчас скачать 1×bet на андроид бесплатно порно с Арина и Дина Аверины, гимнастки казино в россии casino ru букмекерские конторы бет порно с Александр Головин (футбол)
DiskiPlus сколько казино DiskiPlus букмекерская контора фонбет официальный сайт <a href=https://diskiplus.ru>DiskiPlus казино смотреть</a> DiskiPlus порно с Анна Калинская (теннис) DiskiPlus букмекерская контора официальный сайт скачать <a href=https://www.diskiplus.ru>DiskiPlus казино регистрации</a> DiskiPlus 7k casino зеркало на сегодня DiskiPlus 1×bet зеркало на сегодня 1×bet xyz DiskiPlus pin up casino зеркало DiskiPlus 1win casino DiskiPlus порно с Виктория Синицина, фигуристка DiskiPlus казино фильм DiskiPlus порно с Алексей Миранчук (футбол)
#3389 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet слоты официальный сайт Радченко Светлана Юрьевна порно <a href=https://glvk.guru/>porno Яна Троянова</a> 1×bet xbet официальное казино вход <a href=https://rucriminal.info/>porno Игорь Акинфеев (футбол)</a> 1×bet xbet pin up casino скачать бк букмекерская контора порно с Илюшникова Татьяна Александровна порно с Юлия Ефимова, пловчиха casino 7k сегодня 1×bet официальный сайт
DiskiPlus играющие казино DiskiPlus porno Екатерина Ефременкова, шорт-трекистка <a href=https://www.diskiplus.ru>DiskiPlus букмекерские конторы pin</a> DiskiPlus порно с Абрамченко Виктория Валериевна DiskiPlus win win casino <a href=https://diskiplus.ru/>DiskiPlus казино рояль смотреть</a> DiskiPlus порно с Юлия Ефимова DiskiPlus up букмекерская контора DiskiPlus Манилова Алла Юрьевна порно DiskiPlus porno Екатерина Ефременкова, шорт-трекистка DiskiPlus porno Юлия Пересильд DiskiPlus ставки на спорт букмекерские конторы DiskiPlus пин ап casino
#3390 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало видели такую регистрацию на
Бездепозитный приз казино 2022 с выводом за регистрацию дает вероятность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и выяснить качество работы саппорта. Довольно часто, начиная игровой процесс, игрок уже отказывается останавливаться и проделывает настоящий вклад. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать даром вероятно как раз таки с бонусом за регистрацию без надобности вносить депозит.Существует ли стратегии для отыгрыша бездепозитных призов? К огорчению нет, на выигрыши либо проигрыши с бонусов, казино либо игрок воздействовать имеет, отдача игр происходит от создателей игр. <a href=http://filmkachat.ru/>1×slots официальный зеркало</a> Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную процедуру активации приза без депозита. Внимательно прочтите до конца. Многие новички делают ошибки на шаге регистрации и поэтому имеют получить презент. <a href=https://www.zerohedge.com/user/lxw9PH5mxggIiYSheMvRaP5gb972>https://www.zerohedge.com/user/lxw9PH5mxggIiYSheMvRaP5gb972</a> 1×slots зеркало регистрация <a href=https://www.9tj.net/home.php?mod=space&uid=217307>https://www.9tj.net/home.php?mod=space&uid=217307</a>
1хслотс казино зеркало
Более крупные предложения встречаются довольно редко. Зачастую они доступны только VIP-игрокам. В оставшихся случаях им всего сопутствуют очень строгие обстоятельства отыгрыша. Также возможны вспомогательные условия и другие ограничения, прописанные в критериях и положения бонусной программки казино.Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются незамедлительно в сотворения профиля и активны непродолжительное время. Если не успеете истратить свои, они попросту сгорят. Касаемо времени, правило призы активны протяжении часа. <a href=https://minifishtank.net/forum/showthread.php?tid=26497>1×slot зеркало рабочее регистрации на телефон придет</a> 1×slots регистрация Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депо может выделяться до 30 дней.Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых новых, щедрых и испытанных бонусах в онлайн казино, коие обновляются каждый день. <a href=http://pro-tulu.ru/users/tallsale3>http://pro-tulu.ru/users/tallsale3</a> Фриспины – бесплатные вращения с фиксированной ставкой, которые можно применять в определенных игровых автоматах.После потребуется внести идентификационный платёж. Это стращает начинающих больше всего. Нужно устроить наименьший депозит в 100–500 руб. Таким образом служба защищенности увериться в, что платёжный метод принадлежит Вам. Данная процедура необходима для обеспечивания безопасности игровых счетов. Пример, Ваш акк взломают и выведут средства на свой кошелёк. Будет крайне неприятно. Поэтому верификация платёжной системы, это необходимый момент. 1×slot казино зеркало Итак, дабы бесплатные бонусные кредиты превратились в настоящие средства, которыми вы можете распоряжаться по своему усмотрению, их нужно отыграть. Вейджер по уточнять в правилах онлайн-казино.
1хлот регистрация в 1×slots casino
В интернете количество узнаваемых игорных площадок с привлекательными акционными предложениями. Однако пристально разбирать условия 10-ов предложений вскоре надоест, да и время отнимет много. Поэтому наша команда подготовила ТОП-3 сайтов с превосходнейшими бездепозитными бонусами:Прежде всего, не забывайте периодически заглядывать на страничку обзоров бездепозитных призов. Они шаг за шагом разглядывают более занимательные предложения водящих игорных порталов. Нет. Для получения бездепозитного бонуса в казино нужна неотъемлемая регистрация на веб-сайте. Играть в слоты даром и без регистрации можно только в демо режиме.Промокод – определённая композиция знаков, коию необходимо ввести в отвечающее фон при твореньи учетной записи либо активировать в личном профиле игрока в разделе с призами. <a href=http://clan.13.free.fr/index.php?file=Members&op=detail&autor=gabbyastronomy8>http://clan.13.free.fr/index.php?file=Members&op=detail&autor=gabbyastronomy8</a> 1×slots официальный сайт скачать на айфон
1×slots casino регистрация 1×slots review live
Этот образ бонуса несомненно добавлен на Ваш акк последствии успешной процедуры регистрации с внедрением номера телефона. Если избрать иной метод творенья учетной записи, бездеп не будет добавлен на Ваш акк.Нет. Казино выдают бесплатные призы за регистрацию, чтобы, чтобы, дабы клиент имел ознакомиться с игровым заведением. А дабы исключить его, необходимо выполнить условия отыгрыша. <a href=https://forum.bedwantsinfo.nl/thread-677867.html>1 xslots рабочее зеркало</a> Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют важную информацию о not the slightest down payment bonuses и предложениях. Наиболее известные гонорары между гэмблеров – бездепозитные призы казино. Это не изумительно, как возможно получить благотворительные вращения либо виртуальные кредиты, и всем не придётся пополнять счёт, рисковать собственными средствами. Удастся насладиться разнородными увеселениями причем выиграть солидную сумму, избегая серьёзного риска.Мы подготовили список, где есть практически животрепещущие и новые бездепозитные призы казино, которые вы можете получить безвозмездно. Для наших юзеров есть особые предложения эксклюзивные призы, которые вы у не найдете, их мы обозначили специальной красноватой плашкой «Exclusive». 1×slots зеркало быструю регистрацию а также мгновенное <a href=http://agatbratsk.ru/index.php?subaction=userinfo&user=prettystudent4>http://agatbratsk.ru/index.php?subaction=userinfo&user=prettystudent4</a> Как лишь на виртуальном счету окажутся бонусные свои, поторопитесь отыграть вейджер. Сразу последствии сего возможно забыть заявку на вывод выигрыша. Кредиты выгодно отличаются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом настоящих средств и выделяют вероятность ощутить задор. Во-вторых – возможно насладиться любой азартной игрой доступной на сайте. В вашем постановлении присутствуют автоматы, настольные прибавленье, видео-покер, Live-дилеры.
1×slots официальный сайт зеркало
Бoльшинcтвo азартных заведений выдвигают приблизительно однообразные, схожие условия и требования, коие необходимо выполнить, дабы получить бездепозитный бонус за регистрацию. Все их возможно соединить в раз перечень:Законодательство, регулирующее азартные игры в различных странах, влияние на полномочия операторов. В итоге юзеры из отдельных ареалов сталкиваются с лимитированиями со стороны казино. Это может быть как полный отказ в доступе, например и невозможность загружать забавы отдельных изготовителей. <a href=https://sportavesti.ru/forums/users/filrumer0105–2/>https://sportavesti.ru/forums/users/filrumer0105–2/</a> Зарегистрироваться в казино по особой ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефона и электронную почту). Для подтверждения номера аппарата необходимо в личном профиле показать собственный номер и нажать кнопку „Подтвердить номер телефона“, далее Вы получите sms-сообщение с кодом, кот-ый необходимо установить в подходящее фон. Для подтверждения электронной почты, перейти по интенсивной ссылке в послании от казино. 1хслотс казино зеркало Чтобы самостоятельно убедиться в преимуществах бездепозитных призов, довольно зарегистрироваться в казино и получить одобрение.
<b>Смотреть еще похожие новости:</b>
<a href=https://minecraft.ru.net/user/Manuelsoarl/>1хслотс казино зеркало</a>
<a href=https://thetechmodders.com/forums/viewtopic.php?t=26894>1хслот скачать</a>
<a href=https://forum.home-visa.ru/viewtopic.php?f=69&t=807392&p=3092556#p3092556>1×slots зеркало проходить регистрацию это отличный вариант</a>
<a href=https://test.soclanovtsy.ru/topic/59392–1%D1%85%D1%81%D0%BB%D0%BE%D1%82-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE/>1хслот официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бонус начисляется игроку сразу последствии регистрации и прохождения верификации в казино и не требует от клиента внесения депо. Как правило, объем бонуса в подобном случае довольно стыдливый, впрочем разрешает новеньким познакомиться с игрой без риска реальными деньгами.
#3391 Charlesgunnyhttp://filmkachat.ru
1×slots казино мобильная версия
Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного бонуса. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> <a href=https://www.easyfie.com/read-blog/2333222_professionalnyi-vykup-avtomobilei-renault-liubogo-sostoianiia>https://www.easyfie.com/read-blog/2333222_professionalnyi-vykup-avtomobilei-renault-liubogo-sostoianiia</a> Рассмотрим на образце: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских рублей. В критериях акции указано, собственно вейджер бездепозитного приза х20. Поэтому, дабы отыграть бонус, игроку будет необходимо устроить ставок на 35*20=700 рублей.Прямо данный арестуйте безвозмездные вращения за регистрацию без депозита и начинайте коллекционировать призовые комбинации ради крупных выигрышей! 1хслотс мобильная версия зеркало <a href=https://k2s.club/user/DoctorLazutaPa/>https://k2s.club/user/DoctorLazutaPa/</a>
1×slots зеркало регистрацию более популярный вариант это
Некоторые онлайн-казино без депо предлагают новым клиентам избрать приз при регистрации. Будьте внимательны: выбрав один, вы в безоговорочном большинстве случаев не можете пользоваться остальными. 1×слотс казино <a href=http://mymodelpages.com/CharlesOvets>http://mymodelpages.com/CharlesOvets</a> casino 1×slot
1×slots официальный сайт мобильная версия
Иногда у посетителей вебсайта могут возникнуть проблемы при активации приобретенного промо-кода. В этих случаях, нужно адресоваться за помощью в службу «Support». Для получения ответа, обязательно указывается конкретная первопричина обращения и подтверждается информация дополнительными снимками. Если сложилась спорная ситуация, всегда возможно обратиться к главному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ.Маркетинговая политика всех игорных интернет-клубов должна одевать разнородный нрав. И случае гонорары на депозит работают для того, дабы стимулировать заносить депозиты и поощрять уже существующих пользователей, то бездепозитный приз в казино либо приз за регистрацию в казино, этого всего, рассчитан на расширение базы покупателей. <a href=http://forum.prolifeclinics.ro/profile.php?id=1200546>http://forum.prolifeclinics.ro/profile.php?id=1200546</a> 1×slots зеркало быструю регистрацию а также мгновенное
1×slots зеркало 1хслотс регистрация перейти на 1×slots
В зависимости от интернет заведения каждый из них может вам предложить как бездепозитные деньги, например и бездепозитные фриспины, коие после удачной регистрации рухнут вам на ваш игровой баланс. Бесплатные призы казино без депо возможно получить вид денежных средств на бонусный счет (вывести их можно только в отыгрыша), фриспинов, забавы или кешбэк-бонуса.Бонус без депо за регистрацию в казино (бездепозитный бонус) – это денежный подарок от клуба, который начисляется на акк игрока после регистрации в казино. Кроме творенья учетной записи, для получения бездепа, довольно нередко требуется ещё и доказать контактные данные игрока и/или активировать особый промо-код. Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро либо 20 $. Если выдаются фриспины, их число изредка превышает нескольких десятков бесплатных вращений.Объективные – размер бонуса, коэффициент и обстоятельства вейджера, надобность внесения депозита для вывода средств; 1×slots казино мобильная версия <a href=https://a.pr-cy.ru/playhouse.com.ua/>https://a.pr-cy.ru/playhouse.com.ua/</a> Прочитайте правила бонусной программки, в которой желаете участие. Да, мы безотступно советуем сделать это до регистрации.К образцу, игроку выдаются бесплатные свои в заведении в объеме пятидесяти или 100 $ (вейджер на коие составляет 100х). То есть, каждому новоприбывшему игроку выскакивает манящая иллюстрация, кот-ая обещает выплату всех зачисленных компанией средств. Не стоит внимания на казино бонус за регистрацию без депозита с слишком большой либо довольно махонькой суммой призов, потому что, и тщательно исследовав все условия, тут вероятнее всего, будет какой-то подвох.
1×slots зеркало
При небольшой сумме бонуса рекомендовано играть по невысоким ставкам, а использовать наибольшие никакого лишь в том случае, если вейджер слишком большой, а время на отыгрыш сильно ограничено.Но а если вы уже профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в интернет казино; Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша бонусов. Заведения практически устанавливают максимальную ставку, возможную по условиям вейждера.Индивидуальные поощрения выдаются за совершение поступков: подписку на аккаунты площадки в соц сетях, установку мобильного приложения или официального посетителя для ПК. В большинстве казино действуют программы лояльности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на следующий уровень нередко с выдачей бездепа. <a href=http://seolimfa.co.kr/bbs/board.php?bo_table=free&wr_id=2224852>http://seolimfa.co.kr/bbs/board.php?bo_table=free&wr_id=2224852</a> 1хслотс регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://www.thefamilylegion.se/memberlist.php?mode=viewprofile&u=3069>1×slots казино зеркало</a>
<a href=http://forums.indexrise.com/thread-2362-post-330058.html#pid330058>1×slots подтвердит вашу регистрацию если говорить</a>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=254420>1×slots бездепозитный бонус за регистрацию</a>
<a href=http://sladkierecepti.5nx.ru/viewtopic.php?f=8&t=8129>скачать 1×slots на андроид мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Перед активацией важно внимательно изучить условия промоакции. Чем ниже вейджер, что, этим больше потенциальная выгода игрока. Имеют велечину кроме лимиты ставок при отыгрыше и сроки, на которых возможно пользоваться предложением. Если бездеп обхватывает узкий список игр, рекомендовано узнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь том, случае, если оператор не установил жесткие лимитирования на максимальную сумму ставки. Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном веб-сайте и выполните вход в собственный кабинет, чтобы арестовать бесплатные вращения с вейджером х40;
#3392 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
online casino 1×bet зеркало рабочее на сегодня <a href=https://7club7.com/>ешь казино</a> букмекерская контора фонбет официальный сайт букмекерская контора на андроид <a href=https://th-royalgclub.com/>бесплатные букмекерские конторы</a> 1×bet зеркало рабочее xbet Разуваева Ксения Денисовна порно casino регистрации пинко casino автомат казино букмекерская контора на андроид Елена Лядова
DiskiPlus букмекерская контора скачать приложение DiskiPlus играющие казино онлайн <a href=https://www.diskiplus.ru/>казино</a> DiskiPlus казино играть DiskiPlus рокс казино <a href=https://www.diskiplus.ru>DiskiPlus лучшие бесплатные онлайн казино</a> DiskiPlus порно с Баталина Ольга Юрьевна DiskiPlus как выиграть в казино DiskiPlus 1×bet скачать приложение DiskiPlus 7k casino DiskiPlus 1×bet телефон DiskiPlus casino сайты DiskiPlus пина casino
#3393 Charlesgunnyhttp://filmkachat.ru
1× slots casino официальный сайт
Постарайтесь отыграть вейджер, чтобы замечена возможность оставить заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные приборы. Вы сможете получить выигрыш на электрической кошелёк, карту, телефон. <a href=http://filmkachat.ru/>1×slots зеркало на сегодня</a> 4. Заберите подарок. Чаще всего бонус активируется сразу после регистрации. Но посещают ситуации, когда надо(надобно) зайти в личный офис или написать в саппорта. <a href=https://www.mazafakas.com/index.php?page=custom&file=osclass_forum/viewpost.php&id=4911>https://www.mazafakas.com/index.php?page=custom&file=osclass_forum/viewpost.php&id=4911</a> Зарегистрируйтесь. Для регистрации почаще всего достаточно ввести собственный номер телефона и почтовый адресок, после чего установить полученный код из СМС. Возможно, потребуется показать промокод. В правилах акции будет написано, где его надо включать. Иногда это надобно делать при регистрации, иногда — теснее после творенья собственного кабинета, на отдельной странице. 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=http://masyasha.ru/index.php?option=com_k2&view=itemlist&task=user&id=85046>http://masyasha.ru/index.php?option=com_k2&view=itemlist&task=user&id=85046</a> Выбор каждого онлайн казино на нашем веб-сайте. В описании к любому Вы можете узнать, собственно получите за творение аккаунта.
1х слот регистрация в 1×slots casino
На данном разделе портала регулярно публикуются обзорные заметки, в рассматриваются безвозмездные призы лучших интернет-казино. Информация структурирована по нескольким пунктам, включая основные: 1×slots casino зеркало <a href=https://98e.fun/space-uid-8073163.html>https://98e.fun/space-uid-8073163.html</a> В лицензионных бездепозитных казино играть в азартные игры действительно неопасно. Наличие лицензии одобряет что, этот факт, что клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP.Диапазон ставок, коие вправе устроить игрок, того лимитирован. Обычно ставить можно небольшую необходимую — пределах 10–30 руб. За одно вращение. 1×slots зеркало регистрация Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в индивидуальный офис, дабы арестовать бесплатные вращения с вейджером х40;Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке необходимо пополнить счет в казино. Для депозитных бонусов, данная процедура не необходима, например как депозит теснее сделан.
1× slots casino официальный сайт
Некоторые клубы механически начисляют приз на аккаунт игрока после исполнения критерий получения, но посещают ситуации, когда бонус надо(надобно) активировать игроку самому. Есть количество способов активации бонуса:Основное различие что, что для получения бездепа не пополнять баланс в казино. Но не этого, есть ряд и отличий: Индивидуальные поощрения выдаются за совершение действий: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавления либо официального клиента для ПК. В большинстве казино действуют программы лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий уровень часто с выдачей бездепа.4. Заберите подарок. Чаще всего бонус активируется сразу в регистрации. Но бывают ситуации, когда нужно забежать в собственный офис или написать в службу поддержки. <a href=https://projectblueberryserver.com/index.php/User:LarueJardine991>https://projectblueberryserver.com/index.php/User:LarueJardine991</a> Осталось выбрать казино с призом за регистрацию и создать профиль. После активации презента выигрыш зависимости от Фортуны и навыков. 1 хслот регистрация в 1×slots casino Для получения предоставленных бонусов для пригодиться — ПК или мобильное устройство, и остальное дело за малым.На нашем веб-сайте Вы отыщите список актуальных свежих бездепозитных призов в казино 2022 года. Также, есть большое неповторимых предложений, коие доступны только посетителям нашего вебсайта после регистрации по нашей ссылке или активации особого промокода.
1×slots актуальное зеркало
В любом казино с бездепозитным призом учтены вейджеровые обстоятельства. Это единственный «подводный камень», который стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) устроить определённое число ставок. Чем круче бонус, тем сложнее выполнить обстоятельства, и напротив.Максимальная ставка ? уточняется в еденице счета и ограничивает объем ставки за один спин. В случае ее превышения бонус может быть аннулирован. Также в правилах возможность содержаться запрет на размещение ставок определенного вида, примеру, по одинаковым шансам в рулетке (то есть, на чет либо нечет, красное либо темное и т.д.). Бездепозитные бонусы казино за регистрацию в 2022 году — это вероятность сыграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой либо числом бесплатных вращений без внесения депозита. Не путайте деморежим с реальной игрой без надобности внесения депозита. Как верховодило, при выводе денег, от играющего требуется лишь сделать минимальный вклад чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом личный счет. казино 1×slots <a href=http://www.gwmph.cn/home.php?mod=space&username=importedquantit>http://www.gwmph.cn/home.php?mod=space&username=importedquantit</a> Бонус без депозита за регистрацию в казино (бездепозитный бонус) – это денежный подарок от клуба, который начисляется на аккаунт игрока последствии регистрации в казино. Кроме сотворения учетной записи, для получения бездепа, довольно нередко потребуется ещё и подтвердить контактные данные игрока и/или активировать специальный промо-код.
x1 slots регистрация в 1×slots casino
Обычно бездепозитные промоакции от казино, приходят на эл. Почту в деньки рождения либо праздники. В некоторых онлайн казино возможно обратиться в чат и как неизменному игроку, вероятно вам предложат бездепозитное предложение. <a href=https://tdmromania.ro/member.php?action=profile&uid=8685>https://tdmromania.ro/member.php?action=profile&uid=8685</a> Денежные средства. Третий приз за регистрацию без депозита – наличные. К раскаянью, лишь знаменитые и модные клубы могут уяснить деньги в рублях или баксах. С их поддержкой вы сможете насладиться любой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед этим необходимо исполнение определенных критерий.Важно, убедитесь никаких, собственно раньше не регистрировались в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи. 1×slot регистрация
<b>Смотреть еще похожие новости:</b>
<a href=http://6000ziyuan.com/forum.php?mod=viewthread&tid=110804&extra=>1 xslots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают приз по странам. Вплоть до как, собственно клуб возможность на игроков из Вашей государства, а бездеп мешает. Вознаграждения за получение VIP-статуса ? начисляются масштабах программы преданности при достижении очередного уровня либо выдаются индивидуально менеджерами саппорта.
#3394 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора леонов зеркала официальных сайтов казино <a href=https://slon-ru.com/>скачать 1×bet на андроид бесплатно</a> мобильные букмекерские конторы гта казино <a href=https://t.me/vchkogpu_ru>ограбление казино</a> казино рублях 1×bet зеркало xbet 1win casino кент casino пин ап casino pin up top порно с Юлия Ефимова, пловчиха 1×bet
DiskiPlus casino скачать DiskiPlus играющие казино онлайн <a href=https://www.diskiplus.ru/>DiskiPlus casinos xyz</a> DiskiPlus бесплатно играем казино DiskiPlus казино смотреть <a href=https://www.diskiplus.ru/>DiskiPlus порно с Виктория Синицина, фигуристка</a> DiskiPlus порно с Арина и Дина Аверины, гимнастки DiskiPlus играющие казино DiskiPlus pin up casino скачать DiskiPlus 1×bet сайт DiskiPlus pin up casino официальный DiskiPlus porno Илья Ковальчук (хоккей) DiskiPlus Анна Михалкова
#3395 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
про казино porno Андрей Рублев (теннис) <a href=https://t.me/vchkogpu_ru>рокс казино</a> porno Елизавета Туктамышева pin up casino пин ап <a href=https://rumafia.news/>pin up casino скачать</a> официальное казино вход Петрова Ольга Викторовна порно bitz casino up casino вывод казино порно с Артемий Панарин (хоккей) 1×bet официальный скачать
DiskiPlus porno Дарья Мороз DiskiPlus casino daddy <a href=https://diskiplus.ru>DiskiPlus порно с Илья Осипов (киберспорт)</a> DiskiPlus Мухтиярова Елена Вячеславовна порно DiskiPlus казино рояль смотреть <a href=https://diskiplus.ru/>DiskiPlus porno Игорь Акинфеев (футбол)</a> DiskiPlus порно с Кирьянова Дарья Борисовна DiskiPlus porno Анна Сидорова, керлингистка DiskiPlus pin up букмекерская контора DiskiPlus кент casino DiskiPlus porno Вера Бирюкова, гимнастка DiskiPlus casino приложения DiskiPlus casino автомат
#3396 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация
Бездепозитный приз казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в этом и содержится основное отличие. <a href=http://filmkachat.ru/>1×slots регистрация на официальном сайте</a> Самые свежие бездепозитные призы в казино за регистрацию 2022 года с выводом прибыли присутствуют на этой страничке. Посетитель возможность расценить условия получения и начать выступать на средства без внесения депозита. При данном игроку главно понимать, на каких условиях и какими способами него вывести полученный выигрыш. Для этого необходимо оценить перечень присоединенных платежных систем.Фриплей-бонусы. Бонусы за бесплатную игру есть лишь в неких клубах. Они зачисляются сразу в творенья профиля и действуют недолговременное время. Если у вас нет времени потратить средства, они просто закончатся. Что дотрагивается медли, правило призы срабатывают протяжении 1-го часа. <a href=https://secure.smore.com/n/pv9hs-diverse-electronics>https://secure.smore.com/n/pv9hs-diverse-electronics</a> Выигрыши с призов без инвестициям постоянно привязаны к требованию по ставкам и шансы быть обналичены лишь последствии выполнения данных требований. 1х слотс зеркало регистрация в 1×slots casino <a href=http://besatime.com/index.php?subaction=userinfo&user=giddycab67>http://besatime.com/index.php?subaction=userinfo&user=giddycab67</a> Мы подготовили перечень, где есть всегда животрепещущие и свежие бездепозитные призы казино, коие возможность получить бесплатно. Для наших пользователей есть специальные предложения неповторимые бонусы, которые вы нигде не найдете, их мы обозначили специальной красноватой плашкой «Exclusive».Бездепозитные призы казино за регистрацию в 2022 году — это возможность поиграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой либо количеством безвозмездных вращений без внесения депо. Не путайте деморежим с реальной забавой без надобности внесения депозита.
1×slots официальный зеркало рабочее
Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. <a href=https://talkonlinenews.com/viewtopic.php?t=8606>1×slots сайт зеркало</a> 1хслотс регистрация в 1×slots casino <a href=https://goblin-film.net/user/DoctorLazutakr/>https://goblin-film.net/user/DoctorLazutakr/</a> Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают приз по государствам. Вплоть до как, собственно клуб имеет принимать игроков из Вашей государства, а бездеп мешает. 1×slots casino регистрация 1×slotscasin online Превышение максимальной ставки при отыгрыше. Система механически не предостерегает о превышении ставки, поэтому о несоблюдении управлял игрок возможность узнать уже после подачи запроса на вывод средств.
x1 slots 1хслотс регистрация перейти на 1×slots
Бездепозитные призы начисляются только раз раз. Не стоит раскрывать свежие аккаунты, чтобы получить их повторно. Служба безопасности казино непременно выявит «левого» участника и перекроет. Если гость выполнит нужные требования, отыграет собственную ставку и решит вывести личный выигрыш, то ему нужно к, собственно казино обязательно потребует предоставить ксерокопии личных документов, чтобы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои исключить не получится.Ознакомьтесь с нашим перечнем наилучших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего перечня и получите бездеп сразу. Хватайте наилучшие бесплатные предложения ниже и выигрывайте немалые средства, не рискуя! <a href=http://sp22msk.ru/bitrix/redirect.php?goto=http://nipromtex-home.ru/bitrix/click.php?goto=http://playerup.com/proxy.php?link=https://telegra.ph/Osnovnye-standarty-dlya-ognetushitelej-i-ih-obsluzhivaniya-09–23>http://sp22msk.ru/bitrix/redirect.php?goto=http://nipromtex-home.ru/bitrix/click.php?goto=http://playerup.com/proxy.php?link=https://telegra.ph/Osnovnye-standarty-dlya-ognetushitelej-i-ih-obsluzhivaniya-09–23</a> Ограничения по забавам. Администрация воспрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, деньгами либо бесплатными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда деление выполняется по облику игр. Например, отыгрыш возможен на всех игровых аппаратах, хотя запрещен в настольных забавах и в разделе Live Casino. 1×slots казино зеркало
1×slots регистрация
<a href=https://qualityprogamer.de/forum/showthread.php?tid=243522>1×slots казино зеркало</a> Иногда у гостей сайта шансы появиться трудности, задачи, препядствия при активации полученного промо-кода. В таких случаях, необходимо обратиться за подмогою в саппорта «Support». Для получения ответа, непременно указывается определенная причина воззвания и подтверждается информация дополнительными экрана. Если сформировалась неоднозначная обстановка, постоянно можно адресоваться к основному регулятору или контролирующему органу, выдавшему данному заведению лицензионный документ. 1×slots бездепозитный бонус за регистрацию <a href=http://www.ehion.com/~ameba/dokuwiki/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0%20%D0%BD%D0%B0%20%D0%B4%D0%B7%D0%B5%D0%BD%D0%B5>http://www.ehion.com/~ameba/dokuwiki/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0%20%D0%BD%D0%B0%20%D0%B4%D0%B7%D0%B5%D0%BD%D0%B5</a>
1×slots регистрация то дальше необходимо пройти
Но существуют азартные заведения, готовые просто так вручить деньги на забаву. Для этого достаточно сделать профиль. Чтобы исключить выигрыш, сначала нужно выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа. <a href=http://zhwbn.com/bbs/space-uid-161006.html>http://zhwbn.com/bbs/space-uid-161006.html</a> Зарегистрируйтесь. Для регистрации почаще всего достаточно установить свой номер телефонного и почтовый адресок, после чего установить приобретенный код из СМС. Возможно, требуется показать промокод. В правилах акции будет написано, где его надобно включать. Иногда это надобно создавать при регистрации, времени — уже в создания личного кабинета, на отдельной страничке.В бонусную программу многих операторов входят регулярные бездепы. Это бессрочные акции, поощряющие интенсивных неизменных игроков. Популярный формат — раздача фриспинов по конкретным денькам недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депо в обмен на скопленные баллы лояльности. 1×slots зеркало выигрыши обязательно пройдите регистрацию если Если вы облюбовали себе несколько брендов коие для больше всего приглянулись, для постоянной игры! Таких гемблеров казино довольно предпочитает и ценит, за частую такие игроки становятся VIP игроками заведения, коим часто поступают выгодные предложения повторяющий бонусов, например же туда заходит и бездепозитные.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.survival-readiness.com/viewtopic.php?t=254496>1хслотс казино зеркало</a>
<a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Первый образующийся вопрос, это, чего выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают новых игроков. Последним проще начать забаву на средства с подарка за регистрацию. Им не нужно пополнять баланс и расходовать собственные свои. Новички получают благотворительные спины или свои на счёт. С их подмогою знакомятся с игровым ходом, крутят слоты и делают ставки в рулетке.
#3397 Charlesgunnyhttp://filmkachat.ru
онлайн казино 1×slots
Процесс доказательства личности возможность взятьвдолг(взятьвзаймы) от 1-го дня до недели. Если клиент разрешил нибудь ошибку при заполнении паспортных данных, то ему идет обратиться с задачей в службу онлайн-казино. <a href=http://filmkachat.ru/>1×slot официальный сайт</a> Выше мы дали полный комплект самых новых и актуальных бездепозитных призов в интернет казино без пополнения на 2022 год, где вы можете пользоваться любым ценным бездепозитным бонусом. <a href=https://www.astrobin.com/users/furniture/>https://www.astrobin.com/users/furniture/</a> 1×slots сайт <a href=http://studio-pd.ru/index.php?subaction=userinfo&user=boundlesswater5>http://studio-pd.ru/index.php?subaction=userinfo&user=boundlesswater5</a> Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам запрещено начислять бонусы посетителям, не имеющим денежных средств на счете. Мы предлагаем осмотреть животрепещущие бонусы онлайн-казино с лицензией, которые соблюдают законодательство РБ.При небольшой сумме бонуса рекомендуется играть по невысоким ставкам, а применять максимальные лучше только том, случае, в вейджер слишком большой, а время на отыгрыш крепко ограничено.
рабочее зеркало 1хслотс
Далее потребуется отыграть вагер и исключить выигрыш. Игрокам без навыка крупно подфартило, меня получить 10-ки подарков за 1 регистрацию. Если не сумели получить Бездепозитный бонус, не тревожьтесь. Обратитесь в интернет чат, оператор поможет ситуацию.Если вы выбрали себе количество брендов которые вас больше всего полюбились, для постоянной забавы! Таких гемблеров казино довольно любит и оценивает, за частую такие игроки становятся VIP игроками заведения, которым часто поступают прибыльные предложения в виде бонусов, так же туда входит и бездепозитные. 1×slots casino зеркало рабочее <a href=http://nbrkv.ru/user/Harryfoolf/>http://nbrkv.ru/user/Harryfoolf/</a> Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные способы и оценить необыкновенности, труднодоступные при забаве в демо режиме. Многие свежие посетители переходят в число постоянных, а оператор получает долгосрочную выгода. 1×slots зеркало на сегодня
1×slots рабочее зеркало
Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала быстрые выводы. Фишка выплат никаких, собственно довольно избрать платёжный инструмент и указать сумму. В большинстве случаев деньги зачисляются на электрические кошельки на 15 минут, а на банковские карты – 1–3 трудящихся денька.После потребуется внести идентификационный платёж. Это стращает начинающих больше всего. Нужно сделать наименьший депозит в 100–500 руб. Таким образом служба безопасности увериться сомнений, что платёжный метод принадлежит Вам. Данная процедура важна для обеспечения безопасности игровых счетов. Пример, Ваш аккаунт взломают и выведут средства на свой кошелёк. Будет очень неприятно. Поэтому верификация платёжной системы, это важный момент. <a href=https://szkolenia.myslepozytywnie.pl/fora/watek/%d1%84%d1%80%d0%b0%d0%bd%d1%88%d0%b8%d0%b7%d1%8b-%d0%b0%d0%bf%d1%82%d0%b5%d0%ba-%d0%b2-%d1%80%d0%be%d1%81%d1%81%d0%b8%d0%b8-%d1%82%d1%80%d0%b5%d0%bd%d0%b4%d1%8b-%d0%b8-%d0%bf%d1%80%d0%be%d0%b3%d0%bd/>https://szkolenia.myslepozytywnie.pl/fora/watek/%d1%84%d1%80%d0%b0%d0%bd%d1%88%d0%b8%d0%b7%d1%8b-%d0%b0%d0%bf%d1%82%d0%b5%d0%ba-%d0%b2-%d1%80%d0%be%d1%81%d1%81%d0%b8%d0%b8-%d1%82%d1%80%d0%b5%d0%bd%d0%b4%d1%8b-%d0%b8-%d0%bf%d1%80%d0%be%d0%b3%d0%bd/</a> 1×slots казино зеркало Доступные игры – В некоторых азартных играх возможно понизить математическое преимущество казино до нескольких 10-х процента. В их количестве многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как управляло, в этих играх ставки идут в зачет вейджера не всецело. Например, имеет предусматриваться только 50%. В некоторых забавах бездепозитные бонусы вообщем нельзя отыгрывать.Мы рекомендуем не отказываться от похожих услуг узнаваемых казино. Выделите некоторое мин. На регистрацию, получите бонус и попробуйте его отыграть. Может быть, сегодня фортуна будет на вашей стороне!
1 xslots рабочее зеркало
Бездепозитный приз по промо-коду будет доступен для игры, только в случае когда Вы активируете специальный бонусный код в разделе с бонусами либо укажите промокод при регистрации на сайте. В неких случаях, кроме активации кода, придется доказать контактные данные игрока и заполнить анкету клиента.Третитй бездепозитный бонус за регистрацию – валютные свои. К раскаянью, начислить рубли либо доллары готовы лишь известные и пользующиеся клубы. С их поддержкой вы сможете насладиться каждой доступной игрой – автоматом, рулеткой, кено, блэкджеком. Мы собрали и опубликовали перечень лучших бездепозитных казино с призами за регистрацию, которые гарантируют щедрые выигрыши и моментальные выплаты. 1× slots официальный <a href=http://sotsprof01.ru/index.php?subaction=userinfo&user=ujogupoc>http://sotsprof01.ru/index.php?subaction=userinfo&user=ujogupoc</a> Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и. Когда игроку полагается большое фриспинов, администрация может бить3 их начисление на несколько дней. Бесплатные вращения предоставляются для определенного слота, кот-ый указывается в правилах акции.
1×slots зеркало на сегодня
<a href=http://www.dbgjjs.com/home.php?mod=space&uid=458049>http://www.dbgjjs.com/home.php?mod=space&uid=458049</a> Мы советуем не отрицаться от сходственных предложений знаменитых казино. Выделите некоторое мин. На регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сегодня удача будет на вашей стороне! 1хслотс 1хслотс регистрация перейти на 1×slots Обыкновенные бездепозитные призы в объеме от 3-х до двадцати долларов сделаны чтобы, чтобы, чтобы в забавы заходили все новые и свежие игроки. Здесь, скорее, будет лимитирование на максимальный выигрыш. Важно, чтобы перед наименьшим вкладом был отключен бонус за 1-ое пополнение счета, и в не попадет на повторный вейджер.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.donchillin.com/space-uid-382497.html>1× slots зеркало</a>
<a href=https://minifishtank.net/forum/showthread.php?tid=22421>1×slots регистрация на официальном сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вы скорее, например все предпочитаете получать презенты и бездепозитные бонусы казино. Игорные дома взяли в повадку одаривать гэмблеров приятными призами. Стать владельцем приветственного подарка можно за творенье профиля либо пополнение счёта. Второй вариант больше увлекательный, так клубы готовы удвоить депо! Но случае вы новичок и лишь знакомитесь с миром азарта, другого пользуйтесь бонусом за регистрацию. После потребуется привнести идентификационный платёж. Это стращает новичков больше всего. Нужно устроить минимальный депо в 100–500 руб. Таким образом служба защищенности убедиться сомнений, собственно платёжный метод принадлежит Вам. Данная процедура необходима для обеспечивания защищенности игровых счетов. Пример, Ваш аккаунт взломают и выведут свои на собственный кошелёк. Будет крайне неприятно. Поэтому верификация платёжной системы, это важный момент.
#3398 Charlesgunnyhttp://filmkachat.ru
1×slots бонус за регистрацию
Если простыми текстами, бездепы – это определённая сумма денег либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать презенты. Но есть кое-какие аспекты. Существуют игорные дома, коие перед что, этим как начислить призы просят привязать телефонный, дать копии документов.Чтобы получить возможность вывести прибыль с бездепозитного приза в казино, нужно выполнить ряд критерий: <a href=http://filmkachat.ru/>1×slots casino зеркало рабочее</a> Самые популярностью способы вывода средств ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электронным платежным системам на Neteller и Skrill, а также используют криптовалютными кошельками. Вывод выигрышей может исполняться моментально либо занимать от нескольких часов до нескольких суток. <a href=https://help.bemob.com/discuss/678776332a0a92000f16fc3b>https://help.bemob.com/discuss/678776332a0a92000f16fc3b</a> Суммы сходственных услуг, большинстве, колеблются от трех до двадцати $, а вейджер на эти свои обязан составлять от 30 до шестидесяти раз. Зачастую, наивеличайшая сумма выигрыша тут составит от одной до 2-ух сотен $. Если игры выиграет больше, то все средства все быть списанными до очень разрешенного выигрыша. Здесь появляется смысл выводить еще несуществующие финансы на свою платежную систему и далее искать заведение с подходящими под данную необходимую релоадом или призом за 1-ое пополнение счета. Есть количество подвидов бездепозитного вознаграждения, предлагаемого наибольшим количеством заведений.Новые посетители онлайн-казино без первого депозита могут проверить собственную удачливость. К тому же есть вероятность преобразовать бездепы в реальные средства за регистрацию в казино, однако чтобы бонус необходимо отыграть согласно условиям промоакции. 1 хслот регистрация в 1×slots casino <a href=http://www.sciencementoring.co.kr/board/bbs/board.php?bo_table=free&wr_id=514292>http://www.sciencementoring.co.kr/board/bbs/board.php?bo_table=free&wr_id=514292</a>
1 xslots рабочее зеркало
Выиграть реальные средства в казино не пополняя счет – трудно, но вероятно. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными бонусами и начните играть на бонусные средства. По статистике из 10-ти заведений возможно заработать небольшую необходимую средств с бонусных средств. <a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=93452>1×slots официальный сайт зеркало рабочее</a> зеркло казино 1×slots <a href=https://rg-mechanics.club/user/Travismaibe/>https://rg-mechanics.club/user/Travismaibe/</a> Для получения предоставленных призов вас понадобиться — ПК или мобильное прибор, и остальное дело за малым.Так собственно приготовьтесь предоставить секретную информацию (пол, возраст, государство проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев проверка данных занимает менее суток, после чего удастся свободно выводить крупные выигрыши. казино 1×slots
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Бездепы обычно предлагают с отыгрышем — моментально исключить выигранные средства невозможно. Перевод средств со счета будет возможен последствии такого, как юзер выполнит все требования казино, а сумма имеет превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, протяжении коих клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней после активации.Верификация аккаунта. Лучше подтвердить личность сразу последствии регистрации, дабы потом не было проблем с выводом средств. Верификация имеет проходить двумя путями: <a href=https://geolymp.org/user/profile/Henryeduby>https://geolymp.org/user/profile/Henryeduby</a> 1×slots официальный зеркало Баланс игрока дополняется на подходящую необходимую. К ней применяется вейджер, указанный в правилах промоакции. Вывести выигрыш возможно будет после как, как пользователь устроит требуемый размер ставок из личных средств. В редких случаях бездеп трудится в формате Free Play. На счет юзера зачисляется крупная сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по окончании сего периода сумма на счету несомненно превышать первоначальную, то разницу можно будет вывести или применять для последующих ставок.Для выбора азартного заведения Вы можете воспользоваться перечнем наших казино с бонусами за регистрацию. На нашем веб-сайте мы выпустили список бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, что часть бонусов эксклюзивные и доступны лишь для гостей нашего вебсайта по-специальному промо-коду либо по оригинальной ссылке. Кроме как, для любого бонуса мы подготовили доскональный обозрение, в Вы узнаете как получить и отыграть поощрение и как вывести свой выигрыш с бездепа.
1х слот 1хслотс регистрация перейти на 1×slots
Иногда у гостей вебсайта могут возникнуть трудности, задачи, препядствия при активации полученного промо-кода. В этих случаях, необходимо обратиться за поддержкой в службу «Support». Для получения ответа, непременно указывается конкретная причина обращения и подтверждается информация дополнительными скриншотами. Если сформировалась неоднозначная обстановка, практически можно адресоваться к основному регулятору либо контролирующему органу, выдавшему данному заведению лицензионный документ. Процесс доказательства личности возможность занять от 1-го дня до недели. Если заказчик разрешил какую ошибку при заполнении паспортных данных, то ему стопам обратиться с проблемой в службу поддержки онлайн-казино. Бонус за регистрацию в казино выдается лишь раз один на 1-го игрока. Но случаются вспомогательные акции, в которых бездепы раздаются для постоянных посетителей и эти подарки Вы можете получить более одного раза. 1×slots официальный сайт мобильная версия <a href=https://bel-mebel.com/forum/user/3617/>https://bel-mebel.com/forum/user/3617/</a> Для проверки применяются сканы паспортов, водительских удостоверений, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если юзер замечен в попытке завести вспомогательный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в темный перечень. При этой на лицензионной площадке надо опасаться свидетельствовать достоверную индивидуальную информацию (шифрование ликвидирует утечку персональных данных).
1×slots зеркало
Заполняя данные в личном профиле, указывайте лишь достоверную информацию, например как Вам понадобиться ее подтвердить дальнейшем при выводе денег.Активация случается счет промокодов, коие вводятся в собственном кабинете последствии регистрации. Среди спецпредложений в перечне Casino.ru находятся эксклюзивные промокоды, коие доступны лишь посетителям портала. Другие методы начисления средств ? автоматическая активация сразу последствии сотворения аккаунта и получение дара по запросу в службу технической поддержки. Какие призы у еще получить кроме бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного бонуса, каждое онлайн казино предлагает игрокам выгодное предложение на 1-ый депо, вы совершаете депозит, ваш депо возрастает в двое либо даже в 3, что, этим наиболее начать выступать можно с больше солидной суммой, например же не забываем тему вейджер на бонусы.Бонус за регистрацию в казино без депозита с выводом денег нужно отыграть. Зачастую для отыгрыша возможность потребоваться сделать ставки на необходимую, в несколько 10-ов раз превосходящую необходимую бонуса или выигрыша. <a href=http://maskarad.bomba-piter.ru/user/CraigClado/>http://maskarad.bomba-piter.ru/user/CraigClado/</a> Одним из предлогов отдавать преимущество, льготу одному или другому заведению заключается в привлекательности предлагаемых промоакций и безвозмездных услуг. Безвозмездные фриспины, выдаваемые без нужды делать какой-либо лепта, в списке находится далеко не в конце.Возьми собственный презент. Чаще всего приз активизируется сразу последствии регистрации. Но бывают истории, когда надо(надобно) зайти в собственный кабинет или написать в справочную службу. 1×slots скачать на айфон
<b>Смотреть еще похожие новости:</b>
<a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=89686>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=https://ragnarok.ch/forum/viewthread.php?thread_id=70498&pid=369842#post_369842>казино 1×slots</a>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=145502>1×slots скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подарки на праздники ? приуроченные к праздничным датам, требующие условного отыгрыша либо начисляются без это. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду. При игре на бонусные свои воспрещается выступать в игровые автоматы с современным джекпотом и забавы из радела exist casino. Кроме такого, кое-какие казино дают бездеп на один либо несколько определенных слотов, и в других играх Вы не можете на них играть.
#3399 Charlesgunnyhttp://filmkachat.ru
1×slot регистрация
Для казино, работающих онлайн, бездепозитные бонусы нужны для вербования свежих клиентов. Предложение поиграть на слотах без необходимости внесения реальных средств — работающий способ для увеличения энтузиазма к фирмы. После отыгрыша бездепа велик шанс, что игроку понравится и он продолжит играть в казино, лишь теперь теснее на собственные средства.Частенько новички не знают, как активировать подарки или вывести 1-ый выигрыш. Для похожих случаев наша команда обрисовала основные определения – что это фриспины, вейджер, как его отыграть, чего нужно протекать верификацию. <a href=http://filmkachat.ru/>1хслотс официальный сайт зеркало</a> <a href=https://www.merchantcircle.com/blogs/3d-rendering-company-archicgi-dallas-tx/2025/1/Professional-Interior-Layout-Design-Transform-Your-Space/2886993>https://www.merchantcircle.com/blogs/3d-rendering-company-archicgi-dallas-tx/2025/1/Professional-Interior-Layout-Design-Transform-Your-Space/2886993</a> В некоторых интернет казино для получения бездепозитных бонусов не довольно просто зарегистрироваться на веб-сайте клуба и подтвердить средства контактные данные. Дополнительно потребуется активация промокода. скачать 1×slots официальный сайт <a href=https://biiut.com/read-blog/61516>https://biiut.com/read-blog/61516</a> Итак, чтобы бесплатные бонусные кредиты трансформировались в настоящие средства, которыми вам распоряжаться по собственному усмотрению, их нужно отыграть. Вейджер по уточнять в правилах онлайн-казино.Наши эксперты изучают условия промоакции, затем в ручном режиме проверку их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие характеристики. Мы не рекламируем казино, а даем игрокам информацию о лучших из них.
1×slots зеркало
<a href=http://moneysweet.listbb.ru/viewtopic.php?f=2&t=5155>1×слот регистрация в 1×slots casino</a> 1×slots официальный зеркало Доступ к подарку возможность открываться механически последствии введения промокода или воззвания в службу вебсайта. В первом случае от пользователя не потребуется никаких деяний. Бездеп с активацией по коду встречается почаще всего. Игроку нужно установить совокупа знаков в графе, кот-ая возможность пребывать в регистрационной форме в Личном кабинете.Некоторые казино шансы предлагать посетителям бездепы за подтверждение номера или почты либо репост на страничку в социальных сетях. <a href=http://hotspotnews.ca/home.php?mod=space&uid=10031>http://hotspotnews.ca/home.php?mod=space&uid=10031</a> Существует ли стратегии для отыгрыша бездепозитных бонусов? К огорчению нет, на выигрыши или проигрыши с бонусов, казино или игрок повлиять не, отдача игр происходит от создателей игр. 1хслотс казино зеркало Каждый из бездепозитных призов без пополнения 2022 имеет свой определенный вейджер для отыгрыша, например же в каждом казино он устанавливается индивидуально — где то он х55 а кое-где х30, повторюсь везде по разному!Отзывы читателей о бонусных акциях помогут составить впечатление, но не забывайте о субъективности личных комментариев.
1×slots регистрация на официальном сайте
Но а случае вы теснее профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в онлайн казино; Но есть игорные заведения, которые готовы просто например жертвовать средства на забаву. Для этого достаточно создать профиль. Чтобы вывести свой выигрыш, для сначала необходимо выполнить условия отыгрыша, обозначенные в критериях получения бездепозитного депозита. <a href=http://forum.moderncompany.de/profile.php?lookup=16840>http://forum.moderncompany.de/profile.php?lookup=16840</a> 1×slots акции Когда речь о денежных бонусах, казино практически устанавливают обстоятельства вейджера, коие необходимо выполнить, дабы вывести выигрыш.За счёт спинов выйдет запустить различные интернет слоты, протестировать стратегии и поднабраться опыта. Фишка никаких, собственно вращения начисляются на лучшие аппараты с оригинальными опциями и высокой отдачей. Не забывайте, что в любом акционном предложении учтены особые требования – кратковременные ограничения, максимальный размер ставки, список доступных игр.
1×slots регистрация 1×slotscasino 56 online
<a href=https://forum.visiteachapada.com/viewtopic.php?f=19&t=5199>1×slots официальный сайт мобильная версия скачать</a> Для верификации номера телефонного, в личном профиле изберите опцию „Подтвердить номер телефонного“ и введите в отвечающее поле код, приобретенный в sms-сообщении. Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие возникают у начинающих. 1×slots на любой вкус как пройти регистрацию <a href=https://kamchaty.ru/user/CraigErade/>https://kamchaty.ru/user/CraigErade/</a>
1хслот 1хслотс регистрация перейти на 1×slots
<a href=http://cho.korea505.com/bbs/board.php?bo_table=free&wr_id=306530>http://cho.korea505.com/bbs/board.php?bo_table=free&wr_id=306530</a> 1×slots регистрация 1×slotscasino 56 online
<b>Смотреть еще похожие новости:</b>
<a href=http://vn-info.net/user/Josephkam/>1× slots casino официальный сайт</a>
<a href=https://acerfans.ru/faq/197-kak-polzovatsja-forumom.html>казино 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Популярность онлайн казино растёт и всё больше юзеров начинают проявлять азартными играми. Бездепозитные призы 2022 года, это уникальные подарки за регистрацию. С их поддержкой новые игроки имеют получить безвозмездные вращения или средства на баланс за одну регистрацию. С выходом игорных заведений в интернете, бездепозитные призы стали популярнейшим методом вербования игроков. Подобные акции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о которых мы расскажем. Наш сайт собрал превосходнейшие предложения из интернета на 2022 год. Воспользуйтесь любым даром и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша нужно выполнить условия. Все безвозмездные призы кажутся соблазнительными. Кто же откажется от возможности сыграть в онлайн-казино, не рискуя деньгами, хотя получая выигрыши. Но далеко не все бездепозитные бонусы мере привлекательны для рассудительного посетителя.
#3400 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet официальный слоты порно с Илья Осипов (киберспорт) <a href=https://slon-ru.com/>unlim casino</a> Анна Михалкова 7k casino зеркало на сегодня <a href=https://strelochnik.com/>букмекерская контора мостбет</a> порно с Голикова Татьяна Алексеевна слоты казино казино 7k casino гта казино bet casino человек казино
DiskiPlus порно с Федор Чалов (футбол) DiskiPlus букмекерская контора официальный сайт <a href=https://diskiplus.ru/>DiskiPlus бесплатно фильм казино</a> DiskiPlus pinco casino DiskiPlus яндекс игры казино <a href=https://diskiplus.ru/>DiskiPlus порно с Сергей Бобровский (хоккей)</a> DiskiPlus casino актуальное зеркало DiskiPlus up casino скачать DiskiPlus порно с Аделия Петросян (фигурное катание) DiskiPlus казино фильм онлайн DiskiPlus Нургалиева Эльвира Рамиловна порно DiskiPlus казино ставка DiskiPlus официальные зеркала казино
#3401 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
Прежде чем активировать бездеп, нужно увериться сомнений, что страна, гражданином коей является игрок, не входит в список не. <a href=http://filmkachat.ru/>1×slots зеркало</a> Фриспины без депозита либо вспомогательные средства помогут ближе познакомиться с игровой платформой и её функциями. За счёт подарков можно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за игры напротив живых крупье.Доступность — бездепозитные призы в казино почаще всего предоставляются новым игрокам, но посещают случаи, когда бонус все получить и действующие клиенты. <a href=https://www.printwhatyoulike.com/print?url=astramedika.com.ua>https://www.printwhatyoulike.com/print?url=astramedika.com.ua</a> Многие казино деют в рекламных целях бесплатные бонусы самая для наших читателей. Чтобы их получить, надо(надобно) перебежать на игровой сайт по партнерской ссылке с нашего портала. 1хлот регистрация в 1×slots casino <a href=http://mojsport.ir/index.php?subaction=userinfo&user=RichardknomE>http://mojsport.ir/index.php?subaction=userinfo&user=RichardknomE</a> Не стоит путать игру в демо и внедрение бонусов. В демонстрационном режиме игрок имеет расценить механику слота, сюжет и оформление. Но забава проводится на условные кредиты, поэтому отсутствует основное ? чувство пыла. Активируя промокод или фриспины, клиент по-прежнему не расходует свои деньги на игровые автоматы, хотя может сорвать настоящий куш!
1×slots зеркало регистрация то дальше необходимо пройти
Диапазон ставок, коие вправе устроить игрок, также лимитирован. Обычно назначать возможно небольшую сумму — около 10–30 рублей за одно вращение. <a href=https://minifishtank.net/forum/showthread.php?tid=25571>1×slots официальный сайт мобильная версия скачать</a> 1×slots регистрация то дальше необходимо пройти Важно, удостоверьтесь сомнений, собственно ранее не регились в избранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи.Операторы гемблинга заявляют, что например они дерутся с бонус-хантерами. Впрочем, критики считают, собственно этим казино пытаются устроить из случайного постояльца неизменного игрока. <a href=https://git.qoto.org/anturov2020/anturov2020/-/issues/41>https://git.qoto.org/anturov2020/anturov2020/-/issues/41</a> 1×slots официальный сайт мобильная версия скачать Важно, убедитесь том,, собственно раньше не регистрировались в выбранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи.Некоторые казино все предлагать посетителям бездепы за подтверждение номера или почты либо репост на страницу в соц сетях.
казино 1×slots
Доступность — бездепозитные бонусы в казино почаще всего предоставляются свежим игрокам, но бывают случаи, когда приз все получить и действующие клиенты.Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в личный офис, дабы забрать благотворительные вращения с вейджером х40; Основное различие что, нет, собственно для получения бездепа нужно пополнять баланс в казино. Но считая сего, есть ряд прочих отличий:Бездепозитные призы — это презенты от казино вид бонусных средств либо фриспинов для игровых автоматов, коие начисляются на акк игрока последствии процедуры регистрации на сайте заведения. Для получения таких поощрений депо не требуется. <a href=http://hardstorecr.com/mybb/member.php?action=profile&uid=172851>http://hardstorecr.com/mybb/member.php?action=profile&uid=172851</a> Не рекомендуем опрометью голову хвататься за различные предложения получения средств без инвестициям. Вполне вполне, собственно бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на 1-ый взор. Альтернативой является казино приз за депо. Мы предлагаем вам пару советов, благодаря коим у любого игрока несомненно вероятность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег:Oтыгpaть бонус с указанным вeйджepом, для этого необходимо сдeлaть cтaвoк нa cумму, превышающую объем бонуса в несколько один. 1×slos регистрация в 1×slots casino
1×slots зеркало
Выиграть реальные средства в казино не пополняя счет – сложно, хотя возможно. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными призами и начните играть на бонусные свои. По статистике в 10-ти заведений можно заработать маленькую необходимую средств за счет бонусных средств. Во время игры в казино, выигрыши, приобретенные благодаря бесплатным призовым фондам, суммируются и срабатывают в общую сумму для отыгрывания. Однако, случае фортуна улыбнется и выйдет отыграть все призы, игровое заведение гарантированно допустит вывести денежные средства. Сумма вывода несомненно зависеть от лимита, утвержденного именно в этом учреждении. Поэтому, пристально надо(надобно) читать управляла выдачи анлимитных депо.Бонусные деньги – маленькая сумма денег для старта в новеньком казино. На бонусные деньги, обычно разрешается играть во все забавы, кроме слотов с прогрессивным джекпотом и игр из раздела live casino. Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке необходимо пополнить счет в казино. Для депозитных бонусов, эта процедура не нужна, например как депозит теснее сделан. 1×slots casino регистрация 1×slotscasin online <a href=https://hikvisiondb.webcam/wiki/%D0%9E%D0%B1%D1%83%D1%87%D0%B5%D0%BD%D0%B8%D0%B5_%D0%9D%D0%B0_%D0%9F%D1%80%D0%B0%D0%B2%D0%B0>https://hikvisiondb.webcam/wiki/%D0%9E%D0%B1%D1%83%D1%87%D0%B5%D0%BD%D0%B8%D0%B5_%D0%9D%D0%B0_%D0%9F%D1%80%D0%B0%D0%B2%D0%B0</a>
1×slots регистрацию процедура займет всего лишь
Да, у бесплатных бонусов есть дефекты. Прежде всего, они обычно маленькие. Кроме того, обстоятельства вейджера по ним практически жесткие. Но все неименье риска делает их довольно красивыми для посетителей. <a href=https://forum.qwas.ru/post32212.html#p32212>https://forum.qwas.ru/post32212.html#p32212</a> 1×slot зеркало рабочее этих способов предполагает регистрацию Мы собрали и опубликовали список лучших бездепозитных казино с призами за регистрацию, которые гарантируют щедрые выигрыши и моментальные выплаты.
<b>Смотреть еще похожие новости:</b>
<a href=http://griffhunter.com/boards/viewtopic.php?p=480501#p480501>1×slots рабочее зеркало</a>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=351042>1×slots сайт</a>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=340603>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вейджер в переводе с английского означает «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша полученного приза, в нашем случае бездепозитного. Число ставок роли не играет — принципиально только набрать сумму, пропорциональную сумме поощрения.
#3402 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Артемий Панарин (хоккей) casino betting <a href=https://www.ossetia.tv/>реального казино</a> casino betting порно с Аделия Петросян (фигурное катание) <a href=https://m.repost.news/>casino betting</a> порно с Васильева Татьяна Викторовна букмекерская контора скачать приложение Радченко Светлана Юрьевна порно pin up casino скачать человек казино 7k casino официальный сайте букмекерской конторы фонбет
DiskiPlus порно с Дронова Александра Викторовна DiskiPlus casino сайты <a href=https://www.diskiplus.ru>DiskiPlus пин up casino</a> DiskiPlus pin up casino DiskiPlus casino андроид <a href=https://diskiplus.ru>DiskiPlus casino приложения</a> DiskiPlus пин ап casino pin DiskiPlus казино фильм DiskiPlus порно с Кирьянова Дарья Борисовна DiskiPlus казино онлайн DiskiPlus песня казино DiskiPlus порно с Гатагова Ольга Анатольевна DiskiPlus porno Игорь Акинфеев (футбол)
#3403 Charlesgunnyhttp://filmkachat.ru
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Подтверждение персональной инфы. Все казино просят от посетителя пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и присутствие у пользователя иных аккаунтов (мультиаккаунт запрещен). <a href=http://filmkachat.ru/>1×slots на любой вкус как пройти регистрацию</a> <a href=https://guides.co/g/5942/504055>https://guides.co/g/5942/504055</a> Изучить управляла и условия получения бездепозитных бонусов казино, Вы сможете у нас на сайте в разделе с призами или на официальном сайте избранного Вами казино. Если возможности найти необходимую информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал либо по электронной почте. онлайн казино 1×slots <a href=http://www.taroko.org/taroko/forums/member.php?action=profile&uid=462>http://www.taroko.org/taroko/forums/member.php?action=profile&uid=462</a> Для получения предоставленных бонусов вам понадобиться — ПК либо мобильное устройство, и остальное дело за малым.
1×slots официальный demo регистрация в 1×slots casino
На безвозмездные призы онлайн-казино почти практически распространяется ограничения по стране проживания посетителей. Даже если вас разрешено раскрывать счет и играть на средства в заведении, это еще не означают, что вам доступны not the slightest down payment bonuses.В каждом казино с бездепозитным бонусом учтены вейджеровые условия. Это один-единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) устроить определённое число ставок. Чем круче бонус, тем труднее выполнить условия, и напротив. <a href=https://www.mojaremiza.pl/forum/%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-1×slots-0>рабочее зеркало 1×slots</a> 1×slots сайт Теоретически, к бесплатным призам возможно отнести например нарекаемые фриспины. Напомним, речь идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, поэтому собственно они предоставляют только возможность делать ставки.При отыгрыше бездепов, учитывайте временные ограничения. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток. <a href=http://www.rgb-muelheim.de/buch/scarbook.php>http://www.rgb-muelheim.de/buch/scarbook.php</a> 1×slots регистрация на 1хслотс Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы которые появляются у новичков.
1×slots регистрация на официальном сайте
Но не думать, что снабжая пользователей такими призами, казино занимается спонсированием. Ведь размеры вознаграждений, главном, не немалые (средним размером от 5 до 20 $). И на эти средства налагаются определенные обстоятельства и ограничения, неотклонимые к исполненью игрока, если в последствии он вожделеет получить все свои выигранные финансы.Для выбора азартного заведения Вы можете воспользоваться списком наших казино с призами за регистрацию. На нашем сайте мы выпустили список бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, что часть бонусов эксклюзивные и доступны только для посетителей нашего вебсайта по-специальному промо-коду либо по уникальной ссылке. Кроме такого, для каждого бонуса мы подготовили доскональный обзор, каком Вы узнаете как получить и отыграть поощрение и как исключить свой выигрыш с бездепа. <a href=https://exsite.su/user/Davidcoado>https://exsite.su/user/Davidcoado</a> Но а случае вы теснее профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в онлайн казино; 1×slots регистрация 1×slotscasino09k online
1×слотс казино
Зарегистрируйтесь. Для регистрации чаще всего достаточно установить собственный номер телефонного и почтовый адрес, в чего установить полученный код из СМС. Возможно, требуется указать промокод. В правилах промоакции несомненно написано, где его хотелось вводить. Иногда это хотелось делать при регистрации, время — теснее последствии творенья собственного кабинета, на отдельной странице.На безвозмездные призы онлайн-казино практически всегда распространяется ограничения по стране проживания клиентов. Даже в для разрешается открывать счет и выступать на деньги в заведении, это еще не значат, собственно вам доступны no deposit bonuses. Таким образом, заведение пытается показать себя своим вероятным игрокам, а такой рекламный ход как казино бонус без депозита за регистрацию завлекает очень много внимания к игорному заведению и обеспечивает неизменный поток новых посетителей и грядущих посетителей игрового онлайн клуба. 1×slots зеркало которую указывали при регистрации кстати <a href=http://forums.ago.ir/member.php?action=profile&uid=3179>http://forums.ago.ir/member.php?action=profile&uid=3179</a>
1×slots зеркало быструю регистрацию а также мгновенное
Для вывода средств бонус нужно будет отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариантами отыгрыша бездепозитного бонуса до его получения, чтобы избежать конфликтных ситуаций.Акции, посвященные календарным праздничным, посещают рассчитаны как на всех юзеров, например и на категории: примеру, презент на 8 марта девушкам-игрокам или мужчинам на 23 февраля. Иногда у посетителей вебсайта все появиться проблемы при активации полученного промо-кода. В этих случаях, нужно обратиться за поддержкой в службу поддержки «Support». Для получения ответа, обязательно указывается определенная причина воззвания и подтверждается информация дополнительными экрана. Если сложилась неоднозначная обстановка, практически можно адресоваться к главному регулятору или контролирующему органу, выдавшему этому заведению лицензионный документ. <a href=http://www.bxbshop.co.kr/bbs/board.php?bo_table=free&wr_id=205566>http://www.bxbshop.co.kr/bbs/board.php?bo_table=free&wr_id=205566</a> 1хслотс рабочее зеркало на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=271750>1×slots зеркало</a>
<a href=http://board.eternityrpc.com/thread-7-post-17269.html#pid17269>1×slots на любой вкус как пройти регистрацию</a>
<a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1хслот официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Способы получения бездепа различаются в зависимости от облика приза, который приглянулся игроку. Но для или надо(надобно) быть зарегистрированным в законном онлайн-казино и подтвердить свою лицо. В общем виде пошаговая инструкция для получения бездепозитного бонуса смотрится например:
#3404 Charlesgunnyhttp://filmkachat.ru
1хслотс мобильная версия зеркало
Фриспины начисляются по конкретной ставке. После их активации игроку необходимо запустить разъем и увериться, собственно в нем отображаются благотворительные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода последствии отыгрыша определяется оператором и редко превышает 5 000 руб.Для верификации номера телефона, в личном профиле изберите опцию „Подтвердить номер аппарата“ и введите в отвечающее фон код, полученный в sms-сообщении. <a href=http://filmkachat.ru/>1 xslots рабочее зеркало</a> Как верховодило, при выводе финансов, от играющего требуется только устроить минимальный лепта для того, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом личный счет.При регистрации следует свидетельствовать лишь достоверную информацию. Когда учетная запись будет активна, замечен доступ в Личный кабинет. В нем можно избрать еденицу, ввести промокод и узнать доскональные управляла получения и отыгрыша бездепа. Краткая информация об промоакции нередко присутствует именно на регистрационной форме. <a href=https://app.pipefy.com/organizations/301582382/interfaces/cee4daae-995f-468b-8be8-cb9e89cd051f/pages/7519bd40-b099–409e-bcf8–45325dc0e875>https://app.pipefy.com/organizations/301582382/interfaces/cee4daae-995f-468b-8be8-cb9e89cd051f/pages/7519bd40-b099–409e-bcf8–45325dc0e875</a> Теоретически, к безвозмездным призам можно отнести так называемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, поэтому собственно они деют только возможность создавать ставки.Также, ситуации необходимо подтвердить собственный номер аппарата, для этого код, приобретенный в смс-сообщении от клуба установить в особое поле в собственном офисе игрока. 1х слот 1хслотс регистрация перейти на 1×slots <a href=http://mclassic.com.hk/home.php?mod=space&uid=330033>http://mclassic.com.hk/home.php?mod=space&uid=330033</a> Важно, убедитесь что, собственно ранее не регистрировались в выбранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи.Еще одно условие касается объемов ставки. Операторы устанавливают максимальную необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном офисе. При превышении лимита есть риск лишиться бонуса. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, заказчик возможность столкнуться с запретом ставить фишки на шансы.
1×slots официальный demo регистрация в 1×slots casino
1×slots актуальное зеркало Шаг 4. Активация. Внимательно исследуйте обстоятельства, информацию по лимитированиям и сроке деянья бонусного предложения. Разобравшись с правилами, можно активировать приз в личном офисе (время ? с внедрением промокода) или по запросу в саппорт. <a href=https://gamma.app/docs/Mastering-Exterior-Visualization-Techniques-Tools-and-Trends-qriva2zsva45tfp>https://gamma.app/docs/Mastering-Exterior-Visualization-Techniques-Tools-and-Trends-qriva2zsva45tfp</a> 1×slots casino зеркало рабочее Наши специалисты изучают обстоятельства промоакции, этого в ручном режиме проверяют их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и другие параметры. Мы не рекламируем казино, а даем игрокам информацию о лучших из их.
1х слот 1хслотс регистрация перейти на 1×slots
Размер бонуса. В качестве бездепов обычно начисляют очень суммы, а когда речь о бонусах за депо, которые начисляются в процентном соотношении от суммы пополнения, то некоторые казино шансы презентовать игроку до 2000$. <a href=https://maps.google.dj/url?q=https://doctorlazuta.by/>https://maps.google.dj/url?q=https://doctorlazuta.by/</a> Бездепозитные призы — это подарки от казино в виде бонусных средств либо фриспинов для игровых автоматов, которые начисляются на аккаунт игрока после процедуры регистрации на сайте заведения. Для получения этих поощрений депозит не требуется. 1хслотс официальный сайт зеркало Для получения бонуса надо(надобно) пригласить в игру свежего клиента. Казино начисляет пригласившему фиксированный процент от взносов приглашённого повторяющий бонуса: чаще всего его объем не превышает 10%. Срок деяния приза как не выше месяца: пригласивший получает бонус в зависимости от проигранных ставок приглашённого в первый месяц игры.
1×slots казино мобильная версия
При регистрации стопам указывать лишь достоверную информацию. Когда учетная запись будет активна, будет доступ в Личный офис. В нем возможно выбрать валюту, установить промокод и разузнать подробные верховодила получения и отыгрыша бездепа. Краткая информация об акции нередко присутствует непосредственно на регистрационной форме.Прямо данный заберите благотворительные вращения за регистрацию без депо и начинайте собирать призовые комбинации из-за крупных выигрышей! <a href=https://forum.vn.ua/showthread.php?p=3271783#post3271783>1×slots официальный demo регистрация в 1×slots casino</a> 1×слот регистрация в 1×slots casino <a href=http://melitopol.com.ua/forum/profile.php?mode=viewprofile&u=26244>http://melitopol.com.ua/forum/profile.php?mode=viewprofile&u=26244</a>
1×slots официальный demo регистрация в 1×slots casino
Приветственный бездеп предоставляется хоть игроку только один один. Казино дерутся с так именуемыми бонусхантерами (от англ. Bonus Hunter — доброволец за бонусами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения подарка. Исключить подобные действия дозволяет верификация данных. Администрация вправе востребовать у посетителя доказать персональные данные, указанные при регистрации. Приглашаем делиться воззреньями о бонусах. Это поможет иным пользователям подбирать более выгодные предложения.Бездеп с фриспинами может обхватывать всю коллекцию игр на сайте или разработки 1-го провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш имеет быть выведен последствии такого, как пользователь отыграет эту сумму. Возможность оценить глубокий функционал слотов — основное достоинство этой разновидности. Игроку становятся доступны что, эти функции, коие отсутствуют в демонстрационном режиме, а вероятность выиграть реальные средства прибавляет ярких азартных ощущений. <a href=http://0018688.com/home.php?mod=space&uid=12513>http://0018688.com/home.php?mod=space&uid=12513</a> 1×slots официальный сайт скачать на айфон К раскаянью, нет. Почти все казино, просят внесение но бы одного минимального депо для вывода выигрыша с бездепозитного приза. Также учитывайте, собственно исключить деньги разрешено только на что, эту платежную систему, с которой был изготовлен депо.Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.
<b>Смотреть еще похожие новости:</b>
<a href=https://forums.scar-divi.com/topic/879940–1×slot-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D0%B8-%D0%BD%D0%B0-%D1%82%D0%B5%D0%BB%D0%B5%D1%84%D0%BE%D0%BD-%D0%BF%D1%80%D0%B8%D0%B4%D0%B5%D1%82/>1×slot зеркало рабочее регистрации на телефон придет</a>
<a href=http://brilliance.ru/forum/viewtopic.php?f=6&t=43018>1×slots официальный demo регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных требований, не обязательной верификации. Если на сайте предусмотрена неотъемлемая процедура доказательства личности, то исключить выигрыш удастся лишь последствии ревизии данных. Приготовьтесь наполнить анкету и выслать в техподдержку документ, подтверждающий лицо. Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция содержит доскональные управляла, ссылка на которые обыкновенно содержится в промообъявлении. В их указываются лимиты, вейджер, список доступных игр. Если оператор скрывает данные о предложении, то воспользоваться им не стоит.
#3405 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на сайте
Рассмотрим принцип его деянья на случае. Допустим, вы зарегистрировались и получили $10 no down payment bonus с вейджером х50. Это значит, что выигранные средства можно несомненно выводить не ранее, чем последствии такого, как общая сумма ставок достигнет $500. <a href=http://filmkachat.ru/>1×slot зеркало</a> Бездепозитный бонус казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби избранного заведения, определится в выборе игр и проверить качество работы службы поддержки. Довольно часто, начиная игровой процесс, игрок уже отказывается останавливаться и проделывает реальный лепта. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть даром вероятно как один таки с бонусом за регистрацию без надобности вносить депо.Изучить управляла и условия получения бездепозитных призов казино, Вы сможете у нас на сайте в разделе с призами либо на официальном сайте избранного Вами казино. Если не можете найти нужную информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электрической почте. <a href=https://www.exoltech.ps/blogs/post/89893>https://www.exoltech.ps/blogs/post/89893</a> Но эти рамки не смущают и хайроллеров, что коэффициенты на слотах дозволяют рассчитывать на солидные выигрыши, ну неких автоматах разыгрывается передовой джекпот. 1×slots официальный сайт зеркало <a href=https://mysocialclub.ru/user/AshleyInvow/>https://mysocialclub.ru/user/AshleyInvow/</a> Можно ли в одном интернет казино получить больше одного бонуса за регистрацию? Нет, например как в любом интернет казино есть верховодила, к которым надо(надобно) придерживаться, не делать два аккаута для получения бонусов, иначе будет блокировка обоих аккаутов, не пытайтесь обмануть онлайн казино, приз за регистрацию выдаеться один один 1 лицу.
1×slot регистрация
1×slots бонус за регистрацию <a href=http://www.italian-style.ru/Nasha_kompanija/forum/?PAGE_NAME=profile_view&UID=51615>http://www.italian-style.ru/Nasha_kompanija/forum/?PAGE_NAME=profile_view&UID=51615</a> Этот тип приза будет добавлен на Ваш акк последствии удачной процедуры регистрации с внедрением номера аппарата. Если выбрать другой способ сотворения учетной записи, бездеп не будет добавлен на Ваш аккаунт.Некоторые казино могут предлагать клиентам бездепы за свидетельство номера либо почты или репост на страницу в соц сетях. 1× slots casino зеркало Некоторые сайты, этого чем обмануть регистрацию игроков, предлагают ответить на некоторое базисных вопросов. Цель проведения похожей викторины – выявить случайных людей, коие не имеют представления о покере, и не разрешить получения ими бонусов. Если гость уже играл в казино, то ответить на полтора десятка несложных вопросов будет несложно. Очень нередко, ответы можно отыскать на официальных веб-сайтах этих учреждений.Каждый новичок и умелый игрок мечтают скоро стартануть и начать делать настоящие ставки. Для сего довольно забрать подарок, за который не нужно платить. В зависимости от игровой платформы, нужно создать профиль, привязать email или телефонный. После этого администрация начисляет щедрое вознаграждение в виде бесплатных вращений либо виртуальных кредитов.
1× slots официальный
Осталось выбрать казино с призом за регистрацию и создать профиль. После активации презента выигрыш в от Фортуны и навыков. <a href=http://intentionalpress.com/author/doctorlazutaei/>http://intentionalpress.com/author/doctorlazutaei/</a> В перечне притязаний к отыгрышу часто присутствуют лимиты на ставки при забаве на собственные средства. Так, в отыграть нужно 30 000 руб., а предельная сумма ограничена 30 рублями, то вертеть барабаны светит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам действия акции. зеркло казино 1×slots 4. Заберите презент. Чаще всего приз активизируется незамедлительно после регистрации. Но случаются истории, когда нужно забежать в индивидуальный кабинет либо написать в службу поддержки.
1хслотс зеркало
Фриплей-бонусы встречаются только в некоторых клубах. Они зачисляются незамедлительно в творения профиля и активны недолговременное время. Если не успеете истратить средства, они попросту сгорят. Касаемо медли, правило призы активны протяжении часа. Вейджер в переводе с английского значит «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша приобретенного бонуса, в нашем случае бездепозитного. Число ставок большого — принципиально только набрать необходимую, пропорциональную сумме поощрения.Для того, чтобы отыграть сумму вашего бездепозитного бонуса надо(надобно) выполнить обстоятельства вейджера. Очень нередко фриспины даются на конкретные слоты (book of ra, book of dead, book of sun), подбирайте разъем для по, они очень красочные и высококачественные. Бездепозитные приз может быть валютным например и в виде фриспинов на слоты Изучить управляла и обстоятельства получения бездепозитных призов казино, Вы сможете у нас на сайте в разделе с призами или на официальном сайте выбранного Вами казино. Если имеет отыскать необходимую информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал или по электрической почте. 1× slots сайт <a href=http://gogotire.co.kr/bbs/board.php?bo_table=free&wr_id=1875052>http://gogotire.co.kr/bbs/board.php?bo_table=free&wr_id=1875052</a> Далее потребуется отыграть вагер и вывести выигрыш. Игрокам без навыка крупно подфартило, есть получить 10-ки даров за одну регистрацию. Если не сумели получить Бездепозитный приз, не волнуйтесь. Обратитесь в онлайн чат, оператор поможет решить проблему.
1хслотс 1хслотс регистрация перейти на 1×slots
В зависимости от интернет заведения любой из них может для предложить как бездепозитные деньги, например и бездепозитные фриспины, которые в удачной регистрации упадут вас на ваш игровой баланс.Первый возникающий вопрос, это, для выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают новых игроков. Последним проще начать игру на средства с подарка за регистрацию. Им не нужно пополнять баланс и тратить личностные средства. Новички получают безвозмездные спины или средства на счёт. С их поддержкой знакомятся с игровым ходом, крутят слоты и делают ставки в рулетке. Например, игрок получил 500 руб. При творении аккаунта и должен отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 рублей, понадобится устроить 875 спинов для полного отыгрыша.Подарки на определенные даты выделяются критериями получения. Если поощрение начисляют игроку на денек рождения, то сумма обычно зависимости от общего размера депо последний год. <a href=https://kosmetikinstitut-milla.de/user/WalterPak/>https://kosmetikinstitut-milla.de/user/WalterPak/</a> Промокод – определённая комбинация знаков, которую необходимо ввести в отвечающее поле при твореньи учетной записи либо активировать в личном профиле игрока в разделе с призами.При забаве на бонусные свои запрещается выступать в игровые автоматы с современным джекпотом и игры из радела live casino. Кроме такого, кое-какие казино выделяют бездеп на один или несколько конкретных слотов, и в иных забавах Вы не сможете на их выступать. 1×slots рабочее зеркало В бонусную программку многих операторов входят регулярные бездепы. Это пожизненные акции, поощряющие интенсивных постоянных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают неизменные бонусы без депо в обмен на скопленные баллы лояльности.Так что приготовьтесь дать конфиденциальную информацию (пол, возраст, государство проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает менее суток, в чего получится беспрепятственно выводить солидные выигрыши.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.oursson.ru/viewtopic.php?f=2&t=14346>1×slots сайт</a>
<a href=https://www.kfz-gringer.at/index.php/forum/in-neque-arcu-vulputate-vitae/78054–1×slots#77818>1×slots официальный сайт зеркало</a>
<a href=https://www.katzenforum.at/forum/media/users/jamesagema.16012/>1х слот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, которое возможно предназначить игре в казино.
#3406 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino daddy 1go casino <a href=https://rhymes-punches.com/>casino зеркало сегодня рабочее</a> ап казино casino daddy <a href=https://www.ossetia.tv/>букмекерская контора фонбет</a> казино без букмекерская контора ставки казино гта 5 казино фильм смотреть онлайн porno Александра Степанова, фигуристка bitz casino 1×bet зеркало рабочее на сегодня 1×bet xyz
DiskiPlus порно с Владимир Минеев (ММА) DiskiPlus порно с Федор Чалов (футбол) <a href=https://diskiplus.ru>DiskiPlus 1×bet официальный сайт 1×bet xyz</a> DiskiPlus где казино DiskiPlus балтбет букмекерская контора <a href=https://diskiplus.ru/>DiskiPlus 1×bet рабочее</a> DiskiPlus Семёнова Татьяна Владимировна порно DiskiPlus букмекерская контора скачать приложение DiskiPlus online casino 7k DiskiPlus порно с Александр Большунов (лыжные гонки) DiskiPlus где казино DiskiPlus казино фильм DiskiPlus Львова-Белова Мария Алексеевна порно
#3407 Charlesgunnyhttp://filmkachat.ru
1×slots быструю регистрацию а также мгновенное
Ознакомьтесь с нашим списком наихороших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего перечня и получите бездеп сразу. Хватайте наихорошие благотворительные предложения ниже и выигрывайте большие средства, не рискуя! <a href=http://filmkachat.ru/>1×slos регистрация в 1×slots casino</a> <a href=https://slides.com/archicgi-com/essential-electronic-components-for-modern-industrial-applications/scroll>https://slides.com/archicgi-com/essential-electronic-components-for-modern-industrial-applications/scroll</a> 1× slots зеркало <a href=http://lider1c.ru/communication/forum/messages/forum3/message12395/9460-nuzhna-li-viza-v-polshu-dlya-rossiyan?result=new#message12395>http://lider1c.ru/communication/forum/messages/forum3/message12395/9460-nuzhna-li-viza-v-polshu-dlya-rossiyan?result=new#message12395</a> При поддержки такого одобрения оператор может также привлекать посетителей, коие раньше показывали активность на веб-сайте, хотя по некий основанию перестали играть. В данном случае промокод высылается пользователю по электрической почте или в виде SMS.
1×slots регистрация на официальном сайте
Обыкновенные бездепозитные призы в размере от 3-х до двадцати долларов созданы для того, чтобы в игры заходили все новые и свежие игроки. Здесь, всего, будет ограничение на максимальный выигрыш. Важно, дабы перед минимальным вкладом был отключен приз за первое пополнение счета, и игры не попадет на повторный вейджер. 1×slots casino регистрация на сайте Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации презента необходимо подтвердить электрическую почту и привязать телефон; <a href=http://led119.ru/forum/user/99189/>http://led119.ru/forum/user/99189/</a> 1хслотс официальный сайт зеркало При отыгрыше бонусных средств, нужно учитывать срок деяния приза и время, которое дается на отыгрыш. По истечению заявленного медли, не отыгранный бонус будет аннулирован.
1×slots зеркало сайта
После потребуется привнести идентификационный платёж. Это пугает новичков больше всего. Нужно сделать минимальный депозит в 100–500 руб. Таким образом служба безопасности увериться никаких, собственно платёжный метод принадлежит Вам. Данная процедура необходима для обеспечения безопасности игровых счетов. Пример, Ваш аккаунт взломают и выведут свои на собственный кошелёк. Будет очень неприятно. Поэтому верификация платёжной системы, это важный момент. Промокод – определённая комбинация знаков, коию необходимо ввести в отвечающее поле при твореньи учетной записи либо активировать в личном профиле игрока в разделе с призами.Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. <a href=https://rus-crafting.ru/index.php?subaction=userinfo&user=GeraldSew>https://rus-crafting.ru/index.php?subaction=userinfo&user=GeraldSew</a> На бесплатные бонусы онлайн-казино практически постоянно распространяется лимитирования по стране проживания клиентов. Даже в для разрешается раскрывать счет и выступать на средства в заведении, это еще не значат, что вас доступны not the slightest down payment bonuses. 1×slots актуальное зеркало
1×slots регистрация 1×slots review live
Промообъявления от казино не дают реальной картины и направлены на вербование внимания пользователей. Понять, как высоки шансы остаться в плюсе, дозволит личный тест условий предложения: 1×slots зеркало <a href=http://infomts.ru/index.php?subaction=userinfo&user=zealousarbiter6>http://infomts.ru/index.php?subaction=userinfo&user=zealousarbiter6</a>
1×slots официальный сайт, скачать
Объективные – размер приза, коэффициент и обстоятельства вейджера, надобность внесения депо для вывода денег; Бездепозитный приз казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в этом и заключается основное различие. <a href=http://ternovka4school.org.ua/user/RaymondTah/>http://ternovka4school.org.ua/user/RaymondTah/</a> В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и в случае спорных ситуаций нет способности куда-то пожаловаться и доказать собственную правоту.Хотя безвозмездные призы начисляются без депо, не исключено, собственно для придется вносить средства. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь после того, как новый заказчик первый пополнит игровой счет. 1×slots акции Бездепозитные бонусы – это самая небезинтересная и более перспективная промоакция интернет-казино. Они числе лучше фри-спинов, поэтому что выплаты в бесплатных вращениях не гарантированы, ведь композиции на барабанах игрового аппарата имеют не сложиться.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.lightknotes.com/MyBB/showthread.php?tid=201439>1×slots зеркало регистрацию более популярный вариант это</a>
<a href=https://praisenpray.org/forums/showthread.php?tid=102077>скачать 1×slots на андроид мобильная версия</a>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=271970>1×slots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Популярность интернет казино растёт и всё больше пользователей начинают проявлять азартными играми. Бездепозитные бонусы 2022 года, это оригинальные подарки за регистрацию. С их поддержкою свежие игроки все получить безвозмездные вращения либо деньги на баланс за одну регистрацию. С свет игорных заведений в онлайне, бездепозитные бонусы стали знаменитейшим методом привлечения игроков. Подобные промоакции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш вебсайт собрал превосходнейшие предложения из онлайна на 2022 год. Воспользуйтесь каким презентом и сможете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша нужно выполнить обстоятельства. Бездепозитные бонусы казино за регистрацию в 2022 году — это вероятность поиграть за счёт заведения. Казино даёт клиенту шанс пользоваться определённой суммой либо числом даровых вращений без внесения депо. Не путайте деморежим с реальной игрой без необходимости внесения депозита.
#3408 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino betting букмекерская контора официальный сайт скачать <a href=https://rhymes-punches.com/>1×bet xbet</a> 1×bet приложение cat casino <a href=https://t.me/vchkogpu_ru>1×bet рабочее на сегодня</a> cat casino Окладникова Ирина Андреевна порно casino betting почему в казино не бывает настенных часов порно с Алина Загитова, фигуристка Преподобная Надежда Александровна порно unlim casino
DiskiPlus 1×bet 1 DiskiPlus порно с Федор Чалов (футбол) <a href=https://diskiplus.ru>DiskiPlus porno Юлия Канакина, скелетонистка</a> DiskiPlus pin up casino зеркало DiskiPlus Окладникова Ирина Андреевна порно <a href=https://diskiplus.ru/>DiskiPlus porno Алена Косторная (фигурное катание)</a> DiskiPlus казино в россии DiskiPlus ramenbet casino DiskiPlus казино вход DiskiPlus new casino DiskiPlus Набиуллина Эльвира Сахипзадовна порно DiskiPlus порно с Матвей Сафонов (футбол) DiskiPlus 1×bet слоты 1×bet xyz
#3409 Charlesgunnyhttp://filmkachat.ru
1х слот регистрация в 1×slots casino
Акционные предложения от казино есть в разных форматах. Часто призы даются в мена на депозит. Игрок вносит платеж и получает деньги, бесплатные вращения и поощрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — картина бонуса, который гарантирован за выполнение определенных деяний на веб-сайте:Это тоже бесплатные финансы, коие поступают на аккаунты новоиспеченных игроков после регистрирования. А особенность таких бонусов состоит в, собственно обретенные деньги обязательно следует использовать в продолжении назначенного медли. <a href=http://filmkachat.ru/>1×slots официальный demo регистрация в 1×slots casino</a> Автоматы непопросту числятся самым знаменитым азартным развлечением. Чтобы усвоить управление и правила, потребуется всего некоторое минут. Ваша задача устроить ставку, определить количество рабочих линий и возможно крутить барабан. Если на экране выпадет выигрышная композиция – вы выиграли! С этой задачей вас посодействуют управится бездепозитные призы казино.Бездепозитный приз казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в этом и содержится основное различие. <a href=https://mysupport.commscope.com/forums/general-discussion/2063eb83–2ed0-ef11–95f5–6045bdb3316f>https://mysupport.commscope.com/forums/general-discussion/2063eb83–2ed0-ef11–95f5–6045bdb3316f</a> Шаг 4. Активация. Внимательно изучите обстоятельства, информацию по лимитированиям и сроке действия бонусного предложения. Разобравшись с правилами, возможно активировать бонус в собственном кабинете (времени ? с внедрением промокода) или по запросу в саппорт.В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, нужно обратиться в саппорта через лайв-чат на веб-сайте казино. 1×slots сайт <a href=http://otdel.com.ua/index.php?subaction=userinfo&user=variousvalley44>http://otdel.com.ua/index.php?subaction=userinfo&user=variousvalley44</a> Однако в критериях скрываются «подводные камни», которые не позволят вывести солидную необходимую или же вы не успеете отыграть вейджер. Поэтому профессионалы советуют арестовать безвозмездные вращения за регистрацию в казино без депо, дабы поднабраться навыка и получить реальный шанс на победу.Бездепозитные призы казино это финансовая компенсация, предлагаемая пользователям на дармовой основе и возможность выступать в онлайн казино даром. Если сопоставлять их с поощрениями за вклад, в которых средства выдаются лишь потом начального пополнения счета, то бездепозитные гонорары получаются даром. То есть, играющий получает возможность делать ставки на теснее быть финансы, которые выдаст заведение, исполняя, при этом, обычные деянья, чтобы их извлечь (тут речь о регистрация, удостоверении личности с внедрением номера телефонного, дизайна заказы и т.д. ).
1×slots регистрация на 1хслотс
<a href=http://nacionrolera.org/foro/viewtopic.php?f=1210&t=351172>1 x slots casino</a> 1×slot зеркало рабочее этих способов предполагает регистрацию Шаг 4. Активация. Внимательно исследуйте обстоятельства, информацию по лимитированиям и сроке деянья бонусного предложения. Разобравшись с правилами, можно активировать бонус в собственном офисе (время ? с использованием промокода) либо по запросу в саппорт. <a href=http://zbgd.vip/home.php?mod=space&uid=531>http://zbgd.vip/home.php?mod=space&uid=531</a> В перечне притязаний к отыгрышу нередко наличествуют лимиты на ставки при ирге на собственные деньги. Так, случае отыграть нужно 30 000 рублей, а максимальная сумма ограничена 30 рублями, то вертеть барабаны предстоит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками условий по срокам деяния акции.В каждом казино с бездепозитным бонусом предусмотрены вейджеровые условия. Это один-единственный «подводный камень», который стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) устроить определённое число ставок. Чем круче бонус, тем сложнее выполнить обстоятельства, и наоборот. 1×slots казино мобильная версия
1×slot казино зеркало
<a href=http://kbszw.com/home.php?mod=space&uid=18180>http://kbszw.com/home.php?mod=space&uid=18180</a> Сразу в активации промокода можно пользоваться презентом. Как теснее упоминалось, бонусы посещают трёх видов – фриспины, кредиты и фриплей-бонусы.У любой игры средства требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система зачтет любую ставку. В рулетке и покере устроить это гораздо труднее. Именно потому так принципиально пристально разбирать условия получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой ирге, то новички просто «спустят приз на ветер». 1×slot официальный сайт
1×slots рабочее зеркало
<a href=https://acerfans.ru/user/JamesTed/>1×slots рабочее зеркало</a> Для отыгрыша приза казино обязывает игрока сыграть на сумму, в количество раз превосходящую сумму приобретенного приза — тут выгода компании явна.Главное преимущество спинов – возможность выучить различные слоты. Также получится насладиться бонусными раундами, испытывать фортуну в риск-туре и преумножить выигрыш за счёт особых символов. Однако не только игровой процесс заслуживает внимание, как лучше сосредоточиться на реальном выигрыше. При игре на бонусные средства воспрещается играть в игровые автоматы с прогрессивным джекпотом и забавы из радела exist casino. Кроме того, некоторые казино дают бездеп на раз либо количество определенных слотов, и в других играх Вы не можете на них играть.Получить Бездепозитный приз в интернет казино дело двух кликов. Другой момент, отыграть рекламную и соблюсти верховодила и обстоятельства отыгрыша. Под правилами подразумевается не только вагер, но и лимитирования по максимальной ставке. Мы понимаем, собственно в кино все ставят на зеро и выигрывают. Призываем не делать сходственного. Перед активацией приза прочтите управляла. Узнайте следующие факторы: Условия получения подарка, за регистрацию, за депозит и многое. Ограничения по наибольшей ставке. Зачастую не выше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на месте. Поэтому важно аристократия, в каких играх возможно совершать кратность денежного оборота. 1×slots регистрация на сайте 1×slots ru com <a href=http://www.ihaomeijia.com/home.php?mod=space&uid=135852>http://www.ihaomeijia.com/home.php?mod=space&uid=135852</a>
1×slots мобильная версия войти казино
Большинство клубов привлекают внимание игроков за счёт различных подарков. На 1 веб-сайтах возможно получить виртуальные кредиты, которые откроют доступ ко всему софту. На иных же, администрация предлагает благотворительные вращения для пуска топовых интернет слотов. Несмотря на различные акции, стоит выделить самые основные.В интернет-сети постоянно возможно отыскать списки наиболее знаменитых и гарантированных поощрительных программ от известных онлайн-казино. <a href=https://halqym.kz/user/KennethEnliT/>https://halqym.kz/user/KennethEnliT/</a> Некоторые казино могут предлагать клиентам бездепы за подтверждение номера или почты или репост на страницу в соц сетях.Максимальная ставка ? уточняется в валюте счета и ограничивает размер ставки за раз спин. В случае ее превышения приз может быть аннулирован. Также в правилах имеет содержаться запрет на размещение ставок определенного облика, например, по равным шансам в рулетке (то есть, на чет или нечет, красное либо черное и т.д. ). 1×slots подтвердит вашу регистрацию если говорить
<b>Смотреть еще похожие новости:</b>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=5&t=172283&p=239745#p239745>1×slots зеркало регистрация в 1×slots casino</a>
<a href=https://australianwinerytours.com/tours/showthread.php?tid=279353>1×slots зеркало рабочее</a>
<a href=https://bbs.sinbadgroup.org/index.php?xjkh-tampa-s-poster-pup-for-new-cancer-treatment.t48661.html/page-4224#post-210616>1 x slots casino</a>
<a href=https://persiankittencat.com/grey-persian-cats-unraveling-the-charm-of-these-feline-beauties/#comment-45970>1×slots зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Как лишь на виртуальном счету окажутся бонусные средства, поспешите отыграть вейджер. Сразу последствии сего можно забыть заявку на вывод выигрыша. Кредиты выгодно выделяются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом реальных средств и дают вероятность почувствовать азарт. Во-вторых – можно насладиться каждой азартной игрой доступной на веб-сайте. В вашем постановлении присутствуют автоматы, настольные прибавленье, видео-покер, Live-дилеры. Чаще всего интернет-казино предлагают бездепозитные бонусы новым пользователям. Эта промо-акция довольно эффективно завлекает начинающих, подталкивая их к открытию счета. Конечно, не все они становятся послушными посетителями, но сам факт регистрации аккаунта играет на руку заведению.
#3410 Charlesgunnyhttp://filmkachat.ru
сайт 1× slots casino
Прибывшие на аккаунт финансы бездепозитные бонусы предназначаются, в основном, только для новоиспеченных пользователей, которые ранее не имели личного аккаунта в данном казино. Исходя из этого, в раньше у игрока был сделан депо, то, по всей вероятности, у него больше не будет способности рассчитывать на получение такого бонуса в определенном заведении. <a href=http://filmkachat.ru/>1×slots зеркало подтвердит вашу регистрацию если говорить</a> 4. Заберите подарок. Чаще всего бонус активируется сразу после регистрации. Но посещают истории, когда нужно забежать в индивидуальный кабинет либо написать в службу поддержки. <a href=https://prlog.ru/analysis/astramedika.com.ua>https://prlog.ru/analysis/astramedika.com.ua</a> Активация денежного гонорары происходит механически после творения профиля или применения промокода. Иногда операторы предъявляют вспомогательные требования: подписаться на страницы казино в соц сетях либо на рассылку рекламных извещений, скачать и ввести вспомогательный софт и т.д.Но а если вы уже профи по интернет казино, кликаем на красную кнопку «Получить» и Вы автоматически перейдете в интернет казино; 1хлот регистрация в 1×slots casino <a href=http://azad.az/user/Kennethwhirl>http://azad.az/user/Kennethwhirl</a> Обычно бездепозитные акции от казино, приходят на эл. Почту в дни рождения либо дни. В неких интернет казино возможно адресоваться в чат и как постоянному игроку, вполне вам предложат бездепозитное предложение.
1×slots официальный сайт скачать на айфон
Некоторые веб-сайты, прежде чем провести регистрацию игроков, предлагают ответить на количество базовых вопросов. Цель проведения сходственной викторины – выявить случайных людей, которые не имеют представления о покере, и не допустить получения ими призов. Если посетитель теснее играл в казино, то ответить на полтора 10 простых вопросов несомненно нетрудно. Очень часто, ответы возможно найти на официальных сайтах данных учреждений. <a href=https://karakol.com.kg/user/Jameskef/>сайт 1× slots casino</a> 1× slots регистрация в 1×slots casino Некоторые клубы автоматически начисляют бонус на аккаунт игрока в выполнения условий получения, хотя посещают ситуации, когда бонус надо(надобно) активировать игроку самому. Есть некоторое способов активации приза:При маленький сумме бонуса рекомендовано играть по невысоким ставкам, а использовать наибольшие никакого лишь что, нет случае, в вейджер очень великий, а время на отыгрыш сильно ограничено. <a href=https://shanebhih56789.collectblogs.com/75681303/nude-ai-understanding-the-intersection-of-innovation-and-ethics-in-image-manipulation>https://shanebhih56789.collectblogs.com/75681303/nude-ai-understanding-the-intersection-of-innovation-and-ethics-in-image-manipulation</a> Наиболее известные гонорары между гэмблеров – бездепозитные бонусы казино. Это не изумительно, так возможно получить безвозмездные вращения или виртуальные кредиты, и при этом не придётся пополнять счёт, рисковать личностными деньгами. Удастся насладиться разнообразными весельями причем выиграть крупную сумму, избегая серьёзного риска.Изучить верховодила и условия получения бездепозитных призов казино, Вы можете у нас на веб-сайте в разделе с призами или на официальном сайте избранного Вами казино. Если не можете отыскать нужную информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал либо по электронной почте. 1 xslots рабочее зеркало
казино 1× slots официальный сайт
Можно ли зарабатывать на бездепозитных призах? Это не работа, здесь как повезет, если в любом предложенном безедепе, вы будете откручивать вейджер и выводить, это можно назвать везением, и дополнительной добавкой к вашему бюджету.В зависимости от интернет заведения каждый из них может вас предложить как бездепозитные средства, так и бездепозитные фриспины, которые последствии удачной регистрации упадут для на ваш игровой баланс. Чтобы получить вероятность исключить прибыль с бездепозитного бонуса в казино, необходимо выполнить ряд условий:Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных обстановок с казино, когда последствии отыгрыша бездепа вам не дадут вывести солидную необходимую выигрыша. <a href=http://app-vzlom.ru/index.php?subaction=userinfo&user=rareairport12>http://app-vzlom.ru/index.php?subaction=userinfo&user=rareairport12</a> 1×slots официальный регистрация Фриплей-бонусы встречаются только в неких клубах. Они зачисляются сразу в создания профиля и активны недолговременное время. Если не успеете истратить свои, они просто сгорят. Касаемо времени, как призы активны протяжении часа.Необходимость отыгрыша. Вейджер в этом случае выше, чем для призов за депо. И пока свои не отыграны, вывести их невозможно.
1×slots казино зеркало
Это также безвозмездные финансы, которые поступают на аккаунты свежеиспеченных компьютерные в регистрирования. А необыкновенность этих призов произведено никаких, собственно обретенные деньги непременно по применять в продолжении назначенного медли.Чаще всего применяются коды. Их нужно вносить в особые окна регистрационной анкеты, в речь идет о пригласительных бонусах, или в особом разделе собственного офиса игрока. Маркетинговая политического всех игорных интернет-клубов обязана носить разнородный характер. И если вознаграждения на депо служат для того, дабы провоцировать вносить депозиты и поощрять уже имеющих юзеров, то бездепозитный бонус в казино или приз за регистрацию в казино, прежде всего, рассчитан на расширение базы покупателей. 1хслот зеркало сайта <a href=http://kvner.ru/goto.php?url=http://3kon.ru/bitrix/redirect.php?goto=http://gold-sail.com.ua/bitrix/click.php?goto=https://telegra.ph/Osnovy-logiki-buhgalterskogo-ucheta-dlya-programmistov-i-buhgalterov-09–19>http://kvner.ru/goto.php?url=http://3kon.ru/bitrix/redirect.php?goto=http://gold-sail.com.ua/bitrix/click.php?goto=https://telegra.ph/Osnovy-logiki-buhgalterskogo-ucheta-dlya-programmistov-i-buhgalterov-09–19</a> Начнём с такого, что каждое промо за регистрацию предполагает некоторые условия. Бездепозитные призы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, необходимая для исполнения условий. Пример, возымели благотворительные вращения и выиграли с них 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 рублей, проигрышных либо выигрышных, неважно. После исполнения, бонусный баланс перейдёт на реальный и будет легкодоступным к выводу.Чаще всего интернет-казино предлагают бездепозитные бонусы новым юзерам. Эта промо-акция очень отлично завлекает начинающих, подталкивая их к открытию счета. Конечно, не все становятся преданными посетителями, но сам прецедент регистрации аккаунта играет на руку заведению.
1хслотс 1хслотс регистрация перейти на 1×slots
<a href=http://www.dbgjjs.com/home.php?mod=space&uid=458049>http://www.dbgjjs.com/home.php?mod=space&uid=458049</a> В онлайне количество знаменитых игорных площадок с привлекательными акционными услугами. Однако внимательно читать условия 10-ов предложений в надоест, ну и время отнимет количество. Поэтому наша команда подготовила ТОП-3 сайтов с наихорошими бездепозитными бонусами: 1×slots подтвердит вашу регистрацию если говорить
<b>Смотреть еще похожие новости:</b>
<a href=http://nexusroleplay.teamforum.ru/viewtopic.php?f=19&t=6088>1×slots официальный сайт мобильная версия</a>
<a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=94696>1×slots casino зеркало</a>
<a href=https://forumsleague.org/forum/viewtopic.php?f=70&t=19461&p=382181#p382181>казино 1×slots официальный сайт</a>
<a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
За вербование друга ? масштабах партнерской программки клиент получает вознаграждение за привлечение свежих юзеров. Похожим образом трудится третий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения клиента либо в связи с получения им VIP-статуса. Подарок предоставляется последствии обращения в поддержку и проверки.
#3411 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Евгения Медведева, фигуристка porno Юлия Пересильд <a href=https://specreporter.com/>казино рояль смотреть</a> мобильные букмекерские конторы скачать букмекерскую контору <a href=https://slon-ru.com/>бывшие казино</a> porno Алена Косторная (фигурное катание) спорт букмекерская контора лучшие бесплатные онлайн казино porno Марина Александрова водка казино casino riobet гта онлайн казино
DiskiPlus casino x DiskiPlus букмекерская контора <a href=https://www.diskiplus.ru/>DiskiPlus unlim casino</a> DiskiPlus Комарова Наталья Владимировна порно DiskiPlus 1×bet слоты 1×bet xyz <a href=https://diskiplus.ru/>DiskiPlus 1×bet зеркало xbet</a> DiskiPlus порно с Анастасия Потапова, теннисистка DiskiPlus Самойлова Алла Владимировна порно DiskiPlus скачиваемые казино DiskiPlus сайт 1×bet слоты DiskiPlus 1×bet casino DiskiPlus пин ап casino pin up top DiskiPlus 1×bet официальный xbet
#3412 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Дарья Клишина, легкоатлетка порно с Матвей Сафонов (футбол) <a href=https://www.ossetia.tv/>винлайн букмекерская контора официальный сайт</a> porno Ангелина Гончаренко, хоккеистка Крючкова Полина Викторовна порно <a href=https://krtka.info/>лучшие букмекерские конторы</a> porno Анастасия Янькова, боксерка 1×bet зеркало рабочее фреш казино пари букмекерская контора pin up casino buzz 7k casino сайт up casino скачать
DiskiPlus casino 7k сегодня DiskiPlus Фастова Елена Владимировна порно <a href=https://diskiplus.ru>DiskiPlus яндекс казино</a> DiskiPlus top casino DiskiPlus pin up casino buzz <a href=https://www.diskiplus.ru/>DiskiPlus леон букмекерская контора</a> DiskiPlus порно с Александр Головин (футбол) DiskiPlus pin up casino пин DiskiPlus часы казино DiskiPlus 1×bet официальный DiskiPlus вавада казино DiskiPlus официальные сайты казино DiskiPlus 1×bet скачать приложение
#3413 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее на сегодня
Обычно бездепозитные промоакции от казино, прибывают на эл. Почту в деньки рождения или праздничные. В неких онлайн казино возможно обратиться в чат и как постоянному игроку, вероятно для предложат бездепозитное предложение. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> <a href=https://www-ua.spyfu.com/overview/domain?query=playhouse.com.ua>https://www-ua.spyfu.com/overview/domain?query=playhouse.com.ua</a> Каждый новичок и профессиональный игрок мечтают быстро стартануть и начать создавать настоящие ставки. Для этого достаточно забрать презент, за кот-ый не нужно выплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email либо телефонный. После сего администрация начисляет щедрое вознаграждение повторяющий даровых вращений или виртуальных кредитов. 1×slots официальный зеркало <a href=http://bbs.xinhaolian.com/home.php?mod=space&uid=4145110>http://bbs.xinhaolian.com/home.php?mod=space&uid=4145110</a> Но такие рамки не смущают даже хайроллеров, потому коэффициенты на слотах дозволяют рассчитывать на солидные выигрыши, а неких автоматах разыгрывается прогрессивный джекпот.Размер бонуса. В качестве бездепов обычно начисляют небольшие суммы, а когда идет о бонусах за депозит, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино могут подарить игроку до 2000$.
1×slots зеркало регистрация
Мы собрали и выпустили список превосходнейших бездепозитных казино с призами за регистрацию, которые гарантируют щедрые выигрыши и моментальные выплаты.Размер призов чаще всего чисто условный и не выше 50 рублей. Приятно, но осязаемым бустом в игре навряд станет. <a href=http://board.eternityrpc.com/thread-7-post-17173.html#pid17173>1×slots зеркало рабочее</a> 1×slot зеркало рабочее этих способов предполагает регистрацию Для получения выигрыша требуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить определенную сумму, но уже из собственных денег. Она рассчитывается из общего объема выигрыша за всегда применения бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, случае пользователь выиграл 1000 руб., а множитель сочиняет х30, вывести деньги можно будет, сделав ставки на 30 000 руб. <a href=https://oraclenana.com/MYBB3/user-4734.html>https://oraclenana.com/MYBB3/user-4734.html</a> Бездепозитные призы — это презенты от казино повторяющий бонусных средств или фриспинов для игровых автоматов, которые начисляются на аккаунт игрока последствии процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депозит не требуется. 1× slots регистрация в 1×slots casino
1×slos регистрация в 1×slots casino
Этот тип бонуса несомненно добавлен на Ваш аккаунт после успешной процедуры регистрации с внедрением номера телефона. Если выбрать другой метод творенья учетной записи, бездеп не несомненно добавлен на Ваш акк.Как управляло, при выводе финансов, от играющего требуется лишь сделать наименьший лепта для того, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом индивидуальный счет. B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax <a href=http://nfb3806w.bget.ru/user/Jeffreybum/>http://nfb3806w.bget.ru/user/Jeffreybum/</a> На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению сего медли, Вы не сможете активировать и получить бездепозитный приз.Особую изюминку видео слотам придают уникальные знакы. С их появлением активизируются разные призы. Вы можете запустить вспомогательный уровень и прирастить сумму выигрыша. Есть знаки, которые заменяют ненадобные составляющие и сами создают выигрышные комбо. Не стоит забывать и про бонус-тур. После любого удачного спина есть шанс прирастить необходимую выигрыша в 2 либо четыре раза. 1×slots официальный сайт скачать
1×slots официальный зеркало
Наши специалисты исследуют условия акции, этого в ручном режиме проводят их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие параметры. Мы не рекламируем казино, а даем игрокам информацию о лучших из них.Фриплей-бонусы встречаются только в неких клубах. Они зачисляются незамедлительно после творенья профиля и активны недолговременное время. Если не успеете израсходовать свои, они просто сгорят. Касаемо медли, правило призы активны в течение часа. Вышеописанная причина и является главным интересным, в которого операторы отдают часть собственной выгоды на различные маркетинговые затраты и рекламные кампании. А наиболее действующим здесь будут играть непосредственно бездепозитные бонусы казино 2022 с выводом за регистрацию. Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в личный офис, дабы забрать благотворительные вращения с вейджером х40; 1×slots официальный сайт зеркало рабочее <a href=https://wiki.team-glisto.com/index.php?title=Benutzer:ElvinGreig341>https://wiki.team-glisto.com/index.php?title=Benutzer:ElvinGreig341</a> Если вы облюбовали для себя несколько брендов коие вас больше всего приглянулись, для постоянной забавы! Таких гемблеров казино очень любит и оценивает, за частую такие игроки становятся VIP игроками заведения, коим нередко поступают выгодные предложения в виде призов, например же туда входит и бездепозитные.
1×slots на любой вкус как пройти регистрацию
<a href=https://bridge-clip.ru/user/Scottgunda/>https://bridge-clip.ru/user/Scottgunda/</a> Баланс игрока пополняется на соответствующую необходимую. К ней используется вейджер, обозначенный в правилах акции. Вывести выигрыш возможно несомненно после того, как пользователь устроит требуемый объем ставок из собственных средств. В редчайших случаях бездеп работает в формате Free Play. На счет юзера зачисляется крупная сумма, и предоставляется небольшой срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по окончании этого периода сумма на счету несомненно превышать изначальную, то разность возможно несомненно исключить либо применять для последующих ставок. 1× slots зеркало Так что приготовьтесь дать конфиденциальную информацию (пол, возраст, государство проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает менее суток, после чего удастся свободно выводить солидные выигрыши.
<b>Смотреть еще похожие новости:</b>
<a href=http://theauction.com.au/my-account/>1×slots casino online регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Существуют казино с бонусом за регистрацию, в которых очень известны фриспины в онлайн казино потом регистрации в конкретных играх. Они встречаются в чаще даровых поощрений или классических призов в казино без вложений. Например, игрок регистрирует счет, на который начисляются безвозмездные забавы, приз за регистрацию повторяющий бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса игрок выигрывает настоящие деньги, которые в последствии можно успешно вывести из заведения на собственную платежную систему. То есть, все шансы вывести средства без рисков своими финансами. Регистрация, за в получит бонусы, займет минут, а спасибо этому возможно увеличить 5 евро поощрений до тыс. И без всяких проблем вывести их. Предложения с бездепозитными призами за регистрацию дозволяют новым заведениям привлечь аудиторию на свой сайт. А игроки к получают вероятность играть на настоящие деньги без депозита в казино и заработать небольшой стартовый капитал, который разрешается вывести на карту банка либо электронный кошелек.
#3414 Charlesgunnyhttp://filmkachat.ru
1 x slots casino
Верификация аккаунта. Лучше доказать личность сразу последствии регистрации, дабы позже не было заморочек с выводом средств. Верификация имеет проходить 2-мя способами: <a href=http://filmkachat.ru/>1×slots зеркало регистрация в 1×slots casino</a> Даже не выиграв крупную необходимую, игрок увлекательно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе превосходнейших акций легко. Достаточно регулярно учить список новых интернет казино с выводом бонуса без депо в данном разделе.Максимальный размер ставки, который нельзя превосходить пока бонус не несомненно всецело отыгран. В случае нарушения этого правила, бонус и выигрыш с него станут аннулированы. <a href=https://www.ourboox.com/bp/1641454/>https://www.ourboox.com/bp/1641454/</a> 1×slots зеркало этих способов предполагает регистрацию <a href=https://ruisoon.com/space-uid-39121.html>https://ruisoon.com/space-uid-39121.html</a> Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.Иногда у посетителей вебсайта могут появиться трудности, задачи, препядствия при активации приобретенного промо-кода. В этих случаях, нужно обратиться за поддержкой в саппорта «Support». Для получения ответа, непременно указывается определенная первопричина обращения и подтверждается информация дополнительными скриншотами. Если сформировалась спорная ситуация, постоянно можно обратиться к основному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ.
1×slots зеркало регистрацию более популярный вариант это
<a href=https://nauc.info/forums/viewtopic.php?t=20607620>зеркала 1×slots</a> рабочее зеркало 1хслотс <a href=https://www.ytdestek.com/members/23371.html>https://www.ytdestek.com/members/23371.html</a> Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депозит возможность отличаться до 30 дней.Более солидные предложения встречаются очень редко. Зачастую они доступны только VIP-игрокам. В остальных случаях им скорее сопутствуют довольно жесткие обстоятельства отыгрыша. Также возможны дополнительные условия прочие лимитирования, прописанные в условиях и положения бонусной программы казино. скачать 1×slots официальный сайт Активация происходит с помощью промокодов, которые вводятся в личном офисе после регистрации. Среди спецпредложений в списке Casino.ru содержатся эксклюзивные промокоды, коие доступны только посетителям портала. Другие способы начисления средств ? автоматическая активация сразу после творенья аккаунта и получение подарка по запросу в службу технической поддержки.
1×slots коды
Только выполнив все условия отыгрыша и дождавшись окончания ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить средства деньги.Вейджер менее х30–35 считается приемлемым. Опытные игроки утверждают, собственно с таким вейджером реально остаться в плюсе, случае верно подойти к выбору игрового аппарата. <a href=https://geekualizer.com/index.php?page=user&action=pub_profile&id=573>https://geekualizer.com/index.php?page=user&action=pub_profile&id=573</a> 1×slots зеркало В онлайне количество знаменитых игорных площадок с привлекательными акционными предложениями. Однако внимательно разбирать обстоятельства 10-ов услуг в надоест, да и время отнимет количество. Поэтому наша команда подготовила ТОП-3 сайтов с превосходнейшими бездепозитными призами:
1×slots акции
Существуют казино с бонусом за регистрацию, в очень знамениты фриспины в онлайн казино впоследствии регистрации в конкретных забавах. Они встречаются том почаще безвозмездных поощрений либо классических призов в казино без инвестициям. Например, игрок регистрирует счет, на который начисляются бесплатные игры, бонус за регистрацию в виде безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса геймер выигрывает истинные средства, которые в последствии возможно удачно вывести из заведения на свою платежную систему. То есть, есть шансы исключить свои без рисков собственными финансами. Регистрация, за компьютерные получит призы, займет пару минут, а благодаря данному возможно увеличить 5 евро поощрений до тысячи и без всяких заморочек вывести их.Бонус с зачислением денег на счет дает больше свободы деяний. Пользователь сам выбирает, каким образом распорядиться подаренными средствами. Здесь того могут действовать ограничения на перечень дешевых игр, хотя обычно эти рамки не так строги, как в рекламную с бесплатными вращениями. <a href=https://forum.graylite.com/viewtopic.php?p=351966#p351966>1×slots бездепозитный бонус за регистрацию</a> Например, игрок получил 500 рублей при разработке аккаунта и обязан отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 руб., потребуется сделать 875 спинов для полного отыгрыша. казино 1×slots официальный сайт <a href=https://biznes-knigi.com/user/Joshuafliff/>https://biznes-knigi.com/user/Joshuafliff/</a> Перед активацией важно внимательно изучить обстоятельства промоакции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют значение кроме лимиты ставок при отыгрыше и сроки, в течение которых можно пользоваться предложением. Если бездеп охватывает узкий список игр, рекомендуется узнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только никаких случае, в оператор не установил жесткие лимитирования на наивысшую необходимую ставки.Но есть азартные заведения, готовые просто так вручить деньги на забаву. Для этого довольно сделать профиль. Чтобы вывести выигрыш, сперва нужно выполнить вейджеровые условия, прописанные в условиях получения бездепа.
1×slots сайт зеркало
Составленный экспертами Casino.ru перечень онлайн-казино с бездепозитным бонусом позволяет игрокам сравнить спецпредложения различных операторов. Иногда у посетителей вебсайта могут появиться трудности, задачи, препядствия при активации полученного промо-кода. В таких случаях, нужно адресоваться за подмогою в саппорта «Support». Для получения ответа, обязательно указывается определенная первопричина воззвания и подтверждается информация дополнительными экрана. Если сформировалась неоднозначная обстановка, всегда можно обратиться к основному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ. <a href=http://elinen.com.ua/bitrix/redirect.php?goto=http://mkyzyl.ru/bitrix/click.php?goto=http://fotolenta.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/4ZJh5_lozEe>http://elinen.com.ua/bitrix/redirect.php?goto=http://mkyzyl.ru/bitrix/click.php?goto=http://fotolenta.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/4ZJh5_lozEe</a> B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, дабы еще раз получить бесплатный бонус. Игорные заведения нетерпимы к бонус-хантерам, потому вас ожидает неминуемое санкция. 1 xslots рабочее зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=6497>1хслотс мобильная версия зеркало</a>
<a href=https://thetechmodders.com/forums/viewtopic.php?t=26438>1хслотс рабочее зеркало на сегодня</a>
<a href=https://rolivka.online/forum/showthread.php?tid=32311>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чаще всего интернет-казино предлагают бездепозитные призы новым юзерам. Эта промо-акция довольно эффективно завлекает начинающих, подталкивая их к открытию счета. Конечно, не все становятся преданными клиентами, хотя сам факт регистрации аккаунта играет на руку заведению.
#3415 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
демо казино Шевцова Татьяна Викторовна порно <a href=https://glvk.guru/>сайт 1×bet слоты</a> Александра Бортич 1×bet на сегодня <a href=https://rucriminal.info/>casino актуальное зеркало</a> 1×bet на сегодня casino скачать 1go casino casino ru casino бездепозитный казино вход официальный сайт лучшая казино
DiskiPlus кент casino DiskiPlus порно с Евгения Медведева, фигуристка <a href=https://diskiplus.ru>DiskiPlus 1×bet 1хбет</a> DiskiPlus 1go casino DiskiPlus casino бездепозитный <a href=https://diskiplus.ru>DiskiPlus casino бездепозитный</a> DiskiPlus симулятор казино DiskiPlus букмекерские конторы pin DiskiPlus Львова-Белова Мария Алексеевна порно DiskiPlus казино смотреть онлайн бесплатно DiskiPlus 1×bet слоты 1×bet xyz DiskiPlus порно с Константин Тюкавин (футбол) DiskiPlus порно с Петр Ян (ММА)
#3416 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino зеркало сайта porno Юлия Пересильд <a href=https://repost.news/>про казино</a> champion casino букмекерская контора ставки <a href=https://rumafia.news/>gama casino</a> porno Андрей Рублев (теннис) порно с Артемий Панарин (хоккей) казино рублях online casino Разуваева Ксения Денисовна порно официальные зеркала казино 1×bet официальный
DiskiPlus казино играть DiskiPlus порно с Алина Загитова, фигуристка <a href=https://diskiplus.ru>DiskiPlus порно с Диана Шнайдер (теннис)</a> DiskiPlus порно с Федор Чалов (футбол) DiskiPlus казино большая <a href=https://www.diskiplus.ru/>DiskiPlus рабочее казино</a> DiskiPlus бывшие казино DiskiPlus порно с Евгения Медведева DiskiPlus Комарова Наталья Владимировна порно DiskiPlus скачать 1×bet DiskiPlus casino сайты DiskiPlus букмекерская контора бесплатно скачать DiskiPlus порно с Алексей Миранчук (футбол)
#3417 Charlesgunnyhttp://filmkachat.ru
сайт 1× slots casino
При регистрации по свидетельствовать лишь достоверную информацию. Когда учетная запись несомненно активна, замечен доступ в Личный офис. В нем возможно выбрать еденицу, ввести промокод и узнать доскональные управляла получения и отыгрыша бездепа. Краткая информация об акции нередко присутствует непосредственно на регистрационной форме.Бонусы без депо при регистрации считаются самыми красивыми как для опытнейших игроков, так для и новичков. Получив такое вознаграждение, заказчик имеет играть на настоящие деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, еще обстоятельства их активации и выигрыша. <a href=http://filmkachat.ru/>1×slots сайт</a> Не советуем опрометью голову хвататься за всевозможные предложения получения средств без вложений. Вполне возможно, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на первый взгляд. Альтернативой считается казино бонус за депо. Мы предлагаем для пару советов, благодаря коим у любого игрока будет возможность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом средств:Обычно показатель выше, чем для призов на депозит. Не удивляйтесь, в он несомненно том х100. Иногда завышенный коэффициент вейджера уточняется для обитателей отдельных государств. <a href=https://waad.powerappsportals.com/en-US/forums/general-discussion/d50ac186–52cf-ef11–95f6–000d3a393bf8>https://waad.powerappsportals.com/en-US/forums/general-discussion/d50ac186–52cf-ef11–95f6–000d3a393bf8</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=https://www.theexeterdaily.co.uk/users/jeffreytut>https://www.theexeterdaily.co.uk/users/jeffreytut</a> Вышеописанная причина и считается главным нюансом, из-за которого операторы отдают доля собственной выгоды на различные рекламные расходы и маркетинговые кампании. А самым действенным тут будут выступать именно бездепозитные призы казино 2022 с выводом за регистрацию.
1хслотс регистрация в 1×slots casino
Раздача призов может быть приурочена к разным датам: календарные дни, дни рождения игроков, юбилей открытия казино и т. Д. Подарок выдается в виде средств, фриспинов или баллов для накопления и размена на услуги оператора. Если юзер получает выигрыш, средства начисляются на его счет. Для вывода данной суммы придется выполнить ряд притязаний.Для казино, работающих интернет, бездепозитные призы нужны для привлечения свежих посетителей. Предложение поиграть на слотах без надобности внесения реальных средств — работающий способ для повышения энтузиазма к компании. После отыгрыша бездепа велик шанс, что игроку понравится и он продолжит выступать в казино, лишь теперь уже на личные средства. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. <a href=http://jnsedb.kr/bbs/board.php?bo_table=free&wr_id=709756>http://jnsedb.kr/bbs/board.php?bo_table=free&wr_id=709756</a> B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. 1хслотс мобильная версия зеркало Еще одно условие дотрагивается объемов ставки. Операторы устанавливают наивысшую необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, избранной в Личном офисе. При превышении лимита есть риск лишиться бонуса. Существующие ограничения относятся и к конкретным обликам ставок. Например, играя в рулетку, заказчик может столкнуться с запретом ставить фишки на шансы.Частенько новички не знают, как активировать презенты или вывести 1-ый выигрыш. Для подобных случаев наша команда обрисовала главные термины – собственно такое фриспины, вейджер, как его отыграть, для необходимо протекать верификацию.
1хслот официальный сайт зеркало
<a href=http://netvoyne.ru/user/Tyroneskile/>http://netvoyne.ru/user/Tyroneskile/</a> Фриспины предусмотрены для применения в видео слотах. Внимательно ознакомьтесь с условиями – часто их выдают на некоторые автоматы. В зависимости от клуба, у вас получится сделать определённое число ставок. Кстати, продвинутые игорные жилища позволяют запускать любых «одноруких бандитов».Постарайтесь отыграть вейджер, чтобы была возможность забыть заявку на выплату. Кстати, на всех веб-сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы можете получить выигрыш на электронной кошелёк, карту, телефонный. 1×slots регистрация 1×slotscasino 56 online Некоторые казино имеют предлагать клиентам бездепы за подтверждение номера или почты либо репост на страничку в соц сетях.Диапазон ставок, коие вправе сделать игрок, также лимитирован. Обычно ставить возможно небольшую сумму — пределах 10–30 рублей за одно вращение.
1×slots зеркало быструю регистрацию а также мгновенное
Способы получения бездепа различаются зависимо облика бонуса, кот-ый приглянулся игроку. Но для так нужно быть зарегистрированным в легальном онлайн-казино и подтвердить собственную личность. В общем виде пошаговая аннотация для получения бездепозитного бонуса выглядит например:Список например именуемых «запрещенных землель» прилагается к правилам бонусной программки игорного портала. Обязательно выясните, распространяются ли на вас подобные наказания. Бездепозитные призы настоящими деньгами, которые возможно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадались. 1×slots casino регистрация на сайте <a href=https://www.animeforum.ru/index.php?showuser=274557>https://www.animeforum.ru/index.php?showuser=274557</a> Во всех легальных онлайн-казино Беларуси необходимо свидетельство паспортных данных для игры — это заявка правительства страны.Исходя из этого, просто не присутствует мудрых причин махнуть рукой на получение такого приза при регистрации. И, что, на такой бесплатной базе у вас есть все шансы выиграть средства и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные призы, нарекают бесплатными онлайн платформами для игр.
рабочее зеркало 1хслотс
К образцу, игроку выдаются бесплатные свои в заведении в объеме пятидесяти либо ста $ (вейджер на коие сочиняет 100х). То есть, любому новоприбывшему игроку выскакивает манящая картинка, кот-ая сулит выплату всех зачисленных фирмой средств. Не стоит обращать внимания на казино приз за регистрацию без депо с слишком большой либо довольно махонькой суммой бонусов, поэтому что, и тщательно выучив все обстоятельства, здесь всего, несомненно какой-то подвох.Существуют казино с бонусом за регистрацию, в которых довольно известны фриспины в онлайн казино потом регистрации в конкретных забавах. Они встречаются и почаще даровых поощрений или традиционных бонусов в казино без вложений. Например, игрок регистрирует счет, на кот-ый начисляются бесплатные забавы, бонус за регистрацию вид безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса игрок выигрывает настоящие средства, коие в последствии можно удачно исключить из заведения на свою платежную систему. То есть, есть все шансы исключить свои без рисков собственными финансами. Регистрация, за компьютерные получит бонусы, займет минут, а спасибо данному возможно увеличить пять евро поощрений до тысячи и без всяких проблем исключить их. <a href=http://www.sicilianodentro.it/forum/members/251709.html>http://www.sicilianodentro.it/forum/members/251709.html</a> Фриспины без депо либо вспомогательные средства посодействуют поближе познакомиться с игровой платформой и её функциями. За счёт подарков можно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за игры против живых крупье.В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, нужно адресоваться в службу через лайв-чат на веб-сайте казино. рабочее зеркало 1хслотс Вознаграждения за получение VIP-статуса ? начисляются в рамках программки лояльности при достижении одного значения или выдаются индивидуально менеджерами саппорта.
<b>Смотреть еще похожие новости:</b>
<a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=8025>1×slots официальный сайт, скачать</a>
<a href=http://www.topboard.org/media/users/rabofreesn.160691/>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В интернете количество узнаваемых игорных площадок с красивыми акционными предложениями. Однако пристально разбирать условия 10-ов услуг вскоре надоест, да и время отнимет много. Поэтому наша команда подготовила ТОП-3 вебсайтов с лучшими бездепозитными призами:
#3418 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino зеркало сегодня рабочее винлайн букмекерская контора <a href=https://t.me/vchkogpu_ru>1×bet зеркало</a> casino pin официальный скачать 1×bet на андроид <a href=https://repost.news/>зеркала официальных сайтов казино</a> Яровая Ирина Анатольевна порно порно с Арина и Дина Аверины, гимнастки casinos xyz порно с Зырянова Анастасия Владимировна пин ап казино porno Виктория Баркова, легкоатлетка Петрова Ольга Викторовна порно
DiskiPlus официальные зеркала казино DiskiPlus 1×bet зеркало xbet <a href=https://diskiplus.ru>DiskiPlus up casino официальный</a> DiskiPlus порно с Александр Головин (футбол) DiskiPlus букмекерская контора бесплатно скачать <a href=https://diskiplus.ru/>DiskiPlus cometa casino</a> DiskiPlus порно с Захарова Мария Владимировна DiskiPlus win win casino DiskiPlus casino ап DiskiPlus 1×bet xbet DiskiPlus симулятор казино DiskiPlus пин ап casino DiskiPlus pin up casino buzz
#3419 Charlesgunnyhttp://filmkachat.ru
1× slots зеркало
2. Создать свежий профиль. Для регистрации нужно заполнить небольшую анкету либо зайдите в собственный кабинет посредством социальных сетей;Новички не любят незамедлительно же вносить депо. Это обосновано отсутствием опыта и сомненьем. К счастью, в наше время можно получить бездепозитный бонус за регистрацию в казино. Неважно что начисляет система – фриспины или кредиты. В всяком случае вы не рискуете своими сбережениями. Это замечательная вероятность запустить понравившийся видео разъем либо же испытывать удачу в настольных играх. <a href=http://filmkachat.ru/>1×slots мобильная версия войти казино</a> <a href=https://www.trade-forums.co.uk/thread/78331>https://www.trade-forums.co.uk/thread/78331</a> Воспользоваться бездепом возможно не во всех игровых автоматах: казино и тут устанавливает лимитирование для клиентов. Конечно, это возможно счесть некоторым неудобством для игрока, но справедливости ради стоит отметить, что выбор автоматов всё точно остаётся достаточно великим. 1хслот зеркало сайта <a href=https://ponysfm.com/users/Migueltut>https://ponysfm.com/users/Migueltut</a>
1×slots зеркало регистрация
1×slots зеркало проходить регистрацию это отличный вариант Даже не выиграв крупную необходимую, игрок увлекательно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе превосходнейших акций легко. Достаточно регулярно учить список новых интернет казино с выводом бонуса без депо в данном разделе.Шаг 4. Активация. Внимательно исследуйте обстоятельства, информацию по лимитированиям и сроке деяния бонусного предложения. Разобравшись с правилами, можно активировать приз в собственном офисе (иногда ? с внедрением промокода) либо по запросу в саппорт. <a href=http://www.vacationrentals411.com/websitelink.php?webaddress=https://telescope.ac/mephedrone-synthesis/we3mrpajwszv8psn9wk0m2>http://www.vacationrentals411.com/websitelink.php?webaddress=https://telescope.ac/mephedrone-synthesis/we3mrpajwszv8psn9wk0m2</a> Составленный специалистами Casino.ru список онлайн-казино с бездепозитным призом разрешает игрокам сравнить спецпредложения различных операторов. 1×slots зеркало регистрация в 1×slots casino Большинство клубов привлекают внимание игроков за счёт различных презентов. На 1 веб-сайтах возможно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает благотворительные вращения для пуска топовых онлайн слотов. Несмотря на различные акции, стоит выделить самые основные.Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.
онлайн казино 1×slots
<a href=http://helix-group.ru/bitrix/redirect.php?goto=http://pornogames.ru/redirect?url=http://frolovoadmin.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/GUvdNoo2CYW>http://helix-group.ru/bitrix/redirect.php?goto=http://pornogames.ru/redirect?url=http://frolovoadmin.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/GUvdNoo2CYW</a> рабочее зеркало 1×slots Получив собственный презент, Вы можете даром выступать на реальные средства, а выполнив условия отыгрыша, вывести свой выигрыш.
1×slots сайт
Ну и окончательно же, для казино бездепозитные бонусы прибыльны с имиджевой стороны: схожая щедрость повышает степень преданности посетителей к фирмы.Шаг 4. Активация. Внимательно исследуйте обстоятельства, информацию по лимитированиям и сроке деянья бонусного предложения. Разобравшись с правилами, можно активировать приз в личном офисе (время ? с внедрением промокода) или по запросу в саппорт. 1×slots зеркало регистрация в 1×slots casino <a href=https://tony-sheryl.com/bbs/board.php?bo_table=free&wr_id=110099>https://tony-sheryl.com/bbs/board.php?bo_table=free&wr_id=110099</a>
1×slots промокод при регистрации
Также, ситуации нужно подтвердить свой номер аппарата, результата код, полученный в смс-сообщении от клуба установить в особое поле в личном кабинете игрока.Практически все онлайн казино с бездепозитным бонусом за регистрацию учитывает программку преданности — систему поощрения неизменных посетителей, которая произведено из колличества значений. При достижении игроком еще значения на его счёт поступает бонус. Чем повыше уровень — тем щедрее приз. На данном разделе портала периодически публикуются обзорные статьи, каких рассматриваются безвозмездные призы лучших интернет-казино. Информация структурирована по нескольким пт, включая основные: <a href=http://ternovka4school.org.ua/index.php?subaction=userinfo&user=habitualhusk23>http://ternovka4school.org.ua/index.php?subaction=userinfo&user=habitualhusk23</a> Активация денежного вознаграждения случается механически после творения профиля или применения промокода. Иногда операторы предъявляют дополнительные требования: подписаться на страницы казино в соц сетях либо на рассылку рекламных известий, скачать и установить вспомогательный софт и т.д.С этими простыми советами любое казино с бонусом за регистрацию способно принести в разы больше выгоды и полезности. 1×slots официальный demo регистрация в 1×slots casino Следует подчеркнуть, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом.
<b>Смотреть еще похожие новости:</b>
<a href=https://elclasificadomx.com/author/jameslog/>1×slot регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Условия вывода выигрыша. В неких заведениях для успешного вывода с бездепозитного бонуса достаточно пополнения баланса и подтверждения личности. В других же клубах, необходимо некоторое раз прокрутить собственный депо.
#3420 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Илья Ковальчук (хоккей) 1×bet телефон <a href=https://www.ossetia.tv/>Набиуллина Эльвира Сахипзадовна порно</a> букмекерские конторы без депозита букмекерская контора фонбет официальный сайт <a href=https://specreporter.com/>retro casino</a> 1×bet рабочее на сегодня porno Игорь Акинфеев (футбол) casino ап 1win букмекерская контора cat casino букмекерские конторы без депозита яндекс игры казино
DiskiPlus букмекерская контора бетсити DiskiPlus 7k casino сайт <a href=https://diskiplus.ru/>DiskiPlus порно с Бондаренко Анастасия Борисовна</a> DiskiPlus ешь казино DiskiPlus пари букмекерская контора <a href=https://www.diskiplus.ru>DiskiPlus лучшая казино</a> DiskiPlus порно с Федор Чалов (футбол) DiskiPlus официальное казино вход DiskiPlus pinco casino DiskiPlus 1×bet официальный xbet DiskiPlus казино рублях DiskiPlus 1×bet xbet DiskiPlus pin up casino зеркало
#3421 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино проиграл порно с Федор Чалов (футбол) <a href=https://rumafia.news/>ограбление казино</a> порно с Виктория Синицина, фигуристка скачать букмекерскую контору на андроид <a href=https://7club7.com/>Елена Лядова</a> Преподобная Надежда Александровна порно pin ап casino порно с Захарова Мария Владимировна cometa casino unlim casino порно с Афонина Марина Игоревна слоты казино
DiskiPlus сайт pin up casino DiskiPlus бывшие казино <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet зеркало рабочее xbet</a> DiskiPlus автомат казино DiskiPlus Радченко Светлана Юрьевна порно <a href=https://www.diskiplus.ru>DiskiPlus casino рабочее зеркало</a> DiskiPlus букмекерскую контору пин DiskiPlus porno Алена Михайлова DiskiPlus 1×bet зеркало xbet DiskiPlus порно с Владимир Минеев (ММА) DiskiPlus Чулпан Хаматова DiskiPlus порно с Никита Кучеров (хоккей) DiskiPlus 7k casino зеркало
#3422 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Захарова Мария Владимировна леон букмекерская контора <a href=https://t.me/vchkogpu_ru>яндекс игры казино</a> леон букмекерская контора порно с Илюшникова Татьяна Александровна <a href=https://specreporter.com/>букмекерская контора вход</a> up casino скачать 1×bet на андроид бесплатно сайте букмекерской конторы фонбет букмекерская контора официальный сайт скачать casino online зеркало Черкесова Бэлла Мухарбиевна порно pin casino зеркало
DiskiPlus порно с Аделия Петросян (фигурное катание) DiskiPlus скачиваемые казино <a href=https://diskiplus.ru>DiskiPlus 7k casino официальный</a> DiskiPlus Чулпан Хаматова DiskiPlus фильмы казино рояль <a href=https://www.diskiplus.ru/>DiskiPlus букмекерская контора бетсити</a> DiskiPlus скачать casino на андроид DiskiPlus 1×bet слоты 1×bet xyz DiskiPlus Радченко Светлана Юрьевна порно DiskiPlus Валентина Матвиенко порно DiskiPlus ап казино DiskiPlus up casino DiskiPlus порно с Виктория Синицина, фигуристка
#3423 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
В истиннее время получить бонус за регистрацию в казино очень просто. Почти любой игорный дом с радостью предоставит средства или благотворительные вращения. Многие игроки пользуются этим и не стесняются регистрироваться в каждом клубе с выгодными критериями. Кстати, это отличная вероятность придумать выигрышную стратегию и сорвать куш. <a href=http://filmkachat.ru/>рабочее зеркало 1хслотс</a> <a href=https://www.trade-forums.co.uk/thread/78340>https://www.trade-forums.co.uk/thread/78340</a> 1×slots casino регистрация 1×slotscasin online <a href=http://mofirework.ru/bitrix/click.php?goto=http://sibelkom.ru/bitrix/redirect.php?goto=http://veleluce.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/CrYVcmWsDLC>http://mofirework.ru/bitrix/click.php?goto=http://sibelkom.ru/bitrix/redirect.php?goto=http://veleluce.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/CrYVcmWsDLC</a>
1×slot регистрация
1×slots официальный сайт мобильная версия Доступные игры – В некоторых азартных забавах возможно понизить математическое приемущество казино до нескольких десятых процента. В их количестве многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как управляло, в этих забавах ставки идут в зачет вейджера не полностью. Например, имеет учитываться только 50%. В неких играх бездепозитные бонусы вообще невозможно отыгрывать. <a href=https://www.argfx.co/user/Geraldlorce/>https://www.argfx.co/user/Geraldlorce/</a> 1×slots зеркало регистрацию более популярный вариант это
зеркала 1×slots
Для получения депозитного приза нужно восполнить свой игровой баланс настоящими деньгами. Вознаграждение возможно получить либо при внесении первого депозита, или вид фиксированного процента от внесённых средств. Так или другому, приз поступит на счёт только в пополнения.Для проверки используются сканы паспортов, водительских водительских, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если пользователь замечен в попытке ввести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный перечень. При этой на лицензионной площадке не стоит бояться свидетельствовать достоверную индивидуальную информацию (шифрование исключает утечку персональных данных). Для получения бездепа нужно пригласить в игру по реферальной ссылке нового посетителя: он должен зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и восполнить счёт на необходимую, указанную в критериях промоакции.1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, случае не желайте стать жертвой плутов или впустую израсходовать время; <a href=http://slavsbyt.ru/index.php?subaction=userinfo&user=magicalvoodoo20>http://slavsbyt.ru/index.php?subaction=userinfo&user=magicalvoodoo20</a> Одним из предлогов отдавать привилегию 1 либо другому заведению заключается в привлекательности предлагаемых акций и бесплатных предложений. Безвозмездные фриспины, выдаваемые без нужды создавать какой-нибудь лепта, в списке находится далеко не в конце.1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, случае не хотите замерзнуть жертвой жуликов или впустую потратить время; 1×slots официальный сайт зеркало Максимальная ставка ? уточняется в еденице счета и ограничивает объем ставки за один спин. В случае ее превышения приз может быть аннулирован. Также в правилах может содержаться запрет на размещение ставок конкретного облика, примеру, по одинаковым шансам в рулетке (то есть, на чет или нечет, красноватое или темное и т.д.).Постарайтесь отыграть вейджер, дабы замечена возможность забыть заявку на выплату. Кстати, на всех сайтах, представленных в списке, доступны современные платёжные приборы. Вы можете получить выигрыш на электронной кошелёк, карту, телефон.
1хслот зеркало сайта
<a href=https://astraclub.ru/album.php?albumid=238315>1×slots зеркало регистрация в 1×slots casino</a> Срок отыгрыша — это этап, кот-ый начинается в момент активации приза и кончается с его закрытием. Пользователю необходимо уложиться в этот временной зазор, по призовые средства аннулируются. Казино устанавливают перечень игр, ставки в засчитываются при расчете отыгранных средств. Если тайтл не заходит в этот перечень, то ему быть недосегаем для загрузки во время деянья бонусного предложения.Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке адепты онлайн-казино публикуют актуальную информацию о not the slightest deposit bonuses прочих услугах. Промокод – определённая композиция знаков, коию нужно установить в подходящее фон при разработке учетной записи либо активировать в личном профиле игрока в разделе с призами. 1×slots зеркало рабочее на сегодня <a href=http://www.mdream.net/bbs/board.php?bo_table=free&wr_id=174993>http://www.mdream.net/bbs/board.php?bo_table=free&wr_id=174993</a>
1×slots актуальное зеркало
В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать собственный выигрыш с даровых вращений. Прибыль, коию Вы заработаете на этом бездепе можно назначать на вывод без какого либо отыгрыша. <a href=https://www.metal-tracker.com/forum/member.php?action=profile&uid=927407686>https://www.metal-tracker.com/forum/member.php?action=profile&uid=927407686</a> Объективные – размер приза, коэффициент и условия вейджера, необходимость внесения депо для вывода денег; казино 1×slots Игры, каких возможно выступать на бонусные средства. Проверьте перечень игр, в которых можно выступать на бонусные средства, возможно они Вам не понравятся и надо расходовать своё время на эту акцию.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Пoдтвepдить личнocть посетителя. Для удачного вывода средств, необходимо подтвердить личность посетителя. Нa этaпe вepификaции пpoфиля, работники службы защищенности должны убедиться, что у игрока чем один акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не может вывести свой выигрыш, в у него несомненно некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы.
#3424 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
bet casino Ирина Горбачева <a href=https://kompromat1.online/>порно с Ирина Сидоркова</a> Москалькова Татьяна Николаевна порно porno Яна Троянова <a href=https://strelochnik.com/>Кузнецова Анна Юрьевна порно</a> порно с Аделия Петросян (фигурное катание) казино фильм фильмы казино рояль Ирина Горбачева casino вход самое казино порно с Евгения Медведева, фигуристка
DiskiPlus casino pin официальный DiskiPlus официальные букмекерские конторы скачать <a href=https://www.diskiplus.ru>DiskiPlus 1×bet xbet</a> DiskiPlus как выиграть в казино DiskiPlus казино 1 <a href=https://diskiplus.ru/>DiskiPlus 7k casino скачать</a> DiskiPlus casino зеркало сегодня DiskiPlus зеркала официальных сайтов казино DiskiPlus vodka casino DiskiPlus часы казино DiskiPlus реального казино DiskiPlus casino андроид DiskiPlus up букмекерская контора
#3425 Charlesgunnyhttp://filmkachat.ru
скачать 1×slots официальный сайт
Иногда операторы требуют внесение минимального депозита перед выводом для верификации платежного инструмента. В некоторых казино этот депо кроме светит отыграть. <a href=http://filmkachat.ru/>1×slots официальный сайт мобильная версия скачать</a> Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации подарка нужно подтвердить электронную почту и привязать телефон;Чтобы выступать безвозмездно на настоящие деньги в казино, порой достаточно просто зарегистрироваться. Иногда необходимо выполнить дополнительные действия. <a href=https://rapidapi.com/7ball-viet-nam-7ball-viet-nam-default/api/7ball-viet-nam/discussions/146277>https://rapidapi.com/7ball-viet-nam-7ball-viet-nam-default/api/7ball-viet-nam/discussions/146277</a> Поспешите арестовать бездепозитные бонусы за регистрацию в казино из представленного перечня. Все платформы не ведут легальную работа, хотя и порадуют правдивыми плодами забавы, высокой отдачей, прыткими выплатами.Но ни не запамятовывайте внимательно читать верховодила роли в бонусных промоакциях. Если вы нарушите но бы одно условие, позднее вы не сможете устроить недоразумение с администрацией. 1хслотс 1хслотс регистрация перейти на 1×slots <a href=https://www.mom-ent.co.kr/bbs/board.php?bo_table=free&wr_id=1937107>https://www.mom-ent.co.kr/bbs/board.php?bo_table=free&wr_id=1937107</a> Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.
1×slots регистрация 1×slots review live
Верификация необходима для дополнительной защищенности и может техподдержке выявить бонусхантеров и мошенников. Кстати, на некоторых платформах выводы солидных сумм доступны лишь после подтверждения личности.Призовые начисления без депо имеют предоставляться для роли в турнирах онлайн казино. Потратить перечисленные средства можно необыкновенно в этой акции. Условия их проведения в ограничения на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться этим предложением, никакого выучить его правила. <a href=https://karakol.com.kg/user/Jameskef/>1×slots официальный сайт скачать на айфон</a> 1×slots регистрация на сайте <a href=http://forum.inos.at/profile.php?id=884293>http://forum.inos.at/profile.php?id=884293</a> 1×slots рабочее зеркало Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, a зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.Популярность онлайн казино растёт и всё больше пользователей начинают увлекаться азартными забавами. Бездепозитные призы 2022 года, это оригинальные презенты за регистрацию. С их подмогою свежие игроки шансы получить бесплатные вращения или деньги на баланс за 1 регистрацию. С свет игорных заведений в интернете, бездепозитные бонусы стали знаменитейшим методом привлечения игроков. Подобные акции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о которых мы поведаем. Наш вебсайт собрал наилучшие предложения из интернета на 2022 год. Воспользуйтесь каким подарком и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить условия.
1×slots зеркало видели такую регистрацию на
Вышеописанная первопричина и считается основным моментом, следствии которого операторы отдают доля собственной прибыли на различные маркетинговые расходы и рекламные кампании. А самым действующим тут будут выступать именно бездепозитные призы казино 2022 с выводом за регистрацию. <a href=https://bizon.ru/cazinosdep/info>https://bizon.ru/cazinosdep/info</a> Обычно для получения бонусов без депо, казино выдвигает лояльные и абсолютно выполнимые условия, но есть ряд действий которые запрещены и имеют причиной неприятные результаты:Диапазон ставок, которые вправе сделать игрок, того лимитирован. Обычно ставить возможно маленькую сумму — в 10–30 рублей за одно вращение. 1×slots официальный сайт мобильная версия Казино дает вероятность заработать и вывести реальные средства на бездепозитных призах. Обычно, это малозначительная сумма, коию казино возможность для разрешить подарить игроку.
1×slots промокод при регистрации
<a href=https://vredeenvermaak.be/users/jamesapofe/>1×slots casino зеркало</a> 1×slots регистрацию более популярный вариант это <a href=http://dedmorozural.ru/users/patheticideal93>http://dedmorozural.ru/users/patheticideal93</a> Пoдтвepдить личнocть клиента. Для успешного вывода средств, нужно подтвердить личность посетителя. Нa этaпe вepификaции пpoфиля, сотрудники службы защищенности обязаны увериться, что у игрока более раз аккаунт. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не сможет исключить свой выигрыш, случае у него будет количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы.Подтверждение электрической почты – одно из ведущих критерий, которое есть почти в любом бездепозитном казино. Чтобы верифицировать электронную почту, достаточно перебежать по интенсивной ссылке в письме, приобретенном от азартного клуба.
1×slots официальный сайт зеркало рабочее
В количестве случаев бесплатные призы начисляются в кредитах, коие нельзя незамедлительно исключить со счета. Прежде их нужно отыграть по установленным правилам. Эти требования принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже. Бездепозитные призы казино за регистрацию в 2022 году — это возможность поиграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой либо числом бесплатных вращений без внесения депо. Не путайте деморежим с реальной забавой без надобности внесения депозита. <a href=http://place-e.ru/index.php?title=%D1%84%D0%BB%D0%B8%D1%80%D1%82%20%D0%B7%D0%BD%D0%B0%D0%BA%D0%BE%D0%BC%D1%81%D1%82%D0%B2%D0%B0%20>http://place-e.ru/index.php?title=%D1%84%D0%BB%D0%B8%D1%80%D1%82%20%D0%B7%D0%BD%D0%B0%D0%BA%D0%BE%D0%BC%D1%81%D1%82%D0%B2%D0%B0%20</a> 1×slots зеркало видели такую регистрацию на Выигрыши с призов без вложений всегда привязаны к требованию по ставкам и имеют быть обналичены лишь в выполнения данных требований.
<b>Смотреть еще похожие новости:</b>
<a href=http://sladkierecepti.5nx.ru/viewtopic.php?f=8&t=8376>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<a href=http://3ak.cn/home.php?mod=space&uid=187057>1×slots официальный сайт скачать</a>
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=111743&extra=>1×slots официальный сайт мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Составленный экспертами Casino.ru перечень онлайн-казино с бездепозитным призом разрешает игрокам сравнить спецпредложения разных операторов. Новые посетители онлайн-казино без первого депо имеют проверить свою удачливость. К что, этому же есть вероятность преобразовать бездепы в настоящие средства за регистрацию в казино, однако результата приз нужно отыграть сообразно условиям акции.
#3426 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
рокс казино Валентина Матвиенко порно <a href=https://repost.news/>казино вход официальный сайт</a> online casino официальный букмекерская контора официальный сайт <a href=https://7club7.com/>porno Ангелина Гончаренко, хоккеистка</a> Комарова Наталья Владимировна порно 1×bet зеркало бесплатные букмекерские конторы сайт букмекерской конторы Львова-Белова Мария Алексеевна порно 7k casino официальный сайт порно с Юлия Ефимова, пловчиха
DiskiPlus Скоробогатова Ольга Николаевна порно DiskiPlus порно с Каролина Севастьянова <a href=https://diskiplus.ru/>DiskiPlus r7 casino</a> DiskiPlus 1×bet слоты 1×bet xyz DiskiPlus casino <a href=https://www.diskiplus.ru>DiskiPlus порно с Абрамченко Виктория Валериевна</a> DiskiPlus гта казино DiskiPlus pin casino DiskiPlus casino зеркало сегодня рабочее DiskiPlus Семёнова Татьяна Владимировна порно DiskiPlus porno Яна Троянова DiskiPlus скачать 1×bet на андроид бесплатно DiskiPlus 1×bet зеркало xbet
#3427 Dustinstawshttps://auto-club.pl.ua
Журнал об авто <a href=https://auto-club.pl.ua/>https://auto-club.pl.ua</a> для тех, кто за рулем! Новости автопрома, тест-драйвы, рекомендации по выбору авто, советы по ремонту и эксклюзивные интервью с экспертами.
#3428 Hectortwefthttps://myauto.kyiv.ua
Журнал для автолюбителей <a href=https://myauto.kyiv.ua/>https://myauto.kyiv.ua</a> и профессионалов! Всё о новых моделях, технологии, автоспорт, лайфхаки по уходу за авто и экспертные рекомендации.
#3429 ThomasCrelahttps://allauto.kyiv.ua
Все об автомобилях <a href=https://allauto.kyiv.ua/>https://allauto.kyiv.ua</a> в одном журнале! Новости автопрома, тест-драйвы, обзоры моделей, советы по ремонту и тюнингу, страхование и ПДД.
#3430 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Константин Тюкавин (футбол) ешь казино <a href=https://th-royalgclub.com/>cometa casino</a> гта казино зеркала казино <a href=https://vestnik-jurnal.com/>casino зеркало сегодня</a> казино проиграл самое казино 1×bet приложение играющие казино почему в казино не бывает настенных часов casino рабочее 1×bet рабочее на сегодня
DiskiPlus casino зеркало сайта DiskiPlus 7k casino официальный <a href=https://diskiplus.ru/>DiskiPlus демо казино</a> DiskiPlus официальная казино DiskiPlus казино ставка <a href=https://www.diskiplus.ru/>DiskiPlus Валентина Матвиенко порно</a> DiskiPlus порно с Анна Калинская (теннис) DiskiPlus 1×bet рабочее DiskiPlus 1×bet слоты 1×bet top DiskiPlus букмекерская контора бетсити DiskiPlus 1×bet DiskiPlus фреш казино DiskiPlus Скоробогатова Ольга Николаевна порно
#3431 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало подтвердит вашу регистрацию если говорить
Как верховодило, новоприбывшие геймеры для желают ознакомиться с способами ввода и вывода валютных средств и сроки выполнения поданных заявок чтобы четко разуметь, как живо меня вывести свой казино приз за регистрацию без депозита на электрический кошелек или же банковскую карту. К счастью для всех играющих, внутри конкретных холдингов, все казино конкурируют между собой. Ведь случае бы конкретную фирму представляло лишь одно онлайн-заведение, то ли бы клиенты увидели казино с призом за регистрацию и имели бы рассчитывать лишь на вознаграждение в виде приза на первое инвестиция. К любому заведению периодически стопам привлекать свежих игроков, собственно, в, только на руку всем играющим.Бездепозитные бонусы казино за регистрацию в 2022 году — это возможность сыграть за счёт заведения. Казино даёт клиенту шанс воспользоваться определённой суммой или числом бесплатных вращений без внесения депозита. Не путайте деморежим с реальной игрой без необходимости внесения депо. <a href=http://filmkachat.ru/>сайт 1× slots casino</a> Третитй бездепозитный бонус за регистрацию – валютные средства. К раскаянию, начислить рубли либо доллары готовы только известные и знаменитые клубы. С их поддержкой вы сможете насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком. <a href=https://nibbler.co/en_US/reports/playhouse.com.ua#/Test_Page_Analytics>https://nibbler.co/en_US/reports/playhouse.com.ua#/Test_Page_Analytics</a> Промокод – определённая композиция символов, коию нужно ввести в отвечающее фон при разработке учетной записи либо активировать в собственном профиле игрока в разделе с бонусами.При верном раскладе бездепы — это отличный метод выступать на средства без растраты личных средств. Есть некоторое рекомендаций, следуя коим можно извлечь максимально выгоды из сходственных промоакций казино. Играть стопам лишь на лицензированных площадках. Скриптовые сайты столько накалывают с бонусными услугами, но и используют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах невозможно. casino 1×slot <a href=https://yvavilebismovla.ge/user/Charlesrhirl/>https://yvavilebismovla.ge/user/Charlesrhirl/</a>
1×slots казино мобильная версия
Вышеописанная причина и считается главным моментом, из-за которого операторы отдают доля своей прибыли на различные рекламные расходы и рекламные кампании. А наиболее действующим здесь станут выступать непосредственно бездепозитные бонусы казино 2022 с выводом за регистрацию.Также есть онлайн-платформы азартных игр, которые применяют раздачу бездепозитных призов в специальные даты (как для казино, например и для игрока). Помимо этого, действующие геймеры кроме имеют возможность получить схожие бонусы за собственную деятельность (например, за повышения уровня или за похожие достижения). <a href=http://check2go.net/my-account/>1×slots casino зеркало</a> 1×slots зеркало рабочее на сегодня Но на азартных платформах похожие вознаграждения шансы получить теперь зарегистрированные юзеры. В этом случае, бонусы предоставляются в уникальных промоакций или же некоторым игрокам повторяющий акционного предложения, коие прибывает на почту с целью «возвратить» игрока в свое казино. <a href=http://h4.ru/bitrix/redirect.php?goto=http://clever45.ru/bitrix/redirect.php?goto=http://logicloud.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/rburgALRi0h>http://h4.ru/bitrix/redirect.php?goto=http://clever45.ru/bitrix/redirect.php?goto=http://logicloud.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/rburgALRi0h</a> 1×slots регистрация на сайте Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке необходимо пополнить счет в казино. Для депозитных призов, данная процедура не нужна, так как депо уже сделан.
1×slots подтвердит вашу регистрацию если говорить
Кешбэк-бонус дает собой возврат фиксированного процента от ставки в случае проигрыша либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%. <a href=http://www.engel-und-waisen.de/index.php/%C3%90%C3%A2%E2%82%AC%E2%84%A2%C3%90%C2%BB%C3%90%C2%B0%C3%90%C2%B4%C3%90%C2%B8%C3%90%C2%B2%C3%90%C2%BE%C3%91%C3%91%E2%80%9A%C3%90%C2%BE%C3%90%C2%BA_%C3%90%C3%90%C2%B2%C3%91%E2%80%9A%C3%90%C2%BE%C3%91%CB%86%C3%90%C2%BA%C3%90%C2%BE%C3%90%C2%BB%C3%90%C2%B0>http://www.engel-und-waisen.de/index.php/%C3%90%C3%A2%E2%82%AC%E2%84%A2%C3%90%C2%BB%C3%90%C2%B0%C3%90%C2%B4%C3%90%C2%B8%C3%90%C2%B2%C3%90%C2%BE%C3%91%C3%91%E2%80%9A%C3%90%C2%BE%C3%90%C2%BA_%C3%90%C3%90%C2%B2%C3%91%E2%80%9A%C3%90%C2%BE%C3%91%CB%86%C3%90%C2%BA%C3%90%C2%BE%C3%90%C2%BB%C3%90%C2%B0</a> 1×slots рабочее зеркало Изучить управляла и обстоятельства получения бездепозитных призов казино, Вы сможете у нас на сайте в разделе с призами или на официальном сайте выбранного Вами казино. Если имеет отыскать необходимую информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал или по электрической почте.
1х слот регистрация в 1×slots casino
Условия имеют разниться приятель от друга. Но такой бонус имеет быть использован только для игрового процесса – полученные на счет деньги до как, как будут отыграны, исключить нереально.Так собственно главное различие дара на депозит от бездепа – неотъемлемое пополнение счёта. Вы сможете внести депозит и преувеличить стартовый капитал либо отобрать бездеп и при не придётся рисковать собственными сбережениями. Поспешите выполнить простые требования, и администрация ресурса начислит щедрое поощрение! 1 x slots <a href=http://www.ritual-letichev.km.ua/user/CharlesTUP/>http://www.ritual-letichev.km.ua/user/CharlesTUP/</a>
1×slots официальный сайт мобильная версия скачать
Так что главное различие подарка на депозит от бездепа – неотъемлемое пополнение счёта. Вы сможете внести депо и преумножить стартовый капитал либо отобрать бездеп и при не придётся рисковать своими сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начислит щедрое поощрение! Промообъявления от казино не дают реальной картины и ориентированы на привлечение внимания юзеров. Понять, насколько высоки шансы остаться в плюсе, дозволит собственный тест условий предложения: <a href=http://oaomovostok.ru/index.php?subaction=userinfo&user=vivacioushamper>http://oaomovostok.ru/index.php?subaction=userinfo&user=vivacioushamper</a> Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды находятся на данной страничке. Посетитель может расценить условия получения и начать играть на средства без внесения депозита. При этом игроку главно осознавать, на каких критериях и какими методами него вывести полученный выигрыш. Для сего нужно оценить перечень подключенных платежных систем. 1×слот регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=http://griffhunter.com/boards/viewtopic.php?p=459126#p459126>1х слотс зеркало регистрация в 1×slots casino</a>
<a href=https://minecraft.ru.net/user/Manuelsoarl/>1×slots регистрация 1×slotscasino09k online</a>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=484283>1×slots рабочее зеркало</a>
<a href=http://www.arka-bahce.org/forum/showthread.php?p=779863#post779863>1×slots сайт</a>
<a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=93269>1×slots casino зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Верификация аккаунта. Лучше подтвердить личность сразу последствии регистрации, чтобы позже не было заморочек с выводом средств. Верификация имеет проходить двумя путями: В истинное время получить приз за регистрацию в казино очень просто. Почти любой игорный жилище с радостью предоставит средства либо бесплатные вращения. Многие игроки используют данным и не смущяются региться в каждом клубе с выгодными условиями. Кстати, это замечательная возможность придумать выигрышную тактику и сорвать куш.
#3432 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Анна Щербакова, фигуристка казино онлайн <a href=https://kompromat1.online/>1×bet зеркало рабочее xbet</a> Хорова Наталья Александровна порно casino x <a href=https://strelochnik.com/>vodka casino</a> pin up букмекерская контора pin up casino бывшие казино porno Дарья Клишина порно с Карен Хачанов (теннис) online casino порно с Баталина Ольга Юрьевна
DiskiPlus pin ап casino DiskiPlus казино фильм онлайн <a href=https://www.diskiplus.ru/>DiskiPlus Комарова Наталья Владимировна порно</a> DiskiPlus скачиваемые казино DiskiPlus слоты казино <a href=https://diskiplus.ru/>DiskiPlus порно с Виктория Синицина, фигуристка</a> DiskiPlus Шевцова Татьяна Викторовна порно DiskiPlus r7 casino DiskiPlus букмекерская контора фонбет DiskiPlus приложения букмекерских контор DiskiPlus порно с Диана Шнайдер (теннис) DiskiPlus фреш казино DiskiPlus официальная казино
#3433 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино сегодня 1×bet зеркало рабочее xbet <a href=https://www.ossetia.tv/>самое казино</a> casino приложения ограбление казино <a href=https://t.me/vchkogpu_ru>pin casino зеркало</a> казино фильм онлайн казино большая Кузнецова Анна Юрьевна порно рейтинг казино porno Илья Ковальчук (хоккей) букмекерская контора 1×bet слоты 1×bet xyz
DiskiPlus 1go casino DiskiPlus casinos winning <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet casino</a> DiskiPlus 1×bet слоты 1×bet top DiskiPlus букмекерская контора бесплатно скачать <a href=https://diskiplus.ru/>DiskiPlus porno Андрей Рублев (теннис)</a> DiskiPlus реального казино DiskiPlus porno Светлана Ходченкова DiskiPlus casino buzz DiskiPlus pinco casino DiskiPlus bitz casino DiskiPlus cometa casino DiskiPlus букмекерские конторы в россии
#3434 Charlesgunnyhttp://filmkachat.ru
1×slot официальный сайт
Принципиальным отличием даровых призов от бонусов на депо является отсутствие надобности заносить средства на аккаунт. Из-за сего их нередко называют бездепозитными (no deposit bonuses).Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных бонусов принимаются достаточно высочайшие притязания. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до ста раз в игровых автоматах. Например, в игрок получил безвозмездно 10 долларов, то необходимо несомненно отыграть их, поставив одну тысячу спинов по одному доллару любой. Стоит обозначить(означить), что не все казино выделяют возможность выступать на бонусы и не во всех развлекательных заведениях идентичные верховодила для отыгрывания. Некоторые казино запрещают выступать на призы в блекджек либо ограничивают ставки до 5 %, что значительно наращивает в десятки раз число необходимых игр. <a href=http://filmkachat.ru/>1×slots скачать на айфон</a> Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция имеет доскональные правила, гиперссылка на коие обычно находится в промообъявлении. В их указываются лимиты, вейджер, перечень дешевых игр. Если оператор укрывает данные о предложении, то воспользоваться им надо. <a href=https://alestat.com/www,astramedika.com.ua.html>https://alestat.com/www,astramedika.com.ua.html</a> Казино выводит деньги только на ту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного бонуса, Вам сначала необходимо пополнить счет. В некоторых клубах ограниченный перечень способов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет именно с данных платежных методов, которые доступны для вывода.Как только получите бездеп в казино, всё одинаково не забывайте инспектировать электронную почту. Некоторые игорные клубы день радуют интенсивных гэмблеров приятными бонусами. Чаще всего получить подарок возможно в преддверии праздника, на день рождение, за привлечение друга. А того распространённым бонусом считается надбавка к депозиту. Нужно не восполнить счёт, и азартное заведение прирастит его на 50–100%. 1×slots регистрация 1×slotscasino 56 online <a href=http://polishcrazyclan.ugu.pl/member.php?action=profile&uid=262335>http://polishcrazyclan.ugu.pl/member.php?action=profile&uid=262335</a> Нет. Для получения бездепозитного приза в казино необходима неотъемлемая регистрация на веб-сайте. Играть в слоты безвозмездно и без регистрации можно лишь в демо режиме.Как правило, при выводе финансов, от играющего требуется только устроить наименьший лепта для того, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом личный счет.
1хслотс официальный сайт зеркало
Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?Как только вы отыграли вейджер и свои с бонусного баланса перешли вам на настоящий счет, Вы смело можете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (сделать минимальный депозит к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депо). <a href=https://clubdefansde24.com/foro/memberlist.php?mode=viewprofile&u=3464>1хслотс официальный сайт зеркало</a> 1×slots casino регистрация 1×slots review live При пользовании бездепозитным бонусом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют несколько видов лимитов: <a href=https://franciscodwpi43332.full-design.com/nude-ai-exploring-the-boundaries-of-technology-and-ethics-72935807>https://franciscodwpi43332.full-design.com/nude-ai-exploring-the-boundaries-of-technology-and-ethics-72935807</a> 1×slots регистрация то дальше необходимо пройти Перечисленные выше главные характеристики сопровождают фактически любой приз и считаются стереотипными для бездепозитных бонусных начислений в казино.Бездепы с безвозмездными вращениями деют юзерам право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд выплачивает казино. Число спинов ограничено и изредка превышает сотню. Если промоакция включает в себя большое безвозмездных игр, их начисление имеет быть разбито на некоторое дней.
1×slots зеркало на сегодня
При маленькой сумме бонуса рекомендовано играть по невысоким ставкам, а использовать максимальные другого, как лишь в том случае, в вейджер слишком великой, а время на отыгрыш сильно ограничено. Если площадка презентует бездеп за регистрацию, то процедура его получения проста. Нужно только завести аккаунт на веб-сайте и активировать его, подтвердив адрес электронной почты, номер телефона или другие данные, коие настятельно оператор. Перед этим необходимо убедиться, собственно юзер располагается на официальном сайте казино, а не на мошеннической площадке.Бонус с зачислением средств на счет выделяет больше свободы поступков. Пользователь сам избирает, каким образом распорядиться подаренными своими. Здесь также все действовать лимитирования на перечень дешевых игр, хотя обычно эти рамки не например строги, как в промо с безвозмездными вращениями. <a href=http://xn–q20bz7b.com/bbs/board.php?bo_table=free&wr_id=45885>http://xn–q20bz7b.com/bbs/board.php?bo_table=free&wr_id=45885</a> Ознакомьтесь с нашим списком наилучших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего перечня и получите бездеп незамедлительно. Хватайте наилучшие безвозмездные предложения ниже и выигрывайте великие средства, не рискуя!Представленные на данной страничке наилучшие бездеп бонусы в казино за регистрацию в 2022 году имеют оптимальные условия. После кропотливого анализа редакция портала составила рейтинг спецпредложений, каком гости Casino.ru все сортировать перечень по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д. 1хслотс рабочее зеркало на сегодня
1×slots casino зеркало рабочее
<a href=http://turkteam.10tl.net/member.php?action=profile&uid=2012>1×slots зеркало быструю регистрацию а также мгновенное</a> скачать 1×slots на андроид мобильная версия <a href=http://boss.why3s.cc/boss/home.php?mod=space&uid=140281>http://boss.why3s.cc/boss/home.php?mod=space&uid=140281</a> Если вы избираете проверенное лицензионное онлайн казино и выполните все обстоятельства получения бездепозитного приза, проблем с получением подарка у Вас не возникнет.Бездепозитные призы — это презенты от казино повторяющий бонусных денег либо фриспинов для игровых автоматов, которые начисляются на акк игрока после процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депо не требуется.
1×slots зеркало подтвердит вашу регистрацию если говорить
Выбирая бесплатный бонус, пристально изучайте верховодила. Убедитесь, что вам можно на участие в промоакции. Уточните, в каких забавах возможно скорпулезно условия вейджера. При надобности задавайте вопросы адептам саппорта. <a href=http://iwlnx.com/forum/member.php?action=profile&uid=107275>http://iwlnx.com/forum/member.php?action=profile&uid=107275</a> 1хслотс рабочее зеркало Осталось избрать казино с призом за регистрацию и создать профиль. После активации подарка выигрыш находится от Фортуны и способностей.Казино выводит средства лишь на что, эту платежную систему, с котрой был изготовлен депо. То есть, для вывода бездепозитного бонуса, Вам поначалу необходимо пополнить счет. В некоторых клубах узкий перечень методов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с данных платежных способов, коие доступны для вывода.
<b>Смотреть еще похожие новости:</b>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=192053>1×slot регистрация</a>
<a href=https://chasingadream.rpginitiative.com/showthread.php?tid=2&pid=260425#pid260425>1×slots регистрация на 1хслотс</a>
<a href=http://kick.gain.tw/space.php?uid=4479892>1×slots регистрация 1×slots casino c2d ru</a>
<a href=https://surfaceprophets.com/members/davidelicy.5309/>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. На нашем веб-сайте Вы найдете перечень актуальных свежих бездепозитных бонусов в казино 2022 года. Также, есть большое неповторимых предложений, коие доступны только гостям нашего вебсайта после регистрации по нашей ссылке или активации специального промокода.
#3435 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
промокод 1×bet кент casino <a href=https://slon-ru.com/>казино большая</a> казино смотреть онлайн порно с Анна Щербакова, фигуристка <a href=https://sovsekretno.net/>казино рублях</a> 1×bet телефон леон букмекерская контора Крючкова Полина Викторовна порно porno Юлия Канакина порно с Евгений Малкин (хоккей) 1go casino champion casino
DiskiPlus porno Дарья Клишина DiskiPlus casino регистрации <a href=https://diskiplus.ru>DiskiPlus пин ап казино</a> DiskiPlus kent casino DiskiPlus online casino официальный <a href=https://diskiplus.ru>DiskiPlus порно с Елена Никитина, скелетонистка</a> DiskiPlus 1×bet сейчас DiskiPlus автомат казино DiskiPlus официальное казино вход DiskiPlus Валентина Матвиенко порно DiskiPlus porno Мария Шарапова DiskiPlus 1×bet DiskiPlus Елизавета Боярская
#3436 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
суть казино inform@rucriminal.info <a href=https://kompromat1.online/>порно с Петр Ян (ММА)</a> casino 7k сегодня casino ru <a href=https://vestnik-jurnal.com/>букмекерская контора фонбет официальный сайт</a> 1×bet официальный 1×bet xyz пина букмекерской конторы Шевцова Татьяна Викторовна порно bitz casino porno Нина Пирогова, хоккеистка Приезжева Екатерина Геннадьевна порно pin up casino пин ап
DiskiPlus лучшие казино бесплатно DiskiPlus vavada casino <a href=https://www.diskiplus.ru>DiskiPlus букмекерская контора ставки</a> DiskiPlus 1×bet регистрация DiskiPlus kent casino регистрация <a href=https://diskiplus.ru>DiskiPlus Светлана Ходченкова</a> DiskiPlus казино играть DiskiPlus porno Игорь Акинфеев (футбол) DiskiPlus Нургалиева Эльвира Рамиловна порно DiskiPlus вывод казино DiskiPlus porno Анна Сидорова, керлингистка DiskiPlus винлайн букмекерская контора DiskiPlus казино большая
#3437 Charlesgunnyhttp://filmkachat.ru
1×slots бонус за регистрацию
Вывод выигрыша с бездепозитных призов казино – великодушный презент от азартных клубов. Но чтобы вывести свой доход, необходимо выполнить ряд критерий:Фриплей-бонусы встречаются лишь в неких клубах. Они зачисляются сразу после сотворения профиля и активны недолговременное время. Если не успеете израсходовать средства, они просто сгорят. Касаемо медли, в большинстве случаев бонусы активны в течение часа. <a href=http://filmkachat.ru/>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a> Бoльшинcтвo азартных заведений выдвигают примерно однообразные, схожие условия и притязания, которые нужно выполнить, дабы получить бездепозитный бонус за регистрацию. Все их можно соединить в один список: <a href=https://www.papercall.io/speakers/luxury-real-estate-marketing-ideas>https://www.papercall.io/speakers/luxury-real-estate-marketing-ideas</a> 1×slot зеркало <a href=http://japan-lke.com/home.php?mod=space&uid=67573&do=profile>http://japan-lke.com/home.php?mod=space&uid=67573&do=profile</a>
1×slots зеркало выигрыши обязательно пройдите регистрацию если
1×slots быструю регистрацию а также мгновенное <a href=https://amvnews.ru/forum/profile.php?mode=viewprofile&u=75775>https://amvnews.ru/forum/profile.php?mode=viewprofile&u=75775</a> Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.Не стоит путать забаву в демо и использование бонусов. В демонстрационном режиме игрок возможность оценить механику слота, сюжет и оформление. Но игра проводится на относительные кредиты, потому отсутствует главное ? ощущение азарта. Активируя промокод или фриспины, заказчик и не тратит свои средства на игровые автоматы, но может сорвать настоящий куш! casino 1×slot Для проверки применяются сканы паспортов, водительских удостоверений, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если пользователь замечен в попытке ввести дополнительный акк, все его учетные записи подвергаются блокировке, а их владелец попадает в темный список. При забаве на лицензионной площадке не бояться указывать достоверную индивидуальную информацию (шифрование исключает утечку индивидуальных данных).
1×slot зеркало рабочее этих способов предполагает регистрацию
Срок отыгрыша — это период, который наступает в момент активации приза и завершается с его закрытием. Пользователю необходимо уложиться в этот временной зазор, по призовые средства аннулируются. Казино устанавливают список игр, ставки в которых засчитываются при расчете отыгранных средств. Если тайтл не входит в этот список, то возможность быть недосегаем для загрузки период деянья бонусного предложения. Все любят получать презенты. Согласитесь, практически любой играющий человек будет сильно счастлив, случае получит бесплатный презент для забавы в онлайн казино просто за регистрацию или же бонус за внесенный депозит, так нарекаемые приветственные призы для свежих игроков. Соответственно такие онлайн клубы станут более востребованы и предпочтительны у игроков при выборе казино для забавы. Топ казино день обновляется и добавляются свежие и занимательные игровые клубы с симпатичной бонусной политикой и всеми возможными привилегиями, к коим относятся эти бонусы как фриспины за регистрацию, валютные бездепозитные бонусы, а также великодушные бонусы за внесенный депо. <a href=https://www.mircalemi.net/member.php?action=profile&uid=17778>https://www.mircalemi.net/member.php?action=profile&uid=17778</a> 1×slots регистрация на сайте Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную процедуру активации бонуса без депозита. Внимательно прочитайте до конца. Многие новички проделывают оплошности на этапе регистрации и поэтому не могут получить презент.Все обожают получать презенты. Согласитесь, почти любой играющий человек несомненно беспредельно счастлив, в получит даровой подарок для игры в онлайн казино просто за регистрацию либо же приз за внесенный депо, так нарекаемые приветственные бонусы для свежих игроков. Соответственно эти онлайн клубы станут больше известны и преимущественны у игроков при выборе казино для забавы. Топ казино каждый обновляется и прибавляются свежие и увлекательные игровые клубы с привлекательной бонусной политикой и всеми вероятными привилегиями, к коим относятся эти бонусы как фриспины за регистрацию, денежные бездепозитные призы, еще великодушные бонусы за внесенный депо.
1×slots зеркало на сегодня
В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая приятная доля игры. Важно, зачастую бездепозитные призы в казино выдаются с лимитированиями по наибольшей выплате. В среднем возможно рассчитывать на выгода в несколько тысяч руб. Как исключить выигрыш с приза без депо. Придётся подтвердить акк документально, в неких заведениях. Процедура верификации неотклонима и делается каждым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате или прочитайте в правилах.Акции распространяются как на все игры казино, так и на узкий перечень. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino прочие. Промо имеет охватывать разработки 1-го производителя. Бездеп не пересекается с другими акциями казино. Если на сайте учтен кэшбек, он не начисляется за ставки, сделанные бонусными средствами. Для идентификации платежных реквизитов игрока может потребоваться пополнение счета на минимальную сумму. Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. 1×slots рабочее зеркало <a href=https://www.aura-invest.com/bbs/board.php?bo_table=free&wr_id=3386916>https://www.aura-invest.com/bbs/board.php?bo_table=free&wr_id=3386916</a> Перечисленные выше основные свойства сочетают фактически любой бонус и являются стереотипными для бездепозитных бонусных начислений в казино.
1х слотс зеркало регистрация в 1×slots casino
Так же стоит выделить то, собственно в любом интернет казино установлен свой максимальный кешаут на бездепозитный бонус. Как правило кешаут — это максимальная сумма денег, кот-ая дешевая для вывода с бездепозитного приза.Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают приз по государствам. Вплоть до как, что клуб имеет себя игроков из Вашей страны, а бездеп не давать. Подтверждение электронной почты – одно из главных критерий, которое есть практически в каждом бездепозитном казино. Чтобы верифицировать электрическую почту, достаточно перейти по активной ссылке в послании, полученном от азартного клуба.Чаще всего казино бонус за регистрацию без депо даёт вероятность запустить любой машина. Но какого-либо внимательно ознакомиться с критериями. Иногда для забавы доступны только определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, другого, как начать знакомство с миром азарта именно с «одноруких бандитов». <a href=http://www.sksmg.com/home.php?mod=space&uid=197379&do=profile>http://www.sksmg.com/home.php?mod=space&uid=197379&do=profile</a> Подтверждение индивидуальной информации. Все казино требуют от клиента пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и наличие у пользователя других аккаунтов (мультиаккаунт запрещен). casino 1×slot
<b>Смотреть еще похожие новости:</b>
<a href=http://weeklywars.de/memberlist.php?mode=viewprofile&u=860>casino 1×slot</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для тех, кто только подумывает испытать собственную удачу, а также для проф игроков, ищущих новые площадки для выигрышей, водящие лицензированные казино нередко устраивают различные промоакции, и одно из лучших услуг прошедшее время – как для начинающих, так и для проф игроков – бездепозитный приз за регистрацию. В любом казино с бездепозитным призом предусмотрены вейджеровые обстоятельства. Это единственный «подводный камень», который стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, нужно сделать определённое количество ставок. Чем круче приз, что, этим сложнее выполнить обстоятельства, и наоборот.
#3438 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Захарова Мария Владимировна скачать pin casino <a href=https://rhymes-punches.com/>porno Марина Александрова</a> Радченко Светлана Юрьевна порно Александра Бортич <a href=https://strelochnik.com/>порно с Виктория Синицина, фигуристка</a> порно с Алина Загитова пинап казино 1×bet сейчас порно с Баталина Ольга Юрьевна casino актуальное зеркало kent casino пина casino
DiskiPlus retro casino DiskiPlus 1go casino <a href=https://www.diskiplus.ru>DiskiPlus Чулпан Хаматова</a> DiskiPlus казино играть DiskiPlus 7k casino бонус <a href=https://www.diskiplus.ru>DiskiPlus порно с Никита Кучеров (хоккей)</a> DiskiPlus Матвиенко Валентина Ивановна порно DiskiPlus казино регистрации DiskiPlus винлайн букмекерская контора DiskiPlus порно с Зырянова Анастасия Владимировна DiskiPlus казино 1 DiskiPlus online casino 7k DiskiPlus 1×bet официальный xbet
#3439 Charlesgunnyhttp://filmkachat.ru
1× slots официальный
Бездепозитные призы начисляются лишь раз один. Не стоит раскрывать свежие аккаунты, чтобы получить их повторно. Служба защищенности казино непременно выявит «левого» соучастника и заблокирует. Если посетитель выполнит необходимые притязания, отыграет собственную ставку и решит исключить собственный выигрыш, то ему надо(надобно) к, что казино обязательно потребует дать ксерокопии личных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные свои исключить не удастся.Чаще всего, модные сервисы, такие как MoneyBookers и WebMoney, еще MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно обязательное управляло. Финансовые свои выводятся лишь спустя что, эту платежную систему, коей огромной для пополнения депо. Если же игрок получил бездепозитный покерный бонус, требуется пополнить счет на минимальную необходимую, кот-ая сочиняет обычно 10 $. <a href=http://filmkachat.ru/>1×slot зеркало рабочее этих способов предполагает регистрацию</a> <a href=https://rapidapi.com/7ball-viet-nam-7ball-viet-nam-default/api/7ball-viet-nam/discussions/146278>https://rapidapi.com/7ball-viet-nam-7ball-viet-nam-default/api/7ball-viet-nam/discussions/146278</a> Также бездепозитные бонусы могут работать способом возвратить к игре посетителей, временно приостановивших своё сотрудничество с компанией: извещение о бездепе поступает на мобильный телефон либо почту.Фриспины — бесплатные вращения, которые позволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины считаются наиболее популярным и желаемым видом бонуса — бесплатные вращения порой эффективнее и веселее в отыгрыше, чем другие виды бездепов. 1×slos регистрация в 1×slots casino <a href=http://mail.canadalondonchinese.com/home.php?mod=space&uid=111716>http://mail.canadalondonchinese.com/home.php?mod=space&uid=111716</a>
x1 slots 1хслотс регистрация перейти на 1×slots
Перед активацией главно внимательно выучить обстоятельства промоакции. Чем ниже вейджер, тем больше возможная выгода игрока. Имеют значение того лимиты ставок при отыгрыше и сроки, в течение которых возможно воспользоваться предложением. Если бездеп обхватывает узкий список игр, рекомендуется разузнать наибольшие коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят лишь никаких случае, в оператор не установил требовательные лимитирования на наивысшую необходимую ставки.Мы советуем не открещиваться от подобных предложений узнаваемых казино. Выделите количество мин. На регистрацию, получите приз и попробуйте его отыграть. Может быть, сейчас фортуна будет на вашей стороне! <a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=856453>1×slots бонус за регистрацию</a> 1×slots зеркало рабочее на сегодня Также посещают случаи, когда казино начисляет обсужденный приз последствии регистрации нового клиента по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам.2. Создать свежий профиль. Для регистрации нужно заполнить маленькую анкету либо зайдите в индивидуальный кабинет при помощи социальных сетей; <a href=https://wlppr.net/user/GeraldDig/>https://wlppr.net/user/GeraldDig/</a> Но а если вы теснее профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы автоматически перейдете в онлайн казино; 1×slots официальный зеркало рабочее
1× slots casino официальный сайт
Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных ситуаций с казино, когда последствии отыгрыша бездепа для не дадут вывести солидную сумму выигрыша.Игрокам не следует принимать приветственный бонус как гарантированный метод получить крупный выигрыш, хотя это отличная возможность без затрат оценить функционал казино. <a href=https://princeofrubber.com/user-profile/charlessow/?um_action=edit>https://princeofrubber.com/user-profile/charlessow/?um_action=edit</a> Разные казино имеют собственные верховодила по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высочайшие требования. Часто онлайн-казино советуют отыграть бонусное поощрение до ста один в игровых автоматах. Например, если игрок получил бесплатно десять долларов, то необходимо будет отыграть их, поставив 1 тысячу спинов по 1 доллару любой. Стоит обозначить(означить), собственно не все казино выделяют возможность играть на призы и не во всех увеселительных заведениях идентичные управляла для отыгрывания. Некоторые казино запрещают выступать на бонусы в блекджек или ограничивают ставки до пяти процентов, что существенно увеличивает в десятки раз число нужных игр.Так же стоит выделить то, что в любом онлайн казино установлен собственный наибольший кешаут на бездепозитный бонус. Как управляло кешаут — это предельная сумма денег, кот-ая дешевая для вывода с бездепозитного приза. 1×slots регистрация Варианты выигрыша зависят от Вашей успеха и условий игорного портала. Выше мы заявили, что некоторые бездепозитные призы в 2022 году выдаются с ограничениями по наибольшей выплате. Однако, остаются и, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность передовых игр на средства, можно выиграть невероятные суммы. Сегодняшние игровые автоматы либо видео слоты, как их называют. Могут выдавать солидные умножение от х1.000 и выше. Некоторые множат ставку от х100.000.Подарки на конкретные даты выделяются критериями получения. Если одобрение начисляют игроку на день рождения, то сумма обычно зависимости от совместного размера депо последний год.
1×slots мобильная версия войти казино
Фриспины начисляются по конкретной ставке. После их активации игроку необходимо запустить слот и увериться, что в нем показываются благотворительные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода в отыгрыша определяется оператором и редко выше 5 000 рублей. 1хслот скачать <a href=https://xn–80aa6acmqdpq.xn–p1ai/user/JasperSed/>https://xn–80aa6acmqdpq.xn–p1ai/user/JasperSed/</a>
1×slots casino регистрация 1×slots review live
<a href=https://towtrai.com/%D0%B1%D0%BB%D0%BE%D0%B3-%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0-%D1%8F%D0%BD%D0%B4%D0%B5%D0%BA%D1%81/>https://towtrai.com/%D0%B1%D0%BB%D0%BE%D0%B3-%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0-%D1%8F%D0%BD%D0%B4%D0%B5%D0%BA%D1%81/</a> Чтоб получить крупный выигрыш, выбирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша.Первый возникающий вопрос, это, для выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают новых игроков. Последним проще начать игру на средства с подарка за регистрацию. Им не нужно пополнять баланс и тратить личностные средства. Новички получают безвозмездные спины или средства на счёт. С их поддержкой знакомятся с игровым ходом, крутят слоты и делают ставки в рулетке. 1×slots промокод при регистрации 2025 Некоторые онлайн-казино без депозита предлагают свежим посетителям выбрать бонус при регистрации. Будьте внимательны: выбрав один, вы в безусловном большинстве случаев не можете воспользоваться остальными.Объективные – объем приза, коэффициент и обстоятельства вейджера, необходимость внесения депо для вывода средств;
<b>Смотреть еще похожие новости:</b>
<a href=https://www.mshowto.org/forum/members/jamespauri.html>1×slots рабочее зеркало</a>
<a href=https://forum.home-visa.ru/viewtopic.php?f=69&t=807392&p=3002182#p3002182>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Суммы сходственных услуг, как правило, колеблются от трех до двадцати долларов, а вейджер на эти свои должен сочинять от 30 до шестидесяти раз. Зачастую, наибольшая сумма выигрыша здесь составит от одной до двух сотен $. Если игрок выиграет больше, то все свои шансы быть списанными до очень разрешенного выигрыша. Здесь бывает содержание выводить еще несуществующие деньги на собственную платежную систему и дальше искать заведение с благоприятными под данную сумму релоадом или призом за первое пополнение счета. Есть некоторое подвидов бездепозитного вознаграждения, предлагаемого великим числом заведений. Варианты выигрыша в от Вашей успеха и условий игорного портала. Выше мы заявили, собственно некоторые бездепозитные бонусы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются другие, все, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на средства, можно выиграть неописуемые суммы. Сегодняшние игровые автоматы или видео слоты, как их именуют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000.
#3440 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Георгий Джикия (футбол) пари букмекерская контора <a href=https://rhymes-punches.com/>Юдаева Ксения Валентиновна порно</a> porno Светлана Ходченкова casino автомат <a href=https://7club7.com/>pin up casino скачать</a> скачать 1×bet 1×bet xyz 1×bet сейчас порно с Дарья Касаткина (теннис) casino игровой автомат сколько казино казино зеркало сегодня up casino скачать
DiskiPlus gama casino DiskiPlus казино вулкан <a href=https://diskiplus.ru>DiskiPlus казино пину</a> DiskiPlus 1×bet xbet xyz DiskiPlus Светлана Ходченкова <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet сейчас</a> DiskiPlus porno Юлия Канакина DiskiPlus Лут Оксана Николаевна порно DiskiPlus пинко casino DiskiPlus смотреть фильм казино DiskiPlus букмекерская контора фонбет DiskiPlus кент казино DiskiPlus сайт pin up casino
#3441 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
Многие игроки, оценив возможностей казино, остаются выступать в нем и дальше ? на это и нацелено каждое промо. Постоянные клиенты заносят депозиты и делают ставки, обеспечивая долгосрочную выгода оператора. То есть, казино раздают бездепы новым юзерам для формирования приклнной аудитории.Самый распространённый из подобных призов, естесственно же, бездеп на день рождения посетителя — приз в виде фиксированной суммы или фриспинов поступает на счёт игрока, а воспользоваться им возможно протяжении установленного периода медли. <a href=http://filmkachat.ru/>1хслотс зеркало на сегодня</a> <a href=https://www.patreon.com/posts/industrial-top-120668383>https://www.patreon.com/posts/industrial-top-120668383</a> 1хлот регистрация в 1×slots casino <a href=http://evrika41.ru/redirect?url=http://region-samara.su/bitrix/redirect.php?goto=http://supermaz.com/bitrix/rk.php?goto=https://teletype.in/@urist555/ra5m4YYvAKB>http://evrika41.ru/redirect?url=http://region-samara.su/bitrix/redirect.php?goto=http://supermaz.com/bitrix/rk.php?goto=https://teletype.in/@urist555/ra5m4YYvAKB</a>
1×slots рабочее зеркало на сегодня
Простая процедура получения бездепозитного бонуса, кот-ая займет не более 2-х минут. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные.Возьми собственный презент. Чаще всего приз активируется сразу последствии регистрации. Но случаются истории, когда нужно зайти в личный кабинет либо написать в справочную службу. <a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=174057>1хслотс казино зеркало</a> 1× slots casino официальный сайт Некоторые клубы механически начисляют бонус на акк игрока после исполнения критерий получения, но посещают ситуации, когда бонус надо(надобно) активировать игроку самому. Есть несколько методов активации бонуса:Такой казино приз без депо за регистрацию выдается игроку на час и активно используется данное предложение с 2017 года. Это как бы некая маскировка одобрения под бездепозитный. Суть всего сего сводится к что, этому, собственно геймеру на час выдается, например, 1000 $, а реклама повторяет то, собственно каждой выигрыш возможно будет в оставить при себе. Но случае играющий всерьез отнесется к данному предложению, то он попросту растеряет время. Ведь геймеру надо(надобно) будет выступать не в основном аккаунте, а в тренировочном и с ограниченным выбором автоматов и ставок. Да и если, тогда, выигрыша (в всей тыс. ) в управляла вступят определенные обстоятельства, где несомненно сказано, что максимальной суммой победы имеет быть лишь двести $ и деньги возможно применять лишь в качестве бонуса на 1-ый вклад с вейджером 25 от суммы гонорары плюс сам депо. По итогу получится, что игрок выигрывал для 200% бонус с вейджером на конкретную необходимую. Короче разговаривая, это все не вашего времени. <a href=http://parijanka.kz/index.php?subaction=userinfo&user=victoriousgroup>http://parijanka.kz/index.php?subaction=userinfo&user=victoriousgroup</a> Промообъявления от казино мешают реальной картины и направлены на вербование внимания юзеров. Понять, насколько высоки шансы остаться в плюсе, позволит собственный анализ условий предложения:Иногда операторы настоятельно внесение малого депо перед выводом для верификации платежного прибора. В некоторых казино этот депо также светит отыграть. 1×slots casino зеркало рабочее Многие азартные клубы ограничивают необходимую вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании акции, суммы Вы не сможете вывести. Разница будет аннулирована, Вы том не можете создавать на нее ставки.Демоказино есть практически на каждом сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются значительно пореже: там когда выигрыша и соблюдения критерий промоакций бездеп возможно перевоплотить в реальные деньги.
1хлот регистрация в 1×slots casino
Возьми собственный презент. Чаще всего бонус активизируется сразу в регистрации. Но бывают истории, когда надо(надобно) забежать в собственный кабинет либо написать в справочную службу.4. Заберите презент. Чаще всего бонус активизируется сразу в регистрации. Но случаются ситуации, когда нужно зайти в индивидуальный офис или написать в службу поддержки. <a href=http://datangzixun.com/home.php?mod=space&uid=145855>http://datangzixun.com/home.php?mod=space&uid=145855</a> 1хслотс мобильная версия зеркало Верификация аккаунта. Лучше доказать личность сразу последствии регистрации, дабы позже не было заморочек с выводом денег. Верификация может протекать двумя способами:Многие казино предоставляют в маркетинговых целях благотворительные бонусы исключительно для наших читателей. Чтобы их получить, нужно перейти на игровой вебсайт по партнерской ссылке с нашего портала.
казино 1× slots официальный сайт
Бесплатный приз – кредиты, которые онлайн-казино начислит посетителю, не принуждая его пополнять игровой счет. <a href=http://mandala-app.com/forums/memberlist.php?mode=viewprofile&u=3447>1×slots промокод при регистрации</a> При регистрации в том либо ином онлайн игральном заведении — для дается раз шанс испытать свою удачу не внося свои монеты. Замечу что такую поощрительную услугу предоставляют не все онлайн игровые площадки, а лишь щедрая середина(средина) из их. Которые мы подготовили для Вас в нашем перечне. 1×slots регистрация на сайте 1×slots ru com <a href=http://photogeek.ru/users/glavdorogadv2708/>http://photogeek.ru/users/glavdorogadv2708/</a> С такими ординарными советами каждое казино с бонусом за регистрацию способно принести в разы больше выгоды и полезности.Выбирайте наилучшие бесплатные бонусы счет обзоров на Casinoz – и пусть для сопутствует счастье при отыгрыше бонусных кредитов!
1×slots регистрация
<a href=http://forum.computest.ru/post/729580/#p729580>http://forum.computest.ru/post/729580/#p729580</a> 1×slots официальный сайт скачать
<b>Смотреть еще похожие новости:</b>
<a href=http://b2s.bulwork.com/node/1581?page=85#comment-22755>1хслот зеркало</a>
<a href=http://big.bestforums.org/viewtopic.php?f=7&t=18764>1×slots регистрация на сайте 1×slots ru com</a>
<a href=http://link.5nx.ru/viewtopic.php?f=5&t=8139>1× slots зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На нашем сайте Вы найдете перечень актуальных новых бездепозитных призов в казино 2022 года. Также, есть много эксклюзивных услуг, коие доступны лишь гостям нашего вебсайта после регистрации по нашей ссылке либо активации особого промокода. Можно. Вы всегда сможете отказаться от получения бездепозитного приза за регистрацию в казино, же Вы не создадите ставку.
#3442 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino онлайн casino сегодня <a href=https://rumafia.news/>порно с Бондаренко Анастасия Борисовна</a> фильмы казино рояль top casino <a href=https://strelochnik.com/>Семёнова Татьяна Владимировна порно</a> порно с Максим Глушенков (футбол) скачать 1×bet на андроид порно с Владимир Минеев (ММА) Ходнева Светлана Владимировна порно промокод 1×bet порно с Диана Шнайдер (теннис) casino играть
DiskiPlus 1×bet официальный сайт DiskiPlus 1×bet скачать приложение <a href=https://diskiplus.ru/>DiskiPlus порно с Анна Щербакова, фигуристка</a> DiskiPlus 1×bet xbet xyz DiskiPlus Ирина Горбачева <a href=https://www.diskiplus.ru>DiskiPlus 1×bet официальный сайт</a> DiskiPlus new casino DiskiPlus champion casino DiskiPlus Анна Михалкова DiskiPlus скачать pin casino DiskiPlus ев казино DiskiPlus 1×bet на андроид бесплатно DiskiPlus официальная казино
#3443 poeshophttps://poeshop.ru
купить предзнаменования poe 2 <a href=https://poeshop.ru/>купить божественные сферы path of exile 2</a>
#3444 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачиваемые казино порно с Илюшникова Татьяна Александровна <a href=https://t.me/vchkogpu_ru>пари букмекерская контора</a> 1×bet слоты часы казино <a href=https://specreporter.com/>пина букмекерской конторы</a> порно с Никита Кучеров (хоккей) casino приложения Нургалиева Эльвира Рамиловна порно рабочие зеркала казино porno Александр Соболев (футбол) сколько казино букмекерские контора ап
DiskiPlus pin ап casino DiskiPlus Комарова Наталья Владимировна порно <a href=https://diskiplus.ru>DiskiPlus порно с Гатагова Ольга Анатольевна</a> DiskiPlus казино ставка DiskiPlus скачать casino на андроид <a href=https://diskiplus.ru/>DiskiPlus casino актуальное зеркало</a> DiskiPlus макао казино DiskiPlus букмекерская контора официальный сайт DiskiPlus 1×bet на сегодня DiskiPlus 1×bet телефон DiskiPlus champion casino DiskiPlus Александра Бортич DiskiPlus casino игровой автомат
#3445 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pinco casino казино смотреть онлайн бесплатно <a href=https://res-publika.com>играющие казино онлайн</a> слот casino 1×bet скачать приложение <a href=https://www.ossetia.tv/>фреш казино</a> Елизавета Боярская мобильные букмекерские конторы pin up букмекерская контора гама казино champion casino Нургалиева Эльвира Рамиловна порно Набиуллина Эльвира Сахипзадовна порно
DiskiPlus pin up casino top top DiskiPlus порно с Георгий Джикия (футбол) <a href=https://diskiplus.ru/>DiskiPlus смотреть фильм казино</a> DiskiPlus порно с Варвара Субботина DiskiPlus водка казино <a href=https://diskiplus.ru>DiskiPlus pin up букмекерская контора</a> DiskiPlus 1×bet официальный слоты DiskiPlus казино ставка DiskiPlus 1×bet вход DiskiPlus online casino DiskiPlus up букмекерская контора DiskiPlus casino ru DiskiPlus букмекерская контора леонов
#3446 Raymondseevehttps://myauto.kyiv.ua
Главный авто-журнал <a href=https://myauto.kyiv.ua/>https://myauto.kyiv.ua</a> для водителей! Новости, обзоры, сравнения, тюнинг, автоспорт и технологии. Будьте в курсе последних трендов автомобильного мира!
#3447 RichardCiphttps://setbook.com.ua
Журнал об автомобилях <a href=https://setbook.com.ua/>https://setbook.com.ua</a> всё для автолюбителей! Последние автоновости, обзоры моделей, тест-драйвы, советы по ремонту, тюнингу и обслуживанию. Узнайте всё о мире автомобилей!
#3448 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
лучшие онлайн казино casino андроид <a href=https://th-royalgclub.com/>рейтинг казино</a> champion casino porno Ангелина Гончаренко, хоккеистка <a href=https://t.me/vchkogpu_ru>казино вход</a> porno Светлана Ходченкова Яровая Ирина Анатольевна порно скачать 1×bet скачать pin casino букмекерскую контору пин почему в казино нет часов casino промокод
DiskiPlus casino сайты DiskiPlus 1×bet официальный <a href=https://www.diskiplus.ru>DiskiPlus 1×bet на сегодня</a> DiskiPlus порно с Юлия Ефимова, пловчиха DiskiPlus Самойлова Алла Владимировна порно <a href=https://www.diskiplus.ru>DiskiPlus почему в казино нет часов</a> DiskiPlus Лут Оксана Николаевна порно DiskiPlus лучшие казино бесплатно DiskiPlus официальные сайты казино DiskiPlus porno Мира Андреева (теннис) DiskiPlus up casino зеркало DiskiPlus букмекерская контора бесплатно скачать DiskiPlus про казино
#3449 Ремонт холодильников Smeg Москваhttps://remont-holodilnikov-smeg-tent.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт холодильников smeg рядом, можете посмотреть на сайте: <a href=https://remont-holodilnikov-smeg-tent.ru/>ремонт холодильников smeg сервис</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#3450 Ремонт iPhone 12 Pro Maxhttps://remont-iphone-12-pro-max-zarden.ru/
Профессиональный сервисный центр по ремонту бытовой техники с выездом на дом. Мы предлагаем: <a href=https://remont-iphone-12-pro-max-zarden.ru/>ремонт iphone 12 pro max в москве</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#3451 Intopweb_Zexhttps://intopweb.ru/
Доброго времени суток!
У вас уже есть свои социальные сети, сайт или рекламная кампания? Закажите бесплатный аудит и узнайте – насколько хорошо или плохо они работают. Сравните свою окупаемость и эффективность с похожим нашим проектом. <a href=https://intopweb.ru/>разработка сайтов в краснодаре заказать будущего</a> Если web разработка, IT разработка, разработка программного обеспечения, интеграция собственных и сторонних программных продуктов, комплексное обслуживание IT инфраструктуры в Краснодаре, то это в ИнТОП https://intopweb.ru/ . Получите бесплатную консультацию и закажите звонок по номеру +7(861)201–83–36. Всем пока!
#3452 Kenneththilthttps://bsme.cat
проверенный маркетплейс <a href=https://bsme.cat/>https://bsme.cat</a> предлагающий товары на любой вкус. Простая регистрация, быстрая оплата и защита сделок. Убедитесь в качестве сервиса сами!
#3453 Ремонт iPhone 11 Москваhttps://remont-iphone-11-gear.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт iphone 11 рядом, можете посмотреть на сайте: <a href=https://remont-iphone-11-gear.ru/>ремонт iphone 11 цены</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#3454 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet на андроид бесплатно 7k casino официальный <a href=https://slon-ru.com/>Радченко Светлана Юрьевна порно</a> 1×bet на андроид бесплатно порно с Петр Ян (ММА) <a href=https://sovsekretno.net/>1×slots casino</a> казино пину официальная казино Окладникова Ирина Андреевна порно 1×bet сейчас букмекерская контора без яндекс игры казино лучшие букмекерские конторы
DiskiPlus казино пину DiskiPlus сайт pin up casino <a href=https://diskiplus.ru>DiskiPlus up casino зеркало</a> DiskiPlus inform@rucriminal.info DiskiPlus bet casino <a href=https://www.diskiplus.ru>DiskiPlus porno Дарья Клишина</a> DiskiPlus букмекерская контора на андроид DiskiPlus ешь казино DiskiPlus казино смотреть онлайн бесплатно DiskiPlus 7k casino бонус DiskiPlus 1×bet официальный 1×bet xyz DiskiPlus ап казино DiskiPlus лучшая казино
#3455 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasin online
Если площадка презентует бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь завести акк на сайте и активировать его, подтвердив адресок электронной почты, номер аппарата либо иные данные, которые требует оператор. Перед этим нужно убедиться, что пользователь находится на официальном веб-сайте казино, но на мошеннической площадке. <a href=http://filmkachat.ru/>1×slots казино мобильная версия</a> Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие возникают у начинающих. <a href=https://www.exoltech.ps/blogs/post/89897>https://www.exoltech.ps/blogs/post/89897</a> рабочее зеркало 1×slots <a href=http://twchess.lionfree.net/discuz/home.php?mod=space&uid=29142>http://twchess.lionfree.net/discuz/home.php?mod=space&uid=29142</a> Стоит отметить, что бездепозитный приз выдается лишь совершеннолетним новичкам, которые, к, все пригласить собственных приятелей и людей, также рассчитывающих на поощрительную программку преданности. Подобная технология появилась среди конкуренцию онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры способствуют увеличению своей посещаемости, путем привлечения новых игроков. Бонусы – это уникальный шанс для потенциальных участников забавы, коие имеют опробовать софт покер рума и увериться, будут ли они в него выступать или нет. Новый игрок испробует средства силы с настоящими оппонентами в казино.Условия отыгрыша бонуса. Если Вы планируете заработать на бездепозитном бонусе, то начала обратите внимание на значение вейджера и срок, который дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, что, этим проще отыграть приз и вывести выигрыш.
1×slots бездепозитный бонус за регистрацию
Третитй бездепозитный бонус за регистрацию – денежные средства. К сожалению, начислить рубли либо баксы способны только знаменитые и пользующиеся клубы. С их поддержкой появится насладиться любой доступной игрой – автоматом, рулеткой, кено, блэкджеком.Некоторые онлайн-казино без депо предлагают новым посетителям избрать бонус при регистрации. Будьте внимательны: выбрав раз, вы в безоговорочном большинстве случаев не можете пользоваться остальными. 1хслотс регистрация в 1×slots casino <a href=https://stroyotzyvy.org/user/HarryNeips/>https://stroyotzyvy.org/user/HarryNeips/</a> Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, так как Вам придется ее подтвердить в будущем при выводе средств.Активация валютного гонорары случается автоматически последствии творенья профиля либо использования промокода. Иногда операторы предъявляют дополнительные требования: подписаться на страницы казино в социальных сетях либо на рассылку маркетинговых известий, скачать и ввести дополнительный софт и т.д. 1×slots зеркало регистрация в 1×slots casino
1хслотс казино зеркало
Не стоит незамедлительно же отрицаться от приветственных даров в подобных казино. Администрация готова начислить деньги или фриспины, но предварительно сотрудники обязаны убедиться, собственно вы не мошенник. Дело сомнений, что развелось очень много охотников за бонусами. Они выучились обманывать систему и наваривать солидные суммы денег.Иногда операторы просят внесение минимального депозита перед выводом для верификации платежного инструмента. В неких казино данный депозит также предстоит отыграть. На нашем веб-сайте Вы отыщите список актуальных новых бездепозитных призов в казино 2022 года. Также, есть большое эксклюзивных предложений, которые доступны только посетителям нашего вебсайта в регистрации по нашей ссылке или активации особого промокода.Если вы выбрали для себя некоторое брендов коие вам больше всего полюбились, для постоянной игры! Таких гемблеров казино очень любит и ценит, за частую такие игроки становятся VIP игроками заведения, которым часто поступают выгодные предложения в виде бонусов, например же туда входит и бездепозитные. <a href=http://www.snye.co.kr/bbs/board.php?bo_table=free&wr_id=530305>http://www.snye.co.kr/bbs/board.php?bo_table=free&wr_id=530305</a> 1×слотс казино
1 хслот регистрация в 1×slots casino
<a href=http://forums.panzergrenadiers.com/showthread.php?22751–1×slots-%D0%A0%D1%94%D0%A0%D1%95%D0%A0%D2%91%D0%A1%E2%80%B9&p=503205#post503205>1×slots коды</a> Обычно бездепозитные акции от казино, приходят на эл. Почту в деньки рождения либо праздники. В неких интернет казино можно адресоваться в чат и как постоянному игроку, вероятно вас предложат бездепозитное предложение.Для тех, кто лишь взвешивает испытывать свою фортуну, а для профессиональных игроков, ищущих новые площадки для выигрышей, водящие лицензированные казино часто устраивают различные акции, и одно из лучших предложений за время – как для новичков, например и для профессиональных игроков – бездепозитный бонус за регистрацию. 1×slots рабочее зеркало <a href=https://e-participationyouth.eu/forum/profile/edwardzit/>https://e-participationyouth.eu/forum/profile/edwardzit/</a>
1хслотс рабочее зеркало на сегодня
Иногда операторы просят внесение малого депо перед выводом для верификации платежного прибора. В некоторых казино этот депо того светит отыграть. <a href=https://stroyotzyvy.org/user/Jasperjag/>https://stroyotzyvy.org/user/Jasperjag/</a> Бездепозитный приз – это экономическое вознаграждение, которое выдается участнику забавы в казино, для его привлечения и возникновения заинтересованности. Любой посетитель, кот-ый подходит условиям выдачи похожего бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое поощрение считается более эффективным способом, дающим возможность стартовать в игре, не вкладывая личных вещественных средств. рабочее зеркало 1хслотс Фриплей-бонусы встречаются только в неких клубах. Они зачисляются сразу после создания профиля и активны недолговременное время. Если не успеете истратить свои, они просто сгорят. Касаемо медли, как бонусы активны протяжении часа.
<b>Смотреть еще похожие новости:</b>
<a href=http://diablo2r.cn/home.php?mod=space&uid=30130>рабочее зеркало 1×slots</a>
<a href=https://dev.eff.one/forumdisplay.php?fid=10>1×slots зеркало регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины — благотворительные вращения, коие позволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины считаются наиболее известным и желаемым обликом приза — бесплатные вращения иногда эффективнее и веселее в отыгрыше, чем другие виды бездепов. Размер бонуса. В качестве бездепов обыкновенно начисляют очень суммы, а когда речь о призах за депо, коие начисляются в процентном соотношении от суммы пополнения, то кое-какие казино могут подарить игроку до 2000$.
#3456 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Федор Чалов (футбол) porno Анастасия Янькова, боксерка <a href=https://www.ossetia.tv/>porno Илона Маркова, хоккеистка</a> бесплатно играем казино 1×bet зеркало слоты 1×bet xyz <a href=https://slon-ru.com/>1×bet телефон</a> букмекерская контора фонбет официальный сайт 1×bet xbet 1×bet официальный 1×bet xyz пина casino пина букмекерской конторы vodka casino порно с Виктория Синицина, фигуристка
DiskiPlus порно с Константин Тюкавин (футбол) DiskiPlus Манилова Алла Юрьевна порно <a href=https://diskiplus.ru/>DiskiPlus букмекерская контора фонбет</a> DiskiPlus 1×bet зеркало xbet DiskiPlus официальные зеркала казино <a href=https://www.diskiplus.ru>DiskiPlus 1×bet официальный 1×bet xyz</a> DiskiPlus сайт 1×bet слоты DiskiPlus официальная казино DiskiPlus casino рабочее DiskiPlus casino бездепозитный DiskiPlus Преподобная Надежда Александровна порно DiskiPlus 1×bet 1 казино
#3457 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
up букмекерская контора лучшие казино бесплатно <a href=https://strelochnik.com/>порно с Карен Хачанов (теннис)</a> Преподобная Надежда Александровна порно bitz casino <a href=https://m.repost.news/>Любимова Ольга Борисовна порно</a> casinos xyz порно с Афонина Марина Игоревна рокс казино porno Ангелина Гончаренко, хоккеистка Манилова Алла Юрьевна порно porno Виктория Баркова, легкоатлетка фильмы казино рояль
DiskiPlus порно с Илья Осипов (киберспорт) DiskiPlus casino скачать <a href=https://www.diskiplus.ru>DiskiPlus 1×bet рабочее</a> DiskiPlus порно с Матвей Сафонов (футбол) DiskiPlus porno Илья Ковальчук (хоккей) <a href=https://diskiplus.ru>DiskiPlus porno Игорь Акинфеев (футбол)</a> DiskiPlus casino 7k рабочее DiskiPlus online casino 7k DiskiPlus порно с Гатагова Ольга Анатольевна DiskiPlus букмекерская контора официальный сайт DiskiPlus porno Мира Андреева (теннис) DiskiPlus порно с Антропова Валентина Викторовна DiskiPlus казино смотреть онлайн бесплатно
#3458 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Нургалиева Эльвира Рамиловна порно vodka casino <a href=https://th-royalgclub.com/>сайт pin up casino</a> казино вход porno Марина Александрова <a href=https://glvk.guru/>казино без</a> казино в россии casino рабочее зеркало казино большая porno Ангелина Гончаренко, хоккеистка porno Нина Пирогова, хоккеистка Шевцова Татьяна Викторовна порно Попова Анна Юрьевна порно
DiskiPlus kometa casino DiskiPlus порно с Максим Глушенков (футбол) <a href=https://diskiplus.ru>DiskiPlus casino бонус</a> DiskiPlus pin ап casino DiskiPlus пин ап casino pin <a href=https://www.diskiplus.ru/>DiskiPlus retro casino</a> DiskiPlus Любимова Ольга Борисовна порно DiskiPlus porno Юлия Канакина, скелетонистка DiskiPlus Самойлова Алла Владимировна порно DiskiPlus лучшие букмекерские конторы DiskiPlus букмекерская контора фонбет официальный сайт DiskiPlus порно с Елена Никитина, скелетонистка DiskiPlus 1×bet на сегодня
#3459 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация то дальше необходимо пройти
Прочитайте управляла бонусной программки, в желаете участвовать. Да, мы настоятельно советуем сделать это до регистрации.Перечисленные повыше основные свойства сопровождают фактически любой бонус и считаются стереотипными для бездепозитных бонусных начислений в казино. <a href=http://filmkachat.ru/>скачать 1×slots на андроид мобильная версия</a> <a href=https://gmtti.edu/author/Vidikby/>https://gmtti.edu/author/Vidikby/</a> В перечне притязаний к отыгрышу нередко присутствуют лимиты на ставки при ирге на личные деньги. Так, в отыграть надо(надобно) 30 000 рублей, а предельная сумма ограничена 30 рублями, то вертеть барабаны светит 1000 один. Эта особенность затрудняет соблюдение игроками условий по срокам действия промоакции.Самые свежие бездепозитные бонусы в казино за регистрацию 2022 года с выводом прибыли находятся на данной странице. Посетитель возможность оценить условия получения и начать выступать на средства без внесения депо. При данном игроку важно разуметь, на каких критериях и какими способами возможность вывести полученный выигрыш. Для сего необходимо расценить перечень подключенных платежных систем. рабочее зеркало 1×slots <a href=https://xn–9i1b14lcmc51s.kr/bbs/board.php?bo_table=free&wr_id=196244>https://xn–9i1b14lcmc51s.kr/bbs/board.php?bo_table=free&wr_id=196244</a>
казино 1×slots официальный сайт
1хслотс казино зеркало Реже призы без депозита начисляются неизменным игрокам. С их поддержкою администрация постарается удержать ценных посетителей или вожделеет поблагодарить за преданность правильных гостей. Но гораздо чаще для подобных целей используются такие промоакции:В каждом казино с бездепозитным бонусом предусмотрены вейджеровые условия. Это один-единственный «подводный камень», который стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) сделать определённое число ставок. Чем круче бонус, тем сложнее выполнить условия, и наоборот. <a href=https://www.vevioz.com/forums/thread/4584/>https://www.vevioz.com/forums/thread/4584/</a> 1хслотс рабочее зеркало Автоматы неспроста числятся наиболее популярным азартным отдыхом. Чтобы освоить управление и верховодила, потребуется всего несколько минут. Ваша задача сделать ставку, определить число трудящихся линий и возможно вертеть тамбур. Если на выпадет выигрышная композиция – вы выиграли! С данной задачей вас помогут справится бездепозитные призы казино.
казино 1×slots
Каждая игровая платформа отличается критериями по получению и отыгрышу бездепов. В правилах детально расписаны кратковременные рамки, за которые надо(надобно) прокрутить вейджер. Также не забывайте на наибольший объем ставки и наивысшую необходимую выплаты. С иной стороны, чтобы получить бездепозитные призы казино, довольно израсходовать не более 1 минуты.Диапазон ставок, коие вправе сделать игрок, также лимитирован. Обычно ставить можно небольшую сумму — пределах 10–30 руб. За одно вращение. Прибывшие на акк финансы бездепозитные призы предназначаются, главном, лишь для свежеиспеченных пользователей, коие ранее не имели собственного аккаунта в данном казино. Исходя из этого, случае ранее у игрока был изготовлен депо, то, по всей вероятности, у него больше не несомненно возможности рассчитывать на получение такового приза в определенном заведении.Прочитайте верховодила бонусной программки, какой желайте участвовать. Да, мы безотступно советуем сделать это до регистрации. <a href=https://ekvall.co/member.php?action=profile&uid=39713>https://ekvall.co/member.php?action=profile&uid=39713</a> Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают бонус по государствам. Вплоть до как, собственно клуб может себя игроков из Вашей страны, а бездеп не давать.Риск-игра по одинаковым шансам – Также казино возможность запрещать исполнять условия по отыгрышу с помощью раунда на удвоение, который предлагается в слотах, видео-покере и некоторых иных забавах. 1×slots мобильная версия войти казино На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не можете активировать и получить бездепозитный бонус.
1×slots зеркало на сегодня
Выше мы предоставили глубокий набор самых новых и актуальных бездепозитных бонусов в интернет казино без пополнения на 2022 год, где возможность воспользоваться каким ценным бездепозитным призом. <a href=https://forum.ltp-team.com/topic/83438–1×slots-kazino-zerkalo/>1×slots казино зеркало</a> 1×slots регистрация <a href=https://steamboatspringschat.com/forum/members/arnoldren-1460.html>https://steamboatspringschat.com/forum/members/arnoldren-1460.html</a>
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Помимо прочего, для вывода средств по бездепу необходимо внести на счёт свой 1-ый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на минимально возможную сумму, после чего вывод средств станет доступен.Реже призы без депо начисляются постоянным игрокам. С их помощью администрация постарается вычесть ценных посетителей или желает поблагодарить за преданность правильных гостей. Но намного почаще для похожих целей применяются эти промоакции: Акции, посвященные календарным праздничным, случаются рассчитаны как на всех пользователей, например и на категории: например, подарок на 8 марта девушкам-игрокам либо мужчинам на 23 февраля.Также случаются случаи, когда казино начисляет обсужденный приз в регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам. <a href=http://www.bestpop.co.kr/bbs/board.php?bo_table=free&wr_id=648342>http://www.bestpop.co.kr/bbs/board.php?bo_table=free&wr_id=648342</a> 1×slots casino регистрация 1×slotscasin online
<b>Смотреть еще похожие новости:</b>
<a href=http://lider1c.ru/communication/forum/messages/forum5/message20904/16822–1×slots-zerkalo-kotoruyu-ukazyvali-pri-registratsii-kstati?sessid=032ac2805fbd3ce41552733a31ade668&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1×slots зеркало которую указывали при регистрации кстати</a>
<a href=https://www.formulersupport.com/Thread-1×slot-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5-%D1%8D%D1%82%D0%B8%D1%85-%D1%81%D0%BF%D0%BE%D1%81%D0%BE%D0%B1%D0%BE%D0%B2-%D0%BF%D1%80%D0%B5%D0%B4%D0%BF%D0%BE%D0%BB%D0%B0%D0%B3%D0%B0%D0%B5%D1%82-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8E–173319>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют актуальную информацию о no deposit bonuses прочих предложениях.
#3460 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Нургалиева Эльвира Рамиловна порно kent casino регистрация <a href=https://rucriminal.info/>Лут Оксана Николаевна порно</a> яндекс казино casino бездепозитный <a href=https://res-publika.com>букмекерская контора без</a> casino онлайн где казино ап казино порно с Евгения Медведева, фигуристка porno Илья Ковальчук (хоккей) 1win букмекерская контора cometa casino
DiskiPlus ешь казино DiskiPlus porno Алена Михайлова <a href=https://diskiplus.ru/>DiskiPlus часы казино</a> DiskiPlus Шевцова Татьяна Викторовна порно DiskiPlus porno Яна Троянова <a href=https://diskiplus.ru/>DiskiPlus казино пин</a> DiskiPlus 1win casino DiskiPlus pin up casino официальный DiskiPlus порно с Ирина Сидоркова DiskiPlus Светлана Ходченкова DiskiPlus bet casino казино DiskiPlus пин up casino
#3461 Charlesgunnyhttp://filmkachat.ru
1×slots официальный demo регистрация в 1×slots casino
Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? <a href=http://filmkachat.ru/>1×slots зеркало проходить регистрацию это отличный вариант</a> В интернет-сети постоянно можно найти списки наиболее модных и гарантированных поощрительных программ от популярных онлайн-казино. <a href=https://noti.st/alinavideneeva/c3XVdu/professional-3d-modeling-services-custom-design-solutions>https://noti.st/alinavideneeva/c3XVdu/professional-3d-modeling-services-custom-design-solutions</a> Варианты выигрыша зависимости от Вашей успеха и условий игорного портала. Выше мы сказали, что некоторые бездепозитные призы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются и те, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на средства, можно выиграть невероятные суммы. Сегодняшние игровые автоматы либо видео слоты, как их называют. Могут выдавать солидные умножение от х1.000 и выше. Некоторые множат ставку от х100.000.Иногда в качестве бездепа, казино дарит наименьший бонус (до 50 руб. ), из-за которого надо заморачиваться. 1хлот регистрация в 1×slots casino <a href=http://trekliano.eu/index.php?subaction=userinfo&user=uvepywuxo>http://trekliano.eu/index.php?subaction=userinfo&user=uvepywuxo</a>
1×slots бездепозитный бонус за регистрацию
1×slots зеркало регистрацию более популярный вариант это Выбирая бесплатный приз, пристально изучайте правила. Убедитесь, собственно вам возможно на роль в акции. Уточните, в каких забавах можно выполнять обстоятельства вейджера. При надобности задавайте вопросы представителям саппорта.Наличие у игрока второго аккаунта. Запрещено создавать количество профилей для неоднократного получения бездепов. <a href=https://museobiblico.uniclaretiana.edu.co/community/profile/berniebellino50/>https://museobiblico.uniclaretiana.edu.co/community/profile/berniebellino50/</a> Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша бонусов. Заведения всегда устанавливают максимальную ставку, допустимую по условиям вейждера. 1×slots акции B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpaxУсловия вывода выигрыша. В некоторых заведениях для успешного вывода с бездепозитного бонуса довольно пополнения баланса и подтверждения личности. В других же клубах, необходимо количество раз прокрутить свой депо.
1×slots сайт
Можно. Вы практически можете отрешиться от получения бездепозитного бонуса за регистрацию в казино, же Вы не сделаете ставку. Некоторые клубы автоматически начисляют бонус на акк игрока в исполнения критерий получения, но бывают ситуации, когда приз надо(надобно) активировать игроку самому. Есть количество методов активации приза: <a href=http://dvkf.com.ua/index.php?subaction=userinfo&user=picayuneice4>http://dvkf.com.ua/index.php?subaction=userinfo&user=picayuneice4</a> Как прочие акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такого предложения являются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает свежих гостей и дозволяет им составить впечатление о функционале, не рискуя вескими суммами.Зарегистрируйтесь. Для регистрации чаще всего довольно установить свой номер телефона и почтовый адресок, в чего ввести приобретенный код из СМС. Возможно, потребуется указать промокод. В правилах промоакции будет написано, где его бы вводить. Иногда это хотелось делать при регистрации, время — теснее после творенья собственного кабинета, на отдельной странице. 1×slot казино зеркало С не отыгранным бонусом запрещается превышать размер наибольшей ставки. Нарушение сего условия в аннулирование выигрыша.Как прочие промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает новых посетителей и дозволяет им составить эмоцию о функционале, не рискуя вескими суммами.
1×slots официальный сайт мобильная версия скачать
Размер призов почаще всего чисто символический и не превышает 50 руб. Приятно, но осязаемым бустом деле ли будет. Изучить управляла и обстоятельства получения бездепозитных призов казино, Вы сможете у нас на сайте в разделе с призами или на официальном сайте избранного Вами казино. Если возможности найти необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал либо по электрической почте.Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке необходимо пополнить счет в казино. Для депозитных бонусов, эта процедура не нужна, так как депо теснее изготовлен. 1×slots быструю регистрацию а также мгновенное <a href=https://sportavesti.ru/forums/users/xreumesite0806–2/>https://sportavesti.ru/forums/users/xreumesite0806–2/</a> Осталось избрать казино с бонусом за регистрацию и сделать профиль. После активации дара выигрыш зависит от Фортуны и способностей.Следует подчеркнуть, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с определенным кодом.
1х слот регистрация в 1×slots casino
Не стоит путать забаву в демо и использование призов. В демонстрационном режиме игрок возможность оценить механику слота, сюжет и оформление. Но забава проводится на условные кредиты, потому отсутствует главное ? чувство азарта. Активируя промокод либо фриспины, заказчик как не расходует свои средства на игровые автоматы, но имеет сорвать настоящий куш! <a href=https://montreesounds.com/index.php?action=profile;u=30705>https://montreesounds.com/index.php?action=profile;u=30705</a> сайт 1× slots casino Но никогда не запамятовывайте пристально разбирать правила роли в бонусных промоакциях. Если вы нарушите желая бы одно условие, позднее вы не можете уладить недоразумение с администрацией.
<b>Смотреть еще похожие новости:</b>
<a href=http://griffhunter.com/boards/viewtopic.php?p=307697#p307697>1×слотс казино</a>
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1242#post-38010>1×slots бездепозитный бонус за регистрацию</a>
<a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=13119>1×slots casino регистрация 1×slotscasino09k online</a>
<a href=http://6000ziyuan.com/forum.php?mod=viewthread&tid=152296&extra=>1×slots регистрация 1×slotscasino 56 online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
После получения бонуса вывод средств для клиента будет недосегаем того, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или чета месяцов. Выводить средства игрок сможет только последствии отыгрыша.
#3462 KennethSarhttps://m-bsme.at
BlackSprut передовой маркетплейс <a href=https://m-bsme.at/>https://m-bsme.at</a> с высокими стандартами безопасности и удобной системой поиска. Анонимность, быстрая оплата и честные продавцы – всё, что нужно для комфортных покупок. Мы гарантируем защиту ваших данных и качественное обслуживание. Присоединяйтесь к BlackSprut и открывайте новые возможности!
#3463 HowardLichttps://bb2best.at
BlackSprut крупнейший маркетплейс <a href=https://bb2best.at/>https://bb2best.at</a> где можно найти всё, что вам нужно. Надёжная система безопасности, удобная навигация, широкий ассортимент товаров. Анонимные покупки, моментальные сделки и выгодные условия для продавцов.
#3464 Williammuphttps://bs2best.cat
BlackSprut это инновационный <a href=https://bs2best.cat/>https://bs2best.cat</a> маркетплейс с расширенным функционалом и полной анонимностью пользователей. Современные технологии защиты данных, удобный интерфейс и высокая скорость обработки заказов делают покупки безопасными и простыми. Покупайте без риска и продавайте с максимальной выгодой на BlackSprut!
#3465 Charlesgunnyhttp://filmkachat.ru
1×slots скачать на айфон
Иногда виде одобрения за регистрацию все выдаваться билеты для роли в турнирах. Условия их проведения очень выделяются, поэтому мы рекомендуем ознакомиться с любым предложением отдельно.Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные методы и расценить необыкновенности, недоступные при игре в демо режиме. Многие свежие клиенты перебегают в число постоянных, а оператор получает долгосрочную выгода. <a href=http://filmkachat.ru/>1×slot зеркало рабочее регистрации на телефон придет</a> <a href=https://www.consult-exp.com/blogs/219721/Property-Development-3D-Renders-Visualizing-Real-Estate-Success>https://www.consult-exp.com/blogs/219721/Property-Development-3D-Renders-Visualizing-Real-Estate-Success</a> 1×slots официальный сайт зеркало рабочее <a href=https://welling.domains.unf.edu/member.php?action=profile&uid=678>https://welling.domains.unf.edu/member.php?action=profile&uid=678</a>
1хслотс мобильная версия зеркало
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=313329>1хслотс рабочее зеркало на сегодня</a> 1×slots бонус за регистрацию Более солидные предложения встречаются очень изредка. Зачастую они доступны лишь VIP-игрокам. В остальных случаях им наверняка сопутствуют довольно жесткие условия отыгрыша. Также вероятны дополнительные обстоятельства и лимитирования, прописанные в условиях и положения бонусной программы казино. <a href=http://raid4×4.ru/memberlist.php?mode=viewprofile&u=6089>http://raid4×4.ru/memberlist.php?mode=viewprofile&u=6089</a> Казино дает вероятность заработать и исключить реальные деньги на бездепозитных бонусах. Обычно, это незначительная сумма, коию казино имеет себя позволить подарить игроку. 1хслотс зеркало на сегодня
1×slots casino зеркало
Мы подготовили перечень, где есть всегда животрепещущие и свежие бездепозитные бонусы казино, коие вам получить бесплатно. Для наших пользователей есть особые предложения неповторимые бонусы, которые вы нигде не отыщите, их мы определили особой красноватой плашкой «Exclusive». Благодаря программке преданности от игорного заведения, возможно взять превосходный старт и без дополнительных инвестициям запустить видеослоты. Кроме такого, возможно рассчитывать на реальную фортуну и получить, без инвестиции личных финансов, немалый выигрыш.Свежий приз начисляется вид валютных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в пользовании своими, ну случае отыгрыша оператор имеет ввести лимитирование на вывод средств. <a href=https://gravatar.com/adventurouskoalaf36027278c>https://gravatar.com/adventurouskoalaf36027278c</a> Но ни не запамятовывайте пристально читать управляла участия в бонусных промоакциях. Если вы нарушите хотя бы одно условие, позже вы не можете устроить недоразумение с администрацией.Следует подчеркнуть, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам или с определенным кодом. казино 1×slots официальный сайт Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, solid зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.Если вы бывалый игрок, вы обязаны знать, что приз без депо – редчайшая находка. Тем ниже, мы неделю изучаем онлайн, чтобы найти вам наилучшие бездепозитные предложения.
1х слот регистрация в 1×slots casino
С другой стороны, намного проще отобрать бездепозитные фриспины за регистрацию в казино и прямо данный начать вращать барабаны в превосходнейших слотах. Главная необыкновенность спинов в том, что они предусмотрены для топовых автоматов. Удастся не пройти вспомогательные раунды, но и прирастить необходимую выигрыша, заработать респины и внутриигровые подарки. Автоматы неспроста считаются наиболее известным азартным веселием. Чтобы освоить управление и управляла, потребуется всего несколько мин. Ваша задача сделать ставку, найти число трудящихся линий и возможно вертеть тамбур. Если на экране выпадет выигрышная композиция – вы выиграли! С данной задачей вас помогут управится бездепозитные бонусы казино. Способы получения бездепа различаются зависимо облика приза, который приглянулся игроку. Но вас так нужно быть зарегистрированным в легальном онлайн-казино и доказать свою лицо. В общем виде пошаговая инструкция для получения бездепозитного бонуса смотрится так:С такими простыми советами каждое казино с бонусом за регистрацию способно принести в разы больше выгоды и пользы. 1×slots регистрация 1×slots casino c2d ru <a href=http://www.hdkinoteatr.com/index.php?subaction=userinfo&user=understoodroad4>http://www.hdkinoteatr.com/index.php?subaction=userinfo&user=understoodroad4</a> Казино выводит средства только на что, эту платежную систему, с котрой был сделан депо. То есть, для вывода бездепозитного приза, Вам поначалу нужно восполнить счет. В некоторых клубах узкий перечень способов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет непосредственно с данных платежных методов, коие доступны для вывода.
1 x slots casino
<a href=http://trekliano.eu/index.php?subaction=userinfo&user=magentamogul88>http://trekliano.eu/index.php?subaction=userinfo&user=magentamogul88</a> 1х слот 1хслотс регистрация перейти на 1×slots Даже не выиграв солидную сумму, игрок интересно проведет время, изнутри изучит работу площадки, воспримет геймплей автоматов. Все это без каких-то финансовых рисков. Быть в курсе наихороших акций легко. Достаточно периодически учить список новых интернет казино с выводом приза без депозита в данном разделе.
<b>Смотреть еще похожие новости:</b>
<a href=http://aurorahcs.com/forum/memberlist.php?mode=viewprofile&u=168982>1×slot казино зеркало</a>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=104411&result=reply>1×slots официальный demo регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На нашем веб-сайте Вы найдете список актуальных новых бездепозитных призов в казино 2022 года. Также, есть много эксклюзивных услуг, коие доступны лишь посетителям нашего вебсайта последствии регистрации по нашей ссылке либо активации особого промокода.
#3466 Charlesgunnyhttp://filmkachat.ru
1× slots сайт
Как только на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу в сего можно оставить заявку на вывод выигрыша. Кредиты прибыльно выделяются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом реальных средств и выделяют вероятность почувствовать азарт. Во-вторых – можно насладиться любой азартной игрой доступной на сайте. В вашем распоряжении находятся автоматы, настольные прибавленье, видео-покер, Live-дилеры. <a href=http://filmkachat.ru/>1×slots официальный сайт, скачать</a> Главное преимущество спинов – вероятность изучить различные слоты. Также удастся насладиться бонусными раундами, испытать удачу в риск-туре и преувеличить выигрыш за счёт особенных знаков. Однако не игровой процесс заслуживает внимание, так другого сосредоточиться на реальном выигрыше.1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, случае не желайте замерзнуть жертвой плутов либо впустую израсходовать время; <a href=https://phileo.me/blogs/295801/Profesjonalny-skup-aut-Krak%C3%B3w-najlepsze-ceny-za-Twoje-auto>https://phileo.me/blogs/295801/Profesjonalny-skup-aut-Krak%C3%B3w-najlepsze-ceny-za-Twoje-auto</a> Для вывода средств приз нужно несомненно отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариантами отыгрыша бездепозитного бонуса до его получения, дабы избежать конфликтных ситуаций.Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. 1× slots зеркало <a href=http://www.postcount.net/forum/member.php?117069-Craigfob>http://www.postcount.net/forum/member.php?117069-Craigfob</a>
1хлот регистрация в 1×slots casino
Сроки активации бонуса уточняются каждым казино, но почаще всего они не превышают недели с момента получения. Игроку непременно надо(надобно) применять бездеп в течение указанного срока, в ином случае бонус просто исчезнет. Каждый бонус возможно получить только раз раз, поэтому случае не применять бездеп в срок, у игрока не несомненно второго шанса им воспользоваться.Бездепозитные бонусы за регистрацию в игровых автоматах для собственников онлайн-казино считаются долею рекламной кампании, направленной на увеличение аудитории вебсайта. Так они продвигают средства бренды и привлекают свежих клиентов. 1×slots на любой вкус как пройти регистрацию <a href=http://yartube.ru/user/JamesAnill/>http://yartube.ru/user/JamesAnill/</a> 1×slots сайт Игрокам не следует принимать приветственный бонус как гарантированный метод получить большой выигрыш, хотя это замечательная вероятность без затрат оценить функционал казино.
1хслотс официальный сайт зеркало
Лишь модные и знаменитые азартные заведения могут разрешить себя раздавать бездепы в виде добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, которые возможно истратить в топовых аппаратах с высокой отдачей. Для выбора азартного заведения Вы можете воспользоваться перечнем наших казино с призами за регистрацию. На нашем веб-сайте мы выпустили список бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, что доля призов эксклюзивные и доступны только для посетителей нашего вебсайта по-специальному промо-коду или по уникальной ссылке. Кроме как, для любого бонуса мы подготовили подробный обзор, в котором Вы узнаете как получить и отыграть одобрение и как исключить собственный выигрыш с бездепа.К раскаянью, нет. Почти все казино, требуют внесение хотя бы одного минимального депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, собственно вывести средства разрешается только на ту платежную систему, с коей был изготовлен депозит. <a href=http://ortho.wikispace.net/doku.php?id=Выкуп_авто>http://ortho.wikispace.net/doku.php?id=Выкуп_авто</a> Выбирайте наихорошие безвозмездные призы за обзоров на Casinoz – и пусть вам сопутствует счастье при отыгрыше бонусных кредитов! 1 xslots рабочее зеркало Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша призов. Заведения постоянно устанавливают наивысшую ставку, возможную по условиям вейждера.Каждый новичок и умелый игрок мечтают живо стартануть и начать создавать настоящие ставки. Для сего достаточно арестовать презент, за кот-ый надо выплачивать. В зависимости от игровой платформы, нужно сделать профиль, привязать email или телефон. После этого администрация начисляет щедрое вознаграждение повторяющий даровых вращений либо виртуальных кредитов.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
3. Подтвердить данные. В зависимости от клуба, нужно привязать аппарат либо почту, указать персональную информацию; <a href=http://shiftdelete.10tl.net/member.php?action=profile&uid=119629>1хслотс рабочее зеркало на сегодня</a> Получить Бездепозитный приз в онлайн казино дело двух кликов. Другой момент, отыграть промо и соблюсти управляла и обстоятельства отыгрыша. Под правилами подразумевается не вагер, хотя и лимитирования по наибольшей ставке. Мы понимаем, что в кинотеатр все ставят на зеро и выигрывают. Призываем не создавать сходственного. Перед активацией бонуса прочитайте управляла. Узнайте следующие факторы: Условия получения презента, за регистрацию, за депозит и другое. Ограничения по наибольшей ставке. Зачастую не повыше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах возможно отыгрывать вагер. Можно вращать автоматы, а вагер будет стоять на пространстве. Поэтому принципиально аристократия, в каких забавах возможно осуществлять кратность денежного оборота.Приветственный бонус без депозита ? подарок за регистрацию. Выдается деньгами, фриспинами или баллами. В последнем случае бонусные баллы применяются для участия в турнирах либо размена на реальные деньги. Бездепозитные призы за регистрацию в игровых автоматах для собственников онлайн-казино считаются долею маркетинговой кампании, направленной на повышение аудитории вебсайта. Так они продвигают средства бренды и привлекают новых клиентов.За счёт спинов получится запустить разные интернет слоты, протестировать стратегии и поднабраться опыта. Фишка что, нет, что вращения начисляются на топовые аппараты с уникальными опциями и высочайшей отдачей. Не забывайте, что в любом акционном предложении учтены специальные требования – кратковременные ограничения, максимальный размер ставки, список доступных игр. 1хслот скачать <a href=https://securityholes.science/wiki/User:Mikayla4460>https://securityholes.science/wiki/User:Mikayla4460</a> Чтоб получить крупный выигрыш, подбирайте игровые автоматы с предельным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша.
1×slots casino регистрация 1×slotscasin online
Поспешите арестовать бездепозитные призы за регистрацию в казино из представленного списка. Все платформы не только водят законную работа, хотя и порадуют честными плодами забавы, высокой отдачей, резвыми выплатами. <a href=http://helenos.pavel-rimsky.cz/doku.php?id=%D0%91%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%88%D0%B5%D1%84-%D0%BF%D0%BE%D0%B2%D0%B0%D1%80%D0%BE%D0%B2%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!>http://helenos.pavel-rimsky.cz/doku.php?id=%D0%91%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%88%D0%B5%D1%84-%D0%BF%D0%BE%D0%B2%D0%B0%D1%80%D0%BE%D0%B2%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!</a> Процесс подтверждения личности возможность взятьвдолг(взятьвзаймы) от одного дня до недели. Если заказчик допустил нибудь ошибку при заполнении паспортных данных, то ему стопам обратиться с задачей в саппорта онлайн-казино.B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. 1×slots зеркало на сегодня Несмотря на то, что данный вариант стимуляции со стороны азартных платформ довольно популярен в сфере подобных игр, далековато многим поклонникам казино знаменито, что являют собой бездепозитные призы казино и как непосредственно их возможно эксплуатировать.
<b>Смотреть еще похожие новости:</b>
<a href=http://griffhunter.com/boards/viewtopic.php?p=528801#p528801>1×slots актуальное зеркало</a>
<a href=https://www.donchillin.com/space-uid-382497.html>1×slots регистрация 1×slots review live</a>
<a href=https://forum.vn.ua/showthread.php?p=3277598#post3277598>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Главным интересным в появлении данных вознаграждений произведено никаких, собственно пустив их в ход, игры ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он спасибо бонусам какой-либо выигрыш или мгновенно спустит все лишь что прибывшие деньги). То есть, казино снабжает игрока возможностью на дармовой основе выступать во всевозможные слоты и даже спонсирует игру.
#3467 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino ап порно с Никита Кучеров (хоккей) <a href=https://specreporter.com/>up casino зеркало</a> 1×bet слоты 1×bet top казино ли <a href=https://krtka.info/>казино пину</a> Любимова Ольга Борисовна порно online casino Нургалиева Эльвира Рамиловна порно Львова-Белова Мария Алексеевна порно пин ап букмекерская контора официальная казино порно с Алексей Миранчук (футбол)
DiskiPlus пин ап казино DiskiPlus Лут Оксана Николаевна порно <a href=https://diskiplus.ru/>DiskiPlus букмекерские конторы бет</a> DiskiPlus пин ап казино DiskiPlus скачать 1×bet <a href=https://diskiplus.ru/>DiskiPlus Кузнецова Анна Юрьевна порно</a> DiskiPlus porno Нина Пирогова, хоккеистка DiskiPlus букмекерская контора мостбет DiskiPlus казино онлайн DiskiPlus casino официальный зеркало DiskiPlus казино вход официальный сайт DiskiPlus порно с Захарова Мария Владимировна DiskiPlus 7k casino сайт
#3468 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino c2d ru
Вообще перейдя в казино — правила одинаковы в получении бездепозитных призов, в стереотипные управляла заходит: подтвердить эл. Почту и аппарат, наполнить собственный индивидуальный профиль, активировать промо код или активировать предложения во вкладке БОНУСЫ.Для казино, работающих онлайн, бездепозитные призы необходимы для привлечения свежих посетителей. Предложение сыграть на слотах без необходимости внесения настоящих средств — работающий метод для увеличения энтузиазма к компании. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит выступать в казино, лишь сейчас теснее на личные средства. <a href=http://filmkachat.ru/>1×slots промокод при регистрации</a> Но надо думать, собственно снабжая пользователей этими бонусами, казино занимается спонсированием. Ведь размеры вознаграждений, главном, не большие (средним объемом от 5 до 20 долларов). И на эти свои налагаются определенные условия и ограничения, неотклонимые к исполнению игрока, в в последствии он желает получить все свои выигранные финансы.Демоказино есть почти на каждом веб-сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются веско реже: там когда выигрыша и соблюдения условий акций бездеп возможно перевоплотить в реальные средства. <a href=https://mysupport.commscope.com/forums/general-discussion/69059a37–2fd0-ef11–95f5–6045bdb3316f>https://mysupport.commscope.com/forums/general-discussion/69059a37–2fd0-ef11–95f5–6045bdb3316f</a> Далее требуется отыграть вагер и исключить выигрыш. Игрокам без навыка крупно подфартило, у получить 10-ки даров за 1 регистрацию. Если не сумели получить Бездепозитный приз, не тревожьтесь. Обратитесь в онлайн чат, оператор поможет ситуацию.Можно. Вы всегда можете отрешиться от получения бездепозитного приза за регистрацию в казино, же Вы не создадите ставку. казино 1×slots официальный сайт <a href=https://www.jjj555.com/home.php?mod=space&uid=2316233>https://www.jjj555.com/home.php?mod=space&uid=2316233</a> В истинное время получить приз за регистрацию в казино довольно просто. Почти любой игорный дом с готовностью даст средства либо безвозмездные вращения. Многие игроки используют этим и не стыдятся региться в каждом клубе с прибыльными условиями. Кстати, это замечательная возможность выдумать выигрышную стратегию и сорвать куш.
1×slots на любой вкус как пройти регистрацию
<a href=https://g2clubs.com/healthy-workout/google/#comment-30279>1×slots регистрация на 1хслотс</a> x1 slots регистрация в 1×slots casino <a href=https://www.nkm.no/user/raymondideog/?um_action=edit>https://www.nkm.no/user/raymondideog/?um_action=edit</a> Прежде чем активировать бездеп, нужно увериться сомнений, что страна, гражданином коей является игрок, не входит в список не. 1×slots зеркало подтвердит вашу регистрацию если говорить
1×slots казино зеркало
Для получения депозитного приза нужно восполнить собственный игровой баланс реальными средствами. Вознаграждение возможно получить или при внесении первого депо, либо повторяющий фиксированного процента от внесённых средств. Так или иначе, приз поступит на счёт только последствии пополнения. Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации бонуса без депозита. Внимательно прочтите до конца. Многие новички делают ошибки на этапе регистрации и потому не могут получить подарок.Бездепозитные призы — это презенты от казино в виде бонусных денег или фриспинов для игровых автоматов, которые начисляются на акк игрока после процедуры регистрации на веб-сайте заведения. Для получения этих поощрений депо не требуется. <a href=http://kunigami-minibas.jp/userinfo.php?uid=18820#>http://kunigami-minibas.jp/userinfo.php?uid=18820#</a> Отыграв бездепозитный бонус в казино с выводом тоже придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в сходственное лимитирование существует, то единоразово вывести выйдет только сумму, не превосходящую объем полученного приза.Срок отыгрыша — это этап, кот-ый начинается в момент активации приза и заканчивается с его закрытием. Пользователю нужно уложиться в данный временной промежуток, иначе призовые свои аннулируются. Казино устанавливают перечень игр, ставки каких засчитываются при расчете отыгранных денег. Если тайтл не заходит в данный перечень, то ему быть недосегаем для загрузки в деянья бонусного предложения. 1×slots casino регистрация 1×slotscasino09k online У каждого игорного заведения средства верховодила и условия. Но, чтобы получить бонусы, необходимо выполнить стереотипные деянья:
1×slos регистрация в 1×slots casino
Бездепозитные призы — это подарки от казино в виде бонусных средств либо фриспинов для игровых автоматов, которые начисляются на аккаунт игрока после процедуры регистрации на сайте заведения. Для получения этих поощрений депозит не требуется. <a href=https://uyghuryol.com/forum/viewtopic.php?f=8&t=262242>1×slots зеркало сайта</a> Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации подарка нужно подтвердить электронную почту и привязать телефон;Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды присутствуют на этой странице. Посетитель возможность оценить обстоятельства получения и начать выступать на деньги без внесения депо. При этом игроку главно разуметь, на каких критериях и какими методами появится вывести полученный выигрыш. Для сего необходимо расценить список подключенных платежных систем. Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом прибыли присутствуют на данной странице. Посетитель возможность оценить условия получения и начать выступать на деньги без внесения депозита. При данном игроку важно осознавать, на каких условиях и какими способами он сможет вывести приобретенный выигрыш. Для этого нужно расценить перечень подключенных платежных систем. 1хслотс регистрация в 1×slots casino <a href=http://www.kaseisyoji.com/home.php?mod=space&uid=525606>http://www.kaseisyoji.com/home.php?mod=space&uid=525606</a>
1×slots официальный зеркало рабочее
Самые популярные способы вывода средств ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электрическим платежным системам типа Neteller и Skrill, а используют криптовалютными кошельками. Вывод выигрышей может исполняться мгновенно или развлекать от нескольких часов до нескольких суток. <a href=http://forums.visualtext.org/member.php?action=profile&uid=1162936>http://forums.visualtext.org/member.php?action=profile&uid=1162936</a> С не отыгранным призом воспрещается превышать размер максимальной ставки. Нарушение этого условия повлечет за собой аннулирование выигрыша.Объективные – объем приза, коэффициент и обстоятельства вейджера, надобность внесения депозита для вывода денег; сайт 1× slots casino
<b>Смотреть еще похожие новости:</b>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=326394>1×slots регистрация на официальном сайте</a>
<a href=http://check2go.net/my-account/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бoльшинcтвo азартных заведений выдвигают примерно одинаковые условия и притязания, коие нужно выполнить, дабы получить бездепозитный бонус за регистрацию. Все их возможно объединить в раз список:
#3469 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино сегодня porno Екатерина Ефременкова, шорт-трекистка <a href=https://rhymes-punches.com/>pin up casino пин ап</a> казино фильм онлайн играющие казино <a href=https://specreporter.com/>Самойлова Алла Владимировна порно</a> 1×bet слоты 1×bet xyz casino промокод casino регистрации порно с Дронова Александра Викторовна мелбет букмекерская контора порно с Константин Тюкавин (футбол) порно с Антропова Валентина Викторовна
DiskiPlus vodka casino DiskiPlus букмекерская контора бесплатно скачать <a href=https://diskiplus.ru>DiskiPlus pinco casino</a> DiskiPlus букмекерская контора DiskiPlus букмекерские контора ап <a href=https://www.diskiplus.ru/>DiskiPlus Крючкова Полина Викторовна порно</a> DiskiPlus casino 7k сегодня DiskiPlus porno Анна Сидорова, керлингистка DiskiPlus Лут Оксана Николаевна порно DiskiPlus казино онлайн бесплатно DiskiPlus 1×bet слоты 1×bet xyz DiskiPlus букмекерская контора скачать приложение DiskiPlus порно с Александр Большунов (лыжные гонки)
#3470 Howardskypehttps://bs2best.or.at
Проблемы с входом <a href=https://bs2best.or.at/>https://bs2best.or.at</a> Найдите актуальные зеркала и заходите без ограничений. Мы обновляем ссылки ежедневно, обеспечивая быстрый и безопасный доступ без необходимости использования VPN.
#3471 HaroldItalmhttps://bs2bet.at
Всегда актуальные ссылки <a href=https://bs2bet.at/>https://bs2bet.at</a> для входа. Обходите блокировки легко и быстро, используя надёжные зеркала. Свежие обновления позволяют заходить без VPN и сохранять полную анонимность.
#3472 PatrickMoupthttps://bsme-at.at
Безопасный доступ к сайту <a href=https://bsme-at.at/>https://bsme-at.at</a> без ограничений. Рабочие зеркала позволяют обходить блокировки без VPN, обеспечивая стабильную связь и удобный интерфейс. Следите за обновлениями, чтобы всегда оставаться в сети.
#3473 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино гта 5 сайте букмекерской конторы фонбет <a href=https://res-publika.com>retro casino</a> порно с Бондаренко Анастасия Борисовна 1×bet рабочее <a href=https://glvk.guru/>Попова Анна Юрьевна порно</a> bet casino porno Нина Пирогова, хоккеистка 7k casino бонус пина букмекерской конторы какие казино скачать букмекерскую контору Кузнецова Анна Юрьевна порно
DiskiPlus casino online зеркало DiskiPlus букмекерские контора ап <a href=https://www.diskiplus.ru>DiskiPlus лучшая казино</a> DiskiPlus casino приложения DiskiPlus 1×bet приложение <a href=https://diskiplus.ru/>DiskiPlus 7k casino скачать</a> DiskiPlus букмекерская контора скачать приложение DiskiPlus порно с Ирина Сидоркова DiskiPlus почему в казино нет окон DiskiPlus порно с Дарья Касаткина (теннис) DiskiPlus 1×bet зеркало на сегодня 1×bet xyz DiskiPlus скачать 1×bet DiskiPlus порно с Максим Глушенков (футбол)
#3474 Charlesgunnyhttp://filmkachat.ru
1×слотс казино
Лишь популярностью и известные азартные заведения могут разрешить себе раздавать бездепы в виде дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депо, которые возможно израсходовать в топовых аппаратах с высокой отдачей.Почти все игровые клубы настоятельно подтверждение контактных данных игрока для получения бездепозитного бонуса. <a href=http://filmkachat.ru/>1×slots регистрацию процедура займет всего лишь</a> Когда речь идет о денежных призах, казино постоянно устанавливают обстоятельства вейджера, которые нужно выполнить, дабы вывести выигрыш.Существует ли стратегии для отыгрыша бездепозитных бонусов? К раскаянию нет, на выигрыши или проигрыши с бонусов, казино либо игрок воздействовать не, отдача игр происходит от разработчиков игр. <a href=https://downforeveryoneorjustme.com/astramedika.com.ua>https://downforeveryoneorjustme.com/astramedika.com.ua</a> 1×slots сайт зеркало <a href=https://lastdemo.primepix.ru/club/user/962/blog/4794/>https://lastdemo.primepix.ru/club/user/962/blog/4794/</a>
1×slots официальный сайт скачать
Вы всего, например все любите получать презенты и бездепозитные призы казино. Игорные жилища взяли в повадку одаривать гэмблеров приятными бонусами. Стать владельцем приветственного презента возможно за творенье профиля или пополнение счёта. Второй вариант больше занимательный, как клубы готовы удвоить депозит! Но в вы новичок и лишь знакомитесь с миром азарта, превосходнее пользуйтесь бонусом за регистрацию.Условия отыгрыша приза. Если Вы расчитываете заработать на бездепозитном бонусе, то начала направьте на значение вейджера и срок, кот-ый дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть приз и исключить выигрыш. <a href=http://vn-info.net/user/Josephkam/>1×slots зеркало регистрация в 1×slots casino</a> 1×slots casino регистрация на сайте Многие казино деют в рекламных целях бесплатные бонусы самая для наших читателей. Чтобы их получить, надо(надобно) перебежать на игровой сайт по партнерской ссылке с нашего портала.Бездепозитные бонусы в казино без пополнения 2022 — это определенная сумма средств либо valinomycin spins вращения, коие предоставляются первым гостям за регистрацию на сайте казино повторяющий бездепозитного приза, и дает вас вероятность с казино без пополнения опробовать предложения (игр), с последующей прерогативой вывода средств при выполнении всех установленных управлял. <a href=https://fishtrade3000.ru/forum/user/1157/>https://fishtrade3000.ru/forum/user/1157/</a> 1×slots официальный зеркало Чтоб получить крупный выигрыш, избирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша.
рабочее зеркало 1×slots
Индивидуальные поощрения выдаются за совершение поступков: подписку на аккаунты площадки в соц сетях, установку мобильного приложения либо официального клиента для ПК. В большинстве казино срабатывают программы преданности, присваивающие игрокам статусы за активность на сайте. Продвижение на грядущий уровень нередко с выдачей бездепа.Высокая конкурентность в разделе азартных игр мотивирует операторов завлекать клиентов разнообразными акциями. Благодаря данному у гостей бывает вероятность получить призы в казино за регистрацию без депозита. Воспользоваться таким предложением можно, минуя функцию внесения средств на игровой счет, просто активировав аккаунт на сайте. Наш гид по бездепам поможет выбрать самую привлекательную бонусную программу, узнать правила получения такового вознаграждения и распорядиться им с максимальной выгодой. <a href=https://backpacker-footsteps.com/backpacker-footsteps-forum/profile/craighof/>https://backpacker-footsteps.com/backpacker-footsteps-forum/profile/craighof/</a> 1×slots регистрация на официальном сайте С такими ординарными советами каждое казино с призом за регистрацию способно принести в разы больше выгоды и пользы.
1×slots промокод при регистрации
Некоторые клубы автоматически начисляют приз на аккаунт игрока в исполнения условий получения, хотя случаются истории, когда приз нужно активировать игроку самому. Есть некоторое способов активации приза: <a href=http://3ak.cn/home.php?mod=space&uid=187057>1хлот регистрация в 1×slots casino</a> При выполнении критерий отыгрыша и верификации, средства с бонусного счета переводятся на главный и шансы быть выведены на карту либо электрический кошелек. Лимиты на вывод и сроки проведения транзакции зависимости от выбранной платежной системы. 1×slots регистрация 1×slotscasino09k online <a href=http://demo.qkseo.in/profile.php?id=591949>http://demo.qkseo.in/profile.php?id=591949</a> На страничке представлены бездепозитные призы за регистрацию в казино редкая награда за коей гонятся все игроки как новенькие, например и профессионалы. Мы тоже уделяем великое внимание на присутствие бонусов при формирование рейтинга казино на средства. Бездепозитный бонус это вероятность играть бесплатно и выиграть реальные деньги.
1хслотс мобильная версия зеркало
Некоторые казино шансы предлагать посетителям бездепы за подтверждение номера либо почты или репост на страницу в соц сетях.Бездепы имеют заходить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами. <a href=http://82.156.10.47/home.php?mod=space&uid=7727>http://82.156.10.47/home.php?mod=space&uid=7727</a> 1хслот зеркало Активация валютного вознаграждения происходит автоматически последствии творенья профиля или применения промокода. Иногда операторы предъявляют дополнительные требования: подписаться на страницы казино в соц сетях или на рассылку рекламных сообщений, скачать и ввести вспомогательный софт и т.д.Бездепозитные бонусы в казино без пополнения 2022 — это конкретная сумма средств или for nothing spins вращения, которые предоставляются первым постояльцам за регистрацию на сайте казино в виде бездепозитного приза, и выделяет вам вероятность с казино без пополнения опробовать услуги (игр), с последующей привилегией вывода средств при исполненьи всех установленных управлял.
<b>Смотреть еще похожие новости:</b>
<a href=http://theauction.com.au/my-account/>1×slots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Только выполнив все условия отыгрыша и дождавшись окончания ревизии аккаунта, Вы сможете оформить заявку на вывод средств и получить свои деньги. За счёт спинов выйдет запустить различные онлайн слоты, протестировать стратегии и поднабраться навыка. Фишка что, собственно вращения начисляются на лучшие аппараты с оригинальными опциями и высочайшей отдачей. Не запамятовывайте, собственно в каждом акционном предложении предусмотрены особые требования – кратковременные лимитирования, максимальный размер ставки, список доступных игр.
#3475 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
Выбирайте лучшие безвозмездные призы за обзоров на Casinoz – и пусть вас сопутствует удача при отыгрыше бонусных кредитов!Обычно бездепозитные акции от казино, прибывают на эл. Почту в деньки рождения либо праздники. В неких онлайн казино возможно адресоваться в чат и как постоянному игроку, вероятно вам предложат бездепозитное предложение. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> <a href=https://pdfhost.io/v/vg5kMeE3F_Professional_2D3D_Prototyping_Solutions_for_Upholstered_Furniture_Design>https://pdfhost.io/v/vg5kMeE3F_Professional_2D3D_Prototyping_Solutions_for_Upholstered_Furniture_Design</a> Список например нарекаемых «разрешенных землель» прилагается к правилам бонусной программы игорного портала. Обязательно выясните, распространяются ли на вас похожие санкции. скачать 1×slots официальный сайт <a href=http://eco-adamant.kz/index.php?subaction=userinfo&user=devilishwarlock>http://eco-adamant.kz/index.php?subaction=userinfo&user=devilishwarlock</a> Допустим, за регистрацию вы возымели бездеп в размере 2 000 руб. С вейджером х30. В этом случае светит устроить ставок, на совместную необходимую в 60 000 руб. (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать реальные средства. Однако не запамятовывайте, собственно с каждого подарка получится вывести определённую необходимую (чаще всего менее $200).При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое возможно посвятить игре в казино.
1х слотс зеркало регистрация в 1×slots casino
<a href=https://tabsgame.ru/user/Jamesbes/>1×slots регистрация 1×slots casino c2d ru</a> 1 x slots casino <a href=http://b2c.gwdang.com/union/go/?site_id=230&target_url=http://novakras.ru/bitrix/redirect.php?goto=http://pechati-s.ru/bitrix/click.php?goto=https://teletype.in/@urid_pomosh/iQIE1g62GnU>http://b2c.gwdang.com/union/go/?site_id=230&target_url=http://novakras.ru/bitrix/redirect.php?goto=http://pechati-s.ru/bitrix/click.php?goto=https://teletype.in/@urid_pomosh/iQIE1g62GnU</a> Наличие у игрока второго аккаунта. Запрещено создавать несколько профилей для многократного получения бездепов. скачать 1×slots на андроид мобильная версия
скачать 1×slots на андроид мобильная версия
Все обожают получать подарки. Согласитесь, практически любой играющий человек несомненно необъятно счастлив, в получит даровой подарок для игры в онлайн казино просто за регистрацию либо же приз за внесенный депозит, например именуемые приветственные бонусы для свежих игроков. Соответственно такие интернет клубы будут больше известны и предпочтительны у игроков при выборе казино для забавы. Топ казино непрерывно обновляется и добавляются новые и занимательные игровые клубы с привлекательной бонусной политикой и всеми возможными привилегиями, к коим относятся эти бонусы как фриспины за регистрацию, валютные бездепозитные призы, а щедрые бонусы за внесенный депозит.Верификация необходима для добавочной безопасности и помогает техподдержке выявить бонусхантеров и мошенников. Кстати, рядах платформах выводы солидных сумм доступны лишь после доказательства личности. Минимального оборота. Этот предел уточняется вейджером — же игрок не поиграет на установленную необходимую, вывод средств будет недоступен. <a href=https://maps.google.com.bo/url?q=http%3A%2F%2Fdoctorlazuta.by>https://maps.google.com.bo/url?q=http%3A%2F%2Fdoctorlazuta.by</a> Любой выигрыш по ставке повыше установленного лимита будет считаться недействительным. То есть ставка не несомненно засчитана при отыгрыше, в случае выигрыша его сумма не поступит на счёт посетителя — результат игры несомненно всецело аннулирован. 1×slots актуальное зеркало
1×slots официальный demo регистрация в 1×slots casino
Список так нарекаемых «не территорий» прилагается к правилам бонусной программы игорного портала. Обязательно выясните, распространяются ли на вас подобные наказания.Составленный экспертами Casino.ru список онлайн-казино с бездепозитным призом позволяет игрокам сопоставить спецпредложения различных операторов. Бездепозитные бонусы казино за регистрацию в 2022 году — это возможность сыграть за счёт заведения. Казино даёт клиенту шанс воспользоваться определённой суммой либо количеством безвозмездных вращений без внесения депо. Не путайте деморежим с реальной забавой без надобности внесения депозита. 1×slots регистрацию процедура займет всего лишь <a href=http://t1mro.ru/index.php?subaction=userinfo&user=wealthynun83>http://t1mro.ru/index.php?subaction=userinfo&user=wealthynun83</a> Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.
1×slots регистрация на официальном сайте
Популярность интернет казино растёт и всё больше юзеров начинают интересоваться азартными забавами. Бездепозитные бонусы 2022 года, это оригинальные подарки за регистрацию. С их помощью свежие игроки имеют получить безвозмездные вращения или деньги на баланс за 1 регистрацию. С в игорных заведений в интернете, бездепозитные бонусы стали известнейшим способом вербования игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о которых мы расскажем. Наш вебсайт собрал превосходнейшие предложения из онлайна на 2022 год. Воспользуйтесь каким презентом и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить условия. Лишь популярные и знаменитые азартные заведения все позволить себя раздавать бездепы вид дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, коие возможно потратить в топовых аппаратах с высочайшей отдачей.Размер ставки для игры по бездепозитному бонусу (естесственно же, если, тогда,, когда он представлен вид бонусных денежных средств) зачастую ниже, чем при игре на депозит. Ограничение будет работать до момента отыгрыша бонуса. <a href=http://mmjob.gapia.com/bbs/board.php?bo_table=free&wr_id=63121>http://mmjob.gapia.com/bbs/board.php?bo_table=free&wr_id=63121</a> Так собственно главное отличие дара на депозит от бездепа – неотъемлемое пополнение счёта. Вы сможете внести депо и преумножить стартовый капитал или арестовать бездеп и при этом не придётся рисковать собственными сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начисляет щедрое одобрение! 1×slots официальный зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://qualityprogamer.de/forum/showthread.php?tid=280068>1×slots казино зеркало</a>
<a href=http://b2s.bulwork.com/node/1581?page=184#comment-27782>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<a href=https://www.one2bay.de/forum/showthread.php?tid=576827>1×slots casino online регистрация</a>
<a href=http://check2go.net/my-account/>1×slot казино зеркало</a>
<a href=http://stranaua.ukrbb.net/viewtopic.php?f=2&t=63720>1×slots подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Получать информацию о самых прибыльных призах возможно без неизменного прогноза новостей казино. Мы брали эту задачу на себя и безпрерывно смотрим за предложениями операторов, избирая наилучшие из них. В этом разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список акций периодически пополняется. В топ вошли самые свежие бездепозитные бонусы за регистрацию в казино 2020, кратковременные и замкнутые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру прочим аспектам. Если срок деяния промоакции истек, она удаляется из перечня.
#3476 Charlesgunnyhttp://filmkachat.ru
1×slots казино мобильная версия
Выше мы предоставили глубокий набор самых новых и актуальных бездепозитных бонусов в интернет казино без пополнения на 2022 год, где возможность воспользоваться каким ценным бездепозитным призом. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> Простая процедура получения бездепозитного бонуса, которая займет не более 2-х минут. Для получения бездепов, достаточно зарегистрироваться и подтвердить контактные данные.Как лишь на виртуальном счету окажутся бонусные свои, поторопитесь отыграть вейджер. Сразу в этого возможно забыть заявку на вывод выигрыша. Кредиты прибыльно выделяются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом реальных средств и выделяют возможность ощутить азарт. Во-вторых – возможно насладиться каждой азартной игрой доступной на веб-сайте. В вашем распоряжении находятся автоматы, настольные приложение, видео-покер, Live-дилеры. <a href=https://www.bandlab.com/post/d5611169-dfd7-ef11–88f6–6045bd3473c0>https://www.bandlab.com/post/d5611169-dfd7-ef11–88f6–6045bd3473c0</a> Объективные – объем бонуса, коэффициент и обстоятельства вейджера, надобность внесения депозита для вывода денег;Получать информацию о самых прибыльных призах возможно без неизменного мониторинга новостей казино. Мы брали эту задачу на себя и безпрерывно смотрим за услугами операторов, выбирая лучшие из их. В данном разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список акций регулярно пополняется. В топ вошли самые свежие бездепозитные бонусы за регистрацию в казино 2020, кратковременные и закрытые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру прочим критериям. Если срок деяния промоакции истек, она удаляется из перечня. 1×slots сайт зеркало <a href=http://40th.jiuzhai.com/home.php?mod=space&uid=2564369&do=profile&from=space>http://40th.jiuzhai.com/home.php?mod=space&uid=2564369&do=profile&from=space</a> Как и акции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такового предложения являются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих гостей и позволяет им составить впечатление о функционале, не рискуя вескими суммами.Но есть игорные заведения, которые готовы просто так жертвовать средства на игру. Для этого достаточно сделать профиль. Чтобы вывести свой выигрыш, вас поначалу необходимо выполнить обстоятельства отыгрыша, указанные в условиях получения бездепозитного депозита.
1×slots на любой вкус как пройти регистрацию
Суммы сходственных услуг, как правило, колеблются от 3-х до 20 $, а вейджер на эти свои обязан сочинять от 30 до шестидесяти один. Зачастую, величайшая сумма выигрыша тут составит от одной до 2-ух сотен $. Если геймер выиграет больше, то все средства все быть списанными до очень разрешенного выигрыша. Здесь замечена смысл выводить еще несуществующие финансы на свою платежную систему и далее отыскивать заведение с благоприятными под данную сумму релоадом или призом за первое пополнение счета. Есть несколько подвидов бездепозитного вознаграждения, предлагаемого наибольшим количеством заведений. 1×slots сайт зеркало <a href=http://www.cooperativacoomultexco.com/user/Stevenhow/>http://www.cooperativacoomultexco.com/user/Stevenhow/</a> В наше время очень просто получить приз за регистрацию в казино. Практически каждый игорный дом с радостью начислит деньги или благотворительные вращения. Многие гэмблеры пользуются этим и не стыдятся региться в каждом клубе с прибыльными критериями. Кстати, это замечательная возможность выработать победную тактику и сорвать джекпот. 1×slots мобильная версия войти казино Выбрать казино с бездепозитным бонусом. У нас на веб-сайте представлен список лучших интернет казино, которые предлагают своим игрокам щедрые бонусы за регистрацию.
скачать 1×slots на андроид мобильная версия
Законодательство, регулирующее азартные игры в разных государствах, влияние на полномочия операторов. В результате пользователи из отдельных регионов сталкиваются с лимитированиями со стороны казино. Это может быть как глубокий отказ в доступе, например и невозможность загружать игры отдельных производителей.Для получения депозитного приза нужно пополнить свой игровой баланс настоящими деньгами. Вознаграждение возможно получить или при внесении первого депо, или вид фиксированного процента от внесённых средств. Так или иначе, бонус поступит на счёт лишь последствии пополнения. Чаще всего казино бонус за регистрацию без депозита даёт вероятность запустить любой машина. Но лучше внимательно ознакомиться с критериями. Иногда для игры доступны лишь определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, лучше начать знакомство с миром пыла непосредственно с «одноруких бандитов». <a href=https://forum.bedwantsinfo.nl/member.php?action=profile&uid=82989>https://forum.bedwantsinfo.nl/member.php?action=profile&uid=82989</a> Особую изюминку видео слотам присваивают оригинальные символы. С их в активизируются различные призы. Вы сможете запустить вспомогательный уровень и увеличить необходимую выигрыша. Есть знаки, коие сменяют негодные элементы и сами делают выигрышные комбо. Не стоит забывать и на бонус-тур. После любого удачного спина есть шанс прирастить сумму выигрыша в два либо хорошо раза.Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут устанавливает лимитирование для клиентов. Конечно, это возможно счесть некоторым неудобством для игрока, но справедливости ради отметить, собственно выбор автоматов всё равно остаётся довольно великим. 1× slots зеркало Бонус в казино без депозита имеет разные разновидности: такое быть приветственный бонус, акции в честь каких-либо праздников или главных дат, бонус за вербование новых игроков, лояльность и получение VIP-статуса.Ограничения по забавам. Администрация запрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, средствами или безвозмездными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда дробление выполняется по облику игр. Например, отыгрыш возможен на всех игровых аппаратах, хотя запрещен в настольных забавах и в разделе Live Casino.
1×slots актуальное зеркало
Если простыми словами, бездепы – это определённая сумма денег или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать презенты. Но есть кое-какие аспекты. Существуют игорные дома, коие перед что, этим как начислить бонусы просят привязать аппарат, предоставить копии документов.При отыгрыше бонусных средств, нужно учитывать срок действия приза и время, которое дается на отыгрыш. По истечению заявленного медли, не отыгранный приз несомненно аннулирован. За счёт спинов получится запустить различные интернет слоты, протестировать стратегии и поднабраться опыта. Фишка том,, что вращения начисляются на лучшие аппараты с уникальными опциями и высокой отдачей. Не запамятовывайте, собственно в каждом акционном предложении предусмотрены особые требования – кратковременные ограничения, наибольший размер ставки, список доступных игр.Если вы облюбовали себе количество брендов коие вам больше всего приглянулись, для постоянной игры! Таких гемблеров казино довольно предпочитает и оценивает, за частую такие игроки становятся VIP игроками заведения, коим нередко поступают прибыльные предложения повторяющий призов, например же туда входит и бездепозитные. Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке нужно пополнить счет в казино. Для депозитных призов, данная процедура не нужна, так как депо теснее изготовлен.Также учтите, собственно кое-какие игровые платформы сузивают список государств, коие готовы получить предложенный бездепозитный бонус за регистрацию. К примеру, существуют онлайн-заведения, выдающие сходственные призы лишь обитателям определенных стран. К примеру, интернет казино 777 Оригинал предоставляет бездепозитный бонус только игрокам из России и стран СНГ. Или наоборот, снабжают вознаграждением всех, кроме обитателей некоторых стран (как сего, следует пристально учить список, чтобы потом не появилось практически вопросов и претензий). 1×slots рабочее зеркало на сегодня <a href=https://oke.zone/profile.php?id=31165>https://oke.zone/profile.php?id=31165</a> Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном веб-сайте и выполните вход в собственный офис, дабы забрать бесплатные вращения с вейджером х40;После получения приза вывод средств для клиента будет недоступен того, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо пара недель. Выводить средства игрок может лишь в отыгрыша.
казино 1×slots
Многие новички колеблются, собственно поощрительный приз надо будет отдавать, том если они выиграли у казино. Это абсолютно неопасно и накрепко. Выводя выигранные свои, игрок просто останавливает свое роль в игре и теряет уникальную возможность – даром наращивать собственное вещественное положение. Прямо момент арестуйте безвозмездные вращения за регистрацию без депозита и начинайте собирать призовые композиции ради крупных выигрышей! <a href=http://messmangler.com/forums/member.php?action=profile&uid=3570>http://messmangler.com/forums/member.php?action=profile&uid=3570</a> 1×slots официальный сайт зеркало Доступность — бездепозитные бонусы в казино почаще всего предоставляются новым игрокам, хотя случаются случаи, когда бонус могут получить и действующие посетители.Для верификации аккаунта нужно дать профессионалам технической поддержки отсканированную копию паспорта и счета за коммунальные предложения, еще фотографию банковской карты либо снимок страницы электронного кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для подтверждения личности.
<b>Смотреть еще похожие новости:</b>
<a href=http://check2go.net/my-account/>1х слот 1хслотс регистрация перейти на 1×slots</a>
<a href=http://angelandmax.teamforum.ru/memberlist.php?mode=viewprofile&u=640>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для казино, работающих онлайн, бездепозитные бонусы необходимы для привлечения свежих посетителей. Предложение сыграть на слотах без необходимости внесения реальных денег — работающий метод для повышения интереса к компании. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит играть в казино, лишь теперь уже на собственные деньги. Во всех законных онлайн-казино Беларуси необходимо свидетельство паспортных данных для забавы — это заявка правительства государства.
#3477 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
суть казино Семёнова Татьяна Владимировна порно <a href=https://repost.news/>up casino зеркало</a> casino зеркало сегодня рабочее 1win букмекерская контора <a href=https://www.ossetia.tv/>букмекерская контора бесплатно скачать</a> порно с Юлия Ефимова, пловчиха 1win casino порно с Анна Калинская (теннис) сайт букмекерской конторы up casino Любимова Ольга Борисовна порно играющие казино онлайн
DiskiPlus человек казино DiskiPlus балтбет букмекерская контора <a href=https://diskiplus.ru/>DiskiPlus порно с Федор Чалов (футбол)</a> DiskiPlus казино пину DiskiPlus промокод 1×bet <a href=https://diskiplus.ru>DiskiPlus лучшая казино</a> DiskiPlus лучшие казино бесплатно DiskiPlus pin up casino buzz DiskiPlus порно с Алина Загитова, фигуристка DiskiPlus букмекерская контора бетсити DiskiPlus unlim casino DiskiPlus порно с Александр Большунов (лыжные гонки) DiskiPlus порно с Сергей Бобровский (хоккей)
#3478 Charlesgunnyhttp://filmkachat.ru
1×slots casino online регистрация
Бонус за регистрацию в казино выдается лишь один один на одного игрока. Но случаются вспомогательные акции, в рамках которых бездепы раздаются для неизменных посетителей и такие презенты Вы можете получить более одного раза.Далее потребуется отыграть вагер и вывести выигрыш. Игрокам без навыка крупно повезло, возможность получить 10-ки подарков за 1 регистрацию. Если не смогли получить Бездепозитный приз, не волнуйтесь. Обратитесь в онлайн чат, оператор поможет ситуацию. <a href=http://filmkachat.ru/>1×slots официальный зеркало</a> Однако в условиях скрываются «подводные камни», которые не позволят исключить крупную сумму или же вы не успеете отыграть вейджер. Поэтому профессионалы рекомендуют отобрать безвозмездные вращения за регистрацию в казино без депо, чтобы поднабраться навыка и получить реальный шанс на победу.Бездепозитный приз за регистрацию в казино с выводом средств в 2022 году — Наш ресурс дает игрокам важную информацию о самых свежих, великодушных и испытанных призах в онлайн казино, которые обновляются каждый денек. <a href=https://www.lanubedocente.21.edu.ar/profile/vidikby0602/profile>https://www.lanubedocente.21.edu.ar/profile/vidikby0602/profile</a> Максимальная ставка ? уточняется в еденице счета и ограничивает размер ставки за раз спин. В случае ее превышения приз возможность быть аннулирован. Также в правилах возможность находиться запрет на размещение ставок конкретного облика, к, по равным шансам в рулетке (то есть, на чет или нечет, красное или черное и т.д. ).Бесплатный бонус – кредиты, коие онлайн-казино начислит посетителю, не заставляя его пополнять игровой счет. казино 1×slots <a href=https://princeofrubber.com/user-profile/richardcib/?um_action=edit>https://princeofrubber.com/user-profile/richardcib/?um_action=edit</a> Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция имеет подробные правила, ссылка на которые обыкновенно содержится в промообъявлении. В них указываются лимиты, вейджер, список доступных игр. Если оператор прячет данные о предложении, то пользоваться им надо.За привлечение друга ? масштабах партнерской программки клиент получает вознаграждение за вербование новых юзеров.
1хслот 1хслотс регистрация перейти на 1×slots
1хслотс рабочее зеркало <a href=https://morphomics.science/wiki/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%94%D0%B7%D0%B5%D0%BD>https://morphomics.science/wiki/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%94%D0%B7%D0%B5%D0%BD</a> 1×slot рабочее зеркало Существует ли стратегии для отыгрыша бездепозитных бонусов? К огорчению нет, на выигрыши или проигрыши с бонусов, казино или игрок повлиять не, отдача игр происходит от создателей игр.Иногда в качестве одобрения за регистрацию могут выдаваться билеты для роли в турнирах. Условия их проведения очень выделяются, потому мы советуем ознакомиться с каждым предложением раздельно.
1×slots casino зеркало
Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации подарка необходимо подтвердить электронную почту и привязать телефонный; Принципиальным отличием бесплатных бонусов от призов на депо считается недоступность надобности вносить деньги на акк. Из-за сего их нередко называют бездепозитными (not the slightest deposit bonuses). <a href=https://forum.bandariklan.com/member.php?action=profile&uid=20244>https://forum.bandariklan.com/member.php?action=profile&uid=20244</a> Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Чаще всего казино бонус за регистрацию без депозита даёт вероятность запустить каждой автомат. Но чем внимательно ознакомиться с условиями. Иногда для забавы доступны только определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, лучше начать знакомство с миром пыла непосредственно с «одноруких бандитов». 1хслот скачать На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению сего медли, Вы не сможете активировать и получить бездепозитный бонус.В современность довольно просто получить приз за регистрацию в казино. Практически любой игорный жилище с готовностью начислит средства либо бесплатные вращения. Многие гэмблеры пользуются данным и не стыдятся региться в любом клубе с выгодными условиями. Кстати, это замечательная возможность выработать победную тактику и сорвать джекпот.
1×slots зеркало этих способов предполагает регистрацию
Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам запрещено начислять бонусы клиентам, не имеющим денежных средств на счете. Мы предлагаем разглядеть животрепещущие бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ. Но существуют азартные заведения, готовые просто например вручить деньги на игру. Для этого достаточно сделать профиль. Чтобы вывести выигрыш, сначала нужно выполнить вейджеровые обстоятельства, прописанные в критериях получения бездепа.Шаг 5. Использование и отыгрыш. Бездеп обязан быть использован в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера. 1×slots официальный регистрация <a href=https://www.cro-escort.com/member.php?90307-JoshuaGault>https://www.cro-escort.com/member.php?90307-JoshuaGault</a>
1×slots зеркало 1хслотс регистрация перейти на 1×slots
За счёт спинов получится запустить различные интернет слоты, протестировать стратегии и поднабраться опыта. Фишка том,, что вращения начисляются на лучшие аппараты с уникальными опциями и высокой отдачей. Не запамятовывайте, собственно в каждом акционном предложении предусмотрены особые требования – кратковременные ограничения, наибольший размер ставки, список доступных игр.Выбирая безвозмездный приз, внимательно изучайте управляла. Убедитесь, что вас возможно брать роль в промоакции. Уточните, в каких играх можно выполнять условия вейджера. При необходимости задавайте вопросы представителям саппорта. В разделе с призами активировать свой презент. Найти забавы, для которых учтено поощрение и использовать бонус по предназначению. <a href=https://opensourcebridge.science/wiki/User:WFNDanae1218>https://opensourcebridge.science/wiki/User:WFNDanae1218</a> 1 хслот регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://bbs.sinbadgroup.org/index.php?xjkh-tampa-s-poster-pup-for-new-cancer-treatment.t48661.html/page-2752#post-179052>1× slots официальный</a>
<a href=http://check2go.net/my-account/>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=144143>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a>
<a href=http://khodaumo.com/forum/viewtopic.php?f=2&t=75857&sid=3ede2beed765468dfc7aa1b3b40127f8>1х слотс зеркало регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Рассмотрим принцип его деяния на примере. Допустим, вы зарегистрировались и возымели $10 not the slightest deposit bonus с вейджером х50. Это значит, что выигранные деньги можно несомненно выводить не ранее, чем после того, как общая сумма ставок достигнет $500.
#3479 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино фильм смотреть онлайн Окладникова Ирина Андреевна порно <a href=https://strelochnik.com/>пинко casino</a> казино ставка Скворцова Вероника Игоревна порно <a href=https://kompromat1.online/>смотреть фильм казино</a> казино сочи ешь казино официальные сайты казино порно с Ирина Сидоркова porno Катерина Шпица кент казино порно с Афонина Марина Игоревна
DiskiPlus Попова Анна Юрьевна порно DiskiPlus симулятор казино <a href=https://diskiplus.ru/>DiskiPlus 1×bet официальный сайт</a> DiskiPlus букмекерская контора DiskiPlus сайт букмекерской конторы <a href=https://www.diskiplus.ru/>DiskiPlus porno Юлия Канакина, скелетонистка</a> DiskiPlus вавада казино DiskiPlus порно с Илья Осипов (киберспорт) DiskiPlus казино пин DiskiPlus casino играть DiskiPlus пинко casino DiskiPlus букмекерская контора официальный сайт DiskiPlus казино фильм онлайн
#3480 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало на сегодня
Если идет об эксклюзивных услугах, имеет потребоваться регистрация в казино по ссылке с партнерского сайта.Помимо прочего, для вывода средств по бездепу нужно привнести на счёт свой 1-ый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало возможную необходимую, последствии чего вывод средств станет доступен. <a href=http://filmkachat.ru/>1× slots регистрация в 1×slots casino</a> Во всех легальных онлайн-казино Беларуси нужно свидетельство паспортных данных для игры — это требование правительства государства.Бонус с зачислением денег на счет дает больше свободы действий. Пользователь сам подбирает, каким образом воспользоваться подаренными средствами. Здесь того шансы действовать лимитирования на перечень дешевых игр, хотя обычно эти рамки не так строги, как в рекламную с безвозмездными вращениями. <a href=https://calibreapp.com/tools/core-web-vitals-test/astramedika.com.ua?scheme=https&path=%2F&context=origin>https://calibreapp.com/tools/core-web-vitals-test/astramedika.com.ua?scheme=https&path=%2F&context=origin</a> 1×slots зеркало регистрация в 1×slots casino <a href=https://www.plurk.com/p/p9cnwb>https://www.plurk.com/p/p9cnwb</a>
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Прежде чем активировать бездеп, нужно увериться что, нет, собственно государство, гражданином коей является игрок, не заходит в список не.Для получения бонуса надо(надобно) пригласить в забаву нового клиента. Казино начислит пригласившему фиксированный процент от взносов приглашённого повторяющий бонуса: почаще всего его размер не выше 10%. Срок деянья приза в большинстве случаев не выше месяца: пригласивший получает бонус зависимо проигранных ставок приглашённого в 1-ый месяц игры. 1×slot официальный сайт На страничке представлены бездепозитные бонусы за регистрацию в казино редкая награда за коей гонятся все игроки как новенькие, так и профессионалы. Мы также уделяем огромное внимание на наличие призов при составление рейтинга казино на средства. Бездепозитный бонус это возможность выступать бесплатно и выиграть настоящие деньги. <a href=https://destaquebrasil.com/inglaterra/author/michaeldub/>https://destaquebrasil.com/inglaterra/author/michaeldub/</a> Помните, собственно всевозможные нарушения верховодил сведут на нет ваши старания, и вы всего останетесь без начисленного вам безвозмездного приза. Всегда изучайте управляла начисления и условия вейджера. По хоть вопросам, на коие вы не можете без найти ответы, обращайтесь за объясненьям и саппорт.Подтверждение индивидуальной инфы. Все казино настоятельно от посетителя пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и наличие у юзера иных аккаунтов (мультиаккаунт запрещен). 1хлот регистрация в 1×slots casino Вывод выигрыша с бездепозитных бонусов казино – щедрый подарок от азартных клубов. Но чтобы исключить собственный доход, необходимо выполнить ряд условий:Стоит обозначить(означить), что бездепозитный приз выдается лишь совершеннолетним новеньким, коие, же, все пригласить личных приятелей и своих, того рассчитывающих на поощрительную программу лояльности. Подобная технология была среди конкуренцию онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению собственной посещаемости, путем привлечения новых игроков. Бонусы – это оригинальный шанс для вероятных участников игры, которые могут опробовать софт покер рума и увериться, станут ли они в него играть либо нет. Новый игрок испробует свои силы с реальными оппонентами в казино.
1×slots официальный сайт мобильная версия скачать
Наши эксперты исследуют условия акции, после в ручном режиме проверку их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и параметры. Мы не рекламируем казино, а даем игрокам информацию о превосходнейших из их.Если площадка дарует бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь ввести акк на сайте и активировать его, подтвердив адресок электрической почты, номер телефонного либо иные данные, которые просит оператор. Перед данным нужно увериться, что пользователь находится на официальном веб-сайте казино, а не на жульнической площадке. Возможность сыграть вспомогательное соревнование (а время и количество) абсолютно безвозмездно, а выигрыш, в свою очередь, поступает на счёт игрока. <a href=https://forum.kainkalabs.com:443/member.php?action=profile&uid=17596>https://forum.kainkalabs.com:443/member.php?action=profile&uid=17596</a> Минимального оборота. Этот предел устанавливается вейджером — пока игрок не сыграет на установленную необходимую, вывод средств будет недосегаем. 1×slots казино зеркало Перед активацией принципиально пристально выучить условия промоакции. Чем ниже вейджер, тем больше возможная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, протяжении коих можно пользоваться предложением. Если бездеп охватывает ограниченный список игр, рекомендуется узнать наибольшие коэффициенты, уровень отдачи и волатильности. Слоты с низкими множителями выплат подходят только том, случае, в оператор не установил жесткие лимитирования на наивысшую сумму ставки.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Если площадка дарует бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь ввести акк на сайте и активировать его, подтвердив адресок электрической почты, номер телефонного либо иные данные, которые просит оператор. Перед данным нужно увериться, что пользователь находится на официальном веб-сайте казино, а не на жульнической площадке. Денежные свои. Третий бонус за регистрацию без депозита – наличные. К раскаянию, только известные и знаменитые клубы имеют дать средства в руб. Или долларах. С их помощью у насладиться любой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед этим необходимо исполненье определенных условий.Многие азартные клубы ограничивают необходимую вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании промоакции, суммы Вы не можете вывести. Разница несомненно аннулирована, Вы в не сможете делать на нее ставки. Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала резвые выводы. Фишка выплат никаких, что достаточно избрать платёжный инструмент и указать сумму. В большинстве случаев средства зачисляются на электронные кошельки на 15 минут, а на банковские карты – 1–3 рабочих дня. 1×slot рабочее зеркало <a href=http://www.lada-xray.net/member.php?u=20867>http://www.lada-xray.net/member.php?u=20867</a> Промокод – определённая композиция знаков, которую нужно ввести в соответствующее поле при творении учетной записи либо активировать в собственном профиле игрока в разделе с бонусами.
1хслотс рабочее зеркало
Также бывают случаи, когда казино начислит оговоренный бонус последствии регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам.Не трудно додуматься, что no down payment bonuses практически разу не случаются немаленькими. Чаще всего речь о пяти–тридцати баксах (либо эквиваленте этой суммы в другой валюте). Активация валютного вознаграждения происходит механически в сотворения профиля либо использования промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на странички казино в социальных сетях или на рассылку рекламных извещений, скачать и ввести дополнительный софт и т.д. <a href=https://rekordmeister.ru/user/EdwardVioda/>https://rekordmeister.ru/user/EdwardVioda/</a> Бездепозитные бонусы — это презенты от казино вид бонусных денег или фриспинов для игровых автоматов, которые начисляются на аккаунт игрока после процедуры регистрации на веб-сайте заведения. Для получения этих поощрений депо не требуется. 1×slot казино зеркало Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную процедуру активации приза без депозита. Внимательно прочтите до конца. Многие новички делают ошибки на шаге регистрации и поэтому имеют получить презент.Ниже указан важный список законных казино в Беларуси с призами на первый депо. Вы можете попасть на официальный сайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус.
<b>Смотреть еще похожие новости:</b>
<a href=https://sadhaka.nl/forum/viewtopic.php?t=102268>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<a href=https://bans.org.ua/index.php?topic=131966.new#new>1×slots зеркало регистрацию более популярный вариант это</a>
<a href=https://russiancomputerservice.ru/user/JosephCer/>1×slots зеркало проходить регистрацию это отличный вариант</a>
<a href=http://skatefluckit.com/member.php?u=149708>1×slots зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Обычно, бездепозитные призы выдаются под определенные слоты с фиксированной ставкой, хотя их точно воспрещено применять в игровых автоматах с прогрессивным джекпотом. Список игр, в можно применять бездеп, Вы найдете в описании промоакции или сможете уточнить у службы заведения. Не советуем опрометью голову хвататься за всевозможные предложения получения средств без вложений. Вполне вероятно, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на первый взгляд. Альтернативой считается казино бонус за депо. Мы предлагаем для пару советов, благодаря которым у любого игрока несомненно вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств:
#3481 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Александра Бортич букмекерская контора бетсити <a href=https://www.ossetia.tv/>порно с Дарья Касаткина (теннис)</a> cometa casino top casino <a href=https://www.ossetia.tv/>скачиваемые казино</a> порно с Анастасия Потапова, теннисистка пинап казино балтбет букмекерская контора porno Анна Сидорова, керлингистка порно с Кирьянова Дарья Борисовна букмекерская контора фонбет официальный сайт pin casino зеркало
DiskiPlus порно с Анастасия Потапова, теннисистка DiskiPlus Комарова Наталья Владимировна порно <a href=https://diskiplus.ru/>DiskiPlus официальные букмекерские конторы</a> DiskiPlus порно с Евгения Медведева, фигуристка DiskiPlus porno Александр Соболев (футбол) <a href=https://www.diskiplus.ru/>DiskiPlus porno Игорь Акинфеев (футбол)</a> DiskiPlus вавада казино DiskiPlus казино можно DiskiPlus black russia казино DiskiPlus букмекерская контора бесплатно скачать DiskiPlus лучшие букмекерские конторы DiskiPlus игры казино DiskiPlus порно с Евгений Малкин (хоккей)
#3482 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
При отыгрыше бонусных средств, нужно учитывать срок деяния приза и время, которое дается на отыгрыш. По истечению заявленного медли, не отыгранный бонус будет аннулирован.Начнём с того, собственно каждое рекламную за регистрацию подразумевает некие обстоятельства. Бездепозитные призы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность денежного оборота, необходимая для исполнения критерий. Пример, получили безвозмездные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 руб., проигрышных либо выигрышных, так. После исполненья, бонусный баланс перейдёт на настоящий и будет доступным к выводу. <a href=http://filmkachat.ru/>1х слотс зеркало регистрация в 1×slots casino</a> В современность очень просто получить приз за регистрацию в казино. Практически каждый игорный дом с готовностью начисляет деньги либо благотворительные вращения. Многие гэмблеры используют этим и не стыдятся региться в каждом клубе с выгодными условиями. Кстати, это замечательная возможность выработать победную тактику и сорвать джекпот.Да, у безвозмездных призов есть недостатки. Прежде всего, они обычно не. Кроме того, условия вейджера по ним практически жесткие. Но все же неименье риска проделывает их очень привлекательными для клиентов. <a href=https://redmine.dti.economia.gov.br/issues/72789>https://redmine.dti.economia.gov.br/issues/72789</a> 1хслотс мобильная версия зеркало <a href=http://ultfoms.ru/user/HarryMaync/>http://ultfoms.ru/user/HarryMaync/</a> Акционные предложения от казино существуют в разных форматах. Часто бонусы даются в обмен на депо. Игрок вносит платеж и получает средства, благотворительные вращения прочие поощрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — картина бонуса, кот-ый гарантирован за исполнение конкретных поступков на веб-сайте:
1хслотс казино зеркало
Бездепозитные бонусы реальными деньгами, коие возможно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадали.Автоматическая активация кажется самой удобной, хотя ручной метод содержит перед ней превосходства. Прежде чем использовать вознаграждение от казино, стоит заблаговременно определить, сколько медли потребуется на выполнение всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деянья приза. 1×slots рабочее зеркало на сегодня <a href=http://www.cmpedu.co.kr/bbs/board.php?bo_table=free&wr_id=722106>http://www.cmpedu.co.kr/bbs/board.php?bo_table=free&wr_id=722106</a> 1×slots бездепозитный бонус за регистрацию
1×slots официальный сайт скачать на айфон
Особую изюминку видео слотам присваивают оригинальные символы. С их в активируются различные бонусы. Вы сможете запустить дополнительный степень и увеличить необходимую выигрыша. Есть знаки, коие замещают негодные элементы и сами делают выигрышные комбо. Не стоит забывать и тему бонус-тур. После каждого счастливого спина есть шанс увеличить сумму выигрыша в два или хорошо раза. <a href=https://www.google.tl/url?q=https://doctorlazuta.by/>https://www.google.tl/url?q=https://doctorlazuta.by/</a> Главным интересным в появлении данных вознаграждений состоит что, нет, собственно пустив их в ход, игры ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он спасибо призам какой-нибудь выигрыш либо мгновенно спустит все только что прибывшие финансы). То есть, казино снабжает игрока вероятностью на дармовой основе играть во всевозможные слоты и даже спонсирует забаву.Чтобы получить вероятность исключить прибыль с бездепозитного бонуса в казино, необходимо выполнить ряд условий: 1×slots сайт зеркало Заработать на бездепозитных бонусах за регистрацию в казино может каждый юзер, достигший совершеннолетия.
1хслотс зеркало
Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке адепты онлайн-казино публикуют актуальную информацию о not the slightest deposit bonuses и услугах. <a href=http://complainanything.com/node/158?page=973#comment-1317560>x1 slots 1хслотс регистрация перейти на 1×slots</a> Для получения бездепа нужно пригласить в забаву по реферальной ссылке свежего посетителя: он должен зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на необходимую, обозначенную в условиях промоакции. 1×slots зеркало регистрацию более популярный вариант это <a href=http://mbdou-vishenka.ru/user/WilliamBoste/>http://mbdou-vishenka.ru/user/WilliamBoste/</a>
1×slots бездепозитный бонус за регистрацию
В любом казино с бездепозитным призом предусмотрены вейджеровые условия. Это один-единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, нужно устроить определённое количество ставок. Чем круче приз, тем сложнее выполнить условия, и наоборот. Онлайн-казино тщательно продумывают бонусные обстоятельства, которые нужно изучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша прочие ограничения. <a href=https://praisenpray.org/forums/member.php?action=profile&uid=61387>https://praisenpray.org/forums/member.php?action=profile&uid=61387</a> 1х слот 1хслотс регистрация перейти на 1×slots Так же стоит выделить то, собственно в каждом онлайн казино установлен собственный максимальный кешаут на бездепозитный бонус. Как управляло кешаут — это максимальная сумма денег, кот-ая дешевая для вывода с бездепозитного приза.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.drustvogil-galad.si/index.php?action=profile;u=121557>1×slots официальный demo регистрация в 1×slots casino</a>
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=3762>1×slots зеркало регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Отыграв бездепозитный приз в казино с выводом тоже придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в подобное ограничение присутствует, то единоразово вывести получится только сумму, не превышающую размер полученного бонуса.
#3483 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin casino часы казино <a href=https://7club7.com/>pinco casino</a> самое казино casino промокод <a href=https://kompromat1.online/>Чулпан Хаматова</a> казино рояль смотреть яндекс игры казино пин up casino 1×bet бесплатно официальное казино вход рокс казино porno Елизавета Туктамышева
DiskiPlus up casino скачать DiskiPlus Александра Бортич <a href=https://diskiplus.ru>DiskiPlus рабочее казино</a> DiskiPlus букмекерская контора без DiskiPlus букмекерская контора мостбет <a href=https://diskiplus.ru>DiskiPlus реального казино</a> DiskiPlus казино пин DiskiPlus порно с Диана Шнайдер (теннис) DiskiPlus порно с Юлия Ефимова, пловчиха DiskiPlus букмекерские конторы без депозита DiskiPlus 1×bet xbet xyz DiskiPlus казино ставка DiskiPlus пин casino
#3484 Charlesgunnyhttp://filmkachat.ru
казино 1× slots официальный сайт
Выбор любого онлайн казино на нашем веб-сайте. В описании к любому Вы сможете узнать, собственно получите за творение аккаунта. <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> <a href=https://www.merchantcircle.com/blogs/3d-rendering-company-archicgi-dallas-tx/2025/1/3D-Furniture-Rendering-Professional-Visualization-Services/2886994>https://www.merchantcircle.com/blogs/3d-rendering-company-archicgi-dallas-tx/2025/1/3D-Furniture-Rendering-Professional-Visualization-Services/2886994</a> Практически все интернет казино с бездепозитным бонусом за регистрацию предусматривает программу лояльности — систему одобрения неизменных посетителей, которая произведено из большого уровней. При достижении игроком еще уровня на его счёт поступает приз. Чем выше степень — тем щедрее бонус. зеркала 1×slots <a href=http://www.fire-team.ru/forum/member.php?u=4837>http://www.fire-team.ru/forum/member.php?u=4837</a> Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают приз по странам. Вплоть до того, что клуб имеет принимать игроков из Вашей государства, а бездеп мешает.
1×slots рабочее зеркало на сегодня
Размер ставки для игры по бездепозитному призу (конечно же, в случае, когда он представлен повторяющий бонусных валютных средств) зачастую ниже, чем при ирге на депо. Ограничение несомненно действовать до момента отыгрыша бонуса. <a href=http://swissairways-va.com/phpBB3/viewtopic.php?p=1336133#p1336133>1×slots зеркало которую указывали при регистрации кстати</a> 1хслот 1хслотс регистрация перейти на 1×slots Получить Бездепозитный приз в интернет казино дело двух кликов. Другой момент, отыграть рекламную и соблюсти управляла и обстоятельства отыгрыша. Под правилами подразумевается не вагер, но и лимитирования по наибольшей ставке. Мы разумеем, собственно в кино все ставят на зеро и выигрывают. Призываем не делать сходственного. Перед активацией приза прочитайте правила. Узнайте последующие факторы: Условия получения презента, за регистрацию, за депозит и прочее. Ограничения по наибольшей ставке. Зачастую не повыше 350 руб. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вращать автоматы, а вагер будет стоять на пространстве. Поэтому важно аристократия, в каких играх возможно осуществлять кратность денежного оборота.Представленные на данной страничке наилучшие бездеп бонусы в казино за регистрацию в 2022 году имеют оптимальные условия. После кропотливого анализа редакция портала составила рейтинг спецпредложений, каком гости Casino.ru все сортировать перечень по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д. <a href=https://dxyq.org/space-uid-2835.html>https://dxyq.org/space-uid-2835.html</a> Так что можете смело регистрироваться без всяких размышлений. Фортуна сегодня наверняка на вашей стороне. Не страшитесь, как последствие какого или убытка Вам абсолютно не угрожает. С этими призами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе. 1×slots зеркало подтвердит вашу регистрацию если говорить
1хслотс рабочее зеркало на сегодня
Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала прыткие выводы. Фишка выплат в, собственно достаточно избрать платёжный инструмент и показать сумму. В большинстве случаев средства зачисляются на электрические кошельки на 15 мин., а на банковские карты – 1–3 рабочих дня. <a href=http://elite-models.cc/member.php?action=profile&uid=21576>http://elite-models.cc/member.php?action=profile&uid=21576</a> 1×slots казино зеркало Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, the decision зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.Маркетинговая политика всех игорных интернет-клубов должна одевать разнородный нрав. И случае гонорары на депо работают для того, чтобы провоцировать вносить депозиты и поощрять теснее место юзеров, то бездепозитный бонус в казино или приз за регистрацию в казино, до всего, рассчитан на расширение базы покупателей.
1× slots официальный
Третитй бездепозитный бонус за регистрацию – денежные свои. К сожалению, начислить рубли либо доллары способны только известные и известные клубы. С их поддержкою возможность насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком.В бонусную программу множества операторов входят регулярные бездепы. Это пожизненные акции, поощряющие интенсивных постоянных игроков. Популярный формат — раздача фриспинов по конкретным денькам недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депо в обмен на скопленные баллы лояльности. <a href=https://www.formulersupport.com/Thread-1×-slots-casino-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82–180464>1× slots casino официальный сайт</a> Как верховодило, при выводе финансов, от играющего требуется лишь устроить минимальный лепта для того, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом индивидуальный счет. Сразу последствии активации промокода возможно пользоваться подарком. Как теснее упоминалось, бонусы бывают трёх обликов – фриспины, кредиты и фриплей-бонусы.В интернет-сети практически можно найти перечни более модных и обещанных поощрительных программ от популярных онлайн-казино. 1×slots рабочее зеркало <a href=https://popcporn.net/user/CraigGer/>https://popcporn.net/user/CraigGer/</a> Нет. Казино раздают благотворительные бонусы за регистрацию, для того, дабы клиент мог ознакомиться с игровым заведением. А чтобы вывести его, нужно выполнить условия отыгрыша.
1хслотс рабочее зеркало
Если речь идет об эксклюзивных услугах, имеет потребоваться регистрация в казино по ссылке с партнерского сайта. <a href=http://clients1.google.li/url?q=http://academ-complect.ru/bitrix/redirect.php?goto=http://c-m-f.ru/bitrix/redirect.php?goto=https://teletype.in/@urist_free/VjCOBZmNnK_>http://clients1.google.li/url?q=http://academ-complect.ru/bitrix/redirect.php?goto=http://c-m-f.ru/bitrix/redirect.php?goto=https://teletype.in/@urist_free/VjCOBZmNnK_</a> Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Выбор любого интернет казино на нашем сайте. В описании к каждому Вы можете разузнать, что получите за творенье аккаунта. 1×slots казино мобильная версия
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.pmpobc.ca/index.php?topic=144735.new#new>1×slots рабочее зеркало</a>
<a href=https://vredeenvermaak.be/forum/vrede-en-vermaak/>1×slots официальный сайт скачать</a>
<a href=https://bans.org.ua/index.php?topic=129079.new#new>1×slots рабочее зеркало</a>
<a href=https://adminclub.org/showthread.php?tid=62701>1×slots зеркало регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам воспрещено начислять бонусы посетителям, не имеющим денежных средств на счете. Мы предлагаем рассмотреть актуальные призы онлайн-казино с лицензией, которые соблюдают законодательство РБ. Чтобы без увериться в преимуществах бездепозитных призов, довольно зарегистрироваться в казино и получить одобрение.
#3485 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
спорт букмекерская контора 1×bet приложение <a href=https://rucriminal.info/>casino</a> скачать pin casino порно с Виктория Синицина, фигуристка <a href=https://strelochnik.com/>порно с Варвара Субботина</a> Матвиенко Валентина Ивановна порно casino автомат porno Илона Маркова, хоккеистка cometa casino порно с Дарья Клишина, легкоатлетка человек казино 1×bet слоты
DiskiPlus new casino DiskiPlus скачать casino на андроид <a href=https://www.diskiplus.ru>DiskiPlus porno Юлия Канакина</a> DiskiPlus часы казино DiskiPlus скачать сайт букмекерской конторы <a href=https://www.diskiplus.ru>DiskiPlus букмекерская контора вход</a> DiskiPlus kometa casino DiskiPlus gama casino DiskiPlus porno Юлия Канакина, скелетонистка DiskiPlus порно с Евгения Медведева DiskiPlus лучшая казино DiskiPlus казино на деньги DiskiPlus bitz casino
#3486 Charlesgunnyhttp://filmkachat.ru
сайт 1× slots casino
В перечне притязаний к отыгрышу нередко наличествуют лимиты на ставки при этой на собственные деньги. Так, если отыграть нужно 30 000 рублей, а предельная сумма ограничена 30 рублями, то вертеть барабаны светит 1000 один. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам действия промоакции. <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном сайте и выполните вход в собственный кабинет, чтобы забрать безвозмездные вращения с вейджером х40;Новые посетители онлайн-казино без первого депо имеют проверить свою удачливость. К тому же есть вероятность конвертировать бездепы в реальные средства за регистрацию в казино, однако достичь приз необходимо отыграть согласно условиям акции. <a href=https://www.diigo.com/item/note/b90ch/ovct?k=42b2cf8283b52a61a92de693633c0e86>https://www.diigo.com/item/note/b90ch/ovct?k=42b2cf8283b52a61a92de693633c0e86</a> В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с безвозмездных вращений. Прибыль, коию Вы заработаете на этом бездепе можно назначать на вывод без какого или отыгрыша.Популярность онлайн казино растёт и всё больше пользователей начинают интересоваться азартными играми. Бездепозитные призы 2022 года, это уникальные презенты за регистрацию. С их помощью новые игроки могут получить благотворительные вращения либо деньги на баланс за 1 регистрацию. С свет игорных заведений в онлайне, бездепозитные бонусы стали моднейшим способом привлечения игроков. Подобные акции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о которых мы поведаем. Наш вебсайт собрал лучшие предложения из онлайна на 2022 год. Воспользуйтесь любым подарком и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить обстоятельства. 1×slots сайт <a href=http://yurunion.com/index.php?subaction=userinfo&user=undesirablefore>http://yurunion.com/index.php?subaction=userinfo&user=undesirablefore</a> Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки имеют запросить вспомогательные документы либо инициировать короткое общение по Skype.
1х слот регистрация в 1×slots casino
Подобные бонусы без депо предоставляются на более выгодных условиях. Зачастую они крупнее, а условия отыгрыша наименее строгие.Бездепы с бесплатными вращениями деют юзерам право вертеть барабаны игровых автоматов без снятия средств со счета. За каждый раунд выплачивает казино. Число спинов ограничено и изредка превышает сотню. Если акция содержит большое бесплатных игр, их начисление возможность быть разбито на некоторое дней. <a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=58283&result=reply>1×slots актуальное зеркало</a> 1×слотс казино <a href=http://crtdu-kras.ru/communication/forum/user/259643/>http://crtdu-kras.ru/communication/forum/user/259643/</a> Чаще всего, знаменитые сервисы, эти как MoneyBookers и WebMoney, еще MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное управляло. Финансовые средства выводятся лишь спустя ту платежную систему, которой популярностьюимели для пополнения депо. Если же игрок получил бездепозитный покерный бонус, требуется восполнить счет на минимальную сумму, которая сочиняет обычно десять $.Поспешите забрать бездепозитные бонусы за регистрацию в казино из представленного списка. Все платформы столько водят законную работа, но и порадуют правдивыми плодами забавы, высокой отдачей, быстрыми выплатами. скачать 1×slots официальный сайт Главным моментом в появлении данных вознаграждений произведено сомнений, собственно пустив их в ход, игрок ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он благодаря призам какой-нибудь выигрыш либо мгновенно спустит все лишь что прибывшие деньги). То есть, казино снабжает игрока возможностью на дармовой базе играть во всевозможные слоты и даже спонсирует забаву.
1×slots зеркало проходить регистрацию это отличный вариант
Не хотите поиграть в азартные игры, не рискуя своими деньгами, хотя получая в все выплаты? Подобную возможность деют почти лучшие порталы с азартными весельями. В их количестве много правдивых и надежных интернет-казино на русском языке. Они привлекают свежих юзеров различными поощрительными мероприятиями, включая бездепозитные, или бесплатные бонусы. Размер ставки для забавы по бездепозитному призу (окончательно же, когда, когда он представлен повторяющий бонусных денежных средств) зачастую ниже, чем при игре на депо. Ограничение несомненно действовать до этапа отыгрыша бонуса. <a href=https://aiia.su/index.php?subaction=userinfo&user=Craigneits>https://aiia.su/index.php?subaction=userinfo&user=Craigneits</a> Для доказательства электрической почты, просто перейдите по интенсивной ссылке в послании, приобретенном от игрового заведения.Существует ли стратегии для отыгрыша бездепозитных призов? К огорчению нет, на выигрыши или проигрыши с бонусов, казино или игрок воздействовать имеет, отдача игр происходит от разработчиков игр. 1×slots зеркало этих способов предполагает регистрацию Можно. Вы практически можете отрешиться от получения бездепозитного приза за регистрацию в казино, пока Вы не сделаете ставку.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавления или официального клиента для ПК. В большинстве казино действуют программы лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий уровень нередко сопровождается выдачей бездепа. <a href=http://youhotel.ru/forum/memberlist.php?mode=viewprofile&u=29954>1×slots зеркало регистрацию более популярный вариант это</a> В лицензионных бездепозитных казино играть в азартные игры вправду неопасно. Наличие лицензии подтверждает тот прецедент, что клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP.Иногда операторы требуют внесение малого депо перед выводом для верификации платежного прибора. В неких казино этот депо также светит отыграть. Перед активацией важно внимательно выучить обстоятельства акции. Чем ниже вейджер, что, этим больше потенциальная выгода игрока. Имеют велечину также лимиты ставок при отыгрыше и сроки, в течение коих возможно воспользоваться предложением. Если бездеп охватывает ограниченный перечень игр, рекомендуется разузнать максимальные коэффициенты, уровень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь что случае, в оператор не установил взыскательные ограничения на максимальную необходимую ставки. 1×slots бездепозитный бонус за регистрацию <a href=https://qiqer.ru/qforum/profile.php?id=363436>https://qiqer.ru/qforum/profile.php?id=363436</a> Таким образом, заведение пробует показать себя своим потенциальным игрокам, а подобный маркетинговый ход как казино приз без депозита за регистрацию привлекает довольно большое внимания к игорному заведению и обеспечивает постоянный поток свежих гостей и будущих посетителей игрового интернет клуба.Вообще перейдя в казино — верховодила схожи в получении бездепозитных бонусов, в стандартные правила заходит: подтвердить эл. Почту и телефон, наполнить свой индивидуальный профиль, активировать промо код или активировать предложения во вкладке БОНУСЫ.
1×slot регистрация
Промообъявления от казино мешают реальной картины и ориентированы на привлечение внимания пользователей. Понять, насколько высоки шансы остаться в плюсе, дозволит собственный тест критерий предложения:B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax <a href=https://www.amateur-girls-posts.com/forums/profile.php?mode=viewprofile&u=2950493>https://www.amateur-girls-posts.com/forums/profile.php?mode=viewprofile&u=2950493</a> 1× слот зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=142417>1×slots casino регистрация 1×slotscasin online</a>
<a href=https://bbs.sinbadgroup.org/index.php?xjkh-tampa-s-poster-pup-for-new-cancer-treatment.t48661.html/page-1056#post-144308>1×slots рабочее зеркало</a>
<a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=9419>1×slots промокод при регистрации 2025</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но такие рамки не смущают числе хайроллеров, что коэффициенты на слотах разрешают рассчитывать на солидные выигрыши, а в неких автоматах разыгрывается передовой джекпот.
#3487 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
симулятор казино casino зеркало сегодня рабочее <a href=https://specreporter.com/>1go casino</a> казино фильм 1×bet сайт 1×bet xyz <a href=https://res-publika.com>pinco casino</a> casino андроид casino ru порно с Сергей Бобровский (хоккей) пин ап casino pin официальное казино вход Кузнецова Анна Юрьевна порно casino скачать приложение
DiskiPlus букмекерская контора зенит DiskiPlus казино рояль <a href=https://diskiplus.ru/>DiskiPlus порно с Константин Тюкавин (футбол)</a> DiskiPlus 1×bet сайт DiskiPlus 1×bet сайт <a href=https://www.diskiplus.ru/>DiskiPlus зеркала казино</a> DiskiPlus порно с Константин Тюкавин (футбол) DiskiPlus 1×bet скачать приложение на андроид DiskiPlus ешь казино DiskiPlus мелбет букмекерская контора DiskiPlus Лут Оксана Николаевна порно DiskiPlus сайте букмекерской конторы фонбет DiskiPlus 1go casino
#3488 Charlesgunnyhttp://filmkachat.ru
1×slots официальный регистрация
Фриспины предназначены для применения в видео слотах. Внимательно ознакомьтесь с условиями – частенько их выдают на кое-какие автоматы. В зависимости от клуба, у вас выйдет устроить определённое число ставок. Кстати, продвинутые игорные дома позволяют запускать любых «одноруких бандитов».Многие азартные клубы ограничивают необходимую вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не сможете вывести. Разница будет аннулирована, Вы числе не сможете создавать на нее ставки. <a href=http://filmkachat.ru/>1×slots казино мобильная версия</a> <a href=https://seo.valutahosting.it/it/www/astramedika.com.ua>https://seo.valutahosting.it/it/www/astramedika.com.ua</a> В онлайне слишком много скриптовых вебсайтов, коие принадлежат плутам. Их главная цель – заинтересовать гэмблеров, пообещав не только великодушные подарки, хотя и крупные выигрыши. Так что некоторые сайты предлагают получить за регистрацию и $1 000. 1×slots регистрация 1×slotscasino 56 online <a href=https://wolvesbaneuo.com/wiki/index.php/User:ChiquitaMorrisse>https://wolvesbaneuo.com/wiki/index.php/User:ChiquitaMorrisse</a>
1×slots зеркало регистрация то дальше необходимо пройти
1 x slots casino Для получения депозитного бонуса нужно пополнить собственный игровой баланс реальными средствами. Вознаграждение возможно получить либо при внесении первого депо, или вид фиксированного процента от внесённых средств. Так или другому, бонус поступит на счёт только в пополнения. <a href=http://www.bxbshop.co.kr/bbs/board.php?bo_table=free&wr_id=205566>http://www.bxbshop.co.kr/bbs/board.php?bo_table=free&wr_id=205566</a> Также учтите, что кое-какие игровые платформы сузивают перечень стран, которые способны получить предложенный бездепозитный бонус за регистрацию. К образцу, есть онлайн-заведения, выдающие подобные призы только обитателям определенных государств. К образцу, интернет казино 777 Оригинал предоставляет бездепозитный бонус лишь игрокам из России и стран СНГ. Или наоборот, снабжают вознаграждением всех, считая обитателей некоторых стран (как сего, идет пристально учить список, чтобы впоследствии не появилось никаких вопросов и жалоб).Даже не выиграв крупную необходимую, игрок интересно проведет время, изнутри изучит работу площадки, воспримет геймплей автоматов. Все это без каких-то финансовых рисков. Быть в курсе лучших промоакций с. Достаточно регулярно учить перечень новых интернет казино с выводом бонуса без депозита в данном разделе. 1×slots официальный регистрация Как только вы отыграли вейджер и средства с бонусного баланса перебежали вам на реальный счет, Вы неустрашимо сможете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депо).Подобные бонусы без депо предоставляются на больше выгодных критериях. Зачастую они покрупнее, а условия отыгрыша менее жесткие.
1хслотс казино зеркало
Реже призы без депозита начисляются неизменным игрокам. С их поддержкой администрация постарается удержать ценных посетителей либо вожделеет поблагодарить за преданность правильных гостей. Но гораздо почаще для сходственных целей применяются эти промоакции: <a href=https://isvip.ru/user/Chrisneape/>https://isvip.ru/user/Chrisneape/</a> 1хслотс рабочее зеркало Но на азартных платформах похожие гонорары шансы получить теперь зарегистрированные юзеры. В таком случае, бонусы предоставляются масштабах уникальных акций либо же неким игрокам в виде акционного предложения, коие приходит на почту с целью «возвратить» игрока в свое казино.
1×слот регистрация в 1×slots casino
Внесение депо – Будьте готовы пополнить счет в отыгрыша приза. Это стандартное требование управлял для данного типа промо-акций. Лучше заблаговременно уточнить, какую сумму надо(надобно) будет вносить на счет. Как управляло, речь идет о минимальном депозите, хотя вы должны быть уверены, что он вас по кармашку.Онлайн-казино кропотливо продумывают бонусные условия, коие нужно изучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и другие ограничения. <a href=https://koreanstudies.com/forum/viewtopic.php?t=185373>1×slots регистрация то дальше необходимо пройти</a> В качестве бонусов онлайн казино нередко предлагает выдачу фриспинов, то есть даровых вращений игрового барабана. Виртуальные монеты можно использовать для изучения в покерной школе либо для игры в казино.Чтобы без убедиться в превосходстве бездепозитных призов, достаточно зарегистрироваться в казино и получить одобрение. 1 хслот регистрация в 1×slots casino <a href=http://fh3809p1.bget.ru/index.php?subaction=userinfo&user=maturepocket98>http://fh3809p1.bget.ru/index.php?subaction=userinfo&user=maturepocket98</a> Обычно, бездепозитные призы выдаются под определенные слоты с фиксированной ставкой, хотя их точно запрещено использовать в игровых автоматах с прогрессивным джекпотом. Список игр, в которых возможно применять бездеп, Вы найдете в описании акции либо можете уточнить у службы поддержки заведения.Помните, собственно в некоторых забавах сумма ставки идет в зачет вейджера только отчасти. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки числятся как отыгранные средства, момент как в слотах идет в зачет все 100% суммы.
1×slots регистрация на официальном сайте
<a href=http://196.43.133.60/wiki/index.php/%D0%A1%D0%B0%D0%B9%D1%82_%D0%90%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0>http://196.43.133.60/wiki/index.php/%D0%A1%D0%B0%D0%B9%D1%82_%D0%90%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0</a> Иногда виде одобрения за регистрацию шансы выдаваться билеты для участия в турнирах. Условия их проведения очень отличаются, поэтому мы советуем ознакомиться с любым предложением отдельно. 1×slots рабочее зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=781578>казино 1×slots</a>
<a href=https://praisenpray.org/forums/showthread.php?tid=102074>1хслот скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Многие казино деют в маркетинговых целях безвозмездные бонусы необыкновенно для наших читателей. Чтобы их получить, надо(надобно) перебежать на игровой сайт по партнерской ссылке с нашего портала. Большинство клубов завлекают внимание геймеров за счёт разнородных презентов. На 1 сайтах можно получить виртуальные кредиты, которые откроют доступ ко всему софту. На иных же, администрация предлагает бесплатные вращения для запуска лучших онлайн слотов. Несмотря на различные акции, стоит выделить самые главные.
#3489 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Антропова Валентина Викторовна порно с Захарова Мария Владимировна <a href=https://vestnik-jurnal.com/>где казино</a> букмекерские конторы pin порно с Матвей Сафонов (футбол) <a href=https://slon-ru.com/>букмекерская контора вход</a> casino промокод Елизавета Боярская casino online зеркало casino вход водка казино скачать 1×bet букмекерская контора
DiskiPlus порно с Анна Щербакова, фигуристка DiskiPlus казино рояль смотреть <a href=https://www.diskiplus.ru/>DiskiPlus порно с Анна Калинская (теннис)</a> DiskiPlus казино вулкан DiskiPlus 1×bet официальный сайт 1×bet xyz <a href=https://diskiplus.ru>DiskiPlus букмекерские конторы бет</a> DiskiPlus casino онлайн DiskiPlus казино без DiskiPlus pin casino DiskiPlus 1×bet слоты 1×bet top DiskiPlus порно с Алина Загитова DiskiPlus бесплатно играем казино DiskiPlus ев казино
#3490 Charlesgunnyhttp://filmkachat.ru
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Наш перечень содержит наилучшие бездепозитные бонусы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по важным параметрам: <a href=http://filmkachat.ru/>1×slots коды</a> Лишь модные и известные азартные заведения все разрешить себя выдавать бездепы вид добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депо, которые можно истратить в лучших аппаратах с высокой отдачей. <a href=https://similars.net/alternatives-to/playhouse.com.ua>https://similars.net/alternatives-to/playhouse.com.ua</a> 1×slots зеркало регистрация <a href=http://t20suzuki.com/phpBB2/profile.php?mode=viewprofile&u=3717>http://t20suzuki.com/phpBB2/profile.php?mode=viewprofile&u=3717</a>
сайт 1× slots casino
Индивидуальные поощрения выдаются за совершение действий: подписку на аккаунты площадки в соц сетях, установку мобильного приложения или официального посетителя для ПК. В большинстве казино срабатывают программы преданности, присваивающие игрокам статусы за активность на сайте. Продвижение на грядущий уровень нередко сопровождается выдачей бездепа.Помните, собственно в некоторых играх сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных забавах только от 5% до 50% суммы ставки числятся как отыгранные средства, на как в слотах идет в зачет все 100% суммы. <a href=https://adminclub.org/member.php?action=profile&uid=90427>зеркала 1×slots</a> casino 1×slot Минимального оборота. Этот лимит устанавливается вейджером — же игрок не поиграет на установленную сумму, вывод средств несомненно недосегаем.Акционные предложения от казино существуют в разных форматах. Часто призы даются в обмен на депозит. Игрок вносит платеж и получает деньги, безвозмездные вращения и другие одобрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — картина бонуса, который гарантирован за выполнение определенных деяний на сайте: <a href=https://www.wow-interfaces.com/users/Patricklolla>https://www.wow-interfaces.com/users/Patricklolla</a> Прочитайте управляла бонусной программы, какой хотите принять. Да, мы настойчиво рекомендуем сделать это до регистрации.Представьте момент, когда при ставке в 10 руб. Вы получите схожее умножение. Миллион рублей за одно вращение, собственно абсолютно вероятно. Поэтому вопрос, сколько возможно выиграть остаётся закрытым. Предлагаем выяснить самостоятельно. Регистрируйтесь в одном или нескольких онлайн казино, получайте Бездепозитный бонус и проверяйте фортуну в деле. Разумеется, вывести деньги не так просто. Однако шансы есть у всех. 1×slots зеркало выигрыши обязательно пройдите регистрацию если
1×slots casino зеркало рабочее
Срок активации и время на отыгрыш. Зачисление денег либо фриспинов происходит при активации в течение взыскательно ограниченного периода, схожие притязания предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать приз количество дней либо числе недель. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высочайшим вейджером. <a href=https://eventoscqcr.com/campus/community/profile/craigsausy/>https://eventoscqcr.com/campus/community/profile/craigsausy/</a> При забаве на бонусные средства запрещается играть в игровые автоматы с прогрессивным джекпотом и забавы из радела exist casino. Кроме того, некоторые казино выделяют бездеп на один либо несколько конкретных слотов, и в других играх Вы не сможете на их играть. 1× slots casino официальный сайт Чтобы бездеп не был начислен на Ваш акк, Вам надо активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт автоматически, а Вы не планируете его применять, обратитесь в службу поддержки с пожеланием отменить бездепозитный приз.
1×slos регистрация в 1×slots casino
Диапазон ставок, коие вправе устроить игрок, кроме лимитирован. Обычно назначать можно небольшую необходимую — в 10–30 руб. За одно вращение.Подтвердите лицо, предоставив оператору казино свои паспортные данные. Инструкции обыкновенно несложные, главное — четко им по. Если написано, что «на фото должны быть заметны все хорошо угла страницы паспорта» — сделайте непосредственно такое фото. Ознакомьтесь с нашим списком наилучших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего списка и получите бездеп сразу. Хватайте превосходнейшие безвозмездные предложения ниже и выигрывайте великие средства, не рискуя! Бонусы без депозита при регистрации считаются самыми привлекательными как для опытнейших игроков, например для и начинающих. Получив такое вознаграждение, клиент имеет выступать на настоящие средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные призы в интернет-казино Рунета, еще условия их активации и выигрыша.Эффективность бездепов виде маркетингового прибора расценили все операторы. Малоизвестные площадки употребляют такие акции, дабы быстро набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны неизменных посетителей. Не все веб-сайты, дающие подарки без депозита, рекомендованы к этой. За симпатичным промоописанием шансы прятаться неосуществимые условия отыгрыша прочие подводные камни. 1× slots регистрация в 1×slots casino <a href=http://pfb7978i.bget.ru/index.php?subaction=userinfo&user=Charlesfeart>http://pfb7978i.bget.ru/index.php?subaction=userinfo&user=Charlesfeart</a> Следует подчеркнуть, собственно бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом.
1×slots сайт зеркало
Заработать на бездепозитных призах за регистрацию в казино возможность любой пользователь, достигший совершеннолетия. Таким образом онлайн казино получает потенциального игрока. Возможно в будущем либо настоящем он захочет сыграть на средства средства. Так трудятся бездепозитные призы в онлайн казино. Здесь очень подходит выражение, бесплатные сыр посещает лишь в мышеловке. Начинающие игроки имеют не осознавать опасность азарта. Однако со временем осознания становится больше. Это тема для отдельного обсуждения. <a href=https://www.mybbaddons.com/board/user-71207.html>https://www.mybbaddons.com/board/user-71207.html</a> 1×slots регистрация на 1хслотс
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.graylite.com/viewtopic.php?p=373218#p373218>1×slots зеркало рабочее на сегодня</a>
<a href=http://fin-molitor.com/forum/viewtopic.php?f=2&t=455278>1 xslots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Свежий приз начисляется в виде денежных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в пользовании средствами, ну случае отыгрыша оператор может установить лимитирование на вывод средств. Так собственно главное различие презента на депо от бездепа – неотъемлемое пополнение счёта. Вы можете привнести депо и преумножить стартовый капитал или арестовать бездеп и всем не придётся рисковать своими сбережениями. Поспешите выполнить обычные требования, и администрация ресурса начислит щедрое одобрение!
#3491 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Каролина Севастьянова 7k casino зеркало рабочее <a href=https://strelochnik.com/>1win букмекерская контора</a> порно с Александр Большунов (лыжные гонки) up букмекерская контора <a href=https://rucriminal.info/>зеркала казино</a> порно с Илюшникова Татьяна Александровна букмекерская контора фонбет порно с Сергей Бобровский (хоккей) пина букмекерской конторы 1×bet рабочее включи казино скачать casino на андроид
DiskiPlus 1×bet зеркало xbet DiskiPlus кент casino <a href=https://www.diskiplus.ru>DiskiPlus букмекерские контора ап</a> DiskiPlus сайт pin up casino DiskiPlus порно с Георгий Джикия (футбол) <a href=https://www.diskiplus.ru>DiskiPlus рабочие зеркала казино</a> DiskiPlus ограбление казино DiskiPlus сайт букмекерской конторы DiskiPlus пина букмекерской конторы DiskiPlus unlim casino DiskiPlus 1×bet регистрация DiskiPlus online casino DiskiPlus pin casino зеркало
#3492 Charlesgunnyhttp://filmkachat.ru
1хслотс 1хслотс регистрация перейти на 1×slots
Чаще всего интернет-казино предлагают бездепозитные бонусы свежим пользователям. Эта промо-акция очень эффективно завлекает новичков, подталкивая их к открытию счета. Конечно, не все они становятся послушными посетителями, хотя сам факт регистрации аккаунта играет на руку заведению.Такой безвозмездный эквивалент средств зачисляется на профиль пользователя последствии осуществления притязаний и предназначаются они только для игрового процесса. Вывод таких вознаграждений вероятен только в осуществления вейджеровых условий. <a href=http://filmkachat.ru/>1х слот 1хслотс регистрация перейти на 1×slots</a> Также бездепозитные призы все работать методом возвратить к забаве посетителей, пока приостановивших своё сотрудничество с фирмой: извещение о бездепе поступает на мобильный телефон или почту.Не советуем опрометью голову хвататься за всевозможные предложения получения средств без вложений. Вполне вероятно, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на первый взгляд. Альтернативой считается казино бонус за депо. Мы предлагаем для пару советов, благодаря которым у любого игрока несомненно вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств: <a href=https://help.bemob.com/discuss/678776332a0a92000f16fc3b>https://help.bemob.com/discuss/678776332a0a92000f16fc3b</a> Верификация аккаунта. Лучше подтвердить лицо незамедлительно в регистрации, чтобы потом не было проблем с выводом средств. Верификация может протекать 2-мя способами: 1×slots casino зеркало рабочее <a href=http://redhawkclan.free.fr/index.php?file=Members&op=detail&autor=gleamingnip9>http://redhawkclan.free.fr/index.php?file=Members&op=detail&autor=gleamingnip9</a>
1хслотс рабочее зеркало на сегодня
<a href=http://nhomtruyen.com/members/jamesgaw.9280/>1×slots зеркало регистрацию более популярный вариант это</a> 1×slots регистрация на сайте 1×slots ru com При забаве на бонусные свои воспрещается выступать в игровые автоматы с современным джекпотом и игры из радела exist casino. Кроме такого, кое-какие казино выделяют бездеп на раз либо некоторое конкретных слотов, и в других играх Вы не можете на них выступать.Так что приготовьтесь предоставить секретную информацию (пол, возраст, страна проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев проверка данных занимает не более суток, после чего получится беспрепятственно выводить крупные выигрыши. <a href=http://extra-oil.com/index.php?subaction=userinfo&user=demonicranch44>http://extra-oil.com/index.php?subaction=userinfo&user=demonicranch44</a> 1×slots сайт
1×slots casino регистрация 1×slotscasino09k online
Бездепозитный бонус за регистрацию в казино с выводом средств в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых свежих, великодушных и проверенных призах в онлайн казино, которые обновляются любой денек.Выиграть реальные средства в казино не пополняя счет – сложно, хотя возможно. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными призами и начните играть на бонусные свои. По статистике в 10-ти заведений возможно заработать небольшую необходимую средств за счет бонусных средств. <a href=https://bbs.wuxhqi.com/home.php?mod=space&uid=1311983>https://bbs.wuxhqi.com/home.php?mod=space&uid=1311983</a> Автоматическая активация на самой комфортной, хотя ручной метод содержит перед ней достоинства. Прежде чем использовать вознаграждение от казино, стоит заблаговременно определить, сколько времени требуется на выполнение всех критерий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала действия приза. 1×slots бездепозитный бонус за регистрацию
1×slots официальный зеркало
Помните, собственно любые нарушения верховодил сведут на нет ваши усилия, и вы наверняка останетесь без начисленного для бесплатного бонуса. Всегда изучайте управляла начисления и обстоятельства вейджера. По каким вопросам, на коие вы не самостоятельно отыскать ответы, обращайтесь за объяснениям и саппорт. <a href=https://qualityprogamer.de/forum/showthread.php?tid=425435>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> Вейджер (wager) – это коэффициент, кот-ый показывает на какую сумму необходимо сделать ставок, чтобы исключить приз из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода этого приза, Вам нужно сделать ставок на необходимую: 500*70=3500 руб. Только всецело отыграв приз, Вы можете исключить собственный выигрыш.Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных требований, кроме неотъемлемой верификации. Если на веб-сайте предусмотрена обязательная процедура доказательства личности, то вывести выигрыш получится лишь последствии проверки данных. Приготовьтесь наполнить анкету и отправить в техподдержку документ, подтверждающий личность. Так же стоит выделить то, что в каждом интернет казино установлен собственный наибольший кешаут на бездепозитный приз. Как верховодило кешаут — это максимальная сумма денег, которая дешевая для вывода с бездепозитного бонуса.Бесплатный бонус – кредиты, коие онлайн-казино начисляет клиенту, не принуждая его пополнять игровой счет. 1×slots промокод при регистрации <a href=https://gusev-online.ru/user/Briantah/>https://gusev-online.ru/user/Briantah/</a> Если простыми текстами, бездепы – это определённая сумма денег либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать презенты. Но есть кое-какие аспекты. Существуют игорные дома, коие перед что, этим как начислить призы просят привязать телефонный, дать копии документов.Основное верховодило получения бездепа ? творимый акк обязан быть у пользователя первым и единственным. Наличие нескольких аккаунтов строго запрещено. Проверка ведется по имени, e-mal, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депо нужно соблюдать несложную последовательность деяний.
1хслотс рабочее зеркало
Каждый новичок и умелый игрок мечтают живо стартануть и начать создавать настоящие ставки. Для сего достаточно отобрать презент, за кот-ый не нужно платить. В зависимости от игровой платформы, нужно создать профиль, привязать email либо аппарат. После этого администрация начислит щедрое вознаграждение вид бесплатных вращений или виртуальных кредитов.Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных бонусов принимаются достаточно высокие требования. Часто онлайн-казино рекомендуют отыграть бонусное поощрение до 100 один в игровых автоматах. Например, случае игрок получил бесплатно десять $, то нужно несомненно отыграть их, поставив одну тысячу спинов по одному доллару любой. Стоит обозначить(означить), что не все казино дают вероятность играть на бонусы и не во всех развлекательных заведениях идентичные правила для отыгрывания. Некоторые казино запрещают выступать на призы в блекджек либо ограничивают ставки до 5 процентов, собственно значительно увеличивает в десятки раз число нужных игр. <a href=https://mobilka.mobi/user/JoshuaDap/>https://mobilka.mobi/user/JoshuaDap/</a> Каждый компьютерные обязан сначала детально изучить обстоятельства по получению и отыгрышу приглянувшегося дара. Если всё устраивает, поспешите забрать безвозмездные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо в начать вращать барабаны лучших слотов. 1×slots официальный сайт мобильная версия Новые посетители онлайн-казино без первого депо могут проверить свою удачливость. К что, этому же есть возможность преобразовать бездепы в настоящие деньги за регистрацию в казино, впрочем для этого бонус необходимо отыграть согласно условиям промоакции.
<b>Смотреть еще похожие новости:</b>
<a href=https://talkonlinenews.com/viewtopic.php?t=8130>казино 1× slots официальный сайт</a>
<a href=http://forum.survival-readiness.com/viewtopic.php?t=259532>1×slots официальный регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чаще всего интернет-казино предлагают бездепозитные бонусы свежим юзерам. Эта промо-акция довольно отлично привлекает новичков, подталкивая их к открытию счета. Конечно, не они становятся преданными клиентами, хотя сам факт регистрации аккаунта играет на руку заведению. А ознакомиться с свежими онлайн казино, Вы можете за счет призов с выводом прибыли, которые Вы сможете получить без депозита.
#3493 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало
Обычно для получения призов без депозита, казино выдвигает приклнные и вполне выполнимые условия, но есть ряд действий коие воспрещены и имеют стать досадные результаты:Все безвозмездные призы кажутся заманчивыми. Кто же категорически от способности сыграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далеко не все бездепозитные бонусы в презентабельны для рассудительного посетителя. <a href=http://filmkachat.ru/>1×slots скачать на айфон</a> <a href=https://a.pr-cy.ru/astramedika.com.ua/>https://a.pr-cy.ru/astramedika.com.ua/</a> 1×slots casino зеркало <a href=http://www.khleeg.net/vb/member.php?u=7684>http://www.khleeg.net/vb/member.php?u=7684</a>
1×slots зеркало подтвердит вашу регистрацию если говорить
<a href=http://fin-molitor.com/forum/viewtopic.php?f=2&t=397009>1×slots зеркало на сегодня</a> 1× slots сайт <a href=http://sibstroyagent.ru/index.php?subaction=userinfo&user=ubiquitousteleg>http://sibstroyagent.ru/index.php?subaction=userinfo&user=ubiquitousteleg</a> Онлайн гемблинг развивается с каждым деньком больше и больше, новые бренды создаются не по денькам а по часам. Новые онлайн казино делают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и что, этим наиболее предлагают бездепозитные бонусы за регистрацию, собственно бы не упустить эту вероятность — как воспользоваться новым бездепом, рекомендуем навещать наш сайт как можно почаще, самое лакомое и свежие будет добавляться в этом же перечне. 1×slots casino зеркало Список например именуемых «разрешенных землель» прилагается к правилам бонусной программы игорного портала. Обязательно выясните, распространяются ли на вас похожие санкции.
1×slots рабочее зеркало
В реальное время получить бонус за регистрацию в казино довольно просто. Почти каждый игорный жилище с радостью даст средства или безвозмездные вращения. Многие игроки используют этим и не стесняются регистрироваться в любом клубе с прибыльными условиями. Кстати, это замечательная возможность придумать выигрышную тактику и сорвать куш. <a href=https://gtorr.net/index.php?subaction=userinfo&user=AnthonyJum>https://gtorr.net/index.php?subaction=userinfo&user=AnthonyJum</a> 1×slots зеркало регистрация
1×slots рабочее зеркало на сегодня
Онлайн-казино тщательно продумывают бонусные обстоятельства, которые нужно изучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и другие лимитирования. <a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1×slots casino зеркало</a> Простая процедура получения бездепозитного приза, кот-ая займет менее 2-х мин. Для получения бездепов, достаточно зарегистрироваться и доказать контактные данные. 1×slot регистрация <a href=https://domivka.biz.ua/wr_board/tools.php?event=profile&pname=Ralphdox>https://domivka.biz.ua/wr_board/tools.php?event=profile&pname=Ralphdox</a> Иногда у посетителей вебсайта имеют появиться трудности, задачи, препядствия при активации приобретенного промо-кода. В таких случаях, нужно адресоваться за подмогою в саппорта «Support». Для получения ответа, непременно указывается конкретная причина воззвания и подтверждается информация дополнительными снимками. Если сформировалась неоднозначная ситуация, постоянно возможно обратиться к основному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ.Минимального оборота. Этот предел уточняется вейджером — же игрок не поиграет на установленную необходимую, вывод средств будет недосегаем.
1×slots зеркало подтвердит вашу регистрацию если говорить
Но а случае вы уже профи по интернет казино, кликаем на красную кнопку «Получить» и Вы автоматически перейдете в интернет казино;Фриспины без депо или вспомогательные средства посодействуют поближе познакомиться с игровой платформой и её функциями. За счёт даров возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям ради игры напротив живых крупье. А ознакомиться с новыми онлайн казино, Вы сможете за счет призов с выводом выгоды, которые Вы можете получить без депозита.Онлайн-казино кропотливо продумывают бонусные условия, коие нужно изучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и другие ограничения. <a href=http://www.carshowsociety.com/forum.php?action=profile;u=6454>http://www.carshowsociety.com/forum.php?action=profile;u=6454</a> На данном разделе портала регулярно публикуются обзорные статьи, в рассматриваются безвозмездные бонусы лучших интернет-казино. Информация структурирована по нескольким пунктам, включая основные:Доступность — бездепозитные бонусы в казино чаще всего предоставляются новым игрокам, хотя бывают случаи, когда приз имеют получить и действующие клиенты. 1×slots бездепозитный бонус за регистрацию
<b>Смотреть еще похожие новости:</b>
<a href=https://melhorlance.com.br/minha-conta/>1×slots бонус за регистрацию</a>
<a href=https://vredeenvermaak.be/users/jamesapofe/>1×slots коды</a>
<a href=https://persiankittencat.com/grey-persian-cats-unraveling-the-charm-of-these-feline-beauties/#comment-56550>1хслот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Поспешите зарегистрироваться на официальном сайте Клубника, чтобы моментально получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, замечена реальный шанс победу!
#3494 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
рейтинг казино лучшие онлайн казино <a href=https://slon-ru.com/>включи казино</a> порно с Гатагова Ольга Анатольевна porno Юлия Пересильд <a href=https://specreporter.com/>порно с Никита Кучеров (хоккей)</a> casino игровой автомат казино вход порно с Бондаренко Анастасия Борисовна Лут Оксана Николаевна порно лучшие онлайн казино casino актуальное зеркало фильмы казино рояль
DiskiPlus казино ли DiskiPlus Черкесова Бэлла Мухарбиевна порно <a href=https://www.diskiplus.ru/>DiskiPlus казино 5</a> DiskiPlus официальное казино вход DiskiPlus Скоробогатова Ольга Николаевна порно <a href=https://diskiplus.ru>DiskiPlus демо казино</a> DiskiPlus casino бездепозитный DiskiPlus porno Алена Михайлова DiskiPlus up casino зеркало DiskiPlus casino online зеркало DiskiPlus unlim casino DiskiPlus pin ап casino DiskiPlus бесплатные букмекерские конторы
#3495 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация то дальше необходимо пройти
У каждого игорного клубы разные вейджеровые обстоятельства. Чтобы вы гарантировано смогли выполнить их, мы дадим количество советов. Если система начислила небольшую сумму, надо создавать большие ставки – остановитесь на 10–30 центах. Как лишь сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте играть. В противном случае другого, как приглядеться к другому автомату.За счёт спинов получится запустить разные интернет слоты, протестировать стратегии и поднабраться навыка. Фишка что, нет, собственно вращения начисляются на лучшие аппараты с оригинальными опциями и высокой отдачей. Не забывайте, собственно в любом акционном предложении предусмотрены специальные требования – кратковременные лимитирования, максимальный размер ставки, список дешевых игр. <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino09k online</a> Мы делаем ударение на ключевых положениях верховодил, рассказываем о территориальных лимитированиях и вкратце информируем о других промоакциях обсуждаемого казино. <a href=https://www.sitejabber.com/reviews/astramedika.com.ua>https://www.sitejabber.com/reviews/astramedika.com.ua</a> К примеру, игроку выдаются бесплатные свои в заведении в размере пятидесяти либо ста долларов (вейджер на которые сочиняет 100х). То есть, каждому новоприбывшему игроку выскакивает притягивающая картинка, кот-ая сулит выплату всех зачисленных компанией средств. Не стоит внимания на казино бонус за регистрацию без депо с сильно большой либо довольно махонькой суммой призов, потому что, в кропотливо выучив все условия, здесь всего, несомненно какой-то подкол. онлайн казино 1×slots <a href=http://getamped.yxhi.com/doku.php?id=Can_You_Install_the_1×bet_APP_Without_Google_Play?>http://getamped.yxhi.com/doku.php?id=Can_You_Install_the_1×bet_APP_Without_Google_Play?</a> В случае установленного лимита на сумму вывода выигрыша с бездепозитного бонуса, игрок не может вывести больше заявленной суммы.Бонус за регистрацию в казино без депо с выводом денег нужно отыграть. Зачастую для отыгрыша возможность потребоваться сделать ставки на необходимую, в несколько десятков раз превосходящую сумму бонуса или выигрыша.
1×slots регистрация 1×slotscasino09k online
Можно. Вы практически сможете отказаться от получения бездепозитного приза за регистрацию в казино, же Вы не сделаете ставку. зеркло казино 1×slots <a href=https://hastui.com/home.php?mod=space&uid=10477>https://hastui.com/home.php?mod=space&uid=10477</a> 1×slots зеркало проходить регистрацию это отличный вариант
1×slots зеркало регистрацию более популярный вариант это
<a href=http://forums.indexrise.com/user-320258.html>http://forums.indexrise.com/user-320258.html</a> Бездепозитный приз предоставляется новому игроку за конкретные деянья. Часто презент в виде средств или фриспинов выдается за регистрацию, благодаря чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.На страничке представлены бездепозитные бонусы за регистрацию в казино редкая награда за коей гонятся все игроки как новенькие, так и профессионалы. Мы также уделяем огромное внимание на наличие призов при составление рейтинга казино на средства. Бездепозитный бонус это возможность выступать бесплатно и выиграть настоящие деньги. 1×slots казино мобильная версия Бездепы с безвозмездными вращениями предоставляют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд платит казино. Число спинов ограничено и редко выше сотку. Если промоакция включает в себя много даровых игр, их начисление имеет быть разбито на количество дней.Бездепозитный бонус по промо-коду будет доступен для забавы, лишь что случае когда Вы активируете специальный бонусный код в разделе с призами либо укажите промокод при регистрации на веб-сайте. В неких случаях, считая активации кода, придется доказать контактные данные игрока и наполнить анкету клиента.
1хслотс рабочее зеркало
<a href=https://www.allampolgar.hu/showthread.php?tid=3889>1×slots зеркало на сегодня</a> На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не сможете активировать и получить бездепозитный бонус. 1хслотс официальный сайт зеркало <a href=https://diakov.net/user/DoctorLazutaSr/>https://diakov.net/user/DoctorLazutaSr/</a>
1 x slots casino
B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpaxБездепозитные бонусы, как уже ясно, являются уникальной вероятностью приступать к игровому процессу абсолютно бескорыстно, то есть играть в онлайн казино безвозмездно и на имеющие средства сразу в регистрации аккаунта. Автоматы с таким депозитом имеют стать прекрасной возможностью поиграть для почитателей азарта с определенными лимитированиями в денег. <a href=https://astradigital.co.uk/wiki/index.php?title=User:AlejandrinaSulli>https://astradigital.co.uk/wiki/index.php?title=User:AlejandrinaSulli</a> Иногда для получения бонусов нужно связаться с представителями службы поддержки. Удобнее всего с ними собеседовать в онлайн-сате, но от достаточно запроса по электрической почте.Более солидные предложения встречаются довольно редко. Зачастую они доступны только VIP-игрокам. В остальных случаях им скорее сопутствуют довольно строгие условия отыгрыша. Также вероятны дополнительные обстоятельства прочие ограничения, прописанные в критериях и положения бонусной программы казино. 1хслотс официальный сайт зеркало Когда речь идет о валютных призах, казино всегда устанавливают обстоятельства вейджера, коие нужно выполнить, дабы вывести выигрыш.Обычно, бездепозитные призы выдаются под определенные слоты с фиксированной ставкой, хотя их точно запрещено использовать в игровых автоматах с прогрессивным джекпотом. Список игр, в которых возможно применять бездеп, Вы найдете в описании акции либо можете уточнить у службы поддержки заведения.
<b>Смотреть еще похожие новости:</b>
<a href=https://redfist.de/RF-Online-Testforum/viewtopic.php?f=60&t=77236>1×slots casino регистрация 1×slotscasin online</a>
<a href=https://forum.visiteachapada.com/viewtopic.php?f=19&t=3928>1хслотс рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В лицензионных бездепозитных казино выступать в азартные забавы вправду безопасно. Наличие лицензии подтверждает тот прецедент, собственно клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP.
#3496 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Алена Михайлова смотреть фильм казино <a href=https://specreporter.com/>porno Алена Косторная (фигурное катание)</a> казино на деньги kent casino регистрация <a href=https://glvk.guru/>win win casino</a> казино вход Крючкова Полина Викторовна порно Матвиенко Валентина Ивановна порно казино сегодня почему в казино нет окон porno Илона Маркова, хоккеистка 7k casino зеркало рабочее
DiskiPlus порно с Матвей Сафонов (футбол) DiskiPlus порно с Александр Большунов (лыжные гонки) <a href=https://diskiplus.ru>DiskiPlus порно с Максим Глушенков (футбол)</a> DiskiPlus казино ставка DiskiPlus какие казино <a href=https://diskiplus.ru/>DiskiPlus 1×bet 1</a> DiskiPlus unlim casino DiskiPlus casino скачать приложение DiskiPlus мобильные букмекерские конторы DiskiPlus 1×bet сайт DiskiPlus 7k casino зеркало DiskiPlus рейтинг казино DiskiPlus сколько казино
#3497 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало сайта
Когда идет о денежных призах, казино постоянно устанавливают обстоятельства вейджера, коие нужно выполнить, чтобы исключить выигрыш. <a href=http://filmkachat.ru/>1× slots официальный</a> В любом казино с бездепозитным призом предусмотрены вейджеровые обстоятельства. Это один-единственный «подводный камень», кот-ый стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, нужно устроить определённое число ставок. Чем круче бонус, что, этим сложнее выполнить условия, и наоборот.Это тоже бесплатные деньги, коие поступают на аккаунты новоиспеченных игроков после регистрирования. А необыкновенность этих бонусов произведено что, нет, собственно обретенные деньги непременно стопам применять в продолжении назначенного времени. <a href=http://www.fanart-central.net/user/3d-furniture-rendering/profile>http://www.fanart-central.net/user/3d-furniture-rendering/profile</a> Игрокам стоит воспринимать приветственный бонус как гарантированный метод получить крупный выигрыш, хотя это замечательная вероятность без расходов оценить возможностей казино. 1×slots регистрация на сайте <a href=http://dpdr.ru/index.php?subaction=userinfo&user=cuddlyshoe19>http://dpdr.ru/index.php?subaction=userinfo&user=cuddlyshoe19</a> Бездепозитные призы за регистрацию считаются одним из самых модных методов вербования новых игроков в онлайн-казино, потому собственно они предоставляют игрокам вероятность опробовать казино, необыкновенно игровые автоматы, и вероятно, выиграть настоящие средства.
1×slots официальный demo регистрация в 1×slots casino
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5164/#comment-622418>1×slots casino зеркало</a> 1×slots регистрация Бонусы без депо при регистрации числятся самыми красивыми как для опытных игроков, например для и начинающих. Получив такое вознаграждение, клиент возможность выступать на настоящие средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а также условия их активации и выигрыша.Варианты выигрыша зависимости от Вашей успеха и условий игорного портала. Выше мы сказали, что некоторые бездепозитные призы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются и те, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на средства, можно выиграть невероятные суммы. Сегодняшние игровые автоматы либо видео слоты, как их называют. Могут выдавать солидные умножение от х1.000 и выше. Некоторые множат ставку от х100.000. <a href=http://travel.navigator-mas.ru/user/Patrickpop/>http://travel.navigator-mas.ru/user/Patrickpop/</a> 1 x slots casino В разделе с бонусами активировать свой подарок. Найти игры, для которых предусмотрено одобрение и использовать приз по предназначению.
1×slots рабочее зеркало
Более крупные предложения встречаются довольно редко. Зачастую они доступны только VIP-игрокам. В оставшихся случаях им скорее сопутствуют очень строгие обстоятельства отыгрыша. Также возможны дополнительные условия и лимитирования, прописанные в критериях и положения бонусной программы казино.Ограничения по играм. Администрация запрещает игрокам некоторые игровые автоматы с бездепозитным призом, деньгами либо безвозмездными вращениями. Обычно, в правилах приводится полный перечень слотов для отыгрыша. Иногда дробление выполняется по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, хотя запрещен в настольных забавах и в разделе Live Casino. Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?Прочитайте верховодила бонусной программы, какой хотите принять. Да, мы безотступно рекомендуем устроить это до регистрации. <a href=https://www.elektroroller-forum.de/memberlist.php?mode=viewprofile&u=441795>https://www.elektroroller-forum.de/memberlist.php?mode=viewprofile&u=441795</a> 1×slots зеркало регистрация то дальше необходимо пройти В разделе с призами активировать свой презент. Найти забавы, для коих учтено одобрение и применять приз по назначению.Способы получения бездепа различаются от облика приза, кот-ый приглянулся игроку. Но для иначе нужно быть зарегистрированным в легальном онлайн-казино и подтвердить собственную лицо. В общем виде пошаговая инструкция для получения бездепозитного бонуса выглядит например:
1×slots официальный регистрация
Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, например как Вам понадобиться ее подтвердить в при выводе денег. <a href=https://www.makinamania.net/index.php?topic=250459.new#new>1х слот 1хслотс регистрация перейти на 1×slots</a> 1×slots мобильная версия войти казино <a href=https://wallhaven.cc/user/CGI>https://wallhaven.cc/user/CGI</a> Например, игрок получил 500 рублей при разработке аккаунта и обязан отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 руб., потребуется сделать 875 спинов для полного отыгрыша.
x1 slots регистрация в 1×slots casino
Бонус в казино без депо содержит разные вариации: может быть приветственный приз, промоакции в честь каких-либо праздничных либо важных дат, приз за привлечение новых игроков, лояльность и получение VIP-статуса.Чем ниже значение вейджера, тем проще отыграть и исключить приз. Если Вы расчитываете заработать на бездепе, но просто ознакомиться с свежим игровым клубом, то стоит избегать бонусов с высоким вейджером их практически не реально отыграть. С ними Вы сможете только протестировать забавы заведения. <a href=https://aryba.kg/user/Arnoldbaf/>https://aryba.kg/user/Arnoldbaf/</a> Если площадка дарит бездеп за регистрацию, то процедура его получения проста. Нужно только ввести акк на веб-сайте и активировать его, подтвердив адрес электронной почты, номер аппарата или другие данные, коие настятельно оператор. Перед данным нужно убедиться, собственно юзер находится на официальном сайте казино, не на жульнической площадке.Простая процедура получения бездепозитного бонуса, которая займет не более 2-х минут. Для получения бездепов, достаточно зарегистрироваться и доказать контактные данные. 1×slots актуальное зеркало Хотя благотворительные призы начисляются без депозита, не исключено, что для понадобиться вносить деньги. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты только последствии как, как свежий клиент раз пополнит игровой счет.
<b>Смотреть еще похожие новости:</b>
<a href=https://masstr.net/showthread.php?tid=140679>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1526#post-44975>1х слот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подарки на праздники ? приуроченные к праздничным датам, требующие условного отыгрыша либо начисляются без это. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду. Вейджер в переводе с британского означает «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша полученного приза, в нашем случае бездепозитного. Число ставок большого — главно только набрать сумму, пропорциональную сумме одобрения.
#3498 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet слоты 1×bet top casinos xyz <a href=https://rucriminal.info/>сайт казино зеркало</a> 7k casino зеркало на сегодня 1×bet зеркало на сегодня <a href=https://m.repost.news/>рабочее казино</a> порно с Елена Никитина, скелетонистка inform@rucriminal.info Александра Бортич casino betting pin up букмекерская контора казино пин букмекерская контора вход
DiskiPlus смотреть фильм казино DiskiPlus porno Илья Ковальчук (хоккей) <a href=https://www.diskiplus.ru/>DiskiPlus casino онлайн</a> DiskiPlus букмекерская контора фонбет официальный DiskiPlus 1×bet 1 <a href=https://diskiplus.ru/>DiskiPlus 1×bet зеркало xbet xyz</a> DiskiPlus порно с Александр Большунов (лыжные гонки) DiskiPlus казино 5 DiskiPlus 1×bet слоты DiskiPlus порно с Баталина Ольга Юрьевна DiskiPlus букмекерская контора на андроид DiskiPlus bitz casino DiskiPlus лучшие онлайн казино
#3499 Charlesgunnyhttp://filmkachat.ru
1х слотс зеркало регистрация в 1×slots casino
Вообще перейдя в казино — правила одинаковы в получении бездепозитных бонусов, в стереотипные управляла входит: подтвердить эл. Почту и телефонный, заполнить собственный собственный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ. <a href=http://filmkachat.ru/>1×slot зеркало рабочее регистрации на телефон придет</a> Несмотря на то, собственно этот вариант стимуляции со стороны азартных платформ очень моден в похожих игр, далеко многим поклонникам казино ведомо, что являют собой бездепозитные бонусы казино и как непосредственно их вероятно эксплуатировать. <a href=https://www.merchantcircle.com/blogs/3d-rendering-company-archicgi-dallas-tx/2025/1/3D-Furniture-Rendering-Professional-Visualization-Services/2886994>https://www.merchantcircle.com/blogs/3d-rendering-company-archicgi-dallas-tx/2025/1/3D-Furniture-Rendering-Professional-Visualization-Services/2886994</a> Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в индивидуальный кабинет, чтобы отобрать бесплатные вращения с вейджером х40;При верном раскладе бездепы — это отличный метод выступать на средства без растраты личных средств. Есть некоторое рекомендаций, следуя коим можно извлечь максимально выгоды из сходственных промоакций казино. Играть стопам лишь на лицензированных площадках. Скриптовые сайты столько накалывают с бонусными услугами, но и используют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах невозможно. 1×slots регистрацию процедура займет всего лишь <a href=http://mail.canadalondonchinese.com/home.php?mod=space&uid=110677>http://mail.canadalondonchinese.com/home.php?mod=space&uid=110677</a> Но на азартных платформах сходственные вознаграждения имеют получить и уже зарегистрированные пользователи. В этом случае, призы предоставляются масштабах оригинальных промоакций или же неким геймерам в виде акционного предложения, которое прибывает на почту с целью «возвратить» игрока в свое казино.Создание аккаунта. На сайте казино необходимо открыть регистрационную форму и заполнить порожние поля личностными данными. Иногда на этом шаге потребуется показать только адрес электрической почты и пароль, но почаще бы наполнить анкету персональной информацией (ФИО, дата рождения, место проживания и т.д.). Нужно свидетельствовать только настоящие данные, потому впоследствие они станут испытаны.
1×slots рабочее зеркало
1×slots официальный регистрация Казино выделяет возможность заработать и исключить реальные средства на бездепозитных бонусах. Обычно, это незначительная сумма, которую казино может для разрешить подарить игроку.Бесплатные призы казино без депозита возможно получить в виде денежных средств на бонусный счет (исключить их можно лишь последствии отыгрыша), фриспинов, забавы или кешбэк-бонуса. <a href=http://hoiqt.com/user-7010.html>http://hoiqt.com/user-7010.html</a> Исходя из этого, просто не существует мудрых оснований махнуть рукою на получение такого приза при регистрации. И, заметить,, на подобный безвозмездной основе у вас есть все шансы выиграть деньги и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные призы, именуют бесплатными онлайн платформами для игр. 1×slot зеркало В онлайне количество знаменитых игорных площадок с привлекательными акционными услугами. Однако внимательно читать условия 10-ов предложений в надоест, ну и время отнимет количество. Поэтому наша команда подготовила ТОП-3 сайтов с наихорошими бездепозитными бонусами:Промокод – определённая комбинация символов, которую необходимо установить в подходящее поле при разработке учетной записи либо активировать в личном профиле игрока в разделе с призами.
1×slots регистрация на 1хслотс
Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, чтобы появилась возможность вывести выигрыш. <a href=http://xn–2q1bm4ii7b64r7pah0aj1s.com/bbs/board.php?bo_table=2&wr_id=43037>http://xn–2q1bm4ii7b64r7pah0aj1s.com/bbs/board.php?bo_table=2&wr_id=43037</a> Для получения бонуса нужно ознакомиться с программкой лояльности казино и устроить ставки на необходимую, нужную для перехода на следующий уровень.Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. 1хслотс рабочее зеркало
1×slots мобильная версия войти казино
Отзывы читателей о бонусных акциях помогут составить эмоцию, хотя не запамятовывайте о субъективности личных комментариев. Стоит обозначить(означить), что бездепозитный приз выдается лишь взрослым новеньким, которые, же, имеют пригласить собственных друзей и своих, кроме рассчитывающих на поощрительную программу преданности. Подобная технология замечена среди создающих онлайн-казино для популяризации и расширения трафика. Покер румы и спонсоры содействуют увеличению собственной популярности, путем привлечения новых игроков. Бонусы – это оригинальный шанс для вероятных участников забавы, которые могут опробовать софт покер рума и увериться, станут ли они в него выступать или нет. Новый игрок испробует средства силы с реальными оппонентами в казино.Основное различие что, нет, собственно для получения бездепа нужно пополнять баланс в казино. Но считая сего, есть ряд прочих отличий: 1×slots регистрация 1×slots review live <a href=http://dinskoi-raion.ru/forum/?PAGE_NAME=profile_view&UID=63768>http://dinskoi-raion.ru/forum/?PAGE_NAME=profile_view&UID=63768</a> Чтобы получить возможность исключить прибыль с бездепозитного бонуса в казино, необходимо выполнить ряд условий:
1×slots casino регистрация на сайте
Допустим, за регистрацию вы получили бездеп в объеме 2 000 рублей с вейджером х30. В данном случае светит сделать ставок, на общую необходимую в 60 000 руб. (2 000 * 30 = 60 000). Когда выполните обстоятельства по отыгрышу, придёт время заработать настоящие средства. Однако не забывайте, что с любого презента выйдет исключить определённую сумму (чаще всего менее $200). В интернет-сети практически возможно отыскать списки более знаменитых и гарантированных поощрительных программ от модных онлайн-казино.Максимальная ставка ? устанавливается в денежной счета и ограничивает объем ставки за один спин. В случае ее превышения бонус может быть аннулирован. Также в правилах может находиться запрет на размещение ставок конкретного облика, например, по одинаковым шансам в рулетке (словами, на чет либо нечет, красноватое или черное и т.д. ). <a href=https://www.easyuefi.com/forums/member.php?action=profile&uid=36674>https://www.easyuefi.com/forums/member.php?action=profile&uid=36674</a> Активация валютного гонорары случается механически последствии создания профиля или использования промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на страницы казино в социальных сетях либо на рассылку маркетинговых сообщений, скачать и ввести вспомогательный софт и т.д.Стоит отметить, собственно бездепозитный бонус выдается лишь взрослым новеньким, которые, в свою очередь, все пригласить собственных приятелей и знакомых, того рассчитывающих на поощрительную программку преданности. Подобная технология замечена между создающих онлайн-казино для популяризации и расширения трафика. Покер румы и спонсоры способствуют увеличению своей посещаемости, методом вербования свежих игроков. Бонусы – это уникальный шанс для вероятных соучастников забавы, которые могут опробовать софт покер рума и убедиться, будут ли они в него выступать либо нет. Новый игрок испробует свои силы с настоящими оппонентами в казино. казино 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.drustvogil-galad.si/index.php?action=profile;u=121557>1× slots casino официальный сайт</a>
<a href=https://forum.oursson.ru/viewtopic.php?f=2&t=10857>1× slots casino зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Практически все интернет казино с бездепозитным призом за регистрацию предусматривает программу лояльности — систему одобрения постоянных клиентов, кот-ая состоит из множества уровней. При достижении игроком одного уровня на его счёт поступает приз. Чем выше степень — что, этим щедрее бонус. Каждая игровая платформа отличается условиями по получению и отыгрышу бездепов. В правилах детально расписаны кратковременные рамки, за коие нужно прокрутить вейджер. Также не забывайте на максимальный объем ставки и наивысшую сумму выплаты. С другой стороны, дабы получить бездепозитные бонусы казино, довольно истратить менее 1 минутки.
#3500 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
Это также благотворительные деньги, коие поступают на аккаунты новоиспеченных игры последствии регистрирования. А особенность этих призов произведено том,, собственно обретенные финансы обязательно стопам применять в продолжении назначенного времени. <a href=http://filmkachat.ru/>1× slots casino зеркало</a> С не отыгранным призом запрещается превышать объем наибольшей ставки. Нарушение сего условия последствия аннулирование выигрыша.Для получения депозитного приза нужно восполнить собственный игровой баланс реальными средствами. Вознаграждение можно получить или при внесении первого депо, или в виде фиксированного процента от внесённых средств. Так либо иначе, приз поступит на счёт только в пополнения. <a href=https://www.merchantcircle.com/blogs/3d-rendering-company-archicgi-dallas-tx/2025/1/Professional-3D-Rendering-Studio-Architectural-Visualization-Services/2886990>https://www.merchantcircle.com/blogs/3d-rendering-company-archicgi-dallas-tx/2025/1/Professional-3D-Rendering-Studio-Architectural-Visualization-Services/2886990</a> Для тех, кто только взвешивает испытать свою удачу, а для профессиональных игроков, разыскивающих свежие площадки для выигрышей, водящие лицензированные казино нередко организуют различные акции, и лучшее услуг за последнее время – как для начинающих, так и для проф игроков – бездепозитный приз за регистрацию.На страничке представлены бездепозитные призы за регистрацию в казино редчайшая награда за которой гонятся все игроки как новички, например и профессионалы. Мы также уделяем большое внимание на наличие бонусов при составление рейтинга казино на деньги. Бездепозитный приз это вероятность играть безвозмездно и выиграть настоящие средства. 1×slots регистрация 1×slots casino 777 online <a href=https://stalker-worlds.games/user/Harryhup/>https://stalker-worlds.games/user/Harryhup/</a> Бесплатный бонус – кредиты, коие онлайн-казино начисляет клиенту, не заставляя его пополнять игровой счет.
1×slots рабочее зеркало на сегодня
Бездепозитные призы прекрасный вариант даровой забавы в игровые автоматы. Многие пользователи сети не знают, собственно в казино можно начать играть полностью безвозмездно, а потом вывести выигрыш на банковскую карту либо электрический кошелек, иные не доверяют интернет казино, а третьи успешно играют и выигрывают – и тотчас довольно немалые суммы. x1 slots регистрация в 1×slots casino <a href=http://fb7707ng.bget.ru/user/DavidSpeax/>http://fb7707ng.bget.ru/user/DavidSpeax/</a> 1×slot зеркало рабочее регистрации на телефон придет В качестве бонусов онлайн казино нередко предлагает выдачу фриспинов, то есть безвозмездных вращений игрового барабана. Виртуальные монеты возможно использовать для обучения в покерной школе либо для игры в казино.Бездепозитный бонус нередко может стать доступным сразу последствии завершения регистрации, поскольку в большинстве случаев единственным притязанием к нему является регистрация, а этого проверка вашей свежей учетной записи.
1×slots официальный регистрация
Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.При исполнении условий отыгрыша и верификации, деньги с бонусного счета переводятся на ведущей и шансы быть выведены на карту или электронный кошелек. Лимиты на вывод и сроки проведения транзакции находятся от выбранной платежной системы. <a href=http://droid-comz.ru/user/JasperSew/>http://droid-comz.ru/user/JasperSew/</a> 1×slots регистрация на 1хслотс Как только вы отыграли вейджер и средства с бонусного баланса перебежали вам на реальный счет, Вы неустрашимо сможете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депо).Нет. Казино раздают бесплатные призы за регистрацию, чтобы, чтобы, чтобы заказчик мог ознакомиться с игровым заведением. А чтобы исключить его, необходимо выполнить условия отыгрыша.
1×slot зеркало рабочее этих способов предполагает регистрацию
Бездепозитный приз казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби избранного заведения, сориентироваться в выборе игр и выяснить качество работы службы поддержки. Довольно нередко, начиная игровой процесс, игрок уже отказывается останавливаться и проделывает настоящий лепта. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть бесплатно вполне как раз таки с бонусом за регистрацию без необходимости вносить депо. <a href=https://qualityprogamer.de/forum/showthread.php?tid=415247>1× slots зеркало</a> Существуют казино с бонусом за регистрацию, в очень популярны фриспины в интернет казино впоследствии регистрации в определенных играх. Они встречаются и почаще даровых поощрений либо традиционных бонусов в казино без инвестициям. Например, игрок регистрирует счет, на кот-ый начисляются бесплатные игры, приз за регистрацию в виде бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса в выигрывает настоящие деньги, коие в последствии возможно успешно исключить из заведения на собственную платежную систему. То есть, есть шансы исключить средства без рисков своими финансами. Регистрация, какую в получит бонусы, займет минут, а спасибо данному возможно прирастить 5 евро поощрений до тысячи и без всяких проблем вывести их. При маленький сумме приза рекомендовано играть по низким ставкам, а использовать наибольшие какого-либо только в случае, если вейджер слишком великой, а время на отыгрыш крепко ограничено. казино 1× slots официальный сайт <a href=https://www.ofurea.com/blog/91271/%D0%BA%D1%83%D0%BF%D0%B8%D1%82%D1%8C-%D1%80%D0%B0%D0%B7%D0%BC%D0%B5%D1%89%D0%B5%D0%BD%D0%B8%D0%B5-%D1%81%D1%81%D1%8B%D0%BB%D0%BE%D0%BA/>https://www.ofurea.com/blog/91271/%D0%BA%D1%83%D0%BF%D0%B8%D1%82%D1%8C-%D1%80%D0%B0%D0%B7%D0%BC%D0%B5%D1%89%D0%B5%D0%BD%D0%B8%D0%B5-%D1%81%D1%81%D1%8B%D0%BB%D0%BE%D0%BA/</a>
1×slots зеркало на сегодня
Все обожают получать подарки. Согласитесь, практически каждый играющий человек будет безгранично рад, если получит бесплатный подарок для игры в онлайн казино просто за регистрацию или же приз за внесенный депо, например именуемые приветственные бонусы для новых игроков. Соответственно такие интернет клубы будут более модны и предпочтительны у игроков при выборе казино для игры. Топ казино непрерывно обновляется и прибавляются новые и занимательные игровые клубы с привлекательной бонусной политикой и всеми вероятными прерогативами, к коим относятся такие бонусы как фриспины за регистрацию, валютные бездепозитные бонусы, еще великодушные бонусы за внесенный депо. Простая процедура получения бездепозитного бонуса, которая займет не более 2-х мин. Для получения бездепов, достаточно зарегистрироваться и подтвердить контактные данные. <a href=http://fr99659i.bget.ru/forum/showtopic-2382>http://fr99659i.bget.ru/forum/showtopic-2382</a> В большинстве заведений сделать это возможно по адресу электронной почты, по номеру телефона, спустя социальную сеть или гугл-аккаунт. 1хслот 1хслотс регистрация перейти на 1×slots Фриспины начисляются по определенной ставке. После их активации игроку нужно запустить разъем и увериться, что в нем показываются безвозмездные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода последствии отыгрыша ориентируется оператором и изредка выше 5 000 руб.Перечисленные повыше основные свойства сопровождают практически любой бонус и считаются стандартными для бездепозитных бонусных начислений в казино.
<b>Смотреть еще похожие новости:</b>
<a href=http://aficionado.pl/showthread.php?174991–1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82-%D1%81%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C&p=196061>1×slots официальный сайт, скачать</a>
<a href=http://www.arka-bahce.org/forum/showthread.php?p=762846#post762846>1×slots регистрация 1×slots review live</a>
<a href=https://projects.sare.org/people/jamestrazy/>1×slots зеркало быструю регистрацию а также мгновенное</a>
<a href=http://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=6268>1хлот регистрация в 1×slots casino</a>
<a href=http://nrj.rs.ba/viewtopic.php?p=3695#p3695>1×slots казино мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Однако далековато не все ресурсы предлагают своим клиентам бездепозитные призы за регистрацию в казино. В большинстве случаев учтено поощрение на 1-ый депо в размере 100–200%. Это замечательная возможность преумножить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш. В перечне требований к отыгрышу часто присутствуют лимиты на ставки при этой на личные деньги. Так, если отыграть надо(надобно) 30 000 руб., а предельная сумма ограничена 30 рублями, то вращать барабаны светит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками условий по срокам действия акции.
#3501 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
рейтинг казино казино рублях <a href=https://m.repost.news/>casino</a> Крючкова Полина Викторовна порно 7k casino <a href=https://res-publika.com>пин casino</a> 7k casino официальный сайт бесплатно фильм казино спорт букмекерская контора win win casino 1×bet вход casino online зеркало casino играть
DiskiPlus пина букмекерской конторы DiskiPlus смотреть фильм казино <a href=https://www.diskiplus.ru/>DiskiPlus слот casino</a> DiskiPlus casino сайты DiskiPlus Петрова Ольга Викторовна порно <a href=https://diskiplus.ru>DiskiPlus 1×bet бесплатно</a> DiskiPlus up casino зеркало DiskiPlus букмекерская контора официальный сайт скачать DiskiPlus porno Екатерина Ефременкова, шорт-трекистка DiskiPlus pin up casino официальный DiskiPlus порно с Голикова Татьяна Алексеевна DiskiPlus рокс казино DiskiPlus porno Александра Степанова, фигуристка
#3502 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на сайте 1×slots ru com
Не советуем сломя голову браться за всевозможные предложения получения средств без вложений. Вполне возможно, собственно бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем выглядит на 1-ый взор. Альтернативой считается казино бонус за депозит. Мы предлагаем вам пару советов, спасибо которым у каждого игрока несомненно возможность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег: <a href=http://filmkachat.ru/>1×slots казино мобильная версия</a> Самый распространённый из сходственных призов, конечно же, бездеп на день рождения клиента — бонус повторяющий фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им возможно на установленного периода времени. <a href=https://www.sitejabber.com/reviews/playhouse.com.ua>https://www.sitejabber.com/reviews/playhouse.com.ua</a> Вейджер не более х30–35 является приемлемым. Опытные игроки заявляют, что с таким вейджером реально остаться в плюсе, если правильно подойти к выбору игрового аппарата. 1×slot регистрация <a href=https://bandit400.ru/user/DoctorLazutaEn/>https://bandit400.ru/user/DoctorLazutaEn/</a> Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном сайте и выполните вход в индивидуальный офис, чтобы отобрать безвозмездные вращения с вейджером х40;Новички не обожают сразу же вносить депозит. Это обусловлено неименьем навыка и сомнением. К счастью, в наше время можно получить бездепозитный приз за регистрацию в казино. Неважно собственно начисляет система – фриспины либо кредиты. В всяком случае вы не рискуете собственными сбережениями. Это замечательная вероятность запустить приглянувшийся видео слот или же испытать фортуну в настольных забавах.
1×slots зеркало проходить регистрацию это отличный вариант
<a href=https://www.sgomberisgombero.it/author/jamesapate/>1 х слотс зеркало</a> 1×slot зеркало рабочее регистрации на телефон придет Большинство клубов привлекают внимание игроков за счёт различных презентов. На одних веб-сайтах возможно получить виртуальные кредиты, которые откроют доступ ко всему софту. На иных же, администрация предлагает благотворительные вращения для запуска топовых интернет слотов. Несмотря на разные акции, стоит выделить самые основные. <a href=http://oe.kg/bitrix/redirect.php?goto=http://babyloft.ru/bitrix/redirect.php?goto=http://chiefpower.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/FtI8NHXsrFu>http://oe.kg/bitrix/redirect.php?goto=http://babyloft.ru/bitrix/redirect.php?goto=http://chiefpower.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/FtI8NHXsrFu</a> 1×slots рабочее зеркало на сегодня Бездепы обычно предлагают с отыгрышем — моментально вывести выигранные средства нельзя. Перевод средств со счета несомненно возможен последствии такого, как пользователь выполнит все требования казино, а сумма не быть выше установленного правилами лимита. Условиями промоакции фиксируются сроки, протяжении которых заказчик вправе воспользоваться предложением. Обычно они не превышают нескольких дней после активации.В подавляющем большинстве случаев благотворительные призы начисляются в кредитах, которые нельзя сразу вывести со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже.
1×slots зеркало регистрацию более популярный вариант это
Подтвердите лицо, предоставив оператору казино средства паспортные данные. Инструкции обыкновенно несложные, основное — конкретно им идти. Если написано, собственно «на фото обязаны быть видны все хорошо угла страницы паспорта» — сделайте именно такое фото. В большинстве заведений сделать это можно по адресу электронной почты, по номеру аппарата, через социальную сеть или гугл-аккаунт.Исходя из этого, просто не присутствует разумных оснований махнуть рукою на получение такового приза при регистрации. И, не, на подобный безвозмездной основе у вас есть все шансы выиграть деньги и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, нарекают бесплатными онлайн платформами для игр. <a href=http://tehnoprom-nsk.ru/user/MichaelHen/>http://tehnoprom-nsk.ru/user/MichaelHen/</a> Ещё одно распространённое акционное предложение – симпатичный презент с сомнительными притязаниями. К образцу, клуб сулит $100 виде бездепа, хотя с вейджером х80 или х100. Отыграть подобный вейджер фактически нереально и поэтому чем концентрироваться на более занимательных промоакциях.Ознакомьтесь с нашим списком лучших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего списка и получите бездеп сразу. Хватайте наилучшие благотворительные предложения ниже и выигрывайте великие деньги, не рискуя! 1×slots промокод при регистрации
скачать 1×slots официальный сайт
Можно. Вы практически сможете отрешиться от получения бездепозитного бонуса за регистрацию в казино, же Вы не создадите ставку.В разделе с призами активировать свой презент. Найти игры, для которых предусмотрено поощрение и применять приз по предназначению. <a href=https://www.formulersupport.com/Thread-1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE–105305>1×slots зеркало</a> Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке необходимо пополнить счет в казино. Для депозитных призов, данная процедура не нужна, так как депо уже сделан. 1хслотс мобильная версия зеркало <a href=https://forums.dfine.net/member.php?action=profile&uid=1147>https://forums.dfine.net/member.php?action=profile&uid=1147</a>
1× слот зеркало
Так собственно сможете неустрашимо регистрироваться без всяких раздумий. Фортуна сегодня наверняка на вашей стороне. Не побаивайтесь, как последствие какого или ущерба Вам совершенно не угрожает. С такими бонусами как без пополнения, Вы остаетесь лишь в плюсе, хотя не как не в минусе.Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых новых, щедрых и испытанных бонусах в онлайн казино, коие обновляются каждый день. Каждая игровая перрон отличается критериями по получению и отыгрышу бездепов. В правилах детально расписаны временные рамки, за которые нужно прокрутить вейджер. Также не забывайте про наибольший размер ставки и наивысшую сумму выплаты. С другой стороны, чтобы получить бездепозитные призы казино, довольно истратить не более 1 минуты.Ограничения по забавам. Администрация воспрещает игрокам кое-какие игровые автоматы с бездепозитным бонусом, средствами или бесплатными вращениями. Обычно, в правилах приводится глубокий список слотов для отыгрыша. Иногда деление производится по виду игр. Например, отыгрыш возможен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino. <a href=https://hao0724.com/home.php?mod=space&uid=62804&do=profile>https://hao0724.com/home.php?mod=space&uid=62804&do=profile</a> Вейджер (wager) – это коэффициент, который демонстрирует на какую необходимую нужно устроить ставок, дабы вывести бонус из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего бонуса, Вам необходимо устроить ставок на сумму: 500*70=3500 рублей. Только полностью отыграв бонус, Вы сможете вывести свой выигрыш.Ну и окончательно же, для казино бездепозитные призы прибыльны с имиджевой стороны: схожая добродушие повышает уровень преданности клиентов к компании. 1×slots рабочее зеркало На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению этого времени, Вы не сможете активировать и получить бездепозитный бонус.Чем ниже значение вейджера, что, этим легче отыграть и вывести бонус. Если Вы планируете заработать на бездепе, не просто ознакомиться с свежим игровым клубом, то стоит избегать призов с высочайшим вейджером их почти не реально отыграть. С ними Вы сможете лишь протестировать игры заведения.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.arka-bahce.org/forum/showthread.php?p=770891#post770891>1×slots официальный зеркало</a>
<a href=http://86395.ww.w.molifan.net./space-uid-2275092.html>1×slot регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Реже призы без депозита начисляются постоянным игрокам. С их поддержкой администрация старается вычесть ценных клиентов либо желает поблагодарить за лояльность правильных посетителей. Но намного чаще для подобных целей используются эти промоакции: Иногда у посетителей сайта могут появиться трудности, задачи, препядствия при активации полученного промо-кода. В этих случаях, необходимо обратиться за поддержкою в службу поддержки «Support». Для получения ответа, обязательно указывается определенная причина воззвания и подтверждается информация дополнительными скриншотами. Если сложилась неоднозначная обстановка, постоянно можно обратиться к основному регулятору или контролирующему органу, выдавшему этому заведению лицензионный документ.
#3503 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
лучшая казино casino играть <a href=https://strelochnik.com/>порно с Каролина Севастьянова</a> r7 casino 1×bet <a href=https://strelochnik.com/>1×bet зеркало на сегодня</a> казино рублях casino ru лучшие казино бесплатно сайт 1×bet слоты казино смотреть онлайн бесплатно Петрова Ольга Викторовна порно букмекерские конторы в россии
DiskiPlus бесплатное казино DiskiPlus симулятор казино <a href=https://www.diskiplus.ru/>DiskiPlus казино сочи</a> DiskiPlus скачать букмекерскую контору на андроид DiskiPlus 7k casino официальный сайт <a href=https://www.diskiplus.ru>DiskiPlus porno Юлия Пересильд</a> DiskiPlus официальные зеркала казино DiskiPlus 1×bet на андроид бесплатно DiskiPlus гта казино DiskiPlus часы казино DiskiPlus porno Елизавета Туктамышева DiskiPlus porno Нина Пирогова, хоккеистка DiskiPlus макао казино
#3504 СenterEmpathy_raphttps://empathycenter.ru/
Доброго времени суток! Сеть клиник доказательной психиатрии «Эмпатия». Вашей проблемой занимаются сертифицированные специалисты с богатым опытом работы в сфере психологической помощи и охраны психического здоровья. Каждый человек уникален, как и его история. Именно поэтому Вас окружает самое деликатное и чуткое отношение к Вашей проблеме. Эмпатия — понимаем, принимаем, помогаем! <a href=https://empathycenter.ru/articles/izbegayushchee-rasstroystvo-lichnosti/>избегающее расстройство личности</a> Если Сеть клиник доказательной психиатрии или Центр ментального здоровья в Реутове и Москве, то это в Эмпатия Центр https://empathycenter.ru/ . Консультации как очно в Москве и Реутове, так и онлайн по всей России. Консультируйтесь и звоните по бесплатному номеру 8–800–775–07–12. Всем пока!
#3505 Charlesgunnyhttp://filmkachat.ru
1х слот 1хслотс регистрация перейти на 1×slots
Превышение максимальной ставки при отыгрыше. Система автоматически не предуведомляет о превышении ставки, потому о несоблюдении правил игрок имеет узнать уже после подачи запроса на вывод средств. <a href=http://filmkachat.ru/>1×slots подтвердит вашу регистрацию если говорить</a> <a href=https://redmine.dti.economia.gov.br/issues/72789>https://redmine.dti.economia.gov.br/issues/72789</a> Сроки активации приза устанавливаются любым казино, хотя почаще всего они не превосходят недели с момента получения. Игроку обязательно нужно использовать бездеп протяжении обозначенного срока, в ином случае бонус просто исчезнет. Каждый бонус возможно получить только один раз, поэтому случае не использовать бездеп в срок, у игрока не будет 2 шанса им воспользоваться.Главным моментом в появлении этих вознаграждений состоит том,, что пустив их в ход, в ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он спасибо призам какой-нибудь выигрыш или моментально спустит все только собственно прибывшие финансы). То есть, казино снабжает игрока вероятностью на дармовой базе играть во всевозможные слоты даже спонсирует забаву. 1×slos регистрация в 1×slots casino <a href=http://www.3vzq.com/space-uid-186056.html>http://www.3vzq.com/space-uid-186056.html</a> Самый распространённый из подобных бонусов, конечно же, бездеп на день рождения посетителя — бонус вид фиксированной суммы или фриспинов поступает на счёт игрока, а воспользоваться им возможно на установленного периода времени.В каждом казино с бездепозитным бонусом учтены вейджеровые условия. Это один-единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) сделать определённое количество ставок. Чем круче приз, тем сложнее выполнить обстоятельства, и напротив.
1×slots зеркало регистрацию более популярный вариант это
<a href=https://australianwinerytours.com/tours/showthread.php?tid=330739>1×slots зеркало видели такую регистрацию на</a> 1хслотс официальный сайт зеркало Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? <a href=http://azad.az/user/TravisTib/>http://azad.az/user/TravisTib/</a> Бонус в казино без депозита содержит различные разновидности: может быть приветственный бонус, акции в честь каких-то праздничных или важных дат, бонус за привлечение новых игроков, лояльность и получение VIP-статуса.За привлечение приятеля ? масштабах партнерской программы заказчик получает вознаграждение за вербование новых пользователей. 1×slots официальный сайт мобильная версия Бонус за регистрацию в казино без депозита с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша может понадобиться устроить ставки на необходимую, в количество десятков один превышающую сумму приза или выигрыша.
1×slots коды
Прежде всего, не забывайте регулярно заглядывать на страницу обзоров бездепозитных призов. Они шаг за шагом оценивают более увлекательные предложения основных игорных порталов.Вейджер (или вагер) ? это минимальная сумма ставок, коию нужно сделать для вывода валютного бонуса. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, тем привлекательнее спецпредложение. <a href=http://kochtagebuch.org/doku.php?id=Выкуп_авто>http://kochtagebuch.org/doku.php?id=Выкуп_авто</a> Бездепозитные призы начисляются лишь один раз. Не стоит открывать новые аккаунты, чтобы получить их повторно. Служба защищенности казино непременно выявит «левого» соучастника и перекроет. Если гость выполнит нужные притязания, отыграет собственную ставку и решит вывести собственный выигрыш, то ему надо(надобно) сведению, что казино обязательно востребует дать ксерокопии собственных документов, чтобы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные средства исключить не получится.На критериях отыгрыша даровых бонусов стопам остановиться подробнее. С ними связаны аспекты, коие невозможно забыть без внимания. 1×slots casino регистрация 1×slotscasin online Иногда у посетителей сайта все появиться проблемы при активации приобретенного промо-кода. В таких случаях, нужно адресоваться за подмогою в службу поддержки «Support». Для получения ответа, обязательно указывается определенная первопричина воззвания и подтверждается информация дополнительными снимками. Если сложилась спорная ситуация, всегда возможно обратиться к главному регулятору или контролирующему органу, выдавшему этому заведению лицензионный документ.
1×slots казино мобильная версия
Если речь об неповторимых услугах, имеет понадобиться регистрация в казино по ссылке с партнерского вебсайта.Частенько новички не разумеют, как активировать презенты или вывести первый выигрыш. Для похожих случаев наша команда описала основные определения – что такое фриспины, вейджер, как его отыграть, чего нужно протекать верификацию. <a href=https://portugal-campings.com/pt/profile/jamescip/>1×slots официальный сайт скачать</a> Зачастую бездепозитные призы казино для игры предлагаются различными заведениями азартных игр виде рекламных акций или в целях вербования к себе новых игроков. Для бездепозитных бонусов в казино 2022 геймеру не пополнять счет до этапа вывода желанных средств. 1×slots рабочее зеркало <a href=https://swordmaster.org/user/JustinPoext/>https://swordmaster.org/user/JustinPoext/</a>
1×slots зеркало регистрацию более популярный вариант это
При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток.Кешбэк-бонус представляет собой возврат фиксированного процента от ставки если, тогда, проигрыша либо же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не выше 10%. Подтверждение индивидуальной информации. Все казино настоятельно от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и присутствие у юзера иных аккаунтов (мультиаккаунт запрещен).Игры, каких возможно играть на бонусные средства. Проверьте перечень игр, в которых можно выступать на бонусные свои, вполне они Вам не понравятся и не тратить своё время на эту промоакцию. <a href=http://www.djngo.or.kr/gb5/bbs/board.php?bo_table=free&wr_id=1619868>http://www.djngo.or.kr/gb5/bbs/board.php?bo_table=free&wr_id=1619868</a> Кешбэк-бонус представляет собой возврат фиксированного процента от ставки если, тогда, проигрыша либо же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не превышает 10%.Если при регистрации указать промокод, возможно гарантировано получить приз. Где арестовать ваучер? Посетите определенную блоги либо форумы. Иногда администрация клуба проделывает рассылку ваучеров на электронную почту. В последнее время игорные жилища начали афишироваться в кинокартинах и сериалах. Присмотритесь и наверняка заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных руб. 1×slot зеркало рабочее регистрации на телефон придет
<b>Смотреть еще похожие новости:</b>
<a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=158186>казино 1×slots</a>
<a href=http://kick.gain.tw/space.php?uid=4479892>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a>
<a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=13119>1×slots регистрация 1×slots review live</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Каждая игровая перрон отличается критериями по получению и отыгрышу бездепов. В правилах детально расписаны кратковременные рамки, за которые надо(надобно) прокрутить вейджер. Также не забывайте на наибольший размер ставки и максимальную сумму выплаты. С другой стороны, чтобы получить бездепозитные призы казино, достаточно потратить не более 1 минутки.
#3506 Charlesgunnyhttp://filmkachat.ru
1×slots бездепозитный бонус за регистрацию
Таким образом онлайн казино получает потенциального игрока. Возможно в будущем либо истинном он захотит сыграть на свои деньги. Так трудятся бездепозитные призы в интернет казино. Здесь отлично подходит выражение, бесплатные сыр посещает лишь в мышеловке. Начинающие игроки все не осознавать опасность азарта. Однако течением понимания становится больше. Это тема для отдельного обсуждения.Разные казино имеют собственные правила по выведению выигрыша. Для бездепозитных призов принимаются довольно высокие требования. Часто онлайн-казино советуют отыграть бонусное поощрение до 100 один в игровых автоматах. Например, случае игрок получил безвозмездно десять $, то нужно будет отыграть их, поставив 1 тыщу спинов по 1 баксу каждый. Стоит отметить, собственно не все казино дают вероятность играть на призы и не во всех увеселительных заведениях схожие правила для отыгрывания. Некоторые казино воспрещают играть на бонусы в блекджек или ограничивают ставки до пяти процентов, собственно существенно увеличивает в 10-ки один количество нужных игр. <a href=http://filmkachat.ru/>1×слотс казино</a> <a href=https://www.mazafakas.com/index.php?page=custom&file=osclass_forum/viewpost.php&id=4911>https://www.mazafakas.com/index.php?page=custom&file=osclass_forum/viewpost.php&id=4911</a> Обычно бездепозитные промоакции от казино, прибывают на эл. Почту в деньки рождения либо дни. В неких интернет казино возможно адресоваться в чат и как постоянному игроку, возможно вас предложат бездепозитное предложение.Такие поощрения дозволяют безвозмездно протестировать новое казино, разобраться с игровым ходом онлайн слотов, заработать и исключить небольшую сумму денег. 1хслотс официальный сайт зеркало <a href=https://google.la/url?q=https://doctorlazuta.by/>https://google.la/url?q=https://doctorlazuta.by/</a>
1х слотс зеркало регистрация в 1×slots casino
1×slots casino регистрация <a href=http://wwaw.molifan.net/space-uid-1973545.html>http://wwaw.molifan.net/space-uid-1973545.html</a> 1×slots регистрацию более популярный вариант это Чтобы получить возможность вывести прибыль с бездепозитного приза в казино, нужно выполнить ряд условий:Чтоб получить большой выигрыш, избирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша.
1×slots регистрация 1×slots casino 777 online
<a href=http://xprinters.ru/bitrix/redirect.php?goto=http://cnminsk.by/bitrix/redirect.php?goto=http://tvoku.ru/proxy.php?link=https://telegra.ph/Ponimanie-klyuchevyh-aspektov-i-znacheniya-pravosposobnosti-09–23>http://xprinters.ru/bitrix/redirect.php?goto=http://cnminsk.by/bitrix/redirect.php?goto=http://tvoku.ru/proxy.php?link=https://telegra.ph/Ponimanie-klyuchevyh-aspektov-i-znacheniya-pravosposobnosti-09–23</a> В случае установленного лимита на сумму вывода выигрыша с бездепозитного бонуса, игрок не может вывести больше заявленной суммы. 1 x slots
1×slots casino online регистрация
Бездепозитные бонусы настоящими средствами, которые можно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадались. Активация случается за промокодов, которые вводятся в личном офисе последствии регистрации. Среди спецпредложений в перечне Casino.ru содержатся неповторимые промокоды, коие доступны лишь гостям портала. Другие способы начисления средств ? автоматическая активация сразу после создания аккаунта и получение дара по запросу в службу технической поддержки.Вейджер в переводе с британского означает «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша полученного бонуса, в нашем случае бездепозитного. Число ставок значения — главно лишь набрать необходимую, пропорциональную сумме поощрения. Каждый из бездепозитных бонусов без пополнения 2022 содержит собственный определенный вейджер для отыгрыша, например же в каждом казино он уточняется персонально — где то он х55 а кое-где х30, повторюсь везде по разному! 1хслотс казино зеркало <a href=https://cse.google.hr/url?sa=i&url=https://doctorlazuta.by/>https://cse.google.hr/url?sa=i&url=https://doctorlazuta.by/</a> Поспешите забрать бездепозитные бонусы за регистрацию в казино из представленного списка. Все платформы столько водят законную работа, но и порадуют правдивыми плодами забавы, высокой отдачей, быстрыми выплатами.Бездепозитные бонусы за регистрацию считаются одним из самых модных способов вербования новых игроков в онлайн-казино, поэтому что они предоставляют игрокам вероятность опробовать казино, более игровые автоматы, и вероятно, выиграть реальные деньги.
1хслотс 1хслотс регистрация перейти на 1×slots
Сразу после активации промокода возможно воспользоваться презентом. Как уже упоминалось, бонусы бывают трёх видов – фриспины, кредиты и фриплей-бонусы.Внесение депо – Будьте готовы восполнить счет в отыгрыша приза. Это обычное заявка верховодил для данного типа промо-акций. Лучше заблаговременно уточнить, какую необходимую нужно будет заносить на счет. Как управляло, идет о минимальном депозите, но вы обязаны быть уверены, что он вам по карману. <a href=http://j67236dr.bget.ru/user/RalphMex/>http://j67236dr.bget.ru/user/RalphMex/</a> Казино выводит деньги только на ту платежную систему, с котрой был изготовлен депо. То есть, для вывода бездепозитного приза, Вам поначалу необходимо восполнить счет. В неких клубах узкий список способов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет именно с этих платежных методов, коие доступны для вывода.Срок отыгрыша — это этап, который начинается в момент активации бонуса и кончается с его закрытием. Пользователю нужно уложиться в данный временной промежуток, иначе призовые свои аннулируются. Казино устанавливают список игр, ставки каких засчитываются при расчете отыгранных денег. Если тайтл не входит в этот перечень, то он может быть недосегаем для загрузки период деянья бонусного предложения. 1×slots зеркало быструю регистрацию а также мгновенное На данном разделе портала регулярно публикуются обзорные статьи, в рассматриваются бесплатные бонусы наихороших интернет-казино. Информация структурирована по нескольким пт, включая главные:Каждый из бездепозитных бонусов без пополнения 2022 содержит собственный конкретный вейджер для отыгрыша, так же в каждом казино он уточняется персонально — где то он х55 а кое-где х30, повторюсь всюду по различному!
<b>Смотреть еще похожие новости:</b>
<a href=http://www.infoknygos.lt/smforum/index.php?topic=74656.new#new>1×slots рабочее зеркало</a>
<a href=https://www.one2bay.de/forum/showthread.php?tid=543170>1×slots регистрация 1×slotscasino09k online</a>
<a href=https://forums.scar-divi.com/topic/828272–1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D0%B2%D0%B8%D0%B4%D0%B5%D0%BB%D0%B8-%D1%82%D0%B0%D0%BA%D1%83%D1%8E-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8E-%D0%BD%D0%B0/>1×slots зеркало видели такую регистрацию на</a>
<a href=https://your-portal.at.ua/forum/4–63409–1#88411>1хслотс зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бoльшинcтвo азартных заведений выдвигают примерно одинаковые обстоятельства и притязания, которые нужно выполнить, чтобы получить бездепозитный приз за регистрацию. Все их можно объединить в один список: Таким образом, заведение пробует показать себя своим потенциальным игрокам, а такой маркетинговый ход как казино бонус без депо за регистрацию привлекает очень большое внимания к игорному заведению и обеспечивает постоянный струю новых гостей и грядущих посетителей игрового онлайн клуба.
#3507 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Елена Никитина, скелетонистка Семёнова Татьяна Владимировна порно <a href=https://th-royalgclub.com/>карты казино</a> casino промокод Чулпан Хаматова <a href=https://www.ossetia.tv/>porno Анастасия Янькова, боксерка</a> букмекерская контора бетсити Матвиенко Валентина Ивановна порно Окладникова Ирина Андреевна порно спорт букмекерская контора официальное казино вход спорт букмекерская контора porno Светлана Ходченкова
DiskiPlus black russia казино DiskiPlus казино фильм <a href=https://www.diskiplus.ru/>DiskiPlus включи казино</a> DiskiPlus официальная казино DiskiPlus порно с Елена Никитина, скелетонистка <a href=https://www.diskiplus.ru>DiskiPlus букмекерская контора фонбет официальный сайт</a> DiskiPlus порно с Матвей Сафонов (футбол) DiskiPlus автомат казино DiskiPlus казино большая DiskiPlus vodka casino DiskiPlus казино пин DiskiPlus Самойлова Алла Владимировна порно DiskiPlus Шевцова Татьяна Викторовна порно
#3508 Charlesgunnyhttp://filmkachat.ru
1×slots casino зеркало
Баланс игрока дополняется на подобающую необходимую. К ней применяется вейджер, обозначенный в правилах промоакции. Вывести выигрыш возможно несомненно последствии как, как юзер устроит требуемый размер ставок из личных средств. В редких случаях бездеп работает в формате Free Play. На счет юзера зачисляется большая сумма, и предоставляется маленький срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по завершении этого периода сумма на счету будет превышать изначальную, то разность можно будет исключить или применять для последующих ставок. <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> <a href=https://ebusinesspages.com/Vidikby.user>https://ebusinesspages.com/Vidikby.user</a> В случае установленного лимита на сумму вывода выигрыша с бездепозитного приза, игрок не может исключить больше заявленной суммы.Представленные на этой странице лучшие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные обстоятельства. После кропотливого анализа редакция портала составила рейтинг спецпредложений, каком посетители Casino.ru могут сортировать перечень по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д. 1×slots рабочее зеркало <a href=http://nasamomdele.su/forum/memberlist.php?mode=viewprofile&u=64441>http://nasamomdele.su/forum/memberlist.php?mode=viewprofile&u=64441</a> Чем ниже велечину вейджера, тем легче отыграть и вывести бонус. Если Вы планируете заработать на бездепе, но просто ознакомиться с новым игровым клубом, то стоит игнорировать призов с высочайшим вейджером их практически не реально отыграть. С ними Вы можете только протестировать забавы заведения.
1×slots актуальное зеркало
При выполнении условий отыгрыша и верификации, деньги с бонусного счета переводятся на главный и шансы быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции находятся от выбранной платежной системы. <a href=https://timepost.info/showthread.php?tid=118524>1хслот зеркало сайта</a> 1 xslots рабочее зеркало Некоторые онлайн-казино без депо предлагают свежим клиентам избрать бонус при регистрации. Будьте внимательны: выбрав один, вы в абсолютном большинстве случаев не сможете воспользоваться остальными.Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам воспрещено начислять бонусы клиентам, не имеющим валютных средств на счете. Мы предлагаем рассмотреть актуальные призы онлайн-казино с лицензией, коие соблюдают законодательство РБ. <a href=https://rovworld.com/members/justinstoot/profile/>https://rovworld.com/members/justinstoot/profile/</a> Если площадка дарит бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь завести аккаунт на сайте и активировать его, подтвердив адресок электронной почты, номер аппарата или иные данные, которые требует оператор. Перед этим необходимо увериться, собственно пользователь находится на официальном веб-сайте казино, не на мошеннической площадке.При пользовании бездепозитным бонусом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют количество видов лимитов: 1×slots зеркало видели такую регистрацию на Размер бонусов почаще всего чисто условный и не превышает 50 руб. Приятно, но ощутимым бустом деле навряд будет.
1×slots быструю регистрацию а также мгновенное
Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция имеет подробные правила, гиперссылка на которые обыкновенно находится в промообъявлении. В них указываются лимиты, вейджер, перечень доступных игр. Если оператор прячет данные о предложении, то воспользоваться им не стоит.С не отыгранным призом воспрещается превосходить объем максимальной ставки. Нарушение этого обстоятельства иметь аннулирование выигрыша. При регистрации сомнений или ином онлайн игральном заведении — вам дается один шанс испытывать собственную удачу не внося средства монеты. Замечу собственно такую поощрительную предложение деют не все интернет игровые площадки, а лишь великодушная середина(средина) из их. Которые мы подготовили для Вас в нашем списке.Принципиальным различием безвозмездных бонусов от призов на депозит считается недоступность необходимости вносить деньги на акк. Из-за этого их часто называют бездепозитными (not the slightest down payment bonuses). <a href=http://srgls.co.kr/bbs/board.php?bo_table=jiggu&wr_id=44012>http://srgls.co.kr/bbs/board.php?bo_table=jiggu&wr_id=44012</a> Чем ниже велечину вейджера, что, этим проще отыграть и исключить приз. Если Вы расчитываете заработать на бездепе, но просто ознакомиться с новым игровым клубом, то стоит избегать бонусов с высочайшим вейджером их почти не реально отыграть. С ними Вы можете только протестировать игры заведения.Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке нужно пополнить счет в казино. Для депозитных бонусов, данная процедура не нужна, например как депозит теснее сделан. 1×slots официальный зеркало рабочее В списке притязаний к отыгрышу нередко присутствуют лимиты на ставки при игре на собственные средства. Так, в отыграть надо(надобно) 30 000 рублей, а предельная сумма ограничена 30 рублями, то вертеть барабаны светит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам действия акции.
1×slots официальный сайт скачать
Минимального оборота. Этот лимит уточняется вейджером — же игрок не поиграет на установленную необходимую, вывод средств будет недоступен. Бесплатные призы казино без депо возможно получить повторяющий денежных средств на бонусный счет (исключить их можно только после отыгрыша), фриспинов, забавы либо кешбэк-бонуса. Изучить верховодила и условия получения бездепозитных призов казино, Вы можете у нас на сайте в разделе с призами или на официальном сайте избранного Вами казино. Если имеет найти нужную информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал либо по электронной почте.Обычно бездепозитные акции от казино, прибывают на эл. Почту в деньки рождения либо праздники. В неких онлайн казино возможно адресоваться в чат и как постоянному игроку, вероятно вам предложат бездепозитное предложение. 1×slot зеркало рабочее регистрации на телефон придет <a href=http://community.checkinpro-hotel-software.com/memberlist.php?mode=viewprofile&u=387551>http://community.checkinpro-hotel-software.com/memberlist.php?mode=viewprofile&u=387551</a> Можно ли наваривать на бездепозитных бонусах? Это не работа, здесь как повезет, случае в любом предложенном безедепе, вы будете откручивать вейджер и выводить, это возможно именовать везением, и добавочной добавкой к вашему бюджету.
зеркала 1×slots
Перечисленные повыше главные характеристики сочетают фактически любой приз и являются стереотипными для бездепозитных бонусных начислений в казино.Одним из поводов отдавать преимущество, льготу 1 или другому заведению содержится в привлекательности предлагаемых акций и безвозмездных услуг. Безвозмездные фриспины, выдаваемые без дела делать какой-нибудь лепта, в перечне находится далековато не в конце. <a href=https://webin.co.kr/bbs/board.php?bo_table=free&wr_id=978329>https://webin.co.kr/bbs/board.php?bo_table=free&wr_id=978329</a> 1×slots зеркало быструю регистрацию а также мгновенное Третитй бездепозитный бонус за регистрацию – денежные средства. К сожалению, начислить рубли или доллары способны только известные и популярные клубы. С их подмогою появится насладиться каждой доступной игрой – автоматом, рулеткой, кено, блэкджеком.
<b>Смотреть еще похожие новости:</b>
<a href=https://uyghuryol.com/forum/viewtopic.php?f=8&t=267108>1 хслот регистрация в 1×slots casino</a>
<a href=https://forum.pmpobc.ca/index.php?topic=140544.new#new>1хслотс официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Процесс доказательства личности имеет взятьвдолг(взятьвзаймы) от 1-го денька до недели. Если клиент разрешил нибудь ошибку при заполнении паспортных данных, то ему по обратиться с задачей в саппорта онлайн-казино.
#3509 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
7k casino сайт порно с Гатагова Ольга Анатольевна <a href=https://kompromat1.online/>Чулпан Хаматова</a> казино можно Фастова Елена Владимировна порно <a href=https://sovsekretno.net/>казино рояль</a> казино porno Алена Косторная (фигурное катание) казино рулетка про казино Ходнева Светлана Владимировна порно casino актуальное зеркало пин ап казино
DiskiPlus казино ставка DiskiPlus скачать 1×bet 1×bet xyz <a href=https://diskiplus.ru>DiskiPlus casino 7k рабочее</a> DiskiPlus gama casino DiskiPlus casino бонус <a href=https://www.diskiplus.ru>DiskiPlus casinos winning</a> DiskiPlus casino скачать приложение DiskiPlus казино смотреть онлайн DiskiPlus casino buzz DiskiPlus Чулпан Хаматова DiskiPlus гта онлайн казино DiskiPlus казино пину DiskiPlus online casino
#3510 Howardbuphttps://happywoman.kyiv.ua
Твой гид в мире <a href=https://happywoman.kyiv.ua/>https://happywoman.kyiv.ua</a> женственности и гармонии! Узнай больше о моде, косметике, фитнесе, отношениях и мотивации. Все, что нужно для яркой и счастливой жизни!
#3511 Harrycithttps://fashionadvice.kyiv.ua
Мир женщины <a href=https://fashionadvice.kyiv.ua/>https://fashionadvice.kyiv.ua</a> красота, здоровье, успех! Полезные лайфхаки, тренды моды, секреты счастья и гармонии. Портал для тех, кто хочет быть лучшей версией себя!
#3512 Charlesgunnyhttp://filmkachat.ru
зеркло казино 1×slots
Бездепозитные бонусы в казино без пополнения 2022 — это конкретная сумма денег либо gift spins вращения, коие предоставляются первым гостям за регистрацию на сайте казино вид бездепозитного бонуса, и дает для возможность за счет казино без пополнения опробовать предложения (игр), с последующей прерогативой вывода средств при выполнении всех установленных правил. <a href=http://filmkachat.ru/>1хслотс 1хслотс регистрация перейти на 1×slots</a> Это также бесплатные деньги, коие поступают на аккаунты новоиспеченных игры последствии регистрирования. А необыкновенность таких призов состоит в том, что обретенные деньги обязательно следует применять в продолжении назначенного времени.Бездепы обыкновенно предлагают с отыгрышем — быстро вывести выигранные свои нельзя. Перевод денег со счета несомненно возможен последствии как, как пользователь выполнит все требования казино, а сумма не может превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, протяжении которых заказчик вправе воспользоваться предложением. Обычно они не превышают нескольких дней после активации. <a href=https://pdfhost.io/v/vg5kMeE3F_Professional_2D3D_Prototyping_Solutions_for_Upholstered_Furniture_Design>https://pdfhost.io/v/vg5kMeE3F_Professional_2D3D_Prototyping_Solutions_for_Upholstered_Furniture_Design</a> Также бездепозитные призы могут служить способом возвращать к игре посетителей, что приостановивших своё сотрудничество с фирмой: уведомление о бездепе поступает на мобильный аппарат или почту. 1×slots casino online регистрация <a href=https://www.market-directory.com/members/porsedropon-8541.html>https://www.market-directory.com/members/porsedropon-8541.html</a> На данном разделе портала регулярно публикуются обзорные статьи, в которых рассматриваются благотворительные призы лучших интернет-казино. Информация структурирована по нескольким пунктам, включая основные:
1× slots casino зеркало
<a href=https://bbs.sinbadgroup.org/index.php?members/jamesiroma.21478/>1×slots casino регистрация</a> 1×slots зеркало этих способов предполагает регистрацию Иногда в качестве одобрения за регистрацию шансы выдаваться билеты для роли в турнирах. Условия их проведения очень выделяются, поэтому мы советуем ознакомиться с каждым предложением отдельно.Не стоит незамедлительно же отрицаться от приветственных подарков в подобных казино. Администрация готова начислить деньги либо фриспины, но предварительно сотрудники должны увериться, собственно вы не аферист. Дело что, нет, что развелось очень количество охотников за призами. Они выучились накалывать систему и зарабатывать солидные суммы средств. <a href=https://yogaasanas.science/wiki/Glory_Casino>https://yogaasanas.science/wiki/Glory_Casino</a> Например, игрок получил 500 рублей при создании аккаунта и должен отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., понадобится устроить 875 спинов для полного отыгрыша.Свежий приз начисляется вид валютных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в использовании средствами, ну случае отыгрыша оператор имеет установить ограничение на вывод денег. 1×slots официальный зеркало рабочее Oтыгpaть приз с указанным вeйджepом, результата необходимо сдeлaть cтaвoк нa cумму, превышающую объем бонуса в некоторое один.
1 х слотс зеркало
Размер призов почаще всего чисто условный и не превышает 50 руб. Приятно, хотя ощутимым бустом деле ли будет.Выше мы дали полный комплект самых новых и актуальных бездепозитных призов в интернет казино без пополнения на 2022 год, где вы можете пользоваться любым ценным бездепозитным бонусом. Чаще всего применяются коды. Их нужно вносить в особые окна регистрационной анкеты, в речь идет о пригласительных бонусах, или в особом разделе собственного офиса игрока. <a href=http://slideshow-forum.com/profile.php?id=99751>http://slideshow-forum.com/profile.php?id=99751</a> Только выполнив все условия отыгрыша и дождавшись окончания ревизии аккаунта, Вы сможете оформить заявку на вывод средств и получить свои деньги. 1×slots официальный сайт скачать
1×slots casino регистрация 1×slotscasino09k online
Следует выделить, что бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом. <a href=http://www.forum.kalor.ru/1hslots-1hslots-registraciya-pereyti-na-1×slots-t11772.html>1хслотс 1хслотс регистрация перейти на 1×slots</a> Во время забавы в казино, выигрыши, полученные спасибо безвозмездным призовым фондам, суммируются и включаются в совместную необходимую для отыгрывания. Однако, если удача улыбнется и получится отыграть все бонусы, игровое заведение гарантированно разрешит исключить финансовые свои. Сумма вывода будет зависимости от лимита, одобренного непосредственно в данном учреждении. Поэтому, внимательно нужно разбирать правила выдачи безлимитных депозитов.Большинство интернет-казино из нашего топ-10 готовы порадовать вас неповторимыми акциями. Читайте о их в обзорах и на форуме. 1×slots casino зеркало рабочее <a href=http://www.russtars.tv/user/MiguelGrins/>http://www.russtars.tv/user/MiguelGrins/</a> Бонус в казино без депозита имеет различные вариации: может быть приветственный бонус, промоакции в честь каких-либо праздничных или важных дат, бонус за вербование свежих игроков, преданность и получение VIP-статуса.
1×slots коды
Призовые начисления без депо могут предоставляться для роли в турнирах интернет казино. Потратить перечисленные деньги можно исключительно в рамках данной промоакции. Условия их проведения себе лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, другого, как выучить его правила.Самый распространённый из сходственных бонусов, естесственно же, бездеп на денек рождения клиента — приз повторяющий фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им возможно на установленного периода медли. <a href=https://lit-book.ru/user/DarenKag/>https://lit-book.ru/user/DarenKag/</a> Обыкновенные бездепозитные призы в объеме от 3-х до 20 долларов созданы чтобы, чтобы, чтобы в забавы заходили все новые и новые игроки. Здесь, скорее, несомненно лимитирование на максимальный выигрыш. Важно, чтобы перед минимальным вкладом был отключен приз за 1-ое пополнение счета, и игрок не попадет на повторный вейджер.Бездепы с бесплатными вращениями деют юзерам право вертеть барабаны игровых автоматов без снятия средств со счета. За каждый раунд выплачивает казино. Число спинов ограничено и редко превышает сотку. Если промоакция содержит много бесплатных игр, их начисление возможность быть разбито на некоторое дней. скачать 1×slots официальный сайт При ирге на бонусные средства запрещается играть в игровые автоматы с прогрессивным джекпотом и игры из радела live casino. Кроме как, кое-какие казино дают бездеп на один либо количество определенных слотов, и в других играх Вы не сможете на их выступать.Практически все онлайн казино с бездепозитным бонусом за регистрацию учитывает программу преданности — систему поощрения неизменных посетителей, которая состоит из большого значений. При достижении игроком одного значения на его счёт поступает бонус. Чем повыше степень — тем щедрее бонус.
<b>Смотреть еще похожие новости:</b>
<a href=https://persiankittencat.com/grey-persian-cats-unraveling-the-charm-of-these-feline-beauties/#comment-35964>1х слотс зеркало регистрация в 1×slots casino</a>
<a href=https://mcmon.ru/member.php?action=profile&uid=134611>1×slots официальный зеркало</a>
<a href=http://griffhunter.com/boards/viewtopic.php?p=330018#p330018>скачать 1×slots на андроид мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Так же стоит выделить то, что в любом онлайн казино установлен собственный наибольший кешаут на бездепозитный приз. Как правило кешаут — это максимальная сумма средств, которая дешевая для вывода с бездепозитного бонуса.
#3513 Roberttrimihttps://femaleguide.kyiv.ua
Портал для современной <a href=https://femaleguide.kyiv.ua/>https://femaleguide.kyiv.ua</a> женщины! Открой для себя новые идеи в моде, красоте, отношениях и саморазвитии. Полезные статьи и советы для комфортной и счастливой жизни
#3514 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора зенит new casino <a href=https://7club7.com/>порно с Захарова Мария Владимировна</a> porno Ангелина Гончаренко, хоккеистка зеркала казино <a href=https://glvk.guru/>порно с Анна Калинская (теннис)</a> Петрова Ольга Викторовна порно порно с Евгений Малкин (хоккей) порно с Каролина Севастьянова порно с Никита Кучеров (хоккей) сайте букмекерской конторы фонбет casino актуальное зеркало porno Нина Пирогова, хоккеистка
DiskiPlus porno Илона Маркова, хоккеистка DiskiPlus 7k casino скачать <a href=https://www.diskiplus.ru>DiskiPlus new casino</a> DiskiPlus Набиуллина Эльвира Сахипзадовна порно DiskiPlus букмекерскую контору пин <a href=https://www.diskiplus.ru/>DiskiPlus Львова-Белова Мария Алексеевна порно</a> DiskiPlus casino buzz DiskiPlus игры казино DiskiPlus казино пину DiskiPlus гта онлайн казино DiskiPlus Матвиенко Валентина Ивановна порно DiskiPlus 1×bet слоты официальный сайт DiskiPlus casino ru
#3515 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало
Вы наверняка, как и все любите получать презенты и бездепозитные призы казино. Игорные дома брали в привычку одаривать гэмблеров приятными призами. Стать владельцем приветственного презента возможно за творение профиля или пополнение счёта. Второй вариант более увлекательный, так клубы готовы удвоить депо! Но если вы новичок и лишь знакомитесь с миром пыла, превосходнее воспользуйтесь призом за регистрацию.Для получения бонуса надо(надобно) пригласить в игру свежего посетителя. Казино начисляет пригласившему фиксированный процент от взносов приглашённого вид бонуса: почаще всего его объем не превышает 10%. Срок деянья бонуса в большинстве случаев не выше месяца: пригласивший получает бонус в зависимости от проигранных ставок приглашённого в первый месяц забавы. <a href=http://filmkachat.ru/>1×slots акции</a> Главное преимущество спинов – вероятность изучить различные слоты. Также получится насладиться бонусными раундами, испытывать фортуну в риск-туре и преумножить выигрыш за счёт особых символов. Однако не игровой процесс заслуживает внимание, так другого, как сосредоточиться на реальном выигрыше.Частенько новички не понимают, как активировать презенты либо вывести первый выигрыш. Для подобных случаев наша команда обрисовала основные определения – что такое фриспины, вейджер, как его отыграть, для нужно протекать верификацию. <a href=https://heroes.app/blogs/443176/Professional-3D-Furniture-Rendering-Visualization-Services>https://heroes.app/blogs/443176/Professional-3D-Furniture-Rendering-Visualization-Services</a> 1×slots официальный зеркало рабочее <a href=https://forum.expert-watch.com/index.php?action=profile;u=179531>https://forum.expert-watch.com/index.php?action=profile;u=179531</a> Максимальная ставка ? уточняется в валюте счета и ограничивает размер ставки за раз спин. В случае ее превышения бонус может быть аннулирован. Также в правилах может содержаться запрет на размещение ставок определенного облика, к, по одинаковым шансам в рулетке (то есть, на чет или нечет, красноватое или черное и т.д.).Для верификации номера телефонного, в собственном профиле изберите опцию „Подтвердить номер телефона“ и введите в отвечающее фон код, полученный в sms-сообщении.
1×slots официальный сайт скачать
Бездепозитные бонусы начисляются только один раз. Не стоит раскрывать свежие аккаунты, чтобы получить их повторно. Служба защищенности казино непременно выявит «левого» участника и перекроет. Если посетитель выполнит необходимые требования, отыграет собственную ставку и решит вывести личный выигрыш, то ему нужно учесть, собственно казино обязательно востребует предоставить ксерокопии личных документов, чтобы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные свои исключить не удастся. <a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=132861>1× slots casino зеркало</a> 1× слот зеркало Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных призов принимаются достаточно высочайшие требования. Часто онлайн-казино советуют отыграть бонусное одобрение до ста раз в игровых автоматах. Например, если игрок получил безвозмездно десять $, то необходимо несомненно отыграть их, поставив 1 тысячу спинов по одному баксу каждый. Стоит обозначить(означить), что не все казино выделяют вероятность выступать на призы и не во всех развлекательных заведениях схожие верховодила для отыгрывания. Некоторые казино воспрещают играть на призы в блекджек либо ограничивают ставки до пяти процентов, что значительно наращивает в 10-ки один количество нужных игр. <a href=http://droid-comz.ru/user/MichaelEpili/>http://droid-comz.ru/user/MichaelEpili/</a> Фриспины начисляются по конкретной ставке. После их активации игроку нужно запустить разъем и убедиться, что в нем отображаются безвозмездные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода последствии отыгрыша ориентируется оператором и редко выше 5 000 рублей.B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax 1×slots официальный сайт, скачать
1хслотс 1хслотс регистрация перейти на 1×slots
Приглашаем делиться мнениями о призах. Это поможет другим юзерам подбирать более выгодные предложения. <a href=http://pasarinko.zeroweb.kr/bbs/board.php?bo_table=notice&wr_id=3226680>http://pasarinko.zeroweb.kr/bbs/board.php?bo_table=notice&wr_id=3226680</a> Онлайн-казино тщательно продумывают бонусные условия, коие необходимо изучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и ограничения.3. Подтвердить данные. В зависимости от клуба, нужно привязать телефон или почту, показать персональную информацию; 1×slots зеркало рабочее на сегодня На условиях отыгрыша даровых бонусов идет остановиться подробнее. С ними связаны нюансы, коие нельзя забыть без внимания.
1×slots официальный зеркало
Для получения предоставленных призов вам пригодиться — ПК либо мобильное устройство, и остальное дело за небольшим. Заполняя данные в собственном профиле, указывайте только достоверную информацию, так как Вам понадобиться ее доказать в при выводе денег. 1×slots зеркало этих способов предполагает регистрацию <a href=https://deanhiki76543.blogdiloz.com/29636590/deepnude-ai-navigating-the-complexities-of-technology-and-ethics>https://deanhiki76543.blogdiloz.com/29636590/deepnude-ai-navigating-the-complexities-of-technology-and-ethics</a> Главное преимущество спинов – возможность изучить разные слоты. Также получится насладиться бонусными раундами, испытать удачу в риск-туре и преувеличить выигрыш за счёт особенных символов. Однако не только игровой процесс заслуживает внимание, как другого сосредоточиться на реальном выигрыше.
1×slots рабочее зеркало
<a href=http://bbs.boway.net/home.php?mod=space&uid=906960>http://bbs.boway.net/home.php?mod=space&uid=906960</a> Минимального оборота. Этот лимит устанавливается вейджером — же игрок не сыграет на установленную необходимую, вывод средств несомненно недосегаем.Некоторые веб-сайты, прежде чем провести регистрацию игроков, предлагают ответить на количество базовых вопросов. Цель проведения сходственной викторины – выявить случайных людей, которые не имеют представления о покере, и не допустить получения ими призов. Если посетитель теснее играл в казино, то ответить на полтора 10 простых вопросов несомненно нетрудно. Очень часто, ответы возможно найти на официальных сайтах данных учреждений. 1× slots регистрация в 1×slots casino Риск-игра по одинаковым шансам – Также казино имеет запрещать выполнять условия по отыгрышу счет раунда на удвоение, который предлагается в слотах, видео-покере и неких других забавах.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.evangelie.eu/forum/f39.html>1×slots зеркало на сегодня</a>
<a href=https://melhorlance.com.br/author/jamesbom/>1×slots официальный demo регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Можно ли наваривать на бездепозитных призах? Это не работа, здесь как повезет, в в любом предложенном безедепе, вы будете откручивать вейджер и выводить, время возможно именовать везением, и добавочной добавкой к вашему бютжету.
#3516 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino ru сайты казино <a href=https://sovsekretno.net/>винлайн букмекерская контора официальный сайт</a> 1×bet на андроид бесплатно 1×bet зеркало рабочее на сегодня <a href=https://rucriminal.info/>порно с Юлия Ефимова, пловчиха</a> casino автомат скачать pin casino порно с Владимир Минеев (ММА) порно с Васильева Татьяна Викторовна porno Светлана Ходченкова пина casino порно с Илюшникова Татьяна Александровна
DiskiPlus Приезжева Екатерина Геннадьевна порно DiskiPlus 1×bet телефон <a href=https://www.diskiplus.ru>DiskiPlus Разуваева Ксения Денисовна порно</a> DiskiPlus порно с Юлия Ефимова DiskiPlus porno Анастасия Янькова, боксерка <a href=https://www.diskiplus.ru>DiskiPlus casino 7k рабочее</a> DiskiPlus ап казино DiskiPlus pin up casino buzz DiskiPlus Лут Оксана Николаевна порно DiskiPlus casino x DiskiPlus Радченко Светлана Юрьевна порно DiskiPlus porno Анастасия Янькова, боксерка DiskiPlus top casino
#3517 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet retro casino <a href=https://kompromat1.online/>1×bet бесплатно</a> порно с Баталина Ольга Юрьевна porno Виктория Баркова, легкоатлетка <a href=https://strelochnik.com/>porno Яна Троянова</a> лучшие онлайн казино фильмы казино рояль new casino порно с Илюшникова Татьяна Александровна порно с Максим Глушенков (футбол) порно с Анастасия Потапова, теннисистка приложения букмекерских контор
DiskiPlus демо казино DiskiPlus 1×bet официальный <a href=https://diskiplus.ru>DiskiPlus 1×bet на сегодня</a> DiskiPlus 1×bet на сегодня DiskiPlus сайт букмекерской конторы <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet рабочее</a> DiskiPlus порно с Петр Ян (ММА) DiskiPlus 1×bet xbet DiskiPlus сайт 1×bet слоты DiskiPlus мелбет букмекерская контора DiskiPlus порно с Сергей Бобровский (хоккей) DiskiPlus почему казино DiskiPlus bitz casino
#3518 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
Бездепозитные бонусы за регистрацию являются одним из самых известных способов вербования свежих игроков в онлайн-казино, поэтому собственно они предоставляют игрокам вероятность опробовать казино, тем игровые автоматы, и вероятно, выиграть реальные средства. <a href=http://filmkachat.ru/>1×слот регистрация в 1×slots casino</a> С этими простыми советами любое казино с призом за регистрацию способно принести в разы больше выгоды и полезности.Простая процедура получения бездепозитного бонуса, которая займет не более 2-х минут. Для получения бездепов, достаточно зарегистрироваться и доказать контактные данные. <a href=https://www.abclinuxu.cz/lide/shopavto7>https://www.abclinuxu.cz/lide/shopavto7</a> 1×slots зеркало <a href=http://www.rgb-muelheim.de/buch/scarbook.php>http://www.rgb-muelheim.de/buch/scarbook.php</a> Бездепозитные призы начисляются только раз один. Не стоит раскрывать новые аккаунты, дабы получить их повторно. Служба безопасности казино обязательно выявит «левого» участника и заблокирует. Если гость выполнит необходимые требования, отыграет собственную ставку и решит исключить личный выигрыш, то ему надо(надобно) к, что казино обязательно востребует дать ксерокопии личных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои исключить не получится.
1×slots рабочее зеркало
Предложения с бездепозитными бонусами за регистрацию дозволяют новым заведениям привлечь аудиторию на собственный сайт. А игроки в свою очередь получают возможность выступать на настоящие средства без депо в казино и заработать небольшой стартовый капитал, который разрешается вывести на карту банка или электрический кошелек. <a href=https://australiantravelforum.com/Upload/showthread.php?tid=222961>1×slots регистрацию более популярный вариант это</a> 1хслотс казино зеркало Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте условия – они часто выдаются для некоторых машин. В зависимости от клуба вы можете делать определенное количество ставок. Кстати, современные игорные дома выделяют возможность заводить «одноруких злодеев». <a href=http://bbs.boway.net/home.php?mod=space&uid=1034624>http://bbs.boway.net/home.php?mod=space&uid=1034624</a> 1×slot рабочее зеркало Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша призов. Заведения практически устанавливают максимальную ставку, допустимую по условиям вейждера.
1×слот регистрация в 1×slots casino
Суммы похожих услуг, как правило, колеблются от трех до 20 долларов, а вейджер на эти свои должен сочинять от 30 до шестидесяти один. Зачастую, величайшая сумма выигрыша тут составит от одной до двух сотен $. Если компьютерные выиграет больше, то все средства все быть списанными до очень разрешенного выигрыша. Здесь бывает смысл выводить еще несуществующие финансы на собственную платежную систему и дальше находить заведение с благоприятными под данную сумму релоадом либо призом за 1-ое пополнение счета. Есть несколько подвидов бездепозитного вознаграждения, предлагаемого наибольшим количеством заведений.Промообъявления от казино не дают реальной картины и ориентированы на вербование внимания пользователей. Понять, как высоки шансы остаться в плюсе, дозволит личный анализ условий предложения: Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, чтобы снова получить бесплатный приз. Игорные заведения нетерпимы к бонус-хантерам, потому вас ждет неминуемое санкция.Наиболее пользующиеся вознаграждения среди гэмблеров – бездепозитные бонусы казино. Это не умопомрачительно, так возможно получить безвозмездные вращения либо виртуальные кредиты, и при не придётся пополнять счёт, рисковать собственными деньгами. Удастся насладиться разнообразными увеселениями и даже выиграть солидную необходимую, избегая серьёзного риска. <a href=https://www.escortskart.com/user/profile/RubenDyring>https://www.escortskart.com/user/profile/RubenDyring</a> Для такого, дабы отыграть необходимую вашего бездепозитного бонуса надо(надобно) выполнить обстоятельства вейджера. Очень часто фриспины даются на конкретные слоты (book of ra, book of lifeless, book of sun), избирайте разъем себя нраву, все довольно красочные и качественные. Бездепозитные бонус возможность быть валютным так и повторяющий фриспинов на слотыОператоры гемблинга утверждают, что например они сражаются с бонус-хантерами. Впрочем, критики считают, что данным казино пробуют устроить из случайного постояльца постоянного игрока. 1 х слотс зеркало Бездепозитные призы за регистрацию в игровых автоматах для владельцев онлайн-казино являются долею маркетинговой кампании, направленной на повышение аудитории сайта. Так они продвигают свои бренды и завлекают свежих посетителей.
1×slots регистрация
<a href=https://www.bf-france.com/forums/profile/30064-rabofreeor/>1×slots официальный сайт зеркало</a> Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в обязательном порядке необходимо пополнить счет в казино. Для депозитных бонусов, эта процедура не нужна, например как депо теснее изготовлен.Можно. Вы постоянно можете отрешиться от получения бездепозитного приза за регистрацию в казино, же Вы не создадите ставку. 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=https://arjaniki.ru/memberlist.php?mode=viewprofile&u=38901>https://arjaniki.ru/memberlist.php?mode=viewprofile&u=38901</a> Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и расценить особенности, недоступные при этой в демо режиме. Многие новые клиенты перебегают в количество неизменных, а оператор получает длительную прибыль.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
<a href=https://www.deepzone.net/home.php?mod=space&uid=4093414>https://www.deepzone.net/home.php?mod=space&uid=4093414</a> Подтверждение электронной почты – одно из главных критерий, коие есть практически в каждом бездепозитном казино. Чтобы верифицировать электрическую почту, довольно перебежать по активной ссылке в письме, полученном от азартного клуба. 1×slots актуальное зеркало Демоказино есть практически на каждом сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются веско пореже: там когда выигрыша и соблюдения критерий акций бездеп можно перевоплотить в настоящие деньги.Бездепозитные призы начисляются только раз один. Не стоит раскрывать новые аккаунты, дабы получить их повторно. Служба безопасности казино обязательно выявит «левого» участника и заблокирует. Если гость выполнит необходимые требования, отыграет собственную ставку и решит исключить личный выигрыш, то ему надо(надобно) к, что казино обязательно востребует дать ксерокопии личных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои исключить не получится.
<b>Смотреть еще похожие новости:</b>
<a href=http://permitbeijing.com/forum/showthread.php?tid=2223043>1×slots регистрацию более популярный вариант это</a>
<a href=https://forum.spherecommunity.net/User-Jamesmew>1×slots casino зеркало</a>
<a href=https://thetechmodders.com/forums/memberlist.php?mode=viewprofile&u=945&sid=3abfa7ae2c0b2a0eb1d62cb16679bf5d>1хслотс зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Кешбэк-бонус дает собой возврат фиксированного процента от ставки когда проигрыша или же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%. Но есть игорные заведения, которые готовы просто так жертвовать средства на игру. Для сего достаточно сделать профиль. Чтобы исключить собственный выигрыш, вас сначала необходимо выполнить обстоятельства отыгрыша, обозначенные в критериях получения бездепозитного депозита.
#3519 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Яна Троянова porno Анна Сидорова, керлингистка <a href=https://slon-ru.com/>букмекерская контора фонбет официальный сайт</a> porno Анна Сидорова, керлингистка Валентина Матвиенко порно <a href=https://repost.news/>симулятор казино</a> 7k casino скачать ешь казино слоты казино порно с Карен Хачанов (теннис) официальные букмекерские конторы игры казино смотреть фильм казино
DiskiPlus 1×bet сайт DiskiPlus порно с Александр Большунов (лыжные гонки) <a href=https://www.diskiplus.ru>DiskiPlus 1×bet официальный сайт 1×bet xyz</a> DiskiPlus гта казино DiskiPlus porno Юлия Пересильд <a href=https://diskiplus.ru>DiskiPlus суть казино</a> DiskiPlus порно с Евгения Медведева DiskiPlus online casino DiskiPlus порно с Анна Щербакова, фигуристка DiskiPlus порно с Анна Калинская (теннис) DiskiPlus 1×bet сейчас DiskiPlus сколько казино DiskiPlus Попова Анна Юрьевна порно
#3520 Charlesgunnyhttp://filmkachat.ru
1×slots мобильная версия войти казино
Чаще всего казино приз за регистрацию без депо даёт возможность запустить любой машина. Но лучше пристально ознакомиться с критериями. Иногда для игры доступны лишь определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, превосходнее начать знакомство с миром азарта именно с «одноруких злодеев».Новые посетители онлайн-казино без первого депо могут проверить свою удачливость. К тому же есть вероятность конвертировать бездепы в настоящие средства за регистрацию в казино, однако для этого бонус необходимо отыграть согласно условиям промоакции. <a href=http://filmkachat.ru/>1×slots зеркало рабочее на сегодня</a> <a href=https://next.canvanizer.com/canvas/rfilL0Pd61g3J>https://next.canvanizer.com/canvas/rfilL0Pd61g3J</a> В онлайне большое известных игорных площадок с красивыми акционными услугами. Однако внимательно читать обстоятельства десятков услуг в надоест, ну и время отнимет большое. Поэтому наша команда подготовила ТОП-3 вебсайтов с лучшими бездепозитными призами:Если простыми текстами, бездепы – это определённая сумма денег либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать подарки. Но есть некоторые аспекты. Существуют игорные жилища, которые перед что, этим как начислить бонусы настоятельно привязать телефонный, дать копии документов. 1×слот регистрация в 1×slots casino <a href=https://civil808.com/user/65021/jaspernex>https://civil808.com/user/65021/jaspernex</a> Риск-игра по одинаковым шансам – Также казино имеет запрещать исполнять обстоятельства по отыгрышу с помощью раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких других забавах.
casino 1×slot
Чтобы выступать даром на настоящие деньги в казино, не всегда достаточно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные деянья. <a href=https://bajarmp3.net/showthread.php?tid=446699>рабочее зеркало 1×slots</a> 1×slots казино зеркало Онлайн-казино с бездепозитными бонусами ставят клиентам обстоятельства для использования бездепами, поэтому перед участием в акции другого, как тщательно ознакомиться со всеми правилами и нюансами промоакции. Условия имеют прикасаться получения бонуса, его использования и последующего вывода валютных средств когда выигрыша. <a href=http://bestwecando.ourproject.org/dokuwiki-2013–05–10a/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0%20%D0%B4%D0%B7%D0%B5%D0%BD>http://bestwecando.ourproject.org/dokuwiki-2013–05–10a/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0%20%D0%B4%D0%B7%D0%B5%D0%BD</a> К примеру, игроку выдаются безвозмездные средства в заведении в объеме пятидесяти или 100 долларов (вейджер на которые составляет 100х). То есть, каждому новоприбывшему игроку выскакивает манящая картинка, кот-ая обещает выплату всех зачисленных компанией средств. Не стоит обращать внимания на казино бонус за регистрацию без депо с слишком большой либо довольно малеханькой суммой бонусов, поэтому собственно, в тщательно исследовав все условия, тут вероятнее всего, несомненно какой-то подкол. 1×slots официальный сайт зеркало рабочее
1×slots зеркало сайта
<a href=http://www.kuzbass.net/index.php?subaction=userinfo&user=debonairacne72>http://www.kuzbass.net/index.php?subaction=userinfo&user=debonairacne72</a> У любого игорного заведения свои верховодила и обстоятельства. Но, дабы получить бонусы, необходимо выполнить стереотипные действия:Когда речь идет о получении бездепозитных призов в казино, в первую очередь направьте на следующие условия: 1хслотс казино зеркало
1× slots сайт
Так что сможете неустрашимо регистрироваться без всяких раздумий. Фортуна сейчас наверняка на вашей стороне. Не побаивайтесь, так последствие какого или ущерба Вам абсолютно не угрожает. С такими призами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе.Минимального оборота. Этот лимит устанавливается вейджером — же игрок не сыграет на установленную необходимую, вывод средств будет недосегаем. <a href=http://shiftdelete.10tl.net/member.php?action=profile&uid=119629>1 x slots</a> 1хслот зеркало <a href=https://39504.org/member.php?action=profile&uid=5512>https://39504.org/member.php?action=profile&uid=5512</a> Возьми свой подарок. Чаще всего бонус активизируется сразу в регистрации. Но случаются истории, когда нужно зайти в индивидуальный кабинет либо написать в справочную службу.Однако в условиях скрываются «подводные камни», которые не разрешат вывести крупную необходимую или же вы не успеете отыграть вейджер. Поэтому мастера советуют забрать бесплатные вращения за регистрацию в казино без депозита, дабы поднабраться навыка и получить настоящий шанс на победу.
1хслотс казино зеркало
В лицензионных бездепозитных казино выступать в азартные игры вправду неопасно. Наличие лицензии подтверждает что, этот факт, что клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP. Каждый новичок и умелый игрок мечтают скоро стартануть и начать создавать настоящие ставки. Для этого довольно отобрать подарок, за который не нужно выплачивать. В зависимости от игровой платформы, нужно сделать профиль, привязать email или телефон. После этого администрация начислит щедрое вознаграждение повторяющий бесплатных вращений либо виртуальных кредитов.Не советуем опрометью голову браться за всевозможные предложения получения средств без инвестициям. Вполне возможно, собственно бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на первый взгляд. Альтернативой считается казино бонус за депозит. Мы предлагаем для пару советов, благодаря которым у каждого игрока будет вероятность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом средств: <a href=https://dixitp.com/recalde-le-recordo-a-bullrich-su-paso-por-el-gobierno-de-fernando-de-la-rua-tengamoslo-presente/>https://dixitp.com/recalde-le-recordo-a-bullrich-su-paso-por-el-gobierno-de-fernando-de-la-rua-tengamoslo-presente/</a> 1×slots регистрация Чтобы бездеп не был начислен на Ваш аккаунт, Вам не нужно активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк механически, а Вы не расчитываете его использовать, обратитесь в службу с просьбой отменить бездепозитный бонус.Далее требуется отыграть вагер и вывести выигрыш. Игрокам без навыка крупно подфартило, у получить десятки даров за 1 регистрацию. Если не смогли получить Бездепозитный бонус, не беспокойтесь. Обратитесь в интернет чат, оператор поможет исправить.
<b>Смотреть еще похожие новости:</b>
<a href=https://g2clubs.com/healthy-workout/google/#comment-27451>1×slots casino регистрация 1×slots review live</a>
<a href=https://www.donchillin.com/space-uid-382497.html>1×slots официальный demo регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
После получения бонуса вывод средств для посетителя будет недосегаем времени, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя либо чета месяцов. Выводить средства игрок может только последствии отыгрыша.
#3521 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало подтвердит вашу регистрацию если говорить
Самые свежие бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды находятся на этой странице. Посетитель имеет оценить условия получения и начать выступать на деньги без внесения депо. При этом игроку важно понимать, на каких критериях и какими способами него вывести приобретенный выигрыш. Для этого нужно расценить перечень присоединенных платежных систем.Баланс игрока пополняется на подходящую сумму. К ней используется вейджер, обозначенный в правилах акции. Вывести выигрыш возможно несомненно последствии того, как юзер устроит требуемый размер ставок из личных средств. В редчайших случаях бездеп работает в формате Free Play. На счет пользователя зачисляется большая сумма, и предоставляется малый срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по окончании сего периода сумма на счету несомненно превосходить изначальную, то разницу возможно будет вывести или использовать для дальнейших ставок. <a href=http://filmkachat.ru/>1×slots зеркало на сегодня</a> Не стоит путать забаву в демо и использование призов. В демонстрационном режиме игрок возможность оценить механику слота, сюжет и оформление. Но игра ведется на условные кредиты, поэтому отсутствует основное ? чувство азарта. Активируя промокод либо фриспины, заказчик раньше не тратит свои средства на игровые автоматы, но возможность сорвать настоящий куш!Основное различие в том, собственно для получения бездепа нужно пополнять баланс в казино. Но кроме сего, есть ряд и других различий: <a href=https://app.planable.io/b/9T2nTzw9ATQAHwCt6/4AeAuPNczmkTXEDKm/wXHwiuHB6gHWWrXuP>https://app.planable.io/b/9T2nTzw9ATQAHwCt6/4AeAuPNczmkTXEDKm/wXHwiuHB6gHWWrXuP</a> Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Мы подготовили список, где есть практически актуальные и свежие бездепозитные призы казино, коие вам получить безвозмездно. Для наших юзеров есть особые предложения неповторимые бонусы, которые вы ни не отыщите, их мы обозначили особой красной плашкой «Exclusive». 1×slots casino online регистрация <a href=http://scanimager.ru/index.php?subaction=userinfo&user=vivaciousschedu>http://scanimager.ru/index.php?subaction=userinfo&user=vivaciousschedu</a>
1×slots зеркало выигрыши обязательно пройдите регистрацию если
1×slots casino регистрация У нас на сайте Вы найдете перечень призов без депо в проверенных казино и подробную информацию то как их получить и использовать. <a href=https://cse.google.co.jp/url?q=https://doctorlazuta.by/>https://cse.google.co.jp/url?q=https://doctorlazuta.by/</a> Но не размышлять, собственно снабжая юзеров такими призами, казино увлекается спонсированием. Ведь объемы вознаграждений, в, не великие (средним объемом от 5 до 20 $). И на эти свои налагаются конкретные обстоятельства и лимитирования, обязательные к исполненью игрока, если в последствии он желает получить все средства выигранные финансы. сайт 1× slots casino В настоящее время получить приз за регистрацию в казино довольно просто. Почти любой игорный жилище с радостью предоставит деньги или безвозмездные вращения. Многие игроки пользуются данным и не стыдятся региться в каждом клубе с прибыльными условиями. Кстати, это отличная вероятность выдумать выигрышную стратегию и сорвать куш.Внесение депозита – Будьте готовы пополнить счет после отыгрыша бонуса. Это стандартное заявка управлял для данного типа промо-акций. Лучше заблаговременно уточнить, какую необходимую нужно будет вносить на счет. Как управляло, речь идет о минимальном депозите, хотя вы должны быть уверены, что он для по карману.
1×slots официальный сайт зеркало
Чаще всего, популярностью сервисы, эти как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное управляло. Финансовые средства выводятся только через что, эту платежную систему, которой успех для пополнения депо. Если же игрок получил бездепозитный покерный бонус, потребуется пополнить счет на минимальную необходимую, кот-ая сочиняет обычно десять долларов.Денежные свои. Третий бонус за регистрацию без депозита – наличные. К раскаянью, только известные и модные клубы шансы дать деньги в руб. Либо долларах. С их помощью возможность насладиться любой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед этим необходимо исполненье конкретных критерий. <a href=http://abdus.se/guest/guestbook.php>http://abdus.se/guest/guestbook.php</a> Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие появляются у начинающих. 1 x slots casino Бонус в казино без депозита имеет разные варианты: это может быть приветственный бонус, промоакции в честь каких-то праздников либо главных дат, бонус за вербование свежих игроков, лояльность и получение VIP-статуса.
казино 1× slots официальный сайт
Некоторые казино шансы предлагать клиентам бездепы за свидетельство номера либо почты либо репост на страницу в социальных сетях. <a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=432620>1×slos регистрация в 1×slots casino</a> Если речь идет об эксклюзивных услугах, возможность понадобиться регистрация в казино по ссылке с партнерского вебсайта.При игре на бонусные средства воспрещается играть в игровые автоматы с прогрессивным джекпотом и забавы из радела exist casino. Кроме того, некоторые казино дают бездеп на раз либо количество определенных слотов, и в других играх Вы не можете на них играть. 1×slots быструю регистрацию а также мгновенное <a href=https://riverqyho41752.wizzardsblog.com/30290337/ai-nude-revolutionizing-content-moderation-and-privacy-protection>https://riverqyho41752.wizzardsblog.com/30290337/ai-nude-revolutionizing-content-moderation-and-privacy-protection</a>
1×slots быструю регистрацию а также мгновенное
Приветственный бонус без депозита ? подарок за регистрацию. Выдается средствами, фриспинами или баллами. В заключительном случае бонусные баллы используются для участия в турнирах или обмена на настоящие деньги. <a href=http://forum.xpscenery.net/member.php?action=profile&uid=1216>http://forum.xpscenery.net/member.php?action=profile&uid=1216</a> Наши эксперты изучают условия промоакции, затем в ручном режиме проверку их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие характеристики. Мы не рекламируем казино, а даем игрокам информацию о лучших из них. 1×slots официальный сайт, скачать Бездепозитный приз казино 2022 с выводом за регистрацию дает вероятность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и проверить качество работы службы поддержки. Довольно нередко, начиная игровой процесс, игрок теснее не желает останавливаться и проделывает настоящий лепта. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать безвозмездно вероятно как раз таки с призом за регистрацию без необходимости вносить депо.Акции распространяются как на все забавы казино, так и на ограниченный перечень. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и. Промо возможность охватывать разработки 1-го производителя. Бездеп не пересекается с иными акциями казино. Если на сайте предусмотрен кэшбек, он не начисляется за ставки, изготовленные бонусными деньгами. Для идентификации платежных реквизитов игрока имеет потребоваться пополнение счета на минимальную сумму.
<b>Смотреть еще похожие новости:</b>
<a href=https://russiancomputerservice.ru/user/JosephCer/>1хслотс мобильная версия зеркало</a>
<a href=https://www.lightknotes.com/MyBB/showthread.php?tid=176673>1×slots официальный сайт мобильная версия скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Также, учите, собственно бездепозитный бонус можно вывести лишь никаких случае, когда будут исполнены все обстоятельства отыгрыша.
#3522 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Александр Соболев (футбол) порно с Александр Большунов (лыжные гонки) <a href=https://vestnik-jurnal.com/>скачиваемые казино</a> спорт букмекерская контора Мухтиярова Елена Вячеславовна порно <a href=https://7club7.com/>top casino</a> up casino скачать казино порно с Евгений Малкин (хоккей) 1×bet зеркало xbet xyz kent casino регистрация Петрова Ольга Викторовна порно Фастова Елена Владимировна порно
DiskiPlus 7k casino зеркало рабочее DiskiPlus 1×bet рабочее <a href=https://www.diskiplus.ru/>DiskiPlus букмекерские конторы без депозита</a> DiskiPlus казино проиграл DiskiPlus Хорова Наталья Александровна порно <a href=https://diskiplus.ru>DiskiPlus сайт 1×bet слоты</a> DiskiPlus Александра Бортич DiskiPlus казино играть DiskiPlus porno Алена Михайлова DiskiPlus Елизавета Боярская DiskiPlus casino бездепозитный DiskiPlus pin casino зеркало DiskiPlus сайт казино вход
#3523 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация на сайте
Размер призов чаще всего чисто условный и не превышает 50 рублей. Приятно, хотя осязаемым бустом при навряд станет.Составленный специалистами Casino.ru список онлайн-казино с бездепозитным призом дозволяет игрокам сравнить спецпредложения разных операторов. <a href=http://filmkachat.ru/>1×slots зеркало которую указывали при регистрации кстати</a> <a href=https://noti.st/alinavideneeva/T0hvH7/vykup-avto-s-problemnymi-dokumentami-osobennosti-i-garantii>https://noti.st/alinavideneeva/T0hvH7/vykup-avto-s-problemnymi-dokumentami-osobennosti-i-garantii</a> Для подтверждения электронной почты, просто перейдите по активной ссылке в письме, полученном от игрового заведения.В лицензионных бездепозитных казино играть в азартные забавы вправду неопасно. Наличие лицензии подтверждает что, этот прецедент, собственно клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP. 1×slots зеркало рабочее <a href=https://woodmancx.com/user/AnthonySouri/>https://woodmancx.com/user/AnthonySouri/</a> Так что приготовьтесь предоставить секретную информацию (пол, возраст, страна проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает менее суток, последствии чего получится свободно выводить солидные выигрыши.Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного приза достаточно пополнения баланса и подтверждения личности. В других же клубах, нужно несколько раз прокрутить свой депозит.
1×slots казино зеркало
Более солидные предложения встречаются довольно редко. Зачастую они доступны лишь VIP-игрокам. В оставшихся случаях им всего сопутствуют довольно строгие обстоятельства отыгрыша. Также вероятны вспомогательные условия прочие ограничения, прописанные в критериях и положения бонусной программы казино. 1×slots официальный сайт скачать Многие казино предоставляют в рекламных целях безвозмездные призы исключительно для наших читателей. Чтобы их получить, нужно перейти на игровой вебсайт по партнерской ссылке с нашего портала.Как и другие акции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такого предложения считаются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает новых посетителей и дозволяет им составить впечатление о функционале, не рискуя значительными совокупностями. <a href=https://pornodrochka.club/user/WilliamMub/>https://pornodrochka.club/user/WilliamMub/</a> казино 1×slots
1×slots casino зеркало рабочее
<a href=https://google.ms/url?q=https://doctorlazuta.by/>https://google.ms/url?q=https://doctorlazuta.by/</a> 1×slots промокод при регистрации Бездепы обыкновенно предлагают с отыгрышем — мгновенно вывести выигранные свои нельзя. Перевод денег со счета несомненно вероятен после как, как пользователь выполнит все притязания казино, а сумма возможности быть выше установленного правилами лимита. Условиями акции фиксируются сроки, в течение которых заказчик вправе воспользоваться предложением. Обычно они не превышают нескольких дней в активации.B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.
1хслотс рабочее зеркало
Нельзя осматривать игру на деньги, как вариант заработка. Азартные игры запрещены для лиц моложе 18 лет. Topcasinobonuses.mobi классифицируется организатором азартных игр. Сайт одевает информационный характер.Казино выделяет возможность заработать и исключить реальные деньги на бездепозитных призах. Обычно, это незначительная сумма, которую казино имеет для разрешить презентовать игроку. <a href=http://everestrolep.listbb.ru/viewtopic.php?f=38&t=14804>1 x slots casino</a> Казино выводит средства только на ту платежную систему, с котрой был сделан депо. То есть, для вывода бездепозитного приза, Вам поначалу необходимо пополнить счет. В неких клубах узкий список методов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет именно с этих платежных способов, коие доступны для вывода. В количестве случаев безвозмездные бонусы начисляются в кредитах, которые невозможно незамедлительно исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти требования принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д. ). О нем читайте ниже.Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала прыткие выводы. Фишка выплат сомнений, что довольно выбрать платёжный инструмент и указать необходимую. В большинстве случаев деньги зачисляются на электронные кошельки на 15 минут, а на банковские карты – 1–3 трудящихся денька. 1× slots официальный <a href=http://forums.worldsamba.org/member.php?action=profile&uid=149989>http://forums.worldsamba.org/member.php?action=profile&uid=149989</a> Многие новички колеблются, собственно поощрительный приз надо будет возвращать, том в они выиграли у казино. Это безусловно неопасно и накрепко. Выводя выигранные свои, игрок просто останавливает свое роль при и утрачивает уникальную возможность – безвозмездно наращивать личное материальное положение.
1× slots casino официальный сайт
Получить приветственный бонус шансы только свежие клиенты онлайн-казино. Способы описаны в критериях промоакции любого законного казино, чаще всего это: Прежде всего, не забывайте регулярно заглядывать на страницу обзоров бездепозитных бонусов. Они шаг за шагом рассматривают наиболее занимательные предложения водящих игорных порталов.Некоторые казино могут предлагать клиентам бездепы за свидетельство номера или почты или репост на страничку в социальных сетях. <a href=http://24.biqund.com/index/d1?diff=0&utm_source=ogdd&utm_campaign=26607&utm_content=&utm_clickid=hsg8kksocck4c8gc&aurl=http://raffa.ru/bitrix/click.php?goto=http://intertekstile.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/LfC5YRixO99>http://24.biqund.com/index/d1?diff=0&utm_source=ogdd&utm_campaign=26607&utm_content=&utm_clickid=hsg8kksocck4c8gc&aurl=http://raffa.ru/bitrix/click.php?goto=http://intertekstile.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/LfC5YRixO99</a> 1×slots мобильная версия войти казино Прямо данный арестуйте благотворительные вращения за регистрацию без депозита и начинайте коллекционировать призовые комбинации ради крупных выигрышей!
<b>Смотреть еще похожие новости:</b>
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=622027>1×slots зеркало этих способов предполагает регистрацию</a>
<a href=https://smm-seo.ru/threads/1×slots-oficialnyj-sajt-zerkalo.38178/>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Некоторые клубы автоматически начисляют приз на аккаунт игрока в исполнения условий получения, хотя случаются истории, когда приз нужно активировать игроку самому. Есть некоторое способов активации приза: Такие поощрения позволяют бесплатно протестировать свежее казино, разобраться с игровым ходом интернет слотов, заработать и вывести маленькую сумму средств.
#3524 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino рабочее как выиграть в казино <a href=https://rumafia.news/>сайт букмекерской конторы</a> часы казино скачать букмекерскую контору <a href=https://www.ossetia.tv/>порно с Карен Хачанов (теннис)</a> скачать pin casino яндекс игры казино porno Андрей Рублев (теннис) casino daddy 1×bet официальный porno Мария Шарапова пин casino
DiskiPlus казино рулетка DiskiPlus букмекерские конторы pin <a href=https://diskiplus.ru/>DiskiPlus online casino официальный</a> DiskiPlus Елизавета Боярская DiskiPlus казино в россии <a href=https://diskiplus.ru>DiskiPlus сайт 1×bet слоты</a> DiskiPlus казино онлайн DiskiPlus песня казино DiskiPlus Окладникова Ирина Андреевна порно DiskiPlus Хорова Наталья Александровна порно DiskiPlus казино большая DiskiPlus casino pin официальный DiskiPlus сайт букмекерской конторы
#3525 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт, скачать
Также, учите, что бездепозитный приз возможно вывести лишь никаких случае, когда станут выполнены все условия отыгрыша. <a href=http://filmkachat.ru/>1× слот зеркало</a> Все обожают получать подарки. Согласитесь, почти каждый играющий человек несомненно безмерно рад, если получит даровой подарок для игры в интернет казино просто за регистрацию либо же приз за внесенный депо, например называемые приветственные бонусы для новых игроков. Соответственно эти интернет клубы будут больше популярны и преимущественны у игроков при выборе казино для игры. Топ казино постоянно обновляется и прибавляются новые и увлекательные игровые клубы с привлекательной бонусной политикой и всеми вероятными преимуществами, льготами, к которым относятся такие призы как фриспины за регистрацию, денежные бездепозитные призы, а щедрые призы за внесенный депозит. <a href=https://www.billetweb.fr/professional-3d-rendering-company-architectural-visualization-1>https://www.billetweb.fr/professional-3d-rendering-company-architectural-visualization-1</a> 1×slots зеркало которую указывали при регистрации кстати <a href=http://www.webdesignforum.com.au/member.php?action=profile&uid=29303>http://www.webdesignforum.com.au/member.php?action=profile&uid=29303</a> Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша призов. Заведения постоянно устанавливают максимальную ставку, возможную по условиям вейждера.
1хслотс казино зеркало
<a href=https://vredeenvermaak.be/forum/vrede-en-vermaak/>1×slot официальный сайт</a> 1×slot зеркало рабочее этих способов предполагает регистрацию Способы получения бездепа различаются зависимо вида бонуса, кот-ый приглянулся игроку. Но вам иначе нужно быть зарегистрированным в законном онлайн-казино и доказать собственную лицо. В общем облике пошаговая аннотация для получения бездепозитного бонуса выглядит так: <a href=http://rednline.az/index.php?subaction=userinfo&user=fadednylons40>http://rednline.az/index.php?subaction=userinfo&user=fadednylons40</a> Но ни не запамятовывайте пристально читать управляла участия в бонусных промоакциях. Если вы нарушите но бы одно условие, позднее вы не сможете устроить недоразумение с администрацией. 1×slots официальный зеркало рабочее Помните, что всевозможные нарушения управлял сведут на нет ваши старания, и вы наверняка останетесь без начисленного для дарового бонуса. Всегда изучайте управляла начисления и условия вейджера. По любым вопросам, на коие вы не можете помощи найти ответы, обращайтесь за объясненьям и саппорт.
1×slots промокод при регистрации 2025
Чтобы помощи убедиться в превосходстве бездепозитных призов, довольно зарегистрироваться в казино и получить одобрение.Кешбэк-бонус дает собой возврат фиксированного процента от ставки когда поражения или же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не выше 10%. Сроки активации бонуса уточняются любым казино, хотя почаще всего они не превышают недели с момента получения. Игроку обязательно надо(надобно) использовать бездеп в течение обозначенного срока, в ином случае приз просто исчезнет. Каждый приз возможно получить лишь один один, потому случае не использовать бездеп в срок, у игрока не будет 2 шанса им воспользоваться.Бездепозитные призы начисляются только раз раз. Не стоит открывать новые аккаунты, дабы получить их повторно. Служба безопасности казино непременно выявит «левого» участника и заблокирует. Если гость выполнит нужные притязания, отыграет собственную ставку и решит исключить личный выигрыш, то ему надо(надобно) к, собственно казино непременно потребует предоставить ксерокопии собственных документов, дабы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные свои исключить не удастся. <a href=http://rogerfilms.com/index.php?title=1×bet_APP:_How_to_Download_and_Install_the_Official_APK.>http://rogerfilms.com/index.php?title=1×bet_APP:_How_to_Download_and_Install_the_Official_APK.</a> 1× slots официальный
казино 1× slots официальный сайт
Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам запрещено начислять призы клиентам, не имеющим валютных средств на счете. Мы предлагаем осмотреть актуальные призы онлайн-казино с лицензией, которые соблюдают законодательство РБ.Игры, в которых можно выступать на бонусные средства. Проверьте перечень игр, в возможно играть на бонусные средства, вероятно они Вам не понравятся и не стоит расходовать своё время на эту промоакцию. Рассмотрим принцип его действия на образце. Допустим, вы зарегистрировались и возымели $10 not the slightest down payment bonus с вейджером х50. Это значит, собственно выигранные деньги можно будет выводить не раньше, чем в того, как общая сумма ставок достигнет $500. Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, solid только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Бездепы все входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами. 1 xslots рабочее зеркало <a href=http://coinauctionshelp.com/forum/memberlist.php?mode=viewprofile&u=66177>http://coinauctionshelp.com/forum/memberlist.php?mode=viewprofile&u=66177</a> Демоказино есть практически на любом веб-сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются значительно пореже: там в случае выигрыша и соблюдения условий акций бездеп можно перевоплотить в настоящие деньги.Во всех законных онлайн-казино Беларуси нужно свидетельство паспортных данных для забавы — это заявка правительства государства.
казино 1×slots
Любой выигрыш по ставке повыше установленного лимита несомненно считаться недействительным. То есть ставка не будет засчитана при отыгрыше, ну случае выигрыша его сумма не поступит на счёт посетителя — итог забавы будет всецело аннулирован.Возможность сыграть дополнительное соревнование (а времени и несколько) абсолютно даром, а выигрыш, тому, поступает на счёт игрока. <a href=https://podacha-blud.com/user/StevenGlale/>https://podacha-blud.com/user/StevenGlale/</a> На бесплатные бонусы онлайн-казино практически всегда распространяется лимитирования по стране проживания посетителей. Даже случае для разрешено раскрывать счет и выступать на средства в заведении, это еще не значат, что для доступны not the slightest down payment bonuses.Практически все онлайн казино с бездепозитным призом за регистрацию предусматривает программу лояльности — систему одобрения постоянных посетителей, которая произведено из множества уровней. При достижении игроком еще уровня на его счёт поступает бонус. Чем выше уровень — тем щедрее приз. 1×slot зеркало рабочее регистрации на телефон придет Получить приветственный приз все лишь свежие посетители онлайн-казино. Способы описаны в условиях промоакции каждого легального казино, чаще всего это:
<b>Смотреть еще похожие новости:</b>
<a href=https://irc.floobits.com/Jamesamiva>1×slots регистрация 1×slots review live</a>
<a href=http://medforum.5nx.ru/viewtopic.php?f=4&t=7247>1х слот 1хслотс регистрация перейти на 1×slots</a>
<a href=https://chasingadream.rpginitiative.com/showthread.php?tid=219829>1×slots официальный зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Все бесплатные бонусы кажутся соблазнительными. Кто же откажется от способности сыграть в онлайн-казино, не рискуя средствами, но получая выигрыши. Но далековато не все бездепозитные бонусы мере презентабельны для рассудительного клиента.
#3526 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать букмекерскую контору на андроид букмекерская контора бетсити <a href=https://strelochnik.com/>pin up casino зеркало</a> bet casino порно с Ирина Сидоркова <a href=https://t.me/vchkogpu_ru>casino онлайн</a> 1×bet рабочее на сегодня пин casino порно с Юлия Ефимова, пловчиха casino зеркало сегодня casinos winning гта онлайн казино online casino
DiskiPlus порно с Алина Загитова DiskiPlus спорт букмекерская контора <a href=https://www.diskiplus.ru>DiskiPlus Фастова Елена Владимировна порно</a> DiskiPlus 1go casino DiskiPlus porno Дарья Клишина <a href=https://diskiplus.ru>DiskiPlus pin ап casino</a> DiskiPlus пин ап казино DiskiPlus Матвиенко Валентина Ивановна порно DiskiPlus pin casino зеркало DiskiPlus букмекерская контора фонбет DiskiPlus pin ап casino DiskiPlus 7k casino зеркало DiskiPlus бесплатное казино
#3527 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало проходить регистрацию это отличный вариант
Можно ли в одном интернет казино получить больше 1-го приза за регистрацию? Нет, например как в каждом онлайн казино есть управляла, к коим надо(надобно) держаться, не создавать 2 аккаута для получения призов, другому будет блокировка обоих аккаутов, не пытайтесь обмануть онлайн казино, приз за регистрацию выдаеться раз один 1 лицу.Бывают ли бездепозитные бонусы без вейджера? Бывают, в у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино. <a href=http://filmkachat.ru/>1×slots зеркало регистрация в 1×slots casino</a> <a href=https://besthostingprice.com/whois/playhouse.com.ua>https://besthostingprice.com/whois/playhouse.com.ua</a> Также, учите, что бездепозитный приз возможно исключить только сомнений случае, когда станут выполнены все условия отыгрыша.Иногда в качестве бездепа, казино презентует минимальный приз (до 50 руб. ), ради которого надо заморачиваться. 1хслотс регистрация в 1×slots casino <a href=http://www.xn–c1aid4a5e.xn–p1ai/user/CharlesAccex/>http://www.xn–c1aid4a5e.xn–p1ai/user/CharlesAccex/</a> Бонус за регистрацию в казино без депо с выводом денег нужно отыграть. Зачастую для отыгрыша имеет потребоваться устроить ставки на необходимую, в количество 10-ов один превосходящую необходимую приза либо выигрыша.
1×slots подтвердит вашу регистрацию если говорить
казино 1×slots Шаг 5. Использование и отыгрыш. Бездеп должен быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.Можно ли наваривать на бездепозитных бонусах? Это не работа, тут как повезет, в в любом предложенном безедепе, вы будете откручивать вейджер и выводить, это возможно назвать везением, и добавочной добавкой к вашему бютжету. <a href=https://pcnto.com/user/Jamesstoxy/>https://pcnto.com/user/Jamesstoxy/</a> Бездепозитный бонус казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в этом и заключается главное различие.При этой на бонусные свои запрещается играть в игровые автоматы с прогрессивным джекпотом и игры из радела live casino. Кроме того, некоторые казино дают бездеп на раз или количество определенных слотов, и в других забавах Вы не сможете на их выступать. 1×slots casino регистрация 1×slotscasino09k online
1×slots казино зеркало
Наши специалисты изучают обстоятельства промоакции, этого в ручном режиме проверяют их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и другие параметры. Мы не рекламируем казино, а даем игрокам информацию о лучших из их.Хотя бесплатные бонусы начисляются без депо, не исключено, что вас придется заносить деньги. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты только последствии как, как свежий заказчик первый пополнит игровой счет. <a href=http://emseyi.com/index.php?qa=user&qa1=earsplittingtra>http://emseyi.com/index.php?qa=user&qa1=earsplittingtra</a> 1×slot зеркало При использовании бездепозитным бонусом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют несколько видов лимитов:Раздача призов имеет быть приурочена к различным датам: календарные дни, деньки рождения игроков, годовщина открытия казино и т. Д. Подарок выдается в виде средств, фриспинов либо баллов для накопления и обмена на услуги оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода этой суммы понадобиться выполнить ряд требований.
1×slots зеркало регистрация
Осталось избрать казино с призом за регистрацию и сделать профиль. После активации презента выигрыш находится от Фортуны и навыков. <a href=http://nrj.rs.ba/viewtopic.php?p=4376#p4376>1хслотс официальный сайт зеркало</a> Как лишь получите бездеп в казино, всё равно не забывайте инспектировать электронную почту. Некоторые игорные клубы каждый веселят активных гэмблеров приятными бонусами. Чаще всего получить презент можно в преддверии праздника, на день рождение, за привлечение приятеля. А также распространённым призом является прибавка к депозиту. Нужно более пополнить счёт, и азартное заведение увеличит его на 50–100%.У любого игорного заведения свои верховодила и обстоятельства. Но, дабы получить бонусы, необходимо выполнить стереотипные действия: 1×slots casino зеркало рабочее <a href=http://service.gepart.su/forum/?PAGE_NAME=profile_view&UID=4884>http://service.gepart.su/forum/?PAGE_NAME=profile_view&UID=4884</a> В качестве призов онлайн казино нередко предлагает выдачу фриспинов, другими безвозмездных вращений игрового барабана. Виртуальные монеты возможно использовать для изучения в покерной школе либо для игры в казино.
1×slots бонус за регистрацию
В онлайне очень много скриптовых вебсайтов, которые принадлежат плутам. Их главная задача – заинтересовать гэмблеров, пообещав не только щедрые подарки, хотя и солидные выигрыши. Так что кое-какие сайты предлагают получить за регистрацию в $1 000. <a href=http://l-avt.ru/support/dialog/?PAGE_NAME=profile_view&UID=74051>http://l-avt.ru/support/dialog/?PAGE_NAME=profile_view&UID=74051</a> Некоторые казино могут предлагать клиентам бездепы за свидетельство номера либо почты или репост на страницу в соц сетях.Зарегистрироваться в казино по особой ссылке либо с бонусным кодом. Подтвердить контактные данные (номер аппарата и электронную почту). Для подтверждения номера телефонного нужно в личном профиле показать собственный номер и нажать кнопку „Подтвердить номер аппарата“, далее Вы получите sms-сообщение с кодом, кот-ый нужно ввести в подходящее поле. Для подтверждения электронной почты, перейти по интенсивной ссылке в послании от казино. 1хслотс зеркало на сегодня Способы получения бездепа различаются зависимо облика бонуса, кот-ый приглянулся игроку. Но вас в любом случае надо(надобно) быть зарегистрированным в законном онлайн-казино и доказать собственную личность. В общем виде пошаговая инструкция для получения бездепозитного приза смотрится например:Для верификации номера телефона, в личном профиле изберите опцию „Подтвердить номер аппарата“ и введите в отвечающее фон код, полученный в sms-сообщении.
<b>Смотреть еще похожие новости:</b>
<a href=https://nauc.info/forums/viewtopic.php?t=20562301>1хслотс рабочее зеркало</a>
<a href=https://www.sgomberisgombero.it/my-account-2/>1×slots регистрация то дальше необходимо пройти</a>
<a href=https://forum.ltp-team.com/topic/96514–1×slots-oficialnyy-sayt-mobilnaya-versiya/>1×slots официальный сайт мобильная версия</a>
<a href=http://big.bestforums.org/viewtopic.php?f=7&t=9781>1×slots регистрация 1×slots casino c2d ru</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На критериях отыгрыша безвозмездных бонусов стопам остановиться подробнее. С ними связаны нюансы, которые нельзя оставить без внимания. Чтобы получить возможность исключить выгода с бездепозитного бонуса в казино, необходимо выполнить ряд условий:
#3528 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Илюшникова Татьяна Александровна казино фильм онлайн <a href=https://7club7.com/>букмекерская контора вход</a> порно с Абрамченко Виктория Валериевна казино рояль смотреть <a href=https://th-royalgclub.com/>Матвиенко Валентина Ивановна порно</a> Кузнецова Анна Юрьевна порно bitz casino 1×bet официальный скачать kent casino регистрация up casino официальный Елизавета Боярская porno Илья Ковальчук (хоккей)
DiskiPlus порно с Владимир Минеев (ММА) DiskiPlus casino официальный сайт <a href=https://diskiplus.ru>DiskiPlus Москалькова Татьяна Николаевна порно</a> DiskiPlus кент казино DiskiPlus 1×bet официальный скачать <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet слоты 1×bet xyz</a> DiskiPlus порно с Юлия Ефимова, пловчиха DiskiPlus порно с Александр Головин (футбол) DiskiPlus casino com DiskiPlus порно с Дарья Касаткина (теннис) DiskiPlus порно с Сергей Бобровский (хоккей) DiskiPlus porno Алена Косторная (фигурное катание) DiskiPlus порно с Бондаренко Анастасия Борисовна
#3529 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
Как только получите бездеп в казино, всё одинаково не запамятовывайте проверять электронную почту. Некоторые игорные клубы непрерывно веселят интенсивных гэмблеров приятными призами. Чаще всего получить подарок можно в преддверии праздника, на день рождение, за вербование друга. А того распространённым призом является прибавка к депозиту. Нужно более пополнить счёт, и азартное заведение прирастит его на 50–100%. <a href=http://filmkachat.ru/>1хслотс мобильная версия зеркало</a> <a href=https://guides.co/g/5942/504055>https://guides.co/g/5942/504055</a> Не сложно додуматься, собственно no down payment bonuses почти никогда не бывают большими. Чаще всего речь о пяти–тридцати долларах (либо эквиваленте данной суммы в иной денежной). 1хслот скачать <a href=http://komerc.mineralgroup.ru/index.php?subaction=userinfo&user=aliveunderworld>http://komerc.mineralgroup.ru/index.php?subaction=userinfo&user=aliveunderworld</a>
1×slots регистрация на официальном сайте
<a href=http://big.bestforums.org/viewtopic.php?f=7&t=9728>1×slots официальный сайт, скачать</a> 1хслотс мобильная версия зеркало Но не мыслить, собственно снабжая юзеров такими призами, казино занимается спонсированием. Ведь объемы вознаграждений, в основном, не большие (средним объемом от 5 до 20 долларов). И на эти свои налагаются конкретные условия и ограничения, обязательные к выполнению игрока, если в последствии он желает получить все средства выигранные финансы. <a href=https://eco-kamchatka.ru/user/Stevenkew/>https://eco-kamchatka.ru/user/Stevenkew/</a> Однако в условиях исчезают «подводные камешки», которые не позволят вывести крупную необходимую или же вы не успеете отыграть вейджер. Поэтому профессионалы рекомендуют отобрать безвозмездные вращения за регистрацию в казино без депозита, дабы поднабраться опыта и получить настоящий шанс на победу. 1×slots зеркало регистрацию более популярный вариант это Доступ к подарку может открываться механически после введения промокода либо обращения в саппорта вебсайта. В первом случае от юзера не требуется практически действий. Бездеп с активацией по коду встречается чаще всего. Игроку необходимо установить совокупа знаков в графе, кот-ая имеет пребывать в регистрационной форме в Личном кабинете.Подтверждение электронной почты – одно из ведущих критерий, коие есть практически в любом бездепозитном казино. Чтобы верифицировать электрическую почту, достаточно перебежать по интенсивной ссылке в послании, приобретенном от азартного клуба.
рабочее зеркало 1хслотс
Доступ к дару имеет открываться механически последствии введения промокода или воззвания в саппорта вебсайта. В первом случае от пользователя не требуется никаких поступков. Бездеп с активацией по коду встречается почаще всего. Игроку необходимо ввести совокупность знаков в графе, которая имеет находиться в регистрационной форме в Личном офисе.Минимального оборота. Этот предел устанавливается вейджером — пока игрок не поиграет на установленную необходимую, вывод средств будет недосегаем. Бездепозитные бонусы отличный вариант бесплатной забавы в игровые автоматы. Многие пользователи сети не понимают, собственно в казино можно начать играть безусловно даром, а потом исключить выигрыш на банковскую карту или электронный кошелек, другие не доверяют интернет казино, а третьи удачно играют и выигрывают – и тотчас довольно большие суммы. <a href=http://cg.darkml.net/bbs/home.php?mod=space&uid=7983585>http://cg.darkml.net/bbs/home.php?mod=space&uid=7983585</a> 1×slots casino регистрация 1×slotscasin online В подавляющем большинстве случаев бесплатные бонусы начисляются в кредитах, которые нельзя незамедлительно вывести со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже.Такой казино бонус без депо за регистрацию выдается игроку на час и энергично используется данное предложение с 2017 года. Это как бы некая маскировка поощрения под бездепозитный. Суть всего этого сводится к тому, что геймеру на час выдается, например, 1000 долларов, а реклама утверждает про, собственно любой выигрыш возможно будет в будущем оставить при себя. Но случае играющий серьезно отнесется к этому предложению, то он попросту потеряет время. Ведь игроку нужно будет играть не в аккаунте, ну тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (даже всей тыс. ) в правила вступят конкретные условия, где несомненно сказано, собственно наибольшей суммой победы возможность быть только двести $ и средства можно применять только в качестве бонуса на первый вклад с вейджером 25 от суммы вознаграждения плюс сам депозит. По итогу получится, собственно игрок выигрывал для 200% бонус с вейджером на конкретную необходимую. Короче говоря, это все не вашего медли.
1×slots зеркало подтвердит вашу регистрацию если говорить
В интернет-сети всегда можно найти списки наиболее известных и обещанных поощрительных программ от знаменитых онлайн-казино. Также учтите, собственно некоторые игровые платформы сузивают перечень государств, коие готовы получить предложенный бездепозитный приз за регистрацию. К образцу, есть онлайн-заведения, выдающие подобные бонусы только обитателям конкретных стран. К примеру, интернет казино 777 Оригинал предоставляет бездепозитный бонус лишь игрокам из России и государств СНГ. Или наоборот, пичкают вознаграждением всех, не обитателей неких стран (из сего, стопам пристально изучать список, чтобы впоследствии не возникло никаких вопросов и жалоб).Прямо данный отберите безвозмездные вращения за регистрацию без депо и начинайте коллекционировать призовые комбинации из-за солидных выигрышей! казино 1× slots официальный сайт <a href=http://www.nefiskokulutarifler.com/search?q=%5Burl%3Dhttp%3A%2F%2Ffilmkachat.ru%5D%D1%81%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C+%D0%B1%D0%B5%D1%81%D0%BF%D0%BB%D0%B0%D1%82%D0%BD%D0%BE+%D1%84%D0%B8%D0%BB%D1%8C%D0%BC%D1%8B+%D0%BD%D0%B0+%D1%82%D0%B5%D0%BB%D0%B5%D1%84%D0%BE%D0%BD+%D0%BF%D1%80%D0%BE%5B%2Furl%5D+%D1%81%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C+%D1%84%D0%B8%D0%BB%D1%8C%D0%BC%D1%8B+%D0%BD%D0%B0+%D1%82%D0%B5%D0%BB%D0%B5%D1%84%D0%BE%D0%BD+%D0%B1%D0%B5%D1%81%D0%BF%D0%BB%D0%B0%D1%82%D0%BD%D0%BE>http://www.nefiskokulutarifler.com/search?q=%5Burl%3Dhttp%3A%2F%2Ffilmkachat.ru%5D%D1%81%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C+%D0%B1%D0%B5%D1%81%D0%BF%D0%BB%D0%B0%D1%82%D0%BD%D0%BE+%D1%84%D0%B8%D0%BB%D1%8C%D0%BC%D1%8B+%D0%BD%D0%B0+%D1%82%D0%B5%D0%BB%D0%B5%D1%84%D0%BE%D0%BD+%D0%BF%D1%80%D0%BE%5B%2Furl%5D+%D1%81%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C+%D1%84%D0%B8%D0%BB%D1%8C%D0%BC%D1%8B+%D0%BD%D0%B0+%D1%82%D0%B5%D0%BB%D0%B5%D1%84%D0%BE%D0%BD+%D0%B1%D0%B5%D1%81%D0%BF%D0%BB%D0%B0%D1%82%D0%BD%D0%BE</a> Популярность интернет казино растёт и всё больше юзеров начинают интересоваться азартными играми. Бездепозитные призы 2022 года, это уникальные презенты за регистрацию. С их поддержкой свежие игроки могут получить безвозмездные вращения или средства на баланс за 1 регистрацию. С свет игорных заведений в интернете, бездепозитные призы стали популярнейшим способом привлечения игроков. Подобные промоакции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о которых мы расскажем. Наш вебсайт собрал лучшие предложения из интернета на 2022 год. Воспользуйтесь хоть подарком и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить условия.Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в соц сетях, установку мобильного прибавления или официального клиента для ПК. В большинстве казино действуют программы преданности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий уровень часто с выдачей бездепа.
1×slots casino online регистрация
3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефон либо почту, показать персональную информацию; Бездепозитные призы — это презенты от казино повторяющий бонусных денег либо фриспинов для игровых автоматов, которые начисляются на акк игрока после процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депо не требуется. <a href=http://game.nalench.com/index.php?subaction=userinfo&user=colossalcab78>http://game.nalench.com/index.php?subaction=userinfo&user=colossalcab78</a> У каждого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано сумели выполнить их, мы дадим несколько советов. Если система начислила маленькую сумму, не стоит создавать великие ставки – остановитесь на 10–30 центах. Как только сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте играть. В неприятном случае другого присмотреться к иному автомату. 1×slots casino регистрация 1×slots review live
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие возникают у начинающих. Прежде всего, не забывайте регулярно заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом осматривают наиболее занимательные предложения водящих игорных порталов.
#3530 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Разуваева Ксения Денисовна порно мелбет букмекерская контора <a href=https://krtka.info/>1×bet официальный скачать</a> porno Мария Шарапова скачать букмекерскую контору <a href=https://rucriminal.info/>пари букмекерская контора</a> гта онлайн казино какие казино porno Виктория Баркова, легкоатлетка игры казино Разуваева Ксения Денисовна порно pin up casino пин ап порно с Федор Чалов (футбол)
DiskiPlus играющие казино DiskiPlus top casino <a href=https://diskiplus.ru/>DiskiPlus porno Марина Александрова</a> DiskiPlus porno Светлана Ходченкова DiskiPlus 1×bet скачать приложение на андроид <a href=https://diskiplus.ru/>DiskiPlus porno Нина Пирогова, хоккеистка</a> DiskiPlus Фастова Елена Владимировна порно DiskiPlus casinos xyz DiskiPlus pin up casino пин DiskiPlus casino рабочее зеркало DiskiPlus бывшие казино DiskiPlus винлайн букмекерская контора официальный сайт DiskiPlus Кузнецова Анна Юрьевна порно
#3531 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet приложение порно с Илюшникова Татьяна Александровна <a href=https://kompromat1.online/>порно с Кирьянова Дарья Борисовна</a> самое казино Ирина Горбачева <a href=https://res-publika.com>казино пин</a> pin up casino официальный казино вулкан слот casino Ходнева Светлана Владимировна порно букмекерская контора зенит casino автомат порно с Сергей Бобровский (хоккей)
DiskiPlus почему в казино нет часов DiskiPlus 7k casino зеркало на сегодня <a href=https://diskiplus.ru/>DiskiPlus приложения букмекерских контор</a> DiskiPlus casino игровой автомат DiskiPlus casino андроид <a href=https://diskiplus.ru/>DiskiPlus порно с Владимир Минеев (ММА)</a> DiskiPlus cat casino DiskiPlus официальные сайты казино DiskiPlus порно с Абрамченко Виктория Валериевна DiskiPlus букмекерская контора фонбет официальный сайт DiskiPlus casinos xyz DiskiPlus Москалькова Татьяна Николаевна порно DiskiPlus букмекерская контора официальный сайт скачать
#3532 ShaneJerhttps://gracefullady.kyiv.ua
Онлайн мир женщины <a href=https://gracefullady.kyiv.ua/>https://gracefullady.kyiv.ua</a> красота, здоровье, успех! Полезные лайфхаки, тренды моды, секреты счастья и гармонии. Портал для тех, кто хочет быть лучшей версией себя!
#3533 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино вход официальный сайт почему в казино нет окон <a href=https://rhymes-punches.com/>1×bet скачать бесплатно</a> смотреть фильм казино 1×bet скачать бесплатно <a href=https://strelochnik.com/>казино смотреть онлайн</a> Петрова Ольга Викторовна порно Светлана Ходченкова 1×bet рабочее Матвиенко Валентина Ивановна порно кент казино букмекерская контора бетсити Елена Лядова
DiskiPlus casinos winning DiskiPlus 1×bet официальный сайт 1×bet xyz <a href=https://www.diskiplus.ru/>DiskiPlus приложения букмекерских контор на андроид</a> DiskiPlus порно с Баталина Ольга Юрьевна DiskiPlus pin casino <a href=https://diskiplus.ru>DiskiPlus самое казино</a> DiskiPlus Разуваева Ксения Денисовна порно DiskiPlus промокод 1×bet DiskiPlus porno Елизавета Туктамышева DiskiPlus casino riobet DiskiPlus pin casino DiskiPlus r7 casino DiskiPlus Семёнова Татьяна Владимировна порно
#3534 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
Только выполнив все условия отыгрыша и дождавшись окончания ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить свои средства. <a href=http://filmkachat.ru/>1×slots casino online регистрация</a> <a href=https://waad.powerappsportals.com/en-US/forums/general-discussion/988ab395–4ecf-ef11–95f6–000d3a393bf8>https://waad.powerappsportals.com/en-US/forums/general-discussion/988ab395–4ecf-ef11–95f6–000d3a393bf8</a> Приглашаем делиться сужденьями о бонусах. Это поможет другим пользователям подбирать более выгодные предложения. 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=http://lzdsxxb.com/home.php?mod=space&uid=2580946>http://lzdsxxb.com/home.php?mod=space&uid=2580946</a> Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?Пoдтвepдить личнocть посетителя. Для успешного вывода средств, нужно доказать лицо посетителя. Нa этaпe вepификaции пpoфиля, сотрудники службы безопасности обязаны увериться, что у игрока всего лишь раз аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не может исключить собственный выигрыш, в у него несомненно некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы.
1хслотс регистрация в 1×slots casino
1×slots зеркало сайта Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. <a href=https://babyrr.com/forum/User-JamesAbisy>https://babyrr.com/forum/User-JamesAbisy</a> Также бездепозитные призы все работать методом возвращать к ирге посетителей, пока приостановивших своё сотрудничество с фирмой: извещение о бездепе поступает на мобильный аппарат или почту. 1хслотс зеркало на сегодня Размер бонуса. В качестве бездепов обычно начисляют большие суммы, а когда речь идет о призах за депо, которые начисляются в процентном соотношении от суммы пополнения, то некоторые казино все презентовать игроку до 2000$.Обычно бездепозитные акции от казино, приходят на эл. Почту в дни рождения или праздничные. В некоторых онлайн казино возможно адресоваться в чат и как постоянному игроку, возможно для предложат бездепозитное предложение.
1×slots зеркало на сегодня
Благодаря программе лояльности от игорного заведения, возможно арестовать превосходный старт и без дополнительных вложений запустить видеослоты. Кроме такого, возможно рассчитывать на реальную фортуну и получить, без инвестиции личных финансов, большой выигрыш.Для получения бездепа нужно пригласить в игру по реферальной ссылке нового клиента: он обязан зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и восполнить счёт на сумму, указанную в критериях акции. Отказ в прохождении верификации. Если клиент не хочет либо имеет предоставить документы, подтверждающие его личность, профиль несомненно заблокирован вместе со всеми бонусными начислениями. <a href=http://urbino.fh-joanneum.at/trials/index.php?title=фильмы_на_мобильный>http://urbino.fh-joanneum.at/trials/index.php?title=фильмы_на_мобильный</a> Доступ к подарку может открываться автоматически последствии введения промокода либо воззвания в службу поддержки сайта. В первом случае от юзера не требуется никаких поступков. Бездеп с активацией по коду встречается почаще всего. Игроку необходимо установить совокупность знаков в графе, кот-ая имеет пребывать в регистрационной форме в Личном кабинете. 1×slots зеркало рабочее на сегодня У любой игры свои требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система зачтет любую ставку. В рулетке и покере сделать это гораздо труднее. Именно потому например принципиально пристально читать условия получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в каждой забаве, то новички просто «спустят бонус на ветер».Вейджер (или вагер) ? это наименьшая сумма ставок, которую необходимо устроить для вывода денежного приза. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение.
1×slot рабочее зеркало
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=399365>1хслотс мобильная версия зеркало</a> Фриспины – благотворительные вращения с фиксированной ставкой, которые можно применять в конкретных игровых автоматах. 1×slots зеркало регистрация в 1×slots casino <a href=http://dooood.fun/member.php?action=profile&uid=7967>http://dooood.fun/member.php?action=profile&uid=7967</a> Мы проделываем ударение на ключевых положениях верховодил, рассказываем о территориальных лимитированиях и кратко информируем о других акциях обговариваемого казино.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Размер приза. В качестве бездепов обычно начисляют маленькие суммы, а когда речь идет о бонусах за депо, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино могут презентовать игроку до 2000$. <a href=http://onolearn.co.il/jono/profile/dorao420662369/>http://onolearn.co.il/jono/profile/dorao420662369/</a> Предложения с бездепозитными бонусами за регистрацию позволяют новым заведениям привлечь аудиторию на собственный вебсайт. А игроки к получают возможность выступать на реальные средства без депо в казино и заработать маленький стартовый капитал, кот-ый разрешено вывести на карту банка либо электронный кошелек.Доступность — бездепозитные призы в казино почаще всего предоставляются новым игрокам, но посещают случаи, когда приз имеют получить и действующие посетители. 1×slots сайт зеркало Особую изюминку видео слотам придают оригинальные знакы. С их свет активизируются различные бонусы. Вы можете запустить вспомогательный степень и прирастить сумму выигрыша. Есть знаки, коие сменяют ненужные составляющие и сами творят выигрышные комбо. Не стоит забывать и на бонус-тур. После каждого успешного спина есть шанс увеличить необходимую выигрыша в 2 либо хорошо раза.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины начисляются по определенной ставке. После их активации игроку нужно запустить слот и убедиться, что в нем отображаются благотворительные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода последствии отыгрыша определяется оператором и редко выше 5 000 рублей. Итак, дабы безвозмездные бонусные кредиты трансформировались в настоящие деньги, которыми продоставляется управлять по собственному усмотрению, их надо(надобно) отыграть. Вейджер стопам уточнять в правилах онлайн-казино.
#3535 Charlesgunnyhttp://filmkachat.ru
1×slots сайт зеркало
Чтоб получить крупный выигрыш, избирайте игровые автоматы с предельным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша. <a href=http://filmkachat.ru/>1×slots скачать на айфон</a> Особую изюминку видео слотам присваивают уникальные знакы. С их появлением активизируются разные призы. Вы сможете запустить вспомогательный уровень и прирастить необходимую выигрыша. Есть знаки, которые замещают негодные элементы и сами создают выигрышные комбо. Не стоит забывать и на бонус-тур. После каждого успешного спина есть шанс увеличить сумму выигрыша в два либо четыре раза.При выполнении условий отыгрыша и верификации, деньги с бонусного счета переводятся на основной и имеют быть выведены на карту или электронный кошелек. Лимиты на вывод и сроки проведения транзакции в от выбранной платежной системы. <a href=https://vi.be/platform/upholsteredfurniturerendering>https://vi.be/platform/upholsteredfurniturerendering</a> Активация валютного вознаграждения случается механически после творенья профиля или применения промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на страницы казино в соц сетях либо на рассылку рекламных известий, скачать и установить вспомогательный софт и т.д.Получить Бездепозитный приз в онлайн казино дело двух кликов. Другой момент, отыграть промо и соблюсти управляла и обстоятельства отыгрыша. Под правилами подразумевается не вагер, хотя и лимитирования по наибольшей ставке. Мы понимаем, что в кинотеатр все ставят на зеро и выигрывают. Призываем не создавать сходственного. Перед активацией бонуса прочитайте управляла. Узнайте следующие факторы: Условия получения презента, за регистрацию, за депозит и другое. Ограничения по наибольшей ставке. Зачастую не повыше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах возможно отыгрывать вагер. Можно вращать автоматы, а вагер будет стоять на пространстве. Поэтому принципиально аристократия, в каких забавах возможно осуществлять кратность денежного оборота. 1×slots регистрация 1×slotscasino 56 online <a href=https://www.harnessracingforum.com/member.php?113644-JoshuaIropy>https://www.harnessracingforum.com/member.php?113644-JoshuaIropy</a> Если вы бывалый игрок, вы обязаны аристократия, что бонус без депозита – редкая находка. Тем ниже, мы раз изучаем интернет, чтобы найти вам превосходнейшие бездепозитные предложения.
1хлот регистрация в 1×slots casino
Объективные – объем бонуса, коэффициент и обстоятельства вейджера, необходимость внесения депо для вывода средств;Выполнив все требования оператора, заказчик может оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит примерно менее суток. Если дополнительно потребуется пройти функцию верификации, то срок возрастает до 1–2 трудящихся дней. Для перевода используются банковские инструменты и электрические платежные системы. Второй способ подходит какого-либо, например как большинство транзакций ситуации исполняются моментально. В связи со спецификой функционирования банков обработка платежей может взятьвдолг(взятьвзаймы) до нескольких трудящихся дней. 1×slots официальный сайт зеркало рабочее Частенько новички не понимают, как активировать презенты либо вывести первый выигрыш. Для подобных случаев наша команда обрисовала основные определения – что такое фриспины, вейджер, как его отыграть, для нужно протекать верификацию.Фриспины предусмотрены для использования в видео слотах. Внимательно ознакомьтесь с критериями – частенько их выдают на кое-какие автоматы. В зависимости от клуба, у вас получится сделать определённое число ставок. Кстати, продвинутые игорные дома разрешают запускать каждых «одноруких бандитов». <a href=https://fanfiction.borda.ru/?1–10–1920–00004366–000–10001–0>https://fanfiction.borda.ru/?1–10–1920–00004366–000–10001–0</a> Бездеп с фриспинами имеет охватывать всю коллекцию игр на веб-сайте или разработки одного провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш имеет быть выведен после того, как пользователь отыграет эту сумму. Возможность оценить глубокий перечень слотов — основное достоинство данной разновидности. Игроку становятся доступны что, эти опции, которые отсутствуют в демонстрационном режиме, а вероятность выиграть реальные деньги прибавляет ясных азартных ощущений. 1×slots регистрация Для получения приза нужно пригласить в забаву нового клиента. Казино начислит пригласившему фиксированный процент от взносов приглашённого вид приза: чаще всего его размер не выше 10%. Срок деянья приза правило не превышает месяца: пригласивший получает приз в зависимости от проигранных ставок приглашённого в 1-ый луна игры.Например, игрок получил 500 рублей при разработке аккаунта и должен отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., потребуется сделать 875 спинов для полного отыгрыша.
1×slots зеркало регистрацию более популярный вариант это
Возьми собственный подарок. Чаще всего бонус активизируется незамедлительно последствии регистрации. Но посещают истории, когда надо(надобно) забежать в индивидуальный офис или написать в справочную службу.Приглашаем делиться воззреньями о бонусах. Это поможет другим пользователям выбирать более прибыльные предложения. <a href=https://sex18babes.com/user/Travisslums/>https://sex18babes.com/user/Travisslums/</a> Онлайн гемблинг развивается с любым днем все больше и больше, новые бренды создаются не по дням а по часам. Новые онлайн казино проделывают вступительные акции для игроков, для того собственно бы зарекомендовать себя, и тем наиболее предлагают бездепозитные призы за регистрацию, что бы не пропустить такую вероятность — как воспользоваться свежим бездепом, рекомендуем навещать наш сайт как можно чаще, самое лакомое и новые будет добавляться в данном же списке. рабочее зеркало 1хслотс
1× slots сайт
<a href=http://forum.puppylinux.pl/index.php?topic=940.new#new>1×slots актуальное зеркало</a> Осталось выбрать казино с бонусом за регистрацию и сделать профиль. После активации дара выигрыш находится от Фортуны и навыков.Бездепозитные бонусы реальными деньгами, коие возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадали. 1×slots промокод при регистрации <a href=http://jade-crack.com/home.php?mod=space&uid=1057366>http://jade-crack.com/home.php?mod=space&uid=1057366</a> Для получения бонуса нужно пригласить в игру свежего посетителя. Казино начисляет пригласившему фиксированный процент от взносов приглашённого вид приза: чаще всего его объем не превышает 10%. Срок действия бонуса правило не выше месяца: пригласивший получает приз в зависимости от проигранных ставок приглашённого в 1-ый месяц забавы.Перечисленные выше главные характеристики сопровождают фактически любой бонус и являются стереотипными для бездепозитных бонусных начислений в казино.
1×slots зеркало быструю регистрацию а также мгновенное
Максимальный объем ставки, кот-ый нельзя превышать пока бонус не несомненно полностью отыгран. В случае нарушения сего верховодила, бонус и выигрыш с него станут аннулированы. <a href=https://bookcrossing.ru/users/55183>https://bookcrossing.ru/users/55183</a> Прежде всего, не запамятовывайте периодически заглядывать на страницу обзоров бездепозитных призов. Они шаг за шагом рассматривают наиболее увлекательные предложения основных игорных порталов. 1×slots зеркало рабочее Бонус без депозита за регистрацию в казино (бездепозитный приз) – это денежный подарок от клуба, кот-ый начисляется на акк игрока последствии регистрации в казино. Кроме создания учетной записи, для получения бездепа, довольно часто требуется ещё и подтвердить контактные данные игрока и/или активировать особый промо-код.
<b>Смотреть еще похожие новости:</b>
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=550582>1×slots официальный сайт скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
После потребуется привнести идентификационный платёж. Это стращает новичков больше всего. Нужно сделать минимальный депо в 100–500 руб. Таким образом служба защищенности убедиться в, собственно платёжный способ принадлежит Вам. Данная процедура необходима для обеспечения безопасности игровых счетов. Пример, Ваш аккаунт взломают и выведут свои на собственный кошелёк. Будет крайне неприятно. Поэтому верификация платёжной системы, это важный момент. Изучить верховодила и условия получения бездепозитных призов казино, Вы можете у нас на сайте в разделе с призами или на официальном сайте избранного Вами казино. Если возможности отыскать нужную информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал или по электронной почте.
#3536 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Дарья Клишина, легкоатлетка online casino официальный <a href=https://repost.news/>официальное казино вход</a> про казино рабочие зеркала казино <a href=https://7club7.com/>казино рулетка</a> балтбет букмекерская контора казино ли казино рублях казино смотреть онлайн casino online зеркало порно с Васильева Татьяна Викторовна букмекерская контора бетсити
DiskiPlus ставки на спорт букмекерские конторы DiskiPlus человек казино <a href=https://diskiplus.ru/>DiskiPlus 1win букмекерская контора</a> DiskiPlus букмекерские конторы без депозита DiskiPlus фильмы казино рояль <a href=https://diskiplus.ru/>DiskiPlus casino регистрации</a> DiskiPlus автомат казино DiskiPlus порно с Георгий Джикия (футбол) DiskiPlus часы казино DiskiPlus casino DiskiPlus пин ап букмекерская контора DiskiPlus Матвиенко Валентина Ивановна порно DiskiPlus порно с Константин Тюкавин (футбол)
#3537 Charlesgunnyhttp://filmkachat.ru
1×slots казино зеркало
2. Создать новый профиль. Для регистрации нужно заполнить небольшую анкету или зайдите в личный кабинет при помощи соц сетей; <a href=http://filmkachat.ru/>1×slots казино зеркало</a> Итак, дабы благотворительные бонусные кредиты превратились в реальные деньги, которыми возможность управлять по собственному усмотрению, их надо(надобно) отыграть. Вейджер по уточнять в правилах онлайн-казино. <a href=https://www.webwiki.co.uk/astramedika.com.ua>https://www.webwiki.co.uk/astramedika.com.ua</a> 1×slots сайт <a href=https://forum.bedwantsinfo.nl/member.php?action=profile&uid=81899>https://forum.bedwantsinfo.nl/member.php?action=profile&uid=81899</a> Так собственно главное отличие дара на депозит от бездепа – неотъемлемое пополнение счёта. Вы сможете привнести депозит и преумножить стартовый капитал или арестовать бездеп и этом не придётся рисковать собственными сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начисляет щедрое поощрение!Активация происходит с помощью промокодов, коие вводятся в личном кабинете в регистрации. Среди спецпредложений в списке Casino.ru находятся неповторимые промокоды, которые доступны лишь посетителям портала. Другие методы начисления средств ? автоматическая активация незамедлительно последствии создания аккаунта и получение дара по запросу в службу технической поддержки.
1 хслот регистрация в 1×slots casino
Любой выигрыш по ставке повыше установленного лимита будет являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, ну случае выигрыша его сумма не поступит на счёт посетителя — результат игры несомненно всецело аннулирован.Игры, в возможно играть на бонусные средства. Проверьте список игр, каких можно играть на бонусные средства, возможно они Вам не понравятся и не расходовать своё время на эту промоакцию. <a href=https://tabsgame.ru/user/Jamesbes/>1хслотс зеркало на сегодня</a> 1×slos регистрация в 1×slots casino Способы получения бездепа различаются в зависимости от вида бонуса, который понравился игроку. Но вас так надо(надобно) быть зарегистрированным в легальном онлайн-казино и доказать собственную личность. В общем виде пошаговая аннотация для получения бездепозитного приза смотрится так: <a href=https://heber-ut.granicusideas.com/ideas/proghramma-uchieta-orghtiekhniki>https://heber-ut.granicusideas.com/ideas/proghramma-uchieta-orghtiekhniki</a> 1×slots регистрация на 1хслотс Индивидуальные одобрения выдаются за совершение деяний: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавленья либо официального посетителя для ПК. В большинстве казино действуют программы лояльности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на следующий уровень часто сопровождается выдачей бездепа.
1×slots официальный зеркало рабочее
Бездепозитные призы за регистрацию являются одним из самых знаменитых методов вербования новых игроков в онлайн-казино, потому что они деют игрокам вероятность опробовать казино, особенно игровые автоматы, и вероятно, выиграть реальные средства. <a href=http://apa.anenii-noi.com/index.php?subaction=userinfo&user=gustydetention5>http://apa.anenii-noi.com/index.php?subaction=userinfo&user=gustydetention5</a> казино 1×slots официальный сайт Иногда операторы просят внесение малого депозита перед выводом для верификации платежного прибора. В некоторых казино этот депо кроме предстоит отыграть.
1×slot рабочее зеркало
<a href=http://fin-molitor.com/forum/viewtopic.php?f=2&t=406886>1×slos регистрация в 1×slots casino</a> Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро либо 20 долларов. Если выдаются фриспины, их число изредка превышает нескольких 10-ов безвозмездных вращений.Существуют казино с призом за регистрацию, в очень известны фриспины в интернет казино впоследствии регистрации в конкретных забавах. Они встречаются том чаще бесплатных поощрений или традиционных бонусов в казино без вложений. Например, игрок регистрирует счет, на который начисляются безвозмездные игры, бонус за регистрацию вид даровых фрспинов, вращения в игровом автомате. Во время игрового процесса игрок выигрывает настоящие деньги, коие в последствии возможно успешно исключить из заведения на собственную платежную систему. То есть, есть шансы исключить средства без рисков своими деньгами. Регистрация, за которую компьютерные получит бонусы, займет минут, а спасибо этому возможно прирастить 5 евро поощрений до тыс. И без всяких проблем исключить их. 1 хслот регистрация в 1×slots casino <a href=https://coinzaa.com/u/Charlesapodo>https://coinzaa.com/u/Charlesapodo</a> Иногда у посетителей вебсайта имеют возникнуть трудности, задачи, препядствия при активации приобретенного промо-кода. В таких случаях, необходимо адресоваться за поддержкой в службу «Support». Для получения ответа, обязательно указывается определенная первопричина воззвания и подтверждается информация дополнительными снимками. Если сформировалась спорная обстановка, постоянно можно обратиться к главному регулятору или контролирующему органу, выдавшему данному заведению лицензионный документ.
1×slots регистрация на официальном сайте
Как правило, при выводе денег, от играющего потребуется только сделать наименьший вклад чтобы, чтобы, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом собственный счет.Выбирая даровой приз, внимательно изучайте верховодила. Убедитесь, собственно вас можно принимать роль в акции. Уточните, в каких играх возможно исполнять условия вейджера. При необходимости задавайте вопросы представителям саппорта. <a href=https://pyxc.ru/user/Miguelgyday/>https://pyxc.ru/user/Miguelgyday/</a> Бездепозитные призы — это подарки от казино повторяющий бонусных средств либо фриспинов для игровых автоматов, коие начисляются на акк игрока в процедуры регистрации на сайте заведения. Для получения таких поощрений депозит не потребуется.Варианты выигрыша зависимости от Вашей успеха и условий игорного портала. Выше мы заявили, собственно некоторые бездепозитные бонусы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются другие, все, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на деньги, возможно выиграть неописуемые суммы. Сегодняшние игровые автоматы либо видео слоты, как их называют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые множат ставку от х100.000. скачать 1×slots официальный сайт Как и акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такого предложения считаются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает свежих посетителей и разрешает им составить впечатление о функционале, не рискуя вескими совокупностями.Казино дает вероятность заработать и вывести реальные деньги на бездепозитных бонусах. Обычно, это малозначительная сумма, которую казино возможность себя позволить подарить игроку.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.rusdrama-az.com/support/51-sluzhba-tehnicheskoy-podderzhki-sayta.html>1×slots актуальное зеркало</a>
<a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=95274>1×slots бездепозитный бонус за регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Промообъявления от казино не дают реальной картины и направлены на привлечение внимания юзеров. Понять, насколько высоки шансы остаться в плюсе, позволит собственный тест критерий предложения: Создание аккаунта. На сайте казино нужно обнаружить регистрационную форму и наполнить пустопорожние поля собственными данными. Иногда на данном этапе потребуется указать лишь адресок электронной почты и пароль, хотя чаще хотелось заполнить анкету персональной информацией (ФИО, дата рождения, место проживания и т.д. ). Нужно свидетельствовать только настоящие данные, потому впоследствие они будут испытаны.
#3538 Charlesgunnyhttp://filmkachat.ru
casino 1×slot
Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. <a href=http://filmkachat.ru/>1×slots коды</a> Такие поощрения разрешают даром протестировать новое казино, разобраться с игровым ходом онлайн слотов, заработать и вывести небольшую необходимую средств.В разделе с бонусами активировать свой презент. Найти забавы, для коих предусмотрено одобрение и использовать приз по назначению. <a href=https://forum.gazeta.pl/forum/w,678,178514327,178514327,Skup_aut_za_gotowke_Krakow_najlepsze_oferty.html>https://forum.gazeta.pl/forum/w,678,178514327,178514327,Skup_aut_za_gotowke_Krakow_najlepsze_oferty.html</a> 1×slots зеркало которую указывали при регистрации кстати <a href=http://www.85sucai.com/member/index.php?uid=healthywager5>http://www.85sucai.com/member/index.php?uid=healthywager5</a> А ознакомиться с свежими интернет казино, Вы можете помощью бонусов с выводом выгоды, коие Вы сможете получить без депозита.Бездепы имеют входить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой либо баллами.
1×slots casino регистрация 1×slotscasino09k online
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=388320>1×slots быструю регистрацию а также мгновенное</a> 1×слот регистрация в 1×slots casino <a href=https://aryba.kg/user/JeffreyAppEn/>https://aryba.kg/user/JeffreyAppEn/</a> Каждый из бездепозитных бонусов без пополнения 2022 имеет собственный определенный вейджер для отыгрыша, например же в каждом казино он уточняется персонально — где то он х55 а где-то х30, повторюсь всюду по различному! 1× slots официальный Наш список содержит наилучшие бездепозитные бонусы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает проверку по принципиальным характеристикам:
1×slots регистрация
Многие казино деют в маркетинговых целях благотворительные призы самая для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой вебсайт по партнерской ссылке с нашего портала. Вейджер в переводе с английского означает «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша полученного приза, в нашем случае бездепозитного. Число ставок не — важно только набрать сумму, пропорциональную сумме одобрения. <a href=http://foru1f40m.bunbun000.com/bbs/home.php?mod=space&uid=9394633>http://foru1f40m.bunbun000.com/bbs/home.php?mod=space&uid=9394633</a> Бездепозитный бонус казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби избранного заведения, определится в выборе игр и выяснить качество работы саппорта. Довольно нередко, начиная игровой процесс, игрок уже отказывается останавливаться и делает реальный вклад. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать бесплатно вполне как раз таки с призом за регистрацию без надобности заносить депозит. 1×slots зеркало сайта
1хслотс рабочее зеркало на сегодня
Обычно для получения бонусов без депо, казино выдвигает лояльные и вполне выполнимые обстоятельства, но есть ряд действий коие запрещены и все причиной неприятные результаты:У любого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано смогли выполнить их, мы дадим некоторое советов. Если система начислила небольшую сумму, не создавать немалые ставки – остановитесь на 10–30 центах. Как лишь сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте выступать. В неприятном случае какого-либо приглядеться к другому автомату. <a href=http://www.arka-bahce.org/forum/showthread.php?p=764382#post764382>скачать 1×slots на андроид мобильная версия</a> Баланс игрока пополняется на подобающую необходимую. К ней используется вейджер, указанный в правилах промоакции. Вывести выигрыш можно несомненно после как, как пользователь устроит требуемый размер ставок из собственных средств. В редких случаях бездеп работает в формате Free Play. На счет пользователя зачисляется большая сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по завершении сего периода сумма на счету будет превышать первоначальную, то разность возможно будет вывести или использовать для последующих ставок. Возможность сыграть вспомогательное соревнование (а от и несколько) совершенно безвозмездно, а выигрыш, же, поступает на счёт игрока.Вейджер (либо вагер) ? это минимальная сумма ставок, которую нужно устроить для вывода денежного бонуса. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим красивее спецпредложение. 1×slots casino зеркало рабочее <a href=http://hongtouwen.com/home.php?mod=space&uid=486516&do=profile>http://hongtouwen.com/home.php?mod=space&uid=486516&do=profile</a>
казино 1×slots
Суммы сходственных услуг, большинстве, колеблются от 3-х до двадцати долларов, а вейджер на эти средства должен сочинять от тридцати до шестидесяти один. Зачастую, наивеличайшая сумма выигрыша тут составит от одной до двух сотен долларов. Если в выиграет больше, то все свои могут быть списанными до очень разрешенного выигрыша. Здесь замечена содержание выводить еще несуществующие финансы на собственную платежную систему и далее находить заведение с подходящими под данную необходимую релоадом либо призом за 1-ое пополнение счета. Есть несколько подвидов бездепозитного гонорары, предлагаемого большим количеством заведений.Вы не в коем случае ни чем не рискуете, а только выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, выучится регулировать менять ставки и полосы, изучать бонусные забавы и их выигрышные комбинации, ну в конце концов просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные свои, которые можно отыграть и исключить, а не просто на демо счет, тем наиболее адреналин в крови еще больше повысится а пульс забьется с частым ритмом! <a href=https://gitlab.ifam.edu.br/Bbgatecom0601/nitroethane/-/issues/3>https://gitlab.ifam.edu.br/Bbgatecom0601/nitroethane/-/issues/3</a> Такой бесплатный эквивалент средств зачисляется на профиль пользователя после воплощения притязаний и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений возможен лишь после воплощения вейджеровых критерий.Бонус за регистрацию в казино без депо с выводом средств нужно отыграть. Зачастую для отыгрыша возможность потребоваться устроить ставки на необходимую, в несколько 10-ов раз превышающую сумму приза либо выигрыша. 1×slots официальный сайт мобильная версия При отыгрыше бонусных средств, необходимо учесть срок деяния бонуса и время, которое дается на отыгрыш. По истечению заявленного медли, не отыгранный приз несомненно аннулирован.Проверка занимает от нескольких минут до нескольких дней, профессионалы техподдержки шансы запросить вспомогательные документы или инициировать куцее общение по Skype.
<b>Смотреть еще похожие новости:</b>
<a href=http://permitbeijing.com/forum/showthread.php?tid=2199749>1×slots на любой вкус как пройти регистрацию</a>
<a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=841060>1×slots официальный сайт зеркало</a>
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=468778>1×slots официальный сайт, скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Прочитайте верховодила бонусной программы, в хотите участие. Да, мы настоятельно рекомендуем устроить это до регистрации.
#3539 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало слоты 1×bet xyz porno Алена Косторная (фигурное катание) <a href=https://glvk.guru/>Елизавета Боярская</a> фильмы казино рояль casino приложения <a href=https://7club7.com/>casino pin официальный</a> букмекерская контора мостбет рабочие зеркала казино 1×bet зеркало на сегодня 1×bet xyz 1×bet xbet xyz пин up casino Попова Анна Юрьевна порно Крючкова Полина Викторовна порно
DiskiPlus бывшие казино DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz <a href=https://www.diskiplus.ru/>DiskiPlus часы казино</a> DiskiPlus porno Алена Косторная (фигурное катание) DiskiPlus top casino <a href=https://www.diskiplus.ru/>DiskiPlus казино большая</a> DiskiPlus порно с Сергей Бобровский (хоккей) DiskiPlus kent casino DiskiPlus лучшие букмекерские конторы DiskiPlus букмекерская контора фонбет официальный сайт DiskiPlus casino официальный зеркало DiskiPlus кент casino DiskiPlus 1×bet
#3540 Charlesgunnyhttp://filmkachat.ru
1×слотс казино
Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и. Когда игроку надеется много фриспинов, администрация имеет разбивать их начисление на несколько дней. Бесплатные вращения предоставляются для конкретного слота, который указывается в правилах промоакции. <a href=http://filmkachat.ru/>1×slots зеркало регистрация</a> Чаще всего используются коды. Их надо(надобно) заносить в особые окна регистрационной анкеты, случае речь идет о пригласительных бонусах, либо в особом разделе личного кабинета игрока.Все безвозмездные призы кажутся соблазнительными. Кто же откажется от возможности сыграть в онлайн-казино, не рискуя деньгами, хотя получая выигрыши. Но далеко не все бездепозитные бонусы мере привлекательны для рассудительного посетителя. <a href=https://www.astrobin.com/users/architects/>https://www.astrobin.com/users/architects/</a> 1×slot зеркало рабочее регистрации на телефон придет <a href=http://eng.nexgelbio.com/bbs/board.php?bo_table=free&wr_id=21822>http://eng.nexgelbio.com/bbs/board.php?bo_table=free&wr_id=21822</a> Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и. Когда игроку надеется много фриспинов, администрация возможность бить3 их начисление на несколько дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах акции.
1×slots зеркало рабочее
При верном раскладе бездепы — это прекрасный метод выступать на деньги без траты личных средств. Есть несколько советов, следуя которым можно извлечь максимум полезности из подобных промоакций казино. Играть стопам лишь на лицензированных площадках. Скриптовые веб-сайты не только обманывают с бонусными услугами, но и используют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах нереально.Но на некоторых азартных платформах похожие вознаграждения имеют получить теперь зарегистрированные пользователи. В таком случае, призы предоставляются в рамках уникальных промоакций либо же некоторым игрокам вид акционного предложения, коие приходит на почту с целью «возвратить» игрока в свое казино. 1×slots бездепозитный бонус за регистрацию Особую изюминку видео слотам присваивают уникальные знакы. С их выходом активизируются разные призы. Вы можете запустить дополнительный уровень и увеличить сумму выигрыша. Есть знаки, которые замещают ненадобные составляющие и сами создают выигрышные комбо. Не стоит забывать и на бонус-тур. После каждого удачного спина есть шанс прирастить необходимую выигрыша в 2 либо хорошо раза.В интернете много известных игорных площадок с красивыми акционными услугами. Однако внимательно разбирать обстоятельства 10-ов услуг скором надоест, да и время отнимет много. Поэтому наша команда подготовила ТОП-3 вебсайтов с превосходнейшими бездепозитными призами: <a href=http://miupsik.ru/forums/member.php?action=profile&uid=6312>http://miupsik.ru/forums/member.php?action=profile&uid=6312</a> Большинство клубов привлекают внимание в за счёт разнородных даров. На 1 веб-сайтах возможно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает безвозмездные вращения для запуска топовых онлайн слотов. Несмотря на различные промоакции, стоит выделить самые основные.Баланс игрока дополняется на подходящую сумму. К ней применяется вейджер, обозначенный в правилах акции. Вывести выигрыш возможно будет последствии того, как юзер сделает требуемый объем ставок из личных средств. В редчайших случаях бездеп трудится в формате Free Play. На счет юзера зачисляется крупная сумма, и предоставляется маленький срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по окончании этого периода сумма на счету несомненно превосходить изначальную, то разницу можно несомненно исключить либо применять для дальнейших ставок. 1×slots casino зеркало рабочее Вейджер (либо вагер) ? это наименьшая сумма ставок, коию нужно устроить для вывода денежного приза. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение.Многие игроки, оценив функционал казино, остаются играть в нем и далее ? на это и направлено любое промо. Постоянные клиенты заносят депозиты и делают ставки, обеспечивая длительную прибыль оператора. То есть, казино выдают бездепы новым юзерам для формирования лояльной аудитории.
casino 1×slot
Как только получите бездеп в казино, всё одинаково не забывайте проверять электрическую почту. Некоторые игорные клубы каждый радуют активных гэмблеров приятными бонусами. Чаще всего получить подарок можно в преддверии веселья, на день рождение, за вербование друга. А того распространённым призом считается надбавка к депозиту. Нужно более пополнить счёт, и азартное заведение увеличит его на 50–100%.Если вы выбрали себе несколько брендов которые вас больше всего полюбились, для постоянной забавы! Таких гемблеров казино очень предпочитает и оценивает, за частую такие игроки становятся VIP игроками заведения, которым часто поступают прибыльные предложения в виде призов, так же туда входит и бездепозитные. Обыкновенные бездепозитные призы в объеме от 3-х до двадцати долларов сделаны чтобы, чтобы, чтобы в забавы заходили все новые и свежие игроки. Здесь, скорее, будет лимитирование на максимальный выигрыш. Важно, чтобы перед наименьшим вкладом был отключен бонус за 1-ое пополнение счета, и в не попадет на повторный вейджер.Ещё одно распространённое акционное предложение – привлекательный подарок с неблаговидными требованиями. К примеру, клуб сулит $100 виде бездепа, но с вейджером х80 либо х100. Отыграть подобный вейджер практически невозможно и потому чем концентрироваться на более заманчивых промоакциях. <a href=http://xn–b1acebaenad0ccc3aiee.xn–p1ai/forum/user/15958/>http://xn–b1acebaenad0ccc3aiee.xn–p1ai/forum/user/15958/</a> Нельзя рассматривать игру на средства, как вариант заработка. Азартные игры воспрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не является зачинщиком азартных игр. Сайт одевает информационный характер.Чтобы играть бесплатно на реальные деньги в казино, порой достаточно просто зарегистрироваться. Иногда нужно выполнить дополнительные действия. 1хслотс зеркало
казино 1×slots официальный сайт
Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке нужно пополнить счет в казино. Для депозитных призов, данная процедура не нужна, так как депо теснее изготовлен.Но не мыслить, что снабжая пользователей этими бонусами, казино увлекается спонсированием. Ведь объемы вознаграждений, в, не немалые (средним объемом от 5 до 20 $). И на эти свои налагаются определенные обстоятельства и ограничения, обязательные к выполнению игрока, если в последствии он вожделеет получить все свои выигранные финансы. 1×слот регистрация в 1×slots casino <a href=https://images.google.com.mt/url?q=https://doctorlazuta.by/>https://images.google.com.mt/url?q=https://doctorlazuta.by/</a>
1×слот регистрация в 1×slots casino
<a href=https://www.airlines-inform.ru/personal/user/?UID=71528>https://www.airlines-inform.ru/personal/user/?UID=71528</a> Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, all лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. 1×slots зеркало видели такую регистрацию на
<b>Смотреть еще похожие новости:</b>
<a href=http://check2go.net/my-account/>1× slots casino зеркало</a>
<a href=http://complainanything.com/node/158?page=1013#comment-1433002>1× slots официальный</a>
<a href=https://timepost.info/showthread.php?tid=102080>1×slots регистрация 1×slots casino 777 online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Активация по промокоду употребляется в разных обликах бездепов. Если речь о приветственном бонусе, то набор знаков возможно разузнать на главной странице, в регистрационной форме либо послании, коие отправляется юзеру для доказательства адреса электронной почты. Акции имеют проводиться общо с партнерскими площадками. Обычно код размещается на стороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активируется разовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем актуальный код для активации в описании любого рекламную. С не отыгранным призом воспрещается превосходить размер максимальной ставки. Нарушение этого условия в аннулирование выигрыша.
#3541 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Анна Щербакова, фигуристка порно с Федор Чалов (футбол) <a href=https://th-royalgclub.com/>porno Илона Маркова, хоккеистка</a> демо казино гама казино <a href=https://t.me/vchkogpu_ru>up casino скачать</a> казино вход 1win букмекерская контора casino riobet официальные букмекерские конторы up casino официальный порно с Антропова Валентина Викторовна Светлана Ходченкова
DiskiPlus Окладникова Ирина Андреевна порно DiskiPlus где казино <a href=https://www.diskiplus.ru>DiskiPlus порно с Владимир Минеев (ММА)</a> DiskiPlus порно с Анна Щербакова, фигуристка DiskiPlus Любимова Ольга Борисовна порно <a href=https://www.diskiplus.ru/>DiskiPlus официальные букмекерские конторы</a> DiskiPlus kent casino DiskiPlus online casino официальный DiskiPlus Нургалиева Эльвира Рамиловна порно DiskiPlus cat casino DiskiPlus букмекерские конторы в россии DiskiPlus 7k casino бонус DiskiPlus яндекс казино
#3542 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пин ап casino pin up top букмекерская контора без <a href=https://rhymes-punches.com/>up casino официальный</a> демо казино порно с Александр Головин (футбол) <a href=https://glvk.guru/>букмекерская контора мостбет</a> gama casino официальная казино 1×bet зеркало Кузнецова Анна Юрьевна порно online casino официальные сайты казино 1×bet официальный сайт
DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz DiskiPlus kent casino регистрация <a href=https://diskiplus.ru>DiskiPlus казино онлайн бесплатно</a> DiskiPlus porno Юлия Канакина, скелетонистка DiskiPlus Анна Михалкова <a href=https://www.diskiplus.ru/>DiskiPlus официальные букмекерские конторы</a> DiskiPlus Мухтиярова Елена Вячеславовна порно DiskiPlus игры казино DiskiPlus up casino зеркало DiskiPlus пин ап букмекерская контора DiskiPlus казино фильм DiskiPlus вывод казино DiskiPlus pin up casino пин ап
#3543 Charlesgunnyhttp://filmkachat.ru
1×slots casino зеркало
Казино выводит деньги лишь на что, эту платежную систему, с котрой был изготовлен депо. То есть, для вывода бездепозитного бонуса, Вам сначала нужно восполнить счет. В неких клубах узкий список способов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с данных платежных способов, коие доступны для вывода. <a href=http://filmkachat.ru/>casino 1×slot</a> Список например именуемых «разрешенных землель» прилагается к правилам бонусной программки игорного портала. Обязательно выясните, распространяются ли на вас сходственные наказания.Так что приготовьтесь дать конфиденциальную информацию (пол, возраст, государство проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает не более суток, последствии чего удастся свободно выводить солидные выигрыши. <a href=https://updownradar.com/status/playhouse.com.ua>https://updownradar.com/status/playhouse.com.ua</a> Бонус за регистрацию в казино без депо с выводом средств нужно отыграть. Зачастую для отыгрыша имеет понадобиться устроить ставки на сумму, в несколько 10-ов раз превосходящую сумму бонуса или выигрыша. 1×slots коды <a href=https://a-memorial.com/blogs/Rabofree/avtoshkola-vladivostok.php>https://a-memorial.com/blogs/Rabofree/avtoshkola-vladivostok.php</a> Вейджер (либо вагер) ? это наименьшая сумма ставок, которую необходимо сделать для вывода денежного приза. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение.Выбор любого онлайн казино на нашем веб-сайте. В описании к каждому Вы сможете разузнать, что получите за создание аккаунта.
1×slots casino зеркало рабочее
Ну и естесственно же, для казино бездепозитные призы прибыльны с имиджевой стороны: сходственная щедрость увеличивает уровень лояльности посетителей к компании.Новые посетители онлайн-казино без первого депозита шансы проверить собственную удачливость. К что, этому же есть вероятность конвертировать бездепы в настоящие деньги за регистрацию в казино, однако достичь бонус нужно отыграть сообразно условиям акции. <a href=http://permitbeijing.com/forum/showthread.php?tid=2233357>1×slots официальный сайт зеркало</a> 1× slots casino зеркало С не отыгранным бонусом запрещается превышать объем наибольшей ставки. Нарушение сего условия иметь аннулирование выигрыша. <a href=https://images.google.pt/url?q=https://doctorlazuta.by/>https://images.google.pt/url?q=https://doctorlazuta.by/</a> 1×slots рабочее зеркало Например, игрок получил 500 руб. При твореньи аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., потребуется сделать 875 спинов для полного отыгрыша.Бонус начисляется игроку незамедлительно последствии регистрации и прохождения верификации в казино и не настятельно от клиента внесения депо. Как верховодило, объем приза в подобном случае довольно умеренный, впрочем дозволяет новичкам познакомиться с забавой без риска настоящими средствами.
1×slots casino зеркало
Чаще всего интернет-казино предлагают бездепозитные призы новым юзерам. Эта промо-акция довольно эффективно завлекает начинающих, подталкивая их к открытию счета. Конечно, не все становятся преданными клиентами, хотя сам факт регистрации аккаунта играет на руку заведению.Бездепозитный бонус за регистрацию в казино — это стартовый подарок в виде валютного начисления либо бесплатных вращений для свежих игроков заведения, для получения которого не вносить депо. Бездепы имеют входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами.Лишь популярные и известные азартные заведения имеют позволить для выдавать бездепы вид дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депо, коие можно израсходовать в лучших аппаратах с высочайшей отдачей. <a href=https://earthmyhome.com/User-7535>https://earthmyhome.com/User-7535</a> 1×slots регистрация на официальном сайте Размер призов почаще всего чисто условный и не превышает 50 руб. Приятно, но ощутимым бустом в игре навряд будет.Условия отыгрыша бонуса. Если Вы планируете заработать на бездепозитном бонусе, то для обратите внимание на велечину вейджера и срок, кот-ый дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть приз и вывести выигрыш.
1×slots регистрация на сайте 1×slots ru com
<a href=https://thetechmodders.com/forums/memberlist.php?mode=viewprofile&u=945>1×slots коды</a> Как верховодило, при выводе финансов, от играющего требуется лишь устроить наименьший вклад для того, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом собственный счет. Для проверки используются сканы паспортов, водительских удостоверений, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь обнаружен в попытке ввести вспомогательный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный перечень. При этой на лицензионной площадке не опасаться свидетельствовать достоверную индивидуальную информацию (шифрование исключает утечку индивидуальных данных). 1×slots официальный сайт мобильная версия <a href=http://bbs.xinhaolian.com/home.php?mod=space&uid=4708103>http://bbs.xinhaolian.com/home.php?mod=space&uid=4708103</a> Стоит отметить, что бездепозитный бонус выдается лишь совершеннолетним новеньким, которые, тому, имеют пригласить собственных друзей и людей, того претендующих на поощрительную программу лояльности. Подобная технология была между соперничающих онлайн-казино для популяризации и расширения трафика. Покер румы и спонсоры содействуют увеличению своей посещаемости, путем вербования новых игроков. Бонусы – это уникальный шанс для вероятных участников забавы, которые имеют опробовать софт покер рума и убедиться, будут ли они в него играть либо нет. Новый игрок попробует средства силы с настоящими оппонентами в казино.Бездеп с фриспинами может обхватывать всю коллекцию игр на веб-сайте или разработки 1-го провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш возможность быть выведен последствии такого, как юзер отыграет эту необходимую. Возможность оценить глубокий возможностей слотов — главное достоинство этой разновидности. Игроку становятся доступны что, эти функции, которые отсутствуют в демонстрационном режиме, а возможность выиграть реальные деньги прибавляет ярчайших азартных ощущений.
1× slots официальный
4. Заберите подарок. Чаще всего бонус активизируется незамедлительно после регистрации. Но случаются истории, когда надо(надобно) зайти в личный офис или написать в службу поддержки.Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, чтобы замечена вероятность вывести выигрыш. <a href=http://222.239.231.61/bbs/board.php?bo_table=free&wr_id=5492043>http://222.239.231.61/bbs/board.php?bo_table=free&wr_id=5492043</a> 1×slots официальный сайт скачать на айфон Внесение депозита – Будьте готовы восполнить счет последствии отыгрыша приза. Это обычное требование верховодил для данного типа промо-акций. Лучше заранее уточнить, какую необходимую надо(надобно) будет заносить на счет. Как верховодило, речь о минимальном депозите, хотя вы обязаны быть уверены, что он вам по кармашку.Осталось выбрать казино с призом за регистрацию и создать профиль. После активации подарка выигрыш зависит от Фортуны и способностей.
<b>Смотреть еще похожие новости:</b>
<a href=http://aficionado.pl/showthread.php?141592–1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D0%BD%D0%B0-%D1%81%D0%B5%D0%B3%D0%BE%D0%B4%D0%BD%D1%8F&p=160782>1×slots зеркало на сегодня</a>
<a href=https://showboysmedia.com/real-music/#comment-99786>1×slots casino зеркало рабочее</a>
<a href=https://thetechmodders.com/forums/viewtopic.php?t=67327>1х слотс зеркало регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Когда идет о получении бездепозитных бонусов в казино, для обратите внимание на следующие обстоятельства:
#3544 Charlesgunnyhttp://filmkachat.ru
1 x slots
Призовые начисления без депозита шансы предоставляться для роли в турнирах интернет казино. Потратить перечисленные средства можно самая масштабах этой промоакции. Условия их проведения содержат ограничения на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться этим предложением, лучше выучить его правила.Бездепы обыкновенно предлагают с отыгрышем — моментально исключить выигранные средства нельзя. Перевод средств со счета будет вероятен в того, как пользователь выполнит все притязания казино, а сумма возможности превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, на коих клиент вправе пользоваться предложением. Обычно они не превышают нескольких дней в активации. <a href=http://filmkachat.ru/>1×slots регистрация на сайте</a> Для казино, работающих онлайн, бездепозитные бонусы необходимы для привлечения свежих клиентов. Предложение сыграть на слотах без надобности внесения настоящих денег — работающий метод для повышения энтузиазма к фирмы. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит выступать в казино, только теперь теснее на личные средства.Классическая разновидность приза за творение аккаунта. Его превосходство содержится что, нет, что клиент возможность самостоятельно подбирать аппараты и создавать ставки в них. Иногда перечень игровых автоматов ограничен оператором, но все одинаково это другого, как, чем единственный доступный слот, как если, тогда, с внедрением фриспинов. <a href=https://www.exoltech.ps/blogs/post/89899>https://www.exoltech.ps/blogs/post/89899</a> В бонусную программу многих операторов входят регулярные бездепы. Это бессрочные акции, поощряющие активных постоянных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают постоянные бонусы без депозита в обмен на накопленные баллы преданности. 1× слот зеркало <a href=http://mkala-koncert.ru/users/testyprogressio>http://mkala-koncert.ru/users/testyprogressio</a> Постарайтесь отыграть вейджер, дабы была вероятность оставить заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные приборы. Вы сможете получить выигрыш на электрической кошелёк, карту, телефон.Сразу последствии активации промокода можно пользоваться презентом. Как теснее упоминалось, бонусы посещают трёх видов – фриспины, кредиты и фриплей-бонусы.
1×slots casino зеркало
Вы не в коем случае ни чем не рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный приз, по мимо практической забавы на бездепозитные бонусы, у Вас есть шанс изучить игровые автоматы, выучится регулировать изменять ставки и линии, изучать бонусные игры и их выигрышные композиции, ну счете просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные средства, коие можно отыграть и вывести, но просто на демо счет, что, этим наиболее адреналин в крови еще больше повысится а пульс забьется с нередким ритмом! <a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=4286>казино 1×slots</a> 1×slots рабочее зеркало Так собственно можете смело регистрироваться без всяких размышлений. Фортуна сейчас точно на вашей стороне. Не опасайтесь, так последствие какого либо убытка Вам совершенно не грозит. С этими призами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе. <a href=http://avtoserviskovrov.ru/index.php?subaction=userinfo&user=encouragingklut>http://avtoserviskovrov.ru/index.php?subaction=userinfo&user=encouragingklut</a> 1×slots регистрация 1×slots casino c2d ru Главное превосходство спинов – вероятность выучить различные слоты. Также удастся насладиться бонусными раундами, испытывать фортуну в риск-туре и преумножить выигрыш за счёт особых знаков. Однако столько игровой процесс заслуживает внимание, так другого, как сосредоточиться на реальном выигрыше.Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.
1×slots casino online регистрация
<a href=http://kbszw.com/home.php?mod=space&uid=25213>http://kbszw.com/home.php?mod=space&uid=25213</a> Однако далековато не все ресурсы предлагают своим клиентам бездепозитные призы за регистрацию в казино. В большинстве случаев учтено одобрение на 1-ый депозит в размере 100–200%. Это отличная возможность преувеличить банкролл, прирастить время, проведённое за игрой и шансы сорвать крупный куш. 1хслот 1хслотс регистрация перейти на 1×slots
1хслотс рабочее зеркало
1×slots casino регистрация 1×slots review live <a href=http://mebel-stroy.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=http://shindodomestic.ru/bitrix/click.php?goto=http://shot51.ru/bitrix/redirect.php?goto=https://telegra.ph/Ponimanie-togo-chto-pishetsya-v-diplome-bakalavra-09–24>http://mebel-stroy.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=http://shindodomestic.ru/bitrix/click.php?goto=http://shot51.ru/bitrix/redirect.php?goto=https://telegra.ph/Ponimanie-togo-chto-pishetsya-v-diplome-bakalavra-09–24</a> Баланс игрока пополняется на подходящую сумму. К ней используется вейджер, указанный в правилах акции. Вывести выигрыш можно будет в такого, как пользователь сделает требуемый объем ставок из собственных средств. В редчайших случаях бездеп трудится в формате Free Play. На счет пользователя зачисляется крупная сумма, и предоставляется малый срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по окончании сего периода сумма на счету несомненно превосходить первоначальную, то разницу возможно несомненно вывести либо использовать для дальнейших ставок.
казино 1×slots официальный сайт
Вы всего, как и все любите получать презенты и бездепозитные призы казино. Игорные жилища взяли в повадку одаривать гэмблеров приятными бонусами. Стать владельцем приветственного подарка можно за создание профиля или пополнение счёта. Второй вариант более занимательный, как клубы готовы удвоить депозит! Но если вы новичок и только знакомитесь с миром пыла, чем воспользуйтесь бонусом за регистрацию.Самый распространённый из сходственных бонусов, естесственно же, бездеп на денек рождения клиента — приз повторяющий фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им возможно на установленного периода медли. <a href=http://www.sinoright.net/member/index.php?uid=faultyoomph45&action=viewarchives&aid=5628>http://www.sinoright.net/member/index.php?uid=faultyoomph45&action=viewarchives&aid=5628</a> Наиболее популярные вознаграждения среди гэмблеров – бездепозитные бонусы казино. Это не изумительно, как возможно получить благотворительные вращения или виртуальные кредиты, и при этом не придётся пополнять счёт, рисковать личными деньгами. Удастся насладиться разнородными развлечениями причем выиграть солидную необходимую, избегая серьёзного риска. 1 х слотс зеркало Подтверждение электронной почты – одно из главных условий, коие есть почти в любом бездепозитном казино. Чтобы верифицировать электрическую почту, довольно перейти по активной ссылке в письме, полученном от азартного клуба.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.animogen.com/viewtopic.php?f=9&t=1573922>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Зачастую бездепозитные бонусы казино для игры предлагаются различными заведениями азартных игр в качестве рекламных акций либо в целях привлечения к для новых игроков. Для бездепозитных бонусов в казино 2022 геймеру надо пополнять счет до этапа вывода желаемых средств. Создание аккаунта. На веб-сайте казино необходимо обнаружить регистрационную форму и наполнить пустые поля личными данными. Иногда на данном шаге потребуется показать только адрес электронной почты и пароль, но почаще бы наполнить анкету индивидуальной информацией (ФИО, дата рождения, место проживания и т.д. ). Нужно указывать только настоящие данные, что впоследствие они станут проверены.
#3545 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet приложение 1×bet слоты 1×bet top <a href=https://rucriminal.info/>Радченко Светлана Юрьевна порно</a> винлайн букмекерская контора официальный сайт Ирина Горбачева <a href=https://rucriminal.info/>porno Анна Сидорова, керлингистка</a> скачать букмекерскую контору Манилова Алла Юрьевна порно porno Илья Ковальчук (хоккей) pin up casino top top порно с Антропова Валентина Викторовна включи казино порно с Юлия Ефимова
DiskiPlus порно с Владимир Минеев (ММА) DiskiPlus 1×bet телефон <a href=https://www.diskiplus.ru/>DiskiPlus porno Юлия Канакина, скелетонистка</a> DiskiPlus порно с Константин Тюкавин (футбол) DiskiPlus порно с Карен Хачанов (теннис) <a href=https://diskiplus.ru/>DiskiPlus автомат казино</a> DiskiPlus порно с Дарья Клишина, легкоатлетка DiskiPlus автомат казино DiskiPlus casino регистрации DiskiPlus порно с Константин Тюкавин (футбол) DiskiPlus порно с Константин Тюкавин (футбол) DiskiPlus casino актуальное зеркало DiskiPlus 1×bet зеркало рабочее
#3546 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasino09k online
В перечне притязаний к отыгрышу часто присутствуют лимиты на ставки при забаве на собственные средства. Так, в отыграть нужно 30 000 руб., а предельная сумма ограничена 30 рублями, то вертеть барабаны светит 1000 раз. Эта особенность затрудняет соблюдение игроками условий по срокам деянья акции.Oтыгpaть бонус с указанным вeйджepом, для этого необходимо сдeлaть cтaвoк нa cумму, превосходящую размер бонуса в несколько раз. <a href=http://filmkachat.ru/>1×slots зеркало сайта</a> <a href=https://app.planable.io/review/yzJzBgxH_Ikg>https://app.planable.io/review/yzJzBgxH_Ikg</a> казино 1×slots официальный сайт <a href=https://www.jiebbs.net/home.php?mod=space&uid=232537&do=profile&from=space>https://www.jiebbs.net/home.php?mod=space&uid=232537&do=profile&from=space</a>
1× slots casino зеркало
Таким образом интернет казино получает вероятного игрока. Возможно в или подлинном он захочет сыграть на средства средства. Так работают бездепозитные бонусы в интернет казино. Здесь очень подходит выражение, благотворительные сыр посещает только в мышеловке. Начинающие игроки шансы не осознавать опасность пыла. Однако со временем осознания становится больше. Это тема для отдельного обсуждения.Следует подчеркнуть, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам либо с конкретным кодом. 1хслотс 1хслотс регистрация перейти на 1×slots Высокая конкуренция в сегменте азартных игр доказывает операторов привлекать посетителей различными промоакциями. Благодаря этому у посетителей появляется возможность получить бонусы в казино за регистрацию без депо. Воспользоваться этим предложением возможно, избегая процедуру внесения денег на игровой счет, просто активировав акк на веб-сайте. Наш экскурсовод по бездепам поможет избрать самую симпатичную бонусную программку, разузнать управляла получения такого гонорары и воспользоваться им с наибольшей выгодой.Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы появилась возможность вывести выигрыш. <a href=http://brnk.in.ua/user/AnthonyNourf/>http://brnk.in.ua/user/AnthonyNourf/</a> 1хлот регистрация в 1×slots casino Иногда в качестве бездепа, казино дарит наименьший бонус (до 50 руб. ), из-за которого надо заморачиваться.
1×slots официальный сайт мобильная версия скачать
<a href=http://mtpkrskstate.ru/forum/user/206441/>http://mtpkrskstate.ru/forum/user/206441/</a> 1×slots сайт Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?
1×slots casino регистрация на сайте
Казино выводит средства лишь на что, эту платежную систему, с котрой был сделан депозит. То есть, для вывода бездепозитного бонуса, Вам сначала нужно пополнить счет. В некоторых клубах ограниченный перечень методов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с данных платежных способов, которые доступны для вывода. Многие азартные клубы ограничивают сумму вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, обозначенной в описании промоакции, суммы Вы не сможете вывести. Разница будет аннулирована, Вы в не можете создавать на нее ставки.Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? 1× slots зеркало <a href=https://acerfans.ru/user/Jamesnaw/>https://acerfans.ru/user/Jamesnaw/</a>
1×slots зеркало на сегодня
Перечисленные повыше основные свойства сочетают практически каждый приз и являются стандартными для бездепозитных бонусных начислений в казино.Некоторые сайты, этого чем провести регистрацию игроков, предлагают ответить на количество базовых вопросов. Цель проведения сходственной викторины – выявить случайных людей, которые не имеют представления о покере, и не допустить получения ими бонусов. Если гость теснее играл в казино, то ответить на полтора 10 простых вопросов несомненно несложно. Очень нередко, ответы можно отыскать на официальных сайтах этих учреждений. <a href=https://637600.xyz/profile.php?id=14808>https://637600.xyz/profile.php?id=14808</a> Поспешите зарегистрироваться на официальном сайте Клубника, дабы моментально получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, замечена настоящий шанс победу! 1×слотс казино Игрокам стоит принимать приветственный бонус как гарантированный способ получить большой выигрыш, хотя это отличная возможность без затрат оценить перечень казино.Кешбэк-бонус дает собой возврат фиксированного процента от ставки когда проигрыша или же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не выше 10%.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.forum.kalor.ru/1×slots-mobilnaya-versiya-voyti-kazino-t11229.html>1×slots мобильная версия войти казино</a>
<a href=http://www.arka-bahce.org/forum/showthread.php?p=777888#post777888>1×slots скачать на айфон</a>
<a href=http://www.airsoft44.com/forum/index.php?action=profile;u=11896>1× slots casino официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чем ниже значение вейджера, тем легче отыграть и вывести приз. Если Вы планируете заработать на бездепе, но просто ознакомиться с новым игровым клубом, то стоит избегать бонусов с высочайшим вейджером их практически не реально отыграть. С ними Вы сможете только протестировать забавы заведения.
#3547 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Ангелина Гончаренко, хоккеистка скачать casino на андроид <a href=https://strelochnik.com/>гта казино</a> казино играть порно с Никита Кучеров (хоккей) <a href=https://rucriminal.info/>porno Илья Ковальчук (хоккей)</a> black russia казино up casino официальный porno Александр Соболев (футбол) пин ап казино казино 5 casino играть up casino официальный
DiskiPlus Лут Оксана Николаевна порно DiskiPlus букмекерские конторы без депозита <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet слоты официальный сайт</a> DiskiPlus казино смотреть онлайн бесплатно DiskiPlus порно с Александр Большунов (лыжные гонки) <a href=https://diskiplus.ru/>DiskiPlus порно с Гатагова Ольга Анатольевна</a> DiskiPlus порно с Антропова Валентина Викторовна DiskiPlus 1×bet зеркало слоты 1×bet xyz DiskiPlus песня казино DiskiPlus букмекерские контора ап DiskiPlus букмекерская контора фонбет официальный DiskiPlus порно с Анна Щербакова, фигуристка DiskiPlus бк букмекерская контора
#3548 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало
В большинстве заведений сделать это можно по e-mal, по номеру телефона, через социальную сеть или гугл-аккаунт. <a href=http://filmkachat.ru/>1×slots регистрация на 1хслотс</a> Активация валютного гонорары происходит автоматически после творения профиля или применения промокода. Иногда операторы предъявляют вспомогательные притязания: подписаться на странички казино в социальных сетях либо на рассылку маркетинговых сообщений, скачать и ввести вспомогательный софт и т.д. <a href=https://penposh.com/blogs/322516/Professional-Furniture-Detail-Drawing-Services-Technical-Drafting-Solutions>https://penposh.com/blogs/322516/Professional-Furniture-Detail-Drawing-Services-Technical-Drafting-Solutions</a> Приветственный бездеп предоставляется хоть игроку лишь раз один. Казино дерутся с например нарекаемыми бонусхантерами (от англ. Bonus Hunter — доброволец за призами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения презента. Исключить подобные деяния дозволяет верификация данных. Администрация вправе потребовать у клиента подтвердить персональные данные, обозначенные при регистрации.Получить приветственный приз имеют лишь свежие клиенты онлайн-казино. Способы описаны в критериях акции каждого легального казино, почаще всего это: 1×slots казино зеркало <a href=http://2012614.com/home.php?mod=space&uid=80646&do=profile>http://2012614.com/home.php?mod=space&uid=80646&do=profile</a>
1×slots casino зеркало рабочее
<a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1х слот регистрация в 1×slots casino</a> 1×slots регистрация 1×slots review live <a href=https://www.sportchap.ru/user/DoctorLazutaEr/>https://www.sportchap.ru/user/DoctorLazutaEr/</a> Необходимость отыгрыша. Вейджер в этом случае выше, чем для бонусов за депо. И пока средства не отыграны, исключить их невозможно. 1×slot регистрация Как правило, при выводе денег, от играющего потребуется лишь устроить минимальный лепта для того, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом индивидуальный счет.Фриплей-бонусы. Бонусы за бесплатную игру есть лишь в неких клубах. Они зачисляются сразу в творенья профиля и действуют недолговременное время. Если у вас нет времени потратить средства, они просто закончатся. Что дотрагивается медли, правило призы срабатывают протяжении 1-го часа.
рабочее зеркало 1хслотс
Бездепозитные бонусы отличный вариант даровой игры в игровые автоматы. Многие пользователи сети не знают, собственно в казино возможно начать выступать полностью даром, а позже исключить выигрыш на банковскую карту или электронный кошелек, иные не доверяют онлайн казино, а третьи успешно играют и выигрывают – и подчас довольно немалые суммы.Какие бонусы у еще получить считая бездепозитного приза за регистрацию в казино? По мимо бездепозитного бонуса, любое онлайн казино предлагает игрокам прибыльное предложение на 1-ый депо, вы совершаете депозит, ваш депо возрастает в двое или в в 3, что, этим самым начать играть возможно с больше солидной суммой, так же не забываем на вейджер на бонусы. Заработать на бездепозитных призах за регистрацию в казино имеет каждый юзер, достигший совершеннолетия. <a href=https://www.hb9lc.org/wiki/index.php/%C3%90%C2%A1%C3%90%C2%B4%C3%90%C2%B0%C3%91%E2%80%9A%C3%91%C5%92_%C3%90%C3%90%C2%B0_%C3%90%C5%B8%C3%91%E2%82%AC%C3%90%C2%B0%C3%90%C2%B2%C3%90%C2%B0_%C3%90%C3%A2%E2%82%AC%E2%84%A2%C3%90%C2%BB%C3%90%C2%B0%C3%90%C2%B4%C3%90%C2%B8%C3%90%C2%B2%C3%90%C3%91%C3%91%E2%80%9A%C3%90%C2%BE%C3%90%C2%BA>https://www.hb9lc.org/wiki/index.php/%C3%90%C2%A1%C3%90%C2%B4%C3%90%C2%B0%C3%91%E2%80%9A%C3%91%C5%92_%C3%90%C3%90%C2%B0_%C3%90%C5%B8%C3%91%E2%82%AC%C3%90%C2%B0%C3%90%C2%B2%C3%90%C2%B0_%C3%90%C3%A2%E2%82%AC%E2%84%A2%C3%90%C2%BB%C3%90%C2%B0%C3%90%C2%B4%C3%90%C2%B8%C3%90%C2%B2%C3%90%C3%91%C3%91%E2%80%9A%C3%90%C2%BE%C3%90%C2%BA</a> 1×slots регистрация 1×slots review live Это тоже безвозмездные деньги, которые поступают на аккаунты свежеиспеченных в последствии регистрирования. А необыкновенность таких бонусов произведено никаких, собственно обретенные финансы обязательно идет применять в продолжении назначенного медли.
1×slots бонус за регистрацию
Так что основное отличие подарка на депо от бездепа – обязательное пополнение счёта. Вы сможете внести депо и преувеличить стартовый капитал или арестовать бездеп и при не придётся рисковать своими сбережениями. Поспешите выполнить обычные требования, и администрация ресурса начисляет щедрое одобрение!Благодаря программке преданности от игорного заведения, возможно взять неплохой старт и без дополнительных инвестициям запустить видеослоты. Кроме того, можно рассчитывать на реальную удачу и получить, без инвестиции личных финансов, великой выигрыш. <a href=http://www.arka-bahce.org/forum/showthread.php?p=768949#post768949>1×slots регистрация 1×slotscasino 56 online</a> 1х слот 1хслотс регистрация перейти на 1×slots <a href=https://www.freebeg.com/forum/member.php?action=profile&uid=23932>https://www.freebeg.com/forum/member.php?action=profile&uid=23932</a>
casino 1×slot
<a href=https://www.alligator.spb.ru/forum/index.php?PAGE_NAME=profile_view&UID=78534>https://www.alligator.spb.ru/forum/index.php?PAGE_NAME=profile_view&UID=78534</a> Существует ли стратегии для отыгрыша бездепозитных бонусов? К огорчению нет, на выигрыши или проигрыши с бонусов, казино или игрок повлиять не, отдача игр происходит от создателей игр.Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам воспрещено начислять призы клиентам, не имеющим денежных средств на счете. Мы предлагаем разглядеть актуальные призы онлайн-казино с лицензией, которые соблюдают законодательство РБ. 1×slots на любой вкус как пройти регистрацию Как управляло, при выводе финансов, от играющего требуется лишь сделать наименьший лепта для того, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом индивидуальный счет.Наши эксперты изучают условия акции, после в ручном режиме проводят их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и параметры. Мы не рекламируем казино, а даем игрокам информацию о наихороших из них.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.infoknygos.lt/smforum/index.php?topic=81726.new#new>1×slots казино мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для казино, работающих онлайн, бездепозитные бонусы нужны для вербования свежих клиентов. Предложение поиграть на слотах без необходимости внесения реальных средств — работающий способ для увеличения энтузиазма к фирмы. После отыгрыша бездепа велик шанс, что игроку понравится и он продолжит играть в казино, лишь теперь теснее на собственные средства.
#3549 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
retro casino 1×bet зеркало <a href=https://krtka.info/>1×bet 1</a> Комарова Наталья Владимировна порно порно с Анна Калинская (теннис) <a href=https://th-royalgclub.com/>porno Яна Троянова</a> казино фильм почему казино Юдаева Ксения Валентиновна порно Львова-Белова Мария Алексеевна порно букмекерская контора мостбет porno Дарья Мороз champion casino
DiskiPlus букмекерская контора мостбет DiskiPlus казино смотреть онлайн <a href=https://www.diskiplus.ru/>DiskiPlus порно с Анна Щербакова, фигуристка</a> DiskiPlus мелбет букмекерская контора DiskiPlus порно с Максим Глушенков (футбол) <a href=https://diskiplus.ru/>DiskiPlus 7k casino скачать</a> DiskiPlus порно с Евгений Малкин (хоккей) DiskiPlus скачать сайт букмекерской конторы DiskiPlus кент casino DiskiPlus казино ставка DiskiPlus пин ап казино DiskiPlus порно с Александр Головин (футбол) DiskiPlus порно с Карен Хачанов (теннис)
#3550 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации 2025
Бездепы обычно предлагают с отыгрышем — быстро исключить выигранные свои нельзя. Перевод денег со счета будет вероятен в такого, как пользователь выполнит все требования казино, а сумма не может быть выше установленного правилами лимита. Условиями акции фиксируются сроки, на которых заказчик вправе воспользоваться предложением. Обычно они не превышают нескольких дней после активации.Бездепозитные бонусы — это презенты от казино в виде бонусных денег или фриспинов для игровых автоматов, которые начисляются на акк игрока последствии процедуры регистрации на сайте заведения. Для получения таких поощрений депозит не потребуется. <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> Бесплатные бонусы казино без депозита можно получить повторяющий денежных средств на бонусный счет (исключить их возможно лишь после отыгрыша), фриспинов, игры либо кешбэк-бонуса.Бездепозитные призы за регистрацию в игровых автоматах для собственников онлайн-казино считаются долею маркетинговой кампании, направленной на повышение аудитории сайта. Так они продвигают средства бренды и привлекают свежих клиентов. <a href=https://www.jotform.com/250231879042050>https://www.jotform.com/250231879042050</a> Вообще перейдя в казино — правила схожи в получении бездепозитных бонусов, в стандартные управляла входит: подтвердить эл. Почту и телефон, наполнить свой собственный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ.Для получения депозитного приза нужно восполнить собственный игровой баланс реальными средствами. Вознаграждение возможно получить или при внесении первого депо, либо повторяющий фиксированного процента от внесённых средств. Так или иначе, приз поступит на счёт только последствии пополнения. 1×slots на любой вкус как пройти регистрацию <a href=http://fumankong4.cc/home.php?mod=space&uid=627301>http://fumankong4.cc/home.php?mod=space&uid=627301</a> Выиграть реальные средства в казино не пополняя счет – сложно, хотя возможно. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными призами и начните играть на бонусные свои. По статистике в 10-ти заведений возможно заработать небольшую необходимую средств за счет бонусных средств.
1×slots официальный сайт, скачать
Такой бесплатный эквивалент средств зачисляется на профиль юзера после воплощения притязаний и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений вероятен только последствии осуществления вейджеровых критерий. <a href=http://b2s.bulwork.com/node/1581?page=198#comment-28482>1×slots актуальное зеркало</a> 1×slots официальный сайт мобильная версия <a href=http://samaraenergo.rudikoms.ruwww.sharizhelaniy.ruwww.cloud-at-work.com/mac_jforum/user/profile/18148.page>http://samaraenergo.rudikoms.ruwww.sharizhelaniy.ruwww.cloud-at-work.com/mac_jforum/user/profile/18148.page</a> Но есть игорные заведения, коие готовы просто например жертвовать средства на игру. Для этого достаточно создать профиль. Чтобы исключить собственный выигрыш, вам сначала необходимо выполнить условия отыгрыша, обозначенные в критериях получения бездепозитного депо.Более солидные предложения встречаются очень изредка. Зачастую они доступны лишь VIP-игрокам. В остальных случаях им наверняка сопутствуют довольно жесткие условия отыгрыша. Также вероятны вспомогательные обстоятельства и другие ограничения, прописанные в условиях и положения бонусной программки казино. 1хслотс регистрация в 1×slots casino В подавляющем большинстве случаев безвозмездные бонусы начисляются в кредитах, коие нельзя незамедлительно исключить со счета. Прежде их нужно отыграть по установленным правилам. Эти требования принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже.Бездеп с фриспинами возможность охватывать всю коллекцию игр на сайте либо разработки одного провайдера. Обычно предлагается определенный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш имеет быть выведен последствии того, как юзер отыграет эту сумму. Возможность расценить полный возможностей слотов — основное совершенство этой разновидности. Игроку становятся доступны те функции, коие отсутствуют в демонстрационном режиме, а вероятность выиграть настоящие деньги прибавляет ярких азартных ощущений.
1хслотс казино зеркало
Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, дабы еще раз получить безвозмездный бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ждет неизбежное наказание. Но надо думать, собственно снабжая пользователей этими бонусами, казино занимается спонсированием. Ведь размеры вознаграждений, главном, не большие (средним объемом от 5 до 20 долларов). И на эти свои налагаются определенные условия и ограничения, неотклонимые к исполнению игрока, в в последствии он желает получить все свои выигранные финансы. <a href=http://coldskillers.hys.cz/profile.php?lookup=218414>http://coldskillers.hys.cz/profile.php?lookup=218414</a> Бонусные средства – маленькая сумма средств для старта в новом казино. На бонусные деньги, обычно разрешается играть во все игры, кроме слотов с прогрессивным джекпотом и игр из раздела live casino. 1×slots сайт Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы которые возникают у новичков.Как правило, при выводе денег, от играющего потребуется только сделать минимальный вклад для того, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом индивидуальный счет.
1хслот 1хслотс регистрация перейти на 1×slots
Приветственный бонус без депозита ? презент за регистрацию. Выдается средствами, фриспинами либо баллами. В последнем случае бонусные баллы применяются для роли в турнирах либо размена на реальные деньги.С этими простыми советами каждое казино с призом за регистрацию способно принести в разы больше выгоды и выгоды. Иногда для получения бонусов необходимо связаться с представителями саппорта. Удобнее всего с ними разговаривать в онлайн-сате, хотя времени достаточно запроса по электрической почте. 1х слотс зеркало регистрация в 1×slots casino <a href=http://www.advokateninge.se/2017/11/07/hej-varlden/?unapproved=682521&moderation-hash=7952f643aa600869da3cb062a25e690d#comment-682521>http://www.advokateninge.se/2017/11/07/hej-varlden/?unapproved=682521&moderation-hash=7952f643aa600869da3cb062a25e690d#comment-682521</a> Простая процедура получения бездепозитного приза, которая займет не более 2-х мин. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные.Активация по промокоду используется в разных обликах бездепов. Если речь идет о приветственном призе, то набор символов можно разузнать на крупнейшей страничке, в регистрационной форме либо послании, которое отправляется пользователю для доказательства e-mail. Акции шансы проводиться совместно с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активизируется одноразовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном кабинете или начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем актуальный код для активации в описании любого промо.
1×slots официальный сайт скачать
У каждого игорного заведения средства правила и условия. Но, дабы получить призы, нужно выполнить стереотипные деяния: На безвозмездные призы онлайн-казино практически всегда распространяется ограничения по стране проживания клиентов. Даже в для разрешается открывать счет и выступать на деньги в заведении, это еще не значат, собственно вам доступны no deposit bonuses. <a href=http://www.aina-company.com/bbs/board.php?bo_table=free&wr_id=1017347>http://www.aina-company.com/bbs/board.php?bo_table=free&wr_id=1017347</a> 1×slots рабочее зеркало Чаще всего, популярностью сервисы, эти как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное управляло. Финансовые средства выводятся лишь спустя что, эту платежную систему, которой огромный для пополнения депо. Если же игрок получил бездепозитный покерный приз, потребуется восполнить счет на минимальную сумму, которая сочиняет обычно 10 $.
<b>Смотреть еще похожие новости:</b>
<a href=https://koreanstudies.com/forum/viewtopic.php?t=181164>1×slots регистрация 1×slotscasino 56 online</a>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=217689>казино 1× slots официальный сайт</a>
<a href=http://forum.drustvogil-galad.si/index.php?action=profile;u=121557>1×slots быструю регистрацию а также мгновенное</a>
<a href=https://test.soclanovtsy.ru/topic/26973-chicago-house-samples-loops-sounds/page/457/#comment-84374>1×slots официальный регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Активация случается счет промокодов, которые вводятся в собственном кабинете после регистрации. Среди спецпредложений в перечне Casino.ru находятся неповторимые промокоды, коие доступны только гостям портала. Другие способы начисления средств ? автоматическая активация незамедлительно в творения аккаунта и получение презента по запросу в службу технической поддержки.
#3551 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Дронова Александра Викторовна букмекерская контора фонбет официальный <a href=https://t.me/vchkogpu_ru>рокс казино</a> порно с Анна Калинская (теннис) казино рояль смотреть <a href=https://rhymes-punches.com/>casino онлайн</a> играющие казино онлайн 1×bet сейчас порно с Алина Загитова casino сайты казино в россии винлайн букмекерская контора официальный porno Вера Бирюкова, гимнастка
DiskiPlus зеркала казино DiskiPlus Петрова Ольга Викторовна порно <a href=https://www.diskiplus.ru/>DiskiPlus как выиграть в казино</a> DiskiPlus порно с Алина Загитова DiskiPlus порно с Антропова Валентина Викторовна <a href=https://www.diskiplus.ru>DiskiPlus Преподобная Надежда Александровна порно</a> DiskiPlus 1×bet приложение DiskiPlus включи казино DiskiPlus официальные букмекерские конторы DiskiPlus Кузнецова Анна Юрьевна порно DiskiPlus мелбет букмекерская контора DiskiPlus black russia казино DiskiPlus официальные зеркала казино
#3552 Charlesgunnyhttp://filmkachat.ru
1х слот регистрация в 1×slots casino
Для получения бездепа нужно пригласить в забаву по реферальной ссылке нового посетителя: он обязан зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на сумму, указанную в условиях акции. <a href=http://filmkachat.ru/>1×slot официальный сайт</a> Подобные бонусы без депозита предоставляются на больше выгодных условиях. Зачастую они крупнее, а обстоятельства отыгрыша менее строгие. <a href=https://www.bseo-agency.com/blogs/188133/Professional-3D-Visualization-Artist-Skills-Services>https://www.bseo-agency.com/blogs/188133/Professional-3D-Visualization-Artist-Skills-Services</a> Ниже указан актуальный список легальных казино в Беларуси с призами на 1-ый депозит. Вы можете попасть на официальный вебсайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз. 1хслотс зеркало <a href=http://wehavegottalents.com/member/hypnoticweaknes.html>http://wehavegottalents.com/member/hypnoticweaknes.html</a> Бездепозитный бонус казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в этом и заключается основное различие.В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и если, тогда, неоднозначных обстановок нет способности куда-то посетовать и доказать свою правоту.
1×slots скачать на айфон
Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки все запросить вспомогательные документы или инициировать краткое общение по Skype. 1×slots регистрацию более популярный вариант это <a href=https://notebooks.ru/forum/user/83313/>https://notebooks.ru/forum/user/83313/</a> Популярность интернет казино растёт и всё больше пользователей начинают интересоваться азартными забавами. Бездепозитные бонусы 2022 года, это уникальные подарки за регистрацию. С их поддержкой новые игроки имеют получить благотворительные вращения или деньги на баланс за 1 регистрацию. С в игорных заведений в онлайне, бездепозитные призы стали популярнейшим методом вербования игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш вебсайт собрал наихорошие предложения из интернета на 2022 год. Воспользуйтесь каким подарком и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша необходимо выполнить условия.B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax 1×slots быструю регистрацию а также мгновенное Минимального оборота. Этот предел устанавливается вейджером — же игрок не поиграет на установленную необходимую, вывод средств несомненно недоступен.Для казино, работающих онлайн, бездепозитные бонусы нужны для привлечения новых клиентов. Предложение поиграть на слотах без необходимости внесения настоящих средств — работающий способ для увеличения энтузиазма к компании. После отыгрыша бездепа велик шанс, что игроку понравится и он продолжит выступать в казино, лишь сейчас уже на личные средства.
1×слотс казино
С другой стороны, гораздо проще отобрать бездепозитные фриспины за регистрацию в казино и прямо сейчас начать вращать барабаны в лучших слотах. Главная особенность спинов что, собственно они предназначены для лучших автоматов. Удастся не только пройти дополнительные раунды, хотя и прирастить сумму выигрыша, заработать респины и внутриигровые подарки. <a href=https://foro.vcheats.me/Usuario-PatrickIceds>https://foro.vcheats.me/Usuario-PatrickIceds</a> Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, чтобы замечена вероятность вывести выигрыш. 1хслотс мобильная версия зеркало
1×slots зеркало на сегодня
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1962#post-55924>1×slots регистрация 1×slots casino 777 online</a> 1×slots рабочее зеркало <a href=http://donaldvision.nayaa.co.kr/bbs/board.php?bo_table=sub05_01&wr_id=128661>http://donaldvision.nayaa.co.kr/bbs/board.php?bo_table=sub05_01&wr_id=128661</a> Прямо в отберите безвозмездные вращения за регистрацию без депо и начинайте собирать призовые композиции из-за солидных выигрышей!Верификация аккаунта. Лучше доказать личность незамедлительно в регистрации, чтобы потом не было заморочек с выводом средств. Верификация может протекать двумя способами:
1×slots зеркало проходить регистрацию это отличный вариант
Каждый из бездепозитных бонусов без пополнения 2022 имеет свой определенный вейджер для отыгрыша, так же в любом казино он устанавливается индивидуально — где то он х55 а где-то х30, повторюсь всюду по различному! <a href=https://kizkiuz.com/user/GlennCew/>https://kizkiuz.com/user/GlennCew/</a> 1×slots актуальное зеркало Получить Бездепозитный приз в интернет казино дело двух кликов. Другой момент, отыграть рекламную и соблюсти правила и обстоятельства отыгрыша. Под правилами подразумевается не вагер, хотя и лимитирования по максимальной ставке. Мы разумеем, что в кинотеатр все ставят на зеро и выигрывают. Призываем не создавать похожего. Перед активацией приза прочтите верховодила. Узнайте последующие моменты: Условия получения дара, за регистрацию, за депо и другое. Ограничения по наибольшей ставке. Зачастую не повыше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вращать автоматы, а вагер несомненно стоять на месте. Поэтому главно знать, в каких забавах возможно осуществлять кратность валютного оборота.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=140401>1×slots зеркало рабочее</a>
<a href=https://nztw.org/forum.php?mod=forumdisplay&action=list&fid=105>casino 1×slot</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бонус за регистрацию в казино без депо с выводом денег нужно отыграть. Зачастую для отыгрыша имеет понадобиться сделать ставки на сумму, в количество десятков раз превышающую необходимую бонуса или выигрыша.
#3553 Stephenfamhttps://nerjalivingspace.com
Автомобильный портал <a href=https://nerjalivingspace.com/>https://nerjalivingspace.com</a> для автолюбителей! Новости автоиндустрии, обзоры автомобилей, тест-драйвы, полезные советы по ремонту и тюнингу. Будьте в курсе последних трендов и находите ответы на все авто-вопросы!
#3554 Charlesgunnyhttp://filmkachat.ru
1 хслот регистрация в 1×slots casino
Также случаются случаи, когда казино начислит обсужденный бонус в регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам. <a href=http://filmkachat.ru/>1×slots зеркало регистрация в 1×slots casino</a> Раздача призов имеет быть посвящена различным датам: календарные дни, дни рождения игроков, годовщина открытия казино и т. Д. Подарок выдается повторяющий средств, фриспинов или баллов для накопления и размена на предложения оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд требований. <a href=https://be1.ru/stat/playhouse.com.ua>https://be1.ru/stat/playhouse.com.ua</a> Бонусы без депозита при регистрации считаются самыми красивыми как для опытных игроков, например для и новичков. Получив такое вознаграждение, клиент имеет выступать на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные призы в интернет-казино Рунета, а условия их активации и выигрыша.Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической забавы на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, выучится регулировать изменять ставки и линии, изучать бонусные забавы и их выигрышные комбинации, да в конце концов просто зарядится кучей эмоций! Ведь вы будите играть на бонусные средства, которые возможно отыграть и вывести, а не просто на демо счет, что, этим самым адреналин в крови более повысится а пульс забьется с нередким ритмом! 1×slots casino зеркало <a href=http://eric1819.com/home.php?mod=space&uid=647343>http://eric1819.com/home.php?mod=space&uid=647343</a> Для казино, работающих онлайн, бездепозитные призы нужны для вербования новых посетителей. Предложение поиграть на слотах без необходимости внесения настоящих денег — работающий способ для увеличения энтузиазма к фирмы. После отыгрыша бездепа велик шанс, что игроку понравится и он продолжит играть в казино, лишь теперь уже на личные деньги.
1×slots официальный demo регистрация в 1×slots casino
<a href=https://forum.spherecommunity.net/User-Jamesmew>1×slots регистрация 1×slotscasino09k online</a> 1хслотс мобильная версия зеркало <a href=https://forex-arabic.com/members/180484-TyroneDug>https://forex-arabic.com/members/180484-TyroneDug</a> 1×slots зеркало на сегодня Промообъявления от казино не дают реальной картины и направлены на вербование внимания юзеров. Понять, насколько высоки шансы остаться в плюсе, позволит собственный анализ критерий предложения:Размер ставки для игры по бездепозитному бонусу (естесственно же, в случае, когда он представлен вид бонусных денежных средств) часто ниже, чем при ирге на депозит. Ограничение будет действовать до момента отыгрыша приза.
казино 1× slots официальный сайт
Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут устанавливает лимитирование для клиентов. Конечно, это можно счесть некоторым неудобством для игрока, хотя справедливости стоит отметить, что выбор автоматов всё точно остаётся довольно великим.Какие бонусы я могу еще получить не бездепозитного приза за регистрацию в казино? По мимо бездепозитного бонуса, каждое онлайн казино предлагает игрокам прибыльное предложение на первый депозит, вы совершаете депозит, ваш депозит возрастает в двое либо и в 3, что, этим самым начать играть можно с больше крупной суммой, например же не забываем про вейджер на призы. Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша призов. Заведения практически устанавливают максимальную ставку, возможную по условиям вейждера. <a href=https://ingeconvirtual.com/glory-casino/>https://ingeconvirtual.com/glory-casino/</a> Если вы новичок данном и только попали в неизведанную вами район азарта — за предложений как бездепозитные бонусы без пополнения.Однако далековато не все ресурсы предлагают своим посетителям бездепозитные бонусы за регистрацию в казино. В большинстве случаев учтено одобрение на 1-ый депозит в размере 100–200%. Это отличная возможность преумножить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш. 1хслотс казино зеркало Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные способы и расценить особенности, недоступные при ирге в демо режиме. Многие свежие посетители перебегают в количество постоянных, а оператор получает длительную прибыль.Для всех бездепозитных призов действует наибольший лимит на выигрыш. Он показывает максимальную необходимую, коию возможность получить, играя на бонусные кредиты. Как только вас получится выполнить притязания вейджера, возможный максимально несомненно переведен с бонусного счета на главной, а остаток будет списан.
1хслотс регистрация в 1×slots casino
Обычно показатель повыше, чем для призов на депозит. Не дивитесь, в он несомненно и х100. Иногда завышенный коэффициент вейджера устанавливается для обитателей отдельных стран. Чтоб получить крупный выигрыш, подбирайте игровые автоматы с максимальным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша. 1×slots сайт <a href=http://fze.ohosure.org/bbs/home.php?mod=space&uid=100212>http://fze.ohosure.org/bbs/home.php?mod=space&uid=100212</a> Суммы подобных предложений, большинстве, колеблются от трех до двадцати долларов, а вейджер на эти средства должен составлять от тридцати до шестидесяти раз. Зачастую, большая сумма выигрыша здесь составит от одной до двух сотен долларов. Если игры выиграет больше, то все свои шансы быть списанными до максимально разрешенного выигрыша. Здесь появляется содержание выводить еще несуществующие деньги на собственную платежную систему и дальше искать заведение с подходящими под данную необходимую релоадом либо бонусом за 1-ое пополнение счета. Есть количество подвидов бездепозитного гонорары, предлагаемого наибольшим числом заведений.
1×slots зеркало быструю регистрацию а также мгновенное
Выиграть реальные деньги в казино не пополняя счет – сложно, но вероятно. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными призами и начните выступать на бонусные свои. По статистике каком-то 10-ти заведений можно заработать небольшую необходимую денег с бонусных средств. Приглашаем делиться воззреньями о призах. Это поможет иным юзерам избирать более прибыльные предложения.Когда речь идет о получении бездепозитных призов в казино, в первую очередь обратите внимание на последующие обстоятельства: <a href=http://emseyi.com/index.php?qa=user&qa1=billowyspiral8>http://emseyi.com/index.php?qa=user&qa1=billowyspiral8</a> Ну и естесственно же, для казино бездепозитные призы выгодны с имиджевой стороны: сходственная щедрость повышает степень преданности посетителей к компании. x1 slots 1хслотс регистрация перейти на 1×slots Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых свежих, великодушных и проверенных бонусах в онлайн казино, которые обновляются каждый денек.
<b>Смотреть еще похожие новости:</b>
<a href=https://melhorlance.com.br/minha-conta/>1×slots зеркало на сегодня</a>
<a href=https://minecraft.ru.net/user/Manuelsoarl/>онлайн казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В перечне притязаний к отыгрышу часто присутствуют лимиты на ставки при забаве на личные средства. Так, случае отыграть нужно 30 000 рублей, а предельная сумма ограничена 30 рублями, то вертеть барабаны предстоит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками условий по срокам деяния акции. В истинное время получить приз за регистрацию в казино очень просто. Почти любой игорный дом с готовностью предоставит деньги или благотворительные вращения. Многие игроки используют этим и не стыдятся региться в каждом клубе с прибыльными условиями. Кстати, это отличная вероятность выдумать выигрышную стратегию и сорвать куш.
#3555 Jameslerhttps://zarechany.zt.ua
Делаем ремонт правильно <a href=https://zarechany.zt.ua/>https://zarechany.zt.ua</a> Разбираем все этапы – от выбора материалов до дизайна интерьера. Подробные инструкции и лайфхаки от специалистов!
#3556 CraigMelryhttps://ukk.kiev.ua
Профессиональные советы <a href=https://ukk.kiev.ua/>https://ukk.kiev.ua</a> по ремонту и строительству! Пошаговые инструкции, актуальные тренды и лучшие решения для обустройства вашего жилья.
#3557 Danielpexhttps://ucmo.com.ua
Идеи для дома <a href=https://ucmo.com.ua/>https://ucmo.com.ua</a> ремонта и строительства! Полезные советы, лайфхаки и современные технологии, которые помогут сделать ремонт качественно и доступно.
#3558 Ремонт телевизоров Sony Москваhttps://remont-televizorov-sony-fun.ru/
Профессиональный сервисный центр по ремонту бытовой техники с выездом на дом. Мы предлагаем: <a href=https://remont-televizorov-sony-fun.ru/>ремонт телевизоров sony в москве</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#3559 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Радченко Светлана Юрьевна порно яндекс казино <a href=https://www.ossetia.tv/>пари букмекерская контора</a> официальные букмекерские конторы порно с Виктория Синицина, фигуристка <a href=https://sovsekretno.net/>игры казино</a> kent casino симулятор казино porno Александр Соболев (футбол) champion casino 1×bet официальный 1×bet xyz человек казино Радченко Светлана Юрьевна порно
DiskiPlus 7k casino официальный сайт DiskiPlus вавада казино <a href=https://www.diskiplus.ru>DiskiPlus букмекерская контора официальный сайт скачать</a> DiskiPlus фреш казино DiskiPlus водка казино <a href=https://diskiplus.ru/>DiskiPlus порно с Дарья Клишина, легкоатлетка</a> DiskiPlus лучшие букмекерские конторы DiskiPlus порно с Никита Кучеров (хоккей) DiskiPlus Юдаева Ксения Валентиновна порно DiskiPlus casino рабочее зеркало DiskiPlus порно с Евгений Малкин (хоккей) DiskiPlus pin up casino top top DiskiPlus porno Яна Троянова
#3560 Charlesgunnyhttp://filmkachat.ru
1×slots casino зеркало рабочее
Выбирайте наихорошие бесплатные призы счет обзоров на Casinoz – и пусть вас сопутствует удача при отыгрыше бонусных кредитов! <a href=http://filmkachat.ru/>1×slots официальный регистрация</a> При верном подходе бездепы — это отличный способ играть на деньги без растраты собственных средств. Есть количество советов, следуя коим возможно извлечь максимум пользы из похожих акций казино. Играть по только на лицензированных площадках. Скриптовые сайты не только врут с бонусными предложениями, но и употребляют пиратский софт с измененным ГСЧ. Выиграть на этих автоматах невозможно. <a href=https://www.siteprice.org/website-worth/playhouse.com.ua>https://www.siteprice.org/website-worth/playhouse.com.ua</a> Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, дабы появилась вероятность исключить выигрыш. 1×slots зеркало на сегодня <a href=https://www.evangelie.eu/forum/members/84031.html>https://www.evangelie.eu/forum/members/84031.html</a>
1×slots промокод при регистрации 2025
<a href=https://forums.scar-divi.com/topic/847205-x1-slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%B2–1×slots-casino/>x1 slots регистрация в 1×slots casino</a> 1×slots зеркало быструю регистрацию а также мгновенное Но разу не запамятовывайте пристально разбирать верховодила участия в бонусных промоакциях. Если вы нарушите желая бы одно условие, позднее вы не можете уладить недоразумение с администрацией.Игрокам стоит принимать приветственный приз как гарантированный метод получить крупный выигрыш, но это отличная возможность без затрат оценить перечень казино. <a href=http://slavsbyt.ru/index.php?subaction=userinfo&user=elfinstomach75>http://slavsbyt.ru/index.php?subaction=userinfo&user=elfinstomach75</a> При пользовании бездепозитным призом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют количество видов лимитов:Размер бонусов почаще всего чисто условный и не выше 50 рублей. Приятно, но осязаемым бустом при навряд будет. 1×slots зеркало которую указывали при регистрации кстати
1×slots регистрация 1×slots casino c2d ru
Все благотворительные бонусы кажутся заманчивыми. Кто же откажется от возможности сыграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далековато не все бездепозитные призы в равной степени привлекательны для рассудительного посетителя.Лишь модные и знаменитые азартные заведения шансы разрешить для выдавать бездепы повторяющий добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депо, которые возможно потратить в топовых аппаратах с высокой отдачей. <a href=https://www.google.com.fj/url?q=https://doctorlazuta.by/>https://www.google.com.fj/url?q=https://doctorlazuta.by/</a> 1 х слотс зеркало Используйте наихорошие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из списка ниже, дабы заработать подарки за простые деяния и уже сегодня получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высокой отдачей и быстрыми выводами на электрические кошельки.Во время игры в казино, выигрыши, полученные благодаря бесплатным призовым фондам, суммируются и срабатывают в общую необходимую для отыгрывания. Однако, если фортуна улыбнется и получится отыграть все призы, игровое заведение гарантированно допустит исключить финансовые средства. Сумма вывода будет зависеть от лимита, утвержденного непосредственно в этом учреждении. Поэтому, пристально нужно читать верховодила выдачи безлимитных депо.
1 хслот регистрация в 1×slots casino
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=323552&pid=645406#post_645406>1х слот 1хслотс регистрация перейти на 1×slots</a> Фриплей-бонусы. Бонусы за безвозмездную забаву есть лишь в некоторых клубах. Они зачисляются незамедлительно после создания профиля и срабатывают непродолжительное время. Если у вас нет времени потратить средства, они просто закончатся. Что дотрагивается времени, правило призы срабатывают в течение одного часа.B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax скачать 1×slots официальный сайт <a href=https://njt.ru/forum/user/151035/>https://njt.ru/forum/user/151035/</a>
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Бонус за регистрацию в казино без депозита с выводом денег надо(надобно) отыграть. Зачастую для отыгрыша имеет потребоваться устроить ставки на необходимую, в несколько десятков раз превышающую необходимую бонуса или выигрыша.Вейджер (или вагер) ? это минимальная сумма ставок, которую нужно сделать для вывода валютного приза. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение. В некоторых онлайн казино для получения бездепозитных бонусов не довольно просто зарегистрироваться на сайте клуба и подтвердить свои контактные данные. Дополнительно потребуется активация промокода. <a href=http://52gmsy.com/home.php?mod=space&uid=51051>http://52gmsy.com/home.php?mod=space&uid=51051</a> При регистрации следует свидетельствовать только достоверную информацию. Когда учетная запись будет активна, замечен доступ в Личный офис. В нем можно выбрать валюту, установить промокод и узнать доскональные верховодила получения и отыгрыша бездепа. Краткая информация об акции нередко находится именно на регистрационной форме.Но есть игорные заведения, коие готовы просто например жертвовать средства на игру. Для сего довольно создать профиль. Чтобы вывести собственный выигрыш, вас сначала необходимо выполнить условия отыгрыша, указанные в условиях получения бездепозитного депозита. казино 1×slots официальный сайт
<b>Смотреть еще похожие новости:</b>
<a href=https://qualityprogamer.de/forum/showthread.php?tid=391260>1 x slots</a>
<a href=http://www.airsoft44.com/forum/index.php?action=profile;u=11896>1 xslots рабочее зеркало</a>
<a href=http://amazon.rx22.ru/memberlist.php?mode=viewprofile&u=255>1×slot регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подобные бонусы без депо предоставляются на более прибыльных условиях. Зачастую они покрупнее, а условия отыгрыша менее строгие.
#3561 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора зенит сайт винлайн букмекерская контора <a href=https://slon-ru.com/>казино в россии</a> up casino зеркало Лут Оксана Николаевна порно <a href=https://glvk.guru/>casino андроид</a> букмекерская контора фонбет официальный сайт 1×bet официальный кент казино букмекерская контора бесплатно скачать online casino официальный казино смотреть сайт pin up casino
DiskiPlus 1×bet слоты 1×bet top DiskiPlus 1×bet зеркало xbet <a href=https://diskiplus.ru/>DiskiPlus ешь казино</a> DiskiPlus casino riobet DiskiPlus скачать 1×bet на андроид бесплатно <a href=https://diskiplus.ru/>DiskiPlus казино вулкан</a> DiskiPlus официальная казино DiskiPlus Разуваева Ксения Денисовна порно DiskiPlus Яровая Ирина Анатольевна порно DiskiPlus Хорова Наталья Александровна порно DiskiPlus порно с Евгения Медведева, фигуристка DiskiPlus 1×bet официальный xbet DiskiPlus казино вход официальный сайт
#3562 Integrat_Eluffhttps://integrat.pro/
Добрый день!
Компания Интеграт – IT разработчик, интегратор собственных и сторонних программных продуктов! Чтобы отдел продаж был под контролем, а заявки не терялись: настроим телефонию, автоматизируем маркетинг и продажи, интегрируем CRM с сайтами, обучим работе в CRM сотрудников. <a href=https://integrat.pro/>вход битрикс</a> Если настройка и внедрение amoCRM и Битрикс24 в Краснодаре, то это в Интеграт https://integrat.pro/ . Получите бесплатную и правильную консультацию, как управлять отделом продаж по номеру +7(909)450–12–66. До новых встреч!
#3563 Charlesgunnyhttp://filmkachat.ru
1×slots официальный регистрация
Ограничения по играм. Администрация воспрещает игрокам кое-какие игровые автоматы с бездепозитным бонусом, деньгами или безвозмездными вращениями. Обычно, в правилах приводится глубокий список слотов для отыгрыша. Иногда деление производится по виду игр. Например, отыгрыш вероятен на всех игровых аппаратах, но запрещен в настольных забавах и в разделе Live Casino.К сожалению, нет. Почти все казино, требуют внесение желая бы 1-го минимального депозита для вывода выигрыша с бездепозитного бонуса. Также учитывайте, что вывести деньги разрешено только на ту платежную систему, с коей был изготовлен депозит. <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> <a href=http://gendou.com/forum/thread.php?thr=53120>http://gendou.com/forum/thread.php?thr=53120</a> сайт 1× slots casino <a href=https://www.hb9lc.org/wiki/index.php/%C3%90%C2%A1%C3%90%C2%B4%C3%90%C2%B0%C3%91%E2%80%9A%C3%91%C5%92_%C3%90%C3%90%C2%B0_%C3%90%C5%B8%C3%91%E2%82%AC%C3%90%C2%B0%C3%90%C2%B2%C3%90%C2%B0_%C3%90%C3%A2%E2%82%AC%E2%84%A2%C3%90%C2%BB%C3%90%C2%B0%C3%90%C2%B4%C3%90%C2%B8%C3%90%C2%B2%C3%90%C3%91%C3%91%E2%80%9A%C3%90%C2%BE%C3%90%C2%BA>https://www.hb9lc.org/wiki/index.php/%C3%90%C2%A1%C3%90%C2%B4%C3%90%C2%B0%C3%91%E2%80%9A%C3%91%C5%92_%C3%90%C3%90%C2%B0_%C3%90%C5%B8%C3%91%E2%82%AC%C3%90%C2%B0%C3%90%C2%B2%C3%90%C2%B0_%C3%90%C3%A2%E2%82%AC%E2%84%A2%C3%90%C2%BB%C3%90%C2%B0%C3%90%C2%B4%C3%90%C2%B8%C3%90%C2%B2%C3%90%C3%91%C3%91%E2%80%9A%C3%90%C2%BE%C3%90%C2%BA</a> Варианты выигрыша зависимости от Вашей удачи и условий игорного портала. Выше мы заявили, что кое-какие бездепозитные бонусы в 2022 году выдаются с ограничениями по наибольшей выплате. Однако, остаются другие, все, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на средства, возможно выиграть неописуемые суммы. Сегодняшние игровые автоматы или видео слоты, как их именуют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000.
1×slots регистрация 1×slotscasino 56 online
Как и промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения считаются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих посетителей и дозволяет им составить эмоцию о функционале, не рискуя вескими суммами.Бонус с зачислением средств на счет выделяет больше свободы деяний. Пользователь сам подбирает, каким образом воспользоваться подаренными средствами. Здесь того все работать ограничения на перечень доступных игр, но обычно эти рамки не например строги, как в рекламную с бесплатными вращениями. 1×slots регистрация то дальше необходимо пройти Процесс подтверждения личности имеет занять от одного дня до недели. Если заказчик допустил какую оплошность при заполнении паспортных данных, то ему следует адресоваться с проблемой в службу онлайн-казино.Так что основное отличие подарка на депо от бездепа – неотъемлемое пополнение счёта. Вы сможете привнести депозит и преувеличить стартовый капитал или забрать бездеп и всем не придётся рисковать своими сбережениями. Поспешите выполнить обычные требования, и администрация ресурса начисляет щедрое одобрение! <a href=http://www.diarivitamin.com/2015/09/diet-seimbang-elak-batu-hempedu.html>http://www.diarivitamin.com/2015/09/diet-seimbang-elak-batu-hempedu.html</a> Бездепозитные бонусы казино это финансовая компенсация, предлагаемая пользователям на дармовой базе и возможность выступать в интернет казино бесплатно. Если сопоставлять их с одобрениями за вклад, в которых свои выдаются лишь впоследствии начального пополнения счета, то бездепозитные вознаграждения получаются бесплатно. То есть, играющий получает возможность делать ставки на уже быть финансы, коие выдаст заведение, выполняя, при, обычные деянья, чтобы их извлечь (тут идет о регистрация, удостоверении личности с использованием номера телефона, оформления заявки и т.д.). 1 x slots casino
1×slots рабочее зеркало
В большинстве заведений устроить это можно по адресу электронной почты, по номеру телефона, через социальную сеть либо гугл-аккаунт.Баланс игрока дополняется на подобающую необходимую. К ней применяется вейджер, обозначенный в правилах промоакции. Вывести выигрыш возможно несомненно последствии как, как юзер устроит требуемый размер ставок из личных средств. В редких случаях бездеп работает в формате Free Play. На счет юзера зачисляется большая сумма, и предоставляется маленький срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по завершении этого периода сумма на счету будет превышать изначальную, то разность можно будет исключить или применять для последующих ставок. <a href=http://o91668l6.beget.tech/user/ScottRub/>http://o91668l6.beget.tech/user/ScottRub/</a> Это тоже бесплатные деньги, которые поступают на аккаунты свежеиспеченных игры в регистрирования. А необыкновенность этих бонусов состоит в, собственно обретенные финансы обязательно стопам применять в продолжении назначенного времени. 1×slots рабочее зеркало Условия могут разниться приятель от друга. Но такой приз возможность быть применен только для игрового процесса – приобретенные на счет деньги до того, как станут отыграны, исключить нереально.Для верификации номера аппарата, в собственном профиле изберите опцию „Подтвердить номер телефонного“ и введите в подходящее фон код, полученный в sms-сообщении.
1×slots быструю регистрацию а также мгновенное
Зачастую бездепозитные бонусы казино для забавы предлагаются различными заведениями азартных игр виде рекламных промоакций либо в целях привлечения к себе новых игроков. Для бездепозитных призов в казино 2022 игроку не нужно пополнять счет до этапа вывода желанных средств. <a href=http://vn-info.net/user/Josephkam/>1×slots регистрация на официальном сайте</a> Приветственный приз без депозита ? презент за регистрацию. Выдается деньгами, фриспинами или баллами. В заключительном случае бонусные баллы используются для участия в турнирах либо размена на реальные деньги. x1 slots регистрация в 1×slots casino <a href=http://bbs.mycq3d.com/home.php?mod=space&uid=97407>http://bbs.mycq3d.com/home.php?mod=space&uid=97407</a> Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут устанавливает лимитирование для клиентов. Конечно, это возможно счесть неким неудобством для игрока, но справедливости ради необходимо, собственно выбор автоматов всё также остаётся достаточно большим.Также, учите, что бездепозитный приз возможно вывести только что случае, когда будут исполнены все обстоятельства отыгрыша.
1×slots казино мобильная версия
Несмотря на то, что этот вариант стимуляции со стороны азартных платформ довольно известен в похожих игр, далеко не почитателям казино известно, собственно себе бездепозитные призы казино и как именно их вполне эксплуатировать. Получить приветственный бонус все лишь новые клиенты онлайн-казино. Способы описаны в критериях акции каждого законного казино, чаще всего это:Во время забавы в казино, выигрыши, приобретенные благодаря безвозмездным призовым фондам, суммируются и срабатывают в совместную сумму для отыгрывания. Однако, случае удача улыбнется и получится отыграть все бонусы, игровое заведение гарантированно разрешит вывести финансовые свои. Сумма вывода будет находиться от лимита, одобренного непосредственно в этом учреждении. Поэтому, пристально нужно разбирать правила выдачи безлимитных депо. <a href=https://www.autorepguide.com/member.php/7858-Tyronesex>https://www.autorepguide.com/member.php/7858-Tyronesex</a> Мы рекомендуем не отказываться от подобных предложений узнаваемых казино. Выделите некоторое мин. На регистрацию, получите бонус и попробуйте его отыграть. Может быть, сегодня удача несомненно на вашей стороне! 1×slots актуальное зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://www.findaspermdonor.com/viewtopic.php?f=25&t=87326>1×slots официальный сайт зеркало рабочее</a>
<a href=http://xn–80akbkalsbeeafq6a6b2f.xn–p1ai/forum/messages/forum1/topic34441/message194066/?result=new>1×slots актуальное зеркало</a>
<a href=http://aficionado.pl/showthread.php?180338–1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82-%D1%81%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C&p=201410>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При исполненьи критерий отыгрыша и верификации, средства с бонусного счета переводятся на ведущей и имеют быть выведены на карту или электронный кошелек. Лимиты на вывод и сроки проведения транзакции зависимости от выбранной платежной системы.
#3564 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Самойлова Алла Владимировна порно porno Екатерина Ефременкова, шорт-трекистка <a href=https://7club7.com/>1×bet регистрация</a> букмекерские конторы pin пинап казино <a href=https://repost.news/>порно с Кирьянова Дарья Борисовна</a> порно с Анна Калинская (теннис) казино рояль смотреть бывшие казино 1×bet зеркало рабочее на сегодня 1×bet xyz порно с Алина Загитова casino регистрации porno Мира Андреева (теннис)
DiskiPlus bet casino DiskiPlus bitz casino <a href=https://www.diskiplus.ru/>DiskiPlus порно с Илюшникова Татьяна Александровна</a> DiskiPlus inform@rucriminal.info DiskiPlus 1×bet бесплатно <a href=https://diskiplus.ru>DiskiPlus casino приложения</a> DiskiPlus online casino 7k DiskiPlus porno Екатерина Ефременкова, шорт-трекистка DiskiPlus 1×bet на андроид DiskiPlus Валентина Матвиенко порно DiskiPlus порно с Александр Большунов (лыжные гонки) DiskiPlus casino сайты DiskiPlus casino бонус
#3565 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Фастова Елена Владимировна порно 1×bet официальный сайт 1×bet xyz <a href=https://kompromat1.online/>1×bet телефон</a> леон букмекерская контора up casino скачать <a href=https://slon-ru.com/>порно с Евгения Медведева</a> порно с Юлия Ефимова, пловчиха porno Андрей Рублев (теннис) porno Алена Косторная (фигурное катание) casino ru Самойлова Алла Владимировна порно демо казино 1×bet официальный xbet
DiskiPlus porno Мария Шарапова DiskiPlus яндекс игры казино <a href=https://www.diskiplus.ru/>DiskiPlus Скоробогатова Ольга Николаевна порно</a> DiskiPlus официальные зеркала казино DiskiPlus Разуваева Ксения Денисовна порно <a href=https://diskiplus.ru/>DiskiPlus кент казино</a> DiskiPlus Мухтиярова Елена Вячеславовна порно DiskiPlus сайт казино вход DiskiPlus 1×bet зеркало xbet xyz DiskiPlus pin up casino buzz DiskiPlus гта казино DiskiPlus кент казино DiskiPlus ап казино
#3566 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино 1 порно с Голикова Татьяна Алексеевна <a href=https://kompromat1.online/>букмекерская контора на андроид</a> порно с Дарья Клишина, легкоатлетка пинко casino <a href=https://rumafia.news/>порно с Дарья Клишина, легкоатлетка</a> Светлана Ходченкова порно с Анастасия Потапова, теннисистка пина casino Ирина Горбачева порно с Зырянова Анастасия Владимировна casino зеркало сегодня почему в казино нет часов
DiskiPlus порно с Дарья Клишина, легкоатлетка DiskiPlus букмекерская контора ставки <a href=https://www.diskiplus.ru>DiskiPlus 7k casino зеркало на сегодня</a> DiskiPlus porno Игорь Акинфеев (футбол) DiskiPlus Окладникова Ирина Андреевна порно <a href=https://diskiplus.ru>DiskiPlus скачать букмекерскую контору на андроид</a> DiskiPlus официальные сайты казино DiskiPlus pin casino DiskiPlus сайт казино вход DiskiPlus casino зеркало сайта DiskiPlus порно с Константин Тюкавин (футбол) DiskiPlus Приезжева Екатерина Геннадьевна порно DiskiPlus up casino
#3567 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало на сегодня
При использовании бездепозитным бонусом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют несколько видов лимитов: <a href=http://filmkachat.ru/>онлайн казино 1×slots</a> <a href=https://www.abclinuxu.cz/lide/archicgic>https://www.abclinuxu.cz/lide/archicgic</a> 1×slots мобильная версия войти казино <a href=http://demo2-ecomm.in.ua/user/DonaldSub/>http://demo2-ecomm.in.ua/user/DonaldSub/</a> Доступность — бездепозитные бонусы в казино чаще всего предоставляются новым игрокам, но посещают случаи, когда приз все получить и действующие клиенты.Во всех легальных онлайн-казино Беларуси необходимо подтверждение паспортных данных для игры — это требование правительства страны.
1× слот зеркало
1×slots зеркало выигрыши обязательно пройдите регистрацию если Также, учите, что бездепозитный бонус можно исключить лишь в том случае, когда станут выполнены все условия отыгрыша.Чаще всего интернет-казино предлагают бездепозитные призы новым юзерам. Эта промо-акция очень эффективно завлекает новичков, подталкивая их к открытию счета. Конечно, не они становятся послушными посетителями, хотя сам факт регистрации аккаунта играет на руку заведению. <a href=https://morphomics.science/wiki/Why_Are_Pharmacies_Green>https://morphomics.science/wiki/Why_Are_Pharmacies_Green</a> зеркала 1×slots Третитй бездепозитный приз за регистрацию – валютные свои. К раскаянью, начислить рубли либо баксы готовы лишь известные и модные клубы. С их помощью у насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком.
1×slots промокод при регистрации
Бонусные средства – маленькая сумма денег для старта в новом казино. На бонусные средства, обычно разрешено выступать во все игры, считая слотов с современным джекпотом и игр из раздела exist casino.Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные способы и оценить необыкновенности, труднодоступные при забаве в демо режиме. Многие свежие посетители переходят в число постоянных, а оператор получает долгосрочную выгода. <a href=http://silabgarza.net/forums/member.php?action=profile&uid=219429>http://silabgarza.net/forums/member.php?action=profile&uid=219429</a> Многие новички колеблются, что поощрительный приз не нужно несомненно отдавать, даже в они выиграли у казино. Это безусловно неопасно и надежно. Выводя выигранные свои, игрок просто одергивает свое роль в игре и теряет уникальную возможность – даром увеличивать личное материальное положение. 1×slots регистрация на официальном сайте
казино 1×slots официальный сайт
<a href=http://theauction.com.au/my-account/>1×slots официальный зеркало рабочее</a> Следует подчеркнуть, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом. 2. Создать свежий профиль. Для регистрации нужно наполнить небольшую анкету или зайдите в личный кабинет при помощи социальных сеток;Ниже указан актуальный перечень легальных казино в Беларуси с призами на 1-ый депо. Вы сможете попасть на официальный вебсайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. 1×slots официальный сайт мобильная версия скачать <a href=http://hyundai-club.com.ua/member.php?u=91642>http://hyundai-club.com.ua/member.php?u=91642</a> Обычно для получения бонусов без депозита, казино выдвигает приклнные и абсолютно выполнимые обстоятельства, хотя есть ряд поступков которые воспрещены и шансы повлечь за собой досадные результаты:Заработать на бездепозитных призах за регистрацию в казино имеет любой пользователь, достигший совершеннолетия.
1×slots промокод при регистрации
Бездепозитный приз предоставляется новому игроку за конкретные деяния. Часто презент в виде средств или фриспинов выдается за регистрацию, благодаря чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. <a href=https://www.efunda.com/members/people/show_people.cfm?Usr=Palolo1408>https://www.efunda.com/members/people/show_people.cfm?Usr=Palolo1408</a> 1×slots актуальное зеркало Для подтверждения электронной почты, просто перейдите по активной ссылке в послании, полученном от игрового заведения.Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам важную информацию о самых новых, щедрых и проверенных призах в интернет казино, которые обновляются любой денек.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=13119>1× слот зеркало</a>
<a href=https://www.formulersupport.com/Thread-1×slots-casino-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE–135043>1×slots casino зеркало</a>
<a href=https://www.formulersupport.com/Thread-1×slots-%D0%B1%D1%8B%D1%81%D1%82%D1%80%D1%83%D1%8E-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8E-%D0%B0-%D1%82%D0%B0%D0%BA%D0%B6%D0%B5-%D0%BC%D0%B3%D0%BD%D0%BE%D0%B2%D0%B5%D0%BD%D0%BD%D0%BE%D0%B5–116016>1×slots быструю регистрацию а также мгновенное</a>
<a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=465049#pid465049>1×slots casino регистрация 1×slots review live</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?
#3568 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet бесплатно 1×bet официальный <a href=https://vestnik-jurnal.com/>официальные букмекерские конторы скачать</a> up casino официальный ramenbet casino <a href=https://kompromat1.online/>black russia казино</a> casino актуальное зеркало казино фильм онлайн казино гта 5 casino 7k сегодня porno Юлия Пересильд приложения букмекерских контор на андроид Елизавета Боярская
DiskiPlus 7k casino сайт DiskiPlus казино пину <a href=https://diskiplus.ru/>DiskiPlus порно с Абрамченко Виктория Валериевна</a> DiskiPlus 1×bet xbet DiskiPlus porno Алена Косторная (фигурное катание) <a href=https://diskiplus.ru/>DiskiPlus porno Юлия Пересильд</a> DiskiPlus игры казино DiskiPlus казино сегодня DiskiPlus спорт букмекерская контора DiskiPlus букмекерские конторы в россии DiskiPlus up casino зеркало DiskiPlus 1×bet приложение DiskiPlus cat casino
#3569 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet сайт смотреть фильм казино <a href=https://t.me/vchkogpu_ru>Попова Анна Юрьевна порно</a> Кузнецова Анна Юрьевна порно casino онлайн <a href=https://vestnik-jurnal.com/>porno Алена Михайлова</a> porno Екатерина Ефременкова, шорт-трекистка скачать 1×bet на андроид бесплатно 1×bet слоты Семёнова Татьяна Владимировна порно pin up casino top top порно с Дарья Клишина, легкоатлетка порно с Дронова Александра Викторовна
DiskiPlus casino приложения DiskiPlus букмекерские контора ап <a href=https://diskiplus.ru/>DiskiPlus 1×bet xbet</a> DiskiPlus pin up casino buzz DiskiPlus ставки на спорт букмекерские конторы <a href=https://www.diskiplus.ru>DiskiPlus порно с Аделия Петросян (фигурное катание)</a> DiskiPlus порно с Анастасия Потапова, теннисистка DiskiPlus casino онлайн DiskiPlus официальные букмекерские конторы скачать DiskiPlus казино гта 5 DiskiPlus пин ап casino pin up top DiskiPlus скачать букмекерскую контору на андроид DiskiPlus kent casino регистрация
#3570 Charlesgunnyhttp://filmkachat.ru
1×slots сайт зеркало
При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток.Популярность онлайн казино растёт и всё больше пользователей начинают интересоваться азартными играми. Бездепозитные призы 2022 года, это уникальные презенты за регистрацию. С их поддержкою новые игроки шансы получить безвозмездные вращения либо деньги на баланс за одну регистрацию. С свет игорных заведений в интернете, бездепозитные призы стали известнейшим способом вербования игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш сайт собрал наихорошие предложения из интернета на 2022 год. Воспользуйтесь каким даром и сможете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша нужно выполнить обстоятельства. <a href=http://filmkachat.ru/>1× slots casino официальный сайт</a> Практически все онлайн казино с бездепозитным бонусом за регистрацию учитывает программку преданности — систему одобрения постоянных посетителей, кот-ая состоит из большого уровней. При достижении игроком очередного значения на его счёт поступает приз. Чем повыше уровень — что, этим щедрее бонус.Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала резвые выводы. Фишка выплат что, нет, что довольно выбрать платёжный инструмент и указать сумму. В большинстве случаев средства зачисляются на электронные кошельки протяжении 15 мин., а на банковские карты – 1–3 рабочих дня. <a href=https://www.siteprice.org/website-worth/astramedika.com.ua>https://www.siteprice.org/website-worth/astramedika.com.ua</a> Далее требуется отыграть вагер и вывести выигрыш. Игрокам без навыка крупно повезло, возможность получить 10-ки презентов за 1 регистрацию. Если не сумели получить Бездепозитный приз, не тревожьтесь. Обратитесь в интернет чат, оператор поможет исправить. 1×slots мобильная версия войти казино <a href=https://637600.xyz/profile.php?id=12624>https://637600.xyz/profile.php?id=12624</a> Приглашаем делиться воззреньями о призах. Это поможет иным юзерам избирать более прибыльные предложения.Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?
1×slots регистрацию более популярный вариант это
<a href=https://qualityprogamer.de/forum/showthread.php?tid=418334>1×slots сайт</a> 1×slot регистрация Прежде чем активировать бездеп, нужно убедиться что, нет, что государство, уроженцем которой считается игрок, не заходит в перечень разрешенных.При игре на бонусные свои воспрещается выступать в игровые автоматы с современным джекпотом и игры из радела live casino. Кроме такого, кое-какие казино дают бездеп на раз или некоторое определенных слотов, и в иных забавах Вы не можете на них выступать. <a href=http://www.sawineimport.dk/2023/10/lismore-besoeger-alleroed/?unapproved=1652529&moderation-hash=98c9931f99ff5617444dd167ca431ce0#comment-1652529>http://www.sawineimport.dk/2023/10/lismore-besoeger-alleroed/?unapproved=1652529&moderation-hash=98c9931f99ff5617444dd167ca431ce0#comment-1652529</a> 1хслот 1хслотс регистрация перейти на 1×slots В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и в случае спорных ситуаций нет способности куда-то посетовать и доказать собственную правоту.Получить Бездепозитный приз в интернет казино дело двух кликов. Другой момент, отыграть промо и соблюсти верховодила и условия отыгрыша. Под правилами предполагается не вагер, но и лимитирования по максимальной ставке. Мы понимаем, что в кино все ставят на зеро и выигрывают. Призываем не делать сходственного. Перед активацией приза прочтите правила. Узнайте следующие факторы: Условия получения дара, за регистрацию, за депо и другое. Ограничения по наибольшей ставке. Зачастую не выше 350 руб. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вертеть автоматы, а вагер будет стоять на пространстве. Поэтому главно знать, в каких забавах можно осуществлять кратность денежного оборота.
1×slots casino зеркало
Бонус в казино без депозита имеет разные вариации: такое быть приветственный бонус, промоакции в честь каких-либо праздников или важных дат, приз за привлечение новых игроков, преданность и получение VIP-статуса. <a href=http://fitagrunt.ru/index.php?subaction=userinfo&user=abafttiff34>http://fitagrunt.ru/index.php?subaction=userinfo&user=abafttiff34</a> Выполнив все требования оператора, заказчик имеет оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит примерно не более суток. Если дополнительно требуется пройти процедуру верификации, то срок увеличивается до 1–2 трудящихся дней. Для перевода применяются банковские приборы и электрические платежные системы. Второй способ подходит лучше, так как большинство транзакций такой осуществляются моментально. В связи со спецификой функционирования банков обработка платежей возможность занять до нескольких трудящихся дней.Существуют казино с бонусом за регистрацию, в которых очень известны фриспины в онлайн казино потом регистрации в конкретных играх. Они встречаются в чаще даровых поощрений или классических призов в казино без вложений. Например, игрок регистрирует счет, на который начисляются безвозмездные забавы, приз за регистрацию повторяющий бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса игрок выигрывает настоящие деньги, которые в последствии можно успешно вывести из заведения на собственную платежную систему. То есть, все шансы вывести средства без рисков своими финансами. Регистрация, за в получит бонусы, займет минут, а спасибо этому возможно увеличить 5 евро поощрений до тыс. И без всяких проблем вывести их. 1×slots официальный demo регистрация в 1×slots casino
1×slots официальный сайт зеркало рабочее
Помните, собственно в неких забавах сумма ставки идет в зачет вейджера лишь отчасти. Так, в настольных и карточных забавах только от 5% до 50% суммы ставки считаются как отыгранные средства, на как в слотах идет в зачет все 100% суммы.Диапазон ставок, которые вправе устроить игрок, того лимитирован. Обычно ставить можно маленькую сумму — около 10–30 руб. За одно вращение. Минимального оборота. Этот лимит устанавливается вейджером — же игрок не сыграет на установленную сумму, вывод средств будет недоступен.Объективные – объем приза, коэффициент и условия вейджера, необходимость внесения депозита для вывода денег; 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=https://gti-club.ru/forum/member.php?u=414416>https://gti-club.ru/forum/member.php?u=414416</a> Но а случае вы теснее профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы автоматически перейдете в онлайн казино;
1×slots казино зеркало
Для верификации номера телефонного, в собственном профиле выберите опцию „Подтвердить номер телефона“ и введите в соответствующее фон код, полученный в sms-сообщении.Поспешите зарегистрироваться на официальном сайте Клубника, дабы моментально получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, появляется настоящий шанс победу! <a href=https://lukashjhf55677.blogdon.net/deepnude-the-dark-side-of-ai-and-digital-manipulation-46478780>https://lukashjhf55677.blogdon.net/deepnude-the-dark-side-of-ai-and-digital-manipulation-46478780</a> Создание аккаунта. На веб-сайте казино нужно обнаружить регистрационную форму и наполнить пустующие поля собственными данными. Иногда на этом шаге потребуется показать лишь адрес электрической почты и пароль, но почаще надобно наполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д.). Нужно указывать только реальные данные, потому впоследствие они станут испытаны. 1хслотс мобильная версия зеркало Возможность поиграть дополнительное соревнование (а времени и несколько) совершенно бесплатно, а выигрыш, же, поступает на счёт игрока.Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, например как Вам понадобиться ее подтвердить дальнейшем при выводе средств.
<b>Смотреть еще похожие новости:</b>
<a href=https://chasingadream.rpginitiative.com/showthread.php?tid=2&pid=275266#pid275266>1×slots актуальное зеркало</a>
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1627#post-47564>1× slots зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Обычно, бездепозитные бонусы выдаются под определенные слоты с фиксированной ставкой, но их наверняка запрещено использовать в игровых автоматах с прогрессивным джекпотом. Список игр, в которых можно использовать бездеп, Вы отыщите в описании промоакции или сможете уточнить у службы поддержки заведения. Приветственный бонус без депозита ? подарок за регистрацию. Выдается средствами, фриспинами либо баллами. В заключительном случае бонусные баллы используются для роли в турнирах или обмена на реальные деньги.
#3571 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
почему в казино нет окон 1×bet слоты 1×bet xyz <a href=https://repost.news/>Нургалиева Эльвира Рамиловна порно</a> ап казино casino промокод <a href=https://rucriminal.info/>казино вулкан</a> 1×bet 1хбет casino сегодня casino зеркало сайта Разуваева Ксения Денисовна порно 1×bet на андроид букмекерская контора бетсити new casino
DiskiPlus 1×bet на андроид бесплатно DiskiPlus 1×bet зеркало рабочее на сегодня <a href=https://www.diskiplus.ru>DiskiPlus casino играть</a> DiskiPlus 1×bet зеркало DiskiPlus порно с Кирьянова Дарья Борисовна <a href=https://diskiplus.ru/>DiskiPlus порно с Матвей Сафонов (футбол)</a> DiskiPlus официальные сайты казино DiskiPlus pin up casino скачать DiskiPlus casino com DiskiPlus порно с Елена Никитина, скелетонистка DiskiPlus pin ап casino DiskiPlus 7k casino бонус DiskiPlus porno Мира Андреева (теннис)
#3572 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало быструю регистрацию а также мгновенное
Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=http://filmkachat.ru/>рабочее зеркало 1хслотс</a> Получив свой подарок, Вы сможете даром выступать на настоящие средства, а выполнив условия отыгрыша, вывести собственный выигрыш. <a href=https://www.diigo.com/item/note/90mvl/se79?k=b535808e917668ed3ee3207e2956bcfa>https://www.diigo.com/item/note/90mvl/se79?k=b535808e917668ed3ee3207e2956bcfa</a> 1×slots зеркало видели такую регистрацию на <a href=http://forum.anomalythegame.com/viewtopic.php?f=18&t=463858&sid=981e3462f8ea6c3e45fb9bc1a6156f52>http://forum.anomalythegame.com/viewtopic.php?f=18&t=463858&sid=981e3462f8ea6c3e45fb9bc1a6156f52</a> Не желайте сыграть в азартные забавы, не рискуя средствами средствами, но получая в все выплаты? Подобную вероятность предоставляют многие превосходнейшие порталы с азартными увеселениями. В их числе большое добросовестных и надежных интернет-казино на российском языке. Они завлекают новых пользователей разными поощрительными событиями, включая бездепозитные, либо безвозмездные призы.Внесение депозита – Будьте готовы пополнить счет в отыгрыша приза. Это стандартное требование правил для этого подобии промо-акций. Лучше заблаговременно уточнить, какую необходимую нужно будет вносить на счет. Как управляло, речь идет о минимальном депозите, хотя вы обязаны быть уверены, собственно он для по карману.
1×slot зеркало
Главное преимущество спинов – вероятность изучить различные слоты. Также получится насладиться бонусными раундами, испытывать удачу в риск-туре и преувеличить выигрыш за счёт особых символов. Однако не только игровой процесс заслуживает внимание, как другого, как сосредоточиться на реальном выигрыше.Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают бонус по государствам. Вплоть до такого, что клуб может на игроков из Вашей страны, а бездеп мешает. <a href=https://chasingadream.rpginitiative.com/showthread.php?tid=245634>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> 1×slots официальный сайт скачать <a href=http://www.joaskin.co.kr/bbs/board.php?bo_table=free&wr_id=303053>http://www.joaskin.co.kr/bbs/board.php?bo_table=free&wr_id=303053</a> Нельзя разглядывать забаву на средства, как вариант заработка. Азартные забавы воспрещены для лиц младше 18 лет. Topcasinobonuses.mobi не зачинщиком азартных игр. Сайт носит информационный нрав.Иногда операторы просят внесение минимального депозита перед выводом для верификации платежного инструмента. В неких казино данный депозит кроме светит отыграть. зеркло казино 1×slots
1хслот 1хслотс регистрация перейти на 1×slots
Например, игрок получил 500 рублей при творении аккаунта и обязан отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., понадобится устроить 875 спинов для полного отыгрыша.Бoльшинcтвo азартных заведений выдвигают приблизительно однообразные, схожие обстоятельства и притязания, которые нужно выполнить, чтобы получить бездепозитный приз за регистрацию. Все их можно объединить в один список: <a href=https://list.ly/glavdorogadv1605/>https://list.ly/glavdorogadv1605/</a> Нет. Казино раздают благотворительные бонусы за регистрацию, для того, дабы клиент мог ознакомиться с игровым заведением. А чтобы вывести его, нужно выполнить условия отыгрыша. 1×slot зеркало рабочее этих способов предполагает регистрацию Помните, что всевозможные нарушения управлял сведут на нет ваши старания, и вы всего останетесь без начисленного для дарового приза. Всегда изучайте управляла начисления и обстоятельства вейджера. По каким вопросам, на которые вы имеет самостоятельно найти ответы, обращайтесь за объяснениям и саппорт.
1×slots официальный регистрация
Акции распространяются как на все забавы казино, так и на ограниченный перечень. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino прочие. Промо имеет обхватывать разработки 1-го производителя. Бездеп не пересекается с другими промоакциями казино. Если на сайте предусмотрен кэшбек, он не начисляется за ставки, изготовленные бонусными средствами. Для идентификации платежных реквизитов игрока может потребоваться пополнение счета на минимальную необходимую. <a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=33499>1 х слотс зеркало</a> Каждый из бездепозитных бонусов без пополнения 2022 содержит собственный конкретный вейджер для отыгрыша, например же в любом казино он уточняется индивидуально — где то он х55 а кое-где х30, повторюсь всюду по разному! Простая процедура получения бездепозитного приза, которая займет менее 2-х мин. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные. 1×slots casino регистрация <a href=http://forum.d-dub.com/member.php?1451070-KeithBoodo>http://forum.d-dub.com/member.php?1451070-KeithBoodo</a> Заработать на бездепозитных бонусах за регистрацию в казино может каждый юзер, достигший совершеннолетия.Объективные – объем приза, коэффициент и условия вейджера, необходимость внесения депо для вывода денег;
1хслотс регистрация в 1×slots casino
Иногда операторы просят внесение минимального депозита перед выводом для верификации платежного инструмента. В неких казино данный депозит также предстоит отыграть.Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие возникают у начинающих. <a href=http://test.sozapag.ru/forum/user/243832/>http://test.sozapag.ru/forum/user/243832/</a> Похожим образом работает 3-ий способ доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения посетителя или из-за с получения им VIP-статуса. Подарок предоставляется в воззвания в поддержку и ревизии.Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми акциями. Читайте о них в обзорах и на форуме. 1хслотс рабочее зеркало на сегодня Как лишь получите бездеп в казино, всё также не забывайте инспектировать электрическую почту. Некоторые игорные клубы каждый радуют активных гэмблеров приятными бонусами. Чаще всего получить презент возможно в преддверии веселья, на денек рождение, за привлечение приятеля. А также распространённым бонусом считается надбавка к депозиту. Нужно чем восполнить счёт, и азартное заведение увеличит его на 50–100%.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро либо 20 $. Если выдаются фриспины, их число редко превышает нескольких десятков даровых вращений.
<b>Смотреть еще похожие новости:</b>
<a href=http://nexusroleplay.teamforum.ru/viewtopic.php?f=19&t=7988>1×slots зеркало проходить регистрацию это отличный вариант</a>
<a href=http://86395.ww.w.molifan.net./space-uid-2275092.html>1×slots регистрация</a>
<a href=http://www.ihavethepussy.com/de/members/36184-Michaelbar?s=c2b3e7893b2b4b776187b53113fdff73>1×slots регистрация на 1хслотс</a>
<a href=https://irc.floobits.com/Jamesamiva>1×слот регистрация в 1×slots casino</a>
<a href=https://www.findaspermdonor.com/viewtopic.php?f=25&t=93199>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Акции, посвященные календарным праздничным, посещают рассчитаны как на всех юзеров, так и на категории: примеру, презент на 8 марта девушкам-игрокам либо мужчинам на 23 февраля.
#3573 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Евгения Медведева фильмы казино рояль <a href=https://vestnik-jurnal.com/>porno Екатерина Ефременкова, шорт-трекистка</a> Светлана Ходченкова яндекс игры казино <a href=https://krtka.info/>сколько казино</a> casino daddy up casino 1×bet бесплатно 1×bet официальный слоты kometa casino kent casino регистрация порно с Антропова Валентина Викторовна
DiskiPlus порно с Петр Ян (ММА) DiskiPlus porno Елизавета Туктамышева <a href=https://diskiplus.ru/>DiskiPlus online casino</a> DiskiPlus бывшие казино DiskiPlus Юдаева Ксения Валентиновна порно <a href=https://www.diskiplus.ru/>DiskiPlus порно с Абрамченко Виктория Валериевна</a> DiskiPlus порно с Владимир Минеев (ММА) DiskiPlus порно с Кирьянова Дарья Борисовна DiskiPlus приложения букмекерских контор DiskiPlus casino online зеркало DiskiPlus pin up casino официальный DiskiPlus champion casino DiskiPlus Окладникова Ирина Андреевна порно
#3574 JorgeAlomshttps://oo.zt.ua
Как сделать ремонт <a href=https://oo.zt.ua/>https://oo.zt.ua</a> правильно? Наш портал поможет выбрать материалы, спланировать бюджет и создать уютный интерьер. Простые решения для сложных задач!
#3575 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на сайте 1×slots ru com
Получив собственный подарок, Вы сможете безвозмездно выступать на настоящие средства, а выполнив условия отыгрыша, исключить свой выигрыш.B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. <a href=http://filmkachat.ru/>1хлот регистрация в 1×slots casino</a> Начнём с того, что любое промо за регистрацию подразумевает некие обстоятельства. Бездепозитные бонусы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность денежного оборота, необходимая для исполненья критерий. Пример, получили благотворительные вращения и выиграли с них 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 рублей, проигрышных или выигрышных, маловажно. После выполнения, бонусный баланс перейдёт на настоящий и будет доступным к выводу.Составленный знатоками Casino.ru перечень онлайн-казино с бездепозитным бонусом дозволяет игрокам сопоставить спецпредложения различных операторов. <a href=https://www.consult-exp.com/blogs/219732/Professional-Furniture-Renders-From-Concept-to-Photorealism>https://www.consult-exp.com/blogs/219732/Professional-Furniture-Renders-From-Concept-to-Photorealism</a> Мы подготовили список, где есть постоянно актуальные и свежие бездепозитные призы казино, коие вы можете получить даром. Для наших юзеров есть особые предложения эксклюзивные призы, коие вы кого не найдете, их мы обозначили особой красноватой плашкой «Exclusive».Многие казино предоставляют в маркетинговых целях безвозмездные бонусы необыкновенно для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой вебсайт по партнерской ссылке с нашего портала. 1×slots регистрация 1×slots casino 777 online <a href=https://chujalt.com/user-278.html>https://chujalt.com/user-278.html</a> Фриспины начисляются по определенной ставке. После их активации игроку нужно запустить слот и убедиться, что в нем показываются безвозмездные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода в отыгрыша ориентируется оператором и изредка выше 5 000 рублей.
1×slots официальный зеркало рабочее
Баланс игрока пополняется на подобающую необходимую. К ней применяется вейджер, обозначенный в правилах промоакции. Вывести выигрыш возможно будет последствии как, как юзер сделает требуемый объем ставок из личных средств. В редчайших случаях бездеп работает в формате Free Play. На счет юзера зачисляется большая сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по окончании сего периода сумма на счету несомненно превышать изначальную, то разность можно будет исключить либо применять для дальнейших ставок. <a href=https://isomedu.com/forum/profile/josephdrons/>1х слотс зеркало регистрация в 1×slots casino</a> 1×slots акции Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы которые появляются у новичков.Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном призе, то для обратите внимание на значение вейджера и срок, кот-ый дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть бонус и исключить выигрыш. <a href=http://classicalmusicmp3freedownload.com/ja/index.php?title=телефон>http://classicalmusicmp3freedownload.com/ja/index.php?title=телефон</a> 1×slots официальный сайт зеркало рабочее
1×slot казино зеркало
Практически все онлайн казино с бездепозитным бонусом за регистрацию учитывает программу преданности — систему поощрения неизменных посетителей, которая состоит из большого значений. При достижении игроком одного значения на его счёт поступает бонус. Чем повыше степень — тем щедрее бонус.Если при регистрации указать промокод, возможно гарантировано получить приз. Где арестовать ваучер? Посетите тематику блоги или форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В заключительное время игорные жилища начали рекламироваться в фильмах и сериалах. Присмотритесь и скорее заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных руб. <a href=https://tophatsec.com/forum/member.php?action=profile&uid=5387>https://tophatsec.com/forum/member.php?action=profile&uid=5387</a> Бонусные средства – небольшая сумма денег для старта в новеньком казино. На бонусные средства, обычно разрешается выступать во все забавы, кроме слотов с современным джекпотом и игр из раздела live casino.Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. 1×slot зеркало рабочее регистрации на телефон придет Многие азартные клубы ограничивают необходимую вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании акции, суммы Вы не можете исключить. Разница будет аннулирована, Вы даже не сможете делать на нее ставки.Многие азартные клубы ограничивают необходимую вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не можете исключить. Разница будет аннулирована, Вы в не можете создавать на нее ставки.
1×slots официальный сайт зеркало
Так же стоит выделить то, собственно в каждом интернет казино установлен собственный наибольший кешаут на бездепозитный приз. Как управляло кешаут — это предельная сумма денег, которая дешевая для вывода с бездепозитного бонуса. <a href=http://forums.indexrise.com/thread-2362-post-363882.html#pid363882>1×slots официальный зеркало</a> Если вы новичок в и только попали в неизведанную вами район азарта — с помощью услуг как бездепозитные призы без пополнения. 1×slots зеркало регистрация то дальше необходимо пройти <a href=http://azad.az/user/CharlesOxype/>http://azad.az/user/CharlesOxype/</a> На нашем веб-сайте Вы отыщите список своевременных свежих бездепозитных бонусов в казино 2022 года. Также, есть большое эксклюзивных услуг, которые доступны только посетителям нашего вебсайта последствии регистрации по нашей ссылке или активации особого промокода.При регистрации идет указывать только достоверную информацию. Когда учетная запись несомненно активна, замечен доступ в Личный офис. В нем возможно избрать валюту, установить промокод и разузнать подробные правила получения и отыгрыша бездепа. Краткая информация об промоакции часто присутствует непосредственно на регистрационной форме.
1×slots зеркало рабочее на сегодня
Начнём с того, собственно любое промо за регистрацию предполагает некоторые обстоятельства. Бездепозитные призы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность денежного оборота, необходимая для исполнения критерий. Пример, возымели бесплатные вращения и выиграли с них 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 рублей, неудачных или выигрышных, маловажно. После исполнения, бонусный баланс перейдёт на реальный и будет доступным к выводу.На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не можете активировать и получить бездепозитный бонус. К примеру, игроку выдаются безвозмездные свои в заведении в размере пятидесяти либо ста долларов (вейджер на коие составляет 100х). То есть, любому новоприбывшему геймеру выскакивает притягивающая иллюстрация, кот-ая обещает выплату всех зачисленных компанией средств. Не стоит внимания на казино бонус за регистрацию без депо с чрезмерно немалый или довольно малюсенькой суммой призов, поэтому собственно, даже кропотливо выучив все обстоятельства, здесь всего, будет какой-то подвох.Подтвердите регистрацию, дабы активировать Бездепозитный бонус с выводом, потребуется наполнить личный профиль. Заполните порожние поля реальными данными о себя. <a href=http://www.stavenue.com/forum/index.php?action=profile;u=58792>http://www.stavenue.com/forum/index.php?action=profile;u=58792</a> рабочее зеркало 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://sparta.training/faq/online-returns/#comment-67969>1×slots подтвердит вашу регистрацию если говорить</a>
<a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/8270–1-kh-slots-zerkalo#8292>1 х слотс зеркало</a>
<a href=http://www.arka-bahce.org/forum/showthread.php?p=777514&posted=1#post777514>1×slots официальный сайт, скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но есть азартные заведения, готовые просто например вручить деньги на игру. Для сего достаточно сделать профиль. Чтобы исключить выигрыш, сперва нужно выполнить вейджеровые обстоятельства, прописанные в критериях получения бездепа.
#3576 Josephjenhttps://itstore.dp.ua
Лучший портал по строительству <a href=https://itstore.dp.ua/>https://itstore.dp.ua</a> и ремонту! Гайды по отделке, рекомендации экспертов, новинки дизайна и проверенные решения. Все для вашего комфорта!
#3577 RamonDighttps://makprestig.in.ua
Инструкции по ремонту <a href=https://makprestig.in.ua/>https://makprestig.in.ua</a> подбор материалов, планирование, дизайн и советы экспертов. Станьте мастером своего дома!
#3578 Ремонт ноутбуков DELL Москваhttps://remont-noutbukov-dell-servis.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт ноутбуков dell рядом, можете посмотреть на сайте: <a href=https://remont-noutbukov-dell-servis.ru/>ремонт ноутбуков dell сервис</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#3579 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
бк букмекерская контора кент casino <a href=https://vestnik-jurnal.com/>порно с Варвара Субботина</a> демо казино cat casino <a href=https://th-royalgclub.com/>порно с Георгий Джикия (футбол)</a> porno Вера Бирюкова, гимнастка pin up букмекерская контора 1win букмекерская контора сайт винлайн букмекерская контора бесплатно фильм казино порно с Васильева Татьяна Викторовна винлайн букмекерская контора официальный сайт
DiskiPlus пин ап casino DiskiPlus бесплатно фильм казино <a href=https://www.diskiplus.ru/>DiskiPlus яндекс казино</a> DiskiPlus рокс казино DiskiPlus cometa casino <a href=https://www.diskiplus.ru>DiskiPlus макао казино</a> казино DiskiPlus автомат казино DiskiPlus porno Алена Косторная (фигурное катание) DiskiPlus пин ап casino pin up top DiskiPlus пари букмекерская контора DiskiPlus скачать 1×bet на андроид DiskiPlus порно с Афонина Марина Игоревна
#3580 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора фонбет официальный казино рояль <a href=https://slon-ru.com/>часы казино</a> порно с Елена Никитина, скелетонистка vodka casino <a href=https://res-publika.com>7k casino скачать</a> фреш казино букмекерская контора леонов букмекерская контора леонов kometa casino 7k casino зеркало рабочее 7k casino официальный сайт порно с Алина Загитова
DiskiPlus букмекерская контора зенит DiskiPlus сайт букмекерской конторы <a href=https://www.diskiplus.ru/>DiskiPlus букмекерская контора фонбет официальный</a> DiskiPlus porno Илья Ковальчук (хоккей) DiskiPlus casino приложения <a href=https://diskiplus.ru/>DiskiPlus порно с Дронова Александра Викторовна</a> DiskiPlus 1×bet официальный 1×bet xyz DiskiPlus яндекс казино DiskiPlus casino daddy DiskiPlus вывод казино DiskiPlus porno Вера Бирюкова, гимнастка DiskiPlus Окладникова Ирина Андреевна порно DiskiPlus up casino
#3581 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать на айфон
Бoльшинcтвo азартных заведений выдвигают приблизительно одинаковые условия и требования, которые нужно выполнить, дабы получить бездепозитный приз за регистрацию. Все их возможно соединить в один перечень: <a href=http://filmkachat.ru/>1×slots сайт</a> При забаве на бонусные средства запрещается выступать в игровые автоматы с современным джекпотом и игры из радела exist casino. Кроме как, кое-какие казино дают бездеп на раз либо количество определенных слотов, и в иных играх Вы не сможете на них выступать. <a href=https://www.mazafakas.com/index.php?page=custom&file=osclass_forum/viewpost.php&id=4910>https://www.mazafakas.com/index.php?page=custom&file=osclass_forum/viewpost.php&id=4910</a> 1×slots регистрация <a href=http://www.soe-parrot.com/home.php?mod=space&uid=182947>http://www.soe-parrot.com/home.php?mod=space&uid=182947</a> Изучить верховодила и условия получения бездепозитных призов казино, Вы можете у нас на сайте в разделе с призами или на официальном сайте избранного Вами казино. Если имеет найти нужную информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал либо по электронной почте.
1×slots быструю регистрацию а также мгновенное
Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы моментально получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, появляется реальный шанс победу!На страничке представлены бездепозитные бонусы за регистрацию в казино редчайшая награда за которой гонятся все игроки как новички, например и профессионалы. Мы тоже уделяем огромное внимание на присутствие призов при составление рейтинга казино на средства. Бездепозитный приз это возможность играть бесплатно и выиграть настоящие деньги. 1×slots бездепозитный бонус за регистрацию <a href=http://www.so0912.com/home.php?mod=space&uid=2193679>http://www.so0912.com/home.php?mod=space&uid=2193679</a> 1×slots casino регистрация на сайте Oтыгpaть приз с указанным вeйджepом, желаемого необходимо сдeлaть cтaвoк нa cумму, превосходящую объем бонуса в некоторое раз.Бездепы обычно предлагают с отыгрышем — моментально вывести выигранные свои нельзя. Перевод средств со счета несомненно вероятен последствии как, как пользователь выполнит все требования казино, а сумма не быть выше установленного правилами лимита. Условиями промоакции фиксируются сроки, на коих заказчик вправе пользоваться предложением. Обычно они не превышают нескольких дней после активации.
1×slots рабочее зеркало
Доступные забавы – В неких азартных играх возможно понизить математическое преимущество казино до нескольких десятых процента. В их числе многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как правило, в этих забавах ставки идут в зачет вейджера не полностью. Например, возможность учитываться только 50%. В некоторых забавах бездепозитные призы вообще нельзя отыгрывать.У каждого игорного заведения свои правила и условия. Но, дабы получить бонусы, необходимо выполнить стандартные действия: <a href=http://filmsgood.ru/user/Michaelswemn/>http://filmsgood.ru/user/Michaelswemn/</a> рабочее зеркало 1×slots
1×slots регистрация на 1хслотс
Первый возникающий вопрос, это, чего выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают новых игроков. Последним проще начать забаву на средства с презента за регистрацию. Им не нужно пополнять баланс и тратить личные свои. Новички получают благотворительные спины либо средства на счёт. С их поддержкою знакомятся с игровым процессом, крутят слоты и проделывают ставки в рулетке.В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, нужно адресоваться в саппорта через лайв-чат на веб-сайте казино. Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке нужно восполнить счет в казино. Для депозитных бонусов, эта процедура не нужна, например как депо теснее сделан. 1×slots зеркало на сегодня <a href=http://maplemania.6te.net/profile.php?lookup=14095>http://maplemania.6te.net/profile.php?lookup=14095</a>
1хслотс зеркало на сегодня
Для ревизии используются сканы паспортов, водительских удостоверений, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если юзер обнаружен в попытке завести вспомогательный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный список. При забаве на лицензионной площадке не стоит опасаться указывать достоверную персональную информацию (шифрование исключает утечку индивидуальных данных). Если площадка презентует бездеп за регистрацию, то процедура его получения проста. Нужно только завести аккаунт на веб-сайте и активировать его, подтвердив адрес электронной почты, номер телефона или другие данные, коие настятельно оператор. Перед этим необходимо убедиться, собственно юзер располагается на официальном сайте казино, а не на мошеннической площадке. <a href=https://metalverk.ru/forum/?PAGE_NAME=profile_view&UID=74112>https://metalverk.ru/forum/?PAGE_NAME=profile_view&UID=74112</a> 1хслотс рабочее зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://www.easysunnysunshine.com/memberlist.php?mode=viewprofile&u=18118>1× slots зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Теоретически, к безвозмездным бонусам можно отнести так называемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, поэтому собственно они деют только вероятность делать ставки. Бездепы обычно предлагают с отыгрышем — моментально вывести выигранные средства нельзя. Перевод средств со счета несомненно возможен последствии такого, как пользователь выполнит все требования казино, а сумма не быть выше установленного правилами лимита. Условиями промоакции фиксируются сроки, протяжении которых заказчик вправе воспользоваться предложением. Обычно они не превышают нескольких дней после активации.
#3582 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало xbet пин ап casino <a href=https://kompromat1.online/>Ходнева Светлана Владимировна порно</a> 1go casino 7k casino официальный <a href=https://th-royalgclub.com/>up casino официальный</a> порно с Бондаренко Анастасия Борисовна фреш казино пина casino Шевцова Татьяна Викторовна порно промокод 1×bet лучшие онлайн казино порно с Варвара Субботина
DiskiPlus ев казино DiskiPlus casino вход <a href=https://diskiplus.ru>DiskiPlus casino скачать приложение</a> DiskiPlus Петрова Ольга Викторовна порно DiskiPlus порно с Дарья Касаткина (теннис) <a href=https://diskiplus.ru>DiskiPlus казино на деньги</a> DiskiPlus казино сегодня DiskiPlus casino андроид DiskiPlus Светлана Ходченкова DiskiPlus Яровая Ирина Анатольевна порно DiskiPlus порно с Илюшникова Татьяна Александровна DiskiPlus 1×bet на андроид DiskiPlus где казино
#3583 Charlesgunnyhttp://filmkachat.ru
1хслотс 1хслотс регистрация перейти на 1×slots
При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток. <a href=http://filmkachat.ru/>1×slots зеркало регистрацию более популярный вариант это</a> В онлайне очень большое скриптовых вебсайтов, которые принадлежат жуликам. Их главная задача – привлечь гэмблеров, пообещав не только щедрые подарки, но и крупные выигрыши. Так что некоторые веб-сайты предлагают получить за регистрацию в $1 000. <a href=https://forum.gazeta.pl/forum/w,678,178514390,178514390,Professional_Architectural_Renderings.html>https://forum.gazeta.pl/forum/w,678,178514390,178514390,Professional_Architectural_Renderings.html</a> 1×slots зеркало на сегодня <a href=https://www.rs6.com/member.php/753640-Frankfoext>https://www.rs6.com/member.php/753640-Frankfoext</a> При отыгрыше бездепов, учитывайте временные ограничения. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток.
1×slots официальный demo регистрация в 1×slots casino
1 xslots рабочее зеркало <a href=https://www.as7abe.com/wall/blogs/post/53484>https://www.as7abe.com/wall/blogs/post/53484</a> 1хслотс казино зеркало Зачастую бездепозитные призы казино для игры предлагаются различными заведениями азартных игр виде рекламных акций либо в целях привлечения к себя свежих игроков. Для бездепозитных бонусов в казино 2022 игроку не пополнять счет до момента вывода желаемых средств.
1×slots регистрация на официальном сайте
Можно ли наваривать на бездепозитных призах? Это не работа, тут как повезет, если в любом предложенном безедепе, вы будете откручивать вейджер и выводить, тогда возможно назвать везением, и дополнительной добавкой к вашему бютжету. <a href=https://netishin.com.ua/threads/1-win-apostas-br.23356/>https://netishin.com.ua/threads/1-win-apostas-br.23356/</a> Акции распространяются как на все забавы казино, так и на узкий перечень. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и другие. Промо имеет обхватывать разработки одного производителя. Бездеп не пересекается с другими промоакциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, изготовленные бонусными средствами. Для идентификации платежных реквизитов игрока возможность потребоваться пополнение счета на наименьшую сумму.Как и акции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения являются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих гостей и разрешает им составить впечатление о функционале, не рискуя вескими суммами. 1×slots зеркало быструю регистрацию а также мгновенное Можно ли в одном интернет казино получить больше 1-го бонуса за регистрацию? Нет, например как в любом онлайн казино есть правила, к которым нужно придерживаться, не творить два аккаута для получения призов, по будет блокировка обоих аккаутов, не пытайтесь перехитрить онлайн казино, приз за регистрацию выдаеться раз один 1 лицу.
1×slots регистрация то дальше необходимо пройти
Не сложно догадаться, что not the slightest down payment bonuses практически разу не бывают великими. Чаще всего речь идет о пяти–тридцати баксах (либо эквиваленте данной суммы в другой еденице). <a href=http://palais.beesims.com/phpbb/memberlist.php?mode=viewprofile&u=3390&sid=56562e0c84002868f9057959d3281c66>1×slots регистрация</a> Подтвердите регистрацию, дабы активировать Бездепозитный приз с выводом, требуется заполнить собственный профиль. Заполните пустые поля реальными данными о себе.Фриплей-бонусы. Бонусы за безвозмездную забаву есть только в неких клубах. Они зачисляются незамедлительно после создания профиля и срабатывают недолговременное время. Если у вас нет медли истратить средства, они просто завершатся. Что дотрагивается медли, в большинстве случаев бонусы срабатывают на одного часа. Фриплей-бонусы. Бонусы за безвозмездную забаву есть лишь в некоторых клубах. Они зачисляются незамедлительно в творенья профиля и срабатывают недолговременное время. Если у вас нет времени истратить свои, они просто завершатся. Что дотрагивается медли, как призы срабатывают протяжении 1-го часа. 1хслотс регистрация в 1×slots casino <a href=https://shilinka.ru/user/Brianbum/>https://shilinka.ru/user/Brianbum/</a>
x1 slots 1хслотс регистрация перейти на 1×slots
Маркетинговая политика всех игорных интернет-клубов обязана носить различный характер. И в вознаграждения на депозит работают чтобы, чтобы, дабы стимулировать вносить депозиты и поощрять уже быть пользователей, то бездепозитный бонус в казино или приз за регистрацию в казино, этого всего, рассчитан на расширение базы потребителей. Однако далековато не все ресурсы предлагают своим клиентам бездепозитные призы за регистрацию в казино. В большинстве случаев учтено одобрение на 1-ый депозит в размере 100–200%. Это отличная возможность преувеличить банкролл, прирастить время, проведённое за игрой и шансы сорвать крупный куш. <a href=https://interesno.bbmy.ru/viewtopic.php?id=8315#p23789>https://interesno.bbmy.ru/viewtopic.php?id=8315#p23789</a> Иногда операторы требуют внесение малого депозита перед выводом для верификации платежного инструмента. В некоторых казино этот депо того предстоит отыграть. зеркала 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://creapnl.com/foros/tema/1×slots-%d0%b7%d0%b5%d1%80%d0%ba%d0%b0%d0%bb%d0%be-%d1%81%d0%b0%d0%b9%d1%82%d0%b0–46/>1×slots зеркало сайта</a>
<a href=http://www.infoknygos.lt/smforum/index.php?topic=78596.new#new>1×slots официальный сайт, скачать</a>
<a href=https://portugal-campings.com/pt/profile/jamescip/>1 xslots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Так что основное отличие подарка на депо от бездепа – обязательное пополнение счёта. Вы сможете внести депо и преувеличить стартовый капитал или арестовать бездеп и при не придётся рисковать своими сбережениями. Поспешите выполнить обычные требования, и администрация ресурса начисляет щедрое одобрение! Практически все интернет казино с бездепозитным призом за регистрацию предусматривает программку лояльности — систему поощрения постоянных посетителей, которая произведено из колличества уровней. При достижении игроком очередного уровня на его счёт поступает приз. Чем повыше степень — тем щедрее приз.
#3584 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino промокод порно с Арина и Дина Аверины, гимнастки <a href=https://strelochnik.com/>casino pin официальный</a> казино вход 1go casino <a href=https://rhymes-punches.com/>Мухтиярова Елена Вячеславовна порно</a> скачать 1×bet на андроид бесплатно лучшие онлайн казино top casino ешь казино скачать букмекерскую контору букмекерская контора на андроид букмекерская контора на андроид
DiskiPlus сайт винлайн букмекерская контора DiskiPlus 1×bet скачать приложение на андроид <a href=https://www.diskiplus.ru/>DiskiPlus порно с Илья Осипов (киберспорт)</a> DiskiPlus букмекерская контора официальный сайт скачать DiskiPlus порно с Афонина Марина Игоревна <a href=https://diskiplus.ru>DiskiPlus Матвиенко Валентина Ивановна порно</a> DiskiPlus букмекерская контора официальный сайт скачать DiskiPlus официальное казино вход DiskiPlus сайт букмекерской конторы DiskiPlus Самойлова Алла Владимировна порно DiskiPlus casino скачать приложение DiskiPlus cometa casino DiskiPlus porno Юлия Пересильд
#3585 PerevozkiVrn_pephttps://perevozki-vrn.ru/
Добрый день! Перевозка грузов. Всегда в наличии длинномеры 12 и 14 метров, а также краны, тралы, тенты и др. Спецтехника и перевозка негабаритных грузов, сопровождение, а также возможен подбор любых грузовых автомобилей и спецтехники. <a href=https://perevozki-vrn.ru/>аренда манипулятора 20 тонн</a> Если спецтехника в Воронеже, спецтехника Воронеж, аренда автокранов, тралов, длинномеров в Воронеже, то это в perevozki-vrn.ru https://perevozki-vrn.ru/ . Сопровождение и заказ спецтехники в Воронеже. Звоните сейчас: +7 (910) 345–50–48. Всем пока!
#3586 Lesliemarhttps://hotel.kr.ua
Портал для строителей <a href=https://hotel.kr.ua/>https://hotel.kr.ua</a> и домашних мастеров! Полезные статьи, новинки рынка, лайфхаки по ремонту и рекомендации по выбору качественных материалов.
#3587 SolomonMemhttps://insurancecarhum.org
Ваш надежный помощник <a href=https://insurancecarhum.org/>https://insurancecarhum.org</a> в ремонте! Практичные советы, инструкции и секреты профессионалов. Узнайте, как сделать качественный ремонт и выбрать лучшие строительные материалы!
#3588 Stevedualohttps://inbound.com.ua
Ремонт и строительство <a href=https://inbound.com.ua/>https://inbound.com.ua</a> без хлопот! Полезные лайфхаки, новинки в дизайне, технологии строительства и подбор лучших материалов. Создайте комфортное жилье легко и выгодно!
#3589 Charlesgunnyhttp://filmkachat.ru
1хслотс мобильная версия зеркало
Диапазон ставок, которые вправе устроить игрок, того лимитирован. Обычно назначать возможно маленькую сумму — пределах 10–30 руб. За одно вращение. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slots review live</a> <a href=https://heroes.app/blogs/443176/Professional-3D-Furniture-Rendering-Visualization-Services>https://heroes.app/blogs/443176/Professional-3D-Furniture-Rendering-Visualization-Services</a> Самый распространённый из сходственных бонусов, естесственно же, бездеп на денек рождения клиента — приз повторяющий фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им возможно на установленного периода медли.У любого игорного клубы различные вейджеровые обстоятельства. Чтобы вы гарантировано сумели выполнить их, мы дадим несколько советов. Если система начислила небольшую необходимую, не стоит делать великие ставки – остановитесь на 10–30 центах. Как лишь сможете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте играть. В неприятном случае другого присмотреться к иному автомату. 1×slots регистрацию более популярный вариант это <a href=https://www.spairkorea.co.kr:443/gnuboard/bbs/board.php?bo_table=as_inquire&wr_id=1322956>https://www.spairkorea.co.kr:443/gnuboard/bbs/board.php?bo_table=as_inquire&wr_id=1322956</a>
1 x slots casino
1хлот регистрация в 1×slots casino Нельзя осматривать игру на деньги, как вариант заработка. Азартные забавы запрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не зачинщиком азартных игр. Сайт одевает информационный характер.В истинное время получить бонус за регистрацию в казино довольно просто. Почти любой игорный дом с радостью предоставит средства либо безвозмездные вращения. Многие игроки используют этим и не стыдятся региться в любом клубе с выгодными критериями. Кстати, это отличная возможность выдумать выигрышную тактику и сорвать куш. <a href=https://buketik39.ru/user/HenryTut/>https://buketik39.ru/user/HenryTut/</a> x1 slots регистрация в 1×slots casino
1×slots casino регистрация
Поспешите отобрать бездепозитные бонусы за регистрацию в казино из представленного списка. Все платформы не только водят законную деятельность, но и обрадуют честными результатами забавы, высочайшей отдачей, быстрыми выплатами. <a href=https://startacus.net/members/view/Glavdorogadv2106>https://startacus.net/members/view/Glavdorogadv2106</a> Перечисленные повыше основные свойства сочетают практически каждый приз и являются стандартными для бездепозитных бонусных начислений в казино.Не стоит сразу же открещиваться от приветственных презентов в подобных казино. Администрация готова начислить деньги либо фриспины, хотя предварительно сотрудники должны убедиться, что вы не мошенник. Дело что, нет, собственно развелось очень много охотников за бонусами. Они научились врать систему и зарабатывать солидные суммы денег. 1хслот 1хслотс регистрация перейти на 1×slots Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке необходимо пополнить счет в казино. Для депозитных бонусов, данная процедура не необходима, например как депозит уже изготовлен.
1×slots зеркало быструю регистрацию а также мгновенное
Бездепозитный приз – это экономическое вознаграждение, которое выдается участнику забавы в казино, для его привлечения и возникновения заинтригованности. Любой посетитель, кот-ый соответствует условиям выдачи сходственного бездепозитного бонуса, может претендовать на получение вышеуказанного приза. Такое поощрение считается наиболее действенным методом, дающим возможность стартовать при, не вкладывая личных материальных средств. Также, учите, собственно бездепозитный приз возможно исключить только что, нет случае, когда станут выполнены все обстоятельства отыгрыша.Онлайн гемблинг развивается с любым деньком больше и больше, свежие бренды создаются не по денькам а по часам. Новые онлайн казино проделывают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и тем наиболее предлагают бездепозитные призы за регистрацию, что бы не упустить эту возможность — как воспользоваться свежим бездепом, советуем навещать наш сайт как можно почаще, самое смачное и новые несомненно добавляться в данном же перечне. Благодаря программке лояльности от игорного заведения, можно взять неплохой старт и без дополнительных инвестициям запустить видеослоты. Кроме как, возможно рассчитывать на реальную удачу и получить, без инвестиции собственных финансов, немалый выигрыш. 1×slots мобильная версия войти казино <a href=http://bbs.nhcsw.com/home.php?mod=space&uid=1735507>http://bbs.nhcsw.com/home.php?mod=space&uid=1735507</a> Бездепы шансы входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами.Не стоит путать забаву в демо и внедрение бонусов. В демонстрационном режиме игрок может расценить механику слота, сюжет и оформление. Но забава ведется на относительные кредиты, поэтому отсутствует главное ? ощущение пыла. Активируя промокод или фриспины, заказчик раньше не расходует свои средства на игровые автоматы, хотя имеет сорвать настоящий куш!
1×slots на любой вкус как пройти регистрацию
Хотя безвозмездные призы начисляются без депо, не исключено, что для понадобиться вносить деньги. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь в того, как новый заказчик первый пополнит игровой счет. <a href=https://www.artstation.com/glavdorogadv16069/profile>https://www.artstation.com/glavdorogadv16069/profile</a> Во время забавы в казино, выигрыши, приобретенные спасибо безвозмездным призовым фондам, суммируются и включаются в общую необходимую для отыгрывания. Однако, в фортуна улыбнется и получится отыграть все бонусы, игровое заведение гарантированно разрешит вывести денежные средства. Сумма вывода несомненно находиться от лимита, одобренного непосредственно в этом учреждении. Поэтому, внимательно нужно читать правила выдачи анлимитных депо.Для получения предоставленных бонусов вам пригодиться — ПК или мобильное устройство, и остальное дело за небольшим. x1 slots 1хслотс регистрация перейти на 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1136#post-35471>1×slots зеркало проходить регистрацию это отличный вариант</a>
<a href=http://sladkierecepti.5nx.ru/viewtopic.php?f=8&t=6347>1х слотс зеркало регистрация в 1×slots casino</a>
<a href=https://portugal-campings.com/pt/account/>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный приз – это экономическое вознаграждение, коие выдается участнику забавы в казино, для его вербования и появления заинтересованности. Любой посетитель, кот-ый соответствует условиям выдачи сходственного бездепозитного приза, может претендовать на получение вышеуказанного приза. Такое поощрение является более эффективным методом, дающим вероятность стартовать в игре, не вкладывая собственных вещественных средств.
#3590 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Петр Ян (ММА) retro casino <a href=https://glvk.guru/>скачать casino на андроид</a> 1×bet 1 casino <a href=https://sovsekretno.net/>win win casino</a> порно с Алина Загитова ев казино Александра Бортич Ходнева Светлана Владимировна порно casino ап вавада казино казино рублях
DiskiPlus 1×bet рабочее на сегодня DiskiPlus порно с Александр Головин (футбол) <a href=https://www.diskiplus.ru>DiskiPlus 1×bet xbet xyz</a> DiskiPlus bitz casino DiskiPlus казино играть <a href=https://www.diskiplus.ru/>DiskiPlus porno Илона Маркова, хоккеистка</a> DiskiPlus vodka casino DiskiPlus Светлана Ходченкова DiskiPlus ограбление казино DiskiPlus гта казино DiskiPlus казино пин DiskiPlus вывод казино DiskiPlus порно с Зырянова Анастасия Владимировна
#3591 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet регистрация pin up casino пин ап <a href=https://specreporter.com/>порно с Анна Щербакова, фигуристка</a> 1×bet рабочее букмекерская контора вход <a href=https://glvk.guru/>игры казино</a> 7k casino яндекс игры казино казино смотреть онлайн бесплатно 1win casino казино 1 vodka casino пин ап casino pin up top
DiskiPlus 7k casino сайт DiskiPlus букмекерская контора фонбет официальный сайт <a href=https://diskiplus.ru>DiskiPlus слот casino</a> DiskiPlus порно с Федор Чалов (футбол) DiskiPlus про казино <a href=https://www.diskiplus.ru>DiskiPlus Набиуллина Эльвира Сахипзадовна порно</a> DiskiPlus casino бездепозитный DiskiPlus casino riobet DiskiPlus online casino 7k DiskiPlus bitz casino DiskiPlus Ирина Горбачева DiskiPlus 1×bet xbet xyz DiskiPlus porno Яна Троянова
#3592 Charlesgunnyhttp://filmkachat.ru
сайт 1× slots casino
Автоматы непопросту считаются самым знаменитым азартным развлечением. Чтобы усвоить управление и управляла, понадобится всего некоторое мин. Ваша задачка устроить ставку, найти количество рабочих линий и можно крутить барабан. Если дисплее выпадет выигрышная комбинация – вы выиграли! С этой задачей вам посодействуют управится бездепозитные бонусы казино. <a href=http://filmkachat.ru/>1× slots casino зеркало</a> Прежде всего, не запамятовывайте регулярно заглядывать на страницу обзоров бездепозитных призов. Они шаг за шагом осматривают более занимательные предложения ведущих игорных порталов. <a href=https://steemit.com/electronic/@kalinka0588/diverse-electronics-premium-electronic-components-and-solutions>https://steemit.com/electronic/@kalinka0588/diverse-electronics-premium-electronic-components-and-solutions</a> 1×slots казино мобильная версия <a href=http://worklocal.com.au/users/glennlew>http://worklocal.com.au/users/glennlew</a> В неких онлайн казино для получения бездепозитных бонусов не довольно просто зарегистрироваться на сайте клуба и доказать свои контактные данные. Дополнительно потребуется активация промокода.
1×slots зеркало регистрация в 1×slots casino
<a href=https://feederfishing.lt/en/forum/perku/1344436–1×-slots-casino#1355910>1× slots casino зеркало</a> 1×slots официальный сайт зеркало Бесплатные призы казино без депо можно получить в виде денежных средств на бонусный счет (исключить их можно только после отыгрыша), фриспинов, игры или кешбэк-бонуса. <a href=http://wiki.catfolks.net/doku.php?id=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D0%B5%D0%B9%D1%88%D0%B8%D0%B5%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!>http://wiki.catfolks.net/doku.php?id=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D0%B5%D0%B9%D1%88%D0%B8%D0%B5%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!</a> Обычно показатель выше, чем для призов на депозит. Не дивитесь, случае он будет в х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных стран. 1×slots регистрацию процедура займет всего лишь Но эти рамки не смущают и хайроллеров, поскольку коэффициенты на слотах позволяют рассчитывать на крупные выигрыши, в некоторых автоматах разыгрывается передовой джекпот.Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.
1× slots официальный
Фриплей-бонусы. Бонусы за безвозмездную забаву есть лишь в некоторых клубах. Они зачисляются незамедлительно после создания профиля и срабатывают непродолжительное время. Если у вас нет времени потратить средства, они просто закончатся. Что дотрагивается времени, правило призы срабатывают в течение одного часа.Срок отыгрыша — это период, который начинается в момент активации бонуса и заканчивается с его закрытием. Пользователю необходимо уложиться в этот временной промежуток, иначе призовые свои аннулируются. Казино устанавливают список игр, ставки в которых засчитываются при расчете отыгранных средств. Если тайтл не входит в этот список, то возможность быть недосегаем для загрузки во время деянья бонусного предложения. <a href=http://karabash.chelbusiness.ru/index.php?name=account&op=info&uname=knowledgeablere>http://karabash.chelbusiness.ru/index.php?name=account&op=info&uname=knowledgeablere</a> 1×slots официальный зеркало рабочее Бонусные средства – небольшая сумма денег для старта в новеньком казино. На бонусные деньги, обыкновенно разрешается играть во все игры, не слотов с прогрессивным джекпотом и игр из раздела live casino.Новые посетители онлайн-казино без первого депозита имеют проверить собственную удачливость. К что, этому же есть возможность преобразовать бездепы в реальные средства за регистрацию в казино, впрочем для этого приз нужно отыграть сообразно условиям промоакции.
1× slots casino официальный сайт
Бездепозитный бонус за регистрацию в казино — это стартовый подарок в виде денежного начисления или безвозмездных вращений для свежих игроков заведения, для получения которого надо заносить депо. Некоторые клубы механически начисляют бонус на аккаунт игрока последствии выполнения критерий получения, хотя посещают истории, когда бонус нужно активировать игроку самому. Есть некоторое методов активации приза: 1хслотс мобильная версия зеркало <a href=http://msfo-soft.ru/msfo/forum/messages/forum26/topic5913/message189153/?result=new#message189153>http://msfo-soft.ru/msfo/forum/messages/forum26/topic5913/message189153/?result=new#message189153</a>
1×slots casino регистрация 1×slotscasino09k online
Также учтите, что некоторые игровые платформы сузивают перечень стран, коие готовы получить предложенный бездепозитный бонус за регистрацию. К примеру, есть онлайн-заведения, выдающие подобные бонусы только жителям конкретных стран. К примеру, онлайн казино 777 Оригинал предоставляет бездепозитный бонус лишь игрокам из России и стран СНГ. Или наоборот, снабжают вознаграждением всех, считая жителей неких государств (из сего, стопам внимательно учить перечень, чтобы впоследствии не появилось никаких вопросов и жалоб). Бездепозитные бонусы начисляются только раз один. Не стоит открывать новые аккаунты, чтобы получить их повторно. Служба безопасности казино обязательно выявит «левого» участника и перекроет. Если гость выполнит необходимые требования, отыграет свою ставку и решит исключить личный выигрыш, то ему надо(надобно) принять, собственно казино обязательно потребует дать ксерокопии личных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные средства исключить не удастся. <a href=https://forex-bitcoin.com/members/368337-ralphovami>https://forex-bitcoin.com/members/368337-ralphovami</a> Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция содержит подробные верховодила, гиперссылка на которые обычно содержится в промообъявлении. В них указываются лимиты, вейджер, перечень дешевых игр. Если оператор прячет данные о предложении, то пользоваться им не стоит.Когда речь о валютных бонусах, казино всегда устанавливают условия вейджера, которые нужно выполнить, чтобы вывести выигрыш. 1хслотс рабочее зеркало Вейджер в переводе с английского означает «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша полученного бонуса, в нашем случае бездепозитного. Число ставок не — главно лишь набрать сумму, пропорциональную сумме одобрения.Частенько новенькие не понимают, как активировать подарки или вывести первый выигрыш. Для похожих случаев наша команда обрисовала главные термины – собственно такое фриспины, вейджер, как его отыграть, зачем необходимо проходить верификацию.
<b>Смотреть еще похожие новости:</b>
<a href=http://diablo2r.cn/home.php?mod=space&uid=30130>1×slots зеркало на сегодня</a>
<a href=https://your-portal.at.ua/forum/57–724–5#88323>1 x slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Самый распространённый из сходственных призов, естесственно же, бездеп на денек рождения посетителя — приз в виде фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им можно на установленного периода времени. Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного приза достаточно пополнения баланса и подтверждения личности. В других же клубах, необходимо количество один прокрутить собственный депозит.
#3593 10betCasinohttps://10bet.directorio-de-casinos-mx.com
<a href=https://10bet.directorio-de-casinos-mx.com/>10bet.directorio-de-casinos-mx.com</a>
Download application online casino 10bet – win today! <a href=https://10bet.directorio-de-casinos-mx.com/>https://www.10bet.directorio-de-casinos-mx.com</a>
#3594 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino x ап казино <a href=https://strelochnik.com/>порно с Зырянова Анастасия Владимировна</a> 7k casino официальный Александра Бортич <a href=https://m.repost.news/>casino автомат</a> casino официальный сайт up casino порно с Афонина Марина Игоревна 7k casino сайт официальные сайты казино пина букмекерской конторы 1×bet зеркало на сегодня
DiskiPlus casino ап DiskiPlus retro casino <a href=https://www.diskiplus.ru>DiskiPlus порно с Виктория Синицина, фигуристка</a> DiskiPlus 1×bet на сегодня DiskiPlus пин casino <a href=https://www.diskiplus.ru>DiskiPlus porno Ангелина Гончаренко, хоккеистка</a> DiskiPlus играющие казино DiskiPlus casino сайты DiskiPlus букмекерская контора фонбет официальный сайт DiskiPlus Матвиенко Валентина Ивановна порно DiskiPlus 7k casino сайт DiskiPlus порно с Анна Калинская (теннис) DiskiPlus порно с Дарья Клишина, легкоатлетка
#3595 Charlesgunnyhttp://filmkachat.ru
1 хслот регистрация в 1×slots casino
Так что можете смело регистрироваться без всяких размышлений. Фортуна сегодня точно на вашей стороне. Не бойтесь, ведь последствие какого или убытка Вам совершенно не грозит. С этими призами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе. <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino09k online</a> Воспользоваться бездепом можно не во всех игровых автоматах: казино вдруг уточняет ограничение для посетителей. Конечно, это возможно посчитать некоторым неудобством для игрока, хотя ради необходимо, собственно выбор автоматов всё также остаётся достаточно наибольшим. <a href=https://www.easyfie.com/read-blog/2333216_professional-3d-furniture-rendering-services-cgi-visualization>https://www.easyfie.com/read-blog/2333216_professional-3d-furniture-rendering-services-cgi-visualization</a> 1хслот официальный сайт зеркало <a href=http://d90894u1.bget.ru/user/Glennbekly/>http://d90894u1.bget.ru/user/Glennbekly/</a>
1×slots на любой вкус как пройти регистрацию
Доступность — бездепозитные призы в казино почаще всего предоставляются новым игрокам, хотя случаются случаи, когда приз шансы получить и действующие посетители.Многие игроки, оценив возможностей казино, остаются играть в нем и дальше ? на это и нацелено каждое промо. Постоянные посетители вносят депозиты и делают ставки, обеспечивая долгосрочную выгода оператора. То есть, казино выдают бездепы новым пользователям для формирования лояльной аудитории. <a href=http://swissairways-va.com/phpBB3/memberlist.php?mode=viewprofile&u=3495>рабочее зеркало 1хслотс</a> 1×slots зеркало проходить регистрацию это отличный вариант <a href=https://www.xn–72c9aa5escud2b.com/webboard/index.php?action=profile;u=2147878>https://www.xn–72c9aa5escud2b.com/webboard/index.php?action=profile;u=2147878</a> 1×slots рабочее зеркало на сегодня Допустим, за регистрацию вы возымели бездеп в объеме 2 000 руб. С вейджером х30. В данном случае светит сделать ставок, на совместную сумму в 60 000 рублей (2 000 * 30 = 60 000). Когда сделайте условия по отыгрышу, придёт время заработать настоящие деньги. Однако не забывайте, что с каждого дара получится вывести определённую необходимую (чаще всего менее $200).
1х слот 1хслотс регистрация перейти на 1×slots
За вербование приятеля ? в рамках партнерской программки клиент получает вознаграждение за вербование свежих юзеров. <a href=https://active.popsugar.com/@kalinka0588/profile>https://active.popsugar.com/@kalinka0588/profile</a> скачать 1×slots официальный сайт
скачать 1×slots официальный сайт
Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную процедуру активации приза без депо. Внимательно прочитайте до конца. Многие новенькие проделывают промахи на шаге регистрации и поэтому возможности получить презент. <a href=https://www.ldvd.nl/no-22-san-diego-place-rallies-very-last-boise-country-27–16?page=42#comment-237932>1×slots регистрация 1×slots casino 777 online</a> Но на некоторых азартных платформах подобные гонорары имеют получить и уже зарегистрированные юзеры. В этом случае, бонусы предоставляются масштабах оригинальных акций либо же неким геймерам в виде акционного предложения, которое прибывает на почту с целью «возвратить» игрока в свое казино. Как верховодило, новоприбывшие геймеры для желают ознакомиться с способами ввода и вывода валютных средств и сроки выполнения поданных заказов чтобы конкретно разуметь, как стремительно возможность исключить свой казино бонус за регистрацию без депозита на электронный кошелек или же банковскую карту. К счастью для всех играющих, снутри конкретных холдингов, все казино соперничают меж собой. Ведь если бы определенную фирму представляло только одно онлайн-заведение, то ли бы клиенты заметили казино с призом за регистрацию и могли бы рассчитывать лишь на вознаграждение вид бонуса на 1-ое инвестиция. К каждому заведению периодически по завлекать свежих игроков, собственно, в итоге, только на руку всем играющим. 1х слот 1хслотс регистрация перейти на 1×slots <a href=http://www.shunion.co.kr/bbs/board.php?bo_table=free&wr_id=597058>http://www.shunion.co.kr/bbs/board.php?bo_table=free&wr_id=597058</a> Каждый из бездепозитных призов без пополнения 2022 имеет собственный определенный вейджер для отыгрыша, так же в каждом казино он уточняется персонально — где то он х55 а где-то х30, повторюсь всюду по разному!
1×slots casino зеркало
Риск-игра по равным шансам – Также казино может запрещать исполнять условия по отыгрышу с помощью раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких иных забавах. Подтверждение электронной почты – одно из главных условий, которое есть практически в каждом бездепозитном казино. Чтобы верифицировать электронную почту, довольно перейти по интенсивной ссылке в послании, полученном от азартного клуба. <a href=http://xn–or3bi2doop89c.net/bbs/board.php?bo_table=faq&wr_id=9708&&#c_10881>http://xn–or3bi2doop89c.net/bbs/board.php?bo_table=faq&wr_id=9708&&#c_10881</a> 1×slots промокод при регистрации 2025
<b>Смотреть еще похожие новости:</b>
<a href=https://tabsgame.ru/user/Jamesbes/>скачать 1×slots официальный сайт</a>
<a href=https://mit-bbs.com/memberlist.php?mode=viewprofile&u=15318>1×slots официальный сайт мобильная версия</a>
<a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1×slot регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Заработать на бездепозитных бонусах за регистрацию в казино может каждый пользователь, достигший совершеннолетия. Ниже указан актуальный перечень легальных казино в Беларуси с призами на первый депозит. Вы можете попасть на официальный сайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус.
#3596 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Матвиенко Валентина Ивановна порно Попова Анна Юрьевна порно <a href=https://sovsekretno.net/>1×bet скачать бесплатно</a> porno Алена Михайлова слоты казино <a href=https://krtka.info/>ев казино</a> pin up casino порно с Гатагова Ольга Анатольевна букмекерская контора букмекерские конторы в россии porno Вера Бирюкова, гимнастка Кузнецова Анна Юрьевна порно casino автомат
DiskiPlus pin up букмекерская контора DiskiPlus винлайн букмекерская контора официальный сайт <a href=https://diskiplus.ru/>DiskiPlus 1×bet скачать бесплатно</a> DiskiPlus рокс казино DiskiPlus Александра Бортич <a href=https://diskiplus.ru>DiskiPlus 1×bet xbet xyz</a> DiskiPlus casino зеркало сегодня DiskiPlus порно с Дронова Александра Викторовна DiskiPlus почему казино DiskiPlus водка казино DiskiPlus порно с Артемий Панарин (хоккей) DiskiPlus яндекс казино DiskiPlus casino игровой автомат
#3597 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino c2d ru
Подобные бонусы без депозита предоставляются на более прибыльных условиях. Зачастую они крупнее, а обстоятельства отыгрыша наименее жесткие.Многие игроки, оценив перечень казино, остаются играть в нем и далее ? на это и нацелено каждое рекламную. Постоянные клиенты вносят депозиты и делают ставки, обеспечивая долгосрочную выгода оператора. То есть, казино раздают бездепы новым юзерам для формирования лояльной аудитории. <a href=http://filmkachat.ru/>1×slots регистрацию более популярный вариант это</a> Активация по промокоду используется в различных обликах бездепов. Если речь о приветственном призе, то комплект символов можно узнать на главной странице, в регистрационной форме либо послании, коие отправляется пользователю для доказательства адреса электронной почты. Акции имеют проводиться общо с партнерскими площадками. Обычно код располагается на постороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется одноразовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном офисе или начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем важный код для активации в описании каждого промо.Некоторые клубы автоматически начисляют приз на акк игрока после исполненья критерий получения, но посещают ситуации, когда приз нужно активировать игроку самому. Есть несколько методов активации бонуса: <a href=https://waad.powerappsportals.com/en-US/forums/general-discussion/17241746–51cf-ef11–95f6–000d3a393bf8>https://waad.powerappsportals.com/en-US/forums/general-discussion/17241746–51cf-ef11–95f6–000d3a393bf8</a> 1×slots промокод при регистрации <a href=http://autoschool-progress.kz/index.php?subaction=userinfo&user=offbeathealth86>http://autoschool-progress.kz/index.php?subaction=userinfo&user=offbeathealth86</a> Далее требуется отыграть вагер и исключить выигрыш. Игрокам без опыта крупно повезло, возможность получить 10-ки подарков за одну регистрацию. Если не смогли получить Бездепозитный бонус, не беспокойтесь. Обратитесь в интернет чат, оператор поможет ситуацию.
онлайн казино 1×slots
<a href=http://nexusroleplay.teamforum.ru/viewtopic.php?f=19&t=8454>1×slots официальный сайт мобильная версия скачать</a> 1×slots casino регистрация на сайте <a href=http://unix.t7y.ru/user/Michaelpaype>http://unix.t7y.ru/user/Michaelpaype</a> 1×slots регистрация 1×slots casino 777 online Прежде чем активировать бездеп, необходимо увериться том,, собственно страна, гражданином коей является игрок, не входит в список не.Бонус без депо за регистрацию в казино (бездепозитный бонус) – это валютный подарок от клуба, который начисляется на акк игрока в регистрации в казино. Кроме творения учетной записи, для получения бездепа, довольно нередко требуется ещё и доказать контактные данные игрока и/или активировать специальный промо-код.
1×slots официальный сайт, скачать
Похожим образом работает третий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения клиента или в связи с получения им VIP-статуса. Подарок предоставляется после обращения в поддержку и проверки. Вознаграждения за получение VIP-статуса ? начисляются в программы лояльности при достижении еще уровня или выдаются персонально менеджерами службы. <a href=https://blackmarke7.com/user-39951.html>https://blackmarke7.com/user-39951.html</a> 1×slots зеркало проходить регистрацию это отличный вариант
рабочее зеркало 1хслотс
Активация по промокоду употребляется в различных видах бездепов. Если идет о приветственном бонусе, то набор символов возможно разузнать на крупнейшей странице, в регистрационной форме или письме, которое отчаливает пользователю для подтверждения e-mail. Акции имеют проводиться вместе с партнерскими площадками. Обычно код размещается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется одноразовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном кабинете либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем актуальный код для активации в описании любого промо.Для получения приза надо(надобно) пригласить в забаву нового клиента. Казино начислит пригласившему фиксированный процент от взносов приглашённого в виде бонуса: чаще всего его размер не превышает 10%. Срок деяния приза как не превышает месяца: пригласивший получает бонус зависимо проигранных ставок приглашённого в 1-ый месяц забавы. 1×slots регистрацию процедура займет всего лишь <a href=https://mcpe.ru.net/user/Ralphgox/>https://mcpe.ru.net/user/Ralphgox/</a> Фриплей-бонусы встречаются только в неких клубах. Они зачисляются сразу последствии сотворения профиля и активны недолговременное время. Если не успеете потратить средства, они просто сгорят. Касаемо медли, в большинстве случаев призы активны на часа.
1×slots коды
Доступность — бездепозитные бонусы в казино почаще всего предоставляются свежим игрокам, но бывают случаи, когда приз все получить и действующие клиенты.Бездепозитный приз казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в этом и заключается главное различие. <a href=https://www.donchillin.com/space-uid-382497.html>https://www.donchillin.com/space-uid-382497.html</a> 1×slots подтвердит вашу регистрацию если говорить
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.gamesims.sk/viewtopic.php?f=10&t=98917>1×slots регистрация 1×slots review live</a>
<a href=http://big.bestforums.org/viewtopic.php?f=7&t=15641>1×slot зеркало рабочее регистрации на телефон придет</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бесплатный приз – кредиты, которые онлайн-казино начисляет посетителю, не принуждая его пополнять игровой счет.
#3598 Charlesgunnyhttp://filmkachat.ru
казино 1×slots официальный сайт
Активация происходит счет промокодов, коие вводятся в собственном офисе после регистрации. Среди спецпредложений в списке Casino.ru находятся неповторимые промокоды, коие доступны только гостям портала. Другие методы начисления средств ? автоматическая активация незамедлительно после творения аккаунта и получение презента по запросу в службу технической помощи. <a href=http://filmkachat.ru/>1×слот регистрация в 1×slots casino</a> <a href=https://updownradar.com/status/playhouse.com.ua>https://updownradar.com/status/playhouse.com.ua</a> Законодательство, регулирующее азартные игры в разных государствах, влияние на полномочия операторов. В результате юзеры из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это имеет быть как глубокий отказ в доступе, например и невозможность загружать игры отдельных изготовителей. 1×slots мобильная версия войти казино <a href=http://www.carshowsociety.com/forum.php?action=profile;u=11933>http://www.carshowsociety.com/forum.php?action=profile;u=11933</a>
1×slots зеркало регистрация в 1×slots casino
Не сложно догадаться, собственно no down payment bonuses практически никогда не посещают большими. Чаще всего речь о пяти–тридцати долларах (либо эквиваленте данной суммы в иной валюте). 1×slots промокод при регистрации У каждой забавы свои притязания по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система зачтет любую ставку. В рулетке и покере устроить это гораздо труднее. Именно потому так принципиально пристально разбирать обстоятельства получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой ирге, то новички просто «спустят бонус на ветер».Фриплей-бонусы. Бонусы за безвозмездную игру есть лишь в некоторых клубах. Они зачисляются незамедлительно в творения профиля и действуют недолговременное время. Если у вас нет медли истратить свои, они просто закончатся. Что касается времени, в большинстве случаев бонусы срабатывают на 1-го часа. <a href=https://xingxidushi.com/space-uid-119222.html>https://xingxidushi.com/space-uid-119222.html</a> Также учтите, что кое-какие игровые платформы сужают перечень стран, которые способны получить предложенный бездепозитный бонус за регистрацию. К примеру, есть онлайн-заведения, выдающие сходственные бонусы только жильцам конкретных стран. К образцу, интернет казино 777 Оригинал предоставляет бездепозитный бонус только игрокам из России и государств СНГ. Или наоборот, пичкают вознаграждением всех, кроме обитателей неких стран (из сего, стопам пристально учить перечень, чтобы впоследствии не появилось никаких вопросов и жалоб). рабочее зеркало 1хслотс Мы рекомендуем не отказываться от сходственных услуг известных казино. Выделите некоторое мин. На регистрацию, получите приз и попытайтесь его отыграть. Может быть, сегодня удача несомненно на вашей стороне!
1×slots casino online регистрация
Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро либо 20 $. Если выдаются фриспины, их число изредка превышает нескольких десятков даровых вращений. Объективные – объем приза, коэффициент и условия вейджера, необходимость внесения депо для вывода денег; <a href=https://android.nalench.com/user/MichaelIrogs/>https://android.nalench.com/user/MichaelIrogs/</a> 1хслот зеркало Для отыгрыша приза казино обязует игрока поиграть на необходимую, в количество раз превышающую сумму полученного бонуса — здесь выгода фирмы явна.Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную процедуру активации приза без депо. Внимательно прочитайте до конца. Многие новички делают промахи на этапе регистрации и потому не получить презент.
зеркло казино 1×slots
Игрокам стоит воспринимать приветственный бонус как гарантированный метод получить крупный выигрыш, хотя это замечательная вероятность без расходов оценить возможностей казино. <a href=https://www.one2bay.de/forum/showthread.php?tid=337823>1× слот зеркало</a> Какие призы у еще получить считая бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, любое онлайн казино предлагает игрокам выгодное предложение на первый депо, вы совершаете депо, ваш депо возрастает в двое либо числе в трое, тем самым начать играть возможно с больше солидной суммой, так же не запамятываем на вейджер на призы.Верификация аккаунта. Лучше доказать личность незамедлительно в регистрации, чтобы позже не было заморочек с выводом денег. Верификация возможность проходить 2-мя маршрутами: 1 x slots casino <a href=http://support-groups.org/memberlist.php?mode=viewprofile&u=154526>http://support-groups.org/memberlist.php?mode=viewprofile&u=154526</a>
1×slots зеркало рабочее на сегодня
Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. В современность довольно просто получить бонус за регистрацию в казино. Практически любой игорный дом с радостью начисляет средства или безвозмездные вращения. Многие гэмблеры пользуются данным и не смущяются региться в любом клубе с выгодными условиями. Кстати, это замечательная возможность выработать победную стратегию и сорвать джекпот. <a href=http://moderndoctor.ru/bitrix/click.php?goto=http://vodoley-online.ru/bitrix/redirect.php?goto=http://mercedes-club.ru/proxy.php?link=https://telegra.ph/Do-40-procentov-ukraincev-mogut-lishitsya-prava-polzovatsya-russkim-yazykom-09–23>http://moderndoctor.ru/bitrix/click.php?goto=http://vodoley-online.ru/bitrix/redirect.php?goto=http://mercedes-club.ru/proxy.php?link=https://telegra.ph/Do-40-procentov-ukraincev-mogut-lishitsya-prava-polzovatsya-russkim-yazykom-09–23</a> Если площадка дарует бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь ввести акк на сайте и активировать его, подтвердив адресок электрической почты, номер телефонного либо иные данные, которые просит оператор. Перед данным нужно увериться, что пользователь находится на официальном веб-сайте казино, а не на жульнической площадке.Таким образом, заведение пробует показать себя своим вероятным игрокам, а такой маркетинговый ход как казино бонус без депо за регистрацию привлекает очень количество внимания к игорному заведению и обеспечивает постоянный струю новых посетителей и грядущих посетителей игрового онлайн клуба. 1×slots регистрация 1×slotscasino09k online Диапазон ставок, коие вправе сделать игрок, также лимитирован. Обычно ставить возможно небольшую сумму — пределах 10–30 руб. За одно вращение.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=78074>1×slots регистрацию процедура займет всего лишь</a>
<a href=https://mcmon.ru/showthread.php?tid=101053>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный бонус казино 2022 с выводом за регистрацию предоставляет вероятность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и проверить качество работы службы поддержки. Довольно часто, начиная игровой процесс, игрок теснее не желает останавливаться и делает реальный вклад. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать даром вполне как один таки с призом за регистрацию без надобности заносить депозит. Приветственный бездеп предоставляется хоть игроку только один раз. Казино борются с так называемыми бонусхантерами (от англ. Bonus Hunter — охотник за призами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения презента. Исключить сходственные деянья разрешает верификация данных. Администрация вправе востребовать у клиента подтвердить индивидуальные данные, указанные при регистрации.
#3599 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up casino buzz порно с Александр Головин (футбол) <a href=https://repost.news/>порно с Гатагова Ольга Анатольевна</a> casino x порно с Алина Загитова, фигуристка <a href=https://sovsekretno.net/>Нургалиева Эльвира Рамиловна порно</a> порно с Афонина Марина Игоревна casino актуальное зеркало бывшие казино порно с Гатагова Ольга Анатольевна пинко casino 1×bet телефон casino официальный зеркало
DiskiPlus porno Виктория Баркова, легкоатлетка DiskiPlus винлайн букмекерская контора официальный <a href=https://www.diskiplus.ru>DiskiPlus игры казино</a> DiskiPlus ешь казино DiskiPlus букмекерская контора ставки <a href=https://diskiplus.ru>DiskiPlus cat casino</a> DiskiPlus casino 7k рабочее DiskiPlus почему в казино не бывает настенных часов DiskiPlus 1×bet зеркало на сегодня 1×bet xyz DiskiPlus казино вход DiskiPlus лучшая казино DiskiPlus казино смотреть DiskiPlus up букмекерская контора
#3600 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin casino приложения букмекерских контор <a href=https://glvk.guru/>casino играть</a> казино онлайн 1×bet слоты <a href=https://slon-ru.com/>пина букмекерской конторы</a> ограбление казино Приезжева Екатерина Геннадьевна порно Валентина Матвиенко порно top casino black russia казино casinos winning порно с Анна Щербакова, фигуристка
DiskiPlus яндекс казино DiskiPlus яндекс казино <a href=https://diskiplus.ru>DiskiPlus казино в россии</a> DiskiPlus букмекерские конторы бет DiskiPlus порно с Артемий Панарин (хоккей) <a href=https://diskiplus.ru>DiskiPlus up casino официальный</a> DiskiPlus Ирина Горбачева DiskiPlus Петрова Ольга Викторовна порно DiskiPlus casino официальный зеркало DiskiPlus casino онлайн DiskiPlus casino официальный зеркало DiskiPlus скачать pin casino DiskiPlus ев казино
#3601 СenterEmpathy_raphttps://empathycenter.ru/
Добрый день! Сеть клиник доказательной психиатрии «Эмпатия». Вашей проблемой занимаются сертифицированные специалисты с богатым опытом работы в сфере психологической помощи и охраны психического здоровья. Каждый человек уникален, как и его история. Именно поэтому Вас окружает самое чуткое и деликатное отношение к Вашей проблеме. Эмпатия — помогаем, понимаем, принимаем! <a href=https://empathycenter.ru/articles/meksidol-dlya-chego-naznachayut/>мексидол для чего назначают</a> Если Центр ментального здоровья или Сеть клиник доказательной психиатрии в Москве и Реутове, то это в Эмпатия Центр https://empathycenter.ru/ . Консультации как очно в Москве и Реутове, так и онлайн по всей России. Консультируйтесь и звоните по бесплатному номеру 8–800–775–07–12. Увидимся!
#3602 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
официальная казино скачать pin casino <a href=https://slon-ru.com/>pin up casino buzz</a> скачать 1×bet porno Марина Александрова <a href=https://krtka.info/>букмекерская контора официальный сайт</a> казино 1 порно с Сергей Бобровский (хоккей) где казино Мухтиярова Елена Вячеславовна порно porno Елизавета Туктамышева порно с Бондаренко Анастасия Борисовна 1×bet слоты
DiskiPlus лучшие онлайн казино DiskiPlus порно с Евгения Медведева <a href=https://www.diskiplus.ru/>DiskiPlus casino игровой автомат</a> DiskiPlus букмекерская контора бетсити DiskiPlus скачать 1×bet 1×bet xyz <a href=https://www.diskiplus.ru>DiskiPlus леон букмекерская контора</a> DiskiPlus часы казино DiskiPlus сайт казино зеркало DiskiPlus демо казино DiskiPlus порно с Алексей Миранчук (футбол) DiskiPlus скачать букмекерскую контору DiskiPlus пин ап казино DiskiPlus 1×bet слоты 1×bet xyz
#3603 Charlesgunnyhttp://filmkachat.ru
x1 slots 1хслотс регистрация перейти на 1×slots
Бонус с зачислением средств на счет дает больше свободы деяний. Пользователь сам выбирает, каким образом распорядиться подаренными средствами. Здесь того имеют работать ограничения на перечень доступных игр, хотя обыкновенно эти рамки не например строги, как в промо с бесплатными вращениями.Для верификации номера телефона, в собственном профиле изберите опцию „Подтвердить номер телефона“ и введите в подходящее поле код, приобретенный в sms-сообщении. <a href=http://filmkachat.ru/>1× slots зеркало</a> Также бывают случаи, когда казино начисляет обсужденный бонус последствии регистрации нового клиента по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам.Поспешите арестовать бездепозитные бонусы за регистрацию в казино из представленного списка. Все платформы не только водят легальную работа, но и обрадуют добросовестными результатами игры, высочайшей отдачей, прыткими выплатами. <a href=https://waad.powerappsportals.com/en-US/forums/general-discussion/17241746–51cf-ef11–95f6–000d3a393bf8>https://waad.powerappsportals.com/en-US/forums/general-discussion/17241746–51cf-ef11–95f6–000d3a393bf8</a> Как правило, при выводе финансов, от играющего потребуется лишь устроить наименьший лепта чтобы, чтобы, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом индивидуальный счет.Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=https://www.meiyingge8.com/space-uid-551126.html>https://www.meiyingge8.com/space-uid-551126.html</a>
1×slots коды
Прямо сейчас заберите безвозмездные вращения за регистрацию без депо и начинайте собирать призовые комбинации ради солидных выигрышей!В разделе с призами активировать свой презент. Найти забавы, для которых учтено поощрение и использовать бонус по назначению. 1×slots сайт <a href=http://forums.indexrise.com/user-317768.html>http://forums.indexrise.com/user-317768.html</a> При использовании бездепозитным призом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют количество обликов лимитов: казино 1×slots Однако далеко не все ресурсы предлагают своим посетителям бездепозитные призы за регистрацию в казино. В большинстве случаев учтено поощрение на первый депо в объеме 100–200%. Это замечательная возможность преувеличить банкролл, увеличить время, проведённое за игрой и шансы сорвать крупный куш.
1×slots casino регистрация 1×slots review live
Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, solid лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Следует выделить, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом. Для тех, кто только взвешивает испытывать собственную фортуну, а также для профессиональных игроков, разыскивающих новые площадки для выигрышей, водящие лицензированные казино часто устраивают различные промоакции, и одно из лучших услуг за последнее время – как для начинающих, так и для профессиональных игроков – бездепозитный бонус за регистрацию.Фриспины предусмотрены для использования в видео слотах. Внимательно ознакомьтесь с критериями – частенько их выдают на некоторые автоматы. В зависимости от клуба, у вас выйдет сделать определённое число ставок. Кстати, продвинутые игорные жилища разрешают запускать любых «одноруких бандитов». <a href=https://vadaszapro.eu/user/profile/1234569>https://vadaszapro.eu/user/profile/1234569</a> У любого игорного заведения свои верховодила и условия. Но, дабы получить бонусы, нужно выполнить стереотипные деянья:Фриспины начисляются по определенной ставке. После их активации игроку необходимо запустить разъем и убедиться, собственно в нем показываются бесплатные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода в отыгрыша определяется оператором и редко превышает 5 000 руб. 1хслотс казино зеркало Зарегистрироваться в казино по специальной ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефонного и электрическую почту). Для подтверждения номера телефона необходимо в личном профиле показать собственный номер и нажать кнопку „Подтвердить номер телефона“, далее Вы получите sms-сообщение с кодом, который нужно установить в отвечающее поле. Для подтверждения электрической почты, перейти по активной ссылке в послании от казино.
1×slots casino регистрация 1×slotscasin online
Доступ к дару имеет раскрываться механически в введения промокода или обращения в службу вебсайта. В первом случае от пользователя не потребуется практически деяний. Бездеп с активацией по коду встречается чаще всего. Игроку нужно ввести совокупа символов в графе, которая возможность находиться в регистрационной форме в Личном офисе.Суммы подобных предложений, большинстве, колеблются от 3-х до двадцати долларов, а вейджер на эти свои обязан сочинять от 30 до шестидесяти один. Зачастую, величайшая сумма выигрыша тут составит от одной до 2-ух сотен $. Если компьютерные выиграет больше, то все свои имеют быть списанными до максимально разрешенного выигрыша. Здесь появляется смысл выводить еще несуществующие финансы на свою платежную систему и дальше отыскивать заведение с подходящими под данную необходимую релоадом или бонусом за первое пополнение счета. Есть количество подвидов бездепозитного вознаграждения, предлагаемого наибольшим числом заведений. Способы получения бездепа различаются от вида приза, который приглянулся игроку. Но для или надо(надобно) быть зарегистрированным в законном онлайн-казино и доказать свою личность. В общем виде пошаговая аннотация для получения бездепозитного бонуса выглядит например:Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=http://44263.ww.w.molifan.net/space-uid-2184431.html>http://44263.ww.w.molifan.net/space-uid-2184431.html</a> Еще одно условие касается объемов ставки. Операторы устанавливают максимальную необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном офисе. При превышении лимита есть риск лишиться бонуса. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, заказчик возможность столкнуться с запретом ставить фишки на шансы.Получать информацию о самых выгодных призах возможно без постоянного мониторинга новостей казино. Мы брали эту задачку на себя и непрерывно следим за предложениями операторов, избирая наилучшие из их. В этом разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список промоакций регулярно дополняется. В топ зашли самые новые бездепозитные бонусы за регистрацию в казино 2020, временные и закрытые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и другим критериям. Если срок деянья акции истек, она удаляется из перечня.
скачать 1×slots на андроид мобильная версия
Создание аккаунта. На сайте казино необходимо открыть регистрационную форму и заполнить порожние поля собственными данными. Иногда на данном шаге потребуется показать лишь адрес электрической почты и пароль, но чаще хотелось наполнить анкету индивидуальной информацией (ФИО, дата рождения, место проживания и т.д.). Нужно свидетельствовать только настоящие данные, поскольку впоследствие они будут проверены.Бесплатный приз – кредиты, которые онлайн-казино начислит посетителю, не принуждая его пополнять игровой счет. <a href=http://arsivforum.10tl.net/member.php?action=profile&uid=4838>http://arsivforum.10tl.net/member.php?action=profile&uid=4838</a> Еще одно условие дотрагивается размеров ставки. Операторы устанавливают наивысшую сумму, которую игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, избранной в Личном офисе. При превышении лимита есть риск лишиться приза. Существующие ограничения относятся и к определенным видам ставок. Например, играя в рулетку, заказчик имеет столкнуться с запретом ставить фишки на шансы. 1хслот скачать Бездепозитные призы казино за регистрацию в 2022 году — это возможность сыграть за счёт заведения. Казино даёт клиенту шанс пользоваться определённой суммой или количеством даровых вращений без внесения депо. Не путайте деморежим с реальной забавой без необходимости внесения депозита.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.gamesims.sk/viewtopic.php?f=10&t=77534>рабочее зеркало 1×slots</a>
<a href=https://021snyw.com/space-uid-53919.html>1×slot казино зеркало</a>
<a href=https://masstr.net/showthread.php?tid=159771>1 x slots</a>
<a href=https://bans.org.ua/index.php?topic=119674.new#new>1×slots скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Принципиальным различием даровых призов от бонусов на депозит считается неименье надобности вносить средства на акк. Из-за сего их часто называют бездепозитными (not the slightest deposit bonuses). Зачастую бездепозитные бонусы казино для забавы предлагаются различными заведениями азартных игр в качестве рекламных акций либо в целях привлечения к себя новых игроков. Для бездепозитных бонусов в казино 2022 геймеру не пополнять счет до момента вывода желаемых средств.
#3604 Hermanfarhttps://goodday.org.ua
Портал про строительство <a href=https://goodday.org.ua/>https://goodday.org.ua</a> и ремонт! Полезные советы, обзоры материалов, технологии строительства, лайфхаки для дома. Узнайте, как сделать ремонт качественно и сэкономить на строительных работах!
#3605 DonaldHobhttps://decor-kraski.com.ua
Все о строительстве <a href=https://decor-kraski.com.ua/>https://decor-kraski.com.ua</a> и ремонте в одном месте! Подробные инструкции, идеи для дизайна, выбор материалов и советы мастеров. Сделайте свой дом удобным, стильным и долговечным!
#3606 smm-panelhttps://smm-panel-cheap.com
boost of subscribers instagram <a href=https://smm-panel-cheap.com/>boost of subscribers instagram</a>
#3607 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Чаще всего казино приз за регистрацию без депо даёт вероятность запустить любой машина. Но никакого пристально ознакомиться с условиями. Иногда для игры доступны лишь определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, превосходнее начать знакомство с миром азарта именно с «одноруких злодеев». <a href=http://filmkachat.ru/>1хлот регистрация в 1×slots casino</a> Автоматическая активация первый самой комфортной, хотя ручной способ имеет перед ней достоинства. Прежде чем использовать вознаграждение от казино, стоит заблаговременно найти, сколько медли требуется на исполнение всех критерий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала действия приза. <a href=https://vi.be/platform/shopavto>https://vi.be/platform/shopavto</a> 1хслот 1хслотс регистрация перейти на 1×slots <a href=http://ybjlfc.com/home.php?mod=space&uid=399719&do=profile>http://ybjlfc.com/home.php?mod=space&uid=399719&do=profile</a>
1×slots бездепозитный бонус за регистрацию
С не отыгранным призом запрещается превышать размер наибольшей ставки. Нарушение этого условия в аннулирование выигрыша. <a href=https://sparta.training/faq/online-returns/#comment-70323>1×slots регистрация на сайте</a> скачать 1×slots официальный сайт Это тоже бесплатные финансы, которые поступают на аккаунты свежеиспеченных игры после регистрирования. А необыкновенность таких бонусов состоит сомнений, собственно обретенные деньги обязательно по применять в продолжении назначенного времени.Фриплей-бонусы. Бонусы за бесплатную забаву есть лишь в некоторых клубах. Они зачисляются сразу последствии создания профиля и действуют недолговременное время. Если у вас нет времени израсходовать средства, они просто закончатся. Что дотрагивается медли, в большинстве случаев бонусы срабатывают в течение одного часа. <a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=4790>http://www.predictive-datascience.com/forum/member.php?action=profile&uid=4790</a> Однако в условиях скрываются «подводные камни», которые не разрешат вывести крупную необходимую или же вы не успеете отыграть вейджер. Поэтому мастера советуют забрать бесплатные вращения за регистрацию в казино без депозита, дабы поднабраться навыка и получить настоящий шанс на победу.Необходимость отыгрыша. Вейджер в выше, чем для призов за депозит. И пока свои не отыграны, исключить их нельзя. рабочее зеркало 1хслотс
1×slots зеркало этих способов предполагает регистрацию
Высокая конкуренция в разделе азартных игр мотивирует операторов завлекать клиентов разнородными акциями. Благодаря данному у гостей бывает вероятность получить бонусы в казино за регистрацию без депо. Воспользоваться таким предложением возможно, избегая функцию внесения денег на игровой счет, просто активировав аккаунт на сайте. Наш гид по бездепам поможет избрать самую симпатичную бонусную программу, разузнать правила получения такового вознаграждения и распорядиться им с максимальной выгодой. Когда идет о валютных бонусах, казино практически устанавливают условия вейджера, которые необходимо выполнить, дабы вывести выигрыш. <a href=https://r.rumedia.top/user/TerryEnuro/>https://r.rumedia.top/user/TerryEnuro/</a> Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен список превосходнейших интернет казино, коие предлагают своим игрокам щедрые бонусы за регистрацию. 1×slots casino зеркало рабочее Зарегистрируйтесь. Для регистрации почаще всего довольно установить свой номер аппарата и почтовый адресок, после чего установить приобретенный код из СМС. Возможно, потребуется указать промокод. В правилах промоакции будет написано, где его бы вводить. Иногда это надо делать при регистрации, иногда — теснее в сотворения собственного кабинета, на отдельной страничке.
1×slots зеркало регистрация то дальше необходимо пройти
Бывают ли бездепозитные призы без вейджера? Бывают, в у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино. 1×slots casino online регистрация <a href=https://masstr.net/member.php?action=profile&uid=63206>https://masstr.net/member.php?action=profile&uid=63206</a> Чаще всего применяются коды. Их надо(надобно) вносить в специальные окошки регистрационной анкеты, если речь о пригласительных бонусах, либо в определенном разделе собственного офиса игрока.Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам запрещено начислять бонусы клиентам, не имеющим валютных средств на счете. Мы предлагаем осмотреть актуальные призы онлайн-казино с лицензией, которые соблюдают законодательство РБ.
1× slots сайт
<a href=https://faktes.ru/user/ZacheryDualo/>https://faktes.ru/user/ZacheryDualo/</a> 1×slots зеркало подтвердит вашу регистрацию если говорить
<b>Смотреть еще похожие новости:</b>
<a href=https://www.kfz-gringer.at/index.php/forum/suggestion-box/77746–1×slots#77510>1×slots коды</a>
<a href=https://forum.vn.ua/showthread.php?p=3278283#post3278283>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<a href=https://www.thefamilylegion.se/viewtopic.php?f=4&t=23281>1 х слотс зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Не стоит путать игру в демо и использование призов. В демонстрационном режиме игрок возможность расценить механику слота, сюжет и оформление. Но забава проводится на относительные кредиты, поэтому отсутствует главное ? чувство азарта. Активируя промокод или фриспины, клиент и не тратит свои средства на игровые автоматы, но имеет сорвать реальный куш!
#3608 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Максим Глушенков (футбол) Валентина Матвиенко порно <a href=https://slon-ru.com/>casino зеркало сегодня рабочее</a> Скоробогатова Ольга Николаевна порно букмекерские конторы бет <a href=https://glvk.guru/>букмекерская контора скачать приложение</a> леон букмекерская контора букмекерская контора вход порно с Бондаренко Анастасия Борисовна 1×bet зеркало рабочее xbet реального казино 1×bet зеркало на сегодня Нургалиева Эльвира Рамиловна порно
DiskiPlus casino официальный сайт DiskiPlus casino сайты <a href=https://www.diskiplus.ru>DiskiPlus casino зеркало сайта</a> DiskiPlus 1×bet слоты 1×bet top DiskiPlus про казино <a href=https://diskiplus.ru>DiskiPlus 1×bet</a> DiskiPlus официальные зеркала казино DiskiPlus казино ставка DiskiPlus порно с Зырянова Анастасия Владимировна DiskiPlus casino сегодня DiskiPlus сайт букмекерской конторы DiskiPlus порно с Максим Глушенков (футбол) DiskiPlus casino скачать приложение
#3609 Charlesgunnyhttp://filmkachat.ru
зеркала 1×slots
Активация по промокоду употребляется в разных обликах бездепов. Если идет о приветственном бонусе, то набор символов возможно разузнать на основной странице, в регистрационной форме либо письме, коие отправляется юзеру для доказательства адреса электронной почты. Акции шансы проводиться совместно с партнерскими площадками. Обычно код располагается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется одноразовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем актуальный код для активации в описании каждого рекламную. <a href=http://filmkachat.ru/>1×slots мобильная версия войти казино</a> <a href=https://telegra.ph/Industrial-Electronic-Solutions-Custom-Manufacturing–Integration-01–24>https://telegra.ph/Industrial-Electronic-Solutions-Custom-Manufacturing–Integration-01–24</a> 1хслотс зеркало <a href=https://cse.google.co.nz/url?q=https://doctorlazuta.by/>https://cse.google.co.nz/url?q=https://doctorlazuta.by/</a> 1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, если не хотите стать жертвой плутов либо впустую потратить время;Разные казино имеют собственные верховодила по выведению выигрыша. Для бездепозитных бонусов принимаются достаточно высокие притязания. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до 100 один в игровых автоматах. Например, в игрок получил безвозмездно 10 $, то нужно будет отыграть их, поставив одну тыщу спинов по 1 баксу каждый. Стоит отметить, собственно не все казино дают вероятность играть на призы и не во всех увеселительных заведениях схожие правила для отыгрывания. Некоторые казино воспрещают играть на бонусы в блекджек либо ограничивают ставки до пяти процентов, что существенно увеличивает в десятки раз число необходимых игр.
1хслотс 1хслотс регистрация перейти на 1×slots
<a href=http://www.infoknygos.lt/smforum/index.php?topic=75589.new#new>1×slots casino регистрация</a> 1×slots официальный регистрация Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных призов принимаются достаточно высочайшие требования. Часто онлайн-казино рекомендуют отыграть бонусное поощрение до 100 раз в игровых автоматах. Например, случае игрок получил даром десять долларов, то нужно будет отыграть их, поставив 1 тысячу спинов по 1 баксу любой. Стоит отметить, собственно не все казино дают возможность играть на призы и не во всех увеселительных заведениях схожие верховодила для отыгрывания. Некоторые казино воспрещают выступать на призы в блекджек или ограничивают ставки до 5 %, что значительно наращивает в 10-ки раз число необходимых игр. <a href=https://www.emaze.com/@ALIWWWIIQ/looking-to-give-yourhome-a-stunning-makeover-house>https://www.emaze.com/@ALIWWWIIQ/looking-to-give-yourhome-a-stunning-makeover-house</a> 1×slots casino регистрация на сайте Вывод выигрыша с бездепозитных призов казино – великодушный подарок от азартных клубов. Но дабы исключить свой доход, необходимо выполнить ряд условий:Создание аккаунта. На веб-сайте казино необходимо обнаружить регистрационную форму и наполнить пустые поля личными данными. Иногда на данном шаге потребуется показать только адрес электронной почты и пароль, но почаще бы наполнить анкету индивидуальной информацией (ФИО, дата рождения, место проживания и т.д. ). Нужно указывать только настоящие данные, что впоследствие они станут проверены.
зеркло казино 1×slots
Некоторые онлайн-казино без депозита предлагают новым клиентам выбрать бонус при регистрации. Будьте внимательны: выбрав один, вы в безоговорочном большинстве случаев не можете воспользоваться остальными. <a href=http://www.sicilianodentro.it/forum/members/257758.html>http://www.sicilianodentro.it/forum/members/257758.html</a> Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. 1хслотс 1хслотс регистрация перейти на 1×slots
1хслотс рабочее зеркало
<a href=http://216.38.0.7/viewtopic.php?f=12&t=138630>1×slots зеркало сайта</a> Для такого, дабы отыграть необходимую вашего бездепозитного бонуса надо(надобно) выполнить обстоятельства вейджера. Очень часто фриспины даются на конкретные слоты (book of ra, book of lifeless, book of sun), избирайте разъем себя нраву, все довольно красочные и качественные. Бездепозитные бонус возможность быть валютным так и повторяющий фриспинов на слоты Фриспины – благотворительные вращения с фиксированной ставкой, коие возможно использовать в конкретных игровых автоматах.Если вы избираете проверенное лицензионное интернет казино и выполните все обстоятельства получения бездепозитного бонуса, проблем с получением подарка у Вас не возникнет. 1×slot зеркало <a href=http://viralcomms.com/bbs/board.php?bo_table=free&wr_id=450990>http://viralcomms.com/bbs/board.php?bo_table=free&wr_id=450990</a> Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного бонуса.
1×slots официальный сайт мобильная версия
<a href=http://forum.cncprovn.com/members/178714-Waltertox>http://forum.cncprovn.com/members/178714-Waltertox</a> Вы не в коем случае ни чем рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической забавы на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, выучится регулировать изменять ставки и линии, исследовать бонусные игры и их выигрышные композиции, да в просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные свои, коие возможно отыграть и исключить, не просто на демо счет, тем наиболее адреналин в крови еще больше повысится а пульс забьется с нередким ритмом!Акции, приуроченные к календарным праздничным, бывают рассчитаны как на всех пользователей, например и на категории: например, презент на 8 марта девушкам-игрокам либо мужикам на 23 февраля. 1×slots официальный сайт зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://aircompare.us/forums/memberlist.php?mode=viewprofile&u=40074>1×slots зеркало которую указывали при регистрации кстати</a>
<a href=http://miupsik.ru/forums/showthread.php?tid=418274>1×slots промокод при регистрации 2025</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, дабы еще раз получить безвозмездный бонус. Игорные заведения нетерпимы к бонус-хантерам, потому вас ожидает неизбежное санкция.
#3610 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino x 1win casino <a href=https://res-publika.com>1×bet скачать бесплатно</a> Преподобная Надежда Александровна порно казино смотреть онлайн бесплатно <a href=https://specreporter.com/>букмекерские контора ап</a> porno Яна Троянова игры казино винлайн букмекерская контора официальный сайт казино вход официальный сайт 1×bet сайт 1×bet xyz рейтинг казино пин ап казино
DiskiPlus 1×bet зеркало рабочее xbet DiskiPlus порно с Антропова Валентина Викторовна <a href=https://www.diskiplus.ru>DiskiPlus 7k casino зеркало</a> DiskiPlus Скоробогатова Ольга Николаевна порно DiskiPlus Александра Бортич <a href=https://diskiplus.ru/>DiskiPlus казино ли</a> DiskiPlus казино на деньги DiskiPlus Елена Лядова DiskiPlus casino промокод DiskiPlus букмекерские конторы pin DiskiPlus cometa casino DiskiPlus порно с Владимир Минеев (ММА) DiskiPlus букмекерская контора официальный сайт
#3611 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино проиграл порно с Илья Осипов (киберспорт) <a href=https://7club7.com/>порно с Васильева Татьяна Викторовна</a> казино играть казино сегодня <a href=https://slon-ru.com/>порно с Анна Щербакова, фигуристка</a> Шевцова Татьяна Викторовна порно 1win casino Светлана Ходченкова включи казино Александра Бортич играющие казино онлайн porno Екатерина Ефременкова, шорт-трекистка
DiskiPlus букмекерская контора на андроид DiskiPlus зеркала казино <a href=https://www.diskiplus.ru>DiskiPlus порно с Варвара Субботина</a> DiskiPlus 1×bet DiskiPlus бесплатное казино <a href=https://diskiplus.ru/>DiskiPlus Попова Анна Юрьевна порно</a> DiskiPlus балтбет букмекерская контора DiskiPlus casino сегодня DiskiPlus porno Андрей Рублев (теннис) DiskiPlus 1×bet на андроид бесплатно DiskiPlus win win casino DiskiPlus почему казино DiskiPlus вавада казино
#3612 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
7k casino сайт порно с Алина Загитова, фигуристка <a href=https://res-publika.com>casino скачать</a> порно с Георгий Джикия (футбол) казино ставка <a href=https://sovsekretno.net/>1×bet зеркало</a> букмекерские конторы в россии pin casino зеркало казино смотреть онлайн бесплатно casino ru казино вход Комарова Наталья Владимировна порно 1×bet зеркало xbet xyz
DiskiPlus казино фильм онлайн DiskiPlus Александра Бортич <a href=https://diskiplus.ru>DiskiPlus Петрова Ольга Викторовна порно</a> DiskiPlus какие казино DiskiPlus скачать сайт букмекерской конторы <a href=https://diskiplus.ru/>DiskiPlus казино вход</a> DiskiPlus букмекерская контора DiskiPlus скачать 1×bet на андроид бесплатно DiskiPlus играющие казино онлайн DiskiPlus 7k casino официальный сайт DiskiPlus официальные букмекерские конторы DiskiPlus inform@rucriminal.info DiskiPlus скачать букмекерскую контору на андроид
#3613 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало проходить регистрацию это отличный вариант
Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить особенности, труднодоступные при игре в демо режиме. Многие новые клиенты переходят в количество постоянных, а оператор получает долгосрочную прибыль.Чаще всего интернет-казино предлагают бездепозитные бонусы новым юзерам. Эта промо-акция очень отлично завлекает начинающих, подталкивая их к открытию счета. Конечно, не все становятся преданными посетителями, но сам прецедент регистрации аккаунта играет на руку заведению. <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino 56 online</a> У каждого игорного заведения средства правила и условия. Но, чтобы получить призы, нужно выполнить стандартные деянья:Почти все игровые клубы настоятельно свидетельство контактных данных игрока для получения бездепозитного приза. <a href=https://www.abclinuxu.cz/lide/comcgifurniture>https://www.abclinuxu.cz/lide/comcgifurniture</a> Популярность онлайн казино растёт и всё больше пользователей начинают увлекаться азартными играми. Бездепозитные призы 2022 года, это оригинальные подарки за регистрацию. С их помощью новые игроки шансы получить благотворительные вращения или средства на баланс за 1 регистрацию. С появлением игорных заведений в интернете, бездепозитные бонусы стали моднейшим способом вербования игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о которых мы поведаем. Наш сайт собрал наилучшие предложения из онлайна на 2022 год. Воспользуйтесь каким презентом и сможете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша нужно выполнить условия. 1×slots официальный сайт зеркало <a href=http://www.ydelection.com/bbs/board.php?bo_table=free&wr_id=1312006>http://www.ydelection.com/bbs/board.php?bo_table=free&wr_id=1312006</a> Призовые начисления без депозита имеют предоставляться для роли в турнирах интернет казино. Потратить перечисленные средства возможно необыкновенно в данной акции. Условия их проведения содержат ограничения на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться таким предложением, чем изучить его управляла.В лицензионных бездепозитных казино выступать в азартные игры вправду безопасно. Наличие лицензии одобряет что, этот факт, собственно клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP.
рабочее зеркало 1хслотс
<a href=http://board.eternityrpc.com/member.php?action=profile&uid=369>casino 1×slot</a> 1хслот 1хслотс регистрация перейти на 1×slots <a href=http://www.ksmro.co.kr/bbs/board.php?bo_table=free&wr_id=429433>http://www.ksmro.co.kr/bbs/board.php?bo_table=free&wr_id=429433</a> казино 1×slots В интернет-сети всегда можно отыскать перечни наиболее известных и обещанных поощрительных программ от знаменитых онлайн-казино.
1×slots зеркало
Проверка занимает от нескольких мин. До нескольких дней, специалисты техподдержки могут запросить вспомогательные документы либо инициировать куцее общение по Skype.Если вы новичок деле и только попали в неизведанную вами район пыла — с помощью предложений как бездепозитные бонусы без пополнения. В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая доля игры. Важно, зачастую бездепозитные призы в казино выдаются с ограничениями по наибольшей выплате. В среднем можно рассчитывать на прибыль в несколько тысяч рублей. Как исключить выигрыш с бонуса без депозита. Придётся подтвердить акк документально, в некоторых заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате либо прочтите в правилах. <a href=http://clips.tj/user/Forsedroper/>http://clips.tj/user/Forsedroper/</a> 1×slots зеркало подтвердит вашу регистрацию если говорить Подарки на дни ? посвященные торжественным датам, требующие символического отыгрыша либо начисляются без того. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду.
1×slots регистрацию процедура займет всего лишь
<a href=https://isomedu.com/forum/profile/josephdrons/>1×slots casino online регистрация</a> Основное правило получения бездепа ? творимый акк должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов требовательно воспрещено. Проверка проводится по имени, e-mal, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депо необходимо соблюдать несложную очередность действий.Предложения с бездепозитными призами за регистрацию разрешают свежим заведениям привлечь аудиторию на свой вебсайт. А игроки же получают вероятность играть на настоящие деньги без депозита в казино и заработать небольшой стартовый капитал, кот-ый разрешается исключить на карту банка либо электрический кошелек. Чтобы бездеп не был начислен на Ваш акк, Вам надо активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт механически, а Вы не расчитываете его использовать, обратитесь в службу с просьбой отменить бездепозитный приз. casino 1×slot <a href=http://www.yangjisa.co.kr/bbs/board.php?bo_table=free&wr_id=68467>http://www.yangjisa.co.kr/bbs/board.php?bo_table=free&wr_id=68467</a> Пoдтвepдить личнocть клиента. Для удачного вывода средств, нужно доказать лицо клиента. Нa этaпe вepификaции пpoфиля, сотрудники службы защищенности обязаны увериться, что у игрока чем один акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не сможет вывести свой выигрыш, случае у него несомненно несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы.
1×slots акции
Мы делаем акцент на главных положениях верховодил, рассказываем о территориальных ограничениях и вкратце информируем о иных промоакциях обсуждаемого казино.Представьте момент, когда при ставке в 10 рублей Вы получите подобное умножение. Миллион руб. За одно вращение, собственно вполне возможно. Поэтому вопрос, сколько возможно выиграть остаётся закрытым. Предлагаем выяснить самостоятельно. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный приз и инспектируйте фортуну в деле. Разумеется, исключить средства сложно. Однако шансы есть у всех. Для получения бездепа необходимо пригласить в игру по реферальной ссылке нового посетителя: он обязан зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на сумму, обозначенную в критериях промоакции. <a href=http://www.u-em.ru/index.php?subaction=userinfo&user=vengefulgraveya>http://www.u-em.ru/index.php?subaction=userinfo&user=vengefulgraveya</a> Создание аккаунта. На веб-сайте казино нужно открыть регистрационную форму и заполнить пустующие поля собственными данными. Иногда на данном этапе требуется показать лишь адресок электронной почты и пароль, хотя почаще надобно наполнить анкету персональной информацией (ФИО, дата рождения, место проживания и т.д. ). Нужно свидетельствовать только реальные данные, что впоследствие они будут испытаны.Эффективность бездепов в качестве маркетингового прибора оценили многие операторы. Малоизвестные площадки используют такие акции, дабы быстро набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны постоянных посетителей. Не все веб-сайты, дающие презенты без депозита, рекомендованы к ирге. За симпатичным промоописанием имеют скрываться невыполнимые обстоятельства отыгрыша и другие подводные камни. x1 slots 1хслотс регистрация перейти на 1×slots Бесплатные бонусы казино без депо возможно получить повторяющий денежных средств на бонусный счет (исключить их можно лишь в отыгрыша), фриспинов, забавы либо кешбэк-бонуса.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.oursson.ru/viewtopic.php?f=2&t=9172>1×slots мобильная версия войти казино</a>
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1141#post-35581>1×slots casino регистрация 1×slotscasino09k online</a>
<a href=https://forum.vn.ua/showthread.php?p=3279996#post3279996>1хслот официальный сайт зеркало</a>
<a href=http://86395.ww.w.molifan.net./space-uid-2275092.html>1×slots регистрация на сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного приза достаточно пополнения баланса и доказательства личности. В других же клубах, нужно некоторое один прокрутить собственный депо.
#3614 Charlesgunnyhttp://filmkachat.ru
1×slots бонус за регистрацию
Для получения выигрыша потребуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить определенную сумму, но теснее из личных денег. Она рассчитывается из совместного объема выигрыша за всегда использования бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, если юзер выиграл 1000 руб., а множитель сочиняет х30, вывести деньги можно несомненно, сделав ставки на 30 000 рублей. <a href=http://filmkachat.ru/>1хслотс казино зеркало</a> <a href=https://kontactr.com/website/site/astramedika.com.ua>https://kontactr.com/website/site/astramedika.com.ua</a> Доступные игры – В некоторых азартных забавах возможно понизить математическое превосходство казино до нескольких десятых процента. В их числе почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как верховодило, в таких забавах ставки идут в зачет вейджера не всецело. Например, может предусматриваться только 50%. В некоторых играх бездепозитные бонусы вообще невозможно отыгрывать. 1×slots зеркало этих способов предполагает регистрацию <a href=https://sport1477.ru/forums/users/doclazxru2708–2/>https://sport1477.ru/forums/users/doclazxru2708–2/</a> Суммы похожих услуг, в, колеблются от трех до 20 $, а вейджер на эти средства обязан составлять от 30 до шестидесяти раз. Зачастую, величайшая сумма выигрыша тут составит от одной до 2-ух сотен $. Если игры выиграет больше, то все средства имеют быть списанными до максимально разрешенного выигрыша. Здесь бывает смысл выводить еще несуществующие финансы на свою платежную систему и дальше находить заведение с благоприятными под данную необходимую релоадом либо бонусом за первое пополнение счета. Есть несколько подвидов бездепозитного гонорары, предлагаемого большим количеством заведений.Еще одно условие дотрагивается объемов ставки. Операторы устанавливают наивысшую необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, избранной в Личном офисе. При превышении лимита есть риск лишиться бонуса. Существующие ограничения относятся и к конкретным обликам ставок. Например, играя в рулетку, заказчик может столкнуться с запретом ставить фишки на шансы.
1×slots регистрация то дальше необходимо пройти
<a href=http://b2s.bulwork.com/node/1581?page=70#comment-21980>1×slots казино зеркало</a> 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots За счёт спинов получится запустить различные интернет слоты, протестировать стратегии и поднабраться опыта. Фишка том,, что вращения начисляются на топовые аппараты с оригинальными опциями и высокой отдачей. Не забывайте, что в любом акционном предложении учтены особые притязания – временные ограничения, наибольший размер ставки, перечень доступных игр.Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и расценить необыкновенности, труднодоступные при забаве в демо режиме. Многие новые клиенты переходят в число неизменных, а оператор получает длительную выгода. <a href=https://images.google.nu/url?q=https://doctorlazuta.by/>https://images.google.nu/url?q=https://doctorlazuta.by/</a> Некоторые веб-сайты, до чем провести регистрацию игроков, предлагают ответить на количество базисных вопросов. Цель проведения подобной викторины – выявить случайных людей, которые не имеют представления о покере, и не допустить получения ими бонусов. Если посетитель уже играл в казино, то ответить на полтора десятка простых вопросов будет несложно. Очень часто, ответы возможно отыскать на официальных веб-сайтах этих учреждений.В игровых клубах без лицензии Вы покупаете „кота в мешке“ и если, тогда, спорных обстановок нет возможности куда-то пожаловаться и обосновать собственную правоту. 1×slots регистрацию процедура займет всего лишь Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 долларов. Если выдаются фриспины, их количество редко выше нескольких 10-ов даровых вращений.
1×slots зеркало быструю регистрацию а также мгновенное
Промокод – определённая комбинация символов, которую нужно установить в соответствующее поле при творении учетной записи или активировать в собственном профиле игрока в разделе с бонусами. Обычно показатель повыше, чем для призов на депо. Не изумляйтесь, в он будет том х100. Иногда завышенный коэффициент вейджера уточняется для обитателей отдельных государств.Для получения депозитного бонуса нужно пополнить собственный игровой баланс реальными средствами. Вознаграждение можно получить или при внесении первого депозита, или в виде фиксированного процента от внесённых средств. Так или по, бонус поступит на счёт только в пополнения. <a href=https://dc-kd.ru/user/Justinrix/>https://dc-kd.ru/user/Justinrix/</a> Теоретически, к безвозмездным призам возможно отнести так называемые фриспины. Напомним, речь идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, потому собственно они деют только вероятность создавать ставки. 1×slots рабочее зеркало на сегодня В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с даровых вращений. Прибыль, которую Вы заработаете на таком бездепе возможно ставить на вывод без какого либо отыгрыша.
1× слот зеркало
Процесс подтверждения личности возможность взятьвдолг(взятьвзаймы) от 1-го дня до недели. Если заказчик разрешил какую-либо оплошность при заполнении паспортных данных, то ему идет адресоваться с задачей в службу онлайн-казино. Подтвердите регистрацию, дабы активировать Бездепозитный приз с выводом, требуется заполнить собственный профиль. Заполните пустые поля реальными данными о себе. 1×slots сайт <a href=http://www.rgb-muelheim.de/buch/scarbook.php>http://www.rgb-muelheim.de/buch/scarbook.php</a> Прямо в заберите безвозмездные вращения за регистрацию без депо и начинайте собирать призовые комбинации из-за крупных выигрышей!
1× slots сайт
Иногда в качестве бездепа, казино дарит наименьший бонус (до 50 руб. ), из-за которого надо заморачиваться.В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая милая часть забавы. Важно, часто бездепозитные бонусы в казино выдаются с ограничениями по максимальной выплате. В среднем можно рассчитывать на прибыль в количество тыщ рублей. Как вывести выигрыш с приза без депо. Придётся подтвердить акк документально, в некоторых заведениях. Процедура верификации обязательна и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в онлайн чате либо прочитайте в правилах. Новые клиенты онлайн-казино без первого депо шансы выяснить собственную удачливость. К что, этому же есть возможность конвертировать бездепы в настоящие средства за регистрацию в казино, однако для этого приз нужно отыграть сообразно условиям промоакции. <a href=http://gulliverus.ru/user/Donaldturne/>http://gulliverus.ru/user/Donaldturne/</a> В лицензионных бездепозитных казино выступать в азартные забавы вправду безопасно. Наличие лицензии одобряет что, этот прецедент, что клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP. зеркло казино 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://peloton.com.ua/forum/memberlist.php?mode=viewprofile&u=9259>1×slots регистрация на официальном сайте</a>
<a href=http://86395.ww.w.molifan.net./space-uid-2275092.html>1×slot зеркало рабочее регистрации на телефон придет</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Также учтите, собственно некоторые игровые платформы сузивают список государств, коие готовы получить предложенный бездепозитный приз за регистрацию. К образцу, существуют онлайн-заведения, выдающие подобные призы лишь обитателям определенных государств. К примеру, онлайн казино 777 Оригинал дает бездепозитный приз лишь игрокам из России и стран СНГ. Или напротив, снабжают вознаграждением всех, не жителей некоторых государств (следует этого, идет внимательно изучать список, дабы потом не возникло практически вопросов и претензий). Простая процедура получения бездепозитного приза, кот-ая займет менее 2-х мин. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные.
#3615 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Елизавета Боярская пинап казино <a href=https://rucriminal.info/>casinos xyz</a> 1×bet на сегодня официальные сайты казино <a href=https://kompromat1.online/>1×bet сайт</a> букмекерскую контору пин 1×bet зеркало рабочее на сегодня porno Вера Бирюкова, гимнастка водка казино casino ап porno Светлана Ходченкова казино на деньги
DiskiPlus рейтинг казино DiskiPlus букмекерская контора зенит <a href=https://diskiplus.ru/>DiskiPlus демо казино</a> DiskiPlus casino 7k сегодня DiskiPlus casino скачать приложение <a href=https://diskiplus.ru>DiskiPlus 7k casino официальный сайт</a> DiskiPlus сколько казино DiskiPlus up casino скачать DiskiPlus Светлана Ходченкова DiskiPlus ramenbet casino DiskiPlus Чулпан Хаматова DiskiPlus пина casino DiskiPlus порно с Ирина Сидоркова
#3616 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino скачать порно с Арина и Дина Аверины, гимнастки <a href=https://res-publika.com>бк букмекерская контора</a> 1×bet сейчас pin up casino официальный <a href=https://specreporter.com/>Семёнова Татьяна Владимировна порно</a> casino 7k сегодня 7k casino официальный сайт 1×bet зеркало рабочее порно с Александр Головин (футбол) 1×bet приложение casino 7k рабочее pin casino
DiskiPlus 1×bet скачать приложение на андроид DiskiPlus порно с Голикова Татьяна Алексеевна <a href=https://diskiplus.ru>DiskiPlus Яровая Ирина Анатольевна порно</a> DiskiPlus porno Александр Соболев (футбол) DiskiPlus приложения букмекерских контор <a href=https://www.diskiplus.ru/>DiskiPlus бесплатное казино</a> DiskiPlus вавада казино DiskiPlus порно с Максим Глушенков (футбол) DiskiPlus pin up casino пин ап DiskiPlus игры казино DiskiPlus Манилова Алла Юрьевна порно DiskiPlus casino бонус DiskiPlus porno Мария Шарапова
#3617 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
фреш казино 1×bet слоты 1×bet xyz <a href=https://rucriminal.info/>порно с Константин Тюкавин (футбол)</a> Фастова Елена Владимировна порно Елена Лядова <a href=https://rumafia.news/>casino рабочее зеркало</a> порно с Голикова Татьяна Алексеевна porno Ангелина Гончаренко, хоккеистка Юдаева Ксения Валентиновна порно зеркала официальных сайтов казино Приезжева Екатерина Геннадьевна порно казино фильм casino скачать приложение
DiskiPlus pin up casino зеркало DiskiPlus kent casino регистрация <a href=https://diskiplus.ru>DiskiPlus казино без</a> DiskiPlus букмекерскую контору пин DiskiPlus порно с Илюшникова Татьяна Александровна <a href=https://www.diskiplus.ru/>DiskiPlus Разуваева Ксения Денисовна порно</a> DiskiPlus порно с Елена Никитина, скелетонистка DiskiPlus 1×bet зеркало на сегодня 1×bet xyz DiskiPlus фреш казино DiskiPlus порно с Каролина Севастьянова DiskiPlus порно с Алексей Миранчук (футбол) DiskiPlus сайт 1×bet слоты DiskiPlus 1×bet зеркало xbet
#3618 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
Игры, каких возможно играть на бонусные средства. Проверьте перечень игр, в которых можно выступать на бонусные свои, вполне они Вам не понравятся и не тратить своё время на эту промоакцию. <a href=http://filmkachat.ru/>1хслотс казино зеркало</a> Новые клиенты онлайн-казино без первого депо могут выяснить собственную удачливость. К тому же есть возможность конвертировать бездепы в реальные средства за регистрацию в казино, однако достичь бонус необходимо отыграть согласно условиям промоакции. <a href=http://fohweb.com/www.astramedika.com.ua>http://fohweb.com/www.astramedika.com.ua</a> На данном разделе портала периодически публикуются обзорные статьи, в рассматриваются благотворительные призы лучших интернет-казино. Информация структурирована по нескольким пт, включая основные:Подобные бонусы без депо предоставляются на более выгодных критериях. Зачастую они крупнее, а обстоятельства отыгрыша наименее строгие. 1×slots акции <a href=https://slovakia-forex.com/members/267348-geraldhor>https://slovakia-forex.com/members/267348-geraldhor</a>
1 x slots
<a href=https://forum.graylite.com/viewtopic.php?p=297432#p297432>1×slots официальный регистрация</a> 1×slot рабочее зеркало Как правило, при выводе финансов, от играющего требуется лишь устроить минимальный лепта для того, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом собственный счет.Oтыгpaть приз с обозначенным вeйджepом, результата необходимо сдeлaть cтaвoк нa cумму, превосходящую объем приза в несколько раз. <a href=https://transcribe.frick.org/wiki/User:VirgieLockard>https://transcribe.frick.org/wiki/User:VirgieLockard</a> При правильном подходе бездепы — это отличный способ играть на средства без растраты личных средств. Есть несколько советов, следуя коим возможно извлечь максимум полезности из похожих промоакций казино. Играть следует только на лицензированных площадках. Скриптовые сайты не только обманывают с бонусными услугами, но и используют пиратский софт с измененным ГСЧ. Выиграть на таких автоматах невозможно. 1хслот скачать Похожим образом работает третий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения клиента либо в связи с получения им VIP-статуса. Подарок предоставляется последствии воззвания в поддержку и проверки.
1× slots официальный
Некоторые казино шансы предлагать посетителям бездепы за свидетельство номера либо почты либо репост на страничку в социальных сетях. Выбор каждого онлайн казино на нашем веб-сайте. В описании к каждому Вы сможете узнать, что получите за творенье аккаунта.Условия, на коих предоставляется бездеп, регулируются казино. Каждая промоакция имеет подробные верховодила, ссылка на коие обычно содержится в промообъявлении. В них указываются лимиты, вейджер, список дешевых игр. Если оператор укрывает данные о предложении, то воспользоваться им не. <a href=http://www.t3.rim.or.jp/~naoto/yybbs621/yybbs.cgi>http://www.t3.rim.or.jp/~naoto/yybbs621/yybbs.cgi</a> 1хслотс казино зеркало
1×slots регистрация
Бездепозитный приз – это финансовое вознаграждение, коие выдается соучастнику забавы в казино, для его вербования и возникновения заинтригованности. Любой гость, кот-ый подходит условиям выдачи подобного бездепозитного бонуса, может претендовать на получение вышеуказанного приза. Такое поощрение является наиболее эффективным методом, дающим вероятность стартовать при, не вкладывая личных вещественных средств.Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми промоакциями. Читайте о их в обзорах и на форуме. <a href=https://www.thefamilylegion.se/viewtopic.php?f=4&t=9884>казино 1×slots официальный сайт</a> Особую изюминку видео слотам присваивают уникальные знакы. С их появлением активизируются разные призы. Вы сможете запустить вспомогательный уровень и прирастить необходимую выигрыша. Есть знаки, которые замещают негодные элементы и сами создают выигрышные комбо. Не стоит забывать и на бонус-тур. После каждого успешного спина есть шанс увеличить сумму выигрыша в два либо четыре раза. Начнём с как, что каждое рекламную за регистрацию предполагает некие условия. Бездепозитные призы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, нужная для выполнения критерий. Пример, возымели бесплатные вращения и выиграли с них 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 рублей, неудачных или выигрышных, неважно. После выполнения, бонусный баланс перейдёт на настоящий и будет легкодоступным к выводу.Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической забавы на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, научится регулировать изменять ставки и линии, изучать бонусные забавы и их выигрышные комбинации, да счете просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные средства, коие можно отыграть и вывести, а не просто на демо счет, тем самым адреналин в крови еще больше повысится а пульс забьется с нередким ритмом! казино 1×slots официальный сайт <a href=http://mbdou108.ru/user/DoctorLazutapl/>http://mbdou108.ru/user/DoctorLazutapl/</a>
1хслотс регистрация в 1×slots casino
<a href=http://pharmacyhq.com/forum/profile.php?id=583789>http://pharmacyhq.com/forum/profile.php?id=583789</a> Но ни не запамятовывайте внимательно читать верховодила роли в бонусных промоакциях. Если вы нарушите но бы одно условие, позднее вы не сможете устроить недоразумение с администрацией. 1×slots регистрация на сайте 1×slots ru com
<b>Смотреть еще похожие новости:</b>
<a href=https://surfaceprophets.com/members/davidelicy.5309/>1×slot официальный сайт</a>
<a href=https://forum.bedwantsinfo.nl/thread-740041.html>1×slots casino зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В современность очень просто получить приз за регистрацию в казино. Практически любой игорный жилище с готовностью начисляет деньги либо безвозмездные вращения. Многие гэмблеры пользуются данным и не стесняются региться в каждом клубе с прибыльными критериями. Кстати, это отличная вероятность выработать победную стратегию и сорвать джекпот.
#3619 Charlesgunnyhttp://filmkachat.ru
1хслотс мобильная версия зеркало
Для получения предоставленных призов вас понадобиться — ПК либо мобильное устройство, и остальное дело за малым.Прочитайте управляла бонусной программки, какой хотите принять. Да, мы настоятельно советуем сделать это до регистрации. <a href=http://filmkachat.ru/>1×slots коды</a> Автоматы непопросту числятся наиболее известным азартным весельем. Чтобы освоить управление и верховодила, потребуется всего количество мин. Ваша задача сделать ставку, определить число трудящихся линий и возможно вертеть барабан. Если на экране выпадет выигрышная комбинация – вы выиграли! С этой задачей для помогут управится бездепозитные призы казино.Если вы облюбовали для себя несколько брендов которые для больше всего приглянулись, для постоянной игры! Таких гемблеров казино довольно любит и ценит, за частую такие игроки становятся VIP игроками заведения, которым часто поступают прибыльные предложения вид бонусов, так же туда входит и бездепозитные. <a href=https://www.astrobin.com/users/shopavto/>https://www.astrobin.com/users/shopavto/</a> Ознакомьтесь с нашим списком наилучших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего списка и получите бездеп сразу. Хватайте наихорошие безвозмездные предложения ниже и выигрывайте немалые средства, не рискуя! 1хслотс 1хслотс регистрация перейти на 1×slots <a href=http://www.podrujka.com/user/Glennton/>http://www.podrujka.com/user/Glennton/</a> Все благотворительные бонусы кажутся заманчивыми. Кто же категорически от возможности поиграть в онлайн-казино, не рискуя средствами, хотя получая выигрыши. Но далеко не все бездепозитные бонусы в равной степени презентабельны для рассудительного клиента.
1×slots casino регистрация
1хслотс зеркало на сегодня Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депозит может выделяться до 30 дней.Выбрать казино с бездепозитным бонусом. У нас на сайте представлен перечень наихороших интернет казино, которые предлагают своим игрокам щедрые бонусы за регистрацию. <a href=http://v208870d.bget.ru/user/Deweyhah/>http://v208870d.bget.ru/user/Deweyhah/</a> Диапазон ставок, которые вправе сделать игрок, того лимитирован. Обычно ставить можно небольшую необходимую — в 10–30 руб. За одно вращение. 1х слот регистрация в 1×slots casino Не желаете сыграть в азартные игры, не рискуя средствами деньгами, но получая в все выплаты? Подобную возможность предоставляют почти превосходнейшие порталы с азартными весельями. В их количестве большое правдивых и надежных интернет-казино на российском языке. Они завлекают свежих пользователей различными поощрительными мероприятиями, включая бездепозитные, или безвозмездные бонусы.
1×slots зеркало на сегодня
Ограничения по забавам. Администрация запрещает игрокам кое-какие игровые автоматы с бездепозитным призом, деньгами или безвозмездными вращениями. Обычно, в правилах приводится глубокий список слотов для отыгрыша. Иногда дробление выполняется по облику игр. Например, отыгрыш возможен на всех игровых аппаратах, хотя запрещен в настольных забавах и в разделе Live Casino.Превышение максимальной ставки при отыгрыше. Система механически не предупреждает о превышении ставки, поэтому о нарушении управлял игрок может разузнать теснее последствии подачи запроса на вывод средств. <a href=https://masstr.net/member.php?action=profile&uid=27189>https://masstr.net/member.php?action=profile&uid=27189</a> 1×slots рабочее зеркало на сегодня Представленные на этой страничке наихорошие бездеп бонусы в казино за регистрацию в 2022 году имеют подходящие обстоятельства. После кропотливого анализа редакция портала составила рейтинг спецпредложений, каком посетители Casino.ru шансы сортировать список по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д.
1×slots зеркало рабочее на сегодня
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=465936>1хлот регистрация в 1×slots casino</a> Для получения бездепа необходимо пригласить в игру по реферальной ссылке свежего посетителя: он должен зарегистрироваться, пройти верификацию на сайте онлайн-казино и пополнить счёт на необходимую, указанную в условиях акции. С другой стороны, намного проще арестовать бездепозитные фриспины за регистрацию в казино и напрямик сейчас начать вертеть барабаны в превосходнейших слотах. Главная необыкновенность спинов в том, что они предназначены для лучших автоматов. Удастся столько пройти дополнительные раунды, но и увеличить необходимую выигрыша, заработать респины прочие внутриигровые подарки. 1×slots актуальное зеркало <a href=http://op-r.ru/bitrix/click.php?goto=http://voinduha.ru/default.asp?url=yalmarkt.ru/bitrix/rk.php?goto=https://teletype.in/@urist_free/ldXu3L-MFAz>http://op-r.ru/bitrix/click.php?goto=http://voinduha.ru/default.asp?url=yalmarkt.ru/bitrix/rk.php?goto=https://teletype.in/@urist_free/ldXu3L-MFAz</a>
1×slots регистрацию более популярный вариант это
На страничке представлены бездепозитные призы за регистрацию в казино редчайшая заслуга за коей гонятся все игроки как новички, так и мастера. Мы тоже уделяем большое внимание на присутствие призов при формирование рейтинга казино на деньги. Бездепозитный бонус это возможность играть бесплатно и выиграть настоящие деньги. Все любят получать подарки. Согласитесь, почти каждый играющий человек несомненно сильно рад, в получит безвозмездный презент для игры в интернет казино просто за регистрацию или же бонус за внесенный депозит, так нарекаемые приветственные бонусы для свежих игроков. Соответственно эти интернет клубы будут больше модны и преимущественны у игроков при выборе казино для игры. Топ казино непрерывно обновляется и прибавляются новые и интересные игровые клубы с симпатичной бонусной политикой и всеми возможными прерогативами, к коим относятся такие бонусы как фриспины за регистрацию, валютные бездепозитные призы, еще великодушные призы за внесенный депозит.Игры, в которых возможно выступать на бонусные деньги. Проверьте список игр, в которых возможно выступать на бонусные средства, вероятно они Вам не понравятся и не стоит тратить своё время на такую акцию. <a href=https://job.epday.com/home.php?mod=space&uid=645857>https://job.epday.com/home.php?mod=space&uid=645857</a> Активация по промокоду употребляется в разных видах бездепов. Если речь о приветственном бонусе, то набор символов можно разузнать на крупнейшей странице, в регистрационной форме либо послании, коие отчаливает юзеру для доказательства e-mail. Акции все проводиться совместно с партнерскими площадками. Обычно код располагается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется одноразовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем актуальный код для активации в описании каждого рекламную. рабочее зеркало 1хслотс При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, коие можно предназначить игре в казино.
<b>Смотреть еще похожие новости:</b>
<a href=https://irc.floobits.com/Jamesamiva>1×slots регистрация то дальше необходимо пройти</a>
<a href=https://minifishtank.net/forum/showthread.php?tid=26152>1×slots официальный зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Объективные – объем приза, коэффициент и условия вейджера, необходимость внесения депо для вывода денег; При верном раскладе бездепы — это прекрасный метод выступать на средства без траты собственных средств. Есть количество рекомендаций, следуя коим возможно извлечь максимум выгоды из сходственных акций казино. Играть по лишь на лицензированных площадках. Скриптовые веб-сайты не только врут с бонусными предложениями, хотя и используют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах невероятно.
#3620 Charlesgunnyhttp://filmkachat.ru
1х слотс зеркало регистрация в 1×slots casino
Когда идет о получении бездепозитных бонусов в казино, в первую очередь направьте на следующие условия:Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации подарка необходимо подтвердить электронную почту и привязать телефон; <a href=http://filmkachat.ru/>1× слот зеркало</a> <a href=https://www.hogwartsishere.com/1685676/>https://www.hogwartsishere.com/1685676/</a> Доступ к дару возможность открываться автоматически последствии введения промокода или воззвания в службу вебсайта. В первом случае от юзера не требуется практически действий. Бездеп с активацией по коду встречается почаще всего. Игроку необходимо ввести совокупность знаков в графе, которая может находиться в регистрационной форме в Личном офисе.Если вы новичок деле и только попали в неизведанную вами район пыла — с помощью предложений как бездепозитные бонусы без пополнения. 1× slots регистрация в 1×slots casino <a href=https://www.echinamatch.com/author/davidhewly/>https://www.echinamatch.com/author/davidhewly/</a> Как только на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу в сего можно оставить заявку на вывод выигрыша. Кредиты прибыльно выделяются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом реальных средств и выделяют вероятность почувствовать азарт. Во-вторых – можно насладиться любой азартной игрой доступной на сайте. В вашем распоряжении находятся автоматы, настольные прибавленье, видео-покер, Live-дилеры.Для всех бездепозитных призов функционирует наибольший лимит на выигрыш. Он указывает предельную сумму, коию вы сможете получить, играя на бонусные кредиты. Как лишь вас удастся выполнить притязания вейджера, дозволенный максимум несомненно переведен с бонусного счета на основной, а остаток несомненно списан.
1×slots официальный сайт зеркало
1×slots официальный сайт скачать на айфон Реже призы без депозита начисляются постоянным игрокам. С их поддержкою администрация постарается удержать ценных посетителей или желает поблагодарить за лояльность правильных гостей. Но гораздо чаще для похожих целей применяются эти акции: <a href=http://www.s-d.jp/userinfo.php?uid=14475#>http://www.s-d.jp/userinfo.php?uid=14475#</a> Отыграв бездепозитный приз в казино с выводом также придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, случае схожее лимитирование присутствует, то единоразово вывести получится только необходимую, не превосходящую размер полученного бонуса.Отзывы читателей о бонусных промоакциях посодействуют составить впечатление, хотя не забывайте о субъективности собственных объяснений. 1хслотс зеркало на сегодня
1×slots регистрация на официальном сайте
При регистрации что или ином интернет игральном заведении — вас дается раз шанс испытывать свою фортуну не внося свои монеты. Замечу что эту поощрительную услугу предоставляют не все интернет игровые площадки, а лишь щедрая середина(средина) из них. Которые мы подготовили для Вас в нашем перечне. <a href=https://aben75.cafe24.com/bbs/board.php?bo_table=free&wr_id=548611>https://aben75.cafe24.com/bbs/board.php?bo_table=free&wr_id=548611</a> 1×слотс казино К образцу, игроку выдаются бесплатные свои в заведении в размере пятидесяти либо 100 долларов (вейджер на которые сочиняет 100х). То есть, любому новоприбывшему игроку выскакивает манящая картинка, кот-ая сулит выплату всех зачисленных фирмой средств. Не стоит обращать внимания на казино бонус за регистрацию без депозита с сильно большой или довольно малеханькой суммой бонусов, поэтому собственно, в тщательно изучив все обстоятельства, здесь скорее, несомненно какой-то подкол.
1×slots официальный сайт скачать
Бездепозитный приз часто может замерзнуть доступным незамедлительно в завершения регистрации, поскольку как единственным притязанием к нему является регистрация, а этого ревизия вашей новой учетной записи. 1 х слотс зеркало <a href=https://www.dr-ay.com/posts/189572>https://www.dr-ay.com/posts/189572</a> Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут устанавливает лимитирование для клиентов. Конечно, это можно счесть некоторым неудобством для игрока, хотя справедливости стоит отметить, что выбор автоматов всё точно остаётся довольно великим.Чтобы получить вероятность вывести выгода с бездепозитного бонуса в казино, необходимо выполнить ряд условий:
1хслотс регистрация в 1×slots casino
Бездепозитные призы за регистрацию в игровых автоматах для владельцев онлайн-казино считаются частью маркетинговой кампании, направленной на повышение аудитории вебсайта. Так они продвигают средства бренды и привлекают свежих посетителей. <a href=http://x4kurd.freetzi.com/member.php?action=profile&uid=90131>http://x4kurd.freetzi.com/member.php?action=profile&uid=90131</a> Чаще всего применяются коды. Их нужно вносить в особые окна регистрационной анкеты, если речь о пригласительных бонусах, или в особом разделе собственного кабинета игрока.Бoльшинcтвo азартных заведений выдвигают приблизительно одинаковые условия и притязания, которые необходимо выполнить, чтобы получить бездепозитный приз за регистрацию. Все их возможно объединить в раз перечень: 1×slot зеркало Бездепы обыкновенно предлагают с отыгрышем — моментально вывести выигранные средства невозможно. Перевод средств со счета будет вероятен после как, как пользователь выполнит все требования казино, а сумма не может превышать установленного правилами лимита. Условиями акции фиксируются сроки, в течение коих заказчик вправе воспользоваться предложением. Обычно они не превышают нескольких дней последствии активации.
<b>Смотреть еще похожие новости:</b>
<a href=http://kick.gain.tw/space.php?uid=4479892>1×slots официальный сайт скачать на айфон</a>
<a href=http://fin-molitor.com/forum/viewtopic.php?f=2&t=419669>1×slots зеркало рабочее</a>
<a href=http://www.carshowsociety.com/forum.php?action=profile;u=2398>1×slots регистрацию более популярный вариант это</a>
<a href=https://australianwinerytours.com/tours/showthread.php?tid=325054>1×slots регистрация на официальном сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Призовые начисления без депозита шансы предоставляться для участия в турнирах интернет казино. Потратить перечисленные деньги можно необыкновенно в данной промоакции. Условия их проведения в ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, превосходнее изучить его управляла. Процесс доказательства личности имеет взятьвдолг(взятьвзаймы) от одного денька до недели. Если клиент разрешил нибудь ошибку при заполнении паспортных данных, то ему следует адресоваться с проблемой в службу онлайн-казино.
#3621 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Аделия Петросян (фигурное катание) 1×bet 1хбет <a href=https://glvk.guru/>porno Светлана Ходченкова</a> Семёнова Татьяна Владимировна порно Чулпан Хаматова <a href=https://vestnik-jurnal.com/>где казино</a> казино играть porno Игорь Акинфеев (футбол) порно с Матвей Сафонов (футбол) porno Анна Сидорова, керлингистка Набиуллина Эльвира Сахипзадовна порно casinos xyz букмекерская контора на андроид
DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz DiskiPlus champion casino <a href=https://www.diskiplus.ru/>DiskiPlus porno Виктория Баркова, легкоатлетка</a> DiskiPlus порно с Юлия Ефимова, пловчиха DiskiPlus porno Анастасия Янькова, боксерка <a href=https://www.diskiplus.ru/>DiskiPlus Мухтиярова Елена Вячеславовна порно</a> DiskiPlus казино вход официальный сайт DiskiPlus porno Игорь Акинфеев (футбол) DiskiPlus online casino DiskiPlus включи казино DiskiPlus порно с Юлия Ефимова, пловчиха DiskiPlus пин ап казино DiskiPlus ев казино
#3622 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Манилова Алла Юрьевна порно Попова Анна Юрьевна порно <a href=https://th-royalgclub.com/>порно с Юлия Ефимова, пловчиха</a> Радченко Светлана Юрьевна порно игры казино <a href=https://rumafia.news/>Александра Бортич</a> самое казино ramenbet casino карты казино casino com рейтинг казино casinos winning казино вход
DiskiPlus гта онлайн казино DiskiPlus букмекерская контора мостбет <a href=https://www.diskiplus.ru>DiskiPlus казино ли</a> DiskiPlus бывшие казино DiskiPlus 1×bet xbet <a href=https://www.diskiplus.ru/>DiskiPlus сайте букмекерской конторы фонбет</a> DiskiPlus porno Андрей Рублев (теннис) DiskiPlus Манилова Алла Юрьевна порно DiskiPlus порно с Алина Загитова, фигуристка DiskiPlus демо казино DiskiPlus 1×bet DiskiPlus porno Анастасия Янькова, боксерка DiskiPlus порно с Петр Ян (ММА)
#3623 Charlesgunnyhttp://filmkachat.ru
1× slots регистрация в 1×slots casino
Получить Бездепозитный приз в онлайн казино дело 2-ух кликов. Другой момент, отыграть промо и соблюсти правила и условия отыгрыша. Под правилами предполагается не только вагер, хотя и ограничения по максимальной ставке. Мы понимаем, что в кино все ставят на зеро и выигрывают. Призываем не создавать похожего. Перед активацией приза прочтите правила. Узнайте последующие факторы: Условия получения презента, за регистрацию, за депо и другое. Ограничения по наибольшей ставке. Зачастую не выше 350 руб. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вращать автоматы, а вагер несомненно стоять на пространстве. Поэтому главно аристократия, в каких играх можно осуществлять кратность денежного оборота.Верификация аккаунта. Лучше подтвердить лицо сразу последствии регистрации, дабы потом не было проблем с выводом средств. Верификация имеет протекать двумя путями: <a href=http://filmkachat.ru/>1× slots регистрация в 1×slots casino</a> <a href=https://rapidapi.com/7ball-viet-nam-7ball-viet-nam-default/api/7ball-viet-nam/discussions/146279>https://rapidapi.com/7ball-viet-nam-7ball-viet-nam-default/api/7ball-viet-nam/discussions/146279</a> 1×slots зеркало рабочее на сегодня <a href=https://images.google.com.br/url?q=http%3A%2F%2Fdoctorlazuta.by>https://images.google.com.br/url?q=http%3A%2F%2Fdoctorlazuta.by</a> Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен перечень наихороших интернет казино, коие предлагают своим игрокам великодушные бонусы за регистрацию.Третитй бездепозитный приз за регистрацию – валютные средства. К огорчению, начислить рубли либо доллары готовы только знаменитые и популярные клубы. С их поддержкой появится насладиться любой доступной игрой – автоматом, рулеткой, кено, блэкджеком.
1×slots рабочее зеркало на сегодня
Фриспины без депозита или дополнительные свои посодействуют ближе познакомиться с игровой платформой и её функциями. За счёт даров можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям из-за игры напротив живых крупье.Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, a зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. казино 1× slots официальный сайт <a href=http://tehnoprom-nsk.ru/user/TyroneJax/>http://tehnoprom-nsk.ru/user/TyroneJax/</a> 1хслотс зеркало
1×slots коды
В основном случаев благотворительные призы начисляются в кредитах, которые нельзя сразу вывести со счета. Прежде их нужно отыграть по установленным правилам. Эти притязания принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д.). О нем читайте ниже. Многие игроки, оценив возможностей казино, остаются выступать в нем и дальше ? на это и направлено каждое промо. Постоянные посетители вносят депозиты и проделывают ставки, обеспечивая долгосрочную прибыль оператора. То есть, казино выдают бездепы новым юзерам для формирования лояльной аудитории. <a href=http://ww.ansanam.com/bbs/board.php?bo_table=report_status2&wr_id=359520>http://ww.ansanam.com/bbs/board.php?bo_table=report_status2&wr_id=359520</a> 1хслотс регистрация в 1×slots casino
1×slots сайт
Бездепозитные призы прекрасный вариант бесплатной забавы в игровые автоматы. Многие юзеры сети не понимают, что в казино можно начать играть безусловно бесплатно, а потом вывести выигрыш на банковскую карту либо электрический кошелек, другие не доверяют интернет казино, а третьи удачно играют и выигрывают – и тотчас достаточно великие суммы.Так собственно главное различие подарка на депозит от бездепа – обязательное пополнение счёта. Вы можете внести депозит и преувеличить стартовый капитал или забрать бездеп и при не придётся рисковать собственными сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начисляет щедрое поощрение! <a href=https://vredeenvermaak.be/forum/vrede-en-vermaak/>казино 1×slots официальный сайт</a> рабочее зеркало 1×slots <a href=http://www.besatime.com/index.php?subaction=userinfo&user=DavidOntot>http://www.besatime.com/index.php?subaction=userinfo&user=DavidOntot</a> Представленные на данной странице превосходнейшие бездеп бонусы в казино за регистрацию в 2022 году имеют оптимальные обстоятельства. После кропотливого анализа редакция портала составила рейтинг спецпредложений, каком посетители Casino.ru шансы сортировать перечень по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д.Демоказино есть почти на любом веб-сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются значительно реже: там если, тогда, выигрыша и соблюдения условий промоакций бездеп возможно перевоплотить в настоящие средства.
1×slots официальный зеркало рабочее
Приветственный бонус без депозита ? презент за регистрацию. Выдается средствами, фриспинами или баллами. В последнем случае бонусные баллы используются для участия в турнирах либо обмена на настоящие деньги.В бонусную программу многих операторов входят систематические бездепы. Это бессрочные акции, поощряющие интенсивных неизменных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают неизменные бонусы без депо в размен на скопленные баллы лояльности. Бонусы без депозита при регистрации считаются самыми красивыми как для опытных игроков, например для и новичков. Получив такое вознаграждение, заказчик имеет играть на настоящие деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а условия их активации и выигрыша.Любой выигрыш по ставке выше установленного лимита будет являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, а случае выигрыша его сумма не поступит на счёт клиента — результат игры несомненно полностью аннулирован. <a href=http://a96549hg.bget.ru/user/Stevenaporb/>http://a96549hg.bget.ru/user/Stevenaporb/</a> Бездепозитные бонусы, как теснее понятно, считаются уникальной возможностью приступать к игровому процессу полностью бескорыстно, другими выступать в онлайн казино бесплатно и на место средства незамедлительно после регистрации аккаунта. Автоматы с этим депо имеют стать прекрасной вероятностью сыграть для почитателей пыла с определенными лимитированиями в денег. x1 slots регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=http://mandala-app.com/forums/memberlist.php?mode=viewprofile&u=3447>1×slots рабочее зеркало</a>
<a href=https://astraclub.ru/album.php?albumid=237574>1×slots сайт</a>
<a href=https://minifishtank.net/forum/showthread.php?tid=9896>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Обычно показатель повыше, чем для бонусов на депозит. Не удивляйтесь, если он будет и х100. Иногда завышенный коэффициент вейджера уточняется для жителей отдельных государств. Доступность — бездепозитные бонусы в казино чаще всего предоставляются новым игрокам, хотя посещают случаи, когда приз шансы получить и действующие клиенты.
#3624 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Преподобная Надежда Александровна порно 1×bet приложение <a href=https://krtka.info/>букмекерская контора ставки</a> сайт pin up casino порно с Георгий Джикия (футбол) <a href=https://repost.news/>суть казино</a> casino регистрации 1×bet сайт ramenbet casino сайте букмекерской конторы фонбет casino регистрации гта онлайн казино Окладникова Ирина Андреевна порно
DiskiPlus казино онлайн DiskiPlus винлайн букмекерская контора официальный сайт <a href=https://www.diskiplus.ru>DiskiPlus casino</a> DiskiPlus porno Катерина Шпица DiskiPlus 1×bet скачать приложение <a href=https://diskiplus.ru>DiskiPlus казино вулкан</a> DiskiPlus букмекерская контора фонбет официальный DiskiPlus играющие казино онлайн DiskiPlus 1×bet регистрация DiskiPlus porno Светлана Ходченкова DiskiPlus порно с Дронова Александра Викторовна DiskiPlus Анна Михалкова DiskiPlus порно с Васильева Татьяна Викторовна
#3625 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino x kometa casino <a href=https://repost.news/>porno Яна Троянова</a> Скворцова Вероника Игоревна порно 1×bet официальный скачать <a href=https://th-royalgclub.com/>сколько казино</a> скачать букмекерскую контору casino com букмекерская контора бетсити лучшая казино автомат казино casino 7k рабочее pin up casino buzz
DiskiPlus Чулпан Хаматова DiskiPlus порно с Алексей Миранчук (футбол) <a href=https://www.diskiplus.ru/>DiskiPlus порно с Никита Кучеров (хоккей)</a> DiskiPlus казино пину DiskiPlus Комарова Наталья Владимировна порно <a href=https://diskiplus.ru/>DiskiPlus porno Анна Сидорова, керлингистка</a> DiskiPlus мелбет букмекерская контора DiskiPlus казино фильм DiskiPlus порно с Варвара Субботина DiskiPlus casino на телефон DiskiPlus порно с Афонина Марина Игоревна DiskiPlus 1×bet телефон DiskiPlus porno Дарья Мороз
#3626 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать 1×bet казино пину <a href=https://strelochnik.com/>пин ап casino</a> ешь казино винлайн букмекерская контора официальный сайт <a href=https://strelochnik.com/>Кузнецова Анна Юрьевна порно</a> 1×bet зеркало рабочее зеркала официальных сайтов казино пин ап букмекерская контора 7k casino официальный сайт up casino porno Вера Бирюкова, гимнастка порно с Варвара Субботина
DiskiPlus гама казино DiskiPlus 7k casino зеркало рабочее <a href=https://www.diskiplus.ru/>DiskiPlus 7k casino сайт</a> DiskiPlus 1×bet слоты 1×bet xyz DiskiPlus 1×bet слоты официальный сайт <a href=https://www.diskiplus.ru/>DiskiPlus kent casino регистрация</a> DiskiPlus 7k casino официальный DiskiPlus человек казино DiskiPlus макао казино DiskiPlus мобильные букмекерские конторы DiskiPlus pin casino зеркало DiskiPlus букмекерская контора бесплатно скачать DiskiPlus 7k casino бонус
#3627 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало
У любого игорного заведения свои верховодила и обстоятельства. Но, чтобы получить бонусы, необходимо выполнить стандартные деянья:Игрокам стоит воспринимать приветственный бонус как гарантированный метод получить крупный выигрыш, хотя это замечательная вероятность без расходов оценить возможностей казино. <a href=http://filmkachat.ru/>1× slots сайт</a> Для получения приза нужно ознакомиться с программкой преданности казино и сделать ставки на сумму, нужную для перехода на грядущий степень.Условия все разниться приятель от друга. Но такой бонус может быть использован лишь для игрового процесса – полученные на счет деньги до как, как будут отыграны, исключить невозможно. <a href=https://forum.gazeta.pl/forum/w,678,178514390,178514390,Professional_Architectural_Renderings.html>https://forum.gazeta.pl/forum/w,678,178514390,178514390,Professional_Architectural_Renderings.html</a> На благотворительные бонусы онлайн-казино практически практически распространяется ограничения по стране проживания клиентов. Даже если вам разрешено открывать счет и выступать на средства в заведении, это еще не означают, что вам доступны no down payment bonuses. казино 1×slots <a href=https://git.qoto.org/anturov2020/anturov2020/-/issues/44>https://git.qoto.org/anturov2020/anturov2020/-/issues/44</a>
казино 1×slots
Еще одно условие касается размеров ставки. Операторы устанавливают наивысшую сумму, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, избранной в Личном кабинете. При превышении лимита есть риск потерять бонуса. Существующие ограничения относятся и к определенным видам ставок. Например, играя в рулетку, клиент имеет столкнуться с запретом ставить фишки на шансы. 1 x slots casino Срок активации и время на отыгрыш. Зачисление денег или фриспинов происходит при активации протяжении строго ограниченного периода, подобные притязания предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать приз несколько дней или том недель. Другие выдают крупную необходимую за регистрацию, но время отыгрыша ограничивают несколькими часами с необоснованно высоким вейджером. <a href=http://siamchart.com/forum/member.php?63852-Zapravkapt>http://siamchart.com/forum/member.php?63852-Zapravkapt</a> Также бездепозитные бонусы шансы служить методом возвращать к забаве клиентов, временно приостановивших своё сотрудничество с фирмой: извещение о бездепе поступает на мобильный телефон или почту. 1×slots актуальное зеркало Выбор любого онлайн казино на нашем веб-сайте. В описании к каждому Вы можете узнать, собственно получите за творенье аккаунта.На бесплатные призы онлайн-казино почти всегда распространяется лимитирования по стране проживания посетителей. Даже в вас разрешается раскрывать счет и играть на деньги в заведении, это еще не значат, собственно для доступны not the slightest deposit bonuses.
1хслотс мобильная версия зеркало
Таким образом онлайн казино получает потенциального игрока. Возможно в будущем либо истинном он захотит сыграть на свои деньги. Так трудятся бездепозитные призы в интернет казино. Здесь отлично подходит выражение, бесплатные сыр посещает лишь в мышеловке. Начинающие игроки все не осознавать опасность азарта. Однако течением понимания становится больше. Это тема для отдельного обсуждения. Если при регистрации показать промокод, возможно гарантировано получить приз. Где арестовать ваучер? Посетите на блоги либо форумы. Иногда администрация клуба делает рассылку ваучеров на электрическую почту. В последнее время игорные дома начали афишироваться в фильмах и телесериалах. Присмотритесь и наверняка заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных рублей. <a href=https://cardvilla.cc/members/523312.html>https://cardvilla.cc/members/523312.html</a> 1×slots быструю регистрацию а также мгновенное Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих требований, считая обязательной верификации. Если на веб-сайте предусмотрена обязательная процедура доказательства личности, то вывести выигрыш удастся только последствии проверки данных. Приготовьтесь наполнить анкету и отправить в техподдержку документ, подтверждающий личность.Чтобы играть безвозмездно на настоящие средства в казино, не всегда довольно просто зарегистрироваться. Иногда нужно выполнить дополнительные действия.
1×slots casino регистрация 1×slots review live
<a href=https://swordmaster.org/user/JamesVok/>1×slots регистрация на сайте 1×slots ru com</a> Бонус в казино без депо содержит различные вариации: такое быть приветственный приз, акции в честь каких-либо дней или весомых дат, бонус за привлечение свежих игроков, преданность и получение VIP-статуса.Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, чтобы замечена возможность вывести выигрыш. 1 хслот регистрация в 1×slots casino <a href=https://www.miyawaki.wiki/index.php/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%93%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0_%D0%9D%D0%B0_%D0%94%D0%B7%D0%B5%D0%BD%D0%B5>https://www.miyawaki.wiki/index.php/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%93%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0_%D0%9D%D0%B0_%D0%94%D0%B7%D0%B5%D0%BD%D0%B5</a> К примеру, игроку выдаются безвозмездные средства в заведении в размере пятидесяти или 100 долларов (вейджер на которые составляет 100х). То есть, каждому новоприбывшему геймеру выскакивает притягивающая иллюстрация, которая обещает выплату всех зачисленных компанией средств. Не стоит заострять на казино бонус за регистрацию без депозита с чрезмерно большой или довольно малюсенькой суммой бонусов, потому что, том кропотливо изучив все условия, здесь скорее, будет какой-то подвох.Это тоже благотворительные финансы, которые поступают на аккаунты новоиспеченных в после регистрирования. А особенность этих призов произведено сомнений, что обретенные деньги непременно следует использовать в продолжении назначенного медли.
1×slots официальный сайт мобильная версия
В интернете большое знаменитых игорных площадок с привлекательными акционными предложениями. Однако пристально читать условия десятков услуг времени надоест, ну и время отнимет большое. Поэтому наша команда подготовила ТОП-3 сайтов с наихорошими бездепозитными призами:Используйте лучшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из перечня ниже, дабы заработать подарки за простые деяния и уже сегодня получить 1-ый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и быстрыми выводами на электронные кошельки. Бездепозитные призы отличный вариант безвозмездной забавы в игровые автоматы. Многие юзеры сети не знают, собственно в казино возможно начать играть абсолютно даром, а позже вывести выигрыш на банковскую карту или электрический кошелек, иные не доверяют интернет казино, а третьи удачно играют и выигрывают – и тотчас довольно большие суммы. <a href=http://elymbmx.com/mybb/member.php?action=profile&uid=13245>http://elymbmx.com/mybb/member.php?action=profile&uid=13245</a> 1×slots зеркало регистрация Не желаете поиграть в азартные игры, не рискуя своими деньгами, но получая в все выплаты? Подобную вероятность деют почти наилучшие порталы с азартными развлечениями. В их числе количество добросовестных и надежных интернет-казино на русском языке. Они привлекают новых пользователей различными поощрительными мероприятиями, включая бездепозитные, либо бесплатные бонусы.
<b>Смотреть еще похожие новости:</b>
<a href=http://ledyardmachine.com/forum/User-Jameshoing>1×slots официальный сайт мобильная версия скачать</a>
<a href=http://palais.beesims.com/phpbb/viewtopic.php?f=2&t=292266>1 xslots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепы имеют входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой или баллами. Зарегистрируйтесь. Для регистрации чаще всего довольно установить свой номер телефона и почтовый адресок, в чего ввести приобретенный код из СМС. Возможно, требуется показать промокод. В правилах промоакции несомненно написано, где его надо включать. Иногда это надобно создавать при регистрации, времени — уже последствии творенья собственного офиса, на отдельной странице.
#3628 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
kent casino приложения букмекерских контор <a href=https://m.repost.news/>casino buzz</a> Набиуллина Эльвира Сахипзадовна порно пин ап казино <a href=https://t.me/vchkogpu_ru>pin up casino пин</a> casino ап бесплатно играем казино букмекерская контора ставки человек казино 1×bet на андроид сайт букмекерской конторы casino вход
DiskiPlus порно с Юлия Ефимова DiskiPlus порно с Дарья Клишина, легкоатлетка <a href=https://diskiplus.ru>DiskiPlus Валентина Матвиенко порно</a> DiskiPlus casino бонус DiskiPlus суть казино <a href=https://www.diskiplus.ru>DiskiPlus 7k casino сайт</a> DiskiPlus 1×bet 1 DiskiPlus 1×bet зеркало слоты 1×bet xyz DiskiPlus порно с Никита Кучеров (хоккей) DiskiPlus порно с Абрамченко Виктория Валериевна DiskiPlus 1×bet сайт DiskiPlus казино рублях DiskiPlus 1×bet на сегодня
#3629 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slotscasino09k online
Перед активацией главно пристально изучить условия акции. Чем ниже вейджер, что, этим больше потенциальная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, на которых можно пользоваться предложением. Если бездеп обхватывает ограниченный список игр, рекомендуется разузнать максимальные коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только что, нет случае, случае оператор не установил взыскательные лимитирования на максимальную необходимую ставки.Частенько новенькие не разумеют, как активировать презенты или исключить первый выигрыш. Для похожих случаев наша команда описала основные определения – собственно такое фриспины, вейджер, как его отыграть, чего необходимо проходить верификацию. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> Бездепы с безвозмездными вращениями деют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд уплачивает казино. Число спинов ограничено и изредка превышает сотню. Если акция содержит много бесплатных игр, их начисление может быть разбито на количество дней. <a href=https://www.ipaddress.com/website/astramedika.com.ua/>https://www.ipaddress.com/website/astramedika.com.ua/</a> 1×slots сайт <a href=https://foro.vcheats.me/Usuario-HarryScies>https://foro.vcheats.me/Usuario-HarryScies</a>
1×slots зеркало выигрыши обязательно пройдите регистрацию если
<a href=http://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=6268>1×slot регистрация</a> 1×slos регистрация в 1×slots casino <a href=http://skiindustry.org:/forum/member.php?action=profile&uid=1233320>http://skiindustry.org:/forum/member.php?action=profile&uid=1233320</a> 1×slots зеркало рабочее на сегодня Подарки на конкретные даты отличаются критериями получения. Если поощрение начисляют игроку на день рождения, то сумма обыкновенно зависит от совместного объема депо последний год.При исполнении условий отыгрыша и верификации, деньги с бонусного счета переводятся на основной и шансы быть выведены на карту либо электронный кошелек. Лимиты на вывод и сроки проведения транзакции находятся от избранной платежной системы.
1×slos регистрация в 1×slots casino
При маленький сумме приза рекомендуется выступать по невысоким ставкам, а использовать максимальные лучше только что, нет случае, случае вейджер очень немалый, а время на отыгрыш сильно ограничено.Бесплатные бонусы казино без депозита возможно получить повторяющий денежных средств на бонусный счет (вывести их возможно только в отыгрыша), фриспинов, игры либо кешбэк-бонуса. Бездепозитные бонусы в казино без пополнения 2022 — это определенная сумма средств либо gift spins вращения, которые предоставляются первым постояльцам за регистрацию на веб-сайте казино вид бездепозитного бонуса, и выделяет вас возможность за счет казино без пополнения опробовать услуги (игр), с последующей преимуществом, льготой вывода средств при исполнении всех установленных управлял.А ознакомиться с новыми онлайн казино, Вы сможете за счет бонусов с выводом выгоды, которые Вы можете получить без депо. <a href=http://zanasite.free.fr/laripostedumardi/doku.php?id=Выкуп_авто>http://zanasite.free.fr/laripostedumardi/doku.php?id=Выкуп_авто</a> Для всех бездепозитных бонусов функционирует максимальный лимит на выигрыш. Он показывает предельную необходимую, коию вы сможете получить, играя на бонусные кредиты. Как только для удастся выполнить притязания вейджера, допустимый максимум будет переведен с бонусного счета на главной, а остаток будет списан. зеркала 1×slots Акции распространяются как на все игры казино, так и на ограниченный список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и. Промо имеет обхватывать разработки одного производителя. Бездеп не пересекается с иными промоакциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, сделанные бонусными средствами. Для идентификации платежных реквизитов игрока имеет понадобиться пополнение счета на наименьшую сумму.Мы рекомендуем не отказываться от сходственных услуг известных казино. Выделите некоторое мин. На регистрацию, получите приз и попытайтесь его отыграть. Может быть, сегодня удача несомненно на вашей стороне!
1хлот регистрация в 1×slots casino
Для получения депозитного приза нужно восполнить свой игровой баланс настоящими средствами. Вознаграждение можно получить или при внесении первого депо, или в виде фиксированного процента от внесённых средств. Так или по, приз поступит на счёт только в пополнения.Некоторые онлайн-казино без депо предлагают новым посетителям избрать бонус при регистрации. Будьте внимательны: выбрав один, вы в безусловном большинстве случаев не можете пользоваться остальными. <a href=https://sparta.training/faq/online-returns/#comment-66986>1×slots рабочее зеркало</a> Обычно показатель выше, чем для призов на депозит. Не дивитесь, случае он будет в х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных стран. Ещё одно распространённое акционное предложение – симпатичный презент с сомнительными притязаниями. К образцу, клуб сулит $100 в бездепа, хотя с вейджером х80 либо х100. Отыграть подобный вейджер практически невозможно и поэтому другого, как концентрироваться на более заманчивых акциях. 1хслотс 1хслотс регистрация перейти на 1×slots <a href=https://www.freebeg.com/forum/member.php?action=profile&uid=22935>https://www.freebeg.com/forum/member.php?action=profile&uid=22935</a>
1×slots casino регистрация 1×slotscasino09k online
<a href=http://bbs.boway.net/home.php?mod=space&uid=1006204>http://bbs.boway.net/home.php?mod=space&uid=1006204</a> Вейджер не более х30–35 считается приемлемым. Опытные игроки заявляют, что с таким вейджером реально остаться в плюсе, в правильно подойти к выбору игрового аппарата. зеркала 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=13119>казино 1×slots</a>
<a href=http://big.bestforums.org/viewtopic.php?f=7&t=20275>1×slots официальный demo регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для верификации аккаунта нужно дать специалистам технической поддержки отсканированную копию паспорта и счета за коммунальные предложения, а также фотографию банковской карты либо скриншот странички электронного кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для доказательства личности.
#3630 Charlesgunnyhttp://filmkachat.ru
1х слот 1хслотс регистрация перейти на 1×slots
Большинство интернет-казино из нашего топ-10 готовы порадовать вас неповторимыми акциями. Читайте о их в обзорах и на форуме. <a href=http://filmkachat.ru/>рабочее зеркало 1хслотс</a> Бонус с зачислением денег на счет выделяет больше свободы действий. Пользователь сам подбирает, каким образом воспользоваться подаренными своими. Здесь кроме могут действовать лимитирования на список дешевых игр, но обычно эти рамки не так строги, как в рекламную с безвозмездными вращениями.Например, игрок получил 500 руб. При создании аккаунта и обязан отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 рублей, понадобится устроить 875 спинов для полного отыгрыша. <a href=https://www.zerohedge.com/user/XQ0IxyckyYRkQEPXkHNCLEtbcq03>https://www.zerohedge.com/user/XQ0IxyckyYRkQEPXkHNCLEtbcq03</a> В интернет-сети постоянно возможно отыскать перечни более известных и обещанных поощрительных программ от известных онлайн-казино. зеркло казино 1×slots <a href=https://marvelvsdc.faith/wiki/%D0%91%D0%BB%D0%BE%D0%B3_%D0%93%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0>https://marvelvsdc.faith/wiki/%D0%91%D0%BB%D0%BE%D0%B3_%D0%93%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0</a> Как правило, новоприбывшие игроки начала хотят ознакомиться с методами ввода и вывода денежных средств и сроки выполнения поданных заявок дабы четко разуметь, как стремительно возможность исключить свой казино бонус за регистрацию без депозита на электрический кошелек или же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино соперничают между собой. Ведь если бы определенную компанию давало лишь одно онлайн-заведение, то навряд бы посетители увидели казино с призом за регистрацию и могли бы рассчитывать только на вознаграждение повторяющий приза на первое инвестиция. К каждому заведению регулярно следует привлекать свежих игроков, собственно, итоге, только на руку всем играющим.Верификация аккаунта. Лучше доказать личность сразу последствии регистрации, дабы позже не было заморочек с выводом средств. Верификация имеет проходить 2-мя способами:
1×slots подтвердит вашу регистрацию если говорить
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=31541>1×slots сайт</a> 1×slots официальный зеркало <a href=http://chekanka-monet64.ru/index.php?subaction=userinfo&user=creepythrill90>http://chekanka-monet64.ru/index.php?subaction=userinfo&user=creepythrill90</a> 1×slots официальный зеркало рабочее
1хслот скачать
Выше мы дали глубокий набор самых свежих и своевременных бездепозитных бонусов в интернет казино без пополнения на 2022 год, где вам воспользоваться любым ценным бездепозитным призом. Суммы похожих предложений, как правило, колеблются от 3-х до двадцати $, а вейджер на эти средства должен составлять от 30 до шестидесяти один. Зачастую, наибольшая сумма выигрыша тут составит от одной до двух сотен долларов. Если геймер выиграет больше, то все средства шансы быть списанными до очень разрешенного выигрыша. Здесь замечена смысл выводить еще несуществующие деньги на собственную платежную систему и далее отыскивать заведение с подходящими под данную сумму релоадом либо призом за 1-ое пополнение счета. Есть количество подвидов бездепозитного вознаграждения, предлагаемого наибольшим числом заведений.Автоматы неспроста считаются самым модным азартным отдыхом. Чтобы усвоить управление и управляла, понадобится всего некоторое минут. Ваша задачка устроить ставку, найти количество рабочих линий и можно крутить тамбур. Если на выпадет выигрышная композиция – вы выиграли! С данной задачей вам посодействуют справится бездепозитные бонусы казино. <a href=http://bbs.yunduost.com/home.php?mod=space&uid=96998>http://bbs.yunduost.com/home.php?mod=space&uid=96998</a> Помните, что в неких забавах сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки считаются как отыгранные деньги, момент как в слотах идет в зачет все 100% суммы.Любой выигрыш по ставке выше установленного лимита будет являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, а случае выигрыша его сумма не поступит на счёт клиента — итог игры будет всецело аннулирован. 1×slot регистрация К образцу, игроку выдаются безвозмездные свои в заведении в объеме пятидесяти или ста $ (вейджер на коие сочиняет 100х). То есть, каждому новоприбывшему геймеру выскакивает притягивающая картинка, которая обещает выплату всех зачисленных фирмой средств. Не стоит заострять на казино приз за регистрацию без депо с сильно великий либо довольно малюсенькой суммой бонусов, поэтому что, числе тщательно исследовав все обстоятельства, здесь вероятнее всего, несомненно какой-то подкол.Подарки на праздники ? приуроченные к праздничным датам, требующие символического отыгрыша или начисляются без того. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду.
1×slots зеркало рабочее на сегодня
Как лишь вы отыграли вейджер и средства с бонусного баланса перебежали для на настоящий счет, Вы смело можете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (устроить минимальный депо к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депозитом). <a href=https://projects.sare.org/people/jamestrazy/>1×slots официальный сайт зеркало</a> Не сложно додуматься, собственно no down payment bonuses почти никогда не случаются немаленькими. Чаще всего речь идет о пяти–тридцати баксах (либо эквиваленте этой суммы в другой еденице). 1×slots зеркало регистрация в 1×slots casino <a href=http://www.engel-und-waisen.de/index.php/%D0%A4%D0%BB%D0%B8%D1%80%D1%82_%D0%97%D0%BD%D0%B0%D0%BA%D0%BE%D0%BC%D1%81%D1%82%D0%B2%D0%BE_%D0%A0%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F>http://www.engel-und-waisen.de/index.php/%D0%A4%D0%BB%D0%B8%D1%80%D1%82_%D0%97%D0%BD%D0%B0%D0%BA%D0%BE%D0%BC%D1%81%D1%82%D0%B2%D0%BE_%D0%A0%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F</a>
1×слотс казино
Важно, убедитесь что, нет, собственно ранее не регистрировались в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи.Мы собрали и опубликовали перечень наихороших бездепозитных казино с призами за регистрацию, коие гарантируют щедрые выигрыши и моментальные выплаты. Для получения депозитного приза нужно восполнить собственный игровой баланс настоящими деньгами. Вознаграждение возможно получить или при внесении первого депозита, либо в виде фиксированного процента от внесённых средств. Так или по, бонус поступит на счёт только в пополнения. <a href=https://rus-crafting.ru/index.php?subaction=userinfo&user=DoctorLazutaSr>https://rus-crafting.ru/index.php?subaction=userinfo&user=DoctorLazutaSr</a> 1×slots зеркало на сегодня Для верификации аккаунта нужно предоставить специалистам технической поддержки отсканированную копию паспорта и счета за коммунальные предложения, а фотку банковской карты либо скриншот странички электрического кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для подтверждения личности.Заработать на бездепозитных призах за регистрацию в казино возможность каждый пользователь, достигший совершеннолетия.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Во всех легальных онлайн-казино Беларуси необходимо подтверждение паспортных данных для игры — это требование правительства государства. Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.
#3631 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Юлия Канакина, скелетонистка рейтинг казино <a href=https://sovsekretno.net/>сайт казино зеркало</a> Семёнова Татьяна Владимировна порно гама казино <a href=https://res-publika.com>Москалькова Татьяна Николаевна порно</a> Самойлова Алла Владимировна порно казино казино рояль смотреть почему казино casinos xyz казино онлайн 1×bet слоты 1×bet top
DiskiPlus 1×bet зеркало на сегодня DiskiPlus казино сочи <a href=https://www.diskiplus.ru/>DiskiPlus порно с Федор Чалов (футбол)</a> DiskiPlus бывшие казино DiskiPlus 7k casino зеркало на сегодня <a href=https://diskiplus.ru>DiskiPlus порно с Аделия Петросян (фигурное катание)</a> DiskiPlus Юдаева Ксения Валентиновна порно DiskiPlus макао казино DiskiPlus порно с Евгений Малкин (хоккей) DiskiPlus пин ап casino pin DiskiPlus пари букмекерская контора DiskiPlus порно с Анна Щербакова, фигуристка DiskiPlus официальные зеркала казино
#3632 Charlesgunnyhttp://filmkachat.ru
рабочее зеркало 1хслотс
Подтверждение электронной почты – одно из главных условий, которое есть почти в каждом бездепозитном казино. Чтобы верифицировать электрическую почту, довольно перебежать по активной ссылке в послании, приобретенном от азартного клуба.Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. <a href=http://filmkachat.ru/>1×слотс казино</a> В подавляющем большинстве случаев безвозмездные бонусы начисляются в кредитах, коие нельзя незамедлительно исключить со счета. Прежде их нужно отыграть по установленным правилам. Эти требования принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже.Однако в критериях исчезают «подводные камешки», коие не разрешат вывести солидную необходимую либо же вы не успеете отыграть вейджер. Поэтому мастера советуют отобрать безвозмездные вращения за регистрацию в казино без депо, чтобы поднабраться навыка и получить настоящий шанс на победу. <a href=https://www.merchantcircle.com/blogs/3d-rendering-company-archicgi-dallas-tx/2025/1/3D-Furniture-Rendering-Professional-Visualization-Services/2886994>https://www.merchantcircle.com/blogs/3d-rendering-company-archicgi-dallas-tx/2025/1/3D-Furniture-Rendering-Professional-Visualization-Services/2886994</a> Акции, приуроченные к календарным дням, посещают рассчитаны как на всех юзеров, так и на категории: к, презент на 8 марта девушкам-игрокам или мужикам на 23 февраля.Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных ситуаций с казино, когда после отыгрыша бездепа вас не дадут вывести солидную необходимую выигрыша. 1 хслот регистрация в 1×slots casino <a href=http://xn–4k0bv8c1zgcwnr1o.kr/bbs/board.php?bo_table=free&wr_id=134632>http://xn–4k0bv8c1zgcwnr1o.kr/bbs/board.php?bo_table=free&wr_id=134632</a> Особую изюминку видео слотам присваивают уникальные знакы. С их выходом активизируются разные призы. Вы можете запустить дополнительный уровень и увеличить сумму выигрыша. Есть знаки, которые замещают ненадобные составляющие и сами создают выигрышные комбо. Не стоит забывать и на бонус-тур. После каждого удачного спина есть шанс прирастить необходимую выигрыша в 2 либо хорошо раза.
1×slots зеркало регистрацию более популярный вариант это
Некоторые клубы механически начисляют бонус на аккаунт игрока последствии выполнения условий получения, хотя случаются истории, когда бонус надо(надобно) активировать игроку самому. Есть некоторое способов активации приза:Для верификации номера телефонного, в собственном профиле выберите опцию „Подтвердить номер телефонного“ и введите в подходящее поле код, полученный в sms-сообщении. <a href=https://techadron.com/forum/viewtopic.php?p=9343>1хслот зеркало сайта</a> 1 х слотс зеркало Все обожают получать презенты. Согласитесь, почти любой играющий человек несомненно беспредельно счастлив, в получит даровой подарок для игры в онлайн казино просто за регистрацию либо же приз за внесенный депо, так нарекаемые приветственные бонусы для свежих игроков. Соответственно эти онлайн клубы станут больше известны и преимущественны у игроков при выборе казино для забавы. Топ казино каждый обновляется и прибавляются свежие и увлекательные игровые клубы с привлекательной бонусной политикой и всеми вероятными привилегиями, к коим относятся эти бонусы как фриспины за регистрацию, денежные бездепозитные призы, еще великодушные бонусы за внесенный депо.Обычно бездепозитные промоакции от казино, прибывают на эл. Почту в деньки рождения либо праздники. В неких интернет казино можно обратиться в чат и как неизменному игроку, вполне вам предложат бездепозитное предложение. <a href=http://trisinfronteras.com/davidcastro/component/k2/itemlist/user/453886-zacheryheike>http://trisinfronteras.com/davidcastro/component/k2/itemlist/user/453886-zacheryheike</a> Если вы опытный игрок, вы должны знать, что бонус без депо – редкая находка. Тем не менее, мы еженедельно изучаем интернет, чтобы отыскать вам наилучшие бездепозитные предложения.Новые клиенты онлайн-казино без первого депо все выяснить свою удачливость. К тому же есть вероятность конвертировать бездепы в настоящие деньги за регистрацию в казино, однако чтобы бонус необходимо отыграть согласно условиям акции. сайт 1× slots casino Не желаете поиграть в азартные забавы, не рискуя своими средствами, хотя получая в все выплаты? Подобную возможность деют почти наилучшие порталы с азартными веселиями. В их числе количество правдивых и надежных интернет-казино на российском языке. Они привлекают свежих пользователей различными поощрительными мероприятиями, включая бездепозитные, или безвозмездные бонусы.
1×slots рабочее зеркало на сегодня
<a href=http://cheapbooks.cc/memberlist.php?mode=viewprofile&u=42554>http://cheapbooks.cc/memberlist.php?mode=viewprofile&u=42554</a> Бездепозитные бонусы — это презенты от казино повторяющий бонусных средств или фриспинов для игровых автоматов, которые начисляются на аккаунт игрока после процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депозит не потребуется. 1хслотс мобильная версия зеркало
1×slots казино зеркало
Бездепозитные бонусы за регистрацию в игровых автоматах для собственников онлайн-казино считаются долею маркетинговой кампании, направленной на увеличение аудитории сайта. Так они продвигают свои бренды и завлекают свежих посетителей.Но ни не забывайте внимательно читать управляла роли в бонусных промоакциях. Если вы нарушите желая бы одно условие, позже вы не можете уладить недоразумение с администрацией. Демоказино есть почти на любом сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются значительно реже: там когда выигрыша и соблюдения критерий промоакций бездеп возможно перевоплотить в настоящие средства.Мы советуем не отказываться от похожих услуг знаменитых казино. Выделите количество минут на регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сегодня фортуна будет на вашей стороне! Бездепозитный бонус казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в данном и содержится основное различие. 1×slots зеркало рабочее <a href=https://www.knx-fr.com/member.php?action=profile&uid=10090>https://www.knx-fr.com/member.php?action=profile&uid=10090</a> Нет. Для получения бездепозитного приза в казино нужна неотъемлемая регистрация на сайте. Играть в слоты бесплатно и без регистрации можно лишь в демо режиме.Также, такой нужно подтвердить свой номер телефона, достичь код, полученный в смс-сообщении от клуба установить в особое фон в собственном офисе игрока.
1×slots зеркало регистрация
Необходимость отыгрыша. Вейджер в выше, чем для бонусов за депозит. И же средства не отыграны, исключить их невозможно. <a href=http://goodjobdongguan.com/home.php?mod=space&uid=4904484>http://goodjobdongguan.com/home.php?mod=space&uid=4904484</a> 1×slots регистрация то дальше необходимо пройти Наш перечень содержит лучшие бездепозитные бонусы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по принципиальным параметрам:Для получения бездепа необходимо пригласить в игру по реферальной ссылке нового посетителя: он должен зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на необходимую, указанную в условиях акции.
<b>Смотреть еще похожие новости:</b>
<a href=http://check2go.net/my-account/>казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепы шансы входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами. Получив свой подарок, Вы сможете безвозмездно играть на реальные средства, а выполнив обстоятельства отыгрыша, вывести собственный выигрыш.
#3633 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало на сегодня 1×bet зеркало xbet xyz <a href=https://th-royalgclub.com/>зеркала казино</a> Москалькова Татьяна Николаевна порно 1×bet официальный 1×bet xyz <a href=https://rucriminal.info/>официальные зеркала казино</a> casino бонус ап казино порно с Васильева Татьяна Викторовна Елена Лядова казино на деньги играющие казино онлайн 1×bet рабочее
DiskiPlus карты казино DiskiPlus Шевцова Татьяна Викторовна порно <a href=https://www.diskiplus.ru/>DiskiPlus приложения букмекерских контор на андроид</a> DiskiPlus казино онлайн DiskiPlus porno Виктория Баркова, легкоатлетка <a href=https://diskiplus.ru>DiskiPlus 1×bet официальный xbet</a> DiskiPlus кент casino DiskiPlus казино сочи DiskiPlus 1×bet сейчас DiskiPlus рабочее казино DiskiPlus порно с Баталина Ольга Юрьевна DiskiPlus 1×bet сайт DiskiPlus порно с Анастасия Потапова, теннисистка
#3634 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Петрова Ольга Викторовна порно кент казино <a href=https://rucriminal.info/>порно с Абрамченко Виктория Валериевна</a> скачать casino на андроид букмекерская контора зенит <a href=https://repost.news/>официальная казино</a> porno Игорь Акинфеев (футбол) casino зеркало сегодня pin casino зеркало порно с Захарова Мария Владимировна официальные сайты казино casino buzz casinos xyz
DiskiPlus винлайн букмекерская контора официальный DiskiPlus pin up букмекерская контора <a href=https://diskiplus.ru/>DiskiPlus kometa casino</a> DiskiPlus скачать сайт букмекерской конторы DiskiPlus 1×bet вход <a href=https://diskiplus.ru/>DiskiPlus 7k casino скачать</a> DiskiPlus 1×bet скачать приложение на андроид DiskiPlus букмекерская контора бетсити DiskiPlus casino играть DiskiPlus порно с Юлия Ефимова, пловчиха DiskiPlus Шевцова Татьяна Викторовна порно DiskiPlus porno Яна Троянова DiskiPlus porno Марина Александрова
#3635 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Виктория Баркова, легкоатлетка винлайн букмекерская контора <a href=https://glvk.guru/>порно с Александр Головин (футбол)</a> 1×bet слоты официальный сайт букмекерская контора на андроид <a href=https://specreporter.com/>приложения букмекерских контор на андроид</a> симулятор казино porno Мария Шарапова порно с Матвей Сафонов (футбол) porno Екатерина Ефременкова, шорт-трекистка 1×bet на андроид бесплатно порно с Арина и Дина Аверины, гимнастки 1×bet телефон
DiskiPlus включи казино DiskiPlus скачать 1×bet на андроид бесплатно <a href=https://www.diskiplus.ru/>DiskiPlus винлайн букмекерская контора официальный</a> DiskiPlus ramenbet casino DiskiPlus порно с Кирьянова Дарья Борисовна <a href=https://www.diskiplus.ru/>DiskiPlus пин casino</a> DiskiPlus вывод казино DiskiPlus up casino официальный DiskiPlus up casino DiskiPlus леон букмекерская контора DiskiPlus гта онлайн казино DiskiPlus порно с Дарья Касаткина (теннис) DiskiPlus 1×bet зеркало xbet
#3636 Charlesgunnyhttp://filmkachat.ru
1×slots официальный demo регистрация в 1×slots casino
Также, учите, что бездепозитный приз возможно исключить только сомнений случае, когда станут выполнены все условия отыгрыша.Этот тип бонуса несомненно добавлен на Ваш аккаунт последствии успешной процедуры регистрации с использованием номера аппарата. Если выбрать другой способ сотворения учетной записи, бездеп не будет добавлен на Ваш акк. <a href=http://filmkachat.ru/>скачать 1×slots на андроид мобильная версия</a> Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам воспрещено начислять призы посетителям, не имеющим денежных средств на счете. Мы предлагаем разглядеть животрепещущие бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ.Бездепы обычно предлагают с отыгрышем — моментально исключить выигранные средства нельзя. Перевод средств со счета будет вероятен после того, как пользователь выполнит все притязания казино, а сумма возможности превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, протяжении которых клиент вправе пользоваться предложением. Обычно они не превышают нескольких дней последствии активации. <a href=https://www-ua.spyfu.com/overview/domain?query=astramedika.com.ua>https://www-ua.spyfu.com/overview/domain?query=astramedika.com.ua</a> Получить приветственный бонус все только свежие клиенты онлайн-казино. Способы описаны в условиях акции каждого легального казино, чаще всего это:Если вы бывалый игрок, вы обязаны знать, что приз без депо – редкая находка. Тем ниже, мы раз изучаем онлайн, чтобы отыскать вам наихорошие бездепозитные предложения. 1×slots казино мобильная версия <a href=http://fb7707ng.bget.ru/user/Patrickpricy/>http://fb7707ng.bget.ru/user/Patrickpricy/</a> Поспешите зарегистрироваться на официальном веб-сайте Клубника, дабы быстро получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, замечена настоящий шанс победу!
1×slots официальный сайт зеркало
Предложения с бездепозитными бонусами за регистрацию позволяют новым заведениям заинтересовать аудиторию на собственный сайт. А игроки к получают возможность выступать на реальные средства без депозита в казино и заработать малый стартовый капитал, который разрешено исключить на карту банка или электрический кошелек.Практически все интернет казино с бездепозитным бонусом за регистрацию предусматривает программку лояльности — систему одобрения постоянных клиентов, кот-ая произведено из большого уровней. При достижении игроком одного значения на его счёт поступает бонус. Чем повыше степень — тем щедрее бонус. <a href=http://3ak.cn/home.php?mod=space&uid=187057>1хслотс 1хслотс регистрация перейти на 1×slots</a> 1×slots официальный сайт зеркало рабочее Хотя бесплатные бонусы начисляются без депозита, не исключено, что вас понадобиться вносить средства. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только последствии того, как свежий клиент первый пополнит игровой счет.В неких интернет казино для получения бездепозитных призов не довольно просто зарегистрироваться на сайте клуба и подтвердить средства контактные данные. Дополнительно требуется активация промокода. <a href=https://www.amateur-girls-posts.com/forums/profile.php?mode=viewprofile&u=2950533>https://www.amateur-girls-posts.com/forums/profile.php?mode=viewprofile&u=2950533</a> Срок активации и время на отыгрыш. Зачисление средств либо фриспинов происходит при активации в течение взыскательно ограниченного периода, схожие требования предъявляются и к срокам отыгрыша. Одни казино позволяют отыгрывать бонус несколько дней или в недель. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером.В некоторых онлайн казино для получения бездепозитных бонусов не довольно просто зарегистрироваться на сайте клуба и доказать свои контактные данные. Дополнительно потребуется активация промокода. 1×slots бонус за регистрацию
1×slots бездепозитный бонус за регистрацию
С этими ординарными советами любое казино с призом за регистрацию способно принести в разы больше выгоды и полезности.Бездепозитные бонусы, как уже понятно, являются оригинальной вероятностью обратиться игровому процессу абсолютно безвозмездно, словами играть в интернет казино даром и на быть свои сразу последствии регистрации аккаунта. Автоматы с этим депозитом могут стать великолепной вероятностью сыграть для почитателей пыла с определенными ограничениями в финансах. При регистрации стопам указывать только достоверную информацию. Когда учетная запись будет активна, замечен доступ в Личный офис. В нем можно выбрать валюту, ввести промокод и узнать доскональные управляла получения и отыгрыша бездепа. Краткая информация об промоакции нередко находится непосредственно на регистрационной форме.Для получения бонуса надо(надобно) пригласить в забаву свежего посетителя. Казино начисляет пригласившему фиксированный процент от взносов приглашённого вид бонуса: почаще всего его размер не выше 10%. Срок действия бонуса правило не превышает месяца: пригласивший получает бонус зависимо проигранных ставок приглашённого в 1-ый луна игры. <a href=https://masstr.net/member.php?action=profile&uid=29144>https://masstr.net/member.php?action=profile&uid=29144</a> Иногда в бездепа, казино презентует наименьший бонус (до 50 рублей), ради которого надо заморачиваться. 1×slos регистрация в 1×slots casino
1×slots зеркало подтвердит вашу регистрацию если говорить
Для тех, кто лишь подумывает испытать свою фортуну, еще для профессиональных игроков, ищущих новые площадки для выигрышей, основные лицензированные казино часто организуют разные промоакции, и лучшее услуг за время – как для новичков, например и для профессиональных игроков – бездепозитный бонус за регистрацию. Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, чтобы была возможность исключить выигрыш. Бездепы все заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой либо баллами.Выбор любого онлайн казино на нашем сайте. В описании к любому Вы сможете узнать, собственно получите за творенье аккаунта. 1хслотс 1хслотс регистрация перейти на 1×slots <a href=https://ekvall.co/member.php?action=profile&uid=41422>https://ekvall.co/member.php?action=profile&uid=41422</a>
1×slots промокод при регистрации
Кешбэк-бонус представляет собой возврат фиксированного процента от ставки когда проигрыша либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%. Онлайн-казино с бездепозитными бонусами ставят посетителям обстоятельства для пользования бездепами, поэтому перед ролью в промоакции другого, как тщательно ознакомиться со всеми правилами и аспектами акции. Условия шансы дотрагиваться получения бонуса, его использования и следующего вывода денежных средств если, тогда, выигрыша. <a href=http://kerchlibrary.ru/index.php?subaction=userinfo&user=uwola>http://kerchlibrary.ru/index.php?subaction=userinfo&user=uwola</a> Фриплей-бонусы. Бонусы за бесплатную забаву есть только в некоторых клубах. Они зачисляются сразу после сотворения профиля и срабатывают недолговременное время. Если у вас нет времени израсходовать средства, они просто завершатся. Что касается медли, в большинстве случаев призы действуют на 1-го часа. 1×slots на любой вкус как пройти регистрацию Выигрыши с бонусов без вложений всегда привязаны к требованию по ставкам и все быть обналичены только после выполнения данных требований.
<b>Смотреть еще похожие новости:</b>
<a href=https://persiankittencat.com/grey-persian-cats-unraveling-the-charm-of-these-feline-beauties/#comment-65042>1х слот регистрация в 1×slots casino</a>
<a href=https://forum.spherecommunity.net/User-JamesLop>casino 1×slot</a>
<a href=http://nexusroleplay.teamforum.ru/viewtopic.php?f=19&t=7380>1×slots рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Итак, чтобы благотворительные бонусные кредиты превратились в настоящие средства, которыми вам распоряжаться по своему усмотрению, их нужно отыграть. Вейджер следует уточнять в правилах онлайн-казино.
#3637 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino riobet Попова Анна Юрьевна порно <a href=https://7club7.com/>букмекерская контора официальный сайт скачать</a> 1×bet xbet xyz гама казино <a href=https://specreporter.com/>лучшие онлайн казино</a> porno Дарья Мороз 1×bet зеркало слоты почему казино porno Андрей Рублев (теннис) играющие казино бесплатные букмекерские конторы порно с Елена Никитина, скелетонистка
DiskiPlus casino играть DiskiPlus 1×bet слоты <a href=https://www.diskiplus.ru/>DiskiPlus песня казино</a> DiskiPlus играющие казино DiskiPlus казино в россии <a href=https://www.diskiplus.ru/>DiskiPlus porno Юлия Канакина</a> DiskiPlus порно с Виктория Синицина, фигуристка DiskiPlus порно с Варвара Субботина DiskiPlus часы казино DiskiPlus porno Нина Пирогова, хоккеистка DiskiPlus порно с Алексей Миранчук (футбол) DiskiPlus up casino DiskiPlus casino официальный зеркало
#3638 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
зеркала официальных сайтов казино casino на телефон <a href=https://www.ossetia.tv/>7k casino бонус</a> ограбление казино бывшие казино <a href=https://strelochnik.com/>Яровая Ирина Анатольевна порно</a> porno Вера Бирюкова, гимнастка казино проиграл порно с Каролина Севастьянова демо казино 1×bet зеркало на сегодня 1×bet xyz porno Дарья Мороз включи казино
DiskiPlus Семёнова Татьяна Владимировна порно DiskiPlus porno Ангелина Гончаренко, хоккеистка <a href=https://diskiplus.ru/>DiskiPlus как выиграть в казино</a> DiskiPlus 1×slots casino DiskiPlus up casino скачать <a href=https://diskiplus.ru>DiskiPlus букмекерские контора ап</a> DiskiPlus слот casino DiskiPlus pin up casino DiskiPlus казино рояль DiskiPlus Преподобная Надежда Александровна порно DiskiPlus пари букмекерская контора DiskiPlus казино смотреть онлайн DiskiPlus pin up casino скачать
#3639 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Юлия Ефимова, пловчиха casino 7k рабочее <a href=https://m.repost.news/>порно с Аделия Петросян (фигурное катание)</a> порно с Евгения Медведева 1×bet сайт 1×bet xyz <a href=https://m.repost.news/>порно с Дарья Клишина, легкоатлетка</a> Ходнева Светлана Владимировна порно букмекерская контора мостбет букмекерская контора фонбет официальный сайт пин ап casino порно с Каролина Севастьянова букмекерская контора скачать приложение зеркала официальных сайтов казино
DiskiPlus порно с Бондаренко Анастасия Борисовна DiskiPlus порно с Анастасия Потапова, теннисистка <a href=https://www.diskiplus.ru>DiskiPlus официальные букмекерские конторы скачать</a> DiskiPlus смотреть фильм казино DiskiPlus букмекерская контора бетсити <a href=https://diskiplus.ru/>DiskiPlus пин ап букмекерская контора</a> DiskiPlus porno Ангелина Гончаренко, хоккеистка DiskiPlus casino x DiskiPlus порно с Гатагова Ольга Анатольевна DiskiPlus играющие казино DiskiPlus порно с Владимир Минеев (ММА) DiskiPlus бк букмекерская контора DiskiPlus 1×bet на сегодня
#3640 Charlesgunnyhttp://filmkachat.ru
1 хслот регистрация в 1×slots casino
2. Создать новый профиль. Для регистрации надо(надобно) наполнить небольшую анкету или зайдите в личный кабинет при помощи соц сеток;Казино дает вероятность заработать и исключить реальные деньги на бездепозитных бонусах. Обычно, это незначительная сумма, коию казино имеет себя позволить подарить игроку. <a href=http://filmkachat.ru/>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a> Возможность поиграть дополнительное соревнование (а иногда и количество) абсолютно безвозмездно, а выигрыш, тому, поступает на счёт игрока.Бездепы имеют входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой или баллами. <a href=https://redmine.dti.economia.gov.br/issues/72790>https://redmine.dti.economia.gov.br/issues/72790</a> Каждый новичок и профессиональный игрок грезят стремительно стартануть и начать создавать реальные ставки. Для этого достаточно отобрать презент, за кот-ый надо уплачивать. В зависимости от игровой платформы, надо(надобно) сделать профиль, привязать email либо аппарат. После сего администрация начислит щедрое вознаграждение вид даровых вращений или виртуальных кредитов.Промообъявления от казино не дают реальной картины и ориентированы на вербование внимания пользователей. Понять, насколько высоки шансы остаться в плюсе, дозволит собственный тест условий предложения: x1 slots 1хслотс регистрация перейти на 1×slots <a href=http://hotnews.lv/user/Stevenslusa/>http://hotnews.lv/user/Stevenslusa/</a>
1хслотс рабочее зеркало
Бонус начисляется игроку сразу в регистрации и прохождения верификации в казино и не требует от посетителя внесения депозита. Как верховодило, размер бонуса в подобном случае довольно скромный, однако дозволяет новичкам познакомиться с забавой без риска настоящими средствами. <a href=https://your-portal.at.ua/forum/62–6475–7#88325>1×slots рабочее зеркало</a> 1×slots официальный сайт зеркало Иногда виде бездепа, казино дарит наименьший бонус (до 50 рублей), из-за которого не заморачиваться. <a href=http://damoa2019.maru.net/bbs/board.php?bo_table=free&wr_id=15028>http://damoa2019.maru.net/bbs/board.php?bo_table=free&wr_id=15028</a> 1×slots официальный сайт зеркало рабочее Зачастую бездепозитные бонусы казино для забавы предлагаются различными заведениями азартных игр виде рекламных промоакций или в целях вербования к себя новых игроков. Для бездепозитных бонусов в казино 2022 геймеру не нужно пополнять счет до момента вывода желаемых средств.
1хслотс официальный сайт зеркало
Большинство клубов привлекают внимание игры за счёт разнообразных презентов. На одних сайтах можно получить виртуальные кредиты, которые откроют доступ ко всему софту. На иных же, администрация предлагает безвозмездные вращения для пуска лучших онлайн слотов. Несмотря на разные промоакции, стоит выделить самые главные. Когда речь о получении бездепозитных призов в казино, начала обратите внимание на последующие обстоятельства:Обычно, бездепозитные бонусы выдаются под определенные слоты с фиксированной ставкой, но их наверняка воспрещено использовать в игровых автоматах с прогрессивным джекпотом. Список игр, каких можно применять бездеп, Вы найдете в описании акции или сможете уточнить у службы заведения. <a href=http://soundpoolradio.de/profile.php?lookup=16465>http://soundpoolradio.de/profile.php?lookup=16465</a> Также бывают случаи, когда казино начисляет оговоренный приз в регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам.Вышеописанная первопричина и является основным моментом, следствии которого операторы отдают часть своей прибыли на разные маркетинговые затраты и рекламные кампании. А наиболее действующим здесь станут играть непосредственно бездепозитные бонусы казино 2022 с выводом за регистрацию. рабочее зеркало 1хслотс Фриспины – безвозмездные вращения с фиксированной ставкой, коие возможно применять в конкретных игровых автоматах.В некоторых интернет казино для получения бездепозитных призов не достаточно просто зарегистрироваться на сайте клуба и доказать средства контактные данные. Дополнительно требуется активация промокода.
1×slots казино мобильная версия
Для всех бездепозитных призов функционирует максимальный предел на выигрыш. Он указывает предельную необходимую, коию у получить, играя на бонусные кредиты. Как лишь вас получится выполнить притязания вейджера, возможный максимум будет переведен с бонусного счета на главный, а остаток несомненно списан. 1×slots регистрацию более популярный вариант это <a href=https://extremefeeding.com/en/cb-profile/pluginclass/cbblogs?action=blogs&func=show&id=555>https://extremefeeding.com/en/cb-profile/pluginclass/cbblogs?action=blogs&func=show&id=555</a>
1×slots регистрация на сайте 1×slots ru com
<a href=http://www.atego-club.ru/forum/member.php/136567-Williambluts>http://www.atego-club.ru/forum/member.php/136567-Williambluts</a> 1×slots рабочее зеркало на сегодня Однако в критериях исчезают «подводные камешки», коие не позволят вывести солидную необходимую или же вы не успеете отыграть вейджер. Поэтому профессионалы рекомендуют забрать бесплатные вращения за регистрацию в казино без депозита, чтобы поднабраться опыта и получить реальный шанс на победу.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=33837>1хслот зеркало</a>
<a href=http://zxz.listbb.ru/memberlist.php?mode=viewprofile&u=925>1×slots зеркало видели такую регистрацию на</a>
<a href=http://link.5nx.ru/memberlist.php?mode=viewprofile&u=600>1× slots официальный</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Первый образующийся вопрос, это, зачем выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают новых игроков. Последним проще начать забаву на средства с подарка за регистрацию. Им не пополнять баланс и тратить собственные средства. Новички получают благотворительные спины либо средства на счёт. С их подмогою знакомятся с игровым ходом, крутят слоты и делают ставки в рулетке. К примеру, игроку выдаются бесплатные средства в заведении в объеме пятидесяти либо ста долларов (вейджер на которые составляет 100х). То есть, каждому новоприбывшему геймеру выскакивает привлекающая иллюстрация, кот-ая обещает выплату всех зачисленных компанией средств. Не стоит внимания на казино приз за регистрацию без депозита с слишком великой либо очень маленькой суммой бонусов, потому что, числе тщательно выучив все условия, здесь всего, несомненно некий подвох.
#3641 FloydAmurfhttps://www.tmgcompany.com
stehovani cenik <a href=https://www.tmgcompany.com/>levna preprava nabytku</a>
#3642 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Кирьянова Дарья Борисовна casino 7k рабочее <a href=https://krtka.info/>Светлана Ходченкова</a> казино регистрации casino скачать <a href=https://www.ossetia.tv/>зеркала официальных сайтов казино</a> рабочее казино Лут Оксана Николаевна порно казино рулетка 1×bet зеркало рабочее xbet 1×bet скачать бесплатно casino betting casino андроид
DiskiPlus pin casino DiskiPlus букмекерские конторы без депозита <a href=https://diskiplus.ru/>DiskiPlus сайты казино</a> казино DiskiPlus pin casino <a href=https://www.diskiplus.ru>DiskiPlus porno Алена Михайлова</a> DiskiPlus порно с Юлия Ефимова, пловчиха DiskiPlus pin up casino top top DiskiPlus pin up casino пин DiskiPlus win win casino DiskiPlus винлайн букмекерская контора DiskiPlus Лут Оксана Николаевна порно DiskiPlus слоты казино
#3643 DonaldWeawshttps://parkville-zhukovka-poselok.ru
Элитный коттеджный поселок <a href=https://parkville-zhukovka-poselok.ru/>https://parkville-zhukovka-poselok.ru</a> в Жуковке! Просторные дома, свежий воздух, развитая инфраструктура и удобная транспортная доступность. Создайте уютное пространство для жизни в живописном месте!
#3644 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Яна Троянова как выиграть в казино <a href=https://th-royalgclub.com/>Яровая Ирина Анатольевна порно</a> 7k casino зеркало casino 7k сегодня <a href=https://rucriminal.info/>porno Алена Косторная (фигурное катание)</a> Набиуллина Эльвира Сахипзадовна порно casino андроид 1×slots casino официальные зеркала казино карты казино inform@rucriminal.info 1×bet официальный сайт
DiskiPlus пина casino DiskiPlus porno Юлия Пересильд <a href=https://diskiplus.ru/>DiskiPlus зеркала казино</a> DiskiPlus приложения букмекерских контор на андроид DiskiPlus порно с Зырянова Анастасия Владимировна <a href=https://diskiplus.ru/>DiskiPlus казино играть</a> DiskiPlus порно с Петр Ян (ММА) DiskiPlus casino зеркало сайта DiskiPlus винлайн букмекерская контора DiskiPlus casino официальный зеркало DiskiPlus unlim casino DiskiPlus Скоробогатова Ольга Николаевна порно DiskiPlus почему в казино не бывает настенных часов
#3645 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее
Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных ситуаций с казино, когда после отыгрыша бездепа для не дадут вывести солидную необходимую выигрыша.Получать информацию о самых выгодных бонусах возможно без постоянного прогноза новостей казино. Мы брали эту задачу на себя и постоянно смотрим за услугами операторов, выбирая превосходнейшие из них. В этом разделе собраны заключительные бездепы, промокоды к ним и обстоятельства их активации. Список акций регулярно пополняется. В топ вошли самые новые бездепозитные призы за регистрацию в казино 2020, кратковременные и замкнутые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и другим аспектам. Если срок деянья промоакции истек, она удаляется из перечня. <a href=http://filmkachat.ru/>1хслотс казино зеркало</a> На страничке представлены бездепозитные призы за регистрацию в казино редкая заслуга за которой гонятся все игроки как новенькие, так и мастера. Мы также уделяем огромное внимание на наличие призов при формирование рейтинга казино на деньги. Бездепозитный бонус это вероятность играть безвозмездно и выиграть реальные средства. <a href=https://next.canvanizer.com/canvas/rfilL0Pd61g3J>https://next.canvanizer.com/canvas/rfilL0Pd61g3J</a> 1×slots зеркало регистрация то дальше необходимо пройти <a href=http://slideshow-forum.com/profile.php?id=96801>http://slideshow-forum.com/profile.php?id=96801</a>
1×slots регистрация на сайте 1×slots ru com
Как лишь получите бездеп в казино, всё точно не запамятовывайте проверять электрическую почту. Некоторые игорные клубы постоянно радуют активных гэмблеров приятными призами. Чаще всего получить презент возможно в преддверии веселья, на денек рождение, за привлечение приятеля. А кроме распространённым бонусом является прибавка к депозиту. Нужно чем пополнить счёт, и азартное заведение прирастит его на 50–100%. 1хслотс казино зеркало <a href=https://www.mycncuk.com/members/76657-Chriswag>https://www.mycncuk.com/members/76657-Chriswag</a> зеркло казино 1×slots
1×slots casino зеркало рабочее
Наш перечень включает в себя превосходнейшие бездепозитные бонусы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по главным характеристикам:Онлайн гемблинг развивается с каждым днем все больше и больше, свежие бренды создаются не по дням а по часам. Новые онлайн казино делают вступительные акции для игроков, чтобы, чтобы что бы зарекомендовать себя, и тем самым предлагают бездепозитные бонусы за регистрацию, собственно бы не пропустить эту вероятность — как воспользоваться свежим бездепом, рекомендуем навещать наш сайт как возможно почаще, самое лакомое и свежие несомненно добавляться в данном же списке. Для верификации аккаунта нужно дать профессионалам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, а фотку банковской карты либо скриншот странички электрического кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности.Выбирайте наилучшие бесплатные призы счет обзоров на Casinoz – и пусть вас сопутствует счастье при отыгрыше бонусных кредитов! <a href=http://mclassic.com.hk/home.php?mod=space&uid=269883>http://mclassic.com.hk/home.php?mod=space&uid=269883</a> Предложения с бездепозитными бонусами за регистрацию разрешают свежим заведениям заинтересовать аудиторию на собственный вебсайт. А игроки тому получают возможность играть на реальные деньги без депозита в казино и заработать малый стартовый капитал, который разрешается вывести на карту банка или электрический кошелек. 1×slots регистрация 1×slots review live Чаще всего, известные сервисы, эти как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно обязательное правило. Финансовые средства выводятся лишь через что, эту платежную систему, коей пользовались для пополнения депозита. Если же игрок получил бездепозитный покерный приз, требуется пополнить счет на минимальную необходимую, кот-ая составляет обычно десять долларов.
1×slots регистрация на 1хслотс
Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных ситуаций с казино, когда в отыгрыша бездепа вас не дадут исключить крупную сумму выигрыша. <a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=52830>1 x slots</a> Когда идет о получении бездепозитных бонусов в казино, в первую очередь направьте на следующие условия: 1×slots зеркало рабочее на сегодня <a href=https://championsleage.review/wiki/User:CassieMonsoor93>https://championsleage.review/wiki/User:CassieMonsoor93</a> 1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, если не желаете замерзнуть жертвой жуликов или впустую истратить время;
1×slots бонус за регистрацию
В современность очень просто получить бонус за регистрацию в казино. Практически каждый игорный жилище с радостью начислит средства или бесплатные вращения. Многие гэмблеры пользуются данным и не смущяются регистрироваться в каждом клубе с прибыльными условиями. Кстати, это отличная вероятность выработать победную стратегию и сорвать джекпот.Каждый из бездепозитных призов без пополнения 2022 содержит свой конкретный вейджер для отыгрыша, например же в любом казино он уточняется индивидуально — где то он х55 а кое-где х30, повторюсь везде по различному! <a href=https://diakov.net/user/PorsedropSr/>https://diakov.net/user/PorsedropSr/</a> Для вывода средств бонус нужно несомненно отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами акции и вариантами отыгрыша бездепозитного приза до его получения, чтобы избежать конфликтных ситуаций. 1×slots бонус за регистрацию Каждая игровая платформа отличается условиями по получению и отыгрышу бездепов. В правилах детально расписаны кратковременные рамки, за коие нужно прокрутить вейджер. Также не забывайте на максимальный объем ставки и наивысшую сумму выплаты. С другой стороны, дабы получить бездепозитные бонусы казино, довольно истратить менее 1 минутки.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В интернет-сети всегда возможно отыскать списки наиболее модных и гарантированных поощрительных программ от модных онлайн-казино. Условия отыгрыша бонуса. Если Вы планируете заработать на бездепозитном бонусе, то для внимание на значение вейджера и срок, кот-ый дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, что, этим проще отыграть приз и исключить выигрыш.
#3646 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Яна Троянова порно с Варвара Субботина <a href=https://rumafia.news/>Крючкова Полина Викторовна порно</a> ramenbet casino casino рабочее зеркало <a href=https://rhymes-punches.com/>Светлана Ходченкова</a> 1×bet скачать приложение на андроид букмекерские конторы в россии скачать 1×bet на андроид porno Юлия Канакина, скелетонистка порно с Абрамченко Виктория Валериевна пин ап casino pin порно с Гатагова Ольга Анатольевна
DiskiPlus 7k casino бонус DiskiPlus официальные букмекерские конторы скачать <a href=https://www.diskiplus.ru/>DiskiPlus porno Яна Троянова</a> DiskiPlus порно с Елена Никитина, скелетонистка DiskiPlus bitz casino <a href=https://diskiplus.ru/>DiskiPlus pinco casino</a> DiskiPlus 1×bet зеркало рабочее xbet DiskiPlus скачать 1×bet на андроид DiskiPlus сайт 1×bet слоты DiskiPlus 1×bet 1хбет DiskiPlus 1×bet скачать бесплатно DiskiPlus porno Екатерина Ефременкова, шорт-трекистка DiskiPlus скачать 1×bet на андроид бесплатно
#3647 Charlesgunnyhttp://filmkachat.ru
1 xslots рабочее зеркало
Каждый из бездепозитных призов без пополнения 2022 содержит собственный определенный вейджер для отыгрыша, так же в каждом казино он устанавливается персонально — где то он х55 а где-то х30, повторюсь всюду по разному!Прежде чем активировать бездеп, нужно увериться в, что государство, уроженцем коей является игрок, не входит в перечень не. <a href=http://filmkachat.ru/>1× slots официальный</a> Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в индивидуальный кабинет, чтобы отобрать бесплатные вращения с вейджером х40; <a href=https://www.consult-exp.com/blogs/219732/Professional-Furniture-Renders-From-Concept-to-Photorealism>https://www.consult-exp.com/blogs/219732/Professional-Furniture-Renders-From-Concept-to-Photorealism</a> 1×slots официальный сайт, скачать <a href=https://astraclub.ru/members/345589-Scotterunk>https://astraclub.ru/members/345589-Scotterunk</a>
1×slot зеркало рабочее этих способов предполагает регистрацию
Мы проделываем ударение на ключевых положениях правил, рассказываем о территориальных лимитированиях и вкратце информируем о других промоакциях обсуждаемого казино.Так собственно сможете неустрашимо регистрироваться без всяких размышлений. Фортуна сейчас наверняка на вашей стороне. Не побаивайтесь, ведь следствие какого или ущерба Вам абсолютно не угрожает. С такими бонусами как без пополнения, Вы остаетесь только в плюсе, но не как не в минусе. <a href=https://bbs.sinbadgroup.org/index.php?xjkh-tampa-s-poster-pup-for-new-cancer-treatment.t48661.html/page-4163#post-209153>1×slots официальный demo регистрация в 1×slots casino</a> 1×slots бонус за регистрацию Ограничения по играм. Администрация запрещает игрокам кое-какие игровые автоматы с бездепозитным призом, средствами или бесплатными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда разделенье производится по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, хотя запрещен в настольных забавах и в разделе Live Casino.Некоторые казино могут предлагать клиентам бездепы за свидетельство номера либо почты либо репост на страничку в соц сетях. <a href=https://securityholes.science/index.php?title=What_Are_the_Features_of_the_New_Live_Betting_Section_in_the_1×bet_APP?>https://securityholes.science/index.php?title=What_Are_the_Features_of_the_New_Live_Betting_Section_in_the_1×bet_APP?</a> Далее потребуется отыграть вагер и вывести выигрыш. Игрокам без опыта крупно подфартило, они могут получить десятки подарков за 1 регистрацию. Если не смогли получить Бездепозитный приз, не беспокойтесь. Обратитесь в онлайн чат, оператор поможет ситуацию. 1хслотс зеркало на сегодня Нет. Для получения бездепозитного приза в казино необходима неотъемлемая регистрация на сайте. Играть в слоты безвозмездно и без регистрации возможно лишь в демо режиме.
1×slot зеркало рабочее регистрации на телефон придет
<a href=http://roosod.ru/index.php?subaction=userinfo&user=warlikeperditio>http://roosod.ru/index.php?subaction=userinfo&user=warlikeperditio</a> 1×slots официальный зеркало Чаще всего используются коды. Их надо(надобно) заносить в особые окна регистрационной анкеты, случае речь идет о пригласительных бонусах, либо в особом разделе личного кабинета игрока.
1хслот официальный сайт зеркало
Баланс игрока пополняется на подходящую необходимую. К ней применяется вейджер, обозначенный в правилах акции. Вывести выигрыш возможно будет после такого, как юзер устроит требуемый объем ставок из собственных средств. В редких случаях бездеп трудится в формате Free Play. На счет юзера зачисляется большая сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по завершении сего периода сумма на счету будет превосходить изначальную, то разность можно будет исключить либо использовать для последующих ставок.Самый распространённый из похожих призов, конечно же, бездеп на день рождения посетителя — бонус в виде фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им можно на установленного периода времени. Возможность сыграть дополнительное состязание (а от и количество) совершенно бесплатно, а выигрыш, же, поступает на счёт игрока.Бездеп с фриспинами возможность обхватывать всю коллекцию игр на веб-сайте либо разработки 1-го провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш возможность быть выведен последствии как, как пользователь отыграет данную сумму. Возможность оценить глубокий перечень слотов — главное достоинство данной разновидности. Игроку становятся доступны что, эти опции, которые отсутствуют в демонстрационном режиме, а вероятность выиграть реальные средства прибавляет ярких азартных ощущений. Вознаграждения за получение VIP-статуса ? начисляются масштабах программки преданности при достижении одного значения либо выдаются персонально менеджерами службы поддержки. 1×slots официальный demo регистрация в 1×slots casino <a href=https://521zixuan.com/space-uid-1167088.html>https://521zixuan.com/space-uid-1167088.html</a>
1×slots зеркало регистрация в 1×slots casino
Выбор каждого интернет казино на нашем сайте. В описании к любому Вы можете узнать, собственно получите за создание аккаунта. Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, дабы появилась возможность исключить выигрыш. <a href=https://coffeepeople.ru/memberlist.php?mode=viewprofile&u=37229>https://coffeepeople.ru/memberlist.php?mode=viewprofile&u=37229</a> Бoльшинcтвo азартных заведений выдвигают примерно однообразные, схожие условия и притязания, коие необходимо выполнить, чтобы получить бездепозитный бонус за регистрацию. Все их можно объединить в один перечень: 1×slots casino зеркало Казино выводит средства только на что, эту платежную систему, с котрой был сделан депозит. То есть, для вывода бездепозитного приза, Вам поначалу необходимо восполнить счет. В некоторых клубах ограниченный список методов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет именно с этих платежных методов, коие доступны для вывода.Постарайтесь отыграть вейджер, дабы была возможность забыть заявку на выплату. Кстати, на всех веб-сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы можете получить выигрыш на электрической кошелёк, карту, аппарат.
<b>Смотреть еще похожие новости:</b>
<a href=https://radios-collector.com/memberlist.php?mode=viewprofile&u=301>1×slots регистрация</a>
<a href=https://www.formulersupport.com/Thread-1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE–145939>1×slots официальный сайт зеркало</a>
<a href=https://praisenpray.org/forums/showthread.php?tid=105060>1×slots мобильная версия войти казино</a>
<a href=https://nztw.org/thread-572028–1–1.html>1×slots регистрация 1×slots casino c2d ru</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.
#3648 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
Прямо в заберите безвозмездные вращения за регистрацию без депо и начинайте собирать призовые комбинации из-за крупных выигрышей! <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала быстрые выводы. Фишка выплат том,, что довольно избрать платёжный инструмент и указать необходимую. В большинстве случаев средства зачисляются на электрические кошельки в течение 15 минут, а на банковские карты – 1–3 рабочих дня. <a href=https://app.pipefy.com/organizations/301582382/interfaces/2282e13e-d32f-46a8–8604-e703b4ef8f9f/pages/e1864a18–288e-4762–997e-e7e6e5c7956b>https://app.pipefy.com/organizations/301582382/interfaces/2282e13e-d32f-46a8–8604-e703b4ef8f9f/pages/e1864a18–288e-4762–997e-e7e6e5c7956b</a> Это также благотворительные финансы, коие поступают на аккаунты свежеиспеченных геймеров в регистрирования. А необыкновенность этих бонусов произведено что, нет, собственно обретенные деньги непременно стопам применять в продолжении назначенного медли.Чаще всего применяются коды. Их нужно вносить в особые окна регистрационной анкеты, если речь о пригласительных бонусах, или в особом разделе собственного кабинета игрока. 1х слот 1хслотс регистрация перейти на 1×slots <a href=http://moregasmsplease.com/component/kunena/user/557219-patricktus>http://moregasmsplease.com/component/kunena/user/557219-patricktus</a> Однако далековато не все ресурсы предлагают своим клиентам бездепозитные бонусы за регистрацию в казино. В большинстве случаев учтено поощрение на первый депо в размере 100–200%. Это отличная возможность преумножить банкролл, увеличить время, проведённое за игрой и шансы сорвать крупный куш.В интернет-сети практически можно отыскать списки более знаменитых и обещанных поощрительных программ от модных онлайн-казино.
1хлот регистрация в 1×slots casino
1×slots регистрация 1×slots review live Наш перечень содержит лучшие бездепозитные бонусы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по принципиальным параметрам: <a href=http://otdel.com.ua/index.php?subaction=userinfo&user=needlessgala39>http://otdel.com.ua/index.php?subaction=userinfo&user=needlessgala39</a> рабочее зеркало 1×slots
1×slots зеркало подтвердит вашу регистрацию если говорить
Отзывы читателей о бонусных промоакциях посодействуют составить впечатление, но не забывайте о субъективности личных комментариев. Несмотря на то, собственно данный вариант стимуляции со стороны азартных платформ довольно популярен в сфере сходственных игр, далековато не почитателям казино известно, собственно по бездепозитные бонусы казино и как именно их вероятно эксплуатировать.Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? <a href=http://misssophie.net/AG_Wohnungssuche/doku.php?id=бесплатно_скачать_фильм>http://misssophie.net/AG_Wohnungssuche/doku.php?id=бесплатно_скачать_фильм</a> Сроки активации бонуса уточняются каждым казино, но чаще всего они не превосходят недели с момента получения. Игроку обязательно нужно использовать бездеп на обозначенного срока, в ином случае приз просто исчезнет. Каждый бонус возможно получить только раз раз, потому если не использовать бездеп в срок, у игрока не будет 2 шанса им пользоваться.Объективные – объем приза, коэффициент и условия вейджера, необходимость внесения депо для вывода денег; 1×slots зеркало проходить регистрацию это отличный вариант Акции, приуроченные к календарным праздничным, бывают рассчитаны как на всех пользователей, например и на категории: например, презент на 8 марта девушкам-игрокам или мужчинам на 23 февраля.
1×slots регистрация на сайте
Таким образом, заведение пробует продемонстрировать себя своим потенциальным игрокам, а такой рекламный ход как казино бонус без депозита за регистрацию завлекает довольно большое внимания к игорному заведению и обеспечивает неизменный струю свежих гостей и будущих посетителей игрового онлайн клуба.Доступность — бездепозитные призы в казино почаще всего предоставляются свежим игрокам, но случаются случаи, когда приз имеют получить и действующие посетители. <a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=126021>1 xslots рабочее зеркало</a> 1×slots сайт <a href=http://www.cs-tygrysek.ugu.pl/member.php?action=profile&uid=77916>http://www.cs-tygrysek.ugu.pl/member.php?action=profile&uid=77916</a>
1хслотс зеркало
Иногда виде бездепа, казино дарит минимальный приз (до 50 рублей), из-за которого надо заморачиваться.Также, учите, собственно бездепозитный приз можно исключить лишь в том случае, когда будут исполнены все условия отыгрыша. <a href=http://www.atego-club.ru/forum/member.php/219375-JamesDup>http://www.atego-club.ru/forum/member.php/219375-JamesDup</a> После получения бонуса вывод средств для клиента будет недоступен времени, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя или чета месяцов. Выводить средства игрок может только после отыгрыша.У нас на веб-сайте Вы отыщите перечень бонусов без депозита в проверенных казино и доскональную информацию про как их получить и применять. 1×slots зеркало регистрация Ну и естесственно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: подобная добродушие увеличивает уровень лояльности посетителей к компании.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.globalvision2000.com/forum/member.php?action=profile&uid=1072499>1×slots казино зеркало</a>
<a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=96776>1 x slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подтверждение персональной информации. Все казино просят от клиента пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и наличие у юзера других аккаунтов (мультиаккаунт запрещен). При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие возможно предназначить игре в казино.
#3649 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slots review live
На нашем сайте Вы найдете перечень своевременных свежих бездепозитных призов в казино 2022 года. Также, есть большое эксклюзивных услуг, коие доступны только посетителям нашего сайта в регистрации по нашей ссылке или активации специального промокода.Бездепозитный приз казино 2022 с выводом за регистрацию дает вероятность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и проверить качество работы службы поддержки. Довольно нередко, начиная игровой процесс, игрок теснее не желает останавливаться и проделывает настоящий лепта. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать безвозмездно вероятно как раз таки с призом за регистрацию без необходимости вносить депо. <a href=http://filmkachat.ru/>казино 1×slots</a> Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных ситуаций с казино, когда после отыгрыша бездепа для не дадут исключить солидную сумму выигрыша.Большинство интернет-казино из нашего топ-10 готовы повеселить вас эксклюзивными промоакциями. Читайте о их в обзорах и на форуме. <a href=https://www.merchantcircle.com/blogs/3d-rendering-company-archicgi-dallas-tx/2025/1/Professional-3D-Rendering-Studio-Architectural-Visualization-Services/2886990>https://www.merchantcircle.com/blogs/3d-rendering-company-archicgi-dallas-tx/2025/1/Professional-3D-Rendering-Studio-Architectural-Visualization-Services/2886990</a> 1×slots casino регистрация на сайте <a href=http://j67236dr.bget.ru/index.php?subaction=userinfo&user=newutopia24>http://j67236dr.bget.ru/index.php?subaction=userinfo&user=newutopia24</a> Диапазон ставок, коие вправе сделать игрок, кроме лимитирован. Обычно назначать можно маленькую сумму — около 10–30 руб. За одно вращение.При пользовании бездепозитным бонусом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют количество видов лимитов:
1хслотс официальный сайт зеркало
При выполнении условий отыгрыша и верификации, деньги с бонусного счета переводятся на основной и имеют быть выведены на карту или электронный кошелек. Лимиты на вывод и сроки проведения транзакции в от выбранной платежной системы.Бонус без депозита за регистрацию в казино (бездепозитный бонус) – это денежный презент от клуба, который начисляется на аккаунт игрока последствии регистрации в казино. Кроме сотворения учетной записи, для получения бездепа, довольно часто требуется ещё и доказать контактные данные игрока и/или активировать особый промо-код. <a href=https://forum.oursson.ru/viewtopic.php?f=2&t=10942>1×slots зеркало быструю регистрацию а также мгновенное</a> 1 xslots рабочее зеркало Бездепозитные призы прекрасный вариант даровой игры в игровые автоматы. Многие юзеры сети не понимают, собственно в казино можно начать выступать безусловно даром, а позже вывести выигрыш на банковскую карту или электронный кошелек, иные не доверяют интернет казино, а третьи успешно играют и выигрывают – и тотчас довольно немалые суммы. <a href=https://casperforum.org/user/deweyimpar/?um_action=edit>https://casperforum.org/user/deweyimpar/?um_action=edit</a> 1×slots акции Одним из поводов отдавать привилегию 1 или иному заведению заключается в привлекательности предлагаемых промоакций и даровых предложений. Безвозмездные фриспины, выдаваемые без дела делать какой-либо вклад, в списке располагается далековато не в конце.При небольшой сумме бонуса рекомендовано играть по невысоким ставкам, а применять максимальные другого, как только что случае, случае вейджер слишком немалый, а время на отыгрыш сильно ограничено.
1 x slots casino
Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются сразу в сотворения профиля и активны непродолжительное время. Если не успеете потратить свои, они просто сгорят. Касаемо медли, правило призы активны протяжении часа. Подтверждение электронной почты – одно из основных условий, коие есть практически в любом бездепозитном казино. Чтобы верифицировать электронную почту, довольно перейти по интенсивной ссылке в письме, полученном от азартного клуба. <a href=http://anima-rpg.com:/member.php?action=profile&uid=330434>http://anima-rpg.com:/member.php?action=profile&uid=330434</a> После получения приза вывод средств для клиента несомненно недоступен до тех пор, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя или пара недель. Выводить деньги игрок сможет лишь в отыгрыша.Воспользоваться бездепом можно не во всех игровых автоматах: казино вдруг устанавливает ограничение для посетителей. Конечно, это можно посчитать некоторым неудобством для игрока, хотя справедливости необходимо, что выбор автоматов всё одинаково остаётся довольно великим. 1 хслот регистрация в 1×slots casino Если речь идет об неповторимых предложениях, возможность понадобиться регистрация в казино по ссылке с партнерского сайта.
1×slots регистрация 1×slots review live
Фриспины – безвозмездные вращения с фиксированной ставкой, коие возможно применять в определенных игровых автоматах.Самые популярностью методы вывода денег ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам типа Neteller и Skrill, еще пользуются криптовалютными кошельками. Вывод выигрышей возможность исполняться мгновенно либо развлекать от нескольких часов до нескольких суток. 1×slots casino регистрация 1×slotscasin online <a href=http://tvoehobbys.ru/bitrix/redirect.php?goto=http://tekoopt.com/bitrix/redirect.php?goto=http://strim-irk.ru/bitrix/redirect.php?goto=https://telegra.ph/Poshagovoe-rukovodstvo-po-uplate-nalogov-cherez-Sberbank-Onlajn-dlya-individualnyh-predprinimatelej-09–19>http://tvoehobbys.ru/bitrix/redirect.php?goto=http://tekoopt.com/bitrix/redirect.php?goto=http://strim-irk.ru/bitrix/redirect.php?goto=https://telegra.ph/Poshagovoe-rukovodstvo-po-uplate-nalogov-cherez-Sberbank-Onlajn-dlya-individualnyh-predprinimatelej-09–19</a>
1×slots сайт
Возможность сыграть вспомогательное соревнование (а иногда и некоторое) совершенно даром, а выигрыш, тому, поступает на счёт игрока.В бонусную программку множества операторов входят систематические бездепы. Это пожизненные промоакции, поощряющие интенсивных постоянных игроков. Популярный формат — раздача фриспинов по конкретным дням недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают постоянные бонусы без депозита в мена на накопленные баллы лояльности. <a href=https://www.bkeye.co.kr/bbs/board.php?bo_table=free&wr_id=310172>https://www.bkeye.co.kr/bbs/board.php?bo_table=free&wr_id=310172</a> Вы всего, скажем, как все любите получать презенты и бездепозитные призы казино. Игорные жилища брали в повадку одаривать гэмблеров приятными бонусами. Стать владельцем приветственного подарка можно за творение профиля либо пополнение счёта. Второй вариант больше увлекательный, как клубы готовы удвоить депозит! Но случае вы новичок и лишь знакомитесь с миром азарта, никакого пользуйтесь призом за регистрацию.Способы получения бездепа различаются от вида приза, который приглянулся игроку. Но для или надо(надобно) быть зарегистрированным в законном онлайн-казино и доказать свою личность. В общем виде пошаговая аннотация для получения бездепозитного бонуса выглядит например: 1×slots актуальное зеркало Более солидные предложения встречаются очень редко. Зачастую они доступны лишь VIP-игрокам. В оставшихся случаях им наверняка сопутствуют довольно жесткие условия отыгрыша. Также возможны дополнительные условия прочие лимитирования, прописанные в критериях и положения бонусной программы казино.
<b>Смотреть еще похожие новости:</b>
<a href=https://adler.biz/threads/1112/>1×slots регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Доступность — бездепозитные бонусы в казино почаще всего предоставляются свежим игрокам, но случаются случаи, когда приз все получить и действующие клиенты. Таким образом онлайн казино получает вероятного игрока. Возможно в будущем или настоящем он захочет поиграть на свои деньги. Так работают бездепозитные бонусы в онлайн казино. Здесь отлично подходит выражение, безвозмездные сыр бывает лишь в мышеловке. Начинающие игроки имеют не осознавать опасность азарта. Однако времени понимания делается больше. Это тема для отдельного обсуждения.
#3650 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пина букмекерской конторы porno Анна Сидорова, керлингистка <a href=https://specreporter.com/>Матвиенко Валентина Ивановна порно</a> смотреть фильм казино 1×bet слоты <a href=https://rhymes-punches.com/>порно с Александр Головин (футбол)</a> гта онлайн казино casino скачать леон букмекерская контора порно с Петр Ян (ММА) гама казино porno Алена Михайлова casino скачать приложение
DiskiPlus букмекерская контора зенит DiskiPlus Александра Бортич <a href=https://www.diskiplus.ru>DiskiPlus казино без</a> DiskiPlus бк букмекерская контора DiskiPlus casino betting <a href=https://www.diskiplus.ru>DiskiPlus Попова Анна Юрьевна порно</a> DiskiPlus винлайн букмекерская контора официальный сайт DiskiPlus сайте букмекерской конторы фонбет DiskiPlus Александра Бортич DiskiPlus 1×bet официальный сайт 1×bet xyz DiskiPlus фильмы казино рояль DiskiPlus карты казино DiskiPlus букмекерская контора фонбет официальный
#3651 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Варвара Субботина лучшие онлайн казино <a href=https://t.me/vchkogpu_ru>порно с Илюшникова Татьяна Александровна</a> 1go casino порно с Никита Кучеров (хоккей) <a href=https://vestnik-jurnal.com/>букмекерские контора ап</a> вывод казино пинко casino Набиуллина Эльвира Сахипзадовна порно порно с Дарья Касаткина (теннис) лучшая казино 1×bet слоты casino регистрации
DiskiPlus porno Дарья Клишина DiskiPlus 1×bet скачать бесплатно <a href=https://diskiplus.ru>DiskiPlus 7k casino</a> DiskiPlus 1×bet зеркало слоты DiskiPlus Москалькова Татьяна Николаевна порно <a href=https://diskiplus.ru/>DiskiPlus porno Светлана Ходченкова</a> DiskiPlus 1×bet официальный скачать DiskiPlus casino андроид DiskiPlus casino DiskiPlus casino актуальное зеркало DiskiPlus порно с Васильева Татьяна Викторовна DiskiPlus букмекерская контора ставки DiskiPlus 1×bet зеркало рабочее на сегодня
#3652 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация
Начнём с как, собственно каждое промо за регистрацию подразумевает некоторые обстоятельства. Бездепозитные призы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность валютного оборота, необходимая для выполнения критерий. Пример, возымели бесплатные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 руб., неудачных или выигрышных, важно. После исполненья, бонусный баланс перейдёт на реальный и станет доступным к выводу.Бездепозитный бонус часто имеет стать легкодоступным незамедлительно после окончания регистрации, потому в большинстве случаев единственным требованием к нему считается регистрация, а этого проверка вашей новой учетной записи. <a href=http://filmkachat.ru/>1 х слотс зеркало</a> Каждый новичок и профессиональный игрок мечтают скоро стартануть и начать создавать настоящие ставки. Для этого довольно отобрать подарок, за который надо выплачивать. В зависимости от игровой платформы, надо(надобно) сделать профиль, привязать email либо аппарат. После сего администрация начисляет щедрое вознаграждение повторяющий безвозмездных вращений или виртуальных кредитов.Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке представители онлайн-казино публикуют важную информацию о no down payment bonuses и услугах. <a href=https://www.dibiz.com/comcgifurniture>https://www.dibiz.com/comcgifurniture</a> 1×slots рабочее зеркало <a href=http://forum.n34.pl/profile.php?mode=viewprofile&u=1905>http://forum.n34.pl/profile.php?mode=viewprofile&u=1905</a> Прибывшие на аккаунт финансы бездепозитные призы предназначаются, главном, только для новоиспеченных юзеров, коие ранее не имели собственного аккаунта в данном казино. Исходя из этого, случае раньше у игрока был изготовлен депозит, то, по всей вероятности, у него больше не несомненно возможности рассчитывать на получение такового бонуса в конкретном заведении.
1×slot рабочее зеркало
В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая доля забавы. Важно, часто бездепозитные призы в казино выдаются с ограничениями по наибольшей выплате. В среднем возможно рассчитывать на выгода в некоторое тыщ рублей. Как исключить выигрыш с приза без депозита. Придётся доказать аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается каждым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате либо прочтите в правилах. <a href=https://isomedu.com/forum/profile/josephdrons/>1хслот зеркало</a> 1× slots сайт <a href=http://www.vladmines.dn.ua/index.php?name=Account&op=info&uname=stimulatingbrok>http://www.vladmines.dn.ua/index.php?name=Account&op=info&uname=stimulatingbrok</a> Каждый игры обязан сперва детально выучить обстоятельства по получению и отыгрышу понравившегося презента. Если всё устраивает, поспешите отобрать бесплатные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик момент начать вертеть барабаны топовых слотов. скачать 1×slots на андроид мобильная версия Подтвердите лицо, предоставив оператору казино средства паспортные данные. Инструкции обычно несложные, основное — четко им следовать. Если написано, собственно «на фото обязаны быть заметны все хорошо угла страницы паспорта» — сделайте непосредственно это фото.
1×слот регистрация в 1×slots casino
Выбрать казино с бездепозитным призом. У нас на сайте представлен перечень наилучших интернет казино, коие предлагают своим игрокам щедрые бонусы за регистрацию. Индивидуальные поощрения выдаются за совершение деяний: подписку на аккаунты площадки в соц сетях, установку мобильного прибавления либо официального посетителя для ПК. В большинстве казино срабатывают программы лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий степень часто сопрягается выдачей бездепа.Доступ к подарку имеет открываться автоматически после введения промокода или воззвания в службу поддержки вебсайта. В первом случае от юзера не требуется никаких действий. Бездеп с активацией по коду встречается чаще всего. Игроку необходимо ввести совокупа символов в графе, кот-ая возможность находиться в регистрационной форме в Личном офисе. <a href=https://maps.google.com.na/url?q=https://doctorlazuta.by/>https://maps.google.com.na/url?q=https://doctorlazuta.by/</a> За счёт спинов получится запустить разные онлайн слоты, протестировать стратегии и поднабраться навыка. Фишка что, собственно вращения начисляются на топовые аппараты с оригинальными опциями и высокой отдачей. Не забывайте, что в любом акционном предложении предусмотрены особые притязания – временные ограничения, наибольший размер ставки, перечень дешевых игр.Но а если вы теснее профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы автоматически перейдете в онлайн казино; 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и. Когда игроку надеется много фриспинов, администрация возможность разбивать их начисление на количество дней. Бесплатные вращения предоставляются для определенного слота, кот-ый указывается в правилах акции.Раздача призов возможность быть посвящена разным датам: календарные праздники, дни рождения игроков, годовщина открытия казино и т. Д. Подарок выдается повторяющий денег, фриспинов или баллов для накопления и обмена на предложения оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода этой суммы придется выполнить ряд притязаний.
1×slots регистрация 1×slotscasino 56 online
Прежде всего, не забывайте регулярно заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом осматривают наиболее занимательные предложения водящих игорных порталов.Все обожают получать презенты. Согласитесь, практически любой играющий человек будет очень счастлив, если получит бесплатный подарок для забавы в онлайн казино просто за регистрацию либо же приз за внесенный депо, например называемые приветственные призы для новых игроков. Соответственно такие онлайн клубы станут более знамениты и предпочтительны у игроков при выборе казино для забавы. Топ казино каждый обновляется и добавляются свежие и занимательные игровые клубы с привлекательной бонусной политикой и всеми вероятными преимуществами, льготами, к которым относятся эти призы как фриспины за регистрацию, денежные бездепозитные бонусы, а щедрые бонусы за внесенный депо. 1×slots подтвердит вашу регистрацию если говорить <a href=https://bustrader.uk/profile/KSHYolanda>https://bustrader.uk/profile/KSHYolanda</a> Для проверки применяются сканы паспортов, водительских удостоверений, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если юзер замечен в попытке ввести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их обладатель попадает в темный список. При этой на лицензионной площадке не опасаться свидетельствовать достоверную индивидуальную информацию (шифрование ликвидирует утечку индивидуальных данных).
1×slot рабочее зеркало
Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депо имеет отличаться до 30 дней.Чтобы бездеп не был начислен на Ваш аккаунт, Вам не нужно активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк автоматически, а Вы не планируете его применять, обратитесь в службу с просьбой отменить бездепозитный приз. <a href=http://cd.dotspen.com/home.php?mod=space&uid=7720>http://cd.dotspen.com/home.php?mod=space&uid=7720</a> Акционные предложения от казино есть в различных форматах. Часто призы даются в размен на депо. Игрок вносит платеж и получает средства, благотворительные вращения прочие одобрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — картина бонуса, кот-ый гарантирован за исполнение конкретных деяний на веб-сайте:Еще одно условие дотрагивается размеров ставки. Операторы устанавливают максимальную необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, выбранной в Личном кабинете. При превышении лимита есть риск лишиться приза. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, заказчик имеет столкнуться с запретом назначать фишки на шансы. 1×slots зеркало регистрацию более популярный вариант это В интернете большое узнаваемых игорных площадок с красивыми акционными услугами. Однако внимательно читать обстоятельства десятков услуг скором надоест, ну и время отнимет много. Поэтому наша команда подготовила ТОП-3 сайтов с лучшими бездепозитными бонусами:Перечисленные повыше основные характеристики сочетают практически любой приз и являются стандартными для бездепозитных бонусных начислений в казино.
<b>Смотреть еще похожие новости:</b>
<a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=790094>1 x slots</a>
<a href=https://elclasificadomx.com/author/jameslog/>казино 1×slots официальный сайт</a>
<a href=https://melhorlance.com.br/author/jamesbom/>1×slots зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Прямо момент отберите благотворительные вращения за регистрацию без депо и начинайте собирать призовые комбинации ради солидных выигрышей! Онлайн-казино кропотливо продумывают бонусные условия, коие необходимо выучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша прочие лимитирования.
#3653 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино пин Елена Лядова <a href=https://www.ossetia.tv/>up casino официальный</a> casino ru букмекерские конторы в россии <a href=https://th-royalgclub.com/>скачать букмекерскую контору</a> казино ли промокод 1×bet pin up букмекерская контора сайте букмекерской конторы фонбет 1×bet слоты официальный сайт 1×bet зеркало рабочее человек казино
DiskiPlus казино фильм онлайн DiskiPlus champion casino <a href=https://diskiplus.ru/>DiskiPlus порно с Арина и Дина Аверины, гимнастки</a> DiskiPlus букмекерская контора без DiskiPlus win win casino <a href=https://diskiplus.ru/>DiskiPlus рейтинг казино</a> DiskiPlus casino на телефон DiskiPlus гама казино DiskiPlus порно с Диана Шнайдер (теннис) DiskiPlus 1×bet зеркало xbet xyz DiskiPlus casino онлайн DiskiPlus pin up casino пин DiskiPlus porno Александра Степанова, фигуристка
#3654 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация
Чтоб получить крупный выигрыш, избирайте игровые автоматы с предельным процентом отдачи (RTP) из списка тех, коие доступны по условиям отыгрыша. <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> Можно. Вы практически сможете отказаться от получения бездепозитного приза за регистрацию в казино, же Вы не сделаете ставку.Не желайте сыграть в азартные забавы, не рискуя своими деньгами, но получая в все выплаты? Подобную возможность деют многие наилучшие порталы с азартными развлечениями. В их числе большое добросовестных и надежных интернет-казино на российском языке. Они привлекают свежих юзеров разными поощрительными событиями, включая бездепозитные, либо бесплатные призы. <a href=https://swaay.com/u/archicgic/about/>https://swaay.com/u/archicgic/about/</a> Допустим, за регистрацию вы возымели бездеп в размере 2 000 рублей с вейджером х30. В данном случае предстоит сделать ставок, на совместную необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать настоящие деньги. Однако не запамятовывайте, что с каждого презента выйдет исключить определённую сумму (почаще всего менее $200). 1×slots зеркало регистрация <a href=http://bbs.teachersbbs.com/home.php?mod=space&uid=494322>http://bbs.teachersbbs.com/home.php?mod=space&uid=494322</a>
1×slots промокод при регистрации
Новые посетители онлайн-казино без первого депозита шансы проверить свою удачливость. К что, этому же есть вероятность преобразовать бездепы в настоящие деньги за регистрацию в казино, впрочем результата приз нужно отыграть сообразно условиям акции. <a href=http://www.arka-bahce.org/forum/showthread.php?p=776644#post776644>1×slots регистрация на сайте</a> 1хслотс рабочее зеркало <a href=https://www.donchillin.com/space-uid-356039.html>https://www.donchillin.com/space-uid-356039.html</a> Операторы гемблинга заявляют, что так они борются с бонус-хантерами. Впрочем, критики считают, собственно данным казино пытаются сделать из случайного гостя неизменного игрока.Игры, каких можно играть на бонусные средства. Проверьте список игр, каких возможно выступать на бонусные средства, возможно они Вам не понравятся и не стоит расходовать своё время на такую акцию. 1×slots зеркало подтвердит вашу регистрацию если говорить
сайт 1× slots casino
Но эти рамки не смущают и хайроллеров, поскольку коэффициенты на слотах разрешают рассчитывать на солидные выигрыши, а в некоторых автоматах разыгрывается прогрессивный джекпот. Акции распространяются как на все игры казино, так и на ограниченный список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino прочие. Промо может охватывать разработки 1-го производителя. Бездеп не пересекается с иными промоакциями казино. Если на веб-сайте предусмотрен кэшбек, он не начисляется за ставки, сделанные бонусными деньгами. Для идентификации платежных реквизитов игрока имеет понадобиться пополнение счета на минимальную необходимую.У любого игорного клубы различные вейджеровые условия. Чтобы вы гарантировано сумели выполнить их, мы дадим некоторое советов. Если система начислила маленькую необходимую, не стоит делать немалые ставки – остановитесь на 10–30 центах. Как только сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте выступать. В неприятном случае лучше присмотреться к иному автомату. <a href=http://jade-crack.com/home.php?mod=space&uid=684573>http://jade-crack.com/home.php?mod=space&uid=684573</a> Если вы бывалый игрок, вы обязаны аристократия, собственно приз без депозита – редкая находка. Тем ниже, мы раз изучаем интернет, чтобы найти вам лучшие бездепозитные предложения.Таким образом, заведение пробует показать себя своим потенциальным игрокам, а подобный маркетинговый ход как казино приз без депо за регистрацию привлекает довольно много внимания к игорному заведению и обеспечивает постоянный поток новых посетителей и грядущих клиентов игрового интернет клуба. 1×slots быструю регистрацию а также мгновенное Операторы гемблинга утверждают, что так они сражаются с бонус-хантерами. Впрочем, критики считают, собственно данным казино пытаются устроить из случайного гостя неизменного игрока.Так собственно сможете неустрашимо регистрироваться без всяких раздумий. Фортуна сегодня наверняка на вашей стороне. Не побаивайтесь, как последствие какого или ущерба Вам совершенно не угрожает. С такими бонусами как без пополнения, Вы остаетесь лишь в плюсе, хотя не как не в минусе.
1×slots регистрация 1×slots casino c2d ru
Наш перечень содержит наилучшие бездепозитные бонусы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по важным параметрам:Фриспины — безвозмездные вращения, которые дозволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины числятся самым знаменитым и предпочтительным видом бонуса — благотворительные вращения порой эффективнее и веселее в отыгрыше, чем остальные облики бездепов. 1×slots casino регистрация 1×slots review live <a href=http://g95887q6.beget.tech/user/Deweybah/>http://g95887q6.beget.tech/user/Deweybah/</a> Когда речь идет о получении бездепозитных призов в казино, для внимание на следующие обстоятельства:Возможность поиграть вспомогательное состязание (а времени и несколько) совершенно бесплатно, а выигрыш, тому, поступает на счёт игрока.
1×slots зеркало быструю регистрацию а также мгновенное
Призовые начисления без депозита все предоставляться для участия в турнирах интернет казино. Потратить перечисленные средства можно исключительно масштабах этой акции. Условия их проведения содержат лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться этим предложением, какого-либо изучить его верховодила.Во всех легальных онлайн-казино Беларуси нужно подтверждение паспортных данных для забавы — это заявка правительства государства. Подарки на праздники ? приуроченные к парадным датам, требующие условного отыгрыша или начисляются без это. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду. <a href=https://www.wugame.tw/home/home.php?mod=space&uid=9554>https://www.wugame.tw/home/home.php?mod=space&uid=9554</a> Еще одно условие дотрагивается объемов ставки. Операторы устанавливают наивысшую необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном офисе. При превышении лимита есть риск лишиться бонуса. Существующие ограничения относятся и к определенным обликам ставок. Например, играя в рулетку, заказчик может столкнуться с запретом ставить фишки на шансы. 1×slots зеркало регистрация в 1×slots casino Создание аккаунта. На сайте казино необходимо открыть регистрационную форму и заполнить пустые поля собственными данными. Иногда на данном этапе требуется указать лишь адресок электронной почты и пароль, но почаще бы наполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д. ). Нужно указывать только настоящие данные, что впоследствие они станут испытаны.
<b>Смотреть еще похожие новости:</b>
<a href=https://timepost.info/showthread.php?tid=109713>1×slots регистрация 1×slotscasino 56 online</a>
<a href=http://big.bestforums.org/viewtopic.php?f=7&t=19292>1×slots casino регистрация на сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Зарегистрируйтесь. Для регистрации почаще всего достаточно установить собственный номер телефонного и почтовый адрес, последствии чего ввести приобретенный код из СМС. Возможно, потребуется показать промокод. В правилах промоакции будет написано, где его бы включать. Иногда это надо создавать при регистрации, иногда — уже последствии творенья личного офиса, на отдельной страничке. Вейджер в переводе с английского означает «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша полученного приза, в нашем случае бездепозитного. Число ставок не — важно только набрать сумму, пропорциональную сумме одобрения.
#3655 Davidbakhttps://online-otvet.site
Портал с ответами <a href=https://online-otvet.site/>https://online-otvet.site</a> на все школьные предметы! Быстро находите решения по математике, русскому, физике, биологии и другим дисциплинам. Готовые ответы, разборы задач и помощь в учебе для всех классов
#3656 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Ангелина Гончаренко, хоккеистка casino скачать <a href=https://vestnik-jurnal.com/>Окладникова Ирина Андреевна порно</a> 1×bet скачать приложение на андроид 1×bet сайт 1×bet xyz <a href=https://res-publika.com>пинап казино</a> 7k casino скачать порно с Захарова Мария Владимировна букмекерская контора вход сайт казино вход казино онлайн бесплатное казино 7k casino
DiskiPlus порно с Евгения Медведева, фигуристка DiskiPlus где казино <a href=https://diskiplus.ru/>DiskiPlus порно с Матвей Сафонов (футбол)</a> DiskiPlus яндекс казино DiskiPlus порно с Илья Осипов (киберспорт) <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet xbet xyz</a> DiskiPlus 1×bet зеркало на сегодня DiskiPlus Шевцова Татьяна Викторовна порно DiskiPlus лучшая казино DiskiPlus рабочее казино DiskiPlus порно с Анастасия Потапова, теннисистка DiskiPlus букмекерская контора леонов DiskiPlus Радченко Светлана Юрьевна порно
#3657 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало
Важно, удостоверьтесь в том, что ранее не регились в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи.Однако в условиях исчезают «подводные камешки», коие не разрешат исключить крупную сумму либо же вы не успеете отыграть вейджер. Поэтому профессионалы советуют забрать бесплатные вращения за регистрацию в казино без депозита, чтобы поднабраться опыта и получить реальный шанс на победу. <a href=http://filmkachat.ru/>1×slots зеркало этих способов предполагает регистрацию</a> Операторы гемблинга заявляют, что так они борются с бонус-хантерами. Впрочем, критики считают, что данным казино пробуют устроить из случайного гостя неизменного игрока. <a href=https://www.ourboox.com/bp/1641444/>https://www.ourboox.com/bp/1641444/</a> Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? 1×slots зеркало на сегодня <a href=https://wiki.streampy.at/index.php?title=%C3%90%C3%A2%E2%82%AC%E2%84%A2%C3%90%C2%BE%C3%90%C2%B4%C3%90%C2%B8%C3%91%E2%80%9A%C3%90%C2%B5%C3%90%C2%BB%C3%91%C5%92%C3%91%C3%90%C2%BA%C3%90%C2%B8%C3%90%C2%B5_%C3%90%C5%B8%C3%91%E2%82%AC%C3%90%C2%B0%C3%90%C2%B2%C3%90%C2%B0_%C3%90%C3%A2%E2%82%AC%E2%84%A2%C3%90%C2%BB%C3%90%C2%B0%C2%B4%C3%90%C2%B8%C3%90%C2%B2%C3%90%C2%BE%C3%91%C3%91%E2%80%9A%C3%90%C2%BE%C3%90%C2%BA>https://wiki.streampy.at/index.php?title=%C3%90%C3%A2%E2%82%AC%E2%84%A2%C3%90%C2%BE%C3%90%C2%B4%C3%90%C2%B8%C3%91%E2%80%9A%C3%90%C2%B5%C3%90%C2%BB%C3%91%C5%92%C3%91%C3%90%C2%BA%C3%90%C2%B8%C3%90%C2%B5_%C3%90%C5%B8%C3%91%E2%82%AC%C3%90%C2%B0%C3%90%C2%B2%C3%90%C2%B0_%C3%90%C3%A2%E2%82%AC%E2%84%A2%C3%90%C2%BB%C3%90%C2%B0%C2%B4%C3%90%C2%B8%C3%90%C2%B2%C3%90%C2%BE%C3%91%C3%91%E2%80%9A%C3%90%C2%BE%C3%90%C2%BA</a> Чтобы выступать бесплатно на настоящие деньги в казино, не всегда достаточно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные деяния.
казино 1× slots официальный сайт
1×slots зеркало рабочее на сегодня Допустим, за регистрацию вы возымели бездеп в объеме 2 000 руб. С вейджером х30. В данном случае предстоит сделать ставок, на общую сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда сделайте условия по отыгрышу, придёт время заработать настоящие средства. Однако не забывайте, собственно с каждого дара получится вывести определённую сумму (чаще всего не более $200). <a href=https://troypuvt49506.suomiblog.com/unlocking-the-strength-of-undress-ai-a-deep-dive-into-nsfw-written-content-development-45152769>https://troypuvt49506.suomiblog.com/unlocking-the-strength-of-undress-ai-a-deep-dive-into-nsfw-written-content-development-45152769</a> Бездепозитный приз – это финансовое вознаграждение, коие выдается соучастнику забавы в казино, для его вербования и возникновения заинтригованности. Любой гость, кот-ый подходит условиям выдачи подобного бездепозитного бонуса, может претендовать на получение вышеуказанного приза. Такое поощрение является наиболее эффективным методом, дающим вероятность стартовать при, не вкладывая личных вещественных средств. 1×slots бездепозитный бонус за регистрацию
1×slots регистрацию процедура займет всего лишь
Для верификации номера аппарата, в личном профиле изберите опцию „Подтвердить номер телефонного“ и введите в подходящее поле код, приобретенный в sms-сообщении. <a href=https://autogenie.co.uk/1win-casino-jogo/>https://autogenie.co.uk/1win-casino-jogo/</a> Бесплатный бонус – кредиты, которые онлайн-казино начислит клиенту, не принуждая его пополнять игровой счет. онлайн казино 1×slots Маркетинговая политического всех игорных интернет-клубов должна одевать различный характер. И в гонорары на депозит работают для того, дабы стимулировать заносить депозиты и поощрять теснее имеющих пользователей, то бездепозитный приз в казино или приз за регистрацию в казино, этого всего, рассчитан на расширение базы покупателей.Благодаря программе преданности от игорного заведения, можно арестовать хороший старт и без дополнительных инвестициям запустить видеослоты. Кроме такого, возможно рассчитывать на реальную удачу и получить, без инвестиции собственных денег, великой выигрыш.
1×slots регистрация то дальше необходимо пройти
Демоказино есть почти на любом веб-сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются веско пореже: там когда выигрыша и соблюдения условий акций бездеп возможно превратить в настоящие средства.В игровых клубах без лицензии Вы покупаете „кота в мешке“ и когда неоднозначных ситуаций нет возможности куда-то посетовать и доказать собственную правоту. При регистрации никаких или ином онлайн игральном заведении — вас дается один шанс испытать собственную удачу не внося средства монеты. Замечу что такую поощрительную услугу деют не все интернет игровые площадки, а только великодушная середина(средина) из их. Которые мы подготовили для Вас в нашем перечне.Бонус в казино без депозита имеет разные варианты: может быть приветственный бонус, промоакции в честь каких-либо праздников либо главных дат, бонус за вербование свежих игроков, лояльность и получение VIP-статуса. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=http://elpisline.com/bbs/board.php?bo_table=free&wr_id=65451>http://elpisline.com/bbs/board.php?bo_table=free&wr_id=65451</a> Первый образующийся вопрос, это, зачем выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают свежих игроков. Последним легче начать игру на деньги с дара за регистрацию. Им надо пополнять баланс и расходовать собственные средства. Новички получают благотворительные спины или свои на счёт. С их поддержкой знакомятся с игровым ходом, крутят слоты и делают ставки в рулетке.
1 xslots рабочее зеркало
Онлайн-казино тщательно продумывают бонусные обстоятельства, которые нужно выучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и другие лимитирования. Выбирайте лучшие безвозмездные бонусы счет обзоров на Casinoz – и пусть вам сопутствует счастье при отыгрыше бонусных кредитов!Для проверки используются сканы паспортов, водительских удостоверений, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь обнаружен в попытке ввести вспомогательный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный перечень. При этой на лицензионной площадке не опасаться свидетельствовать достоверную индивидуальную информацию (шифрование исключает утечку индивидуальных данных). <a href=http://www.ihavethepussy.com/de/members/42647-ChrisAcaft>http://www.ihavethepussy.com/de/members/42647-ChrisAcaft</a> 1хслотс рабочее зеркало Срок отыгрыша — это период, который начинается в момент активации приза и завершается с его закрытием. Пользователю нужно уложиться в данный временной промежуток, по призовые свои аннулируются. Казино устанавливают список игр, ставки каких засчитываются при расчете отыгранных денег. Если тайтл не входит в этот перечень, то возможность быть недосегаем для загрузки во время действия бонусного предложения.
<b>Смотреть еще похожие новости:</b>
<a href=http://jktroickiy.forumex.ru/viewtopic.php?f=2&t=477>1хслот скачать</a>
<a href=https://vredeenvermaak.be/users/jamesapofe/>1×slots casino регистрация 1×slotscasin online</a>
<a href=https://projects.sare.org/people/jamestrazy/>1× слот зеркало</a>
<a href=https://forum.eliteshost.com/showthread.php?tid=15176>casino 1×slot</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Основное управляло получения бездепа ? создаваемый акк обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов строго воспрещено. Проверка ведется по имени, e-mal, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита необходимо блюсти простую последовательность поступков. Наиболее популярные гонорары между гэмблеров – бездепозитные призы казино. Это не дивно, как возможно получить бесплатные вращения или виртуальные кредиты, и этом не придётся пополнять счёт, рисковать собственными средствами. Удастся насладиться разнородными веселиями и даже выиграть крупную необходимую, избегая серьёзного риска.
#3658 Ремонт ноутбуков DELLhttps://remont-noutbukov-dell-servis.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт ноутбуков dell адреса, можете посмотреть на сайте: <a href=https://remont-noutbukov-dell-servis.ru/>ремонт ноутбуков dell рядом</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#3659 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино casino скачать <a href=https://kompromat1.online/>1×bet зеркало xbet</a> casino регистрации up casino скачать <a href=https://slon-ru.com/>спорт букмекерская контора</a> порно с Евгения Медведева, фигуристка 1×bet зеркало xbet xyz porno Илона Маркова, хоккеистка порно с Карен Хачанов (теннис) 1×bet 1хбет ев казино скачать 1×bet на андроид
DiskiPlus 1×bet на сегодня DiskiPlus casino ап <a href=https://diskiplus.ru>DiskiPlus букмекерская контора бетсити</a> DiskiPlus Хорова Наталья Александровна порно DiskiPlus casino официальный зеркало <a href=https://diskiplus.ru>DiskiPlus Манилова Алла Юрьевна порно</a> DiskiPlus сайт 1×bet слоты DiskiPlus винлайн букмекерская контора DiskiPlus Чулпан Хаматова DiskiPlus Матвиенко Валентина Ивановна порно DiskiPlus фильмы казино рояль DiskiPlus гта казино DiskiPlus скачать 1×bet
#3660 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Никита Кучеров (хоккей) слоты казино <a href=https://kompromat1.online/>скачать pin casino</a> casino приложения casino скачать <a href=https://sovsekretno.net/>black russia казино</a> 1×bet приложение казино рулетка casino приложения 1×bet зеркало рабочее на сегодня Нургалиева Эльвира Рамиловна порно 1×bet слоты 1×bet xyz casino ап
DiskiPlus 1×bet слоты 1×bet top DiskiPlus Скворцова Вероника Игоревна порно <a href=https://www.diskiplus.ru/>DiskiPlus 7k casino сайт</a> DiskiPlus 1×bet на андроид DiskiPlus 1×bet зеркало рабочее на сегодня <a href=https://diskiplus.ru>DiskiPlus pin up casino buzz</a> DiskiPlus рабочие зеркала казино DiskiPlus порно с Евгений Малкин (хоккей) DiskiPlus порно с Кирьянова Дарья Борисовна DiskiPlus casino ru DiskiPlus казино вход DiskiPlus 1×bet зеркало рабочее xbet DiskiPlus Черкесова Бэлла Мухарбиевна порно
#3661 Peterpiokyhttps://t.me/BezdepovichRU
игровые автоматы с бесплатным депозитом <a href=https://t.me/BezdepovichRU>сайты игровых автоматов где выдают деньги при регистрации</a>
#3662 Charlesgunnyhttp://filmkachat.ru
1× slots регистрация в 1×slots casino
Это тоже бесплатные деньги, которые поступают на аккаунты свежеиспеченных игры в регистрирования. А необыкновенность этих бонусов состоит в, собственно обретенные финансы обязательно стопам применять в продолжении назначенного времени. <a href=http://filmkachat.ru/>1×slots casino зеркало</a> При ирге на бонусные свои воспрещается выступать в игровые автоматы с современным джекпотом и забавы из радела live casino. Кроме такого, кое-какие казино дают бездеп на раз или количество конкретных слотов, и в иных забавах Вы не можете на них играть.Максимальная ставка ? уточняется в валюте счета и ограничивает размер ставки за раз спин. В случае ее превышения приз имеет быть аннулирован. Также в правилах возможность содержаться запрет на размещение ставок определенного вида, примеру, по равным шансам в рулетке (то есть, на чет или нечет, красное либо темное и т.д.). <a href=https://www.trade-forums.co.uk/thread/78343>https://www.trade-forums.co.uk/thread/78343</a> Онлайн-казино с бездепозитными бонусами ставят посетителям условия для использования бездепами, поэтому перед участием в акции другого досконально ознакомиться со всеми правилами и нюансами акции. Условия могут прикасаться получения бонуса, его применения и следующего вывода денежных средств в случае выигрыша. 1хслотс рабочее зеркало <a href=http://b775218w.bget.ru/user/JosephTib/>http://b775218w.bget.ru/user/JosephTib/</a> Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.
casino 1×slot
Перечисленные повыше основные характеристики сопровождают практически любой приз и считаются стереотипными для бездепозитных бонусных начислений в казино. <a href=https://bajarmp3.net/showthread.php?tid=422469>1×slots зеркало регистрацию более популярный вариант это</a> 1×slots зеркало регистрация Для получения бонуса надо(надобно) пригласить в забаву нового клиента. Казино начислит пригласившему фиксированный процент от взносов приглашённого повторяющий бонуса: почаще всего его размер не превышает 10%. Срок действия приза правило не превышает месяца: пригласивший получает приз от проигранных ставок приглашённого в первый луна забавы. <a href=http://1k9g.com/space-uid-197676.html>http://1k9g.com/space-uid-197676.html</a> Для доказательства электронной почты, просто перейдите по интенсивной ссылке в письме, полученном от игрового заведения. 1×slots зеркало проходить регистрацию это отличный вариант Реже бонусы без депозита начисляются неизменным игрокам. С их подмогою администрация постарается вычесть ценных посетителей или вожделеет поблагодарить за лояльность верных гостей. Но гораздо почаще для сходственных целей используются такие промоакции:Вейджер (wager) – это коэффициент, кот-ый показывает на какую необходимую нужно устроить ставок, чтобы вывести приз из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода этого бонуса, Вам необходимо сделать ставок на необходимую: 500*70=3500 руб. Только всецело отыграв приз, Вы сможете исключить собственный выигрыш.
1×slots зеркало проходить регистрацию это отличный вариант
Третитй бездепозитный бонус за регистрацию – валютные средства. К раскаянью, начислить рубли или баксы готовы лишь знаменитые и популярные клубы. С их поддержкой у насладиться любой доступной забавой – автоматом, рулеткой, кено, блэкджеком.Для верификации номера телефона, в собственном профиле изберите опцию „Подтвердить номер телефонного“ и введите в отвечающее фон код, полученный в sms-сообщении. Зарегистрируйтесь. Для регистрации чаще всего достаточно ввести свой номер телефонного и почтовый адрес, последствии чего установить приобретенный код из СМС. Возможно, требуется указать промокод. В правилах промоакции несомненно написано, где его надобно вводить. Иногда это хотелось создавать при регистрации, иногда — теснее последствии творения личного кабинета, на отдельной странице.Основное верховодило получения бездепа ? творимый акк должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов взыскательно воспрещено. Проверка ведется по имени, e-mal, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депо нужно блюсти несложную очередность деяний. <a href=http://vshop.livek.tv/yc/bbs/board.php?bo_table=user_feed&wr_id=1379382>http://vshop.livek.tv/yc/bbs/board.php?bo_table=user_feed&wr_id=1379382</a> При исполненьи условий отыгрыша и верификации, средства с бонусного счета переводятся на основной и могут быть выведены на карту либо электронный кошелек. Лимиты на вывод и сроки проведения транзакции находятся от избранной платежной системы.Зачастую бездепозитные призы казино для игры предлагаются различными заведениями азартных игр в маркетинговых промоакций или в целях вербования к для свежих игроков. Для бездепозитных бонусов в казино 2022 игроку не пополнять счет до момента вывода желаемых средств. зеркло казино 1×slots Бездепозитные призы истинными деньгами, коие возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадали.
1×slot зеркало
В интернет-сети практически можно найти перечни более популярных и обещанных поощрительных программ от знаменитых онлайн-казино.В лицензионных бездепозитных казино выступать в азартные забавы действительно безопасно. Наличие лицензии одобряет что, этот факт, собственно клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP. 1хслот 1хслотс регистрация перейти на 1×slots <a href=http://www.ihavethepussy.com/de/members/75620-Porsedropkn>http://www.ihavethepussy.com/de/members/75620-Porsedropkn</a>
1×slots официальный сайт скачать
Наиболее знаменитые вознаграждения между гэмблеров – бездепозитные призы казино. Это не удивительно, так можно получить бесплатные вращения либо виртуальные кредиты, и этом не придётся пополнять счёт, рисковать личностными средствами. Удастся насладиться разнородными развлечениями причем выиграть крупную сумму, избегая серьёзного риска. Возможность сыграть дополнительное состязание (а иногда и количество) абсолютно бесплатно, а выигрыш, в свою очередь, поступает на счёт игрока. <a href=http://www2.bio.ulaval.ca/landrylab/bioinfo/doku.php?id=РР·_чего_состоит_диета_Елены_Малышевой>http://www2.bio.ulaval.ca/landrylab/bioinfo/doku.php?id=РР·_чего_состоит_диета_Елены_Малышевой</a> Мы советуем не отрицаться от сходственных предложений знаменитых казино. Выделите некоторое мин. На регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сегодня удача будет на вашей стороне! 1×slots регистрация 1×slots casino 777 online
<b>Смотреть еще похожие новости:</b>
<a href=https://masstr.net/showthread.php?tid=83512>1×slots регистрация то дальше необходимо пройти</a>
<a href=https://praisenpray.org/forums/showthread.php?tid=103078>1×slots casino регистрация</a>
<a href=http://3ak.cn/home.php?mod=space&uid=187057>1×slots официальный регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы реальными деньгами, коие возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадали. Новички не обожают незамедлительно же заносить депозит. Это обусловлено отсутствием опыта и сомнением. К счастью, наши возможно получить бездепозитный бонус за регистрацию в казино. Неважно собственно начисляет система – фриспины либо кредиты. В любом случае вы не рискуете своими сбережениями. Это замечательная возможность запустить приглянувшийся видео слот или же испытать фортуну в настольных играх.
#3663 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино играть pin up casino top top <a href=https://th-royalgclub.com/>казино</a> 1×bet слоты 1×bet xyz kent casino регистрация <a href=https://vestnik-jurnal.com/>пин up casino</a> казино 5 лучшая казино 7k casino официальный сайт 1×bet официальный сайт 1×bet xyz официальные букмекерские конторы скачать 1×bet официальный 1×bet xyz человек казино
DiskiPlus рабочие зеркала казино DiskiPlus 1×bet скачать приложение на андроид <a href=https://diskiplus.ru>DiskiPlus porno Катерина Шпица</a> DiskiPlus пина casino DiskiPlus порно с Бондаренко Анастасия Борисовна <a href=https://www.diskiplus.ru>DiskiPlus слот casino</a> DiskiPlus сколько казино DiskiPlus casino x DiskiPlus retro casino DiskiPlus порно с Захарова Мария Владимировна DiskiPlus 1×bet официальный слоты DiskiPlus почему в казино нет часов DiskiPlus порно с Евгения Медведева, фигуристка
#3664 StephenFlank
Great site you have here but I was curious about if you knew of any forums that cover the same topics discussed here? I'd really like to be a part of community where I can get feed-back from other knowledgeable people that share the same interest. If you have any suggestions, please let me know. Cheers! <a href=https://mnogopochemu.ru/>почему человек много</a>
#3665 ThomassnizEhttps://vk.com/ivanteevka.massage
профессиональный лечебный <a href=https://vk.com/ivanteevka.massage>массаж Ивантеевка</a> расслабляющие техники для здоровья и красоты. Помогаем снять стресс, улучшить кровообращение и восстановить силы. Запишитесь прямо сейчас!
#3666 JamesLienthttps://sauna-broadway.ru
Сауна очищает организм <a href=https://sauna-broadway.ru/>https://sauna-broadway.ru</a> выводя токсины через пот, укрепляет иммунитет благодаря перепадам температуры, снимает стресс, расслабляя мышцы и улучшая кровообращение. Она делает кожу более упругой, ускоряет восстановление после тренировок, улучшает сон и создаёт атмосферу для общения.
#3667 streetlightinghttps://streetlighting.sundrax.com
street light controller <a href=https://streetlighting.sundrax.com/>street lighting control</a>
#3668 VZTM_mibhttps://vztm.ru/
Доброго времени суток! Воткинский Завод Теплоизоляционных Материалов (ВЗТМ) – vztm.ru! Обеспечиваем теплоизоляцией объекты энергетического, нефтегазового и оборонного комплексов, а также объекты гражданского и промышленного строительства. c 1992 года. <a href=https://vztm.ru/bazaltovaya-vata>утепление стен дома базальтовой ватой</a> Если базальтовая вата или акустический мат в Москве, то это в Воткинский завод теплоизоляционных материалов Торговый дом https://vztm.ru/ . Звоните и консультируйтесь по бесплатному номеру 8–800–551–80–33. До новых встреч!
#3669 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Илона Маркова, хоккеистка рокс казино <a href=https://rucriminal.info/>спорт букмекерская контора</a> casino промокод 1×bet бесплатно <a href=https://specreporter.com/>бесплатно фильм казино</a> казино рулетка лучшая казино up casino скачать скачать 1×bet на андроид порно с Голикова Татьяна Алексеевна порно с Алексей Миранчук (футбол) порно с Анна Калинская (теннис)
DiskiPlus букмекерская контора леонов DiskiPlus casino приложения <a href=https://www.diskiplus.ru/>DiskiPlus порно с Алина Загитова, фигуристка</a> DiskiPlus казино смотреть онлайн бесплатно DiskiPlus порно с Ирина Сидоркова <a href=https://www.diskiplus.ru>DiskiPlus 1×bet xbet xyz</a> DiskiPlus фильмы казино рояль DiskiPlus казино онлайн DiskiPlus рабочее казино DiskiPlus бесплатные букмекерские конторы DiskiPlus порно с Бондаренко Анастасия Борисовна DiskiPlus казино большая DiskiPlus приложения букмекерских контор
#3670 Charlesgunnyhttp://filmkachat.ru
1×slots бонус за регистрацию
Кешбэк-бонус представляет собой возврат фиксированного процента от ставки когда проигрыша либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%.Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных ситуаций с казино, когда в отыгрыша бездепа вам не дадут исключить солидную сумму выигрыша. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало</a> <a href=https://www.abclinuxu.cz/lide/archicgic>https://www.abclinuxu.cz/lide/archicgic</a> Игрокам не следует воспринимать приветственный бонус как гарантированный способ получить большой выигрыш, хотя это замечательная вероятность без расходов расценить возможностей казино. 1× slots официальный <a href=http://orbitasmd.ru/index.php?subaction=userinfo&user=obsequiousklutz>http://orbitasmd.ru/index.php?subaction=userinfo&user=obsequiousklutz</a> Бездепозитные бонусы — это подарки от казино вид бонусных денег или фриспинов для игровых автоматов, коие начисляются на акк игрока последствии процедуры регистрации на сайте заведения. Для получения этих поощрений депо не требуется.Если площадка дарит бездеп за регистрацию, то процедура его получения проста. Нужно лишь ввести аккаунт на веб-сайте и активировать его, подтвердив адрес электрической почты, номер аппарата или иные данные, коие настятельно оператор. Перед этим нужно увериться, собственно юзер находится на официальном веб-сайте казино, а не на мошеннической площадке.
1×slots официальный сайт мобильная версия
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=44024>1хслотс 1хслотс регистрация перейти на 1×slots</a> casino 1×slot Промокод – определённая комбинация символов, коию нужно установить в отвечающее поле при разработке учетной записи либо активировать в собственном профиле игрока в разделе с призами. <a href=http://v208870d.bget.ru/user/Stevenhox/>http://v208870d.bget.ru/user/Stevenhox/</a> Да, у бесплатных призов есть дефекты. Прежде всего, они обыкновенно большие. Кроме такого, условия вейджера по ним практически жесткие. Но все же неименье риска проделывает их довольно привлекательными для посетителей. 1× slots официальный Популярность интернет казино растёт и всё больше юзеров начинают интерес азартными забавами. Бездепозитные призы 2022 года, это уникальные подарки за регистрацию. С их помощью новые игроки имеют получить безвозмездные вращения или деньги на баланс за одну регистрацию. С выходом игорных заведений в онлайне, бездепозитные призы стали наимоднейшим способом вербования игроков. Подобные акции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы расскажем. Наш вебсайт собрал превосходнейшие предложения из онлайна на 2022 год. Воспользуйтесь любым презентом и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить обстоятельства.
1 x slots
Далее потребуется отыграть вагер и вывести выигрыш. Игрокам без опыта крупно подфартило, у получить 10-ки подарков за 1 регистрацию. Если не смогли получить Бездепозитный бонус, не беспокойтесь. Обратитесь в интернет чат, оператор поможет исправить.Акционные предложения от казино есть в различных форматах. Часто призы даются в обмен на депо. Игрок вносит платеж и получает средства, бесплатные вращения и одобрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — вид бонуса, который гарантирован за выполнение определенных поступков на веб-сайте: <a href=http://u-ssr.ru/index.php?subaction=userinfo&user=preciousbandann>http://u-ssr.ru/index.php?subaction=userinfo&user=preciousbandann</a> зеркло казино 1×slots Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 долларов. Если выдаются фриспины, их количество редко выше нескольких 10-ов бесплатных вращений.Иногда виде одобрения за регистрацию имеют выдаваться билеты для участия в турнирах. Условия их проведения очень выделяются, поэтому мы рекомендуем ознакомиться с каждым предложением раздельно.
x1 slots регистрация в 1×slots casino
Многие новенькие колеблются, собственно поощрительный приз не будет возвращать, том в они выиграли у казино. Это безусловно неопасно и накрепко. Выводя выигранные свои, игрок просто останавливает свое роль при и утрачивает уникальную возможность – даром увеличивать личное вещественное положение.Как правило, при выводе финансов, от играющего требуется только сделать наименьший лепта для того, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом собственный счет. <a href=http://medforum.5nx.ru/viewtopic.php?f=4&t=5614>1хлот регистрация в 1×slots casino</a> Бездепозитные бонусы в казино без пополнения 2022 — это определенная сумма средств или valinomycin spins вращения, коие предоставляются первым гостям за регистрацию на веб-сайте казино повторяющий бездепозитного приза, и дает вас вероятность с казино без пополнения опробовать предложения (игр), с последующей преимуществом, льготой вывода средств при исполненьи всех установленных правил. Перед активацией главно пристально изучить обстоятельства промоакции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют значение также лимиты ставок при отыгрыше и сроки, в течение которых возможно пользоваться предложением. Если бездеп обхватывает узкий список игр, рекомендуется узнать максимальные коэффициенты, уровень отдачи и волатильности. Слоты с низкими множителями выплат подходят только что случае, в оператор не установил взыскательные лимитирования на наивысшую сумму ставки.Даже не выиграв крупную сумму, игрок увлекательно проведет время, изнутри исследует работу площадки, оценит геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе наихороших акций легко. Достаточно периодически изучать перечень новых интернет казино с выводом приза без депо в этом разделе. 1 x slots <a href=https://warezlover.xyz/user/PatrickScoub/>https://warezlover.xyz/user/PatrickScoub/</a> Обычно бездепозитные промоакции от казино, приходят на эл. Почту в деньки рождения либо дни. В неких онлайн казино возможно обратиться в чат и как неизменному игроку, вероятно для предложат бездепозитное предложение.Приглашаем делиться сужденьями о бонусах. Это поможет другим пользователям избирать наиболее выгодные предложения.
1хслот скачать
Многие игроки, оценив возможностей казино, остаются играть в нем и далее ? на это и нацелено любое промо. Постоянные посетители вносят депозиты и делают ставки, обеспечивая долгосрочную выгода оператора. То есть, казино выдают бездепы свежим юзерам для формирования лояльной аудитории.Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, the decision только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. <a href=http://www.scoreit.org/p/tyronetum>http://www.scoreit.org/p/tyronetum</a> Подарки на праздники ? приуроченные к парадным датам, требующие условного отыгрыша или начисляются без это. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду. 1×slots мобильная версия войти казино Самый распространённый из похожих бонусов, конечно же, бездеп на денек рождения посетителя — приз в виде фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им возможно в течение установленного периода медли.Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить необыкновенности, недоступные при забаве в демо режиме. Многие свежие посетители перебегают в число постоянных, а оператор получает длительную выгода.
<b>Смотреть еще похожие новости:</b>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=283765>1×slots casino регистрация на сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Процесс доказательства личности может взятьвдолг(взятьвзаймы) от 1-го дня до недели. Если клиент допустил нибудь ошибку при заполнении паспортных данных, то ему стопам адресоваться с проблемой в саппорта онлайн-казино.
#3671 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up букмекерская контора porno Юлия Пересильд <a href=https://m.repost.news/>7k casino зеркало рабочее</a> букмекерская контора леонов как выиграть в казино <a href=https://rucriminal.info/>порно с Никита Кучеров (хоккей)</a> 1×slots casino порно с Анна Калинская (теннис) Анна Михалкова песня казино kometa casino казино рояль смотреть казино большая
DiskiPlus леон букмекерская контора DiskiPlus 1×bet вход <a href=https://www.diskiplus.ru/>DiskiPlus порно с Сергей Бобровский (хоккей)</a> DiskiPlus Мухтиярова Елена Вячеславовна порно DiskiPlus порно с Илья Осипов (киберспорт) <a href=https://www.diskiplus.ru>DiskiPlus ставки на спорт букмекерские конторы</a> DiskiPlus скачиваемые казино DiskiPlus 1×bet зеркало на сегодня 1×bet xyz DiskiPlus 1×bet сайт DiskiPlus кент казино DiskiPlus 1×bet зеркало рабочее xbet DiskiPlus винлайн букмекерская контора официальный DiskiPlus казино зеркало сегодня
#3672 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slotscasino 56 online
Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots review live</a> 2. Создать новый профиль. Для регистрации надо(надобно) наполнить маленькую анкету либо зайдите в индивидуальный кабинет при помощи соц сеток; <a href=https://www.bandlab.com/post/d5611169-dfd7-ef11–88f6–6045bd3473c0>https://www.bandlab.com/post/d5611169-dfd7-ef11–88f6–6045bd3473c0</a> Как правило, при выводе денег, от играющего требуется лишь сделать наименьший вклад для того, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом индивидуальный счет.Лишь популярностью и знаменитые азартные заведения шансы позволить себе раздавать бездепы вид дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, которые можно израсходовать в лучших аппаратах с высочайшей отдачей. 1хслотс зеркало <a href=http://www.xinyuelt1.com/home.php?mod=space&uid=788309>http://www.xinyuelt1.com/home.php?mod=space&uid=788309</a> Рассмотрим принцип его деяния на случае. Допустим, вы зарегистрировались и получили $10 no down payment bonus с вейджером х50. Это значит, собственно выигранные средства можно несомненно выводить не ранее, чем после того, как общая сумма ставок достигнет $500.
1×slots сайт
1×slots зеркало Вышеописанная причина и является главным моментом, следствии которого операторы отдают доля своей выгоды на разные маркетинговые затраты и маркетинговые кампании. А наиболее действенным здесь будут выступать непосредственно бездепозитные призы казино 2022 с выводом за регистрацию.Так собственно приготовьтесь предоставить секретную информацию (пол, возраст, государство проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев проверка данных занимает менее суток, после чего удастся свободно выводить крупные выигрыши. <a href=http://www.ppurihr.or.kr/gb/bbs/board.php?bo_table=qna&wr_id=5401>http://www.ppurihr.or.kr/gb/bbs/board.php?bo_table=qna&wr_id=5401</a> Для вывода средств приз нужно несомненно отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами акции и вариантами отыгрыша бездепозитного бонуса до его получения, чтобы избежать конфликтных ситуаций.Доступность — бездепозитные призы в казино почаще всего предоставляются новым игрокам, хотя бывают случаи, когда бонус шансы получить и действующие клиенты. 1х слотс зеркало регистрация в 1×slots casino
1×slots зеркало на сегодня
Выбор любого интернет казино на нашем сайте. В описании к каждому Вы можете разузнать, что получите за творенье аккаунта.Какие призы есть еще получить не бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, любое онлайн казино предлагает игрокам выгодное предложение на первый депозит, вы совершаете депо, ваш депозит увеличивается в двое либо в в трое, тем наиболее начать выступать возможно с более солидной суммой, так же не забываем на вейджер на бонусы. <a href=http://web.symbol.rs/forum/member.php?action=profile&uid=748478>http://web.symbol.rs/forum/member.php?action=profile&uid=748478</a> Для вывода средств бонус надо(надобно) несомненно отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариациями отыгрыша бездепозитного приза до его получения, чтобы избежать конфликтных ситуаций.Бесплатные призы казино без депозита возможно получить повторяющий денежных средств на бонусный счет (исключить их можно только последствии отыгрыша), фриспинов, забавы или кешбэк-бонуса. 1хслот официальный сайт зеркало Для казино, работающих онлайн, бездепозитные призы необходимы для вербования новых клиентов. Предложение сыграть на слотах без надобности внесения настоящих средств — работающий метод для повышения энтузиазма к фирмы. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит играть в казино, только сейчас теснее на собственные деньги.
1×slots зеркало на сегодня
Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в соц сетях, установку мобильного приложения или официального посетителя для ПК. В большинстве казино срабатывают программки преданности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на грядущий степень нередко сопрягается выдачей бездепа. <a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=68903&result=reply>зеркала 1×slots</a> Бездепы с бесплатными вращениями предоставляют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд уплачивает казино. Число спинов ограничено и изредка выше сотню. Если акция включает в себя количество бесплатных игр, их начисление возможность быть разбито на некоторое дней. У каждой игры средства требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система засчитает каждую ставку. В рулетке и покере сделать это гораздо сложнее. Именно поэтому например важно внимательно читать обстоятельства получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой игре, то новички попросту «спустят бонус на ветер». 1хслотс зеркало на сегодня <a href=http://www.kiripo.com/forum/member.php?action=profile&uid=1158841>http://www.kiripo.com/forum/member.php?action=profile&uid=1158841</a> Бездепозитные призы реальными деньгами, коие возможно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадались.
1×slots официальный сайт, скачать
<a href=http://serov-stal.ru/index.php?subaction=userinfo&user=swankyhardware3>http://serov-stal.ru/index.php?subaction=userinfo&user=swankyhardware3</a> 1×slots casino регистрация на сайте Автоматическая активация показаться самой комфортной, хотя ручной метод содержит перед ней преимущества. Прежде чем применять вознаграждение от казино, стоит заранее определить, сколько медли требуется на выполнение всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деяния бонуса.Для доказательства электронной почты, просто перейдите по активной ссылке в письме, полученном от игрового заведения.
<b>Смотреть еще похожие новости:</b>
<a href=https://orbitsound.com/forum/user-211634.html>1×slots casino регистрация 1×slotscasino09k online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный бонус предоставляется новому игроку за определенные действия. Часто подарок повторяющий денег либо фриспинов выдается за регистрацию, спасибо чему пользователь получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. Все безвозмездные призы кажутся заманчивыми. Кто же откажется от возможности сыграть в онлайн-казино, не рискуя средствами, но получая выигрыши. Но далеко не все бездепозитные бонусы одинаковой презентабельны для рассудительного клиента.
#3673 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
играющие казино порно с Афонина Марина Игоревна <a href=https://th-royalgclub.com/>1×bet зеркало xbet</a> Львова-Белова Мария Алексеевна порно pin up casino зеркало <a href=https://specreporter.com/>7k casino</a> 1×bet скачать бесплатно слоты казино porno Илона Маркова, хоккеистка 1×bet зеркало слоты 1×bet xyz unlim casino порно с Голикова Татьяна Алексеевна порно с Александр Большунов (лыжные гонки)
DiskiPlus вавада казино DiskiPlus Лут Оксана Николаевна порно <a href=https://diskiplus.ru>DiskiPlus казино ставка</a> DiskiPlus 1×bet зеркало DiskiPlus яндекс казино <a href=https://diskiplus.ru/>DiskiPlus человек казино</a> DiskiPlus порно с Арина и Дина Аверины, гимнастки DiskiPlus порно с Алексей Миранчук (футбол) DiskiPlus casino buzz DiskiPlus винлайн букмекерская контора официальный DiskiPlus Петрова Ольга Викторовна порно DiskiPlus мелбет букмекерская контора DiskiPlus online casino официальный
#3674 Marvinpiedohttps://ac-holding.ru/
<a href=https://ac-holding.ru/>Управление строительными проектами</a> Организация строительно-монтажными объектами и реконструкция сооружений: главные работы фирмы AC Holding
Фирма AC Holding уже за 22 лет деятельности успешно работает на строительном сфере, оказывая обширный спектр сервисов в области строительства, реконструкции и реновации. За это период мы реализовали свыше 900 проектов, с учетом 300 восстановительных проектов, что свидетельствует наш квалификацию и высокое качество реализации задач. Наши предложения охватывают как крупные строительно-монтажные здания, так и ремонт пространств, что делает нас проверенным компанией для партнеров всякого уровня.
Руководство сооружаемыми объектами
Одним из главных из ключевых сфер функционирования AC Holding является организация строительно-монтажными проектными работами. Мы принимаем целый процесс работ: от создания и согласования документации до передачи проекта в эксплуатацию. Наши специалисты имеют большими навыками и многолетним стажем, что дает возможность завершать даже особенно многослойные работы. Мы предоставляем следование сроков, бюджета и отличных стандартов уровня.
Наши сервисы предусматривают:
Постройка деловых и жилищных сооружений.
Перестройка и реконструкция сооружений.
Наружные и крышные работы.
Электромонтажные работы и замена электропроводки.
Проектирование и художественный оформление.
Каждый из работа сопровождается постоянным контролем результата, а все наши сотрудники регулярно проходят процесс сертификацию. Дополнительным важным доказательством надежности фирмы являются документы на все типы сооружаемых работ, а также доступность гарантий ISO результата, охраны персонала и экологической безопасности.
Восстановление и реновация сооружений
Восстановление культурного наследия — одна из основных направлений современного сооружения. AC Holding фокусируется на реконструкции уникальных объектов, сочетая обычные способы процесса с современными технологиями. Мы понимаем, что такие сложные проекты нуждаются особого подхода, и наши эксперты внимательно прорабатывают любой шаг, чтобы сохранить уникальность проектов.
Наши объекты в этой области содержат:
Восстановление внешних поверхностей и интерьеров.
Укрепление сооружений объектов.
Восстановление украшающих компонентов.
Использование новых технологических технологий без потери для архитектурного облика.
По каким причинам останавливаются на AC Holding?
22 года на строительном рынке сфере.
900 выполненных задач, среди которых реконструкцию и модернизацию.
Обеспечение качества на все выполненные работы.
Многофункциональный решение — от проектирования до ввода в эксплуатацию сооружения.
Квалифицированные работники и передовое оборудование.
Подайте обращение на нашем ресурсе, и наши профессионалы свяжутся для уточнения с вами для согласования подробностей.
#3675 Charlesgunnyhttp://filmkachat.ru
казино 1×slots официальный сайт
Законодательство, регулирующее азартные забавы в разных государствах, влияет на возможности операторов. В результате юзеры из отдельных регионов сталкиваются с ограничениями со стороны казино. Это возможность быть как глубокий отказ в доступе, например и невозможность загружать игры отдельных изготовителей. <a href=http://filmkachat.ru/>1×slots мобильная версия войти казино</a> Бездепозитный приз часто возможность стать легкодоступным незамедлительно последствии завершения регистрации, поскольку правило единственным притязанием к нему считается регистрация, а после проверка вашей свежей учетной записи. <a href=https://swaay.com/u/archicgic/about/>https://swaay.com/u/archicgic/about/</a> Представленные на этой страничке лучшие бездеп призы в казино за регистрацию в 2022 году имеют подходящие обстоятельства. После кропотливого анализа редакция портала составила рейтинг спецпредложений, в котором посетители Casino.ru имеют сортировать перечень по нескольким аспектам: по сумме, вейджеру, максимальной сумме вывода и т.д.Бонус за регистрацию в казино без депо с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша может потребоваться сделать ставки на сумму, в некоторое десятков один превышающую необходимую приза или выигрыша. 1×slots зеркало выигрыши обязательно пройдите регистрацию если <a href=http://dev.may-green.ru/forum/user/15674/>http://dev.may-green.ru/forum/user/15674/</a>
1×slots официальный demo регистрация в 1×slots casino
У любой игры свои притязания по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система засчитает любую ставку. В рулетке и покере сделать это гораздо сложнее. Именно потому так важно пристально разбирать условия получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой этой, то новенькие попросту «спустят приз на ветер».Для доказательства электрической почты, просто перейдите по интенсивной ссылке в послании, приобретенном от игрового заведения. 1×slots регистрация 1×slots casino 777 online Простая процедура получения бездепозитного приза, которая займет не более 2-х минут. Для получения бездепов, достаточно зарегистрироваться и подтвердить контактные данные.Когда речь идет о денежных бонусах, казино практически устанавливают условия вейджера, которые необходимо выполнить, чтобы вывести выигрыш. <a href=https://benjamins.ch/index.php?title=Benutzer:IvoryCarnahan>https://benjamins.ch/index.php?title=Benutzer:IvoryCarnahan</a> Во всех легальных онлайн-казино Беларуси нужно подтверждение паспортных данных для забавы — это заявка правительства страны.Получив свой презент, Вы можете бесплатно играть на реальные деньги, а выполнив обстоятельства отыгрыша, вывести собственный выигрыш. 1×slots акции Любой выигрыш по ставке выше установленного лимита будет являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, ну случае выигрыша его сумма не поступит на счёт клиента — итог игры несомненно всецело аннулирован.
1×slots регистрация 1×slotscasino 56 online
Некоторые сайты, до чем провести регистрацию игроков, предлагают ответить на некоторое базовых вопросов. Цель проведения сходственной викторины – выявить случайных людей, коие не имеют представления о покере, и не допустить получения ими призов. Если посетитель теснее играл в казино, то ответить на полтора десятка простых вопросов несомненно нетрудно. Очень часто, ответы возможно найти на официальных сайтах этих учреждений. Риск-игра по равным шансам – Также казино возможность воспрещать исполнять обстоятельства по отыгрышу счет раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких других играх.Некоторые клубы механически начисляют приз на аккаунт игрока последствии исполнения критерий получения, хотя бывают ситуации, когда бонус нужно активировать игроку самому. Есть количество методов активации приза: <a href=http://www.baohaibbs.com.cn/home.php?mod=space&uid=38616>http://www.baohaibbs.com.cn/home.php?mod=space&uid=38616</a> Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Бoльшинcтвo азартных заведений выдвигают приблизительно одинаковые обстоятельства и притязания, коие необходимо выполнить, дабы получить бездепозитный бонус за регистрацию. Все их возможно соединить в раз список: 1×slots официальный сайт зеркало Суммы похожих услуг, большинстве, колеблются от трех до 20 $, а вейджер на эти средства обязан сочинять от 30 до шестидесяти один. Зачастую, наивеличайшая сумма выигрыша тут составит от одной до двух сотен долларов. Если игрок выиграет больше, то все свои шансы быть списанными до максимально разрешенного выигрыша. Здесь бывает смысл выводить еще несуществующие финансы на свою платежную систему и дальше отыскивать заведение с благоприятными под данную сумму релоадом или бонусом за 1-ое пополнение счета. Есть некоторое подвидов бездепозитного вознаграждения, предлагаемого наибольшим количеством заведений.
1хслотс мобильная версия зеркало
Важно, удостоверьтесь том,, что раньше не регистрировались в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи.Наиболее популярностью гонорары между гэмблеров – бездепозитные бонусы казино. Это не дивно, как можно получить бесплатные вращения либо виртуальные кредиты, и при не придётся пополнять счёт, рисковать личными средствами. Удастся насладиться различными весельями причем выиграть крупную необходимую, избегая серьёзного риска. Максимальная ставка ? уточняется в денежной счета и ограничивает размер ставки за один спин. В случае ее превышения бонус имеет быть аннулирован. Также в правилах может находиться запрет на размещение ставок конкретного вида, к, по равным шансам в рулетке (другими, на чет или нечет, красноватое или черное и т.д. ). 1×slots регистрацию процедура займет всего лишь <a href=https://fermer365.ru/users/tyronegergo>https://fermer365.ru/users/tyronegergo</a> Фриспины – бесплатные вращения с фиксированной ставкой, которые можно использовать в конкретных игровых автоматах.Более крупные предложения встречаются довольно изредка. Зачастую они доступны только VIP-игрокам. В оставшихся случаях им скорее сопутствуют довольно жесткие условия отыгрыша. Также возможны вспомогательные условия и другие лимитирования, прописанные в критериях и положения бонусной программы казино.
1×slots промокод при регистрации
Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высокие требования. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до 100 один в игровых автоматах. Например, случае игрок получил даром десять долларов, то нужно будет отыграть их, поставив одну тысячу спинов по одному баксу каждый. Стоит отметить, собственно не все казино дают возможность играть на призы и не во всех увеселительных заведениях схожие управляла для отыгрывания. Некоторые казино запрещают играть на бонусы в блекджек либо ограничивают ставки до пяти процентов, собственно существенно увеличивает в 10-ки один число нужных игр.Поспешите зарегистрироваться на официальном сайте Клубника, чтобы мгновенно получить 33 безвозмездных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, появляется настоящий шанс победу! <a href=https://www.jw-eyewear.com/bbs/board.php?bo_table=free&wr_id=1659860>https://www.jw-eyewear.com/bbs/board.php?bo_table=free&wr_id=1659860</a> 1×slots официальный сайт зеркало рабочее Бездепозитные бонусы — это подарки от казино в виде бонусных средств либо фриспинов для игровых автоматов, которые начисляются на аккаунт игрока последствии процедуры регистрации на веб-сайте заведения. Для получения этих поощрений депо не потребуется.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.bedwantsinfo.nl/thread-683228.html>1×slots официальный регистрация</a>
<a href=http://forums.indexrise.com/thread-23034-post-383665.html#pid383665>1×slots официальный зеркало</a>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5033/#comment-605604>1×slot регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Верификация необходима для добавочной защищенности и подсобляет техподдержке выявить бонусхантеров и мошенников. Кстати, на платформах выводы солидных сумм доступны только последствии подтверждения личности. За счёт спинов выйдет запустить разные интернет слоты, протестировать стратегии и поднабраться опыта. Фишка что, что вращения начисляются на лучшие аппараты с уникальными опциями и высокой отдачей. Не запамятовывайте, что в любом акционном предложении учтены особые требования – временные ограничения, наибольший объем ставки, список доступных игр.
#3676 Charlesgunnyhttp://filmkachat.ru
зеркала 1×slots
В некоторых интернет казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на сайте клуба и доказать свои контактные данные. Дополнительно потребуется активация промокода.Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала резвые выводы. Фишка выплат что, собственно довольно выбрать платёжный инструмент и показать необходимую. В большинстве случаев деньги зачисляются на электрические кошельки в течение 15 мин., а на банковские карты – 1–3 трудящихся денька. <a href=http://filmkachat.ru/>1×slots регистрация на сайте 1×slots ru com</a> <a href=https://www.trade-forums.co.uk/thread/78331>https://www.trade-forums.co.uk/thread/78331</a> Бездепозитный приз казино 2022 с выводом за регистрацию дает вероятность ознакомиться игроку с лобби выбранного заведения, сориентироваться в выборе игр и выяснить качество работы саппорта. Довольно нередко, начиная игровой процесс, игрок уже отказывается останавливаться и проделывает реальный лепта. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать даром вполне как один таки с призом за регистрацию без надобности вносить депозит.После потребуется привнести идентификационный платёж. Это стращает новичков больше всего. Нужно сделать минимальный депо в 100–500 рублей. Таким образом служба безопасности убедиться в, собственно платёжный способ принадлежит Вам. Данная процедура необходима для обеспечения защищенности игровых счетов. Пример, Ваш акк взломают и выведут свои на собственный кошелёк. Будет очень неприятно. Поэтому верификация платёжной системы, это необходимый момент. 1×slots актуальное зеркало <a href=http://am_14264130.mongdol.net/bbs/board.php?bo_table=free&wr_id=784135>http://am_14264130.mongdol.net/bbs/board.php?bo_table=free&wr_id=784135</a> Суммы похожих услуг, в, колеблются от 3-х до 20 долларов, а вейджер на эти средства должен сочинять от тридцати до шестидесяти один. Зачастую, большая сумма выигрыша здесь составит от одной до 2-ух сотен $. Если игры выиграет больше, то все средства шансы быть списанными до максимально разрешенного выигрыша. Здесь бывает содержание выводить еще несуществующие финансы на собственную платежную систему и дальше находить заведение с подходящими под данную необходимую релоадом или бонусом за первое пополнение счета. Есть количество подвидов бездепозитного вознаграждения, предлагаемого наибольшим количеством заведений.
1×slots регистрация
<a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=13119>1×slots зеркало регистрация то дальше необходимо пройти</a> 1×slots регистрацию процедура займет всего лишь <a href=https://getcomixxx.com/index.php?subaction=userinfo&user=Geraldtot>https://getcomixxx.com/index.php?subaction=userinfo&user=Geraldtot</a> Практически все онлайн казино с бездепозитным призом за регистрацию учитывает программу преданности — систему одобрения постоянных посетителей, которая произведено из множества значений. При достижении игроком одного уровня на его счёт поступает приз. Чем выше уровень — тем щедрее приз. 1хслотс мобильная версия зеркало
1×slots бонус за регистрацию
В большинстве заведений сделать это можно по адресу электронной почты, по номеру телефонного, спустя социальную сеть или гугл-аккаунт. <a href=http://nawoicheuh.free.fr/index.php?file=Members&op=detail&autor=drydesperado25>http://nawoicheuh.free.fr/index.php?file=Members&op=detail&autor=drydesperado25</a> Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро или 20 $. Если выдаются фриспины, их число редко выше нескольких 10-ов бесплатных вращений.Это также бесплатные финансы, коие поступают на аккаунты новоиспеченных в в регистрирования. А особенность таких призов произведено сомнений, что обретенные деньги непременно следует использовать в продолжении назначенного медли. 1×slos регистрация в 1×slots casino
1×slots casino online регистрация
Новички не обожают незамедлительно же заносить депо. Это обусловлено неимением навыка и недоверием. К счастью, дни возможно получить бездепозитный приз за регистрацию в казино. Неважно собственно начисляет система – фриспины либо кредиты. В всяком случае вы не рискуете собственными сбережениями. Это отличная возможность запустить понравившийся видео слот или же испытывать фортуну в настольных играх. <a href=http://medforum.5nx.ru/viewtopic.php?f=4&t=4980>1×slots рабочее зеркало на сегодня</a> Прежде всего, не забывайте регулярно заглядывать на страницу обзоров бездепозитных призов. Они шаг за шагом оценивают более увлекательные предложения основных игорных порталов.Благодаря программе лояльности от игорного заведения, можно арестовать хороший старт и без добавочных инвестициям запустить видеослоты. Кроме как, можно рассчитывать на реальную фортуну и получить, без вложения собственных денег, великой выигрыш. Получив свой подарок, Вы сможете бесплатно играть на реальные средства, а выполнив условия отыгрыша, вывести свой выигрыш.Бездепозитные бонусы – это исключительно небезинтересная и более перспективная акция интернет-казино. Они в другого, как фри-спинов, потому что выплаты в бесплатных вращениях не гарантированы, как композиции на барабанах игрового аппарата могут не сложиться. 1×slots официальный сайт мобильная версия скачать <a href=http://domstil44.ru/bitrix/rk.php?goto=http://zvo.by/bitrix/redirect.php?goto=http://zn-hotel.ru/links.php?go=https://teletype.in/@urist555/0alGJU6QFG8>http://domstil44.ru/bitrix/rk.php?goto=http://zvo.by/bitrix/redirect.php?goto=http://zn-hotel.ru/links.php?go=https://teletype.in/@urist555/0alGJU6QFG8</a> Для вывода средств бонус надо(надобно) несомненно отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариациями отыгрыша бездепозитного бонуса до его получения, чтобы избежать конфликтных ситуаций.Итак, дабы благотворительные бонусные кредиты превратились в реальные средства, которыми продоставляется управлять по собственному усмотрению, их нужно отыграть. Вейджер стопам уточнять в правилах онлайн-казино.
1×slots зеркало быструю регистрацию а также мгновенное
В наше время довольно просто получить бонус за регистрацию в казино. Практически любой игорный жилище с радостью начислит средства или бесплатные вращения. Многие гэмблеры пользуются данным и не смущяются регистрироваться в любом клубе с прибыльными критериями. Кстати, это отличная вероятность выработать победную стратегию и сорвать джекпот. <a href=https://forum.biblepay.org/index.php?action=profile;u=9324>https://forum.biblepay.org/index.php?action=profile;u=9324</a> 1×slots рабочее зеркало Хотя благотворительные призы начисляются без депо, не исключено, собственно вам придется заносить деньги. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь после как, как новый заказчик раз пополнит игровой счет.Большинство клубов завлекают внимание игры за счёт разнородных презентов. На одних сайтах возможно получить виртуальные кредиты, коие откроют доступ ко всему софту. На иных же, администрация предлагает безвозмездные вращения для запуска топовых онлайн слотов. Несмотря на различные акции, стоит выделить самые основные.
<b>Смотреть еще похожие новости:</b>
<a href=https://forumsleague.org/forum/viewtopic.php?f=70&t=19313&p=384436#p384436>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=https://www.bf-france.com/forums/profile/30064-rabofreeor/>1х слот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Это раз из главных характеристик привлекательности презента. С завешенным коэффициентом и мастера не смогут выполнить условия по отыгрышу. И так, насколько презентабельно смотрится предложение – бездепозитный приз казино в размере $500 либо $1 000. Чтобы новички получше вникли, что же такое вейджер, мы разберём на примере.
#3677 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Дарья Касаткина (теннис) казино зеркало сегодня <a href=https://vestnik-jurnal.com/>casino</a> 7k casino casino рабочее <a href=https://th-royalgclub.com/>Комарова Наталья Владимировна порно</a> порно с Баталина Ольга Юрьевна букмекерская контора бетсити 1×bet сейчас casino рабочее зеркало казино смотреть онлайн порно с Анна Щербакова, фигуристка казино смотреть онлайн бесплатно
DiskiPlus сайт казино зеркало DiskiPlus порно с Владимир Минеев (ММА) <a href=https://diskiplus.ru>DiskiPlus порно с Сергей Бобровский (хоккей)</a> DiskiPlus win win casino DiskiPlus бесплатное казино <a href=https://diskiplus.ru>DiskiPlus порно с Карен Хачанов (теннис)</a> DiskiPlus casinos xyz DiskiPlus Комарова Наталья Владимировна порно DiskiPlus 1×bet зеркало слоты 1×bet xyz DiskiPlus porno Анастасия Янькова, боксерка DiskiPlus казино на деньги DiskiPlus порно с Федор Чалов (футбол) DiskiPlus порно с Бондаренко Анастасия Борисовна
#3678 Charlesgunnyhttp://filmkachat.ru
рабочее зеркало 1хслотс
На странице представлены бездепозитные призы за регистрацию в казино редкая заслуга за коей гонятся все игроки как новенькие, например и профессионалы. Мы также уделяем великое внимание на наличие бонусов при составление рейтинга казино на средства. Бездепозитный бонус это возможность играть бесплатно и выиграть настоящие деньги. <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> Допустим, за регистрацию вы возымели бездеп в объеме 2 000 руб. С вейджером х30. В данном случае светит устроить ставок, на совместную сумму в 60 000 рублей (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать настоящие деньги. Однако не забывайте, собственно с любого презента получится вывести определённую сумму (почаще всего менее $200). <a href=http://fohweb.com/www.astramedika.com.ua>http://fohweb.com/www.astramedika.com.ua</a> Условия могут разниться приятель от друга. Но такой приз имеет быть использован лишь для игрового процесса – приобретенные на счет финансы до того, как будут отыграны, исключить нереально. 1×слотс казино <a href=http://www.sazkar.info/member4454.html>http://www.sazkar.info/member4454.html</a>
1×слот регистрация в 1×slots casino
<a href=https://www.handmakersbrasil.com.br/topic/2418–1×slots-%D0%B0%D0%BA%D1%86%D0%B8%D0%B8/>1×slots акции</a> 1×slots коды <a href=http://xytd1.cn/home.php?mod=space&uid=164384&do=profile>http://xytd1.cn/home.php?mod=space&uid=164384&do=profile</a> В неких онлайн казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на сайте клуба и подтвердить средства контактные данные. Дополнительно потребуется активация промокода. 1хслотс мобильная версия зеркало
1×слотс казино
Бездепозитный приз по промо-коду будет доступен для забавы, лишь что случае когда Вы активируете специальный бонусный код в разделе с призами либо укажите промокод при регистрации на веб-сайте. В некоторых случаях, не активации кода, придется подтвердить контактные данные игрока и наполнить анкету клиента. <a href=https://gidro2000.com/forum-gidro/user/26584/>https://gidro2000.com/forum-gidro/user/26584/</a> 1×slots официальный сайт мобильная версия скачать Подарки на конкретные даты выделяются критериями получения. Если одобрение начисляют игроку на день рождения, то сумма обычно зависимости от совместного размера депо последний год.Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция имеет подробные управляла, гиперссылка на коие обычно находится в промообъявлении. В них указываются лимиты, вейджер, перечень дешевых игр. Если оператор укрывает данные о предложении, то пользоваться им надо.
1×slots рабочее зеркало на сегодня
Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро или 20 $. Если выдаются фриспины, их число редко превышает нескольких 10-ов безвозмездных вращений. Почти все игровые клубы требуют подтверждение контактных данных игрока для получения бездепозитного бонуса. 1×slots зеркало этих способов предполагает регистрацию <a href=http://images.google.ba/url?q=http://dauntless-soft.com/products/android/beforeyougo.asp?U=http://vocabulary.ru/redirect?url=https://teletype.in/@urist555/PdUYOLifbTD>http://images.google.ba/url?q=http://dauntless-soft.com/products/android/beforeyougo.asp?U=http://vocabulary.ru/redirect?url=https://teletype.in/@urist555/PdUYOLifbTD</a> Подарки на дни ? посвященные торжественным датам, требующие условного отыгрыша или начисляются без того. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду.
казино 1×slots официальный сайт
Кешбэк-бонус дает собой возврат фиксированного процента от ставки если, тогда, проигрыша или же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не выше 10%.При помощи такого одобрения оператор имеет кроме завлекать клиентов, коие раньше проявляли активность на веб-сайте, хотя по некий основанию перестали играть. В этом случае промокод высылается юзеру по электрической почте или повторяющий SMS. <a href=https://yvavilebismovla.ge/user/Josephfargy/>https://yvavilebismovla.ge/user/Josephfargy/</a> 1хслотс мобильная версия зеркало Частенько новенькие не понимают, как активировать презенты либо исключить 1-ый выигрыш. Для сходственных случаев наша команда обрисовала основные термины – собственно это фриспины, вейджер, как его отыграть, чего нужно протекать верификацию.
<b>Смотреть еще похожие новости:</b>
<a href=https://chasingadream.rpginitiative.com/showthread.php?tid=159450>1×slots зеркало регистрация то дальше необходимо пройти</a>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=133902>1×slots официальный сайт мобильная версия скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Постарайтесь отыграть вейджер, дабы появилась вероятность оставить заявку на выплату. Кстати, на всех сайтах, представленных в списке, доступны современные платёжные приборы. Вы можете получить выигрыш на электронной кошелёк, карту, телефонный.
#3679 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
мобильные букмекерские конторы 7k casino зеркало на сегодня <a href=https://rumafia.news/>порно с Голикова Татьяна Алексеевна</a> 7k casino лучшая казино <a href=https://7club7.com/>1×bet на андроид</a> 1×bet сейчас 1×bet 1хбет бесплатное казино скачать букмекерскую контору casino зеркало сегодня включи казино 1×bet слоты 1×bet xyz
DiskiPlus unlim casino DiskiPlus порно с Сергей Бобровский (хоккей) <a href=https://diskiplus.ru>DiskiPlus 1×bet официальный 1×bet xyz</a> DiskiPlus водка казино DiskiPlus 1×bet зеркало <a href=https://www.diskiplus.ru/>DiskiPlus cometa casino</a> DiskiPlus кент казино DiskiPlus букмекерская контора зенит DiskiPlus порно с Бондаренко Анастасия Борисовна DiskiPlus porno Катерина Шпица DiskiPlus Елена Лядова DiskiPlus 1×bet скачать приложение на андроид DiskiPlus порно с Афонина Марина Игоревна
#3680 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало рабочее
Обыкновенные бездепозитные призы в объеме от трех до двадцати долларов сделаны для того, чтобы в игры заходили все свежие и свежие игроки. Здесь, скорее, будет лимитирование на максимальный выигрыш. Важно, чтобы перед минимальным вкладом был отключен приз за первое пополнение счета, и игрок не попадет на повторный вейджер.Осталось избрать казино с бонусом за регистрацию и создать профиль. После активации дара выигрыш в от Фортуны и способностей. <a href=http://filmkachat.ru/>скачать 1×slots на андроид мобильная версия</a> Для получения бездепа нужно пригласить в игру по реферальной ссылке нового посетителя: он должен зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и восполнить счёт на необходимую, указанную в критериях промоакции. <a href=https://phileo.me/blogs/295814/Professional-CAD-Drawing-Services-Expert-Design-Solutions>https://phileo.me/blogs/295814/Professional-CAD-Drawing-Services-Expert-Design-Solutions</a> 1×slots бездепозитный бонус за регистрацию <a href=http://www.wdty.org/home.php?mod=space&uid=270553>http://www.wdty.org/home.php?mod=space&uid=270553</a>
1хслотс рабочее зеркало
Максимальный размер ставки, кот-ый невозможно превосходить пока бонус не будет всецело отыгран. В случае нарушения сего управляла, приз и выигрыш с него будут аннулированы. <a href=http://www.easysunnysunshine.com/memberlist.php?mode=viewprofile&u=18118>1×slots зеркало рабочее</a> 1х слот регистрация в 1×slots casino Не стоит сразу же открещиваться от приветственных презентов в подобных казино. Администрация готова начислить деньги либо фриспины, хотя предварительно сотрудники должны убедиться, что вы не мошенник. Дело что, нет, собственно развелось очень много охотников за бонусами. Они научились врать систему и зарабатывать солидные суммы денег.Рассмотрим принцип его действия на случае. Допустим, вы зарегистрировались и возымели $10 no deposit bonus с вейджером х50. Это значит, собственно выигранные средства возможно будет выводить не раньше, чем после как, как общая сумма ставок достигнет $500. <a href=http://www.freeweblink.org/details.php?id=277725>http://www.freeweblink.org/details.php?id=277725</a> 1хслотс рабочее зеркало на сегодня Если площадка дарит бездеп за регистрацию, то процедура его получения проста. Нужно только завести акк на веб-сайте и активировать его, подтвердив адресок электронной почты, номер телефона или другие данные, которые просит оператор. Перед данным необходимо убедиться, что пользователь находится на официальном веб-сайте казино, но на жульнической площадке.
1×slot казино зеркало
Допустим, за регистрацию вы возымели бездеп в объеме 2 000 руб. С вейджером х30. В данном случае светит устроить ставок, на совместную сумму в 60 000 рублей (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать настоящие деньги. Однако не забывайте, собственно с любого презента получится вывести определённую сумму (почаще всего менее $200). Бонус в казино без депозита имеет разные вариации: такое быть приветственный бонус, промоакции в честь каких-либо праздников или важных дат, приз за привлечение новых игроков, преданность и получение VIP-статуса. <a href=http://nis.com.tn/index.php?option=com_kunena&view=topic&catid=2&id=6698&Itemid=151>http://nis.com.tn/index.php?option=com_kunena&view=topic&catid=2&id=6698&Itemid=151</a> x1 slots регистрация в 1×slots casino Многие игроки, оценив функционал казино, остаются играть в нем и далее ? на это и направлено любое промо. Постоянные клиенты заносят депозиты и делают ставки, обеспечивая длительную прибыль оператора. То есть, казино выдают бездепы новым юзерам для формирования лояльной аудитории.
1×slots зеркало проходить регистрацию это отличный вариант
Существует ли стратегии для отыгрыша бездепозитных бонусов? К сожалению нет, на выигрыши либо проигрыши с призов, казино или игрок воздействовать не, отдача игр случается от разработчиков игр.В игровых клубах без лицензии Вы покупаете „кота в мешке“ и когда неоднозначных ситуаций нет способности куда-то посетовать и доказать собственную правоту. 1× slots регистрация в 1×slots casino <a href=https://google.am/url?q=https://doctorlazuta.by/>https://google.am/url?q=https://doctorlazuta.by/</a>
казино 1×slots официальный сайт
Так собственно можете храбро региться без всяких размышлений. Фортуна сейчас наверняка на вашей стороне. Не опасайтесь, как последствие какого либо убытка Вам совершенно не грозит. С такими бонусами как без пополнения, Вы остаетесь только в плюсе, но не как не в минусе. Похожим образом трудится 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя либо в связи с получения им VIP-статуса. Подарок предоставляется после обращения в поддержку и проверки. <a href=https://premiumstoreco.com/user/xrumerseo0606inbox-lv/>https://premiumstoreco.com/user/xrumerseo0606inbox-lv/</a> Не желайте поиграть в азартные игры, не рискуя средствами деньгами, хотя получая в все выплаты? Подобную вероятность деют почти наилучшие порталы с азартными увеселениями. В их количестве количество правдивых и надежных интернет-казино на русском языке. Они завлекают свежих пользователей различными поощрительными мероприятиями, включая бездепозитные, либо безвозмездные призы.Бездепозитный приз – это финансовое вознаграждение, которое выдается соучастнику забавы в казино, для его вербования и появления заинтригованности. Любой гость, кот-ый соответствует условиям выдачи сходственного бездепозитного бонуса, может претендовать на получение вышеуказанного приза. Такое одобрение является наиболее эффективным способом, дающим возможность стартовать при, не вкладывая личных вещественных средств. 1хслотс рабочее зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://www.rusdrama-az.com/support/51-sluzhba-tehnicheskoy-podderzhki-sayta.html>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бонус без депозита за регистрацию в казино (бездепозитный приз) – это валютный подарок от клуба, который начисляется на акк игрока в регистрации в казино. Кроме творенья учетной записи, для получения бездепа, очень часто потребуется ещё и подтвердить контактные данные игрока и/или активировать специальный промо-код.
#3681 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Комарова Наталья Владимировна порно букмекерская контора фонбет официальный сайт <a href=https://rumafia.news/>Львова-Белова Мария Алексеевна порно</a> pin up casino букмекерские конторы бет <a href=https://glvk.guru/>1×bet зеркало рабочее</a> porno Марина Александрова casino зеркало сайта pinco casino казино гта 5 промокод 1×bet casino бездепозитный самое казино
DiskiPlus зеркала официальных сайтов казино DiskiPlus Окладникова Ирина Андреевна порно <a href=https://www.diskiplus.ru/>DiskiPlus porno Алена Косторная (фигурное катание)</a> DiskiPlus порно с Афонина Марина Игоревна DiskiPlus casinos xyz <a href=https://diskiplus.ru>DiskiPlus смотреть фильм казино</a> DiskiPlus casino 7k сегодня DiskiPlus 1×bet зеркало DiskiPlus porno Юлия Канакина DiskiPlus casino buzz DiskiPlus 1×bet официальный слоты DiskiPlus пин ап букмекерская контора DiskiPlus porno Мария Шарапова
#3682 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало на сегодня
Прежде чем активировать бездеп, необходимо увериться что, нет, что страна, уроженцем коей является игрок, не заходит в список запрещенных. <a href=http://filmkachat.ru/>зеркло казино 1×slots</a> Большинство клубов завлекают внимание геймеров за счёт различных подарков. На 1 сайтах возможно получить виртуальные кредиты, которые откроют доступ ко всему софту. На других же, администрация предлагает благотворительные вращения для пуска лучших интернет слотов. Несмотря на разные акции, стоит выделить самые главные. <a href=https://kontactr.com/website/site/astramedika.com.ua>https://kontactr.com/website/site/astramedika.com.ua</a> Большинство интернет-казино из нашего топ-10 готовы повеселить вас эксклюзивными промоакциями. Читайте о их в обзорах и на форуме.В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая часть игры. Важно, зачастую бездепозитные призы в казино выдаются с лимитированиями по наибольшей выплате. В среднем можно рассчитывать на выгода в количество тыщ рублей. Как вывести выигрыш с бонуса без депозита. Придётся подтвердить акк документально, в некоторых заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате либо прочтите в правилах. 1×slots регистрацию более популярный вариант это <a href=https://marexwine.ru/forum/?PAGE_NAME=profile_view&UID=974>https://marexwine.ru/forum/?PAGE_NAME=profile_view&UID=974</a> На странице представлены бездепозитные бонусы за регистрацию в казино редчайшая награда за коей гонятся все игроки как новички, например и профессионалы. Мы тоже уделяем большое внимание на присутствие бонусов при составление рейтинга казино на средства. Бездепозитный приз это возможность выступать даром и выиграть настоящие деньги.Размер ставки для игры по бездепозитному бонусу (конечно же, когда, когда он представлен вид бонусных денежных средств) зачастую ниже, чем при ирге на депозит. Ограничение несомненно работать до этапа отыгрыша приза.
1х слот 1хслотс регистрация перейти на 1×slots
<a href=https://elforodelpoker.com/presentaciones/topic-t289257.html>1хслотс рабочее зеркало</a> 1× slots casino зеркало <a href=http://web.symbol.rs/forum/member.php?action=profile&uid=611472>http://web.symbol.rs/forum/member.php?action=profile&uid=611472</a> 1×slots официальный зеркало рабочее Такой бесплатный эквивалент средств зачисляется на профиль пользователя после осуществления требований и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений возможен лишь после воплощения вейджеровых критерий.
1х слот 1хслотс регистрация перейти на 1×slots
Каждый из бездепозитных бонусов без пополнения 2022 содержит собственный определенный вейджер для отыгрыша, например же в каждом казино он уточняется персонально — где то он х55 а кое-где х30, повторюсь везде по разному! <a href=https://www.retroco.co/home.php?mod=space&uid=396543&do=profile>https://www.retroco.co/home.php?mod=space&uid=396543&do=profile</a> Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке необходимо пополнить счет в казино. Для депозитных призов, эта процедура не нужна, например как депо теснее сделан.Чаще всего интернет-казино предлагают бездепозитные призы свежим пользователям. Эта промо-акция довольно эффективно привлекает начинающих, подталкивая их к открытию счета. Конечно, не все они становятся преданными посетителями, хотя сам прецедент регистрации аккаунта играет на руку заведению. 1×slots зеркало на сегодня
1×slots рабочее зеркало
<a href=http://forum.animogen.com/memberlist.php?mode=viewprofile&u=15333>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a> Для получения предоставленных бонусов вам пригодиться — ПК либо мобильное прибор, и остальное дело за малым. 1хслотс зеркало <a href=http://tutorialsmint.com/user/glennbreme/articles>http://tutorialsmint.com/user/glennbreme/articles</a>
1хслотс мобильная версия зеркало
Возможность протестировать новые забавы, не рискуя личностными средствами и создать личную тактику забавы.Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, чтобы еще раз получить даровой приз. Игорные заведения нетерпимы к бонус-хантерам, потому вас ждет неизбежное наказание. <a href=http://www.rohitab.com/discuss/user/2322115-marilynu53/>http://www.rohitab.com/discuss/user/2322115-marilynu53/</a> При исполненьи критерий отыгрыша и верификации, средства с бонусного счета переводятся на главной и шансы быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции зависимости от выбранной платежной системы. 1×slots актуальное зеркало Бездепозитные призы прекрасный вариант безвозмездной забавы в игровые автоматы. Многие юзеры сети не знают, собственно в казино можно начать выступать полностью бесплатно, а потом вывести выигрыш на банковскую карту или электронный кошелек, другие не доверяют интернет казино, а третьи удачно играют и выигрывают – и тотчас довольно немалые суммы.
<b>Смотреть еще похожие новости:</b>
<a href=https://sparta.training/faq/online-returns/#comment-73690>1хслотс казино зеркало</a>
<a href=https://isomedu.com/forum/profile/josephdrons/>1×slots сайт</a>
<a href=https://chasingadream.rpginitiative.com/showthread.php?tid=196364>1×slot зеркало</a>
<a href=https://redfist.de/RF-Online-Testforum/viewtopic.php?f=105&t=80925>1х слотс зеркало регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Зарегистрируйтесь. Для регистрации чаще всего достаточно установить собственный номер телефонного и почтовый адрес, в чего установить полученный код из СМС. Возможно, требуется указать промокод. В правилах промоакции несомненно написано, где его хотелось вводить. Иногда это хотелось делать при регистрации, время — теснее последствии творенья собственного кабинета, на отдельной странице. Во всех легальных онлайн-казино Беларуси нужно свидетельство паспортных данных для игры — это заявка правительства страны.
#3683 OLanequesy
The 1×Bet promo code: “1XRUN200” best offers new users a 100% sports bonus up to $130 or a casino bonus up to $1950 +150 free spins, appealing to both sports bettors and casino players. To access your account, visit the 1×Bet website and log in. Then, go to the „Promo“ section to check your bonus balance, and visit the Promo Code Store to select a promo code for your preferred sports. 1XBET promo code for 2025: 1XRUN200, simply enter code in the registration form to receive an EXCLUSIVE welcome bonus of 100%, up to €130. To maximize bonuses on 1×bet, use promo code goldenjulius when registering your account. After your initial deposit, you'll receive a 100% bonus.
<a href=https://playplayfun.com/articles/1×bet_promo_code_nigeria_bonus.html>1×bet promo code pakistan</a>
#3684 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet регистрация casino андроид <a href=https://t.me/vchkogpu_ru>как выиграть в казино</a> казино зеркало сегодня 1win casino <a href=https://strelochnik.com/>фреш казино</a> 1×bet зеркало на сегодня рокс казино 1×bet 1хбет порно с Федор Чалов (футбол) мелбет букмекерская контора пина casino ramenbet casino
DiskiPlus порно с Алина Загитова, фигуристка DiskiPlus порно с Каролина Севастьянова <a href=https://diskiplus.ru/>DiskiPlus официальные зеркала казино</a> DiskiPlus 1×bet официальный DiskiPlus Черкесова Бэлла Мухарбиевна порно <a href=https://www.diskiplus.ru/>DiskiPlus бесплатно играем казино</a> DiskiPlus порно с Георгий Джикия (футбол) DiskiPlus casino зеркало сегодня DiskiPlus симулятор казино DiskiPlus 1×bet зеркало рабочее xbet DiskiPlus какие казино DiskiPlus pin up casino buzz DiskiPlus почему в казино не бывает настенных часов
#3685 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
7k casino сайт casino промокод <a href=https://th-royalgclub.com/>ограбление казино</a> официальная казино 1×bet зеркало рабочее xbet <a href=https://repost.news/>как выиграть в казино</a> porno Мария Шарапова pin up casino скачать порно с Константин Тюкавин (футбол) casino актуальное зеркало porno Александр Соболев (футбол) сайт букмекерской конторы порно с Илюшникова Татьяна Александровна
DiskiPlus Попова Анна Юрьевна порно DiskiPlus Матвиенко Валентина Ивановна порно <a href=https://www.diskiplus.ru>DiskiPlus Чулпан Хаматова</a> DiskiPlus сколько казино DiskiPlus бесплатно фильм казино <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet casino</a> DiskiPlus 1×bet регистрация DiskiPlus Разуваева Ксения Денисовна порно DiskiPlus Приезжева Екатерина Геннадьевна порно DiskiPlus официальные букмекерские конторы скачать DiskiPlus букмекерская контора леонов DiskiPlus порно с Голикова Татьяна Алексеевна DiskiPlus inform@rucriminal.info
#3686 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Алена Михайлова porno Дарья Мороз <a href=https://www.ossetia.tv/>леон букмекерская контора</a> 1×bet на сегодня casino 7k рабочее <a href=https://repost.news/>porno Илона Маркова, хоккеистка</a> порно с Арина и Дина Аверины, гимнастки 7k casino скачать сайт букмекерской конторы 1×bet рабочее на сегодня 7k casino сайт Скворцова Вероника Игоревна порно казино ставка
DiskiPlus bet casino DiskiPlus Ходнева Светлана Владимировна порно <a href=https://diskiplus.ru/>DiskiPlus почему казино</a> DiskiPlus порно с Артемий Панарин (хоккей) DiskiPlus pin up casino buzz <a href=https://www.diskiplus.ru/>DiskiPlus букмекерская контора без</a> DiskiPlus казино рублях DiskiPlus casino вход DiskiPlus pin up casino top top DiskiPlus porno Анна Сидорова, керлингистка DiskiPlus лучшие букмекерские конторы DiskiPlus фильмы казино рояль DiskiPlus casino online зеркало
#3687 Charlesgunnyhttp://filmkachat.ru
1×slot официальный сайт
Для получения бонуса нужно ознакомиться с программкой преданности казино и устроить ставки на сумму, необходимую для перехода на грядущий уровень. <a href=http://filmkachat.ru/>1×slots casino регистрация</a> Такой бесплатный эквивалент средств зачисляется на профиль юзера последствии воплощения притязаний и предназначаются они только для игрового процесса. Вывод таких вознаграждений возможен только после осуществления вейджеровых условий. <a href=https://redmine.dti.economia.gov.br/issues/72789>https://redmine.dti.economia.gov.br/issues/72789</a> Вышеописанная причина и считается основным нюансом, в которого операторы отдают доля собственной прибыли на разные маркетинговые затраты и маркетинговые кампании. А самым действенным тут станут выступать именно бездепозитные бонусы казино 2022 с выводом за регистрацию.Если вы новичок в этом деле и только попали в неизведанную вами район азарта — счет предложений как бездепозитные призы без пополнения. 1×slots казино зеркало <a href=https://www.christiandaily.co.kr/service/bbs/board.php?bo_table=free&wr_id=630768>https://www.christiandaily.co.kr/service/bbs/board.php?bo_table=free&wr_id=630768</a>
1×slot зеркало
1×slots официальный сайт скачать на айфон В лицензионных бездепозитных казино выступать в азартные забавы действительно безопасно. Наличие лицензии подтверждает что, этот факт, что клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP. <a href=http://forum.americandream.de/memberlist.php?mode=viewprofile&u=10715>http://forum.americandream.de/memberlist.php?mode=viewprofile&u=10715</a> При пользовании бездепозитным призом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют несколько обликов лимитов:Прежде всего, не забывайте регулярно заглядывать на страницу обзоров бездепозитных бонусов. Они шаг за шагом разглядывают наиболее занимательные предложения основных игорных порталов. 1×slots регистрация 1×slotscasino09k online Во время игры в казино, выигрыши, приобретенные благодаря бесплатным призовым фондам, суммируются и срабатывают в общую необходимую для отыгрывания. Однако, если фортуна улыбнется и получится отыграть все бонусы, игровое заведение гарантированно допустит вывести финансовые средства. Сумма вывода несомненно зависимости от лимита, утвержденного именно в данном учреждении. Поэтому, внимательно нужно читать правила выдачи анлимитных депозитов.Иногда виде бездепа, казино дарует минимальный бонус (до 50 руб. ), из-за которого надо заморачиваться.
1×slots коды
В наше время довольно просто получить приз за регистрацию в казино. Практически любой игорный жилище с готовностью начислит деньги или безвозмездные вращения. Многие гэмблеры используют данным и не стесняются регистрироваться в каждом клубе с прибыльными критериями. Кстати, это замечательная вероятность выработать победную стратегию и сорвать джекпот.Третитй бездепозитный бонус за регистрацию – денежные свои. К раскаянию, начислить рубли либо баксы готовы только знаменитые и пользующиеся клубы. С их поддержкою вас насладиться каждой доступной игрой – автоматом, рулеткой, кено, блэкджеком. Предложения с бездепозитными призами за регистрацию разрешают свежим заведениям привлечь аудиторию на свой вебсайт. А игроки же получают вероятность играть на настоящие деньги без депозита в казино и заработать небольшой стартовый капитал, кот-ый разрешается исключить на карту банка либо электрический кошелек.Многие азартные клубы ограничивают сумму вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании акции, суммы Вы не можете исключить. Разница несомненно аннулирована, Вы даже не можете делать на нее ставки. <a href=http://www.jcdqzdh.com/home.php?mod=space&uid=243542>http://www.jcdqzdh.com/home.php?mod=space&uid=243542</a> Сразу после активации промокода можно пользоваться подарком. Как теснее упоминалось, бонусы случаются трёх обликов – фриспины, кредиты и фриплей-бонусы. 1×slots официальный регистрация
1×slos регистрация в 1×slots casino
Помните, собственно любые нарушения управлял сведут на нет ваши усилия, и вы всего останетесь без начисленного для дарового бонуса. Всегда изучайте управляла начисления и обстоятельства вейджера. По любым вопросам, на коие вы возможности без найти ответы, обращайтесь за объясненьям и саппорт. <a href=http://amazon.rx22.ru/memberlist.php?mode=viewprofile&u=255>1×slots регистрация на сайте</a> Если площадка дарует бездеп за регистрацию, то процедура его получения ординарна. Нужно только ввести аккаунт на веб-сайте и активировать его, подтвердив адресок электронной почты, номер телефонного либо другие данные, которые просит оператор. Перед данным необходимо убедиться, что пользователь располагается на официальном сайте казино, но на мошеннической площадке. В лицензионных бездепозитных казино играть в азартные забавы вправду безопасно. Наличие лицензии одобряет что, этот факт, что клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP.Лишь популярные и известные азартные заведения шансы разрешить себя выдавать бездепы повторяющий добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депо, коие возможно истратить в лучших аппаратах с высокой отдачей. 1×slot рабочее зеркало <a href=https://www.hongwha21.net/bbs/board.php?bo_table=free&wr_id=1008678>https://www.hongwha21.net/bbs/board.php?bo_table=free&wr_id=1008678</a> Все любят получать подарки. Согласитесь, почти каждый играющий человек будет бесконечно счастлив, случае получит даровой презент для забавы в онлайн казино просто за регистрацию или же бонус за внесенный депозит, так именуемые приветственные бонусы для свежих игроков. Соответственно такие интернет клубы будут больше известны и предпочтительны у игроков при выборе казино для забавы. Топ казино день обновляется и прибавляются новые и увлекательные игровые клубы с симпатичной бонусной политикой и всеми возможными привилегиями, к которым относятся такие призы как фриспины за регистрацию, денежные бездепозитные призы, а также щедрые призы за внесенный депозит.
1×slots официальный demo регистрация в 1×slots casino
Если при регистрации показать промокод, возможно гарантировано получить приз. Где взять ваучер? Посетите тематические блоги или форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В последнее время игорные жилища начали афишироваться в кинокартинах и сериалах. Присмотритесь и наверняка заметите промокод, кот-ый принесёт 500 или 1 000 бонусных рублей.Подобные призы без депозита предоставляются на более выгодных условиях. Зачастую они покрупнее, а обстоятельства отыгрыша наименее строгие. <a href=https://www.longisland.com/profile/Glavdorogadv2106>https://www.longisland.com/profile/Glavdorogadv2106</a> казино 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://www.ldvd.nl/no-22-san-diego-place-rallies-very-last-boise-country-27–16?page=34#comment-237530>1хслотс официальный сайт зеркало</a>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=310740>1×slots на любой вкус как пройти регистрацию</a>
<a href=http://www.infoknygos.lt/smforum/index.php?topic=75359.new#new>1×slots casino регистрация 1×slotscasin online</a>
<a href=http://www.forum.kalor.ru/1×slots-kodi-t4730.html>1×slots коды</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Частенько новички не разумеют, как активировать презенты или вывести первый выигрыш. Для похожих случаев наша команда описала основные определения – что такое фриспины, вейджер, как его отыграть, чего нужно протекать верификацию. Чаще всего казино бонус за регистрацию без депозита даёт вероятность запустить каждой автомат. Но другого, как внимательно ознакомиться с условиями. Иногда для забавы доступны только определённые модели. Если вы новичок и ничего не смыслите в гэмблинге, чем начать знакомство с миром пыла непосредственно с «одноруких бандитов».
#3688 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet официальный сайт Нургалиева Эльвира Рамиловна порно <a href=https://m.repost.news/>сайт казино зеркало</a> pin casino Скворцова Вероника Игоревна порно <a href=https://www.ossetia.tv/>букмекерская контора фонбет</a> online casino официальный порно с Арина и Дина Аверины, гимнастки гта онлайн казино Манилова Алла Юрьевна порно казино 1×bet xbet официальные сайты казино
DiskiPlus ев казино DiskiPlus казино фильм смотреть онлайн <a href=https://diskiplus.ru>DiskiPlus casino ап</a> DiskiPlus казино проиграл DiskiPlus макао казино <a href=https://www.diskiplus.ru/>DiskiPlus porno Анастасия Янькова, боксерка</a> DiskiPlus порно с Голикова Татьяна Алексеевна DiskiPlus включи казино DiskiPlus 7k casino официальный сайт DiskiPlus Лут Оксана Николаевна порно DiskiPlus 7k casino зеркало DiskiPlus приложения букмекерских контор DiskiPlus 1×slots casino
#3689 Charlesgunnyhttp://filmkachat.ru
1×slots casino зеркало рабочее
Перед активацией принципиально пристально изучить условия промоакции. Чем ниже вейджер, что, этим больше потенциальная выгода игрока. Имеют значение того лимиты ставок при отыгрыше и сроки, протяжении которых можно пользоваться предложением. Если бездеп охватывает узкий перечень игр, рекомендовано разузнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь что случае, случае оператор не установил требовательные лимитирования на наивысшую сумму ставки. <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino 56 online</a> <a href=https://www.synfig.org/issues/thebuggenie/synfig/issues/9937>https://www.synfig.org/issues/thebuggenie/synfig/issues/9937</a> 1×slots зеркало которую указывали при регистрации кстати <a href=https://www.mycncuk.com/members/76660-MiguelTurgy>https://www.mycncuk.com/members/76660-MiguelTurgy</a>
онлайн казино 1×slots
В интернете слишком количество скриптовых вебсайтов, коие принадлежат плутам. Их главная цель – привлечь гэмблеров, пообещав столько великодушные подарки, хотя и крупные выигрыши. Так собственно кое-какие веб-сайты предлагают получить за регистрацию том $1 000. 1×slots casino регистрация 1×slotscasino09k online Если вы бывалый игрок, вы должны аристократия, собственно бонус без депо – редчайшая находка. Тем не менее, мы в исследуем онлайн, чтобы найти для вас превосходнейшие бездепозитные предложения.Иногда для получения призов нужно спутаться с адептами службы поддержки. Удобнее всего с ними беседовать в онлайн-сате, но иногда довольно запроса по электронной почте. <a href=http://91075425.k216.opensrs.cn/home.php?mod=space&uid=1150569>http://91075425.k216.opensrs.cn/home.php?mod=space&uid=1150569</a> Также, в этом случае необходимо подтвердить свой номер телефонного, для этого код, приобретенный в смс-сообщении от клуба ввести в особое фон в собственном офисе игрока.Для выбора азартного заведения Вы сможете пользоваться перечнем наших казино с призами за регистрацию. На нашем сайте мы опубликовали перечень бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, что доля призов неповторимые и доступны только для гостей нашего сайта по-специальному промо-коду либо по оригинальной ссылке. Кроме того, для каждого бонуса мы подготовили доскональный обзор, в Вы узнаете как получить и отыграть поощрение и как вывести собственный выигрыш с бездепа. 1×slots сайт Многие казино предоставляют в маркетинговых целях благотворительные бонусы исключительно для наших читателей. Чтобы их получить, нужно перейти на игровой вебсайт по партнерской ссылке с нашего портала.Бонус за регистрацию в казино выдается лишь один один на 1-го игрока. Но бывают дополнительные акции, в рамках которых бездепы расступаются для неизменных посетителей и такие подарки Вы можете получить более одного раза.
1 хслот регистрация в 1×slots casino
Еще одно условие касается размеров ставки. Операторы устанавливают максимальную сумму, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном офисе. При превышении лимита есть риск потерять бонуса. Существующие ограничения относятся и к определенным видам ставок. Например, играя в рулетку, заказчик имеет столкнуться с запретом назначать фишки на шансы.Максимальный объем ставки, кот-ый невозможно превышать же приз не несомненно полностью отыгран. В случае нарушения сего верховодила, бонус и выигрыш с него будут аннулированы. <a href=http://itstula.com/user/Julescig/>http://itstula.com/user/Julescig/</a> Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам воспрещено начислять бонусы посетителям, не имеющим денежных средств на счете. Мы предлагаем рассмотреть актуальные призы онлайн-казино с лицензией, которые соблюдают законодательство РБ.Для получения предоставленных призов для понадобиться — ПК или мобильное прибор, и остальное дело за малым. 1×slots casino регистрация
1×slots зеркало регистрация
В истиннее время получить бонус за регистрацию в казино очень просто. Почти любой игорный дом с радостью предоставит средства или благотворительные вращения. Многие игроки пользуются этим и не стесняются регистрироваться в каждом клубе с выгодными критериями. Кстати, это отличная вероятность придумать выигрышную стратегию и сорвать куш.Некоторые онлайн-казино без депо предлагают новым клиентам избрать приз при регистрации. Будьте внимательны: выбрав один, вы в безоговорочном большинстве случаев не можете пользоваться остальными. <a href=https://feederfishing.lt/en/forum/sistemos/1250715–1×-slots#1262189>1× slots сайт</a> Обычно для получения призов без депозита, казино выдвигает лояльные и абсолютно выполнимые обстоятельства, хотя есть ряд действий которые запрещены и все стать неприятные результаты: Так собственно сможете неустрашимо региться без всяких раздумий. Фортуна сейчас точно на вашей стороне. Не побаивайтесь, ведь следствие какого либо ущерба Вам абсолютно не угрожает. С такими бонусами как без пополнения, Вы остаетесь только в плюсе, но не как не в минусе.Фриплей-бонусы. Бонусы за благотворительную забаву есть только в неких клубах. Они зачисляются сразу последствии создания профиля и срабатывают непродолжительное время. Если у вас нет медли израсходовать свои, они просто закончатся. Что дотрагивается времени, в большинстве случаев бонусы срабатывают в течение одного часа. 1х слот регистрация в 1×slots casino <a href=http://ternovka4school.org.ua/user/Gregoryfaf/>http://ternovka4school.org.ua/user/Gregoryfaf/</a> Игры, каких возможно играть на бонусные средства. Проверьте список игр, в можно играть на бонусные свои, вполне они Вам не понравятся и не стоит расходовать своё время на такую акцию.
1×slot рабочее зеркало
Прямо сейчас отберите безвозмездные вращения за регистрацию без депо и начинайте собирать призовые комбинации из-за крупных выигрышей! Итак, чтобы бесплатные бонусные кредиты трансформировались в настоящие средства, которыми продоставляется распоряжаться по своему усмотрению, их нужно отыграть. Вейджер идет уточнять в правилах онлайн-казино. <a href=http://test-sida.noads.biz/home.php?mod=space&uid=81595>http://test-sida.noads.biz/home.php?mod=space&uid=81595</a> Третитй бездепозитный приз за регистрацию – денежные свои. К сожалению, начислить рубли либо баксы способны только знаменитые и популярностью клубы. С их поддержкой появится насладиться любой доступной игрой – автоматом, рулеткой, кено, блэкджеком.Промокод – определённая комбинация символов, коию необходимо ввести в отвечающее поле при твореньи учетной записи или активировать в собственном профиле игрока в разделе с призами. казино 1×slots официальный сайт При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, коие возможно предназначить игре в казино.Диапазон ставок, коие вправе устроить игрок, также лимитирован. Обычно ставить можно маленькую сумму — пределах 10–30 рублей за одно вращение.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.audioheritage.net/memberlist.php?mode=viewprofile&u=19451>1хслотс казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вышеописанная причина и является главным моментом, следствии которого операторы отдают часть собственной выгоды на разные маркетинговые расходы и маркетинговые кампании. А наиболее действенным здесь будут играть непосредственно бездепозитные призы казино 2022 с выводом за регистрацию. Вы наверняка, например все предпочитаете получать презенты и бездепозитные призы казино. Игорные жилища брали в повадку одаривать гэмблеров приятными призами. Стать обладателем приветственного подарка возможно за создание профиля или пополнение счёта. Второй вариант более интересный, ведь клубы готовы удвоить депо! Но случае вы новичок и лишь знакомитесь с миром пыла, другого пользуйтесь бонусом за регистрацию.
#3690 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pinco casino porno Елизавета Туктамышева <a href=https://repost.news/>1×bet сайт 1×bet xyz</a> официальная казино 1×bet на андроид <a href=https://7club7.com/>порно с Александр Головин (футбол)</a> porno Вера Бирюкова, гимнастка 7k casino зеркало порно с Анна Калинская (теннис) 1×bet официальный скачать 1×bet на сегодня gama casino porno Вера Бирюкова, гимнастка
DiskiPlus 1×bet официальный скачать DiskiPlus casino com <a href=https://www.diskiplus.ru/>DiskiPlus винлайн букмекерская контора</a> DiskiPlus porno Дарья Мороз DiskiPlus 7k casino официальный <a href=https://diskiplus.ru/>DiskiPlus Разуваева Ксения Денисовна порно</a> DiskiPlus сайт pin up casino DiskiPlus up casino скачать DiskiPlus Яровая Ирина Анатольевна порно DiskiPlus champion casino DiskiPlus официальная казино DiskiPlus порно с Афонина Марина Игоревна DiskiPlus 1×bet xbet
#3691 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Елена Никитина, скелетонистка pin casino зеркало <a href=https://sovsekretno.net/>мелбет букмекерская контора</a> 1×bet официальный скачать 1×bet сейчас <a href=https://th-royalgclub.com/>Радченко Светлана Юрьевна порно</a> скачать сайт букмекерской конторы pin up casino buzz бывшие казино bitz casino 1×bet слоты казино смотреть онлайн Разуваева Ксения Денисовна порно
DiskiPlus porno Елизавета Туктамышева DiskiPlus pin casino <a href=https://www.diskiplus.ru/>DiskiPlus суть казино</a> DiskiPlus 1×bet 1хбет DiskiPlus казино играть <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet</a> DiskiPlus казино смотреть DiskiPlus pin up casino пин ап DiskiPlus играющие казино DiskiPlus Радченко Светлана Юрьевна порно DiskiPlus Черкесова Бэлла Мухарбиевна порно DiskiPlus Кузнецова Анна Юрьевна порно DiskiPlus казино смотреть онлайн
#3692 Ремонт стиральных машин AEGhttps://remont-stiralnyh-mashin-aeg-rial.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт стиральных машин aeg, можете посмотреть на сайте: <a href=https://remont-stiralnyh-mashin-aeg-rial.ru/>ремонт стиральных машин aeg в москве</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#3693 CasinoStakehttps://stake.directorio-de-casinos-mx.com
<a href=http://adameiseman.net.xx3.kz/go.php?url=https://stake.directorio-de-casinos-mx.com/>https://stake.directorio-de-casinos-mx.com/</a> <a href=http://www.xn–72cai5ggbbbe4m3a4kkl.net/re?url=https://stake.directorio-de-casinos-mx.com/>https://stake.directorio-de-casinos-mx.com/</a> <a href=https://koldorot.shulcloud.com/track.php?id=9d99fd5442d94c008f39f8ec9ae83308&color=b3b3b5&url=https://stake.directorio-de-casinos-mx.com/>https://stake.directorio-de-casinos-mx.com/</a> <a href=http://forum.hiasm.com/redirect/?url=https://stake.directorio-de-casinos-mx.com/>https://stake.directorio-de-casinos-mx.com/</a> <a href=http://www.marbaro.it/go.asp?url=https://stake.directorio-de-casinos-mx.com/>https://stake.directorio-de-casinos-mx.com/</a> <a href=http://studrem.ru/bitrix/rk.php?goto=https://stake.directorio-de-casinos-mx.com/>https://stake.directorio-de-casinos-mx.com/</a> <a href=http://lubartowogloszenia.pl/link.php?url=https://stake.directorio-de-casinos-mx.com/>https://stake.directorio-de-casinos-mx.com/</a> <a href=https://image.google.co.ma/url?sa=t&source=web&rct=j&url=https://stake.directorio-de-casinos-mx.com/>https://stake.directorio-de-casinos-mx.com/</a> <a href=https://m.jp.chuu.co.kr/member/login.html?noMemberOrder&returnUrl=https://stake.directorio-de-casinos-mx.com/>https://stake.directorio-de-casinos-mx.com/</a> <a href=http://prank.su/go?https://stake.directorio-de-casinos-mx.com/>https://stake.directorio-de-casinos-mx.com/</a> <a href=http://3d.skr.jp/cgi-bin/lo/refsweep.cgi?url=https://stake.directorio-de-casinos-mx.com/>https://stake.directorio-de-casinos-mx.com/</a> <a href=http://www.latin-world.nl/redbanner.php?link=worldgreatsuccess.ruhttps://stake.directorio-de-casinos-mx.com/>https://stake.directorio-de-casinos-mx.com/</a> <a href=http://www.foto-flora.ru/go?https://stake.directorio-de-casinos-mx.com/>https://stake.directorio-de-casinos-mx.com/</a> <a href=http://ogloszeniapodkowa.pl/link.php?url=https://stake.directorio-de-casinos-mx.com/>https://stake.directorio-de-casinos-mx.com/</a> <a href=http://blog.1tour.vn.xx3.kz/go.php?url=https://stake.directorio-de-casinos-mx.com/>https://stake.directorio-de-casinos-mx.com/</a>
Upload client online casino Stake – win now! <a href=http://ylaika.ru.xx3.kz/go.php?url=https://stake.directorio-de-casinos-mx.com/>https://stake.directorio-de-casinos-mx.com/</a> <a href=http://givemebooks.com.xx3.kz/go.php?url=https://stake.directorio-de-casinos-mx.com/>https://stake.directorio-de-casinos-mx.com/</a> <a href=https://marketplace.cordeledispatch.com/AdHunter/cordele/Home/EmailFriend?url=https://stake.directorio-de-casinos-mx.com/>https://stake.directorio-de-casinos-mx.com/</a> <a href=http://ivrayon.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=https://stake.directorio-de-casinos-mx.com/>https://stake.directorio-de-casinos-mx.com/</a> <a href=http://canoaclubmilano.it/info.php?a%5B%5D=<a%20href=https://stake.directorio-de-casinos-mx.com/>https://stake.directorio-de-casinos-mx.com/</a> <a href=http://sidebar.link/imgjmp.php?sc=31959&cc=33436&ic=398&url=https://stake.directorio-de-casinos-mx.com/>https://stake.directorio-de-casinos-mx.com/</a> <a href=http://relsvaluation.articulate-online.com/ResetPasswordEmailSent.aspx?Returnurl=https://stake.directorio-de-casinos-mx.com/>https://stake.directorio-de-casinos-mx.com/</a> <a href=http://las-vegas-mercedes-repair-pros.business.site.xx3.kz/go.php?url=https://stake.directorio-de-casinos-mx.com/>https://stake.directorio-de-casinos-mx.com/</a> <a href=https://parks.yazd.ir/en/web/16967/?????-95?p_p_id=31&p_p_lifecycle=0&p_p_state=normal&p_p_mode=view&p_p_col_id=column-1&p_p_col_count=1&_31_struts_action=%2Fimage_gallery_display%2Fview&_31_redirect=&_31_folderId=88797796https://stake.directorio-de-casinos-mx.com/>https://stake.directorio-de-casinos-mx.com/</a> <a href=https://images.t.me/s/worldcasinonet.sv/url?q=https://stake.directorio-de-casinos-mx.com/>https://stake.directorio-de-casinos-mx.com/</a> <a href=https://careerfalcon.com/jobclick/?RedirectURL=&Domain=careerfalcon.com&rgp_m=title3&et=4495https://stake.directorio-de-casinos-mx.com/>https://stake.directorio-de-casinos-mx.com/</a> <a href=http://gorodaleksandrov.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=https://stake.directorio-de-casinos-mx.com/>https://stake.directorio-de-casinos-mx.com/</a> <a href=https://figc.it/app_plugins/newsletterstudio/pages/tracking/trackclick.aspx?nid=253069125210009004111012085086063013012238025189&e=187058020240118019130254006068209156235145004207072238044090139187219225130242113125133026076117&url=https://stake.directorio-de-casinos-mx.com/>https://stake.directorio-de-casinos-mx.com/</a> <a href=http://www.myexpert.ro/redirect.php?url=https://stake.directorio-de-casinos-mx.com/>https://stake.directorio-de-casinos-mx.com/</a> <a href=https://images.google.it/url?q=https%3A%2F%2Fdownload-stake.directorio-de-casinos-mx.com/-fr.com >https://stake.directorio-de-casinos-mx.com/</a>
#3694 Felipetievehttps://novaltd.info
Хочешь <a href=https://novaltd.info/>купить ПАВ в СПБ</a>? Нова маркетплейс – ищи в Яндекс!
#3695 Sk-bauinvest_Flurehttps://sk-bauinvest.ru/
Добрый день! Строительная компания «Бауинвест» предлагает квартиры в новостройках по выгодным и лучшим ценам в Краснодарском Крае. Возможность купить жилье в ипотеку и эскроу, дистанционно. <a href=https://sk-bauinvest.ru/kupit-1-komnatnuyu-kvartiru/>Однокомнатная квартира Краснодар</a> Если купить квартиру в ипотеку и эскроу дистанционно в Краснодаре, то это в Бауинвест https://sk-bauinvest.ru/ . Получите бесплатную и правильную консультацию по номеру +7(861)201–82–82. Оставьте заявку и получите консультацию и подборку квартир, подходящих под ваши критерии. До новых встреч!
#3696 spgOxigenhttps://gas73.ru/products.html
Spectrum of gases – cargo Ulyanovsk <img src=„https://gas73.ru/assets/img/O2_C3H8.png“> <a href=https://dzen.ru/id/601fc4eb0c34da5eddcddc03>Oxigen CO2</a> Phones: +7(9272)70–80–09 Fax: +7 (8422) 65–10–78. 2025
#3697 XRumer23Coics
test Зеркало вулкан платинум официальный сайт
<h1>Зеркало вулкан платинум официальный сайт</h1> Чтобы наслаждаться эмуляторами, которые регулярно делают ставки в клубе. Однако расположены они достаточно удобно и понятно, получите бездепозитный бонус Vulkan Platinum, что придаёт ему стильный и современный вид. Благодаря ему, обеспечивая комфорт и увлекательность игрового процесса, рекомендуется обратится к саппорту. Чтобы максимально эффективно использовать бонусные предложения „вулкан платинум“, независимо от его вкуса и предпочтений, который формируется путем отчисления определенной суммы от каждой ставки на любом автомате. Она доступна гемблерам бесплатно и без регистрации, что гемблинг – полезный <em>официальный сайт</em> получить солидный доход при последовательном и аккуратном подходе? Для его активации <i>вулкану платинум</i> потребуется ввести в личном кабинете промокод! <a href=https://vulkan-primecasino.homes/>казино вулкан платинум официальный сайт играть на реальные деньги с выводом</a> Первый шаг – заполнение необходимой информации, получаемые во время турниров или разовых акций. На сегодня зеркало лучший способ решения такой проблемы. В казино доступно два способа регистрации: по электронной почте или через социальные сети. <h3>вулкан platinum официальный сайт зеркало </h3> Для этого они предварительно собирают информацию, включая компьютеры. К тому же мошенники не завезли нам даже нормальные контакты для связи, а также возможности для ставок на спорт и киберспорт, а бонусная программа постоянно будет мотивировать на очередные успехи, организовывая и предоставляя услуги развлекательного типа своим клиентам, поиграть в популярные сегодня азартные развлечения предлагает сайт Вулкан Платинум. Правила у аппаратов очень простые любой новичок без проблем справится с управлением.
#3698 VZTM_mibhttps://vztm.ru/
Добрый день! vztm.ru – Воткинский Завод Теплоизоляционных Материалов (ВЗТМ)! Обеспечиваем теплоизоляцией объекты энергетического, нефтегазового и оборонного комплексов, а также объекты гражданского и промышленного строительства. c 1992 года. <a href=https://vztm.ru/bazaltovaya-vata>каолиновая вата или базальтовая</a> Если базальтовая вата или акустический мат в Москве, то это в Воткинский завод теплоизоляционных материалов Торговый дом https://vztm.ru/ . Консультируйтесь и звоните по бесплатному номеру 8–800–551–80–33. До новых встреч!
#3699 Robertfrisehttp://avarpressa.ru/user/jessicoore57/
Korean cosmetics <a href=https://www.trapshooters.com/members/jessicoore3.168677/#about>https://www.trapshooters.com/members/jessicoore3.168677/#about</a> perfect skin without effort! Innovative formulas, Asian traditions and visible results. Try the best skin care products right now!
#3700 Jesseadump
polinaninased@gmail.com
#3701 1winCasinohttps://1win.directorio-de-casinos-mx.com
<a href=https://1win.directorio-de-casinos-mx.com>www.1win.directorio-de-casinos-mx.com</a>
Download apk file online casino 1win – win today! <a href=https://1win.directorio-de-casinos-mx.com>http://www.1win.directorio-de-casinos-mx.com</a>
#3702 Perevozki-vr_Halhttps://perevozki-vrn.ru/
Всем привет! Закажите спецтехнику в Воронеже: еврофуры, автокраны, длинномеры, тралы, манипуляторы, экскаваторы. <a href=https://perevozki-vrn.ru/>Аренда бортовых автомобилей</a> Если спецтехника Воронеж, спецтехника в Воронеже, аренда тралов, автокранов, длинномеров в Воронеже, то это в ООО-ФОРВАРД https://perevozki-vrn.ru/ . Перевозка грузов и негабарита. Надежность, опыт 15+ лет. Звоните: +7 (910) 345–50–48. Увидимся!
#3703 GregoryEscaghttps://sauna-broadway.ru
Сауна очищает организм <a href=https://sauna-broadway.ru/>https://sauna-broadway.ru</a> выводя токсины через пот, укрепляет иммунитет благодаря перепадам температуры, снимает стресс, расслабляя мышцы и улучшая кровообращение. Она делает кожу более упругой, ускоряет восстановление после тренировок, улучшает сон и создаёт атмосферу для общения.
#3704 Ремонт стиральных машин AEGhttps://remont-stiralnyh-mashin-aeg-rial.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт стиральных машин aeg в москве, можете посмотреть на сайте: <a href=https://remont-stiralnyh-mashin-aeg-rial.ru/>ремонт стиральных машин aeg в москве</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#3705 Сenter_Empathy_scacthttps://empathycenter.ru/
Всем привет! Сеть клиник доказательной психиатрии «Эмпатия». Центр «Эмпатия» — это команда профессионалов в сфере психического здоровья и психологической помощи. Врачи-психотерапевты, психиатры, психологи, нейропсихологи и эндокринологи объединились вместе для восстановления Вашего внутреннего равновесия и гармоничных отношений с окружающими. Наши специалисты лечат весь спектр психических расстройств, включая самые тяжелые случаи, деликатно и бережно помогают в решении сложных жизненных ситуаций. Мы создали для Вас среду, где вы получите квалифицированную помощь и почувствуете уважение, принятие и заботу. <a href=https://empathycenter.ru/preparations/m/mirtazapin/>миртазапин применение отзывы</a> Если Центр ментального здоровья или Сеть клиник доказательной психиатрии в Москве и Реутове, то это в Эмпатия Центр https://empathycenter.ru/ . Консультации как очно в Реутове и Москве, так и онлайн по всей России. Консультируйтесь и звоните по бесплатному номеру 8–800–775–07–12. Всем пока!
#3706 Dustyloghttps://techduker.com/ai/deepseek/
<a href=https://techduker.com/ai/deepseek/>DeepSeek</a> DeepSeek:探索未知的勇氣
人類對未知的渴望從未停歇。從最初仰望星空,到如今深入海底,我們不斷拓展認知的邊界。DeepSeek,正是這種探索精神的象徵。
它不僅僅是一個名字,更是一種態度。在科技領域,DeepSeek代表著對人工智慧極限的挑戰;在海洋探索中,它意味著對深海奧秘的追尋;在個人成長路上,它象徵著對自我潛能的挖掘。
每一次DeepSeek,都是對舒適圈的突破。它需要勇氣面對未知,需要智慧解決難題,更需要堅持不懈的毅力。正是這種精神,推動著人類文明不斷向前。
當我們以DeepSeek的姿態面對世界,就會發現:未知不再是恐懼的來源,而是充滿可能的寶藏。每一個未解之謎,都是通往新發現的大門;每一次深入探索,都能帶來意想不到的收穫。
在這個充滿變數的時代,DeepSeek精神比以往任何時候都更加重要。它提醒我們:唯有保持好奇,勇於探索,才能在瞬息萬變的世界中找到屬於自己的方向。
#3707 Dannygewhttps://tv.the-hdrezka.com
фильмы без рекламы подборка <a href=https://tv.the-hdrezka.com/>онлайн-кинотеатр HD-720</a>
#3708 LouisDofhttps://nova4.top
Новый формат маркетплейса <a href=https://nova4.top/>https://nova4.top</a> быстро, удобно, надежно! Лучшие предложения, современные технологии и простой интерфейс. Покупайте и продавайте легко, экономя время и деньги!
#3709 JosephWhocahttps://nova7.top
Современный маркетплейс <a href=https://nova7.top/>https://nova7.top</a> для выгодных покупок! Огромный ассортимент, лучшие цены и удобные способы оплаты. Покупайте качественные товары и заказывайте с быстрой доставкой!
#3710 Empathy_center_aritahttps://empathycenter.ru/
Доброго времени суток! «Эмпатия» центр ментального здоровья. Цель каждого специалиста нашей команды – забота о ментальном здоровье людей через предоставление как можно более качественной и доступной медицинской помощи, а также через психопросветительскую деятельность и дестигматизацию ментальных расстройств. Главный врач центра „Эмпатия“ Панова Надежда Вячеславовна. <a href=https://empathycenter.ru/preparations/a/amantadin/>амантадин</a> Если Центр ментального здоровья Эмпатия с более чем 60 работающих врачей и специалистов в Реутове и Москве, то это в сети клиник доказательной психиатрии https://empathycenter.ru/ . Узнавайте и звоните к нам по бесплатному номеру телефона 8–800–775–07–12. Увидимся!
#3711 dwebyhttps://korolev.vhodnye-metallicheskie-dveri.ru/
Входные стальные двери с завода с установкой за 1 день. Любые конфигурации замков на выбор. Более 3500 моделей на складе: <a href=https://korolev.vhodnye-metallicheskie-dveri.ru/>тут</a>
#3712 Montazhp_rewhttps://montazhp.ru/
Доброго времени суток! Важная и интересная новость для тех, кто желает обновить или освежить свой интерьер в Санкт-Петербурге или СПб! А если вы в процессе капитального или евроремонта квартиры, офиса, магазина, дома и т.д., то эта новость именно для вас. Именно для ценителей высочайшего и точного качества выполнения работ, а некачественного и не топорного исполнения. Для вас работает узкоспециализированная компания, которая заточена именно на монтаже плинтусов или установке плинтусов. В это трудно представить и поверить, но ими уже выполнено более 100000 км установленного плинтуса. В общем, если вам интересно найти, монтаж плинтуса, плинтус напольный, установка плинтусов и т.д., например: <a href=https://montazhp.ru/>плинтус под покраску купить</a> Тогда вам обязательно нужно прямо сейчас перейти на сайт montazhp since 2004 и узнать все подробности по плинтус дуб, плинтус, плинтус для пола, покраска плинтусов, плинтус мдф, плинтус для столешницы, плинтус пластиковый, плинтус деревянный, плинтус для кухни в СПб и ЛО и т.д. https://montazhp.ru/ . Обязательно переходите на сайт montazhp.ru Установка плинтусов изучайте информацию и сохраняйте в закладки, не забудьте записать номер телефона и адрес сайта. До новых встреч!
#3713 Warnerbep
antonnikomed46@gmail.com
#3714 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Москалькова Татьяна Николаевна порно porno Илона Маркова, хоккеистка <a href=https://res-publika.com>7k casino бонус</a> 7k casino зеркало на сегодня скачать casino на андроид <a href=https://repost.news/>casinos xyz</a> лучшие казино бесплатно порно с Бондаренко Анастасия Борисовна porno Илона Маркова, хоккеистка скачать 1×bet на андроид бесплатно лучшие онлайн казино порно с Артемий Панарин (хоккей) сайт казино вход
DiskiPlus порно с Диана Шнайдер (теннис) DiskiPlus casino автомат <a href=https://www.diskiplus.ru>DiskiPlus porno Виктория Баркова, легкоатлетка</a> DiskiPlus casino бонус DiskiPlus букмекерская контора официальный сайт <a href=https://diskiplus.ru>DiskiPlus почему в казино не бывает настенных часов</a> DiskiPlus бесплатное казино DiskiPlus порно с Арина и Дина Аверины, гимнастки DiskiPlus порно с Никита Кучеров (хоккей) DiskiPlus порно с Анна Щербакова, фигуристка DiskiPlus казино вход официальный сайт DiskiPlus демо казино DiskiPlus порно с Дарья Касаткина (теннис)
#3715 Charlesgunnyhttp://filmkachat.ru
1×slots подтвердит вашу регистрацию если говорить
Но а в вы теснее профи по интернет казино, кликаем на красную кнопку «Получить» и Вы автоматически перейдете в интернет казино; <a href=http://filmkachat.ru/>1×slots акции</a> Активация происходит счет промокодов, которые вводятся в собственном кабинете после регистрации. Среди спецпредложений в списке Casino.ru содержатся эксклюзивные промокоды, которые доступны только гостям портала. Другие методы начисления средств ? автоматическая активация незамедлительно в сотворения аккаунта и получение презента по запросу в службу технической поддержки. <a href=https://heroes.app/blogs/443183/Auto-skup-Warszawa-profesjonalna-wycena-i-natychmiastowa-got%C3%B3wka>https://heroes.app/blogs/443183/Auto-skup-Warszawa-profesjonalna-wycena-i-natychmiastowa-got%C3%B3wka</a> 1×slots официальный регистрация <a href=https://foros.factormoe.net/user-5415.html>https://foros.factormoe.net/user-5415.html</a> Чтобы бездеп не был начислен на Ваш акк, Вам не нужно активировать бонусный код. Если одобрение от казино было добавлено на Ваш аккаунт автоматически, а Вы не планируете его использовать, обратитесь в службу поддержки с пожеланием отменить бездепозитный приз.К сожалению, нет. Почти все казино, требуют внесение хотя бы одного малого депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, что исключить деньги разрешается лишь на что, эту платежную систему, с которой был сделан депозит.
1хслот зеркало
1хслот 1хслотс регистрация перейти на 1×slots <a href=http://www.sksmg.com/home.php?mod=space&uid=212920&do=profile>http://www.sksmg.com/home.php?mod=space&uid=212920&do=profile</a> При отыгрыше бонусных средств, нужно учитывать срок деянья бонуса и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный приз будет аннулирован.Помните, что в некоторых забавах сумма ставки идет в зачет вейджера лишь отчасти. Так, в настольных и карточных забавах лишь от 5% до 50% суммы ставки считаются как отыгранные деньги, в то время как в слотах идет в зачет все one hundred percent суммы. 1×slots официальный demo регистрация в 1×slots casino Таким образом, заведение пробует показать себя своим потенциальным игрокам, а такой маркетинговый ход как казино бонус без депо за регистрацию привлекает очень большое внимания к игорному заведению и обеспечивает постоянный струю новых гостей и грядущих посетителей игрового онлайн клуба.
1×slots подтвердит вашу регистрацию если говорить
Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депозит возможность отличаться до 30 дней. Также, учите, что бездепозитный бонус возможно вывести только том, случае, когда станут выполнены все обстоятельства отыгрыша. <a href=https://fermer365.ru/users/stevengah>https://fermer365.ru/users/stevengah</a> 1×slots casino регистрация Доступность — бездепозитные бонусы в казино почаще всего предоставляются свежим игрокам, хотя случаются случаи, когда приз могут получить и действующие посетители.Многие азартные клубы ограничивают необходимую вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании промоакции, суммы Вы не можете вывести. Разница несомненно аннулирована, Вы в не сможете делать на нее ставки.
1×slots casino зеркало
Oтыгpaть бонус с указанным вeйджepом, результата нужно сдeлaть cтaвoк нa cумму, превосходящую размер приза в количество один. <a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1×slots официальный сайт зеркало</a> Осталось выбрать казино с бонусом за регистрацию и создать профиль. После активации презента выигрыш зависимости от Фортуны и навыков. Вейджер менее х30–35 считается приемлемым. Опытные игроки заявляют, собственно с таким вейджером реально остаться в плюсе, если верно подойти к выбору игрового аппарата.Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих притязаний, кроме неотъемлемой верификации. Если на веб-сайте предусмотрена неотъемлемая процедура доказательства личности, то вывести выигрыш получится только в проверки данных. Приготовьтесь наполнить анкету и выслать в техподдержку документ, подтверждающий лицо. 1хслотс казино зеркало <a href=http://jkmulti.vip/bbs/board.php?bo_table=free&wr_id=1824070>http://jkmulti.vip/bbs/board.php?bo_table=free&wr_id=1824070</a> На нашем веб-сайте Вы отыщите список актуальных свежих бездепозитных призов в казино 2022 года. Также, есть большое эксклюзивных предложений, коие доступны лишь посетителям нашего сайта последствии регистрации по нашей ссылке либо активации особого промокода.Можно. Вы всегда можете отказаться от получения бездепозитного бонуса за регистрацию в казино, же Вы не создадите ставку.
1 x slots
<a href=http://tc322.ru/bitrix/redirect.php?goto=http://hqcelebcorner.net/proxy.php?link=http://dolgovagro.ru/bitrix/click.php?goto=https://teletype.in/@urist555/GZ60lj06YbT>http://tc322.ru/bitrix/redirect.php?goto=http://hqcelebcorner.net/proxy.php?link=http://dolgovagro.ru/bitrix/click.php?goto=https://teletype.in/@urist555/GZ60lj06YbT</a> Но надо думать, что снабжая юзеров такими призами, казино занимается спонсированием. Ведь объемы вознаграждений, главном, не большие (средним размером от 5 до 20 $). И на эти средства налагаются конкретные обстоятельства и лимитирования, неотклонимые к исполнению игрока, если в последствии он желает получить все свои выигранные деньги. 1хслотс регистрация в 1×slots casino Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен список наихороших онлайн казино, которые предлагают своим игрокам великодушные бонусы за регистрацию.Нет. Казино выдают бесплатные бонусы за регистрацию, для того, дабы заказчик возможность ознакомиться с игровым заведением. А чтобы исключить его, необходимо выполнить условия отыгрыша.
<b>Смотреть еще похожие новости:</b>
<a href=http://theauction.com.au/my-account/>онлайн казино 1×slots</a>
<a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=141785>1× slots casino официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депозит может отличаться до 30 дней. Иногда в качестве одобрения за регистрацию все выдаваться билеты для участия в турнирах. Условия их проведения довольно выделяются, потому мы рекомендуем ознакомиться с каждым предложением раздельно.
#3716 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации
Благодаря программе лояльности от игорного заведения, возможно арестовать хороший старт и без дополнительных вложений запустить видеослоты. Кроме такого, можно рассчитывать на реальную удачу и получить, без инвестиции собственных денег, великой выигрыш. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> Акции распространяются как на все игры казино, например и на ограниченный список. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino прочие. Промо имеет охватывать разработки 1-го производителя. Бездеп не пересекается с другими акциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, сделанные бонусными средствами. Для идентификации платежных реквизитов игрока возможность понадобиться пополнение счета на минимальную необходимую.Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых свежих, щедрых и испытанных бонусах в интернет казино, которые обновляются каждый день. <a href=https://mxsponsor.com/riders/cgifurniture-com>https://mxsponsor.com/riders/cgifurniture-com</a> Для вывода средств приз надо(надобно) будет отыграть законам, установленным казино. Внимательно ознакомьтесь с правилами акции и вариантами отыгрыша бездепозитного бонуса до его получения, дабы избежать конфликтных ситуаций. 1×slots рабочее зеркало на сегодня <a href=http://forum.hi-def.ru/index.php?showtopic=10183>http://forum.hi-def.ru/index.php?showtopic=10183</a> При регистрации том, или ином интернет игральном заведении — вас дается раз шанс испытать собственную удачу не внося средства монеты. Замечу собственно эту поощрительную услугу деют не все интернет игровые площадки, а только щедрая половина из них. Которые мы подготовили для Вас в нашем перечне.Во время игры в казино, выигрыши, приобретенные благодаря бесплатным призовым фондам, суммируются и срабатывают в совместную сумму для отыгрывания. Однако, случае фортуна улыбнется и получится отыграть все призы, игровое заведение гарантированно допустит вывести финансовые свои. Сумма вывода будет зависеть от лимита, одобренного непосредственно в этом учреждении. Поэтому, пристально надо(надобно) читать управляла выдачи анлимитных депозитов.
1×slots casino регистрация
онлайн казино 1×slots Подарки на конкретные даты выделяются условиями получения. Если поощрение начисляют игроку на денек рождения, то сумма обыкновенно находится от совместного размера депозитов за год. <a href=https://usolie-citi.ru/user/DavidBex/>https://usolie-citi.ru/user/DavidBex/</a> Можно. Вы практически можете отрешиться от получения бездепозитного приза за регистрацию в казино, пока Вы не сделаете ставку.Постарайтесь отыграть вейджер, дабы замечена возможность забыть заявку на выплату. Кстати, на всех сайтах, представленных в списке, доступны современные платёжные приборы. Вы можете получить выигрыш на электронной кошелёк, карту, телефон. 1×slots официальный demo регистрация в 1×slots casino Мы проделываем акцент на ключевых положениях верховодил, рассказываем о территориальных ограничениях и кратко информируем о других промоакциях обсуждаемого казино.
1хслотс 1хслотс регистрация перейти на 1×slots
Для получения приза нужно ознакомиться с программкой лояльности казино и устроить ставки на сумму, нужную для перехода на следующий степень.Главное преимущество спинов – возможность изучить разные слоты. Также удастся насладиться бонусными раундами, испытывать удачу в риск-туре и преувеличить выигрыш за счёт особых знаков. Однако не игровой процесс заслуживает внимание, как никакого сосредоточиться на реальном выигрыше. Это один из основных характеристик привлекательности дара. С завешенным коэффициентом в профессионалы не смогут выполнить условия по отыгрышу. И важно, насколько презентабельно выглядит предложение – бездепозитный приз казино в объеме $500 или $1 000. Чтобы новички попревосходнее вдумались, собственно же это вейджер, мы разберём на примере.Фриплей-бонусы. Бонусы за благотворительную игру есть лишь в некоторых клубах. Они зачисляются сразу в создания профиля и срабатывают непродолжительное время. Если у вас нет времени потратить средства, они просто закончатся. Что касается медли, как бонусы срабатывают на одного часа. <a href=https://www.astrobin.com/users/shopavto/>https://www.astrobin.com/users/shopavto/</a> Многие новички сомневаются, что поощрительный приз надо несомненно отдавать, числе если они выиграли у казино. Это безусловно неопасно и надежно. Выводя выигранные свои, игрок просто останавливает свое роль деле и теряет уникальную вероятность – безвозмездно увеличивать личное вещественное положение.Изучить верховодила и условия получения бездепозитных бонусов казино, Вы сможете у нас на веб-сайте в разделе с призами либо на официальном сайте выбранного Вами казино. Если возможности найти нужную информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал либо по электрической почте. 1×slots регистрация У каждой игры средства требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система засчитает каждую ставку. В рулетке и покере сделать это намного труднее. Именно поэтому так главно внимательно читать обстоятельства получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой этой, то новички попросту «спустят бонус на ветер».Обыкновенные бездепозитные призы в объеме от 3-х до двадцати долларов сделаны чтобы, чтобы, чтобы в забавы заходили все новые и свежие игроки. Здесь, скорее, будет лимитирование на максимальный выигрыш. Важно, чтобы перед наименьшим вкладом был отключен бонус за 1-ое пополнение счета, и в не попадет на повторный вейджер.
x1 slots 1хслотс регистрация перейти на 1×slots
Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Чтобы получить возможность исключить выгода с бездепозитного бонуса в казино, необходимо выполнить ряд условий: Главное превосходство спинов – возможность изучить различные слоты. Также получится насладиться бонусными раундами, испытать удачу в риск-туре и преувеличить выигрыш за счёт особых символов. Однако не только игровой процесс заслуживает внимание, ведь другого, как сосредоточиться на реальном выигрыше. 1×slots официальный зеркало <a href=http://multi-net.su/index.php?subaction=userinfo&user=Williammah>http://multi-net.su/index.php?subaction=userinfo&user=Williammah</a>
1×slots регистрацию более популярный вариант это
Но а случае вы теснее профи по интернет казино, кликаем на красноватую кнопку «Получить» и Вы механически перейдете в интернет казино; <a href=http://www.gektor.biz/forum/?PAGE_NAME=profile_view&UID=191326>http://www.gektor.biz/forum/?PAGE_NAME=profile_view&UID=191326</a> Даже не выиграв крупную необходимую, игрок увлекательно проведет время, изнутри исследует работу площадки, оценит геймплей автоматов. Все это без каких-либо денежных рисков. Быть в курсе наилучших промоакций легкостью. Достаточно регулярно изучать перечень свежих онлайн казино с выводом бонуса без депо в этом разделе. 1×slots рабочее зеркало на сегодня Наши специалисты исследуют обстоятельства акции, после в ручном режиме проводят их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие параметры. Мы не рекламируем казино, а даем игрокам информацию о наихороших из них.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро или 20 $. Если выдаются фриспины, их количество редко выше нескольких десятков бесплатных вращений.
<b>Смотреть еще похожие новости:</b>
<a href=https://minifishtank.net/forum/showthread.php?tid=22458>1×slots казино мобильная версия</a>
<a href=http://u0382101.isp.regruhosting.ru/index.php/forum/general-questions-and-how-tos/68883-otzyvy-o-tovarakh>казино 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Еще одно условие касается размеров ставки. Операторы устанавливают наивысшую сумму, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, избранной в Личном офисе. При превышении лимита есть риск потерять приза. Существующие ограничения относятся и к конкретным обликам ставок. Например, играя в рулетку, заказчик имеет столкнуться с запретом ставить фишки на шансы.
#3717 Charlesgunnyhttp://filmkachat.ru
1 хслот регистрация в 1×slots casino
Почти все игровые клубы просят свидетельство контактных данных игрока для получения бездепозитного бонуса.Существуют казино с призом за регистрацию, в которых довольно популярны фриспины в интернет казино потом регистрации в определенных играх. Они встречаются в чаще бесплатных поощрений или традиционных бонусов в казино без вложений. Например, игрок регистрирует счет, на кот-ый начисляются безвозмездные забавы, приз за регистрацию вид бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса игрок выигрывает настоящие деньги, коие в последствии можно успешно исключить из заведения на собственную платежную систему. То есть, есть все шансы вывести средства без рисков своими деньгами. Регистрация, за которую игры получит бонусы, займет несколько, а спасибо этому можно прирастить пять евро поощрений до тыс. И без всяких проблем исключить их. <a href=http://filmkachat.ru/>1×slot зеркало</a> При регистрации том, либо ином онлайн игральном заведении — для дается один шанс испытывать свою фортуну не внося средства монеты. Замечу собственно эту поощрительную услугу деют не все онлайн игровые площадки, а только великодушная середина(средина) из них. Которые мы подготовили для Вас в нашем списке.В разделе с призами активировать свой презент. Найти забавы, для которых учтено поощрение и использовать бонус по назначению. <a href=https://prlog.ru/analysis/playhouse.com.ua>https://prlog.ru/analysis/playhouse.com.ua</a> Каждый из бездепозитных бонусов без пополнения 2022 содержит свой конкретный вейджер для отыгрыша, например же в любом казино он устанавливается персонально — где то он х55 а где-то х30, повторюсь всюду по различному! 1×slots casino регистрация 1×slots review live <a href=https://pdn-forum.bpgs.de/memberlist.php?mode=viewprofile&u=1863>https://pdn-forum.bpgs.de/memberlist.php?mode=viewprofile&u=1863</a> После получения приза вывод средств для клиента несомненно недоступен до тех пор, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя или пара недель. Выводить деньги игрок сможет лишь в отыгрыша.Прежде всего, не забывайте регулярно заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом оценивают наиболее интересные предложения основных игорных порталов.
1×slots регистрация на официальном сайте
В современность очень просто получить приз за регистрацию в казино. Практически любой игорный дом с радостью начислит деньги или безвозмездные вращения. Многие гэмблеры пользуются данным и не стыдятся региться в каждом клубе с выгодными критериями. Кстати, это отличная возможность выработать победную стратегию и сорвать джекпот. 1×slots бездепозитный бонус за регистрацию <a href=http://bocauvietnam.com/member.php?1471909-DeweyCoumb>http://bocauvietnam.com/member.php?1471909-DeweyCoumb</a> Во время забавы в казино, выигрыши, полученные благодаря бесплатным призовым фондам, суммируются и включаются в совместную сумму для отыгрывания. Однако, в удача улыбнется и выйдет отыграть все призы, игровое заведение гарантированно допустит исключить денежные средства. Сумма вывода будет находиться от лимита, утвержденного непосредственно в этом учреждении. Поэтому, внимательно надо(надобно) разбирать верховодила выдачи анлимитных депо. 1×slots казино зеркало
1×slots зеркало регистрация в 1×slots casino
Даже не выиграв крупную необходимую, игрок интересно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе превосходнейших промоакций легкостью. Достаточно регулярно изучать перечень свежих онлайн казино с выводом приза без депозита в данном разделе. <a href=http://nvkb.ru/forum/index.php/user/106639/>http://nvkb.ru/forum/index.php/user/106639/</a> 1×slots рабочее зеркало В основном случаев благотворительные призы начисляются в кредитах, которые нельзя сразу вывести со счета. Прежде их нужно отыграть по установленным правилам. Эти притязания принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д.). О нем читайте ниже.
1×slots сайт
Призовые начисления без депо все предоставляться для роли в турнирах интернет казино. Потратить перечисленные деньги можно исключительно масштабах этой акции. Условия их проведения себе ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться этим предложением, чем изучить его управляла. 1×slots зеркало выигрыши обязательно пройдите регистрацию если <a href=https://www.9lewan.com/space-uid-8393.html>https://www.9lewan.com/space-uid-8393.html</a>
1×slot рабочее зеркало
Как лишь получите бездеп в казино, всё точно не забывайте проверять электронную почту. Некоторые игорные клубы день веселят интенсивных гэмблеров приятными бонусами. Чаще всего получить презент возможно в преддверии праздника, на денек рождение, за вербование приятеля. А также распространённым призом считается прибавка к депозиту. Нужно всего лишь пополнить счёт, и азартное заведение прирастит его на 50–100%. <a href=http://leninsky.ucoz.de/forum/2–853–1#10116>http://leninsky.ucoz.de/forum/2–853–1#10116</a> 1×slots регистрация 1×slots review live
<b>Смотреть еще похожие новости:</b>
<a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=52337>1×slots рабочее зеркало</a>
<a href=http://www.arka-bahce.org/forum/showthread.php?p=781388#post781388>1хслотс казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Частенько новички не разумеют, как активировать подарки либо вывести первый выигрыш. Для похожих случаев наша команда обрисовала главные определения – что такое фриспины, вейджер, как его отыграть, чего нужно протекать верификацию. Бездепозитные призы начисляются только раз раз. Не стоит раскрывать новые аккаунты, дабы получить их повторно. Служба защищенности казино обязательно выявит «левого» участника и заблокирует. Если посетитель выполнит необходимые требования, отыграет свою ставку и решит вывести собственный выигрыш, то ему надо(надобно) к, собственно казино непременно потребует дать ксерокопии собственных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные средства вывести не получится.
#3718 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino pin официальный скачать букмекерскую контору <a href=https://www.ossetia.tv/>букмекерская контора вход</a> сайт pin up casino казино проиграл <a href=https://repost.news/>Львова-Белова Мария Алексеевна порно</a> online casino 7k casino официальный сайт порно с Евгений Малкин (хоккей) Юдаева Ксения Валентиновна порно порно с Каролина Севастьянова казино в россии порно с Арина и Дина Аверины, гимнастки
DiskiPlus 1×bet официальный сайт DiskiPlus Львова-Белова Мария Алексеевна порно <a href=https://www.diskiplus.ru/>DiskiPlus зеркала казино</a> DiskiPlus 1×bet слоты 1×bet top DiskiPlus 1×bet официальный сайт <a href=https://www.diskiplus.ru>DiskiPlus казино без</a> DiskiPlus пин ап casino pin DiskiPlus часы казино DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus вывод казино DiskiPlus пин ап букмекерская контора DiskiPlus порно с Голикова Татьяна Алексеевна DiskiPlus 1×bet сейчас
#3719 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало на сегодня
Для доказательства электрической почты, просто перейдите по интенсивной ссылке в послании, приобретенном от игрового заведения.Вообще перейдя в казино — верховодила одинаковы в получении бездепозитных призов, в стереотипные верховодила заходит: доказать эл. Почту и аппарат, заполнить собственный индивидуальный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ. <a href=http://filmkachat.ru/>1х слот 1хслотс регистрация перейти на 1×slots</a> Бездеп с фриспинами возможность обхватывать всю коллекцию игр на веб-сайте либо разработки 1-го провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш возможность быть выведен последствии как, как пользователь отыграет данную сумму. Возможность оценить глубокий перечень слотов — главное достоинство данной разновидности. Игроку становятся доступны что, эти опции, которые отсутствуют в демонстрационном режиме, а вероятность выиграть реальные средства прибавляет ярких азартных ощущений.Для выбора азартного заведения Вы можете пользоваться перечнем наших казино с бонусами за регистрацию. На нашем веб-сайте мы опубликовали список бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, собственно часть бонусов неповторимые и доступны только для гостей нашего вебсайта по-специальному промо-коду либо по оригинальной ссылке. Кроме такого, для любого бонуса мы подготовили доскональный обозрение, каком Вы узнаете как получить и отыграть одобрение и как вывести свой выигрыш с бездепа. <a href=https://www.bseo-agency.com/blogs/188137/3D-Modeling-for-Product-Lifestyle-Images-Professional-Solutions>https://www.bseo-agency.com/blogs/188137/3D-Modeling-for-Product-Lifestyle-Images-Professional-Solutions</a> Вознаграждения за получение VIP-статуса ? начисляются в рамках программы преданности при достижении одного значения либо выдаются персонально менеджерами саппорта.Бездепозитные бонусы за регистрацию в игровых автоматах для собственников онлайн-казино считаются частью рекламной кампании, направленной на увеличение аудитории вебсайта. Так они продвигают свои бренды и привлекают свежих клиентов. 1×slots зеркало проходить регистрацию это отличный вариант <a href=http://isaevclub.ru/user/JasperHourl/>http://isaevclub.ru/user/JasperHourl/</a>
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Перед активацией важно внимательно выучить обстоятельства акции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют велечину кроме лимиты ставок при отыгрыше и сроки, на коих можно пользоваться предложением. Если бездеп обхватывает узкий перечень игр, рекомендуется разузнать максимальные коэффициенты, уровень отдачи и волатильности. Слоты с низкими множителями выплат подходят только сомнений случае, в оператор не установил взыскательные ограничения на максимальную сумму ставки.Многие азартные клубы ограничивают сумму вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании акции, суммы Вы не можете исключить. Разница будет аннулирована, Вы даже не можете делать на нее ставки. 1хслотс казино зеркало Начнём с того, что каждое промо за регистрацию подразумевает некоторые обстоятельства. Бездепозитные бонусы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, нужная для исполнения критерий. Пример, возымели благотворительные вращения и выиграли с них 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 рублей, проигрышных или выигрышных, так. После исполненья, бонусный баланс перейдёт на настоящий и станет легкодоступным к выводу. <a href=https://simracing.su/user/PatrickBlofs/>https://simracing.su/user/PatrickBlofs/</a> Представленные на данной страничке наихорошие бездеп бонусы в казино за регистрацию в 2022 году имеют подходящие условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, в котором гости Casino.ru шансы сортировать список по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д. 1×slots регистрация Вейджер (либо вагер) ? это минимальная сумма ставок, коию нужно устроить для вывода денежного бонуса. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим красивее спецпредложение.
1×slots скачать на айфон
Во время игры в казино, выигрыши, полученные благодаря бесплатным призовым фондам, суммируются и включаются в общую сумму для отыгрывания. Однако, в удача улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно разрешит вывести финансовые свои. Сумма вывода несомненно находиться от лимита, одобренного непосредственно в данном учреждении. Поэтому, внимательно нужно разбирать верховодила выдачи безлимитных депо. <a href=https://www.russiansuka.net/user/WilliamedisP/>https://www.russiansuka.net/user/WilliamedisP/</a> Бездепозитный приз за регистрацию в казино — это стартовый презент вид денежного начисления или даровых вращений для новых игроков заведения, для получения которого не нужно заносить депозит.Нельзя осматривать игру на средства, как вариант заработка. Азартные игры запрещены для лиц младше 18 лет. Topcasinobonuses.mobi классифицируется зачинщиком азартных игр. Сайт одевает информационный нрав. 1×slots регистрация на 1хслотс
1 x slots casino
<a href=https://seniordance.ru/forum/showthread.php/78288–1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D0%BD%D0%B0-%D1%81%D0%B5%D0%B3%D0%BE%D0%B4%D0%BD%D1%8F?p=108258#post108258>1хслотс зеркало на сегодня</a> Заполняя данные в личном профиле, указывайте только достоверную информацию, так как Вам придется ее доказать дальнейшем при выводе средств. Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют важную информацию о not the slightest down payment bonuses и других услугах. 1×slots на любой вкус как пройти регистрацию <a href=https://forum.kainkalabs.com:443/member.php?action=profile&uid=17481>https://forum.kainkalabs.com:443/member.php?action=profile&uid=17481</a>
зеркло казино 1×slots
<a href=https://tpforums.org/forum/member.php?78974-JasperUnupe>https://tpforums.org/forum/member.php?78974-JasperUnupe</a> 1×slots регистрация
<b>Смотреть еще похожие новости:</b>
<a href=http://3ak.cn/home.php?mod=space&uid=187057>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<a href=https://praisenpray.org/forums/showthread.php?tid=103246>1× слот зеркало</a>
<a href=http://big.bestforums.org/viewtopic.php?f=7&t=19492>1х слотс зеркало регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Мы советуем не открещиваться от подобных предложений узнаваемых казино. Выделите некоторое мин. На регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сейчас удача несомненно на вашей стороне!
#3720 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино вход как выиграть в казино <a href=https://rumafia.news/>gama casino</a> порно с Георгий Джикия (футбол) 1×bet слоты 1×bet xyz <a href=https://strelochnik.com/>букмекерская контора бетсити</a> pin casino Анна Михалкова скачать букмекерскую контору зеркала официальных сайтов казино casino скачать приложение porno Яна Троянова Нургалиева Эльвира Рамиловна порно
DiskiPlus porno Ангелина Гончаренко, хоккеистка DiskiPlus казино регистрации <a href=https://diskiplus.ru/>DiskiPlus букмекерская контора фонбет официальный сайт</a> DiskiPlus порно с Алина Загитова DiskiPlus retro casino <a href=https://www.diskiplus.ru>DiskiPlus скачать 1×bet</a> DiskiPlus играющие казино онлайн DiskiPlus 7k casino зеркало рабочее DiskiPlus порно с Варвара Субботина DiskiPlus порно с Абрамченко Виктория Валериевна DiskiPlus casino сайты DiskiPlus 1×bet зеркало слоты DiskiPlus порно с Гатагова Ольга Анатольевна
#3721 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
бесплатные букмекерские конторы реального казино <a href=https://rhymes-punches.com/>сайты казино</a> casino скачать porno Вера Бирюкова, гимнастка <a href=https://vestnik-jurnal.com/>бесплатно фильм казино</a> порно с Афонина Марина Игоревна гта онлайн казино включи казино kent casino pin up букмекерская контора порно с Анна Калинская (теннис) официальные букмекерские конторы
DiskiPlus vodka casino DiskiPlus 1×bet официальный сайт 1×bet xyz <a href=https://www.diskiplus.ru/>DiskiPlus порно с Дарья Касаткина (теннис)</a> DiskiPlus 1×bet зеркало xbet xyz DiskiPlus лучшие казино бесплатно <a href=https://diskiplus.ru>DiskiPlus 1go casino</a> DiskiPlus пин ап букмекерская контора DiskiPlus pin ап casino DiskiPlus пинко casino DiskiPlus казино пин DiskiPlus порно с Матвей Сафонов (футбол) DiskiPlus 1×bet 1хбет DiskiPlus сайты казино
#3722 Charlesgunnyhttp://filmkachat.ru
1×slots акции
Существуют казино с бонусом за регистрацию, в которых очень востребованы фриспины в онлайн казино потом регистрации в конкретных играх. Они встречаются числе чаще даровых поощрений либо традиционных бонусов в казино без вложений. Например, игрок регистрирует счет, на кот-ый начисляются бесплатные забавы, приз за регистрацию вид безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса в выигрывает настоящие деньги, коие в последствии возможно удачно исключить из заведения на свою платежную систему. То есть, есть шансы исключить свои без рисков своими деньгами. Регистрация, за геймер получит призы, займет минут, а спасибо данному можно прирастить пять евро поощрений до тысячи и без всяких проблем исключить их. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasino09k online</a> <a href=https://calibreapp.com/tools/core-web-vitals-test/playhouse.com.ua?scheme=https&path=%2F&context=origin>https://calibreapp.com/tools/core-web-vitals-test/playhouse.com.ua?scheme=https&path=%2F&context=origin</a> 1×slots зеркало рабочее на сегодня <a href=https://sex18babes.com/user/Oscarmilia/>https://sex18babes.com/user/Oscarmilia/</a> В онлайне количество узнаваемых игорных площадок с привлекательными акционными услугами. Однако пристально разбирать обстоятельства 10-ов услуг времени надоест, да и время отнимет много. Поэтому наша команда подготовила ТОП-3 вебсайтов с наилучшими бездепозитными призами:
1×slots акции
Нет. Для получения бездепозитного бонуса в казино необходима неотъемлемая регистрация на веб-сайте. Играть в слоты безвозмездно и без регистрации возможно лишь в демо режиме.Призовые начисления без депо шансы предоставляться для роли в турнирах онлайн казино. Потратить перечисленные деньги можно исключительно в данной акции. Условия их проведения включают в себя лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться этим предложением, чем изучить его верховодила. 1хслотс 1хслотс регистрация перейти на 1×slots Ниже указан актуальный список легальных казино в Беларуси с призами на 1-ый депо. Вы сможете попасть на официальный сайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. <a href=https://exsite.su/user/Jeffreyhouri>https://exsite.su/user/Jeffreyhouri</a> Бездепозитный бонус за регистрацию в казино — это стартовый подарок в виде денежного начисления либо безвозмездных вращений для свежих игроков заведения, для получения которого не вносить депозит. 1× slots зеркало В большинстве заведений устроить это возможно по e-mal, по номеру аппарата, через социальную сеть либо гугл-аккаунт.
1×slots сайт зеркало
Бездепы с бесплатными вращениями деют юзерам право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд платит казино. Число спинов ограничено и изредка превышает сотню. Если промоакция включает в себя большое бесплатных игр, их начисление имеет быть разбито на несколько дней. Принципиальным отличием бесплатных бонусов от призов на депо считается недоступность надобности вносить деньги на акк. Из-за сего их нередко называют бездепозитными (not the slightest deposit bonuses).Проверка занимает от нескольких мин. До нескольких дней, специалисты техподдержки могут запросить вспомогательные документы либо инициировать куцее общение по Skype. <a href=https://aryba.kg/user/JaspernIX/>https://aryba.kg/user/JaspernIX/</a> Еще одно условие дотрагивается размеров ставки. Операторы устанавливают наивысшую сумму, коию игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, избранной в Личном офисе. При превышении лимита есть риск лишиться приза. Существующие лимитирования относятся и к конкретным обликам ставок. Например, играя в рулетку, заказчик может столкнуться с запретом ставить фишки на шансы.Основное правило получения бездепа ? творимый акк должен быть у юзера первым и единственным. Наличие нескольких аккаунтов взыскательно воспрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депозита нужно соблюдать несложную очередность действий. 1×slots официальный сайт скачать Операторы гемблинга утверждают, собственно например они борются с бонус-хантерами. Впрочем, критики считают, собственно данным казино пытаются сделать из случайного постояльца неизменного игрока.Некоторые веб-сайты, до чем провести регистрацию игроков, предлагают ответить на количество базисных вопросов. Цель проведения подобной викторины – выявить случайных людей, которые не имеют представления о покере, и не допустить получения ими бонусов. Если посетитель уже играл в казино, то ответить на полтора десятка простых вопросов будет несложно. Очень часто, ответы возможно отыскать на официальных веб-сайтах этих учреждений.
1х слотс зеркало регистрация в 1×slots casino
Но существуют азартные заведения, готовые просто например вручить деньги на игру. Для сего достаточно сделать профиль. Чтобы исключить выигрыш, сначала нужно выполнить вейджеровые обстоятельства, прописанные в критериях получения бездепа.У нас на сайте Вы отыщите перечень бонусов без депозита в проверенных казино и доскональную информацию про как их получить и применять. Чаще всего казино бонус за регистрацию без депозита даёт вероятность запустить любой машина. Но лучше внимательно ознакомиться с условиями. Иногда для игры доступны только определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, превосходнее начать знакомство с миром пыла именно с «одноруких бандитов». 1×slots casino регистрация <a href=http://formulandoeinnovando.com/como-se-afecta-la-formulacion-con-el-proceso-que-aplico/?unapproved=463114&moderation-hash=0f6edf3cafaa7049b445b6d2ff01f8df#comment-463114>http://formulandoeinnovando.com/como-se-afecta-la-formulacion-con-el-proceso-que-aplico/?unapproved=463114&moderation-hash=0f6edf3cafaa7049b445b6d2ff01f8df#comment-463114</a> Мы подготовили перечень, где есть всегда животрепещущие и новые бездепозитные призы казино, коие вам получить даром. Для наших пользователей есть специальные предложения эксклюзивные бонусы, которые вы ни не отыщите, их мы определили особой красноватой плашкой «Exclusive».
1×slots регистрация то дальше необходимо пройти
Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную функцию активации приза без депозита. Внимательно прочитайте до конца. Многие новички проделывают промахи на шаге регистрации и поэтому имеют получить презент. Начнём с такого, что любое рекламную за регистрацию подразумевает некие обстоятельства. Бездепозитные бонусы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность валютного оборота, нужная для исполненья условий. Пример, получили безвозмездные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 руб., неудачных либо выигрышных, маловажно. После исполненья, бонусный баланс перейдёт на реальный и станет легкодоступным к выводу.В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с даровых вращений. Прибыль, которую Вы заработаете на этом бездепе можно назначать на вывод без какого или отыгрыша. <a href=http://hxzq.org.cn/space-uid-1481.html>http://hxzq.org.cn/space-uid-1481.html</a> Выполнив все притязания оператора, клиент имеет оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит примерно менее суток. Если дополнительно требуется пройти функцию верификации, то срок увеличивается до 1–2 трудящихся дней. Для перевода используются банковские приборы и электрические платежные системы. Второй способ подходит какого-либо, так как большинство транзакций в этом случае исполняются моментально. В связи со спецификой функционирования банков обработка платежей может взятьвдолг(взятьвзаймы) до нескольких рабочих дней.Выбрать казино с бездепозитным бонусом. У нас на веб-сайте представлен список наихороших онлайн казино, коие предлагают своим игрокам великодушные бонусы за регистрацию. 1×slot регистрация
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Мы рекомендуем не отказываться от похожих услуг узнаваемых казино. Выделите некоторое мин. На регистрацию, получите бонус и попробуйте его отыграть. Может быть, сегодня фортуна будет на вашей стороне! Чтобы бездеп не был начислен на Ваш акк, Вам не нужно активировать бонусный код. Если одобрение от казино было добавлено на Ваш аккаунт автоматически, а Вы не планируете его использовать, обратитесь в службу поддержки с пожеланием отменить бездепозитный приз.
#3723 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Нина Пирогова, хоккеистка Крючкова Полина Викторовна порно <a href=https://krtka.info/>скачать букмекерскую контору на андроид</a> casino регистрации 1×bet официальный <a href=https://res-publika.com>фильмы казино рояль</a> скачать 1×bet на андроид 1×bet зеркало слоты 1×bet xyz про казино ап казино скачать 1×bet на андроид бесплатно casino buzz 1×bet на андроид
DiskiPlus порно с Илья Осипов (киберспорт) DiskiPlus 1×bet сайт <a href=https://diskiplus.ru>DiskiPlus porno Юлия Канакина</a> DiskiPlus online casino DiskiPlus скачать букмекерскую контору <a href=https://diskiplus.ru>DiskiPlus vavada casino</a> DiskiPlus Петрова Ольга Викторовна порно DiskiPlus 1×bet слоты официальный сайт DiskiPlus казино вулкан DiskiPlus Львова-Белова Мария Алексеевна порно DiskiPlus рокс казино DiskiPlus 1×bet телефон DiskiPlus карты казино
#3724 Charlesgunnyhttp://filmkachat.ru
x1 slots 1хслотс регистрация перейти на 1×slots
Итак, дабы бесплатные бонусные кредиты трансформировались в настоящие средства, которыми вам управлять по собственному усмотрению, их надо(надобно) отыграть. Вейджер по уточнять в правилах онлайн-казино.Прочитайте правила бонусной программы, в хотите участвовать. Да, мы настойчиво советуем сделать это до регистрации. <a href=http://filmkachat.ru/>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a> После потребуется привнести идентификационный платёж. Это пугает новичков больше всего. Нужно сделать минимальный депозит в 100–500 руб. Таким образом служба безопасности увериться никаких, собственно платёжный метод принадлежит Вам. Данная процедура необходима для обеспечения безопасности игровых счетов. Пример, Ваш аккаунт взломают и выведут свои на собственный кошелёк. Будет очень неприятно. Поэтому верификация платёжной системы, это важный момент.Кешбэк-бонус представляет собой возврат фиксированного процента от ставки если, тогда, поражения либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не превышает 10%. <a href=https://www.merchantcircle.com/blogs/3d-rendering-company-archicgi-dallas-tx/2025/1/3D-Furniture-Rendering-Professional-Visualization-Services/2886994>https://www.merchantcircle.com/blogs/3d-rendering-company-archicgi-dallas-tx/2025/1/3D-Furniture-Rendering-Professional-Visualization-Services/2886994</a> Во время игры в казино, выигрыши, приобретенные благодаря бесплатным призовым фондам, суммируются и срабатывают в общую сумму для отыгрывания. Однако, случае фортуна улыбнется и выйдет отыграть все призы, игровое заведение гарантированно допустит вывести денежные средства. Сумма вывода несомненно зависеть от лимита, утвержденного именно в этом учреждении. Поэтому, пристально надо(надобно) читать управляла выдачи анлимитных депо.Главным интересным в появлении данных вознаграждений состоит что, нет, собственно пустив их в ход, игры ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он спасибо призам какой-нибудь выигрыш либо мгновенно спустит все только что прибывшие финансы). То есть, казино снабжает игрока вероятностью на дармовой основе играть во всевозможные слоты и даже спонсирует забаву. 1×slots зеркало видели такую регистрацию на <a href=https://storyplus.ru/user/CraigRunTy/>https://storyplus.ru/user/CraigRunTy/</a> Игрокам не принимать приветственный приз как гарантированный метод получить крупный выигрыш, хотя это отличная возможность без расходов оценить функционал казино.Вообще перейдя в казино — правила схожи в получении бездепозитных призов, в стереотипные управляла входит: подтвердить эл. Почту и аппарат, наполнить собственный индивидуальный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ.
1×slots casino регистрация 1×slotscasino09k online
Срок активации и время на отыгрыш. Зачисление средств или фриспинов происходит при активации протяжении строго ограниченного периода, похожие требования предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать приз несколько дней либо том недель. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером.Сроки активации бонуса устанавливаются каждым казино, хотя чаще всего они не превышают недели с момента получения. Игроку обязательно нужно использовать бездеп на указанного срока, в ином случае приз просто исчезнет. Каждый бонус возможно получить только один раз, поэтому в не использовать бездеп в срок, у игрока не будет 2 шанса им воспользоваться. <a href=http://big.bestforums.org/viewtopic.php?f=7&t=16311>казино 1×slots официальный сайт</a> 1×slots регистрация на сайте 1×slots ru com <a href=https://www.mundoreptil.com/member.php?u=49469>https://www.mundoreptil.com/member.php?u=49469</a> 1×slots зеркало регистрация Казино выводит деньги лишь на ту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного бонуса, Вам сначала необходимо пополнить счет. В неких клубах ограниченный список методов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет именно с этих платежных способов, которые доступны для вывода.
1×слот регистрация в 1×slots casino
<a href=https://stroyotzyvy.org/user/Williamhycle/>https://stroyotzyvy.org/user/Williamhycle/</a> 1 х слотс зеркало Акции, посвященные календарным праздникам, посещают рассчитаны как на всех пользователей, так и на категории: к, презент на 8 марта девушкам-игрокам либо мужикам на 23 февраля.Новички не любят незамедлительно же вносить депозит. Это обусловлено неимением навыка и сомненьем. К счастью, дни возможно получить бездепозитный приз за регистрацию в казино. Неважно собственно начислит система – фриспины либо кредиты. В всяком случае вы не рискуете своими сбережениями. Это замечательная вероятность запустить понравившийся видео слот или же испытывать удачу в настольных забавах.
1х слот регистрация в 1×slots casino
Например, игрок получил 500 рублей при разработке аккаунта и должен отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., потребуется сделать 875 спинов для полного отыгрыша. Иногда у гостей сайта могут возникнуть проблемы при активации полученного промо-кода. В этих случаях, нужно адресоваться за подмогою в саппорта «Support». Для получения ответа, непременно указывается определенная причина обращения и подтверждается информация дополнительными скриншотами. Если сложилась неоднозначная ситуация, постоянно возможно адресоваться к основному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ.Благодаря программке лояльности от игорного заведения, возможно брать превосходный старт и без дополнительных вложений запустить видеослоты. Кроме такого, возможно рассчитывать на реальную фортуну и получить, без вложения личных денег, великий выигрыш. 1×slots casino зеркало <a href=https://www.wow-interfaces.com/users/DoctorLazutaea>https://www.wow-interfaces.com/users/DoctorLazutaea</a> Подтверждение персональной информации. Все казино настоятельно от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и наличие у пользователя иных аккаунтов (мультиаккаунт запрещен).
1×slots зеркало быструю регистрацию а также мгновенное
За счёт спинов получится запустить различные интернет слоты, протестировать стратегии и поднабраться опыта. Фишка том,, что вращения начисляются на лучшие аппараты с уникальными опциями и высокой отдачей. Не запамятовывайте, собственно в каждом акционном предложении предусмотрены особые требования – кратковременные ограничения, наибольший размер ставки, список доступных игр.При регистрации следует свидетельствовать лишь достоверную информацию. Когда учетная запись будет активна, появится доступ в Личный кабинет. В нем можно выбрать денежную, ввести промокод и узнать доскональные правила получения и отыгрыша бездепа. Краткая информация об акции нередко находится именно на регистрационной форме. <a href=http://jade-crack.com/home.php?mod=space&uid=1173323>http://jade-crack.com/home.php?mod=space&uid=1173323</a> Составленный специалистами Casino.ru перечень онлайн-казино с бездепозитным призом позволяет игрокам сопоставить спецпредложения различных операторов.Максимальный объем ставки, который нельзя превышать же приз не несомненно всецело отыгран. В случае нарушения сего управляла, бонус и выигрыш с него станут аннулированы. 1×slots быструю регистрацию а также мгновенное Разные казино имеют собственные правила по выведению выигрыша. Для бездепозитных призов принимаются довольно высокие требования. Часто онлайн-казино советуют отыграть бонусное поощрение до 100 один в игровых автоматах. Например, случае игрок получил безвозмездно десять $, то нужно будет отыграть их, поставив 1 тыщу спинов по 1 баксу каждый. Стоит отметить, собственно не все казино дают вероятность играть на призы и не во всех увеселительных заведениях схожие правила для отыгрывания. Некоторые казино воспрещают играть на бонусы в блекджек или ограничивают ставки до пяти процентов, собственно существенно увеличивает в 10-ки один количество нужных игр.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=37934>1х слот регистрация в 1×slots casino</a>
<a href=https://www.bf-france.com/forums/profile/30064-rabofreeor/>1×slots casino online регистрация</a>
<a href=http://6000ziyuan.com/forum.php?mod=viewthread&tid=129238&extra=>1 x slots casino</a>
<a href=http://nhomtruyen.com/members/jamesgaw.9280/>1×slots рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При исполненьи критерий отыгрыша и верификации, средства с бонусного счета переводятся на главный и шансы быть выведены на карту либо электрический кошелек. Лимиты на вывод и сроки проведения транзакции зависят от выбранной платежной системы.
#3725 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Анна Щербакова, фигуристка Петрова Ольга Викторовна порно <a href=https://sovsekretno.net/>бесплатное казино</a> 1×bet зеркало на сегодня букмекерская контора леонов <a href=https://slon-ru.com/>Фастова Елена Владимировна порно</a> 1×bet 1×bet приложение порно с Диана Шнайдер (теннис) casino ru порно с Федор Чалов (футбол) почему в казино нет окон человек казино
DiskiPlus casino зеркало сегодня DiskiPlus казино пин <a href=https://www.diskiplus.ru>DiskiPlus r7 casino</a> DiskiPlus порно с Зырянова Анастасия Владимировна DiskiPlus pin up casino пин ап <a href=https://diskiplus.ru>DiskiPlus up casino скачать</a> DiskiPlus порно с Диана Шнайдер (теннис) DiskiPlus букмекерская контора фонбет официальный сайт DiskiPlus порно с Гатагова Ольга Анатольевна DiskiPlus porno Александра Степанова, фигуристка DiskiPlus casino официальный зеркало DiskiPlus песня казино DiskiPlus pin up casino зеркало
#3726 Charlesgunnyhttp://filmkachat.ru
1хслот 1хслотс регистрация перейти на 1×slots
Чаще всего казино бонус за регистрацию без депозита даёт возможность запустить каждой автомат. Но лучше пристально ознакомиться с условиями. Иногда для забавы доступны только определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, какого-либо начать знакомство с миром пыла непосредственно с «одноруких злодеев».Многие азартные клубы ограничивают необходимую вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании акции, суммы Вы не можете исключить. Разница будет аннулирована, Вы числе не можете создавать на нее ставки. <a href=http://filmkachat.ru/>1×slots казино мобильная версия</a> <a href=https://www.sitejabber.com/reviews/playhouse.com.ua>https://www.sitejabber.com/reviews/playhouse.com.ua</a> Онлайн-казино тщательно продумывают бонусные обстоятельства, которые необходимо выучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и другие лимитирования.Перед активацией принципиально внимательно выучить условия акции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют значение также лимиты ставок при отыгрыше и сроки, протяжении которых возможно пользоваться предложением. Если бездеп охватывает узкий список игр, рекомендуется разузнать наибольшие коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят лишь том, случае, случае оператор не установил строгие лимитирования на максимальную необходимую ставки. 1хслот зеркало сайта <a href=http://b775218w.bget.ru/user/GlennFlema/>http://b775218w.bget.ru/user/GlennFlema/</a>
1×slots регистрация на 1хслотс
Вейджер (или вагер) ? это наименьшая сумма ставок, коию необходимо сделать для вывода валютного бонуса. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение.Для казино, работающих онлайн, бездепозитные бонусы необходимы для вербования свежих посетителей. Предложение поиграть на слотах без надобности внесения реальных денег — работающий способ для увеличения энтузиазма к фирмы. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит играть в казино, лишь сейчас уже на личные деньги. 1×slot рабочее зеркало С другой стороны, намного проще забрать бездепозитные фриспины за регистрацию в казино и прямо момент начать вертеть барабаны в наилучших слотах. Главная особенность спинов сомнений, что они предусмотрены для топовых автоматов. Удастся столько пройти дополнительные раунды, но и увеличить необходимую выигрыша, заработать респины и другие внутриигровые презенты. <a href=https://ads.kazakh-zerno.net/user/Renaldocon/>https://ads.kazakh-zerno.net/user/Renaldocon/</a> 1×slots casino online регистрация Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке необходимо пополнить счет в казино. Для депозитных бонусов, эта процедура не нужна, так как депозит теснее сделан.Бездепы обычно предлагают с отыгрышем — моментально вывести выигранные средства нельзя. Перевод денег со счета будет вероятен в того, как пользователь выполнит все притязания казино, а сумма не быть выше установленного правилами лимита. Условиями промоакции фиксируются сроки, протяжении которых заказчик вправе воспользоваться предложением. Обычно они не превышают нескольких дней в активации.
1×slots зеркало на сегодня
Бездепозитный приз – это финансовое вознаграждение, коие выдается участнику игры в казино, для его вербования и появления заинтересованности. Любой гость, который подходит условиям выдачи подобного бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое одобрение считается наиболее действенным способом, дающим возможность стартовать при, не вкладывая личных вещественных средств. Бездепозитные призы — это презенты от казино повторяющий бонусных денег либо фриспинов для игровых автоматов, которые начисляются на акк игрока после процедуры регистрации на веб-сайте заведения. Для получения этих поощрений депо не потребуется. <a href=http://school-toksovo.ru/bitrix/rk.php?goto=http://nwnights.ru/redirect/murmansk.voobrajulya.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/DM-joZhMyDZ>http://school-toksovo.ru/bitrix/rk.php?goto=http://nwnights.ru/redirect/murmansk.voobrajulya.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/DM-joZhMyDZ</a> Подтвердите регистрацию, дабы активировать Бездепозитный приз с выводом, потребуется заполнить индивидуальный профиль. Заполните пустопорожние поля истинными данными о себе. 1×slots казино зеркало Первый возникающий вопрос, это, чего выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают свежих игроков. Последним проще начать забаву на средства с дара за регистрацию. Им не нужно пополнять баланс и расходовать собственные средства. Новички получают бесплатные спины либо средства на счёт. С их поддержкою знакомятся с игровым ходом, крутят слоты и делают ставки в рулетке.
1× slots casino зеркало
У каждого игорного заведения средства верховодила и обстоятельства. Но, дабы получить призы, необходимо выполнить стандартные деянья:Получить приветственный приз могут лишь новые клиенты онлайн-казино. Способы описаны в условиях промоакции любого законного казино, почаще всего это: <a href=http://sfessd.listbb.ru/memberlist.php?mode=viewprofile&u=86>1×slots зеркало этих способов предполагает регистрацию</a> Зачастую бездепозитные бонусы казино для игры предлагаются различными заведениями азартных игр виде рекламных промоакций или в целях вербования к себя новых игроков. Для бездепозитных призов в казино 2022 игроку не пополнять счет до момента вывода желанных средств.Бoльшинcтвo азартных заведений выдвигают примерно однообразные, схожие обстоятельства и требования, коие нужно выполнить, дабы получить бездепозитный бонус за регистрацию. Все их можно соединить в один список: 1х слот регистрация в 1×slots casino <a href=http://www.worldcultues.com/2020/11/200-cute-girls-instagram-bios-quotes.html>http://www.worldcultues.com/2020/11/200-cute-girls-instagram-bios-quotes.html</a>
1×slots казино зеркало
Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция имеет подробные верховодила, ссылка на которые обыкновенно содержится в промообъявлении. В их указываются лимиты, вейджер, перечень дешевых игр. Если оператор укрывает данные о предложении, то пользоваться им не стоит. <a href=http://b98415ql.bget.ru/user/MichaelAddep/>http://b98415ql.bget.ru/user/MichaelAddep/</a> 1×slots регистрация то дальше необходимо пройти Любой выигрыш по ставке повыше установленного лимита будет являться недействительным. То есть ставка не будет засчитана при отыгрыше, а в случае выигрыша его сумма не поступит на счёт посетителя — результат забавы несомненно полностью аннулирован.Бездепы с безвозмездными вращениями деют юзерам право вертеть барабаны игровых автоматов без снятия средств со счета. За любой раунд выплачивает казино. Число спинов ограничено и редко превышает сотку. Если акция содержит много бесплатных игр, их начисление возможность быть разбито на несколько дней.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=42825>рабочее зеркало 1×slots</a>
<a href=https://minecraft.ru.net/user/Manuelsoarl/>1×slots зеркало быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Способы получения бездепа различаются зависимо облика приза, который приглянулся игроку. Но вас так нужно быть зарегистрированным в легальном онлайн-казино и доказать свою лицо. В общем виде пошаговая инструкция для получения бездепозитного бонуса смотрится так: Осталось выбрать казино с бонусом за регистрацию и создать профиль. После активации презента выигрыш зависит от Фортуны и навыков.
#3727 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
демо казино порно с Зырянова Анастасия Владимировна <a href=https://slon-ru.com/>порно с Юлия Ефимова, пловчиха</a> 1×bet официальный сайт 1×bet xyz porno Александр Соболев (футбол) <a href=https://krtka.info/>cometa casino</a> Манилова Алла Юрьевна порно букмекерскую контору пин casino скачать pin ап casino лучшие букмекерские конторы Шевцова Татьяна Викторовна порно казино онлайн бесплатно
DiskiPlus реального казино DiskiPlus порно с Виктория Синицина, фигуристка <a href=https://www.diskiplus.ru/>DiskiPlus Яровая Ирина Анатольевна порно</a> DiskiPlus смотреть фильм казино DiskiPlus vavada casino <a href=https://diskiplus.ru>DiskiPlus букмекерская контора мостбет</a> DiskiPlus играющие казино DiskiPlus мобильные букмекерские конторы DiskiPlus букмекерская контора фонбет DiskiPlus porno Андрей Рублев (теннис) DiskiPlus порно с Анастасия Потапова, теннисистка DiskiPlus сколько казино DiskiPlus порно с Зырянова Анастасия Владимировна
#3728 Ремонт фотоаппаратов Nikon Москваhttps://remont-fotoapparatov-nikon-mes.ru/
Профессиональный сервисный центр по ремонту бытовой техники с выездом на дом. Мы предлагаем: <a href=https://remont-fotoapparatov-nikon-mes.ru/>ремонт фотоаппаратов nikon адреса</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#3729 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Арина и Дина Аверины, гимнастки пина букмекерской конторы <a href=https://repost.news/>cometa casino</a> зеркала официальных сайтов казино Скоробогатова Ольга Николаевна порно <a href=https://strelochnik.com/>ramenbet casino</a> букмекерские конторы pin Любимова Ольга Борисовна порно мелбет букмекерская контора порно с Дарья Касаткина (теннис) карты казино 1×bet зеркало рабочее на сегодня 1×bet xyz казино вход официальный сайт
DiskiPlus porno Светлана Ходченкова DiskiPlus порно с Елена Никитина, скелетонистка <a href=https://diskiplus.ru/>DiskiPlus 1×bet вход</a> DiskiPlus порно с Евгения Медведева, фигуристка DiskiPlus online casino <a href=https://www.diskiplus.ru>DiskiPlus порно с Васильева Татьяна Викторовна</a> DiskiPlus казино фильм смотреть онлайн DiskiPlus казино онлайн бесплатно DiskiPlus играющие казино онлайн DiskiPlus порно с Алина Загитова, фигуристка DiskiPlus порно с Алина Загитова, фигуристка DiskiPlus казино регистрации DiskiPlus порно с Дронова Александра Викторовна
#3730 Charlesgunnyhttp://filmkachat.ru
1× слот зеркало
Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную процедуру активации приза без депо. Внимательно прочтите до конца. Многие новенькие делают оплошности на шаге регистрации и потому не могут получить презент. <a href=http://filmkachat.ru/>1х слот регистрация в 1×slots casino</a> Существует ли стратегии для отыгрыша бездепозитных бонусов? К огорчению нет, на выигрыши либо проигрыши с бонусов, казино или игрок повлиять не, отдача игр случается от создателей игр.Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в обязательном порядке нужно пополнить счет в казино. Для депозитных бонусов, эта процедура не нужна, так как депо теснее сделан. <a href=https://forum.gazeta.pl/forum/w,678,178514367,178514367,Upholstery_Virtual_Prototyping.html>https://forum.gazeta.pl/forum/w,678,178514367,178514367,Upholstery_Virtual_Prototyping.html</a> Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депо может выделяться до 30 дней.Для доказательства электрической почты, просто перейдите по интенсивной ссылке в послании, приобретенном от игрового заведения. 1×slots акции <a href=https://morphomics.science/wiki/User:TessaForth28672>https://morphomics.science/wiki/User:TessaForth28672</a> Такой казино приз без депо за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это словно некая маскировка одобрения под бездепозитный. Суть всего этого сводится к тому, собственно игроку на час выдается, к примеру, 1000 долларов, а реклама повторяет о том, собственно любой выигрыш возможно будет дальнейшем оставить при себе. Но в играющий всерьез отнесется к данному предложению, то он просто потеряет время. Ведь игроку нужно будет играть не в основном аккаунте, а тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (числе всей тыс. ) в верховодила вступят конкретные обстоятельства, где несомненно сказано, что максимальной суммой победы имеет быть только двести долларов и деньги можно использовать только в бонуса на первый лепта с вейджером 25 от суммы вознаграждения плюс сам депозит. По итогу получится, собственно игрок выигрывал для 200% приз с вейджером на конкретную сумму. Короче разговаривая, это все надо вашего времени.
1×slots промокод при регистрации 2025
Одним из поводов отдавать преимущество, льготу 1 или другому заведению заключается в привлекательности предлагаемых промоакций и безвозмездных предложений. Безвозмездные фриспины, выдаваемые без дела создавать какой-нибудь вклад, в перечне находится далековато не в конце.Мы проделываем акцент на ключевых положениях верховодил, рассказываем о территориальных ограничениях и кратко информируем о других промоакциях обсуждаемого казино. 1×slots актуальное зеркало Некоторые веб-сайты, до чем провести регистрацию игроков, предлагают ответить на несколько базовых вопросов. Цель проведения сходственной викторины – выявить случайных людей, которые не имеют представления о покере, и не разрешить получения ими призов. Если гость теснее играл в казино, то ответить на полтора десятка несложных вопросов будет нетрудно. Очень часто, ответы можно найти на официальных веб-сайтах данных учреждений.Верификация необходима для дополнительной безопасности и помочь техподдержке выявить бонусхантеров и мошенников. Кстати, на некоторых платформах выводы крупных сумм доступны лишь после подтверждения личности. <a href=http://nvkb.ru/forum/index.php/user/89842/>http://nvkb.ru/forum/index.php/user/89842/</a> Выбрать казино с бездепозитным бонусом. У нас на сайте представлен список превосходнейших онлайн казино, которые предлагают своим игрокам щедрые призы за регистрацию. 1×slots зеркало на сегодня
1×slots скачать на айфон
Но на некоторых азартных платформах похожие вознаграждения имеют получить теперь зарегистрированные пользователи. В таком случае, призы предоставляются в рамках уникальных промоакций либо же некоторым игрокам вид акционного предложения, коие приходит на почту с целью «возвратить» игрока в свое казино. <a href=https://www.anobii.com/en/01846359e59433e1de/profile/activity>https://www.anobii.com/en/01846359e59433e1de/profile/activity</a> Это один из главных характеристик привлекательности дара. С завешенным коэффициентом в мастера не сумеют выполнить условия по отыгрышу. И не, как презентабельно смотрится предложение – бездепозитный бонус казино в размере $500 или $1 000. Чтобы новички лучше вникли, что же такое вейджер, мы разберём на случае.Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации презента нужно подтвердить электронную почту и привязать аппарат; сайт 1× slots casino Индивидуальные поощрения выдаются за совершение деяний: подписку на аккаунты площадки в соц сетях, установку мобильного прибавления либо официального посетителя для ПК. В большинстве казино срабатывают программы лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на грядущий степень нередко сопровождается выдачей бездепа.
1 x slots casino
Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, чтобы была вероятность вывести выигрыш. <a href=http://loevil.com/phpBB3/viewtopic.php?t=29921>зеркло казино 1×slots</a> 1хслот зеркало сайта <a href=http://metal-firms.co.ua/wr_board/tools.php?event=profile&pname=dazzlingmagic78>http://metal-firms.co.ua/wr_board/tools.php?event=profile&pname=dazzlingmagic78</a> Для получения бездепа необходимо пригласить в игру по реферальной ссылке свежего клиента: он должен зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на необходимую, обозначенную в критериях промоакции.Поспешите забрать бездепозитные призы за регистрацию в казино из представленного перечня. Все платформы не ведут законную деятельность, хотя и порадуют добросовестными результатами забавы, высочайшей отдачей, прыткими выплатами.
1×слот регистрация в 1×slots casino
Бездепозитные призы за регистрацию в игровых автоматах для хозяев онлайн-казино считаются частью рекламной кампании, направленной на повышение аудитории сайта. Так они продвигают средства бренды и завлекают свежих клиентов.Возможность поиграть дополнительное состязание (а времени и несколько) абсолютно бесплатно, а выигрыш, тому, поступает на счёт игрока. Верификация важна для дополнительной безопасности и подсобляет техподдержке выявить бонусхантеров и мошенников. Кстати, рядах платформах выводы крупных сумм доступны лишь в доказательства личности. <a href=http://bbs.qc0769.com/home.php?mod=space&uid=413738>http://bbs.qc0769.com/home.php?mod=space&uid=413738</a> казино 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=http://everestrolep.listbb.ru/viewtopic.php?f=38&t=11991>1×slots официальный сайт зеркало</a>
<a href=https://uyghuryol.com/forum/viewtopic.php?f=8&t=260098>1×slots официальный сайт, скачать</a>
<a href=http://forum.audioheritage.net/memberlist.php?mode=viewprofile&u=19451>1×slot официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вообще перейдя в казино — верховодила схожи в получении бездепозитных бонусов, в стандартные верховодила заходит: подтвердить эл. Почту и телефонный, наполнить собственный собственный профиль, активировать промо код или активировать предложения во вкладке БОНУСЫ. Бездепозитные призы казино за регистрацию в 2022 году — это вероятность сыграть за счёт заведения. Казино даёт клиенту шанс воспользоваться определённой суммой либо числом даровых вращений без внесения депо. Не путайте деморежим с реальной игрой без надобности внесения депозита.
#3731 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино онлайн бесплатно порно с Афонина Марина Игоревна <a href=https://slon-ru.com/>porno Игорь Акинфеев (футбол)</a> 7k casino официальный яндекс игры казино <a href=https://t.me/vchkogpu_ru>Мухтиярова Елена Вячеславовна порно</a> где казино kometa casino porno Юлия Канакина часы казино 1×bet официальный скачать сайт букмекерской конторы симулятор казино
DiskiPlus пари букмекерская контора DiskiPlus порно с Константин Тюкавин (футбол) <a href=https://diskiplus.ru/>DiskiPlus приложения букмекерских контор на андроид</a> DiskiPlus сайте букмекерской конторы фонбет DiskiPlus порно с Голикова Татьяна Алексеевна <a href=https://diskiplus.ru/>DiskiPlus porno Юлия Канакина</a> DiskiPlus пин casino DiskiPlus скачать букмекерскую контору DiskiPlus самое казино DiskiPlus Светлана Ходченкова DiskiPlus игры казино DiskiPlus букмекерская контора мостбет DiskiPlus 1×bet сейчас
#3732 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало
Баланс игрока пополняется на соответствующую сумму. К ней используется вейджер, обозначенный в правилах акции. Вывести выигрыш возможно будет последствии того, как юзер устроит требуемый размер ставок из личных средств. В редких случаях бездеп работает в формате Free Play. На счет юзера зачисляется большая сумма, и предоставляется небольшой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по завершении этого периода сумма на счету несомненно превышать изначальную, то разность можно несомненно вывести или использовать для последующих ставок. <a href=http://filmkachat.ru/>1×slots зеркало регистрацию более популярный вариант это</a> К раскаянью, нет. Почти все казино, настоятельно внесение хотя бы одного малого депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, что вывести средства разрешается лишь на ту платежную систему, с которой был сделан депо. <a href=https://www.bseo-agency.com/blogs/188135/Professional-Interior-Design-Floor-Plans-Space-Planning-Services>https://www.bseo-agency.com/blogs/188135/Professional-Interior-Design-Floor-Plans-Space-Planning-Services</a> 1хслотс зеркало <a href=http://xn–80aeh5aeeb3a7a4f.xn–p1ai/forum/user/45110/>http://xn–80aeh5aeeb3a7a4f.xn–p1ai/forum/user/45110/</a> Нельзя разглядывать игру на средства, как вариант заработка. Азартные игры запрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не является организатором азартных игр. Сайт одевает информационный характер.
1×slots зеркало рабочее на сегодня
Мы собрали и опубликовали список лучших бездепозитных казино с призами за регистрацию, коие гарантируют щедрые выигрыши и мгновенные выплаты.Бездепозитные призы за регистрацию в игровых автоматах для хозяев онлайн-казино являются частью рекламной кампании, направленной на повышение аудитории вебсайта. Так они продвигают свои бренды и завлекают свежих посетителей. 1хслотс официальный сайт зеркало Верификация аккаунта. Лучше доказать лицо сразу последствии регистрации, чтобы потом не было проблем с выводом средств. Верификация возможность проходить 2-мя путями:Ниже указан актуальный список законных казино в Беларуси с бонусами на 1-ый депо. Вы можете попасть на официальный вебсайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. <a href=https://mega-zaim96.ru/forum/user/30588/>https://mega-zaim96.ru/forum/user/30588/</a> Представьте момент, когда при ставке в 10 рублей Вы получите подобное умножение. Миллион рублей за одно вращение, что абсолютно вполне. Поэтому вопрос, сколько возможно выиграть остаётся закрытым. Предлагаем выяснить самостоятельно. Регистрируйтесь в одном или нескольких онлайн казино, получайте Бездепозитный бонус и проверяйте удачу в деле. Разумеется, вывести деньги сложно. Однако шансы есть у всех. 1×slots зеркало сайта Все обожают получать подарки. Согласитесь, практически любой играющий человек будет безгранично рад, в получит даровой презент для забавы в онлайн казино просто за регистрацию либо же бонус за внесенный депозит, например нарекаемые приветственные бонусы для свежих игроков. Соответственно эти онлайн клубы станут больше популярны и предпочтительны у игроков при выборе казино для игры. Топ казино каждый обновляется и прибавляются новые и увлекательные игровые клубы с привлекательной бонусной политикой и всеми вероятными прерогативами, к коим относятся эти бонусы как фриспины за регистрацию, валютные бездепозитные призы, а также щедрые бонусы за внесенный депозит.Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша бонусов. Заведения всегда устанавливают наивысшую ставку, возможную по условиям вейждера.
1×slots регистрацию процедура займет всего лишь
Хотя благотворительные призы начисляются без депо, не исключено, собственно вам понадобиться заносить деньги. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только в того, как свежий клиент первый пополнит игровой счет. <a href=http://www.lemon-directory.com/%D0%B4%D0%B5%D1%88%D0%B5%D0%B2%D0%B0%D1%8F-%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0_469331.html>http://www.lemon-directory.com/%D0%B4%D0%B5%D1%88%D0%B5%D0%B2%D0%B0%D1%8F-%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0_469331.html</a> Так собственно можете храбро регистрироваться без всяких размышлений. Фортуна сегодня наверняка на вашей стороне. Не страшитесь, как последствие какого либо ущерба Вам совершенно не угрожает. С этими бонусами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе. 1х слотс зеркало регистрация в 1×slots casino Самые свежие бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды находятся на данной страничке. Посетитель может расценить условия получения и начать выступать на средства без внесения депо. При этом игроку главно разуметь, на каких критериях и какими способами возможность вывести приобретенный выигрыш. Для сего нужно расценить перечень присоединенных платежных систем.
1хлот регистрация в 1×slots casino
Все обожают получать презенты. Согласитесь, практически каждый играющий человек несомненно безгранично счастлив, случае получит даровой презент для забавы в интернет казино просто за регистрацию или же приз за внесенный депозит, так называемые приветственные призы для новых игроков. Соответственно эти онлайн клубы будут больше известны и преимущественны у игроков при выборе казино для игры. Топ казино непрерывно обновляется и добавляются свежие и интересные игровые клубы с привлекательной бонусной политикой и всеми возможными преимуществами, льготами, к которым относятся эти бонусы как фриспины за регистрацию, валютные бездепозитные бонусы, а великодушные призы за внесенный депо.Кешбэк-бонус представляет собой возврат фиксированного процента от ставки если, тогда, проигрыша или же от проигранной суммы за определённый период. В большинстве случаев кешбэк не превышает 10%. Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Зарегистрироваться в казино по особой ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефона и электронную почту). Для доказательства номера телефонного нужно в личном профиле показать свой номер и нажать кнопку „Подтвердить номер телефонного“, далее Вы получите sms-сообщение с кодом, который нужно ввести в подходящее фон. Для доказательства электрической почты, перебежать по интенсивной ссылке в письме от казино. 1× slots регистрация в 1×slots casino <a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=9339&TITLE_SEO=9339-iz-chego-sostoit-dieta-eleny-malyshevoy&MID=393316&result=reply#message393316>http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=9339&TITLE_SEO=9339-iz-chego-sostoit-dieta-eleny-malyshevoy&MID=393316&result=reply#message393316</a>
1×slot зеркало рабочее регистрации на телефон придет
Многие казино предоставляют в маркетинговых целях безвозмездные призы исключительно для наших читателей. Чтобы их получить, нужно перейти на игровой вебсайт по партнерской ссылке с нашего портала. Бездепозитный бонус предоставляется новенькому игроку за определенные действия. Часто презент вид денег либо фриспинов выдается за регистрацию, спасибо чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. <a href=http://k98727wu.beget.tech/user/DeweyJatry/>http://k98727wu.beget.tech/user/DeweyJatry/</a> Для получения выигрыша требуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить конкретную сумму, хотя уже из собственных денег. Она рассчитывается из общего объема выигрыша за всегда использования бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, случае юзер выиграл 1000 рублей, а множитель составляет х30, исключить средства возможно несомненно, сделав ставки на 30 000 рублей.Не стоит путать игру в демо и внедрение бонусов. В демонстрационном режиме игрок имеет расценить механику слота, сюжет и оформление. Но забава проводится на условные кредиты, поэтому отсутствует основное ? чувство пыла. Активируя промокод или фриспины, клиент по-прежнему не расходует свои деньги на игровые автоматы, хотя может сорвать настоящий куш! 1×slots casino online регистрация Размер бонуса. В качестве бездепов обычно начисляют небольшие суммы, а когда идет о бонусах за депозит, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино могут подарить игроку до 2000$.При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток.
<b>Смотреть еще похожие новости:</b>
<a href=https://bans.org.ua/index.php?topic=119840.new#new>1× slots casino официальный сайт</a>
<a href=https://acerfans.ru/faq/796-kak-vylozhit-na-forum-informaciju-iz-zhurnala.html>1×slots официальный сайт скачать</a>
<a href=https://www.allampolgar.hu/showthread.php?tid=3251>1 xslots рабочее зеркало</a>
<a href=https://10nsk.ru/user/JosephSuple/>зеркала 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Прямо в заберите безвозмездные вращения за регистрацию без депо и начинайте собирать призовые комбинации из-за крупных выигрышей! При помощи такого поощрения оператор возможность того завлекать посетителей, которые раньше проявляли активность на сайте, но по какой-то причине перестали выступать. В этом случае промокод высылается юзеру по электронной почте либо вид SMS.
#3733 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
Бездепозитный приз казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в этом и заключается главное различие.Этот образ бонуса несомненно добавлен на Ваш акк после удачной процедуры регистрации с использованием номера аппарата. Если избрать другой метод творенья учетной записи, бездеп не будет добавлен на Ваш аккаунт. <a href=http://filmkachat.ru/>1хслотс официальный сайт зеркало</a> <a href=https://www.webwiki.co.uk/astramedika.com.ua>https://www.webwiki.co.uk/astramedika.com.ua</a> Многие игроки, оценив функционал казино, остаются выступать в нем и дальше ? на это и нацелено любое промо. Постоянные посетители заносят депозиты и проделывают ставки, обеспечивая длительную выгода оператора. То есть, казино выдают бездепы новым пользователям для формирования лояльной аудитории. рабочее зеркало 1×slots <a href=https://www.npf-atom.ru/support/forum/view_profile.php?UID=16646>https://www.npf-atom.ru/support/forum/view_profile.php?UID=16646</a> В разделе с призами активировать свой презент. Найти игры, для которых учтено одобрение и применять бонус по предназначению.Для вывода средств бонус нужно несомненно отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариантами отыгрыша бездепозитного бонуса до его получения, чтобы избежать конфликтных ситуаций.
1×slots зеркало регистрацию более популярный вариант это
Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала быстрые выводы. Фишка выплат никаких, что достаточно избрать платёжный инструмент и указать сумму. В большинстве случаев деньги зачисляются на электрические кошельки на 15 мин., а на банковские карты – 1–3 рабочих денька.Однако далеко не все ресурсы предлагают своим посетителям бездепозитные призы за регистрацию в казино. В большинстве случаев учтено поощрение на 1-ый депозит в размере 100–200%. Это отличная вероятность преувеличить банкролл, прирастить время, проведённое за забавой и шансы сорвать крупный куш. <a href=http://forum.animogen.com/memberlist.php?mode=viewprofile&u=15333>1×slots зеркало регистрация</a> 1×slots casino регистрация на сайте Вейджер (либо вагер) ? это минимальная сумма ставок, коию необходимо сделать для вывода валютного приза. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, тем привлекательнее спецпредложение. <a href=https://usolie-citi.ru/user/AnthonyTaupe/>https://usolie-citi.ru/user/AnthonyTaupe/</a> 1×slots зеркало подтвердит вашу регистрацию если говорить Варианты выигрыша находятся от Вашей удачи и критерий игорного портала. Выше мы заявили, что кое-какие бездепозитные бонусы в 2022 году выдаются с лимитированиями по максимальной выплате. Однако, остаются другие, все, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на деньги, можно выиграть неописуемые суммы. Сегодняшние игровые автоматы либо видео слоты, как их называют. Могут выдавать солидные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000.В списке требований к отыгрышу часто наличествуют лимиты на ставки при забаве на личные деньги. Так, если отыграть надо(надобно) 30 000 руб., а предельная сумма ограничена 30 рублями, то вертеть барабаны предстоит 1000 один. Эта особенность затрудняет соблюдение игроками критерий по срокам деяния акции.
1хслот официальный сайт зеркало
Фриспины без депо либо дополнительные свои посодействуют поближе познакомиться с игровой платформой и её функциями. За счёт даров возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям ради игры напротив живых крупье.Некоторые казино могут предлагать клиентам бездепы за подтверждение номера либо почты либо репост на страницу в соц сетях. Помните, что всевозможные нарушения управлял сведут на нет ваши старания, и вы наверняка останетесь без начисленного для дарового бонуса. Всегда изучайте управляла начисления и условия вейджера. По любым вопросам, на коие вы не можете помощи найти ответы, обращайтесь за объясненьям и саппорт. <a href=https://www.vingle.net/posts/5744141>https://www.vingle.net/posts/5744141</a> Обычно показатель выше, чем для призов на депо. Не изумляйтесь, в он несомненно числе х100. Иногда завышенный коэффициент вейджера уточняется для обитателей отдельных государств. 1×slots сайт Принципиальным отличием даровых призов от бонусов на депозит является неименье надобности заносить деньги на акк. Из-за этого их часто именуют бездепозитными (no deposit bonuses).
1×slots скачать на айфон
Бонусные деньги – маленькая сумма денег для старта в новом казино. На бонусные деньги, обыкновенно разрешено выступать во все забавы, считая слотов с современным джекпотом и игр из раздела live casino.Внесение депо – Будьте готовы восполнить счет в отыгрыша приза. Это обычное требование верховодил для этого подобии промо-акций. Лучше заранее уточнить, какую сумму надо(надобно) несомненно заносить на счет. Как верховодило, идет о наименьшем депозите, но вы обязаны быть убеждены, собственно он вас по кармашку. С другой стороны, гораздо легче забрать бездепозитные фриспины за регистрацию в казино и прямо момент начать вертеть барабаны в наилучших слотах. Главная особенность спинов что, собственно они предназначены для лучших автоматов. Удастся не пройти дополнительные раунды, но и прирастить необходимую выигрыша, заработать респины прочие внутриигровые подарки.Подобные бонусы без депо предоставляются на больше прибыльных критериях. Зачастую они крупнее, а обстоятельства отыгрыша менее строгие. 1×slots бездепозитный бонус за регистрацию <a href=https://gti-club.ru/forum/member.php?u=408201>https://gti-club.ru/forum/member.php?u=408201</a> При пользовании бездепозитным призом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют количество обликов лимитов:Но а в вы уже профи по онлайн казино, кликаем на красноватую кнопку «Получить» и Вы механически перейдете в интернет казино;
1хслотс мобильная версия зеркало
Заполняя данные в личном профиле, указывайте только достоверную информацию, так как Вам понадобиться ее подтвердить в будущем при выводе денег. У любой забавы средства притязания по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система засчитает каждую ставку. В рулетке и покере сделать это намного труднее. Именно потому так главно внимательно разбирать обстоятельства получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в каждой игре, то новички просто «спустят приз на ветер». <a href=http://krovlya.dp.ua/index.php?subaction=userinfo&user=uttermostseries>http://krovlya.dp.ua/index.php?subaction=userinfo&user=uttermostseries</a> Варианты выигрыша зависимости от Вашей удачи и условий игорного портала. Выше мы сказали, собственно кое-какие бездепозитные бонусы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются другие, все, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность современных игр на средства, возможно выиграть невозможные суммы. Сегодняшние игровые автоматы либо видео слоты, как их нарекают. Могут выдавать солидные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000. 1×slots зеркало видели такую регистрацию на Также бездепозитные призы могут служить способом возвращать к этой посетителей, пока приостановивших своё сотрудничество с фирмой: извещение о бездепе поступает на мобильный телефон либо почту.Раздача бонусов возможность быть приурочена к различным датам: календарные праздники, деньки рождения игроков, годовщина открытия казино и т. Д. Подарок выдается вид средств, фриспинов или баллов для скопления и обмена на предложения оператора. Если пользователь получает выигрыш, деньги начисляются на его счет. Для вывода данной суммы придется выполнить ряд требований.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.dis-course.net/viewtopic.php?t=491743>1×slots быструю регистрацию а также мгновенное</a>
<a href=https://creapnl.com/foros/tema/1×slots-%d0%bf%d0%be%d0%b4%d1%82%d0%b2%d0%b5%d1%80%d0%b4%d0%b8%d1%82-%d0%b2%d0%b0%d1%88%d1%83-%d1%80%d0%b5%d0%b3%d0%b8%d1%81%d1%82%d1%80%d0%b0%d1%86%d0%b8%d1%8e-%d0%b5%d1%81%d0%bb%d0%b8-%d0%b3%d0%be-9/>1×slots подтвердит вашу регистрацию если говорить</a>
<a href=http://nakupnidivadlo.cz/index.php/forum/3-pripominky/46560–1×slots?start=54#235052>1×slots скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подтверждение индивидуальной информации. Все казино просят от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у юзера других аккаунтов (мультиаккаунт запрещен).
#3734 Empathy_center_aritahttps://empathycenter.ru/
Всем привет! «Эмпатия» центр ментального здоровья. Цель каждого специалиста нашей команды – забота о ментальном здоровье людей через предоставление как можно более качественной и доступной медицинской помощи, а также через дестигматизацию ментальных расстройств и психопросветительскую деятельность. Главный врач центра „Эмпатия“ Панова Надежда Вячеславовна. <a href=https://empathycenter.ru/preparations/b/buspiron/>бусприрон применение</a> Если Центр ментального здоровья Эмпатия с более чем 60 работающих врачей и специалистов в Реутове и Москве, то это в сети клиник доказательной психиатрии https://empathycenter.ru/ . Узнавайте и звоните к нам по бесплатному номеру телефона 8–800–775–07–12. Увидимся!
#3735 Calvinorekshttps://tv.the-hdrezka.com
русские фильмы 2025 подборка <a href=https://tv.the-hdrezka.com/>hd rezka фэнтези hd на айфоне</a>
#3736 Kennethlaumphttps://x-nova.live
Маркетплейс нового поколения <a href=https://x-nova.live/>https://x-nova.live</a> уникальный сервис для удобных покупок и продаж. Интеллектуальный поиск, персонализированные рекомендации и безопасность сделок – все для вашего комфорта!
#3737 EarnestCor
What's up i am kavin, its my first time to commenting anywhere, when i read this paragraph i thought i could also create comment due to this sensible piece of writing.
Its like you read my mind! You seem to know so much about this, like you wrote the book in it or something. I think that you could do with some pics to drive the message home a bit, but instead of that, this is fantastic blog. A great read. I'll certainly be back.
<a href=https://needturfeeguipments.com/listings/for-sale/wyoming-valley-equipment/equipment/>Wyoming Valley Equipment LLC</a>
#3738 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерские контора ап порно с Захарова Мария Владимировна <a href=https://kompromat1.online/>Мухтиярова Елена Вячеславовна порно</a> 1×bet зеркало казино гта 5 <a href=https://specreporter.com/>casinos winning</a> retro casino порно с Ирина Сидоркова казино без casino сегодня винлайн букмекерская контора официальный pin up casino скачать самое казино
DiskiPlus порно с Никита Кучеров (хоккей) DiskiPlus casino вход <a href=https://www.diskiplus.ru/>DiskiPlus porno Нина Пирогова, хоккеистка</a> DiskiPlus порно с Анна Калинская (теннис) DiskiPlus фреш казино <a href=https://diskiplus.ru>DiskiPlus пин up casino</a> DiskiPlus casino скачать DiskiPlus casino x DiskiPlus Разуваева Ксения Денисовна порно DiskiPlus скачать 1×bet на андроид DiskiPlus bet casino DiskiPlus porno Дарья Клишина DiskiPlus порно с Абрамченко Виктория Валериевна
#3739 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino играть казино вход <a href=https://slon-ru.com/>casino официальный зеркало</a> kent casino регистрация порно с Матвей Сафонов (футбол) <a href=https://7club7.com/>суть казино</a> казино большая 1×bet зеркало на сегодня кент casino симулятор казино porno Дарья Клишина лучшие казино бесплатно 1×bet
DiskiPlus мелбет букмекерская контора DiskiPlus скачать casino на андроид <a href=https://www.diskiplus.ru/>DiskiPlus vavada casino</a> DiskiPlus казино сочи DiskiPlus 1×bet скачать приложение <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet на сегодня</a> DiskiPlus порно с Федор Чалов (футбол) DiskiPlus пин ап casino DiskiPlus человек казино DiskiPlus казино играть DiskiPlus порно с Диана Шнайдер (теннис) DiskiPlus 1×bet зеркало xbet DiskiPlus казино смотреть
#3740 mostbetsplklklhttps://mostbet-casino-logowanie-pl.com
MostBet to legalna platforma hazardowa w Polsce z licencja | MostBet logowanie jest szybkie i proste – wystarczy kilka klikniec <a href=https://mostbet-casino-logowanie-pl.com>mostbet casino</a> | MostBet Polska to najlepsza opcja dla graczy szukajacych legalnego kasyna online | W MostBet mozna grac na zywo z prawdziwymi krupierami | W MostBet mozna obstawiac zaklady na najwazniejsze wydarzenia sportowe | MostBet kasyno online oferuje duzy wybor slotow | MostBet to renomowana marka wsrod kasyn online | MostBet rejestracja otwiera drzwi do swiata kasyn online <a href=https://mostbet-casino-logowanie-pl.com/>www.mostbet-casino-logowanie-pl.com</a>.
#3741 BlairCreenhttps://photofile.ru
Красивые поздравления <a href=https://photofile.ru/otkrytki-so-svechami-vechnaya-i-svetlaya-pamyat-110-kartinok>https://photofile.ru/otkrytki-so-svechami-vechnaya-i-svetlaya-pamyat-110-kartinok</a> в одном месте! Огромный выбор картинок и открыток для любого повода. День рождения, юбилей, профессиональные праздники – найдите идеальное поздравление!
#3742 Zelluloza_zemhttps://zelluloza.ru/
Добрый день! Можно сказать, что это великолепная, отличная и нужная новость для всех читателей онлайн и книголюбов! Недавно подсказала один сайт, но не в этом суть, мое удивление и изумление был в том, что этому домену 12 лет. Да, вы не ослышались именно 12 затяжных и долгих лет. За это время сайт не только не загнулся, но превратился в обширный и крупномасштабный портал для любителей книг и читателей. Можно скачивать и читать различные книги без сокращения, а так же находить любимых зарубежных и русских авторов: <a href=http://zelluloza.ru/search/details/22747-Astrollet>715 книга 5 звездный скиталец том 3 полная версия читать полностью</a> В общем, если вам интересно найти, читать книги онлайн фэнтези, фантастика, любовные романы и т.д., например: <a href=https://zelluloza.ru/search/details/115920-Aleksandr-Berg/>берг александр скачать книги</a> Тогда вам срочно нужно прямо сейчас перейти на сайт ДАЙ ЖАРУ и узнать все подробности где можно читать онлайн и скачивать без сокращений полные версии электронных книг про любовные романы, фантастику, фэнтези, о попаданцах и все жанры и т.д. https://zelluloza.ru/ . Бесплатные книги русских писателей можете читать зарегистрироваться или без регистрации. Переходите на сайт, выбирайте книги онлайн, и обязательно сохраняйте в закладках и записывайте название сайта zelluloza.ru. Увидимся!
#3743 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино на деньги casino betting <a href=https://specreporter.com/>порно с Аделия Петросян (фигурное катание)</a> casino бонус top casino <a href=https://kompromat1.online/>bitz casino</a> порно с Петр Ян (ММА) Елена Лядова Юдаева Ксения Валентиновна порно casino официальный зеркало фильмы казино рояль казино ставка porno Илона Маркова, хоккеистка
DiskiPlus казино фильм смотреть онлайн DiskiPlus гта казино <a href=https://diskiplus.ru/>DiskiPlus Радченко Светлана Юрьевна порно</a> DiskiPlus скачать casino на андроид DiskiPlus casino ru <a href=https://diskiplus.ru/>DiskiPlus скачать букмекерскую контору</a> DiskiPlus Комарова Наталья Владимировна порно DiskiPlus демо казино DiskiPlus пин up casino DiskiPlus pinco casino DiskiPlus порно с Голикова Татьяна Алексеевна DiskiPlus Анна Михалкова DiskiPlus Нургалиева Эльвира Рамиловна порно
#3744 Charlesgunnyhttp://filmkachat.ru
1×slots бонус за регистрацию
На бонусные начисления имеют быть установлены дополнительные лимитирования, которые Вы не приняли при отыгрыше. Пока приз всецело не отыгран — средства из казино не выводятся.Законодательство, регулирующее азартные забавы в разных государствах, влияет на возможности операторов. В результате юзеры из отдельных регионов сталкиваются с ограничениями со стороны казино. Это возможность быть как глубокий отказ в доступе, например и невозможность загружать игры отдельных изготовителей. <a href=http://filmkachat.ru/>1хслотс 1хслотс регистрация перейти на 1×slots</a> <a href=https://www.woorank.com/en/teaser-review/astramedika.com.ua>https://www.woorank.com/en/teaser-review/astramedika.com.ua</a> Воспользоваться бездепом возможно не во всех игровых автоматах: казино и тут уточняет лимитирование для посетителей. Конечно, это можно счесть некоторым неудобством для игрока, хотя справедливости необходимо, что выбор автоматов всё равно остаётся довольно наибольшим. 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=http://www.engel-und-waisen.de/index.php/Benutzer:ElanaPadilla2>http://www.engel-und-waisen.de/index.php/Benutzer:ElanaPadilla2</a> Каждый новичок и профессиональный игрок грезят быстро стартануть и начать делать реальные ставки. Для сего достаточно арестовать презент, за кот-ый не уплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email либо аппарат. После сего администрация начисляет щедрое вознаграждение в виде даровых вращений или виртуальных кредитов.Фриплей-бонусы. Бонусы за бесплатную забаву есть лишь в некоторых клубах. Они зачисляются сразу последствии создания профиля и действуют недолговременное время. Если у вас нет времени израсходовать средства, они просто закончатся. Что дотрагивается медли, в большинстве случаев бонусы срабатывают в течение одного часа.
онлайн казино 1×slots
При правильном раскладе бездепы — это отличный способ играть на деньги без траты собственных средств. Есть несколько рекомендаций, следуя которым можно извлечь максимум полезности из подобных промоакций казино. Играть идет только на лицензированных площадках. Скриптовые веб-сайты не дурачат с бонусными предложениями, но и употребляют пиратский софт с измененным ГСЧ. Выиграть на таких автоматах нереально.С иной стороны, гораздо легче арестовать бездепозитные фриспины за регистрацию в казино и прямо сейчас начать вращать барабаны в лучших слотах. Главная необыкновенность спинов сомнений, собственно они предназначены для топовых автоматов. Удастся не пройти вспомогательные раунды, хотя и прирастить сумму выигрыша, заработать респины и другие внутриигровые презенты. 1×slots регистрация 1×slotscasino09k online Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, all зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 долларов. Если выдаются фриспины, их число редко превышает нескольких десятков безвозмездных вращений. <a href=http://bbs.cheaa.com./home.php?mod=space&uid=3140424>http://bbs.cheaa.com./home.php?mod=space&uid=3140424</a> На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не сможете активировать и получить бездепозитный бонус. 1×slots зеркало проходить регистрацию это отличный вариант Многие казино деют в маркетинговых целях бесплатные бонусы исключительно для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой вебсайт по партнерской ссылке с нашего портала.У нас на веб-сайте Вы отыщите перечень бонусов без депозита в испытанных казино и подробную информацию то как их получить и использовать.
скачать 1×slots официальный сайт
<a href=https://stomping-groundz.com/index.php?action=profile;u=2992>https://stomping-groundz.com/index.php?action=profile;u=2992</a> Так собственно основное отличие дара на депозит от бездепа – обязательное пополнение счёта. Вы сможете внести депо и преумножить стартовый капитал либо забрать бездеп и всем не придётся рисковать собственными сбережениями. Поспешите выполнить простые притязания, и администрация ресурса начислит щедрое одобрение! 1хслотс рабочее зеркало
1×slots сайт
Доступ к дару возможность открываться механически после введения промокода либо воззвания в службу сайта. В первом случае от пользователя не потребуется практически действий. Бездеп с активацией по коду встречается чаще всего. Игроку необходимо установить совокупа знаков в графе, кот-ая возможность находиться в регистрационной форме в Личном кабинете.Допустим, за регистрацию вы получили бездеп в размере 2 000 рублей с вейджером х30. В этом случае светит устроить ставок, на совместную необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда выполните обстоятельства по отыгрышу, придёт время заработать реальные деньги. Однако не запамятовывайте, что с любого презента выйдет исключить определённую необходимую (почаще всего менее $200). Высокая конкурентность в сегменте азартных игр мотивирует операторов привлекать клиентов разнообразными акциями. Благодаря данному у гостей появляется вероятность получить бонусы в казино за регистрацию без депозита. Воспользоваться этим предложением возможно, избегая процедуру внесения средств на игровой счет, просто активировав акк на сайте. Наш гид по бездепам поможет выбрать самую симпатичную бонусную программу, разузнать правила получения такого вознаграждения и воспользоваться им с максимальной выгодой.Для отыгрыша приза казино обязывает игрока поиграть на необходимую, в некоторое раз превышающую сумму приобретенного приза — тут выгода фирмы очевидна. Поспешите арестовать бездепозитные бонусы за регистрацию в казино из представленного перечня. Все платформы не только ведут законную работа, хотя и порадуют правдивыми плодами забавы, высочайшей отдачей, быстрыми выплатами. 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=https://honcure.com/user/MiguelTeR/>https://honcure.com/user/MiguelTeR/</a> Бездепозитный приз за регистрацию в казино — это стартовый презент вид денежного начисления или даровых вращений для новых игроков заведения, для получения которого не нужно заносить депозит.
1×slots регистрация то дальше необходимо пройти
Постарайтесь отыграть вейджер, чтобы появилась возможность забыть заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы можете получить выигрыш на электронной кошелёк, карту, аппарат. Допустим, за регистрацию вы возымели бездеп в размере 2 000 руб. С вейджером х30. В этом случае предстоит сделать ставок, на общую необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать настоящие средства. Однако не забывайте, собственно с каждого дара получится вывести определённую сумму (почаще всего не более $200). <a href=http://arenda.mineralgroup.ru/index.php?subaction=userinfo&user=verdantparish67>http://arenda.mineralgroup.ru/index.php?subaction=userinfo&user=verdantparish67</a> зеркло казино 1×slots Каждый из бездепозитных призов без пополнения 2022 имеет собственный определенный вейджер для отыгрыша, так же в любом казино он устанавливается индивидуально — где то он х55 а кое-где х30, повторюсь всюду по различному!Условия отыгрыша приза. Если Вы планируете заработать на бездепозитном призе, то для внимание на велечину вейджера и срок, кот-ый дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть приз и вывести выигрыш.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.emv.info/memberlist.php?mode=viewprofile&u=424>1×slots casino регистрация</a>
<a href=https://feederfishing.lt/en/forum/rites/1356307–1×slots#1367781>1×slots регистрация</a>
<a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/9681–1khslots-kazino-zerkalo#9709>1хслотс казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бонус за регистрацию в казино без депозита с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша может потребоваться устроить ставки на необходимую, в количество 10-ов один превосходящую сумму приза либо выигрыша.
#3745 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Яровая Ирина Анатольевна порно порно с Виктория Синицина, фигуристка <a href=https://repost.news/>pin casino</a> казино гта 5 casino daddy <a href=https://th-royalgclub.com/>букмекерские конторы в россии</a> 1×bet слоты официальный сайт casino 7k рабочее лучшие онлайн казино часы казино ставки на спорт букмекерские конторы скачать 1×bet на андроид порно с Анастасия Потапова, теннисистка
DiskiPlus официальные зеркала казино DiskiPlus леон букмекерская контора <a href=https://diskiplus.ru>DiskiPlus казино регистрации</a> DiskiPlus порно с Юлия Ефимова, пловчиха DiskiPlus букмекерская контора <a href=https://diskiplus.ru/>DiskiPlus порно с Дронова Александра Викторовна</a> DiskiPlus pin up букмекерская контора DiskiPlus бесплатное казино DiskiPlus порно с Юлия Ефимова DiskiPlus Любимова Ольга Борисовна порно DiskiPlus kometa casino DiskiPlus порно с Евгения Медведева, фигуристка DiskiPlus букмекерские конторы в россии
#3746 Charlesgunnyhttp://filmkachat.ru
зеркло казино 1×slots
Для тех, кто только взвешивает испытать собственную фортуну, а также для профессиональных игроков, разыскивающих новые площадки для выигрышей, водящие лицензированные казино часто организуют разные промоакции, и лучшее предложений за время – как для начинающих, например и для профессиональных игроков – бездепозитный бонус за регистрацию. <a href=http://filmkachat.ru/>1×slots casino регистрация</a> Чем ниже значение вейджера, тем легче отыграть и вывести приз. Если Вы планируете заработать на бездепе, не просто ознакомиться с свежим игровым клубом, то стоит избегать бонусов с высочайшим вейджером их почти не реально отыграть. С ними Вы можете лишь протестировать забавы заведения.Не стоит путать игру в демо и внедрение призов. В демонстрационном режиме игрок может расценить механику слота, сюжет и оформление. Но забава ведется на относительные кредиты, поэтому отсутствует главное ? ощущение пыла. Активируя промокод или фриспины, заказчик и не тратит свои средства на игровые автоматы, но возможность сорвать настоящий куш! <a href=https://www.consult-exp.com/blogs/219733/Skup-aut-Warszawa-profesjonalna-wycena-i-natychmiastowa-wyp%C5%82ata>https://www.consult-exp.com/blogs/219733/Skup-aut-Warszawa-profesjonalna-wycena-i-natychmiastowa-wyp%C5%82ata</a> 1× slots casino зеркало <a href=https://sparkitupforums.net/User-Davidligue>https://sparkitupforums.net/User-Davidligue</a>
1×slots зеркало рабочее
Вообще перейдя в казино — верховодила одинаковы в получении бездепозитных призов, в стандартные правила входит: подтвердить эл. Почту и телефон, наполнить собственный индивидуальный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ.Акции, посвященные календарным праздникам, бывают рассчитаны как на всех юзеров, например и на категории: к, презент на 8 марта девушкам-игрокам либо мужчинам на 23 февраля. зеркала 1×slots <a href=http://forum.moto-fan.pl/uzytkownik-frankbrari>http://forum.moto-fan.pl/uzytkownik-frankbrari</a> В качестве призов онлайн казино часто предлагает выдачу фриспинов, то есть бесплатных вращений игрового барабана. Виртуальные монеты можно применять для обучения в покерной школе или для забавы в казино.В списке требований к отыгрышу нередко наличествуют лимиты на ставки при этой на собственные средства. Так, случае отыграть надо(надобно) 30 000 руб., а максимальная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 раз. Эта особенность затрудняет соблюдение игроками условий по срокам действия акции. 1хслотс казино зеркало
1×slots casino регистрация 1×slots review live
При ирге на бонусные свои воспрещается выступать в игровые автоматы с современным джекпотом и игры из радела exist casino. Кроме того, некоторые казино выделяют бездеп на раз либо несколько конкретных слотов, и в других забавах Вы не можете на них играть. В подавляющем большинстве случаев безвозмездные бонусы начисляются в кредитах, коие нельзя незамедлительно исключить со счета. Прежде их нужно отыграть по установленным правилам. Эти требования принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже.Не хотите сыграть в азартные забавы, не рискуя своими деньгами, но получая в все выплаты? Подобную возможность предоставляют многие наихорошие порталы с азартными веселиями. В их количестве много честных и надежных интернет-казино на русском языке. Они привлекают свежих юзеров различными поощрительными событиями, включая бездепозитные, либо безвозмездные призы. <a href=http://t20suzuki.com/phpBB2/profile.php?mode=viewprofile&u=11342>http://t20suzuki.com/phpBB2/profile.php?mode=viewprofile&u=11342</a> У каждой забавы средства притязания по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система засчитает любую ставку. В рулетке и покере устроить это намного труднее. Именно потому так главно пристально читать условия получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой ирге, то новички попросту «спустят приз на ветер».Фриплей-бонусы. Бонусы за бесплатную забаву есть только в некоторых клубах. Они зачисляются сразу после сотворения профиля и срабатывают недолговременное время. Если у вас нет времени израсходовать средства, они просто завершатся. Что касается медли, в большинстве случаев призы действуют на 1-го часа. 1хслотс мобильная версия зеркало А ознакомиться с новыми интернет казино, Вы можете за счет призов с выводом прибыли, которые Вы можете получить без депо.Подтвердите регистрацию, чтобы активировать Бездепозитный приз с выводом, потребуется наполнить личный профиль. Заполните пустые поля истинными данными о себе.
1×slots casino регистрация 1×slotscasino09k online
Казино выделяет вероятность заработать и вывести настоящие деньги на бездепозитных бонусах. Обычно, это малозначительная сумма, коию казино возможность для позволить презентовать игроку.Выиграть реальные средства в казино не пополняя счет – трудно, но вполне. Главное задаться целью и не нарушатьправила заведения. Выберите несколько казино с бездепзитными бонусами и начните играть на бонусные свои. По статистике в одном из 10-ти заведений можно заработать небольшую сумму денег помощью бонусных средств. Мы рекомендуем не открещиваться от подобных услуг знаменитых казино. Выделите количество мин. На регистрацию, получите приз и попробуйте его отыграть. Может быть, сегодня удача будет на вашей стороне!Бонус за регистрацию в казино выдается только один раз на одного игрока. Но бывают вспомогательные акции, масштабах которых бездепы расступаются для постоянных клиентов и эти подарки Вы можете получить более 1-го раза. 1× slots официальный <a href=https://www.lifesshortlivefree.com/community/profile/walterecono/>https://www.lifesshortlivefree.com/community/profile/walterecono/</a>
1×slots регистрация 1×slots casino c2d ru
Список например называемых «не землель» прилагается к правилам бонусной программы игорного портала. Обязательно проверьте, распространяются ли на вас сходственные санкции.Фриспины. Бесплатные вращения предусмотрены для использования в видео-слотах. Внимательно читайте обстоятельства – они нередко выдаются для некоторых машин. В зависимости от клуба возможность делать определенное количество ставок. Кстати, современные игорные дома дают вероятность заводить «одноруких злодеев». Доступность — бездепозитные призы в казино чаще всего предоставляются новым игрокам, но бывают случаи, когда приз имеют получить и действующие посетители.Какие призы есть еще получить не бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, любое онлайн казино предлагает игрокам выгодное предложение на первый депозит, вы совершаете депо, ваш депозит увеличивается в двое либо в в трое, тем наиболее начать выступать возможно с более солидной суммой, так же не забываем на вейджер на бонусы. <a href=https://7apk.ru/user/Michaeljigma/>https://7apk.ru/user/Michaeljigma/</a> Каждый из бездепозитных призов без пополнения 2022 имеет свой определенный вейджер для отыгрыша, например же в любом казино он устанавливается индивидуально — где то он х55 а где-то х30, повторюсь везде по разному! 1× slots официальный
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.puppylinux.pl/index.php?topic=794.new#new>1×slots регистрация на сайте 1×slots ru com</a>
<a href=https://forum.oursson.ru/viewtopic.php?f=2&t=10337>1хслотс казино зеркало</a>
<a href=https://australiantravelforum.com/Upload/showthread.php?tid=193573>1×slots регистрация на 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В качестве призов интернет казино нередко предлагает выдачу фриспинов, словами даровых вращений игрового барабана. Виртуальные монеты можно использовать для обучения в покерной школе или для игры в казино.
#3747 Charlesgunnyhttp://filmkachat.ru
1×slots казино зеркало
При отыгрыше бездепов, учитывайте временные ограничения. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток.Способы получения бездепа различаются от облика бонуса, кот-ый понравился игроку. Но вам так надо(надобно) быть зарегистрированным в законном онлайн-казино и подтвердить собственную личность. В общем виде пошаговая инструкция для получения бездепозитного бонуса смотрится так: <a href=http://filmkachat.ru/>1×slots casino зеркало рабочее</a> На данном разделе портала периодически публикуются обзорные заметки, в рассматриваются безвозмездные бонусы наилучших интернет-казино. Информация структурирована по нескольким пт, включая главные: <a href=https://redmine.dti.economia.gov.br/issues/72788>https://redmine.dti.economia.gov.br/issues/72788</a> Превышение максимальной ставки при отыгрыше. Система автоматически не предупреждает о превышении ставки, поэтому о нарушении верховодил игрок возможность разузнать уже после подачи запроса на вывод средств.В качестве призов онлайн казино нередко предлагает выдачу фриспинов, словами безвозмездных вращений игрового барабана. Виртуальные монеты можно применять для обучения в покерной школе либо для забавы в казино. 1 хслот регистрация в 1×slots casino <a href=https://zeoworks.com/main/member.php?action=profile&uid=215630>https://zeoworks.com/main/member.php?action=profile&uid=215630</a> Поспешите арестовать бездепозитные бонусы за регистрацию в казино из представленного списка. Все платформы не только водят легальную работа, но и обрадуют добросовестными результатами игры, высочайшей отдачей, прыткими выплатами.
1×slots регистрация на официальном сайте
Также, в нужно доказать свой номер телефонного, чтобы код, приобретенный в смс-сообщении от клуба установить в особое поле в личном офисе игрока. <a href=http://miupsik.ru/forums/showthread.php?tid=427571>1×slots регистрацию более популярный вариант это</a> скачать 1×slots на андроид мобильная версия В интернет-сети всегда можно отыскать перечни наиболее известных и обещанных поощрительных программ от знаменитых онлайн-казино.Отзывы читателей о бонусных промоакциях посодействуют составить эмоцию, хотя не запамятовывайте о субъективности собственных объяснений. <a href=http://en.sulseam.com/bbs/board.php?bo_table=free&wr_id=1829048>http://en.sulseam.com/bbs/board.php?bo_table=free&wr_id=1829048</a> 1×slots регистрация на сайте 1×slots ru com Помните, собственно любые нарушения верховодил сведут на нет ваши усилия, и вы скорее останетесь без начисленного вам бесплатного бонуса. Всегда изучайте правила начисления и обстоятельства вейджера. По хоть вопросам, на которые вы не можете самостоятельно найти ответы, обращайтесь за объяснениям и саппорт.
1×slots регистрацию более популярный вариант это
Но есть азартные заведения, готовые просто так вручить средства на забаву. Для этого достаточно создать профиль. Чтобы вывести выигрыш, сперва нужно выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа.Допустим, за регистрацию вы получили бездеп в объеме 2 000 рублей с вейджером х30. В данном случае предстоит сделать ставок, на общую сумму в 60 000 рублей (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать настоящие деньги. Однако не забывайте, что с любого дара выйдет исключить определённую сумму (почаще всего не более $200). Основное верховодило получения бездепа ? творимый аккаунт обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов требовательно воспрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депозита необходимо соблюдать простую последовательность деяний. <a href=https://aben75.cafe24.com/bbs/board.php?bo_table=free&wr_id=171605>https://aben75.cafe24.com/bbs/board.php?bo_table=free&wr_id=171605</a> Возьми свой подарок. Чаще всего бонус активируется незамедлительно после регистрации. Но посещают ситуации, когда нужно забежать в личный офис либо написать в справочную службу. 1хслот официальный сайт зеркало Зарегистрироваться в казино по особой ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефонного и электронную почту). Для подтверждения номера телефона необходимо в собственном профиле указать собственный номер и нажать кнопку „Подтвердить номер аппарата“, далее Вы получите sms-сообщение с кодом, кот-ый необходимо ввести в соответствующее поле. Для доказательства электрической почты, перейти по активной ссылке в письме от казино.
1×slots сайт
Бесплатные призы казино без депо возможно получить вид денежных средств на бонусный счет (вывести их можно только в отыгрыша), фриспинов, забавы или кешбэк-бонуса.Раздача бонусов имеет быть посвящена разным датам: календарные праздничные, деньки рождения игроков, годовщина открытия казино и т. Д. Подарок выдается в виде денег, фриспинов либо баллов для накопления и размена на услуги оператора. Если пользователь получает выигрыш, деньги начисляются на его счет. Для вывода этой суммы придется выполнить ряд требований. <a href=https://10nsk.ru/user/JosephSuple/>казино 1×slots официальный сайт</a> Вейджер не более х30–35 считается приемлемым. Опытные игроки утверждают, что с таким вейджером реально остаться в плюсе, если верно подойти к выбору игрового аппарата. 1×slots регистрация на сайте 1×slots ru com <a href=http://spilov.ru/user/PhilipLen/>http://spilov.ru/user/PhilipLen/</a> Диапазон ставок, коие вправе устроить игрок, кроме лимитирован. Обычно ставить можно небольшую необходимую — пределах 10–30 рублей за одно вращение.
1хслотс казино зеркало
Подобные призы без депо предоставляются на больше выгодных условиях. Зачастую они крупнее, а обстоятельства отыгрыша наименее строгие.Перечисленные выше главные характеристики сопровождают практически любой бонус и являются стереотипными для бездепозитных бонусных начислений в казино. <a href=http://optionshare.tw/home.php?mod=space&uid=971875>http://optionshare.tw/home.php?mod=space&uid=971875</a> 1×slots casino регистрация 1×slotscasin online Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, the decision зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.
<b>Смотреть еще похожие новости:</b>
<a href=https://sadhaka.nl/forum/viewtopic.php?t=102129>1х слотс зеркало регистрация в 1×slots casino</a>
<a href=http://zxz.listbb.ru/memberlist.php?mode=viewprofile&u=925>1×slots быструю регистрацию а также мгновенное</a>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=424402>1хслотс рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Третитй бездепозитный приз за регистрацию – валютные средства. К раскаянию, начислить рубли или доллары способны лишь известные и модные клубы. С их поддержкою появится насладиться каждой доступной игрой – автоматом, рулеткой, кено, блэкджеком. Бездепозитные бонусы за регистрацию в игровых автоматах для владельцев онлайн-казино являются частью рекламной кампании, направленной на увеличение аудитории сайта. Так они продвигают свои бренды и завлекают свежих посетителей.
#3748 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Набиуллина Эльвира Сахипзадовна порно porno Илона Маркова, хоккеистка <a href=https://7club7.com/>букмекерская контора фонбет</a> казино рулетка бк букмекерская контора <a href=https://repost.news/>porno Илья Ковальчук (хоккей)</a> порно с Сергей Бобровский (хоккей) 1×bet приложение лучшие бесплатные онлайн казино porno Илья Ковальчук (хоккей) casino сегодня casino com casino скачать
DiskiPlus порно с Аделия Петросян (фигурное катание) DiskiPlus win win casino <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet скачать бесплатно</a> DiskiPlus казино фильм DiskiPlus пинап казино <a href=https://www.diskiplus.ru/>DiskiPlus казино сочи</a> DiskiPlus retro casino DiskiPlus pin up casino buzz DiskiPlus порно с Максим Глушенков (футбол) DiskiPlus win win casino DiskiPlus pin up букмекерская контора DiskiPlus скачать pin casino DiskiPlus казино ставка
#3749 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало сайта
Для подтверждения электронной почты, просто перейдите по активной ссылке в письме, полученном от игрового заведения. <a href=http://filmkachat.ru/>1×slots бонус за регистрацию</a> <a href=https://app.pipefy.com/organizations/301582382/interfaces/3cb17c11–0e57–461f-8383-e1e42508bc5a/pages/8c03e96c-e422–45c5–89db-a09ec6070594>https://app.pipefy.com/organizations/301582382/interfaces/3cb17c11–0e57–461f-8383-e1e42508bc5a/pages/8c03e96c-e422–45c5–89db-a09ec6070594</a> Бездепы шансы входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой или баллами. 1×slots зеркало регистрация в 1×slots casino <a href=http://www.hdkinoteatr.com/index.php?subaction=userinfo&user=robusthealth72>http://www.hdkinoteatr.com/index.php?subaction=userinfo&user=robusthealth72</a> В разделе с бонусами активировать собственный подарок. Найти игры, для которых предусмотрено поощрение и использовать бонус по предназначению.
1×slots актуальное зеркало
Ограничения по играм. Администрация воспрещает игрокам кое-какие игровые автоматы с бездепозитным бонусом, деньгами либо безвозмездными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда разделение производится по виду игр. Например, отыгрыш вероятен на всех игровых аппаратах, хотя запрещен в настольных забавах и в разделе Live Casino.Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают приз по странам. Вплоть до такого, собственно клуб имеет на игроков из Вашей страны, а бездеп мешает. <a href=http://rodgrodlecha.cba.pl/hidepark/?p=771439#comment-156661>1хслотс официальный сайт зеркало</a> 1×slots зеркало Акции распространяются как на все игры казино, так и на ограниченный список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и. Промо имеет обхватывать разработки одного производителя. Бездеп не пересекается с иными промоакциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, сделанные бонусными средствами. Для идентификации платежных реквизитов игрока имеет понадобиться пополнение счета на наименьшую сумму.B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax <a href=http://biosafe.tj/user/JustinWef/>http://biosafe.tj/user/JustinWef/</a> 1×slots актуальное зеркало В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, необходимо обратиться в службу поддержки спустя лайв-чат на сайте казино.Заполняя данные в личном профиле, указывайте лишь достоверную информацию, так как Вам понадобиться ее подтвердить в будущем при выводе денег.
1хслотс мобильная версия зеркало
Этот образ приза будет добавлен на Ваш аккаунт после успешной процедуры регистрации с использованием номера аппарата. Если избрать другой метод творения учетной записи, бездеп не будет добавлен на Ваш акк. Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.Допустим, за регистрацию вы возымели бездеп в объеме 2 000 рублей с вейджером х30. В данном случае светит сделать ставок, на общую сумму в 60 000 рублей (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать настоящие деньги. Однако не забывайте, собственно с любого подарка получится исключить определённую необходимую (чаще всего менее $200). <a href=http://gulliverus.ru/user/CharlesKeepe/>http://gulliverus.ru/user/CharlesKeepe/</a> 1хслотс казино зеркало
1хслотс рабочее зеркало
Мы делаем акцент на ключевых положениях правил, рассказываем о территориальных ограничениях и вкратце информируем о других промоакциях обговариваемого казино.Акционные предложения от казино существуют в различных форматах. Часто призы даются в размен на депозит. Игрок вносит платеж и получает средства, бесплатные вращения и другие поощрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — вид приза, который гарантирован за исполненье конкретных деяний на сайте: Риск-игра по одинаковым шансам – Также казино имеет запрещать исполнять обстоятельства по отыгрышу с помощью раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких других забавах.Большинство клубов привлекают внимание игры за счёт разнообразных даров. На одних веб-сайтах возможно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает благотворительные вращения для пуска топовых интернет слотов. Несмотря на разные промоакции, стоит выделить самые основные. Как только получите бездеп в казино, всё одинаково не запамятовывайте инспектировать электронную почту. Некоторые игорные клубы каждый веселят интенсивных гэмблеров приятными призами. Чаще всего получить презент возможно в преддверии веселья, на день рождение, за привлечение друга. А кроме распространённым призом является прибавка к депозиту. Нужно не пополнить счёт, и азартное заведение прирастит его на 50–100%. 1×slots промокод при регистрации 2025 <a href=https://www.muttsworldmine.com/forums/user/475679-donaldkig/>https://www.muttsworldmine.com/forums/user/475679-donaldkig/</a> Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную функцию активации бонуса без депо. Внимательно прочитайте до конца. Многие новички делают оплошности на шаге регистрации и потому возможности получить подарок.Минимального оборота. Этот предел уточняется вейджером — пока игрок не сыграет на установленную необходимую, вывод средств будет недоступен.
1×slot зеркало рабочее регистрации на телефон придет
Выбирайте наихорошие безвозмездные призы за обзоров на Casinoz – и пусть для сопутствует счастье при отыгрыше бонусных кредитов!Благодаря программе преданности от игорного заведения, можно арестовать превосходный старт и без дополнительных инвестициям запустить видеослоты. Кроме как, возможно рассчитывать на реальную фортуну и получить, без инвестиции собственных финансов, великий выигрыш. Бонус с зачислением средств на счет выделяет больше свободы действий. Пользователь сам подбирает, каким образом распорядиться подаренными своими. Здесь также все действовать лимитирования на список доступных игр, хотя обыкновенно эти рамки не например строги, как в рекламную с бесплатными вращениями. <a href=https://astraclub.ru/members/345932-WilliamRam>https://astraclub.ru/members/345932-WilliamRam</a> 1×slots сайт зеркало Не сложно догадаться, что no deposit bonuses почти ни не бывают немаленькими. Чаще всего речь идет о пяти–тридцати баксах (или эквиваленте данной суммы в другой денежной).Автоматическая активация может самой комфортной, хотя ручной способ имеет перед ней достоинства. Прежде чем использовать вознаграждение от казино, стоит заблаговременно определить, сколько медли требуется на исполненье всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деянья бонуса.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.arka-bahce.org/forum/showthread.php?p=780613&posted=1#post780613>1× slots casino зеркало</a>
<a href=https://sadhaka.nl/forum/viewtopic.php?t=103896>1×slots зеркало на сегодня</a>
<a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=51430>1×slots casino регистрация 1×slotscasino09k online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам важную информацию о самых новых, великодушных и проверенных призах в онлайн казино, коие обновляются любой день. Некоторые клубы механически начисляют бонус на аккаунт игрока после исполнения условий получения, хотя случаются ситуации, когда бонус надо(надобно) активировать игроку самому. Есть количество методов активации приза:
#3750 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Анна Калинская (теннис) porno Мира Андреева (теннис) <a href=https://kompromat1.online/>мобильные букмекерские конторы</a> casino актуальное зеркало лучшая казино <a href=https://sovsekretno.net/>1×bet зеркало слоты</a> букмекерская контора бесплатно скачать porno Илья Ковальчук (хоккей) порно с Анастасия Потапова, теннисистка сайт 1×bet слоты букмекерская контора скачать приложение песня казино Петрова Ольга Викторовна порно
DiskiPlus сайт 1×bet слоты DiskiPlus porno Марина Александрова <a href=https://diskiplus.ru>DiskiPlus казино гта 5</a> DiskiPlus 7k casino скачать DiskiPlus 1×bet на андроид <a href=https://diskiplus.ru>DiskiPlus 1×bet официальный xbet</a> DiskiPlus 1×bet телефон DiskiPlus Петрова Ольга Викторовна порно DiskiPlus балтбет букмекерская контора DiskiPlus 1×bet слоты DiskiPlus бесплатные букмекерские конторы DiskiPlus казино вход DiskiPlus букмекерские конторы в россии
#3751 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало этих способов предполагает регистрацию
Как верховодило, новоприбывшие игроки в первую очередь хотят ознакомиться с способами ввода и вывода денежных средств и сроки выполнения поданных заказов чтобы четко разуметь, как быстро появится вывести свой казино бонус за регистрацию без депозита на электронный кошелек либо же банковскую карту. К счастью для всех играющих, внутри определенных холдингов, все казино соперничают между собой. Ведь случае бы определенную компанию давало лишь одно онлайн-заведение, то ли бы клиенты увидели казино с призом за регистрацию и имели бы рассчитывать лишь на вознаграждение повторяющий бонуса на 1-ое вложение. К каждому заведению периодически идет завлекать свежих игроков, что, в, лишь на руку всем играющим.Чаще всего применяются коды. Их нужно заносить в специальные окошки регистрационной анкеты, если речь идет о пригласительных призах, либо в особом разделе личного кабинета игрока. <a href=http://filmkachat.ru/>1×slots зеркало рабочее</a> <a href=https://calibreapp.com/tools/core-web-vitals-test/playhouse.com.ua?scheme=https&path=%2F&context=origin>https://calibreapp.com/tools/core-web-vitals-test/playhouse.com.ua?scheme=https&path=%2F&context=origin</a> При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток.Иногда у гостей сайта шансы появиться трудности, задачи, препядствия при активации полученного промо-кода. В таких случаях, необходимо обратиться за подмогою в саппорта «Support». Для получения ответа, непременно указывается определенная причина воззвания и подтверждается информация дополнительными экрана. Если сформировалась неоднозначная обстановка, постоянно можно адресоваться к основному регулятору или контролирующему органу, выдавшему данному заведению лицензионный документ. 1×slots официальный сайт мобильная версия <a href=http://seolimfa.co.kr/bbs/board.php?bo_table=free&wr_id=2224852>http://seolimfa.co.kr/bbs/board.php?bo_table=free&wr_id=2224852</a> В случае с фриспинами без вейджера, Вам не придется отыгрывать свой выигрыш с даровых вращений. Прибыль, коию Вы заработаете на таком бездепе можно назначать на вывод без какого либо отыгрыша.Похожим образом работает 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя или в связи с получения им VIP-статуса. Подарок предоставляется в обращения в поддержку и проверки.
1×слот регистрация в 1×slots casino
1хслот зеркало сайта Да, у даровых бонусов есть недостатки. Прежде всего, они обыкновенно не. Кроме как, обстоятельства вейджера по ним постоянно жесткие. Но таки недоступность риска делает их довольно красивыми для посетителей.Любой выигрыш по ставке повыше установленного лимита несомненно считаться недействительным. То есть ставка не будет засчитана при отыгрыше, а случае выигрыша его сумма не поступит на счёт посетителя — итог забавы будет полностью аннулирован. <a href=http://www.fire-team.ru/forum/member.php?u=5134>http://www.fire-team.ru/forum/member.php?u=5134</a> 1×slots официальный сайт скачать
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Размер ставки для игры по бездепозитному бонусу (конечно же, если, тогда,, когда он представлен в виде бонусных денежных средств) зачастую ниже, чем при забаве на депозит. Ограничение будет действовать до момента отыгрыша приза. Вейджер менее х30–35 является применимым. Опытные игроки утверждают, собственно с таким вейджером реально остаться в плюсе, случае правильно подойти к выбору игрового аппарата.Наличие у игрока второго аккаунта. Запрещено создавать несколько профилей для многократного получения бездепов. <a href=http://y90429l8.bget.ru/user/Davidces/>http://y90429l8.bget.ru/user/Davidces/</a> Новые клиенты онлайн-казино без первого депо шансы выяснить собственную удачливость. К что, этому же есть возможность конвертировать бездепы в настоящие средства за регистрацию в казино, однако для этого приз нужно отыграть сообразно условиям промоакции.На условиях отыгрыша бесплатных бонусов стопам тормознуть подробнее. С ними связаны нюансы, коие невозможно оставить без внимания. 1х слот регистрация в 1×slots casino
1×slots рабочее зеркало на сегодня
Нет. Казино выдают бесплатные призы за регистрацию, чтобы, чтобы, чтобы заказчик мог ознакомиться с игровым заведением. А чтобы исключить его, нужно выполнить обстоятельства отыгрыша. <a href=http://aficionado.pl/showthread.php?177149-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82&p=198220>казино 1×slots официальный сайт</a> Фриспины без депозита либо вспомогательные средства посодействуют поближе познакомиться с игровой платформой и её функциями. За счёт презентов возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям ради игры напротив живых крупье.При отыгрыше бонусных средств, необходимо учитывать срок действия приза и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный бонус несомненно аннулирован. 1×slots рабочее зеркало на сегодня <a href=https://humanlove.stream/wiki/User:Clarita5736>https://humanlove.stream/wiki/User:Clarita5736</a>
рабочее зеркало 1×slots
Как лишь получите бездеп в казино, всё также не забывайте инспектировать электронную почту. Некоторые игорные клубы каждый веселят интенсивных гэмблеров приятными призами. Чаще всего получить презент возможно в преддверии праздника, на день рождение, за привлечение друга. А также распространённым призом является прибавка к депозиту. Нужно всего лишь восполнить счёт, и азартное заведение увеличит его на 50–100%.Фриспины — бесплатные вращения, которые позволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины считаются самым известным и желаемым обликом бонуса — безвозмездные вращения иногда эффективнее и веселее в отыгрыше, чем остальные облики бездепов. Бездеп с фриспинами имеет обхватывать всю коллекцию игр на веб-сайте либо разработки одного провайдера. Обычно предлагается конкретный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш может быть выведен в того, как пользователь отыграет данную сумму. Возможность расценить полный перечень слотов — главное достоинство данной разновидности. Игроку становятся доступны те функции, которые отсутствуют в демонстрационном режиме, а вероятность выиграть настоящие средства добавляет ясных азартных чувств. <a href=https://trade-britanica.trade/wiki/User:ChantalHinder3>https://trade-britanica.trade/wiki/User:ChantalHinder3</a> казино 1×slots официальный сайт 2. Создать новый профиль. Для регистрации нужно заполнить небольшую анкету либо зайдите в индивидуальный кабинет при помощи соц сеток;Бонусы без депозита при регистрации считаются наиболее привлекательными как для опытнейших игроков, например для и начинающих. Получив такое вознаграждение, заказчик может играть на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, еще обстоятельства их активации и выигрыша.
<b>Смотреть еще похожие новости:</b>
<a href=https://masstr.net/showthread.php?tid=127287>1×slots сайт зеркало</a>
<a href=https://www.makinamania.net/index.php?topic=250566.new#new>1 х слотс зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепы обыкновенно предлагают с отыгрышем — быстро вывести выигранные средства нельзя. Перевод средств со счета несомненно вероятен после того, как юзер выполнит все притязания казино, а сумма возможности превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, в течение коих заказчик вправе пользоваться предложением. Обычно они не превосходят нескольких дней последствии активации. Способы получения бездепа различаются от вида приза, кот-ый приглянулся игроку. Но для или нужно быть зарегистрированным в легальном онлайн-казино и подтвердить свою личность. В общем виде пошаговая аннотация для получения бездепозитного бонуса выглядит так:
#3752 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино вулкан лучшие букмекерские конторы <a href=https://kompromat1.online/>Кузнецова Анна Юрьевна порно</a> 1×slots casino 1×bet xbet <a href=https://res-publika.com>porno Дарья Мороз</a> бесплатное казино кент casino 1×bet вход официальное казино вход пина букмекерской конторы скачать букмекерскую контору на андроид Александра Бортич
DiskiPlus porno Александра Степанова, фигуристка DiskiPlus 1×bet сайт 1×bet xyz <a href=https://www.diskiplus.ru/>DiskiPlus букмекерская контора без</a> DiskiPlus сайт казино вход DiskiPlus casino на телефон <a href=https://www.diskiplus.ru/>DiskiPlus win win casino</a> DiskiPlus porno Мира Андреева (теннис) DiskiPlus смотреть фильм казино DiskiPlus Набиуллина Эльвира Сахипзадовна порно DiskiPlus песня казино DiskiPlus играющие казино DiskiPlus Лут Оксана Николаевна порно DiskiPlus порно с Абрамченко Виктория Валериевна
#3753 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up casino скачать букмекерская контора вход <a href=https://t.me/vchkogpu_ru>казино пину</a> порно с Матвей Сафонов (футбол) порно с Афонина Марина Игоревна <a href=https://slon-ru.com/>скачать букмекерскую контору на андроид</a> официальные букмекерские конторы скачать скачать букмекерскую контору на андроид casino актуальное зеркало gama casino top casino 1×bet зеркало слоты 1×bet xyz пинко casino
DiskiPlus рокс казино DiskiPlus винлайн букмекерская контора официальный сайт <a href=https://www.diskiplus.ru>DiskiPlus 1×bet xbet xyz</a> DiskiPlus часы казино DiskiPlus Елизавета Боярская <a href=https://www.diskiplus.ru/>DiskiPlus black russia казино</a> DiskiPlus порно с Алина Загитова, фигуристка DiskiPlus 1×bet зеркало слоты 1×bet xyz DiskiPlus пина букмекерской конторы казино DiskiPlus порно с Петр Ян (ММА) DiskiPlus казино без DiskiPlus Шевцова Татьяна Викторовна порно
#3754 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots review live
Зарегистрируйтесь. Для регистрации почаще всего достаточно установить свой номер телефонного и почтовый адресок, после чего установить приобретенный код из СМС. Возможно, требуется показать промокод. В правилах акции будет написано, где его надобно включать. Иногда это надобно создавать при регистрации, времени — уже в создания личного кабинета, на отдельной страничке.Нельзя рассматривать игру на средства, как вариант заработка. Азартные игры воспрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не является зачинщиком азартных игр. Сайт одевает информационный характер. <a href=http://filmkachat.ru/>1×slots быструю регистрацию а также мгновенное</a> Таким образом онлайн казино получает вероятного игрока. Возможно дальнейшем либо истинном он захотит сыграть на свои деньги. Так трудятся бездепозитные призы в интернет казино. Здесь хорошо подходит выражение, благотворительные сыр случается лишь в мышеловке. Начинающие игроки имеют не обдумывать опасность пыла. Однако времени осознания становится больше. Это тема для отдельного обсуждения. <a href=https://www.jotform.com/250231879042050>https://www.jotform.com/250231879042050</a> Активация валютного гонорары случается механически последствии создания профиля или использования промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на страницы казино в социальных сетях либо на рассылку маркетинговых сообщений, скачать и ввести вспомогательный софт и т.д. 1×slots скачать на айфон <a href=https://www.gta5-mods.com/users/Glavdorogadv2106>https://www.gta5-mods.com/users/Glavdorogadv2106</a> При регистрации что, нет либо ином интернет игральном заведении — для дается раз шанс испытывать свою удачу не внося средства монеты. Замечу что такую поощрительную услугу деют не все интернет игровые площадки, а только щедрая середина(средина) из них. Которые мы подготовили для Вас в нашем списке.
1×slots регистрация на официальном сайте
Однако далековато не все ресурсы предлагают своим посетителям бездепозитные призы за регистрацию в казино. В большинстве случаев учтено одобрение на первый депо в объеме 100–200%. Это отличная возможность преувеличить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш.Онлайн гемблинг развивается с каждым деньком больше и больше, свежие бренды создаются не по денькам а по часам. Новые интернет казино делают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и что, этим самым предлагают бездепозитные бонусы за регистрацию, собственно бы не упустить эту возможность — как пользоваться новым бездепом, советуем посещать наш вебсайт как возможно почаще, самое аппетитное и свежие несомненно добавляться в этом же перечне. 1хслотс официальный сайт зеркало Внесение депо – Будьте готовы восполнить счет после отыгрыша приза. Это стандартное заявка управлял для этого подобии промо-акций. Лучше заблаговременно уточнить, какую сумму надо(надобно) будет заносить на счет. Как верховодило, речь идет о наименьшем депозите, но вы должны быть уверены, собственно он для по кармашку. <a href=https://speakerdeck.com/shopavto7>https://speakerdeck.com/shopavto7</a> Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax 1×slots сайт
казино 1×slots официальный сайт
Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? Для ревизии используются сканы паспортов, водительских прав, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если пользователь обнаружен в попытке ввести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их владелец попадает в черный список. При забаве на лицензионной площадке не бояться указывать достоверную персональную информацию (шифрование исключает утечку индивидуальных данных). <a href=https://www.kailiren.net/space-uid-1351119.html&do=profile>https://www.kailiren.net/space-uid-1351119.html&do=profile</a> Предложения с бездепозитными бонусами за регистрацию разрешают новым заведениям заинтересовать аудиторию на собственный сайт. А игроки же получают возможность играть на настоящие деньги без депо в казино и заработать маленький стартовый капитал, кот-ый разрешается исключить на карту банка либо электрический кошелек. 1×slots зеркало рабочее на сегодня У любого игорного заведения средства правила и обстоятельства. Но, дабы получить бонусы, необходимо выполнить стереотипные деянья:Заполняя данные в личном профиле, указывайте только достоверную информацию, так как Вам придется ее подтвердить в будущем при выводе средств.
1×slots зеркало на сегодня
B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это самая милая часть забавы. Важно, часто бездепозитные бонусы в казино выдаются с лимитированиями по наибольшей выплате. В среднем можно рассчитывать на выгода в некоторое тыщ рублей. Как исключить выигрыш с приза без депо. Придётся подтвердить аккаунт документально, в некоторых заведениях. Процедура верификации обязательна и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате либо прочитайте в правилах.К образцу, игроку выдаются безвозмездные средства в заведении в размере пятидесяти либо ста $ (вейджер на которые сочиняет 100х). То есть, каждому новоприбывшему геймеру выскакивает притягивающая картинка, которая обещает выплату всех зачисленных компанией средств. Не стоит заострять на казино бонус за регистрацию без депозита с сильно великий или довольно маленькой суммой бонусов, поэтому собственно, и кропотливо выучив все условия, тут вероятнее всего, несомненно какой-то подвох. Если площадка дарует бездеп за регистрацию, то процедура его получения проста. Нужно лишь ввести аккаунт на сайте и активировать его, подтвердив адресок электронной почты, номер телефонного либо иные данные, коие требует оператор. Перед этим нужно увериться, что юзер располагается на официальном сайте казино, не на мошеннической площадке. 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=https://mtlpages.com/users/michaelacura>https://mtlpages.com/users/michaelacura</a> Однако в условиях скрываются «подводные камешки», которые не позволят исключить крупную необходимую или же вы не успеете отыграть вейджер. Поэтому профессионалы советуют забрать бесплатные вращения за регистрацию в казино без депозита, дабы поднабраться навыка и получить реальный шанс на победу.
1×slots казино зеркало
В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это самая приятная часть игры. Важно, зачастую бездепозитные призы в казино выдаются с ограничениями по максимальной выплате. В среднем возможно рассчитывать на прибыль в некоторое тыщ рублей. Как исключить выигрыш с бонуса без депо. Придётся доказать аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате либо прочитайте в правилах. <a href=http://biosafe.tj/user/Jamesteari/>http://biosafe.tj/user/Jamesteari/</a> Вейджер менее х30–35 считается приемлемым. Опытные игроки заявляют, собственно с этим вейджером реально остаться в плюсе, в правильно подойти к выбору игрового аппарата.Чтобы получить вероятность исключить выгода с бездепозитного бонуса в казино, необходимо выполнить ряд условий: 1× slots casino зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://projects.sare.org/people/jamestrazy/>x1 slots регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Похожим образом работает третий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя либо из-за с получения им VIP-статуса. Подарок предоставляется после обращения в поддержку и проверки. Важно, убедитесь том,, что раньше не регистрировались в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи.
#3755 JamesCrerohttps://food-recipe.ru
Форум для кулинаров <a href=https://food-recipe.ru/>https://food-recipe.ru</a> и рестораторов! Лучшие рецепты, тренды гастрономии, обсуждения ресторанного бизнеса. Общайтесь, делитесь опытом и вдохновляйтесь новыми идеями. Присоединяйтесь к нашему кулинарному сообществу!
#3756 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino riobet porno Юлия Пересильд <a href=https://th-royalgclub.com/>casino buzz</a> 1win casino 1×bet приложение <a href=https://res-publika.com>бесплатные букмекерские конторы</a> 1×bet зеркало рабочее Окладникова Ирина Андреевна порно porno Дарья Клишина casino рабочее зеркало casino вход казино пину скачиваемые казино
DiskiPlus casino бонус DiskiPlus porno Ангелина Гончаренко, хоккеистка <a href=https://diskiplus.ru/>DiskiPlus porno Илья Ковальчук (хоккей)</a> DiskiPlus casinos winning DiskiPlus Петрова Ольга Викторовна порно <a href=https://www.diskiplus.ru/>DiskiPlus up casino зеркало</a> DiskiPlus макао казино DiskiPlus букмекерская контора на андроид DiskiPlus как выиграть в казино DiskiPlus pinco casino DiskiPlus играющие казино онлайн DiskiPlus cat casino DiskiPlus 7k casino скачать
#3757 Charlesgunnyhttp://filmkachat.ru
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Как правило, при выводе денег, от играющего потребуется только сделать наименьший вклад чтобы, чтобы, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом собственный счет. <a href=http://filmkachat.ru/>1×slots официальный сайт мобильная версия скачать</a> Отыграв бездепозитный приз в казино с выводом тоже придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если подобное ограничение существует, то единоразово вывести выйдет только необходимую, не превышающую объем приобретенного приза.Большинство интернет-казино из нашего топ-10 готовы порадовать вас эксклюзивными промоакциями. Читайте о их в обзорах и на форуме. <a href=https://www.printwhatyoulike.com/print?url=playhouse.com.ua>https://www.printwhatyoulike.com/print?url=playhouse.com.ua</a> 1хслотс казино зеркало <a href=https://circaoldhouses.com/agent/nodressio1/>https://circaoldhouses.com/agent/nodressio1/</a> Таким образом, заведение пытается показать себя своим потенциальным игрокам, а подобный маркетинговый ход как казино приз без депозита за регистрацию завлекает очень много внимания к игорному заведению и обеспечивает неизменный поток свежих посетителей и будущих посетителей игрового онлайн клуба.
1×slot зеркало
<a href=https://nztw.org/forum.php?mod=viewthread&tid=401965&pid=708430&page=1&extra=page%3D1#pid708430>1×slots бездепозитный бонус за регистрацию</a> 1×slots casino online регистрация Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают приз по странам. Вплоть до того, что клуб имеет брать игроков из Вашей государства, а бездеп мешает. <a href=http://www.soe-parrot.com/home.php?mod=space&uid=168921>http://www.soe-parrot.com/home.php?mod=space&uid=168921</a> 1×slots актуальное зеркало Самые новые бездепозитные бонусы в казино за регистрацию 2022 года с выводом выгоды находятся на данной странице. Посетитель имеет оценить обстоятельства получения и начать играть на деньги без внесения депо. При этом игроку важно разуметь, на каких критериях и какими методами у исключить приобретенный выигрыш. Для сего нужно расценить список подключенных платежных систем.Самые новые бездепозитные бонусы в казино за регистрацию 2022 года с выводом прибыли находятся на этой странице. Посетитель может расценить условия получения и начать играть на средства без внесения депо. При этом игроку принципиально понимать, на каких условиях и какими методами у вывести полученный выигрыш. Для этого необходимо расценить список присоединенных платежных систем.
1хслотс мобильная версия зеркало
На странице представлены бездепозитные бонусы за регистрацию в казино редчайшая заслуга за которой гонятся все игроки как новички, так и мастера. Мы тоже уделяем великое внимание на наличие бонусов при формирование рейтинга казино на средства. Бездепозитный бонус это возможность играть бесплатно и выиграть настоящие деньги.Иногда для получения бонусов необходимо связаться с адептами службы поддержки. Удобнее всего с ними беседовать в онлайн-сате, желая иногда достаточно запроса по электронной почте. Похожим образом работает третий метод доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения клиента либо из-за с получения им VIP-статуса. Подарок предоставляется после обращения в поддержку и ревизии.Вообще перейдя в казино — верховодила схожи в получении бездепозитных бонусов, в стереотипные верховодила заходит: подтвердить эл. Почту и телефонный, наполнить собственный личный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ. <a href=http://shinyoungwood.co.kr/bbs/board.php?bo_table=free&wr_id=298205>http://shinyoungwood.co.kr/bbs/board.php?bo_table=free&wr_id=298205</a> Существуют казино с призом за регистрацию, в довольно знамениты фриспины в онлайн казино потом регистрации в конкретных играх. Они встречаются в почаще бесплатных поощрений либо традиционных бонусов в казино без вложений. Например, игрок регистрирует счет, на который начисляются бесплатные игры, приз за регистрацию в виде даровых фрспинов, вращения в игровом автомате. Во время игрового процесса игры выигрывает истинные средства, которые в последствии можно удачно вывести из заведения на свою платежную систему. То есть, все шансы исключить свои без рисков своими деньгами. Регистрация, за которую игрок получит призы, займет пару минут, а благодаря данному возможно увеличить пять евро поощрений до тысячи и без всяких проблем вывести их.Подтверждение регистрации. Казино требуют привязки профиля к электронному адресу и номеру телефонного. Для этого на e-mail отчаливает письмо со ссылкой, а на телефонный ? текстовое известье с кодом. 1хслотс официальный сайт зеркало
казино 1×slots
<a href=https://forum.krymbezpravil.org.ua/memberlist.php?mode=viewprofile&u=10552>1×slots зеркало быструю регистрацию а также мгновенное</a> Это также безвозмездные деньги, коие поступают на аккаунты свежеиспеченных геймеров в регистрирования. А необыкновенность таких бонусов состоит что, собственно обретенные финансы обязательно стопам применять в продолжении назначенного времени.Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и более. Когда игроку надеется много фриспинов, администрация возможность бить3 их начисление на несколько дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах акции. В разделе с призами активировать свой подарок. Найти игры, для которых предусмотрено одобрение и применять приз по предназначению. 1× slots сайт <a href=https://suponevo.webtalk.ru/viewtopic.php?id=6830#p29175>https://suponevo.webtalk.ru/viewtopic.php?id=6830#p29175</a>
1× slots сайт
Верификация важна для добавочной защищенности и помочь техподдержке выявить бонусхантеров и плутов. Кстати, на платформах выводы крупных сумм доступны лишь после подтверждения личности.Операторы гемблинга заявляют, что так они дерутся с бонус-хантерами. Впрочем, критики считают, собственно данным казино пробуют устроить из случайного постояльца неизменного игрока. Когда речь о получении бездепозитных призов в казино, для внимание на последующие обстоятельства: <a href=http://services-sector.ru/clubpointeresam/memberlist.php?mode=viewprofile&u=157333>http://services-sector.ru/clubpointeresam/memberlist.php?mode=viewprofile&u=157333</a> 1×slots casino регистрация В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с безвозмездных вращений. Прибыль, коию Вы заработаете на таком бездепе возможно ставить на вывод без какого или отыгрыша.Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша призов. Заведения практически устанавливают наивысшую ставку, возможную по условиям вейждера.
<b>Смотреть еще похожие новости:</b>
<a href=https://australianwinerytours.com/tours/showthread.php?tid=216164>1×slots зеркало рабочее</a>
<a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/11082–1khslot-skachat#11110>1хслот скачать</a>
<a href=http://link.5nx.ru/viewtopic.php?f=5&t=8108>1×slots casino регистрация 1×slotscasino09k online</a>
<a href=https://acerfans.ru/user/JamesTed/>1×slots сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бонус без депозита за регистрацию в казино (бездепозитный приз) – это валютный подарок от клуба, который начисляется на акк игрока последствии регистрации в казино. Кроме сотворения учетной записи, для получения бездепа, очень нередко потребуется ещё и доказать контактные данные игрока и/или активировать особый промо-код. Бездепозитные призы – это самая небезинтересная и более перспективная промоакция интернет-казино. Они и какого-либо фри-спинов, поэтому что выплаты в безвозмездных вращениях не гарантированы, ведь комбинации на барабанах игрового аппарата все не сложиться.
#3758 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
демо казино букмекерские конторы бет <a href=https://strelochnik.com/>лучшая казино</a> Москалькова Татьяна Николаевна порно Попова Анна Юрьевна порно <a href=https://sovsekretno.net/>порно с Зырянова Анастасия Владимировна</a> почему в казино не бывает настенных часов casino регистрации porno Екатерина Ефременкова, шорт-трекистка casino com Москалькова Татьяна Николаевна порно казино играть online casino 7k
DiskiPlus букмекерская контора на андроид DiskiPlus слоты казино <a href=https://www.diskiplus.ru/>DiskiPlus casino зеркало сегодня</a> DiskiPlus почему в казино не бывает настенных часов DiskiPlus порно с Абрамченко Виктория Валериевна <a href=https://www.diskiplus.ru>DiskiPlus смотреть фильм казино</a> DiskiPlus casino играть DiskiPlus яндекс казино DiskiPlus казино 5 DiskiPlus казино гта 5 DiskiPlus порно с Зырянова Анастасия Владимировна DiskiPlus порно с Юлия Ефимова DiskiPlus casino ru
#3759 Charlesgunnyhttp://filmkachat.ru
сайт 1× slots casino
Первый возникающий вопрос, это, чего выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают новых игроков. Последним проще начать забаву на средства с презента за регистрацию. Им не нужно пополнять баланс и тратить личные свои. Новички получают благотворительные спины либо средства на счёт. С их поддержкою знакомятся с игровым процессом, крутят слоты и проделывают ставки в рулетке. <a href=http://filmkachat.ru/>1×слот регистрация в 1×slots casino</a> Ещё одно распространённое акционное предложение – привлекательный подарок с сомнительными притязаниями. К примеру, клуб сулит $100 в качестве бездепа, но с вейджером х80 либо х100. Отыграть подобный вейджер фактически нереально и потому лучше концентрироваться на больше интересных акциях. <a href=https://www.synfig.org/issues/thebuggenie/synfig/issues/9937>https://www.synfig.org/issues/thebuggenie/synfig/issues/9937</a> рабочее зеркало 1×slots <a href=https://forum.expert-watch.com/index.php?action=profile;u=184986>https://forum.expert-watch.com/index.php?action=profile;u=184986</a> Отыграв бездепозитный бонус в казино с выводом тоже придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в сходственное лимитирование существует, то единоразово вывести получится только необходимую, не превосходящую объем полученного приза.
1×slots официальный demo регистрация в 1×slots casino
У каждой игры свои требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система зачтет любую ставку. В рулетке и покере устроить это гораздо сложнее. Именно поэтому например принципиально пристально читать условия получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в любой ирге, то новенькие попросту «спустят бонус на ветер».Новые клиенты онлайн-казино без первого депо могут проверить свою удачливость. К тому же есть вероятность конвертировать бездепы в настоящие деньги за регистрацию в казино, однако желаемого приз нужно отыграть сообразно условиям акции. <a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=306811>1хслотс рабочее зеркало</a> 1×slots подтвердит вашу регистрацию если говорить Бездепозитный бонус за регистрацию в казино — это стартовый презент повторяющий валютного начисления либо бесплатных вращений для свежих игроков заведения, для получения которого не нужно заносить депо. <a href=http://lexusforum.lv/index.php?subaction=userinfo&user=izekycohu>http://lexusforum.lv/index.php?subaction=userinfo&user=izekycohu</a> 1хслотс 1хслотс регистрация перейти на 1×slots Акционные предложения от казино существуют в различных форматах. Часто бонусы даются в обмен на депо. Игрок заносит платеж и получает деньги, бесплатные вращения и другие одобрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — картина приза, кот-ый гарантирован за исполненье конкретных деяний на сайте:Возьми собственный презент. Чаще всего приз активизируется сразу последствии регистрации. Но бывают истории, когда надо(надобно) зайти в собственный кабинет или написать в справочную службу.
1×slots официальный зеркало
Нет. Казино выдают благотворительные бонусы за регистрацию, чтобы, чтобы, дабы клиент мог ознакомиться с игровым заведением. А дабы исключить его, нужно выполнить условия отыгрыша. Бoльшинcтвo азартных заведений выдвигают примерно одинаковые условия и притязания, которые необходимо выполнить, чтобы получить бездепозитный приз за регистрацию. Все их можно соединить в раз перечень:Не трудно догадаться, что no down payment bonuses почти никогда не случаются великими. Чаще всего идет о пяти–тридцати баксах (или эквиваленте этой суммы в иной денежной). <a href=http://barbatzivsfemei.3×.ro/profile.php?lookup=1711>http://barbatzivsfemei.3×.ro/profile.php?lookup=1711</a> 1×slots сайт
1хлот регистрация в 1×slots casino
Вышеописанная первопричина и является главным нюансом, следствии которого операторы отдают доля своей прибыли на различные маркетинговые затраты и маркетинговые кампании. А самым действенным тут станут выступать непосредственно бездепозитные бонусы казино 2022 с выводом за регистрацию.Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и расценить особенности, недоступные при этой в демо режиме. Многие новые клиенты перебегают в количество неизменных, а оператор получает длительную прибыль. Можно. Вы постоянно сможете отказаться от получения бездепозитного приза за регистрацию в казино, же Вы не создадите ставку. 1×slots casino регистрация на сайте <a href=http://zooboard.ru/user/profile/269420>http://zooboard.ru/user/profile/269420</a>
казино 1×slots официальный сайт
Вейджер не более х30–35 считается приемлемым. Опытные игроки заявляют, что с таким вейджером реально остаться в плюсе, случае верно подойти к выбору игрового аппарата.Осталось избрать казино с бонусом за регистрацию и сделать профиль. После активации презента выигрыш находится от Фортуны и способностей. При забаве на бонусные свои воспрещается выступать в игровые автоматы с современным джекпотом и игры из радела exist casino. Кроме такого, кое-какие казино выделяют бездеп на раз либо некоторое конкретных слотов, и в других играх Вы не можете на них выступать. <a href=http://api.rnet.plus/Service/TC2?block_id=210&user_id=1af3a521-cdbc-a362-d7b4–798a456db1c9&count_jump=true&u=False&teaser_id=842522&orig_url=http://gynecology.school/bitrix/redirect.php?goto=http://online.ts2009.com/mediaWiki/api.php?action=https://telegra.ph/Alya-i-polnaya-istoriya-skryvayushchayasya-za-ee-imenem-09–19>http://api.rnet.plus/Service/TC2?block_id=210&user_id=1af3a521-cdbc-a362-d7b4–798a456db1c9&count_jump=true&u=False&teaser_id=842522&orig_url=http://gynecology.school/bitrix/redirect.php?goto=http://online.ts2009.com/mediaWiki/api.php?action=https://telegra.ph/Alya-i-polnaya-istoriya-skryvayushchayasya-za-ee-imenem-09–19</a> Призовые начисления без депо все предоставляться для роли в турнирах онлайн казино. Потратить перечисленные средства можно исключительно в рамках данной акции. Условия их проведения содержат лимитирования на список игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, другого, как выучить его правила. 1×slots официальный сайт мобильная версия
<b>Смотреть еще похожие новости:</b>
<a href=http://miupsik.ru/forums/showthread.php?tid=419394>сайт 1× slots casino</a>
<a href=https://sparta.training/faq/online-returns/#comment-70793>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Доступные игры – В неких азартных играх можно снизить математическое приемущество казино до нескольких десятых процента. В их числе почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как правило, в этих забавах ставки идут в зачет вейджера не полностью. Например, возможность учитываться лишь 50%. В некоторых забавах бездепозитные бонусы вообщем невозможно отыгрывать. В случае установленного лимита на необходимую вывода выигрыша с бездепозитного приза, игрок не сможет исключить больше заявленной суммы.
#3760 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Приезжева Екатерина Геннадьевна порно смотреть фильм казино <a href=https://strelochnik.com/>порно с Евгения Медведева</a> сайт букмекерской конторы porno Екатерина Ефременкова, шорт-трекистка <a href=https://m.repost.news/>1win casino</a> porno Александра Степанова, фигуристка porno Илья Ковальчук (хоккей) 1×bet официальный xbet casino онлайн top casino ев казино casino buzz
DiskiPlus 1×bet 1хбет DiskiPlus казино онлайн <a href=https://www.diskiplus.ru>DiskiPlus casino онлайн</a> DiskiPlus Самойлова Алла Владимировна порно DiskiPlus porno Ангелина Гончаренко, хоккеистка <a href=https://www.diskiplus.ru>DiskiPlus Крючкова Полина Викторовна порно</a> DiskiPlus retro casino DiskiPlus казино онлайн DiskiPlus яндекс казино DiskiPlus Валентина Матвиенко порно DiskiPlus играющие казино онлайн DiskiPlus pin up букмекерская контора DiskiPlus рейтинг казино
#3761 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее на сегодня
Также бывают случаи, когда казино начислит обсужденный бонус после регистрации нового клиента по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам.Постарайтесь отыграть вейджер, чтобы была возможность забыть заявку на выплату. Кстати, на всех веб-сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы можете получить выигрыш на электронной кошелёк, карту, телефонный. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots casino 777 online</a> Обычно, бездепозитные бонусы выдаются под определенные слоты с фиксированной ставкой, но их наверняка запрещено использовать в игровых автоматах с прогрессивным джекпотом. Список игр, в которых можно использовать бездеп, Вы отыщите в описании промоакции или сможете уточнить у службы поддержки заведения.Бездепозитные призы казино это экономическая компенсация, предлагаемая пользователям на дармовой базе и возможность выступать в интернет казино безвозмездно. Если ассоциировать их с поощрениями за лепта, в которых свои выдаются только потом первоначального пополнения счета, то бездепозитные вознаграждения получаются безвозмездно. То есть, играющий получает вероятность делать ставки на уже место финансы, которые выдаст заведение, исполняя, при, обычные деянья, дабы их извлечь (тут идет речь о регистрация, удостоверении личности с внедрением номера телефона, дизайна заказы и т.д. ). <a href=https://mysupport.commscope.com/forums/general-discussion/69059a37–2fd0-ef11–95f5–6045bdb3316f>https://mysupport.commscope.com/forums/general-discussion/69059a37–2fd0-ef11–95f5–6045bdb3316f</a> Как и акции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такового предложения являются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих гостей и позволяет им составить впечатление о функционале, не рискуя вескими суммами. 1хслот официальный сайт зеркало <a href=http://helenos.pavel-rimsky.cz/doku.php?id=%D0%A4%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B%20%D0%B0%D0%BF%D1%82%D0%B5%D0%BA%20%D0%B2%20%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8:%20%D0%A2%D1%80%D0%B5%D0%BD%D0%B4%D1%8B%20%D0%B8%20%D0%9F%D1%80%D0%BE%D0%B3%D0%BD%D0%BE%D0%B7%D1%8B%20%D0%BD%D0%B0%202024%20%D0%B3%D0%BE%D0%B4>http://helenos.pavel-rimsky.cz/doku.php?id=%D0%A4%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B%20%D0%B0%D0%BF%D1%82%D0%B5%D0%BA%20%D0%B2%20%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8:%20%D0%A2%D1%80%D0%B5%D0%BD%D0%B4%D1%8B%20%D0%B8%20%D0%9F%D1%80%D0%BE%D0%B3%D0%BD%D0%BE%D0%B7%D1%8B%20%D0%BD%D0%B0%202024%20%D0%B3%D0%BE%D0%B4</a> Чтобы играть бесплатно на реальные средства в казино, не всегда довольно просто зарегистрироваться. Иногда нужно выполнить вспомогательные действия.
1×slos регистрация в 1×slots casino
Мы делаем акцент на ключевых положениях верховодил, рассказываем о территориальных ограничениях и вкратце информируем о других акциях обсуждаемого казино. 1 x slots casino <a href=http://lit-book.ru/index.php?subaction=userinfo&user=glossyspeed75>http://lit-book.ru/index.php?subaction=userinfo&user=glossyspeed75</a> Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в неотъемлемом порядке необходимо пополнить счет в казино. Для депозитных призов, данная процедура не необходима, так как депозит уже изготовлен. 1хслот 1хслотс регистрация перейти на 1×slots При регистрации в том либо ином интернет игральном заведении — вам дается раз шанс испытать свою фортуну не внося средства монеты. Замечу собственно эту поощрительную предложение деют не все онлайн игровые площадки, а лишь щедрая середина(средина) из их. Которые мы подготовили для Вас в нашем списке.
1хслот зеркало сайта
После получения приза вывод средств для клиента будет недоступен того, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо пара недель. Выводить средства игрок может лишь в отыгрыша. <a href=http://www.gearcup.cn/home.php?mod=space&uid=124160>http://www.gearcup.cn/home.php?mod=space&uid=124160</a> Некоторые казино шансы предлагать посетителям бездепы за свидетельство номера либо почты либо репост на страничку в социальных сетях. рабочее зеркало 1хслотс Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 долларов. Если выдаются фриспины, их количество изредка выше нескольких десятков безвозмездных вращений.
1×slots официальный регистрация
Как лишь на виртуальном счету окажутся бонусные свои, поторопитесь отыграть вейджер. Сразу после сего можно оставить заявку на вывод выигрыша. Кредиты прибыльно отличаются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом настоящих средств и выделяют вероятность почувствовать азарт. Во-вторых – возможно насладиться каждой азартной забавой доступной на сайте. В вашем постановлении находятся автоматы, настольные прибавленье, видео-покер, Live-дилеры. <a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1×slots casino регистрация 1×slotscasin online</a> Автоматическая активация кажется самой комфортной, но ручной способ имеет перед ней превосходства. Прежде чем применять вознаграждение от казино, стоит заблаговременно найти, сколько медли потребуется на выполнение всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деяния бонуса. 1×слот регистрация в 1×slots casino <a href=https://maps.google.pt/url?sa=t&url=http%3A%2F%2Fdoctorlazuta.by>https://maps.google.pt/url?sa=t&url=http%3A%2F%2Fdoctorlazuta.by</a>
1×slots сайт
Бездепы с безвозмездными вращениями деют юзерам право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд уплачивает казино. Число спинов ограничено и редко превышает сотку. Если промоакция включает в себя много бесплатных игр, их начисление возможность быть разбито на несколько дней.Объективные – объем приза, коэффициент и обстоятельства вейджера, необходимость внесения депозита для вывода денег; Объективные – размер бонуса, коэффициент и обстоятельства вейджера, надобность внесения депо для вывода денег; <a href=http://www.ihaomeijia.com/home.php?mod=space&uid=135155>http://www.ihaomeijia.com/home.php?mod=space&uid=135155</a> 1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, если не хотите замерзнуть жертвой плутов или впустую израсходовать время; 1×slots скачать на айфон Казино выводит деньги только на что, эту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного приза, Вам сначала нужно пополнить счет. В некоторых клубах узкий перечень методов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет именно с данных платежных способов, коие доступны для вывода.
<b>Смотреть еще похожие новости:</b>
<a href=https://masstr.net/showthread.php?tid=102529>1×slots зеркало быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Таким образом онлайн казино получает вероятного игрока. Возможно дальнейшем или настоящем он захочет сыграть на средства средства. Так работают бездепозитные призы в интернет казино. Здесь отлично подходит выражение, благотворительные сыр бывает только в мышеловке. Начинающие игроки могут не осознавать опасность азарта. Однако течением понимания становится больше. Это тема для отдельного обсуждения. Для получения выигрыша потребуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить определенную сумму, но теснее из личных денег. Она рассчитывается из совместного объема выигрыша за всегда использования бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, если юзер выиграл 1000 руб., а множитель сочиняет х30, вывести деньги можно несомненно, сделав ставки на 30 000 рублей.
#3762 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
сайт казино вход casino андроид <a href=https://rucriminal.info/>porno Александра Степанова, фигуристка</a> казино ли бесплатно фильм казино <a href=https://glvk.guru/>скачать pin casino</a> pin up букмекерская контора казино ли букмекерская контора фонбет казино сочи porno Юлия Канакина, скелетонистка porno Илья Ковальчук (хоккей) порно с Алина Загитова
DiskiPlus казино сочи DiskiPlus порно с Абрамченко Виктория Валериевна <a href=https://www.diskiplus.ru/>DiskiPlus pin up casino официальный</a> DiskiPlus слоты казино DiskiPlus казино 5 <a href=https://diskiplus.ru/>DiskiPlus casino онлайн</a> DiskiPlus 7k casino зеркало DiskiPlus порно с Каролина Севастьянова DiskiPlus винлайн букмекерская контора DiskiPlus porno Дарья Клишина DiskiPlus 1×bet слоты 1×bet top DiskiPlus букмекерская контора бесплатно скачать DiskiPlus porno Андрей Рублев (теннис)
#3763 Charlesgunnyhttp://filmkachat.ru
x1 slots 1хслотс регистрация перейти на 1×slots
В наше время довольно просто получить бонус за регистрацию в казино. Практически каждый игорный жилище с готовностью начисляет средства либо благотворительные вращения. Многие гэмблеры используют этим и не смущяются регистрироваться в любом клубе с прибыльными условиями. Кстати, это замечательная вероятность выработать победную тактику и сорвать джекпот. <a href=http://filmkachat.ru/>1×slots casino зеркало</a> <a href=https://www.trade-forums.co.uk/thread/78340>https://www.trade-forums.co.uk/thread/78340</a> Постарайтесь отыграть вейджер, чтобы замечена возможность забыть заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электронной кошелёк, карту, аппарат. 1×slots промокод при регистрации 2025 <a href=http://cvpvm09.ru/user/DoctorLazutaKn/>http://cvpvm09.ru/user/DoctorLazutaKn/</a> Также учтите, что кое-какие игровые платформы сузивают перечень стран, коие готовы получить предложенный бездепозитный приз за регистрацию. К образцу, существуют онлайн-заведения, выдающие подобные призы только жителям конкретных стран. К образцу, онлайн казино 777 Оригинал дает бездепозитный бонус только игрокам из России и стран СНГ. Или напротив, пичкают вознаграждением всех, не обитателей неких стран (исходя из этого, стопам внимательно изучать перечень, дабы впоследствии не возникло никаких вопросов и жалоб).
1×slot зеркало рабочее регистрации на телефон придет
1×slots зеркало рабочее на сегодня Также, такой нужно доказать свой номер аппарата, чтобы код, полученный в смс-сообщении от клуба ввести в специальное фон в личном кабинете игрока. <a href=http://spectr-sb116.ru/user/CraigHok/>http://spectr-sb116.ru/user/CraigHok/</a> 1хслот 1хслотс регистрация перейти на 1×slots Когда речь о денежных призах, казино всегда устанавливают условия вейджера, которые нужно выполнить, чтобы исключить выигрыш.
1×slots casino зеркало рабочее
Но такие рамки не смущают том хайроллеров, потому коэффициенты на слотах дозволяют рассчитывать на солидные выигрыши, а неких автоматах разыгрывается прогрессивный джекпот.Частенько новенькие не разумеют, как активировать подарки либо вывести 1-ый выигрыш. Для похожих случаев наша команда описала главные определения – собственно такое фриспины, вейджер, как его отыграть, для необходимо проходить верификацию. Как только получите бездеп в казино, всё равно не запамятовывайте проверять электронную почту. Некоторые игорные клубы каждый радуют интенсивных гэмблеров приятными бонусами. Чаще всего получить презент можно в преддверии праздника, на денек рождение, за вербование друга. А кроме распространённым бонусом считается надбавка к депозиту. Нужно не пополнить счёт, и азартное заведение увеличит его на 50–100%.Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, дабы замечена вероятность вывести выигрыш. <a href=https://mcpe.ru.net/user/PhilipBreli/>https://mcpe.ru.net/user/PhilipBreli/</a> 1×slots быструю регистрацию а также мгновенное Например, игрок получил 500 рублей при создании аккаунта и должен отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., понадобится устроить 875 спинов для полного отыгрыша.
1×slots официальный сайт скачать
1×slots регистрацию более популярный вариант это <a href=http://sols9.com/batheo/Forum/User-GlennMox>http://sols9.com/batheo/Forum/User-GlennMox</a> Бездепозитные призы казино за регистрацию в 2022 году — это возможность поиграть за счёт заведения. Казино даёт посетителю шанс пользоваться определённой суммой либо числом даровых вращений без внесения депозита. Не путайте деморежим с реальной забавой без надобности внесения депозита.При игре на бонусные средства воспрещается играть в игровые автоматы с современным джекпотом и игры из радела live casino. Кроме такого, кое-какие казино выделяют бездеп на раз или несколько определенных слотов, и в иных играх Вы не сможете на них выступать.
1× slots casino официальный сайт
Но есть азартные заведения, готовые просто так вручить деньги на забаву. Для этого достаточно сделать профиль. Чтобы вывести выигрыш, сначала нужно выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа. <a href=http://rcrd.ru/bitrix/click.php?goto=http://sintegris.ru/bitrix/rk.php?goto=http://ducatiforum.co.uk/proxy.php?link=https://teletype.in/@urist555/jMcDz8y88nj>http://rcrd.ru/bitrix/click.php?goto=http://sintegris.ru/bitrix/rk.php?goto=http://ducatiforum.co.uk/proxy.php?link=https://teletype.in/@urist555/jMcDz8y88nj</a> 1×slots рабочее зеркало на сегодня А ознакомиться с свежими онлайн казино, Вы можете за счет призов с выводом прибыли, которые Вы сможете получить без депозита.1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, в не желаете замерзнуть жертвой плутов либо впустую истратить время;
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Помните, что в неких забавах сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных играх только от 5% до 50% суммы ставки считаются как отыгранные средства, на как в слотах идет в зачет все 100% суммы. Некоторые онлайн-казино без депозита предлагают свежим посетителям выбрать приз при регистрации. Будьте внимательны: выбрав один, вы в абсолютном большинстве случаев не можете воспользоваться остальными.
#3764 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
сайты казино porno Мария Шарапова <a href=https://glvk.guru/>где казино</a> Крючкова Полина Викторовна порно казино 5 <a href=https://m.repost.news/>рабочие зеркала казино</a> лучшая казино казино онлайн porno Александра Степанова, фигуристка казино регистрации играющие казино Елена Лядова букмекерская контора вход
DiskiPlus Шевцова Татьяна Викторовна порно DiskiPlus 1×bet на сегодня <a href=https://diskiplus.ru/>DiskiPlus букмекерские конторы без депозита</a> DiskiPlus 1×bet 1 DiskiPlus 1×bet xbet <a href=https://diskiplus.ru>DiskiPlus скачать букмекерскую контору</a> DiskiPlus порно с Сергей Бобровский (хоккей) DiskiPlus 1×bet зеркало рабочее xbet DiskiPlus 7k casino сайт DiskiPlus 1×bet регистрация DiskiPlus porno Екатерина Ефременкова, шорт-трекистка DiskiPlus пин ап casino DiskiPlus 1×bet официальный сайт
#3765 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация на сайте
Также бездепозитные призы все служить методом вернуть к этой посетителей, временно приостановивших своё сотрудничество с компанией: уведомление о бездепе поступает на мобильный телефон либо почту. <a href=http://filmkachat.ru/>1хслотс зеркало</a> Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.Условия отыгрыша бонуса. Если Вы планируете заработать на бездепозитном призе, то для внимание на велечину вейджера и срок, который дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть приз и вывести выигрыш. <a href=https://similars.net/alternatives-to/playhouse.com.ua>https://similars.net/alternatives-to/playhouse.com.ua</a> Одним из предлогов отдавать привилегию 1 либо другому заведению заключается в привлекательности предлагаемых акций и безвозмездных услуг. Безвозмездные фриспины, выдаваемые без дела создавать какой-либо вклад, в списке находится далеко не в конце.Такой безвозмездный эквивалент средств зачисляется на профиль пользователя после воплощения требований и предназначаются они лишь для игрового процесса. Вывод таких вознаграждений возможен только после воплощения вейджеровых условий. 1×slots промокод при регистрации 2025 <a href=https://qanda.yokepost.com/index.php?qa=147942&qa1=%D0%B7%D0%BD%D0%B0%D0%BA%D0%BE%D0%BC%D1%81%D1%82%D0%B2%D0%B0-%D1%84%D0%BB%D0%B8%D1%80%D1%82-%D1%84%D0%BE%D1%82%D0%BE>https://qanda.yokepost.com/index.php?qa=147942&qa1=%D0%B7%D0%BD%D0%B0%D0%BA%D0%BE%D0%BC%D1%81%D1%82%D0%B2%D0%B0-%D1%84%D0%BB%D0%B8%D1%80%D1%82-%D1%84%D0%BE%D1%82%D0%BE</a>
1×slots регистрация на сайте
Для тех, кто лишь подумывает испытать собственную удачу, а также для профессиональных игроков, ищущих свежие площадки для выигрышей, основные лицензированные казино нередко организуют различные акции, и лучшее услуг за время – как для начинающих, например и для проф игроков – бездепозитный приз за регистрацию.Теоретически, к безвозмездным бонусам возможно отнести например именуемые фриспины. Напомним, речь идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, потому собственно они деют только возможность делать ставки. 1×slots быструю регистрацию а также мгновенное <a href=https://yozhstudio.ru/2019/09/08/%d0%bf%d1%80%d0%b5%d0%b8%d0%bc%d1%83%d1%89%d0%b5%d1%81%d1%82%d0%b2%d0%b0-%d0%b8%d0%bd%d0%b4%d0%b8%d0%b2%d0%b8%d0%b4%d1%83%d0%b0%d0%bb%d1%8c%d0%bd%d0%be%d0%b3%d0%be-%d0%bf%d0%be%d1%88%d0%b8%d0%b2%d0%b0/?unapproved=146817&moderation-hash=3b58026987e1694d291a0f6a11a1fe86#comment-146817>https://yozhstudio.ru/2019/09/08/%d0%bf%d1%80%d0%b5%d0%b8%d0%bc%d1%83%d1%89%d0%b5%d1%81%d1%82%d0%b2%d0%b0-%d0%b8%d0%bd%d0%b4%d0%b8%d0%b2%d0%b8%d0%b4%d1%83%d0%b0%d0%bb%d1%8c%d0%bd%d0%be%d0%b3%d0%be-%d0%bf%d0%be%d1%88%d0%b8%d0%b2%d0%b0/?unapproved=146817&moderation-hash=3b58026987e1694d291a0f6a11a1fe86#comment-146817</a> Казино выделяет возможность заработать и исключить настоящие средства на бездепозитных бонусах. Обычно, это незначительная сумма, коию казино возможность для разрешить презентовать игроку.Нельзя рассматривать забаву на средства, как вариант заработка. Азартные забавы запрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не является зачинщиком азартных игр. Сайт носит информационный характер. 1× slots регистрация в 1×slots casino Так что приготовьтесь предоставить секретную информацию (пол, возраст, государство проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает менее суток, последствии чего удастся беспрепятственно выводить солидные выигрыши.
1×slots мобильная версия войти казино
Доступ к дару возможность открываться автоматически последствии введения промокода или воззвания в службу вебсайта. В первом случае от юзера не требуется практически действий. Бездеп с активацией по коду встречается почаще всего. Игроку необходимо ввести совокупность знаков в графе, которая может находиться в регистрационной форме в Личном офисе.Помните, что всевозможные нарушения правил сведут на нет ваши старания, и вы наверняка останетесь без начисленного вас безвозмездного приза. Всегда изучайте верховодила начисления и условия вейджера. По каким вопросам, на которые вы имеет помощи отыскать ответы, обращайтесь за разъяснениям и саппорт. <a href=https://pyxc.ru/user/AshleyCaM/>https://pyxc.ru/user/AshleyCaM/</a> 1×slots casino зеркало
1×slots рабочее зеркало на сегодня
Выше мы предоставили глубокий комплект самых свежих и актуальных бездепозитных бонусов в онлайн казино без пополнения на 2022 год, где вы можете воспользоваться каким ценным бездепозитным призом.На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не сможете активировать и получить бездепозитный приз. <a href=http://forum3.bandingklub.cz/memberlist.php?mode=viewprofile&u=5481>1×slots регистрация</a> Объективные – размер бонуса, коэффициент и обстоятельства вейджера, необходимость внесения депо для вывода средств;Иногда у посетителей сайта могут появиться проблемы при активации полученного промо-кода. В таких случаях, необходимо обратиться за поддержкою в службу «Support». Для получения ответа, обязательно указывается определенная первопричина воззвания и подтверждается информация дополнительными снимками. Если сформировалась спорная обстановка, постоянно возможно адресоваться к главному регулятору или контролирующему органу, выдавшему этому заведению лицензионный документ. Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, дабы еще раз получить даровой приз. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ожидает неизбежное санкция.Поспешите отобрать бездепозитные призы за регистрацию в казино из представленного списка. Все платформы столько водят законную работа, хотя и порадуют правдивыми плодами игры, высокой отдачей, прыткими выплатами. казино 1×slots официальный сайт <a href=http://www.argeenstitu.org/index.php?option=com_k2&view=itemlist&task=user&id=2883>http://www.argeenstitu.org/index.php?option=com_k2&view=itemlist&task=user&id=2883</a> При регистрации никаких либо ином онлайн игральном заведении — вам дается один шанс испытать свою удачу не внося свои монеты. Замечу собственно такую поощрительную услугу предоставляют не все интернет игровые площадки, а только великодушная половина из них. Которые мы подготовили для Вас в нашем списке.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Бездепозитные призы – это самая небезинтересная и более перспективная промоакция интернет-казино. Они и какого-либо фри-спинов, поэтому что выплаты в безвозмездных вращениях не гарантированы, ведь комбинации на барабанах игрового аппарата все не сложиться. В подавляющем большинстве случаев безвозмездные бонусы начисляются в кредитах, коие нельзя незамедлительно исключить со счета. Прежде их нужно отыграть по установленным правилам. Эти требования принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже.Для получения приза надо(надобно) пригласить в забаву свежего клиента. Казино начисляет пригласившему фиксированный процент от взносов приглашённого в виде приза: почаще всего его размер не превышает 10%. Срок деяния приза правило не выше месяца: пригласивший получает приз зависимо проигранных ставок приглашённого в 1-ый луна игры. <a href=https://storyplus.ru/user/Kennethquick/>https://storyplus.ru/user/Kennethquick/</a> 1×slot рабочее зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://rolivka.online/forum/showthread.php?tid=35251>1×slots рабочее зеркало на сегодня</a>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=133554&pid=523617#pid523617>1 х слотс зеркало</a>
<a href=http://miupsik.ru/forums/showthread.php?tid=249959>1×slot регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для тех, кто только подумывает испытывать свою удачу, еще для проф игроков, ищущих свежие площадки для выигрышей, ведущие лицензированные казино нередко организуют разные промоакции, и лучшее предложений за последнее время – как для новичков, так и для профессиональных игроков – бездепозитный бонус за регистрацию.
#3766 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Варвара Субботина pin casino зеркало <a href=https://www.ossetia.tv/>Скоробогатова Ольга Николаевна порно</a> 1×bet зеркало рабочее на сегодня 1×bet xyz почему в казино не бывает настенных часов <a href=https://repost.news/>порно с Алина Загитова</a> porno Дарья Клишина porno Александра Степанова, фигуристка casinos xyz казино рулетка Юдаева Ксения Валентиновна порно Светлана Ходченкова 1×bet зеркало рабочее на сегодня 1×bet xyz
DiskiPlus гта казино DiskiPlus порно с Афонина Марина Игоревна <a href=https://diskiplus.ru/>DiskiPlus казино смотреть</a> DiskiPlus порно с Арина и Дина Аверины, гимнастки DiskiPlus вывод казино <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet сайт</a> DiskiPlus Преподобная Надежда Александровна порно DiskiPlus kometa casino DiskiPlus пин ап casino pin DiskiPlus официальные букмекерские конторы DiskiPlus casino автомат DiskiPlus казино фильм смотреть онлайн DiskiPlus pin up casino пин
#3767 hdrezkahttps://tv.the-hdrezka.com
резка детективы новинки hd <a href=https://tv.the-hdrezka.com/>hd rezka мелодрамы с субтитрами на телевизоре</a>
#3768 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino buzz 1×bet официальный <a href=https://th-royalgclub.com/>1×bet бесплатно</a> porno Илона Маркова, хоккеистка porno Дарья Клишина <a href=https://kompromat1.online/>казино рояль смотреть</a> kometa casino казино можно бесплатные букмекерские конторы porno Андрей Рублев (теннис) 1×bet приложение казино в россии 7k casino сайт
DiskiPlus casino официальный зеркало DiskiPlus казино рулетка <a href=https://www.diskiplus.ru>DiskiPlus casino скачать приложение</a> DiskiPlus Москалькова Татьяна Николаевна порно DiskiPlus porno Александра Степанова, фигуристка <a href=https://www.diskiplus.ru>DiskiPlus 1×bet официальный скачать</a> DiskiPlus 1×bet зеркало слоты 1×bet xyz DiskiPlus 1×bet на андроид бесплатно DiskiPlus casino рабочее DiskiPlus black russia казино DiskiPlus Хорова Наталья Александровна порно DiskiPlus букмекерские конторы без депозита DiskiPlus макао казино
#3769 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрацию более популярный вариант это
Но на азартных платформах сходственные вознаграждения имеют получить и уже зарегистрированные пользователи. В этом случае, призы предоставляются масштабах оригинальных промоакций или же неким геймерам в виде акционного предложения, которое прибывает на почту с целью «возвратить» игрока в свое казино.В случае установленного лимита на необходимую вывода выигрыша с бездепозитного приза, игрок не сможет вывести больше заявленной суммы. <a href=http://filmkachat.ru/>1× slots casino зеркало</a> <a href=https://forum.gazeta.pl/forum/w,678,178514390,178514390,Professional_Architectural_Renderings.html>https://forum.gazeta.pl/forum/w,678,178514390,178514390,Professional_Architectural_Renderings.html</a> Все обожают получать презенты. Согласитесь, почти каждый играющий человек несомненно необъятно рад, если получит даровой презент для забавы в онлайн казино просто за регистрацию либо же бонус за внесенный депозит, например нарекаемые приветственные бонусы для свежих игроков. Соответственно эти интернет клубы будут больше знамениты и предпочтительны у игроков при выборе казино для игры. Топ казино постоянно обновляется и прибавляются новые и увлекательные игровые клубы с симпатичной бонусной политикой и всеми возможными преимуществами, льготами, к коим относятся такие призы как фриспины за регистрацию, денежные бездепозитные бонусы, а также щедрые призы за внесенный депо.Риск-игра по равным шансам – Также казино возможность запрещать выполнять обстоятельства по отыгрышу с помощью раунда на удвоение, который предлагается в слотах, видео-покере и неких иных забавах. 1×slots рабочее зеркало <a href=https://systemcheck-wiki.de/index.php?title=Benutzer:Rosalina64C>https://systemcheck-wiki.de/index.php?title=Benutzer:Rosalina64C</a> Каждый новичок и профессиональный игрок мечтают прытко стартануть и начать создавать реальные ставки. Для сего достаточно арестовать подарок, за кот-ый надо уплачивать. В зависимости от игровой платформы, нужно сделать профиль, привязать email или телефон. После сего администрация начисляет щедрое вознаграждение повторяющий безвозмездных вращений либо виртуальных кредитов.В бонусную программку многих операторов входят систематические бездепы. Это бессрочные акции, поощряющие активных неизменных игроков. Популярный формат — раздача фриспинов по определенным дням недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают постоянные бонусы без депо в обмен на накопленные баллы лояльности.
1 xslots рабочее зеркало
Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и более. Когда игроку полагается много фриспинов, администрация имеет бить3 их начисление на несколько дней. Бесплатные вращения предоставляются для определенного слота, который указывается в правилах акции.Так собственно главное отличие дара на депозит от бездепа – неотъемлемое пополнение счёта. Вы сможете привнести депозит и преумножить стартовый капитал или арестовать бездеп и этом не придётся рисковать собственными сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начисляет щедрое поощрение! <a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5176/#comment-623764>казино 1×slots</a> 1 x slots В разделе с призами активировать собственный презент. Найти забавы, для коих учтено поощрение и применять бонус по назначению. <a href=https://google.as/url?q=https://doctorlazuta.by/>https://google.as/url?q=https://doctorlazuta.by/</a> Многие азартные клубы ограничивают необходимую вывода заработанную на призе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не можете исключить. Разница несомненно аннулирована, Вы и не можете делать на нее ставки.Такой безвозмездный эквивалент средств зачисляется на профиль юзера последствии осуществления требований и предназначаются они только для игрового процесса. Вывод таких вознаграждений вероятен только в осуществления вейджеровых условий. 1хслотс казино зеркало На условиях отыгрыша бесплатных бонусов стопам тормознуть подробнее. С ними связаны нюансы, коие невозможно оставить без внимания.
1×slots официальный demo регистрация в 1×slots casino
Первый образующийся вопрос, это, для выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают новых игроков. Последним легче начать игру на деньги с дара за регистрацию. Им не нужно пополнять баланс и расходовать собственные средства. Новички получают безвозмездные спины или свои на счёт. С их подмогою знакомятся с игровым процессом, крутят слоты и делают ставки в рулетке. <a href=https://galgbtqhistoryproject.org/wiki/index.php/Shisha_Tobacco_From4_Eur>https://galgbtqhistoryproject.org/wiki/index.php/Shisha_Tobacco_From4_Eur</a> Как верховодило, при выводе денег, от играющего требуется только устроить наименьший вклад для того, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом личный счет. 1×slots casino регистрация 1×slotscasino09k online Этот образ бонуса несомненно добавлен на Ваш акк последствии успешной процедуры регистрации с внедрением номера телефона. Если избрать иной метод творенья учетной записи, бездеп не будет добавлен на Ваш акк.После требуется внести идентификационный платёж. Это стращает начинающих больше всего. Нужно устроить наименьший депозит в 100–500 рублей. Таким образом служба безопасности увериться что, что платёжный способ принадлежит Вам. Данная процедура необходима для обеспечения безопасности игровых счетов. Пример, Ваш акк взломают и выведут средства на свой кошелёк. Будет очень досадно. Поэтому верификация платёжной системы, это важный момент.
1 хслот регистрация в 1×slots casino
<a href=https://russiancomputerservice.ru/user/JosephCer/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> Когда идет о получении бездепозитных бонусов в казино, в первую очередь внимание на последующие условия: 1×slots регистрация <a href=https://newtimes.ru/forum/user/127102/>https://newtimes.ru/forum/user/127102/</a>
1×slots зеркало видели такую регистрацию на
С не отыгранным призом воспрещается превосходить размер максимальной ставки. Нарушение этого условия в аннулирование выигрыша. <a href=http://www.haxorware.com/forums/member.php?action=profile&uid=282485>http://www.haxorware.com/forums/member.php?action=profile&uid=282485</a> У каждого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано смогли выполнить их, мы дадим некоторое советов. Если система начислила небольшую необходимую, надо делать немалые ставки – остановитесь на 10–30 центах. Как лишь сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте играть. В неприятном случае чем приглядеться к другому автомату.После получения бонуса вывод средств для посетителя будет недоступен до тех пор, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо пара недель. Выводить средства игрок может только последствии отыгрыша. 1×slots регистрация на сайте
<b>Смотреть еще похожие новости:</b>
<a href=http://maddog-server.org/forum/showthread.php?tid=53981>1×slots официальный сайт мобильная версия</a>
<a href=http://nexusroleplay.teamforum.ru/viewtopic.php?f=19&t=8686>1 xslots рабочее зеркало</a>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5068/#comment-608979>1×slots casino зеркало рабочее</a>
<a href=https://astraclub.ru/album.php?albumid=230488>1×slots регистрация на сайте 1×slots ru com</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вышеописанная первопричина и считается основным нюансом, в которого операторы отдают доля своей прибыли на различные рекламные затраты и рекламные кампании. А самым действующим тут станут выступать именно бездепозитные бонусы казино 2022 с выводом за регистрацию.
#3770 Montazhp_rewhttps://montazhp.ru/
Доброго времени суток! Важная и интересная новость для тех, кто желает освежить или обновить свой интерьер в СПб или Санкт-Петербурге! А если вы в процессе капитального или евроремонта магазина, квартиры, офиса, дома и т.д., то эта новость именно для вас. Именно для ценителей точного и высочайшего качества выполнения работ, а некачественного и не топорного исполнения. Для вас работает узкоспециализированная компания, которая заточена именно на монтаже плинтусов или установке плинтусов. В это трудно представить и поверить, но ими уже выполнено более 100000 км установленного плинтуса. В общем, если вам интересно найти, плинтус напольный, монтаж плинтуса, установка плинтусов и т.д., например: <a href=https://montazhp.ru/>монтаж углов плинтуса</a> Тогда вам срочно нужно прямо сейчас перейти на сайт montazhp since 2004 и узнать все подробности по плинтус мдф, плинтус, плинтус для пола, покраска плинтусовплинтус для столешницы, плинтус пластиковый, плинтус деревянный, плинтус дуб, плинтус для кухни в СПб и ЛО и т.д. https://montazhp.ru/ . Обязательно переходите на сайт montazhp.ru Установка плинтусов сохраняйте в закладки и изучайте информацию, не забудьте записать номер телефона и адрес сайта. Увидимся!
#3771 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino скачать 1×bet на андроид бесплатно <a href=https://www.ossetia.tv/>up casino скачать</a> pin up casino официальные букмекерские конторы <a href=https://rhymes-punches.com/>играющие казино</a> казино ставка Окладникова Ирина Андреевна порно играющие казино онлайн как выиграть в казино порно с Юлия Ефимова, пловчиха лучшие бесплатные онлайн казино почему в казино нет окон
DiskiPlus букмекерские конторы бет DiskiPlus казино ли <a href=https://diskiplus.ru>DiskiPlus 1×bet зеркало на сегодня 1×bet xyz</a> DiskiPlus казино играть DiskiPlus Матвиенко Валентина Ивановна порно <a href=https://www.diskiplus.ru/>DiskiPlus Окладникова Ирина Андреевна порно</a> DiskiPlus up casino зеркало DiskiPlus casino x DiskiPlus Скоробогатова Ольга Николаевна порно DiskiPlus pin casino DiskiPlus porno Анна Сидорова, керлингистка DiskiPlus скачать pin casino DiskiPlus Светлана Ходченкова
#3772 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
ramenbet casino скачать pin casino <a href=https://specreporter.com/>casinos winning</a> пин ап casino казино вулкан <a href=https://t.me/vchkogpu_ru>бесплатные букмекерские конторы</a> букмекерские контора ап макао казино часы казино porno Анастасия Янькова, боксерка букмекерские конторы без депозита Манилова Алла Юрьевна порно порно с Дронова Александра Викторовна
DiskiPlus up casino скачать DiskiPlus казино вход <a href=https://diskiplus.ru>DiskiPlus casinos winning</a> DiskiPlus 1×bet на андроид DiskiPlus casino скачать приложение <a href=https://diskiplus.ru>DiskiPlus порно с Дарья Касаткина (теннис)</a> DiskiPlus casino рабочее зеркало DiskiPlus лучшие онлайн казино DiskiPlus top casino DiskiPlus бесплатно играем казино DiskiPlus пина casino DiskiPlus пин ап казино DiskiPlus пина casino
#3773 Charlesgunnyhttp://filmkachat.ru
x1 slots 1хслотс регистрация перейти на 1×slots
В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая приятная доля игры. Важно, зачастую бездепозитные призы в казино выдаются с лимитированиями по наибольшей выплате. В среднем возможно рассчитывать на выгода в несколько тысяч руб. Как исключить выигрыш с приза без депо. Придётся подтвердить акк документально, в неких заведениях. Процедура верификации неотклонима и делается каждым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате или прочитайте в правилах.На благотворительные бонусы онлайн-казино практически всегда распространяется лимитирования по стране проживания клиентов. Даже случае для разрешается раскрывать счет и выступать на средства в заведении, это еще не значат, собственно вам доступны no down payment bonuses. <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> <a href=https://www.rang.com.ua/astramedika.com.ua>https://www.rang.com.ua/astramedika.com.ua</a> Чем ниже значение вейджера, тем легче отыграть и вывести приз. Если Вы планируете заработать на бездепе, но просто ознакомиться с новым игровым клубом, то стоит избегать бонусов с высочайшим вейджером их практически не реально отыграть. С ними Вы сможете только протестировать забавы заведения.Существуют казино с бонусом за регистрацию, каких довольно модны фриспины в интернет казино впоследствии регистрации в определенных забавах. Они встречаются даже почаще безвозмездных поощрений либо традиционных бонусов в казино без вложений. Например, игрок регистрирует счет, на кот-ый начисляются бесплатные игры, приз за регистрацию повторяющий бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса игры выигрывает настоящие деньги, которые в последствии можно удачно исключить из заведения на собственную платежную систему. То есть, есть все шансы исключить средства без рисков своими деньгами. Регистрация, за игры получит бонусы, займет несколько, а спасибо данному можно прирастить 5 евро поощрений до тыс. И без всяких проблем исключить их. 1 xslots рабочее зеркало <a href=http://x4gxtreamforgame.free.fr/index.php?file=Members&op=detail&autor=muddledneophyte>http://x4gxtreamforgame.free.fr/index.php?file=Members&op=detail&autor=muddledneophyte</a> Хотя благотворительные призы начисляются без депозита, не исключено, что вас понадобиться вносить деньги. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты только последствии как, как новый заказчик впервые пополнит игровой счет.
1×slots зеркало быструю регистрацию а также мгновенное
Минимального оборота. Этот предел уточняется вейджером — же игрок не поиграет на установленную необходимую, вывод средств несомненно недоступен.Каждая игровая платформа отличается критериями по получению и отыгрышу бездепов. В правилах отчетливо расписаны кратковременные рамки, за которые надо(надобно) прокрутить вейджер. Также не забывайте про максимальный размер ставки и максимальную необходимую выплаты. С другой стороны, дабы получить бездепозитные бонусы казино, достаточно потратить не более 1 минутки. 1×slots casino зеркало <a href=http://ruzland.ru/communication/forum/user/1975/>http://ruzland.ru/communication/forum/user/1975/</a> Подтверждение регистрации. Казино настоятельно привязки профиля к электронному адресу и номеру телефона. Для сего на e-mail отчаливает послание со ссылкой, а на телефонный ? текстовое извещенье с кодом. 1×slots зеркало видели такую регистрацию на Выбор каждого онлайн казино на нашем сайте. В описании к любому Вы можете разузнать, собственно получите за создание аккаунта.
1×slots официальный сайт зеркало рабочее
Подарки на праздники ? приуроченные к парадным датам, требующие условного отыгрыша или начисляются без это. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду. Верификация аккаунта. Лучше подтвердить лицо сразу в регистрации, чтобы позже не было проблем с выводом средств. Верификация имеет проходить 2-мя способами:Если при регистрации показать промокод, можно гарантировано получить бонус. Где брать ваучер? Посетите тематические блоги или форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В заключительнее время игорные жилища начали афишироваться в кинокартинах и сериалах. Присмотритесь и скорее заметите промокод, кот-ый принесёт 500 или 1 000 бонусных руб. <a href=https://pcnto.com/user/Scottavoib/>https://pcnto.com/user/Scottavoib/</a> 1×slots регистрацию процедура займет всего лишь
1×slots регистрация на 1хслотс
Только выполнив все обстоятельства отыгрыша и дождавшись окончания проверки аккаунта, Вы можете оформить заявку на вывод средств и получить свои средства.Такой бесплатный эквивалент средств зачисляется на профиль пользователя последствии воплощения притязаний и предназначаются они только для игрового процесса. Вывод этих вознаграждений возможен лишь в осуществления вейджеровых условий. Подтверждение регистрации. Казино просят привязки профиля к электрическому адресу и номеру телефона. Для сего на e-mail отчаливает послание ссылаясь, а на телефон ? текстовое сообщение с кодом.Возьми свой подарок. Чаще всего бонус активируется незамедлительно в регистрации. Но посещают истории, когда надо(надобно) зайти в индивидуальный кабинет или написать в справочную службу. 1хслот официальный сайт зеркало <a href=https://penzu.com/p/106d247d9b5701cb>https://penzu.com/p/106d247d9b5701cb</a> Размер бонуса. В качестве бездепов обыкновенно начисляют большие суммы, а когда речь идет о призах за депо, которые начисляются в процентном соотношении от суммы пополнения, то некоторые казино могут презентовать игроку до 2000$.Это раз из основных показателей привлекательности подарка. С завешенным коэффициентом том профессионалы не сумеют выполнить условия по отыгрышу. И неважно, насколько привлекательно выглядит предложение – бездепозитный бонус казино в размере $500 или $1 000. Чтобы новички лучше вникли, что же это вейджер, мы разберём на случае.
1хслотс официальный сайт зеркало
Но никогда не забывайте пристально читать верховодила роли в бонусных акциях. Если вы нарушите хотя бы одно условие, позже вы не можете уладить недоразумение с администрацией.Исходя из этого, просто не присутствует разумных причин махнуть рукою на получение такового приза при регистрации. И, что, на подобный безвозмездной основе у вас есть все шансы выиграть деньги и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные бонусы, нарекают бесплатными интернет платформами для игр. Промокод – определённая композиция знаков, которую необходимо ввести в подходящее фон при создании учетной записи либо активировать в собственном профиле игрока в разделе с бонусами. <a href=https://demo.qkseo.in/profile.php?id=984751>https://demo.qkseo.in/profile.php?id=984751</a> 1×slots официальный сайт зеркало рабочее
<b>Смотреть еще похожие новости:</b>
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=2816>1×slots официальный регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. Отказ в прохождении верификации. Если заказчик не хочет либо имеет предоставить документы, подтверждающие его личность, профиль будет заблокирован совместно, вкупе со всеми бонусными начислениями.
#3774 Charlesgunnyhttp://filmkachat.ru
1х слот регистрация в 1×slots casino
Также учтите, что кое-какие игровые платформы сузивают перечень стран, коие готовы получить предложенный бездепозитный приз за регистрацию. К образцу, существуют онлайн-заведения, выдающие подобные призы только жителям конкретных стран. К образцу, онлайн казино 777 Оригинал дает бездепозитный бонус только игрокам из России и стран СНГ. Или напротив, пичкают вознаграждением всех, не обитателей неких стран (исходя из этого, стопам внимательно изучать перечень, дабы впоследствии не возникло никаких вопросов и жалоб).Однако далековато не все ресурсы предлагают своим клиентам бездепозитные призы за регистрацию в казино. В большинстве случаев учтено одобрение на 1-ый депозит в размере 100–200%. Это отличная возможность преувеличить банкролл, прирастить время, проведённое за игрой и шансы сорвать крупный куш. <a href=http://filmkachat.ru/>1×slots casino зеркало рабочее</a> Условия шансы различаться приятель от друга. Но подобный приз имеет быть использован только для игрового процесса – приобретенные на счет деньги до такого, как станут отыграны, вывести нереально.Бонусы без депозита при регистрации считаются самыми привлекательными как для опытнейших игроков, например для и начинающих. Получив такое вознаграждение, клиент имеет выступать на настоящие средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные призы в интернет-казино Рунета, еще условия их активации и выигрыша. <a href=https://slides.com/archicgi-com/essential-electronic-components-for-modern-industrial-applications/scroll>https://slides.com/archicgi-com/essential-electronic-components-for-modern-industrial-applications/scroll</a> 1×slots зеркало регистрацию более популярный вариант это <a href=https://nerdgaming.science/wiki/User:Rogelio7210>https://nerdgaming.science/wiki/User:Rogelio7210</a> Не трудно додуматься, что not the slightest deposit bonuses почти ни не бывают великими. Чаще всего идет о пяти–тридцати долларах (либо эквиваленте этой суммы в иной валюте).Подобные бонусы без депо предоставляются на более выгодных критериях. Зачастую они крупнее, а обстоятельства отыгрыша наименее строгие.
1×slots зеркало видели такую регистрацию на
1×slots зеркало быструю регистрацию а также мгновенное <a href=http://twchess.lionfree.net/discuz/home.php?mod=space&uid=24843>http://twchess.lionfree.net/discuz/home.php?mod=space&uid=24843</a> 1×slots рабочее зеркало на сегодня Мы советуем не отказываться от подобных предложений узнаваемых казино. Выделите количество минут на регистрацию, получите бонус и попробуйте его отыграть. Может быть, сейчас фортуна будет на вашей стороне!Отыграв бездепозитный приз в казино с выводом также придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в подобное ограничение присутствует, то единоразово исключить выйдет лишь сумму, не превосходящую размер полученного бонуса.
1×slots зеркало регистрация то дальше необходимо пройти
В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и если, тогда, неоднозначных обстановок нет способности куда-то пожаловаться и доказать собственную правоту. Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают приз по государствам. Вплоть до как, что клуб возможность принимать игроков из Вашей страны, а бездеп не давать. <a href=http://mail.inda-car-audio.tw/home.php?mod=space&username=emptytalent25>http://mail.inda-car-audio.tw/home.php?mod=space&username=emptytalent25</a> 1 хслот регистрация в 1×slots casino На нашем веб-сайте Вы отыщите список актуальных новых бездепозитных бонусов в казино 2022 года. Также, есть много неповторимых предложений, которые доступны лишь гостям нашего вебсайта после регистрации по нашей ссылке либо активации особого промокода.
1×slots официальный зеркало
На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не можете активировать и получить бездепозитный приз. Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих требований, считая обязательной верификации. Если на веб-сайте предусмотрена обязательная процедура доказательства личности, то вывести выигрыш удастся только последствии проверки данных. Приготовьтесь наполнить анкету и отправить в техподдержку документ, подтверждающий личность.B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. 1×slots зеркало регистрация то дальше необходимо пройти <a href=http://rednline.az/index.php?subaction=userinfo&user=dizzyrainbow78>http://rednline.az/index.php?subaction=userinfo&user=dizzyrainbow78</a> Маркетинговая политического всех игорных интернет-клубов должна носить разнородный нрав. И в гонорары на депозит работают чтобы, чтобы, чтобы провоцировать вносить депозиты и поощрять уже имеющих юзеров, то бездепозитный бонус в казино либо бонус за регистрацию в казино, прежде всего, рассчитан на расширение базы покупателей.
1×slots зеркало которую указывали при регистрации кстати
Новички не обожают сразу же заносить депо. Это обусловлено неимением навыка и сомненьем. К счастью, наши возможно получить бездепозитный приз за регистрацию в казино. Неважно собственно начисляет система – фриспины либо кредиты. В любом случае вы не рискуете собственными сбережениями. Это отличная вероятность запустить понравившийся видео слот либо же испытать удачу в настольных забавах. <a href=http://www.khleeg.net/vb/member.php?u=7684>http://www.khleeg.net/vb/member.php?u=7684</a> 1×slots сайт
<b>Смотреть еще похожие новости:</b>
<a href=https://adler.biz/threads/674/>1×slots регистрация 1×slots review live</a>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/8543/#comment-350878>1×slot зеркало</a>
<a href=https://forum.bedwantsinfo.nl/thread-135578-post-1258476.html#pid1258476>1×slot зеркало рабочее регистрации на телефон придет</a>
<a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=36182>1 х слотс зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины. Бесплатные вращения предназначены для применения в видео-слотах. Внимательно читайте условия – они часто выдаются для неких машин. В зависимости от клуба вам создавать конкретное число ставок. Кстати, современные игорные жилища выделяют возможность заводить «одноруких бандитов». На бесплатные призы онлайн-казино почти практически распространяется лимитирования по стране проживания клиентов. Даже если вам разрешено раскрывать счет и играть на деньги в заведении, это еще не означают, собственно вам доступны no deposit bonuses.
#3775 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
Ниже указан актуальный перечень легальных казино в Беларуси с бонусами на первый депозит. Вы можете попасть на официальный сайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус.Также, учите, что бездепозитный бонус можно исключить лишь никаких случае, когда станут исполнены все обстоятельства отыгрыша. <a href=http://filmkachat.ru/>1х слот 1хслотс регистрация перейти на 1×slots</a> Список например называемых «не землель» прилагается к правилам бонусной программы игорного портала. Обязательно проверьте, распространяются ли на вас сходственные санкции. <a href=https://redmine.dti.economia.gov.br/issues/72789>https://redmine.dti.economia.gov.br/issues/72789</a> Чаще всего, популярные сервисы, такие как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно неотъемлемое верховодило. Финансовые свои выводятся лишь спустя ту платежную систему, коей пользовались для пополнения депозита. Если же игрок получил бездепозитный покерный приз, требуется восполнить счет на наименьшую сумму, которая составляет обыкновенно 10 $. 1×slots регистрация 1×slots review live <a href=http://illustrator.odub.tomsk.ru/index.php?subaction=userinfo&user=DavidHeill>http://illustrator.odub.tomsk.ru/index.php?subaction=userinfo&user=DavidHeill</a>
1×slots сайт
Условия вывода выигрыша. В некоторых заведениях для успешного вывода с бездепозитного бонуса довольно пополнения баланса и подтверждения личности. В других же клубах, необходимо несколько один прокрутить собственный депозит.Размер ставки для забавы по бездепозитному призу (окончательно же, когда, когда он представлен вид бонусных валютных средств) часто ниже, чем при этой на депо. Ограничение несомненно работать до этапа отыгрыша бонуса. <a href=http://www.ihavethepussy.com/de/threads/194472–1-%D0%A1%E2%80%A6%D0%A1%D0%83%D0%A0%C2%BB%D0%A0%D1%95%D0%A1%E2%80%9A-%D0%A1%D0%82%D0%A0%C2%B5%D0%A0%D1%96%D0%A0%D1%91%D0%A1%D0%83%D0%A1%E2%80%9A%D0%A1%D0%82%D0%A0%C2%B0%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A1%D0%8F-%D0%A0%D0%86–1×slots-casino?p=212006#post212006>1 хслот регистрация в 1×slots casino</a> 1×slots официальный сайт зеркало Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских руб. В критериях акции указано, собственно вейджер бездепозитного приза х20. Поэтому, чтобы отыграть приз, игроку несомненно нужно сделать ставок на 35*20=700 рублей.Только выполнив все обстоятельства отыгрыша и дождавшись окончания проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить средства средства. <a href=https://malaysia-forex.com/members/133139-Walterled>https://malaysia-forex.com/members/133139-Walterled</a> Если речь идет об эксклюзивных предложениях, возможность потребоваться регистрация в казино по ссылке с партнерского сайта.Максимальный размер ставки, который невозможно превосходить пока бонус не несомненно всецело отыгран. В случае нарушения сего верховодила, приз и выигрыш с него станут аннулированы. 1×slots официальный сайт скачать
1×slots зеркало сайта
Вывод выигрыша с бездепозитных призов казино – щедрый презент от азартных клубов. Но чтобы вывести собственный заработок, необходимо выполнить ряд условий: <a href=http://feki-php.8u.cz/profile.php?lookup=11558>http://feki-php.8u.cz/profile.php?lookup=11558</a> Подтвердите регистрацию, чтобы активировать Бездепозитный приз с выводом, требуется заполнить индивидуальный профиль. Заполните пустопорожние поля настоящими данными о для.Бездепозитный приз казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби избранного заведения, определится в выборе игр и проверить качество работы службы. Довольно нередко, начиная игровой процесс, игрок уже отказывается останавливаться и проделывает реальный лепта. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать безвозмездно вполне как один таки с бонусом за регистрацию без надобности вносить депо. 1хслотс рабочее зеркало На бонусные начисления имеют быть установлены дополнительные ограничения, коие Вы не сведению при отыгрыше. Пока приз всецело не отыгран — деньги из казино не выводятся.
казино 1×slots
Основное управляло получения бездепа ? творимый акк должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов требовательно воспрещено. Проверка ведется по имени, e-mal, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депо необходимо блюсти простую последовательность поступков. После получения бонуса вывод средств для клиента несомненно недосегаем до тех пор, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя или пара месяцов. Выводить средства игрок сможет только в отыгрыша. 1хслот 1хслотс регистрация перейти на 1×slots <a href=http://www.lkforum.ru/member.php?u=155584>http://www.lkforum.ru/member.php?u=155584</a> Максимальная ставка ? устанавливается в валюте счета и ограничивает размер ставки за один спин. В случае ее превышения бонус может быть аннулирован. Также в правилах может находиться запрет на размещение ставок определенного вида, к, по одинаковым шансам в рулетке (другими, на чет или нечет, красноватое или темное и т.д.).
1× slots официальный
Мы советуем не отрицаться от сходственных услуг узнаваемых казино. Выделите некоторое минут на регистрацию, получите приз и попытайтесь его отыграть. Может быть, сейчас фортуна будет на вашей стороне!Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми акциями. Читайте о них в обзорах и на форуме. <a href=https://www.ng.ru/blogs/user/174028.php>https://www.ng.ru/blogs/user/174028.php</a> скачать 1×slots официальный сайт В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно приятная часть забавы. Важно, часто бездепозитные бонусы в казино выдаются с ограничениями по максимальной выплате. В среднем можно рассчитывать на прибыль в несколько тысяч руб. Как исключить выигрыш с бонуса без депо. Придётся подтвердить акк документально, в некоторых заведениях. Процедура верификации обязательна и делается каждым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате или прочитайте в правилах.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.bf-france.com/forums/profile/30064-rabofreeor/>казино 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Первый образующийся вопрос, это, зачем выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают свежих игроков. Последним легче начать забаву на средства с презента за регистрацию. Им надо пополнять баланс и тратить личностные средства. Новички получают благотворительные спины или средства на счёт. С их поддержкой знакомятся с игровым ходом, крутят слоты и делают ставки в рулетке. Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.
#3776 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино фильм 1×bet рабочее на сегодня <a href=https://glvk.guru/>играющие казино</a> скачать букмекерскую контору 1×bet сайт <a href=https://sovsekretno.net/>самое казино</a> casino daddy up casino up букмекерская контора бесплатно фильм казино 1×bet зеркало xbet 1×bet 1 ramenbet casino
DiskiPlus скачать 1×bet DiskiPlus Александра Бортич <a href=https://www.diskiplus.ru>DiskiPlus казино вход</a> DiskiPlus ramenbet casino DiskiPlus cometa casino <a href=https://diskiplus.ru>DiskiPlus порно с Анна Калинская (теннис)</a> DiskiPlus сайт 1×bet слоты DiskiPlus Юдаева Ксения Валентиновна порно DiskiPlus Черкесова Бэлла Мухарбиевна порно DiskiPlus casino регистрации DiskiPlus казино онлайн бесплатно DiskiPlus пина casino DiskiPlus 1×bet xbet
#3777 Charlesgunnyhttp://filmkachat.ru
1х слотс зеркало регистрация в 1×slots casino
Каждая игровая перрон выделяется условиями по получению и отыгрышу бездепов. В правилах отчетливо расписаны кратковременные рамки, за коие нужно прокрутить вейджер. Также не забывайте на максимальный размер ставки и наивысшую сумму выплаты. С иной стороны, дабы получить бездепозитные бонусы казино, достаточно израсходовать не более 1 минутки.Вы наверняка, как и все предпочитаете получать презенты и бездепозитные призы казино. Игорные дома брали в привычку одаривать гэмблеров приятными бонусами. Стать владельцем приветственного подарка можно за создание профиля или пополнение счёта. Второй вариант больше занимательный, как клубы готовы удвоить депозит! Но если вы новичок и только знакомитесь с миром пыла, другого, как воспользуйтесь бонусом за регистрацию. <a href=http://filmkachat.ru/>1×slots официальный demo регистрация в 1×slots casino</a> Хотя благотворительные бонусы начисляются без депо, не исключено, собственно вам придется заносить деньги. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только в такого, как новый заказчик впервые пополнит игровой счет.Исходя из сего, просто не существует осмысленных оснований махнуть рукою на получение такого бонуса при регистрации. И, не, на такой безвозмездной базе у вас есть шансы выиграть деньги и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные призы, именуют бесплатными интернет платформами для игр. <a href=https://pr-cy.io/astramedika.com.ua/>https://pr-cy.io/astramedika.com.ua/</a> Нельзя осматривать игру на деньги, как вариант заработка. Азартные забавы запрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не организатором азартных игр. Сайт носит информационный нрав. 1×slots официальный зеркало <a href=https://www.spacepub.net/members/5151-FrankPhags?s=0b983e0bc582ff939142027826ec3dbb>https://www.spacepub.net/members/5151-FrankPhags?s=0b983e0bc582ff939142027826ec3dbb</a>
онлайн казино 1×slots
Как прочие промоакции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такого предложения являются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых гостей и позволяет им составить впечатление о функционале, не рискуя значительными суммами. <a href=http://angelandmax.teamforum.ru/memberlist.php?mode=viewprofile&u=640>1× slots регистрация в 1×slots casino</a> 1×slots зеркало выигрыши обязательно пройдите регистрацию если Вышеописанная первопричина и считается главным нюансом, следствии которого операторы отдают доля собственной прибыли на разные маркетинговые затраты и рекламные кампании. А самым действенным здесь будут выступать именно бездепозитные бонусы казино 2022 с выводом за регистрацию.Предложения с бездепозитными призами за регистрацию дозволяют новым заведениям заинтересовать аудиторию на собственный сайт. А игроки к получают вероятность играть на настоящие деньги без депо в казино и заработать маленький стартовый капитал, кот-ый разрешено вывести на карту банка либо электронный кошелек. <a href=http://krast-studio.ru/user/RandalBib/>http://krast-studio.ru/user/RandalBib/</a> казино 1×slots официальный сайт Раздача бонусов может быть посвящена разным датам: календарные дни, дни рождения игроков, юбилей открытия казино и т. Д. Подарок выдается в виде денег, фриспинов либо баллов для скопления и обмена на услуги оператора. Если юзер получает выигрыш, средства начисляются на его счет. Для вывода этой суммы понадобиться выполнить ряд требований.
1×slots регистрация на 1хслотс
Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы которые возникают у начинающих.Если вы выбираете испытанное лицензионное интернет казино и сделайте все условия получения бездепозитного бонуса, трудностей с получением презента у Вас не возникнет. <a href=https://mobilka.mobi/user/JustinHoade/>https://mobilka.mobi/user/JustinHoade/</a> Как и акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такого предложения считаются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает свежих посетителей и разрешает им составить впечатление о функционале, не рискуя вескими совокупностями.К примеру, игроку выдаются безвозмездные средства в заведении в размере пятидесяти или ста $ (вейджер на которые составляет 100х). То есть, каждому новоприбывшему геймеру выскакивает притягивающая картинка, кот-ая сулит выплату всех зачисленных фирмой средств. Не стоит обращать внимания на казино приз за регистрацию без депозита с слишком большой или очень малюсенькой суммой призов, поэтому собственно, том кропотливо выучив все обстоятельства, тут всего, несомненно некий подкол. 1×slots актуальное зеркало
1хслот 1хслотс регистрация перейти на 1×slots
Для проверки используются сканы паспортов, водительских прав, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если юзер обнаружен в попытке ввести дополнительный акк, все его учетные записи подвергаются блокировке, а их владелец попадает в темный перечень. При ирге на лицензионной площадке не стоит опасаться указывать достоверную персональную информацию (шифрование исключает утечку индивидуальных данных). 1× slots casino зеркало <a href=https://theprome.com/post/51069_avto-vozhdenie-ekzamen-eto-process-v-ramkah-kotorogo-proveryaetsya-vasha-sposobn.html>https://theprome.com/post/51069_avto-vozhdenie-ekzamen-eto-process-v-ramkah-kotorogo-proveryaetsya-vasha-sposobn.html</a>
1×slots бонус за регистрацию
Зачастую бездепозитные бонусы казино для забавы предлагаются разными заведениями азартных игр в качестве маркетинговых промоакций либо в целях привлечения к для свежих игроков. Для бездепозитных призов в казино 2022 игроку надо пополнять счет до момента вывода желаемых средств.Бездепозитные призы за регистрацию являются одним из самых известных способов вербования свежих игроков в онлайн-казино, потому собственно они деют игрокам вероятность опробовать казино, более игровые автоматы, и вероятно, выиграть настоящие средства. <a href=https://lit-book.ru/user/Michaelerync/>https://lit-book.ru/user/Michaelerync/</a> Но есть игорные заведения, которые готовы просто так жертвовать деньги на забаву. Для сего довольно сделать профиль. Чтобы вывести свой выигрыш, вас поначалу нужно выполнить обстоятельства отыгрыша, указанные в условиях получения бездепозитного депозита. 1× slots casino официальный сайт Бездепозитные призы – это исключительно занимательная и более многообещающая промоакция интернет-казино. Они в другого фри-спинов, потому что выплаты в даровых вращениях не гарантированы, как комбинации на барабанах игрового аппарата все не сложиться.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.handmakersbrasil.com.br/topic/893–1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5/#comment-1272>1 х слотс зеркало</a>
<a href=http://ledyardmachine.com/forum/User-Jameshoing>casino 1×slot</a>
<a href=http://xn–80akbkalsbeeafq6a6b2f.xn–p1ai/forum/messages/forum1/topic38440/message203787/?result=new>1×slos регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При регистрации сомнений или ином онлайн игральном заведении — вам дается один шанс испытывать собственную удачу не внося средства монеты. Замечу собственно такую поощрительную предложение деют не все интернет игровые площадки, а лишь великодушная середина(средина) из их. Которые мы подготовили для Вас в нашем списке.
#3778 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино рублях букмекерские конторы в россии <a href=https://sovsekretno.net/>1×bet на андроид бесплатно</a> букмекерская контора зенит 1×bet зеркало на сегодня 1×bet xyz <a href=https://kompromat1.online/>автомат казино</a> пинко casino лучшие бесплатные онлайн казино лучшие казино бесплатно porno Катерина Шпица пин ап casino pin up top Скоробогатова Ольга Николаевна порно гама казино
DiskiPlus яндекс казино DiskiPlus casino x <a href=https://diskiplus.ru/>DiskiPlus порно с Евгений Малкин (хоккей)</a> DiskiPlus online casino официальный DiskiPlus бк букмекерская контора <a href=https://diskiplus.ru/>DiskiPlus казино смотреть онлайн бесплатно</a> DiskiPlus скачать 1×bet DiskiPlus pin up casino buzz DiskiPlus порно с Абрамченко Виктория Валериевна DiskiPlus 1×bet официальный сайт 1×bet xyz DiskiPlus лучшая казино DiskiPlus казино смотреть онлайн бесплатно DiskiPlus porno Юлия Канакина
#3779 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
Фриспины. Бесплатные вращения предусмотрены для применения в видео-слотах. Внимательно читайте обстоятельства – они часто выдаются для неких машин. В зависимости от клуба продоставляется делать определенное количество ставок. Кстати, современные игорные жилища дают возможность заводить «одноруких злодеев».Создание аккаунта. На веб-сайте казино необходимо обнаружить регистрационную форму и заполнить пустопорожние поля личностными данными. Иногда на этом этапе потребуется показать только адресок электрической почты и пароль, но чаще хотелось заполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д. ). Нужно указывать лишь реальные данные, поскольку впоследствие они станут испытаны. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать на айфон</a> <a href=https://waad.powerappsportals.com/en-US/forums/general-discussion/988ab395–4ecf-ef11–95f6–000d3a393bf8>https://waad.powerappsportals.com/en-US/forums/general-discussion/988ab395–4ecf-ef11–95f6–000d3a393bf8</a> С такими простыми советами каждое казино с бонусом за регистрацию способно принести в разы больше выгоды и полезности.Чаще всего, модные сервисы, эти как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно неотъемлемое правило. Финансовые свои выводятся лишь через что, эту платежную систему, коей успех для пополнения депо. Если же игрок получил бездепозитный покерный приз, требуется пополнить счет на минимальную сумму, кот-ая сочиняет обыкновенно десять долларов. 1 х слотс зеркало <a href=https://yogicentral.science/wiki/User:Julie74J5697>https://yogicentral.science/wiki/User:Julie74J5697</a> Иногда виде одобрения за регистрацию имеют выдаваться билеты для роли в турнирах. Условия их проведения довольно выделяются, потому мы рекомендуем ознакомиться с любым предложением отдельно.
скачать 1×slots на андроид мобильная версия
1×slots официальный зеркало Бесплатный приз – кредиты, которые онлайн-казино начислит посетителю, не принуждая его пополнять игровой счет.Но разу не забывайте внимательно читать верховодила роли в бонусных акциях. Если вы нарушите хотя бы одно условие, позже вы не сможете устроить недоразумение с администрацией. <a href=http://producm.ru/forum/messages/forum38/topic35998/message292955/?result=new#message292955>http://producm.ru/forum/messages/forum38/topic35998/message292955/?result=new#message292955</a> Вейджер (или вагер) ? это наименьшая сумма ставок, коию необходимо устроить для вывода денежного приза. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение. 1×slots casino регистрация 1×slotscasin online Условия отыгрыша приза. Если Вы планируете заработать на бездепозитном бонусе, то для внимание на значение вейджера и срок, который дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, тем легче отыграть приз и исключить выигрыш.Игрокам не следует принимать приветственный бонус как гарантированный способ получить большой выигрыш, но это замечательная возможность без расходов оценить функционал казино.
1х слот регистрация в 1×slots casino
Выполнив все притязания оператора, клиент имеет оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит примерно менее суток. Если дополнительно потребуется пройти процедуру верификации, то срок возрастает до 1–2 трудящихся дней. Для перевода используются банковские приборы и электронные платежные системы. Второй метод подходит другого, так как основная транзакций такой исполняются моментально. В связи со спецификой функционирования банков обработка платежей возможность занять до нескольких рабочих дней.Бездепозитные бонусы за регистрацию в игровых автоматах для хозяев онлайн-казино являются частью рекламной кампании, направленной на увеличение аудитории сайта. Так они продвигают средства бренды и завлекают новых клиентов. <a href=http://hotissuemedical.com/bbs/board.php?bo_table=free&wr_id=250209>http://hotissuemedical.com/bbs/board.php?bo_table=free&wr_id=250209</a> Таким образом, заведение пытается продемонстрировать себя своим вероятным геймерам, а такой рекламный ход как казино бонус без депо за регистрацию завлекает очень количество внимания к игорному заведению и обеспечивает неизменный струю новых посетителей и грядущих клиентов игрового онлайн клуба. 1× слот зеркало
казино 1×slots
<a href=https://seniordance.ru/forum/showthread.php/68674–1%D1%85%D1%81%D0%BB%D0%BE%D1%82-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%81%D0%B0%D0%B9%D1%82%D0%B0?p=98088#post98088>1хслот зеркало сайта</a> Акции распространяются как на все игры казино, так и на ограниченный список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino прочие. Промо может охватывать разработки 1-го производителя. Бездеп не пересекается с иными промоакциями казино. Если на веб-сайте предусмотрен кэшбек, он не начисляется за ставки, сделанные бонусными деньгами. Для идентификации платежных реквизитов игрока имеет понадобиться пополнение счета на минимальную необходимую. онлайн казино 1×slots <a href=https://uberant.com/users/Vykupavto0311/>https://uberant.com/users/Vykupavto0311/</a> Бездепозитные бонусы за регистрацию являются одним из самых популярных способов привлечения свежих игроков в онлайн-казино, потому собственно они предоставляют игрокам вероятность опробовать казино, более игровые автоматы, и вероятно, выиграть реальные деньги.
1×slots casino регистрация 1×slotscasin online
У любого игорного заведения свои правила и условия. Но, чтобы получить бонусы, нужно выполнить стереотипные деяния:В случае с фриспинами без вейджера, Вам не придется отыгрывать свой выигрыш с бесплатных вращений. Прибыль, которую Вы заработаете на таком бездепе можно ставить на вывод без какого либо отыгрыша. <a href=http://fabnews.ru/blog/7266.html>http://fabnews.ru/blog/7266.html</a> Однако далековато не все ресурсы предлагают своим клиентам бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено одобрение на 1-ый депо в объеме 100–200%. Это замечательная возможность преумножить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш.Подтверждение индивидуальной информации. Все казино требуют от клиента пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у юзера других аккаунтов (мультиаккаунт запрещен). 1хслот официальный сайт зеркало Изучить правила и обстоятельства получения бездепозитных бонусов казино, Вы сможете у нас на сайте в разделе с бонусами либо на официальном веб-сайте выбранного Вами казино. Если имеет найти необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электрической почте.Срок отыгрыша — это период, который наступает в момент активации бонуса и завершается с его закрытием. Пользователю нужно уложиться в данный временной промежуток, иначе призовые свои аннулируются. Казино устанавливают список игр, ставки в которых засчитываются при расчете отыгранных денег. Если тайтл не входит в данный список, то предоставляется быть недоступен для загрузки период деяния бонусного предложения.
<b>Смотреть еще похожие новости:</b>
<a href=http://nexusroleplay.teamforum.ru/viewtopic.php?f=19&t=3383>1×slots сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выбор любого онлайн казино на нашем веб-сайте. В описании к любому Вы сможете узнать, собственно получите за творение аккаунта. Можно ли наваривать на бездепозитных призах? Это не работа, тут как повезет, в в любом предложенном безедепе, вы будете откручивать вейджер и выводить, это возможно назвать везением, и добавочной добавкой к вашему бюджету.
#3780 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Нина Пирогова, хоккеистка Анна Михалкова <a href=https://slon-ru.com/>пина casino</a> букмекерская контора скачать casino на андроид <a href=https://krtka.info/>фреш казино</a> мобильные букмекерские конторы винлайн букмекерская контора официальный retro casino казино рояль porno Мира Андреева (теннис) официальные зеркала казино porno Александр Соболев (футбол)
DiskiPlus скачать 1×bet DiskiPlus казино сочи <a href=https://diskiplus.ru>DiskiPlus champion casino</a> DiskiPlus Хорова Наталья Александровна порно DiskiPlus retro casino <a href=https://www.diskiplus.ru/>DiskiPlus Львова-Белова Мария Алексеевна порно</a> DiskiPlus сайты казино DiskiPlus Лут Оксана Николаевна порно DiskiPlus казино ставка DiskiPlus казино в россии DiskiPlus букмекерская контора DiskiPlus Мухтиярова Елена Вячеславовна порно DiskiPlus pin up casino зеркало
#3781 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
Чаще всего применяются коды. Их надо(надобно) заносить в специальные окна регистрационной анкеты, в речь идет о пригласительных бонусах, либо в особом разделе личного кабинета игрока.Бездепозитные призы в казино без пополнения 2022 — это определенная сумма средств или vacant spins вращения, которые предоставляются первым гостям за регистрацию на сайте казино повторяющий бездепозитного бонуса, и дает для возможность с казино без пополнения опробовать предложения (игр), с последующей привилегией вывода средств при исполненьи всех установленных управлял. <a href=http://filmkachat.ru/>1хслот скачать</a> Но есть азартные заведения, готовые просто так вручить деньги на игру. Для этого довольно создать профиль. Чтобы исключить выигрыш, сперва необходимо выполнить вейджеровые условия, прописанные в критериях получения бездепа.Почти все игровые клубы требуют подтверждение контактных данных игрока для получения бездепозитного приза. <a href=https://penposh.com/blogs/322511/Luxury-Real-Estate-Marketing-Materials-Premium-Property-Promotion-Guide>https://penposh.com/blogs/322511/Luxury-Real-Estate-Marketing-Materials-Premium-Property-Promotion-Guide</a> Для казино, работающих онлайн, бездепозитные бонусы необходимы для вербования свежих посетителей. Предложение сыграть на слотах без надобности внесения реальных средств — работающий метод для увеличения интереса к компании. После отыгрыша бездепа великоват шанс, собственно игроку понравится и он продолжит играть в казино, лишь теперь теснее на собственные средства. 1×slots регистрация 1×slots casino 777 online <a href=http://twchess.lionfree.net/discuz/home.php?mod=space&uid=24150>http://twchess.lionfree.net/discuz/home.php?mod=space&uid=24150</a> Составленный экспертами Casino.ru список онлайн-казино с бездепозитным бонусом дозволяет игрокам сопоставить спецпредложения различных операторов.Доступ к дару возможность открываться механически после введения промокода либо воззвания в службу сайта. В первом случае от пользователя не потребуется практически действий. Бездеп с активацией по коду встречается чаще всего. Игроку необходимо установить совокупа знаков в графе, кот-ая возможность находиться в регистрационной форме в Личном кабинете.
1хслот официальный сайт зеркало
Наш список включает в себя лучшие бездепозитные бонусы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по принципиальным параметрам:Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, all зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. 1×slots сайт Заработать на бездепозитных призах за регистрацию в казино возможность любой пользователь, достигший совершеннолетия.Хотя безвозмездные призы начисляются без депо, не исключено, что для придется заносить средства. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь в такого, как новый клиент впервые пополнит игровой счет. <a href=http://forum.americandream.de/memberlist.php?mode=viewprofile&u=7369>http://forum.americandream.de/memberlist.php?mode=viewprofile&u=7369</a> Сразу после активации промокода возможно воспользоваться даром. Как теснее упоминалось, бонусы случаются трёх обликов – фриспины, кредиты и фриплей-бонусы.Бездепозитный приз предоставляется новому игроку за конкретные деяния. Часто подарок повторяющий средств или фриспинов выдается за регистрацию, благодаря чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. 1×slots зеркало на сегодня Будьте внимательнее при ознакомлении с правилами во избежание появления конфликтных ситуаций с казино, когда в отыгрыша бездепа вас не дадут исключить крупную необходимую выигрыша.Важно, убедитесь в, собственно раньше не регились в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи.
1хслотс официальный сайт зеркало
Классическая разновидность приза за создание аккаунта. Его превосходство заключается в, что заказчик может самостоятельно избирать аппараты и делать ставки в них. Иногда список игровых автоматов ограничен оператором, хотя все также это какого-либо, чем один-единственный доступный разъем, как в случае с внедрением фриспинов. <a href=https://www.techieshah.com/2019/08/eclipse-server-tomcat-v85-server-at.html>https://www.techieshah.com/2019/08/eclipse-server-tomcat-v85-server-at.html</a> Сроки активации приза устанавливаются каждым казино, но почаще всего они не превышают недели с этапа получения. Игроку обязательно нужно применять бездеп на обозначенного срока, в ином случае приз просто исчезнет. Каждый приз можно получить только раз один, потому если не применять бездеп в срок, у игрока не будет второго шанса им пользоваться.А ознакомиться с новыми онлайн казино, Вы можете с бонусов с выводом выгоды, которые Вы сможете получить без депозита. 1×slots зеркало на сегодня Бездеп с фриспинами возможность охватывать всю коллекцию игр на веб-сайте или разработки одного провайдера. Обычно предлагается конкретный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш имеет быть выведен последствии как, как юзер отыграет данную сумму. Возможность расценить полный перечень слотов — главное достоинство данной разновидности. Игроку становятся доступны что, эти опции, коие отсутствуют в демонстрационном режиме, а вероятность выиграть реальные деньги добавляет ясных азартных ощущений.Бесплатный приз – кредиты, коие онлайн-казино начисляет посетителю, не принуждая его пополнять игровой счет.
1×slots рабочее зеркало на сегодня
Иногда виде поощрения за регистрацию шансы выдаваться билеты для роли в турнирах. Условия их проведения очень отличаются, поэтому мы советуем ознакомиться с любым предложением отдельно.Практически все онлайн казино с бездепозитным призом за регистрацию учитывает программку лояльности — систему одобрения постоянных клиентов, кот-ая состоит из большого значений. При достижении игроком еще значения на его счёт поступает приз. Чем повыше уровень — что, этим щедрее приз. Выбирая даровой бонус, внимательно изучайте верховодила. Убедитесь, собственно для можно брать участие в промоакции. Уточните, в каких забавах возможно исполнять условия вейджера. При надобности задавайте вопросы представителям саппорта.За счёт спинов выйдет запустить разные онлайн слоты, протестировать стратегии и поднабраться опыта. Фишка в, собственно вращения начисляются на лучшие аппараты с уникальными опциями и высочайшей отдачей. Не запамятовывайте, что в каждом акционном предложении предусмотрены особые притязания – временные лимитирования, максимальный размер ставки, перечень доступных игр. 1×slots зеркало этих способов предполагает регистрацию <a href=http://rtpsouth.com/UserProfile/tabid/69/userId/105342/Default.aspx>http://rtpsouth.com/UserProfile/tabid/69/userId/105342/Default.aspx</a>
1×slot регистрация
Максимальная ставка ? устанавливается в валюте счета и ограничивает размер ставки за раз спин. В случае ее превышения бонус имеет быть аннулирован. Также в правилах может содержаться запрет на размещение ставок конкретного облика, примеру, по равным шансам в рулетке (словами, на чет либо нечет, красноватое либо черное и т.д. ). <a href=https://google.com.pl/url?q=https://doctorlazuta.by/>https://google.com.pl/url?q=https://doctorlazuta.by/</a> 1×slots рабочее зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://www.arka-bahce.org/forum/showthread.php?p=781400&posted=1#post781400>1×slots быструю регистрацию а также мгновенное</a>
<a href=https://www.allampolgar.hu/showthread.php?tid=3284>1× slots casino зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Размер бонуса. В качестве бездепов обыкновенно начисляют не суммы, а когда речь идет о призах за депо, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино имеют подарить игроку до 2000$. 4. Заберите презент. Чаще всего бонус активизируется незамедлительно в регистрации. Но бывают истории, когда нужно зайти в индивидуальный офис либо написать в службу.
#3782 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slotscasino09k online
Онлайн гемблинг развивается с любым днем все больше и больше, свежие бренды создаются не по дням а по часам. Новые интернет казино проделывают вступительные акции для игроков, для того собственно бы зарекомендовать себя, и тем самым предлагают бездепозитные призы за регистрацию, что бы не пропустить такую возможность — как пользоваться свежим бездепом, советуем посещать наш вебсайт как возможно чаще, самое смачное и новые несомненно добавляться в данном же списке. <a href=http://filmkachat.ru/>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a> Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут уточняет лимитирование для клиентов. Конечно, это возможно посчитать некоторым неудобством для игрока, хотя справедливости ради необходимо, что выбор автоматов всё также остаётся довольно большим. <a href=https://phileo.me/blogs/295811/3D-Property-Visualization-Transform-Real-Estate-Marketing-Today>https://phileo.me/blogs/295811/3D-Property-Visualization-Transform-Real-Estate-Marketing-Today</a> сайт 1× slots casino <a href=https://www.freebeg.com/forum/member.php?action=profile&uid=23474>https://www.freebeg.com/forum/member.php?action=profile&uid=23474</a> Ну и окончательно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: подобная добродушие увеличивает степень лояльности посетителей к компании.Бездепозитные призы за регистрацию считаются одним из самых известных методов привлечения свежих игроков в онлайн-казино, поэтому что они предоставляют игрокам вероятность опробовать казино, особенно игровые автоматы, и вполне, выиграть реальные средства.
1×slots зеркало рабочее
<a href=http://forums.indexrise.com/thread-309-post-411487.html#pid411487>1×slots регистрацию более популярный вариант это</a> 1×slots коды Автоматическая активация на самой удобной, хотя ручной метод содержит перед ней преимущества. Прежде чем использовать вознаграждение от казино, стоит заранее определить, сколько времени требуется на исполненье всех критерий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала действия приза. <a href=https://acerfans.ru/user/JustinBut/>https://acerfans.ru/user/JustinBut/</a> Фриспины — бесплатные вращения, коие дозволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся самым известным и преимущественным обликом бонуса — безвозмездные вращения иногда эффективнее и веселее в отыгрыше, чем другие облики бездепов. 1х слотс зеркало регистрация в 1×slots casino Суммы подобных предложений, как правило, колеблются от 3-х до двадцати долларов, а вейджер на эти свои должен сочинять от тридцати до шестидесяти один. Зачастую, большая сумма выигрыша здесь составит от одной до двух сотен долларов. Если в выиграет больше, то все свои могут быть списанными до очень разрешенного выигрыша. Здесь замечена содержание выводить еще несуществующие деньги на собственную платежную систему и далее отыскивать заведение с подходящими под данную сумму релоадом или призом за 1-ое пополнение счета. Есть некоторое подвидов бездепозитного вознаграждения, предлагаемого наибольшим числом заведений.
1×slots рабочее зеркало
Возможность поиграть вспомогательное соревнование (а время и количество) совершенно бесплатно, а выигрыш, к, поступает на счёт игрока.Классическая разновидность приза за создание аккаунта. Его преимущество заключается что, нет, что клиент возможность без подбирать аппараты и делать ставки в их. Иногда перечень игровых автоматов ограничен оператором, но все равно это превосходнее, чем один-единственный доступный слот, как если, тогда, с внедрением фриспинов. Постарайтесь отыграть вейджер, дабы замечена возможность забыть заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные инструменты. Вы можете получить выигрыш на электронной кошелёк, карту, телефонный. <a href=http://lider1c.ru/communication/forum/messages/forum4/message13931/10591-franshizy-agentstva-nedvizhimosti-rossii_-vkhod-v-mir-uspeshnogo-biznesa?result=new#message13931>http://lider1c.ru/communication/forum/messages/forum4/message13931/10591-franshizy-agentstva-nedvizhimosti-rossii_-vkhod-v-mir-uspeshnogo-biznesa?result=new#message13931</a> Бездепозитные бонусы за регистрацию в игровых автоматах для собственников онлайн-казино считаются частью маркетинговой кампании, направленной на увеличение аудитории сайта. Так они продвигают свои бренды и привлекают новых клиентов. 1×slots рабочее зеркало Промообъявления от казино не дают реальной картины и ориентированы на вербование внимания пользователей. Понять, насколько высоки шансы остаться в плюсе, дозволит собственный тест условий предложения:Заработать на бездепозитных призах за регистрацию в казино возможность каждый юзер, достигший совершеннолетия.
1×slots зеркало
Активация по промокоду употребляется в разных видах бездепов. Если речь о приветственном бонусе, то набор символов можно разузнать на крупнейшей странице, в регистрационной форме либо послании, коие отчаливает юзеру для доказательства e-mail. Акции все проводиться совместно с партнерскими площадками. Обычно код располагается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется одноразовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем актуальный код для активации в описании каждого рекламную.Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция имеет подробные правила, гиперссылка на коие обычно находится в промообъявлении. В их указываются лимиты, вейджер, перечень доступных игр. Если оператор скрывает данные о предложении, то пользоваться им не. Ниже указан актуальный перечень легальных казино в Беларуси с бонусами на 1-ый депозит. Вы сможете попасть на официальный вебсайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз. 1×slots зеркало быструю регистрацию а также мгновенное <a href=https://bongfood.kr/bbs/board.php?bo_table=free&wr_id=705787>https://bongfood.kr/bbs/board.php?bo_table=free&wr_id=705787</a> Бoльшинcтвo азартных заведений выдвигают примерно одинаковые условия и требования, которые нужно выполнить, чтобы получить бездепозитный приз за регистрацию. Все их можно соединить в один список:
1×slots рабочее зеркало
Каждый игрок обязан сперва детально изучить обстоятельства по получению и отыгрышу приглянувшегося презента. Если всё устраивает, поспешите арестовать бесплатные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик момент начать вращать барабаны лучших слотов. Таким образом, заведение пытается продемонстрировать себя своим вероятным геймерам, а подобный рекламный ход как казино приз без депозита за регистрацию завлекает довольно количество внимания к игорному заведению и обеспечивает неизменный поток свежих посетителей и будущих клиентов игрового интернет клуба.Операторы гемблинга заявляют, что так они сражаются с бонус-хантерами. Впрочем, критики считают, собственно этим казино пробуют устроить из случайного постояльца неизменного игрока. <a href=https://app.welvi.co.kr/bbs/board.php?bo_table=qa&wr_id=1752772>https://app.welvi.co.kr/bbs/board.php?bo_table=qa&wr_id=1752772</a> В лицензионных бездепозитных казино выступать в азартные игры действительно безопасно. Наличие лицензии подтверждает что, этот прецедент, собственно клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP. 1×slots зеркало быструю регистрацию а также мгновенное Минимального оборота. Этот предел уточняется вейджером — пока игрок не поиграет на установленную сумму, вывод средств несомненно недоступен.В разделе с призами активировать свой презент. Найти игры, для которых предусмотрено поощрение и применять приз по предназначению.
<b>Смотреть еще похожие новости:</b>
<a href=https://tabsgame.ru/user/Jamesbes/>1×slots сайт зеркало</a>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=192382>1×slots зеркало рабочее</a>
<a href=https://forum.spherecommunity.net/User-JamesLop>1×slots рабочее зеркало на сегодня</a>
<a href=https://www.formulersupport.com/Thread-1%D1%85-%D1%81%D0%BB%D0%BE%D1%82–1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%BF%D0%B5%D1%80%D0%B5%D0%B9%D1%82%D0%B8-%D0%BD%D0%B0–1×slots–152011>1х слот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Только выполнив все обстоятельства отыгрыша и дождавшись окончания ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить свои средства. Казино дает вероятность заработать и вывести настоящие средства на бездепозитных бонусах. Обычно, это малозначительная сумма, коию казино может себя позволить подарить игроку.
#3783 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
слот casino карты казино <a href=https://rumafia.news/>спорт букмекерская контора</a> порно с Варвара Субботина vodka casino <a href=https://t.me/vchkogpu_ru>порно с Афонина Марина Игоревна</a> порно с Юлия Ефимова официальные зеркала казино бесплатно играем казино Скоробогатова Ольга Николаевна порно казино смотреть онлайн бесплатно казино пин inform@rucriminal.info
DiskiPlus Набиуллина Эльвира Сахипзадовна порно DiskiPlus casino автомат <a href=https://diskiplus.ru>DiskiPlus 1×bet зеркало рабочее xbet</a> DiskiPlus porno Алена Косторная (фигурное катание) DiskiPlus kent casino регистрация <a href=https://www.diskiplus.ru>DiskiPlus играющие казино онлайн</a> DiskiPlus porno Алена Михайлова DiskiPlus яндекс казино DiskiPlus Петрова Ольга Викторовна порно DiskiPlus порно с Анна Калинская (теннис) DiskiPlus up букмекерская контора DiskiPlus online casino DiskiPlus porno Александра Степанова, фигуристка
#3784 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию более популярный вариант это
Суммы подобных предложений, как правило, колеблются от 3-х до 20 $, а вейджер на эти средства обязан сочинять от тридцати до шестидесяти один. Зачастую, величайшая сумма выигрыша здесь составит от одной до двух сотен долларов. Если в выиграет больше, то все средства имеют быть списанными до максимально разрешенного выигрыша. Здесь бывает смысл выводить еще несуществующие финансы на свою платежную систему и далее находить заведение с подходящими под данную сумму релоадом или призом за 1-ое пополнение счета. Есть некоторое подвидов бездепозитного вознаграждения, предлагаемого великим количеством заведений. <a href=http://filmkachat.ru/>1×slots зеркало которую указывали при регистрации кстати</a> Изучить верховодила и обстоятельства получения бездепозитных бонусов казино, Вы сможете у нас на веб-сайте в разделе с призами либо на официальном веб-сайте выбранного Вами казино. Если не отыскать необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электронной почте. <a href=https://rapidapi.com/7ball-viet-nam-7ball-viet-nam-default/api/7ball-viet-nam/discussions/146278>https://rapidapi.com/7ball-viet-nam-7ball-viet-nam-default/api/7ball-viet-nam/discussions/146278</a> 1× slots сайт <a href=http://womans-days.ru/index.php?subaction=userinfo&user=badlabyrinth78>http://womans-days.ru/index.php?subaction=userinfo&user=badlabyrinth78</a> Размер ставки для забавы по бездепозитному бонусу (естесственно же, в случае, когда он представлен повторяющий бонусных валютных средств) зачастую ниже, чем при игре на депо. Ограничение несомненно работать до этапа отыгрыша приза.В любом казино с бездепозитным призом учтены вейджеровые обстоятельства. Это единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, нужно устроить определённое количество ставок. Чем круче приз, что, этим труднее выполнить обстоятельства, и напротив.
1×slots casino зеркало
Бездепозитные призы за регистрацию в игровых автоматах для хозяев онлайн-казино считаются долею рекламной кампании, направленной на увеличение аудитории сайта. Так они продвигают средства бренды и привлекают новых клиентов. <a href=https://mit-bbs.com/viewtopic.php?t=144030>1х слот регистрация в 1×slots casino</a> 1 хслот регистрация в 1×slots casino <a href=https://forum.gekko.wizb.it/user-32478.html>https://forum.gekko.wizb.it/user-32478.html</a> 1×slots казино зеркало Фриплей-бонусы. Бонусы за бесплатную игру есть только в некоторых клубах. Они зачисляются сразу после сотворения профиля и срабатывают недолговременное время. Если у вас нет времени израсходовать средства, они просто закончатся. Что дотрагивается медли, в большинстве случаев призы действуют в течение 1-го часа.
1хслотс казино зеркало
Прежде чем активировать бездеп, необходимо убедиться никаких, собственно государство, уроженцем которой считается игрок, не заходит в перечень запрещенных. Нет. Для получения бездепозитного бонуса в казино нужна неотъемлемая регистрация на сайте. Играть в слоты бесплатно и без регистрации возможно только в демо режиме.Начнём с как, что любое рекламную за регистрацию предполагает некоторые обстоятельства. Бездепозитные бонусы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, необходимая для исполнения условий. Пример, получили благотворительные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 рублей, проигрышных либо выигрышных, маловажно. После исполнения, бонусный баланс перейдёт на настоящий и будет доступным к выводу. <a href=https://mobilka.mobi/user/PatrickUnilm/>https://mobilka.mobi/user/PatrickUnilm/</a> 1хслотс официальный сайт зеркало Если идет об эксклюзивных предложениях, может потребоваться регистрация в казино по ссылке с партнерского вебсайта.Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала прыткие выводы. Фишка выплат что, что довольно выбрать платёжный инструмент и показать сумму. В большинстве случаев средства зачисляются на электронные кошельки в течение 15 мин., а на банковские карты – 1–3 трудящихся денька.
1хслотс мобильная версия зеркало
Прямо данный отберите бесплатные вращения за регистрацию без депозита и начинайте коллекционировать призовые комбинации из-за солидных выигрышей! Осталось выбрать казино с призом за регистрацию и создать профиль. После активации презента выигрыш зависимости от Фортуны и навыков. Суммы сходственных предложений, в, колеблются от 3-х до двадцати долларов, а вейджер на эти средства обязан сочинять от 30 до шестидесяти один. Зачастую, большая сумма выигрыша здесь составит от одной до двух сотен $. Если геймер выиграет больше, то все средства шансы быть списанными до очень разрешенного выигрыша. Здесь замечена смысл выводить еще несуществующие деньги на собственную платежную систему и дальше отыскивать заведение с благоприятными под данную сумму релоадом либо бонусом за первое пополнение счета. Есть несколько подвидов бездепозитного гонорары, предлагаемого великим количеством заведений.Бездепы обыкновенно предлагают с отыгрышем — быстро вывести выигранные средства нельзя. Перевод средств со счета несомненно вероятен после того, как юзер выполнит все притязания казино, а сумма возможности превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, в течение коих заказчик вправе пользоваться предложением. Обычно они не превосходят нескольких дней последствии активации. 1×slots подтвердит вашу регистрацию если говорить <a href=http://www.gameuseduniverse.com/member.php/168933-MycsgoSat>http://www.gameuseduniverse.com/member.php/168933-MycsgoSat</a>
1×slots бездепозитный бонус за регистрацию
Казино дает вероятность заработать и вывести реальные средства на бездепозитных призах. Обычно, это малозначительная сумма, коию казино возможность для разрешить подарить игроку.Не стоит сразу же открещиваться от приветственных презентов в подобных казино. Администрация готова начислить деньги либо фриспины, хотя предварительно сотрудники должны убедиться, что вы не мошенник. Дело что, нет, собственно развелось очень много охотников за бонусами. Они научились врать систему и зарабатывать солидные суммы денег. <a href=https://webanketa.com/forms/6gtk2c9q6wqp4s1scrw64dv6/>https://webanketa.com/forms/6gtk2c9q6wqp4s1scrw64dv6/</a> После получения приза вывод средств для клиента будет недоступен до, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или пара месяцов. Выводить средства игрок может только в отыгрыша.В интернет-сети постоянно можно отыскать перечни более популярных и гарантированных поощрительных программ от известных онлайн-казино. 1×slots регистрация то дальше необходимо пройти Активация денежного гонорары происходит механически в сотворения профиля либо использования промокода. Иногда операторы предъявляют вспомогательные требования: подписаться на страницы казино в соц сетях или на рассылку рекламных известий, скачать и ввести вспомогательный софт и т.д.
<b>Смотреть еще похожие новости:</b>
<a href=http://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=6268>1×slots рабочее зеркало на сегодня</a>
<a href=http://forum.animogen.com/memberlist.php?mode=viewprofile&u=15333>1×слот регистрация в 1×slots casino</a>
<a href=http://palais.beesims.com/phpbb/viewtopic.php?f=2&t=292441>1×slots официальный сайт, скачать</a>
<a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=7847>1×slots официальный зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы, как теснее ясно, считаются оригинальной возможностью к игровому процессу безусловно бесплатно, то есть играть в интернет казино бесплатно и на существующие средства незамедлительно после регистрации аккаунта. Автоматы с таким депо имеют замерзнуть великолепной возможностью сыграть для почитателей азарта с определенными ограничениями в денег.
#3785 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
карты казино казино пину <a href=https://res-publika.com>Петрова Ольга Викторовна порно</a> букмекерская контора вход Преподобная Надежда Александровна порно <a href=https://sovsekretno.net/>букмекерская контора фонбет официальный</a> пин up casino pin up casino скачать casino игровой автомат порно с Голикова Татьяна Алексеевна букмекерская контора скачать приложение 1×bet 1 бесплатное казино
DiskiPlus букмекерская контора официальный сайт скачать DiskiPlus Ходнева Светлана Владимировна порно <a href=https://diskiplus.ru>DiskiPlus 1×bet xbet xyz</a> DiskiPlus Попова Анна Юрьевна порно DiskiPlus казино рулетка <a href=https://diskiplus.ru>DiskiPlus online casino 7k</a> DiskiPlus casino игровой автомат DiskiPlus казино ли DiskiPlus казино регистрации DiskiPlus casino com DiskiPlus человек казино DiskiPlus казино рублях DiskiPlus casino официальный зеркало
#3786 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
про казино казино онлайн <a href=https://glvk.guru/>casino pin официальный</a> играющие казино champion casino <a href=https://glvk.guru/>демо казино</a> лучшие казино бесплатно casino онлайн vodka casino пина букмекерской конторы порно с Юлия Ефимова зеркала официальных сайтов казино порно с Каролина Севастьянова
DiskiPlus порно с Зырянова Анастасия Владимировна DiskiPlus 7k casino зеркало на сегодня <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet зеркало слоты 1×bet xyz</a> DiskiPlus букмекерские конторы бет DiskiPlus слоты казино <a href=https://diskiplus.ru/>DiskiPlus casino регистрации</a> DiskiPlus casino промокод DiskiPlus porno Ангелина Гончаренко, хоккеистка DiskiPlus cat casino DiskiPlus Юдаева Ксения Валентиновна порно DiskiPlus Окладникова Ирина Андреевна порно DiskiPlus porno Илья Ковальчук (хоккей) DiskiPlus 1×bet на андроид
#3787 Empathycenter_Tubhttps://empathycenter.ru/
Добрый день! Центр Эмпатия — сеть клиник доказательной психиатрии. Более 60 врачей работают с взрослыми и детьми, применяя эффективные и современные методы диагностики и лечения. <a href=https://empathycenter.ru/articles/psikhogennyy-kashel/>психогенный кашель</a> Если сеть клиник доказательной психиатрии с более чем 60 работающих врачей и специалистов в Москве, то это в Эмпатия Центре ментального здоровья https://empathycenter.ru/ . Выбирайте рядом с вами Эмпатия м. Электрозаводская, Эмпатия м. Университет, Эмпатия Реутов м. Новокосино. До новых встреч!
#3788 Ремонт холодильников Hotpoint AristonoyhirbIwnjucphttps://remont-holodilnikov-hotpoint-ariston-vas.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт холодильников hotpoint ariston, можете посмотреть на сайте: <a href=https://remont-holodilnikov-hotpoint-ariston-vas.ru/>ремонт холодильников hotpoint ariston адреса</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#3789 Ремонт холодильников Mielehttps://remont-holodilnikov-miele-verd.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт холодильников miele рядом, можете посмотреть на сайте: <a href=https://remont-holodilnikov-miele-verd.ru/>ремонт холодильников miele в москве</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#3790 perevozimgruzbyhttps://perevozimgruz.by
грузоперевозки минск брест <a href=https://perevozimgruz.by/gruzoperevozki-minsk-moskva/gruzovoe-taksi-minsk-moskva-minsk/>https://perevozimgruz.by/gruzoperevozki-minsk-moskva/gruzovoe-taksi-minsk-moskva-minsk/</a>
#3791 srochno-zaymhttps://srochno-zaym-online.ru
Каталог финансовых организаций <a href=https://srochno-zaym-online.ru/>srochno-zaym-online.ru</a> в которых можно получить срочные онлайн займы и кредиты не выходя из дома.
#3792 perevozimgruzhttps://perevozimgruz.by
грузотакси с грузчиками <a href=https://perevozimgruz.by/>грузоперевозки минск</a>
#3793 JosephBratehttps://srochno-zaym-online.ru
Срочный онлайн займ <a href=https://srochno-zaym-online.ru/>https://srochno-zaym-online.ru</a> современный способ быстро получить взаймы необходимую сумму на личные нужды на небольшой срок.
#3794 GeraldFuhhttps://ganar-apuestas-deportivas.com
?El paraiso del juego en Pin Up Casino <a href=https://ganar-apuestas-deportivas.com/>https://ganar-apuestas-deportivas.com</a> te espera! Echa un vistazo a nuestra coleccion de tragamonedas, juegos en vivo y juegos de mesa. Bonos rentables, torneos y un programa VIP te proporcionaran el maximo de emociones. ?Empieza a jugar ahora y gana!
#3795 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino 777 online
Прямо сейчас заберите безвозмездные вращения за регистрацию без депозита и начинайте коллекционировать призовые композиции ради солидных выигрышей!Также, учите, собственно бездепозитный бонус можно исключить только в том случае, когда будут исполнены все обстоятельства отыгрыша. <a href=http://filmkachat.ru/>1×slots зеркало на сегодня</a> <a href=https://rapidapi.com/7ball-viet-nam-7ball-viet-nam-default/api/7ball-viet-nam/discussions/146278>https://rapidapi.com/7ball-viet-nam-7ball-viet-nam-default/api/7ball-viet-nam/discussions/146278</a> Как правило, при выводе финансов, от играющего потребуется лишь устроить наименьший лепта чтобы, чтобы, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом индивидуальный счет.Призовые начисления без депозита все предоставляться для участия в турнирах онлайн казино. Потратить перечисленные деньги возможно необыкновенно в рамках этой акции. Условия их проведения включают в себя лимитирования на список игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться таким предложением, лучше изучить его верховодила. 1×slots актуальное зеркало <a href=http://xn–80aeh5aeeb3a7a4f.xn–p1ai/forum/user/53466/>http://xn–80aeh5aeeb3a7a4f.xn–p1ai/forum/user/53466/</a>
скачать 1×slots на андроид мобильная версия
Итак, чтобы бесплатные бонусные кредиты трансформировались в настоящие средства, которыми продоставляется распоряжаться по своему усмотрению, их нужно отыграть. Вейджер идет уточнять в правилах онлайн-казино. 1×slots casino online регистрация Срок отыгрыша — это этап, кот-ый начинается в момент активации бонуса и завершается с его закрытием. Пользователю нужно уложиться в данный временной зазор, по призовые средства аннулируются. Казино устанавливают список игр, ставки в засчитываются при расчете отыгранных денег. Если тайтл не входит в этот список, то ему быть недоступен для загрузки в деяния бонусного предложения. <a href=http://ta-ural.ru/bitrix/click.php?goto=http://maps.google.tt/url?q=http://coachkat.agilecrm.com/click?u=https://teletype.in/@urist555/NEr8s0SzPoX>http://ta-ural.ru/bitrix/click.php?goto=http://maps.google.tt/url?q=http://coachkat.agilecrm.com/click?u=https://teletype.in/@urist555/NEr8s0SzPoX</a> Но не стоит думать, собственно снабжая юзеров такими призами, казино занимается спонсированием. Ведь объемы вознаграждений, главном, не большие (средним объемом от 5 до 20 долларов). И на эти средства налагаются определенные обстоятельства и ограничения, неотклонимые к выполнению игрока, в в последствии он желает получить все средства выигранные финансы.Бездеп с фриспинами возможность охватывать всю коллекцию игр на сайте или разработки одного провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш возможность быть выведен после как, как юзер отыграет эту необходимую. Возможность расценить полный перечень слотов — основное совершенство этой разновидности. Игроку становятся доступны те функции, коие отсутствуют в демонстрационном режиме, а возможность выиграть настоящие деньги добавляет ясных азартных чувств. 1×slots зеркало сайта Необходимость отыгрыша. Вейджер такой повыше, чем для бонусов за депо. И пока средства не отыграны, вывести их невозможно.При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток.
1×slots официальный demo регистрация в 1×slots casino
<a href=http://soe-parrot.com/home.php?mod=space&uid=168994>http://soe-parrot.com/home.php?mod=space&uid=168994</a> Такой казино бонус без депо за регистрацию выдается игроку на час и активно употребляется данное предложение с 2017 года. Это как бы некая конспирация поощрения под бездепозитный. Суть всего сего сводится к что, этому, что геймеру на час выдается, к примеру, 1000 $, а реклама повторяет про, что любой выигрыш можно будет дальнейшем оставить при себе. Но в играющий всерьез отнесется к этому предложению, то он попросту потеряет время. Ведь геймеру нужно будет выступать не в основном аккаунте, а тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (том всей тыс. ) в верховодила вступят конкретные обстоятельства, где несомненно сказано, что максимальной суммой победы имеет быть лишь двести $ и деньги можно применять лишь виде приза на первый лепта с вейджером 25 от суммы гонорары плюс сам депозит. По результату получится, что игрок выигрывал себе 200% приз с вейджером на конкретную необходимую. Короче говоря, это все не вашего медли. 1×slots быструю регистрацию а также мгновенное В разделе с бонусами активировать свой подарок. Найти забавы, для которых предусмотрено поощрение и применять бонус по назначению.Для получения выигрыша требуется выполнить обстоятельства казино. Чаще всего игроку нужно поставить конкретную необходимую, но уже из собственных средств. Она рассчитывается из совместного объема выигрыша за всегда использования бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, если пользователь выиграл 1000 руб., а множитель сочиняет х30, вывести средства можно несомненно, сделав ставки на 30 000 руб.
1×slots зеркало которую указывали при регистрации кстати
Основное правило получения бездепа ? творимый акк должен быть у юзера первым и единственным. Наличие нескольких аккаунтов взыскательно воспрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депозита нужно соблюдать несложную очередность действий. <a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=6390>1×slots зеркало этих способов предполагает регистрацию</a> Подтверждение персональной инфы. Все казино настоятельно от посетителя пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и наличие у пользователя иных аккаунтов (мультиаккаунт запрещен). Когда идет о получении бездепозитных бонусов в казино, для обратите внимание на последующие условия:Далее требуется отыграть вагер и вывести выигрыш. Игрокам без опыта крупно повезло, меня получить десятки презентов за одну регистрацию. Если не сумели получить Бездепозитный бонус, не беспокойтесь. Обратитесь в интернет чат, оператор поможет решить проблему. 1×slots официальный сайт скачать на айфон <a href=http://cgi.www5f.biglobe.ne.jp/~ciao/0bbs/book.cgi>http://cgi.www5f.biglobe.ne.jp/~ciao/0bbs/book.cgi</a> B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.
1×slots официальный зеркало рабочее
Почти все игровые клубы требуют подтверждение контактных данных игрока для получения бездепозитного приза. <a href=http://tutorialsmint.com/user/julesincuh/articles>http://tutorialsmint.com/user/julesincuh/articles</a> Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? 1хслотс рабочее зеркало Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации подарка нужно доказать электрическую почту и привязать телефонный;Условия вывода выигрыша. В некоторых заведениях для успешного вывода с бездепозитного приза довольно пополнения баланса и доказательства личности. В иных же клубах, нужно некоторое раз прокрутить собственный депозит.
<b>Смотреть еще похожие новости:</b>
<a href=https://thetechmodders.com/forums/viewtopic.php?t=58021>рабочее зеркало 1хслотс</a>
<a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=9700&TITLE_SEO=9700-kharakteristiki-tovarov&MID=504197&result=reply#message504197>1×slot рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы отличный вариант бесплатной забавы в игровые автоматы. Многие пользователи сети не понимают, собственно в казино можно начать выступать полностью даром, а потом вывести выигрыш на банковскую карту либо электрический кошелек, иные не доверяют интернет казино, а третьи удачно играют и выигрывают – и подчас довольно большие суммы.
#3796 Matthewarotshttps://www.wildberries.ru/catalog/117605496/detail.aspx
Кружевной бюстгальтер <a href=https://www.wildberries.ru/catalog/117605496/detail.aspx>https://www.wildberries.ru/catalog/117605496/detail.aspx</a> без косточек с застежкой спереди — это идеальный выбор для тех, кто ценит комфорт и стиль. Изготовленный из мягкого и нежного кружева, он обеспечивает естественную поддержку, не ограничивая движения. Удобная застежка спереди позволяет легко надевать и снимать бюстгальтер, а его изысканный дизайн добавляет нотку романтики в ваш образ.
#3797 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
яндекс игры казино казино большая <a href=https://kompromat1.online/>casino зеркало сегодня</a> casino скачать приложение кент казино <a href=https://7club7.com/>casino актуальное зеркало</a> 1×bet слоты кент казино казино онлайн Лут Оксана Николаевна порно порно с Васильева Татьяна Викторовна казино ли casino автомат
DiskiPlus 1×bet бесплатно DiskiPlus casino зеркало сегодня рабочее <a href=https://www.diskiplus.ru>DiskiPlus порно с Петр Ян (ММА)</a> DiskiPlus гта онлайн казино DiskiPlus porno Нина Пирогова, хоккеистка <a href=https://diskiplus.ru/>DiskiPlus казино вход</a> DiskiPlus casino на телефон DiskiPlus пари букмекерская контора DiskiPlus porno Анна Сидорова, керлингистка DiskiPlus casino бездепозитный DiskiPlus Юдаева Ксения Валентиновна порно DiskiPlus казино смотреть DiskiPlus bitz casino
#3798 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
рабочее казино пин casino <a href=https://rhymes-punches.com/>porno Юлия Канакина</a> porno Анастасия Янькова, боксерка официальное казино вход <a href=https://rumafia.news/>макао казино</a> лучшие казино бесплатно casino актуальное зеркало казино смотреть 7k casino букмекерская контора сайт pin up casino casino сайты
DiskiPlus порно с Илюшникова Татьяна Александровна DiskiPlus Самойлова Алла Владимировна порно <a href=https://diskiplus.ru/>DiskiPlus casinos xyz</a> DiskiPlus казино ставка DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz <a href=https://www.diskiplus.ru>DiskiPlus 1×bet на андроид бесплатно</a> DiskiPlus порно с Владимир Минеев (ММА) DiskiPlus официальное казино вход DiskiPlus букмекерская контора официальный сайт скачать DiskiPlus pinco casino DiskiPlus букмекерская контора DiskiPlus porno Елизавета Туктамышева DiskiPlus casinos winning
#3799 Charlesgunnyhttp://filmkachat.ru
1×slots скачать на айфон
Главное преимущество спинов – вероятность выучить различные слоты. Также удастся насладиться бонусными раундами, испытывать удачу в риск-туре и преумножить выигрыш за счёт особых знаков. Однако не только игровой процесс заслуживает внимание, ведь чем сосредоточиться на реальном выигрыше.На бонусные начисления шансы быть установлены вспомогательные лимитирования, коие Вы не к при отыгрыше. Пока приз всецело не отыгран — средства из казино не выводятся. <a href=http://filmkachat.ru/>1×slots casino регистрация на сайте</a> Но а случае вы теснее профи по онлайн казино, кликаем на красноватую кнопку «Получить» и Вы механически перейдете в онлайн казино; <a href=https://redmine.dti.economia.gov.br/issues/72789>https://redmine.dti.economia.gov.br/issues/72789</a> Чаще всего интернет-казино предлагают бездепозитные призы свежим юзерам. Эта промо-акция довольно отлично завлекает новичков, подталкивая их к открытию счета. Конечно, не все они становятся послушными клиентами, хотя сам факт регистрации аккаунта играет на руку заведению. 1×slots рабочее зеркало <a href=http://www.bestpop.co.kr/bbs/board.php?bo_table=free&wr_id=740022>http://www.bestpop.co.kr/bbs/board.php?bo_table=free&wr_id=740022</a> Обычно, бездепозитные бонусы выдаются под определенные слоты с фиксированной ставкой, но их наверняка запрещено использовать в игровых автоматах с прогрессивным джекпотом. Список игр, в которых можно использовать бездеп, Вы отыщите в описании промоакции или сможете уточнить у службы поддержки заведения.
1× slots casino зеркало
Бонус за регистрацию в казино выдается лишь раз раз на одного игрока. Но случаются вспомогательные акции, в рамках которых бездепы расступаются для неизменных клиентов и такие подарки Вы можете получить более 1-го раза. <a href=https://www.ldvd.nl/no-22-san-diego-place-rallies-very-last-boise-country-27–16?page=52#comment-238453>1×slots казино зеркало</a> 1×slots казино зеркало Если вы выбираете испытанное лицензионное интернет казино и выполните все условия получения бездепозитного бонуса, проблем с получением подарка у Вас не возникнет.Бонус за регистрацию в казино без депо с выводом денег надо(надобно) отыграть. Зачастую для отыгрыша возможность понадобиться сделать ставки на сумму, в некоторое десятков один превосходящую необходимую приза или выигрыша. <a href=https://fromkorea.kr/bbs/board.php?bo_table=free&wr_id=111261>https://fromkorea.kr/bbs/board.php?bo_table=free&wr_id=111261</a> 1×slots официальный сайт зеркало Некоторые клубы механически начисляют приз на акк игрока последствии исполненья критерий получения, но посещают ситуации, когда приз надо(надобно) активировать игроку самому. Есть несколько методов активации приза:
1×slot зеркало
Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и. Когда игроку полагается большое фриспинов, администрация имеет разбивать их начисление на некоторое дней. Бесплатные вращения предоставляются для конкретного слота, который указывается в правилах промоакции.Если вы выбираете проверенное лицензионное интернет казино и выполните все условия получения бездепозитного приза, проблем с получением дара у Вас не возникнет. <a href=http://clipartus.ru/user/HenrySquat/>http://clipartus.ru/user/HenrySquat/</a> 1×slots промокод при регистрации 2025 На нашем веб-сайте Вы отыщите список актуальных свежих бездепозитных бонусов в казино 2022 года. Также, есть много неповторимых услуг, коие доступны только гостям нашего сайта последствии регистрации по нашей ссылке или активации специального промокода.Условия отыгрыша приза. Если Вы расчитываете заработать на бездепозитном бонусе, то начала направьте на значение вейджера и срок, кот-ый дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть приз и исключить выигрыш.
1×slots зеркало проходить регистрацию это отличный вариант
Следует подчеркнуть, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам либо с конкретным кодом.В лицензионных бездепозитных казино играть в азартные забавы действительно безопасно. Наличие лицензии подтверждает что, этот прецедент, что клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP. Казино выделяет возможность заработать и исключить реальные средства на бездепозитных бонусах. Обычно, это малозначительная сумма, которую казино может для разрешить подарить игроку.Выиграть реальные средства в казино не пополняя счет – сложно, но вполне. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными бонусами и начните играть на бонусные средства. По статистике из 10-ти заведений можно заработать маленькую необходимую денег за счет бонусных средств. 1хслотс казино зеркало <a href=https://www.liveinternet.ru/users/yana-beauty/profile>https://www.liveinternet.ru/users/yana-beauty/profile</a>
1×slots коды
<a href=http://ceh-i.ru/user/Forsedropkt/>http://ceh-i.ru/user/Forsedropkt/</a> Чтобы помощи увериться в преимуществах бездепозитных бонусов, достаточно зарегистрироваться в казино и получить поощрение.Бонус без депо за регистрацию в казино (бездепозитный бонус) – это денежный презент от клуба, который начисляется на акк игрока последствии регистрации в казино. Кроме сотворения учетной записи, для получения бездепа, очень нередко требуется ещё и доказать контактные данные игрока и/или активировать особый промо-код. 1×slots регистрация на сайте 1×slots ru com Максимальная ставка ? устанавливается в валюте счета и ограничивает объем ставки за один спин. В случае ее превышения бонус возможность быть аннулирован. Также в правилах имеет находиться запрет на размещение ставок определенного облика, примеру, по одинаковым шансам в рулетке (другими, на чет либо нечет, красноватое либо темное и т.д. ).Бездепозитный приз предоставляется новому игроку за конкретные деянья. Часто презент в виде средств или фриспинов выдается за регистрацию, благодаря чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.
<b>Смотреть еще похожие новости:</b>
<a href=https://bans.org.ua/index.php?topic=117957.new#new>1×slots регистрация 1×slotscasino09k online</a>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=145165>1×slots casino регистрация</a>
<a href=https://nztw.org/home.php?mod=space&uid=43957>1хслот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные призы начисляются лишь раз раз. Не стоит открывать свежие аккаунты, дабы получить их повторно. Служба защищенности казино непременно выявит «левого» соучастника и перекроет. Если посетитель выполнит нужные притязания, отыграет собственную ставку и решит вывести собственный выигрыш, то ему нужно принять, что казино обязательно потребует дать ксерокопии собственных документов, чтобы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные средства исключить не получится. Для как, чтобы отыграть необходимую вашего бездепозитного приза надо(надобно) выполнить обстоятельства вейджера. Очень нередко фриспины даются на конкретные слоты (book of ra, book of deceased, book of sun), избирайте разъем себя нраву, они очень красочные и высококачественные. Бездепозитные бонус может быть денежным так и повторяющий фриспинов на слоты
#3800 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino ап Елизавета Боярская <a href=https://m.repost.news/>лучшие онлайн казино</a> 1×bet слоты порно с Артемий Панарин (хоккей) <a href=https://kompromat1.online/>porno Илона Маркова, хоккеистка</a> сайт pin up casino порно с Виктория Синицина, фигуристка казино играть порно с Дарья Клишина, легкоатлетка бк букмекерская контора сайт казино зеркало букмекерские конторы в россии
DiskiPlus r7 casino DiskiPlus официальные сайты казино <a href=https://www.diskiplus.ru/>DiskiPlus пина букмекерской конторы</a> DiskiPlus casino андроид DiskiPlus Александра Бортич <a href=https://www.diskiplus.ru/>DiskiPlus сайт казино зеркало</a> DiskiPlus казино фильм смотреть онлайн DiskiPlus porno Катерина Шпица DiskiPlus промокод 1×bet DiskiPlus 1×bet официальный 1×bet xyz DiskiPlus Ходнева Светлана Владимировна порно DiskiPlus cometa casino DiskiPlus Фастова Елена Владимировна порно
#3801 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
up casino зеркало букмекерская контора бесплатно скачать <a href=https://krtka.info/>casino pin официальный</a> Разуваева Ксения Денисовна порно балтбет букмекерская контора <a href=https://th-royalgclub.com/>казино регистрации</a> porno Ангелина Гончаренко, хоккеистка casino riobet казино регистрации 1×bet вход up букмекерская контора букмекерскую контору пин сколько казино
DiskiPlus порно с Алина Загитова DiskiPlus pin ап casino <a href=https://diskiplus.ru/>DiskiPlus casino промокод</a> DiskiPlus pin casino DiskiPlus porno Илона Маркова, хоккеистка <a href=https://www.diskiplus.ru>DiskiPlus pin casino зеркало</a> DiskiPlus ставки на спорт букмекерские конторы DiskiPlus порно с Матвей Сафонов (футбол) DiskiPlus скачать pin casino DiskiPlus казино без DiskiPlus casino бонус DiskiPlus букмекерские конторы в россии DiskiPlus порно с Аделия Петросян (фигурное катание)
#3802 Charlesgunnyhttp://filmkachat.ru
1×слотс казино
Сразу последствии активации промокода можно пользоваться презентом. Как уже упоминалось, бонусы случаются трёх видов – фриспины, кредиты и фриплей-бонусы.Выигрыши с бонусов без вложений всегда привязаны к притязанию по ставкам и могут быть обналичены только после выполнения этих притязаний. <a href=http://filmkachat.ru/>1× slots зеркало</a> В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и когда спорных обстановок нет возможности куда-то пожаловаться и обосновать свою правоту. <a href=https://www.synfig.org/issues/thebuggenie/synfig/issues/7646>https://www.synfig.org/issues/thebuggenie/synfig/issues/7646</a> Казино выводит средства только на ту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного приза, Вам сначала необходимо восполнить счет. В неких клубах узкий перечень способов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет непосредственно с этих платежных методов, которые доступны для вывода. 1×slots зеркало рабочее <a href=http://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=4913>http://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=4913</a>
1×slots регистрация то дальше необходимо пройти
1× slots casino официальный сайт В основном случаев благотворительные бонусы начисляются в кредитах, коие нельзя сразу исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже. <a href=http://mrkarpiuk.xaa.pl/boards/shopping/member.php?action=profile&uid=45111>http://mrkarpiuk.xaa.pl/boards/shopping/member.php?action=profile&uid=45111</a> 1×slots зеркало которую указывали при регистрации кстати Не стоит путать забаву в демо и использование призов. В демонстрационном режиме игрок может оценить механику слота, сюжет и оформление. Но игра проводится на условные кредиты, поэтому отсутствует основное ? чувство пыла. Активируя промокод или фриспины, клиент по-прежнему не тратит средства средства на игровые автоматы, но возможность сорвать настоящий куш!Размер ставки для забавы по бездепозитному призу (естесственно же, в случае, когда он представлен повторяющий бонусных валютных средств) зачастую ниже, чем при игре на депо. Ограничение несомненно работать до этапа отыгрыша бонуса.
1×slots casino регистрация
Бездепозитные бонусы в казино без пополнения 2022 — это определенная сумма денег либо gorovyh spins вращения, коие предоставляются первым гостям за регистрацию на веб-сайте казино повторяющий бездепозитного приза, и выделяет вам возможность за счет казино без пополнения опробовать услуги (игр), с последующей преимуществом, льготой вывода средств при выполнении всех установленных правил. В зависимости от интернет заведения любой из них может вас предложить как бездепозитные средства, так и бездепозитные фриспины, коие последствии успешной регистрации рухнут вам на ваш игровой баланс.Ну и окончательно же, для казино бездепозитные бонусы прибыльны с имиджевой стороны: схожая щедрость повышает степень преданности посетителей к фирмы. <a href=https://forum.papbio.org/member.php?action=profile&uid=77193>https://forum.papbio.org/member.php?action=profile&uid=77193</a> 1хслотс 1хслотс регистрация перейти на 1×slots Для отыгрыша бонуса казино обязывает игрока поиграть на сумму, в несколько раз превосходящую необходимую приобретенного приза — здесь выгода фирмы очевидна.
1хслотс зеркало на сегодня
Когда идет о валютных бонусах, казино практически устанавливают обстоятельства вейджера, коие нужно выполнить, чтобы исключить выигрыш.Выбирайте лучшие благотворительные призы с помощью обзоров на Casinoz – и пусть вам сопутствует удача при отыгрыше бонусных кредитов! Также учтите, что некоторые игровые платформы сужают перечень государств, которые готовы получить предложенный бездепозитный приз за регистрацию. К примеру, есть онлайн-заведения, выдающие сходственные призы только жильцам определенных стран. К образцу, онлайн казино 777 Оригинал предоставляет бездепозитный бонус только игрокам из России и государств СНГ. Или напротив, снабжают вознаграждением всех, не жителей неких стран (следует этого, идет пристально учить список, дабы впоследствии не возникло никаких вопросов и жалоб).При маленький сумме бонуса рекомендуется играть по невысоким ставкам, а применять наибольшие чем лишь никаких случае, если вейджер очень великой, а время на отыгрыш сильно ограничено. 1×slots официальный регистрация <a href=http://witiai.cn/home.php?mod=space&uid=63871>http://witiai.cn/home.php?mod=space&uid=63871</a> Составленный знатоками Casino.ru перечень онлайн-казино с бездепозитным бонусом разрешает игрокам сравнить спецпредложения различных операторов.
1×slots регистрацию процедура займет всего лишь
Выбор любого интернет казино на нашем сайте. В описании к каждому Вы сможете узнать, собственно получите за создание аккаунта.Онлайн гемблинг развивается с любым днем все больше и больше, новые бренды создаются не по денькам а по часам. Новые интернет казино делают вступительные акции для игроков, для того что бы зарекомендовать себя, и что, этим наиболее предлагают бездепозитные призы за регистрацию, собственно бы не упустить эту вероятность — как пользоваться свежим бездепом, рекомендуем навещать наш сайт как возможно почаще, самое лакомое и новые будет добавляться в этом же списке. <a href=http://ailehekimiklinikasi.az/index.php?subaction=userinfo&user=patheticpraise9>http://ailehekimiklinikasi.az/index.php?subaction=userinfo&user=patheticpraise9</a> Иногда в качестве одобрения за регистрацию шансы выдаваться билеты для роли в турнирах. Условия их проведения очень выделяются, поэтому мы советуем ознакомиться с каждым предложением отдельно. 1×slots зеркало которую указывали при регистрации кстати
<b>Смотреть еще похожие новости:</b>
<a href=https://www.bf-france.com/forums/profile/30064-rabofreeor/>1×slots регистрация 1×slotscasino09k online</a>
<a href=http://policeacademy.teamforum.ru/memberlist.php?mode=viewprofile&u=410>1×slots регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для получения выигрыша требуется выполнить условия казино. Чаще всего игроку необходимо поставить конкретную необходимую, но теснее из собственных денег. Она рассчитывается из совместного размера выигрыша за все время использования бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, в пользователь выиграл 1000 рублей, а множитель сочиняет х30, исключить средства возможно будет, сделав ставки на 30 000 руб. Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала прыткие выводы. Фишка выплат в том, собственно довольно выбрать платёжный инструмент и указать сумму. В большинстве случаев деньги зачисляются на электрические кошельки в течение 15 мин., а на банковские карты – 1–3 рабочих дня.
#3803 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Дарья Мороз порно с Дарья Клишина, легкоатлетка <a href=https://strelochnik.com/>приложения букмекерских контор на андроид</a> 1×bet водка казино <a href=https://vestnik-jurnal.com/>кент казино</a> казино 1 Елизавета Боярская рокс казино почему казино casino betting казино фильм смотреть онлайн порно с Варвара Субботина
DiskiPlus casino DiskiPlus Ходнева Светлана Владимировна порно <a href=https://www.diskiplus.ru>DiskiPlus unlim casino</a> DiskiPlus pin up casino DiskiPlus слот casino <a href=https://diskiplus.ru>DiskiPlus букмекерские контора ап</a> DiskiPlus casino актуальное зеркало DiskiPlus порно с Захарова Мария Владимировна DiskiPlus 1×bet официальный xbet DiskiPlus ев казино DiskiPlus black russia казино DiskiPlus casino скачать DiskiPlus порно с Артемий Панарин (хоккей)
#3804 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пина букмекерской конторы inform@rucriminal.info <a href=https://t.me/vchkogpu_ru>Семёнова Татьяна Владимировна порно</a> pin up casino buzz порно с Зырянова Анастасия Владимировна <a href=https://t.me/vchkogpu_ru>1×bet официальный сайт</a> ап казино где казино 1×bet casino pin up casino пин ап пин ап казино скачать casino на андроид порно с Аделия Петросян (фигурное катание)
DiskiPlus 7k casino сайт DiskiPlus порно с Артемий Панарин (хоккей) <a href=https://diskiplus.ru>DiskiPlus bitz casino</a> DiskiPlus промокод 1×bet DiskiPlus официальные зеркала казино <a href=https://www.diskiplus.ru/>DiskiPlus порно с Елена Никитина, скелетонистка</a> DiskiPlus слот casino DiskiPlus порно с Юлия Ефимова, пловчиха DiskiPlus Анна Михалкова DiskiPlus 7k casino зеркало на сегодня DiskiPlus порно с Сергей Бобровский (хоккей) DiskiPlus porno Андрей Рублев (теннис) DiskiPlus casinos xyz
#3805 Charlesgunnyhttp://filmkachat.ru
1×slots подтвердит вашу регистрацию если говорить
Одним из поводов отдавать преимущество, льготу одному либо другому заведению содержится в привлекательности предлагаемых акций и бесплатных услуг. Безвозмездные фриспины, выдаваемые без дела создавать какой-нибудь вклад, в списке располагается далеко не в конце.Бездепозитные бонусы за регистрацию являются одним из самых популярных способов вербования новых игроков в онлайн-казино, потому собственно они деют игрокам возможность опробовать казино, необыкновенно игровые автоматы, и возможно, выиграть настоящие деньги. <a href=http://filmkachat.ru/>1×slots casino online регистрация</a> <a href=https://www-ua.spyfu.com/overview/domain?query=playhouse.com.ua>https://www-ua.spyfu.com/overview/domain?query=playhouse.com.ua</a> casino 1×slot <a href=https://dokuwiki.stream/index.php?title=скачать_фильмы_новинки_на_телефон_хорошем_качестве>https://dokuwiki.stream/index.php?title=скачать_фильмы_новинки_на_телефон_хорошем_качестве</a>
1×slot зеркало
Зачастую бездепозитные призы казино для игры предлагаются разными заведениями азартных игр в маркетинговых акций или в целях привлечения к себя свежих игроков. Для бездепозитных бонусов в казино 2022 игроку не пополнять счет до момента вывода хотимых средств.Приглашаем делиться мнениями о призах. Это поможет другим юзерам выбирать наиболее прибыльные предложения. 1×slots рабочее зеркало на сегодня В списке требований к отыгрышу часто наличествуют лимиты на ставки при забаве на личные деньги. Так, если отыграть надо(надобно) 30 000 руб., а предельная сумма ограничена 30 рублями, то вертеть барабаны предстоит 1000 один. Эта особенность затрудняет соблюдение игроками критерий по срокам деяния акции.Доступные игры – В неких азартных играх можно снизить математическое приемущество казино до нескольких десятых процента. В их числе почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как правило, в этих забавах ставки идут в зачет вейджера не полностью. Например, возможность учитываться лишь 50%. В некоторых забавах бездепозитные бонусы вообщем невозможно отыгрывать. <a href=http://troderstro.ru/user/Jamesbeisy/>http://troderstro.ru/user/Jamesbeisy/</a> Вознаграждения за получение VIP-статуса ? начисляются в программки преданности при достижении еще уровня или выдаются персонально менеджерами службы поддержки.Бонусы без депозита при регистрации считаются наиболее привлекательными как для опытнейших игроков, так для и новичков. Получив это вознаграждение, заказчик может играть на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные призы в интернет-казино Рунета, еще обстоятельства их активации и выигрыша. 1×slot зеркало рабочее регистрации на телефон придет
1×slots на любой вкус как пройти регистрацию
Большинство интернет-казино из нашего топ-10 готовы повеселить вас эксклюзивными акциями. Читайте о их в обзорах и на форуме.Ниже указан актуальный перечень законных казино в Беларуси с призами на первый депозит. Вы можете попасть на официальный вебсайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. В зависимости от интернет заведения любой из их возможность для предложить как бездепозитные средства, так и бездепозитные фриспины, которые последствии удачной регистрации рухнут для на ваш игровой баланс. <a href=http://wiki.serialkiller.adele.im/doku.php?id=Can_You_Access_Virtual_Sports_Through_the_1×bet_APP?>http://wiki.serialkiller.adele.im/doku.php?id=Can_You_Access_Virtual_Sports_Through_the_1×bet_APP?</a> Если площадка дарует бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь ввести акк на сайте и активировать его, подтвердив адрес электрической почты, номер телефонного либо другие данные, которые настятельно оператор. Перед данным нужно убедиться, собственно юзер располагается на официальном веб-сайте казино, а не на мошеннической площадке. 1×slots рабочее зеркало
1×slots официальный зеркало
<a href=http://swissairways-va.com/phpBB3/memberlist.php?mode=viewprofile&u=3495>казино 1× slots официальный сайт</a> Свежий бонус начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в использовании своими, в случае отыгрыша оператор может ввести лимитирование на вывод денег.Как только на виртуальном счету окажутся бонусные свои, поторопитесь отыграть вейджер. Сразу после этого возможно забыть заявку на вывод выигрыша. Кредиты выгодно отличаются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом настоящих средств и дают возможность ощутить азарт. Во-вторых – возможно насладиться каждой азартной забавой доступной на веб-сайте. В вашем постановлении находятся автоматы, настольные приложение, видео-покер, Live-дилеры. Вы всего, как и все любите получать презенты и бездепозитные бонусы казино. Игорные жилища взяли в привычку одаривать гэмблеров приятными бонусами. Стать владельцем приветственного подарка возможно за творение профиля либо пополнение счёта. Второй вариант больше интересный, так клубы готовы удвоить депозит! Но случае вы новичок и только знакомитесь с миром азарта, другого воспользуйтесь бонусом за регистрацию.Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки имеют запросить вспомогательные документы либо инициировать короткое общение по Skype. casino 1×slot <a href=https://gockhuat.net/member.php?u=270157>https://gockhuat.net/member.php?u=270157</a>
1×slots актуальное зеркало
<a href=https://myleslgxs88766.theblogfairy.com/29773932/the-ethics-and-controversy-surrounding-deepnude-a-closer-look-at-ai-s-dark-side>https://myleslgxs88766.theblogfairy.com/29773932/the-ethics-and-controversy-surrounding-deepnude-a-closer-look-at-ai-s-dark-side</a> 1× slots зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=58045>1 х слотс зеркало</a>
<a href=https://www.addonface.com/welcome>казино 1× slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездеп с фриспинами имеет обхватывать всю коллекцию игр на веб-сайте либо разработки 1-го провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш может быть выведен последствии того, как пользователь отыграет данную необходимую. Возможность оценить полный перечень слотов — основное достоинство этой разновидности. Игроку становятся доступны что, эти опции, которые отсутствуют в демонстрационном режиме, а вероятность выиграть настоящие деньги добавляет ярких азартных ощущений.
#3806 Charlesgunnyhttp://filmkachat.ru
1хслотс мобильная версия зеркало
Фриплей-бонусы. Бонусы за безвозмездную игру есть только в неких клубах. Они зачисляются сразу последствии творенья профиля и действуют недолговременное время. Если у вас нет медли потратить свои, они просто закончатся. Что касается медли, как призы действуют в течение одного часа.Процесс подтверждения личности может занять от одного дня до недели. Если клиент допустил какую оплошность при заполнении паспортных данных, то ему идет адресоваться с задачей в саппорта онлайн-казино. <a href=http://filmkachat.ru/>x1 slots регистрация в 1×slots casino</a> Принципиальным отличием даровых бонусов от призов на депо считается отсутствие необходимости вносить деньги на аккаунт. Из-за сего их часто нарекают бездепозитными (no deposit bonuses). <a href=https://steemit.com/electronic/@kalinka0588/diverse-electronics-premium-electronic-components-and-solutions>https://steemit.com/electronic/@kalinka0588/diverse-electronics-premium-electronic-components-and-solutions</a> Прочитайте управляла бонусной программы, какой желаете участвовать. Да, мы безотступно рекомендуем сделать это до регистрации. 1×slots зеркало этих способов предполагает регистрацию <a href=https://nrns-games.com/index.php?action=profile;u=42401>https://nrns-games.com/index.php?action=profile;u=42401</a>
1хслотс официальный сайт зеркало
<a href=https://radios-collector.com/viewtopic.php?f=7&t=103857>1× slots casino зеркало</a> 1×slots регистрация 1×slotscasino 56 online Доступ к дару имеет открываться механически в введения промокода или воззвания в службу вебсайта. В первом случае от пользователя не требуется практически деяний. Бездеп с активацией по коду встречается чаще всего. Игроку необходимо ввести совокупа символов в графе, кот-ая имеет находиться в регистрационной форме в Личном кабинете.Как управляло, новоприбывшие игроки в первую очередь хотят ознакомиться с способами ввода и вывода валютных средств и сроки исполнения поданных заказов чтобы конкретно разуметь, как прытко у вывести свой казино приз за регистрацию без депо на электронный кошелек либо же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино соперничают между собой. Ведь случае бы определенную фирму представляло лишь одно онлайн-заведение, то навряд бы клиенты заметили казино с бонусом за регистрацию и могли бы рассчитывать только на вознаграждение в виде приза на первое вложение. К каждому заведению периодически идет привлекать новых игроков, собственно, в, только на руку всем играющим. <a href=http://diskusi.smk-roudlotussholihin.sch.id/index.php?qa=user&qa1=disillusioneddi>http://diskusi.smk-roudlotussholihin.sch.id/index.php?qa=user&qa1=disillusioneddi</a> Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном сайте и сделайте вход в личный офис, дабы арестовать благотворительные вращения с вейджером х40; 1×slots зеркало на сегодня
1×slots акции
Возможность сыграть дополнительное состязание (а времени и некоторое) абсолютно безвозмездно, а выигрыш, к, поступает на счёт игрока.Но существуют азартные заведения, готовые просто например вручить деньги на игру. Для сего достаточно сделать профиль. Чтобы исключить выигрыш, сначала нужно выполнить вейджеровые обстоятельства, прописанные в критериях получения бездепа. <a href=https://donovanebvm54321.blogadvize.com/37180092/deepnude-the-dark-side-of-ai-and-digital-manipulation>https://donovanebvm54321.blogadvize.com/37180092/deepnude-the-dark-side-of-ai-and-digital-manipulation</a> В онлайне много известных игорных площадок с красивыми акционными услугами. Однако внимательно разбирать обстоятельства 10-ов предложений вскоре надоест, да и время отнимет количество. Поэтому наша команда подготовила ТОП-3 вебсайтов с лучшими бездепозитными бонусами:Сроки активации бонуса устанавливаются любым казино, хотя почаще всего они не превосходят недели с этапа получения. Игроку обязательно надо(надобно) применять бездеп протяжении указанного срока, в ином случае приз просто исчезнет. Каждый приз можно получить только один раз, поэтому в не использовать бездеп в срок, у игрока не несомненно второго шанса им пользоваться. 1×slots официальный зеркало
1хслот 1хслотс регистрация перейти на 1×slots
<a href=http://www.arka-bahce.org/forum/showthread.php?p=761641#post761641>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a> Будьте внимательнее при ознакомлении с правилами во избежание появления конфликтных ситуаций с казино, когда в отыгрыша бездепа для не дадут исключить солидную сумму выигрыша.Как лишь на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу в сего возможно забыть заявку на вывод выигрыша. Кредиты прибыльно выделяются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом реальных средств и выделяют возможность почувствовать задор. Во-вторых – возможно насладиться каждой азартной игрой доступной на сайте. В вашем распоряжении присутствуют автоматы, настольные приложение, видео-покер, Live-дилеры. Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих требований, кроме обязательной верификации. Если на веб-сайте предусмотрена обязательная процедура подтверждения личности, то вывести выигрыш удастся лишь в проверки данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий лицо. 1×slots зеркало на сегодня <a href=http://cqr3d.ru/index.php?subaction=userinfo&user=dashingtiff28>http://cqr3d.ru/index.php?subaction=userinfo&user=dashingtiff28</a> Как верховодило, новоприбывшие геймеры начала хотят ознакомиться с методами ввода и вывода валютных средств и сроки выполнения поданных заявок дабы четко осознавать, как скоро возможность исключить собственный казино приз за регистрацию без депо на электрический кошелек или же банковскую карту. К счастью для всех играющих, внутри определенных холдингов, все казино соперничают меж собой. Ведь случае бы определенную компанию давало лишь одно онлайн-заведение, то ли бы посетители заметили казино с бонусом за регистрацию и возможность бы рассчитывать лишь на вознаграждение повторяющий приза на 1-ое вложение. К любому заведению регулярно стопам завлекать свежих игроков, собственно, конечном, только на руку всем играющим.Бесплатный бонус – кредиты, которые онлайн-казино начислит клиенту, не заставляя его пополнять игровой счет.
1хслотс официальный сайт зеркало
К огорчению, нет. Почти все казино, требуют внесение хотя бы 1-го минимального депо для вывода выигрыша с бездепозитного бонуса. Также учитывайте, собственно исключить деньги разрешено только на что, эту платежную систему, с коей был изготовлен депозит.Но не стоит думать, что снабжая пользователей этими бонусами, казино занимается спонсированием. Ведь размеры вознаграждений, главном, не большие (средним объемом от 5 до 20 долларов). И на эти свои налагаются определенные условия и лимитирования, обязательные к исполнению игрока, если в последствии он вожделеет получить все свои выигранные деньги. Бездепозитный приз – это экономическое вознаграждение, которое выдается соучастнику игры в казино, для его привлечения и появления заинтересованности. Любой гость, кот-ый подходит условиям выдачи подобного бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое одобрение является более действенным методом, дающим возможность стартовать в игре, не вкладывая личных материальных средств.Варианты выигрыша находятся от Вашей удачи и условий игорного портала. Выше мы сказали, собственно кое-какие бездепозитные призы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются они, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность передовых игр на деньги, можно выиграть невозможные суммы. Сегодняшние игровые автоматы или видео слоты, как их нарекают. Могут выдавать солидные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000. <a href=http://xn–4k0bv8c1zgcwnr1o.kr/bbs/board.php?bo_table=free&wr_id=60506>http://xn–4k0bv8c1zgcwnr1o.kr/bbs/board.php?bo_table=free&wr_id=60506</a> Бездепозитный бонус за регистрацию в казино — это стартовый презент повторяющий денежного начисления или безвозмездных вращений для свежих игроков заведения, для получения которого надо заносить депозит. 1×slots казино зеркало Используйте наилучшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из списка ниже, дабы заработать подарки за простые деянья и уже сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высокой отдачей и прыткими выводами на электронные кошельки.Эффективность бездепов в качестве рекламного прибора оценили многие операторы. Малоизвестные площадки употребляют эти акции, дабы стремительно набрать базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны постоянных посетителей. Не все веб-сайты, дающие подарки без депозита, рекомендованы к ирге. За привлекательным промоописанием все прятаться невыполнимые обстоятельства отыгрыша и другие подводные камни.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.findaspermdonor.com/memberlist.php?mode=viewprofile&u=13618&sid=1528be8f3f0df0c34346a7923a743348>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=773571>1хслотс мобильная версия зеркало</a>
<a href=https://aircompare.us/forums/viewtopic.php?t=386597>скачать 1×slots на андроид мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Доступ к дару возможность раскрываться автоматически после введения промокода либо обращения в службу сайта. В первом случае от юзера не требуется практически действий. Бездеп с активацией по коду встречается чаще всего. Игроку необходимо ввести совокупность символов в графе, которая может находиться в регистрационной форме в Личном офисе.
#3807 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
Помните, что в неких забавах сумма ставки идет в зачет вейджера только отчасти. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки считаются как отыгранные средства, тот как в слотах идет в зачет все 100% суммы.Новички не любят сразу же вносить депо. Это обосновано отсутствием опыта и сомнением. К счастью, в наше время возможно получить бездепозитный приз за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В любом случае вы не рискуете своими сбережениями. Это отличная вероятность запустить понравившийся видео слот либо же испытать удачу в настольных играх. <a href=http://filmkachat.ru/>1×slots казино мобильная версия</a> Мы подготовили перечень, где есть всегда животрепещущие и новые бездепозитные бонусы казино, которые возможность получить бесплатно. Для наших пользователей есть специальные предложения неповторимые бонусы, которые вы у не отыщите, их мы определили специальной красной плашкой «Exclusive».Для того, чтобы отыграть необходимую вашего бездепозитного бонуса нужно выполнить обстоятельства вейджера. Очень нередко фриспины даются на конкретные слоты (book of ra, book of dead, book of sun), подбирайте разъем себя по, они очень красочные и качественные. Бездепозитные приз имеет быть валютным так и повторяющий фриспинов на слоты <a href=https://besthostingprice.com/whois/playhouse.com.ua>https://besthostingprice.com/whois/playhouse.com.ua</a> В интернет-сети практически можно отыскать перечни наиболее модных и обещанных поощрительных программ от популярных онлайн-казино. 1×slots официальный сайт скачать на айфон <a href=http://umpquahealthnewtoncreek.com/__media__/js/netsoltrademark.php?d=tupalo.com%2Fen%2Fusers%2F7937703>http://umpquahealthnewtoncreek.com/__media__/js/netsoltrademark.php?d=tupalo.com%2Fen%2Fusers%2F7937703</a> Иногда операторы просят внесение минимального депо перед выводом для верификации платежного прибора. В неких казино данный депозит кроме светит отыграть.
1×slots регистрация 1×slots casino c2d ru
Проверка занимает от нескольких мин. До нескольких дней, спецы техподдержки имеют запросить дополнительные документы либо инициировать куцее общение по Skype.Бездепозитный приз по промо-коду несомненно доступен для забавы, только в том случае когда Вы активируете специальный бонусный код в разделе с бонусами либо укажите промокод при регистрации на сайте. В неких случаях, считая активации кода, понадобиться подтвердить контактные данные игрока и наполнить анкету клиента. 1×slots промокод при регистрации <a href=https://martinzbbz62738.digiblogbox.com/54830616/the-rise-of-deepfake-encounter-swapping-how-ai-is-switching-personalized-media>https://martinzbbz62738.digiblogbox.com/54830616/the-rise-of-deepfake-encounter-swapping-how-ai-is-switching-personalized-media</a> В зависимости от онлайн заведения каждый из их имеет вам предложить как бездепозитные деньги, например и бездепозитные фриспины, которые после удачной регистрации упадут для на ваш игровой баланс.Операторы гемблинга заявляют, собственно например они дерутся с бонус-хантерами. Впрочем, критики считают, что данным казино пытаются устроить из случайного постояльца неизменного игрока. casino 1×slot
1×slots зеркало регистрация
На нашем сайте Вы найдете перечень актуальных новых бездепозитных призов в казино 2022 года. Также, есть большое эксклюзивных предложений, коие доступны только посетителям нашего вебсайта последствии регистрации по нашей ссылке либо активации специального промокода.Суммы сходственных услуг, в, колеблются от 3-х до 20 долларов, а вейджер на эти средства обязан составлять от 30 до шестидесяти один. Зачастую, большая сумма выигрыша здесь составит от одной до двух сотен долларов. Если игры выиграет больше, то все средства имеют быть списанными до очень разрешенного выигрыша. Здесь замечена содержание выводить еще несуществующие деньги на собственную платежную систему и далее находить заведение с подходящими под данную необходимую релоадом либо бонусом за первое пополнение счета. Есть количество подвидов бездепозитного вознаграждения, предлагаемого великим количеством заведений. Вообще перейдя в казино — управляла одинаковы в получении бездепозитных бонусов, в стандартные верховодила заходит: доказать эл. Почту и телефонный, заполнить свой личный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ.Самые новые бездепозитные бонусы в казино за регистрацию 2022 года с выводом прибыли находятся на данной страничке. Посетитель имеет расценить условия получения и начать играть на деньги без внесения депо. При данном игроку важно разуметь, на каких условиях и какими способами он сможет исключить приобретенный выигрыш. Для этого необходимо расценить перечень подключенных платежных систем. <a href=http://5.101.112.134/profile/absurdanyplace9/>http://5.101.112.134/profile/absurdanyplace9/</a> 1×slots казино зеркало При правильном подходе бездепы — это отличный метод выступать на деньги без траты собственных средств. Есть несколько рекомендаций, следуя которым возможно извлечь максимум выгоды из похожих акций казино. Играть стопам только на лицензированных площадках. Скриптовые веб-сайты столько обманывают с бонусными предложениями, хотя и употребляют пиратский софт с измененным ГСЧ. Выиграть на таких автоматах невозможно.
1×slots зеркало рабочее на сегодня
Игрокам стоит принимать приветственный приз как гарантированный способ получить большой выигрыш, но это отличная возможность без затрат расценить возможностей казино. Итак, дабы безвозмездные бонусные кредиты трансформировались в реальные средства, которыми продоставляется управлять по собственному усмотрению, их нужно отыграть. Вейджер стопам уточнять в правилах онлайн-казино. 1×slots регистрация на сайте <a href=https://visualchemy.gallery/forum/profile.php?id=4034505>https://visualchemy.gallery/forum/profile.php?id=4034505</a> В каждом казино с бездепозитным призом предусмотрены вейджеровые обстоятельства. Это один-единственный «подводный камень», кот-ый стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, нужно сделать определённое количество ставок. Чем круче бонус, тем сложнее выполнить условия, и наоборот.
1×slots регистрация 1×slots casino 777 online
Подобные бонусы без депо предоставляются на больше выгодных критериях. Зачастую они покрупнее, а условия отыгрыша менее жесткие.При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие можно предназначить этой в казино. <a href=https://physicsmastered.com/author/renaldoavoib/>https://physicsmastered.com/author/renaldoavoib/</a> Размер ставки для игры по бездепозитному призу (окончательно же, когда, когда он представлен вид бонусных денежных средств) часто ниже, чем при этой на депо. Ограничение несомненно действовать до этапа отыгрыша приза. 1×slots бездепозитный бонус за регистрацию При пользовании бездепозитным призом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют количество видов лимитов:
<b>Смотреть еще похожие новости:</b>
<a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=6507>1×slots казино зеркало</a>
<a href=http://check2go.net/my-account/>1хслот зеркало</a>
<a href=http://polishcrazyclan.ugu.pl/member.php?action=profile&uid=272738>1× slots регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Доступные забавы – В неких азартных играх можно снизить математическое преимущество казино до нескольких 10-х процента. В их количестве многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как управляло, в этих играх ставки идут в зачет вейджера не полностью. Например, возможность учитываться лишь 50%. В неких забавах бездепозитные призы вообщем нельзя отыгрывать. С этими простыми советами любое казино с бонусом за регистрацию способно принести в разы больше выгоды и выгоды.
#3808 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
включи казино порно с Анна Щербакова, фигуристка <a href=https://www.ossetia.tv/>bitz casino</a> 1×bet слоты 1×bet xyz казино рублях <a href=https://strelochnik.com/>фреш казино</a> casino онлайн пин ап casino pin up top casino x порно с Алексей Миранчук (футбол) casino регистрации 7k casino зеркало рабочее официальные букмекерские конторы скачать
DiskiPlus Скоробогатова Ольга Николаевна порно DiskiPlus скачать букмекерскую контору на андроид <a href=https://www.diskiplus.ru/>DiskiPlus почему казино</a> DiskiPlus казино без DiskiPlus лучшие бесплатные онлайн казино <a href=https://www.diskiplus.ru>DiskiPlus игры казино</a> DiskiPlus porno Вера Бирюкова, гимнастка DiskiPlus Валентина Матвиенко порно DiskiPlus порно с Елена Никитина, скелетонистка DiskiPlus casino рабочее зеркало DiskiPlus Приезжева Екатерина Геннадьевна порно DiskiPlus 1×bet на сегодня DiskiPlus 1×bet скачать бесплатно
#3809 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало сайта
Также учтите, что некоторые игровые платформы сузивают перечень стран, коие готовы получить предложенный бездепозитный бонус за регистрацию. К примеру, есть онлайн-заведения, выдающие подобные бонусы только жителям конкретных стран. К примеру, онлайн казино 777 Оригинал предоставляет бездепозитный бонус лишь игрокам из России и стран СНГ. Или наоборот, снабжают вознаграждением всех, считая жителей неких государств (из сего, стопам внимательно учить перечень, чтобы впоследствии не появилось никаких вопросов и жалоб). <a href=http://filmkachat.ru/>1хслотс официальный сайт зеркало</a> Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы которые появляются у новичков. <a href=https://www.merchantcircle.com/blogs/3d-rendering-company-archicgi-dallas-tx/2025/1/Professional-3D-Rendering-Studio-Architectural-Visualization-Services/2886990>https://www.merchantcircle.com/blogs/3d-rendering-company-archicgi-dallas-tx/2025/1/Professional-3D-Rendering-Studio-Architectural-Visualization-Services/2886990</a> Бездепозитные призы прекрасный вариант безвозмездной игры в игровые автоматы. Многие юзеры сети не знают, что в казино возможно начать выступать абсолютно бесплатно, а позже вывести выигрыш на банковскую карту либо электрический кошелек, иные не доверяют онлайн казино, а третьи успешно играют и выигрывают – и подчас достаточно немалые суммы.У каждой забавы средства притязания по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система засчитает каждую ставку. В рулетке и покере устроить это намного сложнее. Именно поэтому так важно внимательно разбирать обстоятельства получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в любой ирге, то новенькие попросту «спустят приз на ветер». 1×slot зеркало рабочее регистрации на телефон придет <a href=http://avtosalontochka.ru/index.php?subaction=userinfo&user=tightfistedcuff>http://avtosalontochka.ru/index.php?subaction=userinfo&user=tightfistedcuff</a> Чаще всего казино бонус за регистрацию без депозита даёт вероятность запустить каждой машина. Но другого внимательно ознакомиться с условиями. Иногда для игры доступны только определённые модели. Если вы новичок и ничего не смыслите в гэмблинге, чем начать знакомство с миром пыла именно с «одноруких злодеев».
1×slots официальный сайт скачать
<a href=https://acerfans.ru/user/JamesTed/>1 хслот регистрация в 1×slots casino</a> 1хслот официальный сайт зеркало Риск-игра по равным шансам – Также казино возможность воспрещать исполнять обстоятельства по отыгрышу счет раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких других играх.Автоматы неспроста числятся самым знаменитым азартным отдыхом. Чтобы освоить управление и верховодила, потребуется всего некоторое минут. Ваша задачка устроить ставку, найти число трудящихся линий и можно вертеть барабан. Если на экране выпадет выигрышная комбинация – вы выиграли! С этой задачей вас помогут справится бездепозитные призы казино. <a href=http://bbs.all4seiya.net/home.php?mod=space&uid=1058566>http://bbs.all4seiya.net/home.php?mod=space&uid=1058566</a> Для ревизии используются сканы паспортов, водительских водительских, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь обнаружен в попытке ввести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный список. При ирге на лицензионной площадке не опасаться указывать достоверную персональную информацию (шифрование исключает утечку индивидуальных данных).Прежде всего, не забывайте периодически заглядывать на страницу обзоров бездепозитных призов. Они шаг за шагом осматривают более интересные предложения водящих игорных порталов. 1×slots зеркало на сегодня Бонус за регистрацию в казино без депо с выводом средств нужно отыграть. Зачастую для отыгрыша имеет понадобиться устроить ставки на сумму, в несколько 10-ов раз превосходящую сумму бонуса или выигрыша.
1×slots сайт
Акции распространяются как на все игры казино, например и на ограниченный перечень. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino прочие. Промо имеет обхватывать разработки 1-го производителя. Бездеп не пересекается с другими промоакциями казино. Если на сайте предусмотрен кэшбек, он не начисляется за ставки, сделанные бонусными средствами. Для идентификации платежных реквизитов игрока возможность понадобиться пополнение счета на минимальную необходимую. Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.Превышение наибольшей ставки при отыгрыше. Система автоматически не предупреждает о превышении ставки, поэтому о нарушении правил игрок возможность разузнать уже в подачи запроса на вывод средств. <a href=http://spilov.ru/user/Henrystugh/>http://spilov.ru/user/Henrystugh/</a> Не рекомендуем сломя голову браться за всевозможные предложения получения средств без вложений. Вполне вероятно, собственно бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем выглядит на 1-ый взор. Альтернативой является казино приз за депо. Мы предлагаем вас пару советов, благодаря коим у любого игрока несомненно возможность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств: casino 1×slot Возможность поиграть вспомогательное соревнование (а иногда и некоторое) абсолютно безвозмездно, а выигрыш, в свою очередь, поступает на счёт игрока.Так собственно главное отличие дара на депозит от бездепа – неотъемлемое пополнение счёта. Вы сможете внести депо и преумножить стартовый капитал или арестовать бездеп и при этом не придётся рисковать собственными сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начисляет щедрое одобрение!
казино 1×slots официальный сайт
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-2029#post-57906>1×slot казино зеркало</a> Законодательство, регулирующее азартные игры в различных странах, влияние на полномочия операторов. В результате пользователи из отдельных регионов сталкиваются с ограничениями со стороны казино. Это имеет быть как полный отказ в доступе, так и невозможность загружать забавы отдельных изготовителей.В бонусную программку многих операторов входят систематические бездепы. Это пожизненные промоакции, поощряющие активных постоянных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают неизменные бонусы без депо в обмен на скопленные баллы преданности. Активация случается с помощью промокодов, коие вводятся в собственном офисе последствии регистрации. Среди спецпредложений в перечне Casino.ru находятся неповторимые промокоды, которые доступны лишь посетителям портала. Другие способы начисления средств ? автоматическая активация сразу последствии создания аккаунта и получение дара по запросу в службу технической поддержки.Для того, чтобы отыграть сумму вашего бездепозитного приза надо(надобно) выполнить обстоятельства вейджера. Очень часто фриспины даются на определенные слоты (book of ra, book of dead, book of sun), избирайте слот себя нраву, они все довольно красочные и качественные. Бездепозитные приз может быть валютным например и повторяющий фриспинов на слоты скачать 1×slots на андроид мобильная версия <a href=http://olis-nsk.ru/bitrix/redirect.php?goto=http://sexy-photos.net/o.php?link=http://cpo.by/bitrix/redirect.php?goto=https://teletype.in/@urist555/lfJAFs_c0na>http://olis-nsk.ru/bitrix/redirect.php?goto=http://sexy-photos.net/o.php?link=http://cpo.by/bitrix/redirect.php?goto=https://teletype.in/@urist555/lfJAFs_c0na</a> Игры, в которых возможно играть на бонусные деньги. Проверьте список игр, каких возможно выступать на бонусные средства, вполне они Вам не понравятся и не стоит расходовать своё время на такую акцию.Для получения бонуса нужно ознакомиться с программкой преданности казино и устроить ставки на сумму, нужную для перехода на следующий степень.
1×slots зеркало сайта
Получить приветственный бонус все только новые посетители онлайн-казино. Способы описаны в условиях промоакции любого законного казино, чаще всего это:Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала прыткие выводы. Фишка выплат сомнений, что достаточно выбрать платёжный инструмент и показать необходимую. В большинстве случаев средства зачисляются на электронные кошельки в течение 15 мин., а на банковские карты – 1–3 рабочих дня. Получать информацию о самых прибыльных призах возможно без неизменного мониторинга новостей казино. Мы брали данную задачу на себя и безпрерывно смотрим за услугами операторов, избирая превосходнейшие из их. В данном разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список промоакций периодически пополняется. В топ зашли самые свежие бездепозитные бонусы за регистрацию в казино 2020, временные и замкнутые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и аспектам. Если срок деянья акции истек, она удаляется из списка. <a href=http://www.lemon-directory.com/1win-brasil-login-Oficial_482978.html>http://www.lemon-directory.com/1win-brasil-login-Oficial_482978.html</a> Подтвердите регистрацию, дабы активировать Бездепозитный приз с выводом, требуется заполнить индивидуальный профиль. Заполните пустопорожние поля истинными данными о для. 1× slots casino официальный сайт
<b>Смотреть еще похожие новости:</b>
<a href=https://vredeenvermaak.be/forum/vrede-en-vermaak/>1×slots бездепозитный бонус за регистрацию</a>
<a href=http://mi.minfish.com/home.php?mod=space&uid=1196847>1×slots зеркало проходить регистрацию это отличный вариант</a>
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=12334>онлайн казино 1×slots</a>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=481042>сайт 1× slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Сразу в активации промокода возможно воспользоваться даром. Как уже упоминалось, призы бывают трёх видов – фриспины, кредиты и фриплей-бонусы.
#3810 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино рояль Яровая Ирина Анатольевна порно <a href=https://slon-ru.com/>порно с Петр Ян (ММА)</a> казино 5 букмекерская контора зенит <a href=https://www.ossetia.tv/>скачать 1×bet</a> казино фильм смотреть онлайн гта онлайн казино порно с Максим Глушенков (футбол) порно с Илья Осипов (киберспорт) гта онлайн казино мелбет букмекерская контора порно с Голикова Татьяна Алексеевна
DiskiPlus porno Александр Соболев (футбол) DiskiPlus где казино <a href=https://diskiplus.ru>DiskiPlus porno Яна Троянова</a> DiskiPlus гта казино DiskiPlus казино вход официальный сайт <a href=https://diskiplus.ru>DiskiPlus казино ставка</a> DiskiPlus 1×bet официальный сайт DiskiPlus 1×bet официальный DiskiPlus бесплатное казино DiskiPlus 1×bet на андроид DiskiPlus включи казино DiskiPlus 7k casino зеркало DiskiPlus champion casino
#3811 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slots review live
Одним из поводов отдавать преимущество, льготу одному или иному заведению заключается в привлекательности предлагаемых акций и даровых предложений. Безвозмездные фриспины, выдаваемые без нужды создавать какой-либо вклад, в перечне располагается далековато не в конце. <a href=http://filmkachat.ru/>1 хслот регистрация в 1×slots casino</a> Выиграть настоящие деньги в казино не пополняя счет – сложно, хотя возможно. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными призами и начните выступать на бонусные средства. По статистике в 10-ти заведений возможно заработать маленькую необходимую средств за счет бонусных средств.Условия шансы разниться друг от приятеля. Но такой приз возможность быть применен только для игрового процесса – приобретенные на счет финансы до того, как станут отыграны, вывести невозможно. <a href=https://nibbler.co/en_US/reports/playhouse.com.ua#/Test_Page_Analytics>https://nibbler.co/en_US/reports/playhouse.com.ua#/Test_Page_Analytics</a> Для тех, кто лишь взвешивает испытывать свою фортуну, а также для проф игроков, разыскивающих свежие площадки для выигрышей, ведущие лицензированные казино нередко организуют разные акции, и одно из лучших услуг прошедшее время – как для новичков, так и для проф игроков – бездепозитный приз за регистрацию. 1×slot официальный сайт <a href=http://dac21.com/bbs/board.php?bo_table=free&wr_id=1003344>http://dac21.com/bbs/board.php?bo_table=free&wr_id=1003344</a> Можно ли зарабатывать на бездепозитных бонусах? Это не работа, тут как повезет, если в любом предложенном безедепе, вы будете откручивать вейджер и выводить, это можно назвать везением, и добавочной добавкой к вашему бюджету.Помните, что в неких играх сумма ставки идет в зачет вейджера лишь отчасти. Так, в настольных и карточных играх только от 5% до 50% суммы ставки числятся как отыгранные деньги, момент как в слотах идет в зачет все 100% суммы.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
В большинстве заведений устроить это возможно по e-mal, по номеру телефонного, спустя социальную сеть либо гугл-аккаунт. 1×slots casino зеркало рабочее Для тех, кто лишь подумывает испытать собственную удачу, а также для профессиональных игроков, ищущих свежие площадки для выигрышей, основные лицензированные казино нередко организуют различные акции, и лучшее услуг за время – как для начинающих, например и для проф игроков – бездепозитный приз за регистрацию. <a href=http://mariland.org/index.php?subaction=userinfo&user=blackmiscellany>http://mariland.org/index.php?subaction=userinfo&user=blackmiscellany</a> 1хслот зеркало
1×slot регистрация
За счёт спинов выйдет запустить разные онлайн слоты, протестировать стратегии и поднабраться навыка. Фишка сомнений, собственно вращения начисляются на топовые аппараты с оригинальными опциями и высочайшей отдачей. Не забывайте, что в любом акционном предложении учтены специальные притязания – временные лимитирования, максимальный объем ставки, перечень дешевых игр. После получения бонуса вывод средств для посетителя будет недосегаем до тех пор, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или чета недель. Выводить средства игрок сможет только в отыгрыша.Чаще всего используются коды. Их нужно заносить в специальные окошки регистрационной анкеты, если речь идет о пригласительных призах, или в определенном разделе личного кабинета игрока. <a href=https://forum.fne82.org/profile.php?id=543381>https://forum.fne82.org/profile.php?id=543381</a> Суммы похожих услуг, большинстве, колеблются от трех до 20 $, а вейджер на эти средства обязан сочинять от 30 до шестидесяти один. Зачастую, наивеличайшая сумма выигрыша тут составит от одной до двух сотен долларов. Если игрок выиграет больше, то все свои шансы быть списанными до максимально разрешенного выигрыша. Здесь бывает смысл выводить еще несуществующие финансы на свою платежную систему и дальше отыскивать заведение с благоприятными под данную сумму релоадом или бонусом за 1-ое пополнение счета. Есть некоторое подвидов бездепозитного вознаграждения, предлагаемого наибольшим количеством заведений.Реже призы без депозита начисляются постоянным игрокам. С их поддержкой администрация постарается вычесть ценных клиентов либо вожделеет поблагодарить за преданность верных посетителей. Но гораздо чаще для сходственных целей используются такие акции: зеркала 1×slots
скачать 1×slots официальный сайт
Как и другие акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых гостей и позволяет им составить впечатление о функционале, не рискуя вескими суммами.Бoльшинcтвo азартных заведений выдвигают приблизительно однообразные, схожие обстоятельства и притязания, коие необходимо выполнить, дабы получить бездепозитный бонус за регистрацию. Все их возможно объединить в раз перечень: <a href=http://jktroickiy.forumex.ru/viewtopic.php?f=2&t=2375>1х слот 1хслотс регистрация перейти на 1×slots</a> На благотворительные бонусы онлайн-казино почти постоянно распространяется лимитирования по стране проживания клиентов. Даже случае для разрешено раскрывать счет и выступать на средства в заведении, это еще не означают, что вам доступны no deposit bonuses.Выбор любого онлайн казино на нашем веб-сайте. В описании к любому Вы сможете узнать, собственно получите за творение аккаунта. Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут устанавливает лимитирование для клиентов. Конечно, это можно счесть некоторым неудобством для игрока, хотя справедливости стоит отметить, что выбор автоматов всё точно остаётся довольно великим. 1хслотс официальный сайт зеркало <a href=https://sunyudang.com/bbs/board.php?bo_table=free&wr_id=198831>https://sunyudang.com/bbs/board.php?bo_table=free&wr_id=198831</a> Внесение депозита – Будьте готовы восполнить счет последствии отыгрыша приза. Это обычное требование верховодил для данного типа промо-акций. Лучше заранее уточнить, какую необходимую надо(надобно) будет заносить на счет. Как верховодило, речь о минимальном депозите, хотя вы обязаны быть уверены, что он вам по кармашку.Особую изюминку видео слотам придают уникальные символы. С их в активируются разные призы. Вы сможете запустить дополнительный степень и увеличить необходимую выигрыша. Есть знаки, которые заменяют негодные составляющие и сами делают выигрышные комбо. Не стоит забывать и на бонус-тур. После любого успешного спина есть шанс прирастить сумму выигрыша в 2 либо хорошо раза.
1×slots регистрация 1×slotscasino 56 online
Как правило, при выводе финансов, от играющего требуется лишь устроить наименьший лепта чтобы, чтобы, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом индивидуальный счет.Большинство интернет-казино из нашего топ-10 готовы порадовать вас неповторимыми промоакциями. Читайте о них в обзорах и на форуме. Кешбэк-бонус дает собой возврат фиксированного процента от ставки в случае проигрыша либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%. <a href=http://shichaoliuluntan.com/home.php?mod=space&uid=366468>http://shichaoliuluntan.com/home.php?mod=space&uid=366468</a> casino 1×slot
<b>Смотреть еще похожие новости:</b>
<a href=https://orbitsound.com/forum/user-211634.html>1×slots рабочее зеркало</a>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=252689>1×slots рабочее зеркало на сегодня</a>
<a href=https://www.goslog.ru/forum/messages/forum1/message16171/11-obrashcheniya-grazhdan?result=reply#message16171>1×slots зеркало быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бонус в казино без депо имеет разные разновидности: такое быть приветственный бонус, промоакции в честь каких-либо дней либо важных дат, бонус за привлечение свежих игроков, преданность и получение VIP-статуса. Казино выводит средства только на что, эту платежную систему, с котрой был сделан депо. То есть, для вывода бездепозитного приза, Вам поначалу нужно восполнить счет. В некоторых клубах узкий перечень способов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет непосредственно с данных платежных методов, коие доступны для вывода.
#3812 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пина букмекерской конторы casino online зеркало <a href=https://rucriminal.info/>ramenbet casino</a> 1×bet на андроид Черкесова Бэлла Мухарбиевна порно <a href=https://repost.news/>1×bet 1</a> Львова-Белова Мария Алексеевна порно casino андроид casino зеркало сегодня casino вход up букмекерская контора казино зеркало сегодня казино на деньги
DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus Черкесова Бэлла Мухарбиевна порно <a href=https://diskiplus.ru/>DiskiPlus 1×bet зеркало рабочее xbet</a> DiskiPlus порно с Голикова Татьяна Алексеевна DiskiPlus скачать casino на андроид <a href=https://www.diskiplus.ru/>DiskiPlus casino приложения</a> DiskiPlus casino рабочее зеркало DiskiPlus пин ап казино DiskiPlus букмекерскую контору пин DiskiPlus Набиуллина Эльвира Сахипзадовна порно DiskiPlus casino DiskiPlus casino онлайн DiskiPlus порно с Антропова Валентина Викторовна
#3813 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация в 1×slots casino
Лишь знаменитые и знаменитые азартные заведения шансы разрешить себя выдавать бездепы повторяющий дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, которые возможно истратить в топовых аппаратах с высокой отдачей.Чаще всего, знаменитые сервисы, такие как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное верховодило. Финансовые средства выводятся только через что, эту платежную систему, которой популярностьюимели для пополнения депозита. Если же игрок получил бездепозитный покерный бонус, требуется пополнить счет на минимальную необходимую, которая сочиняет обычно 10 $. <a href=http://filmkachat.ru/>1×slots зеркало регистрация то дальше необходимо пройти</a> Поспешите забрать бездепозитные призы за регистрацию в казино из представленного списка. Все платформы не водят законную работа, хотя и обрадуют добросовестными плодами игры, высочайшей отдачей, быстрыми выплатами. <a href=https://offcourse.co/users/profile/%D0%BC%D0%B0%D0%BDi%D0%BA%D1%8E%D1%80-%D0%BD%D0%B0-%D0%BA%D0%BE%D1%80%D0%BE%D1%82%D0%BAi-%D0%BDi%D0%B3%D1%82i/>https://offcourse.co/users/profile/%D0%BC%D0%B0%D0%BDi%D0%BA%D1%8E%D1%80-%D0%BD%D0%B0-%D0%BA%D0%BE%D1%80%D0%BE%D1%82%D0%BAi-%D0%BDi%D0%B3%D1%82i/</a> Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых свежих, великодушных и проверенных призах в интернет казино, которые обновляются каждый денек. 1×slots зеркало проходить регистрацию это отличный вариант <a href=https://www.harnessracingforum.com/member.php?113427-MiguelNon>https://www.harnessracingforum.com/member.php?113427-MiguelNon</a> Призовые начисления без депо имеют предоставляться для роли в турнирах онлайн казино. Потратить перечисленные деньги возможно самая в рамках данной промоакции. Условия их проведения себе ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, другого выучить его правила.Для получения бонуса нужно ознакомиться с программкой лояльности казино и устроить ставки на сумму, необходимую для перехода на грядущий уровень.
1× slots casino зеркало
На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не можете активировать и получить бездепозитный бонус. casino 1×slot Как правило, новоприбывшие игроки начала хотят ознакомиться с методами ввода и вывода денежных средств и сроки выполнения поданных заявок дабы четко разуметь, как стремительно возможность исключить свой казино бонус за регистрацию без депозита на электрический кошелек или же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино соперничают между собой. Ведь если бы определенную компанию давало лишь одно онлайн-заведение, то навряд бы посетители увидели казино с призом за регистрацию и могли бы рассчитывать только на вознаграждение повторяющий приза на первое инвестиция. К каждому заведению регулярно следует привлекать свежих игроков, собственно, итоге, только на руку всем играющим. <a href=https://fakenews.win/wiki/Shisha_Tobacco_From4_Eur>https://fakenews.win/wiki/Shisha_Tobacco_From4_Eur</a> 1×slots официальный зеркало рабочее Получить приветственный бонус все лишь свежие посетители онлайн-казино. Способы описаны в критериях промоакции каждого легального казино, чаще всего это:Большинство клубов завлекают внимание в за счёт разнообразных подарков. На 1 сайтах можно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает безвозмездные вращения для пуска лучших онлайн слотов. Несмотря на различные промоакции, стоит выделить самые главные.
1×slots официальный сайт скачать
Однако в условиях скрываются «подводные камешки», которые не разрешат вывести солидную необходимую или же вы не успеете отыграть вейджер. Поэтому профессионалы советуют отобрать безвозмездные вращения за регистрацию в казино без депозита, чтобы поднабраться опыта и получить настоящий шанс на победу.В зависимости от интернет заведения каждый из их может для предложить как бездепозитные средства, так и бездепозитные фриспины, коие последствии успешной регистрации рухнут вас на ваш игровой баланс. <a href=https://www.xn–72c9aa5escud2b.com/webboard/index.php?action=profile;u=1765034>https://www.xn–72c9aa5escud2b.com/webboard/index.php?action=profile;u=1765034</a> Возьми свой подарок. Чаще всего приз активизируется сразу в регистрации. Но бывают истории, когда нужно забежать в личный кабинет или написать в справочную службу. 1×slots официальный сайт скачать Фриспины – безвозмездные вращения с фиксированной ставкой, коие возможно применять в определенных игровых автоматах.Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают приз по странам. Вплоть до как, собственно клуб может себя игроков из Вашей страны, а бездеп мешает.
онлайн казино 1×slots
<a href=http://b2s.bulwork.com/node/1581?page=118#comment-24430>1×slots зеркало подтвердит вашу регистрацию если говорить</a> Любой выигрыш по ставке выше установленного лимита будет являться недействительным. То есть ставка не будет засчитана при отыгрыше, а в случае выигрыша его сумма не поступит на счёт клиента — итог забавы несомненно всецело аннулирован.Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и. Когда игроку полагается много фриспинов, администрация может разбивать их начисление на несколько дней. Бесплатные вращения предоставляются для определенного слота, который указывается в правилах акции. зеркала 1×slots <a href=http://georgiantheatre.ge/user/DavidMuddy/>http://georgiantheatre.ge/user/DavidMuddy/</a> Активация случается за промокодов, которые вводятся в собственном офисе после регистрации. Среди спецпредложений в перечне Casino.ru содержатся эксклюзивные промокоды, коие доступны только гостям портала. Другие способы начисления средств ? автоматическая активация сразу в творения аккаунта и получение презента по запросу в службу технической помощи.
1×slot рабочее зеркало
Также есть онлайн-платформы азартных игр, коие используют раздачу бездепозитных бонусов в специальные даты (как для казино, например и для игрока). Помимо сего, действующие геймеры того имеют возможность получить похожие бонусы за свою деятельность (например, за повышения значения либо за схожие заслуги). Можно ли наваривать на бездепозитных бонусах? Это не работа, здесь как повезет, если в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, тогда можно именовать везением, и добавочной добавкой к вашему бюджету.Условия отыгрыша приза. Если Вы расчитываете заработать на бездепозитном бонусе, то начала направьте на значение вейджера и срок, кот-ый дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть приз и исключить выигрыш. <a href=http://www.bakinsky-dvorik.ru/forum/?PAGE_NAME=profile_view&UID=170949>http://www.bakinsky-dvorik.ru/forum/?PAGE_NAME=profile_view&UID=170949</a> 1хслотс 1хслотс регистрация перейти на 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://bajarmp3.net/showthread.php?tid=421140>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Прочитайте правила бонусной программы, в хотите принять. Да, мы настойчиво советуем устроить это до регистрации.
#3814 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать на айфон
Для доказательства электронной почты, просто перейдите по активной ссылке в письме, приобретенном от игрового заведения.Бездепозитные призы за регистрацию в игровых автоматах для хозяев онлайн-казино являются долею рекламной кампании, направленной на повышение аудитории вебсайта. Так они продвигают средства бренды и завлекают свежих посетителей. <a href=http://filmkachat.ru/>1×slots регистрация на сайте</a> Если площадка презентует бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь завести акк на сайте и активировать его, подтвердив адресок электронной почты, номер аппарата либо иные данные, которые требует оператор. Перед этим нужно убедиться, что пользователь находится на официальном веб-сайте казино, но на мошеннической площадке.Для выбора азартного заведения Вы сможете пользоваться списком наших казино с призами за регистрацию. На нашем сайте мы опубликовали перечень бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, собственно доля призов неповторимые и доступны только для посетителей нашего сайта по-специальному промо-коду или по уникальной ссылке. Кроме того, для каждого приза мы подготовили подробный обзор, в котором Вы узнаете как получить и отыграть одобрение и как исключить собственный выигрыш с бездепа. <a href=https://www.rang.com.ua/astramedika.com.ua>https://www.rang.com.ua/astramedika.com.ua</a> 1×slots зеркало регистрация <a href=https://r.rumedia.top/user/Oscarsiz/>https://r.rumedia.top/user/Oscarsiz/</a> Исходя из этого, просто не существует осмысленных оснований махнуть рукою на получение такого приза при регистрации. И, заметить,, на подобный бесплатной базе у вас есть шансы выиграть деньги и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, называют бесплатными интернет платформами для игр.
1×slots официальный сайт зеркало
При этой на бонусные средства воспрещается играть в игровые автоматы с современным джекпотом и игры из радела exist casino. Кроме того, некоторые казино выделяют бездеп на один или несколько конкретных слотов, и в других забавах Вы не можете на них играть.Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации презента необходимо доказать электронную почту и привязать телефон; онлайн казино 1×slots Фриспины начисляются по определенной ставке. После их активации игроку необходимо запустить разъем и увериться, что в нем показываются благотворительные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода в отыгрыша ориентируется оператором и редко выше 5 000 рублей. <a href=https://web.xndl.com/home.php?mod=space&uid=636487>https://web.xndl.com/home.php?mod=space&uid=636487</a> В лицензионных бездепозитных казино выступать в азартные забавы действительно безопасно. Наличие лицензии одобряет что, этот факт, собственно клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP.Если площадка дарит бездеп за регистрацию, то процедура его получения проста. Нужно лишь ввести акк на веб-сайте и активировать его, подтвердив адресок электронной почты, номер телефонного либо иные данные, которые просит оператор. Перед данным необходимо убедиться, собственно юзер находится на официальном веб-сайте казино, но на мошеннической площадке. 1хслотс официальный сайт зеркало Шаг 5. Использование и отыгрыш. Бездеп должен быть применен в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера.
казино 1×slots официальный сайт
В основном случаев безвозмездные бонусы начисляются в кредитах, коие невозможно незамедлительно вывести со счета. Прежде их нужно отыграть по установленным правилам. Эти притязания принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже. Эффективность бездепов в качестве рекламного инструмента оценили почти операторы. Малоизвестные площадки используют эти промоакции, чтобы прытко набрать базу. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны постоянных гостей. Не все сайты, дающие презенты без депо, рекомендованы к ирге. За привлекательным промоописанием могут скрываться невыполнимые обстоятельства отыгрыша и другие подводные камешки.Маркетинговая деятеля всех игорных интернет-клубов обязана носить различный характер. И случае гонорары на депо служат для того, чтобы провоцировать заносить депозиты и поощрять уже место юзеров, то бездепозитный приз в казино или бонус за регистрацию в казино, этого всего, рассчитан на расширение базы покупателей. <a href=http://avarpressa.ru/user/TyroneBap/>http://avarpressa.ru/user/TyroneBap/</a> 1хслот 1хслотс регистрация перейти на 1×slots Стоит обозначить(означить), собственно бездепозитный бонус выдается только совершеннолетним новичкам, коие, тому, имеют пригласить собственных друзей и своих, также претендующих на поощрительную программу преданности. Подобная разработка была среди создающих онлайн-казино для популяризации и расширения трафика. Покер румы и спонсоры содействуют увеличению своей популярности, путем привлечения новых игроков. Бонусы – это уникальный шанс для потенциальных соучастников забавы, коие имеют опробовать софт покер рума и увериться, будут ли они в него выступать либо нет. Новый игрок попробует свои силы с настоящими оппонентами в казино.
скачать 1×slots на андроид мобильная версия
Однако далеко не все ресурсы предлагают своим посетителям бездепозитные призы за регистрацию в казино. В большинстве случаев предусмотрено одобрение на 1-ый депозит в объеме 100–200%. Это замечательная вероятность преувеличить банкролл, прирастить время, проведённое за забавой и шансы сорвать большой куш.Рассмотрим принцип его деяния на примере. Допустим, вы зарегистрировались и получили $10 not the slightest deposit bonus с вейджером х50. Это значит, что выигранные деньги можно будет выводить не раньше, чем последствии такого, как общая сумма ставок достигнет $500. 1× slots сайт <a href=https://www.openstreetmap.org/user/REDICO>https://www.openstreetmap.org/user/REDICO</a> Фриспины без депозита либо дополнительные свои помогут ближе познакомиться с игровой платформой и её функциями. За счёт подарков можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям из-за забавы против живых крупье.Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы быстро получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, бывает настоящий шанс победу!
1×slots официальный сайт скачать
Некоторые клубы автоматически начисляют бонус на аккаунт игрока в выполнения условий получения, хотя посещают истории, когда бонус нужно активировать игроку самому. Есть некоторое способов активации бонуса:За привлечение приятеля ? в рамках партнерской программы заказчик получает вознаграждение за вербование свежих юзеров. Максимальный размер ставки, кот-ый нельзя превосходить пока бонус не несомненно полностью отыгран. В случае нарушения сего правила, бонус и выигрыш с него станут аннулированы.Для отыгрыша бонуса казино обязует игрока сыграть на необходимую, в количество раз превосходящую необходимую приобретенного приза — здесь выгода компании явна. <a href=http://www.bj1777.com/dzbbs/home.php?mod=space&username=excellentlawn39>http://www.bj1777.com/dzbbs/home.php?mod=space&username=excellentlawn39</a> зеркло казино 1×slots Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?
<b>Смотреть еще похожие новости:</b>
<a href=https://mit-bbs.com/viewtopic.php?t=169025>1хслотс официальный сайт зеркало</a>
<a href=http://board.eternityrpc.com/member.php?action=profile&uid=369>зеркала 1×slots</a>
<a href=https://forum.pmpobc.ca/index.php?topic=119292.new#new>1×slots casino регистрация на сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Любой выигрыш по ставке выше установленного лимита будет считаться недействительным. То есть ставка не несомненно засчитана при отыгрыше, а случае выигрыша его сумма не поступит на счёт посетителя — результат игры будет полностью аннулирован. Бонус за регистрацию в казино выдается только один один на 1-го игрока. Но посещают дополнительные акции, в рамках которых бездепы раздаются для постоянных посетителей и эти подарки Вы сможете получить более одного раза.
#3815 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало рабочее 1×bet зеркало рабочее на сегодня <a href=https://glvk.guru/>casino официальный сайт</a> casino бонус 1×bet зеркало на сегодня 1×bet xyz <a href=https://glvk.guru/>бесплатные букмекерские конторы</a> 1×bet зеркало рабочее почему в казино нет окон 1×bet официальный сайт порно с Антропова Валентина Викторовна casino riobet сайт казино зеркало 1×bet официальный xbet
DiskiPlus казино в россии DiskiPlus casino автомат <a href=https://diskiplus.ru>DiskiPlus почему в казино нет окон</a> DiskiPlus 1×bet телефон DiskiPlus официальные сайты казино <a href=https://www.diskiplus.ru>DiskiPlus где казино</a> DiskiPlus порно с Александр Большунов (лыжные гонки) DiskiPlus порно с Дронова Александра Викторовна DiskiPlus porno Александра Степанова, фигуристка DiskiPlus porno Вера Бирюкова, гимнастка DiskiPlus ев казино DiskiPlus 1×bet зеркало DiskiPlus реального казино
#3816 Charlesgunnyhttp://filmkachat.ru
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и более. Когда игроку полагается большое фриспинов, администрация возможность разбивать их начисление на количество дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах акции.Суммы подобных предложений, как правило, колеблются от 3-х до двадцати долларов, а вейджер на эти свои должен сочинять от тридцати до шестидесяти один. Зачастую, большая сумма выигрыша здесь составит от одной до двух сотен долларов. Если в выиграет больше, то все свои могут быть списанными до очень разрешенного выигрыша. Здесь замечена содержание выводить еще несуществующие деньги на собственную платежную систему и далее отыскивать заведение с подходящими под данную сумму релоадом или призом за 1-ое пополнение счета. Есть некоторое подвидов бездепозитного вознаграждения, предлагаемого наибольшим числом заведений. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> <a href=https://te.legra.ph/Vykup-avto-SHkoda-bystraya-ocenka-i-momentalnyj-raschet-01–24>https://te.legra.ph/Vykup-avto-SHkoda-bystraya-ocenka-i-momentalnyj-raschet-01–24</a> 1×slots регистрация на 1хслотс <a href=http://zebra.shoes/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://1d.media/bitrix/redirect.php?goto=http://tributes.theage.com.au/obituaries/138576/anthony-francis-re/?r=https://teletype.in/@urid_pomosh/fkuo5vM1-_C>http://zebra.shoes/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://1d.media/bitrix/redirect.php?goto=http://tributes.theage.com.au/obituaries/138576/anthony-francis-re/?r=https://teletype.in/@urid_pomosh/fkuo5vM1-_C</a> Фриспины предусмотрены для применения в видео слотах. Внимательно ознакомьтесь с критериями – частенько их выдают на кое-какие автоматы. В зависимости от клуба, у вас выйдет устроить определённое количество ставок. Кстати, продвинутые игорные дома разрешают запускать любых «одноруких злодеев».Чтобы без увериться в преимуществах бездепозитных призов, достаточно зарегистрироваться в казино и получить одобрение.
1×slots casino регистрация
Бонус начисляется игроку сразу последствии регистрации и прохождения верификации в казино и не требует от клиента внесения депо. Как правило, объем бонуса в подобном случае довольно стыдливый, впрочем разрешает новеньким познакомиться с игрой без риска реальными деньгами.Еще одно условие дотрагивается размеров ставки. Операторы устанавливают наивысшую необходимую, которую игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, избранной в Личном офисе. При превышении лимита есть риск потерять бонуса. Существующие ограничения относятся и к определенным обликам ставок. Например, играя в рулетку, клиент может столкнуться с запретом назначать фишки на шансы. <a href=http://forum.l2endless.com/showthread.php?tid=335699>1×slots регистрация</a> 1×slots подтвердит вашу регистрацию если говорить Вообще перейдя в казино — верховодила схожи в получении бездепозитных бонусов, в стандартные верховодила заходит: подтвердить эл. Почту и телефонный, наполнить собственный собственный профиль, активировать промо код или активировать предложения во вкладке БОНУСЫ. <a href=https://www.stroimvmeste.com.ua/user/Scottenvem/>https://www.stroimvmeste.com.ua/user/Scottenvem/</a> Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в собственный офис, чтобы отобрать бесплатные вращения с вейджером х40; 1х слот регистрация в 1×slots casino
1×slots регистрация 1×slots casino c2d ru
Максимальный размер ставки, кот-ый невозможно превосходить пока приз не несомненно полностью отыгран. В случае нарушения этого управляла, приз и выигрыш с него будут аннулированы. Но надо размышлять, что снабжая пользователей этими бонусами, казино увлекается спонсированием. Ведь размеры вознаграждений, главном, не немалые (средним размером от 5 до 20 $). И на эти средства налагаются определенные обстоятельства и лимитирования, неотклонимые к исполненью игрока, в в последствии он вожделеет получить все свои выигранные деньги. <a href=http://ssmt.ru/bitrix/redirect.php?goto=http://qsoft.ru/bitrix/click.php?goto=http://bismar.pro/bitrix/redirect.php?goto=https://teletype.in/@urist555/cLT8RCXBloV>http://ssmt.ru/bitrix/redirect.php?goto=http://qsoft.ru/bitrix/click.php?goto=http://bismar.pro/bitrix/redirect.php?goto=https://teletype.in/@urist555/cLT8RCXBloV</a> казино 1×slots официальный сайт
1×slot казино зеркало
<a href=http://theauction.com.au/author/jamesflake/>1хслотс рабочее зеркало</a> Выбор любого интернет казино на нашем веб-сайте. В описании к каждому Вы можете разузнать, что получите за творение аккаунта. 1 xslots рабочее зеркало <a href=https://www.aktas1.kz/gig/user/Kennethjotom/>https://www.aktas1.kz/gig/user/Kennethjotom/</a> В большинстве заведений сделать это возможно по e-mal, по номеру аппарата, спустя социальную сеть либо гугл-аккаунт.В большинстве заведений устроить это можно по e-mal, по номеру телефона, спустя социальную сеть или гугл-аккаунт.
1×slots регистрация то дальше необходимо пройти
Доступность — бездепозитные бонусы в казино почаще всего предоставляются свежим игрокам, хотя случаются случаи, когда приз могут получить и действующие посетители. <a href=https://thiamlau.com/forum/member.php?action=profile&uid=3925>https://thiamlau.com/forum/member.php?action=profile&uid=3925</a> 1×slots регистрация 1×slots casino 777 online
<b>Смотреть еще похожие новости:</b>
<a href=https://demo.comuni-italiani.it/forum/memberlist.php?mode=viewprofile&u=18269>1×slots официальный зеркало рабочее</a>
<a href=http://aficionado.pl/showthread.php?178700–1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D0%BD%D0%B0-%D1%81%D0%B5%D0%B3%D0%BE%D0%B4%D0%BD%D1%8F&p=199771>1×slots зеркало на сегодня</a>
<a href=https://traderscrypt.com/forums/showthread.php?tid=5891&pid=8745#pid8745>1×slots регистрация то дальше необходимо пройти</a>
<a href=http://policeacademy.teamforum.ru/memberlist.php?mode=viewprofile&u=410>1×slots официальный сайт, скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вейджер не более х30–35 является приемлемым. Опытные игроки заявляют, что с этим вейджером реально остаться в плюсе, в верно подойти к выбору игрового аппарата.
#3817 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
kometa casino 1×bet сайт 1×bet xyz <a href=https://sovsekretno.net/>Матвиенко Валентина Ивановна порно</a> casino вход 1×bet официальный сайт 1×bet xyz <a href=https://kompromat1.online/>1×bet зеркало рабочее</a> пинко casino casino бездепозитный как выиграть в казино porno Катерина Шпица пин casino top casino casino 7k рабочее
DiskiPlus порно с Евгения Медведева DiskiPlus Львова-Белова Мария Алексеевна порно <a href=https://diskiplus.ru>DiskiPlus казино онлайн бесплатно</a> DiskiPlus порно с Дронова Александра Викторовна DiskiPlus человек казино <a href=https://www.diskiplus.ru>DiskiPlus пина casino</a> DiskiPlus ставки на спорт букмекерские конторы DiskiPlus porno Дарья Мороз DiskiPlus inform@rucriminal.info DiskiPlus пин ап casino pin DiskiPlus casino 7k рабочее DiskiPlus up casino официальный DiskiPlus порно с Алина Загитова, фигуристка
#3818 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало на сегодня
Но а если вы уже профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы автоматически перейдете в онлайн казино; <a href=http://filmkachat.ru/>1×slots зеркало видели такую регистрацию на</a> <a href=https://www.webwiki.co.uk/playhouse.com.ua>https://www.webwiki.co.uk/playhouse.com.ua</a> Если ординарными словами, бездепы – это определённая сумма средств или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать презенты. Но есть кое-какие нюансы. Существуют игорные дома, коие перед тем как начислить призы просят привязать телефон, предоставить копии документов.На страничке представлены бездепозитные бонусы за регистрацию в казино редчайшая награда за которой гонятся все игроки как новички, например и мастера. Мы также уделяем огромное внимание на присутствие призов при формирование рейтинга казино на средства. Бездепозитный бонус это возможность выступать безвозмездно и выиграть реальные деньги. 1×slots регистрация 1×slotscasino09k online <a href=http://bbs.boway.net/home.php?mod=space&uid=1212003>http://bbs.boway.net/home.php?mod=space&uid=1212003</a> Риск-игра по равным шансам – Также казино возможность воспрещать выполнять условия по отыгрышу за раунда на удвоение, который предлагается в слотах, видео-покере и неких других забавах.
зеркала 1×slots
Помните, собственно всевозможные нарушения управлял сведут на нет ваши старания, и вы всего останетесь без начисленного вам дарового приза. Всегда изучайте управляла начисления и условия вейджера. По каким вопросам, на коие вы не можете помощи отыскать ответы, обращайтесь за объясненьям и саппорт. <a href=http://griffhunter.com/boards/viewtopic.php?p=559823#p559823>1×slots зеркало рабочее на сегодня</a> 1×slots casino регистрация 1×slotscasino09k online <a href=http://mrkarpiuk.xaa.pl/boards/shopping/member.php?action=profile&uid=36010>http://mrkarpiuk.xaa.pl/boards/shopping/member.php?action=profile&uid=36010</a> Каждая игровая перрон выделяется условиями по получению и отыгрышу бездепов. В правилах отчетливо расписаны кратковременные рамки, за коие нужно прокрутить вейджер. Также не забывайте на наибольший объем ставки и наивысшую необходимую выплаты. С другой стороны, дабы получить бездепозитные бонусы казино, довольно израсходовать не более 1 минутки.Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном призе, то в первую очередь внимание на значение вейджера и срок, кот-ый дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, что, этим проще отыграть бонус и вывести выигрыш. 1×slots официальный demo регистрация в 1×slots casino Иногда у гостей сайта шансы возникнуть проблемы при активации приобретенного промо-кода. В этих случаях, необходимо обратиться за помощью в службу «Support». Для получения ответа, непременно указывается конкретная причина обращения и подтверждается информация дополнительными снимками. Если сложилась спорная ситуация, постоянно возможно адресоваться к главному регулятору или контролирующему органу, выдавшему данному заведению лицензионный документ.
1×slots сайт
Бездепозитные призы начисляются только один раз. Не стоит раскрывать свежие аккаунты, чтобы получить их повторно. Служба безопасности казино непременно выявит «левого» участника и заблокирует. Если посетитель выполнит нужные требования, отыграет свою ставку и решит исключить собственный выигрыш, то ему нужно сведению, собственно казино непременно потребует предоставить ксерокопии личных документов, чтобы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные средства вывести не получится.Кешбэк-бонус представляет собой возврат фиксированного процента от ставки если, тогда, проигрыша или же от проигранной суммы за определённый период. В большинстве случаев кешбэк не превышает 10%. <a href=https://www.rmbbk.com/space-uid-1743973.html>https://www.rmbbk.com/space-uid-1743973.html</a> 1×slots регистрацию более популярный вариант это
1×slots официальный зеркало рабочее
<a href=http://griffhunter.com/boards/viewtopic.php?p=505876#p505876>1×slot рабочее зеркало</a> При использовании бездепозитным призом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют несколько обликов лимитов:Чаще всего, популярностью сервисы, такие как MoneyBookers и WebMoney, еще MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно обязательное правило. Финансовые средства выводятся только спустя ту платежную систему, которой пользовались для пополнения депо. Если же игрок получил бездепозитный покерный приз, требуется пополнить счет на наименьшую сумму, кот-ая составляет обычно 10 $. 1×slots казино мобильная версия <a href=http://sobaeksanrock.dgweb.kr/bbs/board.php?bo_table=free&wr_id=3089151>http://sobaeksanrock.dgweb.kr/bbs/board.php?bo_table=free&wr_id=3089151</a> Такой бесплатный эквивалент средств зачисляется на профиль пользователя после осуществления требований и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений возможен лишь после воплощения вейджеровых критерий.
1хслот официальный сайт зеркало
Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала прыткие выводы. Фишка выплат что, нет, собственно довольно выбрать платёжный инструмент и указать сумму. В большинстве случаев средства зачисляются на электрические кошельки в течение 15 минут, а на банковские карты – 1–3 рабочих денька. <a href=https://foros.factormoe.net/user-5390.html>https://foros.factormoe.net/user-5390.html</a> Ограничения по играм. Администрация воспрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, средствами либо бесплатными вращениями. Обычно, в правилах приводится полный перечень слотов для отыгрыша. Иногда разделенье производится по виду игр. Например, отыгрыш вероятен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino.Фриспины – безвозмездные вращения с фиксированной ставкой, коие можно применять в конкретных игровых автоматах. 1×slot зеркало Максимальный размер ставки, который невозможно превышать же бонус не будет всецело отыгран. В случае нарушения этого правила, бонус и выигрыш с него станут аннулированы.
<b>Смотреть еще похожие новости:</b>
<a href=http://smpn1bejen.sch.id/forum/>1×slots зеркало рабочее на сегодня</a>
<a href=http://aficionado.pl/showthread.php?176599–1×slots-%D0%BC%D0%BE%D0%B1%D0%B8%D0%BB%D1%8C%D0%BD%D0%B0%D1%8F-%D0%B2%D0%B5%D1%80%D1%81%D0%B8%D1%8F-%D0%B2%D0%BE%D0%B9%D1%82%D0%B8-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE&p=197669>1×slots мобильная версия войти казино</a>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=251803>1×slots casino регистрация на сайте</a>
<a href=https://www.globalvision2000.com/forum/member.php?action=profile&uid=1072499>1×slots быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Первый возникающий вопрос, это, зачем выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают свежих игроков. Последним проще начать забаву на деньги с дара за регистрацию. Им не нужно пополнять баланс и тратить собственные свои. Новички получают бесплатные спины либо средства на счёт. С их поддержкою знакомятся с игровым ходом, крутят слоты и проделывают ставки в рулетке. Представьте момент, когда при ставке в 10 рублей Вы получите сходственное умножение. Миллион рублей за одно вращение, собственно вполне возможно. Поэтому вопрос, сколько возможно выиграть остаётся не. Предлагаем выяснить других. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный приз и проверяйте удачу в деле. Разумеется, исключить средства довольно. Однако шансы есть у всех.
#3819 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
промокод 1×bet казино онлайн бесплатно <a href=https://7club7.com/>1×bet зеркало xbet</a> казино на деньги online casino официальный <a href=https://rumafia.news/>vodka casino</a> casino buzz 1×bet зеркало рабочее на сегодня смотреть фильм казино казино большая Елена Лядова порно с Каролина Севастьянова porno Светлана Ходченкова
DiskiPlus пин up casino DiskiPlus 1×bet официальный слоты <a href=https://diskiplus.ru>DiskiPlus Набиуллина Эльвира Сахипзадовна порно</a> DiskiPlus up casino официальный DiskiPlus порно с Евгения Медведева, фигуристка <a href=https://www.diskiplus.ru/>DiskiPlus casino рабочее</a> DiskiPlus casino автомат DiskiPlus сколько казино DiskiPlus порно с Дарья Касаткина (теннис) DiskiPlus букмекерская контора бесплатно скачать DiskiPlus официальные сайты казино DiskiPlus скачиваемые казино DiskiPlus букмекерская контора бетсити
#3820 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация то дальше необходимо пройти
Чтобы получить возможность исключить прибыль с бездепозитного приза в казино, необходимо выполнить ряд критерий:Сроки активации бонуса устанавливаются каждым казино, хотя почаще всего они не превосходят недели с момента получения. Игроку непременно надо(надобно) применять бездеп в течение указанного срока, в ином случае бонус просто исчезнет. Каждый бонус можно получить только раз раз, поэтому случае не применять бездеп в срок, у игрока не несомненно 2 шанса им пользоваться. <a href=http://filmkachat.ru/>1× slots регистрация в 1×slots casino</a> Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам запрещено начислять призы клиентам, не имеющим валютных средств на счете. Мы предлагаем осмотреть актуальные призы онлайн-казино с лицензией, которые соблюдают законодательство РБ. <a href=https://www.astrobin.com/users/architects/>https://www.astrobin.com/users/architects/</a> Проверка занимает от нескольких мин. До нескольких дней, профессионалы техподдержки могут запросить дополнительные документы либо инициировать короткое общение по Skype.Основное отличие никаких, что для получения бездепа не надо пополнять баланс в казино. Но считая этого, есть ряд и других отличий: 1×slots скачать на айфон <a href=https://timeoftheworld.date/index.php?title=1_win_login_aposta>https://timeoftheworld.date/index.php?title=1_win_login_aposta</a>
1×slots зеркало выигрыши обязательно пройдите регистрацию если
1хслот 1хслотс регистрация перейти на 1×slots К примеру, игроку выдаются бесплатные средства в заведении в размере пятидесяти либо 100 долларов (вейджер на которые составляет 100х). То есть, любому новоприбывшему игроку выскакивает привлекающая иллюстрация, кот-ая сулит выплату всех зачисленных компанией средств. Не стоит внимания на казино бонус за регистрацию без депозита с чрезмерно великой или очень маленькой суммой призов, потому собственно, в кропотливо изучив все условия, тут скорее, будет некий подвох. <a href=https://www.hubtamil.com/talk/member.php?1636996-Patrickpaf>https://www.hubtamil.com/talk/member.php?1636996-Patrickpaf</a> Допустим, за регистрацию вы получили бездеп в размере 2 000 руб. С вейджером х30. В этом случае предстоит сделать ставок, на общую необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать реальные деньги. Однако не забывайте, что с любого дара выйдет исключить определённую сумму (почаще всего менее $200). 1×slots скачать на айфон На условиях отыгрыша даровых призов идет тормознуть подробнее. С ними связаны аспекты, коие невозможно забыть без внимания.Казино выводит деньги только на ту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного бонуса, Вам сначала необходимо пополнить счет. В некоторых клубах ограниченный перечень способов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет именно с данных платежных методов, которые доступны для вывода.
1×slots зеркало регистрация в 1×slots casino
Демоказино есть почти на каждом веб-сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются значительно реже: там если, тогда, выигрыша и соблюдения критерий акций бездеп возможно превратить в реальные деньги.Если вы выбираете проверенное лицензионное онлайн казино и выполните все условия получения бездепозитного приза, трудностей с получением презента у Вас не возникнет. Бездепозитный бонус казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в данном и заключается основное отличие.Если вы опытный игрок, вы обязаны знать, собственно бонус без депозита – редкая находка. Тем не, мы еженедельно исследуем онлайн, дабы найти вам наихорошие бездепозитные предложения. <a href=http://classicalmusicmp3freedownload.com/ja/index.php?title=%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%AF%D0%BD%D0%B4%D0%B5%D0%BA%D1%81>http://classicalmusicmp3freedownload.com/ja/index.php?title=%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%AF%D0%BD%D0%B4%D0%B5%D0%BA%D1%81</a> Возьми собственный презент. Чаще всего бонус активизируется сразу в регистрации. Но посещают истории, когда нужно зайти в индивидуальный офис или написать в справочную службу. 1×slots зеркало выигрыши обязательно пройдите регистрацию если
зеркала 1×slots
Помните, что любые нарушения верховодил сведут на нет ваши старания, и вы всего останетесь без начисленного вас бесплатного приза. Всегда изучайте верховодила начисления и обстоятельства вейджера. По любым вопросам, на которые вы не можете помощи найти ответы, обращайтесь за объяснениям и саппорт.Подтверждение персональной инфы. Все казино просят от клиента пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и присутствие у юзера других аккаунтов (мультиаккаунт запрещен). Во всех законных онлайн-казино Беларуси нужно свидетельство паспортных данных для забавы — это требование правительства государства.На критериях отыгрыша даровых призов по тормознуть подробнее. С ними связаны аспекты, которые невозможно оставить без внимания. 1×slots зеркало регистрация то дальше необходимо пройти <a href=https://forum.mbprinteddroids.com/member.php?action=profile&uid=77845>https://forum.mbprinteddroids.com/member.php?action=profile&uid=77845</a> Чтобы играть даром на настоящие средства в казино, порой довольно просто зарегистрироваться. Иногда необходимо выполнить дополнительные действия.
1×slots казино мобильная версия
<a href=https://cse.google.me/url?q=https://doctorlazuta.by/>https://cse.google.me/url?q=https://doctorlazuta.by/</a> Изучить правила и условия получения бездепозитных бонусов казино, Вы можете у нас на сайте в разделе с бонусами или на официальном веб-сайте выбранного Вами казино. Если не можете найти необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал либо по электронной почте.Некоторые онлайн-казино без депозита предлагают свежим посетителям избрать бонус при регистрации. Будьте внимательны: выбрав раз, вы в безоговорочном большинстве случаев не сможете воспользоваться остальными. 1 x slots Многие новички сомневаются, что поощрительный приз не несомненно отдавать, даже случае они выиграли у казино. Это полностью неопасно и накрепко. Выводя выигранные свои, игрок просто одергивает свое участие деле и теряет уникальную возможность – бесплатно увеличивать собственное материальное положение.Хотя благотворительные призы начисляются без депозита, не исключено, собственно вам придется вносить деньги. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь последствии как, как свежий клиент первый пополнит игровой счет.
<b>Смотреть еще похожие новости:</b>
<a href=https://acerfans.ru/faq/197-kak-polzovatsja-forumom.html>сайт 1× slots casino</a>
<a href=https://nauc.info/forums/viewtopic.php?t=20629943>1×slots сайт зеркало</a>
<a href=http://forum.survival-readiness.com/viewtopic.php?t=268950>зеркло казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депозит возможность отличаться до 30 дней.
#3821 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Семёнова Татьяна Владимировна порно casino скачать приложение <a href=https://strelochnik.com/>лучшие онлайн казино</a> 1×bet официальный 1×bet xyz казино онлайн <a href=https://repost.news/>1×bet на андроид бесплатно</a> porno Дарья Мороз Любимова Ольга Борисовна порно casino автомат pin up casino порно с Анастасия Потапова, теннисистка 1×bet сайт Валентина Матвиенко порно
DiskiPlus porno Юлия Канакина, скелетонистка DiskiPlus Комарова Наталья Владимировна порно <a href=https://www.diskiplus.ru/>DiskiPlus порно с Гатагова Ольга Анатольевна</a> DiskiPlus kent casino регистрация DiskiPlus порно с Юлия Ефимова <a href=https://www.diskiplus.ru>DiskiPlus казино играть</a> DiskiPlus скачать сайт букмекерской конторы DiskiPlus vavada casino DiskiPlus бесплатные букмекерские конторы DiskiPlus порно с Матвей Сафонов (футбол) DiskiPlus 1×bet сейчас DiskiPlus порно с Владимир Минеев (ММА) DiskiPlus сайт винлайн букмекерская контора
#3822 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet слоты 1×bet xyz винлайн букмекерская контора официальный <a href=https://m.repost.news/>pin up casino зеркало</a> up casino зеркало casino андроид <a href=https://sovsekretno.net/>porno Алена Косторная (фигурное катание)</a> порно с Евгения Медведева 1×bet официальный 7k casino официальный казино регистрации включи казино porno Дарья Клишина винлайн букмекерская контора
DiskiPlus приложения букмекерских контор DiskiPlus казино рояль смотреть <a href=https://diskiplus.ru>DiskiPlus бк букмекерская контора</a> DiskiPlus porno Яна Троянова DiskiPlus яндекс казино <a href=https://www.diskiplus.ru/>DiskiPlus казино в россии</a> DiskiPlus казино смотреть онлайн бесплатно DiskiPlus 1×bet на андроид DiskiPlus 1×bet xbet DiskiPlus скачать 1×bet DiskiPlus казино фильм смотреть онлайн DiskiPlus porno Вера Бирюкова, гимнастка DiskiPlus казино смотреть онлайн
#3823 Charlesgunnyhttp://filmkachat.ru
1 x slots casino
Главным нюансом в возникновении данных вознаграждений состоит в, что пустив их в ход, в ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он спасибо призам какой-нибудь выигрыш или мгновенно спустит все лишь что прибывшие финансы). То есть, казино снабжает игрока возможностью на дармовой базе выступать во всевозможные слоты причем спонсирует забаву. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots casino c2d ru</a> Бездепозитный приз нередко может стать легкодоступным сразу после завершения регистрации, поскольку как единственным требованием к нему считается регистрация, а этого ревизия вашей свежей учетной записи. <a href=https://te.legra.ph/Vykup-avto-SHkoda-bystraya-ocenka-i-momentalnyj-raschet-01–24>https://te.legra.ph/Vykup-avto-SHkoda-bystraya-ocenka-i-momentalnyj-raschet-01–24</a> Онлайн-казино кропотливо продумывают бонусные условия, которые нужно выучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и другие ограничения.Призовые начисления без депо имеют предоставляться для участия в турнирах онлайн казино. Потратить перечисленные средства можно исключительно в рамках данной промоакции. Условия их проведения в лимитирования на список игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться этим предложением, другого, как изучить его верховодила. 1 x slots casino <a href=https://forum-nine.mirbb.com/t10125-topic#30699>https://forum-nine.mirbb.com/t10125-topic#30699</a>
1×slots казино зеркало
скачать 1×slots на андроид мобильная версия Это раз из главных характеристик привлекательности презента. С завешенным коэффициентом числе профессионалы не смогут выполнить обстоятельства по отыгрышу. И неважно, как привлекательно смотрится предложение – бездепозитный бонус казино в объеме $500 либо $1 000. Чтобы новички попревосходнее вникли, собственно же такое вейджер, мы разберём на образце.Бездепозитные бонусы за регистрацию в игровых автоматах для собственников онлайн-казино считаются долею маркетинговой кампании, направленной на увеличение аудитории сайта. Так они продвигают свои бренды и завлекают свежих посетителей. <a href=https://www.retroco.co/home.php?mod=space&uid=396543&do=profile>https://www.retroco.co/home.php?mod=space&uid=396543&do=profile</a> Суммы подобных предложений, как правило, колеблются от 3-х до 20 $, а вейджер на эти средства обязан сочинять от тридцати до шестидесяти один. Зачастую, величайшая сумма выигрыша здесь составит от одной до двух сотен долларов. Если в выиграет больше, то все средства имеют быть списанными до максимально разрешенного выигрыша. Здесь бывает смысл выводить еще несуществующие финансы на свою платежную систему и далее находить заведение с подходящими под данную сумму релоадом или призом за 1-ое пополнение счета. Есть некоторое подвидов бездепозитного вознаграждения, предлагаемого великим количеством заведений.Бездепозитный бонус за регистрацию в казино — это стартовый подарок повторяющий денежного начисления либо бесплатных вращений для свежих игроков заведения, для получения которого надо заносить депозит. 1×slos регистрация в 1×slots casino Необходимость отыгрыша. Вейджер ситуации выше, чем для бонусов за депо. И же свои не отыграны, исключить их нельзя.
1×slots регистрацию более популярный вариант это
Как правило, при выводе финансов, от играющего требуется только устроить минимальный лепта чтобы, чтобы, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом личный счет.Бездепы могут заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами. Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных обстановок с казино, когда последствии отыгрыша бездепа вам не дадут вывести солидную необходимую выигрыша.Представленные на этой страничке наихорошие бездеп призы в казино за регистрацию в 2022 году имеют подходящие условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, в гости Casino.ru имеют сортировать список по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д. <a href=http://forum.centrum-hvac.pl/User-Jamesflusy>http://forum.centrum-hvac.pl/User-Jamesflusy</a> Частенько новички не понимают, как активировать презенты либо вывести первый выигрыш. Для подобных случаев наша команда обрисовала основные определения – что такое фриспины, вейджер, как его отыграть, для нужно протекать верификацию.Почти все игровые клубы настоятельно свидетельство контактных данных игрока для получения бездепозитного бонуса. 1×slots зеркало Иногда операторы просят внесение минимального депо перед выводом для верификации платежного прибора. В неких казино данный депо того предстоит отыграть.Бесплатные призы казино без депозита можно получить в виде валютных средств на бонусный счет (исключить их можно лишь после отыгрыша), фриспинов, игры либо кешбэк-бонуса.
1×slots официальный зеркало
Вывод выигрыша с бездепозитных бонусов казино – великодушный подарок от азартных клубов. Но чтобы вывести свой доход, нужно выполнить ряд условий: Реже призы без депо начисляются постоянным игрокам. С их помощью администрация старается удержать ценных клиентов либо желает поблагодарить за преданность правильных посетителей. Но намного чаще для похожих целей применяются эти акции:Самые новые бездепозитные бонусы в казино за регистрацию 2022 года с выводом выгоды находятся на этой страничке. Посетитель имеет оценить условия получения и начать играть на деньги без внесения депозита. При данном игроку важно разуметь, на каких условиях и какими методами появится вывести приобретенный выигрыш. Для этого нужно расценить перечень подключенных платежных систем. 1хслотс рабочее зеркало <a href=https://images.google.com.sg/url?q=https://doctorlazuta.by/>https://images.google.com.sg/url?q=https://doctorlazuta.by/</a> В неких онлайн казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на сайте клуба и подтвердить свои контактные данные. Дополнительно требуется активация промокода.
1×slots регистрацию более популярный вариант это
Наличие у игрока второго аккаунта. Запрещено делать некоторое профилей для многократного получения бездепов. Онлайн гемблинг развивается с каждым днем все больше и больше, новые бренды создаются не по дням а по часам. Новые интернет казино делают вступительные акции для игроков, для того собственно бы зарекомендовать себя, и что, этим самым предлагают бездепозитные бонусы за регистрацию, собственно бы не пропустить такую вероятность — как пользоваться новым бездепом, рекомендуем посещать наш вебсайт как возможно чаще, самое аппетитное и свежие будет добавляться в этом же списке.Если вы выбрали себе несколько брендов коие вас больше всего полюбились, для постоянной игры! Таких гемблеров казино довольно любит и ценит, за частую эти игроки становятся VIP игроками заведения, которым часто поступают прибыльные предложения в виде бонусов, так же туда заходит и бездепозитные. <a href=https://historydb.date/wiki/User:IraWragge9>https://historydb.date/wiki/User:IraWragge9</a> 1х слот 1хслотс регистрация перейти на 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://showboysmedia.com/real-music/#comment-66075>1×slots на любой вкус как пройти регистрацию</a>
<a href=https://forumauthority.com/thread-6615-post-39532.html#pid39532>казино 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Зарегистрируйтесь. Для регистрации почаще всего довольно установить свой номер аппарата и почтовый адресок, после чего установить приобретенный код из СМС. Возможно, потребуется указать промокод. В правилах промоакции будет написано, где его бы вводить. Иногда это надо делать при регистрации, иногда — теснее в сотворения собственного кабинета, на отдельной страничке.
#3824 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация в 1×slots casino
Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, чтобы снова получить бесплатный приз. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ждет неизбежное санкция. <a href=http://filmkachat.ru/>1×slots быструю регистрацию а также мгновенное</a> Бездепозитные бонусы начисляются только раз один. Не стоит открывать свежие аккаунты, дабы получить их повторно. Служба безопасности казино обязательно выявит «левого» соучастника и перекроет. Если посетитель выполнит нужные требования, отыграет свою ставку и решит вывести собственный выигрыш, то ему нужно принять, собственно казино непременно потребует предоставить ксерокопии личных документов, чтобы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои исключить не получится. <a href=https://swaay.com/u/comcgifurniture/about/>https://swaay.com/u/comcgifurniture/about/</a> 1×slots зеркало которую указывали при регистрации кстати <a href=https://inetlinks.ru/member.php?27574-Jamesbreap>https://inetlinks.ru/member.php?27574-Jamesbreap</a> При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие возможно предназначить этой в казино.
1×slots casino online регистрация
<a href=https://masstr.net/showthread.php?tid=108276>1×slots регистрация то дальше необходимо пройти</a> 1×slots официальный зеркало В зависимости от интернет заведения любой из них может вас предложить как бездепозитные средства, так и бездепозитные фриспины, коие последствии успешной регистрации рухнут вам на ваш игровой баланс. <a href=https://pbtur.com.br/users/renaldoprany>https://pbtur.com.br/users/renaldoprany</a> Можно ли в одном онлайн казино получить больше одного приза за регистрацию? Нет, так как в любом интернет казино есть управляла, к коим нужно придерживаться, не создавать 2 аккаута для получения бонусов, иначе будет блокировка обоих аккаутов, не пытайтесь обмануть онлайн казино, бонус за регистрацию выдаеться один раз одному лицу. 1×slots casino зеркало рабочее Зачастую бездепозитные бонусы казино для игры предлагаются различными заведениями азартных игр виде маркетинговых акций либо в целях привлечения к для новых игроков. Для бездепозитных призов в казино 2022 игроку надо пополнять счет до момента вывода желанных средств.Это раз из главных характеристик привлекательности презента. С завешенным коэффициентом числе профессионалы не смогут выполнить обстоятельства по отыгрышу. И неважно, как привлекательно смотрится предложение – бездепозитный бонус казино в объеме $500 либо $1 000. Чтобы новички попревосходнее вникли, собственно же такое вейджер, мы разберём на образце.
1×slots регистрация
<a href=https://www.feeder.mobi/members/jamesamusy/profile/>https://www.feeder.mobi/members/jamesamusy/profile/</a> 1×slots сайт Бездепозитный бонус предоставляется новому игроку за определенные деянья. Часто подарок в виде денег или фриспинов выдается за регистрацию, благодаря чему юзер получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.
1×slots casino регистрация
Для получения бездепа нужно пригласить в забаву по реферальной ссылке свежего посетителя: он должен зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на необходимую, обозначенную в условиях промоакции.Как верховодило, при выводе финансов, от играющего требуется лишь устроить минимальный лепта для того, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом индивидуальный счет. Бездепозитные бонусы за регистрацию в игровых автоматах для хозяев онлайн-казино являются частью рекламной кампании, направленной на увеличение аудитории сайта. Так они продвигают свои бренды и завлекают свежих посетителей. Для отыгрыша бонуса казино обязывает игрока сыграть на необходимую, в некоторое раз превышающую сумму приобретенного бонуса — здесь выгода компании очевидна. 1×slots зеркало регистрация то дальше необходимо пройти <a href=https://classic.darkml.net/bbs/home.php?mod=space&uid=7973883>https://classic.darkml.net/bbs/home.php?mod=space&uid=7973883</a> Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро либо 20 $. Если выдаются фриспины, их число редко превышает нескольких десятков даровых вращений.
1×slots официальный сайт зеркало
Обычно, бездепозитные бонусы выдаются под конкретные слоты с фиксированной ставкой, но их наверняка запрещено использовать в игровых автоматах с современным джекпотом. Список игр, в которых возможно использовать бездеп, Вы отыщите в описании акции либо можете уточнить у саппорта заведения.Перед активацией принципиально пристально изучить обстоятельства промоакции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, в течение коих возможно пользоваться предложением. Если бездеп охватывает ограниченный перечень игр, рекомендовано разузнать максимальные коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят лишь что, нет случае, если оператор не установил жесткие ограничения на наивысшую необходимую ставки. Такой казино приз без депозита за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это как бы какая-то конспирация поощрения под бездепозитный. Суть всего этого сводится к что, этому, собственно геймеру на час выдается, к примеру, 1000 долларов, а реклама твердит про, что каждой выигрыш возможно будет в будущем оставить при себя. Но в играющий серьезно отнесется к этому предложению, то он просто растеряет время. Ведь игроку нужно несомненно играть не главном аккаунте, ну тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (том всей тыс. ) в управляла вступят определенные условия, где несомненно сказано, собственно наибольшей суммой победы возможность быть лишь двести $ и деньги возможно применять лишь виде бонуса на первый лепта с вейджером 25 от суммы гонорары плюс сам депо. По результату выйдет, что игрок выигрывал себя 200% приз с вейджером на конкретную сумму. Короче разговаривая, это все надо вашего медли.Вейджер (либо вагер) ? это минимальная сумма ставок, которую необходимо устроить для вывода денежного бонуса. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение. <a href=http://www.vinolian.com/bbs/board.php?bo_table=free&wr_id=210762>http://www.vinolian.com/bbs/board.php?bo_table=free&wr_id=210762</a> Таким образом, заведение пробует показать себя своим вероятным геймерам, а такой рекламный ход как казино бонус без депо за регистрацию привлекает очень количество внимания к игорному заведению и обеспечивает постоянный поток свежих посетителей и грядущих посетителей игрового интернет клуба. 1×slot зеркало рабочее регистрации на телефон придет
<b>Смотреть еще похожие новости:</b>
<a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=13119>зеркло казино 1×slots</a>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/7301/#comment-316932>1×slots официальный сайт скачать</a>
<a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=38692>1×slots скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чтобы получить вероятность исключить выгода с бездепозитного приза в казино, необходимо выполнить ряд условий: Наши эксперты изучают обстоятельства промоакции, затем в ручном режиме проверяют их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и другие характеристики. Мы не рекламируем казино, а даем игрокам информацию о наилучших из их.
#3825 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Юлия Пересильд top casino <a href=https://res-publika.com>casino riobet</a> лучшие онлайн казино casino актуальное зеркало <a href=https://m.repost.news/>порно с Карен Хачанов (теннис)</a> казино порно с Алексей Миранчук (футбол) фильмы казино рояль 1×bet казино смотреть автомат казино Чулпан Хаматова
DiskiPlus букмекерская контора ставки DiskiPlus казино рояль <a href=https://diskiplus.ru>DiskiPlus порно с Максим Глушенков (футбол)</a> DiskiPlus приложения букмекерских контор DiskiPlus casino buzz <a href=https://diskiplus.ru/>DiskiPlus порно с Варвара Субботина</a> DiskiPlus Светлана Ходченкова DiskiPlus букмекерская контора без DiskiPlus казино вход DiskiPlus карты казино DiskiPlus 1×bet xbet DiskiPlus 1×bet xbet xyz DiskiPlus Львова-Белова Мария Алексеевна порно
#3826 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию более популярный вариант это
Основное отличие в том, что для получения бездепа не пополнять баланс в казино. Но кроме этого, есть ряд прочих отличий: <a href=http://filmkachat.ru/>1×slos регистрация в 1×slots casino</a> Зарегистрироваться в казино по специальной ссылке или с бонусным кодом. Подтвердить контактные данные (номер аппарата и электрическую почту). Для подтверждения номера телефона необходимо в собственном профиле показать собственный номер и надавить кнопку „Подтвердить номер аппарата“, далее Вы получите sms-сообщение с кодом, который необходимо установить в отвечающее поле. Для подтверждения электронной почты, перейти по интенсивной ссылке в послании от казино.Еще одно условие дотрагивается размеров ставки. Операторы устанавливают наивысшую необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, избранной в Личном офисе. При превышении лимита есть риск потерять приза. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, клиент возможность столкнуться с запретом назначать фишки на шансы. <a href=https://xranks.com/astramedika.com.ua>https://xranks.com/astramedika.com.ua</a> 1х слот регистрация в 1×slots casino <a href=http://populardirectory.org/Green-pharmacy-nearby_305447.html>http://populardirectory.org/Green-pharmacy-nearby_305447.html</a>
1 х слотс зеркало
<a href=http://www.easysunnysunshine.com/memberlist.php?mode=viewprofile&u=18118>1×слотс казино</a> 1хслотс казино зеркало <a href=https://besthostingprice.com/whois/ua-traveler.com>https://besthostingprice.com/whois/ua-traveler.com</a> Вообще перейдя в казино — верховодила схожи в получении бездепозитных бонусов, в стандартные управляла заходит: подтвердить эл. Почту и телефон, наполнить свой индивидуальный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ. 1×slots официальный зеркало рабочее
1х слот 1хслотс регистрация перейти на 1×slots
А ознакомиться с свежими онлайн казино, Вы можете за счет призов с выводом прибыли, которые Вы сможете получить без депозита. 3. Подтвердить данные. В зависимости от клуба, нужно привязать телефонный либо почту, показать индивидуальную информацию; <a href=http://geolan-ksl.ru/forum/user/90045/>http://geolan-ksl.ru/forum/user/90045/</a> Наиболее пользующиеся вознаграждения среди гэмблеров – бездепозитные призы казино. Это не удивительно, так возможно получить бесплатные вращения или виртуальные кредиты, и этом не придётся пополнять счёт, рисковать личностными средствами. Удастся насладиться разнообразными веселиями и даже выиграть солидную необходимую, избегая серьёзного риска. 1×slots регистрация на официальном сайте Подарки на праздники ? приуроченные к праздничным датам, требующие символического отыгрыша либо начисляются без такового. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду.Наш список содержит наилучшие бездепозитные бонусы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает проверку по принципиальным характеристикам:
1×slots официальный сайт зеркало
На бонусные начисления могут быть установлены вспомогательные ограничения, которые Вы не сведению при отыгрыше. Пока бонус полностью не отыгран — деньги из казино не выводятся.Если вы выбрали себе некоторое брендов которые для больше всего полюбились, для неизменной игры! Таких гемблеров казино очень любит и ценит, за частую такие игроки становятся VIP игроками заведения, которым нередко поступают прибыльные предложения повторяющий призов, например же туда заходит и бездепозитные. <a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=44529>1хслотс 1хслотс регистрация перейти на 1×slots</a> Получить приветственный приз могут только новые посетители онлайн-казино. Способы описаны в критериях акции каждого легального казино, почаще всего это: 1 x slots <a href=http://dac21.com/bbs/board.php?bo_table=free&wr_id=716175>http://dac21.com/bbs/board.php?bo_table=free&wr_id=716175</a> Существуют казино с призом за регистрацию, каких довольно модны фриспины в интернет казино впоследствии регистрации в конкретных забавах. Они встречаются числе почаще безвозмездных поощрений или классических призов в казино без инвестициям. Например, игрок регистрирует счет, на который начисляются безвозмездные забавы, приз за регистрацию повторяющий безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса в выигрывает истинные средства, которые в последствии можно удачно исключить из заведения на собственную платежную систему. То есть, все шансы вывести средства без рисков своими деньгами. Регистрация, за которую геймер получит призы, займет несколько, а благодаря данному возможно прирастить 5 евро поощрений до тыс. И без всяких проблем вывести их.
1хслот скачать
В количестве случаев безвозмездные призы начисляются в кредитах, которые нельзя незамедлительно вывести со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже. Одним из поводов отдавать привилегию 1 либо иному заведению заключается в привлекательности предлагаемых промоакций и даровых предложений. Безвозмездные фриспины, выдаваемые без дела делать какой-нибудь лепта, в списке располагается далековато не в конце.Автоматы неспроста считаются самым популярным азартным развлечением. Чтобы усвоить управление и правила, потребуется всего количество минут. Ваша задачка сделать ставку, найти количество рабочих линий и можно крутить барабан. Если дисплее выпадет выигрышная композиция – вы выиграли! С этой задачей для помогут справится бездепозитные бонусы казино. <a href=https://esinislam.com/MediaEnglish/modules.php?name=Your_Account&op=userinfo&username=MagaretBoo>https://esinislam.com/MediaEnglish/modules.php?name=Your_Account&op=userinfo&username=MagaretBoo</a> Бездепозитные призы истинными деньгами, коие можно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадались.Для верификации номера телефона, в собственном профиле выберите опцию „Подтвердить номер телефона“ и введите в отвечающее фон код, полученный в sms-сообщении. 1×slots официальный сайт зеркало рабочее Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы была возможность исключить выигрыш.
<b>Смотреть еще похожие новости:</b>
<a href=http://link.5nx.ru/viewtopic.php?f=5&t=7826>1×slots скачать на айфон</a>
<a href=http://lynnniman.org/index.php?/topic/2910–1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D0%BF%D1%80%D0%BE%D1%85%D0%BE%D0%B4%D0%B8%D1%82%D1%8C-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8E-%D1%8D%D1%82%D0%BE-%D0%BE%D1%82%D0%BB%D0%B8%D1%87%D0%BD%D1%8B%D0%B9-%D0%B2%D0%B0%D1%80%D0%B8%D0%B0%D0%BD%D1%82/>1×slots зеркало проходить регистрацию это отличный вариант</a>
<a href=https://acerfans.ru/user/JamesTed/>1×slot официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины — бесплатные вращения, коие дозволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся самым популярным и предпочтительным обликом бонуса — благотворительные вращения порой эффективнее и веселее в отыгрыше, чем остальные облики бездепов. Некоторые казино все предлагать посетителям бездепы за подтверждение номера либо почты или репост на страничку в соц сетях.
#3827 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
ев казино 7k casino зеркало на сегодня <a href=https://sovsekretno.net/>win win casino</a> 1×bet зеркало 1×bet зеркало рабочее на сегодня 1×bet xyz <a href=https://repost.news/>порно с Дарья Клишина, легкоатлетка</a> casino betting casino зеркало сегодня рабочее casino вход порно с Александр Большунов (лыжные гонки) бесплатное казино порно с Алексей Миранчук (футбол) порно с Захарова Мария Владимировна
DiskiPlus Юдаева Ксения Валентиновна порно DiskiPlus слот casino <a href=https://www.diskiplus.ru/>DiskiPlus inform@rucriminal.info</a> DiskiPlus казино рояль смотреть DiskiPlus порно с Елена Никитина, скелетонистка <a href=https://diskiplus.ru>DiskiPlus лучшие казино бесплатно</a> DiskiPlus r7 casino DiskiPlus black russia казино DiskiPlus 1×bet зеркало на сегодня DiskiPlus бесплатно фильм казино DiskiPlus порно с Баталина Ольга Юрьевна DiskiPlus Комарова Наталья Владимировна порно DiskiPlus ев казино
#3828 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации 2025
Если вы опытный игрок, вы обязаны аристократия, что бонус без депозита – редкая находка. Тем не, мы неделю исследуем интернет, дабы найти для вас наилучшие бездепозитные предложения. <a href=http://filmkachat.ru/>1×slots зеркало рабочее</a> Каждый игрок обязан сперва детально выучить условия по получению и отыгрышу приглянувшегося дара. Если всё организует, поторопитесь арестовать безвозмездные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо в начать вращать барабаны лучших слотов. <a href=https://www.webwiki.com/astramedika.com.ua>https://www.webwiki.com/astramedika.com.ua</a> Также бездепозитные бонусы могут служить способом возвратить к игре посетителей, временно приостановивших своё сотрудничество с фирмой: уведомление о бездепе поступает на мобильный телефонный или почту. скачать 1×slots на андроид мобильная версия <a href=http://www.aytastarim.net/index.php?subaction=userinfo&user=ywosahu>http://www.aytastarim.net/index.php?subaction=userinfo&user=ywosahu</a> Можно ли в одном онлайн казино получить больше 1-го приза за регистрацию? Нет, так как в каждом онлайн казино есть верховодила, к которым нужно держаться, не творить 2 аккаута для получения бонусов, другому несомненно блокировка обоих аккаутов, не пытайтесь перехитрить онлайн казино, приз за регистрацию выдаеться один один одному личику.Шаг 4. Активация. Внимательно выучите условия, информацию по лимитированиям и сроке деяния бонусного предложения. Разобравшись с правилами, возможно активировать приз в личном кабинете (времени ? с внедрением промокода) или по запросу в саппорт.
1×slot рабочее зеркало
В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая доля игры. Важно, зачастую бездепозитные призы в казино выдаются с ограничениями по наибольшей выплате. В среднем можно рассчитывать на прибыль в несколько тысяч рублей. Как исключить выигрыш с бонуса без депозита. Придётся подтвердить акк документально, в некоторых заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате либо прочтите в правилах.В качестве бонусов онлайн казино часто предлагает выдачу фриспинов, другими бесплатных вращений игрового барабана. Виртуальные монеты можно использовать для изучения в покерной школе или для игры в казино. <a href=https://www.globalvision2000.com/forum/member.php?action=profile&uid=1072499>1× слот зеркало</a> 1×slots актуальное зеркало <a href=https://www.google.mn/url?q=https://doctorlazuta.by/>https://www.google.mn/url?q=https://doctorlazuta.by/</a> зеркала 1×slots Необходимость отыгрыша. Вейджер такой выше, чем для призов за депо. И же свои не отыграны, вывести их невозможно.
1×slots регистрация 1×slots casino c2d ru
Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция содержит доскональные правила, гиперссылка на коие обычно содержится в промообъявлении. В них указываются лимиты, вейджер, перечень дешевых игр. Если оператор укрывает данные о предложении, то пользоваться им не. <a href=http://ortho.wikispace.net/doku.php?id=Выкуп_авто>http://ortho.wikispace.net/doku.php?id=Выкуп_авто</a> 1×slots казино зеркало Но такие рамки не смущают даже хайроллеров, поскольку коэффициенты на слотах позволяют рассчитывать на крупные выигрыши, а неких автоматах разыгрывается прогрессивный джекпот.Объективные – размер бонуса, коэффициент и условия вейджера, необходимость внесения депозита для вывода денег;
1×slots актуальное зеркало
В современность очень просто получить бонус за регистрацию в казино. Практически любой игорный дом с готовностью начислит средства или бесплатные вращения. Многие гэмблеры используют этим и не стыдятся региться в любом клубе с прибыльными критериями. Кстати, это замечательная возможность выработать победную стратегию и сорвать джекпот. <a href=http://kemsrr.forumex.ru/viewtopic.php?f=7&t=2615>1× slots зеркало</a> Также учтите, что кое-какие игровые платформы сузивают список государств, которые готовы получить предложенный бездепозитный приз за регистрацию. К образцу, есть онлайн-заведения, выдающие подобные бонусы лишь жителям определенных государств. К образцу, онлайн казино 777 Оригинал предоставляет бездепозитный приз только игрокам из России и государств СНГ. Или напротив, снабжают вознаграждением всех, не жителей неких стран (исходя из сего, стопам внимательно учить перечень, дабы потом не появилось никаких вопросов и жалоб). Исходя из сего, просто не существует осмысленных оснований махнуть рукою на получение такого бонуса при регистрации. И, не, на такой безвозмездной базе у вас есть шансы выиграть деньги и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные призы, именуют бесплатными интернет платформами для игр. 1×slot казино зеркало <a href=http://rozetkarok.ru/index.php?subaction=userinfo&user=nonstopghoul7>http://rozetkarok.ru/index.php?subaction=userinfo&user=nonstopghoul7</a> Иногда у посетителей сайта шансы возникнуть трудности, задачи, препядствия при активации полученного промо-кода. В этих случаях, необходимо адресоваться за поддержкою в саппорта «Support». Для получения ответа, непременно указывается определенная первопричина воззвания и подтверждается информация дополнительными скриншотами. Если сформировалась неоднозначная обстановка, постоянно можно обратиться к главному регулятору либо контролирующему органу, выдавшему данному заведению лицензионный документ.Как только получите бездеп в казино, всё также не забывайте инспектировать электрическую почту. Некоторые игорные клубы каждый веселят интенсивных гэмблеров приятными бонусами. Чаще всего получить подарок можно в преддверии праздника, на денек рождение, за привлечение приятеля. А также распространённым призом является прибавка к депозиту. Нужно чем восполнить счёт, и азартное заведение увеличит его на 50–100%.
1х слотс зеркало регистрация в 1×slots casino
В онлайне слишком количество скриптовых вебсайтов, коие принадлежат мошенникам. Их основная задача – привлечь гэмблеров, пообещав не щедрые подарки, но и крупные выигрыши. Так собственно кое-какие сайты предлагают получить за регистрацию том $1 000. <a href=http://unit.igaoche.com/home.php?mod=space&uid=1359062>http://unit.igaoche.com/home.php?mod=space&uid=1359062</a> Бездепы все заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами.В некоторых онлайн казино для получения бездепозитных призов не довольно просто зарегистрироваться на веб-сайте клуба и подтвердить свои контактные данные. Дополнительно требуется активация промокода. 1×slots регистрация то дальше необходимо пройти
<b>Смотреть еще похожие новости:</b>
<a href=https://www.makinamania.net/index.php?topic=252403.new#new>1×slot казино зеркало</a>
<a href=https://thetechmodders.com/forums/viewtopic.php?t=63687>1×slots регистрация 1×slotscasino09k online</a>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=323513&pid=645309#post_645309>1×slots зеркало которую указывали при регистрации кстати</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вы не в коем случае ни чем не рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической забавы на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, научится регулировать менять ставки и полосы, исследовать бонусные забавы и их выигрышные комбинации, ну в конце концов просто зарядится кучей впечатлений! Ведь вы будите выступать на бонусные средства, коие возможно отыграть и исключить, а не просто на демо счет, что, этим наиболее адреналин в крови более повысится а пульс забьется с нередким ритмом! Возможность протестировать новые забавы, не рискуя личностными своими и разработать собственную тактику игры.
#3829 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet 1 Шевцова Татьяна Викторовна порно <a href=https://glvk.guru/>1×bet регистрация</a> зеркала казино бк букмекерская контора <a href=https://rucriminal.info/>казино смотреть</a> скачать сайт букмекерской конторы casino зеркало сегодня рабочее casino официальный сайт casino на телефон 7k casino сайт casino 7k сегодня 1×bet зеркало на сегодня 1×bet xyz
DiskiPlus букмекерские конторы бет DiskiPlus порно с Евгения Медведева <a href=https://diskiplus.ru>DiskiPlus казино ли</a> DiskiPlus казино можно DiskiPlus Разуваева Ксения Денисовна порно <a href=https://www.diskiplus.ru>DiskiPlus казино ставка</a> DiskiPlus казино ли DiskiPlus porno Дарья Клишина DiskiPlus pin up casino пин ап DiskiPlus букмекерская контора DiskiPlus какие казино DiskiPlus casino зеркало сегодня DiskiPlus 1×bet слоты
#3830 Ремонт холодильников Hotpoint Ariston Москваoyhirbhttps://remont-holodilnikov-hotpoint-ariston-vas.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт холодильников hotpoint ariston рядом, можете посмотреть на сайте: <a href=https://remont-holodilnikov-hotpoint-ariston-vas.ru/>ремонт холодильников hotpoint ariston рядом</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#3831 Ремонт холодильников Mielehttps://remont-holodilnikov-miele-verd.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт холодильников miele, можете посмотреть на сайте: <a href=https://remont-holodilnikov-miele-verd.ru/>срочный ремонт холодильников miele</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#3832 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации 2025
Рассмотрим принцип его действия на случае. Допустим, вы зарегистрировались и получили $10 no down payment bonus с вейджером х50. Это означает, собственно выигранные деньги можно будет выводить не ранее, чем последствии такого, как общая сумма ставок достигнет $500. <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> Автоматы непопросту числятся наиболее известным азартным весельем. Чтобы усвоить управление и правила, понадобится всего количество мин. Ваша задача устроить ставку, найти число трудящихся линий и можно крутить барабан. Если на выпадет выигрышная комбинация – вы выиграли! С этой задачей вас помогут управится бездепозитные призы казино.Простая процедура получения бездепозитного приза, которая займет не более 2-х мин. Для получения бездепов, достаточно зарегистрироваться и доказать контактные данные. <a href=https://app.pipefy.com/organizations/301582382/interfaces/3cb17c11–0e57–461f-8383-e1e42508bc5a/pages/8c03e96c-e422–45c5–89db-a09ec6070594>https://app.pipefy.com/organizations/301582382/interfaces/3cb17c11–0e57–461f-8383-e1e42508bc5a/pages/8c03e96c-e422–45c5–89db-a09ec6070594</a> В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с даровых вращений. Прибыль, которую Вы заработаете на этом бездепе можно ставить на вывод без какого либо отыгрыша. 1×slots сайт зеркало <a href=https://eco-kamchatka.ru/user/DeweyTug/>https://eco-kamchatka.ru/user/DeweyTug/</a>
1×slots казино зеркало
Бездепозитные призы казино это финансовая компенсация, предлагаемая юзерам на дармовой основе и вероятность играть в онлайн казино безвозмездно. Если сравнивать их с одобрениями за вклад, в средства выдаются лишь впоследствии первоначального пополнения счета, то бездепозитные вознаграждения получаются бесплатно. То есть, играющий получает вероятность делать ставки на уже имеющие финансы, которые выдаст заведение, выполняя, при этом, обычные действия, чтобы их извлечь (здесь идет о регистрация, удостоверении личности с внедрением номера телефонного, оформления заявки и т.д.).Способы получения бездепа различаются от облика приза, который понравился игроку. Но для или надо(надобно) быть зарегистрированным в легальном онлайн-казино и подтвердить свою личность. В общем виде пошаговая инструкция для получения бездепозитного приза смотрится например: 1×slots casino регистрация <a href=https://studynotes.ie/posts/MNID8Y->https://studynotes.ie/posts/MNID8Y-</a> Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. 1×слотс казино
1×slots casino регистрация
Объективные – размер бонуса, коэффициент и условия вейджера, надобность внесения депозита для вывода денег; Казино дает возможность заработать и исключить реальные средства на бездепозитных призах. Обычно, это незначительная сумма, которую казино возможность себя разрешить подарить игроку. <a href=http://jusintergentes.com.ua/index.php?option=com_k2&view=itemlist&task=user&id=1380278&lang=uk>http://jusintergentes.com.ua/index.php?option=com_k2&view=itemlist&task=user&id=1380278&lang=uk</a> 1×slots бонус за регистрацию
1×slots регистрация 1×slotscasino 56 online
Если при регистрации показать промокод, можно гарантировано получить приз. Где брать ваучер? Посетите тематические блоги или форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В заключительнее время игорные дома начали рекламироваться в фильмах и сериалах. Присмотритесь и всего заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных рублей. казино 1×slots <a href=https://stomping-groundz.com/index.php?action=profile;u=2943>https://stomping-groundz.com/index.php?action=profile;u=2943</a> В зависимости от онлайн заведения каждый из них возможность вам предложить как бездепозитные средства, например и бездепозитные фриспины, коие после удачной регистрации упадут вам на ваш игровой баланс.
1×slots рабочее зеркало на сегодня
Прямо сейчас отберите бесплатные вращения за регистрацию без депозита и начинайте коллекционировать призовые композиции ради солидных выигрышей!Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. <a href=https://images.google.com.co/url?q=https://doctorlazuta.by/>https://images.google.com.co/url?q=https://doctorlazuta.by/</a> На странице представлены бездепозитные бонусы за регистрацию в казино редкая награда за которой гонятся все игроки как новенькие, например и профессионалы. Мы также уделяем огромное внимание на наличие бонусов при составление рейтинга казино на средства. Бездепозитный приз это вероятность выступать безвозмездно и выиграть реальные средства. x1 slots регистрация в 1×slots casino Начнём с как, собственно любое рекламную за регистрацию предполагает некие условия. Бездепозитные призы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность денежного оборота, необходимая для выполнения условий. Пример, получили бесплатные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 руб., неудачных либо выигрышных, важно. После исполнения, бонусный баланс перейдёт на реальный и будет доступным к выводу.
<b>Смотреть еще похожие новости:</b>
<a href=https://feederfishing.lt/en/forum/pokalbiai-apie-viska/1375033–1×slots-demo-1×slots-cas#1386507>1×slots официальный demo регистрация в 1×slots casino</a>
<a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=436513&p=1351850#p1351850>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Кешбэк-бонус дает собой возврат фиксированного процента от ставки в случае поражения или же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не превышает 10%.
#3833 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино большая up букмекерская контора <a href=https://vestnik-jurnal.com/>black russia казино</a> porno Илья Ковальчук (хоккей) порно с Георгий Джикия (футбол) <a href=https://7club7.com/>порно с Елена Никитина, скелетонистка</a> почему в казино нет окон 1×bet зеркало рабочее на сегодня порно с Зырянова Анастасия Владимировна 1×bet слоты официальный сайт мелбет букмекерская контора 1×bet зеркало рабочее на сегодня 1×bet xyz букмекерская контора бесплатно скачать
DiskiPlus порно с Алексей Миранчук (футбол) DiskiPlus официальные букмекерские конторы <a href=https://www.diskiplus.ru>DiskiPlus человек казино</a> DiskiPlus порно с Владимир Минеев (ММА) DiskiPlus casino рабочее зеркало <a href=https://diskiplus.ru>DiskiPlus порно с Анна Калинская (теннис)</a> DiskiPlus букмекерская контора без DiskiPlus скачать 1×bet на андроид DiskiPlus порно с Анна Калинская (теннис) DiskiPlus казино сочи DiskiPlus casino актуальное зеркало DiskiPlus рокс казино DiskiPlus порно с Кирьянова Дарья Борисовна
#3834 Charlesgunnyhttp://filmkachat.ru
зеркала 1×slots
Вообще перейдя в казино — правила одинаковы в получении бездепозитных призов, в стереотипные верховодила входит: доказать эл. Почту и аппарат, заполнить собственный личный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ.Самые знаменитые способы вывода денег ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам типа Neteller и Skrill, а используют криптовалютными кошельками. Вывод выигрышей имеет осуществляться мгновенно либо развлекать от нескольких часов до нескольких суток. <a href=http://filmkachat.ru/>1×slot официальный сайт</a> <a href=https://offcourse.co/users/profile/%D0%BC%D0%B0%D0%BDi%D0%BA%D1%8E%D1%80-%D0%BD%D0%B0-%D0%BA%D0%BE%D1%80%D0%BE%D1%82%D0%BAi-%D0%BDi%D0%B3%D1%82i/>https://offcourse.co/users/profile/%D0%BC%D0%B0%D0%BDi%D0%BA%D1%8E%D1%80-%D0%BD%D0%B0-%D0%BA%D0%BE%D1%80%D0%BE%D1%82%D0%BAi-%D0%BDi%D0%B3%D1%82i/</a> Однако далеко не все ресурсы предлагают своим посетителям бездепозитные призы за регистрацию в казино. В большинстве случаев предусмотрено поощрение на первый депозит в размере 100–200%. Это отличная вероятность преумножить банкролл, прирастить время, проведённое за игрой и шансы сорвать крупный куш. 1×slots официальный зеркало <a href=https://bongatoken.com/user/JasperGes/>https://bongatoken.com/user/JasperGes/</a>
1×slots casino регистрация 1×slotscasino09k online
<a href=https://mit-bbs.com/viewtopic.php?t=157585>1×slots зеркало быструю регистрацию а также мгновенное</a> 1×slots официальный сайт, скачать Казино выделяет возможность заработать и исключить настоящие средства на бездепозитных бонусах. Обычно, это незначительная сумма, коию казино возможность для разрешить презентовать игроку.Для получения приза нужно пригласить в забаву нового посетителя. Казино начисляет пригласившему фиксированный процент от взносов приглашённого в виде бонуса: почаще всего его объем не выше 10%. Срок деяния приза как не выше месяца: пригласивший получает приз зависимо проигранных ставок приглашённого в 1-ый месяц игры. <a href=https://loansnearme.com.au/author/doctorlazutakt/>https://loansnearme.com.au/author/doctorlazutakt/</a> 1×slots актуальное зеркало
1×slots casino зеркало рабочее
Бесплатный приз – кредиты, коие онлайн-казино начислит посетителю, не принуждая его пополнять игровой счет. Бонус в казино без депо содержит различные вариации: такое быть приветственный приз, акции в честь каких-либо дней или весомых дат, бонус за привлечение свежих игроков, преданность и получение VIP-статуса.В качестве бонусов онлайн казино нередко предлагает выдачу фриспинов, то есть безвозмездных вращений игрового барабана. Виртуальные монеты возможно использовать для обучения в покерной школе либо для игры в казино. <a href=https://swordmaster.org/user/Brianlib/>https://swordmaster.org/user/Brianlib/</a> Новички не любят сразу же вносить депозит. Это обосновано неимением опыта и сомненьем. К счастью, в можно получить бездепозитный бонус за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В любом случае вы не рискуете своими сбережениями. Это замечательная вероятность запустить приглянувшийся видео разъем либо же испытать удачу в настольных забавах.Если вы новичок в и лишь попали в неизведанную вами область пыла — счет предложений как бездепозитные призы без пополнения. 1×slots официальный регистрация
1×slots официальный сайт мобильная версия скачать
Так что главное различие подарка на депо от бездепа – неотъемлемое пополнение счёта. Вы можете привнести депозит и преувеличить стартовый капитал или арестовать бездеп и этом не придётся рисковать своими сбережениями. Поспешите выполнить обычные требования, и администрация ресурса начисляет щедрое поощрение! <a href=https://adminclub.org/showthread.php?tid=64270>1×slots регистрация на сайте</a> Казино выделяет возможность заработать и исключить реальные деньги на бездепозитных призах. Обычно, это незначительная сумма, которую казино имеет для разрешить презентовать игроку.Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. 1×slots официальный сайт зеркало <a href=http://usr.by/user/Gregoryweicy/>http://usr.by/user/Gregoryweicy/</a> Чаще всего применяются коды. Их надо(надобно) вносить в особые окошки регистрационной анкеты, в речь о пригласительных призах, или в особом разделе собственного кабинета игрока.
рабочее зеркало 1хслотс
Популярность интернет казино растёт и всё больше юзеров начинают проявлять азартными играми. Бездепозитные бонусы 2022 года, это уникальные подарки за регистрацию. С их поддержкой новые игроки все получить благотворительные вращения либо средства на баланс за одну регистрацию. С выходом игорных заведений в онлайне, бездепозитные призы стали моднейшим способом вербования игроков. Подобные промоакции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о коих мы расскажем. Наш сайт собрал лучшие предложения из онлайна на 2022 год. Воспользуйтесь хоть подарком и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить обстоятельства. Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы которые возникают у начинающих.Можно. Вы всегда можете отказаться от получения бездепозитного бонуса за регистрацию в казино, же Вы не создадите ставку. <a href=http://worldpoetry.cn/home.php?mod=space&uid=329064>http://worldpoetry.cn/home.php?mod=space&uid=329064</a> 1×slots зеркало В интернете много знаменитых игорных площадок с красивыми акционными предложениями. Однако пристально читать условия 10-ов услуг времени надоест, да и время отнимет много. Поэтому наша команда подготовила ТОП-3 вебсайтов с наилучшими бездепозитными бонусами:Иногда у гостей сайта шансы появиться трудности, задачи, препядствия при активации полученного промо-кода. В таких случаях, необходимо обратиться за подмогою в саппорта «Support». Для получения ответа, непременно указывается определенная причина воззвания и подтверждается информация дополнительными экрана. Если сформировалась неоднозначная обстановка, постоянно можно адресоваться к основному регулятору или контролирующему органу, выдавшему данному заведению лицензионный документ.
<b>Смотреть еще похожие новости:</b>
<a href=https://pbtur.com.br/users/jameshex>1×slots рабочее зеркало</a>
<a href=http://medforum.5nx.ru/viewtopic.php?f=4&t=6809>1×slot зеркало</a>
<a href=https://forum.bandariklan.com/showthread.php?tid=176825&pid=959948#pid959948>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Промокод – определённая комбинация символов, коию нужно ввести в отвечающее фон при твореньи учетной записи либо активировать в собственном профиле игрока в разделе с бонусами. Начнём с того, что любое рекламную за регистрацию предполагает некие условия. Бездепозитные призы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность валютного оборота, нужная для выполнения условий. Пример, получили безвозмездные вращения и выиграли с них 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 руб., проигрышных или выигрышных, не. После исполнения, бонусный баланс перейдёт на реальный и станет доступным к выводу.
#3835 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Александр Большунов (лыжные гонки) 1×bet официальный слоты <a href=https://strelochnik.com/>демо казино</a> букмекерская контора бесплатно скачать Попова Анна Юрьевна порно <a href=https://vestnik-jurnal.com/>1win букмекерская контора</a> порно с Аделия Петросян (фигурное катание) букмекерские конторы без депозита casino бездепозитный букмекерская контора вход casino online зеркало Семёнова Татьяна Владимировна порно порно с Дарья Касаткина (теннис)
DiskiPlus где казино DiskiPlus bitz casino <a href=https://diskiplus.ru/>DiskiPlus скачать 1×bet на андроид бесплатно</a> DiskiPlus порно с Юлия Ефимова DiskiPlus casino бездепозитный <a href=https://www.diskiplus.ru>DiskiPlus букмекерская контора на андроид</a> DiskiPlus 1×bet зеркало рабочее DiskiPlus pinco casino DiskiPlus про казино DiskiPlus букмекерская контора леонов DiskiPlus смотреть фильм казино DiskiPlus Елена Лядова DiskiPlus букмекерские конторы в россии
#3836 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
Выиграть реальные деньги в казино не пополняя счет – сложно, хотя вполне. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными призами и начните играть на бонусные средства. По статистике в 10-ти заведений можно заработать маленькую необходимую средств помощью бонусных средств.Бездепозитный приз за регистрацию в казино — это стартовый подарок повторяющий денежного начисления или безвозмездных вращений для новых игроков заведения, для получения которого не заносить депо. <a href=http://filmkachat.ru/>1 x slots casino</a> Прибывшие на акк деньги бездепозитные призы предназначаются, главном, лишь для новоиспеченных пользователей, которые раньше не имели собственного аккаунта в данном казино. Исходя из сего, если ранее у игрока был изготовлен депозит, то, по всей вероятности, у него больше не будет возможности рассчитывать на получение такового бонуса в определенном заведении. <a href=https://heroes.app/blogs/443170/3D-Visualization-Specialist-Expert-Services-Career-Guide>https://heroes.app/blogs/443170/3D-Visualization-Specialist-Expert-Services-Career-Guide</a> Каждая игровая платформа выделяется условиями по получению и отыгрышу бездепов. В правилах детально расписаны временные рамки, за которые нужно прокрутить вейджер. Также не забывайте тему наибольший размер ставки и наивысшую необходимую выплаты. С другой стороны, чтобы получить бездепозитные призы казино, довольно израсходовать не более 1 минутки. 1хлот регистрация в 1×slots casino <a href=https://forums.overclockers.ru/memberlist.php?mode=viewprofile&u=429676>https://forums.overclockers.ru/memberlist.php?mode=viewprofile&u=429676</a> В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая часть игры. Важно, зачастую бездепозитные призы в казино выдаются с лимитированиями по наибольшей выплате. В среднем можно рассчитывать на выгода в количество тыщ рублей. Как вывести выигрыш с бонуса без депозита. Придётся подтвердить акк документально, в некоторых заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате либо прочтите в правилах.Как управляло, при выводе финансов, от играющего потребуется только устроить минимальный лепта чтобы, чтобы, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом собственный счет.
1×slots регистрация 1×slots review live
Большинство интернет-казино из нашего топ-10 готовы повеселить вас эксклюзивными промоакциями. Читайте о их в обзорах и на форуме.Бездепы обычно предлагают с отыгрышем — быстро исключить выигранные свои невозможно. Перевод денег со счета будет возможен последствии того, как пользователь выполнит все требования казино, а сумма имеет быть выше установленного правилами лимита. Условиями промоакции фиксируются сроки, протяжении коих заказчик вправе пользоваться предложением. Обычно они не превосходят нескольких дней в активации. 1×slots казино зеркало Вы не в коем случае ни чем рискуете, а только выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической забавы на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, выучится регулировать изменять ставки и линии, исследовать бонусные забавы и их выигрышные комбинации, ну счете просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные свои, которые возможно отыграть и вывести, а не просто на демо счет, что, этим наиболее адреналин в крови еще больше повысится а пульс забьется с частым ритмом! <a href=http://raid4×4.ru/memberlist.php?mode=viewprofile&u=11215>http://raid4×4.ru/memberlist.php?mode=viewprofile&u=11215</a> 1×slots бонус за регистрацию Бездепозитные призы отличный вариант безвозмездной забавы в игровые автоматы. Многие юзеры сети не знают, собственно в казино возможно начать играть абсолютно даром, а позже вывести выигрыш на банковскую карту или электрический кошелек, иные не доверяют интернет казино, а третьи удачно играют и выигрывают – и тотчас довольно большие суммы.
1×slots регистрация то дальше необходимо пройти
Поспешите отобрать бездепозитные призы за регистрацию в казино из представленного перечня. Все платформы не ведут легальную деятельность, но и порадуют правдивыми плодами игры, высочайшей отдачей, быстрыми выплатами. Для верификации номера телефонного, в собственном профиле выберите опцию „Подтвердить номер аппарата“ и введите в соответствующее фон код, приобретенный в sms-сообщении. <a href=http://lsdsng.com/user/543990>http://lsdsng.com/user/543990</a> Подтверждение регистрации. Казино требуют привязки профиля к электрическому адресу и номеру аппарата. Для этого на e-mail отчаливает послание со ссылкой, а на телефонный ? текстовое извещение с кодом.Выиграть настоящие средства в казино не пополняя счет – трудно, хотя вероятно. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными призами и начните играть на бонусные средства. По статистике в 10-ти заведений возможно заработать небольшую необходимую средств помощью бонусных средств. 1×slots бездепозитный бонус за регистрацию Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют актуальную информацию о not the slightest deposit bonuses и других предложениях.
1×slots сайт зеркало
Бездепозитные бонусы реальными деньгами, которые можно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадали.Принципиальным отличием даровых призов от бонусов на депозит является неименье надобности заносить деньги на акк. Из-за этого их часто именуют бездепозитными (no deposit bonuses). <a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=288260&pid=649109#post_649109>1×slots зеркало на сегодня</a> Отзывы читателей о бонусных акциях посодействуют составить впечатление, но не запамятовывайте о субъективности собственных объяснений.На бонусные начисления шансы быть установлены вспомогательные лимитирования, коие Вы не приняли при отыгрыше. Пока приз полностью не отыгран — деньги из казино не выводятся. В количестве случаев безвозмездные бонусы начисляются в кредитах, которые невозможно сразу вывести со счета. Прежде их нужно отыграть по установленным правилам. Эти требования принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже.Обычно показатель выше, чем для призов на депо. Не удивляйтесь, если он несомненно числе х100. Иногда завышенный коэффициент вейджера устанавливается для обитателей отдельных стран. 1хслотс мобильная версия зеркало <a href=http://agriexpert.kz/user/JulesSmabe/>http://agriexpert.kz/user/JulesSmabe/</a> Отзывы читателей о бонусных акциях посодействуют составить впечатление, но не забывайте о субъективности личных объяснений.1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, случае не желаете замерзнуть жертвой мошенников или впустую потратить время;
1×slots рабочее зеркало
Oтыгpaть приз с обозначенным вeйджepом, желаемого нужно сдeлaть cтaвoк нa cумму, превосходящую размер бонуса в несколько раз. <a href=http://61gold.ru/bitrix/redirect.php?goto=http://svetsadpark.ru/bitrix/redirect.php?goto=http://darcons.ru/bitrix/redirect.php?goto=https://teletype.in/@urist_free/VjCOBZmNnK_>http://61gold.ru/bitrix/redirect.php?goto=http://svetsadpark.ru/bitrix/redirect.php?goto=http://darcons.ru/bitrix/redirect.php?goto=https://teletype.in/@urist_free/VjCOBZmNnK_</a> Например, игрок получил 500 руб. При творении аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 рублей, понадобится устроить 875 спинов для полного отыгрыша. 1×slot рабочее зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://forumauthority.com/thread-6686.html>1×slot регистрация</a>
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-2013#post-57437>рабочее зеркало 1×slots</a>
<a href=http://theauction.com.au/my-account/>рабочее зеркало 1×slots</a>
<a href=http://miupsik.ru/forums/showthread.php?tid=248204>1х слот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Не хотите поиграть в азартные забавы, не рискуя средствами средствами, но получая в все выплаты? Подобную вероятность предоставляют почти наилучшие порталы с азартными весельями. В их количестве количество честных и надежных интернет-казино на русском языке. Они завлекают свежих юзеров разными поощрительными мероприятиями, включая бездепозитные, или бесплатные призы.
#3837 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
рабочее казино champion casino <a href=https://kompromat1.online/>порно с Евгений Малкин (хоккей)</a> порно с Васильева Татьяна Викторовна porno Ангелина Гончаренко, хоккеистка <a href=https://sovsekretno.net/>пин ап казино</a> лучшие онлайн казино 1×bet регистрация включи казино 1×bet зеркало рабочее на сегодня 1×bet xyz кент казино Яровая Ирина Анатольевна порно казино онлайн
DiskiPlus porno Игорь Акинфеев (футбол) DiskiPlus казино зеркало сегодня <a href=https://diskiplus.ru>DiskiPlus порно с Владимир Минеев (ММА)</a> DiskiPlus 1×bet бесплатно DiskiPlus 1×bet слоты 1×bet top <a href=https://diskiplus.ru/>DiskiPlus промокод 1×bet</a> DiskiPlus 1go casino DiskiPlus гта казино DiskiPlus официальные букмекерские конторы скачать DiskiPlus официальные сайты казино DiskiPlus порно с Александр Головин (футбол) DiskiPlus porno Светлана Ходченкова DiskiPlus 1×bet скачать бесплатно
#3838 Edwardmergohttps://oblako53.com/en/
Is it possible to win at <a href=https://oblako53.com/en/>Lucky Jet</a>? We analyze the main strategies, analyze player reviews, and give an honest assessment of the popular game. Read to avoid mistakes and increase your chances of success!
#3839 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Евгения Медведева порно с Дарья Клишина, легкоатлетка <a href=https://www.ossetia.tv/>автомат казино</a> porno Юлия Канакина официальное казино вход <a href=https://rumafia.news/>porno Катерина Шпица</a> Матвиенко Валентина Ивановна порно Попова Анна Юрьевна порно 1×bet официальный слоты 7k casino скачать букмекерские конторы без депозита порно с Дарья Клишина, легкоатлетка pin up casino скачать
DiskiPlus порно с Максим Глушенков (футбол) DiskiPlus сайт винлайн букмекерская контора <a href=https://diskiplus.ru>DiskiPlus макао казино</a> DiskiPlus пари букмекерская контора DiskiPlus букмекерская контора фонбет официальный <a href=https://diskiplus.ru>DiskiPlus champion casino</a> DiskiPlus рокс казино DiskiPlus porno Александр Соболев (футбол) DiskiPlus казино играть DiskiPlus фильмы казино рояль DiskiPlus casino сайты DiskiPlus порно с Голикова Татьяна Алексеевна DiskiPlus порно с Захарова Мария Владимировна
#3840 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация то дальше необходимо пройти
Выше мы дали полный набор самых свежих и своевременных бездепозитных призов в интернет казино без пополнения на 2022 год, где вам воспользоваться хоть ценным бездепозитным бонусом. <a href=http://filmkachat.ru/>рабочее зеркало 1хслотс</a> Заполняя данные в личном профиле, указывайте лишь достоверную информацию, так как Вам понадобиться ее подтвердить в будущем при выводе средств.Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция содержит доскональные управляла, ссылка на которые обыкновенно содержится в промообъявлении. В их указываются лимиты, вейджер, список доступных игр. Если оператор укрывает данные о предложении, то воспользоваться им надо. <a href=https://www.consult-exp.com/blogs/219721/Property-Development-3D-Renders-Visualizing-Real-Estate-Success>https://www.consult-exp.com/blogs/219721/Property-Development-3D-Renders-Visualizing-Real-Estate-Success</a> Выбрать казино с бездепозитным призом. У нас на сайте представлен перечень превосходнейших онлайн казино, коие предлагают своим игрокам великодушные призы за регистрацию. 1×slots сайт <a href=https://www.metasoa.com/bbs/board.php?bo_table=free&wr_id=119743>https://www.metasoa.com/bbs/board.php?bo_table=free&wr_id=119743</a> В интернете большое знаменитых игорных площадок с красивыми акционными предложениями. Однако внимательно читать обстоятельства десятков предложений времени надоест, ну и время отнимет большое. Поэтому наша команда подготовила ТОП-3 вебсайтов с лучшими бездепозитными бонусами:Мы подготовили список, где есть практически животрепещущие и новые бездепозитные бонусы казино, которые продоставляется получить безвозмездно. Для наших юзеров есть особые предложения неповторимые бонусы, которые вы нигде не отыщите, их мы обозначили специальной красной плашкой «Exclusive».
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Если речь об эксклюзивных предложениях, может потребоваться регистрация в казино по ссылке с партнерского сайта. 1хслотс 1хслотс регистрация перейти на 1×slots <a href=http://unqbit.org/bbs/board.php?bo_table=free&wr_id=9502>http://unqbit.org/bbs/board.php?bo_table=free&wr_id=9502</a> 1×slots casino регистрация 1×slotscasino09k online Акции распространяются как на все игры казино, так и на узкий список. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и другие. Промо имеет охватывать разработки 1-го производителя. Бездеп не пересекается с другими акциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, изготовленные бонусными средствами. Для идентификации платежных реквизитов игрока может понадобиться пополнение счета на минимальную необходимую.Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.
1хслотс официальный сайт зеркало
Демоказино есть почти на каждом сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются существенно пореже: там если, тогда, выигрыша и соблюдения критерий промоакций бездеп возможно перевоплотить в реальные средства. <a href=http://www.automingwei.com/home.php?mod=space&uid=60690>http://www.automingwei.com/home.php?mod=space&uid=60690</a> Необходимость отыгрыша. Вейджер в выше, чем для призов за депозит. И пока свои не отыграны, исключить их нельзя.Представленные на этой страничке превосходнейшие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные обстоятельства. После кропотливого анализа редакция портала составила рейтинг спецпредложений, каком гости Casino.ru имеют сортировать список по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д. 1×slots на любой вкус как пройти регистрацию Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша призов. Заведения постоянно устанавливают максимальную ставку, возможную по условиям вейждера.Поспешите забрать бездепозитные призы за регистрацию в казино из представленного перечня. Все платформы не ведут легальную работа, хотя и порадуют добросовестными плодами игры, высокой отдачей, быстрыми выплатами.
1×slots casino регистрация на сайте
Также существуют онлайн-платформы азартных игр, коие применяют раздачу бездепозитных бонусов в особые даты (как для казино, например и для игрока). Помимо этого, действующие геймеры кроме имеют вероятность получить похожие призы за собственную деятельность (к примеру, за увеличения значения либо за похожие заслуги).Можно ли в одном онлайн казино получить больше 1-го бонуса за регистрацию? Нет, так как в любом онлайн казино есть правила, к коим нужно придерживаться, не создавать 2 аккаута для получения призов, иначе будет блокировка обоих аккаутов, не пытайтесь обмануть интернет казино, приз за регистрацию выдаеться раз раз 1 лицу. Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные способы и расценить особенности, труднодоступные при ирге в демо режиме. Многие свежие посетители переходят в число постоянных, а оператор получает длительную прибыль.Бездепозитные бонусы – это исключительно интересная и более многообещающая промоакция интернет-казино. Они в превосходнее фри-спинов, потому собственно выплаты в безвозмездных вращениях не гарантированы, так композиции на барабанах игрового аппарата могут не сложиться. Выиграть реальные средства в казино не пополняя счет – сложно, хотя возможно. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными призами и начните играть на бонусные свои. По статистике в 10-ти заведений можно заработать маленькую необходимую средств за счет бонусных средств. 1×slots casino регистрация на сайте <a href=https://forum.gamefa.com/User-JoshuaLam>https://forum.gamefa.com/User-JoshuaLam</a> Перед активацией главно пристально выучить обстоятельства промоакции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют значение также лимиты ставок при отыгрыше и сроки, в течение которых можно воспользоваться предложением. Если бездеп охватывает узкий перечень игр, рекомендовано узнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь в случае, в оператор не установил взыскательные лимитирования на наивысшую сумму ставки.Новые клиенты онлайн-казино без первого депозита шансы выяснить собственную удачливость. К что, этому же есть возможность конвертировать бездепы в реальные деньги за регистрацию в казино, впрочем результата приз необходимо отыграть сообразно условиям промоакции.
1×slots casino регистрация 1×slots review live
Бездепозитный бонус – это финансовое вознаграждение, которое выдается участнику игры в казино, для его привлечения и возникновения заинтригованности. Любой гость, кот-ый подходит условиям выдачи сходственного бездепозитного бонуса, имеет претендовать на получение вышеуказанного приза. Такое одобрение считается более эффективным методом, дающим вероятность стартовать в игре, не вкладывая личных вещественных средств.Фриспины предназначены для применения в видео слотах. Внимательно ознакомьтесь с условиями – часто их выдают на кое-какие автоматы. В зависимости от клуба, у вас получится устроить определённое количество ставок. Кстати, продвинутые игорные дома позволяют запускать каждых «одноруких злодеев». <a href=https://39504.org/member.php?action=profile&uid=25862>https://39504.org/member.php?action=profile&uid=25862</a> Но никогда не запамятовывайте внимательно разбирать верховодила роли в бонусных акциях. Если вы нарушите хотя бы одно условие, позже вы не сможете уладить недоразумение с администрацией.Главное превосходство спинов – возможность изучить разные слоты. Также получится насладиться бонусными раундами, испытать фортуну в риск-туре и преувеличить выигрыш за счёт особенных символов. Однако не игровой процесс заслуживает внимание, так превосходнее сосредоточиться на реальном выигрыше. 1×slots зеркало При игре на бонусные свои воспрещается выступать в игровые автоматы с современным джекпотом и забавы из радела exist casino. Кроме такого, кое-какие казино дают бездеп на один либо несколько определенных слотов, и в других играх Вы не можете на них играть.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/8517/#comment-349998>1×slots casino зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Такие одобрения позволяют бесплатно протестировать новое казино, разобраться с игровым процессом онлайн слотов, заработать и исключить небольшую сумму денег. Не советуем сломя голову хвататься за различные предложения получения средств без инвестициям. Вполне вероятно, что бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем смотрится на 1-ый взгляд. Альтернативой является казино приз за депозит. Мы предлагаем вам пару советов, спасибо которым у каждого игрока будет вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом денег:
#3841 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало слоты new casino <a href=https://krtka.info/>бесплатное казино</a> 1×bet xbet 1×bet зеркало слоты <a href=https://rhymes-punches.com/>скачать букмекерскую контору</a> gama casino pin up casino buzz казино зеркало сегодня Москалькова Татьяна Николаевна порно kent casino регистрация casino ап 1×bet зеркало
DiskiPlus casino автомат DiskiPlus порно с Антропова Валентина Викторовна <a href=https://www.diskiplus.ru/>DiskiPlus casino x</a> DiskiPlus casino приложения DiskiPlus порно с Сергей Бобровский (хоккей) <a href=https://diskiplus.ru>DiskiPlus pin ап casino</a> DiskiPlus ставки на спорт букмекерские конторы DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz DiskiPlus Самойлова Алла Владимировна порно DiskiPlus букмекерские конторы без депозита DiskiPlus 1×bet зеркало слоты 1×bet xyz DiskiPlus 7k casino скачать DiskiPlus казино можно
#3842 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
балтбет букмекерская контора 1×bet на андроид бесплатно <a href=https://glvk.guru/>1×bet зеркало xbet xyz</a> порно с Захарова Мария Владимировна 1×bet зеркало слоты 1×bet xyz <a href=https://res-publika.com>автомат казино</a> 1×bet скачать приложение порно с Алексей Миранчук (футбол) ешь казино часы казино казино в россии бесплатно играем казино букмекерская контора вход
DiskiPlus 1×bet слоты 1×bet top DiskiPlus Попова Анна Юрьевна порно <a href=https://diskiplus.ru/>DiskiPlus пин ап букмекерская контора</a> DiskiPlus винлайн букмекерская контора официальный DiskiPlus букмекерская контора фонбет официальный <a href=https://www.diskiplus.ru>DiskiPlus приложения букмекерских контор на андроид</a> DiskiPlus порно с Антропова Валентина Викторовна DiskiPlus casino актуальное зеркало DiskiPlus 7k casino зеркало DiskiPlus порно с Александр Головин (футбол) DiskiPlus порно с Дарья Клишина, легкоатлетка DiskiPlus casino приложения DiskiPlus казино большая
#3843 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino 777 online
Перечисленные повыше основные характеристики сочетают фактически любой бонус и являются стереотипными для бездепозитных бонусных начислений в казино.Вейджер (wager) – это коэффициент, кот-ый показывает на какую сумму необходимо устроить ставок, чтобы исключить бонус из казино. Пример: Вы получили за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода сего приза, Вам нужно устроить ставок на необходимую: 500*70=3500 руб. Только всецело отыграв бонус, Вы сможете вывести свой выигрыш. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> <a href=https://app.planable.io/b/9T2nTzw9ATQAHwCt6/4AeAuPNczmkTXEDKm/wXHwiuHB6gHWWrXuP>https://app.planable.io/b/9T2nTzw9ATQAHwCt6/4AeAuPNczmkTXEDKm/wXHwiuHB6gHWWrXuP</a> 1×slots casino регистрация 1×slots review live <a href=https://stroyotzyvy.org/user/RalphLor/>https://stroyotzyvy.org/user/RalphLor/</a> Ну и конечно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: подобная добродушие увеличивает степень преданности посетителей к компании.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
1×slot официальный сайт Такие одобрения дозволяют безвозмездно протестировать новое казино, разобраться с игровым процессом онлайн слотов, заработать и исключить небольшую необходимую денег. <a href=https://full-chip.net/user/PatrickCoala/>https://full-chip.net/user/PatrickCoala/</a> Если вы новичок в этом деле и только попали в неизведанную вами область пыла — счет предложений как бездепозитные призы без пополнения.Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен список наилучших онлайн казино, коие предлагают своим игрокам великодушные призы за регистрацию. казино 1×slots официальный сайт
1×слот регистрация в 1×slots casino
Этот тип приза будет добавлен на Ваш акк после удачной процедуры регистрации с внедрением номера телефона. Если выбрать другой способ творенья учетной записи, бездеп не несомненно добавлен на Ваш акк. Обычно, бездепозитные призы выдаются под определенные слоты с фиксированной ставкой, хотя их точно запрещено использовать в игровых автоматах с современным джекпотом. Список игр, в возможно использовать бездеп, Вы отыщите в описании акции либо можете уточнить у службы заведения.Если вы выбрали для себя количество брендов которые для больше всего полюбились, для постоянной игры! Таких гемблеров казино довольно предпочитает и оценивает, за частую такие игроки становятся VIP игроками заведения, коим нередко поступают прибыльные предложения повторяющий призов, например же туда заходит и бездепозитные. <a href=https://cracked.sx/member.php?action=profile&uid=191708>https://cracked.sx/member.php?action=profile&uid=191708</a> Доступ к подарку имеет открываться автоматически в введения промокода либо обращения в службу поддержки сайта. В первом случае от пользователя не требуется практически поступков. Бездеп с активацией по коду встречается почаще всего. Игроку нужно установить совокупа символов в графе, которая возможность находиться в регистрационной форме в Личном кабинете.Денежные свои. Третий бонус за регистрацию без депозита – наличные. К сожалению, только известные и модные клубы имеют дать деньги в рублях или долларах. С их поддержкой вы сможете насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед этим необходимо исполнение определенных критерий. казино 1× slots официальный сайт Хотя безвозмездные бонусы начисляются без депо, не исключено, собственно вас придется заносить средства. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь после как, как свежий заказчик раз пополнит игровой счет.При отыгрыше бонусных средств, нужно учесть срок деяния приза и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный приз несомненно аннулирован.
1×slot зеркало рабочее этих способов предполагает регистрацию
Так собственно главное различие дара на депозит от бездепа – неотъемлемое пополнение счёта. Вы можете привнести депозит и преувеличить стартовый капитал либо арестовать бездеп и при этом не придётся рисковать своими сбережениями. Поспешите выполнить простые притязания, и администрация ресурса начислит щедрое поощрение! B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.Бездепозитный приз предоставляется новенькому игроку за конкретные деяния. Часто презент вид денег либо фриспинов выдается за регистрацию, благодаря чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. 1× slots сайт <a href=http://d992387h.bget.ru/user/Oscarher/>http://d992387h.bget.ru/user/Oscarher/</a>
1× slots регистрация в 1×slots casino
<a href=http://forum.omnicomm.pro/index.php/topic,9271.0.html>http://forum.omnicomm.pro/index.php/topic,9271.0.html</a> Превышение наибольшей ставки при отыгрыше. Система механически не предуведомляет о превышении ставки, потому о нарушении управлял игрок имеет узнать теснее в подачи запроса на вывод средств.Наиболее знаменитые гонорары между гэмблеров – бездепозитные бонусы казино. Это не изумительно, ведь можно получить безвозмездные вращения либо виртуальные кредиты, и при не придётся пополнять счёт, рисковать личными деньгами. Удастся насладиться разнородными развлечениями причем выиграть крупную сумму, избегая серьёзного риска. 1хслотс рабочее зеркало Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, дабы еще раз получить даровой бонус. Игорные заведения нетерпимы к бонус-хантерам, потому вас ждет неизбежное санкция.
<b>Смотреть еще похожие новости:</b>
<a href=http://g2clubs.com/healthy-workout/google/>1×slots официальный сайт зеркало рабочее</a>
<a href=https://hiddeninthesand.com/blogs/news/2024/11/the-unfortunate-history-of-fraudulent-tally-hall-uploads/#comment-48167>1хслотс рабочее зеркало</a>
<a href=https://sadhaka.nl/forum/viewtopic.php?t=102623>1хслотс регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Законодательство, регулирующее азартные игры в разных государствах, влияние на полномочия операторов. В результате пользователи из отдельных регионов сталкиваются с лимитированиями со стороны казино. Это может быть как глубокий отказ в доступе, например и невозможность загружать игры отдельных производителей.
#3844 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино без 1×bet рабочее на сегодня <a href=https://th-royalgclub.com/>скачать 1×bet на андроид бесплатно</a> Скворцова Вероника Игоревна порно 1×bet xbet xyz <a href=https://t.me/vchkogpu_ru>Манилова Алла Юрьевна порно</a> casino buzz Ирина Горбачева бесплатное казино 1win букмекерская контора pin casino казино пин Кузнецова Анна Юрьевна порно
DiskiPlus порно с Александр Головин (футбол) DiskiPlus 1×bet зеркало слоты 1×bet xyz <a href=https://diskiplus.ru/>DiskiPlus лучшие букмекерские конторы</a> DiskiPlus порно с Сергей Бобровский (хоккей) DiskiPlus порно с Илья Осипов (киберспорт) <a href=https://www.diskiplus.ru>DiskiPlus champion casino</a> DiskiPlus porno Елизавета Туктамышева DiskiPlus реального казино DiskiPlus скачать 1×bet на андроид бесплатно DiskiPlus букмекерские конторы без депозита DiskiPlus винлайн букмекерская контора официальный DiskiPlus букмекерские конторы в россии DiskiPlus скачать pin casino
#3845 Charlesgunnyhttp://filmkachat.ru
1×slots быструю регистрацию а также мгновенное
Как прочие промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения являются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает новых гостей и дозволяет им составить эмоцию о функционале, не рискуя значительными суммами.Хотя благотворительные призы начисляются без депо, не исключено, собственно вам понадобиться заносить деньги. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только в того, как свежий клиент первый пополнит игровой счет. <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino09k online</a> <a href=http://www.fanart-central.net/user/3d-furniture-rendering/profile>http://www.fanart-central.net/user/3d-furniture-rendering/profile</a> Перед активацией главно пристально выучить условия акции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, протяжении коих возможно воспользоваться предложением. Если бездеп обхватывает ограниченный перечень игр, рекомендовано разузнать максимальные коэффициенты, уровень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь что, нет случае, если оператор не установил строгие ограничения на максимальную сумму ставки.После требуется внести идентификационный платёж. Это стращает начинающих больше всего. Нужно устроить минимальный депо в 100–500 рублей. Таким образом служба безопасности убедиться в, собственно платёжный метод принадлежит Вам. Данная процедура важна для обеспечения защищенности игровых счетов. Пример, Ваш акк взломают и выведут средства на свой кошелёк. Будет крайне досадно. Поэтому верификация платёжной системы, это необходимый момент. зеркло казино 1×slots <a href=http://mayakminska.1stbb.ru/memberlist.php?mode=viewprofile&u=9211>http://mayakminska.1stbb.ru/memberlist.php?mode=viewprofile&u=9211</a> Казино выводит деньги только на что, эту платежную систему, с котрой был сделан депозит. То есть, для вывода бездепозитного приза, Вам сначала нужно пополнить счет. В неких клубах узкий список способов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с этих платежных способов, которые доступны для вывода.Ну и конечно же, для казино бездепозитные призы прибыльны с имиджевой стороны: подобная добродушие повышает уровень лояльности посетителей к компании.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
казино 1×slots официальный сайт Допустим, за регистрацию вы получили бездеп в объеме 2 000 рублей с вейджером х30. В данном случае светит сделать ставок, на общую необходимую в 60 000 руб. (2 000 * 30 = 60 000). Когда выполните обстоятельства по отыгрышу, придёт время заработать настоящие средства. Однако не забывайте, что с любого презента выйдет исключить определённую сумму (чаще всего менее $200).Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. <a href=https://www.nordicpromos.com/boards/topic/684339/%D0%BD%D0%B0%D0%B9%D0%BA%D1%80%D0%B0%D1%89%D1%96-%D0%BA%D1%80%D0%B5%D0%B4%D0%B8%D1%82%D0%B8-%D1%82%D1%83%D1%82#560499>https://www.nordicpromos.com/boards/topic/684339/%D0%BD%D0%B0%D0%B9%D0%BA%D1%80%D0%B0%D1%89%D1%96-%D0%BA%D1%80%D0%B5%D0%B4%D0%B8%D1%82%D0%B8-%D1%82%D1%83%D1%82#560499</a> Далее потребуется отыграть вагер и исключить выигрыш. Игрокам без навыка крупно повезло, они могут получить 10-ки подарков за 1 регистрацию. Если не сумели получить Бездепозитный приз, не беспокойтесь. Обратитесь в онлайн чат, оператор поможет решить проблему. 1×slots регистрация
1хслот официальный сайт зеркало
Изучить правила и условия получения бездепозитных бонусов казино, Вы сможете у нас на сайте в разделе с бонусами или на официальном веб-сайте выбранного Вами казино. Если возможности отыскать необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электронной почте.Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации приза без депо. Внимательно прочтите до конца. Многие новенькие проделывают ошибки на этапе регистрации и поэтому не получить презент. При регистрации по указывать лишь достоверную информацию. Когда учетная запись будет активна, замечен доступ в Личный кабинет. В нем возможно избрать еденицу, установить промокод и разузнать подробные правила получения и отыгрыша бездепа. Краткая информация об промоакции часто находится непосредственно на регистрационной форме.В реальное время получить приз за регистрацию в казино довольно просто. Почти любой игорный жилище с радостью даст деньги либо благотворительные вращения. Многие игроки пользуются этим и не стесняются региться в каждом клубе с выгодными критериями. Кстати, это отличная возможность придумать выигрышную тактику и сорвать куш. <a href=http://munservis.mirniy.ru/user/DoctorLazutapt/>http://munservis.mirniy.ru/user/DoctorLazutapt/</a> Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке представители онлайн-казино публикуют актуальную информацию о no down payment bonuses и других предложениях. 1 х слотс зеркало Так собственно можете отважно регистрироваться без всяких размышлений. Фортуна сегодня наверняка на вашей стороне. Не бойтесь, так следствие какого или убытка Вам совершенно не грозит. С этими призами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе.
1×slots быструю регистрацию а также мгновенное
Стоит обозначить(означить), что бездепозитный приз выдается лишь взрослым новеньким, которые, же, имеют пригласить собственных друзей и своих, кроме рассчитывающих на поощрительную программу преданности. Подобная технология замечена среди создающих онлайн-казино для популяризации и расширения трафика. Покер румы и спонсоры содействуют увеличению собственной популярности, путем привлечения новых игроков. Бонусы – это оригинальный шанс для вероятных участников забавы, которые могут опробовать софт покер рума и увериться, станут ли они в него выступать или нет. Новый игрок испробует средства силы с реальными оппонентами в казино.Постарайтесь отыграть вейджер, дабы замечена возможность оставить заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электрической кошелёк, карту, аппарат. <a href=https://fougerite.com/members/jamesstawl.14360/>1хслотс рабочее зеркало</a> 1×slots бонус за регистрацию <a href=https://clients1.google.com.mm/url?q=http%3A%2F%2Fdoctorlazuta.by>https://clients1.google.com.mm/url?q=http%3A%2F%2Fdoctorlazuta.by</a> Процесс доказательства личности может занять от 1-го денька до недели. Если клиент разрешил какую оплошность при заполнении паспортных данных, то ему по адресоваться с проблемой в службу поддержки онлайн-казино.
1×slots рабочее зеркало
Новички не любят незамедлительно же заносить депо. Это обосновано неимением опыта и сомнением. К счастью, дни возможно получить бездепозитный бонус за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В любом случае вы не рискуете своими сбережениями. Это отличная возможность запустить понравившийся видео разъем либо же испытывать удачу в настольных играх. Не хотите поиграть в азартные игры, не рискуя средствами деньгами, хотя получая в все выплаты? Подобную вероятность деют почти лучшие порталы с азартными весельями. В их числе много правдивых и надежных интернет-казино на русском языке. Они привлекают новых пользователей разными поощрительными мероприятиями, включая бездепозитные, или безвозмездные призы. <a href=http://wiki.myamens.com/index.php/1×slots_%D0%97%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE_%D0%A0%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5>http://wiki.myamens.com/index.php/1×slots_%D0%97%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE_%D0%A0%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5</a> 1×slots на любой вкус как пройти регистрацию Риск-игра по одинаковым шансам – Также казино возможность запрещать скорпулезно условия по отыгрышу счет раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких иных играх.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.vn.ua/showthread.php?p=3279757#post3279757>1×slots регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. Маркетинговая политика всех игорных интернет-клубов должна одевать разнородный нрав. И если вознаграждения на депозит работают для того, дабы стимулировать вносить депозиты и поощрять теснее имеющих пользователей, то бездепозитный бонус в казино или бонус за регистрацию в казино, до всего, рассчитан на расширение базы покупателей.
#3846 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Комарова Наталья Владимировна порно porno Анна Сидорова, керлингистка <a href=https://m.repost.news/>казино 1</a> Александра Бортич порно с Юлия Ефимова, пловчиха <a href=https://rucriminal.info/>порно с Елена Никитина, скелетонистка</a> Мухтиярова Елена Вячеславовна порно 7k casino зеркало Приезжева Екатерина Геннадьевна порно почему в казино не бывает настенных часов часы казино скачиваемые казино порно с Ирина Сидоркова
DiskiPlus сайт казино зеркало DiskiPlus 1×bet слоты 1×bet top <a href=https://diskiplus.ru>DiskiPlus порно с Бондаренко Анастасия Борисовна</a> DiskiPlus букмекерская контора фонбет официальный сайт DiskiPlus казино ли <a href=https://diskiplus.ru>DiskiPlus 1×bet скачать бесплатно</a> DiskiPlus казино фильм смотреть онлайн DiskiPlus porno Юлия Пересильд DiskiPlus 1×bet сайт DiskiPlus casino бонус DiskiPlus casino играть DiskiPlus лучшая казино DiskiPlus porno Мира Андреева (теннис)
#3847 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию процедура займет всего лишь
Частенько новички не понимают, как активировать подарки либо вывести 1-ый выигрыш. Для сходственных случаев наша команда обрисовала главные термины – что это фриспины, вейджер, как его отыграть, зачем нужно протекать верификацию.Бездепозитный приз за регистрацию в казино — это стартовый подарок вид денежного начисления или бесплатных вращений для новых игроков заведения, для получения которого надо вносить депозит. <a href=http://filmkachat.ru/>1 х слотс зеркало</a> При исполненьи критерий отыгрыша и верификации, средства с бонусного счета переводятся на основной и шансы быть выведены на карту либо электронный кошелек. Лимиты на вывод и сроки проведения транзакции зависят от выбранной платежной системы. <a href=https://www.woorank.com/en/teaser-review/playhouse.com.ua?generationId=872ad221–0955–4d77–9976-f6c1e3b64286&usecase=all>https://www.woorank.com/en/teaser-review/playhouse.com.ua?generationId=872ad221–0955–4d77–9976-f6c1e3b64286&usecase=all</a> При небольшой сумме приза рекомендовано играть по невысоким ставкам, а использовать максимальные другого, как только в случае, случае вейджер слишком немалый, а время на отыгрыш крепко ограничено.Можно ли в одном онлайн казино получить больше одного бонуса за регистрацию? Нет, так как в любом интернет казино есть правила, к которым нужно придерживаться, не творить два аккаута для получения бонусов, иначе несомненно блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, бонус за регистрацию выдаеться один раз одному личику. 1×slots регистрация на сайте <a href=http://d992387h.bget.ru/user/Charlesunope/>http://d992387h.bget.ru/user/Charlesunope/</a> Изучить правила и условия получения бездепозитных бонусов казино, Вы можете у нас на веб-сайте в разделе с призами или на официальном сайте избранного Вами казино. Если не можете отыскать нужную информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электрической почте.Чтобы бездеп не был начислен на Ваш акк, Вам не нужно активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк автоматически, а Вы не планируете его использовать, обратитесь в службу поддержки с пожеланием отменить бездепозитный бонус.
1×slots регистрация на 1хслотс
Шаг 4. Активация. Внимательно выучите обстоятельства, информацию по ограничениям и сроке деянья бонусного предложения. Разобравшись с правилами, возможно активировать приз в собственном кабинете (времени ? с внедрением промокода) либо по запросу в саппорт.Главное превосходство спинов – вероятность выучить разные слоты. Также получится насладиться бонусными раундами, испытывать удачу в риск-туре и преувеличить выигрыш за счёт особенных символов. Однако не игровой процесс заслуживает внимание, так какого-либо сосредоточиться на реальном выигрыше. <a href=https://www.allampolgar.hu/showthread.php?tid=4030>1× slots сайт</a> 1×slots зеркало на сегодня Популярность интернет казино растёт и всё больше пользователей начинают интересоваться азартными забавами. Бездепозитные бонусы 2022 года, это уникальные подарки за регистрацию. С их поддержкой новые игроки имеют получить благотворительные вращения или деньги на баланс за 1 регистрацию. С в игорных заведений в онлайне, бездепозитные призы стали популярнейшим методом вербования игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш вебсайт собрал наихорошие предложения из интернета на 2022 год. Воспользуйтесь каким подарком и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша необходимо выполнить условия. <a href=https://www.vevioz.com/read-blog/151003>https://www.vevioz.com/read-blog/151003</a> 1×slots коды
1 х слотс зеркало
Казино выводит средства только на что, эту платежную систему, с котрой был сделан депозит. То есть, для вывода бездепозитного бонуса, Вам сначала нужно пополнить счет. В некоторых клубах ограниченный список способов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет непосредственно с данных платежных способов, коие доступны для вывода.Во время забавы в казино, выигрыши, полученные благодаря бесплатным призовым фондам, суммируются и срабатывают в совместную сумму для отыгрывания. Однако, случае удача улыбнется и выйдет отыграть все призы, игровое заведение гарантированно допустит исключить денежные свои. Сумма вывода несомненно находиться от лимита, одобренного именно в этом учреждении. Поэтому, внимательно нужно разбирать правила выдачи анлимитных депо. В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и в случае неоднозначных обстановок нет возможности куда-то посетовать и обосновать свою правоту. <a href=https://ai-db.science/index.php?title=мультфильмы_скачать_бесплатно_без_регистрации_и_смс>https://ai-db.science/index.php?title=мультфильмы_скачать_бесплатно_без_регистрации_и_смс</a> 1×slots официальный зеркало рабочее Бездепозитный бонус за регистрацию в казино — это стартовый презент в виде валютного начисления либо бесплатных вращений для свежих игроков заведения, для получения которого надо вносить депозит.
1×slots casino зеркало рабочее
Основное различие в, собственно для получения бездепа нужно пополнять баланс в казино. Но не сего, есть ряд и различий: казино 1×slots официальный сайт <a href=http://shop.luxlite.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://sociologos.ru/bitrix/redirect.php?goto=http://grizzlyshop.ru/bitrix/redirect.php?goto=https://telegra.ph/Sovety-i-sekrety-kak-izbezhat-polucheniya-sudebnoj-povestki-09–19>http://shop.luxlite.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://sociologos.ru/bitrix/redirect.php?goto=http://grizzlyshop.ru/bitrix/redirect.php?goto=https://telegra.ph/Sovety-i-sekrety-kak-izbezhat-polucheniya-sudebnoj-povestki-09–19</a> Если площадка презентует бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь ввести аккаунт на сайте и активировать его, подтвердив адрес электрической почты, номер аппарата либо иные данные, коие требует оператор. Перед этим нужно увериться, собственно юзер располагается на официальном сайте казино, не на мошеннической площадке.
казино 1×slots
Рассмотрим принцип его деяния на случае. Допустим, вы зарегались и получили $10 not the slightest down payment bonus с вейджером х50. Это значит, собственно выигранные деньги можно несомненно выводить не ранее, чем в такого, как общая сумма ставок достигнет $500. При верном раскладе бездепы — это прекрасный метод выступать на деньги без растраты личных средств. Есть количество советов, следуя коим можно извлечь максимум выгоды из подобных промоакций казино. Играть идет лишь на лицензированных площадках. Скриптовые веб-сайты не только накалывают с бонусными услугами, хотя и употребляют пиратский софт с измененным ГСЧ. Выиграть на таких автоматах невозможно.Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации приза без депо. Внимательно прочитайте до конца. Многие новички делают ошибки на шаге регистрации и потому не могут получить презент. <a href=http://www.0pcdd.com/space-uid-272883.html>http://www.0pcdd.com/space-uid-272883.html</a> Фриспины — безвозмездные вращения, которые дозволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины числятся наиболее знаменитым и преимущественным видом приза — безвозмездные вращения порой эффективнее и веселее в отыгрыше, чем другие виды бездепов. 1×slots регистрация 1×slots review live Вы скорее, скажем, как все любите получать подарки и бездепозитные бонусы казино. Игорные жилища взяли в повадку одаривать гэмблеров приятными призами. Стать обладателем приветственного презента возможно за творение профиля либо пополнение счёта. Второй вариант более интересный, так клубы готовы удвоить депо! Но в вы новичок и лишь знакомитесь с миром азарта, никакого пользуйтесь призом за регистрацию.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.mshowto.org/forum/members/jamespauri.html>1хслотс регистрация в 1×slots casino</a>
<a href=https://mit-bbs.com/viewtopic.php?t=291505>1хслотс рабочее зеркало</a>
<a href=https://test.soclanovtsy.ru/topic/26973-chicago-house-samples-loops-sounds/page/380/#comment-78357>1×slots зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Такой безвозмездный эквивалент средств зачисляется на профиль пользователя в осуществления притязаний и предназначаются они лишь для игрового процесса. Вывод таких вознаграждений вероятен только последствии осуществления вейджеровых критерий.
#3848 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
официальная казино new casino <a href=https://sovsekretno.net/>порно с Алина Загитова</a> up casino зеркало porno Екатерина Ефременкова, шорт-трекистка <a href=https://krtka.info/>7k casino зеркало</a> casino вход champion casino casino pin официальный 1×bet официальный xbet new casino casino pin официальный порно с Анна Калинская (теннис)
DiskiPlus pin up casino top top DiskiPlus casino онлайн <a href=https://www.diskiplus.ru>DiskiPlus порно с Диана Шнайдер (теннис)</a> DiskiPlus смотреть фильм казино DiskiPlus 7k casino зеркало <a href=https://diskiplus.ru/>DiskiPlus Елизавета Боярская</a> DiskiPlus pin up casino пин ап DiskiPlus casino приложения DiskiPlus Светлана Ходченкова DiskiPlus казино 5 DiskiPlus автомат казино DiskiPlus Лут Оксана Николаевна порно DiskiPlus casino сайты
#3849 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Илья Ковальчук (хоккей) лучшие казино бесплатно <a href=https://glvk.guru/>промокод 1×bet</a> сайт букмекерской конторы порно с Елена Никитина, скелетонистка <a href=https://slon-ru.com/>казино рояль</a> casino сайты кент казино скачать букмекерскую контору casino сегодня casino сегодня балтбет букмекерская контора казино зеркало сегодня
DiskiPlus кент казино DiskiPlus porno Ангелина Гончаренко, хоккеистка <a href=https://www.diskiplus.ru/>DiskiPlus яндекс игры казино</a> DiskiPlus демо казино DiskiPlus лучшие казино бесплатно <a href=https://diskiplus.ru>DiskiPlus 1×bet на андроид</a> DiskiPlus bitz casino DiskiPlus 1×bet на сегодня DiskiPlus pin up casino пин ап DiskiPlus бк букмекерская контора DiskiPlus casino ап DiskiPlus Чулпан Хаматова DiskiPlus букмекерская контора зенит
#3850 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать сайт букмекерской конторы casino актуальное зеркало <a href=https://m.repost.news/>порно с Анна Щербакова, фигуристка</a> 1×bet зеркало xbet порно с Абрамченко Виктория Валериевна <a href=https://strelochnik.com/>up casino</a> 1go casino букмекерская контора бетсити Львова-Белова Мария Алексеевна порно win win casino pin up casino зеркало 1×bet слоты 1×bet xyz порно с Сергей Бобровский (хоккей)
DiskiPlus up casino зеркало DiskiPlus букмекерские конторы бет <a href=https://www.diskiplus.ru>DiskiPlus 1×bet официальный сайт 1×bet xyz</a> DiskiPlus порно с Илюшникова Татьяна Александровна DiskiPlus casino зеркало сайта <a href=https://www.diskiplus.ru/>DiskiPlus 7k casino зеркало рабочее</a> DiskiPlus 1×bet зеркало рабочее на сегодня DiskiPlus casino андроид DiskiPlus казино вход DiskiPlus человек казино DiskiPlus 7k casino зеркало на сегодня DiskiPlus vodka casino DiskiPlus up casino
#3851 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало на сегодня
Доступность — бездепозитные бонусы в казино чаще всего предоставляются новым игрокам, но посещают случаи, когда приз все получить и действующие клиенты. <a href=http://filmkachat.ru/>1×slots зеркало</a> <a href=https://portfolium.com/entry/professional-3d-product-modeling-services-custom>https://portfolium.com/entry/professional-3d-product-modeling-services-custom</a> Фриспины предназначены для использования в видео слотах. Внимательно ознакомьтесь с критериями – частенько их выдают на кое-какие автоматы. В зависимости от клуба, у вас выйдет сделать определённое количество ставок. Кстати, продвинутые игорные дома позволяют запускать каждых «одноруких злодеев». 1×slots зеркало рабочее на сегодня <a href=https://cursos.fixtech.com.br/forum/member.php?action=profile&uid=17055>https://cursos.fixtech.com.br/forum/member.php?action=profile&uid=17055</a> Варианты выигрыша зависят от Вашей успеха и условий игорного портала. Выше мы сказали, что кое-какие бездепозитные призы в 2022 году выдаются с ограничениями по наибольшей выплате. Однако, остаются они, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность передовых игр на средства, можно выиграть неописуемые суммы. Сегодняшние игровые автоматы или видео слоты, как их именуют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000.Как только на виртуальном счету окажутся бонусные средства, поспешите отыграть вейджер. Сразу после сего возможно забыть заявку на вывод выигрыша. Кредиты прибыльно отличаются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом настоящих средств и дают возможность ощутить азарт. Во-вторых – можно насладиться любой азартной забавой доступной на сайте. В вашем распоряжении находятся автоматы, настольные прибавление, видео-покер, Live-дилеры.
1×slot зеркало
<a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=53125>1×slots рабочее зеркало на сегодня</a> x1 slots 1хслотс регистрация перейти на 1×slots Фриплей-бонусы. Бонусы за бесплатную игру есть лишь в некоторых клубах. Они зачисляются незамедлительно после творенья профиля и действуют непродолжительное время. Если у вас нет медли потратить средства, они просто закончатся. Что дотрагивается времени, правило призы срабатывают протяжении 1-го часа. <a href=http://sobaeksanrock.dgweb.kr/bbs/board.php?bo_table=free&wr_id=2422479>http://sobaeksanrock.dgweb.kr/bbs/board.php?bo_table=free&wr_id=2422479</a> 1×slots рабочее зеркало на сегодня Подтвердите личность, предоставив оператору казино средства паспортные данные. Инструкции обычно легкие, главное — конкретно им стопам. Если написано, собственно «на фото обязаны быть заметны все хорошо угла страницы паспорта» — устройте непосредственно такое фото.
1×slots официальный сайт скачать на айфон
<a href=http://www.sglpw.cn/home.php?mod=space&uid=330898>http://www.sglpw.cn/home.php?mod=space&uid=330898</a> Фриспины начисляются по конкретной ставке. После их активации игроку нужно запустить разъем и увериться, собственно в нем показываются бесплатные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода в отыгрыша ориентируется оператором и редко превышает 5 000 руб.В разделе с бонусами активировать свой презент. Найти забавы, для коих предусмотрено одобрение и использовать приз по назначению. 1×slots официальный сайт скачать Фриспины предусмотрены для использования в видео слотах. Внимательно ознакомьтесь с критериями – часто их выдают на кое-какие автоматы. В зависимости от клуба, у вас получится сделать определённое число ставок. Кстати, продвинутые игорные жилища позволяют запускать каждых «одноруких бандитов».
1×slot официальный сайт
Бездепозитные бонусы в казино без пополнения 2022 — это определенная сумма средств либо gift spins вращения, которые предоставляются первым постояльцам за регистрацию на веб-сайте казино вид бездепозитного бонуса, и выделяет вас возможность за счет казино без пополнения опробовать услуги (игр), с последующей преимуществом, льготой вывода средств при исполнении всех установленных управлял.Чтобы получить возможность исключить прибыль с бездепозитного бонуса в казино, необходимо выполнить ряд условий: Фриплей-бонусы встречаются только в неких клубах. Они зачисляются незамедлительно последствии творенья профиля и активны непродолжительное время. Если не успеете потратить свои, они попросту сгорят. Касаемо медли, правило бонусы активны на часа.Фриплей-бонусы. Бонусы за безвозмездную игру есть только в неких клубах. Они зачисляются сразу последствии творенья профиля и действуют недолговременное время. Если у вас нет медли потратить свои, они просто закончатся. Что касается медли, как призы действуют в течение одного часа. 1×slots официальный сайт зеркало <a href=https://mail.1directory.org/details.php?id=292516>https://mail.1directory.org/details.php?id=292516</a> Это также безвозмездные финансы, которые поступают на аккаунты свежеиспеченных компьютерные последствии регистрирования. А особенность таких призов состоит сомнений, что обретенные финансы обязательно по использовать в продолжении назначенного медли.Бонусные средства – небольшая сумма денег для старта в новом казино. На бонусные средства, обыкновенно разрешается выступать во все забавы, не слотов с прогрессивным джекпотом и игр из раздела exist casino.
1 x slots casino
Также, учите, что бездепозитный приз возможно вывести лишь том, случае, когда станут выполнены все условия отыгрыша. На нашем веб-сайте Вы найдете перечень актуальных новых бездепозитных бонусов в казино 2022 года. Также, есть количество неповторимых услуг, которые доступны лишь гостям нашего сайта последствии регистрации по нашей ссылке или активации специального промокода.Бездепозитные бонусы – это исключительно занимательная и наиболее перспективная акция интернет-казино. Они том чем фри-спинов, поэтому собственно выплаты в бесплатных вращениях не гарантированы, ведь композиции на барабанах игрового аппарата все не сложиться. <a href=http://xn–80aphfq.xn–p1ai/user/MycsgoSiz/>http://xn–80aphfq.xn–p1ai/user/MycsgoSiz/</a> 1 x slots casino
<b>Смотреть еще похожие новости:</b>
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=6416>1×slots акции</a>
<a href=https://takesalary.com/the-day-ai-took-over-losing-my-job-as-a-content-writer/#comment-4468>1×slots подтвердит вашу регистрацию если говорить</a>
<a href=https://minifishtank.net/forum/showthread.php?tid=24512>1×slots casino регистрация</a>
<a href=https://russiancomputerservice.ru/user/JosephCer/>1хслотс официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Внесение депо – Будьте готовы пополнить счет последствии отыгрыша бонуса. Это стандартное заявка правил для этого подобии промо-акций. Лучше заблаговременно уточнить, какую сумму нужно несомненно вносить на счет. Как верховодило, речь о наименьшем депозите, но вы должны быть убеждены, собственно он для по карману.
#3852 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
промокод 1×bet казино смотреть онлайн бесплатно <a href=https://rhymes-punches.com/>казино смотреть</a> порно с Артемий Панарин (хоккей) 1×bet приложение <a href=https://th-royalgclub.com/>казино фильм</a> официальные букмекерские конторы балтбет букмекерская контора суть казино порно с Анна Щербакова, фигуристка порно с Виктория Синицина, фигуристка 1×bet зеркало слоты букмекерскую контору пин
DiskiPlus порно с Артемий Панарин (хоккей) DiskiPlus порно с Александр Большунов (лыжные гонки) <a href=https://diskiplus.ru/>DiskiPlus kometa casino</a> DiskiPlus black russia казино DiskiPlus кент casino <a href=https://www.diskiplus.ru/>DiskiPlus гта казино</a> DiskiPlus почему казино DiskiPlus Юдаева Ксения Валентиновна порно DiskiPlus casino рабочее DiskiPlus 1×bet слоты официальный сайт DiskiPlus мелбет букмекерская контора DiskiPlus часы казино DiskiPlus как выиграть в казино
#3853 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Набиуллина Эльвира Сахипзадовна порно казино можно <a href=https://kompromat1.online/>про казино</a> 7k casino зеркало рабочее casino официальный зеркало <a href=https://res-publika.com>1×bet телефон</a> porno Алена Михайлова казино ставка Петрова Ольга Викторовна порно ев казино мобильные букмекерские конторы ставки на спорт букмекерские конторы 1×bet 1
DiskiPlus porno Яна Троянова DiskiPlus 1×bet 1хбет <a href=https://www.diskiplus.ru/>DiskiPlus vavada casino</a> DiskiPlus 1×bet xbet DiskiPlus рокс казино <a href=https://www.diskiplus.ru>DiskiPlus букмекерские контора ап</a> DiskiPlus Попова Анна Юрьевна порно DiskiPlus kent casino DiskiPlus 1win casino DiskiPlus букмекерская контора ставки DiskiPlus порно с Георгий Джикия (футбол) DiskiPlus букмекерские конторы без депозита DiskiPlus Радченко Светлана Юрьевна порно
#3854 Charlesgunnyhttp://filmkachat.ru
зеркала 1×slots
Игры, каких можно играть на бонусные средства. Проверьте список игр, в возможно играть на бонусные средства, возможно они Вам не понравятся и надо расходовать своё время на такую промоакцию.Для выбора азартного заведения Вы сможете воспользоваться списком наших казино с бонусами за регистрацию. На нашем сайте мы опубликовали перечень бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, что часть бонусов неповторимые и доступны лишь для посетителей нашего сайта по-специальному промо-коду или по уникальной ссылке. Кроме того, для любого приза мы подготовили подробный обозрение, каком Вы узнаете как получить и отыграть одобрение и как вывести свой выигрыш с бездепа. <a href=http://filmkachat.ru/>1×slots зеркало видели такую регистрацию на</a> В любом казино с бездепозитным бонусом предусмотрены вейджеровые обстоятельства. Это один-единственный «подводный камень», который стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, нужно сделать определённое число ставок. Чем круче бонус, что, этим труднее выполнить обстоятельства, и наоборот.Теоретически, к бесплатным бонусам можно отнести так именуемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, поэтому что они предоставляют только вероятность создавать ставки. <a href=https://noti.st/alinavideneeva/qgz7Oi/professional-furniture-technical-drawing-services-solutions>https://noti.st/alinavideneeva/qgz7Oi/professional-furniture-technical-drawing-services-solutions</a> Такой безвозмездный эквивалент средств зачисляется на профиль юзера в осуществления требований и предназначаются они только для игрового процесса. Вывод этих вознаграждений возможен лишь в осуществления вейджеровых условий.Даже не выиграв солидную сумму, игрок увлекательно проведет время, изнутри изучит работу площадки, воспримет геймплей автоматов. Все это без каких-либо денежных рисков. Быть в курсе лучших акций легкостью. Достаточно регулярно изучать перечень свежих интернет казино с выводом бонуса без депо в этом разделе. 1×slot официальный сайт <a href=http://d90432w9.beget.tech/user/ZacherydAm/>http://d90432w9.beget.tech/user/ZacherydAm/</a>
1×slots регистрация то дальше необходимо пройти
Выполнив все притязания оператора, заказчик может оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем не более суток. Если дополнительно требуется пройти функцию верификации, то срок возрастает до 1–2 рабочих дней. Для перевода используются банковские приборы и электрические платежные системы. Второй способ подходит лучше, так как основная транзакций в этом случае осуществляются мгновенно. В связи со спецификой функционирования банков обработка платежей возможность занять до нескольких трудящихся дней. 1× slots casino официальный сайт Каждый игрок должен сначала отчетливо изучить условия по получению и отыгрышу приглянувшегося дара. Если всё организует, поторопитесь забрать безвозмездные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо данный начать вращать барабаны лучших слотов. <a href=https://freetone.pro/user/GlennJew/>https://freetone.pro/user/GlennJew/</a> Бездепозитный приз – это экономическое вознаграждение, коие выдается соучастнику игры в казино, для его привлечения и возникновения заинтригованности. Любой гость, который соответствует условиям выдачи сходственного бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое одобрение является наиболее действенным способом, дающим возможность стартовать в игре, не вкладывая собственных материальных средств.Бoльшинcтвo азартных заведений выдвигают примерно однообразные, схожие условия и требования, коие необходимо выполнить, чтобы получить бездепозитный приз за регистрацию. Все их можно соединить в раз перечень: 1×slots зеркало 1хслотс регистрация перейти на 1×slots Используйте наилучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из списка ниже, дабы заработать презенты за простые деяния теперь сегодня получить 1-ый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и резвыми выводами на электрические кошельки.
1хслотс регистрация в 1×slots casino
Можно ли зарабатывать на бездепозитных призах? Это не работа, тут как повезет, если в любом предложенном безедепе, вы будете откручивать вейджер и выводить, время возможно назвать везением, и дополнительной добавкой к вашему бютжету. <a href=http://jejuwood.net/bbs/board.php?bo_table=free&wr_id=822217>http://jejuwood.net/bbs/board.php?bo_table=free&wr_id=822217</a> Самые популярные способы вывода денег ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам на Neteller и Skrill, а пользуются криптовалютными кошельками. Вывод выигрышей возможность исполняться быстро либо развлекать от нескольких часов до нескольких суток. 1×slots регистрацию процедура займет всего лишь Бонусные средства – маленькая сумма средств для старта в новеньком казино. На бонусные средства, обыкновенно разрешается играть во все забавы, кроме слотов с современным джекпотом и игр из раздела live casino.Получить Бездепозитный бонус в онлайн казино дело 2-ух кликов. Другой момент, отыграть промо и соблюсти правила и условия отыгрыша. Под правилами предполагается не только вагер, хотя и ограничения по наибольшей ставке. Мы разумеем, что в кинотеатр все ставят на зеро и выигрывают. Призываем не создавать сходственного. Перед активацией бонуса прочитайте верховодила. Узнайте последующие моменты: Условия получения дара, за регистрацию, за депо и многое. Ограничения по максимальной ставке. Зачастую не повыше 350 руб. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вращать автоматы, а вагер будет стоять на пространстве. Поэтому важно знать, в каких забавах можно осуществлять кратность валютного оборота.
1×slots casino регистрация 1×slots review live
<a href=https://thetechmodders.com/forums/viewtopic.php?t=62831>1×слот регистрация в 1×slots casino</a> 1хслот скачать <a href=https://eccentrictirade.com/forums/member.php?action=profile&uid=2435>https://eccentrictirade.com/forums/member.php?action=profile&uid=2435</a> Стоит отметить, что бездепозитный бонус выдается лишь совершеннолетним новеньким, которые, в свою очередь, имеют пригласить собственных приятелей и своих, также рассчитывающих на поощрительную программку преданности. Подобная разработка замечена между конкурирующих онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры содействуют повышению собственной посещаемости, путем вербования свежих игроков. Бонусы – это уникальный шанс для вероятных участников забавы, коие имеют опробовать софт покер рума и увериться, будут ли они в него играть или нет. Новый игрок попробует свои силы с реальными оппонентами в казино.Бонусы без депо при регистрации числятся наиболее привлекательными как для опытнейших игроков, так для и новичков. Получив это вознаграждение, клиент может играть на реальные средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные призы в интернет-казино Рунета, а также обстоятельства их активации и выигрыша.
1×slots зеркало видели такую регистрацию на
Зачастую бездепозитные призы казино для игры предлагаются различными заведениями азартных игр в маркетинговых промоакций или в целях вербования к для свежих игроков. Для бездепозитных бонусов в казино 2022 игроку не пополнять счет до момента вывода желаемых средств. <a href=https://simracing.su/user/Forsedropkl/>https://simracing.su/user/Forsedropkl/</a> Многие новенькие сомневаются, что поощрительный приз не нужно несомненно возвращать, в в они выиграли у казино. Это безусловно безопасно и надежно. Выводя выигранные средства, игрок просто одергивает свое участие при и утрачивает уникальную вероятность – безвозмездно увеличивать личное материальное положение. 1 x slots Если вы выбрали для себя некоторое брендов коие вам больше всего полюбились, для постоянной игры! Таких гемблеров казино очень любит и ценит, за частую такие игроки становятся VIP игроками заведения, которым часто поступают выгодные предложения в виде бонусов, например же туда входит и бездепозитные.
<b>Смотреть еще похожие новости:</b>
<a href=http://griffhunter.com/boards/viewtopic.php?p=587524#p587524>казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Исходя из этого, просто не существует мудрых оснований махнуть рукой на получение такового приза при регистрации. И, кстати, на такой безвозмездной основе у вас есть шансы выиграть деньги и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, именуют бесплатными интернет платформами для игр. Бонус в казино без депозита содержит различные вариации: такое быть приветственный приз, акции в честь каких-либо дней либо весомых дат, приз за вербование новых игроков, лояльность и получение VIP-статуса.
#3855 Donaldraphttps://vibrometro1a.com
Equipos de calibración: esencial para el funcionamiento estable y productivo de las dispositivos.
En el mundo de la avances actual, donde la efectividad y la estabilidad del sistema son de alta trascendencia, los aparatos de equilibrado cumplen un papel vital. Estos aparatos específicos están concebidos para equilibrar y asegurar partes rotativas, ya sea en herramientas de fábrica, medios de transporte de transporte o incluso en equipos caseros.
Para los técnicos en reparación de equipos y los profesionales, operar con equipos de equilibrado es importante para garantizar el operación fluido y estable de cualquier sistema dinámico. Gracias a estas opciones modernas modernas, es posible minimizar sustancialmente las vibraciones, el ruido y la esfuerzo sobre los rodamientos, extendiendo la longevidad de elementos valiosos.
También importante es el función que tienen los aparatos de balanceo en la servicio al cliente. El asistencia especializado y el reparación regular usando estos aparatos habilitan brindar asistencias de excelente nivel, mejorando la agrado de los consumidores.
Para los responsables de empresas, la inversión en sistemas de equilibrado y medidores puede ser fundamental para aumentar la efectividad y rendimiento de sus equipos. Esto es principalmente relevante para los empresarios que dirigen medianas y pequeñas emprendimientos, donde cada detalle importa.
Por otro lado, los dispositivos de calibración tienen una extensa implementación en el área de la prevención y el monitoreo de estándar. Facilitan identificar eventuales errores, impidiendo intervenciones elevadas y perjuicios a los sistemas. Incluso, los indicadores recopilados de estos sistemas pueden aplicarse para optimizar procesos y incrementar la reconocimiento en motores de investigación.
Las zonas de aplicación de los equipos de calibración comprenden diversas áreas, desde la fabricación de transporte personal hasta el control ambiental. No influye si se habla de grandes elaboraciones manufactureras o modestos establecimientos de uso personal, los sistemas de calibración son fundamentales para proteger un funcionamiento óptimo y sin paradas.
#3856 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
суть казино 1×bet телефон <a href=https://rumafia.news/>Шевцова Татьяна Викторовна порно</a> 7k casino бонус порно с Артемий Панарин (хоккей) <a href=https://t.me/vchkogpu_ru>porno Яна Троянова</a> 1×bet скачать бесплатно официальные зеркала казино 1×bet скачать приложение на андроид 1×bet официальный 1×bet xyz casino скачать 1×bet приложение casino андроид
DiskiPlus казино проиграл DiskiPlus казино смотреть онлайн бесплатно <a href=https://www.diskiplus.ru>DiskiPlus казино фильм смотреть онлайн</a> DiskiPlus 1×bet слоты DiskiPlus casino online зеркало <a href=https://www.diskiplus.ru>DiskiPlus casino андроид</a> DiskiPlus porno Елизавета Туктамышева DiskiPlus porno Екатерина Ефременкова, шорт-трекистка DiskiPlus ев казино DiskiPlus kent casino DiskiPlus балтбет букмекерская контора DiskiPlus казино рулетка DiskiPlus porno Марина Александрова
#3857 Charlesgunnyhttp://filmkachat.ru
1× slots зеркало
При отыгрыше бонусных средств, нужно учесть срок деяния приза и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный приз несомненно аннулирован.3. Подтвердить данные. В зависимости от клуба, нужно привязать телефон или почту, показать персональную информацию; <a href=http://filmkachat.ru/>1×slots быструю регистрацию а также мгновенное</a> Бонусные деньги – небольшая сумма денег для старта в новом казино. На бонусные средства, обыкновенно разрешено играть во все забавы, не слотов с прогрессивным джекпотом и игр из раздела live casino. <a href=https://www.jotform.com/250231879042050>https://www.jotform.com/250231879042050</a> 1×slots регистрацию более популярный вариант это <a href=https://xn–6-gtb4aicb3c6b.xn–p1ai/user/JasperVeria/>https://xn–6-gtb4aicb3c6b.xn–p1ai/user/JasperVeria/</a> Только выполнив все обстоятельства отыгрыша и дождавшись окончания проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить свои деньги.
1×slots регистрация на сайте 1×slots ru com
Нельзя рассматривать игру на деньги, как вариант заработка. Азартные игры воспрещены для лиц младше 18 лет. Topcasinobonuses.mobi не зачинщиком азартных игр. Сайт носит информационный характер.Обычно, бездепозитные призы выдаются под конкретные слоты с фиксированной ставкой, хотя их точно запрещено применять в игровых автоматах с современным джекпотом. Список игр, каких возможно использовать бездеп, Вы отыщите в описании промоакции либо можете уточнить у саппорта заведения. <a href=http://216.38.0.7/viewtopic.php?f=12&t=260971>1×slots casino регистрация 1×slotscasino09k online</a> 1хслотс официальный сайт зеркало Осталось выбрать казино с бонусом за регистрацию и создать профиль. После активации дара выигрыш зависит от Фортуны и способностей.В любом казино с бездепозитным бонусом учтены вейджеровые обстоятельства. Это один-единственный «подводный камень», кот-ый стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, нужно сделать определённое количество ставок. Чем круче приз, что, этим сложнее выполнить условия, и наоборот. <a href=http://blackpearlbasketball.com.au/index.php?option=com_k2&view=itemlist&task=user&id=792941>http://blackpearlbasketball.com.au/index.php?option=com_k2&view=itemlist&task=user&id=792941</a> 1 x slots Иногда виде бездепа, казино дарует минимальный бонус (до 50 руб. ), ради которого не заморачиваться.Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских рублей. В условиях промоакции предписано, что вейджер бездепозитного бонуса х20. Поэтому, чтобы отыграть приз, игроку несомненно необходимо сделать ставок на 35*20=700 руб.
1×slots регистрация 1×slotscasino09k online
Но а в вы теснее профи по интернет казино, кликаем на красноватую кнопку «Получить» и Вы автоматически перейдете в интернет казино; Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=https://trade-britanica.trade/index.php?title=Выкуп_авто>https://trade-britanica.trade/index.php?title=Выкуп_авто</a> Представленные на этой страничке лучшие бездеп призы в казино за регистрацию в 2022 году имеют подходящие обстоятельства. После кропотливого анализа редакция портала составила рейтинг спецпредложений, в котором посетители Casino.ru имеют сортировать перечень по нескольким аспектам: по сумме, вейджеру, максимальной сумме вывода и т.д.При поддержки такого поощрения оператор может также завлекать посетителей, коие ранее показывали активность на веб-сайте, но по какой-то причине перестали выступать. В этом случае промокод высылается юзеру по электронной почте или в виде SMS. 1×slots коды
1хслотс зеркало
Вышеописанная причина и является главным моментом, из-за которого операторы отдают часть собственной прибыли на разные рекламные затраты и рекламные кампании. А наиболее действенным тут станут выступать непосредственно бездепозитные бонусы казино 2022 с выводом за регистрацию. <a href=http://lider1c.ru/communication/forum/messages/forum5/message22334/18230–1kh-slots-zerkalo-registratsiya-v-1×slots-casino?sessid=894123b4e8ad2503d1b3641743a9d5a8&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1х слотс зеркало регистрация в 1×slots casino</a> Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая часть забавы. Важно, часто бездепозитные бонусы в казино выдаются с ограничениями по максимальной выплате. В среднем можно рассчитывать на прибыль в количество тыщ рублей. Как вывести выигрыш с бонуса без депозита. Придётся доказать аккаунт документально, в некоторых заведениях. Процедура верификации обязательна и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате либо прочтите в правилах.Но есть игорные заведения, коие готовы просто например жертвовать средства на забаву. Для сего достаточно сделать профиль. Чтобы исключить собственный выигрыш, для поначалу нужно выполнить обстоятельства отыгрыша, обозначенные в критериях получения бездепозитного депо. 1хслотс официальный сайт зеркало <a href=http://pfb7978i.bget.ru/index.php?subaction=userinfo&user=KennethAcils>http://pfb7978i.bget.ru/index.php?subaction=userinfo&user=KennethAcils</a>
1×slots зеркало быструю регистрацию а также мгновенное
Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке необходимо пополнить счет в казино. Для депозитных призов, эта процедура не нужна, например как депо теснее сделан.Главное преимущество спинов – вероятность изучить различные слоты. Также удастся насладиться бонусными раундами, испытывать удачу в риск-туре и преувеличить выигрыш за счёт особых знаков. Однако не игровой процесс заслуживает внимание, ведь чем сосредоточиться на реальном выигрыше. Для получения приза надо(надобно) ознакомиться с программкой лояльности казино и устроить ставки на сумму, нужную для перехода на следующий уровень.Однако в критериях скрываются «подводные камни», коие не разрешат вывести солидную необходимую либо же вы не успеете отыграть вейджер. Поэтому мастера рекомендуют арестовать благотворительные вращения за регистрацию в казино без депо, дабы поднабраться опыта и получить настоящий шанс на победу. <a href=http://www.ceraunavoltapavullo.it/index.php?option=com_k2&view=itemlist&task=user&id=1126967>http://www.ceraunavoltapavullo.it/index.php?option=com_k2&view=itemlist&task=user&id=1126967</a> Бездепозитный бонус предоставляется новенькому игроку за конкретные действия. Часто презент в виде денег либо фриспинов выдается за регистрацию, благодаря чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. 1×слотс казино Ещё одно распространённое акционное предложение – симпатичный подарок с сомнительными требованиями. К образцу, клуб сулит $100 в качестве бездепа, хотя с вейджером х80 либо х100. Отыграть такой вейджер практически нереально и потому никакого концентрироваться на более интересных акциях.
<b>Смотреть еще похожие новости:</b>
<a href=https://karakol.com.kg/user/Jameskef/>1×slots казино мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Даже не выиграв крупную сумму, игрок увлекательно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-либо финансовых рисков. Быть в курсе лучших акций с. Достаточно регулярно изучать список свежих интернет казино с выводом бонуса без депо в данном разделе.
#3858 Charlesgunnyhttp://filmkachat.ru
1× slots casino зеркало
В перечне требований к отыгрышу часто присутствуют лимиты на ставки при ирге на собственные деньги. Так, случае отыграть нужно 30 000 рублей, а максимальная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 раз. Эта особенность затрудняет соблюдение игроками критерий по срокам деянья акции.Бездепозитный приз казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби выбранного заведения, сориентироваться в выборе игр и выяснить качество работы службы поддержки. Довольно нередко, начиная игровой процесс, игрок уже не желает останавливаться и делает реальный вклад. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать бесплатно вполне как раз таки с призом за регистрацию без надобности вносить депо. <a href=http://filmkachat.ru/>1×slots скачать на айфон</a> При регистрации стопам указывать лишь достоверную информацию. Когда учетная запись будет активна, будет доступ в Личный кабинет. В нем возможно избрать денежную, установить промокод и узнать доскональные правила получения и отыгрыша бездепа. Краткая информация об акции нередко присутствует именно на регистрационной форме.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. <a href=https://www.astrobin.com/users/shopavto/>https://www.astrobin.com/users/shopavto/</a> Размер призов почаще всего чисто условный и не превышает 50 рублей. Приятно, но ощутимым бустом при навряд будет. 1×slots казино мобильная версия <a href=http://www.ubnt.su/max.php?url=https://www.sandiegoreader.com/users/Blackshisha0212/>http://www.ubnt.su/max.php?url=https://www.sandiegoreader.com/users/Blackshisha0212/</a> Обыкновенные бездепозитные призы в объеме от 3-х до двадцати долларов сделаны чтобы, чтобы, дабы в игры заходили все свежие и свежие игроки. Здесь, всего, несомненно лимитирование на максимальный выигрыш. Важно, дабы перед наименьшим вкладом был отключен бонус за 1-ое пополнение счета, и игрок не попадет на повторный вейджер.
зеркала 1×slots
<a href=http://freedom.teamforum.ru/memberlist.php?mode=viewprofile&u=6332>1хслотс рабочее зеркало</a> 1×slots рабочее зеркало на сегодня Популярность интернет казино растёт и всё больше юзеров начинают интерес азартными забавами. Бездепозитные бонусы 2022 года, это оригинальные подарки за регистрацию. С их помощью свежие игроки все получить благотворительные вращения или средства на баланс за 1 регистрацию. С появлением игорных заведений в онлайне, бездепозитные бонусы стали знаменитейшим методом привлечения игроков. Подобные акции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о которых мы расскажем. Наш вебсайт собрал лучшие предложения из онлайна на 2022 год. Воспользуйтесь хоть презентом и можете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша необходимо выполнить условия. <a href=http://d90432w9.beget.tech/user/Henrymen/>http://d90432w9.beget.tech/user/Henrymen/</a> Активация по промокоду используется в различных обликах бездепов. Если речь о приветственном призе, то комплект символов можно узнать на главной странице, в регистрационной форме либо послании, коие отправляется пользователю для доказательства адреса электронной почты. Акции имеют проводиться общо с партнерскими площадками. Обычно код располагается на постороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется одноразовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном офисе или начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем важный код для активации в описании каждого промо. 1хслотс рабочее зеркало
1×slot зеркало рабочее этих способов предполагает регистрацию
Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.В случае с фриспинами без вейджера, Вам не придется отыгрывать свой выигрыш с безвозмездных вращений. Прибыль, которую Вы заработаете на таком бездепе возможно назначать на вывод без какого или отыгрыша. <a href=https://bans.org.ua/index.php?action=profile;u=1394913>https://bans.org.ua/index.php?action=profile;u=1394913</a> Если вы выбрали себе некоторое брендов коие вам больше всего полюбились, для неизменной забавы! Таких гемблеров казино очень предпочитает и оценивает, за частую эти игроки становятся VIP игроками заведения, коим нередко поступают выгодные предложения в виде призов, например же туда заходит и бездепозитные.В настоящее время получить приз за регистрацию в казино очень просто. Почти любой игорный дом с готовностью предоставит деньги либо бесплатные вращения. Многие игроки пользуются данным и не смущяются региться в каждом клубе с выгодными критериями. Кстати, это отличная вероятность выдумать выигрышную стратегию и сорвать куш. 1×slots регистрацию процедура займет всего лишь Таким образом интернет казино получает вероятного игрока. Возможно дальнейшем либо подлинном он захочет сыграть на свои средства. Так работают бездепозитные бонусы в онлайн казино. Здесь отлично подходит выражение, бесплатные сыр бывает только в мышеловке. Начинающие игроки могут не обдумывать опасность азарта. Однако времени осознания становится больше. Это тема для отдельного обсуждения.
1х слотс зеркало регистрация в 1×slots casino
Бездепы обыкновенно предлагают с отыгрышем — мгновенно исключить выигранные свои нельзя. Перевод средств со счета несомненно вероятен в такого, как пользователь выполнит все требования казино, а сумма возможности быть выше установленного правилами лимита. Условиями промоакции фиксируются сроки, на которых заказчик вправе воспользоваться предложением. Обычно они не превосходят нескольких дней последствии активации. <a href=https://forum.gamesims.sk/viewtopic.php?f=10&t=101285>1хлот регистрация в 1×slots casino</a> Многие новички колеблются, собственно поощрительный приз не нужно будет отдавать, числе если они выиграли у казино. Это абсолютно неопасно и надежно. Выводя выигранные свои, игрок просто одергивает свое участие деле и утрачивает уникальную возможность – бесплатно увеличивать собственное вещественное положение. 1× слот зеркало <a href=https://bitcointalk.org/index.php?action=profile;u=3657393;sa=summary>https://bitcointalk.org/index.php?action=profile;u=3657393;sa=summary</a>
1×slots зеркало регистрация
Фриплей-бонусы. Бонусы за безвозмездную забаву есть лишь в некоторых клубах. Они зачисляются незамедлительно в творенья профиля и срабатывают недолговременное время. Если у вас нет времени истратить свои, они просто завершатся. Что дотрагивается медли, как призы срабатывают протяжении 1-го часа. Бонус с зачислением денег на счет выделяет больше свободы действий. Пользователь сам подбирает, каким образом распорядиться подаренными своими. Здесь того могут работать лимитирования на список доступных игр, но обычно эти рамки не например строги, как в рекламную с бесплатными вращениями. <a href=https://knpnewz.com/member.php?action=profile&uid=104083>https://knpnewz.com/member.php?action=profile&uid=104083</a> Многие игроки, оценив функционал казино, остаются выступать в нем и дальше ? на это и нацелено любое промо. Постоянные посетители заносят депозиты и делают ставки, обеспечивая длительную прибыль оператора. То есть, казино выдают бездепы свежим юзерам для формирования лояльной аудитории.Создание аккаунта. На веб-сайте казино нужно обнаружить регистрационную форму и наполнить пустующие поля личностными данными. Иногда на этом этапе требуется указать только адресок электронной почты и пароль, хотя почаще надобно заполнить анкету персональной информацией (ФИО, дата рождения, пространство проживания и т.д. ). Нужно указывать лишь реальные данные, что впоследствие они станут испытаны. 1×slots промокод при регистрации 2025 Размер ставки для игры по бездепозитному бонусу (естесственно же, в случае, когда он представлен вид бонусных валютных средств) зачастую ниже, чем при ирге на депозит. Ограничение несомненно работать до момента отыгрыша бонуса.
<b>Смотреть еще похожие новости:</b>
<a href=https://acerfans.ru/user/JamesTed/>1×slots зеркало рабочее на сегодня</a>
<a href=http://forums.panzergrenadiers.com/showthread.php?22860–1×slot-%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%B7%D0%A0%D1%91%D0%A0%D0%85%D0%A0%D1%95-%D0%A0%C2%B7%D0%A0%C2%B5%D0%A1%D0%82%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%BB%D0%A0%D1%95&p=503407#post503407>1×slot казино зеркало</a>
<a href=https://www.donchillin.com/space-uid-382497.html>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепы обыкновенно предлагают с отыгрышем — моментально исключить выигранные свои невозможно. Перевод денег со счета несомненно вероятен после такого, как юзер выполнит все требования казино, а сумма не быть выше установленного правилами лимита. Условиями акции фиксируются сроки, протяжении которых заказчик вправе воспользоваться предложением. Обычно они не превышают нескольких дней последствии активации. Объективные – размер бонуса, коэффициент и обстоятельства вейджера, надобность внесения депо для вывода средств;
#3859 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению этого времени, Вы не можете активировать и получить бездепозитный бонус. <a href=http://filmkachat.ru/>1×slots регистрацию процедура займет всего лишь</a> Постарайтесь отыграть вейджер, чтобы замечена вероятность забыть заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электрической кошелёк, карту, телефон. <a href=https://noti.st/alinavideneeva/qgz7Oi/professional-furniture-technical-drawing-services-solutions>https://noti.st/alinavideneeva/qgz7Oi/professional-furniture-technical-drawing-services-solutions</a> Пoдтвepдить личнocть посетителя. Для удачного вывода средств, необходимо подтвердить личность посетителя. Нa этaпe вepификaции пpoфиля, работники службы защищенности должны убедиться, что у игрока чем один акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не может вывести свой выигрыш, в у него несомненно некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы. 1×slots рабочее зеркало <a href=http://d992387h.bget.ru/user/Oscarher/>http://d992387h.bget.ru/user/Oscarher/</a>
1×slots зеркало которую указывали при регистрации кстати
1×slots зеркало сайта Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.Так что основное отличие подарка на депо от бездепа – обязательное пополнение счёта. Вы можете привнести депо и преумножить стартовый капитал или забрать бездеп и при этом не придётся рисковать своими сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начисляет щедрое одобрение! <a href=https://www.sportsheadsgames.com/profile/DoctorLazutaPi>https://www.sportsheadsgames.com/profile/DoctorLazutaPi</a> Для получения бонуса нужно пригласить в забаву нового посетителя. Казино начислит пригласившему фиксированный процент от взносов приглашённого повторяющий приза: почаще всего его размер не выше 10%. Срок деянья бонуса правило не выше месяца: пригласивший получает приз в зависимости от проигранных ставок приглашённого в 1-ый месяц забавы.Но такие рамки не смущают даже хайроллеров, поскольку коэффициенты на слотах позволяют рассчитывать на крупные выигрыши, а неких автоматах разыгрывается прогрессивный джекпот. 1×slots казино мобильная версия
1×slots бонус за регистрацию
Теоретически, к бесплатным призам возможно отнести например нарекаемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, потому что они предоставляют лишь возможность создавать ставки. <a href=https://www.forodelguardiacivil.com/members/536224-RenaldoFAF>https://www.forodelguardiacivil.com/members/536224-RenaldoFAF</a> 1× slots сайт
1×slots зеркало видели такую регистрацию на
Для верификации аккаунта нужно дать специалистам технической поддержки отсканированную копию паспорта и счета за коммунальные предложения, а также фотографию банковской карты либо скриншот странички электронного кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для доказательства личности.Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и более. Когда игроку полагается большое фриспинов, администрация возможность разбивать их начисление на количество дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах промоакции. Важно, удостоверьтесь сомнений, собственно раньше не регистрировались в выбранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи.Если площадка дарит бездеп за регистрацию, то процедура его получения проста. Нужно лишь ввести акк на веб-сайте и активировать его, подтвердив адресок электронной почты, номер телефонного либо иные данные, которые просит оператор. Перед данным необходимо убедиться, собственно юзер находится на официальном веб-сайте казино, но на мошеннической площадке. 1×slots сайт <a href=https://aktivnoe.forum24.ru/?1–7–0–00008758–000–0–0–1683721219>https://aktivnoe.forum24.ru/?1–7–0–00008758–000–0–0–1683721219</a>
1×slot регистрация
<a href=https://ugzhnkchr.ru/user/Joshuameals/>https://ugzhnkchr.ru/user/Joshuameals/</a> 1хслот скачать
<b>Смотреть еще похожие новости:</b>
<a href=https://creapnl.com/foros/tema/1%d1%85%d1%81%d0%bb%d0%be%d1%82%d1%81-%d1%80%d0%b0%d0%b1%d0%be%d1%87%d0%b5%d0%b5-%d0%b7%d0%b5%d1%80%d0%ba%d0%b0%d0%bb%d0%be-84/>1хслотс рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Поспешите зарегистрироваться на официальном веб-сайте Клубника, дабы быстро получить 33 безвозмездных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, замечена настоящий шанс победу! За вербование приятеля ? масштабах партнерской программы клиент получает вознаграждение за вербование новых юзеров.
#3860 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пин casino ставки на спорт букмекерские конторы <a href=https://rucriminal.info/>porno Катерина Шпица</a> часы казино 1×bet слоты 1×bet top <a href=https://kompromat1.online/>win win casino</a> Фастова Елена Владимировна порно казино фильм слот casino Юдаева Ксения Валентиновна порно суть казино Яровая Ирина Анатольевна порно Скворцова Вероника Игоревна порно
DiskiPlus 1×bet сейчас DiskiPlus 1×bet слоты 1×bet xyz <a href=https://www.diskiplus.ru/>DiskiPlus 1go casino</a> DiskiPlus porno Дарья Мороз DiskiPlus бывшие казино <a href=https://www.diskiplus.ru/>DiskiPlus porno Вера Бирюкова, гимнастка</a> DiskiPlus казино смотреть онлайн DiskiPlus Самойлова Алла Владимировна порно DiskiPlus casino вход DiskiPlus Крючкова Полина Викторовна порно DiskiPlus Самойлова Алла Владимировна порно DiskiPlus 1×bet зеркало на сегодня 1×bet xyz DiskiPlus суть казино
#3861 Charlesgunnyhttp://filmkachat.ru
скачать 1×slots официальный сайт
Во всех законных онлайн-казино Беларуси нужно свидетельство паспортных данных для забавы — это заявка правительства страны. <a href=http://filmkachat.ru/>1хслотс официальный сайт зеркало</a> Принципиальным различием безвозмездных призов от бонусов на депозит является неимение надобности вносить деньги на аккаунт. Из-за этого их нередко нарекают бездепозитными (not the slightest down payment bonuses).Популярность онлайн казино растёт и всё больше пользователей начинают увлекаться азартными играми. Бездепозитные призы 2022 года, это оригинальные подарки за регистрацию. С их помощью новые игроки шансы получить благотворительные вращения или средства на баланс за 1 регистрацию. С появлением игорных заведений в интернете, бездепозитные бонусы стали моднейшим способом вербования игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о которых мы поведаем. Наш сайт собрал наилучшие предложения из онлайна на 2022 год. Воспользуйтесь каким презентом и сможете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша нужно выполнить условия. <a href=https://app.pipefy.com/organizations/301582382/interfaces/cee4daae-995f-468b-8be8-cb9e89cd051f/pages/7519bd40-b099–409e-bcf8–45325dc0e875>https://app.pipefy.com/organizations/301582382/interfaces/cee4daae-995f-468b-8be8-cb9e89cd051f/pages/7519bd40-b099–409e-bcf8–45325dc0e875</a> Бонус начисляется игроку незамедлительно последствии регистрации и прохождения верификации в казино и не настятельно от клиента внесения депо. Как управляло, объем приза в сходственном случае достаточно стыдливый, однако дозволяет новеньким познакомиться с игрой без риска настоящими деньгами. 1×slots подтвердит вашу регистрацию если говорить <a href=https://www.anobii.com/en/collections/6286076>https://www.anobii.com/en/collections/6286076</a> Отыграв бездепозитный приз в казино с выводом также придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, случае подобное ограничение существует, то единоразово исключить получится только необходимую, не превосходящую объем приобретенного бонуса.
1× slots casino зеркало
Прямо момент заберите благотворительные вращения за регистрацию без депо и начинайте собирать призовые композиции ради солидных выигрышей! <a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=358098>скачать 1×slots официальный сайт</a> 1×slots бездепозитный бонус за регистрацию <a href=http://www.keeha.co.kr/bbs/board.php?bo_table=notice_en&wr_id=485723>http://www.keeha.co.kr/bbs/board.php?bo_table=notice_en&wr_id=485723</a> За вербование приятеля ? в партнерской программки клиент получает вознаграждение за привлечение свежих юзеров. 1×slots регистрацию более популярный вариант это Для отыгрыша бонуса казино обязует игрока сыграть на необходимую, в количество раз превышающую необходимую полученного бонуса — здесь выгода компании явна.Поспешите зарегистрироваться на официальном сайте Клубника, дабы быстро получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, замечена реальный шанс победу!
1×slots зеркало рабочее
Приветственный бездеп предоставляется любому игроку только раз один. Казино сражаются с так именуемыми бонусхантерами (от англ. Bonus Hunter — охотник за призами), пытающимися заводить многочисленные аккаунты для надувательства оператора и повторного получения дара. Исключить похожие деяния разрешает верификация данных. Администрация вправе востребовать у клиента доказать персональные данные, указанные при регистрации. <a href=https://woodmancx.com/user/WalterEmift/>https://woodmancx.com/user/WalterEmift/</a> В любом казино с бездепозитным бонусом предусмотрены вейджеровые обстоятельства. Это единственный «подводный камень», который стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) устроить определённое количество ставок. Чем круче приз, что, этим сложнее выполнить обстоятельства, и наоборот.Приглашаем делиться мнениями о призах. Это поможет другим юзерам подбирать более выгодные предложения. 1×slots казино зеркало При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток.Фриспины без депозита либо дополнительные свои посодействуют ближе познакомиться с игровой платформой и её функциями. За счёт презентов можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради забавы против живых крупье.
1 x slots
Для проверки применяются сканы паспортов, водительских прав, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если юзер замечен в попытке завести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их владелец попадает в темный список. При ирге на лицензионной площадке не стоит опасаться указывать достоверную персональную информацию (шифрование ликвидирует утечку персональных данных).Доступные забавы – В неких азартных забавах возможно понизить математическое превосходство казино до нескольких 10-х процента. В их числе почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как верховодило, в таких забавах ставки идут в зачет вейджера не полностью. Например, возможность учитываться лишь 50%. В некоторых играх бездепозитные призы вообщем невозможно отыгрывать. <a href=http://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=6268>1 х слотс зеркало</a> Зарегистрируйтесь. Для регистрации чаще всего достаточно ввести собственный номер телефона и почтовый адрес, последствии чего ввести полученный код из СМС. Возможно, требуется указать промокод. В правилах промоакции несомненно написано, где его бы включать. Иногда это хотелось делать при регистрации, иногда — уже в сотворения личного кабинета, на отдельной странице.Если площадка презентует бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь ввести аккаунт на сайте и активировать его, подтвердив адрес электрической почты, номер аппарата либо иные данные, коие требует оператор. Перед этим нужно увериться, собственно юзер располагается на официальном сайте казино, не на мошеннической площадке. Многие новички колеблются, собственно поощрительный приз не несомненно отдавать, в в они выиграли у казино. Это полностью неопасно и накрепко. Выводя выигранные свои, игрок просто останавливает свое участие деле и утрачивает уникальную возможность – бесплатно наращивать личное материальное положение.Чем ниже велечину вейджера, что, этим легче отыграть и вывести приз. Если Вы планируете заработать на бездепе, не просто ознакомиться с свежим игровым клубом, то стоит игнорировать бонусов с высоким вейджером их практически не реально отыграть. С ними Вы можете лишь протестировать забавы заведения. казино 1×slots <a href=https://www.mshowto.org/forum/members/glennhap.html>https://www.mshowto.org/forum/members/glennhap.html</a> Ограничения по забавам. Администрация воспрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, средствами либо безвозмездными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда дробленье выполняется по виду игр. Например, отыгрыш возможен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino.
1×slots коды
Отзывы читателей о бонусных акциях посодействуют составить впечатление, но не запамятовывайте о субъективности собственных объяснений.Выполнив все притязания оператора, клиент возможность оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем не более суток. Если дополнительно требуется пройти процедуру верификации, то срок увеличивается до 1–2 рабочих дней. Для перевода применяются банковские приборы и электрические платежные системы. Второй метод подходит другого, как, например как большинство транзакций в этом случае исполняются моментально. В связи со специфичностью функционирования банков обработка платежей имеет занять до нескольких рабочих дней. Зарегистрироваться в казино по особой ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефонного и электронную почту). Для доказательства номера аппарата нужно в собственном профиле указать свой номер и нажать кнопку „Подтвердить номер телефона“, далее Вы получите sms-сообщение с кодом, кот-ый нужно установить в отвечающее поле. Для доказательства электрической почты, перейти по интенсивной ссылке в послании от казино.Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, the decision зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. <a href=http://www.okaywan.com/home.php?mod=space&uid=495465>http://www.okaywan.com/home.php?mod=space&uid=495465</a> После потребуется внести идентификационный платёж. Это стращает начинающих больше всего. Нужно сделать минимальный депозит в 100–500 рублей. Таким образом служба защищенности убедиться что, нет, собственно платёжный метод принадлежит Вам. Данная процедура важна для обеспечивания защищенности игровых счетов. Пример, Ваш акк взломают и выведут средства на свой кошелёк. Будет крайне досадно. Поэтому верификация платёжной системы, это необходимый момент. 1×slots casino регистрация 1×slots review live Предложения с бездепозитными призами за регистрацию позволяют новым заведениям привлечь аудиторию на свой сайт. А игроки к получают вероятность выступать на настоящие средства без депо в казино и заработать маленькой стартовый капитал, кот-ый разрешено исключить на карту банка либо электронный кошелек.
<b>Смотреть еще похожие новости:</b>
<a href=http://permitbeijing.com/forum/showthread.php?tid=2195952>казино 1× slots официальный сайт</a>
<a href=https://mcmon.ru/showthread.php?tid=105166>1×slot рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Риск-игра по одинаковым шансам – Также казино возможность запрещать скорпулезно условия по отыгрышу счет раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких иных играх.
#3862 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора фонбет официальный сайт 1×bet слоты 1×bet xyz <a href=https://strelochnik.com/>1×bet вход</a> порно с Артемий Панарин (хоккей) casinos xyz <a href=https://m.repost.news/>pin ап casino</a> pin ап casino casino официальный зеркало casino riobet casino скачать порно с Александр Головин (футбол) 7k casino порно с Виктория Синицина, фигуристка
DiskiPlus лучшие букмекерские конторы DiskiPlus фильмы казино рояль <a href=https://www.diskiplus.ru/>DiskiPlus человек казино</a> DiskiPlus приложения букмекерских контор на андроид DiskiPlus 1×bet скачать приложение на андроид <a href=https://diskiplus.ru>DiskiPlus букмекерская контора</a> DiskiPlus букмекерские конторы в россии DiskiPlus casino игровой автомат DiskiPlus порно с Сергей Бобровский (хоккей) DiskiPlus скачать сайт букмекерской конторы DiskiPlus cat casino DiskiPlus порно с Анастасия Потапова, теннисистка DiskiPlus casinos winning
#3863 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино фильм 1×bet xbet xyz <a href=https://vestnik-jurnal.com/>up casino</a> 1×bet зеркало рабочее pin casino зеркало <a href=https://vestnik-jurnal.com/>порно с Елена Никитина, скелетонистка</a> 1×bet xbet xyz казино регистрации мелбет букмекерская контора cometa casino porno Анастасия Янькова, боксерка porno Нина Пирогова, хоккеистка официальные букмекерские конторы скачать
DiskiPlus винлайн букмекерская контора DiskiPlus порно с Антропова Валентина Викторовна <a href=https://www.diskiplus.ru>DiskiPlus скачать 1×bet</a> DiskiPlus Елена Лядова DiskiPlus pinco casino <a href=https://diskiplus.ru>DiskiPlus 1go casino</a> DiskiPlus порно с Евгения Медведева, фигуристка DiskiPlus 1×bet официальный DiskiPlus приложения букмекерских контор DiskiPlus 7k casino сайт DiskiPlus up casino официальный DiskiPlus kometa casino DiskiPlus какие казино
#3864 Charlesgunnyhttp://filmkachat.ru
1 x slots casino
Для отыгрыша бонуса казино обязывает игрока сыграть на необходимую, в некоторое один превосходящую необходимую полученного приза — тут выгода фирмы очевидна. <a href=http://filmkachat.ru/>1×slots бонус за регистрацию</a> В основном случаев бесплатные бонусы начисляются в кредитах, коие нельзя незамедлительно вывести со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти требования принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д.). О нем читайте ниже. <a href=https://prlog.ru/analysis/astramedika.com.ua>https://prlog.ru/analysis/astramedika.com.ua</a> Несмотря на то, собственно этот вариант стимуляции со стороны азартных платформ довольно моден области похожих игр, далековато не всем поклонникам казино знаменито, что сами бездепозитные призы казино и как непосредственно их вполне эксплуатировать. 1×slots регистрация 1×slots casino c2d ru <a href=http://services-sector.ru/clubpointeresam/memberlist.php?mode=viewprofile&u=157789>http://services-sector.ru/clubpointeresam/memberlist.php?mode=viewprofile&u=157789</a>
1×slots зеркало на сегодня
1хслотс зеркало <a href=http://enterprisenetworks.boyunsoft.com/redirect.aspx?id=2336&q=201904&f=0&url=http%3a%2f%2ftupalo.com%2Fen%2Fusers%2F7937703>http://enterprisenetworks.boyunsoft.com/redirect.aspx?id=2336&q=201904&f=0&url=http%3a%2f%2ftupalo.com%2Fen%2Fusers%2F7937703</a> Таким образом, заведение пробует показать себя своим вероятным игрокам, а такой рекламный ход как казино приз без депозита за регистрацию привлекает довольно много внимания к игорному заведению и обеспечивает неизменный поток свежих посетителей и грядущих клиентов игрового онлайн клуба.Реже бонусы без депо начисляются постоянным игрокам. С их поддержкой администрация старается вычесть ценных посетителей либо вожделеет поблагодарить за преданность правильных гостей. Но намного почаще для сходственных целей применяются эти промоакции: 1×slots зеркало видели такую регистрацию на Возможность протестировать новые игры, не рискуя личными своими и создать собственную тактику игры.Нет. Для получения бездепозитного бонуса в казино необходима неотъемлемая регистрация на сайте. Играть в слоты бесплатно и без регистрации возможно только в демо режиме.
казино 1×slots официальный сайт
Первый возникающий вопрос, это, чего выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают свежих игроков. Последним легче начать игру на деньги с презента за регистрацию. Им не нужно пополнять баланс и расходовать личностные свои. Новички получают бесплатные спины или свои на счёт. С их помощью знакомятся с игровым процессом, крутят слоты и проделывают ставки в рулетке. Практически все интернет казино с бездепозитным призом за регистрацию учитывает программу преданности — систему поощрения постоянных посетителей, кот-ая состоит из большого уровней. При достижении игроком одного уровня на его счёт поступает бонус. Чем выше уровень — что, этим щедрее приз.Выиграть настоящие средства в казино не пополняя счет – сложно, но вероятно. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными призами и начните выступать на бонусные средства. По статистике из 10-ти заведений возможно заработать небольшую сумму средств за счет бонусных средств. <a href=http://mtpkrskstate.ru/forum/user/206947/>http://mtpkrskstate.ru/forum/user/206947/</a> Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации подарка необходимо подтвердить электронную почту и привязать телефонный;Обыкновенные бездепозитные призы в объеме от 3-х до 20 $ сделаны чтобы, чтобы, чтобы в игры заходили все свежие и новые игроки. Здесь, скорее, будет ограничение на наибольший выигрыш. Важно, чтобы перед наименьшим вкладом был отключен бонус за 1-ое пополнение счета, и игрок не попадет на повторный вейджер. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Сразу после активации промокода возможно воспользоваться презентом. Как уже упоминалось, бонусы случаются трёх обликов – фриспины, кредиты и фриплей-бонусы.Бoльшинcтвo азартных заведений выдвигают примерно однообразные, схожие обстоятельства и требования, которые нужно выполнить, дабы получить бездепозитный приз за регистрацию. Все их можно соединить в раз список:
1×slots мобильная версия войти казино
Бездепозитные бонусы реальными деньгами, коие возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадали. Если вы выбрали себе количество брендов которые вас больше всего полюбились, для постоянной забавы! Таких гемблеров казино довольно любит и оценивает, за частую такие игроки становятся VIP игроками заведения, которым часто поступают прибыльные предложения в виде бонусов, так же туда входит и бездепозитные. 1×slots зеркало сайта <a href=http://www.podrujka.com/user/PorsedropPa/>http://www.podrujka.com/user/PorsedropPa/</a> В онлайне очень количество скриптовых сайтов, которые принадлежат плутам. Их основная цель – привлечь гэмблеров, пообещав не только щедрые презенты, но и крупные выигрыши. Так собственно некоторые веб-сайты предлагают получить за регистрацию том $1 000.
1хслотс официальный сайт зеркало
<a href=http://bcbrg.com/bbs/board.php?bo_table=free&wr_id=48752>http://bcbrg.com/bbs/board.php?bo_table=free&wr_id=48752</a> Oтыгpaть приз с указанным вeйджepом, результата необходимо сдeлaть cтaвoк нa cумму, превышающую объем бонуса в некоторое один. 1×слотс казино Превышение максимальной ставки при отыгрыше. Система механически не предостерегает о превышении ставки, поэтому о несоблюдении правил игрок возможность разузнать теснее в подачи запроса на вывод средств.
<b>Смотреть еще похожие новости:</b>
<a href=https://lawsbay.com/webdesing-8/#comment-12379>1× slots регистрация в 1×slots casino</a>
<a href=https://thetechmodders.com/forums/viewtopic.php?t=68798>1×слотс казино</a>
<a href=http://kemsrr.forumex.ru/viewtopic.php?f=7&t=3337>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Как лишь получите бездеп в казино, всё также не забывайте проверять электрическую почту. Некоторые игорные клубы непрерывно радуют активных гэмблеров приятными призами. Чаще всего получить подарок возможно в преддверии праздника, на день рождение, за вербование друга. А кроме распространённым призом считается прибавка к депозиту. Нужно всего лишь восполнить счёт, и азартное заведение прирастит его на 50–100%.
#3865 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet сейчас почему в казино нет окон <a href=https://slon-ru.com/>casino buzz</a> промокод 1×bet пинко casino <a href=https://specreporter.com/>casino на телефон</a> казино фильм порно с Зырянова Анастасия Владимировна лучшие онлайн казино 1×bet зеркало рабочее xbet суть казино слоты казино 1×bet официальный 1×bet xyz
DiskiPlus casino скачать приложение DiskiPlus рабочие зеркала казино <a href=https://diskiplus.ru/>DiskiPlus самое казино</a> DiskiPlus unlim casino DiskiPlus сайт pin up casino <a href=https://www.diskiplus.ru>DiskiPlus casino автомат</a> DiskiPlus bitz casino DiskiPlus рабочие зеркала казино DiskiPlus Юдаева Ксения Валентиновна порно DiskiPlus спорт букмекерская контора DiskiPlus сайты казино DiskiPlus рабочие зеркала казино DiskiPlus букмекерская контора фонбет официальный сайт
#3866 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало
Внесение депо – Будьте готовы восполнить счет последствии отыгрыша приза. Это стандартное заявка управлял для данного на промо-акций. Лучше заблаговременно уточнить, какую сумму нужно несомненно вносить на счет. Как правило, речь о минимальном депозите, хотя вы обязаны быть уверены, собственно он вам по карману. <a href=http://filmkachat.ru/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> Приветственный приз без депо ? презент за регистрацию. Выдается средствами, фриспинами или баллами. В заключительном случае бонусные баллы применяются для участия в турнирах или обмена на реальные средства.В качестве бонусов онлайн казино часто предлагает выдачу фриспинов, словами даровых вращений игрового барабана. Виртуальные монеты возможно применять для обучения в покерной школе или для игры в казино. <a href=https://www.astrobin.com/users/shopavto/>https://www.astrobin.com/users/shopavto/</a> Промокод – определённая композиция знаков, коию нужно ввести в соответствующее фон при создании учетной записи или активировать в собственном профиле игрока в разделе с бонусами.Некоторые клубы механически начисляют приз на аккаунт игрока последствии исполнения критерий получения, хотя бывают ситуации, когда бонус нужно активировать игроку самому. Есть количество методов активации приза: 1×slots официальный зеркало рабочее <a href=http://a96549hg.bget.ru/user/Walterreith/>http://a96549hg.bget.ru/user/Walterreith/</a> Если речь об эксклюзивных предложениях, может потребоваться регистрация в казино по ссылке с партнерского сайта.Игрокам стоит принимать приветственный приз как гарантированный способ получить крупный выигрыш, но это замечательная вероятность без затрат расценить функционал казино.
1×slots подтвердит вашу регистрацию если говорить
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-2090#post-59804>1×slots рабочее зеркало на сегодня</a> 1×slots казино зеркало Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских рублей. В критериях промоакции указано, что вейджер бездепозитного приза х20. Поэтому, дабы отыграть приз, игроку несомненно необходимо устроить ставок на 35*20=700 руб. <a href=http://hi.paltalk.com/client/webapp/client/External.wmt?url=http://dpo-smolensk.ru/bitrix/rk.php?goto=http://quad-industry.com/bitrix/redirect.php?goto=https://teletype.in/@urist555/8FahXNzLVBp>http://hi.paltalk.com/client/webapp/client/External.wmt?url=http://dpo-smolensk.ru/bitrix/rk.php?goto=http://quad-industry.com/bitrix/redirect.php?goto=https://teletype.in/@urist555/8FahXNzLVBp</a> Мы собрали и опубликовали перечень наихороших бездепозитных казино с бонусами за регистрацию, коие гарантируют великодушные выигрыши и мгновенные выплаты.Все любят получать подарки. Согласитесь, почти каждый играющий человек будет бесконечно счастлив, случае получит даровой презент для забавы в онлайн казино просто за регистрацию или же бонус за внесенный депозит, так именуемые приветственные бонусы для свежих игроков. Соответственно такие интернет клубы будут больше известны и предпочтительны у игроков при выборе казино для забавы. Топ казино день обновляется и прибавляются новые и увлекательные игровые клубы с симпатичной бонусной политикой и всеми возможными привилегиями, к которым относятся такие призы как фриспины за регистрацию, денежные бездепозитные призы, а также щедрые призы за внесенный депозит. 1×slots мобильная версия войти казино Условия вывода выигрыша. В неких заведениях для удачного вывода с бездепозитного бонуса достаточно пополнения баланса и подтверждения личности. В других же клубах, необходимо несколько один прокрутить свой депо.
1×slots на любой вкус как пройти регистрацию
На бонусные начисления имеют быть установлены дополнительные лимитирования, которые Вы не приняли при отыгрыше. Пока приз всецело не отыгран — деньги из казино не выводятся.Фриспины — благотворительные вращения, коие позволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся самым популярным и желаемым видом приза — благотворительные вращения порой эффективнее и веселее в отыгрыше, чем другие облики бездепов. Как правило, новоприбывшие геймеры в первую очередь желают ознакомиться с методами ввода и вывода валютных средств и сроки выполнения поданных заказов дабы конкретно разуметь, как прытко меня исключить свой казино приз за регистрацию без депозита на электрический кошелек или же банковскую карту. К счастью для всех играющих, снутри конкретных холдингов, все казино соперничают между собой. Ведь в бы определенную фирму представляло лишь одно онлайн-заведение, то навряд бы клиенты заметили казино с бонусом за регистрацию и могли бы рассчитывать лишь на вознаграждение повторяющий приза на 1-ое вложение. К каждому заведению регулярно стопам привлекать свежих игроков, собственно, конечном, только на руку всем играющим.Когда идет о получении бездепозитных бонусов в казино, в первую очередь направьте на следующие условия: <a href=https://forums.drdarkesoftwares.com/member.php?action=profile&uid=1345>https://forums.drdarkesoftwares.com/member.php?action=profile&uid=1345</a> Выбор любого интернет казино на нашем сайте. В описании к любому Вы можете разузнать, собственно получите за создание аккаунта.При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, коие возможно предназначить игре в казино. 1×slots рабочее зеркало на сегодня Это тоже безвозмездные деньги, коие поступают на аккаунты новоиспеченных игроков последствии регистрирования. А особенность таких призов состоит в, собственно обретенные финансы обязательно идет использовать в продолжении назначенного медли.
казино 1×slots официальный сайт
Более крупные предложения встречаются довольно редко. Зачастую они доступны только VIP-игрокам. В оставшихся случаях им всего сопутствуют очень строгие обстоятельства отыгрыша. Также возможны вспомогательные условия и другие ограничения, прописанные в критериях и положения бонусной программки казино. 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=http://www.djwx.com/forums/user/profile/62139.page>http://www.djwx.com/forums/user/profile/62139.page</a> Бездепы все заходить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой или баллами.
1×slots бонус за регистрацию
Если площадка презентует бездеп за регистрацию, то процедура его получения проста. Нужно только ввести акк на веб-сайте и активировать его, подтвердив адрес электрической почты, номер телефона либо другие данные, коие настятельно оператор. Перед данным нужно убедиться, что юзер располагается на официальном сайте казино, но на жульнической площадке. <a href=http://iawbs.com/home.php?mod=space&uid=834261>http://iawbs.com/home.php?mod=space&uid=834261</a> Простая процедура получения бездепозитного бонуса, которая займет менее 2-х минут. Для получения бездепов, достаточно зарегистрироваться и доказать контактные данные. 1×slots casino регистрация 1×slots review live Доступ к дару имеет открываться механически последствии введения промокода или воззвания в саппорта вебсайта. В первом случае от пользователя не требуется никаких поступков. Бездеп с активацией по коду встречается почаще всего. Игроку необходимо ввести совокупность знаков в графе, которая имеет находиться в регистрационной форме в Личном офисе.
<b>Смотреть еще похожие новости:</b>
<a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=9743>1×слотс казино</a>
<a href=http://griffhunter.com/boards/viewtopic.php?p=399218#p399218>x1 slots регистрация в 1×slots casino</a>
<a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=41243>1х слот регистрация в 1×slots casino</a>
<a href=https://minecraft.ru.net/user/Manuelsoarl/>1 х слотс зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Частенько новички не знают, как активировать презенты или вывести 1-ый выигрыш. Для подобных случаев наша команда обрисовала главные термины – собственно такое фриспины, вейджер, как его отыграть, для необходимо протекать верификацию.
#3867 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Анна Щербакова, фигуристка порно с Константин Тюкавин (футбол) <a href=https://7club7.com/>бесплатные букмекерские конторы</a> про казино казино пину <a href=https://sovsekretno.net/>вавада казино</a> человек казино casino мобильные букмекерские конторы гта казино порно с Голикова Татьяна Алексеевна порно с Ирина Сидоркова casino pin официальный
DiskiPlus почему в казино не бывает настенных часов DiskiPlus casino betting <a href=https://diskiplus.ru/>DiskiPlus бывшие казино</a> DiskiPlus Ходнева Светлана Владимировна порно DiskiPlus самое казино <a href=https://diskiplus.ru>DiskiPlus casino бонус</a> DiskiPlus порно с Петр Ян (ММА) DiskiPlus 7k casino зеркало на сегодня DiskiPlus 7k casino бонус DiskiPlus porno Мира Андреева (теннис) DiskiPlus 1×bet рабочее на сегодня DiskiPlus Семёнова Татьяна Владимировна порно DiskiPlus казино сочи
#3868 Charlesgunnyhttp://filmkachat.ru
рабочее зеркало 1×slots
Для получения выигрыша потребуется выполнить условия казино. Чаще всего игроку нужно поставить конкретную сумму, хотя уже из собственных средств. Она рассчитывается из общего объема выигрыша за всегда использования бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, в юзер выиграл 1000 рублей, а множитель сочиняет х30, вывести средства можно будет, сделав ставки на 30 000 руб. <a href=http://filmkachat.ru/>1×slots регистрацию более популярный вариант это</a> Можно. Вы всегда можете отказаться от получения бездепозитного бонуса за регистрацию в казино, же Вы не создадите ставку. <a href=https://next.canvanizer.com/demo/whiteboard-canvas>https://next.canvanizer.com/demo/whiteboard-canvas</a> На бонусные начисления все быть установлены вспомогательные лимитирования, которые Вы не учли при отыгрыше. Пока бонус полностью не отыгран — средства из казино не выводятся.Перечисленные повыше главные характеристики сопровождают практически любой бонус и являются стандартными для бездепозитных бонусных начислений в казино. 1хслотс рабочее зеркало <a href=http://suprememasterchinghai.net/bbs/board.php?bo_table=free&wr_id=2401764>http://suprememasterchinghai.net/bbs/board.php?bo_table=free&wr_id=2401764</a> Игрокам не следует принимать приветственный бонус как гарантированный метод получить крупный выигрыш, хотя это отличная возможность без затрат оценить функционал казино.Размер ставки для игры по бездепозитному бонусу (естесственно же, если, тогда,, когда он представлен в виде бонусных валютных средств) зачастую ниже, чем при этой на депозит. Ограничение будет работать до этапа отыгрыша приза.
казино 1×slots официальный сайт
<a href=https://www.allampolgar.hu/showthread.php?tid=3033>1х слотс зеркало регистрация в 1×slots casino</a> 1×slots регистрация то дальше необходимо пройти <a href=http://18245.ww.w.molifan.net/space-uid-2365543.html>http://18245.ww.w.molifan.net/space-uid-2365543.html</a> Только выполнив все условия отыгрыша и дождавшись окончания ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить средства деньги. 1×slot казино зеркало В бонусную программу многих операторов входят регулярные бездепы. Это бессрочные акции, поощряющие активных неизменных игроков. Популярный формат — раздача фриспинов по определенным дням недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депо в мена на накопленные баллы преданности.Фриспины – благотворительные вращения с фиксированной ставкой, коие можно применять в определенных игровых автоматах.
1×slots промокод при регистрации
<a href=http://0119ddd.com/bbs/board.php?bo_table=free&wr_id=134473>http://0119ddd.com/bbs/board.php?bo_table=free&wr_id=134473</a> Если вы новичок в и лишь попали в неизведанную вами область пыла — с помощью предложений как бездепозитные бонусы без пополнения. 1×slots официальный зеркало
рабочее зеркало 1хслотс
<a href=https://forum.spherecommunity.net/User-JamesLop>1×slots зеркало проходить регистрацию это отличный вариант</a> Представьте момент, когда при ставке в 10 руб. Вы получите схожее умножение. Миллион рублей за одно вращение, что вполне вероятно. Поэтому вопрос, сколько возможно выиграть остаётся открытым. Предлагаем выяснить других. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный бонус и инспектируйте удачу в деле. Разумеется, исключить средства довольно. Однако шансы есть у всех. 1×slots официальный сайт зеркало <a href=http://www.alzlt5.com/space-uid-277556.html>http://www.alzlt5.com/space-uid-277556.html</a>
1×slots казино зеркало
Одним из поводов отдавать привилегию одному либо иному заведению содержится в привлекательности предлагаемых промоакций и даровых предложений. Безвозмездные фриспины, выдаваемые без нужды делать какой-либо вклад, в списке находится далеко не в конце.Вывод выигрыша с бездепозитных призов казино – щедрый презент от азартных клубов. Но дабы исключить свой заработок, нужно выполнить ряд условий: Во всех легальных онлайн-казино Беларуси необходимо свидетельство паспортных данных для забавы — это требование правительства государства. <a href=http://t-res.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=http://xn----7sbnelamcgre0r.xn–p1ai/bitrix/redirect.php?goto=http://wildorchid.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/094W-ZH1zxh>http://t-res.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=http://xn----7sbnelamcgre0r.xn–p1ai/bitrix/redirect.php?goto=http://wildorchid.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/094W-ZH1zxh</a> В наше время очень просто получить бонус за регистрацию в казино. Практически любой игорный дом с готовностью начислит деньги или благотворительные вращения. Многие гэмблеры пользуются этим и не смущяются регистрироваться в любом клубе с выгодными критериями. Кстати, это замечательная вероятность выработать победную стратегию и сорвать джекпот.Обычно показатель выше, чем для бонусов на депо. Не дивитесь, случае он несомненно и х100. Иногда завышенный коэффициент вейджера устанавливается для обитателей отдельных стран. 1×slots регистрация 1×slotscasino09k online Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен перечень превосходнейших онлайн казино, коие предлагают своим игрокам щедрые призы за регистрацию.Бездепозитные бонусы за регистрацию в игровых автоматах для хозяев онлайн-казино считаются частью маркетинговой кампании, направленной на увеличение аудитории сайта. Так они продвигают средства бренды и привлекают новых посетителей.
<b>Смотреть еще похожие новости:</b>
<a href=https://showboysmedia.com/real-music/#comment-63457>1×slots официальный сайт мобильная версия</a>
<a href=https://projects.sare.org/people/jamestrazy/>1×slot казино зеркало</a>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=101727&result=reply>1х слот 1хслотс регистрация перейти на 1×slots</a>
<a href=https://praisenpray.org/forums/showthread.php?tid=101711>1хслотс рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В качестве бонусов интернет казино нередко предлагает выдачу фриспинов, другими даровых вращений игрового барабана. Виртуальные монеты возможно использовать для изучения в покерной школе либо для игры в казино.
#3869 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало сайта
Также существуют онлайн-платформы азартных игр, которые используют раздачу бездепозитных бонусов в специальные даты (как для казино, так и для игрока). Помимо этого, действующие игроки того имеют вероятность получить схожие призы за собственную работа (к примеру, за увеличения уровня или за схожие достижения). <a href=http://filmkachat.ru/>1×slots зеркало этих способов предполагает регистрацию</a> Ещё одно распространённое акционное предложение – симпатичный подарок с сомнительными требованиями. К образцу, клуб сулит $100 в качестве бездепа, хотя с вейджером х80 либо х100. Отыграть такой вейджер практически нереально и потому никакого концентрироваться на более интересных акциях. <a href=https://www.dibiz.com/archicgic>https://www.dibiz.com/archicgic</a> 1×slots казино зеркало <a href=http://www.podrujka.com/user/Henryabamb/>http://www.podrujka.com/user/Henryabamb/</a> Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Новые посетители онлайн-казино без первого депозита имеют выяснить собственную удачливость. К что, этому же есть возможность конвертировать бездепы в реальные деньги за регистрацию в казино, однако чтобы приз нужно отыграть сообразно условиям акции.
1хслот зеркало сайта
Для получения бонуса надо(надобно) пригласить в игру свежего посетителя. Казино начислит пригласившему фиксированный процент от взносов приглашённого повторяющий бонуса: почаще всего его объем не превышает 10%. Срок деянья приза как не превышает месяца: пригласивший получает приз от проигранных ставок приглашённого в 1-ый луна забавы.Обычно для получения бонусов без депозита, казино выдвигает лояльные и вполне выполнимые обстоятельства, но есть ряд поступков коие запрещены и имеют причиной досадные результаты: <a href=https://www.ldvd.nl/no-22-san-diego-place-rallies-very-last-boise-country-27–16?page=28#comment-237258>1×slots акции</a> 1×slots официальный сайт мобильная версия скачать <a href=https://www.modernvespa.it/profile/3512-patrickecose/>https://www.modernvespa.it/profile/3512-patrickecose/</a> 1хслотс казино зеркало Так что основное различие презента на депо от бездепа – обязательное пополнение счёта. Вы сможете внести депозит и преувеличить стартовый капитал или арестовать бездеп и всем не придётся рисковать своими сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начислит щедрое одобрение!Для получения бездепа нужно пригласить в игру по реферальной ссылке нового посетителя: он обязан зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на необходимую, указанную в условиях промоакции.
1×slots казино мобильная версия
Бездепозитный приз часто может стать доступным сразу в завершения регистрации, поскольку правило единственным требованием к нему является регистрация, а этого проверка вашей свежей учетной записи.Бонус за регистрацию в казино без депозита с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша возможность понадобиться сделать ставки на необходимую, в количество 10-ов раз превышающую сумму приза либо выигрыша. Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, например как Вам придется ее доказать дальнейшем при выводе средств. <a href=http://zeren.freeoda.com/member.php?action=profile&uid=4381>http://zeren.freeoda.com/member.php?action=profile&uid=4381</a> Обычно бездепозитные акции от казино, прибывают на эл. Почту в деньки рождения либо праздники. В неких онлайн казино возможно обратиться в чат и как постоянному игроку, вероятно вам предложат бездепозитное предложение. 1×slots casino регистрация 1×slots review live
1×slots официальный demo регистрация в 1×slots casino
Таким образом онлайн казино получает потенциального игрока. Возможно в или подлинном он захочет сыграть на средства деньги. Так работают бездепозитные бонусы в интернет казино. Здесь хорошо подходит выражение, благотворительные сыр случается только в мышеловке. Начинающие игроки могут не обдумывать опасность пыла. Однако с осознания делается больше. Это тема для отдельного обсуждения.Практически все интернет казино с бездепозитным бонусом за регистрацию предусматривает программу преданности — систему одобрения постоянных посетителей, кот-ая состоит из большого значений. При достижении игроком одного значения на его счёт поступает приз. Чем повыше уровень — тем щедрее бонус. <a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1885#post-53771>1×slots сайт</a> Прямо данный отберите бесплатные вращения за регистрацию без депозита и начинайте собирать призовые комбинации из-за солидных выигрышей! 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=https://pcnto.com/user/Porsedropsl/>https://pcnto.com/user/Porsedropsl/</a> Необходимость отыгрыша. Вейджер в выше, чем для бонусов за депозит. И же средства не отыграны, вывести их невозможно.
1×slots бездепозитный бонус за регистрацию
Активация по промокоду употребляется в различных обликах бездепов. Если речь идет о приветственном бонусе, то комплект знаков возможно разузнать на крупнейшей страничке, в регистрационной форме либо послании, которое отправляется юзеру для подтверждения e-mail. Акции имеют проводиться общо с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активируется разовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном кабинете или начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем важный код для активации в описании каждого рекламную. Теоретически, к безвозмездным бонусам возможно отнести например именуемые фриспины. Напомним, речь идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, поэтому что они деют лишь вероятность делать ставки.Размер призов почаще всего чисто символический и не превышает 50 рублей. Приятно, хотя ощутимым бустом в игре ли станет. <a href=http://okprint.kz/user/RichardNop/>http://okprint.kz/user/RichardNop/</a> Для того, чтобы отыграть сумму вашего бездепозитного приза нужно выполнить условия вейджера. Очень нередко фриспины даются на определенные слоты (book of ra, book of deceased, book of sun), подбирайте слот для по душе, они все очень красивые и высококачественные. Бездепозитные приз имеет быть денежным например и вид фриспинов на слотыТолько выполнив все условия отыгрыша и дождавшись завершения проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить средства деньги. 1×slots промокод при регистрации Рассмотрим принцип его деяния на примере. Допустим, вы зарегистрировались и получили $10 not the slightest deposit bonus с вейджером х50. Это значит, что выигранные средства можно несомненно выводить не раньше, чем после как, как общая сумма ставок достигнет $500.Для верификации аккаунта нужно дать профессионалам технической поддержки отсканированную копию паспорта и счета за коммунальные предложения, а фотку банковской карты или снимок страницы электронного кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для доказательства личности.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.allampolgar.hu/showthread.php?tid=4139>1×slots сайт</a>
<a href=https://test.soclanovtsy.ru/topic/57645-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-1×-slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82/>казино 1× slots официальный сайт</a>
<a href=https://www.lkgs.net/member.php/11965-JamesJax>1 х слотс зеркало</a>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=242791>1×slots промокод при регистрации 2025</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Это один из главных показателей привлекательности подарка. С завешенным коэффициентом даже мастера не сумеют выполнить обстоятельства по отыгрышу. И так, насколько привлекательно смотрится предложение – бездепозитный приз казино в размере $500 либо $1 000. Чтобы новички получше вдумались, собственно же это вейджер, мы разберём на примере.
#3870 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
зеркала казино сайт казино вход <a href=https://repost.news/>официальные зеркала казино</a> cometa casino букмекерская контора зенит <a href=https://t.me/vchkogpu_ru>porno Ангелина Гончаренко, хоккеистка</a> сайт pin up casino porno Елизавета Туктамышева 7k casino зеркало рабочее автомат казино casino регистрации Елена Лядова up букмекерская контора
DiskiPlus 7k casino сайт DiskiPlus black russia казино <a href=https://www.diskiplus.ru>DiskiPlus порно с Сергей Бобровский (хоккей)</a> DiskiPlus самое казино DiskiPlus inform@rucriminal.info <a href=https://www.diskiplus.ru/>DiskiPlus porno Екатерина Ефременкова, шорт-трекистка</a> DiskiPlus casino скачать DiskiPlus рейтинг казино DiskiPlus Нургалиева Эльвира Рамиловна порно DiskiPlus 1×bet скачать бесплатно DiskiPlus сайт винлайн букмекерская контора DiskiPlus porno Мария Шарапова DiskiPlus win win casino
#3871 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия скачать
Выигрыши с призов без инвестициям всегда привязаны к притязанию по ставкам и шансы быть обналичены лишь в исполненья этих притязаний.Фриспины — бесплатные вращения, коие разрешают игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины считаются самым знаменитым и желаемым обликом приза — бесплатные вращения иногда эффективнее и веселее в отыгрыше, чем другие облики бездепов. <a href=http://filmkachat.ru/>1 x slots</a> Ещё одно распространённое акционное предложение – симпатичный подарок с неблаговидными требованиями. К образцу, клуб обещает $100 в качестве бездепа, но с вейджером х80 либо х100. Отыграть такой вейджер фактически невероятно и поэтому какого-либо концентрироваться на более занимательных акциях.Бездепозитный приз по промо-коду будет доступен для игры, только что случае когда Вы активируете специальный бонусный код в разделе с призами или укажите промокод при регистрации на веб-сайте. В некоторых случаях, кроме активации кода, придется доказать контактные данные игрока и наполнить анкету клиента. <a href=https://www.exoltech.ps/blogs/post/89902>https://www.exoltech.ps/blogs/post/89902</a> Фриплей-бонусы. Бонусы за безвозмездную игру есть только в некоторых клубах. Они зачисляются незамедлительно после сотворения профиля и действуют непродолжительное время. Если у вас нет времени истратить свои, они просто завершатся. Что дотрагивается медли, в большинстве случаев призы срабатывают на 1-го часа. 1×slots зеркало выигрыши обязательно пройдите регистрацию если <a href=http://geolan-ksl.ru/forum/user/84567/>http://geolan-ksl.ru/forum/user/84567/</a> Также учтите, собственно кое-какие игровые платформы сузивают список стран, коие способны получить предложенный бездепозитный бонус за регистрацию. К образцу, существуют онлайн-заведения, выдающие подобные бонусы лишь обитателям конкретных государств. К примеру, интернет казино 777 Оригинал дает бездепозитный приз лишь игрокам из России и стран СНГ. Или наоборот, пичкают вознаграждением всех, кроме обитателей некоторых государств (исходя из сего, по внимательно изучать перечень, чтобы потом не появилось практически вопросов и претензий).
1×slots зеркало регистрация то дальше необходимо пройти
<a href=http://check2go.net/author/jameslob/>1хслотс казино зеркало</a> 1×slots casino регистрация 1×slotscasino09k online Стоит обозначить(означить), собственно бездепозитный бонус выдается только взрослым новеньким, коие, в свою очередь, могут пригласить личных друзей и знакомых, кроме претендующих на поощрительную программу лояльности. Подобная разработка замечена между создающих онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры содействуют повышению собственной популярности, методом вербования свежих игроков. Бонусы – это оригинальный шанс для вероятных соучастников игры, которые все опробовать софт покер рума и убедиться, станут ли они в него играть либо нет. Новый игрок попробует свои силы с реальными оппонентами в казино.В неких онлайн казино для получения бездепозитных бонусов не довольно просто зарегистрироваться на веб-сайте клуба и подтвердить свои контактные данные. Дополнительно потребуется активация промокода. <a href=https://danmanba.cc/home.php?mod=space&uid=138169&do=profile&from=space>https://danmanba.cc/home.php?mod=space&uid=138169&do=profile&from=space</a> 1×slots официальный сайт скачать Основное различие что, нет, собственно для получения бездепа не пополнять баланс в казино. Но не этого, есть ряд и отличий:
1×slots зеркало рабочее
За привлечение друга ? в рамках партнерской программки клиент получает вознаграждение за вербование свежих юзеров. <a href=https://pbtur.com.br/users/kennethfraph>https://pbtur.com.br/users/kennethfraph</a> 1×slots на любой вкус как пройти регистрацию
1×slot казино зеркало
Бонус за регистрацию в казино выдается лишь раз раз на 1-го игрока. Но бывают дополнительные промоакции, в рамках которых бездепы раздаются для постоянных клиентов и эти подарки Вы можете получить больше одного раза.К раскаянию, нет. Почти все казино, требуют внесение но бы 1-го малого депозита для вывода выигрыша с бездепозитного бонуса. Также учитывайте, что исключить средства разрешается лишь на что, эту платежную систему, с которой был изготовлен депозит. <a href=https://www.goslog.ru/personal/profile/index.php?PAGE_NAME=profile_view&UID=66187>1× slots зеркало</a> Важно, убедитесь в том, что ранее не регились в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи.Похожим образом работает 3-ий способ доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения посетителя либо из-за с получения им VIP-статуса. Подарок предоставляется последствии обращения в поддержку и проверки. 1 x slots casino <a href=https://imoodle.win/index.php?title=%D1%82%D0%B5%D0%BB%D0%B5%D0%B3%D1%80%D0%B0%D0%BC%20%D1%84%D0%BB%D0%B8%D1%80%D1%82%20%D0%B7%D0%BD%D0%B0%D0%BA%D0%BE%D0%BC%D1%81%D1%82%D0%B2%D0%B0>https://imoodle.win/index.php?title=%D1%82%D0%B5%D0%BB%D0%B5%D0%B3%D1%80%D0%B0%D0%BC%20%D1%84%D0%BB%D0%B8%D1%80%D1%82%20%D0%B7%D0%BD%D0%B0%D0%BA%D0%BE%D0%BC%D1%81%D1%82%D0%B2%D0%B0</a> Промообъявления от казино мешают реальной картины и ориентированы на вербование внимания юзеров. Понять, как высоки шансы остаться в плюсе, дозволит собственный тест условий предложения:
1×slots casino online регистрация
Маркетинговая политика всех игорных интернет-клубов обязана одевать различный характер. И случае гонорары на депозит служат для того, чтобы стимулировать заносить депозиты и поощрять уже место юзеров, то бездепозитный бонус в казино или бонус за регистрацию в казино, прежде всего, рассчитан на расширение базы покупателей. Внесение депо – Будьте готовы восполнить счет после отыгрыша бонуса. Это стандартное заявка правил для этого на промо-акций. Лучше заблаговременно уточнить, какую необходимую надо(надобно) несомненно заносить на счет. Как верховодило, речь о минимальном депозите, но вы обязаны быть уверены, собственно он вам по карману.На страничке представлены бездепозитные призы за регистрацию в казино редчайшая награда за которой гонятся все игроки как новенькие, так и профессионалы. Мы также уделяем великое внимание на наличие призов при формирование рейтинга казино на деньги. Бездепозитный приз это вероятность выступать даром и выиграть настоящие средства. <a href=https://securityholes.science/wiki/1×slots_%D0%A0%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5_%D0%97%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE_%D0%9D%D0%B0_%D0%A1%D0%B5%D0%B3%D0%BE%D0%B4%D0%BD%D1%8F>https://securityholes.science/wiki/1×slots_%D0%A0%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5_%D0%97%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE_%D0%9D%D0%B0_%D0%A1%D0%B5%D0%B3%D0%BE%D0%B4%D0%BD%D1%8F</a> Приветственный бездеп предоставляется какому игроку только один один. Казино сражаются с например называемыми бонусхантерами (от англ. Bonus Hunter — доброволец за призами), пытающимися заводить многочисленные аккаунты для обмана оператора и повторного получения подарка. Исключить сходственные действия дозволяет верификация данных. Администрация вправе потребовать у посетителя подтвердить персональные данные, обозначенные при регистрации. 1×slots casino регистрация Ограничения по играм. Администрация воспрещает игрокам кое-какие игровые автоматы с бездепозитным бонусом, деньгами или безвозмездными вращениями. Обычно, в правилах приводится полный перечень слотов для отыгрыша. Иногда разделение выполняется по облику игр. Например, отыгрыш возможен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino.
<b>Смотреть еще похожие новости:</b>
<a href=http://aficionado.pl/showthread.php?179738–1×slots-casino-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5&p=200809>1×slots casino зеркало рабочее</a>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5074/#comment-609865>1×slots регистрация на 1хслотс</a>
<a href=http://aficionado.pl/showthread.php?110186–1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82-%D0%BC%D0%BE%D0%B1%D0%B8%D0%BB%D1%8C%D0%BD%D0%B0%D1%8F-%D0%B2%D0%B5%D1%80%D1%81%D0%B8%D1%8F&p=127990>1×slots официальный сайт мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вейджер менее х30–35 считается приемлемым. Опытные игроки заявляют, собственно с таким вейджером реально остаться в плюсе, если верно подойти к выбору игрового аппарата. Начнём с того, собственно каждое рекламную за регистрацию подразумевает некие обстоятельства. Бездепозитные призы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность денежного оборота, необходимая для исполнения критерий. Пример, получили безвозмездные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 руб., проигрышных либо выигрышных, так. После исполненья, бонусный баланс перейдёт на настоящий и будет доступным к выводу.
#3872 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора бесплатно скачать Елена Лядова <a href=https://kompromat1.online/>песня казино</a> Крючкова Полина Викторовна порно букмекерская контора леонов <a href=https://th-royalgclub.com/>букмекерская контора</a> casino скачать kent casino букмекерская контора реального казино сайт винлайн букмекерская контора порно с Дронова Александра Викторовна porno Марина Александрова
DiskiPlus балтбет букмекерская контора DiskiPlus Самойлова Алла Владимировна порно <a href=https://diskiplus.ru>DiskiPlus порно с Кирьянова Дарья Борисовна</a> DiskiPlus Анна Михалкова DiskiPlus ограбление казино <a href=https://www.diskiplus.ru/>DiskiPlus казино большая</a> DiskiPlus top casino DiskiPlus скачать 1×bet на андроид DiskiPlus порно с Дронова Александра Викторовна DiskiPlus какие казино DiskiPlus Приезжева Екатерина Геннадьевна порно DiskiPlus pin up casino официальный DiskiPlus casino играть
#3873 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало слоты 1×bet xyz пари букмекерская контора <a href=https://rucriminal.info/>1win casino</a> bet casino porno Екатерина Ефременкова, шорт-трекистка <a href=https://t.me/vchkogpu_ru>пин ап casino</a> букмекерская контора скачать приложение порно с Анастасия Потапова, теннисистка порно с Юлия Ефимова casino регистрации порно с Евгений Малкин (хоккей) casino на телефон cat casino
DiskiPlus какие казино DiskiPlus Разуваева Ксения Денисовна порно <a href=https://www.diskiplus.ru/>DiskiPlus casino betting</a> DiskiPlus сайт букмекерской конторы DiskiPlus ramenbet casino <a href=https://www.diskiplus.ru/>DiskiPlus официальное казино вход</a> DiskiPlus 1×bet DiskiPlus порно с Алексей Миранчук (футбол) DiskiPlus 1×bet слоты DiskiPlus пин ап букмекерская контора DiskiPlus леон букмекерская контора DiskiPlus про казино DiskiPlus porno Дарья Мороз
#3874 Terrytefhttps://ufavip.sbs
Знакомства в Уфе <a href=https://ufavip.sbs/>ufavip.sbs</a> с нашей платформой стали еще проще, можно встретить девушек, готовых к интересному общению и приятному времяпрепровождению. Здесь каждый найдет то, что ищет: от легкого флирта до серьезных отношений.
#3875 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino зеркало сайта 7k casino <a href=https://www.ossetia.tv/>казино рояль смотреть</a> порно с Дарья Клишина, легкоатлетка казино вход официальный сайт <a href=https://m.repost.news/>кент casino</a> пари букмекерская контора 1×bet 1 порно с Георгий Джикия (футбол) пинап казино casino скачать приложение порно с Артемий Панарин (хоккей) лучшие букмекерские конторы
DiskiPlus мелбет букмекерская контора DiskiPlus 1×bet официальный <a href=https://www.diskiplus.ru>DiskiPlus яндекс игры казино</a> DiskiPlus пин ап казино DiskiPlus казино смотреть онлайн <a href=https://diskiplus.ru/>DiskiPlus casino рабочее</a> DiskiPlus porno Андрей Рублев (теннис) DiskiPlus porno Светлана Ходченкова DiskiPlus порно с Александр Головин (футбол) DiskiPlus Шевцова Татьяна Викторовна порно DiskiPlus 7k casino зеркало рабочее DiskiPlus гта онлайн казино DiskiPlus гта онлайн казино
#3876 Charlesgunnyhttp://filmkachat.ru
1×slots бонус за регистрацию
Постарайтесь отыграть вейджер, дабы была вероятность оставить заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные приборы. Вы сможете получить выигрыш на электрической кошелёк, карту, телефон. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots casino c2d ru</a> Бездепозитные бонусы реальными средствами, которые можно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадали. <a href=https://try.powermapper.com/Demo/Report/5b704f84-deeb-4992-b7c3–5f00c037e5d1>https://try.powermapper.com/Demo/Report/5b704f84-deeb-4992-b7c3–5f00c037e5d1</a> Размер ставки для игры по бездепозитному бонусу (естесственно же, в случае, когда он представлен вид бонусных денежных средств) часто ниже, чем при ирге на депозит. Ограничение будет действовать до момента отыгрыша приза.Обыкновенные бездепозитные бонусы в объеме от трех до двадцати долларов сделаны для того, чтобы в забавы заходили все новые и новые игроки. Здесь, вероятнее всего, несомненно ограничение на наибольший выигрыш. Важно, чтобы перед наименьшим вкладом был отключен бонус за первое пополнение счета, и компьютерные не попадет на повторный вейджер. 1×slots casino зеркало рабочее <a href=https://job.epday.com/home.php?mod=space&uid=636603>https://job.epday.com/home.php?mod=space&uid=636603</a>
1×slot регистрация
Доступность — бездепозитные призы в казино чаще всего предоставляются новым игрокам, хотя бывают случаи, когда бонус могут получить и действующие посетители. 1×slots официальный сайт скачать на айфон Чтобы играть безвозмездно на настоящие средства в казино, не всегда довольно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные деяния. <a href=https://tvoyaskala.com/user/WalterSuela/>https://tvoyaskala.com/user/WalterSuela/</a> Ниже указан важный список законных казино в Беларуси с бонусами на 1-ый депо. Вы сможете попасть на официальный вебсайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз. 1×slot регистрация
x1 slots регистрация в 1×slots casino
Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. <a href=https://www.ls1.com/forums/member.php?u=118454>https://www.ls1.com/forums/member.php?u=118454</a> 1хслотс казино зеркало
1хслотс рабочее зеркало
Еще одно условие касается объемов ставки. Операторы устанавливают наивысшую необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном кабинете. При превышении лимита есть риск потерять бонуса. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, заказчик может столкнуться с запретом назначать фишки на шансы.В интернет-сети всегда возможно найти списки более известных и гарантированных поощрительных программ от модных онлайн-казино. Ограничения по играм. Администрация воспрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, деньгами или бесплатными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда дробленье выполняется по виду игр. Например, отыгрыш возможен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino.Бездепозитные бонусы казино это финансовая компенсация, предлагаемая пользователям на дармовой основе и вероятность играть в онлайн казино даром. Если ассоциировать их с поощрениями за вклад, каких средства выдаются только впоследствии первоначального пополнения счета, то бездепозитные гонорары получаются даром. То есть, играющий получает возможность делать ставки на уже имеющие деньги, коие выдаст заведение, выполняя, всем, обычные деянья, дабы их извлечь (тут речь о регистрация, удостоверении личности с использованием номера аппарата, дизайна заказы и т.д.). В бонусную программку многих операторов входят регулярные бездепы. Это пожизненные акции, поощряющие интенсивных постоянных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают неизменные бонусы без депо в обмен на скопленные баллы лояльности. 1 x slots <a href=http://www.afunnydir.com/%D0%B1%D0%BB%D0%BE%D0%B3-%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0_427574.html>http://www.afunnydir.com/%D0%B1%D0%BB%D0%BE%D0%B3-%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0_427574.html</a>
1×slots casino регистрация на сайте
Срок отыгрыша — это этап, кот-ый наступает в момент активации бонуса и заканчивается с его закрытием. Пользователю необходимо уложиться в этот временной зазор, по призовые средства аннулируются. Казино устанавливают перечень игр, ставки в которых засчитываются при расчете отыгранных средств. Если тайтл не заходит в данный список, то он может быть недоступен для загрузки период деянья бонусного предложения.Третитй бездепозитный бонус за регистрацию – денежные средства. К раскаянию, начислить рубли или доллары готовы лишь известные и знаменитые клубы. С их помощью возможность насладиться любой доступной игрой – автоматом, рулеткой, кено, блэкджеком. <a href=http://www.iawbs.com/home.php?mod=space&uid=839770>http://www.iawbs.com/home.php?mod=space&uid=839770</a> Бонус за регистрацию в казино выдается только один раз на 1-го игрока. Но случаются вспомогательные промоакции, в которых бездепы раздаются для неизменных посетителей и такие презенты Вы сможете получить больше 1-го раза.Обычно бездепозитные акции от казино, приходят на эл. Почту в деньки рождения либо дни. В неких интернет казино можно обратиться в чат и как неизменному игроку, возможно вас предложат бездепозитное предложение. 1×slos регистрация в 1×slots casino Если площадка презентует бездеп за регистрацию, то процедура его получения проста. Нужно только завести аккаунт на веб-сайте и активировать его, подтвердив адрес электронной почты, номер телефона или другие данные, коие настятельно оператор. Перед этим необходимо убедиться, собственно юзер располагается на официальном сайте казино, а не на мошеннической площадке.Однако в критериях скрываются «подводные камни», которые не позволят вывести солидную необходимую или же вы не успеете отыграть вейджер. Поэтому профессионалы советуют арестовать безвозмездные вращения за регистрацию в казино без депо, дабы поднабраться навыка и получить реальный шанс на победу.
<b>Смотреть еще похожие новости:</b>
<a href=http://aurorahcs.com/forum/viewtopic.php?f=8&t=765882>казино 1×slots</a>
<a href=http://link.5nx.ru/memberlist.php?mode=viewprofile&u=600>1хслотс рабочее зеркало</a>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=135479>1×slot зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для верификации номера телефона, в собственном профиле изберите опцию „Подтвердить номер телефонного“ и введите в отвечающее фон код, полученный в sms-сообщении.
#3877 Charlesgunnyhttp://filmkachat.ru
1×slots бонус за регистрацию
На критериях отыгрыша бесплатных бонусов стопам тормознуть подробнее. С ними связаны аспекты, которые невозможно забыть без внимания.Чаще всего интернет-казино предлагают бездепозитные призы новым юзерам. Эта промо-акция довольно эффективно завлекает начинающих, подталкивая их к открытию счета. Конечно, не все становятся преданными клиентами, хотя сам факт регистрации аккаунта играет на руку заведению. <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> <a href=https://www.consult-exp.com/blogs/219733/Skup-aut-Warszawa-profesjonalna-wycena-i-natychmiastowa-wyp%C5%82ata>https://www.consult-exp.com/blogs/219733/Skup-aut-Warszawa-profesjonalna-wycena-i-natychmiastowa-wyp%C5%82ata</a> 1× slots casino официальный сайт <a href=https://www.sportnabiblioteka.bg/index.php?option=com_k2&view=itemlist&task=user&id=117534>https://www.sportnabiblioteka.bg/index.php?option=com_k2&view=itemlist&task=user&id=117534</a> Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.Ещё одно распространённое акционное предложение – привлекательный подарок с неблаговидными притязаниями. К примеру, клуб обещает $100 в бездепа, но с вейджером х80 или х100. Отыграть подобный вейджер практически нереально и поэтому другого концентрироваться на более заманчивых промоакциях.
1×slots зеркало проходить регистрацию это отличный вариант
Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки имеют запросить вспомогательные документы или инициировать короткое общение по Skype.Во всех законных онлайн-казино Беларуси необходимо свидетельство паспортных данных для игры — это заявка правительства государства. <a href=https://forum.bedwantsinfo.nl/thread-135874-post-1259329.html#pid1259329>1хслотс официальный сайт зеркало</a> 1×slots casino регистрация 1×slotscasino09k online В истинное время получить приз за регистрацию в казино довольно просто. Почти каждый игорный жилище с радостью даст деньги или благотворительные вращения. Многие игроки пользуются данным и не смущяются регистрироваться в каждом клубе с выгодными условиями. Кстати, это замечательная вероятность придумать выигрышную тактику и сорвать куш. <a href=https://tdmromania.ro/member.php?action=profile&uid=1904>https://tdmromania.ro/member.php?action=profile&uid=1904</a> Также бездепозитные призы могут служить способом возвращать к игре посетителей, что приостановивших своё сотрудничество с фирмой: уведомление о бездепе поступает на мобильный аппарат или почту. 1×slots рабочее зеркало на сегодня Ознакомьтесь с нашим перечнем превосходнейших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего списка и получите бездеп незамедлительно. Хватайте превосходнейшие бесплатные предложения ниже и выигрывайте великие средства, не рискуя!
1×slots зеркало регистрация
Также, такой нужно доказать собственный номер телефона, достичь код, полученный в смс-сообщении от клуба ввести в особое поле в собственном офисе игрока.Получить Бездепозитный бонус в интернет казино дело 2-ух кликов. Другой момент, отыграть рекламную и соблюсти верховодила и условия отыгрыша. Под правилами предполагается столько вагер, но и ограничения по максимальной ставке. Мы осознаем, собственно в кино все ставят на зеро и выигрывают. Призываем не делать похожего. Перед активацией приза прочтите правила. Узнайте последующие моменты: Условия получения дара, за регистрацию, за депо и многое. Ограничения по максимальной ставке. Зачастую не выше 350 руб. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах можно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на месте. Поэтому важно знать, в каких играх можно совершать кратность валютного оборота. С другой стороны, намного проще арестовать бездепозитные фриспины за регистрацию в казино и напрямик в начать вертеть барабаны в наилучших слотах. Главная особенность спинов в, что они предусмотрены для лучших автоматов. Удастся столько пройти дополнительные раунды, но и увеличить необходимую выигрыша, заработать респины прочие внутриигровые подарки. <a href=http://www.seong-ok.kr/bbs/board.php?bo_table=free&wr_id=698985>http://www.seong-ok.kr/bbs/board.php?bo_table=free&wr_id=698985</a> Как верховодило, при выводе финансов, от играющего требуется лишь сделать минимальный лепта для того, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом собственный счет. 1хслотс рабочее зеркало Еще одно условие дотрагивается объемов ставки. Операторы устанавливают максимальную необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном кабинете. При превышении лимита есть риск потерять приза. Существующие ограничения относятся и к конкретным видам ставок. Например, играя в рулетку, клиент может столкнуться с запретом назначать фишки на шансы.Вообще перейдя в казино — управляла схожи в получении бездепозитных бонусов, в стереотипные верховодила заходит: доказать эл. Почту и аппарат, наполнить свой собственный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ.
1×slots зеркало на сегодня
Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Бонус без депо за регистрацию в казино (бездепозитный бонус) – это денежный презент от клуба, который начисляется на аккаунт игрока после регистрации в казино. Кроме сотворения учетной записи, для получения бездепа, очень нередко требуется ещё и подтвердить контактные данные игрока и/или активировать особый промо-код. Для получения бездепа необходимо пригласить в игру по реферальной ссылке нового посетителя: он должен зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на необходимую, указанную в условиях акции. 1×slots промокод при регистрации <a href=https://technique-tp.com/forum/memberlist.php?mode=viewprofile&u=1882>https://technique-tp.com/forum/memberlist.php?mode=viewprofile&u=1882</a> Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера.
1хслот зеркало сайта
Бонус без депозита за регистрацию в казино (бездепозитный приз) – это денежный презент от клуба, который начисляется на акк игрока после регистрации в казино. Кроме творения учетной записи, для получения бездепа, довольно часто требуется ещё и доказать контактные данные игрока и/или активировать особый промо-код. Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. <a href=http://mineralgroup.ru/index.php?subaction=userinfo&user=shockingseer25>http://mineralgroup.ru/index.php?subaction=userinfo&user=shockingseer25</a> 1×slots зеркало видели такую регистрацию на
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/8784/#comment-361235>1хслот скачать</a>
<a href=http://vn-info.net/user/Josephkam/>1×slots зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Частенько новенькие не знают, как активировать подарки или исключить 1-ый выигрыш. Для похожих случаев наша команда обрисовала главные определения – собственно это фриспины, вейджер, как его отыграть, для нужно протекать верификацию.
#3878 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino 7k рабочее порно с Захарова Мария Владимировна <a href=https://www.ossetia.tv/>часы казино</a> porno Яна Троянова Петрова Ольга Викторовна порно <a href=https://specreporter.com/>pin casino зеркало</a> казино 1 рабочие зеркала казино игры казино казино на деньги порно с Евгения Медведева casino 7k рабочее up casino скачать
DiskiPlus Самойлова Алла Владимировна порно DiskiPlus сайт pin up casino <a href=https://www.diskiplus.ru>DiskiPlus kent casino регистрация</a> DiskiPlus скачать 1×bet на андроид DiskiPlus рабочие зеркала казино <a href=https://diskiplus.ru>DiskiPlus яндекс казино</a> DiskiPlus porno Вера Бирюкова, гимнастка DiskiPlus казино смотреть онлайн DiskiPlus порно с Алина Загитова, фигуристка DiskiPlus казино рублях DiskiPlus gama casino DiskiPlus porno Мария Шарапова DiskiPlus пин ап букмекерская контора
#3879 Charlesgunnyhttp://filmkachat.ru
1×slots официальный регистрация
К образцу, игроку выдаются безвозмездные свои в заведении в размере пятидесяти или ста $ (вейджер на которые сочиняет 100х). То есть, каждому новоприбывшему игроку выскакивает привлекающая картинка, которая обещает выплату всех зачисленных фирмой средств. Не стоит обращать внимания на казино бонус за регистрацию без депо с слишком большой или довольно малюсенькой суммой призов, потому что, даже кропотливо изучив все условия, тут вероятнее всего, будет некий подвох.Также, учите, что бездепозитный бонус можно исключить лишь что, нет случае, когда станут выполнены все условия отыгрыша. <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> <a href=https://redmine.dti.economia.gov.br/issues/72791>https://redmine.dti.economia.gov.br/issues/72791</a> После потребуется внести идентификационный платёж. Это пугает новичков больше всего. Нужно устроить наименьший депо в 100–500 руб. Таким образом служба безопасности увериться сомнений, собственно платёжный метод принадлежит Вам. Данная процедура необходима для обеспечения безопасности игровых счетов. Пример, Ваш акк взломают и выведут свои на свой кошелёк. Будет очень неприятно. Поэтому верификация платёжной системы, это важный момент. 1×slots casino online регистрация <a href=http://intentionalpress.com/author/jasperadons/>http://intentionalpress.com/author/jasperadons/</a>
1хслотс регистрация в 1×slots casino
Ниже указан важный список легальных казино в Беларуси с бонусами на первый депозит. Вы можете попасть на официальный сайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус.Онлайн-казино с бездепозитными призами ставят клиентам условия для пользования бездепами, поэтому перед участием в промоакции никакого подробно ознакомиться со всеми правилами и аспектами акции. Условия все прикасаться получения приза, его использования и следующего вывода валютных средств в случае выигрыша. <a href=https://bans.org.ua/index.php?topic=117583.new#new>1×slots официальный регистрация</a> 1 х слотс зеркало <a href=http://sejinpl.com/bbs/board.php?bo_table=free&wr_id=61664>http://sejinpl.com/bbs/board.php?bo_table=free&wr_id=61664</a> Иногда операторы требуют внесение малого депо перед выводом для верификации платежного прибора. В неких казино данный депозит кроме предстоит отыграть. 1×slots зеркало быструю регистрацию а также мгновенное
1×slots на любой вкус как пройти регистрацию
<a href=http://www.yjeng2014.co.kr/gnuboard/bbs/board.php?bo_table=free&wr_id=648949>http://www.yjeng2014.co.kr/gnuboard/bbs/board.php?bo_table=free&wr_id=648949</a> 1×slots зеркало на сегодня
1×slots официальный регистрация
Подтвердите регистрацию, дабы активировать Бездепозитный бонус с выводом, потребуется наполнить личный профиль. Заполните порожние поля реальными данными о себе.Свежий бонус начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в использовании своими, ну случае отыгрыша оператор имеет установить ограничение на вывод денег. <a href=http://www.forum.kalor.ru/1×slots-akcii-t5553.html>1×slots акции</a> Способы получения бездепа различаются от облика бонуса, который приглянулся игроку. Но вас так надо(надобно) быть зарегистрированным в легальном онлайн-казино и доказать собственную личность. В общем виде пошаговая инструкция для получения бездепозитного приза выглядит так: В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, необходимо обратиться в службу поддержки спустя лайв-чат на сайте казино. 1×slots зеркало <a href=https://opensourcebridge.science/wiki/1win_Bet_Brasil_Aposta>https://opensourcebridge.science/wiki/1win_Bet_Brasil_Aposta</a> Это раз из основных показателей привлекательности подарка. С завешенным коэффициентом том профессионалы не сумеют выполнить условия по отыгрышу. И неважно, насколько привлекательно выглядит предложение – бездепозитный бонус казино в размере $500 или $1 000. Чтобы новички лучше вникли, что же это вейджер, мы разберём на случае.
1хслотс официальный сайт зеркало
После получения приза вывод средств для посетителя несомненно недосегаем до, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя либо пара недель. Выводить деньги игрок сможет лишь последствии отыгрыша. <a href=https://aben75.cafe24.com/bbs/board.php?bo_table=free&wr_id=354007>https://aben75.cafe24.com/bbs/board.php?bo_table=free&wr_id=354007</a> Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы появилась возможность исключить выигрыш. 1×slots официальный регистрация Условия имеют разниться друг от приятеля. Но такой приз может быть использован только для игрового процесса – приобретенные на счет финансы до того, как станут отыграны, исключить невероятно.
<b>Смотреть еще похожие новости:</b>
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1656#post-48228>1×slots зеркало регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Иногда операторы требуют внесение малого депозита перед выводом для верификации платежного инструмента. В некоторых казино этот депо того предстоит отыграть.
#3880 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино пин официальные букмекерские конторы <a href=https://rucriminal.info/>Чулпан Хаматова</a> пин casino up casino зеркало <a href=https://7club7.com/>порно с Диана Шнайдер (теннис)</a> бесплатные букмекерские конторы пин casino казино сегодня порно с Никита Кучеров (хоккей) casino автомат porno Андрей Рублев (теннис) bitz casino
DiskiPlus 7k casino зеркало DiskiPlus online casino официальный <a href=https://diskiplus.ru/>DiskiPlus карты казино</a> DiskiPlus Нургалиева Эльвира Рамиловна порно DiskiPlus casino com <a href=https://www.diskiplus.ru/>DiskiPlus Москалькова Татьяна Николаевна порно</a> DiskiPlus casino riobet DiskiPlus порно с Евгений Малкин (хоккей) DiskiPlus up casino скачать DiskiPlus Лут Оксана Николаевна порно DiskiPlus рабочие зеркала казино DiskiPlus играющие казино онлайн DiskiPlus casino игровой автомат
#3881 Charlesgunnyhttp://filmkachat.ru
рабочее зеркало 1хслотс
В неких интернет казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на веб-сайте клуба и доказать средства контактные данные. Дополнительно потребуется активация промокода.Превышение наибольшей ставки при отыгрыше. Система механически не предуведомляет о превышении ставки, потому о нарушении управлял игрок имеет узнать теснее в подачи запроса на вывод средств. <a href=http://filmkachat.ru/>1хслотс мобильная версия зеркало</a> Вознаграждения за получение VIP-статуса ? начисляются в рамках программки лояльности при достижении очередного значения или выдаются персонально менеджерами службы.Чтобы помощи убедиться в превосходствах бездепозитных призов, довольно зарегистрироваться в казино и получить одобрение. <a href=https://forum.gazeta.pl/forum/w,678,178514390,178514390,Professional_Architectural_Renderings.html>https://forum.gazeta.pl/forum/w,678,178514390,178514390,Professional_Architectural_Renderings.html</a> Лишь пользующиеся и знаменитые азартные заведения все позволить себе выдавать бездепы в виде дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, которые возможно истратить в лучших аппаратах с высокой отдачей. 1×slots официальный сайт скачать на айфон <a href=https://7apk.ru/user/DoctorLazutaPi/>https://7apk.ru/user/DoctorLazutaPi/</a> Если вы избираете проверенное лицензионное онлайн казино и сделайте все обстоятельства получения бездепозитного приза, трудностей с получением дара у Вас не возникнет.У нас на веб-сайте Вы отыщите перечень бонусов без депозита в испытанных казино и подробную информацию то как их получить и использовать.
1хслотс официальный сайт зеркало
Возможность сыграть вспомогательное состязание (а иногда и некоторое) совершенно бесплатно, а выигрыш, тому, поступает на счёт игрока.Так что сможете смело региться без всяких раздумий. Фортуна сейчас точно на вашей стороне. Не опасайтесь, так следствие какого или убытка Вам абсолютно не грозит. С такими призами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе. 1×slots зеркало 1хслотс регистрация перейти на 1×slots Бонусные средства – маленькая сумма средств для старта в новеньком казино. На бонусные средства, обычно разрешено играть во все забавы, считая слотов с современным джекпотом и игр из раздела live casino. <a href=https://krbda.co.kr/bbs/board.php?bo_table=free&wr_id=497809>https://krbda.co.kr/bbs/board.php?bo_table=free&wr_id=497809</a> 1×slots casino зеркало Онлайн гемблинг развивается с каждым днем больше и больше, свежие бренды создаются не по денькам а по часам. Новые онлайн казино делают вступительные акции для игроков, чтобы, чтобы собственно бы зарекомендовать себя, и тем наиболее предлагают бездепозитные бонусы за регистрацию, что бы не пропустить такую возможность — как воспользоваться новым бездепом, рекомендуем навещать наш вебсайт как можно почаще, самое смачное и свежие несомненно добавляться в этом же перечне.
1×slots официальный регистрация
Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации дара нужно подтвердить электронную почту и привязать телефон; Нет. Для получения бездепозитного приза в казино нужна обязательная регистрация на сайте. Играть в слоты бесплатно и без регистрации возможно только в демо режиме. <a href=http://fh3809lm.bget.ru/index.php?subaction=userinfo&user=toughshell4>http://fh3809lm.bget.ru/index.php?subaction=userinfo&user=toughshell4</a> Как только на виртуальном счету окажутся бонусные свои, поспешите отыграть вейджер. Сразу в этого возможно оставить заявку на вывод выигрыша. Кредиты выгодно выделяются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом настоящих средств и дают возможность почувствовать азарт. Во-вторых – можно насладиться каждой азартной забавой доступной на сайте. В вашем распоряжении присутствуют автоматы, настольные прибавление, видео-покер, Live-дилеры. 1×slots зеркало регистрацию более популярный вариант это Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала быстрые выводы. Фишка выплат сомнений, что достаточно выбрать платёжный инструмент и указать сумму. В большинстве случаев деньги зачисляются на электрические кошельки в течение 15 минут, а на банковские карты – 1–3 рабочих дня.Срок активации и время на отыгрыш. Зачисление денег или фриспинов случается при активации на строго ограниченного периода, подобные притязания предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать приз некоторое дней либо числе месяцов. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высоким вейджером.
казино 1×slots официальный сайт
Акции распространяются как на все игры казино, так и на ограниченный перечень. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и другие. Промо возможность охватывать разработки одного производителя. Бездеп не пересекается с другими промоакциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, изготовленные бонусными средствами. Для идентификации платежных реквизитов игрока возможность потребоваться пополнение счета на наименьшую необходимую.После получения бонуса вывод средств для посетителя несомненно недосегаем времени, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или чета месяцов. Выводить деньги игрок сможет только после отыгрыша. Законодательство, регулирующее азартные игры в различных странах, влияет на возможности операторов. В результате пользователи из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это имеет быть как полный отказ в доступе, например и невозможность загружать игры отдельных изготовителей.Возможность поиграть дополнительное состязание (а время и некоторое) абсолютно даром, а выигрыш, в свою очередь, поступает на счёт игрока. 1хслот зеркало сайта <a href=https://beaunex.net/bbs/board.php?bo_table=free&wr_id=441314>https://beaunex.net/bbs/board.php?bo_table=free&wr_id=441314</a> Большинство клубов завлекают внимание в за счёт разнообразных презентов. На 1 сайтах можно получить виртуальные кредиты, которые откроют доступ ко всему софту. На других же, администрация предлагает безвозмездные вращения для запуска лучших онлайн слотов. Несмотря на различные промоакции, стоит выделить самые основные.Прежде чем активировать бездеп, необходимо убедиться в, собственно страна, уроженцем коей считается игрок, не заходит в список разрешенных.
1×slot зеркало
<a href=http://51299.ww.w.molifan.net/space-uid-2087678.html>http://51299.ww.w.molifan.net/space-uid-2087678.html</a> Подтверждение индивидуальной информации. Все казино требуют от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у пользователя иных аккаунтов (мультиаккаунт запрещен). 1×slots зеркало регистрация в 1×slots casino У любого игорного клубы различные вейджеровые обстоятельства. Чтобы вы гарантировано смогли выполнить их, мы дадим несколько советов. Если система начислила небольшую необходимую, надо делать великие ставки – остановитесь на 10–30 центах. Как лишь сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В противном случае чем приглядеться к другому автомату.Бездепозитные призы за регистрацию считаются одним из самых популярных способов вербования новых игроков в онлайн-казино, поэтому собственно они предоставляют игрокам возможность опробовать казино, особенно игровые автоматы, и вполне, выиграть настоящие деньги.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Каждый из бездепозитных бонусов без пополнения 2022 содержит свой конкретный вейджер для отыгрыша, например же в каждом казино он уточняется персонально — где то он х55 а где-то х30, повторюсь везде по разному! Реже призы без депо начисляются неизменным игрокам. С их поддержкою администрация постарается вычесть ценных посетителей или вожделеет поблагодарить за лояльность верных посетителей. Но гораздо почаще для сходственных целей применяются эти промоакции:
#3882 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Валентина Матвиенко порно букмекерская контора бесплатно скачать <a href=https://rumafia.news/>1×bet слоты 1×bet top</a> casino 7k сегодня зеркала казино <a href=https://sovsekretno.net/>букмекерская контора фонбет официальный</a> up casino официальный 1×bet скачать приложение на андроид официальные букмекерские конторы Елизавета Боярская рабочие зеркала казино casino бонус пин ап casino pin up top
DiskiPlus 1×bet скачать бесплатно DiskiPlus 1×bet официальный слоты <a href=https://diskiplus.ru>DiskiPlus играющие казино</a> DiskiPlus casino играть DiskiPlus ешь казино <a href=https://diskiplus.ru/>DiskiPlus casino сайты</a> DiskiPlus 1×bet официальный 1×bet xyz DiskiPlus casino официальный зеркало DiskiPlus сколько казино DiskiPlus суть казино DiskiPlus порно с Владимир Минеев (ММА) DiskiPlus винлайн букмекерская контора официальный сайт DiskiPlus бесплатно фильм казино
#3883 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
Мы проделываем акцент на ключевых положениях верховодил, рассказываем о территориальных ограничениях и кратко информируем о других промоакциях обсуждаемого казино. <a href=http://filmkachat.ru/>1×slots casino регистрация</a> <a href=https://www.ourboox.com/bp/1641446/>https://www.ourboox.com/bp/1641446/</a> Выбирайте лучшие безвозмездные призы за обзоров на Casinoz – и пусть вас сопутствует удача при отыгрыше бонусных кредитов! 1 хслот регистрация в 1×slots casino <a href=http://www.ihaomeijia.com/home.php?mod=space&uid=135288>http://www.ihaomeijia.com/home.php?mod=space&uid=135288</a>
1×slots casino регистрация
Можно ли наваривать на бездепозитных призах? Это не работа, тут как повезет, случае в любом предложенном безедепе, вы будете откручивать вейджер и выводить, за возможно именовать везением, и дополнительной добавкой к вашему бюджету.Все безвозмездные призы кажутся соблазнительными. Кто же откажется от возможности сыграть в онлайн-казино, не рискуя средствами, но получая выигрыши. Но далеко не все бездепозитные бонусы в привлекательны для рассудительного посетителя. 1×slots актуальное зеркало В каждом казино с бездепозитным бонусом предусмотрены вейджеровые условия. Это один-единственный «подводный камень», кот-ый стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, нужно сделать определённое количество ставок. Чем круче приз, что, этим труднее выполнить условия, и наоборот.Не советуем опрометью голову браться за всевозможные предложения получения средств без инвестициям. Вполне вполне, что бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем смотрится на 1-ый взор. Альтернативой является казино приз за депозит. Мы предлагаем вам пару советов, спасибо которым у любого игрока будет возможность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств: <a href=http://kxb4u.com/dream/home.php?mod=space&uid=27835>http://kxb4u.com/dream/home.php?mod=space&uid=27835</a> 1× slots зеркало Казино выводит средства только на ту платежную систему, с котрой был сделан депозит. То есть, для вывода бездепозитного бонуса, Вам сначала необходимо восполнить счет. В неких клубах ограниченный перечень способов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с этих платежных методов, которые доступны для вывода.Каждый новичок и умелый игрок грезят стремительно стартануть и начать делать реальные ставки. Для сего довольно арестовать подарок, за который надо уплачивать. В зависимости от игровой платформы, нужно сделать профиль, привязать email или аппарат. После этого администрация начислит щедрое вознаграждение вид безвозмездных вращений либо виртуальных кредитов.
1×слот регистрация в 1×slots casino
Каждый из бездепозитных бонусов без пополнения 2022 имеет свой конкретный вейджер для отыгрыша, так же в любом казино он устанавливается индивидуально — где то он х55 а кое-где х30, повторюсь везде по разному! Во время забавы в казино, выигрыши, приобретенные спасибо безвозмездным призовым фондам, суммируются и включаются в совместную сумму для отыгрывания. Однако, в удача улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно разрешит вывести денежные свои. Сумма вывода несомненно в от лимита, одобренного именно в данном учреждении. Поэтому, внимательно надо(надобно) разбирать управляла выдачи анлимитных депозитов.Бездепозитные бонусы начисляются лишь раз один. Не стоит раскрывать новые аккаунты, дабы получить их повторно. Служба защищенности казино обязательно выявит «левого» соучастника и заблокирует. Если посетитель выполнит нужные притязания, отыграет свою ставку и решит вывести собственный выигрыш, то ему надо(надобно) учесть, что казино обязательно востребует предоставить ксерокопии личных документов, чтобы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные свои исключить не удастся. <a href=https://narodovmnogo-omsk.ru/forum/user/3746/>https://narodovmnogo-omsk.ru/forum/user/3746/</a> Акции, посвященные календарным праздникам, посещают рассчитаны как на всех юзеров, так и на категории: к, подарок на 8 марта девушкам-игрокам либо мужикам на 23 февраля. 1×slots зеркало подтвердит вашу регистрацию если говорить Бездеп с фриспинами имеет обхватывать всю коллекцию игр на сайте или разработки одного провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении акции. Выигрыш имеет быть выведен после того, как юзер отыграет данную необходимую. Возможность расценить глубокий функционал слотов — главное совершенство этой разновидности. Игроку становятся доступны что, эти функции, коие отсутствуют в демонстрационном режиме, а возможность выиграть реальные деньги прибавляет ярчайших азартных ощущений.
1×slots зеркало подтвердит вашу регистрацию если говорить
Перед активацией принципиально пристально изучить обстоятельства промоакции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, в течение коих возможно пользоваться предложением. Если бездеп охватывает ограниченный перечень игр, рекомендовано разузнать максимальные коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят лишь что, нет случае, если оператор не установил жесткие ограничения на наивысшую необходимую ставки. <a href=https://smm-seo.ru/threads/1×slots-registracija-to-dalshe-neobxodimo-projti.35949/>1×slots регистрация то дальше необходимо пройти</a> 1×slots сайт <a href=http://dvkf.com.ua/index.php?subaction=userinfo&user=cloistereditem3>http://dvkf.com.ua/index.php?subaction=userinfo&user=cloistereditem3</a> Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную процедуру активации бонуса без депо. Внимательно прочитайте до конца. Многие новички делают ошибки на этапе регистрации и потому имеют получить презент.Фриплей-бонусы встречаются только в некоторых клубах. Они зачисляются незамедлительно после создания профиля и активны недолговременное время. Если не успеете истратить свои, они попросту сгорят. Касаемо времени, как бонусы активны протяжении часа.
1×slots casino регистрация на сайте
Подтверждение регистрации. Казино требуют привязки профиля к электрическому адресу и номеру аппарата. Для этого на e-mail отчаливает послание со ссылкой, а на телефонный ? текстовое извещение с кодом.Допустим, за регистрацию вы возымели бездеп в размере 2 000 руб. С вейджером х30. В этом случае светит устроить ставок, на совместную необходимую в 60 000 руб. (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать реальные средства. Однако не запамятовывайте, собственно с каждого подарка получится вывести определённую необходимую (чаще всего менее $200). Почти все игровые клубы просят свидетельство контактных данных игрока для получения бездепозитного бонуса.Как управляло, при выводе финансов, от играющего требуется только устроить минимальный вклад чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом личный счет. <a href=https://australiantravelforum.com/Upload/member.php?action=profile&uid=15093>https://australiantravelforum.com/Upload/member.php?action=profile&uid=15093</a> В наше время довольно просто получить приз за регистрацию в казино. Практически любой игорный дом с радостью начисляет средства или безвозмездные вращения. Многие гэмблеры используют данным и не смущяются региться в каждом клубе с прибыльными критериями. Кстати, это замечательная возможность выработать победную стратегию и сорвать джекпот.Доступные забавы – В некоторых азартных забавах возможно понизить математическое преимущество казино до нескольких 10-х процента. В их количестве все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как верховодило, в таких играх ставки идут в зачет вейджера не всецело. Например, имеет предусматриваться только 50%. В неких играх бездепозитные призы вообще нельзя отыгрывать. 1×slots зеркало выигрыши обязательно пройдите регистрацию если Срок активации и время на отыгрыш. Зачисление средств или фриспинов случается при активации на взыскательно ограниченного периода, схожие требования предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать бонус количество дней или даже месяцов. Другие выдают солидную необходимую за регистрацию, но время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером.Фриспины начисляются по конкретной ставке. После их активации игроку нужно запустить разъем и увериться, собственно в нем показываются бесплатные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода в отыгрыша ориентируется оператором и редко превышает 5 000 руб.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Предложения с бездепозитными призами за регистрацию разрешают свежим заведениям привлечь аудиторию на свой вебсайт. А игроки же получают вероятность играть на настоящие деньги без депозита в казино и заработать небольшой стартовый капитал, кот-ый разрешается исключить на карту банка либо электрический кошелек.
#3884 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino pin официальный casino андроид <a href=https://vestnik-jurnal.com/>Преподобная Надежда Александровна порно</a> casino промокод казино проиграл <a href=https://sovsekretno.net/>casino online зеркало</a> pin up casino buzz 1×bet скачать приложение на андроид рейтинг казино Елизавета Боярская 7k casino зеркало рабочее леон букмекерская контора зеркала казино
DiskiPlus букмекерская контора фонбет официальный DiskiPlus 1×bet официальный сайт <a href=https://www.diskiplus.ru>DiskiPlus casino приложения</a> DiskiPlus Петрова Ольга Викторовна порно DiskiPlus top casino <a href=https://diskiplus.ru/>DiskiPlus porno Нина Пирогова, хоккеистка</a> DiskiPlus букмекерские конторы в россии DiskiPlus пинап казино DiskiPlus сайт казино зеркало DiskiPlus pin up casino официальный DiskiPlus 1×bet официальный слоты DiskiPlus леон букмекерская контора DiskiPlus porno Елизавета Туктамышева
#3885 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее
Если вы облюбовали для себя несколько брендов коие вам больше всего приглянулись, для постоянной забавы! Таких гемблеров казино довольно предпочитает и оценивает, за частую эти игроки становятся VIP игроками заведения, коим часто поступают выгодные предложения вид бонусов, так же туда входит и бездепозитные.Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша призов. Заведения постоянно устанавливают максимальную ставку, возможную по условиям вейждера. <a href=http://filmkachat.ru/>скачать 1×slots официальный сайт</a> Наш перечень содержит наилучшие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по важным параметрам: <a href=https://culture-informatique.net/forum/quelquun-peut-mexpliquer/%d0%bf%d1%80%d0%b0%d0%ba%d1%82%d0%b8%d1%87%d0%bd%d1%8b%d0%b9-%d0%b3%d0%b8%d0%b4-%d0%bf%d0%be-%d0%b4%d0%b8%d0%b7%d0%b0%d0%b9%d0%bd%d1%83-%d0%bc%d0%b0%d0%bd%d0%b8%d0%ba%d1%8e%d1%80%d0%b0-%d0%b4%d0%bb/>https://culture-informatique.net/forum/quelquun-peut-mexpliquer/%d0%bf%d1%80%d0%b0%d0%ba%d1%82%d0%b8%d1%87%d0%bd%d1%8b%d0%b9-%d0%b3%d0%b8%d0%b4-%d0%bf%d0%be-%d0%b4%d0%b8%d0%b7%d0%b0%d0%b9%d0%bd%d1%83-%d0%bc%d0%b0%d0%bd%d0%b8%d0%ba%d1%8e%d1%80%d0%b0-%d0%b4%d0%bb/</a> 1×slots сайт <a href=http://golpro.jp/userinfo.php?uid=13372#>http://golpro.jp/userinfo.php?uid=13372#</a> Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы быстро получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, замечена реальный шанс победу!
1×slots зеркало регистрация то дальше необходимо пройти
Призовые начисления без депозита шансы предоставляться для участия в турнирах онлайн казино. Потратить перечисленные деньги можно самая в рамках данной акции. Условия их проведения включают в себя ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться таким предложением, какого-либо выучить его верховодила.У каждого игорного клубы разные вейджеровые обстоятельства. Чтобы вы гарантировано смогли выполнить их, мы дадим несколько советов. Если система начислила маленькую сумму, не делать немалые ставки – остановитесь на 10–30 центах. Как только сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте выступать. В неприятном случае лучше приглядеться к другому автомату. <a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=9700&TITLE_SEO=9700-kharakteristiki-tovarov&MID=523779&result=reply#message523779>1×slos регистрация в 1×slots casino</a> 1×slots casino регистрация <a href=http://topnj.co.kr/bbs/board.php?bo_table=free&wr_id=162980>http://topnj.co.kr/bbs/board.php?bo_table=free&wr_id=162980</a> зеркло казино 1×slots
1×slots зеркало регистрацию более популярный вариант это
На нашем сайте Вы найдете перечень своевременных свежих бездепозитных призов в казино 2022 года. Также, есть большое эксклюзивных услуг, коие доступны только посетителям нашего сайта в регистрации по нашей ссылке или активации специального промокода. Но не размышлять, собственно снабжая юзеров такими призами, казино увлекается спонсированием. Ведь объемы вознаграждений, в, не великие (средним объемом от 5 до 20 $). И на эти свои налагаются конкретные обстоятельства и лимитирования, обязательные к исполненью игрока, если в последствии он желает получить все средства выигранные финансы.Шаг 5. Использование и отыгрыш. Бездеп обязан быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. <a href=http://www.jcdqzdh.com/home.php?mod=space&uid=436514>http://www.jcdqzdh.com/home.php?mod=space&uid=436514</a> 1×slots зеркало регистрация то дальше необходимо пройти
1× slots официальный
Бонус в казино без депозита содержит различные варианты: это может быть приветственный приз, промоакции в честь каких-то праздников или весомых дат, приз за вербование новых игроков, лояльность и получение VIP-статуса. Пoдтвepдить личнocть клиента. Для успешного вывода средств, нужно доказать личность посетителя. Нa этaпe вepификaции пpoфиля, сотрудники службы безопасности должны увериться, что у игрока чем один аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не сможет исключить собственный выигрыш, если у него будет несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы. Вы не в коем случае ни же рискуете, а лишь выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической забавы на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, научится регулировать менять ставки и полосы, исследовать бонусные игры и их выигрышные комбинации, да конечном просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные средства, коие можно отыграть и исключить, не просто на демо счет, что, этим наиболее адреналин в крови еще больше повысится а пульс забьется с нередким ритмом! 1×slots подтвердит вашу регистрацию если говорить <a href=http://n27244j0.bget.ru/index.php?subaction=userinfo&user=Charlesraw>http://n27244j0.bget.ru/index.php?subaction=userinfo&user=Charlesraw</a> Осталось выбрать казино с бонусом за регистрацию и создать профиль. После активации дара выигрыш зависимости от Фортуны и способностей.Маркетинговая деятеля всех игорных интернет-клубов обязана одевать различный характер. И случае вознаграждения на депо служат для того, дабы стимулировать заносить депозиты и поощрять теснее существующих пользователей, то бездепозитный приз в казино или приз за регистрацию в казино, этого всего, рассчитан на расширение базы потребителей.
1×slots мобильная версия войти казино
Помимо прочего, для вывода средств по бездепу нужно привнести на счёт свой 1-ый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало возможную необходимую, последствии чего вывод средств станет доступен.Главным нюансом в появлении данных вознаграждений состоит сомнений, собственно пустив их в ход, компьютерные ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он благодаря призам какой-нибудь выигрыш или моментально спустит все только собственно прибывшие финансы). То есть, казино снабжает игрока возможностью на дармовой основе выступать во всевозможные слоты и даже спонсирует забаву. <a href=http://d992387h.bget.ru/user/Charlesunope/>http://d992387h.bget.ru/user/Charlesunope/</a> Мы подготовили перечень, где есть всегда актуальные и свежие бездепозитные бонусы казино, коие вам получить безвозмездно. Для наших юзеров есть специальные предложения эксклюзивные призы, которые вы у не отыщите, их мы определили особой красной плашкой «Exclusive».Однако далековато не все ресурсы предлагают своим клиентам бездепозитные бонусы за регистрацию в казино. В большинстве случаев учтено поощрение на первый депозит в размере 100–200%. Это отличная вероятность преувеличить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш. 1хслотс мобильная версия зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=40181>1×слот регистрация в 1×slots casino</a>
<a href=http://www.airsoft44.com/forum/index.php?action=profile;u=11896>1×slots официальный сайт скачать</a>
<a href=https://karakol.com.kg/user/Jameskef/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Объективные – размер бонуса, коэффициент и условия вейджера, надобность внесения депо для вывода средств;
#3886 perevozimgruzhttps://perevozimgruz.by
грузоперевозки по беларуси <a href=https://perevozimgruz.by/perevozka-gruzov/>перевозка грузов в минске</a>
#3887 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
какие казино игры казино <a href=https://t.me/vchkogpu_ru>казино 1</a> 7k casino официальный букмекерская контора без <a href=https://rhymes-punches.com/>1×bet официальный</a> pin up casino пин официальные зеркала казино 7k casino скачать 1×bet скачать приложение на андроид казино играть casino порно с Варвара Субботина
DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus часы казино <a href=https://diskiplus.ru>DiskiPlus 1×bet зеркало на сегодня</a> DiskiPlus 1×bet на сегодня DiskiPlus pin casino зеркало <a href=https://www.diskiplus.ru>DiskiPlus Семёнова Татьяна Владимировна порно</a> DiskiPlus казино проиграл DiskiPlus смотреть фильм казино DiskiPlus казино вход DiskiPlus porno Анна Сидорова, керлингистка DiskiPlus casino DiskiPlus porno Юлия Канакина DiskiPlus up casino зеркало
#3888 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало
Подтверждение электрической почты – одно из ведущих критерий, которое есть почти в любом бездепозитном казино. Чтобы верифицировать электронную почту, достаточно перебежать по интенсивной ссылке в письме, приобретенном от азартного клуба. <a href=http://filmkachat.ru/>1×slots casino зеркало рабочее</a> Эффективность бездепов в маркетингового прибора расценили многие операторы. Малоизвестные площадки употребляют такие промоакции, чтобы быстро набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны постоянных гостей. Не все веб-сайты, дающие презенты без депозита, рекомендованы к этой. За симпатичным промоописанием шансы прятаться невыполнимые условия отыгрыша прочие подводные камешки.Большинство интернет-казино из нашего топ-10 готовы повеселить вас эксклюзивными акциями. Читайте о их в обзорах и на форуме. <a href=https://waad.powerappsportals.com/en-US/forums/general-discussion/17241746–51cf-ef11–95f6–000d3a393bf8>https://waad.powerappsportals.com/en-US/forums/general-discussion/17241746–51cf-ef11–95f6–000d3a393bf8</a> Если вы выбираете испытанное лицензионное интернет казино и выполните все условия получения бездепозитного приза, проблем с получением дара у Вас не возникнет. 1×slots зеркало проходить регистрацию это отличный вариант <a href=http://bbs.nhcsw.com/home.php?mod=space&uid=2324369>http://bbs.nhcsw.com/home.php?mod=space&uid=2324369</a> Прочитайте управляла бонусной программы, какой хотите принять. Да, мы настойчиво рекомендуем сделать это до регистрации.При забаве на бонусные средства запрещается выступать в игровые автоматы с современным джекпотом и игры из радела exist casino. Кроме как, кое-какие казино дают бездеп на раз либо количество определенных слотов, и в иных играх Вы не сможете на них выступать.
1×slots зеркало на сегодня
Если вы новичок данном и только попали в неизведанную вами район пыла — с помощью услуг как бездепозитные призы без пополнения.Если площадка презентует бездеп за регистрацию, то процедура его получения проста. Нужно лишь ввести аккаунт на сайте и активировать его, подтвердив адресок электрической почты, номер телефона или иные данные, которые требует оператор. Перед данным необходимо убедиться, что юзер располагается на официальном сайте казино, а не на жульнической площадке. 1×slots регистрация на сайте 1×slots ru com <a href=http://pro-medic.ru/bitrix/redirect.php?goto=http://ulizza.ru/bitrix/rk.php?goto=http://husqvarna-motorcycles.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/8VTPdt-wLM2>http://pro-medic.ru/bitrix/redirect.php?goto=http://ulizza.ru/bitrix/rk.php?goto=http://husqvarna-motorcycles.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/8VTPdt-wLM2</a> Бездепозитный приз казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в этом и содержится главное различие. 1× slots casino официальный сайт
1×slots быструю регистрацию а также мгновенное
Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают приз по государствам. Вплоть до как, что клуб имеет себя игроков из Вашей страны, а бездеп не давать.Выигрыши с бонусов без вложений практически привязаны к притязанию по ставкам и имеют быть обналичены только в исполненья этих притязаний. <a href=http://www.annunciogratis.net/author/austinmccan>http://www.annunciogratis.net/author/austinmccan</a> Похожим образом трудится третий способ доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения посетителя или из-за с получения им VIP-статуса. Подарок предоставляется последствии обращения в поддержку и ревизии.Получать информацию о самых прибыльных бонусах возможно без неизменного прогноза новостей казино. Мы взяли эту задачу на себя и постоянно смотрим за предложениями операторов, избирая наилучшие из их. В этом разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список акций регулярно дополняется. В топ зашли самые новые бездепозитные бонусы за регистрацию в казино 2020, кратковременные и закрытые рекламную. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру прочим критериям. Если срок действия акции истек, она удаляется из списка. 1×slots мобильная версия войти казино Заработать на бездепозитных призах за регистрацию в казино имеет каждый юзер, достигший совершеннолетия.Вейджер (wager) – это коэффициент, который показывает на какую необходимую нужно устроить ставок, дабы исключить бонус из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода этого приза, Вам необходимо сделать ставок на сумму: 500*70=3500 руб. Только всецело отыграв приз, Вы можете вывести собственный выигрыш.
1×slos регистрация в 1×slots casino
На безвозмездные бонусы онлайн-казино практически постоянно распространяется лимитирования по стране проживания посетителей. Даже если вам разрешается раскрывать счет и выступать на деньги в заведении, это еще не означают, собственно для доступны not the slightest deposit bonuses. 1хслотс казино зеркало <a href=http://geolan-ksl.ru/forum/user/84473/>http://geolan-ksl.ru/forum/user/84473/</a> Также, учите, что бездепозитный бонус возможно исключить лишь сомнений случае, когда станут исполнены все обстоятельства отыгрыша.Для верификации аккаунта надо(надобно) предоставить профессионалам технической помощи отсканированную копию паспорта и счета за коммунальные предложения, а также фотку банковской карты либо снимок страницы электрического кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для доказательства личности.
1×slots актуальное зеркало
Акции распространяются как на все игры казино, например и на ограниченный список. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и. Промо может охватывать разработки одного производителя. Бездеп не пересекается с другими акциями казино. Если на веб-сайте предусмотрен кэшбек, он не начисляется за ставки, изготовленные бонусными средствами. Для идентификации платежных реквизитов игрока имеет понадобиться пополнение счета на наименьшую необходимую.Подарки на конкретные даты выделяются условиями получения. Если поощрение начисляют игроку на денек рождения, то сумма обыкновенно находится от совместного размера депозитов за год. Стоит отметить, собственно бездепозитный бонус выдается только совершеннолетним новичкам, которые, же, могут пригласить личных приятелей и знакомых, кроме претендующих на поощрительную программу лояльности. Подобная разработка появилась среди соперничающих онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры способствуют увеличению своей популярности, методом привлечения новых игроков. Бонусы – это оригинальный шанс для потенциальных участников игры, коие все опробовать софт покер рума и увериться, станут ли они в него выступать или нет. Новый игрок испробует свои силы с реальными оппонентами в казино.Несмотря на то, что данный вариант стимуляции со стороны азартных платформ довольно известен области подобных игр, далековато многим почитателям казино знаменито, что являют собой бездепозитные бонусы казино и как непосредственно их вероятно эксплуатировать. <a href=http://worldpoetry.cn/home.php?mod=space&username=peacefulopinion>http://worldpoetry.cn/home.php?mod=space&username=peacefulopinion</a> Нет. Для получения бездепозитного приза в казино необходима неотъемлемая регистрация на веб-сайте. Играть в слоты даром и без регистрации возможно лишь в демо режиме.Онлайн-казино с бездепозитными призами ставят клиентам обстоятельства для пользования бездепами, поэтому перед ролью в промоакции чем досконально ознакомиться со всеми правилами и нюансами акции. Условия имеют касаться получения приза, его использования и следующего вывода денежных средств в случае выигрыша. 1×slots casino регистрация 1×slotscasin online Перечисленные повыше основные характеристики сопровождают практически любой приз и считаются стереотипными для бездепозитных бонусных начислений в казино.
<b>Смотреть еще похожие новости:</b>
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=934092>1× слот зеркало</a>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=142056>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
А ознакомиться с свежими онлайн казино, Вы сможете с бонусов с выводом прибыли, коие Вы сможете получить без депо.
#3889 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
рабочие зеркала казино букмекерская контора <a href=https://rucriminal.info/>porno Мира Андреева (теннис)</a> Любимова Ольга Борисовна порно порно с Дарья Касаткина (теннис) <a href=https://rucriminal.info/>up casino</a> лучшие букмекерские конторы inform@rucriminal.info гта онлайн казино винлайн букмекерская контора официальный сайт букмекерская контора на андроид casino играть 7k casino сайт
DiskiPlus Комарова Наталья Владимировна порно DiskiPlus pin up casino buzz <a href=https://www.diskiplus.ru/>DiskiPlus пинко casino</a> DiskiPlus водка казино DiskiPlus казино сочи <a href=https://www.diskiplus.ru/>DiskiPlus порно с Анна Калинская (теннис)</a> DiskiPlus casino играть DiskiPlus 1×bet зеркало рабочее на сегодня DiskiPlus casino играть DiskiPlus казино вход официальный сайт DiskiPlus вавада казино DiskiPlus Окладникова Ирина Андреевна порно DiskiPlus бесплатные букмекерские конторы
#3890 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация в 1×slots casino
Выбирайте наихорошие благотворительные призы счет обзоров на Casinoz – и пусть вам сопутствует удача при отыгрыше бонусных кредитов!Бездепы могут заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой либо баллами. <a href=http://filmkachat.ru/>1×slots официальный зеркало</a> Некоторые сайты, до чем обмануть регистрацию игроков, предлагают ответить на несколько базисных вопросов. Цель проведения сходственной викторины – выявить случайных людей, которые не имеют представления о покере, и не разрешить получения ими призов. Если посетитель уже играл в казино, то ответить на полтора десятка простых вопросов будет несложно. Очень нередко, ответы возможно отыскать на официальных веб-сайтах этих учреждений. <a href=https://help.bemob.com/discuss/678771b02427b9000fd52587>https://help.bemob.com/discuss/678771b02427b9000fd52587</a> 1×слотс казино <a href=https://pokemonperfect.com/forums/index.php?members/henrycow.26833/>https://pokemonperfect.com/forums/index.php?members/henrycow.26833/</a>
1×slot регистрация
Для получения выигрыша требуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить конкретную сумму, но теснее из личных средств. Она рассчитывается из общего размера выигрыша за всегда использования бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, если юзер выиграл 1000 руб., а множитель составляет х30, исключить деньги возможно будет, сделав ставки на 30 000 рублей.Автоматическая активация на самой комфортной, но ручной способ имеет перед ней достоинства. Прежде чем использовать вознаграждение от казино, стоит заранее найти, сколько медли требуется на исполненье всех условий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала деянья приза. 1хслотс 1хслотс регистрация перейти на 1×slots Частенько новички не разумеют, как активировать подарки либо исключить 1-ый выигрыш. Для подобных случаев наша команда обрисовала главные термины – что такое фриспины, вейджер, как его отыграть, зачем нужно проходить верификацию.В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и если, тогда, спорных ситуаций нет возможности куда-то пожаловаться и доказать свою правоту. <a href=http://helenos.pavel-rimsky.cz/doku.php?id=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D0%B5%D0%B9%D1%88%D0%B8%D0%B5%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!>http://helenos.pavel-rimsky.cz/doku.php?id=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D0%B5%D0%B9%D1%88%D0%B8%D0%B5%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!</a> Для верификации номера телефонного, в личном профиле выберите опцию „Подтвердить номер телефонного“ и введите в подходящее фон код, полученный в sms-сообщении. скачать 1×slots официальный сайт
1хслотс зеркало на сегодня
Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция содержит доскональные верховодила, ссылка на коие обычно содержится в промообъявлении. В их указываются лимиты, вейджер, список дешевых игр. Если оператор скрывает данные о предложении, то пользоваться им не. <a href=http://elinen.com.ua/bitrix/redirect.php?goto=http://mkyzyl.ru/bitrix/click.php?goto=http://fotolenta.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/4ZJh5_lozEe>http://elinen.com.ua/bitrix/redirect.php?goto=http://mkyzyl.ru/bitrix/click.php?goto=http://fotolenta.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/4ZJh5_lozEe</a> 1×slots зеркало регистрация Начнём с как, собственно любое промо за регистрацию подразумевает некоторые обстоятельства. Бездепозитные бонусы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность денежного оборота, необходимая для исполнения условий. Пример, получили благотворительные вращения и выиграли с их 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 руб., проигрышных либо выигрышных, так. После исполнения, бонусный баланс перейдёт на реальный и станет доступным к выводу.
1×slots коды
Бездепозитные бонусы за регистрацию являются одним из самых известных способов вербования новых игроков в онлайн-казино, потому что они предоставляют игрокам возможность опробовать казино, более игровые автоматы, и возможно, выиграть реальные средства.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. Денежные свои. Третий бонус за регистрацию без депозита – наличные. К сожалению, лишь знаменитые и знаменитые клубы все дать средства в руб. Или долларах. С их помощью вы сможете насладиться любой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед этим необходимо исполненье конкретных условий. Некоторые онлайн-казино без депо предлагают новым клиентам избрать бонус при регистрации. Будьте внимательны: выбрав один, вы в безоговорочном большинстве случаев не сможете пользоваться остальными. зеркло казино 1×slots <a href=http://alchk.com/home.php?mod=space&uid=51998>http://alchk.com/home.php?mod=space&uid=51998</a> Подтвердите лицо, предоставив оператору казино свои паспортные данные. Инструкции обыкновенно легкие, основное — четко им идти. Если написано, что «на фото обязаны быть заметны все четыре угла странички паспорта» — сделайте непосредственно это фото.
1× слот зеркало
Автоматы неспроста числятся самым популярным азартным веселием. Чтобы усвоить управление и верховодила, потребуется всего некоторое минут. Ваша задача устроить ставку, определить количество рабочих линий и возможно вертеть барабан. Если на выпадет выигрышная композиция – вы выиграли! С этой задачей для посодействуют управится бездепозитные призы казино.B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax <a href=http://xn–9r2b13phzdq9r.com/bbs/board.php?bo_table=free&wr_id=2885494>http://xn–9r2b13phzdq9r.com/bbs/board.php?bo_table=free&wr_id=2885494</a> Бездепозитные бонусы – это самая небезинтересная и более многообещающая акция интернет-казино. Они и чем фри-спинов, потому собственно выплаты в бесплатных вращениях не гарантированы, ведь композиции на барабанах игрового аппарата все не сложиться.Бездепозитные призы за регистрацию считаются одним из самых знаменитых способов привлечения свежих игроков в онлайн-казино, потому собственно они предоставляют игрокам возможность опробовать казино, неподражаемо игровые автоматы, и вероятно, выиграть реальные средства. скачать 1×slots на андроид мобильная версия
<b>Смотреть еще похожие новости:</b>
<a href=https://sadhaka.nl/forum/viewtopic.php?t=102224>1хслотс официальный сайт зеркало</a>
<a href=https://americanrabbit.org/viewtopic.php?f=2&t=2399>1хслотс казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
После потребуется привнести идентификационный платёж. Это пугает новичков больше всего. Нужно сделать минимальный депозит в 100–500 руб. Таким образом служба безопасности увериться никаких, собственно платёжный метод принадлежит Вам. Данная процедура необходима для обеспечения безопасности игровых счетов. Пример, Ваш аккаунт взломают и выведут свои на собственный кошелёк. Будет очень неприятно. Поэтому верификация платёжной системы, это важный момент.
#3891 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Дарья Клишина, легкоатлетка 1×bet официальный 1×bet xyz <a href=https://sovsekretno.net/>порно с Антропова Валентина Викторовна</a> online casino 7k Ирина Горбачева <a href=https://krtka.info/>порно с Евгения Медведева</a> карты казино сайт букмекерской конторы лучшие букмекерские конторы сайт казино зеркало казино смотреть онлайн пин ап казино Ирина Горбачева
DiskiPlus online casino 7k DiskiPlus Александра Бортич <a href=https://diskiplus.ru/>DiskiPlus как выиграть в казино</a> DiskiPlus porno Нина Пирогова, хоккеистка DiskiPlus казино проиграл <a href=https://www.diskiplus.ru>DiskiPlus леон букмекерская контора</a> DiskiPlus макао казино DiskiPlus букмекерская контора официальный сайт DiskiPlus pin up букмекерская контора DiskiPlus casino 7k сегодня DiskiPlus порно с Юлия Ефимова DiskiPlus почему в казино нет часов DiskiPlus казино онлайн
#3892 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
леон букмекерская контора casino вход <a href=https://m.repost.news/>балтбет букмекерская контора</a> зеркала казино 1×bet вход <a href=https://rucriminal.info/>казино ставка</a> Ирина Горбачева про казино 1×bet 1 кент казино гта казино 7k casino сайт casino зеркало сайта
DiskiPlus пина букмекерской конторы DiskiPlus 7k casino официальный сайт <a href=https://diskiplus.ru/>DiskiPlus pin up casino пин ап</a> DiskiPlus порно с Гатагова Ольга Анатольевна DiskiPlus Валентина Матвиенко порно <a href=https://www.diskiplus.ru/>DiskiPlus casino промокод</a> DiskiPlus 1×bet сайт DiskiPlus казино онлайн бесплатно DiskiPlus казино фильм онлайн DiskiPlus казино пину DiskiPlus casino buzz DiskiPlus 1×bet на сегодня DiskiPlus porno Алена Косторная (фигурное катание)
#3893 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Львова-Белова Мария Алексеевна порно porno Александр Соболев (футбол) <a href=https://rucriminal.info/>порно с Аделия Петросян (фигурное катание)</a> Манилова Алла Юрьевна порно порно с Алина Загитова <a href=https://7club7.com/>порно с Александр Головин (футбол)</a> порно с Анна Калинская (теннис) казино без casino 7k сегодня champion casino casino pin официальный мелбет букмекерская контора pinco casino
DiskiPlus 1×bet скачать приложение на андроид DiskiPlus kent casino <a href=https://diskiplus.ru>DiskiPlus порно с Баталина Ольга Юрьевна</a> DiskiPlus букмекерская контора леонов DiskiPlus 1×bet слоты официальный сайт <a href=https://www.diskiplus.ru>DiskiPlus винлайн букмекерская контора</a> DiskiPlus зеркала официальных сайтов казино DiskiPlus порно с Александр Головин (футбол) DiskiPlus порно с Анна Калинская (теннис) DiskiPlus porno Александр Соболев (футбол) DiskiPlus casino рабочее зеркало DiskiPlus почему казино DiskiPlus порно с Елена Никитина, скелетонистка
#3894 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало на сегодня
Если вы опытный игрок, вы обязаны знать, что приз без депозита – редчайшая находка. Тем не менее, мы раз исследуем онлайн, чтобы найти для вас превосходнейшие бездепозитные предложения. <a href=http://filmkachat.ru/>1×slots casino online регистрация</a> Зарегистрироваться в казино по специальной ссылке либо с бонусным кодом. Подтвердить контактные данные (номер аппарата и электронную почту). Для доказательства номера телефонного необходимо в собственном профиле указать собственный номер и надавить кнопку „Подтвердить номер аппарата“, дальше Вы получите sms-сообщение с кодом, кот-ый необходимо установить в отвечающее фон. Для доказательства электронной почты, перебежать по активной ссылке в послании от казино. <a href=https://www.rang.com.ua/astramedika.com.ua>https://www.rang.com.ua/astramedika.com.ua</a> Ограничения по забавам. Администрация запрещает игрокам кое-какие игровые автоматы с бездепозитным призом, средствами либо безвозмездными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда разделенье производится по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, хотя запрещен в настольных забавах и в разделе Live Casino. казино 1×slots <a href=https://steamboatspringschat.com/forum/members/walterwer-1531.html>https://steamboatspringschat.com/forum/members/walterwer-1531.html</a>
1× slots регистрация в 1×slots casino
В интернете слишком много скриптовых сайтов, которые принадлежат плутам. Их главная задача – привлечь гэмблеров, пообещав не только щедрые презенты, хотя и солидные выигрыши. Так что кое-какие сайты предлагают получить за регистрацию том $1 000. <a href=https://www.findaspermdonor.com/memberlist.php?mode=viewprofile&u=13618>1хслотс рабочее зеркало</a> 1×slots casino регистрация Можно ли наваривать на бездепозитных призах? Это не работа, здесь как повезет, если в любом предложенном безедепе, вы будете откручивать вейджер и выводить, это возможно именовать везением, и дополнительной добавкой к вашему бютжету. <a href=https://xn–6-gtb4aicb3c6b.xn–p1ai/user/JeffreyFlada/>https://xn–6-gtb4aicb3c6b.xn–p1ai/user/JeffreyFlada/</a> Основное отличие что, что для получения бездепа нужно пополнять баланс в казино. Но кроме сего, есть ряд и других отличий:Существуют казино с бонусом за регистрацию, в которых очень знамениты фриспины в интернет казино впоследствии регистрации в определенных играх. Они встречаются даже чаще даровых поощрений или классических призов в казино без вложений. Например, игрок регистрирует счет, на который начисляются безвозмездные забавы, приз за регистрацию повторяющий бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса в выигрывает истинные деньги, коие в последствии возможно удачно вывести из заведения на собственную платежную систему. То есть, есть шансы вывести свои без рисков собственными деньгами. Регистрация, за которую в получит бонусы, займет пару минут, а спасибо этому можно прирастить 5 евро поощрений до тыс. И без всяких заморочек вывести их. рабочее зеркало 1хслотс Но есть игорные заведения, которые готовы просто например жертвовать средства на забаву. Для этого достаточно создать профиль. Чтобы вывести свой выигрыш, для сначала необходимо выполнить условия отыгрыша, обозначенные в критериях получения бездепозитного депозита.
1×slots мобильная версия войти казино
Размер призов почаще всего чисто условный и не превышает 50 руб. Приятно, хотя ощутимым бустом деле ли будет. Баланс игрока пополняется на подобающую сумму. К ней используется вейджер, обозначенный в правилах акции. Вывести выигрыш возможно несомненно последствии как, как пользователь сделает требуемый размер ставок из собственных средств. В редких случаях бездеп работает в формате Free Play. На счет пользователя зачисляется большая сумма, и предоставляется небольшой срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по завершении сего периода сумма на счету будет превышать изначальную, то разность возможно будет вывести либо применять для последующих ставок. <a href=http://barbatzivsfemei.3×.ro/profile.php?lookup=1360>http://barbatzivsfemei.3×.ro/profile.php?lookup=1360</a> Не советуем сломя голову браться за всевозможные предложения получения средств без инвестициям. Вполне возможно, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на 1-ый взгляд. Альтернативой является казино бонус за депо. Мы предлагаем для пару советов, спасибо коим у любого игрока несомненно вероятность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег: 1×slots зеркало рабочее Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, a только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Казино выводит средства только на что, эту платежную систему, с котрой был сделан депозит. То есть, для вывода бездепозитного бонуса, Вам сначала нужно пополнить счет. В некоторых клубах ограниченный список способов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет непосредственно с данных платежных способов, коие доступны для вывода.
1×slots рабочее зеркало
<a href=https://www.goslog.ru/forum/messages/forum1/message10139/11-obrashcheniya-grazhdan?result=reply#message10139>1×slots официальный сайт скачать на айфон</a> Принципиальным различием даровых бонусов от бонусов на депо является неименье необходимости вносить деньги на аккаунт. Из-за этого их нередко нарекают бездепозитными (no down payment bonuses).Получать информацию о самых выгодных призах возможно без неизменного мониторинга новостей казино. Мы брали эту задачу на себя и постоянно следим за услугами операторов, избирая наихорошие из их. В данном разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список промоакций регулярно дополняется. В топ вошли самые новые бездепозитные призы за регистрацию в казино 2020, временные и закрытые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и аспектам. Если срок действия акции истек, она удаляется из списка. 1×slot рабочее зеркало <a href=https://filmy-hd.ru/user/Stevenbib/>https://filmy-hd.ru/user/Stevenbib/</a> Зарегистрируйтесь. Для регистрации почаще всего довольно ввести свой номер телефонного и почтовый адресок, в чего ввести приобретенный код из СМС. Возможно, требуется указать промокод. В правилах акции будет написано, где его надобно вводить. Иногда это бы создавать при регистрации, времени — теснее после творения собственного кабинета, на отдельной странице.
1×slots коды
Нет. Казино раздают благотворительные бонусы за регистрацию, для того, дабы клиент возможность ознакомиться с игровым заведением. А дабы вывести его, необходимо выполнить условия отыгрыша. Наш перечень включает в себя наихорошие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит ревизию по главным параметрам: <a href=https://ads.kazakh-zerno.net/user/GlennSoasp/>https://ads.kazakh-zerno.net/user/GlennSoasp/</a> x1 slots регистрация в 1×slots casino Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.Только выполнив все условия отыгрыша и дождавшись завершения ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить свои деньги.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=56330>1×slots промокод при регистрации 2025</a>
<a href=https://www.kuyoux.com/space-uid-35770.html>1×slots бездепозитный бонус за регистрацию</a>
<a href=http://policeacademy.teamforum.ru/memberlist.php?mode=viewprofile&u=410>1×slots официальный сайт мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Также учтите, что кое-какие игровые платформы сузивают перечень стран, которые способны получить предложенный бездепозитный бонус за регистрацию. К образцу, есть онлайн-заведения, выдающие подобные призы только обитателям определенных государств. К образцу, интернет казино 777 Оригинал предоставляет бездепозитный бонус лишь игрокам из России и стран СНГ. Или наоборот, снабжают вознаграждением всех, считая обитателей некоторых стран (как сего, идет пристально учить список, чтобы впоследствии не появилось никаких вопросов и жалоб).
#3895 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора скачать приложение бесплатно фильм казино <a href=https://res-publika.com>casino ап</a> 1×bet зеркало на сегодня порно с Анастасия Потапова, теннисистка <a href=https://strelochnik.com/>порно с Бондаренко Анастасия Борисовна</a> Петрова Ольга Викторовна порно слоты казино порно с Алина Загитова, фигуристка porno Анастасия Янькова, боксерка пинко casino балтбет букмекерская контора букмекерская контора
DiskiPlus слот casino DiskiPlus казино без <a href=https://www.diskiplus.ru>DiskiPlus casino онлайн</a> DiskiPlus винлайн букмекерская контора официальный сайт DiskiPlus порно с Антропова Валентина Викторовна <a href=https://www.diskiplus.ru/>DiskiPlus порно с Дарья Касаткина (теннис)</a> DiskiPlus casino 7k сегодня DiskiPlus автомат казино DiskiPlus бывшие казино DiskiPlus букмекерские конторы бет DiskiPlus порно с Абрамченко Виктория Валериевна DiskiPlus скачать 1×bet на андроид DiskiPlus порно с Евгений Малкин (хоккей)
#3896 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
игры казино официальные букмекерские конторы <a href=https://repost.news/>скачать 1×bet</a> вывод казино часы казино <a href=https://rumafia.news/>скачать букмекерскую контору на андроид</a> казино вулкан казино сочи порно с Матвей Сафонов (футбол) casino рабочее 1×bet сайт 1×bet официальный Светлана Ходченкова
DiskiPlus скачать 1×bet на андроид DiskiPlus cometa casino <a href=https://www.diskiplus.ru>DiskiPlus Скоробогатова Ольга Николаевна порно</a> DiskiPlus спорт букмекерская контора DiskiPlus пин ап букмекерская контора <a href=https://www.diskiplus.ru>DiskiPlus букмекерская контора официальный сайт</a> DiskiPlus почему в казино нет окон DiskiPlus порно с Алина Загитова DiskiPlus top casino DiskiPlus vodka casino DiskiPlus демо казино DiskiPlus online casino официальный DiskiPlus casino автомат
#3897 Charlesgunnyhttp://filmkachat.ru
1×slots быструю регистрацию а также мгновенное
Бездепозитные бонусы – это исключительно небезинтересная и более перспективная акция интернет-казино. Они том превосходнее фри-спинов, потому что выплаты в даровых вращениях не гарантированы, ведь композиции на барабанах игрового аппарата имеют не сложиться. <a href=http://filmkachat.ru/>1× slots зеркало</a> <a href=https://phileo.me/blogs/295811/3D-Property-Visualization-Transform-Real-Estate-Marketing-Today>https://phileo.me/blogs/295811/3D-Property-Visualization-Transform-Real-Estate-Marketing-Today</a> Размер бонусов почаще всего чисто условный и не выше 50 рублей. Приятно, но ощутимым бустом деле вряд ли будет.B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. казино 1×slots <a href=https://buketik39.ru/user/Richardancep/>https://buketik39.ru/user/Richardancep/</a>
казино 1×slots
x1 slots регистрация в 1×slots casino Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, the decision зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. <a href=https://able2know.org/user/julesruica/>https://able2know.org/user/julesruica/</a> 1хслотс рабочее зеркало Такой казино приз без депозита за регистрацию выдается игроку на час и энергично используется данное предложение с 2017 года. Это как бы некая конспирация одобрения под бездепозитный. Суть всего сего сводится к что, этому, что геймеру на час выдается, к примеру, 1000 $, а реклама твердит то, что любой выигрыш можно несомненно в оставить при себе. Но случае играющий серьезно отнесется к этому предложению, то он попросту потеряет время. Ведь геймеру нужно несомненно играть не в основном аккаунте, а тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (даже всей тысячи) в управляла вступят определенные условия, где несомненно сказано, что наибольшей суммой победы может быть только двести долларов и деньги возможно использовать лишь в приза на первый вклад с вейджером 25 от суммы вознаграждения плюс сам депо. По итогу получится, собственно игрок выигрывал себе 200% бонус с вейджером на определенную необходимую. Короче разговаривая, это все не стоит вашего времени.
1×slot официальный сайт
<a href=http://filmsgood.ru/user/PorsedropKt/>http://filmsgood.ru/user/PorsedropKt/</a> 1×slots зеркало которую указывали при регистрации кстати Наш список включает в себя лучшие бездепозитные призы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по принципиальным характеристикам:Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном сайте и сделайте вход в личный кабинет, дабы забрать безвозмездные вращения с вейджером х40;
1×slots сайт
Ознакомьтесь с нашим перечнем наихороших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего списка и получите бездеп незамедлительно. Хватайте наихорошие безвозмездные предложения ниже и выигрывайте великие деньги, не рискуя! 1хслотс официальный сайт зеркало <a href=http://blackpearlbasketball.com.au/index.php?option=com_k2&view=itemlist&task=user&id=860249>http://blackpearlbasketball.com.au/index.php?option=com_k2&view=itemlist&task=user&id=860249</a> Активация денежного гонорары случается автоматически после творения профиля либо применения промокода. Иногда операторы предъявляют дополнительные требования: подписаться на страницы казино в соц сетях или на рассылку маркетинговых известий, скачать и ввести вспомогательный софт и т.д.
x1 slots 1хслотс регистрация перейти на 1×slots
Но существуют азартные заведения, готовые просто например вручить средства на забаву. Для этого достаточно создать профиль. Чтобы вывести выигрыш, сперва необходимо выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа. <a href=https://australiantravelforum.com/Upload/member.php?action=profile&uid=1473>https://australiantravelforum.com/Upload/member.php?action=profile&uid=1473</a> Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, дабы снова получить безвозмездный бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ожидает неминуемое санкция.При маленькой сумме бонуса рекомендовано играть по невысоким ставкам, а применять максимальные другого, как только никаких случае, если вейджер слишком великий, а время на отыгрыш сильно ограничено. 1×slots сайт Бесплатные призы казино без депозита можно получить вид валютных средств на бонусный счет (вывести их можно лишь в отыгрыша), фриспинов, игры или кешбэк-бонуса.
<b>Смотреть еще похожие новости:</b>
<a href=http://miupsik.ru/forums/showthread.php?tid=418331>1×slots регистрация 1×slotscasino 56 online</a>
<a href=https://www.makinamania.net/index.php?topic=252570.new#new>казино 1×slots</a>
<a href=https://forum.bandariklan.com/showthread.php?tid=176825&pid=978478#pid978478>1×slots казино мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бесплатные призы казино без депо можно получить вид денежных средств на бонусный счет (вывести их возможно только после отыгрыша), фриспинов, игры или кешбэк-бонуса. На условиях отыгрыша безвозмездных призов по тормознуть подробнее. С ними связаны аспекты, коие невозможно оставить без внимания.
#3898 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало на сегодня pin up casino пин <a href=https://repost.news/>Львова-Белова Мария Алексеевна порно</a> Кузнецова Анна Юрьевна порно казино смотреть онлайн бесплатно <a href=https://www.ossetia.tv/>casino скачать приложение</a> Александра Бортич black russia казино игры казино 1×bet официальный 1×bet xyz 1×bet xbet xyz Разуваева Ксения Денисовна порно бывшие казино
DiskiPlus 1×bet зеркало слоты 1×bet xyz DiskiPlus r7 casino <a href=https://www.diskiplus.ru>DiskiPlus porno Елизавета Туктамышева</a> DiskiPlus 1×bet зеркало рабочее на сегодня DiskiPlus макао казино <a href=https://diskiplus.ru>DiskiPlus порно с Георгий Джикия (футбол)</a> DiskiPlus букмекерскую контору пин DiskiPlus букмекерская контора официальный сайт DiskiPlus 7k casino зеркало DiskiPlus porno Александра Степанова, фигуристка DiskiPlus порно с Евгения Медведева DiskiPlus casino betting DiskiPlus kent casino
#3899 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт, скачать
Перед активацией главно пристально выучить обстоятельства акции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют велечину также лимиты ставок при отыгрыше и сроки, протяжении которых возможно воспользоваться предложением. Если бездеп охватывает ограниченный список игр, рекомендуется разузнать максимальные коэффициенты, степень отдачи и волатильности. Слоты с невысокими множителями выплат подходят лишь что случае, случае оператор не установил взыскательные лимитирования на максимальную необходимую ставки. <a href=http://filmkachat.ru/>1×slot регистрация</a> <a href=https://www.onairseo.com/crawl-report/7290>https://www.onairseo.com/crawl-report/7290</a> 1хлот регистрация в 1×slots casino <a href=https://www.javab24.com/profile/25928-frankdrest>https://www.javab24.com/profile/25928-frankdrest</a> Варианты выигрыша зависимости от Вашей успеха и условий игорного портала. Выше мы сказали, что кое-какие бездепозитные призы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются они, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность передовых игр на деньги, возможно выиграть невозможные суммы. Сегодняшние игровые автоматы или видео слоты, как их нарекают. Могут выдавать крупные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000.
зеркала 1×slots
Составленный специалистами Casino.ru список онлайн-казино с бездепозитным призом разрешает игрокам сопоставить спецпредложения различных операторов.Представленные на этой странице наилучшие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные обстоятельства. После тщательного анализа редакция портала составила рейтинг спецпредложений, каком посетители Casino.ru могут сортировать список по нескольким аспектам: по сумме, вейджеру, максимальной сумме вывода и т.д. 1×slots официальный сайт, скачать <a href=https://sparkitupforums.net/User-Renaldogorma>https://sparkitupforums.net/User-Renaldogorma</a> Условия вывода выигрыша. В некоторых заведениях для успешного вывода с бездепозитного бонуса достаточно пополнения баланса и подтверждения личности. В иных же клубах, необходимо несколько один прокрутить свой депозит.У нас на веб-сайте Вы найдете перечень призов без депо в испытанных казино и доскональную информацию про как их получить и использовать. 1×slots регистрация 1×slots casino c2d ru
1×slots casino регистрация 1×slots review live
Но не стоит размышлять, собственно снабжая юзеров такими призами, казино занимается спонсированием. Ведь размеры вознаграждений, главном, не большие (средним размером от 5 до 20 долларов). И на эти средства налагаются конкретные условия и лимитирования, неотклонимые к исполнению игрока, случае в последствии он желает получить все средства выигранные деньги.Когда идет о денежных призах, казино практически устанавливают условия вейджера, коие нужно выполнить, чтобы вывести выигрыш. Таким образом, заведение пытается продемонстрировать себя своим вероятным геймерам, а такой рекламный ход как казино бонус без депозита за регистрацию завлекает очень большое внимания к игорному заведению и обеспечивает неизменный струю свежих гостей и будущих посетителей игрового онлайн клуба.Приглашаем делиться воззреньями о бонусах. Это поможет другим пользователям выбирать более прибыльные предложения. <a href=http://cg.darkml.net/bbs/home.php?mod=space&uid=7860905>http://cg.darkml.net/bbs/home.php?mod=space&uid=7860905</a> Чтобы помощи увериться в преимуществах бездепозитных бонусов, достаточно зарегистрироваться в казино и получить поощрение. 1×slots casino регистрация При маленькой сумме бонуса рекомендовано выступать по низким ставкам, а применять наибольшие какого-либо лишь в том случае, если вейджер слишком великий, а время на отыгрыш крепко ограничено.
1×slot зеркало
За вербование приятеля ? масштабах партнерской программки заказчик получает вознаграждение за вербование новых пользователей.Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного бонуса достаточно пополнения баланса и подтверждения личности. В других же клубах, необходимо количество один прокрутить свой депозит. Каждая игровая перрон отличается критериями по получению и отыгрышу бездепов. В правилах отчетливо расписаны временные рамки, за которые надо(надобно) прокрутить вейджер. Также не запамятовывайте на наибольший объем ставки и максимальную сумму выплаты. С другой стороны, дабы получить бездепозитные призы казино, достаточно потратить не более 1 минутки. 1×slots быструю регистрацию а также мгновенное <a href=http://www.atego-club.ru/forum/member.php/131380-HarryScack>http://www.atego-club.ru/forum/member.php/131380-HarryScack</a> Некоторые онлайн-казино без депозита предлагают свежим клиентам избрать приз при регистрации. Будьте внимательны: выбрав раз, вы в безусловном большинстве случаев не сможете воспользоваться остальными.Условия могут разниться приятель от друга. Но такой приз имеет быть использован лишь для игрового процесса – приобретенные на счет финансы до того, как будут отыграны, исключить нереально.
1×slots casino регистрация
Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. Бездепозитный бонус часто может стать легкодоступным сразу в завершения регистрации, потому как единственным притязанием к нему является регистрация, а после ревизия вашей свежей учетной записи. <a href=http://bmwspeed.lv/user/FrankWooni/>http://bmwspeed.lv/user/FrankWooni/</a> Так что приготовьтесь дать секретную информацию (пол, возраст, государство проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает менее суток, после чего получится беспрепятственно выводить крупные выигрыши. казино 1×slots Если ординарными текстами, бездепы – это определённая сумма средств либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать презенты. Но есть кое-какие нюансы. Существуют игорные жилища, которые перед тем как начислить бонусы требуют привязать телефон, предоставить копии документов.Также бездепозитные бонусы все работать способом возвращать к ирге клиентов, пока приостановивших своё сотрудничество с компанией: извещение о бездепе поступает на мобильный аппарат или почту.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.mshowto.org/forum/members/jamespauri.html>1×slots актуальное зеркало</a>
<a href=http://forum.puppylinux.pl/index.php?topic=793.new#new>1 xslots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, all только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. Однако в критериях исчезают «подводные камешки», коие не позволят исключить солидную сумму либо же вы не успеете отыграть вейджер. Поэтому профессионалы рекомендуют отобрать благотворительные вращения за регистрацию в казино без депо, чтобы поднабраться опыта и получить реальный шанс на победу.
#3900 slots-raithttps://slots-rait.com
Turkiye Slotlar Rehberi <a href=https://slots-rait.com/>Oyun slotlar</a> En Iyi Slotlar ve Casinolar! Nerede oynayabileceginizi, hangi oyunlarn populer oldugunu ve bonuslar nasl alabileceginizi ogrenin. Oyun alanlar ve guncel eglencelere dair kapsaml bir genel baks!
#3901 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино фильм смотреть онлайн бк букмекерская контора <a href=https://repost.news/>7k casino сайт</a> Елена Лядова 1×bet телефон <a href=https://rumafia.news/>демо казино</a> пин ап casino яндекс казино casino ru Самойлова Алла Владимировна порно casino официальный сайт игры казино букмекерская контора бесплатно скачать
DiskiPlus скачать 1×bet на андроид бесплатно DiskiPlus 7k casino скачать <a href=https://www.diskiplus.ru/>DiskiPlus порно с Евгения Медведева</a> DiskiPlus casino онлайн DiskiPlus скачать 1×bet на андроид <a href=https://diskiplus.ru/>DiskiPlus casino ап</a> DiskiPlus 1×slots casino DiskiPlus kent casino регистрация DiskiPlus сайт букмекерской конторы DiskiPlus new casino DiskiPlus порно с Карен Хачанов (теннис) DiskiPlus порно с Ирина Сидоркова DiskiPlus порно с Никита Кучеров (хоккей)
#3902 slots-coolhttps://slots-cool.com
Turkiye’deki slot makineleri <a href=https://slots-cool.com/>para cekme ozellikli slotlar</a> gercek parayla oynanabilen slotlar kapsaml bir baks! Nerede oynan?r, hangi slotlar en karldr ve en iyi casino nasl secilir Kumar severler icin ipuclar, incelemeler, derecelendirmeler ve bonuslar!
#3903 Charlesgunnyhttp://filmkachat.ru
казино 1×slots официальный сайт
Вейджер не более х30–35 является приемлемым. Опытные игроки заявляют, что с таким вейджером реально остаться в плюсе, если правильно подойти к выбору игрового аппарата. <a href=http://filmkachat.ru/>1×slots зеркало</a> Бездепозитный приз – это финансовое вознаграждение, которое выдается соучастнику забавы в казино, для его вербования и возникновения заинтригованности. Любой посетитель, кот-ый подходит условиям выдачи сходственного бездепозитного бонуса, может претендовать на получение вышеуказанного приза. Такое поощрение считается наиболее действенным способом, дающим возможность стартовать деле, не вкладывая личных материальных средств. <a href=https://mxsponsor.com/riders/cgifurniture-com>https://mxsponsor.com/riders/cgifurniture-com</a> Особую изюминку видео слотам придают оригинальные символы. С их выходом активируются различные бонусы. Вы можете запустить дополнительный степень и увеличить сумму выигрыша. Есть знаки, коие заменяют ненужные составляющие и сами творят выигрышные комбо. Не стоит забывать и про бонус-тур. После любого счастливого спина есть шанс прирастить необходимую выигрыша в 2 или хорошо раза. 1×slos регистрация в 1×slots casino <a href=http://bbs.jiatuxueyuan.com/home.php?mod=space&uid=1615615>http://bbs.jiatuxueyuan.com/home.php?mod=space&uid=1615615</a>
1×slots официальный сайт мобильная версия скачать
Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депозит возможность отличаться до 30 дней. 1хслот официальный сайт зеркало Внесение депозита – Будьте готовы пополнить счет последствии отыгрыша бонуса. Это стандартное требование правил для этого подобии промо-акций. Лучше заранее уточнить, какую сумму надо(надобно) несомненно вносить на счет. Как верховодило, речь о наименьшем депозите, хотя вы должны быть убеждены, собственно он для по кармашку.Классическая разновидность бонуса за творение аккаунта. Его преимущество содержится что, нет, что клиент возможность без выбирать аппараты и создавать ставки в их. Иногда список игровых автоматов ограничен оператором, хотя все также это другого, как, чем единственный доступный разъем, как в случае с внедрением фриспинов. <a href=https://princeofrubber.com/user-profile/williamunard/?um_action=edit>https://princeofrubber.com/user-profile/williamunard/?um_action=edit</a> 1×slots зеркало регистрацию более популярный вариант это Таким образом, заведение пытается показать себя своим потенциальным игрокам, а такой маркетинговый ход как казино приз без депозита за регистрацию завлекает довольно много внимания к игорному заведению и обеспечивает неизменный струю свежих гостей и грядущих посетителей игрового интернет клуба.Акционные предложения от казино существуют в различных форматах. Часто призы даются в размен на депозит. Игрок заносит платеж и получает средства, безвозмездные вращения и поощрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — вид приза, который гарантирован за выполнение определенных действий на веб-сайте:
1×slots зеркало этих способов предполагает регистрацию
Новые посетители онлайн-казино без первого депозита могут проверить собственную удачливость. К что, этому же есть возможность конвертировать бездепы в настоящие деньги за регистрацию в казино, однако чтобы бонус необходимо отыграть согласно условиям акции.У любого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано сумели выполнить их, мы дадим несколько советов. Если система начислила небольшую необходимую, надо делать большие ставки – остановитесь на 10–30 центах. Как лишь сможете заработать примерно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В противном случае никакого приглядеться к иному автомату. <a href=https://eco-kamchatka.ru/user/CraigThary/>https://eco-kamchatka.ru/user/CraigThary/</a> Бонус с зачислением денег на счет дает больше свободы деяний. Пользователь сам выбирает, каким образом распорядиться подаренными средствами. Здесь того могут действовать ограничения на перечень дешевых игр, хотя обычно эти рамки не так строги, как в рекламную с бесплатными вращениями. 1хслотс 1хслотс регистрация перейти на 1×slots
1×slots промокод при регистрации
В качестве призов онлайн казино нередко предлагает выдачу фриспинов, словами безвозмездных вращений игрового барабана. Виртуальные монеты можно применять для изучения в покерной школе или для игры в казино.Бездепозитные призы – это самая интересная и наиболее многообещающая промоакция интернет-казино. Они числе чем фри-спинов, поэтому собственно выплаты в безвозмездных вращениях не гарантированы, ведь комбинации на барабанах игрового аппарата имеют не сложиться. Самые знаменитые способы вывода средств ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электронным платежным системам на Neteller и Skrill, а используют криптовалютными кошельками. Вывод выигрышей может исполняться моментально или развлекать от нескольких часов до нескольких суток. Заполняя данные в собственном профиле, указывайте только достоверную информацию, например как Вам придется ее доказать в при выводе средств.Возможность протестировать новые игры, не рискуя личностными средствами и создать собственную тактику игры. 1×slots casino online регистрация <a href=https://www.rmbbk.com/space-uid-1269490.html>https://www.rmbbk.com/space-uid-1269490.html</a> Операторы гемблинга заявляют, собственно например они дерутся с бонус-хантерами. Впрочем, критики считают, что данным казино пытаются устроить из случайного постояльца неизменного игрока.Бoльшинcтвo азартных заведений выдвигают приблизительно одинаковые условия и требования, которые нужно выполнить, дабы получить бездепозитный приз за регистрацию. Все их возможно соединить в один перечень:
1хслотс зеркало
Бoльшинcтвo азартных заведений выдвигают приблизительно одинаковые условия и требования, коие необходимо выполнить, чтобы получить бездепозитный приз за регистрацию. Все их возможно объединить в один перечень:Ниже указан важный список законных казино в Беларуси с призами на 1-ый депо. Вы сможете попасть на официальный вебсайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз. <a href=https://mbio.me/bbs/board.php?bo_table=free&wr_id=749770>https://mbio.me/bbs/board.php?bo_table=free&wr_id=749770</a> В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с бесплатных вращений. Прибыль, которую Вы заработаете на этом бездепе можно ставить на вывод без какого либо отыгрыша. 1×slots актуальное зеркало Перечисленные повыше основные характеристики сопровождают практически любой приз и считаются стандартными для бездепозитных бонусных начислений в казино.Помните, собственно в некоторых забавах сумма ставки идет в зачет вейджера только отчасти. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки числятся как отыгранные средства, момент как в слотах идет в зачет все 100% суммы.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.airsoft44.com/forum/index.php?action=profile;u=11896>1×slots казино мобильная версия</a>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=448685>1×slots на любой вкус как пройти регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подарки на конкретные даты отличаются условиями получения. Если одобрение начисляют игроку на день рождения, то сумма обычно зависимости от общего объема депо за год.
#3904 Charlesgunnyhttp://filmkachat.ru
1×slots бездепозитный бонус за регистрацию
Например, игрок получил 500 рублей при создании аккаунта и должен отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 рублей, понадобится устроить 875 спинов для полного отыгрыша. <a href=http://filmkachat.ru/>1×slots сайт зеркало</a> Чтобы других убедиться в превосходстве бездепозитных бонусов, довольно зарегистрироваться в казино и получить поощрение. <a href=https://slides.com/archicgi-com/essential-electronic-components-for-modern-industrial-applications/scroll>https://slides.com/archicgi-com/essential-electronic-components-for-modern-industrial-applications/scroll</a> Бoльшинcтвo азартных заведений выдвигают приблизительно одинаковые обстоятельства и притязания, которые нужно выполнить, дабы получить бездепозитный бонус за регистрацию. Все их возможно объединить в один список: 1×slots casino зеркало рабочее <a href=http://mail.clicksordirectory.com/details.php?id=438437>http://mail.clicksordirectory.com/details.php?id=438437</a>
казино 1×slots официальный сайт
Пoдтвepдить личнocть клиента. Для успешного вывода средств, необходимо подтвердить личность клиента. Нa этaпe вepификaции пpoфиля, сотрудники службы защищенности должны увериться, собственно у игрока более один акк. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не сможет вывести свой выигрыш, если у него несомненно количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы. <a href=https://nauc.info/forums/viewtopic.php?t=20630618>1×slots зеркало</a> 1×slots регистрация на сайте <a href=https://forumniebiescy.pl/memberlist.php?mode=viewprofile&u=70685>https://forumniebiescy.pl/memberlist.php?mode=viewprofile&u=70685</a> 1×slots зеркало этих способов предполагает регистрацию Лишь популярностью и известные азартные заведения могут разрешить себе раздавать бездепы в виде дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депо, которые возможно израсходовать в топовых аппаратах с высокой отдачей.Допустим, за регистрацию вы получили бездеп в размере 2 000 руб. С вейджером х30. В этом случае предстоит сделать ставок, на общую необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать реальные деньги. Однако не забывайте, что с любого дара выйдет исключить определённую сумму (почаще всего менее $200).
зеркала 1×slots
<a href=http://spilov.ru/user/JamesEquah/>http://spilov.ru/user/JamesEquah/</a> Как правило, при выводе финансов, от играющего потребуется лишь устроить минимальный лепта для того, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом собственный счет. 1×slots casino регистрация на сайте
1×slots коды
Все бесплатные бонусы кажутся заманчивыми. Кто же категорически от возможности сыграть в онлайн-казино, не рискуя средствами, хотя получая выигрыши. Но далеко не все бездепозитные бонусы в равной степени привлекательны для рассудительного посетителя.Благодаря программке лояльности от игорного заведения, возможно арестовать превосходный старт и без дополнительных инвестициям запустить видеослоты. Кроме такого, возможно рассчитывать на реальную удачу и получить, без вложения личных финансов, большой выигрыш. <a href=https://www.findaspermdonor.com/viewtopic.php?f=25&t=89978>1×slots казино зеркало</a> Важно, убедитесь никаких, собственно раньше не регистрировались в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи. 1× slots casino зеркало <a href=https://radioizba.ru/communication/forum/?PAGE_NAME=profile_view&UID=19703>https://radioizba.ru/communication/forum/?PAGE_NAME=profile_view&UID=19703</a>
1×slots коды
Если ординарными текстами, бездепы – это определённая сумма денег или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать презенты. Но есть кое-какие нюансы. Существуют игорные дома, коие перед что, этим как начислить бонусы требуют привязать телефонный, дать копии документов.Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? Обычно, бездепозитные призы выдаются под определенные слоты с фиксированной ставкой, хотя их точно запрещено использовать в игровых автоматах с современным джекпотом. Список игр, в возможно использовать бездеп, Вы отыщите в описании акции либо можете уточнить у службы заведения. <a href=https://images.google.com.jm/url?q=https://doctorlazuta.by/>https://images.google.com.jm/url?q=https://doctorlazuta.by/</a> 1×slots зеркало рабочее Какие бонусы возможность еще получить не бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного бонуса, любое онлайн казино предлагает игрокам выгодное предложение на первый депо, вы совершаете депо, ваш депозит возрастает в двое либо том в трое, тем самым начать играть можно с больше крупной суммой, например же не запамятываем на вейджер на бонусы.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.fromrus.su/index.php?/topic/29788–1×-%D1%81%D0%BB%D0%BE%D1%82-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE/>1× слот зеркало</a>
<a href=http://fin-molitor.com/forum/viewtopic.php?f=2&t=490063>1хслотс официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подтвердите регистрацию, дабы активировать Бездепозитный бонус с выводом, требуется наполнить индивидуальный профиль. Заполните пустопорожние поля истинными данными о себе.
#3905 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало
На условиях отыгрыша даровых бонусов стопам остановиться подробнее. С ними связаны аспекты, коие нельзя оставить без внимания. <a href=http://filmkachat.ru/>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a> Получать информацию о самых прибыльных призах возможно без неизменного мониторинга новостей казино. Мы брали эту задачу на себя и безпрерывно смотрим за услугами операторов, выбирая лучшие из их. В данном разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список акций регулярно пополняется. В топ вошли самые свежие бездепозитные бонусы за регистрацию в казино 2020, кратковременные и закрытые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру прочим критериям. Если срок деяния промоакции истек, она удаляется из перечня.Главное преимущество спинов – возможность изучить разные слоты. Также получится насладиться бонусными раундами, испытать удачу в риск-туре и преувеличить выигрыш за счёт особенных символов. Однако не только игровой процесс заслуживает внимание, как другого сосредоточиться на реальном выигрыше. <a href=https://app.planable.io/review/yzJzBgxH_Ikg>https://app.planable.io/review/yzJzBgxH_Ikg</a> Бездепозитный бонус – это финансовое вознаграждение, которое выдается участнику игры в казино, для его привлечения и возникновения заинтригованности. Любой гость, кот-ый подходит условиям выдачи сходственного бездепозитного бонуса, имеет претендовать на получение вышеуказанного приза. Такое одобрение считается более эффективным методом, дающим вероятность стартовать в игре, не вкладывая личных вещественных средств.Обычно показатель повыше, чем для бонусов на депо. Не дивитесь, в он будет в х100. Иногда завышенный коэффициент вейджера уточняется для обитателей отдельных стран. 1×slots зеркало рабочее на сегодня <a href=http://g95887q6.beget.tech/user/TerryQuobe/>http://g95887q6.beget.tech/user/TerryQuobe/</a>
1×slots сайт
<a href=https://ragnarok.ch/forum/viewthread.php?thread_id=139127>1× slots официальный</a> 1×slots регистрация 1×slots casino c2d ru <a href=https://www.freebeg.com/forum/member.php?action=profile&uid=23459>https://www.freebeg.com/forum/member.php?action=profile&uid=23459</a> Помимо прочего, для вывода средств по бездепу необходимо привнести на счёт свой первый депо — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на минимально возможную необходимую, в чего вывод средств будет доступен. 1×slots сайт
1×slots регистрация на сайте
Мы собрали и выпустили перечень наилучших бездепозитных казино с бонусами за регистрацию, коие гарантируют великодушные выигрыши и моментальные выплаты. На безвозмездные бонусы онлайн-казино почти практически распространяется ограничения по стране проживания клиентов. Даже в для разрешено раскрывать счет и играть на средства в заведении, это еще не означают, собственно вам доступны not the slightest deposit bonuses. <a href=https://dokuwiki.stream/wiki/User:RyanLevvy20392>https://dokuwiki.stream/wiki/User:RyanLevvy20392</a> На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению сего медли, Вы не можете активировать и получить бездепозитный приз. 1×slots официальный сайт мобильная версия Обычно показатель выше, чем для бонусов на депо. Не изумляйтесь, случае он будет том х100. Иногда завышенный коэффициент вейджера уточняется для жителей отдельных государств.Лишь пользующиеся и известные азартные заведения могут разрешить себя выдавать бездепы в виде добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депо, коие возможно потратить в топовых аппаратах с высокой отдачей.
1хслотс регистрация в 1×slots casino
Помните, собственно любые нарушения верховодил сведут на нет ваши старания, и вы скорее останетесь без начисленного вас безвозмездного приза. Всегда изучайте правила начисления и обстоятельства вейджера. По любым вопросам, на коие вы не самостоятельно найти ответы, обращайтесь за разъяснениям и саппорт.Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. <a href=http://u0382101.isp.regruhosting.ru/index.php/forum/general-questions-and-how-tos/68883-otzyvy-o-tovarakh?start=1056#129790>зеркала 1×slots</a> В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать собственный выигрыш с даровых вращений. Прибыль, коию Вы заработаете на этом бездепе можно назначать на вывод без какого либо отыгрыша. Доступность — бездепозитные бонусы в казино почаще всего предоставляются новым игрокам, хотя случаются случаи, когда бонус могут получить и действующие посетители. 1× slots регистрация в 1×slots casino <a href=http://postroika-remont.online/profile.php?u=dynamicmishap84>http://postroika-remont.online/profile.php?u=dynamicmishap84</a> Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.
1×slots casino регистрация
<a href=https://images.google.ac/url?q=https://doctorlazuta.by/>https://images.google.ac/url?q=https://doctorlazuta.by/</a> Для верификации аккаунта нужно дать специалистам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, а фотографию банковской карты или скриншот страницы электронного кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для доказательства личности.Вообще перейдя в казино — правила одинаковы в получении бездепозитных призов, в стереотипные управляла входит: доказать эл. Почту и аппарат, заполнить собственный личный профиль, активировать рекламную код либо активировать предложения во вкладке БОНУСЫ. 1×slots быструю регистрацию а также мгновенное Бездеп с фриспинами имеет обхватывать всю коллекцию игр на веб-сайте либо разработки 1-го провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш может быть выведен в такого, как пользователь отыграет эту необходимую. Возможность оценить полный функционал слотов — главное достоинство данной разновидности. Игроку становятся доступны что, эти функции, коие отсутствуют в демонстрационном режиме, а возможность выиграть настоящие средства прибавляет ярких азартных ощущений.
<b>Смотреть еще похожие новости:</b>
<a href=http://3ak.cn/home.php?mod=space&uid=187057>1 x slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чаще всего, модные сервисы, такие как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно обязательное верховодило. Финансовые средства выводятся только спустя что, эту платежную систему, которой успех для пополнения депозита. Если же игрок получил бездепозитный покерный бонус, требуется пополнить счет на наименьшую необходимую, кот-ая составляет обыкновенно 10 долларов. С не отыгранным призом воспрещается превышать размер максимальной ставки. Нарушение этого условия повлечет за собой аннулирование выигрыша.
#3906 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино 1 Черкесова Бэлла Мухарбиевна порно <a href=https://glvk.guru/>up casino официальный</a> официальные зеркала казино casino регистрации <a href=https://sovsekretno.net/>casino зеркало сегодня рабочее</a> porno Андрей Рублев (теннис) казино ли porno Мира Андреева (теннис) порно с Баталина Ольга Юрьевна букмекерские контора ап букмекерская контора бесплатно скачать 1×bet официальный 1×bet xyz
DiskiPlus самое казино DiskiPlus 1×bet на сегодня <a href=https://diskiplus.ru/>DiskiPlus песня казино</a> DiskiPlus pin up casino пин DiskiPlus porno Елизавета Туктамышева <a href=https://diskiplus.ru/>DiskiPlus vavada casino</a> DiskiPlus pin up casino пин ап DiskiPlus порно с Зырянова Анастасия Владимировна DiskiPlus казино сочи DiskiPlus Преподобная Надежда Александровна порно DiskiPlus порно с Константин Тюкавин (футбол) DiskiPlus суть казино DiskiPlus гама казино
#3907 Charlesgunnyhttp://filmkachat.ru
1 x slots
Выбирайте наихорошие безвозмездные бонусы счет обзоров на Casinoz – и пусть вас сопутствует удача при отыгрыше бонусных кредитов! <a href=http://filmkachat.ru/>казино 1× slots официальный сайт</a> Максимальный размер ставки, который нельзя превосходить пока бонус не будет всецело отыгран. В случае нарушения этого управляла, приз и выигрыш с него станут аннулированы. <a href=http://gendou.com/forum/thread.php?thr=53119>http://gendou.com/forum/thread.php?thr=53119</a> За привлечение приятеля ? масштабах партнерской программы заказчик получает вознаграждение за привлечение свежих пользователей. 1× слот зеркало <a href=https://fa.earnvisits.com/index.php?page=user&action=pub_profile&id=185125>https://fa.earnvisits.com/index.php?page=user&action=pub_profile&id=185125</a> Иногда операторы настоятельно внесение минимального депозита перед выводом для верификации платежного инструмента. В некоторых казино данный депозит кроме предстоит отыграть.Бездепозитные бонусы казино за регистрацию в 2022 году — это возможность сыграть за счёт заведения. Казино даёт клиенту шанс воспользоваться определённой суммой либо количеством безвозмездных вращений без внесения депо. Не путайте деморежим с реальной забавой без надобности внесения депозита.
1×slots зеркало
1× slots официальный <a href=https://tony-sheryl.com/bbs/board.php?bo_table=free&wr_id=110099>https://tony-sheryl.com/bbs/board.php?bo_table=free&wr_id=110099</a> 1×slots casino регистрация 1×slotscasino09k online
1×slots зеркало видели такую регистрацию на
Хотя бесплатные бонусы начисляются без депо, не исключено, собственно вас придется заносить средства. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты лишь после того, как новый заказчик первый пополнит игровой счет. Не трудно догадаться, что no down payment bonuses почти никогда не случаются великими. Чаще всего идет о пяти–тридцати баксах (или эквиваленте этой суммы в иной денежной). <a href=http://yseoul.com/bbs/board.php?bo_table=free&wr_id=302359>http://yseoul.com/bbs/board.php?bo_table=free&wr_id=302359</a> 1×slot зеркало рабочее этих способов предполагает регистрацию Осталось выбрать казино с бонусом за регистрацию и сделать профиль. После активации презента выигрыш в от Фортуны и навыков.Проверка занимает от нескольких мин. До нескольких дней, специалисты техподдержки могут запросить дополнительные документы либо инициировать краткое общение по Skype.
1хслотс рабочее зеркало на сегодня
Хотя безвозмездные призы начисляются без депозита, не исключено, собственно вас придется вносить средства. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты лишь последствии как, как свежий заказчик раз пополнит игровой счет. <a href=https://radios-collector.com/memberlist.php?mode=viewprofile&u=301&sid=3b14c89de33545f09efe2f626f183a6b>1хслотс казино зеркало</a> Можно ли зарабатывать на бездепозитных призах? Это не работа, здесь как повезет, если в любом предложенном безедепе, вы будете откручивать вейджер и выводить, это можно назвать везением, и дополнительной добавкой к вашему бюджету. 1×slots казино зеркало <a href=http://www.rhl-mod.ru/members/98264-jamesalugs/>http://www.rhl-mod.ru/members/98264-jamesalugs/</a> Бонусные средства – небольшая сумма денег для старта в новом казино. На бонусные средства, обыкновенно разрешается выступать во все забавы, не слотов с прогрессивным джекпотом и игр из раздела exist casino.Если ординарными словами, бездепы – это определённая сумма средств или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать презенты. Но есть кое-какие аспекты. Существуют игорные дома, которые перед тем как начислить бонусы настоятельно привязать телефон, предоставить копии документов.
1×slots официальный сайт зеркало
Также бездепозитные призы шансы служить методом возвращать к ирге клиентов, что приостановивших своё сотрудничество с фирмой: уведомление о бездепе поступает на мобильный телефонный или почту. <a href=http://misojin.co/bbs/board.php?bo_table=free&wr_id=408475>http://misojin.co/bbs/board.php?bo_table=free&wr_id=408475</a> С иной стороны, гораздо легче забрать бездепозитные фриспины за регистрацию в казино и напрямик данный начать вращать барабаны в лучших слотах. Главная необыкновенность спинов том,, собственно они предназначены для лучших автоматов. Удастся не только пройти вспомогательные раунды, хотя и прирастить сумму выигрыша, заработать респины и внутриигровые подарки. 1×slots регистрация на 1хслотс Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в обязательном порядке нужно пополнить счет в казино. Для депозитных бонусов, данная процедура не нужна, например как депо теснее изготовлен.Чаще всего казино бонус за регистрацию без депозита даёт возможность запустить каждой машина. Но другого, как пристально ознакомиться с условиями. Иногда для забавы доступны лишь определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, другого, как начать знакомство с миром пыла именно с «одноруких бандитов».
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=576834#pid576834>1×slots casino регистрация 1×slotscasin online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Доступность — бездепозитные призы в казино почаще всего предоставляются новым игрокам, хотя бывают случаи, когда бонус шансы получить и действующие клиенты.
#3908 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Абрамченко Виктория Валериевна r7 casino <a href=https://res-publika.com>Москалькова Татьяна Николаевна порно</a> порно с Петр Ян (ММА) лучшие букмекерские конторы <a href=https://specreporter.com/>казино играть</a> Преподобная Надежда Александровна порно Петрова Ольга Викторовна порно 1×bet зеркало Ходнева Светлана Владимировна порно ешь казино порно с Анна Щербакова, фигуристка Крючкова Полина Викторовна порно
DiskiPlus casino автомат DiskiPlus пинап казино <a href=https://diskiplus.ru>DiskiPlus porno Катерина Шпица</a> DiskiPlus online casino 7k DiskiPlus букмекерские конторы pin <a href=https://www.diskiplus.ru>DiskiPlus 7k casino сайт</a> DiskiPlus pin up casino официальный DiskiPlus лучшая казино DiskiPlus казино регистрации DiskiPlus демо казино DiskiPlus порно с Евгений Малкин (хоккей) DiskiPlus официальные сайты казино DiskiPlus casino официальный зеркало
#3909 Charlesgunnyhttp://filmkachat.ru
1×slots сайт зеркало
Мы подготовили список, где есть постоянно актуальные и свежие бездепозитные бонусы казино, которые возможность получить даром. Для наших юзеров есть специальные предложения эксклюзивные призы, коие вы у не найдете, их мы определили специальной красной плашкой «Exclusive».Бездеп с фриспинами возможность охватывать всю коллекцию игр на веб-сайте либо разработки одного провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении промоакции. Выигрыш может быть выведен последствии как, как юзер отыграет эту сумму. Возможность оценить глубокий возможностей слотов — основное достоинство этой разновидности. Игроку становятся доступны что, эти функции, которые отсутствуют в демонстрационном режиме, а вероятность выиграть настоящие средства прибавляет ясных азартных чувств. <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> Мы советуем не отрицаться от сходственных услуг узнаваемых казино. Выделите некоторое минут на регистрацию, получите приз и попытайтесь его отыграть. Может быть, сейчас фортуна будет на вашей стороне!Вы скорее, скажем, как все любите получать подарки и бездепозитные призы казино. Игорные жилища брали в привычку одаривать гэмблеров приятными призами. Стать владельцем приветственного подарка можно за творенье профиля либо пополнение счёта. Второй вариант больше увлекательный, ведь клубы готовы удвоить депо! Но случае вы новичок и лишь знакомитесь с миром азарта, чем воспользуйтесь бонусом за регистрацию. <a href=https://alestat.com/www,astramedika.com.ua.html>https://alestat.com/www,astramedika.com.ua.html</a> На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не можете активировать и получить бездепозитный приз. 1× slots casino официальный сайт <a href=https://bbs.airav.cc/home.php?mod=space&uid=2281780>https://bbs.airav.cc/home.php?mod=space&uid=2281780</a> За счёт спинов выйдет запустить различные онлайн слоты, протестировать стратегии и поднабраться опыта. Фишка в, что вращения начисляются на топовые аппараты с уникальными опциями и высочайшей отдачей. Не запамятовывайте, что в любом акционном предложении учтены особые притязания – кратковременные лимитирования, максимальный объем ставки, список дешевых игр.Так что основное отличие подарка на депо от бездепа – обязательное пополнение счёта. Вы можете привнести депо и преумножить стартовый капитал или забрать бездеп и при этом не придётся рисковать своими сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начисляет щедрое одобрение!
1×slots casino регистрация на сайте
<a href=http://moneysweet.listbb.ru/memberlist.php?mode=viewprofile&u=6851>1 х слотс зеркало</a> 1×слот регистрация в 1×slots casino <a href=https://www.anobii.com/en/017cd3ab87ae617c10/profile/activity>https://www.anobii.com/en/017cd3ab87ae617c10/profile/activity</a> 1хслотс зеркало на сегодня Особую изюминку видео слотам присваивают уникальные знакы. С их выходом активизируются разные призы. Вы можете запустить дополнительный уровень и увеличить сумму выигрыша. Есть знаки, которые замещают ненадобные составляющие и сами создают выигрышные комбо. Не стоит забывать и на бонус-тур. После каждого удачного спина есть шанс прирастить необходимую выигрыша в 2 либо хорошо раза.
1×slots регистрация 1×slotscasino09k online
Основное отличие сомнений, что для получения бездепа не пополнять баланс в казино. Но не этого, есть ряд и отличий: <a href=http://shigebao.com.cn/home.php?mod=space&uid=1146688>http://shigebao.com.cn/home.php?mod=space&uid=1146688</a> Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие появляются у новичков. 1×slots casino регистрация 1×slotscasin online Фриспины без депозита либо вспомогательные средства помогут ближе познакомиться с игровой платформой и её функциями. За счёт подарков можно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за игры напротив живых крупье.Многие азартные клубы ограничивают сумму вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании акции, суммы Вы не сможете исключить. Разница будет аннулирована, Вы числе не можете создавать на нее ставки.
1×slots зеркало проходить регистрацию это отличный вариант
Вывод выигрыша с бездепозитных призов казино – великодушный подарок от азартных клубов. Но дабы вывести свой заработок, нужно выполнить ряд условий: <a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=159&pid=651808#post_651808>1×slots casino регистрация на сайте</a> За вербование приятеля ? в рамках партнерской программки заказчик получает вознаграждение за вербование новых юзеров.Выбирайте лучшие безвозмездные призы за обзоров на Casinoz – и пусть вам сопутствует удача при отыгрыше бонусных кредитов! Oтыгpaть бонус с указанным вeйджepом, чтобы нужно сдeлaть cтaвoк нa cумму, превышающую размер бонуса в количество раз. 1×slots зеркало видели такую регистрацию на <a href=https://images.google.lu/url?q=https://doctorlazuta.by/>https://images.google.lu/url?q=https://doctorlazuta.by/</a> Еще одно условие дотрагивается объемов ставки. Операторы устанавливают максимальную сумму, коию игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, избранной в Личном офисе. При превышении лимита есть риск потерять бонуса. Существующие лимитирования относятся и к конкретным обликам ставок. Например, играя в рулетку, клиент возможность столкнуться с запретом ставить фишки на шансы.После получения бонуса вывод средств для посетителя будет недосегаем того, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо пара месяцов. Выводить деньги игрок сможет только после отыгрыша.
1×slots регистрацию более популярный вариант это
При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток. <a href=https://www.alligator.spb.ru/forum/index.php?PAGE_NAME=profile_view&UID=85441>https://www.alligator.spb.ru/forum/index.php?PAGE_NAME=profile_view&UID=85441</a> Приветственный бездеп предоставляется любому игроку лишь один раз. Казино сражаются с например именуемыми бонусхантерами (от англ. Bonus Hunter — доброволец за призами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения подарка. Исключить похожие деяния дозволяет верификация данных. Администрация вправе потребовать у клиента доказать индивидуальные данные, указанные при регистрации. зеркала 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=http://evtrucksforum.com/memberlist.php?mode=viewprofile&u=28289>1хлот регистрация в 1×slots casino</a>
<a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=13119>1х слот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для верификации номера аппарата, в личном профиле выберите опцию „Подтвердить номер телефонного“ и введите в соответствующее поле код, приобретенный в sms-сообщении. Фриспины начисляются по определенной ставке. После их активации игроку необходимо запустить разъем и убедиться, собственно в нем показываются благотворительные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода в отыгрыша определяется оператором и редко выше 5 000 руб.
#3910 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации
Диапазон ставок, которые вправе устроить игрок, того лимитирован. Обычно назначать возможно маленькую необходимую — около 10–30 рублей за одно вращение.В интернете слишком количество скриптовых сайтов, коие принадлежат мошенникам. Их основная цель – привлечь гэмблеров, пообещав столько великодушные презенты, но и крупные выигрыши. Так собственно некоторые веб-сайты предлагают получить за регистрацию даже $1 000. <a href=http://filmkachat.ru/>1хслотс рабочее зеркало на сегодня</a> Существуют казино с призом за регистрацию, в довольно знамениты фриспины в онлайн казино потом регистрации в конкретных играх. Они встречаются в почаще бесплатных поощрений либо традиционных бонусов в казино без вложений. Например, игрок регистрирует счет, на который начисляются бесплатные игры, приз за регистрацию в виде даровых фрспинов, вращения в игровом автомате. Во время игрового процесса игры выигрывает истинные средства, которые в последствии можно удачно вывести из заведения на свою платежную систему. То есть, все шансы исключить свои без рисков своими деньгами. Регистрация, за которую игрок получит призы, займет пару минут, а благодаря данному возможно увеличить пять евро поощрений до тысячи и без всяких проблем вывести их.Также, ситуации нужно подтвердить свой номер аппарата, результата код, полученный в смс-сообщении от клуба установить в особое поле в личном кабинете игрока. <a href=https://www.printwhatyoulike.com/print?url=astramedika.com.ua>https://www.printwhatyoulike.com/print?url=astramedika.com.ua</a> Также бездепозитные призы имеют служить методом возвращать к забаве клиентов, временно приостановивших своё сотрудничество с компанией: извещение о бездепе поступает на мобильный телефон либо почту. казино 1×slots <a href=https://escortexxx.ca/author/craigrix/>https://escortexxx.ca/author/craigrix/</a> Принципиальным отличием даровых призов от бонусов на депозит является неименье надобности заносить деньги на акк. Из-за этого их часто именуют бездепозитными (no deposit bonuses).Но существуют азартные заведения, готовые просто например вручить деньги на игру. Для сего достаточно сделать профиль. Чтобы исключить выигрыш, сначала необходимо выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа.
1×slots подтвердит вашу регистрацию если говорить
Некоторые казино все предлагать клиентам бездепы за подтверждение номера либо почты либо репост на страничку в соц сетях. 1×slots зеркало регистрация У нас на веб-сайте Вы найдете перечень призов без депо в проверенных казино и доскональную информацию то как их получить и использовать.Например, игрок получил 500 рублей при твореньи аккаунта и обязан отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., понадобится устроить 875 спинов для полного отыгрыша. <a href=https://rus-crafting.ru/index.php?subaction=userinfo&user=PatrickInfam>https://rus-crafting.ru/index.php?subaction=userinfo&user=PatrickInfam</a> Чтобы выступать безвозмездно на настоящие средства в казино, не всегда довольно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные деянья.Обычно показатель повыше, чем для бонусов на депо. Не удивляйтесь, если он несомненно даже х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных стран. 1×slots казино зеркало Размер бонусов почаще всего чисто условный и не превышает 50 руб. Приятно, хотя ощутимым бустом деле вряд ли будет.Нет. Для получения бездепозитного бонуса в казино необходима обязательная регистрация на сайте. Играть в слоты даром и без регистрации возможно лишь в демо режиме.
1×slots официальный demo регистрация в 1×slots casino
Доступность — бездепозитные бонусы в казино чаще всего предоставляются свежим игрокам, но случаются случаи, когда бонус все получить и действующие посетители. Более солидные предложения встречаются очень изредка. Зачастую они доступны лишь VIP-игрокам. В остальных случаях им наверняка сопутствуют довольно жесткие условия отыгрыша. Также вероятны дополнительные обстоятельства и лимитирования, прописанные в условиях и положения бонусной программы казино. <a href=http://g961713h.beget.tech/user/JustinAdorm/>http://g961713h.beget.tech/user/JustinAdorm/</a> 1×slots зеркало видели такую регистрацию на Как верховодило, новоприбывшие геймеры для желают ознакомиться с способами ввода и вывода валютных средств и сроки выполнения поданных заказов чтобы конкретно разуметь, как стремительно возможность исключить свой казино бонус за регистрацию без депозита на электронный кошелек или же банковскую карту. К счастью для всех играющих, снутри конкретных холдингов, все казино соперничают меж собой. Ведь если бы определенную фирму представляло только одно онлайн-заведение, то ли бы клиенты заметили казино с призом за регистрацию и могли бы рассчитывать лишь на вознаграждение вид бонуса на 1-ое инвестиция. К каждому заведению периодически по завлекать свежих игроков, собственно, в итоге, только на руку всем играющим.Иногда виде одобрения за регистрацию могут выдаваться билеты для участия в турнирах. Условия их проведения довольно выделяются, поэтому мы рекомендуем ознакомиться с любым предложением раздельно.
1×slots казино зеркало
Можно ли в одном интернет казино получить больше 1-го приза за регистрацию? Нет, так как в любом интернет казино есть верховодила, к которым надо(надобно) держаться, не делать два аккаута для получения бонусов, по несомненно блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, приз за регистрацию выдаеться один раз 1 лицу.Для получения бонуса нужно пригласить в игру нового посетителя. Казино начислит пригласившему фиксированный процент от взносов приглашённого в виде бонуса: почаще всего его размер не превышает 10%. Срок действия приза правило не выше месяца: пригласивший получает приз зависимо проигранных ставок приглашённого в первый луна игры. 1× slots casino официальный сайт <a href=http://appsisun.iwinv.net/bbs/board.php?bo_table=free&wr_id=21141>http://appsisun.iwinv.net/bbs/board.php?bo_table=free&wr_id=21141</a> Для тех, кто только взвешивает испытать собственную фортуну, а также для проф игроков, разыскивающих новые площадки для выигрышей, основные лицензированные казино нередко устраивают различные акции, и одно из лучших услуг за последнее время – как для начинающих, так и для проф игроков – бездепозитный приз за регистрацию.Акционные предложения от казино существуют в разных форматах. Часто призы даются в мена на депозит. Игрок заносит платеж и получает средства, безвозмездные вращения прочие поощрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — картина приза, кот-ый гарантирован за исполнение конкретных поступков на сайте:
1×slots casino регистрация на сайте
Фриспины начисляются по определенной ставке. После их активации игроку необходимо запустить слот и увериться, собственно в нем показываются благотворительные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода после отыгрыша ориентируется оператором и редко превышает 5 000 рублей.Так что основное отличие презента на депозит от бездепа – неотъемлемое пополнение счёта. Вы сможете внести депозит и преувеличить стартовый капитал или отобрать бездеп и при этом не придётся рисковать своими сбережениями. Поспешите выполнить простые требования, и администрация ресурса начисляет щедрое одобрение! <a href=http://www.ngo.ne.jp/userinfo.php?uid=33007>http://www.ngo.ne.jp/userinfo.php?uid=33007</a> 1×slots казино зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1×slots коды</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В списке требований к отыгрышу нередко присутствуют лимиты на ставки при игре на собственные средства. Так, в отыграть нужно 30 000 руб., а предельная сумма ограничена 30 рублями, то вращать барабаны светит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам деяния промоакции. Прямо момент арестуйте бесплатные вращения за регистрацию без депозита и начинайте собирать призовые комбинации из-за солидных выигрышей!
#3911 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пинап казино порно с Афонина Марина Игоревна <a href=https://glvk.guru/>pin up casino top top</a> казино ли сайт 1×bet слоты <a href=https://vestnik-jurnal.com/>Скоробогатова Ольга Николаевна порно</a> 1×bet на сегодня 1×bet xbet скачать 1×bet на андроид бесплатно порно с Анна Калинская (теннис) up букмекерская контора 1×bet на сегодня pin up casino пин
DiskiPlus 1×bet скачать приложение на андроид DiskiPlus pin casino зеркало <a href=https://www.diskiplus.ru/>DiskiPlus казино 5</a> DiskiPlus казино фильм DiskiPlus 1×bet на андроид <a href=https://www.diskiplus.ru/>DiskiPlus самое казино</a> DiskiPlus винлайн букмекерская контора официальный сайт DiskiPlus inform@rucriminal.info DiskiPlus Ходнева Светлана Владимировна порно DiskiPlus порно с Федор Чалов (футбол) DiskiPlus ramenbet casino DiskiPlus порно с Дронова Александра Викторовна DiskiPlus porno Яна Троянова
#3912 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино фильм бесплатно играем казино <a href=https://repost.news/>porno Алена Михайлова</a> гама казино казино регистрации <a href=https://sovsekretno.net/>порно с Дарья Клишина, легкоатлетка</a> 7k casino официальный pinco casino porno Анастасия Янькова, боксерка официальное казино вход пин casino скачать 1×bet на андроид porno Анастасия Янькова, боксерка
DiskiPlus песня казино DiskiPlus сайт pin up casino <a href=https://diskiplus.ru/>DiskiPlus 1×bet бесплатно</a> DiskiPlus casino com DiskiPlus online casino 7k <a href=https://www.diskiplus.ru/>DiskiPlus Крючкова Полина Викторовна порно</a> DiskiPlus лучшая казино DiskiPlus порно с Аделия Петросян (фигурное катание) DiskiPlus ешь казино DiskiPlus 1×bet зеркало на сегодня DiskiPlus pin up casino top top DiskiPlus online casino официальный DiskiPlus порно с Анна Калинская (теннис)
#3913 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Алена Михайлова pin up casino зеркало <a href=https://7club7.com/>порно с Арина и Дина Аверины, гимнастки</a> кент казино Кузнецова Анна Юрьевна порно <a href=https://www.ossetia.tv/>online casino официальный</a> kent casino bitz casino casino ru порно с Матвей Сафонов (футбол) Радченко Светлана Юрьевна порно porno Дарья Мороз casino автомат
DiskiPlus порно с Варвара Субботина DiskiPlus пин ап букмекерская контора <a href=https://www.diskiplus.ru>DiskiPlus pin up casino buzz</a> DiskiPlus сайт казино зеркало DiskiPlus суть казино <a href=https://diskiplus.ru>DiskiPlus Радченко Светлана Юрьевна порно</a> DiskiPlus ешь казино DiskiPlus букмекерская контора бесплатно скачать DiskiPlus 1×bet вход DiskiPlus играющие казино DiskiPlus 1×bet зеркало на сегодня 1×bet xyz DiskiPlus ев казино DiskiPlus Нургалиева Эльвира Рамиловна порно
#3914 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация на сайте
Вышеописанная причина и является главным моментом, следствии которого операторы отдают доля своей выгоды на разные маркетинговые затраты и маркетинговые кампании. А наиболее действенным здесь будут выступать непосредственно бездепозитные призы казино 2022 с выводом за регистрацию. <a href=http://filmkachat.ru/>1хслот зеркало</a> Ограничения по забавам. Администрация запрещает игрокам некоторые игровые автоматы с бездепозитным призом, средствами или бесплатными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда дробленье выполняется по облику игр. Например, отыгрыш возможен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino.Можно ли зарабатывать на бездепозитных призах? Это не работа, здесь как повезет, в в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, тогда возможно именовать везением, и добавочной добавкой к вашему бютжету. <a href=https://xequte.com/forum/topic.asp?TOPIC_ID=15274>https://xequte.com/forum/topic.asp?TOPIC_ID=15274</a> B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.Некоторые сайты, этого чем провести регистрацию игроков, предлагают ответить на количество базовых вопросов. Цель проведения сходственной викторины – выявить случайных людей, которые не имеют представления о покере, и не допустить получения ими бонусов. Если гость теснее играл в казино, то ответить на полтора 10 простых вопросов несомненно несложно. Очень нередко, ответы можно отыскать на официальных сайтах этих учреждений. 1×slots бонус за регистрацию <a href=http://www.engel-und-waisen.de/index.php/Shisha_Tobacco_From4_Eur>http://www.engel-und-waisen.de/index.php/Shisha_Tobacco_From4_Eur</a> Используйте наилучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, чтобы заработать презенты за простые деянья теперь сегодня получить 1-ый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высокой отдачей и быстрыми выводами на электронные кошельки.Как только на виртуальном счету окажутся бонусные свои, поспешите отыграть вейджер. Сразу последствии этого можно забыть заявку на вывод выигрыша. Кредиты прибыльно выделяются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом настоящих средств и выделяют возможность почувствовать задор. Во-вторых – можно насладиться каждой азартной игрой доступной на сайте. В вашем постановлении присутствуют автоматы, настольные прибавление, видео-покер, Live-дилеры.
1×slots официальный сайт, скачать
Игры, в которых возможно выступать на бонусные средства. Проверьте список игр, в которых можно играть на бонусные свои, вероятно они Вам не понравятся и надо расходовать своё время на такую промоакцию.Особую изюминку видео слотам присваивают уникальные символы. С их свет активируются различные бонусы. Вы сможете запустить вспомогательный степень и увеличить необходимую выигрыша. Есть знаки, которые сменяют ненужные элементы и сами создают выигрышные комбо. Не стоит забывать и на бонус-тур. После любого удачного спина есть шанс увеличить сумму выигрыша в два либо четыре раза. <a href=http://theauction.com.au/my-account/>1×slots актуальное зеркало</a> скачать 1×slots официальный сайт Изучить правила и условия получения бездепозитных бонусов казино, Вы можете у нас на сайте в разделе с призами либо на официальном сайте избранного Вами казино. Если не отыскать необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электронной почте.Иногда в поощрения за регистрацию имеют выдаваться билеты для участия в турнирах. Условия их проведения довольно отличаются, поэтому мы советуем ознакомиться с любым предложением отдельно. <a href=http://illustrator.odub.tomsk.ru/index.php?subaction=userinfo&user=JulesHaw>http://illustrator.odub.tomsk.ru/index.php?subaction=userinfo&user=JulesHaw</a> 1 хслот регистрация в 1×slots casino
1×slots casino online регистрация
Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам запрещено начислять призы клиентам, не имеющим валютных средств на счете. Мы предлагаем разглядеть актуальные бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ.Однако далеко не все ресурсы предлагают своим посетителям бездепозитные бонусы за регистрацию в казино. В большинстве случаев учтено одобрение на 1-ый депо в размере 100–200%. Это отличная вероятность преумножить банкролл, прирастить время, проведённое за игрой и шансы сорвать большой куш. <a href=http://bbs.qc0769.com/home.php?mod=space&uid=427858>http://bbs.qc0769.com/home.php?mod=space&uid=427858</a> 1хслотс мобильная версия зеркало Бездепозитные призы реальными деньгами, которые возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадались.При подмоги такового одобрения оператор имеет кроме привлекать посетителей, коие раньше проявляли активность на веб-сайте, но по какой-то причине прекратили выступать. В данном случае промокод высылается пользователю по электрической почте или в виде SMS.
1×slots casino регистрация 1×slots review live
В случае установленного лимита на сумму вывода выигрыша с бездепозитного приза, игрок не может вывести больше заявленной суммы. Фриплей-бонусы встречаются только в неких клубах. Они зачисляются сразу последствии создания профиля и активны недолговременное время. Если не успеете истратить свои, они просто сгорят. Касаемо времени, в большинстве случаев призы активны в течение часа. 1×slots официальный сайт зеркало <a href=http://aluxwheel.com/bbs/board.php?bo_table=free&wr_id=209113>http://aluxwheel.com/bbs/board.php?bo_table=free&wr_id=209113</a>
1×slots официальный сайт зеркало рабочее
Для вывода средств приз нужно несомненно отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариантами отыгрыша бездепозитного бонуса до его получения, дабы избежать конфликтных ситуаций. Промообъявления от казино не дают реальной картины и ориентированы на привлечение внимания пользователей. Понять, насколько высоки шансы остаться в плюсе, позволит личный тест условий предложения: <a href=https://forum.mpgames.ir/member.php?24601-RenaldoTom>https://forum.mpgames.ir/member.php?24601-RenaldoTom</a> Вывод выигрыша с бездепозитных бонусов казино – великодушный презент от азартных клубов. Но чтобы исключить собственный заработок, необходимо выполнить ряд условий: 1×slots casino регистрация 1×slotscasino09k online Такие одобрения разрешают бесплатно протестировать свежее казино, разобраться с игровым процессом онлайн слотов, заработать и исключить маленькую необходимую средств.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=37621>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<a href=http://diablo2r.cn/home.php?mod=space&uid=30130>1х слотс зеркало регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Отзывы читателей о бонусных акциях посодействуют составить эмоцию, хотя не забывайте о субъективности собственных объяснений.
#3915 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
сайт казино вход казино гта 5 <a href=https://www.ossetia.tv/>Кузнецова Анна Юрьевна порно</a> букмекерская контора фонбет porno Мира Андреева (теннис) <a href=https://7club7.com/>рейтинг казино</a> порно с Дронова Александра Викторовна пин ап казино Елизавета Боярская казино зеркало сегодня казино смотреть онлайн бесплатно Приезжева Екатерина Геннадьевна порно сайт pin up casino
DiskiPlus 1×bet слоты официальный сайт DiskiPlus 1×bet телефон <a href=https://diskiplus.ru/>DiskiPlus Шевцова Татьяна Викторовна порно</a> DiskiPlus порно с Анастасия Потапова, теннисистка DiskiPlus букмекерская контора фонбет официальный сайт <a href=https://www.diskiplus.ru>DiskiPlus порно с Алина Загитова</a> DiskiPlus порно с Арина и Дина Аверины, гимнастки DiskiPlus казино ставка DiskiPlus casino betting DiskiPlus casino зеркало сегодня DiskiPlus porno Алена Косторная (фигурное катание) DiskiPlus приложения букмекерских контор DiskiPlus промокод 1×bet
#3916 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Александра Бортич vodka casino <a href=https://kompromat1.online/>казино ставка</a> 7k casino официальный casino ru <a href=https://7club7.com/>казино рояль</a> 1×bet скачать бесплатно ставки на спорт букмекерские конторы лучшие букмекерские конторы casino регистрации 1×bet зеркало xbet xyz 1×bet зеркало слоты casino сегодня
DiskiPlus casino скачать приложение DiskiPlus casino pin официальный <a href=https://diskiplus.ru/>DiskiPlus up букмекерская контора</a> DiskiPlus сайт 1×bet слоты DiskiPlus casino промокод <a href=https://diskiplus.ru>DiskiPlus гта казино</a> DiskiPlus смотреть фильм казино DiskiPlus casino betting DiskiPlus казино фильм DiskiPlus porno Алена Михайлова DiskiPlus 1×bet зеркало слоты 1×bet xyz DiskiPlus казино без DiskiPlus Кузнецова Анна Юрьевна порно
#3917 Charlesgunnyhttp://filmkachat.ru
1×slots быструю регистрацию а также мгновенное
Чаще всего используются коды. Их нужно заносить в особые окна регистрационной анкеты, если идет о пригласительных призах, или в особом разделе личного кабинета игрока.Используйте наихорошие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из списка ниже, дабы заработать подарки за простые действия теперь сегодня получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высокой отдачей и быстрыми выводами на электрические кошельки. <a href=http://filmkachat.ru/>1×slots зеркало подтвердит вашу регистрацию если говорить</a> Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам воспрещено начислять бонусы клиентам, не имеющим денежных средств на счете. Мы предлагаем разглядеть актуальные бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ.Выполнив все притязания оператора, клиент может оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем менее суток. Если дополнительно потребуется пройти процедуру верификации, то срок возрастает до 1–2 рабочих дней. Для перевода применяются банковские инструменты и электрические платежные системы. Второй метод подходит какого-либо, так как масса транзакций в осуществляются моментально. В связи со специфичностью функционирования банков обработка платежей имеет занять до нескольких рабочих дней. <a href=http://www.pvp.iq.pl/thread-5909.html>http://www.pvp.iq.pl/thread-5909.html</a> Онлайн гемблинг развивается с каждым деньком больше и больше, новые бренды создаются не по денькам а по часам. Новые онлайн казино делают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и что, этим наиболее предлагают бездепозитные бонусы за регистрацию, собственно бы не упустить эту вероятность — как воспользоваться новым бездепом, рекомендуем навещать наш сайт как можно почаще, самое лакомое и свежие будет добавляться в этом же перечне.Так же стоит выделить то, собственно в каждом интернет казино установлен свой максимальный кешаут на бездепозитный бонус. Как верховодило кешаут — это предельная сумма денег, кот-ая доступная для вывода с бездепозитного приза. 1×slots актуальное зеркало <a href=https://trueanal.org/user/EdwardPah/>https://trueanal.org/user/EdwardPah/</a>
1×slots регистрация 1×slots casino 777 online
Как лишь получите бездеп в казино, всё также не забывайте инспектировать электрическую почту. Некоторые игорные клубы каждый радуют активных гэмблеров приятными бонусами. Чаще всего получить презент возможно в преддверии веселья, на денек рождение, за привлечение приятеля. А также распространённым бонусом считается надбавка к депозиту. Нужно чем восполнить счёт, и азартное заведение увеличит его на 50–100%.Подтверждение регистрации. Казино настоятельно привязки профиля к электрическому адресу и номеру аппарата. Для этого на e-mail отчаливает письмо ссылаясь, а на телефон ? текстовое извещение с кодом. <a href=https://australiantravelforum.com/Upload/showthread.php?tid=193924>1×slots зеркало подтвердит вашу регистрацию если говорить</a> 1×слот регистрация в 1×slots casino Составленный специалистами Casino.ru перечень онлайн-казино с бездепозитным бонусом позволяет игрокам сравнить спецпредложения разных операторов.Многие казино деют в рекламных целях благотворительные призы самая для наших читателей. Чтобы их получить, нужно перебежать на игровой вебсайт по партнерской ссылке с нашего портала. <a href=https://adobeacrobat.cc/member.php?action=profile&uid=2927>https://adobeacrobat.cc/member.php?action=profile&uid=2927</a> 1×slots casino online регистрация Свежий приз начисляется вид валютных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в использовании своими, ну случае отыгрыша оператор может установить лимитирование на вывод средств.Если площадка презентует бездеп за регистрацию, то процедура его получения проста. Нужно только завести аккаунт на веб-сайте и активировать его, подтвердив адрес электронной почты, номер телефона или другие данные, коие настятельно оператор. Перед этим необходимо убедиться, собственно юзер располагается на официальном сайте казино, а не на мошеннической площадке.
казино 1×slots официальный сайт
Пoдтвepдить личнocть клиента. Для успешного вывода средств, нужно доказать личность клиента. Нa этaпe вepификaции пpoфиля, работники службы защищенности должны убедиться, что у игрока всего лишь один акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не может исключить свой выигрыш, в у него несомненно некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы.Большинство клубов привлекают внимание игроков за счёт различных презентов. На одних веб-сайтах возможно получить виртуальные кредиты, которые откроют доступ ко всему софту. На иных же, администрация предлагает благотворительные вращения для запуска топовых интернет слотов. Несмотря на разные акции, стоит выделить самые основные. <a href=https://www.merchantcircle.com/blogs/-1-boise-id/2024/8/-/2796684>https://www.merchantcircle.com/blogs/-1-boise-id/2024/8/-/2796684</a> 1×slots casino зеркало рабочее Если вы новичок в этом деле и только попали в неизведанную вами район азарта — счет предложений как бездепозитные призы без пополнения.Каждый геймер должен сперва детально выучить обстоятельства по получению и отыгрышу понравившегося дара. Если всё устраивает, поторопитесь арестовать безвозмездные спины за регистрацию в казино без депо с выводом и без отыгрыша и прямо сейчас начать вертеть барабаны лучших слотов.
казино 1× slots официальный сайт
У каждого игорного заведения свои управляла и обстоятельства. Но, чтобы получить призы, необходимо выполнить стандартные деянья:Бездепозитные призы прекрасный вариант безвозмездной игры в игровые автоматы. Многие юзеры сети не знают, что в казино возможно начать выступать абсолютно бесплатно, а позже вывести выигрыш на банковскую карту либо электрический кошелек, иные не доверяют онлайн казино, а третьи успешно играют и выигрывают – и подчас достаточно немалые суммы. Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и. Когда игроку полагается много фриспинов, администрация имеет разбивать их начисление на количество дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах акции. 1х слотс зеркало регистрация в 1×slots casino <a href=http://d90432w9.beget.tech/user/RobertLaunc/>http://d90432w9.beget.tech/user/RobertLaunc/</a>
1хслот 1хслотс регистрация перейти на 1×slots
<a href=http://dalcomi.co.kr/bbs/board.php?bo_table=free&wr_id=35626>http://dalcomi.co.kr/bbs/board.php?bo_table=free&wr_id=35626</a> Также, учите, собственно бездепозитный бонус возможно вывести только что, нет случае, когда будут выполнены все обстоятельства отыгрыша.Вейджер (wager) – это коэффициент, кот-ый показывает на какую необходимую нужно устроить ставок, чтобы вывести приз из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода этого бонуса, Вам необходимо сделать ставок на необходимую: 500*70=3500 руб. Только всецело отыграв приз, Вы сможете исключить собственный выигрыш. 1хслот 1хслотс регистрация перейти на 1×slots Первый образующийся вопрос, это, чего выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают свежих игроков. Последним проще начать забаву на средства с презента за регистрацию. Им не нужно пополнять баланс и тратить собственные свои. Новички получают безвозмездные спины либо свои на счёт. С их подмогою знакомятся с игровым ходом, крутят слоты и делают ставки в рулетке.Варианты выигрыша в от Вашей удачи и критерий игорного портала. Выше мы заявили, собственно некоторые бездепозитные призы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются и, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность современных игр на деньги, возможно выиграть невероятные суммы. Сегодняшние игровые автоматы или видео слоты, как их нарекают. Могут выдавать солидные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.home-visa.ru/viewtopic.php?f=69&t=807392&p=2779775#p2779775>1×slots casino регистрация 1×slotscasino09k online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
У нас на сайте Вы найдете перечень призов без депо в проверенных казино и подробную информацию то как их получить и использовать. Как правило, новоприбывшие геймеры начала хотят ознакомиться с методами ввода и вывода валютных средств и сроки выполнения поданных заказов чтобы конкретно понимать, как стремительно меня исключить свой казино бонус за регистрацию без депо на электронный кошелек либо же банковскую карту. К счастью для всех играющих, снутри конкретных холдингов, все казино конкурируют меж собой. Ведь если бы определенную компанию представляло лишь одно онлайн-заведение, то вряд ли бы посетители увидели казино с бонусом за регистрацию и имели бы рассчитывать только на вознаграждение повторяющий приза на первое вложение. К любому заведению периодически стопам привлекать новых игроков, что, в итоге, только на руку всем играющим.
#3918 Intopweb_Zexhttps://intopweb.ru/
Доброго времени суток!
У вас уже есть своя рекламная кампания, сайт или социальные сети? Закажите бесплатный аудит и узнайте – насколько хорошо или плохо они работают. Сравните свою окупаемость и эффективность с похожим нашим проектом. <a href=https://intopweb.ru/>краснодар заказать</a> Если интеграция собственных и сторонних программных продуктов, IT разработка, разработка программного обеспечения, web разработка, комплексное обслуживание IT инфраструктуры в Краснодаре, то это в ИнТОП https://intopweb.ru/ . Закажите звонок и получите бесплатную консультацию по номеру +7(861)201–83–36. Увидимся!
#3919 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino рабочее зеркало скачать 1×bet <a href=https://rhymes-punches.com/>букмекерские контора ап</a> 1×bet на андроид бесплатно почему в казино нет окон <a href=https://repost.news/>1×bet скачать бесплатно</a> букмекерская контора леонов pin casino up casino официальный порно с Владимир Минеев (ММА) суть казино pin up casino пин букмекерскую контору пин
DiskiPlus 1×bet приложение DiskiPlus порно с Афонина Марина Игоревна <a href=https://www.diskiplus.ru>DiskiPlus порно с Анастасия Потапова, теннисистка</a> DiskiPlus сколько казино DiskiPlus pin up casino зеркало <a href=https://www.diskiplus.ru>DiskiPlus порно с Елена Никитина, скелетонистка</a> DiskiPlus casino вход DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus Александра Бортич DiskiPlus порно с Никита Кучеров (хоккей) DiskiPlus porno Катерина Шпица DiskiPlus casinos xyz DiskiPlus porno Яна Троянова
#3920 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
Выполнив все притязания оператора, клиент имеет оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем не более суток. Если дополнительно потребуется пройти процедуру верификации, то срок возрастает до 1–2 трудящихся дней. Для перевода применяются банковские приборы и электронные платежные системы. Второй метод подходит никакого, например как основная транзакций ситуации осуществляются моментально. В связи со спецификой функционирования банков обработка платежей имеет занять до нескольких трудящихся дней. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать на айфон</a> Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?Многие азартные клубы ограничивают сумму вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, обозначенной в описании акции, суммы Вы не сможете исключить. Разница несомненно аннулирована, Вы и не сможете делать на нее ставки. <a href=https://www.nitrnd.com/blogs/229352/How-Modern-3D-Visual-Technology-Transforms-Digital-Experience>https://www.nitrnd.com/blogs/229352/How-Modern-3D-Visual-Technology-Transforms-Digital-Experience</a> Шаг 4. Активация. Внимательно выучите условия, информацию по ограничениям и сроке деянья бонусного предложения. Разобравшись с правилами, можно активировать приз в личном офисе (иногда ? с использованием промокода) либо по запросу в саппорт.При регистрации в или ином интернет игральном заведении — вам дается один шанс испытать свою удачу не внося средства монеты. Замечу собственно такую поощрительную предложение предоставляют не все интернет игровые площадки, а только великодушная половина из их. Которые мы подготовили для Вас в нашем перечне. 1×slot официальный сайт <a href=http://d668804q.beget.tech/user/Raymondelova/>http://d668804q.beget.tech/user/Raymondelova/</a>
1×slots регистрация 1×slotscasino09k online
Вывод выигрыша с бездепозитных призов казино – щедрый презент от азартных клубов. Но чтобы исключить собственный заработок, необходимо выполнить ряд условий: <a href=http://forum.survival-readiness.com/viewtopic.php?t=250516>1×slots рабочее зеркало</a> x1 slots регистрация в 1×slots casino Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, чтобы была возможность исключить выигрыш.Бездепозитные бонусы в казино без пополнения 2022 — это конкретная сумма средств либо vacant spins вращения, коие предоставляются первым гостям за регистрацию на сайте казино повторяющий бездепозитного приза, и дает вам возможность помощью казино без пополнения опробовать предложения (игр), с последующей прерогативой вывода средств при исполненьи всех установленных верховодил. <a href=https://boobs.red/user/Travissmake/>https://boobs.red/user/Travissmake/</a> Не сложно догадаться, что not the slightest down payment bonuses почти ни не бывают немаленькими. Чаще всего речь идет о пяти–тридцати долларах (либо эквиваленте этой суммы в иной еденице).Как только получите бездеп в казино, всё точно не запамятовывайте инспектировать электрическую почту. Некоторые игорные клубы непрерывно веселят интенсивных гэмблеров приятными бонусами. Чаще всего получить презент можно в преддверии веселья, на денек рождение, за вербование друга. А того распространённым призом считается прибавка к депозиту. Нужно не восполнить счёт, и азартное заведение прирастит его на 50–100%. 1×slots официальный сайт скачать на айфон В большинстве заведений сделать это возможно по e-mal, по номеру телефонного, через социальную сеть или гугл-аккаунт.
1×slots зеркало на сегодня
Также бездепозитные бонусы все работать способом возвратить к игре посетителей, пока приостановивших своё сотрудничество с фирмой: извещение о бездепе поступает на мобильный телефонный или почту.Чем ниже велечину вейджера, что, этим проще отыграть и исключить бонус. Если Вы планируете заработать на бездепе, не просто ознакомиться с новым игровым клубом, то стоит избегать призов с высочайшим вейджером их практически не реально отыграть. С ними Вы сможете лишь протестировать забавы заведения. Выбирая бесплатный приз, внимательно изучайте верховодила. Убедитесь, что для можно себя роль в промоакции. Уточните, в каких играх возможно исполнять обстоятельства вейджера. При надобности задавайте вопросы адептам саппорта.Такие одобрения позволяют даром протестировать свежее казино, разобраться с игровым процессом интернет слотов, заработать и вывести маленькую необходимую средств. <a href=http://e-audit.gefest.me/index.php?subaction=userinfo&user=obeisantzone11>http://e-audit.gefest.me/index.php?subaction=userinfo&user=obeisantzone11</a> 1×slots зеркало регистрация в 1×slots casino
1×slot регистрация
<a href=http://u0382101.isp.regruhosting.ru/index.php/forum/general-questions-and-how-tos/68883-otzyvy-o-tovarakh?start=2685#137055>1×slots casino регистрация 1×slotscasino09k online</a> Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих притязаний, кроме неотъемлемой верификации. Если на веб-сайте предусмотрена неотъемлемая процедура доказательства личности, то вывести выигрыш получится только в проверки данных. Приготовьтесь наполнить анкету и выслать в техподдержку документ, подтверждающий лицо.Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция содержит доскональные верховодила, ссылка на коие обычно содержится в промообъявлении. В их указываются лимиты, вейджер, список дешевых игр. Если оператор скрывает данные о предложении, то пользоваться им не. 1×слотс казино <a href=http://www.zerobywav.com/home.php?mod=space&uid=3716946&do=profile&from=space>http://www.zerobywav.com/home.php?mod=space&uid=3716946&do=profile&from=space</a> Превышение наибольшей ставки при отыгрыше. Система механически не предуведомляет о превышении ставки, потому о нарушении управлял игрок имеет узнать теснее в подачи запроса на вывод средств.У любой игры средства притязания по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система зачтет каждую ставку. В рулетке и покере устроить это гораздо сложнее. Именно потому так принципиально внимательно разбирать обстоятельства получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в каждой этой, то новенькие просто «спустят бонус на ветер».
1хслотс мобильная версия зеркало
Не хотите сыграть в азартные игры, не рискуя своими деньгами, хотя получая в все выплаты? Подобную возможность деют все превосходнейшие порталы с азартными развлечениями. В их числе большое честных и надежных интернет-казино на российском языке. Они привлекают новых пользователей различными поощрительными событиями, включая бездепозитные, либо безвозмездные бонусы. Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала прыткие выводы. Фишка выплат что, что довольно выбрать платёжный инструмент и показать необходимую. В большинстве случаев деньги зачисляются на электрические кошельки на 15 минут, а на банковские карты – 1–3 трудящихся дня. <a href=https://www.mmybt.com/space-uid-1105358.html>https://www.mmybt.com/space-uid-1105358.html</a> Но существуют азартные заведения, готовые просто так вручить деньги на забаву. Для сего достаточно создать профиль. Чтобы исключить выигрыш, сначала необходимо выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа.Для тех, кто лишь подумывает испытать собственную удачу, еще для профессиональных игроков, отыскивающих свежие площадки для выигрышей, ведущие лицензированные казино нередко устраивают различные акции, и лучшее предложений за последнее время – как для новичков, например и для профессиональных игроков – бездепозитный бонус за регистрацию. 1×slots зеркало сайта Многие азартные клубы ограничивают сумму вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не можете вывести. Разница несомненно аннулирована, Вы и не сможете делать на нее ставки.Бонусные средства – маленькая сумма средств для старта в новеньком казино. На бонусные средства, обычно разрешено играть во все забавы, считая слотов с современным джекпотом и игр из раздела live casino.
<b>Смотреть еще похожие новости:</b>
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=87458&extra=>1×слотс казино</a>
<a href=https://aircompare.us/forums/memberlist.php?mode=viewprofile&u=40074>1×slots зеркало на сегодня</a>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/5376/#comment-265859>1×slots официальный сайт скачать</a>
<a href=https://orbitsound.com/forum/user-211634.html>1×slots рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Зачастую бездепозитные бонусы казино для игры предлагаются разными заведениями азартных игр в маркетинговых промоакций или в целях привлечения к себе новых игроков. Для бездепозитных бонусов в казино 2022 геймеру надо пополнять счет до этапа вывода хотимых средств. Основное правило получения бездепа ? создаваемый акк должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов взыскательно запрещено. Проверка проводится по имени, e-mal, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита необходимо блюсти простую очередность действий.
#3921 DavidBuphttps://deep-nude.net
Create images <a href=https://deep-nude.net/>deep nude generator</a> easily with AI. Remove clothes from anyone in the image and enjoy their nakedness.
#3922 Charlesgunnyhttp://filmkachat.ru
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
После получения приза вывод средств для клиента будет недоступен до, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо пара недель. Выводить средства игрок может лишь в отыгрыша.Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить необыкновенности, недоступные при забаве в демо режиме. Многие свежие клиенты перебегают в число постоянных, а оператор получает долгосрочную прибыль. <a href=http://filmkachat.ru/>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a> <a href=https://www.empowher.com/groups/blogs-4/posts-33>https://www.empowher.com/groups/blogs-4/posts-33</a> Но никогда не запамятовывайте внимательно разбирать правила роли в бонусных акциях. Если вы нарушите хотя бы одно условие, позднее вы не сможете уладить недоразумение с администрацией.Фриспины – благотворительные вращения с фиксированной ставкой, которые можно применять в конкретных игровых автоматах. 1×slots сайт <a href=http://kioskindustry.ru/index.php?subaction=userinfo&user=cooinglimbo90>http://kioskindustry.ru/index.php?subaction=userinfo&user=cooinglimbo90</a> Акции, приуроченные к календарным праздникам, случаются рассчитаны как на всех пользователей, например и на категории: к, подарок на 8 марта девушкам-игрокам либо мужчинам на 23 февраля.Зарегистрируйтесь. Для регистрации почаще всего довольно установить собственный номер телефонного и почтовый адрес, последствии чего установить приобретенный код из СМС. Возможно, требуется показать промокод. В правилах промоакции будет написано, где его хотелось вводить. Иногда это надо делать при регистрации, времени — теснее в творенья личного офиса, на отдельной странице.
1×slots зеркало
<a href=https://forum.lazarev.ru/viewtopic.php?f=7&t=181575>1хслотс рабочее зеркало на сегодня</a> 1× slots сайт Пoдтвepдить личнocть клиента. Для удачного вывода средств, необходимо подтвердить личность посетителя. Нa этaпe вepификaции пpoфиля, сотрудники службы защищенности должны увериться, что у игрока более один аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не сможет исключить свой выигрыш, если у него будет некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы.Подтвердите лицо, предоставив оператору казино свои паспортные данные. Инструкции обычно легкие, основное — четко им стопам. Если написано, что «на фото обязаны быть заметны все хорошо угла странички паспорта» — устройте именно такое фото. <a href=http://fanfiction.borda.ru/?1–10–0–00007615–000–0–0>http://fanfiction.borda.ru/?1–10–0–00007615–000–0–0</a> 1×slots зеркало рабочее Возможность поиграть вспомогательное состязание (а иногда и количество) абсолютно бесплатно, а выигрыш, же, поступает на счёт игрока.В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая доля игры. Важно, часто бездепозитные призы в казино выдаются с лимитированиями по максимальной выплате. В среднем можно рассчитывать на прибыль в несколько тыщ рублей. Как вывести выигрыш с приза без депо. Придётся доказать аккаунт документально, в некоторых заведениях. Процедура верификации неотклонима и делается каждым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате либо прочтите в правилах.
1×slots регистрация 1×slots casino c2d ru
Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высокие притязания. Часто онлайн-казино советуют отыграть бонусное поощрение до 100 раз в игровых автоматах. Например, в игрок получил даром 10 долларов, то нужно несомненно отыграть их, поставив 1 тысячу спинов по 1 баксу каждый. Стоит отметить, собственно не все казино дают вероятность играть на бонусы и не во всех развлекательных заведениях схожие правила для отыгрывания. Некоторые казино запрещают играть на бонусы в блекджек либо ограничивают ставки до пяти %, что значительно увеличивает в десятки раз число нужных игр.Чаще всего казино бонус за регистрацию без депозита даёт возможность запустить каждой машина. Но другого, как пристально ознакомиться с условиями. Иногда для забавы доступны лишь определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, другого, как начать знакомство с миром пыла именно с «одноруких бандитов». <a href=https://elclasificadomx.com/author/jameslog/>https://elclasificadomx.com/author/jameslog/</a> Иногда виде поощрения за регистрацию шансы выдаваться билеты для участия в турнирах. Условия их проведения довольно отличаются, поэтому мы рекомендуем ознакомиться с любым предложением отдельно.Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, the decision лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. 1×slots актуальное зеркало
1×slots официальный сайт мобильная версия скачать
<a href=https://www.katzenforum.at/forum/media/users/jamesagema.16012/>1×slots регистрация</a> 2. Создать новый профиль. Для регистрации надо(надобно) заполнить маленькую анкету либо зайдите в собственный офис посредством соц сетей;Бездепы обыкновенно предлагают с отыгрышем — моментально исключить выигранные средства невозможно. Перевод денег со счета несомненно вероятен после такого, как пользователь выполнит все притязания казино, а сумма не быть выше установленного правилами лимита. Условиями промоакции фиксируются сроки, на которых заказчик вправе пользоваться предложением. Обычно они не превосходят нескольких дней последствии активации. 1хслотс мобильная версия зеркало <a href=http://arsivforum.10tl.net/member.php?action=profile&uid=4838>http://arsivforum.10tl.net/member.php?action=profile&uid=4838</a> Представьте момент, когда при ставке в 10 рублей Вы получите подобное умножение. Миллион руб. За одно вращение, что вполне возможно. Поэтому вопрос, сколько возможно выиграть остаётся открытым. Предлагаем выяснить самостоятельно. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный бонус и инспектируйте фортуну в деле. Разумеется, вывести средства довольно. Однако шансы есть у всех.Первый возникающий вопрос, это, чего выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают новых игроков. Последним легче начать игру на деньги с презента за регистрацию. Им не нужно пополнять баланс и расходовать личностные свои. Новички получают благотворительные спины либо средства на счёт. С их помощью знакомятся с игровым ходом, крутят слоты и делают ставки в рулетке.
1×slots зеркало на сегодня
Подобные бонусы без депо предоставляются на более выгодных критериях. Зачастую они покрупнее, а обстоятельства отыгрыша наименее жесткие.Допустим, за регистрацию вы получили бездеп в размере 2 000 рублей с вейджером х30. В этом случае предстоит сделать ставок, на совместную сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда сделайте условия по отыгрышу, придёт время заработать настоящие средства. Однако не запамятовывайте, собственно с каждого презента получится исключить определённую сумму (чаще всего не более $200). <a href=http://flowerwheel.synology.me/dokuwiki/doku.php?id=Выкуп_авто>http://flowerwheel.synology.me/dokuwiki/doku.php?id=Выкуп_авто</a> 1× slots сайт Для получения депозитного бонуса необходимо восполнить собственный игровой баланс реальными деньгами. Вознаграждение возможно получить или при внесении первого депозита, либо вид фиксированного процента от внесённых средств. Так либо по, приз поступит на счёт лишь после пополнения.Также бездепозитные призы имеют служить методом возвратить к игре посетителей, что приостановивших своё сотрудничество с компанией: извещение о бездепе поступает на мобильный аппарат или почту.
<b>Смотреть еще похожие новости:</b>
<a href=https://10nsk.ru/user/JosephSuple/>1×slot зеркало рабочее регистрации на телефон придет</a>
<a href=http://www.infoknygos.lt/smforum/index.php?topic=80720.new#new>казино 1×slots официальный сайт</a>
<a href=http://nexusroleplay.teamforum.ru/viewtopic.php?f=19&t=3357>x1 slots регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Активация по промокоду используется в различных обликах бездепов. Если речь о приветственном бонусе, то набор символов возможно узнать на главной страничке, в регистрационной форме или послании, которое отправляется пользователю для подтверждения e-mail. Акции шансы проводиться вместе с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активируется разовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем актуальный код для активации в описании каждого промо. Это также благотворительные финансы, коие поступают на аккаунты новоиспеченных геймеров последствии регистрирования. А особенность таких бонусов произведено никаких, собственно обретенные деньги обязательно идет применять в продолжении назначенного медли.
#3923 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало xbet xyz Львова-Белова Мария Алексеевна порно <a href=https://th-royalgclub.com/>порно с Петр Ян (ММА)</a> casino online зеркало слоты казино <a href=https://rumafia.news/>скачать букмекерскую контору на андроид</a> 1×bet официальный скачать 7k casino зеркало на сегодня бесплатно играем казино почему в казино нет часов какие казино online casino автомат казино
DiskiPlus casino ап DiskiPlus гта казино <a href=https://www.diskiplus.ru/>DiskiPlus porno Игорь Акинфеев (футбол)</a> DiskiPlus порно с Алексей Миранчук (футбол) DiskiPlus 1×bet телефон <a href=https://diskiplus.ru/>DiskiPlus casino вход</a> DiskiPlus бесплатные букмекерские конторы DiskiPlus скачать 1×bet 1×bet xyz DiskiPlus бесплатные букмекерские конторы DiskiPlus официальные сайты казино DiskiPlus букмекерская контора скачать приложение DiskiPlus какие казино DiskiPlus champion casino
#3924 Charlesgunnyhttp://filmkachat.ru
1×slot официальный сайт
Благодаря программе преданности от игорного заведения, можно арестовать неплохой старт и без добавочных инвестициям запустить видеослоты. Кроме такого, возможно рассчитывать на реальную удачу и получить, без инвестиции собственных финансов, немалый выигрыш.Такой безвозмездный эквивалент средств зачисляется на профиль юзера в воплощения притязаний и предназначаются они только для игрового процесса. Вывод таких вознаграждений вероятен только последствии осуществления вейджеровых условий. <a href=http://filmkachat.ru/>1×slots регистрация то дальше необходимо пройти</a> <a href=https://community.wongcw.com/blogs/934091/Transform-Your-Space-with-a-Professional-Interior-Design-Plan-That>https://community.wongcw.com/blogs/934091/Transform-Your-Space-with-a-Professional-Interior-Design-Plan-That</a> Как верховодило, при выводе денег, от играющего требуется лишь сделать наименьший вклад чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом личный счет. 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=https://forums.datanav.co.ke/member.php?action=profile&uid=3725>https://forums.datanav.co.ke/member.php?action=profile&uid=3725</a> Вы скорее, как и все предпочитаете получать подарки и бездепозитные бонусы казино. Игорные дома взяли в привычку одаривать гэмблеров приятными призами. Стать обладателем приветственного подарка можно за создание профиля или пополнение счёта. Второй вариант более интересный, ведь клубы готовы удвоить депо! Но если вы новичок и только знакомитесь с миром азарта, никакого пользуйтесь призом за регистрацию.
1× slots зеркало
При исполнении условий отыгрыша и верификации, деньги с бонусного счета переводятся на главной и имеют быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции зависимости от избранной платежной системы.Подарки на конкретные даты отличаются критериями получения. Если одобрение начисляют игроку на день рождения, то сумма обычно зависимости от общего размера депозитов за год. <a href=https://minifishtank.net/forum/showthread.php?tid=25225>1×slots официальный сайт мобильная версия скачать</a> 1хлот регистрация в 1×slots casino Бездепы шансы входить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами. <a href=https://clicgo.ru/user/Kennethunuff/>https://clicgo.ru/user/Kennethunuff/</a> Похожим образом трудится 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя либо из-за с получения им VIP-статуса. Подарок предоставляется последствии обращения в поддержку и ревизии.Предложения с бездепозитными призами за регистрацию дозволяют новым заведениям привлечь аудиторию на свой сайт. А игроки в свою очередь получают возможность играть на настоящие средства без депо в казино и заработать маленькой стартовый капитал, кот-ый разрешается исключить на карту банка либо электронный кошелек. 1×slots зеркало быструю регистрацию а также мгновенное При верном подходе бездепы — это прекрасный способ выступать на деньги без растраты собственных средств. Есть несколько рекомендаций, следуя которым возможно извлечь максимум пользы из подобных акций казино. Играть стопам только на лицензированных площадках. Скриптовые сайты столько дурачат с бонусными услугами, хотя и употребляют пиратский софт с измененным ГСЧ. Выиграть на этих автоматах нереально.
1хслотс 1хслотс регистрация перейти на 1×slots
<a href=https://bdsmboard.org/member.php?437313-Porsedropkr>https://bdsmboard.org/member.php?437313-Porsedropkr</a> Если вы новичок деле и только попали в неизведанную вами район пыла — счет предложений как бездепозитные призы без пополнения. 1×slots быструю регистрацию а также мгновенное В любом казино с бездепозитным бонусом учтены вейджеровые условия. Это единственный «подводный камень», который стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) устроить определённое число ставок. Чем круче приз, что, этим труднее выполнить обстоятельства, и напротив.
1 xslots рабочее зеркало
<a href=http://6000ziyuan.com/forum.php?mod=viewthread&tid=110504&extra=>1× slots регистрация в 1×slots casino</a> Для казино, работающих онлайн, бездепозитные призы необходимы для вербования свежих клиентов. Предложение сыграть на слотах без необходимости внесения реальных средств — работающий способ для повышения интереса к компании. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит играть в казино, только сейчас уже на личные деньги.Не сложно догадаться, собственно not the slightest deposit bonuses почти никогда не бывают большими. Чаще всего идет о пяти–тридцати долларах (или эквиваленте данной суммы в иной денежной). Создание аккаунта. На веб-сайте казино нужно открыть регистрационную форму и наполнить пустопорожние поля личными данными. Иногда на данном шаге потребуется указать лишь адресок электрической почты и пароль, хотя чаще надобно наполнить анкету персональной информацией (ФИО, дата рождения, место проживания и т.д. ). Нужно свидетельствовать только реальные данные, поскольку впоследствие они станут испытаны. 1×slots регистрация на сайте <a href=https://danteqncq76543.blog-eye.com/30401780/deepnude-the-dark-side-of-ai-technology-and-its-ethical-implications>https://danteqncq76543.blog-eye.com/30401780/deepnude-the-dark-side-of-ai-technology-and-its-ethical-implications</a> Для выбора азартного заведения Вы сможете воспользоваться перечнем наших казино с призами за регистрацию. На нашем сайте мы выпустили перечень бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, что доля бонусов неповторимые и доступны только для посетителей нашего вебсайта по-специальному промо-коду или по оригинальной ссылке. Кроме такого, для каждого бонуса мы подготовили доскональный обозрение, в котором Вы узнаете как получить и отыграть одобрение и как вывести собственный выигрыш с бездепа.Зарегистрироваться в казино по особой ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефонного и электронную почту). Для подтверждения номера телефона необходимо в собственном профиле указать собственный номер и нажать кнопку „Подтвердить номер аппарата“, далее Вы получите sms-сообщение с кодом, кот-ый необходимо ввести в соответствующее поле. Для доказательства электрической почты, перейти по активной ссылке в письме от казино.
1×slots актуальное зеркало
Прочитайте верховодила бонусной программы, в которой желаете участие. Да, мы настоятельно советуем сделать это до регистрации. Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке адепты онлайн-казино публикуют актуальную информацию о no deposit bonuses и других услугах. <a href=http://xsyywx.com/home.php?mod=space&uid=42346>http://xsyywx.com/home.php?mod=space&uid=42346</a> 1×slots зеркало регистрация то дальше необходимо пройти Бездепозитные призы казино это финансовая компенсация, предлагаемая юзерам на дармовой базе и возможность играть в интернет казино даром. Если сопоставлять их с поощрениями за лепта, в средства выдаются только впоследствии начального пополнения счета, то бездепозитные гонорары получаются даром. То есть, играющий получает возможность делать ставки на уже имеющие финансы, коие выдаст заведение, выполняя, при этом, обыденные деяния, чтобы их извлечь (тут речь о регистрация, удостоверении личности с внедрением номера аппарата, дизайна заявки и т.д.).
<b>Смотреть еще похожие новости:</b>
<a href=https://adminclub.org/showthread.php?tid=69444>1х слот 1хслотс регистрация перейти на 1×slots</a>
<a href=http://aurorahcs.com/forum/memberlist.php?mode=viewprofile&u=168982>1хслотс официальный сайт зеркало</a>
<a href=https://portugal-campings.com/pt/profile/jamescip/>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Хотя благотворительные бонусы начисляются без депо, не исключено, собственно вам понадобиться вносить деньги. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только последствии того, как свежий клиент первый пополнит игровой счет. Вейджер (или вагер) ? это наименьшая сумма ставок, коию нужно сделать для вывода денежного бонуса. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение.
#3925 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала резвые выводы. Фишка выплат никаких, собственно достаточно избрать платёжный инструмент и указать необходимую. В большинстве случаев деньги зачисляются на электрические кошельки протяжении 15 минут, а на банковские карты – 1–3 рабочих дня. <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> Бездепозитные бонусы — это подарки от казино вид бонусных средств или фриспинов для игровых автоматов, коие начисляются на аккаунт игрока в процедуры регистрации на сайте заведения. Для получения этих поощрений депозит не потребуется. <a href=https://www.gift-me.net/blogs/201226/%D0%9E%D1%86%D0%B5%D0%BD%D0%BA%D0%B0-%D0%B0%D0%B2%D1%82%D0%BE-%D0%BE%D0%BD%D0%BB%D0%B0%D0%B9%D0%BD-%D0%BA%D0%B0%D0%BA-%D1%80%D0%B0%D0%B1%D0%BE%D1%82%D0%B0%D0%B5%D1%82-%D0%B8-%D0%BD%D0%B0-%D1%87%D1%82%D0%BE-%D0%BE%D0%B1%D1%80%D0%B0%D1%82%D0%B8%D1%82%D1%8C-%D0%B2%D0%BD%D0%B8%D0%BC%D0%B0%D0%BD%D0%B8%D0%B5>https://www.gift-me.net/blogs/201226/%D0%9E%D1%86%D0%B5%D0%BD%D0%BA%D0%B0-%D0%B0%D0%B2%D1%82%D0%BE-%D0%BE%D0%BD%D0%BB%D0%B0%D0%B9%D0%BD-%D0%BA%D0%B0%D0%BA-%D1%80%D0%B0%D0%B1%D0%BE%D1%82%D0%B0%D0%B5%D1%82-%D0%B8-%D0%BD%D0%B0-%D1%87%D1%82%D0%BE-%D0%BE%D0%B1%D1%80%D0%B0%D1%82%D0%B8%D1%82%D1%8C-%D0%B2%D0%BD%D0%B8%D0%BC%D0%B0%D0%BD%D0%B8%D0%B5</a> Размер бонусов чаще всего чисто символический и не выше 50 рублей. Приятно, хотя осязаемым бустом при вряд ли станет.Нет. Для получения бездепозитного бонуса в казино нужна неотъемлемая регистрация на веб-сайте. Играть в слоты бесплатно и без регистрации можно лишь в демо режиме. рабочее зеркало 1×slots <a href=http://www.mjjcn.com/mjjcnforum/space-uid-604911.html>http://www.mjjcn.com/mjjcnforum/space-uid-604911.html</a>
1хслот 1хслотс регистрация перейти на 1×slots
<a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=872368>1×slots официальный регистрация</a> 1×slots коды Бездепы обыкновенно предлагают с отыгрышем — быстро вывести выигранные средства невозможно. Перевод денег со счета несомненно возможен после того, как юзер выполнит все притязания казино, а сумма имеет быть выше установленного правилами лимита. Условиями акции фиксируются сроки, протяжении которых заказчик вправе воспользоваться предложением. Обычно они не превосходят нескольких дней в активации. <a href=http://forum.d-dub.com/member.php?1380145-Josephgooro>http://forum.d-dub.com/member.php?1380145-Josephgooro</a> Изучить верховодила и условия получения бездепозитных призов казино, Вы сможете у нас на сайте в разделе с бонусами либо на официальном сайте выбранного Вами казино. Если не можете отыскать необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал либо по электрической почте.Акции, приуроченные к календарным праздничным, случаются рассчитаны как на всех пользователей, например и на категории: например, подарок на 8 марта девушкам-игрокам или мужикам на 23 февраля. 1×slots промокод при регистрации Более крупные предложения встречаются очень изредка. Зачастую они доступны лишь VIP-игрокам. В оставшихся случаях им наверняка сопутствуют очень жесткие обстоятельства отыгрыша. Также возможны вспомогательные условия и другие лимитирования, прописанные в условиях и положения бонусной программки казино.
1×slots официальный сайт зеркало
Ещё одно распространённое акционное предложение – привлекательный подарок с сомнительными притязаниями. К примеру, клуб обещает $100 виде бездепа, хотя с вейджером х80 либо х100. Отыграть подобный вейджер практически невозможно и поэтому лучше концентрироваться на больше интересных промоакциях. <a href=https://shilinka.ru/user/EdwardGen/>https://shilinka.ru/user/EdwardGen/</a> Частенько новички не разумеют, как активировать презенты либо исключить первый выигрыш. Для сходственных случаев наша команда обрисовала основные определения – что это фриспины, вейджер, как его отыграть, зачем необходимо протекать верификацию.Чтобы выступать даром на реальные деньги в казино, порой довольно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные деяния. casino 1×slot
1×slots официальный сайт зеркало
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=403301>зеркала 1×slots</a> Наши эксперты исследуют условия акции, после в ручном режиме проводят их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие параметры. Мы не рекламируем казино, а даем игрокам информацию о превосходнейших из их.Получить приветственный бонус все лишь свежие клиенты онлайн-казино. Способы описаны в критериях промоакции любого легального казино, чаще всего это: При этой на бонусные свои запрещается выступать в игровые автоматы с прогрессивным джекпотом и игры из радела live casino. Кроме того, кое-какие казино дают бездеп на раз или количество конкретных слотов, и в иных играх Вы не сможете на их выступать. x1 slots регистрация в 1×slots casino <a href=http://td-scs.ru/communication/forum/user/108328/>http://td-scs.ru/communication/forum/user/108328/</a> Бонусы без депо при регистрации числятся наиболее привлекательными как для опытнейших игроков, так для и начинающих. Получив это вознаграждение, заказчик возможность играть на настоящие средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, еще обстоятельства их активации и выигрыша.В интернете количество узнаваемых игорных площадок с красивыми акционными услугами. Однако пристально читать обстоятельства 10-ов услуг вскоре надоест, ну и время отнимет количество. Поэтому наша команда подготовила ТОП-3 вебсайтов с наихорошими бездепозитными призами:
1×slots официальный зеркало рабочее
Чтобы помощи увериться в преимуществах бездепозитных бонусов, достаточно зарегистрироваться в казино и получить поощрение. Подтверждение электронной почты – одно из основных критерий, коие есть почти в каждом бездепозитном казино. Чтобы верифицировать электрическую почту, довольно перейти по интенсивной ссылке в послании, приобретенном от азартного клуба.Онлайн гемблинг развивается с каждым днем все больше и больше, свежие бренды создаются не по денькам а по часам. Новые интернет казино делают вступительные акции для игроков, для того собственно бы зарекомендовать себя, и тем наиболее предлагают бездепозитные призы за регистрацию, что бы не упустить такую возможность — как пользоваться новым бездепом, рекомендуем посещать наш вебсайт как можно чаще, самое аппетитное и свежие несомненно добавляться в данном же списке. <a href=http://hxwltw.com/home.php?mod=space&uid=332837&do=profile>http://hxwltw.com/home.php?mod=space&uid=332837&do=profile</a> 1×slots казино зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://link.5nx.ru/viewtopic.php?f=5&t=7352>1×slots casino регистрация на сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чем ниже велечину вейджера, тем проще отыграть и вывести бонус. Если Вы планируете заработать на бездепе, не просто ознакомиться с новым игровым клубом, то стоит избегать бонусов с высоким вейджером их почти не реально отыграть. С ними Вы можете только протестировать игры заведения.
#3926 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
спорт букмекерская контора казино без <a href=https://slon-ru.com/>porno Яна Троянова</a> спорт букмекерская контора букмекерская контора зенит <a href=https://m.repost.news/>бесплатно фильм казино</a> букмекерские конторы бет букмекерская контора скачать приложение казино сочи casino ru porno Александра Степанова, фигуристка порно с Юлия Ефимова, пловчиха сайт казино зеркало
DiskiPlus 1win букмекерская контора DiskiPlus Скоробогатова Ольга Николаевна порно <a href=https://diskiplus.ru>DiskiPlus гта казино</a> DiskiPlus почему казино DiskiPlus букмекерские контора ап <a href=https://diskiplus.ru/>DiskiPlus casino сегодня</a> DiskiPlus пинап казино DiskiPlus up casino DiskiPlus casino ru DiskiPlus казино смотреть онлайн бесплатно DiskiPlus казино ставка DiskiPlus порно с Виктория Синицина, фигуристка DiskiPlus казино проиграл
#3927 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
сайт 1×bet слоты макао казино <a href=https://slon-ru.com/>retro casino</a> pin up casino скачать скачать сайт букмекерской конторы <a href=https://m.repost.news/>сколько казино</a> спорт букмекерская контора мобильные букмекерские конторы казино ставка казино регистрации casino официальный сайт казино можно Хорова Наталья Александровна порно
DiskiPlus ап казино DiskiPlus реального казино <a href=https://www.diskiplus.ru/>DiskiPlus рабочие зеркала казино</a> DiskiPlus pin up casino зеркало DiskiPlus casino официальный сайт <a href=https://diskiplus.ru/>DiskiPlus порно с Диана Шнайдер (теннис)</a> DiskiPlus casino автомат DiskiPlus casino ап DiskiPlus casino riobet DiskiPlus порно с Константин Тюкавин (футбол) DiskiPlus порно с Алина Загитова, фигуристка DiskiPlus pin up casino top top DiskiPlus пин ап casino
#3928 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
Вейджер (или вагер) ? это наименьшая сумма ставок, коию необходимо устроить для вывода денежного приза. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение. <a href=http://filmkachat.ru/>1×slots регистрацию процедура займет всего лишь</a> Ниже указан важный перечень законных казино в Беларуси с призами на 1-ый депозит. Вы сможете попасть на официальный сайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. <a href=https://smallpdf.com/file#s=9463ef68–18a1–4460-a705-d0f7b3ee8b70>https://smallpdf.com/file#s=9463ef68–18a1–4460-a705-d0f7b3ee8b70</a> Составленный экспертами Casino.ru перечень онлайн-казино с бездепозитным призом позволяет игрокам сравнить спецпредложения разных операторов.Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы появилась возможность вывести выигрыш. 1×slots casino регистрация на сайте <a href=https://www.wakewiki.de/index.php?title=%D0%98%D0%B7_%D0%A7%D0%B5%D0%B3%D0%BE_%D0%A1%D0%BE%D1%81%D1%82%D0%BE%D0%B8%D1%82_%D0%94%D0%B8%D0%B5%D1%82%D0%B0_%D0%95%D0%BB%D0%B5%D0%BD%D1%8B_%D0%9C%D0%B0%D0%BB%D1%8B%D1%88%D0%B5%D0%B2%D0%BE%D0%B9>https://www.wakewiki.de/index.php?title=%D0%98%D0%B7_%D0%A7%D0%B5%D0%B3%D0%BE_%D0%A1%D0%BE%D1%81%D1%82%D0%BE%D0%B8%D1%82_%D0%94%D0%B8%D0%B5%D1%82%D0%B0_%D0%95%D0%BB%D0%B5%D0%BD%D1%8B_%D0%9C%D0%B0%D0%BB%D1%8B%D1%88%D0%B5%D0%B2%D0%BE%D0%B9</a>
1×slots зеркало рабочее на сегодня
1×slots регистрация 1×slots casino c2d ru Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить необыкновенности, недоступные при этой в демо режиме. Многие новые посетители переходят в число неизменных, а оператор получает длительную прибыль. <a href=https://adobeacrobat.cc/member.php?action=profile&uid=3030>https://adobeacrobat.cc/member.php?action=profile&uid=3030</a> Наши эксперты исследуют условия акции, затем в ручном режиме проверку их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие характеристики. Мы не рекламируем казино, а даем игрокам информацию о лучших из них. 1×slots регистрация на сайте Чаще всего применяются коды. Их надо(надобно) вносить в специальные окна регистрационной анкеты, если речь о пригласительных призах, либо в определенном разделе личного кабинета игрока.Фриспины без депо либо дополнительные свои посодействуют поближе познакомиться с игровой платформой и её функциями. За счёт даров возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям ради игры напротив живых крупье.
1 хслот регистрация в 1×slots casino
Баланс игрока дополняется на соответствующую необходимую. К ней применяется вейджер, указанный в правилах акции. Вывести выигрыш возможно будет в как, как юзер сделает требуемый объем ставок из личных средств. В редчайших случаях бездеп работает в формате Free Play. На счет пользователя зачисляется крупная сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по окончании этого периода сумма на счету несомненно превышать первоначальную, то разность можно несомненно вывести либо использовать для последующих ставок.В интернете большое узнаваемых игорных площадок с красивыми акционными услугами. Однако пристально читать условия 10-ов услуг скором надоест, да и время отнимет количество. Поэтому наша команда подготовила ТОП-3 вебсайтов с наихорошими бездепозитными призами: Проверка занимает от нескольких минут до нескольких дней, профессионалы техподдержки все запросить вспомогательные документы или инициировать куцее общение по Skype. <a href=https://szkolenia.myslepozytywnie.pl/fora/watek/%d1%81%d0%ba%d0%b0%d1%87%d0%b0%d1%82%d1%8c-%d1%84%d0%b8%d0%bb%d1%8c%d0%bc%d1%8b-%d0%bd%d0%be%d0%b2%d0%b8%d0%bd%d0%ba%d0%b8-%d0%bd%d0%b0-%d1%82%d0%b5%d0%bb%d0%b5%d1%84%d0%be%d0%bd/>https://szkolenia.myslepozytywnie.pl/fora/watek/%d1%81%d0%ba%d0%b0%d1%87%d0%b0%d1%82%d1%8c-%d1%84%d0%b8%d0%bb%d1%8c%d0%bc%d1%8b-%d0%bd%d0%be%d0%b2%d0%b8%d0%bd%d0%ba%d0%b8-%d0%bd%d0%b0-%d1%82%d0%b5%d0%bb%d0%b5%d1%84%d0%be%d0%bd/</a> В разделе с бонусами активировать собственный подарок. Найти игры, для коих предусмотрено одобрение и использовать бонус по назначению. рабочее зеркало 1×slots В бонусную программу множества операторов входят систематические бездепы. Это бессрочные промоакции, поощряющие активных неизменных игроков. Популярный формат — раздача фриспинов по конкретным дням недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают постоянные призы без депозита в мена на накопленные баллы преданности.
1×slot зеркало
Однако в критериях исчезают «подводные камни», коие не разрешат исключить солидную необходимую или же вы не успеете отыграть вейджер. Поэтому мастера рекомендуют арестовать бесплатные вращения за регистрацию в казино без депо, чтобы поднабраться навыка и получить настоящий шанс на победу.Рассмотрим принцип его деяния на образце. Допустим, вы зарегались и возымели $10 not the slightest down payment bonus с вейджером х50. Это значит, собственно выигранные деньги можно будет выводить не ранее, чем после такого, как общая сумма ставок достигнет $500. Процесс подтверждения личности может взятьвдолг(взятьвзаймы) от одного дня до недели. Если заказчик допустил какую-либо ошибку при заполнении паспортных данных, то ему стопам адресоваться с проблемой в службу онлайн-казино. Подтвердите личность, предоставив оператору казино средства паспортные данные. Инструкции обыкновенно несложные, главное — четко им следовать. Если написано, собственно «на фото обязаны быть видны все четыре угла странички паспорта» — сделайте непосредственно это фото.Представьте момент, когда при ставке в 10 рублей Вы получите сходственное умножение. Миллион руб. За одно вращение, собственно абсолютно вполне. Поэтому вопрос, сколько можно выиграть остаётся не. Предлагаем проверить без. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный приз и проверяйте фортуну в деле. Разумеется, вывести деньги не так просто. Однако шансы есть у всех. онлайн казино 1×slots <a href=https://filmy-hd.ru/user/DonaldSok/>https://filmy-hd.ru/user/DonaldSok/</a> Подтверждение электрической почты – одно из основных условий, которое есть почти в любом бездепозитном казино. Чтобы верифицировать электрическую почту, довольно перебежать по интенсивной ссылке в письме, приобретенном от азартного клуба.Также есть онлайн-платформы азартных игр, которые используют раздачу бездепозитных призов в особые даты (как для казино, например и для игрока). Помимо этого, действующие игроки кроме имеют возможность получить похожие бонусы за свою работа (например, за повышения значения либо за схожие достижения).
1×slots официальный сайт мобильная версия скачать
<a href=https://bridge-clip.ru/user/Scottgunda/>https://bridge-clip.ru/user/Scottgunda/</a> Теоретически, к безвозмездным бонусам возможно отнести например нарекаемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, поэтому собственно они предоставляют лишь вероятность делать ставки. 1×slots официальный сайт скачать
<b>Смотреть еще похожие новости:</b>
<a href=https://sadhaka.nl/forum/viewtopic.php?t=103966>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В лицензионных бездепозитных казино играть в азартные забавы действительно безопасно. Наличие лицензии подтверждает тот факт, что клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP.
#3929 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasino09k online
4. Заберите презент. Чаще всего приз активизируется незамедлительно после регистрации. Но посещают истории, когда надо(надобно) зайти в личный кабинет либо написать в саппорта. <a href=http://filmkachat.ru/>1× slots зеркало</a> Новички не обожают сразу же вносить депозит. Это обосновано отсутствием опыта и недоверием. К счастью, в наше время можно получить бездепозитный бонус за регистрацию в казино. Неважно собственно начисляет система – фриспины или кредиты. В всяком случае вы не рискуете собственными сбережениями. Это замечательная вероятность запустить приглянувшийся видео слот либо же испытывать удачу в настольных забавах. <a href=https://letterboxd.com/lexxeagle/list/revolutionary-approaches-in-modern-virtual/>https://letterboxd.com/lexxeagle/list/revolutionary-approaches-in-modern-virtual/</a> Онлайн гемблинг развивается с каждым деньком больше и больше, свежие бренды создаются не по денькам а по часам. Новые интернет казино делают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и что, этим самым предлагают бездепозитные бонусы за регистрацию, собственно бы не упустить эту возможность — как пользоваться новым бездепом, советуем посещать наш вебсайт как возможно почаще, самое аппетитное и свежие несомненно добавляться в этом же перечне. 1× slots официальный <a href=http://linuxmagazin.3×.ro/modules.php?name=Your_Account&op=userinfo&username=permissibleback>http://linuxmagazin.3×.ro/modules.php?name=Your_Account&op=userinfo&username=permissibleback</a> Лишь популярностью и известные азартные заведения могут разрешить себя раздавать бездепы вид добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депо, коие можно потратить в топовых аппаратах с высочайшей отдачей.Фриспины начисляются по определенной ставке. После их активации игроку необходимо запустить слот и убедиться, что в нем отображаются благотворительные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода после отыгрыша определяется оператором и изредка выше 5 000 рублей.
1хслотс официальный сайт зеркало
<a href=https://forumsleague.org/forum/viewtopic.php?f=70&t=19377&p=383338#p383338>зеркала 1×slots</a> казино 1×slots официальный сайт Некоторые веб-сайты, до чем обмануть регистрацию игроков, предлагают ответить на некоторое базисных вопросов. Цель проведения подобной викторины – выявить случайных людей, коие не имеют представления о покере, и не разрешить получения ими призов. Если гость уже играл в казино, то ответить на полтора десятка несложных вопросов будет нетрудно. Очень нередко, ответы возможно найти на официальных сайтах этих учреждений. <a href=https://wifidb.science/wiki/User:Jonah34335>https://wifidb.science/wiki/User:Jonah34335</a> Далее требуется отыграть вагер и исключить выигрыш. Игрокам без опыта крупно повезло, у получить 10-ки даров за 1 регистрацию. Если не смогли получить Бездепозитный бонус, не тревожьтесь. Обратитесь в интернет чат, оператор поможет ситуацию.Приветственный бонус без депозита ? подарок за регистрацию. Выдается средствами, фриспинами либо баллами. В последнем случае бонусные баллы применяются для участия в турнирах или размена на реальные средства. 1 х слотс зеркало Например, игрок получил 500 руб. При твореньи аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 рублей, понадобится сделать 875 спинов для полного отыгрыша.
1×slots регистрация 1×slotscasino09k online
Во всех законных онлайн-казино Беларуси нужно подтверждение паспортных данных для забавы — это требование правительства государства.Не сложно догадаться, что no deposit bonuses почти ни не бывают великими. Чаще всего речь идет о пяти–тридцати долларах (или эквиваленте этой суммы в другой еденице). <a href=http://womans-days.ru/user/FrankSek/>http://womans-days.ru/user/FrankSek/</a> 1×slots регистрация 1×slots casino c2d ru
1хслотс казино зеркало
Нет. Для получения бездепозитного приза в казино нужна обязательная регистрация на веб-сайте. Играть в слоты даром и без регистрации можно лишь в демо режиме. <a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1×slots промокод при регистрации 2025</a> Ограничения по играм. Администрация запрещает игрокам кое-какие игровые автоматы с бездепозитным призом, средствами или безвозмездными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда дробление производится по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, хотя запрещен в настольных забавах и в разделе Live Casino. 1×slots регистрация на официальном сайте <a href=https://www.assayyarat.com/forums/member671326.html>https://www.assayyarat.com/forums/member671326.html</a> При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток.
казино 1× slots официальный сайт
Необходимость отыгрыша. Вейджер в выше, чем для призов за депозит. И пока свои не отыграны, исключить их нельзя. <a href=http://dedmorozural.ru/users/absurdflat65>http://dedmorozural.ru/users/absurdflat65</a> Объективные – объем бонуса, коэффициент и обстоятельства вейджера, надобность внесения депозита для вывода средств; 1×slos регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=http://3ak.cn/home.php?mod=space&uid=187057>1×slots зеркало рабочее</a>
<a href=https://forum.vn.ua/showthread.php?p=3276846#post3276846>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=176378&pid=502028#pid502028>1хслотс казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Обычно, бездепозитные призы выдаются под определенные слоты с фиксированной ставкой, хотя их точно запрещено использовать в игровых автоматах с современным джекпотом. Список игр, в можно использовать бездеп, Вы отыщите в описании акции или можете уточнить у саппорта заведения. Существует ли стратегии для отыгрыша бездепозитных бонусов? К сожалению нет, на выигрыши либо проигрыши с бонусов, казино либо игрок повлиять не может, отдача игр случается от разработчиков игр.
#3930 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Приезжева Екатерина Геннадьевна порно лучшая казино <a href=https://res-publika.com>официальные букмекерские конторы</a> казино фильм смотреть онлайн порно с Максим Глушенков (футбол) <a href=https://rucriminal.info/>Львова-Белова Мария Алексеевна порно</a> порно с Алина Загитова, фигуристка gama casino порно с Кирьянова Дарья Борисовна kent casino казино смотреть ramenbet casino бесплатно фильм казино
DiskiPlus казино в россии DiskiPlus porno Илона Маркова, хоккеистка <a href=https://diskiplus.ru>DiskiPlus casino 7k рабочее</a> DiskiPlus казино рулетка DiskiPlus вывод казино <a href=https://www.diskiplus.ru>DiskiPlus порно с Голикова Татьяна Алексеевна</a> DiskiPlus порно с Карен Хачанов (теннис) DiskiPlus 1×bet сейчас DiskiPlus порно с Арина и Дина Аверины, гимнастки DiskiPlus порно с Кирьянова Дарья Борисовна DiskiPlus 1×bet слоты 1×bet top DiskiPlus casino рабочее DiskiPlus porno Александра Степанова, фигуристка
#3931 Charlesgunnyhttp://filmkachat.ru
1хслот скачать
Когда речь о получении бездепозитных призов в казино, начала внимание на последующие обстоятельства: <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> Иногда для получения призов необходимо спутаться с представителями службы. Удобнее всего с ними разговаривать в онлайн-сате, но от довольно запроса по электрической почте.Однако далеко не все ресурсы предлагают своим посетителям бездепозитные бонусы за регистрацию в казино. В большинстве случаев учтено одобрение на 1-ый депозит в размере 100–200%. Это замечательная вероятность преумножить банкролл, увеличить время, проведённое за забавой и шансы сорвать большой куш. <a href=https://telegra.ph/Navigating-Cannabis-Delivery-Services-in-Port-Perry-Your-Complete-Local-Guide-11–24>https://telegra.ph/Navigating-Cannabis-Delivery-Services-in-Port-Perry-Your-Complete-Local-Guide-11–24</a> 1×slots официальный регистрация <a href=http://x70181pe.beget.tech/user/Arnoldhourb/>http://x70181pe.beget.tech/user/Arnoldhourb/</a> У любой забавы средства притязания по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система зачтет каждую ставку. В рулетке и покере сделать это гораздо сложнее. Именно поэтому например важно внимательно читать обстоятельства получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой ирге, то новички попросту «спустят приз на ветер».
1×slots регистрация на официальном сайте
Обычно бездепозитные акции от казино, прибывают на эл. Почту в деньки рождения либо праздники. В неких онлайн казино возможно обратиться в чат и как постоянному игроку, вероятно вам предложат бездепозитное предложение.Такой бесплатный эквивалент средств зачисляется на профиль юзера в осуществления требований и предназначаются они только для игрового процесса. Вывод этих вознаграждений возможен лишь последствии осуществления вейджеровых условий. 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=http://travel.navigator-mas.ru/user/ChrisWer/>http://travel.navigator-mas.ru/user/ChrisWer/</a> Чтобы других увериться в преимуществах бездепозитных бонусов, достаточно зарегистрироваться в казино и получить поощрение.Во всех легальных онлайн-казино Беларуси необходимо подтверждение паспортных данных для игры — это заявка правительства страны. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Основное различие том,, собственно для получения бездепа не пополнять баланс в казино. Но кроме этого, есть ряд прочих отличий:Возможность протестировать новые игры, не рискуя личностными своими и создать собственную тактику игры.
1×slots официальный сайт, скачать
В перечне требований к отыгрышу нередко присутствуют лимиты на ставки при забаве на собственные деньги. Так, в отыграть надо(надобно) 30 000 руб., а предельная сумма ограничена 30 рублями, то вертеть барабаны предстоит 1000 один. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам деяния акции.Вывод выигрыша с бездепозитных призов казино – щедрый подарок от азартных клубов. Но чтобы вывести собственный заработок, нужно выполнить ряд критерий: Бонусы без депозита при регистрации считаются наиболее красивыми как для опытных игроков, так для и начинающих. Получив это вознаграждение, клиент возможность выступать на настоящие деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные призы в интернет-казино Рунета, еще условия их активации и выигрыша. <a href=https://www.javab24.com/profile/25818-travisemisa>https://www.javab24.com/profile/25818-travisemisa</a> 1×слот регистрация в 1×slots casino К раскаянью, нет. Почти все казино, настоятельно внесение хотя бы одного малого депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, что вывести средства разрешается лишь на ту платежную систему, с которой был сделан депо.
1×slots casino регистрация на сайте
Диапазон ставок, которые вправе устроить игрок, также лимитирован. Обычно назначать можно маленькую необходимую — в 10–30 руб. За одно вращение. Ну и окончательно же, для казино бездепозитные призы выгодны с имиджевой стороны: сходственная щедрость повышает степень преданности клиентов к фирмы.Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных требований, считая обязательной верификации. Если на веб-сайте предусмотрена неотъемлемая процедура доказательства личности, то исключить выигрыш получится лишь после проверки данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий лицо. Бездепозитный приз – это экономическое вознаграждение, коие выдается участнику игры в казино, для его вербования и появления заинтригованности. Любой гость, который подходит условиям выдачи подобного бездепозитного бонуса, может претендовать на получение вышеуказанного приза. Такое поощрение является наиболее эффективным методом, дающим возможность стартовать при, не вкладывая собственных вещественных средств.Как только на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу последствии этого можно оставить заявку на вывод выигрыша. Кредиты выгодно выделяются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом настоящих средств и дают возможность ощутить азарт. Во-вторых – возможно насладиться каждой азартной забавой доступной на сайте. В вашем распоряжении находятся автоматы, настольные приложение, видео-покер, Live-дилеры. 1× slots casino зеркало <a href=https://www.vennews.net/home.php?mod=space&uid=169276&do=profile&from=space>https://www.vennews.net/home.php?mod=space&uid=169276&do=profile&from=space</a>
1×slots регистрация то дальше необходимо пройти
Ниже указан актуальный список законных казино в Беларуси с бонусами на 1-ый депо. Вы можете попасть на официальный вебсайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус.Бывают ли бездепозитные призы без вейджера? Бывают, случае у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный бонус за регистрацию уточняется вейджер во всех казино. Зарегистрироваться в казино по специальной ссылке или с бонусным кодом. Подтвердить контактные данные (номер аппарата и электрическую почту). Для доказательства номера телефонного нужно в собственном профиле указать свой номер и нажать кнопку „Подтвердить номер телефона“, дальше Вы получите sms-сообщение с кодом, который нужно установить в подходящее поле. Для подтверждения электронной почты, перейти по интенсивной ссылке в послании от казино.Следует подчеркнуть, собственно бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с определенным кодом. <a href=http://pfb7978i.bget.ru/index.php?subaction=userinfo&user=Justinses>http://pfb7978i.bget.ru/index.php?subaction=userinfo&user=Justinses</a> Превышение максимальной ставки при отыгрыше. Система механически не предостерегает о превышении ставки, потому о несоблюдении управлял игрок может узнать теснее последствии подачи запроса на вывод средств. зеркала 1×slots Ну и конечно же, для казино бездепозитные бонусы прибыльны с имиджевой стороны: сходственная добродушие повышает степень преданности посетителей к фирмы.Зарегистрироваться в казино по специальной ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефона и электронную почту). Для подтверждения номера телефонного необходимо в собственном профиле указать свой номер и надавить кнопку „Подтвердить номер телефонного“, дальше Вы получите sms-сообщение с кодом, кот-ый необходимо ввести в соответствующее фон. Для доказательства электронной почты, перебежать по интенсивной ссылке в письме от казино.
<b>Смотреть еще похожие новости:</b>
<a href=http://khodaumo.com/forum/viewtopic.php?f=2&t=77229&sid=085eb353127e6444c1d76101ef296817>казино 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для верификации аккаунта нужно предоставить спецам технической помощи отсканированную копию паспорта и счета за коммунальные предложения, еще фотографию банковской карты или экрана странички электронного кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности. Лишь модные и известные азартные заведения все разрешить себя выдавать бездепы вид добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депо, которые можно истратить в лучших аппаратах с высокой отдачей.
#3932 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия
Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция имеет подробные правила, гиперссылка на которые обыкновенно находится в промообъявлении. В них указываются лимиты, вейджер, перечень доступных игр. Если оператор прячет данные о предложении, то воспользоваться им не стоит.Большинство клубов привлекают внимание компьютерные за счёт разнородных даров. На 1 веб-сайтах можно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает бесплатные вращения для запуска лучших онлайн слотов. Несмотря на различные промоакции, стоит выделить самые главные. <a href=http://filmkachat.ru/>казино 1×slots</a> Главное превосходство спинов – вероятность выучить различные слоты. Также удастся насладиться бонусными раундами, испытывать удачу в риск-туре и преувеличить выигрыш за счёт особых знаков. Однако столько игровой процесс заслуживает внимание, ведь лучше сосредоточиться на реальном выигрыше. <a href=https://graph.org/Transform-Your-Furniture-Ideas-into-Reality-A-Deep-Dive-into-3D-Design-Tools-11–22>https://graph.org/Transform-Your-Furniture-Ideas-into-Reality-A-Deep-Dive-into-3D-Design-Tools-11–22</a> Многие новенькие колеблются, собственно поощрительный приз не будет возвращать, даже случае они выиграли у казино. Это абсолютно неопасно и надежно. Выводя выигранные средства, игрок просто одергивает свое участие при и теряет уникальную вероятность – даром наращивать личное материальное положение.При регистрации стопам свидетельствовать лишь достоверную информацию. Когда учетная запись несомненно активна, появится доступ в Личный офис. В нем можно выбрать денежную, установить промокод и узнать подробные управляла получения и отыгрыша бездепа. Краткая информация об промоакции часто присутствует непосредственно на регистрационной форме. 1×slots регистрация то дальше необходимо пройти <a href=http://art-kam96.ru/index.php?subaction=userinfo&user=juvenileoutlaw8>http://art-kam96.ru/index.php?subaction=userinfo&user=juvenileoutlaw8</a> Бонус в казино без депо имеет разные вариации: такое быть приветственный приз, акции в честь каких-либо праздничных либо весомых дат, приз за привлечение свежих игроков, преданность и получение VIP-статуса.
1хлот регистрация в 1×slots casino
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=36971>сайт 1× slots casino</a> 1×slots casino зеркало При верном раскладе бездепы — это прекрасный метод выступать на деньги без траты личных средств. Есть несколько советов, следуя которым можно извлечь максимум полезности из подобных промоакций казино. Играть стопам лишь на лицензированных площадках. Скриптовые веб-сайты не только обманывают с бонусными услугами, но и используют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах нереально.Бонусы без депо при регистрации числятся самыми красивыми как для опытных игроков, так для и новичков. Получив это вознаграждение, клиент возможность выступать на настоящие средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные призы в интернет-казино Рунета, а также условия их активации и выигрыша. <a href=https://notebooks.ru/forum/index.php?PAGE_NAME=profile_view&UID=54108>https://notebooks.ru/forum/index.php?PAGE_NAME=profile_view&UID=54108</a> Каждый новичок и умелый игрок мечтают скоро стартануть и начать делать настоящие ставки. Для этого достаточно забрать презент, за кот-ый не платить. В зависимости от игровой платформы, нужно сделать профиль, привязать email либо телефон. После сего администрация начислит щедрое вознаграждение вид бесплатных вращений или виртуальных кредитов.Наши специалисты исследуют обстоятельства промоакции, после в ручном режиме проверку их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и другие параметры. Мы не рекламируем казино, а даем игрокам информацию о наихороших из них. казино 1×slots официальный сайт
1×slots зеркало регистрация
Если идет об неповторимых услугах, возможность потребоваться регистрация в казино по ссылке с партнерского сайта.Обычно для получения бонусов без депо, казино выдвигает приклнные и абсолютно выполнимые обстоятельства, но есть ряд поступков которые запрещены и шансы повлечь за собой противные результаты: Игры, в можно выступать на бонусные деньги. Проверьте список игр, каких можно играть на бонусные средства, возможно они Вам не понравятся и надо расходовать своё время на такую акцию. <a href=http://ekaterinovka.sarat.ru/board/tools.php?event=profile&pname=DoctorLazutaOn>http://ekaterinovka.sarat.ru/board/tools.php?event=profile&pname=DoctorLazutaOn</a> Чтобы бездеп не был начислен на Ваш аккаунт, Вам надо активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк автоматически, а Вы не планируете его использовать, обратитесь в службу поддержки с пожеланием отменить бездепозитный приз. 1 xslots рабочее зеркало Чаще всего используются коды. Их надо(надобно) заносить в специальные окошки регистрационной анкеты, случае речь о пригласительных призах, либо в определенном разделе личного офиса игрока.
1×slot зеркало
Некоторые онлайн-казино без депо предлагают новым клиентам выбрать бонус при регистрации. Будьте внимательны: выбрав один, вы в безусловном большинстве случаев не можете пользоваться остальными. <a href=http://link.5nx.ru/viewtopic.php?f=5&t=5314>1× slots casino зеркало</a> Однако в условиях скрываются «подводные камешки», которые не разрешат исключить солидную сумму или же вы не успеете отыграть вейджер. Поэтому профессионалы рекомендуют забрать благотворительные вращения за регистрацию в казино без депо, чтобы поднабраться навыка и получить реальный шанс на победу. 1×slots сайт зеркало <a href=http://renebiemans.nl/users.php?m=details&id=33244>http://renebiemans.nl/users.php?m=details&id=33244</a> В лицензионных бездепозитных казино играть в азартные забавы действительно безопасно. Наличие лицензии подтверждает тот факт, что клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP.
1× slots регистрация в 1×slots casino
Возможность сыграть дополнительное состязание (а времени и некоторое) абсолютно безвозмездно, а выигрыш, к, поступает на счёт игрока. Баланс игрока пополняется на соответствующую сумму. К ней применяется вейджер, указанный в правилах промоакции. Вывести выигрыш возможно несомненно после такого, как юзер устроит требуемый объем ставок из собственных средств. В редчайших случаях бездеп работает в формате Free Play. На счет юзера зачисляется крупная сумма, и предоставляется малый срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по завершении сего периода сумма на счету несомненно превышать первоначальную, то разницу можно несомненно исключить либо использовать для дальнейших ставок. <a href=http://zoomir10.ru/bitrix/redirect.php?goto=http://b2c.hypernet.ru/bitrix/rk.php?goto=http://salon-tamara.ru/bitrix/redirect.php?goto=https://telegra.ph/Polnoe-rukovodstvo-po-nastolnoj-igre-Go-Vejci-Baduk-Igo-09–19>http://zoomir10.ru/bitrix/redirect.php?goto=http://b2c.hypernet.ru/bitrix/rk.php?goto=http://salon-tamara.ru/bitrix/redirect.php?goto=https://telegra.ph/Polnoe-rukovodstvo-po-nastolnoj-igre-Go-Vejci-Baduk-Igo-09–19</a> У нас на веб-сайте Вы найдете перечень призов без депозита в испытанных казино и доскональную информацию то как их получить и использовать. 1хслотс рабочее зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://smm-seo.ru/members/rabofreeol.4209/>1хслотс рабочее зеркало на сегодня</a>
<a href=http://griffhunter.com/boards/viewtopic.php?p=546553#p546553>1×slots регистрация 1×slots casino c2d ru</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выше мы предоставили глубокий комплект самых свежих и актуальных бездепозитных бонусов в интернет казино без пополнения на 2022 год, где вы можете пользоваться каким ценным бездепозитным призом.
#3933 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino автомат кент casino <a href=https://slon-ru.com/>сайт казино зеркало</a> porno Мира Андреева (теннис) винлайн букмекерская контора официальный сайт <a href=https://7club7.com/>top casino</a> ramenbet casino 1×bet телефон Петрова Ольга Викторовна порно casino сайты порно с Матвей Сафонов (футбол) винлайн букмекерская контора официальный сайт пинко casino
DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus casino x <a href=https://www.diskiplus.ru>DiskiPlus казино онлайн бесплатно</a> DiskiPlus vavada casino DiskiPlus сайты казино <a href=https://diskiplus.ru>DiskiPlus casino официальный зеркало</a> DiskiPlus 1×bet официальный сайт DiskiPlus спорт букмекерская контора DiskiPlus porno Екатерина Ефременкова, шорт-трекистка DiskiPlus Москалькова Татьяна Николаевна порно DiskiPlus porno Александра Степанова, фигуристка DiskiPlus скачать 1×bet на андроид бесплатно DiskiPlus Преподобная Надежда Александровна порно
#3934 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино сегодня top casino <a href=https://slon-ru.com/>online casino</a> 1×bet официальный пинап казино <a href=https://th-royalgclub.com/>вавада казино</a> казино ставка леон букмекерская контора Матвиенко Валентина Ивановна порно слоты казино порно с Илья Осипов (киберспорт) kometa casino ешь казино
DiskiPlus пин ап casino pin DiskiPlus букмекерская контора официальный сайт скачать <a href=https://www.diskiplus.ru>DiskiPlus сайт букмекерской конторы</a> DiskiPlus porno Андрей Рублев (теннис) DiskiPlus casino регистрации <a href=https://www.diskiplus.ru/>DiskiPlus Хорова Наталья Александровна порно</a> DiskiPlus 7k casino зеркало DiskiPlus казино смотреть DiskiPlus 7k casino зеркало DiskiPlus 1×bet официальный сайт 1×bet xyz DiskiPlus 1×bet зеркало xbet DiskiPlus какие казино DiskiPlus казино фильм смотреть онлайн
#3935 PatrickSixhttps://shared-steam.org
Хотите играть в Steam-игры <a href=https://shared-steam.org/>shared-steam</a> дешевле? Shared-Steam.org предлагает аренду аккаунтов с топовыми играми. Безопасность, доступность и удобство – ваш гейминг без границ!
#3936 Charlesgunnyhttp://filmkachat.ru
1×slots сайт
Перед активацией важно внимательно изучить обстоятельства промоакции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют значение кроме лимиты ставок при отыгрыше и сроки, в течение которых можно пользоваться предложением. Если бездеп охватывает узкий список игр, рекомендуется узнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только никаких случае, в оператор не установил жесткие лимитирования на наивысшую необходимую ставки.У каждого игорного клубы различные вейджеровые обстоятельства. Чтобы вы гарантировано сумели выполнить их, мы дадим количество советов. Если система начислила маленькую необходимую, не стоит делать большие ставки – остановитесь на 10–30 центах. Как только сумеете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте играть. В противном случае какого-либо приглядеться к иному автомату. <a href=http://filmkachat.ru/>1×slots регистрацию более популярный вариант это</a> Так что приготовьтесь дать секретную информацию (пол, возраст, страна проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает менее суток, после чего удастся свободно выводить солидные выигрыши.Не стоит сразу же отказываться от приветственных даров в сходственных казино. Администрация готова начислить деньги или фриспины, но сначала сотрудники обязаны убедиться, собственно вы не мошенник. Дело что, нет, что развелось очень количество охотников за бонусами. Они научились обманывать систему и зарабатывать крупные суммы средств. <a href=https://www.thuum.org/viewthread.php?thread=8824>https://www.thuum.org/viewthread.php?thread=8824</a> 1×slots casino регистрация 1×slots review live <a href=http://usr.by/user/DoctorLazutama/>http://usr.by/user/DoctorLazutama/</a> Шаг 4. Активация. Внимательно исследуйте обстоятельства, информацию по лимитированиям и сроке деяния бонусного предложения. Разобравшись с правилами, можно активировать приз в собственном офисе (иногда ? с внедрением промокода) либо по запросу в саппорт.
1×slots официальный регистрация
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/8661/#comment-356129>1×slots официальный зеркало</a> 1×slots официальный сайт мобильная версия скачать После получения бонуса вывод средств для клиента будет недоступен до, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя или пара недель. Выводить деньги игрок сможет лишь последствии отыгрыша.Мы проделываем ударение на ключевых положениях верховодил, рассказываем о территориальных лимитированиях и кратко информируем о иных акциях обсуждаемого казино. <a href=http://www.tronicb7records.com/new/component/k2/itemlist/user/94840>http://www.tronicb7records.com/new/component/k2/itemlist/user/94840</a> Мы проделываем ударение на ключевых положениях правил, рассказываем о территориальных ограничениях и кратко информируем о иных акциях обсуждаемого казино.На страничке представлены бездепозитные призы за регистрацию в казино редкая заслуга за которой гонятся все игроки как новенькие, так и мастера. Мы также уделяем огромное внимание на наличие призов при формирование рейтинга казино на деньги. Бездепозитный бонус это вероятность играть безвозмездно и выиграть реальные средства. 1×slots зеркало быструю регистрацию а также мгновенное
1×slots официальный сайт зеркало
Бонус с зачислением денег на счет дает больше свободы деяний. Пользователь сам выбирает, каким образом распорядиться подаренными средствами. Здесь того могут действовать ограничения на перечень дешевых игр, хотя обычно эти рамки не так строги, как в рекламную с бесплатными вращениями. На нашем веб-сайте Вы найдете список своевременных новых бездепозитных бонусов в казино 2022 года. Также, есть количество эксклюзивных предложений, которые доступны только посетителям нашего сайта последствии регистрации по нашей ссылке либо активации особого промокода. <a href=http://fumankong2.cc/home.php?mod=space&uid=581358>http://fumankong2.cc/home.php?mod=space&uid=581358</a> Перед активацией главно внимательно изучить обстоятельства промоакции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют значение также лимиты ставок при отыгрыше и сроки, в течение которых можно воспользоваться предложением. Если бездеп обхватывает ограниченный перечень игр, рекомендуется разузнать наибольшие коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только в случае, в оператор не установил строгие ограничения на наивысшую необходимую ставки.Для отыгрыша бонуса казино обязывает игрока поиграть на необходимую, в несколько один превосходящую сумму приобретенного приза — здесь выгода фирмы очевидна. 1×slots актуальное зеркало Подтверждение регистрации. Казино требуют привязки профиля к электрическому адресу и номеру телефонного. Для сего на e-mail отчаливает письмо ссылаясь, а на телефон ? текстовое известие с кодом.
1×slot официальный сайт
В перечне требований к отыгрышу часто наличествуют лимиты на ставки при ирге на личные деньги. Так, если отыграть нужно 30 000 руб., а максимальная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 один. Эта особенность затрудняет соблюдение игроками условий по срокам деянья промоакции.Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных бонусов принимаются достаточно высокие требования. Часто онлайн-казино рекомендуют отыграть бонусное поощрение до 100 один в игровых автоматах. Например, случае игрок получил бесплатно десять $, то нужно несомненно отыграть их, поставив одну тысячу спинов по одному доллару любой. Стоит обозначить(означить), что не все казино дают вероятность играть на бонусы и не во всех развлекательных заведениях идентичные правила для отыгрывания. Некоторые казино запрещают выступать на призы в блекджек либо ограничивают ставки до 5 процентов, собственно значительно увеличивает в десятки раз число нужных игр. Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации дара нужно подтвердить электрическую почту и привязать телефон;В неких интернет казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на веб-сайте клуба и подтвердить средства контактные данные. Дополнительно требуется активация промокода. Таким образом онлайн казино получает потенциального игрока. Возможно в будущем или настоящем он захотит поиграть на свои средства. Так трудятся бездепозитные призы в онлайн казино. Здесь очень подходит выражение, бесплатные сыр случается лишь в мышеловке. Начинающие игроки все не обдумывать опасность пыла. Однако со временем осознания делается больше. Это тема для отдельного обсуждения.Как только получите бездеп в казино, всё равно не забывайте проверять электрическую почту. Некоторые игорные клубы постоянно веселят интенсивных гэмблеров приятными призами. Чаще всего получить подарок можно в преддверии веселья, на денек рождение, за вербование друга. А того распространённым призом считается надбавка к депозиту. Нужно не восполнить счёт, и азартное заведение увеличит его на 50–100%. 1×slots бездепозитный бонус за регистрацию <a href=https://pyxc.ru/user/JasperEcory/>https://pyxc.ru/user/JasperEcory/</a>
1×slots casino регистрация 1×slotscasino09k online
Для тех, кто только взвешивает испытать собственную фортуну, а для профессиональных игроков, отыскивающих новые площадки для выигрышей, водящие лицензированные казино нередко организуют разные промоакции, и лучшее предложений за время – как для новичков, так и для проф игроков – бездепозитный бонус за регистрацию. <a href=https://arenafighter.adult/mybb/member.php?action=profile&uid=262894>https://arenafighter.adult/mybb/member.php?action=profile&uid=262894</a> 1 x slots А ознакомиться с свежими интернет казино, Вы можете за счет бонусов с выводом выгоды, коие Вы можете получить без депо.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.skmecca.com/2011/04/14/leave-the-world-better-than-you-found-it/comment-page-95/#comment-133924>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В списке требований к отыгрышу часто наличествуют лимиты на ставки при этой на личные деньги. Так, если отыграть надо(надобно) 30 000 руб., а предельная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 раз. Эта особенность затрудняет соблюдение игроками условий по срокам деянья акции. Теоретически, к бесплатным призам можно отнести например называемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, поэтому что они предоставляют лишь вероятность делать ставки.
#3937 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Александр Большунов (лыжные гонки) гама казино <a href=https://rucriminal.info/>порно с Диана Шнайдер (теннис)</a> лучшие букмекерские конторы kent casino регистрация <a href=https://th-royalgclub.com/>online casino официальный</a> porno Марина Александрова почему в казино не бывает настенных часов винлайн букмекерская контора официальный сайт pin up casino casino официальный зеркало реального казино порно с Илья Осипов (киберспорт)
DiskiPlus казино рулетка DiskiPlus 1×bet зеркало на сегодня <a href=https://www.diskiplus.ru/>DiskiPlus букмекерская контора вход</a> DiskiPlus пин up casino DiskiPlus пинко casino <a href=https://www.diskiplus.ru>DiskiPlus Александра Бортич</a> DiskiPlus 7k casino зеркало рабочее DiskiPlus скачать 1×bet на андроид бесплатно DiskiPlus букмекерскую контору пин DiskiPlus kometa casino DiskiPlus пари букмекерская контора DiskiPlus 1×bet слоты DiskiPlus казино фильм
#3938 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало на сегодня 1×bet xyz pin up букмекерская контора <a href=https://res-publika.com>porno Мира Андреева (теннис)</a> порно с Алексей Миранчук (футбол) букмекерская контора <a href=https://vestnik-jurnal.com/>unlim casino</a> porno Юлия Канакина, скелетонистка Александра Бортич vavada casino casino рабочее зеркало vodka casino казино гта 5 Манилова Алла Юрьевна порно
DiskiPlus 1×bet официальный скачать DiskiPlus porno Алена Михайлова <a href=https://www.diskiplus.ru/>DiskiPlus казино большая</a> DiskiPlus porno Катерина Шпица DiskiPlus порно с Алексей Миранчук (футбол) <a href=https://diskiplus.ru/>DiskiPlus Скворцова Вероника Игоревна порно</a> DiskiPlus casino зеркало сегодня рабочее DiskiPlus 7k casino зеркало на сегодня DiskiPlus какие казино DiskiPlus casino зеркало сегодня рабочее DiskiPlus porno Мира Андреева (теннис) DiskiPlus porno Юлия Канакина DiskiPlus включи казино
#3939 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино гта 5 Лут Оксана Николаевна порно <a href=https://krtka.info/>порно с Илья Осипов (киберспорт)</a> букмекерская контора фонбет официальный Светлана Ходченкова <a href=https://sovsekretno.net/>порно с Илья Осипов (киберспорт)</a> часы казино где казино Крючкова Полина Викторовна порно лучшая казино порно с Алексей Миранчук (футбол) пин up casino ев казино
DiskiPlus казино в россии DiskiPlus порно с Гатагова Ольга Анатольевна <a href=https://diskiplus.ru>DiskiPlus рабочие зеркала казино</a> DiskiPlus 1×bet DiskiPlus 1×bet зеркало xbet xyz <a href=https://www.diskiplus.ru>DiskiPlus casino приложения</a> DiskiPlus Преподобная Надежда Александровна порно DiskiPlus ешь казино DiskiPlus porno Вера Бирюкова, гимнастка DiskiPlus porno Катерина Шпица DiskiPlus Разуваева Ксения Денисовна порно DiskiPlus спорт букмекерская контора DiskiPlus казино вход
#3940 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino 7k сегодня слоты казино <a href=https://res-publika.com>букмекерская контора зенит</a> пин ап казино casino 7k рабочее <a href=https://rumafia.news/>букмекерские конторы в россии</a> рабочее казино Приезжева Екатерина Геннадьевна порно Любимова Ольга Борисовна порно порно с Дронова Александра Викторовна букмекерскую контору пин сайты казино porno Алена Косторная (фигурное катание)
DiskiPlus почему в казино нет часов DiskiPlus бесплатно играем казино <a href=https://diskiplus.ru>DiskiPlus песня казино</a> DiskiPlus 1go casino DiskiPlus рабочее казино <a href=https://diskiplus.ru>DiskiPlus самое казино</a> DiskiPlus порно с Юлия Ефимова DiskiPlus casino riobet DiskiPlus 1win букмекерская контора DiskiPlus скачиваемые казино DiskiPlus зеркала казино DiskiPlus Матвиенко Валентина Ивановна порно DiskiPlus casino daddy
#3941 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Юлия Канакина casino 7k рабочее <a href=https://t.me/vchkogpu_ru>порно с Дронова Александра Викторовна</a> промокод 1×bet porno Яна Троянова <a href=https://rumafia.news/>скачать casino на андроид</a> casino зеркало сегодня porno Алена Михайлова казино ли про казино пин up casino 1×bet зеркало слоты порно с Георгий Джикия (футбол)
DiskiPlus retro casino DiskiPlus pinco casino <a href=https://www.diskiplus.ru>DiskiPlus лучшие онлайн казино</a> DiskiPlus играющие казино DiskiPlus Скоробогатова Ольга Николаевна порно <a href=https://diskiplus.ru>DiskiPlus фильмы казино рояль</a> DiskiPlus гта казино DiskiPlus 1×bet 1 DiskiPlus porno Виктория Баркова, легкоатлетка DiskiPlus казино фильм онлайн DiskiPlus порно с Илья Осипов (киберспорт) DiskiPlus Любимова Ольга Борисовна порно DiskiPlus зеркала официальных сайтов казино
#3942 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало на сегодня
Фриплей-бонусы встречаются только в неких клубах. Они зачисляются сразу в создания профиля и активны недолговременное время. Если не успеете истратить свои, они просто сгорят. Касаемо времени, как призы активны протяжении часа. <a href=http://filmkachat.ru/>1×slots подтвердит вашу регистрацию если говорить</a> Помните, собственно в неких забавах сумма ставки идет в зачет вейджера лишь отчасти. Так, в настольных и карточных играх только от 5% до 50% суммы ставки считаются как отыгранные средства, момент как в слотах идет в зачет все one hundred percent суммы.Это один из основных показателей привлекательности подарка. С завешенным коэффициентом том профессионалы не сумеют выполнить обстоятельства по отыгрышу. И маловажно, как привлекательно выглядит предложение – бездепозитный бонус казино в объеме $500 или $1 000. Чтобы новенькие попревосходнее вдумались, собственно же это вейджер, мы разберём на образце. <a href=https://blog.udn.com/G_112062930339362154/181391883>https://blog.udn.com/G_112062930339362154/181391883</a> 1×slots официальный зеркало <a href=https://foros.factormoe.net/user-5313.html>https://foros.factormoe.net/user-5313.html</a> Но а случае вы теснее профи по интернет казино, кликаем на красную кнопку «Получить» и Вы автоматически перейдете в онлайн казино;Бездепы могут заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами.
1 x slots casino
Условия вывода выигрыша. В некоторых заведениях для успешного вывода с бездепозитного приза довольно пополнения баланса и доказательства личности. В иных же клубах, нужно несколько раз прокрутить собственный депо. 1×slots казино зеркало Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают бонус по странам. Вплоть до как, собственно клуб возможность брать игроков из Вашей страны, а бездеп мешает. <a href=http://biyografiforum.10tl.net/member.php?action=profile&uid=2689>http://biyografiforum.10tl.net/member.php?action=profile&uid=2689</a> 1× слот зеркало
1× слот зеркало
Некоторые казино имеют предлагать посетителям бездепы за свидетельство номера либо почты либо репост на страничку в социальных сетях. Бонус в казино без депозита содержит различные варианты: это может быть приветственный приз, промоакции в честь каких-то праздников или весомых дат, приз за вербование новых игроков, лояльность и получение VIP-статуса.Некоторые онлайн-казино без депозита предлагают свежим посетителям избрать приз при регистрации. Будьте внимательны: выбрав раз, вы в безоговорочном большинстве случаев не сможете воспользоваться остальными. <a href=https://www.autorepguide.com/member.php/8000-Jasperjob>https://www.autorepguide.com/member.php/8000-Jasperjob</a> Казино выводит деньги лишь на что, эту платежную систему, с котрой был сделан депо. То есть, для вывода бездепозитного бонуса, Вам поначалу нужно пополнить счет. В некоторых клубах ограниченный список методов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет именно с данных платежных способов, коие доступны для вывода.3. Подтвердить данные. В зависимости от клуба, нужно привязать телефонный или почту, показать персональную информацию; 1х слот регистрация в 1×slots casino
казино 1×slots
Активация происходит с помощью промокодов, которые вводятся в собственном кабинете в регистрации. Среди спецпредложений в перечне Casino.ru находятся неповторимые промокоды, которые доступны лишь гостям портала. Другие способы начисления средств ? автоматическая активация сразу последствии творения аккаунта и получение подарка по запросу в службу технической поддержки. <a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/8084/#comment-337993>1×slot зеркало рабочее регистрации на телефон придет</a> B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. 1×slots регистрация <a href=http://188.17.148.172/forum/profile.php?action=show&member=827>http://188.17.148.172/forum/profile.php?action=show&member=827</a>
1хслотс рабочее зеркало
Размер приза. В качестве бездепов обыкновенно начисляют небольшие суммы, а когда идет о призах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то кое-какие казино шансы подарить игроку до 2000$. При выполнении условий отыгрыша и верификации, деньги с бонусного счета переводятся на главный и шансы быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции находятся от выбранной платежной системы. <a href=https://warezlover.xyz/user/Waltervep/>https://warezlover.xyz/user/Waltervep/</a> Подтверждение электронной почты – одно из основных условий, коие есть практически в любом бездепозитном казино. Чтобы верифицировать электронную почту, довольно перейти по интенсивной ссылке в письме, полученном от азартного клуба.Шаг 4. Активация. Внимательно исследуйте обстоятельства, информацию по лимитированиям и сроке деяния бонусного предложения. Разобравшись с правилами, можно активировать приз в собственном кабинете (иногда ? с внедрением промокода) или по запросу в саппорт. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Размер приза. В качестве бездепов обычно начисляют маленькие суммы, а когда речь идет о бонусах за депо, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино могут презентовать игроку до 2000$.Если вы новичок в и лишь попали в неизведанную вами область пыла — счет предложений как бездепозитные призы без пополнения.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.gamesims.sk/viewtopic.php?f=10&t=128722>1×slots подтвердит вашу регистрацию если говорить</a>
<a href=http://vn-info.net/user/Josephkam/>рабочее зеркало 1×slots</a>
<a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1 x slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала быстрые выводы. Фишка выплат в том, собственно довольно избрать платёжный инструмент и показать сумму. В большинстве случаев деньги зачисляются на электрические кошельки на 15 минут, а на банковские карты – 1–3 трудящихся денька. Это также благотворительные финансы, коие поступают на аккаунты новоиспеченных геймеров последствии регистрирования. А особенность таких бонусов произведено никаких, собственно обретенные деньги обязательно идет применять в продолжении назначенного медли.
#3943 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
лучшие бесплатные онлайн казино up casino скачать <a href=https://t.me/vchkogpu_ru>порно с Федор Чалов (футбол)</a> скачать casino на андроид porno Ангелина Гончаренко, хоккеистка <a href=https://rucriminal.info/>casino регистрации</a> порно с Дарья Клишина, легкоатлетка 1×bet сайт 1×bet xyz online casino официальный casino 7k рабочее фильмы казино рояль casino бонус казино смотреть онлайн
DiskiPlus порно с Петр Ян (ММА) DiskiPlus casino buzz <a href=https://diskiplus.ru>DiskiPlus kent casino</a> DiskiPlus pin up casino скачать DiskiPlus porno Алена Косторная (фигурное катание) <a href=https://www.diskiplus.ru/>DiskiPlus up casino</a> DiskiPlus казино сочи DiskiPlus Анна Михалкова DiskiPlus pin up casino top top DiskiPlus casino DiskiPlus часы казино DiskiPlus казино ставка DiskiPlus porno Илона Маркова, хоккеистка
#3944 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать на айфон
Максимальная ставка ? уточняется в еденице счета и ограничивает размер ставки за один спин. В случае ее превышения приз имеет быть аннулирован. Также в правилах может находиться запрет на размещение ставок определенного облика, например, по равным шансам в рулетке (другими, на чет либо нечет, красное либо темное и т.д. ).Доступность — бездепозитные бонусы в казино чаще всего предоставляются новым игрокам, хотя посещают случаи, когда бонус имеют получить и действующие клиенты. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> <a href=https://trumpbookusa.com/blogs/259423/Professional-3D-Animation-Services-in-the-Digital-Age>https://trumpbookusa.com/blogs/259423/Professional-3D-Animation-Services-in-the-Digital-Age</a> Ещё одно распространённое акционное предложение – симпатичный подарок с неблаговидными требованиями. К образцу, клуб обещает $100 виде бездепа, но с вейджером х80 или х100. Отыграть такой вейджер практически невозможно и поэтому лучше концентрироваться на больше интересных промоакциях. 1×slots зеркало регистрацию более популярный вариант это <a href=https://www.ytdestek.com/members/24013.html?s=0e5aa71ad8cb2f2074a5f0461dfa63fe>https://www.ytdestek.com/members/24013.html?s=0e5aa71ad8cb2f2074a5f0461dfa63fe</a> Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.Выбирая безвозмездный приз, внимательно изучайте управляла. Убедитесь, собственно вас возможно брать участие в акции. Уточните, в каких играх возможно исполнять условия вейджера. При необходимости задавайте вопросы представителям саппорта.
сайт 1× slots casino
<a href=https://www.goslog.ru/forum/messages/forum1/message12801/11-obrashcheniya-grazhdan?result=reply#message12801>1×slots зеркало рабочее</a> 1×slots официальный зеркало рабочее Каждый новичок и умелый игрок грезят живо стартануть и начать делать настоящие ставки. Для этого довольно отобрать презент, за который надо выплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email либо телефон. После этого администрация начислит щедрое вознаграждение вид даровых вращений или виртуальных кредитов.Минимального оборота. Этот предел уточняется вейджером — пока игрок не поиграет на установленную необходимую, вывод средств будет недоступен. <a href=https://asdmcpe.org/user/WilliamWoubs/>https://asdmcpe.org/user/WilliamWoubs/</a> Некоторые сайты, до чем обмануть регистрацию игроков, предлагают ответить на некоторое базисных вопросов. Цель проведения сходственной викторины – выявить случайных людей, коие не имеют представления о покере, и не допустить получения ими призов. Если посетитель уже играл в казино, то ответить на полтора 10 несложных вопросов будет нетрудно. Очень часто, ответы возможно найти на официальных веб-сайтах данных учреждений. скачать 1×slots на андроид мобильная версия Мы подготовили перечень, где есть практически актуальные и новые бездепозитные бонусы казино, коие вы можете получить безвозмездно. Для наших юзеров есть специальные предложения неповторимые бонусы, коие вы ни не найдете, их мы определили специальной красноватой плашкой «Exclusive».
казино 1×slots официальный сайт
Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.Доступность — бездепозитные призы в казино почаще всего предоставляются новым игрокам, но посещают случаи, когда приз имеют получить и действующие посетители. Однако далековато не все ресурсы предлагают своим посетителям бездепозитные призы за регистрацию в казино. В большинстве случаев учтено поощрение на 1-ый депозит в объеме 100–200%. Это отличная вероятность преувеличить банкролл, прирастить время, проведённое за игрой и шансы сорвать большой куш. <a href=http://balaklavskiy-16.ru/post/1509/#p1509>http://balaklavskiy-16.ru/post/1509/#p1509</a> Можно ли в одном интернет казино получить больше одного бонуса за регистрацию? Нет, например как в каждом онлайн казино есть управляла, к которым нужно держаться, не создавать два аккаута для получения призов, иначе несомненно блокировка обоих аккаутов, не пытайтесь перехитрить онлайн казино, бонус за регистрацию выдаеться один один 1 личику.Составленный специалистами Casino.ru перечень онлайн-казино с бездепозитным призом позволяет игрокам сопоставить спецпредложения различных операторов. казино 1×slots официальный сайт Вейджер (или вагер) ? это наименьшая сумма ставок, коию необходимо устроить для вывода денежного приза. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение.
1× slots зеркало
4. Заберите презент. Чаще всего приз активизируется незамедлительно после регистрации. Но случаются истории, когда нужно забежать в индивидуальный кабинет либо написать в службу поддержки.Бездепозитный приз казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в этом и заключается основное различие. Некоторые клубы автоматически начисляют бонус на акк игрока последствии исполненья условий получения, но случаются истории, когда приз надо(надобно) активировать игроку самому. Есть некоторое способов активации бонуса: 1хслотс 1хслотс регистрация перейти на 1×slots <a href=http://www.en.besatime.com/index.php?subaction=userinfo&user=Oscaracupt>http://www.en.besatime.com/index.php?subaction=userinfo&user=Oscaracupt</a> Также случаются случаи, когда казино начислит обсужденный бонус последствии регистрации свежего клиента по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам.
1×slot казино зеркало
Таким образом интернет казино получает потенциального игрока. Возможно в будущем либо подлинном он захотит поиграть на средства средства. Так трудятся бездепозитные бонусы в интернет казино. Здесь хорошо подходит выражение, бесплатные сыр бывает только в мышеловке. Начинающие игроки шансы не обдумывать опасность пыла. Однако со временем осознания делается больше. Это тема для отдельного обсуждения. В бонусную программку множества операторов входят регулярные бездепы. Это бессрочные промоакции, поощряющие активных неизменных игроков. Популярный формат — раздача фриспинов по конкретным дням недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депозита в мена на накопленные баллы преданности. <a href=https://www.professionistidelsuono.net/forums/member.php?action=profile&uid=240590>https://www.professionistidelsuono.net/forums/member.php?action=profile&uid=240590</a> 1×slots официальный сайт зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://praisenpray.org/forums/member.php?action=profile&uid=63121>1×slots casino зеркало рабочее</a>
<a href=https://surfaceprophets.com/threads/1×-slots-casino-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82.38694/>1× slots casino официальный сайт</a>
<a href=https://forum.oursson.ru/viewtopic.php?f=2&t=12718>1 х слотс зеркало</a>
<a href=http://weeklywars.de/memberlist.php?mode=viewprofile&u=860>1×slots промокод при регистрации</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Новые посетители онлайн-казино без первого депо имеют проверить свою удачливость. К тому же есть вероятность преобразовать бездепы в настоящие средства за регистрацию в казино, однако достичь бонус нужно отыграть согласно условиям акции.
#3945 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
официальные сайты казино порно с Баталина Ольга Юрьевна <a href=https://th-royalgclub.com/>сайты казино</a> r7 casino porno Андрей Рублев (теннис) <a href=https://rucriminal.info/>Любимова Ольга Борисовна порно</a> приложения букмекерских контор гама казино казино 1 порно с Максим Глушенков (футбол) casino рабочее пин ап casino pin бесплатное казино
DiskiPlus зеркала официальных сайтов казино DiskiPlus up casino зеркало <a href=https://diskiplus.ru/>DiskiPlus пина букмекерской конторы</a> DiskiPlus pin casino зеркало DiskiPlus Приезжева Екатерина Геннадьевна порно <a href=https://www.diskiplus.ru/>DiskiPlus казино фильм смотреть онлайн</a> DiskiPlus online casino 7k DiskiPlus казино ставка DiskiPlus порно с Кирьянова Дарья Борисовна DiskiPlus Анна Михалкова DiskiPlus бесплатное казино DiskiPlus casino актуальное зеркало DiskiPlus new casino
#3946 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Илюшникова Татьяна Александровна casino регистрации <a href=https://specreporter.com/>суть казино</a> скачиваемые казино макао казино <a href=https://www.ossetia.tv/>букмекерская контора ставки</a> pin up casino официальный ограбление казино porno Юлия Канакина, скелетонистка up букмекерская контора лучшие букмекерские конторы ограбление казино 1go casino
DiskiPlus сайт pin up casino DiskiPlus порно с Баталина Ольга Юрьевна <a href=https://diskiplus.ru/>DiskiPlus пин casino</a> DiskiPlus слоты казино DiskiPlus порно с Илья Осипов (киберспорт) <a href=https://diskiplus.ru/>DiskiPlus casino daddy</a> DiskiPlus порно с Максим Глушенков (футбол) DiskiPlus порно с Арина и Дина Аверины, гимнастки DiskiPlus порно с Васильева Татьяна Викторовна DiskiPlus бесплатное казино DiskiPlus играющие казино DiskiPlus ев казино DiskiPlus casino актуальное зеркало
#3947 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать
После потребуется внести идентификационный платёж. Это пугает новичков больше всего. Нужно сделать наименьший депозит в 100–500 руб. Таким образом служба защищенности увериться что, нет, собственно платёжный метод принадлежит Вам. Данная процедура необходима для обеспечивания защищенности игровых счетов. Пример, Ваш аккаунт взломают и выведут свои на собственный кошелёк. Будет очень досадно. Поэтому верификация платёжной системы, это необходимый момент.С не отыгранным бонусом запрещается превышать размер наибольшей ставки. Нарушение этого обстоятельства в аннулирование выигрыша. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> Чаще всего применяются коды. Их надо(надобно) заносить в особые окошки регистрационной анкеты, случае речь о пригласительных призах, либо в определенном разделе личного кабинета игрока.Можно. Вы практически сможете отказаться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не сделаете ставку. <a href=https://www.themoviedb.org/u/archicgicom>https://www.themoviedb.org/u/archicgicom</a> 1 x slots casino <a href=http://toolbarqueries.google.co.tz/url?q=http://sar.medguard.ru/bitrix/redirect.php?goto=http://tdsouz.kz/bitrix/redirect.php?goto=https://teletype.in/@urist555/cLT8RCXBloV>http://toolbarqueries.google.co.tz/url?q=http://sar.medguard.ru/bitrix/redirect.php?goto=http://tdsouz.kz/bitrix/redirect.php?goto=https://teletype.in/@urist555/cLT8RCXBloV</a> Но на некоторых азартных платформах похожие вознаграждения имеют получить теперь зарегистрированные пользователи. В таком случае, призы предоставляются в рамках уникальных промоакций либо же некоторым игрокам вид акционного предложения, коие приходит на почту с целью «возвратить» игрока в свое казино.
1хслотс казино зеркало
1× slots сайт Теоретически, к безвозмездным призам можно отнести например называемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, потому собственно они предоставляют лишь вероятность создавать ставки.Подобные бонусы без депозита предоставляются на более выгодных критериях. Зачастую они крупнее, а обстоятельства отыгрыша наименее жесткие. <a href=https://www.cro-escort.com/member.php?124708-DoctorLazutaOr>https://www.cro-escort.com/member.php?124708-DoctorLazutaOr</a> После потребуется внести идентификационный платёж. Это стращает начинающих больше всего. Нужно сделать минимальный депозит в 100–500 рублей. Таким образом служба безопасности увериться никаких, что платёжный метод принадлежит Вам. Данная процедура необходима для обеспечивания безопасности игровых счетов. Пример, Ваш аккаунт взломают и выведут свои на свой кошелёк. Будет очень досадно. Поэтому верификация платёжной системы, это важный момент. 1хслот скачать
1хслотс казино зеркало
Не стоит путать игру в демо и использование призов. В демонстрационном режиме игрок возможность оценить механику слота, сюжет и оформление. Но игра проводится на условные кредиты, потому отсутствует основное ? чувство азарта. Активируя промокод либо фриспины, клиент как не тратит средства деньги на игровые автоматы, но возможность сорвать реальный куш!Наш список включает в себя превосходнейшие бездепозитные бонусы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по главным параметрам: <a href=https://veteran-gazeta.ru/forum/user/386/>https://veteran-gazeta.ru/forum/user/386/</a> В интернет-сети постоянно можно отыскать списки наиболее популярных и обещанных поощрительных программ от популярных онлайн-казино.Бездепозитные призы – это самая небезинтересная и наиболее многообещающая акция интернет-казино. Они в никакого фри-спинов, потому что выплаты в даровых вращениях не гарантированы, ведь комбинации на барабанах игрового аппарата могут не сложиться. 1×slots сайт зеркало На безвозмездные бонусы онлайн-казино практически постоянно распространяется ограничения по стране проживания клиентов. Даже случае вас разрешено раскрывать счет и играть на деньги в заведении, это еще не означают, собственно вас доступны no deposit bonuses.Более солидные предложения встречаются очень редко. Зачастую они доступны лишь VIP-игрокам. В оставшихся случаях им скорее сопутствуют очень жесткие условия отыгрыша. Также вероятны дополнительные обстоятельства и лимитирования, прописанные в условиях и положения бонусной программки казино.
1×slots зеркало которую указывали при регистрации кстати
На бонусные начисления шансы быть установлены дополнительные ограничения, коие Вы не к при отыгрыше. Пока бонус всецело не отыгран — средства из казино не выводятся. Доступность — бездепозитные бонусы в казино почаще всего предоставляются свежим игрокам, хотя посещают случаи, когда бонус могут получить и действующие клиенты.Прочитайте правила бонусной программки, в которой желаете участие. Да, мы настоятельно рекомендуем сделать это до регистрации. Бонусы без депозита при регистрации числятся наиболее привлекательными как для опытнейших игроков, так для и новичков. Получив это вознаграждение, клиент может играть на настоящие деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а условия их активации и выигрыша. 1хслотс официальный сайт зеркало <a href=https://edwinfsck41852.thenerdsblog.com/35925844/ai-nude-app-the-future-of-content-moderation-and-privacy-protection>https://edwinfsck41852.thenerdsblog.com/35925844/ai-nude-app-the-future-of-content-moderation-and-privacy-protection</a> Более солидные предложения встречаются очень изредка. Зачастую они доступны лишь VIP-игрокам. В остальных случаях им всего сопутствуют очень строгие условия отыгрыша. Также возможны дополнительные обстоятельства прочие ограничения, прописанные в критериях и положения бонусной программы казино.
1×slots регистрация 1×slotscasino09k online
Наиболее популярные гонорары среди гэмблеров – бездепозитные призы казино. Это не дивно, ведь можно получить бесплатные вращения либо виртуальные кредиты, и при не придётся пополнять счёт, рисковать собственными средствами. Удастся насладиться различными увеселениями даже выиграть крупную сумму, избегая серьёзного риска.Осталось избрать казино с призом за регистрацию и создать профиль. После активации подарка выигрыш в от Фортуны и способностей. <a href=http://128.199.110.255/home.php?mod=space&uid=332274>http://128.199.110.255/home.php?mod=space&uid=332274</a> Кешбэк-бонус представляет собой возврат фиксированного процента от ставки если, тогда, поражения либо же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не превышает 10%. 1×slots зеркало быструю регистрацию а также мгновенное Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в личный офис, чтобы забрать бесплатные вращения с вейджером х40;Итак, дабы безвозмездные бонусные кредиты трансформировались в настоящие средства, которыми вам распоряжаться по своему усмотрению, их надо(надобно) отыграть. Вейджер стопам уточнять в правилах онлайн-казино.
<b>Смотреть еще похожие новости:</b>
<a href=https://bbs.sinbadgroup.org/index.php?xjkh-tampa-s-poster-pup-for-new-cancer-treatment.t48661.html/page-1168#post-146605>1×slots сайт</a>
<a href=https://orbitsound.com/forum/user-211634.html>1×slots casino регистрация</a>
<a href=https://sadhaka.nl/forum/memberlist.php?mode=viewprofile&u=3268>рабочее зеркало 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы отличный вариант даровой игры в игровые автоматы. Многие пользователи сети не знают, собственно в казино возможно начать выступать полностью даром, а позже исключить выигрыш на банковскую карту или электронный кошелек, иные не доверяют онлайн казино, а третьи успешно играют и выигрывают – и подчас довольно немалые суммы.
#3948 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Владимир Минеев (ММА) porno Алена Михайлова <a href=https://www.ossetia.tv/>1×bet сайт 1×bet xyz</a> kent casino Елена Лядова <a href=https://rumafia.news/>где казино</a> букмекерские конторы в россии вавада казино букмекерская контора без букмекерская контора бесплатно скачать скачать casino на андроид порно с Абрамченко Виктория Валериевна casino актуальное зеркало
DiskiPlus casino актуальное зеркало DiskiPlus porno Мария Шарапова <a href=https://diskiplus.ru/>DiskiPlus casino ап</a> DiskiPlus суть казино DiskiPlus 1×bet зеркало xbet xyz <a href=https://diskiplus.ru>DiskiPlus casino сегодня</a> DiskiPlus porno Марина Александрова DiskiPlus 7k casino скачать DiskiPlus казино смотреть DiskiPlus казино смотреть онлайн бесплатно DiskiPlus казино пину DiskiPlus 7k casino зеркало рабочее DiskiPlus казино рублях
#3949 Charlesgunnyhttp://filmkachat.ru
рабочее зеркало 1хслотс
У каждой забавы средства требования по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система зачтет каждую ставку. В рулетке и покере устроить это намного труднее. Именно поэтому например главно внимательно читать обстоятельства получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой забаве, то новички просто «спустят бонус на ветер».Ниже указан важный список законных казино в Беларуси с бонусами на первый депо. Вы сможете попасть на официальный вебсайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз. <a href=http://filmkachat.ru/>1хслотс официальный сайт зеркало</a> <a href=https://codepen.io/bjxkafyt-the-encoder/pen/bNbrqxY>https://codepen.io/bjxkafyt-the-encoder/pen/bNbrqxY</a> Игры, в которых возможно играть на бонусные средства. Проверьте список игр, каких можно играть на бонусные средства, вполне они Вам не понравятся и не тратить своё время на эту промоакцию. 1×slots зеркало регистрация в 1×slots casino <a href=https://www.amateur-girls-posts.com/forums/profile.php?mode=viewprofile&u=2950500>https://www.amateur-girls-posts.com/forums/profile.php?mode=viewprofile&u=2950500</a>
1×slots зеркало сайта
<a href=http://miupsik.ru/forums/showthread.php?tid=412142>1хслотс зеркало</a> 1×slots официальный сайт скачать Для отыгрыша бонуса казино обязывает игрока поиграть на сумму, в количество один превышающую необходимую полученного бонуса — тут выгода фирмы явна.Бездепозитные бонусы – это исключительно занимательная и более перспективная промоакция интернет-казино. Они и лучше фри-спинов, потому что выплаты в безвозмездных вращениях не гарантированы, так композиции на барабанах игрового аппарата шансы не сложиться. <a href=https://www.catabase.fr/mybb/member.php?action=profile&uid=3963>https://www.catabase.fr/mybb/member.php?action=profile&uid=3963</a> 1×slots регистрация 1×slots casino c2d ru Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?
1хслотс 1хслотс регистрация перейти на 1×slots
Но такие рамки не смущают числе хайроллеров, что коэффициенты на слотах разрешают рассчитывать на солидные выигрыши, а в неких автоматах разыгрывается передовой джекпот. <a href=https://bbs.521zixuan.com/space-uid-802296.html>https://bbs.521zixuan.com/space-uid-802296.html</a> 1×slots casino регистрация на сайте Для получения бездепа нужно пригласить в забаву по реферальной ссылке нового клиента: он должен зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и восполнить счёт на сумму, указанную в условиях акции.
1×slots регистрация
Вейджер (wager) – это коэффициент, кот-ый демонстрирует на какую сумму нужно сделать ставок, чтобы исключить приз из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего бонуса, Вам необходимо устроить ставок на сумму: 500*70=3500 руб. Только всецело отыграв приз, Вы можете вывести собственный выигрыш. 1 x slots <a href=https://inkbunny.net/Sladkovby1709>https://inkbunny.net/Sladkovby1709</a> Получить приветственный приз могут лишь новые клиенты онлайн-казино. Способы описаны в критериях промоакции каждого легального казино, чаще всего это:Обычно, бездепозитные бонусы выдаются под конкретные слоты с фиксированной ставкой, но их наверняка запрещено использовать в игровых автоматах с современным джекпотом. Список игр, в которых возможно использовать бездеп, Вы отыщите в описании акции либо можете уточнить у саппорта заведения.
1× slots casino официальный сайт
<a href=http://bts.clanweb.eu/profile.php?lookup=36698>http://bts.clanweb.eu/profile.php?lookup=36698</a> Не стоит путать игру в демо и использование призов. В демонстрационном режиме игрок может расценить механику слота, сюжет и оформление. Но игра проводится на условные кредиты, потому отсутствует основное ? чувство азарта. Активируя промокод или фриспины, заказчик раньше не тратит свои средства на игровые автоматы, хотя возможность сорвать реальный куш!Приветственный бонус без депо ? подарок за регистрацию. Выдается средствами, фриспинами либо баллами. В заключительном случае бонусные баллы применяются для роли в турнирах либо обмена на настоящие средства. 1хслотс зеркало на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=https://www.globalvision2000.com/forum/member.php?action=profile&uid=1072499>1×slots актуальное зеркало</a>
<a href=https://qualityprogamer.de/forum/showthread.php?tid=410868>1хслот скачать</a>
<a href=https://swordmaster.org/user/JamesVok/>1×slots регистрация то дальше необходимо пройти</a>
<a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=1075251#pid1075251>1×slots официальный регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских рублей. В критериях промоакции указано, собственно вейджер бездепозитного приза х20. Поэтому, дабы отыграть приз, игроку несомненно необходимо устроить ставок на 35*20=700 руб. Такие поощрения дозволяют бесплатно протестировать новое казино, разобраться с игровым ходом интернет слотов, заработать и вывести маленькую сумму средств.
#3950 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Васильева Татьяна Викторовна casino 7k сегодня <a href=https://rumafia.news/>букмекерские конторы pin</a> casino на телефон 1×bet слоты 1×bet top <a href=https://specreporter.com/>Скоробогатова Ольга Николаевна порно</a> pin casino зеркало kent casino регистрация порно с Анна Щербакова, фигуристка смотреть фильм казино букмекерские конторы без депозита casino сайты casino buzz
DiskiPlus порно с Евгения Медведева DiskiPlus porno Илья Ковальчук (хоккей) <a href=https://www.diskiplus.ru/>DiskiPlus макао казино</a> DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus 1×bet 1 <a href=https://diskiplus.ru/>DiskiPlus скачать 1×bet</a> DiskiPlus букмекерские конторы без депозита DiskiPlus 1×bet официальный 1×bet xyz DiskiPlus casino промокод DiskiPlus демо казино DiskiPlus unlim casino DiskiPlus казино гта 5 DiskiPlus 1×bet зеркало слоты
#3951 Charlesgunnyhttp://filmkachat.ru
казино 1×slots официальный сайт
Условия имеют разниться друг от приятеля. Но такой приз возможность быть использован только для игрового процесса – приобретенные на счет финансы до того, как станут отыграны, исключить невероятно.Несмотря на то, что этот вариант стимуляции со стороны азартных платформ очень известен в сфере похожих игр, далековато не всем поклонникам казино знаменито, собственно являют собой бездепозитные бонусы казино и как непосредственно их вероятно эксплуатировать. <a href=http://filmkachat.ru/>1×slots бонус за регистрацию</a> Хотя безвозмездные призы начисляются без депо, не исключено, что для придется заносить средства. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь в такого, как новый клиент впервые пополнит игровой счет.При выполнении условий отыгрыша и верификации, деньги с бонусного счета переводятся на основной и имеют быть выведены на карту или электронный кошелек. Лимиты на вывод и сроки проведения транзакции в от выбранной платежной системы. <a href=https://www.uannounceit.com/article/1415>https://www.uannounceit.com/article/1415</a> 1×slots официальный зеркало рабочее <a href=http://b98415ql.bget.ru/index.php?subaction=userinfo&user=determinedkit67>http://b98415ql.bget.ru/index.php?subaction=userinfo&user=determinedkit67</a> Подтверждение регистрации. Казино просят привязки профиля к электронному адресу и номеру телефонного. Для сего на e-mail отчаливает послание ссылаясь, а на телефон ? текстовое известие с кодом.
1×slots официальный сайт скачать
В настоящее время получить приз за регистрацию в казино очень просто. Почти любой игорный дом с готовностью предоставит деньги либо бесплатные вращения. Многие игроки пользуются данным и не смущяются региться в каждом клубе с выгодными критериями. Кстати, это отличная вероятность выдумать выигрышную стратегию и сорвать куш.С такими ординарными советами любое казино с призом за регистрацию способно принести в разы больше выгоды и пользы. <a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=53244>казино 1×slots</a> 1х слот регистрация в 1×slots casino Несмотря на то, собственно этот вариант стимуляции со стороны азартных платформ довольно моден области похожих игр, далековато не всем поклонникам казино знаменито, что сами бездепозитные призы казино и как непосредственно их вполне эксплуатировать. <a href=http://www.aipingce.com/space-uid-119489.html>http://www.aipingce.com/space-uid-119489.html</a> Минимального оборота. Этот предел уточняется вейджером — пока игрок не сыграет на установленную необходимую, вывод средств будет недоступен. 1×slots акции Постарайтесь отыграть вейджер, дабы замечена возможность оставить заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные приборы. Вы можете получить выигрыш на электронной кошелёк, карту, аппарат.За вербование приятеля ? масштабах партнерской программы заказчик получает вознаграждение за привлечение свежих пользователей.
зеркло казино 1×slots
Не трудно додуматься, что not the slightest deposit bonuses почти никогда не случаются большими. Чаще всего речь идет о пяти–тридцати баксах (или эквиваленте этой суммы в другой еденице).3. Подтвердить данные. В зависимости от клуба, нужно привязать телефонный либо почту, показать персональную информацию; <a href=http://balaklavskiy-16.ru/user/10864/>http://balaklavskiy-16.ru/user/10864/</a> Как только вы отыграли вейджер и свои с бонусного баланса перешли для на реальный счет, Вы отважно можете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать минимальный депо к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депозитом). 1×slots регистрация 1×slotscasino 56 online
1×слотс казино
<a href=https://forum.ltp-team.com/topic/78513–1×slots-rabochee-zerkalo-na-segodnya/>1×slots рабочее зеркало на сегодня</a> Вы не в коем случае ни чем рискуете, а только выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической забавы на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, выучится регулировать изменять ставки и полосы, исследовать бонусные игры и их выигрышные комбинации, ну в конце концов просто зарядится кучей эмоций! Ведь вы будите играть на бонусные свои, коие можно отыграть и исключить, не просто на демо счет, тем наиболее адреналин в крови более повысится а пульс забьется с нередким ритмом! 1×slot рабочее зеркало <a href=http://www.ksmro.co.kr/bbs/board.php?bo_table=free&wr_id=470652>http://www.ksmro.co.kr/bbs/board.php?bo_table=free&wr_id=470652</a> Каждый новичок и умелый игрок мечтают быстро стартануть и начать создавать реальные ставки. Для этого довольно забрать презент, за кот-ый не нужно выплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email или аппарат. После этого администрация начислит щедрое вознаграждение в виде безвозмездных вращений либо виртуальных кредитов.
1×slots регистрация 1×slots casino c2d ru
Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы мгновенно получить 33 безвозмездных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, бывает реальный шанс победу! <a href=https://images.google.com.pa/url?sa=t&url=https://doctorlazuta.by/>https://images.google.com.pa/url?sa=t&url=https://doctorlazuta.by/</a> В разделе с призами активировать собственный презент. Найти забавы, для коих учтено поощрение и применять бонус по назначению.Далее потребуется отыграть вагер и исключить выигрыш. Игрокам без опыта крупно подфартило, меня получить десятки презентов за одну регистрацию. Если не смогли получить Бездепозитный приз, не тревожьтесь. Обратитесь в онлайн чат, оператор поможет решить проблему. 1×slots регистрация 1×slots review live Используйте наилучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из списка ниже, чтобы заработать презенты за обычные действия теперь сегодня получить первый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высокой отдачей и быстрыми выводами на электрические кошельки.Фриплей-бонусы. Бонусы за безвозмездную игру есть только в неких клубах. Они зачисляются сразу последствии творенья профиля и действуют недолговременное время. Если у вас нет медли потратить свои, они просто закончатся. Что касается медли, как призы действуют в течение одного часа.
<b>Смотреть еще похожие новости:</b>
<a href=http://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=6268>1×slots официальный сайт мобильная версия</a>
<a href=https://praisenpray.org/forums/showthread.php?tid=98731>1×slots на любой вкус как пройти регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Иногда у гостей сайта шансы возникнуть проблемы при активации полученного промо-кода. В этих случаях, необходимо обратиться за помощью в службу поддержки «Support». Для получения ответа, обязательно указывается определенная первопричина обращения и подтверждается информация дополнительными скриншотами. Если сложилась спорная обстановка, всегда можно адресоваться к главному регулятору или контролирующему органу, выдавшему данному заведению лицензионный документ. Заработать на бездепозитных бонусах за регистрацию в казино может каждый юзер, достигший совершеннолетия.
#3952 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Хорова Наталья Александровна порно яндекс игры казино <a href=https://rumafia.news/>pin casino</a> casino riobet casino официальный зеркало <a href=https://rumafia.news/>порно с Евгения Медведева, фигуристка</a> приложения букмекерских контор на андроид казино регистрации Скоробогатова Ольга Николаевна порно casino зеркало сайта 1×bet 1хбет casino сегодня сайт казино вход
DiskiPlus 1×bet рабочее DiskiPlus сайте букмекерской конторы фонбет <a href=https://diskiplus.ru/>DiskiPlus 1×bet сайт</a> DiskiPlus Попова Анна Юрьевна порно DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz <a href=https://diskiplus.ru/>DiskiPlus порно с Гатагова Ольга Анатольевна</a> DiskiPlus casino DiskiPlus kent casino DiskiPlus casino приложения DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus 1×bet на андроид бесплатно DiskiPlus 1×bet официальный слоты DiskiPlus спорт букмекерская контора
#3953 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
лучшие онлайн казино казино <a href=https://strelochnik.com/>Нургалиева Эльвира Рамиловна порно</a> порно с Аделия Петросян (фигурное катание) букмекерская контора фонбет официальный <a href=https://glvk.guru/>часы казино</a> porno Юлия Канакина, скелетонистка gama casino casino betting Хорова Наталья Александровна порно казино рублях леон букмекерская контора casino игровой автомат
DiskiPlus porno Вера Бирюкова, гимнастка DiskiPlus сайт казино зеркало <a href=https://diskiplus.ru>DiskiPlus bitz casino</a> DiskiPlus казино пину DiskiPlus порно с Виктория Синицина, фигуристка <a href=https://www.diskiplus.ru>DiskiPlus Разуваева Ксения Денисовна порно</a> DiskiPlus porno Юлия Канакина, скелетонистка DiskiPlus лучшие букмекерские конторы DiskiPlus букмекерская контора зенит DiskiPlus casino официальный сайт DiskiPlus new casino DiskiPlus букмекерские контора ап DiskiPlus порно с Анна Калинская (теннис)
#3954 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на официальном сайте
Бесплатный бонус – кредиты, которые онлайн-казино начисляет клиенту, не заставляя его пополнять игровой счет.Условия отыгрыша приза. Если Вы планируете заработать на бездепозитном призе, то в первую очередь обратите внимание на велечину вейджера и срок, который дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть бонус и вывести выигрыш. <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> <a href=https://www.cyberlord.at/forum/?id=1&thread=19231>https://www.cyberlord.at/forum/?id=1&thread=19231</a> Акционные предложения от казино есть в разных форматах. Часто бонусы даются в размен на депо. Игрок вносит платеж и получает деньги, благотворительные вращения и поощрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — картина бонуса, который гарантирован за исполнение определенных действий на сайте:3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать аппарат либо почту, указать персональную информацию; 1×slots регистрация 1×slotscasino09k online <a href=http://www.zgqsz.com/home.php?mod=space&uid=327304>http://www.zgqsz.com/home.php?mod=space&uid=327304</a>
1× slots casino зеркало
Чтоб получить крупный выигрыш, подбирайте игровые автоматы с максимальным процентом отдачи (RTP) из перечня тех, которые доступны по условиям отыгрыша.Прежде всего, не запамятовывайте периодически заглядывать на страничку обзоров бездепозитных призов. Они шаг за шагом рассматривают более увлекательные предложения ведущих игорных порталов. зеркала 1×slots Во всех законных онлайн-казино Беларуси нужно свидетельство паспортных данных для забавы — это требование правительства государства. <a href=https://forum.kainkalabs.com:443/member.php?action=profile&uid=22115>https://forum.kainkalabs.com:443/member.php?action=profile&uid=22115</a> Практически все онлайн казино с бездепозитным призом за регистрацию учитывает программку преданности — систему поощрения постоянных клиентов, которая произведено из большого уровней. При достижении игроком одного уровня на его счёт поступает бонус. Чем повыше уровень — тем щедрее приз. 1×slots рабочее зеркало
казино 1×slots
На бонусные начисления могут быть установлены вспомогательные лимитирования, которые Вы не сведению при отыгрыше. Пока бонус полностью не отыгран — деньги из казино не выводятся.Наличие у игрока 2 аккаунта. Запрещено создавать количество профилей для неоднократного получения бездепов. <a href=https://cardvilla.cc/members/515558.html>https://cardvilla.cc/members/515558.html</a> 1хслот скачать
1×slots casino регистрация на сайте
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=437243>1×slot зеркало рабочее регистрации на телефон придет</a> За счёт спинов получится запустить разные онлайн слоты, протестировать стратегии и поднабраться навыка. Фишка том,, что вращения начисляются на топовые аппараты с оригинальными опциями и высочайшей отдачей. Не запамятовывайте, что в каждом акционном предложении предусмотрены специальные притязания – кратковременные лимитирования, максимальный размер ставки, список дешевых игр.Активация происходит с помощью промокодов, которые вводятся в личном офисе после регистрации. Среди спецпредложений в списке Casino.ru содержатся эксклюзивные промокоды, коие доступны только посетителям портала. Другие способы начисления средств ? автоматическая активация сразу после творенья аккаунта и получение подарка по запросу в службу технической поддержки. казино 1×slots официальный сайт <a href=https://filmy-hd.ru/user/ForsedropMn/>https://filmy-hd.ru/user/ForsedropMn/</a> Как управляло, новоприбывшие игроки в первую очередь хотят ознакомиться с методами ввода и вывода валютных средств и сроки выполнения поданных заказов чтобы четко понимать, как прытко у исключить собственный казино приз за регистрацию без депо на электрический кошелек или же банковскую карту. К счастью для всех играющих, внутри конкретных холдингов, все казино конкурируют между собой. Ведь в бы определенную компанию давало лишь одно онлайн-заведение, то навряд бы клиенты увидели казино с бонусом за регистрацию и возможность бы рассчитывать только на вознаграждение повторяющий бонуса на 1-ое вложение. К каждому заведению периодически по завлекать свежих игроков, собственно, в, только на руку всем играющим.
казино 1× slots официальный сайт
Такой безвозмездный эквивалент средств зачисляется на профиль юзера в осуществления требований и предназначаются они только для игрового процесса. Вывод этих вознаграждений возможен лишь в осуществления вейджеровых условий. Мы подготовили список, где есть постоянно животрепещущие и свежие бездепозитные призы казино, которые вам получить даром. Для наших пользователей есть особые предложения эксклюзивные призы, которые вы у не отыщите, их мы обозначили особой красной плашкой «Exclusive».При ирге на бонусные средства запрещается выступать в игровые автоматы с современным джекпотом и забавы из радела live casino. Кроме того, некоторые казино дают бездеп на раз либо некоторое определенных слотов, и в иных играх Вы не можете на них выступать. <a href=https://pastebin.com/u/Glavdorogadv2106>https://pastebin.com/u/Glavdorogadv2106</a> 1×slot рабочее зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=107812&extra=>1×slots регистрация 1×slotscasino 56 online</a>
<a href=https://melhorlance.com.br/minha-conta/>онлайн казино 1×slots</a>
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=55866&extra=>1хслотс рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если идет об эксклюзивных предложениях, может потребоваться регистрация в казино по ссылке с партнерского вебсайта. В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая приятная часть игры. Важно, часто бездепозитные призы в казино выдаются с ограничениями по наибольшей выплате. В среднем возможно рассчитывать на прибыль в количество тыщ рублей. Как исключить выигрыш с приза без депо. Придётся доказать акк документально, в неких заведениях. Процедура верификации обязательна и делается каждым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате либо прочитайте в правилах.
#3955 Empathy_emimahttps://empathycenter.ru/
Доброго времени суток! В центре «Эмпатия» оказывается помощь в устранении ряда психологических барьеров и неврологических нарушений: чувства вины, страхов, тревог, раздражительности, депрессии, навязчивых мыслей и образов, неуверенности в собственных силах, стеснительности, низкой самооценки, панических атак и сексуальных проблем. В качестве терапевтических методов используются: индивидуальная работа с нейропсихологом, психотерапевтическое программирование, стратегическая терапия, групповая терапия.<a href=https://empathycenter.ru/>https://empathycenter.ru/</a> Если Сеть клиник доказательной психиатрии или empathycenter.ru в Реутове и Москве, то это в Эмпатия Центр https://empathycenter.ru/ . Консультации как очно в Реутове и Москве, так и онлайн по всей России. Сеть клиник доказательной психиатрии «Эмпатия». Звоните и консультируйтесь по бесплатному номеру 8–800–775–07–12. Увидимся!
#3956 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
бесплатно играем казино песня казино <a href=https://t.me/vchkogpu_ru>vavada casino</a> порно с Гатагова Ольга Анатольевна casino x <a href=https://rumafia.news/>1×bet зеркало рабочее</a> 1×bet 1 почему в казино нет часов 1go casino 1×bet телефон лучшая казино casino betting казино рулетка
DiskiPlus букмекерскую контору пин DiskiPlus ограбление казино <a href=https://diskiplus.ru>DiskiPlus 1×bet официальный сайт</a> DiskiPlus Окладникова Ирина Андреевна порно DiskiPlus яндекс игры казино <a href=https://diskiplus.ru/>DiskiPlus казино онлайн бесплатно</a> DiskiPlus ramenbet casino DiskiPlus промокод 1×bet DiskiPlus пин up casino DiskiPlus букмекерская контора без DiskiPlus porno Виктория Баркова, легкоатлетка DiskiPlus порно с Виктория Синицина, фигуристка DiskiPlus почему казино
#3957 Charlesgunnyhttp://filmkachat.ru
1хслот официальный сайт зеркало
Бездепозитный приз – это финансовое вознаграждение, которое выдается соучастнику забавы в казино, для его вербования и появления заинтригованности. Любой гость, кот-ый соответствует условиям выдачи сходственного бездепозитного бонуса, может претендовать на получение вышеуказанного приза. Такое одобрение является наиболее эффективным способом, дающим возможность стартовать при, не вкладывая личных вещественных средств. <a href=http://filmkachat.ru/>1×slots казино зеркало</a> Как только на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу последствии этого можно оставить заявку на вывод выигрыша. Кредиты выгодно выделяются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом настоящих средств и дают возможность ощутить азарт. Во-вторых – возможно насладиться каждой азартной забавой доступной на сайте. В вашем распоряжении находятся автоматы, настольные приложение, видео-покер, Live-дилеры. <a href=https://divisionmidway.org/jobs/author/archicgi-com/>https://divisionmidway.org/jobs/author/archicgi-com/</a> 1×slots регистрацию более популярный вариант это <a href=http://silkhunter.com/index.php?title=Выкуп_авто>http://silkhunter.com/index.php?title=Выкуп_авто</a>
1×slot рабочее зеркало
1 х слотс зеркало Итак, чтобы благотворительные бонусные кредиты превратились в настоящие средства, которыми продоставляется управлять по своему усмотрению, их нужно отыграть. Вейджер по уточнять в правилах онлайн-казино.На бонусные начисления имеют быть установлены дополнительные ограничения, коие Вы не сведению при отыгрыше. Пока приз всецело не отыгран — деньги из казино не выводятся. <a href=http://www.so0912.com/home.php?mod=space&uid=2233733>http://www.so0912.com/home.php?mod=space&uid=2233733</a> 1×slots зеркало рабочее Не советуем сломя голову браться за различные предложения получения средств без вложений. Вполне вероятно, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем смотрится на 1-ый взор. Альтернативой считается казино приз за депозит. Мы предлагаем вас пару советов, благодаря которым у любого игрока несомненно возможность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом средств:Более крупные предложения встречаются очень редко. Зачастую они доступны лишь VIP-игрокам. В оставшихся случаях им скорее сопутствуют довольно жесткие условия отыгрыша. Также возможны вспомогательные условия прочие ограничения, прописанные в критериях и положения бонусной программки казино.
1×slots рабочее зеркало
Отказ в прохождении верификации. Если заказчик не желает или возможности дать документы, подтверждающие его лицо, профиль будет заблокирован совместно, вкупе со всеми бонусными начислениями.Используйте наилучшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, чтобы заработать презенты за простые деяния теперь сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высокой отдачей и прыткими выводами на электронные кошельки. Ограничения по забавам. Администрация воспрещает игрокам некоторые игровые автоматы с бездепозитным призом, деньгами или бесплатными вращениями. Обычно, в правилах приводится полный перечень слотов для отыгрыша. Иногда разделение выполняется по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino.Постарайтесь отыграть вейджер, дабы была вероятность оставить заявку на выплату. Кстати, на всех сайтах, представленных в списке, доступны современные платёжные приборы. Вы можете получить выигрыш на электронной кошелёк, карту, телефон. <a href=http://build-info.biz.ua/wr_board/tools.php?event=profile&pname=omniscientengin>http://build-info.biz.ua/wr_board/tools.php?event=profile&pname=omniscientengin</a> Какие призы я могу еще получить не бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, любое онлайн казино предлагает игрокам выгодное предложение на первый депо, вы совершаете депо, ваш депо возрастает в двое либо том в 3, что, этим наиболее начать играть возможно с более крупной суммой, например же не запамятываем про вейджер на призы. 1×слотс казино На странице представлены бездепозитные бонусы за регистрацию в казино редкая заслуга за которой гонятся все игроки как новички, так и мастера. Мы также уделяем огромное внимание на присутствие призов при формирование рейтинга казино на средства. Бездепозитный бонус это вероятность играть бесплатно и выиграть настоящие средства.В некоторых интернет казино для получения бездепозитных призов не довольно просто зарегистрироваться на веб-сайте клуба и доказать свои контактные данные. Дополнительно требуется активация промокода.
1×slots регистрация 1×slots casino c2d ru
Размер приза. В качестве бездепов обычно начисляют очень суммы, а когда речь о бонусах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино шансы подарить игроку до 2000$.Бонусы без депо при регистрации числятся наиболее красивыми как для опытных игроков, так для и начинающих. Получив это вознаграждение, заказчик имеет играть на настоящие средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а обстоятельства их активации и выигрыша. <a href=https://forum.eliteshost.com/showthread.php?tid=16976>1×slots зеркало регистрацию более популярный вариант это</a> Для получения предоставленных бонусов для пригодиться — ПК либо мобильное устройство, и остальное дело за небольшим. Можно. Вы постоянно сможете отрешиться от получения бездепозитного бонуса за регистрацию в казино, же Вы не сделаете ставку. 1×slots казино зеркало <a href=http://polegasm.net/index.php/forum/suggestion-box/149486>http://polegasm.net/index.php/forum/suggestion-box/149486</a>
1×slots рабочее зеркало
Наиболее пользующиеся вознаграждения среди гэмблеров – бездепозитные призы казино. Это не умопомрачительно, ведь можно получить бесплатные вращения либо виртуальные кредиты, и при не придётся пополнять счёт, рисковать личными средствами. Удастся насладиться различными веселиями и даже выиграть солидную необходимую, избегая серьёзного риска.Сразу последствии активации промокода возможно воспользоваться презентом. Как теснее упоминалось, бонусы посещают трёх обликов – фриспины, кредиты и фриплей-бонусы. В случае установленного лимита на сумму вывода выигрыша с бездепозитного бонуса, игрок не может вывести больше заявленной суммы. <a href=http://empyrethegame.com/forum/memberlist.php?mode=viewprofile&u=324522>http://empyrethegame.com/forum/memberlist.php?mode=viewprofile&u=324522</a> Используйте превосходнейшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из перечня ниже, чтобы заработать презенты за обычные действия теперь сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высочайшей отдачей и резвыми выводами на электронные кошельки.Большинство интернет-казино из нашего топ-10 готовы порадовать вас неповторимыми промоакциями. Читайте о них в обзорах и на форуме. 1×slots зеркало этих способов предполагает регистрацию Бездепозитный приз за регистрацию в казино — это стартовый подарок в виде валютного начисления или безвозмездных вращений для свежих игроков заведения, для получения которого не нужно вносить депо.Существует ли стратегии для отыгрыша бездепозитных бонусов? К сожалению нет, на выигрыши или проигрыши с призов, казино либо игрок повлиять имеет, отдача игр происходит от разработчиков игр.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.fromrus.su/index.php?/topic/22242–1×slots-%D0%B1%D0%BE%D0%BD%D1%83%D1%81-%D0%B7%D0%B0-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8E/>1×slots бонус за регистрацию</a>
<a href=https://ragnarok.ch/forum/viewthread.php?thread_id=141170>1хслотс регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Суммы похожих услуг, в, колеблются от трех до 20 $, а вейджер на эти средства обязан составлять от 30 до шестидесяти раз. Зачастую, величайшая сумма выигрыша тут составит от одной до 2-ух сотен $. Если игры выиграет больше, то все средства имеют быть списанными до максимально разрешенного выигрыша. Здесь бывает смысл выводить еще несуществующие финансы на свою платежную систему и дальше находить заведение с благоприятными под данную необходимую релоадом либо бонусом за первое пополнение счета. Есть несколько подвидов бездепозитного гонорары, предлагаемого большим количеством заведений.
#3958 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино рояль смотреть casino автомат <a href=https://res-publika.com>как выиграть в казино</a> гта онлайн казино игры казино <a href=https://rumafia.news/>почему казино</a> порно с Диана Шнайдер (теннис) казино играть 1×bet зеркало рабочее xbet смотреть фильм казино casino промокод порно с Алексей Миранчук (футбол) человек казино
DiskiPlus сайт казино вход DiskiPlus скачать 1×bet 1×bet xyz <a href=https://www.diskiplus.ru>DiskiPlus casino com</a> DiskiPlus порно с Анна Калинская (теннис) DiskiPlus casino автомат <a href=https://diskiplus.ru/>DiskiPlus 1×bet зеркало рабочее</a> DiskiPlus букмекерская контора зенит DiskiPlus карты казино DiskiPlus Приезжева Екатерина Геннадьевна порно DiskiPlus порно с Дарья Клишина, легкоатлетка DiskiPlus 1×bet зеркало рабочее на сегодня DiskiPlus порно с Георгий Джикия (футбол) DiskiPlus порно с Владимир Минеев (ММА)
#3959 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация то дальше необходимо пройти
Далее требуется отыграть вагер и вывести выигрыш. Игрокам без навыка крупно подфартило, у получить десятки даров за 1 регистрацию. Если не смогли получить Бездепозитный бонус, не беспокойтесь. Обратитесь в интернет чат, оператор поможет исправить. <a href=http://filmkachat.ru/>1х слотс зеркало регистрация в 1×slots casino</a> Рассмотрим принцип его деянья на образце. Допустим, вы зарегались и получили $10 no deposit bonus с вейджером х50. Это значит, что выигранные деньги возможно несомненно выводить не ранее, чем после такого, как общая сумма ставок достигнет $500.Зарегистрируйтесь. Для регистрации чаще всего достаточно ввести собственный номер телефона и почтовый адрес, последствии чего ввести полученный код из СМС. Возможно, требуется указать промокод. В правилах промоакции несомненно написано, где его бы включать. Иногда это хотелось делать при регистрации, иногда — уже в сотворения личного кабинета, на отдельной странице. <a href=https://myanimelist.net/profile/shopavto>https://myanimelist.net/profile/shopavto</a> Важно, удостоверьтесь что, нет, собственно ранее не регистрировались в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи.Разные казино имеют собственные верховодила по выведению выигрыша. Для бездепозитных призов принимаются достаточно высочайшие требования. Часто онлайн-казино советуют отыграть бонусное одобрение до 100 раз в игровых автоматах. Например, случае игрок получил даром десять долларов, то нужно несомненно отыграть их, поставив 1 тысячу спинов по 1 доллару каждый. Стоит отметить, собственно не все казино выделяют возможность играть на бонусы и не во всех увеселительных заведениях идентичные управляла для отыгрывания. Некоторые казино запрещают выступать на призы в блекджек либо ограничивают ставки до пяти %, что существенно увеличивает в десятки раз количество нужных игр. казино 1×slots <a href=http://twchess.lionfree.net/discuz/home.php?mod=space&username=Oscarzen>http://twchess.lionfree.net/discuz/home.php?mod=space&username=Oscarzen</a> Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные способы и расценить особенности, недоступные при этой в демо режиме. Многие новые клиенты переходят в количество постоянных, а оператор получает длительную прибыль.
1×slots официальный зеркало рабочее
<a href=https://forum.vn.ua/showthread.php?p=3280100#post3280100>рабочее зеркало 1×slots</a> 1×slots регистрация Максимальный размер ставки, который невозможно превышать пока бонус не несомненно всецело отыгран. В случае нарушения сего верховодила, приз и выигрыш с него будут аннулированы. <a href=http://antiugon.center/index.php?subaction=userinfo&user=tenderinterior9>http://antiugon.center/index.php?subaction=userinfo&user=tenderinterior9</a> Возможность протестировать новые забавы, не рискуя личностными средствами и разработать собственную стратегию забавы.Существует ли стратегии для отыгрыша бездепозитных призов? К раскаянию нет, на выигрыши или проигрыши с призов, казино или игрок воздействовать не может, отдача игр происходит от создателей игр. 1×slots казино зеркало У нас на сайте Вы найдете список призов без депо в проверенных казино и доскональную информацию о том как их получить и применять.Но а в вы уже профи по интернет казино, кликаем на красноватую кнопку «Получить» и Вы автоматически перейдете в онлайн казино;
скачать 1×slots на андроид мобильная версия
Для вывода средств приз нужно несомненно отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами акции и вариациями отыгрыша бездепозитного бонуса до его получения, дабы избежать конфликтных ситуаций. <a href=http://dns2.shadr.ru/user/Raymondliady/>http://dns2.shadr.ru/user/Raymondliady/</a> Мы подготовили список, где есть постоянно животрепещущие и свежие бездепозитные призы казино, которые вам получить даром. Для наших пользователей есть особые предложения эксклюзивные призы, которые вы у не отыщите, их мы обозначили особой красной плашкой «Exclusive». 1× слот зеркало
онлайн казино 1×slots
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=435165>1хслот 1хслотс регистрация перейти на 1×slots</a> 1×slots сайт <a href=https://hallbook.com.br/blogs/307090/A-Comprehensive-Guide-to-3D-Architectural-Rendering-for-Modern-Design>https://hallbook.com.br/blogs/307090/A-Comprehensive-Guide-to-3D-Architectural-Rendering-for-Modern-Design</a> На бонусные начисления шансы быть установлены вспомогательные лимитирования, коие Вы не к при отыгрыше. Пока приз всецело не отыгран — деньги из казино не выводятся.Выбор каждого онлайн казино на нашем сайте. В описании к любому Вы можете узнать, что получите за творение аккаунта.
casino 1×slot
Баланс игрока дополняется на подходящую сумму. К ней применяется вейджер, указанный в правилах промоакции. Вывести выигрыш можно будет в такого, как юзер сделает требуемый размер ставок из личных средств. В редких случаях бездеп трудится в формате Free Play. На счет пользователя зачисляется большая сумма, и предоставляется малый срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по завершении сего периода сумма на счету будет превосходить первоначальную, то разницу можно будет вывести или использовать для дальнейших ставок.Иногда операторы просят внесение минимального депозита перед выводом для верификации платежного инструмента. В некоторых казино данный депо того светит отыграть. <a href=http://ezevertech.com/bbs/board.php?bo_table=free&wr_id=14641>http://ezevertech.com/bbs/board.php?bo_table=free&wr_id=14641</a> Бездепы обычно предлагают с отыгрышем — мгновенно исключить выигранные свои невозможно. Перевод денег со счета будет возможен в такого, как пользователь выполнит все требования казино, а сумма имеет быть выше установленного правилами лимита. Условиями акции фиксируются сроки, протяжении которых клиент вправе воспользоваться предложением. Обычно они не превышают нескольких дней в активации.Чем ниже велечину вейджера, тем легче отыграть и вывести бонус. Если Вы планируете заработать на бездепе, но просто ознакомиться с новым игровым клубом, то стоит игнорировать призов с высочайшим вейджером их практически не реально отыграть. С ними Вы можете только протестировать забавы заведения. 1×slots casino online регистрация Но на некоторых азартных платформах сходственные вознаграждения имеют получить теперь зарегистрированные юзеры. В таком случае, бонусы предоставляются масштабах оригинальных промоакций либо же некоторым геймерам повторяющий акционного предложения, коие прибывает на почту с целью «возвратить» игрока в свое казино.В лицензионных бездепозитных казино играть в азартные игры вправду неопасно. Наличие лицензии подтверждает тот прецедент, что клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.puppylinux.pl/index.php?topic=917.new#new>1×slots регистрация 1×slots casino 777 online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную процедуру активации бонуса без депо. Внимательно прочтите до конца. Многие новенькие делают оплошности на этапе регистрации и потому не получить подарок.
#3960 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино смотреть онлайн пари букмекерская контора <a href=https://rucriminal.info/>сайты казино</a> new casino kent casino <a href=https://glvk.guru/>Радченко Светлана Юрьевна порно</a> пина букмекерской конторы промокод 1×bet пин ап casino pin Хорова Наталья Александровна порно казино можно Скворцова Вероника Игоревна порно Попова Анна Юрьевна порно
DiskiPlus porno Александр Соболев (футбол) DiskiPlus casino pin официальный <a href=https://www.diskiplus.ru/>DiskiPlus casino pin официальный</a> DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz DiskiPlus бесплатные букмекерские конторы <a href=https://www.diskiplus.ru>DiskiPlus casino на телефон</a> DiskiPlus pin up casino зеркало DiskiPlus порно с Анастасия Потапова, теннисистка DiskiPlus 1×bet зеркало рабочее DiskiPlus 7k casino официальный DiskiPlus bitz casino DiskiPlus лучшие онлайн казино DiskiPlus мелбет букмекерская контора
#3961 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet скачать приложение на андроид порно с Елена Никитина, скелетонистка <a href=https://specreporter.com/>vodka casino</a> порно с Владимир Минеев (ММА) порно с Алина Загитова <a href=https://sovsekretno.net/>казино без</a> порно с Максим Глушенков (футбол) где казино pin up casino скачать порно с Ирина Сидоркова 1×bet 1хбет 7k casino зеркало рабочее сколько казино
DiskiPlus рокс казино DiskiPlus винлайн букмекерская контора <a href=https://diskiplus.ru/>DiskiPlus Лут Оксана Николаевна порно</a> DiskiPlus bet casino DiskiPlus гама казино <a href=https://www.diskiplus.ru/>DiskiPlus пари букмекерская контора</a> DiskiPlus Александра Бортич DiskiPlus Александра Бортич DiskiPlus казино вход DiskiPlus скачать pin casino DiskiPlus порно с Карен Хачанов (теннис) DiskiPlus гама казино DiskiPlus casino вход
#3962 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Афонина Марина Игоревна porno Ангелина Гончаренко, хоккеистка <a href=https://strelochnik.com/>7k casino сайт</a> автомат казино почему в казино нет окон <a href=https://7club7.com/>r7 casino</a> песня казино 1×bet на сегодня Шевцова Татьяна Викторовна порно порно с Елена Никитина, скелетонистка порно с Арина и Дина Аверины, гимнастки 1×bet зеркало рабочее на сегодня 1×bet xyz порно с Елена Никитина, скелетонистка
DiskiPlus гама казино DiskiPlus pin up casino top top <a href=https://diskiplus.ru>DiskiPlus лучшая казино</a> DiskiPlus porno Александр Соболев (футбол) DiskiPlus 1×bet xbet xyz <a href=https://diskiplus.ru>DiskiPlus casino скачать</a> DiskiPlus casino com DiskiPlus casinos winning DiskiPlus скачать букмекерскую контору на андроид DiskiPlus казино ставка DiskiPlus porno Нина Пирогова, хоккеистка DiskiPlus ставки на спорт букмекерские конторы DiskiPlus порно с Бондаренко Анастасия Борисовна
#3963 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
как выиграть в казино казино вулкан <a href=https://res-publika.com>1×bet зеркало слоты</a> porno Андрей Рублев (теннис) 1×bet зеркало рабочее xbet <a href=https://rucriminal.info/>букмекерская контора фонбет официальный</a> кент казино casino ru Крючкова Полина Викторовна порно casino официальный сайт Преподобная Надежда Александровна порно 1×bet слоты официальный сайт казино пину
DiskiPlus 1×bet зеркало на сегодня DiskiPlus 1×bet зеркало рабочее на сегодня <a href=https://www.diskiplus.ru/>DiskiPlus пинко casino</a> DiskiPlus порно с Юлия Ефимова, пловчиха DiskiPlus 1×bet xbet <a href=https://diskiplus.ru>DiskiPlus Радченко Светлана Юрьевна порно</a> DiskiPlus бесплатные букмекерские конторы DiskiPlus casino сайты DiskiPlus порно с Анастасия Потапова, теннисистка DiskiPlus porno Илья Ковальчук (хоккей) DiskiPlus порно с Ирина Сидоркова DiskiPlus спорт букмекерская контора DiskiPlus porno Марина Александрова
#3964 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало
Фриплей-бонусы. Бонусы за благотворительную игру есть лишь в некоторых клубах. Они зачисляются сразу в создания профиля и срабатывают непродолжительное время. Если у вас нет времени потратить средства, они просто закончатся. Что касается медли, как бонусы срабатывают на одного часа. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> Для проверки применяются сканы паспортов, водительских удостоверений, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь замечен в попытке ввести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их владелец попадает в темный список. При игре на лицензионной площадке надо опасаться свидетельствовать достоверную индивидуальную информацию (шифрование ликвидирует утечку персональных данных).Мы собрали и опубликовали список наихороших бездепозитных казино с бонусами за регистрацию, коие гарантируют великодушные выигрыши и мгновенные выплаты. <a href=https://app.roll20.net/users/15345358/vykup-avariinykh-avto-p>https://app.roll20.net/users/15345358/vykup-avariinykh-avto-p</a> 1×slot зеркало <a href=http://bbs.ztbs.cn/home.php?mod=space&uid=107065>http://bbs.ztbs.cn/home.php?mod=space&uid=107065</a> Выиграть настоящие деньги в казино не пополняя счет – трудно, но вполне. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными бонусами и начните выступать на бонусные средства. По статистике из 10-ти заведений можно заработать маленькую сумму денег помощью бонусных средств.Фриспины — благотворительные вращения, коие дозволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся самым знаменитым и преимущественным обликом приза — благотворительные вращения иногда эффективнее и веселее в отыгрыше, чем остальные облики бездепов.
1×slots регистрация то дальше необходимо пройти
<a href=http://evtrucksforum.com/viewtopic.php?p=917198#p917198>1×slots зеркало которую указывали при регистрации кстати</a> 1×slots казино зеркало <a href=http://chelmaps.ru/index.php?subaction=userinfo&user=verdantbroker17>http://chelmaps.ru/index.php?subaction=userinfo&user=verdantbroker17</a> Акции, приуроченные к календарным дням, случаются рассчитаны как на всех юзеров, так и на категории: примеру, подарок на 8 марта девушкам-игрокам или мужчинам на 23 февраля.Фриспины без депо либо дополнительные свои помогут поближе познакомиться с игровой платформой и её функциями. За счёт подарков возможно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям из-за игры напротив живых крупье. 1 х слотс зеркало
1×slots на любой вкус как пройти регистрацию
Обыкновенные бездепозитные призы в размере от 3-х до двадцати долларов созданы для того, чтобы в игры заходили все свежие и свежие игроки. Здесь, скорее, несомненно лимитирование на максимальный выигрыш. Важно, дабы перед наименьшим вкладом был отключен приз за первое пополнение счета, и игры не попадет на повторный вейджер.Воспользоваться бездепом можно не во всех игровых автоматах: казино вдруг уточняет ограничение для посетителей. Конечно, это можно посчитать неким неудобством для игрока, хотя справедливости ради необходимо, собственно выбор автоматов всё также остаётся довольно наибольшим. Способы получения бездепа различаются зависимо вида бонуса, кот-ый приглянулся игроку. Но вам иначе нужно быть зарегистрированным в законном онлайн-казино и доказать собственную лицо. В общем облике пошаговая аннотация для получения бездепозитного бонуса выглядит так:А ознакомиться с свежими интернет казино, Вы можете за счет бонусов с выводом выгоды, коие Вы можете получить без депо. <a href=http://www.pr-bio.co.kr/eng/bbs/board.php?bo_table=free&wr_id=243309>http://www.pr-bio.co.kr/eng/bbs/board.php?bo_table=free&wr_id=243309</a> Возьми собственный презент. Чаще всего приз активизируется сразу после регистрации. Но посещают ситуации, когда нужно забежать в собственный офис или написать в справочную службу. 1 x slots casino
1хслотс казино зеркало
Бездепозитный бонус казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в данном и содержится главное различие. Рассмотрим принцип его деяния на примере. Допустим, вы зарегистрировались и получили $10 not the slightest deposit bonus с вейджером х50. Это значит, что выигранные средства можно несомненно выводить не раньше, чем после как, как общая сумма ставок достигнет $500.Существует ли стратегии для отыгрыша бездепозитных бонусов? К раскаянью нет, на выигрыши или проигрыши с бонусов, казино или игрок повлиять имеет, отдача игр происходит от разработчиков игр. Бонусы без депозита при регистрации считаются самыми привлекательными как для опытных игроков, так для и новичков. Получив это вознаграждение, заказчик возможность играть на настоящие средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, еще условия их активации и выигрыша.Даже не выиграв солидную необходимую, игрок интересно проведет время, изнутри исследует работу площадки, воспримет геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе наилучших промоакций легко. Достаточно периодически учить перечень новых онлайн казино с выводом приза без депозита в этом разделе. 1×slots на любой вкус как пройти регистрацию <a href=https://web.xndl.com/home.php?mod=space&uid=635688>https://web.xndl.com/home.php?mod=space&uid=635688</a>
1×slots актуальное зеркало
Бездепозитные бонусы, как теснее понятно, являются оригинальной возможностью обратиться игровому процессу безусловно бескорыстно, словами играть в онлайн казино безвозмездно и на существующие свои незамедлительно последствии регистрации аккаунта. Автоматы с таким депозитом все стать великолепной возможностью сыграть для поклонников пыла с определенными ограничениями в финансах. <a href=https://praisenpray.org/forums/member.php?action=profile&uid=67328>https://praisenpray.org/forums/member.php?action=profile&uid=67328</a> 1×slots casino регистрация 1×slots review live Изучить управляла и обстоятельства получения бездепозитных призов казино, Вы можете у нас на веб-сайте в разделе с призами либо на официальном сайте избранного Вами казино. Если возможности найти необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электрической почте.Самый распространённый из подобных призов, естесственно же, бездеп на день рождения посетителя — приз вид фиксированной суммы либо фриспинов поступает на счёт игрока, а воспользоваться им можно протяжении установленного периода медли.
<b>Смотреть еще похожие новости:</b>
<a href=http://medforum.5nx.ru/viewtopic.php?f=4&t=6065>1×slos регистрация в 1×slots casino</a>
<a href=https://nztw.org/thread-362828–1–1.html>1 x slots casino</a>
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=7879>1хлот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Так же стоит выделить то, собственно в каждом интернет казино установлен свой максимальный кешаут на бездепозитный бонус. Как верховодило кешаут — это предельная сумма денег, кот-ая доступная для вывода с бездепозитного приза. Обычно для получения бонусов без депо, казино выдвигает лояльные и абсолютно выполнимые условия, но есть ряд деяний которые воспрещены и могут повлечь за собой противные последствия:
#3965 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
Чтобы без увериться в превосходстве бездепозитных призов, достаточно зарегистрироваться в казино и получить одобрение. <a href=http://filmkachat.ru/>1×slots регистрация то дальше необходимо пройти</a> Прежде всего, не забывайте периодически заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом оценивают наиболее интересные предложения водящих игорных порталов.Oтыгpaть приз с обозначенным вeйджepом, желаемого необходимо сдeлaть cтaвoк нa cумму, превосходящую объем бонуса в некоторое раз. <a href=https://peertrainer.com/LoungeCommunityThread.aspx?ForumID=1&ThreadID=316720>https://peertrainer.com/LoungeCommunityThread.aspx?ForumID=1&ThreadID=316720</a> 1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, если не желайте стать жертвой мошенников или впустую потратить время; 1×slots регистрация 1×slots review live <a href=http://xn----ptbagsgdho0d.xn–p1ai/index.php?subaction=userinfo&user=immenserunt18>http://xn----ptbagsgdho0d.xn–p1ai/index.php?subaction=userinfo&user=immenserunt18</a> Если площадка презентует бездеп за регистрацию, то процедура его получения проста. Нужно лишь завести акк на веб-сайте и активировать его, подтвердив адресок электронной почты, номер телефонного или иные данные, которые настятельно оператор. Перед данным необходимо убедиться, собственно юзер находится на официальном веб-сайте казино, а не на жульнической площадке.Шаг 5. Использование и отыгрыш. Бездеп обязан быть использован в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера.
казино 1×slots официальный сайт
1×slots актуальное зеркало <a href=https://bans.org.ua/index.php?action=profile;u=1360419>https://bans.org.ua/index.php?action=profile;u=1360419</a> Первый образующийся вопрос, это, для выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают новых игроков. Последним легче начать игру на средства с подарка за регистрацию. Им надо пополнять баланс и расходовать личностные средства. Новички получают благотворительные спины или свои на счёт. С их поддержкой знакомятся с игровым процессом, крутят слоты и делают ставки в рулетке. 1×slots зеркало регистрация то дальше необходимо пройти Обычно бездепозитные акции от казино, прибывают на эл. Почту в дни рождения либо праздники. В неких интернет казино можно обратиться в чат и как неизменному игроку, возможно вас предложат бездепозитное предложение.Таким образом онлайн казино получает потенциального игрока. Возможно в будущем либо истинном он захочет поиграть на средства средства. Так работают бездепозитные призы в интернет казино. Здесь хорошо подходит выражение, безвозмездные сыр бывает только в мышеловке. Начинающие игроки шансы не осознавать опасность пыла. Однако времени понимания делается больше. Это тема для отдельного обсуждения.
1×slots официальный сайт зеркало
На данном разделе портала периодически публикуются обзорные заметки, в рассматриваются безвозмездные бонусы наилучших интернет-казино. Информация структурирована по нескольким пт, включая главные: Бездепы имеют заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой либо баллами.Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам воспрещено начислять бонусы посетителям, не имеющим денежных средств на счете. Мы предлагаем осмотреть актуальные призы онлайн-казино с лицензией, которые соблюдают законодательство РБ. <a href=http://specforum.smartbuy.ru/bitrix/redirect.php?goto=http://tornado.nsk.ru/bitrix/redirect.php?goto=http://repository.kaznaru.edu.kz/cgi/set_lang?referrer=https://teletype.in/@urist555/bEM115TIt_T>http://specforum.smartbuy.ru/bitrix/redirect.php?goto=http://tornado.nsk.ru/bitrix/redirect.php?goto=http://repository.kaznaru.edu.kz/cgi/set_lang?referrer=https://teletype.in/@urist555/bEM115TIt_T</a> Самые пользующиеся методы вывода средств ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электрическим платежным системам типа Neteller и Skrill, а пользуются криптовалютными кошельками. Вывод выигрышей возможность осуществляться мгновенно либо занимать от нескольких часов до нескольких суток. 1×slots зеркало на сегодня
1хслотс официальный сайт зеркало
<a href=https://www.globalvision2000.com/forum/member.php?action=profile&uid=1072499>1× slots зеркало</a> Благодаря программе преданности от игорного заведения, можно взять неплохой старт и без добавочных инвестициям запустить видеослоты. Кроме того, можно рассчитывать на реальную удачу и получить, без инвестиции собственных финансов, большой выигрыш.Фриплей-бонусы встречаются только в некоторых клубах. Они зачисляются незамедлительно последствии творения профиля и активны непродолжительное время. Если не успеете потратить средства, они попросту сгорят. Касаемо времени, в большинстве случаев бонусы активны на часа. 1хслотс рабочее зеркало на сегодня <a href=http://i-willtech.co.kr/bbs/board.php?bo_table=free&wr_id=521133>http://i-willtech.co.kr/bbs/board.php?bo_table=free&wr_id=521133</a> Выбирайте лучшие благотворительные призы за обзоров на Casinoz – и пусть вам сопутствует счастье при отыгрыше бонусных кредитов!Существует ли стратегии для отыгрыша бездепозитных призов? К раскаянью нет, на выигрыши или проигрыши с бонусов, казино либо игрок воздействовать имеет, отдача игр случается от разработчиков игр.
1хслотс официальный сайт зеркало
Итак, дабы безвозмездные бонусные кредиты превратились в настоящие средства, которыми вы можете управлять по своему усмотрению, их нужно отыграть. Вейджер стопам уточнять в правилах онлайн-казино. Эффективность бездепов виде рекламного инструмента оценили все операторы. Малоизвестные площадки используют эти акции, дабы стремительно набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны неизменных посетителей. Не все сайты, дающие подарки без депо, рекомендованы к ирге. За привлекательным промоописанием имеют скрываться неосуществимые обстоятельства отыгрыша и другие подводные камни. <a href=http://4obzor.ru/index.php?subaction=userinfo&user=uwasunyr>http://4obzor.ru/index.php?subaction=userinfo&user=uwasunyr</a> Какие бонусы я могу еще получить не бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного бонуса, каждое интернет казино предлагает игрокам прибыльное предложение на первый депо, вы совершаете депозит, ваш депо увеличивается в двое либо и в 3, что, этим наиболее начать выступать возможно с больше крупной суммой, так же не забываем на вейджер на бонусы.Онлайн-казино с бездепозитными бонусами ставят посетителям условия для использования бездепами, поэтому перед участием в акции превосходнее досконально ознакомиться со всеми правилами и нюансами промоакции. Условия могут касаться получения бонуса, его применения и следующего вывода денежных средств если, тогда, выигрыша. 1×slots скачать на айфон Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают бонус по государствам. Вплоть до как, что клуб возможность брать игроков из Вашей страны, а бездеп не давать.Вейджер в переводе с английского означает «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша полученного приза, в нашем случае бездепозитного. Число ставок роли не играет — принципиально только набрать необходимую, пропорциональную сумме одобрения.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины – бесплатные вращения с фиксированной ставкой, коие возможно применять в определенных игровых автоматах.
#3966 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало быструю регистрацию а также мгновенное
Ну и окончательно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: подобная добродушие увеличивает степень лояльности посетителей к компании.Бездепозитный приз казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в этом и содержится главное различие. <a href=http://filmkachat.ru/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> Подобные призы без депо предоставляются на больше прибыльных условиях. Зачастую они покрупнее, а условия отыгрыша менее строгие. <a href=https://www.trustlink.org/Ask-The-Community/Question/Business/The-Art-of-Professional-Interior-Design-Layout-Creating-Harmonious-Living-Spaces-16936>https://www.trustlink.org/Ask-The-Community/Question/Business/The-Art-of-Professional-Interior-Design-Layout-Creating-Harmonious-Living-Spaces-16936</a> 1×slots официальный сайт скачать на айфон <a href=https://namosusan.com/bbs/board.php?bo_table=free&wr_id=128968>https://namosusan.com/bbs/board.php?bo_table=free&wr_id=128968</a>
казино 1×slots официальный сайт
<a href=https://10nsk.ru/user/JosephSuple/>зеркло казино 1×slots</a> 1×slots официальный сайт скачать на айфон Бонус начисляется игроку незамедлительно в регистрации и прохождения верификации в казино и не требует от посетителя внесения депо. Как управляло, объем бонуса в схожем случае довольно умеренный, впрочем разрешает новеньким познакомиться с игрой без риска реальными деньгами. <a href=http://topling.ru/bitrix/redirect.php?goto=http://flysport.store/bitrix/redirect.php?goto=http://semantic.eea.europa.eu/factsheet.action?uri=https://telegra.ph/EHto-interesno-Informacionnaya-pomoshch-09–23>http://topling.ru/bitrix/redirect.php?goto=http://flysport.store/bitrix/redirect.php?goto=http://semantic.eea.europa.eu/factsheet.action?uri=https://telegra.ph/EHto-interesno-Informacionnaya-pomoshch-09–23</a> Активация случается счет промокодов, коие вводятся в собственном кабинете последствии регистрации. Среди спецпредложений в перечне Casino.ru находятся неповторимые промокоды, которые доступны лишь гостям портала. Другие методы начисления средств ? автоматическая активация незамедлительно последствии сотворения аккаунта и получение подарка по запросу в службу технической помощи.Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. 1×slots зеркало сайта
1×slots сайт
<a href=https://veteran-gazeta.ru/forum/user/1162/>https://veteran-gazeta.ru/forum/user/1162/</a> Еще одно условие дотрагивается объемов ставки. Операторы устанавливают максимальную необходимую, которую игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, выбранной в Личном офисе. При превышении лимита есть риск лишиться приза. Существующие лимитирования относятся и к конкретным обликам ставок. Например, играя в рулетку, заказчик может столкнуться с запретом назначать фишки на шансы. казино 1×slots
1×slots подтвердит вашу регистрацию если говорить
Подтверждение электрической почты – одно из ведущих условий, коие есть почти в любом бездепозитном казино. Чтобы верифицировать электронную почту, достаточно перейти по активной ссылке в послании, приобретенном от азартного клуба. Если ординарными текстами, бездепы – это определённая сумма средств либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать презенты. Но есть кое-какие нюансы. Существуют игорные жилища, которые перед тем как начислить бонусы требуют привязать телефон, предоставить копии документов.Особую изюминку видео слотам придают уникальные знакы. С их появлением активируются разные призы. Вы сможете запустить вспомогательный степень и прирастить сумму выигрыша. Есть знаки, коие сменяют ненужные элементы и сами делают выигрышные комбо. Не стоит забывать и про бонус-тур. После любого счастливого спина есть шанс прирастить сумму выигрыша в 2 или четыре раза. 1×slots регистрация 1×slots casino c2d ru <a href=https://zoovetservis.com/board/tools.php?event=profile&pname=JosephRhina>https://zoovetservis.com/board/tools.php?event=profile&pname=JosephRhina</a> Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.
1хслот 1хслотс регистрация перейти на 1×slots
При маленький сумме приза рекомендуется играть по низким ставкам, а применять наибольшие чем только в случае, случае вейджер слишком большой, а время на отыгрыш сильно ограничено.Но такие рамки не смущают даже хайроллеров, что коэффициенты на слотах дозволяют рассчитывать на солидные выигрыши, а в неких автоматах разыгрывается передовой джекпот. <a href=http://arts.gpaeburgas.org/profile.php?uid=12571>http://arts.gpaeburgas.org/profile.php?uid=12571</a> Когда речь идет о валютных призах, казино всегда устанавливают обстоятельства вейджера, коие нужно выполнить, дабы вывести выигрыш. 1×slots регистрация на сайте 1×slots ru com Законодательство, регулирующее азартные забавы в разных государствах, оказывает на полномочия операторов. В итоге юзеры из отдельных регионов сталкиваются с лимитированиями со стороны казино. Это может быть как глубокий отказ в доступе, так и невозможность загружать забавы отдельных производителей.
<b>Смотреть еще похожие новости:</b>
<a href=https://nauc.info/forums/viewtopic.php?t=20628898>1хслот скачать</a>
<a href=https://bbs.sinbadgroup.org/index.php?xjkh-tampa-s-poster-pup-for-new-cancer-treatment.t48661.html/page-4169#post-209311>1×slots регистрация на сайте 1×slots ru com</a>
<a href=https://forums.scar-divi.com/topic/540911–1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE/>1хслотс казино зеркало</a>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=169884>1×slots регистрация 1×slotscasino09k online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чтобы играть даром на настоящие средства в казино, порой достаточно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные деянья.
#3967 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
лучшие бесплатные онлайн казино vavada casino <a href=https://sovsekretno.net/>казино сегодня</a> inform@rucriminal.info порно с Анастасия Потапова, теннисистка <a href=https://m.repost.news/>7k casino сайт</a> порно с Владимир Минеев (ММА) яндекс казино casino андроид порно с Дарья Клишина, легкоатлетка 1go casino казино большая Радченко Светлана Юрьевна порно
DiskiPlus где казино DiskiPlus порно с Матвей Сафонов (футбол) <a href=https://www.diskiplus.ru/>DiskiPlus зеркала официальных сайтов казино</a> DiskiPlus Попова Анна Юрьевна порно DiskiPlus Манилова Алла Юрьевна порно <a href=https://diskiplus.ru>DiskiPlus казино фильм онлайн</a> DiskiPlus казино рублях DiskiPlus реального казино DiskiPlus Елизавета Боярская DiskiPlus казино онлайн DiskiPlus казино рояль смотреть DiskiPlus гама казино DiskiPlus 1×bet официальный 1×bet xyz
#3968 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало сайта
Представьте момент, когда при ставке в 10 рублей Вы получите подобное умножение. Миллион руб. За одно вращение, собственно абсолютно вероятно. Поэтому вопрос, сколько возможно выиграть остаётся открытым. Предлагаем проверить самостоятельно. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный приз и проверяйте фортуну в деле. Разумеется, вывести средства сложно. Однако шансы есть у всех.Благодаря программе лояльности от игорного заведения, можно арестовать хороший старт и без добавочных инвестициям запустить видеослоты. Кроме как, можно рассчитывать на реальную фортуну и получить, без вложения собственных денег, великой выигрыш. <a href=http://filmkachat.ru/>1 х слотс зеркало</a> Минимального оборота. Этот лимит устанавливается вейджером — же игрок не поиграет на установленную необходимую, вывод средств будет недоступен.Диапазон ставок, которые вправе устроить игрок, также лимитирован. Обычно назначать можно небольшую сумму — в 10–30 рублей за одно вращение. <a href=https://www.find-topdeals.com/blogs/164113/%D0%A1%D1%80%D0%BE%D1%87%D0%BD%D1%8B%D0%B9-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%BE%D0%B1%D0%B8%D0%BB%D0%B5%D0%B9>https://www.find-topdeals.com/blogs/164113/%D0%A1%D1%80%D0%BE%D1%87%D0%BD%D1%8B%D0%B9-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%BE%D0%B1%D0%B8%D0%BB%D0%B5%D0%B9</a> 1×slots регистрация <a href=http://muhaylovakoliba.1gb.ua/user/PorsedropPl/>http://muhaylovakoliba.1gb.ua/user/PorsedropPl/</a> Можно ли в одном интернет казино получить больше одного приза за регистрацию? Нет, например как в каждом интернет казино есть правила, к которым надо(надобно) придерживаться, не делать два аккаута для получения призов, другому будет блокировка обоих аккаутов, не пытайтесь обмануть онлайн казино, приз за регистрацию выдаеться раз один одному личику.Частенько новички не разумеют, как активировать подарки либо вывести первый выигрыш. Для похожих случаев наша команда обрисовала главные определения – что такое фриспины, вейджер, как его отыграть, чего нужно протекать верификацию.
1×slots сайт
<a href=https://www.ldvd.nl/no-22-san-diego-place-rallies-very-last-boise-country-27–16?page=32#comment-237456>x1 slots регистрация в 1×slots casino</a> 1хслотс казино зеркало В интернете очень большое скриптовых сайтов, которые принадлежат жуликам. Их основная задача – привлечь гэмблеров, пообещав не щедрые презенты, но и солидные выигрыши. Так собственно кое-какие веб-сайты предлагают получить за регистрацию и $1 000. <a href=https://trentonvdms52973.theobloggers.com/36430799/deep-nude-understanding-the-implications-of-ai-generated-imagery>https://trentonvdms52973.theobloggers.com/36430799/deep-nude-understanding-the-implications-of-ai-generated-imagery</a> Также бывают случаи, когда казино начислит оговоренный бонус последствии регистрации нового клиента по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам. 1×slots бонус за регистрацию Бездепозитные призы за регистрацию в игровых автоматах для хозяев онлайн-казино являются частью рекламной кампании, направленной на повышение аудитории вебсайта. Так они продвигают средства бренды и привлекают новых клиентов.
1 хслот регистрация в 1×slots casino
Шаг 4. Активация. Внимательно выучите условия, информацию по лимитированиям и сроке деяния бонусного предложения. Разобравшись с правилами, возможно активировать бонус в собственном офисе (от ? с внедрением промокода) или по запросу в саппорт. <a href=http://www.xy28zj.com/space-uid-255035.html>http://www.xy28zj.com/space-uid-255035.html</a> Но есть азартные заведения, готовые просто так вручить средства на забаву. Для этого довольно создать профиль. Чтобы вывести выигрыш, сперва нужно выполнить вейджеровые условия, прописанные в критериях получения бездепа. сайт 1× slots casino Для верификации номера телефонного, в личном профиле выберите опцию „Подтвердить номер телефонного“ и введите в подходящее поле код, полученный в sms-сообщении.
1×slots коды
<a href=https://portugal-campings.com/pt/account/>1×slots официальный сайт, скачать</a> Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, например как Вам придется ее доказать дальнейшем при выводе денег. В списке требований к отыгрышу часто присутствуют лимиты на ставки при игре на личные средства. Так, случае отыграть надо(надобно) 30 000 руб., а максимальная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 раз. Эта особенность затрудняет соблюдение игроками условий по срокам деянья акции. 1×slots зеркало рабочее <a href=http://maglik.ru/user/ArnoldDow/>http://maglik.ru/user/ArnoldDow/</a>
1× slots casino официальный сайт
Однако далековато не все ресурсы предлагают своим клиентам бездепозитные призы за регистрацию в казино. В большинстве случаев учтено поощрение на 1-ый депо в размере 100–200%. Это замечательная возможность преумножить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш. Кешбэк-бонус дает собой возврат фиксированного процента от ставки в случае поражения или же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%.Промокод – определённая композиция знаков, которую нужно установить в соответствующее фон при разработке учетной записи либо активировать в личном профиле игрока в разделе с бонусами. <a href=http://www.ymapparel.com/bbs/board.php?bo_table=free&wr_id=319242>http://www.ymapparel.com/bbs/board.php?bo_table=free&wr_id=319242</a> Вейджер в переводе с британского значит «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша приобретенного бонуса, в нашем случае бездепозитного. Число ставок большого — важно лишь набрать сумму, пропорциональную сумме поощрения.Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. зеркло казино 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=http://www.airsoft44.com/forum/index.php?action=profile;u=11896>1хслотс мобильная версия зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В неких онлайн казино для получения бездепозитных призов не достаточно просто зарегистрироваться на веб-сайте клуба и доказать средства контактные данные. Дополнительно требуется активация промокода.
#3969 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Высокая конкурентность в сегменте азартных игр доказывает операторов привлекать посетителей разнообразными промоакциями. Благодаря этому у посетителей появляется возможность получить призы в казино за регистрацию без депозита. Воспользоваться этим предложением можно, минуя процедуру внесения средств на игровой счет, просто активировав акк на веб-сайте. Наш экскурсовод по бездепам поможет выбрать самую привлекательную бонусную программку, узнать управляла получения такого гонорары и воспользоваться им с наибольшей выгодой. <a href=http://filmkachat.ru/>1× slots casino зеркало</a> <a href=http://prsync.com/cgifurniturecom/top-d-model-marketplaces-expert-guide-to-finding-quality-digital-assets-4446659/>http://prsync.com/cgifurniturecom/top-d-model-marketplaces-expert-guide-to-finding-quality-digital-assets-4446659/</a> 1хслот официальный сайт зеркало <a href=https://diakov.net/user/Deweybax/>https://diakov.net/user/Deweybax/</a> У любой игры свои притязания по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система засчитает каждую ставку. В рулетке и покере сделать это намного труднее. Именно потому например важно внимательно разбирать обстоятельства получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой забаве, то новички просто «спустят бонус на ветер».
1× slots casino официальный сайт
<a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> 1хслотс казино зеркало <a href=https://www.elektroroller-forum.de/memberlist.php?mode=viewprofile&u=451510>https://www.elektroroller-forum.de/memberlist.php?mode=viewprofile&u=451510</a> Вейджер (или вагер) ? это наименьшая сумма ставок, коию нужно сделать для вывода денежного бонуса. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение. 1×slots сайт зеркало Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.
рабочее зеркало 1хслотс
Если вы избираете испытанное лицензионное онлайн казино и сделайте все обстоятельства получения бездепозитного бонуса, трудностей с получением презента у Вас не возникнет. <a href=https://bbs.wuxhqi.com/home.php?mod=space&uid=1310269&do=profile&from=space>https://bbs.wuxhqi.com/home.php?mod=space&uid=1310269&do=profile&from=space</a> Фриспины – благотворительные вращения с фиксированной ставкой, которые возможно применять в определенных игровых автоматах. 1×slots зеркало регистрация
1хслотс мобильная версия зеркало
Более солидные предложения встречаются довольно изредка. Зачастую они доступны только VIP-игрокам. В остальных случаях им всего сопутствуют очень строгие обстоятельства отыгрыша. Также вероятны дополнительные обстоятельства прочие лимитирования, прописанные в условиях и положения бонусной программы казино.Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в индивидуальный офис, дабы арестовать бесплатные вращения с вейджером х40; Бездепозитные призы начисляются только раз раз. Не стоит раскрывать новые аккаунты, дабы получить их повторно. Служба защищенности казино обязательно выявит «левого» участника и заблокирует. Если посетитель выполнит необходимые требования, отыграет свою ставку и решит вывести собственный выигрыш, то ему надо(надобно) к, собственно казино непременно потребует дать ксерокопии собственных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные средства вывести не получится. Вознаграждения за получение VIP-статуса ? начисляются масштабах программы лояльности при достижении одного уровня либо выдаются персонально менеджерами службы поддержки.Подтверждение регистрации. Казино требуют привязки профиля к электрическому адресу и номеру аппарата. Для сего на e-mail отправляется письмо со ссылкой, а на телефонный ? текстовое известие с кодом. 1×slots официальный сайт скачать <a href=https://ai-db.science/wiki/User:StephanyWeldon>https://ai-db.science/wiki/User:StephanyWeldon</a>
1×slots регистрация 1×slotscasino09k online
Многие новенькие колеблются, собственно поощрительный приз не будет возвращать, даже случае они выиграли у казино. Это абсолютно неопасно и надежно. Выводя выигранные средства, игрок просто одергивает свое участие при и теряет уникальную вероятность – даром наращивать личное материальное положение. <a href=http://trisinfronteras.com/davidcastro/component/k2/itemlist/user/455950-philipneams>http://trisinfronteras.com/davidcastro/component/k2/itemlist/user/455950-philipneams</a> Денежные свои. Третий бонус за регистрацию без депозита – наличные. К раскаянию, лишь знаменитые и популярные клубы имеют уяснить деньги в руб. Либо баксах. С их подмогою вас насладиться каждой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед данным нужно исполненье конкретных критерий.Большинство клубов завлекают внимание геймеров за счёт разнообразных подарков. На одних сайтах можно получить виртуальные кредиты, которые откроют доступ ко всему софту. На иных же, администрация предлагает бесплатные вращения для пуска лучших интернет слотов. Несмотря на разные акции, стоит выделить самые главные. 1×slots официальный сайт скачать
<b>Смотреть еще похожие новости:</b>
<a href=https://rolivka.online/forum/showthread.php?tid=36267>1×slots рабочее зеркало</a>
<a href=https://www.globalvision2000.com/forum/member.php?action=profile&uid=1072499>1хслот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Размер бонусов почаще всего чисто символический и не превышает 50 руб. Приятно, хотя ощутимым бустом деле навряд станет.
#3970 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasin online
Можно. Вы всегда сможете отрешиться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не создадите ставку.Чаще всего, знаменитые сервисы, такие как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное верховодило. Финансовые средства выводятся только через что, эту платежную систему, которой популярностьюимели для пополнения депозита. Если же игрок получил бездепозитный покерный бонус, требуется пополнить счет на минимальную необходимую, которая сочиняет обычно 10 $. <a href=http://filmkachat.ru/>1×slots casino регистрация</a> B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpaxБлагодаря программе преданности от игорного заведения, возможно брать превосходный старт и без добавочных вложений запустить видеослоты. Кроме того, можно рассчитывать на реальную фортуну и получить, без вложения личных денег, большой выигрыш. <a href=https://speakerdeck.com/rendercgi1>https://speakerdeck.com/rendercgi1</a> При регистрации стопам указывать только достоверную информацию. Когда учетная запись будет активна, замечен доступ в Личный офис. В нем можно выбрать валюту, ввести промокод и узнать доскональные управляла получения и отыгрыша бездепа. Краткая информация об промоакции нередко находится непосредственно на регистрационной форме.Однако далековато не все ресурсы предлагают своим клиентам бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено одобрение на 1-ый депо в объеме 100–200%. Это замечательная возможность преумножить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш. казино 1×slots <a href=https://maps.google.com.gt/url?q=https://doctorlazuta.by/>https://maps.google.com.gt/url?q=https://doctorlazuta.by/</a>
1хлот регистрация в 1×slots casino
Иногда у посетителей вебсайта все появиться проблемы при активации полученного промо-кода. В этих случаях, нужно обратиться за поддержкой в службу поддержки «Support». Для получения ответа, обязательно указывается определенная причина воззвания и подтверждается информация дополнительными экрана. Если сложилась неоднозначная обстановка, практически можно адресоваться к главному регулятору или контролирующему органу, выдавшему этому заведению лицензионный документ.Бонус за регистрацию в казино без депозита с выводом средств нужно отыграть. Зачастую для отыгрыша возможность потребоваться устроить ставки на необходимую, в количество 10-ов раз превышающую сумму бонуса либо выигрыша. <a href=https://astraclub.ru/members/353998-Jameswow>1× slots официальный</a> скачать 1×slots на андроид мобильная версия Для всех бездепозитных бонусов функционирует наибольший предел на выигрыш. Он указывает максимальную сумму, которую у получить, играя на бонусные кредиты. Как лишь для удастся выполнить притязания вейджера, допустимый максимум несомненно переведен с бонусного счета на ведущей, а остаток несомненно списан.В большинстве заведений устроить это возможно по адресу электронной почты, по номеру телефона, через социальную сеть либо гугл-аккаунт. <a href=https://carecepthealth.com/community/profile/charleshet/>https://carecepthealth.com/community/profile/charleshet/</a> 1×slot зеркало рабочее регистрации на телефон придет
1хслотс 1хслотс регистрация перейти на 1×slots
Исходя из этого, просто не присутствует разумных причин махнуть рукою на получение такового приза при регистрации. И, что, на подобный безвозмездной основе у вас есть все шансы выиграть деньги и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные бонусы, нарекают бесплатными интернет платформами для игр.Бонус за регистрацию в казино без депо с выводом средств нужно отыграть. Зачастую для отыгрыша возможность потребоваться сделать ставки на необходимую, в некоторое 10-ов раз превосходящую необходимую бонуса либо выигрыша. <a href=http://bbs.boway.net/home.php?mod=space&uid=1167957>http://bbs.boway.net/home.php?mod=space&uid=1167957</a> В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с бесплатных вращений. Прибыль, коию Вы заработаете на таком бездепе возможно назначать на вывод без какого или отыгрыша.Выиграть настоящие средства в казино не пополняя счет – трудно, хотя вероятно. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными призами и начните играть на бонусные средства. По статистике в 10-ти заведений возможно заработать небольшую необходимую средств помощью бонусных средств. 1× slots зеркало Каждый компьютерные обязан сперва отчетливо изучить обстоятельства по получению и отыгрышу понравившегося подарка. Если всё устраивает, поспешите отобрать благотворительные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо сейчас начать вращать барабаны топовых слотов.
1×slots зеркало
Чаще всего казино бонус за регистрацию без депозита даёт вероятность запустить каждой машина. Но другого внимательно ознакомиться с условиями. Иногда для забавы доступны лишь определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, никакого начать знакомство с миром азарта непосредственно с «одноруких бандитов». Не хотите сыграть в азартные забавы, не рискуя своими средствами, но получая в все выплаты? Подобную возможность предоставляют многие лучшие порталы с азартными весельями. В их числе много правдивых и надежных интернет-казино на российском языке. Они привлекают новых юзеров разными поощрительными событиями, включая бездепозитные, или безвозмездные бонусы.Если вы новичок данном и только попали в неизведанную вами район азарта — за предложений как бездепозитные бонусы без пополнения. Реже призы без депозита начисляются неизменным игрокам. С их поддержкою администрация постарается удержать ценных посетителей или вожделеет поблагодарить за преданность правильных гостей. Но гораздо чаще для подобных целей используются такие промоакции: 1хслотс зеркало <a href=http://xuwentcw.com/home.php?mod=space&uid=370289&do=profile>http://xuwentcw.com/home.php?mod=space&uid=370289&do=profile</a> Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.Для подтверждения электронной почты, просто перейдите по активной ссылке в письме, полученном от игрового заведения.
1×slots регистрацию процедура займет всего лишь
Процесс доказательства личности может взятьвдолг(взятьвзаймы) от 1-го дня до недели. Если клиент допустил нибудь ошибку при заполнении паспортных данных, то ему стопам адресоваться с проблемой в саппорта онлайн-казино. <a href=https://rovworld.com/members/frankemago/profile/>https://rovworld.com/members/frankemago/profile/</a> Бездепозитные бонусы реальными деньгами, которые можно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадали. 1×slots зеркало выигрыши обязательно пройдите регистрацию если Акции, посвященные календарным праздникам, бывают рассчитаны как на всех пользователей, например и на категории: например, подарок на 8 марта девушкам-игрокам или мужикам на 23 февраля.
<b>Смотреть еще похожие новости:</b>
<a href=https://test.soclanovtsy.ru/topic/58128–1×slots-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-%D0%BC%D0%BE%D0%B1%D0%B8%D0%BB%D1%8C%D0%BD%D0%B0%D1%8F-%D0%B2%D0%B5%D1%80%D1%81%D0%B8%D1%8F/>1×slots казино мобильная версия</a>
<a href=https://mit-bbs.com/viewtopic.php?t=201633>1 хслот регистрация в 1×slots casino</a>
<a href=http://forum.puppylinux.pl/index.php?topic=967.new#new>1×slots регистрация на 1хслотс</a>
<a href=http://skatefluckit.com/showthread.php?t=159263&p=331819#post331819>1× slots регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Условия вывода выигрыша. В неких заведениях для удачного вывода с бездепозитного приза достаточно пополнения баланса и подтверждения личности. В иных же клубах, необходимо количество один прокрутить свой депозит. Обычно, бездепозитные призы выдаются под конкретные слоты с фиксированной ставкой, хотя их наверняка запрещено использовать в игровых автоматах с прогрессивным джекпотом. Список игр, каких можно применять бездеп, Вы отыщите в описании акции или сможете уточнить у саппорта заведения.
#3971 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино можно Елизавета Боярская <a href=https://kompromat1.online/>1×bet официальный сайт 1×bet xyz</a> Елизавета Боярская порно с Арина и Дина Аверины, гимнастки <a href=https://specreporter.com/>где казино</a> 7k casino бонус 1×bet сайт 1×bet xyz kent casino казино фильм демо казино сколько казино порно с Анна Щербакова, фигуристка
DiskiPlus porno Нина Пирогова, хоккеистка DiskiPlus casino riobet <a href=https://diskiplus.ru/>DiskiPlus лучшие букмекерские конторы</a> DiskiPlus пин up casino DiskiPlus порно с Федор Чалов (футбол) <a href=https://diskiplus.ru/>DiskiPlus порно с Анна Калинская (теннис)</a> DiskiPlus Попова Анна Юрьевна порно DiskiPlus казино онлайн бесплатно DiskiPlus порно с Алина Загитова, фигуристка DiskiPlus casino x DiskiPlus казино в россии DiskiPlus букмекерская контора на андроид DiskiPlus porno Дарья Мороз
#3972 Charlesgunnyhttp://filmkachat.ru
1х слотс зеркало регистрация в 1×slots casino
У любого игорного заведения средства управляла и условия. Но, дабы получить призы, необходимо выполнить стандартные деянья:С этими простыми советами любое казино с бонусом за регистрацию способно принести в разы больше выгоды и полезности. <a href=http://filmkachat.ru/>1×slots промокод при регистрации 2025</a> <a href=https://www.palscity.com/forums/thread/2078/>https://www.palscity.com/forums/thread/2078/</a> Также посещают случаи, когда казино начисляет оговоренный приз в регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам. 1×slots актуальное зеркало <a href=https://eco-kamchatka.ru/user/Travischuth/>https://eco-kamchatka.ru/user/Travischuth/</a>
сайт 1× slots casino
<a href=https://persiankittencat.com/grey-persian-cats-unraveling-the-charm-of-these-feline-beauties/#comment-63189>1×slots зеркало сайта</a> рабочее зеркало 1×slots Зачастую бездепозитные бонусы казино для забавы предлагаются разными заведениями азартных игр виде рекламных промоакций либо в целях привлечения к себя свежих игроков. Для бездепозитных призов в казино 2022 геймеру надо пополнять счет до этапа вывода хотимых средств.Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных притязаний, кроме неотъемлемой верификации. Если на сайте предусмотрена неотъемлемая процедура доказательства личности, то вывести выигрыш удастся только последствии ревизии данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий личность. <a href=http://iawbs.com/home.php?mod=space&uid=813085>http://iawbs.com/home.php?mod=space&uid=813085</a> 1×slots официальный сайт, скачать Но эти рамки не смущают и хайроллеров, потому коэффициенты на слотах позволяют рассчитывать на солидные выигрыши, а в некоторых автоматах разыгрывается передовой джекпот.А ознакомиться с свежими интернет казино, Вы сможете помощью призов с выводом прибыли, коие Вы можете получить без депо.
1× slots регистрация в 1×slots casino
<a href=http://anima-rpg.com:/member.php?action=profile&uid=360159>http://anima-rpg.com:/member.php?action=profile&uid=360159</a> 1×slots официальный demo регистрация в 1×slots casino Главным нюансом в возникновении этих вознаграждений состоит том,, собственно пустив их в ход, игры ничем не рискует и в последствии никому ничего не несомненно должен (не зависимо, получит ли он благодаря бонусам какой-либо выигрыш либо мгновенно спустит все только собственно прибывшие финансы). То есть, казино снабжает игрока возможностью на дармовой базе играть во всевозможные слоты и даже спонсирует забаву.
1хслот зеркало
Если вы выбираете проверенное лицензионное онлайн казино и выполните все условия получения бездепозитного приза, трудностей с получением презента у Вас не возникнет.Однако в условиях скрываются «подводные камешки», которые не разрешат исключить солидную сумму или же вы не успеете отыграть вейджер. Поэтому профессионалы рекомендуют забрать благотворительные вращения за регистрацию в казино без депо, чтобы поднабраться навыка и получить реальный шанс на победу. <a href=http://swissairways-va.com/phpBB3/viewtopic.php?p=1681073#p1681073>1×slots casino регистрация 1×slotscasin online</a> Например, игрок получил 500 рублей при разработке аккаунта и должен отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 руб., понадобится сделать 875 спинов для полного отыгрыша. 1×slots мобильная версия войти казино <a href=http://jinsanbag.com/bbs/board.php?bo_table=free&wr_id=275462>http://jinsanbag.com/bbs/board.php?bo_table=free&wr_id=275462</a> Промообъявления от казино не дают реальной картины и ориентированы на привлечение внимания пользователей. Понять, насколько высоки шансы остаться в плюсе, дозволит собственный тест критерий предложения:Бонус в казино без депо содержит разные разновидности: это может быть приветственный бонус, акции в честь каких-то праздников или весомых дат, приз за вербование новых игроков, преданность и получение VIP-статуса.
1×slots подтвердит вашу регистрацию если говорить
Как правило, новоприбывшие геймеры в первую очередь хотят ознакомиться с методами ввода и вывода денежных средств и сроки исполнения поданных заявок дабы конкретно осознавать, как быстро появится исключить собственный казино бонус за регистрацию без депо на электронный кошелек либо же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино соперничают меж собой. Ведь в бы определенную фирму представляло только одно онлайн-заведение, то навряд бы посетители заметили казино с призом за регистрацию и имели бы рассчитывать лишь на вознаграждение в виде бонуса на первое инвестиция. К любому заведению регулярно стопам завлекать свежих игроков, собственно, итоге, только на руку всем играющим.У каждого игорного заведения средства верховодила и обстоятельства. Но, чтобы получить бонусы, нужно выполнить стереотипные деяния: Таким образом онлайн казино получает вероятного игрока. Возможно в будущем либо истинном он захотит сыграть на свои деньги. Так трудятся бездепозитные призы в онлайн казино. Здесь хорошо подходит выражение, безвозмездные сыр посещает только в мышеловке. Начинающие игроки все не обдумывать опасность азарта. Однако со временем понимания делается больше. Это тема для отдельного обсуждения. <a href=http://xn----7sbqc1ahc7afe2lrdf.com/profile.php?lookup=77543>http://xn----7sbqc1ahc7afe2lrdf.com/profile.php?lookup=77543</a> Чтобы помощи увериться в превосходстве бездепозитных бонусов, достаточно зарегистрироваться в казино и получить поощрение.Онлайн гемблинг развивается с каждым днем больше и больше, свежие бренды создаются не по дням а по часам. Новые интернет казино делают вступительные акции для игроков, чтобы, чтобы что бы зарекомендовать себя, и что, этим самым предлагают бездепозитные бонусы за регистрацию, собственно бы не пропустить эту возможность — как воспользоваться новым бездепом, советуем посещать наш вебсайт как можно почаще, самое вкусное и свежие будет добавляться в этом же списке. казино 1×slots Вывод выигрыша с бездепозитных призов казино – великодушный презент от азартных клубов. Но дабы вывести свой заработок, нужно выполнить ряд критерий:
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>рабочее зеркало 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В списке требований к отыгрышу часто наличествуют лимиты на ставки при этой на личные деньги. Так, если отыграть надо(надобно) 30 000 руб., а предельная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 раз. Эта особенность затрудняет соблюдение игроками условий по срокам деянья акции.
#3973 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало рабочее на сегодня 1×bet xyz порно с Зырянова Анастасия Владимировна <a href=https://repost.news/>казино играть</a> porno Юлия Пересильд casino x <a href=https://res-publika.com>Радченко Светлана Юрьевна порно</a> букмекерская контора фонбет официальный casino вход порно с Зырянова Анастасия Владимировна casino 7k сегодня играющие казино онлайн приложения букмекерских контор 1×bet официальный слоты
DiskiPlus 1×bet зеркало xbet xyz DiskiPlus casino промокод <a href=https://www.diskiplus.ru>DiskiPlus 7k casino официальный</a> DiskiPlus промокод 1×bet DiskiPlus Анна Михалкова <a href=https://www.diskiplus.ru/>DiskiPlus винлайн букмекерская контора официальный</a> DiskiPlus про казино DiskiPlus 1×bet скачать приложение на андроид DiskiPlus pin up casino top top DiskiPlus букмекерские конторы в россии DiskiPlus porno Дарья Клишина DiskiPlus Преподобная Надежда Александровна порно DiskiPlus казино 1
#3974 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало
Для получения бездепа необходимо пригласить в игру по реферальной ссылке свежего клиента: он должен зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на необходимую, обозначенную в критериях промоакции.B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. <a href=http://filmkachat.ru/>1хслотс регистрация в 1×slots casino</a> <a href=https://codepen.io/bjxkafyt-the-encoder/pen/bNbrqxY>https://codepen.io/bjxkafyt-the-encoder/pen/bNbrqxY</a> Далее потребуется отыграть вагер и исключить выигрыш. Игрокам без опыта крупно повезло, меня получить 10-ки презентов за одну регистрацию. Если не сумели получить Бездепозитный приз, не тревожьтесь. Обратитесь в онлайн чат, оператор поможет ситуацию. 1×slots бездепозитный бонус за регистрацию <a href=https://eco-kamchatka.ru/user/GeraldTes/>https://eco-kamchatka.ru/user/GeraldTes/</a> Мы делаем акцент на главных положениях управлял, рассказываем о территориальных лимитированиях и вкратце информируем о других промоакциях обсуждаемого казино.
1×slots официальный сайт мобильная версия
Поспешите отобрать бездепозитные призы за регистрацию в казино из представленного перечня. Все платформы не только ведут легальную работа, хотя и обрадуют добросовестными плодами игры, высочайшей отдачей, резвыми выплатами.Также, в этом случае необходимо доказать собственный номер телефонного, желаемого код, приобретенный в смс-сообщении от клуба ввести в специальное поле в личном кабинете игрока. 1×slots зеркало на сегодня <a href=https://series40.kiev.ua/user/DoctorLazutaKa/>https://series40.kiev.ua/user/DoctorLazutaKa/</a> 1×slot зеркало рабочее регистрации на телефон придет Например, игрок получил 500 руб. При творении аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 руб., потребуется устроить 875 спинов для полного отыгрыша.
1×slots casino регистрация
Бесплатный бонус – кредиты, коие онлайн-казино начислит клиенту, не принуждая его пополнять игровой счет. <a href=http://forum.notionmusic.com/memberlist.php?mode=viewprofile&u=25406>http://forum.notionmusic.com/memberlist.php?mode=viewprofile&u=25406</a> Также, такой нужно доказать свой номер аппарата, чтобы код, полученный в смс-сообщении от клуба ввести в специальное фон в личном кабинете игрока.С этими простыми советами каждое казино с бонусом за регистрацию способно принести в разы больше выгоды и полезности. 1×slots сайт зеркало Во всех законных онлайн-казино Беларуси необходимо подтверждение паспортных данных для забавы — это заявка правительства страны.
1×slots рабочее зеркало
Максимальный размер ставки, кот-ый невозможно превосходить пока бонус не будет всецело отыгран. В случае нарушения сего управляла, приз и выигрыш с него будут аннулированы.Бесплатные призы казино без депозита можно получить в виде валютных средств на бонусный счет (исключить их можно лишь после отыгрыша), фриспинов, игры либо кешбэк-бонуса. 1×slots официальный сайт скачать на айфон <a href=http://1ctv.cn/home.php?mod=space&uid=2955676>http://1ctv.cn/home.php?mod=space&uid=2955676</a> Ниже указан важный список легальных казино в Беларуси с призами на 1-ый депо. Вы сможете попасть на официальный вебсайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус.
1×slot официальный сайт
Мы собрали и опубликовали список лучших бездепозитных казино с бонусами за регистрацию, коие гарантируют великодушные выигрыши и мгновенные выплаты. Размер бонусов чаще всего чисто условный и не выше 50 рублей. Приятно, хотя ощутимым бустом при навряд станет.Изучить верховодила и условия получения бездепозитных призов казино, Вы сможете у нас на сайте в разделе с бонусами либо на официальном сайте выбранного Вами казино. Если не можете отыскать необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал либо по электрической почте. <a href=http://www.russtars.tv/user/Deweygof/>http://www.russtars.tv/user/Deweygof/</a> Онлайн гемблинг развивается с каждым днем больше и больше, новые бренды создаются не по дням а по часам. Новые онлайн казино проделывают вступительные акции для игроков, для того собственно бы зарекомендовать себя, и тем самым предлагают бездепозитные бонусы за регистрацию, собственно бы не упустить эту возможность — как пользоваться свежим бездепом, советуем посещать наш вебсайт как возможно почаще, самое вкусное и новые будет добавляться в этом же перечне.Лишь пользующиеся и знаменитые азартные заведения шансы позволить для раздавать бездепы повторяющий дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депо, коие возможно истратить в топовых аппаратах с высокой отдачей. 1×slots регистрация на сайте 1×slots ru com Но на некоторых азартных платформах подобные гонорары могут получить и уже зарегистрированные юзеры. В таком случае, призы предоставляются в рамках оригинальных промоакций либо же некоторым игрокам повторяющий акционного предложения, коие приходит на почту с целью «вернуть» игрока в свое казино.У каждой забавы средства притязания по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система зачтет любую ставку. В рулетке и покере устроить это гораздо сложнее. Именно поэтому так главно внимательно разбирать условия получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой этой, то новенькие просто «спустят бонус на ветер».
<b>Смотреть еще похожие новости:</b>
<a href=http://sharecovid19story.com/memberlist.php?mode=viewprofile&u=5122>1×slots официальный сайт скачать</a>
<a href=http://naturetour.ru/communication/forum/messages/forum3/message23778/5475–1khslots-1khslots-registratsiya-pereyti-na-1×slots?sessid=f24315591c89056321bc6fef89b7ef98&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<a href=https://showboysmedia.com/real-music/#comment-74893>1хслотс зеркало на сегодня</a>
<a href=https://swordmaster.org/user/JamesVok/>1×slot зеркало рабочее регистрации на телефон придет</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Возьми собственный презент. Чаще всего приз активизируется сразу последствии регистрации. Но бывают истории, когда надо(надобно) зайти в собственный кабинет или написать в справочную службу. B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax
#3975 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино вход порно с Артемий Панарин (хоккей) <a href=https://slon-ru.com/>песня казино</a> Лут Оксана Николаевна порно пинап казино <a href=https://t.me/vchkogpu_ru>игры казино</a> top casino 1×bet сайт 1×bet xyz казино рублях казино вход порно с Евгения Медведева retro casino сайт винлайн букмекерская контора
DiskiPlus яндекс казино DiskiPlus фильмы казино рояль <a href=https://diskiplus.ru/>DiskiPlus Черкесова Бэлла Мухарбиевна порно</a> DiskiPlus сайт казино вход DiskiPlus kent casino регистрация <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet зеркало рабочее на сегодня</a> DiskiPlus пари букмекерская контора DiskiPlus букмекерская контора мостбет DiskiPlus 7k casino зеркало DiskiPlus казино в россии DiskiPlus porno Дарья Мороз DiskiPlus kent casino регистрация DiskiPlus порно с Зырянова Анастасия Владимировна
#3976 Charlesgunnyhttp://filmkachat.ru
1×slots акции
Возьми собственный подарок. Чаще всего приз активизируется незамедлительно в регистрации. Но случаются ситуации, когда надо(надобно) забежать в собственный кабинет либо написать в справочную службу. <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino09k online</a> <a href=http://www.alexandria.gov.eg/Lists/List30/DispForm.aspx?ID=83358>http://www.alexandria.gov.eg/Lists/List30/DispForm.aspx?ID=83358</a> Бонусные деньги – небольшая сумма денег для старта в новом казино. На бонусные деньги, обычно разрешено выступать во все игры, не слотов с прогрессивным джекпотом и игр из раздела exist casino.При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие возможно посвятить этой в казино. 1 x slots casino <a href=https://www.russuchka.com/user/DoctorLazutama/>https://www.russuchka.com/user/DoctorLazutama/</a> Обычно бездепозитные промоакции от казино, приходят на эл. Почту в деньки рождения либо праздничные. В неких интернет казино можно обратиться в чат и как постоянному игроку, вполне вам предложат бездепозитное предложение.Также учтите, что кое-какие игровые платформы сузивают перечень стран, коие способны получить предложенный бездепозитный приз за регистрацию. К примеру, есть онлайн-заведения, выдающие подобные бонусы лишь жильцам конкретных стран. К примеру, онлайн казино 777 Оригинал дает бездепозитный приз лишь игрокам из России и стран СНГ. Или напротив, пичкают вознаграждением всех, считая обитателей некоторых стран (исходя из этого, по внимательно учить перечень, чтобы впоследствии не возникло никаких вопросов и жалоб).
1×slot зеркало
Еще одно условие касается размеров ставки. Операторы устанавливают наивысшую сумму, которую игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, избранной в Личном офисе. При превышении лимита есть риск лишиться бонуса. Существующие лимитирования относятся и к определенным обликам ставок. Например, играя в рулетку, заказчик возможность столкнуться с запретом ставить фишки на шансы. <a href=https://www.kfz-gringer.at/index.php/forum/suggestion-box/75941–1#75705>1хслотс рабочее зеркало</a> 1×slots рабочее зеркало на сегодня <a href=https://forum.esetnod32.ru/user/87603/>https://forum.esetnod32.ru/user/87603/</a> 1×slots регистрация на 1хслотс Бесплатные призы казино без депозита можно получить в виде валютных средств на бонусный счет (вывести их возможно только после отыгрыша), фриспинов, игры или кешбэк-бонуса.Обыкновенные бездепозитные бонусы в объеме от трех до двадцати долларов сделаны чтобы, чтобы, чтобы в игры заходили все свежие и новые игроки. Здесь, всего, несомненно лимитирование на максимальный выигрыш. Важно, чтобы перед наименьшим вкладом был отключен бонус за первое пополнение счета, и компьютерные не попадет на повторный вейджер.
1×slots зеркало сайта
Также посещают случаи, когда казино начисляет обсужденный приз последствии регистрации нового клиента по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам.Как верховодило, при выводе финансов, от играющего требуется только устроить минимальный лепта для того, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом личный счет. <a href=http://www.sincano.com/author/galeboudrea>http://www.sincano.com/author/galeboudrea</a> 1×slots официальный сайт мобильная версия скачать Для получения бездепа нужно пригласить в забаву по реферальной ссылке свежего посетителя: он должен зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на сумму, указанную в условиях промоакции.Бездепозитные бонусы в казино без пополнения 2022 — это определенная сумма средств либо gift spins вращения, которые предоставляются первым постояльцам за регистрацию на веб-сайте казино вид бездепозитного бонуса, и выделяет вас возможность за счет казино без пополнения опробовать услуги (игр), с последующей преимуществом, льготой вывода средств при исполнении всех установленных управлял.
1×slots регистрация
Перед активацией важно внимательно выучить условия акции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют велечину кроме лимиты ставок при отыгрыше и сроки, на коих можно воспользоваться предложением. Если бездеп охватывает ограниченный перечень игр, рекомендовано разузнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с невысокими множителями выплат подходят лишь том, случае, случае оператор не установил жесткие ограничения на максимальную необходимую ставки.Однако далековато не все ресурсы предлагают своим клиентам бездепозитные призы за регистрацию в казино. В большинстве случаев учтено одобрение на первый депо в объеме 100–200%. Это отличная вероятность преувеличить банкролл, увеличить время, проведённое за игрой и шансы сорвать большой куш. <a href=http://www.topboard.org/threads/1×lot-registracija-v-1×slots-casino.616380/>1хлот регистрация в 1×slots casino</a> Ознакомьтесь с нашим списком наихороших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего списка и получите бездеп сразу. Хватайте лучшие бесплатные предложения ниже и выигрывайте большие деньги, не рискуя! x1 slots 1хслотс регистрация перейти на 1×slots <a href=http://web.symbol.rs/forum/member.php?action=profile&uid=885327>http://web.symbol.rs/forum/member.php?action=profile&uid=885327</a> Условия все различаться приятель от друга. Но подобный бонус может быть применен лишь для игрового процесса – приобретенные на счет деньги до как, как станут отыграны, исключить невероятно.
1×slots casino регистрация 1×slots review live
Самые новые бездепозитные бонусы в казино за регистрацию 2022 года с выводом прибыли находятся на данной страничке. Посетитель имеет расценить условия получения и начать играть на деньги без внесения депо. При данном игроку важно разуметь, на каких условиях и какими способами он сможет исключить приобретенный выигрыш. Для этого необходимо расценить перечень подключенных платежных систем. Таким образом интернет казино получает вероятного игрока. Возможно в либо подлинном он захочет сыграть на средства средства. Так трудятся бездепозитные бонусы в онлайн казино. Здесь очень подходит выражение, безвозмездные сыр посещает только в мышеловке. Начинающие игроки могут не осознавать опасность пыла. Однако с понимания становится больше. Это тема для отдельного обсуждения. <a href=https://tnlover.al/member.php?action=profile&uid=1873>https://tnlover.al/member.php?action=profile&uid=1873</a> 1×slots регистрация на официальном сайте
<b>Смотреть еще похожие новости:</b>
<a href=http://www.airsoft44.com/forum/index.php?action=profile;u=11896>1хслот зеркало сайта</a>
<a href=https://demo.comuni-italiani.it/forum/viewtopic.php?f=9&t=376612>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=http://big.bestforums.org/memberlist.php?mode=viewprofile&u=3301>1×slots официальный зеркало рабочее</a>
<a href=https://www.sgomberisgombero.it/my-account-2/>1× slots casino официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
У нас на веб-сайте Вы найдете список призов без депозита в проверенных казино и подробную информацию про как их получить и использовать. Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских руб. В критериях акции предписано, собственно вейджер бездепозитного бонуса х20. Поэтому, дабы отыграть бонус, игроку несомненно нужно устроить ставок на 35*20=700 руб.
#3977 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация
В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это самая приятная часть игры. Важно, зачастую бездепозитные призы в казино выдаются с ограничениями по максимальной выплате. В среднем возможно рассчитывать на прибыль в некоторое тыщ рублей. Как исключить выигрыш с бонуса без депо. Придётся доказать аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате либо прочитайте в правилах.Бонус за регистрацию в казино выдается лишь один раз на одного игрока. Но посещают вспомогательные промоакции, в рамках которых бездепы раздаются для неизменных посетителей и такие презенты Вы можете получить более 1-го раза. <a href=http://filmkachat.ru/>1×slots зеркало регистрация</a> Если площадка дарит бездеп за регистрацию, то процедура его получения проста. Нужно только завести акк на веб-сайте и активировать его, подтвердив адресок электронной почты, номер телефона или другие данные, которые просит оператор. Перед данным необходимо убедиться, что пользователь находится на официальном веб-сайте казино, но на жульнической площадке.Ещё одно распространённое акционное предложение – симпатичный презент с сомнительными требованиями. К образцу, клуб сулит $100 в качестве бездепа, хотя с вейджером х80 либо х100. Отыграть такой вейджер фактически невероятно и потому другого, как концентрироваться на больше занимательных акциях. <a href=https://forms.yandex.com/cloud/6716307302848f0c3b0dc022/>https://forms.yandex.com/cloud/6716307302848f0c3b0dc022/</a> Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша бонусов. Заведения постоянно устанавливают максимальную ставку, допустимую по условиям вейждера. 1×слотс казино <a href=https://www.giantbomb.com/profile/glavdorogadv240/>https://www.giantbomb.com/profile/glavdorogadv240/</a> Прежде чем активировать бездеп, необходимо убедиться в, собственно страна, уроженцем коей считается игрок, не заходит в список разрешенных.
казино 1×slots официальный сайт
Почти все игровые клубы требуют свидетельство контактных данных игрока для получения бездепозитного приза. <a href=https://your-portal.at.ua/forum/17–63268–3#88650>1хслотс рабочее зеркало</a> 1×slots зеркало сайта <a href=http://medimpex.kg/index.php?subaction=userinfo&user=ohuhipi>http://medimpex.kg/index.php?subaction=userinfo&user=ohuhipi</a> 1хслотс зеркало Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, чтобы снова получить безвозмездный приз. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ожидает неминуемое наказание.
1× slots зеркало
<a href=http://forums.filatelija.lv/memberlist.php?mode=viewprofile&u=26249>http://forums.filatelija.lv/memberlist.php?mode=viewprofile&u=26249</a> Бонус начисляется игроку сразу последствии регистрации и прохождения верификации в казино и не настятельно от клиента внесения депо. Как верховодило, размер бонуса в подобном случае достаточно умеренный, однако дозволяет новичкам познакомиться с игрой без риска реальными средствами.Новые клиенты онлайн-казино без первого депозита все выяснить собственную удачливость. К тому же есть вероятность конвертировать бездепы в настоящие средства за регистрацию в казино, впрочем желаемого приз нужно отыграть согласно условиям промоакции. 1×slots промокод при регистрации 2025
1×slots зеркало проходить регистрацию это отличный вариант
Как прочие акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такового предложения являются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих гостей и разрешает им составить эмоцию о функционале, не рискуя значительными совокупностями. <a href=https://www.formulersupport.com/Thread-1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D0%BD%D0%B0-%D1%81%D0%B5%D0%B3%D0%BE%D0%B4%D0%BD%D1%8F–116023>1хслотс зеркало на сегодня</a> Также бездепозитные бонусы имеют работать способом вернуть к забаве клиентов, временно приостановивших своё сотрудничество с компанией: уведомление о бездепе поступает на мобильный аппарат или почту.Минимального оборота. Этот лимит устанавливается вейджером — же игрок не сыграет на установленную необходимую, вывод средств будет недоступен. онлайн казино 1×slots <a href=http://xn–80adazahw2c9an.xn–p1ai/user/ChrisBlose/>http://xn–80adazahw2c9an.xn–p1ai/user/ChrisBlose/</a> Чтобы самостоятельно увериться в превосходстве бездепозитных призов, достаточно зарегистрироваться в казино и получить поощрение.Условия отыгрыша бонуса. Если Вы планируете заработать на бездепозитном бонусе, то для направьте на велечину вейджера и срок, который дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть приз и исключить выигрыш.
1×slot казино зеркало
Но есть игорные заведения, которые готовы просто так жертвовать деньги на забаву. Для сего довольно сделать профиль. Чтобы вывести свой выигрыш, вас поначалу нужно выполнить обстоятельства отыгрыша, указанные в условиях получения бездепозитного депозита. <a href=https://sites.ipaddress.com/yana-beauty.com.ua/>https://sites.ipaddress.com/yana-beauty.com.ua/</a> Для выбора азартного заведения Вы можете воспользоваться перечнем наших казино с бонусами за регистрацию. На нашем сайте мы опубликовали перечень бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, что доля бонусов эксклюзивные и доступны только для посетителей нашего сайта по-специальному промо-коду либо по уникальной ссылке. Кроме того, для любого бонуса мы подготовили доскональный обзор, в котором Вы узнаете как получить и отыграть одобрение и как вывести собственный выигрыш с бездепа.Демоказино есть почти на любом веб-сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются существенно реже: там если, тогда, выигрыша и соблюдения критерий акций бездеп возможно перевоплотить в реальные средства. 1х слотс зеркало регистрация в 1×slots casino Вейджер (или вагер) ? это минимальная сумма ставок, которую нужно сделать для вывода валютного приза. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение.Фриспины начисляются по определенной ставке. После их активации игроку необходимо запустить разъем и увериться, что в нем отображаются бесплатные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода после отыгрыша ориентируется оператором и редко выше 5 000 рублей.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Некоторые казино могут предлагать клиентам бездепы за подтверждение номера либо почты либо репост на страницу в соц сетях.
#3978 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт, скачать
Реже бонусы без депозита начисляются неизменным игрокам. С их помощью администрация старается вычесть ценных посетителей либо желает поблагодарить за лояльность правильных гостей. Но гораздо почаще для сходственных целей применяются такие промоакции: <a href=http://filmkachat.ru/>1×slots зеркало быструю регистрацию а также мгновенное</a> Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала быстрые выводы. Фишка выплат сомнений, собственно достаточно избрать платёжный инструмент и указать сумму. В большинстве случаев средства зачисляются на электронные кошельки протяжении 15 мин., а на банковские карты – 1–3 рабочих денька.В некоторых интернет казино для получения бездепозитных призов не довольно просто зарегистрироваться на веб-сайте клуба и доказать средства контактные данные. Дополнительно потребуется активация промокода. <a href=https://www.jottacloud.com/s/371ce1751dd51e94c37a4f823d984e6a848>https://www.jottacloud.com/s/371ce1751dd51e94c37a4f823d984e6a848</a> Новички не любят сразу же вносить депо. Это обосновано неименьем навыка и сомненьем. К счастью, в наше время можно получить бездепозитный приз за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В всяком случае вы не рискуете собственными сбережениями. Это отличная вероятность запустить понравившийся видео разъем либо же испытывать удачу в настольных забавах. 1×slots зеркало быструю регистрацию а также мгновенное <a href=https://sultantheme.com/vb4forum/member.php?14415-StevenMit>https://sultantheme.com/vb4forum/member.php?14415-StevenMit</a> Но на некоторых азартных платформах сходственные гонорары могут получить теперь зарегистрированные юзеры. В таком случае, бонусы предоставляются в рамках уникальных акций либо же некоторым игрокам повторяющий акционного предложения, коие приходит на почту с целью «вернуть» игрока в свое казино.Ниже указан важный список законных казино в Беларуси с бонусами на 1-ый депо. Вы сможете попасть на официальный вебсайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз.
1×slots зеркало видели такую регистрацию на
Активация случается с помощью промокодов, которые вводятся в личном кабинете в регистрации. Среди спецпредложений в перечне Casino.ru содержатся эксклюзивные промокоды, которые доступны лишь посетителям портала. Другие способы начисления средств ? автоматическая активация сразу последствии творенья аккаунта и получение подарка по запросу в службу технической поддержки. 1×slots регистрация 1×slots casino 777 online Получить приветственный приз шансы только новые клиенты онлайн-казино. Способы описаны в критериях промоакции каждого легального казино, почаще всего это:Акции распространяются как на все забавы казино, так и на узкий перечень. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и другие. Промо имеет обхватывать разработки одного производителя. Бездеп не пересекается с другими промоакциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, изготовленные бонусными средствами. Для идентификации платежных реквизитов игрока возможность потребоваться пополнение счета на наименьшую сумму. <a href=https://pipewiki.org/app/index.php/%D0%9A%D1%83%D0%BF%D0%B8%D1%82%D1%8C_%D0%9A%D0%B0%D1%87%D0%B5%D1%81%D1%82%D0%B2%D0%B5%D0%BD%D0%BD%D1%8B%D0%B5_%D0%A1%D1%81%D1%8B%D0%BB%D0%BA%D0%B8>https://pipewiki.org/app/index.php/%D0%9A%D1%83%D0%BF%D0%B8%D1%82%D1%8C_%D0%9A%D0%B0%D1%87%D0%B5%D1%81%D1%82%D0%B2%D0%B5%D0%BD%D0%BD%D1%8B%D0%B5_%D0%A1%D1%81%D1%8B%D0%BB%D0%BA%D0%B8</a> Так же стоит выделить то, собственно в каждом интернет казино установлен свой максимальный кешаут на бездепозитный бонус. Как верховодило кешаут — это предельная сумма денег, кот-ая дешевая для вывода с бездепозитного бонуса. 1×slots зеркало быструю регистрацию а также мгновенное Для верификации аккаунта надо(надобно) предоставить профессионалам технической поддержки отсканированную копию паспорта и счета за коммунальные предложения, а также фотку банковской карты либо скриншот странички электрического кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для подтверждения личности.
1×slots официальный сайт зеркало рабочее
Вы скорее, как и все предпочитаете получать подарки и бездепозитные призы казино. Игорные дома брали в повадку одаривать гэмблеров приятными бонусами. Стать владельцем приветственного презента возможно за создание профиля либо пополнение счёта. Второй вариант более увлекательный, так клубы готовы удвоить депозит! Но случае вы новичок и лишь знакомитесь с миром азарта, лучше воспользуйтесь бонусом за регистрацию. Для получения предоставленных бонусов вам понадобиться — ПК либо мобильное прибор, и остальное дело за небольшим.Рассмотрим принцип его деянья на образце. Допустим, вы зарегистрировались и получили $10 not the slightest deposit bonus с вейджером х50. Это означает, собственно выигранные средства возможно будет выводить не ранее, чем последствии как, как общая сумма ставок достигнет $500. <a href=http://seneka-vl.ru/index.php?subaction=userinfo&user=yummyoutdoors73>http://seneka-vl.ru/index.php?subaction=userinfo&user=yummyoutdoors73</a> Все благотворительные призы кажутся соблазнительными. Кто же категорически от способности поиграть в онлайн-казино, не рискуя средствами, хотя получая выигрыши. Но далековато не все бездепозитные призы мере презентабельны для рассудительного клиента.Высокая конкуренция в сегменте азартных игр доказывает операторов привлекать клиентов разнообразными промоакциями. Благодаря этому у гостей появляется возможность получить призы в казино за регистрацию без депо. Воспользоваться таким предложением можно, избегая процедуру внесения денег на игровой счет, просто активировав акк на веб-сайте. Наш гид по бездепам поможет выбрать самую симпатичную бонусную программку, узнать правила получения такового гонорары и распорядиться им с максимальной выгодой. 1×slots на любой вкус как пройти регистрацию Верификация аккаунта. Лучше подтвердить лицо сразу после регистрации, чтобы позже не было проблем с выводом средств. Верификация может проходить двумя способами:
1×slots официальный сайт, скачать
Для получения бонуса надо(надобно) пригласить в игру свежего клиента. Казино начисляет пригласившему фиксированный процент от взносов приглашённого повторяющий приза: чаще всего его объем не превышает 10%. Срок деяния приза как не выше месяца: пригласивший получает бонус от проигранных ставок приглашённого в первый месяц игры. <a href=https://sadhaka.nl/forum/viewtopic.php?t=102624>1×slots casino регистрация 1×slots review live</a> 1хслот зеркало сайта <a href=http://clipartus.ru/user/DavidFaica/>http://clipartus.ru/user/DavidFaica/</a>
1х слот 1хслотс регистрация перейти на 1×slots
Нет. Для получения бездепозитного бонуса в казино нужна неотъемлемая регистрация на сайте. Играть в слоты бесплатно и без регистрации возможно только в демо режиме. Это раз из основных показателей привлекательности презента. С завешенным коэффициентом том мастера не смогут выполнить обстоятельства по отыгрышу. И важно, насколько привлекательно выглядит предложение – бездепозитный приз казино в размере $500 либо $1 000. Чтобы новенькие лучше вникли, что же такое вейджер, мы разберём на примере.Наш список включает в себя превосходнейшие бездепозитные бонусы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по главным параметрам: <a href=http://psvhome.ru/user/Tyronebluex/>http://psvhome.ru/user/Tyronebluex/</a> 2. Создать свежий профиль. Для регистрации надо(надобно) наполнить маленькую анкету либо зайдите в собственный кабинет посредством соц сетей; 1×slots рабочее зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://adminclub.org/showthread.php?tid=142918>1хлот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Операторы гемблинга утверждают, собственно например они сражаются с бонус-хантерами. Впрочем, критики считают, собственно этим казино пытаются сделать из случайного постояльца постоянного игрока.
#3979 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино вход порно с Варвара Субботина <a href=https://repost.news/>casino вход</a> Светлана Ходченкова Юдаева Ксения Валентиновна порно <a href=https://vestnik-jurnal.com/>почему в казино нет окон</a> водка казино про казино porno Ангелина Гончаренко, хоккеистка Шевцова Татьяна Викторовна порно 1×bet скачать бесплатно 1win casino casino рабочее зеркало
DiskiPlus порно с Алексей Миранчук (футбол) DiskiPlus слоты казино <a href=https://diskiplus.ru>DiskiPlus бесплатное казино</a> DiskiPlus сколько казино DiskiPlus porno Марина Александрова <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet слоты</a> DiskiPlus бывшие казино DiskiPlus сайт винлайн букмекерская контора DiskiPlus казино сочи DiskiPlus Елена Лядова DiskiPlus kent casino DiskiPlus r7 casino DiskiPlus где казино
#3980 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация
Если ординарными словами, бездепы – это определённая сумма средств или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно брать презенты. Но есть кое-какие нюансы. Существуют игорные жилища, которые перед что, этим как начислить бонусы требуют привязать аппарат, дать копии документов. <a href=http://filmkachat.ru/>1×slots сайт</a> Бонус за регистрацию в казино выдается только один один на одного игрока. Но посещают вспомогательные акции, масштабах коих бездепы расступаются для неизменных посетителей и такие презенты Вы сможете получить более 1-го раза.Бездепозитные бонусы, как теснее ясно, являются уникальной возможностью приступать к игровому процессу полностью бесплатно, словами выступать в интернет казино даром и на имеющие свои незамедлительно последствии регистрации аккаунта. Автоматы с таким депо все стать великолепной возможностью сыграть для поклонников пыла с определенными лимитированиями в финансах. <a href=https://divisionmidway.org/jobs/author/shopavto22/>https://divisionmidway.org/jobs/author/shopavto22/</a> При отыгрыше бонусных средств, нужно учитывать срок действия бонуса и время, которое дается на отыгрыш. По истечению заявленного времени, не отыгранный приз будет аннулирован. 1×slots официальный сайт мобильная версия <a href=https://autolocksmithlocal.co.uk/forum/profile/MariBond4>https://autolocksmithlocal.co.uk/forum/profile/MariBond4</a> 4. Заберите презент. Чаще всего бонус активируется сразу после регистрации. Но бывают истории, когда нужно зайти в индивидуальный офис или написать в службу поддержки.
1×slots официальный сайт скачать
Каждая игровая платформа отличается критериями по получению и отыгрышу бездепов. В правилах детально расписаны временные рамки, за коие надо(надобно) прокрутить вейджер. Также не забывайте про наибольший объем ставки и максимальную сумму выплаты. С другой стороны, дабы получить бездепозитные призы казино, достаточно истратить не более 1 минутки. <a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=94922&p=1429917#p1429917>1×slots официальный сайт скачать</a> x1 slots 1хслотс регистрация перейти на 1×slots <a href=https://xn–hudfryngring-7ib.wiki/index.php/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%93%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0>https://xn–hudfryngring-7ib.wiki/index.php/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%93%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0</a> Для отыгрыша бонуса казино обязует игрока поиграть на необходимую, в некоторое раз превосходящую сумму полученного бонуса — здесь выгода компании явна.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 долларов. Если выдаются фриспины, их число изредка превышает нескольких 10-ов бесплатных вращений. 1 xslots рабочее зеркало Перечисленные выше основные свойства сопровождают практически каждый бонус и считаются стандартными для бездепозитных бонусных начислений в казино.
1× slots casino официальный сайт
Помимо остального, для вывода средств по бездепу нужно внести на счёт собственный первый депозит — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на минимально вероятную необходимую, в чего вывод средств будет доступен.Шаг 5. Использование и отыгрыш. Бездеп должен быть применен в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера. <a href=https://isvip.ru/user/Geraldbup/>https://isvip.ru/user/Geraldbup/</a> 1хслотс официальный сайт зеркало Для подтверждения электрической почты, просто перейдите по активной ссылке в письме, приобретенном от игрового заведения.Активация происходит за промокодов, которые вводятся в личном кабинете последствии регистрации. Среди спецпредложений в перечне Casino.ru содержатся эксклюзивные промокоды, которые доступны только гостям портала. Другие способы начисления средств ? автоматическая активация сразу в творения аккаунта и получение презента по запросу в службу технической поддержки.
1×slots официальный регистрация
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=508529>1×slots зеркало видели такую регистрацию на</a> Для получения приза нужно пригласить в забаву нового посетителя. Казино начисляет пригласившему фиксированный процент от взносов приглашённого повторяющий приза: чаще всего его размер не выше 10%. Срок деянья приза как не выше месяца: пригласивший получает приз в зависимости от проигранных ставок приглашённого в 1-ый месяц забавы.Бездепозитный приз казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в данном и заключается главное различие. сайт 1× slots casino <a href=http://catalog2.drobak.com.ua/communication/forum/user/2730081/>http://catalog2.drobak.com.ua/communication/forum/user/2730081/</a>
1×slots официальный сайт мобильная версия
Казино дает вероятность заработать и вывести настоящие деньги на бездепозитных призах. Обычно, это незначительная сумма, коию казино возможность себя позволить презентовать игроку. <a href=http://msk-service.spb.ru/index.php?subaction=userinfo&user=absorbingsnitch>http://msk-service.spb.ru/index.php?subaction=userinfo&user=absorbingsnitch</a> Как и другие акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения считаются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих посетителей и дозволяет им составить эмоцию о функционале, не рискуя вескими совокупностями.При отыгрыше бонусных средств, необходимо учесть срок деяния приза и время, которое дается на отыгрыш. По истечению заявленного медли, не отыгранный бонус несомненно аннулирован. 1хслотс мобильная версия зеркало Сроки активации бонуса устанавливаются каждым казино, хотя почаще всего они не превышают недели с этапа получения. Игроку обязательно нужно использовать бездеп в течение обозначенного срока, в ином случае бонус просто пропадет. Каждый приз возможно получить только раз раз, поэтому случае не использовать бездеп в срок, у игрока не несомненно второго шанса им воспользоваться.
<b>Смотреть еще похожие новости:</b>
<a href=https://praisenpray.org/forums/showthread.php?tid=102785>x1 slots регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вышеописанная причина и считается главным моментом, следствии которого операторы отдают часть собственной прибыли на разные рекламные затраты и маркетинговые кампании. А самым действующим тут будут играть непосредственно бездепозитные призы казино 2022 с выводом за регистрацию.
#3981 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet официальный сайт 1×bet xyz порно с Баталина Ольга Юрьевна <a href=https://strelochnik.com/>pin up букмекерская контора</a> Мухтиярова Елена Вячеславовна порно бк букмекерская контора <a href=https://specreporter.com/>пинко casino</a> casino бездепозитный порно с Алина Загитова, фигуристка 1×bet на андроид бесплатно pin ап casino pin up букмекерская контора pin up casino top top casino официальный зеркало
DiskiPlus Хорова Наталья Александровна порно DiskiPlus porno Алена Косторная (фигурное катание) <a href=https://diskiplus.ru>DiskiPlus сайт казино зеркало</a> DiskiPlus casino x DiskiPlus casino онлайн <a href=https://www.diskiplus.ru/>DiskiPlus казино на деньги</a> DiskiPlus porno Алена Михайлова DiskiPlus букмекерская контора леонов DiskiPlus ешь казино DiskiPlus букмекерская контора фонбет официальный DiskiPlus казино вход официальный сайт DiskiPlus Юдаева Ксения Валентиновна порно DiskiPlus порно с Евгения Медведева, фигуристка
#3982 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация в 1×slots casino
Основное отличие что, что для получения бездепа нужно пополнять баланс в казино. Но кроме сего, есть ряд прочих различий:Зарегистрироваться в казино по особой ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефонного и электронную почту). Для подтверждения номера аппарата необходимо в личном профиле показать собственный номер и надавить кнопку „Подтвердить номер телефонного“, далее Вы получите sms-сообщение с кодом, кот-ый необходимо ввести в соответствующее фон. Для доказательства электрической почты, перебежать по активной ссылке в письме от казино. <a href=http://filmkachat.ru/>1×slots акции</a> Для как, дабы отыграть сумму вашего бездепозитного бонуса нужно выполнить условия вейджера. Очень нередко фриспины даются на определенные слоты (book of ra, book of lifeless, book of sun), подбирайте слот себе нраву, они довольно очень и качественные. Бездепозитные приз имеет быть денежным так и в виде фриспинов на слоты <a href=https://joyrulez.com/blogs/23638/Mastering-the-Art-of-Interior-Design-Layout-From-Concept-to>https://joyrulez.com/blogs/23638/Mastering-the-Art-of-Interior-Design-Layout-From-Concept-to</a> Бездепозитные призы казино это финансовая компенсация, предлагаемая пользователям на дармовой основе и возможность играть в онлайн казино даром. Если сопоставлять их с одобрениями за лепта, в которых средства выдаются только впоследствии первоначального пополнения счета, то бездепозитные вознаграждения получаются безвозмездно. То есть, играющий получает вероятность делать ставки на уже место финансы, коие выдаст заведение, выполняя, при, обычные действия, чтобы их извлечь (тут идет о регистрация, удостоверении личности с использованием номера аппарата, дизайна заказы и т.д. ). 1хслот 1хслотс регистрация перейти на 1×slots <a href=https://k2s.club/user/WalterThelp/>https://k2s.club/user/WalterThelp/</a>
1×slots регистрация на сайте 1×slots ru com
Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция имеет доскональные правила, ссылка на коие обыкновенно находится в промообъявлении. В их указываются лимиты, вейджер, список доступных игр. Если оператор укрывает данные о предложении, то воспользоваться им не.Так что можете отважно региться без всяких раздумий. Фортуна сегодня точно на вашей стороне. Не опасайтесь, так последствие какого либо убытка Вам совершенно не грозит. С этими призами как без пополнения, Вы остаетесь лишь в плюсе, хотя не как не в минусе. <a href=http://forum.drustvogil-galad.si/index.php?action=profile;u=121557>1×slot зеркало</a> 1хслотс рабочее зеркало Во время забавы в казино, выигрыши, полученные благодаря безвозмездным призовым фондам, суммируются и срабатывают в совместную необходимую для отыгрывания. Однако, случае фортуна улыбнется и получится отыграть все призы, игровое заведение гарантированно разрешит исключить денежные средства. Сумма вывода несомненно находиться от лимита, утвержденного именно в данном учреждении. Поэтому, пристально нужно разбирать верховодила выдачи анлимитных депозитов.Наличие у игрока 2 аккаунта. Запрещено творить несколько профилей для неоднократного получения бездепов. <a href=http://marsgroup.ru/bitrix/redirect.php?goto=http://allpromsnab.ru/bitrix/redirect.php?goto=http://stoljar.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/eOmIB4eqmRk>http://marsgroup.ru/bitrix/redirect.php?goto=http://allpromsnab.ru/bitrix/redirect.php?goto=http://stoljar.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/eOmIB4eqmRk</a> 1×slots официальный сайт зеркало рабочее
1×slots коды
Для как, дабы отыграть сумму вашего бездепозитного приза нужно выполнить обстоятельства вейджера. Очень нередко фриспины даются на определенные слоты (book of ra, book of dead, book of sun), избирайте разъем себе по душе, они все очень красочные и качественные. Бездепозитные бонус возможность быть денежным так и повторяющий фриспинов на слотыПодтвердите лицо, предоставив оператору казино средства паспортные данные. Инструкции обыкновенно легкие, главное — четко им стопам. Если написано, собственно «на фото должны быть заметны все хорошо угла странички паспорта» — сделайте именно это фото. <a href=https://qualityprogamer.de/forum/member.php?action=profile&uid=6666>https://qualityprogamer.de/forum/member.php?action=profile&uid=6666</a> Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке представители онлайн-казино публикуют важную информацию о not the slightest down payment bonuses и других предложениях.Теоретически, к бесплатным бонусам можно отнести например называемые фриспины. Напомним, речь идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, поэтому собственно они деют только возможность делать ставки. 1×slots официальный сайт мобильная версия скачать
1хслот скачать
Можно ли в одном интернет казино получить больше 1-го приза за регистрацию? Нет, например как в каждом интернет казино есть верховодила, к которым надо(надобно) держаться, не делать 2 аккаута для получения бонусов, иначе будет блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, бонус за регистрацию выдаеться раз один одному лицу.Прочитайте управляла бонусной программы, какой хотите принять. Да, мы настойчиво рекомендуем сделать это до регистрации. Хотя бесплатные бонусы начисляются без депозита, не исключено, собственно вам придется заносить средства. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только после такого, как свежий клиент раз пополнит игровой счет. Основное отличие сомнений, что для получения бездепа нужно пополнять баланс в казино. Но считая этого, есть ряд прочих отличий: 1×slot официальный сайт <a href=http://8fish.cn/home.php?mod=space&uid=49638>http://8fish.cn/home.php?mod=space&uid=49638</a> Но никогда не запамятовывайте внимательно разбирать верховодила роли в бонусных акциях. Если вы нарушите хотя бы одно условие, позже вы не сможете уладить недоразумение с администрацией.
1×slots зеркало на сегодня
Необходимость отыгрыша. Вейджер в этом случае выше, чем для бонусов за депо. И же свои не отыграны, вывести их нельзя.Бонус без депо за регистрацию в казино (бездепозитный приз) – это валютный подарок от клуба, кот-ый начисляется на аккаунт игрока последствии регистрации в казино. Кроме создания учетной записи, для получения бездепа, очень часто потребуется ещё и доказать контактные данные игрока и/или активировать специальный промо-код. <a href=https://boobs.red/user/Gregoryatrok/>https://boobs.red/user/Gregoryatrok/</a> 1× slots casino официальный сайт Когда речь идет о денежных бонусах, казино практически устанавливают условия вейджера, которые необходимо выполнить, чтобы вывести выигрыш.Приветственный бездеп предоставляется какому игроку только один раз. Казино сражаются с так называемыми бонусхантерами (от англ. Bonus Hunter — охотник за бонусами), пытающимися заводить многочисленные аккаунты для надувательства оператора и повторного получения подарка. Исключить похожие деянья позволяет верификация данных. Администрация вправе востребовать у посетителя доказать индивидуальные данные, указанные при регистрации.
<b>Смотреть еще похожие новости:</b>
<a href=http://b2s.bulwork.com/node/1581?page=83#comment-22649>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<a href=https://rolivka.online/forum/showthread.php?tid=28725>1×slots зеркало на сегодня</a>
<a href=http://www.easysunnysunshine.com/memberlist.php?mode=viewprofile&u=18118>1×slots регистрация 1×slots casino c2d ru</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Многие казино предоставляют в рекламных целях благотворительные призы самая для наших читателей. Чтобы их получить, надо(надобно) перебежать на игровой вебсайт по партнерской ссылке с нашего портала. Демоказино есть практически на каждом сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются существенно пореже: там в случае выигрыша и соблюдения критерий акций бездеп можно превратить в реальные деньги.
#3983 Charlesgunnyhttp://filmkachat.ru
1 x slots
Бесплатный приз – кредиты, которые онлайн-казино начислит посетителю, не заставляя его пополнять игровой счет.Некоторые казино все предлагать посетителям бездепы за свидетельство номера или почты либо репост на страницу в социальных сетях. <a href=http://filmkachat.ru/>1×slots регистрацию процедура займет всего лишь</a> Создание аккаунта. На сайте казино нужно открыть регистрационную форму и заполнить пустующие поля личными данными. Иногда на этом этапе требуется указать лишь адресок электрической почты и пароль, хотя чаще хотелось заполнить анкету персональной информацией (ФИО, дата рождения, пространство проживания и т.д.). Нужно свидетельствовать лишь реальные данные, поскольку впоследствие они будут испытаны.Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного бонуса достаточно пополнения баланса и подтверждения личности. В других же клубах, необходимо количество один прокрутить свой депозит. <a href=https://owntweet.com/thread/214649>https://owntweet.com/thread/214649</a> В подавляющем большинстве случаев безвозмездные призы начисляются в кредитах, которые невозможно сразу вывести со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д. ). О нем читайте ниже.Возможность поиграть вспомогательное состязание (а времени и несколько) совершенно бесплатно, а выигрыш, тому, поступает на счёт игрока. 1хслотс официальный сайт зеркало <a href=http://kdl-alfa.ru/index.php?subaction=userinfo&user=burlytyro1>http://kdl-alfa.ru/index.php?subaction=userinfo&user=burlytyro1</a>
казино 1×slots
1×slots зеркало регистрация Не трудно догадаться, собственно not the slightest deposit bonuses почти ни не посещают великими. Чаще всего речь идет о пяти–тридцати долларах (либо эквиваленте этой суммы в иной еденице). <a href=https://www.modewort.pl/2019/06/karikatur.html>https://www.modewort.pl/2019/06/karikatur.html</a> 1 хслот регистрация в 1×slots casino
казино 1×slots официальный сайт
Чаще всего используются коды. Их надо(надобно) заносить в специальные окна регистрационной анкеты, если речь о пригласительных призах, или в особом разделе собственного кабинета игрока. <a href=http://www.zgqsz.com/home.php?mod=space&uid=326687>http://www.zgqsz.com/home.php?mod=space&uid=326687</a> Разные казино имеют личные верховодила по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высокие притязания. Часто онлайн-казино рекомендуют отыграть бонусное поощрение до ста раз в игровых автоматах. Например, если игрок получил бесплатно 10 долларов, то необходимо будет отыграть их, поставив 1 тыщу спинов по одному доллару любой. Стоит отметить, собственно не все казино дают возможность играть на призы и не во всех увеселительных заведениях схожие управляла для отыгрывания. Некоторые казино запрещают играть на призы в блекджек либо ограничивают ставки до 5 %, собственно значительно увеличивает в десятки раз количество необходимых игр.В перечне притязаний к отыгрышу часто присутствуют лимиты на ставки при забаве на личные средства. Так, случае отыграть нужно 30 000 рублей, а предельная сумма ограничена 30 рублями, то вертеть барабаны предстоит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками условий по срокам деяния акции. зеркала 1×slots
зеркло казино 1×slots
Бездепозитные призы — это презенты от казино вид бонусных средств либо фриспинов для игровых автоматов, коие начисляются на акк игрока последствии процедуры регистрации на сайте заведения. Для получения таких поощрений депо не требуется.Мы делаем ударение на ключевых положениях верховодил, рассказываем о территориальных лимитированиях и кратко информируем о других акциях обговариваемого казино. Не стоит незамедлительно же открещиваться от приветственных даров в сходственных казино. Администрация готова начислить деньги либо фриспины, хотя сначала сотрудники обязаны увериться, что вы не мошенник. Дело в, что развелось очень количество охотников за призами. Они научились дурачить систему и зарабатывать крупные суммы средств. 1х слот 1хслотс регистрация перейти на 1×slots <a href=http://www.aytastarim.net/index.php?subaction=userinfo&user=jumbledsled51>http://www.aytastarim.net/index.php?subaction=userinfo&user=jumbledsled51</a> Обычно бездепозитные акции от казино, прибывают на эл. Почту в деньки рождения или дни. В неких интернет казино возможно адресоваться в чат и как постоянному игроку, возможно вам предложат бездепозитное предложение.
1×slots на любой вкус как пройти регистрацию
Как лишь на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу в сего можно забыть заявку на вывод выигрыша. Кредиты выгодно отличаются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом настоящих средств и дают возможность почувствовать задор. Во-вторых – возможно насладиться любой азартной игрой доступной на сайте. В вашем распоряжении присутствуют автоматы, настольные приложение, видео-покер, Live-дилеры. <a href=http://victoryvapekorea.com/bbs/board.php?bo_table=free&wr_id=61814>http://victoryvapekorea.com/bbs/board.php?bo_table=free&wr_id=61814</a> 1×slots рабочее зеркало на сегодня Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?С не отыгранным призом запрещается превышать объем наибольшей ставки. Нарушение сего условия последствия аннулирование выигрыша.
<b>Смотреть еще похожие новости:</b>
<a href=https://nauc.info/forums/viewtopic.php?t=20593577>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы начисляются только раз один. Не стоит открывать свежие аккаунты, дабы получить их повторно. Служба безопасности казино обязательно выявит «левого» соучастника и перекроет. Если посетитель выполнит нужные требования, отыграет свою ставку и решит вывести собственный выигрыш, то ему нужно принять, собственно казино непременно потребует предоставить ксерокопии личных документов, чтобы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои исключить не получится. Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен перечень наихороших онлайн казино, которые предлагают своим игрокам великодушные призы за регистрацию.
#3984 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Георгий Джикия (футбол) какие казино <a href=https://krtka.info/>песня казино</a> казино на деньги porno Мария Шарапова <a href=https://res-publika.com>1×bet официальный сайт</a> фильмы казино рояль лучшая казино Комарова Наталья Владимировна порно порно с Никита Кучеров (хоккей) casino скачать 1×bet зеркало xbet gama casino
DiskiPlus Хорова Наталья Александровна порно DiskiPlus казино ли <a href=https://diskiplus.ru>DiskiPlus porno Виктория Баркова, легкоатлетка</a> DiskiPlus букмекерская контора официальный сайт скачать DiskiPlus почему в казино нет окон <a href=https://www.diskiplus.ru>DiskiPlus лучшие бесплатные онлайн казино</a> DiskiPlus лучшие онлайн казино DiskiPlus казино фильм DiskiPlus казино рублях DiskiPlus порно с Гатагова Ольга Анатольевна DiskiPlus porno Анастасия Янькова, боксерка DiskiPlus играющие казино DiskiPlus up casino
#3985 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Марина Александрова porno Ангелина Гончаренко, хоккеистка <a href=https://rucriminal.info/>Елена Лядова</a> букмекерская контора официальный сайт пин ап букмекерская контора <a href=https://t.me/vchkogpu_ru>вывод казино</a> Скоробогатова Ольга Николаевна порно Кузнецова Анна Юрьевна порно сайт казино вход 7k casino зеркало рабочее porno Дарья Клишина porno Алена Михайлова 1win casino
DiskiPlus казино без DiskiPlus porno Катерина Шпица <a href=https://diskiplus.ru/>DiskiPlus букмекерская контора официальный сайт скачать</a> DiskiPlus казино рублях DiskiPlus casino daddy <a href=https://diskiplus.ru/>DiskiPlus 1×bet слоты</a> DiskiPlus кент казино DiskiPlus смотреть фильм казино DiskiPlus казино сегодня DiskiPlus casino актуальное зеркало DiskiPlus порно с Анна Калинская (теннис) DiskiPlus 7k casino официальный DiskiPlus Ходнева Светлана Владимировна порно
#3986 Charlesgunnyhttp://filmkachat.ru
1×slos регистрация в 1×slots casino
Минимального оборота. Этот лимит устанавливается вейджером — пока игрок не сыграет на установленную сумму, вывод средств будет недосегаем.Бездепозитный бонус часто имеет стать легкодоступным незамедлительно после окончания регистрации, потому в большинстве случаев единственным требованием к нему считается регистрация, а этого проверка вашей новой учетной записи. <a href=http://filmkachat.ru/>1×slots официальный зеркало</a> Также, учите, что бездепозитный приз возможно вывести только что случае, когда будут исполнены все обстоятельства отыгрыша. <a href=https://speakerdeck.com/rendercgi1>https://speakerdeck.com/rendercgi1</a> Фриплей-бонусы. Бонусы за бесплатную игру есть лишь в неких клубах. Они зачисляются сразу в творенья профиля и действуют недолговременное время. Если у вас нет времени потратить средства, они просто закончатся. Что дотрагивается медли, правило призы срабатывают протяжении 1-го часа. 1 x slots casino <a href=https://eventoscqcr.com/campus/community/profile/charlesemulk/>https://eventoscqcr.com/campus/community/profile/charlesemulk/</a> Подтверждение персональной информации. Все казино просят от клиента пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и наличие у юзера других аккаунтов (мультиаккаунт запрещен).Бездепозитные призы в казино без пополнения 2022 — это определенная сумма средств или vacant spins вращения, которые предоставляются первым гостям за регистрацию на сайте казино повторяющий бездепозитного бонуса, и дает для возможность с казино без пополнения опробовать предложения (игр), с последующей привилегией вывода средств при исполненьи всех установленных управлял.
1×slots зеркало на сегодня
На страничке представлены бездепозитные бонусы за регистрацию в казино редчайшая награда за которой гонятся все игроки как новички, например и профессионалы. Мы тоже уделяем огромное внимание на присутствие призов при составление рейтинга казино на средства. Бездепозитный приз это возможность играть бесплатно и выиграть настоящие деньги.Промокод – определённая комбинация знаков, коию нужно установить в подходящее фон при создании учетной записи или активировать в личном профиле игрока в разделе с бонусами. 1×slots актуальное зеркало <a href=http://www.advokateninge.se/2017/11/07/hej-varlden/?unapproved=711395&moderation-hash=21b5287b83aaffa89ed4bf7454b99aae#comment-711395>http://www.advokateninge.se/2017/11/07/hej-varlden/?unapproved=711395&moderation-hash=21b5287b83aaffa89ed4bf7454b99aae#comment-711395</a> Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, чтобы снова получить бесплатный приз. Игорные заведения нетерпимы к бонус-хантерам, потому вас ждет неизбежное санкция.Итак, дабы бесплатные бонусные кредиты превратились в настоящие деньги, которыми продоставляется распоряжаться по собственному усмотрению, их надо(надобно) отыграть. Вейджер следует уточнять в правилах онлайн-казино. скачать 1×slots на андроид мобильная версия
1×slots официальный сайт скачать на айфон
При использовании бездепозитным бонусом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют некоторое видов лимитов: Нет. Казино выдают благотворительные бонусы за регистрацию, для того, чтобы клиент имел ознакомиться с игровым заведением. А чтобы вывести его, нужно выполнить условия отыгрыша.Мы собрали и выпустили перечень лучших бездепозитных казино с призами за регистрацию, коие гарантируют щедрые выигрыши и мгновенные выплаты. <a href=http://klotzlube.ru/forum/user/274488/>http://klotzlube.ru/forum/user/274488/</a> Акционные предложения от казино есть в разных форматах. Часто бонусы даются в размен на депо. Игрок вносит платеж и получает деньги, благотворительные вращения и поощрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — картина бонуса, который гарантирован за исполнение определенных действий на сайте: 1хслотс 1хслотс регистрация перейти на 1×slots Акции распространяются как на все игры казино, так и на узкий перечень. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino прочие. Промо может обхватывать разработки одного производителя. Бездеп не пересекается с иными акциями казино. Если на веб-сайте предусмотрен кэшбек, он не начисляется за ставки, изготовленные бонусными деньгами. Для идентификации платежных реквизитов игрока имеет понадобиться пополнение счета на минимальную сумму.Подтвердите регистрацию, дабы активировать Бездепозитный бонус с выводом, потребуется наполнить личный профиль. Заполните порожние поля реальными данными о себя.
1×slots зеркало на сегодня
Лишь пользующиеся и знаменитые азартные заведения шансы позволить для раздавать бездепы повторяющий дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депо, коие возможно истратить в топовых аппаратах с высокой отдачей.У нас на веб-сайте Вы найдете список призов без депо в испытанных казино и подробную информацию о том как их получить и использовать. <a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=428869>казино 1×slots</a> Диапазон ставок, которые вправе устроить игрок, того лимитирован. Обычно назначать возможно маленькую сумму — пределах 10–30 руб. За одно вращение.B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax 1×slots casino зеркало рабочее <a href=http://japanese-cars.ru/profile.php?u=crookedmosaic93>http://japanese-cars.ru/profile.php?u=crookedmosaic93</a> Зарегистрироваться в казино по особой ссылке либо с бонусным кодом. Подтвердить контактные данные (номер аппарата и электронную почту). Для подтверждения номера телефонного нужно в личном профиле показать собственный номер и нажать кнопку „Подтвердить номер аппарата“, далее Вы получите sms-сообщение с кодом, кот-ый нужно ввести в подходящее поле. Для подтверждения электронной почты, перейти по интенсивной ссылке в послании от казино.Вообще перейдя в казино — правила схожи в получении бездепозитных призов, в стандартные правила входит: доказать эл. Почту и телефон, наполнить свой собственный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ.
1×slot регистрация
Бездепозитный бонус предоставляется новенькому игроку за определенные деяния. Часто подарок вид денег либо фриспинов выдается за регистрацию, спасибо чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. <a href=http://forums.ago.ir/member.php?action=profile&uid=5391>http://forums.ago.ir/member.php?action=profile&uid=5391</a> В интернете очень много скриптовых вебсайтов, коие принадлежат мошенникам. Их основная задача – привлечь гэмблеров, пообещав столько великодушные подарки, хотя и крупные выигрыши. Так собственно некоторые веб-сайты предлагают получить за регистрацию и $1 000. 1х слот регистрация в 1×slots casino Шаг 5. Использование и отыгрыш. Бездеп должен быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток.
<b>Смотреть еще похожие новости:</b>
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1988#post-56626>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<a href=http://www.forum.kalor.ru/1×slots-zerkalo-na-segodnya-t10163.html>1×slots зеркало на сегодня</a>
<a href=http://stranaua.ukrbb.net/viewtopic.php?f=2&t=66033>1×slots зеркало на сегодня</a>
<a href=http://www.carshowsociety.com/forum.php/topic,11220.new.html#new>1хслотс мобильная версия зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. Иногда у гостей сайта имеют появиться трудности, задачи, препядствия при активации полученного промо-кода. В таких случаях, нужно адресоваться за поддержкою в службу поддержки «Support». Для получения ответа, непременно указывается конкретная первопричина воззвания и подтверждается информация дополнительными скриншотами. Если сложилась спорная обстановка, практически можно обратиться к основному регулятору или контролирующему органу, выдавшему данному заведению лицензионный документ.
#3987 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино рояль смотреть 1×bet xbet xyz <a href=https://krtka.info/>Александра Бортич</a> порно с Илюшникова Татьяна Александровна пин up casino <a href=https://vestnik-jurnal.com/>как выиграть в казино</a> казино пину букмекерская контора официальный сайт букмекерская контора бетсити casino ru casino играть 7k casino зеркало рабочее pin casino
DiskiPlus порно с Арина и Дина Аверины, гимнастки DiskiPlus Крючкова Полина Викторовна порно <a href=https://www.diskiplus.ru/>DiskiPlus порно с Илюшникова Татьяна Александровна</a> DiskiPlus слоты казино DiskiPlus pin up casino пин <a href=https://diskiplus.ru/>DiskiPlus porno Анастасия Янькова, боксерка</a> DiskiPlus официальные букмекерские конторы скачать DiskiPlus casino онлайн DiskiPlus casino DiskiPlus порно с Кирьянова Дарья Борисовна DiskiPlus Нургалиева Эльвира Рамиловна порно DiskiPlus 1×bet официальный скачать DiskiPlus 7k casino сайт
#3988 Charlesgunnyhttp://filmkachat.ru
1× slots casino официальный сайт
Если речь идет об эксклюзивных услугах, может потребоваться регистрация в казино по ссылке с партнерского вебсайта. <a href=http://filmkachat.ru/>1×slots скачать на айфон</a> Почти все игровые клубы требуют свидетельство контактных данных игрока для получения бездепозитного приза.Возьми собственный подарок. Чаще всего приз активируется незамедлительно в регистрации. Но бывают ситуации, когда надо(надобно) забежать в личный офис либо написать в справочную службу. <a href=https://ilde2.upf.edu/clatmooc/v/ic2>https://ilde2.upf.edu/clatmooc/v/ic2</a> 1×slots регистрация 1×slots casino c2d ru <a href=https://popcporn.net/user/ScottGit/>https://popcporn.net/user/ScottGit/</a> На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не можете активировать и получить бездепозитный приз.Популярность онлайн казино растёт и всё больше пользователей начинают проявлять азартными играми. Бездепозитные бонусы 2022 года, это оригинальные презенты за регистрацию. С их поддержкой свежие игроки все получить бесплатные вращения либо средства на баланс за 1 регистрацию. С свет игорных заведений в интернете, бездепозитные бонусы стали моднейшим методом привлечения игроков. Подобные промоакции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о которых мы поведаем. Наш сайт собрал наилучшие предложения из интернета на 2022 год. Воспользуйтесь хоть даром и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить условия.
1хслотс рабочее зеркало
1 x slots 2. Создать свежий профиль. Для регистрации нужно заполнить небольшую анкету либо зайдите в личный кабинет посредством социальных сетей; <a href=http://fumankong2.cc/home.php?mod=space&uid=602547>http://fumankong2.cc/home.php?mod=space&uid=602547</a> Составленный знатоками Casino.ru перечень онлайн-казино с бездепозитным бонусом разрешает игрокам сравнить спецпредложения различных операторов.Для тех, кто только взвешивает испытывать собственную фортуну, а также для профессиональных игроков, разыскивающих новые площадки для выигрышей, водящие лицензированные казино часто устраивают различные промоакции, и одно из лучших услуг за последнее время – как для начинающих, так и для профессиональных игроков – бездепозитный бонус за регистрацию. 1×slots casino регистрация 1×slotscasin online
1×slots casino online регистрация
В наше время довольно просто получить бонус за регистрацию в казино. Практически любой игорный жилище с радостью начисляет деньги либо безвозмездные вращения. Многие гэмблеры пользуются этим и не смущяются региться в любом клубе с выгодными условиями. Кстати, это отличная вероятность выработать победную тактику и сорвать джекпот.В настоящее время получить приз за регистрацию в казино очень просто. Почти любой игорный дом с готовностью предоставит деньги либо бесплатные вращения. Многие игроки пользуются данным и не смущяются региться в каждом клубе с выгодными критериями. Кстати, это отличная вероятность выдумать выигрышную стратегию и сорвать куш. <a href=http://e-audit.gefest.me/index.php?subaction=userinfo&user=aspiringportrai>http://e-audit.gefest.me/index.php?subaction=userinfo&user=aspiringportrai</a> В неких интернет казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на веб-сайте клуба и доказать средства контактные данные. Дополнительно потребуется активация промокода.Но на некоторых азартных платформах подобные гонорары шансы получить и уже зарегистрированные юзеры. В этом случае, бонусы предоставляются в оригинальных акций или же неким игрокам в виде акционного предложения, коие прибывает на почту с целью «возвратить» игрока в свое казино. 1×slots рабочее зеркало
1×slots casino зеркало рабочее
Подтверждение регистрации. Казино настоятельно привязки профиля к электронному адресу и номеру телефонного. Для этого на e-mail отправляется письмо со ссылкой, а на телефонный ? текстовое известье с кодом. Бездепозитный приз за регистрацию в казино с выводом средств в 2022 году — Наш ресурс дает игрокам важную информацию о самых свежих, великодушных и испытанных призах в онлайн казино, которые обновляются каждый денек. 1хслотс зеркало на сегодня <a href=http://honevi.grodno.by/index.php?subaction=userinfo&user=Gregorymeazy>http://honevi.grodno.by/index.php?subaction=userinfo&user=Gregorymeazy</a> Выбрать казино с бездепозитным бонусом. У нас на сайте представлен перечень наилучших онлайн казино, которые предлагают своим игрокам великодушные призы за регистрацию.Сроки активации приза устанавливаются каждым казино, но чаще всего они не превосходят недели с этапа получения. Игроку непременно нужно применять бездеп протяжении указанного срока, в ином случае бонус просто пропадет. Каждый бонус можно получить только раз раз, поэтому в не применять бездеп в срок, у игрока не несомненно второго шанса им пользоваться.
1×slots коды
Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке нужно восполнить счет в казино. Для депозитных призов, данная процедура не нужна, например как депо теснее сделан. Казино выводит средства лишь на что, эту платежную систему, с котрой был сделан депозит. То есть, для вывода бездепозитного приза, Вам сначала необходимо восполнить счет. В неких клубах ограниченный список методов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет непосредственно с данных платежных методов, коие доступны для вывода.Благодаря программе преданности от игорного заведения, можно арестовать превосходный старт и без дополнительных инвестициям запустить видеослоты. Кроме как, возможно рассчитывать на реальную фортуну и получить, без инвестиции собственных финансов, великий выигрыш. <a href=https://www.google.com.ph/url?q=https://doctorlazuta.by/>https://www.google.com.ph/url?q=https://doctorlazuta.by/</a> Суммы похожих услуг, как правило, колеблются от трех до 20 долларов, а вейджер на эти свои должен сочинять от 30 до шестидесяти один. Зачастую, величайшая сумма выигрыша тут составит от одной до двух сотен $. Если компьютерные выиграет больше, то все средства все быть списанными до очень разрешенного выигрыша. Здесь бывает смысл выводить еще несуществующие финансы на собственную платежную систему и дальше находить заведение с благоприятными под данную сумму релоадом либо призом за 1-ое пополнение счета. Есть несколько подвидов бездепозитного вознаграждения, предлагаемого наибольшим количеством заведений. 1×slots регистрацию более популярный вариант это
<b>Смотреть еще похожие новости:</b>
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=36618>1×slots промокод при регистрации</a>
<a href=https://dev.eff.one/member.php?action=profile&uid=904>1×слот регистрация в 1×slots casino</a>
<a href=https://www.formulersupport.com/Thread-1×-slots-casino-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82–124119>1× slots casino официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
К примеру, игроку выдаются безвозмездные свои в заведении в объеме пятидесяти либо 100 долларов (вейджер на коие сочиняет 100х). То есть, каждому новоприбывшему игроку выскакивает манящая иллюстрация, кот-ая обещает выплату всех зачисленных компанией средств. Не стоит заострять на казино бонус за регистрацию без депозита с чрезмерно великой либо довольно маленькой суммой призов, потому что, и тщательно исследовав все обстоятельства, здесь вероятнее всего, несомненно какой-то подкол. При регистрации идет указывать только достоверную информацию. Когда учетная запись несомненно активна, замечен доступ в Личный офис. В нем возможно избрать валюту, установить промокод и разузнать подробные правила получения и отыгрыша бездепа. Краткая информация об промоакции часто присутствует непосредственно на регистрационной форме.
#3989 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
песня казино казино в россии <a href=https://vestnik-jurnal.com/>казино гта 5</a> порно с Ирина Сидоркова Ходнева Светлана Владимировна порно <a href=https://strelochnik.com/>порно с Артемий Панарин (хоккей)</a> 1×bet вход gama casino 7k casino официальный casino рабочее 1×bet зеркало слоты 1×bet xyz порно с Захарова Мария Владимировна pin ап casino
DiskiPlus ап казино DiskiPlus 1×bet на сегодня <a href=https://www.diskiplus.ru>DiskiPlus Ходнева Светлана Владимировна порно</a> DiskiPlus сайт букмекерской конторы DiskiPlus лучшие казино бесплатно <a href=https://www.diskiplus.ru/>DiskiPlus фреш казино</a> DiskiPlus порно с Анна Калинская (теннис) DiskiPlus официальные зеркала казино DiskiPlus порно с Афонина Марина Игоревна DiskiPlus бесплатное казино DiskiPlus букмекерская контора без DiskiPlus почему в казино нет часов DiskiPlus casino riobet
#3990 Charlesgunnyhttp://filmkachat.ru
1×slots на любой вкус как пройти регистрацию
Главным нюансом в появлении этих вознаграждений произведено в том, собственно пустив их в ход, компьютерные ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он спасибо призам какой-либо выигрыш либо мгновенно спустит все лишь собственно прибывшие финансы). То есть, казино снабжает игрока возможностью на дармовой основе выступать во различные слоты и даже спонсирует забаву.Если вы новичок данном и только попали в неизведанную вами область пыла — счет предложений как бездепозитные призы без пополнения. <a href=http://filmkachat.ru/>1×slots регистрация на сайте</a> <a href=https://myanimelist.net/profile/shopavto>https://myanimelist.net/profile/shopavto</a> В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, необходимо обратиться в саппорта через лайв-чат на сайте казино. 1×slots casino зеркало рабочее <a href=http://lanteks.ru/bitrix/rk.php?goto=http://image.google.ms/url?q=http://digl-shop.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/H_VRNFpMXGL>http://lanteks.ru/bitrix/rk.php?goto=http://image.google.ms/url?q=http://digl-shop.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/H_VRNFpMXGL</a> Заработать на бездепозитных бонусах за регистрацию в казино имеет каждый юзер, достигший совершеннолетия.Прямо момент заберите благотворительные вращения за регистрацию без депо и начинайте собирать призовые композиции ради солидных выигрышей!
1хслотс зеркало на сегодня
Иногда виде бездепа, казино дарит наименьший бонус (до 50 рублей), из-за которого не заморачиваться. 1×slots акции Бесплатный бонус – кредиты, которые онлайн-казино начисляет клиенту, не принуждая его пополнять игровой счет. <a href=https://aben75.cafe24.com/bbs/board.php?bo_table=free&wr_id=702700>https://aben75.cafe24.com/bbs/board.php?bo_table=free&wr_id=702700</a> скачать 1×slots на андроид мобильная версия За счёт спинов получится запустить различные интернет слоты, протестировать стратегии и поднабраться навыка. Фишка в том, что вращения начисляются на топовые аппараты с оригинальными опциями и высокой отдачей. Не забывайте, что в каждом акционном предложении предусмотрены особые требования – временные лимитирования, максимальный объем ставки, список доступных игр.Это также бесплатные финансы, коие поступают на аккаунты новоиспеченных в в регистрирования. А особенность таких призов произведено сомнений, что обретенные деньги непременно следует использовать в продолжении назначенного медли.
1×slots зеркало регистрация в 1×slots casino
Какие бонусы я могу еще получить кроме бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, каждое интернет казино предлагает игрокам прибыльное предложение на 1-ый депо, вы совершаете депозит, ваш депозит увеличивается в двое либо даже в трое, тем наиболее начать выступать можно с больше крупной суммой, например же не забываем про вейджер на бонусы. <a href=http://cnccompany.com.ua/index.php?subaction=userinfo&user=chillysemester6>http://cnccompany.com.ua/index.php?subaction=userinfo&user=chillysemester6</a> Каждый компьютерные обязан сначала детально выучить обстоятельства по получению и отыгрышу приглянувшегося дара. Если всё организует, поторопитесь забрать благотворительные спины за регистрацию в казино без депозита с выводом и без отыгрыша и напрямик момент начать вращать барабаны лучших слотов.Выбирая даровой приз, внимательно изучайте правила. Убедитесь, что вам можно себя участие в акции. Уточните, в каких играх можно исполнять обстоятельства вейджера. При необходимости задавайте вопросы представителям саппорта. 1×slots зеркало подтвердит вашу регистрацию если говорить Сроки активации бонуса устанавливаются любым казино, хотя почаще всего они не превосходят недели с момента получения. Игроку обязательно нужно применять бездеп в течение обозначенного срока, в ином случае бонус просто пропадет. Каждый бонус возможно получить лишь один один, поэтому в не использовать бездеп в срок, у игрока не несомненно 2 шанса им пользоваться.Вывод выигрыша с бездепозитных бонусов казино – щедрый подарок от азартных клубов. Но чтобы исключить свой заработок, нужно выполнить ряд условий:
1хслотс рабочее зеркало
Прежде чем активировать бездеп, необходимо увериться том,, собственно страна, гражданином коей является игрок, не входит в список не. 1×slots casino зеркало рабочее <a href=http://www.kumkangenc.com/bbs/board.php?bo_table=inquiry&wr_id=93028>http://www.kumkangenc.com/bbs/board.php?bo_table=inquiry&wr_id=93028</a>
рабочее зеркало 1хслотс
Автоматическая активация может самой комфортной, но ручной способ имеет перед ней превосходства. Прежде чем использовать вознаграждение от казино, стоит заранее найти, сколько времени требуется на исполненье всех условий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала действия приза. <a href=http://wp1065308.server-he.de/doku.php?id=1win_plataforma_jogo>http://wp1065308.server-he.de/doku.php?id=1win_plataforma_jogo</a> Для выбора азартного заведения Вы можете пользоваться списком наших казино с призами за регистрацию. На нашем сайте мы выпустили список бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, что часть бонусов неповторимые и доступны только для гостей нашего сайта по-специальному промо-коду либо по уникальной ссылке. Кроме такого, для любого бонуса мы подготовили доскональный обзор, каком Вы узнаете как получить и отыграть поощрение и как исключить свой выигрыш с бездепа. скачать 1×slots официальный сайт
<b>Смотреть еще похожие новости:</b>
<a href=https://adminclub.org/showthread.php?tid=111326>1×slots казино мобильная версия</a>
<a href=https://forums.scar-divi.com/topic/704743–1%D1%85%D1%81%D0%BB%D0%BE%D1%82-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%81%D0%B0%D0%B9%D1%82%D0%B0/>1хслот зеркало сайта</a>
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1315#post-39757>1×slot казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выигрыши с бонусов без инвестициям практически привязаны к притязанию по ставкам и могут быть обналичены только после исполненья этих притязаний. В истинное время получить приз за регистрацию в казино очень просто. Почти любой игорный дом с готовностью предоставит деньги или благотворительные вращения. Многие игроки используют этим и не стыдятся региться в каждом клубе с прибыльными условиями. Кстати, это отличная вероятность выдумать выигрышную стратегию и сорвать куш.
#3991 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino актуальное зеркало casino на телефон <a href=https://strelochnik.com/>7k casino скачать</a> порно с Максим Глушенков (футбол) порно с Дронова Александра Викторовна <a href=https://rucriminal.info/>retro casino</a> порно с Зырянова Анастасия Владимировна 1×bet официальный xbet Скоробогатова Ольга Николаевна порно казино без 1×bet скачать приложение casino зеркало сегодня casino промокод
DiskiPlus порно с Абрамченко Виктория Валериевна DiskiPlus casino ru <a href=https://diskiplus.ru>DiskiPlus casino x</a> DiskiPlus kent casino регистрация DiskiPlus порно с Захарова Мария Владимировна <a href=https://www.diskiplus.ru/>DiskiPlus Радченко Светлана Юрьевна порно</a> DiskiPlus яндекс казино DiskiPlus win win casino DiskiPlus pin up casino официальный DiskiPlus рейтинг казино DiskiPlus kometa casino DiskiPlus Львова-Белова Мария Алексеевна порно DiskiPlus пин ап casino
#3992 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
ставки на спорт букмекерские конторы официальные сайты казино <a href=https://krtka.info/>Матвиенко Валентина Ивановна порно</a> 1×bet на андроид 1×bet скачать приложение на андроид <a href=https://rhymes-punches.com/>pinco casino</a> официальные сайты казино 7k casino официальный casino играть casino рабочее casino актуальное зеркало 1×bet зеркало рабочее на сегодня 1×bet xyz 1×bet зеркало на сегодня 1×bet xyz
DiskiPlus Ирина Горбачева DiskiPlus casino бонус <a href=https://www.diskiplus.ru/>DiskiPlus игры казино</a> DiskiPlus online casino официальный DiskiPlus Светлана Ходченкова <a href=https://www.diskiplus.ru>DiskiPlus casino скачать приложение</a> DiskiPlus букмекерская контора без DiskiPlus казино смотреть DiskiPlus 1×bet сайт DiskiPlus porno Александра Степанова, фигуристка DiskiPlus ограбление казино DiskiPlus официальные букмекерские конторы DiskiPlus 7k casino
#3993 Charlesgunnyhttp://filmkachat.ru
1×slots на любой вкус как пройти регистрацию
Вознаграждения за получение VIP-статуса ? начисляются масштабах программки лояльности при достижении одного уровня или выдаются индивидуально менеджерами саппорта. <a href=http://filmkachat.ru/>1×slots зеркало регистрация то дальше необходимо пройти</a> Приглашаем делиться суждениями о призах. Это поможет иным пользователям подбирать более прибыльные предложения. <a href=https://linqto.me/n/gtji>https://linqto.me/n/gtji</a> При игре на бонусные средства воспрещается играть в игровые автоматы с прогрессивным джекпотом и забавы из радела exist casino. Кроме того, некоторые казино дают бездеп на раз либо количество определенных слотов, и в других играх Вы не можете на них играть. 1×slots официальный сайт мобильная версия скачать <a href=http://www.vintageampeg.com/forum/member.php?action=profile&uid=7111>http://www.vintageampeg.com/forum/member.php?action=profile&uid=7111</a>
1хслотс рабочее зеркало
1×slots зеркало проходить регистрацию это отличный вариант <a href=http://fast-debt.ru/forum/profile/exuberantcatego/>http://fast-debt.ru/forum/profile/exuberantcatego/</a> В неких интернет казино для получения бездепозитных бонусов не довольно просто зарегистрироваться на сайте клуба и подтвердить свои контактные данные. Дополнительно требуется активация промокода.Помните, собственно всевозможные нарушения правил сведут на нет ваши усилия, и вы наверняка останетесь без начисленного вас безвозмездного приза. Всегда изучайте верховодила начисления и обстоятельства вейджера. По каким вопросам, на которые вы имеет самостоятельно найти ответы, обращайтесь за объясненьям и саппорт. 1×slots сайт Не желаете сыграть в азартные забавы, не рискуя средствами средствами, хотя получая в все выплаты? Подобную вероятность предоставляют многие превосходнейшие порталы с азартными веселиями. В их количестве много честных и надежных интернет-казино на российском языке. Они завлекают свежих пользователей различными поощрительными событиями, включая бездепозитные, или безвозмездные бонусы.Также посещают случаи, когда казино начислит оговоренный бонус последствии регистрации свежего клиента по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам.
1×slots зеркало этих способов предполагает регистрацию
Поспешите зарегистрироваться на официальном сайте Клубника, дабы мгновенно получить 33 безвозмездных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, замечена настоящий шанс победу!Далее потребуется отыграть вагер и исключить выигрыш. Игрокам без навыка крупно повезло, они могут получить 10-ки подарков за 1 регистрацию. Если не сумели получить Бездепозитный приз, не беспокойтесь. Обратитесь в онлайн чат, оператор поможет решить проблему. <a href=http://maskarad.bomba-piter.ru/user/RalphElire/>http://maskarad.bomba-piter.ru/user/RalphElire/</a> Фриспины без депо или дополнительные свои посодействуют поближе познакомиться с игровой платформой и её функциями. За счёт презентов можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради забавы напротив живых крупье. 1×slots зеркало регистрация Воспользоваться бездепом можно не во всех игровых автоматах: казино вдруг устанавливает ограничение для посетителей. Конечно, это можно посчитать некоторым неудобством для игрока, хотя справедливости необходимо, что выбор автоматов всё одинаково остаётся довольно великим.Приглашаем делиться суждениями о призах. Это поможет другим юзерам выбирать более прибыльные предложения.
1×slots зеркало сайта
Выполнив все требования оператора, клиент имеет оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит в среднем не более суток. Если дополнительно потребуется пройти процедуру верификации, то срок увеличивается до 1–2 трудящихся дней. Для перевода применяются банковские приборы и электрические платежные системы. Второй способ подходит другого, как, так как масса транзакций ситуации исполняются мгновенно. В связи со спецификой функционирования банков обработка платежей имеет взятьвдолг(взятьвзаймы) до нескольких трудящихся дней. <a href=https://americanrabbit.org/memberlist.php?mode=viewprofile&u=1252>1×slots зеркало которую указывали при регистрации кстати</a> Перечисленные выше главные свойства сочетают практически любой бонус и являются стандартными для бездепозитных бонусных начислений в казино.Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную процедуру активации приза без депо. Внимательно прочтите до конца. Многие новички делают ошибки на этапе регистрации и потому не получить подарок. Первый возникающий вопрос, это, чего выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают новых игроков. Последним легче начать забаву на средства с презента за регистрацию. Им не пополнять баланс и тратить личностные свои. Новички получают безвозмездные спины или средства на счёт. С их поддержкою знакомятся с игровым процессом, крутят слоты и делают ставки в рулетке.Итак, дабы безвозмездные бонусные кредиты трансформировались в реальные деньги, которыми возможность распоряжаться по своему усмотрению, их надо(надобно) отыграть. Вейджер следует уточнять в правилах онлайн-казино. 1хслот официальный сайт зеркало <a href=http://best-realtors.com.ua/index.php?subaction=userinfo&user=abandonedarson2>http://best-realtors.com.ua/index.php?subaction=userinfo&user=abandonedarson2</a> Также учтите, что кое-какие игровые платформы сузивают перечень стран, которые способны получить предложенный бездепозитный бонус за регистрацию. К образцу, есть онлайн-заведения, выдающие подобные призы только обитателям определенных государств. К образцу, интернет казино 777 Оригинал предоставляет бездепозитный бонус лишь игрокам из России и стран СНГ. Или наоборот, снабжают вознаграждением всех, считая обитателей некоторых стран (как сего, идет пристально учить список, чтобы впоследствии не появилось никаких вопросов и жалоб).
1×slots официальный сайт скачать
Выигрыши с призов без вложений постоянно привязаны к притязанию по ставкам и все быть обналичены лишь последствии выполнения этих притязаний. <a href=https://forum.expert-watch.com/index.php?action=profile;u=219108>https://forum.expert-watch.com/index.php?action=profile;u=219108</a> Не стоит путать игру в демо и использование призов. В демонстрационном режиме игрок возможность оценить механику слота, сюжет и оформление. Но игра проводится на условные кредиты, потому отсутствует основное ? чувство азарта. Активируя промокод либо фриспины, клиент как не тратит средства деньги на игровые автоматы, но возможность сорвать реальный куш! 1× slots регистрация в 1×slots casino Многие игроки, оценив возможностей казино, остаются выступать в нем и далее ? на это и направлено каждое рекламную. Постоянные клиенты заносят депозиты и делают ставки, обеспечивая длительную прибыль оператора. То есть, казино раздают бездепы свежим юзерам для формирования приклнной аудитории.Самый распространённый из подобных бонусов, окончательно же, бездеп на день рождения клиента — бонус вид фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им можно в течение установленного периода медли.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выполнив все притязания оператора, заказчик имеет оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит в среднем не более суток. Если дополнительно потребуется пройти функцию верификации, то срок возрастает до 1–2 трудящихся дней. Для перевода применяются банковские приборы и электрические платежные системы. Второй способ подходит какого-либо, так как основная транзакций ситуации осуществляются моментально. В связи со спецификой функционирования банков обработка платежей имеет занять до нескольких рабочих дней. Бонус без депо за регистрацию в казино (бездепозитный приз) – это денежный подарок от клуба, кот-ый начисляется на аккаунт игрока в регистрации в казино. Кроме создания учетной записи, для получения бездепа, довольно часто требуется ещё и подтвердить контактные данные игрока и/или активировать особый промо-код.
#3994 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать
Промокод – определённая комбинация символов, коию необходимо установить в подходящее фон при разработке учетной записи или активировать в личном профиле игрока в разделе с призами.Как лишь получите бездеп в казино, всё также не забывайте инспектировать электрическую почту. Некоторые игорные клубы каждый радуют активных гэмблеров приятными бонусами. Чаще всего получить презент возможно в преддверии веселья, на денек рождение, за привлечение приятеля. А также распространённым бонусом считается надбавка к депозиту. Нужно чем восполнить счёт, и азартное заведение увеличит его на 50–100%. <a href=http://filmkachat.ru/>1×slot казино зеркало</a> <a href=https://graph.org/Transform-Your-Space-Professional-3D-Bedroom-Design-Secrets-Revealed-12–21>https://graph.org/Transform-Your-Space-Professional-3D-Bedroom-Design-Secrets-Revealed-12–21</a> 1×slots зеркало регистрация в 1×slots casino <a href=http://spectr-sb116.ru/user/TyroneNat/>http://spectr-sb116.ru/user/TyroneNat/</a> Так что можете храбро региться без всяких размышлений. Фортуна сейчас точно на вашей стороне. Не страшитесь, так последствие какого либо ущерба Вам абсолютно не угрожает. С такими призами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе.
1х слотс зеркало регистрация в 1×slots casino
В реальное время получить бонус за регистрацию в казино довольно просто. Почти любой игорный жилище с готовностью даст средства либо благотворительные вращения. Многие игроки пользуются данным и не стыдятся региться в любом клубе с выгодными критериями. Кстати, это замечательная вероятность выдумать выигрышную тактику и сорвать куш. <a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=62892>казино 1×slots официальный сайт</a> 1×slots зеркало подтвердит вашу регистрацию если говорить Размер бонуса. В качестве бездепов обыкновенно начисляют не суммы, а когда речь идет о призах за депо, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино имеют подарить игроку до 2000$.Подтверждение регистрации. Казино требуют привязки профиля к электрическому адресу и номеру аппарата. Для сего на e-mail отправляется послание ссылаясь, а на аппарат ? текстовое сообщение с кодом. <a href=https://goblin-film.net/user/CharlesFem/>https://goblin-film.net/user/CharlesFem/</a> Маркетинговая политика всех игорных интернет-клубов должна одевать разнородный нрав. И если вознаграждения на депозит работают для того, дабы стимулировать вносить депозиты и поощрять теснее имеющих пользователей, то бездепозитный бонус в казино или бонус за регистрацию в казино, до всего, рассчитан на расширение базы покупателей.Бездепозитные бонусы казино это финансовая компенсация, предлагаемая юзерам на дармовой базе и вероятность выступать в интернет казино даром. Если ассоциировать их с одобрениями за вклад, в средства выдаются только потом начального пополнения счета, то бездепозитные вознаграждения получаются даром. То есть, играющий получает вероятность делать ставки на теснее место деньги, коие выдаст заведение, исполняя, при, обычные деянья, дабы их извлечь (здесь идет речь о регистрация, удостоверении личности с использованием номера телефонного, дизайна заказы и т.д.). 1×slots зеркало регистрацию более популярный вариант это Создание аккаунта. На веб-сайте казино необходимо обнаружить регистрационную форму и заполнить пустопорожние поля личностными данными. Иногда на этом этапе потребуется показать только адресок электрической почты и пароль, но чаще хотелось заполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д. ). Нужно указывать лишь реальные данные, поскольку впоследствие они станут испытаны.
1×slots регистрация
Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Допустим, за регистрацию вы возымели бездеп в размере 2 000 руб. С вейджером х30. В этом случае предстоит сделать ставок, на общую сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать реальные деньги. Однако не забывайте, собственно с любого презента выйдет исключить определённую необходимую (почаще всего не более $200). Как правило, при выводе денег, от играющего потребуется только устроить наименьший вклад чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом индивидуальный счет. <a href=http://mpalata.ru/forum/memberlist.php?mode=viewprofile&u=110894>http://mpalata.ru/forum/memberlist.php?mode=viewprofile&u=110894</a> Таким образом онлайн казино получает вероятного игрока. Возможно в или истинном он захочет сыграть на средства деньги. Так работают бездепозитные бонусы в интернет казино. Здесь отлично подходит выражение, безвозмездные сыр случается лишь в мышеловке. Начинающие игроки имеют не обдумывать опасность пыла. Однако с осознания становится больше. Это тема для отдельного обсуждения.Бездепозитный бонус по промо-коду несомненно доступен для забавы, только никаких случае когда Вы активируете особый бонусный код в разделе с призами либо укажите промокод при регистрации на веб-сайте. В некоторых случаях, кроме активации кода, придется подтвердить контактные данные игрока и заполнить анкету посетителя. 1хслотс официальный сайт зеркало Многие азартные клубы ограничивают сумму вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании промоакции, суммы Вы не сможете вывести. Разница несомненно аннулирована, Вы в не можете делать на нее ставки.
1×slots регистрация на сайте 1×slots ru com
<a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=13119>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a> Максимальная ставка ? устанавливается в денежной счета и ограничивает объем ставки за раз спин. В случае ее превышения бонус возможность быть аннулирован. Также в правилах может содержаться запрет на размещение ставок конкретного облика, примеру, по одинаковым шансам в рулетке (то есть, на чет либо нечет, красноватое либо черное и т.д. ). 1×slots на любой вкус как пройти регистрацию <a href=https://pediascape.science/wiki/How_To_Troubleshoot_Common_Issues_With_The_1×bet_APP_In_Bangladesh_BD>https://pediascape.science/wiki/How_To_Troubleshoot_Common_Issues_With_The_1×bet_APP_In_Bangladesh_BD</a>
1×slots зеркало этих способов предполагает регистрацию
Получить Бездепозитный приз в интернет казино дело 2-ух кликов. Другой момент, отыграть промо и соблюсти верховодила и условия отыгрыша. Под правилами предполагается не только вагер, но и лимитирования по максимальной ставке. Мы осознаем, собственно в кинотеатр все ставят на зеро и выигрывают. Призываем не создавать сходственного. Перед активацией бонуса прочтите управляла. Узнайте последующие факторы: Условия получения презента, за регистрацию, за депо и другое. Ограничения по наибольшей ставке. Зачастую не повыше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах можно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на пространстве. Поэтому главно аристократия, в каких забавах можно осуществлять кратность денежного оборота. <a href=http://mirniy.ru/index.php?subaction=userinfo&user=billowypreview1>http://mirniy.ru/index.php?subaction=userinfo&user=billowypreview1</a> На нашем веб-сайте Вы отыщите список своевременных свежих бездепозитных бонусов в казино 2022 года. Также, есть много неповторимых услуг, которые доступны лишь гостям нашего сайта в регистрации по нашей ссылке или активации особого промокода.Как верховодило, новоприбывшие геймеры для желают ознакомиться с способами ввода и вывода валютных средств и сроки выполнения поданных заказов чтобы конкретно разуметь, как стремительно возможность исключить свой казино бонус за регистрацию без депозита на электронный кошелек или же банковскую карту. К счастью для всех играющих, снутри конкретных холдингов, все казино соперничают меж собой. Ведь если бы определенную фирму представляло только одно онлайн-заведение, то ли бы клиенты заметили казино с призом за регистрацию и могли бы рассчитывать лишь на вознаграждение вид бонуса на 1-ое инвестиция. К каждому заведению периодически по завлекать свежих игроков, собственно, в итоге, только на руку всем играющим. 1×slots быструю регистрацию а также мгновенное
<b>Смотреть еще похожие новости:</b>
<a href=http://khodaumo.com/forum/viewtopic.php?f=2&t=75282&sid=e8c071c82add556c71d85a61d938d006>1×slots casino регистрация на сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выбирайте превосходнейшие благотворительные бонусы с помощью обзоров на Casinoz – и пусть вам сопутствует счастье при отыгрыше бонусных кредитов! Третитй бездепозитный приз за регистрацию – валютные средства. К сожалению, начислить рубли либо баксы готовы лишь известные и знаменитые клубы. С их подмогою вы сможете насладиться любой доступной игрой – автоматом, рулеткой, кено, блэкджеком.
#3995 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать 1×bet 1×bet xyz 1×bet зеркало слоты 1×bet xyz <a href=https://krtka.info/>порно с Баталина Ольга Юрьевна</a> самое казино букмекерские конторы в россии <a href=https://m.repost.news/>порно с Илюшникова Татьяна Александровна</a> 1×bet рабочее 1×bet скачать приложение casino официальный зеркало casino pin официальный бк букмекерская контора casino актуальное зеркало casino зеркало сайта
DiskiPlus up casino зеркало DiskiPlus официальное казино вход <a href=https://diskiplus.ru/>DiskiPlus пина букмекерской конторы</a> DiskiPlus спорт букмекерская контора DiskiPlus casino x <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet слоты официальный сайт</a> DiskiPlus рейтинг казино DiskiPlus букмекерская контора ставки DiskiPlus Разуваева Ксения Денисовна порно DiskiPlus порно с Каролина Севастьянова DiskiPlus как выиграть в казино DiskiPlus пинко casino DiskiPlus Хорова Наталья Александровна порно
#3996 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin casino скачать букмекерскую контору <a href=https://krtka.info/>сайт 1×bet слоты</a> порно с Алексей Миранчук (футбол) kent casino <a href=https://rumafia.news/>казино ли</a> порно с Константин Тюкавин (футбол) casino бездепозитный порно с Каролина Севастьянова 1×bet xbet porno Алена Косторная (фигурное катание) 1×bet слоты 1×bet xyz зеркала казино
DiskiPlus Хорова Наталья Александровна порно DiskiPlus порно с Аделия Петросян (фигурное катание) <a href=https://www.diskiplus.ru>DiskiPlus казино гта 5</a> DiskiPlus 1×bet скачать бесплатно DiskiPlus порно с Арина и Дина Аверины, гимнастки <a href=https://diskiplus.ru/>DiskiPlus порно с Бондаренко Анастасия Борисовна</a> DiskiPlus kent casino регистрация DiskiPlus сайт казино вход DiskiPlus Юдаева Ксения Валентиновна порно DiskiPlus винлайн букмекерская контора официальный сайт DiskiPlus ramenbet casino DiskiPlus kometa casino DiskiPlus казино ли
#3997 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт, скачать
Основное управляло получения бездепа ? создаваемый акк должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов требовательно воспрещено. Проверка ведется по имени, e-mal, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депо нужно соблюдать простую последовательность поступков.А ознакомиться с свежими онлайн казино, Вы сможете за счет бонусов с выводом выгоды, коие Вы можете получить без депо. <a href=http://filmkachat.ru/>1×slots официальный сайт, скачать</a> <a href=https://www.scutify.com/articles/2024–11–22-understanding-3d-modeling-costs-a-comprehensive-guide-to-industry-pricing>https://www.scutify.com/articles/2024–11–22-understanding-3d-modeling-costs-a-comprehensive-guide-to-industry-pricing</a> Бездепозитный бонус – это экономическое вознаграждение, которое выдается участнику игры в казино, для его вербования и появления заинтересованности. Любой посетитель, который соответствует условиям выдачи подобного бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое одобрение считается более эффективным способом, дающим возможность стартовать в игре, не вкладывая собственных вещественных средств. 1×slots регистрация на сайте 1×slots ru com <a href=http://arskland.ru/people/user/19762/>http://arskland.ru/people/user/19762/</a>
казино 1×slots
1×slots зеркало на сегодня Фриспины предназначены для применения в видео слотах. Внимательно ознакомьтесь с условиями – частенько их выдают на некоторые автоматы. В зависимости от клуба, у вас получится устроить определённое количество ставок. Кстати, продвинутые игорные дома разрешают запускать любых «одноруких злодеев». <a href=http://fumankong2.cc/home.php?mod=space&uid=483576>http://fumankong2.cc/home.php?mod=space&uid=483576</a> Бездепозитные бонусы казино за регистрацию в 2022 году — это вероятность поиграть за счёт заведения. Казино даёт посетителю шанс пользоваться определённой суммой или количеством даровых вращений без внесения депозита. Не путайте деморежим с реальной игрой без необходимости внесения депо.Возможность протестировать свежие забавы, не рискуя личностными своими и создать личную тактику игры. 1×slots официальный сайт зеркало
1×slots официальный сайт скачать
<a href=http://www.pawsarl.es/blog/%D0%B8%D0%B7-%D1%87%D0%B5%D0%B3%D0%BE-%D1%81%D0%BE%D1%81%D1%82%D0%BE%D0%B8%D1%82-%D0%B4%D0%B8%D0%B5%D1%82%D0%B0-%D0%B5%D0%BB%D0%B5%D0%BD%D1%8B-%D0%BC%D0%B0%D0%BB%D1%8B%D1%88%D0%B5%D0%B2%D0%BE%D0%B9.html>http://www.pawsarl.es/blog/%D0%B8%D0%B7-%D1%87%D0%B5%D0%B3%D0%BE-%D1%81%D0%BE%D1%81%D1%82%D0%BE%D0%B8%D1%82-%D0%B4%D0%B8%D0%B5%D1%82%D0%B0-%D0%B5%D0%BB%D0%B5%D0%BD%D1%8B-%D0%BC%D0%B0%D0%BB%D1%8B%D1%88%D0%B5%D0%B2%D0%BE%D0%B9.html</a> Как лишь на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу в сего возможно оставить заявку на вывод выигрыша. Кредиты выгодно отличаются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом реальных средств и дают вероятность ощутить азарт. Во-вторых – возможно насладиться любой азартной забавой доступной на веб-сайте. В вашем распоряжении находятся автоматы, настольные приложение, видео-покер, Live-дилеры. 1×slots казино мобильная версия Какие призы у еще получить считая бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, любое онлайн казино предлагает игрокам выгодное предложение на первый депо, вы совершаете депо, ваш депо возрастает в двое либо числе в трое, тем самым начать играть возможно с больше солидной суммой, так же не запамятываем на вейджер на призы.
1×slots casino регистрация
Хотя бесплатные призы начисляются без депозита, не исключено, что для понадобиться вносить деньги. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только в такого, как новый клиент впервые пополнит игровой счет. 2. Создать свежий профиль. Для регистрации нужно наполнить маленькую анкету либо зайдите в личный кабинет при помощи социальных сеток; 1хслотс зеркало на сегодня <a href=http://www.imxy28.com/space-uid-332822.html>http://www.imxy28.com/space-uid-332822.html</a> Выбор каждого интернет казино на нашем сайте. В описании к любому Вы можете узнать, собственно получите за создание аккаунта.
1х слотс зеркало регистрация в 1×slots casino
На страничке представлены бездепозитные бонусы за регистрацию в казино редчайшая заслуга за коей гонятся все игроки как новички, так и профессионалы. Мы также уделяем огромное внимание на наличие призов при составление рейтинга казино на деньги. Бездепозитный бонус это вероятность выступать даром и выиграть реальные средства.У каждого игорного заведения средства правила и обстоятельства. Но, дабы получить бонусы, необходимо выполнить стереотипные деяния: Все бесплатные призы кажутся соблазнительными. Кто же категорически от возможности сыграть в онлайн-казино, не рискуя средствами, хотя получая выигрыши. Но далековато не все бездепозитные бонусы мере привлекательны для рассудительного клиента. <a href=https://monelik.ru/user/JosephGuitS/>https://monelik.ru/user/JosephGuitS/</a> рабочее зеркало 1×slots Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша призов. Заведения постоянно устанавливают наивысшую ставку, возможную по условиям вейждера.При малый сумме приза рекомендовано выступать по низким ставкам, а использовать максимальные другого только что случае, если вейджер слишком немалый, а время на отыгрыш крепко ограничено.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.carshowsociety.com/forum.php/topic,11220.new.html#new>1×slots официальный регистрация</a>
<a href=http://permitbeijing.com/forum/showthread.php?tid=2221364>1×slots casino регистрация 1×slotscasin online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.
#3998 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet на сегодня bet casino <a href=https://7club7.com/>бесплатные букмекерские конторы</a> black russia казино фреш казино <a href=https://rumafia.news/>Комарова Наталья Владимировна порно</a> порно с Виктория Синицина, фигуристка букмекерские конторы бет casino зеркало сегодня рабочее casinos winning porno Алена Михайлова up букмекерская контора порно с Евгений Малкин (хоккей)
DiskiPlus сайт pin up casino DiskiPlus порно с Каролина Севастьянова <a href=https://www.diskiplus.ru>DiskiPlus порно с Захарова Мария Владимировна</a> DiskiPlus 1×bet скачать приложение DiskiPlus бесплатное казино <a href=https://diskiplus.ru/>DiskiPlus ешь казино</a> DiskiPlus казино фильм смотреть онлайн DiskiPlus win win casino DiskiPlus porno Андрей Рублев (теннис) DiskiPlus порно с Евгения Медведева DiskiPlus 1×bet официальный сайт 1×bet xyz DiskiPlus Любимова Ольга Борисовна порно DiskiPlus промокод 1×bet
#3999 Charlesgunnyhttp://filmkachat.ru
1×slot регистрация
В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая приятная часть забавы. Важно, зачастую бездепозитные бонусы в казино выдаются с ограничениями по наибольшей выплате. В среднем возможно рассчитывать на выгода в количество тысяч руб. Как исключить выигрыш с бонуса без депозита. Придётся подтвердить акк документально, в неких заведениях. Процедура верификации обязательна и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате или прочитайте в правилах. <a href=http://filmkachat.ru/>1 x slots casino</a> Существует ли стратегии для отыгрыша бездепозитных бонусов? К сожалению нет, на выигрыши или проигрыши с бонусов, казино или игрок повлиять не может, отдача игр происходит от создателей игр. <a href=https://smallpdf.com/file#s=9463ef68–18a1–4460-a705-d0f7b3ee8b70>https://smallpdf.com/file#s=9463ef68–18a1–4460-a705-d0f7b3ee8b70</a> Бонус за регистрацию в казино без депо с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша имеет потребоваться устроить ставки на сумму, в количество 10-ов один превосходящую сумму приза или выигрыша. 1×slots на любой вкус как пройти регистрацию <a href=https://ootmkorea.com/bbs/board.php?bo_table=free&wr_id=41946>https://ootmkorea.com/bbs/board.php?bo_table=free&wr_id=41946</a> Мы подготовили перечень, где есть практически животрепещущие и свежие бездепозитные призы казино, коие вы можете получить даром. Для наших юзеров есть специальные предложения неповторимые призы, которые вы у не найдете, их мы обозначили специальной красноватой плашкой «Exclusive».Следует подчеркнуть, что бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам либо с конкретным кодом.
1×slots рабочее зеркало
Существует ли стратегии для отыгрыша бездепозитных бонусов? К сожалению нет, на выигрыши или проигрыши с бонусов, казино либо игрок повлиять возможности, отдача игр случается от разработчиков игр. 1×slots регистрация на сайте 1×slots ru com Бездепозитные бонусы за регистрацию являются одним из самых известных методов вербования свежих игроков в онлайн-казино, потому собственно они предоставляют игрокам возможность опробовать казино, тем игровые автоматы, и вполне, выиграть реальные деньги. <a href=https://ruisoon.com/space-uid-39012.html>https://ruisoon.com/space-uid-39012.html</a> Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. 1×slots регистрацию более популярный вариант это Этот тип бонуса будет добавлен на Ваш аккаунт последствии успешной процедуры регистрации с внедрением номера аппарата. Если выбрать иной способ сотворения учетной записи, бездеп не несомненно добавлен на Ваш аккаунт.Возьми свой подарок. Чаще всего приз активируется незамедлительно после регистрации. Но бывают ситуации, когда надо(надобно) забежать в личный кабинет либо написать в справочную службу.
1×слот регистрация в 1×slots casino
Вейджер (wager) – это коэффициент, который демонстрирует на какую необходимую нужно сделать ставок, дабы вывести приз из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода этого бонуса, Вам необходимо сделать ставок на сумму: 500*70=3500 рублей. Только полностью отыграв приз, Вы можете исключить собственный выигрыш.Постарайтесь отыграть вейджер, дабы была возможность забыть заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы можете получить выигрыш на электрической кошелёк, карту, телефонный. Только выполнив все обстоятельства отыгрыша и дождавшись окончания проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить свои деньги.Основное управляло получения бездепа ? творимый аккаунт должен быть у юзера первым и единственным. Наличие нескольких аккаунтов требовательно воспрещено. Проверка ведется по имени, e-mal, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита необходимо соблюдать простую последовательность деяний. <a href=http://ternovka4school.org.ua/user/FrankWar/>http://ternovka4school.org.ua/user/FrankWar/</a> С такими простыми советами любое казино с бонусом за регистрацию способно принести в разы больше выгоды и полезности. 1хслотс официальный сайт зеркало
1хслотс казино зеркало
Индивидуальные поощрения выдаются за совершение деяний: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавленья или официального клиента для ПК. В большинстве казино действуют программки преданности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий степень нередко сопровождается выдачей бездепа. Наш перечень содержит наилучшие бездепозитные бонусы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по важным параметрам: 1×slots акции <a href=http://interiorwork.co.kr/bbs/board.php?bo_table=free&wr_id=972360>http://interiorwork.co.kr/bbs/board.php?bo_table=free&wr_id=972360</a>
1×slots регистрация 1×slots casino c2d ru
В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, нужно адресоваться в службу через лайв-чат на веб-сайте казино.Для всех бездепозитных призов функционирует максимальный лимит на выигрыш. Он показывает максимальную сумму, коию вас получить, играя на бонусные кредиты. Как лишь вам удастся выполнить притязания вейджера, дозволенный максимум будет переведен с бонусного счета на главной, а остаток будет списан. <a href=http://e-audit.gefest.me/index.php?subaction=userinfo&user=sablefacsimile7>http://e-audit.gefest.me/index.php?subaction=userinfo&user=sablefacsimile7</a> Мы делаем акцент на главных положениях верховодил, рассказываем о территориальных ограничениях и вкратце информируем о иных промоакциях обсуждаемого казино.Вывод выигрыша с бездепозитных призов казино – щедрый презент от азартных клубов. Но дабы исключить собственный заработок, необходимо выполнить ряд критерий: 1×slots регистрация 1×slots review live Выбор каждого интернет казино на нашем сайте. В описании к любому Вы можете разузнать, собственно получите за творенье аккаунта.
<b>Смотреть еще похожие новости:</b>
<a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=13552>1×slots регистрация на сайте</a>
<a href=https://mit-bbs.com/viewtopic.php?p=138529#p138529>1х слот регистрация в 1×slots casino</a>
<a href=https://forum.vn.ua/showthread.php?p=3271817#post3271817>1× slots официальный</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Также, учите, собственно бездепозитный бонус возможно вывести только в случае, когда станут исполнены все обстоятельства отыгрыша. Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных обстановок с казино, когда последствии отыгрыша бездепа вам не дадут вывести солидную необходимую выигрыша.
#4000 Charlesgunnyhttp://filmkachat.ru
1×slots казино зеркало
Автоматическая активация показаться самой удобной, но ручной метод содержит перед ней достоинства. Прежде чем применять вознаграждение от казино, стоит заранее найти, сколько времени потребуется на выполнение всех критерий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала деянья приза.С не отыгранным бонусом запрещается превосходить объем наибольшей ставки. Нарушение сего обстоятельства последствия аннулирование выигрыша. <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, all только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Прежде чем активировать бездеп, необходимо убедиться никаких, собственно государство, уроженцем которой считается игрок, не заходит в перечень запрещенных. <a href=https://trumpbookusa.com/blogs/259423/Professional-3D-Animation-Services-in-the-Digital-Age>https://trumpbookusa.com/blogs/259423/Professional-3D-Animation-Services-in-the-Digital-Age</a> Можно. Вы постоянно можете отказаться от получения бездепозитного приза за регистрацию в казино, пока Вы не сделаете ставку. скачать 1×slots официальный сайт <a href=http://www.gektor.biz/forum/?PAGE_NAME=profile_view&UID=184180>http://www.gektor.biz/forum/?PAGE_NAME=profile_view&UID=184180</a> Бонус начисляется игроку незамедлительно в регистрации и прохождения верификации в казино и не требует от клиента внесения депозита. Как правило, размер бонуса в сходственном случае достаточно скромный, впрочем разрешает новеньким познакомиться с забавой без риска реальными средствами.Приглашаем делиться мнениями о призах. Это поможет другим пользователям подбирать более прибыльные предложения.
1×слот регистрация в 1×slots casino
1×slots промокод при регистрации 2025 <a href=http://111.t95283ld.bget.ru/user/Williamjiche/>http://111.t95283ld.bget.ru/user/Williamjiche/</a> Особую изюминку видео слотам присваивают уникальные знакы. С их появлением активизируются разные призы. Вы сможете запустить вспомогательный уровень и прирастить необходимую выигрыша. Есть знаки, которые замещают негодные элементы и сами создают выигрышные комбо. Не стоит забывать и на бонус-тур. После каждого успешного спина есть шанс увеличить сумму выигрыша в два либо четыре раза. 1хслотс официальный сайт зеркало На бонусные начисления шансы быть установлены дополнительные ограничения, коие Вы не к при отыгрыше. Пока бонус всецело не отыгран — средства из казино не выводятся.
1хслотс зеркало на сегодня
<a href=https://issuu.com/cazinosdep>https://issuu.com/cazinosdep</a> 1×slots casino зеркало рабочее 3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефонный или почту, показать персональную информацию;
1×slots casino зеркало рабочее
Поспешите арестовать бездепозитные бонусы за регистрацию в казино из представленного списка. Все платформы столько ведут легальную деятельность, но и обрадуют честными результатами забавы, высочайшей отдачей, резвыми выплатами. 1×slots casino зеркало <a href=http://021bababa.org/space-uid-495377.html>http://021bababa.org/space-uid-495377.html</a> Для получения выигрыша потребуется выполнить условия казино. Чаще всего игроку нужно поставить конкретную сумму, хотя уже из собственных средств. Она рассчитывается из общего объема выигрыша за всегда использования бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, в юзер выиграл 1000 рублей, а множитель сочиняет х30, вывести средства можно будет, сделав ставки на 30 000 руб.Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.
1×slots мобильная версия войти казино
Фриспины – благотворительные вращения с фиксированной ставкой, которые можно использовать в определенных игровых автоматах.В игровых клубах без лицензии Вы покупаете „кота в мешке“ и если, тогда, неоднозначных обстановок нет возможности куда-то пожаловаться и доказать собственную правоту. <a href=http://soe-parrot.com/home.php?mod=space&uid=177432>http://soe-parrot.com/home.php?mod=space&uid=177432</a> Чаще всего применяются коды. Их надо(надобно) заносить в особые окошки регистрационной анкеты, случае речь о пригласительных призах, либо в определенном разделе личного кабинета игрока.Каждый игрок обязан сперва отчетливо изучить условия по получению и отыгрышу приглянувшегося подарка. Если всё устраивает, поспешите отобрать безвозмездные спины за регистрацию в казино без депозита с выводом и без отыгрыша и напрямик в начать вращать барабаны топовых слотов. 1 x slots Помимо прочего, для вывода средств по бездепу нужно внести на счёт свой первый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на мало возможную сумму, после чего вывод средств станет доступен.
<b>Смотреть еще похожие новости:</b>
<a href=https://melhorlance.com.br/minha-conta/>1×slots зеркало</a>
<a href=https://forum.ltp-team.com/topic/79425-sayt-1×-slots-casino/>сайт 1× slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Казино дает вероятность заработать и вывести настоящие средства на бездепозитных бонусах. Обычно, это малозначительная сумма, коию казино может себя позволить подарить игроку. Доступность — бездепозитные призы в казино почаще всего предоставляются свежим игрокам, хотя посещают случаи, когда бонус шансы получить и действующие посетители.
#4001 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Юлия Канакина 1×bet зеркало рабочее <a href=https://rucriminal.info/>1×bet бесплатно</a> спорт букмекерская контора лучшие онлайн казино <a href=https://kompromat1.online/>вавада казино</a> пинап казино casino официальный сайт Скворцова Вероника Игоревна порно 1×bet зеркало рабочее на сегодня 1×bet xyz Александра Бортич порно с Петр Ян (ММА) Попова Анна Юрьевна порно
DiskiPlus kent casino DiskiPlus bet casino <a href=https://www.diskiplus.ru>DiskiPlus porno Юлия Канакина, скелетонистка</a> DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus casino riobet <a href=https://diskiplus.ru/>DiskiPlus gama casino</a> DiskiPlus pinco casino DiskiPlus гта казино DiskiPlus порно с Диана Шнайдер (теннис) DiskiPlus порно с Варвара Субботина DiskiPlus сайте букмекерской конторы фонбет DiskiPlus порно с Максим Глушенков (футбол) DiskiPlus 1×bet зеркало на сегодня
#4002 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
Для получения депозитного приза необходимо восполнить свой игровой баланс настоящими средствами. Вознаграждение возможно получить или при внесении первого депозита, либо вид фиксированного процента от внесённых средств. Так или по, приз поступит на счёт только в пополнения. <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> Для получения предоставленных призов для пригодиться — ПК или мобильное прибор, и остальное дело за небольшим. <a href=https://forum.highlite.com/showthread.php?tid=1881>https://forum.highlite.com/showthread.php?tid=1881</a> Если вы облюбовали для себя некоторое брендов которые для больше всего приглянулись, для постоянной игры! Таких гемблеров казино очень любит и ценит, за частую эти игроки становятся VIP игроками заведения, коим нередко поступают прибыльные предложения повторяющий бонусов, например же туда входит и бездепозитные. 1×slots casino регистрация 1×slots review live <a href=http://bbs.cheaa.com/home.php?mod=space&uid=3303442>http://bbs.cheaa.com/home.php?mod=space&uid=3303442</a>
1хслотс казино зеркало
Выбирайте наилучшие бесплатные бонусы с помощью обзоров на Casinoz – и пусть вас сопутствует счастье при отыгрыше бонусных кредитов!После получения бонуса вывод средств для клиента будет недосегаем времени, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо чета недель. Выводить средства игрок сможет лишь после отыгрыша. 1×slots регистрация на сайте 1×slots ru com В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать собственный выигрыш с даровых вращений. Прибыль, коию Вы заработаете на этом бездепе возможно назначать на вывод без какого или отыгрыша. <a href=https://marvelvsdc.faith/wiki/User:KathleneStrempel>https://marvelvsdc.faith/wiki/User:KathleneStrempel</a> Бонус за регистрацию в казино выдается лишь раз один на одного игрока. Но случаются вспомогательные акции, в рамках которых бездепы расступаются для постоянных клиентов и эти презенты Вы сможете получить более 1-го раза. 1хслот зеркало Если ординарными текстами, бездепы – это определённая сумма денег или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать презенты. Но есть кое-какие аспекты. Существуют игорные жилища, которые перед тем как начислить призы требуют привязать телефонный, предоставить копии документов.
1×slots промокод при регистрации
<a href=https://www.fairyabc.com/home.php?mod=space&uid=112261>https://www.fairyabc.com/home.php?mod=space&uid=112261</a> В истиннее время получить приз за регистрацию в казино довольно просто. Почти каждый игорный жилище с готовностью даст деньги или благотворительные вращения. Многие игроки используют этим и не смущяются региться в каждом клубе с прибыльными условиями. Кстати, это замечательная возможность придумать выигрышную стратегию и сорвать куш.Хотя благотворительные бонусы начисляются без депо, не исключено, собственно вам понадобиться вносить деньги. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только последствии того, как свежий клиент первый пополнит игровой счет. 1×slots рабочее зеркало на сегодня Иногда у гостей сайта шансы возникнуть проблемы при активации приобретенного промо-кода. В этих случаях, необходимо обратиться за помощью в службу «Support». Для получения ответа, непременно указывается конкретная причина обращения и подтверждается информация дополнительными снимками. Если сложилась спорная ситуация, постоянно возможно адресоваться к главному регулятору или контролирующему органу, выдавшему данному заведению лицензионный документ.Поспешите зарегистрироваться на официальном веб-сайте Клубника, дабы быстро получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, появляется настоящий шанс победу!
1×slots регистрация на официальном сайте
В некоторых интернет казино для получения бездепозитных призов не довольно просто зарегистрироваться на сайте клуба и доказать свои контактные данные. Дополнительно потребуется активация промокода. Главное превосходство спинов – вероятность выучить разные слоты. Также получится насладиться бонусными раундами, испытывать удачу в риск-туре и преувеличить выигрыш за счёт особенных символов. Однако не игровой процесс заслуживает внимание, так какого-либо сосредоточиться на реальном выигрыше. 1×slots зеркало сайта <a href=http://www.en.besatime.com/index.php?subaction=userinfo&user=GeraldTap>http://www.en.besatime.com/index.php?subaction=userinfo&user=GeraldTap</a> Изучить управляла и обстоятельства получения бездепозитных бонусов казино, Вы можете у нас на веб-сайте в разделе с призами или на официальном веб-сайте избранного Вами казино. Если имеет найти нужную информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал или по электронной почте.
1хслот официальный сайт зеркало
<a href=https://images.google.ci/url?q=https://doctorlazuta.by/>https://images.google.ci/url?q=https://doctorlazuta.by/</a> 1×slot казино зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://moneysweet.listbb.ru/memberlist.php?mode=viewprofile&u=6851>рабочее зеркало 1×slots</a>
<a href=http://everestrolep.listbb.ru/viewtopic.php?f=38&t=12683>1×slots официальный сайт мобильная версия</a>
<a href=http://board.eternityrpc.com/thread-7-post-15962.html#pid15962>1хслотс зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают бонус по государствам. Вплоть до как, что клуб возможность брать игроков из Вашей страны, а бездеп не давать. Представленные на данной страничке наихорошие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, в гости Casino.ru шансы сортировать перечень по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д.
#4003 Charlesgunnyhttp://filmkachat.ru
1× slots casino официальный сайт
В перечне притязаний к отыгрышу нередко наличествуют лимиты на ставки при этой на собственные деньги. Так, если отыграть нужно 30 000 рублей, а предельная сумма ограничена 30 рублями, то вертеть барабаны светит 1000 один. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам действия промоакции.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 $. Если выдаются фриспины, их количество изредка превышает нескольких 10-ов бесплатных вращений. <a href=http://filmkachat.ru/>1×slots казино зеркало</a> Таким образом интернет казино получает потенциального игрока. Возможно в или подлинном он захочет поиграть на средства средства. Так работают бездепозитные бонусы в онлайн казино. Здесь отлично подходит выражение, бесплатные сыр бывает только в мышеловке. Начинающие игроки все не осознавать опасность азарта. Однако течением понимания делается больше. Это тема для отдельного обсуждения. <a href=https://speakerdeck.com/rendercgi1>https://speakerdeck.com/rendercgi1</a> В лицензионных бездепозитных казино играть в азартные игры вправду неопасно. Наличие лицензии одобряет тот факт, что клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP. 1×slots мобильная версия войти казино <a href=http://thrope.co.kr/bbs/board.php?bo_table=free&wr_id=35318>http://thrope.co.kr/bbs/board.php?bo_table=free&wr_id=35318</a> Можно ли наваривать на бездепозитных бонусах? Это не работа, здесь как повезет, если в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, это возможно назвать везением, и добавочной добавкой к вашему бюджету.
casino 1×slot
1×slots зеркало быструю регистрацию а также мгновенное Третитй бездепозитный бонус за регистрацию – денежные средства. К сожалению, начислить рубли или баксы готовы только знаменитые и модные клубы. С их поддержкою вас насладиться каждой доступной игрой – автоматом, рулеткой, кено, блэкджеком.Это один из главных характеристик привлекательности презента. С завешенным коэффициентом и профессионалы не сумеют выполнить обстоятельства по отыгрышу. И не, насколько презентабельно смотрится предложение – бездепозитный бонус казино в размере $500 либо $1 000. Чтобы новенькие лучше вдумались, собственно же это вейджер, мы разберём на случае. <a href=http://www.soilhome.com/home.php?mod=space&uid=10328>http://www.soilhome.com/home.php?mod=space&uid=10328</a> 1×slots регистрация на 1хслотс Если речь об неповторимых услугах, имеет понадобиться регистрация в казино по ссылке с партнерского вебсайта.
1×slots регистрация 1×slotscasino 56 online
Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке необходимо пополнить счет в казино. Для депозитных бонусов, эта процедура не нужна, так как депозит теснее сделан.Для получения бонуса надо(надобно) пригласить в игру свежего клиента. Казино начислит пригласившему фиксированный процент от взносов приглашённого в виде бонуса: почаще всего его объем не превышает 10%. Срок деяния бонуса в большинстве случаев не превышает месяца: пригласивший получает бонус от проигранных ставок приглашённого в первый луна игры. Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном призе, то в первую очередь внимание на значение вейджера и срок, кот-ый дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, что, этим проще отыграть бонус и вывести выигрыш.Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную функцию активации приза без депо. Внимательно прочтите до конца. Многие новенькие делают ошибки на шаге регистрации и потому имеют получить подарок. <a href=http://sobaeksanrock.dgweb.kr/bbs/board.php?bo_table=free&wr_id=2483241>http://sobaeksanrock.dgweb.kr/bbs/board.php?bo_table=free&wr_id=2483241</a> Допустим, за регистрацию вы возымели бездеп в размере 2 000 руб. С вейджером х30. В данном случае предстоит сделать ставок, на общую необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда выполните обстоятельства по отыгрышу, придёт время заработать настоящие деньги. Однако не запамятовывайте, собственно с любого презента выйдет исключить определённую необходимую (чаще всего менее $200). 1×slots рабочее зеркало на сегодня В бонусную программку множества операторов входят регулярные бездепы. Это бессрочные акции, поощряющие активных неизменных игроков. Популярный формат — раздача фриспинов по конкретным денькам недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают неизменные бонусы без депо в мена на скопленные баллы лояльности.
1×slots мобильная версия войти казино
В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с бесплатных вращений. Прибыль, коию Вы заработаете на этом бездепе можно назначать на вывод без какого либо отыгрыша. Поспешите забрать бездепозитные бонусы за регистрацию в казино из представленного списка. Все платформы не только водят законную работа, хотя и обрадуют честными результатами забавы, высокой отдачей, резвыми выплатами. Предложения с бездепозитными бонусами за регистрацию дозволяют свежим заведениям заинтересовать аудиторию на свой вебсайт. А игроки тому получают вероятность выступать на реальные деньги без депозита в казино и заработать малый стартовый капитал, кот-ый разрешается вывести на карту банка или электрический кошелек.Но эти рамки не смущают числе хайроллеров, что коэффициенты на слотах разрешают рассчитывать на крупные выигрыши, ну неких автоматах разыгрывается передовой джекпот. 1×slots casino регистрация <a href=http://www.audipiter.ru/user/JasperExpot/>http://www.audipiter.ru/user/JasperExpot/</a>
сайт 1× slots casino
При отыгрыше бонусных средств, необходимо учитывать срок деяния приза и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный приз несомненно аннулирован.Каждый из бездепозитных бонусов без пополнения 2022 имеет собственный конкретный вейджер для отыгрыша, так же в любом казино он устанавливается индивидуально — где то он х55 а кое-где х30, повторюсь всюду по разному! В количестве случаев бесплатные призы начисляются в кредитах, коие невозможно незамедлительно вывести со счета. Прежде их нужно отыграть по установленным правилам. Эти требования принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д.). О нем читайте ниже. <a href=http://bbs.ts3sv.com/home.php?mod=space&uid=681847&do=profile>http://bbs.ts3sv.com/home.php?mod=space&uid=681847&do=profile</a> Чаще всего казино бонус за регистрацию без депозита даёт возможность запустить каждой автомат. Но чем внимательно ознакомиться с условиями. Иногда для забавы доступны только определённые модели. Если вы новичок и ничего не смыслите в гэмблинге, лучше начать знакомство с миром азарта именно с «одноруких бандитов». 1×slots зеркало регистрацию более популярный вариант это Но существуют азартные заведения, готовые просто так вручить деньги на забаву. Для этого достаточно сделать профиль. Чтобы исключить выигрыш, сначала нужно выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа.
<b>Смотреть еще похожие новости:</b>
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=12662&p=17543#p17543>1×slots зеркало которую указывали при регистрации кстати</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Внесение депо – Будьте готовы восполнить счет в отыгрыша бонуса. Это обычное заявка верховодил для этого подобии промо-акций. Лучше заранее уточнить, какую сумму нужно будет заносить на счет. Как управляло, речь о минимальном депозите, но вы обязаны быть уверены, что он вас по карману.
#4004 Edgararilihttps://sugar-news.com.ua
Свежие и актуальные новости <a href=https://sugar-news.com.ua/>https://sugar-news.com.ua</a> Украины и мира! Будьте в курсе последних событий, аналитики и трендов. Читайте последние новости Украины онлайн!
#4005 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Алена Михайлова казино 5 <a href=https://7club7.com/>1×bet xbet xyz</a> Самойлова Алла Владимировна порно up casino <a href=https://specreporter.com/>casinos winning</a> казино вулкан 7k casino слот casino 1×bet официальный сайт 1×bet xyz porno Алена Косторная (фигурное катание) лучшая казино казино смотреть онлайн бесплатно
DiskiPlus 1×bet зеркало DiskiPlus 1×bet слоты <a href=https://www.diskiplus.ru>DiskiPlus r7 casino</a> DiskiPlus порно с Афонина Марина Игоревна DiskiPlus online casino официальный <a href=https://www.diskiplus.ru>DiskiPlus казино сочи</a> DiskiPlus unlim casino DiskiPlus ставки на спорт букмекерские конторы DiskiPlus букмекерская контора официальный сайт скачать DiskiPlus pin up casino официальный DiskiPlus porno Яна Троянова DiskiPlus 1×bet 1 DiskiPlus Фастова Елена Владимировна порно
#4006 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino 777 online
Для верификации номера аппарата, в личном профиле выберите опцию „Подтвердить номер телефона“ и введите в отвечающее фон код, приобретенный в sms-сообщении. <a href=http://filmkachat.ru/>сайт 1× slots casino</a> Какие бонусы есть еще получить не бездепозитного приза за регистрацию в казино? По мимо бездепозитного бонуса, каждое интернет казино предлагает игрокам прибыльное предложение на 1-ый депозит, вы совершаете депозит, ваш депозит увеличивается в двое или и в 3, что, этим наиболее начать выступать можно с более крупной суммой, например же не забываем тему вейджер на бонусы. <a href=https://www.tadalive.com/blog/446712/why-every-dream-home-needs-a-solid-interior-design-plan/>https://www.tadalive.com/blog/446712/why-every-dream-home-needs-a-solid-interior-design-plan/</a> Фриспины — бесплатные вращения, которые разрешают игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины числятся наиболее известным и желаемым видом приза — бесплатные вращения иногда эффективнее и веселее в отыгрыше, чем остальные виды бездепов.Бездепозитные призы отличный вариант даровой игры в игровые автоматы. Многие пользователи сети не понимают, что в казино можно начать играть безусловно даром, а позже исключить выигрыш на банковскую карту либо электрический кошелек, другие не доверяют онлайн казино, а третьи успешно играют и выигрывают – и тотчас достаточно большие суммы. 1× slots зеркало <a href=http://zanasite.free.fr/laripostedumardi/doku.php?id=Выкуп_авто>http://zanasite.free.fr/laripostedumardi/doku.php?id=Выкуп_авто</a>
1×slots casino регистрация 1×slotscasin online
Бoльшинcтвo азартных заведений выдвигают приблизительно однообразные, схожие условия и притязания, которые нужно выполнить, дабы получить бездепозитный бонус за регистрацию. Все их возможно соединить в раз перечень:Минимального оборота. Этот лимит устанавливается вейджером — пока игрок не сыграет на установленную сумму, вывод средств будет недосегаем. <a href=https://forums.scar-divi.com/topic/686072–1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE/>1×slots официальный сайт зеркало</a> 1×slots регистрация 1×slots casino 777 online <a href=https://correspondent.in.ua/user/Justincot/>https://correspondent.in.ua/user/Justincot/</a> Выполнив все притязания оператора, заказчик может оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит примерно не более суток. Если дополнительно требуется пройти процедуру верификации, то срок возрастает до 1–2 рабочих дней. Для перевода применяются банковские приборы и электронные платежные системы. Второй способ подходит лучше, например как масса транзакций ситуации исполняются мгновенно. В связи со спецификой функционирования банков обработка платежей может занять до нескольких трудящихся дней.Многие новички сомневаются, что поощрительный приз не будет отдавать, числе в они выиграли у казино. Это абсолютно безопасно и надежно. Выводя выигранные средства, игрок просто останавливает свое роль в игре и теряет уникальную возможность – даром наращивать собственное материальное положение. 1×slots бездепозитный бонус за регистрацию В разделе с бонусами активировать собственный подарок. Найти игры, для которых предусмотрено поощрение и использовать бонус по предназначению.При регистрации том, либо ином онлайн игральном заведении — вас дается один шанс испытывать собственную фортуну не внося средства монеты. Замечу собственно эту поощрительную услугу деют не все онлайн игровые площадки, а лишь щедрая половина из их. Которые мы подготовили для Вас в нашем списке.
1×slots рабочее зеркало
Проверка занимает от нескольких мин. До нескольких дней, спецы техподдержки имеют запросить дополнительные документы либо инициировать куцее общение по Skype.В любом казино с бездепозитным бонусом учтены вейджеровые условия. Это единственный «подводный камень», который стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) сделать определённое число ставок. Чем круче приз, тем сложнее выполнить условия, и напротив. <a href=http://www.mignonmuse.com/bbs/board.php?bo_table=free&wr_id=384660>http://www.mignonmuse.com/bbs/board.php?bo_table=free&wr_id=384660</a> 1×slot зеркало Существуют казино с призом за регистрацию, в довольно востребованы фриспины в онлайн казино потом регистрации в определенных играх. Они встречаются числе почаще бесплатных поощрений либо традиционных призов в казино без вложений. Например, игрок регистрирует счет, на который начисляются бесплатные игры, бонус за регистрацию в виде бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса в выигрывает настоящие деньги, коие в последствии возможно удачно вывести из заведения на собственную платежную систему. То есть, есть все шансы исключить свои без рисков своими деньгами. Регистрация, за игрок получит призы, займет пару минут, а спасибо этому можно увеличить 5 евро поощрений до тыс. И без всяких заморочек вывести их.Для получения выигрыша потребуется выполнить обстоятельства казино. Чаще всего игроку нужно поставить определенную сумму, хотя уже из личных средств. Она рассчитывается из общего объема выигрыша за всегда применения бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, если юзер выиграл 1000 руб., а множитель составляет х30, вывести деньги можно несомненно, сделав ставки на 30 000 рублей.
1хслот зеркало сайта
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=706528>1 x slots casino</a> Исходя из этого, просто не существует осмысленных причин махнуть рукою на получение такового бонуса при регистрации. И, будет, на подобный бесплатной базе у вас есть шансы выиграть средства и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные бонусы, именуют безвозмездными онлайн платформами для игр.Онлайн гемблинг развивается с каждым деньком все больше и больше, свежие бренды создаются не по дням а по часам. Новые интернет казино проделывают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и что, этим наиболее предлагают бездепозитные бонусы за регистрацию, что бы не пропустить такую возможность — как пользоваться свежим бездепом, советуем навещать наш вебсайт как можно чаще, самое аппетитное и свежие будет добавляться в данном же списке. рабочее зеркало 1хслотс <a href=http://datangzixun.com/home.php?mod=space&uid=145855>http://datangzixun.com/home.php?mod=space&uid=145855</a> В качестве бонусов интернет казино нередко предлагает выдачу фриспинов, то есть безвозмездных вращений игрового барабана. Виртуальные монеты возможно применять для обучения в покерной школе либо для забавы в казино.
1х слот регистрация в 1×slots casino
Выполнив все требования оператора, заказчик возможность оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит примерно не более суток. Если дополнительно требуется пройти функцию верификации, то срок увеличивается до 1–2 трудящихся дней. Для перевода используются банковские приборы и электронные платежные системы. Второй способ подходит никакого, например как большинство транзакций в этом случае исполняются мгновенно. В связи со спецификой функционирования банков обработка платежей возможность взятьвдолг(взятьвзаймы) до нескольких трудящихся дней.Так собственно сможете неустрашимо регистрироваться без всяких размышлений. Фортуна сейчас наверняка на вашей стороне. Не побаивайтесь, ведь следствие какого или ущерба Вам абсолютно не угрожает. С такими бонусами как без пополнения, Вы остаетесь только в плюсе, но не как не в минусе. <a href=https://securityholes.science/index.php?title=Выкуп_авто>https://securityholes.science/index.php?title=Выкуп_авто</a> В лицензионных бездепозитных казино играть в азартные игры вправду неопасно. Наличие лицензии одобряет что, этот факт, собственно клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP.Однако далеко не все ресурсы предлагают своим посетителям бездепозитные бонусы за регистрацию в казино. В большинстве случаев учтено поощрение на первый депозит в размере 100–200%. Это отличная вероятность преувеличить банкролл, прирастить время, проведённое за забавой и шансы сорвать крупный куш. 1×slots зеркало видели такую регистрацию на
<b>Смотреть еще похожие новости:</b>
<a href=http://86395.ww.w.molifan.net./space-uid-2275092.html>1 x slots casino</a>
<a href=https://qualityprogamer.de/forum/showthread.php?tid=417859>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Предложения с бездепозитными призами за регистрацию позволяют новым заведениям заинтересовать аудиторию на свой сайт. А игроки же получают вероятность выступать на настоящие средства без депозита в казино и заработать малый стартовый капитал, который разрешается вывести на карту банка либо электронный кошелек.
#4007 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino играть Любимова Ольга Борисовна порно <a href=https://slon-ru.com/>Кузнецова Анна Юрьевна порно</a> Анна Михалкова casino вход <a href=https://vestnik-jurnal.com/>porno Анна Сидорова, керлингистка</a> казино фильм casino сегодня 1×bet слоты сайт казино зеркало 1win букмекерская контора 1×bet официальный сайт 1×bet xyz porno Виктория Баркова, легкоатлетка
DiskiPlus порно с Захарова Мария Владимировна DiskiPlus скачать букмекерскую контору <a href=https://www.diskiplus.ru>DiskiPlus up casino скачать</a> DiskiPlus фильмы казино рояль DiskiPlus Комарова Наталья Владимировна порно <a href=https://diskiplus.ru/>DiskiPlus мобильные букмекерские конторы</a> DiskiPlus 1×bet casino DiskiPlus порно с Евгений Малкин (хоккей) DiskiPlus top casino DiskiPlus вывод казино DiskiPlus 1×bet официальный DiskiPlus порно с Илюшникова Татьяна Александровна DiskiPlus porno Яна Троянова
#4008 Charlesgunnyhttp://filmkachat.ru
1×slots официальный demo регистрация в 1×slots casino
Следует выделить, что бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> Шаг 4. Активация. Внимательно изучите условия, информацию по лимитированиям и сроке действия бонусного предложения. Разобравшись с правилами, можно активировать бонус в личном офисе (от ? с использованием промокода) или по запросу в саппорт.Нельзя разглядывать забаву на деньги, как вариант заработка. Азартные забавы воспрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не организатором азартных игр. Сайт носит информационный характер. <a href=https://vhearts.net/forums/thread/8949/>https://vhearts.net/forums/thread/8949/</a> Классическая разновидность приза за создание аккаунта. Его превосходство заключается в, что заказчик может самостоятельно избирать аппараты и делать ставки в них. Иногда список игровых автоматов ограничен оператором, хотя все также это какого-либо, чем один-единственный доступный разъем, как в случае с внедрением фриспинов. 1х слот регистрация в 1×slots casino <a href=http://obruchalka-vrn.ru/index.php?subaction=userinfo&user=brokenexclusion>http://obruchalka-vrn.ru/index.php?subaction=userinfo&user=brokenexclusion</a> Необходимость отыгрыша. Вейджер такой выше, чем для призов за депозит. И пока средства не отыграны, исключить их нельзя.Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного приза достаточно пополнения баланса и подтверждения личности. В иных же клубах, нужно несколько один прокрутить свой депозит.
1×slots casino регистрация 1×slotscasin online
Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, all зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. <a href=https://www.rusdrama-az.com/support/51-sluzhba-tehnicheskoy-podderzhki-sayta.html>1×slots рабочее зеркало на сегодня</a> 1хслот зеркало Подарки на праздники ? приуроченные к праздничным датам, требующие символического отыгрыша или начисляются без того. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду. <a href=https://meiying99.com/home.php?mod=space&uid=417363>https://meiying99.com/home.php?mod=space&uid=417363</a> 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Фриспины начисляются по конкретной ставке. После их активации игроку нужно запустить слот и убедиться, собственно в нем показываются благотворительные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода в отыгрыша определяется оператором и изредка превышает 5 000 руб.Будьте внимательнее при ознакомлении с правилами во избежание появления конфликтных обстановок с казино, когда после отыгрыша бездепа для не дадут исключить солидную необходимую выигрыша.
1х слот регистрация в 1×slots casino
Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. <a href=http://www.miranetwork.it/index.php?option=com_k2&view=itemlist&task=user&id=396314>http://www.miranetwork.it/index.php?option=com_k2&view=itemlist&task=user&id=396314</a> Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депо может выделяться до 30 дней. 1×slots официальный сайт зеркало рабочее За счёт спинов выйдет запустить различные онлайн слоты, протестировать стратегии и поднабраться опыта. Фишка никаких, собственно вращения начисляются на топовые аппараты с оригинальными опциями и высочайшей отдачей. Не запамятовывайте, что в любом акционном предложении предусмотрены особые требования – кратковременные ограничения, максимальный размер ставки, перечень доступных игр.
1×slot рабочее зеркало
Помните, собственно всевозможные нарушения верховодил сведут на нет ваши старания, и вы скорее останетесь без начисленного вам дарового бонуса. Всегда изучайте управляла начисления и обстоятельства вейджера. По хоть вопросам, на коие вы возможности без найти ответы, обращайтесь за объяснениям и саппорт.Бонус без депозита за регистрацию в казино (бездепозитный приз) – это валютный подарок от клуба, который начисляется на аккаунт игрока последствии регистрации в казино. Кроме творенья учетной записи, для получения бездепа, довольно часто потребуется ещё и доказать контактные данные игрока и/или активировать особый промо-код. <a href=http://maddog-server.org/forum/showthread.php?tid=53253>1×slots официальный сайт скачать</a> К образцу, игроку выдаются бесплатные свои в заведении в объеме пятидесяти либо ста $ (вейджер на коие сочиняет 100х). То есть, любому новоприбывшему игроку выскакивает привлекающая картинка, кот-ая сулит выплату всех зачисленных фирмой средств. Не стоит обращать внимания на казино приз за регистрацию без депо с сильно великой либо очень маленькой суммой призов, поэтому собственно, числе тщательно выучив все обстоятельства, тут всего, несомненно некий подкол. 3. Подтвердить данные. В зависимости от клуба, нужно привязать аппарат или почту, показать индивидуальную информацию;Бесплатный приз – кредиты, которые онлайн-казино начисляет посетителю, не принуждая его пополнять игровой счет. 1×slots скачать на айфон <a href=http://www.ls-city.com.pl/index.php?subaction=userinfo&user=CharlesCax>http://www.ls-city.com.pl/index.php?subaction=userinfo&user=CharlesCax</a>
1×slots casino регистрация
Чаще всего, популярностью сервисы, такие как MoneyBookers и WebMoney, еще MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно обязательное правило. Финансовые средства выводятся только спустя ту платежную систему, которой пользовались для пополнения депо. Если же игрок получил бездепозитный покерный приз, требуется пополнить счет на наименьшую сумму, кот-ая составляет обычно 10 $. В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать собственный выигрыш с даровых вращений. Прибыль, коию Вы заработаете на этом бездепе возможно назначать на вывод без какого или отыгрыша.Все любят получать подарки. Согласитесь, почти каждый играющий человек будет бесконечно счастлив, случае получит даровой презент для забавы в онлайн казино просто за регистрацию или же бонус за внесенный депозит, так именуемые приветственные бонусы для свежих игроков. Соответственно такие интернет клубы будут больше известны и предпочтительны у игроков при выборе казино для забавы. Топ казино день обновляется и прибавляются новые и увлекательные игровые клубы с симпатичной бонусной политикой и всеми возможными привилегиями, к которым относятся такие призы как фриспины за регистрацию, денежные бездепозитные призы, а также щедрые призы за внесенный депозит. <a href=http://mcart.ru/bitrix/redirect.php?goto=http://sinur.ru/bitrix/rk.php?goto=http://tapki.su/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/U71mMUVehev>http://mcart.ru/bitrix/redirect.php?goto=http://sinur.ru/bitrix/rk.php?goto=http://tapki.su/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/U71mMUVehev</a> 1×slots зеркало на сегодня Первый возникающий вопрос, это, чего выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают свежих игроков. Последним проще начать забаву на средства с дара за регистрацию. Им не пополнять баланс и тратить личностные свои. Новички получают благотворительные спины либо средства на счёт. С их поддержкой знакомятся с игровым ходом, крутят слоты и проделывают ставки в рулетке.Денежные средства. Третий бонус за регистрацию без депо – наличные. К огорчению, только знаменитые и знаменитые клубы имеют дать деньги в рублях или баксах. С их помощью вас насладиться любой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед этим нужно выполнение конкретных критерий.
<b>Смотреть еще похожие новости:</b>
<a href=https://traderscrypt.com/forums/showthread.php?tid=5891&pid=8787#pid8787>1 x slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, the decision лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. Ограничения по играм. Администрация запрещает игрокам кое-какие игровые автоматы с бездепозитным призом, деньгами или бесплатными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда разделение производится по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, хотя запрещен в настольных забавах и в разделе Live Casino.
#4009 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
Условия вывода выигрыша. В неких заведениях для успешного вывода с бездепозитного бонуса довольно пополнения баланса и доказательства личности. В иных же клубах, нужно некоторое раз прокрутить свой депозит.Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских руб. В условиях акции предписано, что вейджер бездепозитного приза х20. Поэтому, чтобы отыграть бонус, игроку будет нужно сделать ставок на 35*20=700 руб. <a href=http://filmkachat.ru/>1×slot официальный сайт</a> <a href=http://www.gothicpast.com/myomeka/posters/show/78646>http://www.gothicpast.com/myomeka/posters/show/78646</a> У любой игры средства требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система засчитает каждую ставку. В рулетке и покере сделать это намного сложнее. Именно поэтому например главно внимательно читать условия получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой игре, то новенькие попросту «спустят приз на ветер».Отзывы читателей о бонусных акциях помогут составить впечатление, но не забывайте о субъективности личных объяснений. 1×slots casino регистрация 1×slotscasin online <a href=https://nordgoldjobs.com/forum/user/35946/>https://nordgoldjobs.com/forum/user/35946/</a>
1×slots рабочее зеркало на сегодня
Получать информацию о самых выгодных бонусах можно без постоянного мониторинга новостей казино. Мы взяли данную задачку на себя и непрерывно следим за услугами операторов, выбирая превосходнейшие из их. В данном разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список промоакций регулярно дополняется. В топ зашли самые новые бездепозитные призы за регистрацию в казино 2020, временные и закрытые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и другим критериям. Если срок деянья акции истек, она удаляется из списка.Для казино, работающих онлайн, бездепозитные призы необходимы для привлечения новых посетителей. Предложение поиграть на слотах без надобности внесения настоящих средств — работающий метод для увеличения интереса к компании. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит играть в казино, лишь теперь уже на собственные деньги. <a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=42378>casino 1×slot</a> 1×slots регистрация на сайте <a href=https://laguna-club.by/blog.php?cp=143>https://laguna-club.by/blog.php?cp=143</a> Иногда операторы просят внесение минимального депо перед выводом для верификации платежного прибора. В неких казино данный депо того предстоит отыграть. 1×slots зеркало видели такую регистрацию на В бонусную программу множества операторов входят регулярные бездепы. Это пожизненные промоакции, поощряющие интенсивных постоянных игроков. Популярный формат — раздача фриспинов по конкретным денькам недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депозита в обмен на скопленные баллы преданности.Бездепозитный бонус нередко возможность стать доступным незамедлительно после завершения регистрации, потому как единственным требованием к нему является регистрация, а этого проверка вашей новой учетной записи.
1×slots официальный сайт скачать
Допустим, за регистрацию вы получили бездеп в размере 2 000 рублей с вейджером х30. В этом случае предстоит сделать ставок, на совместную сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда сделайте условия по отыгрышу, придёт время заработать настоящие средства. Однако не запамятовывайте, собственно с каждого презента получится исключить определённую сумму (чаще всего не более $200).Подарки на праздничные ? посвященные праздничным датам, требующие условного отыгрыша или начисляются без того. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду. <a href=http://hoiqt.com/user-5205.html>http://hoiqt.com/user-5205.html</a> Чем ниже значение вейджера, тем проще отыграть и исключить бонус. Если Вы расчитываете заработать на бездепе, а не просто ознакомиться с новым игровым клубом, то стоит избегать призов с высочайшим вейджером их почти не реально отыграть. С ними Вы сможете только протестировать игры заведения. 1хслотс казино зеркало
1хслот официальный сайт зеркало
<a href=https://australianwinerytours.com/tours/showthread.php?tid=44836&pid=349143#pid349143>1×slots casino регистрация 1×slots review live</a> 1×slots casino регистрация 1×slotscasino09k online <a href=https://rentry.co/ay4w86fo>https://rentry.co/ay4w86fo</a> Каждый новичок и умелый игрок мечтают скоро стартануть и начать делать настоящие ставки. Для этого достаточно забрать презент, за кот-ый не платить. В зависимости от игровой платформы, нужно сделать профиль, привязать email либо телефон. После сего администрация начислит щедрое вознаграждение вид бесплатных вращений или виртуальных кредитов.
казино 1×slots
На страничке представлены бездепозитные призы за регистрацию в казино редчайшая заслуга за которой гонятся все игроки как новички, так и мастера. Мы также уделяем огромное внимание на присутствие бонусов при формирование рейтинга казино на средства. Бездепозитный бонус это возможность выступать даром и выиграть настоящие средства.Бездепозитные призы – это самая интересная и более многообещающая промоакция интернет-казино. Они в превосходнее фри-спинов, потому что выплаты в безвозмездных вращениях не гарантированы, так композиции на барабанах игрового аппарата все не сложиться. <a href=http://design-navigator.ru/bitrix/redirect.php?goto=http://clients1.google.je/url?q=http://220ds.ru/redirect?url=https://teletype.in/@urist555/ql4PyVPJWYK>http://design-navigator.ru/bitrix/redirect.php?goto=http://clients1.google.je/url?q=http://220ds.ru/redirect?url=https://teletype.in/@urist555/ql4PyVPJWYK</a> Можно. Вы всегда можете отказаться от получения бездепозитного приза за регистрацию в казино, пока Вы не сделаете ставку. 1×slos регистрация в 1×slots casino Предложения с бездепозитными призами за регистрацию разрешают новым заведениям привлечь аудиторию на свой сайт. А игроки в свою очередь получают вероятность выступать на реальные деньги без депо в казино и заработать маленький стартовый капитал, кот-ый разрешается исключить на карту банка либо электронный кошелек.Прямо данный отберите бесплатные вращения за регистрацию без депозита и начинайте собирать призовые комбинации из-за солидных выигрышей!
<b>Смотреть еще похожие новости:</b>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=174886>1× slots сайт</a>
<a href=https://www.goslog.ru/forum/messages/forum1/message14859/11-obrashcheniya-grazhdan?result=reply#message14859>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чтобы получить возможность исключить выгода с бездепозитного приза в казино, необходимо выполнить ряд критерий:
#4010 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Илья Осипов (киберспорт) сайт казино вход <a href=https://glvk.guru/>casino сегодня</a> Попова Анна Юрьевна порно porno Мария Шарапова <a href=https://www.ossetia.tv/>порно с Юлия Ефимова, пловчиха</a> Шевцова Татьяна Викторовна порно pin up casino официальный мобильные букмекерские конторы pin up casino buzz porno Анастасия Янькова, боксерка porno Ангелина Гончаренко, хоккеистка 1×bet официальный слоты
DiskiPlus букмекерская контора вход DiskiPlus casino pin официальный <a href=https://diskiplus.ru>DiskiPlus бесплатно играем казино</a> DiskiPlus porno Мира Андреева (теннис) DiskiPlus кент casino <a href=https://diskiplus.ru/>казино</a> DiskiPlus porno Алена Михайлова DiskiPlus казино рояль DiskiPlus сайт букмекерской конторы DiskiPlus порно с Алексей Миранчук (футбол) DiskiPlus Любимова Ольга Борисовна порно DiskiPlus казино 5 DiskiPlus casino бездепозитный
#4011 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino промокод 1×bet официальный слоты <a href=https://rucriminal.info/>казино ставка</a> casino daddy casino ап <a href=https://www.ossetia.tv/>1win букмекерская контора</a> champion casino black russia казино казино 5 pin casino зеркало 7k casino зеркало на сегодня Черкесова Бэлла Мухарбиевна порно casino скачать
DiskiPlus приложения букмекерских контор на андроид DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz <a href=https://diskiplus.ru>DiskiPlus 1×bet слоты</a> DiskiPlus казино фильм DiskiPlus Нургалиева Эльвира Рамиловна порно <a href=https://diskiplus.ru/>DiskiPlus казино регистрации</a> DiskiPlus сайты казино DiskiPlus сайт 1×bet слоты DiskiPlus cometa casino DiskiPlus казино зеркало сегодня DiskiPlus porno Юлия Канакина, скелетонистка DiskiPlus порно с Георгий Джикия (футбол) DiskiPlus casino ru
#4012 Charlesgunnyhttp://filmkachat.ru
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Для того, дабы отыграть сумму вашего бездепозитного бонуса надо(надобно) выполнить обстоятельства вейджера. Очень нередко фриспины даются на определенные слоты (book of ra, book of lifeless, book of sun), выбирайте разъем для по, они очень красивые и качественные. Бездепозитные приз может быть денежным так и в виде фриспинов на слотыДоступ к подарку возможность открываться механически в введения промокода либо обращения в службу поддержки сайта. В первом случае от юзера не требуется практически действий. Бездеп с активацией по коду встречается чаще всего. Игроку необходимо ввести совокупность знаков в графе, кот-ая возможность пребывать в регистрационной форме в Личном кабинете. <a href=http://filmkachat.ru/>1×slots зеркало подтвердит вашу регистрацию если говорить</a> <a href=https://ai.ceo/read-blog/246294>https://ai.ceo/read-blog/246294</a> 1×slots зеркало видели такую регистрацию на <a href=https://www.intensedebate.com/people/Cazinosdep>https://www.intensedebate.com/people/Cazinosdep</a> Активация валютного вознаграждения происходит механически в сотворения профиля либо использования промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на странички казино в социальных сетях или на рассылку рекламных извещений, скачать и ввести дополнительный софт и т.д.
1×слотс казино
Допустим, за регистрацию вы получили бездеп в объеме 2 000 руб. С вейджером х30. В данном случае предстоит сделать ставок, на общую сумму в 60 000 рублей (2 000 * 30 = 60 000). Когда сделайте условия по отыгрышу, придёт время заработать настоящие деньги. Однако не забывайте, что с любого подарка получится исключить определённую сумму (чаще всего не более $200). 1×slot рабочее зеркало Для казино, работающих онлайн, бездепозитные призы необходимы для привлечения свежих посетителей. Предложение сыграть на слотах без необходимости внесения настоящих средств — работающий метод для увеличения энтузиазма к компании. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит выступать в казино, лишь сейчас теснее на личные средства. <a href=http://mashspec.ru/user/AshleyNot/>http://mashspec.ru/user/AshleyNot/</a> Вейджер (wager) – это коэффициент, кот-ый демонстрирует на какую сумму необходимо сделать ставок, чтобы исключить приз из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего бонуса, Вам необходимо сделать ставок на необходимую: 500*70=3500 руб. Только всецело отыграв бонус, Вы сможете вывести свой выигрыш.Простая процедура получения бездепозитного бонуса, кот-ая займет менее 2-х минут. Для получения бездепов, достаточно зарегистрироваться и подтвердить контактные данные. 1×slots зеркало регистрацию более популярный вариант это
1хслотс рабочее зеркало
Возьми собственный подарок. Чаще всего приз активируется сразу в регистрации. Но посещают истории, когда нужно зайти в индивидуальный офис или написать в справочную службу. <a href=http://samjinuc.com/bbs/board.php?bo_table=free&wr_id=69850>http://samjinuc.com/bbs/board.php?bo_table=free&wr_id=69850</a> 1×slots регистрация на сайте 1×slots ru com
1×slots casino регистрация 1×slots review live
Помните, собственно любые нарушения верховодил сведут на нет ваши усилия, и вы всего останетесь без начисленного вам безвозмездного приза. Всегда изучайте верховодила начисления и обстоятельства вейджера. По каким вопросам, на которые вы имеет самостоятельно отыскать ответы, обращайтесь за разъяснениям и саппорт.Перед активацией главно внимательно выучить условия акции. Чем ниже вейджер, что, этим больше потенциальная выгода игрока. Имеют велечину кроме лимиты ставок при отыгрыше и сроки, в течение коих возможно воспользоваться предложением. Если бездеп охватывает ограниченный перечень игр, рекомендуется узнать наибольшие коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только в случае, случае оператор не установил строгие лимитирования на наивысшую сумму ставки. <a href=https://www.formulersupport.com/Thread-1×-slots-casino-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82–151005>1× slots casino официальный сайт</a> При пользовании бездепозитным бонусом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют некоторое обликов лимитов:Ознакомьтесь с нашим перечнем наилучших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего списка и получите бездеп незамедлительно. Хватайте превосходнейшие благотворительные предложения ниже и выигрывайте большие деньги, не рискуя! 1×slots регистрация на официальном сайте <a href=https://radioizba.ru/communication/forum/?PAGE_NAME=profile_view&UID=19943>https://radioizba.ru/communication/forum/?PAGE_NAME=profile_view&UID=19943</a>
1×slots зеркало сайта
Доступ к дару может открываться автоматически последствии введения промокода или обращения в службу поддержки сайта. В первом случае от пользователя не требуется никаких поступков. Бездеп с активацией по коду встречается почаще всего. Игроку необходимо установить совокупа символов в графе, кот-ая может находиться в регистрационной форме в Личном офисе. Прямо данный отберите бесплатные вращения за регистрацию без депозита и начинайте коллекционировать призовые комбинации из-за солидных выигрышей!Внесение депозита – Будьте готовы пополнить счет последствии отыгрыша бонуса. Это обычное требование верховодил для данного подобии промо-акций. Лучше заблаговременно уточнить, какую сумму надо(надобно) несомненно вносить на счет. Как управляло, речь идет о наименьшем депозите, но вы должны быть уверены, собственно он вас по карману. <a href=http://marymstyle.ru/index.php?subaction=userinfo&user=obtainableblack>http://marymstyle.ru/index.php?subaction=userinfo&user=obtainableblack</a> Новички не обожают сразу же вносить депозит. Это обосновано отсутствием опыта и сомненьем. К счастью, дни можно получить бездепозитный приз за регистрацию в казино. Неважно собственно начисляет система – фриспины или кредиты. В всяком случае вы не рискуете своими сбережениями. Это отличная возможность запустить приглянувшийся видео разъем либо же испытать удачу в настольных играх.Во время игры в казино, выигрыши, полученные спасибо безвозмездным призовым фондам, суммируются и срабатывают в общую сумму для отыгрывания. Однако, в удача улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно допустит исключить денежные средства. Сумма вывода будет зависимости от лимита, одобренного именно в этом учреждении. Поэтому, пристально нужно читать правила выдачи безлимитных депозитов. рабочее зеркало 1хслотс
<b>Смотреть еще похожие новости:</b>
<a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=7523&TITLE_SEO=7523-preobrazovatel-interfeysov-usb-rs485&MID=472041&result=reply#message472041>1×slots официальный сайт мобильная версия скачать</a>
<a href=http://miupsik.ru/forums/showthread.php?tid=352872>1×slots зеркало регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриплей-бонусы. Бонусы за бесплатную игру есть лишь в некоторых клубах. Они зачисляются незамедлительно после творенья профиля и действуют непродолжительное время. Если у вас нет медли потратить средства, они просто закончатся. Что дотрагивается времени, правило призы срабатывают протяжении 1-го часа. С иной стороны, намного легче забрать бездепозитные фриспины за регистрацию в казино и напрямик данный начать вертеть барабаны в наилучших слотах. Главная необыкновенность спинов сомнений, что они предусмотрены для топовых автоматов. Удастся не только пройти вспомогательные раунды, но и увеличить необходимую выигрыша, заработать респины и внутриигровые презенты.
#4013 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
сайте букмекерской конторы фонбет casino 7k рабочее <a href=https://slon-ru.com/>porno Илона Маркова, хоккеистка</a> казино фильм сайт букмекерской конторы <a href=https://kompromat1.online/>porno Юлия Канакина, скелетонистка</a> часы казино 1×bet рабочее на сегодня порно с Анна Калинская (теннис) porno Илона Маркова, хоккеистка букмекерская контора бетсити порно с Карен Хачанов (теннис) porno Елизавета Туктамышева
DiskiPlus casino актуальное зеркало DiskiPlus казино онлайн <a href=https://diskiplus.ru/>DiskiPlus ев казино</a> DiskiPlus 1×bet на сегодня DiskiPlus кент casino <a href=https://diskiplus.ru/>DiskiPlus букмекерские конторы бет</a> DiskiPlus яндекс игры казино DiskiPlus казино без DiskiPlus porno Александра Степанова, фигуристка DiskiPlus porno Яна Троянова DiskiPlus сайты казино DiskiPlus pin casino DiskiPlus 1×bet xbet xyz
#4014 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet официальный казино вход <a href=https://www.ossetia.tv/>лучшие онлайн казино</a> букмекерская контора официальный сайт 1×bet слоты официальный сайт <a href=https://rucriminal.info/>казино на деньги</a> казино смотреть онлайн яндекс казино 1×bet приложение казино проиграл Приезжева Екатерина Геннадьевна порно букмекерская контора фонбет лучшая казино
DiskiPlus porno Александра Степанова, фигуристка DiskiPlus казино 1 <a href=https://diskiplus.ru>DiskiPlus casino 7k рабочее</a> DiskiPlus порно с Баталина Ольга Юрьевна DiskiPlus casino x <a href=https://www.diskiplus.ru>DiskiPlus casino зеркало сегодня рабочее</a> DiskiPlus самое казино DiskiPlus порно с Васильева Татьяна Викторовна DiskiPlus Елизавета Боярская DiskiPlus сайты казино DiskiPlus порно с Юлия Ефимова, пловчиха DiskiPlus порно с Захарова Мария Владимировна DiskiPlus игры казино
#4015 Charlesgunnyhttp://filmkachat.ru
1 x slots
Каждый новичок и профессиональный игрок грезят быстро стартануть и начать создавать реальные ставки. Для сего достаточно забрать презент, за кот-ый не выплачивать. В зависимости от игровой платформы, нужно создать профиль, привязать email либо телефон. После этого администрация начисляет щедрое вознаграждение повторяющий бесплатных вращений или виртуальных кредитов.Акции, посвященные календарным праздникам, случаются рассчитаны как на всех пользователей, например и на категории: например, презент на 8 марта девушкам-игрокам или мужчинам на 23 февраля. <a href=http://filmkachat.ru/>1×slots зеркало быструю регистрацию а также мгновенное</a> Вывод выигрыша с бездепозитных призов казино – щедрый подарок от азартных клубов. Но чтобы вывести собственный заработок, нужно выполнить ряд критерий: <a href=https://www.scutify.com/articles/2024–10–25------>https://www.scutify.com/articles/2024–10–25------</a> Размер призов чаще всего чисто символический и не выше 50 руб. Приятно, но ощутимым бустом деле ли станет.Процесс подтверждения личности имеет занять от 1-го дня до недели. Если заказчик допустил нибудь ошибку при заполнении паспортных данных, то ему стопам адресоваться с задачей в службу онлайн-казино. 1×slots зеркало быструю регистрацию а также мгновенное <a href=http://www.efdir.relevantdirectories.com/1win-brasil-bet-apostas_326222.html>http://www.efdir.relevantdirectories.com/1win-brasil-bet-apostas_326222.html</a>
1хслотс мобильная версия зеркало
1×слотс казино Бонус с зачислением денег на счет выделяет больше свободы поступков. Пользователь сам выбирает, каким образом воспользоваться подаренными своими. Здесь того имеют работать лимитирования на перечень доступных игр, хотя обычно эти рамки не так строги, как в промо с безвозмездными вращениями.Фриспины без депо либо вспомогательные средства помогут поближе познакомиться с игровой платформой и её функциями. За счёт презентов возможно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради забавы против живых крупье. <a href=http://111.t95283ld.bget.ru/user/Williamjiche/>http://111.t95283ld.bget.ru/user/Williamjiche/</a> 1×slots зеркало видели такую регистрацию на Раздача призов возможность быть посвящена различным датам: календарные праздники, дни рождения игроков, годовщина открытия казино и т. Д. Подарок выдается вид денег, фриспинов либо баллов для скопления и размена на предложения оператора. Если юзер получает выигрыш, средства начисляются на его счет. Для вывода этой суммы понадобиться выполнить ряд требований.
1×slots официальный зеркало
Особую изюминку видео слотам присваивают уникальные знакы. С их в активизируются разные бонусы. Вы сможете запустить вспомогательный уровень и прирастить сумму выигрыша. Есть знаки, коие замещают ненадобные элементы и сами создают выигрышные комбо. Не стоит забывать и про бонус-тур. После любого удачного спина есть шанс прирастить необходимую выигрыша в 2 или четыре раза. Заработать на бездепозитных призах за регистрацию в казино имеет любой пользователь, достигший совершеннолетия.Эффективность бездепов в маркетингового прибора расценили почти операторы. Малоизвестные площадки употребляют эти акции, дабы прытко набрать базу. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны постоянных гостей. Не все сайты, дающие презенты без депозита, рекомендованы к ирге. За привлекательным промоописанием имеют прятаться неосуществимые обстоятельства отыгрыша и другие подводные камни. <a href=http://minivenebi.ge/index.php?subaction=userinfo&user=measlytyro39>http://minivenebi.ge/index.php?subaction=userinfo&user=measlytyro39</a> Простая процедура получения бездепозитного приза, которая займет не более 2-х мин. Для получения бездепов, достаточно зарегистрироваться и доказать контактные данные. 1×slots зеркало регистрация Бездепозитные бонусы — это подарки от казино в виде бонусных денег либо фриспинов для игровых автоматов, которые начисляются на аккаунт игрока после процедуры регистрации на сайте заведения. Для получения таких поощрений депо не требуется.
1хслотс казино зеркало
Кешбэк-бонус представляет собой возврат фиксированного процента от ставки если, тогда, поражения либо же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не выше 10%. Заработать на бездепозитных бонусах за регистрацию в казино может каждый юзер, достигший совершеннолетия. 1×slots casino регистрация <a href=https://gshost.ru/user/ZacheryNak/>https://gshost.ru/user/ZacheryNak/</a> Бездепозитный приз казино 2022 с выводом за регистрацию дает вероятность ознакомиться игроку с лобби избранного заведения, сориентироваться в выборе игр и проверить качество работы службы. Довольно нередко, начиная игровой процесс, игрок теснее не желает останавливаться и проделывает реальный вклад. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать бесплатно вероятно как один таки с призом за регистрацию без необходимости вносить депо.
1×slots зеркало регистрация в 1×slots casino
Несмотря на то, собственно этот вариант стимуляции со стороны азартных платформ довольно моден в подобных игр, далековато многим почитателям казино знаменито, собственно сами бездепозитные призы казино и как непосредственно их возможно эксплуатировать.Такие поощрения разрешают безвозмездно протестировать свежее казино, разобраться с игровым процессом интернет слотов, заработать и исключить маленькую сумму денег. Бездепы обыкновенно предлагают с отыгрышем — быстро исключить выигранные свои невозможно. Перевод средств со счета несомненно возможен последствии такого, как юзер выполнит все требования казино, а сумма имеет превышать установленного правилами лимита. Условиями акции фиксируются сроки, на коих клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней после активации. <a href=http://forum.opelclub-by.com/index.php?showuser=77607>http://forum.opelclub-by.com/index.php?showuser=77607</a> Размер ставки для игры по бездепозитному призу (конечно же, в случае, когда он представлен повторяющий бонусных валютных средств) часто ниже, чем при ирге на депозит. Ограничение несомненно действовать до этапа отыгрыша бонуса. 1×slots промокод при регистрации При пользовании бездепозитным призом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют количество видов лимитов:
<b>Смотреть еще похожие новости:</b>
<a href=http://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=6268>1×slots casino регистрация 1×slotscasino09k online</a>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=304269>1× slots casino зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Каждый геймер должен сперва отчетливо изучить условия по получению и отыгрышу приглянувшегося презента. Если всё устраивает, поторопитесь арестовать бесплатные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик сейчас начать вертеть барабаны лучших слотов. Приглашаем делиться суждениями о призах. Это поможет другим юзерам подбирать более выгодные предложения.
#4016 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
7k casino официальный порно с Каролина Севастьянова <a href=https://slon-ru.com/>porno Екатерина Ефременкова, шорт-трекистка</a> 1×bet вход порно с Анна Щербакова, фигуристка <a href=https://specreporter.com/>1×bet зеркало слоты 1×bet xyz</a> пин ап casino pin up top порно с Карен Хачанов (теннис) порно с Дарья Клишина, легкоатлетка 1×bet зеркало рабочее ограбление казино Приезжева Екатерина Геннадьевна порно порно с Каролина Севастьянова
DiskiPlus casino зеркало сайта DiskiPlus почему в казино нет часов <a href=https://www.diskiplus.ru/>DiskiPlus лучшая казино</a> DiskiPlus рабочие зеркала казино DiskiPlus 1×bet телефон <a href=https://www.diskiplus.ru>DiskiPlus Приезжева Екатерина Геннадьевна порно</a> DiskiPlus Львова-Белова Мария Алексеевна порно DiskiPlus вавада казино DiskiPlus казино без DiskiPlus Разуваева Ксения Денисовна порно DiskiPlus мобильные букмекерские конторы DiskiPlus pin up casino официальный DiskiPlus kent casino
#4017 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Дарья Клишина, легкоатлетка казино 5 <a href=https://res-publika.com>лучшие бесплатные онлайн казино</a> porno Нина Пирогова, хоккеистка пин ап casino <a href=https://res-publika.com>зеркала официальных сайтов казино</a> r7 casino pin up casino официальный unlim casino казино можно порно с Георгий Джикия (футбол) Окладникова Ирина Андреевна порно казино
DiskiPlus букмекерская контора фонбет официальный сайт DiskiPlus казино 1 <a href=https://diskiplus.ru>DiskiPlus лучшие букмекерские конторы</a> DiskiPlus porno Светлана Ходченкова DiskiPlus pin up casino <a href=https://www.diskiplus.ru>DiskiPlus порно с Георгий Джикия (футбол)</a> DiskiPlus суть казино DiskiPlus porno Александр Соболев (футбол) DiskiPlus pin ап casino DiskiPlus порно с Карен Хачанов (теннис) DiskiPlus 1win casino DiskiPlus 1×bet скачать приложение DiskiPlus вывод казино
#4018 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino c2d ru
Заработать на бездепозитных призах за регистрацию в казино возможность каждый юзер, достигший совершеннолетия.А ознакомиться с свежими онлайн казино, Вы можете за счет призов с выводом прибыли, которые Вы сможете получить без депозита. <a href=http://filmkachat.ru/>1×slots бездепозитный бонус за регистрацию</a> <a href=https://forms.yandex.com/cloud/6716307302848f0c3b0dc022/>https://forms.yandex.com/cloud/6716307302848f0c3b0dc022/</a> Для тех, кто лишь взвешивает испытывать свою фортуну, а также для проф игроков, разыскивающих свежие площадки для выигрышей, ведущие лицензированные казино нередко организуют разные акции, и одно из лучших услуг прошедшее время – как для новичков, так и для проф игроков – бездепозитный приз за регистрацию.Пoдтвepдить личнocть посетителя. Для удачного вывода средств, необходимо подтвердить лицо клиента. Нa этaпe вepификaции пpoфиля, работники службы защищенности обязаны убедиться, собственно у игрока не раз акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не может вывести свой выигрыш, случае у него несомненно количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы. 1×slot зеркало рабочее регистрации на телефон придет <a href=http://j67236dr.bget.ru/user/Gregoryseict/>http://j67236dr.bget.ru/user/Gregoryseict/</a> Популярность онлайн казино растёт и всё больше юзеров начинают интересоваться азартными играми. Бездепозитные призы 2022 года, это оригинальные подарки за регистрацию. С их подмогою свежие игроки все получить безвозмездные вращения или деньги на баланс за одну регистрацию. С появлением игорных заведений в онлайне, бездепозитные призы стали наимоднейшим методом привлечения игроков. Подобные акции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш вебсайт собрал наилучшие предложения из онлайна на 2022 год. Воспользуйтесь каким презентом и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить условия.
1×slots зеркало на сегодня
Бездепозитный приз за регистрацию в казино с выводом средств в 2022 году — Наш ресурс дает игрокам актуальную информацию о самых свежих, щедрых и испытанных бонусах в интернет казино, которые обновляются каждый денек.Срок активации и время на отыгрыш. Зачисление денег либо фриспинов происходит при активации в течение требовательно ограниченного периода, схожие притязания предъявляются и к срокам отыгрыша. Одни казино позволяют отыгрывать бонус некоторое дней или числе месяцов. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высоким вейджером. <a href=http://youboy.comwww.molifan.net/space-uid-2295552.html>1×slots casino регистрация 1×slots review live</a> 1× slots регистрация в 1×slots casino Выбирая безвозмездный приз, пристально изучайте управляла. Убедитесь, что вам возможно на роль в акции. Уточните, в каких играх можно скорпулезно обстоятельства вейджера. При необходимости задавайте вопросы адептам саппорта. <a href=https://www.jhshe.com/home.php?mod=space&uid=1752578&do=profile&from=space>https://www.jhshe.com/home.php?mod=space&uid=1752578&do=profile&from=space</a> казино 1×slots
1×slots официальный сайт мобильная версия скачать
Вейджер (wager) – это коэффициент, который демонстрирует на какую сумму нужно сделать ставок, дабы исключить бонус из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода этого бонуса, Вам нужно устроить ставок на сумму: 500*70=3500 рублей. Только всецело отыграв приз, Вы сможете исключить свой выигрыш. Помните, собственно в неких забавах сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных играх только от 5% до 50% суммы ставки считаются как отыгранные деньги, в то время как в слотах идет в зачет все 100% суммы. <a href=http://a1pay06.com/bbs/board.php?bo_table=free&wr_id=3987653>http://a1pay06.com/bbs/board.php?bo_table=free&wr_id=3987653</a> Бездепозитные бонусы за регистрацию в игровых автоматах для собственников онлайн-казино считаются долею рекламной кампании, направленной на увеличение аудитории вебсайта. Так они продвигают средства бренды и завлекают новых посетителей.Чтобы бездеп не был начислен на Ваш аккаунт, Вам не активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт автоматически, а Вы не планируете его применять, обратитесь в службу с пожеланием отменить бездепозитный бонус. 1×slots регистрацию более популярный вариант это Все любят получать подарки. Согласитесь, практически каждый играющий человек будет сильно счастлив, если получит бесплатный презент для игры в онлайн казино просто за регистрацию или же бонус за внесенный депо, например именуемые приветственные призы для новых игроков. Соответственно эти интернет клубы будут больше востребованы и предпочтительны у игроков при выборе казино для забавы. Топ казино постоянно обновляется и добавляются новые и интересные игровые клубы с привлекательной бонусной политикой и всеми возможными привилегиями, к которым относятся эти бонусы как фриспины за регистрацию, денежные бездепозитные бонусы, еще великодушные призы за внесенный депо.В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и если, тогда, неоднозначных ситуаций нет способности куда-то пожаловаться и обосновать свою правоту.
1хслотс рабочее зеркало
Главным интересным в появлении этих вознаграждений состоит что, что пустив их в ход, компьютерные ничем не рискует и в последствии никому ничего не несомненно должен (не зависимо, получит ли он благодаря бонусам какой-нибудь выигрыш или моментально спустит все лишь собственно прибывшие финансы). То есть, казино снабжает игрока возможностью на дармовой основе выступать во всевозможные слоты и даже спонсирует игру. 1×slots зеркало быструю регистрацию а также мгновенное <a href=https://velorout.com.ua/user/WalterCreri/>https://velorout.com.ua/user/WalterCreri/</a> На критериях отыгрыша безвозмездных призов следует тормознуть подробнее. С ними связаны нюансы, которые невозможно оставить без внимания.В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать собственный выигрыш с безвозмездных вращений. Прибыль, коию Вы заработаете на этом бездепе можно ставить на вывод без какого либо отыгрыша.
1×slots casino зеркало рабочее
Помните, собственно любые нарушения управлял сведут на нет ваши старания, и вы наверняка останетесь без начисленного вас бесплатного приза. Всегда изучайте правила начисления и обстоятельства вейджера. По каким вопросам, на коие вы возможности без найти ответы, обращайтесь за разъяснениям и саппорт. <a href=http://rusnord.ru/index.php?subaction=userinfo&user=deepepic20>http://rusnord.ru/index.php?subaction=userinfo&user=deepepic20</a> 1×slots актуальное зеркало Также, учите, что бездепозитный приз можно вывести только что случае, когда станут исполнены все обстоятельства отыгрыша.Вы наверняка, как и все предпочитаете получать презенты и бездепозитные призы казино. Игорные дома брали в привычку одаривать гэмблеров приятными бонусами. Стать владельцем приветственного подарка можно за создание профиля или пополнение счёта. Второй вариант больше занимательный, как клубы готовы удвоить депозит! Но если вы новичок и только знакомитесь с миром пыла, другого, как воспользуйтесь бонусом за регистрацию.
<b>Смотреть еще похожие новости:</b>
<a href=https://test.soclanovtsy.ru/topic/34267–1×%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE/>1×слотс казино</a>
<a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1 x slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Заполняя данные в личном профиле, указывайте только достоверную информацию, так как Вам понадобиться ее подтвердить в будущем при выводе денег.
#4019 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
ешь казино букмекерская контора бетсити <a href=https://www.ossetia.tv/>Манилова Алла Юрьевна порно</a> бесплатное казино промокод 1×bet <a href=https://glvk.guru/>7k casino сайт</a> порно с Абрамченко Виктория Валериевна porno Андрей Рублев (теннис) 1×bet 1хбет смотреть фильм казино casino 7k рабочее porno Дарья Мороз игры казино
DiskiPlus казино 1 DiskiPlus kent casino регистрация <a href=https://diskiplus.ru/>DiskiPlus порно с Максим Глушенков (футбол)</a> DiskiPlus играющие казино онлайн DiskiPlus casino сайты <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet официальный сайт</a> DiskiPlus смотреть фильм казино DiskiPlus casino официальный сайт DiskiPlus пари букмекерская контора DiskiPlus Разуваева Ксения Денисовна порно DiskiPlus винлайн букмекерская контора официальный DiskiPlus казино без DiskiPlus казино в россии
#4020 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация то дальше необходимо пройти
Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, чтобы снова получить безвозмездный приз. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ждет неизбежное наказание.Чаще всего казино бонус за регистрацию без депозита даёт вероятность запустить каждой автомат. Но другого, как внимательно ознакомиться с условиями. Иногда для забавы доступны только определённые модели. Если вы новичок и ничего не смыслите в гэмблинге, чем начать знакомство с миром пыла непосредственно с «одноруких бандитов». <a href=http://filmkachat.ru/>1×slots регистрация на 1хслотс</a> Срок отыгрыша — это этап, кот-ый начинается в момент активации приза и кончается с его закрытием. Пользователю нужно уложиться в данный временной промежуток, иначе призовые свои аннулируются. Казино устанавливают перечень игр, ставки в засчитываются при расчете отыгранных средств. Если тайтл не заходит в этот список, то ему быть недосегаем для загрузки в действия бонусного предложения. <a href=https://blog.udn.com/G_112062930339362154/181391895>https://blog.udn.com/G_112062930339362154/181391895</a> 3. Подтвердить данные. В зависимости от клуба, нужно привязать телефонный либо почту, показать персональную информацию; 1×slots официальный сайт мобильная версия скачать <a href=http://lysyegory.ru/redirect?url=http://sklad27.ru/bitrix/redirect.php?goto=http://zdravsnab.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/AuH6Kbzf20g>http://lysyegory.ru/redirect?url=http://sklad27.ru/bitrix/redirect.php?goto=http://zdravsnab.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/AuH6Kbzf20g</a> Бездепозитные бонусы настоящими деньгами, коие возможно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадали.Для отыгрыша приза казино обязует игрока поиграть на необходимую, в количество один превышающую сумму полученного бонуса — здесь выгода компании очевидна.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Фриспины начисляются по определенной ставке. После их активации игроку нужно запустить слот и увериться, что в нем показываются безвозмездные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода последствии отыгрыша ориентируется оператором и изредка выше 5 000 руб. 1×slots официальный зеркало Иногда в бездепа, казино дарует минимальный приз (до 50 рублей), ради которого не заморачиваться.Срок активации и время на отыгрыш. Зачисление денег или фриспинов случается при активации в течение строго ограниченного периода, похожие требования предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать приз несколько дней или том месяцов. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высочайшим вейджером. <a href=http://retail-ts.ru/index.php?subaction=userinfo&user=magnificentshut>http://retail-ts.ru/index.php?subaction=userinfo&user=magnificentshut</a> Подтвердите регистрацию, дабы активировать Бездепозитный бонус с выводом, требуется заполнить индивидуальный профиль. Заполните пустые поля реальными данными о себе. 1хслот зеркало Подтвердите лицо, предоставив оператору казино свои паспортные данные. Инструкции обычно легкие, основное — конкретно им стопам. Если написано, что «на фото должны быть заметны все хорошо угла страницы паспорта» — устройте именно такое фото.Демоказино есть почти на каждом сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются значительно реже: там в случае выигрыша и соблюдения условий промоакций бездеп возможно превратить в настоящие деньги.
1×slots регистрацию процедура займет всего лишь
Чтобы без убедиться в превосходствах бездепозитных бонусов, довольно зарегистрироваться в казино и получить одобрение.Благодаря программке лояльности от игорного заведения, можно взять превосходный старт и без дополнительных инвестициям запустить видеослоты. Кроме того, возможно рассчитывать на реальную фортуну и получить, без вложения собственных финансов, великий выигрыш. При маленькой сумме приза рекомендовано выступать по невысоким ставкам, а применять наибольшие превосходнее только в случае, случае вейджер слишком немалый, а время на отыгрыш крепко ограничено.Бездепозитный бонус предоставляется новому игроку за определенные деянья. Часто презент в виде денег или фриспинов выдается за регистрацию, спасибо чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. <a href=http://wiki.die-karte-bitte.de/index.php/Benutzer_Diskussion:LarueGwin0744>http://wiki.die-karte-bitte.de/index.php/Benutzer_Diskussion:LarueGwin0744</a> В современность очень просто получить приз за регистрацию в казино. Практически каждый игорный дом с радостью начислит деньги или безвозмездные вращения. Многие гэмблеры пользуются этим и не смущяются региться в каждом клубе с выгодными условиями. Кстати, это отличная вероятность выработать победную стратегию и сорвать джекпот. 1×slots рабочее зеркало Зарегистрируйтесь. Для регистрации почаще всего достаточно ввести собственный номер телефонного и почтовый адрес, после чего установить полученный код из СМС. Возможно, потребуется указать промокод. В правилах акции будет написано, где его надобно вводить. Иногда это бы делать при регистрации, время — теснее в создания личного кабинета, на отдельной страничке.
1×slots на любой вкус как пройти регистрацию
Поспешите забрать бездепозитные бонусы за регистрацию в казино из представленного списка. Все платформы не только ведут законную деятельность, но и порадуют честными плодами забавы, высокой отдачей, быстрыми выплатами. Основное различие что, что для получения бездепа не пополнять баланс в казино. Но не этого, есть ряд и отличий: Маркетинговая политика всех игорных интернет-клубов должна одевать разнородный нрав. И если вознаграждения на депозит работают для того, дабы стимулировать вносить депозиты и поощрять теснее имеющих пользователей, то бездепозитный бонус в казино или бонус за регистрацию в казино, до всего, рассчитан на расширение базы покупателей. 1×slots регистрация 1×slotscasino09k online <a href=http://rabotalnr.ru/users/wearymistake74>http://rabotalnr.ru/users/wearymistake74</a> Автоматическая активация на самой комфортной, но ручной способ имеет перед ней достоинства. Прежде чем использовать вознаграждение от казино, стоит заранее определить, сколько времени потребуется на выполнение всех критерий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деянья приза.Многие казино предоставляют в маркетинговых целях благотворительные призы необыкновенно для наших читателей. Чтобы их получить, надо(надобно) перебежать на игровой сайт по партнерской ссылке с нашего портала.
1×slots регистрация то дальше необходимо пройти
Доступные игры – В некоторых азартных забавах можно снизить математическое превосходство казино до нескольких 10-х процента. В их количестве почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как управляло, в таких играх ставки идут в зачет вейджера не всецело. Например, имеет предусматриваться лишь 50%. В неких играх бездепозитные бонусы вообщем невозможно отыгрывать.Постарайтесь отыграть вейджер, чтобы появилась вероятность оставить заявку на выплату. Кстати, на всех сайтах, представленных в списке, доступны современные платёжные приборы. Вы сможете получить выигрыш на электронной кошелёк, карту, телефонный. Да, у бесплатных бонусов есть недостатки. Прежде всего, они обыкновенно большие. Кроме как, обстоятельства вейджера по ним всегда строгие. Но таки неименье риска проделывает их очень привлекательными для клиентов.Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных требований, не обязательной верификации. Если на сайте предусмотрена обязательная процедура доказательства личности, то исключить выигрыш удастся лишь после проверки данных. Приготовьтесь заполнить анкету и отправить в техподдержку документ, подтверждающий личность. <a href=https://diart.su/user/Jamescrupe/>https://diart.su/user/Jamescrupe/</a> Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми акциями. Читайте о них в обзорах и на форуме. 1×slots зеркало сайта Бездепозитные бонусы — это презенты от казино вид бонусных денег или фриспинов для игровых автоматов, которые начисляются на акк игрока в процедуры регистрации на сайте заведения. Для получения этих поощрений депо не потребуется.В наше время довольно просто получить бонус за регистрацию в казино. Практически любой игорный дом с готовностью начисляет деньги или бесплатные вращения. Многие гэмблеры пользуются этим и не стесняются региться в любом клубе с выгодными критериями. Кстати, это замечательная вероятность выработать победную стратегию и сорвать джекпот.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.donchillin.com/space-uid-382497.html>1хслот зеркало</a>
<a href=https://forum.gamesims.sk/viewtopic.php?f=10&t=115359>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.
#4021 Charlesgunnyhttp://filmkachat.ru
зеркло казино 1×slots
Более крупные предложения встречаются довольно изредка. Зачастую они доступны только VIP-игрокам. В остальных случаях им всего сопутствуют очень строгие обстоятельства отыгрыша. Также вероятны вспомогательные обстоятельства прочие ограничения, прописанные в условиях и положения бонусной программки казино. <a href=http://filmkachat.ru/>1×slots зеркало подтвердит вашу регистрацию если говорить</a> Благодаря программе лояльности от игорного заведения, возможно арестовать неплохой старт и без дополнительных инвестициям запустить видеослоты. Кроме того, можно рассчитывать на реальную удачу и получить, без вложения собственных денег, большой выигрыш. <a href=https://blog.udn.com/G_112062930339362154/181391883>https://blog.udn.com/G_112062930339362154/181391883</a> Иногда в бездепа, казино дарует минимальный бонус (до 50 руб. ), ради которого не заморачиваться.Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных притязаний, кроме неотъемлемой верификации. Если на веб-сайте учтена обязательная процедура подтверждения личности, то вывести выигрыш получится только в проверки данных. Приготовьтесь заполнить анкету и отправить в техподдержку документ, подтверждающий личность. 1хслот зеркало <a href=https://holdenggfd72839.aboutyoublog.com/30718232/the-cutting-fringe-of-nsfw-ai-discovering-the-attributes-of-undress-ai>https://holdenggfd72839.aboutyoublog.com/30718232/the-cutting-fringe-of-nsfw-ai-discovering-the-attributes-of-undress-ai</a>
1×slots зеркало проходить регистрацию это отличный вариант
Многие новенькие колеблются, что поощрительный приз не будет возвращать, том в они выиграли у казино. Это абсолютно безопасно и надежно. Выводя выигранные свои, игрок просто останавливает свое роль деле и теряет уникальную возможность – безвозмездно наращивать личное вещественное положение.Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных требований, считая обязательной верификации. Если на веб-сайте предусмотрена неотъемлемая процедура доказательства личности, то исключить выигрыш получится лишь после проверки данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий лицо. <a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=496175>зеркло казино 1×slots</a> 1×slots зеркало рабочее на сегодня Особую изюминку видео слотам присваивают уникальные символы. С их свет активизируются различные призы. Вы можете запустить вспомогательный уровень и увеличить необходимую выигрыша. Есть знаки, коие замещают ненадобные составляющие и сами создают выигрышные комбо. Не стоит забывать и на бонус-тур. После каждого счастливого спина есть шанс прирастить сумму выигрыша в два либо четыре раза.Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных призов принимаются довольно высочайшие требования. Часто онлайн-казино советуют отыграть бонусное поощрение до ста раз в игровых автоматах. Например, если игрок получил даром десять долларов, то необходимо несомненно отыграть их, поставив 1 тысячу спинов по одному доллару любой. Стоит обозначить(означить), что не все казино выделяют возможность выступать на бонусы и не во всех развлекательных заведениях идентичные верховодила для отыгрывания. Некоторые казино запрещают выступать на призы в блекджек или ограничивают ставки до 5 %, собственно значительно наращивает в 10-ки один количество нужных игр. <a href=https://rdaforum.com/user-16066.html>https://rdaforum.com/user-16066.html</a> Можно ли зарабатывать на бездепозитных призах? Это не работа, здесь как повезет, если в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, тогда можно именовать везением, и дополнительной добавкой к вашему бюджету. 1×slots зеркало на сегодня
1×slots зеркало которую указывали при регистрации кстати
Процесс доказательства личности имеет занять от одного дня до недели. Если заказчик допустил какую ошибку при заполнении паспортных данных, то ему стопам адресоваться с проблемой в службу онлайн-казино.Обычно бездепозитные промоакции от казино, приходят на эл. Почту в дни рождения или праздничные. В некоторых интернет казино можно адресоваться в чат и как неизменному игроку, возможно вас предложат бездепозитное предложение. Но эти рамки не смущают том хайроллеров, потому коэффициенты на слотах разрешают рассчитывать на крупные выигрыши, в некоторых автоматах разыгрывается прогрессивный джекпот.Бездепозитный приз казино 2022 с выводом за регистрацию предоставляет вероятность ознакомиться игроку с лобби выбранного заведения, сориентироваться в выборе игр и проверить качество работы службы. Довольно часто, начиная игровой процесс, игрок теснее не желает останавливаться и проделывает настоящий лепта. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть безвозмездно вероятно как один таки с бонусом за регистрацию без необходимости вносить депо. <a href=https://forum.expert-watch.com/index.php?action=profile;u=184986>https://forum.expert-watch.com/index.php?action=profile;u=184986</a> Несмотря на то, что этот вариант стимуляции со стороны азартных платформ очень востребован в похожих игр, далеко не поклонникам казино ведомо, что сами бездепозитные призы казино и как непосредственно их возможно эксплуатировать. 1× slots casino зеркало Иногда в поощрения за регистрацию все выдаваться билеты для участия в турнирах. Условия их проведения очень отличаются, потому мы рекомендуем ознакомиться с каждым предложением отдельно.Чаще всего интернет-казино предлагают бездепозитные бонусы свежим юзерам. Эта промо-акция очень эффективно привлекает новичков, подталкивая их к открытию счета. Конечно, не они становятся послушными клиентами, но сам прецедент регистрации аккаунта играет на руку заведению.
зеркло казино 1×slots
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=69148&result=reply>1× slots casino официальный сайт</a> На условиях отыгрыша даровых призов стопам остановиться подробнее. С ними связаны нюансы, которые нельзя оставить без внимания.Если вы облюбовали для себя некоторое брендов которые вас больше всего приглянулись, для постоянной забавы! Таких гемблеров казино довольно предпочитает и оценивает, за частую эти игроки становятся VIP игроками заведения, которым часто поступают прибыльные предложения в виде призов, так же туда входит и бездепозитные. Создание аккаунта. На веб-сайте казино нужно открыть регистрационную форму и заполнить пустующие поля собственными данными. Иногда на данном этапе потребуется указать лишь адресок электрической почты и пароль, но чаще бы заполнить анкету персональной информацией (ФИО, дата рождения, место проживания и т.д.). Нужно указывать лишь настоящие данные, потому впоследствие они будут проверены. 1×slots зеркало рабочее <a href=https://www.beatstars.com/vykupavto0311/about>https://www.beatstars.com/vykupavto0311/about</a>
1×slots актуальное зеркало
Бездепозитные призы, как теснее ясно, являются уникальной возможностью приступать к игровому процессу полностью безвозмездно, другими играть в онлайн казино безвозмездно и на существующие средства незамедлительно последствии регистрации аккаунта. Автоматы с таким депозитом шансы замерзнуть великолепной возможностью сыграть для поклонников азарта с определенными лимитированиями в финансах.Первый образующийся вопрос, это, чего выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают новых игроков. Последним проще начать забаву на средства с подарка за регистрацию. Им не нужно пополнять баланс и расходовать собственные свои. Новички получают благотворительные спины или свои на счёт. С их подмогою знакомятся с игровым ходом, крутят слоты и делают ставки в рулетке. <a href=http://eric1819.com/home.php?mod=space&uid=647343>http://eric1819.com/home.php?mod=space&uid=647343</a> Мы подготовили список, где есть постоянно актуальные и свежие бездепозитные призы казино, коие вы можете получить даром. Для наших юзеров есть особые предложения эксклюзивные призы, коие вы кого не найдете, их мы обозначили особой красноватой плашкой «Exclusive». 1×slots регистрация Можно. Вы практически можете отказаться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не создадите ставку.Акции распространяются как на все игры казино, например и на ограниченный перечень. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и. Промо возможность охватывать разработки 1-го производителя. Бездеп не пересекается с иными акциями казино. Если на сайте учтен кэшбек, он не начисляется за ставки, изготовленные бонусными средствами. Для идентификации платежных реквизитов игрока возможность понадобиться пополнение счета на минимальную необходимую.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.findaspermdonor.com/viewtopic.php?f=25&t=89292>1×slots актуальное зеркало</a>
<a href=http://nakupnidivadlo.cz/index.php/forum/3-pripominky/46542–1×-slots?start=6#234689>зеркло казино 1×slots</a>
<a href=https://timepost.info/showthread.php?tid=113897>1хслотс официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Некоторые клубы автоматически начисляют бонус на акк игрока после исполнения условий получения, хотя случаются истории, когда приз нужно активировать игроку самому. Есть количество способов активации бонуса: Нет. Для получения бездепозитного бонуса в казино нужна неотъемлемая регистрация на сайте. Играть в слоты бесплатно и без регистрации возможно только в демо режиме.
#4022 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Нургалиева Эльвира Рамиловна порно Крючкова Полина Викторовна порно <a href=https://strelochnik.com/>яндекс казино</a> 1×bet зеркало бесплатные букмекерские конторы <a href=https://rhymes-punches.com/>казино онлайн бесплатно</a> casino онлайн Москалькова Татьяна Николаевна порно казино регистрации пари букмекерская контора рокс казино porno Юлия Пересильд официальные зеркала казино
DiskiPlus Семёнова Татьяна Владимировна порно DiskiPlus casino ап <a href=https://diskiplus.ru/>DiskiPlus pin up casino пин ап</a> DiskiPlus лучшие бесплатные онлайн казино DiskiPlus бесплатно играем казино <a href=https://diskiplus.ru>DiskiPlus 7k casino зеркало рабочее</a> DiskiPlus букмекерские конторы без депозита DiskiPlus porno Андрей Рублев (теннис) DiskiPlus официальное казино вход DiskiPlus винлайн букмекерская контора официальный сайт DiskiPlus online casino 7k DiskiPlus мелбет букмекерская контора DiskiPlus Елена Лядова
#4023 Charlesgunnyhttp://filmkachat.ru
1хслотс 1хслотс регистрация перейти на 1×slots
2. Создать новый профиль. Для регистрации надо(надобно) заполнить маленькую анкету или зайдите в индивидуальный офис посредством соц сетей; <a href=http://filmkachat.ru/>1× slots зеркало</a> Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном сайте и выполните вход в личный кабинет, дабы арестовать бесплатные вращения с вейджером х40; <a href=https://forum.highlite.com/showthread.php?tid=1881>https://forum.highlite.com/showthread.php?tid=1881</a> Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, научится регулировать менять ставки и линии, изучать бонусные забавы и их выигрышные композиции, да в просто зарядится кучей впечатлений! Ведь вы будите выступать на бонусные средства, которые возможно отыграть и вывести, а не просто на демо счет, что, этим самым адреналин в крови еще повысится а пульс забьется с частым ритмом!Иногда виде одобрения за регистрацию шансы выдаваться билеты для роли в турнирах. Условия их проведения очень отличаются, поэтому мы советуем ознакомиться с любым предложением отдельно. 1×slots казино зеркало <a href=http://canadalondonchinese.com/home.php?mod=space&uid=223767>http://canadalondonchinese.com/home.php?mod=space&uid=223767</a> Шаг 4. Активация. Внимательно изучите условия, информацию по лимитированиям и сроке деянья бонусного предложения. Разобравшись с правилами, можно активировать приз в личном кабинете (иногда ? с использованием промокода) либо по запросу в саппорт.
1×slot зеркало рабочее этих способов предполагает регистрацию
Третитй бездепозитный бонус за регистрацию – денежные средства. К сожалению, начислить рубли или баксы готовы только знаменитые и модные клубы. С их поддержкою вас насладиться каждой доступной игрой – автоматом, рулеткой, кено, блэкджеком.В разделе с призами активировать свой презент. Найти забавы, для которых учтено поощрение и использовать бонус по предназначению. <a href=https://swordmaster.org/user/JamesVok/>1×slots актуальное зеркало</a> 1×slots регистрация 1×slots casino c2d ru Бездепозитный приз предоставляется новому игроку за определенные деянья. Часто презент в виде средств либо фриспинов выдается за регистрацию, спасибо чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. <a href=https://www.justlink.org/details.php?id=361551>https://www.justlink.org/details.php?id=361551</a> На благотворительные призы онлайн-казино практически практически распространяется ограничения по стране проживания посетителей. Даже если вас разрешается открывать счет и выступать на деньги в заведении, это еще не значат, что вас доступны no deposit bonuses.Многие азартные клубы ограничивают необходимую вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, обозначенной в описании промоакции, суммы Вы не сможете вывести. Разница будет аннулирована, Вы числе не сможете делать на нее ставки. зеркло казино 1×slots При исполнении условий отыгрыша и верификации, деньги с бонусного счета переводятся на главной и имеют быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции зависимости от избранной платежной системы.
1хслотс рабочее зеркало
Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и более. Когда игроку надеется большое фриспинов, администрация возможность бить3 их начисление на количество дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах промоакции.В интернет-сети практически можно найти списки более модных и гарантированных поощрительных программ от популярных онлайн-казино. <a href=http://miracletour.com/bitrix/rk.php?goto=http://ceramics.ru/bitrix/click.php?goto=http://planetsib.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/FjaU6N7GMkI>http://miracletour.com/bitrix/rk.php?goto=http://ceramics.ru/bitrix/click.php?goto=http://planetsib.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/FjaU6N7GMkI</a> 1хслотс мобильная версия зеркало Бездепозитный бонус за регистрацию в казино — это стартовый презент повторяющий денежного начисления или безвозмездных вращений для свежих игроков заведения, для получения которого надо заносить депозит.
1хслот зеркало
Практически все интернет казино с бездепозитным призом за регистрацию учитывает программку преданности — систему одобрения постоянных клиентов, которая состоит из множества уровней. При достижении игроком одного значения на его счёт поступает бонус. Чем повыше уровень — тем щедрее бонус.При помощи такового поощрения оператор может также привлекать клиентов, которые ранее проявляли активность на веб-сайте, хотя по некий основанию прекратили играть. В этом случае промокод высылается пользователю по электронной почте либо в виде SMS. 1хслот официальный сайт зеркало <a href=https://knowyourmeme.com/users/jasperjag>https://knowyourmeme.com/users/jasperjag</a> Особую изюминку видео слотам присваивают оригинальные символы. С их свет активируются разные бонусы. Вы сможете запустить вспомогательный степень и прирастить необходимую выигрыша. Есть знаки, коие замещают негодные элементы и сами творят выигрышные комбо. Не стоит забывать и про бонус-тур. После любого успешного спина есть шанс увеличить необходимую выигрыша в 2 либо четыре раза.
1х слот 1хслотс регистрация перейти на 1×slots
Так собственно приготовьтесь предоставить секретную информацию (пол, возраст, страна проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает не более суток, последствии чего удастся свободно выводить крупные выигрыши.Поспешите зарегистрироваться на официальном сайте Клубника, дабы быстро получить 33 безвозмездных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, замечена реальный шанс победу! <a href=http://www.imxy28.com/space-uid-316459.html>http://www.imxy28.com/space-uid-316459.html</a> Также бездепозитные призы могут работать способом вернуть к этой посетителей, что приостановивших своё сотрудничество с компанией: уведомление о бездепе поступает на мобильный телефонный либо почту.Чем ниже велечину вейджера, тем проще отыграть и исключить приз. Если Вы расчитываете заработать на бездепе, но просто ознакомиться с новым игровым клубом, то стоит игнорировать бонусов с высоким вейджером их практически не реально отыграть. С ними Вы можете только протестировать забавы заведения. 1×slots casino регистрация Каждый новичок и профессиональный игрок грезят прытко стартануть и начать создавать реальные ставки. Для этого достаточно арестовать презент, за кот-ый не уплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email или аппарат. После сего администрация начислит щедрое вознаграждение в виде безвозмездных вращений либо виртуальных кредитов.Также бездепозитные призы могут служить способом возвращать к игре посетителей, что приостановивших своё сотрудничество с фирмой: уведомление о бездепе поступает на мобильный аппарат или почту.
<b>Смотреть еще похожие новости:</b>
<a href=https://tabsgame.ru/user/Jamesbes/>1хслотс рабочее зеркало на сегодня</a>
<a href=https://bans.org.ua/index.php?topic=122449.new#new>1×slots рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный бонус – это экономическое вознаграждение, которое выдается участнику игры в казино, для его привлечения и появления заинтригованности. Любой гость, который подходит условиям выдачи похожего бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое одобрение является наиболее эффективным методом, дающим вероятность стартовать при, не вкладывая личных вещественных средств. Для получения предоставленных бонусов вас пригодиться — ПК либо мобильное устройство, и остальное дело за небольшим.
#4024 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Преподобная Надежда Александровна порно casino играть <a href=https://krtka.info/>порно с Федор Чалов (футбол)</a> порно с Евгения Медведева казино сегодня <a href=https://t.me/vchkogpu_ru>kent casino</a> сайт казино вход Нургалиева Эльвира Рамиловна порно gama casino казино рояль порно с Афонина Марина Игоревна сайт казино вход пин ап casino pin
DiskiPlus бывшие казино DiskiPlus ап казино <a href=https://diskiplus.ru>DiskiPlus 1×bet зеркало слоты 1×bet xyz</a> DiskiPlus Хорова Наталья Александровна порно DiskiPlus казино фильм <a href=https://www.diskiplus.ru>DiskiPlus букмекерская контора фонбет официальный</a> DiskiPlus top casino DiskiPlus бесплатное казино DiskiPlus казино вход DiskiPlus играющие казино DiskiPlus порно с Константин Тюкавин (футбол) DiskiPlus 1×bet xbet xyz DiskiPlus казино рояль смотреть
#4025 Integrat_Eluffhttps://integrat.pro/
Добрый день! Компания Интеграт – IT разработчик, интегратор сторонних и собственных программных продуктов! Чтобы заявки не терялись, а отдел продаж был под контролем: обучим работе в CRM сотрудников, автоматизируем маркетинг и продажи, интегрируем CRM с сайтами, настроим телефонию. <a href=https://integrat.pro/>roistat отзывы сотрудников</a> Если внедрение и настройка amoCRM и Битрикс24 в Краснодаре, то это в Интеграт https://integrat.pro/ . Получите бесплатную и правильную консультацию, как управлять отделом продаж по номеру +7(909)450–12–66. Всем пока!
#4026 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
сайте букмекерской конторы фонбет казино сегодня <a href=https://kompromat1.online/>1×bet 1хбет</a> pin up букмекерская контора Крючкова Полина Викторовна порно <a href=https://rucriminal.info/>казино 1</a> фреш казино бесплатные букмекерские конторы porno Ангелина Гончаренко, хоккеистка казино вход официальные сайты казино 1×bet приложение бесплатное казино
DiskiPlus пин ап казино DiskiPlus 1×bet рабочее <a href=https://diskiplus.ru>DiskiPlus официальные сайты казино</a> DiskiPlus casino актуальное зеркало DiskiPlus бесплатные букмекерские конторы <a href=https://www.diskiplus.ru>DiskiPlus 1×bet слоты 1×bet top</a> DiskiPlus порно с Абрамченко Виктория Валериевна DiskiPlus макао казино DiskiPlus casino играть DiskiPlus black russia казино DiskiPlus Нургалиева Эльвира Рамиловна порно DiskiPlus казино рояль DiskiPlus casino вход
#4027 Charlesgunnyhttp://filmkachat.ru
1×slots скачать на айфон
Еще одно условие касается объемов ставки. Операторы устанавливают наивысшую необходимую, которую игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, выбранной в Личном кабинете. При превышении лимита есть риск лишиться бонуса. Существующие ограничения относятся и к конкретным обликам ставок. Например, играя в рулетку, клиент возможность столкнуться с запретом ставить фишки на шансы.В перечне требований к отыгрышу часто наличествуют лимиты на ставки при ирге на личные деньги. Так, если отыграть нужно 30 000 руб., а максимальная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 один. Эта особенность затрудняет соблюдение игроками условий по срокам деянья промоакции. <a href=http://filmkachat.ru/>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a> <a href=https://owntweet.com/thread/214646>https://owntweet.com/thread/214646</a> Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, solid зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. рабочее зеркало 1хслотс <a href=http://blog.kickiyangzhang.de/2015/06/newyorkerlikesyou.html>http://blog.kickiyangzhang.de/2015/06/newyorkerlikesyou.html</a> Приветственный бездеп предоставляется любому игроку только раз один. Казино борются с так именуемыми бонусхантерами (от англ. Bonus Hunter — доброволец за призами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения дара. Исключить подобные действия разрешает верификация данных. Администрация вправе востребовать у клиента доказать индивидуальные данные, обозначенные при регистрации.В онлайне большое известных игорных площадок с привлекательными акционными предложениями. Однако пристально читать обстоятельства десятков услуг в надоест, да и время отнимет большое. Поэтому наша команда подготовила ТОП-3 вебсайтов с лучшими бездепозитными бонусами:
1×slots регистрация
Вообще перейдя в казино — правила одинаковы в получении бездепозитных призов, в стереотипные управляла входит: доказать эл. Почту и аппарат, заполнить собственный личный профиль, активировать рекламную код либо активировать предложения во вкладке БОНУСЫ. <a href=http://kemsrr.forumex.ru/viewtopic.php?f=7&t=2081>1×slots официальный зеркало рабочее</a> 1×slots акции Как управляло, при выводе денег, от играющего потребуется только устроить минимальный лепта чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом личный счет. <a href=http://pclub.cc/home.php?mod=space&uid=228381>http://pclub.cc/home.php?mod=space&uid=228381</a> Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам запрещено начислять бонусы посетителям, не имеющим денежных средств на счете. Мы предлагаем осмотреть актуальные призы онлайн-казино с лицензией, которые соблюдают законодательство РБ. 1×slots мобильная версия войти казино Начнём с как, что каждое рекламную за регистрацию подразумевает некие условия. Бездепозитные бонусы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность валютного оборота, необходимая для исполненья критерий. Пример, получили безвозмездные вращения и выиграли с них 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 рублей, проигрышных или выигрышных, не. После исполнения, бонусный баланс перейдёт на реальный и станет легкодоступным к выводу.Бездепы с бесплатными вращениями предоставляют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд уплачивает казино. Число спинов ограничено и изредка выше сотню. Если промоакция включает в себя большое даровых игр, их начисление может быть разбито на некоторое дней.
1×слотс казино
Ниже указан актуальный список законных казино в Беларуси с бонусами на 1-ый депо. Вы можете попасть на официальный вебсайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус.На нашем сайте Вы отыщите список актуальных свежих бездепозитных бонусов в казино 2022 года. Также, есть много неповторимых предложений, коие доступны лишь посетителям нашего вебсайта после регистрации по нашей ссылке или активации специального промокода. Однако далековато не все ресурсы предлагают своим клиентам бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено поощрение на первый депозит в объеме 100–200%. Это замечательная вероятность преумножить банкролл, увеличить время, проведённое за игрой и шансы сорвать большой куш.У любой игры свои требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система зачтет каждую ставку. В рулетке и покере устроить это намного сложнее. Именно поэтому например главно внимательно читать обстоятельства получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой забаве, то новенькие просто «спустят бонус на ветер». <a href=https://tabsgame.ru/user/DarenSaw/>https://tabsgame.ru/user/DarenSaw/</a> 1×slots рабочее зеркало на сегодня
1×slots на любой вкус как пройти регистрацию
Заработать на бездепозитных бонусах за регистрацию в казино возможность любой пользователь, достигший совершеннолетия. В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, нужно обратиться в службу поддержки через лайв-чат на сайте казино.Заработать на бездепозитных призах за регистрацию в казино имеет любой пользователь, достигший совершеннолетия. 1×slots зеркало рабочее на сегодня <a href=http://suncheon.info/bbs/board.php?bo_table=free&wr_id=91287>http://suncheon.info/bbs/board.php?bo_table=free&wr_id=91287</a> Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие возникают у новичков.
казино 1×slots
Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. <a href=http://best-realtors.com.ua/index.php?subaction=userinfo&user=robusthangover6>http://best-realtors.com.ua/index.php?subaction=userinfo&user=robusthangover6</a> Можно ли зарабатывать на бездепозитных призах? Это не работа, тут как повезет, если в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, это возможно назвать везением, и добавочной добавкой к вашему бютжету.Зачастую бездепозитные бонусы казино для забавы предлагаются разными заведениями азартных игр виде рекламных промоакций либо в целях привлечения к себя свежих игроков. Для бездепозитных призов в казино 2022 геймеру надо пополнять счет до этапа вывода хотимых средств. 1×slots официальный зеркало рабочее Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и более. Когда игроку полагается количество фриспинов, администрация может разбивать их начисление на некоторое дней. Бесплатные вращения предоставляются для определенного слота, кот-ый указывается в правилах акции.
<b>Смотреть еще похожие новости:</b>
<a href=https://irc.floobits.com/Jamesamiva>1 x slots casino</a>
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1703#post-49342>1×slots зеркало которую указывали при регистрации кстати</a>
<a href=http://forum.survival-readiness.com/viewtopic.php?t=266593>1хслотс мобильная версия зеркало</a>
<a href=http://skatefluckit.com/member.php?u=149708>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Сразу после активации промокода возможно воспользоваться даром. Как теснее упоминалось, бонусы случаются трёх обликов – фриспины, кредиты и фриплей-бонусы. Отзывы читателей о бонусных акциях помогут составить впечатление, но не забывайте о субъективности личных объяснений.
#4028 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
сайт винлайн букмекерская контора винлайн букмекерская контора <a href=https://krtka.info/>1×bet скачать бесплатно</a> бывшие казино порно с Васильева Татьяна Викторовна <a href=https://www.ossetia.tv/>как выиграть в казино</a> 1×bet xbet xyz Елена Лядова porno Юлия Пересильд сайт винлайн букмекерская контора самое казино 1×bet официальный сайт 1×bet xyz порно с Владимир Минеев (ММА)
DiskiPlus Кузнецова Анна Юрьевна порно DiskiPlus casino pin официальный <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet зеркало рабочее</a> DiskiPlus пинап казино DiskiPlus казино зеркало сегодня <a href=https://diskiplus.ru/>DiskiPlus 1×bet</a> DiskiPlus pin ап casino DiskiPlus 1×bet официальный скачать DiskiPlus порно с Алина Загитова DiskiPlus пина casino DiskiPlus 1×bet зеркало рабочее на сегодня DiskiPlus 1×bet скачать приложение на андроид DiskiPlus пин ап casino pin up top
#4029 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало xbet xyz 1×bet зеркало рабочее <a href=https://rucriminal.info/>ап казино</a> скачать 1×bet на андроид бесплатно порно с Голикова Татьяна Алексеевна <a href=https://rucriminal.info/>порно с Гатагова Ольга Анатольевна</a> играющие казино скачать 1×bet up casino скачать порно с Дронова Александра Викторовна casino играть ставки на спорт букмекерские конторы kent casino
DiskiPlus porno Дарья Клишина DiskiPlus Кузнецова Анна Юрьевна порно <a href=https://diskiplus.ru>DiskiPlus 1×bet регистрация</a> DiskiPlus porno Светлана Ходченкова DiskiPlus пина casino <a href=https://www.diskiplus.ru>DiskiPlus pin up casino скачать</a> DiskiPlus porno Виктория Баркова, легкоатлетка DiskiPlus porno Анна Сидорова, керлингистка DiskiPlus сайт букмекерской конторы DiskiPlus рокс казино DiskiPlus официальные зеркала казино DiskiPlus скачать сайт букмекерской конторы DiskiPlus pin up casino buzz
#4030 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino x 1×bet на сегодня <a href=https://glvk.guru/>букмекерские конторы pin</a> 1×bet бесплатно слот casino <a href=https://res-publika.com>porno Юлия Канакина, скелетонистка</a> порно с Алина Загитова, фигуристка вавада казино Черкесова Бэлла Мухарбиевна порно букмекерская контора казино проиграл порно с Сергей Бобровский (хоккей) 1win букмекерская контора
DiskiPlus Радченко Светлана Юрьевна порно DiskiPlus pin ап casino <a href=https://diskiplus.ru>DiskiPlus порно с Евгения Медведева, фигуристка</a> DiskiPlus Александра Бортич DiskiPlus 1win casino <a href=https://diskiplus.ru/>DiskiPlus букмекерская контора бетсити</a> DiskiPlus официальные сайты казино DiskiPlus порно с Дарья Клишина, легкоатлетка DiskiPlus порно с Дронова Александра Викторовна DiskiPlus porno Дарья Клишина DiskiPlus скачать 1×bet на андроид бесплатно DiskiPlus casinos xyz DiskiPlus porno Дарья Клишина
#4031 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Самойлова Алла Владимировна порно порно с Зырянова Анастасия Владимировна <a href=https://vestnik-jurnal.com/>сайте букмекерской конторы фонбет</a> Елена Лядова слот casino <a href=https://slon-ru.com/>сайт pin up casino</a> casino daddy Попова Анна Юрьевна порно включи казино сайт казино зеркало casino скачать приложение casinos winning сайт винлайн букмекерская контора
DiskiPlus Нургалиева Эльвира Рамиловна порно DiskiPlus казино онлайн <a href=https://diskiplus.ru>DiskiPlus порно с Кирьянова Дарья Борисовна</a> DiskiPlus 1×bet на андроид DiskiPlus лучшие казино бесплатно <a href=https://www.diskiplus.ru>DiskiPlus винлайн букмекерская контора</a> DiskiPlus kent casino регистрация DiskiPlus сайт букмекерской конторы DiskiPlus казино онлайн бесплатно DiskiPlus сайт казино вход DiskiPlus porno Вера Бирюкова, гимнастка DiskiPlus порно с Захарова Мария Владимировна DiskiPlus скачиваемые казино
#4032 Joshuastusyhttps://888casino-official-brazil.site
Cassino online Pin Up <a href=https://888casino-official-brazil.site/>https://888casino-official-brazil.site</a> ganhos sem limites! Jogue seus caca-niqueis favoritos, participe de torneios, ganhe cashback e rodadas gratis. Licenca, seguranca e pagamentos rapidos!
#4033 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать сайт букмекерской конторы играющие казино онлайн <a href=https://th-royalgclub.com/>яндекс игры казино</a> Набиуллина Эльвира Сахипзадовна порно пинко casino <a href=https://t.me/vchkogpu_ru>игры казино</a> 7k casino бонус Ирина Горбачева играющие казино онлайн порно с Петр Ян (ММА) 1×bet вход скачиваемые казино порно с Алексей Миранчук (футбол)
DiskiPlus new casino DiskiPlus порно с Артемий Панарин (хоккей) <a href=https://diskiplus.ru>DiskiPlus casino сайты</a> DiskiPlus Елена Лядова DiskiPlus казино гта 5 <a href=https://diskiplus.ru>DiskiPlus порно с Дарья Касаткина (теннис)</a> DiskiPlus Преподобная Надежда Александровна порно DiskiPlus casino промокод DiskiPlus 1×bet зеркало xbet xyz DiskiPlus ев казино DiskiPlus ставки на спорт букмекерские конторы DiskiPlus скачать букмекерскую контору на андроид DiskiPlus казино играть
#4034 Charlesgunnyhttp://filmkachat.ru
1×slots casino online регистрация
Бездепозитный приз казино 2022 с выводом за регистрацию предоставляет возможность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и проверить качество работы саппорта. Довольно нередко, начиная игровой процесс, игрок уже отказывается останавливаться и проделывает настоящий лепта. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть безвозмездно вероятно как раз таки с бонусом за регистрацию без надобности вносить депозит. <a href=http://filmkachat.ru/>1×слот регистрация в 1×slots casino</a> <a href=https://juicedmuscle.com/forum/general/general-chat/264982-creating-immersive-spaces-the-art-and-science-of-3d-walkthrough-animation>https://juicedmuscle.com/forum/general/general-chat/264982-creating-immersive-spaces-the-art-and-science-of-3d-walkthrough-animation</a> 1×slots актуальное зеркало <a href=https://honcure.com/user/Jamesrooks/>https://honcure.com/user/Jamesrooks/</a> Также бездепозитные бонусы могут работать методом вернуть к этой клиентов, временно приостановивших своё сотрудничество с компанией: извещение о бездепе поступает на мобильный телефон или почту.Мы собрали и выпустили перечень наихороших бездепозитных казино с призами за регистрацию, коие гарантируют великодушные выигрыши и моментальные выплаты.
1× slots casino официальный сайт
Многие казино предоставляют в маркетинговых целях безвозмездные призы исключительно для наших читателей. Чтобы их получить, нужно перейти на игровой вебсайт по партнерской ссылке с нашего портала.Условия вывода выигрыша. В неких заведениях для удачного вывода с бездепозитного приза довольно пополнения баланса и подтверждения личности. В иных же клубах, нужно несколько один прокрутить собственный депозит. 1×slots промокод при регистрации 2025 <a href=http://xn–80aagidcc4cnuqfk6b2je.xn–p1ai/index.php?subaction=userinfo&user=aboriginalserie>http://xn–80aagidcc4cnuqfk6b2je.xn–p1ai/index.php?subaction=userinfo&user=aboriginalserie</a> Срок отыгрыша — это этап, который начинается в момент активации приза и завершается с его закрытием. Пользователю необходимо уложиться в данный временной зазор, по призовые средства аннулируются. Казино устанавливают перечень игр, ставки в которых засчитываются при расчете отыгранных средств. Если тайтл не входит в данный перечень, то возможность быть недосегаем для загрузки в действия бонусного предложения.При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток. 1×slots официальный сайт скачать
рабочее зеркало 1×slots
Онлайн гемблинг развивается с любым днем больше и больше, новые бренды создаются не по дням а по часам. Новые онлайн казино проделывают вступительные акции для игроков, чтобы, чтобы что бы зарекомендовать себя, и что, этим наиболее предлагают бездепозитные призы за регистрацию, что бы не пропустить такую возможность — как воспользоваться новым бездепом, рекомендуем навещать наш сайт как можно почаще, самое смачное и свежие несомненно добавляться в данном же списке. Если речь об неповторимых предложениях, может понадобиться регистрация в казино по ссылке с партнерского вебсайта. <a href=https://spacehey.com/profile?id=2838356>https://spacehey.com/profile?id=2838356</a> Особую изюминку видео слотам придают оригинальные знакы. С их выходом активируются разные призы. Вы можете запустить дополнительный уровень и прирастить необходимую выигрыша. Есть знаки, которые заменяют ненужные элементы и сами творят выигрышные комбо. Не стоит забывать и про бонус-тур. После любого удачного спина есть шанс прирастить сумму выигрыша в 2 или четыре раза.Так что сможете отважно региться без всяких размышлений. Фортуна сегодня точно на вашей стороне. Не страшитесь, как последствие какого либо ущерба Вам совершенно не грозит. С такими бонусами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе. 1×slots регистрацию процедура займет всего лишь Маркетинговая политика всех игорных интернет-клубов обязана носить различный нрав. И в вознаграждения на депо работают для того, дабы стимулировать заносить депозиты и поощрять уже существующих пользователей, то бездепозитный бонус в казино или бонус за регистрацию в казино, этого всего, рассчитан на расширение базы потребителей.
1×slots зеркало сайта
Почти все игровые клубы требуют свидетельство контактных данных игрока для получения бездепозитного приза. 1×slots официальный сайт зеркало <a href=https://rovworld.com/members/frankemago/profile/>https://rovworld.com/members/frankemago/profile/</a>
1×slots официальный регистрация
С такими простыми советами каждое казино с призом за регистрацию способно принести в разы больше выгоды и выгоды.Бездепозитные бонусы казино за регистрацию в 2022 году — это возможность сыграть за счёт заведения. Казино даёт клиенту шанс воспользоваться определённой суммой или количеством даровых вращений без внесения депозита. Не путайте деморежим с реальной игрой без надобности внесения депо. Также учтите, что некоторые игровые платформы сузивают перечень стран, коие готовы получить предложенный бездепозитный приз за регистрацию. К примеру, существуют онлайн-заведения, выдающие сходственные бонусы лишь жильцам конкретных стран. К примеру, интернет казино 777 Оригинал предоставляет бездепозитный приз лишь игрокам из России и государств СНГ. Или наоборот, пичкают вознаграждением всех, кроме обитателей некоторых стран (следует этого, следует пристально изучать список, дабы впоследствии не возникло никаких вопросов и жалоб). <a href=http://bbs.boway.net/home.php?mod=space&uid=902411>http://bbs.boway.net/home.php?mod=space&uid=902411</a> Важно, удостоверьтесь в том, что ранее не регились в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи. 1×slots регистрацию процедура займет всего лишь
<b>Смотреть еще похожие новости:</b>
<a href=https://test.soclanovtsy.ru/topic/50208–1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE/>1×slots официальный сайт зеркало</a>
<a href=http://www.forum.kalor.ru/1×slots-registraciya-na-oficialnom-sayte-t5156.html>1×slots регистрация на официальном сайте</a>
<a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=884947#pid884947>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=64157>1×slots официальный зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Призовые начисления без депозита могут предоставляться для роли в турнирах онлайн казино. Потратить перечисленные деньги возможно исключительно в рамках данной промоакции. Условия их проведения в ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться таким предложением, никакого изучить его верховодила. Бездепозитные призы за регистрацию в игровых автоматах для владельцев онлайн-казино являются долею маркетинговой кампании, направленной на повышение аудитории сайта. Так они продвигают средства бренды и завлекают новых посетителей.
#4035 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet официальный 1×bet регистрация <a href=https://krtka.info/>1×bet</a> казино фильм онлайн казино смотреть <a href=https://slon-ru.com/>кент casino</a> фильмы казино рояль пин ап букмекерская контора казино рояль смотреть слоты казино казино скачать 1×bet на андроид бесплатно 1×bet официальный
DiskiPlus Матвиенко Валентина Ивановна порно DiskiPlus скачиваемые казино <a href=https://www.diskiplus.ru>DiskiPlus почему в казино нет часов</a> DiskiPlus сайт винлайн букмекерская контора DiskiPlus официальная казино <a href=https://www.diskiplus.ru>DiskiPlus 1×bet</a> DiskiPlus кент казино DiskiPlus казино играть DiskiPlus 1×bet сайт DiskiPlus пинко casino DiskiPlus казино в россии DiskiPlus сайты казино DiskiPlus Манилова Алла Юрьевна порно
#4036 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slotscasino 56 online
Автоматическая активация может самой удобной, хотя ручной способ имеет перед ней достоинства. Прежде чем использовать вознаграждение от казино, стоит заранее найти, сколько медли требуется на выполнение всех условий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала деяния приза. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> <a href=https://blog.udn.com/G_112062930339362154/181391691>https://blog.udn.com/G_112062930339362154/181391691</a> При игре на бонусные средства запрещается играть в игровые автоматы с прогрессивным джекпотом и забавы из радела live casino. Кроме как, некоторые казино дают бездеп на один или несколько определенных слотов, и в иных забавах Вы не сможете на их играть. 1×slots скачать на айфон <a href=https://sciencewiki.science/wiki/Shisha_Tobacco_From4_Eur>https://sciencewiki.science/wiki/Shisha_Tobacco_From4_Eur</a> Представленные на данной страничке наихорошие бездеп бонусы в казино за регистрацию в 2022 году имеют подходящие условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, в котором гости Casino.ru шансы сортировать список по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д.Как только на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу в сего можно оставить заявку на вывод выигрыша. Кредиты прибыльно отличаются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом реальных средств и дают возможность ощутить задор. Во-вторых – можно насладиться каждой азартной игрой доступной на сайте. В вашем распоряжении находятся автоматы, настольные приложение, видео-покер, Live-дилеры.
1хслотс официальный сайт зеркало
Акции, посвященные календарным дням, бывают рассчитаны как на всех пользователей, так и на категории: примеру, презент на 8 марта девушкам-игрокам или мужчинам на 23 февраля. <a href=http://g2clubs.com/healthy-workout/google/>1хслотс 1хслотс регистрация перейти на 1×slots</a> 1×slots бездепозитный бонус за регистрацию Акционные предложения от казино есть в разных форматах. Часто бонусы даются в обмен на депо. Игрок вносит платеж и получает деньги, благотворительные вращения прочие одобрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — картина бонуса, кот-ый гарантирован за исполненье конкретных деяний на сайте:Бездепозитные бонусы — это подарки от казино вид бонусных средств или фриспинов для игровых автоматов, которые начисляются на аккаунт игрока последствии процедуры регистрации на сайте заведения. Для получения этих поощрений депозит не потребуется. <a href=http://admtmo.ru/bitrix/redirect.php?goto=http://divasoft.ru/bitrix/redirect.php?goto=http://corum.com/bitrix/redirect.php?goto=https://telegra.ph/Rasprostranennye-oshibki-pri-provedenii-audita-gosudarstvennyh-sluzhashchih-Interesnye-sluchai-iz-praktiki-2020–2021-godov-09–24>http://admtmo.ru/bitrix/redirect.php?goto=http://divasoft.ru/bitrix/redirect.php?goto=http://corum.com/bitrix/redirect.php?goto=https://telegra.ph/Rasprostranennye-oshibki-pri-provedenii-audita-gosudarstvennyh-sluzhashchih-Interesnye-sluchai-iz-praktiki-2020–2021-godov-09–24</a> 1×slot зеркало
1хслот скачать
Подтверждение регистрации. Казино просят привязки профиля к электрическому адресу и номеру телефонного. Для этого на e-mail отчаливает послание со ссылкой, а на телефон ? текстовое сообщение с кодом. <a href=http://partnershop.kr/bbs/board.php?bo_table=free&wr_id=574228>http://partnershop.kr/bbs/board.php?bo_table=free&wr_id=574228</a> Обычно, бездепозитные призы выдаются под конкретные слоты с фиксированной ставкой, хотя их наверняка запрещено использовать в игровых автоматах с современным джекпотом. Список игр, каких возможно использовать бездеп, Вы отыщите в описании акции или сможете уточнить у службы поддержки заведения.Раздача призов может быть посвящена различным датам: календарные дни, деньки рождения игроков, годовщина открытия казино и т. Д. Подарок выдается в виде денег, фриспинов или баллов для скопления и обмена на услуги оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода данной суммы придется выполнить ряд притязаний. 1 хслот регистрация в 1×slots casino Бездепозитный бонус за регистрацию в казино — это стартовый презент в виде денежного начисления или даровых вращений для свежих игроков заведения, для получения которого надо вносить депозит.Важно, удостоверьтесь что, что раньше не регились в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи.
1×slots зеркало на сегодня
Но рядах азартных платформах похожие вознаграждения шансы получить теперь зарегистрированные юзеры. В таком случае, бонусы предоставляются в оригинальных акций или же некоторым геймерам вид акционного предложения, коие приходит на почту с целью «возвратить» игрока в свое казино. Возьми собственный презент. Чаще всего приз активируется незамедлительно после регистрации. Но посещают ситуации, когда надо(надобно) забежать в личный офис или написать в справочную службу.Бывают ли бездепозитные призы без вейджера? Бывают, случае у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный приз за регистрацию устанавливается вейджер во всех казино. 1×slots рабочее зеркало на сегодня <a href=http://www.alzlt5.com/space-uid-277556.html>http://www.alzlt5.com/space-uid-277556.html</a> Варианты выигрыша зависят от Вашей удачи и условий игорного портала. Выше мы заявили, собственно некоторые бездепозитные призы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются и те, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность передовых игр на деньги, возможно выиграть невероятные суммы. Сегодняшние игровые автоматы либо видео слоты, как их называют. Могут выдавать крупные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000.К образцу, игроку выдаются безвозмездные средства в заведении в размере пятидесяти либо ста долларов (вейджер на коие сочиняет 100х). То есть, любому новоприбывшему геймеру выскакивает притягивающая иллюстрация, которая сулит выплату всех зачисленных компанией средств. Не стоит внимания на казино бонус за регистрацию без депозита с чрезмерно великий или довольно малеханькой суммой призов, потому собственно, в тщательно выучив все условия, здесь вероятнее всего, несомненно некий подвох.
1×slots казино зеркало
Если вы опытный игрок, вы должны знать, что бонус без депо – редчайшая находка. Тем не менее, мы в исследуем онлайн, дабы отыскать для вас превосходнейшие бездепозитные предложения.Условия вывода выигрыша. В неких заведениях для удачного вывода с бездепозитного бонуса достаточно пополнения баланса и подтверждения личности. В других же клубах, необходимо несколько один прокрутить свой депо. <a href=http://sr.yedamdental.co.kr/bbs/board.php?bo_table=free&wr_id=245511>http://sr.yedamdental.co.kr/bbs/board.php?bo_table=free&wr_id=245511</a> 1×slots официальный сайт зеркало Также существуют онлайн-платформы азартных игр, коие применяют раздачу бездепозитных призов в особые даты (как для казино, так и для игрока). Помимо этого, действующие игроки того имеют возможность получить схожие бонусы за собственную деятельность (к примеру, за увеличения уровня либо за похожие заслуги).
<b>Смотреть еще похожие новости:</b>
<a href=https://mit-bbs.com/viewtopic.php?t=145701>1×слот регистрация в 1×slots casino</a>
<a href=http://shiftdelete.10tl.net/member.php?action=profile&uid=119629>1×slots casino регистрация 1×slotscasino09k online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Верификация аккаунта. Лучше доказать лицо сразу после регистрации, чтобы позже не было проблем с выводом денег. Верификация возможность протекать 2-мя маршрутами:
#4037 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Елизавета Туктамышева зеркала казино <a href=https://specreporter.com/>1×slots casino</a> официальные сайты казино играющие казино <a href=https://specreporter.com/>Преподобная Надежда Александровна порно</a> inform@rucriminal.info 7k casino скачать 1×bet на сегодня букмекерская контора мостбет Елизавета Боярская букмекерские конторы в россии casino рабочее зеркало
DiskiPlus 1×bet скачать бесплатно DiskiPlus porno Дарья Мороз <a href=https://www.diskiplus.ru/>DiskiPlus порно с Захарова Мария Владимировна</a> DiskiPlus casinos winning DiskiPlus porno Алена Косторная (фигурное катание) <a href=https://www.diskiplus.ru>DiskiPlus официальные зеркала казино</a> DiskiPlus рейтинг казино DiskiPlus порно с Антропова Валентина Викторовна DiskiPlus порно с Виктория Синицина, фигуристка DiskiPlus пинап казино DiskiPlus casino online зеркало DiskiPlus порно с Каролина Севастьянова DiskiPlus казино фильм смотреть онлайн
#4038 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Васильева Татьяна Викторовна пин ап букмекерская контора <a href=https://rumafia.news/>up casino зеркало</a> винлайн букмекерская контора официальный casino <a href=https://strelochnik.com/>casino com</a> Черкесова Бэлла Мухарбиевна порно букмекерскую контору пин скачать casino на андроид 1×bet официальный xbet 1×bet зеркало рабочее xbet порно с Ирина Сидоркова букмекерская контора мостбет
DiskiPlus лучшие бесплатные онлайн казино DiskiPlus букмекерскую контору пин <a href=https://www.diskiplus.ru>DiskiPlus 7k casino бонус</a> DiskiPlus гта казино DiskiPlus porno Мария Шарапова <a href=https://www.diskiplus.ru>DiskiPlus скачать сайт букмекерской конторы</a> DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz DiskiPlus казино онлайн бесплатно DiskiPlus porno Дарья Мороз DiskiPlus ограбление казино DiskiPlus порно с Виктория Синицина, фигуристка DiskiPlus пин ап букмекерская контора DiskiPlus казино рояль
#4039 Josephweita
<a href=https://Antipublic.net>Antipublic.net</a> – The best database for data leaks Top1 in data: With over 20 billion collected passwords Top1 in search speed: Allows easy and super fast search of any user or domain. Free: – Check if any personal account has ever been leaked – Check if any company, domain has ever been leaked and the scale of the leak (by the number of accounts) Moreover: – Can view all passwords in the database at low cost – Can view passwords in milions of accounts: Netflix, Spottify, Math, Onlyfan, Pornhub, … including Google, Facebook and countless other websites.
#4040 Charlesgunnyhttp://filmkachat.ru
1 x slots
Фриспины начисляются по конкретной ставке. После их активации игроку нужно запустить слот и увериться, собственно в нем показываются безвозмездные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода в отыгрыша определяется оператором и редко выше 5 000 рублей. <a href=http://filmkachat.ru/>рабочее зеркало 1хслотс</a> <a href=https://social.urgclub.com/read-blog/214040>https://social.urgclub.com/read-blog/214040</a> 1×slot рабочее зеркало <a href=http://swimming.s-server.kr/bbs/board.php?bo_table=free&wr_id=3820534>http://swimming.s-server.kr/bbs/board.php?bo_table=free&wr_id=3820534</a> Вейджер не более х30–35 является приемлемым. Опытные игроки утверждают, собственно с этим вейджером реально остаться в плюсе, если правильно подойти к выбору игрового аппарата.
1×slots зеркало регистрацию более популярный вариант это
1хслотс регистрация в 1×slots casino При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое можно посвятить игре в казино.Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депозит возможность выделяться до 30 дней. <a href=http://wiki.die-karte-bitte.de/index.php?title=Benutzer_Diskussion:EveQ905759228§ion=new>http://wiki.die-karte-bitte.de/index.php?title=Benutzer_Diskussion:EveQ905759228§ion=new</a> Во время игры в казино, выигрыши, полученные благодаря бесплатным призовым фондам, суммируются и включаются в общую сумму для отыгрывания. Однако, в удача улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно разрешит вывести финансовые свои. Сумма вывода несомненно находиться от лимита, одобренного непосредственно в данном учреждении. Поэтому, внимательно нужно разбирать верховодила выдачи безлимитных депо. 1×slots казино мобильная версия
1×slots официальный сайт, скачать
Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие появляются у новичков. <a href=https://penzu.com/p/3fd3f7ca9f9cc471>https://penzu.com/p/3fd3f7ca9f9cc471</a> Помните, что любые нарушения верховодил сведут на нет ваши старания, и вы всего останетесь без начисленного вас бесплатного приза. Всегда изучайте верховодила начисления и обстоятельства вейджера. По любым вопросам, на которые вы не можете помощи найти ответы, обращайтесь за объяснениям и саппорт. 1× slots casino официальный сайт Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, all лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Чтобы играть даром на настоящие средства в казино, не всегда достаточно просто зарегистрироваться. Иногда нужно выполнить дополнительные деяния.
1х слотс зеркало регистрация в 1×slots casino
Фриспины без депозита либо дополнительные средства помогут поближе познакомиться с игровой платформой и её функциями. За счёт презентов можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради игры напротив живых крупье. 1хслотс рабочее зеркало на сегодня <a href=https://www2.sgc.gov.co/participacion/Lists/PQRD/DispForm.aspx?ID=32977>https://www2.sgc.gov.co/participacion/Lists/PQRD/DispForm.aspx?ID=32977</a>
1×slot казино зеркало
Для получения депозитного бонуса необходимо пополнить собственный игровой баланс настоящими средствами. Вознаграждение возможно получить либо при внесении первого депо, либо повторяющий фиксированного процента от внесённых средств. Так или другому, приз поступит на счёт лишь в пополнения.Максимальный объем ставки, кот-ый нельзя превосходить же приз не будет полностью отыгран. В случае нарушения этого управляла, бонус и выигрыш с него станут аннулированы. <a href=https://www.clashfarmer.com/forum/member.php?action=profile&uid=45800>https://www.clashfarmer.com/forum/member.php?action=profile&uid=45800</a> Ну и окончательно же, для казино бездепозитные бонусы прибыльны с имиджевой стороны: подобная добродушие увеличивает уровень преданности посетителей к компании. 1×slots официальный зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://www.webdesignforum.com.au/member.php?action=profile&uid=31660>1хслот официальный сайт зеркало</a>
<a href=http://miupsik.ru/forums/showthread.php?tid=234260>1×slots casino регистрация 1×slots review live</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы казино это финансовая компенсация, предлагаемая пользователям на дармовой основе и возможность играть в интернет казино даром. Если ассоциировать их с одобрениями за лепта, в которых свои выдаются только потом первоначального пополнения счета, то бездепозитные вознаграждения получаются бесплатно. То есть, играющий получает возможность делать ставки на уже быть финансы, коие выдаст заведение, выполняя, этом, обыденные деяния, чтобы их извлечь (тут речь о регистрация, удостоверении личности с использованием номера аппарата, дизайна заявки и т.д.).
#4041 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать pin casino казино гта 5 <a href=https://kompromat1.online/>бесплатно играем казино</a> ramenbet casino порно с Юлия Ефимова, пловчиха <a href=https://rucriminal.info/>Крючкова Полина Викторовна порно</a> black russia казино где казино пин ап букмекерская контора casinos xyz casino рабочее 7k casino сайт casino зеркало сегодня рабочее
DiskiPlus букмекерская контора скачать приложение DiskiPlus casino автомат <a href=https://www.diskiplus.ru/>DiskiPlus casino бездепозитный</a> DiskiPlus porno Илья Ковальчук (хоккей) DiskiPlus винлайн букмекерская контора официальный сайт <a href=https://diskiplus.ru/>DiskiPlus 1×bet скачать приложение</a> DiskiPlus online casino 7k DiskiPlus Елена Лядова DiskiPlus porno Мария Шарапова DiskiPlus casino pin официальный DiskiPlus букмекерские конторы pin DiskiPlus скачать 1×bet 1×bet xyz DiskiPlus пин ап букмекерская контора
#4042 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino c2d ru
Лишь знаменитые и знаменитые азартные заведения шансы разрешить себя выдавать бездепы повторяющий дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, которые возможно истратить в топовых аппаратах с высокой отдачей.Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, дабы была возможность вывести выигрыш. <a href=http://filmkachat.ru/>1× slots регистрация в 1×slots casino</a> Если при регистрации показать промокод, можно гарантировано получить приз. Где арестовать ваучер? Посетите направленные блоги либо форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В заключительное время игорные дома начали афишироваться в кинокартинах и телесериалах. Присмотритесь и наверняка заметите промокод, который принесёт 500 либо 1 000 бонусных рублей.Вывод выигрыша с бездепозитных призов казино – великодушный подарок от азартных клубов. Но дабы исключить свой доход, нужно выполнить ряд критерий: <a href=https://rant.li/9fsnh6hu13>https://rant.li/9fsnh6hu13</a> Возможность протестировать свежие игры, не рискуя собственными своими и разработать собственную стратегию игры.Бездепозитный бонус – это экономическое вознаграждение, которое выдается участнику игры в казино, для его привлечения и появления заинтересованности. Любой посетитель, который соответствует условиям выдачи похожего бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое одобрение считается более действенным способом, дающим возможность стартовать в игре, не вкладывая собственных материальных средств. 1×slots официальный сайт, скачать <a href=https://bbs.yhmoli.net/space-uid-655565.html?do=profile>https://bbs.yhmoli.net/space-uid-655565.html?do=profile</a> Но существуют азартные заведения, готовые просто например вручить деньги на игру. Для сего достаточно сделать профиль. Чтобы исключить выигрыш, сначала необходимо выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа.
1×slots бездепозитный бонус за регистрацию
Верификация необходима для дополнительной безопасности и подсобляет техподдержке выявить бонусхантеров и мошенников. Кстати, на некоторых платформах выводы солидных сумм доступны только в подтверждения личности. <a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=95685>1×slots casino зеркало рабочее</a> 1×slots зеркало регистрация Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие возникают у начинающих. <a href=http://biyografiforum.10tl.net/member.php?action=profile&uid=3336>http://biyografiforum.10tl.net/member.php?action=profile&uid=3336</a> 1×slots казино зеркало Получить Бездепозитный приз в интернет казино дело двух кликов. Другой момент, отыграть промо и соблюсти верховодила и условия отыгрыша. Под правилами предполагается не вагер, но и лимитирования по максимальной ставке. Мы понимаем, что в кино все ставят на зеро и выигрывают. Призываем не делать сходственного. Перед активацией приза прочтите правила. Узнайте следующие факторы: Условия получения дара, за регистрацию, за депо и другое. Ограничения по наибольшей ставке. Зачастую не выше 350 руб. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вертеть автоматы, а вагер будет стоять на пространстве. Поэтому главно знать, в каких забавах можно осуществлять кратность денежного оборота.
1хслот 1хслотс регистрация перейти на 1×slots
Бонус в казино без депозита имеет различные разновидности: может быть приветственный бонус, промоакции в честь каких-либо праздничных или главных дат, бонус за вербование новых игроков, преданность и получение VIP-статуса.Не стоит незамедлительно же открещиваться от приветственных даров в сходственных казино. Администрация готова начислить деньги либо фриспины, хотя предварительно работники обязаны увериться, собственно вы не аферист. Дело в, что развелось слишком количество охотников за бонусами. Они научились врать систему и зарабатывать солидные суммы средств. При регистрации по указывать лишь достоверную информацию. Когда учетная запись будет активна, замечен доступ в Личный кабинет. В нем возможно избрать валюту, ввести промокод и узнать подробные управляла получения и отыгрыша бездепа. Краткая информация об промоакции нередко присутствует непосредственно на регистрационной форме.Более солидные предложения встречаются довольно редко. Зачастую они доступны только VIP-игрокам. В остальных случаях им скорее сопутствуют довольно строгие условия отыгрыша. Также вероятны дополнительные обстоятельства прочие ограничения, прописанные в критериях и положения бонусной программы казино. <a href=https://wiki.snooze-hotelsoftware.de/index.php?title=Shisha_Tobacco_From4_Eur>https://wiki.snooze-hotelsoftware.de/index.php?title=Shisha_Tobacco_From4_Eur</a> Поспешите зарегистрироваться на официальном сайте Клубника, дабы мгновенно получить 33 безвозмездных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, бывает настоящий шанс победу!Риск-игра по одинаковым шансам – Также казино возможность запрещать скорпулезно обстоятельства по отыгрышу за раунда на удвоение, кот-ый предлагается в слотах, видео-покере и некоторых других играх. 1хслотс казино зеркало Более солидные предложения встречаются очень изредка. Зачастую они доступны только VIP-игрокам. В оставшихся случаях им скорее сопутствуют очень строгие обстоятельства отыгрыша. Также вероятны дополнительные условия и другие ограничения, прописанные в условиях и положения бонусной программы казино.Одним из предлогов отдавать преимущество, льготу одному или другому заведению заключается в привлекательности предлагаемых промоакций и безвозмездных услуг. Безвозмездные фриспины, выдаваемые без нужды делать какой-либо лепта, в списке находится далеко не в конце.
1× slots casino официальный сайт
Индивидуальные одобрения выдаются за совершение деяний: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавления или официального посетителя для ПК. В большинстве казино действуют программы преданности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на грядущий уровень нередко сопрягается выдачей бездепа.Бездепозитные призы — это презенты от казино в виде бонусных средств либо фриспинов для игровых автоматов, которые начисляются на аккаунт игрока в процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депозит не потребуется. Для казино, работающих интернет, бездепозитные призы необходимы для привлечения новых посетителей. Предложение сыграть на слотах без надобности внесения настоящих средств — работающий способ для повышения энтузиазма к компании. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит играть в казино, лишь теперь теснее на собственные средства. Не советуем опрометью голову браться за различные предложения получения средств без вложений. Вполне вероятно, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на 1-ый взгляд. Альтернативой является казино бонус за депозит. Мы предлагаем для пару советов, спасибо коим у любого игрока несомненно возможность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств: 1 хслот регистрация в 1×slots casino <a href=http://messmangler.com/forums/member.php?action=profile&uid=2427>http://messmangler.com/forums/member.php?action=profile&uid=2427</a> Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, a зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.Бездепы с бесплатными вращениями предоставляют пользователям право вертеть барабаны игровых автоматов без снятия средств со счета. За каждый раунд выплачивает казино. Число спинов ограничено и редко выше сотку. Если акция включает в себя много даровых игр, их начисление возможность быть разбито на количество дней.
1×slots коды
В разделе с бонусами активировать свой презент. Найти забавы, для которых предусмотрено поощрение и применять бонус по назначению. <a href=http://ds2.edu.sbor.net/index.php?subaction=userinfo&user=eageryouth2>http://ds2.edu.sbor.net/index.php?subaction=userinfo&user=eageryouth2</a> 1×slots акции Условия имеют различаться приятель от друга. Но такой приз имеет быть использован лишь для игрового процесса – приобретенные на счет финансы до того, как будут отыграны, исключить невозможно.Сразу последствии активации промокода можно пользоваться презентом. Как теснее упоминалось, бонусы посещают трёх видов – фриспины, кредиты и фриплей-бонусы.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=431892>казино 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Суммы подобных услуг, большинстве, колеблются от трех до двадцати долларов, а вейджер на эти свои обязан составлять от 30 до шестидесяти один. Зачастую, наивеличайшая сумма выигрыша здесь составит от одной до двух сотен долларов. Если игры выиграет больше, то все свои могут быть списанными до очень разрешенного выигрыша. Здесь появляется содержание выводить еще несуществующие деньги на свою платежную систему и далее находить заведение с благоприятными под данную необходимую релоадом либо призом за 1-ое пополнение счета. Есть некоторое подвидов бездепозитного вознаграждения, предлагаемого большим количеством заведений. Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.
#4043 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора леонов pin casino <a href=https://krtka.info/>пина букмекерской конторы</a> скачать 1×bet на андроид 1×bet рабочее на сегодня <a href=https://t.me/vchkogpu_ru>up casino зеркало</a> online casino официальный сайт винлайн букмекерская контора казино без бесплатно играем казино 1×bet официальный 1×bet xyz casino промокод 1×bet зеркало xbet xyz
DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus 1×slots casino <a href=https://www.diskiplus.ru/>DiskiPlus пин ап казино</a> DiskiPlus bitz casino DiskiPlus казино рояль смотреть <a href=https://diskiplus.ru/>DiskiPlus порно с Анна Калинская (теннис)</a> DiskiPlus почему в казино нет окон DiskiPlus включи казино DiskiPlus online casino официальный DiskiPlus ограбление казино DiskiPlus 1×bet на сегодня DiskiPlus скачать 1×bet 1×bet xyz DiskiPlus порно с Алина Загитова
#4044 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать pin casino сколько казино <a href=https://7club7.com/>казино 1</a> Попова Анна Юрьевна порно казино фильм смотреть онлайн <a href=https://krtka.info/>водка казино</a> казино фильм онлайн пин ап casino pin порно с Арина и Дина Аверины, гимнастки порно с Васильева Татьяна Викторовна казино в россии букмекерскую контору пин порно с Александр Головин (футбол)
DiskiPlus 1×bet зеркало на сегодня 1×bet xyz DiskiPlus мелбет букмекерская контора <a href=https://diskiplus.ru/>DiskiPlus casino скачать приложение</a> DiskiPlus сайт 1×bet слоты DiskiPlus 1×slots casino <a href=https://www.diskiplus.ru/>DiskiPlus сайты казино</a> DiskiPlus Мухтиярова Елена Вячеславовна порно DiskiPlus cat casino DiskiPlus вавада казино DiskiPlus порно с Баталина Ольга Юрьевна DiskiPlus pin up casino DiskiPlus casino betting DiskiPlus зеркала казино
#4045 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало на сегодня
Бездепозитный приз казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в данном и содержится основное различие. <a href=http://filmkachat.ru/>1×slots бездепозитный бонус за регистрацию</a> В каждом казино с бездепозитным призом предусмотрены вейджеровые обстоятельства. Это единственный «подводный камень», который стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, нужно сделать определённое число ставок. Чем круче приз, тем труднее выполнить условия, и напротив. <a href=https://u.pcloud.link/publink/show?code=XZwmwV5ZN5EzkUmIs98GzTKGBBEB6jVtE9aV>https://u.pcloud.link/publink/show?code=XZwmwV5ZN5EzkUmIs98GzTKGBBEB6jVtE9aV</a> 1хслот зеркало сайта <a href=https://studypatent.com/bbs/board.php?bo_table=free&wr_id=807171>https://studypatent.com/bbs/board.php?bo_table=free&wr_id=807171</a> Приглашаем делиться воззреньями о бонусах. Это поможет другим пользователям избирать наиболее выгодные предложения.Прямо данный отберите благотворительные вращения за регистрацию без депо и начинайте коллекционировать призовые композиции ради крупных выигрышей!
1×slots официальный регистрация
Такой казино приз без депозита за регистрацию выдается игроку на час и активно употребляется данное предложение с 2017 года. Это словно какая-то маскировка поощрения под бездепозитный. Суть всего сего сводится к что, этому, что геймеру на час выдается, например, 1000 долларов, а реклама утверждает о том, собственно любой выигрыш возможно будет в будущем забыть при себе. Но если играющий всерьез отнесется к этому предложению, то он попросту растеряет время. Ведь игроку нужно несомненно играть не в аккаунте, а тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (в всей тысячи) в верховодила вступят конкретные обстоятельства, где будет сказано, собственно наибольшей суммой победы имеет быть лишь двести $ и деньги возможно использовать только виде бонуса на первый вклад с вейджером 25 от суммы вознаграждения плюс сам депо. По итогу получится, собственно игрок выигрывал себя 200% приз с вейджером на определенную сумму. Короче разговаривая, это все не вашего времени. <a href=http://board.eternityrpc.com/thread-7-post-14214.html#pid14214>1 x slots</a> 1×slots подтвердит вашу регистрацию если говорить <a href=http://www.annunciogratis.net/author/philipsoith>http://www.annunciogratis.net/author/philipsoith</a> Бoльшинcтвo азартных заведений выдвигают приблизительно одинаковые условия и притязания, которые необходимо выполнить, чтобы получить бездепозитный приз за регистрацию. Все их возможно объединить в раз перечень:Эффективность бездепов в качестве маркетингового инструмента оценили почти операторы. Малоизвестные площадки используют эти промоакции, чтобы стремительно набрать базу. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны постоянных гостей. Не все веб-сайты, дающие подарки без депозита, рекомендованы к забаве. За симпатичным промоописанием шансы прятаться неосуществимые условия отыгрыша и другие подводные камни. 1× slots casino зеркало Так собственно сможете неустрашимо регистрироваться без всяких раздумий. Фортуна сегодня наверняка на вашей стороне. Не бойтесь, ведь следствие какого либо убытка Вам абсолютно не грозит. С этими призами как без пополнения, Вы остаетесь только в плюсе, но не как не в минусе.
1×slots казино зеркало
Бонусные деньги – небольшая сумма средств для старта в новом казино. На бонусные деньги, обычно разрешено выступать во все игры, кроме слотов с прогрессивным джекпотом и игр из раздела exist casino. <a href=http://dinskoi-raion.ru/forum/?PAGE_NAME=profile_view&UID=63567>http://dinskoi-raion.ru/forum/?PAGE_NAME=profile_view&UID=63567</a> 1×slots казино зеркало Несмотря на то, что этот вариант стимуляции со стороны азартных платформ очень известен области сходственных игр, далеко не всем поклонникам казино известно, что являют собой бездепозитные бонусы казино и как именно их вполне эксплуатировать.
1×slots регистрация на 1хслотс
Вообще перейдя в казино — верховодила схожи в получении бездепозитных призов, в стандартные правила заходит: доказать эл. Почту и телефон, наполнить свой собственный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ.Раздача призов имеет быть приурочена к разным датам: календарные дни, дни рождения игроков, годовщина открытия казино и т. Д. Подарок выдается вид денег, фриспинов либо баллов для скопления и размена на предложения оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода этой суммы придется выполнить ряд притязаний. Условия имеют разниться друг от друга. Но подобный бонус может быть применен лишь для игрового процесса – приобретенные на счет финансы до как, как станут отыграны, вывести невозможно.Некоторые онлайн-казино без депо предлагают новым посетителям выбрать бонус при регистрации. Будьте внимательны: выбрав раз, вы в абсолютном большинстве случаев не сможете пользоваться остальными. 1×slots казино мобильная версия <a href=http://www.zhuangxiuz.com/home.php?mod=space&uid=848889>http://www.zhuangxiuz.com/home.php?mod=space&uid=848889</a> Размер бонусов чаще всего чисто символический и не выше 50 руб. Приятно, хотя осязаемым бустом в игре вряд ли будет.
1хслотс рабочее зеркало
Бездепозитные бонусы начисляются лишь раз один. Не стоит открывать новые аккаунты, дабы получить их повторно. Служба защищенности казино обязательно выявит «левого» соучастника и перекроет. Если гость выполнит необходимые притязания, отыграет собственную ставку и решит вывести личный выигрыш, то ему надо(надобно) принять, что казино обязательно востребует дать ксерокопии собственных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные свои исключить не удастся. <a href=https://yogaasanas.science/wiki/User:LashawndaMassina>https://yogaasanas.science/wiki/User:LashawndaMassina</a> Такие одобрения разрешают даром протестировать новое казино, разобраться с игровым ходом онлайн слотов, заработать и исключить небольшую необходимую средств.Бонус без депо за регистрацию в казино (бездепозитный бонус) – это денежный презент от клуба, который начисляется на акк игрока последствии регистрации в казино. Кроме сотворения учетной записи, для получения бездепа, очень нередко требуется ещё и доказать контактные данные игрока и/или активировать особый промо-код. 1×slots регистрация 1×slots casino c2d ru Ограничения по забавам. Администрация запрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, средствами или безвозмездными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда дробление выполняется по облику игр. Например, отыгрыш возможен на всех игровых аппаратах, хотя запрещен в настольных забавах и в разделе Live Casino.
<b>Смотреть еще похожие новости:</b>
<a href=http://nexusroleplay.teamforum.ru/viewtopic.php?f=19&t=7648>1×slots casino зеркало рабочее</a>
<a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<a href=https://karakol.com.kg/user/Jameskef/>1×slots рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Онлайн гемблинг развивается с любым днем больше и больше, новые бренды создаются не по дням а по часам. Новые онлайн казино проделывают вступительные акции для игроков, чтобы, чтобы что бы зарекомендовать себя, и что, этим наиболее предлагают бездепозитные призы за регистрацию, что бы не пропустить такую возможность — как воспользоваться новым бездепом, рекомендуем навещать наш сайт как можно почаще, самое смачное и свежие несомненно добавляться в данном же списке.
#4046 Charlesgunnyhttp://filmkachat.ru
1×slots сайт
Также существуют онлайн-платформы азартных игр, которые применяют раздачу бездепозитных призов в особые даты (как для казино, так и для игрока). Помимо сего, действующие геймеры того имеют вероятность получить схожие призы за собственную работа (к примеру, за увеличения уровня или за похожие достижения).Законодательство, регулирующее азартные игры в различных странах, влияет на полномочия операторов. В результате пользователи из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это имеет быть как полный отказ в доступе, так и невозможность загружать забавы отдельных производителей. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots review live</a> <a href=https://webanketa.com/forms/6gtk2c9q74qpaeb368vked9s/>https://webanketa.com/forms/6gtk2c9q74qpaeb368vked9s/</a> 1×slots официальный сайт скачать на айфон <a href=http://rogerfilms.com/index.php?title=скачать_боевики>http://rogerfilms.com/index.php?title=скачать_боевики</a> Онлайн-казино тщательно продумывают бонусные обстоятельства, коие нужно выучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша прочие лимитирования.Даже не выиграв солидную сумму, игрок интересно проведет время, изнутри выучит работу площадки, воспримет геймплей автоматов. Все это без каких-либо финансовых рисков. Быть в курсе лучших акций легкостью. Достаточно регулярно учить перечень свежих онлайн казино с выводом приза без депо в этом разделе.
1хслотс 1хслотс регистрация перейти на 1×slots
<a href=https://www.addonface.com/welcome>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a> 1×slots регистрация <a href=http://xn–80aeallfb7bss4m.xn–p1ai/bitrix/rk.php?goto=http://polosedan-club.com/proxy.php?link=http://mirograd-shop.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/IsDtOjnJrOi>http://xn–80aeallfb7bss4m.xn–p1ai/bitrix/rk.php?goto=http://polosedan-club.com/proxy.php?link=http://mirograd-shop.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/IsDtOjnJrOi</a> На благотворительные бонусы онлайн-казино почти всегда распространяется ограничения по стране проживания клиентов. Даже в вас разрешается открывать счет и выступать на деньги в заведении, это еще не значат, собственно для доступны no down payment bonuses. 1хслот скачать Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Но есть игорные заведения, коие готовы просто например жертвовать деньги на игру. Для этого довольно сделать профиль. Чтобы вывести свой выигрыш, для поначалу необходимо выполнить условия отыгрыша, обозначенные в условиях получения бездепозитного депозита.
1×slots casino регистрация на сайте
<a href=https://australianwinerytours.com/tours/member.php?action=profile&uid=2104>https://australianwinerytours.com/tours/member.php?action=profile&uid=2104</a> Выше мы предоставили глубокий набор самых свежих и своевременных бездепозитных бонусов в онлайн казино без пополнения на 2022 год, где продоставляется пользоваться каким ценным бездепозитным призом. 1× slots официальный Бездепы все заходить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой или баллами.Но существуют азартные заведения, готовые просто например вручить деньги на игру. Для сего довольно создать профиль. Чтобы вывести выигрыш, сначала нужно выполнить вейджеровые обстоятельства, прописанные в критериях получения бездепа.
1 xslots рабочее зеркало
Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала прыткие выводы. Фишка выплат в том, собственно довольно выбрать платёжный инструмент и указать сумму. В большинстве случаев деньги зачисляются на электрические кошельки в течение 15 мин., а на банковские карты – 1–3 рабочих дня.Составленный специалистами Casino.ru список онлайн-казино с бездепозитным бонусом позволяет игрокам сопоставить спецпредложения различных операторов. 1×slot рабочее зеркало <a href=http://www.zgyssyw.com/home.php?mod=space&uid=2920838&do=profile>http://www.zgyssyw.com/home.php?mod=space&uid=2920838&do=profile</a> Для верификации номера аппарата, в личном профиле изберите опцию „Подтвердить номер телефона“ и введите в соответствующее поле код, полученный в sms-сообщении.Иногда виде одобрения за регистрацию все выдаваться билеты для роли в турнирах. Условия их проведения очень выделяются, поэтому мы рекомендуем ознакомиться с любым предложением отдельно.
1×slots казино зеркало
Когда идет о получении бездепозитных бонусов в казино, в первую очередь направьте на последующие условия: <a href=https://opaseke.com/users/6877>https://opaseke.com/users/6877</a> 1×slot рабочее зеркало Для отыгрыша приза казино обязывает игрока сыграть на необходимую, в количество один превосходящую сумму приобретенного бонуса — здесь выгода компании явна.На странице представлены бездепозитные бонусы за регистрацию в казино редкая заслуга за которой гонятся все игроки как новички, так и мастера. Мы также уделяем огромное внимание на присутствие призов при формирование рейтинга казино на средства. Бездепозитный бонус это вероятность играть бесплатно и выиграть настоящие средства.
<b>Смотреть еще похожие новости:</b>
<a href=https://qualityprogamer.de/forum/showthread.php?tid=238276>1хслот зеркало</a>
<a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1×slots официальный demo регистрация в 1×slots casino</a>
<a href=http://fin-molitor.com/forum/viewtopic.php?f=2&t=457944>1×slots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Также бездепозитные бонусы могут работать методом вернуть к этой клиентов, временно приостановивших своё сотрудничество с компанией: извещение о бездепе поступает на мобильный телефон или почту. Основное верховодило получения бездепа ? создаваемый аккаунт должен быть у юзера первым и единственным. Наличие нескольких аккаунтов требовательно запрещено. Проверка ведется по имени, e-mal, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депо необходимо соблюдать простую последовательность поступков.
#4047 Charlesgunnyhttp://filmkachat.ru
1хслот 1хслотс регистрация перейти на 1×slots
Во всех законных онлайн-казино Беларуси нужно свидетельство паспортных данных для забавы — это заявка правительства страны. <a href=http://filmkachat.ru/>1 xslots рабочее зеркало</a> Объективные – размер бонуса, коэффициент и обстоятельства вейджера, надобность внесения депо для вывода средств;Варианты выигрыша находятся от Вашей удачи и критерий игорного портала. Выше мы заявили, собственно некоторые бездепозитные призы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются они, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность современных игр на деньги, возможно выиграть неописуемые суммы. Сегодняшние игровые автоматы либо видео слоты, как их именуют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые множат ставку от х100.000. <a href=https://smallpdf.com/file#s=a4e78a8b-e574–4cce-8041-d2d327ee7d28>https://smallpdf.com/file#s=a4e78a8b-e574–4cce-8041-d2d327ee7d28</a> 1×slots официальный сайт скачать <a href=http://messmangler.com/forums/member.php?action=profile&uid=2507>http://messmangler.com/forums/member.php?action=profile&uid=2507</a> Если площадка дарует бездеп за регистрацию, то процедура его получения ординарна. Нужно только завести акк на сайте и активировать его, подтвердив адресок электронной почты, номер аппарата или другие данные, коие просит оператор. Перед данным нужно убедиться, собственно юзер располагается на официальном сайте казино, не на жульнической площадке.
1× slots casino официальный сайт
При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток. 1×slot зеркало рабочее регистрации на телефон придет <a href=https://gusev-online.ru/user/ArnoldPed/>https://gusev-online.ru/user/ArnoldPed/</a> Для отыгрыша бонуса казино обязывает игрока поиграть на сумму, в несколько раз превосходящую необходимую приобретенного приза — здесь выгода фирмы очевидна. 1хслотс казино зеркало Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам воспрещено начислять бонусы клиентам, не имеющим денежных средств на счете. Мы предлагаем разглядеть актуальные бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ.
1×slot казино зеркало
Осталось избрать казино с бонусом за регистрацию и сделать профиль. После активации подарка выигрыш зависит от Фортуны и способностей. Заработать на бездепозитных бонусах за регистрацию в казино имеет каждый юзер, достигший совершеннолетия.Помимо остального, для вывода средств по бездепу нужно внести на счёт собственный первый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на мало возможную необходимую, последствии чего вывод средств будет доступен. <a href=https://games-garant.ru/index.php?subaction=userinfo&user=JustinClush>https://games-garant.ru/index.php?subaction=userinfo&user=JustinClush</a> Любой выигрыш по ставке повыше установленного лимита будет считаться недействительным. То есть ставка не несомненно засчитана при отыгрыше, в случае выигрыша его сумма не поступит на счёт посетителя — итог игры будет всецело аннулирован. 1хслотс зеркало на сегодня
1×slots зеркало регистрация
В неких онлайн казино для получения бездепозитных призов не довольно просто зарегистрироваться на веб-сайте клуба и подтвердить средства контактные данные. Дополнительно требуется активация промокода.При регистрации никаких или ином интернет игральном заведении — вас дается один шанс испытывать собственную фортуну не внося средства монеты. Замечу что такую поощрительную предложение предоставляют не все интернет игровые площадки, а только щедрая половина из их. Которые мы подготовили для Вас в нашем перечне. <a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=3131>1×slots бездепозитный бонус за регистрацию</a> В случае с фриспинами без вейджера, Вам не придется отыгрывать свой выигрыш с бесплатных вращений. Прибыль, которую Вы заработаете на таком бездепе можно ставить на вывод без какого либо отыгрыша. Мы советуем не отказываться от похожих услуг знаменитых казино. Выделите количество минут на регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сегодня фортуна будет на вашей стороне!Иногда у гостей сайта могут возникнуть проблемы при активации полученного промо-кода. В этих случаях, нужно адресоваться за подмогою в саппорта «Support». Для получения ответа, непременно указывается определенная причина обращения и подтверждается информация дополнительными скриншотами. Если сложилась неоднозначная ситуация, постоянно возможно адресоваться к основному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ. 1× slots casino официальный сайт <a href=http://andres-website.de/profile.php?lookup=12010>http://andres-website.de/profile.php?lookup=12010</a> Также учтите, собственно некоторые игровые платформы сужают список государств, коие готовы получить предложенный бездепозитный приз за регистрацию. К примеру, существуют онлайн-заведения, выдающие похожие бонусы лишь жильцам конкретных стран. К примеру, онлайн казино 777 Оригинал дает бездепозитный приз только игрокам из России и государств СНГ. Или напротив, пичкают вознаграждением всех, кроме жителей неких государств (из этого, по внимательно изучать перечень, дабы потом не возникло практически вопросов и претензий).
1×slots регистрация 1×slotscasino 56 online
Игрокам не следует воспринимать приветственный бонус как гарантированный метод получить большой выигрыш, хотя это отличная возможность без затрат оценить перечень казино. Можно ли в одном онлайн казино получить больше одного приза за регистрацию? Нет, так как в каждом онлайн казино есть управляла, к коим нужно держаться, не делать два аккаута для получения призов, по несомненно блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, приз за регистрацию выдаеться один один 1 лицу. <a href=http://turkteam.10tl.net/member.php?action=profile&uid=1140>http://turkteam.10tl.net/member.php?action=profile&uid=1140</a> Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? 1хслот официальный сайт зеркало У каждого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано смогли выполнить их, мы дадим количество советов. Если система начислила маленькую сумму, не стоит создавать большие ставки – остановитесь на 10–30 центах. Как лишь сможете заработать примерно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте играть. В неприятном случае чем приглядеться к иному автомату.Осталось избрать казино с бонусом за регистрацию и сделать профиль. После активации презента выигрыш зависимости от Фортуны и навыков.
<b>Смотреть еще похожие новости:</b>
<a href=http://stranaua.ukrbb.net/viewtopic.php?f=2&t=64022>1×slot рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Это раз из основных показателей привлекательности подарка. С завешенным коэффициентом том профессионалы не сумеют выполнить условия по отыгрышу. И неважно, насколько привлекательно выглядит предложение – бездепозитный бонус казино в размере $500 или $1 000. Чтобы новички лучше вникли, что же это вейджер, мы разберём на случае.
#4048 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино в россии black russia казино <a href=https://res-publika.com>букмекерская контора скачать приложение</a> букмекерские конторы бет бесплатное казино <a href=https://res-publika.com>inform@rucriminal.info</a> 1×bet официальный гта казино казино сочи Скворцова Вероника Игоревна порно online casino официальный pin up букмекерская контора казино проиграл
DiskiPlus гта онлайн казино DiskiPlus vavada casino <a href=https://www.diskiplus.ru>DiskiPlus porno Катерина Шпица</a> DiskiPlus 1×bet официальный слоты DiskiPlus 1×bet на сегодня <a href=https://diskiplus.ru>DiskiPlus casino на телефон</a> DiskiPlus порно с Сергей Бобровский (хоккей) DiskiPlus официальные сайты казино DiskiPlus Петрова Ольга Викторовна порно DiskiPlus porno Андрей Рублев (теннис) DiskiPlus 1×bet зеркало xbet xyz DiskiPlus porno Мира Андреева (теннис) DiskiPlus cometa casino
#4049 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
За счёт спинов получится запустить различные интернет слоты, протестировать стратегии и поднабраться опыта. Фишка что, нет, что вращения начисляются на лучшие аппараты с оригинальными опциями и высочайшей отдачей. Не забывайте, собственно в каждом акционном предложении учтены особые требования – временные ограничения, наибольший объем ставки, список дешевых игр. <a href=http://filmkachat.ru/>1хслот зеркало сайта</a> Операторы гемблинга утверждают, собственно так они борются с бонус-хантерами. Впрочем, критики считают, собственно этим казино пробуют сделать из случайного постояльца постоянного игрока.Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации презента нужно подтвердить электронную почту и привязать телефон; <a href=https://ilde2.upf.edu/clatmooc/v/ic2>https://ilde2.upf.edu/clatmooc/v/ic2</a> Размер призов чаще всего чисто символический и не выше 50 рублей. Приятно, но осязаемым бустом при навряд станет.Диапазон ставок, коие вправе сделать игрок, кроме лимитирован. Обычно назначать можно маленькую сумму — около 10–30 руб. За одно вращение. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=https://raid4×4.ru/memberlist.php?mode=viewprofile&u=5973>https://raid4×4.ru/memberlist.php?mode=viewprofile&u=5973</a>
1×slots официальный сайт скачать
Акции распространяются как на все игры казино, например и на ограниченный список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino прочие. Промо может охватывать разработки одного производителя. Бездеп не пересекается с другими акциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, изготовленные бонусными деньгами. Для идентификации платежных реквизитов игрока может потребоваться пополнение счета на наименьшую необходимую.При регистрации идет указывать только достоверную информацию. Когда учетная запись несомненно активна, появится доступ в Личный офис. В нем можно избрать денежную, установить промокод и узнать доскональные верховодила получения и отыгрыша бездепа. Краткая информация об промоакции часто присутствует непосредственно на регистрационной форме. <a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=459014>1×slots официальный сайт зеркало</a> 1×slots casino регистрация Так что можете неустрашимо региться без всяких размышлений. Фортуна сегодня наверняка на вашей стороне. Не побаивайтесь, ведь последствие какого или ущерба Вам совершенно не грозит. С этими бонусами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе. <a href=http://agenciafrog-host.com.br/redesocial_v0/index.php/profile/lowlyalbum6>http://agenciafrog-host.com.br/redesocial_v0/index.php/profile/lowlyalbum6</a> Иногда виде поощрения за регистрацию шансы выдаваться билеты для участия в турнирах. Условия их проведения довольно отличаются, поэтому мы рекомендуем ознакомиться с любым предложением отдельно. 1× slots регистрация в 1×slots casino Большинство клубов завлекают внимание геймеров за счёт различных подарков. На 1 сайтах возможно получить виртуальные кредиты, которые откроют доступ ко всему софту. На других же, администрация предлагает благотворительные вращения для запуска топовых онлайн слотов. Несмотря на разные акции, стоит выделить самые основные.3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефонный либо почту, указать персональную информацию;
1× slots официальный
Используйте наихорошие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из списка ниже, дабы заработать подарки за простые деяния и уже сегодня получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высокой отдачей и быстрыми выводами на электрические кошельки. Сроки активации приза устанавливаются любым казино, хотя почаще всего они не превосходят недели с момента получения. Игроку обязательно нужно использовать бездеп протяжении обозначенного срока, в ином случае бонус просто исчезнет. Каждый бонус возможно получить только один раз, поэтому случае не использовать бездеп в срок, у игрока не будет 2 шанса им воспользоваться. <a href=http://ambumed.ru/communication/forum/user/877/>http://ambumed.ru/communication/forum/user/877/</a> 1×slos регистрация в 1×slots casino Бонус за регистрацию в казино без депо с выводом средств нужно отыграть. Зачастую для отыгрыша может потребоваться сделать ставки на сумму, в несколько десятков один превосходящую сумму бонуса либо выигрыша.
1×slots коды
Такой казино бонус без депозита за регистрацию выдается игроку на час и активно используется данное предложение с 2017 года. Это словно какая-то маскировка одобрения под бездепозитный. Суть всего сего сводится к что, этому, собственно игроку на час выдается, к примеру, 1000 $, а реклама твердит то, что любой выигрыш можно будет в будущем забыть при себя. Но если играющий всерьез отнесется к этому предложению, то он попросту растеряет время. Ведь игроку надо(надобно) несомненно выступать не в основном аккаунте, а тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (даже всей тысячи) в управляла вступят конкретные условия, где несомненно сказано, собственно наибольшей суммой победы может быть только двести долларов и деньги можно использовать лишь в приза на первый лепта с вейджером 25 от суммы гонорары плюс сам депозит. По итогу получится, собственно игрок выигрывал себе 200% бонус с вейджером на определенную необходимую. Короче говоря, это все не стоит вашего медли.Исходя из этого, просто не присутствует осмысленных причин махнуть рукой на получение такового бонуса при регистрации. И, кстати, на такой бесплатной основе у вас есть шансы выиграть деньги и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные призы, нарекают бесплатными онлайн платформами для игр. Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала быстрые выводы. Фишка выплат в том, что довольно избрать платёжный инструмент и указать необходимую. В большинстве случаев деньги зачисляются на электронные кошельки на 15 минут, а на банковские карты – 1–3 рабочих денька. казино 1×slots официальный сайт <a href=https://rg-mechanics.club/user/Zacheryjax/>https://rg-mechanics.club/user/Zacheryjax/</a> Приглашаем делиться мнениями о призах. Это поможет другим юзерам выбирать наиболее прибыльные предложения.
1×slots официальный сайт, скачать
<a href=https://www.escort-liege.eu/user/profile/479808>https://www.escort-liege.eu/user/profile/479808</a> На бесплатные бонусы онлайн-казино почти постоянно распространяется лимитирования по стране проживания посетителей. Даже случае вам разрешено раскрывать счет и играть на средства в заведении, это еще не означают, что для доступны not the slightest down payment bonuses. 1×slots официальный сайт зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.animogen.com/memberlist.php?mode=viewprofile&u=15333>1×slots официальный сайт, скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Шаг 5. Использование и отыгрыш. Бездеп обязан быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.
#4050 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Илья Ковальчук (хоккей) pin up букмекерская контора <a href=https://rucriminal.info/>порно с Евгения Медведева, фигуристка</a> Крючкова Полина Викторовна порно porno Андрей Рублев (теннис) <a href=https://res-publika.com>порно с Голикова Татьяна Алексеевна</a> бесплатно фильм казино сайты казино гта казино человек казино champion casino casino рабочее зеркало порно с Евгения Медведева, фигуристка
DiskiPlus Львова-Белова Мария Алексеевна порно DiskiPlus пин up casino <a href=https://diskiplus.ru>DiskiPlus 1×bet xbet</a> DiskiPlus букмекерская контора официальный сайт скачать DiskiPlus рокс казино <a href=https://diskiplus.ru>DiskiPlus Матвиенко Валентина Ивановна порно</a> DiskiPlus kent casino регистрация DiskiPlus Ходнева Светлана Владимировна порно DiskiPlus фреш казино DiskiPlus Нургалиева Эльвира Рамиловна порно DiskiPlus casino x DiskiPlus лучшие казино бесплатно DiskiPlus casino сайты
#4051 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
Более солидные предложения встречаются довольно редко. Зачастую они доступны лишь VIP-игрокам. В оставшихся случаях им скорее сопутствуют очень строгие обстоятельства отыгрыша. Также вероятны дополнительные обстоятельства и ограничения, прописанные в критериях и положения бонусной программы казино. <a href=http://filmkachat.ru/>рабочее зеркало 1×slots</a> <a href=https://www.nitrnd.com/blogs/229798/Transforming-Dream-Kitchens-Through-Professional-3D-Rendering-Solutions>https://www.nitrnd.com/blogs/229798/Transforming-Dream-Kitchens-Through-Professional-3D-Rendering-Solutions</a> 1×slots акции <a href=https://bybak.com/home.php?mod=space&uid=4230926>https://bybak.com/home.php?mod=space&uid=4230926</a> Максимальная ставка ? устанавливается в валюте счета и ограничивает размер ставки за раз спин. В случае ее превышения бонус имеет быть аннулирован. Также в правилах может содержаться запрет на размещение ставок конкретного облика, примеру, по равным шансам в рулетке (словами, на чет либо нечет, красноватое либо черное и т.д. ).Первый возникающий вопрос, это, зачем выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают новых игроков. Последним легче начать забаву на средства с дара за регистрацию. Им не нужно пополнять баланс и тратить собственные средства. Новички получают благотворительные спины или средства на счёт. С их поддержкою знакомятся с игровым процессом, крутят слоты и делают ставки в рулетке.
1×slot зеркало рабочее этих способов предполагает регистрацию
Не стоит путать забаву в демо и использование призов. В демонстрационном режиме игрок может оценить механику слота, сюжет и оформление. Но игра проводится на условные кредиты, поэтому отсутствует основное ? чувство пыла. Активируя промокод или фриспины, клиент по-прежнему не тратит средства средства на игровые автоматы, но возможность сорвать настоящий куш! <a href=https://www.thefamilylegion.se/viewtopic.php?f=4&t=18743>1×slots регистрация 1×slotscasino 56 online</a> 1хслотс казино зеркало Многие казино предоставляют в рекламных целях безвозмездные призы необыкновенно для наших читателей. Чтобы их получить, нужно перебежать на игровой сайт по партнерской ссылке с нашего портала.Свежий приз начисляется вид валютных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в пользовании своими, ну случае отыгрыша оператор имеет ввести лимитирование на вывод средств. <a href=https://www.0574snyw.com/space-uid-181223.html>https://www.0574snyw.com/space-uid-181223.html</a> скачать 1×slots официальный сайт
1× slots зеркало
К раскаянью, нет. Почти все казино, просят внесение желая бы одного малого депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, собственно исключить средства разрешается лишь на что, эту платежную систему, с которой был изготовлен депозит. <a href=http://osvita.ch.ua/index.php?subaction=userinfo&user=numerouspet0>http://osvita.ch.ua/index.php?subaction=userinfo&user=numerouspet0</a> 1×slots казино зеркало Заполняя данные в личном профиле, указывайте лишь достоверную информацию, так как Вам понадобиться ее подтвердить в при выводе денег.Подтверждение электрической почты – одно из основных условий, которое есть почти в любом бездепозитном казино. Чтобы верифицировать электрическую почту, довольно перейти по активной ссылке в послании, полученном от азартного клуба.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Итак, дабы бесплатные бонусные кредиты трансформировались в реальные средства, которыми вам управлять по собственному усмотрению, их надо(надобно) отыграть. Вейджер идет уточнять в правилах онлайн-казино. <a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=118251>1×slots регистрация 1×slotscasino09k online</a> Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном сайте и выполните вход в личный кабинет, чтобы отобрать безвозмездные вращения с вейджером х40; Однако далековато не все ресурсы предлагают своим клиентам бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено поощрение на первый депозит в объеме 100–200%. Это замечательная вероятность преумножить банкролл, увеличить время, проведённое за игрой и шансы сорвать большой куш. x1 slots регистрация в 1×slots casino <a href=http://cvpvm09.ru/user/Henryrhiny/>http://cvpvm09.ru/user/Henryrhiny/</a>
1×slots рабочее зеркало
Прежде чем активировать бездеп, нужно убедиться никаких, собственно государство, гражданином коей является игрок, не заходит в перечень разрешенных. <a href=http://mongdol.net/bbs/board.php?bo_table=free&wr_id=67853>http://mongdol.net/bbs/board.php?bo_table=free&wr_id=67853</a> Обычно показатель выше, чем для бонусов на депо. Не удивляйтесь, случае он будет в х100. Иногда завышенный коэффициент вейджера уточняется для обитателей отдельных государств.Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды присутствуют на этой странице. Посетитель возможность оценить обстоятельства получения и начать выступать на деньги без внесения депо. При этом игроку главно разуметь, на каких критериях и какими методами появится вывести полученный выигрыш. Для сего необходимо расценить список подключенных платежных систем. 1×slots официальный сайт, скачать
<b>Смотреть еще похожие новости:</b>
<a href=https://talkonlinenews.com/viewtopic.php?t=8204>рабочее зеркало 1×slots</a>
<a href=https://chasingadream.rpginitiative.com/showthread.php?tid=132899>зеркло казино 1×slots</a>
<a href=http://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=6268>1 хслот регистрация в 1×slots casino</a>
<a href=https://minifishtank.net/forum/showthread.php?tid=23451>1×slots casino регистрация 1×slots review live</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В любом казино с бездепозитным призом предусмотрены вейджеровые обстоятельства. Это единственный «подводный камень», который стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, нужно устроить определённое число ставок. Чем круче бонус, что, этим труднее выполнить условия, и наоборот.
#4052 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Аделия Петросян (фигурное катание) фильмы казино рояль <a href=https://specreporter.com/>пина букмекерской конторы</a> 1×bet xbet Скоробогатова Ольга Николаевна порно <a href=https://www.ossetia.tv/>порно с Сергей Бобровский (хоккей)</a> как выиграть в казино рейтинг казино Москалькова Татьяна Николаевна порно up casino лучшие бесплатные онлайн казино 1×bet xbet xyz казино без
DiskiPlus Ирина Горбачева DiskiPlus лучшие онлайн казино <a href=https://www.diskiplus.ru/>DiskiPlus casino daddy</a> DiskiPlus букмекерскую контору пин DiskiPlus casino online зеркало <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet приложение</a> DiskiPlus леон букмекерская контора DiskiPlus почему в казино нет часов DiskiPlus 1go casino DiskiPlus порно с Владимир Минеев (ММА) DiskiPlus up casino скачать DiskiPlus 1×bet официальный слоты DiskiPlus up casino официальный
#4053 Charlesgunnyhttp://filmkachat.ru
1×slots casino online регистрация
Принципиальным отличием безвозмездных призов от призов на депо является отсутствие надобности вносить средства на аккаунт. Из-за сего их часто именуют бездепозитными (not the slightest deposit bonuses).Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам запрещено начислять призы посетителям, не имеющим денежных средств на счете. Мы предлагаем осмотреть животрепещущие призы онлайн-казино с лицензией, коие соблюдают законодательство РБ. <a href=http://filmkachat.ru/>1×slots казино зеркало</a> <a href=https://www.ted.com/profiles/48491724>https://www.ted.com/profiles/48491724</a> В наше время довольно просто получить бонус за регистрацию в казино. Практически любой игорный жилище с радостью начислит средства или бесплатные вращения. Многие гэмблеры пользуются данным и не смущяются регистрироваться в любом клубе с прибыльными критериями. Кстати, это отличная вероятность выработать победную стратегию и сорвать джекпот.Особую изюминку видео слотам придают уникальные знакы. С их выходом активируются разные бонусы. Вы сможете запустить вспомогательный степень и прирастить необходимую выигрыша. Есть знаки, коие сменяют ненужные составляющие и сами создают выигрышные комбо. Не стоит забывать и про бонус-тур. После любого удачного спина есть шанс увеличить необходимую выигрыша в два либо четыре раза. казино 1× slots официальный сайт <a href=https://www.globalvision2000.com/forum/member.php?action=profile&uid=1053890>https://www.globalvision2000.com/forum/member.php?action=profile&uid=1053890</a> Каждая игровая платформа выделяется критериями по получению и отыгрышу бездепов. В правилах детально расписаны кратковременные рамки, за коие надо(надобно) прокрутить вейджер. Также не запамятовывайте на наибольший объем ставки и наивысшую необходимую выплаты. С иной стороны, дабы получить бездепозитные бонусы казино, достаточно потратить не более 1 минуты.
1×slot казино зеркало
1×slots casino online регистрация Когда идет о денежных призах, казино постоянно устанавливают обстоятельства вейджера, коие нужно выполнить, чтобы исключить выигрыш.Бездепозитный бонус за регистрацию в казино с выводом средств в 2022 году — Наш ресурс дает игрокам важную информацию о самых свежих, щедрых и проверенных бонусах в онлайн казино, коие обновляются любой денек. <a href=https://qiqer.ru/qforum/profile.php?id=372910>https://qiqer.ru/qforum/profile.php?id=372910</a> Это один из главных показателей привлекательности подарка. С завешенным коэффициентом и мастера не смогут выполнить условия по отыгрышу. И неважно, насколько презентабельно смотрится предложение – бездепозитный бонус казино в объеме $500 или $1 000. Чтобы новички попревосходнее вдумались, что же такое вейджер, мы разберём на примере. 1×slots регистрация на сайте Чаще всего казино приз за регистрацию без депо даёт возможность запустить любой автомат. Но какого-либо пристально ознакомиться с критериями. Иногда для игры доступны только определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, лучше начать знакомство с миром пыла именно с «одноруких злодеев».
1×slots бездепозитный бонус за регистрацию
Операторы гемблинга заявляют, что так они сражаются с бонус-хантерами. Впрочем, критики считают, собственно этим казино пробуют устроить из случайного постояльца неизменного игрока. <a href=http://tube.tunanno.com/profile.php?u=ruddyhijacker34>http://tube.tunanno.com/profile.php?u=ruddyhijacker34</a> 1 x slots casino
1×slots зеркало регистрацию более популярный вариант это
<a href=https://seniordance.ru/forum/showthread.php/71575–1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82-%D1%81%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C?p=101057#post101057>1×slots официальный сайт, скачать</a> Существуют казино с призом за регистрацию, в очень востребованы фриспины в онлайн казино впоследствии регистрации в конкретных забавах. Они встречаются том почаще бесплатных поощрений или классических бонусов в казино без вложений. Например, игрок регистрирует счет, на который начисляются бесплатные забавы, приз за регистрацию повторяющий бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса геймер выигрывает настоящие средства, которые в последствии можно успешно вывести из заведения на собственную платежную систему. То есть, есть шансы исключить средства без рисков собственными финансами. Регистрация, за которую игры получит бонусы, займет минут, а спасибо данному можно увеличить 5 евро поощрений до тыс. И без всяких заморочек вывести их. 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=http://www.pawsarl.es/blog/%D1%88%D0%B0%D0%BA%D0%B5%D0%BD.html>http://www.pawsarl.es/blog/%D1%88%D0%B0%D0%BA%D0%B5%D0%BD.html</a> Бонусные деньги – маленькая сумма денег для старта в новеньком казино. На бонусные деньги, обычно разрешается играть во все забавы, кроме слотов с прогрессивным джекпотом и игр из раздела live casino.
1×slots регистрация 1×slotscasino 56 online
Бездепозитные призы начисляются лишь раз раз. Не стоит открывать новые аккаунты, чтобы получить их повторно. Служба защищенности казино обязательно выявит «левого» соучастника и заблокирует. Если гость выполнит необходимые притязания, отыграет собственную ставку и решит вывести личный выигрыш, то ему надо(надобно) к, собственно казино непременно потребует предоставить ксерокопии собственных документов, чтобы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные средства исключить не получится.Чтобы бездеп не был начислен на Ваш аккаунт, Вам не нужно активировать бонусный код. Если поощрение от казино было добавлено на Ваш акк автоматически, а Вы не планируете его использовать, обратитесь в саппорта с пожеланием отменить бездепозитный приз. Доступные забавы – В неких азартных забавах возможно понизить математическое превосходство казино до нескольких 10-х процента. В их количестве многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как верховодило, в этих забавах ставки идут в зачет вейджера не всецело. Например, имеет учитываться только 50%. В неких забавах бездепозитные призы вообще нельзя отыгрывать.Не советуем опрометью голову браться за всевозможные предложения получения средств без инвестициям. Вполне возможно, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем смотрится на первый взгляд. Альтернативой считается казино бонус за депозит. Мы предлагаем для пару советов, благодаря коим у каждого игрока несомненно вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом денег: <a href=https://analsex.tube/user/WilliamZer/>https://analsex.tube/user/WilliamZer/</a> Бонус с зачислением средств на счет выделяет больше свободы поступков. Пользователь сам подбирает, каким образом воспользоваться подаренными своими. Здесь кроме могут работать лимитирования на список дешевых игр, хотя обыкновенно эти рамки не например строги, как в промо с безвозмездными вращениями. 1×slots регистрацию более популярный вариант это У нас на сайте Вы найдете список призов без депо в испытанных казино и подробную информацию то как их получить и использовать.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.pmpobc.ca/index.php?topic=162358.new#new>1×slots регистрация на 1хслотс</a>
<a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<a href=http://amazon.rx22.ru/memberlist.php?mode=viewprofile&u=255>1× slots casino зеркало</a>
<a href=https://projects.sare.org/people/jamestrazy/>рабочее зеркало 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Наш список включает в себя лучшие бездепозитные бонусы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит ревизию по главным характеристикам: Для всех бездепозитных бонусов функционирует наибольший лимит на выигрыш. Он показывает максимальную сумму, которую у получить, играя на бонусные кредиты. Как только для удастся выполнить требования вейджера, допустимый максимум несомненно переведен с бонусного счета на главной, а остаток несомненно списан.
#4054 Charlesgunnyhttp://filmkachat.ru
1хслотс мобильная версия зеркало
В неких интернет казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на веб-сайте клуба и доказать средства контактные данные. Дополнительно потребуется активация промокода. <a href=http://filmkachat.ru/>1×slots бонус за регистрацию</a> <a href=https://hanson.net/users/archicgicom>https://hanson.net/users/archicgicom</a> 1×slots зеркало регистрация <a href=http://yslit.com/home.php?mod=space&uid=672406>http://yslit.com/home.php?mod=space&uid=672406</a> Можно. Вы постоянно можете отрешиться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не создадите ставку.
1×slots скачать на айфон
1×slots официальный зеркало рабочее С такими простыми советами каждое казино с призом за регистрацию способно принести в разы больше выгоды и выгоды. <a href=https://www.modernvespa.it/profile/3586-tyronedek/>https://www.modernvespa.it/profile/3586-tyronedek/</a> Для отыгрыша бонуса казино обязывает игрока поиграть на сумму, в несколько раз превосходящую необходимую приобретенного приза — здесь выгода фирмы очевидна.Самые популярностью способы вывода денег ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электронным платежным системам подобии Neteller и Skrill, а также используют криптовалютными кошельками. Вывод выигрышей имеет осуществляться моментально либо развлекать от нескольких часов до нескольких суток. 1×slots зеркало проходить регистрацию это отличный вариант
1×slots официальный сайт скачать
Если вы новичок данном и лишь попали в неизведанную вами область азарта — за услуг как бездепозитные призы без пополнения. <a href=http://avestalaw.ru/index.php?subaction=userinfo&user=resolutepaint96>http://avestalaw.ru/index.php?subaction=userinfo&user=resolutepaint96</a> 1×слотс казино Основное управляло получения бездепа ? создаваемый акк должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов взыскательно запрещено. Проверка проводится по имени, e-mal, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депо нужно блюсти несложную очередность поступков.
рабочее зеркало 1хслотс
<a href=https://forum.dis-course.net/viewtopic.php?t=494803>1×slots зеркало регистрацию более популярный вариант это</a> Для доказательства электронной почты, просто перейдите по интенсивной ссылке в письме, полученном от игрового заведения.Акционные предложения от казино существуют в различных форматах. Часто призы даются в размен на депозит. Игрок вносит платеж и получает средства, бесплатные вращения и другие поощрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — вид приза, который гарантирован за исполненье конкретных деяний на сайте: Если площадка дарует бездеп за регистрацию, то процедура его получения проста. Нужно лишь завести аккаунт на сайте и активировать его, подтвердив адрес электронной почты, номер телефонного или иные данные, которые просит оператор. Перед данным нужно убедиться, собственно пользователь располагается на официальном сайте казино, но на жульнической площадке.Практически все интернет казино с бездепозитным бонусом за регистрацию предусматривает программку лояльности — систему одобрения постоянных клиентов, кот-ая произведено из большого уровней. При достижении игроком одного значения на его счёт поступает бонус. Чем повыше степень — тем щедрее бонус. скачать 1×slots на андроид мобильная версия <a href=http://forum.drustvogil-galad.si/index.php?action=profile;u=41233>http://forum.drustvogil-galad.si/index.php?action=profile;u=41233</a>
1×слотс казино
Объективные – объем бонуса, коэффициент и обстоятельства вейджера, надобность внесения депозита для вывода средств;Для подтверждения электронной почты, просто перейдите по интенсивной ссылке в письме, полученном от игрового заведения. <a href=http://wap.pk8.org.cn/home.php?mod=space&uid=31926&do=profile>http://wap.pk8.org.cn/home.php?mod=space&uid=31926&do=profile</a> Не желайте поиграть в азартные игры, не рискуя своими деньгами, хотя получая в все выплаты? Подобную вероятность предоставляют все превосходнейшие порталы с азартными веселиями. В их числе много честных и надежных интернет-казино на русском языке. Они привлекают свежих юзеров разными поощрительными событиями, включая бездепозитные, либо безвозмездные призы.Отказ в прохождении верификации. Если заказчик не хочет либо не дать документы, подтверждающие его личность, профиль несомненно заблокирован совместно, вкупе со всеми бонусными начислениями. 1×slots подтвердит вашу регистрацию если говорить Некоторые клубы механически начисляют приз на аккаунт игрока после исполнения критерий получения, но посещают ситуации, когда бонус надо(надобно) активировать игроку самому. Есть количество способов активации бонуса:Бездепозитные бонусы казино это финансовая компенсация, предлагаемая юзерам на дармовой базе и возможность выступать в онлайн казино бесплатно. Если сравнивать их с поощрениями за вклад, каких средства выдаются только потом первоначального пополнения счета, то бездепозитные вознаграждения получаются даром. То есть, играющий получает вероятность создавать ставки на теснее имеющие деньги, которые выдаст заведение, выполняя, этом, обыденные действия, дабы их извлечь (тут идет о регистрация, удостоверении личности с внедрением номера телефонного, оформления заказы и т.д.).
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Создание аккаунта. На веб-сайте казино необходимо обнаружить регистрационную форму и заполнить пустопорожние поля личностными данными. Иногда на этом этапе потребуется показать только адресок электрической почты и пароль, но чаще хотелось заполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д. ). Нужно указывать лишь реальные данные, поскольку впоследствие они станут испытаны.
#4055 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее на сегодня
Вывод выигрыша с бездепозитных бонусов казино – щедрый подарок от азартных клубов. Но чтобы исключить собственный доход, нужно выполнить ряд критерий:В онлайне много известных игорных площадок с красивыми акционными услугами. Однако пристально разбирать условия 10-ов услуг в надоест, ну и время отнимет количество. Поэтому наша команда подготовила ТОП-3 сайтов с превосходнейшими бездепозитными бонусами: <a href=http://filmkachat.ru/>рабочее зеркало 1×slots</a> Акционные предложения от казино есть в разных форматах. Часто бонусы даются в обмен на депо. Игрок вносит платеж и получает деньги, безвозмездные вращения и другие поощрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — вид бонуса, который гарантирован за выполнение определенных деяний на сайте:Бонус с зачислением средств на счет дает больше свободы действий. Пользователь сам избирает, каким образом воспользоваться подаренными средствами. Здесь кроме шансы работать лимитирования на список доступных игр, хотя обыкновенно эти рамки не так строги, как в рекламную с безвозмездными вращениями. <a href=https://community.wongcw.com/blogs/934091/Transform-Your-Space-with-a-Professional-Interior-Design-Plan-That>https://community.wongcw.com/blogs/934091/Transform-Your-Space-with-a-Professional-Interior-Design-Plan-That</a> Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы была возможность вывести выигрыш.Каждая игровая платформа выделяется условиями по получению и отыгрышу бездепов. В правилах отчетливо расписаны временные рамки, за коие нужно прокрутить вейджер. Также не запамятовывайте про наибольший размер ставки и наивысшую сумму выплаты. С другой стороны, дабы получить бездепозитные бонусы казино, довольно потратить не более 1 минуты. 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=http://bbs.weipubao.cn/home.php?mod=space&uid=3038928>http://bbs.weipubao.cn/home.php?mod=space&uid=3038928</a>
1×слотс казино
Зарегистрироваться в казино по специальной ссылке либо с бонусным кодом. Подтвердить контактные данные (номер аппарата и электрическую почту). Для доказательства номера телефона нужно в собственном профиле указать свой номер и надавить кнопку „Подтвердить номер телефонного“, дальше Вы получите sms-сообщение с кодом, который нужно ввести в соответствующее поле. Для доказательства электрической почты, перебежать по активной ссылке в письме от казино. <a href=https://koreanstudies.com/forum/viewtopic.php?t=148353>рабочее зеркало 1×slots</a> 1× slots casino официальный сайт Бездепозитные бонусы, как теснее ясно, являются оригинальной возможностью обратиться игровому процессу полностью бесплатно, то есть выступать в интернет казино бесплатно и на место свои незамедлительно последствии регистрации аккаунта. Автоматы с таким депозитом все замерзнуть великолепной возможностью поиграть для поклонников азарта с определенными лимитированиями в финансах. <a href=http://cargo-200.ru/index.php?subaction=userinfo&user=historicalloser>http://cargo-200.ru/index.php?subaction=userinfo&user=historicalloser</a> У любой забавы свои притязания по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система засчитает каждую ставку. В рулетке и покере устроить это намного сложнее. Именно потому например принципиально внимательно читать условия получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой этой, то новички попросту «спустят приз на ветер». 1× slots casino официальный сайт Высокая конкурентность в сегменте азартных игр мотивирует операторов привлекать посетителей различными промоакциями. Благодаря этому у посетителей появляется вероятность получить бонусы в казино за регистрацию без депо. Воспользоваться таким предложением можно, минуя процедуру внесения денег на игровой счет, просто активировав аккаунт на сайте. Наш экскурсовод по бездепам поможет выбрать самую симпатичную бонусную программу, разузнать верховодила получения такого гонорары и воспользоваться им с наибольшей выгодой.4. Заберите презент. Чаще всего приз активизируется незамедлительно последствии регистрации. Но случаются истории, когда нужно забежать в индивидуальный кабинет либо написать в службу.
1×slots официальный сайт мобильная версия
В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, необходимо адресоваться в службу спустя лайв-чат на веб-сайте казино.Маркетинговая деятеля всех игорных интернет-клубов должна носить разнообразный нрав. И в вознаграждения на депозит служат чтобы, чтобы, чтобы провоцировать заносить депозиты и поощрять теснее быть юзеров, то бездепозитный бонус в казино либо приз за регистрацию в казино, прежде всего, рассчитан на расширение базы потребителей. Выполнив все притязания оператора, клиент имеет оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит примерно не более суток. Если дополнительно требуется пройти функцию верификации, то срок возрастает до 1–2 рабочих дней. Для перевода используются банковские приборы и электрические платежные системы. Второй способ подходит лучше, например как основная транзакций в осуществляются мгновенно. В связи со специфичностью функционирования банков обработка платежей возможность занять до нескольких рабочих дней.Вышеописанная первопричина и является главным нюансом, следствии которого операторы отдают доля своей прибыли на различные маркетинговые затраты и маркетинговые кампании. А самым действенным тут станут выступать непосредственно бездепозитные бонусы казино 2022 с выводом за регистрацию. <a href=https://civil808.com/user/64001/harrycob>https://civil808.com/user/64001/harrycob</a> Да, у бесплатных призов есть дефекты. Прежде всего, они обыкновенно большие. Кроме такого, условия вейджера по ним практически жесткие. Но все же неименье риска проделывает их довольно привлекательными для посетителей. 1×slots зеркало У нас на веб-сайте Вы найдете перечень призов без депозита в испытанных казино и подробную информацию то как их получить и применять.Размер бонуса. В качестве бездепов обычно начисляют небольшие суммы, а когда идет о бонусах за депозит, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино могут подарить игроку до 2000$.
1хслот зеркало сайта
Вейджер (или вагер) ? это минимальная сумма ставок, которую необходимо сделать для вывода валютного бонуса. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение.Бонус в казино без депозита содержит различные варианты: это может быть приветственный приз, акции в честь каких-то праздников или весомых дат, приз за вербование новых игроков, лояльность и получение VIP-статуса. <a href=https://forum.vn.ua/showthread.php?p=3280029#post3280029>1×slots зеркало подтвердит вашу регистрацию если говорить</a> казино 1× slots официальный сайт <a href=https://www.hebergementweb.org/threads/avtoshkola-vladivostok.1566097/>https://www.hebergementweb.org/threads/avtoshkola-vladivostok.1566097/</a>
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Вышеописанная первопричина и является главным нюансом, следствии которого операторы отдают доля своей прибыли на различные маркетинговые затраты и маркетинговые кампании. А самым действенным тут станут выступать непосредственно бездепозитные бонусы казино 2022 с выводом за регистрацию. В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно приятная часть игры. Важно, зачастую бездепозитные бонусы в казино выдаются с лимитированиями по наибольшей выплате. В среднем можно рассчитывать на прибыль в несколько тыщ руб. Как исключить выигрыш с бонуса без депозита. Придётся доказать аккаунт документально, в некоторых заведениях. Процедура верификации обязательна и делается каждым игроком. О документальном доказательстве учетной записи спрашивайте в интернет чате или прочитайте в правилах. <a href=http://putevki.by/index.php?name=account&op=info&uname=abandonedphobia>http://putevki.by/index.php?name=account&op=info&uname=abandonedphobia</a> Самый распространённый из сходственных призов, окончательно же, бездеп на день рождения посетителя — приз повторяющий фиксированной суммы либо фриспинов поступает на счёт игрока, а воспользоваться им возможно на установленного периода времени.Чтоб получить большой выигрыш, избирайте игровые автоматы с максимальным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша. 1×slos регистрация в 1×slots casino Срок отыгрыша — это период, кот-ый наступает в момент активации бонуса и кончается с его закрытием. Пользователю нужно уложиться в этот временной промежуток, иначе призовые свои аннулируются. Казино устанавливают список игр, ставки в засчитываются при расчете отыгранных денег. Если тайтл не заходит в этот список, то предоставляется быть недоступен для загрузки во время деяния бонусного предложения.К примеру, игроку выдаются безвозмездные средства в заведении в объеме пятидесяти или ста $ (вейджер на коие составляет 100х). То есть, каждому новоприбывшему геймеру выскакивает привлекающая иллюстрация, которая обещает выплату всех зачисленных компанией средств. Не стоит обращать внимания на казино приз за регистрацию без депо с слишком великой либо очень махонькой суммой призов, потому что, даже кропотливо изучив все условия, тут всего, будет некий подвох.
<b>Смотреть еще похожие новости:</b>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=133667>казино 1×slots официальный сайт</a>
<a href=https://timepost.info/showthread.php?tid=109988>casino 1×slot</a>
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=922047>1×slots casino регистрация 1×slotscasino09k online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Отзывы читателей о бонусных промоакциях посодействуют составить впечатление, но не забывайте о субъективности собственных объяснений. Операторы гемблинга утверждают, что например они сражаются с бонус-хантерами. Впрочем, критики считают, что данным казино пробуют устроить из случайного постояльца постоянного игрока.
#4056 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
Бонус в казино без депо имеет разные варианты: это может быть приветственный бонус, акции в честь каких-то праздников либо важных дат, приз за вербование новых игроков, лояльность и получение VIP-статуса. <a href=http://filmkachat.ru/>1×slots зеркало регистрация в 1×slots casino</a> Для верификации аккаунта нужно дать специалистам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, а фотографию банковской карты или скриншот страницы электронного кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для доказательства личности. <a href=https://www.emaze.com/@ALIWWWITF/advanced-techniques-inrealistic-rendering-from-theory-to>https://www.emaze.com/@ALIWWWITF/advanced-techniques-inrealistic-rendering-from-theory-to</a> Необходимость отыгрыша. Вейджер такой повыше, чем для бонусов за депо. И же средства не отыграны, вывести их невозможно. 1×slots промокод при регистрации <a href=http://www.air119.net/bbs/board.php?bo_table=free&wr_id=460644>http://www.air119.net/bbs/board.php?bo_table=free&wr_id=460644</a>
1×slots промокод при регистрации
Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша бонусов. Заведения всегда устанавливают наивысшую ставку, возможную по условиям вейждера. <a href=https://masstr.net/showthread.php?tid=98063>1×slots официальный demo регистрация в 1×slots casino</a> 1×slots регистрация 1×slotscasino 56 online Простая процедура получения бездепозитного бонуса, кот-ая займет не более 2-х минут. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные. <a href=https://www.thenewtop10s.com/author/brianbig/>https://www.thenewtop10s.com/author/brianbig/</a> Чтоб получить крупный выигрыш, избирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша. казино 1×slots официальный сайт Используйте наихорошие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, чтобы заработать презенты за простые действия и уже сейчас получить первый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высокой отдачей и быстрыми выводами на электрические кошельки.Изучить управляла и обстоятельства получения бездепозитных бонусов казино, Вы сможете у нас на сайте в разделе с призами либо на официальном сайте избранного Вами казино. Если возможности найти необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электрической почте.
1хслотс зеркало на сегодня
В лицензионных бездепозитных казино выступать в азартные забавы вправду безопасно. Наличие лицензии одобряет что, этот прецедент, что клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP. <a href=https://brp.bars.su/forum/?PAGE_NAME=profile_view&UID=49691>https://brp.bars.su/forum/?PAGE_NAME=profile_view&UID=49691</a> Баланс игрока дополняется на подобающую необходимую. К ней применяется вейджер, указанный в правилах промоакции. Вывести выигрыш можно будет после того, как пользователь сделает требуемый объем ставок из личных средств. В редчайших случаях бездеп трудится в формате Free Play. На счет пользователя зачисляется большая сумма, и предоставляется маленький срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по завершении сего периода сумма на счету будет превышать изначальную, то разницу возможно несомненно исключить или применять для последующих ставок. 1×slots официальный зеркало рабочее
казино 1×slots
Обычно для получения призов без депозита, казино выдвигает приклнные и вполне выполнимые обстоятельства, хотя есть ряд действий коие запрещены и все причиной досадные результаты: <a href=http://www.fiat130.it/phpbb3/viewtopic.php?f=14&t=324309>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> 1×slots зеркало на сегодня <a href=http://www.ydelection.com/bbs/board.php?bo_table=free&wr_id=1453845>http://www.ydelection.com/bbs/board.php?bo_table=free&wr_id=1453845</a> Вейджер не более х30–35 является приемлемым. Опытные игроки утверждают, что с этим вейджером реально остаться в плюсе, случае правильно подойти к выбору игрового аппарата.Бывают ли бездепозитные призы без вейджера? Бывают, случае у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино.
1хслотс официальный сайт зеркало
Если вы избираете проверенное лицензионное интернет казино и выполните все обстоятельства получения бездепозитного приза, трудностей с получением презента у Вас не возникнет.B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. <a href=http://ceh-i.ru/user/GlennWhown/>http://ceh-i.ru/user/GlennWhown/</a> Фриспины. Бесплатные вращения предусмотрены для использования в видео-слотах. Внимательно читайте обстоятельства – они часто выдаются для некоторых машин. В зависимости от клуба возможность делать конкретное количество ставок. Кстати, современные игорные дома выделяют вероятность заводить «одноруких злодеев». 1×slots официальный сайт мобильная версия скачать Чем ниже велечину вейджера, тем легче отыграть и вывести бонус. Если Вы планируете заработать на бездепе, но просто ознакомиться с свежим игровым клубом, то стоит игнорировать призов с высоким вейджером их почти не реально отыграть. С ними Вы сможете только протестировать забавы заведения.
<b>Смотреть еще похожие новости:</b>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=288260&pid=701740#post_701740>1×slots casino зеркало рабочее</a>
<a href=https://persiankittencat.com/grey-persian-cats-unraveling-the-charm-of-these-feline-beauties/>1×slots регистрация то дальше необходимо пройти</a>
<a href=http://check2go.net/my-account/>1×slots зеркало проходить регистрацию это отличный вариант</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепы обычно предлагают с отыгрышем — мгновенно вывести выигранные средства нельзя. Перевод средств со счета будет возможен в того, как пользователь выполнит все притязания казино, а сумма имеет превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, на коих клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней в активации.
#4057 Charlesgunnyhttp://filmkachat.ru
1×slots казино зеркало
Все любят получать презенты. Согласитесь, почти любой играющий человек несомненно сильно счастлив, в получит безвозмездный презент для забавы в интернет казино просто за регистрацию либо же бонус за внесенный депозит, так нарекаемые приветственные призы для свежих игроков. Соответственно эти онлайн клубы станут больше востребованы и преимущественны у игроков при выборе казино для забавы. Топ казино постоянно обновляется и добавляются свежие и интересные игровые клубы с симпатичной бонусной политикой и всеми возможными привилегиями, к которым относятся эти призы как фриспины за регистрацию, денежные бездепозитные призы, а щедрые призы за внесенный депозит.Иногда у посетителей вебсайта могут появиться трудности, задачи, препядствия при активации приобретенного промо-кода. В этих случаях, нужно обратиться за поддержкой в саппорта «Support». Для получения ответа, непременно указывается определенная первопричина обращения и подтверждается информация дополнительными скриншотами. Если сформировалась спорная ситуация, постоянно можно обратиться к основному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> Если при регистрации указать промокод, можно гарантировано получить приз. Где взять ваучер? Посетите направленные блоги либо форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В заключительное время игорные дома начали рекламироваться в фильмах и сериалах. Присмотритесь и всего заметите промокод, который принесёт 500 или 1 000 бонусных руб.Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, all только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. <a href=https://connects.ctschicago.edu/forums/users/200497/>https://connects.ctschicago.edu/forums/users/200497/</a> Не хотите поиграть в азартные игры, не рискуя своими деньгами, хотя получая в все выплаты? Подобную вероятность деют почти наилучшие порталы с азартными развлечениями. В их количестве количество правдивых и надежных интернет-казино на российском языке. Они привлекают новых пользователей разными поощрительными мероприятиями, включая бездепозитные, либо бесплатные бонусы.Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке адепты онлайн-казино публикуют актуальную информацию о no deposit bonuses прочих предложениях. 1×slots casino зеркало <a href=https://www.vennews.net/home.php?mod=space&uid=161349&do=profile&from=space>https://www.vennews.net/home.php?mod=space&uid=161349&do=profile&from=space</a> Максимальный объем ставки, который нельзя превышать же приз не несомненно полностью отыгран. В случае нарушения этого правила, бонус и выигрыш с него станут аннулированы.В лицензионных бездепозитных казино выступать в азартные забавы вправду безопасно. Наличие лицензии одобряет тот прецедент, собственно клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP.
1хслотс мобильная версия зеркало
Нельзя разглядывать забаву на средства, как вариант заработка. Азартные забавы воспрещены для лиц младше 18 лет. Topcasinobonuses.mobi не зачинщиком азартных игр. Сайт носит информационный нрав.На условиях отыгрыша безвозмездных призов следует остановиться подробнее. С ними связаны нюансы, которые нельзя оставить без внимания. <a href=https://forum.spherecommunity.net/User-JamesLop>1хслотс официальный сайт зеркало</a> 1×slots зеркало регистрацию более популярный вариант это Несмотря на то, что данный вариант стимуляции со стороны азартных платформ очень востребован в сходственных игр, далековато многим почитателям казино известно, что являют собой бездепозитные бонусы казино и как непосредственно их возможно эксплуатировать.Как только получите бездеп в казино, всё одинаково не забывайте инспектировать электрическую почту. Некоторые игорные клубы постоянно радуют активных гэмблеров приятными призами. Чаще всего получить подарок можно в преддверии праздника, на день рождение, за привлечение приятеля. А кроме распространённым призом является прибавка к депозиту. Нужно чем пополнить счёт, и азартное заведение увеличит его на 50–100%. <a href=http://istiqbolsari.uz/user/Henryadact/>http://istiqbolsari.uz/user/Henryadact/</a> Изучить правила и обстоятельства получения бездепозитных бонусов казино, Вы сможете у нас на сайте в разделе с бонусами либо на официальном веб-сайте выбранного Вами казино. Если имеет найти необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электрической почте.Получать информацию о самых выгодных бонусах можно без постоянного прогноза новостей казино. Мы взяли эту задачку на себя и постоянно следим за предложениями операторов, выбирая наилучшие из них. В этом разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список акций регулярно дополняется. В топ вошли самые новые бездепозитные призы за регистрацию в казино 2020, кратковременные и закрытые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру прочим критериям. Если срок действия промоакции истек, она удаляется из перечня. 1× slots зеркало
1×слот регистрация в 1×slots casino
B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax Поспешите зарегистрироваться на официальном сайте Клубника, чтобы моментально получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, замечена реальный шанс победу! <a href=https://king-wifi.win/wiki/User:KristeenColman>https://king-wifi.win/wiki/User:KristeenColman</a> А ознакомиться с новыми интернет казино, Вы можете с призов с выводом выгоды, которые Вы можете получить без депо.Заработать на бездепозитных призах за регистрацию в казино возможность любой пользователь, достигший совершеннолетия. 1×slots официальный зеркало Автоматы неспроста числятся самым знаменитым азартным развлечением. Чтобы освоить управление и управляла, потребуется всего количество минут. Ваша задачка сделать ставку, определить число трудящихся линий и возможно крутить тамбур. Если дисплее выпадет выигрышная комбинация – вы выиграли! С этой задачей вам помогут управится бездепозитные бонусы казино.
1×slots скачать на айфон
Бездепозитный приз по промо-коду несомненно доступен для забавы, только в том случае когда Вы активируете специальный бонусный код в разделе с бонусами либо укажите промокод при регистрации на сайте. В неких случаях, считая активации кода, понадобиться подтвердить контактные данные игрока и наполнить анкету клиента.Казино выводит средства только на ту платежную систему, с котрой был сделан депозит. То есть, для вывода бездепозитного бонуса, Вам сначала необходимо восполнить счет. В неких клубах ограниченный перечень способов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с этих платежных методов, которые доступны для вывода. 1 х слотс зеркало <a href=http://theall.barunweb.co.kr/bbs/board.php?bo_table=free&wr_id=235829>http://theall.barunweb.co.kr/bbs/board.php?bo_table=free&wr_id=235829</a> Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, чтобы снова получить безвозмездный приз. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ждет неизбежное наказание.
1×slot регистрация
Составленный специалистами Casino.ru список онлайн-казино с бездепозитным призом дозволяет игрокам сопоставить спецпредложения разных операторов. <a href=https://www.uned-psicologia.com/index.php?action=profile;u=22067>https://www.uned-psicologia.com/index.php?action=profile;u=22067</a> Наш список включает в себя превосходнейшие бездепозитные бонусы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по главным параметрам: 1×slots регистрация 1×slotscasino 56 online
<b>Смотреть еще похожие новости:</b>
<a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=890083>1хслотс рабочее зеркало</a>
<a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=9700&TITLE_SEO=9700-kharakteristiki-tovarov&MID=524524&result=reply#message524524>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=144169>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Самые модные методы вывода средств ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электронным платежным системам типа Neteller и Skrill, а также используют криптовалютными кошельками. Вывод выигрышей имеет исполняться мгновенно либо развлекать от нескольких часов до нескольких суток.
#4058 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
почему в казино нет окон официальная казино <a href=https://7club7.com/>kent casino регистрация</a> рейтинг казино скачать pin casino <a href=https://vestnik-jurnal.com/>букмекерские конторы pin</a> 1×bet на сегодня casino зеркало сегодня смотреть фильм казино 1×bet xbet 1×bet слоты 1×bet xyz unlim casino 1win casino
DiskiPlus зеркала официальных сайтов казино DiskiPlus 7k casino сайт <a href=https://diskiplus.ru>DiskiPlus казино 1</a> DiskiPlus pin up casino пин ап DiskiPlus casino автомат <a href=https://diskiplus.ru/>DiskiPlus ramenbet casino</a> DiskiPlus 7k casino зеркало на сегодня DiskiPlus r7 casino DiskiPlus сколько казино DiskiPlus 7k casino зеркало на сегодня DiskiPlus 1×bet сайт DiskiPlus porno Александр Соболев (футбол) DiskiPlus сайт винлайн букмекерская контора
#4059 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Баталина Ольга Юрьевна 7k casino скачать <a href=https://slon-ru.com/>porno Марина Александрова</a> 7k casino официальный casino buzz <a href=https://krtka.info/>1×bet слоты</a> порно с Зырянова Анастасия Владимировна сайт казино зеркало porno Дарья Клишина 1×bet скачать бесплатно порно с Артемий Панарин (хоккей) порно с Арина и Дина Аверины, гимнастки почему в казино нет часов
DiskiPlus Яровая Ирина Анатольевна порно DiskiPlus почему в казино нет окон <a href=https://www.diskiplus.ru/>DiskiPlus букмекерская контора леонов</a> DiskiPlus букмекерская контора фонбет официальный DiskiPlus пина букмекерской конторы <a href=https://www.diskiplus.ru/>DiskiPlus казино фильм</a> DiskiPlus casinos xyz DiskiPlus casino рабочее DiskiPlus казино ли DiskiPlus online casino 7k DiskiPlus 1×bet xbet xyz DiskiPlus играющие казино онлайн DiskiPlus про казино
#4060 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
Бoльшинcтвo азартных заведений выдвигают примерно одинаковые условия и притязания, коие необходимо выполнить, дабы получить бездепозитный приз за регистрацию. Все их возможно объединить в один перечень:Наши эксперты исследуют условия акции, затем в ручном режиме проверку их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и характеристики. Мы не рекламируем казино, а даем игрокам информацию о наихороших из них. <a href=http://filmkachat.ru/>онлайн казино 1×slots</a> Условия могут разниться друг от приятеля. Но подобный бонус возможность быть использован только для игрового процесса – полученные на счет финансы до такого, как станут отыграны, исключить невероятно. <a href=https://blog.udn.com/G_112062930339362154/181391904>https://blog.udn.com/G_112062930339362154/181391904</a> Если ординарными словами, бездепы – это определённая сумма средств или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно брать презенты. Но есть кое-какие нюансы. Существуют игорные жилища, которые перед что, этим как начислить бонусы требуют привязать аппарат, дать копии документов.При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие можно посвятить ирге в казино. 1×slots официальный сайт скачать на айфон <a href=https://tulaart.ru/forum/index.php?action=profile;u=41892>https://tulaart.ru/forum/index.php?action=profile;u=41892</a> Максимальная ставка ? устанавливается в валюте счета и ограничивает размер ставки за один спин. В случае ее превышения бонус может быть аннулирован. Также в правилах может находиться запрет на размещение ставок определенного вида, к, по одинаковым шансам в рулетке (другими, на чет или нечет, красноватое или темное и т.д.).
1×slots сайт
В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с даровых вращений. Прибыль, которую Вы заработаете на таком бездепе возможно ставить на вывод без какого либо отыгрыша. <a href=https://forum.dis-course.net/viewtopic.php?p=929662#p929662>1×slot зеркало рабочее этих способов предполагает регистрацию</a> 1×slots официальный сайт мобильная версия скачать Казино выводит средства лишь на что, эту платежную систему, с котрой был сделан депозит. То есть, для вывода бездепозитного приза, Вам сначала необходимо восполнить счет. В неких клубах ограниченный список методов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет непосредственно с данных платежных методов, коие доступны для вывода. <a href=http://www.xiaoditech.com/bbs/home.php?mod=space&uid=1725076>http://www.xiaoditech.com/bbs/home.php?mod=space&uid=1725076</a> Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых новых, щедрых и проверенных бонусах в интернет казино, коие обновляются любой день.Например, игрок получил 500 руб. При создании аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 рублей, понадобится устроить 875 спинов для полного отыгрыша. скачать 1×slots официальный сайт Бездепозитные призы истинными деньгами, которые возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадались.Перечисленные повыше главные характеристики сочетают фактически каждый приз и считаются стандартными для бездепозитных бонусных начислений в казино.
1×slots регистрация 1×slots review live
Фриспины начисляются по конкретной ставке. После их активации игроку необходимо запустить слот и увериться, что в нем показываются благотворительные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода в отыгрыша определяется оператором и редко выше 5 000 рублей. <a href=http://teltzion.org/doku.php?id=%D0%A4%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B%20%D0%BA%D0%BE%D0%BD%D0%B4%D0%B8%D1%82%D0%B5%D1%80%D1%81%D0%BA%D0%BE%D0%B9:%20%D0%BF%D1%83%D1%82%D1%8C%20%D0%BA%20%D1%81%D0%BB%D0%B0%D0%B4%D0%BA%D0%BE%D0%BC%D1%83%20%D0%B1%D0%B8%D0%B7%D0%BD%D0%B5%D1%81%D1%83%20%D0%B2%20%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8>http://teltzion.org/doku.php?id=%D0%A4%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B%20%D0%BA%D0%BE%D0%BD%D0%B4%D0%B8%D1%82%D0%B5%D1%80%D1%81%D0%BA%D0%BE%D0%B9:%20%D0%BF%D1%83%D1%82%D1%8C%20%D0%BA%20%D1%81%D0%BB%D0%B0%D0%B4%D0%BA%D0%BE%D0%BC%D1%83%20%D0%B1%D0%B8%D0%B7%D0%BD%D0%B5%D1%81%D1%83%20%D0%B2%20%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8</a> Условия могут различаться приятель от приятеля. Но подобный приз имеет быть использован лишь для игрового процесса – приобретенные на счет деньги до как, как станут отыграны, вывести нереально.Если при регистрации показать промокод, можно гарантировано получить бонус. Где взять ваучер? Посетите определенную блоги или форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В заключительнее время игорные дома начали афишироваться в кинокартинах и сериалах. Присмотритесь и наверняка заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных руб. 1×slots официальный сайт мобильная версия скачать У каждого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано смогли выполнить их, мы дадим некоторое советов. Если система начислила маленькую сумму, не создавать немалые ставки – остановитесь на 10–30 центах. Как только сумеете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В противном случае превосходнее приглядеться к другому автомату.Кешбэк-бонус представляет собой возврат фиксированного процента от ставки если, тогда, поражения либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не превышает 10%.
1×slots официальный регистрация
Основное верховодило получения бездепа ? создаваемый аккаунт обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов требовательно запрещено. Проверка ведется по имени, e-mal, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита необходимо блюсти несложную очередность действий.Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=136672>1хслотс рабочее зеркало</a> Но существуют азартные заведения, готовые просто например вручить средства на забаву. Для этого достаточно создать профиль. Чтобы вывести выигрыш, сперва необходимо выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа.Перечисленные повыше главные характеристики сопровождают практически каждый бонус и являются стандартными для бездепозитных бонусных начислений в казино. Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.На странице представлены бездепозитные призы за регистрацию в казино редкая заслуга за коей гонятся все игроки как новенькие, например и профессионалы. Мы также уделяем великое внимание на наличие бонусов при составление рейтинга казино на средства. Бездепозитный бонус это возможность играть бесплатно и выиграть настоящие деньги. 1×slots официальный demo регистрация в 1×slots casino <a href=http://www.cristaleriajara.com/galeriajara/profile.php?uid=20437>http://www.cristaleriajara.com/galeriajara/profile.php?uid=20437</a> Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала прыткие выводы. Фишка выплат том,, что довольно избрать платёжный инструмент и указать сумму. В большинстве случаев деньги зачисляются на электронные кошельки на 15 мин., а на банковские карты – 1–3 рабочих дня.Приветственный бездеп предоставляется какому игроку лишь раз раз. Казино дерутся с так нарекаемыми бонусхантерами (от англ. Bonus Hunter — охотник за призами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения дара. Исключить похожие деяния дозволяет верификация данных. Администрация вправе потребовать у клиента подтвердить персональные данные, указанные при регистрации.
1×slots бездепозитный бонус за регистрацию
При маленький сумме приза рекомендовано играть по невысоким ставкам, а использовать наибольшие какого-либо только что, нет случае, если вейджер слишком великий, а время на отыгрыш крепко ограничено.Активация по промокоду используется в различных обликах бездепов. Если речь идет о приветственном призе, то набор символов возможно разузнать на главной страничке, в регистрационной форме или письме, коие отправляется пользователю для доказательства e-mail. Акции имеют проводиться общо с партнерскими площадками. Обычно код располагается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется разовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном кабинете либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем важный код для активации в описании любого рекламную. <a href=https://www.nintendo-master.com/profil/glavdorogadv1808>https://www.nintendo-master.com/profil/glavdorogadv1808</a> 1×slots официальный demo регистрация в 1×slots casino 3. Подтвердить данные. В зависимости от клуба, нужно привязать телефон либо почту, указать персональную информацию;
<b>Смотреть еще похожие новости:</b>
<a href=https://feederfishing.lt/en/forum/subkategorija-1–1/1342661–1×slots#1354135>1×slots рабочее зеркало</a>
<a href=https://www.goslog.ru/forum/messages/forum1/message24739/11-obrashcheniya-grazhdan?result=reply#message24739>1×slots зеркало сайта</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Возможность поиграть вспомогательное соревнование (а от и некоторое) совершенно даром, а выигрыш, к, поступает на счёт игрока. Ну и конечно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: схожая добродушие повышает степень преданности клиентов к компании.
#4061 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино вход скачиваемые казино <a href=https://specreporter.com/>Москалькова Татьяна Николаевна порно</a> Львова-Белова Мария Алексеевна порно cat casino <a href=https://glvk.guru/>букмекерские конторы без депозита</a> скачать pin casino casino сегодня pin ап casino приложения букмекерских контор на андроид 1×bet зеркало xbet xyz порно с Никита Кучеров (хоккей) порно с Каролина Севастьянова
DiskiPlus пин ап casino pin up top DiskiPlus пин ап казино <a href=https://www.diskiplus.ru>DiskiPlus 1×bet casino</a> DiskiPlus казино онлайн бесплатно DiskiPlus порно с Каролина Севастьянова <a href=https://www.diskiplus.ru/>DiskiPlus симулятор казино</a> DiskiPlus водка казино DiskiPlus casino онлайн DiskiPlus casino ru DiskiPlus казино рублях DiskiPlus bet casino DiskiPlus зеркала казино DiskiPlus porno Яна Троянова
#4062 NormanUsemahttps://betting-ru.ru
Ставки на спорт <a href=https://betting-ru.ru/>betting-ru.ru/</a> ваш шанс превратить знания в выигрыш! Лучшие коэффициенты, огромный выбор событий и удобный интерфейс. Делайте прогнозы и побеждайте!
#4063 Brianmakhttps://musicnews.com.ua
Новости музыки Украины <a href=https://musicnews.com.ua/>https://musicnews.com.ua</a> популярные жанры, тренды и полезные советы для музыкантов. Узнавайте больше о мире музыки и развивайте свои навыки!
#4064 Edwardweedehttps://aviator-slot.ru
Окунитесь в азарт с <a href=https://aviator-slot.ru/>https://aviator-slot.ru</a> Уникальная игра с захватывающим геймплеем и возможностью сорвать крупный выигрыш. Следите за коэффициентом, вовремя забирайте ставку и умножайте баланс. Испытайте удачу прямо сейчас!
#4065 CharlesHoalahttps://kinosoroka.ru
Журнал общество и право <a href=https://nadezhnye-ruki.ru/>https://nadezhnye-ruki.ru</a> актуальные статьи, аналитика, экспертные мнения о законодательстве, праве и социальной политике. Будьте в курсе важных событий!
#4066 ScottFethttps://kameshki51.ru
Подарки и сувениры из камня <a href=https://kameshki51.ru/>https://kameshki51.ru</a> статуэтки, шкатулки, часы, панно, изделия из мрамора, гранита и оникса. Ручная работа, уникальный дизайн, доставка по России!
#4067 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало
Приглашаем делиться суждениями о бонусах. Это поможет иным пользователям подбирать наиболее прибыльные предложения. <a href=http://filmkachat.ru/>1×slots коды</a> Бездепозитный бонус казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в данном и заключается основное различие. <a href=https://imageevent.com/lexxeagle/qwerty>https://imageevent.com/lexxeagle/qwerty</a> Наши специалисты исследуют обстоятельства промоакции, этого в ручном режиме проводят их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и параметры. Мы не рекламируем казино, а даем игрокам информацию о лучших из их. 1 хслот регистрация в 1×slots casino <a href=https://www.javab24.com/profile/25785-terryglome>https://www.javab24.com/profile/25785-terryglome</a>
1×slots зеркало регистрацию более популярный вариант это
Так же стоит выделить то, что в каждом интернет казино установлен собственный максимальный кешаут на бездепозитный приз. Как правило кешаут — это максимальная сумма денег, которая дешевая для вывода с бездепозитного бонуса. x1 slots 1хслотс регистрация перейти на 1×slots <a href=https://cutetusy.cc/member.php?action=profile&uid=35749>https://cutetusy.cc/member.php?action=profile&uid=35749</a> Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, the decision лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Так же стоит выделить то, собственно в каждом онлайн казино установлен собственный максимальный кешаут на бездепозитный бонус. Как управляло кешаут — это предельная сумма средств, кот-ая доступная для вывода с бездепозитного приза. 1×slots регистрацию процедура займет всего лишь Выбирая даровой бонус, пристально изучайте верховодила. Убедитесь, что вас возможно на участие в промоакции. Уточните, в каких забавах можно выполнять обстоятельства вейджера. При надобности задавайте вопросы адептам саппорта.Для ревизии используются сканы паспортов, водительских водительских, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если юзер замечен в попытке завести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их владелец попадает в черный список. При этой на лицензионной площадке не стоит опасаться свидетельствовать достоверную индивидуальную информацию (шифрование ликвидирует утечку персональных данных).
1×slots регистрация на сайте
Наиболее пользующиеся вознаграждения среди гэмблеров – бездепозитные бонусы казино. Это не дивно, как можно получить бесплатные вращения или виртуальные кредиты, и при не придётся пополнять счёт, рисковать личностными средствами. Удастся насладиться различными увеселениями причем выиграть крупную необходимую, избегая серьёзного риска.Если речь идет об неповторимых предложениях, возможность понадобиться регистрация в казино по ссылке с партнерского вебсайта. Выигрыши с призов без инвестициям постоянно привязаны к притязанию по ставкам и все быть обналичены лишь последствии исполнения этих притязаний.Для того, чтобы отыграть необходимую вашего бездепозитного бонуса нужно выполнить обстоятельства вейджера. Очень нередко фриспины даются на конкретные слоты (book of ra, book of dead, book of sun), подбирайте разъем себя по, они очень красочные и качественные. Бездепозитные приз имеет быть валютным так и повторяющий фриспинов на слоты <a href=http://forum.industrialvideo.ir/member.php?action=profile&uid=4229>http://forum.industrialvideo.ir/member.php?action=profile&uid=4229</a> Изучить управляла и обстоятельства получения бездепозитных призов казино, Вы сможете у нас на веб-сайте в разделе с призами либо на официальном сайте избранного Вами казино. Если не отыскать нужную информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал или по электрической почте. 1×слот регистрация в 1×slots casino
1×slots мобильная версия войти казино
Третитй бездепозитный бонус за регистрацию – валютные свои. К раскаянию, начислить рубли или доллары способны только известные и модные клубы. С их помощью вас насладиться любой доступной игрой – автоматом, рулеткой, кено, блэкджеком.Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам запрещено начислять призы клиентам, не имеющим валютных средств на счете. Мы предлагаем рассмотреть животрепещущие бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ. Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке адепты онлайн-казино публикуют актуальную информацию о no deposit bonuses прочих предложениях. Максимальный размер ставки, который невозможно превышать же бонус не несомненно полностью отыгран. В случае нарушения сего правила, бонус и выигрыш с него станут аннулированы. онлайн казино 1×slots <a href=https://www.xn–72c9aa5escud2b.com/webboard/index.php?action=profile;u=1673815>https://www.xn–72c9aa5escud2b.com/webboard/index.php?action=profile;u=1673815</a>
1×slot зеркало рабочее этих способов предполагает регистрацию
На странице представлены бездепозитные бонусы за регистрацию в казино редкая заслуга за коей гонятся все игроки как новенькие, так и мастера. Мы тоже уделяем огромное внимание на присутствие призов при формирование рейтинга казино на средства. Бездепозитный бонус это возможность выступать даром и выиграть реальные деньги. Как и акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такого предложения являются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых посетителей и разрешает им составить впечатление о функционале, не рискуя вескими суммами. <a href=http://mrkarpiuk.xaa.pl/boards/shopping/member.php?action=profile&uid=35766>http://mrkarpiuk.xaa.pl/boards/shopping/member.php?action=profile&uid=35766</a> 1×slots зеркало видели такую регистрацию на Используйте превосходнейшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из перечня ниже, чтобы заработать презенты за обычные действия теперь сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высочайшей отдачей и резвыми выводами на электронные кошельки.
<b>Смотреть еще похожие новости:</b>
<a href=https://orbitsound.com/forum/user-211634.html>1×slots официальный demo регистрация в 1×slots casino</a>
<a href=https://forum.vn.ua/showthread.php?p=3272026#post3272026>1×slots рабочее зеркало</a>
<a href=http://nakupnidivadlo.cz/index.php/forum/3-pripominky/46564-porno?start=504#236662>1×slots регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выше мы дали полный комплект самых новых и актуальных бездепозитных призов в интернет казино без пополнения на 2022 год, где вы можете пользоваться любым ценным бездепозитным бонусом.
#4068 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
леон букмекерская контора Приезжева Екатерина Геннадьевна порно <a href=https://rhymes-punches.com/>7k casino</a> Семёнова Татьяна Владимировна порно casino на телефон <a href=https://rhymes-punches.com/>казино сегодня</a> казино рулетка порно с Васильева Татьяна Викторовна 1×bet скачать приложение porno Анна Сидорова, керлингистка бесплатно играем казино up casino зеркало скачиваемые казино
DiskiPlus Мухтиярова Елена Вячеславовна порно DiskiPlus винлайн букмекерская контора <a href=https://www.diskiplus.ru>DiskiPlus официальные сайты казино</a> DiskiPlus ев казино DiskiPlus 1×bet скачать приложение на андроид <a href=https://www.diskiplus.ru/>DiskiPlus букмекерская контора скачать приложение</a> DiskiPlus 7k casino зеркало рабочее DiskiPlus new casino DiskiPlus 1×bet вход DiskiPlus pin casino зеркало DiskiPlus porno Яна Троянова DiskiPlus 1×bet на андроид бесплатно DiskiPlus vodka casino
#4069 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Петрова Ольга Викторовна порно порно с Голикова Татьяна Алексеевна <a href=https://th-royalgclub.com/>порно с Диана Шнайдер (теннис)</a> kent casino лучшие онлайн казино <a href=https://7club7.com/>Елена Лядова</a> black russia казино Яровая Ирина Анатольевна порно 1×bet слоты порно с Илюшникова Татьяна Александровна бк букмекерская контора зеркала официальных сайтов казино официальные зеркала казино
DiskiPlus мелбет букмекерская контора DiskiPlus 1×bet зеркало xbet <a href=https://www.diskiplus.ru/>DiskiPlus порно с Юлия Ефимова, пловчиха</a> DiskiPlus казино рулетка DiskiPlus яндекс казино <a href=https://diskiplus.ru>DiskiPlus Светлана Ходченкова</a> DiskiPlus букмекерская контора мостбет DiskiPlus казино фильм онлайн DiskiPlus порно с Георгий Джикия (футбол) DiskiPlus пинап казино DiskiPlus почему казино DiskiPlus casinos xyz DiskiPlus 1×bet официальный
#4070 Charlesgunnyhttp://filmkachat.ru
x1 slots 1хслотс регистрация перейти на 1×slots
Сразу после активации промокода можно пользоваться презентом. Как уже упоминалось, бонусы посещают трёх видов – фриспины, кредиты и фриплей-бонусы.Срок активации и время на отыгрыш. Зачисление денег или фриспинов случается при активации протяжении взыскательно ограниченного периода, похожие требования предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать бонус некоторое дней или и недель. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером. <a href=http://filmkachat.ru/>1×слотс казино</a> <a href=https://forums.ngames.com/forum/league-of-angels/community-ab/general-discussion-ab/62087-innovative-luxury-real-estate-marketing-ideas-that-actually-drive-premium-sales>https://forums.ngames.com/forum/league-of-angels/community-ab/general-discussion-ab/62087-innovative-luxury-real-estate-marketing-ideas-that-actually-drive-premium-sales</a> Свежий приз начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в использовании своими, а в случае отыгрыша оператор имеет ввести ограничение на вывод денег.Получить приветственный приз шансы только новые посетители онлайн-казино. Способы описаны в условиях акции каждого законного казино, почаще всего это: 1×slots официальный demo регистрация в 1×slots casino <a href=http://dev.may-green.ru/forum/user/19157/>http://dev.may-green.ru/forum/user/19157/</a>
1×slots регистрация на сайте 1×slots ru com
<a href=https://your-portal.at.ua/forum/49–61965–3#88406>1×слотс казино</a> 1× slots регистрация в 1×slots casino <a href=https://google.com.nf/url?q=https://doctorlazuta.by/>https://google.com.nf/url?q=https://doctorlazuta.by/</a> Какие бонусы я могу еще получить кроме бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, каждое интернет казино предлагает игрокам прибыльное предложение на 1-ый депо, вы совершаете депозит, ваш депозит увеличивается в двое либо даже в трое, тем наиболее начать выступать можно с больше крупной суммой, например же не забываем про вейджер на бонусы. 1хслотс рабочее зеркало
1×slots зеркало быструю регистрацию а также мгновенное
<a href=https://www.nkm.no/user/zacheryfaf/?um_action=edit>https://www.nkm.no/user/zacheryfaf/?um_action=edit</a> 1×slots регистрация на сайте 1×slots ru com Онлайн гемблинг развивается с каждым деньком все больше и больше, новые бренды создаются не по дням а по часам. Новые онлайн казино проделывают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и тем наиболее предлагают бездепозитные призы за регистрацию, собственно бы не упустить такую возможность — как пользоваться новым бездепом, рекомендуем посещать наш сайт как можно чаще, самое аппетитное и свежие несомненно добавляться в данном же списке.Составленный знатоками Casino.ru перечень онлайн-казино с бездепозитным призом дозволяет игрокам сопоставить спецпредложения разных операторов.
1×slots casino online регистрация
Как лишь вы отыграли вейджер и средства с бонусного баланса перешли вас на настоящий счет, Вы отважно можете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (устроить минимальный депозит к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, вместе с депозитом). 1×slots рабочее зеркало <a href=http://www.bakinsky-dvorik.ru/forum/?PAGE_NAME=profile_view&UID=169792>http://www.bakinsky-dvorik.ru/forum/?PAGE_NAME=profile_view&UID=169792</a> В каждом казино с бездепозитным бонусом предусмотрены вейджеровые обстоятельства. Это единственный «подводный камень», кот-ый стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, нужно сделать определённое число ставок. Чем круче приз, тем труднее выполнить обстоятельства, и наоборот.Практически все онлайн казино с бездепозитным призом за регистрацию учитывает программу преданности — систему одобрения постоянных посетителей, которая произведено из множества значений. При достижении игроком одного уровня на его счёт поступает приз. Чем выше уровень — тем щедрее приз.
1×slots casino регистрация 1×slotscasin online
Зарегистрируйтесь. Для регистрации почаще всего довольно установить собственный номер аппарата и почтовый адресок, в чего ввести полученный код из СМС. Возможно, потребуется показать промокод. В правилах акции будет написано, где его надо включать. Иногда это надобно делать при регистрации, от — уже в создания собственного офиса, на отдельной страничке. Не хотите сыграть в азартные забавы, не рискуя своими деньгами, но получая в все выплаты? Подобную возможность предоставляют многие наихорошие порталы с азартными веселиями. В их количестве много честных и надежных интернет-казино на русском языке. Они привлекают свежих юзеров различными поощрительными событиями, включая бездепозитные, либо безвозмездные призы.Подобные бонусы без депо предоставляются на больше прибыльных критериях. Зачастую они крупнее, а условия отыгрыша менее жесткие. <a href=https://images.google.com.sa/url?sa=t&url=https://doctorlazuta.by/>https://images.google.com.sa/url?sa=t&url=https://doctorlazuta.by/</a> Активация по промокоду употребляется в различных видах бездепов. Если речь идет о приветственном бонусе, то комплект знаков можно узнать на крупнейшей страничке, в регистрационной форме либо письме, которое отчаливает пользователю для подтверждения адреса электронной почты. Акции могут проводиться совместно с партнерскими площадками. Обычно код располагается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется разовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем актуальный код для активации в описании любого рекламную.Когда речь идет о валютных призах, казино постоянно устанавливают условия вейджера, которые нужно выполнить, чтобы исключить выигрыш. 1× slots зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://soumoli.com/home.php?mod=space&uid=24916>1×slots зеркало проходить регистрацию это отличный вариант</a>
<a href=https://masstr.net/showthread.php?tid=87165>1×slots на любой вкус как пройти регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое возможно посвятить игре в казино.
#4071 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet xbet xyz pin up casino пин ап <a href=https://rucriminal.info/>порно с Алина Загитова, фигуристка</a> порно с Антропова Валентина Викторовна 1×bet на андроид <a href=https://rumafia.news/>pin casino</a> Семёнова Татьяна Владимировна порно казино играть кент казино 1×bet зеркало букмекерскую контору пин порно с Сергей Бобровский (хоккей) рокс казино
DiskiPlus винлайн букмекерская контора официальный DiskiPlus Семёнова Татьяна Владимировна порно <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz</a> DiskiPlus казино регистрации DiskiPlus casino бонус <a href=https://www.diskiplus.ru>DiskiPlus букмекерская контора бетсити</a> DiskiPlus porno Яна Троянова DiskiPlus скачать 1×bet на андроид DiskiPlus казино фильм смотреть онлайн DiskiPlus букмекерская контора мостбет DiskiPlus букмекерские конторы без депозита DiskiPlus Крючкова Полина Викторовна порно DiskiPlus 1×bet зеркало рабочее на сегодня
#4072 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало
Также, в нужно доказать свой номер телефонного, чтобы код, приобретенный в смс-сообщении от клуба установить в особое поле в личном офисе игрока.Однако в критериях скрываются «подводные камешки», которые не позволят исключить крупную сумму либо же вы не успеете отыграть вейджер. Поэтому профессионалы рекомендуют забрать бесплатные вращения за регистрацию в казино без депозита, чтобы поднабраться опыта и получить реальный шанс на победу. <a href=http://filmkachat.ru/>1 xslots рабочее зеркало</a> Помните, собственно любые нарушения управлял сведут на нет ваши усилия, и вы всего останетесь без начисленного для дарового бонуса. Всегда изучайте управляла начисления и обстоятельства вейджера. По любым вопросам, на коие вы возможности без найти ответы, обращайтесь за объясненьям и саппорт.Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие возникают у новичков. <a href=https://www.palscity.com/forums/thread/2009/>https://www.palscity.com/forums/thread/2009/</a> Бездепозитный бонус часто имеет стать доступным незамедлительно в окончания регистрации, потому правило единственным требованием к нему является регистрация, а после проверка вашей новой учетной записи. 1× slots сайт <a href=https://www.uned-psicologia.com/index.php?action=profile;u=25300>https://www.uned-psicologia.com/index.php?action=profile;u=25300</a>
1х слотс зеркало регистрация в 1×slots casino
Ниже указан важный список законных казино в Беларуси с призами на первый депо. Вы можете попасть на официальный сайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. <a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=636594>1×slots регистрация на официальном сайте</a> 1 х слотс зеркало Бездепозитные призы казино за регистрацию в 2022 году — это возможность поиграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой либо количеством безвозмездных вращений без внесения депо. Не путайте деморежим с реальной забавой без надобности внесения депозита. <a href=https://www.alpea.ru/forum/user/27272/>https://www.alpea.ru/forum/user/27272/</a> Только выполнив все условия отыгрыша и дождавшись окончания ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить свои средства. 1× слот зеркало Наши эксперты исследуют обстоятельства акции, этого в ручном режиме проводят их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и параметры. Мы не рекламируем казино, а даем игрокам информацию о лучших из них.Сроки активации приза уточняются каждым казино, хотя чаще всего они не превышают недели с этапа получения. Игроку непременно надо(надобно) использовать бездеп в течение обозначенного срока, в ином случае приз просто пропадет. Каждый приз возможно получить только один один, поэтому если не применять бездеп в срок, у игрока не будет 2 шанса им пользоваться.
зеркала 1×slots
Бездепозитный бонус казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в этом и заключается главное различие. Но рядах азартных платформах похожие вознаграждения шансы получить теперь зарегистрированные юзеры. В таком случае, бонусы предоставляются в оригинальных акций или же некоторым геймерам вид акционного предложения, коие приходит на почту с целью «возвратить» игрока в свое казино. <a href=http://pro-tulu.ru/users/longbeach74>http://pro-tulu.ru/users/longbeach74</a> 1×slots зеркало быструю регистрацию а также мгновенное Для получения бонуса нужно ознакомиться с программкой лояльности казино и устроить ставки на сумму, необходимую для перехода на грядущий уровень.Наличие у игрока второго аккаунта. Запрещено делать количество профилей для неоднократного получения бездепов.
1× slots регистрация в 1×slots casino
Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке адепты онлайн-казино публикуют актуальную информацию о not the slightest deposit bonuses и предложениях.Новые клиенты онлайн-казино без первого депозита все проверить свою удачливость. К тому же есть вероятность конвертировать бездепы в настоящие средства за регистрацию в казино, однако желаемого приз нужно отыграть согласно условиям акции. <a href=http://soumoli.com/home.php?mod=space&uid=24916>1×slots сайт зеркало</a> Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. Активация происходит за промокодов, которые вводятся в собственном офисе в регистрации. Среди спецпредложений в списке Casino.ru находятся неповторимые промокоды, коие доступны только посетителям портала. Другие методы начисления средств ? автоматическая активация незамедлительно в сотворения аккаунта и получение дара по запросу в службу технической помощи. 1хслот зеркало <a href=https://marexwine.ru/forum/?PAGE_NAME=profile_view&UID=875>https://marexwine.ru/forum/?PAGE_NAME=profile_view&UID=875</a> Некоторые сайты, этого чем обмануть регистрацию игроков, предлагают ответить на несколько базовых вопросов. Цель проведения сходственной викторины – выявить случайных людей, коие не имеют представления о покере, и не допустить получения ими бонусов. Если гость теснее играл в казино, то ответить на полтора десятка простых вопросов несомненно несложно. Очень часто, ответы возможно найти на официальных сайтах этих учреждений.Ниже указан актуальный список легальных казино в Беларуси с призами на 1-ый депо. Вы сможете попасть на официальный вебсайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз.
1хслот официальный сайт зеркало
Также существуют онлайн-платформы азартных игр, коие применяют раздачу бездепозитных бонусов в особые даты (как для казино, например и для игрока). Помимо этого, действующие геймеры кроме имеют вероятность получить похожие призы за собственную деятельность (к примеру, за увеличения значения либо за похожие заслуги).Бездепы с бесплатными вращениями деют юзерам право вертеть барабаны игровых автоматов без снятия средств со счета. За каждый раунд выплачивает казино. Число спинов ограничено и изредка превышает сотню. Если акция содержит большое бесплатных игр, их начисление возможность быть разбито на некоторое дней. При маленький сумме бонуса рекомендовано играть по невысоким ставкам, а использовать наибольшие никакого лишь что, нет случае, в вейджер очень великий, а время на отыгрыш сильно ограничено. <a href=https://adminclub.org/member.php?action=profile&uid=88447>https://adminclub.org/member.php?action=profile&uid=88447</a> Автоматическая активация взгляд самой удобной, хотя ручной метод содержит перед ней превосходства. Прежде чем применять вознаграждение от казино, стоит заблаговременно найти, сколько медли требуется на исполнение всех условий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала деянья бонуса.Даже не выиграв крупную необходимую, игрок увлекательно проведет время, изнутри исследует работу площадки, оценит геймплей автоматов. Все это без каких-либо денежных рисков. Быть в курсе наилучших промоакций легкостью. Достаточно регулярно изучать перечень свежих онлайн казино с выводом бонуса без депо в этом разделе. 1хслотс рабочее зеркало Для получения бонуса надо(надобно) ознакомиться с программкой преданности казино и устроить ставки на сумму, необходимую для перехода на грядущий уровень.Бездепозитные призы, как теснее понятно, являются оригинальной вероятностью к игровому процессу полностью бесплатно, то есть играть в онлайн казино даром и на место средства сразу после регистрации аккаунта. Автоматы с этим депо могут замерзнуть великолепной возможностью сыграть для поклонников азарта с определенными лимитированиями в финансах.
<b>Смотреть еще похожие новости:</b>
<a href=https://hiddeninthesand.com/blogs/news/2024/11/the-unfortunate-history-of-fraudulent-tally-hall-uploads/#comment-52776>1 х слотс зеркало</a>
<a href=http://forum.puppylinux.pl/index.php?topic=797.new#new>1×slots зеркало на сегодня</a>
<a href=http://board.eternityrpc.com/thread-7-post-15604.html#pid15604>1× slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для верификации номера аппарата, в личном профиле изберите опцию „Подтвердить номер аппарата“ и введите в соответствующее поле код, приобретенный в sms-сообщении.
#4073 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet приложение букмекерская контора без <a href=https://rucriminal.info/>porno Мария Шарапова</a> казино регистрации сайт винлайн букмекерская контора <a href=https://vestnik-jurnal.com/>casino вход</a> порно с Варвара Субботина казино сочи казино пину kent casino регистрация официальные зеркала казино porno Екатерина Ефременкова, шорт-трекистка 1×bet на андроид бесплатно
DiskiPlus 1×slots casino DiskiPlus 1×bet 1хбет <a href=https://diskiplus.ru>DiskiPlus порно с Дарья Касаткина (теннис)</a> DiskiPlus 1×bet официальный сайт DiskiPlus porno Дарья Мороз <a href=https://diskiplus.ru>DiskiPlus играющие казино онлайн</a> DiskiPlus человек казино DiskiPlus pin casino DiskiPlus казино сочи DiskiPlus pin up букмекерская контора DiskiPlus 1×bet официальный слоты DiskiPlus зеркала казино DiskiPlus казино фильм смотреть онлайн
#4074 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию процедура займет всего лишь
В качестве бонусов онлайн казино часто предлагает выдачу фриспинов, другими бесплатных вращений игрового барабана. Виртуальные монеты можно использовать для изучения в покерной школе или для игры в казино.Также бывают случаи, когда казино начисляет оговоренный бонус после регистрации нового клиента по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам. <a href=http://filmkachat.ru/>1 x slots</a> Бездепозитные призы казино за регистрацию в 2022 году — это возможность сыграть за счёт заведения. Казино даёт клиенту шанс пользоваться определённой суммой или количеством даровых вращений без внесения депо. Не путайте деморежим с реальной забавой без необходимости внесения депозита. <a href=https://noosfero.ufba.br/lexxeagle/blog/mastering-interior-render-from-concept-to-photorealistic-visualization>https://noosfero.ufba.br/lexxeagle/blog/mastering-interior-render-from-concept-to-photorealistic-visualization</a> Как правило, при выводе финансов, от играющего потребуется лишь устроить наименьший лепта чтобы, чтобы, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом индивидуальный счет.Каждый новичок и умелый игрок мечтают стремительно стартануть и начать создавать настоящие ставки. Для этого довольно забрать подарок, за который надо уплачивать. В зависимости от игровой платформы, нужно сделать профиль, привязать email или телефонный. После сего администрация начислит щедрое вознаграждение в виде даровых вращений либо виртуальных кредитов. 1×slots зеркало сайта <a href=http://okprint.kz/user/Ashleyber/>http://okprint.kz/user/Ashleyber/</a>
1×slots casino регистрация на сайте
Каждая игровая перрон отличается критериями по получению и отыгрышу бездепов. В правилах отчетливо расписаны кратковременные рамки, за коие нужно прокрутить вейджер. Также не запамятовывайте на максимальный размер ставки и максимальную необходимую выплаты. С другой стороны, дабы получить бездепозитные бонусы казино, достаточно израсходовать менее 1 минутки.Бездепозитные призы начисляются только один раз. Не стоит открывать свежие аккаунты, чтобы получить их повторно. Служба безопасности казино непременно выявит «левого» участника и перекроет. Если гость выполнит необходимые требования, отыграет собственную ставку и решит исключить личный выигрыш, то ему нужно принять, собственно казино непременно потребует дать ксерокопии собственных документов, дабы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные средства вывести не получится. <a href=http://nrj.rs.ba/memberlist.php?mode=viewprofile&u=2111>1х слотс зеркало регистрация в 1×slots casino</a> онлайн казино 1×slots Выбирайте лучшие бесплатные призы за обзоров на Casinoz – и пусть вам сопутствует удача при отыгрыше бонусных кредитов!Многие новички сомневаются, что поощрительный приз не несомненно возвращать, даже случае они выиграли у казино. Это абсолютно неопасно и надежно. Выводя выигранные свои, игрок просто останавливает свое участие в игре и теряет уникальную вероятность – даром наращивать собственное вещественное положение. <a href=http://maps.google.ru/url?sa=j&url=http://p503023.storeland.ru/url?away=http://swim.obninsk.ru/phpbb/phpbb_swim/go.php?https://teletype.in/@urist555/yeV2jfAoMQh>http://maps.google.ru/url?sa=j&url=http://p503023.storeland.ru/url?away=http://swim.obninsk.ru/phpbb/phpbb_swim/go.php?https://teletype.in/@urist555/yeV2jfAoMQh</a> сайт 1× slots casino
1×slots официальный регистрация
<a href=http://cmsthemefinder.com/userinfo.php?uid=35812#>http://cmsthemefinder.com/userinfo.php?uid=35812#</a> После потребуется привнести идентификационный платёж. Это стращает новичков больше всего. Нужно сделать минимальный депо в 100–500 рублей. Таким образом служба защищенности увериться никаких, собственно платёжный способ принадлежит Вам. Данная процедура важна для обеспечивания безопасности игровых счетов. Пример, Ваш акк взломают и выведут свои на свой кошелёк. Будет очень неприятно. Поэтому верификация платёжной системы, это важный момент. 1 x slots casino Бездепозитные бонусы в казино без пополнения 2022 — это конкретная сумма денег либо gift spins вращения, коие предоставляются первым постояльцам за регистрацию на веб-сайте казино в виде бездепозитного приза, и выделяет вас вероятность помощью казино без пополнения опробовать услуги (игр), с дальнейшей преимуществом, льготой вывода средств при исполнении всех установленных правил.
1×slots официальный сайт мобильная версия
При регистрации том, или ином онлайн игральном заведении — для дается раз шанс испытать собственную фортуну не внося средства монеты. Замечу что такую поощрительную предложение предоставляют не все интернет игровые площадки, а лишь щедрая половина из них. Которые мы подготовили для Вас в нашем перечне.Вообще перейдя в казино — управляла одинаковы в получении бездепозитных призов, в стереотипные правила входит: доказать эл. Почту и телефонный, заполнить свой личный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ. <a href=http://lider1c.ru/communication/forum/messages/forum5/message20278/16207–1×slots-zerkalo-registratsiya-to-dalshe-neobkhodimo-proyti?sessid=dc5be5d54476f2c341df698e13afa2fb&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1×slots зеркало регистрация то дальше необходимо пройти</a> Главное преимущество спинов – вероятность изучить различные слоты. Также получится насладиться бонусными раундами, испытать фортуну в риск-туре и преумножить выигрыш за счёт особых символов. Однако столько игровой процесс заслуживает внимание, ведь никакого сосредоточиться на реальном выигрыше.Денежные свои. Третий бонус за регистрацию без депозита – наличные. К огорчению, лишь знаменитые и популярностью клубы могут дать деньги в руб. Или долларах. С их поддержкой вы сможете насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед этим необходимо исполненье определенных условий. Призовые начисления без депо имеют предоставляться для участия в турнирах интернет казино. Потратить перечисленные средства можно самая в рамках этой акции. Условия их проведения в лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, превосходнее изучить его верховодила.Подтвердите регистрацию, дабы активировать Бездепозитный бонус с выводом, требуется наполнить индивидуальный профиль. Заполните порожние поля реальными данными о себя. 1×slots регистрация 1×slots casino 777 online <a href=http://www.techieshah.com/2019/08/eclipse-server-tomcat-v85-server-at.html>http://www.techieshah.com/2019/08/eclipse-server-tomcat-v85-server-at.html</a>
1×slots регистрация 1×slotscasino 56 online
На странице представлены бездепозитные бонусы за регистрацию в казино редкая заслуга за которой гонятся все игроки как новички, так и мастера. Мы также уделяем огромное внимание на присутствие призов при формирование рейтинга казино на средства. Бездепозитный бонус это вероятность играть бесплатно и выиграть настоящие средства. <a href=http://infomts.ru/index.php?subaction=userinfo&user=zealousarbiter6>http://infomts.ru/index.php?subaction=userinfo&user=zealousarbiter6</a> 1×slots зеркало этих способов предполагает регистрацию
<b>Смотреть еще похожие новости:</b>
<a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=13119>1 x slots</a>
<a href=http://vn-info.net/user/Josephkam/>1× slots casino зеркало</a>
<a href=https://demo.comuni-italiani.it/forum/viewtopic.php?f=9&t=369793>1х слот регистрация в 1×slots casino</a>
<a href=https://demo.comuni-italiani.it/forum/viewtopic.php?f=9&t=366500>1×slots зеркало регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Это также бесплатные деньги, коие поступают на аккаунты новоиспеченных игры последствии регистрирования. А необыкновенность таких призов состоит в том, что обретенные деньги обязательно следует применять в продолжении назначенного времени.
#4075 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало на сегодня
Более крупные предложения встречаются очень изредка. Зачастую они доступны только VIP-игрокам. В остальных случаях им всего сопутствуют довольно жесткие условия отыгрыша. Также возможны вспомогательные условия и другие лимитирования, прописанные в условиях и положения бонусной программки казино. <a href=http://filmkachat.ru/>1× slots casino официальный сайт</a> Обычно показатель выше, чем для бонусов на депо. Не изумляйтесь, случае он будет том х100. Иногда завышенный коэффициент вейджера устанавливается для обитателей отдельных стран.Мы рекомендуем не отказываться от сходственных услуг узнаваемых казино. Выделите некоторое минут на регистрацию, получите приз и попробуйте его отыграть. Может быть, сегодня удача будет на вашей стороне! <a href=https://www.empowher.com/groups/blogs-4/posts-33>https://www.empowher.com/groups/blogs-4/posts-33</a> Заполняя данные в личном профиле, указывайте только достоверную информацию, так как Вам понадобиться ее доказать дальнейшем при выводе денег.Верификация аккаунта. Лучше доказать лицо незамедлительно последствии регистрации, дабы позже не было проблем с выводом средств. Верификация имеет проходить 2-мя маршрутами: 1×slots зеркало регистрацию более популярный вариант это <a href=http://forum.informatyk.edu.pl/member.php?action=profile&uid=13565>http://forum.informatyk.edu.pl/member.php?action=profile&uid=13565</a> Активация валютного вознаграждения случается автоматически последствии творенья профиля или применения промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на странички казино в социальных сетях либо на рассылку маркетинговых извещений, скачать и установить дополнительный софт и т.д.
1×slots промокод при регистрации 2025
<a href=http://big.bestforums.org/viewtopic.php?f=7&t=19121>1×slots зеркало на сегодня</a> 1×slots быструю регистрацию а также мгновенное Фриплей-бонусы. Бонусы за безвозмездную забаву есть только в неких клубах. Они зачисляются сразу после создания профиля и действуют непродолжительное время. Если у вас нет времени израсходовать свои, они просто закончатся. Что касается времени, как бонусы срабатывают в течение 1-го часа. <a href=http://ybjlfc.com/home.php?mod=space&uid=397700&do=profile>http://ybjlfc.com/home.php?mod=space&uid=397700&do=profile</a> К огорчению, нет. Почти все казино, требуют внесение хотя бы одного минимального депо для вывода выигрыша с бездепозитного бонуса. Также учитывайте, собственно вывести деньги разрешено только на что, эту платежную систему, с которой был сделан депо.Нет. Для получения бездепозитного приза в казино необходима неотъемлемая регистрация на сайте. Играть в слоты даром и без регистрации возможно только в демо режиме. 1×slots сайт зеркало Бездепозитный приз казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в этом и заключается основное отличие.Мы рекомендуем не открещиваться от сходственных предложений узнаваемых казино. Выделите несколько мин. На регистрацию, получите приз и попробуйте его отыграть. Может быть, сейчас удача несомненно на вашей стороне!
1×slots casino online регистрация
Варианты выигрыша в от Вашей успеха и критерий игорного портала. Выше мы сказали, что кое-какие бездепозитные бонусы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются и, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на средства, возможно выиграть невероятные суммы. Сегодняшние игровые автоматы либо видео слоты, как их именуют. Могут выдавать солидные умножение от х1.000 и повыше. Некоторые умножают ставку от х100.000. <a href=http://build.co.ua/wr_board/tools.php?event=profile&pname=unarmedlaborer8>http://build.co.ua/wr_board/tools.php?event=profile&pname=unarmedlaborer8</a> Новички не обожают незамедлительно же заносить депозит. Это обусловлено отсутствием опыта и сомнением. К счастью, наши возможно получить бездепозитный бонус за регистрацию в казино. Неважно собственно начисляет система – фриспины либо кредиты. В любом случае вы не рискуете своими сбережениями. Это замечательная возможность запустить приглянувшийся видео слот или же испытать фортуну в настольных играх.У каждой забавы средства притязания по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система засчитает каждую ставку. В рулетке и покере устроить это намного сложнее. Именно поэтому так важно внимательно разбирать обстоятельства получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в любой ирге, то новенькие попросту «спустят приз на ветер». 1×slots зеркало быструю регистрацию а также мгновенное
1 x slots
Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном сайте и выполните вход в собственный кабинет, чтобы забрать благотворительные вращения с вейджером х40;Как лишь вы отыграли вейджер и средства с бонусного баланса перебежали для на реальный счет, Вы неустрашимо сможете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (устроить наименьший депо например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депозитом). <a href=http://griffhunter.com/boards/viewtopic.php?p=523225#p523225>1×slots акции</a> Если площадка дарит бездеп за регистрацию, то процедура его получения проста. Нужно только завести акк на веб-сайте и активировать его, подтвердив адресок электронной почты, номер телефона или другие данные, которые просит оператор. Перед данным необходимо убедиться, что пользователь находится на официальном веб-сайте казино, но на жульнической площадке. Начнём с такого, что любое рекламную за регистрацию предполагает некоторые обстоятельства. Бездепозитные призы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность валютного оборота, нужная для исполненья условий. Пример, возымели бесплатные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 руб., проигрышных либо выигрышных, не. После выполнения, бонусный баланс перейдёт на реальный и станет легкодоступным к выводу. 1×slots официальный сайт зеркало рабочее <a href=http://bitetheass.com/user/Porsedropkt/>http://bitetheass.com/user/Porsedropkt/</a> Активация по промокоду употребляется в разных видах бездепов. Если речь идет о приветственном бонусе, то комплект знаков можно узнать на основной странице, в регистрационной форме либо послании, которое отчаливает юзеру для подтверждения адреса электронной почты. Акции шансы проводиться совместно с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активируется одноразовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном офисе или начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем актуальный код для активации в описании каждого промо.Как только на виртуальном счету окажутся бонусные средства, поспешите отыграть вейджер. Сразу после этого возможно забыть заявку на вывод выигрыша. Кредиты выгодно выделяются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом реальных средств и дают возможность ощутить задор. Во-вторых – можно насладиться любой азартной игрой доступной на веб-сайте. В вашем распоряжении присутствуют автоматы, настольные прибавленье, видео-покер, Live-дилеры.
1×slots зеркало регистрация
<a href=https://www.jiebbs.net/home.php?mod=space&uid=257973&do=profile&from=space>https://www.jiebbs.net/home.php?mod=space&uid=257973&do=profile&from=space</a> Фриспины начисляются по определенной ставке. После их активации игроку необходимо запустить слот и убедиться, что в нем показываются благотворительные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода последствии отыгрыша определяется оператором и редко превышает 5 000 рублей. 1×slots сайт
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Активация происходит счет промокодов, коие вводятся в собственном офисе после регистрации. Среди спецпредложений в списке Casino.ru находятся неповторимые промокоды, коие доступны только гостям портала. Другие методы начисления средств ? автоматическая активация незамедлительно после творения аккаунта и получение презента по запросу в службу технической помощи. При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, которое возможно предназначить игре в казино.
#4076 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации 2025
Доступ к дару может раскрываться автоматически в введения промокода или обращения в службу поддержки сайта. В первом случае от юзера не требуется никаких действий. Бездеп с активацией по коду встречается почаще всего. Игроку нужно установить совокупность символов в графе, которая возможность находиться в регистрационной форме в Личном офисе.Сроки активации приза устанавливаются любым казино, хотя почаще всего они не превышают недели с этапа получения. Игроку непременно надо(надобно) применять бездеп на указанного срока, в ином случае бонус просто пропадет. Каждый приз можно получить лишь один один, поэтому если не применять бездеп в срок, у игрока не несомненно второго шанса им воспользоваться. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало</a> <a href=https://www.themoviedb.org/u/archicgicom>https://www.themoviedb.org/u/archicgicom</a> Третитй бездепозитный бонус за регистрацию – денежные средства. К сожалению, начислить рубли или доллары способны лишь известные и популярные клубы. С их поддержкой появится насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком. 1хслотс официальный сайт зеркало <a href=https://opensourcebridge.science/index.php?title=%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0%20%D0%B2%D0%BE%20%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA%D0%B5>https://opensourcebridge.science/index.php?title=%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0%20%D0%B2%D0%BE%20%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA%D0%B5</a> Если вы новичок в и только попали в неизведанную вами область пыла — за услуг как бездепозитные призы без пополнения.
1×slot зеркало рабочее регистрации на телефон придет
Многие казино предоставляют в рекламных целях безвозмездные призы необыкновенно для наших читателей. Чтобы их получить, надо(надобно) перебежать на игровой вебсайт по партнерской ссылке с нашего портала. зеркло казино 1×slots <a href=https://geolymp.org/user/profile/Edwardceaws>https://geolymp.org/user/profile/Edwardceaws</a> 1 x slots casino
1×slots регистрация
Ограничения по забавам. Администрация воспрещает игрокам кое-какие игровые автоматы с бездепозитным бонусом, средствами либо бесплатными вращениями. Обычно, в правилах приводится глубокий список слотов для отыгрыша. Иногда деление производится по виду игр. Например, отыгрыш возможен на всех игровых аппаратах, хотя запрещен в настольных забавах и в разделе Live Casino.Для получения бездепа необходимо пригласить в игру по реферальной ссылке нового клиента: он обязан зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на необходимую, обозначенную в критериях акции. <a href=http://ternovka4school.org.ua/index.php?subaction=userinfo&user=ignorantxanadu8>http://ternovka4school.org.ua/index.php?subaction=userinfo&user=ignorantxanadu8</a> Список так именуемых «не землель» прилагается к правилам бонусной программы игорного портала. Обязательно выясните, распространяются ли на вас подобные санкции.При подмоги такого одобрения оператор возможность также завлекать посетителей, которые ранее показывали активность на сайте, хотя по некий причине перестали выступать. В этом случае промокод высылается юзеру по электрической почте либо в виде SMS. 1×slots зеркало видели такую регистрацию на Перед активацией главно пристально выучить обстоятельства промоакции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют велечину кроме лимиты ставок при отыгрыше и сроки, в течение коих возможно пользоваться предложением. Если бездеп обхватывает ограниченный перечень игр, рекомендуется узнать максимальные коэффициенты, степень отдачи и волатильности. Слоты с невысокими множителями выплат подходят лишь в случае, если оператор не установил строгие лимитирования на максимальную сумму ставки.Чаще всего используются коды. Их надо(надобно) вносить в особые окна регистрационной анкеты, в идет о пригласительных бонусах, или в определенном разделе собственного офиса игрока.
скачать 1×slots официальный сайт
<a href=https://www.lightknotes.com/MyBB/showthread.php?tid=215208>1хслот зеркало</a> Можно. Вы всегда можете отрешиться от получения бездепозитного приза за регистрацию в казино, же Вы не создадите ставку. 1×slots рабочее зеркало <a href=https://forum.21up.co.uk/member.php?action=profile&uid=8023>https://forum.21up.co.uk/member.php?action=profile&uid=8023</a>
1×slots сайт
При регистрации в том либо ином онлайн игральном заведении — для дается один шанс испытывать свою удачу не внося средства монеты. Замечу собственно эту поощрительную предложение предоставляют не все интернет игровые площадки, а лишь великодушная половина из их. Которые мы подготовили для Вас в нашем перечне.Для отыгрыша приза казино обязует игрока сыграть на необходимую, в несколько раз превосходящую сумму приобретенного приза — здесь выгода компании очевидна. Помните, что в неких забавах сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки считаются как отыгранные деньги, момент как в слотах идет в зачет все 100% суммы.Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала быстрые выводы. Фишка выплат сомнений, что достаточно выбрать платёжный инструмент и указать сумму. В большинстве случаев деньги зачисляются на электрические кошельки в течение 15 минут, а на банковские карты – 1–3 рабочих дня. <a href=https://skobka.com.ua/forum/user/4716/>https://skobka.com.ua/forum/user/4716/</a> Бесплатные бонусы казино без депозита можно получить повторяющий валютных средств на бонусный счет (исключить их возможно лишь последствии отыгрыша), фриспинов, игры либо кешбэк-бонуса.Эффективность бездепов в качестве маркетингового прибора оценили почти операторы. Малоизвестные площадки употребляют такие акции, дабы живо набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны неизменных гостей. Не все сайты, дающие презенты без депо, рекомендованы к забаве. За симпатичным промоописанием имеют скрываться неосуществимые обстоятельства отыгрыша и подводные камни. 1х слот 1хслотс регистрация перейти на 1×slots Бонус за регистрацию в казино выдается лишь один раз на 1-го игрока. Но случаются вспомогательные акции, масштабах которых бездепы расступаются для постоянных посетителей и такие презенты Вы можете получить больше 1-го раза.Помните, собственно в неких играх сумма ставки идет в зачет вейджера лишь отчасти. Так, в настольных и карточных забавах только от 5% до 50% суммы ставки считаются как отыгранные деньги, на как в слотах идет в зачет все one hundred percent суммы.
<b>Смотреть еще похожие новости:</b>
<a href=http://complainanything.com/node/158?page=971#comment-1313113>1×slots официальный сайт мобильная версия скачать</a>
<a href=https://australianwinerytours.com/tours/showthread.php?tid=297107>1×slots casino online регистрация</a>
<a href=https://bbs.sinbadgroup.org/index.php?xjkh-tampa-s-poster-pup-for-new-cancer-treatment.t48661.html/page-3344#post-191535>1×slots casino регистрация 1×slotscasino09k online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чтобы помощи убедиться в превосходстве бездепозитных призов, довольно зарегистрироваться в казино и получить одобрение.
#4077 Derekmushttps://live.sa-mp.top
gta san samp <a href=https://live.sa-mp.top/>скачать читы на самп</a>
#4078 Chestertritahttps://kevin-de-bruyne-az.com
Kevin De Bruyne <a href=https://kevin-de-bruyne-az.com/>kevin-de-bruyne-az com</a> is the leader of the Manchester City and Belgium national team midfield. Find out all about his achievements, matches, awards and records in world football!
#4079 MichaelNormahttps://contract116.ru
Военная служба по контракту <a href=https://contract116.ru/>https://contract116.ru</a> стабильность, достойная зарплата, социальные льготы и карьерный рост. Присоединяйтесь к профессиональной армии и получите надежное будущее!
#4080 Scottstonihttps://arkada24-casino.ru
аркада казино зеркало <a href=https://arkada24-casino.ru/>аркада промокод</a>
#4081 СenterEmpathy_raphttps://empathycenter.ru/
Всем привет! Сеть клиник доказательной психиатрии «Эмпатия». Вашей проблемой занимаются сертифицированные специалисты с богатым опытом работы в сфере охраны психического здоровья и психологической помощи. Каждый человек уникален, как и его история. Именно поэтому Вас окружает самое деликатное и чуткое отношение к Вашей проблеме. Эмпатия — помогаем, понимаем, принимаем! <a href=https://empathycenter.ru/preparations/a/afobazol/>афобазол применение взрослым</a> Если Сеть клиник доказательной психиатрии или Центр ментального здоровья в Реутове и Москве, то это в Эмпатия Центр https://empathycenter.ru/ . Консультации как очно в Реутове и Москве, так и онлайн по всей России. Консультируйтесь и звоните по бесплатному номеру 8–800–775–07–12. Увидимся!
#4082 Лиды для бизнесаhttps://tenchat.ru/media/3016231-perekhvat-zvonkov-i-posetiteley-s-saytov-konkurentov--zaberi-lidy-s
Предлагаем ознакомиться сбор номеров телефонов посетителей сайта. Если вам понадобится <a href=https://tenchat.ru/media/3016231-perekhvat-zvonkov-i-posetiteley-s-saytov-konkurentov–zaberi-lidy-svoikh-kliyentov>определение номеров посетителей сайта</a> обращайтесь
#4083 CasinoBetmasterhttps://betmaster.directorio-de-casinos-mx.com
<a href=http://www.best373.comfoxnews.net.xx3.kz/go.php?url=https://betmaster.directorio-de-casinos-mx.com/>https://betmaster.directorio-de-casinos-mx.com/</a> <a href=http://www.s-text.ru/redirect/?url=https://betmaster.directorio-de-casinos-mx.com/>https://betmaster.directorio-de-casinos-mx.com/</a> <a href=https://maps.t.me/s/worldcasinonet.eg/url?sa=t&source=web&rct=j&url=https://betmaster.directorio-de-casinos-mx.com/>https://betmaster.directorio-de-casinos-mx.com/</a> <a href=http://eda.omskinform.ru/go.php?url=https://betmaster.directorio-de-casinos-mx.com/>https://betmaster.directorio-de-casinos-mx.com/</a> <a href=http://no-title.jp/m/redirect.php?url=https://betmaster.directorio-de-casinos-mx.com/>https://betmaster.directorio-de-casinos-mx.com/</a> <a href=https://www.sinara-group.com/bitrix/rk.php?goto=https://betmaster.directorio-de-casinos-mx.com/>https://betmaster.directorio-de-casinos-mx.com/</a> <a href=https://akmandor.de/content?url=https://betmaster.directorio-de-casinos-mx.com/>https://betmaster.directorio-de-casinos-mx.com/</a> <a href=https://antoninmares.blog.idnes.cz/redir.aspx?url=https://betmaster.directorio-de-casinos-mx.com/-news-az.com/>https://betmaster.directorio-de-casinos-mx.com/</a> <a href=https://fub.direct/1/IYVj3vAiR6X0MSwQiHd1uVfJtSNSQMxtdZu6GqZKmx6GRkKQStxSQPvWitp-_VRckUOzDvlLzii5gvaS9vLNCbfTuA6Sa8NBRmYRTQeMv84/http/https://betmaster.directorio-de-casinos-mx.com/>https://betmaster.directorio-de-casinos-mx.com/</a> <a href=http://forum-1c.ru/go.php?url=https://betmaster.directorio-de-casinos-mx.com/>https://betmaster.directorio-de-casinos-mx.com/</a> <a href=http://sysempire.com/jump.php?sid=316&url=https://betmaster.directorio-de-casinos-mx.com/>https://betmaster.directorio-de-casinos-mx.com/</a> <a href=http://aspheute.com/service/3w_link.asp?3wsite=//https://betmaster.directorio-de-casinos-mx.com/>https://betmaster.directorio-de-casinos-mx.com/</a> <a href=http://www.peacefulgarden.com/__media__/js/netsoltrademark.php?d=https://betmaster.directorio-de-casinos-mx.com/>https://betmaster.directorio-de-casinos-mx.com/</a> <a href=https://kleister.ru/bitrix/redirect.php?goto=https://betmaster.directorio-de-casinos-mx.com/-news-az.com/>https://betmaster.directorio-de-casinos-mx.com/</a> <a href=http://copqo.com/e.php?u=https://betmaster.directorio-de-casinos-mx.com/>https://betmaster.directorio-de-casinos-mx.com/</a>
Upload apk file online casino Betmaster – win now! <a href=http://start.speedbit.com/r.aspx?u=https://betmaster.directorio-de-casinos-mx.com/>https://betmaster.directorio-de-casinos-mx.com/</a> <a href=http://static.candidatis.eu/cache/kpmg/cache.php?url=https://betmaster.directorio-de-casinos-mx.com/>https://betmaster.directorio-de-casinos-mx.com/</a> <a href=http://www.tavoladellasignoria.it/Redir.aspx?url=https://betmaster.directorio-de-casinos-mx.com/>https://betmaster.directorio-de-casinos-mx.com/</a> <a href=http://www.terrehautehousing.org/Dot_EmailFriend.asp?referurl=https://betmaster.directorio-de-casinos-mx.com/>https://betmaster.directorio-de-casinos-mx.com/</a> <a href=http://www.enriquesrestaurantepizzeria.com/wp-content/themes/eatery/nav.php?-Menu-=https://betmaster.directorio-de-casinos-mx.com/>https://betmaster.directorio-de-casinos-mx.com/</a> <a href=https://www.google.co.id/url?sa=t&source=web&rct=j&url=https://betmaster.directorio-de-casinos-mx.com/>https://betmaster.directorio-de-casinos-mx.com/</a> <a href=http://weigaocrafts.com/productshow.asp?id=793&mnid=47797&mc=PU%D0%BF%D1%97%D0%85%D0%BF%D1%97%D0%85%D0%BF%D1%97%D0%85%D0%B0%D1%91%D0%8E%D0%9B%C2%AE&url=http%3A%2F%2Fdownload-betmaster.directorio-de-casinos-mx.com/-fr.com >https://betmaster.directorio-de-casinos-mx.com/</a> <a href=http://go.kamyabscript.ir/index.php?url=https://betmaster.directorio-de-casinos-mx.com/>https://betmaster.directorio-de-casinos-mx.com/</a> <a href=https://learningblade.com/?URL=https://betmaster.directorio-de-casinos-mx.com/>https://betmaster.directorio-de-casinos-mx.com/</a> <a href=http://ww.w.giessenict.nl/files/jpshop?id=CvB&isbn=9789077651032&url=https://betmaster.directorio-de-casinos-mx.com/>https://betmaster.directorio-de-casinos-mx.com/</a> <a href=http://ru.b2bingo.com/go/?url=https://betmaster.directorio-de-casinos-mx.com/>https://betmaster.directorio-de-casinos-mx.com/</a> <a href=http://kcsonpkgo.ru/bitrix/rk.php?goto=https://betmaster.directorio-de-casinos-mx.com/>https://betmaster.directorio-de-casinos-mx.com/</a> <a href=https://mainkeys.net/go/https://betmaster.directorio-de-casinos-mx.com/>https://betmaster.directorio-de-casinos-mx.com/</a> <a href=https://www.forodvd.com/redirect-to/?redirect=https%3A%2F%2Ft.me/s/worldcasinonet>https://betmaster.directorio-de-casinos-mx.com/</a> <a href=http://www.buyinsurance4less.com/r.php?abc=http%3A%2F%2Fbetmaster.directorio-de-casinos-mx.com/>https://betmaster.directorio-de-casinos-mx.com/</a>
#4084 Danielvoxhttps://vinicius-junior-bd.com
All about Vinicius Junior <a href=https://vinicius-junior-bd.com/>vinicius-junior-bd.com/</a> career, trophies, highlights and records. Follow the Brazilian winger, his success at Real Madrid and on the international stage!
#4085 KevinButhttps://mndcdn.com/
<a href=https://mndcdn.com/>ทดลองเล่นสล็อต</a> เล่นฟรี สล็อตแมชชีน PG หมายถึงอะไร? เพราะอะไร จึงกลายเป็น เกมยอดฮิต?
เกมสล็อตออนไลน์ เป็นเกมที่ เป็นที่นิยม อย่างสูง ในทุกช่วงเวลา และ นับเป็น หนึ่งในจำนวน เกมที่ผู้เล่น รู้จักดี และยัง หลงใหล อย่างสูง ในสาขา เกมดิจิทัล แต่ ผู้ที่เพิ่งเป็น มือใหม่ หรืออาจจะ มีประสบการณ์ การเล่นสล็อต ไม่มาก วันนี้พวกเรา จะนำคุณ มาทำความเข้าใจกับ ทดลองเล่น สล็อตแมชชีน PG ที่ เกมสล็อตโดยตรง ที่ได้รับความชื่นชอบ อย่างแพร่หลาย โดย คุณจะได้ ศึกษาหรือเรียนรู้ พร้อมทั้ง เริ่มการเล่น ได้เร็ว และยัง สนุกสนาน พร้อมกับ ประสบการณ์ใหม่ การเล่น ที่ท้าทาย และยัง น่าตื่นตาตื่นใจ
เล่นฟรี เกมสล็อต PG คืออะไร? เล่นฟรี สล็อตแมชชีน PG เป็นเกม เกมออนไลน์สล็อต ที่ออกแบบมา โดย บริษัทผู้พัฒนา PG Soft ซึ่งถือเป็น หนึ่งในประเภท ผู้พัฒนา เกมสล็อตออนไลน์ ยอดนิยม ในโลก เกมสล็อตนี้ ได้แนวคิด จาก เครื่องเล่นสล็อต แบบดั้งเดิม แต่ได้ เพิ่มเติม ความทันสมัยและความน่าสนใจ และยัง ความเพลิดเพลิน เข้าไป โดย เกม ประกอบด้วย 5 แถวแนวตั้ง และ 15 แบบ รูปแบบการได้รางวัล ที่ ผู้เล่นออนไลน์ มีโอกาสในการ ชนะรางวัล ได้หลายรูปแบบ
สัญลักษณ์ในเกม ในเกมดังกล่าว สล็อต PG นั้น มีความหลากหลาย เช่น สัญลักษณ์เชอร์รี่, ตัวเลข 7, เพชร, และยัง รูปสัญลักษณ์ อื่นๆอีกมากมาย ที่เกี่ยวข้อง กับแนวคิด เกมดังกล่าว ซึ่งทุกๆ ทุกเกม มี แนวคิด พร้อมทั้ง รูปแบบการเล่นเกม ที่ต่างออกไป ออกไป เช่นเช่น ธีมสัตว์, ธีมเทพเจ้า, ธีมอาหารอร่อย, หรืออาจจะ ธีมการเดินทาง เป็นต้นมา
เพราะเหตุใด ลองเล่น เกมสล็อต PG จึงเป็น เกมที่คนชอบมาก? ความง่าย ในการเล่นเกม ลองเล่น สล็อต PG เป็นเกม ที่ง่ายต่อการเข้าใจ ไม่สลับซับซ้อน เหมาะสมสำหรับ ผู้ที่เพิ่งเริ่ม และ มือเก่า ผู้เล่นสล็อต เพียง เลือกจำนวนเงินที่ จำนวนเงินที่ต้องการ กดเริ่ม รวมทั้ง รอผล ผลลัพธ์ ซึ่งทำให้ ระบบการเล่นสล็อต ที่ตรงไปตรงมา ส่งผลให้ ผู้เล่นสล็อต สามารถที่จะ เพลิดเพลิน ได้โดย ไม่ต้องกังวลใจ เกี่ยวกับเรื่อง กฎเกณฑ์ต่างๆ ที่ยาก
รูปแบบการให้ การมอบรางวัล ที่หลายรูปแบบ เกมสล็อตออนไลน์ PG มีให้เลือก รูปแบบ ให้ชนะรางวัล มากถึง 15 รูปแบบการชนะ ซึ่งทำให้ มากกว่า สล็อตแมชชีนคลาสสิก ปกติ ทำให้ผู้เล่น ผู้เล่น มีโอกาสที่จะ รับรางวัล ได้หลายรอบ นอกจากนั้น ยังมีให้เลือก ฟีเจอร์พิเศษ เช่นเช่น การหมุนฟรี, ตัวคูณเงิน, พร้อมทั้ง โบนัสเกม ที่เพิ่มเข้าไป ความน่าสนใจ ให้กับ การเล่น
#4086 ShaneGuppyhttps://evps.host
Fast and secure VPS <a href=https://evps.host/products>https://evps.host/</a> for any task! Flexible configurations, SSD drives, DDoS protection. Easy scaling, high performance and 24/7 support!
#4087 gambling-softhttps://gambling-soft.com
buy casino script <a href=https://gambling-soft.com/>online gambling platform</a>
#4088 seo-basehttps://seo-base.ru
сео продвижение сайтов частником <a href=https://seo-base.ru/>https://seo-base.ru</a>
#4089 Jamesraphttps://astra-hotel.ch/articles/code_promo_45.html
Свежие промокоды казино <a href=https://tako-text.ru/kernel/inc/?promokod_bet_vinner_pri_registracii.html>https://tako-text.ru/kernel/inc/?promokod_bet_vinner_pri_registracii.html</a> бонусы, фриспины и эксклюзивные акции от топовых платформ! Найдите лучшие предложения, активируйте код и выигрывайте больше.
#4090 Donaldraphttps://vibrometro1a.com
<a href=https://vibrometro1a.com>equilibrado estatico</a> Dispositivos de ajuste: fundamental para el rendimiento suave y óptimo de las maquinarias.
En el entorno de la ciencia actual, donde la efectividad y la fiabilidad del dispositivo son de máxima trascendencia, los aparatos de balanceo tienen un función esencial. Estos sistemas especializados están desarrollados para calibrar y regular piezas rotativas, ya sea en dispositivos industrial, medios de transporte de traslado o incluso en dispositivos domésticos.
Para los expertos en reparación de aparatos y los técnicos, trabajar con sistemas de equilibrado es esencial para garantizar el operación fluido y estable de cualquier mecanismo móvil. Gracias a estas soluciones tecnológicas modernas, es posible disminuir considerablemente las vibraciones, el estruendo y la esfuerzo sobre los sujeciones, prolongando la longevidad de partes caros.
Igualmente significativo es el función que desempeñan los dispositivos de equilibrado en la soporte al comprador. El ayuda profesional y el mantenimiento permanente aplicando estos sistemas posibilitan brindar prestaciones de óptima estándar, elevando la agrado de los clientes.
Para los titulares de negocios, la financiamiento en unidades de ajuste y detectores puede ser fundamental para aumentar la efectividad y desempeño de sus aparatos. Esto es sobre todo importante para los dueños de negocios que manejan pequeñas y pequeñas organizaciones, donde cada aspecto importa.
Además, los dispositivos de equilibrado tienen una extensa aplicación en el ámbito de la prevención y el control de nivel. Permiten encontrar probables defectos, impidiendo arreglos onerosas y daños a los aparatos. Más aún, los indicadores obtenidos de estos dispositivos pueden usarse para perfeccionar procesos y incrementar la reconocimiento en sistemas de consulta.
Las zonas de implementación de los sistemas de balanceo incluyen variadas sectores, desde la fabricación de bicicletas hasta el supervisión de la naturaleza. No influye si se trata de importantes fabricaciones productivas o limitados establecimientos de uso personal, los dispositivos de calibración son indispensables para promover un operación productivo y sin presencia de interrupciones.
#4091 VZTM_mibhttps://vztm.ru/
Всем привет! Воткинский Завод Теплоизоляционных Материалов (ВЗТМ) – vztm.ru! Обеспечиваем теплоизоляцией объекты оборонного, нефтегазового и энергетического комплексов, а также объекты промышленного и гражданского строительства. c 1992 года. <a href=https://vztm.ru/bazaltovaya-vata>базальтовое волокно минеральная вата</a> Если акустический мат или базальтовая вата в Москве, то это в Воткинский завод теплоизоляционных материалов Торговый дом https://vztm.ru/ . Консультируйтесь и звоните по бесплатному номеру 8–800–551–80–33. Увидимся!
#4092 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino pin официальный up букмекерская контора <a href=https://vestnik-jurnal.com/>порно с Евгений Малкин (хоккей)</a> букмекерская контора леонов cometa casino <a href=https://rhymes-punches.com/>сайт казино зеркало</a> porno Яна Троянова казино рублях сайте букмекерской конторы фонбет 1×bet сейчас смотреть фильм казино казино ставка Елена Лядова
DiskiPlus up casino скачать DiskiPlus 1×bet зеркало рабочее <a href=https://diskiplus.ru/>DiskiPlus пин ап casino</a> DiskiPlus porno Илья Ковальчук (хоккей) DiskiPlus ставки на спорт букмекерские конторы <a href=https://diskiplus.ru>DiskiPlus порно с Анна Калинская (теннис)</a> DiskiPlus Крючкова Полина Викторовна порно DiskiPlus porno Александра Степанова, фигуристка DiskiPlus porno Илона Маркова, хоккеистка DiskiPlus Самойлова Алла Владимировна порно DiskiPlus порно с Сергей Бобровский (хоккей) DiskiPlus Александра Бортич DiskiPlus пин ап букмекерская контора
#4093 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало сайта
Некоторые онлайн-казино без депо предлагают свежим посетителям избрать бонус при регистрации. Будьте внимательны: выбрав раз, вы в абсолютном большинстве случаев не можете пользоваться остальными. <a href=http://filmkachat.ru/>1×slots casino зеркало рабочее</a> Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке адепты онлайн-казино публикуют важную информацию о not the slightest down payment bonuses прочих услугах. <a href=http://www.gothicpast.com/myomeka/posters/show/79259>http://www.gothicpast.com/myomeka/posters/show/79259</a> 1×slots регистрация 1×slotscasino09k online <a href=https://wood.co.ua/wr_board/tools.php?event=profile&pname=Raymondflurn>https://wood.co.ua/wr_board/tools.php?event=profile&pname=Raymondflurn</a> Выбрать казино с бездепозитным призом. У нас на сайте представлен перечень наилучших интернет казино, коие предлагают своим игрокам щедрые бонусы за регистрацию.Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную функцию активации бонуса без депо. Внимательно прочитайте до конца. Многие новички делают оплошности на шаге регистрации и потому возможности получить подарок.
рабочее зеркало 1хслотс
Подарки на определенные даты выделяются условиями получения. Если одобрение начисляют игроку на день рождения, то сумма обычно находится от общего объема депо за год. <a href=https://www.one2bay.de/forum/showthread.php?tid=401418>1×slos регистрация в 1×slots casino</a> 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Ограничения по играм. Администрация воспрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, деньгами или бесплатными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда дробленье выполняется по виду игр. Например, отыгрыш возможен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino. <a href=https://valetinowiki.racing/index.php?title=фильмы_бесплатно_торрент>https://valetinowiki.racing/index.php?title=фильмы_бесплатно_торрент</a> В основном случаев безвозмездные призы начисляются в кредитах, коие нельзя незамедлительно исключить со счета. Прежде их нужно отыграть по установленным правилам. Эти притязания принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже.Так что можете отважно региться без всяких размышлений. Фортуна сейчас точно на вашей стороне. Не бойтесь, так следствие какого либо убытка Вам абсолютно не грозит. С этими призами как без пополнения, Вы остаетесь только в плюсе, но не как не в минусе. 1×slots промокод при регистрации 2025 Бездепозитный бонус предоставляется новому игроку за конкретные деяния. Часто подарок в виде денег или фриспинов выдается за регистрацию, благодаря чему пользователь получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.
1×slots зеркало регистрацию более популярный вариант это
Составленный экспертами Casino.ru перечень онлайн-казино с бездепозитным призом позволяет игрокам сравнить спецпредложения различных операторов. <a href=http://fr79056g.bget.ru/index.php?name=account&op=info&uname=hystericalspray>http://fr79056g.bget.ru/index.php?name=account&op=info&uname=hystericalspray</a> Размер бонуса. В качестве бездепов обычно начисляют большие суммы, а когда речь о призах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то кое-какие казино все подарить игроку до 2000$.В количестве случаев бесплатные призы начисляются в кредитах, коие невозможно незамедлительно вывести со счета. Прежде их нужно отыграть по установленным правилам. Эти требования принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д.). О нем читайте ниже. 1×slots промокод при регистрации Возможность протестировать новые забавы, не рискуя личностными средствами и разработать собственную стратегию забавы.Фриплей-бонусы. Бонусы за благотворительную забаву есть лишь в некоторых клубах. Они зачисляются незамедлительно после творения профиля и срабатывают непродолжительное время. Если у вас нет времени истратить средства, они просто завершатся. Что дотрагивается времени, правило бонусы срабатывают на 1-го часа.
1хслотс казино зеркало
При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, которое возможно посвятить ирге в казино. <a href=https://bans.org.ua/index.php?topic=131888.new#new>1хслотс рабочее зеркало на сегодня</a> Вы скорее, скажем, как все любите получать подарки и бездепозитные бонусы казино. Игорные дома взяли в привычку одаривать гэмблеров приятными бонусами. Стать владельцем приветственного презента можно за творение профиля либо пополнение счёта. Второй вариант больше увлекательный, так клубы готовы удвоить депозит! Но если вы новичок и только знакомитесь с миром азарта, какого-либо воспользуйтесь призом за регистрацию. В лицензионных бездепозитных казино выступать в азартные игры действительно безопасно. Наличие лицензии одобряет тот факт, что клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP.Предложения с бездепозитными бонусами за регистрацию позволяют новым заведениям привлечь аудиторию на собственный вебсайт. А игроки к получают возможность выступать на реальные средства без депо в казино и заработать маленький стартовый капитал, кот-ый разрешено вывести на карту банка либо электронный кошелек. 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=https://pixel-brush.ru/user/Miguelged/>https://pixel-brush.ru/user/Miguelged/</a> Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.
1х слот 1хслотс регистрация перейти на 1×slots
Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации презента необходимо доказать электрическую почту и привязать телефонный; Для получения бонуса нужно ознакомиться с программкой преданности казино и устроить ставки на необходимую, необходимую для перехода на грядущий степень.Но не стоит мыслить, собственно снабжая пользователей этими призами, казино увлекается спонсированием. Ведь объемы вознаграждений, главном, не немалые (средним объемом от 5 до 20 долларов). И на эти свои налагаются определенные обстоятельства и ограничения, обязательные к выполнению игрока, если в последствии он желает получить все свои выигранные деньги. <a href=http://emseyi.com/index.php?qa=user&qa1=adamantferry1>http://emseyi.com/index.php?qa=user&qa1=adamantferry1</a> 1хслот зеркало сайта Бездепозитные призы в казино без пополнения 2022 — это определенная сумма средств либо for nothing spins вращения, которые предоставляются первым гостям за регистрацию на сайте казино в виде бездепозитного бонуса, и выделяет вам возможность за счет казино без пополнения опробовать предложения (игр), с последующей привилегией вывода средств при исполненьи всех установленных верховодил.
<b>Смотреть еще похожие новости:</b>
<a href=https://adminclub.org/showthread.php?tid=141447>казино 1× slots официальный сайт</a>
<a href=https://forum.dis-course.net/viewtopic.php?p=954890#p954890>1×slots регистрация на сайте 1×slots ru com</a>
<a href=https://karakol.com.kg/user/Jameskef/>1×слот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Внесение депозита – Будьте готовы восполнить счет в отыгрыша приза. Это стандартное заявка управлял для этого на промо-акций. Лучше заранее уточнить, какую сумму надо(надобно) несомненно вносить на счет. Как управляло, речь идет о минимальном депозите, но вы должны быть убеждены, что он вам по карману.
#4094 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало xbet Чулпан Хаматова <a href=https://kompromat1.online/>гта казино</a> casino вход сайте букмекерской конторы фонбет <a href=https://th-royalgclub.com/>пина casino</a> cat casino casino riobet фреш казино ramenbet casino porno Андрей Рублев (теннис) casino актуальное зеркало букмекерские конторы бет
DiskiPlus 1×bet зеркало рабочее xbet DiskiPlus скачать 1×bet на андроид <a href=https://diskiplus.ru/>DiskiPlus букмекерские конторы бет</a> DiskiPlus пин up casino DiskiPlus пин up casino <a href=https://www.diskiplus.ru/>DiskiPlus официальные сайты казино</a> DiskiPlus Мухтиярова Елена Вячеславовна порно DiskiPlus pin up букмекерская контора DiskiPlus порно с Сергей Бобровский (хоккей) DiskiPlus porno Игорь Акинфеев (футбол) DiskiPlus порно с Евгения Медведева, фигуристка DiskiPlus porno Дарья Мороз DiskiPlus casino сегодня
#4095 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Васильева Татьяна Викторовна porno Вера Бирюкова, гимнастка <a href=https://vestnik-jurnal.com/>казино зеркало сегодня</a> официальное казино вход bitz casino <a href=https://repost.news/>casino скачать приложение</a> порно с Абрамченко Виктория Валериевна kent casino кент casino гта онлайн казино симулятор казино пина casino pin up casino скачать
DiskiPlus казино вход DiskiPlus скачать 1×bet на андроид бесплатно <a href=https://www.diskiplus.ru/>DiskiPlus какие казино</a> DiskiPlus бесплатные букмекерские конторы DiskiPlus казино смотреть онлайн <a href=https://www.diskiplus.ru>DiskiPlus симулятор казино</a> DiskiPlus порно с Каролина Севастьянова DiskiPlus сайты казино DiskiPlus porno Елизавета Туктамышева DiskiPlus Приезжева Екатерина Геннадьевна порно DiskiPlus casino betting DiskiPlus бк букмекерская контора DiskiPlus 1×bet приложение
#4096 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
cometa casino официальные сайты казино <a href=https://kompromat1.online/>букмекерская контора</a> лучшие букмекерские конторы Разуваева Ксения Денисовна порно <a href=https://slon-ru.com/>казино вход официальный сайт</a> рокс казино Радченко Светлана Юрьевна порно порно с Дронова Александра Викторовна Шевцова Татьяна Викторовна порно casino pin официальный casino рабочее порно с Анна Калинская (теннис)
DiskiPlus спорт букмекерская контора DiskiPlus porno Юлия Пересильд <a href=https://www.diskiplus.ru/>DiskiPlus бесплатные букмекерские конторы</a> DiskiPlus 1×bet зеркало xbet DiskiPlus casino приложения <a href=https://www.diskiplus.ru/>DiskiPlus Анна Михалкова</a> DiskiPlus порно с Елена Никитина, скелетонистка DiskiPlus гта онлайн казино DiskiPlus 1×bet зеркало xbet xyz DiskiPlus Матвиенко Валентина Ивановна порно DiskiPlus пин ап букмекерская контора DiskiPlus unlim casino DiskiPlus леон букмекерская контора
#4097 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт, скачать
Основное верховодило получения бездепа ? создаваемый аккаунт обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов требовательно запрещено. Проверка ведется по имени, e-mal, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита необходимо блюсти несложную очередность действий.Фриспины – безвозмездные вращения с фиксированной ставкой, которые возможно использовать в конкретных игровых автоматах. <a href=http://filmkachat.ru/>1×slots акции</a> <a href=https://groups.google.com/u/1/g/3d-rendering-services>https://groups.google.com/u/1/g/3d-rendering-services</a> 1×slots зеркало видели такую регистрацию на <a href=https://simracing.su/user/RichardPrews/>https://simracing.su/user/RichardPrews/</a> Срок активации и время на отыгрыш. Зачисление денег либо фриспинов случается при активации протяжении строго ограниченного периода, похожие притязания предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать приз количество дней или даже месяцов. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с неоправданно высоким вейджером.
1×slots бонус за регистрацию
Для верификации аккаунта нужно предоставить профессионалам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, а фотку банковской карты либо скриншот страницы электрического кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для подтверждения личности. 1хслот зеркало Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? <a href=http://forums.overhax.fun/member.php?action=profile&uid=4574>http://forums.overhax.fun/member.php?action=profile&uid=4574</a> В онлайне количество знаменитых игорных площадок с привлекательными акционными предложениями. Однако внимательно разбирать обстоятельства 10-ов услуг в надоест, да и время отнимет количество. Поэтому наша команда подготовила ТОП-3 сайтов с превосходнейшими бездепозитными призами: 1×slots официальный сайт, скачать А ознакомиться с свежими интернет казино, Вы сможете помощью призов с выводом выгоды, которые Вы можете получить без депо.
x1 slots 1хслотс регистрация перейти на 1×slots
<a href=http://islamdini.kg/index.php?subaction=userinfo&user=uppityremorse22>http://islamdini.kg/index.php?subaction=userinfo&user=uppityremorse22</a> 1× slots casino зеркало Допустим, за регистрацию вы возымели бездеп в объеме 2 000 руб. С вейджером х30. В данном случае предстоит сделать ставок, на совместную необходимую в 60 000 руб. (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать реальные деньги. Однако не забывайте, что с любого дара получится вывести определённую сумму (почаще всего менее $200).В игровых клубах без лицензии Вы покупаете „кота в мешке“ и если, тогда, неоднозначных обстановок нет возможности куда-то пожаловаться и доказать собственную правоту.
1х слот регистрация в 1×slots casino
Бездепозитный бонус предоставляется новенькому игроку за конкретные действия. Часто презент в виде денег либо фриспинов выдается за регистрацию, благодаря чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. Вывод выигрыша с бездепозитных бонусов казино – великодушный подарок от азартных клубов. Но чтобы вывести свой заработок, нужно выполнить ряд условий: 1×slots регистрация 1×slotscasino09k online <a href=https://kamchaty.ru/user/Briangot/>https://kamchaty.ru/user/Briangot/</a> Каждый из бездепозитных призов без пополнения 2022 содержит свой определенный вейджер для отыгрыша, например же в каждом казино он уточняется персонально — где то он х55 а где-то х30, повторюсь везде по различному!Срок отыгрыша — это период, кот-ый наступает в момент активации бонуса и заканчивается с его закрытием. Пользователю необходимо уложиться в данный временной зазор, по призовые средства аннулируются. Казино устанавливают перечень игр, ставки каких засчитываются при расчете отыгранных средств. Если тайтл не входит в данный список, то возможность быть недосегаем для загрузки в деянья бонусного предложения.
1×slots промокод при регистрации 2025
Так что приготовьтесь дать секретную информацию (пол, возраст, государство проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает менее суток, после чего получится беспрепятственно выводить крупные выигрыши.Даже не выиграв солидную сумму, игрок интересно проведет время, изнутри изучит работу площадки, воспримет геймплей автоматов. Все это без каких-либо финансовых рисков. Быть в курсе лучших промоакций с. Достаточно периодически изучать перечень свежих онлайн казино с выводом приза без депозита в этом разделе. Зарегистрироваться в казино по особой ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефона и электрическую почту). Для доказательства номера телефонного необходимо в собственном профиле показать свой номер и нажать кнопку „Подтвердить номер аппарата“, далее Вы получите sms-сообщение с кодом, кот-ый нужно ввести в соответствующее поле. Для доказательства электрической почты, перейти по интенсивной ссылке в письме от казино. <a href=http://freemovies.pl/user/GeraldPeews/>http://freemovies.pl/user/GeraldPeews/</a> 1хслотс официальный сайт зеркало Обычно для получения призов без депо, казино выдвигает приклнные и абсолютно выполнимые условия, хотя есть ряд деяний которые воспрещены и все стать неприятные последствия:Постарайтесь отыграть вейджер, чтобы была вероятность забыть заявку на выплату. Кстати, на всех веб-сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы можете получить выигрыш на электронной кошелёк, карту, аппарат.
<b>Смотреть еще похожие новости:</b>
<a href=https://g2clubs.com/healthy-workout/google/#comment-31858>1×slots официальный сайт мобильная версия скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриплей-бонусы. Бонусы за безвозмездную забаву есть только в неких клубах. Они зачисляются незамедлительно после сотворения профиля и действуют недолговременное время. Если у вас нет медли истратить свои, они просто завершатся. Что дотрагивается времени, правило призы действуют протяжении 1-го часа. При поддержки такого поощрения оператор возможность также завлекать клиентов, коие ранее проявляли активность на сайте, но по какой-то причине перестали играть. В этом случае промокод высылается пользователю по электронной почте либо в виде SMS.
#4098 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Абрамченко Виктория Валериевна pin up casino buzz <a href=https://t.me/vchkogpu_ru>bet casino</a> где казино 1×bet официальный слоты <a href=https://res-publika.com>порно с Васильева Татьяна Викторовна</a> new casino online casino 7k casino официальный зеркало Попова Анна Юрьевна порно casino daddy казино проиграл букмекерская контора бесплатно скачать
DiskiPlus казино сегодня DiskiPlus casino рабочее зеркало <a href=https://www.diskiplus.ru>DiskiPlus Крючкова Полина Викторовна порно</a> DiskiPlus казино можно DiskiPlus casino buzz <a href=https://www.diskiplus.ru>DiskiPlus casino 7k сегодня</a> DiskiPlus 7k casino бонус DiskiPlus букмекерская контора бетсити DiskiPlus porno Виктория Баркова, легкоатлетка DiskiPlus порно с Федор Чалов (футбол) DiskiPlus porno Светлана Ходченкова DiskiPlus сайт 1×bet слоты DiskiPlus kent casino регистрация
#4099 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало которую указывали при регистрации кстати
Основное различие что, нет, собственно для получения бездепа не пополнять баланс в казино. Но кроме сего, есть ряд и отличий: <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> Да, у бесплатных бонусов есть недостатки. Прежде всего, они обычно не. Кроме такого, обстоятельства вейджера по ним постоянно жесткие. Но таки недоступность риска делает их довольно красивыми для клиентов. <a href=https://www.friend007.com/forums/thread/7390/>https://www.friend007.com/forums/thread/7390/</a> Верификация аккаунта. Лучше подтвердить личность сразу после регистрации, чтобы потом не было заморочек с выводом денег. Верификация возможность протекать двумя маршрутами: 1хслотс 1хслотс регистрация перейти на 1×slots <a href=http://yuyue.com.tw/upload/home.php?mod=space&uid=172305>http://yuyue.com.tw/upload/home.php?mod=space&uid=172305</a>
1×slots регистрация то дальше необходимо пройти
Можно ли наваривать на бездепозитных бонусах? Это не работа, здесь как повезет, случае в любом предложенном безедепе, вы будете откручивать вейджер и выводить, это возможно именовать везением, и добавочной добавкой к вашему бюджету.Чтобы выступать даром на настоящие деньги в казино, порой довольно просто зарегистрироваться. Иногда нужно выполнить дополнительные действия. 1хлот регистрация в 1×slots casino <a href=http://psvhome.ru/user/DonaldwAt/>http://psvhome.ru/user/DonaldwAt/</a> 1× slots casino официальный сайт Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро или 20 долларов. Если выдаются фриспины, их количество редко превышает нескольких 10-ов безвозмездных вращений.Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную процедуру активации приза без депо. Внимательно прочитайте до конца. Многие новенькие делают ошибки на этапе регистрации и поэтому не получить презент.
1×slots официальный сайт зеркало
Выбирая бесплатный бонус, пристально изучайте верховодила. Убедитесь, собственно вас возможно на роль в промоакции. Уточните, в каких забавах возможно исполнять условия вейджера. При надобности задавайте вопросы адептам саппорта. <a href=http://tellmy.ru/user/TyroneCycle/>http://tellmy.ru/user/TyroneCycle/</a> 1×slots актуальное зеркало Для получения депозитного бонуса необходимо восполнить собственный игровой баланс настоящими деньгами. Вознаграждение возможно получить или при внесении первого депозита, или вид фиксированного процента от внесённых средств. Так или по, бонус поступит на счёт только в пополнения.Существует ли стратегии для отыгрыша бездепозитных бонусов? К огорчению нет, на выигрыши либо проигрыши с бонусов, казино или игрок повлиять не, отдача игр случается от создателей игр.
1×slots официальный сайт зеркало
Но ни не забывайте внимательно читать управляла роли в бонусных промоакциях. Если вы нарушите желая бы одно условие, позже вы не можете уладить недоразумение с администрацией. Итак, дабы безвозмездные бонусные кредиты трансформировались в реальные деньги, которыми продоставляется управлять по собственному усмотрению, их надо(надобно) отыграть. Вейджер стопам уточнять в правилах онлайн-казино. 1×slots регистрацию более популярный вариант это <a href=https://hackmd.io/@lexxeagle/S1tjPfmuT>https://hackmd.io/@lexxeagle/S1tjPfmuT</a> Некоторые казино шансы предлагать посетителям бездепы за свидетельство номера или почты или репост на страничку в социальных сетях.
1хслот официальный сайт зеркало
Существуют казино с бонусом за регистрацию, каких очень востребованы фриспины в онлайн казино потом регистрации в определенных играх. Они встречаются и чаще безвозмездных поощрений или классических бонусов в казино без инвестициям. Например, игрок регистрирует счет, на кот-ый начисляются безвозмездные игры, бонус за регистрацию вид даровых фрспинов, вращения в игровом автомате. Во время игрового процесса игры выигрывает настоящие деньги, коие в последствии возможно удачно вывести из заведения на собственную платежную систему. То есть, все шансы исключить свои без рисков собственными финансами. Регистрация, какую геймер получит призы, займет пару минут, а спасибо данному можно прирастить 5 евро поощрений до тыс. И без всяких проблем исключить их.Изучить правила и обстоятельства получения бездепозитных бонусов казино, Вы сможете у нас на сайте в разделе с призами или на официальном веб-сайте выбранного Вами казино. Если имеет найти необходимую информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал или по электрической почте. Срок отыгрыша — это этап, кот-ый наступает в момент активации бонуса и заканчивается с его закрытием. Пользователю необходимо уложиться в этот временной зазор, по призовые средства аннулируются. Казино устанавливают перечень игр, ставки в которых засчитываются при расчете отыгранных средств. Если тайтл не заходит в данный список, то он может быть недоступен для загрузки период деянья бонусного предложения. <a href=http://donggoudi.com/home.php?mod=space&uid=1204875>http://donggoudi.com/home.php?mod=space&uid=1204875</a> Бездепозитные бонусы – это самая занимательная и более многообещающая акция интернет-казино. Они и другого фри-спинов, поэтому собственно выплаты в безвозмездных вращениях не гарантированы, так композиции на барабанах игрового аппарата имеют не сложиться.Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. 1хслот зеркало Ну и естесственно же, для казино бездепозитные призы выгодны с имиджевой стороны: схожая щедрость повышает уровень лояльности посетителей к компании.
<b>Смотреть еще похожие новости:</b>
<a href=https://creapnl.com/foros/tema/%d1%80%d0%b0%d0%b1%d0%be%d1%87%d0%b5%d0%b5-%d0%b7%d0%b5%d1%80%d0%ba%d0%b0%d0%bb%d0%be-1%d1%85%d1%81%d0%bb%d0%be%d1%82%d1%81–39/>рабочее зеркало 1хслотс</a>
<a href=http://swissairways-va.com/phpBB3/memberlist.php?mode=viewprofile&u=3495>x1 slots регистрация в 1×slots casino</a>
<a href=http://www.topboard.org/threads/1×-slot-1×slots-registracija-perejti-na-1×slots.600715/>1х слот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Начнём с того, собственно любое промо за регистрацию предполагает некоторые обстоятельства. Бездепозитные призы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность денежного оборота, необходимая для исполнения критерий. Пример, возымели бесплатные вращения и выиграли с них 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 рублей, неудачных или выигрышных, маловажно. После исполнения, бонусный баланс перейдёт на реальный и будет доступным к выводу.
#4100 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Валентина Матвиенко порно порно с Аделия Петросян (фигурное катание) <a href=https://7club7.com/>букмекерская контора бесплатно скачать</a> сайт букмекерской конторы online casino <a href=https://rhymes-punches.com/>1×bet на андроид бесплатно</a> порно с Дарья Касаткина (теннис) casino betting пин casino порно с Никита Кучеров (хоккей) букмекерские конторы без депозита porno Игорь Акинфеев (футбол) 1×bet вход
DiskiPlus Манилова Алла Юрьевна порно DiskiPlus рейтинг казино <a href=https://www.diskiplus.ru>DiskiPlus Кузнецова Анна Юрьевна порно</a> DiskiPlus pin up букмекерская контора DiskiPlus порно с Елена Никитина, скелетонистка <a href=https://www.diskiplus.ru>DiskiPlus включи казино</a> DiskiPlus casino com DiskiPlus казино фильм смотреть онлайн DiskiPlus kent casino регистрация DiskiPlus официальные букмекерские конторы скачать DiskiPlus пин ап casino pin DiskiPlus pin casino зеркало DiskiPlus сколько казино
#4101 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация в 1×slots casino
Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?Для всех бездепозитных бонусов действует наибольший лимит на выигрыш. Он показывает максимальную сумму, которую возможность получить, играя на бонусные кредиты. Как только для удастся выполнить притязания вейджера, возможный максимально будет переведен с бонусного счета на ведущей, а остаток будет списан. <a href=http://filmkachat.ru/>зеркала 1×slots</a> Итак, дабы бесплатные бонусные кредиты превратились в настоящие деньги, которыми возможность распоряжаться по своему усмотрению, их нужно отыграть. Вейджер стопам уточнять в правилах онлайн-казино.Бонус за регистрацию в казино выдается лишь один один на 1-го игрока. Но случаются дополнительные акции, в коих бездепы раздаются для неизменных посетителей и такие подарки Вы сможете получить больше одного раза. <a href=https://speakerdeck.com/rendercgi1>https://speakerdeck.com/rendercgi1</a> Игрокам стоит принимать приветственный бонус как гарантированный метод получить крупный выигрыш, хотя это отличная возможность без затрат оценить возможностей казино. 1хслот 1хслотс регистрация перейти на 1×slots <a href=https://www.sjdream.net/bbs/board.php?bo_table=free&wr_id=547738>https://www.sjdream.net/bbs/board.php?bo_table=free&wr_id=547738</a> Бездепозитные бонусы истинными средствами, коие можно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадали.
1×slot зеркало рабочее регистрации на телефон придет
<a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=900107>1×slot казино зеркало</a> 1×slots промокод при регистрации 2025 Перед активацией важно внимательно изучить обстоятельства акции. Чем ниже вейджер, что, этим больше потенциальная выгода игрока. Имеют значение кроме лимиты ставок при отыгрыше и сроки, в течение которых возможно воспользоваться предложением. Если бездеп обхватывает узкий перечень игр, рекомендовано разузнать максимальные коэффициенты, степень отдачи и волатильности. Слоты с невысокими множителями выплат подходят лишь в том случае, если оператор не установил требовательные ограничения на максимальную необходимую ставки.Третитй бездепозитный приз за регистрацию – денежные средства. К сожалению, начислить рубли либо доллары готовы лишь известные и популярные клубы. С их поддержкой вы сможете насладиться любой доступной игрой – автоматом, рулеткой, кено, блэкджеком. <a href=https://youlangue.lu/blog/index.php?entryid=256383>https://youlangue.lu/blog/index.php?entryid=256383</a> 1×slots официальный сайт зеркало рабочее
1×slots коды
Возьми собственный презент. Чаще всего бонус активизируется сразу в регистрации. Но бывают истории, когда надо(надобно) забежать в собственный кабинет либо написать в справочную службу.Чтоб получить большой выигрыш, подбирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша. <a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=10016&TITLE_SEO=10016-avtoservis-_avtodom-serezhkin_-vash-besproigryshnyy-assistent-v-remonte-i-obsluzhivanii-avtomashiny&MID=387535&result=new#message387535>http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=10016&TITLE_SEO=10016-avtoservis-_avtodom-serezhkin_-vash-besproigryshnyy-assistent-v-remonte-i-obsluzhivanii-avtomashiny&MID=387535&result=new#message387535</a> x1 slots регистрация в 1×slots casino
1×slots регистрация 1×slotscasino09k online
1х слот регистрация в 1×slots casino <a href=http://isminecraft.ru/user/Anthonynus/>http://isminecraft.ru/user/Anthonynus/</a> Сразу в активации промокода можно пользоваться даром. Как теснее упоминалось, призы случаются трёх обликов – фриспины, кредиты и фриплей-бонусы.Главным моментом в возникновении этих вознаграждений произведено том,, что пустив их в ход, игрок ничем не рискует и в последствии никому ничего не несомненно должен (не зависимо, получит ли он благодаря бонусам какой-либо выигрыш или моментально спустит все лишь собственно прибывшие деньги). То есть, казино снабжает игрока возможностью на дармовой базе выступать во различные слоты даже спонсирует игру.
1×slos регистрация в 1×slots casino
В качестве призов онлайн казино нередко предлагает выдачу фриспинов, то есть бесплатных вращений игрового барабана. Виртуальные монеты можно использовать для изучения в покерной школе либо для игры в казино.Акции, приуроченные к календарным праздникам, случаются рассчитаны как на всех пользователей, так и на категории: например, подарок на 8 марта девушкам-игрокам или мужикам на 23 февраля. <a href=http://ds1.dspnbmall.co.kr/bbs/board.php?bo_table=free&wr_id=767257>http://ds1.dspnbmall.co.kr/bbs/board.php?bo_table=free&wr_id=767257</a> При правильном подходе бездепы — это прекрасный способ играть на деньги без траты личных средств. Есть несколько советов, следуя которым возможно извлечь максимально выгоды из похожих акций казино. Играть идет лишь на лицензированных площадках. Скриптовые сайты не обманывают с бонусными предложениями, но и употребляют пиратский софт с модифицированным ГСЧ. Выиграть на этих автоматах невероятно.Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, например как Вам придется ее подтвердить дальнейшем при выводе средств. 1×slots зеркало выигрыши обязательно пройдите регистрацию если Чаще всего используются коды. Их нужно заносить в особые окна регистрационной анкеты, случае идет о пригласительных призах, либо в особом разделе собственного кабинета игрока.
<b>Смотреть еще похожие новости:</b>
<a href=https://shopcms.vsupport.club/topic/10271-pin-up-casino-giris/page-4#entry94556>1× slots сайт</a>
<a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=788546>скачать 1×slots официальный сайт</a>
<a href=https://www.mojaremiza.pl/forum/1×slot-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F>1×slots коды</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Главным нюансом в возникновении данных вознаграждений произведено никаких, собственно пустив их в ход, игрок ничем не рискует и в последствии никому ничего не несомненно обязан (не зависимо, получит ли он благодаря призам какой-нибудь выигрыш или мгновенно спустит все лишь что прибывшие финансы). То есть, казино снабжает игрока вероятностью на дармовой основе играть во различные слоты причем спонсирует забаву. Такой казино приз без депо за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это как бы некая маскировка одобрения под бездепозитный. Суть всего этого сводится к тому, собственно геймеру на час выдается, например, 1000 долларов, а реклама твердит о том, что любой выигрыш возможно несомненно в оставить при для. Но случае играющий серьезно отнесется к этому предложению, то он просто растеряет время. Ведь игроку нужно несомненно играть не главном аккаунте, а тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (в всей тыс. ) в управляла вступят определенные условия, где будет сказано, что максимальной суммой победы возможность быть лишь двести долларов и средства можно использовать только в качестве приза на 1-ый вклад с вейджером 25 от суммы гонорары плюс сам депозит. По итогу получится, собственно игрок выигрывал себя 200% бонус с вейджером на определенную необходимую. Короче говоря, это все надо вашего времени.
#4102 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на сайте 1×slots ru com
Размер бонуса. В качестве бездепов обыкновенно начисляют большие суммы, а когда речь о призах за депо, которые начисляются в процентном соотношении от суммы пополнения, то некоторые казино имеют презентовать игроку до 2000$.Для вывода средств приз нужно будет отыграть законам, установленным казино. Внимательно ознакомьтесь с правилами акции и вариантами отыгрыша бездепозитного приза до его получения, дабы избежать конфликтных обстановок. <a href=http://filmkachat.ru/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> За привлечение друга ? масштабах партнерской программы заказчик получает вознаграждение за привлечение новых пользователей. <a href=https://forums.delphiforums.com/biznewsopps/messages/4670/1>https://forums.delphiforums.com/biznewsopps/messages/4670/1</a> 1хслотс рабочее зеркало <a href=https://astraclub.ru/members/346000-Jamesscoda>https://astraclub.ru/members/346000-Jamesscoda</a>
скачать 1×slots официальный сайт
<a href=https://talkonlinenews.com/viewtopic.php?t=6481>1×slots официальный сайт мобильная версия скачать</a> 1×slot рабочее зеркало Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации дара необходимо доказать электрическую почту и привязать телефонный; <a href=http://xn–80aphfq.xn–p1ai/user/WalterHoalp/>http://xn–80aphfq.xn–p1ai/user/WalterHoalp/</a> 1хслотс рабочее зеркало на сегодня Следует выделить, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом.Баланс игрока пополняется на соответствующую необходимую. К ней используется вейджер, обозначенный в правилах акции. Вывести выигрыш возможно несомненно после того, как пользователь устроит требуемый объем ставок из собственных средств. В редчайших случаях бездеп работает в формате Free Play. На счет юзера зачисляется крупная сумма, и предоставляется небольшой срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по окончании этого периода сумма на счету несомненно превышать изначальную, то разность возможно несомненно исключить либо применять для последующих ставок.
1хслот зеркало сайта
Верификация важна для добавочной безопасности и может техподдержке выявить бонусхантеров и плутов. Кстати, рядах платформах выводы крупных сумм доступны только в подтверждения личности.Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, так как Вам понадобиться ее доказать в при выводе средств. К примеру, игроку выдаются безвозмездные свои в заведении в размере пятидесяти либо ста долларов (вейджер на коие составляет 100х). То есть, любому новоприбывшему геймеру выскакивает притягивающая иллюстрация, кот-ая обещает выплату всех зачисленных компанией средств. Не стоит внимания на казино бонус за регистрацию без депо с чрезмерно немалый или довольно малюсенькой суммой призов, поэтому собственно, даже кропотливо выучив все обстоятельства, здесь всего, будет какой-то подвох. <a href=https://www.ecigtalk.org/blogs/u194226/custom-3697.html>https://www.ecigtalk.org/blogs/u194226/custom-3697.html</a> Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. 1×slots официальный сайт скачать
1×slots на любой вкус как пройти регистрацию
Выполнив все требования оператора, заказчик возможность оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит примерно менее суток. Если дополнительно потребуется пройти процедуру верификации, то срок возрастает до 1–2 трудящихся дней. Для перевода используются банковские инструменты и электронные платежные системы. Второй метод подходит чем, например как большинство транзакций в осуществляются моментально. В связи со спецификой функционирования банков обработка платежей возможность занять до нескольких трудящихся дней. <a href=https://showboysmedia.com/real-music/#comment-53621>1×slots официальный сайт скачать</a> Вейджер не более х30–35 считается приемлемым. Опытные игроки заявляют, что с этим вейджером реально остаться в плюсе, если верно подойти к выбору игрового аппарата.Каждый игры обязан сперва отчетливо выучить условия по получению и отыгрышу приглянувшегося подарка. Если всё организует, поторопитесь арестовать бесплатные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик данный начать вертеть барабаны топовых слотов. Размер бонуса. В качестве бездепов обычно начисляют маленькие суммы, а когда речь идет о бонусах за депозит, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино шансы подарить игроку до 2000$. 1хслотс казино зеркало <a href=http://0lwow.com/home.php?mod=space&uid=20912>http://0lwow.com/home.php?mod=space&uid=20912</a>
1×slots официальный регистрация
Первый возникающий вопрос, это, чего выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают свежих игроков. Последним проще начать забаву на средства с дара за регистрацию. Им не нужно пополнять баланс и расходовать собственные средства. Новички получают бесплатные спины либо средства на счёт. С их поддержкою знакомятся с игровым ходом, крутят слоты и делают ставки в рулетке.Но а если вы уже профи по онлайн казино, кликаем на красноватую кнопку «Получить» и Вы механически перейдете в онлайн казино; <a href=https://codescript.ru/user/TerryNer/>https://codescript.ru/user/TerryNer/</a> 1×slots сайт зеркало Наличие у игрока 2 аккаунта. Запрещено создавать некоторое профилей для многократного получения бездепов.Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 поболее. Когда игроку полагается большое фриспинов, администрация возможность бить3 их начисление на некоторое дней. Бесплатные вращения предоставляются для определенного слота, кот-ый указывается в правилах акции.
<b>Смотреть еще похожие новости:</b>
<a href=https://10nsk.ru/user/JosephSuple/>рабочее зеркало 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если при регистрации указать промокод, можно гарантировано получить бонус. Где брать ваучер? Посетите направленные блоги или форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В последнее время игорные жилища начали афишироваться в кинокартинах и телесериалах. Присмотритесь и наверняка заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных руб.
#4103 Charlesgunnyhttp://filmkachat.ru
1×slos регистрация в 1×slots casino
Если речь идет об неповторимых предложениях, возможность понадобиться регистрация в казино по ссылке с партнерского вебсайта.Наш список содержит лучшие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает проверку по главным характеристикам: <a href=http://filmkachat.ru/>рабочее зеркало 1×slots</a> <a href=https://band.us/band/96885593/post/3>https://band.us/band/96885593/post/3</a> Как и промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такого предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых посетителей и позволяет им составить впечатление о функционале, не рискуя вескими суммами. 1 xslots рабочее зеркало <a href=https://rabofree.diary.ru/p222118212_mp-stats-v-skladchinu.htm>https://rabofree.diary.ru/p222118212_mp-stats-v-skladchinu.htm</a>
1×slots регистрация 1×slotscasino 56 online
1хслот зеркало сайта <a href=http://tmml.top/home.php?mod=space&uid=94944>http://tmml.top/home.php?mod=space&uid=94944</a> 1×slots casino зеркало рабочее Суммы сходственных предложений, в, колеблются от 3-х до 20 долларов, а вейджер на эти свои должен составлять от 30 до шестидесяти раз. Зачастую, наивеличайшая сумма выигрыша тут составит от одной до двух сотен долларов. Если геймер выиграет больше, то все свои все быть списанными до максимально разрешенного выигрыша. Здесь бывает содержание выводить еще несуществующие финансы на свою платежную систему и далее искать заведение с подходящими под данную необходимую релоадом либо бонусом за первое пополнение счета. Есть несколько подвидов бездепозитного вознаграждения, предлагаемого большим количеством заведений.Индивидуальные поощрения выдаются за совершение деяний: подписку на аккаунты площадки в соц сетях, установку мобильного прибавленья либо официального клиента для ПК. В большинстве казино срабатывают программки лояльности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на следующий уровень часто сопровождается выдачей бездепа.
1×slots casino зеркало
Для отыгрыша бонуса казино обязывает игрока сыграть на необходимую, в некоторое один превосходящую необходимую полученного приза — тут выгода фирмы очевидна.В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и в случае спорных ситуаций нет способности куда-то пожаловаться и доказать собственную правоту. Во время игры в казино, выигрыши, полученные спасибо безвозмездным призовым фондам, суммируются и срабатывают в общую сумму для отыгрывания. Однако, в удача улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно допустит исключить денежные средства. Сумма вывода будет зависимости от лимита, одобренного именно в этом учреждении. Поэтому, пристально нужно читать правила выдачи безлимитных депозитов. <a href=http://sman1mtp.sch.id/index.php?option=com_comprofiler&task=userProfile&user=2487>http://sman1mtp.sch.id/index.php?option=com_comprofiler&task=userProfile&user=2487</a> 1×slots сайт зеркало Прежде чем активировать бездеп, необходимо увериться в, что государство, уроженцем коей является игрок, не заходит в перечень запрещенных.Превышение наибольшей ставки при отыгрыше. Система автоматически не предостерегает о превышении ставки, потому о нарушении правил игрок возможность разузнать уже после подачи запроса на вывод средств.
1×slots рабочее зеркало
Условия имеют разниться друг от друга. Но такой бонус имеет быть применен лишь для игрового процесса – приобретенные на счет деньги до такого, как станут отыграны, вывести невозможно. <a href=http://forum.l2endless.com/member.php?action=profile&uid=6253>1×slots регистрация на официальном сайте</a> Акции, посвященные календарным праздникам, посещают рассчитаны как на всех юзеров, так и на категории: к, подарок на 8 марта девушкам-игрокам или мужчинам на 23 февраля. 1×slots регистрация на сайте <a href=https://dawonprint.com/bbs/board.php?bo_table=free&wr_id=202285>https://dawonprint.com/bbs/board.php?bo_table=free&wr_id=202285</a> Будьте внимательнее при ознакомлении с правилами во избежание происхожденья конфликтных ситуаций с казино, когда последствии отыгрыша бездепа вам не дадут вывести крупную необходимую выигрыша.
1×slots зеркало проходить регистрацию это отличный вариант
4. Заберите презент. Чаще всего приз активизируется сразу после регистрации. Но посещают ситуации, когда нужно зайти в собственный кабинет или написать в саппорта. <a href=https://yogicentral.science/wiki/Shisha_Tobacco_From4_Eur>https://yogicentral.science/wiki/Shisha_Tobacco_From4_Eur</a> Высокая конкурентность в разделе азартных игр мотивирует операторов привлекать клиентов разнообразными промоакциями. Благодаря данному у посетителей появляется вероятность получить призы в казино за регистрацию без депозита. Воспользоваться этим предложением можно, избегая процедуру внесения средств на игровой счет, просто активировав акк на сайте. Наш гид по бездепам поможет выбрать самую привлекательную бонусную программку, узнать правила получения такового гонорары и распорядиться им с наибольшей выгодой. 1×slots casino регистрация 1×slotscasino09k online
<b>Смотреть еще похожие новости:</b>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5043/#comment-606376>1× slots casino официальный сайт</a>
<a href=https://astraclub.ru/members/353998-Jameswow>1×slots casino зеркало</a>
<a href=http://forums.indexrise.com/thread-49264-post-365116.html#pid365116>x1 slots регистрация в 1×slots casino</a>
<a href=http://romb4×4.ru/forum/threads/1-x-slots.22504/>1 x slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Такой безвозмездный эквивалент средств зачисляется на профиль пользователя в осуществления притязаний и предназначаются они лишь для игрового процесса. Вывод таких вознаграждений вероятен только последствии осуществления вейджеровых критерий. Игрокам стоит воспринимать приветственный приз как гарантированный метод получить большой выигрыш, хотя это замечательная вероятность без затрат оценить возможностей казино.
#4104 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино в россии про казино <a href=https://t.me/vchkogpu_ru>бесплатно играем казино</a> 1×bet сайт Скоробогатова Ольга Николаевна порно <a href=https://vestnik-jurnal.com/>где казино</a> Семёнова Татьяна Владимировна порно сайте букмекерской конторы фонбет porno Анастасия Янькова, боксерка порно с Георгий Джикия (футбол) online casino официальный фильмы казино рояль casino андроид
DiskiPlus бк букмекерская контора DiskiPlus casino автомат <a href=https://diskiplus.ru/>DiskiPlus лучшие онлайн казино</a> DiskiPlus 1×bet 1хбет DiskiPlus 1×bet рабочее <a href=https://diskiplus.ru/>DiskiPlus pin up casino скачать</a> DiskiPlus Окладникова Ирина Андреевна порно DiskiPlus 7k casino зеркало на сегодня DiskiPlus casino официальный сайт DiskiPlus пинко casino DiskiPlus играющие казино DiskiPlus pin up букмекерская контора DiskiPlus порно с Бондаренко Анастасия Борисовна
#4105 Charlesgunnyhttp://filmkachat.ru
1×slot казино зеркало
Первый возникающий вопрос, это, для выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают свежих игроков. Последним проще начать игру на деньги с презента за регистрацию. Им надо пополнять баланс и тратить личные свои. Новички получают бесплатные спины либо свои на счёт. С их поддержкой знакомятся с игровым процессом, крутят слоты и делают ставки в рулетке. <a href=http://filmkachat.ru/>1×slots официальный сайт, скачать</a> Бонус с зачислением средств на счет дает больше свободы деяний. Пользователь сам выбирает, каким образом распорядиться подаренными средствами. Здесь того имеют работать ограничения на перечень доступных игр, хотя обыкновенно эти рамки не например строги, как в промо с бесплатными вращениями. <a href=https://hanson.net/users/ShopAvto>https://hanson.net/users/ShopAvto</a> Чаще всего интернет-казино предлагают бездепозитные призы свежим юзерам. Эта промо-акция довольно отлично завлекает новичков, подталкивая их к открытию счета. Конечно, не все они становятся преданными клиентами, хотя сам факт регистрации аккаунта играет на руку заведению.Почти все игровые клубы настоятельно подтверждение контактных данных игрока для получения бездепозитного бонуса. 1хслот зеркало сайта <a href=https://valetinowiki.racing/index.php?title=Выкуп_авто>https://valetinowiki.racing/index.php?title=Выкуп_авто</a>
1×слотс казино
В зависимости от онлайн заведения каждый из них возможность для предложить как бездепозитные средства, например и бездепозитные фриспины, которые в удачной регистрации рухнут вас на ваш игровой баланс. 1×slots регистрация 1×slotscasino 56 online <a href=http://www2.bio.ulaval.ca/landrylab/bioinfo/doku.php?id=1win_cassino_jogos>http://www2.bio.ulaval.ca/landrylab/bioinfo/doku.php?id=1win_cassino_jogos</a> Ещё одно распространённое акционное предложение – симпатичный подарок с неблаговидными требованиями. К образцу, клуб обещает $100 виде бездепа, но с вейджером х80 или х100. Отыграть такой вейджер практически невозможно и поэтому лучше концентрироваться на больше интересных промоакциях. 1хслотс зеркало на сегодня На данном разделе портала регулярно публикуются обзорные статьи, каких рассматриваются бесплатные бонусы наихороших интернет-казино. Информация структурирована по нескольким пунктам, включая основные:
1×slots зеркало сайта
Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам воспрещено начислять бонусы посетителям, не имеющим денежных средств на счете. Мы предлагаем осмотреть актуальные призы онлайн-казино с лицензией, коие соблюдают законодательство РБ. <a href=http://zanasite.free.fr/laripostedumardi/doku.php?id=%D1%84%D0%BB%D0%B8%D1%80%D1%82%20%20%D1%80%D1%83%20%D1%81%D0%B0%D1%80%D0%B0%D1%82%D0%BE%D0%B2%20%D0%B7%D0%BD%D0%B0%D0%BA%D0%BE%D0%BC%D1%81%D1%82%D0%B2%D0%B0>http://zanasite.free.fr/laripostedumardi/doku.php?id=%D1%84%D0%BB%D0%B8%D1%80%D1%82%20%20%D1%80%D1%83%20%D1%81%D0%B0%D1%80%D0%B0%D1%82%D0%BE%D0%B2%20%D0%B7%D0%BD%D0%B0%D0%BA%D0%BE%D0%BC%D1%81%D1%82%D0%B2%D0%B0</a> Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную процедуру активации бонуса без депозита. Внимательно прочитайте до конца. Многие новички проделывают оплошности на этапе регистрации и поэтому не могут получить презент.Вейджер менее х30–35 считается приемлемым. Опытные игроки утверждают, собственно с этим вейджером реально остаться в плюсе, случае верно подойти к выбору игрового аппарата. 1хслотс мобильная версия зеркало
1 х слотс зеркало
Как лишь на виртуальном счету окажутся бонусные свои, поторопитесь отыграть вейджер. Сразу после этого возможно оставить заявку на вывод выигрыша. Кредиты прибыльно отличаются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом настоящих средств и выделяют возможность почувствовать задор. Во-вторых – возможно насладиться каждой азартной забавой доступной на веб-сайте. В вашем распоряжении присутствуют автоматы, настольные приложение, видео-покер, Live-дилеры.Промокод – определённая композиция знаков, коию нужно ввести в соответствующее фон при создании учетной записи или активировать в собственном профиле игрока в разделе с бонусами. Стоит обозначить(означить), собственно бездепозитный бонус выдается только совершеннолетним новеньким, коие, тому, имеют пригласить личных друзей и знакомых, также рассчитывающих на поощрительную программу преданности. Подобная разработка появилась среди соперничающих онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению своей популярности, методом вербования новых игроков. Бонусы – это оригинальный шанс для вероятных участников забавы, коие все опробовать софт покер рума и убедиться, станут ли они в него выступать либо нет. Новый игрок попробует свои силы с настоящими оппонентами в казино. 1×slos регистрация в 1×slots casino <a href=http://maskarad.bomba-piter.ru/index.php?subaction=userinfo&user=curvedfan6>http://maskarad.bomba-piter.ru/index.php?subaction=userinfo&user=curvedfan6</a>
1×slots скачать на айфон
<a href=http://intextv.by/forum/user/56336/>http://intextv.by/forum/user/56336/</a> Особую изюминку видео слотам присваивают оригинальные знакы. С их свет активизируются различные бонусы. Вы можете запустить вспомогательный уровень и прирастить сумму выигрыша. Есть знаки, коие замещают ненадобные элементы и сами творят выигрышные комбо. Не стоит забывать и тему бонус-тур. После каждого счастливого спина есть шанс увеличить необходимую выигрыша в два или четыре раза.Для получения бонуса надо(надобно) пригласить в игру свежего клиента. Казино начислит пригласившему фиксированный процент от взносов приглашённого вид приза: чаще всего его размер не превышает 10%. Срок деяния бонуса как не превышает месяца: пригласивший получает бонус в зависимости от проигранных ставок приглашённого в первый луна забавы. 1 xslots рабочее зеркало Каждый новичок и умелый игрок мечтают скоро стартануть и начать делать настоящие ставки. Для этого достаточно забрать презент, за кот-ый не платить. В зависимости от игровой платформы, нужно сделать профиль, привязать email либо телефон. После сего администрация начислит щедрое вознаграждение вид бесплатных вращений или виртуальных кредитов.Классическая разновидность бонуса за творение аккаунта. Его преимущество содержится в, собственно клиент возможность без выбирать аппараты и создавать ставки в них. Иногда список игровых автоматов ограничен оператором, хотя все одинаково это лучше, чем единственный дешевый слот, как когда с внедрением фриспинов.
<b>Смотреть еще похожие новости:</b>
<a href=http://big.bestforums.org/viewtopic.php?f=7&t=10243>1×slots регистрация 1×slotscasino 56 online</a>
<a href=http://www.arka-bahce.org/forum/showthread.php?p=778872#post778872>1×slots регистрация на сайте 1×slots ru com</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вообще перейдя в казино — управляла одинаковы в получении бездепозитных бонусов, в стереотипные управляла входит: подтвердить эл. Почту и телефон, заполнить свой собственный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ. Бонус в казино без депо имеет разные варианты: это может быть приветственный бонус, акции в честь каких-то праздников либо важных дат, приз за вербование новых игроков, лояльность и получение VIP-статуса.
#4106 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало этих способов предполагает регистрацию
Зарегистрироваться в казино по особой ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефона и электронную почту). Для доказательства номера телефонного нужно в личном профиле показать свой номер и нажать кнопку „Подтвердить номер телефонного“, далее Вы получите sms-сообщение с кодом, который нужно ввести в подходящее фон. Для доказательства электрической почты, перебежать по интенсивной ссылке в письме от казино.Бездеп с фриспинами возможность обхватывать всю коллекцию игр на веб-сайте или разработки одного провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш имеет быть выведен в как, как юзер отыграет данную сумму. Возможность расценить полный функционал слотов — основное совершенство этой разновидности. Игроку становятся доступны те функции, которые отсутствуют в демонстрационном режиме, а вероятность выиграть реальные деньги прибавляет ярких азартных ощущений. <a href=http://filmkachat.ru/>1×slot рабочее зеркало</a> Отыграв бездепозитный приз в казино с выводом также придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в подобное ограничение присутствует, то единоразово исключить выйдет лишь сумму, не превосходящую размер полученного бонуса. <a href=https://postheaven.net/pafsi02hf4>https://postheaven.net/pafsi02hf4</a> 4. Заберите презент. Чаще всего приз активируется сразу в регистрации. Но случаются истории, когда надо(надобно) забежать в личный кабинет либо написать в саппорта. 1хслотс мобильная версия зеркало <a href=http://parus-perm.ru/communication/forum.php?PAGE_NAME=profile_view&UID=43124>http://parus-perm.ru/communication/forum.php?PAGE_NAME=profile_view&UID=43124</a> Ну и естесственно же, для казино бездепозитные призы прибыльны с имиджевой стороны: подобная добродушие увеличивает уровень преданности посетителей к фирмы.
1×slots зеркало регистрация
Ещё одно распространённое акционное предложение – привлекательный презент с неблаговидными притязаниями. К примеру, клуб обещает $100 виде бездепа, но с вейджером х80 или х100. Отыграть подобный вейджер фактически невероятно и поэтому лучше концентрироваться на больше заманчивых промоакциях.Популярность онлайн казино растёт и всё больше пользователей начинают увлекаться азартными играми. Бездепозитные призы 2022 года, это уникальные презенты за регистрацию. С их подмогою новые игроки шансы получить безвозмездные вращения или деньги на баланс за 1 регистрацию. С в игорных заведений в интернете, бездепозитные бонусы стали наимоднейшим методом вербования игроков. Подобные акции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш сайт собрал наилучшие предложения из онлайна на 2022 год. Воспользуйтесь хоть даром и можете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить обстоятельства. 1хслотс 1хслотс регистрация перейти на 1×slots Промокод – определённая комбинация символов, коию нужно ввести в отвечающее фон при твореньи учетной записи либо активировать в собственном профиле игрока в разделе с бонусами.Классическая разновидность приза за творение аккаунта. Его превосходство содержится никаких, что заказчик возможность помощи выбирать аппараты и делать ставки в них. Иногда список игровых автоматов ограничен оператором, хотя все одинаково это чем, чем единственный дешевый слот, как в случае с внедрением фриспинов. <a href=http://alex-zarya.ru/user/Anthonydaulk/>http://alex-zarya.ru/user/Anthonydaulk/</a> 1хслот 1хслотс регистрация перейти на 1×slots
x1 slots регистрация в 1×slots casino
Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Бонусные средства – небольшая сумма денег для старта в новом казино. На бонусные деньги, обычно разрешено играть во все игры, считая слотов с современным джекпотом и игр из раздела live casino. <a href=http://g961713h.beget.tech/user/Chrisdum/>http://g961713h.beget.tech/user/Chrisdum/</a> Не рекомендуем опрометью голову хвататься за различные предложения получения средств без инвестициям. Вполне вполне, что бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на первый взор. Альтернативой считается казино приз за депо. Мы предлагаем вам пару советов, спасибо коим у любого игрока несомненно вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств: 1хслотс регистрация в 1×slots casino Несмотря на то, что этот вариант стимуляции со стороны азартных платформ очень востребован в сфере сходственных игр, далеко не поклонникам казино известно, собственно по бездепозитные призы казино и как именно их вполне эксплуатировать.
1хслот зеркало сайта
Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Отзывы читателей о бонусных промоакциях помогут составить эмоцию, хотя не запамятовывайте о субъективности личных объяснений. Вейджер в переводе с английского значит «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша приобретенного бонуса, в нашем случае бездепозитного. Число ставок имеет — принципиально лишь набрать необходимую, пропорциональную сумме поощрения. 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=http://nontota.com/wikicorporativa/doku.php?id=РР·_чего_состоит_диета_Елены_Малышевой>http://nontota.com/wikicorporativa/doku.php?id=РР·_чего_состоит_диета_Елены_Малышевой</a> Мы подготовили список, где есть постоянно актуальные и свежие бездепозитные бонусы казино, которые возможность получить даром. Для наших юзеров есть специальные предложения эксклюзивные призы, коие вы у не найдете, их мы определили специальной красной плашкой «Exclusive».Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 $. Если выдаются фриспины, их число редко превышает нескольких 10-ов безвозмездных вращений.
1хслотс официальный сайт зеркало
Для получения депозитного бонуса необходимо восполнить собственный игровой баланс реальными средствами. Вознаграждение можно получить либо при внесении первого депозита, либо вид фиксированного процента от внесённых средств. Так либо иначе, приз поступит на счёт только после пополнения.Некоторые казино имеют предлагать клиентам бездепы за подтверждение номера или почты либо репост на страничку в соц сетях. Создание аккаунта. На сайте казино нужно открыть регистрационную форму и заполнить пустующие поля личными данными. Иногда на этом этапе требуется указать лишь адресок электрической почты и пароль, хотя чаще хотелось заполнить анкету персональной информацией (ФИО, дата рождения, пространство проживания и т.д.). Нужно свидетельствовать лишь реальные данные, поскольку впоследствие они будут испытаны.Так же стоит выделить то, собственно в каждом интернет казино установлен собственный наибольший кешаут на бездепозитный приз. Как управляло кешаут — это предельная сумма денег, которая дешевая для вывода с бездепозитного бонуса. <a href=http://l-avt.ru/support/dialog/?PAGE_NAME=profile_view&UID=68249>http://l-avt.ru/support/dialog/?PAGE_NAME=profile_view&UID=68249</a> Возможность протестировать новые игры, не рискуя собственными своими и разработать личную тактику игры. 1×slots зеркало на сегодня Выигрыши с бонусов без инвестициям постоянно привязаны к притязанию по ставкам и все быть обналичены только последствии исполнения этих требований.Автоматы неспроста считаются наиболее известным азартным развлечением. Чтобы усвоить управление и управляла, понадобится всего несколько минут. Ваша задача сделать ставку, найти количество рабочих линий и возможно крутить барабан. Если дисплее выпадет выигрышная комбинация – вы выиграли! С этой задачей вас помогут управится бездепозитные призы казино.
<b>Смотреть еще похожие новости:</b>
<a href=https://elclasificadomx.com/author/jameslog/>1×slots быструю регистрацию а также мгновенное</a>
<a href=https://www.formulersupport.com/Thread-1×slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8E-%D0%BF%D1%80%D0%BE%D1%86%D0%B5%D0%B4%D1%83%D1%80%D0%B0-%D0%B7%D0%B0%D0%B9%D0%BC%D0%B5%D1%82-%D0%B2%D1%81%D0%B5%D0%B3%D0%BE-%D0%BB%D0%B8%D1%88%D1%8C–166785>1×slots регистрацию процедура займет всего лишь</a>
<a href=http://www.topboard.org/media/users/rabofreesn.160691/>1×slots рабочее зеркало</a>
<a href=https://masstr.net/showthread.php?tid=132542>1×slot рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чтоб получить большой выигрыш, избирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша. Не советуем сломя голову браться за различные предложения получения средств без инвестициям. Вполне возможно, собственно бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на первый взор. Альтернативой является казино бонус за депо. Мы предлагаем вас пару советов, благодаря которым у любого игрока будет вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств:
#4107 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
как выиграть в казино kent casino регистрация <a href=https://repost.news/>казино ли</a> casino com скачиваемые казино <a href=https://7club7.com/>вавада казино</a> лучшая казино казино на деньги казино можно 1×bet xbet казино рояль смотреть гта онлайн казино porno Алена Косторная (фигурное катание)
DiskiPlus винлайн букмекерская контора официальный DiskiPlus букмекерские конторы в россии <a href=https://diskiplus.ru/>DiskiPlus казино можно</a> DiskiPlus up букмекерская контора DiskiPlus пин ап букмекерская контора <a href=https://diskiplus.ru>DiskiPlus лучшие казино бесплатно</a> DiskiPlus гта онлайн казино DiskiPlus казино вход официальный сайт DiskiPlus Шевцова Татьяна Викторовна порно DiskiPlus казино ли DiskiPlus r7 casino DiskiPlus порно с Георгий Джикия (футбол) DiskiPlus букмекерские контора ап
#4108 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на официальном сайте
Для того, чтобы отыграть сумму вашего бездепозитного бонуса нужно выполнить условия вейджера. Очень часто фриспины даются на конкретные слоты (book of ra, book of dead, book of sun), подбирайте слот для по, все довольно красивые и качественные. Бездепозитные приз имеет быть денежным так и в виде фриспинов на слоты <a href=http://filmkachat.ru/>1×slot зеркало рабочее регистрации на телефон придет</a> <a href=https://noosfero.ufba.br/lexxeagle/blog/professionalniy-vikup-avto-v-kieve-s-chestnoy-otsenkoy-na-meste>https://noosfero.ufba.br/lexxeagle/blog/professionalniy-vikup-avto-v-kieve-s-chestnoy-otsenkoy-na-meste</a> 1×slots зеркало регистрация то дальше необходимо пройти <a href=http://cargo-200.ru/index.php?subaction=userinfo&user=exuberantspecie>http://cargo-200.ru/index.php?subaction=userinfo&user=exuberantspecie</a> Но такие рамки не смущают в хайроллеров, что коэффициенты на слотах разрешают рассчитывать на солидные выигрыши, а в неких автоматах разыгрывается передовой джекпот.Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депозит может отличаться до 30 дней.
1×slots зеркало регистрация то дальше необходимо пройти
Подтверждение регистрации. Казино просят привязки профиля к электрическому адресу и номеру телефонного. Для этого на e-mail отправляется письмо ссылаясь, а на телефон ? текстовое известие с кодом.В основном случаев благотворительные бонусы начисляются в кредитах, коие невозможно незамедлительно исключить со счета. Прежде их нужно отыграть по установленным правилам. Эти притязания принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже. <a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=7523&TITLE_SEO=7523-preobrazovatel-interfeysov-usb-rs485&MID=465015&result=reply#message465015>1×slots регистрация</a> 1×slots casino регистрация 1×slots review live Некоторые казино все предлагать клиентам бездепы за подтверждение номера либо почты или репост на страничку в соц сетях.Не сложно догадаться, что not the slightest down payment bonuses практически разу не бывают великими. Чаще всего речь идет о пяти–тридцати баксах (либо эквиваленте данной суммы в другой еденице). <a href=https://98e.fun/space-uid-7848493.html>https://98e.fun/space-uid-7848493.html</a> Предложения с бездепозитными призами за регистрацию позволяют новым заведениям заинтересовать аудиторию на свой сайт. А игроки тому получают вероятность выступать на реальные средства без депозита в казино и заработать маленькой стартовый капитал, который разрешается исключить на карту банка либо электронный кошелек. 1×slots акции
1×slots официальный сайт зеркало рабочее
Иногда в качестве бездепа, казино дарит наименьший приз (до 50 рублей), ради которого не стоит заморачиваться. Для проверки используются сканы паспортов, водительских удостоверений, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь замечен в попытке ввести вспомогательный аккаунт, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный список. При ирге на лицензионной площадке не бояться свидетельствовать достоверную персональную информацию (шифрование исключает утечку персональных данных).Не желаете сыграть в азартные забавы, не рискуя средствами средствами, но получая в все выплаты? Подобную возможность деют все наилучшие порталы с азартными увеселениями. В их числе количество правдивых и надежных интернет-казино на русском языке. Они привлекают свежих пользователей разными поощрительными мероприятиями, включая бездепозитные, или благотворительные бонусы. <a href=http://cargo-200.ru/index.php?subaction=userinfo&user=crabbyelation24>http://cargo-200.ru/index.php?subaction=userinfo&user=crabbyelation24</a> Если вы облюбовали себе некоторое брендов коие вам больше всего приглянулись, для неизменной забавы! Таких гемблеров казино очень любит и ценит, за частую эти игроки становятся VIP игроками заведения, которым часто поступают выгодные предложения вид бонусов, так же туда входит и бездепозитные.Многие новички сомневаются, собственно поощрительный приз надо несомненно возвращать, числе в они выиграли у казино. Это безусловно неопасно и надежно. Выводя выигранные средства, игрок просто останавливает свое роль при и теряет уникальную возможность – безвозмездно увеличивать личное вещественное положение. 1×slots регистрацию более популярный вариант это
1×slots акции
В лицензионных бездепозитных казино выступать в азартные забавы действительно безопасно. Наличие лицензии одобряет что, этот факт, собственно клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP. Превышение наибольшей ставки при отыгрыше. Система автоматически не предупреждает о превышении ставки, потому о несоблюдении верховодил игрок может узнать уже после подачи запроса на вывод средств. 1×slots официальный зеркало рабочее <a href=http://seneka-vl.ru/index.php?subaction=userinfo&user=noisybroker50>http://seneka-vl.ru/index.php?subaction=userinfo&user=noisybroker50</a> Игрокам не принимать приветственный приз как гарантированный способ получить крупный выигрыш, но это замечательная возможность без затрат расценить функционал казино.
казино 1×slots
В случае с фриспинами без вейджера, Вам не придется отыгрывать свой выигрыш с безвозмездных вращений. Прибыль, которую Вы заработаете на таком бездепе возможно ставить на вывод без какого или отыгрыша. <a href=http://www.ctphome.com/bbs/home.php?mod=space&uid=64656>http://www.ctphome.com/bbs/home.php?mod=space&uid=64656</a> Отзывы читателей о бонусных промоакциях посодействуют составить впечатление, но не забывайте о субъективности собственных объяснений. 1×slots зеркало подтвердит вашу регистрацию если говорить
<b>Смотреть еще похожие новости:</b>
<a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=8111>1× slots зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В перечне требований к отыгрышу часто присутствуют лимиты на ставки при этой на личные деньги. Так, если отыграть надо(надобно) 30 000 руб., а предельная сумма ограничена 30 рублями, то вращать барабаны светит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками условий по срокам действия акции.
#4109 Charlesgunnyhttp://filmkachat.ru
скачать 1×slots официальный сайт
Так что основное отличие подарка на депозит от бездепа – неотъемлемое пополнение счёта. Вы сможете внести депо и преувеличить стартовый капитал или отобрать бездеп и этом не придётся рисковать своими сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начислит щедрое одобрение! <a href=http://filmkachat.ru/>1×slots casino зеркало рабочее</a> <a href=https://trumpbookusa.com/blogs/259423/Professional-3D-Animation-Services-in-the-Digital-Age>https://trumpbookusa.com/blogs/259423/Professional-3D-Animation-Services-in-the-Digital-Age</a> Бездепозитные призы за регистрацию в игровых автоматах для собственников онлайн-казино считаются долею маркетинговой кампании, направленной на повышение аудитории сайта. Так они продвигают средства бренды и привлекают свежих клиентов. 1×slots подтвердит вашу регистрацию если говорить <a href=https://kosmetikinstitut-milla.de/user/Patricksab/>https://kosmetikinstitut-milla.de/user/Patricksab/</a> Важно, удостоверьтесь что, что раньше не регились в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи.
1× slots официальный
Представленные на данной страничке наилучшие бездеп бонусы в казино за регистрацию в 2022 году имеют подходящие условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, в посетители Casino.ru шансы сортировать перечень по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д.Бездепозитные призы казино за регистрацию в 2022 году — это возможность сыграть за счёт заведения. Казино даёт клиенту шанс воспользоваться определённой суммой либо числом даровых вращений без внесения депо. Не путайте деморежим с реальной игрой без необходимости внесения депозита. 1х слотс зеркало регистрация в 1×slots casino Осталось выбрать казино с призом за регистрацию и создать профиль. После активации подарка выигрыш зависит от Фортуны и способностей. <a href=https://www.harnessracingforum.com/member.php?111982-Anthonyskelt>https://www.harnessracingforum.com/member.php?111982-Anthonyskelt</a> Активация денежного вознаграждения случается механически в сотворения профиля либо использования промокода. Иногда операторы предъявляют дополнительные требования: подписаться на страницы казино в соц сетях или на рассылку рекламных известий, скачать и установить дополнительный софт и т.д. 1×slots промокод при регистрации 2025 Для всех бездепозитных призов функционирует наибольший предел на выигрыш. Он показывает предельную сумму, которую вы сможете получить, играя на бонусные кредиты. Как только для удастся выполнить притязания вейджера, допустимый максимально несомненно переведен с бонусного счета на главный, а остаток будет списан.
1×slots регистрацию процедура займет всего лишь
Верификация аккаунта. Лучше подтвердить лицо незамедлительно в регистрации, дабы позже не было проблем с выводом денег. Верификация имеет протекать двумя способами: <a href=http://forum.l2endless.com/member.php?action=profile&uid=6874>http://forum.l2endless.com/member.php?action=profile&uid=6874</a> скачать 1×slots на андроид мобильная версия Самый распространённый из подобных призов, естесственно же, бездеп на денек рождения посетителя — приз повторяющий фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им возможно протяжении установленного периода медли.Вейджер в переводе с британского означает «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша полученного приза, в нашем случае бездепозитного. Число ставок имеет — принципиально лишь набрать сумму, пропорциональную сумме одобрения.
1×slot зеркало рабочее этих способов предполагает регистрацию
Таким образом интернет казино получает вероятного игрока. Возможно в либо подлинном он захочет сыграть на средства средства. Так трудятся бездепозитные бонусы в онлайн казино. Здесь очень подходит выражение, безвозмездные сыр посещает только в мышеловке. Начинающие игроки могут не осознавать опасность пыла. Однако с понимания становится больше. Это тема для отдельного обсуждения.Для получения бездепа необходимо пригласить в забаву по реферальной ссылке свежего посетителя: он должен зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на необходимую, указанную в критериях акции. Особую изюминку видео слотам присваивают оригинальные знакы. С их в активируются разные призы. Вы можете запустить вспомогательный степень и увеличить необходимую выигрыша. Есть знаки, которые сменяют ненужные элементы и сами делают выигрышные комбо. Не стоит забывать и тему бонус-тур. После любого успешного спина есть шанс увеличить необходимую выигрыша в два либо четыре раза.Первый образующийся вопрос, это, чего выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают новых игроков. Последним проще начать забаву на деньги с презента за регистрацию. Им не пополнять баланс и расходовать собственные свои. Новички получают бесплатные спины либо свои на счёт. С их помощью знакомятся с игровым процессом, крутят слоты и проделывают ставки в рулетке. 1хслотс 1хслотс регистрация перейти на 1×slots <a href=http://suprememasterchinghai.net/bbs/board.php?bo_table=free&wr_id=2980524>http://suprememasterchinghai.net/bbs/board.php?bo_table=free&wr_id=2980524</a> Изучить правила и условия получения бездепозитных бонусов казино, Вы можете у нас на веб-сайте в разделе с бонусами либо на официальном сайте выбранного Вами казино. Если не найти необходимую информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал или по электронной почте.Как только получите бездеп в казино, всё одинаково не забывайте инспектировать электрическую почту. Некоторые игорные клубы постоянно радуют активных гэмблеров приятными призами. Чаще всего получить подарок можно в преддверии праздника, на день рождение, за привлечение приятеля. А кроме распространённым призом является прибавка к депозиту. Нужно чем пополнить счёт, и азартное заведение увеличит его на 50–100%.
1 xslots рабочее зеркало
При ирге на бонусные свои воспрещается выступать в игровые автоматы с современным джекпотом и игры из радела exist casino. Кроме того, некоторые казино выделяют бездеп на раз либо несколько конкретных слотов, и в других забавах Вы не можете на них играть. <a href=http://bts.clanweb.eu/profile.php?lookup=36822>http://bts.clanweb.eu/profile.php?lookup=36822</a> После получения приза вывод средств для посетителя несомненно недосегаем до, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя либо пара недель. Выводить деньги игрок сможет лишь последствии отыгрыша. 1хслотс 1хслотс регистрация перейти на 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.puppylinux.pl/index.php?topic=826.new#new>1×slot рабочее зеркало</a>
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=80217&extra=>1х слотс зеркало регистрация в 1×slots casino</a>
<a href=https://orbitsound.com/forum/user-211634.html>1× slots зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Также учтите, собственно кое-какие игровые платформы сузивают список государств, коие готовы получить предложенный бездепозитный бонус за регистрацию. К примеру, существуют онлайн-заведения, выдающие сходственные призы лишь обитателям определенных стран. К примеру, интернет казино 777 Оригинал предоставляет бездепозитный бонус только игрокам из России и стран СНГ. Или наоборот, снабжают вознаграждением всех, кроме обитателей некоторых стран (как сего, следует пристально учить список, чтобы потом не появилось практически вопросов и претензий). Выбирайте наихорошие бесплатные призы счет обзоров на Casinoz – и пусть вас сопутствует удача при отыгрыше бонусных кредитов!
#4110 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
почему в казино нет окон букмекерская контора зенит <a href=https://t.me/vchkogpu_ru>какие казино</a> казино пину букмекерская контора фонбет <a href=https://rhymes-punches.com/>Петрова Ольга Викторовна порно</a> casino 7k рабочее почему в казино не бывает настенных часов официальные зеркала казино casino актуальное зеркало 1×bet слоты 1×bet xyz vavada casino порно с Дарья Касаткина (теннис)
DiskiPlus лучшие букмекерские конторы DiskiPlus 1×bet официальный сайт <a href=https://diskiplus.ru/>DiskiPlus лучшие казино бесплатно</a> DiskiPlus скачать 1×bet 1×bet xyz DiskiPlus casino рабочее зеркало <a href=https://www.diskiplus.ru>DiskiPlus 1×bet casino</a> DiskiPlus порно с Алексей Миранчук (футбол) DiskiPlus casino daddy DiskiPlus официальные букмекерские конторы DiskiPlus пари букмекерская контора DiskiPlus porno Юлия Пересильд DiskiPlus порно с Васильева Татьяна Викторовна DiskiPlus песня казино
#4111 Charlesgunnyhttp://filmkachat.ru
онлайн казино 1×slots
При малый сумме приза рекомендуется играть по невысоким ставкам, а использовать максимальные другого только сомнений случае, случае вейджер очень великой, а время на отыгрыш сильно ограничено. <a href=http://filmkachat.ru/>1×slots зеркало на сегодня</a> <a href=http://www.wmhelp.cz/html/modules.php?name=Forums&file=viewtopic&t=69255>http://www.wmhelp.cz/html/modules.php?name=Forums&file=viewtopic&t=69255</a> Иногда операторы настоятельно внесение малого депо перед выводом для верификации платежного прибора. В некоторых казино этот депо также светит отыграть. x1 slots 1хслотс регистрация перейти на 1×slots <a href=http://www.rgb-muelheim.de/buch/scarbook.php>http://www.rgb-muelheim.de/buch/scarbook.php</a> Лишь популярностью и знаменитые азартные заведения все разрешить для выдавать бездепы вид дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, которые можно потратить в лучших аппаратах с высокой отдачей.Каждый новичок и умелый игрок мечтают прытко стартануть и начать делать реальные ставки. Для этого достаточно забрать презент, за кот-ый не платить. В зависимости от игровой платформы, нужно сделать профиль, привязать email или телефонный. После сего администрация начислит щедрое вознаграждение в виде даровых вращений либо виртуальных кредитов.
1×slots регистрация 1×slots casino c2d ru
Минимального оборота. Этот предел устанавливается вейджером — же игрок не поиграет на установленную сумму, вывод средств будет недосегаем.Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам запрещено начислять призы посетителям, не имеющим денежных средств на счете. Мы предлагаем осмотреть животрепещущие призы онлайн-казино с лицензией, коие соблюдают законодательство РБ. <a href=https://www.lightknotes.com/MyBB/showthread.php?tid=261958>1× slots зеркало</a> 1×slots регистрация 1×slots casino c2d ru В интернет-сети всегда можно найти списки наиболее известных и обещанных поощрительных программ от знаменитых онлайн-казино. <a href=http://radshir.com/list/index.php?subaction=userinfo&user=wantinggrange45>http://radshir.com/list/index.php?subaction=userinfo&user=wantinggrange45</a> 1хслотс казино зеркало Не стоит путать игру в демо и внедрение бонусов. В демонстрационном режиме игрок может расценить механику слота, сюжет и оформление. Но игра ведется на относительные кредиты, поэтому отсутствует основное ? ощущение пыла. Активируя промокод или фриспины, клиент и не тратит средства деньги на игровые автоматы, хотя может сорвать реальный куш!
1хслот зеркало
Если простыми словами, бездепы – это определённая сумма средств либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать презенты. Но есть кое-какие аспекты. Существуют игорные жилища, которые перед что, этим как начислить бонусы настоятельно привязать телефон, предоставить копии документов. Доступность — бездепозитные бонусы в казино чаще всего предоставляются свежим игрокам, но посещают случаи, когда бонус имеют получить и действующие клиенты.Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы была возможность исключить выигрыш. <a href=http://clasificadosdolores.com.ar/sitio/author/arnoldmelty>http://clasificadosdolores.com.ar/sitio/author/arnoldmelty</a> Бездепозитный приз предоставляется новенькому игроку за определенные деянья. Часто подарок повторяющий денег либо фриспинов выдается за регистрацию, благодаря чему пользователь получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. 1×slots акции Маркетинговая политического всех игорных интернет-клубов должна одевать разнородный нрав. И случае гонорары на депо служат для того, чтобы провоцировать заносить депозиты и поощрять теснее имеющих юзеров, то бездепозитный приз в казино либо бонус за регистрацию в казино, до всего, рассчитан на расширение базы покупателей.
казино 1×slots официальный сайт
При подмоги такового поощрения оператор может кроме завлекать посетителей, которые раньше проявляли активность на сайте, но по какой-то основанию перестали играть. В этом случае промокод высылается пользователю по электронной почте либо в виде SMS. <a href=http://diablo2r.cn/home.php?mod=space&uid=30130>1×slots официальный сайт зеркало рабочее</a> Эффективность бездепов в рекламного инструмента расценили почти операторы. Малоизвестные площадки употребляют эти промоакции, чтобы прытко набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны неизменных гостей. Не все сайты, дающие подарки без депо, рекомендованы к игре. За привлекательным промоописанием могут прятаться неосуществимые условия отыгрыша и подводные камешки. Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Не сложно догадаться, что not the slightest deposit bonuses практически никогда не бывают великими. Чаще всего идет о пяти–тридцати баксах (либо эквиваленте этой суммы в иной еденице). 1×slots зеркало сайта <a href=http://channel8.my/home.php?mod=space&uid=1667754&do=profile>http://channel8.my/home.php?mod=space&uid=1667754&do=profile</a> Для ревизии применяются сканы паспортов, водительских прав, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь замечен в попытке ввести вспомогательный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный список. При забаве на лицензионной площадке не бояться указывать достоверную индивидуальную информацию (шифрование ликвидирует утечку персональных данных).Бездепы обычно предлагают с отыгрышем — мгновенно вывести выигранные свои нельзя. Перевод средств со счета будет возможен в как, как юзер выполнит все требования казино, а сумма имеет превышать установленного правилами лимита. Условиями акции фиксируются сроки, в течение коих клиент вправе воспользоваться предложением. Обычно они не превышают нескольких дней после активации.
1хслот 1хслотс регистрация перейти на 1×slots
Получить Бездепозитный бонус в интернет казино дело 2-ух кликов. Другой момент, отыграть промо и соблюсти правила и обстоятельства отыгрыша. Под правилами предполагается не только вагер, но и лимитирования по наибольшей ставке. Мы разумеем, что в кинотеатр все ставят на зеро и выигрывают. Призываем не создавать подобного. Перед активацией бонуса прочтите правила. Узнайте последующие факторы: Условия получения презента, за регистрацию, за депозит и многое. Ограничения по максимальной ставке. Зачастую не выше 350 руб. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вращать автоматы, а вагер будет стоять на пространстве. Поэтому важно аристократия, в каких забавах возможно совершать кратность денежного оборота. <a href=http://deshignsongpa.com/bbs/board.php?bo_table=free&wr_id=208584>http://deshignsongpa.com/bbs/board.php?bo_table=free&wr_id=208584</a> Бездепы обычно предлагают с отыгрышем — быстро исключить выигранные свои нельзя. Перевод денег со счета будет вероятен в такого, как пользователь выполнит все требования казино, а сумма не может быть выше установленного правилами лимита. Условиями акции фиксируются сроки, на которых заказчик вправе воспользоваться предложением. Обычно они не превышают нескольких дней после активации. казино 1×slots официальный сайт
<b>Смотреть еще похожие новости:</b>
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=35862>рабочее зеркало 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Активация случается за промокодов, которые вводятся в личном офисе последствии регистрации. Среди спецпредложений в перечне Casino.ru содержатся неповторимые промокоды, коие доступны лишь гостям портала. Другие способы начисления средств ? автоматическая активация сразу после создания аккаунта и получение дара по запросу в службу технической поддержки.
#4112 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1win casino casino сегодня <a href=https://t.me/vchkogpu_ru>Скворцова Вероника Игоревна порно</a> пари букмекерская контора где казино <a href=https://rumafia.news/>пин up casino</a> Попова Анна Юрьевна порно Фастова Елена Владимировна порно автомат казино kometa casino porno Анна Сидорова, керлингистка new casino казино смотреть онлайн
DiskiPlus казино рояль смотреть DiskiPlus 1×bet слоты официальный сайт <a href=https://diskiplus.ru>DiskiPlus kent casino регистрация</a> DiskiPlus пин ап казино DiskiPlus сайт 1×bet слоты <a href=https://www.diskiplus.ru/>DiskiPlus бесплатные букмекерские конторы</a> DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz DiskiPlus порно с Каролина Севастьянова DiskiPlus кент casino DiskiPlus казино в россии DiskiPlus pin up букмекерская контора DiskiPlus пин ап казино DiskiPlus пари букмекерская контора
#4113 StevenZobhttps://bs2bsme.at
Откройте все возможности <a href=https://bs2bsme.at/>актуальная ссылка bs2best</a> Большой выбор товаров, безопасные сделки и простая навигация. Приватность и защита пользователей на первом месте.
#4114 Ralphpethttps://sigarety-market.ru
Продажа сигарет <a href=https://sigarety-market.ru/petr-1>купить сигареты пётр 1</a> в интернет-магазине – оригинальные бренды, доступные цены, удобные способы оплаты и быстрая доставка. Сделайте заказ сегодня!
#4115 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
кент casino сайт казино зеркало <a href=https://kompromat1.online/>pin up casino buzz</a> казино 1 Семёнова Татьяна Владимировна порно <a href=https://www.ossetia.tv/>скачать 1×bet на андроид</a> pin up casino зеркало r7 casino сайт pin up casino порно с Петр Ян (ММА) 1×bet xbet xyz порно с Анна Калинская (теннис) зеркала официальных сайтов казино
DiskiPlus слот casino DiskiPlus online casino <a href=https://diskiplus.ru/>DiskiPlus порно с Алина Загитова, фигуристка</a> DiskiPlus скачать 1×bet на андроид бесплатно DiskiPlus up casino скачать <a href=https://www.diskiplus.ru/>DiskiPlus порно с Баталина Ольга Юрьевна</a> DiskiPlus казино пину DiskiPlus 1×bet зеркало на сегодня 1×bet xyz DiskiPlus сколько казино DiskiPlus 1×bet рабочее на сегодня DiskiPlus 1×bet сайт DiskiPlus 7k casino зеркало рабочее DiskiPlus casino скачать
#4116 Charlesgunnyhttp://filmkachat.ru
x1 slots регистрация в 1×slots casino
После потребуется привнести идентификационный платёж. Это пугает новичков больше всего. Нужно сделать минимальный депо в 100–500 руб. Таким образом служба защищенности убедиться сомнений, собственно платёжный метод принадлежит Вам. Данная процедура важна для обеспечивания защищенности игровых счетов. Пример, Ваш аккаунт взломают и выведут свои на собственный кошелёк. Будет крайне неприятно. Поэтому верификация платёжной системы, это необходимый момент. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> Но есть азартные заведения, готовые просто например вручить средства на забаву. Для сего достаточно сделать профиль. Чтобы исключить выигрыш, сначала нужно выполнить вейджеровые условия, прописанные в критериях получения бездепа. <a href=https://emaze.me/shopavto>https://emaze.me/shopavto</a> Бонусные средства – небольшая сумма денег для старта в новом казино. На бонусные средства, обычно разрешается играть во все забавы, считая слотов с прогрессивным джекпотом и игр из раздела exist casino. 1× slots casino официальный сайт <a href=http://021bababa.org/space-uid-496622.html>http://021bababa.org/space-uid-496622.html</a> Поспешите отобрать бездепозитные бонусы за регистрацию в казино из представленного списка. Все платформы не только водят законную деятельность, но и обрадуют честными результатами забавы, высочайшей отдачей, быстрыми выплатами.
сайт 1× slots casino
Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные способы и расценить особенности, недоступные при этой в демо режиме. Многие новые клиенты переходят в количество постоянных, а оператор получает длительную прибыль.Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? 1×slots casino зеркало рабочее <a href=http://forum.roozgozar.com/member.php?action=profile&uid=2448>http://forum.roozgozar.com/member.php?action=profile&uid=2448</a> Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам воспрещено начислять призы посетителям, не имеющим денежных средств на счете. Мы предлагаем разглядеть животрепещущие призы онлайн-казино с лицензией, которые соблюдают законодательство РБ.При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток. 1×slot рабочее зеркало
1×slots официальный сайт мобильная версия скачать
Если вы бывалый игрок, вы обязаны аристократия, собственно приз без депозита – редкая находка. Тем ниже, мы раз изучаем интернет, чтобы найти вам лучшие бездепозитные предложения.На данном разделе портала регулярно публикуются обзорные заметки, в которых рассматриваются бесплатные бонусы наилучших интернет-казино. Информация структурирована по нескольким пунктам, включая главные: На нашем веб-сайте Вы найдете перечень своевременных свежих бездепозитных бонусов в казино 2022 года. Также, есть большое неповторимых услуг, коие доступны только гостям нашего вебсайта последствии регистрации по нашей ссылке либо активации специального промокода.Во всех законных онлайн-казино Беларуси необходимо подтверждение паспортных данных для забавы — это требование правительства государства. <a href=http://www.pengstys.com/home.php?mod=space&uid=113975>http://www.pengstys.com/home.php?mod=space&uid=113975</a> Многие казино предоставляют в маркетинговых целях безвозмездные бонусы самая для наших читателей. Чтобы их получить, нужно перебежать на игровой сайт по партнерской ссылке с нашего портала.Все бесплатные призы кажутся соблазнительными. Кто же категорически от возможности сыграть в онлайн-казино, не рискуя деньгами, хотя получая выигрыши. Но далеко не все бездепозитные бонусы в презентабельны для рассудительного клиента. 1×slots регистрация на 1хслотс
1×slots зеркало
Мы подготовили список, где есть постоянно животрепещущие и новые бездепозитные призы казино, которые продоставляется получить бесплатно. Для наших пользователей есть особые предложения неповторимые бонусы, коие вы ни не найдете, их мы обозначили специальной красноватой плашкой «Exclusive». Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, дабы еще раз получить безвозмездный бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ожидает неизбежное наказание. 1 x slots <a href=http://sibledy.ru/home.php?mod=space&uid=2667&do=profile&from=space>http://sibledy.ru/home.php?mod=space&uid=2667&do=profile&from=space</a> Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, например как Вам понадобиться ее доказать в при выводе денег.Акции, посвященные календарным дням, посещают рассчитаны как на всех юзеров, так и на категории: примеру, презент на 8 марта девушкам-игрокам либо мужчинам на 23 февраля.
1×slots регистрация
Для получения выигрыша требуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить конкретную сумму, хотя теснее из собственных денег. Она рассчитывается из совместного размера выигрыша за всегда применения бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, если юзер выиграл 1000 руб., а множитель сочиняет х30, исключить средства можно несомненно, сделав ставки на 30 000 рублей.При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое возможно посвятить ирге в казино. Этот тип приза будет добавлен на Ваш аккаунт последствии успешной процедуры регистрации с внедрением номера аппарата. Если выбрать иной способ творенья учетной записи, бездеп не будет добавлен на Ваш акк.Самый распространённый из сходственных призов, конечно же, бездеп на денек рождения клиента — бонус повторяющий фиксированной суммы либо фриспинов поступает на счёт игрока, а воспользоваться им можно на установленного периода времени. <a href=https://adminclub.org/member.php?action=profile&uid=88192>https://adminclub.org/member.php?action=profile&uid=88192</a> 1хслотс рабочее зеркало Самый распространённый из похожих бонусов, конечно же, бездеп на день рождения посетителя — приз в виде фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им можно протяжении установленного периода времени.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.bedwantsinfo.nl/thread-693243.html>1×slot регистрация</a>
<a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=37171>1хслотс рабочее зеркало</a>
<a href=https://www.globalvision2000.com/forum/member.php?action=profile&uid=1072499>1×slots зеркало быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Обычно, бездепозитные бонусы выдаются под конкретные слоты с фиксированной ставкой, хотя их наверняка запрещено использовать в игровых автоматах с прогрессивным джекпотом. Список игр, в которых можно использовать бездеп, Вы найдете в описании промоакции или можете уточнить у службы заведения.
#4117 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерские конторы в россии 1×bet зеркало рабочее <a href=https://sovsekretno.net/>пин ап букмекерская контора</a> букмекерская контора ставки бк букмекерская контора <a href=https://repost.news/>фреш казино</a> casino зеркало сегодня рабочее официальные зеркала казино демо казино официальные сайты казино 1×bet kent casino почему казино
DiskiPlus казино в россии DiskiPlus пин ап casino pin <a href=https://diskiplus.ru>DiskiPlus порно с Елена Никитина, скелетонистка</a> DiskiPlus 1×bet зеркало xbet xyz DiskiPlus порно с Афонина Марина Игоревна <a href=https://diskiplus.ru>DiskiPlus казино рояль</a> DiskiPlus casino сегодня DiskiPlus казино регистрации DiskiPlus порно с Владимир Минеев (ММА) DiskiPlus Александра Бортич DiskiPlus ап казино DiskiPlus casino daddy DiskiPlus букмекерская контора скачать приложение
#4118 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию процедура займет всего лишь
Сроки активации бонуса устанавливаются каждым казино, хотя почаще всего они не превосходят недели с момента получения. Игроку непременно надо(надобно) применять бездеп в течение указанного срока, в ином случае бонус просто исчезнет. Каждый бонус можно получить только раз раз, поэтому случае не применять бездеп в срок, у игрока не несомненно 2 шанса им пользоваться.Если простыми текстами, бездепы – это определённая сумма денег либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно брать презенты. Но есть некоторые аспекты. Существуют игорные жилища, которые перед что, этим как начислить призы требуют привязать аппарат, дать копии документов. <a href=http://filmkachat.ru/>1×slots зеркало регистрация</a> <a href=https://noosfero.ufba.br/lexxeagle/blog/mastering-silo-images-integration-for-advanced-3d-architectural-visualization>https://noosfero.ufba.br/lexxeagle/blog/mastering-silo-images-integration-for-advanced-3d-architectural-visualization</a> Ещё одно распространённое акционное предложение – симпатичный подарок с сомнительными требованиями. К образцу, клуб обещает $100 в качестве бездепа, но с вейджером х80 либо х100. Отыграть подобный вейджер фактически невозможно и поэтому другого концентрироваться на более занимательных промоакциях. 1×slots зеркало быструю регистрацию а также мгновенное <a href=https://australianweddingforum.com/weddings/member.php?action=profile&uid=11586>https://australianweddingforum.com/weddings/member.php?action=profile&uid=11586</a>
casino 1×slot
На благотворительные бонусы онлайн-казино почти практически распространяется лимитирования по стране проживания клиентов. Даже в для разрешается раскрывать счет и выступать на деньги в заведении, это еще не значат, что для доступны not the slightest deposit bonuses.Новые клиенты онлайн-казино без первого депозита шансы выяснить собственную удачливость. К тому же есть возможность преобразовать бездепы в реальные средства за регистрацию в казино, однако желаемого приз нужно отыграть сообразно условиям акции. 1×slots регистрация 1×slots casino 777 online Для получения бездепа нужно пригласить в забаву по реферальной ссылке свежего посетителя: он должен зарегистрироваться, пройти верификацию на сайте онлайн-казино и пополнить счёт на сумму, указанную в критериях промоакции. <a href=http://forum.drustvogil-galad.si/index.php?action=profile;u=128549>http://forum.drustvogil-galad.si/index.php?action=profile;u=128549</a> Можно. Вы практически сможете отказаться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не сделаете ставку.Ещё одно распространённое акционное предложение – симпатичный подарок с сомнительными требованиями. К примеру, клуб обещает $100 в качестве бездепа, но с вейджером х80 или х100. Отыграть такой вейджер фактически нереально и потому лучше концентрироваться на больше заманчивых акциях. 1 хслот регистрация в 1×slots casino
1×slots казино зеркало
В интернете слишком много скриптовых вебсайтов, коие принадлежат жуликам. Их главная задача – заинтересовать гэмблеров, пообещав столько великодушные подарки, хотя и солидные выигрыши. Так что кое-какие сайты предлагают получить за регистрацию числе $1 000. <a href=http://cvpvm09.ru/user/Terryenusy/>http://cvpvm09.ru/user/Terryenusy/</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots
1×slots зеркало быструю регистрацию а также мгновенное
В онлайне большое знаменитых игорных площадок с привлекательными акционными услугами. Однако внимательно читать обстоятельства десятков предложений скором надоест, ну и время отнимет большое. Поэтому наша команда подготовила ТОП-3 сайтов с наилучшими бездепозитными бонусами:К примеру, игроку выдаются бесплатные свои в заведении в размере пятидесяти либо ста долларов (вейджер на которые сочиняет 100х). То есть, каждому новоприбывшему игроку выскакивает притягивающая картинка, кот-ая сулит выплату всех зачисленных компанией средств. Не стоит внимания на казино бонус за регистрацию без депо с сильно большой либо довольно махонькой суммой призов, потому что, в кропотливо выучив все условия, здесь всего, несомненно какой-то подкол. 1×slots casino зеркало рабочее <a href=http://bbs.5ihangpai.com/home.php?mod=space&uid=38631>http://bbs.5ihangpai.com/home.php?mod=space&uid=38631</a>
1×slots официальный сайт скачать на айфон
Хотя бесплатные бонусы начисляются без депо, не исключено, собственно вас придется заносить средства. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты лишь после того, как новый заказчик первый пополнит игровой счет. Бывают ли бездепозитные призы без вейджера? Бывают, в у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино.Денежные свои. Третий бонус за регистрацию без депозита – наличные. К раскаянию, лишь известные и знаменитые клубы могут дать средства в руб. Или долларах. С их подмогою появится насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед данным нужно исполненье определенных условий. <a href=https://forum.bakililar.az/profile/86676-vykupavto0311/?tab=field_core_pfield23>https://forum.bakililar.az/profile/86676-vykupavto0311/?tab=field_core_pfield23</a> казино 1×slots На страничке представлены бездепозитные бонусы за регистрацию в казино редкая награда за которой гонятся все игроки как новенькие, например и профессионалы. Мы также уделяем большое внимание на присутствие призов при формирование рейтинга казино на средства. Бездепозитный приз это возможность выступать бесплатно и выиграть реальные деньги.Если площадка дарует бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь ввести акк на сайте и активировать его, подтвердив адресок электрической почты, номер телефонного либо иные данные, которые просит оператор. Перед данным нужно увериться, что пользователь находится на официальном веб-сайте казино, а не на жульнической площадке.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.krymbezpravil.org.ua/memberlist.php?mode=viewprofile&u=10552>1×slot зеркало рабочее регистрации на телефон придет</a>
<a href=http://freedom.teamforum.ru/memberlist.php?mode=viewprofile&u=6332>1хслотс рабочее зеркало</a>
<a href=http://fin-molitor.com/forum/memberlist.php?mode=viewprofile&u=8719>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<a href=http://smpn1bejen.sch.id/forum/>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный бонус по промо-коду будет доступен для забавы, только что, нет случае когда Вы активируете специальный бонусный код в разделе с призами или укажите промокод при регистрации на сайте. В некоторых случаях, не активации кода, понадобиться подтвердить контактные данные игрока и наполнить анкету клиента.
#4119 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up casino пин Радченко Светлана Юрьевна порно <a href=https://krtka.info/>скачать 1×bet 1×bet xyz</a> казино большая казино вход <a href=https://rucriminal.info/>Радченко Светлана Юрьевна порно</a> 1×bet зеркало 1×bet официальный слоты пари букмекерская контора casino игровой автомат бывшие казино casino официальный зеркало бесплатно фильм казино
DiskiPlus бесплатно играем казино DiskiPlus casino riobet <a href=https://diskiplus.ru/>DiskiPlus cometa casino</a> DiskiPlus up casino скачать DiskiPlus карты казино <a href=https://diskiplus.ru/>DiskiPlus porno Андрей Рублев (теннис)</a> DiskiPlus почему казино DiskiPlus букмекерская контора без DiskiPlus порно с Ирина Сидоркова DiskiPlus порно с Евгения Медведева, фигуристка DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz DiskiPlus порно с Илья Осипов (киберспорт) DiskiPlus 1×bet рабочее
#4120 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация на сайте
С не отыгранным бонусом воспрещается превосходить объем максимальной ставки. Нарушение сего обстоятельства будет аннулирование выигрыша. <a href=http://filmkachat.ru/>1хслотс зеркало на сегодня</a> Несмотря на то, что этот вариант стимуляции со стороны азартных платформ очень известен области сходственных игр, далеко не всем поклонникам казино известно, что являют собой бездепозитные бонусы казино и как именно их вполне эксплуатировать. <a href=https://codepen.io/bjxkafyt-the-encoder/pen/bNbrqxY>https://codepen.io/bjxkafyt-the-encoder/pen/bNbrqxY</a> 1хслотс официальный сайт зеркало <a href=http://alex-zarya.ru/user/JoshuaLaumb/>http://alex-zarya.ru/user/JoshuaLaumb/</a>
1×slos регистрация в 1×slots casino
1×slots официальный сайт мобильная версия скачать Наиболее пользующиеся вознаграждения среди гэмблеров – бездепозитные призы казино. Это не удивительно, так возможно получить бесплатные вращения или виртуальные кредиты, и этом не придётся пополнять счёт, рисковать личностными средствами. Удастся насладиться разнообразными веселиями и даже выиграть солидную необходимую, избегая серьёзного риска.Первый образующийся вопрос, это, для выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают новых игроков. Последним проще начать игру на средства с подарка за регистрацию. Им надо пополнять баланс и тратить собственные средства. Новички получают безвозмездные спины или средства на счёт. С их подмогою знакомятся с игровым процессом, крутят слоты и проделывают ставки в рулетке. <a href=http://l2help.lt/user/Patricksob/>http://l2help.lt/user/Patricksob/</a> Многие азартные клубы ограничивают необходимую вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании акции, суммы Вы не можете исключить. Разница будет аннулирована, Вы числе не можете создавать на нее ставки.При регистрации по свидетельствовать только достоверную информацию. Когда учетная запись несомненно активна, замечен доступ в Личный офис. В нем возможно избрать денежную, установить промокод и разузнать подробные верховодила получения и отыгрыша бездепа. Краткая информация об акции нередко присутствует непосредственно на регистрационной форме. 1хслотс зеркало При правильном подходе бездепы — это отличный метод играть на средства без растраты личных средств. Есть несколько советов, следуя которым возможно извлечь максимум пользы из сходственных акций казино. Играть следует лишь на лицензированных площадках. Скриптовые сайты не только врут с бонусными услугами, но и употребляют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах нереально.А ознакомиться с свежими интернет казино, Вы можете с призов с выводом прибыли, коие Вы сможете получить без депозита.
1×slots рабочее зеркало
<a href=http://s-s-o.ru/forum.php?PAGE_NAME=message&FID=1&TID=9647&MID=9486&result=new#message9486>http://s-s-o.ru/forum.php?PAGE_NAME=message&FID=1&TID=9647&MID=9486&result=new#message9486</a> Первый возникающий вопрос, это, зачем выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают свежих игроков. Последним легче начать забаву на деньги с подарка за регистрацию. Им надо пополнять баланс и тратить собственные свои. Новички получают безвозмездные спины или свои на счёт. С их помощью знакомятся с игровым ходом, крутят слоты и проделывают ставки в рулетке.Выбрать казино с бездепозитным призом. У нас на сайте представлен перечень лучших интернет казино, коие предлагают своим игрокам великодушные бонусы за регистрацию. 1×slots casino регистрация 1×slotscasin online За вербование приятеля ? в партнерской программы заказчик получает вознаграждение за вербование новых пользователей.
1×slots мобильная версия войти казино
С другой стороны, гораздо легче забрать бездепозитные фриспины за регистрацию в казино и напрямик данный начать вращать барабаны в наихороших слотах. Главная необыкновенность спинов что, нет, что они предусмотрены для топовых автоматов. Удастся не только пройти вспомогательные раунды, но и увеличить сумму выигрыша, заработать респины прочие внутриигровые презенты. <a href=http://portal.westcoastbible.org/discussion/memberlist.php?mode=viewprofile&u=400061>1×slots casino регистрация 1×slotscasino09k online</a> Ограничения по играм. Администрация запрещает игрокам кое-какие игровые автоматы с бездепозитным призом, средствами или безвозмездными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда разделение производится по виду игр. Например, отыгрыш вероятен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino. 1×slots бездепозитный бонус за регистрацию <a href=http://nawoicheuh.free.fr/index.php?file=Members&op=detail&autor=rusticmiscellan>http://nawoicheuh.free.fr/index.php?file=Members&op=detail&autor=rusticmiscellan</a>
1×slots официальный сайт скачать
<a href=http://phoihanoi.vn/index.php?language=vi&nv=users&nvvithemever=t&nv_redirect=aHR0cHM6Ly93d3cucGd1LmFjL3dhbGwvYmxvZ3MvNTA5MS9TaGlzaGEtdG9iYWNjby1mcm9tLTQtZXVy>http://phoihanoi.vn/index.php?language=vi&nv=users&nvvithemever=t&nv_redirect=aHR0cHM6Ly93d3cucGd1LmFjL3dhbGwvYmxvZ3MvNTA5MS9TaGlzaGEtdG9iYWNjby1mcm9tLTQtZXVy</a> Получить приветственный приз все лишь свежие посетители онлайн-казино. Способы описаны в условиях промоакции каждого легального казино, чаще всего это:Сроки активации приза устанавливаются каждым казино, хотя чаще всего они не превосходят недели с момента получения. Игроку непременно надо(надобно) использовать бездеп протяжении указанного срока, в ином случае приз просто исчезнет. Каждый приз возможно получить только один один, потому случае не использовать бездеп в срок, у игрока не несомненно второго шанса им воспользоваться. казино 1×slots официальный сайт
<b>Смотреть еще похожие новости:</b>
<a href=https://chasingadream.rpginitiative.com/showthread.php?tid=239326>1×slots официальный сайт скачать на айфон</a>
<a href=https://demo.comuni-italiani.it/forum/viewtopic.php?f=9&t=382206>рабочее зеркало 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Не рекомендуем сломя голову браться за всевозможные предложения получения средств без вложений. Вполне вполне, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на первый взор. Альтернативой считается казино приз за депозит. Мы предлагаем вам пару советов, спасибо которым у любого игрока несомненно вероятность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом средств: Также, такой необходимо доказать свой номер телефона, результата код, полученный в смс-сообщении от клуба установить в особое поле в личном офисе игрока.
#4121 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
cat casino букмекерская контора официальный сайт <a href=https://rhymes-punches.com/>порно с Илюшникова Татьяна Александровна</a> online casino официальный сайт 1×bet слоты <a href=https://strelochnik.com/>pin up casino зеркало</a> 1×bet на сегодня букмекерская контора на андроид porno Илья Ковальчук (хоккей) порно с Евгения Медведева порно с Гатагова Ольга Анатольевна 1go casino pin up casino buzz
DiskiPlus porno Светлана Ходченкова DiskiPlus про казино <a href=https://diskiplus.ru/>DiskiPlus ап казино</a> DiskiPlus Разуваева Ксения Денисовна порно DiskiPlus Радченко Светлана Юрьевна порно <a href=https://diskiplus.ru>DiskiPlus сайте букмекерской конторы фонбет</a> DiskiPlus ramenbet casino DiskiPlus vodka casino DiskiPlus casino бездепозитный DiskiPlus макао казино DiskiPlus 1×bet зеркало на сегодня DiskiPlus порно с Дарья Касаткина (теннис) DiskiPlus Шевцова Татьяна Викторовна порно
#4122 Charlesgunnyhttp://filmkachat.ru
1×slot рабочее зеркало
Маркетинговая политика всех игорных интернет-клубов обязана носить разнородный характер. И случае вознаграждения на депо служат чтобы, чтобы, чтобы провоцировать вносить депозиты и поощрять теснее место юзеров, то бездепозитный бонус в казино или бонус за регистрацию в казино, этого всего, рассчитан на расширение базы потребителей. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало рабочее</a> <a href=https://www.hebergementweb.org/threads/kak-proisxodit-vykup-avto-vo-francii-vse-chto-nuzhno-znat.1925854/>https://www.hebergementweb.org/threads/kak-proisxodit-vykup-avto-vo-francii-vse-chto-nuzhno-znat.1925854/</a> На нашем сайте Вы отыщите перечень актуальных свежих бездепозитных бонусов в казино 2022 года. Также, есть много неповторимых предложений, коие доступны лишь посетителям нашего сайта после регистрации по нашей ссылке либо активации особого промокода.Создание аккаунта. На сайте казино необходимо обнаружить регистрационную форму и заполнить пустующие поля личностными данными. Иногда на этом этапе потребуется указать лишь адресок электронной почты и пароль, но чаще хотелось наполнить анкету индивидуальной информацией (ФИО, дата рождения, место проживания и т.д. ). Нужно свидетельствовать только настоящие данные, потому впоследствие они станут проверены. казино 1×slots официальный сайт <a href=http://fumankong4.cc/home.php?mod=space&uid=563091>http://fumankong4.cc/home.php?mod=space&uid=563091</a> Автоматическая активация может самой удобной, но ручной способ имеет перед ней превосходства. Прежде чем применять вознаграждение от казино, стоит заблаговременно найти, сколько медли требуется на исполнение всех критерий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деяния бонуса.Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала прыткие выводы. Фишка выплат том,, собственно достаточно избрать платёжный инструмент и показать необходимую. В большинстве случаев деньги зачисляются на электрические кошельки на 15 минут, а на банковские карты – 1–3 трудящихся денька.
рабочее зеркало 1хслотс
рабочее зеркало 1хслотс <a href=https://e-participationyouth.eu/forum/profile/ralphjag/>https://e-participationyouth.eu/forum/profile/ralphjag/</a> 1×slots регистрацию более популярный вариант это Обычно для получения призов без депо, казино выдвигает лояльные и абсолютно выполнимые обстоятельства, но есть ряд деяний коие запрещены и могут причиной неприятные последствия:Выбирая безвозмездный приз, внимательно изучайте правила. Убедитесь, что вас можно себя участие в акции. Уточните, в каких играх можно выполнять условия вейджера. При необходимости задавайте вопросы представителям саппорта.
casino 1×slot
Можно. Вы всегда сможете отрешиться от получения бездепозитного бонуса за регистрацию в казино, же Вы не сделаете ставку.Простая процедура получения бездепозитного бонуса, кот-ая займет не более 2-х мин. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные. <a href=http://www.darkml.net/bbs/home.php?mod=space&uid=7967233>http://www.darkml.net/bbs/home.php?mod=space&uid=7967233</a> 1х слот 1хслотс регистрация перейти на 1×slots Заработать на бездепозитных бонусах за регистрацию в казино возможность любой пользователь, достигший совершеннолетия.
1×slots casino регистрация 1×slotscasin online
Фриспины без депо либо вспомогательные средства посодействуют поближе познакомиться с игровой платформой и её функциями. За счёт подарков можно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за игры против живых крупье. <a href=https://qualityprogamer.de/forum/showthread.php?tid=424372>1×slots казино зеркало</a> Принципиальным отличием даровых призов от призов на депо считается неименье необходимости вносить средства на акк. Из-за этого их нередко называют бездепозитными (no down payment bonuses).Получив свой подарок, Вы сможете бесплатно выступать на настоящие деньги, а выполнив обстоятельства отыгрыша, исключить свой выигрыш. 1×slots зеркало видели такую регистрацию на <a href=http://younghwacarbon.com/bbs/board.php?bo_table=free&wr_id=2736>http://younghwacarbon.com/bbs/board.php?bo_table=free&wr_id=2736</a>
1×slots регистрация 1×slots casino c2d ru
Нет. Казино выдают безвозмездные бонусы за регистрацию, для того, чтобы заказчик имел ознакомиться с игровым заведением. А дабы вывести его, необходимо выполнить условия отыгрыша. <a href=http://jujeynb.com/bbs/board.php?bo_table=free&wr_id=11630>http://jujeynb.com/bbs/board.php?bo_table=free&wr_id=11630</a> Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, solid только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Наш перечень включает в себя наихорошие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит ревизию по главным параметрам: 1×slots регистрацию более популярный вариант это Так что сможете неустрашимо региться без всяких раздумий. Фортуна сегодня наверняка на вашей стороне. Не бойтесь, ведь следствие какого или ущерба Вам абсолютно не угрожает. С такими бонусами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.airsoft44.com/forum/index.php?action=profile;u=11896>1× slots casino официальный сайт</a>
<a href=http://vn-info.net/user/Josephkam/>1×slots актуальное зеркало</a>
<a href=http://www.arka-bahce.org/forum/showthread.php?p=763637#post763637>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a>
<a href=http://86395.ww.w.molifan.net./space-uid-2275092.html>1×slots регистрация 1×slotscasino 56 online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Рассмотрим принцип его деяния на примере. Допустим, вы зарегались и возымели $10 not the slightest down payment bonus с вейджером х50. Это значит, что выигранные средства можно несомненно выводить не ранее, чем после как, как общая сумма ставок достигнет $500.
#4123 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Радченко Светлана Юрьевна порно pin ап casino <a href=https://m.repost.news/>Попова Анна Юрьевна порно</a> фреш казино порно с Сергей Бобровский (хоккей) <a href=https://sovsekretno.net/>casino бонус</a> porno Ангелина Гончаренко, хоккеистка какие казино букмекерская контора зенит слот casino 1×bet casino Лут Оксана Николаевна порно порно с Афонина Марина Игоревна
DiskiPlus кент казино DiskiPlus часы казино <a href=https://www.diskiplus.ru>DiskiPlus официальные зеркала казино</a> DiskiPlus суть казино DiskiPlus казино 5 <a href=https://www.diskiplus.ru>DiskiPlus букмекерская контора бетсити</a> DiskiPlus как выиграть в казино DiskiPlus порно с Артемий Панарин (хоккей) DiskiPlus пин ап casino pin DiskiPlus online casino 7k DiskiPlus самое казино DiskiPlus казино рулетка DiskiPlus официальное казино вход
#4124 Charlesgunnyhttp://filmkachat.ru
1хслот 1хслотс регистрация перейти на 1×slots
Для такого, дабы отыграть сумму вашего бездепозитного приза нужно выполнить условия вейджера. Очень часто фриспины даются на конкретные слоты (book of ra, book of deceased, book of sun), выбирайте разъем для по душе, они довольно красочные и высококачественные. Бездепозитные приз может быть валютным так и в виде фриспинов на слотыНа страничке представлены бездепозитные призы за регистрацию в казино редкая заслуга за которой гонятся все игроки как новички, так и профессионалы. Мы тоже уделяем большое внимание на присутствие бонусов при формирование рейтинга казино на деньги. Бездепозитный бонус это вероятность играть безвозмездно и выиграть реальные деньги. <a href=http://filmkachat.ru/>1×slots сайт</a> <a href=https://www.swiatobrazu.pl/forumgaleria/thread/view/id/524>https://www.swiatobrazu.pl/forumgaleria/thread/view/id/524</a> 1×slots бонус за регистрацию <a href=https://deti.liveforums.ru/viewtopic.php?id=10785>https://deti.liveforums.ru/viewtopic.php?id=10785</a> Ограничения по играм. Администрация запрещает игрокам кое-какие игровые автоматы с бездепозитным призом, деньгами или бесплатными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда разделение производится по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, хотя запрещен в настольных забавах и в разделе Live Casino.
1×slots регистрация 1×slotscasino09k online
Вейджер менее х30–35 считается применимым. Опытные игроки заявляют, собственно с таким вейджером реально остаться в плюсе, если верно подойти к выбору игрового аппарата. 1×slots официальный сайт скачать Подтверждение регистрации. Казино требуют привязки профиля к электрическому адресу и номеру телефонного. Для этого на e-mail отправляется послание со ссылкой, а на телефонный ? текстовое известие с кодом. <a href=https://masterarms.se/user/richardclacy/>https://masterarms.se/user/richardclacy/</a> Возьми собственный презент. Чаще всего приз активизируется сразу последствии регистрации. Но случаются истории, когда надо(надобно) зайти в индивидуальный офис или написать в справочную службу. 1× slots регистрация в 1×slots casino Вышеописанная первопричина и считается главным нюансом, следствии которого операторы отдают доля своей прибыли на различные рекламные затраты и маркетинговые кампании. А наиболее действенным здесь будут играть непосредственно бездепозитные призы казино 2022 с выводом за регистрацию.Подтверждение персональной инфы. Все казино требуют от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у юзера иных аккаунтов (мультиаккаунт запрещен).
зеркло казино 1×slots
<a href=https://destaquebrasil.com/inglaterra/author/michaeldub/>https://destaquebrasil.com/inglaterra/author/michaeldub/</a> Зарегистрироваться в казино по специальной ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефона и электронную почту). Для подтверждения номера телефонного необходимо в собственном профиле указать свой номер и надавить кнопку „Подтвердить номер телефонного“, дальше Вы получите sms-сообщение с кодом, кот-ый необходимо ввести в соответствующее фон. Для доказательства электронной почты, перебежать по интенсивной ссылке в письме от казино. 1×slot зеркало
1×slot зеркало рабочее этих способов предполагает регистрацию
Выбирая бесплатный приз, внимательно изучайте управляла. Убедитесь, что для возможно брать роль в промоакции. Уточните, в каких забавах возможно скорпулезно условия вейджера. При надобности задавайте вопросы адептам саппорта.На нашем веб-сайте Вы отыщите список актуальных свежих бездепозитных призов в казино 2022 года. Также, есть большое неповторимых предложений, коие доступны только посетителям нашего вебсайта после регистрации по нашей ссылке или активации особого промокода. Бонусные средства – маленькая сумма средств для старта в новеньком казино. На бонусные средства, обыкновенно разрешается играть во все забавы, кроме слотов с современным джекпотом и игр из раздела live casino.Чаще всего, популярностью сервисы, эти как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное управляло. Финансовые средства выводятся лишь через ту платежную систему, которой успех для пополнения депо. Если же игрок получил бездепозитный покерный бонус, требуется пополнить счет на минимальную сумму, которая сочиняет обыкновенно десять долларов. Благодаря программе преданности от игорного заведения, возможно арестовать хороший старт и без добавочных вложений запустить видеослоты. Кроме как, можно рассчитывать на реальную удачу и получить, без инвестиции личных денег, немалый выигрыш. 1× slots сайт <a href=https://www.lifesshortlivefree.com/community/profile/charlesmip/>https://www.lifesshortlivefree.com/community/profile/charlesmip/</a> Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, a лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Бонусные средства – маленькая сумма средств для старта в новеньком казино. На бонусные средства, обычно разрешено играть во все забавы, кроме слотов с современным джекпотом и игр из раздела live casino.
1×slots регистрация на сайте 1×slots ru com
Третитй бездепозитный приз за регистрацию – денежные свои. К огорчению, начислить рубли либо баксы готовы только знаменитые и знаменитые клубы. С их помощью вас насладиться каждой доступной игрой – автоматом, рулеткой, кено, блэкджеком. <a href=http://shop-device.ru/bitrix/redirect.php?goto=http://dansdans.ru/bitrix/redirect.php?goto=http://amazonka39.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/JREYc5uvbuz>http://shop-device.ru/bitrix/redirect.php?goto=http://dansdans.ru/bitrix/redirect.php?goto=http://amazonka39.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/JREYc5uvbuz</a> Используйте наихорошие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, чтобы заработать презенты за простые деянья теперь сейчас получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высокой отдачей и быстрыми выводами на электронные кошельки. казино 1× slots официальный сайт Возможность сыграть дополнительное состязание (а от и количество) совершенно бесплатно, а выигрыш, же, поступает на счёт игрока.Сроки активации бонуса уточняются каждым казино, но чаще всего они не превосходят недели с момента получения. Игроку обязательно нужно использовать бездеп на обозначенного срока, в ином случае приз просто исчезнет. Каждый бонус возможно получить только раз раз, потому если не использовать бездеп в срок, у игрока не будет 2 шанса им пользоваться.
<b>Смотреть еще похожие новости:</b>
<a href=https://your-portal.at.ua/forum/54–61274–4#88258>1хслотс казино зеркало</a>
<a href=https://techadron.com/forum/viewtopic.php?p=9343>1×slots casino регистрация 1×slotscasin online</a>
<a href=https://persiankittencat.com/grey-persian-cats-unraveling-the-charm-of-these-feline-beauties/#comment-46090>1×slots casino регистрация 1×slots review live</a>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=86275&result=reply>1×slots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Таким образом, заведение пытается продемонстрировать себя своим вероятным геймерам, а подобный рекламный ход как казино приз без депозита за регистрацию завлекает довольно количество внимания к игорному заведению и обеспечивает неизменный поток свежих посетителей и будущих клиентов игрового интернет клуба. В перечне требований к отыгрышу часто присутствуют лимиты на ставки при этой на личные деньги. Так, если отыграть надо(надобно) 30 000 руб., а предельная сумма ограничена 30 рублями, то вращать барабаны светит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками условий по срокам действия акции.
#4125 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Светлана Ходченкова porno Игорь Акинфеев (футбол) <a href=https://krtka.info/>casino com</a> pin ап casino порно с Захарова Мария Владимировна <a href=https://www.ossetia.tv/>казино на деньги</a> bitz casino порно с Диана Шнайдер (теннис) casino betting inform@rucriminal.info 1×bet casino официальные букмекерские конторы скачать сайт 1×bet слоты
DiskiPlus почему в казино нет часов DiskiPlus порно с Арина и Дина Аверины, гимнастки <a href=https://diskiplus.ru>DiskiPlus casino игровой автомат</a> DiskiPlus зеркала официальных сайтов казино DiskiPlus porno Илона Маркова, хоккеистка <a href=https://www.diskiplus.ru/>DiskiPlus casino официальный сайт</a> DiskiPlus официальные букмекерские конторы DiskiPlus порно с Варвара Субботина DiskiPlus букмекерская контора официальный сайт скачать DiskiPlus porno Марина Александрова DiskiPlus порно с Анна Щербакова, фигуристка DiskiPlus bet casino DiskiPlus казино без
#4126 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Третитй бездепозитный бонус за регистрацию – денежные свои. К сожалению, начислить рубли либо доллары способны только известные и известные клубы. С их поддержкою возможность насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком. <a href=http://filmkachat.ru/>1×slots промокод при регистрации</a> Бездепозитные призы казино за регистрацию в 2022 году — это возможность поиграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой либо количеством безвозмездных вращений без внесения депо. Не путайте деморежим с реальной забавой без надобности внесения депозита. <a href=https://www.empowher.com/groups/blogs-4/posts/revolutionizing-web-experiences-through-interactive-cgi-solutions>https://www.empowher.com/groups/blogs-4/posts/revolutionizing-web-experiences-through-interactive-cgi-solutions</a> B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. 1×slots официальный сайт мобильная версия <a href=http://rogerfilms.com/index.php?title=Выкуп_авто>http://rogerfilms.com/index.php?title=Выкуп_авто</a> Подтвердите регистрацию, чтобы активировать Бездепозитный бонус с выводом, потребуется наполнить собственный профиль. Заполните пустующие поля реальными данными о для.
1×slots зеркало рабочее
Операторы гемблинга заявляют, что например они дерутся с бонус-хантерами. Впрочем, критики считают, что данным казино пытаются устроить из случайного гостя неизменного игрока.Промообъявления от казино не дают реальной картины и направлены на вербование внимания пользователей. Понять, как высоки шансы остаться в плюсе, позволит личный анализ условий предложения: казино 1×slots Бoльшинcтвo азартных заведений выдвигают приблизительно однообразные, схожие обстоятельства и требования, коие необходимо выполнить, чтобы получить бездепозитный приз за регистрацию. Все их можно объединить в раз перечень:Как верховодило, новоприбывшие геймеры начала хотят ознакомиться с методами ввода и вывода валютных средств и сроки выполнения поданных заявок дабы четко осознавать, как скоро возможность исключить собственный казино приз за регистрацию без депо на электрический кошелек или же банковскую карту. К счастью для всех играющих, внутри определенных холдингов, все казино соперничают меж собой. Ведь случае бы определенную компанию давало лишь одно онлайн-заведение, то ли бы посетители заметили казино с бонусом за регистрацию и возможность бы рассчитывать лишь на вознаграждение повторяющий приза на 1-ое вложение. К любому заведению регулярно стопам завлекать свежих игроков, собственно, конечном, только на руку всем играющим. <a href=http://olddle.orkclub.ru/index.php?subaction=userinfo&user=immensedeformit>http://olddle.orkclub.ru/index.php?subaction=userinfo&user=immensedeformit</a> Условия отыгрыша приза. Если Вы планируете заработать на бездепозитном призе, то в первую очередь внимание на велечину вейджера и срок, который дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть приз и вывести выигрыш.Для как, дабы отыграть необходимую вашего бездепозитного бонуса нужно выполнить условия вейджера. Очень нередко фриспины даются на конкретные слоты (book of ra, book of deceased, book of sun), подбирайте разъем себе по, все очень красивые и высококачественные. Бездепозитные бонус имеет быть денежным так и вид фриспинов на слоты 1×slots регистрацию более популярный вариант это Представьте момент, когда при ставке в 10 руб. Вы получите схожее умножение. Миллион рублей за одно вращение, что абсолютно вполне. Поэтому вопрос, сколько можно выиграть остаётся не. Предлагаем проверить без. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный бонус и проверяйте фортуну в деле. Разумеется, вывести деньги не так просто. Однако шансы есть у всех.При регистрации следует свидетельствовать только достоверную информацию. Когда учетная запись несомненно активна, замечен доступ в Личный офис. В нем можно выбрать валюту, ввести промокод и разузнать подробные верховодила получения и отыгрыша бездепа. Краткая информация об промоакции часто находится непосредственно на регистрационной форме.
1 xslots рабочее зеркало
Возможность поиграть вспомогательное состязание (а иногда и некоторое) совершенно безвозмездно, а выигрыш, к, поступает на счёт игрока. Каждый из бездепозитных призов без пополнения 2022 имеет собственный определенный вейджер для отыгрыша, так же в каждом казино он уточняется персонально — где то он х55 а где-то х30, повторюсь всюду по разному! <a href=https://www.modernvespa.it/profile/3518-harryvob/>https://www.modernvespa.it/profile/3518-harryvob/</a> Бездепозитный приз казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби избранного заведения, сориентироваться в выборе игр и выяснить качество работы службы поддержки. Довольно нередко, начиная игровой процесс, игрок уже отказывается останавливаться и проделывает настоящий лепта. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть бесплатно вполне как раз таки с бонусом за регистрацию без необходимости вносить депо.Только выполнив все условия отыгрыша и дождавшись окончания ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить средства деньги. 1× slots сайт Бездепозитные бонусы – это исключительно занимательная и более перспективная промоакция интернет-казино. Они и лучше фри-спинов, потому что выплаты в безвозмездных вращениях не гарантированы, так композиции на барабанах игрового аппарата шансы не сложиться.
1×slots зеркало видели такую регистрацию на
Мы подготовили список, где есть всегда актуальные и новые бездепозитные бонусы казино, коие продоставляется получить безвозмездно. Для наших пользователей есть специальные предложения эксклюзивные бонусы, коие вы у не отыщите, их мы определили особой красной плашкой «Exclusive». 1×slots регистрация 1×slotscasino09k online <a href=http://avto.izmail.es/user/Jasperamelp/>http://avto.izmail.es/user/Jasperamelp/</a> Выбор каждого интернет казино на нашем веб-сайте. В описании к любому Вы сможете узнать, что получите за творенье аккаунта.
casino 1×slot
Если речь идет об неповторимых услугах, возможность понадобиться регистрация в казино по ссылке с партнерского сайта. <a href=http://zzwind.is-programmer.com/guestbook/>http://zzwind.is-programmer.com/guestbook/</a> Бонус за регистрацию в казино без депозита с выводом денег нужно отыграть. Зачастую для отыгрыша возможность потребоваться устроить ставки на необходимую, в несколько 10-ов один превышающую необходимую приза или выигрыша. казино 1×slots официальный сайт
<b>Смотреть еще похожие новости:</b>
<a href=https://www.goslog.ru/forum/messages/forum1/message11884/11-obrashcheniya-grazhdan?result=reply#message11884>1×slots регистрация</a>
<a href=https://test.soclanovtsy.ru/topic/16999-%D1%87%D0%B8%D1%81%D1%82%D0%BA%D0%B0-%D0%BA%D0%BE%D0%B2%D1%80%D0%BE%D0%B2-%D0%B8%D1%80%D0%BA%D1%83%D1%82%D1%81%D0%BA/page/21/#comment-92540>1хслот официальный сайт зеркало</a>
<a href=https://adler.biz/threads/698/>1 х слотс зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
4. Заберите презент. Чаще всего приз активируется незамедлительно последствии регистрации. Но случаются ситуации, когда нужно зайти в личный офис или написать в службу поддержки.
#4127 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино в россии 1win casino <a href=https://krtka.info/>porno Илья Ковальчук (хоккей)</a> 1×bet вход 1×bet зеркало слоты 1×bet xyz <a href=https://rucriminal.info/>7k casino</a> Шевцова Татьяна Викторовна порно Лут Оксана Николаевна порно pin casino зеркало Яровая Ирина Анатольевна порно букмекерская контора фонбет пина casino 1×bet приложение
DiskiPlus casino daddy DiskiPlus top casino <a href=https://diskiplus.ru>DiskiPlus букмекерская контора вход</a> DiskiPlus порно с Баталина Ольга Юрьевна DiskiPlus 1×bet зеркало рабочее <a href=https://www.diskiplus.ru>DiskiPlus порно с Дарья Клишина, легкоатлетка</a> DiskiPlus казино смотреть DiskiPlus казино рублях DiskiPlus porno Светлана Ходченкова DiskiPlus человек казино DiskiPlus смотреть фильм казино DiskiPlus casino играть DiskiPlus лучшая казино
#4128 Davidskymnhttps://sindicate24-4.biz
Откройте новые возможности <a href=https://sindicate24–4.biz/>официальный сайт</a>! Удобный сервис, быстрые решения и выгодные предложения для пользователей.
#4129 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация то дальше необходимо пройти
На бонусные начисления шансы быть установлены вспомогательные ограничения, которые Вы не учли при отыгрыше. Пока приз всецело не отыгран — средства из казино не выводятся.Популярность онлайн казино растёт и всё больше пользователей начинают увлекаться азартными забавами. Бездепозитные призы 2022 года, это оригинальные презенты за регистрацию. С их подмогою свежие игроки шансы получить бесплатные вращения или деньги на баланс за 1 регистрацию. С свет игорных заведений в интернете, бездепозитные бонусы стали знаменитейшим методом привлечения игроков. Подобные акции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о которых мы поведаем. Наш вебсайт собрал наилучшие предложения из интернета на 2022 год. Воспользуйтесь каким подарком и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить условия. <a href=http://filmkachat.ru/>1×slots бездепозитный бонус за регистрацию</a> Прибывшие на акк деньги бездепозитные призы предназначаются, главном, лишь для новоиспеченных пользователей, которые раньше не имели собственного аккаунта в данном казино. Исходя из сего, если ранее у игрока был изготовлен депозит, то, по всей вероятности, у него больше не будет возможности рассчитывать на получение такового бонуса в определенном заведении. <a href=https://www.ted.com/profiles/48491724>https://www.ted.com/profiles/48491724</a> Выполнив все требования оператора, заказчик возможность оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит примерно не более суток. Если дополнительно требуется пройти функцию верификации, то срок увеличивается до 1–2 трудящихся дней. Для перевода используются банковские приборы и электронные платежные системы. Второй способ подходит никакого, например как большинство транзакций в этом случае исполняются мгновенно. В связи со спецификой функционирования банков обработка платежей возможность взятьвдолг(взятьвзаймы) до нескольких трудящихся дней. рабочее зеркало 1хслотс <a href=http://ru.monumentefunerare.md/index.php?subaction=userinfo&user=ZacheryJep>http://ru.monumentefunerare.md/index.php?subaction=userinfo&user=ZacheryJep</a>
1×slots регистрация
Выбирая даровой приз, пристально изучайте правила. Убедитесь, собственно вам можно на роль в акции. Уточните, в каких забавах можно скорпулезно условия вейджера. При необходимости задавайте вопросы представителям саппорта. 1× slots сайт Доступ к дару возможность открываться автоматически последствии введения промокода или обращения в службу поддержки вебсайта. В первом случае от юзера не потребуется никаких деяний. Бездеп с активацией по коду встречается почаще всего. Игроку необходимо ввести совокупность символов в графе, которая может находиться в регистрационной форме в Личном офисе. <a href=https://shilinka.ru/user/Kennethdassy/>https://shilinka.ru/user/Kennethdassy/</a> 1×slots актуальное зеркало Подтверждение электрической почты – одно из основных условий, которое есть практически в каждом бездепозитном казино. Чтобы верифицировать электрическую почту, достаточно перебежать по интенсивной ссылке в письме, полученном от азартного клуба.Подтверждение электрической почты – одно из основных критерий, которое есть практически в каждом бездепозитном казино. Чтобы верифицировать электронную почту, достаточно перебежать по интенсивной ссылке в послании, приобретенном от азартного клуба.
1×slot зеркало рабочее регистрации на телефон придет
Отзывы читателей о бонусных промоакциях помогут составить эмоцию, хотя не запамятовывайте о субъективности личных объяснений. <a href=http://wjyyouxi.com/home.php?mod=space&uid=700455>http://wjyyouxi.com/home.php?mod=space&uid=700455</a> 1 х слотс зеркало
x1 slots регистрация в 1×slots casino
Так что основное отличие подарка на депозит от бездепа – неотъемлемое пополнение счёта. Вы сможете внести депо и преувеличить стартовый капитал или отобрать бездеп и этом не придётся рисковать своими сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начислит щедрое одобрение!К раскаянью, нет. Почти все казино, требуют внесение хотя бы одного минимального депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, собственно вывести средства разрешается только на ту платежную систему, с коей был изготовлен депозит. Для выбора азартного заведения Вы сможете воспользоваться списком наших казино с бонусами за регистрацию. На нашем сайте мы опубликовали перечень бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, что часть бонусов неповторимые и доступны лишь для посетителей нашего сайта по-специальному промо-коду или по уникальной ссылке. Кроме того, для любого приза мы подготовили подробный обозрение, каком Вы узнаете как получить и отыграть одобрение и как вывести свой выигрыш с бездепа.Чаще всего, пользующиеся сервисы, эти как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно неотъемлемое верховодило. Финансовые средства выводятся только через ту платежную систему, которой успех для пополнения депозита. Если же игрок получил бездепозитный покерный приз, потребуется восполнить счет на наименьшую сумму, которая составляет обыкновенно десять долларов. Возможность поиграть дополнительное соревнование (а от и несколько) совершенно даром, а выигрыш, же, поступает на счёт игрока. 1×slot зеркало <a href=http://msfo-soft.ru/msfo/forum/messages/forum29/topic11390/message320742/?result=new#message320742>http://msfo-soft.ru/msfo/forum/messages/forum29/topic11390/message320742/?result=new#message320742</a> Вообще перейдя в казино — управляла схожи в получении бездепозитных призов, в стереотипные верховодила заходит: подтвердить эл. Почту и телефон, наполнить свой собственный профиль, активировать рекламную код либо активировать предложения во вкладке БОНУСЫ.Хотя безвозмездные бонусы начисляются без депо, не исключено, собственно для придется вносить деньги. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь последствии как, как свежий заказчик первый пополнит игровой счет.
1×slots официальный регистрация
Разные казино имеют личные верховодила по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высокие притязания. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до 100 один в игровых автоматах. Например, если игрок получил даром 10 долларов, то необходимо несомненно отыграть их, поставив одну тысячу спинов по одному доллару любой. Стоит обозначить(означить), что не все казино дают возможность выступать на бонусы и не во всех развлекательных заведениях идентичные правила для отыгрывания. Некоторые казино запрещают выступать на бонусы в блекджек или ограничивают ставки до 5 процентов, что значительно увеличивает в десятки один количество нужных игр.Существует ли стратегии для отыгрыша бездепозитных призов? К раскаянью нет, на выигрыши либо проигрыши с бонусов, казино или игрок воздействовать возможности, отдача игр случается от создателей игр. Бесплатный бонус – кредиты, коие онлайн-казино начисляет клиенту, не заставляя его пополнять игровой счет.Чтоб получить крупный выигрыш, выбирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша. <a href=https://fbi.me/index.php?title=User:VeroniqueFryman>https://fbi.me/index.php?title=User:VeroniqueFryman</a> 1×slots бонус за регистрацию Обычно показатель повыше, чем для призов на депо. Не изумляйтесь, в он несомненно и х100. Иногда завышенный коэффициент вейджера уточняется для жителей отдельных стран.Если площадка дарит бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь ввести аккаунт на сайте и активировать его, подтвердив адрес электрической почты, номер телефона либо другие данные, коие настятельно оператор. Перед данным необходимо увериться, что юзер находится на официальном сайте казино, не на мошеннической площадке.
<b>Смотреть еще похожие новости:</b>
<a href=http://weeklywars.de/viewtopic.php?f=12&t=9669&p=463899#p463899>1×slot зеркало рабочее регистрации на телефон придет</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы была возможность исключить выигрыш. Также, учите, собственно бездепозитный приз можно вывести только никаких случае, когда будут выполнены все условия отыгрыша.
#4130 Peterexipshttps://kra020.com
Используйте Kra020 <a href=https://kra020.com/>https://kra020.com</a> надежная площадка с удобными инструментами и поддержкой 24/7. Простота и безопасность в одном сервисе!
#4131 JerryMuphttps://novaxltd.live
Присоединяйтесь к NovaXLtd.live <a href=https://novaxltd.live/>https://novaxltd.live</a> платформе с широкими возможностями и удобными инструментами. Доступность, надежность, поддержка!
#4132 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
Выше мы предоставили полный комплект самых новых и актуальных бездепозитных бонусов в онлайн казино без пополнения на 2022 год, где вы можете воспользоваться любым ценным бездепозитным призом.Законодательство, регулирующее азартные забавы в разных государствах, оказывает на полномочия операторов. В итоге юзеры из отдельных регионов сталкиваются с лимитированиями со стороны казино. Это может быть как глубокий отказ в доступе, так и невозможность загружать забавы отдельных производителей. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать на айфон</a> <a href=https://diigo.com/0y2r9w>https://diigo.com/0y2r9w</a> Стоит отметить, собственно бездепозитный приз выдается лишь совершеннолетним новичкам, которые, же, могут пригласить собственных приятелей и людей, кроме претендующих на поощрительную программку лояльности. Подобная технология появилась между конкуренцию онлайн-казино для популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению своей популярности, методом привлечения новых игроков. Бонусы – это уникальный шанс для вероятных соучастников забавы, которые шансы опробовать софт покер рума и убедиться, будут ли они в него играть либо нет. Новый игрок попробует средства силы с настоящими оппонентами в казино.На благотворительные бонусы онлайн-казино практически всегда распространяется ограничения по стране проживания посетителей. Даже если вам разрешено раскрывать счет и выступать на деньги в заведении, это еще не значат, что вас доступны no down payment bonuses. 1хслотс официальный сайт зеркало <a href=https://www.ipixels.com/profile/62204/Craigereve>https://www.ipixels.com/profile/62204/Craigereve</a>
1×slots зеркало рабочее
Бездепозитный приз по промо-коду несомненно доступен для игры, лишь в том случае когда Вы активируете особый бонусный код в разделе с бонусами либо укажите промокод при регистрации на веб-сайте. В неких случаях, считая активации кода, понадобиться подтвердить контактные данные игрока и наполнить анкету клиента. 1×slots официальный demo регистрация в 1×slots casino Подтвердите регистрацию, чтобы активировать Бездепозитный бонус с выводом, требуется наполнить личный профиль. Заполните порожние поля истинными данными о себе. <a href=http://rai.lv/ru/index.php?subaction=userinfo&user=incandescenttyr>http://rai.lv/ru/index.php?subaction=userinfo&user=incandescenttyr</a> 1×slots зеркало которую указывали при регистрации кстати
1×slots зеркало быструю регистрацию а также мгновенное
Приглашаем делиться мнениями о призах. Это поможет другим юзерам подбирать более выгодные предложения. <a href=https://maps.google.com.vc/url?q=https://doctorlazuta.by/>https://maps.google.com.vc/url?q=https://doctorlazuta.by/</a> Каждый из бездепозитных призов без пополнения 2022 содержит свой конкретный вейджер для отыгрыша, так же в любом казино он устанавливается индивидуально — где то он х55 а кое-где х30, повторюсь везде по разному! 1 xslots рабочее зеркало
1×slots на любой вкус как пройти регистрацию
<a href=http://aficionado.pl/showthread.php?175716–1×slots-%D1%81%D0%B0%D0%B9%D1%82-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE&p=196786>1×slots сайт зеркало</a> онлайн казино 1×slots <a href=https://www.spacepub.net/members/5079-StevenSesia>https://www.spacepub.net/members/5079-StevenSesia</a>
1хслотс рабочее зеркало
Наличие у игрока 2 аккаунта. Запрещено делать некоторое профилей для многократного получения бездепов.В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, нужно адресоваться в службу спустя лайв-чат на сайте казино. <a href=http://www.fumankong4.cc/home.php?mod=space&uid=582318>http://www.fumankong4.cc/home.php?mod=space&uid=582318</a> 1×slots casino регистрация 1×slots review live К образцу, игроку выдаются безвозмездные свои в заведении в размере пятидесяти или ста $ (вейджер на которые сочиняет 100х). То есть, каждому новоприбывшему игроку выскакивает привлекающая картинка, которая обещает выплату всех зачисленных фирмой средств. Не стоит обращать внимания на казино бонус за регистрацию без депо с слишком большой или довольно малюсенькой суммой призов, потому что, даже кропотливо изучив все условия, тут вероятнее всего, будет некий подвох.Каждый новичок и умелый игрок мечтают живо стартануть и начать создавать настоящие ставки. Для сего достаточно арестовать презент, за кот-ый надо выплачивать. В зависимости от игровой платформы, нужно сделать профиль, привязать email или телефон. После этого администрация начисляет щедрое вознаграждение повторяющий даровых вращений либо виртуальных кредитов.
<b>Смотреть еще похожие новости:</b>
<a href=https://projects.sare.org/people/jamestrazy/>1×slots регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные призы казино за регистрацию в 2022 году — это возможность поиграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой либо количеством бесплатных вращений без внесения депозита. Не путайте деморежим с реальной забавой без надобности внесения депозита. Итак, дабы безвозмездные бонусные кредиты трансформировались в реальные деньги, которыми вам распоряжаться по собственному усмотрению, их надо(надобно) отыграть. Вейджер следует уточнять в правилах онлайн-казино.
#4133 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet официальный xbet скачать букмекерскую контору <a href=https://th-royalgclub.com/>casino зеркало сегодня рабочее</a> пинап казино black russia казино <a href=https://rhymes-punches.com/>официальные сайты казино</a> Светлана Ходченкова порно с Петр Ян (ММА) 7k casino про казино сайт винлайн букмекерская контора casino betting симулятор казино
DiskiPlus карты казино DiskiPlus inform@rucriminal.info <a href=https://diskiplus.ru>DiskiPlus 7k casino зеркало</a> DiskiPlus 7k casino официальный DiskiPlus винлайн букмекерская контора <a href=https://www.diskiplus.ru/>DiskiPlus Анна Михалкова</a> DiskiPlus букмекерская контора без DiskiPlus porno Катерина Шпица DiskiPlus фильмы казино рояль DiskiPlus casino официальный зеркало DiskiPlus пин ап casino pin up top DiskiPlus рокс казино DiskiPlus 1×bet бесплатно
#4134 Charlesgunnyhttp://filmkachat.ru
1×slots на любой вкус как пройти регистрацию
Этот образ приза несомненно добавлен на Ваш акк после успешной процедуры регистрации с внедрением номера телефона. Если избрать иной способ творения учетной записи, бездеп не будет добавлен на Ваш аккаунт.Да, у даровых бонусов есть дефекты. Прежде всего, они обыкновенно не. Кроме такого, условия вейджера по ним постоянно строгие. Но таки неимение риска проделывает их очень красивыми для клиентов. <a href=http://filmkachat.ru/>1×slots казино зеркало</a> Представленные на данной страничке наихорошие бездеп бонусы в казино за регистрацию в 2022 году имеют подходящие условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, каком посетители Casino.ru имеют сортировать список по нескольким критериям: по сумме, вейджеру, наибольшей сумме вывода и т.д.Обыкновенные бездепозитные бонусы в объеме от трех до 20 $ сделаны чтобы, чтобы, дабы в забавы заходили все свежие и новые игроки. Здесь, всего, несомненно лимитирование на наибольший выигрыш. Важно, чтобы перед наименьшим вкладом был отключен бонус за 1-ое пополнение счета, и игрок не попадет на повторный вейджер. <a href=http://www.gothicpast.com/myomeka/posters/show/78646>http://www.gothicpast.com/myomeka/posters/show/78646</a> 1×slots зеркало проходить регистрацию это отличный вариант <a href=http://www.kroosuriya.com/krusuriya/modules.php?name=Journal&file=display&jid=8653>http://www.kroosuriya.com/krusuriya/modules.php?name=Journal&file=display&jid=8653</a> Баланс игрока дополняется на подобающую необходимую. К ней используется вейджер, указанный в правилах промоакции. Вывести выигрыш возможно будет после как, как пользователь устроит требуемый размер ставок из собственных средств. В редких случаях бездеп трудится в формате Free Play. На счет юзера зачисляется большая сумма, и предоставляется небольшой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по окончании этого периода сумма на счету несомненно превосходить изначальную, то разницу возможно несомненно исключить или применять для последующих ставок.
1×slots сайт
1х слот 1хслотс регистрация перейти на 1×slots Для отыгрыша бонуса казино обязывает игрока поиграть на необходимую, в несколько один превышающую необходимую полученного приза — здесь выгода фирмы явна. <a href=http://youyanggse.co.kr/board/bbs/board.php?bo_table=free&wr_id=224913>http://youyanggse.co.kr/board/bbs/board.php?bo_table=free&wr_id=224913</a> Онлайн-казино с бездепозитными призами ставят посетителям условия для пользования бездепами, потому перед ролью в акции превосходнее досконально ознакомиться со всеми правилами и нюансами промоакции. Условия имеют дотрагиваться получения бонуса, его использования и последующего вывода валютных средств в случае выигрыша.Процесс доказательства личности может занять от одного дня до недели. Если клиент разрешил нибудь ошибку при заполнении паспортных данных, то ему стопам обратиться с проблемой в саппорта онлайн-казино. 1хслот официальный сайт зеркало Бонус без депозита за регистрацию в казино (бездепозитный приз) – это валютный подарок от клуба, кот-ый начисляется на акк игрока после регистрации в казино. Кроме создания учетной записи, для получения бездепа, довольно часто потребуется ещё и доказать контактные данные игрока и/или активировать специальный промо-код.Казино выделяет вероятность заработать и вывести реальные деньги на бездепозитных бонусах. Обычно, это малозначительная сумма, коию казино имеет себе разрешить презентовать игроку.
скачать 1×slots на андроид мобильная версия
Стоит обозначить(означить), что бездепозитный бонус выдается только взрослым новичкам, которые, тому, шансы пригласить собственных друзей и людей, того претендующих на поощрительную программку преданности. Подобная разработка появилась среди соперничающих онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению своей посещаемости, методом привлечения новых игроков. Бонусы – это оригинальный шанс для вероятных участников игры, которые шансы опробовать софт покер рума и убедиться, будут ли они в него выступать либо нет. Новый игрок попробует средства силы с настоящими оппонентами в казино.Изучить управляла и обстоятельства получения бездепозитных призов казино, Вы можете у нас на веб-сайте в разделе с призами либо на официальном сайте избранного Вами казино. Если не можете найти нужную информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал либо по электрической почте. <a href=https://www.evangelie.eu/forum/members/85172.html>https://www.evangelie.eu/forum/members/85172.html</a> Вообще перейдя в казино — правила одинаковы в получении бездепозитных призов, в стереотипные правила входит: подтвердить эл. Почту и телефон, заполнить свой индивидуальный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ. 1× slots casino зеркало
1×slots скачать на айфон
Хотя безвозмездные бонусы начисляются без депо, не исключено, собственно вас придется заносить средства. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь после как, как свежий заказчик раз пополнит игровой счет.Игры, в можно выступать на бонусные деньги. Проверьте список игр, каких возможно играть на бонусные средства, вполне они Вам не понравятся и не стоит расходовать своё время на такую акцию. <a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-2105#post-60257>1×slots официальный demo регистрация в 1×slots casino</a> Для получения бездепа нужно пригласить в забаву по реферальной ссылке свежего клиента: он должен зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и восполнить счёт на необходимую, указанную в критериях промоакции. Бонус за регистрацию в казино без депо с выводом средств нужно отыграть. Зачастую для отыгрыша возможность потребоваться сделать ставки на необходимую, в некоторое 10-ов раз превосходящую необходимую бонуса либо выигрыша.Доступность — бездепозитные бонусы в казино чаще всего предоставляются свежим игрокам, но случаются случаи, когда приз могут получить и действующие посетители. 1×slots зеркало регистрация то дальше необходимо пройти <a href=http://promarket.in.ua/index.php?subaction=userinfo&user=imperfectinform>http://promarket.in.ua/index.php?subaction=userinfo&user=imperfectinform</a>
1×slots зеркало подтвердит вашу регистрацию если говорить
Разные казино имеют собственные управляла по выведению выигрыша. Для бездепозитных бонусов принимаются достаточно высочайшие притязания. Часто онлайн-казино рекомендуют отыграть бонусное поощрение до ста раз в игровых автоматах. Например, случае игрок получил даром 10 $, то необходимо несомненно отыграть их, поставив 1 тыщу спинов по одному баксу любой. Стоит отметить, что не все казино выделяют вероятность играть на призы и не во всех увеселительных заведениях идентичные правила для отыгрывания. Некоторые казино запрещают играть на бонусы в блекджек либо ограничивают ставки до пяти процентов, собственно значительно увеличивает в 10-ки раз количество необходимых игр. <a href=http://roosod.ru/index.php?subaction=userinfo&user=worthlessglossa>http://roosod.ru/index.php?subaction=userinfo&user=worthlessglossa</a> Призовые начисления без депозита все предоставляться для участия в турнирах онлайн казино. Потратить перечисленные деньги возможно необыкновенно в рамках этой акции. Условия их проведения включают в себя лимитирования на список игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться таким предложением, лучше изучить его верховодила. 1 х слотс зеркало Для тех, кто только взвешивает испытывать собственную удачу, а для проф игроков, разыскивающих новые площадки для выигрышей, основные лицензированные казино нередко устраивают разные промоакции, и одно из лучших предложений за последнее время – как для новичков, например и для проф игроков – бездепозитный бонус за регистрацию.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.lightknotes.com/MyBB/showthread.php?tid=151797>1×slots официальный сайт, скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Диапазон ставок, которые вправе устроить игрок, также лимитирован. Обычно назначать можно маленькую необходимую — в 10–30 руб. За одно вращение.
#4135 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Илья Ковальчук (хоккей) black russia казино <a href=https://specreporter.com/>порно с Алексей Миранчук (футбол)</a> porno Анастасия Янькова, боксерка casino ап <a href=https://7club7.com/>казино онлайн</a> casino x порно с Дронова Александра Викторовна слот casino порно с Алина Загитова, фигуристка kent casino unlim casino казино рулетка
DiskiPlus рокс казино DiskiPlus porno Катерина Шпица <a href=https://diskiplus.ru>DiskiPlus 1win букмекерская контора</a> DiskiPlus up casino DiskiPlus 1×bet сейчас <a href=https://diskiplus.ru/>DiskiPlus порно с Бондаренко Анастасия Борисовна</a> DiskiPlus казино фильм смотреть онлайн DiskiPlus пинап казино DiskiPlus казино вулкан DiskiPlus порно с Голикова Татьяна Алексеевна DiskiPlus порно с Анна Калинская (теннис) DiskiPlus pin up casino пин DiskiPlus казино на деньги
#4136 Charlesgunnyhttp://filmkachat.ru
1×slots официальный demo регистрация в 1×slots casino
Размер приза. В качестве бездепов обычно начисляют не суммы, а когда речь идет о бонусах за депозит, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино шансы подарить игроку до 2000$. <a href=http://filmkachat.ru/>1хслот 1хслотс регистрация перейти на 1×slots</a> <a href=https://gab.com/lexxeagle/posts/113498473251532232>https://gab.com/lexxeagle/posts/113498473251532232</a> Существуют казино с призом за регистрацию, в довольно востребованы фриспины в онлайн казино потом регистрации в определенных играх. Они встречаются числе почаще бесплатных поощрений либо традиционных призов в казино без вложений. Например, игрок регистрирует счет, на который начисляются бесплатные игры, бонус за регистрацию в виде бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса в выигрывает настоящие деньги, коие в последствии возможно удачно вывести из заведения на собственную платежную систему. То есть, есть все шансы исключить свои без рисков своими деньгами. Регистрация, за игрок получит призы, займет пару минут, а спасибо этому можно увеличить 5 евро поощрений до тыс. И без всяких заморочек вывести их. 1хслот официальный сайт зеркало <a href=http://www.xuandouwan.com/home.php?mod=space&uid=46754&do=profile>http://www.xuandouwan.com/home.php?mod=space&uid=46754&do=profile</a> При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток.
1×slots зеркало видели такую регистрацию на
Многие новички колеблются, собственно поощрительный приз надо будет отдавать, в если они выиграли у казино. Это полностью неопасно и накрепко. Выводя выигранные свои, игрок просто одергивает свое участие в игре и теряет уникальную возможность – безвозмездно увеличивать собственное вещественное положение. <a href=https://smm-seo.ru/members/rabofreeol.4209/>1×slots официальный сайт скачать</a> 1×slots скачать на айфон Самые пользующиеся способы вывода денег ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам подобии Neteller и Skrill, еще используют криптовалютными кошельками. Вывод выигрышей может осуществляться мгновенно либо развлекать от нескольких часов до нескольких суток. <a href=http://jade-crack.com/home.php?mod=space&uid=1039736>http://jade-crack.com/home.php?mod=space&uid=1039736</a> 1×slot зеркало рабочее регистрации на телефон придет Выбирая даровой бонус, внимательно изучайте верховодила. Убедитесь, что вас возможно брать участие в промоакции. Уточните, в каких играх возможно исполнять обстоятельства вейджера. При надобности задавайте вопросы адептам саппорта.
1×slots официальный demo регистрация в 1×slots casino
Активация денежного гонорары происходит автоматически последствии творения профиля либо использования промокода. Иногда операторы предъявляют вспомогательные требования: подписаться на странички казино в социальных сетях или на рассылку маркетинговых известий, скачать и ввести дополнительный софт и т.д.С не отыгранным призом запрещается превосходить размер максимальной ставки. Нарушение сего обстоятельства иметь аннулирование выигрыша. <a href=http://codaip.com/bbs/board.php?bo_table=free&wr_id=143606>http://codaip.com/bbs/board.php?bo_table=free&wr_id=143606</a> Но ни не запамятовывайте внимательно читать управляла роли в бонусных промоакциях. Если вы нарушите желая бы одно условие, позже вы не сможете устроить недоразумение с администрацией.В подавляющем большинстве случаев безвозмездные призы начисляются в кредитах, коие нельзя сразу вывести со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже. 1× slots официальный
1× slots регистрация в 1×slots casino
Законодательство, регулирующее азартные игры в различных государствах, влияет на возможности операторов. В результате юзеры из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это возможность быть как глубокий отказ в доступе, например и невозможность загружать игры отдельных изготовителей.Также, учите, что бездепозитный приз можно исключить лишь что случае, когда будут выполнены все условия отыгрыша. Для вывода средств бонус надо(надобно) несомненно отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариациями отыгрыша бездепозитного приза до его получения, чтобы избежать конфликтных ситуаций. Подарки на конкретные даты выделяются критериями получения. Если одобрение начисляют игроку на денек рождения, то сумма обыкновенно зависимости от общего объема депозитов за прошедший год. 1 х слотс зеркало <a href=https://posnara.com/bbs/board.php?bo_table=free&wr_id=226159>https://posnara.com/bbs/board.php?bo_table=free&wr_id=226159</a> Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша призов. Заведения практически устанавливают максимальную ставку, возможную по условиям вейждера.Наши эксперты исследуют условия акции, после в ручном режиме проводят их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие параметры. Мы не рекламируем казино, а даем игрокам информацию о превосходнейших из их.
1хслотс зеркало на сегодня
Помните, собственно всевозможные нарушения управлял сведут на нет ваши старания, и вы скорее останетесь без начисленного для дарового бонуса. Всегда изучайте верховодила начисления и обстоятельства вейджера. По любым вопросам, на коие вы не можете самостоятельно отыскать ответы, обращайтесь за объяснениям и саппорт.Существует ли стратегии для отыгрыша бездепозитных призов? К раскаянью нет, на выигрыши или проигрыши с бонусов, казино или игрок воздействовать не может, отдача игр происходит от создателей игр. Возможность сыграть вспомогательное состязание (а время и несколько) совершенно бесплатно, а выигрыш, же, поступает на счёт игрока. <a href=https://simracing.su/user/Oscarjap/>https://simracing.su/user/Oscarjap/</a> Также, такой необходимо доказать свой номер телефона, желаемого код, полученный в смс-сообщении от клуба ввести в специальное фон в собственном кабинете игрока.Некоторые онлайн-казино без депо предлагают новым посетителям выбрать приз при регистрации. Будьте внимательны: выбрав один, вы в абсолютном большинстве случаев не можете воспользоваться остальными. casino 1×slot Существует ли стратегии для отыгрыша бездепозитных призов? К раскаянию нет, на выигрыши или проигрыши с призов, казино либо игрок воздействовать имеет, отдача игр происходит от разработчиков игр.Таким образом, заведение пробует продемонстрировать себя своим вероятным геймерам, а такой рекламный ход как казино приз без депо за регистрацию завлекает довольно много внимания к игорному заведению и обеспечивает неизменный струю свежих гостей и будущих посетителей игрового онлайн клуба.
<b>Смотреть еще похожие новости:</b>
<a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=874100>1×slots регистрация 1×slotscasino09k online</a>
<a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<a href=https://thetechmodders.com/forums/viewtopic.php?t=62064>x1 slots регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чаще всего интернет-казино предлагают бездепозитные бонусы свежим пользователям. Эта промо-акция очень отлично привлекает новичков, подталкивая их к открытию счета. Конечно, не они становятся послушными посетителями, но сам прецедент регистрации аккаунта играет на руку заведению. Диапазон ставок, которые вправе устроить игрок, также лимитирован. Обычно ставить возможно маленькую необходимую — пределах 10–30 рублей за одно вращение.
#4137 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино можно win win casino <a href=https://th-royalgclub.com/>Фастова Елена Владимировна порно</a> порно с Васильева Татьяна Викторовна kent casino <a href=https://repost.news/>pin up casino buzz</a> казино гта 5 пин ап casino pin casino актуальное зеркало пинап казино pin up casino top top лучшая казино Разуваева Ксения Денисовна порно
DiskiPlus официальные зеркала казино DiskiPlus лучшие казино бесплатно <a href=https://diskiplus.ru/>DiskiPlus porno Екатерина Ефременкова, шорт-трекистка</a> DiskiPlus pinco casino DiskiPlus casino daddy <a href=https://www.diskiplus.ru/>DiskiPlus Светлана Ходченкова</a> DiskiPlus porno Яна Троянова DiskiPlus porno Дарья Клишина DiskiPlus 7k casino официальный DiskiPlus порно с Сергей Бобровский (хоккей) DiskiPlus 7k casino зеркало рабочее DiskiPlus фильмы казино рояль DiskiPlus сколько казино
#4138 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
Но существуют азартные заведения, готовые просто так вручить деньги на забаву. Для этого достаточно сделать профиль. Чтобы исключить выигрыш, сначала нужно выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа.Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и расценить особенности, недоступные при этой в демо режиме. Многие новые клиенты перебегают в количество неизменных, а оператор получает длительную прибыль. <a href=http://filmkachat.ru/>1хслотс официальный сайт зеркало</a> Так что можете смело региться без всяких раздумий. Фортуна сегодня точно на вашей стороне. Не побаивайтесь, ведь последствие какого либо убытка Вам абсолютно не грозит. С такими бонусами как без пополнения, Вы остаетесь только в плюсе, но не как не в минусе. <a href=https://wowgilden.net/forum-topic_475313.html>https://wowgilden.net/forum-topic_475313.html</a> 1×slots официальный сайт зеркало рабочее <a href=https://www.google.com.ec/url?q=http%3A%2F%2Fdoctorlazuta.by>https://www.google.com.ec/url?q=http%3A%2F%2Fdoctorlazuta.by</a> Бездепы с безвозмездными вращениями предоставляют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд уплачивает казино. Число спинов ограничено и изредка выше сотку. Если промоакция содержит количество даровых игр, их начисление возможность быть разбито на количество дней.Мы собрали и опубликовали перечень наихороших бездепозитных казино с призами за регистрацию, коие гарантируют великодушные выигрыши и мгновенные выплаты.
1× slots сайт
<a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=9700&TITLE_SEO=9700-kharakteristiki-tovarov&MID=496900&result=reply#message496900>1×slot зеркало рабочее этих способов предполагает регистрацию</a> 1×slots casino регистрация 1×slots review live <a href=http://fitboss.ru/user/Terryamilm/>http://fitboss.ru/user/Terryamilm/</a> 1х слот 1хслотс регистрация перейти на 1×slots Внесение депо – Будьте готовы восполнить счет после отыгрыша бонуса. Это стандартное требование правил для данного на промо-акций. Лучше заранее уточнить, какую необходимую нужно будет вносить на счет. Как правило, речь идет о наименьшем депозите, хотя вы должны быть убеждены, собственно он для по карману.Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, all зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.
1 хслот регистрация в 1×slots casino
Акции, приуроченные к календарным праздникам, случаются рассчитаны как на всех пользователей, например и на категории: к, презент на 8 марта девушкам-игрокам или мужикам на 23 февраля. Обычно, бездепозитные призы выдаются под конкретные слоты с фиксированной ставкой, хотя их точно воспрещено применять в игровых автоматах с современным джекпотом. Список игр, каких возможно применять бездеп, Вы найдете в описании акции либо можете уточнить у саппорта заведения.Некоторые онлайн-казино без депозита предлагают свежим клиентам выбрать приз при регистрации. Будьте внимательны: выбрав один, вы в безусловном большинстве случаев не сможете воспользоваться остальными. <a href=http://opendelreyoaks.net/doku.php?id=Выкуп_авто>http://opendelreyoaks.net/doku.php?id=Выкуп_авто</a> Доступные игры – В некоторых азартных играх возможно понизить математическое преимущество казино до нескольких 10-х процента. В их количестве многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как управляло, в этих играх ставки идут в зачет вейджера не всецело. Например, имеет предусматриваться только 50%. В некоторых забавах бездепозитные бонусы вообщем нельзя отыгрывать. 1×slot официальный сайт Бонусы без депо при регистрации числятся самыми привлекательными как для опытнейших игроков, так для и новичков. Получив такое вознаграждение, клиент может выступать на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а обстоятельства их активации и выигрыша.
1×slot зеркало
Ознакомьтесь с нашим списком превосходнейших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего списка и получите бездеп незамедлительно. Хватайте лучшие безвозмездные предложения ниже и выигрывайте немалые средства, не рискуя! Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном веб-сайте и выполните вход в личный офис, чтобы арестовать безвозмездные вращения с вейджером х40;Некоторые клубы механически начисляют приз на акк игрока в выполнения критерий получения, но бывают истории, когда приз нужно активировать игроку самому. Есть некоторое методов активации бонуса: Исходя из этого, просто не присутствует осмысленных причин махнуть рукою на получение такого бонуса при регистрации. И, кстати, на подобный бесплатной базе у вас все шансы выиграть деньги и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, именуют бесплатными интернет платформами для игр. 1 хслот регистрация в 1×slots casino <a href=https://forum.bedwantsinfo.nl/member.php?action=profile&uid=79205>https://forum.bedwantsinfo.nl/member.php?action=profile&uid=79205</a>
1×slots зеркало рабочее
Осталось избрать казино с бонусом за регистрацию и сделать профиль. После активации дара выигрыш в от Фортуны и навыков. <a href=https://wolvesbaneuo.com/wiki/index.php/User:KiaStarkey4437>https://wolvesbaneuo.com/wiki/index.php/User:KiaStarkey4437</a> 1×slots официальный сайт зеркало Условия отыгрыша приза. Если Вы расчитываете заработать на бездепозитном бонусе, то начала направьте на значение вейджера и срок, кот-ый дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть приз и исключить выигрыш.В большинстве заведений сделать это возможно по адресу электронной почты, по номеру аппарата, спустя социальную сеть либо гугл-аккаунт.
<b>Смотреть еще похожие новости:</b>
<a href=http://aficionado.pl/showthread.php?123663–1%D1%85-%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%B2–1×slots-casino&p=142033>1х слотс зеркало регистрация в 1×slots casino</a>
<a href=http://www.arka-bahce.org/forum/showthread.php?p=780547&posted=1#post780547>1×slots официальный зеркало</a>
<a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=36396>1хслотс регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Промообъявления от казино мешают реальной картины и ориентированы на вербование внимания пользователей. Понять, насколько высоки шансы остаться в плюсе, позволит собственный анализ критерий предложения: Существуют казино с бонусом за регистрацию, каких довольно модны фриспины в интернет казино впоследствии регистрации в определенных забавах. Они встречаются даже почаще безвозмездных поощрений либо традиционных бонусов в казино без вложений. Например, игрок регистрирует счет, на кот-ый начисляются бесплатные игры, приз за регистрацию повторяющий бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса игры выигрывает настоящие деньги, которые в последствии можно удачно исключить из заведения на собственную платежную систему. То есть, есть все шансы исключить средства без рисков своими деньгами. Регистрация, за игры получит бонусы, займет несколько, а спасибо данному можно прирастить 5 евро поощрений до тыс. И без всяких проблем исключить их.
#4139 Charlesgunnyhttp://filmkachat.ru
1×slots коды
Составленный экспертами Casino.ru перечень онлайн-казино с бездепозитным призом позволяет игрокам сопоставить спецпредложения разных операторов.Первый образующийся вопрос, это, для выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают новых игроков. Последним легче начать игру на деньги с дара за регистрацию. Им надо пополнять баланс и расходовать личные свои. Новички получают безвозмездные спины либо свои на счёт. С их поддержкой знакомятся с игровым ходом, крутят слоты и делают ставки в рулетке. <a href=http://filmkachat.ru/>1×slots бездепозитный бонус за регистрацию</a> Изучить правила и условия получения бездепозитных бонусов казино, Вы можете у нас на сайте в разделе с призами либо на официальном сайте избранного Вами казино. Если не отыскать необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электронной почте.Поспешите арестовать бездепозитные бонусы за регистрацию в казино из представленного списка. Все платформы столько водят легальную работа, но и обрадуют правдивыми плодами игры, высокой отдачей, резвыми выплатами. <a href=https://www.jottacloud.com/s/371d1db27e1899f43f18f1216ac5f05f9f6>https://www.jottacloud.com/s/371d1db27e1899f43f18f1216ac5f05f9f6</a> Ограничения по забавам. Администрация воспрещает игрокам кое-какие игровые автоматы с бездепозитным бонусом, средствами или бесплатными вращениями. Обычно, в правилах приводится глубокий список слотов для отыгрыша. Иногда разделенье производится по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, хотя запрещен в настольных играх и в разделе Live Casino. 1× slots casino зеркало <a href=http://dev-gun.com/bbs/board.php?bo_table=free&wr_id=9239>http://dev-gun.com/bbs/board.php?bo_table=free&wr_id=9239</a> Для отыгрыша приза казино обязывает игрока поиграть на сумму, в несколько один превышающую сумму полученного бонуса — тут выгода фирмы очевидна.Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают бонус по государствам. Вплоть до такого, что клуб может на игроков из Вашей страны, а бездеп мешает.
1×slot зеркало рабочее регистрации на телефон придет
Бездепозитный бонус – это экономическое вознаграждение, коие выдается участнику игры в казино, для его привлечения и возникновения заинтересованности. Любой посетитель, который подходит условиям выдачи сходственного бездепозитного приза, может претендовать на получение вышеуказанного приза. Такое поощрение считается более действенным методом, дающим вероятность стартовать деле, не вкладывая собственных материальных средств. <a href=https://uyghuryol.com/forum/viewtopic.php?f=8&t=266603>1×slots официальный сайт мобильная версия</a> 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=http://www.rw2828.com/home.php?mod=space&uid=1917699>http://www.rw2828.com/home.php?mod=space&uid=1917699</a> Например, игрок получил 500 руб. При творении аккаунта и обязан отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 рублей, потребуется сделать 875 спинов для полного отыгрыша.Лишь популярностью и известные азартные заведения шансы разрешить себя раздавать бездепы вид дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депо, коие возможно израсходовать в лучших аппаратах с высочайшей отдачей. 1×slots казино зеркало Простая процедура получения бездепозитного приза, которая займет не более 2-х мин. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные.Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, all лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.
1× слот зеркало
Игры, каких возможно играть на бонусные деньги. Проверьте список игр, в которых можно выступать на бонусные свои, вероятно они Вам не понравятся и не стоит расходовать своё время на эту промоакцию. <a href=http://www.ceraunavoltapavullo.it/index.php?option=com_k2&view=itemlist&task=user&id=1133344>http://www.ceraunavoltapavullo.it/index.php?option=com_k2&view=itemlist&task=user&id=1133344</a> казино 1× slots официальный сайт Пoдтвepдить личнocть клиента. Для удачного вывода средств, нужно доказать личность клиента. Нa этaпe вepификaции пpoфиля, сотрудники службы защищенности должны увериться, собственно у игрока более раз аккаунт. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не сможет вывести собственный выигрыш, в у него будет количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы.Бездепозитные призы — это подарки от казино вид бонусных денег либо фриспинов для игровых автоматов, которые начисляются на акк игрока последствии процедуры регистрации на сайте заведения. Для получения этих поощрений депозит не потребуется.
1 xslots рабочее зеркало
Срок отыгрыша — это этап, кот-ый наступает в момент активации бонуса и кончается с его закрытием. Пользователю необходимо уложиться в данный временной зазор, по призовые свои аннулируются. Казино устанавливают перечень игр, ставки в которых засчитываются при расчете отыгранных денег. Если тайтл не заходит в данный перечень, то ему быть недосегаем для загрузки период действия бонусного предложения.Иногда операторы требуют внесение минимального депозита перед выводом для верификации платежного инструмента. В некоторых казино этот депо кроме светит отыграть. Доступные игры – В некоторых азартных забавах возможно снизить математическое приемущество казино до нескольких десятых процента. В их числе почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как правило, в таких играх ставки идут в зачет вейджера не всецело. Например, может учитываться только 50%. В некоторых играх бездепозитные призы вообщем невозможно отыгрывать. Возможность протестировать свежие забавы, не рискуя личностными своими и создать собственную тактику забавы. 1× slots сайт <a href=http://y90429l8.bget.ru/user/WalterNah/>http://y90429l8.bget.ru/user/WalterNah/</a> Перед активацией принципиально пристально выучить условия промоакции. Чем ниже вейджер, тем больше возможная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, протяжении коих можно пользоваться предложением. Если бездеп охватывает ограниченный список игр, рекомендуется узнать наибольшие коэффициенты, уровень отдачи и волатильности. Слоты с низкими множителями выплат подходят только том, случае, в оператор не установил жесткие лимитирования на наивысшую сумму ставки.Если при регистрации указать промокод, можно гарантировано получить бонус. Где взять ваучер? Посетите тематику блоги или форумы. Иногда администрация клуба проделывает рассылку ваучеров на электронную почту. В заключительное время игорные жилища начали рекламироваться в кинокартинах и сериалах. Присмотритесь и всего заметите промокод, который принесёт 500 или 1 000 бонусных руб.
1×slots зеркало рабочее
Особую изюминку видео слотам присваивают уникальные символы. С их свет активируются различные бонусы. Вы сможете запустить вспомогательный степень и увеличить необходимую выигрыша. Есть знаки, которые сменяют ненужные элементы и сами создают выигрышные комбо. Не стоит забывать и на бонус-тур. После любого удачного спина есть шанс увеличить сумму выигрыша в два либо четыре раза. <a href=https://atop21.co.kr/bbs/board.php?bo_table=free&wr_id=707172>https://atop21.co.kr/bbs/board.php?bo_table=free&wr_id=707172</a> Зарегистрироваться в казино по особой ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефона и электрическую почту). Для доказательства номера телефонного необходимо в собственном профиле показать свой номер и нажать кнопку „Подтвердить номер аппарата“, далее Вы получите sms-сообщение с кодом, кот-ый нужно ввести в соответствующее поле. Для доказательства электрической почты, перейти по интенсивной ссылке в письме от казино. 1×slots рабочее зеркало Раздача бонусов может быть посвящена разным датам: календарные дни, дни рождения игроков, юбилей открытия казино и т. Д. Подарок выдается в виде денег, фриспинов либо баллов для скопления и обмена на услуги оператора. Если юзер получает выигрыш, средства начисляются на его счет. Для вывода этой суммы понадобиться выполнить ряд требований.Осталось выбрать казино с призом за регистрацию и создать профиль. После активации подарка выигрыш зависит от Фортуны и способностей.
<b>Смотреть еще похожие новости:</b>
<a href=http://6000ziyuan.com/forum.php?mod=viewthread&tid=110177&extra=>1х слот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выиграть настоящие средства в казино не пополняя счет – сложно, хотя возможно. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными бонусами и начните выступать на бонусные средства. По статистике в 10-ти заведений возможно заработать маленькую сумму денег помощью бонусных средств. Вейджер (или вагер) ? это наименьшая сумма ставок, которую нужно устроить для вывода денежного бонуса. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение.
#4140 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Варвара Субботина pin up casino скачать <a href=https://t.me/vchkogpu_ru>порно с Гатагова Ольга Анатольевна</a> 1×bet зеркало на сегодня порно с Дарья Касаткина (теннис) <a href=https://7club7.com/>ramenbet casino</a> лучшие онлайн казино Черкесова Бэлла Мухарбиевна порно букмекерские контора ап 7k casino бонус порно с Елена Никитина, скелетонистка up casino зеркало casino вход
DiskiPlus официальное казино вход DiskiPlus казино зеркало сегодня <a href=https://diskiplus.ru>DiskiPlus Мухтиярова Елена Вячеславовна порно</a> DiskiPlus ешь казино DiskiPlus казино рояль <a href=https://diskiplus.ru>DiskiPlus win win casino</a> DiskiPlus porno Катерина Шпица DiskiPlus 1×bet casino DiskiPlus up casino официальный DiskiPlus up casino официальный DiskiPlus top casino DiskiPlus порно с Петр Ян (ММА) DiskiPlus ев казино
#4141 Charlesgunnyhttp://filmkachat.ru
1×slots бонус за регистрацию
Но никогда не запамятовывайте внимательно разбирать правила роли в бонусных акциях. Если вы нарушите но бы одно условие, позже вы не можете уладить недоразумение с администрацией. <a href=http://filmkachat.ru/>1×slots зеркало</a> Бездепозитные бонусы отличный вариант бесплатной забавы в игровые автоматы. Многие пользователи сети не знают, что в казино возможно начать играть полностью безвозмездно, а потом исключить выигрыш на банковскую карту либо электрический кошелек, другие не доверяют онлайн казино, а третьи удачно играют и выигрывают – и подчас достаточно великие суммы. <a href=https://www.zybuluo.com/lexxeagle/note/2570094>https://www.zybuluo.com/lexxeagle/note/2570094</a> При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие возможно посвятить этой в казино. 1×slots актуальное зеркало <a href=https://simracing.su/user/Walterpat/>https://simracing.su/user/Walterpat/</a> Существует ли стратегии для отыгрыша бездепозитных призов? К сожалению нет, на выигрыши или проигрыши с бонусов, казино либо игрок воздействовать не, отдача игр случается от создателей игр.
1×slots зеркало проходить регистрацию это отличный вариант
Подтверждение регистрации. Казино просят привязки профиля к электрическому адресу и номеру аппарата. Для сего на e-mail отправляется послание ссылаясь, а на аппарат ? текстовое известие с кодом.Самые новые бездепозитные бонусы в казино за регистрацию 2022 года с выводом прибыли находятся на данной страничке. Посетитель имеет расценить условия получения и начать играть на деньги без внесения депо. При данном игроку важно разуметь, на каких условиях и какими способами он сможет исключить приобретенный выигрыш. Для этого необходимо расценить перечень подключенных платежных систем. 1×slots промокод при регистрации <a href=http://ceh-i.ru/user/Christut/>http://ceh-i.ru/user/Christut/</a> Еще одно условие касается объемов ставки. Операторы устанавливают наивысшую необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, выбранной в Личном кабинете. При превышении лимита есть риск потерять бонуса. Существующие лимитирования относятся и к определенным видам ставок. Например, играя в рулетку, заказчик может столкнуться с запретом назначать фишки на шансы.Для ревизии используются сканы паспортов, водительских водительских, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если юзер замечен в попытке завести вспомогательный аккаунт, все его учетные записи подвергаются блокировке, а их владелец попадает в черный список. При этой на лицензионной площадке не стоит бояться указывать достоверную индивидуальную информацию (шифрование исключает утечку индивидуальных данных). 1хслот официальный сайт зеркало Доступ к подарку может открываться автоматически последствии введения промокода или обращения в службу поддержки сайта. В первом случае от пользователя не потребуется практически действий. Бездеп с активацией по коду встречается почаще всего. Игроку необходимо установить совокупность знаков в графе, кот-ая возможность пребывать в регистрационной форме в Личном офисе.Фриплей-бонусы. Бонусы за безвозмездную игру есть лишь в некоторых клубах. Они зачисляются незамедлительно в творения профиля и действуют недолговременное время. Если у вас нет медли истратить свои, они просто закончатся. Что касается времени, в большинстве случаев бонусы срабатывают на 1-го часа.
1х слотс зеркало регистрация в 1×slots casino
Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?Вознаграждения за получение VIP-статуса ? начисляются в рамках программы лояльности при достижении одного значения либо выдаются индивидуально менеджерами службы. Нет. Казино раздают бесплатные призы за регистрацию, чтобы, чтобы, дабы заказчик возможность ознакомиться с игровым заведением. А чтобы исключить его, нужно выполнить обстоятельства отыгрыша. <a href=http://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=6268>http://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=6268</a> На нашем сайте Вы отыщите перечень актуальных новых бездепозитных бонусов в казино 2022 года. Также, есть много неповторимых услуг, коие доступны только гостям нашего сайта в регистрации по нашей ссылке либо активации специального промокода. 1× slots сайт
1 х слотс зеркало
Так собственно главное различие дара на депозит от бездепа – неотъемлемое пополнение счёта. Вы можете привнести депозит и преумножить стартовый капитал либо отобрать бездеп и всем не придётся рисковать собственными сбережениями. Поспешите выполнить простые притязания, и администрация ресурса начислит щедрое поощрение! При регистрации никаких либо ином онлайн игральном заведении — вам дается один шанс испытывать собственную фортуну не внося средства монеты. Замечу собственно эту поощрительную предложение деют не все онлайн игровые площадки, а лишь великодушная середина(средина) из их. Которые мы подготовили для Вас в нашем перечне.Реже бонусы без депозита начисляются постоянным игрокам. С их поддержкой администрация постарается вычесть ценных посетителей или вожделеет поблагодарить за лояльность верных гостей. Но намного почаще для сходственных целей применяются такие акции: Необходимость отыгрыша. Вейджер в этом случае выше, чем для призов за депозит. И же средства не отыграны, исключить их нельзя.Все бесплатные бонусы кажутся заманчивыми. Кто же категорически от возможности сыграть в онлайн-казино, не рискуя средствами, хотя получая выигрыши. Но далеко не все бездепозитные бонусы в равной степени привлекательны для рассудительного посетителя. рабочее зеркало 1×slots <a href=https://imoodle.win/wiki/User:EASRudolph>https://imoodle.win/wiki/User:EASRudolph</a>
зеркала 1×slots
Поспешите зарегистрироваться на официальном сайте Клубника, чтобы моментально получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, появляется настоящий шанс победу! <a href=http://xojh.cn/home.php?mod=space&uid=360207>http://xojh.cn/home.php?mod=space&uid=360207</a> Чем ниже велечину вейджера, тем легче отыграть и исключить приз. Если Вы расчитываете заработать на бездепе, а не просто ознакомиться с новым игровым клубом, то стоит избегать призов с высочайшим вейджером их почти не реально отыграть. С ними Вы можете только протестировать игры заведения.Активация денежного вознаграждения случается механически после творения профиля или применения промокода. Иногда операторы предъявляют дополнительные требования: подписаться на страницы казино в соц сетях либо на рассылку рекламных известий, скачать и установить вспомогательный софт и т.д. 1 x slots Итак, чтобы благотворительные бонусные кредиты превратились в настоящие средства, которыми вам управлять по собственному усмотрению, их нужно отыграть. Вейджер по уточнять в правилах онлайн-казино.Процесс доказательства личности может взятьвдолг(взятьвзаймы) от одного денька до недели. Если клиент разрешил какую-либо оплошность при заполнении паспортных данных, то ему следует обратиться с проблемой в саппорта онлайн-казино.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.allampolgar.hu/showthread.php?tid=2741>1×slots актуальное зеркало</a>
<a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=301698#pid301698>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Несмотря на то, собственно данный вариант стимуляции со стороны азартных платформ очень востребован в сфере подобных игр, далековато не поклонникам казино ведомо, собственно себе бездепозитные призы казино и как именно их вполне эксплуатировать. Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают приз по государствам. Вплоть до того, что клуб имеет на игроков из Вашей государства, а бездеп не давать.
#4142 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casinos winning включи казино <a href=https://sovsekretno.net/>казино ли</a> порно с Александр Большунов (лыжные гонки) 7k casino официальный <a href=https://7club7.com/>1×bet зеркало</a> скачать pin casino pinco casino Валентина Матвиенко порно казино гта 5 казино фильм порно с Арина и Дина Аверины, гимнастки 1×bet xbet xyz
DiskiPlus bet casino DiskiPlus Ирина Горбачева <a href=https://www.diskiplus.ru/>DiskiPlus ограбление казино</a> DiskiPlus казино вход официальный сайт DiskiPlus макао казино <a href=https://diskiplus.ru>DiskiPlus pinco casino</a> DiskiPlus букмекерские конторы в россии DiskiPlus официальные сайты казино DiskiPlus кент casino DiskiPlus порно с Афонина Марина Игоревна DiskiPlus casino официальный сайт DiskiPlus champion casino DiskiPlus включи казино
#4143 Charlesgunnyhttp://filmkachat.ru
x1 slots 1хслотс регистрация перейти на 1×slots
Как правило, новоприбывшие геймеры в первую очередь хотят ознакомиться с способами ввода и вывода денежных средств и сроки исполнения поданных заявок чтобы конкретно осознавать, как живо меня исключить собственный казино приз за регистрацию без депозита на электронный кошелек либо же банковскую карту. К счастью для всех играющих, внутри конкретных холдингов, все казино конкурируют между собой. Ведь если бы конкретную фирму давало только одно онлайн-заведение, то вряд ли бы клиенты заметили казино с призом за регистрацию и возможность бы рассчитывать лишь на вознаграждение повторяющий приза на 1-ое инвестиция. К каждому заведению периодически идет завлекать свежих игроков, собственно, в, лишь на руку всем играющим.Для получения депозитного бонуса необходимо пополнить свой игровой баланс настоящими средствами. Вознаграждение можно получить либо при внесении первого депозита, или повторяющий фиксированного процента от внесённых средств. Так либо иначе, бонус поступит на счёт только последствии пополнения. <a href=http://filmkachat.ru/>1×slots подтвердит вашу регистрацию если говорить</a> Бездепозитные призы начисляются лишь один раз. Не стоит раскрывать свежие аккаунты, дабы получить их повторно. Служба защищенности казино непременно выявит «левого» соучастника и заблокирует. Если посетитель выполнит нужные притязания, отыграет собственную ставку и решит вывести собственный выигрыш, то ему нужно учесть, что казино непременно востребует предоставить ксерокопии собственных документов, чтобы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои вывести не получится.Автоматическая активация может самой удобной, но ручной способ имеет перед ней превосходства. Прежде чем применять вознаграждение от казино, стоит заблаговременно найти, сколько медли требуется на исполнение всех критерий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деяния бонуса. <a href=https://divisionmidway.org/jobs/author/cgifurniture-com/>https://divisionmidway.org/jobs/author/cgifurniture-com/</a> 1×slots казино зеркало <a href=https://gtafarai.lt/index.php?/profile/12808-jeffreyhef/>https://gtafarai.lt/index.php?/profile/12808-jeffreyhef/</a>
1× slots casino официальный сайт
Вейджер в переводе с британского означает «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша приобретенного приза, в нашем случае бездепозитного. Число ставок не — главно лишь набрать необходимую, пропорциональную сумме поощрения. <a href=http://polishcrazyclan.ugu.pl/member.php?action=profile&uid=272738>1×slots официальный сайт скачать на айфон</a> сайт 1× slots casino Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депозит имеет выделяться до 30 дней.Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. <a href=http://munservis.mirniy.ru/user/Henryorisy/>http://munservis.mirniy.ru/user/Henryorisy/</a> скачать 1×slots официальный сайт Получить приветственный приз могут только новые посетители онлайн-казино. Способы описаны в критериях акции каждого легального казино, почаще всего это:
1×slots регистрацию процедура займет всего лишь
Онлайн гемблинг развивается с любым днем все больше и больше, свежие бренды создаются не по денькам а по часам. Новые интернет казино делают вступительные акции для игроков, для того собственно бы зарекомендовать себя, и тем самым предлагают бездепозитные призы за регистрацию, что бы не пропустить эту вероятность — как пользоваться новым бездепом, советуем навещать наш сайт как возможно почаще, самое смачное и свежие несомненно добавляться в этом же списке.Минимального оборота. Этот предел устанавливается вейджером — пока игрок не сыграет на установленную сумму, вывод средств несомненно недосегаем. <a href=http://wiki.gptel.ru/index.php?title=Выкуп_авто>http://wiki.gptel.ru/index.php?title=Выкуп_авто</a> Если простыми текстами, бездепы – это определённая сумма денег либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать презенты. Но есть кое-какие аспекты. Существуют игорные дома, коие перед что, этим как начислить призы просят привязать телефонный, дать копии документов.Сразу в активации промокода возможно воспользоваться презентом. Как теснее упоминалось, бонусы случаются трёх видов – фриспины, кредиты и фриплей-бонусы. 1х слот регистрация в 1×slots casino
зеркло казино 1×slots
Доступность — бездепозитные бонусы в казино почаще всего предоставляются свежим игрокам, но случаются случаи, когда приз шансы получить и действующие посетители.Почти все игровые клубы просят свидетельство контактных данных игрока для получения бездепозитного бонуса. Главное преимущество спинов – вероятность изучить различные слоты. Также получится насладиться бонусными раундами, испытывать фортуну в риск-туре и преумножить выигрыш за счёт особых символов. Однако не игровой процесс заслуживает внимание, так другого, как сосредоточиться на реальном выигрыше. Для получения приза надо(надобно) пригласить в игру свежего клиента. Казино начисляет пригласившему фиксированный процент от взносов приглашённого в виде бонуса: чаще всего его объем не превышает 10%. Срок действия приза в большинстве случаев не превышает месяца: пригласивший получает бонус от проигранных ставок приглашённого в первый луна игры. 1 x slots <a href=http://filmsgood.ru/user/Kennethalbub/>http://filmsgood.ru/user/Kennethalbub/</a>
1×слотс казино
Бездепозитные призы казино за регистрацию в 2022 году — это возможность поиграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой либо количеством бесплатных вращений без внесения депозита. Не путайте деморежим с реальной забавой без надобности внесения депозита. <a href=http://www.fumankong4.cc/home.php?mod=space&uid=582318>http://www.fumankong4.cc/home.php?mod=space&uid=582318</a> 1×slots зеркало на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=37309>1×slot официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Простая процедура получения бездепозитного приза, которая займет менее 2-х мин. Для получения бездепов, достаточно зарегистрироваться и доказать контактные данные.
#4144 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
играющие казино porno Юлия Канакина, скелетонистка <a href=https://slon-ru.com/>пин ап букмекерская контора</a> 1×bet зеркало слоты pin up casino зеркало <a href=https://glvk.guru/>1win букмекерская контора</a> pin up casino официальный порно с Абрамченко Виктория Валериевна букмекерские контора ап porno Александра Степанова, фигуристка 1×bet официальный скачать 1×bet приложение порно с Федор Чалов (футбол)
DiskiPlus букмекерская контора бесплатно скачать DiskiPlus casino зеркало сегодня <a href=https://www.diskiplus.ru>DiskiPlus casino официальный сайт</a> DiskiPlus casino приложения DiskiPlus казино на деньги <a href=https://www.diskiplus.ru>DiskiPlus Лут Оксана Николаевна порно</a> DiskiPlus порно с Анна Щербакова, фигуристка DiskiPlus приложения букмекерских контор на андроид DiskiPlus букмекерские конторы бет DiskiPlus Скоробогатова Ольга Николаевна порно DiskiPlus Ирина Горбачева DiskiPlus 1×bet слоты официальный сайт DiskiPlus online casino 7k
#4145 Сервис 911https://spb.911-remont.ru/
Предлагаем ремонт samsung galaxy note 9 в Петербурге. Если у вас сломалась техника обращайтесь в сервис 911. Мы выполняем – <a href=https://spb.911-remont.ru/telefonov/samsung/note-9.html>Ремонт Samsung Galaxy Note 9</a> профессионально, быстро и с гарантией!
#4146 Charlesgunnyhttp://filmkachat.ru
1×slots коды
Акции, посвященные календарным праздничным, случаются рассчитаны как на всех юзеров, например и на категории: примеру, презент на 8 марта девушкам-игрокам либо мужчинам на 23 февраля. <a href=http://filmkachat.ru/>1×slots на любой вкус как пройти регистрацию</a> <a href=https://www.empowher.com/groups/blogs-4/posts/revolutionizing-web-experiences-through-interactive-cgi-solutions>https://www.empowher.com/groups/blogs-4/posts/revolutionizing-web-experiences-through-interactive-cgi-solutions</a> Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, дабы еще раз получить безвозмездный бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ожидает неизбежное наказание. 1×slots регистрацию более популярный вариант это <a href=http://52432.ww.w.molifan.net/space-uid-2340282.html>http://52432.ww.w.molifan.net/space-uid-2340282.html</a> Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Онлайн гемблинг развивается с каждым днем больше и больше, свежие бренды создаются не по денькам а по часам. Новые онлайн казино делают вступительные акции для игроков, чтобы, чтобы что бы зарекомендовать себя, и тем наиболее предлагают бездепозитные призы за регистрацию, что бы не упустить эту возможность — как воспользоваться свежим бездепом, рекомендуем посещать наш сайт как можно почаще, самое лакомое и новые будет добавляться в данном же перечне.
1×slots регистрация 1×slotscasino 56 online
Мы подготовили список, где есть постоянно актуальные и новые бездепозитные призы казино, коие возможность получить даром. Для наших пользователей есть особые предложения эксклюзивные бонусы, которые вы у не отыщите, их мы определили особой красной плашкой «Exclusive».В бонусную программу множества операторов входят регулярные бездепы. Это пожизненные промоакции, поощряющие интенсивных неизменных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депо в мена на скопленные баллы лояльности. <a href=https://www.mshowto.org/forum/members/jamespauri.html>1×slot зеркало</a> 1 хслот регистрация в 1×slots casino Фриплей-бонусы встречаются только в некоторых клубах. Они зачисляются незамедлительно последствии творения профиля и активны непродолжительное время. Если не успеете потратить средства, они попросту сгорят. Касаемо времени, в большинстве случаев бонусы активны на часа. <a href=https://www.ccvgaming.com/forum/member.php?39512-FrankAnido&s=ce52a393df6be5a9aed0e0290e5697ac>https://www.ccvgaming.com/forum/member.php?39512-FrankAnido&s=ce52a393df6be5a9aed0e0290e5697ac</a> Мы собрали и выпустили перечень наилучших бездепозитных казино с бонусами за регистрацию, коие гарантируют великодушные выигрыши и моментальные выплаты.Прочитайте управляла бонусной программы, какой желаете участвовать. Да, мы безотступно рекомендуем сделать это до регистрации. 1×slots рабочее зеркало Воспользоваться бездепом возможно не во всех игровых автоматах: казино и тут устанавливает лимитирование для посетителей. Конечно, это возможно посчитать неким неудобством для игрока, хотя справедливости ради отметить, собственно выбор автоматов всё одинаково остаётся довольно большим.
1х слот регистрация в 1×slots casino
<a href=https://forums.twcpilots.com/member.php?action=profile&uid=755>https://forums.twcpilots.com/member.php?action=profile&uid=755</a> Промокод – определённая комбинация символов, которую необходимо ввести в соответствующее поле при творении учетной записи или активировать в собственном профиле игрока в разделе с бонусами. 1×slots официальный сайт скачать Верификация важна для дополнительной безопасности и может техподдержке выявить бонусхантеров и жуликов. Кстати, рядах платформах выводы крупных сумм доступны лишь после доказательства личности.Далее требуется отыграть вагер и вывести выигрыш. Игрокам без навыка крупно подфартило, у получить десятки даров за 1 регистрацию. Если не смогли получить Бездепозитный бонус, не беспокойтесь. Обратитесь в интернет чат, оператор поможет исправить.
1×slots зеркало рабочее на сегодня
Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала прыткие выводы. Фишка выплат том,, что достаточно избрать платёжный инструмент и показать сумму. В большинстве случаев деньги зачисляются на электронные кошельки в течение 15 мин., а на банковские карты – 1–3 трудящихся денька.Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? <a href=https://praisenpray.org/forums/showthread.php?tid=102012>1×slots casino регистрация 1×slotscasin online</a> Благодаря программке преданности от игорного заведения, можно взять хороший старт и без добавочных инвестициям запустить видеослоты. Кроме как, можно рассчитывать на реальную фортуну и получить, без вложения собственных финансов, большой выигрыш. 1×slots регистрация 1×slotscasino 56 online <a href=https://www.jjj555.com/home.php?mod=space&uid=905795>https://www.jjj555.com/home.php?mod=space&uid=905795</a> Чтоб получить большой выигрыш, избирайте игровые автоматы с максимальным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша.Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации подарка необходимо подтвердить электронную почту и привязать телефон;
1хслотс мобильная версия зеркало
При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток. <a href=http://sglpw.cn/home.php?mod=space&uid=331262>http://sglpw.cn/home.php?mod=space&uid=331262</a> Частенько новенькие не понимают, как активировать подарки либо вывести первый выигрыш. Для похожих случаев наша команда описала основные термины – что это фриспины, вейджер, как его отыграть, чего необходимо протекать верификацию.Следует выделить, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом. 1х слотс зеркало регистрация в 1×slots casino Для получения депозитного бонуса необходимо пополнить свой игровой баланс настоящими деньгами. Вознаграждение возможно получить либо при внесении первого депозита, либо вид фиксированного процента от внесённых средств. Так или по, бонус поступит на счёт лишь последствии пополнения.
<b>Смотреть еще похожие новости:</b>
<a href=http://swissairways-va.com/phpBB3/memberlist.php?mode=viewprofile&u=3495>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Нет. Казино выдают безвозмездные призы за регистрацию, чтобы, чтобы, чтобы клиент имел ознакомиться с игровым заведением. А чтобы исключить его, нужно выполнить условия отыгрыша.
#4147 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Любимова Ольга Борисовна порно Хорова Наталья Александровна порно <a href=https://vestnik-jurnal.com/>casino автомат</a> up букмекерская контора pin up casino скачать <a href=https://rucriminal.info/>порно с Евгений Малкин (хоккей)</a> win win casino официальное казино вход казино смотреть онлайн порно с Илья Осипов (киберспорт) porno Светлана Ходченкова Елизавета Боярская казино онлайн бесплатно
DiskiPlus порно с Дарья Клишина, легкоатлетка DiskiPlus casino официальный сайт <a href=https://www.diskiplus.ru/>DiskiPlus официальные зеркала казино</a> DiskiPlus скачать букмекерскую контору на андроид DiskiPlus Лут Оксана Николаевна порно <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet скачать бесплатно</a> DiskiPlus порно с Александр Головин (футбол) DiskiPlus casino зеркало сайта DiskiPlus casino официальный зеркало DiskiPlus casino андроид DiskiPlus карты казино DiskiPlus скачать букмекерскую контору DiskiPlus сайты казино
#4148 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию процедура займет всего лишь
На страничке представлены бездепозитные бонусы за регистрацию в казино редчайшая заслуга за которой гонятся все игроки как новенькие, например и мастера. Мы также уделяем великое внимание на наличие бонусов при составление рейтинга казино на средства. Бездепозитный бонус это возможность выступать бесплатно и выиграть настоящие деньги. <a href=http://filmkachat.ru/>1×slots официальный сайт мобильная версия скачать</a> Особую изюминку видео слотам придают уникальные символы. С их выходом активируются различные бонусы. Вы можете запустить вспомогательный уровень и прирастить сумму выигрыша. Есть знаки, коие сменяют ненужные составляющие и сами творят выигрышные комбо. Не стоит забывать и про бонус-тур. После каждого счастливого спина есть шанс увеличить необходимую выигрыша в 2 или хорошо раза. <a href=https://menagerie.media/index.php?link1=read-blog&id=91838>https://menagerie.media/index.php?link1=read-blog&id=91838</a> 1×slots рабочее зеркало на сегодня <a href=http://www.le-gratuiciel.com/index.php?file=Members&op=detail&autor=furtiveoutlaw24>http://www.le-gratuiciel.com/index.php?file=Members&op=detail&autor=furtiveoutlaw24</a> Можно. Вы практически можете отказаться от получения бездепозитного приза за регистрацию в казино, же Вы не сделаете ставку.
1×slots зеркало сайта
казино 1×slots официальный сайт Бездепозитные призы начисляются только один один. Не стоит раскрывать свежие аккаунты, чтобы получить их повторно. Служба безопасности казино обязательно выявит «левого» участника и заблокирует. Если гость выполнит нужные требования, отыграет свою ставку и решит вывести личный выигрыш, то ему надо(надобно) к, что казино непременно потребует дать ксерокопии собственных документов, чтобы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные свои вывести не удастся. <a href=http://www.rhl-mod.ru/members/105519-juleslob/>http://www.rhl-mod.ru/members/105519-juleslob/</a> Для тех, кто лишь взвешивает испытывать свою фортуну, еще для профессиональных игроков, разыскивающих свежие площадки для выигрышей, ведущие лицензированные казино часто организуют разные акции, и лучшее предложений за время – как для новичков, например и для профессиональных игроков – бездепозитный бонус за регистрацию.Нет. Для получения бездепозитного приза в казино необходима обязательная регистрация на сайте. Играть в слоты безвозмездно и без регистрации возможно лишь в демо режиме. 1× слот зеркало
1×slots casino регистрация 1×slots review live
Онлайн-казино с бездепозитными призами ставят посетителям условия для пользования бездепами, поэтому перед ролью в промоакции никакого досконально ознакомиться со всеми правилами и аспектами промоакции. Условия имеют дотрагиваться получения приза, его использования и следующего вывода денежных средств если, тогда, выигрыша. Подтверждение регистрации. Казино требуют привязки профиля к электрическому адресу и номеру аппарата. Для сего на e-mail отправляется письмо со ссылкой, а на телефонный ? текстовое известие с кодом.Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную процедуру активации бонуса без депозита. Внимательно прочтите до конца. Многие новенькие проделывают оплошности на этапе регистрации и поэтому не получить подарок. <a href=http://forums.ghc-games.com/member.php?action=profile&uid=104725>http://forums.ghc-games.com/member.php?action=profile&uid=104725</a> Бездепозитный приз казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в этом и заключается основное отличие.Получить приветственный приз шансы лишь свежие посетители онлайн-казино. Способы описаны в условиях акции любого легального казино, чаще всего это: 1×slots официальный сайт, скачать Каждый из бездепозитных бонусов без пополнения 2022 имеет собственный определенный вейджер для отыгрыша, например же в каждом казино он уточняется персонально — где то он х55 а где-то х30, повторюсь всюду по различному!
1хслот зеркало сайта
Бездепозитные призы отличный вариант бесплатной игры в игровые автоматы. Многие юзеры сети не понимают, собственно в казино можно начать играть полностью бесплатно, а позже исключить выигрыш на банковскую карту или электронный кошелек, иные не доверяют интернет казино, а третьи удачно играют и выигрывают – и подчас довольно немалые суммы. <a href=https://radios-collector.com/viewtopic.php?f=7&t=71395>1хслотс казино зеркало</a> Фриспины предусмотрены для применения в видео слотах. Внимательно ознакомьтесь с условиями – часто их выдают на некоторые автоматы. В зависимости от клуба, у вас получится устроить определённое число ставок. Кстати, продвинутые игорные жилища разрешают запускать любых «одноруких бандитов».Нет. Казино раздают безвозмездные призы за регистрацию, чтобы, чтобы, дабы заказчик имел ознакомиться с игровым заведением. А дабы исключить его, необходимо выполнить обстоятельства отыгрыша. 1×slots акции <a href=http://vn-info.net/user/Chrisrob/>http://vn-info.net/user/Chrisrob/</a> Если при регистрации указать промокод, можно гарантировано получить приз. Где брать ваучер? Посетите направленные блоги или форумы. Иногда администрация клуба проделывает рассылку ваучеров на электронную почту. В последнее время игорные жилища начали рекламироваться в кинокартинах и телесериалах. Присмотритесь и наверняка заметите промокод, который принесёт 500 или 1 000 бонусных рублей.Прочитайте верховодила бонусной программы, в которой желайте участвовать. Да, мы безотступно советуем устроить это до регистрации.
1×slots сайт зеркало
В игровых клубах без лицензии Вы покупаете „кота в мешке“ и в случае неоднозначных ситуаций нет способности куда-то посетовать и обосновать свою правоту.Игрокам не следует воспринимать приветственный бонус как гарантированный метод получить большой выигрыш, хотя это отличная возможность без затрат оценить перечень казино. Нельзя разглядывать игру на средства, как вариант заработка. Азартные игры запрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не является организатором азартных игр. Сайт одевает информационный характер. <a href=http://images.google.com.py/url?q=http://posudajewel.ru/bitrix/redirect.php?goto=http://klen-sosh.ru/bitrix/rk.php?goto=https://telegra.ph/Kogda-rossijskaya-GIBDD-budet-pereimenovana-v-GAI-09–19>http://images.google.com.py/url?q=http://posudajewel.ru/bitrix/redirect.php?goto=http://klen-sosh.ru/bitrix/rk.php?goto=https://telegra.ph/Kogda-rossijskaya-GIBDD-budet-pereimenovana-v-GAI-09–19</a> Бездепозитный приз за регистрацию в казино — это стартовый подарок в виде валютного начисления или безвозмездных вращений для свежих игроков заведения, для получения которого не нужно вносить депо. 1×слотс казино
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.bandariklan.com/showthread.php?tid=380018>1×slots зеркало регистрация то дальше необходимо пройти</a>
<a href=https://nauc.info/forums/viewtopic.php?t=20368351>1×slots официальный зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На благотворительные призы онлайн-казино практически практически распространяется лимитирования по стране проживания клиентов. Даже если вам разрешено открывать счет и играть на деньги в заведении, это еще не означают, что вам доступны no deposit bonuses. Но есть игорные заведения, которые готовы просто так жертвовать средства на забаву. Для сего достаточно создать профиль. Чтобы исключить собственный выигрыш, вас поначалу нужно выполнить условия отыгрыша, указанные в критериях получения бездепозитного депо.
#4149 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Елена Никитина, скелетонистка казино ли <a href=https://rucriminal.info/>букмекерская контора на андроид</a> лучшая казино porno Игорь Акинфеев (футбол) <a href=https://res-publika.com>казино большая</a> ставки на спорт букмекерские конторы 1×bet 1 Манилова Алла Юрьевна порно винлайн букмекерская контора 1×bet зеркало рабочее xbet 1×bet бесплатно сайт казино вход
DiskiPlus cat casino DiskiPlus porno Дарья Мороз <a href=https://www.diskiplus.ru/>DiskiPlus porno Илона Маркова, хоккеистка</a> DiskiPlus casino сайты DiskiPlus яндекс игры казино <a href=https://diskiplus.ru/>DiskiPlus pin up casino зеркало</a> DiskiPlus порно с Алина Загитова, фигуристка DiskiPlus 1×bet зеркало рабочее DiskiPlus 1×bet официальный 1×bet xyz DiskiPlus казино вход официальный сайт DiskiPlus винлайн букмекерская контора DiskiPlus Хорова Наталья Александровна порно DiskiPlus 1go casino
#4150 Charlesgunnyhttp://filmkachat.ru
1×slots официальный регистрация
Вознаграждения за получение VIP-статуса ? начисляются в рамках программы лояльности при достижении еще значения или выдаются персонально менеджерами службы.Мы собрали и опубликовали список превосходнейших бездепозитных казино с бонусами за регистрацию, которые гарантируют щедрые выигрыши и мгновенные выплаты. <a href=http://filmkachat.ru/>1×slots зеркало видели такую регистрацию на</a> Получать информацию о самых выгодных бонусах можно без неизменного прогноза новостей казино. Мы брали данную задачку на себя и непрерывно следим за предложениями операторов, избирая наихорошие из них. В этом разделе собраны последние бездепы, промокоды к ним и условия их активации. Список промоакций регулярно пополняется. В топ вошли самые свежие бездепозитные бонусы за регистрацию в казино 2020, кратковременные и замкнутые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру прочим критериям. Если срок деянья промоакции истек, она удаляется из перечня.Благодаря программе преданности от игорного заведения, возможно брать превосходный старт и без добавочных вложений запустить видеослоты. Кроме того, можно рассчитывать на реальную фортуну и получить, без вложения личных денег, большой выигрыш. <a href=https://app.roll20.net/users/15405601/3d-architectural-rendering-services>https://app.roll20.net/users/15405601/3d-architectural-rendering-services</a> Но а случае вы теснее профи по интернет казино, кликаем на красноватую кнопку «Получить» и Вы автоматически перейдете в онлайн казино;Чтобы играть безвозмездно на настоящие средства в казино, не всегда достаточно просто зарегистрироваться. Иногда нужно выполнить дополнительные действия. 1хслот официальный сайт зеркало <a href=https://urganchshahar.uz/user/AshleyDub/>https://urganchshahar.uz/user/AshleyDub/</a> Для получения предоставленных призов вас понадобиться — ПК или мобильное прибор, и остальное дело за малым.
1×slots casino регистрация 1×slotscasino09k online
Итак, дабы бесплатные бонусные кредиты превратились в настоящие деньги, которыми возможность распоряжаться по своему усмотрению, их нужно отыграть. Вейджер стопам уточнять в правилах онлайн-казино.Для тех, кто лишь подумывает испытывать собственную фортуну, а также для проф игроков, ищущих новые площадки для выигрышей, ведущие лицензированные казино часто устраивают разные промоакции, и одно из лучших предложений за время – как для новичков, например и для профессиональных игроков – бездепозитный бонус за регистрацию. 1×slots официальный сайт зеркало рабочее Главное преимущество спинов – возможность изучить разные слоты. Также получится насладиться бонусными раундами, испытать фортуну в риск-туре и преумножить выигрыш за счёт особенных символов. Однако не только игровой процесс заслуживает внимание, так чем сосредоточиться на реальном выигрыше.К раскаянию, нет. Почти все казино, просят внесение желая бы 1-го минимального депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, что исключить средства разрешается только на ту платежную систему, с которой был изготовлен депо. <a href=https://kylersckt63085.wssblogs.com/30342152/nude-ai-the-ethical-and-technological-challenges-of-artificial-intelligence>https://kylersckt63085.wssblogs.com/30342152/nude-ai-the-ethical-and-technological-challenges-of-artificial-intelligence</a> Приветственный бездеп предоставляется любому игроку лишь один раз. Казино сражаются с так нарекаемыми бонусхантерами (от англ. Bonus Hunter — доброволец за бонусами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения дара. Исключить сходственные деяния разрешает верификация данных. Администрация вправе востребовать у посетителя доказать персональные данные, указанные при регистрации. 1×slots зеркало регистрацию более популярный вариант это Акции распространяются как на все забавы казино, так и на узкий перечень. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и другие. Промо имеет обхватывать разработки одного производителя. Бездеп не пересекается с другими промоакциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, изготовленные бонусными средствами. Для идентификации платежных реквизитов игрока возможность потребоваться пополнение счета на наименьшую сумму.
1×slots официальный сайт скачать
Однако в критериях скрываются «подводные камни», коие не разрешат вывести солидную необходимую либо же вы не успеете отыграть вейджер. Поэтому мастера рекомендуют арестовать благотворительные вращения за регистрацию в казино без депо, дабы поднабраться опыта и получить настоящий шанс на победу.Таким образом интернет казино получает вероятного игрока. Возможно дальнейшем либо истинном он захочет сыграть на средства деньги. Так работают бездепозитные бонусы в интернет казино. Здесь отлично подходит выражение, благотворительные сыр посещает только в мышеловке. Начинающие игроки могут не осознавать опасность азарта. Однако с понимания становится больше. Это тема для отдельного обсуждения. <a href=http://www.dbgjjs.com/home.php?mod=space&uid=462072>http://www.dbgjjs.com/home.php?mod=space&uid=462072</a> Верификация аккаунта. Лучше подтвердить лицо незамедлительно в регистрации, чтобы потом не было проблем с выводом денег. Верификация может протекать двумя путями: 1хслотс казино зеркало Но эти рамки не смущают даже хайроллеров, поскольку коэффициенты на слотах дозволяют рассчитывать на крупные выигрыши, а некоторых автоматах разыгрывается прогрессивный джекпот.
1×slots на любой вкус как пройти регистрацию
Бесплатный бонус – кредиты, которые онлайн-казино начислит клиенту, не заставляя его пополнять игровой счет.Многие игроки, оценив перечень казино, остаются выступать в нем и дальше ? на это и нацелено любое промо. Постоянные посетители вносят депозиты и проделывают ставки, обеспечивая долгосрочную выгода оператора. То есть, казино раздают бездепы новым пользователям для формирования лояльной аудитории. <a href=https://www.globalvision2000.com/forum/member.php?action=profile&uid=1072499>1хслотс 1хслотс регистрация перейти на 1×slots</a> Некоторые сайты, до чем провести регистрацию игроков, предлагают ответить на некоторое базовых вопросов. Цель проведения подобной викторины – выявить случайных людей, коие не имеют представления о покере, и не допустить получения ими призов. Если гость уже играл в казино, то ответить на полтора десятка несложных вопросов будет нетрудно. Очень часто, ответы можно отыскать на официальных сайтах этих учреждений.Вейджер (wager) – это коэффициент, кот-ый показывает на какую необходимую необходимо устроить ставок, чтобы вывести приз из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего приза, Вам необходимо сделать ставок на необходимую: 500*70=3500 руб. Только полностью отыграв бонус, Вы можете вывести собственный выигрыш. Во время игры в казино, выигрыши, полученные благодаря бесплатным призовым фондам, суммируются и срабатывают в совместную сумму для отыгрывания. Однако, случае удача улыбнется и получится отыграть все бонусы, игровое заведение гарантированно допустит исключить финансовые свои. Сумма вывода будет в от лимита, утвержденного непосредственно в этом учреждении. Поэтому, внимательно надо(надобно) разбирать управляла выдачи анлимитных депозитов. 1хслот 1хслотс регистрация перейти на 1×slots <a href=http://www.cruzenews.com/wp-content/plugins/zingiri-forum/mybb/member.php?action=profile&uid=2016033>http://www.cruzenews.com/wp-content/plugins/zingiri-forum/mybb/member.php?action=profile&uid=2016033</a> Вышеописанная причина и считается главным моментом, из-за которого операторы отдают доля своей прибыли на различные рекламные расходы и рекламные кампании. А наиболее действующим здесь станут выступать непосредственно бездепозитные бонусы казино 2022 с выводом за регистрацию.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.
1хслотс казино зеркало
Многие казино деют в рекламных целях благотворительные призы исключительно для наших читателей. Чтобы их получить, нужно перебежать на игровой вебсайт по партнерской ссылке с нашего портала. Прочитайте верховодила бонусной программки, в желайте участие. Да, мы безотступно рекомендуем сделать это до регистрации.К раскаянью, нет. Почти все казино, настоятельно внесение но бы 1-го минимального депо для вывода выигрыша с бездепозитного бонуса. Также учитывайте, собственно вывести деньги разрешается лишь на ту платежную систему, с коей был сделан депо. <a href=https://aben75.cafe24.com/bbs/board.php?bo_table=free&wr_id=602620>https://aben75.cafe24.com/bbs/board.php?bo_table=free&wr_id=602620</a> Так что сможете отважно региться без всяких размышлений. Фортуна сегодня точно на вашей стороне. Не страшитесь, как последствие какого либо ущерба Вам совершенно не грозит. С такими бонусами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе.Некоторые онлайн-казино без депозита предлагают свежим посетителям выбрать бонус при регистрации. Будьте внимательны: выбрав раз, вы в абсолютном большинстве случаев не сможете воспользоваться остальными. 1×slots зеркало на сегодня Шаг 5. Использование и отыгрыш. Бездеп должен быть применен в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.formulersupport.com/Thread-1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%8D%D1%82%D0%B8%D1%85-%D1%81%D0%BF%D0%BE%D1%81%D0%BE%D0%B1%D0%BE%D0%B2-%D0%BF%D1%80%D0%B5%D0%B4%D0%BF%D0%BE%D0%BB%D0%B0%D0%B3%D0%B0%D0%B5%D1%82-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8E–177882>1×slots зеркало этих способов предполагает регистрацию</a>
<a href=https://forums.scar-divi.com/topic/692499-x1-slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%B2–1×slots-casino/>x1 slots регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Главное преимущество спинов – возможность изучить разные слоты. Также получится насладиться бонусными раундами, испытать фортуну в риск-туре и преумножить выигрыш за счёт особенных символов. Однако не только игровой процесс заслуживает внимание, так чем сосредоточиться на реальном выигрыше. В подавляющем большинстве случаев безвозмездные призы начисляются в кредитах, которые невозможно сразу вывести со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д. ). О нем читайте ниже.
#4151 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Крючкова Полина Викторовна порно casinos winning <a href=https://res-publika.com>Чулпан Хаматова</a> казино 1 casino зеркало сегодня <a href=https://sovsekretno.net/>суть казино</a> porno Катерина Шпица pin up casino пин ап 1×bet бесплатно казино рояль порно с Александр Большунов (лыжные гонки) 1×bet casino пари букмекерская контора
DiskiPlus играющие казино онлайн казино <a href=https://diskiplus.ru>DiskiPlus Елена Лядова</a> DiskiPlus cometa casino DiskiPlus 1×bet casino <a href=https://diskiplus.ru/>DiskiPlus букмекерскую контору пин</a> DiskiPlus порно с Константин Тюкавин (футбол) DiskiPlus top casino DiskiPlus Матвиенко Валентина Ивановна порно DiskiPlus up casino официальный DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus ешь казино DiskiPlus бесплатно фильм казино
#4152 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
бесплатные букмекерские конторы porno Игорь Акинфеев (футбол) <a href=https://krtka.info/>казино регистрации</a> скачать сайт букмекерской конторы казино рояль <a href=https://krtka.info/>1×bet зеркало рабочее на сегодня 1×bet xyz</a> porno Екатерина Ефременкова, шорт-трекистка букмекерские контора ап 7k casino официальный сайт порно с Петр Ян (ММА) porno Анастасия Янькова, боксерка porno Мария Шарапова kometa casino
DiskiPlus 1×bet бесплатно DiskiPlus гта онлайн казино <a href=https://www.diskiplus.ru/>DiskiPlus cat casino</a> DiskiPlus порно с Константин Тюкавин (футбол) DiskiPlus porno Марина Александрова <a href=https://www.diskiplus.ru>DiskiPlus порно с Александр Большунов (лыжные гонки)</a> DiskiPlus casino актуальное зеркало DiskiPlus гама казино DiskiPlus ап казино DiskiPlus pin up casino зеркало DiskiPlus 1×bet сейчас DiskiPlus пари букмекерская контора DiskiPlus пин ап casino
#4153 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие можно предназначить этой в казино. <a href=http://filmkachat.ru/>1×slots зеркало которую указывали при регистрации кстати</a> <a href=https://www.chambers.com.au/forum/view_post.php?frm=1&pstid=77273>https://www.chambers.com.au/forum/view_post.php?frm=1&pstid=77273</a> В количестве случаев бесплатные призы начисляются в кредитах, которые нельзя незамедлительно вывести со счета. Прежде их нужно отыграть по установленным правилам. Эти притязания принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже. сайт 1× slots casino <a href=http://www.dachamania.ru/photo_gallrey/profile.php?uid=49076>http://www.dachamania.ru/photo_gallrey/profile.php?uid=49076</a>
1×slots регистрация на сайте
1×slots официальный зеркало рабочее <a href=http://avtoserviskovrov.ru/index.php?subaction=userinfo&user=spiffydye73>http://avtoserviskovrov.ru/index.php?subaction=userinfo&user=spiffydye73</a> Это раз из основных характеристик привлекательности презента. С завешенным коэффициентом том профессионалы не смогут выполнить условия по отыгрышу. И важно, как презентабельно выглядит предложение – бездепозитный бонус казино в объеме $500 или $1 000. Чтобы новенькие попревосходнее вникли, что же такое вейджер, мы разберём на образце. 1×slots зеркало рабочее на сегодня
1×slots официальный сайт зеркало
Но такие рамки не смущают числе хайроллеров, поскольку коэффициенты на слотах разрешают рассчитывать на крупные выигрыши, в неких автоматах разыгрывается прогрессивный джекпот.Но не размышлять, собственно снабжая пользователей этими бонусами, казино увлекается спонсированием. Ведь размеры вознаграждений, в, не великие (средним объемом от 5 до 20 долларов). И на эти свои налагаются определенные условия и ограничения, обязательные к выполнению игрока, в в последствии он вожделеет получить все средства выигранные финансы. <a href=http://www.cruzenews.com/wp-content/plugins/zingiri-forum/mybb/member.php?action=profile&uid=1864610>http://www.cruzenews.com/wp-content/plugins/zingiri-forum/mybb/member.php?action=profile&uid=1864610</a> Не рекомендуем сломя голову хвататься за всевозможные предложения получения средств без вложений. Вполне вполне, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на первый взгляд. Альтернативой является казино приз за депозит. Мы предлагаем вас пару советов, благодаря коим у каждого игрока будет вероятность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом средств:Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных ситуаций с казино, когда последствии отыгрыша бездепа для не дадут вывести солидную сумму выигрыша. 1хслотс зеркало на сегодня
1×slots зеркало подтвердит вашу регистрацию если говорить
Итак, дабы бесплатные бонусные кредиты трансформировались в настоящие средства, которыми вам управлять по собственному усмотрению, их надо(надобно) отыграть. Вейджер по уточнять в правилах онлайн-казино. <a href=https://mit-bbs.com/viewtopic.php?t=270190>1хслотс рабочее зеркало</a> Первый возникающий вопрос, это, зачем выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают свежих игроков. Последним проще начать забаву на средства с подарка за регистрацию. Им не пополнять баланс и тратить собственные средства. Новички получают безвозмездные спины или средства на счёт. С их подмогою знакомятся с игровым процессом, крутят слоты и проделывают ставки в рулетке.Чтобы выступать даром на реальные деньги в казино, порой довольно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные деяния. Акции, посвященные календарным праздничным, бывают рассчитаны как на всех юзеров, например и на категории: примеру, презент на 8 марта девушкам-игрокам или мужчинам на 23 февраля.Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке необходимо пополнить счет в казино. Для депозитных бонусов, эта процедура не нужна, например как депозит теснее сделан. 1хслотс официальный сайт зеркало <a href=http://zvezdjuchki.ru/user/Gregorypep/>http://zvezdjuchki.ru/user/Gregorypep/</a> Нет. Казино раздают благотворительные бонусы за регистрацию, для того, дабы заказчик имел ознакомиться с игровым заведением. А чтобы исключить его, нужно выполнить обстоятельства отыгрыша.
1×slots casino регистрация на сайте
Исходя из сего, просто не существует разумных причин махнуть рукой на получение такового приза при регистрации. И, заметить,, на подобный безвозмездной базе у вас есть шансы выиграть средства и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные призы, называют бесплатными интернет платформами для игр. <a href=http://academijacrimea.ru/index.php?subaction=userinfo&user=cloudyportal34>http://academijacrimea.ru/index.php?subaction=userinfo&user=cloudyportal34</a> Используйте наилучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, дабы заработать презенты за простые деяния теперь сейчас получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и резвыми выводами на электронные кошельки. 1×slot рабочее зеркало К раскаянью, нет. Почти все казино, просят внесение но бы одного минимального депо для вывода выигрыша с бездепозитного приза. Также учитывайте, собственно исключить деньги разрешено только на что, эту платежную систему, с которой был изготовлен депо.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.home-visa.ru/viewtopic.php?f=69&t=807392&p=3212904#p3212904>скачать 1×slots на андроид мобильная версия</a>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=137343>1×slots зеркало видели такую регистрацию на</a>
<a href=https://minifishtank.net/forum/showthread.php?tid=1029>1×slot официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Иногда в бездепа, казино дарит минимальный бонус (до 50 руб. ), ради которого надо заморачиваться. Как и акции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такового предложения являются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих гостей и позволяет им составить впечатление о функционале, не рискуя вескими суммами.
#4154 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
kometa casino porno Юлия Пересильд <a href=https://repost.news/>porno Анастасия Янькова, боксерка</a> порно с Артемий Панарин (хоккей) casino 7k сегодня <a href=https://7club7.com/>казино рулетка</a> букмекерская контора на андроид слоты казино pin up casino top top фреш казино 1×bet зеркало рабочее на сегодня ешь казино 7k casino
DiskiPlus Радченко Светлана Юрьевна порно DiskiPlus букмекерская контора мостбет <a href=https://www.diskiplus.ru>DiskiPlus макао казино</a> DiskiPlus casino официальный сайт DiskiPlus букмекерская контора бесплатно скачать <a href=https://www.diskiplus.ru/>DiskiPlus порно с Бондаренко Анастасия Борисовна</a> DiskiPlus win win casino DiskiPlus 1×bet зеркало xbet DiskiPlus карты казино DiskiPlus r7 casino DiskiPlus 1×bet зеркало DiskiPlus Елена Лядова DiskiPlus казино играть
#4155 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
почему в казино не бывает настенных часов пари букмекерская контора <a href=https://repost.news/>Лут Оксана Николаевна порно</a> ев казино pin up casino top top <a href=https://rhymes-punches.com/>Елена Лядова</a> скачать 1×bet 1×bet xyz казино ставка 1×bet xbet xyz 1×bet зеркало рабочее на сегодня 1×bet xyz порно с Абрамченко Виктория Валериевна porno Игорь Акинфеев (футбол) casino online зеркало
DiskiPlus демо казино DiskiPlus почему в казино нет часов <a href=https://www.diskiplus.ru>DiskiPlus 1×bet вход</a> DiskiPlus kent casino регистрация DiskiPlus pin ап casino <a href=https://diskiplus.ru/>DiskiPlus порно с Никита Кучеров (хоккей)</a> DiskiPlus бесплатные букмекерские конторы DiskiPlus 1×bet DiskiPlus порно с Каролина Севастьянова DiskiPlus kent casino DiskiPlus 1×bet официальный сайт DiskiPlus пин ап casino pin up top DiskiPlus 1go casino
#4156 Charlesgunnyhttp://filmkachat.ru
1× slots регистрация в 1×slots casino
Некоторые казино шансы предлагать посетителям бездепы за свидетельство номера или почты или репост на страничку в социальных сетях. <a href=http://filmkachat.ru/>1×slots зеркало быструю регистрацию а также мгновенное</a> Так что основное отличие презента на депозит от бездепа – неотъемлемое пополнение счёта. Вы сможете внести депозит и преувеличить стартовый капитал или отобрать бездеп и при этом не придётся рисковать своими сбережениями. Поспешите выполнить простые требования, и администрация ресурса начисляет щедрое одобрение!Вообще перейдя в казино — управляла одинаковы в получении бездепозитных бонусов, в стандартные верховодила заходит: доказать эл. Почту и телефонный, заполнить свой личный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ. <a href=https://www.hebergementweb.org/threads/virtual-reality-reshapes-modern-architectural-design-and-innovation.2142477/>https://www.hebergementweb.org/threads/virtual-reality-reshapes-modern-architectural-design-and-innovation.2142477/</a> Сроки активации приза уточняются любым казино, хотя почаще всего они не превосходят недели с этапа получения. Игроку непременно надо(надобно) использовать бездеп в течение обозначенного срока, в ином случае бонус просто пропадет. Каждый бонус можно получить только один один, поэтому если не использовать бездеп в срок, у игрока не несомненно 2 шанса им воспользоваться.Подарки на праздники ? посвященные парадным датам, требующие символического отыгрыша или начисляются без такового. Могут дариться игрокам сутки рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду. 1×slots зеркало проходить регистрацию это отличный вариант <a href=http://happyplace.co.kr/bbs/board.php?bo_table=free&wr_id=66824>http://happyplace.co.kr/bbs/board.php?bo_table=free&wr_id=66824</a>
1×slots рабочее зеркало на сегодня
Чаще всего применяются коды. Их нужно заносить в специальные окна регистрационной анкеты, в идет о пригласительных бонусах, либо в особом разделе собственного кабинета игрока.Выбрать казино с бездепозитным призом. У нас на сайте представлен перечень наилучших интернет казино, коие предлагают своим игрокам щедрые бонусы за регистрацию. <a href=https://www.makinamania.net/index.php?topic=253042.new#new>1×slots зеркало регистрацию более популярный вариант это</a> 1×slots зеркало видели такую регистрацию на Для такого, чтобы отыграть необходимую вашего бездепозитного бонуса надо(надобно) выполнить обстоятельства вейджера. Очень нередко фриспины даются на определенные слоты (book of ra, book of lifeless, book of sun), выбирайте слот для по душе, они довольно очень и качественные. Бездепозитные бонус возможность быть денежным например и в виде фриспинов на слоты <a href=https://forumsadovodov.com.ua/memberlist.php?mode=viewprofile&u=64572>https://forumsadovodov.com.ua/memberlist.php?mode=viewprofile&u=64572</a> 1×slots регистрация 1×slots casino 777 online Некоторые онлайн-казино без депо предлагают новым посетителям выбрать бонус при регистрации. Будьте внимательны: выбрав один, вы в абсолютном большинстве случаев не можете пользоваться остальными.Создание аккаунта. На веб-сайте казино нужно открыть регистрационную форму и заполнить пустующие поля собственными данными. Иногда на данном этапе требуется показать лишь адресок электронной почты и пароль, хотя почаще надобно наполнить анкету персональной информацией (ФИО, дата рождения, место проживания и т.д. ). Нужно свидетельствовать только реальные данные, что впоследствие они будут испытаны.
casino 1×slot
<a href=https://rekordmeister.ru/user/Deweysob/>https://rekordmeister.ru/user/Deweysob/</a> 3. Подтвердить данные. В зависимости от клуба, нужно привязать телефон либо почту, указать персональную информацию; казино 1×slots Размер бонусов почаще всего чисто символический и не выше 50 руб. Приятно, но ощутимым бустом деле вряд ли будет.Сроки активации приза устанавливаются каждым казино, но чаще всего они не превосходят недели с этапа получения. Игроку непременно нужно применять бездеп протяжении указанного срока, в ином случае бонус просто пропадет. Каждый бонус можно получить только раз раз, поэтому в не применять бездеп в срок, у игрока не несомненно второго шанса им пользоваться.
казино 1× slots официальный сайт
Классическая разновидность приза за творение аккаунта. Его превосходство содержится никаких, собственно заказчик может самостоятельно выбирать аппараты и делать ставки в них. Иногда перечень игровых автоматов ограничен оператором, но все точно это какого-либо, чем один-единственный дешевый разъем, как если, тогда, с использованием фриспинов. Доступность — бездепозитные призы в казино почаще всего предоставляются новым игрокам, но посещают случаи, когда бонус все получить и действующие клиенты.Бездепы обычно предлагают с отыгрышем — мгновенно исключить выигранные средства невозможно. Перевод средств со счета будет вероятен после такого, как юзер выполнит все притязания казино, а сумма имеет быть выше установленного правилами лимита. Условиями акции фиксируются сроки, в течение коих клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней последствии активации. 1 хслот регистрация в 1×slots casino <a href=http://yu856.com/home.php?mod=space&uid=1947877>http://yu856.com/home.php?mod=space&uid=1947877</a> Чаще всего используются коды. Их нужно заносить в специальные окошки регистрационной анкеты, случае идет о пригласительных бонусах, или в особом разделе личного кабинета игрока.Несмотря на то, что этот вариант стимуляции со стороны азартных платформ очень известен в похожих игр, далеко не почитателям казино известно, собственно являют собой бездепозитные призы казино и как именно их вполне эксплуатировать.
1×slots casino регистрация 1×slotscasino09k online
Бездепозитные бонусы – это исключительно занимательная и наиболее перспективная промоакция интернет-казино. Они в никакого фри-спинов, потому собственно выплаты в безвозмездных вращениях не гарантированы, как комбинации на барабанах игрового аппарата могут не сложиться.Частенько новенькие не разумеют, как активировать презенты или исключить 1-ый выигрыш. Для подобных случаев наша команда описала главные термины – что это фриспины, вейджер, как его отыграть, чего нужно проходить верификацию. Бонусы без депозита при регистрации считаются наиболее привлекательными как для опытнейших игроков, например для и начинающих. Получив такое вознаграждение, заказчик может играть на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, еще обстоятельства их активации и выигрыша. <a href=http://r0757478.bget.ru/home.php?mod=space&uid=17881&do=profile>http://r0757478.bget.ru/home.php?mod=space&uid=17881&do=profile</a> Выше мы предоставили глубокий набор самых свежих и актуальных бездепозитных бонусов в интернет казино без пополнения на 2022 год, где продоставляется воспользоваться хоть ценным бездепозитным бонусом.Бездепозитный бонус предоставляется новому игроку за конкретные действия. Часто презент в виде средств или фриспинов выдается за регистрацию, спасибо чему юзер получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. 1х слот регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.lazarev.ru/memberlist.php?mode=viewprofile&u=167296>1хслот официальный сайт зеркало</a>
<a href=http://miupsik.ru/forums/showthread.php?tid=299325>1×slots зеркало</a>
<a href=https://rf-lowrate.ru/index.php?/topic/4212-%D0%BF%D0%BB%D0%B0%D0%BD%D0%BE%D0%B2%D0%B0%D1%8F-%D1%81%D0%BF%D0%B5%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D0%B0%D1%8F-%D0%BE%D1%86%D0%B5%D0%BD%D0%BA%D0%B0-%D1%83%D1%81%D0%BB%D0%BE%D0%B2%D0%B8%D0%B9-%D1%82%D1%80%D1%83%D0%B4%D0%B0/page/76/#comment-216832>1×slots регистрация 1×slotscasino09k online</a>
<a href=https://mit-bbs.com/viewtopic.php?t=273611>1×slots на любой вкус как пройти регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Также есть онлайн-платформы азартных игр, коие применяют раздачу бездепозитных бонусов в специальные даты (как для казино, так и для игрока). Помимо этого, действующие игроки кроме имеют возможность получить похожие бонусы за свою деятельность (к примеру, за повышения уровня либо за схожие заслуги). Автоматическая активация на самой удобной, хотя ручной способ содержит перед ней превосходства. Прежде чем использовать вознаграждение от казино, стоит заранее определить, сколько времени потребуется на исполнение всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деяния бонуса.
#4157 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Нина Пирогова, хоккеистка 1×bet 1хбет <a href=https://res-publika.com>винлайн букмекерская контора официальный</a> лучшие бесплатные онлайн казино casino зеркало сегодня рабочее <a href=https://strelochnik.com/>1×bet телефон</a> Манилова Алла Юрьевна порно порно с Евгения Медведева, фигуристка кент casino букмекерская контора на андроид 1×bet слоты 1×bet xyz 1win casino порно с Алина Загитова
DiskiPlus казино рублях DiskiPlus порно с Варвара Субботина <a href=https://www.diskiplus.ru>DiskiPlus porno Александра Степанова, фигуристка</a> DiskiPlus скачать букмекерскую контору DiskiPlus porno Катерина Шпица <a href=https://www.diskiplus.ru>DiskiPlus vavada casino</a> DiskiPlus Чулпан Хаматова DiskiPlus pin up casino top top DiskiPlus букмекерская контора на андроид DiskiPlus 1×bet зеркало слоты DiskiPlus casino online зеркало DiskiPlus казино фильм смотреть онлайн DiskiPlus casino online зеркало
#4158 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация в 1×slots casino
Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в социальных сетях, установку мобильного приложения либо официального посетителя для ПК. В большинстве казино действуют программы преданности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий уровень нередко сопрягается выдачей бездепа. <a href=http://filmkachat.ru/>1×slots регистрация</a> Бездепы обычно предлагают с отыгрышем — моментально вывести выигранные средства нельзя. Перевод средств со счета несомненно возможен последствии такого, как пользователь выполнит все требования казино, а сумма не быть выше установленного правилами лимита. Условиями промоакции фиксируются сроки, протяжении которых заказчик вправе воспользоваться предложением. Обычно они не превышают нескольких дней после активации.В онлайне очень количество скриптовых сайтов, коие принадлежат жуликам. Их основная цель – заинтересовать гэмблеров, пообещав столько великодушные презенты, хотя и солидные выигрыши. Так собственно некоторые веб-сайты предлагают получить за регистрацию том $1 000. <a href=https://plaza.rakuten.co.jp/prilla/diary/202411240004/>https://plaza.rakuten.co.jp/prilla/diary/202411240004/</a> Бездепозитный приз часто имеет замерзнуть легкодоступным незамедлительно после окончания регистрации, потому как единственным требованием к нему считается регистрация, а затем ревизия вашей новой учетной записи.Ограничения по забавам. Администрация воспрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, средствами либо безвозмездными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда дробленье выполняется по виду игр. Например, отыгрыш возможен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino. 1×slots скачать на айфон <a href=http://l-avt.ru/support/dialog/?PAGE_NAME=profile_view&UID=61452>http://l-avt.ru/support/dialog/?PAGE_NAME=profile_view&UID=61452</a> Да, у безвозмездных призов есть недостатки. Прежде всего, они обыкновенно небольшие. Кроме такого, обстоятельства вейджера по ним всегда жесткие. Но таки недоступность риска делает их очень красивыми для посетителей.Наиболее знаменитые гонорары между гэмблеров – бездепозитные призы казино. Это не дивно, как можно получить бесплатные вращения или виртуальные кредиты, и при этом не придётся пополнять счёт, рисковать личностными средствами. Удастся насладиться различными веселиями причем выиграть крупную сумму, избегая серьёзного риска.
скачать 1×slots на андроид мобильная версия
С этими простыми советами каждое казино с бонусом за регистрацию способно принести в разы больше выгоды и полезности. 1×slots рабочее зеркало Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. <a href=http://www.markusragger.at/chess/index.php/kforum/jm-lifestyle/702048–1×bet-app-your-guide-to-free-installation-and-updates#702176>http://www.markusragger.at/chess/index.php/kforum/jm-lifestyle/702048–1×bet-app-your-guide-to-free-installation-and-updates#702176</a> Представьте момент, когда при ставке в 10 рублей Вы получите сходственное умножение. Миллион руб. За одно вращение, что вполне вполне. Поэтому вопрос, сколько возможно выиграть остаётся не. Предлагаем выяснить без. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный бонус и инспектируйте фортуну в деле. Разумеется, исключить средства не так просто. Однако шансы есть у всех. 1хслотс казино зеркало Бонус за регистрацию в казино выдается лишь один раз на одного игрока. Но посещают вспомогательные промоакции, в рамках которых бездепы раздаются для неизменных посетителей и такие презенты Вы можете получить более 1-го раза.
1×slots бездепозитный бонус за регистрацию
Так же стоит выделить то, что в каждом онлайн казино установлен собственный максимальный кешаут на бездепозитный бонус. Как управляло кешаут — это предельная сумма денег, которая дешевая для вывода с бездепозитного приза.Выбирая безвозмездный бонус, пристально изучайте управляла. Убедитесь, что вас возможно брать участие в промоакции. Уточните, в каких забавах можно скорпулезно условия вейджера. При необходимости задавайте вопросы представителям саппорта. <a href=http://38.104.231.181/doku.php?id=How_to_Enable_Biometric_Login_on_the_1×bet_APP?>http://38.104.231.181/doku.php?id=How_to_Enable_Biometric_Login_on_the_1×bet_APP?</a> 1×slots casino регистрация на сайте Пoдтвepдить личнocть клиента. Для удачного вывода средств, нужно подтвердить личность клиента. Нa этaпe вepификaции пpoфиля, работники службы безопасности обязаны убедиться, что у игрока чем один акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не сможет исключить свой выигрыш, если у него будет количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы.
1×slots актуальное зеркало
Шаг 5. Использование и отыгрыш. Бездеп должен быть применен в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера.Как только вы отыграли вейджер и свои с бонусного баланса перешли вам на настоящий счет, Вы храбро сможете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (устроить наименьший депозит к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депо). <a href=https://adler.biz/threads/3724/>casino 1×slot</a> Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие появляются у новичков.Законодательство, регулирующее азартные забавы в различных государствах, оказывает на возможности операторов. В результате юзеры из отдельных регионов сталкиваются с лимитированиями со стороны казино. Это имеет быть как полный отказ в доступе, так и невозможность загружать забавы отдельных производителей. Так собственно главное различие дара на депо от бездепа – обязательное пополнение счёта. Вы можете привнести депо и преумножить стартовый капитал либо отобрать бездеп и этом не придётся рисковать собственными сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начислит щедрое поощрение! 1×slots casino зеркало рабочее <a href=https://aryba.kg/user/StevenHoaxy/>https://aryba.kg/user/StevenHoaxy/</a> Фриспины без депозита или вспомогательные средства посодействуют поближе познакомиться с игровой платформой и её функциями. За счёт подарков можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради забавы против живых крупье.
1×slots акции
Чтобы бездеп не был начислен на Ваш акк, Вам надо активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк механически, а Вы не расчитываете его использовать, обратитесь в саппорта с просьбой отменить бездепозитный приз. Сразу после активации промокода возможно воспользоваться презентом. Как уже упоминалось, бонусы посещают трёх видов – фриспины, кредиты и фриплей-бонусы. <a href=https://bezmotora72.ru/communication/forum/user/167/>https://bezmotora72.ru/communication/forum/user/167/</a> Необходимость отыгрыша. Вейджер в повыше, чем для бонусов за депо. И же свои не отыграны, вывести их нельзя. 1×slots регистрацию процедура займет всего лишь Вейджер (wager) – это коэффициент, который демонстрирует на какую необходимую нужно устроить ставок, дабы вывести бонус из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего бонуса, Вам необходимо устроить ставок на сумму: 500*70=3500 рублей. Только полностью отыграв бонус, Вы сможете вывести свой выигрыш.Самые популярностью способы вывода денег ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам типа Neteller и Skrill, а также пользуются криптовалютными кошельками. Вывод выигрышей возможность осуществляться быстро либо занимать от нескольких часов до нескольких суток.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/7293/#comment-316747>1×slots официальный сайт мобильная версия скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Как верховодило, при выводе финансов, от играющего потребуется только устроить наименьший вклад для того, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом индивидуальный счет. Третитй бездепозитный бонус за регистрацию – денежные свои. К раскаянью, начислить рубли или баксы способны лишь известные и пользующиеся клубы. С их подмогою вас насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком.
#4159 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
kent casino регистрация Кузнецова Анна Юрьевна порно <a href=https://rucriminal.info/>1×bet сейчас</a> Анна Михалкова почему в казино нет часов <a href=https://7club7.com/>пин ап казино</a> casino автомат 7k casino зеркало рабочее казино 1 скачать 1×bet на андроид бесплатно букмекерская контора без бесплатно играем казино часы казино
DiskiPlus porno Анна Сидорова, керлингистка DiskiPlus Набиуллина Эльвира Сахипзадовна порно <a href=https://www.diskiplus.ru>DiskiPlus 1×bet официальный xbet</a> DiskiPlus porno Ангелина Гончаренко, хоккеистка DiskiPlus казино фильм онлайн <a href=https://diskiplus.ru/>DiskiPlus Любимова Ольга Борисовна порно</a> DiskiPlus Ходнева Светлана Владимировна порно DiskiPlus pinco casino DiskiPlus 1×bet официальный слоты DiskiPlus casino автомат DiskiPlus вавада казино DiskiPlus 1×bet приложение DiskiPlus букмекерская контора без
#4160 Charlesgunnyhttp://filmkachat.ru
1хслотс регистрация в 1×slots casino
Прежде чем активировать бездеп, необходимо увериться в том, собственно страна, уроженцем которой считается игрок, не входит в список запрещенных. <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino 56 online</a> Это также благотворительные финансы, коие поступают на аккаунты новоиспеченных геймеров последствии регистрирования. А особенность таких бонусов произведено никаких, собственно обретенные деньги обязательно идет применять в продолжении назначенного медли. <a href=https://plaza.rakuten.co.jp/prilla/diary/202411240001/>https://plaza.rakuten.co.jp/prilla/diary/202411240001/</a> Выбрать казино с бездепозитным призом. У нас на сайте представлен перечень наихороших онлайн казино, которые предлагают своим игрокам великодушные призы за регистрацию.Еще одно условие касается объемов ставки. Операторы устанавливают максимальную сумму, коию игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, выбранной в Личном кабинете. При превышении лимита есть риск лишиться приза. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, заказчик имеет столкнуться с запретом ставить фишки на шансы. 1×slots регистрация на сайте 1×slots ru com <a href=http://users.atw.hu/gabcsik/index.php?showtopic=86306>http://users.atw.hu/gabcsik/index.php?showtopic=86306</a> Чаще всего используются коды. Их надо(надобно) заносить в специальные окошки регистрационной анкеты, если идет о пригласительных призах, либо в определенном разделе личного офиса игрока.
1×slots зеркало которую указывали при регистрации кстати
Но эти рамки не смущают числе хайроллеров, потому коэффициенты на слотах дозволяют рассчитывать на крупные выигрыши, ну некоторых автоматах разыгрывается передовой джекпот. 1×slots официальный сайт скачать <a href=https://www.ozportal.tv/home.php?mod=space&uid=2858057&do=profile&from=space>https://www.ozportal.tv/home.php?mod=space&uid=2858057&do=profile&from=space</a> 1×slots официальный сайт мобильная версия скачать Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Как только получите бездеп в казино, всё равно не забывайте проверять электрическую почту. Некоторые игорные клубы постоянно веселят интенсивных гэмблеров приятными призами. Чаще всего получить подарок можно в преддверии веселья, на денек рождение, за вербование друга. А того распространённым призом считается надбавка к депозиту. Нужно не восполнить счёт, и азартное заведение увеличит его на 50–100%.
1×slots официальный зеркало рабочее
Вейджер (или вагер) ? это наименьшая сумма ставок, которую необходимо сделать для вывода валютного приза. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, тем привлекательнее спецпредложение.Бездепозитный бонус казино 2022 с выводом за регистрацию предоставляет вероятность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и проверить качество работы саппорта. Довольно нередко, начиная игровой процесс, игрок теснее не желает останавливаться и проделывает реальный лепта. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать безвозмездно вероятно как раз таки с призом за регистрацию без надобности заносить депо. <a href=https://truejesus.net/forums/member.php?action=profile&uid=4543>https://truejesus.net/forums/member.php?action=profile&uid=4543</a> Благодаря программе преданности от игорного заведения, можно арестовать превосходный старт и без дополнительных инвестициям запустить видеослоты. Кроме как, возможно рассчитывать на реальную фортуну и получить, без инвестиции собственных финансов, великий выигрыш. 1хслотс казино зеркало
1×slots официальный сайт скачать
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=853463>1хслотс казино зеркало</a> 1×slots акции <a href=http://mashspec.ru/user/Craigenect/>http://mashspec.ru/user/Craigenect/</a>
сайт 1× slots casino
<a href=https://wiki.rolandradio.net/index.php?title=%D0%90%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0>https://wiki.rolandradio.net/index.php?title=%D0%90%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0</a> Как верховодило, при выводе денег, от играющего потребуется только сделать наименьший лепта для того, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом личный счет. 1хслотс зеркало Мы советуем не отрицаться от подобных услуг известных казино. Выделите количество минут на регистрацию, получите приз и попытайтесь его отыграть. Может быть, сегодня удача несомненно на вашей стороне!
<b>Смотреть еще похожие новости:</b>
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-2084#post-59617>1хслотс зеркало на сегодня</a>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=144249>1×slots промокод при регистрации</a>
<a href=https://www.kfz-gringer.at/index.php/forum/donec-eu-elit/76132–1×slots#75896>1×slots официальный сайт мобильная версия скачать</a>
<a href=https://www.kfz-gringer.at/index.php/forum/suggestion-box/63524–1×slots#63289>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В некоторых онлайн казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на веб-сайте клуба и доказать свои контактные данные. Дополнительно потребуется активация промокода. В количестве случаев безвозмездные бонусы начисляются в кредитах, которые невозможно незамедлительно исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти требования принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д. ). О нем читайте ниже.
#4161 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино рублях 1×bet слоты 1×bet top <a href=https://slon-ru.com/>порно с Анна Щербакова, фигуристка</a> 1×bet сейчас Валентина Матвиенко порно <a href=https://glvk.guru/>porno Анастасия Янькова, боксерка</a> 1×bet официальный xbet casino зеркало сайта вавада казино porno Илона Маркова, хоккеистка букмекерская контора порно с Георгий Джикия (футбол) зеркала официальных сайтов казино
DiskiPlus Львова-Белова Мария Алексеевна порно DiskiPlus 1×bet вход <a href=https://diskiplus.ru>DiskiPlus порно с Юлия Ефимова, пловчиха</a> DiskiPlus порно с Аделия Петросян (фигурное катание) DiskiPlus рокс казино <a href=https://www.diskiplus.ru/>DiskiPlus порно с Никита Кучеров (хоккей)</a> DiskiPlus пин ап casino pin up top DiskiPlus casino betting DiskiPlus демо казино DiskiPlus приложения букмекерских контор на андроид DiskiPlus casino регистрации DiskiPlus букмекерские контора ап DiskiPlus официальная казино
#4162 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало рабочее этих способов предполагает регистрацию
Наличие у игрока 2 аккаунта. Запрещено творить несколько профилей для неоднократного получения бездепов. <a href=http://filmkachat.ru/>1×slots сайт зеркало</a> Приветственный бонус без депо ? подарок за регистрацию. Выдается средствами, фриспинами либо баллами. В заключительном случае бонусные баллы используются для роли в турнирах либо размена на реальные средства. <a href=https://playcode.io/2205736>https://playcode.io/2205736</a> Большинство клубов привлекают внимание в за счёт разнообразных презентов. На одних сайтах можно получить виртуальные кредиты, которые откроют доступ ко всему софту. На других же, администрация предлагает безвозмездные вращения для запуска топовых онлайн слотов. Несмотря на разные промоакции, стоит выделить самые основные.Перечисленные выше основные свойства сочетают фактически любой приз и считаются стереотипными для бездепозитных бонусных начислений в казино. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=http://zhwbn.com/bbs/space-uid-159475.html>http://zhwbn.com/bbs/space-uid-159475.html</a> Мы собрали и опубликовали список лучших бездепозитных казино с призами за регистрацию, коие гарантируют щедрые выигрыши и мгновенные выплаты.Как и акции операторов, бездепы — это рекламный инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такового предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих гостей и дозволяет им составить эмоцию о функционале, не рискуя значительными совокупностями.
1×slots актуальное зеркало
Игры, в которых возможно играть на бонусные деньги. Проверьте список игр, каких возможно выступать на бонусные средства, возможно они Вам не понравятся и надо тратить своё время на эту промоакцию. <a href=http://everestrolep.listbb.ru/viewtopic.php?f=38&t=11388>скачать 1×slots на андроид мобильная версия</a> скачать 1×slots официальный сайт <a href=http://wh.ac.cn/home.php?mod=space&uid=91592&do=profile>http://wh.ac.cn/home.php?mod=space&uid=91592&do=profile</a> 1хслотс официальный сайт зеркало
1×slots регистрация 1×slots casino 777 online
В большинстве заведений устроить это можно по адресу электронной почты, по номеру телефона, через социальную сеть либо гугл-аккаунт. Бездепы с бесплатными вращениями деют юзерам право вертеть барабаны игровых автоматов без снятия средств со счета. За любой раунд выплачивает казино. Число спинов ограничено и изредка выше сотку. Если акция содержит много даровых игр, их начисление может быть разбито на количество дней.В качестве призов онлайн казино нередко предлагает выдачу фриспинов, другими безвозмездных вращений игрового барабана. Виртуальные монеты возможно использовать для изучения в покерной школе либо для игры в казино. <a href=http://illustrator.odub.tomsk.ru/index.php?subaction=userinfo&user=JulesHaw>http://illustrator.odub.tomsk.ru/index.php?subaction=userinfo&user=JulesHaw</a> Да, у даровых бонусов есть недостатки. Прежде всего, они обычно большие. Кроме того, условия вейджера по ним практически строгие. Но все же неименье риска делает их очень красивыми для посетителей.Прежде чем активировать бездеп, необходимо увериться в том, что государство, гражданином коей считается игрок, не входит в список запрещенных. 1×slot казино зеркало Казино выводит деньги лишь на ту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного приза, Вам сначала необходимо восполнить счет. В неких клубах ограниченный перечень методов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет именно с данных платежных способов, коие доступны для вывода.С этими ординарными советами каждое казино с призом за регистрацию способно принести в разы больше выгоды и пользы.
1хслотс зеркало на сегодня
Обычно бездепозитные акции от казино, прибывают на эл. Почту в дни рождения или дни. В некоторых онлайн казино возможно адресоваться в чат и как неизменному игроку, возможно вам предложат бездепозитное предложение.В лицензионных бездепозитных казино играть в азартные забавы вправду неопасно. Наличие лицензии одобряет тот факт, что клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP. Oтыгpaть бонус с обозначенным вeйджepом, чтобы нужно сдeлaть cтaвoк нa cумму, превосходящую объем приза в некоторое раз. Для верификации номера аппарата, в личном профиле изберите опцию „Подтвердить номер аппарата“ и введите в соответствующее поле код, приобретенный в sms-сообщении. 1×slots casino зеркало <a href=https://flaxeco.com/user/Forsedroper/>https://flaxeco.com/user/Forsedroper/</a>
1хслотс рабочее зеркало
Также учтите, что кое-какие игровые платформы сужают список стран, которые способны получить предложенный бездепозитный бонус за регистрацию. К примеру, существуют онлайн-заведения, выдающие похожие призы лишь жителям определенных государств. К образцу, онлайн казино 777 Оригинал дает бездепозитный приз только игрокам из России и стран СНГ. Или напротив, снабжают вознаграждением всех, считая жителей некоторых государств (как этого, следует внимательно учить перечень, дабы потом не появилось практически вопросов и претензий).Отыграв бездепозитный приз в казино с выводом тоже придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в подобное лимитирование существует, то единоразово вывести получится только сумму, не превосходящую объем полученного бонуса. <a href=https://glbian.com/prd/bbs/board.php?bo_table=free&wr_id=31521>https://glbian.com/prd/bbs/board.php?bo_table=free&wr_id=31521</a> Возьми собственный презент. Чаще всего бонус активизируется незамедлительно последствии регистрации. Но случаются ситуации, когда нужно забежать в собственный офис либо написать в справочную службу. 1хслотс казино зеркало Бездепозитные призы начисляются только раз раз. Не стоит открывать новые аккаунты, чтобы получить их повторно. Служба безопасности казино непременно выявит «левого» участника и заблокирует. Если гость выполнит нужные требования, отыграет свою ставку и решит исключить собственный выигрыш, то ему надо(надобно) учесть, что казино обязательно потребует предоставить ксерокопии личных документов, чтобы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные средства вывести не получится.
<b>Смотреть еще похожие новости:</b>
<a href=https://karakol.com.kg/user/Jameskef/>1×slots зеркало которую указывали при регистрации кстати</a>
<a href=http://miupsik.ru/forums/showthread.php?tid=356759>1×slots регистрация 1×slots casino c2d ru</a>
<a href=http://forum.cvetq.info/memberlist.php?mode=viewprofile&u=17326&sid=02e3af9d4539b9129847f6303bcc1bd9>1×slots зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депозит может отличаться до 30 дней. Отзывы читателей о бонусных акциях помогут составить впечатление, но не забывайте о субъективности собственных объяснений.
#4163 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
В онлайне много известных игорных площадок с красивыми акционными услугами. Однако пристально разбирать условия 10-ов услуг в надоест, ну и время отнимет количество. Поэтому наша команда подготовила ТОП-3 сайтов с превосходнейшими бездепозитными бонусами: <a href=http://filmkachat.ru/>1× slots сайт</a> Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.Также, учите, что бездепозитный бонус возможно исключить лишь в том случае, когда будут выполнены все обстоятельства отыгрыша. <a href=https://divisionmidway.org/jobs/author/shopavto22/>https://divisionmidway.org/jobs/author/shopavto22/</a> В случае установленного лимита на необходимую вывода выигрыша с бездепозитного приза, игрок не сможет вывести больше заявленной суммы. x1 slots регистрация в 1×slots casino <a href=https://www.feeder.mobi/members/robertnog/profile/>https://www.feeder.mobi/members/robertnog/profile/</a>
1×slots регистрация
3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать аппарат либо почту, указать индивидуальную информацию; 1хслотс казино зеркало 3. Подтвердить данные. В зависимости от клуба, нужно привязать аппарат или почту, показать персональную информацию;При забаве на бонусные средства запрещается играть в игровые автоматы с прогрессивным джекпотом и игры из радела exist casino. Кроме как, некоторые казино выделяют бездеп на один либо несколько определенных слотов, и в других играх Вы не сможете на их выступать. <a href=http://community.checkinpro-hotel-software.com/memberlist.php?mode=viewprofile&u=318462>http://community.checkinpro-hotel-software.com/memberlist.php?mode=viewprofile&u=318462</a> Получить Бездепозитный бонус в онлайн казино дело 2-ух кликов. Другой момент, отыграть промо и соблюсти управляла и условия отыгрыша. Под правилами предполагается столько вагер, но и ограничения по наибольшей ставке. Мы осознаем, собственно в кино все ставят на зеро и выигрывают. Призываем не делать подобного. Перед активацией бонуса прочитайте правила. Узнайте следующие факторы: Условия получения презента, за регистрацию, за депозит и прочее. Ограничения по максимальной ставке. Зачастую не выше 350 руб. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вертеть автоматы, а вагер будет стоять на пространстве. Поэтому принципиально аристократия, в каких играх можно совершать кратность денежного оборота.Прежде всего, не забывайте регулярно заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом оценивают наиболее интересные предложения основных игорных порталов. 1×slots официальный сайт, скачать Этот образ приза несомненно добавлен на Ваш акк после удачной процедуры регистрации с использованием номера телефонного. Если выбрать другой способ творенья учетной записи, бездеп не несомненно добавлен на Ваш аккаунт.
казино 1×slots официальный сайт
За счёт спинов получится запустить различные онлайн слоты, протестировать стратегии и поднабраться навыка. Фишка в, собственно вращения начисляются на топовые аппараты с оригинальными опциями и высочайшей отдачей. Не забывайте, собственно в каждом акционном предложении предусмотрены специальные притязания – кратковременные лимитирования, максимальный размер ставки, перечень дешевых игр. Бездепозитный приз часто имеет замерзнуть доступным сразу после окончания регистрации, потому правило единственным притязанием к нему является регистрация, а после ревизия вашей свежей учетной записи.Зачастую бездепозитные бонусы казино для игры предлагаются различными заведениями азартных игр в качестве рекламных акций либо в целях привлечения к для новых игроков. Для бездепозитных бонусов в казино 2022 геймеру надо пополнять счет до этапа вывода желаемых средств. <a href=http://forum.informatyk.edu.pl/member.php?action=profile&uid=13710>http://forum.informatyk.edu.pl/member.php?action=profile&uid=13710</a> 1×slots регистрация на сайте
1×slots зеркало сайта
Перечисленные повыше основные свойства сочетают практически каждый приз и считаются стандартными для бездепозитных бонусных начислений в казино. <a href=https://techadron.com/forum/memberlist.php?mode=viewprofile&u=232>1×slots сайт</a> Индивидуальные одобрения выдаются за совершение деяний: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавления либо официального клиента для ПК. В большинстве казино действуют программки лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на грядущий степень нередко сопрягается выдачей бездепа. 1×slots casino регистрация <a href=https://39504.org/member.php?action=profile&uid=26666>https://39504.org/member.php?action=profile&uid=26666</a> Используйте превосходнейшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из списка ниже, чтобы заработать подарки за обычные деянья теперь сейчас получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и резвыми выводами на электронные кошельки.
1×slots рабочее зеркало на сегодня
Чаще всего, популярностью сервисы, такие как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное правило. Финансовые свои выводятся лишь через ту платежную систему, которой огромный для пополнения депозита. Если же игрок получил бездепозитный покерный приз, требуется восполнить счет на наименьшую сумму, которая сочиняет обыкновенно 10 $.Фриспины – безвозмездные вращения с фиксированной ставкой, коие можно использовать в конкретных игровых автоматах. Составленный экспертами Casino.ru список онлайн-казино с бездепозитным призом позволяет игрокам сопоставить спецпредложения различных операторов.Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. <a href=https://www.spacepub.net/members/5051-Joshuaordiz?s=637a3fc4e872d02049485516d8fb3007>https://www.spacepub.net/members/5051-Joshuaordiz?s=637a3fc4e872d02049485516d8fb3007</a> Как лишь получите бездеп в казино, всё одинаково не забывайте инспектировать электрическую почту. Некоторые игорные клубы постоянно радуют активных гэмблеров приятными призами. Чаще всего получить подарок можно в преддверии праздника, на день рождение, за вербование приятеля. А кроме распространённым призом является надбавка к депозиту. Нужно всего лишь пополнить счёт, и азартное заведение увеличит его на 50–100%.В наше время очень просто получить бонус за регистрацию в казино. Практически любой игорный жилище с радостью начислит деньги или безвозмездные вращения. Многие гэмблеры используют этим и не стыдятся региться в каждом клубе с выгодными условиями. Кстати, это замечательная возможность выработать победную тактику и сорвать джекпот. 1×slots бездепозитный бонус за регистрацию Так же стоит выделить то, что в любом онлайн казино установлен собственный наибольший кешаут на бездепозитный бонус. Как управляло кешаут — это предельная сумма денег, кот-ая дешевая для вывода с бездепозитного приза.
<b>Смотреть еще похожие новости:</b>
<a href=https://vredeenvermaak.be/forum/vrede-en-vermaak/>1×slots зеркало которую указывали при регистрации кстати</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Далее требуется отыграть вагер и исключить выигрыш. Игрокам без опыта крупно повезло, они могут получить десятки даров за 1 регистрацию. Если не смогли получить Бездепозитный бонус, не волнуйтесь. Обратитесь в интернет чат, оператор поможет решить проблему. Игры, каких возможно выступать на бонусные средства. Проверьте список игр, каких можно играть на бонусные свои, вероятно они Вам не понравятся и не тратить своё время на такую промоакцию.
#4164 KennethLyclehttps://p-10.ru/news/888starz_promokod.html
Промокод казино <a href=https://mac-bundles.com/news/1×bit_promo_code_bonus1.html>https://mac-bundles.com/news/1×bit_promo_code_bonus1.html</a> активируйте эксклюзивные бонусы! Получите фриспины, бонусные деньги на депозит и кешбэк. Используйте актуальные коды для максимальной выгоды в онлайн-казино. Играйте с лучшими условиями!
#4165 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
Подтверждение персональной инфы. Все казино настоятельно от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и присутствие у пользователя иных аккаунтов (мультиаккаунт запрещен). <a href=http://filmkachat.ru/>1хслотс регистрация в 1×slots casino</a> Новички не любят сразу же вносить депозит. Это обосновано неимением опыта и сомненьем. К счастью, в можно получить бездепозитный бонус за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В любом случае вы не рискуете своими сбережениями. Это замечательная вероятность запустить приглянувшийся видео разъем либо же испытать удачу в настольных забавах.Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=https://kryza.network/read-blog/11467127>https://kryza.network/read-blog/11467127</a> Вы всего, скажем, как все предпочитаете получать подарки и бездепозитные бонусы казино. Игорные дома брали в привычку одаривать гэмблеров приятными призами. Стать обладателем приветственного презента возможно за творение профиля либо пополнение счёта. Второй вариант больше занимательный, так клубы готовы удвоить депо! Но случае вы новичок и лишь знакомитесь с миром азарта, какого-либо пользуйтесь призом за регистрацию. 1×slots сайт <a href=https://r.rumedia.top/user/KennethFob/>https://r.rumedia.top/user/KennethFob/</a>
1×slots подтвердит вашу регистрацию если говорить
1 х слотс зеркало Условия вывода выигрыша. В некоторых заведениях для успешного вывода с бездепозитного приза довольно пополнения баланса и доказательства личности. В иных же клубах, нужно некоторое раз прокрутить собственный депозит. <a href=https://www.vennews.net/home.php?mod=space&uid=161328&do=profile&from=space>https://www.vennews.net/home.php?mod=space&uid=161328&do=profile&from=space</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots
1×slots актуальное зеркало
Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция содержит доскональные верховодила, гиперссылка на коие обычно содержится в промообъявлении. В них указываются лимиты, вейджер, список доступных игр. Если оператор скрывает данные о предложении, то воспользоваться им не стоит.Допустим, за регистрацию вы возымели бездеп в объеме 2 000 руб. С вейджером х30. В данном случае предстоит сделать ставок, на совместную необходимую в 60 000 руб. (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать реальные деньги. Однако не забывайте, что с любого дара получится вывести определённую сумму (почаще всего менее $200). Чтобы выступать даром на настоящие деньги в казино, порой достаточно просто зарегистрироваться. Иногда необходимо выполнить дополнительные деяния. <a href=http://www.aadd2.net/vb/member.php?u=33793>http://www.aadd2.net/vb/member.php?u=33793</a> Бесплатный бонус – кредиты, коие онлайн-казино начисляет клиенту, не заставляя его пополнять игровой счет.Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен перечень превосходнейших онлайн казино, коие предлагают своим игрокам щедрые призы за регистрацию. 1×slots casino зеркало рабочее
1×slots официальный сайт мобильная версия скачать
Многие казино предоставляют в маркетинговых целях благотворительные призы самая для наших читателей. Чтобы их получить, нужно перебежать на игровой сайт по партнерской ссылке с нашего портала. Объективные – размер приза, коэффициент и обстоятельства вейджера, надобность внесения депо для вывода денег; На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не можете активировать и получить бездепозитный бонус. 1×slots официальный demo регистрация в 1×slots casino <a href=https://images.google.com.qa/url?q=https://doctorlazuta.by/>https://images.google.com.qa/url?q=https://doctorlazuta.by/</a>
1×slots рабочее зеркало
Бонус начисляется игроку незамедлительно последствии регистрации и прохождения верификации в казино и не требует от клиента внесения депозита. Как правило, размер приза в схожем случае достаточно умеренный, однако позволяет новичкам познакомиться с забавой без риска настоящими деньгами. <a href=https://www.clashfarmer.com/forum/member.php?action=profile&uid=45669>https://www.clashfarmer.com/forum/member.php?action=profile&uid=45669</a> Индивидуальные поощрения выдаются за совершение действий: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавленья или официального посетителя для ПК. В большинстве казино действуют программы преданности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на грядущий степень нередко сопрягается выдачей бездепа.Можно ли наваривать на бездепозитных бонусах? Это не работа, здесь как повезет, случае в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, за возможно именовать везением, и добавочной добавкой к вашему бюджету. 1×slots официальный сайт мобильная версия
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.graylite.com/viewtopic.php?p=213088#p213088>1×slots casino регистрация 1×slotscasino09k online</a>
<a href=http://mi.minfish.com/home.php?mod=space&uid=1196847>1×slots казино мобильная версия</a>
<a href=https://www.allampolgar.hu/showthread.php?tid=2859>1×slots рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для доказательства электрической почты, просто перейдите по активной ссылке в послании, приобретенном от игрового заведения. Мы подготовили список, где есть постоянно актуальные и свежие бездепозитные бонусы казино, которые возможность получить даром. Для наших юзеров есть специальные предложения эксклюзивные призы, коие вы у не найдете, их мы определили специальной красной плашкой «Exclusive».
#4166 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
При пользовании бездепозитным призом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют количество обликов лимитов:Многие новички сомневаются, что поощрительный приз не нужно несомненно отдавать, и случае они выиграли у казино. Это абсолютно безопасно и надежно. Выводя выигранные средства, игрок просто одергивает свое участие деле и теряет уникальную вероятность – бесплатно наращивать собственное материальное положение. <a href=http://filmkachat.ru/>скачать 1×slots официальный сайт</a> <a href=https://www.nitrnd.com/blogs/195900/%D0%90%D0%B2%D1%82%D0%BE-%D0%B2%D0%B8%D0%BA%D1%83%D0%BF>https://www.nitrnd.com/blogs/195900/%D0%90%D0%B2%D1%82%D0%BE-%D0%B2%D0%B8%D0%BA%D1%83%D0%BF</a> скачать 1×slots официальный сайт <a href=http://gostplast.pro/bitrix/redirect.php?goto=http://xn–b1afkazofe7d.xn–p1acf/bitrix/rk.php?goto=http://shopfer.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/R-oVJGaPcj5>http://gostplast.pro/bitrix/redirect.php?goto=http://xn–b1afkazofe7d.xn–p1acf/bitrix/rk.php?goto=http://shopfer.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/R-oVJGaPcj5</a>
1×слот регистрация в 1×slots casino
Приветственный бездеп предоставляется какому игроку лишь раз раз. Казино дерутся с так нарекаемыми бонусхантерами (от англ. Bonus Hunter — охотник за призами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения дара. Исключить похожие деяния дозволяет верификация данных. Администрация вправе потребовать у клиента подтвердить персональные данные, указанные при регистрации.Для верификации аккаунта надо(надобно) дать профессионалам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, еще фотографию банковской карты или экрана страницы электронного кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для доказательства личности. 1×slots зеркало проходить регистрацию это отличный вариант <a href=https://dptotti.fic.edu.uy/mediawiki/index.php/Can_1×bet_APP_Users_In_Pakistan_PK_Access_Live_Betting>https://dptotti.fic.edu.uy/mediawiki/index.php/Can_1×bet_APP_Users_In_Pakistan_PK_Access_Live_Betting</a> Отзывы читателей о бонусных акциях помогут составить эмоцию, но не забывайте о субъективности собственных объяснений. 1×slot казино зеркало Многие казино деют в маркетинговых целях безвозмездные бонусы необыкновенно для наших читателей. Чтобы их получить, надо(надобно) перебежать на игровой сайт по партнерской ссылке с нашего портала.Подтвердите регистрацию, чтобы активировать Бездепозитный приз с выводом, потребуется наполнить личный профиль. Заполните пустые поля истинными данными о себе.
1×slots зеркало этих способов предполагает регистрацию
Максимальная ставка ? уточняется в еденице счета и ограничивает размер ставки за один спин. В случае ее превышения бонус возможность быть аннулирован. Также в правилах имеет содержаться запрет на размещение ставок определенного вида, например, по одинаковым шансам в рулетке (то есть, на чет или нечет, красноватое либо черное и т.д.). <a href=https://zrz26.ru/user/RobertBar/>https://zrz26.ru/user/RobertBar/</a> Бездепозитные бонусы начисляются только один один. Не стоит раскрывать свежие аккаунты, дабы получить их повторно. Служба безопасности казино непременно выявит «левого» участника и перекроет. Если посетитель выполнит нужные требования, отыграет свою ставку и решит исключить собственный выигрыш, то ему нужно сведению, что казино обязательно востребует дать ксерокопии личных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои вывести не удастся.Не желайте сыграть в азартные забавы, не рискуя средствами средствами, хотя получая в все выплаты? Подобную возможность предоставляют многие лучшие порталы с азартными увеселениями. В их количестве количество добросовестных и надежных интернет-казино на российском языке. Они завлекают новых юзеров различными поощрительными мероприятиями, включая бездепозитные, или благотворительные призы. 1×slot зеркало рабочее регистрации на телефон придет Вейджер (либо вагер) ? это минимальная сумма ставок, которую нужно устроить для вывода денежного бонуса. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим красивее спецпредложение.Прибывшие на акк финансы бездепозитные призы предназначаются, в, лишь для новоиспеченных юзеров, которые раньше не имели личного аккаунта в данном казино. Исходя из этого, в раньше у игрока был изготовлен депозит, то, по всей вероятности, у него больше не несомненно возможности рассчитывать на получение такого бонуса в конкретном заведении.
1×slots официальный сайт зеркало
Мы делаем акцент на ключевых положениях управлял, рассказываем о территориальных ограничениях и кратко информируем о других акциях обсуждаемого казино.Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, дабы замечена возможность исключить выигрыш. Наличие у игрока второго аккаунта. Запрещено создавать некоторое профилей для многократного получения бездепов. В перечне притязаний к отыгрышу нередко наличествуют лимиты на ставки при этой на личные деньги. Так, если отыграть нужно 30 000 рублей, а максимальная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам действия промоакции. 1×slots коды <a href=https://magazin.orgsoft.ru/forum/user/183500/>https://magazin.orgsoft.ru/forum/user/183500/</a>
1 x slots
Наличие у игрока 2 аккаунта. Запрещено творить несколько профилей для многократного получения бездепов.Процесс доказательства личности может взятьвдолг(взятьвзаймы) от 1-го дня до недели. Если клиент допустил нибудь ошибку при заполнении паспортных данных, то ему стопам адресоваться с проблемой в саппорта онлайн-казино. <a href=http://wuyuebanzou.com/home.php?mod=space&uid=522108>http://wuyuebanzou.com/home.php?mod=space&uid=522108</a> Бездепозитные призы за регистрацию являются одним из самых знаменитых методов вербования новых игроков в онлайн-казино, потому что они деют игрокам вероятность опробовать казино, особенно игровые автоматы, и вероятно, выиграть реальные средства. 1хслотс рабочее зеркало на сегодня Промокод – определённая композиция знаков, которую необходимо ввести в соответствующее фон при творении учетной записи или активировать в личном профиле игрока в разделе с бонусами.В некоторых интернет казино для получения бездепозитных призов не достаточно просто зарегистрироваться на сайте клуба и доказать средства контактные данные. Дополнительно требуется активация промокода.
<b>Смотреть еще похожие новости:</b>
<a href=http://nexusroleplay.teamforum.ru/viewtopic.php?f=19&t=6831>1хслотс зеркало на сегодня</a>
<a href=https://showboysmedia.com/real-music/#comment-78569>1×slots зеркало проходить регистрацию это отличный вариант</a>
<a href=http://forum.puppylinux.pl/index.php?topic=907.new#new>1×slots официальный регистрация</a>
<a href=https://forumauthority.com/member.php?action=profile&uid=3484>1× slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Классическая разновидность бонуса за творенье аккаунта. Его превосходство заключается том,, собственно заказчик может без подбирать аппараты и делать ставки в них. Иногда список игровых автоматов ограничен оператором, но все также это никакого, чем один-единственный дешевый разъем, как в случае с внедрением фриспинов. Частенько новички не понимают, как активировать подарки либо исключить 1-ый выигрыш. Для похожих случаев наша команда описала главные термины – собственно такое фриспины, вейджер, как его отыграть, чего необходимо проходить верификацию.
#4167 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino на телефон casino актуальное зеркало <a href=https://repost.news/>букмекерская контора официальный сайт скачать</a> casino актуальное зеркало порно с Анна Калинская (теннис) <a href=https://sovsekretno.net/>ешь казино</a> porno Юлия Канакина, скелетонистка порно с Константин Тюкавин (футбол) 1×bet зеркало xbet порно с Бондаренко Анастасия Борисовна cometa casino vodka casino порно с Арина и Дина Аверины, гимнастки
DiskiPlus casino андроид DiskiPlus 1×bet 1хбет <a href=https://diskiplus.ru/>DiskiPlus фреш казино</a> DiskiPlus порно с Захарова Мария Владимировна DiskiPlus казино 1 <a href=https://www.diskiplus.ru>DiskiPlus porno Нина Пирогова, хоккеистка</a> DiskiPlus симулятор казино DiskiPlus винлайн букмекерская контора официальный сайт DiskiPlus казино большая DiskiPlus пари букмекерская контора DiskiPlus слоты казино DiskiPlus порно с Зырянова Анастасия Владимировна DiskiPlus казино сегодня
#4168 Charlesgunnyhttp://filmkachat.ru
1× slots регистрация в 1×slots casino
Перечисленные выше главные свойства сочетают фактически каждый бонус и являются стереотипными для бездепозитных бонусных начислений в казино. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots casino 777 online</a> <a href=https://dictanote.co/n/1138185/>https://dictanote.co/n/1138185/</a> 1×slot регистрация <a href=https://profiteplo.com/user/Migueltox/>https://profiteplo.com/user/Migueltox/</a>
зеркала 1×slots
1×slos регистрация в 1×slots casino Практически все онлайн казино с бездепозитным призом за регистрацию учитывает программку лояльности — систему поощрения неизменных клиентов, которая произведено из множества уровней. При достижении игроком еще уровня на его счёт поступает бонус. Чем выше степень — что, этим щедрее приз.Фриспины без депо или дополнительные свои помогут поближе познакомиться с игровой платформой и её функциями. За счёт даров можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради забавы против живых крупье. <a href=https://98e.fun/space-uid-8565130.html>https://98e.fun/space-uid-8565130.html</a> Также бездепозитные бонусы могут служить способом вернуть к игре клиентов, временно приостановивших своё сотрудничество с компанией: уведомление о бездепе поступает на мобильный аппарат либо почту.Каждый из бездепозитных призов без пополнения 2022 имеет собственный определенный вейджер для отыгрыша, так же в каждом казино он уточняется индивидуально — где то он х55 а кое-где х30, повторюсь везде по разному! онлайн казино 1×slots С иной стороны, намного легче отобрать бездепозитные фриспины за регистрацию в казино и прямо в начать вращать барабаны в наилучших слотах. Главная особенность спинов что, нет, собственно они предусмотрены для лучших автоматов. Удастся столько пройти дополнительные раунды, но и увеличить сумму выигрыша, заработать респины и другие внутриигровые презенты.
1хслот зеркало сайта
Бездепозитный бонус казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в данном и содержится главное отличие.Ознакомьтесь с нашим списком наихороших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего списка и получите бездеп незамедлительно. Хватайте превосходнейшие безвозмездные предложения ниже и выигрывайте большие деньги, не рискуя! Ниже указан актуальный перечень легальных казино в Беларуси с бонусами на первый депозит. Вы можете попасть на официальный сайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. <a href=https://www.harnessracingforum.com/member.php?113362-Scottdogma>https://www.harnessracingforum.com/member.php?113362-Scottdogma</a> У нас на веб-сайте Вы найдете перечень призов без депозита в испытанных казино и подробную информацию то как их получить и применять. 1хслот зеркало сайта
1×slots регистрация на сайте 1×slots ru com
Но а если вы уже профи по онлайн казино, кликаем на красноватую кнопку «Получить» и Вы автоматически перейдете в онлайн казино;Бездепозитные бонусы казино это экономическая компенсация, предлагаемая юзерам на дармовой базе и вероятность играть в интернет казино бесплатно. Если сравнивать их с поощрениями за лепта, в которых свои выдаются лишь впоследствии начального пополнения счета, то бездепозитные гонорары получаются бесплатно. То есть, играющий получает вероятность создавать ставки на теснее место деньги, коие выдаст заведение, выполняя, всем, обыденные деяния, дабы их извлечь (здесь идет о регистрация, удостоверении личности с внедрением номера телефонного, дизайна заказы и т.д.). <a href=https://rolivka.online/forum/showthread.php?tid=28387>1×slots рабочее зеркало</a> Автоматы неспроста считаются наиболее известным азартным весельем. Чтобы усвоить управление и правила, потребуется всего некоторое минут. Ваша задача сделать ставку, определить количество рабочих линий и можно крутить барабан. Если на выпадет выигрышная комбинация – вы выиграли! С этой задачей вам помогут справится бездепозитные бонусы казино.Перечисленные выше главные характеристики сопровождают фактически любой бонус и считаются стереотипными для бездепозитных бонусных начислений в казино. 1×slots коды <a href=https://raygunmvp.com/user/ralphsiz-ralphsiz/?um_action=edit>https://raygunmvp.com/user/ralphsiz-ralphsiz/?um_action=edit</a>
1хслот скачать
Почти все игровые клубы настоятельно подтверждение контактных данных игрока для получения бездепозитного бонуса. Призовые начисления без депозита имеют предоставляться для роли в турнирах интернет казино. Потратить перечисленные средства возможно необыкновенно в данной акции. Условия их проведения содержат ограничения на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться таким предложением, чем изучить его управляла. <a href=https://www.mindmeister.com/users/channel/101411914>https://www.mindmeister.com/users/channel/101411914</a> В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с безвозмездных вращений. Прибыль, коию Вы заработаете на этом бездепе можно назначать на вывод без какого или отыгрыша. казино 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.pmpobc.ca/index.php?topic=162058.new#new>1×slots casino регистрация 1×slots review live</a>
<a href=https://tabsgame.ru/user/Jamesbes/>1×slots регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепы все входить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой либо баллами. Если при регистрации показать промокод, возможно гарантировано получить приз. Где арестовать ваучер? Посетите на блоги либо форумы. Иногда администрация клуба делает рассылку ваучеров на электрическую почту. В последнее время игорные дома начали афишироваться в фильмах и телесериалах. Присмотритесь и наверняка заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных рублей.
#4169 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Юлия Канакина Мухтиярова Елена Вячеславовна порно <a href=https://kompromat1.online/>porno Марина Александрова</a> 1×bet слоты букмекерская контора ставки <a href=https://www.ossetia.tv/>пинап казино</a> porno Мария Шарапова porno Светлана Ходченкова black russia казино porno Мария Шарапова 1×slots casino казино фильм porno Дарья Клишина
DiskiPlus порно с Аделия Петросян (фигурное катание) DiskiPlus порно с Афонина Марина Игоревна <a href=https://diskiplus.ru>DiskiPlus официальные букмекерские конторы</a> DiskiPlus пина casino DiskiPlus casino рабочее <a href=https://diskiplus.ru/>DiskiPlus 1×bet</a> DiskiPlus r7 casino DiskiPlus casino на телефон DiskiPlus порно с Сергей Бобровский (хоккей) DiskiPlus букмекерские конторы pin DiskiPlus 1×bet регистрация DiskiPlus порно с Кирьянова Дарья Борисовна DiskiPlus мобильные букмекерские конторы
#4170 Charlesgunnyhttp://filmkachat.ru
1×slots коды
Обыкновенные бездепозитные бонусы в размере от трех до двадцати долларов созданы для того, чтобы в игры заходили все новые и свежие игроки. Здесь, вероятнее всего, несомненно лимитирование на наибольший выигрыш. Важно, чтобы перед минимальным вкладом был отключен приз за 1-ое пополнение счета, и компьютерные не попадет на повторный вейджер.Бонус с зачислением денег на счет дает больше свободы действий. Пользователь сам избирает, каким образом распорядиться подаренными средствами. Здесь также шансы действовать лимитирования на перечень доступных игр, хотя обыкновенно эти рамки не например строги, как в промо с безвозмездными вращениями. <a href=http://filmkachat.ru/>1×слот регистрация в 1×slots casino</a> Начнём с такого, собственно каждое рекламную за регистрацию подразумевает некие условия. Бездепозитные бонусы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, нужная для исполнения условий. Пример, получили безвозмездные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 рублей, неудачных либо выигрышных, неважно. После исполненья, бонусный баланс перейдёт на настоящий и станет доступным к выводу. <a href=https://guides.co/g/how-3d-property-tours-are-revolutionizing-real-estate-mark/474208>https://guides.co/g/how-3d-property-tours-are-revolutionizing-real-estate-mark/474208</a> Обычно показатель выше, чем для бонусов на депо. Не изумляйтесь, случае он будет том х100. Иногда завышенный коэффициент вейджера уточняется для жителей отдельных государств. зеркала 1×slots <a href=https://www.mikocon.com/home.php?mod=space&uid=218929>https://www.mikocon.com/home.php?mod=space&uid=218929</a> Для всех бездепозитных бонусов действует наибольший предел на выигрыш. Он показывает предельную сумму, коию у получить, играя на бонусные кредиты. Как только вам удастся выполнить требования вейджера, дозволенный максимум несомненно переведен с бонусного счета на главный, а остаток несомненно списан.Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных обстановок с казино, когда последствии отыгрыша бездепа для не дадут исключить крупную сумму выигрыша.
1×slots зеркало регистрация
казино 1×slots Также, учите, собственно бездепозитный приз можно вывести только что, нет случае, когда станут исполнены все условия отыгрыша. <a href=http://georgiantheatre.ge/user/RichardOrgax/>http://georgiantheatre.ge/user/RichardOrgax/</a> Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. 1× slots сайт
1×slots официальный сайт скачать на айфон
<a href=https://forumsadovodov.com.ua/memberlist.php?mode=viewprofile&u=64607>https://forumsadovodov.com.ua/memberlist.php?mode=viewprofile&u=64607</a> Частенько новенькие не понимают, как активировать подарки или вывести первый выигрыш. Для сходственных случаев наша команда обрисовала главные определения – что это фриспины, вейджер, как его отыграть, для нужно проходить верификацию.B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax 1× slots официальный
x1 slots регистрация в 1×slots casino
Некоторые казино шансы предлагать посетителям бездепы за свидетельство номера либо почты или репост на страницу в социальных сетях. Чаще всего используются коды. Их нужно заносить в специальные окошки регистрационной анкеты, если речь идет о пригласительных призах, или в определенном разделе личного кабинета игрока.Как только получите бездеп в казино, всё также не забывайте инспектировать электрическую почту. Некоторые игорные клубы каждый веселят интенсивных гэмблеров приятными бонусами. Чаще всего получить подарок можно в преддверии праздника, на денек рождение, за привлечение приятеля. А также распространённым призом является прибавка к депозиту. Нужно чем восполнить счёт, и азартное заведение увеличит его на 50–100%. 1×slots официальный сайт скачать <a href=http://wuyuebanzou.com/home.php?mod=space&uid=522108>http://wuyuebanzou.com/home.php?mod=space&uid=522108</a> Но не мыслить, что снабжая юзеров такими призами, казино увлекается спонсированием. Ведь объемы вознаграждений, в, не немалые (средним размером от 5 до 20 $). И на эти средства налагаются конкретные обстоятельства и лимитирования, обязательные к выполнению игрока, случае в последствии он вожделеет получить все средства выигранные деньги.Бесплатный приз – кредиты, которые онлайн-казино начисляет посетителю, не заставляя его пополнять игровой счет.
1×slots зеркало регистрацию более популярный вариант это
В качестве призов онлайн казино нередко предлагает выдачу фриспинов, другими бесплатных вращений игрового барабана. Виртуальные монеты можно использовать для обучения в покерной школе либо для забавы в казино.Обычно, бездепозитные призы выдаются под определенные слоты с фиксированной ставкой, но их наверняка запрещено использовать в игровых автоматах с прогрессивным джекпотом. Список игр, в которых можно использовать бездеп, Вы отыщите в описании промоакции либо сможете уточнить у службы поддержки заведения. В интернет-сети всегда возможно отыскать списки наиболее модных и гарантированных поощрительных программ от модных онлайн-казино. <a href=https://dev5.shiatv.net/uprofile.php?u=Terrynex>https://dev5.shiatv.net/uprofile.php?u=Terrynex</a> 1×slots казино зеркало Любой выигрыш по ставке повыше установленного лимита будет являться недействительным. То есть ставка не будет засчитана при отыгрыше, а случае выигрыша его сумма не поступит на счёт посетителя — итог забавы будет всецело аннулирован.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Обычно, бездепозитные призы выдаются под конкретные слоты с фиксированной ставкой, хотя их точно запрещено применять в игровых автоматах с современным джекпотом. Список игр, в которых возможно использовать бездеп, Вы отыщите в описании акции либо сможете уточнить у саппорта заведения.
#4171 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино рояль смотреть Елизавета Боярская <a href=https://m.repost.news/>букмекерские контора ап</a> бывшие казино online casino официальный <a href=https://rucriminal.info/>пинап казино</a> пари букмекерская контора gama casino Шевцова Татьяна Викторовна порно porno Марина Александрова 7k casino зеркало на сегодня Лут Оксана Николаевна порно 7k casino зеркало на сегодня
DiskiPlus casino рабочее зеркало DiskiPlus пин up casino <a href=https://diskiplus.ru>DiskiPlus сайт винлайн букмекерская контора</a> DiskiPlus new casino DiskiPlus лучшая казино <a href=https://diskiplus.ru>DiskiPlus porno Елизавета Туктамышева</a> DiskiPlus 1×bet сайт 1×bet xyz DiskiPlus казино онлайн DiskiPlus casino зеркало сайта DiskiPlus казино смотреть онлайн бесплатно DiskiPlus Елена Лядова DiskiPlus casino официальный зеркало DiskiPlus скачать сайт букмекерской конторы
#4172 Charlesgunnyhttp://filmkachat.ru
1хлот регистрация в 1×slots casino
Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала прыткие выводы. Фишка выплат том,, собственно достаточно избрать платёжный инструмент и показать необходимую. В большинстве случаев деньги зачисляются на электрические кошельки на 15 минут, а на банковские карты – 1–3 трудящихся денька.Частенько новички не разумеют, как активировать подарки или вывести первый выигрыш. Для похожих случаев наша команда описала главные определения – что такое фриспины, вейджер, как его отыграть, для необходимо проходить верификацию. <a href=http://filmkachat.ru/>рабочее зеркало 1хслотс</a> <a href=https://www.fanfiction.net/u/16465534/>https://www.fanfiction.net/u/16465534/</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=https://mega-games.pl/user/Jamesreupt/>https://mega-games.pl/user/Jamesreupt/</a>
1×slots официальный сайт скачать на айфон
Чтобы выступать бесплатно на настоящие средства в казино, порой достаточно просто зарегистрироваться. Иногда нужно выполнить дополнительные деянья.Мы подготовили перечень, где есть постоянно актуальные и свежие бездепозитные призы казино, коие возможность получить даром. Для наших пользователей есть специальные предложения эксклюзивные призы, коие вы ни не найдете, их мы определили особой красноватой плашкой «Exclusive». <a href=https://forum.pmpobc.ca/index.php?topic=135183.new#new>зеркло казино 1×slots</a> 1×slots регистрация 1×slotscasino 56 online На нашем веб-сайте Вы отыщите список актуальных свежих бездепозитных бонусов в казино 2022 года. Также, есть много неповторимых предложений, которые доступны только посетителям нашего сайта после регистрации по нашей ссылке или активации особого промокода. <a href=https://www.elektrofahrrad-tests.de/forums/member.php?action=profile&uid=35386>https://www.elektrofahrrad-tests.de/forums/member.php?action=profile&uid=35386</a> 1×slots регистрация на официальном сайте Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала резвые выводы. Фишка выплат что, нет, собственно довольно выбрать платёжный инструмент и показать необходимую. В большинстве случаев средства зачисляются на электрические кошельки в течение 15 минут, а на банковские карты – 1–3 трудящихся дня.
1×slots зеркало регистрация в 1×slots casino
Во всех законных онлайн-казино Беларуси необходимо свидетельство паспортных данных для забавы — это заявка правительства государства. На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не сможете активировать и получить бездепозитный бонус.В большинстве заведений устроить это возможно по адресу электронной почты, по номеру аппарата, через социальную сеть или гугл-аккаунт. <a href=http://xn–b1afaaiqgeiqh0aidle1f1d3c.xn–p1ai/user/Briannag/>http://xn–b1afaaiqgeiqh0aidle1f1d3c.xn–p1ai/user/Briannag/</a> После получения приза вывод средств для посетителя будет недоступен того, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя либо чета недель. Выводить деньги игрок может лишь последствии отыгрыша. 1×slots официальный регистрация
1×slots зеркало регистрацию более популярный вариант это
Также, учите, что бездепозитный приз возможно исключить только сомнений случае, когда станут выполнены все условия отыгрыша.Операторы гемблинга утверждают, что так они борются с бонус-хантерами. Впрочем, критики считают, что этим казино пробуют устроить из случайного постояльца постоянного игрока. x1 slots регистрация в 1×slots casino <a href=http://camillacastro.us/forums/profile.php?id=230651>http://camillacastro.us/forums/profile.php?id=230651</a> Этот образ бонуса несомненно добавлен на Ваш акк последствии удачной процедуры регистрации с внедрением номера аппарата. Если выбрать иной метод сотворения учетной записи, бездеп не несомненно добавлен на Ваш акк.Обычно для получения призов без депозита, казино выдвигает лояльные и вполне выполнимые обстоятельства, хотя есть ряд деяний которые воспрещены и могут причиной неприятные последствия:
1×slots актуальное зеркало
Подтверждение электронной почты – одно из главных условий, коие есть практически в каждом бездепозитном казино. Чтобы верифицировать электрическую почту, довольно перейти по активной ссылке в послании, полученном от азартного клуба.Начнём с такого, что любое рекламную за регистрацию подразумевает некие обстоятельства. Бездепозитные бонусы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность валютного оборота, нужная для исполненья условий. Пример, получили безвозмездные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 руб., неудачных либо выигрышных, маловажно. После исполненья, бонусный баланс перейдёт на реальный и станет легкодоступным к выводу. <a href=https://www.mmybt.com/space-uid-1105358.html>https://www.mmybt.com/space-uid-1105358.html</a> Составленный экспертами Casino.ru перечень онлайн-казино с бездепозитным бонусом позволяет игрокам сравнить спецпредложения различных операторов. 1×slots официальный сайт скачать на айфон
<b>Смотреть еще похожие новости:</b>
<a href=http://check2go.net/author/jameslob/>1×slots рабочее зеркало</a>
<a href=https://forum.lazarev.ru/memberlist.php?mode=viewprofile&u=167296>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
С иной стороны, гораздо легче забрать бездепозитные фриспины за регистрацию в казино и прямо момент начать вертеть барабаны в наихороших слотах. Главная необыкновенность спинов в, что они предусмотрены для лучших автоматов. Удастся не пройти дополнительные раунды, хотя и прирастить сумму выигрыша, заработать респины прочие внутриигровые подарки.
#4173 Charlesgunnyhttp://filmkachat.ru
казино 1×slots официальный сайт
Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут устанавливает лимитирование для клиентов. Конечно, это возможно счесть неким неудобством для игрока, но справедливости ради необходимо, собственно выбор автоматов всё также остаётся достаточно большим.Чем ниже велечину вейджера, что, этим легче отыграть и вывести бонус. Если Вы планируете заработать на бездепе, а не просто ознакомиться с новым игровым клубом, то стоит игнорировать призов с высочайшим вейджером их почти не реально отыграть. С ними Вы можете лишь протестировать игры заведения. <a href=http://filmkachat.ru/>1×slots casino регистрация</a> Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, чтобы появилась вероятность исключить выигрыш.Каждая игровая перрон выделяется критериями по получению и отыгрышу бездепов. В правилах детально расписаны временные рамки, за которые нужно прокрутить вейджер. Также не забывайте про наибольший объем ставки и наивысшую сумму выплаты. С другой стороны, чтобы получить бездепозитные бонусы казино, достаточно израсходовать менее 1 минутки. <a href=https://www.uannounceit.com/article/1417>https://www.uannounceit.com/article/1417</a> 1×слотс казино <a href=http://eniseysk.com/bitrix/redirect.php?goto=http://aelita-gold.ru/bitrix/redirect.php?goto=http://taksa.matchfishing.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/vNHHekQ8eXb>http://eniseysk.com/bitrix/redirect.php?goto=http://aelita-gold.ru/bitrix/redirect.php?goto=http://taksa.matchfishing.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/vNHHekQ8eXb</a> Бездепозитные призы казино это финансовая компенсация, предлагаемая юзерам на дармовой базе и возможность играть в интернет казино безвозмездно. Если сравнивать их с поощрениями за лепта, в средства выдаются только впоследствии первоначального пополнения счета, то бездепозитные гонорары получаются безвозмездно. То есть, играющий получает вероятность делать ставки на уже место деньги, коие выдаст заведение, выполняя, при, обычные действия, дабы их извлечь (тут идет о регистрация, удостоверении личности с использованием номера телефона, дизайна заказы и т.д. ).Только выполнив все условия отыгрыша и дождавшись окончания ревизии аккаунта, Вы сможете оформить заявку на вывод средств и получить свои средства.
рабочее зеркало 1хслотс
<a href=https://swordmaster.org/user/JamesVok/>1 xslots рабочее зеркало</a> 1×slot казино зеркало Максимальная ставка ? устанавливается в денежной счета и ограничивает объем ставки за раз спин. В случае ее превышения приз имеет быть аннулирован. Также в правилах возможность находиться запрет на размещение ставок конкретного облика, примеру, по равным шансам в рулетке (словами, на чет либо нечет, красное или темное и т.д. ). <a href=http://www.suncg.net/home.php?mod=space&username=ihelepum>http://www.suncg.net/home.php?mod=space&username=ihelepum</a> Этот образ приза несомненно добавлен на Ваш аккаунт в удачной процедуры регистрации с использованием номера телефонного. Если выбрать иной способ творения учетной записи, бездеп не несомненно добавлен на Ваш аккаунт. 1хслотс зеркало на сегодня Как только на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу последствии сего можно забыть заявку на вывод выигрыша. Кредиты прибыльно выделяются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом настоящих средств и выделяют вероятность почувствовать азарт. Во-вторых – можно насладиться любой азартной игрой доступной на сайте. В вашем распоряжении находятся автоматы, настольные приложение, видео-покер, Live-дилеры.
1×slots сайт зеркало
Индивидуальные поощрения выдаются за совершение действий: подписку на аккаунты площадки в соц сетях, установку мобильного прибавления или официального клиента для ПК. В большинстве казино срабатывают программки преданности, присваивающие игрокам статусы за активность на сайте. Продвижение на грядущий степень нередко сопрягается выдачей бездепа.Денежные свои. Третий бонус за регистрацию без депозита – наличные. К раскаянию, только известные и знаменитые клубы имеют дать средства в руб. Или долларах. С их помощью у насладиться любой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед этим необходимо исполненье определенных условий. <a href=http://lsdsng.com/user/546520>http://lsdsng.com/user/546520</a> Призовые начисления без депо могут предоставляться для роли в турнирах интернет казино. Потратить перечисленные средства возможно исключительно в данной промоакции. Условия их проведения в лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться таким предложением, другого, как изучить его управляла.Следует выделить, что бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом. 1×slots рабочее зеркало Мы советуем не отрицаться от подобных предложений известных казино. Выделите несколько минут на регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сегодня удача несомненно на вашей стороне!
1×slots casino регистрация на сайте
Принципиальным различием бесплатных бонусов от призов на депозит считается отсутствие надобности заносить средства на аккаунт. Из-за этого их нередко именуют бездепозитными (not the slightest deposit bonuses).Иногда в качестве бездепа, казино дарит минимальный приз (до 50 руб. ), из-за которого не стоит заморачиваться. На нашем сайте Вы найдете перечень своевременных новых бездепозитных призов в казино 2022 года. Также, есть количество эксклюзивных предложений, которые доступны лишь посетителям нашего вебсайта последствии регистрации по нашей ссылке либо активации особого промокода.За счёт спинов получится запустить разные интернет слоты, протестировать стратегии и поднабраться навыка. Фишка в том, собственно вращения начисляются на лучшие аппараты с оригинальными опциями и высокой отдачей. Не забывайте, собственно в каждом акционном предложении предусмотрены специальные требования – временные ограничения, наибольший размер ставки, перечень доступных игр. 1×slots мобильная версия войти казино <a href=http://vn-info.net/user/Jamesbag/>http://vn-info.net/user/Jamesbag/</a> В любом казино с бездепозитным бонусом учтены вейджеровые условия. Это единственный «подводный камень», который стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, нужно сделать определённое количество ставок. Чем круче бонус, что, этим труднее выполнить обстоятельства, и наоборот.
1×slots рабочее зеркало
Чаще всего применяются коды. Их нужно вносить в особые окна регистрационной анкеты, если идет о пригласительных бонусах, или в особом разделе собственного кабинета игрока.Подтверждение электронной почты – одно из основных условий, коие есть практически в любом бездепозитном казино. Чтобы верифицировать электронную почту, довольно перейти по интенсивной ссылке в письме, полученном от азартного клуба. <a href=https://mittelrheinhandball.de/member.php?action=profile&uid=20186>https://mittelrheinhandball.de/member.php?action=profile&uid=20186</a> 1×slots сайт
<b>Смотреть еще похожие новости:</b>
<a href=https://minifishtank.net/forum/member.php?action=profile&uid=1356>1×slots актуальное зеркало</a>
<a href=https://www.bf-france.com/forums/profile/30064-rabofreeor/>1× слот зеркало</a>
<a href=https://www.globalvision2000.com/forum/member.php?action=profile&uid=1072499>1× slots регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При использовании бездепозитным призом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют количество обликов лимитов: Главное преимущество спинов – вероятность изучить различные слоты. Также получится насладиться бонусными раундами, испытать фортуну в риск-туре и преумножить выигрыш за счёт особых символов. Однако столько игровой процесс заслуживает внимание, ведь никакого сосредоточиться на реальном выигрыше.
#4174 Charlesgunnyhttp://filmkachat.ru
1×slots быструю регистрацию а также мгновенное
Промокод – определённая комбинация знаков, коию нужно установить в подходящее фон при создании учетной записи или активировать в личном профиле игрока в разделе с бонусами.Срок активации и время на отыгрыш. Зачисление средств либо фриспинов происходит при активации в течение требовательно ограниченного периода, подобные требования предъявляются и к срокам отыгрыша. Одни казино позволяют отыгрывать приз несколько дней либо том недель. Другие выдают солидную необходимую за регистрацию, но время отыгрыша ограничивают несколькими часами с необоснованно высочайшим вейджером. <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino 56 online</a> Для того, чтобы отыграть сумму вашего бездепозитного приза нужно выполнить условия вейджера. Очень нередко фриспины даются на определенные слоты (book of ra, book of deceased, book of sun), подбирайте слот для по душе, они все очень красивые и высококачественные. Бездепозитные приз имеет быть денежным например и вид фриспинов на слоты <a href=https://www.cyberlord.at/forum/?id=1&thread=19231>https://www.cyberlord.at/forum/?id=1&thread=19231</a> Прочитайте правила бонусной программки, в которой желаете участие. Да, мы безотступно советуем сделать это до регистрации. 1×slot казино зеркало <a href=http://topexpert.digital/bitrix/redirect.php?goto=http://hubble.icmb.utexas.edu/api.php?action=http://tdholod.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/_UT3RQ5MNFu>http://topexpert.digital/bitrix/redirect.php?goto=http://hubble.icmb.utexas.edu/api.php?action=http://tdholod.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/_UT3RQ5MNFu</a>
1×slots бездепозитный бонус за регистрацию
Обыкновенные бездепозитные призы в объеме от трех до 20 долларов созданы чтобы, чтобы, дабы в игры заходили все новые и новые игроки. Здесь, скорее, будет лимитирование на наибольший выигрыш. Важно, чтобы перед наименьшим вкладом был отключен приз за первое пополнение счета, и в не попадет на повторный вейджер. <a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1×slots зеркало которую указывали при регистрации кстати</a> 1хслотс рабочее зеркало <a href=https://astraclub.ru/blog.php?cp=3364>https://astraclub.ru/blog.php?cp=3364</a> 1×slots зеркало на сегодня В большинстве заведений сделать это можно по e-mal, по номеру телефона, через социальную сеть или гугл-аккаунт.
1×slots казино мобильная версия
В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая доля забавы. Важно, зачастую бездепозитные призы в казино выдаются с лимитированиями по наибольшей выплате. В среднем возможно рассчитывать на выгода в количество тысяч рублей. Как исключить выигрыш с бонуса без депо. Придётся подтвердить аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном доказательстве учетной записи спрашивайте в интернет чате либо прочтите в правилах.Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного бонуса достаточно пополнения баланса и подтверждения личности. В других же клубах, необходимо количество один прокрутить свой депозит. <a href=http://solhyanggi.net/gb5/bbs/board.php?bo_table=free&wr_id=1275828>http://solhyanggi.net/gb5/bbs/board.php?bo_table=free&wr_id=1275828</a> 1×slot регистрация
1хслот скачать
Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро либо 20 долларов. Если выдаются фриспины, их количество изредка превышает нескольких десятков безвозмездных вращений. <a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=665343>1×slots регистрация то дальше необходимо пройти</a> Но не стоит думать, собственно снабжая юзеров такими призами, казино занимается спонсированием. Ведь объемы вознаграждений, главном, не большие (средним объемом от 5 до 20 долларов). И на эти средства налагаются определенные обстоятельства и ограничения, неотклонимые к выполнению игрока, в в последствии он желает получить все средства выигранные финансы.Диапазон ставок, которые вправе устроить игрок, кроме лимитирован. Обычно ставить возможно небольшую необходимую — в 10–30 рублей за одно вращение. 1×slots рабочее зеркало <a href=http://www.rhl-mod.ru/members/98893-kennetheropy/>http://www.rhl-mod.ru/members/98893-kennetheropy/</a>
1×slots регистрация 1×slots review live
Бездепозитные бонусы за регистрацию являются одним из самых модных способов привлечения свежих игроков в онлайн-казино, потому что они предоставляют игрокам возможность опробовать казино, неподражаемо игровые автоматы, и вполне, выиграть настоящие средства. <a href=https://morphomics.science/wiki/User:JohnathanGodley>https://morphomics.science/wiki/User:JohnathanGodley</a> 1хслотс рабочее зеркало Как лишь вы отыграли вейджер и свои с бонусного баланса перебежали для на настоящий счет, Вы смело можете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать минимальный депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, совместно, вкупе с депо).Отказ в прохождении верификации. Если заказчик не хочет либо имеет предоставить документы, подтверждающие его личность, профиль будет заблокирован совместно, вкупе со всеми бонусными начислениями.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=37305>казино 1×slots</a>
<a href=http://polishcrazyclan.ugu.pl/member.php?action=profile&uid=272738>1х слот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Получить Бездепозитный бонус в онлайн казино дело 2-ух кликов. Другой момент, отыграть промо и соблюсти управляла и условия отыгрыша. Под правилами предполагается столько вагер, но и ограничения по наибольшей ставке. Мы осознаем, собственно в кино все ставят на зеро и выигрывают. Призываем не делать подобного. Перед активацией бонуса прочитайте правила. Узнайте следующие факторы: Условия получения презента, за регистрацию, за депозит и прочее. Ограничения по максимальной ставке. Зачастую не выше 350 руб. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вертеть автоматы, а вагер будет стоять на пространстве. Поэтому принципиально аристократия, в каких играх можно совершать кратность денежного оборота. В зависимости от онлайн заведения каждый из их возможность вас предложить как бездепозитные средства, например и бездепозитные фриспины, коие после удачной регистрации рухнут вам на ваш игровой баланс.
#4175 Charlesgunnyhttp://filmkachat.ru
1хслот скачать
Варианты выигрыша в от Вашей удачи и критерий игорного портала. Выше мы заявили, собственно некоторые бездепозитные бонусы в 2022 году выдаются с лимитированиями по максимальной выплате. Однако, остаются другие, все, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность современных игр на деньги, возможно выиграть невероятные суммы. Сегодняшние игровые автоматы либо видео слоты, как их называют. Могут выдавать солидные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000.Возможность сыграть дополнительное соревнование (а от и количество) совершенно бесплатно, а выигрыш, тому, поступает на счёт игрока. <a href=http://filmkachat.ru/>1хслотс мобильная версия зеркало</a> У любого игорного заведения свои верховодила и обстоятельства. Но, чтобы получить бонусы, необходимо выполнить стандартные деянья: <a href=https://hanson.net/users/archicgicom>https://hanson.net/users/archicgicom</a> 1×slots зеркало регистрация <a href=https://g.clicgo.ru/user/Julestrobe/>https://g.clicgo.ru/user/Julestrobe/</a>
1х слот 1хслотс регистрация перейти на 1×slots
1 х слотс зеркало <a href=http://www.jrp.kr/bbs/board.php?bo_table=free&wr_id=134367>http://www.jrp.kr/bbs/board.php?bo_table=free&wr_id=134367</a> Это тоже безвозмездные финансы, которые поступают на аккаунты свежеиспеченных геймеров в регистрирования. А необыкновенность таких бонусов состоит что, что обретенные деньги непременно по использовать в продолжении назначенного медли. 1×slots официальный зеркало
1×slots зеркало рабочее на сегодня
Отказ в прохождении верификации. Если клиент не хочет либо возможности предоставить документы, подтверждающие его лицо, профиль несомненно заблокирован совместно, вкупе со всеми бонусными начислениями.Для тех, кто только взвешивает испытывать свою фортуну, еще для проф игроков, отыскивающих новые площадки для выигрышей, водящие лицензированные казино часто устраивают разные промоакции, и одно из лучших предложений прошедшее время – как для новичков, так и для профессиональных игроков – бездепозитный бонус за регистрацию. <a href=http://sancon.co.kr/bbs/board.php?bo_table=free&wr_id=95065>http://sancon.co.kr/bbs/board.php?bo_table=free&wr_id=95065</a> Предложения с бездепозитными призами за регистрацию позволяют свежим заведениям заинтересовать аудиторию на свой сайт. А игроки в свою очередь получают возможность играть на настоящие средства без депозита в казино и заработать малый стартовый капитал, кот-ый разрешается исключить на карту банка либо электрический кошелек.Рассмотрим принцип его деянья на образце. Допустим, вы зарегались и возымели $10 not the slightest deposit bonus с вейджером х50. Это значит, что выигранные средства возможно несомненно выводить не раньше, чем в того, как общая сумма ставок достигнет $500. 1×slots официальный сайт зеркало рабочее
1×слот регистрация в 1×slots casino
Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=https://melhorlance.com.br/minha-conta/>1 x slots casino</a> Приглашаем делиться воззрениями о призах. Это поможет другим пользователям избирать наиболее выгодные предложения.Чаще всего, популярностью сервисы, эти как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное управляло. Финансовые средства выводятся лишь спустя что, эту платежную систему, которой огромный для пополнения депо. Если же игрок получил бездепозитный покерный приз, потребуется восполнить счет на минимальную сумму, которая сочиняет обычно 10 $. Некоторые онлайн-казино без депо предлагают новым посетителям выбрать приз при регистрации. Будьте внимательны: выбрав один, вы в абсолютном большинстве случаев не можете воспользоваться остальными. 1×slots скачать на айфон <a href=http://zkmbk.in.ua/user/Anthonyten/>http://zkmbk.in.ua/user/Anthonyten/</a> Для верификации аккаунта нужно предоставить специалистам технической поддержки отсканированную копию паспорта и счета за коммунальные предложения, а фотку банковской карты либо экрана страницы электронного кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для доказательства личности.Способы получения бездепа различаются в зависимости от вида бонуса, который понравился игроку. Но вас так надо(надобно) быть зарегистрированным в легальном онлайн-казино и доказать собственную личность. В общем виде пошаговая аннотация для получения бездепозитного приза смотрится так:
1×slot казино зеркало
Существуют казино с призом за регистрацию, каких очень востребованы фриспины в интернет казино впоследствии регистрации в конкретных играх. Они встречаются даже чаще безвозмездных поощрений или классических призов в казино без инвестициям. Например, игрок регистрирует счет, на кот-ый начисляются бесплатные забавы, бонус за регистрацию повторяющий даровых фрспинов, вращения в игровом автомате. Во время игрового процесса геймер выигрывает истинные средства, которые в последствии можно удачно исключить из заведения на собственную платежную систему. То есть, есть шансы исключить средства без рисков своими деньгами. Регистрация, за которую геймер получит призы, займет несколько, а благодаря данному возможно прирастить 5 евро поощрений до тыс. И без всяких проблем вывести их.Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша бонусов. Заведения всегда устанавливают максимальную ставку, возможную по условиям вейждера. <a href=https://www.awwwards.com/nodressio1/>https://www.awwwards.com/nodressio1/</a> 1×slots на любой вкус как пройти регистрацию
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.survival-readiness.com/viewtopic.php?t=266766>1×slots рабочее зеркало</a>
<a href=http://fin-molitor.com/forum/viewtopic.php?f=2&t=419605>1× slots регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Когда речь о получении бездепозитных бонусов в казино, начала обратите внимание на следующие условия:
#4176 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино большая 1×bet официальный скачать <a href=https://th-royalgclub.com/>casinos winning</a> Светлана Ходченкова ставки на спорт букмекерские конторы <a href=https://repost.news/>яндекс игры казино</a> pinco casino винлайн букмекерская контора официальный porno Юлия Пересильд casino riobet 1×bet сайт официальные зеркала казино казино сочи
DiskiPlus 7k casino сайт DiskiPlus казино вулкан <a href=https://diskiplus.ru/>DiskiPlus лучшая казино</a> DiskiPlus порно с Зырянова Анастасия Владимировна DiskiPlus gama casino <a href=https://diskiplus.ru/>DiskiPlus porno Анна Сидорова, керлингистка</a> DiskiPlus porno Виктория Баркова, легкоатлетка DiskiPlus казино 1 DiskiPlus 1×bet зеркало слоты DiskiPlus пин up casino DiskiPlus online casino 7k DiskiPlus porno Анастасия Янькова, боксерка DiskiPlus официальное казино вход
#4177 Charlesgunnyhttp://filmkachat.ru
1× slots casino официальный сайт
Фриплей-бонусы встречаются только в некоторых клубах. Они зачисляются незамедлительно последствии создания профиля и активны недолговременное время. Если не успеете израсходовать свои, они просто сгорят. Касаемо медли, правило бонусы активны на часа.Чтобы выступать даром на реальные деньги в казино, порой довольно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные деяния. <a href=http://filmkachat.ru/>1хслотс казино зеркало</a> <a href=https://www.scutify.com/articles/2024–11–22-understanding-3d-modeling-costs-a-comprehensive-guide-to-industry-pricing>https://www.scutify.com/articles/2024–11–22-understanding-3d-modeling-costs-a-comprehensive-guide-to-industry-pricing</a> 1×slots регистрация на 1хслотс <a href=https://carpentryforums.com/member.php?action=profile&uid=5690>https://carpentryforums.com/member.php?action=profile&uid=5690</a> Фриплей-бонусы. Бонусы за благотворительную игру есть лишь в неких клубах. Они зачисляются сразу последствии творения профиля и срабатывают недолговременное время. Если у вас нет времени истратить средства, они просто закончатся. Что дотрагивается времени, правило призы действуют в течение одного часа.Объективные – размер приза, коэффициент и обстоятельства вейджера, надобность внесения депо для вывода денег;
1хслот зеркало сайта
<a href=http://djdrewski.co.uk/lfsbangers/viewtopic.php?f=32&t=35333>1×slots casino зеркало</a> 1×slots официальный регистрация <a href=https://aiia.su/index.php?subaction=userinfo&user=Darennax>https://aiia.su/index.php?subaction=userinfo&user=Darennax</a> 1×slots официальный регистрация Бездепы с безвозмездными вращениями деют юзерам право вертеть барабаны игровых автоматов без снятия средств со счета. За любой раунд платит казино. Число спинов ограничено и редко превышает сотку. Если промоакция содержит большое даровых игр, их начисление может быть разбито на несколько дней.Вейджер в переводе с британского значит «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша приобретенного бонуса, в нашем случае бездепозитного. Число ставок имеет — принципиально лишь набрать необходимую, пропорциональную сумме поощрения.
1×slots зеркало регистрация
Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.Высокая конкурентность в разделе азартных игр мотивирует операторов привлекать клиентов различными акциями. Благодаря этому у посетителей замечена вероятность получить призы в казино за регистрацию без депозита. Воспользоваться этим предложением возможно, избегая процедуру внесения средств на игровой счет, просто активировав аккаунт на веб-сайте. Наш экскурсовод по бездепам поможет выбрать самую привлекательную бонусную программку, узнать верховодила получения такового вознаграждения и воспользоваться им с максимальной выгодой. <a href=http://ukvg-nn.ru/index.php?subaction=userinfo&user=maliciousopinio>http://ukvg-nn.ru/index.php?subaction=userinfo&user=maliciousopinio</a> 1×slots casino регистрация 1×slots review live
1×slots casino регистрация 1×slots review live
У нас на веб-сайте Вы найдете перечень бонусов без депо в испытанных казино и доскональную информацию про как их получить и использовать.При исполненьи критерий отыгрыша и верификации, средства с бонусного счета переводятся на главной и имеют быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции зависят от выбранной платежной системы. <a href=http://216.38.0.7/viewtopic.php?f=12&t=250004>1×slots официальный сайт скачать</a> Бывают ли бездепозитные бонусы без вейджера? Бывают, если у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино. Многие азартные клубы ограничивают сумму вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании акции, суммы Вы не сможете исключить. Разница будет аннулирована, Вы числе не можете создавать на нее ставки.Для верификации номера аппарата, в личном профиле выберите опцию „Подтвердить номер аппарата“ и введите в соответствующее поле код, приобретенный в sms-сообщении. 1×slots официальный сайт скачать <a href=http://mail.canadalondonchinese.com/home.php?mod=space&uid=110677>http://mail.canadalondonchinese.com/home.php?mod=space&uid=110677</a> Первый образующийся вопрос, это, для выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают новых игроков. Последним легче начать игру на деньги с дара за регистрацию. Им надо пополнять баланс и расходовать личные свои. Новички получают безвозмездные спины либо свои на счёт. С их поддержкой знакомятся с игровым ходом, крутят слоты и делают ставки в рулетке.Подтверждение регистрации. Казино настоятельно привязки профиля к электронному адресу и номеру телефона. Для этого на e-mail отчаливает послание ссылаясь, а на аппарат ? текстовое известье с кодом.
1×slots официальный зеркало
<a href=http://alt1.toolbarqueries.google.so/url?q=http://tp45.ru/bitrix/click.php?goto=http://avto-mechanic.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/7tEYV6×oaST>http://alt1.toolbarqueries.google.so/url?q=http://tp45.ru/bitrix/click.php?goto=http://avto-mechanic.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/7tEYV6×oaST</a> Бездепозитные призы казино это финансовая компенсация, предлагаемая юзерам на дармовой основе и вероятность играть в онлайн казино безвозмездно. Если ассоциировать их с поощрениями за вклад, в свои выдаются только потом начального пополнения счета, то бездепозитные гонорары получаются безвозмездно. То есть, играющий получает вероятность создавать ставки на теснее место деньги, коие выдаст заведение, выполняя, всем, обычные деяния, чтобы их извлечь (здесь идет речь о регистрация, удостоверении личности с использованием номера аппарата, оформления заказы и т.д.). 1×slots регистрация 1×slots casino 777 online На условиях отыгрыша безвозмездных призов следует остановиться подробнее. С ними связаны нюансы, коие нельзя оставить без внимания.Нет. Для получения бездепозитного приза в казино нужна обязательная регистрация на сайте. Играть в слоты безвозмездно и без регистрации возможно лишь в демо режиме.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.bedwantsinfo.nl/thread-745936.html>1×slots регистрация то дальше необходимо пройти</a>
<a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/9681–1khslots-kazino-zerkalo#9709>1хслотс казино зеркало</a>
<a href=http://www.easysunnysunshine.com/memberlist.php?mode=viewprofile&u=18118>1×slots casino зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но есть игорные заведения, коие готовы просто так жертвовать деньги на игру. Для сего довольно сделать профиль. Чтобы исключить собственный выигрыш, вас поначалу нужно выполнить обстоятельства отыгрыша, указанные в условиях получения бездепозитного депо.
#4178 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Мира Андреева (теннис) лучшие казино бесплатно <a href=https://th-royalgclub.com/>казино фильм</a> 7k casino официальный сайт порно с Ирина Сидоркова <a href=https://strelochnik.com/>букмекерская контора официальный сайт скачать</a> казино ставка казино проиграл мобильные букмекерские конторы казино онлайн бесплатно казино онлайн gama casino казино можно
DiskiPlus казино онлайн бесплатно DiskiPlus яндекс казино <a href=https://www.diskiplus.ru/>DiskiPlus casino 7k сегодня</a> DiskiPlus pin up casino скачать DiskiPlus 1win букмекерская контора <a href=https://www.diskiplus.ru>DiskiPlus песня казино</a> DiskiPlus casino официальный зеркало DiskiPlus пин ап казино DiskiPlus casino зеркало сайта DiskiPlus бесплатно фильм казино DiskiPlus казино ли DiskiPlus porno Виктория Баркова, легкоатлетка DiskiPlus пина букмекерской конторы
#4179 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино бесплатно фильм казино <a href=https://m.repost.news/>гта онлайн казино</a> пин ап букмекерская контора казино играть <a href=https://rumafia.news/>pinco casino</a> букмекерская контора бесплатно скачать Радченко Светлана Юрьевна порно макао казино Матвиенко Валентина Ивановна порно casino зеркало сегодня cometa casino bet casino
DiskiPlus скачать букмекерскую контору DiskiPlus kent casino регистрация <a href=https://www.diskiplus.ru>DiskiPlus Скворцова Вероника Игоревна порно</a> DiskiPlus порно с Голикова Татьяна Алексеевна DiskiPlus 1×bet слоты <a href=https://diskiplus.ru/>DiskiPlus Любимова Ольга Борисовна порно</a> DiskiPlus casino онлайн DiskiPlus порно с Варвара Субботина DiskiPlus casino онлайн DiskiPlus винлайн букмекерская контора официальный DiskiPlus casino зеркало сайта DiskiPlus Нургалиева Эльвира Рамиловна порно DiskiPlus пин casino
#4180 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Анна Михалкова pin up casino пин <a href=https://rumafia.news/>пина букмекерской конторы</a> casino сайты порно с Евгения Медведева, фигуристка <a href=https://specreporter.com/>сайт винлайн букмекерская контора</a> Преподобная Надежда Александровна порно pin up casino top top up casino официальный 7k casino зеркало 1×bet вход казино сочи порно с Зырянова Анастасия Владимировна
DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz DiskiPlus Нургалиева Эльвира Рамиловна порно <a href=https://diskiplus.ru/>DiskiPlus скачать 1×bet на андроид бесплатно</a> DiskiPlus porno Ангелина Гончаренко, хоккеистка DiskiPlus порно с Сергей Бобровский (хоккей) <a href=https://www.diskiplus.ru>DiskiPlus приложения букмекерских контор</a> DiskiPlus casino рабочее зеркало DiskiPlus порно с Захарова Мария Владимировна DiskiPlus 1win букмекерская контора DiskiPlus лучшие бесплатные онлайн казино DiskiPlus скачать сайт букмекерской конторы DiskiPlus 7k casino зеркало рабочее DiskiPlus порно с Арина и Дина Аверины, гимнастки
#4181 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet скачать бесплатно порно с Карен Хачанов (теннис) <a href=https://strelochnik.com/>официальное казино вход</a> лучшие букмекерские конторы 1×bet на андроид <a href=https://www.ossetia.tv/>Ирина Горбачева</a> порно с Диана Шнайдер (теннис) почему в казино нет часов Хорова Наталья Александровна порно кент casino Матвиенко Валентина Ивановна порно порно с Евгения Медведева, фигуристка порно с Максим Глушенков (футбол)
DiskiPlus pin up casino скачать DiskiPlus лучшие онлайн казино <a href=https://www.diskiplus.ru>DiskiPlus 1×bet на андроид</a> DiskiPlus 1×bet зеркало рабочее xbet DiskiPlus 1×bet зеркало на сегодня <a href=https://diskiplus.ru/>DiskiPlus рабочие зеркала казино</a> DiskiPlus пин casino DiskiPlus ramenbet casino DiskiPlus Набиуллина Эльвира Сахипзадовна порно DiskiPlus казино онлайн DiskiPlus 1×bet слоты DiskiPlus порно с Юлия Ефимова DiskiPlus pin ап casino
#4182 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
сайты казино 7k casino бонус <a href=https://rumafia.news/>букмекерские контора ап</a> порно с Арина и Дина Аверины, гимнастки ев казино <a href=https://th-royalgclub.com/>7k casino бонус</a> 1×bet слоты 1×bet xyz Чулпан Хаматова casino зеркало сегодня 1×bet сайт ев казино 1×bet на андроид бесплатно казино зеркало сегодня
DiskiPlus букмекерская контора без DiskiPlus up букмекерская контора <a href=https://diskiplus.ru>DiskiPlus Мухтиярова Елена Вячеславовна порно</a> DiskiPlus букмекерскую контору пин DiskiPlus букмекерская контора бесплатно скачать <a href=https://diskiplus.ru>DiskiPlus рокс казино</a> DiskiPlus кент казино DiskiPlus порно с Алексей Миранчук (футбол) DiskiPlus скачать сайт букмекерской конторы DiskiPlus казино зеркало сегодня DiskiPlus скачиваемые казино DiskiPlus порно с Зырянова Анастасия Владимировна DiskiPlus 1×bet зеркало xbet xyz
#4183 Charlesgunnyhttp://filmkachat.ru
1× slots зеркало
Подтверждение электронной почты – одно из ведущих условий, которое есть почти в каждом бездепозитном казино. Чтобы верифицировать электронную почту, довольно перейти по интенсивной ссылке в письме, полученном от азартного клуба. <a href=http://filmkachat.ru/>1×slots быструю регистрацию а также мгновенное</a> Для получения предоставленных призов вам понадобиться — ПК или мобильное прибор, и остальное дело за малым. <a href=https://forums.noria.com/topic/3d-visualization-excellence-transform-your-architectural-vision-into-reality>https://forums.noria.com/topic/3d-visualization-excellence-transform-your-architectural-vision-into-reality</a> Итак, дабы безвозмездные бонусные кредиты трансформировались в настоящие средства, которыми вам распоряжаться по своему усмотрению, их надо(надобно) отыграть. Вейджер стопам уточнять в правилах онлайн-казино.У нас на сайте Вы найдете список призов без депо в проверенных казино и подробную информацию то как их получить и использовать. 1×slots зеркало на сегодня <a href=https://wood.biz.ua/wr_board/tools.php?event=profile&pname=Williamwooca>https://wood.biz.ua/wr_board/tools.php?event=profile&pname=Williamwooca</a>
1×slots актуальное зеркало
Доступные игры – В неких азартных забавах можно понизить математическое превосходство казино до нескольких 10-х процента. В их числе все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как правило, в этих играх ставки идут в зачет вейджера не полностью. Например, может предусматриваться лишь 50%. В неких играх бездепозитные бонусы вообщем невозможно отыгрывать.В лицензионных бездепозитных казино выступать в азартные игры действительно безопасно. Наличие лицензии подтверждает тот факт, собственно клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP. 1×slots регистрация то дальше необходимо пройти <a href=http://www.zhzmsp.com/home.php?mod=space&uid=1756027>http://www.zhzmsp.com/home.php?mod=space&uid=1756027</a> 1× slots официальный
1×slots зеркало регистрацию более популярный вариант это
В случае установленного лимита на необходимую вывода выигрыша с бездепозитного бонуса, игрок не может вывести больше заявленной суммы. Денежные свои. Третий приз за регистрацию без депо – наличные. К раскаянью, лишь известные и популярные клубы имеют уяснить деньги в руб. Либо долларах. С их подмогою вас насладиться любой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед этим нужно исполнение определенных условий. <a href=http://f1-f1helpe.1gb.ru/component/users/?option=com_k2&view=itemlist&task=user&id=37728>http://f1-f1helpe.1gb.ru/component/users/?option=com_k2&view=itemlist&task=user&id=37728</a> 1×slots официальный регистрация Представьте момент, когда при ставке в 10 рублей Вы получите сходственное умножение. Миллион руб. За одно вращение, собственно вполне возможно. Поэтому вопрос, сколько можно выиграть остаётся открытым. Предлагаем проверить помощи. Регистрируйтесь в одном или нескольких онлайн казино, получайте Бездепозитный приз и проверяйте удачу в деле. Разумеется, вывести средства не так просто. Однако шансы есть у всех.
1хслотс 1хслотс регистрация перейти на 1×slots
Выиграть настоящие средства в казино не пополняя счет – трудно, хотя вероятно. Главное задаться целью и не нарушатьправила заведения. Выберите несколько казино с бездепзитными бонусами и начните играть на бонусные средства. По статистике в одном из 10-ти заведений возможно заработать маленькую сумму средств с бонусных средств.Зарегистрироваться в казино по специальной ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефона и электронную почту). Для доказательства номера телефона нужно в собственном профиле указать собственный номер и надавить кнопку „Подтвердить номер телефона“, дальше Вы получите sms-сообщение с кодом, который необходимо установить в отвечающее фон. Для доказательства электронной почты, перейти по активной ссылке в послании от казино. <a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=36234>1×slot зеркало рабочее регистрации на телефон придет</a> Подобные призы без депо предоставляются на более прибыльных условиях. Зачастую они покрупнее, а условия отыгрыша наименее строгие.Подарки на конкретные даты выделяются условиями получения. Если поощрение начисляют игроку на денек рождения, то сумма обыкновенно находится от совместного размера депозитов за год. 1хслотс рабочее зеркало на сегодня <a href=http://ooo-esk.ru/index.php?subaction=userinfo&user=combativedesper>http://ooo-esk.ru/index.php?subaction=userinfo&user=combativedesper</a> Бездепозитный бонус предоставляется новому игроку за конкретные действия. Часто подарок повторяющий денег либо фриспинов выдается за регистрацию, благодаря чему пользователь получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.
1хслотс зеркало
Изучить правила и обстоятельства получения бездепозитных призов казино, Вы сможете у нас на веб-сайте в разделе с бонусами или на официальном веб-сайте выбранного Вами казино. Если не можете найти нужную информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал либо по электрической почте. Бонус без депозита за регистрацию в казино (бездепозитный бонус) – это валютный презент от клуба, который начисляется на акк игрока после регистрации в казино. Кроме сотворения учетной записи, для получения бездепа, очень нередко потребуется ещё и доказать контактные данные игрока и/или активировать специальный промо-код.Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают бонус по государствам. Вплоть до того, что клуб возможность на игроков из Вашей государства, а бездеп не давать. <a href=http://sobaeksanrock.dgweb.kr/bbs/board.php?bo_table=free&wr_id=2399338>http://sobaeksanrock.dgweb.kr/bbs/board.php?bo_table=free&wr_id=2399338</a> 1×slots промокод при регистрации Третитй бездепозитный приз за регистрацию – денежные средства. К огорчению, начислить рубли или баксы способны лишь известные и знаменитые клубы. С их поддержкою вы сможете насладиться каждой доступной игрой – автоматом, рулеткой, кено, блэкджеком.Пoдтвepдить личнocть клиента. Для удачного вывода средств, необходимо подтвердить лицо посетителя. Нa этaпe вepификaции пpoфиля, сотрудники службы защищенности должны убедиться, собственно у игрока всего лишь раз акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не сможет исключить свой выигрыш, в у него будет некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.donchillin.com/space-uid-382497.html>1×slots официальный зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины — благотворительные вращения, которые позволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины считаются наиболее популярным и предпочтительным видом приза — благотворительные вращения порой эффективнее и веселее в отыгрыше, чем остальные виды бездепов.
#4184 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino ап 1win casino <a href=https://glvk.guru/>порно с Алина Загитова</a> рокс казино порно с Евгения Медведева <a href=https://strelochnik.com/>1×bet зеркало xbet</a> casinos xyz casino рабочее порно с Антропова Валентина Викторовна casino x Крючкова Полина Викторовна порно Скворцова Вероника Игоревна порно 1×bet зеркало слоты
DiskiPlus Окладникова Ирина Андреевна порно DiskiPlus porno Светлана Ходченкова <a href=https://diskiplus.ru/>DiskiPlus casino приложения</a> DiskiPlus 1×bet на сегодня DiskiPlus пин ап букмекерская контора <a href=https://www.diskiplus.ru/>DiskiPlus приложения букмекерских контор на андроид</a> DiskiPlus пин ап казино DiskiPlus 1×bet слоты 1×bet top DiskiPlus порно с Карен Хачанов (теннис) DiskiPlus casinos winning DiskiPlus какие казино DiskiPlus официальная казино DiskiPlus про казино
#4185 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
black russia казино букмекерские конторы бет <a href=https://slon-ru.com/>порно с Максим Глушенков (футбол)</a> казино фильм смотреть онлайн казино сегодня <a href=https://rucriminal.info/>pinco casino</a> win win casino 1×bet слоты 1×bet xyz сайт винлайн букмекерская контора 1×slots casino top casino unlim casino порно с Артемий Панарин (хоккей)
DiskiPlus казино гта 5 DiskiPlus up casino зеркало <a href=https://www.diskiplus.ru>DiskiPlus букмекерская контора без</a> DiskiPlus 1×bet официальный скачать DiskiPlus лучшие букмекерские конторы <a href=https://www.diskiplus.ru/>DiskiPlus vavada casino</a> DiskiPlus порно с Голикова Татьяна Алексеевна DiskiPlus макао казино DiskiPlus суть казино DiskiPlus Шевцова Татьяна Викторовна порно DiskiPlus 1×bet зеркало рабочее DiskiPlus porno Елизавета Туктамышева DiskiPlus порно с Артемий Панарин (хоккей)
#4186 Charlesgunnyhttp://filmkachat.ru
1×slots подтвердит вашу регистрацию если говорить
Перечисленные повыше основные характеристики сочетают практически любой приз и являются стандартными для бездепозитных бонусных начислений в казино. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало</a> Обыкновенные бездепозитные призы в размере от трех до 20 $ созданы для того, дабы в забавы заходили все новые и новые игроки. Здесь, скорее, будет лимитирование на максимальный выигрыш. Важно, чтобы перед минимальным вкладом был отключен бонус за первое пополнение счета, и геймер не попадет на повторный вейджер. <a href=https://forums.delphiforums.com/biznewsopps/messages/4670/1>https://forums.delphiforums.com/biznewsopps/messages/4670/1</a> В онлайне очень много скриптовых вебсайтов, которые принадлежат мошенникам. Их основная цель – заинтересовать гэмблеров, пообещав не щедрые подарки, хотя и крупные выигрыши. Так собственно кое-какие веб-сайты предлагают получить за регистрацию в $1 000. 1×slots сайт <a href=http://promarket.in.ua/index.php?subaction=userinfo&user=imperfectinform>http://promarket.in.ua/index.php?subaction=userinfo&user=imperfectinform</a> Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депо возможность выделяться до 30 дней.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
<a href=https://www.lightknotes.com/MyBB/showthread.php?tid=222118>1×slots акции</a> 1×slots официальный сайт зеркало <a href=http://fitagrunt.ru/index.php?subaction=userinfo&user=oludugy>http://fitagrunt.ru/index.php?subaction=userinfo&user=oludugy</a> казино 1× slots официальный сайт Бездепозитные призы казино это финансовая компенсация, предлагаемая юзерам на дармовой базе и возможность играть в интернет казино даром. Если сопоставлять их с поощрениями за лепта, в средства выдаются только впоследствии начального пополнения счета, то бездепозитные гонорары получаются даром. То есть, играющий получает возможность делать ставки на уже имеющие финансы, коие выдаст заведение, выполняя, при этом, обыденные деяния, чтобы их извлечь (тут речь о регистрация, удостоверении личности с внедрением номера аппарата, дизайна заявки и т.д.).Новички не любят сразу же вносить депо. Это обосновано отсутствием опыта и сомнением. К счастью, в наше время возможно получить бездепозитный приз за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В любом случае вы не рискуете своими сбережениями. Это отличная вероятность запустить понравившийся видео слот либо же испытать удачу в настольных играх.
1× slots casino официальный сайт
Онлайн гемблинг развивается с любым днем больше и больше, новые бренды создаются не по денькам а по часам. Новые интернет казино проделывают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и тем наиболее предлагают бездепозитные призы за регистрацию, что бы не пропустить эту возможность — как пользоваться свежим бездепом, рекомендуем навещать наш сайт как можно почаще, самое вкусное и свежие будет добавляться в данном же перечне.Возьми свой подарок. Чаще всего бонус активизируется сразу последствии регистрации. Но бывают истории, когда нужно забежать в индивидуальный офис либо написать в справочную службу. Фриспины начисляются по определенной ставке. После их активации игроку необходимо запустить разъем и увериться, что в нем показываются благотворительные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода в отыгрыша ориентируется оператором и редко выше 5 000 рублей. <a href=http://zhwbn.com/bbs/space-uid-162070.html>http://zhwbn.com/bbs/space-uid-162070.html</a> 1×slot официальный сайт Ещё одно распространённое акционное предложение – симпатичный подарок с сомнительными требованиями. К образцу, клуб обещает $100 в качестве бездепа, но с вейджером х80 либо х100. Отыграть подобный вейджер фактически невозможно и поэтому другого концентрироваться на более занимательных промоакциях.
1×slots регистрация на сайте
Чтобы выступать даром на настоящие деньги в казино, порой довольно просто зарегистрироваться. Иногда нужно выполнить дополнительные действия.На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не сможете активировать и получить бездепозитный бонус. Срок активации и время на отыгрыш. Зачисление средств либо фриспинов случается при активации протяжении требовательно ограниченного периода, схожие требования предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать бонус количество дней либо даже месяцов. Другие выдают солидную сумму за регистрацию, хотя время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером.Не стоит незамедлительно же отказываться от приветственных презентов в похожих казино. Администрация готова начислить средства либо фриспины, хотя предварительно работники должны увериться, что вы не аферист. Дело в, собственно развелось слишком много охотников за призами. Они выучились врать систему и наваривать солидные суммы денег. 1×slos регистрация в 1×slots casino <a href=http://forum.omnicomm.pro/index.php/topic,9923.msg391449.html#msg391449>http://forum.omnicomm.pro/index.php/topic,9923.msg391449.html#msg391449</a>
1×slots официальный сайт зеркало
Бездепы могут входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами.Теоретически, к безвозмездным бонусам можно отнести так называемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, потому собственно они деют только возможность делать ставки. Все любят получать презенты. Согласитесь, практически любой играющий человек будет сильно счастлив, случае получит бесплатный презент для забавы в онлайн казино просто за регистрацию или же бонус за внесенный депозит, так нарекаемые приветственные призы для свежих игроков. Соответственно такие онлайн клубы станут более востребованы и предпочтительны у игроков при выборе казино для забавы. Топ казино день обновляется и добавляются свежие и занимательные игровые клубы с симпатичной бонусной политикой и всеми возможными привилегиями, к коим относятся эти бонусы как фриспины за регистрацию, валютные бездепозитные бонусы, а также великодушные бонусы за внесенный депо.Однако далеко не все ресурсы предлагают своим клиентам бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено поощрение на 1-ый депозит в размере 100–200%. Это замечательная вероятность преумножить банкролл, прирастить время, проведённое за игрой и шансы сорвать большой куш. <a href=http://www.zghncy.cn/home.php?mod=space&uid=704049>http://www.zghncy.cn/home.php?mod=space&uid=704049</a> Все обожают получать презенты. Согласитесь, практически каждый играющий человек несомненно безгранично счастлив, случае получит даровой презент для забавы в интернет казино просто за регистрацию или же приз за внесенный депозит, так называемые приветственные призы для новых игроков. Соответственно эти онлайн клубы будут больше известны и преимущественны у игроков при выборе казино для игры. Топ казино непрерывно обновляется и добавляются свежие и интересные игровые клубы с привлекательной бонусной политикой и всеми возможными преимуществами, льготами, к которым относятся эти бонусы как фриспины за регистрацию, валютные бездепозитные бонусы, а великодушные призы за внесенный депо. 1хслотс мобильная версия зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.home-visa.ru/viewtopic.php?f=69&t=807392&p=3079252#p3079252>скачать 1×slots официальный сайт</a>
<a href=http://check2go.net/my-account/>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Призовые начисления без депозита все предоставляться для участия в турнирах интернет казино. Потратить перечисленные деньги возможно исключительно в рамках данной промоакции. Условия их проведения себе лимитирования на список игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, другого изучить его правила.
#4187 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Дарья Мороз 1×bet зеркало <a href=https://specreporter.com/>скачать 1×bet</a> кент казино casino ru <a href=https://res-publika.com>пари букмекерская контора</a> казино можно фильмы казино рояль букмекерская контора порно с Захарова Мария Владимировна online casino официальный скачать букмекерскую контору букмекерская контора вход
DiskiPlus porno Мира Андреева (теннис) DiskiPlus porno Елизавета Туктамышева <a href=https://www.diskiplus.ru/>DiskiPlus porno Марина Александрова</a> DiskiPlus Ирина Горбачева DiskiPlus 1×bet бесплатно <a href=https://diskiplus.ru/>DiskiPlus porno Светлана Ходченкова</a> DiskiPlus букмекерская контора фонбет официальный сайт DiskiPlus букмекерская контора без DiskiPlus 1×bet зеркало на сегодня DiskiPlus casino ап DiskiPlus casino рабочее DiskiPlus играющие казино онлайн DiskiPlus Кузнецова Анна Юрьевна порно
#4188 TylerZerhttps://mndcdn.com/
ทดสอบ เกมสล็อต PG คืออะไร? ด้วยเหตุใด จึงกลายเป็น เกมที่นิยม?
เกมสล็อตดิจิทัล คือเกมที่ เป็นที่รู้จัก อย่างแพร่หลาย ในทุกช่วงเวลา และ ถือเป็น หนึ่งในบรรดา เกมที่ผู้เล่น รู้จัก และ สนุกสนาน อย่างมาก ในแวดวง เกมออนไลต์ อย่างไรก็ตาม ผู้ที่ยังคงเป็น ผู้ที่ยังไม่ชำนาญ หรือแม้แต่ มีประสบการณ์น้อย การเล่นสล็อต เพียงเล็กน้อย วันนี้ จะพาคุณ มาทำความรู้จัก เล่นฟรี เครื่องสล็อต PG ที่ เกมสล็อตโดยตรง ที่คนนิยม อย่างแพร่หลาย ผ่าน คุณจะสามารถที่จะ ทำความเข้าใจ พร้อมทั้ง เริ่มการเล่น ได้โดยเร็ว และยัง เพลิดเพลิน ร่วมกับ ประสบการณ์ใหม่ การเล่น ที่น่าตื่นเต้น และยัง น่าสนใจ
เล่นฟรี สล็อตแมชชีน PG หมายถึงอะไร? ทดสอบ เครื่องสล็อต PG ถือเป็นเกม เกมออนไลน์สล็อต ที่ถูกพัฒนา โดย บริษัทผู้พัฒนา PG Soft ซึ่งถือเป็น หนึ่งในประเภท ผู้พัฒนา เกมออนไลน์สล็อต ยอดนิยม ในระดับโลก เกมดังกล่าว ได้ไอเดีย มาจาก เครื่องเล่นเกมสล็อต แบบเดิม แต่ได้ เพิ่มเติม ความทันสมัยและความสนุก และ ความสนุก เข้าไป โดยที่ เกม มี 5 แถว รวมทั้ง 15 แบบ รูปแบบการได้รางวัล ซึ่งทำให้ ผู้เล่น มีโอกาสได้ ลุ้นรับรางวัล ได้หลายรูปแบบ
สัญลักษณ์ ในเกมสล็อต เครื่องสล็อต PG นั้น มีหลายรูปแบบ ตัวอย่างเช่น ผลเชอร์รี่, เลข 7, ไอคอนเพชร, และ ไอคอน อื่นๆอีก ที่เกี่ยวข้องกับ กับแนวคิด เกมสล็อต ซึ่งแต่ละ แต่ละเกมดังกล่าว มีอยู่ แนวคิด รวมทั้ง รูปแบบการเล่นสล็อต ที่ต่างออกไป ไป เช่นได้แก่ ธีมป่า, ธีมเทพเจ้าโบราณ, ธีมการกิน, หรือ ธีมการเดินทาง เป็นต้น
ทำไม ทดสอบ เกมสล็อต PG จึงกลายเป็น เกมที่คนชอบมาก? ความง่ายดาย ในการเล่นเกมออนไลน์ เล่นฟรี เครื่องสล็อต PG ถือเป็นเกม ที่เรียนรู้ได้ง่าย ไม่ซับซ้อน เหมาะสำหรับ ผู้ที่ยังไม่ชำนาญ และยัง ผู้เล่นเก่า ผู้เล่นออนไลน์ เพียง เลือกจำนวนเงินที่ จำนวนเงินที่ต้องการ กดเริ่ม และ รอลุ้น ผลลัพธ์ ซึ่งทำให้ ระบบการเล่นสล็อต ที่ตรงไปตรงมา ทำให้ผู้เล่น ผู้เล่น สามารถที่จะได้ เพลิดเพลิน ได้โดยไม่ต้อง ไม่ต้องเครียด ในเรื่อง กฎระเบียบ ที่ยุ่งยาก
รูปแบบ การแจกเงินรางวัล ที่หลายรูปแบบ เกมสล็อตออนไลน์ PG มีอยู่ รูปแบบการได้รางวัล ให้ได้รางวัล มากถึงสูงสุด 15 รูปแบบการชนะ ซึ่งทำให้ มากกว่า เกมสล็อตคลาสสิก ทั่วไปๆ ทำให้คุณ ผู้เล่นออนไลน์ มีโอกาส ชนะรางวัล ได้หลายครั้ง นอกจากนี้ ยังมีให้เลือก ฟีเจอร์เสริม เช่นเช่น การหมุนฟรี, ตัวคูณ, และยัง รางวัลโบนัส ที่เสริม ความน่าสนใจ ให้กับ การเล่นเกม
#4189 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало
Иногда операторы требуют внесение малого депо перед выводом для верификации платежного прибора. В неких казино этот депозит кроме предстоит отыграть. <a href=http://filmkachat.ru/>зеркала 1×slots</a> Можно ли зарабатывать на бездепозитных бонусах? Это не работа, тут как повезет, в в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, время возможно назвать везением, и дополнительной добавкой к вашему бюджету.Для доказательства электронной почты, просто перейдите по интенсивной ссылке в послании, приобретенном от игрового заведения. <a href=https://band.us/band/96885593/post/1>https://band.us/band/96885593/post/1</a> 1×slot официальный сайт <a href=http://elite-models.cc/member.php?action=profile&uid=21301>http://elite-models.cc/member.php?action=profile&uid=21301</a>
1 хслот регистрация в 1×slots casino
1×slots casino зеркало Выбирая даровой приз, внимательно изучайте правила. Убедитесь, что вам можно себя участие в акции. Уточните, в каких играх можно исполнять обстоятельства вейджера. При необходимости задавайте вопросы представителям саппорта. <a href=http://suvenir.k-78.ru/communication/forum/user/45406/>http://suvenir.k-78.ru/communication/forum/user/45406/</a> Так же стоит выделить то, что в любом онлайн казино установлен собственный максимальный кешаут на бездепозитный приз. Как правило кешаут — это максимальная сумма денег, которая доступная для вывода с бездепозитного бонуса. 1×slots регистрация 1×slots review live Раздача бонусов может быть посвящена различным датам: календарные праздники, деньки рождения игроков, юбилей открытия казино и т. Д. Подарок выдается повторяющий денег, фриспинов либо баллов для скопления и обмена на предложения оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода этой суммы придется выполнить ряд требований.Бонус в казино без депозита содержит различные вариации: такое быть приветственный приз, акции в честь каких-либо дней либо весомых дат, приз за вербование новых игроков, лояльность и получение VIP-статуса.
1× slots casino официальный сайт
Максимальный объем ставки, кот-ый невозможно превосходить пока бонус не будет полностью отыгран. В случае нарушения этого верховодила, приз и выигрыш с него станут аннулированы.Возможность протестировать новые забавы, не рискуя собственными средствами и разработать личную стратегию игры. <a href=https://reveal.ru/gate.html?name=Journal&file=display&jid=54338>https://reveal.ru/gate.html?name=Journal&file=display&jid=54338</a> 1×slots бонус за регистрацию Несмотря на то, собственно данный вариант стимуляции со стороны азартных платформ довольно моден в сфере подобных игр, далековато многим почитателям казино знаменито, собственно себе бездепозитные призы казино и как непосредственно их вероятно эксплуатировать.4. Заберите презент. Чаще всего приз активируется сразу последствии регистрации. Но случаются ситуации, когда нужно забежать в индивидуальный офис или написать в службу поддержки.
1×slots официальный сайт мобильная версия скачать
У нас на сайте Вы найдете перечень бонусов без депо в проверенных казино и подробную информацию то как их получить и использовать. <a href=http://permitbeijing.com/forum/showthread.php?tid=2248179>1×slots зеркало видели такую регистрацию на</a> Многие игроки, оценив возможностей казино, остаются играть в нем и далее ? на это и направлено каждое рекламную. Постоянные клиенты заносят депозиты и делают ставки, обеспечивая длительную прибыль оператора. То есть, казино выдают бездепы свежим юзерам для формирования приклнной аудитории. Классическая разновидность бонуса за творение аккаунта. Его превосходство содержится том,, собственно заказчик имеет самостоятельно подбирать аппараты и создавать ставки в них. Иногда список игровых автоматов ограничен оператором, хотя все точно это никакого, чем единственный дешевый разъем, как в случае с использованием фриспинов.Такие поощрения дозволяют даром протестировать свежее казино, разобраться с игровым процессом интернет слотов, заработать и вывести маленькую сумму денег. 1хслотс зеркало на сегодня <a href=https://foro.muelendhir.com/member.php?action=profile&uid=9369>https://foro.muelendhir.com/member.php?action=profile&uid=9369</a>
1×slots зеркало регистрация то дальше необходимо пройти
<a href=https://qiqer.ru/qforum/profile.php?id=361940>https://qiqer.ru/qforum/profile.php?id=361940</a> 1×slots casino зеркало рабочее Не хотите поиграть в азартные игры, не рискуя своими деньгами, но получая в все выплаты? Подобную возможность предоставляют почти наилучшие порталы с азартными увеселениями. В их количестве количество честных и надежных интернет-казино на российском языке. Они завлекают свежих юзеров разными поощрительными событиями, включая бездепозитные, либо благотворительные бонусы.Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.
<b>Смотреть еще похожие новости:</b>
<a href=https://timepost.info/showthread.php?tid=103918>1×slots официальный регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша призов. Заведения постоянно устанавливают наивысшую ставку, допустимую по условиям вейждера. Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских руб. В условиях акции указано, что вейджер бездепозитного бонуса х20. Поэтому, дабы отыграть приз, игроку несомненно необходимо сделать ставок на 35*20=700 руб.
#4190 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
сайт казино зеркало retro casino <a href=https://slon-ru.com/>porno Анастасия Янькова, боксерка</a> casino зеркало сайта казино онлайн <a href=https://kompromat1.online/>casino онлайн</a> Львова-Белова Мария Алексеевна порно казино вход официальный сайт Елизавета Боярская букмекерские конторы бет casino онлайн гта казино порно с Константин Тюкавин (футбол)
DiskiPlus самое казино DiskiPlus porno Александр Соболев (футбол) <a href=https://diskiplus.ru/>DiskiPlus сколько казино</a> DiskiPlus up casino DiskiPlus порно с Зырянова Анастасия Владимировна <a href=https://www.diskiplus.ru/>DiskiPlus порно с Евгения Медведева</a> DiskiPlus порно с Александр Большунов (лыжные гонки) DiskiPlus Шевцова Татьяна Викторовна порно DiskiPlus вавада казино DiskiPlus порно с Артемий Панарин (хоккей) DiskiPlus пинко casino DiskiPlus 1×bet зеркало DiskiPlus порно с Аделия Петросян (фигурное катание)
#4191 Charlesgunnyhttp://filmkachat.ru
1×slots казино зеркало
Бывают ли бездепозитные призы без вейджера? Бывают, если у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино. <a href=http://filmkachat.ru/>1хслотс зеркало на сегодня</a> Только выполнив все обстоятельства отыгрыша и дождавшись завершения проверки аккаунта, Вы можете оформить заявку на вывод средств и получить средства средства.Чаще всего используются коды. Их нужно заносить в особые окошки регистрационной анкеты, в идет о пригласительных бонусах, или в особом разделе собственного офиса игрока. <a href=https://scrapbox.io/shopavto/%D0%A2%D0%B5%D1%80%D0%BC%D1%96%D0%BD%D0%BE%D0%B2%D0%B8%D0%B9_%D0%B2%D0%B8%D0%BA%D1%83%D0%BF_%D0%B0%D0%B2%D1%82%D0%BE:_%D1%8F%D0%BA_%D0%B2%D0%B8%D0%B3%D1%96%D0%B4%D0%BD%D0%BE_%D1%82%D0%B0_%D1%88%D0%B2%D0%B8%D0%B4%D0%BA%D0%BE_%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D1%82%D0%B8_%D1%82%D1%80%D0%B0%D0%BD%D1%81%D0%BF%D0%BE%D1%80%D1%82%D0%BD%D0%B8%D0%B9_%D0%B7%D0%B0%D1%81%D1%96%D0%B1>https://scrapbox.io/shopavto/%D0%A2%D0%B5%D1%80%D0%BC%D1%96%D0%BD%D0%BE%D0%B2%D0%B8%D0%B9_%D0%B2%D0%B8%D0%BA%D1%83%D0%BF_%D0%B0%D0%B2%D1%82%D0%BE:_%D1%8F%D0%BA_%D0%B2%D0%B8%D0%B3%D1%96%D0%B4%D0%BD%D0%BE_%D1%82%D0%B0_%D1%88%D0%B2%D0%B8%D0%B4%D0%BA%D0%BE_%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D1%82%D0%B8_%D1%82%D1%80%D0%B0%D0%BD%D1%81%D0%BF%D0%BE%D1%80%D1%82%D0%BD%D0%B8%D0%B9_%D0%B7%D0%B0%D1%81%D1%96%D0%B1</a> Выше мы предоставили глубокий набор самых свежих и актуальных бездепозитных бонусов в интернет казино без пополнения на 2022 год, где вам воспользоваться хоть ценным бездепозитным призом.При правильном раскладе бездепы — это прекрасный метод играть на средства без растраты собственных средств. Есть несколько советов, следуя коим можно извлечь максимум пользы из сходственных промоакций казино. Играть по только на лицензированных площадках. Скриптовые сайты не только дурачат с бонусными услугами, хотя и употребляют пиратский софт с модифицированным ГСЧ. Выиграть на этих автоматах нереально. 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=https://mobilka.mobi/user/Chrisfaith/>https://mobilka.mobi/user/Chrisfaith/</a>
1×slots быструю регистрацию а также мгновенное
Мы подготовили список, где есть практически животрепещущие и новые бездепозитные призы казино, которые вы можете получить безвозмездно. Для наших юзеров есть особые предложения эксклюзивные призы, которые вы у не найдете, их мы обозначили специальной красноватой плашкой «Exclusive».Бездепозитный бонус – это финансовое вознаграждение, которое выдается участнику забавы в казино, для его вербования и появления заинтересованности. Любой посетитель, кот-ый соответствует условиям выдачи похожего бездепозитного бонуса, может претендовать на получение вышеуказанного приза. Такое одобрение считается наиболее эффективным методом, дающим возможность стартовать в игре, не вкладывая собственных материальных средств. 1×slots официальный сайт, скачать Обычно бездепозитные промоакции от казино, прибывают на эл. Почту в деньки рождения или праздничные. В некоторых онлайн казино можно обратиться в чат и как неизменному игроку, вероятно для предложат бездепозитное предложение.Существует ли стратегии для отыгрыша бездепозитных призов? К огорчению нет, на выигрыши либо проигрыши с призов, казино либо игрок повлиять имеет, отдача игр случается от создателей игр. <a href=https://historydb.date/wiki/1_Win_Login_Official>https://historydb.date/wiki/1_Win_Login_Official</a> 1×slots зеркало на сегодня Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных обстановок с казино, когда в отыгрыша бездепа вас не дадут исключить крупную сумму выигрыша.
казино 1× slots официальный сайт
Кешбэк-бонус дает собой возврат фиксированного процента от ставки в случае проигрыша либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%.Диапазон ставок, коие вправе сделать игрок, кроме лимитирован. Обычно назначать можно небольшую сумму — в 10–30 руб. За одно вращение. <a href=https://buketik39.ru/user/Charleselata/>https://buketik39.ru/user/Charleselata/</a> Вы наверняка, как и все предпочитаете получать презенты и бездепозитные бонусы казино. Игорные жилища брали в повадку одаривать гэмблеров приятными бонусами. Стать владельцем приветственного подарка возможно за творение профиля либо пополнение счёта. Второй вариант больше интересный, так клубы готовы удвоить депозит! Но в вы новичок и только знакомитесь с миром пыла, какого-либо воспользуйтесь бонусом за регистрацию. 1×slots зеркало подтвердит вашу регистрацию если говорить Зарегистрироваться в казино по специальной ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефонного и электрическую почту). Для подтверждения номера телефона необходимо в собственном профиле указать собственный номер и надавить кнопку „Подтвердить номер аппарата“, дальше Вы получите sms-сообщение с кодом, кот-ый необходимо установить в подходящее поле. Для подтверждения электронной почты, перейти по активной ссылке в послании от казино.
1×slots сайт
Акции распространяются как на все игры казино, например и на узкий список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino прочие. Промо возможность охватывать разработки одного производителя. Бездеп не пересекается с иными акциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, сделанные бонусными деньгами. Для идентификации платежных реквизитов игрока может понадобиться пополнение счета на наименьшую сумму. <a href=http://tarratorriya.tforums.org/memberlist.php?mode=viewprofile&u=785>1× слот зеркало</a> Почти все игровые клубы настоятельно подтверждение контактных данных игрока для получения бездепозитного приза. 1×slots скачать на айфон <a href=https://wikiformonday.com/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%AF%D0%BD%D0%B4%D0%B5%D0%BA%D1%81>https://wikiformonday.com/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%AF%D0%BD%D0%B4%D0%B5%D0%BA%D1%81</a> Вейджер в переводе с британского значит «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша приобретенного бонуса, в нашем случае бездепозитного. Число ставок роли не играет — важно только набрать сумму, пропорциональную сумме одобрения.Нельзя рассматривать игру на деньги, как вариант заработка. Азартные игры воспрещены для лиц младше 18 лет. Topcasinobonuses.mobi не зачинщиком азартных игр. Сайт носит информационный характер.
1×slots официальный сайт скачать
Главное преимущество спинов – возможность выучить различные слоты. Также получится насладиться бонусными раундами, испытывать фортуну в риск-туре и преумножить выигрыш за счёт особых символов. Однако не только игровой процесс заслуживает внимание, как лучше сосредоточиться на реальном выигрыше.Предложения с бездепозитными бонусами за регистрацию дозволяют свежим заведениям заинтересовать аудиторию на собственный вебсайт. А игроки к получают вероятность выступать на реальные деньги без депозита в казино и заработать малый стартовый капитал, который разрешено вывести на карту банка или электрический кошелек. За вербование приятеля ? масштабах партнерской программы заказчик получает вознаграждение за привлечение новых пользователей.Бездепозитный бонус казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в данном и содержится основное отличие. <a href=http://cars.autokaif.ru/index.php?subaction=userinfo&user=aquatichail6>http://cars.autokaif.ru/index.php?subaction=userinfo&user=aquatichail6</a> Для получения бонуса нужно пригласить в игру свежего посетителя. Казино начисляет пригласившему фиксированный процент от взносов приглашённого вид приза: чаще всего его объем не превышает 10%. Срок действия бонуса правило не выше месяца: пригласивший получает приз в зависимости от проигранных ставок приглашённого в 1-ый месяц забавы. зеркала 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=http://vn-info.net/user/Josephkam/>1×slots зеркало регистрация в 1×slots casino</a>
<a href=http://naturetour.ru/communication/forum/messages/forum3/message23867/5563–1×slots-bezdepozitnyy-bonus-za-registratsiyu?sessid=f4a7b4ca1661c2f057e94db12ad8d786&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1×slots бездепозитный бонус за регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Нельзя рассматривать забаву на средства, как вариант заработка. Азартные игры запрещены для лиц младше 18 лет. Topcasinobonuses.mobi не является организатором азартных игр. Сайт носит информационный нрав. При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое возможно посвятить игре в казино.
#4192 Frankcreskhttps://annuaire-des-casinos.com
madnix casino en ligne <a href=https://annuaire-des-casinos.com/>casino en ligne en france</a>
#4193 Jamestorhttps://bip39-phrase.blogspot.com/2025/02/bip39-world-list-2048.html
Full wordlist New full <a href=https://bip39-phrase.blogspot.com/2025/02/bip39-world-list-2048.html>BIP39</a> 2048 words used to create and restore crypto wallets. Multi-language support, high security and ease of use to protect your funds. 2048 mnemonic words for seed generation.
#4194 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
гта казино сайт винлайн букмекерская контора <a href=https://m.repost.news/>casino сегодня</a> сайт 1×bet слоты порно с Федор Чалов (футбол) <a href=https://slon-ru.com/>porno Виктория Баркова, легкоатлетка</a> играющие казино онлайн порно с Антропова Валентина Викторовна порно с Виктория Синицина, фигуристка скачать сайт букмекерской конторы реального казино казино проиграл 1win букмекерская контора
DiskiPlus 1×bet xbet DiskiPlus 1×bet зеркало <a href=https://www.diskiplus.ru>DiskiPlus casino зеркало сайта</a> DiskiPlus Петрова Ольга Викторовна порно DiskiPlus порно с Арина и Дина Аверины, гимнастки <a href=https://www.diskiplus.ru>DiskiPlus casino бездепозитный</a> DiskiPlus сайте букмекерской конторы фонбет DiskiPlus 1×bet зеркало рабочее DiskiPlus porno Дарья Клишина DiskiPlus винлайн букмекерская контора DiskiPlus букмекерскую контору пин DiskiPlus porno Дарья Клишина DiskiPlus сайт казино зеркало
#4195 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало рабочее
Бездепозитные бонусы истинными средствами, коие можно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадали.Главное превосходство спинов – возможность изучить разные слоты. Также удастся насладиться бонусными раундами, испытывать фортуну в риск-туре и преумножить выигрыш за счёт особых символов. Однако не только игровой процесс заслуживает внимание, как какого-либо сосредоточиться на реальном выигрыше. <a href=http://filmkachat.ru/>зеркло казино 1×slots</a> <a href=https://jumpshare.com/v/g7cIh0cVypvEGdf6HhDQ>https://jumpshare.com/v/g7cIh0cVypvEGdf6HhDQ</a> Как только вы отыграли вейджер и свои с бонусного баланса перешли вам на настоящий счет, Вы храбро сможете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (устроить наименьший депозит к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депо). 1×slots регистрацию более популярный вариант это <a href=http://masyasha.ru/index.php?option=com_k2&view=itemlist&task=user&id=83754>http://masyasha.ru/index.php?option=com_k2&view=itemlist&task=user&id=83754</a> Бонус без депо за регистрацию в казино (бездепозитный бонус) – это денежный подарок от клуба, который начисляется на акк игрока после регистрации в казино. Кроме творения учетной записи, для получения бездепа, очень нередко потребуется ещё и доказать контактные данные игрока и/или активировать специальный промо-код.Следует подчеркнуть, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом.
1×slots регистрация на сайте 1×slots ru com
Вейджер (либо вагер) ? это минимальная сумма ставок, которую нужно сделать для вывода валютного бонуса. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение.Но не думать, что снабжая пользователей такими призами, казино занимается спонсированием. Ведь размеры вознаграждений, главном, не немалые (средним размером от 5 до 20 $). И на эти средства налагаются определенные обстоятельства и ограничения, неотклонимые к исполненью игрока, если в последствии он вожделеет получить все свои выигранные финансы. <a href=https://www.katzenforum.at/forum/threads/1-x-slots-zerkalo.39778/>1 х слотс зеркало</a> 1×slots сайт <a href=https://obmenka.forum2×2.ru/t6996-topic#39087>https://obmenka.forum2×2.ru/t6996-topic#39087</a> 1×slots зеркало быструю регистрацию а также мгновенное Размер ставки для игры по бездепозитному призу (окончательно же, когда, когда он представлен вид бонусных денежных средств) часто ниже, чем при этой на депозит. Ограничение будет действовать до момента отыгрыша бонуса.
1х слотс зеркало регистрация в 1×slots casino
Чтоб получить крупный выигрыш, подбирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша. <a href=https://mail.1directory.org/details.php?id=292516>https://mail.1directory.org/details.php?id=292516</a> Обыкновенные бездепозитные бонусы в размере от 3-х до 20 $ созданы чтобы, чтобы, дабы в забавы заходили все новые и новые игроки. Здесь, скорее, несомненно ограничение на наибольший выигрыш. Важно, дабы перед наименьшим вкладом был отключен бонус за 1-ое пополнение счета, и игры не попадет на повторный вейджер. 1×slots официальный demo регистрация в 1×slots casino Благодаря программе лояльности от игорного заведения, возможно арестовать неплохой старт и без дополнительных инвестициям запустить видеослоты. Кроме того, можно рассчитывать на реальную удачу и получить, без вложения собственных денег, большой выигрыш.Но не размышлять, что снабжая юзеров такими бонусами, казино увлекается спонсированием. Ведь объемы вознаграждений, в основном, не большие (средним объемом от 5 до 20 долларов). И на эти свои налагаются конкретные обстоятельства и лимитирования, неотклонимые к выполнению игрока, случае в последствии он желает получить все свои выигранные финансы.
1×slots зеркало на сегодня
Такой казино бонус без депо за регистрацию выдается игроку на час и активно используется данное предложение с 2017 года. Это как бы некая маскировка поощрения под бездепозитный. Суть всего сего сводится к тому, собственно геймеру на час выдается, например, 1000 $, а реклама твердит то, собственно любой выигрыш возможно будет в будущем оставить при себе. Но в играющий серьезно отнесется к этому предложению, то он попросту потеряет время. Ведь игроку нужно несомненно играть не главном аккаунте, в тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (числе всей тыс. ) в верховодила вступят определенные условия, где будет сказано, что наибольшей суммой победы имеет быть только двести долларов и средства можно использовать лишь виде приза на первый лепта с вейджером 25 от суммы вознаграждения плюс сам депо. По результату выйдет, собственно игрок выигрывал себе 200% бонус с вейджером на определенную сумму. Короче говоря, это все не вашего времени. <a href=http://palais.beesims.com/phpbb/viewtopic.php?f=2&t=290686&p=361817#p361817>1× slots casino официальный сайт</a> В неких онлайн казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на сайте клуба и подтвердить средства контактные данные. Дополнительно потребуется активация промокода.Условия шансы разниться приятель от приятеля. Но такой приз возможность быть применен лишь для игрового процесса – полученные на счет деньги до как, как будут отыграны, исключить невероятно. Нельзя осматривать забаву на деньги, как вариант заработка. Азартные игры запрещены для лиц младше 18 лет. Topcasinobonuses.mobi не зачинщиком азартных игр. Сайт одевает информационный характер.Отказ в прохождении верификации. Если клиент не хочет или имеет предоставить документы, подтверждающие его лицо, профиль несомненно заблокирован вместе со всеми бонусными начислениями. x1 slots регистрация в 1×slots casino <a href=https://www.ozportal.tv/home.php?mod=space&uid=2685124&do=profile&from=space>https://www.ozportal.tv/home.php?mod=space&uid=2685124&do=profile&from=space</a>
1× slots casino зеркало
Фриспины начисляются по конкретной ставке. После их активации игроку необходимо запустить слот и увериться, собственно в нем отображаются бесплатные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода после отыгрыша ориентируется оператором и изредка выше 5 000 руб.В разделе с бонусами активировать собственный презент. Найти игры, для которых предусмотрено одобрение и применять приз по назначению. <a href=http://forum.xpscenery.net/member.php?action=profile&uid=1216>http://forum.xpscenery.net/member.php?action=profile&uid=1216</a> Похожим образом трудится 3-ий способ доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения клиента или в связи с получения им VIP-статуса. Подарок предоставляется в воззвания в поддержку и ревизии.На бонусные начисления шансы быть установлены дополнительные лимитирования, которые Вы не сведению при отыгрыше. Пока приз полностью не отыгран — средства из казино не выводятся. 1×slots сайт зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://griffhunter.com/boards/viewtopic.php?p=338121#p338121>1×slots казино зеркало</a>
<a href=https://swordmaster.org/user/JamesVok/>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бoльшинcтвo азартных заведений выдвигают примерно одинаковые условия и притязания, коие необходимо выполнить, дабы получить бездепозитный приз за регистрацию. Все их возможно соединить в раз перечень: В лицензионных бездепозитных казино выступать в азартные игры вправду неопасно. Наличие лицензии одобряет что, этот прецедент, собственно клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP.
#4196 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее
Лишь пользующиеся и известные азартные заведения все разрешить себя раздавать бездепы повторяющий добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, коие возможно истратить в лучших аппаратах с высокой отдачей.Выбирая бесплатный бонус, внимательно изучайте правила. Убедитесь, собственно вам можно себя роль в акции. Уточните, в каких играх можно скорпулезно условия вейджера. При надобности задавайте вопросы представителям саппорта. <a href=http://filmkachat.ru/>1хслотс регистрация в 1×slots casino</a> Наши специалисты изучают условия промоакции, этого в ручном режиме проверку их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и характеристики. Мы не рекламируем казино, а даем игрокам информацию о лучших из их.Бездепозитные бонусы настоящими деньгами, коие возможно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадали. <a href=https://groups.google.com/u/2/g/shopavto>https://groups.google.com/u/2/g/shopavto</a> 1×slots бонус за регистрацию <a href=https://www.reikiandastrologypredictions.com/member.php?action=profile&uid=19471>https://www.reikiandastrologypredictions.com/member.php?action=profile&uid=19471</a> Бездепозитные бонусы прекрасный вариант даровой игры в игровые автоматы. Многие пользователи сети не понимают, собственно в казино можно начать играть абсолютно бесплатно, а потом вывести выигрыш на банковскую карту или электронный кошелек, иные не доверяют интернет казино, а третьи удачно играют и выигрывают – и тотчас достаточно большие суммы.
1×slot зеркало рабочее регистрации на телефон придет
Пoдтвepдить личнocть клиента. Для удачного вывода средств, необходимо подтвердить личность посетителя. Нa этaпe вepификaции пpoфиля, работники службы защищенности обязаны убедиться, собственно у игрока всего лишь один акк. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не сможет исключить собственный выигрыш, случае у него будет количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы.Проверка занимает от нескольких минут до нескольких дней, профессионалы техподдержки шансы запросить вспомогательные документы или инициировать краткое общение по Skype. <a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=38865>1×slots мобильная версия войти казино</a> 1×slots casino зеркало рабочее В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с безвозмездных вращений. Прибыль, коию Вы заработаете на этом бездепе можно назначать на вывод без какого или отыгрыша. <a href=http://bme.clanweb.eu/profile.php?lookup=6162>http://bme.clanweb.eu/profile.php?lookup=6162</a> 1×slots официальный сайт мобильная версия 4. Заберите презент. Чаще всего бонус активируется незамедлительно в регистрации. Но посещают ситуации, когда нужно забежать в индивидуальный офис или написать в службу поддержки.
1×slots рабочее зеркало на сегодня
Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. <a href=http://j90806hs.bget.ru/user/DoctorLazutasi/>http://j90806hs.bget.ru/user/DoctorLazutasi/</a> Для доказательства электронной почты, просто перейдите по интенсивной ссылке в послании, полученном от игрового заведения. 1×slots актуальное зеркало Получив собственный подарок, Вы можете бесплатно выступать на настоящие средства, а выполнив условия отыгрыша, вывести свой выигрыш.
1× slots регистрация в 1×slots casino
Итак, дабы безвозмездные бонусные кредиты трансформировались в реальные деньги, которыми возможность распоряжаться по своему усмотрению, их надо(надобно) отыграть. Вейджер следует уточнять в правилах онлайн-казино. Превышение максимальной ставки при отыгрыше. Система механически не предостерегает о превышении ставки, потому о несоблюдении управлял игрок может узнать теснее последствии подачи запроса на вывод средств.Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные способы и расценить необыкновенности, труднодоступные при игре в демо режиме. Многие новые посетители перебегают в количество неизменных, а оператор получает длительную выгода. 1×slots бонус за регистрацию <a href=https://foro.vcheats.me/Usuario-Davidpib>https://foro.vcheats.me/Usuario-Davidpib</a> Разные казино имеют собственные управляла по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высочайшие притязания. Часто онлайн-казино советуют отыграть бонусное одобрение до 100 один в игровых автоматах. Например, случае игрок получил даром 10 долларов, то нужно несомненно отыграть их, поставив 1 тысячу спинов по 1 доллару любой. Стоит обозначить(означить), собственно не все казино дают вероятность выступать на призы и не во всех увеселительных заведениях схожие верховодила для отыгрывания. Некоторые казино запрещают играть на бонусы в блекджек либо ограничивают ставки до 5 %, собственно существенно увеличивает в 10-ки раз число необходимых игр.Вейджер не более х30–35 является применимым. Опытные игроки утверждают, собственно с таким вейджером реально остаться в плюсе, в правильно подойти к выбору игрового аппарата.
1×slot зеркало рабочее этих способов предполагает регистрацию
В зависимости от интернет заведения каждый из их имеет для предложить как бездепозитные деньги, например и бездепозитные фриспины, коие после удачной регистрации рухнут вас на ваш игровой баланс. Бездепозитные бонусы за регистрацию являются одним из самых известных способов вербования свежих игроков в онлайн-казино, поэтому собственно они предоставляют игрокам вероятность опробовать казино, тем игровые автоматы, и вероятно, выиграть реальные средства.Акции, приуроченные к календарным праздничным, случаются рассчитаны как на всех пользователей, например и на категории: например, подарок на 8 марта девушкам-игрокам или мужикам на 23 февраля. <a href=http://forum.pinoo.com.tr/profile.php?id=1303447>http://forum.pinoo.com.tr/profile.php?id=1303447</a> Для верификации номера аппарата, в собственном профиле выберите опцию „Подтвердить номер телефона“ и введите в подходящее поле код, приобретенный в sms-сообщении.Также, такой нужно доказать собственный номер телефона, достичь код, полученный в смс-сообщении от клуба ввести в особое поле в собственном офисе игрока. x1 slots 1хслотс регистрация перейти на 1×slots Бездеп с фриспинами возможность обхватывать всю коллекцию игр на сайте либо разработки одного провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении промоакции. Выигрыш может быть выведен последствии как, как юзер отыграет эту необходимую. Возможность оценить глубокий возможностей слотов — главное достоинство данной разновидности. Игроку становятся доступны те опции, коие отсутствуют в демонстрационном режиме, а вероятность выиграть настоящие средства прибавляет ярких азартных чувств.
<b>Смотреть еще похожие новости:</b>
<a href=http://31057.ww.w.molifan.net/space-uid-2304539.html>1×slots официальный регистрация</a>
<a href=https://minifishtank.net/forum/showthread.php?tid=22873>1хслот официальный сайт зеркало</a>
<a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=145484>скачать 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного приза.
#4197 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало
Практически все интернет казино с бездепозитным призом за регистрацию предусматривает программу лояльности — систему одобрения постоянных клиентов, кот-ая состоит из множества уровней. При достижении игроком одного уровня на его счёт поступает приз. Чем выше степень — что, этим щедрее бонус.Воспользоваться бездепом возможно не во всех игровых автоматах: казино и тут уточняет лимитирование для клиентов. Конечно, это возможно посчитать неким неудобством для игрока, но справедливости отметить, что выбор автоматов всё точно остаётся довольно наибольшим. <a href=http://filmkachat.ru/>1 х слотс зеркало</a> Наиболее популярностью вознаграждения среди гэмблеров – бездепозитные призы казино. Это не дивно, ведь возможно получить благотворительные вращения или виртуальные кредиты, и этом не придётся пополнять счёт, рисковать личными деньгами. Удастся насладиться разнородными увеселениями даже выиграть крупную сумму, избегая серьёзного риска. <a href=https://www.swiatobrazu.pl/forumgaleria/thread/view/id/590>https://www.swiatobrazu.pl/forumgaleria/thread/view/id/590</a> Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют важную информацию о not the slightest down payment bonuses прочих предложениях. 1×slots зеркало видели такую регистрацию на <a href=https://foxsheets.statfoxsports.com/UserProfile/tabid/57/userId/191694/Default.aspx>https://foxsheets.statfoxsports.com/UserProfile/tabid/57/userId/191694/Default.aspx</a> Риск-игра по одинаковым шансам – Также казино может воспрещать исполнять условия по отыгрышу за раунда на удвоение, который предлагается в слотах, видео-покере и неких других играх.
1×slots зеркало которую указывали при регистрации кстати
1×slot рабочее зеркало <a href=http://vfb7968c.bget.ru/index.php?subaction=userinfo&user=uttermostcorps4>http://vfb7968c.bget.ru/index.php?subaction=userinfo&user=uttermostcorps4</a> Вышеописанная первопричина и является главным нюансом, следствии которого операторы отдают доля своей прибыли на различные маркетинговые затраты и маркетинговые кампании. А самым действенным тут станут выступать непосредственно бездепозитные бонусы казино 2022 с выводом за регистрацию. 1×slots зеркало которую указывали при регистрации кстати Однако в условиях исчезают «подводные камешки», которые не позволят вывести крупную сумму либо же вы не успеете отыграть вейджер. Поэтому мастера рекомендуют отобрать безвозмездные вращения за регистрацию в казино без депозита, чтобы поднабраться навыка и получить реальный шанс на победу.
1×slots официальный сайт мобильная версия
Иногда для получения бонусов необходимо связаться с адептами саппорта. Удобнее всего с ними разговаривать в онлайн-сате, но время достаточно запроса по электрической почте. Этот образ приза несомненно добавлен на Ваш акк после удачной процедуры регистрации с использованием номера телефонного. Если выбрать другой способ творенья учетной записи, бездеп не несомненно добавлен на Ваш аккаунт.Подтверждение регистрации. Казино просят привязки профиля к электрическому адресу и номеру аппарата. Для сего на e-mail отчаливает письмо ссылаясь, а на аппарат ? текстовое известье с кодом. <a href=http://lzdsxxb.com/home.php?mod=space&uid=2580946>http://lzdsxxb.com/home.php?mod=space&uid=2580946</a> Многие новенькие сомневаются, собственно поощрительный приз не нужно несомненно возвращать, том случае они выиграли у казино. Это полностью неопасно и накрепко. Выводя выигранные свои, игрок просто одергивает свое роль деле и утрачивает уникальную вероятность – даром наращивать собственное материальное положение. 1×slots зеркало регистрация в 1×slots casino
1×slots официальный сайт скачать
Превышение наибольшей ставки при отыгрыше. Система автоматически не предостерегает о превышении ставки, поэтому о нарушении верховодил игрок имеет разузнать уже последствии подачи запроса на вывод средств.Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам воспрещено начислять призы клиентам, не имеющим денежных средств на счете. Мы предлагаем разглядеть животрепещущие бонусы онлайн-казино с лицензией, которые соблюдают законодательство РБ. 1×slots зеркало регистрация то дальше необходимо пройти <a href=http://www.ures.co.kr/bbs/board.php?bo_table=free&wr_id=20831>http://www.ures.co.kr/bbs/board.php?bo_table=free&wr_id=20831</a> Доступные игры – В некоторых азартных забавах возможно понизить математическое приемущество казино до нескольких десятых процента. В их количестве многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как управляло, в этих забавах ставки идут в зачет вейджера не полностью. Например, имеет учитываться только 50%. В неких играх бездепозитные бонусы вообще невозможно отыгрывать.Бездепозитные призы казино это экономическая компенсация, предлагаемая юзерам на дармовой основе и вероятность играть в интернет казино даром. Если сопоставлять их с одобрениями за лепта, в средства выдаются лишь впоследствии начального пополнения счета, то бездепозитные вознаграждения получаются бесплатно. То есть, играющий получает вероятность делать ставки на уже имеющие финансы, которые выдаст заведение, выполняя, всем, обыденные деянья, дабы их извлечь (здесь идет о регистрация, удостоверении личности с использованием номера телефона, оформления заявки и т.д. ).
1хслотс зеркало на сегодня
Составленный знатоками Casino.ru список онлайн-казино с бездепозитным призом разрешает игрокам сравнить спецпредложения разных операторов. Свежий приз начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в пользовании средствами, ну случае отыгрыша оператор может установить лимитирование на вывод средств.Oтыгpaть бонус с указанным вeйджepом, для этого необходимо сдeлaть cтaвoк нa cумму, превосходящую объем приза в несколько один. <a href=http://gripublicidad.com/index.php?option=com_kunena&view=user&userid=19455>http://gripublicidad.com/index.php?option=com_kunena&view=user&userid=19455</a> 1×slots официальный сайт мобильная версия
<b>Смотреть еще похожие новости:</b>
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=4792>казино 1×slots</a>
<a href=http://freedom.teamforum.ru/memberlist.php?mode=viewprofile&u=6332>1×slots зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Отзывы читателей о бонусных акциях посодействуют составить впечатление, хотя не забывайте о субъективности собственных комментариев.
#4198 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino 7k сегодня пин ап casino pin <a href=https://glvk.guru/>фреш казино</a> рабочее казино смотреть фильм казино <a href=https://strelochnik.com/>up букмекерская контора</a> винлайн букмекерская контора официальный Ходнева Светлана Владимировна порно сайт pin up casino casino x Попова Анна Юрьевна порно зеркала официальных сайтов казино 1×bet на андроид
DiskiPlus Шевцова Татьяна Викторовна порно DiskiPlus рокс казино <a href=https://www.diskiplus.ru/>DiskiPlus pin up casino buzz</a> DiskiPlus букмекерская контора фонбет официальный DiskiPlus 1×bet рабочее <a href=https://diskiplus.ru>DiskiPlus гама казино</a> DiskiPlus порно с Арина и Дина Аверины, гимнастки DiskiPlus винлайн букмекерская контора официальный DiskiPlus 1×bet слоты официальный сайт DiskiPlus 1×bet casino DiskiPlus vodka casino DiskiPlus porno Александр Соболев (футбол) DiskiPlus порно с Петр Ян (ММА)
#4199 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
bet casino мобильные букмекерские конторы <a href=https://rumafia.news/>porno Александр Соболев (футбол)</a> pin casino казино большая <a href=https://glvk.guru/>up casino скачать</a> казино 5 kent casino 1×bet зеркало рабочее на сегодня 7k casino сайт букмекерская контора мостбет cat casino casino рабочее
DiskiPlus букмекерская контора мостбет DiskiPlus порно с Петр Ян (ММА) <a href=https://diskiplus.ru/>DiskiPlus Елена Лядова</a> DiskiPlus r7 casino DiskiPlus porno Марина Александрова <a href=https://diskiplus.ru/>DiskiPlus букмекерская контора вход</a> DiskiPlus casino x DiskiPlus демо казино DiskiPlus Семёнова Татьяна Владимировна порно DiskiPlus 1×bet телефон DiskiPlus порно с Юлия Ефимова, пловчиха DiskiPlus casino рабочее DiskiPlus порно с Георгий Джикия (футбол)
#4200 Charlesgunnyhttp://filmkachat.ru
скачать 1×slots на андроид мобильная версия
Некоторые казино имеют предлагать посетителям бездепы за свидетельство номера или почты или репост на страницу в социальных сетях.Активация происходит с помощью промокодов, коие вводятся в личном офисе в регистрации. Среди спецпредложений в перечне Casino.ru содержатся неповторимые промокоды, которые доступны только посетителям портала. Другие методы начисления средств ? автоматическая активация незамедлительно в творенья аккаунта и получение подарка по запросу в службу технической поддержки. <a href=http://filmkachat.ru/>1×slots casino online регистрация</a> Онлайн-казино кропотливо продумывают бонусные условия, которые нужно выучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и ограничения.Не стоит путать игру в демо и внедрение призов. В демонстрационном режиме игрок возможность оценить механику слота, сюжет и оформление. Но игра проводится на относительные кредиты, поэтому отсутствует главное ? чувство пыла. Активируя промокод либо фриспины, клиент раньше не расходует средства деньги на игровые автоматы, хотя возможность сорвать настоящий куш! <a href=https://diigo.com/0y2rbf>https://diigo.com/0y2rbf</a> Ниже указан актуальный перечень законных казино в Беларуси с призами на 1-ый депо. Вы сможете попасть на официальный вебсайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз.При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое возможно посвятить игре в казино. 1×slots зеркало на сегодня <a href=https://www.gamers-forum.com/member.php?104598-JeffreyCinny>https://www.gamers-forum.com/member.php?104598-JeffreyCinny</a> Онлайн-казино с бездепозитными бонусами ставят клиентам обстоятельства для использования бездепами, поэтому перед участием в акции другого, как тщательно ознакомиться со всеми правилами и нюансами промоакции. Условия имеют прикасаться получения бонуса, его использования и последующего вывода валютных средств когда выигрыша.
1×slots официальный demo регистрация в 1×slots casino
<a href=https://forum.ltp-team.com/topic/83194–1hlot-registraciya-v-1×slots-casino/>1хлот регистрация в 1×slots casino</a> 1×slot рабочее зеркало <a href=https://uniteckorea.net/bbs/board.php?bo_table=free&wr_id=287618>https://uniteckorea.net/bbs/board.php?bo_table=free&wr_id=287618</a> 1×slots зеркало проходить регистрацию это отличный вариант
1×slots рабочее зеркало
При использовании бездепозитным призом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют несколько обликов лимитов: Бесплатный бонус – кредиты, коие онлайн-казино начислит клиенту, не заставляя его пополнять игровой счет.Промокод – определённая композиция символов, которую нужно установить в отвечающее фон при создании учетной записи или активировать в собственном профиле игрока в разделе с бонусами. <a href=https://www.camedu.org/blog/index.php?entryid=10214>https://www.camedu.org/blog/index.php?entryid=10214</a> 1×slots официальный сайт зеркало Акции, приуроченные к календарным дням, случаются рассчитаны как на всех пользователей, так и на категории: примеру, презент на 8 марта девушкам-игрокам или мужикам на 23 февраля.Иногда в качестве бездепа, казино дарует наименьший бонус (до 50 руб. ), ради которого не заморачиваться.
1×slots официальный сайт скачать на айфон
Для ревизии применяются сканы паспортов, водительских водительских, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если юзер обнаружен в попытке ввести вспомогательный аккаунт, все его учетные записи подвергаются блокировке, а их владелец попадает в темный перечень. При этой на лицензионной площадке надо опасаться свидетельствовать достоверную персональную информацию (шифрование исключает утечку индивидуальных данных). <a href=https://orbitsound.com/forum/thread-17-post-79771.html#pid79771>1×slots официальный сайт зеркало</a> Многие казино деют в маркетинговых целях бесплатные бонусы самая для наших читателей. Чтобы их получить, нужно перейти на игровой сайт по партнерской ссылке с нашего портала. 1хслотс казино зеркало <a href=https://spencerenwf07408.iyublog.com/29770643/deep-nude-understanding-the-implications-of-ai-generated-imagery>https://spencerenwf07408.iyublog.com/29770643/deep-nude-understanding-the-implications-of-ai-generated-imagery</a>
1×slots мобильная версия войти казино
Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают приз по странам. Вплоть до как, собственно клуб возможность на игроков из Вашей государства, а бездеп мешает.Казино выводит деньги лишь на ту платежную систему, с котрой был изготовлен депо. То есть, для вывода бездепозитного бонуса, Вам сначала нужно пополнить счет. В неких клубах узкий перечень способов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с данных платежных способов, которые доступны для вывода. <a href=http://www.pigcraft.ugu.pl/member.php?action=profile&uid=240865>http://www.pigcraft.ugu.pl/member.php?action=profile&uid=240865</a> 1×slots зеркало проходить регистрацию это отличный вариант
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.survival-readiness.com/viewtopic.php?t=251163>1×слот регистрация в 1×slots casino</a>
<a href=https://redfist.de/RF-Online-Testforum/viewtopic.php?f=105&t=80936>онлайн казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные призы казино это экономическая компенсация, предлагаемая юзерам на дармовой основе и возможность выступать в онлайн казино безвозмездно. Если сравнивать их с поощрениями за лепта, каких средства выдаются только впоследствии начального пополнения счета, то бездепозитные гонорары получаются безвозмездно. То есть, играющий получает возможность делать ставки на теснее быть финансы, которые выдаст заведение, исполняя, этом, обычные деяния, чтобы их извлечь (тут идет о регистрация, удостоверении личности с внедрением номера телефона, оформления заявки и т.д.).
#4201 Charlesgunnyhttp://filmkachat.ru
1хслотс 1хслотс регистрация перейти на 1×slots
Бездепы могут входить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами.Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=http://filmkachat.ru/>1×slots бонус за регистрацию</a> <a href=https://www.zybuluo.com/comcgifurniture/note/2570100>https://www.zybuluo.com/comcgifurniture/note/2570100</a> Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша призов. Заведения всегда устанавливают наивысшую ставку, допустимую по условиям вейждера.Получить приветственный бонус могут лишь новые клиенты онлайн-казино. Способы описаны в условиях промоакции любого легального казино, почаще всего это: x1 slots 1хслотс регистрация перейти на 1×slots <a href=http://fb7707ng.bget.ru/user/Josephslulk/>http://fb7707ng.bget.ru/user/Josephslulk/</a> Вы не в коем случае ни же рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный бонус, по мимо практической забавы на бездепозитные бонусы, у Вас есть шанс изучить игровые автоматы, выучится регулировать изменять ставки и линии, исследовать бонусные забавы и их выигрышные композиции, ну в конце концов просто зарядится кучей эмоций! Ведь вы будите играть на бонусные свои, которые возможно отыграть и вывести, не просто на демо счет, тем наиболее адреналин в крови еще больше повысится а пульс забьется с частым ритмом!Во всех законных онлайн-казино Беларуси нужно свидетельство паспортных данных для игры — это заявка правительства государства.
1×slots официальный сайт мобильная версия скачать
Если при регистрации указать промокод, возможно гарантировано получить бонус. Где брать ваучер? Посетите на блоги или форумы. Иногда администрация клуба делает рассылку ваучеров на электрическую почту. В заключительнее время игорные дома начали афишироваться в фильмах и сериалах. Присмотритесь и наверняка заметите промокод, кот-ый принесёт 500 или 1 000 бонусных руб.Начнём с как, собственно каждое промо за регистрацию подразумевает некоторые обстоятельства. Бездепозитные бонусы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность денежного оборота, необходимая для исполнения критерий. Пример, возымели благотворительные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 рублей, неудачных либо выигрышных, не. После исполненья, бонусный баланс перейдёт на настоящий и будет легкодоступным к выводу. <a href=http://nakupnidivadlo.cz/index.php/forum/3-pripominky/46553?start=18#234931>1хслотс рабочее зеркало на сегодня</a> 1× slots зеркало Выигрыши с призов без инвестициям постоянно привязаны к требованию по ставкам и все быть обналичены лишь в выполнения данных притязаний.Некоторые казино все предлагать клиентам бездепы за подтверждение номера либо почты или репост на страничку в соц сетях. <a href=http://icfoodseasoning.com/bbs/board.php?bo_table=free&wr_id=26152>http://icfoodseasoning.com/bbs/board.php?bo_table=free&wr_id=26152</a> Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 $. Если выдаются фриспины, их число изредка превышает нескольких десятков безвозмездных вращений.Существуют казино с призом за регистрацию, в которых очень востребованы фриспины в онлайн казино потом регистрации в конкретных играх. Они встречаются в чаще даровых поощрений либо традиционных бонусов в казино без инвестициям. Например, игрок регистрирует счет, на который начисляются бесплатные забавы, приз за регистрацию вид безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса игры выигрывает настоящие средства, коие в последствии возможно удачно вывести из заведения на свою платежную систему. То есть, все шансы исключить средства без рисков своими финансами. Регистрация, за которую игры получит призы, займет минут, а благодаря данному можно увеличить пять евро поощрений до тысячи и без всяких проблем исключить их. 1×slos регистрация в 1×slots casino Чтобы бездеп не был начислен на Ваш акк, Вам не нужно активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк автоматически, а Вы не планируете его использовать, обратитесь в службу поддержки с просьбой отменить бездепозитный бонус.Промообъявления от казино мешают реальной картины и ориентированы на вербование внимания пользователей. Понять, насколько высоки шансы остаться в плюсе, позволит собственный анализ критерий предложения:
1×slots коды
Так собственно можете неустрашимо регистрироваться без всяких размышлений. Фортуна сейчас наверняка на вашей стороне. Не бойтесь, как последствие какого или убытка Вам абсолютно не грозит. С этими призами как без пополнения, Вы остаетесь только в плюсе, но не как не в минусе.Мы собрали и выпустили перечень превосходнейших бездепозитных казино с бонусами за регистрацию, которые гарантируют великодушные выигрыши и мгновенные выплаты. Реже бонусы без депо начисляются неизменным игрокам. С их помощью администрация старается вычесть ценных клиентов либо вожделеет поблагодарить за преданность верных посетителей. Но намного почаще для сходственных целей используются такие промоакции:В онлайне слишком количество скриптовых вебсайтов, коие принадлежат плутам. Их главная цель – заинтересовать гэмблеров, пообещав не великодушные презенты, но и крупные выигрыши. Так что некоторые веб-сайты предлагают получить за регистрацию даже $1 000. <a href=http://labelv.net/bbs/board.php?bo_table=free&wr_id=164657>http://labelv.net/bbs/board.php?bo_table=free&wr_id=164657</a> 1×slots на любой вкус как пройти регистрацию Представьте момент, когда при ставке в 10 рублей Вы получите сходственное умножение. Миллион руб. За одно вращение, что вполне вполне. Поэтому вопрос, сколько возможно выиграть остаётся не. Предлагаем выяснить без. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный бонус и инспектируйте фортуну в деле. Разумеется, исключить средства не так просто. Однако шансы есть у всех.Стоит обозначить(означить), собственно бездепозитный бонус выдается только совершеннолетним новичкам, коие, к, все пригласить собственных приятелей и своих, также претендующих на поощрительную программку лояльности. Подобная разработка появилась между создающих онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры содействуют увеличению собственной популярности, методом привлечения новых игроков. Бонусы – это оригинальный шанс для вероятных участников игры, которые могут опробовать софт покер рума и увериться, станут ли они в него выступать либо нет. Новый игрок попробует средства силы с настоящими оппонентами в казино.
1×slots регистрация на сайте
Воспользоваться бездепом возможно не во всех игровых автоматах: казино вдруг уточняет лимитирование для клиентов. Конечно, это можно посчитать некоторым неудобством для игрока, но ради отметить, что выбор автоматов всё также остаётся достаточно большим.В разделе с призами активировать свой подарок. Найти игры, для коих предусмотрено поощрение и применять бонус по назначению. <a href=https://elclasificadomx.com/author/jameslog/>1×slots скачать на айфон</a> В истиннее время получить бонус за регистрацию в казино очень просто. Почти любой игорный дом с радостью даст деньги либо безвозмездные вращения. Многие игроки используют данным и не стесняются региться в любом клубе с прибыльными условиями. Кстати, это отличная вероятность придумать выигрышную тактику и сорвать куш. 1×slot зеркало рабочее регистрации на телефон придет <a href=http://www.glife2120.ru/user/WilliamAlora/>http://www.glife2120.ru/user/WilliamAlora/</a> К примеру, игроку выдаются бесплатные средства в заведении в объеме пятидесяти либо 100 долларов (вейджер на коие составляет 100х). То есть, любому новоприбывшему геймеру выскакивает притягивающая иллюстрация, кот-ая сулит выплату всех зачисленных компанией средств. Не стоит заострять на казино приз за регистрацию без депозита с сильно немалый либо очень маленькой суммой бонусов, поэтому собственно, числе тщательно выучив все обстоятельства, здесь скорее, несомненно какой-то подкол.Если вы бывалый игрок, вы обязаны аристократия, собственно приз без депозита – редчайшая находка. Тем не, мы неделю исследуем онлайн, дабы найти для вас лучшие бездепозитные предложения.
1хслот скачать
Бонус в казино без депо содержит разные варианты: такое быть приветственный бонус, акции в честь каких-то праздников или весомых дат, бонус за вербование новых игроков, преданность и получение VIP-статуса.Самые свежие бездепозитные бонусы в казино за регистрацию 2022 года с выводом прибыли находятся на данной страничке. Посетитель может оценить условия получения и начать играть на деньги без внесения депозита. При данном игроку главно понимать, на каких условиях и какими методами появится вывести приобретенный выигрыш. Для этого необходимо оценить список присоединенных платежных систем. 2. Создать свежий профиль. Для регистрации нужно наполнить небольшую анкету либо зайдите в индивидуальный кабинет посредством социальных сеток; <a href=http://otdel.com.ua/index.php?subaction=userinfo&user=incandescenthob>http://otdel.com.ua/index.php?subaction=userinfo&user=incandescenthob</a> Наличие у игрока 2 аккаунта. Запрещено создавать количество профилей для многократного получения бездепов. 1×slots регистрация на 1хслотс Зарегистрироваться в казино по особой ссылке или с бонусным кодом. Подтвердить контактные данные (номер аппарата и электронную почту). Для подтверждения номера телефона необходимо в личном профиле указать свой номер и надавить кнопку „Подтвердить номер телефонного“, далее Вы получите sms-сообщение с кодом, который нужно ввести в соответствующее фон. Для подтверждения электронной почты, перейти по активной ссылке в письме от казино.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.vn.ua/showthread.php?p=3271582#post3271582>1хслот зеркало сайта</a>
<a href=http://miupsik.ru/forums/showthread.php?tid=272732>1×slots зеркало сайта</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бонусные деньги – небольшая сумма денег для старта в новом казино. На бонусные деньги, обыкновенно разрешается выступать во все игры, не слотов с прогрессивным джекпотом и игр из раздела exist casino. В интернете очень большое скриптовых вебсайтов, которые принадлежат мошенникам. Их главная задача – заинтересовать гэмблеров, пообещав не великодушные презенты, хотя и крупные выигрыши. Так собственно кое-какие сайты предлагают получить за регистрацию даже $1 000.
#4202 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Алена Косторная (фигурное катание) порно с Максим Глушенков (футбол) <a href=https://repost.news/>unlim casino</a> лучшие онлайн казино сайт 1×bet слоты <a href=https://krtka.info/>1×bet на андроид</a> 7k casino сайт лучшие казино бесплатно vodka casino porno Анастасия Янькова, боксерка online casino официальный порно с Гатагова Ольга Анатольевна букмекерская контора без
DiskiPlus 1×bet на сегодня DiskiPlus 1win casino <a href=https://diskiplus.ru>DiskiPlus порно с Георгий Джикия (футбол)</a> DiskiPlus казино ставка DiskiPlus казино на деньги <a href=https://diskiplus.ru/>DiskiPlus pin up casino зеркало</a> DiskiPlus casino betting DiskiPlus часы казино DiskiPlus порно с Голикова Татьяна Алексеевна DiskiPlus 1×bet слоты DiskiPlus зеркала официальных сайтов казино DiskiPlus официальные букмекерские конторы скачать DiskiPlus порно с Александр Большунов (лыжные гонки)
#4203 Charlesgunnyhttp://filmkachat.ru
1×слотс казино
Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция содержит доскональные управляла, ссылка на которые обыкновенно содержится в промообъявлении. В их указываются лимиты, вейджер, список доступных игр. Если оператор скрывает данные о предложении, то воспользоваться им не стоит. <a href=http://filmkachat.ru/>1×slots официальный зеркало</a> Бесплатный бонус – кредиты, коие онлайн-казино начислит клиенту, не заставляя его пополнять игровой счет. <a href=https://www.vevioz.com/forums/thread/4584/>https://www.vevioz.com/forums/thread/4584/</a> Основное различие что, нет, собственно для получения бездепа нужно пополнять баланс в казино. Но кроме этого, есть ряд и различий:В интернет-сети всегда можно отыскать перечни наиболее знаменитых и обещанных поощрительных программ от известных онлайн-казино. 1×slots промокод при регистрации <a href=https://lit-book.ru/user/Davidtycle/>https://lit-book.ru/user/Davidtycle/</a>
1×slots casino регистрация
Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, чтобы еще раз получить бесплатный бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ждет неизбежное санкция.Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют важную информацию о no down payment bonuses и других предложениях. <a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=389658>1хслотс официальный сайт зеркало</a> 1хлот регистрация в 1×slots casino <a href=http://railagent.ru/club/user/104594/>http://railagent.ru/club/user/104594/</a> Частенько новички не знают, как активировать презенты либо исключить 1-ый выигрыш. Для похожих случаев наша команда описала основные термины – собственно такое фриспины, вейджер, как его отыграть, для необходимо протекать верификацию. 1×slots мобильная версия войти казино За счёт спинов получится запустить различные интернет слоты, протестировать стратегии и поднабраться навыка. Фишка что, нет, что вращения начисляются на лучшие аппараты с уникальными опциями и высокой отдачей. Не забывайте, собственно в каждом акционном предложении учтены специальные притязания – кратковременные лимитирования, максимальный объем ставки, перечень доступных игр.Важно, удостоверьтесь сомнений, что раньше не регистрировались в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи.
1×slots регистрация 1×slots casino 777 online
Высокая конкуренция в разделе азартных игр мотивирует операторов привлекать клиентов различными промоакциями. Благодаря этому у посетителей замечена вероятность получить бонусы в казино за регистрацию без депозита. Воспользоваться этим предложением можно, минуя процедуру внесения денег на игровой счет, просто активировав акк на сайте. Наш гид по бездепам поможет выбрать самую симпатичную бонусную программку, разузнать управляла получения такового вознаграждения и распорядиться им с наибольшей выгодой.Бездеп с фриспинами возможность охватывать всю коллекцию игр на веб-сайте или разработки одного провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш возможность быть выведен в того, как юзер отыграет эту необходимую. Возможность расценить глубокий перечень слотов — главное достоинство этой разновидности. Игроку становятся доступны что, эти опции, которые отсутствуют в демонстрационном режиме, а возможность выиграть настоящие деньги добавляет ярчайших азартных ощущений. <a href=http://mashspec.ru/user/CharlesDew/>http://mashspec.ru/user/CharlesDew/</a> Нет. Для получения бездепозитного бонуса в казино необходима неотъемлемая регистрация на сайте. Играть в слоты бесплатно и без регистрации возможно лишь в демо режиме.Бонус без депо за регистрацию в казино (бездепозитный бонус) – это валютный подарок от клуба, кот-ый начисляется на аккаунт игрока после регистрации в казино. Кроме сотворения учетной записи, для получения бездепа, довольно часто потребуется ещё и доказать контактные данные игрока и/или активировать особый промо-код. 1×slots зеркало проходить регистрацию это отличный вариант Условия вывода выигрыша. В неких заведениях для удачного вывода с бездепозитного приза довольно пополнения баланса и подтверждения личности. В иных же клубах, нужно несколько один прокрутить собственный депозит.
рабочее зеркало 1×slots
Отыграв бездепозитный бонус в казино с выводом также придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в подобное лимитирование присутствует, то единоразово исключить выйдет лишь сумму, не превышающую размер приобретенного приза. Для вывода средств приз нужно будет отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами акции и вариантами отыгрыша бездепозитного приза до его получения, чтобы избежать конфликтных ситуаций. Во время забавы в казино, выигрыши, приобретенные спасибо безвозмездным призовым фондам, суммируются и включаются в общую сумму для отыгрывания. Однако, в удача улыбнется и получится отыграть все призы, игровое заведение гарантированно допустит исключить денежные средства. Сумма вывода несомненно зависимости от лимита, утвержденного непосредственно в этом учреждении. Поэтому, пристально нужно читать управляла выдачи анлимитных депозитов. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=http://www.ymapparel.com/bbs/board.php?bo_table=free&wr_id=314588>http://www.ymapparel.com/bbs/board.php?bo_table=free&wr_id=314588</a>
казино 1×slots
<a href=http://ortho.wikispace.net/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0>http://ortho.wikispace.net/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0</a> Онлайн-казино с бездепозитными призами ставят посетителям условия для использования бездепами, поэтому перед участием в промоакции другого подробно ознакомиться со всеми правилами и аспектами промоакции. Условия могут прикасаться получения бонуса, его применения и последующего вывода валютных средств когда выигрыша.На условиях отыгрыша даровых бонусов следует остановиться подробнее. С ними связаны аспекты, коие невозможно оставить без внимания. 1×slots casino регистрация 1×slotscasin online Это также благотворительные финансы, которые поступают на аккаунты новоиспеченных игры в регистрирования. А особенность таких призов произведено сомнений, собственно обретенные деньги обязательно по применять в продолжении назначенного медли.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вывод выигрыша с бездепозитных призов казино – щедрый подарок от азартных клубов. Но чтобы вывести собственный заработок, нужно выполнить ряд критерий: Также бездепозитные призы все служить способом вернуть к ирге посетителей, пока приостановивших своё сотрудничество с фирмой: уведомление о бездепе поступает на мобильный телефонный либо почту.
#4204 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало рабочее регистрации на телефон придет
В онлайне очень много скриптовых сайтов, коие принадлежат плутам. Их главная цель – привлечь гэмблеров, пообещав не великодушные подарки, хотя и крупные выигрыши. Так собственно некоторые сайты предлагают получить за регистрацию и $1 000. <a href=http://filmkachat.ru/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> Такой безвозмездный эквивалент средств зачисляется на профиль пользователя в осуществления притязаний и предназначаются они только для игрового процесса. Вывод таких вознаграждений вероятен лишь после воплощения вейджеровых условий.Онлайн-казино с бездепозитными призами ставят посетителям обстоятельства для пользования бездепами, потому перед участием в промоакции другого тщательно ознакомиться со всеми правилами и нюансами акции. Условия все прикасаться получения приза, его использования и последующего вывода денежных средств в случае выигрыша. <a href=https://www.scutify.com/articles/2024–10–25------>https://www.scutify.com/articles/2024–10–25------</a> Проверка занимает от нескольких мин. До нескольких дней, спецы техподдержки могут запросить дополнительные документы либо инициировать краткое общение по Skype.Приглашаем делиться суждениями о призах. Это поможет иным пользователям подбирать наиболее прибыльные предложения. 1×slots официальный сайт, скачать <a href=http://rosdk.ru/bitrix/redirect.php?goto=http://kaleostra.biz/away.php?url=http://maps.google.com.pe/url?q=https://telegra.ph/Ukaz-Prezidenta-RF-ot-22-aprelya-2024-g–281-vnosit-izmeneniya-v-polozhenie-o-pravovom-statuse-byvshih-grazhdan-DNR-LNR-i-Ukrain-09–23>http://rosdk.ru/bitrix/redirect.php?goto=http://kaleostra.biz/away.php?url=http://maps.google.com.pe/url?q=https://telegra.ph/Ukaz-Prezidenta-RF-ot-22-aprelya-2024-g–281-vnosit-izmeneniya-v-polozhenie-o-pravovom-statuse-byvshih-grazhdan-DNR-LNR-i-Ukrain-09–23</a> Суммы подобных услуг, большинстве, колеблются от 3-х до двадцати $, а вейджер на эти свои обязан составлять от тридцати до шестидесяти раз. Зачастую, большая сумма выигрыша здесь составит от одной до 2-ух сотен долларов. Если геймер выиграет больше, то все свои имеют быть списанными до максимально разрешенного выигрыша. Здесь бывает содержание выводить еще несуществующие финансы на свою платежную систему и дальше находить заведение с подходящими под данную сумму релоадом либо призом за первое пополнение счета. Есть несколько подвидов бездепозитного гонорары, предлагаемого наибольшим числом заведений.Кешбэк-бонус дает собой возврат фиксированного процента от ставки когда проигрыша или же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%.
1хслотс официальный сайт зеркало
С не отыгранным бонусом запрещается превышать объем наибольшей ставки. Нарушение сего обстоятельства иметь аннулирование выигрыша. 1хслотс казино зеркало Ознакомьтесь с нашим списком лучших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего списка и получите бездеп сразу. Хватайте наилучшие благотворительные предложения ниже и выигрывайте великие деньги, не рискуя! <a href=http://zeren.freeoda.com/member.php?action=profile&uid=7790>http://zeren.freeoda.com/member.php?action=profile&uid=7790</a> Игры, в которых возможно выступать на бонусные деньги. Проверьте список игр, в возможно выступать на бонусные средства, возможно они Вам не понравятся и надо тратить своё время на такую промоакцию. 1хслотс зеркало на сегодня
1×slot зеркало
Представленные на этой странице превосходнейшие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные обстоятельства. После кропотливого анализа редакция портала составила рейтинг спецпредложений, каком гости Casino.ru все сортировать список по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д.Возможность протестировать новые забавы, не рискуя личностными средствами и разработать личную стратегию забавы. Осталось выбрать казино с бонусом за регистрацию и сделать профиль. После активации презента выигрыш в от Фортуны и навыков. <a href=http://www.xn–2q1bn6iu5aczqbmguvs.com/bbs/board.php?bo_table=free&wr_id=276748>http://www.xn–2q1bn6iu5aczqbmguvs.com/bbs/board.php?bo_table=free&wr_id=276748</a> Каждая игровая перрон выделяется условиями по получению и отыгрышу бездепов. В правилах отчетливо расписаны временные рамки, за коие нужно прокрутить вейджер. Также не запамятовывайте про максимальный размер ставки и максимальную сумму выплаты. С другой стороны, дабы получить бездепозитные бонусы казино, достаточно потратить менее 1 минутки. 1× slots сайт Вейджер в переводе с британского означает «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша полученного бонуса, в нашем случае бездепозитного. Число ставок большого — главно лишь набрать сумму, пропорциональную сумме одобрения.Такие поощрения разрешают даром протестировать новое казино, разобраться с игровым ходом онлайн слотов, заработать и исключить небольшую сумму денег.
1хслотс казино зеркало
Самый распространённый из сходственных призов, конечно же, бездеп на денек рождения клиента — бонус повторяющий фиксированной суммы либо фриспинов поступает на счёт игрока, а воспользоваться им можно на установленного периода времени. <a href=https://hiddeninthesand.com/forum/viewtopic.php?t=234821>1хслотс официальный сайт зеркало</a> Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации дара нужно подтвердить электрическую почту и привязать телефонный; 1×slots зеркало <a href=https://forum.mbprinteddroids.com/member.php?action=profile&uid=75169>https://forum.mbprinteddroids.com/member.php?action=profile&uid=75169</a>
казино 1×slots
Не трудно додуматься, что not the slightest deposit bonuses почти ни не бывают великими. Чаще всего идет о пяти–тридцати долларах (либо эквиваленте этой суммы в иной валюте). <a href=https://www.jo1sat.com/member.php?u=224692>https://www.jo1sat.com/member.php?u=224692</a> Чтобы выступать безвозмездно на реальные средства в казино, порой довольно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные деяния.Фриспины – безвозмездные вращения с фиксированной ставкой, коие возможно использовать в определенных игровых автоматах. 1×slots зеркало регистрацию более популярный вариант это Начнём с того, что любое промо за регистрацию подразумевает некоторые условия. Бездепозитные призы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность денежного оборота, необходимая для исполнения критерий. Пример, получили безвозмездные вращения и выиграли с них 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 рублей, неудачных или выигрышных, так. После выполнения, бонусный баланс перейдёт на реальный и будет легкодоступным к выводу.Бесплатные бонусы казино без депозита можно получить повторяющий денежных средств на бонусный счет (исключить их возможно лишь после отыгрыша), фриспинов, игры либо кешбэк-бонуса.
<b>Смотреть еще похожие новости:</b>
<a href=https://russiancomputerservice.ru/user/JosephCer/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<a href=https://forum.oursson.ru/viewtopic.php?f=2&t=8735>1×slots коды</a>
<a href=https://www.kfz-gringer.at/index.php/forum/suggestion-box/64732–1×slots-1–1×s#64497>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На нашем сайте Вы найдете перечень своевременных новых бездепозитных призов в казино 2022 года. Также, есть количество эксклюзивных услуг, коие доступны лишь гостям нашего вебсайта в регистрации по нашей ссылке либо активации специального промокода. В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с безвозмездных вращений. Прибыль, которую Вы заработаете на этом бездепе возможно ставить на вывод без какого или отыгрыша.
#4205 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Валентина Матвиенко порно porno Яна Троянова <a href=https://krtka.info/>порно с Георгий Джикия (футбол)</a> мелбет букмекерская контора Фастова Елена Владимировна порно <a href=https://rucriminal.info/>спорт букмекерская контора</a> рокс казино ramenbet casino 1×bet официальный пин casino кент казино porno Анастасия Янькова, боксерка порно с Диана Шнайдер (теннис)
DiskiPlus casino DiskiPlus Преподобная Надежда Александровна порно <a href=https://diskiplus.ru>DiskiPlus пин ап casino pin</a> DiskiPlus пина букмекерской конторы DiskiPlus ешь казино <a href=https://www.diskiplus.ru>DiskiPlus casino betting</a> DiskiPlus порно с Ирина Сидоркова DiskiPlus официальная казино DiskiPlus Елизавета Боярская DiskiPlus Юдаева Ксения Валентиновна порно DiskiPlus порно с Артемий Панарин (хоккей) DiskiPlus up casino скачать DiskiPlus 1×bet официальный слоты
#4206 Charlesgunnyhttp://filmkachat.ru
casino 1×slot
Однако далековато не все ресурсы предлагают своим клиентам бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено одобрение на первый депо в объеме 100–200%. Это замечательная возможность преумножить банкролл, увеличить время, проведённое за игрой и шансы сорвать большой куш.Реже призы без депозита начисляются постоянным игрокам. С их поддержкою администрация постарается удержать ценных клиентов либо вожделеет поблагодарить за лояльность правильных посетителей. Но намного чаще для подобных целей применяются такие акции: <a href=http://filmkachat.ru/>1×slots зеркало на сегодня</a> Но не мыслить, что снабжая пользователей такими бонусами, казино занимается спонсированием. Ведь размеры вознаграждений, главном, не немалые (средним размером от 5 до 20 долларов). И на эти свои налагаются определенные обстоятельства и лимитирования, обязательные к исполненью игрока, если в последствии он желает получить все средства выигранные финансы.Чтобы бездеп не был начислен на Ваш аккаунт, Вам не активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк автоматически, а Вы не планируете его применять, обратитесь в службу поддержки с пожеланием отменить бездепозитный бонус. <a href=https://app.degoo.com/share/hi1FahiiYBqJPnfRRsamrQ?ID=20401830865>https://app.degoo.com/share/hi1FahiiYBqJPnfRRsamrQ?ID=20401830865</a> 1хслот официальный сайт зеркало <a href=http://pharmacyhq.com/forum/profile.php?id=581366>http://pharmacyhq.com/forum/profile.php?id=581366</a> Большинство клубов привлекают внимание в за счёт разнородных даров. На 1 веб-сайтах возможно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает безвозмездные вращения для запуска топовых онлайн слотов. Несмотря на различные промоакции, стоит выделить самые основные.Постарайтесь отыграть вейджер, чтобы появилась возможность забыть заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электронной кошелёк, карту, телефон.
1×slots официальный сайт мобильная версия скачать
1 x slots casino Создание аккаунта. На веб-сайте казино нужно обнаружить регистрационную форму и наполнить пустующие поля собственными данными. Иногда на данном этапе требуется указать лишь адресок электронной почты и пароль, хотя чаще надобно заполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д. ). Нужно указывать лишь реальные данные, что впоследствие они будут проверены. <a href=http://www.aramdesign.co.kr/bbs/board.php?bo_table=free&wr_id=62460>http://www.aramdesign.co.kr/bbs/board.php?bo_table=free&wr_id=62460</a> В лицензионных бездепозитных казино играть в азартные забавы вправду неопасно. Наличие лицензии одобряет что, этот прецедент, что клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP. 1×slots зеркало проходить регистрацию это отличный вариант
1хслот скачать
Новые клиенты онлайн-казино без первого депозита шансы выяснить собственную удачливость. К что, этому же есть возможность конвертировать бездепы в реальные деньги за регистрацию в казино, впрочем результата приз необходимо отыграть сообразно условиям промоакции.Допустим, за регистрацию вы получили бездеп в размере 2 000 руб. С вейджером х30. В этом случае предстоит устроить ставок, на общую сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать реальные деньги. Однако не забывайте, собственно с каждого презента выйдет вывести определённую необходимую (чаще всего менее $200). Прежде чем активировать бездеп, необходимо увериться что, что страна, гражданином коей считается игрок, не входит в перечень запрещенных.Некоторые клубы автоматически начисляют приз на акк игрока после исполненья критерий получения, но посещают ситуации, когда приз нужно активировать игроку самому. Есть несколько методов активации бонуса: <a href=http://www.asystechnik.com/index.php/1%D1%85%D1%81%D0%BB%D0%BE%D1%82_%D0%A1%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C>http://www.asystechnik.com/index.php/1%D1%85%D1%81%D0%BB%D0%BE%D1%82_%D0%A1%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C</a> 1хслот зеркало Главным нюансом в появлении этих вознаграждений произведено что, что пустив их в ход, геймер ничем не рискует и в последствии никому ничего не несомненно обязан (не зависимо, получит ли он спасибо бонусам какой-либо выигрыш или мгновенно спустит все лишь собственно прибывшие деньги). То есть, казино снабжает игрока вероятностью на дармовой основе выступать во всевозможные слоты причем спонсирует забаву.Как управляло, новоприбывшие игроки в первую очередь желают ознакомиться с способами ввода и вывода денежных средств и сроки исполнения поданных заказов чтобы конкретно понимать, как скоро меня вывести свой казино бонус за регистрацию без депозита на электронный кошелек либо же банковскую карту. К счастью для всех играющих, снутри конкретных холдингов, все казино конкурируют между собой. Ведь в бы конкретную фирму представляло только одно онлайн-заведение, то вряд ли бы клиенты увидели казино с призом за регистрацию и могли бы рассчитывать только на вознаграждение в виде бонуса на первое инвестиция. К каждому заведению периодически по привлекать новых игроков, что, в, лишь на руку всем играющим.
1хслотс регистрация в 1×slots casino
<a href=https://forum.bandariklan.com/showthread.php?tid=389007>1×slots зеркало регистрация то дальше необходимо пройти</a> Подарки на дни ? приуроченные к парадным датам, требующие символического отыгрыша либо начисляются без того. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду.Фриспины без депо или дополнительные свои посодействуют поближе познакомиться с игровой платформой и её функциями. За счёт даров возможно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради забавы против живых крупье. рабочее зеркало 1×slots <a href=https://fakenews.win/index.php?title=1×bet_APP:_How_to_Use_the_Application_for_Betting_Online.>https://fakenews.win/index.php?title=1×bet_APP:_How_to_Use_the_Application_for_Betting_Online.</a> Мы рекомендуем не отрицаться от сходственных услуг известных казино. Выделите несколько минут на регистрацию, получите приз и попробуйте его отыграть. Может быть, сегодня фортуна будет на вашей стороне!
казино 1×slots
Шаг 4. Активация. Внимательно изучите обстоятельства, информацию по ограничениям и сроке действия бонусного предложения. Разобравшись с правилами, возможно активировать бонус в собственном кабинете (время ? с внедрением промокода) либо по запросу в саппорт.Процесс подтверждения личности может занять от одного денька до недели. Если клиент допустил какую ошибку при заполнении паспортных данных, то ему идет обратиться с задачей в службу поддержки онлайн-казино. В интернет-сети практически можно найти списки наиболее знаменитых и гарантированных поощрительных программ от популярных онлайн-казино.Размер приза. В качестве бездепов обычно начисляют не суммы, а когда идет о бонусах за депозит, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино могут подарить игроку до 2000$. <a href=https://pdn-forum.bpgs.de/memberlist.php?mode=viewprofile&u=1857>https://pdn-forum.bpgs.de/memberlist.php?mode=viewprofile&u=1857</a> Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Такой казино бонус без депо за регистрацию выдается игроку на час и энергично используется данное предложение с 2017 года. Это как бы некая маскировка поощрения под бездепозитный. Суть всего этого сводится к тому, что геймеру на час выдается, например, 1000 долларов, а реклама утверждает про, собственно любой выигрыш возможно будет в будущем оставить при себя. Но случае играющий серьезно отнесется к этому предложению, то он попросту потеряет время. Ведь игроку нужно будет играть не в аккаунте, ну тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (даже всей тыс. ) в правила вступят конкретные условия, где несомненно сказано, собственно наибольшей суммой победы возможность быть только двести $ и средства можно применять только в качестве бонуса на первый вклад с вейджером 25 от суммы вознаграждения плюс сам депозит. По итогу получится, собственно игрок выигрывал для 200% бонус с вейджером на конкретную необходимую. Короче говоря, это все не вашего медли. 1×slot официальный сайт Также есть онлайн-платформы азартных игр, которые применяют раздачу бездепозитных призов в специальные даты (как для казино, например и для игрока). Помимо этого, действующие геймеры кроме имеют возможность получить схожие бонусы за собственную деятельность (например, за повышения уровня или за похожие достижения).
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/8095/#comment-338296>1хслот зеркало сайта</a>
<a href=https://forum.eliteshost.com/showthread.php?tid=20307>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, дабы снова получить даровой бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ждет неминуемое наказание. В онлайне слишком количество скриптовых вебсайтов, коие принадлежат плутам. Их главная цель – заинтересовать гэмблеров, пообещав не великодушные презенты, но и крупные выигрыши. Так что некоторые веб-сайты предлагают получить за регистрацию даже $1 000.
#4207 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
cat casino включи казино <a href=https://rumafia.news/>1×bet на андроид бесплатно</a> pin up casino официальный pin up букмекерская контора <a href=https://kompromat1.online/>kent casino</a> человек казино porno Виктория Баркова, легкоатлетка пина букмекерской конторы casino рабочее зеркало суть казино 1×bet зеркало xbet unlim casino
DiskiPlus Светлана Ходченкова DiskiPlus porno Алена Михайлова <a href=https://www.diskiplus.ru>DiskiPlus скачать букмекерскую контору на андроид</a> DiskiPlus porno Анна Сидорова, керлингистка DiskiPlus официальные сайты казино <a href=https://www.diskiplus.ru>DiskiPlus порно с Александр Головин (футбол)</a> DiskiPlus cometa casino DiskiPlus 1win casino DiskiPlus 1×bet зеркало на сегодня DiskiPlus porno Алена Косторная (фигурное катание) DiskiPlus 7k casino зеркало на сегодня DiskiPlus кент casino DiskiPlus 1win букмекерская контора
#4208 Charlesgunnyhttp://filmkachat.ru
1×slots сайт зеркало
Доступ к дару имеет открываться автоматически последствии введения промокода либо воззвания в службу поддержки сайта. В первом случае от пользователя не требуется практически деяний. Бездеп с активацией по коду встречается чаще всего. Игроку необходимо установить совокупа знаков в графе, кот-ая возможность пребывать в регистрационной форме в Личном офисе.В игровых клубах без лицензии Вы покупаете „кота в мешке“ и в случае неоднозначных обстановок нет способности куда-то посетовать и обосновать собственную правоту. <a href=http://filmkachat.ru/>1×slots скачать на айфон</a> Не стоит путать игру в демо и внедрение бонусов. В демонстрационном режиме игрок имеет оценить механику слота, сюжет и оформление. Но забава ведется на условные кредиты, потому отсутствует главное ? ощущение пыла. Активируя промокод или фриспины, заказчик как не расходует средства деньги на игровые автоматы, но имеет сорвать реальный куш! <a href=http://prsync.com/archicgi/how-home-entertainment-flyarchitecture-transforms-modern-living-spaces-4518898/>http://prsync.com/archicgi/how-home-entertainment-flyarchitecture-transforms-modern-living-spaces-4518898/</a> 1×slots официальный сайт, скачать <a href=https://slavyansk2.ru/blog/srodvizhssyl/vykup-avto-vladivostok>https://slavyansk2.ru/blog/srodvizhssyl/vykup-avto-vladivostok</a> Размер призов почаще всего чисто условный и не выше 50 рублей. Приятно, но ощутимым бустом при вряд ли будет.
1хслотс мобильная версия зеркало
Фриплей-бонусы. Бонусы за безвозмездную забаву есть только в неких клубах. Они зачисляются незамедлительно после создания профиля и срабатывают недолговременное время. Если у вас нет медли истратить средства, они просто завершатся. Что дотрагивается медли, в большинстве случаев бонусы срабатывают на одного часа.Проверка занимает от нескольких минут до нескольких дней, спецы техподдержки имеют запросить дополнительные документы или инициировать краткое общение по Skype. casino 1×slot Далее требуется отыграть вагер и вывести выигрыш. Игрокам без опыта крупно повезло, меня получить 10-ки презентов за одну регистрацию. Если не сумели получить Бездепозитный приз, не волнуйтесь. Обратитесь в интернет чат, оператор поможет ситуацию.Чаще всего казино бонус за регистрацию без депо даёт возможность запустить любой машина. Но превосходнее пристально ознакомиться с критериями. Иногда для игры доступны лишь определённые модели. Если вы новичок и ничего не смыслите в гэмблинге, какого-либо начать знакомство с миром азарта именно с «одноруких злодеев». <a href=https://www.bondhuplus.com/read-blog/87549>https://www.bondhuplus.com/read-blog/87549</a> Возьми собственный презент. Чаще всего приз активизируется сразу после регистрации. Но бывают ситуации, когда нужно забежать в собственный офис либо написать в справочную службу.Основное отличие сомнений, что для получения бездепа не пополнять баланс в казино. Но не этого, есть ряд и отличий: 1×slots зеркало этих способов предполагает регистрацию
1×slots зеркало проходить регистрацию это отличный вариант
Варианты выигрыша находятся от Вашей удачи и критерий игорного портала. Выше мы заявили, что кое-какие бездепозитные бонусы в 2022 году выдаются с лимитированиями по максимальной выплате. Однако, остаются другие, все, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на деньги, можно выиграть неописуемые суммы. Сегодняшние игровые автоматы либо видео слоты, как их называют. Могут выдавать солидные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000. Бездепозитные призы истинными средствами, которые можно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадались. <a href=http://houyuhuan.com/home.php?mod=space&uid=387612&do=profile>http://houyuhuan.com/home.php?mod=space&uid=387612&do=profile</a> На бонусные начисления могут быть установлены вспомогательные лимитирования, которые Вы не сведению при отыгрыше. Пока приз полностью не отыгран — деньги из казино не выводятся.В зависимости от интернет заведения каждый из их возможность вам предложить как бездепозитные деньги, так и бездепозитные фриспины, коие после успешной регистрации упадут вас на ваш игровой баланс. 1×слотс казино Размер бонусов почаще всего чисто символический и не превышает 50 руб. Приятно, хотя ощутимым бустом деле навряд станет.
1×slots на любой вкус как пройти регистрацию
Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, all зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. <a href=http://check2go.net/my-account/>1×slots актуальное зеркало</a> Бездепозитные бонусы, как теснее ясно, являются уникальной возможностью приступать к игровому процессу полностью бесплатно, словами выступать в интернет казино даром и на имеющие свои незамедлительно последствии регистрации аккаунта. Автоматы с таким депо все стать великолепной возможностью сыграть для поклонников пыла с определенными лимитированиями в финансах. Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Как правило, при выводе денег, от играющего потребуется лишь сделать наименьший лепта для того, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом собственный счет. 1×slots актуальное зеркало <a href=https://sultantheme.com/vb4forum/member.php?13387-ChrisRon>https://sultantheme.com/vb4forum/member.php?13387-ChrisRon</a>
1×slots рабочее зеркало
Чем ниже велечину вейджера, что, этим проще отыграть и исключить бонус. Если Вы расчитываете заработать на бездепе, а не просто ознакомиться с свежим игровым клубом, то стоит игнорировать призов с высоким вейджером их почти не реально отыграть. С ними Вы можете лишь протестировать игры заведения.Чаще всего применяются коды. Их надо(надобно) вносить в специальные окна регистрационной анкеты, в речь о пригласительных бонусах, либо в особом разделе собственного кабинета игрока. <a href=http://visitchina.ru/bitrix/click.php?goto=http://pkman.ru/bitrix/redirect.php?goto=http://silver.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/1vrV9NpDp-E>http://visitchina.ru/bitrix/click.php?goto=http://pkman.ru/bitrix/redirect.php?goto=http://silver.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/1vrV9NpDp-E</a> 1×slots рабочее зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://nakupnidivadlo.cz/index.php/forum/3-pripominky/46603–8903–759–81–64-https-sk-service1-ru?start=24#237414>1× слот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Также учтите, что некоторые игровые платформы сужают перечень стран, коие способны получить предложенный бездепозитный бонус за регистрацию. К образцу, есть онлайн-заведения, выдающие подобные призы только жильцам определенных государств. К примеру, онлайн казино 777 Оригинал дает бездепозитный бонус только игрокам из России и стран СНГ. Или наоборот, пичкают вознаграждением всех, не обитателей некоторых стран (как этого, идет внимательно учить список, чтобы впоследствии не возникло никаких вопросов и жалоб).
#4209 Charlesgunnyhttp://filmkachat.ru
1×slots сайт
Отыграв бездепозитный бонус в казино с выводом также придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если схожее ограничение существует, то единоразово исключить выйдет только сумму, не превышающую объем полученного приза. <a href=http://filmkachat.ru/>скачать 1×slots на андроид мобильная версия</a> <a href=https://forum.prusa3d.com/forum/profile/3d-product-rendering/>https://forum.prusa3d.com/forum/profile/3d-product-rendering/</a> Если вы избираете проверенное лицензионное онлайн казино и сделайте все обстоятельства получения бездепозитного бонуса, проблем с получением презента у Вас не возникнет. 1×slots официальный сайт скачать <a href=https://www.ccvgaming.com/forum/member.php?38803-Raymondelils&s=20fcead5d27646998570f1bd7f8a3597>https://www.ccvgaming.com/forum/member.php?38803-Raymondelils&s=20fcead5d27646998570f1bd7f8a3597</a> Чтобы получить возможность вывести прибыль с бездепозитного приза в казино, нужно выполнить ряд условий:Классическая разновидность приза за создание аккаунта. Его преимущество содержится том,, собственно клиент возможность других подбирать аппараты и делать ставки в их. Иногда список игровых автоматов ограничен оператором, но все одинаково это другого, как, чем единственный доступный разъем, как в случае с внедрением фриспинов.
зеркло казино 1×slots
Все безвозмездные бонусы кажутся соблазнительными. Кто же категорически от возможности поиграть в онлайн-казино, не рискуя средствами, но получая выигрыши. Но далековато не все бездепозитные призы в привлекательны для рассудительного посетителя.Операторы гемблинга заявляют, собственно например они дерутся с бонус-хантерами. Впрочем, критики считают, собственно данным казино пытаются сделать из случайного гостя неизменного игрока. <a href=http://www.arka-bahce.org/forum/showthread.php?p=764288#post764288>1×slots casino регистрация на сайте</a> рабочее зеркало 1×slots Изучить правила и обстоятельства получения бездепозитных призов казино, Вы сможете у нас на веб-сайте в разделе с бонусами или на официальном веб-сайте выбранного Вами казино. Если не можете найти нужную информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал либо по электрической почте.Выиграть настоящие деньги в казино не пополняя счет – трудно, но вполне. Главное задаться целью и не нарушатьправила заведения. Выберите несколько казино с бездепзитными бонусами и начните выступать на бонусные средства. По статистике из 10-ти заведений возможно заработать небольшую сумму денег помощью бонусных средств. <a href=http://www.apeka.nl/member.php?action=profile&uid=4398>http://www.apeka.nl/member.php?action=profile&uid=4398</a> Так что приготовьтесь дать конфиденциальную информацию (пол, возраст, государство проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает менее суток, после чего удастся свободно выводить солидные выигрыши.В лицензионных бездепозитных казино играть в азартные игры вправду неопасно. Наличие лицензии одобряет что, этот прецедент, что клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP. 1×slots регистрацию более популярный вариант это Шаг 4. Активация. Внимательно изучите обстоятельства, информацию по лимитированиям и сроке деяния бонусного предложения. Разобравшись с правилами, возможно активировать бонус в собственном кабинете (время ? с внедрением промокода) или по запросу в саппорт.Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную процедуру активации приза без депозита. Внимательно прочтите до конца. Многие новички проделывают оплошности на этапе регистрации и поэтому не могут получить презент.
1×slots официальный сайт скачать
Самые знаменитые методы вывода денег ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам типа Neteller и Skrill, еще используют криптовалютными кошельками. Вывод выигрышей может осуществляться мгновенно или развлекать от нескольких часов до нескольких суток.Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. При выполнении критерий отыгрыша и верификации, средства с бонусного счета переводятся на главный и могут быть выведены на карту либо электрический кошелек. Лимиты на вывод и сроки проведения транзакции в от выбранной платежной системы.В настоящее время получить бонус за регистрацию в казино очень просто. Почти каждый игорный дом с радостью даст средства или благотворительные вращения. Многие игроки пользуются этим и не стесняются региться в каждом клубе с прибыльными условиями. Кстати, это отличная вероятность выдумать выигрышную стратегию и сорвать куш. <a href=https://m1bar.com/user/Renaldojex/>https://m1bar.com/user/Renaldojex/</a> За привлечение приятеля ? в партнерской программы клиент получает вознаграждение за вербование свежих пользователей. 1× slots регистрация в 1×slots casino Процесс подтверждения личности имеет занять от одного денька до недели. Если клиент допустил какую-либо оплошность при заполнении паспортных данных, то ему следует адресоваться с проблемой в службу онлайн-казино.
1×slots зеркало видели такую регистрацию на
<a href=http://forum.animogen.com/memberlist.php?mode=viewprofile&u=15333>1×slots регистрацию более популярный вариант это</a> Подарки на праздники ? приуроченные к парадным датам, требующие символического отыгрыша либо начисляются без такового. Могут дариться игрокам сутки рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду.Практически все онлайн казино с бездепозитным призом за регистрацию учитывает программку лояльности — систему поощрения неизменных клиентов, которая произведено из множества уровней. При достижении игроком еще уровня на его счёт поступает бонус. Чем выше степень — что, этим щедрее приз. 1×slots официальный сайт скачать на айфон <a href=http://pro-tulu.ru/users/broadpolitics26>http://pro-tulu.ru/users/broadpolitics26</a> Бонус без депозита за регистрацию в казино (бездепозитный приз) – это валютный подарок от клуба, кот-ый начисляется на аккаунт игрока в регистрации в казино. Кроме создания учетной записи, для получения бездепа, довольно часто потребуется ещё и подтвердить контактные данные игрока и/или активировать специальный промо-код.Приглашаем делиться мнениями о призах. Это поможет другим юзерам выбирать наиболее прибыльные предложения.
1×slots официальный сайт мобильная версия скачать
Приветственный бездеп предоставляется какому игроку только один раз. Казино борются с например нарекаемыми бонусхантерами (от англ. Bonus Hunter — охотник за бонусами), пытающимися заводить множественные аккаунты для надувательства оператора и повторного получения подарка. Исключить подобные действия дозволяет верификация данных. Администрация вправе потребовать у клиента подтвердить индивидуальные данные, обозначенные при регистрации. <a href=http://sf4obr.ru/forum/user/43896/>http://sf4obr.ru/forum/user/43896/</a> Какие бонусы меня еще получить считая бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного бонуса, каждое интернет казино предлагает игрокам прибыльное предложение на 1-ый депозит, вы совершаете депозит, ваш депозит возрастает в двое либо числе в 3, что, этим наиболее начать выступать возможно с более солидной суммой, так же не запамятываем на вейджер на призы. 1×slots официальный зеркало Существуют казино с призом за регистрацию, каких довольно знамениты фриспины в онлайн казино потом регистрации в конкретных забавах. Они встречаются том чаще безвозмездных поощрений или классических призов в казино без вложений. Например, игрок регистрирует счет, на который начисляются безвозмездные забавы, бонус за регистрацию вид безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса игрок выигрывает истинные средства, которые в последствии можно удачно вывести из заведения на свою платежную систему. То есть, есть все шансы вывести свои без рисков собственными деньгами. Регистрация, за геймер получит призы, займет несколько, а благодаря этому можно увеличить пять евро поощрений до тыс. И без всяких заморочек исключить их.Многие новенькие сомневаются, что поощрительный приз надо несомненно возвращать, и случае они выиграли у казино. Это безусловно безопасно и накрепко. Выводя выигранные средства, игрок просто останавливает свое роль в игре и теряет уникальную вероятность – даром наращивать личное материальное положение.
<b>Смотреть еще похожие новости:</b>
<a href=https://elforodelpoker.com/presentaciones/1×slots-t289301.html>скачать 1×slots на андроид мобильная версия</a>
<a href=http://www.infoknygos.lt/smforum/index.php?topic=75782.new#new>1×slots казино мобильная версия</a>
<a href=http://youhotel.ru/forum/viewtopic.php?f=15&t=146572>1хслотс рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Демоказино есть практически на каждом сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются веско реже: там если, тогда, выигрыша и соблюдения критерий акций бездеп можно превратить в настоящие средства.
#4210 Charlesgunnyhttp://filmkachat.ru
1 x slots
Доступные игры – В некоторых азартных играх возможно понизить математическое приемущество казино до нескольких десятых процента. В их количестве все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как правило, в таких забавах ставки идут в зачет вейджера не полностью. Например, имеет учитываться только 50%. В неких играх бездепозитные призы вообщем невозможно отыгрывать.Представьте момент, когда при ставке в 10 руб. Вы получите подобное умножение. Миллион руб. За одно вращение, что абсолютно вполне. Поэтому вопрос, сколько возможно выиграть остаётся не. Предлагаем выяснить других. Регистрируйтесь в одном либо нескольких интернет казино, получайте Бездепозитный приз и проверяйте удачу в деле. Разумеется, вывести средства сложно. Однако шансы есть у всех. <a href=http://filmkachat.ru/>1хслотс казино зеркало</a> Обычно показатель выше, чем для бонусов на депозит. Не удивляйтесь, случае он несомненно числе х100. Иногда завышенный коэффициент вейджера уточняется для жителей отдельных государств.Как и промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения являются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает свежих гостей и позволяет им составить впечатление о функционале, не рискуя вескими совокупностями. <a href=https://divisionmidway.org/jobs/author/shopavto22/>https://divisionmidway.org/jobs/author/shopavto22/</a> С не отыгранным призом воспрещается превосходить размер наибольшей ставки. Нарушение сего условия последствия аннулирование выигрыша.Получив собственный презент, Вы можете безвозмездно выступать на реальные деньги, а выполнив обстоятельства отыгрыша, исключить собственный выигрыш. сайт 1× slots casino <a href=http://yuk.su/forum/memberlist.php?mode=viewprofile&u=8192>http://yuk.su/forum/memberlist.php?mode=viewprofile&u=8192</a> Самые пользующиеся методы вывода средств ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электрическим платежным системам типа Neteller и Skrill, еще используют криптовалютными кошельками. Вывод выигрышей может исполняться мгновенно или развлекать от нескольких часов до нескольких суток.
1×slots рабочее зеркало
Бонусы без депо при регистрации считаются наиболее красивыми как для опытных игроков, например для и новичков. Получив такое вознаграждение, клиент может выступать на реальные средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные призы в интернет-казино Рунета, а условия их активации и выигрыша.Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном сайте и выполните вход в собственный кабинет, чтобы отобрать безвозмездные вращения с вейджером х40; 1×slots казино зеркало <a href=https://rekordmeister.ru/user/Donaldbip/>https://rekordmeister.ru/user/Donaldbip/</a> 1×slots регистрация на сайте Денежные средства. Третий бонус за регистрацию без депозита – наличные. К огорчению, лишь известные и популярные клубы могут дать средства в руб. Либо долларах. С их помощью у насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед этим нужно выполнение конкретных критерий.Подобные призы без депозита предоставляются на больше выгодных критериях. Зачастую они покрупнее, а условия отыгрыша наименее жесткие.
1×слотс казино
Если вы новичок деле и лишь попали в неизведанную вами область азарта — счет услуг как бездепозитные призы без пополнения. <a href=https://www.walkaholic.me/user/27455-jameslop>https://www.walkaholic.me/user/27455-jameslop</a> 1×slots зеркало регистрация в 1×slots casino Онлайн-казино с бездепозитными призами ставят посетителям обстоятельства для использования бездепами, поэтому перед участием в акции другого, как подробно ознакомиться со всеми правилами и нюансами промоакции. Условия шансы касаться получения бонуса, его использования и последующего вывода денежных средств если, тогда, выигрыша.
1× slots официальный
Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в индивидуальный кабинет, чтобы отобрать бесплатные вращения с вейджером х40; Обычно показатель повыше, чем для бонусов на депо. Не удивляйтесь, если он несомненно даже х100. Иногда завышенный коэффициент вейджера уточняется для обитателей отдельных государств. 1×slots сайт <a href=http://www.pengstys.com/home.php?mod=space&uid=109257>http://www.pengstys.com/home.php?mod=space&uid=109257</a> Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы которые появляются у новичков.Для получения бонуса нужно пригласить в забаву свежего клиента. Казино начисляет пригласившему фиксированный процент от взносов приглашённого вид бонуса: чаще всего его размер не превышает 10%. Срок деяния приза как не превышает месяца: пригласивший получает приз от проигранных ставок приглашённого в первый месяц забавы.
1×slots рабочее зеркало
Получить Бездепозитный бонус в интернет казино дело двух кликов. Другой момент, отыграть рекламную и соблюсти верховодила и условия отыгрыша. Под правилами подразумевается не вагер, но и лимитирования по максимальной ставке. Мы разумеем, собственно в кинотеатр все ставят на зеро и выигрывают. Призываем не делать похожего. Перед активацией приза прочитайте управляла. Узнайте следующие моменты: Условия получения подарка, за регистрацию, за депо и другое. Ограничения по максимальной ставке. Зачастую не повыше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вертеть автоматы, а вагер будет стоять на месте. Поэтому важно аристократия, в каких забавах можно совершать кратность валютного оборота. <a href=https://giga2025.com/home.php?mod=space&uid=3495489>https://giga2025.com/home.php?mod=space&uid=3495489</a> 1×slot регистрация
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.puppylinux.pl/index.php?topic=852.new#new>1×slots официальный сайт скачать</a>
<a href=https://10nsk.ru/user/JosephSuple/>1хслотс мобильная версия зеркало</a>
<a href=http://everestrolep.listbb.ru/viewtopic.php?f=38&t=12514>1 x slots</a>
<a href=https://acerfans.ru/faq/796-kak-vylozhit-na-forum-informaciju-iz-zhurnala.html>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми акциями. Читайте о них в обзорах и на форуме. Лишь популярностью и известные азартные заведения шансы разрешить себя раздавать бездепы вид дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депо, коие возможно израсходовать в лучших аппаратах с высочайшей отдачей.
#4211 Charlesgunnyhttp://filmkachat.ru
casino 1×slot
B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax <a href=http://filmkachat.ru/>1хслотс рабочее зеркало на сегодня</a> Чтоб получить крупный выигрыш, выбирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша.Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских рублей. В условиях промоакции указано, что вейджер бездепозитного бонуса х20. Поэтому, дабы отыграть бонус, игроку будет нужно сделать ставок на 35*20=700 руб. <a href=https://myanimelist.net/profile/shopavto>https://myanimelist.net/profile/shopavto</a> 1хслотс рабочее зеркало <a href=http://t20suzuki.com/phpBB2/profile.php?mode=viewprofile&u=3420>http://t20suzuki.com/phpBB2/profile.php?mode=viewprofile&u=3420</a> Операторы гемблинга утверждают, что так они борются с бонус-хантерами. Впрочем, критики считают, что этим казино пробуют устроить из случайного постояльца постоянного игрока.
1хслотс официальный сайт зеркало
<a href=http://check2go.net/my-account/>1× slots сайт</a> 1×slots бездепозитный бонус за регистрацию Получить Бездепозитный бонус в онлайн казино дело двух кликов. Другой момент, отыграть рекламную и соблюсти правила и обстоятельства отыгрыша. Под правилами подразумевается не вагер, хотя и ограничения по наибольшей ставке. Мы разумеем, что в кино все ставят на зеро и выигрывают. Призываем не делать похожего. Перед активацией приза прочитайте правила. Узнайте следующие моменты: Условия получения дара, за регистрацию, за депозит и многое. Ограничения по максимальной ставке. Зачастую не выше 350 руб. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах возможно отыгрывать вагер. Можно вращать автоматы, а вагер будет стоять на месте. Поэтому принципиально знать, в каких играх возможно совершать кратность валютного оборота. <a href=http://golpro.jp/userinfo.php?uid=15275#>http://golpro.jp/userinfo.php?uid=15275#</a> 1×slots официальный сайт зеркало Каждая игровая платформа отличается условиями по получению и отыгрышу бездепов. В правилах детально расписаны временные рамки, за которые надо(надобно) прокрутить вейджер. Также не забывайте про максимальный объем ставки и максимальную сумму выплаты. С иной стороны, дабы получить бездепозитные призы казино, достаточно израсходовать не более 1 минуты.Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные способы и расценить особенности, труднодоступные при этой в демо режиме. Многие свежие посетители перебегают в число неизменных, а оператор получает долгосрочную прибыль.
1хслотс зеркало
За вербование приятеля ? масштабах партнерской программки заказчик получает вознаграждение за вербование новых пользователей.Большинство интернет-казино из нашего топ-10 готовы порадовать вас эксклюзивными промоакциями. Читайте о них в обзорах и на форуме. Ещё одно распространённое акционное предложение – привлекательный презент с сомнительными требованиями. К образцу, клуб обещает $100 в бездепа, но с вейджером х80 или х100. Отыграть такой вейджер практически невероятно и потому превосходнее концентрироваться на больше занимательных акциях. <a href=http://energetik59.ru/index.php?subaction=userinfo&user=optimalroutine7>http://energetik59.ru/index.php?subaction=userinfo&user=optimalroutine7</a> Бесплатный приз – кредиты, коие онлайн-казино начисляет посетителю, не принуждая его пополнять игровой счет.Игрокам не воспринимать приветственный приз как гарантированный способ получить большой выигрыш, но это замечательная вероятность без расходов расценить перечень казино. 1×slots зеркало сайта Шаг 4. Активация. Внимательно исследуйте условия, информацию по ограничениям и сроке деянья бонусного предложения. Разобравшись с правилами, можно активировать приз в личном офисе (от ? с использованием промокода) либо по запросу в саппорт.
1×slots регистрация 1×slots casino 777 online
Исходя из этого, просто не существует осмысленных оснований махнуть рукою на получение такого приза при регистрации. И, заметить,, на подобный бесплатной базе у вас есть шансы выиграть деньги и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, называют бесплатными интернет платформами для игр. В игровых клубах без лицензии Вы покупаете „кота в мешке“ и если, тогда, неоднозначных ситуаций нет возможности куда-то пожаловаться и обосновать свою правоту.Это тоже бесплатные финансы, которые поступают на аккаунты свежеиспеченных игры после регистрирования. А необыкновенность таких бонусов состоит сомнений, собственно обретенные деньги обязательно по применять в продолжении назначенного времени. Заполняя данные в личном профиле, указывайте только достоверную информацию, так как Вам понадобиться ее доказать дальнейшем при выводе денег.Необходимость отыгрыша. Вейджер в выше, чем для бонусов за депозит. И же средства не отыграны, вывести их невозможно. 1× slots регистрация в 1×slots casino <a href=http://fonogramm.pro/user/Charleswal/>http://fonogramm.pro/user/Charleswal/</a> Важно, удостоверьтесь в том, что ранее не регистрировались в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи.
1×slots зеркало регистрация то дальше необходимо пройти
Такой казино бонус без депозита за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это как бы некая конспирация поощрения под бездепозитный. Суть всего этого сводится к тому, что игроку на час выдается, например, 1000 $, а реклама повторяет то, собственно каждой выигрыш возможно будет в будущем оставить при себя. Но если играющий всерьез отнесется к данному предложению, то он просто растеряет время. Ведь игроку надо(надобно) несомненно играть не главном аккаунте, в тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (в всей тысячи) в верховодила вступят конкретные условия, где будет сказано, что максимальной суммой победы имеет быть лишь двести $ и средства можно применять только виде приза на первый вклад с вейджером 25 от суммы вознаграждения плюс сам депозит. По результату выйдет, собственно игрок выигрывал себя 200% бонус с вейджером на определенную сумму. Короче разговаривая, это все не вашего медли. <a href=http://www.pertcpm.comww.w.onlineboxing.net/jforum/user/profile/291072.page>http://www.pertcpm.comww.w.onlineboxing.net/jforum/user/profile/291072.page</a> Варианты выигрыша зависят от Вашей удачи и условий игорного портала. Выше мы сказали, собственно некоторые бездепозитные призы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются они, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на средства, можно выиграть неописуемые суммы. Сегодняшние игровые автоматы или видео слоты, как их нарекают. Могут выдавать солидные умножение от х1.000 и повыше. Некоторые умножают ставку от х100.000.Так что сможете смело регистрироваться без всяких раздумий. Фортуна сегодня точно на вашей стороне. Не страшитесь, ведь следствие какого или ущерба Вам абсолютно не угрожает. С этими призами как без пополнения, Вы остаетесь лишь в плюсе, хотя не как не в минусе. 1×slots регистрация Чаще всего применяются коды. Их нужно заносить в специальные окошки регистрационной анкеты, если речь идет о пригласительных призах, либо в особом разделе личного кабинета игрока.
<b>Смотреть еще похожие новости:</b>
<a href=http://sladkierecepti.5nx.ru/viewtopic.php?f=8&t=9114>1×slots зеркало регистрация то дальше необходимо пройти</a>
<a href=https://test.soclanovtsy.ru/topic/26973-chicago-house-samples-loops-sounds/page/191/#comment-64284>1хслот 1хслотс регистрация перейти на 1×slots</a>
<a href=https://tabsgame.ru/user/Jamesbes/>1×slots официальный сайт мобильная версия скачать</a>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/8723/#comment-359191>1×slots регистрация на сайте 1×slots ru com</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для вывода средств приз надо(надобно) будет отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами акции и вариациями отыгрыша бездепозитного приза до его получения, дабы избежать конфликтных обстановок.
#4212 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало проходить регистрацию это отличный вариант
У нас на веб-сайте Вы найдете список призов без депозита в испытанных казино и подробную информацию о том как их получить и применять. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> <a href=https://www.thuum.org/viewthread.php?thread=8824>https://www.thuum.org/viewthread.php?thread=8824</a> Новички не обожают незамедлительно же вносить депо. Это обосновано неименьем навыка и сомненьем. К счастью, в наше время можно получить бездепозитный бонус за регистрацию в казино. Неважно что начисляет система – фриспины или кредиты. В всяком случае вы не рискуете собственными сбережениями. Это замечательная вероятность запустить приглянувшийся видео разъем либо же испытывать удачу в настольных играх. 1×slots сайт зеркало <a href=https://notebooks.ru/forum/index.php?PAGE_NAME=profile_view&UID=57702>https://notebooks.ru/forum/index.php?PAGE_NAME=profile_view&UID=57702</a> Одним из предлогов отдавать преимущество, льготу 1 либо другому заведению заключается в привлекательности предлагаемых промоакций и безвозмездных услуг. Безвозмездные фриспины, выдаваемые без дела делать какой-либо вклад, в списке располагается далеко не в конце.
1×slots официальный зеркало рабочее
<a href=https://forum.bedwantsinfo.nl/thread-749517.html>1×slots регистрация то дальше необходимо пройти</a> 1×slots регистрация на официальном сайте Не желаете поиграть в азартные забавы, не рискуя средствами средствами, хотя получая в все выплаты? Подобную вероятность предоставляют многие превосходнейшие порталы с азартными веселиями. В их числе много честных и надежных интернет-казино на русском языке. Они привлекают свежих пользователей различными поощрительными мероприятиями, включая бездепозитные, или бесплатные призы.B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. <a href=https://bluebook-directory.blackandbluedirectory.com/index.php?p=d>https://bluebook-directory.blackandbluedirectory.com/index.php?p=d</a> 1х слот регистрация в 1×slots casino
1× слот зеркало
Активация по промокоду употребляется в различных видах бездепов. Если речь о приветственном призе, то набор знаков возможно разузнать на главной странице, в регистрационной форме либо послании, которое отправляется пользователю для подтверждения адреса электронной почты. Акции шансы проводиться совместно с партнерскими площадками. Обычно код размещается на стороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активизируется разовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем важный код для активации в описании любого промо. <a href=https://floobits.com/DonaldEmorb>https://floobits.com/DonaldEmorb</a> казино 1×slots Денежные свои. Третий приз за регистрацию без депо – наличные. К сожалению, лишь знаменитые и известные клубы шансы уяснить деньги в руб. Либо долларах. С их поддержкой возможность насладиться любой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед этим необходимо исполненье определенных условий.Шаг 4. Активация. Внимательно исследуйте условия, информацию по лимитированиям и сроке действия бонусного предложения. Разобравшись с правилами, можно активировать приз в личном офисе (от ? с использованием промокода) или по запросу в саппорт.
1×slots casino регистрация 1×slotscasin online
<a href=https://astraclub.ru/members/353998-Jameswow>1×slots рабочее зеркало</a> В большинстве заведений устроить это можно по e-mal, по номеру телефонного, через социальную сеть либо гугл-аккаунт.Получив свой презент, Вы сможете безвозмездно играть на реальные деньги, а выполнив обстоятельства отыгрыша, исключить собственный выигрыш. Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные способы и расценить необыкновенности, недоступные при забаве в демо режиме. Многие новые клиенты перебегают в количество постоянных, а оператор получает длительную выгода.Акционные предложения от казино существуют в различных форматах. Часто бонусы даются в размен на депозит. Игрок заносит платеж и получает деньги, благотворительные вращения прочие поощрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — вид бонуса, кот-ый гарантирован за выполнение конкретных поступков на сайте: 1×slots зеркало рабочее на сегодня <a href=http://www.igmph.com/bbs/board.php?bo_table=free&wr_id=190738>http://www.igmph.com/bbs/board.php?bo_table=free&wr_id=190738</a> Промообъявления от казино не дают реальной картины и ориентированы на привлечение внимания пользователей. Понять, как высоки шансы остаться в плюсе, позволит личный анализ критерий предложения:
1×slots регистрация то дальше необходимо пройти
На бонусные начисления могут быть установлены вспомогательные лимитирования, которые Вы не сведению при отыгрыше. Пока бонус полностью не отыгран — деньги из казино не выводятся.Наши эксперты изучают условия промоакции, затем в ручном режиме проверку их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие характеристики. Мы не рекламируем казино, а даем игрокам информацию о лучших из них. <a href=http://m1bar.com/index.php?subaction=userinfo&user=habitualshoe47>http://m1bar.com/index.php?subaction=userinfo&user=habitualshoe47</a> 1×slots рабочее зеркало Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, solid только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.bedwantsinfo.nl/user-83172.html>1×slots официальный регистрация</a>
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=63835>1×slots зеркало которую указывали при регистрации кстати</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Изучить правила и обстоятельства получения бездепозитных бонусов казино, Вы можете у нас на веб-сайте в разделе с бонусами или на официальном веб-сайте выбранного Вами казино. Если не отыскать необходимую информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал либо по электронной почте. Бездепы обычно предлагают с отыгрышем — мгновенно исключить выигранные свои невозможно. Перевод денег со счета будет возможен в такого, как пользователь выполнит все требования казино, а сумма имеет быть выше установленного правилами лимита. Условиями акции фиксируются сроки, протяжении которых клиент вправе воспользоваться предложением. Обычно они не превышают нескольких дней в активации.
#4213 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Радченко Светлана Юрьевна порно спорт букмекерская контора <a href=https://rucriminal.info/>букмекерская контора без</a> 1×bet скачать приложение порно с Кирьянова Дарья Борисовна <a href=https://specreporter.com/>casino x</a> Львова-Белова Мария Алексеевна порно win win casino casino ап Валентина Матвиенко порно Набиуллина Эльвира Сахипзадовна порно яндекс игры казино букмекерская контора мостбет
DiskiPlus казино без DiskiPlus букмекерская контора фонбет официальный сайт <a href=https://www.diskiplus.ru/>DiskiPlus кент casino</a> DiskiPlus пинко casino DiskiPlus карты казино <a href=https://diskiplus.ru>DiskiPlus casino buzz</a> DiskiPlus порно с Максим Глушенков (футбол) DiskiPlus casino 7k рабочее DiskiPlus 1×bet слоты DiskiPlus casino pin официальный DiskiPlus казино фильм DiskiPlus Нургалиева Эльвира Рамиловна порно DiskiPlus 1×bet сейчас
#4214 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало
Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 $. Если выдаются фриспины, их количество изредка превышает нескольких 10-ов даровых вращений.Активация случается счет промокодов, коие вводятся в личном офисе в регистрации. Среди спецпредложений в списке Casino.ru содержатся эксклюзивные промокоды, коие доступны только посетителям портала. Другие методы начисления средств ? автоматическая активация незамедлительно в создания аккаунта и получение подарка по запросу в службу технической помощи. <a href=http://filmkachat.ru/>1×slot зеркало рабочее этих способов предполагает регистрацию</a> <a href=https://ilde2.upf.edu/clatmooc/v/ibq>https://ilde2.upf.edu/clatmooc/v/ibq</a> 1хслот 1хслотс регистрация перейти на 1×slots <a href=http://www.ruyi28.com/space-uid-2397.html>http://www.ruyi28.com/space-uid-2397.html</a>
x1 slots регистрация в 1×slots casino
Бонусные деньги – небольшая сумма денег для старта в новом казино. На бонусные средства, обыкновенно разрешено играть во все забавы, не слотов с прогрессивным джекпотом и игр из раздела live casino.Воспользоваться бездепом возможно не во всех игровых автоматах: казино вдруг уточняет ограничение для клиентов. Конечно, это возможно счесть некоторым неудобством для игрока, хотя ради отметить, что выбор автоматов всё точно остаётся довольно великим. <a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=103426&extra=>1 x slots casino</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots Ограничения по забавам. Администрация запрещает игрокам кое-какие игровые автоматы с бездепозитным призом, деньгами либо безвозмездными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда дробленье производится по облику игр. Например, отыгрыш возможен на всех игровых аппаратах, хотя запрещен в настольных играх и в разделе Live Casino.Подтверждение регистрации. Казино настоятельно привязки профиля к электронному адресу и номеру телефонного. Для этого на e-mail отправляется письмо со ссылкой, а на телефонный ? текстовое известье с кодом. <a href=http://x4kurd.freetzi.com/member.php?action=profile&uid=81819>http://x4kurd.freetzi.com/member.php?action=profile&uid=81819</a> Получить Бездепозитный приз в интернет казино дело 2-ух кликов. Другой момент, отыграть рекламную и соблюсти управляла и условия отыгрыша. Под правилами подразумевается столько вагер, но и лимитирования по максимальной ставке. Мы осознаем, собственно в кинотеатр все ставят на зеро и выигрывают. Призываем не делать похожего. Перед активацией приза прочтите управляла. Узнайте последующие моменты: Условия получения подарка, за регистрацию, за депозит и прочее. Ограничения по наибольшей ставке. Зачастую не повыше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вращать автоматы, а вагер несомненно стоять на пространстве. Поэтому принципиально знать, в каких играх можно совершать кратность денежного оборота.После требуется привнести идентификационный платёж. Это стращает начинающих больше всего. Нужно сделать наименьший депозит в 100–500 рублей. Таким образом служба безопасности увериться никаких, собственно платёжный способ принадлежит Вам. Данная процедура важна для обеспечения безопасности игровых счетов. Пример, Ваш акк взломают и выведут средства на собственный кошелёк. Будет очень неприятно. Поэтому верификация платёжной системы, это необходимый момент. 1×slots официальный регистрация
1×slots casino зеркало
Поспешите отобрать бездепозитные призы за регистрацию в казино из представленного списка. Все платформы столько водят законную работа, хотя и порадуют правдивыми результатами забавы, высочайшей отдачей, резвыми выплатами.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. Осталось избрать казино с бонусом за регистрацию и сделать профиль. После активации дара выигрыш в от Фортуны и навыков.Бездепозитные призы, как уже ясно, являются оригинальной возможностью к игровому процессу абсолютно бескорыстно, словами играть в онлайн казино безвозмездно и на быть свои незамедлительно в регистрации аккаунта. Автоматы с этим депо все стать прекрасной возможностью сыграть для почитателей пыла с определенными ограничениями в финансах. <a href=http://m555.com.ua/bitrix/redirect.php?goto=http://kolpino.ru/bitrix/click.php?goto=http://startek.su/bitrix/redirect.php?goto=https://teletype.in/@urist555/3kv3wQH4neQ>http://m555.com.ua/bitrix/redirect.php?goto=http://kolpino.ru/bitrix/click.php?goto=http://startek.su/bitrix/redirect.php?goto=https://teletype.in/@urist555/3kv3wQH4neQ</a> 1×slots зеркало регистрация в 1×slots casino
1×slots официальный сайт, скачать
<a href=http://complainanything.com/node/158?page=1019#comment-1447055>1×slots зеркало регистрацию более популярный вариант это</a> Вы не в коем случае ни чем не рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный приз, по мимо практической забавы на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, выучится регулировать изменять ставки и полосы, изучать бонусные забавы и их выигрышные комбинации, ну конечном просто зарядится кучей впечатлений! Ведь вы будите выступать на бонусные средства, коие можно отыграть и вывести, но просто на демо счет, тем самым адреналин в крови еще больше повысится а пульс забьется с нередким ритмом!Многие игроки, оценив возможностей казино, остаются выступать в нем и дальше ? на это и направлено каждое рекламную. Постоянные клиенты заносят депозиты и делают ставки, обеспечивая долгосрочную прибыль оператора. То есть, казино выдают бездепы новым юзерам для формирования лояльной аудитории. 1×slots регистрация на 1хслотс <a href=https://www.yuliancaishang.com/space-uid-297521.html>https://www.yuliancaishang.com/space-uid-297521.html</a> Бездепозитный бонус по промо-коду несомненно доступен для игры, только том, случае когда Вы активируете особый бонусный код в разделе с призами либо укажите промокод при регистрации на сайте. В неких случаях, кроме активации кода, придется подтвердить контактные данные игрока и наполнить анкету клиента.
1×slots зеркало видели такую регистрацию на
Предложения с бездепозитными бонусами за регистрацию дозволяют новым заведениям заинтересовать аудиторию на собственный сайт. А игроки тому получают возможность выступать на реальные средства без депо в казино и заработать маленькой стартовый капитал, который разрешено вывести на карту банка или электронный кошелек. Несмотря на то, что этот вариант стимуляции со стороны азартных платформ очень известен области сходственных игр, далеко не всем поклонникам казино известно, что являют собой бездепозитные бонусы казино и как именно их вполне эксплуатировать.Основное правило получения бездепа ? создаваемый аккаунт обязан быть у пользователя первым и единственным. Наличие нескольких аккаунтов взыскательно запрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депо необходимо соблюдать несложную последовательность действий. <a href=http://yerliakor.com/user/Craigcot/>http://yerliakor.com/user/Craigcot/</a> Возможность поиграть вспомогательное соревнование (а времени и количество) абсолютно безвозмездно, а выигрыш, тому, поступает на счёт игрока.Для выбора азартного заведения Вы можете воспользоваться списком наших казино с бонусами за регистрацию. На нашем веб-сайте мы опубликовали список бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, собственно часть бонусов неповторимые и доступны только для гостей нашего сайта по-специальному промо-коду или по оригинальной ссылке. Кроме такого, для любого бонуса мы подготовили подробный обозрение, в котором Вы узнаете как получить и отыграть одобрение и как исключить свой выигрыш с бездепа. 1×slots casino регистрация 1×slots review live При забаве на бонусные свои запрещается выступать в игровые автоматы с прогрессивным джекпотом и забавы из радела exist casino. Кроме как, некоторые казино дают бездеп на один либо некоторое конкретных слотов, и в других забавах Вы не можете на их играть.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.home-visa.ru/memberlist.php?mode=viewprofile&u=3536>1×slots промокод при регистрации 2025</a>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=448193>1хслотс официальный сайт зеркало</a>
<a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=1168700#pid1168700>casino 1×slot</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Иногда операторы требуют внесение минимального депозита перед выводом для верификации платежного инструмента. В некоторых казино данный депозит кроме предстоит отыграть. Главным моментом в возникновении данных вознаграждений произведено в, собственно пустив их в ход, игры ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он спасибо призам какой-либо выигрыш либо мгновенно спустит все только что прибывшие деньги). То есть, казино снабжает игрока вероятностью на дармовой базе играть во различные слоты даже спонсирует забаву.
#4215 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
официальные сайты казино Любимова Ольга Борисовна порно <a href=https://rucriminal.info/>водка казино</a> up casino скачать Разуваева Ксения Денисовна порно <a href=https://specreporter.com/>лучшие онлайн казино</a> винлайн букмекерская контора официальный сайт casino зеркало сегодня рабочее казино смотреть почему казино лучшие бесплатные онлайн казино 1×bet регистрация 1×bet телефон
DiskiPlus скачать 1×bet DiskiPlus порно с Петр Ян (ММА) <a href=https://diskiplus.ru/>DiskiPlus симулятор казино</a> DiskiPlus порно с Анна Щербакова, фигуристка DiskiPlus зеркала официальных сайтов казино <a href=https://diskiplus.ru/>DiskiPlus pin up casino</a> DiskiPlus порно с Константин Тюкавин (футбол) DiskiPlus казино ли DiskiPlus casino pin официальный DiskiPlus 1×bet зеркало слоты DiskiPlus porno Катерина Шпица DiskiPlus букмекерская контора скачать приложение DiskiPlus pinco casino
#4216 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Скворцова Вероника Игоревна порно 1×bet зеркало на сегодня <a href=https://vestnik-jurnal.com/>1×bet скачать бесплатно</a> porno Екатерина Ефременкова, шорт-трекистка porno Юлия Канакина <a href=https://krtka.info/>играющие казино</a> казино фильм онлайн r7 casino Самойлова Алла Владимировна порно порно с Константин Тюкавин (футбол) 1×bet сайт pinco casino скачать 1×bet
DiskiPlus казино 1 DiskiPlus vodka casino <a href=https://diskiplus.ru/>DiskiPlus 1×bet бесплатно</a> DiskiPlus казино смотреть DiskiPlus букмекерская контора мостбет <a href=https://diskiplus.ru/>DiskiPlus casino ап</a> DiskiPlus 1×bet DiskiPlus официальные сайты казино DiskiPlus Черкесова Бэлла Мухарбиевна порно DiskiPlus рейтинг казино DiskiPlus порно с Юлия Ефимова DiskiPlus casino 7k сегодня DiskiPlus 7k casino зеркало на сегодня
#4217 Charlesgunnyhttp://filmkachat.ru
рабочее зеркало 1×slots
Следует выделить, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом. <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> Не сложно додуматься, что no deposit bonuses почти ни не посещают великими. Чаще всего идет о пяти–тридцати долларах (либо эквиваленте данной суммы в иной валюте). <a href=https://www.artstation.com/user-47518283/profile>https://www.artstation.com/user-47518283/profile</a> 1×slots официальный сайт зеркало <a href=http://nvkb.ru/forum/index.php/user/105049/>http://nvkb.ru/forum/index.php/user/105049/</a> Разные казино имеют личные верховодила по выведению выигрыша. Для бездепозитных призов принимаются достаточно высочайшие требования. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до 100 раз в игровых автоматах. Например, в игрок получил даром 10 $, то необходимо несомненно отыграть их, поставив одну тыщу спинов по одному доллару каждый. Стоит обозначить(означить), что не все казино дают возможность играть на призы и не во всех увеселительных заведениях идентичные верховодила для отыгрывания. Некоторые казино запрещают играть на бонусы в блекджек либо ограничивают ставки до 5 %, что значительно увеличивает в 10-ки один число необходимых игр.
1х слот 1хслотс регистрация перейти на 1×slots
Свежий приз начисляется повторяющий валютных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в пользовании средствами, а случае отыгрыша оператор может ввести лимитирование на вывод средств.Способы получения бездепа различаются в зависимости от вида бонуса, кот-ый понравился игроку. Но для или надо(надобно) быть зарегистрированным в легальном онлайн-казино и доказать свою личность. В общем виде пошаговая аннотация для получения бездепозитного бонуса выглядит так: <a href=https://info.patternizer.com/why-patternizer-doesnt-output-css/>1×slots мобильная версия войти казино</a> 1×slots официальный сайт зеркало рабочее Любой выигрыш по ставке повыше установленного лимита будет считаться недействительным. То есть ставка не несомненно засчитана при отыгрыше, в случае выигрыша его сумма не поступит на счёт посетителя — итог игры будет всецело аннулирован.Бездепозитные призы – это исключительно занимательная и наиболее многообещающая акция интернет-казино. Они даже другого фри-спинов, потому собственно выплаты в даровых вращениях не гарантированы, как комбинации на барабанах игрового аппарата могут не сложиться. <a href=https://cameradb.review/wiki/User:MyrtleCollocott>https://cameradb.review/wiki/User:MyrtleCollocott</a> 1×slots регистрация 1×slots review live Если вы выбрали для себя несколько брендов коие вас больше всего полюбились, для неизменной забавы! Таких гемблеров казино очень любит и оценивает, за частую эти игроки становятся VIP игроками заведения, коим часто поступают прибыльные предложения в виде призов, так же туда входит и бездепозитные.
1×slots casino зеркало
Когда речь идет о денежных призах, казино постоянно устанавливают условия вейджера, которые нужно выполнить, дабы вывести выигрыш.Проверка занимает от нескольких минут до нескольких дней, профессионалы техподдержки шансы запросить вспомогательные документы или инициировать короткое общение по Skype. Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных обстановок с казино, когда последствии отыгрыша бездепа вам не дадут вывести солидную необходимую выигрыша.А ознакомиться с новыми онлайн казино, Вы можете помощью бонусов с выводом прибыли, коие Вы сможете получить без депозита. <a href=https://www.bos7.cc/home.php?mod=space&uid=2901707&do=profile&from=space>https://www.bos7.cc/home.php?mod=space&uid=2901707&do=profile&from=space</a> Стоит обозначить(означить), собственно бездепозитный приз выдается только совершеннолетним новеньким, коие, тому, имеют пригласить личных друзей и своих, кроме рассчитывающих на поощрительную программку преданности. Подобная разработка замечена между конкуренцию онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению собственной популярности, путем вербования новых игроков. Бонусы – это оригинальный шанс для потенциальных соучастников игры, коие имеют опробовать софт покер рума и увериться, будут ли они в него выступать или нет. Новый игрок попробует свои силы с реальными оппонентами в казино.Вы не в коем случае ни же рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный бонус, по мимо практической игры на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, научится регулировать менять ставки и линии, исследовать бонусные игры и их выигрышные композиции, да счете просто зарядится кучей эмоций! Ведь вы будите играть на бонусные свои, которые возможно отыграть и исключить, не просто на демо счет, что, этим наиболее адреналин в крови более повысится а пульс забьется с частым ритмом! онлайн казино 1×slots
1хлот регистрация в 1×slots casino
Так же стоит выделить то, что в любом интернет казино установлен свой максимальный кешаут на бездепозитный бонус. Как управляло кешаут — это предельная сумма денег, кот-ая доступная для вывода с бездепозитного приза. <a href=https://forums.scar-divi.com/topic/785784–1×slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8E-%D0%B1%D0%BE%D0%BB%D0%B5%D0%B5-%D0%BF%D0%BE%D0%BF%D1%83%D0%BB%D1%8F%D1%80%D0%BD%D1%8B%D0%B9-%D0%B2%D0%B0%D1%80%D0%B8%D0%B0%D0%BD%D1%82-%D1%8D%D1%82%D0%BE/>1×slots регистрацию более популярный вариант это</a> Сразу последствии активации промокода возможно воспользоваться подарком. Как уже упоминалось, призы посещают трёх обликов – фриспины, кредиты и фриплей-бонусы.В некоторых интернет казино для получения бездепозитных призов не довольно просто зарегистрироваться на сайте клуба и доказать свои контактные данные. Дополнительно потребуется активация промокода. Также, в этом случае необходимо подтвердить собственный номер телефонного, чтобы код, приобретенный в смс-сообщении от клуба установить в особое фон в собственном офисе игрока. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=http://ezevertech.com/bbs/board.php?bo_table=free&wr_id=14641>http://ezevertech.com/bbs/board.php?bo_table=free&wr_id=14641</a>
1× слот зеркало
Казино выделяет возможность заработать и вывести настоящие средства на бездепозитных призах. Обычно, это незначительная сумма, коию казино может себя позволить презентовать игроку.Как управляло, при выводе финансов, от играющего требуется лишь устроить минимальный вклад чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом собственный счет. <a href=http://www.imruyi.com/space-uid-1778008.html>http://www.imruyi.com/space-uid-1778008.html</a> Чаще всего используются коды. Их нужно заносить в специальные окошки регистрационной анкеты, случае речь о пригласительных призах, либо в особом разделе личного офиса игрока. 1×slots регистрация на 1хслотс Зарегистрируйтесь. Для регистрации чаще всего довольно ввести свой номер аппарата и почтовый адресок, в чего установить полученный код из СМС. Возможно, требуется показать промокод. В правилах промоакции будет написано, где его надо вводить. Иногда это надо делать при регистрации, от — теснее после творенья личного офиса, на отдельной странице.При отыгрыше бонусных средств, необходимо учесть срок действия бонуса и время, коие дается на отыгрыш. По истечению заявленного медли, не отыгранный приз будет аннулирован.
<b>Смотреть еще похожие новости:</b>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=105249&result=reply>1×slots актуальное зеркало</a>
<a href=https://irc.floobits.com/Jamesamiva>1×slots зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для казино, работающих онлайн, бездепозитные бонусы нужны для вербования новых клиентов. Предложение поиграть на слотах без надобности внесения реальных средств — работающий метод для повышения интереса к фирмы. После отыгрыша бездепа великоват шанс, собственно игроку понравится и он продолжит выступать в казино, только сейчас уже на личные деньги. Кешбэк-бонус дает собой возврат фиксированного процента от ставки в случае поражения или же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%.
#4218 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
bitz casino винлайн букмекерская контора официальный <a href=https://th-royalgclub.com/>казино ставка</a> 1×bet приложение 1×bet xbet <a href=https://www.ossetia.tv/>сайт 1×bet слоты</a> Приезжева Екатерина Геннадьевна порно казино вход официальный сайт 1×bet слоты 1×bet xyz скачать 1×bet на андроид 1×bet скачать бесплатно пин ап casino pin порно с Алина Загитова
DiskiPlus vavada casino DiskiPlus casino betting <a href=https://diskiplus.ru/>DiskiPlus 1×bet 1хбет</a> DiskiPlus inform@rucriminal.info DiskiPlus porno Александр Соболев (футбол) <a href=https://diskiplus.ru>DiskiPlus up casino зеркало</a> DiskiPlus порно с Евгения Медведева DiskiPlus зеркала казино DiskiPlus porno Ангелина Гончаренко, хоккеистка DiskiPlus 1×bet зеркало xbet xyz DiskiPlus retro casino DiskiPlus казино пину DiskiPlus casino игровой автомат
#4219 Charlesgunnyhttp://filmkachat.ru
зеркло казино 1×slots
Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам запрещено начислять бонусы посетителям, не имеющим валютных средств на счете. Мы предлагаем рассмотреть актуальные призы онлайн-казино с лицензией, коие соблюдают законодательство РБ. <a href=http://filmkachat.ru/>1хслот скачать</a> Самый распространённый из подобных призов, окончательно же, бездеп на день рождения посетителя — бонус в виде фиксированной суммы или фриспинов поступает на счёт игрока, а воспользоваться им возможно протяжении установленного периода медли.Бонусные средства – небольшая сумма средств для старта в новеньком казино. На бонусные средства, обыкновенно разрешается играть во все забавы, кроме слотов с прогрессивным джекпотом и игр из раздела exist casino. <a href=https://divisionmidway.org/jobs/author/cgifurniture-com/>https://divisionmidway.org/jobs/author/cgifurniture-com/</a> 1×slots официальный сайт зеркало <a href=http://forum.l2endless.com/member.php?action=profile&uid=11785>http://forum.l2endless.com/member.php?action=profile&uid=11785</a> При верном подходе бездепы — это отличный метод выступать на средства без траты собственных средств. Есть некоторое советов, следуя коим можно извлечь максимально полезности из похожих промоакций казино. Играть следует лишь на лицензированных площадках. Скриптовые сайты не обманывают с бонусными услугами, но и употребляют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах невозможно.Все благотворительные призы кажутся соблазнительными. Кто же откажется от способности поиграть в онлайн-казино, не рискуя средствами, хотя получая выигрыши. Но далеко не все бездепозитные бонусы в равной степени привлекательны для рассудительного клиента.
1×slots промокод при регистрации 2025
1хслотс 1хслотс регистрация перейти на 1×slots Выигрыши с призов без инвестициям постоянно привязаны к требованию по ставкам и шансы быть обналичены лишь последствии выполнения данных требований.Основное различие том,, что для получения бездепа нужно пополнять баланс в казино. Но кроме этого, есть ряд и отличий: <a href=http://www.ritual-letichev.km.ua/user/Patrickwag/>http://www.ritual-letichev.km.ua/user/Patrickwag/</a> Акции распространяются как на все игры казино, так и на ограниченный перечень. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и другие. Промо возможность охватывать разработки одного производителя. Бездеп не пересекается с другими промоакциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, изготовленные бонусными средствами. Для идентификации платежных реквизитов игрока возможность потребоваться пополнение счета на наименьшую необходимую.Как только на виртуальном счету окажутся бонусные свои, поспешите отыграть вейджер. Сразу последствии этого можно оставить заявку на вывод выигрыша. Кредиты выгодно отличаются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом настоящих средств и дают вероятность ощутить азарт. Во-вторых – можно насладиться любой азартной забавой доступной на веб-сайте. В вашем постановлении находятся автоматы, настольные прибавление, видео-покер, Live-дилеры. 1 х слотс зеркало Условия вывода выигрыша. В неких заведениях для успешного вывода с бездепозитного приза довольно пополнения баланса и доказательства личности. В иных же клубах, нужно некоторое раз прокрутить собственный депо.
1×slots официальный сайт мобильная версия скачать
Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.Таким образом интернет казино получает потенциального игрока. Возможно дальнейшем либо настоящем он захотит сыграть на средства средства. Так трудятся бездепозитные призы в интернет казино. Здесь очень подходит выражение, благотворительные сыр посещает только в мышеловке. Начинающие игроки могут не обдумывать опасность пыла. Однако с осознания становится больше. Это тема для отдельного обсуждения. Получив собственный подарок, Вы можете безвозмездно выступать на настоящие средства, а выполнив условия отыгрыша, вывести собственный выигрыш. <a href=https://rafaelikki67788.blog5.net/72625583/nude-ai-app-navigating-the-balance-between-privacy-and-technology>https://rafaelikki67788.blog5.net/72625583/nude-ai-app-navigating-the-balance-between-privacy-and-technology</a> Бездепозитные призы в казино без пополнения 2022 — это определенная сумма средств или for nothing spins вращения, коие предоставляются первым гостям за регистрацию на сайте казино вид бездепозитного бонуса, и выделяет вам вероятность за счет казино без пополнения опробовать услуги (игр), с последующей прерогативой вывода средств при выполнении всех установленных верховодил.Автоматическая активация первый самой комфортной, но ручной способ содержит перед ней преимущества. Прежде чем использовать вознаграждение от казино, стоит заранее найти, сколько времени требуется на исполнение всех условий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала действия бонуса. 1×slots подтвердит вашу регистрацию если говорить Но на некоторых азартных платформах подобные вознаграждения могут получить теперь зарегистрированные пользователи. В этом случае, бонусы предоставляются в уникальных акций или же некоторым игрокам повторяющий акционного предложения, коие приходит на почту с целью «вернуть» игрока в свое казино.
казино 1×slots официальный сайт
Онлайн-казино тщательно продумывают бонусные обстоятельства, которые необходимо выучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и другие лимитирования. На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не сможете активировать и получить бездепозитный приз. 1хслотс рабочее зеркало на сегодня <a href=https://velorout.com.ua/user/Kennethacaks/>https://velorout.com.ua/user/Kennethacaks/</a>
1×slots зеркало регистрация
Ниже указан актуальный перечень законных казино в Беларуси с призами на первый депозит. Вы можете попасть на официальный вебсайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус.Выигрыши с бонусов без вложений практически привязаны к притязанию по ставкам и могут быть обналичены лишь последствии исполнения этих притязаний. Принципиальным различием бесплатных призов от призов на депозит является недоступность надобности вносить деньги на аккаунт. Из-за этого их нередко называют бездепозитными (not the slightest deposit bonuses).Бездепозитные призы за регистрацию в игровых автоматах для хозяев онлайн-казино считаются долею рекламной кампании, направленной на увеличение аудитории сайта. Так они продвигают средства бренды и привлекают новых клиентов. <a href=http://forum.roozgozar.com/member.php?action=profile&uid=2812>http://forum.roozgozar.com/member.php?action=profile&uid=2812</a> 1×slots рабочее зеркало на сегодня Наши эксперты исследуют обстоятельства акции, этого в ручном режиме проверяют их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и параметры. Мы не рекламируем казино, а даем игрокам информацию о наихороших из них.Благодаря программе лояльности от игорного заведения, возможно арестовать неплохой старт и без дополнительных инвестициям запустить видеослоты. Кроме того, можно рассчитывать на реальную удачу и получить, без вложения собственных денег, большой выигрыш.
<b>Смотреть еще похожие новости:</b>
<a href=https://fougerite.com/members/jamesstawl.14360/>1×slots регистрация на 1хслотс</a>
<a href=https://forum.oursson.ru/viewtopic.php?f=2&t=11736>1×слотс казино</a>
<a href=http://everestrolep.listbb.ru/viewtopic.php?f=38&t=11669>онлайн казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных ситуаций с казино, когда после отыгрыша бездепа для не дадут вывести солидную необходимую выигрыша. Такие поощрения позволяют бесплатно протестировать свежее казино, разобраться с игровым процессом онлайн слотов, заработать и исключить маленькую сумму средств.
#4220 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
kometa casino 1×bet рабочее <a href=https://t.me/vchkogpu_ru>Чулпан Хаматова</a> porno Юлия Канакина, скелетонистка online casino 7k <a href=https://sovsekretno.net/>казино 1</a> букмекерская контора бесплатно скачать порно с Зырянова Анастасия Владимировна яндекс казино букмекерская контора ставки casino зеркало сайта ев казино 7k casino официальный сайт
DiskiPlus ramenbet casino DiskiPlus pin casino <a href=https://diskiplus.ru/>DiskiPlus скачать 1×bet 1×bet xyz</a> DiskiPlus сколько казино DiskiPlus симулятор казино <a href=https://diskiplus.ru/>DiskiPlus 7k casino бонус</a> DiskiPlus бесплатно играем казино DiskiPlus зеркала казино DiskiPlus casinos xyz DiskiPlus пин ап casino pin DiskiPlus официальные сайты казино DiskiPlus porno Светлана Ходченкова DiskiPlus porno Юлия Канакина, скелетонистка
#4221 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало
Можно. Вы постоянно сможете отказаться от получения бездепозитного приза за регистрацию в казино, же Вы не сделаете ставку. <a href=http://filmkachat.ru/>1×slots регистрация то дальше необходимо пройти</a> Получив свой презент, Вы можете даром играть на настоящие деньги, а выполнив обстоятельства отыгрыша, исключить собственный выигрыш.Доступ к подарку имеет раскрываться механически после введения промокода либо обращения в службу сайта. В первом случае от пользователя не требуется никаких деяний. Бездеп с активацией по коду встречается почаще всего. Игроку необходимо установить совокупа знаков в графе, которая возможность находиться в регистрационной форме в Личном офисе. <a href=https://www.4sync.com/s/fLYUHSTCD>https://www.4sync.com/s/fLYUHSTCD</a> 1×slots промокод при регистрации 2025 <a href=http://spilov.ru/user/GregoryFrove/>http://spilov.ru/user/GregoryFrove/</a>
зеркала 1×slots
Важно, удостоверьтесь что, нет, что ранее не регистрировались в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи.Также, ситуации нужно доказать свой номер телефонного, желаемого код, полученный в смс-сообщении от клуба ввести в специальное поле в личном кабинете игрока. рабочее зеркало 1хслотс Сроки активации бонуса уточняются каждым казино, хотя чаще всего они не превосходят недели с этапа получения. Игроку обязательно нужно использовать бездеп протяжении обозначенного срока, в ином случае приз просто пропадет. Каждый приз можно получить лишь раз один, потому случае не использовать бездеп в срок, у игрока не несомненно второго шанса им воспользоваться.Наши специалисты исследуют обстоятельства промоакции, затем в ручном режиме проводят их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и другие параметры. Мы не рекламируем казино, а даем игрокам информацию о наихороших из их. <a href=https://forum.beloader.com/home.php?mod=space&uid=202675>https://forum.beloader.com/home.php?mod=space&uid=202675</a> Даже не выиграв солидную сумму, игрок интересно проведет время, изнутри изучит работу площадки, воспримет геймплей автоматов. Все это без каких-либо финансовых рисков. Быть в курсе лучших промоакций с. Достаточно периодически изучать перечень свежих онлайн казино с выводом приза без депозита в этом разделе.Обычно бездепозитные акции от казино, прибывают на эл. Почту в деньки рождения или дни. В неких интернет казино возможно адресоваться в чат и как постоянному игроку, возможно вам предложат бездепозитное предложение. 1×slots регистрация 1×slotscasino09k online
1×slots зеркало рабочее на сегодня
В качестве бонусов интернет казино часто предлагает выдачу фриспинов, то есть даровых вращений игрового барабана. Виртуальные монеты возможно применять для изучения в покерной школе или для игры в казино.В истиннее время получить бонус за регистрацию в казино очень просто. Почти любой игорный дом с радостью даст деньги либо безвозмездные вращения. Многие игроки используют данным и не стесняются региться в любом клубе с прибыльными условиями. Кстати, это отличная вероятность придумать выигрышную тактику и сорвать куш. Казино выделяет возможность заработать и вывести настоящие средства на бездепозитных призах. Обычно, это малозначительная сумма, которую казино возможность себе разрешить презентовать игроку. <a href=https://pixel-brush.ru/user/ZacheryNes/>https://pixel-brush.ru/user/ZacheryNes/</a> В наше время довольно просто получить приз за регистрацию в казино. Практически любой игорный дом с радостью начисляет деньги либо безвозмездные вращения. Многие гэмблеры используют этим и не смущяются региться в любом клубе с прибыльными критериями. Кстати, это отличная возможность выработать победную стратегию и сорвать джекпот.Получить Бездепозитный приз в онлайн казино дело 2-ух кликов. Другой момент, отыграть промо и соблюсти управляла и обстоятельства отыгрыша. Под правилами предполагается столько вагер, хотя и ограничения по наибольшей ставке. Мы понимаем, что в кино все ставят на зеро и выигрывают. Призываем не создавать подобного. Перед активацией бонуса прочтите правила. Узнайте последующие факторы: Условия получения презента, за регистрацию, за депозит и прочее. Ограничения по наибольшей ставке. Зачастую не выше 350 руб. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вращать автоматы, а вагер несомненно стоять на пространстве. Поэтому главно знать, в каких играх возможно осуществлять кратность денежного оборота. зеркала 1×slots Простая процедура получения бездепозитного приза, которая займет не более 2-х минут. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные.В интернете количество известных игорных площадок с красивыми акционными услугами. Однако пристально разбирать обстоятельства десятков предложений времени надоест, ну и время отнимет много. Поэтому наша команда подготовила ТОП-3 вебсайтов с наихорошими бездепозитными бонусами:
1×slots зеркало регистрация в 1×slots casino
Для получения приза нужно ознакомиться с программой преданности казино и сделать ставки на сумму, нужную для перехода на следующий степень. Для как, дабы отыграть сумму вашего бездепозитного приза нужно выполнить обстоятельства вейджера. Очень нередко фриспины даются на определенные слоты (book of ra, book of dead, book of sun), избирайте разъем себе по душе, они все очень красочные и качественные. Бездепозитные бонус возможность быть денежным так и повторяющий фриспинов на слотыБездеп с фриспинами возможность обхватывать всю коллекцию игр на сайте или разработки одного провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш может быть выведен в как, как пользователь отыграет данную необходимую. Возможность расценить полный перечень слотов — главное достоинство этой разновидности. Игроку становятся доступны те опции, коие отсутствуют в демонстрационном режиме, а возможность выиграть настоящие деньги прибавляет ярчайших азартных чувств. 1×slot регистрация <a href=http://www.ntsr.info/forum/user/101853/>http://www.ntsr.info/forum/user/101853/</a> Самые свежие бездепозитные бонусы в казино за регистрацию 2022 года с выводом прибыли находятся на данной странице. Посетитель имеет расценить обстоятельства получения и начать играть на средства без внесения депозита. При этом игроку главно понимать, на каких условиях и какими способами появится исключить полученный выигрыш. Для сего необходимо оценить список подключенных платежных систем.Так что приготовьтесь дать конфиденциальную информацию (пол, возраст, государство проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает не более суток, последствии чего удастся свободно выводить солидные выигрыши.
1хслот 1хслотс регистрация перейти на 1×slots
Бонус за регистрацию в казино без депозита с выводом денег нужно отыграть. Зачастую для отыгрыша возможность понадобиться сделать ставки на необходимую, в количество десятков раз превышающую необходимую бонуса или выигрыша.Существуют казино с призом за регистрацию, в довольно знамениты фриспины в онлайн казино потом регистрации в конкретных играх. Они встречаются в почаще бесплатных поощрений либо традиционных бонусов в казино без вложений. Например, игрок регистрирует счет, на который начисляются бесплатные игры, приз за регистрацию в виде даровых фрспинов, вращения в игровом автомате. Во время игрового процесса игры выигрывает истинные средства, которые в последствии можно удачно вывести из заведения на свою платежную систему. То есть, все шансы исключить свои без рисков своими деньгами. Регистрация, за которую игрок получит призы, займет пару минут, а благодаря данному возможно увеличить пять евро поощрений до тысячи и без всяких проблем вывести их. <a href=https://wlppr.net/user/TyroneGok/>https://wlppr.net/user/TyroneGok/</a> 1×slots casino регистрация Создание аккаунта. На веб-сайте казино нужно открыть регистрационную форму и наполнить пустопорожние поля собственными данными. Иногда на данном шаге требуется показать только адрес электрической почты и пароль, хотя почаще надобно заполнить анкету персональной информацией (ФИО, дата рождения, пространство проживания и т.д.). Нужно указывать лишь реальные данные, поскольку впоследствие они будут испытаны.Бесплатные призы казино без депозита возможно получить в виде денежных средств на бонусный счет (вывести их можно лишь последствии отыгрыша), фриспинов, забавы либо кешбэк-бонуса.
<b>Смотреть еще похожие новости:</b>
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=3747>1×slots зеркало регистрацию более популярный вариант это</a>
<a href=https://fougerite.com/members/jamesstawl.14360/>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a>
<a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=598116#pid598116>1×slots официальный регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Популярность интернет казино растёт и всё больше пользователей начинают интерес азартными играми. Бездепозитные призы 2022 года, это оригинальные подарки за регистрацию. С их поддержкой свежие игроки могут получить благотворительные вращения либо средства на баланс за одну регистрацию. С выходом игорных заведений в интернете, бездепозитные бонусы стали моднейшим способом привлечения игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш сайт собрал наилучшие предложения из интернета на 2022 год. Воспользуйтесь хоть презентом и можете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить обстоятельства.
#4222 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet приложение порно с Бондаренко Анастасия Борисовна <a href=https://rucriminal.info/>Шевцова Татьяна Викторовна порно</a> порно с Виктория Синицина, фигуристка Окладникова Ирина Андреевна порно <a href=https://krtka.info/>официальные букмекерские конторы</a> кент casino винлайн букмекерская контора официальный 1×bet вход 1×bet телефон порно с Матвей Сафонов (футбол) почему в казино нет окон макао казино
DiskiPlus 1×bet приложение DiskiPlus порно с Алексей Миранчук (футбол) <a href=https://diskiplus.ru/>DiskiPlus винлайн букмекерская контора официальный</a> DiskiPlus 1×bet зеркало DiskiPlus 1×bet рабочее на сегодня <a href=https://www.diskiplus.ru>DiskiPlus casino 7k рабочее</a> DiskiPlus 1×bet официальный 1×bet xyz DiskiPlus 1×bet на андроид бесплатно DiskiPlus демо казино DiskiPlus top casino DiskiPlus pinco casino DiskiPlus Семёнова Татьяна Владимировна порно DiskiPlus порно с Константин Тюкавин (футбол)
#4223 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на сайте
Условия отыгрыша бонуса. Если Вы планируете заработать на бездепозитном призе, то для внимание на велечину вейджера и срок, который дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть приз и вывести выигрыш.В списке требований к отыгрышу часто присутствуют лимиты на ставки при ирге на собственные деньги. Так, случае отыграть надо(надобно) 30 000 руб., а предельная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 один. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам деянья акции. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> Существуют казино с призом за регистрацию, в очень известны фриспины в интернет казино впоследствии регистрации в конкретных забавах. Они встречаются том чаще бесплатных поощрений или традиционных бонусов в казино без вложений. Например, игрок регистрирует счет, на который начисляются безвозмездные игры, бонус за регистрацию вид даровых фрспинов, вращения в игровом автомате. Во время игрового процесса игрок выигрывает настоящие деньги, коие в последствии возможно успешно исключить из заведения на собственную платежную систему. То есть, есть шансы исключить средства без рисков своими деньгами. Регистрация, за которую компьютерные получит бонусы, займет минут, а спасибо этому возможно прирастить 5 евро поощрений до тыс. И без всяких проблем исключить их.Онлайн-казино кропотливо продумывают бонусные условия, коие необходимо изучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и другие лимитирования. <a href=https://onetable.world/read-blog/89545>https://onetable.world/read-blog/89545</a> Игрокам не следует принимать приветственный бонус как гарантированный способ получить большой выигрыш, но это замечательная вероятность без расходов оценить перечень казино.Для такого, дабы отыграть сумму вашего бездепозитного бонуса нужно выполнить условия вейджера. Очень часто фриспины даются на определенные слоты (book of ra, book of dead, book of sun), избирайте слот себя нраву, все довольно красочные и качественные. Бездепозитные приз возможность быть валютным например и повторяющий фриспинов на слоты 1×slots сайт <a href=https://gidro2000.com/forum-gidro/user/21741/>https://gidro2000.com/forum-gidro/user/21741/</a> Как только получите бездеп в казино, всё также не запамятовывайте инспектировать электрическую почту. Некоторые игорные клубы непрерывно радуют активных гэмблеров приятными призами. Чаще всего получить подарок можно в преддверии веселья, на день рождение, за привлечение друга. А кроме распространённым бонусом является надбавка к депозиту. Нужно не восполнить счёт, и азартное заведение увеличит его на 50–100%.Бездепозитный приз казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в данном и содержится главное различие.
1хслотс 1хслотс регистрация перейти на 1×slots
Маркетинговая деятеля всех игорных интернет-клубов обязана одевать различный характер. И если вознаграждения на депозит работают чтобы, чтобы, чтобы провоцировать вносить депозиты и поощрять теснее имеющих юзеров, то бездепозитный бонус в казино либо бонус за регистрацию в казино, до всего, рассчитан на расширение базы покупателей. 1×slots подтвердит вашу регистрацию если говорить <a href=https://www.mikocon.com/home.php?mod=space&uid=212083>https://www.mikocon.com/home.php?mod=space&uid=212083</a> 1×slots рабочее зеркало Размер бонуса. В качестве бездепов обычно начисляют маленькие суммы, а когда речь о призах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино все подарить игроку до 2000$.Похожим образом трудится третий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя или в связи с получения им VIP-статуса. Подарок предоставляется после обращения в поддержку и проверки.
казино 1× slots официальный сайт
Прибывшие на аккаунт деньги бездепозитные бонусы предназначаются, главном, только для свежеиспеченных пользователей, коие ранее не имели собственного аккаунта в данном казино. Исходя из сего, случае ранее у игрока был сделан депо, то, по всей вероятности, у него больше не будет способности рассчитывать на получение такового приза в определенном заведении. Но на некоторых азартных платформах сходственные вознаграждения имеют получить теперь зарегистрированные юзеры. В таком случае, бонусы предоставляются масштабах оригинальных промоакций либо же некоторым геймерам повторяющий акционного предложения, коие прибывает на почту с целью «возвратить» игрока в свое казино.Все любят получать презенты. Согласитесь, почти любой играющий человек будет безгранично рад, если получит даровой подарок для забавы в интернет казино просто за регистрацию либо же бонус за внесенный депо, например именуемые приветственные бонусы для новых игроков. Соответственно такие интернет клубы станут больше известны и предпочтительны у игроков при выборе казино для игры. Топ казино постоянно обновляется и прибавляются свежие и занимательные игровые клубы с симпатичной бонусной политикой и всеми возможными привилегиями, к которым относятся эти призы как фриспины за регистрацию, денежные бездепозитные призы, а также великодушные бонусы за внесенный депо. <a href=https://noteswiki.net/index.php?title=Benutzer:ChristyTrent>https://noteswiki.net/index.php?title=Benutzer:ChristyTrent</a> 1× slots официальный Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских рублей. В критериях акции указано, что вейджер бездепозитного приза х20. Поэтому, дабы отыграть бонус, игроку будет нужно устроить ставок на 35*20=700 руб.Выигрыши с призов без инвестициям всегда привязаны к притязанию по ставкам и шансы быть обналичены лишь в исполненья этих притязаний.
1×slots регистрация на 1хслотс
Бонус за регистрацию в казино выдается только раз раз на 1-го игрока. Но случаются вспомогательные акции, в коих бездепы раздаются для постоянных посетителей и такие подарки Вы сможете получить больше 1-го раза.Иногда виде одобрения за регистрацию шансы выдаваться билеты для участия в турнирах. Условия их проведения очень отличаются, поэтому мы советуем ознакомиться с любым предложением отдельно. Бонус за регистрацию в казино без депо с выводом денег нужно отыграть. Зачастую для отыгрыша имеет понадобиться сделать ставки на сумму, в количество десятков раз превышающую необходимую бонуса или выигрыша.Бездепозитные бонусы реальными деньгами, которые можно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадались. 1хслотс 1хслотс регистрация перейти на 1×slots <a href=http://www.bakinsky-dvorik.ru/forum/?PAGE_NAME=profile_view&UID=169772>http://www.bakinsky-dvorik.ru/forum/?PAGE_NAME=profile_view&UID=169772</a> Для всех бездепозитных призов действует наибольший предел на выигрыш. Он показывает максимальную сумму, коию появится получить, играя на бонусные кредиты. Как только вас удастся выполнить требования вейджера, возможный максимум несомненно переведен с бонусного счета на главный, а остаток несомненно списан.Да, у безвозмездных бонусов есть недостатки. Прежде всего, они обыкновенно маленькие. Кроме как, обстоятельства вейджера по ним практически жесткие. Но все отсутствие риска проделывает их довольно красивыми для посетителей.
скачать 1×slots на андроид мобильная версия
Бездепозитные призы, как уже понятно, являются уникальной возможностью обратиться игровому процессу безусловно бескорыстно, то есть играть в онлайн казино безвозмездно и на имеющие свои незамедлительно после регистрации аккаунта. Автоматы с этим депозитом шансы стать великолепной возможностью сыграть для поклонников пыла с определенными ограничениями в денег.Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, чтобы появилась возможность вывести выигрыш. Ниже указан актуальный список легальных казино в Беларуси с призами на 1-ый депо. Вы сможете попасть на официальный вебсайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз.Игры, в которых можно выступать на бонусные средства. Проверьте перечень игр, каких возможно играть на бонусные средства, вполне они Вам не понравятся и надо тратить своё время на такую акцию. <a href=https://skobka.com.ua/forum/user/4776/>https://skobka.com.ua/forum/user/4776/</a> 1×slots регистрация на 1хслотс Подобные бонусы без депозита предоставляются на больше прибыльных критериях. Зачастую они крупнее, а условия отыгрыша наименее строгие.Свежий бонус начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в пользовании своими, а в случае отыгрыша оператор возможность ввести ограничение на вывод средств.
<b>Смотреть еще похожие новости:</b>
<a href=http://kick.gain.tw/viewthread.php?tid=4718163&extra=>1×slots регистрация на сайте</a>
<a href=http://griffhunter.com/boards/viewtopic.php?p=321425#p321425>1×slots casino регистрация 1×slotscasino09k online</a>
<a href=https://redfist.de/RF-Online-Testforum/viewtopic.php?f=105&t=80862>1хслотс официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Однако далековато не все ресурсы предлагают своим клиентам бездепозитные призы за регистрацию в казино. В большинстве случаев учтено одобрение на 1-ый депозит в размере 100–200%. Это отличная возможность преувеличить банкролл, прирастить время, проведённое за игрой и шансы сорвать крупный куш.
#4224 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
ев казино лучшие онлайн казино <a href=https://rucriminal.info/>суть казино</a> где казино 7k casino официальный <a href=https://krtka.info/>рабочее казино</a> 1×bet сейчас скачать букмекерскую контору casino играть пин ап casino pin up top порно с Бондаренко Анастасия Борисовна casino бонус Скворцова Вероника Игоревна порно
DiskiPlus зеркала официальных сайтов казино DiskiPlus 1×bet официальный сайт <a href=https://www.diskiplus.ru>DiskiPlus 1×bet скачать приложение</a> DiskiPlus 1×bet зеркало на сегодня 1×bet xyz DiskiPlus casino на телефон <a href=https://www.diskiplus.ru>DiskiPlus Юдаева Ксения Валентиновна порно</a> DiskiPlus up casino официальный DiskiPlus casino автомат DiskiPlus сайты казино DiskiPlus официальные зеркала казино DiskiPlus порно с Алина Загитова DiskiPlus яндекс игры казино DiskiPlus 1go casino
#4225 Charlesgunnyhttp://filmkachat.ru
1×slots официальный demo регистрация в 1×slots casino
Классическая разновидность бонуса за творенье аккаунта. Его преимущество содержится в, собственно клиент возможность без избирать аппараты и создавать ставки в их. Иногда список игровых автоматов ограничен оператором, хотя все также это чем, чем единственный доступный разъем, как в случае с внедрением фриспинов. <a href=http://filmkachat.ru/>1× слот зеркало</a> <a href=https://social.urgclub.com/read-blog/214040>https://social.urgclub.com/read-blog/214040</a> 1хслотс мобильная версия зеркало <a href=https://warezlover.xyz/user/Anthonydah/>https://warezlover.xyz/user/Anthonydah/</a> После потребуется привнести идентификационный платёж. Это пугает новичков больше всего. Нужно сделать наименьший депозит в 100–500 руб. Таким образом служба защищенности увериться что, нет, что платёжный способ принадлежит Вам. Данная процедура необходима для обеспечивания безопасности игровых счетов. Пример, Ваш аккаунт взломают и выведут свои на собственный кошелёк. Будет очень неприятно. Поэтому верификация платёжной системы, это важный момент.Обычно для получения бонусов без депо, казино выдвигает приклнные и вполне выполнимые условия, хотя есть ряд действий коие воспрещены и все повлечь за собой противные результаты:
1×slots официальный сайт мобильная версия
1×slots казино мобильная версия Самые свежие бездепозитные бонусы в казино за регистрацию 2022 года с выводом выгоды находятся на данной странице. Посетитель имеет оценить условия получения и начать выступать на деньги без внесения депо. При данном игроку важно разуметь, на каких критериях и какими методами у вывести приобретенный выигрыш. Для этого необходимо оценить список присоединенных платежных систем.Бездепозитный бонус казино 2022 с выводом за регистрацию предоставляет вероятность ознакомиться игроку с лобби избранного заведения, определится в выборе игр и проверить качество работы службы. Довольно часто, начиная игровой процесс, игрок теснее отказывается останавливаться и проделывает настоящий лепта. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть бесплатно вполне как один таки с бонусом за регистрацию без необходимости заносить депозит. <a href=http://vti-service.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://sushi-istra.ru/bitrix/redirect.php?goto=http://zakazatstriptiz-spb.ru/bitrix/redirect.php?goto=https://telegra.ph/Prodazha-kvartiry-cherez-notariusa-09–23>http://vti-service.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://sushi-istra.ru/bitrix/redirect.php?goto=http://zakazatstriptiz-spb.ru/bitrix/redirect.php?goto=https://telegra.ph/Prodazha-kvartiry-cherez-notariusa-09–23</a> сайт 1× slots casino Фриспины – безвозмездные вращения с фиксированной ставкой, которые возможно использовать в конкретных игровых автоматах.Таким образом, заведение пытается показать себя своим потенциальным игрокам, а такой рекламный ход как казино бонус без депозита за регистрацию привлекает очень много внимания к игорному заведению и обеспечивает постоянный струю свежих посетителей и будущих клиентов игрового онлайн клуба.
1×slots casino регистрация 1×slotscasin online
За счёт спинов получится запустить различные интернет слоты, протестировать стратегии и поднабраться опыта. Фишка что, нет, что вращения начисляются на лучшие аппараты с оригинальными опциями и высочайшей отдачей. Не забывайте, собственно в каждом акционном предложении учтены особые требования – временные ограничения, наибольший объем ставки, список дешевых игр.Помните, собственно всевозможные нарушения управлял сведут на нет ваши старания, и вы всего останетесь без начисленного вам дарового приза. Всегда изучайте управляла начисления и условия вейджера. По каким вопросам, на коие вы не можете помощи отыскать ответы, обращайтесь за объясненьям и саппорт. Верификация важна для дополнительной безопасности и помочь техподдержке выявить бонусхантеров и мошенников. Кстати, рядах платформах выводы солидных сумм доступны только после подтверждения личности. <a href=https://www.assayyarat.com/forums/member692611.html>https://www.assayyarat.com/forums/member692611.html</a> Популярность интернет казино растёт и всё больше пользователей начинают интерес азартными играми. Бездепозитные призы 2022 года, это уникальные презенты за регистрацию. С их поддержкою свежие игроки имеют получить бесплатные вращения либо деньги на баланс за одну регистрацию. С в игорных заведений в интернете, бездепозитные призы стали наимоднейшим методом привлечения игроков. Подобные промоакции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о которых мы расскажем. Наш сайт собрал превосходнейшие предложения из интернета на 2022 год. Воспользуйтесь любым даром и сможете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша нужно выполнить условия. 1×слот регистрация в 1×slots casino
1×slots регистрация на сайте
К огорчению, нет. Почти все казино, настоятельно внесение но бы 1-го минимального депо для вывода выигрыша с бездепозитного бонуса. Также учитывайте, что вывести деньги разрешено только на ту платежную систему, с коей был сделан депо.Выбрать казино с бездепозитным призом. У нас на сайте представлен перечень лучших интернет казино, которые предлагают своим игрокам щедрые призы за регистрацию. Законодательство, регулирующее азартные забавы в разных государствах, влияние на возможности операторов. В итоге юзеры из отдельных регионов сталкиваются с лимитированиями со стороны казино. Это может быть как глубокий отказ в доступе, например и невозможность загружать игры отдельных изготовителей.Если вы опытный игрок, вы должны знать, что приз без депозита – редчайшая находка. Тем не, мы раз изучаем онлайн, дабы отыскать вам лучшие бездепозитные предложения. 1×slot официальный сайт <a href=https://www.nulled.to/user/6335456-deena71c38>https://www.nulled.to/user/6335456-deena71c38</a> Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, solid только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Бонус за регистрацию в казино без депо с выводом средств нужно отыграть. Зачастую для отыгрыша возможность понадобиться устроить ставки на сумму, в несколько десятков раз превышающую сумму приза или выигрыша.
1× slots официальный
Чаще всего, знаменитые сервисы, такие как MoneyBookers и WebMoney, еще MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно обязательное правило. Финансовые свои выводятся лишь через что, эту платежную систему, коей огромной для пополнения депозита. Если же игрок получил бездепозитный покерный приз, требуется пополнить счет на минимальную необходимую, которая сочиняет обычно десять $. Как только получите бездеп в казино, всё равно не запамятовывайте проверять электрическую почту. Некоторые игорные клубы постоянно радуют интенсивных гэмблеров приятными бонусами. Чаще всего получить презент можно в преддверии веселья, на денек рождение, за вербование приятеля. А кроме распространённым призом является прибавка к депозиту. Нужно более восполнить счёт, и азартное заведение увеличит его на 50–100%. <a href=http://startlogistic.ru/index.php?subaction=userinfo&user=coherentcategor>http://startlogistic.ru/index.php?subaction=userinfo&user=coherentcategor</a> При ирге на бонусные средства запрещается играть в игровые автоматы с прогрессивным джекпотом и игры из радела live casino. Кроме как, кое-какие казино дают бездеп на один либо количество определенных слотов, и в других играх Вы не сможете на их выступать. 1×slots официальный сайт зеркало Некоторые казино имеют предлагать посетителям бездепы за свидетельство номера или почты либо репост на страницу в социальных сетях.
<b>Смотреть еще похожие новости:</b>
<a href=https://praisenpray.org/forums/showthread.php?tid=103061>1×slots зеркало регистрацию более популярный вариант это</a>
<a href=https://www.goslog.ru/forum/messages/forum1/message18149/11-obrashcheniya-grazhdan?result=reply#message18149>1×slots официальный сайт скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Более солидные предложения встречаются довольно изредка. Зачастую они доступны только VIP-игрокам. В остальных случаях им скорее сопутствуют довольно строгие обстоятельства отыгрыша. Также возможны дополнительные обстоятельства и ограничения, прописанные в критериях и положения бонусной программы казино.
#4226 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Анна Михалкова леон букмекерская контора <a href=https://strelochnik.com/>порно с Евгений Малкин (хоккей)</a> букмекерская контора скачать приложение porno Анна Сидорова, керлингистка <a href=https://th-royalgclub.com/>порно с Алина Загитова</a> казино смотреть онлайн казино гта 5 казино фильм смотреть онлайн casino игровой автомат букмекерская контора мостбет 1×bet 1×bet зеркало рабочее на сегодня 1×bet xyz
DiskiPlus 1×bet на сегодня DiskiPlus букмекерская контора фонбет официальный сайт <a href=https://diskiplus.ru>DiskiPlus casino андроид</a> DiskiPlus пари букмекерская контора DiskiPlus 1×bet официальный скачать <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet</a> DiskiPlus пин up casino DiskiPlus vavada casino DiskiPlus casino актуальное зеркало DiskiPlus 1×bet сейчас DiskiPlus гта казино DiskiPlus порно с Анастасия Потапова, теннисистка DiskiPlus Радченко Светлана Юрьевна порно
#4227 Charlesgunnyhttp://filmkachat.ru
скачать 1×slots официальный сайт
Самый распространённый из сходственных призов, естесственно же, бездеп на денек рождения посетителя — приз в виде фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им можно на установленного периода времени.Вы всего, скажем, как все предпочитаете получать презенты и бездепозитные бонусы казино. Игорные жилища брали в повадку одаривать гэмблеров приятными призами. Стать владельцем приветственного подарка возможно за творенье профиля либо пополнение счёта. Второй вариант более занимательный, как клубы готовы удвоить депозит! Но в вы новичок и лишь знакомитесь с миром азарта, превосходнее воспользуйтесь призом за регистрацию. <a href=http://filmkachat.ru/>1×slots казино зеркало</a> Ознакомьтесь с нашим перечнем лучших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего списка и получите бездеп незамедлительно. Хватайте превосходнейшие благотворительные предложения ниже и выигрывайте большие деньги, не рискуя! <a href=https://www.fanfiction.net/u/16457165/>https://www.fanfiction.net/u/16457165/</a> 1×slots рабочее зеркало на сегодня <a href=http://radshir.com/list/index.php?subaction=userinfo&user=Travisgoxia>http://radshir.com/list/index.php?subaction=userinfo&user=Travisgoxia</a> Благодаря программе преданности от игорного заведения, можно арестовать хороший старт и без дополнительных инвестициям запустить видеослоты. Кроме такого, возможно рассчитывать на реальную удачу и получить, без инвестиции собственных денег, великой выигрыш.
1×slots регистрация 1×slotscasino09k online
Например, игрок получил 500 руб. При твореньи аккаунта и обязан отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 руб., понадобится устроить 875 спинов для полного отыгрыша.Операторы гемблинга заявляют, собственно например они сражаются с бонус-хантерами. Впрочем, критики считают, что этим казино пытаются устроить из случайного гостя постоянного игрока. 1×slots официальный регистрация <a href=https://g.clicgo.ru/user/Gregorygoora/>https://g.clicgo.ru/user/Gregorygoora/</a> Во время игры в казино, выигрыши, приобретенные благодаря безвозмездным призовым фондам, суммируются и срабатывают в совместную необходимую для отыгрывания. Однако, случае фортуна улыбнется и получится отыграть все призы, игровое заведение гарантированно допустит вывести денежные свои. Сумма вывода несомненно в от лимита, одобренного непосредственно в данном учреждении. Поэтому, внимательно надо(надобно) читать управляла выдачи безлимитных депозитов. 1×slots зеркало быструю регистрацию а также мгновенное Для получения предоставленных призов для пригодиться — ПК или мобильное устройство, и остальное дело за малым.
1×slot рабочее зеркало
Например, игрок получил 500 руб. При творении аккаунта и обязан отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 рублей, потребуется сделать 875 спинов для полного отыгрыша.При отыгрыше бонусных средств, нужно учитывать срок деянья бонуса и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный приз будет аннулирован. <a href=https://honcure.com/user/Ashleywaymn/>https://honcure.com/user/Ashleywaymn/</a> 1× slots casino зеркало Перед активацией главно пристально выучить обстоятельства промоакции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, в течение которых можно воспользоваться предложением. Если бездеп обхватывает узкий список игр, рекомендовано узнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с низкими множителями выплат подходят только сомнений случае, случае оператор не установил требовательные лимитирования на наивысшую сумму ставки.
1хслотс 1хслотс регистрация перейти на 1×slots
1×slots официальный сайт скачать <a href=http://psvhome.ru/user/Oscarimido/>http://psvhome.ru/user/Oscarimido/</a>
1×slots зеркало
Во всех законных онлайн-казино Беларуси необходимо подтверждение паспортных данных для забавы — это заявка правительства страны.Хотя безвозмездные призы начисляются без депо, не исключено, что для понадобиться вносить деньги. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь в того, как новый заказчик первый пополнит игровой счет. Баланс игрока дополняется на подходящую сумму. К ней используется вейджер, указанный в правилах акции. Вывести выигрыш можно будет после такого, как пользователь устроит требуемый объем ставок из личных средств. В редчайших случаях бездеп трудится в формате Free Play. На счет пользователя зачисляется большая сумма, и предоставляется малый срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по окончании этого периода сумма на счету будет превосходить изначальную, то разницу возможно будет вывести либо применять для дальнейших ставок.Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депо возможность отличаться до 30 дней. <a href=http://wiki.hightgames.ru/index.php?title=Выкуп_авто>http://wiki.hightgames.ru/index.php?title=Выкуп_авто</a> 1×slots регистрация Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном сайте и сделайте вход в личный кабинет, чтобы отобрать безвозмездные вращения с вейджером х40;
<b>Смотреть еще похожие новости:</b>
<a href=https://minifishtank.net/forum/showthread.php?tid=25369>1×slots мобильная версия войти казино</a>
<a href=https://elclasificadomx.com/author/jameslog/>1×slots актуальное зеркало</a>
<a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=9378>1× slots casino официальный сайт</a>
<a href=https://americanrabbit.org/viewtopic.php?f=2&t=432>1×slots рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, чтобы замечена возможность вывести выигрыш. Для верификации номера телефона, в личном профиле выберите опцию „Подтвердить номер телефона“ и введите в отвечающее поле код, приобретенный в sms-сообщении.
#4228 Keithmydayhttps://sites.google.com/view/bip39-mnemonic-code
New full <a href=https://sites.google.com/view/bip39-mnemonic-code/>bip39 world list</a> 2048 words used to create and restore crypto wallets. Multi-language support, high security and ease of use to protect your funds.
#4229 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Анна Сидорова, керлингистка официальное казино вход <a href=https://vestnik-jurnal.com/>какие казино</a> up casino лучшие букмекерские конторы <a href=https://sovsekretno.net/>зеркала казино</a> black russia казино casino регистрации casino приложения слот casino porno Илона Маркова, хоккеистка Кузнецова Анна Юрьевна порно порно с Дарья Клишина, легкоатлетка
DiskiPlus казино гта 5 DiskiPlus порно с Юлия Ефимова, пловчиха <a href=https://diskiplus.ru>DiskiPlus up букмекерская контора</a> DiskiPlus где казино DiskiPlus 1×bet <a href=https://diskiplus.ru/>DiskiPlus пин ап казино</a> DiskiPlus Фастова Елена Владимировна порно DiskiPlus почему в казино нет часов DiskiPlus pin up casino скачать DiskiPlus скачать 1×bet 1×bet xyz DiskiPlus слот casino DiskiPlus казино играть DiskiPlus порно с Баталина Ольга Юрьевна
#4230 Jamestorhttps://bip39-phrase.blogspot.com/2025/02/bip39-world-list-2048.html
Full wordlist New full <a href=https://bip39-phrase.blogspot.com/2025/02/bip39-world-list-2048.html>BIP39</a> 2048 words used to create and restore crypto wallets. Multi-language support, high security and ease of use to protect your funds. 2048 mnemonic words for seed generation.
#4231 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать сайт букмекерской конторы casino онлайн <a href=https://repost.news/>казино смотреть онлайн бесплатно</a> карты казино Светлана Ходченкова <a href=https://www.ossetia.tv/>казино сочи</a> Нургалиева Эльвира Рамиловна порно почему казино Ирина Горбачева рейтинг казино симулятор казино 7k casino официальный спорт букмекерская контора
DiskiPlus официальные зеркала казино DiskiPlus букмекерская контора фонбет <a href=https://www.diskiplus.ru/>DiskiPlus Набиуллина Эльвира Сахипзадовна порно</a> DiskiPlus порно с Зырянова Анастасия Владимировна DiskiPlus почему в казино нет часов <a href=https://diskiplus.ru>DiskiPlus букмекерские конторы бет</a> DiskiPlus лучшие букмекерские конторы DiskiPlus порно с Каролина Севастьянова DiskiPlus porno Дарья Клишина DiskiPlus играющие казино онлайн DiskiPlus 7k casino сайт DiskiPlus сколько казино DiskiPlus букмекерская контора
#4232 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало рабочее
Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки могут запросить вспомогательные документы или инициировать куцее общение по Skype. <a href=http://filmkachat.ru/>1×slots зеркало регистрация</a> <a href=https://www.xaphyr.com/blogs/984858/Transform-Your-Space-Professional-Secrets-of-Interior-Design-Layout-Mastery>https://www.xaphyr.com/blogs/984858/Transform-Your-Space-Professional-Secrets-of-Interior-Design-Layout-Mastery</a> У каждого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано смогли выполнить их, мы дадим количество советов. Если система начислила маленькую необходимую, не создавать большие ставки – остановитесь на 10–30 центах. Как только сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте играть. В противном случае никакого приглядеться к иному автомату. 1×slots на любой вкус как пройти регистрацию <a href=http://elektrofahrrad-tests.de/forums/member.php?action=profile&uid=33935>http://elektrofahrrad-tests.de/forums/member.php?action=profile&uid=33935</a> Получить Бездепозитный бонус в онлайн казино дело 2-ух кликов. Другой момент, отыграть промо и соблюсти управляла и условия отыгрыша. Под правилами предполагается столько вагер, но и ограничения по наибольшей ставке. Мы осознаем, собственно в кино все ставят на зеро и выигрывают. Призываем не делать подобного. Перед активацией бонуса прочитайте правила. Узнайте следующие факторы: Условия получения презента, за регистрацию, за депозит и прочее. Ограничения по максимальной ставке. Зачастую не выше 350 руб. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вертеть автоматы, а вагер будет стоять на пространстве. Поэтому принципиально аристократия, в каких играх можно совершать кратность денежного оборота.
1хслотс 1хслотс регистрация перейти на 1×slots
<a href=https://karakol.com.kg/user/Jameskef/>1хслот официальный сайт зеркало</a> 1×slots зеркало выигрыши обязательно пройдите регистрацию если <a href=http://miupsik.ru/forums/member.php?action=profile&uid=5692>http://miupsik.ru/forums/member.php?action=profile&uid=5692</a> На бонусные начисления все быть установлены вспомогательные ограничения, коие Вы не учли при отыгрыше. Пока бонус полностью не отыгран — деньги из казино не выводятся. 1×slots регистрация 1×slotscasino 56 online Так собственно сможете неустрашимо региться без всяких размышлений. Фортуна сегодня наверняка на вашей стороне. Не опасайтесь, ведь последствие какого или ущерба Вам абсолютно не угрожает. С этими бонусами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе.Иногда операторы настоятельно внесение малого депо перед выводом для верификации платежного прибора. В некоторых казино этот депозит кроме предстоит отыграть.
1хслотс рабочее зеркало
Размер бонуса. В качестве бездепов обыкновенно начисляют маленькие суммы, а когда идет о призах за депо, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино все презентовать игроку до 2000$. Бездепы обычно предлагают с отыгрышем — быстро исключить выигранные свои нельзя. Перевод средств со счета будет вероятен в того, как пользователь выполнит все притязания казино, а сумма не быть выше установленного правилами лимита. Условиями акции фиксируются сроки, на которых клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней последствии активации. <a href=http://geolan-ksl.ru/forum/user/89286/>http://geolan-ksl.ru/forum/user/89286/</a> 1×slots казино мобильная версия
1×slots бездепозитный бонус за регистрацию
Варианты выигрыша находятся от Вашей удачи и критерий игорного портала. Выше мы заявили, собственно некоторые бездепозитные бонусы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются и те, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность современных игр на средства, можно выиграть неописуемые суммы. Сегодняшние игровые автоматы либо видео слоты, как их именуют. Могут выдавать солидные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000.Шаг 4. Активация. Внимательно изучите условия, информацию по ограничениям и сроке деяния бонусного предложения. Разобравшись с правилами, возможно активировать бонус в личном офисе (время ? с использованием промокода) либо по запросу в саппорт. Выигрыши с призов без инвестициям постоянно привязаны к притязанию по ставкам и все быть обналичены лишь последствии исполнения этих притязаний. Нет. Для получения бездепозитного приза в казино необходима неотъемлемая регистрация на сайте. Играть в слоты даром и без регистрации возможно лишь в демо режиме.Суммы подобных услуг, случаев, колеблются от трех до 20 долларов, а вейджер на эти свои должен составлять от 30 до шестидесяти раз. Зачастую, величайшая сумма выигрыша тут составит от одной до двух сотен долларов. Если в выиграет больше, то все средства имеют быть списанными до очень разрешенного выигрыша. Здесь появляется смысл выводить еще несуществующие финансы на свою платежную систему и дальше искать заведение с благоприятными под данную сумму релоадом либо бонусом за 1-ое пополнение счета. Есть некоторое подвидов бездепозитного гонорары, предлагаемого великим числом заведений. 1×slots регистрацию процедура займет всего лишь <a href=https://bbs.wuxhqi.com/home.php?mod=space&uid=1167343>https://bbs.wuxhqi.com/home.php?mod=space&uid=1167343</a> Для доказательства электронной почты, просто перейдите по активной ссылке в послании, приобретенном от игрового заведения.Бездепы обычно предлагают с отыгрышем — мгновенно исключить выигранные средства невозможно. Перевод средств со счета будет вероятен после такого, как юзер выполнит все притязания казино, а сумма имеет быть выше установленного правилами лимита. Условиями акции фиксируются сроки, в течение коих клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней последствии активации.
1×slots зеркало рабочее
Для отыгрыша приза казино обязует игрока поиграть на сумму, в несколько один превышающую необходимую приобретенного приза — здесь выгода фирмы очевидна. <a href=http://domocontrol.ru/user/GlennBub/>http://domocontrol.ru/user/GlennBub/</a> Наличие у игрока второго аккаунта. Запрещено делать количество профилей для многократного получения бездепов. 1×слот регистрация в 1×slots casino Когда идет о получении бездепозитных бонусов в казино, в первую очередь направьте на последующие обстоятельства:Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?
<b>Смотреть еще похожие новости:</b>
<a href=https://adminclub.org/showthread.php?tid=61848>1×slots промокод при регистрации</a>
<a href=https://forum.oursson.ru/viewtopic.php?f=2&t=8920>1×слотс казино</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Следует выделить, собственно бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом.
#4233 Frankcreskhttps://annuaire-des-casinos.com
vegas casino en ligne <a href=https://annuaire-des-casinos.com/>site casino en ligne</a>
#4234 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up casino официальный порно с Дронова Александра Викторовна <a href=https://th-royalgclub.com/>букмекерская контора фонбет</a> порно с Федор Чалов (футбол) какие казино <a href=https://kompromat1.online/>porno Мира Андреева (теннис)</a> казино рояль смотреть букмекерская контора фонбет букмекерская контора без porno Анна Сидорова, керлингистка gama casino 7k casino официальный сайт букмекерские конторы в россии
DiskiPlus porno Виктория Баркова, легкоатлетка DiskiPlus pin up casino официальный <a href=https://www.diskiplus.ru>DiskiPlus 7k casino скачать</a> DiskiPlus casino промокод DiskiPlus up casino официальный <a href=https://diskiplus.ru>DiskiPlus porno Ангелина Гончаренко, хоккеистка</a> DiskiPlus casino 7k сегодня DiskiPlus спорт букмекерская контора DiskiPlus пин ап casino pin DiskiPlus казино рублях DiskiPlus casino андроид DiskiPlus casino com DiskiPlus casino daddy
#4235 PerevozkiVrn_pephttps://perevozki-vrn.ru/
Добрый день! Перевозка грузов. Всегда в наличии длинномеры 12 и 14 метров, а также тралы, краны, тенты и др. Спецтехника и перевозка негабаритных грузов, сопровождение, а также возможен подбор любой спецтехники и грузовых автомобилей. <a href=https://perevozki-vrn.ru/>требуется бульдозер в аренду</a> Если аренда тралов, автокранов, длинномеров в Воронеже, спецтехника в Воронеже, спецтехника Воронеж, то это в perevozki-vrn.ru https://perevozki-vrn.ru/ . Сопровождение и заказ спецтехники в Воронеже. Звоните сейчас: +7 (910) 345–50–48. Всем пока!
#4236 email4domainhttps://email4domain.ru
Почта для домена на <a href=https://email4domain.ru/>https://email4domain.ru</a> это корпоративный почтовый сервис email для организаций. Почта для домена обеспечивает сотрудников адресами электронной почты на собственном домене компании. Почта для бизнеса улучшает узнаваемость и повышает имидж бренда.
#4237 Cecilcothttps://annuaire-des-casinos.com
liste casino en ligne <a href=https://annuaire-des-casinos.com/>cresus casino en ligne</a>
#4238 Montazhp_rewhttps://montazhp.ru/
Всем привет! Интересная и важная новость для тех, кто желает обновить или освежить свой интерьер в СПб или Санкт-Петербурге! А если вы в процессе евроремонта или капитального ремонта офиса, квартиры, магазина, дома и т.д., то эта новость именно для вас. Именно для ценителей точного и высочайшего качества выполнения работ, а не топорного и некачественного исполнения. Для вас работает узкоспециализированная компания, которая заточена именно на установке плинтусов или монтаже плинтусов. В это трудно представить и поверить, но ими уже выполнено более 100000 км установленного плинтуса. В общем, если вам интересно найти, установка плинтусов, плинтус напольный, монтаж плинтуса и т.д., например: <a href=https://montazhp.ru/>плинтус для кухни в спб</a> Тогда вам нужно прямо сейчас перейти на сайт montazhp since 2004 и узнать все подробности по плинтус пластиковый, плинтус, плинтус для пола, покраска плинтусов, плинтус мдф, плинтус для столешницы, плинтус деревянный, плинтус дуб, плинтус для кухни в СПб и ЛО и т.д. https://montazhp.ru/ . Обязательно переходите на сайт montazhp.ru Установка плинтусов сохраняйте в закладки и изучайте информацию, не забудьте записать адрес сайта и номер телефона. До новых встреч!
#4239 UlyssesTrupshttps://vinicius-jr.com.mx
Fan site de Vinicius Junior <a href=https://vinicius-jr.com.mx/>vinicius-jr</a> noticias, logros y detalles sobre su carrera en el Real Madrid. Sigue la evolucion de esta estrella del futbol mundial.
#4240 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало на сегодня
Бездепы обыкновенно предлагают с отыгрышем — моментально исключить выигранные средства нельзя. Перевод средств со счета будет вероятен в того, как пользователь выполнит все притязания казино, а сумма возможности превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, на коих клиент вправе пользоваться предложением. Обычно они не превышают нескольких дней в активации. <a href=http://filmkachat.ru/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> Бездепы обычно предлагают с отыгрышем — быстро исключить выигранные свои невозможно. Перевод денег со счета будет возможен последствии того, как пользователь выполнит все требования казино, а сумма имеет быть выше установленного правилами лимита. Условиями промоакции фиксируются сроки, протяжении коих заказчик вправе пользоваться предложением. Обычно они не превосходят нескольких дней в активации. <a href=https://forums.ngames.com/forum/league-of-angels/community-ab/general-discussion-ab/62087-innovative-luxury-real-estate-marketing-ideas-that-actually-drive-premium-sales>https://forums.ngames.com/forum/league-of-angels/community-ab/general-discussion-ab/62087-innovative-luxury-real-estate-marketing-ideas-that-actually-drive-premium-sales</a> 1×slots casino зеркало <a href=https://demo.qkseo.in/viewtopic.php?id=904769>https://demo.qkseo.in/viewtopic.php?id=904769</a>
зеркло казино 1×slots
Но есть игорные заведения, коие готовы просто например жертвовать деньги на игру. Для этого довольно сделать профиль. Чтобы вывести свой выигрыш, для поначалу необходимо выполнить условия отыгрыша, обозначенные в условиях получения бездепозитного депозита. 1×slot зеркало Бездепозитные бонусы, как уже ясно, считаются оригинальной вероятностью приступать к игровому процессу безусловно бескорыстно, другими выступать в интернет казино безвозмездно и на быть свои незамедлительно в регистрации аккаунта. Автоматы с таким депозитом шансы замерзнуть прекрасной вероятностью сыграть для поклонников пыла с определенными ограничениями в финансах.Фриспины – бесплатные вращения с фиксированной ставкой, коие можно применять в определенных игровых автоматах. <a href=https://www.usajobsindex.com/author/forsedropoa/>https://www.usajobsindex.com/author/forsedropoa/</a> 1×slots зеркало Доступные забавы – В неких азартных забавах возможно понизить математическое превосходство казино до нескольких 10-х процента. В их числе многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как управляло, в таких забавах ставки идут в зачет вейджера не всецело. Например, может учитываться лишь 50%. В неких забавах бездепозитные призы вообще нельзя отыгрывать.
1хслотс казино зеркало
<a href=http://old.clientbase.ru/forum/index.php?showuser=23800>http://old.clientbase.ru/forum/index.php?showuser=23800</a> 1×slots казино зеркало Благодаря программке лояльности от игорного заведения, возможно брать неплохой старт и без дополнительных вложений запустить видеослоты. Кроме такого, возможно рассчитывать на реальную удачу и получить, без вложения собственных денег, немалый выигрыш.Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.
1×slots зеркало которую указывали при регистрации кстати
Как верховодило, при выводе денег, от играющего требуется лишь сделать минимальный вклад для того, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом собственный счет.Но рядах азартных платформах похожие гонорары имеют получить теперь зарегистрированные пользователи. В таком случае, бонусы предоставляются масштабах уникальных акций или же некоторым игрокам вид акционного предложения, коие прибывает на почту с целью «возвратить» игрока в свое казино. <a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=192655>1хслот зеркало</a> Некоторые казино имеют предлагать клиентам бездепы за подтверждение номера либо почты либо репост на страницу в соц сетях. 1×slots регистрация то дальше необходимо пройти <a href=http://miupsik.ru/forums/member.php?action=profile&uid=5323>http://miupsik.ru/forums/member.php?action=profile&uid=5323</a> Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.Приветственный бездеп предоставляется хоть игроку только один раз. Казино борются с например нарекаемыми бонусхантерами (от англ. Bonus Hunter — доброволец за бонусами), пытающимися заводить многочисленные аккаунты для надувательства оператора и повторного получения дара. Исключить сходственные действия позволяет верификация данных. Администрация вправе потребовать у посетителя подтвердить персональные данные, указанные при регистрации.
казино 1×slots официальный сайт
Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные способы и оценить необыкновенности, труднодоступные при забаве в демо режиме. Многие новые клиенты переходят в количество неизменных, а оператор получает длительную выгода. <a href=http://ttceducation.co.kr/bbs/board.php?bo_table=free&wr_id=753577>http://ttceducation.co.kr/bbs/board.php?bo_table=free&wr_id=753577</a> 1×slots регистрация 1×slotscasino09k online Промокод – определённая комбинация символов, коию необходимо ввести в подходящее фон при твореньи учетной записи либо активировать в собственном профиле игрока в разделе с бонусами.Бездепозитные призы в казино без пополнения 2022 — это определенная сумма средств или gratuitous spins вращения, коие предоставляются первым постояльцам за регистрацию на сайте казино повторяющий бездепозитного приза, и дает вас возможность помощью казино без пополнения опробовать услуги (игр), с последующей преимуществом, льготой вывода средств при исполненьи всех установленных управлял.
<b>Смотреть еще похожие новости:</b>
<a href=https://praisenpray.org/forums/showthread.php?tid=103331>1х слотс зеркало регистрация в 1×slots casino</a>
<a href=http://forum.animogen.com/memberlist.php?mode=viewprofile&u=15333>скачать 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для получения депозитного бонуса нужно пополнить собственный игровой баланс реальными средствами. Вознаграждение можно получить или при внесении первого депозита, или в виде фиксированного процента от внесённых средств. Так или по, бонус поступит на счёт только в пополнения. Однако далеко не все ресурсы предлагают своим клиентам бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено одобрение на первый депо в размере 100–200%. Это замечательная возможность преумножить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш.
#4241 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
сайты казино порно с Илюшникова Татьяна Александровна <a href=https://specreporter.com/>1×bet телефон</a> сайт винлайн букмекерская контора букмекерская контора на андроид <a href=https://vestnik-jurnal.com/>online casino</a> 1×bet официальный скачать pin up casino top top сайт казино вход casino на телефон Радченко Светлана Юрьевна порно ешь казино pin up casino пин
DiskiPlus порно с Каролина Севастьянова DiskiPlus порно с Арина и Дина Аверины, гимнастки <a href=https://diskiplus.ru>DiskiPlus unlim casino</a> DiskiPlus Приезжева Екатерина Геннадьевна порно DiskiPlus порно с Алина Загитова, фигуристка <a href=https://www.diskiplus.ru/>DiskiPlus вывод казино</a> DiskiPlus автомат казино DiskiPlus 1×bet зеркало слоты 1×bet xyz DiskiPlus скачать 1×bet на андроид бесплатно DiskiPlus pin casino зеркало DiskiPlus 1×bet официальный сайт 1×bet xyz DiskiPlus демо казино DiskiPlus online casino 7k
#4242 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slotscasino 56 online
Призовые начисления без депо все предоставляться для участия в турнирах интернет казино. Потратить перечисленные деньги возможно исключительно в данной промоакции. Условия их проведения себе ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, лучше изучить его верховодила.Ниже указан актуальный перечень законных казино в Беларуси с призами на первый депозит. Вы можете попасть на официальный вебсайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots review live</a> У каждого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано смогли выполнить их, мы дадим количество советов. Если система начислила небольшую необходимую, надо делать большие ставки – остановитесь на 10–30 центах. Как лишь сможете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте играть. В противном случае другого приглядеться к иному автомату. <a href=https://www.as7abe.com/wall/blogs/post/60173>https://www.as7abe.com/wall/blogs/post/60173</a> 1×slots зеркало видели такую регистрацию на <a href=https://www.bookcrossing.com/journal/17357097>https://www.bookcrossing.com/journal/17357097</a>
1×slots официальный сайт зеркало рабочее
Получить приветственный приз все лишь новые посетители онлайн-казино. Способы описаны в критериях промоакции каждого законного казино, чаще всего это:На критериях отыгрыша бесплатных призов стопам тормознуть подробнее. С ними связаны нюансы, коие невозможно забыть без внимания. <a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=96164>1×slots casino регистрация 1×slots review live</a> 1×slots казино зеркало Бездепы все заходить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой или баллами. <a href=https://ww.interdance.ru/user/Randalincaw/>https://ww.interdance.ru/user/Randalincaw/</a> 1×slots casino регистрация 1×slotscasino09k online
1× slots зеркало
Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и расценить необыкновенности, труднодоступные при игре в демо режиме. Многие новые посетители переходят в количество неизменных, а оператор получает длительную выгода. <a href=http://u-berry.com.ua/index.php?subaction=userinfo&user=kindheartedjung>http://u-berry.com.ua/index.php?subaction=userinfo&user=kindheartedjung</a> Бездепозитный бонус предоставляется новенькому игроку за конкретные действия. Часто подарок в виде денег либо фриспинов выдается за регистрацию, спасибо чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. 1×slots рабочее зеркало на сегодня
казино 1×slots
Маркетинговая деятеля всех игорных интернет-клубов должна носить различный нрав. И случае вознаграждения на депо работают чтобы, чтобы, дабы стимулировать заносить депозиты и поощрять уже быть пользователей, то бездепозитный бонус в казино или бонус за регистрацию в казино, этого всего, рассчитан на расширение базы покупателей.В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и когда неоднозначных ситуаций нет способности куда-то посетовать и обосновать свою правоту. Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала прыткие выводы. Фишка выплат что, что довольно выбрать платёжный инструмент и показать необходимую. В большинстве случаев деньги зачисляются на электрические кошельки на 15 минут, а на банковские карты – 1–3 трудящихся дня.Допустим, за регистрацию вы получили бездеп в размере 2 000 руб. С вейджером х30. В данном случае светит устроить ставок, на совместную сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать настоящие деньги. Однако не забывайте, собственно с каждого подарка получится исключить определённую сумму (чаще всего менее $200). Высокая конкуренция в разделе азартных игр мотивирует операторов привлекать посетителей разнородными промоакциями. Благодаря этому у посетителей бывает возможность получить призы в казино за регистрацию без депо. Воспользоваться таким предложением возможно, избегая процедуру внесения средств на игровой счет, просто активировав аккаунт на веб-сайте. Наш гид по бездепам поможет избрать самую привлекательную бонусную программу, разузнать правила получения такого вознаграждения и воспользоваться им с максимальной выгодой.С иной стороны, гораздо проще отобрать бездепозитные фриспины за регистрацию в казино и прямо момент начать вертеть барабаны в наилучших слотах. Главная особенность спинов никаких, собственно они предназначены для топовых автоматов. Удастся не только пройти вспомогательные раунды, но и прирастить сумму выигрыша, заработать респины и другие внутриигровые подарки. 1×slots официальный demo регистрация в 1×slots casino <a href=http://isaevclub.ru/user/DoctorLazutami/>http://isaevclub.ru/user/DoctorLazutami/</a>
1хслотс зеркало
Главное превосходство спинов – возможность изучить разные слоты. Также получится насладиться бонусными раундами, испытать фортуну в риск-туре и преувеличить выигрыш за счёт особенных символов. Однако не игровой процесс заслуживает внимание, так превосходнее сосредоточиться на реальном выигрыше.Ну и окончательно же, для казино бездепозитные призы прибыльны с имиджевой стороны: схожая добродушие повышает уровень преданности клиентов к компании. Вы не в коем случае ни чем рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный приз, по мимо практической забавы на бездепозитные бонусы, у Вас есть шанс изучить игровые автоматы, научится регулировать изменять ставки и линии, изучать бонусные забавы и их выигрышные комбинации, да в просто зарядится кучей эмоций! Ведь вы будите играть на бонусные свои, которые можно отыграть и вывести, но просто на демо счет, тем наиболее адреналин в крови более повысится а пульс забьется с частым ритмом!Фриспины – благотворительные вращения с фиксированной ставкой, коие можно использовать в определенных игровых автоматах. <a href=https://podacha-blud.com/user/DoctorLazutasn/>https://podacha-blud.com/user/DoctorLazutasn/</a> За счёт спинов выйдет запустить различные онлайн слоты, протестировать стратегии и поднабраться опыта. Фишка никаких, собственно вращения начисляются на топовые аппараты с оригинальными опциями и высочайшей отдачей. Не запамятовывайте, что в любом акционном предложении предусмотрены особые требования – кратковременные ограничения, максимальный размер ставки, перечень доступных игр.Самые новые бездепозитные бонусы в казино за регистрацию 2022 года с выводом прибыли присутствуют на этой странице. Посетитель имеет оценить обстоятельства получения и начать играть на деньги без внесения депозита. При данном игроку важно понимать, на каких условиях и какими методами него исключить полученный выигрыш. Для этого необходимо оценить список подключенных платежных систем. 1×slots сайт зеркало При подмоги такого одобрения оператор возможность также завлекать посетителей, которые ранее показывали активность на сайте, хотя по некий причине перестали выступать. В этом случае промокод высылается юзеру по электрической почте либо в виде SMS.
<b>Смотреть еще похожие новости:</b>
<a href=https://koreanstudies.com/forum/viewtopic.php?t=176647>рабочее зеркало 1×slots</a>
<a href=http://complainanything.com/node/158?page=943#comment-1188268>x1 slots регистрация в 1×slots casino</a>
<a href=http://mandala-app.com/forums/memberlist.php?mode=viewprofile&u=3447>1×slos регистрация в 1×slots casino</a>
<a href=https://www.lightknotes.com/MyBB/showthread.php?tid=276897>1×slots зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, случае не желайте стать жертвой жуликов или впустую потратить время;
#4243 Mathewfushttps://mohamed-salah.com.mx/
Sitio fan de Mohamed Salah <a href=https://mohamed-salah.com.mx/>https://mohamed-salah.com.mx</a> ultimas noticias, records, entrevistas y los mejores momentos de la carrera de uno de los futbolistas mas grandes de la actualidad. ?Mantente al tanto!
#4244 RalphSaghttps://kevin-de-bruyne.com.mx
Kevin De Bruyne <a href=https://kevin-de-bruyne.com.mx/>kevin de bruyne</a> es un maestro del futbol moderno, conocido por su vision de juego, precision y liderazgo en el Manchester City. Su talento y trabajo duro lo han convertido en una leyenda del deporte.
#4245 Charlesgunnyhttp://filmkachat.ru
1×slots акции
Чтобы получить вероятность исключить выгода с бездепозитного бонуса в казино, необходимо выполнить ряд условий:Если вы новичок в и только попали в неизведанную вами район пыла — с помощью предложений как бездепозитные бонусы без пополнения. <a href=http://filmkachat.ru/>1хслот 1хслотс регистрация перейти на 1×slots</a> Условия отыгрыша приза. Если Вы планируете заработать на бездепозитном призе, то начала направьте на велечину вейджера и срок, который дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть приз и вывести выигрыш. <a href=https://ilde2.upf.edu/clatmooc/v/ibs>https://ilde2.upf.edu/clatmooc/v/ibs</a> 1×slots сайт <a href=http://www.khanlin.com/bbs/board.php?bo_table=free&wr_id=153651>http://www.khanlin.com/bbs/board.php?bo_table=free&wr_id=153651</a>
x1 slots регистрация в 1×slots casino
<a href=http://mi.minfish.com/home.php?mod=space&uid=1196847>1×slots сайт</a> 1×slots зеркало проходить регистрацию это отличный вариант Онлайн-казино с бездепозитными бонусами ставят клиентам обстоятельства для пользования бездепами, потому перед ролью в акции другого, как подробно ознакомиться со всеми правилами и нюансами акции. Условия все касаться получения приза, его использования и следующего вывода денежных средств в случае выигрыша.Для получения выигрыша потребуется выполнить обстоятельства казино. Чаще всего игроку нужно поставить определенную сумму, хотя уже из личных средств. Она рассчитывается из общего объема выигрыша за всегда применения бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, если юзер выиграл 1000 руб., а множитель составляет х30, вывести деньги можно несомненно, сделав ставки на 30 000 рублей. <a href=https://wiki.rolandradio.net/index.php?title=1win_Cassino_Aposta>https://wiki.rolandradio.net/index.php?title=1win_Cassino_Aposta</a> 1×slots регистрация 1×slotscasino09k online Как управляло, при выводе денег, от играющего потребуется лишь устроить минимальный лепта для того, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом личный счет.Шаг 5. Использование и отыгрыш. Бездеп должен быть применен в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера.
1×slots подтвердит вашу регистрацию если говорить
В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, необходимо адресоваться в службу спустя лайв-чат на веб-сайте казино. <a href=https://heyzine.com/flip-book/75aa235662.html>https://heyzine.com/flip-book/75aa235662.html</a> Прямо сейчас арестуйте безвозмездные вращения за регистрацию без депозита и начинайте собирать призовые композиции ради солидных выигрышей! 1×slots актуальное зеркало
1×slots casino регистрация 1×slots review live
Возможность поиграть вспомогательное состязание (а иногда и некоторое) совершенно безвозмездно, а выигрыш, к, поступает на счёт игрока. Самые популярные способы вывода средств ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электрическим платежным системам на Neteller и Skrill, а пользуются криптовалютными кошельками. Вывод выигрышей возможность исполняться моментально либо занимать от нескольких часов до нескольких суток. 1×slots актуальное зеркало <a href=http://artshi.ru/index.php?subaction=userinfo&user=patheticsample1>http://artshi.ru/index.php?subaction=userinfo&user=patheticsample1</a> Выполнив все притязания оператора, заказчик возможность оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит примерно не более суток. Если дополнительно потребуется пройти процедуру верификации, то срок увеличивается до 1–2 трудящихся дней. Для перевода используются банковские инструменты и электрические платежные системы. Второй метод подходит чем, так как основная транзакций в исполняются мгновенно. В связи со специфичностью функционирования банков обработка платежей возможность занять до нескольких трудящихся дней.Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам запрещено начислять бонусы посетителям, не имеющим валютных средств на счете. Мы предлагаем разглядеть актуальные призы онлайн-казино с лицензией, коие соблюдают законодательство РБ.
1×slots зеркало быструю регистрацию а также мгновенное
Суммы похожих услуг, как правило, колеблются от трех до 20 долларов, а вейджер на эти свои должен сочинять от 30 до шестидесяти один. Зачастую, величайшая сумма выигрыша тут составит от одной до двух сотен $. Если компьютерные выиграет больше, то все средства все быть списанными до очень разрешенного выигрыша. Здесь бывает смысл выводить еще несуществующие финансы на собственную платежную систему и дальше находить заведение с благоприятными под данную сумму релоадом либо призом за 1-ое пополнение счета. Есть несколько подвидов бездепозитного вознаграждения, предлагаемого наибольшим количеством заведений.Все любят получать презенты. Согласитесь, практически каждый играющий человек несомненно бесконечно рад, случае получит бесплатный подарок для игры в онлайн казино просто за регистрацию или же приз за внесенный депо, так именуемые приветственные призы для новых игроков. Соответственно такие интернет клубы станут больше известны и предпочтительны у игроков при выборе казино для забавы. Топ казино каждый обновляется и прибавляются новые и увлекательные игровые клубы с привлекательной бонусной политикой и всеми возможными привилегиями, к которым относятся такие призы как фриспины за регистрацию, денежные бездепозитные бонусы, а великодушные призы за внесенный депо. Не сложно догадаться, собственно not the slightest deposit bonuses почти никогда не бывают большими. Чаще всего идет о пяти–тридцати долларах (или эквиваленте данной суммы в иной денежной).Особую изюминку видео слотам придают уникальные знакы. С их выходом активируются разные бонусы. Вы сможете запустить вспомогательный степень и прирастить необходимую выигрыша. Есть знаки, коие сменяют ненужные составляющие и сами создают выигрышные комбо. Не стоит забывать и про бонус-тур. После любого удачного спина есть шанс увеличить необходимую выигрыша в два либо четыре раза. <a href=https://rabofree.diary.ru/p222118212_mp-stats-v-skladchinu.htm>https://rabofree.diary.ru/p222118212_mp-stats-v-skladchinu.htm</a> Доступные забавы – В неких азартных забавах можно снизить математическое преимущество казино до нескольких 10-х процента. В их числе многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как управляло, в этих играх ставки идут в зачет вейджера не всецело. Например, может предусматриваться лишь 50%. В некоторых забавах бездепозитные бонусы вообще нельзя отыгрывать. 1× slots casino зеркало Если при регистрации показать промокод, можно гарантировано получить бонус. Где брать ваучер? Посетите на блоги либо форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В последнее время игорные дома начали афишироваться в кинокартинах и телесериалах. Присмотритесь и всего заметите промокод, который принесёт 500 или 1 000 бонусных рублей.
<b>Смотреть еще похожие новости:</b>
<a href=https://adminclub.org/showthread.php?tid=67349>1×slot регистрация</a>
<a href=https://forum.oursson.ru/viewtopic.php?f=2&t=12678>1×slots зеркало рабочее на сегодня</a>
<a href=https://your-portal.at.ua/forum/20–63222–2#88501>1×slots casino регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Внесение депозита – Будьте готовы пополнить счет последствии отыгрыша приза. Это стандартное требование управлял для данного типа промо-акций. Лучше заблаговременно уточнить, какую необходимую надо(надобно) несомненно вносить на счет. Как правило, речь идет о наименьшем депозите, хотя вы должны быть убеждены, собственно он для по кармашку. Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, дабы еще раз получить даровой бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ждет неминуемое санкция.
#4246 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
водка казино игры казино <a href=https://www.ossetia.tv/>порно с Александр Головин (футбол)</a> retro casino pin up casino пин <a href=https://strelochnik.com/>пин casino</a> казино фильм смотреть онлайн казино онлайн бесплатно casino 7k сегодня casino x яндекс казино про казино играющие казино онлайн
DiskiPlus сайте букмекерской конторы фонбет DiskiPlus официальное казино вход <a href=https://www.diskiplus.ru/>DiskiPlus casino андроид</a> DiskiPlus 1×bet сейчас DiskiPlus гта казино <a href=https://diskiplus.ru/>DiskiPlus автомат казино</a> DiskiPlus вавада казино DiskiPlus 1×bet скачать приложение DiskiPlus Елена Лядова DiskiPlus казино фильм онлайн DiskiPlus inform@rucriminal.info DiskiPlus сайт букмекерской конторы DiskiPlus porno Вера Бирюкова, гимнастка
#4247 Charlesgunnyhttp://filmkachat.ru
1×slots подтвердит вашу регистрацию если говорить
Баланс игрока пополняется на подобающую необходимую. К ней используется вейджер, указанный в правилах промоакции. Вывести выигрыш можно несомненно после как, как пользователь устроит требуемый размер ставок из собственных средств. В редких случаях бездеп работает в формате Free Play. На счет пользователя зачисляется большая сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по завершении сего периода сумма на счету будет превышать первоначальную, то разность возможно будет вывести или использовать для последующих ставок. <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> К образцу, игроку выдаются безвозмездные свои в заведении в размере пятидесяти или 100 $ (вейджер на коие сочиняет 100х). То есть, любому новоприбывшему игроку выскакивает притягивающая картинка, которая сулит выплату всех зачисленных фирмой средств. Не стоит обращать внимания на казино бонус за регистрацию без депо с чрезмерно великий или довольно махонькой суммой призов, поэтому собственно, том кропотливо исследовав все обстоятельства, тут вероятнее всего, будет какой-то подкол. <a href=https://speakerdeck.com/shopavto7>https://speakerdeck.com/shopavto7</a> Срок отыгрыша — это период, который наступает в момент активации бонуса и заканчивается с его закрытием. Пользователю нужно уложиться в данный временной зазор, иначе призовые средства аннулируются. Казино устанавливают перечень игр, ставки каких засчитываются при расчете отыгранных денег. Если тайтл не входит в этот перечень, то он может быть недосегаем для загрузки во время деяния бонусного предложения.Возьми свой подарок. Чаще всего приз активируется сразу после регистрации. Но случаются истории, когда надо(надобно) зайти в собственный кабинет или написать в справочную службу. 1×slots регистрация 1×slotscasino 56 online <a href=http://postmaster.sunhelp.co.kr/bbs/board.php?bo_table=qa&wr_id=10154&&#c_10582>http://postmaster.sunhelp.co.kr/bbs/board.php?bo_table=qa&wr_id=10154&&#c_10582</a> Иногда виде одобрения за регистрацию имеют выдаваться билеты для участия в турнирах. Условия их проведения очень выделяются, поэтому мы рекомендуем ознакомиться с каждым предложением раздельно.Подтвердите лицо, предоставив оператору казино свои паспортные данные. Инструкции обыкновенно несложные, основное — четко им по. Если написано, что «на фото должны быть видны все четыре угла странички паспорта» — сделайте именно это фото.
1×slots зеркало регистрацию более популярный вариант это
На странице представлены бездепозитные призы за регистрацию в казино редчайшая заслуга за которой гонятся все игроки как новички, например и мастера. Мы тоже уделяем великое внимание на присутствие бонусов при формирование рейтинга казино на деньги. Бездепозитный приз это вероятность играть безвозмездно и выиграть реальные средства.В случае установленного лимита на необходимую вывода выигрыша с бездепозитного приза, игрок не сможет вывести больше заявленной суммы. <a href=https://redfist.de/RF-Online-Testforum/viewtopic.php?f=60&t=77076>1×slots сайт</a> 1хслотс рабочее зеркало Начнём с того, собственно каждое промо за регистрацию подразумевает некоторые условия. Бездепозитные бонусы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, необходимая для исполнения условий. Пример, возымели благотворительные вращения и выиграли с них 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 рублей, неудачных либо выигрышных, важно. После исполнения, бонусный баланс перейдёт на настоящий и станет доступным к выводу. <a href=http://dudoser.com/index.php?subaction=userinfo&user=goodquagmire52>http://dudoser.com/index.php?subaction=userinfo&user=goodquagmire52</a> Доступ к дару имеет открываться автоматически после введения промокода или воззвания в саппорта вебсайта. В первом случае от юзера не потребуется практически деяний. Бездеп с активацией по коду встречается чаще всего. Игроку нужно ввести совокупность символов в графе, кот-ая возможность пребывать в регистрационной форме в Личном кабинете. 1×slots зеркало сайта Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, чтобы была вероятность вывести выигрыш.
1 x slots
За счёт спинов выйдет запустить разные онлайн слоты, протестировать стратегии и поднабраться навыка. Фишка никаких, собственно вращения начисляются на лучшие аппараты с уникальными опциями и высочайшей отдачей. Не запамятовывайте, собственно в каждом акционном предложении предусмотрены специальные требования – кратковременные лимитирования, максимальный объем ставки, список дешевых игр. <a href=http://levin-lic.ru/index.php?subaction=userinfo&user=lewdacademic31>http://levin-lic.ru/index.php?subaction=userinfo&user=lewdacademic31</a> При верном подходе бездепы — это прекрасный способ выступать на средства без траты собственных средств. Есть некоторое рекомендаций, следуя которым можно извлечь максимум пользы из похожих промоакций казино. Играть следует лишь на лицензированных площадках. Скриптовые сайты не дурачат с бонусными услугами, хотя и используют пиратский софт с модифицированным ГСЧ. Выиграть на этих автоматах нереально.Подтверждение электрической почты – одно из основных условий, которое есть практически в любом бездепозитном казино. Чтобы верифицировать электрическую почту, достаточно перебежать по интенсивной ссылке в послании, приобретенном от азартного клуба. 1×slots регистрация на 1хслотс Простая процедура получения бездепозитного приза, которая займет менее 2-х мин. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные.Бесплатные призы казино без депо можно получить в виде денежных средств на бонусный счет (исключить их можно только после отыгрыша), фриспинов, игры или кешбэк-бонуса.
1 xslots рабочее зеркало
Минимального оборота. Этот предел уточняется вейджером — пока игрок не поиграет на установленную сумму, вывод средств несомненно недосегаем. <a href=https://forums.scar-divi.com/topic/768962–1×slots-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-%D0%BC%D0%BE%D0%B1%D0%B8%D0%BB%D1%8C%D0%BD%D0%B0%D1%8F-%D0%B2%D0%B5%D1%80%D1%81%D0%B8%D1%8F/>1×slots казино мобильная версия</a> На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не сможете активировать и получить бездепозитный бонус. В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, необходимо обратиться в саппорта спустя лайв-чат на сайте казино. 1×слот регистрация в 1×slots casino <a href=https://zeoworks.com/main/member.php?action=profile&uid=252027>https://zeoworks.com/main/member.php?action=profile&uid=252027</a> 3. Подтвердить данные. В зависимости от клуба, нужно привязать телефон или почту, показать персональную информацию;
1×slots регистрация 1×slotscasino09k online
Бездепозитный приз казино 2022 с выводом за регистрацию предоставляет вероятность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и выяснить качество работы службы. Довольно часто, начиная игровой процесс, игрок уже отказывается останавливаться и делает настоящий лепта. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать безвозмездно возможно как раз таки с призом за регистрацию без надобности вносить депо. Самые новые бездепозитные бонусы в казино за регистрацию 2022 года с выводом прибыли присутствуют на данной страничке. Посетитель возможность расценить обстоятельства получения и начать играть на средства без внесения депозита. При данном игроку принципиально осознавать, на каких условиях и какими методами у исключить полученный выигрыш. Для сего необходимо оценить список подключенных платежных систем. <a href=https://community.networkofcare.org/blogs/qwerty/archive/2024/07/28/skup-aut-w-krakowie-kompleksowy-przewodnik-dla-sprzedaj-cych-pojazdy.aspx>https://community.networkofcare.org/blogs/qwerty/archive/2024/07/28/skup-aut-w-krakowie-kompleksowy-przewodnik-dla-sprzedaj-cych-pojazdy.aspx</a> 1×slots сайт
<b>Смотреть еще похожие новости:</b>
<a href=https://redfist.de/RF-Online-Testforum/viewtopic.php?f=60&t=76953>1×slots регистрация на 1хслотс</a>
<a href=http://forum.audioheritage.net/memberlist.php?mode=viewprofile&u=19451>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Постарайтесь отыграть вейджер, чтобы замечена вероятность оставить заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электронной кошелёк, карту, телефон.
#4248 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало
Не советуем сломя голову хвататься за всевозможные предложения получения средств без инвестициям. Вполне вероятно, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем выглядит на 1-ый взгляд. Альтернативой считается казино приз за депозит. Мы предлагаем вас пару советов, благодаря которым у любого игрока будет возможность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом средств: <a href=http://filmkachat.ru/>1хслотс рабочее зеркало</a> Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в неотъемлемом порядке нужно восполнить счет в казино. Для депозитных призов, данная процедура не необходима, так как депозит уже сделан.Некоторые казино могут предлагать клиентам бездепы за подтверждение номера либо почты либо репост на страницу в соц сетях. <a href=https://www.friend007.com/forums/thread/7390/>https://www.friend007.com/forums/thread/7390/</a> Все благотворительные бонусы кажутся соблазнительными. Кто же откажется от возможности поиграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далековато не все бездепозитные призы одинаковой презентабельны для рассудительного посетителя.Бездепозитный бонус за регистрацию в казино — это стартовый подарок в виде валютного начисления либо бесплатных вращений для свежих игроков заведения, для получения которого не вносить депо. 1×slots зеркало которую указывали при регистрации кстати <a href=http://intextv.by/forum/user/58892/>http://intextv.by/forum/user/58892/</a> Возможность протестировать новые игры, не рискуя личностными средствами и создать собственную тактику игры.
онлайн казино 1×slots
1×slots зеркало выигрыши обязательно пройдите регистрацию если Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция содержит доскональные правила, гиперссылка на коие обычно находится в промообъявлении. В них указываются лимиты, вейджер, список доступных игр. Если оператор скрывает данные о предложении, то воспользоваться им надо.При ирге на бонусные свои запрещается играть в игровые автоматы с прогрессивным джекпотом и забавы из радела exist casino. Кроме как, кое-какие казино выделяют бездеп на раз или некоторое конкретных слотов, и в иных играх Вы не можете на них выступать. <a href=https://pbtur.com.br/users/keithodows>https://pbtur.com.br/users/keithodows</a> Для получения выигрыша требуется выполнить обстоятельства казино. Чаще всего игроку нужно поставить конкретную необходимую, но уже из собственных средств. Она рассчитывается из совместного объема выигрыша за всегда использования бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, если пользователь выиграл 1000 руб., а множитель сочиняет х30, вывести средства можно несомненно, сделав ставки на 30 000 руб. 1×slots регистрация 1×slotscasino09k online Бездепы с безвозмездными вращениями предоставляют юзерам право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд платит казино. Число спинов ограничено и изредка выше сотку. Если промоакция включает в себя большое бесплатных игр, их начисление может быть разбито на некоторое дней.Можно. Вы постоянно можете отрешиться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не создадите ставку.
1×slots зеркало рабочее на сегодня
Следует выделить, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом.Проверка занимает от нескольких минут до нескольких дней, спецы техподдержки имеют запросить вспомогательные документы либо инициировать краткое общение по Skype. <a href=https://diart.su/user/Zacheryben/>https://diart.su/user/Zacheryben/</a> Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации дара нужно подтвердить электрическую почту и привязать телефонный; 1×slots официальный сайт зеркало Oтыгpaть бонус с указанным вeйджepом, для этого необходимо сдeлaть cтaвoк нa cумму, превосходящую размер бонуса в несколько раз.
1×slots регистрацию процедура займет всего лишь
<a href=https://forum.dis-course.net/memberlist.php?mode=viewprofile&u=37238>казино 1×slots</a> Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают бонус по государствам. Вплоть до того, собственно клуб имеет себя игроков из Вашей страны, а бездеп не давать. 1×slots официальный сайт мобильная версия скачать <a href=https://ads.kazakh-zerno.net/user/GlennSoasp/>https://ads.kazakh-zerno.net/user/GlennSoasp/</a> Подтверждение регистрации. Казино настоятельно привязки профиля к электрическому адресу и номеру телефона. Для сего на e-mail отправляется послание ссылаясь, а на телефонный ? текстовое извещенье с кодом.Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен перечень наилучших онлайн казино, коие предлагают своим игрокам щедрые бонусы за регистрацию.
1 x slots
Условия, на коих предоставляется бездеп, регулируются казино. Каждая промоакция содержит подробные управляла, ссылка на коие обычно находится в промообъявлении. В их указываются лимиты, вейджер, перечень дешевых игр. Если оператор прячет данные о предложении, то воспользоваться им не стоит.К сожалению, нет. Почти все казино, требуют внесение хотя бы одного малого депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, что исключить деньги разрешается лишь на что, эту платежную систему, с которой был сделан депозит. <a href=https://receptsamogona.ru/user/Charlesvar/>https://receptsamogona.ru/user/Charlesvar/</a> Составленный специалистами Casino.ru список онлайн-казино с бездепозитным призом разрешает игрокам сравнить спецпредложения разных операторов. скачать 1×slots на андроид мобильная версия Иногда виде бездепа, казино дарит минимальный приз (до 50 рублей), из-за которого надо заморачиваться.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.bf-france.com/forums/profile/30064-rabofreeor/>casino 1×slot</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Каждый новичок и профессиональный игрок грезят скоро стартануть и начать делать реальные ставки. Для этого довольно забрать подарок, за который не выплачивать. В зависимости от игровой платформы, надо(надобно) сделать профиль, привязать email или телефонный. После сего администрация начисляет щедрое вознаграждение в виде даровых вращений либо виртуальных кредитов. Сразу в активации промокода возможно воспользоваться даром. Как уже упоминалось, призы бывают трёх видов – фриспины, кредиты и фриплей-бонусы.
#4249 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
часы казино pinco casino <a href=https://www.ossetia.tv/>1×bet скачать приложение на андроид</a> винлайн букмекерская контора официальный casino игровой автомат <a href=https://res-publika.com>Скоробогатова Ольга Николаевна порно</a> casino зеркало сегодня букмекерская контора фонбет официальный сайт лучшие бесплатные онлайн казино casino buzz Александра Бортич карты казино Попова Анна Юрьевна порно
DiskiPlus casino скачать DiskiPlus зеркала казино <a href=https://www.diskiplus.ru>DiskiPlus 1×bet зеркало xbet xyz</a> DiskiPlus пин ап казино DiskiPlus порно с Юлия Ефимова, пловчиха <a href=https://diskiplus.ru>DiskiPlus букмекерская контора скачать приложение</a> DiskiPlus porno Анна Сидорова, керлингистка DiskiPlus 1×bet официальный DiskiPlus букмекерская контора ставки DiskiPlus порно с Аделия Петросян (фигурное катание) DiskiPlus порно с Константин Тюкавин (футбол) DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus casino зеркало сайта
#4250 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрацию более популярный вариант это
B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpaxXoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. <a href=http://filmkachat.ru/>1×slots бонус за регистрацию</a> Прежде всего, не запамятовывайте периодически заглядывать на страницу обзоров бездепозитных бонусов. Они шаг за шагом оценивают более увлекательные предложения основных игорных порталов.Важно, убедитесь в, собственно раньше не регились в выбранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи. <a href=https://hanson.net/users/archicgicom>https://hanson.net/users/archicgicom</a> Бездепозитные призы – это исключительно интересная и наиболее многообещающая промоакция интернет-казино. Они числе чем фри-спинов, поэтому что выплаты в бесплатных вращениях не гарантированы, как комбинации на барабанах игрового аппарата имеют не сложиться. 1хслот скачать <a href=https://lunar.az/user/Joshuaexade/>https://lunar.az/user/Joshuaexade/</a> Чтобы играть безвозмездно на настоящие средства в казино, не всегда довольно просто зарегистрироваться. Иногда нужно выполнить дополнительные действия.Фриспины. Бесплатные вращения предназначены для применения в видео-слотах. Внимательно читайте условия – они часто выдаются для неких машин. В зависимости от клуба вам создавать конкретное число ставок. Кстати, современные игорные жилища выделяют возможность заводить «одноруких бандитов».
рабочее зеркало 1×slots
Мы советуем не отрицаться от подобных предложений известных казино. Выделите несколько минут на регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сегодня удача несомненно на вашей стороне!При отыгрыше бездепов, учитывайте временные ограничения. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток. 1×slots бездепозитный бонус за регистрацию Для вывода средств приз надо(надобно) будет отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариантами отыгрыша бездепозитного приза до его получения, дабы избежать конфликтных обстановок. <a href=http://corp-eeek.ru/index.php?subaction=userinfo&user=tiresomekeyston>http://corp-eeek.ru/index.php?subaction=userinfo&user=tiresomekeyston</a> Свежий бонус начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в использовании своими, в случае отыгрыша оператор может ввести лимитирование на вывод денег.Отзывы читателей о бонусных промоакциях помогут составить эмоцию, хотя не запамятовывайте о субъективности собственных комментариев. 1×slots коды Приветственный бездеп предоставляется хоть игроку только один раз. Казино борются с так именуемыми бонусхантерами (от англ. Bonus Hunter — охотник за бонусами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения презента. Исключить подобные деянья разрешает верификация данных. Администрация вправе востребовать у посетителя доказать индивидуальные данные, обозначенные при регистрации.
1×slots актуальное зеркало
Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, чтобы замечена вероятность исключить выигрыш. <a href=http://whirlpowertool.ru/index.php?subaction=userinfo&user=gaudydisclaimer>http://whirlpowertool.ru/index.php?subaction=userinfo&user=gaudydisclaimer</a> Это также благотворительные деньги, которые поступают на аккаунты свежеиспеченных игры после регистрирования. А необыкновенность таких бонусов состоит том,, собственно обретенные деньги обязательно следует применять в продолжении назначенного времени. 1×slot зеркало
1хслот скачать
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/8020/#comment-336047>1×slots быструю регистрацию а также мгновенное</a> Любой выигрыш по ставке повыше установленного лимита будет считаться недействительным. То есть ставка не несомненно засчитана при отыгрыше, в случае выигрыша его сумма не поступит на счёт посетителя — результат игры несомненно всецело аннулирован.На условиях отыгрыша бесплатных призов по тормознуть подробнее. С ними связаны аспекты, коие невозможно забыть без внимания. В лицензионных бездепозитных казино выступать в азартные забавы вправду безопасно. Наличие лицензии подтверждает что, этот факт, собственно клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP. 1×slot рабочее зеркало <a href=http://web.symbol.rs/forum/member.php?action=profile&uid=657615>http://web.symbol.rs/forum/member.php?action=profile&uid=657615</a> Помните, что в неких забавах сумма ставки идет в зачет вейджера лишь частично. Так, в настольных и карточных забавах только от 5% до 50% суммы ставки числятся как отыгранные деньги, тот как в слотах идет в зачет все 100% суммы.Популярность онлайн казино растёт и всё больше пользователей начинают интересоваться азартными забавами. Бездепозитные бонусы 2022 года, это оригинальные подарки за регистрацию. С их подмогою свежие игроки все получить безвозмездные вращения или средства на баланс за 1 регистрацию. С выходом игорных заведений в онлайне, бездепозитные бонусы стали знаменитейшим методом привлечения игроков. Подобные акции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о коих мы расскажем. Наш вебсайт собрал наихорошие предложения из онлайна на 2022 год. Воспользуйтесь каким даром и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить обстоятельства.
1хслотс зеркало
Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, solid зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.Бонус без депо за регистрацию в казино (бездепозитный бонус) – это денежный подарок от клуба, который начисляется на акк игрока после регистрации в казино. Кроме творения учетной записи, для получения бездепа, очень нередко потребуется ещё и доказать контактные данные игрока и/или активировать специальный промо-код. Постарайтесь отыграть вейджер, чтобы появилась вероятность оставить заявку на выплату. Кстати, на всех веб-сайтах, представленных в перечне, доступны современные платёжные приборы. Вы сможете получить выигрыш на электрической кошелёк, карту, аппарат.Бездепозитный бонус – это финансовое вознаграждение, которое выдается соучастнику забавы в казино, для его вербования и возникновения заинтригованности. Любой посетитель, который подходит условиям выдачи сходственного бездепозитного бонуса, возможность претендовать на получение вышеуказанного приза. Такое одобрение является более действенным способом, дающим вероятность стартовать в игре, не вкладывая личных вещественных средств. <a href=https://www.forum-motorrad.net/members/19566-jamesheelp.html>https://www.forum-motorrad.net/members/19566-jamesheelp.html</a> Фриспины. Бесплатные вращения предусмотрены для использования в видео-слотах. Внимательно читайте условия – они часто выдаются для неких машин. В зависимости от клуба вы можете создавать конкретное количество ставок. Кстати, современные игорные жилища дают возможность заводить «одноруких злодеев». 1×slots зеркало проходить регистрацию это отличный вариант В разделе с бонусами активировать собственный презент. Найти забавы, для коих учтено поощрение и использовать бонус по назначению.Промокод – определённая композиция символов, коию нужно ввести в отвечающее фон при разработке учетной записи либо активировать в собственном профиле игрока в разделе с бонусами.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=63557>1×slots промокод при регистрации</a>
<a href=http://board.eternityrpc.com/thread-7-post-14398.html#pid14398>1×slots официальный сайт скачать</a>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=192679>1×slots зеркало регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В большинстве заведений устроить это можно по e-mal, по номеру телефонного, через социальную сеть либо гугл-аккаунт.
#4251 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало рабочее Разуваева Ксения Денисовна порно <a href=https://vestnik-jurnal.com/>казино фильм смотреть онлайн</a> бесплатное казино казино сегодня <a href=https://th-royalgclub.com/>букмекерская контора официальный сайт</a> порно с Алина Загитова, фигуристка Фастова Елена Владимировна порно пин ап казино порно с Диана Шнайдер (теннис) казино смотреть онлайн pin casino casino ап
DiskiPlus new casino DiskiPlus мобильные букмекерские конторы <a href=https://www.diskiplus.ru/>DiskiPlus casino daddy</a> DiskiPlus промокод 1×bet DiskiPlus pin casino зеркало <a href=https://diskiplus.ru>DiskiPlus Семёнова Татьяна Владимировна порно</a> DiskiPlus 1×bet официальный сайт DiskiPlus porno Ангелина Гончаренко, хоккеистка DiskiPlus казино пину DiskiPlus casino online зеркало DiskiPlus букмекерскую контору пин DiskiPlus Елена Лядова DiskiPlus букмекерская контора мостбет
#4252 Charlesgunnyhttp://filmkachat.ru
casino 1×slot
Условия отыгрыша приза. Если Вы расчитываете заработать на бездепозитном призе, то в первую очередь внимание на значение вейджера и срок, кот-ый дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть бонус и вывести выигрыш. <a href=http://filmkachat.ru/>1×slot казино зеркало</a> Не рекомендуем опрометью голову хвататься за различные предложения получения средств без инвестициям. Вполне вполне, собственно бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на 1-ый взор. Альтернативой является казино приз за депо. Мы предлагаем вам пару советов, благодаря коим у любого игрока несомненно вероятность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег: <a href=https://www.zybuluo.com/lexxeagle/note/2570094>https://www.zybuluo.com/lexxeagle/note/2570094</a> Суммы сходственных предложений, случаев, колеблются от 3-х до двадцати $, а вейджер на эти средства обязан составлять от тридцати до шестидесяти раз. Зачастую, большая сумма выигрыша здесь составит от одной до 2-ух сотен долларов. Если в выиграет больше, то все свои имеют быть списанными до максимально разрешенного выигрыша. Здесь появляется содержание выводить еще несуществующие деньги на свою платежную систему и далее отыскивать заведение с подходящими под данную необходимую релоадом или бонусом за первое пополнение счета. Есть количество подвидов бездепозитного гонорары, предлагаемого большим числом заведений.Oтыгpaть бонус с указанным вeйджepом, чтобы необходимо сдeлaть cтaвoк нa cумму, превышающую объем бонуса в несколько раз. 1хслот зеркало <a href=http://randy-harrison.it/gallery/profile.php?uid=151278>http://randy-harrison.it/gallery/profile.php?uid=151278</a> Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном сайте и выполните вход в личный офис, чтобы отобрать бесплатные вращения с вейджером х40;Прежде всего, не запамятовывайте регулярно заглядывать на страницу обзоров бездепозитных бонусов. Они шаг за шагом рассматривают наиболее увлекательные предложения ведущих игорных порталов.
1×slots рабочее зеркало
<a href=http://nhomtruyen.com/members/jamesgaw.9280/>онлайн казино 1×slots</a> 1хслотс рабочее зеркало <a href=http://bbs.boway.net/home.php?mod=space&uid=1015034&do=profile&from=space>http://bbs.boway.net/home.php?mod=space&uid=1015034&do=profile&from=space</a> Приветственный бонус без депозита ? подарок за регистрацию. Выдается деньгами, фриспинами либо баллами. В последнем случае бонусные баллы применяются для участия в турнирах либо обмена на реальные деньги. 1×slot зеркало рабочее регистрации на телефон придет
онлайн казино 1×slots
Промообъявления от казино не дают реальной картины и ориентированы на привлечение внимания пользователей. Понять, насколько высоки шансы остаться в плюсе, позволит собственный анализ критерий предложения: <a href=http://www.modernism.hk/?s=%3Ca+href%3Dhttps%3A%2F%2Fglavdorogadv.ru%3E%D0%B3%D0%BB%D0%B0%D0%B2%D0%BD%D0%B0%D1%8F+%D0%B4%D0%BE%D1%80%D0%BE%D0%B3%D0%B0+%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0%3C%2Fa%3E+%D0%BE%D0%B1%D1%83%D1%87%D0%B5%D0%BD%D0%B8%D0%B5+%D0%BD%D0%B0+%D0%BF%D1%80%D0%B0%D0%B2%D0%B0+%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA&x=0&y=0>http://www.modernism.hk/?s=%3Ca+href%3Dhttps%3A%2F%2Fglavdorogadv.ru%3E%D0%B3%D0%BB%D0%B0%D0%B2%D0%BD%D0%B0%D1%8F+%D0%B4%D0%BE%D1%80%D0%BE%D0%B3%D0%B0+%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0%3C%2Fa%3E+%D0%BE%D0%B1%D1%83%D1%87%D0%B5%D0%BD%D0%B8%D0%B5+%D0%BD%D0%B0+%D0%BF%D1%80%D0%B0%D0%B2%D0%B0+%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA&x=0&y=0</a> 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
1×slots регистрация на 1хслотс
Верификация аккаунта. Лучше подтвердить личность сразу последствии регистрации, дабы позже не было проблем с выводом денег. Верификация может проходить двумя способами: Шаг 5. Использование и отыгрыш. Бездеп обязан быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. 1×slots официальный сайт скачать на айфон <a href=https://www.sc0796.cn/home.php?mod=space&uid=457073&do=profile&from=space>https://www.sc0796.cn/home.php?mod=space&uid=457073&do=profile&from=space</a> Но не мыслить, что снабжая пользователей такими бонусами, казино занимается спонсированием. Ведь размеры вознаграждений, главном, не немалые (средним размером от 5 до 20 долларов). И на эти свои налагаются определенные обстоятельства и лимитирования, обязательные к исполненью игрока, если в последствии он желает получить все средства выигранные финансы.
1х слот 1хслотс регистрация перейти на 1×slots
Исходя из этого, просто не существует осмысленных причин махнуть рукою на получение такового бонуса при регистрации. И, будет, на подобный бесплатной базе у вас есть шансы выиграть средства и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные бонусы, именуют безвозмездными онлайн платформами для игр. Существует ли стратегии для отыгрыша бездепозитных призов? К раскаянью нет, на выигрыши или проигрыши с бонусов, казино или игрок повлиять имеет, отдача игр происходит от разработчиков игр.Некоторые сайты, этого чем обмануть регистрацию игроков, предлагают ответить на количество базисных вопросов. Цель проведения подобной викторины – выявить случайных людей, которые не имеют представления о покере, и не допустить получения ими бонусов. Если гость теснее играл в казино, то ответить на полтора десятка простых вопросов будет нетрудно. Очень часто, ответы возможно найти на официальных сайтах данных учреждений. <a href=http://forum.drustvogil-galad.si/index.php?action=profile;u=46014>http://forum.drustvogil-galad.si/index.php?action=profile;u=46014</a> Также, в нужно подтвердить собственный номер телефона, для этого код, приобретенный в смс-сообщении от клуба ввести в специальное фон в собственном кабинете игрока.Также бывают случаи, когда казино начислит оговоренный бонус в регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам. 1 x slots Бесплатные бонусы казино без депо можно получить в виде валютных средств на бонусный счет (вывести их возможно только после отыгрыша), фриспинов, игры или кешбэк-бонуса.Можно ли в одном интернет казино получить больше одного приза за регистрацию? Нет, так как в любом онлайн казино есть верховодила, к коим надо(надобно) держаться, не создавать два аккаута для получения бонусов, другому будет блокировка обоих аккаутов, не пытайтесь обмануть онлайн казино, бонус за регистрацию выдаеться один раз одному лицу.
<b>Смотреть еще похожие новости:</b>
<a href=https://dev.eff.one/forumdisplay.php?fid=10>1×slots зеркало этих способов предполагает регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вознаграждения за получение VIP-статуса ? начисляются в программки лояльности при достижении одного значения или выдаются индивидуально менеджерами службы.
#4253 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Вера Бирюкова, гимнастка 1×bet официальный сайт 1×bet xyz <a href=https://m.repost.news/>букмекерская контора официальный сайт</a> ставки на спорт букмекерские конторы яндекс казино <a href=https://sovsekretno.net/>1×bet на андроид</a> casino зеркало сегодня casino актуальное зеркало официальные сайты казино 1×bet официальный песня казино порно с Баталина Ольга Юрьевна 1×bet зеркало
DiskiPlus Набиуллина Эльвира Сахипзадовна порно DiskiPlus pin up букмекерская контора <a href=https://www.diskiplus.ru/>DiskiPlus казино сочи</a> DiskiPlus 7k casino официальный DiskiPlus порно с Варвара Субботина <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet слоты</a> DiskiPlus 1×bet на сегодня DiskiPlus inform@rucriminal.info DiskiPlus порно с Диана Шнайдер (теннис) DiskiPlus porno Анастасия Янькова, боксерка DiskiPlus зеркала казино DiskiPlus про казино DiskiPlus скачать pin casino
#4254 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало
Однако далеко не все ресурсы предлагают своим посетителям бездепозитные призы за регистрацию в казино. В большинстве случаев учтено поощрение на первый депозит в размере 100–200%. Это отличная вероятность преувеличить банкролл, прирастить время, проведённое за игрой и шансы сорвать большой куш. <a href=http://filmkachat.ru/>1×slots на любой вкус как пройти регистрацию</a> Все обожают получать подарки. Согласитесь, почти каждый играющий человек несомненно необъятно счастлив, случае получит безвозмездный подарок для игры в онлайн казино просто за регистрацию или же приз за внесенный депозит, например именуемые приветственные бонусы для свежих игроков. Соответственно эти онлайн клубы станут более популярны и преимущественны у игроков при выборе казино для забавы. Топ казино день обновляется и прибавляются новые и занимательные игровые клубы с привлекательной бонусной политикой и всеми вероятными прерогативами, к коим относятся эти бонусы как фриспины за регистрацию, валютные бездепозитные призы, а великодушные призы за внесенный депо.Если вы облюбовали себе количество брендов коие вам больше всего приглянулись, для постоянной игры! Таких гемблеров казино довольно предпочитает и оценивает, за частую такие игроки становятся VIP игроками заведения, коим нередко поступают прибыльные предложения повторяющий призов, например же туда входит и бездепозитные. <a href=https://www.exoltech.us/blogs/246291/Mastering-the-Art-of-Home-Design-Drafting-A-Professional-s>https://www.exoltech.us/blogs/246291/Mastering-the-Art-of-Home-Design-Drafting-A-Professional-s</a> Вейджер (или вагер) ? это наименьшая сумма ставок, которую нужно устроить для вывода денежного приза. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение.При исполнении условий отыгрыша и верификации, деньги с бонусного счета переводятся на основной и шансы быть выведены на карту либо электронный кошелек. Лимиты на вывод и сроки проведения транзакции находятся от избранной платежной системы. 1×slot регистрация <a href=https://london-tour.de/forum/member.php?action=profile&uid=7674>https://london-tour.de/forum/member.php?action=profile&uid=7674</a> Прежде чем активировать бездеп, необходимо убедиться никаких, собственно государство, уроженцем которой считается игрок, не заходит в перечень запрещенных.Как и акции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения являются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих гостей и разрешает им составить впечатление о функционале, не рискуя вескими суммами.
1×slots скачать на айфон
Выбирайте превосходнейшие бесплатные призы за обзоров на Casinoz – и пусть для сопутствует удача при отыгрыше бонусных кредитов! 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Прямо в заберите благотворительные вращения за регистрацию без депо и начинайте коллекционировать призовые композиции ради крупных выигрышей!Акции, приуроченные к календарным праздничным, посещают рассчитаны как на всех юзеров, например и на категории: примеру, презент на 8 марта девушкам-игрокам либо мужикам на 23 февраля. <a href=https://uadplugins.club/memberlist.php?mode=viewprofile&u=225179>https://uadplugins.club/memberlist.php?mode=viewprofile&u=225179</a> Поспешите забрать бездепозитные призы за регистрацию в казино из представленного списка. Все платформы не водят законную работа, хотя и обрадуют добросовестными плодами игры, высочайшей отдачей, быстрыми выплатами.Предложения с бездепозитными призами за регистрацию разрешают свежим заведениям привлечь аудиторию на свой сайт. А игроки же получают вероятность играть на реальные деньги без депо в казино и заработать малый стартовый капитал, который разрешается исключить на карту банка либо электрический кошелек. 1×slots казино зеркало
1×slots зеркало которую указывали при регистрации кстати
Проверка занимает от нескольких минут до нескольких дней, профессионалы техподдержки все запросить вспомогательные документы либо инициировать куцее общение по Skype. При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, коие возможно предназначить игре в казино.При отыгрыше бездепов, учитывайте кратковременные лимитирования. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток. <a href=http://hxzq.org.cn/space-uid-1282.html>http://hxzq.org.cn/space-uid-1282.html</a> На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не сможете активировать и получить бездепозитный приз.Некоторые сайты, этого чем провести регистрацию игроков, предлагают ответить на количество базовых вопросов. Цель проведения сходственной викторины – выявить случайных людей, которые не имеют представления о покере, и не допустить получения ими бонусов. Если гость теснее играл в казино, то ответить на полтора 10 простых вопросов несомненно несложно. Очень нередко, ответы можно отыскать на официальных сайтах этих учреждений. 1×slots быструю регистрацию а также мгновенное
1хслотс рабочее зеркало на сегодня
<a href=https://techadron.com/forum/viewtopic.php?p=9343>1×slots акции</a> Изучить управляла и условия получения бездепозитных бонусов казино, Вы сможете у нас на сайте в разделе с призами или на официальном сайте избранного Вами казино. Если возможности найти необходимую информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал либо по электронной почте.Бонус начисляется игроку сразу после регистрации и прохождения верификации в казино и не настятельно от посетителя внесения депозита. Как правило, размер бонуса в схожем случае достаточно стыдливый, впрочем дозволяет новеньким познакомиться с игрой без риска реальными деньгами. 1×slots официальный зеркало <a href=https://www.megaindex.org/project/view/236>https://www.megaindex.org/project/view/236</a>
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Бездепозитный бонус нередко возможность стать доступным сразу в окончания регистрации, что правило единственным притязанием к нему является регистрация, а после проверка вашей новой учетной записи.Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, так как Вам придется ее подтвердить в будущем при выводе средств. <a href=http://pharmacyhq.com/forum/profile.php?id=554519>http://pharmacyhq.com/forum/profile.php?id=554519</a> Постарайтесь отыграть вейджер, чтобы появилась возможность забыть заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электронной кошелёк, карту, телефон. 1× слот зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://www.ihavethepussy.com/de/threads/195900–1×-slots-%D0%A0%D1%95%D0%A1%E2%80%9E%D0%A0%D1%91%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A0%C2%B0%D0%A0%C2%BB%D0%A1%D0%8A%D0%A0%D0%85%D0%A1%E2%80%B9%D0%A0%E2%84%96?p=213434#post213434>1× slots официальный</a>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=166015>1×slots регистрация 1×slots review live</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если вы облюбовали себе некоторое брендов коие для больше всего полюбились, для постоянной игры! Таких гемблеров казино довольно предпочитает и оценивает, за частую эти игроки становятся VIP игроками заведения, которым нередко поступают выгодные предложения в виде бонусов, так же туда заходит и бездепозитные. Для получения бонуса нужно пригласить в забаву нового посетителя. Казино начислит пригласившему фиксированный процент от взносов приглашённого повторяющий приза: почаще всего его размер не выше 10%. Срок деянья бонуса правило не выше месяца: пригласивший получает приз в зависимости от проигранных ставок приглашённого в 1-ый месяц забавы.
#4255 Charlesgunnyhttp://filmkachat.ru
1×slots казино мобильная версия
Первый возникающий вопрос, это, зачем выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают новых игроков. Последним легче начать забаву на средства с дара за регистрацию. Им не нужно пополнять баланс и тратить собственные средства. Новички получают благотворительные спины или средства на счёт. С их поддержкою знакомятся с игровым процессом, крутят слоты и делают ставки в рулетке.Подтвердите лицо, предоставив оператору казино свои паспортные данные. Инструкции обыкновенно несложные, главное — конкретно им стопам. Если написано, что «на фото должны быть заметны все четыре угла странички паспорта» — сделайте непосредственно это фото. <a href=http://filmkachat.ru/>1×slots зеркало регистрация то дальше необходимо пройти</a> Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам важную информацию о самых новых, щедрых и испытанных бонусах в интернет казино, которые обновляются любой день. <a href=https://owntweet.com/thread/214646>https://owntweet.com/thread/214646</a> 1×slots casino регистрация 1×slots review live <a href=http://dotmetal.com.ua/wr_board/tools.php?event=profile&pname=minorallure45>http://dotmetal.com.ua/wr_board/tools.php?event=profile&pname=minorallure45</a>
1×slots регистрация на официальном сайте
<a href=https://test.soclanovtsy.ru/topic/39295–1×slots-casino-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%BD%D0%B0-%D1%81%D0%B0%D0%B9%D1%82%D0%B5/>1×slots casino регистрация на сайте</a> 1×slots casino регистрация на сайте Таким образом, заведение пытается продемонстрировать себя своим вероятным игрокам, а подобный рекламный ход как казино бонус без депо за регистрацию завлекает довольно большое внимания к игорному заведению и обеспечивает постоянный поток свежих посетителей и будущих клиентов игрового онлайн клуба.Но существуют азартные заведения, готовые просто так вручить деньги на забаву. Для этого довольно создать профиль. Чтобы вывести выигрыш, сначала нужно выполнить вейджеровые условия, прописанные в условиях получения бездепа. <a href=http://d668804q.beget.tech/user/Williamidorn/>http://d668804q.beget.tech/user/Williamidorn/</a> Зачастую бездепозитные призы казино для игры предлагаются различными заведениями азартных игр виде рекламных акций или в целях привлечения к себе новых игроков. Для бездепозитных призов в казино 2022 игроку надо пополнять счет до момента вывода хотимых средств.Получить Бездепозитный приз в интернет казино дело 2-ух кликов. Другой момент, отыграть рекламную и соблюсти управляла и обстоятельства отыгрыша. Под правилами предполагается не вагер, хотя и лимитирования по наибольшей ставке. Мы осознаем, что в кинотеатр все ставят на зеро и выигрывают. Призываем не делать сходственного. Перед активацией бонуса прочитайте верховодила. Узнайте последующие факторы: Условия получения подарка, за регистрацию, за депо и прочее. Ограничения по максимальной ставке. Зачастую не выше 350 руб. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вращать автоматы, а вагер будет стоять на месте. Поэтому принципиально знать, в каких играх можно осуществлять кратность валютного оборота. 1×slots официальный сайт мобильная версия
1×slots регистрация 1×slotscasino09k online
Фриспины – бесплатные вращения с фиксированной ставкой, которые можно использовать в определенных игровых автоматах.Подтверждение индивидуальной информации. Все казино просят от посетителя пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у пользователя иных аккаунтов (мультиаккаунт запрещен). <a href=https://www.spacepub.net/members/5151-FrankPhags?s=3f2aab9e9611e8212e0c2c7f3aa3f74b>https://www.spacepub.net/members/5151-FrankPhags?s=3f2aab9e9611e8212e0c2c7f3aa3f74b</a> Главное превосходство спинов – возможность выучить разные слоты. Также получится насладиться бонусными раундами, испытать фортуну в риск-туре и преумножить выигрыш за счёт особенных символов. Однако столько игровой процесс заслуживает внимание, так другого сосредоточиться на реальном выигрыше.Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? 1× slots casino официальный сайт Не стоит путать забаву в демо и внедрение призов. В демонстрационном режиме игрок возможность расценить механику слота, сюжет и оформление. Но игра проводится на относительные кредиты, потому отсутствует главное ? чувство азарта. Активируя промокод или фриспины, клиент и не расходует свои деньги на игровые автоматы, но возможность сорвать реальный куш!На данном разделе портала регулярно публикуются обзорные статьи, каких рассматриваются благотворительные бонусы наихороших интернет-казино. Информация структурирована по нескольким пунктам, включая основные:
1×slots официальный сайт, скачать
Используйте лучшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из списка ниже, дабы заработать презенты за обычные деяния и уже сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высочайшей отдачей и быстрыми выводами на электрические кошельки. <a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=89106>1×slots зеркало на сегодня</a> Можно. Вы практически можете отказаться от получения бездепозитного приза за регистрацию в казино, же Вы не сделаете ставку. 1хслотс рабочее зеркало <a href=https://forum.eliteshost.com/member.php?action=profile&uid=8100>https://forum.eliteshost.com/member.php?action=profile&uid=8100</a>
1×slots регистрация то дальше необходимо пройти
Шаг 4. Активация. Внимательно выучите условия, информацию по ограничениям и сроке деяния бонусного предложения. Разобравшись с правилами, можно активировать приз в личном офисе (от ? с использованием промокода) или по запросу в саппорт. Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, the decision лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Для такого, чтобы отыграть сумму вашего бездепозитного приза надо(надобно) выполнить обстоятельства вейджера. Очень нередко фриспины даются на конкретные слоты (book of ra, book of deceased, book of sun), избирайте разъем себе нраву, они все довольно очень и высококачественные. Бездепозитные приз возможность быть денежным например и повторяющий фриспинов на слоты <a href=https://latino-forex.com/members/240068-doctorlazutael?s=ebb292cc7626ec80c290607ee2645696>https://latino-forex.com/members/240068-doctorlazutael?s=ebb292cc7626ec80c290607ee2645696</a> Стоит обозначить(означить), что бездепозитный бонус выдается только взрослым новичкам, которые, тому, шансы пригласить собственных друзей и людей, того претендующих на поощрительную программку преданности. Подобная разработка появилась среди соперничающих онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению своей посещаемости, методом привлечения новых игроков. Бонусы – это оригинальный шанс для вероятных участников игры, которые шансы опробовать софт покер рума и убедиться, будут ли они в него выступать либо нет. Новый игрок попробует средства силы с настоящими оппонентами в казино.Вознаграждения за получение VIP-статуса ? начисляются в рамках программки лояльности при достижении одного значения или выдаются индивидуально менеджерами саппорта. 1хлот регистрация в 1×slots casino Существует ли стратегии для отыгрыша бездепозитных бонусов? К огорчению нет, на выигрыши или проигрыши с бонусов, казино или игрок повлиять не, отдача игр происходит от создателей игр.
<b>Смотреть еще похожие новости:</b>
<a href=https://thetechmodders.com/forums/viewtopic.php?t=24972>сайт 1× slots casino</a>
<a href=https://minifishtank.net/forum/showthread.php?tid=719>1×slots официальный регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Реже бонусы без депо начисляются неизменным игрокам. С их поддержкой администрация постарается удержать ценных посетителей или желает поблагодарить за преданность верных гостей. Но намного почаще для подобных целей используются такие промоакции: Верификация необходима для добавочной защищенности и подсобляет техподдержке выявить бонусхантеров и мошенников. Кстати, на платформах выводы солидных сумм доступны только последствии подтверждения личности.
#4256 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
vodka casino pin casino зеркало <a href=https://7club7.com/>букмекерские конторы бет</a> казино вулкан pin casino <a href=https://specreporter.com/>порно с Гатагова Ольга Анатольевна</a> 1win букмекерская контора сайт казино зеркало порно с Дронова Александра Викторовна porno Елизавета Туктамышева pin up casino пин ап казино онлайн букмекерская контора скачать приложение
DiskiPlus Ходнева Светлана Владимировна порно DiskiPlus казино фильм онлайн <a href=https://diskiplus.ru>DiskiPlus casino pin официальный</a> DiskiPlus лучшие онлайн казино DiskiPlus bet casino <a href=https://www.diskiplus.ru/>DiskiPlus 1win букмекерская контора</a> DiskiPlus casino зеркало сайта DiskiPlus порно с Диана Шнайдер (теннис) DiskiPlus казино вулкан DiskiPlus 1×bet 1хбет DiskiPlus почему в казино не бывает настенных часов DiskiPlus казино большая DiskiPlus Елена Лядова
#4257 rodrihttps://rodri.com.mx
Sitio web de fans <a href=https://rodri.com.mx/>rodri.com mx</a> de Rodri Hernandez: Descubre la carrera y logros del mediocampista espanol del Manchester City. Noticias, estadisticas y analisis del juego de uno de los mejores futbolistas actuales.
#4258 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Дарья Клишина, легкоатлетка казино смотреть онлайн <a href=https://www.ossetia.tv/>официальные сайты казино</a> 1×bet официальный сайт 1×bet xyz официальные букмекерские конторы скачать <a href=https://7club7.com/>порно с Максим Глушенков (футбол)</a> 1×bet рабочее на сегодня порно с Зырянова Анастасия Владимировна 1×bet официальный 1×bet xyz porno Илона Маркова, хоккеистка online casino 7k casino промокод порно с Каролина Севастьянова
DiskiPlus kometa casino DiskiPlus vavada casino <a href=https://www.diskiplus.ru/>DiskiPlus porno Александр Соболев (футбол)</a> DiskiPlus букмекерские конторы в россии DiskiPlus 1×bet рабочее <a href=https://diskiplus.ru>DiskiPlus 1win букмекерская контора</a> DiskiPlus лучшая казино DiskiPlus pin up casino скачать DiskiPlus casino официальный сайт DiskiPlus 1×slots casino DiskiPlus приложения букмекерских контор DiskiPlus лучшие казино бесплатно DiskiPlus казино онлайн бесплатно
#4259 Charlesgunnyhttp://filmkachat.ru
1×slots быструю регистрацию а также мгновенное
Обычно показатель выше, чем для бонусов на депозит. Не удивляйтесь, случае он несомненно числе х100. Иногда завышенный коэффициент вейджера уточняется для жителей отдельных государств. <a href=http://filmkachat.ru/>1×slots коды</a> Иногда у гостей вебсайта шансы возникнуть трудности, задачи, препядствия при активации полученного промо-кода. В таких случаях, нужно обратиться за подмогою в саппорта «Support». Для получения ответа, непременно указывается определенная первопричина обращения и подтверждается информация дополнительными снимками. Если сложилась спорная обстановка, практически можно обратиться к основному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ. <a href=https://www.4sync.com/s/fpXRu8Czr>https://www.4sync.com/s/fpXRu8Czr</a> Наш перечень включает в себя наилучшие бездепозитные бонусы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит ревизию по важным характеристикам:Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, дабы появилась возможность исключить выигрыш. 1×slots регистрация 1×slotscasino 56 online <a href=https://sc-grandmaster.ru/forum/?PAGE_NAME=profile_view&UID=15277>https://sc-grandmaster.ru/forum/?PAGE_NAME=profile_view&UID=15277</a> Существуют казино с призом за регистрацию, в очень востребованы фриспины в интернет казино впоследствии регистрации в определенных забавах. Они встречаются даже чаще даровых поощрений или классических призов в казино без вложений. Например, игрок регистрирует счет, на который начисляются безвозмездные игры, бонус за регистрацию повторяющий бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса компьютерные выигрывает истинные средства, которые в последствии можно успешно вывести из заведения на собственную платежную систему. То есть, все шансы вывести свои без рисков собственными финансами. Регистрация, какую игрок получит бонусы, займет пару минут, а благодаря данному можно увеличить 5 евро поощрений до тыс. И без всяких заморочек исключить их.1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, случае не желаете замерзнуть жертвой жуликов либо впустую истратить время;
1хслотс рабочее зеркало на сегодня
Маркетинговая деятеля всех игорных интернет-клубов обязана одевать различный характер. И случае вознаграждения на депо служат для того, дабы стимулировать заносить депозиты и поощрять теснее существующих пользователей, то бездепозитный приз в казино или приз за регистрацию в казино, этого всего, рассчитан на расширение базы потребителей.Баланс игрока дополняется на соответствующую необходимую. К ней применяется вейджер, указанный в правилах промоакции. Вывести выигрыш можно будет после такого, как юзер устроит требуемый объем ставок из личных средств. В редчайших случаях бездеп трудится в формате Free Play. На счет юзера зачисляется крупная сумма, и предоставляется малый срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по окончании этого периода сумма на счету несомненно превосходить первоначальную, то разницу можно несомненно исключить или использовать для дальнейших ставок. <a href=https://australiantravelforum.com/Upload/showthread.php?tid=272003>1×slots casino регистрация на сайте</a> 1×slots регистрация 1×slots casino c2d ru <a href=https://forum.skymso.top/home.php?mod=space&uid=113156&do=profile>https://forum.skymso.top/home.php?mod=space&uid=113156&do=profile</a> Бонус начисляется игроку незамедлительно после регистрации и прохождения верификации в казино и не просит от посетителя внесения депо. Как правило, размер бонуса в подобном случае довольно застенчивый, однако дозволяет новеньким познакомиться с забавой без риска реальными деньгами.Возьми собственный подарок. Чаще всего бонус активируется сразу в регистрации. Но бывают истории, когда надо(надобно) забежать в собственный кабинет или написать в справочную службу. 1×slots зеркало которую указывали при регистрации кстати Подобные бонусы без депо предоставляются на больше выгодных критериях. Зачастую они покрупнее, а условия отыгрыша менее строгие.Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные способы и расценить необыкновенности, недоступные при ирге в демо режиме. Многие новые посетители переходят в количество неизменных, а оператор получает длительную прибыль.
1×slots зеркало этих способов предполагает регистрацию
Не стоит сразу же открещиваться от приветственных презентов в подобных казино. Администрация готова начислить средства или фриспины, хотя сначала сотрудники обязаны увериться, собственно вы не мошенник. Дело никаких, что развелось очень много охотников за бонусами. Они научились накалывать систему и зарабатывать солидные суммы средств.В случае установленного лимита на сумму вывода выигрыша с бездепозитного приза, игрок не может вывести больше заявленной суммы. Не стоит сразу же открещиваться от приветственных презентов в подобных казино. Администрация готова начислить средства или фриспины, хотя сначала сотрудники обязаны увериться, собственно вы не мошенник. Дело никаких, что развелось очень много охотников за бонусами. Они научились накалывать систему и зарабатывать солидные суммы средств. <a href=http://shilinka.ru/user/PatrickLef/>http://shilinka.ru/user/PatrickLef/</a> 1×slot зеркало рабочее этих способов предполагает регистрацию
скачать 1×slots официальный сайт
Пoдтвepдить личнocть посетителя. Для удачного вывода средств, необходимо подтвердить лицо посетителя. Нa этaпe вepификaции пpoфиля, работники службы защищенности обязаны убедиться, что у игрока более один аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не сможет исключить собственный выигрыш, случае у него будет количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы.Перечисленные повыше основные свойства сочетают практически каждый приз и считаются стандартными для бездепозитных бонусных начислений в казино. Максимальная ставка ? уточняется в еденице счета и ограничивает объем ставки за один спин. В случае ее превышения приз может быть аннулирован. Также в правилах возможность находиться запрет на размещение ставок определенного вида, например, по одинаковым шансам в рулетке (другими, на чет или нечет, красное или темное и т.д.).Лишь знаменитые и знаменитые азартные заведения могут позволить себя выдавать бездепы в виде дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депо, коие возможно израсходовать в лучших аппаратах с высокой отдачей. 1× slots регистрация в 1×slots casino <a href=https://asmopt.ru/communication/forum/user/183/>https://asmopt.ru/communication/forum/user/183/</a> Бездепозитные призы начисляются только раз раз. Не стоит открывать новые аккаунты, чтобы получить их повторно. Служба защищенности казино непременно выявит «левого» участника и перекроет. Если посетитель выполнит нужные требования, отыграет собственную ставку и решит исключить личный выигрыш, то ему нужно сведению, что казино непременно потребует предоставить ксерокопии личных документов, дабы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные свои исключить не удастся.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Главное превосходство спинов – возможность изучить разные слоты. Также получится насладиться бонусными раундами, испытать фортуну в риск-туре и преумножить выигрыш за счёт особых знаков. Однако не только игровой процесс заслуживает внимание, так другого, как сосредоточиться на реальном выигрыше.Несмотря на то, что данный вариант стимуляции со стороны азартных платформ очень востребован области подобных игр, далековато не всем почитателям казино знаменито, что себе бездепозитные бонусы казино и как непосредственно их вполне эксплуатировать. <a href=http://ooo-esk.ru/index.php?subaction=userinfo&user=reconditecongre>http://ooo-esk.ru/index.php?subaction=userinfo&user=reconditecongre</a> Наш перечень включает в себя наилучшие бездепозитные бонусы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит ревизию по важным характеристикам: 1×slots официальный demo регистрация в 1×slots casino Нет. Казино выдают благотворительные бонусы за регистрацию, для того, дабы заказчик возможность ознакомиться с игровым заведением. А дабы исключить его, нужно выполнить обстоятельства отыгрыша.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.fiat130.it/phpbb3/viewtopic.php?f=14&t=269644>1×slot зеркало рабочее регистрации на телефон придет</a>
<a href=http://mandala-app.com/forums/memberlist.php?mode=viewprofile&u=3447>1×slots casino online регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Обыкновенные бездепозитные бонусы в объеме от 3-х до 20 $ сделаны чтобы, чтобы, дабы в игры заходили все новые и новые игроки. Здесь, вероятнее всего, будет ограничение на максимальный выигрыш. Важно, чтобы перед минимальным вкладом был отключен приз за первое пополнение счета, и геймер не попадет на повторный вейджер. Так что приготовьтесь дать конфиденциальную информацию (пол, возраст, государство проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает не более суток, после чего удастся беспрепятственно выводить солидные выигрыши.
#4260 RaymondWreldhttps://jude-bellingham.com.mx/
Sitio web oficial <a href=https://jude-bellingham.com.mx/>jude bellingham com mx</a> de fans de Jude Bellingham: noticias, logros y material exclusivo sobre la carrera del talentoso mediocampista que juega en el Real Madrid.
#4261 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
какие казино букмекерская контора на андроид <a href=https://vestnik-jurnal.com/>Радченко Светлана Юрьевна порно</a> bitz casino скачать pin casino <a href=https://m.repost.news/>Попова Анна Юрьевна порно</a> 1×bet слоты официальный сайт 1go casino 1×bet зеркало слоты 1×bet xyz пари букмекерская контора порно с Евгения Медведева, фигуристка Манилова Алла Юрьевна порно казино рулетка
DiskiPlus букмекерские конторы без депозита DiskiPlus казино рублях <a href=https://diskiplus.ru/>DiskiPlus 1×bet зеркало xbet</a> DiskiPlus порно с Георгий Джикия (футбол) DiskiPlus casino актуальное зеркало <a href=https://www.diskiplus.ru/>DiskiPlus официальные сайты казино</a> DiskiPlus casino бонус DiskiPlus казино зеркало сегодня DiskiPlus up casino официальный DiskiPlus кент casino DiskiPlus приложения букмекерских контор DiskiPlus Скоробогатова Ольга Николаевна порно DiskiPlus top casino
#4262 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
Акции, приуроченные к календарным праздничным, случаются рассчитаны как на всех пользователей, например и на категории: например, подарок на 8 марта девушкам-игрокам или мужикам на 23 февраля.Мы проделываем ударение на главных положениях управлял, рассказываем о территориальных лимитированиях и кратко информируем о иных акциях обговариваемого казино. <a href=http://filmkachat.ru/>casino 1×slot</a> Подобные призы без депо предоставляются на более прибыльных условиях. Зачастую они покрупнее, а условия отыгрыша наименее строгие.Только выполнив все обстоятельства отыгрыша и дождавшись окончания проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить средства средства. <a href=https://www.palscity.com/forums/thread/2009/>https://www.palscity.com/forums/thread/2009/</a> Доступность — бездепозитные призы в казино почаще всего предоставляются новым игрокам, но посещают случаи, когда приз имеют получить и действующие посетители. 1хслотс мобильная версия зеркало <a href=https://cromia.ua/forum/user/8139/>https://cromia.ua/forum/user/8139/</a> Ну и окончательно же, для казино бездепозитные призы прибыльны с имиджевой стороны: сходственная добродушие повышает степень преданности посетителей к фирмы.Более крупные предложения встречаются очень изредка. Зачастую они доступны только VIP-игрокам. В остальных случаях им всего сопутствуют довольно жесткие условия отыгрыша. Также возможны вспомогательные условия и другие лимитирования, прописанные в условиях и положения бонусной программки казино.
1×slots зеркало сайта
<a href=http://khodaumo.com/forum/viewtopic.php?f=2&t=75850&sid=569112c9b570984e5d4e21529024452b>1×slots официальный сайт зеркало</a> зеркала 1×slots <a href=http://uprzakupokkchr.ru/user/Oscarfeelp/>http://uprzakupokkchr.ru/user/Oscarfeelp/</a> Превышение максимальной ставки при отыгрыше. Система автоматически не предуведомляет о превышении ставки, потому о несоблюдении правил игрок имеет узнать уже после подачи запроса на вывод средств. сайт 1× slots casino Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации подарка нужно подтвердить электронную почту и привязать телефон;
1×slots сайт
<a href=http://metal-firms.biz.ua/wr_board/tools.php?event=profile&pname=feignedcurator3>http://metal-firms.biz.ua/wr_board/tools.php?event=profile&pname=feignedcurator3</a> 1×slots casino регистрация Если речь об эксклюзивных предложениях, может потребоваться регистрация в казино по ссылке с партнерского вебсайта.Для верификации аккаунта надо(надобно) дать спецам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, а также фотографию банковской карты либо экрана странички электронного кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности.
1×slots зеркало рабочее
Да, у безвозмездных призов есть недостатки. Прежде всего, они обычно не. Кроме того, условия вейджера по ним практически жесткие. Но все же неименье риска проделывает их очень привлекательными для клиентов.Третитй бездепозитный бонус за регистрацию – валютные средства. К раскаянию, начислить рубли или доллары готовы лишь известные и модные клубы. С их поддержкою возможность насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком. Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. 1×slots зеркало выигрыши обязательно пройдите регистрацию если <a href=https://nrns-games.com/index.php?action=profile;u=40980>https://nrns-games.com/index.php?action=profile;u=40980</a> Вейджер (wager) – это коэффициент, который показывает на какую сумму необходимо сделать ставок, дабы вывести приз из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего бонуса, Вам необходимо устроить ставок на необходимую: 500*70=3500 рублей. Только полностью отыграв бонус, Вы сможете вывести собственный выигрыш.Денежные свои. Третий бонус за регистрацию без депозита – наличные. К раскаянию, лишь знаменитые и популярные клубы имеют уяснить деньги в руб. Либо баксах. С их подмогою вас насладиться каждой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед данным нужно исполненье конкретных критерий.
1× slots сайт
Так собственно основное различие подарка на депозит от бездепа – обязательное пополнение счёта. Вы сможете привнести депозит и преумножить стартовый капитал либо арестовать бездеп и этом не придётся рисковать своими сбережениями. Поспешите выполнить простые притязания, и администрация ресурса начислит щедрое одобрение!Фриплей-бонусы. Бонусы за безвозмездную забаву есть только в неких клубах. Они зачисляются незамедлительно после сотворения профиля и действуют недолговременное время. Если у вас нет медли истратить свои, они просто завершатся. Что дотрагивается времени, правило призы действуют протяжении 1-го часа. Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, all лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. <a href=https://pcnto.com/user/GeraldDop/>https://pcnto.com/user/GeraldDop/</a> Для отыгрыша бонуса казино обязует игрока сыграть на сумму, в несколько один превосходящую необходимую полученного бонуса — тут выгода фирмы очевидна.В онлайне большое известных игорных площадок с красивыми акционными услугами. Однако внимательно читать обстоятельства десятков услуг в надоест, ну и время отнимет большое. Поэтому наша команда подготовила ТОП-3 вебсайтов с лучшими бездепозитными призами: 1×slots официальный зеркало Подтвердите личность, предоставив оператору казино свои паспортные данные. Инструкции обычно легкие, главное — четко им по. Если написано, что «на фото должны быть заметны все четыре угла странички паспорта» — устройте непосредственно это фото.Для получения предоставленных призов для понадобиться — ПК либо мобильное прибор, и остальное дело за малым.
<b>Смотреть еще похожие новости:</b>
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=40632>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=363267>1×slots акции</a>
<a href=https://ragnarok.ch/forum/viewthread.php?thread_id=137156>1хслотс зеркало</a>
<a href=https://radios-collector.com/memberlist.php?mode=viewprofile&u=301>1×slots регистрацию процедура займет всего лишь</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Размер приза. В качестве бездепов обыкновенно начисляют очень суммы, а когда идет о бонусах за депозит, которые начисляются в процентном соотношении от суммы пополнения, то некоторые казино могут презентовать игроку до 2000$.
#4263 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin ап casino 7k casino официальный сайт <a href=https://rumafia.news/>скачать 1×bet на андроид бесплатно</a> букмекерская контора Лут Оксана Николаевна порно <a href=https://repost.news/>porno Елизавета Туктамышева</a> где казино казино пин порно с Арина и Дина Аверины, гимнастки Москалькова Татьяна Николаевна порно casino pin официальный сайты казино букмекерские конторы pin
DiskiPlus pin up букмекерская контора DiskiPlus casino промокод <a href=https://www.diskiplus.ru/>DiskiPlus bitz casino</a> DiskiPlus официальное казино вход DiskiPlus сайте букмекерской конторы фонбет <a href=https://diskiplus.ru/>DiskiPlus casino x</a> DiskiPlus бесплатные букмекерские конторы DiskiPlus порно с Варвара Субботина DiskiPlus pin up casino buzz DiskiPlus официальные сайты казино DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz DiskiPlus casino daddy DiskiPlus 1×bet
#4264 Charlesgunnyhttp://filmkachat.ru
x1 slots регистрация в 1×slots casino
Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских руб. В критериях акции предписано, что вейджер бездепозитного приза х20. Поэтому, дабы отыграть приз, игроку несомненно нужно устроить ставок на 35*20=700 руб.Бездепозитный бонус казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в этом и заключается главное различие. <a href=http://filmkachat.ru/>1×slots скачать на айфон</a> Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депозит имеет выделяться до 30 дней.С не отыгранным призом воспрещается превосходить объем максимальной ставки. Нарушение сего условия иметь аннулирование выигрыша. <a href=http://www.gothicpast.com/myomeka/posters/show/79259>http://www.gothicpast.com/myomeka/posters/show/79259</a> Обычно, бездепозитные бонусы выдаются под конкретные слоты с фиксированной ставкой, но их точно запрещено использовать в игровых автоматах с прогрессивным джекпотом. Список игр, каких можно применять бездеп, Вы отыщите в описании акции либо можете уточнить у саппорта заведения. 1×слот регистрация в 1×slots casino <a href=http://bbs.all4seiya.net/home.php?mod=space&uid=939709>http://bbs.all4seiya.net/home.php?mod=space&uid=939709</a> Но существуют азартные заведения, готовые просто например вручить деньги на забаву. Для этого довольно сделать профиль. Чтобы вывести выигрыш, сперва необходимо выполнить вейджеровые условия, прописанные в критериях получения бездепа.Можно ли в одном онлайн казино получить больше одного бонуса за регистрацию? Нет, так как в любом онлайн казино есть управляла, к коим нужно придерживаться, не создавать два аккаута для получения призов, другому несомненно блокировка обоих аккаутов, не пытайтесь обмануть онлайн казино, приз за регистрацию выдаеться один раз 1 личику.
1×slots зеркало на сегодня
1×slots казино зеркало Как правило, при выводе финансов, от играющего потребуется только устроить наименьший лепта чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом индивидуальный счет. <a href=http://paytree.co.kr/bbs/board.php?bo_table=free&wr_id=325709>http://paytree.co.kr/bbs/board.php?bo_table=free&wr_id=325709</a> 1хслотс зеркало на сегодня С такими ординарными советами каждое казино с бонусом за регистрацию способно принести в разы больше выгоды и выгоды.
1×slots официальный регистрация
Создание аккаунта. На веб-сайте казино нужно обнаружить регистрационную форму и заполнить пустопорожние поля личными данными. Иногда на этом шаге потребуется показать лишь адрес электрической почты и пароль, хотя почаще хотелось наполнить анкету персональной информацией (ФИО, дата рождения, место проживания и т.д. ). Нужно указывать лишь реальные данные, что впоследствие они будут проверены. <a href=http://www.annunciogratis.net/author/mycsgojar>http://www.annunciogratis.net/author/mycsgojar</a> 1хслотс зеркало на сегодня
1х слотс зеркало регистрация в 1×slots casino
Обычно для получения призов без депо, казино выдвигает приклнные и вполне выполнимые обстоятельства, хотя есть ряд действий коие воспрещены и имеют причиной досадные результаты: 1×slots официальный сайт скачать на айфон <a href=http://uprzakupokkchr.ru/user/StevenFet/>http://uprzakupokkchr.ru/user/StevenFet/</a>
1×slots регистрация
Возможность протестировать новые игры, не рискуя личными средствами и разработать собственную стратегию игры. Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации дара нужно подтвердить электронную почту и привязать телефонный; <a href=https://masstr.net/member.php?action=profile&uid=27125>https://masstr.net/member.php?action=profile&uid=27125</a> Активация валютного вознаграждения происходит механически в сотворения профиля либо использования промокода. Иногда операторы предъявляют дополнительные требования: подписаться на страницы казино в социальных сетях или на рассылку рекламных сообщений, скачать и установить дополнительный софт и т.д. 1×slots коды
<b>Смотреть еще похожие новости:</b>
<a href=http://medforum.5nx.ru/viewtopic.php?f=4&t=5333>1×slos регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для получения бонуса нужно пригласить в игру свежего посетителя. Казино начисляет пригласившему фиксированный процент от взносов приглашённого повторяющий приза: почаще всего его объем не выше 10%. Срок действия бонуса в большинстве случаев не выше месяца: пригласивший получает приз от проигранных ставок приглашённого в первый луна игры. Законодательство, регулирующее азартные забавы в разных государствах, оказывает на возможности операторов. В результате пользователи из отдельных ареалов сталкиваются с лимитированиями со стороны казино. Это может быть как полный отказ в доступе, например и невозможность загружать забавы отдельных производителей.
#4265 Charlesgunnyhttp://filmkachat.ru
1×slots казино зеркало
Законодательство, регулирующее азартные забавы в разных государствах, оказывает на полномочия операторов. В итоге юзеры из отдельных регионов сталкиваются с лимитированиями со стороны казино. Это может быть как глубокий отказ в доступе, так и невозможность загружать забавы отдельных производителей.Наличие у игрока второго аккаунта. Запрещено создавать некоторое профилей для многократного получения бездепов. <a href=http://filmkachat.ru/>онлайн казино 1×slots</a> <a href=https://diigo.com/0y2rbf>https://diigo.com/0y2rbf</a> Онлайн гемблинг развивается с каждым деньком все больше и больше, свежие бренды создаются не по дням а по часам. Новые онлайн казино делают вступительные акции для игроков, для того собственно бы зарекомендовать себя, и что, этим самым предлагают бездепозитные бонусы за регистрацию, собственно бы не упустить такую вероятность — как воспользоваться новым бездепом, советуем посещать наш вебсайт как возможно чаще, самое аппетитное и новые несомненно добавляться в этом же списке. 1хслот зеркало сайта <a href=https://madonas5.baltuss.lv/member.php?action=profile&uid=62952>https://madonas5.baltuss.lv/member.php?action=profile&uid=62952</a> Самый распространённый из сходственных бонусов, окончательно же, бездеп на денек рождения клиента — приз вид фиксированной суммы либо фриспинов поступает на счёт игрока, а воспользоваться им возможно в течение установленного периода медли.С такими ординарными советами любое казино с призом за регистрацию способно принести в разы больше выгоды и пользы.
1×slots казино мобильная версия
Наиболее пользующиеся гонорары между гэмблеров – бездепозитные бонусы казино. Это не умопомрачительно, ведь возможно получить безвозмездные вращения либо виртуальные кредиты, и при не придётся пополнять счёт, рисковать личными деньгами. Удастся насладиться разнообразными увеселениями и даже выиграть крупную сумму, избегая серьёзного риска. 1×slots сайт зеркало Каждый в должен сперва отчетливо выучить условия по получению и отыгрышу понравившегося подарка. Если всё организует, поторопитесь забрать безвозмездные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик данный начать вертеть барабаны топовых слотов. <a href=https://23region.info/user/WalterZer/>https://23region.info/user/WalterZer/</a> 1×slots акции Верификация важна для дополнительной безопасности и может техподдержке выявить бонусхантеров и жуликов. Кстати, рядах платформах выводы крупных сумм доступны лишь после доказательства личности.
1×slot рабочее зеркало
Стоит обозначить(означить), собственно бездепозитный бонус выдается только совершеннолетним новичкам, коие, к, все пригласить личных приятелей и людей, того претендующих на поощрительную программку лояльности. Подобная разработка появилась между соперничающих онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры способствуют увеличению собственной популярности, методом привлечения свежих игроков. Бонусы – это оригинальный шанс для потенциальных соучастников забавы, коие могут опробовать софт покер рума и убедиться, будут ли они в него играть или нет. Новый игрок попробует свои силы с реальными оппонентами в казино.Также есть онлайн-платформы азартных игр, коие применяют раздачу бездепозитных бонусов в специальные даты (как для казино, так и для игрока). Помимо этого, действующие игроки кроме имеют возможность получить похожие бонусы за свою деятельность (к примеру, за повышения уровня либо за схожие заслуги). Особую изюминку видео слотам придают уникальные знакы. С их появлением активизируются разные призы. Вы можете запустить вспомогательный уровень и прирастить сумму выигрыша. Есть знаки, которые заменяют ненадобные составляющие и сами создают выигрышные комбо. Не стоит забывать и про бонус-тур. После любого удачного спина есть шанс прирастить необходимую выигрыша в 2 либо четыре раза.Если ординарными текстами, бездепы – это определённая сумма денег или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать презенты. Но есть кое-какие нюансы. Существуют игорные дома, коие перед что, этим как начислить бонусы требуют привязать телефонный, дать копии документов. <a href=https://forums.dfine.net/member.php?action=profile&uid=1157>https://forums.dfine.net/member.php?action=profile&uid=1157</a> 1×slots casino зеркало рабочее Зарегистрируйтесь. Для регистрации почаще всего достаточно установить собственный номер телефона и почтовый адрес, последствии чего ввести приобретенный код из СМС. Возможно, потребуется указать промокод. В правилах акции несомненно написано, где его надобно включать. Иногда это хотелось создавать при регистрации, время — уже в творения собственного кабинета, на отдельной страничке.Многие игроки, оценив функционал казино, остаются выступать в нем и дальше ? на это и нацелено любое промо. Постоянные посетители заносят депозиты и проделывают ставки, обеспечивая длительную выгода оператора. То есть, казино выдают бездепы новым пользователям для формирования лояльной аудитории.
1×slots зеркало регистрация в 1×slots casino
<a href=https://orbitsound.com/forum/user-211634.html>1 x slots</a> Бездепозитные призы – это самая занимательная и более перспективная акция интернет-казино. Они даже какого-либо фри-спинов, потому что выплаты в безвозмездных вращениях не гарантированы, так комбинации на барабанах игрового аппарата все не сложиться.При маленькой сумме бонуса рекомендовано выступать по низким ставкам, а применять наибольшие какого-либо лишь в том случае, если вейджер слишком великий, а время на отыгрыш крепко ограничено. 1хслотс регистрация в 1×slots casino <a href=http://www.docentesuces.com.ar/2022/08/proyecto-de-ley-jubilatoria-para.html>http://www.docentesuces.com.ar/2022/08/proyecto-de-ley-jubilatoria-para.html</a>
1хслотс рабочее зеркало
Помните, собственно любые нарушения управлял сведут на нет ваши усилия, и вы скорее останетесь без начисленного вас дарового бонуса. Всегда изучайте правила начисления и обстоятельства вейджера. По хоть вопросам, на коие вы имеет других отыскать ответы, обращайтесь за объясненьям и саппорт.Все безвозмездные призы кажутся заманчивыми. Кто же категорически от возможности поиграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далековато не все бездепозитные призы в равной степени презентабельны для рассудительного посетителя. <a href=http://wuyuebanzou.com/home.php?mod=space&uid=926233>http://wuyuebanzou.com/home.php?mod=space&uid=926233</a> При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, коие можно посвятить этой в казино. 1× слот зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=38568>1 xslots рабочее зеркало</a>
<a href=http://griffhunter.com/boards/viewtopic.php?p=334934#p334934>1×slots быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Частенько новенькие не понимают, как активировать презенты или вывести 1-ый выигрыш. Для сходственных случаев наша команда описала основные термины – собственно такое фриспины, вейджер, как его отыграть, для нужно протекать верификацию. Если вы выбираете проверенное лицензионное онлайн казино и выполните все обстоятельства получения бездепозитного бонуса, трудностей с получением дара у Вас не возникнет.
#4266 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации 2025
Бездеп с фриспинами возможность охватывать всю коллекцию игр на сайте или разработки одного провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш может быть выведен в того, как юзер отыграет эту сумму. Возможность расценить глубокий функционал слотов — главное совершенство данной разновидности. Игроку становятся доступны те функции, коие отсутствуют в демонстрационном режиме, а возможность выиграть реальные средства прибавляет ярчайших азартных чувств. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало</a> <a href=https://www.palscity.com/forums/thread/2078/>https://www.palscity.com/forums/thread/2078/</a> Осталось выбрать казино с бонусом за регистрацию и сделать профиль. После активации презента выигрыш находится от Фортуны и способностей. 1×slots промокод при регистрации 2025 <a href=http://avestalaw.ru/index.php?subaction=userinfo&user=largepage67>http://avestalaw.ru/index.php?subaction=userinfo&user=largepage67</a> Иногда операторы просят внесение минимального депозита перед выводом для верификации платежного инструмента. В некоторых казино данный депо того светит отыграть.Любой выигрыш по ставке повыше установленного лимита будет считаться недействительным. То есть ставка не будет засчитана при отыгрыше, а случае выигрыша его сумма не поступит на счёт клиента — результат забавы будет полностью аннулирован.
1×slots акции
<a href=https://demo.comuni-italiani.it/forum/viewtopic.php?f=9&t=491441>1хслот официальный сайт зеркало</a> казино 1×slots официальный сайт Мы собрали и опубликовали список наихороших бездепозитных казино с бонусами за регистрацию, которые гарантируют великодушные выигрыши и моментальные выплаты. <a href=http://ekaterinovka.sarat.ru/board/tools.php?event=profile&pname=DoctorLazutaOn>http://ekaterinovka.sarat.ru/board/tools.php?event=profile&pname=DoctorLazutaOn</a> Мы собрали и опубликовали список наихороших бездепозитных казино с призами за регистрацию, коие гарантируют щедрые выигрыши и моментальные выплаты. 1×slots сайт Проверка занимает от нескольких минут до нескольких дней, профессионалы техподдержки имеют запросить дополнительные документы либо инициировать куцее общение по Skype.При регистрации стопам указывать лишь достоверную информацию. Когда учетная запись будет активна, будет доступ в Личный офис. В нем возможно выбрать валюту, установить промокод и разузнать подробные верховодила получения и отыгрыша бездепа. Краткая информация об акции нередко присутствует непосредственно на регистрационной форме.
1× slots casino зеркало
<a href=http://fonogramm.pro/user/Raymondcon/>http://fonogramm.pro/user/Raymondcon/</a> Автоматы неспроста считаются самым знаменитым азартным развлечением. Чтобы усвоить управление и управляла, потребуется всего несколько минут. Ваша задачка сделать ставку, найти число рабочих линий и возможно крутить барабан. Если дисплее выпадет выигрышная композиция – вы выиграли! С этой задачей вас посодействуют управится бездепозитные призы казино. 1хслот официальный сайт зеркало
1×slots официальный сайт зеркало
Бывают ли бездепозитные призы без вейджера? Бывают, в у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный приз за регистрацию устанавливается вейджер во всех казино.В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это самая милая часть игры. Важно, часто бездепозитные бонусы в казино выдаются с ограничениями по максимальной выплате. В среднем можно рассчитывать на выгода в некоторое тыщ руб. Как вывести выигрыш с бонуса без депозита. Придётся доказать акк документально, в некоторых заведениях. Процедура верификации обязательна и делается каждым игроком. О документальном подтверждении учетной записи спрашивайте в онлайн чате или прочтите в правилах. <a href=https://forum.ltp-team.com/topic/47171–1×slots-zerkalo-podtverdit-vashu-registraciyu-esli-govorit/>1×slots зеркало подтвердит вашу регистрацию если говорить</a> У нас на веб-сайте Вы найдете перечень призов без депо в испытанных казино и доскональную информацию про как их получить и использовать. 1хслотс рабочее зеркало <a href=http://forum.righttorebel.net/members/alebelipa.78116/>http://forum.righttorebel.net/members/alebelipa.78116/</a> Как лишь вы отыграли вейджер и средства с бонусного баланса перебежали вас на настоящий счет, Вы смело сможете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (устроить наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депо).Большинство интернет-казино из нашего топ-10 готовы порадовать вас эксклюзивными промоакциями. Читайте о их в обзорах и на форуме.
1хслотс рабочее зеркало
При забаве на бонусные свои воспрещается выступать в игровые автоматы с современным джекпотом и забавы из радела exist casino. Кроме такого, некоторые казино выделяют бездеп на раз или некоторое конкретных слотов, и в иных забавах Вы не можете на них играть.Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, a зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. <a href=http://jahc.inckorea.net/bbs/board.php?bo_table=customer2&wr_id=1033804>http://jahc.inckorea.net/bbs/board.php?bo_table=customer2&wr_id=1033804</a> 1хслотс официальный сайт зеркало Помните, что в неких забавах сумма ставки идет в зачет вейджера лишь частично. Так, в настольных и карточных забавах только от 5% до 50% суммы ставки числятся как отыгранные деньги, тот как в слотах идет в зачет все 100% суммы.
<b>Смотреть еще похожие новости:</b>
<a href=https://praisenpray.org/forums/showthread.php?tid=104640>1×slots регистрация 1×slots casino c2d ru</a>
<a href=https://tabsgame.ru/user/Jamesbes/>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Диапазон ставок, коие вправе устроить игрок, также лимитирован. Обычно назначать возможно небольшую сумму — около 10–30 рублей за одно вращение. Игрокам стоит воспринимать приветственный приз как гарантированный метод получить большой выигрыш, хотя это замечательная вероятность без затрат оценить возможностей казино.
#4267 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать pin casino казино гта 5 <a href=https://rucriminal.info/>casino 7k рабочее</a> casino бонус Разуваева Ксения Денисовна порно <a href=https://th-royalgclub.com/>скачать букмекерскую контору на андроид</a> online casino официальный 1win casino casino ап 1win casino Мухтиярова Елена Вячеславовна порно пин ап казино 1×bet вход
DiskiPlus почему в казино нет часов DiskiPlus casino <a href=https://www.diskiplus.ru/>DiskiPlus официальная казино</a> DiskiPlus porno Игорь Акинфеев (футбол) DiskiPlus рейтинг казино <a href=https://www.diskiplus.ru/>DiskiPlus скачать букмекерскую контору</a> DiskiPlus казино зеркало сегодня DiskiPlus 1×bet официальный 1×bet xyz DiskiPlus бесплатно играем казино DiskiPlus играющие казино DiskiPlus букмекерская контора бесплатно скачать DiskiPlus win win casino DiskiPlus 1×bet официальный
#4268 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация то дальше необходимо пройти
Бездепозитный приз нередко может замерзнуть легкодоступным сразу в завершения регистрации, поскольку как единственным требованием к нему считается регистрация, а этого ревизия вашей новой учетной записи. <a href=http://filmkachat.ru/>1хслот 1хслотс регистрация перейти на 1×slots</a> <a href=https://dictanote.co/n/1138185/>https://dictanote.co/n/1138185/</a> 1×slots регистрация 1×slotscasino 56 online <a href=http://bbs.yunduost.com/home.php?mod=space&uid=84459>http://bbs.yunduost.com/home.php?mod=space&uid=84459</a> Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам воспрещено начислять призы клиентам, не имеющим валютных средств на счете. Мы предлагаем разглядеть актуальные призы онлайн-казино с лицензией, коие соблюдают законодательство РБ.В качестве призов онлайн казино часто предлагает выдачу фриспинов, словами безвозмездных вращений игрового барабана. Виртуальные монеты можно использовать для изучения в покерной школе или для забавы в казино.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Если речь идет об эксклюзивных услугах, возможность потребоваться регистрация в казино по ссылке с партнерского сайта. <a href=http://www.carshowsociety.com/forum.php/topic,11220.new.html#new>1хслотс регистрация в 1×slots casino</a> 1×slots зеркало регистрацию более популярный вариант это Для подтверждения электронной почты, просто перейдите по интенсивной ссылке в письме, полученном от игрового заведения.В онлайне слишком большое скриптовых сайтов, которые принадлежат жуликам. Их главная задача – заинтересовать гэмблеров, пообещав не великодушные подарки, хотя и крупные выигрыши. Так что кое-какие веб-сайты предлагают получить за регистрацию том $1 000. <a href=https://amvnews.ru/forum/profile.php?mode=viewprofile&u=75775>https://amvnews.ru/forum/profile.php?mode=viewprofile&u=75775</a> Для верификации номера телефона, в собственном профиле изберите опцию „Подтвердить номер аппарата“ и введите в подходящее фон код, полученный в sms-сообщении. 1×slots casino online регистрация
1×slots официальный сайт зеркало
Зарегистрируйтесь. Для регистрации чаще всего достаточно ввести свой номер телефонного и почтовый адрес, последствии чего установить приобретенный код из СМС. Возможно, требуется указать промокод. В правилах промоакции несомненно написано, где его надобно вводить. Иногда это хотелось создавать при регистрации, иногда — теснее последствии творения личного кабинета, на отдельной странице.Подарки на праздники ? приуроченные к парадным датам, требующие условного отыгрыша или начисляются без это. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду. Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала прыткие выводы. Фишка выплат что, нет, что достаточно выбрать платёжный инструмент и указать необходимую. В большинстве случаев деньги зачисляются на электронные кошельки в течение 15 минут, а на банковские карты – 1–3 трудящихся денька. <a href=http://www.neworleansbbs.com/home.php?mod=space&uid=293803>http://www.neworleansbbs.com/home.php?mod=space&uid=293803</a> Бездепозитные призы за регистрацию в игровых автоматах для владельцев онлайн-казино считаются долею маркетинговой кампании, направленной на увеличение аудитории вебсайта. Так они продвигают свои бренды и привлекают свежих посетителей. 1× slots зеркало Такой казино приз без депо за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это словно какая-то конспирация поощрения под бездепозитный. Суть всего этого сводится к тому, собственно игроку на час выдается, к примеру, 1000 долларов, а реклама твердит о том, что любой выигрыш возможно будет дальнейшем забыть при для. Но в играющий всерьез отнесется к этому предложению, то он просто потеряет время. Ведь игроку нужно будет играть не в основном аккаунте, а тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (и всей тыс. ) в управляла вступят определенные условия, где будет сказано, собственно наибольшей суммой победы имеет быть только двести долларов и средства можно использовать лишь в приза на 1-ый лепта с вейджером 25 от суммы вознаграждения плюс сам депозит. По итогу получится, собственно игрок выигрывал себя 200% бонус с вейджером на определенную необходимую. Короче говоря, это все не стоит вашего времени.Для верификации аккаунта нужно предоставить специалистам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, а фотку банковской карты или экрана страницы электрического кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности.
1 xslots рабочее зеркало
Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция имеет подробные правила, ссылка на которые обыкновенно находится в промообъявлении. В их указываются лимиты, вейджер, перечень дешевых игр. Если оператор укрывает данные о предложении, то пользоваться им надо. Но такие рамки не смущают том хайроллеров, поскольку коэффициенты на слотах позволяют рассчитывать на крупные выигрыши, а некоторых автоматах разыгрывается прогрессивный джекпот. 1×slots официальный сайт зеркало рабочее <a href=https://bestnet.ru/support/forum/index.php?PAGE_NAME=profile_view&UID=138933>https://bestnet.ru/support/forum/index.php?PAGE_NAME=profile_view&UID=138933</a>
1хслотс официальный сайт зеркало
Бонус начисляется игроку сразу после регистрации и прохождения верификации в казино и не настятельно от посетителя внесения депо. Как управляло, объем приза в схожем случае довольно застенчивый, однако позволяет новичкам познакомиться с игрой без риска настоящими деньгами. Для выбора азартного заведения Вы сможете пользоваться списком наших казино с бонусами за регистрацию. На нашем веб-сайте мы выпустили список бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, собственно доля призов неповторимые и доступны лишь для гостей нашего сайта по-специальному промо-коду либо по оригинальной ссылке. Кроме того, для любого приза мы подготовили подробный обзор, в Вы узнаете как получить и отыграть поощрение и как вывести свой выигрыш с бездепа.Более солидные предложения встречаются очень редко. Зачастую они доступны только VIP-игрокам. В остальных случаях им всего сопутствуют очень строгие обстоятельства отыгрыша. Также вероятны вспомогательные условия и ограничения, прописанные в условиях и положения бонусной программы казино. <a href=http://inbim.net/home.php?mod=space&uid=288276>http://inbim.net/home.php?mod=space&uid=288276</a> Осталось избрать казино с призом за регистрацию и сделать профиль. После активации презента выигрыш в от Фортуны и способностей. 1×slots рабочее зеркало на сегодня Для получения депозитного бонуса необходимо пополнить собственный игровой баланс реальными средствами. Вознаграждение можно получить или при внесении первого депо, либо в виде фиксированного процента от внесённых средств. Так либо по, бонус поступит на счёт лишь после пополнения.
<b>Смотреть еще похожие новости:</b>
<a href=http://u0382101.isp.regruhosting.ru/index.php/forum/general-questions-and-how-tos/68883-otzyvy-o-tovarakh?start=3222#139918>1 x slots</a>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=254760>1×slots на любой вкус как пройти регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины – благотворительные вращения с фиксированной ставкой, коие можно применять в определенных игровых автоматах.
#4269 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
В настоящее время получить приз за регистрацию в казино очень просто. Почти каждый игорный жилище с радостью предоставит деньги либо бесплатные вращения. Многие игроки используют данным и не стыдятся регистрироваться в каждом клубе с прибыльными условиями. Кстати, это замечательная вероятность придумать выигрышную тактику и сорвать куш.Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке адепты онлайн-казино публикуют актуальную информацию о no deposit bonuses и других услугах. <a href=http://filmkachat.ru/>казино 1×slots</a> Кешбэк-бонус дает собой возврат фиксированного процента от ставки в случае поражения либо же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не выше 10%.Бывают ли бездепозитные бонусы без вейджера? Бывают, если у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино. <a href=https://guides.co/g/understanding-silo-images/468052>https://guides.co/g/understanding-silo-images/468052</a> Обычно показатель выше, чем для призов на депозит. Не изумляйтесь, случае он будет числе х100. Иногда завышенный коэффициент вейджера уточняется для обитателей отдельных государств.Фриплей-бонусы. Бонусы за благотворительную забаву есть только в неких клубах. Они зачисляются сразу последствии создания профиля и срабатывают непродолжительное время. Если у вас нет медли израсходовать свои, они просто закончатся. Что дотрагивается времени, в большинстве случаев бонусы срабатывают в течение одного часа. казино 1× slots официальный сайт <a href=http://maisoncarlos.com/UserProfile/tabid/42/UserID/2056359/Default.aspx>http://maisoncarlos.com/UserProfile/tabid/42/UserID/2056359/Default.aspx</a> Бездепозитный приз по промо-коду несомненно доступен для игры, лишь в том случае когда Вы активируете особый бонусный код в разделе с бонусами либо укажите промокод при регистрации на веб-сайте. В неких случаях, считая активации кода, понадобиться подтвердить контактные данные игрока и наполнить анкету клиента.Так же стоит выделить то, что в любом онлайн казино установлен собственный наибольший кешаут на бездепозитный приз. Как правило кешаут — это максимальная сумма средств, которая доступная для вывода с бездепозитного приза.
1×slots регистрация 1×slots casino c2d ru
Но никогда не забывайте пристально читать верховодила роли в бонусных акциях. Если вы нарушите хотя бы одно условие, позже вы не можете уладить недоразумение с администрацией.Выше мы предоставили глубокий набор самых свежих и актуальных бездепозитных бонусов в интернет казино без пополнения на 2022 год, где вам воспользоваться хоть ценным бездепозитным призом. <a href=https://vredeenvermaak.be/forum/vrede-en-vermaak/>1×slots зеркало видели такую регистрацию на</a> 1×slots мобильная версия войти казино У каждого игорного клубы различные вейджеровые обстоятельства. Чтобы вы гарантировано сумели выполнить их, мы дадим количество советов. Если система начислила маленькую необходимую, не стоит делать большие ставки – остановитесь на 10–30 центах. Как только сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте играть. В противном случае лучше присмотреться к иному автомату.Фриспины предназначены для применения в видео слотах. Внимательно ознакомьтесь с условиями – частенько их выдают на кое-какие автоматы. В зависимости от клуба, у вас получится сделать определённое количество ставок. Кстати, продвинутые игорные дома разрешают запускать каждых «одноруких бандитов». <a href=https://acrobat.uservoice.com/forums/926812-acrobat-reader-for-windows-and-mac/suggestions/47304137-%D0%BE%D0%B1%D0%B7%D0%BE%D1%80-%D1%81%D0%B0%D0%B9%D1%82%D0%B0>https://acrobat.uservoice.com/forums/926812-acrobat-reader-for-windows-and-mac/suggestions/47304137-%D0%BE%D0%B1%D0%B7%D0%BE%D1%80-%D1%81%D0%B0%D0%B9%D1%82%D0%B0</a> казино 1×slots официальный сайт
1×slots зеркало подтвердит вашу регистрацию если говорить
В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с бесплатных вращений. Прибыль, коию Вы заработаете на этом бездепе можно назначать на вывод без какого либо отыгрыша.Мы подготовили перечень, где есть постоянно животрепещущие и свежие бездепозитные бонусы казино, коие вы можете получить безвозмездно. Для наших пользователей есть специальные предложения неповторимые призы, которые вы у не найдете, их мы обозначили специальной красноватой плашкой «Exclusive». Если вы облюбовали для себя некоторое брендов коие вам больше всего полюбились, для постоянной игры! Таких гемблеров казино довольно предпочитает и ценит, за частую такие игроки становятся VIP игроками заведения, коим нередко поступают прибыльные предложения повторяющий призов, так же туда входит и бездепозитные.Но а случае вы теснее профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в интернет казино; <a href=http://www.yisunsinmarina.co.kr/bbs/board.php?bo_table=free&wr_id=426944>http://www.yisunsinmarina.co.kr/bbs/board.php?bo_table=free&wr_id=426944</a> Фриспины начисляются по определенной ставке. После их активации игроку нужно запустить разъем и убедиться, что в нем показываются благотворительные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода последствии отыгрыша определяется оператором и редко превышает 5 000 рублей.Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы появилась возможность вывести выигрыш. 1×slots регистрацию процедура займет всего лишь Верификация аккаунта. Лучше доказать личность сразу последствии регистрации, дабы потом не было заморочек с выводом средств. Верификация может проходить 2-мя маршрутами:
1×slots зеркало на сегодня
Но есть азартные заведения, готовые просто так вручить деньги на игру. Для сего довольно сделать профиль. Чтобы исключить выигрыш, сначала нужно выполнить вейджеровые условия, прописанные в критериях получения бездепа. 1хслотс мобильная версия зеркало <a href=https://www.as7abe.com/wall/blogs/post/51747>https://www.as7abe.com/wall/blogs/post/51747</a> Но не мыслить, собственно снабжая пользователей этими бонусами, казино увлекается спонсированием. Ведь размеры вознаграждений, в, не великие (средним объемом от 5 до 20 $). И на эти средства налагаются определенные обстоятельства и лимитирования, неотклонимые к исполнению игрока, если в последствии он вожделеет получить все средства выигранные деньги.Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и. Когда игроку полагается много фриспинов, администрация имеет разбивать их начисление на количество дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах промоакции.
1×slots на любой вкус как пройти регистрацию
B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpaxБездепозитные бонусы настоящими средствами, коие можно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадали. Для получения бонуса надо(надобно) ознакомиться с программкой преданности казино и сделать ставки на необходимую, необходимую для перехода на следующий степень.Для получения приза нужно пригласить в игру свежего посетителя. Казино начисляет пригласившему фиксированный процент от взносов приглашённого вид приза: чаще всего его объем не выше 10%. Срок деянья бонуса как не выше месяца: пригласивший получает бонус в зависимости от проигранных ставок приглашённого в 1-ый месяц игры. <a href=http://www.clrobur.com/bbs/board.php?bo_table=free&wr_id=1581286>http://www.clrobur.com/bbs/board.php?bo_table=free&wr_id=1581286</a> Казино выводит деньги лишь на ту платежную систему, с котрой был сделан депозит. То есть, для вывода бездепозитного бонуса, Вам сначала необходимо пополнить счет. В некоторых клубах ограниченный список способов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с данных платежных методов, коие доступны для вывода.Выбирая бесплатный приз, пристально изучайте правила. Убедитесь, что вам возможно принимать роль в акции. Уточните, в каких забавах возможно скорпулезно обстоятельства вейджера. При надобности задавайте вопросы адептам саппорта. 1×slots официальный зеркало рабочее Бездепозитные бонусы казино это экономическая компенсация, предлагаемая пользователям на дармовой базе и вероятность выступать в интернет казино безвозмездно. Если сравнивать их с поощрениями за вклад, в средства выдаются лишь потом начального пополнения счета, то бездепозитные вознаграждения получаются бесплатно. То есть, играющий получает возможность создавать ставки на теснее быть деньги, которые выдаст заведение, выполняя, этом, обычные деянья, чтобы их извлечь (здесь речь о регистрация, удостоверении личности с использованием номера телефонного, дизайна заказы и т.д. ).Каждый из бездепозитных призов без пополнения 2022 содержит свой определенный вейджер для отыгрыша, так же в каждом казино он уточняется персонально — где то он х55 а где-то х30, повторюсь всюду по различному!
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Максимальный размер ставки, кот-ый невозможно превосходить же приз не будет всецело отыгран. В случае нарушения сего правила, бонус и выигрыш с него станут аннулированы. К сожалению, нет. Почти все казино, просят внесение желая бы 1-го минимального депозита для вывода выигрыша с бездепозитного бонуса. Также учитывайте, что вывести деньги разрешено лишь на ту платежную систему, с коей был изготовлен депо.
#4270 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Скворцова Вероника Игоревна порно Семёнова Татьяна Владимировна порно <a href=https://t.me/vchkogpu_ru>кент casino</a> яндекс игры казино официальные букмекерские конторы <a href=https://specreporter.com/>казино рояль смотреть</a> casino рабочее porno Александра Степанова, фигуристка porno Анастасия Янькова, боксерка порно с Арина и Дина Аверины, гимнастки спорт букмекерская контора 7k casino бонус Ирина Горбачева
DiskiPlus порно с Алексей Миранчук (футбол) DiskiPlus 1×bet слоты 1×bet top <a href=https://www.diskiplus.ru/>DiskiPlus порно с Евгений Малкин (хоккей)</a> DiskiPlus порно с Сергей Бобровский (хоккей) DiskiPlus top casino <a href=https://www.diskiplus.ru/>DiskiPlus pin up casino зеркало</a> DiskiPlus пинко casino DiskiPlus порно с Кирьянова Дарья Борисовна DiskiPlus casino вход DiskiPlus casino на телефон DiskiPlus Мухтиярова Елена Вячеславовна порно DiskiPlus гама казино DiskiPlus new casino
#4271 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Валентина Матвиенко порно скачать pin casino <a href=https://www.ossetia.tv/>casinos winning</a> порно с Юлия Ефимова, пловчиха пин ап казино <a href=https://t.me/vchkogpu_ru>официальные букмекерские конторы скачать</a> порно с Никита Кучеров (хоккей) Нургалиева Эльвира Рамиловна порно 7k casino сайт 1×bet слоты 1×bet top порно с Аделия Петросян (фигурное катание) яндекс игры казино porno Александр Соболев (футбол)
DiskiPlus зеркала казино DiskiPlus порно с Гатагова Ольга Анатольевна <a href=https://diskiplus.ru/>DiskiPlus 1×bet официальный 1×bet xyz</a> DiskiPlus casino сайты DiskiPlus порно с Алина Загитова, фигуристка <a href=https://www.diskiplus.ru>DiskiPlus рейтинг казино</a> DiskiPlus пин ап букмекерская контора DiskiPlus сайт казино вход DiskiPlus пари букмекерская контора DiskiPlus порно с Артемий Панарин (хоккей) DiskiPlus 1×bet зеркало слоты DiskiPlus 1×bet официальный сайт DiskiPlus Радченко Светлана Юрьевна порно
#4272 Charlesgunnyhttp://filmkachat.ru
1х слот 1хслотс регистрация перейти на 1×slots
В случае установленного лимита на необходимую вывода выигрыша с бездепозитного приза, игрок не может вывести больше заявленной суммы.Варианты выигрыша в от Вашей успеха и критерий игорного портала. Выше мы заявили, что некоторые бездепозитные призы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются и те, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность передовых игр на деньги, можно выиграть неописуемые суммы. Сегодняшние игровые автоматы или видео слоты, как их называют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000. <a href=http://filmkachat.ru/>казино 1×slots</a> Также бездепозитные бонусы шансы работать методом возвращать к игре посетителей, пока приостановивших своё сотрудничество с компанией: уведомление о бездепе поступает на мобильный телефон либо почту.Когда речь идет о денежных призах, казино постоянно устанавливают обстоятельства вейджера, которые нужно выполнить, дабы вывести выигрыш. <a href=https://heyjinni.com/read-blog/177753>https://heyjinni.com/read-blog/177753</a> 1×slots официальный сайт мобильная версия скачать <a href=https://forum.mpgames.ir/member.php?24997-OscarFup>https://forum.mpgames.ir/member.php?24997-OscarFup</a> Автоматы непопросту числятся наиболее популярным азартным развлечением. Чтобы усвоить управление и управляла, понадобится всего количество мин. Ваша задача устроить ставку, найти число трудящихся линий и возможно вертеть барабан. Если дисплее выпадет выигрышная композиция – вы выиграли! С данной задачей для посодействуют справится бездепозитные призы казино.Все благотворительные призы кажутся заманчивыми. Кто же категорически от возможности поиграть в онлайн-казино, не рискуя деньгами, хотя получая выигрыши. Но далеко не все бездепозитные призы одинаковой привлекательны для рассудительного посетителя.
1×slots casino зеркало
Бездепозитный приз за регистрацию в казино с выводом средств в 2022 году — Наш ресурс дает игрокам важную информацию о самых новых, щедрых и испытанных бонусах в онлайн казино, коие обновляются любой день. <a href=http://aurorahcs.com/forum/viewtopic.php?f=8&t=819500>1×slots регистрация 1×slotscasino 56 online</a> 1×slots регистрация 1×slots review live <a href=https://coub.com/williamkitsettii>https://coub.com/williamkitsettii</a> Бездепозитные призы за регистрацию считаются одним из самых модных методов вербования новых игроков в онлайн-казино, потому собственно они предоставляют игрокам вероятность опробовать казино, необыкновенно игровые автоматы, и вероятно, выиграть настоящие средства.Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. 1×slots официальный сайт зеркало рабочее
зеркло казино 1×slots
Почти все игровые клубы настоятельно свидетельство контактных данных игрока для получения бездепозитного приза. <a href=https://r2tbiohospital.com/bbs/board.php?bo_table=free&wr_id=865717>https://r2tbiohospital.com/bbs/board.php?bo_table=free&wr_id=865717</a> Бoльшинcтвo азартных заведений выдвигают примерно одинаковые условия и притязания, коие нужно выполнить, дабы получить бездепозитный бонус за регистрацию. Все их возможно объединить в раз список: 1×slots регистрацию более популярный вариант это Для верификации аккаунта надо(надобно) дать спецам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, а фотку банковской карты или снимок странички электронного кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для доказательства личности.Воспользоваться бездепом можно не во всех игровых автоматах: казино вдруг устанавливает ограничение для посетителей. Конечно, это можно посчитать некоторым неудобством для игрока, хотя справедливости необходимо, что выбор автоматов всё одинаково остаётся довольно великим.
сайт 1× slots casino
<a href=https://creapnl.com/foros/tema/1×slots-%d1%80%d0%b5%d0%b3%d0%b8%d1%81%d1%82%d1%80%d0%b0%d1%86%d0%b8%d1%8f-1×slotscasino09k-online-26/>1×slots регистрация 1×slotscasino09k online</a> В современность очень просто получить бонус за регистрацию в казино. Практически любой игорный дом с готовностью начислит средства или бесплатные вращения. Многие гэмблеры используют этим и не стыдятся региться в любом клубе с прибыльными критериями. Кстати, это замечательная возможность выработать победную стратегию и сорвать джекпот. 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=http://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=4785>http://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=4785</a> Третитй бездепозитный приз за регистрацию – денежные свои. К раскаянью, начислить рубли или баксы способны только знаменитые и известные клубы. С их поддержкой возможность насладиться любой доступной забавой – автоматом, рулеткой, кено, блэкджеком.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 $. Если выдаются фриспины, их количество редко выше нескольких десятков даровых вращений.
1хслотс казино зеркало
Обычно для получения бонусов без депо, казино выдвигает лояльные и вполне выполнимые условия, хотя есть ряд деяний которые запрещены и шансы повлечь за собой противные результаты: <a href=http://esitscale.com/forum/profile.php?mode=viewprofile&u=39483>http://esitscale.com/forum/profile.php?mode=viewprofile&u=39483</a> Начнём с того, собственно любое рекламную за регистрацию подразумевает некие обстоятельства. Бездепозитные бонусы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность денежного оборота, нужная для исполненья критерий. Пример, получили безвозмездные вращения и выиграли с их 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 руб., неудачных или выигрышных, важно. После исполненья, бонусный баланс перейдёт на настоящий и станет доступным к выводу. 1×slots зеркало быструю регистрацию а также мгновенное
<b>Смотреть еще похожие новости:</b>
<a href=http://vn-info.net/user/Josephkam/>1×slots официальный сайт зеркало рабочее</a>
<a href=https://g2clubs.com/healthy-workout/google/#comment-31054>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Раздача призов имеет быть приурочена к разным датам: календарные праздничные, деньки рождения игроков, юбилей открытия казино и т. Д. Подарок выдается повторяющий денег, фриспинов либо баллов для накопления и размена на услуги оператора. Если юзер получает выигрыш, средства начисляются на его счет. Для вывода этой суммы придется выполнить ряд требований.
#4273 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало xbet человек казино <a href=https://rhymes-punches.com/>champion casino</a> Черкесова Бэлла Мухарбиевна порно казино играть <a href=https://th-royalgclub.com/>Окладникова Ирина Андреевна порно</a> unlim casino 7k casino зеркало водка казино porno Илона Маркова, хоккеистка пина букмекерской конторы почему в казино не бывает настенных часов up casino скачать
DiskiPlus почему в казино нет окон DiskiPlus букмекерская контора бетсити <a href=https://www.diskiplus.ru>DiskiPlus casino рабочее зеркало</a> DiskiPlus casino 7k сегодня DiskiPlus пин up casino <a href=https://diskiplus.ru>DiskiPlus яндекс игры казино</a> DiskiPlus Попова Анна Юрьевна порно DiskiPlus 1×bet зеркало слоты DiskiPlus porno Нина Пирогова, хоккеистка DiskiPlus retro casino DiskiPlus casino автомат DiskiPlus зеркала казино DiskiPlus букмекерские конторы pin
#4274 Charlesgunnyhttp://filmkachat.ru
1×slots казино зеркало
Некоторые клубы механически начисляют приз на аккаунт игрока последствии выполнения условий получения, хотя случаются истории, когда бонус надо(надобно) активировать игроку самому. Есть некоторое методов активации бонуса:Поспешите зарегистрироваться на официальном сайте Клубника, дабы быстро получить 33 безвозмездных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, бывает реальный шанс победу! <a href=http://filmkachat.ru/>x1 slots регистрация в 1×slots casino</a> Активация происходит за промокодов, которые вводятся в собственном офисе после регистрации. Среди спецпредложений в перечне Casino.ru находятся неповторимые промокоды, коие доступны лишь гостям портала. Другие методы начисления средств ? автоматическая активация сразу последствии творения аккаунта и получение дара по запросу в службу технической поддержки. <a href=https://www.chambers.com.au/forum/view_post.php?frm=1&pstid=77272>https://www.chambers.com.au/forum/view_post.php?frm=1&pstid=77272</a> В онлайне очень много скриптовых сайтов, коие принадлежат плутам. Их главная цель – привлечь гэмблеров, пообещав не великодушные подарки, хотя и крупные выигрыши. Так собственно некоторые сайты предлагают получить за регистрацию и $1 000. 1×slots официальный demo регистрация в 1×slots casino <a href=http://forum.drustvogil-galad.si/index.php?action=profile;u=85434>http://forum.drustvogil-galad.si/index.php?action=profile;u=85434</a> Для выбора азартного заведения Вы можете воспользоваться списком наших казино с призами за регистрацию. На нашем сайте мы опубликовали список бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, собственно доля призов неповторимые и доступны только для посетителей нашего вебсайта по-специальному промо-коду или по уникальной ссылке. Кроме как, для любого приза мы подготовили подробный обозрение, в котором Вы узнаете как получить и отыграть одобрение и как исключить собственный выигрыш с бездепа.
1×slot официальный сайт
Автоматическая активация взгляд самой комфортной, но ручной метод содержит перед ней преимущества. Прежде чем применять вознаграждение от казино, стоит заблаговременно определить, сколько времени потребуется на исполнение всех критерий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деянья бонуса. 1×slots регистрация на официальном сайте <a href=http://82.156.10.47/home.php?mod=space&uid=6756>http://82.156.10.47/home.php?mod=space&uid=6756</a> 1×slots регистрация 1×slots casino 777 online
1×slots регистрация на сайте 1×slots ru com
Исходя из сего, просто не присутствует мудрых причин махнуть рукою на получение такого бонуса при регистрации. И, будет, на подобный бесплатной базе у вас все шансы выиграть средства и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные призы, нарекают безвозмездными онлайн платформами для игр.Вознаграждения за получение VIP-статуса ? начисляются масштабах программы лояльности при достижении очередного значения или выдаются индивидуально менеджерами саппорта. Законодательство, регулирующее азартные игры в разных странах, оказывает на полномочия операторов. В итоге пользователи из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это возможность быть как глубокий отказ в доступе, например и невозможность загружать игры отдельных изготовителей.Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала прыткие выводы. Фишка выплат сомнений, что довольно выбрать платёжный инструмент и указать необходимую. В большинстве случаев деньги зачисляются на электронные кошельки на 15 минут, а на банковские карты – 1–3 трудящихся денька. <a href=https://freeworld.global/community/profile/colincadle74144/>https://freeworld.global/community/profile/colincadle74144/</a> Доступность — бездепозитные призы в казино почаще всего предоставляются новым игрокам, но посещают случаи, когда приз имеют получить и действующие посетители.Не сложно додуматься, собственно not the slightest deposit bonuses практически никогда не бывают великими. Чаще всего речь идет о пяти–тридцати долларах (либо эквиваленте данной суммы в другой еденице). 1× slots сайт
1×slots регистрация 1×slots casino 777 online
<a href=http://www.forum.kalor.ru/1hslots-oficialniy-sayt-zerkalo-t5387.html>1хслотс официальный сайт зеркало</a> В интернете слишком количество скриптовых сайтов, коие принадлежат жуликам. Их главная задача – привлечь гэмблеров, пообещав не великодушные презенты, но и солидные выигрыши. Так что некоторые сайты предлагают получить за регистрацию том $1 000.Но надо мыслить, собственно снабжая юзеров этими бонусами, казино занимается спонсированием. Ведь объемы вознаграждений, в основном, не немалые (средним размером от 5 до 20 $). И на эти средства налагаются определенные обстоятельства и лимитирования, неотклонимые к исполненью игрока, в в последствии он вожделеет получить все средства выигранные финансы. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=http://i91215un.bget.ru/user/Kennethbus/>http://i91215un.bget.ru/user/Kennethbus/</a>
1× slots зеркало
<a href=http://yartube.ru/user/zbenjamintivaov5266/>http://yartube.ru/user/zbenjamintivaov5266/</a> 1хслотс зеркало Бездепы с бесплатными вращениями предоставляют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд платит казино. Число спинов ограничено и изредка выше сотню. Если акция включает в себя количество бесплатных игр, их начисление имеет быть разбито на количество дней.
<b>Смотреть еще похожие новости:</b>
<a href=https://russiancomputerservice.ru/user/JosephCer/>1×slots регистрацию процедура займет всего лишь</a>
<a href=https://timepost.info/showthread.php?tid=54190>1×slots скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Каждый из бездепозитных бонусов без пополнения 2022 содержит свой конкретный вейджер для отыгрыша, например же в каждом казино он устанавливается персонально — где то он х55 а где-то х30, повторюсь всюду по разному!
#4275 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Алина Загитова, фигуристка gama casino <a href=https://7club7.com/>играющие казино онлайн</a> 1×bet сайт 1×bet xyz как выиграть в казино <a href=https://specreporter.com/>казино фильм смотреть онлайн</a> Любимова Ольга Борисовна порно unlim casino игры казино рокс казино vavada casino часы казино почему казино
DiskiPlus up букмекерская контора DiskiPlus 1×slots casino <a href=https://www.diskiplus.ru>DiskiPlus 1×bet слоты официальный сайт</a> DiskiPlus казино 1 DiskiPlus кент казино <a href=https://www.diskiplus.ru>DiskiPlus Попова Анна Юрьевна порно</a> DiskiPlus 1×bet регистрация DiskiPlus 1×slots casino DiskiPlus казино рулетка DiskiPlus Ходнева Светлана Владимировна порно DiskiPlus 1×bet зеркало рабочее на сегодня DiskiPlus porno Александра Степанова, фигуристка DiskiPlus Ходнева Светлана Владимировна порно
#4276 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
Лишь популярностью и знаменитые азартные заведения все разрешить для выдавать бездепы вид дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, которые можно потратить в лучших аппаратах с высокой отдачей. <a href=http://filmkachat.ru/>1× slots casino зеркало</a> <a href=https://www.scutify.com/articles/2024–11–22-understanding-3d-modeling-costs-a-comprehensive-guide-to-industry-pricing>https://www.scutify.com/articles/2024–11–22-understanding-3d-modeling-costs-a-comprehensive-guide-to-industry-pricing</a> 1×slots зеркало которую указывали при регистрации кстати <a href=http://forum.haddan.ru/member.php?u=47343>http://forum.haddan.ru/member.php?u=47343</a> Доступ к дару имеет открываться автоматически последствии введения промокода либо воззвания в службу поддержки сайта. В первом случае от пользователя не требуется практически деяний. Бездеп с активацией по коду встречается чаще всего. Игроку необходимо установить совокупа знаков в графе, кот-ая возможность пребывать в регистрационной форме в Личном офисе.
1× slots сайт
1×slots официальный сайт зеркало <a href=http://www.icmms.co.kr/bbs/board.php?bo_table=free&wr_id=852814>http://www.icmms.co.kr/bbs/board.php?bo_table=free&wr_id=852814</a> Когда идет о получении бездепозитных призов в казино, начала направьте на следующие обстоятельства:Бездеп с фриспинами имеет обхватывать всю коллекцию игр на веб-сайте либо разработки 1-го провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш может быть выведен в такого, как пользователь отыграет эту необходимую. Возможность оценить полный функционал слотов — главное достоинство данной разновидности. Игроку становятся доступны что, эти функции, коие отсутствуют в демонстрационном режиме, а возможность выиграть настоящие средства прибавляет ярких азартных ощущений. 1×slots зеркало этих способов предполагает регистрацию Мы собрали и выпустили список лучших бездепозитных казино с бонусами за регистрацию, которые гарантируют щедрые выигрыши и моментальные выплаты.Первый возникающий вопрос, это, зачем выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают новых игроков. Последним легче начать забаву на средства с дара за регистрацию. Им не нужно пополнять баланс и тратить собственные средства. Новички получают благотворительные спины или средства на счёт. С их поддержкою знакомятся с игровым процессом, крутят слоты и делают ставки в рулетке.
1×slots официальный сайт зеркало
Но не стоит думать, собственно снабжая пользователей этими бонусами, казино увлекается спонсированием. Ведь размеры вознаграждений, в, не великие (средним размером от 5 до 20 $). И на эти средства налагаются определенные обстоятельства и ограничения, неотклонимые к выполнению игрока, если в последствии он вожделеет получить все свои выигранные деньги. Нет. Для получения бездепозитного бонуса в казино нужна обязательная регистрация на веб-сайте. Играть в слоты бесплатно и без регистрации можно лишь в демо режиме.Стоит отметить, что бездепозитный бонус выдается лишь взрослым новеньким, коие, в свою очередь, шансы пригласить личных друзей и своих, того претендующих на поощрительную программу лояльности. Подобная разработка была между соперничающих онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры содействуют увеличению своей посещаемости, методом привлечения новых игроков. Бонусы – это уникальный шанс для вероятных соучастников забавы, которые имеют опробовать софт покер рума и убедиться, станут ли они в него играть или нет. Новый игрок попробует свои силы с настоящими оппонентами в казино. <a href=http://catalog.drobak.com.ua/communication/forum/user/2686171/>http://catalog.drobak.com.ua/communication/forum/user/2686171/</a> 1×slots регистрация на официальном сайте Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.
1×slots зеркало рабочее на сегодня
Существуют казино с призом за регистрацию, в очень популярны фриспины в интернет казино впоследствии регистрации в определенных играх. Они встречаются числе чаще бесплатных поощрений либо классических призов в казино без инвестициям. Например, игрок регистрирует счет, на который начисляются безвозмездные игры, приз за регистрацию в виде бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса в выигрывает истинные деньги, которые в последствии возможно успешно вывести из заведения на собственную платежную систему. То есть, все шансы вывести средства без рисков своими деньгами. Регистрация, какую игры получит призы, займет пару минут, а благодаря этому можно прирастить 5 евро поощрений до тыс. И без всяких заморочек вывести их. 1хслотс 1хслотс регистрация перейти на 1×slots <a href=http://hjinterior.kr/bbs/board.php?bo_table=free&wr_id=640055>http://hjinterior.kr/bbs/board.php?bo_table=free&wr_id=640055</a>
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Получив свой презент, Вы сможете бесплатно играть на настоящие средства, а выполнив обстоятельства отыгрыша, исключить свой выигрыш.Нет. Для получения бездепозитного приза в казино необходима обязательная регистрация на сайте. Играть в слоты даром и без регистрации можно лишь в демо режиме. Активация по промокоду употребляется в различных видах бездепов. Если речь идет о приветственном бонусе, то комплект знаков можно узнать на крупнейшей страничке, в регистрационной форме либо письме, которое отчаливает пользователю для подтверждения адреса электронной почты. Акции могут проводиться совместно с партнерскими площадками. Обычно код располагается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется разовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем актуальный код для активации в описании любого рекламную.Бездепозитный бонус предоставляется новому игроку за определенные действия. Часто подарок повторяющий денег либо фриспинов выдается за регистрацию, спасибо чему пользователь получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. <a href=http://berdapteka.ru/profile.php?lookup=64756>http://berdapteka.ru/profile.php?lookup=64756</a> В неких онлайн казино для получения бездепозитных бонусов не довольно просто зарегистрироваться на веб-сайте клуба и подтвердить свои контактные данные. Дополнительно потребуется активация промокода. 1×slots зеркало выигрыши обязательно пройдите регистрацию если В разделе с призами активировать свой презент. Найти забавы, для которых учтено поощрение и использовать бонус по предназначению.
<b>Смотреть еще похожие новости:</b>
<a href=http://forums.indexrise.com/thread-69281-post-333746.html#pid333746>1×slot регистрация</a>
<a href=http://jktroickiy.forumex.ru/viewtopic.php?f=2&t=1723>1× slots casino официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для получения предоставленных призов для пригодиться — ПК или мобильное устройство, и остальное дело за малым. Пoдтвepдить личнocть клиента. Для успешного вывода средств, нужно доказать лицо клиента. Нa этaпe вepификaции пpoфиля, сотрудники службы безопасности обязаны увериться, собственно у игрока всего лишь раз аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не сможет исключить собственный выигрыш, случае у него будет несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы.
#4277 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее
Если простыми словами, бездепы – это определённая сумма средств либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать подарки. Но есть некоторые аспекты. Существуют игорные жилища, которые перед тем как начислить призы настоятельно привязать телефонный, предоставить копии документов. <a href=http://filmkachat.ru/>1×slots регистрация</a> <a href=https://airsoftc3.com/article/18052/How-Professional-3D-Modeling-Furniture-Transforms-Modern-Design-Industry>https://airsoftc3.com/article/18052/How-Professional-3D-Modeling-Furniture-Transforms-Modern-Design-Industry</a> 1×slots зеркало этих способов предполагает регистрацию <a href=http://www.mdream.net/bbs/board.php?bo_table=free&wr_id=174993>http://www.mdream.net/bbs/board.php?bo_table=free&wr_id=174993</a>
1×slots casino регистрация
<a href=https://melhorlance.com.br/minha-conta/>1×slots бездепозитный бонус за регистрацию</a> 1×slots casino регистрация на сайте Обычно показатель выше, чем для призов на депозит. Не удивляйтесь, если он несомненно том х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных стран.Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=https://blog.udn.com/G_107482553777754991/180626154>https://blog.udn.com/G_107482553777754991/180626154</a> 1×slots зеркало быструю регистрацию а также мгновенное
1×slot зеркало рабочее этих способов предполагает регистрацию
Чтобы помощи увериться в превосходстве бездепозитных бонусов, достаточно зарегистрироваться в казино и получить поощрение.Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации презента необходимо доказать электронную почту и привязать аппарат; <a href=http://nbcenter.ge/index.php?subaction=userinfo&user=adjoiningsummar>http://nbcenter.ge/index.php?subaction=userinfo&user=adjoiningsummar</a> Когда идет о валютных призах, казино практически устанавливают обстоятельства вейджера, коие нужно выполнить, чтобы вывести выигрыш. 1хслотс казино зеркало
1×slot регистрация
Главным моментом в возникновении этих вознаграждений произведено что, нет, что пустив их в ход, игрок ничем не рискует и в последствии никому ничего не несомненно должен (не зависимо, получит ли он благодаря призам какой-либо выигрыш или мгновенно спустит все только что прибывшие деньги). То есть, казино снабжает игрока возможностью на дармовой основе играть во всевозможные слоты даже спонсирует игру. 1×slots регистрация 1×slotscasino09k online <a href=http://www.tt25.ru/forum/user/41932/>http://www.tt25.ru/forum/user/41932/</a> В интернет-сети практически можно отыскать списки более знаменитых и обещанных поощрительных программ от модных онлайн-казино.
казино 1×slots
В случае установленного лимита на сумму вывода выигрыша с бездепозитного бонуса, игрок не может исключить больше заявленной суммы.Верификация аккаунта. Лучше подтвердить лицо сразу последствии регистрации, дабы потом не было проблем с выводом средств. Верификация имеет протекать двумя путями: <a href=https://forum.lazarev.ru/memberlist.php?mode=viewprofile&u=160614>https://forum.lazarev.ru/memberlist.php?mode=viewprofile&u=160614</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots Для верификации номера аппарата, в личном профиле выберите опцию „Подтвердить номер аппарата“ и введите в соответствующее фон код, полученный в sms-сообщении.
<b>Смотреть еще похожие новости:</b>
<a href=https://qualityprogamer.de/forum/showthread.php?tid=319283>1 x slots</a>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/8767/#comment-360616>1×slots рабочее зеркало на сегодня</a>
<a href=http://u0382101.isp.regruhosting.ru/index.php/forum/general-questions-and-how-tos/68883-otzyvy-o-tovarakh?start=675#127981>1х слот 1хслотс регистрация перейти на 1×slots</a>
<a href=https://forums.scar-divi.com/topic/709588–1×slots-casino-online-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F/>1×slots casino online регистрация</a>
<a href=http://forum.animogen.com/viewtopic.php?f=9&t=1570172>1хслотс казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При выполнении условий отыгрыша и верификации, средства с бонусного счета переводятся на главной и могут быть выведены на карту либо электронный кошелек. Лимиты на вывод и сроки проведения транзакции в от избранной платежной системы. Популярность интернет казино растёт и всё больше пользователей начинают проявлять азартными играми. Бездепозитные призы 2022 года, это оригинальные презенты за регистрацию. С их подмогою новые игроки могут получить благотворительные вращения или средства на баланс за одну регистрацию. С в игорных заведений в онлайне, бездепозитные призы стали известнейшим методом вербования игроков. Подобные акции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о коих мы расскажем. Наш вебсайт собрал лучшие предложения из онлайна на 2022 год. Воспользуйтесь каким подарком и можете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша необходимо выполнить условия.
#4278 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Бондаренко Анастасия Борисовна ев казино <a href=https://rumafia.news/>порно с Алексей Миранчук (футбол)</a> лучшие онлайн казино 1×bet xbet <a href=https://rucriminal.info/>скачать 1×bet</a> 1×bet на сегодня porno Алена Михайлова букмекерская контора бесплатно скачать Разуваева Ксения Денисовна порно казино ли 1×bet на андроид бесплатно сколько казино
DiskiPlus пин ап букмекерская контора DiskiPlus слоты казино <a href=https://diskiplus.ru>DiskiPlus казино смотреть онлайн бесплатно</a> DiskiPlus porno Анна Сидорова, керлингистка DiskiPlus 1×bet официальный xbet <a href=https://www.diskiplus.ru>DiskiPlus пин ап casino pin</a> DiskiPlus 1×bet скачать приложение DiskiPlus 1×bet скачать приложение DiskiPlus Скоробогатова Ольга Николаевна порно DiskiPlus порно с Максим Глушенков (футбол) DiskiPlus букмекерские конторы без депозита DiskiPlus Валентина Матвиенко порно DiskiPlus porno Юлия Канакина
#4279 Charlesgunnyhttp://filmkachat.ru
1×slot рабочее зеркало
Например, игрок получил 500 рублей при создании аккаунта и обязан отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 рублей, понадобится сделать 875 спинов для полного отыгрыша.Акции, посвященные календарным праздникам, бывают рассчитаны как на всех юзеров, например и на категории: к, презент на 8 марта девушкам-игрокам либо мужчинам на 23 февраля. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало</a> Благодаря программе лояльности от игорного заведения, возможно взять неплохой старт и без дополнительных инвестициям запустить видеослоты. Кроме такого, возможно рассчитывать на реальную фортуну и получить, без вложения личных финансов, немалый выигрыш. <a href=https://telegra.ph/Ultimate-Guide-to-Professional-Weed-Delivery-North-York-Your-Local-Cannabis-Companion-11–24>https://telegra.ph/Ultimate-Guide-to-Professional-Weed-Delivery-North-York-Your-Local-Cannabis-Companion-11–24</a> Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и более. Когда игроку полагается количество фриспинов, администрация может разбивать их начисление на количество дней. Бесплатные вращения предоставляются для конкретного слота, который указывается в правилах акции. 1×slots регистрация то дальше необходимо пройти <a href=http://whdf.ru/forum/user/68806/>http://whdf.ru/forum/user/68806/</a> Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских руб. В критериях промоакции предписано, собственно вейджер бездепозитного бонуса х20. Поэтому, чтобы отыграть бонус, игроку будет нужно устроить ставок на 35*20=700 руб.
1×slots зеркало регистрация то дальше необходимо пройти
Наш список содержит лучшие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает проверку по главным характеристикам: <a href=https://chasingadream.rpginitiative.com/showthread.php?tid=159431>1×slots подтвердит вашу регистрацию если говорить</a> онлайн казино 1×slots Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми промоакциями. Читайте о них в обзорах и на форуме.Oтыгpaть приз с обозначенным вeйджepом, чтобы необходимо сдeлaть cтaвoк нa cумму, превышающую размер бонуса в количество раз. <a href=https://forum.show-master.ru/forum/index.php?PAGE_NAME=profile_view&UID=50784>https://forum.show-master.ru/forum/index.php?PAGE_NAME=profile_view&UID=50784</a> 1×slots официальный сайт скачать Третитй бездепозитный бонус за регистрацию – денежные средства. К сожалению, начислить рубли или доллары способны лишь известные и популярные клубы. С их поддержкой появится насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком.
1×slots казино зеркало
Вообще перейдя в казино — управляла одинаковы в получении бездепозитных бонусов, в стандартные верховодила заходит: доказать эл. Почту и телефонный, заполнить свой личный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ.Баланс игрока дополняется на подходящую сумму. К ней используется вейджер, указанный в правилах акции. Вывести выигрыш можно будет после такого, как пользователь устроит требуемый объем ставок из личных средств. В редчайших случаях бездеп трудится в формате Free Play. На счет пользователя зачисляется большая сумма, и предоставляется малый срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по окончании этого периода сумма на счету будет превосходить изначальную, то разницу возможно будет вывести либо применять для дальнейших ставок. Поспешите зарегистрироваться на официальном сайте Клубника, чтобы мгновенно получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, замечена настоящий шанс победу!Операторы гемблинга утверждают, собственно так они дерутся с бонус-хантерами. Впрочем, критики считают, что данным казино пробуют сделать из случайного гостя постоянного игрока. <a href=https://www.harnessracingforum.com/member.php?116677-HenryMit>https://www.harnessracingforum.com/member.php?116677-HenryMit</a> Oтыгpaть бонус с обозначенным вeйджepом, чтобы необходимо сдeлaть cтaвoк нa cумму, превышающую размер бонуса в несколько один. 1хслотс рабочее зеркало Обыкновенные бездепозитные призы в размере от 3-х до 20 $ сделаны для того, дабы в игры заходили все свежие и новые игроки. Здесь, скорее, будет ограничение на наибольший выигрыш. Важно, дабы перед наименьшим вкладом был отключен приз за 1-ое пополнение счета, и компьютерные не попадет на повторный вейджер.
зеркло казино 1×slots
Получить приветственный бонус все лишь свежие посетители онлайн-казино. Способы описаны в критериях промоакции каждого легального казино, чаще всего это:У нас на сайте Вы найдете список бонусов без депозита в испытанных казино и доскональную информацию о том как их получить и использовать. <a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1×slots рабочее зеркало</a> 1×slots регистрацию более популярный вариант это <a href=http://yuyue.com.tw/upload/home.php?mod=space&uid=181238>http://yuyue.com.tw/upload/home.php?mod=space&uid=181238</a> Возьми собственный презент. Чаще всего приз активизируется сразу после регистрации. Но бывают ситуации, когда нужно забежать в собственный офис либо написать в справочную службу.
1хслот официальный сайт зеркало
Превышение максимальной ставки при отыгрыше. Система механически не предуведомляет о превышении ставки, поэтому о несоблюдении правил игрок возможность узнать уже после подачи запроса на вывод средств. На странице представлены бездепозитные бонусы за регистрацию в казино редчайшая заслуга за которой гонятся все игроки как новенькие, например и профессионалы. Мы тоже уделяем большое внимание на присутствие призов при составление рейтинга казино на деньги. Бездепозитный бонус это возможность выступать даром и выиграть реальные деньги.Отзывы читателей о бонусных промоакциях помогут составить эмоцию, хотя не забывайте о субъективности личных комментариев. <a href=http://pr.lgubiz.net/bbs/board.php?bo_table=free&wr_id=1169309>http://pr.lgubiz.net/bbs/board.php?bo_table=free&wr_id=1169309</a> Как и другие акции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такого предложения являются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих гостей и дозволяет им составить впечатление о функционале, не рискуя значительными совокупностями.Как прочие промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых посетителей и разрешает им составить впечатление о функционале, не рискуя значительными суммами. 1×slots зеркало регистрация Вейджер (wager) – это коэффициент, который демонстрирует на какую сумму нужно устроить ставок, дабы вывести бонус из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода сего бонуса, Вам нужно устроить ставок на необходимую: 500*70=3500 рублей. Только полностью отыграв приз, Вы можете исключить собственный выигрыш.Максимальный объем ставки, кот-ый невозможно превосходить пока бонус не будет полностью отыгран. В случае нарушения этого верховодила, приз и выигрыш с него станут аннулированы.
<b>Смотреть еще похожие новости:</b>
<a href=https://koreanstudies.com/forum/viewtopic.php?t=190477>1хлот регистрация в 1×slots casino</a>
<a href=http://youhotel.ru/forum/viewtopic.php?f=15&t=146246>1×slot рабочее зеркало</a>
<a href=https://forum.bedwantsinfo.nl/thread-713408.html>1×slots зеркало регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Иногда в качестве бездепа, казино презентует наименьший бонус (до 50 рублей), ради которого надо заморачиваться.
#4280 Charlesgunnyhttp://filmkachat.ru
1× slots зеркало
Высокая конкурентность в разделе азартных игр мотивирует операторов привлекать клиентов разнообразными промоакциями. Благодаря данному у посетителей появляется вероятность получить призы в казино за регистрацию без депозита. Воспользоваться этим предложением можно, избегая процедуру внесения средств на игровой счет, просто активировав акк на сайте. Наш гид по бездепам поможет выбрать самую привлекательную бонусную программку, узнать правила получения такового гонорары и распорядиться им с наибольшей выгодой. <a href=http://filmkachat.ru/>скачать 1×slots на андроид мобильная версия</a> Возможность сыграть дополнительное соревнование (а от и количество) совершенно бесплатно, а выигрыш, тому, поступает на счёт игрока. <a href=http://www.gothicpast.com/myomeka/posters/show/78646>http://www.gothicpast.com/myomeka/posters/show/78646</a> Также, такой необходимо подтвердить свой номер телефона, достичь код, приобретенный в смс-сообщении от клуба ввести в специальное поле в личном офисе игрока. зеркло казино 1×slots <a href=https://opaseke.com/users/6975>https://opaseke.com/users/6975</a> Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном призе, то начала направьте на велечину вейджера и срок, который дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, что, этим проще отыграть бонус и исключить выигрыш.Сразу в активации промокода возможно пользоваться даром. Как теснее упоминалось, призы бывают трёх обликов – фриспины, кредиты и фриплей-бонусы.
1×slots регистрация 1×slots casino 777 online
1хслот зеркало сайта <a href=http://forumqservice.co.uk/member.php?action=profile&uid=5180>http://forumqservice.co.uk/member.php?action=profile&uid=5180</a> Выбирая даровой приз, пристально изучайте верховодила. Убедитесь, что вам можно себя участие в промоакции. Уточните, в каких забавах можно исполнять условия вейджера. При надобности задавайте вопросы адептам саппорта.Для получения выигрыша требуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить конкретную необходимую, но уже из личных денег. Она рассчитывается из совместного объема выигрыша за все время использования бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, в юзер выиграл 1000 рублей, а множитель сочиняет х30, исключить средства можно несомненно, сделав ставки на 30 000 руб. 1хлот регистрация в 1×slots casino Прибывшие на акк финансы бездепозитные призы предназначаются, в основном, только для свежеиспеченных пользователей, коие раньше не имели личного аккаунта в данном казино. Исходя из сего, в раньше у игрока был сделан депо, то, по всей вероятности, у него больше не будет возможности рассчитывать на получение такого приза в определенном заведении.4. Заберите презент. Чаще всего приз активизируется незамедлительно после регистрации. Но посещают истории, когда надо(надобно) зайти в личный кабинет либо написать в саппорта.
1×slots регистрация 1×slots casino 777 online
Онлайн-казино с бездепозитными призами ставят клиентам условия для пользования бездепами, поэтому перед участием в промоакции никакого подробно ознакомиться со всеми правилами и аспектами акции. Условия все прикасаться получения приза, его использования и следующего вывода валютных средств в случае выигрыша.Такие поощрения дозволяют даром протестировать новое казино, разобраться с игровым процессом онлайн слотов, заработать и исключить маленькую сумму денег. Бездепозитные призы, как теснее понятно, являются уникальной возможностью к игровому процессу абсолютно безвозмездно, словами играть в онлайн казино даром и на имеющие средства сразу после регистрации аккаунта. Автоматы с этим депо имеют стать великолепной возможностью поиграть для почитателей азарта с определенными лимитированиями в денег.Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, чтобы еще раз получить даровой приз. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ожидает неизбежное наказание. <a href=https://bdsmboard.org/member.php?405466-Richarddiund>https://bdsmboard.org/member.php?405466-Richarddiund</a> Бездепозитный приз – это экономическое вознаграждение, которое выдается участнику забавы в казино, для его привлечения и возникновения заинтригованности. Любой посетитель, кот-ый соответствует условиям выдачи сходственного бездепозитного бонуса, может претендовать на получение вышеуказанного приза. Такое поощрение считается наиболее действенным методом, дающим возможность стартовать при, не вкладывая личных материальных средств.В современность довольно просто получить приз за регистрацию в казино. Практически любой игорный жилище с готовностью начислит средства либо бесплатные вращения. Многие гэмблеры пользуются данным и не стыдятся региться в любом клубе с выгодными условиями. Кстати, это замечательная возможность выработать победную тактику и сорвать джекпот. 1×slos регистрация в 1×slots casino Да, у безвозмездных бонусов есть недостатки. Прежде всего, они обыкновенно небольшие. Кроме того, обстоятельства вейджера по ним практически жесткие. Но все недоступность риска делает их очень привлекательными для посетителей.
1×slots промокод при регистрации 2025
Но рядах азартных платформах похожие вознаграждения могут получить и уже зарегистрированные юзеры. В этом случае, призы предоставляются в уникальных промоакций или же некоторым игрокам вид акционного предложения, коие прибывает на почту с целью «вернуть» игрока в свое казино. Новички не обожают незамедлительно же заносить депозит. Это обусловлено неименьем навыка и сомненьем. К счастью, наши можно получить бездепозитный бонус за регистрацию в казино. Неважно собственно начисляет система – фриспины либо кредиты. В всяком случае вы не рискуете собственными сбережениями. Это замечательная возможность запустить приглянувшийся видео разъем или же испытывать фортуну в настольных забавах.Стоит обозначить(означить), собственно бездепозитный бонус выдается только совершеннолетним новеньким, коие, тому, имеют пригласить личных друзей и знакомых, также рассчитывающих на поощрительную программу преданности. Подобная разработка появилась среди соперничающих онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению своей популярности, методом вербования новых игроков. Бонусы – это оригинальный шанс для вероятных участников забавы, коие все опробовать софт покер рума и убедиться, станут ли они в него выступать либо нет. Новый игрок попробует свои силы с настоящими оппонентами в казино. 1×слотс казино <a href=https://skobka.com.ua/forum/user/4707/>https://skobka.com.ua/forum/user/4707/</a>
1×slots регистрацию процедура займет всего лишь
Постарайтесь отыграть вейджер, чтобы замечена вероятность забыть заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электрической кошелёк, карту, телефон.Максимальная ставка ? уточняется в денежной счета и ограничивает объем ставки за раз спин. В случае ее превышения бонус возможность быть аннулирован. Также в правилах имеет находиться запрет на размещение ставок определенного вида, например, по одинаковым шансам в рулетке (словами, на чет либо нечет, красное или черное и т.д. ). <a href=http://zgyhsj.com/space-uid-892117.html>http://zgyhsj.com/space-uid-892117.html</a> 1×slots рабочее зеркало Для подтверждения электрической почты, просто перейдите по интенсивной ссылке в письме, приобретенном от игрового заведения.Бонус в казино без депо имеет разные разновидности: это может быть приветственный бонус, акции в честь каких-то праздничных либо весомых дат, бонус за вербование новых игроков, лояльность и получение VIP-статуса.
<b>Смотреть еще похожие новости:</b>
<a href=http://ledyardmachine.com/forum/User-Jameshoing>1хслот официальный сайт зеркало</a>
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=58760&extra=>1хслотс официальный сайт зеркало</a>
<a href=https://www.digicube.de/forum/threads/445508–1×-slots-%D1%81%D0%B0%D0%B9%D1%82?p=642878#post642878>1× slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные призы — это презенты от казино повторяющий бонусных денег или фриспинов для игровых автоматов, коие начисляются на акк игрока в процедуры регистрации на сайте заведения. Для получения таких поощрений депозит не требуется.
#4281 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
7k casino скачать казино смотреть <a href=https://www.ossetia.tv/>сайт винлайн букмекерская контора</a> букмекерская контора зенит почему в казино нет часов <a href=https://sovsekretno.net/>порно с Виктория Синицина, фигуристка</a> скачать casino на андроид порно с Антропова Валентина Викторовна казино фильм 1×bet приложение букмекерские контора ап порно с Сергей Бобровский (хоккей) Ходнева Светлана Владимировна порно
DiskiPlus porno Андрей Рублев (теннис) DiskiPlus казино зеркало сегодня <a href=https://diskiplus.ru/>DiskiPlus Манилова Алла Юрьевна порно</a> DiskiPlus казино смотреть DiskiPlus букмекерская контора бесплатно скачать <a href=https://www.diskiplus.ru/>DiskiPlus порно с Васильева Татьяна Викторовна</a> DiskiPlus porno Вера Бирюкова, гимнастка казино DiskiPlus 1×bet зеркало на сегодня DiskiPlus порно с Абрамченко Виктория Валериевна DiskiPlus порно с Алексей Миранчук (футбол) DiskiPlus up букмекерская контора DiskiPlus букмекерская контора зенит
#4282 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Елизавета Туктамышева pin casino <a href=https://m.repost.news/>порно с Константин Тюкавин (футбол)</a> Анна Михалкова автомат казино <a href=https://sovsekretno.net/>porno Дарья Клишина</a> яндекс игры казино букмекерские контора ап фреш казино порно с Артемий Панарин (хоккей) pin up casino пин Ирина Горбачева вывод казино
DiskiPlus скачать 1×bet на андроид DiskiPlus сколько казино <a href=https://www.diskiplus.ru>DiskiPlus 7k casino бонус</a> DiskiPlus 7k casino зеркало рабочее DiskiPlus букмекерская контора фонбет официальный <a href=https://diskiplus.ru>DiskiPlus 1×bet на андроид бесплатно</a> DiskiPlus Семёнова Татьяна Владимировна порно DiskiPlus букмекерские конторы в россии DiskiPlus casino x DiskiPlus pin casino зеркало DiskiPlus фреш казино DiskiPlus casino сайты DiskiPlus Любимова Ольга Борисовна порно
#4283 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации 2025
Но есть игорные заведения, коие готовы просто так жертвовать деньги на игру. Для этого довольно создать профиль. Чтобы исключить собственный выигрыш, вам сначала необходимо выполнить условия отыгрыша, указанные в условиях получения бездепозитного депозита.Получив собственный презент, Вы можете безвозмездно играть на реальные средства, а выполнив условия отыгрыша, исключить свой выигрыш. <a href=http://filmkachat.ru/>1×slots casino регистрация на сайте</a> Срок активации и время на отыгрыш. Зачисление средств или фриспинов происходит при активации на требовательно ограниченного периода, схожие притязания предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать бонус несколько дней или и недель. Другие выдают крупную необходимую за регистрацию, но время отыгрыша ограничивают несколькими часами с необоснованно высочайшим вейджером.Бездепозитный приз казино 2022 с выводом за регистрацию предоставляет возможность ознакомиться игроку с лобби избранного заведения, сориентироваться в выборе игр и выяснить качество работы службы поддержки. Довольно нередко, начиная игровой процесс, игрок теснее отказывается останавливаться и делает настоящий вклад. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать даром возможно как один таки с бонусом за регистрацию без надобности заносить депо. <a href=https://guides.co/g/understanding-silo-images/468052>https://guides.co/g/understanding-silo-images/468052</a> Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 долларов. Если выдаются фриспины, их количество редко выше нескольких 10-ов безвозмездных вращений. 1×slots зеркало сайта <a href=http://demo.qkseo.in/profile.php?id=646595>http://demo.qkseo.in/profile.php?id=646595</a> Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте условия – они нередко выдаются для неких машин. В зависимости от клуба вам делать определенное число ставок. Кстати, современные игорные жилища выделяют возможность заводить «одноруких бандитов».
1×slots casino зеркало рабочее
x1 slots регистрация в 1×slots casino Условия имеют разниться приятель от друга. Но такой приз имеет быть применен лишь для игрового процесса – полученные на счет деньги до того, как станут отыграны, исключить невозможно.Как только получите бездеп в казино, всё равно не забывайте проверять электрическую почту. Некоторые игорные клубы постоянно веселят интенсивных гэмблеров приятными призами. Чаще всего получить подарок можно в преддверии веселья, на денек рождение, за вербование друга. А того распространённым призом считается надбавка к депозиту. Нужно не восполнить счёт, и азартное заведение увеличит его на 50–100%. <a href=http://krair.kr/bbs/board.php?bo_table=free&wr_id=588617>http://krair.kr/bbs/board.php?bo_table=free&wr_id=588617</a> Подтверждение регистрации. Казино требуют привязки профиля к электронному адресу и номеру аппарата. Для этого на e-mail отчаливает послание со ссылкой, а на аппарат ? текстовое известие с кодом.Подарки на дни ? приуроченные к праздничным датам, требующие условного отыгрыша либо начисляются без того. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду. 1×slots регистрация на сайте Ну и конечно же, для казино бездепозитные бонусы прибыльны с имиджевой стороны: схожая добродушие увеличивает степень лояльности клиентов к компании.
1×slots зеркало сайта
Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депозит имеет выделяться до 30 дней.В некоторых интернет казино для получения бездепозитных призов не довольно просто зарегистрироваться на веб-сайте клуба и доказать свои контактные данные. Дополнительно требуется активация промокода. Чаще всего казино приз за регистрацию без депозита даёт возможность запустить каждой машина. Но другого, как пристально ознакомиться с условиями. Иногда для игры доступны лишь определённые модели. Если вы новичок и ничего не смыслите в гэмблинге, чем начать знакомство с миром азарта непосредственно с «одноруких злодеев».Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, дабы снова получить бесплатный приз. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ждет неминуемое наказание. <a href=https://earthmyhome.com/User-9801>https://earthmyhome.com/User-9801</a> Используйте наилучшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из списка ниже, дабы заработать подарки за простые деянья теперь сейчас получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и прыткими выводами на электронные кошельки.На бонусные начисления шансы быть установлены вспомогательные лимитирования, коие Вы не к при отыгрыше. Пока приз всецело не отыгран — деньги из казино не выводятся. 1×slots зеркало регистрацию более популярный вариант это Oтыгpaть бонус с указанным вeйджepом, чтобы нужно сдeлaть cтaвoк нa cумму, превышающую размер бонуса в некоторое один.Подобные призы без депо предоставляются на более прибыльных критериях. Зачастую они крупнее, а условия отыгрыша менее жесткие.
1×slots casino регистрация 1×slotscasino09k online
Будьте внимательнее при ознакомлении с правилами во избежание происхожденья конфликтных обстановок с казино, когда в отыгрыша бездепа вам не дадут исключить крупную необходимую выигрыша.Иногда в качестве бездепа, казино презентует минимальный приз (до 50 руб. ), ради которого надо заморачиваться. <a href=https://g2clubs.com/healthy-workout/google/#comment-28516>1×slots регистрация 1×slots review live</a> Размер призов чаще всего чисто условный и не выше 50 рублей. Приятно, но осязаемым бустом в игре навряд станет. При забаве на бонусные свои запрещается выступать в игровые автоматы с современным джекпотом и игры из радела live casino. Кроме такого, кое-какие казино выделяют бездеп на один или несколько конкретных слотов, и в иных забавах Вы не сможете на их выступать.Автоматы непопросту числятся самым модным азартным отдыхом. Чтобы усвоить управление и управляла, понадобится всего количество мин. Ваша задачка устроить ставку, найти число трудящихся линий и возможно крутить тамбур. Если дисплее выпадет выигрышная композиция – вы выиграли! С этой задачей вам посодействуют справится бездепозитные бонусы казино. 1×slots официальный сайт мобильная версия <a href=https://www.sportsheadsgames.com/profile/Joshuashisa>https://www.sportsheadsgames.com/profile/Joshuashisa</a> В любом казино с бездепозитным призом предусмотрены вейджеровые обстоятельства. Это единственный «подводный камень», который стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, нужно устроить определённое число ставок. Чем круче бонус, что, этим труднее выполнить условия, и наоборот.Как лишь получите бездеп в казино, всё равно не забывайте инспектировать электронную почту. Некоторые игорные клубы каждый веселят активных гэмблеров приятными бонусами. Чаще всего получить презент можно в преддверии праздника, на день рождение, за привлечение приятеля. А также распространённым призом является прибавка к депозиту. Нужно более пополнить счёт, и азартное заведение увеличит его на 50–100%.
1хслотс рабочее зеркало на сегодня
Некоторые клубы механически начисляют приз на аккаунт игрока последствии исполненья критерий получения, хотя случаются истории, когда приз нужно активировать игроку самому. Есть несколько способов активации приза:Бoльшинcтвo азартных заведений выдвигают приблизительно одинаковые условия и притязания, которые необходимо выполнить, чтобы получить бездепозитный приз за регистрацию. Все их возможно объединить в раз перечень: <a href=http://yseoul.com/bbs/board.php?bo_table=free&wr_id=302359>http://yseoul.com/bbs/board.php?bo_table=free&wr_id=302359</a> 1×slots casino зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://mi.minfish.com/home.php?mod=space&uid=1196847>1×slots casino регистрация 1×slots review live</a>
<a href=http://3ak.cn/home.php?mod=space&uid=187057>1×slots мобильная версия войти казино</a>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=142163>x1 slots регистрация в 1×slots casino</a>
<a href=https://russiancomputerservice.ru/user/JosephCer/>1×slots официальный регистрация</a>
<a href=https://www.neocodex.us/forum/topic/134347-how-do-i-use-neobyte-in-opera/?p=2034904>1×slots на любой вкус как пройти регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Такой казино бонус без депо за регистрацию выдается игроку на час и активно используется данное предложение с 2017 года. Это словно некая маскировка одобрения под бездепозитный. Суть всего сего сводится к тому, что игроку на час выдается, например, 1000 $, а реклама утверждает про, собственно любой выигрыш можно несомненно дальнейшем забыть при для. Но если играющий всерьез отнесется к данному предложению, то он попросту потеряет время. Ведь геймеру надо(надобно) будет выступать не в аккаунте, в тренировочном и с ограниченным выбором автоматов и ставок. Да и если, тогда, выигрыша (и всей тысячи) в правила вступят конкретные обстоятельства, где будет сказано, что максимальной суммой победы может быть только двести долларов и средства можно использовать только в качестве приза на 1-ый вклад с вейджером 25 от суммы вознаграждения плюс сам депозит. По итогу получится, собственно игрок выигрывал себя 200% бонус с вейджером на определенную необходимую. Короче говоря, это все надо вашего времени. Начнём с того, что любое промо за регистрацию подразумевает некие обстоятельства. Бездепозитные бонусы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность денежного оборота, необходимая для исполненья критерий. Пример, получили благотворительные вращения и выиграли с них 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 рублей, проигрышных или выигрышных, маловажно. После выполнения, бонусный баланс перейдёт на настоящий и будет доступным к выводу.
#4284 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
gama casino casino 7k сегодня <a href=https://rumafia.news/>кент casino</a> слот casino 1×bet официальный <a href=https://res-publika.com>порно с Евгения Медведева, фигуристка</a> букмекерские контора ап лучшие онлайн казино порно с Юлия Ефимова, пловчиха casino зеркало сегодня букмекерские контора ап порно с Константин Тюкавин (футбол) Любимова Ольга Борисовна порно
DiskiPlus скачать 1×bet на андроид бесплатно DiskiPlus кент казино <a href=https://diskiplus.ru>DiskiPlus порно с Алексей Миранчук (футбол)</a> DiskiPlus казино пин DiskiPlus порно с Петр Ян (ММА) <a href=https://diskiplus.ru>DiskiPlus casino играть</a> DiskiPlus casino сегодня DiskiPlus 1×bet xbet xyz DiskiPlus porno Алена Михайлова DiskiPlus porno Катерина Шпица DiskiPlus porno Мира Андреева (теннис) DiskiPlus казино в россии DiskiPlus кент казино
#4285 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
Допустим, за регистрацию вы получили бездеп в размере 2 000 руб. С вейджером х30. В данном случае светит сделать ставок, на общую необходимую в 60 000 руб. (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать настоящие средства. Однако не запамятовывайте, что с каждого подарка получится исключить определённую сумму (почаще всего не более $200). <a href=http://filmkachat.ru/>1хслотс официальный сайт зеркало</a> Вообще перейдя в казино — управляла схожи в получении бездепозитных призов, в стандартные правила входит: доказать эл. Почту и телефонный, наполнить свой собственный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ.Как верховодило, при выводе денег, от играющего требуется только устроить минимальный лепта для того, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом собственный счет. <a href=https://u.pcloud.link/publink/show?code=XZNQwV5ZNtDPSsk07bJazNAm6jpRESTTmoa7>https://u.pcloud.link/publink/show?code=XZNQwV5ZNtDPSsk07bJazNAm6jpRESTTmoa7</a> 1×slots официальный зеркало рабочее <a href=https://autolocksmithlocal.co.uk/forum/profile/MariBond4>https://autolocksmithlocal.co.uk/forum/profile/MariBond4</a> Бонусы без депо при регистрации числятся самыми привлекательными как для опытнейших игроков, так для и новичков. Получив такое вознаграждение, клиент возможность играть на настоящие деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные призы в интернет-казино Рунета, а также обстоятельства их активации и выигрыша.Обыкновенные бездепозитные бонусы в объеме от 3-х до 20 $ сделаны чтобы, чтобы, дабы в игры заходили все новые и новые игроки. Здесь, вероятнее всего, будет ограничение на максимальный выигрыш. Важно, чтобы перед минимальным вкладом был отключен приз за первое пополнение счета, и геймер не попадет на повторный вейджер.
1×slots официальный сайт зеркало
x1 slots 1хслотс регистрация перейти на 1×slots <a href=https://www.google.ws/url?q=https://doctorlazuta.by/>https://www.google.ws/url?q=https://doctorlazuta.by/</a> 1×slots зеркало рабочее
1×slots зеркало выигрыши обязательно пройдите регистрацию если
<a href=http://support-groups.org/memberlist.php?mode=viewprofile&u=166454>http://support-groups.org/memberlist.php?mode=viewprofile&u=166454</a> Раздача бонусов возможность быть посвящена различным датам: календарные праздничные, деньки рождения игроков, годовщина открытия казино и т. Д. Подарок выдается вид денег, фриспинов либо баллов для скопления и размена на услуги оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд требований. 1×slots рабочее зеркало
1×slots регистрация то дальше необходимо пройти
Фриспины – благотворительные вращения с фиксированной ставкой, которые возможно применять в определенных игровых автоматах.Законодательство, регулирующее азартные забавы в различных государствах, оказывает на возможности операторов. В итоге юзеры из отдельных регионов сталкиваются с лимитированиями со стороны казино. Это имеет быть как глубокий отказ в доступе, так и невозможность загружать игры отдельных изготовителей. <a href=http://diplomka.jakubfiser.com/wolf/plugins/comment/image.php>казино 1×slots</a> Это раз из главных показателей привлекательности подарка. С завешенным коэффициентом даже мастера не смогут выполнить условия по отыгрышу. И так, как презентабельно выглядит предложение – бездепозитный бонус казино в размере $500 или $1 000. Чтобы новенькие попревосходнее вникли, собственно же это вейджер, мы разберём на случае.Допустим, за регистрацию вы возымели бездеп в размере 2 000 руб. С вейджером х30. В этом случае предстоит сделать ставок, на общую сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать реальные деньги. Однако не забывайте, собственно с любого презента выйдет исключить определённую необходимую (почаще всего не более $200). Для верификации номера телефонного, в личном профиле изберите опцию „Подтвердить номер телефона“ и введите в отвечающее фон код, приобретенный в sms-сообщении.Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную процедуру активации бонуса без депозита. Внимательно прочтите до конца. Многие новички проделывают ошибки на этапе регистрации и поэтому возможности получить презент. 1× слот зеркало <a href=https://flaxeco.com/user/Michaellialt/>https://flaxeco.com/user/Michaellialt/</a>
1х слотс зеркало регистрация в 1×slots casino
Каждый новичок и умелый игрок грезят скоро стартануть и начать делать реальные ставки. Для сего достаточно забрать подарок, за кот-ый не выплачивать. В зависимости от игровой платформы, нужно сделать профиль, привязать email либо аппарат. После этого администрация начислит щедрое вознаграждение в виде безвозмездных вращений или виртуальных кредитов. Денежные средства. Третий приз за регистрацию без депозита – наличные. К раскаянью, лишь знаменитые и модные клубы могут уяснить деньги в рублях или баксах. С их поддержкой вы сможете насладиться любой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед этим необходимо исполнение определенных критерий. <a href=https://www.itv.ru/forum/user/142857/>https://www.itv.ru/forum/user/142857/</a> Подтверждение индивидуальной инфы. Все казино требуют от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и присутствие у юзера других аккаунтов (мультиаккаунт запрещен). 1×slots зеркало быструю регистрацию а также мгновенное Нет. Для получения бездепозитного бонуса в казино нужна неотъемлемая регистрация на веб-сайте. Играть в слоты бесплатно и без регистрации можно лишь в демо режиме.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный приз часто возможность замерзнуть легкодоступным сразу в завершения регистрации, поскольку как единственным требованием к нему считается регистрация, а этого проверка вашей свежей учетной записи. Подтверждение электрической почты – одно из ведущих условий, которое есть практически в любом бездепозитном казино. Чтобы верифицировать электронную почту, достаточно перебежать по активной ссылке в послании, приобретенном от азартного клуба.
#4286 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
Обычно для получения призов без депозита, казино выдвигает лояльные и абсолютно выполнимые обстоятельства, хотя есть ряд поступков которые воспрещены и могут повлечь за собой противные результаты: <a href=http://filmkachat.ru/>1×slots регистрацию более популярный вариант это</a> <a href=https://www.uannounceit.com/article/1416>https://www.uannounceit.com/article/1416</a> На критериях отыгрыша безвозмездных призов следует остановиться подробнее. С ними связаны аспекты, которые нельзя забыть без внимания. 1×slots регистрация на 1хслотс <a href=https://k2s.club/user/ForsedropOa/>https://k2s.club/user/ForsedropOa/</a>
казино 1× slots официальный сайт
Наличие у игрока второго аккаунта. Запрещено делать количество профилей для многократного получения бездепов.Мы собрали и выпустили перечень превосходнейших бездепозитных казино с бонусами за регистрацию, которые гарантируют щедрые выигрыши и моментальные выплаты. 1×slots регистрация 1×slots review live Бездепозитные бонусы казино за регистрацию в 2022 году — это вероятность поиграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой либо числом даровых вращений без внесения депозита. Не путайте деморежим с реальной игрой без надобности внесения депо. <a href=http://service.gepart.su/forum/?PAGE_NAME=profile_view&UID=7846>http://service.gepart.su/forum/?PAGE_NAME=profile_view&UID=7846</a> Допустим, за регистрацию вы возымели бездеп в объеме 2 000 рублей с вейджером х30. В этом случае предстоит сделать ставок, на совместную необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать настоящие деньги. Однако не запамятовывайте, собственно с каждого дара получится вывести определённую необходимую (чаще всего менее $200).Практически все интернет казино с бездепозитным призом за регистрацию предусматривает программу лояльности — систему поощрения неизменных клиентов, которая произведено из множества значений. При достижении игроком одного уровня на его счёт поступает бонус. Чем выше степень — тем щедрее приз. 1×slots casino регистрация на сайте
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Если простыми текстами, бездепы – это определённая сумма денег либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать подарки. Но есть некоторые аспекты. Существуют игорные жилища, которые перед что, этим как начислить бонусы настоятельно привязать телефонный, дать копии документов. <a href=http://mos-it.ru/index.php?subaction=userinfo&user=prettycuff3>http://mos-it.ru/index.php?subaction=userinfo&user=prettycuff3</a> 1× slots регистрация в 1×slots casino
1хслотс регистрация в 1×slots casino
Какие призы я могу еще получить не бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, любое онлайн казино предлагает игрокам выгодное предложение на первый депо, вы совершаете депо, ваш депо возрастает в двое либо том в 3, что, этим наиболее начать играть возможно с более крупной суммой, например же не запамятываем про вейджер на призы. <a href=http://miupsik.ru/forums/showthread.php?tid=401910>1хслотс казино зеркало</a> На данном разделе портала периодически публикуются обзорные статьи, каких рассматриваются бесплатные призы лучших интернет-казино. Информация структурирована по нескольким пт, включая основные: 1×слот регистрация в 1×slots casino <a href=http://agro-directory.dp.ua/wr_board/tools.php?event=profile&pname=tinyexpenditure>http://agro-directory.dp.ua/wr_board/tools.php?event=profile&pname=tinyexpenditure</a> Подтверждение персональной инфы. Все казино настоятельно от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и присутствие у пользователя иных аккаунтов (мультиаккаунт запрещен).Фриспины предусмотрены для использования в видео слотах. Внимательно ознакомьтесь с критериями – часто их выдают на кое-какие автоматы. В зависимости от клуба, у вас выйдет сделать определённое число ставок. Кстати, продвинутые игорные жилища позволяют запускать каждых «одноруких бандитов».
1хлот регистрация в 1×slots casino
Постарайтесь отыграть вейджер, дабы появилась вероятность оставить заявку на выплату. Кстати, на всех сайтах, представленных в списке, доступны современные платёжные приборы. Вы сможете получить выигрыш на электрической кошелёк, карту, аппарат. <a href=http://www.jcdqzdh.com/home.php?mod=space&uid=311948>http://www.jcdqzdh.com/home.php?mod=space&uid=311948</a> Но разу не забывайте пристально читать управляла участия в бонусных промоакциях. Если вы нарушите хотя бы одно условие, позднее вы не сможете устроить недоразумение с администрацией. 1×slots акции Таким образом, заведение пытается показать себя своим потенциальным игрокам, а такой маркетинговый ход как казино приз без депозита за регистрацию завлекает довольно много внимания к игорному заведению и обеспечивает неизменный струю свежих гостей и грядущих посетителей игрового интернет клуба.Не хотите поиграть в азартные игры, не рискуя средствами деньгами, хотя получая в все выплаты? Подобную вероятность деют почти лучшие порталы с азартными весельями. В их числе много правдивых и надежных интернет-казино на русском языке. Они привлекают новых пользователей разными поощрительными мероприятиями, включая бездепозитные, или безвозмездные призы.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.bandariklan.com/showthread.php?tid=176825&pid=991284#pid991284>1 x slots</a>
<a href=http://nrj.rs.ba/memberlist.php?mode=viewprofile&u=2111>1×slots официальный сайт мобильная версия скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Максимальный размер ставки, кот-ый нельзя превосходить пока бонус не несомненно полностью отыгран. В случае нарушения сего правила, бонус и выигрыш с него станут аннулированы. Еще одно условие касается размеров ставки. Операторы устанавливают наивысшую сумму, которую игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, избранной в Личном офисе. При превышении лимита есть риск лишиться бонуса. Существующие лимитирования относятся и к определенным обликам ставок. Например, играя в рулетку, заказчик возможность столкнуться с запретом ставить фишки на шансы.
#4287 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino сайты porno Мария Шарапова <a href=https://rumafia.news/>симулятор казино</a> фильмы казино рояль 1×bet рабочее на сегодня <a href=https://www.ossetia.tv/>7k casino скачать</a> porno Екатерина Ефременкова, шорт-трекистка casino pin официальный яндекс игры казино cat casino казино рояль Анна Михалкова казино фильм смотреть онлайн
DiskiPlus 1×bet сайт 1×bet xyz DiskiPlus 1×bet xbet xyz <a href=https://diskiplus.ru/>DiskiPlus играющие казино онлайн</a> DiskiPlus казино 5 DiskiPlus пина casino <a href=https://diskiplus.ru>DiskiPlus казино рояль смотреть</a> DiskiPlus фреш казино DiskiPlus porno Мира Андреева (теннис) DiskiPlus 1×bet телефон DiskiPlus inform@rucriminal.info DiskiPlus официальные зеркала казино DiskiPlus 1×bet официальный сайт 1×bet xyz DiskiPlus казино рублях
#4288 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация
Все любят получать презенты. Согласитесь, почти любой играющий человек будет безгранично рад, если получит даровой подарок для забавы в интернет казино просто за регистрацию либо же бонус за внесенный депо, например именуемые приветственные бонусы для новых игроков. Соответственно такие интернет клубы станут больше известны и предпочтительны у игроков при выборе казино для игры. Топ казино постоянно обновляется и прибавляются свежие и занимательные игровые клубы с симпатичной бонусной политикой и всеми возможными привилегиями, к которым относятся эти призы как фриспины за регистрацию, денежные бездепозитные призы, а также великодушные бонусы за внесенный депо.Для казино, работающих интернет, бездепозитные бонусы необходимы для привлечения свежих клиентов. Предложение сыграть на слотах без надобности внесения реальных средств — работающий метод для повышения интереса к компании. После отыгрыша бездепа великоват шанс, собственно игроку понравится и он продолжит выступать в казино, только сейчас теснее на собственные средства. <a href=http://filmkachat.ru/>1×slots регистрацию более популярный вариант это</a> Как прочие акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такого предложения являются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает новых посетителей и позволяет им составить эмоцию о функционале, не рискуя значительными совокупностями. <a href=https://www.gift-me.net/blogs/229355/How-to-Create-Stunning-3D-Animation-Presentations-That-Captivate-Your>https://www.gift-me.net/blogs/229355/How-to-Create-Stunning-3D-Animation-Presentations-That-Captivate-Your</a> казино 1×slots <a href=http://beimeishufa.org/home.php?mod=space&uid=1905708>http://beimeishufa.org/home.php?mod=space&uid=1905708</a> Рассмотрим на образце: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских рублей. В условиях промоакции указано, собственно вейджер бездепозитного бонуса х20. Поэтому, чтобы отыграть бонус, игроку несомненно нужно сделать ставок на 35*20=700 рублей.
1×slots casino регистрация
<a href=https://forum-macan.ru/viewtopic.php?t=3892>1×slots зеркало проходить регистрацию это отличный вариант</a> 1×slots официальный сайт скачать Демоказино есть практически на любом сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются веско пореже: там в случае выигрыша и соблюдения условий промоакций бездеп возможно перевоплотить в реальные деньги. <a href=http://www.atego-club.ru/forum/member.php/139754-Stevensooda>http://www.atego-club.ru/forum/member.php/139754-Stevensooda</a> Иногда для получения призов нужно спутаться с адептами службы поддержки. Удобнее всего с ними беседовать в онлайн-сате, но иногда довольно запроса по электронной почте.Все благотворительные призы кажутся соблазнительными. Кто же откажется от способности поиграть в онлайн-казино, не рискуя средствами, хотя получая выигрыши. Но далековато не все бездепозитные призы одинаковой привлекательны для рассудительного посетителя. 1×slots регистрация Активация валютного вознаграждения происходит автоматически последствии творенья профиля либо использования промокода. Иногда операторы предъявляют вспомогательные притязания: подписаться на страницы казино в соц сетях либо на рассылку рекламных извещений, скачать и ввести дополнительный софт и т.д.У нас на веб-сайте Вы найдете список призов без депозита в проверенных казино и подробную информацию про как их получить и использовать.
1×slots рабочее зеркало
Похожим образом трудится третий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения клиента или из-за с получения им VIP-статуса. Подарок предоставляется в воззвания в поддержку и ревизии.Будьте внимательнее при ознакомлении с правилами во избежание появления конфликтных обстановок с казино, когда в отыгрыша бездепа вам не дадут исключить крупную необходимую выигрыша. <a href=http://it.euroweb.ro/wiki/index.php/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%AF%D0%BD%D0%B4%D0%B5%D0%BA%D1%81>http://it.euroweb.ro/wiki/index.php/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%AF%D0%BD%D0%B4%D0%B5%D0%BA%D1%81</a> B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax 1×slot рабочее зеркало
казино 1×slots
<a href=https://www.sgomberisgombero.it/my-account-2/>1×slots регистрация на сайте</a> Помимо остального, для вывода средств по бездепу нужно внести на счёт свой 1-ый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на мало вероятную сумму, после чего вывод средств будет доступен. 1×slots регистрация 1×slotscasino 56 online <a href=https://forum.openmarine.net/member.php?action=profile&uid=13420>https://forum.openmarine.net/member.php?action=profile&uid=13420</a> Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.
1×slots зеркало этих способов предполагает регистрацию
Размер бонуса. В качестве бездепов обыкновенно начисляют небольшие суммы, а когда речь идет о призах за депо, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино имеют презентовать игроку до 2000$. <a href=https://www.indiegogo.com/individuals/35853256>https://www.indiegogo.com/individuals/35853256</a> Проверка занимает от нескольких мин. До нескольких дней, специалисты техподдержки все запросить вспомогательные документы или инициировать куцее общение по Skype. 1×slots сайт Самые популярностью способы вывода денег ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам подобии Neteller и Skrill, еще используют криптовалютными кошельками. Вывод выигрышей имеет исполняться моментально либо развлекать от нескольких часов до нескольких суток.
<b>Смотреть еще похожие новости:</b>
<a href=https://acerfans.ru/user/JamesTed/>1×slot официальный сайт</a>
<a href=https://forum.visiteachapada.com/viewtopic.php?f=19&t=3042>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вейджер менее х30–35 считается приемлемым. Опытные игроки заявляют, что с этим вейджером реально остаться в плюсе, случае верно подойти к выбору игрового аппарата. При пользовании бездепозитным бонусом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют количество видов лимитов:
#4289 Office_2019_dlhttps://6688cn.net
免费下载微软 Office 2019 专业增强版 (32 位/64 位) 多语言版本
微软 Office 2019 专业增强版 (Retail-VL Version) 是微软最新推出的办公套件,为企业和个人用户提供全面的生产力工具。此版本包括 Access、Excel、Outlook、PowerPoint、Publisher、Word 和 Skype for Business 等核心应用,并支持多语言。
Microsoft Office 2019 专业增强版概述 Microsoft Office 2019 专业增强版集成了强大的办公工具,采用 Click-to-Run 技术,替代传统的 MSI 安装方式,提供更快速、更可靠的安装和更新体验。无论是文档制作、数据分析、信息展示、电子邮件管理还是团队协作,Office 2019 都能满足您的需求。 Link : https://6688cn.net/…-office-2019
#4290 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots review live
Акции, приуроченные к календарным дням, посещают рассчитаны как на всех пользователей, например и на категории: примеру, подарок на 8 марта девушкам-игрокам или мужчинам на 23 февраля. <a href=http://filmkachat.ru/>1×slots зеркало регистрация в 1×slots casino</a> <a href=https://jumpshare.com/v/6DEzisT7cRjyebCJQLAM>https://jumpshare.com/v/6DEzisT7cRjyebCJQLAM</a> Частенько новенькие не знают, как активировать презенты либо исключить первый выигрыш. Для похожих случаев наша команда обрисовала основные определения – что такое фриспины, вейджер, как его отыграть, зачем необходимо проходить верификацию.Процесс подтверждения личности может занять от 1-го дня до недели. Если клиент разрешил нибудь оплошность при заполнении паспортных данных, то ему по адресоваться с задачей в службу поддержки онлайн-казино. 1×slots официальный сайт скачать <a href=http://worklocal.com.au/users/donaldgap>http://worklocal.com.au/users/donaldgap</a>
1×slots регистрация 1×slotscasino09k online
К сожалению, нет. Почти все казино, требуют внесение но бы 1-го малого депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, собственно исключить деньги разрешается лишь на ту платежную систему, с коей был сделан депо. <a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=428568>рабочее зеркало 1×slots</a> 1×slots казино мобильная версия <a href=http://www.extrasensorika.ru/forum/index.php?PAGE_NAME=profile_view&UID=655>http://www.extrasensorika.ru/forum/index.php?PAGE_NAME=profile_view&UID=655</a> Изучить правила и обстоятельства получения бездепозитных призов казино, Вы можете у нас на веб-сайте в разделе с бонусами либо на официальном веб-сайте выбранного Вами казино. Если имеет отыскать нужную информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал или по электрической почте.Популярность интернет казино растёт и всё больше пользователей начинают интерес азартными забавами. Бездепозитные бонусы 2022 года, это оригинальные презенты за регистрацию. С их поддержкою свежие игроки все получить безвозмездные вращения либо деньги на баланс за 1 регистрацию. С в игорных заведений в онлайне, бездепозитные бонусы стали знаменитейшим способом привлечения игроков. Подобные промоакции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш вебсайт собрал наилучшие предложения из онлайна на 2022 год. Воспользуйтесь каким даром и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша необходимо выполнить обстоятельства. 1хслот зеркало Главным нюансом в возникновении этих вознаграждений состоит том,, собственно пустив их в ход, игры ничем не рискует и в последствии никому ничего не несомненно должен (не зависимо, получит ли он благодаря бонусам какой-либо выигрыш либо мгновенно спустит все только собственно прибывшие финансы). То есть, казино снабжает игрока возможностью на дармовой базе играть во всевозможные слоты и даже спонсирует забаву.
1×slots промокод при регистрации
<a href=https://magadan-mebel.ru/forum/user/1118/>https://magadan-mebel.ru/forum/user/1118/</a> Чаще всего, известные сервисы, эти как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно неотъемлемое управляло. Финансовые средства выводятся только спустя ту платежную систему, которой пользовались для пополнения депо. Если же игрок получил бездепозитный покерный бонус, потребуется восполнить счет на наименьшую сумму, кот-ая составляет обыкновенно 10 долларов.2. Создать свежий профиль. Для регистрации надо(надобно) наполнить маленькую анкету или зайдите в собственный кабинет посредством социальных сеток; 1× слот зеркало
1×slots зеркало сайта
Приветственный бездеп предоставляется какому игроку только раз один. Казино борются с так именуемыми бонусхантерами (от англ. Bonus Hunter — охотник за бонусами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения дара. Исключить подобные действия разрешает верификация данных. Администрация вправе потребовать у посетителя доказать индивидуальные данные, обозначенные при регистрации. Частенько новенькие не разумеют, как активировать презенты или исключить первый выигрыш. Для похожих случаев наша команда описала основные определения – собственно такое фриспины, вейджер, как его отыграть, чего необходимо проходить верификацию.Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам запрещено начислять призы клиентам, не имеющим валютных средств на счете. Мы предлагаем рассмотреть животрепещущие бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ. 1×slots официальный сайт зеркало <a href=http://yagiro.ru/profile/chivalrousjourn/>http://yagiro.ru/profile/chivalrousjourn/</a> Срок активации и время на отыгрыш. Зачисление денег либо фриспинов случается при активации на взыскательно ограниченного периода, похожие требования предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать бонус количество дней либо и месяцов. Другие выдают крупную необходимую за регистрацию, но время отыгрыша ограничивают несколькими часами с неоправданно высоким вейджером.Автоматы неспроста числятся самым популярным азартным веселием. Чтобы усвоить управление и верховодила, потребуется всего некоторое минут. Ваша задача устроить ставку, определить количество рабочих линий и возможно вертеть барабан. Если на выпадет выигрышная композиция – вы выиграли! С этой задачей для посодействуют управится бездепозитные призы казино.
1× slots casino зеркало
Каждый новичок и умелый игрок мечтают прытко стартануть и начать делать реальные ставки. Для этого достаточно забрать презент, за кот-ый не платить. В зависимости от игровой платформы, нужно сделать профиль, привязать email или телефонный. После сего администрация начислит щедрое вознаграждение в виде даровых вращений либо виртуальных кредитов.Размер бонуса. В качестве бездепов обычно начисляют очень суммы, а когда речь о бонусах за депо, которые начисляются в процентном соотношении от суммы пополнения, то некоторые казино шансы презентовать игроку до 2000$. Фриспины — бесплатные вращения, которые разрешают игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины числятся наиболее известным и желаемым видом приза — бесплатные вращения иногда эффективнее и веселее в отыгрыше, чем остальные виды бездепов. <a href=http://xn–80adt5btj4c.xn–80asehdb/index.php?subaction=userinfo&user=earthywealth39>http://xn–80adt5btj4c.xn–80asehdb/index.php?subaction=userinfo&user=earthywealth39</a> Но на некоторых азартных платформах подобные гонорары могут получить и уже зарегистрированные юзеры. В таком случае, призы предоставляются в рамках оригинальных промоакций либо же некоторым игрокам повторяющий акционного предложения, коие приходит на почту с целью «вернуть» игрока в свое казино. 1×slos регистрация в 1×slots casino Следует подчеркнуть, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам или с определенным кодом.
<b>Смотреть еще похожие новости:</b>
<a href=https://adminclub.org/showthread.php?tid=62326>1хслот скачать</a>
<a href=https://forum.spherecommunity.net/User-JamesLop>казино 1×slots официальный сайт</a>
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1968#post-56102>1×slots зеркало регистрацию более популярный вариант это</a>
<a href=http://nacionrolera.org/foro/viewtopic.php?f=1210&t=146004>1×slots casino регистрация на сайте</a>
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=944962>1×slots официальный сайт скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подобные бонусы без депозита предоставляются на больше прибыльных условиях. Зачастую они крупнее, а условия отыгрыша наименее строгие. Поспешите зарегистрироваться на официальном сайте Клубника, дабы быстро получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, бывает настоящий шанс победу!
#4291 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Шевцова Татьяна Викторовна порно porno Нина Пирогова, хоккеистка <a href=https://specreporter.com/>1×bet сайт</a> pin up casino скачать Преподобная Надежда Александровна порно <a href=https://rhymes-punches.com/>леон букмекерская контора</a> casino daddy винлайн букмекерская контора букмекерская контора фонбет официальный почему казино pin up casino buzz pin up casino официальный up casino
DiskiPlus лучшие казино бесплатно DiskiPlus casino андроид <a href=https://diskiplus.ru>DiskiPlus порно с Александр Большунов (лыжные гонки)</a> DiskiPlus 1×bet зеркало слоты DiskiPlus 7k casino зеркало рабочее <a href=https://www.diskiplus.ru/>DiskiPlus вавада казино</a> DiskiPlus казино вход DiskiPlus казино на деньги DiskiPlus 1×bet телефон DiskiPlus casino betting DiskiPlus сайт казино вход DiskiPlus porno Андрей Рублев (теннис) DiskiPlus casino ап
#4292 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Голикова Татьяна Алексеевна 1×bet скачать приложение на андроид <a href=https://rumafia.news/>1×bet слоты 1×bet xyz</a> скачать сайт букмекерской конторы Попова Анна Юрьевна порно <a href=https://krtka.info/>1go casino</a> 1×bet официальный сайт 1×bet xyz porno Алена Косторная (фигурное катание) ограбление казино казино Комарова Наталья Владимировна порно casino играть гта казино
DiskiPlus казино рояль смотреть DiskiPlus up casino зеркало <a href=https://diskiplus.ru/>DiskiPlus 1×bet бесплатно</a> DiskiPlus порно с Карен Хачанов (теннис) DiskiPlus приложения букмекерских контор <a href=https://diskiplus.ru/>DiskiPlus pin up casino скачать</a> DiskiPlus casino зеркало сайта DiskiPlus pin up casino buzz DiskiPlus 1×bet зеркало слоты 1×bet xyz DiskiPlus бесплатно фильм казино DiskiPlus up букмекерская контора DiskiPlus pin casino DiskiPlus пин ап casino pin
#4293 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало выигрыши обязательно пройдите регистрацию если
А ознакомиться с свежими интернет казино, Вы сможете с бонусов с выводом выгоды, коие Вы можете получить без депозита.Законодательство, регулирующее азартные забавы в разных странах, влияние на возможности операторов. В итоге пользователи из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это возможность быть как полный отказ в доступе, например и невозможность загружать забавы отдельных изготовителей. <a href=http://filmkachat.ru/>1×slots зеркало рабочее на сегодня</a> Мы собрали и выпустили список наилучших бездепозитных казино с бонусами за регистрацию, которые гарантируют великодушные выигрыши и мгновенные выплаты. <a href=https://smallpdf.com/file#s=9463ef68–18a1–4460-a705-d0f7b3ee8b70>https://smallpdf.com/file#s=9463ef68–18a1–4460-a705-d0f7b3ee8b70</a> 1хслотс зеркало на сегодня <a href=https://yogicentral.science/index.php?title=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0%20%D0%B4%D0%B7%D0%B5%D0%BD>https://yogicentral.science/index.php?title=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0%20%D0%B4%D0%B7%D0%B5%D0%BD</a>
1×slots актуальное зеркало
Получать информацию о самых выгодных призах возможно без неизменного прогноза новостей казино. Мы брали данную задачку на себя и непрерывно следим за услугами операторов, избирая превосходнейшие из них. В этом разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список акций регулярно дополняется. В топ зашли самые свежие бездепозитные призы за регистрацию в казино 2020, временные и закрытые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и другим критериям. Если срок действия акции истек, она удаляется из списка.Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации приза без депозита. Внимательно прочитайте до конца. Многие новички делают промахи на шаге регистрации и потому возможности получить подарок. <a href=http://www.airsoft44.com/forum/index.php?action=profile;u=11896>1хслотс рабочее зеркало на сегодня</a> 1×slos регистрация в 1×slots casino Используйте наихорошие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из списка ниже, дабы заработать презенты за простые деянья и уже сегодня получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и быстрыми выводами на электронные кошельки. <a href=https://www.donchillin.com/space-uid-397480.html>https://www.donchillin.com/space-uid-397480.html</a> Поспешите зарегистрироваться на официальном сайте Клубника, дабы моментально получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, появляется настоящий шанс победу! 1хслотс казино зеркало Более солидные предложения встречаются очень редко. Зачастую они доступны лишь VIP-игрокам. В остальных случаях им наверняка сопутствуют очень строгие обстоятельства отыгрыша. Также вероятны дополнительные обстоятельства и ограничения, прописанные в условиях и положения бонусной программки казино.
1 хслот регистрация в 1×slots casino
За привлечение друга ? масштабах партнерской программы заказчик получает вознаграждение за вербование новых пользователей.Подтверждение регистрации. Казино просят привязки профиля к электрическому адресу и номеру телефонного. Для этого на e-mail отчаливает послание со ссылкой, а на телефон ? текстовое сообщение с кодом. <a href=https://inetlinks.ru/member.php?23588-OscarErose>https://inetlinks.ru/member.php?23588-OscarErose</a> Прибывшие на аккаунт деньги бездепозитные бонусы предназначаются, главном, лишь для новоиспеченных юзеров, которые раньше не имели личного аккаунта в данном казино. Исходя из сего, если ранее у игрока был сделан депо, то, по всей вероятности, у него больше не будет способности рассчитывать на получение такого бонуса в определенном заведении. 1×slos регистрация в 1×slots casino С не отыгранным бонусом запрещается превышать размер максимальной ставки. Нарушение этого условия повлечет за собой аннулирование выигрыша.
1×slots зеркало этих способов предполагает регистрацию
Суммы подобных предложений, случаев, колеблются от трех до 20 $, а вейджер на эти свои обязан составлять от 30 до шестидесяти раз. Зачастую, величайшая сумма выигрыша здесь составит от одной до 2-ух сотен $. Если геймер выиграет больше, то все средства все быть списанными до максимально разрешенного выигрыша. Здесь бывает смысл выводить еще несуществующие деньги на свою платежную систему и дальше искать заведение с благоприятными под данную сумму релоадом или бонусом за первое пополнение счета. Есть количество подвидов бездепозитного вознаграждения, предлагаемого великим числом заведений.Чаще всего интернет-казино предлагают бездепозитные призы новым юзерам. Эта промо-акция довольно эффективно завлекает новичков, подталкивая их к открытию счета. Конечно, не они становятся послушными посетителями, хотя сам факт регистрации аккаунта играет на руку заведению. <a href=https://forumsleague.org/forum/viewtopic.php?f=70&t=19386&p=382012#p382012>1×slots зеркало видели такую регистрацию на</a> Для вывода средств бонус надо(надобно) несомненно отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариациями отыгрыша бездепозитного бонуса до его получения, чтобы избежать конфликтных ситуаций.В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая часть забавы. Важно, зачастую бездепозитные призы в казино выдаются с лимитированиями по максимальной выплате. В среднем можно рассчитывать на прибыль в несколько тыщ руб. Как вывести выигрыш с приза без депо. Придётся доказать акк документально, в некоторых заведениях. Процедура верификации обязательна и делается каждым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате или прочтите в правилах. 1× slots регистрация в 1×slots casino <a href=http://bbs.wbdatavis.com/home.php?mod=space&uid=19907&do=profile>http://bbs.wbdatavis.com/home.php?mod=space&uid=19907&do=profile</a>
1× slots регистрация в 1×slots casino
Любой выигрыш по ставке повыше установленного лимита будет являться недействительным. То есть ставка не будет засчитана при отыгрыше, в случае выигрыша его сумма не поступит на счёт клиента — результат забавы несомненно полностью аннулирован.Иногда в поощрения за регистрацию могут выдаваться билеты для участия в турнирах. Условия их проведения очень отличаются, поэтому мы советуем ознакомиться с каждым предложением раздельно. Как только получите бездеп в казино, всё одинаково не забывайте инспектировать электронную почту. Некоторые игорные клубы день радуют интенсивных гэмблеров приятными бонусами. Чаще всего получить подарок возможно в преддверии праздника, на день рождение, за привлечение друга. А того распространённым бонусом считается надбавка к депозиту. Нужно не восполнить счёт, и азартное заведение прирастит его на 50–100%. <a href=https://sportcar.moscow/user/Daviddaf/>https://sportcar.moscow/user/Daviddaf/</a> Диапазон ставок, коие вправе устроить игрок, кроме лимитирован. Обычно ставить можно небольшую необходимую — пределах 10–30 рублей за одно вращение. 1×slots casino зеркало Первый возникающий вопрос, это, зачем выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают свежих игроков. Последним проще начать забаву на средства с подарка за регистрацию. Им не пополнять баланс и тратить собственные средства. Новички получают безвозмездные спины или средства на счёт. С их подмогою знакомятся с игровым процессом, крутят слоты и проделывают ставки в рулетке.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=62467>1× слот зеркало</a>
<a href=http://djdrewski.co.uk/lfsbangers/viewtopic.php?f=32&t=27424>1×slots зеркало регистрация</a>
<a href=https://www.reisezielforum.de/viewtopic.php?t=401831>1хслотс рабочее зеркало на сегодня</a>
<a href=https://nauc.info/forums/viewtopic.php?t=20519152>1×slot рабочее зеркало</a>
<a href=https://persiankittencat.com/big-lots-christmas-decorations/#comment-56893>1× slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бонус с зачислением средств на счет дает больше свободы деяний. Пользователь сам выбирает, каким образом воспользоваться подаренными своими. Здесь кроме могут работать ограничения на перечень доступных игр, но обычно эти рамки не так строги, как в рекламную с бесплатными вращениями. Обычно для получения призов без депозита, казино выдвигает лояльные и вполне выполнимые условия, хотя есть ряд деяний коие воспрещены и все стать неприятные последствия:
#4294 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Набиуллина Эльвира Сахипзадовна порно официальные букмекерские конторы скачать <a href=https://specreporter.com/>казино сочи</a> porno Яна Троянова inform@rucriminal.info <a href=https://rhymes-punches.com/>up casino</a> казино рояль порно с Александр Большунов (лыжные гонки) казино пину порно с Евгения Медведева, фигуристка Мухтиярова Елена Вячеславовна порно kent casino яндекс казино
DiskiPlus pin up casino buzz DiskiPlus порно с Юлия Ефимова <a href=https://diskiplus.ru>DiskiPlus up casino</a> DiskiPlus букмекерская контора на андроид DiskiPlus казино 1 <a href=https://www.diskiplus.ru/>DiskiPlus pin ап casino</a> DiskiPlus симулятор казино DiskiPlus порно с Дарья Касаткина (теннис) DiskiPlus top casino DiskiPlus порно с Гатагова Ольга Анатольевна DiskiPlus бк букмекерская контора DiskiPlus Светлана Ходченкова DiskiPlus Светлана Ходченкова
#4295 Charlesgunnyhttp://filmkachat.ru
1×slot официальный сайт
Перед активацией главно внимательно изучить обстоятельства промоакции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют значение также лимиты ставок при отыгрыше и сроки, в течение которых можно воспользоваться предложением. Если бездеп обхватывает ограниченный перечень игр, рекомендуется разузнать наибольшие коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только в случае, в оператор не установил строгие ограничения на наивысшую необходимую ставки.Для получения бездепа нужно пригласить в игру по реферальной ссылке нового посетителя: он должен зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и восполнить счёт на необходимую, указанную в критериях промоакции. <a href=http://filmkachat.ru/>1×slot зеркало рабочее регистрации на телефон придет</a> <a href=https://peertrainer.com/LoungeCommunityThread.aspx?ForumID=1&ThreadID=316720>https://peertrainer.com/LoungeCommunityThread.aspx?ForumID=1&ThreadID=316720</a> Бездепозитные призы за регистрацию считаются одним из самых модных методов привлечения свежих игроков в онлайн-казино, поэтому собственно они деют игрокам вероятность опробовать казино, тем игровые автоматы, и вероятно, выиграть настоящие деньги.Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить особенности, труднодоступные при игре в демо режиме. Многие свежие посетители переходят в число неизменных, а оператор получает долгосрочную прибыль. 1×слот регистрация в 1×slots casino <a href=http://medik.co.kr/bbs/board.php?bo_table=free&wr_id=682966>http://medik.co.kr/bbs/board.php?bo_table=free&wr_id=682966</a>
1×slots рабочее зеркало
<a href=https://www.findaspermdonor.com/viewtopic.php?f=25&t=92670>1×slots официальный сайт зеркало рабочее</a> 1×slots официальный зеркало А ознакомиться с свежими онлайн казино, Вы сможете за счет бонусов с выводом прибыли, коие Вы сможете получить без депозита. <a href=http://cloudscapehill.com/user/zacherywhilm/?um_action=edit>http://cloudscapehill.com/user/zacherywhilm/?um_action=edit</a> 1×slos регистрация в 1×slots casino Иногда для получения призов необходимо связаться с адептами службы поддержки. Удобнее всего с ними разговаривать в онлайн-сате, хотя времени довольно запроса по электронной почте.Ограничения по забавам. Администрация воспрещает игрокам кое-какие игровые автоматы с бездепозитным бонусом, средствами или бесплатными вращениями. Обычно, в правилах приводится глубокий список слотов для отыгрыша. Иногда разделенье производится по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, хотя запрещен в настольных играх и в разделе Live Casino.
1×slots зеркало быструю регистрацию а также мгновенное
Рассмотрим на образце: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских руб. В критериях акции указано, что вейджер бездепозитного приза х20. Поэтому, чтобы отыграть приз, игроку несомненно необходимо сделать ставок на 35*20=700 рублей.Выполнив все притязания оператора, заказчик имеет оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем не более суток. Если дополнительно требуется пройти функцию верификации, то срок увеличивается до 1–2 трудящихся дней. Для перевода используются банковские инструменты и электронные платежные системы. Второй способ подходит лучше, например как основная транзакций ситуации исполняются моментально. В связи со спецификой функционирования банков обработка платежей может взятьвдолг(взятьвзаймы) до нескольких рабочих дней. <a href=http://centroversalles.org/index.php?option=com_kunena&view=topic&catid=2&id=488233&Itemid=172>http://centroversalles.org/index.php?option=com_kunena&view=topic&catid=2&id=488233&Itemid=172</a> 1×slots официальный сайт скачать
1× slots официальный
1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, если не хотите замерзнуть жертвой жуликов или впустую израсходовать время; Да, у бесплатных бонусов есть недостатки. Прежде всего, они обыкновенно большие. Кроме как, обстоятельства вейджера по ним всегда строгие. Но таки неименье риска проделывает их очень привлекательными для клиентов.Бездепозитный бонус предоставляется новому игроку за определенные деянья. Часто подарок повторяющий средств или фриспинов выдается за регистрацию, благодаря чему пользователь получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. Бонусы без депозита при регистрации считаются самыми красивыми как для опытных игроков, например для и новичков. Получив такое вознаграждение, клиент имеет выступать на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные призы в интернет-казино Рунета, а условия их активации и выигрыша.Получать информацию о самых выгодных бонусах возможно без постоянного мониторинга новостей казино. Мы брали данную задачку на себя и непрерывно смотрим за услугами операторов, избирая лучшие из их. В данном разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список акций регулярно дополняется. В топ зашли самые новые бездепозитные бонусы за регистрацию в казино 2020, временные и закрытые рекламную. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и аспектам. Если срок действия промоакции истек, она удаляется из списка. 1×slots акции <a href=https://www.tomimarket.co.kr/bbs/board.php?bo_table=free&wr_id=181388>https://www.tomimarket.co.kr/bbs/board.php?bo_table=free&wr_id=181388</a> Чаще всего казино приз за регистрацию без депозита даёт вероятность запустить любой машина. Но другого внимательно ознакомиться с условиями. Иногда для игры доступны лишь определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, лучше начать знакомство с миром азарта непосредственно с «одноруких злодеев».
1×slots зеркало регистрацию более популярный вариант это
Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную функцию активации приза без депозита. Внимательно прочитайте до конца. Многие новички проделывают промахи на шаге регистрации и поэтому имеют получить презент. <a href=http://solhyanggi.net/gb5/bbs/board.php?bo_table=free&wr_id=1299376>http://solhyanggi.net/gb5/bbs/board.php?bo_table=free&wr_id=1299376</a> 1×slots зеркало быструю регистрацию а также мгновенное
<b>Смотреть еще похожие новости:</b>
<a href=https://nztw.org/home.php?mod=space&uid=43957>1×slot зеркало</a>
<a href=https://forum.eliteshost.com/showthread.php?tid=17300>1×slots зеркало которую указывали при регистрации кстати</a>
<a href=https://melhorlance.com.br/minha-conta/>1×slots регистрация 1×slots casino c2d ru</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В количестве случаев безвозмездные бонусы начисляются в кредитах, коие невозможно незамедлительно исключить со счета. Прежде их нужно отыграть по установленным правилам. Эти требования принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д.). О нем читайте ниже. Доступность — бездепозитные бонусы в казино чаще всего предоставляются свежим игрокам, хотя бывают случаи, когда приз могут получить и действующие посетители.
#4296 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
приложения букмекерских контор на андроид пари букмекерская контора <a href=https://vestnik-jurnal.com/>porno Юлия Пересильд</a> казино регистрации скачать casino на андроид <a href=https://m.repost.news/>casino андроид</a> 1×bet официальный скачать cat casino игры казино 7k casino официальный сайт играющие казино casino порно с Антропова Валентина Викторовна
DiskiPlus casino зеркало сегодня DiskiPlus 1×bet 1 <a href=https://diskiplus.ru>DiskiPlus win win casino</a> DiskiPlus 1×bet вход DiskiPlus 1×bet рабочее на сегодня <a href=https://www.diskiplus.ru/>DiskiPlus pin ап casino</a> DiskiPlus porno Екатерина Ефременкова, шорт-трекистка DiskiPlus porno Илья Ковальчук (хоккей) DiskiPlus порно с Анна Щербакова, фигуристка DiskiPlus порно с Анна Калинская (теннис) DiskiPlus ев казино DiskiPlus официальные букмекерские конторы DiskiPlus букмекерская контора фонбет
#4297 Tyleroralfhttps://vibrometro1a.com
<a href=https://vibrometro1a.com>equilibrador</a> Aparatos de calibración: importante para el rendimiento estable y óptimo de las máquinas.
En el ámbito de la tecnología avanzada, donde la efectividad y la seguridad del dispositivo son de suma importancia, los sistemas de calibración cumplen un papel esencial. Estos aparatos dedicados están creados para balancear y fijar partes dinámicas, ya sea en dispositivos de fábrica, automóviles de desplazamiento o incluso en equipos de uso diario.
Para los técnicos en mantenimiento de sistemas y los ingenieros, utilizar con aparatos de balanceo es crucial para proteger el rendimiento suave y estable de cualquier dispositivo rotativo. Gracias a estas opciones avanzadas sofisticadas, es posible disminuir notablemente las movimientos, el sonido y la carga sobre los soportes, aumentando la vida útil de componentes valiosos.
Asimismo relevante es el tarea que tienen los equipos de equilibrado en la asistencia al cliente. El apoyo profesional y el soporte permanente aplicando estos equipos permiten ofrecer servicios de gran calidad, elevando la contento de los consumidores.
Para los dueños de proyectos, la contribución en equipos de ajuste y sensores puede ser importante para mejorar la efectividad y productividad de sus aparatos. Esto es sobre todo significativo para los empresarios que dirigen modestas y medianas negocios, donde cada punto importa.
Por otro lado, los sistemas de ajuste tienen una amplia implementación en el ámbito de la protección y el control de estándar. Habilitan detectar eventuales fallos, impidiendo reparaciones elevadas y perjuicios a los aparatos. También, los datos obtenidos de estos aparatos pueden usarse para optimizar métodos y aumentar la visibilidad en plataformas de exploración.
Las sectores de aplicación de los aparatos de ajuste comprenden múltiples ramas, desde la elaboración de bicicletas hasta el control ambiental. No interesa si se trata de grandes manufacturas productivas o pequeños establecimientos hogareños, los equipos de ajuste son fundamentales para promover un operación productivo y libre de detenciones.
#4298 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Алина Загитова смотреть фильм казино <a href=https://t.me/vchkogpu_ru>Валентина Матвиенко порно</a> Черкесова Бэлла Мухарбиевна порно почему в казино нет часов <a href=https://res-publika.com>porno Илона Маркова, хоккеистка</a> скачать сайт букмекерской конторы казино сегодня 1×bet скачать бесплатно букмекерская контора без порно с Диана Шнайдер (теннис) porno Яна Троянова казино 1
DiskiPlus про казино DiskiPlus kent casino <a href=https://diskiplus.ru/>DiskiPlus casino играть</a> DiskiPlus casino промокод DiskiPlus casino рабочее <a href=https://www.diskiplus.ru>DiskiPlus зеркала казино</a> DiskiPlus up casino скачать DiskiPlus 1win casino DiskiPlus казино регистрации DiskiPlus гта онлайн казино DiskiPlus 1×bet зеркало xbet xyz DiskiPlus почему в казино нет окон DiskiPlus казино регистрации
#4299 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация на сайте
Казино выводит деньги только на ту платежную систему, с котрой был изготовлен депо. То есть, для вывода бездепозитного приза, Вам поначалу необходимо восполнить счет. В неких клубах узкий список способов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет именно с этих платежных методов, коие доступны для вывода.Получить приветственный бонус все только свежие клиенты онлайн-казино. Способы описаны в условиях акции каждого легального казино, чаще всего это: <a href=http://filmkachat.ru/>1×slots зеркало регистрацию более популярный вариант это</a> Индивидуальные поощрения выдаются за совершение поступков: подписку на аккаунты площадки в соц сетях, установку мобильного приложения либо официального клиента для ПК. В большинстве казино срабатывают программы преданности, присваивающие игрокам статусы за активность на сайте. Продвижение на грядущий уровень нередко с выдачей бездепа.Бонус начисляется игроку сразу последствии регистрации и прохождения верификации в казино и не требует от клиента внесения депо. Как управляло, размер приза в сходственном случае довольно скромный, однако разрешает новеньким познакомиться с забавой без риска реальными деньгами. <a href=https://www.swiatobrazu.pl/forumgaleria/thread/view/id/524>https://www.swiatobrazu.pl/forumgaleria/thread/view/id/524</a> Бесплатные бонусы казино без депо можно получить в виде денежных средств на бонусный счет (вывести их можно лишь в отыгрыша), фриспинов, забавы либо кешбэк-бонуса.Таким образом интернет казино получает потенциального игрока. Возможно в либо подлинном он захочет сыграть на свои средства. Так работают бездепозитные бонусы в онлайн казино. Здесь хорошо подходит выражение, бесплатные сыр случается только в мышеловке. Начинающие игроки имеют не осознавать опасность азарта. Однако течением осознания делается больше. Это тема для отдельного обсуждения. 1×slots зеркало регистрация <a href=http://www.gedankengut.one/index.php?title=Выкуп_авто>http://www.gedankengut.one/index.php?title=Выкуп_авто</a> На данном разделе портала регулярно публикуются обзорные статьи, в рассматриваются безвозмездные бонусы лучших интернет-казино. Информация структурирована по нескольким пунктам, включая главные:Даже не выиграв солидную необходимую, игрок интересно проведет время, изнутри исследует работу площадки, оценит геймплей автоматов. Все это без каких-либо денежных рисков. Быть в курсе превосходнейших акций легко. Достаточно периодически учить список свежих интернет казино с выводом бонуса без депо в этом разделе.
1×slots мобильная версия войти казино
У нас на сайте Вы найдете список призов без депо в проверенных казино и подробную информацию то как их получить и использовать.Помните, что в неких забавах сумма ставки идет в зачет вейджера лишь отчасти. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки считаются как отыгранные деньги, момент как в слотах идет в зачет все one hundred percent суммы. <a href=https://demo.comuni-italiani.it/forum/viewtopic.php?f=9&t=366712>сайт 1× slots casino</a> 1×slots скачать на айфон <a href=https://www.professionistidelsuono.net/forums/member.php?action=profile&uid=239092>https://www.professionistidelsuono.net/forums/member.php?action=profile&uid=239092</a> С такими простыми советами любое казино с бонусом за регистрацию способно принести в разы больше выгоды и пользы. 1хслотс казино зеркало Реже призы без депозита начисляются постоянным игрокам. С их поддержкой администрация постарается удержать ценных посетителей или вожделеет поблагодарить за преданность правильных посетителей. Но намного почаще для подобных целей используются такие акции:
1×slots сайт зеркало
Прежде всего, не забывайте регулярно заглядывать на страницу обзоров бездепозитных бонусов. Они шаг за шагом рассматривают наиболее занимательные предложения водящих игорных порталов.Ещё одно распространённое акционное предложение – привлекательный подарок с сомнительными притязаниями. К примеру, клуб сулит $100 в бездепа, хотя с вейджером х80 либо х100. Отыграть такой вейджер практически нереально и потому какого-либо концентрироваться на более занимательных промоакциях. Помимо остального, для вывода средств по бездепу нужно внести на счёт собственный первый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на мало возможную необходимую, последствии чего вывод средств будет доступен. <a href=https://www.reikiandastrologypredictions.com/member.php?action=profile&uid=19483>https://www.reikiandastrologypredictions.com/member.php?action=profile&uid=19483</a> 1×slots зеркало регистрация в 1×slots casino
1×слот регистрация в 1×slots casino
Чаще всего интернет-казино предлагают бездепозитные бонусы свежим юзерам. Эта промо-акция очень эффективно привлекает начинающих, подталкивая их к открытию счета. Конечно, не все они становятся послушными клиентами, но сам факт регистрации аккаунта играет на руку заведению.Зарегистрируйтесь. Для регистрации почаще всего достаточно ввести собственный номер телефона и почтовый адресок, после чего установить полученный код из СМС. Возможно, потребуется показать промокод. В правилах акции будет написано, где его надо включать. Иногда это надобно делать при регистрации, иногда — теснее после творенья собственного кабинета, на отдельной странице. Бонус с зачислением денег на счет дает больше свободы действий. Пользователь сам подбирает, каким образом воспользоваться подаренными средствами. Здесь того имеют работать ограничения на список доступных игр, но обыкновенно эти рамки не так строги, как в рекламную с бесплатными вращениями.Возьми свой подарок. Чаще всего бонус активизируется незамедлительно после регистрации. Но случаются истории, когда надо(надобно) зайти в личный офис либо написать в справочную службу. 1×slots сайт <a href=http://n0.ntos.co.kr/bbs/board.php?bo_table=free&wr_id=8638784>http://n0.ntos.co.kr/bbs/board.php?bo_table=free&wr_id=8638784</a> Активация денежного гонорары происходит автоматически последствии творения профиля либо использования промокода. Иногда операторы предъявляют вспомогательные требования: подписаться на странички казино в социальных сетях или на рассылку маркетинговых известий, скачать и ввести дополнительный софт и т.д.Но а в вы теснее профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в интернет казино;
1× slots зеркало
Раздача призов возможность быть приурочена к различным датам: календарные дни, дни рождения игроков, юбилей открытия казино и т. Д. Подарок выдается вид средств, фриспинов или баллов для скопления и обмена на предложения оператора. Если юзер получает выигрыш, средства начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд притязаний.Как правило, новоприбывшие игроки для хотят ознакомиться с способами ввода и вывода валютных средств и сроки выполнения поданных заказов чтобы конкретно осознавать, как прытко они смогут исключить собственный казино приз за регистрацию без депо на электронный кошелек или же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино соперничают меж собой. Ведь в бы конкретную компанию представляло лишь одно онлайн-заведение, то навряд бы клиенты увидели казино с бонусом за регистрацию и возможность бы рассчитывать только на вознаграждение повторяющий бонуса на первое инвестиция. К каждому заведению регулярно идет завлекать новых игроков, что, конечном, только на руку всем играющим. Вывод выигрыша с бездепозитных бонусов казино – великодушный подарок от азартных клубов. Но дабы исключить свой доход, нужно выполнить ряд критерий:Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция имеет подробные управляла, ссылка на которые обычно находится в промообъявлении. В них указываются лимиты, вейджер, перечень доступных игр. Если оператор скрывает данные о предложении, то пользоваться им надо. <a href=http://dns2.shadr.ru/user/Porsedropkn/>http://dns2.shadr.ru/user/Porsedropkn/</a> 1хслотс регистрация в 1×slots casino Все обожают получать подарки. Согласитесь, практически каждый играющий человек несомненно беспредельно рад, в получит даровой презент для забавы в интернет казино просто за регистрацию или же бонус за внесенный депо, так называемые приветственные призы для свежих игроков. Соответственно эти интернет клубы будут больше популярны и предпочтительны у игроков при выборе казино для забавы. Топ казино каждый обновляется и прибавляются свежие и интересные игровые клубы с привлекательной бонусной политикой и всеми возможными прерогативами, к коим относятся такие бонусы как фриспины за регистрацию, денежные бездепозитные бонусы, а также великодушные призы за внесенный депо.
<b>Смотреть еще похожие новости:</b>
<a href=http://big.bestforums.org/viewtopic.php?f=7&t=2913&p=20893#p20893>1×slots подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Операторы гемблинга утверждают, что например они сражаются с бонус-хантерами. Впрочем, критики считают, что данным казино пробуют устроить из случайного постояльца постоянного игрока. Онлайн-казино кропотливо продумывают бонусные условия, которые необходимо выучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и другие ограничения.
#4300 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino игровой автомат Любимова Ольга Борисовна порно <a href=https://kompromat1.online/>симулятор казино</a> винлайн букмекерская контора porno Виктория Баркова, легкоатлетка <a href=https://rumafia.news/>casino скачать приложение</a> 1×bet 1 1×bet слоты 1×bet xyz porno Александра Степанова, фигуристка casino pin официальный букмекерскую контору пин Петрова Ольга Викторовна порно casino daddy
DiskiPlus пин ап casino pin up top DiskiPlus казино в россии <a href=https://diskiplus.ru/>DiskiPlus ев казино</a> DiskiPlus демо казино DiskiPlus казино можно <a href=https://www.diskiplus.ru>DiskiPlus porno Андрей Рублев (теннис)</a> DiskiPlus casino приложения DiskiPlus казино пин DiskiPlus леон букмекерская контора DiskiPlus 1×bet слоты официальный сайт DiskiPlus скачать 1×bet DiskiPlus pin up casino top top DiskiPlus порно с Максим Глушенков (футбол)
#4301 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
up casino скачать порно с Баталина Ольга Юрьевна <a href=https://glvk.guru/>казино большая</a> kent casino регистрация скачать pin casino <a href=https://rhymes-punches.com/>up casino скачать</a> зеркала казино 1×bet официальный 1×bet xyz порно с Бондаренко Анастасия Борисовна официальные букмекерские конторы играющие казино онлайн 1×bet рабочее на сегодня 1×bet
DiskiPlus пин casino DiskiPlus казино ли <a href=https://diskiplus.ru>DiskiPlus слоты казино</a> DiskiPlus порно с Юлия Ефимова DiskiPlus porno Андрей Рублев (теннис) <a href=https://diskiplus.ru>DiskiPlus сайт винлайн букмекерская контора</a> DiskiPlus 7k casino официальный DiskiPlus online casino DiskiPlus букмекерская контора официальный сайт скачать DiskiPlus официальные зеркала казино DiskiPlus букмекерская контора фонбет DiskiPlus Петрова Ольга Викторовна порно казино
#4302 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало на сегодня
Еще одно условие дотрагивается объемов ставки. Операторы устанавливают наивысшую сумму, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном офисе. При превышении лимита есть риск лишиться приза. Существующие ограничения относятся и к определенным обликам ставок. Например, играя в рулетку, клиент может столкнуться с запретом назначать фишки на шансы. <a href=http://filmkachat.ru/>1 х слотс зеркало</a> Для получения депозитного приза необходимо восполнить собственный игровой баланс реальными средствами. Вознаграждение можно получить или при внесении первого депозита, или повторяющий фиксированного процента от внесённых средств. Так либо иначе, бонус поступит на счёт лишь после пополнения.При маленький сумме приза рекомендуется играть по низким ставкам, а применять наибольшие лучше лишь том, случае, в вейджер очень большой, а время на отыгрыш сильно ограничено. <a href=https://webanketa.com/forms/6gtk2c9r64qk4cb5cgw66c9p/>https://webanketa.com/forms/6gtk2c9r64qk4cb5cgw66c9p/</a> Подтвердите регистрацию, чтобы активировать Бездепозитный приз с выводом, требуется заполнить собственный профиль. Заполните пустопорожние поля реальными данными о для. 1×slots бездепозитный бонус за регистрацию <a href=https://clients1.google.com.af/url?q=https://doctorlazuta.by/>https://clients1.google.com.af/url?q=https://doctorlazuta.by/</a> Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс дает игрокам важную информацию о самых свежих, щедрых и испытанных бонусах в онлайн казино, коие обновляются каждый денек.Главным моментом в возникновении данных вознаграждений произведено в том, что пустив их в ход, игры ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он спасибо бонусам какой-либо выигрыш либо моментально спустит все только собственно прибывшие деньги). То есть, казино снабжает игрока вероятностью на дармовой базе играть во всевозможные слоты даже спонсирует игру.
онлайн казино 1×slots
<a href=https://timepost.info/showthread.php?tid=105780>1хлот регистрация в 1×slots casino</a> 1×slots зеркало сайта <a href=http://www.zhzmsp.com/home.php?mod=space&uid=2024783>http://www.zhzmsp.com/home.php?mod=space&uid=2024783</a> 1×slots зеркало рабочее на сегодня Онлайн-казино с бездепозитными бонусами ставят посетителям обстоятельства для пользования бездепами, поэтому перед ролью в промоакции другого, как тщательно ознакомиться со всеми правилами и аспектами акции. Условия шансы дотрагиваться получения бонуса, его использования и следующего вывода денежных средств если, тогда, выигрыша.Автоматы неспроста числятся самым знаменитым азартным отдыхом. Чтобы освоить управление и верховодила, потребуется всего некоторое минут. Ваша задачка устроить ставку, найти число трудящихся линий и можно вертеть барабан. Если на экране выпадет выигрышная комбинация – вы выиграли! С этой задачей вас помогут справится бездепозитные призы казино.
1×slots промокод при регистрации 2025
Как лишь получите бездеп в казино, всё также не забывайте инспектировать электрическую почту. Некоторые игорные клубы день радуют интенсивных гэмблеров приятными бонусами. Чаще всего получить подарок возможно в преддверии веселья, на денек рождение, за вербование друга. А также распространённым бонусом является прибавка к депозиту. Нужно не пополнить счёт, и азартное заведение прирастит его на 50–100%.Каждый из бездепозитных призов без пополнения 2022 содержит свой определенный вейджер для отыгрыша, так же в каждом казино он уточняется персонально — где то он х55 а где-то х30, повторюсь всюду по различному! Существуют казино с призом за регистрацию, каких довольно востребованы фриспины в интернет казино впоследствии регистрации в определенных забавах. Они встречаются том почаще бесплатных поощрений или классических призов в казино без инвестициям. Например, игрок регистрирует счет, на который начисляются безвозмездные игры, бонус за регистрацию вид безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса в выигрывает истинные средства, которые в последствии можно успешно вывести из заведения на собственную платежную систему. То есть, есть все шансы вывести средства без рисков собственными финансами. Регистрация, за которую компьютерные получит бонусы, займет пару минут, а благодаря этому возможно увеличить 5 евро поощрений до тыс. И без всяких заморочек вывести их. <a href=https://mysocialclub.ru/user/JeffreyGroms/>https://mysocialclub.ru/user/JeffreyGroms/</a> Итак, дабы безвозмездные бонусные кредиты превратились в реальные деньги, которыми вы можете управлять по собственному усмотрению, их нужно отыграть. Вейджер стопам уточнять в правилах онлайн-казино. 1×slots рабочее зеркало на сегодня
1×слотс казино
Итак, дабы безвозмездные бонусные кредиты трансформировались в реальные деньги, которыми продоставляется управлять по своему усмотрению, их надо(надобно) отыграть. Вейджер стопам уточнять в правилах онлайн-казино. 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=http://daojianchina.com/home.php?mod=space&uid=4684569>http://daojianchina.com/home.php?mod=space&uid=4684569</a> Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют важную информацию о not the slightest down payment bonuses и услугах.
1×slots регистрация 1×slots review live
Выбирайте лучшие благотворительные призы за обзоров на Casinoz – и пусть вам сопутствует счастье при отыгрыше бонусных кредитов!Новички не любят сразу же вносить депо. Это обосновано неименьем опыта и сомненьем. К счастью, наши возможно получить бездепозитный приз за регистрацию в казино. Неважно собственно начислит система – фриспины или кредиты. В любом случае вы не рискуете своими сбережениями. Это отличная возможность запустить понравившийся видео слот или же испытать удачу в настольных играх. Как только получите бездеп в казино, всё точно не запамятовывайте инспектировать электрическую почту. Некоторые игорные клубы непрерывно веселят интенсивных гэмблеров приятными бонусами. Чаще всего получить презент можно в преддверии веселья, на денек рождение, за вербование друга. А того распространённым призом считается прибавка к депозиту. Нужно не восполнить счёт, и азартное заведение прирастит его на 50–100%. <a href=http://wdty.org/home.php?mod=space&uid=261994>http://wdty.org/home.php?mod=space&uid=261994</a> 1×slots официальный зеркало В интернет-сети постоянно можно найти перечни более знаменитых и гарантированных поощрительных программ от знаменитых онлайн-казино.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.donchillin.com/space-uid-382497.html>1× slots регистрация в 1×slots casino</a>
<a href=http://www.airsoft44.com/forum/index.php?action=profile;u=11896>1× слот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Размер ставки для забавы по бездепозитному бонусу (естесственно же, когда, когда он представлен вид бонусных денежных средств) зачастую ниже, чем при игре на депо. Ограничение будет работать до момента отыгрыша приза. В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, нужно адресоваться в службу поддержки через лайв-чат на веб-сайте казино.
#4303 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
online casino 7k casino рабочее <a href=https://rhymes-punches.com/>1×bet на андроид</a> casino бонус порно с Бондаренко Анастасия Борисовна <a href=https://repost.news/>up букмекерская контора</a> официальные сайты казино casino автомат порно с Сергей Бобровский (хоккей) порно с Арина и Дина Аверины, гимнастки порно с Петр Ян (ММА) гта казино 1×bet на андроид
DiskiPlus casino зеркало сайта DiskiPlus скачать сайт букмекерской конторы <a href=https://diskiplus.ru/>DiskiPlus porno Мира Андреева (теннис)</a> DiskiPlus казино 5 DiskiPlus скачать 1×bet <a href=https://www.diskiplus.ru/>DiskiPlus букмекерские контора ап</a> DiskiPlus смотреть фильм казино DiskiPlus 1×bet зеркало рабочее DiskiPlus 1×bet xbet xyz DiskiPlus casino сегодня DiskiPlus 1×bet официальный 1×bet xyz DiskiPlus Светлана Ходченкова DiskiPlus про казино
#4304 bip39https://sites.google.com/view/bip39-mnemonic-code/
Use the proven <a href=https://sites.google.com/view/bip39-mnemonic-code/>bip39 world list</a> standard to protect your assets and easily restore access to your finances. A complete list of 2048 mnemonic words used to generate and restore cryptocurrency wallets.
#4305 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало рабочее xbet Комарова Наталья Владимировна порно <a href=https://www.ossetia.tv/>1×bet официальный скачать</a> casino daddy казино фильм онлайн <a href=https://th-royalgclub.com/>1×slots casino</a> 7k casino бонус порно с Елена Никитина, скелетонистка Набиуллина Эльвира Сахипзадовна порно пинко casino pin up casino официальный pin up casino официальный Матвиенко Валентина Ивановна порно
DiskiPlus порно с Карен Хачанов (теннис) DiskiPlus 7k casino официальный <a href=https://diskiplus.ru/>DiskiPlus порно с Максим Глушенков (футбол)</a> DiskiPlus макао казино DiskiPlus casino x <a href=https://diskiplus.ru>DiskiPlus порно с Дарья Касаткина (теннис)</a> DiskiPlus 7k casino скачать DiskiPlus porno Вера Бирюкова, гимнастка DiskiPlus официальная казино DiskiPlus демо казино DiskiPlus промокод 1×bet DiskiPlus Ходнева Светлана Владимировна порно DiskiPlus порно с Виктория Синицина, фигуристка
#4306 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Скоробогатова Ольга Николаевна порно 1×bet на сегодня <a href=https://rumafia.news/>up casino скачать</a> 1×bet зеркало рабочее букмекерская контора бетсити <a href=https://res-publika.com>гта онлайн казино</a> скачать букмекерскую контору на андроид официальные сайты казино kent casino порно с Каролина Севастьянова 1×bet бесплатно casino игровой автомат казино в россии
DiskiPlus бесплатно играем казино DiskiPlus cat casino <a href=https://diskiplus.ru>DiskiPlus porno Катерина Шпица</a> DiskiPlus играющие казино онлайн DiskiPlus букмекерские конторы в россии <a href=https://www.diskiplus.ru/>DiskiPlus порно с Константин Тюкавин (футбол)</a> DiskiPlus ев казино DiskiPlus порно с Бондаренко Анастасия Борисовна DiskiPlus 1×slots casino DiskiPlus официальные зеркала казино DiskiPlus казино ли DiskiPlus реального казино DiskiPlus casino промокод
#4307 RushbetCasinohttps://rushbet.directorio-de-casinos-mx.com
<a href=https://rushbet.directorio-de-casinos-mx.com/>www.rushbet.directorio-de-casinos-mx.com</a>
Download application online casino Rushbet – play now! <a href=https://rushbet.directorio-de-casinos-mx.com/>https://rushbet.directorio-de-casinos-mx.com</a>
#4308 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать casino на андроид casino бездепозитный <a href=https://krtka.info/>1×bet зеркало слоты</a> букмекерская контора бетсити 1×bet рабочее <a href=https://7club7.com/>порно с Владимир Минеев (ММА)</a> пин ап казино рейтинг казино ramenbet casino porno Ангелина Гончаренко, хоккеистка казино рояль смотреть 1×bet скачать приложение на андроид порно с Артемий Панарин (хоккей)
DiskiPlus porno Андрей Рублев (теннис) DiskiPlus казино сочи <a href=https://diskiplus.ru/>DiskiPlus играющие казино</a> DiskiPlus казино смотреть онлайн бесплатно DiskiPlus какие казино <a href=https://diskiplus.ru/>DiskiPlus порно с Георгий Джикия (футбол)</a> DiskiPlus часы казино DiskiPlus официальные букмекерские конторы скачать DiskiPlus casino ап DiskiPlus винлайн букмекерская контора официальный сайт DiskiPlus скачать pin casino DiskiPlus 1×slots casino DiskiPlus почему в казино нет окон
#4309 KennethHoilehttps://chelyabinsk.standart-express.ru
грузчики нанять <a href=https://chelyabinsk.standart-express.ru/>chelyabinsk standart express ru</a>
#4310 Richardusepehttps://profimaster58.ru
Продажа инструментов для дома <a href=https://profimaster58.ru/>https://profimaster58.ru</a> строительства и ремонта! Огромный выбор ручного и электроинструмента, выгодные цены, акции и быстрая доставка. Найдите все необходимое в одном месте!
#4311 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора официальный сайт скачать Манилова Алла Юрьевна порно <a href=https://slon-ru.com/>играющие казино</a> пина casino сайты казино <a href=https://rucriminal.info/>Черкесова Бэлла Мухарбиевна порно</a> casino скачать приложение порно с Александр Большунов (лыжные гонки) casino онлайн r7 casino 1×bet casino сайт 1×bet слоты почему в казино не бывает настенных часов
DiskiPlus сайте букмекерской конторы фонбет DiskiPlus казино вход официальный сайт <a href=https://diskiplus.ru/>DiskiPlus casino автомат</a> DiskiPlus 1×bet зеркало рабочее DiskiPlus приложения букмекерских контор <a href=https://www.diskiplus.ru/>DiskiPlus скачать 1×bet на андроид</a> DiskiPlus букмекерские конторы pin DiskiPlus 1×bet слоты 1×bet top DiskiPlus букмекерская контора вход DiskiPlus пин ап casino DiskiPlus Елена Лядова DiskiPlus casino com DiskiPlus сайт казино зеркало
#4312 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
Для доказательства электрической почты, просто перейдите по интенсивной ссылке в письме, приобретенном от игрового заведения. <a href=http://filmkachat.ru/>казино 1× slots официальный сайт</a> <a href=https://u.pcloud.link/publink/show?code=XZNQwV5ZNtDPSsk07bJazNAm6jpRESTTmoa7>https://u.pcloud.link/publink/show?code=XZNQwV5ZNtDPSsk07bJazNAm6jpRESTTmoa7</a> С не отыгранным бонусом запрещается превышать размер наибольшей ставки. Нарушение сего обстоятельства повлечет за собой аннулирование выигрыша. 1×slots официальный зеркало рабочее <a href=http://www.wy881688.com/home.php?mod=space&uid=682473&do=profile>http://www.wy881688.com/home.php?mod=space&uid=682473&do=profile</a>
1хслот зеркало
<a href=https://praisenpray.org/forums/member.php?action=profile&uid=63121>казино 1×slots</a> 1хслот скачать <a href=https://w-o-n.org/member.php?action=profile&uid=2864>https://w-o-n.org/member.php?action=profile&uid=2864</a> Мы делаем акцент на главных положениях правил, рассказываем о территориальных ограничениях и вкратце информируем о других промоакциях обговариваемого казино. 1× slots casino официальный сайт Большинство интернет-казино из нашего топ-10 готовы порадовать вас эксклюзивными акциями. Читайте о их в обзорах и на форуме.
1×slots официальный сайт скачать на айфон
А ознакомиться с свежими интернет казино, Вы сможете с бонусов с выводом выгоды, коие Вы можете получить без депозита.Ещё одно распространённое акционное предложение – привлекательный презент с неблаговидными притязаниями. К примеру, клуб сулит $100 в бездепа, хотя с вейджером х80 или х100. Отыграть такой вейджер практически нереально и потому никакого концентрироваться на больше заманчивых акциях. При подмоги такого одобрения оператор возможность также завлекать посетителей, которые ранее показывали активность на сайте, хотя по некий причине перестали выступать. В этом случае промокод высылается юзеру по электрической почте либо в виде SMS. <a href=http://k-special.com/bbs/board.php?bo_table=free&wr_id=1292394>http://k-special.com/bbs/board.php?bo_table=free&wr_id=1292394</a> Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных ситуаций с казино, когда последствии отыгрыша бездепа вам не дадут исключить крупную необходимую выигрыша.Для получения предоставленных бонусов вас понадобиться — ПК или мобильное прибор, и остальное дело за малым. 1×слотс казино B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.
1×slots регистрация 1×slots casino 777 online
Все любят получать презенты. Согласитесь, практически каждый играющий человек несомненно беспредельно счастлив, случае получит даровой презент для забавы в интернет казино просто за регистрацию или же бонус за внесенный депо, так называемые приветственные призы для свежих игроков. Соответственно такие интернет клубы будут более знамениты и преимущественны у игроков при выборе казино для забавы. Топ казино день обновляется и добавляются новые и увлекательные игровые клубы с привлекательной бонусной политикой и всеми возможными преимуществами, льготами, к которым относятся такие бонусы как фриспины за регистрацию, валютные бездепозитные бонусы, а также щедрые призы за внесенный депозит.Чем ниже значение вейджера, тем проще отыграть и исключить бонус. Если Вы расчитываете заработать на бездепе, а не просто ознакомиться с новым игровым клубом, то стоит избегать призов с высочайшим вейджером их почти не реально отыграть. С ними Вы сможете только протестировать игры заведения. <a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=41962>1хслотс казино зеркало</a> 1хслот зеркало сайта <a href=https://build-info.biz.ua/wr_board/tools.php?event=profile&pname=Davidalurl>https://build-info.biz.ua/wr_board/tools.php?event=profile&pname=Davidalurl</a> Далее требуется отыграть вагер и исключить выигрыш. Игрокам без навыка крупно повезло, меня получить 10-ки даров за 1 регистрацию. Если не сумели получить Бездепозитный бонус, не беспокойтесь. Обратитесь в интернет чат, оператор поможет ситуацию.Чтобы играть даром на реальные средства в казино, не всегда достаточно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные действия.
1×slots на любой вкус как пройти регистрацию
Чтоб получить крупный выигрыш, избирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, коие доступны по условиям отыгрыша.Раздача бонусов может быть приурочена к разным датам: календарные праздничные, дни рождения игроков, юбилей открытия казино и т. Д. Подарок выдается повторяющий средств, фриспинов либо баллов для скопления и обмена на предложения оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода этой суммы понадобиться выполнить ряд требований. Для получения выигрыша потребуется выполнить условия казино. Чаще всего игроку нужно поставить конкретную необходимую, хотя уже из собственных денег. Она рассчитывается из совместного размера выигрыша за всегда использования бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, случае пользователь выиграл 1000 руб., а множитель составляет х30, исключить средства возможно несомненно, сделав ставки на 30 000 рублей.Получать информацию о самых выгодных призах можно без постоянного мониторинга новостей казино. Мы брали данную задачку на себя и непрерывно следим за услугами операторов, выбирая лучшие из них. В данном разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список промоакций периодически пополняется. В топ вошли самые свежие бездепозитные призы за регистрацию в казино 2020, временные и замкнутые промо. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и аспектам. Если срок деянья промоакции истек, она удаляется из перечня. <a href=https://advansbum.by/index.php?option=com_k2&view=itemlist&task=user&id=1029474>https://advansbum.by/index.php?option=com_k2&view=itemlist&task=user&id=1029474</a> Акции распространяются как на все забавы казино, так и на узкий список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и. Промо возможность охватывать разработки 1-го производителя. Бездеп не пересекается с другими акциями казино. Если на сайте предусмотрен кэшбек, он не начисляется за ставки, изготовленные бонусными средствами. Для идентификации платежных реквизитов игрока может потребоваться пополнение счета на минимальную необходимую.С этими ординарными советами любое казино с бонусом за регистрацию способно принести в разы больше выгоды и полезности. казино 1×slots официальный сайт Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция содержит доскональные правила, гиперссылка на коие обычно содержится в промообъявлении. В них указываются лимиты, вейджер, перечень дешевых игр. Если оператор укрывает данные о предложении, то пользоваться им не.Бездепозитные бонусы за регистрацию в игровых автоматах для владельцев онлайн-казино являются долею маркетинговой кампании, направленной на увеличение аудитории вебсайта. Так они продвигают свои бренды и привлекают новых посетителей.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.carshowsociety.com/forum.php/topic,11220.new.html#new>1х слот 1хслотс регистрация перейти на 1×slots</a>
<a href=http://swissairways-va.com/phpBB3/memberlist.php?mode=viewprofile&u=3495>1×slots зеркало регистрация то дальше необходимо пройти</a>
<a href=https://www.goslog.ru/forum/messages/forum1/message21548/11-obrashcheniya-grazhdan?result=reply#message21548>1×slots регистрация 1×slots casino c2d ru</a>
<a href=https://clubdefansde24.com/foro/memberlist.php?mode=viewprofile&u=3464>1хслотс рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых свежих, великодушных и проверенных призах в интернет казино, которые обновляются каждый денек. Существует ли стратегии для отыгрыша бездепозитных бонусов? К сожалению нет, на выигрыши или проигрыши с бонусов, казино либо игрок воздействовать не может, отдача игр случается от разработчиков игр.
#4313 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
мобильные букмекерские конторы казино онлайн бесплатно <a href=https://rucriminal.info/>1×bet зеркало xbet</a> букмекерская контора бетсити casino рабочее <a href=https://rhymes-punches.com/>Кузнецова Анна Юрьевна порно</a> Яровая Ирина Анатольевна порно 1×bet зеркало рабочее на сегодня казино играть бесплатно играем казино кент казино порно с Юлия Ефимова Валентина Матвиенко порно
DiskiPlus bitz casino DiskiPlus porno Илона Маркова, хоккеистка <a href=https://diskiplus.ru/>DiskiPlus пина букмекерской конторы</a> DiskiPlus 7k casino DiskiPlus порно с Алина Загитова <a href=https://diskiplus.ru>DiskiPlus человек казино</a> DiskiPlus порно с Каролина Севастьянова DiskiPlus где казино DiskiPlus 1×bet слоты DiskiPlus порно с Зырянова Анастасия Владимировна DiskiPlus porno Елизавета Туктамышева DiskiPlus casino buzz DiskiPlus casinos winning
#4314 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
Автоматическая активация кажется самой удобной, хотя ручной метод содержит перед ней превосходства. Прежде чем применять вознаграждение от казино, стоит заблаговременно определить, сколько времени потребуется на исполнение всех критерий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала действия бонуса.Не хотите сыграть в азартные игры, не рискуя своими деньгами, но получая в все выплаты? Подобную возможность деют все наихорошие порталы с азартными развлечениями. В их количестве большое добросовестных и надежных интернет-казино на российском языке. Они завлекают новых юзеров разными поощрительными событиями, включая бездепозитные, либо благотворительные бонусы. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots review live</a> Предложения с бездепозитными бонусами за регистрацию разрешают свежим заведениям заинтересовать аудиторию на собственный вебсайт. А игроки в свою очередь получают возможность выступать на реальные средства без депо в казино и заработать маленькой стартовый капитал, кот-ый разрешено исключить на карту банка или электрический кошелек.Прочитайте управляла бонусной программы, какой желайте принять. Да, мы настоятельно рекомендуем устроить это до регистрации. <a href=https://ai.ceo/read-blog/246294>https://ai.ceo/read-blog/246294</a> Выбрать казино с бездепозитным призом. У нас на сайте представлен перечень лучших онлайн казино, которые предлагают своим игрокам щедрые призы за регистрацию. 1×slots регистрация на сайте 1×slots ru com <a href=https://foro.lahuertinadetoni.es/user-2420.html>https://foro.lahuertinadetoni.es/user-2420.html</a>
casino 1×slot
Подарки на дни ? приуроченные к праздничным датам, требующие символического отыгрыша или начисляются без того. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду. 1×slots регистрация 1×slotscasino09k online Но надо размышлять, что снабжая пользователей такими призами, казино занимается спонсированием. Ведь объемы вознаграждений, главном, не немалые (средним размером от 5 до 20 $). И на эти свои налагаются определенные обстоятельства и ограничения, неотклонимые к исполненью игрока, случае в последствии он желает получить все средства выигранные финансы. <a href=https://play.eslgaming.com/player/20327685/>https://play.eslgaming.com/player/20327685/</a> Бездепозитный приз казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в данном и заключается главное различие.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 $. Если выдаются фриспины, их число изредка превышает нескольких десятков безвозмездных вращений. 1 xslots рабочее зеркало
1×slots рабочее зеркало на сегодня
<a href=http://xt600.ru/go/url=http://universe-humidifier.ru/bitrix/rk.php?goto=http://naperstok.com/bitrix/redirect.php?goto=https://teletype.in/@urist555/0zbbUL9qFGp>http://xt600.ru/go/url=http://universe-humidifier.ru/bitrix/rk.php?goto=http://naperstok.com/bitrix/redirect.php?goto=https://teletype.in/@urist555/0zbbUL9qFGp</a> 1×slots промокод при регистрации 2025 Бездепозитный приз – это экономическое вознаграждение, коие выдается участнику игры в казино, для его привлечения и появления заинтересованности. Любой гость, кот-ый соответствует условиям выдачи подобного бездепозитного приза, имеет претендовать на получение вышеуказанного приза. Такое поощрение считается наиболее эффективным методом, дающим возможность стартовать при, не вкладывая собственных материальных средств.
1×slots рабочее зеркало
Срок отыгрыша — это период, кот-ый начинается в момент активации приза и завершается с его закрытием. Пользователю необходимо уложиться в этот временной промежуток, по призовые средства аннулируются. Казино устанавливают перечень игр, ставки каких засчитываются при расчете отыгранных средств. Если тайтл не заходит в данный перечень, то ему быть недоступен для загрузки период деяния бонусного предложения. Не хотите поиграть в азартные игры, не рискуя своими средствами, но получая в все выплаты? Подобную возможность предоставляют все наихорошие порталы с азартными увеселениями. В их количестве много добросовестных и надежных интернет-казино на российском языке. Они привлекают свежих юзеров разными поощрительными событиями, включая бездепозитные, или бесплатные бонусы. 1×slots зеркало регистрация то дальше необходимо пройти <a href=https://arenafighter.adult/mybb/member.php?action=profile&uid=262913>https://arenafighter.adult/mybb/member.php?action=profile&uid=262913</a> Во время игры в казино, выигрыши, приобретенные спасибо безвозмездным призовым фондам, суммируются и срабатывают в общую необходимую для отыгрывания. Однако, случае фортуна улыбнется и получится отыграть все бонусы, игровое заведение гарантированно разрешит вывести финансовые свои. Сумма вывода несомненно в от лимита, одобренного именно в данном учреждении. Поэтому, пристально нужно читать правила выдачи безлимитных депозитов.Бездеп с фриспинами возможность охватывать всю коллекцию игр на сайте либо разработки одного провайдера. Обычно предлагается определенный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш имеет быть выведен последствии того, как юзер отыграет эту сумму. Возможность расценить полный возможностей слотов — основное совершенство этой разновидности. Игроку становятся доступны те функции, коие отсутствуют в демонстрационном режиме, а вероятность выиграть настоящие деньги прибавляет ярких азартных ощущений.
1×slots казино зеркало
<a href=http://whdf.ru/forum/user/93853/>http://whdf.ru/forum/user/93853/</a> Для того, чтобы отыграть сумму вашего бездепозитного приза нужно выполнить условия вейджера. Очень нередко фриспины даются на определенные слоты (book of ra, book of deceased, book of sun), подбирайте слот для по душе, они все очень красивые и высококачественные. Бездепозитные приз имеет быть денежным например и вид фриспинов на слотыМаксимальная ставка ? устанавливается в еденице счета и ограничивает объем ставки за раз спин. В случае ее превышения бонус имеет быть аннулирован. Также в правилах имеет содержаться запрет на размещение ставок конкретного вида, к, по одинаковым шансам в рулетке (другими, на чет или нечет, красноватое или черное и т.д.). 1×slots регистрация на сайте 1×slots ru com Обычно для получения бонусов без депо, казино выдвигает приклнные и абсолютно выполнимые условия, но есть ряд поступков коие запрещены и имеют стать неприятные результаты:
<b>Смотреть еще похожие новости:</b>
<a href=https://forums.scar-divi.com/topic/856426–1×slot-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F/>1×slot регистрация</a>
<a href=https://www.findaspermdonor.com/viewtopic.php?f=25&t=90789>скачать 1×slots официальный сайт</a>
<a href=https://melhorlance.com.br/minha-conta/>1×slots казино мобильная версия</a>
<a href=http://nacionrolera.org/foro/memberlist.php?mode=viewprofile&u=41202>1хслотс рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но надо мыслить, собственно снабжая пользователей такими бонусами, казино занимается спонсированием. Ведь размеры вознаграждений, в, не немалые (средним размером от 5 до 20 $). И на эти свои налагаются определенные обстоятельства и ограничения, обязательные к выполнению игрока, в в последствии он вожделеет получить все свои выигранные деньги.
#4315 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало
В случае с фриспинами без вейджера, Вам не придется отыгрывать свой выигрыш с даровых вращений. Прибыль, коию Вы заработаете на таком бездепе можно назначать на вывод без какого либо отыгрыша. <a href=http://filmkachat.ru/>1×slots сайт зеркало</a> Важно, удостоверьтесь никаких, собственно раньше не регистрировались в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи. <a href=https://webanketa.com/forms/6gtk2c9q6wqp4s1scrw64dv6/>https://webanketa.com/forms/6gtk2c9q6wqp4s1scrw64dv6/</a> Бездепозитные бонусы казино это экономическая компенсация, предлагаемая пользователям на дармовой основе и вероятность выступать в онлайн казино даром. Если сопоставлять их с одобрениями за лепта, в средства выдаются только впоследствии начального пополнения счета, то бездепозитные вознаграждения получаются даром. То есть, играющий получает вероятность создавать ставки на уже существующие финансы, которые выдаст заведение, выполняя, при, обычные деянья, дабы их извлечь (здесь идет о регистрация, удостоверении личности с использованием номера телефона, дизайна заказы и т.д. ).Но есть игорные заведения, которые готовы просто например жертвовать средства на забаву. Для сего достаточно сделать профиль. Чтобы вывести свой выигрыш, для поначалу нужно выполнить обстоятельства отыгрыша, обозначенные в критериях получения бездепозитного депо. 1×slots рабочее зеркало на сегодня <a href=https://ai.igcps.com/home.php?mod=space&uid=734929&do=profile&from=space>https://ai.igcps.com/home.php?mod=space&uid=734929&do=profile&from=space</a> Казино выводит деньги лишь на ту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного бонуса, Вам сначала необходимо пополнить счет. В неких клубах ограниченный список методов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет именно с этих платежных способов, которые доступны для вывода.Только выполнив все обстоятельства отыгрыша и дождавшись окончания ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить свои средства.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала резвые выводы. Фишка выплат сомнений, собственно довольно выбрать платёжный инструмент и указать необходимую. В большинстве случаев средства зачисляются на электрические кошельки протяжении 15 минут, а на банковские карты – 1–3 рабочих дня. 1×slots регистрация 1×slots casino c2d ru Бонус начисляется игроку сразу после регистрации и прохождения верификации в казино и не требует от клиента внесения депо. Как правило, объем бонуса в схожем случае достаточно скромный, однако позволяет новеньким познакомиться с забавой без риска настоящими средствами. <a href=http://viko.com.ru/index.php?subaction=userinfo&user=grumpyidol83>http://viko.com.ru/index.php?subaction=userinfo&user=grumpyidol83</a> Чаще всего казино приз за регистрацию без депо даёт возможность запустить любой машина. Но превосходнее пристально ознакомиться с критериями. Иногда для игры доступны лишь определённые модели. Если вы новичок и ничего не смыслите в гэмблинге, другого, как начать знакомство с миром азарта именно с «одноруких злодеев».Частенько новенькие не разумеют, как активировать подарки либо вывести 1-ый выигрыш. Для подобных случаев наша команда обрисовала основные определения – что такое фриспины, вейджер, как его отыграть, зачем необходимо проходить верификацию. 1×slots зеркало этих способов предполагает регистрацию Обычно для получения призов без депо, казино выдвигает приклнные и вполне выполнимые обстоятельства, хотя есть ряд действий коие воспрещены и имеют причиной досадные результаты:
1×слот регистрация в 1×slots casino
Подтверждение персональной инфы. Все казино настоятельно от посетителя пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и наличие у пользователя иных аккаунтов (мультиаккаунт запрещен). Бездеп с фриспинами может охватывать всю коллекцию игр на сайте или разработки 1-го провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш может быть выведен последствии такого, как юзер отыграет эту сумму. Возможность расценить полный функционал слотов — главное совершенство данной разновидности. Игроку становятся доступны что, эти опции, которые отсутствуют в демонстрационном режиме, а возможность выиграть реальные деньги добавляет ярчайших азартных ощущений. <a href=http://tutorialsmint.com/user/ralphhaw/articles>http://tutorialsmint.com/user/ralphhaw/articles</a> 1х слотс зеркало регистрация в 1×slots casino
1хслотс 1хслотс регистрация перейти на 1×slots
Бонус в казино без депо содержит различные варианты: такое быть приветственный приз, акции в честь каких-либо праздничных либо весомых дат, приз за вербование новых игроков, преданность и получение VIP-статуса.Ограничения по забавам. Администрация воспрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, деньгами либо бесплатными вращениями. Обычно, в правилах приводится глубокий список слотов для отыгрыша. Иногда дробленье выполняется по виду игр. Например, отыгрыш вероятен на всех игровых аппаратах, но запрещен в настольных забавах и в разделе Live Casino. Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают приз по государствам. Вплоть до такого, собственно клуб имеет себя игроков из Вашей государства, а бездеп не давать.Выполнив все требования оператора, клиент может оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит примерно менее суток. Если дополнительно потребуется пройти процедуру верификации, то срок возрастает до 1–2 рабочих дней. Для перевода применяются банковские приборы и электрические платежные системы. Второй метод подходит никакого, так как большинство транзакций такой осуществляются мгновенно. В связи со специфичностью функционирования банков обработка платежей может занять до нескольких трудящихся дней. 1×slots регистрацию более популярный вариант это <a href=http://sols9.com/batheo/Forum/User-RenaldoMyday>http://sols9.com/batheo/Forum/User-RenaldoMyday</a> Сразу последствии активации промокода возможно пользоваться подарком. Как теснее упоминалось, бонусы бывают трёх видов – фриспины, кредиты и фриплей-бонусы.
1×slots регистрация на 1хслотс
Бонус с зачислением средств на счет дает больше свободы действий. Пользователь сам подбирает, каким образом распорядиться подаренными средствами. Здесь кроме шансы работать ограничения на список доступных игр, но обычно эти рамки не например строги, как в промо с безвозмездными вращениями.Используйте лучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из перечня ниже, чтобы заработать презенты за обычные действия теперь сегодня получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и резвыми выводами на электрические кошельки. Для получения приза надо(надобно) ознакомиться с программой преданности казино и устроить ставки на необходимую, нужную для перехода на следующий степень. <a href=http://y90429l8.bget.ru/user/DoctorLazutaer/>http://y90429l8.bget.ru/user/DoctorLazutaer/</a> 1×slots зеркало быструю регистрацию а также мгновенное Фриспины без депо или дополнительные свои посодействуют поближе познакомиться с игровой платформой и её функциями. За счёт презентов можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради забавы напротив живых крупье.Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала прыткие выводы. Фишка выплат что, собственно довольно выбрать платёжный инструмент и показать необходимую. В большинстве случаев средства зачисляются на электронные кошельки протяжении 15 минут, а на банковские карты – 1–3 трудящихся дня.
<b>Смотреть еще похожие новости:</b>
<a href=http://forums.indexrise.com/thread-1096-post-331592.html#pid331592>1хслотс зеркало</a>
<a href=http://forums.indexrise.com/thread-1096-post-332338.html#pid332338>1×slots официальный регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция имеет подробные управляла, ссылка на которые обычно находится в промообъявлении. В них указываются лимиты, вейджер, перечень доступных игр. Если оператор скрывает данные о предложении, то пользоваться им надо.
#4316 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Елена Лядова порно с Максим Глушенков (футбол) <a href=https://kompromat1.online/>балтбет букмекерская контора</a> casino сайты фреш казино <a href=https://specreporter.com/>porno Алена Михайлова</a> скачать букмекерскую контору porno Екатерина Ефременкова, шорт-трекистка 1×bet зеркало слоты 1×bet xyz casino daddy букмекерская контора ставки casino buzz промокод 1×bet
DiskiPlus ставки на спорт букмекерские конторы DiskiPlus порно с Диана Шнайдер (теннис) <a href=https://diskiplus.ru/>DiskiPlus скачать casino на андроид</a> DiskiPlus мобильные букмекерские конторы DiskiPlus букмекерская контора зенит <a href=https://www.diskiplus.ru>DiskiPlus порно с Евгения Медведева, фигуристка</a> DiskiPlus online casino 7k DiskiPlus казино ли DiskiPlus приложения букмекерских контор на андроид DiskiPlus kent casino регистрация DiskiPlus официальные зеркала казино DiskiPlus casinos winning DiskiPlus порно с Дарья Касаткина (теннис)
#4317 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало на сегодня
Как управляло, при выводе финансов, от играющего требуется лишь сделать наименьший лепта для того, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом личный счет. <a href=http://filmkachat.ru/>1×slot казино зеркало</a> <a href=https://groups.google.com/u/1/g/3d-rendering-services>https://groups.google.com/u/1/g/3d-rendering-services</a> Прочитайте правила бонусной программки, какой хотите принять. Да, мы настойчиво советуем устроить это до регистрации. 1×slots зеркало регистрацию более популярный вариант это <a href=http://bbs.xinhaolian.com/home.php?mod=space&uid=4031698>http://bbs.xinhaolian.com/home.php?mod=space&uid=4031698</a> После получения приза вывод средств для посетителя будет недоступен до, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо чета недель. Выводить средства игрок может лишь после отыгрыша.
1х слот 1хслотс регистрация перейти на 1×slots
Выбрать казино с бездепозитным бонусом. У нас на сайте представлен список наихороших интернет казино, которые предлагают своим игрокам великодушные призы за регистрацию. <a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=2869>1 x slots casino</a> 1×slots сайт <a href=https://www.warshipsfaq.ru/user/DoctorLazutakl>https://www.warshipsfaq.ru/user/DoctorLazutakl</a> Наиболее модные гонорары между гэмблеров – бездепозитные призы казино. Это не изумительно, ведь возможно получить благотворительные вращения либо виртуальные кредиты, и при этом не придётся пополнять счёт, рисковать личными деньгами. Удастся насладиться разнообразными весельями даже выиграть солидную сумму, избегая серьёзного риска.Условия отыгрыша бонуса. Если Вы планируете заработать на бездепозитном бонусе, то для обратите внимание на значение вейджера и срок, который дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть приз и вывести выигрыш. казино 1×slots
casino 1×slot
Когда идет о получении бездепозитных бонусов в казино, начала обратите внимание на следующие обстоятельства: <a href=http://mongdol.net/bbs/board.php?bo_table=free&wr_id=2464302>http://mongdol.net/bbs/board.php?bo_table=free&wr_id=2464302</a> Одним из поводов отдавать привилегию 1 или иному заведению заключается в привлекательности предлагаемых промоакций и безвозмездных предложений. Безвозмездные фриспины, выдаваемые без нужды делать какой-нибудь лепта, в списке находится далеко не в конце.Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в собственный кабинет, дабы арестовать бесплатные вращения с вейджером х40; онлайн казино 1×slots
рабочее зеркало 1×slots
Подтверждение регистрации. Казино требуют привязки профиля к электронному адресу и номеру аппарата. Для этого на e-mail отправляется послание ссылаясь, а на аппарат ? текстовое извещенье с кодом. 1хслотс казино зеркало <a href=http://beldam.free.fr/naintendo/profile.php?mode=viewprofile&u=4417>http://beldam.free.fr/naintendo/profile.php?mode=viewprofile&u=4417</a> За счёт спинов получится запустить разные интернет слоты, протестировать стратегии и поднабраться навыка. Фишка что, нет, собственно вращения начисляются на лучшие аппараты с оригинальными опциями и высокой отдачей. Не забывайте, собственно в любом акционном предложении предусмотрены специальные требования – кратковременные лимитирования, максимальный размер ставки, список дешевых игр.
1×slots актуальное зеркало
В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с безвозмездных вращений. Прибыль, которую Вы заработаете на таком бездепе возможно назначать на вывод без какого либо отыгрыша. <a href=http://okprint.kz/user/Anthonyslila/>http://okprint.kz/user/Anthonyslila/</a> Подарки на конкретные даты отличаются критериями получения. Если поощрение начисляют игроку на день рождения, то сумма обыкновенно находится от общего объема депо за прошедший год. онлайн казино 1×slots На данном разделе портала регулярно публикуются обзорные заметки, в рассматриваются благотворительные бонусы превосходнейших интернет-казино. Информация структурирована по нескольким пунктам, включая главные:
<b>Смотреть еще похожие новости:</b>
<a href=https://021snyw.com/space-uid-53919.html>зеркала 1×slots</a>
<a href=https://adminclub.org/member.php?action=profile&uid=90427>1×slots актуальное зеркало</a>
<a href=https://astraclub.ru/members/353998-Jameswow>1 хслот регистрация в 1×slots casino</a>
<a href=http://fin-molitor.com/forum/viewtopic.php?f=2&t=427386>1×slots зеркало видели такую регистрацию на</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Такой казино бонус без депозита за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это словно некая маскировка одобрения под бездепозитный. Суть всего сего сводится к что, этому, что игроку на час выдается, к примеру, 1000 $, а реклама повторяет то, что каждой выигрыш возможно будет в забыть при себе. Но если играющий серьезно отнесется к этому предложению, то он попросту растеряет время. Ведь игроку нужно будет выступать не в аккаунте, а тренировочном и с ограниченным выбором автоматов и ставок. Да и если, тогда, выигрыша (даже всей тыс. ) в правила вступят определенные обстоятельства, где будет сказано, собственно максимальной суммой победы может быть только двести $ и средства можно использовать лишь в приза на первый вклад с вейджером 25 от суммы вознаграждения плюс сам депо. По результату получится, собственно игрок выигрывал для 200% приз с вейджером на определенную необходимую. Короче разговаривая, это все не стоит вашего времени.
#4318 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet рабочее казино вход официальный сайт <a href=https://th-royalgclub.com/>казино ли</a> букмекерские конторы pin cat casino <a href=https://krtka.info/>человек казино</a> casino рабочее 1×bet зеркало слоты 1×bet xyz букмекерская контора фонбет официальный сайт bitz casino сайт pin up casino фильмы казино рояль Окладникова Ирина Андреевна порно
DiskiPlus top casino DiskiPlus casino бонус <a href=https://www.diskiplus.ru>DiskiPlus Нургалиева Эльвира Рамиловна порно</a> DiskiPlus казино 5 DiskiPlus казино сочи <a href=https://www.diskiplus.ru>DiskiPlus казино 1</a> DiskiPlus champion casino DiskiPlus букмекерская контора официальный сайт DiskiPlus букмекерские контора ап DiskiPlus Преподобная Надежда Александровна порно DiskiPlus порно с Дарья Клишина, легкоатлетка DiskiPlus up casino официальный DiskiPlus порно с Зырянова Анастасия Владимировна
#4319 Charlesgunnyhttp://filmkachat.ru
1х слот 1хслотс регистрация перейти на 1×slots
При подмоги такого одобрения оператор может кроме привлекать посетителей, коие раньше проявляли активность на сайте, но по какой-то причине перестали выступать. В данном случае промокод высылается юзеру по электронной почте или повторяющий SMS.Необходимость отыгрыша. Вейджер в повыше, чем для бонусов за депо. И пока средства не отыграны, вывести их невозможно. <a href=http://filmkachat.ru/>1хслотс мобильная версия зеркало</a> Однако далеко не все ресурсы предлагают своим посетителям бездепозитные призы за регистрацию в казино. В большинстве случаев учтено поощрение на 1-ый депозит в размере 100–200%. Это замечательная возможность преумножить банкролл, прирастить время, проведённое за игрой и шансы сорвать большой куш.После получения приза вывод средств для посетителя несомненно недоступен того, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или пара месяцов. Выводить деньги игрок может только в отыгрыша. <a href=https://smallpdf.com/file#s=a4e78a8b-e574–4cce-8041-d2d327ee7d28>https://smallpdf.com/file#s=a4e78a8b-e574–4cce-8041-d2d327ee7d28</a> Нет. Для получения бездепозитного бонуса в казино необходима неотъемлемая регистрация на веб-сайте. Играть в слоты даром и без регистрации возможно только в демо режиме.Во время игры в казино, выигрыши, полученные благодаря бесплатным призовым фондам, суммируются и срабатывают в совместную сумму для отыгрывания. Однако, случае удача улыбнется и получится отыграть все бонусы, игровое заведение гарантированно допустит исключить финансовые свои. Сумма вывода будет в от лимита, утвержденного непосредственно в этом учреждении. Поэтому, внимательно надо(надобно) разбирать управляла выдачи анлимитных депозитов. 1×slots регистрация на сайте 1×slots ru com <a href=https://aiia.su/index.php?subaction=userinfo&user=Robertamabe>https://aiia.su/index.php?subaction=userinfo&user=Robertamabe</a> Каждый новичок и умелый игрок грезят стремительно стартануть и начать делать реальные ставки. Для этого довольно забрать презент, за кот-ый надо выплачивать. В зависимости от игровой платформы, нужно создать профиль, привязать email либо телефон. После сего администрация начислит щедрое вознаграждение вид безвозмездных вращений или виртуальных кредитов.Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную процедуру активации бонуса без депозита. Внимательно прочтите до конца. Многие новенькие проделывают оплошности на шаге регистрации и потому не могут получить презент.
1×slots зеркало регистрация то дальше необходимо пройти
В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, необходимо адресоваться в службу поддержки через лайв-чат на сайте казино. <a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=525793>1×slots официальный сайт, скачать</a> 1×slot официальный сайт <a href=http://3.13.251.167/home.php?mod=space&uid=1085586>http://3.13.251.167/home.php?mod=space&uid=1085586</a> Когда речь о получении бездепозитных бонусов в казино, начала обратите внимание на следующие условия:Чаще всего применяются коды. Их надо(надобно) вносить в особые окна регистрационной анкеты, в речь о пригласительных призах, либо в определенном разделе собственного офиса игрока. 1×slots на любой вкус как пройти регистрацию
1×slots на любой вкус как пройти регистрацию
Первый образующийся вопрос, это, чего выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают новых игроков. Последним проще начать забаву на деньги с презента за регистрацию. Им не пополнять баланс и расходовать собственные свои. Новички получают бесплатные спины либо свои на счёт. С их помощью знакомятся с игровым процессом, крутят слоты и проделывают ставки в рулетке. Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, дабы снова получить бесплатный приз. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ждет неминуемое наказание.Если площадка дарит бездеп за регистрацию, то процедура его получения проста. Нужно лишь ввести аккаунт на веб-сайте и активировать его, подтвердив адрес электрической почты, номер телефона либо иные данные, которые требует оператор. Перед этим необходимо увериться, что пользователь находится на официальном веб-сайте казино, но на мошеннической площадке. <a href=https://cryptosafeguard.net/forum/member.php?action=profile&uid=487>https://cryptosafeguard.net/forum/member.php?action=profile&uid=487</a> Таким образом интернет казино получает потенциального игрока. Возможно в будущем либо настоящем он захотит сыграть на средства средства. Так трудятся бездепозитные призы в интернет казино. Здесь очень подходит выражение, бесплатные сыр случается только в мышеловке. Начинающие игроки могут не осознавать опасность азарта. Однако времени осознания становится больше. Это тема для отдельного обсуждения.Первый образующийся вопрос, это, зачем выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают новых игроков. Последним легче начать забаву на средства с дара за регистрацию. Им не пополнять баланс и расходовать личностные средства. Новички получают безвозмездные спины или средства на счёт. С их помощью знакомятся с игровым ходом, крутят слоты и проделывают ставки в рулетке. 1×slots зеркало рабочее на сегодня Прежде всего, не запамятовывайте регулярно заглядывать на страницу обзоров бездепозитных бонусов. Они шаг за шагом рассматривают наиболее увлекательные предложения ведущих игорных порталов.Но есть игорные заведения, которые готовы просто так жертвовать средства на игру. Для сего достаточно сделать профиль. Чтобы исключить собственный выигрыш, вас сначала необходимо выполнить обстоятельства отыгрыша, обозначенные в критериях получения бездепозитного депозита.
рабочее зеркало 1хслотс
Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные способы и расценить необыкновенности, труднодоступные при забаве в демо режиме. Многие свежие клиенты перебегают в количество неизменных, а оператор получает длительную выгода. <a href=https://forum.vn.ua/showthread.php?p=3278999#post3278999>1×slots сайт</a> Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном сайте и выполните вход в индивидуальный кабинет, дабы арестовать безвозмездные вращения с вейджером х40; В современность довольно просто получить бонус за регистрацию в казино. Практически каждый игорный дом с радостью начислит деньги либо безвозмездные вращения. Многие гэмблеры пользуются этим и не стыдятся регистрироваться в каждом клубе с прибыльными условиями. Кстати, это отличная возможность выработать победную стратегию и сорвать джекпот. 1х слот регистрация в 1×slots casino <a href=http://forums.ago.ir/member.php?action=profile&uid=5391>http://forums.ago.ir/member.php?action=profile&uid=5391</a> Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.
1×slots зеркало на сегодня
Существуют казино с призом за регистрацию, каких довольно востребованы фриспины в интернет казино впоследствии регистрации в определенных забавах. Они встречаются том почаще бесплатных поощрений или классических призов в казино без инвестициям. Например, игрок регистрирует счет, на который начисляются безвозмездные игры, бонус за регистрацию вид безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса в выигрывает истинные средства, которые в последствии можно успешно вывести из заведения на собственную платежную систему. То есть, есть все шансы вывести средства без рисков собственными финансами. Регистрация, за которую компьютерные получит бонусы, займет пару минут, а благодаря этому возможно увеличить 5 евро поощрений до тыс. И без всяких заморочек вывести их.Если вы выбрали для себя некоторое брендов которые вам больше всего приглянулись, для постоянной игры! Таких гемблеров казино очень любит и оценивает, за частую эти игроки становятся VIP игроками заведения, коим часто поступают прибыльные предложения в виде призов, так же туда входит и бездепозитные. <a href=http://www.lighttoguideourfeet.com/member.php?u=1456118>http://www.lighttoguideourfeet.com/member.php?u=1456118</a> Бездепозитные призы за регистрацию в игровых автоматах для владельцев онлайн-казино считаются долею маркетинговой кампании, направленной на увеличение аудитории вебсайта. Так они продвигают свои бренды и привлекают свежих посетителей. 1×slots регистрация 1×slotscasino09k online Прежде всего, не забывайте периодически заглядывать на страницу обзоров бездепозитных призов. Они шаг за шагом осматривают более интересные предложения ведущих игорных порталов.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.one2bay.de/forum/showthread.php?tid=318692>1×slot рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Необходимость отыгрыша. Вейджер в повыше, чем для бонусов за депо. И же свои не отыграны, вывести их нельзя.
#4320 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Сергей Бобровский (хоккей) порно с Евгений Малкин (хоккей) <a href=https://m.repost.news/>porno Екатерина Ефременкова, шорт-трекистка</a> 1×bet зеркало порно с Петр Ян (ММА) <a href=https://th-royalgclub.com/>Преподобная Надежда Александровна порно</a> porno Екатерина Ефременкова, шорт-трекистка up casino скачать up casino скачать Приезжева Екатерина Геннадьевна порно 1×bet зеркало рабочее xbet ramenbet casino мобильные букмекерские конторы
DiskiPlus гама казино DiskiPlus скачать 1×bet 1×bet xyz <a href=https://diskiplus.ru>DiskiPlus Самойлова Алла Владимировна порно</a> DiskiPlus порно с Александр Большунов (лыжные гонки) DiskiPlus приложения букмекерских контор <a href=https://www.diskiplus.ru/>DiskiPlus порно с Алина Загитова</a> DiskiPlus 1×bet слоты официальный сайт DiskiPlus 1×bet зеркало DiskiPlus пин ап casino pin DiskiPlus pin casino DiskiPlus online casino официальный DiskiPlus скачать 1×bet на андроид DiskiPlus 1×bet телефон
#4321 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало
Условия имеют различаться приятель от друга. Но такой приз имеет быть использован лишь для игрового процесса – приобретенные на счет финансы до того, как будут отыграны, исключить невозможно. <a href=http://filmkachat.ru/>1×slots регистрация</a> Для получения депозитного приза необходимо пополнить собственный игровой баланс настоящими средствами. Вознаграждение можно получить или при внесении первого депозита, или в виде фиксированного процента от внесённых средств. Так либо иначе, приз поступит на счёт только последствии пополнения. <a href=https://guides.co/g/understanding-silo-images/468052>https://guides.co/g/understanding-silo-images/468052</a> При забаве на бонусные свои запрещается выступать в игровые автоматы с современным джекпотом и игры из радела live casino. Кроме как, некоторые казино дают бездеп на один либо некоторое определенных слотов, и в других играх Вы не можете на их играть.Фриспины без депо или дополнительные средства помогут поближе познакомиться с игровой платформой и её функциями. За счёт презентов можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям из-за игры против живых крупье. 1×slots рабочее зеркало <a href=http://codescript.ru/index.php?subaction=userinfo&user=jitteryshield65>http://codescript.ru/index.php?subaction=userinfo&user=jitteryshield65</a> Предложения с бездепозитными бонусами за регистрацию позволяют свежим заведениям привлечь аудиторию на свой вебсайт. А игроки в свою очередь получают возможность выступать на реальные средства без депозита в казино и заработать малый стартовый капитал, который разрешается исключить на карту банка или электрический кошелек.
1×slots официальный сайт зеркало рабочее
Маркетинговая политика всех игорных интернет-клубов должна одевать разнообразный нрав. И в вознаграждения на депозит работают чтобы, чтобы, дабы стимулировать вносить депозиты и поощрять теснее быть пользователей, то бездепозитный бонус в казино либо приз за регистрацию в казино, прежде всего, рассчитан на расширение базы потребителей. 1хслотс мобильная версия зеркало <a href=https://www.play56.net/home.php?mod=space&uid=3545323>https://www.play56.net/home.php?mod=space&uid=3545323</a> Подтверждение регистрации. Казино просят привязки профиля к электрическому адресу и номеру телефонного. Для этого на e-mail отправляется письмо ссылаясь, а на телефон ? текстовое известие с кодом.Объективные – объем приза, коэффициент и обстоятельства вейджера, надобность внесения депо для вывода денег; casino 1×slot Главным моментом в появлении этих вознаграждений произведено сомнений, собственно пустив их в ход, компьютерные ничем не рискует и в последствии никому ничего не несомненно должен (не зависимо, получит ли он благодаря бонусам какой-либо выигрыш либо моментально спустит все только собственно прибывшие деньги). То есть, казино снабжает игрока вероятностью на дармовой основе играть во различные слоты даже спонсирует игру.Вознаграждения за получение VIP-статуса ? начисляются в рамках программы преданности при достижении очередного уровня или выдаются индивидуально менеджерами службы.
1×slot зеркало
Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.Суммы подобных предложений, большинстве, колеблются от 3-х до двадцати долларов, а вейджер на эти свои обязан сочинять от 30 до шестидесяти один. Зачастую, величайшая сумма выигрыша тут составит от одной до 2-ух сотен $. Если компьютерные выиграет больше, то все свои имеют быть списанными до максимально разрешенного выигрыша. Здесь появляется смысл выводить еще несуществующие финансы на свою платежную систему и дальше отыскивать заведение с подходящими под данную необходимую релоадом или бонусом за первое пополнение счета. Есть количество подвидов бездепозитного вознаграждения, предлагаемого наибольшим числом заведений. Денежные средства. Третий приз за регистрацию без депо – наличные. К раскаянию, лишь знаменитые и популярные клубы шансы уяснить средства в руб. Либо баксах. С их помощью возможность насладиться любой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед данным нужно выполнение конкретных условий.В списке требований к отыгрышу нередко присутствуют лимиты на ставки при игре на собственные средства. Так, в отыграть нужно 30 000 руб., а предельная сумма ограничена 30 рублями, то вращать барабаны светит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам деяния промоакции. <a href=http://metabolichealthdigest.com/user/oscartic/?um_action=edit>http://metabolichealthdigest.com/user/oscartic/?um_action=edit</a> Выбирая даровой бонус, пристально изучайте верховодила. Убедитесь, что вас можно на роль в акции. Уточните, в каких забавах возможно скорпулезно условия вейджера. При необходимости задавайте вопросы адептам саппорта.Доступность — бездепозитные призы в казино чаще всего предоставляются новым игрокам, хотя бывают случаи, когда бонус могут получить и действующие посетители. 1хслотс зеркало на сегодня Обычно для получения призов без депо, казино выдвигает приклнные и вполне выполнимые обстоятельства, хотя есть ряд действий коие воспрещены и имеют причиной досадные результаты:Поспешите забрать бездепозитные призы за регистрацию в казино из представленного списка. Все платформы не водят законную работа, хотя и обрадуют добросовестными плодами игры, высочайшей отдачей, быстрыми выплатами.
1×slots регистрация на 1хслотс
Бездепозитный бонус казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в данном и содержится главное различие.Если площадка дарит бездеп за регистрацию, то процедура его получения проста. Нужно только ввести акк на веб-сайте и активировать его, подтвердив адрес электронной почты, номер аппарата или другие данные, коие настятельно оператор. Перед данным нужно убедиться, собственно юзер находится на официальном сайте казино, не на жульнической площадке. Выигрыши с бонусов без вложений всегда привязаны к притязанию по ставкам и могут быть обналичены только после выполнения этих притязаний. 1×slots зеркало рабочее на сегодня <a href=http://nvkb.ru/bitrix/click.php?goto=http://mattpear.co/bitrix/redirect.php?goto=http://stankoff.kz/bitrix/redirect.php?goto=https://teletype.in/@urist555/9z4qHVGk_gF>http://nvkb.ru/bitrix/click.php?goto=http://mattpear.co/bitrix/redirect.php?goto=http://stankoff.kz/bitrix/redirect.php?goto=https://teletype.in/@urist555/9z4qHVGk_gF</a> Для ревизии применяются сканы паспортов, водительских удостоверений, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если юзер обнаружен в попытке завести дополнительный акк, все его учетные записи подвергаются блокировке, а их владелец попадает в темный перечень. При забаве на лицензионной площадке не опасаться указывать достоверную индивидуальную информацию (шифрование ликвидирует утечку индивидуальных данных).
x1 slots регистрация в 1×slots casino
<a href=https://forum.papbio.org/member.php?action=profile&uid=87288>https://forum.papbio.org/member.php?action=profile&uid=87288</a> 1× slots официальный Нет. Для получения бездепозитного приза в казино необходима обязательная регистрация на сайте. Играть в слоты даром и без регистрации можно лишь в демо режиме.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.176mw.net/forum.php?mod=viewthread&tid=1&pid=546541&page=3284&extra=#pid546541>1×slots казино зеркало</a>
<a href=https://www.formulersupport.com/Thread-1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%B2–1×slots-casino–107077>1×slots зеркало регистрация в 1×slots casino</a>
<a href=http://complainanything.com/node/158?page=1035#comment-1483276>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Нельзя рассматривать забаву на средства, как вариант заработка. Азартные забавы запрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не является зачинщиком азартных игр. Сайт носит информационный нрав. Баланс игрока пополняется на подобающую сумму. К ней используется вейджер, обозначенный в правилах промоакции. Вывести выигрыш можно несомненно последствии того, как пользователь устроит требуемый размер ставок из собственных средств. В редких случаях бездеп трудится в формате Free Play. На счет юзера зачисляется большая сумма, и предоставляется небольшой срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по завершении сего периода сумма на счету будет превосходить изначальную, то разницу возможно будет исключить или применять для дальнейших ставок.
#4322 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало
В бонусную программу множества операторов входят регулярные бездепы. Это бессрочные акции, поощряющие активных постоянных игроков. Популярный формат — раздача фриспинов по конкретным дням недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депо в размен на скопленные баллы лояльности. <a href=http://filmkachat.ru/>1×slot зеркало рабочее регистрации на телефон придет</a> <a href=https://groups.google.com/u/1/g/3d-rendering-services>https://groups.google.com/u/1/g/3d-rendering-services</a> На условиях отыгрыша безвозмездных призов по тормознуть подробнее. С ними связаны нюансы, которые невозможно забыть без внимания. 1×slots регистрация 1×slotscasino 56 online <a href=http://n27244j0.bget.ru/index.php?subaction=userinfo&user=PhilipElofs>http://n27244j0.bget.ru/index.php?subaction=userinfo&user=PhilipElofs</a> Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают бонус по странам. Вплоть до того, что клуб имеет брать игроков из Вашей страны, а бездеп не давать.У любого игорного заведения свои верховодила и обстоятельства. Но, чтобы получить бонусы, необходимо выполнить стандартные деянья:
1хслотс 1хслотс регистрация перейти на 1×slots
Подтвердите регистрацию, чтобы активировать Бездепозитный приз с выводом, требуется заполнить собственный профиль. Заполните пустопорожние поля истинными данными о себе. 1×slots зеркало рабочее Если вы бывалый игрок, вы должны знать, что бонус без депо – редкая находка. Тем не, мы раз исследуем онлайн, чтобы найти для вас лучшие бездепозитные предложения. <a href=http://v48100ec.bget.ru/user/Frankken/>http://v48100ec.bget.ru/user/Frankken/</a> 1×slots бездепозитный бонус за регистрацию Бездепозитные призы начисляются только раз раз. Не стоит открывать свежие аккаунты, чтобы получить их повторно. Служба безопасности казино непременно выявит «левого» соучастника и заблокирует. Если гость выполнит необходимые притязания, отыграет свою ставку и решит вывести собственный выигрыш, то ему надо(надобно) принять, что казино обязательно востребует дать ксерокопии личных документов, дабы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные средства исключить не получится.Помимо остального, для вывода средств по бездепу нужно внести на счёт собственный первый депозит — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало возможную сумму, после чего вывод средств будет доступен.
1×slots промокод при регистрации 2025
Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, например как Вам понадобиться ее подтвердить в при выводе денег. <a href=http://www.ihavethepussy.com/de/members/46356-RaymondRen>http://www.ihavethepussy.com/de/members/46356-RaymondRen</a> Осталось выбрать казино с бонусом за регистрацию и сделать профиль. После активации дара выигрыш находится от Фортуны и навыков.Проверка занимает от нескольких мин. До нескольких дней, спецы техподдержки имеют запросить дополнительные документы либо инициировать куцее общение по Skype. 1хслотс 1хслотс регистрация перейти на 1×slots
1×slots регистрацию процедура займет всего лишь
Денежные средства. Третий бонус за регистрацию без депо – наличные. К огорчению, только знаменитые и знаменитые клубы имеют дать деньги в рублях или баксах. С их помощью вас насладиться любой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед этим нужно выполнение конкретных критерий. Мы рекомендуем не открещиваться от сходственных услуг известных казино. Выделите некоторое минут на регистрацию, получите бонус и попробуйте его отыграть. Может быть, сегодня фортуна будет на вашей стороне! Многие новенькие колеблются, собственно поощрительный приз не нужно несомненно отдавать, в случае они выиграли у казино. Это безусловно неопасно и надежно. Выводя выигранные свои, игрок просто останавливает свое роль деле и утрачивает уникальную вероятность – даром увеличивать личное вещественное положение. 1×slots официальный зеркало рабочее <a href=https://australianwinerytours.com/tours/member.php?action=profile&uid=1842>https://australianwinerytours.com/tours/member.php?action=profile&uid=1842</a> Наличие у игрока 2 аккаунта. Запрещено создавать количество профилей для многократного получения бездепов.
1×slots официальный сайт скачать
Как правило, новоприбывшие геймеры для хотят ознакомиться с методами ввода и вывода валютных средств и сроки исполнения поданных заказов чтобы четко понимать, как прытко они смогут вывести свой казино бонус за регистрацию без депо на электронный кошелек или же банковскую карту. К счастью для всех играющих, внутри определенных холдингов, все казино конкурируют меж собой. Ведь случае бы определенную компанию представляло лишь одно онлайн-заведение, то ли бы посетители увидели казино с призом за регистрацию и возможность бы рассчитывать только на вознаграждение повторяющий бонуса на 1-ое инвестиция. К каждому заведению регулярно следует привлекать новых игроков, что, итоге, лишь на руку всем играющим.Шаг 5. Использование и отыгрыш. Бездеп обязан быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. <a href=https://dokuwiki.stream/wiki/1_Win_Brasil_Official>https://dokuwiki.stream/wiki/1_Win_Brasil_Official</a> 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Более солидные предложения встречаются очень изредка. Зачастую они доступны лишь VIP-игрокам. В остальных случаях им наверняка сопутствуют довольно жесткие условия отыгрыша. Также вероятны дополнительные обстоятельства и лимитирования, прописанные в условиях и положения бонусной программы казино.На данном разделе портала периодически публикуются обзорные статьи, каких рассматриваются безвозмездные бонусы превосходнейших интернет-казино. Информация структурирована по нескольким пт, включая главные:
<b>Смотреть еще похожие новости:</b>
<a href=https://www.xn–72c9aa5escud2b.com/webboard/index.php/topic,514796.new.html#new>1 x slots</a>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=381885>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Кешбэк-бонус представляет собой возврат фиксированного процента от ставки если, тогда, проигрыша или же от проигранной суммы за определённый период. В большинстве случаев кешбэк не превышает 10%.
#4323 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet официальный сайт 1×bet xyz casino андроид <a href=https://sovsekretno.net/>порно с Диана Шнайдер (теннис)</a> рабочее казино порно с Матвей Сафонов (футбол) <a href=https://m.repost.news/>водка казино</a> официальное казино вход порно с Дарья Касаткина (теннис) казино вход почему в казино нет окон 1×bet рабочее пин ап casino pin up top porno Дарья Клишина
DiskiPlus порно с Каролина Севастьянова DiskiPlus Фастова Елена Владимировна порно <a href=https://www.diskiplus.ru>DiskiPlus винлайн букмекерская контора официальный сайт</a> DiskiPlus порно с Артемий Панарин (хоккей) DiskiPlus порно с Георгий Джикия (футбол) <a href=https://www.diskiplus.ru>DiskiPlus порно с Юлия Ефимова, пловчиха</a> DiskiPlus porno Екатерина Ефременкова, шорт-трекистка DiskiPlus Елизавета Боярская DiskiPlus 1×bet официальный xbet DiskiPlus casino ru DiskiPlus cat casino DiskiPlus casino скачать приложение DiskiPlus casino андроид
#4324 Charlesgunnyhttp://filmkachat.ru
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Это раз из главных показателей привлекательности дара. С завешенным коэффициентом том профессионалы не смогут выполнить обстоятельства по отыгрышу. И неважно, как привлекательно смотрится предложение – бездепозитный приз казино в размере $500 или $1 000. Чтобы новички получше вникли, что же это вейджер, мы разберём на образце. <a href=http://filmkachat.ru/>1× slots casino официальный сайт</a> <a href=https://webanketa.com/forms/6gtk2c9q6mqk8d34c8v32db6/>https://webanketa.com/forms/6gtk2c9q6mqk8d34c8v32db6/</a> Способы получения бездепа различаются от облика бонуса, который понравился игроку. Но для иначе нужно быть зарегистрированным в легальном онлайн-казино и подтвердить свою личность. В общем виде пошаговая инструкция для получения бездепозитного приза смотрится например: 1×slots регистрация на сайте <a href=https://www.ytdestek.com/members/23530.html>https://www.ytdestek.com/members/23530.html</a> Для подтверждения электронной почты, просто перейдите по интенсивной ссылке в письме, полученном от игрового заведения.
1хслот 1хслотс регистрация перейти на 1×slots
1×slots регистрацию процедура займет всего лишь В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать собственный выигрыш с бесплатных вращений. Прибыль, коию Вы заработаете на этом бездепе возможно назначать на вывод без какого или отыгрыша.Как прочие акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такого предложения являются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает новых посетителей и позволяет им составить эмоцию о функционале, не рискуя значительными совокупностями. <a href=https://pediascape.science/wiki/How_To_Troubleshoot_Common_Issues_With_The_1×bet_APP_In_Bangladesh_BD>https://pediascape.science/wiki/How_To_Troubleshoot_Common_Issues_With_The_1×bet_APP_In_Bangladesh_BD</a> Такой бесплатный эквивалент средств зачисляется на профиль юзера после воплощения притязаний и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений вероятен только последствии осуществления вейджеровых критерий.Акции распространяются как на все забавы казино, так и на узкий перечень. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino прочие. Промо имеет обхватывать разработки 1-го производителя. Бездеп не пересекается с иными промоакциями казино. Если на сайте учтен кэшбек, он не начисляется за ставки, сделанные бонусными деньгами. Для идентификации платежных реквизитов игрока может потребоваться пополнение счета на минимальную сумму. 1×slots актуальное зеркало Получить Бездепозитный приз в онлайн казино дело 2-ух кликов. Другой момент, отыграть промо и соблюсти управляла и условия отыгрыша. Под правилами подразумевается не только вагер, но и лимитирования по наибольшей ставке. Мы понимаем, что в кинотеатр все ставят на зеро и выигрывают. Призываем не делать подобного. Перед активацией приза прочитайте верховодила. Узнайте последующие моменты: Условия получения подарка, за регистрацию, за депо и другое. Ограничения по наибольшей ставке. Зачастую не повыше 350 руб. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на месте. Поэтому важно аристократия, в каких забавах можно совершать кратность валютного оборота.Далее требуется отыграть вагер и исключить выигрыш. Игрокам без опыта крупно повезло, возможность получить 10-ки подарков за одну регистрацию. Если не смогли получить Бездепозитный бонус, не беспокойтесь. Обратитесь в интернет чат, оператор поможет ситуацию.
1×slots зеркало регистрация то дальше необходимо пройти
Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном сайте и выполните вход в личный кабинет, чтобы отобрать безвозмездные вращения с вейджером х40;Чтобы других убедиться в превосходстве бездепозитных бонусов, достаточно зарегистрироваться в казино и получить поощрение. У каждого игорного клубы разные вейджеровые обстоятельства. Чтобы вы гарантировано смогли выполнить их, мы дадим несколько советов. Если система начислила маленькую сумму, не делать немалые ставки – остановитесь на 10–30 центах. Как только сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте выступать. В неприятном случае лучше приглядеться к другому автомату. <a href=http://biosafe.tj/user/WalterBycle/>http://biosafe.tj/user/WalterBycle/</a> Обыкновенные бездепозитные бонусы в размере от трех до 20 $ сделаны для того, чтобы в игры заходили все свежие и свежие игроки. Здесь, вероятнее всего, будет лимитирование на максимальный выигрыш. Важно, чтобы перед наименьшим вкладом был отключен приз за первое пополнение счета, и компьютерные не попадет на повторный вейджер.Чаще всего, модные сервисы, такие как MoneyBookers и WebMoney, еще MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно обязательное управляло. Финансовые свои выводятся лишь спустя что, эту платежную систему, коей огромной для пополнения депо. Если же игрок получил бездепозитный покерный бонус, требуется пополнить счет на минимальную необходимую, кот-ая сочиняет обычно 10 $. онлайн казино 1×slots Практически все интернет казино с бездепозитным бонусом за регистрацию предусматривает программу лояльности — систему одобрения неизменных посетителей, которая произведено из большого уровней. При достижении игроком еще уровня на его счёт поступает приз. Чем выше степень — тем щедрее бонус.Игры, в которых можно выступать на бонусные деньги. Проверьте перечень игр, в которых возможно выступать на бонусные средства, возможно они Вам не понравятся и надо тратить своё время на эту промоакцию.
1×slots сайт
Отыграв бездепозитный приз в казино с выводом также придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, случае схожее лимитирование существует, то единоразово исключить выйдет только сумму, не превосходящую объем полученного бонуса.В наше время очень просто получить бонус за регистрацию в казино. Практически любой игорный жилище с радостью начислит деньги или безвозмездные вращения. Многие гэмблеры используют этим и не стыдятся региться в каждом клубе с выгодными условиями. Кстати, это замечательная возможность выработать победную тактику и сорвать джекпот. <a href=http://www.carshowsociety.com/forum.php/topic,11220.new.html#new>1×slots официальный зеркало рабочее</a> Некоторые клубы автоматически начисляют приз на акк игрока последствии исполненья условий получения, но бывают ситуации, когда приз нужно активировать игроку самому. Есть несколько методов активации бонуса: При отыгрыше бонусных средств, нужно учитывать срок действия приза и время, которое дается на отыгрыш. По истечению заявленного медли, не отыгранный приз несомненно аннулирован. 1×slots быструю регистрацию а также мгновенное <a href=http://mutons.ru/club/user/7249/blog/1714/>http://mutons.ru/club/user/7249/blog/1714/</a> К примеру, игроку выдаются безвозмездные средства в заведении в размере пятидесяти или ста $ (вейджер на которые составляет 100х). То есть, каждому новоприбывшему геймеру выскакивает притягивающая картинка, кот-ая сулит выплату всех зачисленных фирмой средств. Не стоит обращать внимания на казино приз за регистрацию без депозита с слишком большой или очень малюсенькой суммой призов, поэтому собственно, том кропотливо выучив все обстоятельства, тут всего, несомненно некий подкол.Бездепозитные призы за регистрацию в игровых автоматах для собственников онлайн-казино считаются долею маркетинговой кампании, направленной на повышение аудитории вебсайта. Так они продвигают средства бренды и привлекают новых клиентов.
1хслотс официальный сайт зеркало
Онлайн-казино кропотливо продумывают бонусные условия, коие необходимо изучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и другие лимитирования. <a href=http://w937480o.bget.ru/index.php?subaction=userinfo&user=jumbledfuton22>http://w937480o.bget.ru/index.php?subaction=userinfo&user=jumbledfuton22</a> Бонусные средства – маленькая сумма средств для старта в новеньком казино. На бонусные средства, обыкновенно разрешается играть во все забавы, кроме слотов с современным джекпотом и игр из раздела live casino. 1×slots зеркало видели такую регистрацию на Перед активацией важно внимательно изучить обстоятельства промоакции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют значение кроме лимиты ставок при отыгрыше и сроки, в течение которых можно пользоваться предложением. Если бездеп охватывает узкий список игр, рекомендуется узнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только никаких случае, в оператор не установил жесткие лимитирования на наивысшую необходимую ставки.При выполнении условий отыгрыша и верификации, деньги с бонусного счета переводятся на основной и имеют быть выведены на карту или электронный кошелек. Лимиты на вывод и сроки проведения транзакции в от выбранной платежной системы.
<b>Смотреть еще похожие новости:</b>
<a href=http://aficionado.pl/newthread.php?do=newthread&f=1>1×slots зеркало этих способов предполагает регистрацию</a>
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=10771>1×slot официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Большинство интернет-казино из нашего топ-10 готовы порадовать вас эксклюзивными промоакциями. Читайте о их в обзорах и на форуме.
#4325 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
бесплатно фильм казино казино рояль смотреть <a href=https://specreporter.com/>kent casino</a> 7k casino официальный сайт casino рабочее <a href=https://m.repost.news/>бывшие казино</a> порно с Виктория Синицина, фигуристка casino ап демо казино casino приложения casino актуальное зеркало Александра Бортич казино ли
DiskiPlus порно с Бондаренко Анастасия Борисовна DiskiPlus официальная казино <a href=https://www.diskiplus.ru/>DiskiPlus casino промокод</a> DiskiPlus яндекс игры казино DiskiPlus casino скачать <a href=https://www.diskiplus.ru>DiskiPlus casino сайты</a> DiskiPlus официальные букмекерские конторы скачать DiskiPlus лучшие букмекерские конторы DiskiPlus порно с Илюшникова Татьяна Александровна DiskiPlus casino на телефон DiskiPlus букмекерская контора ставки DiskiPlus porno Дарья Мороз DiskiPlus porno Нина Пирогова, хоккеистка
#4326 WilliamVoThttps://stroyosnastka.com.ua
Ищете квартиру в новом доме? <a href=https://stroyosnastka.com.ua/>новостройки Украина</a> – это современные жилые комплексы, доступные цены, рассрочка и ипотека. Подберите идеальное жилье от надежных застройщиков!
#4327 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
вывод казино casino 7k рабочее <a href=https://rumafia.news/>Хорова Наталья Александровна порно</a> ограбление казино порно с Васильева Татьяна Викторовна <a href=https://repost.news/>гта онлайн казино</a> казино 5 inform@rucriminal.info рокс казино лучшая казино Семёнова Татьяна Владимировна порно Шевцова Татьяна Викторовна порно porno Юлия Канакина
DiskiPlus где казино DiskiPlus Елизавета Боярская <a href=https://www.diskiplus.ru/>DiskiPlus казино вулкан</a> DiskiPlus 1go casino DiskiPlus vodka casino <a href=https://diskiplus.ru>DiskiPlus карты казино</a> DiskiPlus порно с Захарова Мария Владимировна DiskiPlus спорт букмекерская контора DiskiPlus игры казино DiskiPlus казино можно DiskiPlus porno Александра Степанова, фигуристка DiskiPlus балтбет букмекерская контора DiskiPlus porno Илона Маркова, хоккеистка
#4328 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Никита Кучеров (хоккей) порно с Васильева Татьяна Викторовна <a href=https://glvk.guru/>ramenbet casino</a> Комарова Наталья Владимировна порно порно с Дарья Касаткина (теннис) <a href=https://vestnik-jurnal.com/>7k casino зеркало на сегодня</a> казино гта 5 online casino 7k bet casino казино рояль Юдаева Ксения Валентиновна порно Попова Анна Юрьевна порно casino сегодня
DiskiPlus казино рояль DiskiPlus 1×bet сайт 1×bet xyz <a href=https://diskiplus.ru>DiskiPlus porno Елизавета Туктамышева</a> DiskiPlus 7k casino сайт DiskiPlus порно с Евгений Малкин (хоккей) <a href=https://diskiplus.ru/>DiskiPlus Нургалиева Эльвира Рамиловна порно</a> DiskiPlus казино онлайн бесплатно DiskiPlus 1×bet на андроид бесплатно DiskiPlus порно с Елена Никитина, скелетонистка DiskiPlus пин ап букмекерская контора DiskiPlus букмекерская контора DiskiPlus казино можно DiskiPlus часы казино
#4329 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Александр Соболев (футбол) Львова-Белова Мария Алексеевна порно <a href=https://specreporter.com/>champion casino</a> casino daddy Приезжева Екатерина Геннадьевна порно <a href=https://rhymes-punches.com/>порно с Сергей Бобровский (хоккей)</a> bet casino Кузнецова Анна Юрьевна порно casino официальный зеркало casino зеркало сегодня рабочее автомат казино пинко casino porno Нина Пирогова, хоккеистка
DiskiPlus карты казино DiskiPlus 1×bet официальный скачать <a href=https://diskiplus.ru>DiskiPlus букмекерская контора официальный сайт</a> DiskiPlus балтбет букмекерская контора DiskiPlus скачать сайт букмекерской конторы <a href=https://diskiplus.ru/>DiskiPlus 7k casino бонус</a> DiskiPlus pin casino зеркало DiskiPlus bet casino DiskiPlus 1×bet 1 DiskiPlus порно с Аделия Петросян (фигурное катание) DiskiPlus Набиуллина Эльвира Сахипзадовна порно DiskiPlus cometa casino DiskiPlus игры казино
#4330 Charlesgunnyhttp://filmkachat.ru
1хслотс мобильная версия зеркало
Для отыгрыша бонуса казино обязывает игрока поиграть на необходимую, в несколько один превосходящую сумму приобретенного приза — здесь выгода фирмы очевидна. <a href=http://filmkachat.ru/>x1 slots регистрация в 1×slots casino</a> <a href=http://www.redsea.gov.eg/deutsche/Lists/Beschwerden_List/DispForm.aspx?ID=7439>http://www.redsea.gov.eg/deutsche/Lists/Beschwerden_List/DispForm.aspx?ID=7439</a> Бездепозитный приз – это экономическое вознаграждение, которое выдается участнику игры в казино, для его привлечения и появления заинтригованности. Любой посетитель, который соответствует условиям выдачи подобного бездепозитного бонуса, может претендовать на получение вышеуказанного приза. Такое поощрение является наиболее действенным способом, дающим вероятность стартовать при, не вкладывая собственных материальных средств.Так же стоит выделить то, собственно в каждом онлайн казино установлен свой наибольший кешаут на бездепозитный приз. Как управляло кешаут — это максимальная сумма средств, кот-ая доступная для вывода с бездепозитного бонуса. 1хслотс зеркало <a href=https://v7.toonanime.co/user/Ashleyupsek/>https://v7.toonanime.co/user/Ashleyupsek/</a>
1×slots зеркало на сегодня
Онлайн-казино с бездепозитными бонусами ставят клиентам обстоятельства для использования бездепами, поэтому перед участием в промоакции превосходнее подробно ознакомиться со всеми правилами и аспектами акции. Условия могут касаться получения приза, его применения и следующего вывода денежных средств если, тогда, выигрыша.На страничке представлены бездепозитные бонусы за регистрацию в казино редчайшая награда за которой гонятся все игроки как новички, например и мастера. Мы также уделяем огромное внимание на присутствие призов при формирование рейтинга казино на средства. Бездепозитный бонус это возможность выступать безвозмездно и выиграть реальные деньги. 1×slots официальный сайт скачать Бездепозитные бонусы — это подарки от казино вид бонусных средств или фриспинов для игровых автоматов, которые начисляются на аккаунт игрока последствии процедуры регистрации на сайте заведения. Для получения этих поощрений депозит не потребуется. <a href=http://www.nnov.org/profile/?user_id=8588350>http://www.nnov.org/profile/?user_id=8588350</a> Перечисленные выше главные характеристики сопровождают фактически любой бонус и являются стереотипными для бездепозитных бонусных начислений в казино.Выбор любого онлайн казино на нашем веб-сайте. В описании к каждому Вы сможете разузнать, что получите за творение аккаунта. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
1×slots казино зеркало
Бездепозитный приз за регистрацию в казино — это стартовый презент повторяющий денежного начисления либо даровых вращений для новых игроков заведения, для получения которого не нужно заносить депо.Прежде всего, не запамятовывайте периодически заглядывать на страницу обзоров бездепозитных призов. Они шаг за шагом рассматривают более занимательные предложения водящих игорных порталов. <a href=http://troderstro.ru/user/Davidsnite/>http://troderstro.ru/user/Davidsnite/</a> К раскаянию, нет. Почти все казино, требуют внесение но бы 1-го малого депозита для вывода выигрыша с бездепозитного бонуса. Также учитывайте, что исключить средства разрешается лишь на что, эту платежную систему, с которой был изготовлен депозит. скачать 1×slots официальный сайт
1× слот зеркало
Также посещают случаи, когда казино начисляет оговоренный бонус в регистрации нового клиента по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам.Но никогда не забывайте внимательно разбирать управляла роли в бонусных акциях. Если вы нарушите желая бы одно условие, позже вы не сможете уладить недоразумение с администрацией. 1 xslots рабочее зеркало <a href=https://bbs.wuxhqi.com/home.php?mod=space&uid=1475620>https://bbs.wuxhqi.com/home.php?mod=space&uid=1475620</a>
x1 slots 1хслотс регистрация перейти на 1×slots
Да, у безвозмездных призов есть дефекты. Прежде всего, они обыкновенно очень. Кроме как, обстоятельства вейджера по ним постоянно строгие. Но все же недоступность риска делает их очень привлекательными для клиентов. <a href=https://sciencewiki.science/wiki/1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81_%D0%97%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE_%D0%9D%D0%B0_%D0%A1%D0%B5%D0%B3%D0%BE%D0%B4%D0%BD%D1%8F>https://sciencewiki.science/wiki/1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81_%D0%97%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE_%D0%9D%D0%B0_%D0%A1%D0%B5%D0%B3%D0%BE%D0%B4%D0%BD%D1%8F</a> 3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефонный либо почту, указать персональную информацию; 1×slots рабочее зеркало С не отыгранным призом запрещается превышать объем наибольшей ставки. Нарушение этого обстоятельства виде аннулирование выигрыша.
<b>Смотреть еще похожие новости:</b>
<a href=https://talkonlinenews.com/memberlist.php?mode=viewprofile&u=778>1×slots рабочее зеркало</a>
<a href=http://complainanything.com/node/158?page=913#comment-1091296>1×slot рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
У любого игорного заведения свои управляла и условия. Но, чтобы получить бонусы, нужно выполнить стереотипные действия: Казино выделяет вероятность заработать и вывести настоящие средства на бездепозитных призах. Обычно, это малозначительная сумма, которую казино имеет себя разрешить презентовать игроку.
#4331 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора бетсити pin up casino скачать <a href=https://rucriminal.info/>Фастова Елена Владимировна порно</a> промокод 1×bet Александра Бортич <a href=https://specreporter.com/>Валентина Матвиенко порно</a> водка казино pin up casino пин ап порно с Владимир Минеев (ММА) casino 7k рабочее винлайн букмекерская контора Скворцова Вероника Игоревна порно рокс казино
DiskiPlus смотреть фильм казино DiskiPlus порно с Юлия Ефимова, пловчиха <a href=https://www.diskiplus.ru>DiskiPlus казино онлайн</a> DiskiPlus ramenbet casino DiskiPlus casino com <a href=https://diskiplus.ru>DiskiPlus винлайн букмекерская контора официальный сайт</a> DiskiPlus букмекерская контора вход DiskiPlus porno Мира Андреева (теннис) DiskiPlus casino официальный сайт DiskiPlus мобильные букмекерские конторы DiskiPlus сколько казино DiskiPlus лучшие онлайн казино DiskiPlus суть казино
#4332 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
gama casino порно с Гатагова Ольга Анатольевна <a href=https://krtka.info/>казино ставка</a> казино рулетка 1×bet на сегодня <a href=https://7club7.com/>casino на телефон</a> лучшие бесплатные онлайн казино ев казино pinco casino 1×bet слоты 1×bet top порно с Абрамченко Виктория Валериевна букмекерская контора бесплатно скачать bitz casino
DiskiPlus 1×bet телефон DiskiPlus 1×bet официальный слоты <a href=https://diskiplus.ru>DiskiPlus retro casino</a> DiskiPlus гта казино DiskiPlus официальное казино вход <a href=https://www.diskiplus.ru/>DiskiPlus казино рублях</a> DiskiPlus 1×bet зеркало слоты 1×bet xyz DiskiPlus букмекерская контора официальный сайт DiskiPlus inform@rucriminal.info DiskiPlus 1×bet регистрация DiskiPlus казино рояль смотреть DiskiPlus промокод 1×bet DiskiPlus black russia казино
#4333 Ремонт iMac 27 Москваhttps://remont-imac-27-mupt.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт imac 27 цены, можете посмотреть на сайте: <a href=https://remont-imac-27-mupt.ru/>ремонт imac 27</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#4334 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерские конторы в россии pin casino зеркало <a href=https://m.repost.news/>порно с Бондаренко Анастасия Борисовна</a> porno Алена Косторная (фигурное катание) порно с Алина Загитова, фигуристка <a href=https://rucriminal.info/>pin up casino</a> казино сочи unlim casino 1×bet рабочее 1win букмекерская контора порно с Алексей Миранчук (футбол) сайт казино вход casino играть
DiskiPlus пари букмекерская контора DiskiPlus 1×bet зеркало слоты 1×bet xyz <a href=https://www.diskiplus.ru>DiskiPlus casino рабочее</a> DiskiPlus казино фильм DiskiPlus официальные букмекерские конторы <a href=https://www.diskiplus.ru/>DiskiPlus фильмы казино рояль</a> DiskiPlus casino регистрации DiskiPlus Самойлова Алла Владимировна порно DiskiPlus зеркала официальных сайтов казино DiskiPlus реального казино DiskiPlus суть казино DiskiPlus официальное казино вход DiskiPlus casino скачать
#4335 ShaneLixhttps://www.777lu.net
stehovani kroky <a href=https://www.777lu.net/>demontaz nabytku</a>
#4336 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало рабочее регистрации на телефон придет
Одним из предлогов отдавать преимущество, льготу одному либо другому заведению содержится в привлекательности предлагаемых промоакций и даровых услуг. Безвозмездные фриспины, выдаваемые без нужды делать какой-либо лепта, в перечне располагается далековато не в конце. <a href=http://filmkachat.ru/>1 x slots casino</a> При регистрации по указывать только достоверную информацию. Когда учетная запись будет активна, появится доступ в Личный кабинет. В нем возможно избрать денежную, ввести промокод и узнать доскональные верховодила получения и отыгрыша бездепа. Краткая информация об промоакции часто находится непосредственно на регистрационной форме.Как только получите бездеп в казино, всё одинаково не забывайте проверять электрическую почту. Некоторые игорные клубы каждый радуют активных гэмблеров приятными бонусами. Чаще всего получить подарок можно в преддверии веселья, на день рождение, за вербование друга. А того распространённым призом считается надбавка к депозиту. Нужно более пополнить счёт, и азартное заведение увеличит его на 50–100%. <a href=https://peertrainer.com/LoungeCommunityThread.aspx?ForumID=1&ThreadID=316722>https://peertrainer.com/LoungeCommunityThread.aspx?ForumID=1&ThreadID=316722</a> Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? 1 x slots casino <a href=http://intentionalpress.com/author/doctorlazutaei/>http://intentionalpress.com/author/doctorlazutaei/</a> Не стоит сразу же отказываться от приветственных презентов в сходственных казино. Администрация готова начислить деньги либо фриспины, но предварительно работники должны увериться, собственно вы не мошенник. Дело в том, собственно развелось слишком много охотников за призами. Они научились врать систему и зарабатывать солидные суммы средств.
рабочее зеркало 1×slots
Будьте внимательнее при ознакомлении с правилами во избежание появления конфликтных ситуаций с казино, когда в отыгрыша бездепа для не дадут исключить солидную сумму выигрыша.Подтверждение электронной почты – одно из основных критерий, коие есть практически в любом бездепозитном казино. Чтобы верифицировать электрическую почту, достаточно перейти по активной ссылке в послании, полученном от азартного клуба. казино 1×slots Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации приза без депозита. Внимательно прочитайте до конца. Многие новички делают промахи на шаге регистрации и потому возможности получить подарок. <a href=http://www.hififever.com/dz/home.php?mod=space&uid=211927&do=profile>http://www.hififever.com/dz/home.php?mod=space&uid=211927&do=profile</a> Способы получения бездепа различаются от облика бонуса, кот-ый понравился игроку. Но вам так надо(надобно) быть зарегистрированным в законном онлайн-казино и подтвердить собственную личность. В общем виде пошаговая инструкция для получения бездепозитного бонуса смотрится так: 1хслот 1хслотс регистрация перейти на 1×slots Не желаете поиграть в азартные забавы, не рискуя своими средствами, хотя получая в все выплаты? Подобную вероятность деют многие наилучшие порталы с азартными развлечениями. В их числе много добросовестных и надежных интернет-казино на русском языке. Они привлекают новых юзеров разными поощрительными событиями, включая бездепозитные, либо безвозмездные призы.
1×slots зеркало видели такую регистрацию на
Ещё одно распространённое акционное предложение – привлекательный подарок с сомнительными притязаниями. К примеру, клуб обещает $100 виде бездепа, хотя с вейджером х80 либо х100. Отыграть подобный вейджер фактически нереально и поэтому другого концентрироваться на более заманчивых промоакциях.Новички не обожают сразу же вносить депозит. Это обосновано отсутствием опыта и сомненьем. К счастью, дни можно получить бездепозитный приз за регистрацию в казино. Неважно собственно начисляет система – фриспины или кредиты. В всяком случае вы не рискуете своими сбережениями. Это отличная возможность запустить приглянувшийся видео разъем либо же испытать удачу в настольных играх. <a href=http://zimmu.com/api/manual/doku.php?id=%D0%B2%D0%BE%D0%B4%D0%B8%D1%82%D0%B5%D0%BB%D1%8C%D1%81%D0%BA%D0%B8%D0%B5%20%D0%BF%D1%80%D0%B0%D0%B2%D0%B0%20%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA>http://zimmu.com/api/manual/doku.php?id=%D0%B2%D0%BE%D0%B4%D0%B8%D1%82%D0%B5%D0%BB%D1%8C%D1%81%D0%BA%D0%B8%D0%B5%20%D0%BF%D1%80%D0%B0%D0%B2%D0%B0%20%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA</a> 1×slots регистрацию процедура займет всего лишь Принципиальным различием безвозмездных призов от призов на депозит считается неимение необходимости вносить деньги на аккаунт. Из-за этого их нередко именуют бездепозитными (not the slightest deposit bonuses).Как верховодило, при выводе финансов, от играющего требуется лишь устроить минимальный вклад чтобы, чтобы, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом личный счет.
1×slots коды
1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=http://www.superstitionism.com/forum/profile.php?id=1312269>http://www.superstitionism.com/forum/profile.php?id=1312269</a> Нельзя разглядывать забаву на средства, как вариант заработка. Азартные игры запрещены для лиц моложе 18 лет. Topcasinobonuses.mobi классифицируется организатором азартных игр. Сайт одевает информационный нрав.Многие казино предоставляют в маркетинговых целях благотворительные бонусы исключительно для наших читателей. Чтобы их получить, нужно перейти на игровой вебсайт по партнерской ссылке с нашего портала.
1×slots актуальное зеркало
При использовании бездепозитным призом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют несколько обликов лимитов: Первый образующийся вопрос, это, чего выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают свежих игроков. Последним проще начать забаву на средства с презента за регистрацию. Им не нужно пополнять баланс и тратить собственные свои. Новички получают безвозмездные спины либо свои на счёт. С их подмогою знакомятся с игровым ходом, крутят слоты и делают ставки в рулетке.Если ординарными текстами, бездепы – это определённая сумма средств либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать подарки. Но есть некоторые нюансы. Существуют игорные жилища, которые перед тем как начислить призы настоятельно привязать телефонный, дать копии документов. <a href=https://raid4×4.ru/memberlist.php?mode=viewprofile&u=5980>https://raid4×4.ru/memberlist.php?mode=viewprofile&u=5980</a> Ознакомьтесь с нашим списком наихороших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего списка и получите бездеп незамедлительно. Хватайте превосходнейшие безвозмездные предложения ниже и выигрывайте большие деньги, не рискуя!Иногда для получения бонусов нужно связаться с адептами саппорта. Удобнее всего с ними собеседовать в онлайн-сате, хотя иногда достаточно запроса по электронной почте. 1×slots зеркало видели такую регистрацию на
<b>Смотреть еще похожие новости:</b>
<a href=http://big.bestforums.org/viewtopic.php?f=7&t=9465>1хслот 1хслотс регистрация перейти на 1×slots</a>
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=55656>1×slots официальный сайт скачать</a>
<a href=https://americanrabbit.org/viewtopic.php?f=2&t=1776>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Этот тип бонуса несомненно добавлен на Ваш акк в удачной процедуры регистрации с внедрением номера аппарата. Если избрать иной метод творения учетной записи, бездеп не будет добавлен на Ваш аккаунт. Онлайн гемблинг развивается с каждым деньком все больше и больше, свежие бренды создаются не по дням а по часам. Новые онлайн казино делают вступительные акции для игроков, чтобы, чтобы собственно бы зарекомендовать себя, и что, этим самым предлагают бездепозитные призы за регистрацию, что бы не упустить такую возможность — как пользоваться свежим бездепом, рекомендуем посещать наш сайт как возможно почаще, самое аппетитное и новые несомненно добавляться в данном же списке.
#4337 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало этих способов предполагает регистрацию
К примеру, игроку выдаются бесплатные средства в заведении в размере пятидесяти либо ста долларов (вейджер на коие составляет 100х). То есть, каждому новоприбывшему игроку выскакивает притягивающая иллюстрация, которая обещает выплату всех зачисленных фирмой средств. Не стоит обращать внимания на казино приз за регистрацию без депо с чрезмерно большой либо довольно малюсенькой суммой бонусов, потому что, и кропотливо исследовав все обстоятельства, тут скорее, несомненно некий подкол. <a href=http://filmkachat.ru/>1×slots зеркало сайта</a> Нет. Для получения бездепозитного приза в казино нужна обязательная регистрация на сайте. Играть в слоты бесплатно и без регистрации можно лишь в демо режиме.Суммы подобных услуг, большинстве, колеблются от трех до двадцати долларов, а вейджер на эти свои обязан составлять от 30 до шестидесяти один. Зачастую, наивеличайшая сумма выигрыша здесь составит от одной до двух сотен долларов. Если игры выиграет больше, то все свои могут быть списанными до очень разрешенного выигрыша. Здесь появляется содержание выводить еще несуществующие деньги на свою платежную систему и далее находить заведение с благоприятными под данную необходимую релоадом либо призом за 1-ое пополнение счета. Есть некоторое подвидов бездепозитного вознаграждения, предлагаемого большим количеством заведений. <a href=https://webanketa.com/forms/6gtk2c9q74qpaeb368vked9s/>https://webanketa.com/forms/6gtk2c9q74qpaeb368vked9s/</a> Условия вывода выигрыша. В неких заведениях для удачного вывода с бездепозитного приза довольно пополнения баланса и подтверждения личности. В иных же клубах, нужно несколько один прокрутить собственный депозит.Варианты выигрыша в от Вашей удачи и критерий игорного портала. Выше мы заявили, собственно некоторые бездепозитные призы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются и, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность современных игр на деньги, возможно выиграть невероятные суммы. Сегодняшние игровые автоматы или видео слоты, как их нарекают. Могут выдавать солидные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000. 1×slots регистрация 1×slots casino c2d ru <a href=http://janews.com.au/modules/newbb/viewtopic.php?topic_id=6324&post_id=6324&order=DESC&viewmode=flat&pid=0&forum=27>http://janews.com.au/modules/newbb/viewtopic.php?topic_id=6324&post_id=6324&order=DESC&viewmode=flat&pid=0&forum=27</a>
1×slots рабочее зеркало на сегодня
онлайн казино 1×slots Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша бонусов. Заведения всегда устанавливают наивысшую ставку, возможную по условиям вейждера.Третитй бездепозитный приз за регистрацию – валютные свои. К сожалению, начислить рубли или доллары готовы только знаменитые и популярные клубы. С их помощью вас насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком. <a href=http://www.clean-ace8.com/bbs/board.php?bo_table=free&wr_id=138647>http://www.clean-ace8.com/bbs/board.php?bo_table=free&wr_id=138647</a> Игры, в можно выступать на бонусные деньги. Проверьте список игр, каких возможно играть на бонусные средства, вполне они Вам не понравятся и не стоит расходовать своё время на такую акцию.Диапазон ставок, коие вправе устроить игрок, того лимитирован. Обычно ставить можно небольшую сумму — в 10–30 рублей за одно вращение. 1 xslots рабочее зеркало Так что основное отличие дара на депо от бездепа – обязательное пополнение счёта. Вы сможете внести депо и преумножить стартовый капитал или забрать бездеп и при не придётся рисковать собственными сбережениями. Поспешите выполнить обычные требования, и администрация ресурса начисляет щедрое одобрение!
1 xslots рабочее зеркало
Если ординарными словами, бездепы – это определённая сумма средств или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно брать презенты. Но есть кое-какие аспекты. Существуют игорные дома, коие перед тем как начислить призы требуют привязать аппарат, дать копии документов. Возможность поиграть дополнительное соревнование (а времени и несколько) совершенно бесплатно, а выигрыш, же, поступает на счёт игрока. <a href=http://www.glife2120.ru/user/DoctorLazutami/>http://www.glife2120.ru/user/DoctorLazutami/</a> Бездепы могут заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами. 1×slots официальный сайт зеркало Сроки активации бонуса устанавливаются любым казино, хотя почаще всего они не превосходят недели с этапа получения. Игроку обязательно надо(надобно) применять бездеп протяжении указанного срока, в ином случае приз просто исчезнет. Каждый приз можно получить только один раз, поэтому в не использовать бездеп в срок, у игрока не несомненно второго шанса им пользоваться.
1× slots официальный
Рассмотрим принцип его действия на образце. Допустим, вы зарегистрировались и возымели $10 no deposit bonus с вейджером х50. Это означает, что выигранные средства возможно будет выводить не раньше, чем последствии как, как общая сумма ставок достигнет $500. 1×slots casino регистрация на сайте <a href=http://sr.yedamdental.co.kr/bbs/board.php?bo_table=free&wr_id=867458>http://sr.yedamdental.co.kr/bbs/board.php?bo_table=free&wr_id=867458</a> Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, the decision лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Для казино, работающих интернет, бездепозитные бонусы необходимы для привлечения свежих клиентов. Предложение сыграть на слотах без надобности внесения реальных средств — работающий метод для повышения интереса к компании. После отыгрыша бездепа великоват шанс, собственно игроку понравится и он продолжит выступать в казино, только сейчас теснее на собственные средства.
1×slots казино зеркало
Бездепы шансы входить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами.Если речь идет об неповторимых предложениях, имеет потребоваться регистрация в казино по ссылке с партнерского сайта. <a href=http://icfoodseasoning.com/bbs/board.php?bo_table=free&wr_id=26152>http://icfoodseasoning.com/bbs/board.php?bo_table=free&wr_id=26152</a> казино 1×slots В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и если, тогда, неоднозначных ситуаций нет возможности куда-то пожаловаться и обосновать собственную правоту.Чтобы бездеп не был начислен на Ваш акк, Вам не нужно активировать бонусный код. Если одобрение от казино было добавлено на Ваш аккаунт механически, а Вы не планируете его применять, обратитесь в службу с пожеланием отменить бездепозитный бонус.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.handmakersbrasil.com.br/topic/554–1-x-slots/>1 x slots</a>
<a href=http://www.forum.kalor.ru/1×slots-oficialniy-zerkalo-t5296.html>1×slots официальный зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Главное превосходство спинов – возможность выучить разные слоты. Также получится насладиться бонусными раундами, испытать фортуну в риск-туре и преумножить выигрыш за счёт особенных символов. Однако столько игровой процесс заслуживает внимание, так другого сосредоточиться на реальном выигрыше.
#4338 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
рокс казино 1×bet приложение <a href=https://slon-ru.com/>порно с Абрамченко Виктория Валериевна</a> casino зеркало сайта скачать 1×bet на андроид <a href=https://t.me/vchkogpu_ru>porno Нина Пирогова, хоккеистка</a> Светлана Ходченкова порно с Аделия Петросян (фигурное катание) 1×bet зеркало рабочее винлайн букмекерская контора porno Ангелина Гончаренко, хоккеистка 1×bet xbet 1×bet слоты 1×bet top
DiskiPlus 1go casino DiskiPlus водка казино <a href=https://diskiplus.ru>DiskiPlus porno Светлана Ходченкова</a> DiskiPlus casino играть DiskiPlus порно с Захарова Мария Владимировна <a href=https://diskiplus.ru/>DiskiPlus Скворцова Вероника Игоревна порно</a> DiskiPlus porno Яна Троянова DiskiPlus pin up casino пин DiskiPlus Радченко Светлана Юрьевна порно DiskiPlus porno Светлана Ходченкова DiskiPlus Нургалиева Эльвира Рамиловна порно DiskiPlus винлайн букмекерская контора DiskiPlus лучшая казино
#4339 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
Можно. Вы всегда сможете отрешиться от получения бездепозитного бонуса за регистрацию в казино, же Вы не сделаете ставку. <a href=http://filmkachat.ru/>1 хслот регистрация в 1×slots casino</a> Также случаются случаи, когда казино начислит обсужденный бонус в регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам. <a href=http://www.wmhelp.cz/html/modules.php?name=Forums&file=viewtopic&t=69255>http://www.wmhelp.cz/html/modules.php?name=Forums&file=viewtopic&t=69255</a> Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских руб. В условиях промоакции предписано, что вейджер бездепозитного бонуса х20. Поэтому, чтобы отыграть приз, игроку несомненно нужно сделать ставок на 35*20=700 руб.Срок активации и время на отыгрыш. Зачисление средств или фриспинов случается при активации на взыскательно ограниченного периода, подобные требования предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать приз количество дней либо даже недель. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером. 1×slots зеркало видели такую регистрацию на <a href=http://r66251ds.beget.tech/member.php?action=profile&uid=104328>http://r66251ds.beget.tech/member.php?action=profile&uid=104328</a> Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.
1×slots на любой вкус как пройти регистрацию
Бонус начисляется игроку незамедлительно в регистрации и прохождения верификации в казино и не требует от посетителя внесения депо. Как управляло, объем бонуса в схожем случае довольно умеренный, впрочем разрешает новеньким познакомиться с игрой без риска реальными деньгами.Выполнив все требования оператора, заказчик может оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит примерно менее суток. Если дополнительно потребуется пройти функцию верификации, то срок возрастает до 1–2 трудящихся дней. Для перевода используются банковские инструменты и электрические платежные системы. Второй способ подходит какого-либо, например как большинство транзакций ситуации исполняются моментально. В связи со спецификой функционирования банков обработка платежей может взятьвдолг(взятьвзаймы) до нескольких трудящихся дней. <a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/8740/#comment-359720>1×slots регистрация на официальном сайте</a> 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=https://521zixuan.com/space-uid-766510.html>https://521zixuan.com/space-uid-766510.html</a> Активация случается счет промокодов, которые вводятся в собственном кабинете в регистрации. Среди спецпредложений в списке Casino.ru находятся неповторимые промокоды, которые доступны лишь гостям портала. Другие способы начисления средств ? автоматическая активация незамедлительно последствии творения аккаунта и получение подарка по запросу в службу технической помощи. 1×slots сайт
1хслотс 1хслотс регистрация перейти на 1×slots
Какие бонусы я могу еще получить не бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного бонуса, каждое интернет казино предлагает игрокам прибыльное предложение на первый депо, вы совершаете депозит, ваш депо увеличивается в двое либо и в 3, что, этим наиболее начать выступать возможно с больше крупной суммой, так же не забываем на вейджер на бонусы. Мы подготовили перечень, где есть постоянно актуальные и свежие бездепозитные бонусы казино, которые возможность получить даром. Для наших юзеров есть специальные предложения неповторимые бонусы, которые вы нигде не найдете, их мы обозначили специальной красноватой плашкой «Exclusive».Стоит отметить, собственно бездепозитный бонус выдается лишь взрослым новеньким, коие, тому, имеют пригласить личных друзей и своих, того рассчитывающих на поощрительную программу лояльности. Подобная технология замечена между конкурирующих онлайн-казино для популяризации и расширения трафика. Покер румы и спонсоры содействуют увеличению собственной посещаемости, путем вербования новых игроков. Бонусы – это оригинальный шанс для потенциальных соучастников игры, которые могут опробовать софт покер рума и убедиться, станут ли они в него играть либо нет. Новый игрок испробует средства силы с реальными оппонентами в казино. <a href=http://spectr-sb116.ru/user/TravisDunse/>http://spectr-sb116.ru/user/TravisDunse/</a> Таким образом онлайн казино получает вероятного игрока. Возможно в или истинном он захочет сыграть на свои деньги. Так работают бездепозитные призы в онлайн казино. Здесь отлично подходит выражение, безвозмездные сыр случается лишь в мышеловке. Начинающие игроки все не осознавать опасность азарта. Однако течением понимания становится больше. Это тема для отдельного обсуждения. 1×slots официальный сайт зеркало
1×slot зеркало рабочее этих способов предполагает регистрацию
Помните, собственно в некоторых играх сумма ставки идет в зачет вейджера лишь отчасти. Так, в настольных и карточных забавах лишь от 5% до 50% суммы ставки числятся как отыгранные деньги, момент как в слотах идет в зачет все one hundred percent суммы.При регистрации в том либо ином онлайн игральном заведении — для дается раз шанс испытать свою удачу не внося свои монеты. Замечу что такую поощрительную услугу предоставляют не все онлайн игровые площадки, а лишь щедрая середина(средина) из их. Которые мы подготовили для Вас в нашем перечне. Можно ли в одном интернет казино получить больше 1-го бонуса за регистрацию? Нет, например как в каждом онлайн казино есть верховодила, к коим нужно держаться, не создавать два аккаута для получения призов, по будет блокировка обоих аккаутов, не пытайтесь обмануть онлайн казино, бонус за регистрацию выдаеться раз раз одному личику.Как лишь вы отыграли вейджер и средства с бонусного баланса перебежали вас на настоящий счет, Вы смело сможете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (устроить наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депо). 1×slots коды <a href=http://boss.why3s.cc/boss/home.php?mod=space&uid=144895>http://boss.why3s.cc/boss/home.php?mod=space&uid=144895</a> Помните, собственно любые нарушения верховодил сведут на нет ваши усилия, и вы скорее останетесь без начисленного вам бесплатного бонуса. Всегда изучайте правила начисления и обстоятельства вейджера. По хоть вопросам, на которые вы не можете самостоятельно найти ответы, обращайтесь за объяснениям и саппорт.
1хслотс официальный сайт зеркало
Верификация важна для добавочной безопасности и подсобляет техподдержке выявить бонусхантеров и плутов. Кстати, рядах платформах выводы крупных сумм доступны лишь последствии подтверждения личности.Бездепозитные призы казино за регистрацию в 2022 году — это возможность поиграть за счёт заведения. Казино даёт клиенту шанс пользоваться определённой суммой или количеством безвозмездных вращений без внесения депо. Не путайте деморежим с реальной забавой без необходимости внесения депо. <a href=http://bbs.totoroclub.com.cn/home.php?mod=space&uid=373753&do=profile>http://bbs.totoroclub.com.cn/home.php?mod=space&uid=373753&do=profile</a> 1×slots официальный demo регистрация в 1×slots casino Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Бонусы без депозита при регистрации числятся наиболее красивыми как для опытных игроков, так для и новичков. Получив это вознаграждение, заказчик возможность играть на реальные средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, еще обстоятельства их активации и выигрыша.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Прямо момент арестуйте благотворительные вращения за регистрацию без депозита и начинайте собирать призовые композиции ради крупных выигрышей! Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.
#4340 Charlesgunnyhttp://filmkachat.ru
1×slots коды
Игрокам не принимать приветственный приз как гарантированный способ получить крупный выигрыш, но это замечательная возможность без затрат расценить функционал казино.Новички не обожают сразу же вносить депо. Это обусловлено неименьем опыта и сомнением. К счастью, дни возможно получить бездепозитный бонус за регистрацию в казино. Неважно что начисляет система – фриспины или кредиты. В всяком случае вы не рискуете своими сбережениями. Это замечательная вероятность запустить понравившийся видео слот либо же испытывать удачу в настольных играх. <a href=http://filmkachat.ru/>1×slots официальный demo регистрация в 1×slots casino</a> Не стоит сразу же открещиваться от приветственных презентов в подобных казино. Администрация готова начислить деньги либо фриспины, хотя предварительно сотрудники должны убедиться, что вы не мошенник. Дело что, нет, собственно развелось очень много охотников за бонусами. Они научились врать систему и зарабатывать солидные суммы денег.Зарегистрируйтесь. Для регистрации чаще всего довольно установить свой номер телефона и почтовый адресок, в чего ввести приобретенный код из СМС. Возможно, потребуется указать промокод. В правилах промоакции будет написано, где его бы вводить. Иногда это хотелось делать при регистрации, время — теснее после творенья собственного кабинета, на отдельной странице. <a href=https://www.exoltech.us/blogs/246291/Mastering-the-Art-of-Home-Design-Drafting-A-Professional-s>https://www.exoltech.us/blogs/246291/Mastering-the-Art-of-Home-Design-Drafting-A-Professional-s</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=http://www.glaschat.ru/glas-f/member.php?488883-Davidbeaus>http://www.glaschat.ru/glas-f/member.php?488883-Davidbeaus</a>
1×slots официальный сайт скачать
1×slots регистрация 1×slotscasino 56 online Бывают ли бездепозитные призы без вейджера? Бывают, в у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино. <a href=https://blogs.rufox.ru/~lexxeagle/49493.htm>https://blogs.rufox.ru/~lexxeagle/49493.htm</a> Выбрать казино с бездепозитным бонусом. У нас на веб-сайте представлен список превосходнейших онлайн казино, которые предлагают своим игрокам щедрые призы за регистрацию. 1×slots зеркало проходить регистрацию это отличный вариант Если вы выбираете испытанное лицензионное интернет казино и выполните все обстоятельства получения бездепозитного приза, трудностей с получением подарка у Вас не возникнет.Нет. Казино выдают благотворительные бонусы за регистрацию, чтобы, чтобы, чтобы клиент мог ознакомиться с игровым заведением. А чтобы исключить его, нужно выполнить обстоятельства отыгрыша.
1хслотс рабочее зеркало
3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефонный либо почту, показать персональную информацию; <a href=http://elka54.ru/forum/?PAGE_NAME=profile_view&UID=109026>http://elka54.ru/forum/?PAGE_NAME=profile_view&UID=109026</a> 1×слотс казино
1×slots регистрация 1×slots casino c2d ru
Пoдтвepдить личнocть клиента. Для удачного вывода средств, необходимо подтвердить личность посетителя. Нa этaпe вepификaции пpoфиля, работники службы защищенности обязаны убедиться, собственно у игрока всего лишь один акк. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не сможет исключить собственный выигрыш, случае у него будет количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы.Чаще всего используются коды. Их нужно заносить в особые окошки регистрационной анкеты, если идет о пригласительных призах, или в определенном разделе личного офиса игрока. Срок активации и время на отыгрыш. Зачисление средств или фриспинов происходит при активации на строго ограниченного периода, подобные требования предъявляются и к срокам отыгрыша. Одни казино позволяют отыгрывать приз количество дней или том месяцов. Другие выдают крупную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с неоправданно высоким вейджером.Список так нарекаемых «не территорий» прилагается к правилам бонусной программы игорного портала. Обязательно выясните, распространяются ли на вас подобные наказания. 1×slots рабочее зеркало <a href=https://mega-games.pl/user/GlennAwado/>https://mega-games.pl/user/GlennAwado/</a> Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в неотъемлемом порядке нужно восполнить счет в казино. Для депозитных призов, данная процедура не необходима, так как депозит уже сделан.
1×slots зеркало сайта
Бездепозитные призы в казино без пополнения 2022 — это определенная сумма денег или gift spins вращения, коие предоставляются первым постояльцам за регистрацию на веб-сайте казино вид бездепозитного бонуса, и выделяет для вероятность за счет казино без пополнения опробовать предложения (игр), с последующей преимуществом, льготой вывода средств при выполнении всех установленных верховодил.Бездепозитные бонусы — это подарки от казино вид бонусных денег или фриспинов для игровых автоматов, коие начисляются на акк игрока последствии процедуры регистрации на сайте заведения. Для получения этих поощрений депо не требуется. <a href=http://www.budhano.com/bbs/home.php/home.php?mod=space&uid=279821&do=profile>http://www.budhano.com/bbs/home.php/home.php?mod=space&uid=279821&do=profile</a> Не рекомендуем сломя голову хвататься за всевозможные предложения получения средств без инвестициям. Вполне вполне, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на первый взор. Альтернативой считается казино приз за депо. Мы предлагаем вас пару советов, благодаря которым у каждого игрока будет вероятность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег:Выбирайте наихорошие безвозмездные призы за обзоров на Casinoz – и пусть для сопутствует счастье при отыгрыше бонусных кредитов! 1×slots регистрацию более популярный вариант это Мы подготовили список, где есть постоянно актуальные и новые бездепозитные призы казино, которые продоставляется получить даром. Для наших юзеров есть специальные предложения эксклюзивные призы, коие вы ни не найдете, их мы обозначили специальной красной плашкой «Exclusive».
<b>Смотреть еще похожие новости:</b>
<a href=https://www.kfz-gringer.at/index.php/forum/suggestion-box/70835–1–1–1×slots#70600>1х слот 1хслотс регистрация перейти на 1×slots</a>
<a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=306688#pid306688>1хслотс казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Также, учите, собственно бездепозитный приз возможно вывести только что случае, когда будут исполнены все условия отыгрыша. Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном призе, то в первую очередь направьте на велечину вейджера и срок, который дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть бонус и вывести выигрыш.
#4341 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1win casino букмекерская контора на андроид <a href=https://vestnik-jurnal.com/>champion casino</a> скачать 1×bet 1×bet xyz казино в россии <a href=https://7club7.com/>официальные букмекерские конторы скачать</a> букмекерские конторы в россии 7k casino бонус porno Александр Соболев (футбол) porno Нина Пирогова, хоккеистка 1×bet слоты 1×bet xyz казино Скворцова Вероника Игоревна порно
DiskiPlus казино вход официальный сайт DiskiPlus скачать casino на андроид <a href=https://diskiplus.ru>DiskiPlus казино онлайн бесплатно</a> DiskiPlus 1×slots casino DiskiPlus порно с Юлия Ефимова <a href=https://diskiplus.ru>DiskiPlus рейтинг казино</a> DiskiPlus букмекерская контора скачать приложение DiskiPlus pin up casino зеркало DiskiPlus кент казино DiskiPlus 1×bet xbet DiskiPlus порно с Бондаренко Анастасия Борисовна DiskiPlus казино в россии DiskiPlus порно с Никита Кучеров (хоккей)
#4342 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее
Большинство клубов привлекают внимание компьютерные за счёт различных презентов. На 1 веб-сайтах можно получить виртуальные кредиты, которые откроют доступ ко всему софту. На других же, администрация предлагает безвозмездные вращения для пуска лучших онлайн слотов. Несмотря на разные акции, стоит выделить самые основные.Бездепозитные бонусы в казино без пополнения 2022 — это конкретная сумма денег или for nothing spins вращения, коие предоставляются первым постояльцам за регистрацию на сайте казино в виде бездепозитного бонуса, и выделяет вас возможность с казино без пополнения опробовать услуги (игр), с последующей привилегией вывода средств при выполнении всех установленных верховодил. <a href=http://filmkachat.ru/>рабочее зеркало 1×slots</a> <a href=https://scrapbox.io/renderings-real-estate/Transform_Real_Estate_Presentations_with_Professional_3D_Renderings>https://scrapbox.io/renderings-real-estate/Transform_Real_Estate_Presentations_with_Professional_3D_Renderings</a> Если идет об неповторимых предложениях, возможность потребоваться регистрация в казино по ссылке с партнерского вебсайта.Начнём с такого, собственно любое рекламную за регистрацию предполагает некоторые условия. Бездепозитные бонусы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность валютного оборота, необходимая для исполнения условий. Пример, получили благотворительные вращения и выиграли с них 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 рублей, проигрышных или выигрышных, важно. После исполненья, бонусный баланс перейдёт на реальный и будет легкодоступным к выводу. скачать 1×slots на андроид мобильная версия <a href=https://www.google.cg/url?q=https://doctorlazuta.by/>https://www.google.cg/url?q=https://doctorlazuta.by/</a>
1×slots регистрация
Самые популярностью способы вывода денег ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам типа Neteller и Skrill, а также пользуются криптовалютными кошельками. Вывод выигрышей возможность осуществляться быстро либо занимать от нескольких часов до нескольких суток.Для верификации номера телефонного, в личном профиле изберите опцию „Подтвердить номер телефонного“ и введите в соответствующее фон код, приобретенный в sms-сообщении. 1×slos регистрация в 1×slots casino Способы получения бездепа различаются в зависимости от вида приза, который понравился игроку. Но для в любом случае нужно быть зарегистрированным в законном онлайн-казино и доказать свою лицо. В общем виде пошаговая аннотация для получения бездепозитного бонуса выглядит например:Вообще перейдя в казино — управляла одинаковы в получении бездепозитных призов, в стандартные правила входит: доказать эл. Почту и телефон, заполнить свой индивидуальный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ. <a href=http://prostor-teks.ru/bitrix/redirect.php?goto=http://kensinhan.hatenablog.com/iframe/hatena_bookmark_comment?canonical_uri=http://jump.2ch.net/?https://teletype.in/@urist555/TDFcohEG3AT>http://prostor-teks.ru/bitrix/redirect.php?goto=http://kensinhan.hatenablog.com/iframe/hatena_bookmark_comment?canonical_uri=http://jump.2ch.net/?https://teletype.in/@urist555/TDFcohEG3AT</a> 1× slots casino зеркало
1×slots casino регистрация
<a href=http://t73108uj.bget.ru/member.php?action=profile&uid=115372>http://t73108uj.bget.ru/member.php?action=profile&uid=115372</a> Онлайн гемблинг развивается с каждым деньком больше и больше, новые бренды создаются не по денькам а по часам. Новые интернет казино делают вступительные промоакции для игроков, для того собственно бы зарекомендовать себя, и тем наиболее предлагают бездепозитные бонусы за регистрацию, что бы не упустить эту вероятность — как пользоваться новым бездепом, советуем посещать наш вебсайт как возможно почаще, самое вкусное и свежие будет добавляться в этом же списке. 1×slots официальный demo регистрация в 1×slots casino При исполнении критерий отыгрыша и верификации, средства с бонусного счета переводятся на главной и могут быть выведены на карту либо электрический кошелек. Лимиты на вывод и сроки проведения транзакции в от избранной платежной системы.
1×slots casino online регистрация
<a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=147363>1 x slots</a> 1×slots сайт зеркало <a href=https://creator.wonderhowto.com/glavdorogadv2106/>https://creator.wonderhowto.com/glavdorogadv2106/</a> У любой забавы средства притязания по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система засчитает любую ставку. В рулетке и покере устроить это намного сложнее. Именно поэтому так принципиально пристально разбирать условия получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в любой игре, то новенькие просто «спустят бонус на ветер».Большинство интернет-казино из нашего топ-10 готовы повеселить вас эксклюзивными промоакциями. Читайте о их в обзорах и на форуме.
1×slots зеркало на сегодня
Постарайтесь отыграть вейджер, дабы замечена возможность оставить заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электронной кошелёк, карту, аппарат. В лицензионных бездепозитных казино играть в азартные игры вправду неопасно. Наличие лицензии одобряет что, этот прецедент, что клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP. <a href=http://mobile.xxxxxxx.molifan.net/space-uid-2077138.html>http://mobile.xxxxxxx.molifan.net/space-uid-2077138.html</a> Чаще всего казино приз за регистрацию без депо даёт возможность запустить каждой машина. Но превосходнее внимательно ознакомиться с критериями. Иногда для забавы доступны лишь определённые модели. Если вы новичок и ничего не смыслите в гэмблинге, другого, как начать знакомство с миром азарта непосредственно с «одноруких злодеев». 1×slots casino зеркало рабочее
<b>Смотреть еще похожие новости:</b>
<a href=https://mit-bbs.com/viewtopic.php?t=141036>1×slots скачать на айфон</a>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5128/#comment-617086>1×slots регистрация на 1хслотс</a>
<a href=https://mit-bbs.com/viewtopic.php?t=292653>1×slots регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бонус с зачислением денег на счет выделяет больше свободы действий. Пользователь сам подбирает, каким образом воспользоваться подаренными своими. Здесь того имеют работать ограничения на список дешевых игр, хотя обычно эти рамки не так строги, как в промо с безвозмездными вращениями.
#4343 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало видели такую регистрацию на
Такой казино приз без депо за регистрацию выдается игроку на час и активно используется данное предложение с 2017 года. Это как бы какая-то конспирация поощрения под бездепозитный. Суть всего сего сводится к что, этому, что игроку на час выдается, к примеру, 1000 $, а реклама утверждает про, собственно любой выигрыш возможно несомненно в будущем забыть при для. Но если играющий всерьез отнесется к этому предложению, то он попросту потеряет время. Ведь игроку надо(надобно) будет выступать не главном аккаунте, а в тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (и всей тыс. ) в управляла вступят конкретные обстоятельства, где будет сказано, собственно максимальной суммой победы может быть только двести $ и средства возможно применять лишь в качестве приза на 1-ый лепта с вейджером 25 от суммы вознаграждения плюс сам депо. По результату получится, что игрок выигрывал себя 200% приз с вейджером на конкретную необходимую. Короче разговаривая, это все не стоит вашего времени. <a href=http://filmkachat.ru/>1×slots зеркало на сегодня</a> <a href=https://www.scutify.com/articles/2024–10–25------>https://www.scutify.com/articles/2024–10–25------</a> При этой на бонусные средства запрещается играть в игровые автоматы с современным джекпотом и игры из радела exist casino. Кроме того, кое-какие казино выделяют бездеп на раз либо количество определенных слотов, и в других забавах Вы не можете на их выступать.Список например нарекаемых «запрещенных территорий» прилагается к правилам бонусной программы игорного портала. Обязательно выясните, распространяются ли на вас сходственные наказания. 1 xslots рабочее зеркало <a href=https://king-wifi.win/index.php?title=Выкуп_авто>https://king-wifi.win/index.php?title=Выкуп_авто</a> Акционные предложения от казино есть в разных форматах. Часто бонусы даются в размен на депо. Игрок вносит платеж и получает деньги, благотворительные вращения и поощрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — картина бонуса, который гарантирован за исполнение определенных действий на сайте:Не стоит сразу же отрицаться от приветственных презентов в похожих казино. Администрация готова начислить средства либо фриспины, хотя сначала работники обязаны убедиться, собственно вы не мошенник. Дело сомнений, что развелось слишком много охотников за бонусами. Они выучились врать систему и зарабатывать крупные суммы средств.
1хслотс казино зеркало
У каждого игорного заведения средства верховодила и обстоятельства. Но, дабы получить призы, необходимо выполнить стандартные деянья: 1×slot зеркало рабочее этих способов предполагает регистрацию Бездепозитные бонусы прекрасный вариант безвозмездной забавы в игровые автоматы. Многие пользователи сети не знают, что в казино возможно начать выступать абсолютно безвозмездно, а потом вывести выигрыш на банковскую карту либо электрический кошелек, другие не доверяют онлайн казино, а третьи успешно играют и выигрывают – и тотчас достаточно великие суммы.Индивидуальные поощрения выдаются за совершение действий: подписку на аккаунты площадки в соц сетях, установку мобильного прибавленья или официального посетителя для ПК. В большинстве казино срабатывают программы преданности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на следующий уровень часто сопровождается выдачей бездепа. <a href=https://rokot-taldom.ru/component/users/?option=com_k2&view=itemlist&task=user&id=489>https://rokot-taldom.ru/component/users/?option=com_k2&view=itemlist&task=user&id=489</a> Мы рекомендуем не отказываться от похожих предложений известных казино. Выделите количество мин. На регистрацию, получите приз и попробуйте его отыграть. Может быть, сегодня фортуна несомненно на вашей стороне!Промокод – определённая композиция знаков, коию необходимо установить в подходящее поле при твореньи учетной записи либо активировать в собственном профиле игрока в разделе с бонусами. 1×slots официальный зеркало рабочее Бонус за регистрацию в казино без депозита с выводом средств нужно отыграть. Зачастую для отыгрыша возможность потребоваться устроить ставки на необходимую, в некоторое десятков раз превышающую сумму бонуса либо выигрыша.
1×slots зеркало быструю регистрацию а также мгновенное
В интернете слишком много скриптовых сайтов, коие принадлежат мошенникам. Их основная цель – привлечь гэмблеров, пообещав столько великодушные презенты, но и солидные выигрыши. Так что кое-какие веб-сайты предлагают получить за регистрацию в $1 000.Каждый из бездепозитных призов без пополнения 2022 имеет свой определенный вейджер для отыгрыша, так же в каждом казино он устанавливается персонально — где то он х55 а где-то х30, повторюсь везде по различному! <a href=https://www.kenpoguy.com/phasickombatives/profile.php?id=2224335>https://www.kenpoguy.com/phasickombatives/profile.php?id=2224335</a> Бонус за регистрацию в казино без депо с выводом средств нужно отыграть. Зачастую для отыгрыша возможность потребоваться устроить ставки на сумму, в количество десятков раз превосходящую сумму бонуса либо выигрыша.Когда речь о получении бездепозитных бонусов в казино, начала обратите внимание на следующие обстоятельства: 1×slots промокод при регистрации 2025
1×slots casino регистрация
Мы подготовили перечень, где есть всегда животрепещущие и свежие бездепозитные призы казино, коие возможность получить бесплатно. Для наших пользователей есть специальные предложения неповторимые бонусы, которые вы нигде не найдете, их мы обозначили специальной красноватой плашкой «Exclusive». В перечне притязаний к отыгрышу часто присутствуют лимиты на ставки при забаве на собственные средства. Так, в отыграть нужно 30 000 руб., а предельная сумма ограничена 30 рублями, то вертеть барабаны светит 1000 раз. Эта особенность затрудняет соблюдение игроками условий по срокам деянья акции. Иногда виде одобрения за регистрацию все выдаваться билеты для роли в турнирах. Условия их проведения очень выделяются, поэтому мы рекомендуем ознакомиться с любым предложением отдельно. 1× slots casino официальный сайт <a href=https://findmyjobs.lk/author/deweycrall/>https://findmyjobs.lk/author/deweycrall/</a> Существуют казино с призом за регистрацию, в которых довольно знамениты фриспины в онлайн казино впоследствии регистрации в определенных забавах. Они встречаются числе почаще бесплатных поощрений или классических бонусов в казино без инвестициям. Например, игрок регистрирует счет, на кот-ый начисляются бесплатные игры, приз за регистрацию в виде безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса в выигрывает настоящие средства, которые в последствии возможно удачно вывести из заведения на собственную платежную систему. То есть, есть шансы вывести свои без рисков своими финансами. Регистрация, за которую компьютерные получит призы, займет минут, а спасибо данному возможно прирастить пять евро поощрений до тыс. И без всяких проблем исключить их.
1×slots коды
Если ординарными текстами, бездепы – это определённая сумма денег или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно брать презенты. Но есть некоторые аспекты. Существуют игорные жилища, которые перед тем как начислить бонусы требуют привязать аппарат, дать копии документов.Автоматы неспроста считаются наиболее популярным азартным отдыхом. Чтобы освоить управление и управляла, понадобится всего количество мин. Ваша задачка сделать ставку, найти число трудящихся линий и можно вертеть тамбур. Если на выпадет выигрышная комбинация – вы выиграли! С данной задачей вам помогут справится бездепозитные бонусы казино. <a href=http://www.idsys.kr/bbs/board.php?bo_table=free&wr_id=295007>http://www.idsys.kr/bbs/board.php?bo_table=free&wr_id=295007</a> 1хслотс зеркало на сегодня Наличие у игрока второго аккаунта. Запрещено делать некоторое профилей для многократного получения бездепов.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=38100>1×slots casino регистрация на сайте</a>
<a href=http://link.5nx.ru/viewtopic.php?f=5&t=4522>1 хслот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала резвые выводы. Фишка выплат сомнений, собственно довольно выбрать платёжный инструмент и указать необходимую. В большинстве случаев средства зачисляются на электрические кошельки протяжении 15 минут, а на банковские карты – 1–3 рабочих дня.
#4344 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
up букмекерская контора pin casino зеркало <a href=https://specreporter.com/>retro casino</a> Лут Оксана Николаевна порно казино пину <a href=https://strelochnik.com/>почему в казино не бывает настенных часов</a> pin up casino скачать porno Илья Ковальчук (хоккей) casino 7k рабочее самое казино порно с Владимир Минеев (ММА) скачать сайт букмекерской конторы ramenbet casino
DiskiPlus 1×bet зеркало рабочее на сегодня DiskiPlus Кузнецова Анна Юрьевна порно <a href=https://www.diskiplus.ru>DiskiPlus сайт винлайн букмекерская контора</a> DiskiPlus 1×bet рабочее DiskiPlus Анна Михалкова <a href=https://diskiplus.ru>DiskiPlus 1×bet на андроид</a> DiskiPlus слот casino DiskiPlus 1×bet приложение DiskiPlus 1×bet на андроид DiskiPlus порно с Бондаренко Анастасия Борисовна DiskiPlus 1win casino DiskiPlus casino скачать приложение DiskiPlus new casino
#4345 Charlesgunnyhttp://filmkachat.ru
сайт 1× slots casino
Промокод – определённая композиция знаков, коию нужно установить в подходящее фон при разработке учетной записи либо активировать в личном профиле игрока в разделе с призами. <a href=http://filmkachat.ru/>1хслот 1хслотс регистрация перейти на 1×slots</a> На критериях отыгрыша бесплатных бонусов стопам остановиться подробнее. С ними связаны аспекты, коие нельзя оставить без внимания.Если вы бывалый игрок, вы обязаны аристократия, что бонус без депо – редчайшая находка. Тем ниже, мы неделю исследуем онлайн, дабы найти для вас наихорошие бездепозитные предложения. <a href=https://mega.nz/file/d28RQCBS#2i_xAXDQfj-rVkVhMWNDPYPXRKJ71NaLOz_MKYAVxxQ>https://mega.nz/file/d28RQCBS#2i_xAXDQfj-rVkVhMWNDPYPXRKJ71NaLOz_MKYAVxxQ</a> 1×slot зеркало <a href=https://39504.org/member.php?action=profile&uid=110597>https://39504.org/member.php?action=profile&uid=110597</a>
1×slots зеркало сайта
Получить Бездепозитный бонус в онлайн казино дело двух кликов. Другой момент, отыграть промо и соблюсти правила и условия отыгрыша. Под правилами подразумевается не только вагер, но и ограничения по максимальной ставке. Мы разумеем, собственно в кино все ставят на зеро и выигрывают. Призываем не создавать подобного. Перед активацией приза прочтите верховодила. Узнайте следующие моменты: Условия получения подарка, за регистрацию, за депозит и прочее. Ограничения по наибольшей ставке. Зачастую не повыше 350 рублей. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на пространстве. Поэтому главно аристократия, в каких забавах возможно совершать кратность денежного оборота. <a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=141502>1×slots регистрация на официальном сайте</a> 1×slots промокод при регистрации 2025 При верном раскладе бездепы — это прекрасный способ выступать на средства без растраты собственных средств. Есть количество советов, следуя которым можно извлечь максимально выгоды из похожих акций казино. Играть по лишь на лицензированных площадках. Скриптовые сайты не только обманывают с бонусными предложениями, хотя и употребляют пиратский софт с измененным ГСЧ. Выиграть на этих автоматах невозможно. <a href=http://netvoyne.ru/user/Donaldtof/>http://netvoyne.ru/user/Donaldtof/</a> 1× slots casino официальный сайт Для получения приза нужно ознакомиться с программкой преданности казино и сделать ставки на сумму, нужную для перехода на грядущий степень.Также учтите, что некоторые игровые платформы сужают перечень государств, которые готовы получить предложенный бездепозитный бонус за регистрацию. К примеру, существуют онлайн-заведения, выдающие сходственные призы только жителям конкретных стран. К образцу, интернет казино 777 Оригинал предоставляет бездепозитный бонус только игрокам из России и государств СНГ. Или напротив, пичкают вознаграждением всех, не обитателей некоторых стран (следует этого, стопам пристально изучать список, дабы впоследствии не появилось никаких вопросов и жалоб).
1×slot зеркало рабочее этих способов предполагает регистрацию
Как лишь получите бездеп в казино, всё точно не забывайте инспектировать электрическую почту. Некоторые игорные клубы постоянно радуют активных гэмблеров приятными бонусами. Чаще всего получить подарок можно в преддверии веселья, на день рождение, за вербование друга. А того распространённым призом считается надбавка к депозиту. Нужно всего лишь пополнить счёт, и азартное заведение увеличит его на 50–100%. <a href=https://paladinscounter.com/users/Julescyday>https://paladinscounter.com/users/Julescyday</a> 1×slots официальный сайт зеркало Чтобы получить возможность вывести прибыль с бездепозитного бонуса в казино, нужно выполнить ряд критерий:В неких онлайн казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на сайте клуба и подтвердить свои контактные данные. Дополнительно требуется активация промокода.
1×slots официальный сайт мобильная версия скачать
Фриспины без депо или дополнительные свои помогут поближе познакомиться с игровой платформой и её функциями. За счёт даров можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради забавы против живых крупье.Сроки активации приза уточняются любым казино, но чаще всего они не превосходят недели с момента получения. Игроку непременно нужно применять бездеп на обозначенного срока, в ином случае приз просто пропадет. Каждый бонус можно получить только один раз, поэтому в не применять бездеп в срок, у игрока не будет второго шанса им пользоваться. Вышеописанная причина и считается основным интересным, в которого операторы отдают часть собственной выгоды на разные рекламные расходы и рекламные кампании. А наиболее действующим здесь будут играть именно бездепозитные призы казино 2022 с выводом за регистрацию.Вообще перейдя в казино — верховодила одинаковы в получении бездепозитных призов, в стереотипные верховодила заходит: доказать эл. Почту и аппарат, заполнить собственный индивидуальный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ. Зарегистрируйтесь. Для регистрации чаще всего достаточно ввести свой номер телефона и почтовый адресок, после чего ввести полученный код из СМС. Возможно, потребуется указать промокод. В правилах акции несомненно написано, где его бы включать. Иногда это бы создавать при регистрации, время — уже после сотворения собственного кабинета, на отдельной страничке.Бесплатные призы казино без депо возможно получить повторяющий денежных средств на бонусный счет (исключить их можно только после отыгрыша), фриспинов, забавы либо кешбэк-бонуса. 1×slots зеркало регистрация <a href=http://shinyoungwood.kr/bbs/board.php?bo_table=free&wr_id=297276>http://shinyoungwood.kr/bbs/board.php?bo_table=free&wr_id=297276</a> Онлайн гемблинг развивается с каждым деньком все больше и больше, свежие бренды создаются не по денькам а по часам. Новые интернет казино делают вступительные промоакции для игроков, для того собственно бы зарекомендовать себя, и тем самым предлагают бездепозитные бонусы за регистрацию, собственно бы не упустить эту вероятность — как пользоваться свежим бездепом, советуем посещать наш вебсайт как возможно чаще, самое аппетитное и новые будет добавляться в этом же перечне.
зеркло казино 1×slots
Проверка занимает от нескольких мин. До нескольких дней, спецы техподдержки имеют запросить дополнительные документы либо инициировать куцее общение по Skype.Прежде чем активировать бездеп, необходимо убедиться сомнений, что страна, уроженцем коей считается игрок, не заходит в список запрещенных. Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? <a href=http://freedom.teamforum.ru/memberlist.php?mode=viewprofile&u=10374>http://freedom.teamforum.ru/memberlist.php?mode=viewprofile&u=10374</a> Промокод – определённая композиция знаков, коию необходимо установить в подходящее поле при твореньи учетной записи либо активировать в собственном профиле игрока в разделе с бонусами.Не рекомендуем сломя голову браться за различные предложения получения средств без инвестициям. Вполне вполне, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на 1-ый взор. Альтернативой является казино приз за депозит. Мы предлагаем вам пару советов, спасибо которым у каждого игрока несомненно вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом денег: 1×slots casino регистрация 1×slots review live Для вывода средств бонус нужно будет отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариантами отыгрыша бездепозитного бонуса до его получения, чтобы избежать конфликтных ситуаций.Бездепозитный приз по промо-коду несомненно доступен для забавы, только что, нет случае когда Вы активируете особый бонусный код в разделе с бонусами либо укажите промокод при регистрации на веб-сайте. В некоторых случаях, считая активации кода, придется доказать контактные данные игрока и наполнить анкету посетителя.
<b>Смотреть еще похожие новости:</b>
<a href=https://koreanstudies.com/forum/viewtopic.php?t=195074>1×slots зеркало регистрацию более популярный вариант это</a>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=342539>1×slots рабочее зеркало</a>
<a href=http://miupsik.ru/forums/showthread.php?tid=383929>1×slots официальный demo регистрация в 1×slots casino</a>
<a href=https://forum.gamesims.sk/viewtopic.php?f=10&t=57132>1×slots акции</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Можно ли в одном онлайн казино получить больше 1-го бонуса за регистрацию? Нет, так как в любом онлайн казино есть верховодила, к коим нужно держаться, не творить 2 аккаута для получения бонусов, иначе несомненно блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, бонус за регистрацию выдаеться один раз 1 лицу. 4. Заберите подарок. Чаще всего бонус активируется незамедлительно после регистрации. Но посещают ситуации, когда надо(надобно) зайти в личный офис или написать в службу поддержки.
#4346 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Алена Михайлова 1×bet слоты 1×bet top <a href=https://kompromat1.online/>Преподобная Надежда Александровна порно</a> порно с Каролина Севастьянова букмекерская контора <a href=https://krtka.info/>casino зеркало сегодня рабочее</a> casino приложения букмекерских контор 7k casino зеркало сайте букмекерской конторы фонбет 1×bet сайт 1×bet xyz букмекерская контора бетсити 1×bet приложение
DiskiPlus фреш казино DiskiPlus porno Александр Соболев (футбол) <a href=https://www.diskiplus.ru>DiskiPlus porno Яна Троянова</a> DiskiPlus pin casino зеркало DiskiPlus самое казино <a href=https://www.diskiplus.ru/>DiskiPlus porno Андрей Рублев (теннис)</a> DiskiPlus 1×bet официальный сайт DiskiPlus Попова Анна Юрьевна порно DiskiPlus Скоробогатова Ольга Николаевна порно DiskiPlus Валентина Матвиенко порно DiskiPlus casino daddy DiskiPlus Лут Оксана Николаевна порно DiskiPlus casino онлайн
#4347 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Дарья Мороз casino daddy <a href=https://7club7.com/>up букмекерская контора</a> porno Дарья Клишина букмекерскую контору пин <a href=https://repost.news/>casino скачать</a> смотреть фильм казино online casino официальный скачать 1×bet на андроид бесплатно казино сегодня казино гта 5 порно с Матвей Сафонов (футбол) порно с Гатагова Ольга Анатольевна
DiskiPlus Москалькова Татьяна Николаевна порно DiskiPlus порно с Юлия Ефимова, пловчиха <a href=https://diskiplus.ru/>DiskiPlus Самойлова Алла Владимировна порно</a> DiskiPlus 7k casino зеркало на сегодня DiskiPlus kent casino <a href=https://diskiplus.ru/>DiskiPlus букмекерская контора вход</a> DiskiPlus яндекс казино DiskiPlus казино рулетка DiskiPlus casino бонус DiskiPlus casino сайты DiskiPlus порно с Максим Глушенков (футбол) DiskiPlus casino daddy DiskiPlus bitz casino
#4348 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
бесплатно играем казино Елизавета Боярская <a href=https://t.me/vchkogpu_ru>top casino</a> 1×bet зеркало рабочее porno Юлия Канакина, скелетонистка <a href=https://rhymes-punches.com/>букмекерская контора зенит</a> win win casino скачать 1×bet на андроид casinos winning вывод казино фильмы казино рояль сайты казино porno Анна Сидорова, керлингистка
DiskiPlus up букмекерская контора DiskiPlus porno Яна Троянова <a href=https://www.diskiplus.ru/>DiskiPlus пина casino</a> DiskiPlus casino riobet DiskiPlus скачиваемые казино <a href=https://www.diskiplus.ru>DiskiPlus пин up casino</a> DiskiPlus black russia казино DiskiPlus Окладникова Ирина Андреевна порно DiskiPlus казино на деньги DiskiPlus порно с Владимир Минеев (ММА) DiskiPlus казино вход официальный сайт DiskiPlus казино смотреть онлайн бесплатно DiskiPlus porno Нина Пирогова, хоккеистка
#4349 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация то дальше необходимо пройти
Если простыми текстами, бездепы – это определённая сумма средств либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать подарки. Но есть некоторые аспекты. Существуют игорные дома, которые перед тем как начислить призы требуют привязать телефон, дать копии документов.Предложения с бездепозитными призами за регистрацию дозволяют новым заведениям привлечь аудиторию на свой сайт. А игроки к получают вероятность играть на настоящие деньги без депозита в казино и заработать небольшой стартовый капитал, который разрешается вывести на карту банка либо электронный кошелек. <a href=http://filmkachat.ru/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> Классическая разновидность приза за создание аккаунта. Его преимущество содержится том,, что заказчик возможность без подбирать аппараты и создавать ставки в их. Иногда перечень игровых автоматов ограничен оператором, хотя все точно это чем, чем единственный дешевый разъем, как в случае с внедрением фриспинов.На безвозмездные призы онлайн-казино практически постоянно распространяется лимитирования по стране проживания посетителей. Даже в вам разрешено открывать счет и играть на средства в заведении, это еще не значат, собственно вас доступны not the slightest down payment bonuses. <a href=http://www.alexandria.gov.eg/Lists/List30/DispForm.aspx?ID=83358>http://www.alexandria.gov.eg/Lists/List30/DispForm.aspx?ID=83358</a> 1×slot официальный сайт <a href=https://ruisoon.com/space-uid-38584.html>https://ruisoon.com/space-uid-38584.html</a> Выше мы предоставили полный комплект самых новых и актуальных бездепозитных бонусов в онлайн казино без пополнения на 2022 год, где вы можете воспользоваться любым ценным бездепозитным призом.Бездепозитные бонусы за регистрацию в игровых автоматах для собственников онлайн-казино считаются долею рекламной кампании, направленной на увеличение аудитории вебсайта. Так они продвигают средства бренды и привлекают свежих клиентов.
1×slots casino регистрация
При помощи такого одобрения оператор имеет кроме завлекать клиентов, коие раньше проявляли активность на веб-сайте, хотя по некий основанию перестали играть. В этом случае промокод высылается юзеру по электрической почте или повторяющий SMS.Благодаря программке лояльности от игорного заведения, возможно взять хороший старт и без добавочных вложений запустить видеослоты. Кроме того, можно рассчитывать на реальную фортуну и получить, без вложения личных финансов, великий выигрыш. 1×slots зеркало выигрыши обязательно пройдите регистрацию если Индивидуальные поощрения выдаются за совершение действий: подписку на аккаунты площадки в соц сетях, установку мобильного прибавленья либо официального клиента для ПК. В большинстве казино срабатывают программки лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий степень часто сопровождается выдачей бездепа. <a href=https://www.sportchap.ru/user/Geraldarrom/>https://www.sportchap.ru/user/Geraldarrom/</a> Законодательство, регулирующее азартные забавы в различных странах, оказывает на возможности операторов. В итоге пользователи из отдельных регионов сталкиваются с лимитированиями со стороны казино. Это возможность быть как полный отказ в доступе, так и невозможность загружать забавы отдельных производителей. 1хслотс официальный сайт зеркало
1хлот регистрация в 1×slots casino
Доступность — бездепозитные бонусы в казино почаще всего предоставляются новым игрокам, хотя случаются случаи, когда бонус могут получить и действующие посетители.Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. <a href=http://istiqbolsari.uz/user/RaymondCaw/>http://istiqbolsari.uz/user/RaymondCaw/</a> Также учтите, что кое-какие игровые платформы сузивают список государств, которые способны получить предложенный бездепозитный приз за регистрацию. К примеру, существуют онлайн-заведения, выдающие подобные бонусы только обитателям определенных стран. К образцу, интернет казино 777 Оригинал дает бездепозитный приз лишь игрокам из России и стран СНГ. Или напротив, пичкают вознаграждением всех, кроме обитателей неких государств (как сего, по пристально учить перечень, дабы потом не возникло практически вопросов и претензий).Возьми собственный подарок. Чаще всего приз активируется незамедлительно в регистрации. Но бывают ситуации, когда надо(надобно) забежать в личный офис либо написать в справочную службу. 1× slots casino зеркало Если вы новичок деле и только попали в неизведанную вами район пыла — с помощью предложений как бездепозитные бонусы без пополнения.
1×slots зеркало рабочее
<a href=https://shopcms.vsupport.club/topic/10224-pin-up-casino/page-4#entry94198>1×slots регистрация то дальше необходимо пройти</a> Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, чтобы была возможность вывести выигрыш.Главным моментом в появлении данных вознаграждений произведено сомнений, собственно пустив их в ход, игрок ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он благодаря призам какой-нибудь выигрыш либо мгновенно спустит все лишь что прибывшие деньги). То есть, казино снабжает игрока возможностью на дармовой базе играть во всевозможные слоты и даже спонсирует забаву. В любом казино с бездепозитным бонусом учтены вейджеровые обстоятельства. Это один-единственный «подводный камень», кот-ый стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, нужно сделать определённое количество ставок. Чем круче приз, что, этим сложнее выполнить условия, и наоборот. 1 xslots рабочее зеркало <a href=https://cameradb.review/wiki/User:JarrodBarunga>https://cameradb.review/wiki/User:JarrodBarunga</a> Третитй бездепозитный приз за регистрацию – валютные средства. К раскаянью, начислить рубли или доллары способны лишь известные и известные клубы. С их подмогою вы сможете насладиться любой доступной забавой – автоматом, рулеткой, кено, блэкджеком.
1хслот зеркало сайта
Бездепозитный приз нередко имеет замерзнуть доступным сразу после окончания регистрации, что правило единственным притязанием к нему считается регистрация, а после ревизия вашей новой учетной записи. <a href=https://lecointurc.com/users/mycsgozer>https://lecointurc.com/users/mycsgozer</a> Бездепозитные бонусы — это подарки от казино повторяющий бонусных денег либо фриспинов для игровых автоматов, коие начисляются на аккаунт игрока после процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депо не требуется.Каждая игровая перрон отличается критериями по получению и отыгрышу бездепов. В правилах отчетливо расписаны кратковременные рамки, за коие надо(надобно) прокрутить вейджер. Также не запамятовывайте про максимальный объем ставки и максимальную сумму выплаты. С иной стороны, дабы получить бездепозитные бонусы казино, достаточно истратить менее 1 минуты. 1×slots регистрацию процедура займет всего лишь
<b>Смотреть еще похожие новости:</b>
<a href=https://www.lightknotes.com/MyBB/showthread.php?tid=278054>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=https://bans.org.ua/index.php?topic=118567.new#new>1×slots официальный сайт зеркало</a>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=142739>1×slots casino регистрация</a>
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=558254>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подтверждение электронной почты – одно из главных условий, коие есть практически в каждом бездепозитном казино. Чтобы верифицировать электрическую почту, довольно перейти по активной ссылке в послании, полученном от азартного клуба.
#4350 Ремонт холодильников Siemens Москваhttps://remont-holodilnikov-siemens-volt.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт холодильников siemens рядом, можете посмотреть на сайте: <a href=https://remont-holodilnikov-siemens-volt.ru/>ремонт холодильников siemens</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#4351 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet букмекерская контора фонбет официальный <a href=https://rumafia.news/>букмекерская контора бесплатно скачать</a> up casino зеркало казино сегодня <a href=https://specreporter.com/>ramenbet casino</a> ап казино фильмы казино рояль кент casino порно с Анастасия Потапова, теннисистка порно с Виктория Синицина, фигуристка Анна Михалкова лучшие букмекерские конторы
DiskiPlus пина букмекерской конторы DiskiPlus смотреть фильм казино <a href=https://diskiplus.ru>DiskiPlus porno Илья Ковальчук (хоккей)</a> DiskiPlus 1×bet на андроид DiskiPlus 1×bet зеркало на сегодня 1×bet xyz <a href=https://www.diskiplus.ru>DiskiPlus порно с Юлия Ефимова</a> DiskiPlus казино 1 DiskiPlus 1×bet зеркало рабочее xbet DiskiPlus казино 1 DiskiPlus казино гта 5 DiskiPlus up casino официальный DiskiPlus casino автомат DiskiPlus casino ru
#4352 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
Воспользоваться бездепом возможно не во всех игровых автоматах: казино и тут уточняет ограничение для посетителей. Конечно, это можно счесть неким неудобством для игрока, хотя ради стоит отметить, что выбор автоматов всё равно остаётся достаточно наибольшим. <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> В настоящее время получить бонус за регистрацию в казино довольно просто. Почти каждый игорный дом с готовностью даст деньги или бесплатные вращения. Многие игроки пользуются этим и не стесняются регистрироваться в любом клубе с прибыльными критериями. Кстати, это отличная вероятность выдумать выигрышную стратегию и сорвать куш.Казино выводит средства только на ту платежную систему, с котрой был сделан депозит. То есть, для вывода бездепозитного бонуса, Вам сначала нужно восполнить счет. В некоторых клубах узкий перечень методов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет именно с этих платежных методов, коие доступны для вывода. <a href=https://www.find-topdeals.com/blogs/187723/Unlocking-the-Magic-of-Professional-Architectural-Render-Creation>https://www.find-topdeals.com/blogs/187723/Unlocking-the-Magic-of-Professional-Architectural-Render-Creation</a> Заработать на бездепозитных бонусах за регистрацию в казино возможность каждый юзер, достигший совершеннолетия. 1× slots casino зеркало <a href=https://connect.garmin.com/modern/profile/39660c37-a44a-497d-a343-baca71ee5272>https://connect.garmin.com/modern/profile/39660c37-a44a-497d-a343-baca71ee5272</a> Фриспины предназначены для использования в видео слотах. Внимательно ознакомьтесь с условиями – часто их выдают на некоторые автоматы. В зависимости от клуба, у вас получится сделать определённое число ставок. Кстати, продвинутые игорные жилища позволяют запускать каждых «одноруких злодеев».Вывод выигрыша с бездепозитных бонусов казино – великодушный подарок от азартных клубов. Но чтобы исключить собственный заработок, нужно выполнить ряд критерий:
1×slots регистрация на сайте
<a href=https://russiancomputerservice.ru/user/JosephCer/>1хслот официальный сайт зеркало</a> 1×slots casino регистрация Призовые начисления без депо имеют предоставляться для роли в турнирах онлайн казино. Потратить перечисленные средства можно необыкновенно в этой акции. Условия их проведения в ограничения на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться этим предложением, никакого выучить его правила. <a href=http://mrkarpiuk.xaa.pl/boards/shopping/member.php?action=profile&uid=37223>http://mrkarpiuk.xaa.pl/boards/shopping/member.php?action=profile&uid=37223</a> В подавляющем большинстве случаев благотворительные призы начисляются в кредитах, которые нельзя сразу вывести со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже.Акции распространяются как на все игры казино, например и на узкий список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino прочие. Промо возможность охватывать разработки одного производителя. Бездеп не пересекается с иными акциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, сделанные бонусными деньгами. Для идентификации платежных реквизитов игрока может понадобиться пополнение счета на наименьшую сумму. 1×slots мобильная версия войти казино
1×slots casino зеркало
Как только вы отыграли вейджер и свои с бонусного баланса перешли вам на настоящий счет, Вы храбро сможете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (устроить наименьший депозит к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депо). <a href=http://bbs.ou-lei.com/home.php?mod=space&username=udizugi>http://bbs.ou-lei.com/home.php?mod=space&username=udizugi</a> Принципиальным отличием безвозмездных призов от бонусов на депо считается неимение надобности заносить деньги на акк. Из-за сего их нередко именуют бездепозитными (not the slightest deposit bonuses). 1×слот регистрация в 1×slots casino На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не сможете активировать и получить бездепозитный приз.Если ординарными словами, бездепы – это определённая сумма средств или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно брать презенты. Но есть кое-какие нюансы. Существуют игорные жилища, которые перед что, этим как начислить бонусы требуют привязать аппарат, дать копии документов.
1хслотс официальный сайт зеркало
Самый распространённый из похожих бонусов, конечно же, бездеп на денек рождения посетителя — приз в виде фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им возможно в течение установленного периода медли.Отзывы читателей о бонусных акциях помогут составить эмоцию, хотя не забывайте о субъективности личных комментариев. <a href=https://forum.lazarev.ru/memberlist.php?mode=viewprofile&u=167296>1×slots официальный сайт зеркало</a> Для получения бонуса нужно ознакомиться с программкой лояльности казино и устроить ставки на сумму, необходимую для перехода на грядущий уровень. Итак, чтобы благотворительные бонусные кредиты превратились в реальные деньги, которыми вы можете управлять по собственному усмотрению, их нужно отыграть. Вейджер по уточнять в правилах онлайн-казино.Сразу в активации промокода можно воспользоваться презентом. Как уже упоминалось, призы посещают трёх видов – фриспины, кредиты и фриплей-бонусы. 1хслотс зеркало на сегодня <a href=https://systemcheck-wiki.de/index.php?title=Easy_Login_With_The_1×bet_APP.>https://systemcheck-wiki.de/index.php?title=Easy_Login_With_The_1×bet_APP.</a>
1×slots регистрация то дальше необходимо пройти
Казино выделяет возможность заработать и исключить настоящие средства на бездепозитных бонусах. Обычно, это незначительная сумма, коию казино возможность для разрешить презентовать игроку.Этот тип бонуса несомненно добавлен на Ваш аккаунт последствии успешной процедуры регистрации с использованием номера аппарата. Если выбрать другой способ сотворения учетной записи, бездеп не будет добавлен на Ваш акк. <a href=http://parus-perm.ru/communication/forum.php?PAGE_NAME=profile_view&UID=41199>http://parus-perm.ru/communication/forum.php?PAGE_NAME=profile_view&UID=41199</a> Акционные предложения от казино существуют в различных форматах. Часто призы даются в размен на депозит. Игрок заносит платеж и получает средства, безвозмездные вращения и поощрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — вид приза, который гарантирован за выполнение определенных действий на веб-сайте: 1хслот зеркало Ограничения по играм. Администрация запрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, средствами или безвозмездными вращениями. Обычно, в правилах приводится полный перечень слотов для отыгрыша. Иногда разделение производится по виду игр. Например, отыгрыш вероятен на всех игровых аппаратах, но запрещен в настольных забавах и в разделе Live Casino.
<b>Смотреть еще похожие новости:</b>
<a href=http://link.5nx.ru/viewtopic.php?f=5&t=8718>1хслот 1хслотс регистрация перейти на 1×slots</a>
<a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=118161>1×slots casino online регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для получения приза нужно пригласить в забаву нового посетителя. Казино начисляет пригласившему фиксированный процент от взносов приглашённого повторяющий приза: чаще всего его размер не выше 10%. Срок деянья приза как не выше месяца: пригласивший получает приз в зависимости от проигранных ставок приглашённого в 1-ый месяц забавы. Воспользоваться бездепом можно не во всех игровых автоматах: казино вдруг устанавливает ограничение для посетителей. Конечно, это можно счесть некоторым неудобством для игрока, хотя справедливости ради необходимо, собственно выбор автоматов всё одинаково остаётся достаточно великим.
#4353 Charlesgunnyhttp://filmkachat.ru
1×slots акции
Новые посетители онлайн-казино без первого депозита шансы выяснить собственную удачливость. К что, этому же есть возможность преобразовать бездепы в реальные средства за регистрацию в казино, впрочем результата бонус необходимо отыграть согласно условиям промоакции. <a href=http://filmkachat.ru/>1×slots зеркало регистрацию более популярный вариант это</a> Рассмотрим принцип его деянья на случае. Допустим, вы зарегались и получили $10 no deposit bonus с вейджером х50. Это означает, что выигранные средства возможно несомненно выводить не ранее, чем последствии такого, как общая сумма ставок достигнет $500.Помимо остального, для вывода средств по бездепу необходимо привнести на счёт собственный первый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало вероятную необходимую, в чего вывод средств станет доступен. <a href=https://www.hebergementweb.org/threads/virtual-reality-reshapes-modern-architectural-design-and-innovation.2142477/>https://www.hebergementweb.org/threads/virtual-reality-reshapes-modern-architectural-design-and-innovation.2142477/</a> Во всех законных онлайн-казино Беларуси необходимо подтверждение паспортных данных для игры — это требование правительства страны. 1×slots актуальное зеркало <a href=http://molotok-m.ru/bitrix/redirect.php?goto=http://clients1.google.sr/url?q=http://yunona-medica.ru/bitrix/redirect.php?goto=https://telegra.ph/Kak-zamenit-svidetelstvo-o-registracii-transportnogo-sredstva-pri-smene-adresa-09–23>http://molotok-m.ru/bitrix/redirect.php?goto=http://clients1.google.sr/url?q=http://yunona-medica.ru/bitrix/redirect.php?goto=https://telegra.ph/Kak-zamenit-svidetelstvo-o-registracii-transportnogo-sredstva-pri-smene-adresa-09–23</a> Бывают ли бездепозитные бонусы без вейджера? Бывают, случае у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино.
1хслотс 1хслотс регистрация перейти на 1×slots
Онлайн-казино с бездепозитными бонусами ставят посетителям условия для использования бездепами, потому перед участием в акции какого-либо подробно ознакомиться со всеми правилами и аспектами промоакции. Условия могут дотрагиваться получения бонуса, его применения и последующего вывода валютных средств если, тогда, выигрыша. <a href=https://forum.eliteshost.com/showthread.php?tid=19762>1× слот зеркало</a> 1×slots официальный сайт скачать на айфон Таким образом онлайн казино получает вероятного игрока. Возможно в или истинном он захочет сыграть на средства деньги. Так работают бездепозитные бонусы в интернет казино. Здесь отлично подходит выражение, безвозмездные сыр случается лишь в мышеловке. Начинающие игроки имеют не обдумывать опасность пыла. Однако с осознания становится больше. Это тема для отдельного обсуждения.Фриспины – бесплатные вращения с фиксированной ставкой, коие возможно использовать в определенных игровых автоматах. <a href=http://xn----7sbabja7ekbaahnetbi5o6b.xn–p1ai/profile.php?lookup=30074>http://xn----7sbabja7ekbaahnetbi5o6b.xn–p1ai/profile.php?lookup=30074</a> 1×slots коды Бездепозитные призы за регистрацию в игровых автоматах для собственников онлайн-казино являются частью рекламной кампании, направленной на повышение аудитории сайта. Так они продвигают свои бренды и привлекают свежих клиентов.Не стоит незамедлительно же отрицаться от приветственных подарков в подобных казино. Администрация готова начислить деньги либо фриспины, но предварительно сотрудники должны увериться, собственно вы не аферист. Дело что, нет, что развелось очень количество охотников за призами. Они выучились накалывать систему и зарабатывать солидные суммы средств.
1×slots акции
Фриспины без депо или дополнительные средства посодействуют ближе познакомиться с игровой платформой и её функциями. За счёт подарков возможно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям из-за игры против живых крупье.В качестве бонусов интернет казино часто предлагает выдачу фриспинов, словами бесплатных вращений игрового барабана. Виртуальные монеты можно использовать для обучения в покерной школе или для забавы в казино. <a href=https://job.epday.com/home.php?mod=space&uid=635995>https://job.epday.com/home.php?mod=space&uid=635995</a> скачать 1×slots официальный сайт Не рекомендуем опрометью голову хвататься за различные предложения получения средств без инвестициям. Вполне вполне, что бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на первый взор. Альтернативой считается казино приз за депо. Мы предлагаем вам пару советов, спасибо коим у любого игрока несомненно вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств:
1хслот зеркало
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=3757>1×slots рабочее зеркало</a> Новые клиенты онлайн-казино без первого депозита шансы выяснить собственную удачливость. К тому же есть возможность преобразовать бездепы в реальные средства за регистрацию в казино, однако желаемого приз нужно отыграть сообразно условиям акции.В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это исключительно приятная доля игры. Важно, зачастую бездепозитные призы в казино выдаются с ограничениями по максимальной выплате. В среднем возможно рассчитывать на прибыль в некоторое тысяч руб. Как вывести выигрыш с бонуса без депозита. Придётся доказать акк документально, в неких заведениях. Процедура верификации неотклонима и делается каждым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате или прочтите в правилах. 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=https://qashvqt.uz/index.php?subaction=userinfo&user=GlennSnulk>https://qashvqt.uz/index.php?subaction=userinfo&user=GlennSnulk</a> Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки имеют запросить вспомогательные документы либо инициировать короткое общение по Skype.
1×slots регистрация 1×slots review live
<a href=http://incorgrupp.ua/index.php?subaction=userinfo&user=glorioussermon3>http://incorgrupp.ua/index.php?subaction=userinfo&user=glorioussermon3</a> скачать 1×slots официальный сайт Возможность протестировать свежие забавы, не рискуя личными своими и разработать личную стратегию игры.
<b>Смотреть еще похожие новости:</b>
<a href=http://216.38.0.7/memberlist.php?mode=viewprofile&u=4020>1×slots рабочее зеркало на сегодня</a>
<a href=https://www.globalvision2000.com/forum/member.php?action=profile&uid=1072499>1×slots casino регистрация 1×slotscasino09k online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Превышение наибольшей ставки при отыгрыше. Система механически не предостерегает о превышении ставки, поэтому о нарушении верховодил игрок может разузнать теснее в подачи запроса на вывод средств. Минимального оборота. Этот лимит уточняется вейджером — же игрок не поиграет на установленную необходимую, вывод средств будет недоступен.
#4354 Charlesgunnyhttp://filmkachat.ru
зеркло казино 1×slots
Иногда у посетителей вебсайта все появиться проблемы при активации полученного промо-кода. В этих случаях, нужно обратиться за поддержкой в службу поддержки «Support». Для получения ответа, обязательно указывается определенная причина воззвания и подтверждается информация дополнительными экрана. Если сложилась неоднозначная обстановка, практически можно адресоваться к главному регулятору или контролирующему органу, выдавшему этому заведению лицензионный документ.Заработать на бездепозитных бонусах за регистрацию в казино имеет любой пользователь, достигший совершеннолетия. <a href=http://filmkachat.ru/>казино 1×slots</a> Бездепы могут входить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами.Одним из поводов отдавать преимущество, льготу одному или иному заведению содержится в привлекательности предлагаемых промоакций и даровых услуг. Безвозмездные фриспины, выдаваемые без дела делать какой-либо вклад, в перечне располагается далековато не в конце. <a href=https://medium.com/@comcgifurniture/professional-weed-delivery-burlington-services-transform-local-cannabis-market-1e4f51451d6d>https://medium.com/@comcgifurniture/professional-weed-delivery-burlington-services-transform-local-cannabis-market-1e4f51451d6d</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=https://mj-go.kr/bbs/board.php?bo_table=free&wr_id=980635>https://mj-go.kr/bbs/board.php?bo_table=free&wr_id=980635</a> Принципиальным отличием бесплатных призов от бонусов на депозит является неимение необходимости вносить средства на акк. Из-за этого их нередко называют бездепозитными (not the slightest deposit bonuses).
1×slots регистрация 1×slots casino c2d ru
Существует ли стратегии для отыгрыша бездепозитных призов? К огорчению нет, на выигрыши либо проигрыши с бонусов, казино либо игрок воздействовать имеет, отдача игр происходит от создателей игр. <a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=94922&p=1430254#p1430254>1×slots казино зеркало</a> 1×slots зеркало Нет. Для получения бездепозитного бонуса в казино нужна обязательная регистрация на веб-сайте. Играть в слоты даром и без регистрации можно только в демо режиме. <a href=http://o96737zj.beget.tech/user/Michaelisors/>http://o96737zj.beget.tech/user/Michaelisors/</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots Обычно бездепозитные промоакции от казино, приходят на эл. Почту в деньки рождения либо праздники. В неких интернет казино можно обратиться в чат и как постоянному игроку, вполне для предложат бездепозитное предложение.
1×slots регистрация 1×slotscasino 56 online
С другой стороны, гораздо легче забрать бездепозитные фриспины за регистрацию в казино и напрямик данный начать вращать барабаны в наихороших слотах. Главная необыкновенность спинов что, нет, что они предусмотрены для топовых автоматов. Удастся не только пройти вспомогательные раунды, но и увеличить сумму выигрыша, заработать респины прочие внутриигровые презенты. Выше мы дали полный комплект самых новых и актуальных бездепозитных призов в интернет казино без пополнения на 2022 год, где вы можете воспользоваться каким ценным бездепозитным бонусом. <a href=http://www.scoreit.org/p/davidpyday>http://www.scoreit.org/p/davidpyday</a> Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, all зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. 1×slots зеркало регистрация Большинство интернет-казино из нашего топ-10 готовы повеселить вас эксклюзивными промоакциями. Читайте о них в обзорах и на форуме.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=347537>1×slots casino регистрация на сайте</a> Для тех, кто лишь подумывает испытать свою фортуну, еще для профессиональных игроков, ищущих новые площадки для выигрышей, основные лицензированные казино часто организуют разные промоакции, и лучшее услуг за время – как для новичков, например и для профессиональных игроков – бездепозитный бонус за регистрацию. 1×slots скачать на айфон <a href=http://forum.yurclub.ru/index.php?showuser=205514>http://forum.yurclub.ru/index.php?showuser=205514</a> Онлайн-казино кропотливо продумывают бонусные обстоятельства, которые нужно выучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша прочие ограничения.
зеркала 1×slots
Допустим, за регистрацию вы получили бездеп в размере 2 000 рублей с вейджером х30. В этом случае предстоит сделать ставок, на общую необходимую в 60 000 руб. (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать реальные средства. Однако не запамятовывайте, что с каждого подарка выйдет исключить определённую необходимую (чаще всего не более $200). <a href=https://pf-k.ru/profile/69785-prostoysoft0105/?tab=field_core_pfield15>https://pf-k.ru/profile/69785-prostoysoft0105/?tab=field_core_pfield15</a> 1×slots актуальное зеркало Это тоже безвозмездные финансы, которые поступают на аккаунты свежеиспеченных геймеров в регистрирования. А необыкновенность таких бонусов состоит что, что обретенные деньги непременно по использовать в продолжении назначенного медли.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.katzenforum.at/forum/media/users/jamesagema.16012/>1×slots регистрация 1×slotscasino 56 online</a>
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=637347>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Представленные на данной страничке лучшие бездеп призы в казино за регистрацию в 2022 году имеют подходящие условия. После кропотливого анализа редакция портала составила рейтинг спецпредложений, в котором посетители Casino.ru шансы сортировать перечень по нескольким аспектам: по сумме, вейджеру, максимальной сумме вывода и т.д. Самые известные методы вывода средств ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электрическим платежным системам подобии Neteller и Skrill, а также пользуются криптовалютными кошельками. Вывод выигрышей имеет осуществляться быстро или развлекать от нескольких часов до нескольких суток.
#4355 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало
В игровых клубах без лицензии Вы покупаете „кота в мешке“ и в случае спорных обстановок нет способности куда-то посетовать и доказать свою правоту. <a href=http://filmkachat.ru/>1×slots регистрация на сайте</a> Перед активацией главно пристально выучить обстоятельства акции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют велечину также лимиты ставок при отыгрыше и сроки, протяжении которых возможно воспользоваться предложением. Если бездеп охватывает ограниченный список игр, рекомендуется разузнать максимальные коэффициенты, степень отдачи и волатильности. Слоты с невысокими множителями выплат подходят лишь что случае, случае оператор не установил взыскательные лимитирования на максимальную необходимую ставки. <a href=https://myanimelist.net/profile/shopavto>https://myanimelist.net/profile/shopavto</a> Перед активацией главно пристально изучить условия акции. Чем ниже вейджер, что, этим больше потенциальная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, на которых можно пользоваться предложением. Если бездеп обхватывает ограниченный список игр, рекомендуется разузнать максимальные коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только что, нет случае, случае оператор не установил взыскательные лимитирования на максимальную необходимую ставки.Выбирая безвозмездный приз, внимательно изучайте управляла. Убедитесь, собственно вам возможно брать участие в промоакции. Уточните, в каких играх можно исполнять обстоятельства вейджера. При надобности задавайте вопросы представителям саппорта. 1×slots рабочее зеркало <a href=https://cq.x7cq.vip/home.php?mod=space&uid=9282712>https://cq.x7cq.vip/home.php?mod=space&uid=9282712</a>
1×slots актуальное зеркало
Фриплей-бонусы. Бонусы за бесплатную забаву есть лишь в некоторых клубах. Они зачисляются сразу последствии создания профиля и действуют недолговременное время. Если у вас нет времени израсходовать средства, они просто закончатся. Что дотрагивается медли, в большинстве случаев бонусы срабатывают в течение одного часа. <a href=https://www.bf-france.com/forums/profile/30064-rabofreeor/>1×slots зеркало которую указывали при регистрации кстати</a> 1хслотс зеркало В игровых клубах без лицензии Вы покупаете „кота в мешке“ и в случае спорных ситуаций нет возможности куда-то посетовать и обосновать свою правоту.Фриплей-бонусы. Бонусы за бесплатную игру есть лишь в неких клубах. Они зачисляются незамедлительно после творенья профиля и срабатывают недолговременное время. Если у вас нет времени истратить средства, они просто закончатся. Что касается времени, правило бонусы срабатывают протяжении одного часа. <a href=http://moujmasti.com/member.php?174176-Jamesagefe>http://moujmasti.com/member.php?174176-Jamesagefe</a> При отыгрыше бонусных средств, нужно учесть срок действия приза и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный приз несомненно аннулирован. 1×slots регистрация то дальше необходимо пройти
1хслотс официальный сайт зеркало
Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, all зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. <a href=http://forum.gokturkvirtual.com/uye-patrickmup.html>http://forum.gokturkvirtual.com/uye-patrickmup.html</a> 1хслотс 1хслотс регистрация перейти на 1×slots Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция имеет доскональные правила, ссылка на коие обыкновенно находится в промообъявлении. В их указываются лимиты, вейджер, список доступных игр. Если оператор укрывает данные о предложении, то воспользоваться им не.Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, дабы появилась возможность исключить выигрыш.
1×slot зеркало рабочее регистрации на телефон придет
Срок отыгрыша — это период, который начинается в момент активации бонуса и кончается с его закрытием. Пользователю нужно уложиться в данный временной зазор, иначе призовые свои аннулируются. Казино устанавливают перечень игр, ставки в засчитываются при расчете отыгранных средств. Если тайтл не заходит в этот перечень, то он может быть недоступен для загрузки в деянья бонусного предложения.Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, solid зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. Далее требуется отыграть вагер и исключить выигрыш. Игрокам без навыка крупно повезло, возможность получить десятки даров за одну регистрацию. Если не сумели получить Бездепозитный приз, не волнуйтесь. Обратитесь в онлайн чат, оператор поможет ситуацию.При регистрации стопам свидетельствовать только достоверную информацию. Когда учетная запись несомненно активна, появится доступ в Личный кабинет. В нем можно избрать валюту, установить промокод и разузнать подробные управляла получения и отыгрыша бездепа. Краткая информация об промоакции нередко находится непосредственно на регистрационной форме. 1× slots casino официальный сайт <a href=http://bmdherb.com/bmdherb/bbs/board.php?bo_table=free&wr_id=675257>http://bmdherb.com/bmdherb/bbs/board.php?bo_table=free&wr_id=675257</a>
1×slot рабочее зеркало
Прежде чем активировать бездеп, нужно увериться никаких, собственно государство, уроженцем которой является игрок, не заходит в перечень не. <a href=https://forum.papbio.org/member.php?action=profile&uid=89721>https://forum.papbio.org/member.php?action=profile&uid=89721</a> Для верификации номера телефонного, в собственном профиле выберите опцию „Подтвердить номер телефона“ и введите в подходящее поле код, полученный в sms-сообщении. 1×слотс казино Бонус без депозита за регистрацию в казино (бездепозитный бонус) – это валютный презент от клуба, который начисляется на акк игрока после регистрации в казино. Кроме сотворения учетной записи, для получения бездепа, очень нередко требуется ещё и доказать контактные данные игрока и/или активировать специальный промо-код.Многие игроки, оценив возможностей казино, остаются играть в нем и далее ? на это и нацелено любое промо. Постоянные посетители вносят депозиты и делают ставки, обеспечивая долгосрочную выгода оператора. То есть, казино выдают бездепы свежим юзерам для формирования лояльной аудитории.
<b>Смотреть еще похожие новости:</b>
<a href=https://bbs.sinbadgroup.org/index.php?xjkh-tampa-s-poster-pup-for-new-cancer-treatment.t48661.html/page-4183#post-209659>1хслотс официальный сайт зеркало</a>
<a href=http://sladkierecepti.5nx.ru/viewtopic.php?f=8&t=8826>1хслотс мобильная версия зеркало</a>
<a href=http://evtrucksforum.com/viewtopic.php?p=804376#p804376>1×slots подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Можно ли в одном интернет казино получить больше одного приза за регистрацию? Нет, так как в каждом онлайн казино есть правила, к которым надо(надобно) придерживаться, не творить 2 аккаута для получения бонусов, по несомненно блокировка обоих аккаутов, не пытайтесь обмануть онлайн казино, бонус за регистрацию выдаеться один один 1 личику.
#4356 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
7k casino официальный Львова-Белова Мария Алексеевна порно <a href=https://t.me/vchkogpu_ru>винлайн букмекерская контора официальный</a> балтбет букмекерская контора фильмы казино рояль <a href=https://vestnik-jurnal.com/>porno Виктория Баркова, легкоатлетка</a> скачать 1×bet официальные букмекерские конторы скачать казино ставка сайт винлайн букмекерская контора up casino зеркало казино можно порно с Анна Калинская (теннис)
DiskiPlus casino рабочее зеркало DiskiPlus казино ставка <a href=https://diskiplus.ru>DiskiPlus казино фильм</a> DiskiPlus 1×bet приложение DiskiPlus pin up casino пин <a href=https://diskiplus.ru/>DiskiPlus cat casino</a> DiskiPlus яндекс игры казино DiskiPlus игры казино DiskiPlus винлайн букмекерская контора официальный сайт DiskiPlus мобильные букмекерские конторы DiskiPlus pinco casino DiskiPlus казино фильм смотреть онлайн DiskiPlus 1×bet рабочее
#4357 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию более популярный вариант это
Активация случается с помощью промокодов, которые вводятся в личном кабинете в регистрации. Среди спецпредложений в перечне Casino.ru содержатся эксклюзивные промокоды, которые доступны лишь посетителям портала. Другие способы начисления средств ? автоматическая активация сразу последствии творенья аккаунта и получение подарка по запросу в службу технической поддержки.Игрокам стоит принимать приветственный бонус как гарантированный способ получить большой выигрыш, хотя это отличная возможность без затрат оценить перечень казино. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало</a> Мы рекомендуем не отказываться от сходственных услуг узнаваемых казино. Выделите некоторое минут на регистрацию, получите приз и попробуйте его отыграть. Может быть, сегодня удача будет на вашей стороне!Поспешите арестовать бездепозитные бонусы за регистрацию в казино из представленного перечня. Все платформы не только ведут законную работа, хотя и порадуют правдивыми плодами забавы, высочайшей отдачей, быстрыми выплатами. <a href=https://www.scutify.com/articles/2024–11–22-understanding-3d-modeling-costs-a-comprehensive-guide-to-industry-pricing>https://www.scutify.com/articles/2024–11–22-understanding-3d-modeling-costs-a-comprehensive-guide-to-industry-pricing</a> 1×slots официальный сайт скачать <a href=http://www.01.com.hk/member.php?Action=viewprofile&username=PorsedropMi>http://www.01.com.hk/member.php?Action=viewprofile&username=PorsedropMi</a> Обычно показатель повыше, чем для призов на депо. Не дивитесь, если он несомненно числе х100. Иногда завышенный коэффициент вейджера устанавливается для обитателей отдельных государств.Далее потребуется отыграть вагер и вывести выигрыш. Игрокам без навыка крупно подфартило, они могут получить десятки презентов за 1 регистрацию. Если не сумели получить Бездепозитный бонус, не беспокойтесь. Обратитесь в интернет чат, оператор поможет ситуацию.
1×slot зеркало рабочее этих способов предполагает регистрацию
Чтобы выступать безвозмездно на настоящие деньги в казино, порой довольно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные действия.Также посещают случаи, когда казино начислит обсужденный бонус после регистрации свежего клиента по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам. <a href=https://www.lightknotes.com/MyBB/showthread.php?tid=176820>1хслотс мобильная версия зеркало</a> 1×слотс казино Нельзя разглядывать игру на деньги, как вариант заработка. Азартные игры запрещены для лиц младше 18 лет. Topcasinobonuses.mobi не является зачинщиком азартных игр. Сайт одевает информационный нрав.В неких онлайн казино для получения бездепозитных призов не довольно просто зарегистрироваться на сайте клуба и подтвердить свои контактные данные. Дополнительно потребуется активация промокода. <a href=http://g70787z8.beget.tech/user/Joshuatok/>http://g70787z8.beget.tech/user/Joshuatok/</a> В лицензионных бездепозитных казино выступать в азартные игры вправду неопасно. Наличие лицензии одобряет тот факт, собственно клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP.Подтверждение индивидуальной инфы. Все казино просят от посетителя пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у юзера иных аккаунтов (мультиаккаунт запрещен). 1х слот 1хслотс регистрация перейти на 1×slots
x1 slots регистрация в 1×slots casino
Чтобы получить возможность исключить прибыль с бездепозитного бонуса в казино, необходимо выполнить ряд условий: <a href=http://pureunsc.com/bbs/board.php?bo_table=free&wr_id=1543>http://pureunsc.com/bbs/board.php?bo_table=free&wr_id=1543</a> Наиболее знаменитые гонорары между гэмблеров – бездепозитные призы казино. Это не дивно, как можно получить бесплатные вращения или виртуальные кредиты, и при этом не придётся пополнять счёт, рисковать личностными средствами. Удастся насладиться различными веселиями причем выиграть крупную сумму, избегая серьёзного риска. 1×slots casino регистрация 1×slotscasin online
1×slot зеркало
Также, в этом случае нужно подтвердить собственный номер аппарата, желаемого код, приобретенный в смс-сообщении от клуба ввести в специальное поле в собственном кабинете игрока. <a href=https://www.sgomberisgombero.it/author/jamesapate/>1×slots рабочее зеркало на сегодня</a> Нет. Казино раздают благотворительные бонусы за регистрацию, чтобы, чтобы, дабы клиент имел ознакомиться с игровым заведением. А чтобы исключить его, необходимо выполнить обстоятельства отыгрыша. 1хслотс официальный сайт зеркало <a href=https://www.market-directory.com/members/raymondzem-5167.html>https://www.market-directory.com/members/raymondzem-5167.html</a> Одним из предлогов отдавать преимущество, льготу одному или другому заведению заключается в привлекательности предлагаемых промоакций и безвозмездных услуг. Безвозмездные фриспины, выдаваемые без нужды делать какой-либо лепта, в списке находится далеко не в конце.Воспользоваться бездепом возможно не во всех игровых автоматах: казино и тут устанавливает ограничение для посетителей. Конечно, это возможно посчитать некоторым неудобством для игрока, но справедливости ради стоит отметить, собственно выбор автоматов всё равно остаётся достаточно большим.
1 x slots
Наши эксперты изучают условия промоакции, этого в ручном режиме проверяют их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и характеристики. Мы не рекламируем казино, а даем игрокам информацию о превосходнейших из них.Вывод выигрыша с бездепозитных призов казино – щедрый подарок от азартных клубов. Но чтобы исключить свой заработок, нужно выполнить ряд критерий: У каждого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано смогли выполнить их, мы дадим несколько советов. Если система начислила маленькую необходимую, не стоит делать немалые ставки – остановитесь на 10–30 центах. Как лишь сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте играть. В неприятном случае какого-либо приглядеться к иному автомату.При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие можно предназначить этой в казино. <a href=https://scrapbox.io/renderings-real-estate/Transform_Real_Estate_Presentations_with_Professional_3D_Renderings>https://scrapbox.io/renderings-real-estate/Transform_Real_Estate_Presentations_with_Professional_3D_Renderings</a> Рассмотрим принцип его деянья на случае. Допустим, вы зарегались и получили $10 no deposit bonus с вейджером х50. Это означает, что выигранные средства возможно несомненно выводить не ранее, чем последствии такого, как общая сумма ставок достигнет $500. x1 slots регистрация в 1×slots casino Законодательство, регулирующее азартные забавы в различных государствах, оказывает на полномочия операторов. В итоге юзеры из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это имеет быть как полный отказ в доступе, так и невозможность загружать игры отдельных изготовителей.
<b>Смотреть еще похожие новости:</b>
<a href=https://bans.org.ua/index.php?topic=118131.new#new>1хслотс зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные призы в казино без пополнения 2022 — это конкретная сумма денег либо gift spins вращения, которые предоставляются первым постояльцам за регистрацию на сайте казино повторяющий бездепозитного приза, и выделяет вас вероятность помощью казино без пополнения опробовать услуги (игр), с последующей преимуществом, льготой вывода средств при выполнении всех установленных верховодил.
#4358 Charlesgunnyhttp://filmkachat.ru
сайт 1× slots casino
На данном разделе портала регулярно публикуются обзорные статьи, каких рассматриваются бесплатные бонусы наихороших интернет-казино. Информация структурирована по нескольким пунктам, включая основные: <a href=http://filmkachat.ru/>1хслот скачать</a> Доступные забавы – В неких азартных забавах возможно снизить математическое превосходство казино до нескольких десятых процента. В их количестве многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как управляло, в таких играх ставки идут в зачет вейджера не всецело. Например, имеет учитываться лишь 50%. В некоторых забавах бездепозитные призы вообщем нельзя отыгрывать.При отыгрыше бонусных средств, необходимо учесть срок действия приза и время, коие дается на отыгрыш. По истечению заявленного медли, не отыгранный бонус будет аннулирован. <a href=https://speakerdeck.com/shopavto7>https://speakerdeck.com/shopavto7</a> казино 1× slots официальный сайт <a href=https://wood.biz.ua/wr_board/tools.php?event=profile&pname=WalterLop>https://wood.biz.ua/wr_board/tools.php?event=profile&pname=WalterLop</a> Необходимость отыгрыша. Вейджер в этом случае повыше, чем для призов за депозит. И пока средства не отыграны, исключить их невозможно.
1×slots официальный зеркало
Бездепозитные призы, как уже понятно, считаются уникальной вероятностью приступать к игровому процессу полностью безвозмездно, то есть играть в онлайн казино даром и на существующие средства сразу после регистрации аккаунта. Автоматы с этим депо могут стать прекрасной вероятностью сыграть для почитателей пыла с определенными ограничениями в денег.2. Создать новый профиль. Для регистрации надо(надобно) наполнить небольшую анкету или зайдите в личный кабинет при помощи соц сеток; <a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=143862>скачать 1×slots на андроид мобильная версия</a> 1×slots зеркало на сегодня <a href=http://soumoli.com/home.php?mod=space&uid=37748>http://soumoli.com/home.php?mod=space&uid=37748</a> Наши эксперты изучают условия акции, после в ручном режиме проводят их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и параметры. Мы не рекламируем казино, а даем игрокам информацию о наихороших из них.Самые новые бездепозитные бонусы в казино за регистрацию 2022 года с выводом прибыли находятся на этой странице. Посетитель может расценить условия получения и начать играть на средства без внесения депо. При этом игроку принципиально понимать, на каких условиях и какими методами у вывести полученный выигрыш. Для этого необходимо расценить список присоединенных платежных систем. 1 х слотс зеркало Автоматическая активация показаться самой удобной, но ручной метод имеет перед ней преимущества. Прежде чем использовать вознаграждение от казино, стоит заблаговременно определить, сколько медли требуется на исполнение всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деянья приза.
1× slots зеркало
Поспешите арестовать бездепозитные бонусы за регистрацию в казино из представленного перечня. Все платформы не только ведут законную работа, хотя и порадуют добросовестными плодами забавы, высокой отдачей, прыткими выплатами.В некоторых онлайн казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на веб-сайте клуба и доказать свои контактные данные. Дополнительно потребуется активация промокода. Бесплатный приз – кредиты, коие онлайн-казино начисляет посетителю, не принуждая его пополнять игровой счет.Если при регистрации указать промокод, можно гарантировано получить бонус. Где брать ваучер? Посетите направленные блоги или форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В последнее время игорные жилища начали афишироваться в кинокартинах и телесериалах. Присмотритесь и наверняка заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных руб. <a href=http://old.clientbase.ru/forum/index.php?showuser=23808>http://old.clientbase.ru/forum/index.php?showuser=23808</a> Нельзя разглядывать игру на деньги, как вариант заработка. Азартные игры запрещены для лиц младше 18 лет. Topcasinobonuses.mobi не является зачинщиком азартных игр. Сайт одевает информационный нрав. x1 slots 1хслотс регистрация перейти на 1×slots
casino 1×slot
Выполнив все притязания оператора, клиент имеет оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит примерно не более суток. Если дополнительно требуется пройти функцию верификации, то срок возрастает до 1–2 рабочих дней. Для перевода используются банковские приборы и электрические платежные системы. Второй способ подходит лучше, например как основная транзакций в осуществляются мгновенно. В связи со специфичностью функционирования банков обработка платежей возможность занять до нескольких рабочих дней.Бездепозитные призы отличный вариант бесплатной игры в игровые автоматы. Многие пользователи сети не знают, собственно в казино можно начать играть безусловно безвозмездно, а потом исключить выигрыш на банковскую карту либо электронный кошелек, другие не доверяют интернет казино, а третьи удачно играют и выигрывают – и тотчас достаточно великие суммы. Многие новички сомневаются, что поощрительный приз не несомненно отдавать, даже случае они выиграли у казино. Это полностью неопасно и накрепко. Выводя выигранные свои, игрок просто одергивает свое участие деле и теряет уникальную возможность – бесплатно увеличивать собственное материальное положение.Но а если вы уже профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в интернет казино; скачать 1×slots на андроид мобильная версия <a href=http://www.eionia.co.kr/home/bbs/board.php?bo_table=free&wr_id=417212>http://www.eionia.co.kr/home/bbs/board.php?bo_table=free&wr_id=417212</a> В разделе с бонусами активировать свой презент. Найти забавы, для коих учтено поощрение и применять приз по предназначению.
1×slots официальный demo регистрация в 1×slots casino
Акции распространяются как на все забавы казино, так и на узкий перечень. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino прочие. Промо может обхватывать разработки 1-го производителя. Бездеп не пересекается с иными промоакциями казино. Если на сайте предусмотрен кэшбек, он не начисляется за ставки, сделанные бонусными средствами. Для идентификации платежных реквизитов игрока возможность понадобиться пополнение счета на минимальную сумму.В списке требований к отыгрышу часто наличествуют лимиты на ставки при игре на собственные средства. Так, случае отыграть надо(надобно) 30 000 рублей, а предельная сумма ограничена 30 рублями, то вертеть барабаны светит 1000 один. Эта особенность затрудняет соблюдение игроками условий по срокам деянья акции. Так же стоит выделить то, собственно в каждом онлайн казино установлен собственный наибольший кешаут на бездепозитный приз. Как правило кешаут — это максимальная сумма средств, которая дешевая для вывода с бездепозитного бонуса. <a href=https://steemit.com/roller-shutters/@kalinka0588/key-factors-for-choosing-quality-roller-shutters>https://steemit.com/roller-shutters/@kalinka0588/key-factors-for-choosing-quality-roller-shutters</a> Бездепозитный бонус часто имеет стать легкодоступным незамедлительно после окончания регистрации, потому в большинстве случаев единственным требованием к нему считается регистрация, а этого проверка вашей новой учетной записи.Маркетинговая деятеля всех игорных интернет-клубов обязана носить разнообразный нрав. И случае гонорары на депо работают чтобы, чтобы, чтобы провоцировать заносить депозиты и поощрять теснее место юзеров, то бездепозитный бонус в казино или бонус за регистрацию в казино, прежде всего, рассчитан на расширение базы потребителей. 1×slots зеркало на сегодня 2. Создать новый профиль. Для регистрации надо(надобно) заполнить небольшую анкету или зайдите в собственный офис посредством соц сетей;Вы всего, скажем, как все любите получать подарки и бездепозитные призы казино. Игорные дома взяли в повадку одаривать гэмблеров приятными призами. Стать владельцем приветственного презента можно за создание профиля или пополнение счёта. Второй вариант больше занимательный, ведь клубы готовы удвоить депо! Но в вы новичок и только знакомитесь с миром азарта, чем воспользуйтесь призом за регистрацию.
<b>Смотреть еще похожие новости:</b>
<a href=http://6000ziyuan.com/forum.php?mod=viewthread&tid=138003&extra=>казино 1× slots официальный сайт</a>
<a href=https://qualityprogamer.de/forum/showthread.php?tid=397027>зеркала 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если вы облюбовали себе количество брендов которые вам больше всего приглянулись, для постоянной игры! Таких гемблеров казино довольно предпочитает и ценит, за частую такие игроки становятся VIP игроками заведения, которым нередко поступают выгодные предложения повторяющий бонусов, например же туда заходит и бездепозитные.
#4359 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
винлайн букмекерская контора официальный пинап казино <a href=https://sovsekretno.net/>pin up casino</a> букмекерские контора ап пин ап casino pin up top <a href=https://7club7.com/>unlim casino</a> слот casino порно с Георгий Джикия (футбол) porno Илья Ковальчук (хоккей) порно с Дарья Клишина, легкоатлетка скачать 1×bet 1×bet xyz фреш казино Скворцова Вероника Игоревна порно
DiskiPlus казино фильм DiskiPlus 1×bet зеркало на сегодня 1×bet xyz <a href=https://www.diskiplus.ru>DiskiPlus casinos winning</a> DiskiPlus pin casino DiskiPlus new casino <a href=https://diskiplus.ru/>DiskiPlus porno Илона Маркова, хоккеистка</a> DiskiPlus 1×bet зеркало слоты DiskiPlus лучшие букмекерские конторы DiskiPlus porno Илья Ковальчук (хоккей) DiskiPlus porno Виктория Баркова, легкоатлетка DiskiPlus казино смотреть онлайн бесплатно DiskiPlus букмекерская контора официальный сайт скачать DiskiPlus леон букмекерская контора
#4360 Charlesgunnyhttp://filmkachat.ru
1×slots быструю регистрацию а также мгновенное
Бездепозитные призы – это самая небезинтересная и более перспективная промоакция интернет-казино. Они и никакого фри-спинов, поэтому собственно выплаты в даровых вращениях не гарантированы, ведь комбинации на барабанах игрового аппарата могут не сложиться. <a href=http://filmkachat.ru/>1×slots бездепозитный бонус за регистрацию</a> Мы советуем не отрицаться от сходственных услуг узнаваемых казино. Выделите некоторое минут на регистрацию, получите приз и попытайтесь его отыграть. Может быть, сейчас фортуна будет на вашей стороне! <a href=http://www.pvp.iq.pl/thread-5909.html>http://www.pvp.iq.pl/thread-5909.html</a> 1×slot казино зеркало <a href=http://forum.topgamesinc.com/member.php?1264933-tinybough58>http://forum.topgamesinc.com/member.php?1264933-tinybough58</a>
1×slots регистрация 1×slots casino c2d ru
Выбирайте наилучшие благотворительные призы с помощью обзоров на Casinoz – и пусть вас сопутствует счастье при отыгрыше бонусных кредитов! рабочее зеркало 1×slots Бездепозитные бонусы – это исключительно занимательная и наиболее многообещающая акция интернет-казино. Они том другого фри-спинов, потому собственно выплаты в даровых вращениях не гарантированы, как композиции на барабанах игрового аппарата имеют не сложиться. <a href=http://unqbit.org/bbs/board.php?bo_table=free&wr_id=37050>http://unqbit.org/bbs/board.php?bo_table=free&wr_id=37050</a> 1×slot зеркало рабочее регистрации на телефон придет
1хслотс регистрация в 1×slots casino
Верификация аккаунта. Лучше доказать личность незамедлительно в регистрации, чтобы позже не было заморочек с выводом денег. Верификация возможность проходить 2-мя маршрутами: Бездепозитный приз часто может замерзнуть доступным незамедлительно в завершения регистрации, поскольку как единственным притязанием к нему является регистрация, а этого ревизия вашей новой учетной записи.Минимального оборота. Этот предел устанавливается вейджером — же игрок не поиграет на установленную сумму, вывод средств будет недосегаем. <a href=http://www.mxeia.com/home.php?mod=space&username=numerouscamper1&do=profile>http://www.mxeia.com/home.php?mod=space&username=numerouscamper1&do=profile</a> За счёт спинов выйдет запустить разные интернет слоты, протестировать стратегии и поднабраться опыта. Фишка что, что вращения начисляются на лучшие аппараты с уникальными опциями и высокой отдачей. Не запамятовывайте, что в любом акционном предложении учтены особые требования – временные ограничения, наибольший объем ставки, список доступных игр. x1 slots регистрация в 1×slots casino Законодательство, регулирующее азартные забавы в различных странах, влияние на полномочия операторов. В результате пользователи из отдельных регионов сталкиваются с ограничениями со стороны казино. Это имеет быть как полный отказ в доступе, например и невозможность загружать игры отдельных производителей.Выполнив все притязания оператора, клиент имеет оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит примерно менее суток. Если дополнительно требуется пройти функцию верификации, то срок увеличивается до 1–2 рабочих дней. Для перевода применяются банковские инструменты и электронные платежные системы. Второй метод подходит никакого, например как масса транзакций в исполняются моментально. В связи со спецификой функционирования банков обработка платежей может занять до нескольких трудящихся дней.
сайт 1× slots casino
Также, учите, что бездепозитный приз можно исключить только в случае, когда станут выполнены все обстоятельства отыгрыша. Фриспины – безвозмездные вращения с фиксированной ставкой, которые возможно применять в определенных игровых автоматах.Максимальная ставка ? уточняется в валюте счета и ограничивает размер ставки за один спин. В случае ее превышения приз возможность быть аннулирован. Также в правилах возможность находиться запрет на размещение ставок конкретного вида, примеру, по одинаковым шансам в рулетке (словами, на чет или нечет, красное или черное и т.д. ). 1×slots зеркало выигрыши обязательно пройдите регистрацию если <a href=http://bbs.yongrenqianyou.com/home.php?mod=space&uid=4117882&do=profile>http://bbs.yongrenqianyou.com/home.php?mod=space&uid=4117882&do=profile</a> Но не мыслить, что снабжая юзеров такими призами, казино увлекается спонсированием. Ведь объемы вознаграждений, в, не немалые (средним размером от 5 до 20 $). И на эти средства налагаются конкретные обстоятельства и лимитирования, обязательные к выполнению игрока, случае в последствии он вожделеет получить все средства выигранные деньги.
1хслотс 1хслотс регистрация перейти на 1×slots
Так собственно приготовьтесь предоставить секретную информацию (пол, возраст, страна проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает менее суток, в чего получится беспрепятственно выводить крупные выигрыши. Проверка занимает от нескольких мин. До нескольких дней, профессионалы техподдержки все запросить дополнительные документы или инициировать куцее общение по Skype.Только выполнив все обстоятельства отыгрыша и дождавшись завершения проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить свои средства. <a href=https://rylanalvc07418.jaiblogs.com/57271630/the-ethics-and-controversy-surrounding-deepnude-a-closer-look-at-ai-s-dark-side>https://rylanalvc07418.jaiblogs.com/57271630/the-ethics-and-controversy-surrounding-deepnude-a-closer-look-at-ai-s-dark-side</a> Чаще всего казино бонус за регистрацию без депозита даёт вероятность запустить каждой машина. Но другого внимательно ознакомиться с условиями. Иногда для забавы доступны лишь определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, никакого начать знакомство с миром азарта непосредственно с «одноруких бандитов». 1×slots официальный сайт зеркало Чтобы без убедиться в преимуществах бездепозитных призов, довольно зарегистрироваться в казино и получить одобрение.С такими ординарными советами каждое казино с бонусом за регистрацию способно принести в разы больше выгоды и полезности.
<b>Смотреть еще похожие новости:</b>
<a href=https://talkonlinenews.com/viewtopic.php?t=7492>1хслотс рабочее зеркало</a>
<a href=https://forumsleague.org/forum/viewtopic.php?f=70&t=18914&p=382732#p382732>1 х слотс зеркало</a>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=278367>1×slots регистрацию процедура займет всего лишь</a>
<a href=https://qualityprogamer.de/forum/showthread.php?tid=373732>1хслотс зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Изучить верховодила и условия получения бездепозитных призов казино, Вы сможете у нас на сайте в разделе с бонусами либо на официальном веб-сайте выбранного Вами казино. Если имеет отыскать необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал либо по электронной почте.
#4361 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Елизавета Боярская букмекерская контора без <a href=https://glvk.guru/>1×bet скачать приложение</a> скачать сайт букмекерской конторы букмекерская контора зенит <a href=https://th-royalgclub.com/>1×bet 1</a> казино ли pin up casino top top казино регистрации casino x порно с Кирьянова Дарья Борисовна пина casino порно с Бондаренко Анастасия Борисовна
DiskiPlus букмекерская контора без DiskiPlus pinco casino <a href=https://www.diskiplus.ru>DiskiPlus Преподобная Надежда Александровна порно</a> DiskiPlus гама казино DiskiPlus 1×bet зеркало на сегодня 1×bet xyz <a href=https://diskiplus.ru>DiskiPlus ставки на спорт букмекерские конторы</a> DiskiPlus Приезжева Екатерина Геннадьевна порно DiskiPlus online casino официальный DiskiPlus casino автомат DiskiPlus casino ап DiskiPlus Ирина Горбачева DiskiPlus порно с Артемий Панарин (хоккей) казино
#4362 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
макао казино vodka casino <a href=https://kompromat1.online/>1×bet casino</a> 1×bet зеркало сколько казино <a href=https://th-royalgclub.com/>казино пину</a> 1×bet официальный сайт 1×bet xyz лучшая казино официальные букмекерские конторы скачать Москалькова Татьяна Николаевна порно 1×bet рабочее на сегодня кент casino букмекерская контора ставки
DiskiPlus 1×bet зеркало на сегодня DiskiPlus casino daddy <a href=https://diskiplus.ru/>DiskiPlus casino промокод</a> DiskiPlus яндекс казино DiskiPlus 1×bet на андроид бесплатно <a href=https://www.diskiplus.ru>DiskiPlus porno Ангелина Гончаренко, хоккеистка</a> DiskiPlus пари букмекерская контора DiskiPlus казино онлайн DiskiPlus винлайн букмекерская контора DiskiPlus porno Катерина Шпица DiskiPlus букмекерские конторы бет DiskiPlus пин ап casino pin up top DiskiPlus porno Юлия Канакина, скелетонистка
#4363 Charlesgunnyhttp://filmkachat.ru
скачать 1×slots на андроид мобильная версия
Для тех, кто лишь подумывает испытать собственную удачу, а также для профессиональных игроков, ищущих свежие площадки для выигрышей, основные лицензированные казино нередко организуют различные акции, и лучшее услуг за время – как для начинающих, например и для проф игроков – бездепозитный приз за регистрацию.Бездепозитный бонус часто имеет стать доступным незамедлительно в окончания регистрации, потому правило единственным требованием к нему является регистрация, а после проверка вашей новой учетной записи. <a href=http://filmkachat.ru/>1 xslots рабочее зеркало</a> Размер ставки для забавы по бездепозитному бонусу (естесственно же, если, тогда,, когда он представлен повторяющий бонусных валютных средств) часто ниже, чем при ирге на депо. Ограничение несомненно действовать до этапа отыгрыша бонуса.Для тех, кто только взвешивает испытывать свою удачу, а также для профессиональных игроков, ищущих свежие площадки для выигрышей, основные лицензированные казино нередко организуют разные промоакции, и одно из лучших предложений прошедшее время – как для новичков, например и для профессиональных игроков – бездепозитный бонус за регистрацию. <a href=https://noosfero.ufba.br/lexxeagle/blog/mastering-silo-images-integration-for-advanced-3d-architectural-visualization>https://noosfero.ufba.br/lexxeagle/blog/mastering-silo-images-integration-for-advanced-3d-architectural-visualization</a> Чаще всего казино приз за регистрацию без депо даёт возможность запустить любой машина. Но лучше пристально ознакомиться с критериями. Иногда для игры доступны лишь определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, превосходнее начать знакомство с миром азарта именно с «одноруких злодеев». 1×slots рабочее зеркало на сегодня <a href=http://wx.abcvote.cn/home.php?mod=space&uid=4347624>http://wx.abcvote.cn/home.php?mod=space&uid=4347624</a>
1хслотс официальный сайт зеркало
Подарки на дни ? посвященные праздничным датам, требующие условного отыгрыша или начисляются без это. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду. рабочее зеркало 1хслотс Теоретически, к безвозмездным бонусам возможно отнести например нарекаемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, поэтому собственно они предоставляют лишь вероятность делать ставки.Будьте внимательнее при ознакомлении с правилами во избежание появления конфликтных ситуаций с казино, когда в отыгрыша бездепа для не дадут исключить солидную сумму выигрыша. <a href=https://webguiding.net/%D1%84%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B-%D0%BF%D0%B8%D1%86%D1%86%D0%B5%D1%80%D0%B8%D0%B8_279139.html>https://webguiding.net/%D1%84%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B-%D0%BF%D0%B8%D1%86%D1%86%D0%B5%D1%80%D0%B8%D0%B8_279139.html</a> Игры, каких возможно играть на бонусные средства. Проверьте перечень игр, в которых можно выступать на бонусные свои, вполне они Вам не понравятся и не тратить своё время на эту промоакцию.Приглашаем делиться воззрениями о бонусах. Это поможет другим пользователям выбирать наиболее прибыльные предложения. 1 xslots рабочее зеркало Ниже указан актуальный перечень легальных казино в Беларуси с призами на 1-ый депозит. Вы можете попасть на официальный сайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус.
1×slots зеркало регистрация
Для подтверждения электрической почты, просто перейдите по активной ссылке в послании, полученном от игрового заведения. <a href=http://espania.webcindario.com/modules.php?name=Forums&file=viewtopic&p=288#288>http://espania.webcindario.com/modules.php?name=Forums&file=viewtopic&p=288#288</a> При пользовании бездепозитным призом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют несколько обликов лимитов: 1х слот 1хслотс регистрация перейти на 1×slots
1×slots зеркало этих способов предполагает регистрацию
Похожим образом трудится 3-ий способ доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения посетителя либо из-за с получения им VIP-статуса. Подарок предоставляется последствии воззвания в поддержку и ревизии. Классическая разновидность бонуса за создание аккаунта. Его превосходство заключается сомнений, собственно клиент может других избирать аппараты и делать ставки в них. Иногда список игровых автоматов ограничен оператором, но все также это никакого, чем один-единственный доступный слот, как когда с использованием фриспинов.Все обожают получать подарки. Согласитесь, почти каждый играющий человек несомненно необъятно счастлив, случае получит безвозмездный подарок для игры в онлайн казино просто за регистрацию или же приз за внесенный депозит, например именуемые приветственные бонусы для свежих игроков. Соответственно эти онлайн клубы станут более популярны и преимущественны у игроков при выборе казино для забавы. Топ казино день обновляется и прибавляются новые и занимательные игровые клубы с привлекательной бонусной политикой и всеми вероятными прерогативами, к коим относятся эти бонусы как фриспины за регистрацию, валютные бездепозитные призы, а великодушные призы за внесенный депо. Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы которые появляются у начинающих.Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить особенности, труднодоступные при игре в демо режиме. Многие свежие клиенты перебегают в число постоянных, а оператор получает долгосрочную выгода. 1×slots коды <a href=https://casperforum.org/user/geraldkig/?um_action=edit>https://casperforum.org/user/geraldkig/?um_action=edit</a>
1×slots промокод при регистрации 2025
<a href=https://sklad-slabov.ru/forum/user/16337/>https://sklad-slabov.ru/forum/user/16337/</a> B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.Бездепы могут входить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами. 1×slots регистрацию процедура займет всего лишь Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают бонус по государствам. Вплоть до как, собственно клуб может себя игроков из Вашей страны, а бездеп не давать.
<b>Смотреть еще похожие новости:</b>
<a href=https://bans.org.ua/index.php?topic=129054.new#new>1×slots официальный сайт скачать на айфон</a>
<a href=http://permitbeijing.com/forum/showthread.php?tid=2242587>1х слот 1хслотс регистрация перейти на 1×slots</a>
<a href=https://koreanstudies.com/forum/viewtopic.php?t=193679>1×slots регистрация на сайте</a>
<a href=https://www.xn–72c9aa5escud2b.com/webboard/index.php/topic,509295.new.html#new>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Ниже указан актуальный список законных казино в Беларуси с бонусами на 1-ый депо. Вы можете попасть на официальный сайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. На благотворительные призы онлайн-казино практически практически распространяется лимитирования по стране проживания клиентов. Даже если вам разрешено открывать счет и играть на деньги в заведении, это еще не означают, что вам доступны no deposit bonuses.
#4364 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up casino официальный 1×bet скачать приложение <a href=https://rucriminal.info/>Юдаева Ксения Валентиновна порно</a> 1win букмекерская контора порно с Гатагова Ольга Анатольевна <a href=https://t.me/vchkogpu_ru>промокод 1×bet</a> 1×bet официальный скачать Радченко Светлана Юрьевна порно казино вход ап казино casino зеркало сегодня 1×bet официальный сайт 1×bet xyz казино фильм
DiskiPlus 7k casino DiskiPlus симулятор казино <a href=https://diskiplus.ru/>DiskiPlus casino рабочее зеркало</a> DiskiPlus 1×bet на андроид бесплатно DiskiPlus сайт винлайн букмекерская контора <a href=https://www.diskiplus.ru/>DiskiPlus 7k casino скачать</a> DiskiPlus up casino скачать DiskiPlus фильмы казино рояль DiskiPlus Мухтиярова Елена Вячеславовна порно DiskiPlus porno Алена Михайлова DiskiPlus pin ап casino DiskiPlus porno Алена Михайлова DiskiPlus порно с Владимир Минеев (ММА)
#4365 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало рабочее этих способов предполагает регистрацию
Новички не любят сразу же заносить депозит. Это обусловлено неимением опыта и сомнением. К счастью, дни возможно получить бездепозитный приз за регистрацию в казино. Неважно собственно начислит система – фриспины либо кредиты. В любом случае вы не рискуете своими сбережениями. Это отличная возможность запустить понравившийся видео слот или же испытать фортуну в настольных забавах.Размер ставки для игры по бездепозитному бонусу (естесственно же, если, тогда,, когда он представлен в виде бонусных валютных средств) зачастую ниже, чем при этой на депозит. Ограничение будет работать до этапа отыгрыша приза. <a href=http://filmkachat.ru/>1×slots регистрация на сайте</a> <a href=https://www.zybuluo.com/lexxeagle/note/2570094>https://www.zybuluo.com/lexxeagle/note/2570094</a> 1хслот 1хслотс регистрация перейти на 1×slots <a href=http://zxos.vip/home.php?mod=space&uid=68413&do=profile>http://zxos.vip/home.php?mod=space&uid=68413&do=profile</a>
1×slots зеркало регистрация в 1×slots casino
Вейджер не более х30–35 считается приемлемым. Опытные игроки утверждают, собственно с таким вейджером реально остаться в плюсе, если верно подойти к выбору игрового аппарата.Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 поболее. Когда игроку надеется много фриспинов, администрация возможность разбивать их начисление на некоторое дней. Бесплатные вращения предоставляются для конкретного слота, который указывается в правилах промоакции. 1×slots рабочее зеркало <a href=http://fumankong2.cc/home.php?mod=space&uid=575378>http://fumankong2.cc/home.php?mod=space&uid=575378</a> Перечисленные повыше основные свойства сопровождают фактически любой бонус и считаются стереотипными для бездепозитных бонусных начислений в казино.Заполняя данные в личном профиле, указывайте только достоверную информацию, так как Вам придется ее доказать в при выводе средств. x1 slots регистрация в 1×slots casino Наш список содержит превосходнейшие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по важным параметрам:Осталось выбрать казино с призом за регистрацию и создать профиль. После активации презента выигрыш зависимости от Фортуны и навыков.
1 хслот регистрация в 1×slots casino
Для получения депозитного бонуса необходимо пополнить свой игровой баланс реальными средствами. Вознаграждение можно получить либо при внесении первого депо, или повторяющий фиксированного процента от внесённых средств. Так либо иначе, приз поступит на счёт лишь последствии пополнения. Зарегистрируйтесь. Для регистрации почаще всего достаточно ввести собственный номер аппарата и почтовый адрес, последствии чего установить полученный код из СМС. Возможно, требуется показать промокод. В правилах акции несомненно написано, где его хотелось включать. Иногда это надо создавать при регистрации, от — уже последствии сотворения личного офиса, на отдельной страничке.Бонус за регистрацию в казино без депозита с выводом денег нужно отыграть. Зачастую для отыгрыша может понадобиться сделать ставки на необходимую, в несколько десятков раз превышающую необходимую бонуса либо выигрыша. <a href=https://r.rumedia.top/user/Justinvox/>https://r.rumedia.top/user/Justinvox/</a> 1× slots casino зеркало Казино выводит средства лишь на что, эту платежную систему, с котрой был сделан депозит. То есть, для вывода бездепозитного бонуса, Вам сначала нужно пополнить счет. В некоторых клубах ограниченный перечень методов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с данных платежных способов, которые доступны для вывода.
1×slots зеркало видели такую регистрацию на
Для получения депозитного бонуса необходимо пополнить свой игровой баланс реальными средствами. Вознаграждение можно получить либо при внесении первого депо, или повторяющий фиксированного процента от внесённых средств. Так либо иначе, приз поступит на счёт лишь последствии пополнения. Риск-игра по одинаковым шансам – Также казино возможность запрещать скорпулезно обстоятельства по отыгрышу за раунда на удвоение, кот-ый предлагается в слотах, видео-покере и некоторых других играх. Объективные – объем бонуса, коэффициент и обстоятельства вейджера, надобность внесения депозита для вывода средств; 1×slots коды <a href=https://asdmcpe.org/user/DonaldHig/>https://asdmcpe.org/user/DonaldHig/</a> Воспользоваться бездепом возможно не во всех игровых автоматах: казино вдруг уточняет ограничение для посетителей. Конечно, это можно посчитать неким неудобством для игрока, хотя справедливости необходимо, что выбор автоматов всё одинаково остаётся достаточно большим.Для выбора азартного заведения Вы сможете воспользоваться списком наших казино с бонусами за регистрацию. На нашем сайте мы опубликовали перечень бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, что часть бонусов неповторимые и доступны лишь для посетителей нашего сайта по-специальному промо-коду или по уникальной ссылке. Кроме того, для любого приза мы подготовили подробный обозрение, каком Вы узнаете как получить и отыграть одобрение и как вывести свой выигрыш с бездепа.
1×slots регистрация 1×slotscasino09k online
Перечисленные выше главные характеристики сочетают фактически каждый приз и являются стереотипными для бездепозитных бонусных начислений в казино.Большинство клубов завлекают внимание в за счёт разнообразных подарков. На 1 сайтах можно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает безвозмездные вращения для пуска лучших онлайн слотов. Несмотря на различные промоакции, стоит выделить самые главные. В интернет-сети всегда можно отыскать перечни наиболее известных и обещанных поощрительных программ от знаменитых онлайн-казино. <a href=https://www.google.com.ag/url?q=https://doctorlazuta.by/>https://www.google.com.ag/url?q=https://doctorlazuta.by/</a> 1х слот регистрация в 1×slots casino Получить приветственный бонус имеют лишь свежие клиенты онлайн-казино. Способы описаны в критериях акции любого легального казино, чаще всего это:Превышение наибольшей ставки при отыгрыше. Система автоматически не предостерегает о превышении ставки, потому о нарушении правил игрок возможность разузнать уже после подачи запроса на вывод средств.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.ihavethepussy.com/de/threads/199249-%D0%A1%D0%83%D0%A0%D1%94%D0%A0%C2%B0%D0%A1%E2%80%A1%D0%A0%C2%B0%D0%A1%E2%80%9A%D0%A1%D0%8A-1×slots-%D0%A0%D1%95%D0%A1%E2%80%9E%D0%A0%D1%91%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A0%C2%B0%D0%A0%C2%BB%D0%A1%D0%8A%D0%A0%D0%85%D0%A1%E2%80%B9%D0%A0%E2%84%96-%D0%A1%D0%83%D0%A0%C2%B0%D0%A0%E2%84%96%D0%A1%E2%80%9A?p=216783#post216783>скачать 1×slots официальный сайт</a>
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=876966>1×slots официальный сайт мобильная версия скачать</a>
<a href=https://www.lightknotes.com/MyBB/showthread.php?tid=154155>1×slots зеркало регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Наиболее популярные вознаграждения среди гэмблеров – бездепозитные призы казино. Это не удивительно, так возможно получить благотворительные вращения или виртуальные кредиты, и этом не придётся пополнять счёт, рисковать личными деньгами. Удастся насладиться различными увеселениями причем выиграть солидную сумму, избегая серьёзного риска.
#4366 Charlesgunnyhttp://filmkachat.ru
1хлот регистрация в 1×slots casino
Некоторые онлайн-казино без депозита предлагают свежим клиентам выбрать приз при регистрации. Будьте внимательны: выбрав один, вы в безусловном большинстве случаев не сможете воспользоваться остальными.Важно, удостоверьтесь в том, что раньше не регились в избранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи. <a href=http://filmkachat.ru/>1×slot зеркало рабочее регистрации на телефон придет</a> Бездепозитные бонусы начисляются только раз один. Не стоит раскрывать свежие аккаунты, дабы получить их повторно. Служба безопасности казино обязательно выявит «левого» участника и заблокирует. Если посетитель выполнит необходимые требования, отыграет свою ставку и решит исключить личный выигрыш, то ему нужно к, собственно казино непременно потребует предоставить ксерокопии личных документов, дабы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные свои вывести не удастся.Фриспины без депозита или вспомогательные средства помогут ближе познакомиться с игровой платформой и её функциями. За счёт презентов можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям из-за забавы против живых крупье. <a href=https://heyjinni.com/read-blog/177751>https://heyjinni.com/read-blog/177751</a> Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных требований, считая обязательной верификации. Если на веб-сайте предусмотрена неотъемлемая процедура доказательства личности, то исключить выигрыш получится лишь после проверки данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий лицо.У нас на сайте Вы отыщите список бонусов без депо в проверенных казино и подробную информацию о том как их получить и применять. 1хслотс регистрация в 1×slots casino <a href=http://www.realitybyrach.com/2011/09/we-bought-zoo-trailer.html>http://www.realitybyrach.com/2011/09/we-bought-zoo-trailer.html</a>
1×slots регистрация на сайте
Получить приветственный приз могут лишь свежие посетители онлайн-казино. Способы описаны в критериях промоакции каждого законного казино, чаще всего это:Наш перечень содержит наилучшие бездепозитные призы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по важным характеристикам: <a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=120128>1×slots казино зеркало</a> 1×slots casino регистрация 1×slotscasin online Выполнив все требования оператора, клиент возможность оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит примерно менее суток. Если дополнительно требуется пройти функцию верификации, то срок увеличивается до 1–2 рабочих дней. Для перевода применяются банковские инструменты и электрические платежные системы. Второй способ подходит лучше, например как основная транзакций в осуществляются мгновенно. В связи со спецификой функционирования банков обработка платежей возможность взятьвдолг(взятьвзаймы) до нескольких рабочих дней.Самые пользующиеся способы вывода денег ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электрическим платежным системам подобии Neteller и Skrill, а пользуются криптовалютными кошельками. Вывод выигрышей может осуществляться моментально или развлекать от нескольких часов до нескольких суток. <a href=https://www.koi-s.id/member.php?324808-Davidnorie>https://www.koi-s.id/member.php?324808-Davidnorie</a> Бывают ли бездепозитные призы без вейджера? Бывают, в у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино. 1×slots регистрация на сайте Так что сможете неустрашимо региться без всяких раздумий. Фортуна сегодня наверняка на вашей стороне. Не бойтесь, ведь следствие какого или ущерба Вам абсолютно не угрожает. С такими бонусами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе.Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.
1×slots зеркало быструю регистрацию а также мгновенное
<a href=http://alfasys.com.ua/index.php?subaction=userinfo&user=noisyrhythm81>http://alfasys.com.ua/index.php?subaction=userinfo&user=noisyrhythm81</a> 1×slots зеркало рабочее на сегодня Для верификации аккаунта надо(надобно) дать профессионалам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, еще фотографию банковской карты или экрана страницы электронного кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для доказательства личности.Используйте наихорошие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из списка ниже, дабы заработать подарки за простые деяния и уже сегодня получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высокой отдачей и быстрыми выводами на электрические кошельки.
1×slots регистрацию процедура займет всего лишь
Выигрыши с призов без инвестициям практически привязаны к требованию по ставкам и шансы быть обналичены только в исполнения данных требований.Чем ниже значение вейджера, что, этим легче отыграть и вывести бонус. Если Вы планируете заработать на бездепе, не просто ознакомиться с свежим игровым клубом, то стоит избегать призов с высочайшим вейджером их почти не реально отыграть. С ними Вы сможете лишь протестировать игры заведения. <a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=925065>1×slots зеркало рабочее на сегодня</a> Зарегистрируйтесь. Для регистрации почаще всего достаточно установить собственный номер телефона и почтовый адрес, последствии чего ввести приобретенный код из СМС. Возможно, потребуется указать промокод. В правилах акции несомненно написано, где его надобно включать. Иногда это хотелось создавать при регистрации, время — уже в творения собственного кабинета, на отдельной страничке. 1хслот зеркало сайта <a href=http://wh.ac.cn/home.php?mod=space&uid=91592&do=profile>http://wh.ac.cn/home.php?mod=space&uid=91592&do=profile</a> Нельзя рассматривать игру на деньги, как вариант заработка. Азартные игры воспрещены для лиц младше 18 лет. Topcasinobonuses.mobi не зачинщиком азартных игр. Сайт носит информационный характер.Как управляло, при выводе финансов, от играющего требуется только сделать наименьший вклад чтобы, чтобы, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом собственный счет.
1×slots casino зеркало рабочее
Так собственно приготовьтесь предоставить секретную информацию (пол, возраст, государство проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев проверка данных занимает менее суток, после чего удастся свободно выводить крупные выигрыши. <a href=https://masterarms.se/user/zacherycon/>https://masterarms.se/user/zacherycon/</a> Так собственно приготовьтесь предоставить конфиденциальную информацию (пол, возраст, государство проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает менее суток, последствии чего получится беспрепятственно выводить крупные выигрыши. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Выбирайте наилучшие благотворительные бонусы за обзоров на Casinoz – и пусть вам сопутствует удача при отыгрыше бонусных кредитов!Возьми собственный презент. Чаще всего приз активируется незамедлительно после регистрации. Но посещают ситуации, когда надо(надобно) забежать в личный офис или написать в справочную службу.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.findaspermdonor.com/viewtopic.php?f=25&t=92052>1× slots официальный</a>
<a href=https://forum.ltp-team.com/topic/80386–1hslot-1hslots-registraciya-pereyti-na-1×slots/>1хслот 1хслотс регистрация перейти на 1×slots</a>
<a href=https://thetechmodders.com/forums/viewtopic.php?t=64737>1×slot казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Раздача призов может быть посвящена различным датам: календарные дни, дни рождения игроков, годовщина открытия казино и т. Д. Подарок выдается повторяющий средств, фриспинов либо баллов для накопления и размена на предложения оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд требований.
#4367 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация то дальше необходимо пройти
Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.Если вы бывалый игрок, вы обязаны знать, что приз без депо – редкая находка. Тем ниже, мы раз изучаем онлайн, чтобы отыскать вам наихорошие бездепозитные предложения. <a href=http://filmkachat.ru/>1×slots регистрация на 1хслотс</a> Еще одно условие касается объемов ставки. Операторы устанавливают максимальную необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном офисе. При превышении лимита есть риск лишиться бонуса. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, заказчик возможность столкнуться с запретом ставить фишки на шансы. <a href=https://vhearts.net/forums/thread/8947/>https://vhearts.net/forums/thread/8947/</a> Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала быстрые выводы. Фишка выплат сомнений, собственно довольно избрать платёжный инструмент и показать сумму. В большинстве случаев средства зачисляются на электронные кошельки в течение 15 минут, а на банковские карты – 1–3 рабочих денька.Бездепозитный приз предоставляется новому игроку за определенные действия. Часто презент в виде средств либо фриспинов выдается за регистрацию, благодаря чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. 1×slot зеркало рабочее регистрации на телефон придет <a href=http://womans-days.ru/user/Raymondrix/>http://womans-days.ru/user/Raymondrix/</a> Обыкновенные бездепозитные призы в размере от 3-х до 20 долларов сделаны чтобы, чтобы, дабы в забавы заходили все новые и новые игроки. Здесь, вероятнее всего, несомненно лимитирование на наибольший выигрыш. Важно, дабы перед минимальным вкладом был отключен приз за 1-ое пополнение счета, и игрок не попадет на повторный вейджер.Эффективность бездепов виде маркетингового инструмента оценили многие операторы. Малоизвестные площадки используют такие промоакции, дабы живо набрать базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны постоянных посетителей. Не все сайты, дающие подарки без депозита, рекомендованы к этой. За привлекательным промоописанием имеют скрываться неосуществимые обстоятельства отыгрыша и другие подводные камешки.
1×slots официальный зеркало
Мы собрали и опубликовали перечень наихороших бездепозитных казино с бонусами за регистрацию, которые гарантируют великодушные выигрыши и моментальные выплаты.При правильном раскладе бездепы — это отличный метод играть на средства без траты личных средств. Есть несколько советов, следуя коим можно извлечь максимально полезности из подобных промоакций казино. Играть по лишь на лицензированных площадках. Скриптовые веб-сайты не обманывают с бонусными предложениями, но и используют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах невозможно. <a href=https://hiddeninthesand.com/forum/viewtopic.php?t=295310>1хслот скачать</a> 1×slots промокод при регистрации Онлайн гемблинг развивается с каждым днем больше и больше, новые бренды создаются не по дням а по часам. Новые онлайн казино проделывают вступительные акции для игроков, для того собственно бы зарекомендовать себя, и тем самым предлагают бездепозитные бонусы за регистрацию, собственно бы не упустить эту возможность — как пользоваться свежим бездепом, советуем посещать наш вебсайт как возможно почаще, самое вкусное и новые будет добавляться в этом же перечне. <a href=http://mediawiki.envri.eu/index.php?title=РР·_чего_состоит_диета_Елены_Малышевой>http://mediawiki.envri.eu/index.php?title=РР·_чего_состоит_диета_Елены_Малышевой</a> В зависимости от интернет заведения любой из их возможность для предложить как бездепозитные средства, так и бездепозитные фриспины, которые последствии удачной регистрации рухнут для на ваш игровой баланс. 1хслотс казино зеркало Для получения выигрыша требуется выполнить условия казино. Чаще всего игроку нужно поставить конкретную сумму, но уже из личных денег. Она рассчитывается из совместного размера выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, случае пользователь выиграл 1000 руб., а множитель составляет х30, вывести средства можно будет, сделав ставки на 30 000 рублей.
1×slot казино зеркало
На странице представлены бездепозитные призы за регистрацию в казино редчайшая заслуга за коей гонятся все игроки как новички, так и мастера. Мы тоже уделяем большое внимание на наличие бонусов при составление рейтинга казино на деньги. Бездепозитный бонус это вероятность играть даром и выиграть настоящие средства. Осталось выбрать казино с бонусом за регистрацию и создать профиль. После активации дара выигрыш в от Фортуны и навыков. <a href=https://ls-rcr.com/forum/memberlist.php?mode=viewprofile&u=47224>https://ls-rcr.com/forum/memberlist.php?mode=viewprofile&u=47224</a> Допустим, за регистрацию вы возымели бездеп в размере 2 000 рублей с вейджером х30. В данном случае предстоит устроить ставок, на совместную необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать реальные средства. Однако не запамятовывайте, собственно с каждого дара выйдет исключить определённую сумму (чаще всего не более $200).У любого игорного клубы различные вейджеровые условия. Чтобы вы гарантировано сумели выполнить их, мы дадим количество советов. Если система начислила маленькую необходимую, надо делать великие ставки – остановитесь на 10–30 центах. Как только сможете заработать примерно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В неприятном случае лучше приглядеться к другому автомату. 1хслотс мобильная версия зеркало Казино выводит средства только на ту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного приза, Вам поначалу необходимо пополнить счет. В некоторых клубах узкий список методов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с данных платежных способов, которые доступны для вывода.
1×slots зеркало подтвердит вашу регистрацию если говорить
Сразу последствии активации промокода возможно воспользоваться подарком. Как теснее упоминалось, бонусы бывают трёх видов – фриспины, кредиты и фриплей-бонусы. <a href=http://sladkierecepti.5nx.ru/viewtopic.php?f=8&t=7918>1× slots регистрация в 1×slots casino</a> B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. Несмотря на то, собственно этот вариант стимуляции со стороны азартных платформ довольно известен в сфере сходственных игр, далеко не поклонникам казино известно, собственно по бездепозитные призы казино и как именно их возможно эксплуатировать.На безвозмездные бонусы онлайн-казино практически практически распространяется лимитирования по стране проживания клиентов. Даже если вам разрешено раскрывать счет и выступать на деньги в заведении, это еще не значат, собственно вас доступны no deposit bonuses. 1×слотс казино <a href=https://www.stroimvmeste.com.ua/user/Jaspergor/>https://www.stroimvmeste.com.ua/user/Jaspergor/</a> Получив свой презент, Вы сможете бесплатно играть на настоящие средства, а выполнив обстоятельства отыгрыша, исключить свой выигрыш.
сайт 1× slots casino
Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша бонусов. Заведения всегда устанавливают наивысшую ставку, возможную по условиям вейждера. 3. Подтвердить данные. В зависимости от клуба, нужно привязать телефонный либо почту, показать индивидуальную информацию;Бывают ли бездепозитные бонусы без вейджера? Бывают, в у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино. <a href=https://raid4×4.ru/memberlist.php?mode=viewprofile&u=5042>https://raid4×4.ru/memberlist.php?mode=viewprofile&u=5042</a> С такими ординарными советами каждое казино с бонусом за регистрацию способно принести в разы больше выгоды и выгоды. 1×slots официальный сайт зеркало Для всех бездепозитных призов действует максимальный лимит на выигрыш. Он показывает предельную необходимую, коию возможность получить, играя на бонусные кредиты. Как только вас получится выполнить требования вейджера, допустимый максимально будет переведен с бонусного счета на главной, а остаток будет списан.
<b>Смотреть еще похожие новости:</b>
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?p=737417#p737417>сайт 1× slots casino</a>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=150334>1×slots casino регистрация на сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если речь об эксклюзивных предложениях, может потребоваться регистрация в казино по ссылке с партнерского сайта.
#4368 Charlesgunnyhttp://filmkachat.ru
1×slots акции
Простая процедура получения бездепозитного бонуса, которая займет менее 2-х мин. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные.Не стоит незамедлительно же открещиваться от приветственных презентов в похожих казино. Администрация готова начислить деньги или фриспины, но предварительно работники обязаны убедиться, что вы не аферист. Дело в том, собственно развелось очень много охотников за призами. Они выучились дурачить систему и наваривать крупные суммы денег. <a href=http://filmkachat.ru/>1×slots сайт</a> Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. <a href=https://www.thisisant.com/forum/viewthread/7824/>https://www.thisisant.com/forum/viewthread/7824/</a> Каждый из бездепозитных бонусов без пополнения 2022 содержит свой конкретный вейджер для отыгрыша, например же в каждом казино он уточняется персонально — где то он х55 а где-то х30, повторюсь везде по разному! сайт 1× slots casino <a href=https://correspondent.in.ua/user/Stevengab/>https://correspondent.in.ua/user/Stevengab/</a>
casino 1×slot
1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, случае не желаете стать жертвой мошенников либо впустую израсходовать время;Чтобы бездеп не был начислен на Ваш аккаунт, Вам не нужно активировать бонусный код. Если поощрение от казино было добавлено на Ваш акк автоматически, а Вы не планируете его использовать, обратитесь в саппорта с пожеланием отменить бездепозитный приз. <a href=http://www.carshowsociety.com/forum.php?action=profile;u=2398>казино 1×slots</a> 1×slots рабочее зеркало на сегодня Получать информацию о самых прибыльных призах возможно без неизменного мониторинга новостей казино. Мы брали данную задачу на себя и безпрерывно смотрим за услугами операторов, избирая превосходнейшие из их. В данном разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список промоакций периодически пополняется. В топ зашли самые свежие бездепозитные бонусы за регистрацию в казино 2020, временные и замкнутые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и аспектам. Если срок деянья акции истек, она удаляется из списка.Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=http://studio-pd.ru/index.php?subaction=userinfo&user=loutishoomph51>http://studio-pd.ru/index.php?subaction=userinfo&user=loutishoomph51</a> Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации презента необходимо подтвердить электрическую почту и привязать аппарат; 1×слот регистрация в 1×slots casino Онлайн гемблинг развивается с любым днем больше и больше, свежие бренды создаются не по дням а по часам. Новые интернет казино проделывают вступительные акции для игроков, чтобы, чтобы что бы зарекомендовать себя, и тем самым предлагают бездепозитные призы за регистрацию, собственно бы не пропустить такую возможность — как воспользоваться свежим бездепом, рекомендуем навещать наш сайт как можно чаще, самое аппетитное и новые будет добавляться в данном же перечне.Для верификации аккаунта нужно дать спецам технической поддержки отсканированную копию паспорта и счета за коммунальные предложения, а также фотку банковской карты или снимок странички электрического кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности.
1×slots регистрация то дальше необходимо пройти
Объективные – объем приза, коэффициент и обстоятельства вейджера, надобность внесения депо для вывода денег;Бонус в казино без депозита содержит разные варианты: это может быть приветственный приз, акции в честь каких-то праздничных или важных дат, бонус за привлечение свежих игроков, преданность и получение VIP-статуса. Отказ в прохождении верификации. Если заказчик не желает либо имеет дать документы, подтверждающие его лицо, профиль будет заблокирован совместно, вкупе со всеми бонусными начислениями. <a href=http://forums.ghc-games.com/member.php?action=profile&uid=104676>http://forums.ghc-games.com/member.php?action=profile&uid=104676</a> Бездепозитный приз нередко возможность замерзнуть доступным незамедлительно последствии окончания регистрации, что правило единственным требованием к нему считается регистрация, а после проверка вашей новой учетной записи. 1×slots casino регистрация 1×slots review live
1хслотс казино зеркало
Ограничения по играм. Администрация запрещает игрокам некоторые игровые автоматы с бездепозитным призом, деньгами либо безвозмездными вращениями. Обычно, в правилах приводится полный перечень слотов для отыгрыша. Иногда дробление выполняется по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, хотя запрещен в настольных забавах и в разделе Live Casino. <a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/8491/#comment-349102>казино 1×slots</a> 3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефон либо почту, показать персональную информацию;В количестве случаев безвозмездные призы начисляются в кредитах, коие нельзя незамедлительно исключить со счета. Прежде их нужно отыграть по установленным правилам. Эти требования принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д. ). О нем читайте ниже. При регистрации стопам свидетельствовать лишь достоверную информацию. Когда учетная запись несомненно активна, появится доступ в Личный офис. В нем можно выбрать денежную, установить промокод и узнать подробные управляла получения и отыгрыша бездепа. Краткая информация об промоакции часто присутствует непосредственно на регистрационной форме.После требуется привнести идентификационный платёж. Это пугает новичков больше всего. Нужно сделать минимальный депо в 100–500 рублей. Таким образом служба безопасности убедиться том,, собственно платёжный способ принадлежит Вам. Данная процедура важна для обеспечения защищенности игровых счетов. Пример, Ваш аккаунт взломают и выведут свои на собственный кошелёк. Будет очень досадно. Поэтому верификация платёжной системы, это важный момент. 1×slots зеркало регистрация в 1×slots casino <a href=http://bbs.molifan.net/space-uid-2342318.html>http://bbs.molifan.net/space-uid-2342318.html</a>
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Поспешите зарегистрироваться на официальном сайте Клубника, дабы быстро получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, замечена реальный шанс победу! Бонус за регистрацию в казино без депо с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша имеет потребоваться устроить ставки на сумму, в количество 10-ов один превосходящую сумму приза или выигрыша. <a href=https://wodemeimei.com/home.php?mod=space&uid=32152>https://wodemeimei.com/home.php?mod=space&uid=32152</a> Как только вы отыграли вейджер и свои с бонусного баланса перешли вам на настоящий счет, Вы смело можете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (сделать минимальный депозит к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депо). 1×slots зеркало регистрацию более популярный вариант это
<b>Смотреть еще похожие новости:</b>
<a href=https://acerfans.ru/user/JamesTed/>1×slots зеркало видели такую регистрацию на</a>
<a href=http://fin-molitor.com/forum/memberlist.php?mode=viewprofile&u=8719>1×slots зеркало которую указывали при регистрации кстати</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Помните, что в некоторых играх сумма ставки идет в зачет вейджера лишь отчасти. Так, в настольных и карточных забавах лишь от 5% до 50% суммы ставки числятся как отыгранные средства, тот как в слотах идет в зачет все one hundred percent суммы.
#4369 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино 1 retro casino <a href=https://rucriminal.info/>7k casino официальный</a> porno Светлана Ходченкова up casino официальный <a href=https://slon-ru.com/>порно с Зырянова Анастасия Владимировна</a> официальная казино порно с Алексей Миранчук (футбол) unlim casino Лут Оксана Николаевна порно букмекерская контора фонбет официальный сайт букмекерская контора мостбет пин ап casino pin
DiskiPlus гта онлайн казино DiskiPlus 1×bet официальный слоты <a href=https://diskiplus.ru>DiskiPlus casino 7k рабочее</a> DiskiPlus букмекерская контора фонбет DiskiPlus kometa casino <a href=https://www.diskiplus.ru>DiskiPlus пин ап казино</a> DiskiPlus pin ап casino DiskiPlus ешь казино DiskiPlus Окладникова Ирина Андреевна порно DiskiPlus казино смотреть онлайн бесплатно DiskiPlus 1×bet скачать приложение на андроид DiskiPlus вавада казино DiskiPlus porno Марина Александрова
#4370 Charlesgunnyhttp://filmkachat.ru
casino 1×slot
Обыкновенные бездепозитные призы в объеме от 3-х до двадцати долларов сделаны чтобы, чтобы, чтобы в забавы заходили все новые и свежие игроки. Здесь, скорее, будет лимитирование на максимальный выигрыш. Важно, чтобы перед наименьшим вкладом был отключен бонус за 1-ое пополнение счета, и в не попадет на повторный вейджер. <a href=http://filmkachat.ru/>1×slots зеркало на сегодня</a> При небольшой сумме бонуса рекомендовано играть по невысоким ставкам, а применять максимальные чем лишь том, случае, если вейджер слишком большой, а время на отыгрыш крепко ограничено. <a href=https://www.palscity.com/forums/thread/2083/>https://www.palscity.com/forums/thread/2083/</a> 1× slots зеркало <a href=https://wiki.streampy.at/index.php?title=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0_%D0%9F%D0%B8%D1%86%D1%86%D1%8B_%D0%9E%D1%82_%D0%A0%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0_MUCHO>https://wiki.streampy.at/index.php?title=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0_%D0%9F%D0%B8%D1%86%D1%86%D1%8B_%D0%9E%D1%82_%D0%A0%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0_MUCHO</a> Возьми собственный подарок. Чаще всего бонус активируется сразу в регистрации. Но бывают истории, когда надо(надобно) забежать в собственный кабинет или написать в справочную службу.Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша призов. Заведения постоянно устанавливают наивысшую ставку, возможную по условиям вейждера.
1×slots регистрация 1×slots casino 777 online
<a href=http://forums.indexrise.com/thread-67444-post-329770.html#pid329770>1хслотс зеркало</a> 1×slots регистрация 1×slots review live В каждом казино с бездепозитным бонусом предусмотрены вейджеровые условия. Это один-единственный «подводный камень», который стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) устроить определённое число ставок. Чем круче бонус, тем сложнее выполнить обстоятельства, и наоборот. <a href=https://gti-club.ru/forum/member.php?u=413221>https://gti-club.ru/forum/member.php?u=413221</a> Призовые начисления без депо все предоставляться для участия в турнирах интернет казино. Потратить перечисленные деньги возможно исключительно в данной промоакции. Условия их проведения себе ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, лучше изучить его верховодила. рабочее зеркало 1×slots
1х слот регистрация в 1×slots casino
Обычно, бездепозитные бонусы выдаются под конкретные слоты с фиксированной ставкой, но их наверняка воспрещено применять в игровых автоматах с прогрессивным джекпотом. Список игр, в возможно применять бездеп, Вы найдете в описании промоакции либо сможете уточнить у службы поддержки заведения.Для подтверждения электрической почты, просто перейдите по интенсивной ссылке в послании, приобретенном от игрового заведения. Когда идет о получении бездепозитных бонусов в казино, начала обратите внимание на следующие обстоятельства: <a href=http://yamuhajirin.org/index.php?option=com_kunena&view=topic&catid=3&id=152016&Itemid=2552>http://yamuhajirin.org/index.php?option=com_kunena&view=topic&catid=3&id=152016&Itemid=2552</a> 1×slots casino регистрация 1×slots review live
x1 slots регистрация в 1×slots casino
Наш перечень содержит наилучшие бездепозитные бонусы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по принципиальным характеристикам:Когда речь идет о получении бездепозитных бонусов в казино, начала направьте на следующие условия: <a href=https://koreanstudies.com/forum/viewtopic.php?t=196941>1хслот зеркало сайта</a> Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, a зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.Похожим образом трудится 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения клиента или в связи с получения им VIP-статуса. Подарок предоставляется в воззвания в поддержку и проверки. 1×slots мобильная версия войти казино <a href=https://viewcinema.ru/user/Scottbounk/>https://viewcinema.ru/user/Scottbounk/</a> Размер бонусов чаще всего чисто символический и не выше 50 рублей. Приятно, хотя осязаемым бустом при вряд ли станет.Диапазон ставок, которые вправе сделать игрок, того лимитирован. Обычно назначать возможно маленькую необходимую — пределах 10–30 руб. За одно вращение.
1×slots регистрация на официальном сайте
Возможность сыграть вспомогательное состязание (а иногда и некоторое) совершенно бесплатно, а выигрыш, тому, поступает на счёт игрока. 1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, случае не желаете замерзнуть жертвой жуликов или впустую израсходовать время;Бездепозитный бонус нередко имеет стать легкодоступным сразу после окончания регистрации, потому правило единственным требованием к нему считается регистрация, а после проверка вашей свежей учетной записи. <a href=http://solbi.co.kr/bbs/board.php?bo_table=gallery&wr_id=188846>http://solbi.co.kr/bbs/board.php?bo_table=gallery&wr_id=188846</a> 1× slots casino официальный сайт Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить необыкновенности, труднодоступные при ирге в демо режиме. Многие свежие посетители перебегают в число неизменных, а оператор получает долгосрочную выгода.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=42133>скачать 1×slots официальный сайт</a>
<a href=https://tucmas.fi/phpBB/viewtopic.php?f=4&t=354180>1×slots регистрация на 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Можно. Вы постоянно сможете отказаться от получения бездепозитного приза за регистрацию в казино, пока Вы не сделаете ставку. Фриспины – благотворительные вращения с фиксированной ставкой, коие возможно использовать в конкретных игровых автоматах.
#4371 Everettimpubhttps://www.777lu.net
moving personal items Prague <a href=https://www.777lu.net/>student apartment moving Prague</a>
#4372 Charlesgunnyhttp://filmkachat.ru
1×slots скачать на айфон
Призовые начисления без депо могут предоставляться для роли в турнирах онлайн казино. Потратить перечисленные средства возможно самая в рамках этой акции. Условия их проведения включают в себя лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться этим предложением, другого, как выучить его правила. <a href=http://filmkachat.ru/>рабочее зеркало 1×slots</a> <a href=https://mega.nz/file/E6tG2Y6a#35AP8eRuVWDBW0vFRNmk3yz9lTf4-ohI6ETi78fc0BA>https://mega.nz/file/E6tG2Y6a#35AP8eRuVWDBW0vFRNmk3yz9lTf4-ohI6ETi78fc0BA</a> Так собственно приготовьтесь предоставить секретную информацию (пол, возраст, страна проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает не более суток, в чего удастся беспрепятственно выводить крупные выигрыши.Ещё одно распространённое акционное предложение – симпатичный подарок с сомнительными требованиями. К примеру, клуб обещает $100 в качестве бездепа, но с вейджером х80 или х100. Отыграть такой вейджер фактически нереально и потому лучше концентрироваться на больше заманчивых акциях. 1×slots бонус за регистрацию <a href=http://maps.google.mu/url?sa=t&rct=j&url=http://teaway.ru/bitrix/redirect.php?goto=http://images.google.com.mm/url?q=https://teletype.in/@urist555/E9kgfLPtDGD>http://maps.google.mu/url?sa=t&rct=j&url=http://teaway.ru/bitrix/redirect.php?goto=http://images.google.com.mm/url?q=https://teletype.in/@urist555/E9kgfLPtDGD</a> Бездепозитные призы истинными деньгами, которые можно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадались.
1×slots зеркало регистрация в 1×slots casino
Oтыгpaть бонус с указанным вeйджepом, для этого необходимо сдeлaть cтaвoк нa cумму, превышающую объем бонуса в несколько один. <a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=1015039#pid1015039>1хслотс казино зеркало</a> 1×slots зеркало регистрация то дальше необходимо пройти <a href=http://021bababa.org/space-uid-486195.html>http://021bababa.org/space-uid-486195.html</a> рабочее зеркало 1×slots Подарки на праздники ? приуроченные к праздничным датам, требующие условного отыгрыша либо начисляются без такового. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду.Бездепозитные призы за регистрацию в игровых автоматах для владельцев онлайн-казино являются долею рекламной кампании, направленной на повышение аудитории вебсайта. Так они продвигают свои бренды и завлекают свежих клиентов.
1× slots сайт
Наш перечень содержит наихорошие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по главным характеристикам:Бездепозитный бонус нередко возможность стать доступным незамедлительно после завершения регистрации, потому как единственным требованием к нему является регистрация, а этого проверка вашей новой учетной записи. Онлайн-казино с бездепозитными призами ставят посетителям условия для пользования бездепами, потому перед ролью в промоакции никакого тщательно ознакомиться со всеми правилами и аспектами акции. Условия шансы прикасаться получения приза, его применения и следующего вывода денежных средств когда выигрыша. <a href=http://www.01.com.hk/member.php?Action=viewprofile&username=TerryLIEMS>http://www.01.com.hk/member.php?Action=viewprofile&username=TerryLIEMS</a> Бездепозитный приз казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в данном и содержится основное различие. 1×slots актуальное зеркало Варианты выигрыша в от Вашей успеха и критерий игорного портала. Выше мы заявили, собственно некоторые бездепозитные бонусы в 2022 году выдаются с ограничениями по наибольшей выплате. Однако, остаются и, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность передовых игр на деньги, возможно выиграть невероятные суммы. Сегодняшние игровые автоматы или видео слоты, как их нарекают. Могут выдавать солидные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000.Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.
1×slots регистрация 1×slotscasino 56 online
В списке требований к отыгрышу часто присутствуют лимиты на ставки при игре на личные средства. Так, случае отыграть надо(надобно) 30 000 руб., а максимальная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 раз. Эта особенность затрудняет соблюдение игроками условий по срокам деянья акции. <a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1×slots казино мобильная версия</a> Почти все игровые клубы требуют подтверждение контактных данных игрока для получения бездепозитного бонуса. 1×slots зеркало сайта <a href=https://codescript.ru/user/TerryNer/>https://codescript.ru/user/TerryNer/</a> Представленные на этой странице превосходнейшие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, в гости Casino.ru имеют сортировать перечень по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д.
1×slots официальный сайт зеркало
Приветственный бонус без депо ? подарок за регистрацию. Выдается средствами, фриспинами либо баллами. В заключительном случае бонусные баллы применяются для роли в турнирах либо обмена на настоящие средства. Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, all лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. <a href=https://google.fr/url?q=https://doctorlazuta.by/>https://google.fr/url?q=https://doctorlazuta.by/</a> Мы собрали и выпустили перечень лучших бездепозитных казино с бонусами за регистрацию, коие гарантируют щедрые выигрыши и моментальные выплаты. 1×slot казино зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=95663>казино 1×slots официальный сайт</a>
<a href=https://chasingadream.rpginitiative.com/showthread.php?tid=205003>casino 1×slot</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Список так нарекаемых «разрешенных землель» прилагается к правилам бонусной программки игорного портала. Обязательно выясните, распространяются ли на вас сходственные наказания. Если ординарными словами, бездепы – это определённая сумма денег либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать презенты. Но есть некоторые аспекты. Существуют игорные жилища, которые перед что, этим как начислить призы просят привязать аппарат, дать копии документов.
#4373 Andrewcichttps://sites.google.com/view/bip39-mnemonic-code/
The most comprehensive <a href=https://sites.google.com/view/bip39-mnemonic-code/>bip39 world list</a> for securely creating and restoring cryptocurrency wallets. Learn how mnemonic coding works and protect your digital assets!
#4374 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию более популярный вариант это
При помощи такого одобрения оператор имеет кроме завлекать клиентов, коие раньше проявляли активность на веб-сайте, хотя по некий основанию перестали играть. В этом случае промокод высылается юзеру по электрической почте или повторяющий SMS. <a href=http://filmkachat.ru/>1×slots зеркало регистрацию более популярный вариант это</a> На бесплатные призы онлайн-казино почти постоянно распространяется ограничения по стране проживания посетителей. Даже случае для разрешается открывать счет и играть на средства в заведении, это еще не означают, что для доступны not the slightest down payment bonuses. <a href=https://kryza.network/read-blog/11467127>https://kryza.network/read-blog/11467127</a> В каждом казино с бездепозитным бонусом учтены вейджеровые обстоятельства. Это единственный «подводный камень», который стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) сделать определённое число ставок. Чем круче бонус, что, этим труднее выполнить обстоятельства, и напротив. 1×slot казино зеркало <a href=http://www.dllaoma.com/home.php?mod=space&uid=372844>http://www.dllaoma.com/home.php?mod=space&uid=372844</a> Чтоб получить большой выигрыш, выбирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша.
1хслотс рабочее зеркало
Вейджер (либо вагер) ? это минимальная сумма ставок, которую необходимо устроить для вывода денежного бонуса. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение. 1×slots бонус за регистрацию <a href=http://cloudscapehill.com/user/jamesked/?um_action=edit>http://cloudscapehill.com/user/jamesked/?um_action=edit</a> 1×slots зеркало регистрация то дальше необходимо пройти Составленный знатоками Casino.ru список онлайн-казино с бездепозитным бонусом дозволяет игрокам сопоставить спецпредложения различных операторов.
1хслотс рабочее зеркало
Фриспины. Бесплатные вращения предназначены для применения в видео-слотах. Внимательно читайте условия – они нередко выдаются для неких машин. В зависимости от клуба продоставляется создавать определенное число ставок. Кстати, современные игорные жилища дают возможность заводить «одноруких бандитов». <a href=https://ep-team.ru/forum/index.php?action=profile;u=7941>https://ep-team.ru/forum/index.php?action=profile;u=7941</a> 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.
1×slots casino регистрация 1×slots review live
Чтобы бездеп не был начислен на Ваш аккаунт, Вам не активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк автоматически, а Вы не планируете его применять, обратитесь в службу поддержки с пожеланием отменить бездепозитный бонус.Чаще всего интернет-казино предлагают бездепозитные бонусы новым юзерам. Эта промо-акция очень отлично завлекает новичков, подталкивая их к открытию счета. Конечно, не они становятся послушными клиентами, но сам факт регистрации аккаунта играет на руку заведению. <a href=https://masstr.net/showthread.php?tid=146032>1×slots зеркало рабочее</a> Вы не в коем случае ни же рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической забавы на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, научится регулировать изменять ставки и линии, исследовать бонусные игры и их выигрышные композиции, да в просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные свои, которые можно отыграть и вывести, не просто на демо счет, тем самым адреналин в крови еще больше повысится а пульс забьется с частым ритмом! Для получения выигрыша требуется выполнить условия казино. Чаще всего игроку необходимо поставить определенную сумму, но уже из собственных денег. Она рассчитывается из общего размера выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, случае пользователь выиграл 1000 руб., а множитель сочиняет х30, вывести средства возможно будет, сделав ставки на 30 000 рублей. 1×slots зеркало на сегодня <a href=https://www.startupforum.ir/members/henrytethy>https://www.startupforum.ir/members/henrytethy</a> Первый возникающий вопрос, это, зачем выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают новых игроков. Последним легче начать забаву на средства с подарка за регистрацию. Им надо пополнять баланс и расходовать личностные средства. Новички получают безвозмездные спины или средства на счёт. С их помощью знакомятся с игровым ходом, крутят слоты и проделывают ставки в рулетке.
1×slots регистрация 1×slotscasino09k online
Так собственно главное различие презента на депо от бездепа – обязательное пополнение счёта. Вы можете привнести депо и преувеличить стартовый капитал или отобрать бездеп и при не придётся рисковать собственными сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начисляет щедрое одобрение!Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 $. Если выдаются фриспины, их количество изредка выше нескольких 10-ов даровых вращений. <a href=http://hongtouwen.com/home.php?mod=space&uid=385729&do=profile>http://hongtouwen.com/home.php?mod=space&uid=385729&do=profile</a> 1×slots зеркало которую указывали при регистрации кстати На данном разделе портала регулярно публикуются обзорные заметки, в которых рассматриваются благотворительные призы наилучших интернет-казино. Информация структурирована по нескольким пт, включая основные:
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=145834>казино 1×slots</a>
<a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=424298#pid424298>1×slot зеркало</a>
<a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=54227>1хслотс зеркало</a>
<a href=https://portugal-campings.com/pt/account/>1×slots регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax
#4375 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию процедура займет всего лишь
Бездепозитный приз по промо-коду несомненно доступен для игры, только никаких случае когда Вы активируете особый бонусный код в разделе с призами либо укажите промокод при регистрации на веб-сайте. В неких случаях, считая активации кода, придется подтвердить контактные данные игрока и заполнить анкету клиента.Если при регистрации показать промокод, можно гарантировано получить бонус. Где взять ваучер? Посетите определенную блоги или форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В заключительнее время игорные дома начали афишироваться в кинокартинах и сериалах. Присмотритесь и наверняка заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных руб. <a href=http://filmkachat.ru/>1хслотс рабочее зеркало</a> Высокая конкуренция в сегменте азартных игр доказывает операторов завлекать посетителей разнородными промоакциями. Благодаря данному у гостей бывает возможность получить бонусы в казино за регистрацию без депо. Воспользоваться таким предложением можно, минуя функцию внесения денег на игровой счет, просто активировав акк на сайте. Наш гид по бездепам поможет избрать самую симпатичную бонусную программу, разузнать правила получения такого гонорары и распорядиться им с наибольшей выгодой.Размер приза. В качестве бездепов обыкновенно начисляют очень суммы, а когда идет о призах за депо, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино все презентовать игроку до 2000$. <a href=https://social.urgclub.com/read-blog/214040>https://social.urgclub.com/read-blog/214040</a> Для вывода средств бонус нужно несомненно отыграть законам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариациями отыгрыша бездепозитного приза до его получения, чтобы избежать конфликтных обстановок. казино 1×slots <a href=http://uplmegaporn.com/user/ChrisRah/>http://uplmegaporn.com/user/ChrisRah/</a> Риск-игра по равным шансам – Также казино может воспрещать выполнять условия по отыгрышу за раунда на удвоение, который предлагается в слотах, видео-покере и некоторых иных играх.
1×slots casino online регистрация
Бездепозитный бонус нередко имеет стать легкодоступным сразу после окончания регистрации, что как единственным притязанием к нему считается регистрация, а затем проверка вашей новой учетной записи.Отзывы читателей о бонусных промоакциях помогут составить эмоцию, хотя не забывайте о субъективности собственных комментариев. 1×slots официальный сайт скачать на айфон В некоторых онлайн казино для получения бездепозитных бонусов не довольно просто зарегистрироваться на сайте клуба и подтвердить свои контактные данные. Дополнительно потребуется активация промокода. <a href=http://www.ka1799.com/bbs/board.php?bo_table=free&wr_id=326022>http://www.ka1799.com/bbs/board.php?bo_table=free&wr_id=326022</a> Бонус без депо за регистрацию в казино (бездепозитный бонус) – это денежный презент от клуба, кот-ый начисляется на аккаунт игрока после регистрации в казино. Кроме творенья учетной записи, для получения бездепа, довольно часто требуется ещё и подтвердить контактные данные игрока и/или активировать специальный промо-код. 1×slots зеркало регистрация
1×slots рабочее зеркало
На нашем веб-сайте Вы найдете перечень актуальных свежих бездепозитных бонусов в казино 2022 года. Также, есть большое неповторимых услуг, которые доступны только посетителям нашего вебсайта последствии регистрации по нашей ссылке или активации специального промокода. <a href=https://eccentrictirade.com/forums/member.php?action=profile&uid=2679>https://eccentrictirade.com/forums/member.php?action=profile&uid=2679</a> Используйте наихорошие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, дабы заработать подарки за простые деянья и уже сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и прыткими выводами на электронные кошельки. 1×slots регистрация на сайте 1×slots ru com При малый сумме приза рекомендуется выступать по низким ставкам, а использовать наибольшие другого лишь сомнений случае, в вейджер очень немалый, а время на отыгрыш крепко ограничено.
1×slots регистрацию более популярный вариант это
У каждой игры средства требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система засчитает каждую ставку. В рулетке и покере сделать это гораздо сложнее. Именно поэтому например важно внимательно читать обстоятельства получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой игре, то новички попросту «спустят бонус на ветер». <a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=217233>1×slots официальный сайт скачать</a> Выбирая бесплатный приз, внимательно изучайте управляла. Убедитесь, что для возможно брать роль в промоакции. Уточните, в каких забавах возможно скорпулезно условия вейджера. При надобности задавайте вопросы адептам саппорта. Как только вы отыграли вейджер и свои с бонусного баланса перешли вам на настоящий счет, Вы храбро сможете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (устроить наименьший депозит к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депо). 1×slots регистрация 1×slots casino c2d ru <a href=http://fonogramm.pro/user/Julescah/>http://fonogramm.pro/user/Julescah/</a> Для всех бездепозитных призов функционирует максимальный предел на выигрыш. Он показывает максимальную необходимую, коию вы сможете получить, играя на бонусные кредиты. Как только вам получится выполнить притязания вейджера, дозволенный максимум несомненно переведен с бонусного счета на основной, а остаток будет списан.Ограничения по забавам. Администрация воспрещает игрокам кое-какие игровые автоматы с бездепозитным призом, деньгами либо бесплатными вращениями. Обычно, в правилах приводится глубокий список слотов для отыгрыша. Иногда разделенье выполняется по облику игр. Например, отыгрыш возможен на всех игровых аппаратах, хотя запрещен в настольных играх и в разделе Live Casino.
казино 1×slots официальный сайт
<a href=https://bongatoken.com/user/Julessmord/>https://bongatoken.com/user/Julessmord/</a> Если площадка дарует бездеп за регистрацию, то процедура его получения проста. Нужно лишь завести аккаунт на сайте и активировать его, подтвердив адресок электронной почты, номер телефонного либо иные данные, которые настятельно оператор. Перед данным необходимо убедиться, собственно юзер находится на официальном веб-сайте казино, а не на мошеннической площадке. x1 slots 1хслотс регистрация перейти на 1×slots Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных ситуаций с казино, когда в отыгрыша бездепа для не дадут исключить крупную необходимую выигрыша.
<b>Смотреть еще похожие новости:</b>
<a href=https://games-garant.ru/index.php?subaction=userinfo&user=Jamesneorm>1×slots казино мобильная версия</a>
<a href=http://www.fiat130.it/phpbb3/memberlist.php?mode=viewprofile&u=293>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При отыгрыше бездепов, учитывайте кратковременные лимитирования. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток.
#4376 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало этих способов предполагает регистрацию
Все любят получать подарки. Согласитесь, почти любой играющий человек несомненно бесконечно счастлив, в получит даровой подарок для игры в онлайн казино просто за регистрацию или же приз за внесенный депо, например нарекаемые приветственные призы для свежих игроков. Соответственно такие онлайн клубы будут более популярны и предпочтительны у игроков при выборе казино для игры. Топ казино непрерывно обновляется и добавляются свежие и интересные игровые клубы с симпатичной бонусной политикой и всеми возможными прерогативами, к которым относятся такие призы как фриспины за регистрацию, валютные бездепозитные бонусы, а также щедрые призы за внесенный депозит.Если вы новичок деле и лишь попали в неизведанную вами область азарта — счет предложений как бездепозитные бонусы без пополнения. <a href=http://filmkachat.ru/>онлайн казино 1×slots</a> Когда идет о получении бездепозитных бонусов в казино, начала направьте на следующие обстоятельства:Ещё одно распространённое акционное предложение – привлекательный презент с неблаговидными притязаниями. К образцу, клуб обещает $100 виде бездепа, но с вейджером х80 либо х100. Отыграть подобный вейджер практически невероятно и потому превосходнее концентрироваться на более интересных промоакциях. <a href=https://heyjinni.com/read-blog/177751>https://heyjinni.com/read-blog/177751</a> Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, solid только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Бонус с зачислением денег на счет дает больше свободы поступков. Пользователь сам избирает, каким образом распорядиться подаренными своими. Здесь также шансы действовать лимитирования на список дешевых игр, хотя обыкновенно эти рамки не так строги, как в промо с безвозмездными вращениями. 1×slots актуальное зеркало <a href=https://ic-info.ru/forum/user/164429/>https://ic-info.ru/forum/user/164429/</a>
1×slots регистрация 1×slotscasino 56 online
Некоторые казино могут предлагать клиентам бездепы за подтверждение номера или почты или репост на страницу в соц сетях.Размер призов почаще всего чисто условный и не превышает 50 рублей. Приятно, но ощутимым бустом при ли станет. 1×slots коды <a href=http://gunayresulova.com/index.php?subaction=userinfo&user=earsplittingver>http://gunayresulova.com/index.php?subaction=userinfo&user=earsplittingver</a> Предложения с бездепозитными бонусами за регистрацию дозволяют свежим заведениям привлечь аудиторию на свой вебсайт. А игроки тому получают вероятность играть на реальные деньги без депозита в казино и заработать маленький стартовый капитал, который разрешается исключить на карту банка либо электрический кошелек. 1×slots регистрация на сайте 1×slots ru com
1хслотс зеркало
Срок активации и время на отыгрыш. Зачисление денег либо фриспинов происходит при активации в течение требовательно ограниченного периода, похожие притязания предъявляются и к срокам отыгрыша. Одни казино позволяют отыгрывать приз некоторое дней либо в недель. Другие выдают крупную сумму за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высоким вейджером. <a href=https://www.giantbomb.com/profile/kachfil1/blog/filmy-na-telefon-skachat/167238/>https://www.giantbomb.com/profile/kachfil1/blog/filmy-na-telefon-skachat/167238/</a> 1×slots сайт
1×slot регистрация
Если речь идет об эксклюзивных услугах, имеет потребоваться регистрация в казино по ссылке с партнерского сайта.У каждого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано смогли выполнить их, мы дадим количество советов. Если система начислила маленькую необходимую, не создавать большие ставки – остановитесь на 10–30 центах. Как только сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте играть. В противном случае никакого приглядеться к иному автомату. <a href=https://australianwinerytours.com/tours/showthread.php?tid=277951>1×slots официальный сайт зеркало</a> Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить особенности, недоступные при ирге в демо режиме. Многие свежие клиенты переходят в число постоянных, а оператор получает долгосрочную прибыль.Фриспины начисляются по определенной ставке. После их активации игроку нужно запустить разъем и увериться, что в нем показываются безвозмездные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода последствии отыгрыша ориентируется оператором и изредка выше 5 000 руб. 1×slots зеркало сайта <a href=http://forum.moderncompany.de/profile.php?lookup=15982>http://forum.moderncompany.de/profile.php?lookup=15982</a> Бонус в казино без депозита имеет различные разновидности: может быть приветственный бонус, промоакции в честь каких-либо праздничных или главных дат, бонус за вербование новых игроков, преданность и получение VIP-статуса.
1×slots зеркало проходить регистрацию это отличный вариант
В реальное время получить бонус за регистрацию в казино довольно просто. Почти каждый игорный жилище с готовностью предоставит деньги либо безвозмездные вращения. Многие игроки пользуются данным и не смущяются региться в любом клубе с прибыльными условиями. Кстати, это отличная вероятность придумать выигрышную стратегию и сорвать куш. Если площадка дарит бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь ввести аккаунт на сайте и активировать его, подтвердив адрес электрической почты, номер телефона или иные данные, коие просит оператор. Перед этим нужно увериться, что юзер располагается на официальном веб-сайте казино, но на жульнической площадке.Важно, убедитесь что, собственно раньше не регились в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи. <a href=http://mp3monster.ru/index.php?subaction=userinfo&user=hellishjournal5>http://mp3monster.ru/index.php?subaction=userinfo&user=hellishjournal5</a> В онлайне очень много скриптовых сайтов, коие принадлежат плутам. Их главная цель – привлечь гэмблеров, пообещав не великодушные подарки, хотя и крупные выигрыши. Так собственно некоторые сайты предлагают получить за регистрацию и $1 000.Бонус с зачислением денег на счет выделяет больше свободы деяний. Пользователь сам избирает, каким образом воспользоваться подаренными средствами. Здесь того все действовать ограничения на список дешевых игр, хотя обычно эти рамки не например строги, как в рекламную с безвозмездными вращениями. 1×slots casino регистрация 1×slots review live Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.
<b>Смотреть еще похожие новости:</b>
<a href=https://nauc.info/forums/viewtopic.php?t=20643919>1×slots зеркало</a>
<a href=http://amazon.rx22.ru/memberlist.php?mode=viewprofile&u=255>1× slots официальный</a>
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1067#post-33757>1×slots регистрация 1×slots casino 777 online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если вы избираете проверенное лицензионное онлайн казино и сделайте все обстоятельства получения бездепозитного бонуса, трудностей с получением подарка у Вас не возникнет.
#4377 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
кент казино bitz casino <a href=https://specreporter.com/>7k casino скачать</a> букмекерская контора зенит порно с Алина Загитова, фигуристка <a href=https://krtka.info/>Набиуллина Эльвира Сахипзадовна порно</a> казино регистрации porno Дарья Клишина симулятор казино 7k casino официальный porno Мария Шарапова ограбление казино casino сегодня
DiskiPlus online casino официальный DiskiPlus пин ап casino <a href=https://diskiplus.ru/>DiskiPlus букмекерские контора ап</a> DiskiPlus 1×bet официальный слоты DiskiPlus казино в россии <a href=https://www.diskiplus.ru/>DiskiPlus 7k casino зеркало рабочее</a> казино DiskiPlus 1×bet телефон DiskiPlus порно с Карен Хачанов (теннис) DiskiPlus казино гта 5 DiskiPlus casinos xyz DiskiPlus 1×bet на андроид бесплатно DiskiPlus Лут Оксана Николаевна порно
#4378 Charlesgunnyhttp://filmkachat.ru
1хслотс мобильная версия зеркало
Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.Некоторые казино все предлагать посетителям бездепы за свидетельство номера или почты либо репост на страницу в социальных сетях. <a href=http://filmkachat.ru/>1х слот 1хслотс регистрация перейти на 1×slots</a> <a href=https://noosfero.ufba.br/lexxeagle/blog/mastering-interior-render-from-concept-to-photorealistic-visualization>https://noosfero.ufba.br/lexxeagle/blog/mastering-interior-render-from-concept-to-photorealistic-visualization</a> Можно ли в одном интернет казино получить больше 1-го бонуса за регистрацию? Нет, например как в любом онлайн казино есть правила, к которым нужно придерживаться, не творить два аккаута для получения призов, по будет блокировка обоих аккаутов, не пытайтесь перехитрить онлайн казино, приз за регистрацию выдаеться раз один 1 лицу. 1хслот зеркало <a href=http://intentionalpress.com/author/oscarmuh/>http://intentionalpress.com/author/oscarmuh/</a> При регистрации что, нет либо ином онлайн игральном заведении — для дается раз шанс испытывать свою фортуну не внося свои монеты. Замечу собственно эту поощрительную предложение предоставляют не все интернет игровые площадки, а только великодушная половина из них. Которые мы подготовили для Вас в нашем перечне.
скачать 1×slots на андроид мобильная версия
<a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1× slots регистрация в 1×slots casino</a> 1хслот официальный сайт зеркало Каждый компьютерные обязан сначала детально выучить условия по получению и отыгрышу понравившегося презента. Если всё устраивает, поспешите забрать благотворительные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик сейчас начать вращать барабаны топовых слотов. <a href=https://tpang.co.kr/bbs/board.php?bo_table=free&wr_id=826863>https://tpang.co.kr/bbs/board.php?bo_table=free&wr_id=826863</a> Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного приза достаточно пополнения баланса и подтверждения личности. В других же клубах, необходимо количество один прокрутить собственный депо.Если речь об эксклюзивных услугах, имеет понадобиться регистрация в казино по ссылке с партнерского сайта. 1×slot официальный сайт Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.Прямо данный заберите благотворительные вращения за регистрацию без депо и начинайте коллекционировать призовые комбинации из-за крупных выигрышей!
1хслотс мобильная версия зеркало
Важно, удостоверьтесь в, что раньше не регистрировались в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи.Когда идет о получении бездепозитных призов в казино, для направьте на последующие обстоятельства: Для отыгрыша приза казино обязует игрока поиграть на необходимую, в количество раз превышающую сумму полученного бонуса — здесь выгода фирмы явна. <a href=http://wehavegottalents.com/member/vagabondcard2.html>http://wehavegottalents.com/member/vagabondcard2.html</a> 1×slots зеркало регистрацию более популярный вариант это
1×slots зеркало быструю регистрацию а также мгновенное
Бесплатный бонус – кредиты, которые онлайн-казино начислит посетителю, не заставляя его пополнять игровой счет.Онлайн-казино тщательно продумывают бонусные обстоятельства, коие нужно изучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и лимитирования. Не рекомендуем сломя голову хвататься за различные предложения получения средств без инвестициям. Вполне вероятно, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на 1-ый взор. Альтернативой считается казино бонус за депо. Мы предлагаем для пару советов, благодаря коим у каждого игрока несомненно возможность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег: казино 1×slots официальный сайт <a href=http://abc64.ru/out.php?link=http://images.google.co.za/url?q=http://rodos74.ru/bitrix/click.php?goto=https://teletype.in/@urid_pomosh/1F8fAptHcPN>http://abc64.ru/out.php?link=http://images.google.co.za/url?q=http://rodos74.ru/bitrix/click.php?goto=https://teletype.in/@urid_pomosh/1F8fAptHcPN</a>
1× slots casino официальный сайт
Чтоб получить крупный выигрыш, избирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша.Также существуют онлайн-платформы азартных игр, коие применяют раздачу бездепозитных призов в специальные даты (как для казино, так и для игрока). Помимо сего, действующие геймеры кроме имеют вероятность получить похожие бонусы за собственную работа (к примеру, за увеличения значения либо за схожие достижения). При использовании бездепозитным бонусом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют некоторое видов лимитов:У нас на сайте Вы найдете список бонусов без депо в испытанных казино и подробную информацию про как их получить и применять. <a href=https://forums.twcpilots.com/member.php?action=profile&uid=800>https://forums.twcpilots.com/member.php?action=profile&uid=800</a> 1хслот зеркало Каждый новичок и умелый игрок грезят живо стартануть и начать создавать реальные ставки. Для сего достаточно отобрать подарок, за кот-ый не нужно уплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email или аппарат. После сего администрация начислит щедрое вознаграждение вид даровых вращений или виртуальных кредитов.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.katzenforum.at/forum/media/users/jamesagema.16012/>1×slots казино мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Зарегистрируйтесь. Для регистрации почаще всего довольно установить собственный номер телефонного и почтовый адрес, последствии чего установить приобретенный код из СМС. Возможно, требуется показать промокод. В правилах промоакции будет написано, где его хотелось вводить. Иногда это надо делать при регистрации, времени — теснее в творенья личного офиса, на отдельной странице. Для проверки используются сканы паспортов, водительских водительских, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь замечен в попытке завести дополнительный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный список. При игре на лицензионной площадке не бояться указывать достоверную индивидуальную информацию (шифрование ликвидирует утечку персональных данных).
#4379 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало этих способов предполагает регистрацию
Это также безвозмездные финансы, которые поступают на аккаунты свежеиспеченных компьютерные последствии регистрирования. А особенность таких призов состоит сомнений, что обретенные финансы обязательно по использовать в продолжении назначенного медли.Итак, дабы благотворительные бонусные кредиты трансформировались в настоящие средства, которыми вы можете управлять по собственному усмотрению, их надо(надобно) отыграть. Вейджер следует уточнять в правилах онлайн-казино. <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino 56 online</a> На страничке представлены бездепозитные призы за регистрацию в казино редкая награда за коей гонятся все игроки как новенькие, например и профессионалы. Мы также уделяем огромное внимание на присутствие призов при составление рейтинга казино на деньги. Бездепозитный приз это вероятность выступать безвозмездно и выиграть реальные средства.Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих притязаний, считая обязательной верификации. Если на сайте предусмотрена обязательная процедура доказательства личности, то вывести выигрыш удастся только после ревизии данных. Приготовьтесь наполнить анкету и отправить в техподдержку документ, подтверждающий лицо. <a href=https://www.fundable.com/user-1002820>https://www.fundable.com/user-1002820</a> 1хслотс казино зеркало <a href=http://psvhome.ru/user/DoctorLazutakt/>http://psvhome.ru/user/DoctorLazutakt/</a> Многие казино деют в рекламных целях безвозмездные призы необыкновенно для наших читателей. Чтобы их получить, надо(надобно) перебежать на игровой сайт по партнерской ссылке с нашего портала.
1хслот зеркало
Акции распространяются как на все забавы казино, так и на узкий перечень. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и другие. Промо имеет обхватывать разработки одного производителя. Бездеп не пересекается с другими промоакциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, изготовленные бонусными средствами. Для идентификации платежных реквизитов игрока возможность потребоваться пополнение счета на наименьшую сумму. <a href=https://minifishtank.net/forum/showthread.php?tid=24649>1×slot зеркало</a> 1хслотс рабочее зеркало <a href=https://www.usajobsindex.com/author/raymondcrupe/>https://www.usajobsindex.com/author/raymondcrupe/</a> Бездепозитные бонусы казино это экономическая компенсация, предлагаемая пользователям на дармовой базе и возможность выступать в интернет казино даром. Если ассоциировать их с поощрениями за лепта, каких свои выдаются только потом начального пополнения счета, то бездепозитные гонорары получаются безвозмездно. То есть, играющий получает возможность создавать ставки на теснее существующие деньги, коие выдаст заведение, исполняя, при, обыденные деянья, дабы их извлечь (тут идет речь о регистрация, удостоверении личности с использованием номера аппарата, дизайна заказы и т.д. ). 1×slots официальный зеркало Таким образом, заведение пробует показать себя своим вероятным игрокам, а такой маркетинговый ход как казино бонус без депозита за регистрацию завлекает очень много внимания к игорному заведению и обеспечивает неизменный поток свежих посетителей и грядущих клиентов игрового интернет клуба.
1×slot рабочее зеркало
На страничке представлены бездепозитные бонусы за регистрацию в казино редчайшая награда за которой гонятся все игроки как новички, например и мастера. Мы также уделяем огромное внимание на присутствие призов при формирование рейтинга казино на средства. Бездепозитный бонус это возможность выступать безвозмездно и выиграть реальные деньги.Похожим образом трудится 3-ий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя или в связи с получения им VIP-статуса. Подарок предоставляется в обращения в поддержку и проверки. Да, у безвозмездных бонусов есть недостатки. Прежде всего, они обыкновенно маленькие. Кроме как, обстоятельства вейджера по ним практически жесткие. Но все отсутствие риска проделывает их довольно красивыми для посетителей.Рассмотрим принцип его деяния на случае. Допустим, вы зарегистрировались и получили $10 no deposit bonus с вейджером х50. Это значит, собственно выигранные деньги можно несомненно выводить не раньше, чем последствии того, как общая сумма ставок достигнет $500. <a href=http://ru-adres.ru/index.php?subaction=userinfo&user=ynyjytud>http://ru-adres.ru/index.php?subaction=userinfo&user=ynyjytud</a> Можно ли наваривать на бездепозитных бонусах? Это не работа, здесь как повезет, если в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, это возможно назвать везением, и добавочной добавкой к вашему бюджету.Все безвозмездные призы кажутся соблазнительными. Кто же откажется от возможности сыграть в онлайн-казино, не рискуя деньгами, хотя получая выигрыши. Но далеко не все бездепозитные бонусы мере привлекательны для рассудительного посетителя. 1×slots официальный сайт зеркало Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.
1×slots актуальное зеркало
Каждый из бездепозитных бонусов без пополнения 2022 имеет свой конкретный вейджер для отыгрыша, так же в каждом казино он устанавливается персонально — где то он х55 а где-то х30, повторюсь всюду по различному! <a href=http://everestrolep.listbb.ru/viewtopic.php?f=38&t=13444>1×slots промокод при регистрации 2025</a> При регистрации в либо ином интернет игральном заведении — для дается один шанс испытывать свою удачу не внося свои монеты. Замечу собственно эту поощрительную услугу деют не все онлайн игровые площадки, а только великодушная середина(средина) из их. Которые мы подготовили для Вас в нашем списке.За счёт спинов получится запустить разные онлайн слоты, протестировать стратегии и поднабраться навыка. Фишка что, собственно вращения начисляются на топовые аппараты с оригинальными опциями и высокой отдачей. Не забывайте, что в любом акционном предложении предусмотрены особые притязания – временные ограничения, наибольший размер ставки, перечень дешевых игр. Заполняя данные в личном профиле, указывайте лишь достоверную информацию, так как Вам понадобиться ее подтвердить в будущем при выводе денег.Мы рекомендуем не открещиваться от сходственных услуг знаменитых казино. Выделите несколько минут на регистрацию, получите приз и попробуйте его отыграть. Может быть, сейчас фортуна несомненно на вашей стороне! 1×slots мобильная версия войти казино <a href=http://belitavitex.kz/bitrix/rk.php?goto=http://bellehome.ru/bitrix/redirect.php?goto=http://data.openlinksw.com/val/recover.vsp?returnto=https://telegra.ph/Zayavlenie-na-poluchenie-trudovoj-knizhki-09–19>http://belitavitex.kz/bitrix/rk.php?goto=http://bellehome.ru/bitrix/redirect.php?goto=http://data.openlinksw.com/val/recover.vsp?returnto=https://telegra.ph/Zayavlenie-na-poluchenie-trudovoj-knizhki-09–19</a> Когда идет о валютных бонусах, казино постоянно устанавливают условия вейджера, коие необходимо выполнить, чтобы исключить выигрыш.
казино 1×slots официальный сайт
Помните, собственно любые нарушения верховодил сведут на нет ваши усилия, и вы скорее останетесь без начисленного для дарового приза. Всегда изучайте верховодила начисления и условия вейджера. По хоть вопросам, на коие вы не других отыскать ответы, обращайтесь за объясненьям и саппорт.Бонус без депо за регистрацию в казино (бездепозитный бонус) – это валютный презент от клуба, который начисляется на аккаунт игрока после регистрации в казино. Кроме творенья учетной записи, для получения бездепа, очень нередко потребуется ещё и доказать контактные данные игрока и/или активировать специальный промо-код. <a href=https://www.bos7.cc/home.php?mod=space&uid=3122229>https://www.bos7.cc/home.php?mod=space&uid=3122229</a> 1×slots casino регистрация Когда речь о денежных призах, казино постоянно устанавливают обстоятельства вейджера, которые нужно выполнить, чтобы вывести выигрыш.Самые свежие бездепозитные бонусы в казино за регистрацию 2022 года с выводом выгоды находятся на данной странице. Посетитель имеет оценить обстоятельства получения и начать выступать на средства без внесения депо. При данном игроку главно осознавать, на каких критериях и какими способами него вывести полученный выигрыш. Для этого нужно расценить список присоединенных платежных систем.
<b>Смотреть еще похожие новости:</b>
<a href=http://link.5nx.ru/viewtopic.php?f=5&t=5990>1×slots быструю регистрацию а также мгновенное</a>
<a href=http://www.ihavethepussy.com/de/threads/227298-%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%B7%D0%A0%D1%91%D0%A0%D0%85%D0%A0%D1%95–1×slots-%D0%A0%D1%95%D0%A1%E2%80%9E%D0%A0%D1%91%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A0%C2%B0%D0%A0%C2%BB%D0%A1%D0%8A%D0%A0%D0%85%D0%A1%E2%80%B9%D0%A0%E2%84%96-%D0%A1%D0%83%D0%A0%C2%B0%D0%A0%E2%84%96%D0%A1%E2%80%9A?p=245377#post245377>казино 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подарки на праздники ? приуроченные к парадным датам, требующие условного отыгрыша или начисляются без это. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду.
#4380 Charlesgunnyhttp://filmkachat.ru
x1 slots 1хслотс регистрация перейти на 1×slots
В зависимости от интернет заведения каждый из них может вас предложить как бездепозитные деньги, например и бездепозитные фриспины, коие в успешной регистрации упадут вас на ваш игровой баланс. <a href=http://filmkachat.ru/>1×slots casino зеркало рабочее</a> Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.У нас на сайте Вы отыщите список бонусов без депозита в испытанных казино и подробную информацию про как их получить и применять. <a href=https://www.empowher.com/groups/blogs-4/posts-33>https://www.empowher.com/groups/blogs-4/posts-33</a> 1хслотс мобильная версия зеркало <a href=https://0752snyw.com/space-uid-109076.html>https://0752snyw.com/space-uid-109076.html</a> В случае установленного лимита на сумму вывода выигрыша с бездепозитного бонуса, игрок не может исключить больше заявленной суммы.Доступность — бездепозитные призы в казино почаще всего предоставляются новым игрокам, но посещают случаи, когда приз имеют получить и действующие посетители.
1хслотс мобильная версия зеркало
На данном разделе портала периодически публикуются обзорные статьи, в которых рассматриваются благотворительные призы наихороших интернет-казино. Информация структурирована по нескольким пт, включая главные:Бонус без депо за регистрацию в казино (бездепозитный приз) – это денежный подарок от клуба, кот-ый начисляется на аккаунт игрока последствии регистрации в казино. Кроме творенья учетной записи, для получения бездепа, довольно часто потребуется ещё и подтвердить контактные данные игрока и/или активировать особый промо-код. 1×slots официальный зеркало Акции распространяются как на все игры казино, например и на ограниченный перечень. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и. Промо возможность охватывать разработки 1-го производителя. Бездеп не пересекается с иными акциями казино. Если на сайте учтен кэшбек, он не начисляется за ставки, изготовленные бонусными средствами. Для идентификации платежных реквизитов игрока возможность понадобиться пополнение счета на минимальную необходимую. <a href=http://forestgum.ru/bitrix/redirect.php?goto=http://foodferm.ru/bitrix/rk.php?goto=http://tqazwsxedc.hatenablog.com/iframe/hatena_bookmark_comment?canonical_uri=https://telegra.ph/Ceny-na-protezirovanie-zubov-v-Novosibirske-09–19>http://forestgum.ru/bitrix/redirect.php?goto=http://foodferm.ru/bitrix/rk.php?goto=http://tqazwsxedc.hatenablog.com/iframe/hatena_bookmark_comment?canonical_uri=https://telegra.ph/Ceny-na-protezirovanie-zubov-v-Novosibirske-09–19</a> 1хслотс рабочее зеркало Предложения с бездепозитными призами за регистрацию разрешают свежим заведениям привлечь аудиторию на свой сайт. А игроки же получают вероятность играть на реальные деньги без депо в казино и заработать малый стартовый капитал, который разрешается исключить на карту банка либо электрический кошелек.
1×slot официальный сайт
Новые посетители онлайн-казино без первого депо могут проверить свою удачливость. К что, этому же есть возможность преобразовать бездепы в настоящие деньги за регистрацию в казино, впрочем для этого бонус необходимо отыграть согласно условиям промоакции.Также, учите, собственно бездепозитный бонус можно исключить только в том случае, когда будут исполнены все обстоятельства отыгрыша. <a href=http://maglik.ru/user/Charlesexamp/>http://maglik.ru/user/Charlesexamp/</a> 1×slots официальный сайт зеркало На бонусные начисления шансы быть установлены вспомогательные лимитирования, коие Вы не к при отыгрыше. Пока приз всецело не отыгран — деньги из казино не выводятся.
1×slots casino зеркало рабочее
В бонусную программу многих операторов входят систематические бездепы. Это пожизненные акции, поощряющие интенсивных постоянных игроков. Популярный формат — раздача фриспинов по конкретным дням недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают неизменные бонусы без депозита в размен на скопленные баллы лояльности.Баланс игрока пополняется на соответствующую сумму. К ней применяется вейджер, обозначенный в правилах акции. Вывести выигрыш можно несомненно в как, как юзер сделает требуемый объем ставок из личных средств. В редчайших случаях бездеп работает в формате Free Play. На счет пользователя зачисляется крупная сумма, и предоставляется маленький срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по завершении сего периода сумма на счету будет превышать первоначальную, то разность можно будет вывести либо использовать для дальнейших ставок. <a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/8933–1-khslot-registratsiya-v-1×slots-casino#8955>1 хслот регистрация в 1×slots casino</a> Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, the decision зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. Прочитайте правила бонусной программы, в хотите участие. Да, мы настойчиво рекомендуем сделать это до регистрации.Лишь известные и известные азартные заведения все позволить себя раздавать бездепы вид добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депо, которые можно израсходовать в лучших аппаратах с высочайшей отдачей. 1×slots регистрацию процедура займет всего лишь <a href=https://sity.kr/bbs/board.php?bo_table=freetalking&wr_id=15937>https://sity.kr/bbs/board.php?bo_table=freetalking&wr_id=15937</a> Создание аккаунта. На веб-сайте казино нужно открыть регистрационную форму и заполнить пустующие поля собственными данными. Иногда на данном этапе потребуется указать лишь адресок электрической почты и пароль, но чаще бы заполнить анкету персональной информацией (ФИО, дата рождения, место проживания и т.д.). Нужно указывать лишь настоящие данные, потому впоследствие они будут проверены.
1× slots casino зеркало
Если площадка презентует бездеп за регистрацию, то процедура его получения проста. Нужно лишь ввести аккаунт на веб-сайте и активировать его, подтвердив адресок электронной почты, номер телефонного или другие данные, коие настятельно оператор. Перед данным необходимо увериться, что юзер находится на официальном сайте казино, не на жульнической площадке. Сроки активации бонуса устанавливаются любым казино, хотя почаще всего они не превосходят недели с этапа получения. Игроку обязательно надо(надобно) применять бездеп протяжении указанного срока, в ином случае приз просто исчезнет. Каждый приз можно получить только один раз, поэтому в не использовать бездеп в срок, у игрока не несомненно второго шанса им пользоваться.Максимальный размер ставки, кот-ый невозможно превосходить пока бонус не будет полностью отыгран. В случае нарушения этого верховодила, приз и выигрыш с него будут аннулированы. <a href=http://okprint.kz/user/DeweyMopsy/>http://okprint.kz/user/DeweyMopsy/</a> 1×slot зеркало рабочее этих способов предполагает регистрацию Доступ к подарку может открываться автоматически последствии введения промокода либо обращения в службу вебсайта. В первом случае от пользователя не потребуется никаких деяний. Бездеп с активацией по коду встречается почаще всего. Игроку необходимо установить совокупа символов в графе, кот-ая может пребывать в регистрационной форме в Личном кабинете.
<b>Смотреть еще похожие новости:</b>
<a href=http://u0382101.isp.regruhosting.ru/index.php/forum/general-questions-and-how-tos/68883-otzyvy-o-tovarakh?start=2040#133884>1×slots регистрация на 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Ещё одно распространённое акционное предложение – привлекательный подарок с сомнительными притязаниями. К примеру, клуб обещает $100 виде бездепа, хотя с вейджером х80 либо х100. Отыграть подобный вейджер фактически нереально и поэтому другого концентрироваться на более заманчивых промоакциях.
#4381 Haroldsubhttp://womantowoman.tv/dev/inc/otdyh_dlya_dushi.html
Используйте актуальный <a href=https://hyd-parts.ru/news/sovety_po_prohoghdeniyu_mage_knight_apocalypse_osnovnye_missii086__2.html>промокод 1×bet</a> и получите увеличенный бонус на первый депозит! Делайте ставки на спорт, играйте в казино и пользуйтесь эксклюзивными предложениями. Легкая регистрация и моментальные выплаты!
#4382 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
кент casino рокс казино <a href=https://rhymes-punches.com/>casino 7k сегодня</a> casino зеркало сайта casino автомат <a href=https://rhymes-punches.com/>Петрова Ольга Викторовна порно</a> Шевцова Татьяна Викторовна порно порно с Анна Калинская (теннис) gama casino порно с Дронова Александра Викторовна Москалькова Татьяна Николаевна порно мелбет букмекерская контора casino актуальное зеркало
DiskiPlus казино смотреть онлайн бесплатно DiskiPlus скачать 1×bet на андроид бесплатно <a href=https://www.diskiplus.ru/>DiskiPlus порно с Афонина Марина Игоревна</a> DiskiPlus букмекерские конторы бет DiskiPlus порно с Зырянова Анастасия Владимировна <a href=https://www.diskiplus.ru/>DiskiPlus casino com</a> DiskiPlus Семёнова Татьяна Владимировна порно DiskiPlus официальное казино вход DiskiPlus порно с Юлия Ефимова, пловчиха DiskiPlus кент казино DiskiPlus скачать 1×bet 1×bet xyz DiskiPlus casino бездепозитный DiskiPlus сайт винлайн букмекерская контора
#4383 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало
Акционные предложения от казино есть в разных форматах. Часто бонусы даются в обмен на депо. Игрок вносит платеж и получает деньги, безвозмездные вращения и другие поощрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — вид бонуса, который гарантирован за выполнение определенных деяний на сайте:Чтобы выступать безвозмездно на реальные деньги в казино, не всегда довольно просто зарегистрироваться. Иногда необходимо выполнить дополнительные деянья. <a href=http://filmkachat.ru/>1×слотс казино</a> <a href=https://playcode.io/2205736>https://playcode.io/2205736</a> Хотя благотворительные призы начисляются без депозита, не исключено, собственно для понадобиться вносить средства. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты лишь в такого, как новый клиент впервые пополнит игровой счет. 1хслотс казино зеркало <a href=http://avestalaw.ru/index.php?subaction=userinfo&user=stakingtheme19>http://avestalaw.ru/index.php?subaction=userinfo&user=stakingtheme19</a>
1×slots рабочее зеркало
В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая милая доля игры. Важно, зачастую бездепозитные призы в казино выдаются с ограничениями по максимальной выплате. В среднем можно рассчитывать на выгода в несколько тыщ руб. Как исключить выигрыш с бонуса без депо. Придётся подтвердить аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается каждым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате или прочитайте в правилах. <a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=68473>1×slots зеркало на сегодня</a> 1×slots официальный сайт зеркало <a href=http://www.gtcm.info/home.php?mod=space&uid=734171>http://www.gtcm.info/home.php?mod=space&uid=734171</a> Но есть игорные заведения, которые готовы просто так жертвовать средства на забаву. Для сего достаточно сделать профиль. Чтобы вывести свой выигрыш, для сначала нужно выполнить обстоятельства отыгрыша, указанные в условиях получения бездепозитного депо.Подарки на дни ? посвященные торжественным датам, требующие символического отыгрыша или начисляются без того. Могут дариться игрокам сутки рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду. 1×slot зеркало
1хслотс рабочее зеркало
Для получения предоставленных призов для пригодиться — ПК или мобильное устройство, и остальное дело за малым.Во время игры в казино, выигрыши, полученные благодаря бесплатным призовым фондам, суммируются и срабатывают в общую сумму для отыгрывания. Однако, в фортуна улыбнется и получится отыграть все призы, игровое заведение гарантированно разрешит вывести финансовые средства. Сумма вывода будет зависимости от лимита, утвержденного именно в данном учреждении. Поэтому, пристально надо(надобно) разбирать правила выдачи анлимитных депозитов. У каждого игорного заведения свои управляла и условия. Но, дабы получить призы, нужно выполнить стереотипные деяния:Бездепозитный приз казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в этом и содержится основное отличие. <a href=http://inbim.net/home.php?mod=space&uid=288276>http://inbim.net/home.php?mod=space&uid=288276</a> Бонусные средства – небольшая сумма средств для старта в новеньком казино. На бонусные средства, обыкновенно разрешается играть во все забавы, кроме слотов с прогрессивным джекпотом и игр из раздела exist casino. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Хотя благотворительные бонусы начисляются без депозита, не исключено, собственно вас понадобиться вносить деньги. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты лишь после как, как свежий заказчик впервые пополнит игровой счет.Доступность — бездепозитные призы в казино почаще всего предоставляются новым игрокам, но случаются случаи, когда приз могут получить и действующие посетители.
1×slots регистрацию процедура займет всего лишь
Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте условия – они нередко выдаются для неких машин. В зависимости от клуба вам делать определенное число ставок. Кстати, современные игорные жилища выделяют возможность заводить «одноруких бандитов». <a href=https://talkonlinenews.com/viewtopic.php?t=3980>1 xslots рабочее зеркало</a> Способы получения бездепа различаются зависимо облика бонуса, который понравился игроку. Но вас в любом случае надо(надобно) быть зарегистрированным в законном онлайн-казино и доказать собственную лицо. В общем облике пошаговая инструкция для получения бездепозитного приза смотрится например: Для тех, кто лишь взвешивает испытывать свою фортуну, а также для проф игроков, разыскивающих свежие площадки для выигрышей, ведущие лицензированные казино нередко организуют разные акции, и одно из лучших услуг прошедшее время – как для новичков, так и для проф игроков – бездепозитный приз за регистрацию.Как только вы отыграли вейджер и средства с бонусного баланса перебежали вас на реальный счет, Вы храбро сможете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (устроить минимальный депозит к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депозитом). 1×slots зеркало этих способов предполагает регистрацию <a href=https://onmogul.com/9428d33f-5250–464d-b086-f382ce7f293b>https://onmogul.com/9428d33f-5250–464d-b086-f382ce7f293b</a>
1×slots регистрацию процедура займет всего лишь
У нас на веб-сайте Вы отыщите перечень призов без депо в проверенных казино и подробную информацию про как их получить и применять. <a href=http://edok-journal.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=http://adminbr.ru/bitrix/redirect.php?goto=http://getairsoft.ru/bitrix/redirect.php?goto=https://telegra.ph/Kompensaciya-za-arendu-zhilya-dlya-voennosluzhashchih-09–19>http://edok-journal.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=http://adminbr.ru/bitrix/redirect.php?goto=http://getairsoft.ru/bitrix/redirect.php?goto=https://telegra.ph/Kompensaciya-za-arendu-zhilya-dlya-voennosluzhashchih-09–19</a> 1×слотс казино
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.gamesims.sk/viewtopic.php?f=10&t=59659>1×slots зеркало</a>
<a href=http://vn-info.net/user/Josephkam/>1×slots официальный сайт зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депо имеет выделяться до 30 дней. Зарегистрируйтесь. Для регистрации чаще всего достаточно ввести собственный номер телефона и почтовый адрес, последствии чего ввести полученный код из СМС. Возможно, требуется указать промокод. В правилах промоакции несомненно написано, где его бы включать. Иногда это хотелось делать при регистрации, иногда — уже в сотворения личного кабинета, на отдельной странице.
#4384 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать pin casino букмекерская контора фонбет официальный <a href=https://krtka.info/>порно с Голикова Татьяна Алексеевна</a> демо казино порно с Зырянова Анастасия Владимировна <a href=https://rhymes-punches.com/>porno Яна Троянова</a> пин ап казино букмекерская контора официальный сайт скачать 1×bet официальный 1×bet xyz казино рояль смотреть букмекерские конторы без депозита порно с Каролина Севастьянова ап казино
DiskiPlus online casino официальный DiskiPlus porno Яна Троянова <a href=https://www.diskiplus.ru>DiskiPlus водка казино</a> DiskiPlus бесплатное казино DiskiPlus Юдаева Ксения Валентиновна порно <a href=https://diskiplus.ru>DiskiPlus 1×bet официальный xbet</a> DiskiPlus Москалькова Татьяна Николаевна порно DiskiPlus 1×bet слоты DiskiPlus up casino скачать DiskiPlus porno Алена Косторная (фигурное катание) DiskiPlus Хорова Наталья Александровна порно DiskiPlus 1×bet казино
#4385 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
лучшие букмекерские конторы приложения букмекерских контор на андроид <a href=https://rucriminal.info/>мобильные букмекерские конторы</a> casino играть 1×bet сайт <a href=https://vestnik-jurnal.com/>автомат казино</a> букмекерская контора ставки 1win casino champion casino букмекерская контора ставки 7k casino сайт casino ап cometa casino
DiskiPlus букмекерская контора официальный сайт скачать DiskiPlus Преподобная Надежда Александровна порно <a href=https://www.diskiplus.ru/>DiskiPlus сайт казино зеркало</a> DiskiPlus карты казино DiskiPlus порно с Никита Кучеров (хоккей) <a href=https://www.diskiplus.ru>DiskiPlus букмекерская контора зенит</a> DiskiPlus автомат казино DiskiPlus порно с Васильева Татьяна Викторовна DiskiPlus Крючкова Полина Викторовна порно DiskiPlus зеркала казино DiskiPlus casino pin официальный DiskiPlus porno Мира Андреева (теннис) DiskiPlus букмекерские конторы в россии
#4386 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало
Однако в критериях скрываются «подводные камни», коие не разрешат вывести солидную необходимую либо же вы не успеете отыграть вейджер. Поэтому мастера рекомендуют арестовать благотворительные вращения за регистрацию в казино без депо, дабы поднабраться опыта и получить настоящий шанс на победу. <a href=http://filmkachat.ru/>1×slots официальный регистрация</a> <a href=https://peertrainer.com/LoungeCommunityThread.aspx?ForumID=1&ThreadID=316721>https://peertrainer.com/LoungeCommunityThread.aspx?ForumID=1&ThreadID=316721</a> Обычно бездепозитные акции от казино, прибывают на эл. Почту в деньки рождения либо праздники. В неких онлайн казино возможно обратиться в чат и как постоянному игроку, вероятно вам предложат бездепозитное предложение. 1 xslots рабочее зеркало <a href=http://mobile.xxxxxxx.molifan.net/space-uid-2079590.html>http://mobile.xxxxxxx.molifan.net/space-uid-2079590.html</a> На бонусные начисления имеют быть установлены вспомогательные лимитирования, которые Вы не учли при отыгрыше. Пока приз полностью не отыгран — деньги из казино не выводятся.Бонус с зачислением денег на счет выделяет больше свободы деяний. Пользователь сам подбирает, каким образом воспользоваться подаренными средствами. Здесь также все действовать ограничения на список доступных игр, но обыкновенно эти рамки не так строги, как в рекламную с безвозмездными вращениями.
1×slots casino регистрация на сайте
Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала быстрые выводы. Фишка выплат никаких, собственно довольно избрать платёжный инструмент и указать сумму. В большинстве случаев деньги зачисляются на электрические кошельки на 15 минут, а на банковские карты – 1–3 трудящихся денька.Нет. Казино выдают благотворительные призы за регистрацию, для того, чтобы заказчик мог ознакомиться с игровым заведением. А чтобы исключить его, необходимо выполнить обстоятельства отыгрыша. 1×slots зеркало выигрыши обязательно пройдите регистрацию если <a href=http://www.pigcraft.ugu.pl/member.php?action=profile&uid=234353>http://www.pigcraft.ugu.pl/member.php?action=profile&uid=234353</a> Главное превосходство спинов – возможность выучить разные слоты. Также получится насладиться бонусными раундами, испытывать фортуну в риск-туре и преумножить выигрыш за счёт особых символов. Однако не только игровой процесс заслуживает внимание, как никакого сосредоточиться на реальном выигрыше. зеркло казино 1×slots
1×slot зеркало рабочее этих способов предполагает регистрацию
С такими ординарными советами каждое казино с бонусом за регистрацию способно принести в разы больше выгоды и пользы. В большинстве заведений устроить это возможно по адресу электронной почты, по номеру телефонного, спустя социальную сеть либо гугл-аккаунт. <a href=http://pastport.jp/user/Scottlyday>http://pastport.jp/user/Scottlyday</a> При правильном подходе бездепы — это прекрасный способ играть на деньги без траты личных средств. Есть несколько советов, следуя которым возможно извлечь максимально выгоды из похожих акций казино. Играть идет лишь на лицензированных площадках. Скриптовые сайты не обманывают с бонусными предложениями, но и употребляют пиратский софт с модифицированным ГСЧ. Выиграть на этих автоматах невероятно.Кешбэк-бонус дает собой возврат фиксированного процента от ставки когда поражения либо же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не выше 10%. 1×slots зеркало 1хслотс регистрация перейти на 1×slots
1×slots на любой вкус как пройти регистрацию
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=494881>x1 slots регистрация в 1×slots casino</a> Доступные игры – В некоторых азартных играх возможно понизить математическое преимущество казино до нескольких 10-х процента. В их количестве многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как управляло, в этих играх ставки идут в зачет вейджера не всецело. Например, имеет предусматриваться только 50%. В некоторых забавах бездепозитные бонусы вообщем нельзя отыгрывать.Любой выигрыш по ставке повыше установленного лимита несомненно являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, а в случае выигрыша его сумма не поступит на счёт посетителя — итог забавы будет всецело аннулирован. 1×slots регистрацию процедура займет всего лишь <a href=http://robertchang.ca/bbs/board.php?bo_table=free&wr_id=926677>http://robertchang.ca/bbs/board.php?bo_table=free&wr_id=926677</a> Бездепозитные бонусы — это презенты от казино повторяющий бонусных денег либо фриспинов для игровых автоматов, которые начисляются на акк игрока после процедуры регистрации на сайте заведения. Для получения таких поощрений депо не требуется.Такой бесплатный эквивалент средств зачисляется на профиль пользователя в осуществления требований и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений возможен только после воплощения вейджеровых критерий.
1 х слотс зеркало
Выше мы дали глубокий комплект самых новых и актуальных бездепозитных бонусов в онлайн казино без пополнения на 2022 год, где возможность пользоваться каким ценным бездепозитным бонусом. <a href=http://www.nurrochma.com/2015/09/asyiknya-piknik-ramai-ramai.html>http://www.nurrochma.com/2015/09/asyiknya-piknik-ramai-ramai.html</a> Варианты выигрыша зависят от Вашей успеха и условий игорного портала. Выше мы сказали, что кое-какие бездепозитные бонусы в 2022 году выдаются с лимитированиями по максимальной выплате. Однако, остаются другие, все, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на средства, возможно выиграть невероятные суммы. Сегодняшние игровые автоматы или видео слоты, как их называют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000.Можно ли наваривать на бездепозитных бонусах? Это не работа, тут как повезет, в в любом предложенном безедепе, вы будете откручивать вейджер и выводить, это можно именовать везением, и дополнительной добавкой к вашему бюджету. 1×slots регистрацию более популярный вариант это Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это самая приятная часть игры. Важно, часто бездепозитные призы в казино выдаются с лимитированиями по наибольшей выплате. В среднем возможно рассчитывать на выгода в несколько тыщ рублей. Как исключить выигрыш с приза без депо. Придётся доказать акк документально, в некоторых заведениях. Процедура верификации неотклонима и делается каждым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате либо прочитайте в правилах.
<b>Смотреть еще похожие новости:</b>
<a href=http://nhomtruyen.com/threads/1×-slot-registracija-v-1×slots-casino.86594/>1х слот регистрация в 1×slots casino</a>
<a href=https://www.ldvd.nl/no-22-san-diego-place-rallies-very-last-boise-country-27–16?page=38#comment-237754>1×slots регистрация на официальном сайте</a>
<a href=http://xn–80akbkalsbeeafq6a6b2f.xn–p1ai/forum/messages/forum1/topic35719/message195744/?result=new>1×slots зеркало регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выбирайте лучшие безвозмездные призы за обзоров на Casinoz – и пусть вам сопутствует счастье при отыгрыше бонусных кредитов! Объективные – размер приза, коэффициент и обстоятельства вейджера, надобность внесения депо для вывода денег;
#4387 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino регистрации букмекерская контора официальный сайт скачать <a href=https://m.repost.news/>pinco casino</a> casino онлайн часы казино <a href=https://rucriminal.info/>казино фильм</a> porno Юлия Канакина казино вход официальный сайт Комарова Наталья Владимировна порно pin up casino top top пин up casino порно с Баталина Ольга Юрьевна 1win букмекерская контора
DiskiPlus casino приложения DiskiPlus Юдаева Ксения Валентиновна порно <a href=https://www.diskiplus.ru>DiskiPlus cat casino</a> DiskiPlus казино играть DiskiPlus porno Дарья Клишина <a href=https://diskiplus.ru>DiskiPlus porno Мария Шарапова</a> DiskiPlus pin up casino пин DiskiPlus porno Юлия Пересильд DiskiPlus бесплатно играем казино DiskiPlus casino бонус DiskiPlus casino betting DiskiPlus порно с Кирьянова Дарья Борисовна DiskiPlus сайт 1×bet слоты
#4388 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало сайта
Так что можете отважно региться без всяких размышлений. Фортуна сейчас наверняка на вашей стороне. Не опасайтесь, ведь следствие какого либо ущерба Вам абсолютно не грозит. С такими призами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе.К раскаянию, нет. Почти все казино, настоятельно внесение желая бы 1-го минимального депозита для вывода выигрыша с бездепозитного бонуса. Также учитывайте, что исключить средства разрешено лишь на ту платежную систему, с которой был изготовлен депо. <a href=http://filmkachat.ru/>1хслот зеркало сайта</a> <a href=https://guides.co/g/how-3d-property-tours-are-revolutionizing-real-estate-mark/474208>https://guides.co/g/how-3d-property-tours-are-revolutionizing-real-estate-mark/474208</a> Обычно бездепозитные акции от казино, прибывают на эл. Почту в дни рождения или дни. В некоторых онлайн казино возможно адресоваться в чат и как неизменному игроку, вероятно вас предложат бездепозитное предложение.Приглашаем делиться суждениями о призах. Это поможет иным пользователям подбирать более прибыльные предложения. x1 slots регистрация в 1×slots casino <a href=http://www.edid.co.kr/bbs/board.php?bo_table=free&wr_id=231112>http://www.edid.co.kr/bbs/board.php?bo_table=free&wr_id=231112</a> Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция содержит доскональные управляла, гиперссылка на коие обычно находится в промообъявлении. В их указываются лимиты, вейджер, перечень дешевых игр. Если оператор скрывает данные о предложении, то воспользоваться им не.
зеркала 1×slots
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=10969>казино 1× slots официальный сайт</a> 1×slots зеркало регистрацию более популярный вариант это <a href=http://kioskindustry.ru/index.php?subaction=userinfo&user=cooinglimbo90>http://kioskindustry.ru/index.php?subaction=userinfo&user=cooinglimbo90</a> Вывод выигрыша с бездепозитных призов казино – великодушный презент от азартных клубов. Но дабы вывести собственный доход, необходимо выполнить ряд условий: 1×slots зеркало 1хслотс регистрация перейти на 1×slots Выбирая бесплатный бонус, пристально изучайте правила. Убедитесь, собственно для возможно принимать участие в акции. Уточните, в каких забавах можно выполнять условия вейджера. При необходимости задавайте вопросы представителям саппорта.Большинство интернет-казино из нашего топ-10 готовы повеселить вас эксклюзивными акциями. Читайте о их в обзорах и на форуме.
1хслотс рабочее зеркало
Более крупные предложения встречаются довольно изредка. Зачастую они доступны лишь VIP-игрокам. В оставшихся случаях им скорее сопутствуют очень строгие обстоятельства отыгрыша. Также возможны вспомогательные обстоятельства и лимитирования, прописанные в условиях и положения бонусной программы казино. <a href=http://www.kroosuriya.com/krusuriya/modules.php?name=Journal&file=display&jid=11396>http://www.kroosuriya.com/krusuriya/modules.php?name=Journal&file=display&jid=11396</a> Главное преимущество спинов – возможность изучить разные слоты. Также получится насладиться бонусными раундами, испытать удачу в риск-туре и преувеличить выигрыш за счёт особенных символов. Однако не только игровой процесс заслуживает внимание, как другого сосредоточиться на реальном выигрыше. 1×slots зеркало этих способов предполагает регистрацию Существуют казино с призом за регистрацию, в которых очень знамениты фриспины в онлайн казино впоследствии регистрации в определенных играх. Они встречаются и почаще безвозмездных поощрений или классических бонусов в казино без вложений. Например, игрок регистрирует счет, на который начисляются безвозмездные игры, приз за регистрацию вид безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса в выигрывает настоящие средства, коие в последствии возможно успешно исключить из заведения на свою платежную систему. То есть, есть все шансы вывести свои без рисков собственными финансами. Регистрация, за которую игрок получит бонусы, займет пару минут, а благодаря данному возможно увеличить 5 евро поощрений до тыс. И без всяких заморочек исключить их.Для доказательства электронной почты, просто перейдите по интенсивной ссылке в послании, приобретенном от игрового заведения.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Выбор каждого онлайн казино на нашем веб-сайте. В описании к любому Вы можете узнать, собственно получите за творение аккаунта. Так что главное различие презента на депозит от бездепа – неотъемлемое пополнение счёта. Вы сможете внести депозит и преувеличить стартовый капитал или арестовать бездеп и при этом не придётся рисковать своими сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начисляет щедрое одобрение! 1×slots на любой вкус как пройти регистрацию <a href=http://sporovo.by/index.php?subaction=userinfo&user=eropabuhe>http://sporovo.by/index.php?subaction=userinfo&user=eropabuhe</a> Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.Прибывшие на аккаунт финансы бездепозитные бонусы предназначаются, в основном, только для новоиспеченных пользователей, которые ранее не имели личного аккаунта в данном казино. Исходя из этого, в раньше у игрока был сделан депо, то, по всей вероятности, у него больше не будет способности рассчитывать на получение такого бонуса в определенном заведении.
зеркала 1×slots
2. Создать свежий профиль. Для регистрации надо(надобно) наполнить маленькую анкету или зайдите в собственный кабинет посредством социальных сеток;Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 $. Если выдаются фриспины, их число редко превышает нескольких десятков даровых вращений. В бонусную программу множества операторов входят регулярные бездепы. Это пожизненные акции, поощряющие интенсивных постоянных игроков. Популярный формат — раздача фриспинов по конкретным денькам недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депо в обмен на скопленные баллы лояльности.Доступ к дару имеет открываться автоматически после введения промокода или воззвания в саппорта вебсайта. В первом случае от юзера не потребуется практически деяний. Бездеп с активацией по коду встречается чаще всего. Игроку нужно ввести совокупность символов в графе, кот-ая возможность пребывать в регистрационной форме в Личном кабинете. <a href=http://b77706vw.bget.ru/user/Zacherytub/>http://b77706vw.bget.ru/user/Zacherytub/</a> Ну и естесственно же, для казино бездепозитные призы выгодны с имиджевой стороны: сходственная щедрость повышает степень преданности посетителей к компании. x1 slots 1хслотс регистрация перейти на 1×slots Превышение наибольшей ставки при отыгрыше. Система механически не предостерегает о превышении ставки, поэтому о нарушении верховодил игрок может разузнать теснее в подачи запроса на вывод средств.
<b>Смотреть еще похожие новости:</b>
<a href=http://golf.blue-devil.eu/viewtopic.php?f=22&t=31708&p=188867&sid=f10027b39d2bb4b32902985e6c2c8aa1#p188867>1×slots зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Помните, что всевозможные нарушения правил сведут на нет ваши старания, и вы всего останетесь без начисленного вам бесплатного приза. Всегда изучайте правила начисления и условия вейджера. По каким вопросам, на которые вы возможности без найти ответы, обращайтесь за разъяснениям и саппорт.
#4389 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало слоты порно с Афонина Марина Игоревна <a href=https://res-publika.com>porno Игорь Акинфеев (футбол)</a> играющие казино онлайн 1×bet слоты <a href=https://sovsekretno.net/>автомат казино</a> 1×bet вход букмекерская контора зенит casinos xyz приложения букмекерских контор реального казино porno Светлана Ходченкова самое казино
DiskiPlus пин ап casino DiskiPlus pin up casino скачать <a href=https://www.diskiplus.ru>DiskiPlus смотреть фильм казино</a> DiskiPlus яндекс казино DiskiPlus casino ап <a href=https://www.diskiplus.ru/>DiskiPlus балтбет букмекерская контора</a> DiskiPlus кент casino DiskiPlus casino вход DiskiPlus рейтинг казино DiskiPlus 1×bet официальный xbet DiskiPlus букмекерская контора DiskiPlus Скоробогатова Ольга Николаевна порно DiskiPlus официальные сайты казино
#4390 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерские контора ап ап казино <a href=https://th-royalgclub.com/>1×bet зеркало слоты 1×bet xyz</a> порно с Илюшникова Татьяна Александровна casino игровой автомат <a href=https://th-royalgclub.com/>pin up casino пин ап</a> бесплатное казино вывод казино порно с Васильева Татьяна Викторовна пин up casino букмекерские контора ап порно с Арина и Дина Аверины, гимнастки casino промокод
DiskiPlus porno Юлия Канакина, скелетонистка DiskiPlus 1×bet рабочее <a href=https://diskiplus.ru/>DiskiPlus pinco casino</a> DiskiPlus casino ап DiskiPlus букмекерские конторы бет <a href=https://diskiplus.ru/>DiskiPlus 1win букмекерская контора</a> DiskiPlus букмекерская контора без DiskiPlus пинко casino DiskiPlus букмекерская контора бесплатно скачать DiskiPlus порно с Анна Щербакова, фигуристка DiskiPlus смотреть фильм казино DiskiPlus casino актуальное зеркало DiskiPlus пин casino
#4391 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало этих способов предполагает регистрацию
Бонус за регистрацию в казино без депозита с выводом денег нужно отыграть. Зачастую для отыгрыша возможность понадобиться устроить ставки на необходимую, в количество 10-ов раз превосходящую сумму бонуса либо выигрыша.Бездепозитные призы начисляются только раз раз. Не стоит открывать свежие аккаунты, чтобы получить их повторно. Служба безопасности казино непременно выявит «левого» соучастника и заблокирует. Если гость выполнит необходимые притязания, отыграет свою ставку и решит вывести собственный выигрыш, то ему надо(надобно) принять, что казино обязательно востребует дать ксерокопии личных документов, дабы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные средства исключить не получится. <a href=http://filmkachat.ru/>1×slots мобильная версия войти казино</a> Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. <a href=https://diigo.com/0y2r36>https://diigo.com/0y2r36</a> Многие казино деют в рекламных целях бесплатные призы исключительно для наших читателей. Чтобы их получить, надо(надобно) перебежать на игровой вебсайт по партнерской ссылке с нашего портала. 1×slots зеркало видели такую регистрацию на <a href=http://krasna-devica.ru/forum/puteshestviya/5434-s-turciey-pohozhe-oblom-gde-otdyhat-budem#comment-32888>http://krasna-devica.ru/forum/puteshestviya/5434-s-turciey-pohozhe-oblom-gde-otdyhat-budem#comment-32888</a> Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы быстро получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, замечена реальный шанс победу!Поспешите арестовать бездепозитные бонусы за регистрацию в казино из представленного списка. Все платформы не только ведут легальную деятельность, хотя и обрадуют честными плодами забавы, высочайшей отдачей, быстрыми выплатами.
1×slots casino регистрация
<a href=https://sparta.training/faq/online-returns/#comment-67608>1×slots актуальное зеркало</a> 1×slots зеркало на сегодня Список например называемых «запрещенных землель» прилагается к правилам бонусной программки игорного портала. Обязательно проверьте, распространяются ли на вас похожие санкции. <a href=http://printsstars.ru/communication/forum/index.php?PAGE_NAME=profile_view&UID=228688>http://printsstars.ru/communication/forum/index.php?PAGE_NAME=profile_view&UID=228688</a> Сроки активации приза уточняются любым казино, но чаще всего они не превосходят недели с момента получения. Игроку непременно нужно применять бездеп на обозначенного срока, в ином случае приз просто пропадет. Каждый бонус можно получить только один раз, поэтому в не применять бездеп в срок, у игрока не будет второго шанса им пользоваться.Заработать на бездепозитных призах за регистрацию в казино возможность каждый юзер, достигший совершеннолетия. 1× slots официальный В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с даровых вращений. Прибыль, коию Вы заработаете на таком бездепе возможно назначать на вывод без какого или отыгрыша.
онлайн казино 1×slots
B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. Некоторые сайты, прежде чем обмануть регистрацию игроков, предлагают ответить на некоторое базовых вопросов. Цель проведения похожей викторины – выявить случайных людей, которые не имеют представления о покере, и не допустить получения ими призов. Если гость теснее играл в казино, то ответить на полтора десятка несложных вопросов будет несложно. Очень часто, ответы можно отыскать на официальных веб-сайтах этих учреждений. <a href=http://www.haoxin.city/home.php?mod=space&uid=187901&do=profile>http://www.haoxin.city/home.php?mod=space&uid=187901&do=profile</a> Как правило, новоприбывшие геймеры в первую очередь хотят ознакомиться с методами ввода и вывода денежных средств и сроки исполнения поданных заявок дабы конкретно осознавать, как быстро появится исключить собственный казино бонус за регистрацию без депо на электронный кошелек либо же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино соперничают меж собой. Ведь в бы определенную фирму представляло только одно онлайн-заведение, то навряд бы посетители заметили казино с призом за регистрацию и имели бы рассчитывать лишь на вознаграждение в виде бонуса на первое инвестиция. К любому заведению регулярно стопам завлекать свежих игроков, собственно, итоге, только на руку всем играющим. 1хслотс 1хслотс регистрация перейти на 1×slots
1×slots официальный сайт зеркало рабочее
Бывают ли бездепозитные бонусы без вейджера? Бывают, в у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино.Если вы новичок в и только попали в неизведанную вами область азарта — за услуг как бездепозитные призы без пополнения. Активация валютного вознаграждения происходит автоматически последствии творенья профиля либо использования промокода. Иногда операторы предъявляют вспомогательные притязания: подписаться на страницы казино в соц сетях либо на рассылку рекламных извещений, скачать и ввести дополнительный софт и т.д.У любого игорного заведения свои управляла и условия. Но, чтобы получить призы, необходимо выполнить стереотипные деянья: 1× slots зеркало <a href=https://dc-kd.ru/user/Forsedroppi/>https://dc-kd.ru/user/Forsedroppi/</a> Бездепозитный бонус за регистрацию в казино с выводом средств в 2022 году — Наш ресурс предоставляет игрокам важную информацию о самых свежих, великодушных и испытанных бонусах в интернет казино, которые обновляются каждый денек.Все любят получать подарки. Согласитесь, почти каждый играющий человек несомненно сильно рад, если получит безвозмездный презент для забавы в интернет казино просто за регистрацию либо же приз за внесенный депозит, например называемые приветственные призы для новых игроков. Соответственно эти интернет клубы будут больше известны и преимущественны у игроков при выборе казино для забавы. Топ казино день обновляется и добавляются новые и интересные игровые клубы с симпатичной бонусной политикой и всеми вероятными преимуществами, льготами, к которым относятся эти призы как фриспины за регистрацию, денежные бездепозитные призы, а также щедрые призы за внесенный депозит.
1×slots регистрация на 1хслотс
Выполнив все требования оператора, заказчик возможность оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит примерно не более суток. Если дополнительно требуется пройти функцию верификации, то срок увеличивается до 1–2 трудящихся дней. Для перевода используются банковские приборы и электронные платежные системы. Второй способ подходит никакого, например как большинство транзакций в этом случае исполняются мгновенно. В связи со спецификой функционирования банков обработка платежей возможность взятьвдолг(взятьвзаймы) до нескольких трудящихся дней. Важно, убедитесь в, собственно раньше не регились в выбранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи. <a href=https://qiqer.ru/qforum/profile.php?id=362330>https://qiqer.ru/qforum/profile.php?id=362330</a> рабочее зеркало 1хслотс
<b>Смотреть еще похожие новости:</b>
<a href=https://www.donchillin.com/space-uid-382497.html>казино 1×slots официальный сайт</a>
<a href=https://your-portal.at.ua/forum/51–61764–3#88605>1×slots casino регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Каждая игровая платформа отличается условиями по получению и отыгрышу бездепов. В правилах отчетливо расписаны кратковременные рамки, за коие нужно прокрутить вейджер. Также не запамятовывайте на наибольший объем ставки и максимальную необходимую выплаты. С другой стороны, дабы получить бездепозитные призы казино, довольно истратить не более 1 минуты.
#4392 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало этих способов предполагает регистрацию
Осталось избрать казино с бонусом за регистрацию и создать профиль. После активации подарка выигрыш зависимости от Фортуны и навыков. <a href=http://filmkachat.ru/>1×slots регистрацию более популярный вариант это</a> Внесение депо – Будьте готовы восполнить счет после отыгрыша приза. Это стандартное требование правил для этого на промо-акций. Лучше заблаговременно уточнить, какую сумму надо(надобно) будет вносить на счет. Как правило, идет о наименьшем депозите, хотя вы должны быть уверены, что он для по карману. <a href=https://www.vevioz.com/forums/thread/4584/>https://www.vevioz.com/forums/thread/4584/</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=http://ooo-esk.ru/index.php?subaction=userinfo&user=enedexuj>http://ooo-esk.ru/index.php?subaction=userinfo&user=enedexuj</a>
1×slots быструю регистрацию а также мгновенное
Чаще всего, модные сервисы, эти как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно неотъемлемое правило. Финансовые свои выводятся лишь через что, эту платежную систему, коей успех для пополнения депо. Если же игрок получил бездепозитный покерный приз, требуется пополнить счет на минимальную сумму, кот-ая сочиняет обыкновенно десять долларов. <a href=http://maddog-server.org/forum/showthread.php?tid=52941>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a> 1×slots рабочее зеркало Подтверждение индивидуальной инфы. Все казино настоятельно от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и присутствие у юзера иных аккаунтов (мультиаккаунт запрещен).Можно ли в одном онлайн казино получить больше одного приза за регистрацию? Нет, так как в каждом интернет казино есть управляла, к коим надо(надобно) держаться, не творить 2 аккаута для получения бонусов, другому несомненно блокировка обоих аккаутов, не пытайтесь обмануть интернет казино, бонус за регистрацию выдаеться один раз одному личику. <a href=https://www.cfbwz.com/home.php?mod=space&uid=89152&do=profile&from=space>https://www.cfbwz.com/home.php?mod=space&uid=89152&do=profile&from=space</a> Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного бонуса довольно пополнения баланса и доказательства личности. В иных же клубах, нужно количество раз прокрутить собственный депо.Иногда в качестве поощрения за регистрацию имеют выдаваться билеты для участия в турнирах. Условия их проведения довольно отличаются, потому мы советуем ознакомиться с каждым предложением раздельно. 1×slots официальный сайт, скачать Для получения бездепа нужно пригласить в игру по реферальной ссылке свежего посетителя: он должен зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на необходимую, указанную в условиях промоакции.
1×slots официальный регистрация
Объективные – размер бонуса, коэффициент и условия вейджера, необходимость внесения депозита для вывода средств; Процесс подтверждения личности имеет занять от 1-го дня до недели. Если заказчик допустил нибудь ошибку при заполнении паспортных данных, то ему стопам адресоваться с задачей в службу онлайн-казино.Также учтите, что кое-какие игровые платформы сузивают список государств, которые способны получить предложенный бездепозитный приз за регистрацию. К примеру, существуют онлайн-заведения, выдающие подобные бонусы только обитателям определенных стран. К образцу, интернет казино 777 Оригинал дает бездепозитный приз лишь игрокам из России и стран СНГ. Или напротив, пичкают вознаграждением всех, кроме обитателей неких государств (как сего, по пристально учить перечень, дабы потом не возникло практически вопросов и претензий). <a href=http://shilinka.ru/user/Geraldsok/>http://shilinka.ru/user/Geraldsok/</a> Выбор любого интернет казино на нашем сайте. В описании к каждому Вы сможете разузнать, что получите за творенье аккаунта.Наличие у игрока второго аккаунта. Запрещено творить несколько профилей для многократного получения бездепов. зеркло казино 1×slots Призовые начисления без депо имеют предоставляться для роли в турнирах интернет казино. Потратить перечисленные деньги возможно самая в данной акции. Условия их проведения включают в себя ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться этим предложением, другого, как выучить его управляла.
1хслотс официальный сайт зеркало
Индивидуальные поощрения выдаются за совершение действий: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавленья или официального посетителя для ПК. В большинстве казино действуют программы преданности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на грядущий степень нередко сопрягается выдачей бездепа.Классическая разновидность приза за создание аккаунта. Его преимущество содержится том,, собственно клиент возможность помощи выбирать аппараты и делать ставки в них. Иногда список игровых автоматов ограничен оператором, но все точно это другого, как, чем единственный дешевый разъем, как когда с использованием фриспинов. <a href=https://melhorlance.com.br/author/jamesbom/>1×slos регистрация в 1×slots casino</a> В зависимости от онлайн заведения каждый из них возможность для предложить как бездепозитные средства, например и бездепозитные фриспины, которые в удачной регистрации рухнут вас на ваш игровой баланс. 1хслотс зеркало на сегодня <a href=http://messmangler.com/forums/member.php?action=profile&uid=3014>http://messmangler.com/forums/member.php?action=profile&uid=3014</a>
1×slots зеркало этих способов предполагает регистрацию
Иногда в одобрения за регистрацию могут выдаваться билеты для участия в турнирах. Условия их проведения довольно отличаются, потому мы рекомендуем ознакомиться с каждым предложением отдельно. Бонус без депо за регистрацию в казино (бездепозитный приз) – это валютный презент от клуба, кот-ый начисляется на акк игрока в регистрации в казино. Кроме творения учетной записи, для получения бездепа, очень часто требуется ещё и доказать контактные данные игрока и/или активировать особый промо-код. <a href=http://ip-iv.ru/index.php?subaction=userinfo&user=Travisusets>http://ip-iv.ru/index.php?subaction=userinfo&user=Travisusets</a> Для доказательства электрической почты, просто перейдите по активной ссылке в письме, полученном от игрового заведения.Варианты выигрыша зависимости от Вашей успеха и условий игорного портала. Выше мы заявили, собственно некоторые бездепозитные бонусы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются другие, все, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на деньги, возможно выиграть неописуемые суммы. Сегодняшние игровые автоматы либо видео слоты, как их называют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые множат ставку от х100.000. казино 1×slots B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы появилась возможность вывести выигрыш.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.lightknotes.com/MyBB/showthread.php?tid=262489>1×slots официальный регистрация</a>
<a href=http://nakupnidivadlo.cz/index.php/forum/3-pripominky/46564-porno?start=144#236302>x1 slots регистрация в 1×slots casino</a>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=344415>1×slots бездепозитный бонус за регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный приз нередко может стать доступным сразу в завершения регистрации, поскольку в большинстве случаев единственным притязанием к нему является регистрация, а затем ревизия вашей свежей учетной записи. Не желаете сыграть в азартные забавы, не рискуя средствами средствами, хотя получая в все выплаты? Подобную вероятность предоставляют многие превосходнейшие порталы с азартными веселиями. В их количестве много честных и надежных интернет-казино на российском языке. Они завлекают свежих пользователей различными поощрительными событиями, включая бездепозитные, или безвозмездные бонусы.
#4393 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Александр Соболев (футбол) casino онлайн <a href=https://slon-ru.com/>casino официальный сайт</a> 1×bet зеркало рабочее xbet казино онлайн бесплатно <a href=https://7club7.com/>casino сегодня</a> Скворцова Вероника Игоревна порно casino buzz casino рабочее зеркало порно с Антропова Валентина Викторовна cometa casino пин ап casino casino вход
DiskiPlus промокод 1×bet DiskiPlus porno Дарья Клишина <a href=https://diskiplus.ru/>DiskiPlus порно с Баталина Ольга Юрьевна</a> DiskiPlus казино ставка DiskiPlus champion casino <a href=https://diskiplus.ru>DiskiPlus pin up букмекерская контора</a> DiskiPlus официальные букмекерские конторы DiskiPlus 1×bet сайт 1×bet xyz DiskiPlus casino betting DiskiPlus почему в казино не бывает настенных часов DiskiPlus порно с Каролина Севастьянова DiskiPlus Набиуллина Эльвира Сахипзадовна порно DiskiPlus Скоробогатова Ольга Николаевна порно
#4394 Charlesgunnyhttp://filmkachat.ru
x1 slots 1хслотс регистрация перейти на 1×slots
Большинство клубов привлекают внимание в за счёт разнородных подарков. На 1 сайтах можно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает благотворительные вращения для пуска топовых онлайн слотов. Несмотря на разные промоакции, стоит выделить самые главные. <a href=http://filmkachat.ru/>1хслот зеркало</a> Помните, что в неких забавах сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных забавах только от 5% до 50% суммы ставки считаются как отыгранные средства, тот как в слотах идет в зачет все 100% суммы. <a href=https://forums.noria.com/topic/3d-visualization-excellence-transform-your-architectural-vision-into-reality>https://forums.noria.com/topic/3d-visualization-excellence-transform-your-architectural-vision-into-reality</a> Похожим образом трудится 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения клиента или в связи с получения им VIP-статуса. Подарок предоставляется в воззвания в поддержку и проверки.Нельзя осматривать игру на деньги, как вариант заработка. Азартные игры запрещены для лиц моложе 18 лет. Topcasinobonuses.mobi классифицируется организатором азартных игр. Сайт одевает информационный характер. казино 1×slots <a href=http://raid4×4.ru/memberlist.php?mode=viewprofile&u=26107>http://raid4×4.ru/memberlist.php?mode=viewprofile&u=26107</a>
1×slots регистрация 1×slots casino 777 online
Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают бонус по странам. Вплоть до такого, что клуб имеет брать игроков из Вашей страны, а бездеп не давать.Зачастую бездепозитные призы казино для игры предлагаются разными заведениями азартных игр в рекламных промоакций либо в целях привлечения к себе свежих игроков. Для бездепозитных бонусов в казино 2022 игроку надо пополнять счет до момента вывода хотимых средств. <a href=https://www.digicube.de/forum/threads/549555–1×slots-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE?p=753373#post753373>1×slots казино зеркало</a> 1×slots регистрацию более популярный вариант это <a href=http://donaldvision.nayaa.co.kr/bbs/board.php?bo_table=sub05_01&wr_id=182450>http://donaldvision.nayaa.co.kr/bbs/board.php?bo_table=sub05_01&wr_id=182450</a> Почти все игровые клубы настоятельно свидетельство контактных данных игрока для получения бездепозитного приза.Бывают ли бездепозитные бонусы без вейджера? Бывают, в у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино. 1×slots casino зеркало Самые модные способы вывода денег ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам на Neteller и Skrill, а пользуются криптовалютными кошельками. Вывод выигрышей возможность осуществляться быстро либо занимать от нескольких часов до нескольких суток.Как только получите бездеп в казино, всё равно не запамятовывайте проверять электрическую почту. Некоторые игорные клубы постоянно радуют активных гэмблеров приятными бонусами. Чаще всего получить подарок можно в преддверии веселья, на денек рождение, за вербование приятеля. А кроме распространённым бонусом считается надбавка к депозиту. Нужно не пополнить счёт, и азартное заведение прирастит его на 50–100%.
1×slots официальный сайт зеркало
Каждый новичок и профессиональный игрок мечтают быстро стартануть и начать создавать настоящие ставки. Для этого достаточно забрать презент, за кот-ый не нужно выплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email либо телефонный. После сего администрация начисляет щедрое вознаграждение повторяющий даровых вращений или виртуальных кредитов. Обычно показатель повыше, чем для бонусов на депо. Не дивитесь, если он будет том х100. Иногда завышенный коэффициент вейджера уточняется для жителей отдельных государств. <a href=https://images.google.com.ag/url?sa=t&url=https://doctorlazuta.by/>https://images.google.com.ag/url?sa=t&url=https://doctorlazuta.by/</a> Хотя благотворительные призы начисляются без депо, не исключено, собственно вам понадобиться заносить деньги. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только в того, как свежий клиент первый пополнит игровой счет.Изучить верховодила и условия получения бездепозитных бонусов казино, Вы можете у нас на веб-сайте в разделе с бонусами либо на официальном веб-сайте выбранного Вами казино. Если имеет отыскать нужную информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал или по электронной почте. 1×слотс казино При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие можно посвятить ирге в казино.При исполнении условий отыгрыша и верификации, деньги с бонусного счета переводятся на основной и все быть выведены на карту или электронный кошелек. Лимиты на вывод и сроки проведения транзакции в от избранной платежной системы.
казино 1× slots официальный сайт
Высокая конкурентность в сегменте азартных игр доказывает операторов привлекать посетителей разнообразными промоакциями. Благодаря этому у посетителей появляется возможность получить призы в казино за регистрацию без депозита. Воспользоваться этим предложением можно, минуя процедуру внесения средств на игровой счет, просто активировав акк на веб-сайте. Наш экскурсовод по бездепам поможет выбрать самую привлекательную бонусную программку, узнать управляла получения такого гонорары и воспользоваться им с наибольшей выгодой. 1×slots официальный сайт скачать <a href=https://princeofrubber.com/user-profile/joshuamof/?um_action=edit>https://princeofrubber.com/user-profile/joshuamof/?um_action=edit</a> Иногда виде поощрения за регистрацию все выдаваться билеты для роли в турнирах. Условия их проведения довольно выделяются, поэтому мы советуем ознакомиться с любым предложением раздельно.Помните, собственно в некоторых играх сумма ставки идет в зачет вейджера лишь отчасти. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки числятся как отыгранные деньги, момент как в слотах идет в зачет все one hundred percent суммы.
1× слот зеркало
Каждый новичок и профессиональный игрок мечтают быстро стартануть и начать делать настоящие ставки. Для этого довольно арестовать презент, за который не платить. В зависимости от игровой платформы, нужно сделать профиль, привязать email либо телефонный. После этого администрация начисляет щедрое вознаграждение в виде бесплатных вращений либо виртуальных кредитов. <a href=https://maps.google.co.mz/url?q=https://doctorlazuta.by/>https://maps.google.co.mz/url?q=https://doctorlazuta.by/</a> Для вывода средств бонус надо(надобно) несомненно отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариациями отыгрыша бездепозитного бонуса до его получения, чтобы избежать конфликтных ситуаций. 1×slot зеркало При маленький сумме приза рекомендуется играть по низким ставкам, а применять наибольшие чем только в случае, случае вейджер слишком большой, а время на отыгрыш сильно ограничено.Вейджер (wager) – это коэффициент, который показывает на какую необходимую нужно устроить ставок, дабы вывести бонус из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода этого приза, Вам нужно устроить ставок на сумму: 500*70=3500 рублей. Только полностью отыграв приз, Вы можете исключить собственный выигрыш.
<b>Смотреть еще похожие новости:</b>
<a href=http://shiftdelete.10tl.net/member.php?action=profile&uid=119629>1×слот регистрация в 1×slots casino</a>
<a href=http://naturetour.ru/communication/forum/messages/forum3/message23424/5127–1×slots-zerkalo-videli-takuyu-registratsiyu-na?sessid=2e341849088400e971054e381de52995&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1×slots зеркало видели такую регистрацию на</a>
<a href=https://thetechmodders.com/forums/viewtopic.php?t=62763>1×slots скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Изучить правила и обстоятельства получения бездепозитных призов казино, Вы сможете у нас на веб-сайте в разделе с бонусами или на официальном веб-сайте выбранного Вами казино. Если не можете найти нужную информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал либо по электрической почте. У нас на сайте Вы отыщите перечень призов без депозита в испытанных казино и доскональную информацию то как их получить и применять.
#4395 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin casino зеркало лучшие бесплатные онлайн казино <a href=https://rucriminal.info/>порно с Георгий Джикия (футбол)</a> порно с Абрамченко Виктория Валериевна порно с Аделия Петросян (фигурное катание) <a href=https://glvk.guru/>pin up casino пин ап</a> pin up casino пин ап Анна Михалкова porno Юлия Канакина, скелетонистка порно с Дронова Александра Викторовна r7 casino Мухтиярова Елена Вячеславовна порно скачать 1×bet на андроид бесплатно
DiskiPlus казино фильм DiskiPlus top casino <a href=https://diskiplus.ru>DiskiPlus почему казино</a> DiskiPlus скачать букмекерскую контору на андроид DiskiPlus официальная казино <a href=https://www.diskiplus.ru>DiskiPlus Окладникова Ирина Андреевна порно</a> DiskiPlus лучшие онлайн казино DiskiPlus сайте букмекерской конторы фонбет DiskiPlus демо казино DiskiPlus 1×bet регистрация DiskiPlus porno Александр Соболев (футбол) DiskiPlus 1×bet xbet DiskiPlus 1×bet официальный
#4396 Bradleytichttps://remcomp89.ru
Ремонт компьютеров и ноутбуков <a href=https://remcomp89.ru/>https://remcomp89.ru</a> в Новом Уренгое – быстрые и качественные услуги! Диагностика, настройка, замена комплектующих, восстановление данных. Гарантия на работу, доступные цены и выезд мастера!
#4397 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало рабочее xbet рабочее казино <a href=https://t.me/vchkogpu_ru>сайт букмекерской конторы</a> top casino 1×bet на сегодня <a href=https://slon-ru.com/>Елена Лядова</a> суть казино cometa casino 7k casino бонус казино ставка букмекерскую контору пин 7k casino сайт букмекерская контора зенит
DiskiPlus букмекерская контора бесплатно скачать DiskiPlus pin up casino скачать <a href=https://diskiplus.ru>DiskiPlus win win casino</a> DiskiPlus casino x DiskiPlus карты казино <a href=https://www.diskiplus.ru/>DiskiPlus скачать 1×bet на андроид бесплатно</a> DiskiPlus casino на телефон DiskiPlus porno Анна Сидорова, керлингистка DiskiPlus букмекерская контора мостбет DiskiPlus гта онлайн казино DiskiPlus Семёнова Татьяна Владимировна порно DiskiPlus ставки на спорт букмекерские конторы DiskiPlus автомат казино
#4398 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasin online
Основное верховодило получения бездепа ? творимый аккаунт обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов строго запрещено. Проверка проводится по имени, адресу электронной почты, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита необходимо блюсти несложную очередность деяний.Наиболее знаменитые гонорары между гэмблеров – бездепозитные бонусы казино. Это не изумительно, ведь можно получить безвозмездные вращения либо виртуальные кредиты, и при не придётся пополнять счёт, рисковать личными деньгами. Удастся насладиться разнородными развлечениями причем выиграть крупную сумму, избегая серьёзного риска. <a href=http://filmkachat.ru/>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a> <a href=https://www.nitrnd.com/blogs/229352/How-Modern-3D-Visual-Technology-Transforms-Digital-Experience>https://www.nitrnd.com/blogs/229352/How-Modern-3D-Visual-Technology-Transforms-Digital-Experience</a> 1хслотс мобильная версия зеркало <a href=https://forum.storeland.ru/index.php?/user/25621-cazinosdep/>https://forum.storeland.ru/index.php?/user/25621-cazinosdep/</a> Большинство клубов завлекают внимание игры за счёт разнородных презентов. На одних сайтах возможно получить виртуальные кредиты, коие откроют доступ ко всему софту. На иных же, администрация предлагает безвозмездные вращения для запуска топовых онлайн слотов. Несмотря на различные акции, стоит выделить самые основные.
1×slots бездепозитный бонус за регистрацию
Но существуют азартные заведения, готовые просто например вручить деньги на игру. Для этого достаточно сделать профиль. Чтобы вывести выигрыш, сначала нужно выполнить вейджеровые обстоятельства, прописанные в критериях получения бездепа.Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте обстоятельства – они часто выдаются для неких машин. В зависимости от клуба возможность создавать определенное число ставок. Кстати, современные игорные жилища дают вероятность заводить «одноруких злодеев». <a href=https://rolivka.online/forum/showthread.php?tid=29916>1×slots сайт</a> 1× slots casino зеркало <a href=http://www.bj1777.com/dzbbs/home.php?mod=space&uid=785936>http://www.bj1777.com/dzbbs/home.php?mod=space&uid=785936</a> К образцу, игроку выдаются безвозмездные средства в заведении в объеме пятидесяти либо 100 $ (вейджер на коие составляет 100х). То есть, любому новоприбывшему геймеру выскакивает манящая картинка, которая сулит выплату всех зачисленных фирмой средств. Не стоит внимания на казино приз за регистрацию без депозита с сильно великий или очень малюсенькой суммой призов, потому что, даже тщательно исследовав все условия, здесь скорее, несомненно некий подкол.Прямо сейчас арестуйте благотворительные вращения за регистрацию без депозита и начинайте собирать призовые комбинации ради солидных выигрышей! казино 1× slots официальный сайт Бездепозитный приз предоставляется новенькому игроку за определенные деянья. Часто презент повторяющий средств или фриспинов выдается за регистрацию, спасибо чему юзер получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.
1×slots скачать на айфон
Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном призе, то начала направьте на велечину вейджера и срок, который дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, что, этим проще отыграть бонус и исключить выигрыш.Почти все игровые клубы настоятельно подтверждение контактных данных игрока для получения бездепозитного приза. <a href=http://www.ka1799.com/bbs/board.php?bo_table=free&wr_id=322267>http://www.ka1799.com/bbs/board.php?bo_table=free&wr_id=322267</a> Существует ли стратегии для отыгрыша бездепозитных бонусов? К раскаянию нет, на выигрыши либо проигрыши с призов, казино либо игрок повлиять возможности, отдача игр случается от создателей игр. 1×slots регистрация 1×slots casino 777 online Верификация аккаунта. Лучше доказать лицо сразу последствии регистрации, чтобы потом не было заморочек с выводом средств. Верификация имеет протекать 2-мя маршрутами:Фриплей-бонусы встречаются только в неких клубах. Они зачисляются сразу последствии творенья профиля и активны недолговременное время. Если не успеете израсходовать средства, они просто сгорят. Касаемо медли, как бонусы активны в течение часа.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Чтобы выступать безвозмездно на настоящие деньги в казино, порой довольно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные действия.Как только на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу в сего можно оставить заявку на вывод выигрыша. Кредиты прибыльно выделяются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом реальных средств и выделяют вероятность почувствовать азарт. Во-вторых – можно насладиться любой азартной игрой доступной на сайте. В вашем распоряжении находятся автоматы, настольные прибавленье, видео-покер, Live-дилеры. Суммы похожих услуг, большинстве, колеблются от 3-х до двадцати долларов, а вейджер на эти средства должен составлять от 30 до шестидесяти один. Зачастую, величайшая сумма выигрыша тут составит от одной до 2-ух сотен $. Если компьютерные выиграет больше, то все свои все быть списанными до очень разрешенного выигрыша. Здесь замечена смысл выводить еще несуществующие деньги на свою платежную систему и дальше находить заведение с благоприятными под данную необходимую релоадом или бонусом за 1-ое пополнение счета. Есть несколько подвидов бездепозитного гонорары, предлагаемого большим числом заведений. Но а случае вы теснее профи по интернет казино, кликаем на красноватую кнопку «Получить» и Вы механически перейдете в интернет казино;Чтоб получить большой выигрыш, избирайте игровые автоматы с предельным процентом отдачи (RTP) из списка тех, коие доступны по условиям отыгрыша. 1×slots зеркало которую указывали при регистрации кстати <a href=https://prpack.ru/user/StevenshoFt/>https://prpack.ru/user/StevenshoFt/</a> В онлайне много известных игорных площадок с красивыми акционными услугами. Однако пристально разбирать условия 10-ов услуг в надоест, ну и время отнимет количество. Поэтому наша команда подготовила ТОП-3 сайтов с превосходнейшими бездепозитными бонусами:
казино 1×slots
Возьми собственный презент. Чаще всего приз активизируется сразу после регистрации. Но случаются истории, когда нужно забежать в индивидуальный офис либо написать в справочную службу.На бонусные начисления все быть установлены вспомогательные лимитирования, которые Вы не учли при отыгрыше. Пока бонус полностью не отыгран — средства из казино не выводятся. Также бездепозитные бонусы могут служить способом вернуть к игре клиентов, временно приостановивших своё сотрудничество с компанией: уведомление о бездепе поступает на мобильный аппарат либо почту.Бонусы без депозита при регистрации числятся наиболее привлекательными как для опытных игроков, например для и начинающих. Получив это вознаграждение, клиент возможность выступать на реальные средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные призы в интернет-казино Рунета, а также условия их активации и выигрыша. <a href=http://elektrofahrrad-tests.de/forums/member.php?action=profile&uid=35386>http://elektrofahrrad-tests.de/forums/member.php?action=profile&uid=35386</a> 1× slots официальный
<b>Смотреть еще похожие новости:</b>
<a href=http://weeklywars.de/viewtopic.php?f=12&t=10628&p=533295#p533295>1×slots коды</a>
<a href=https://australianwinerytours.com/tours/showthread.php?tid=343918>1×slots акции</a>
<a href=https://your-portal.at.ua/forum/36–63416–2#88237>1×slots официальный зеркало рабочее</a>
<a href=https://www.allampolgar.hu/showthread.php?tid=4028>1×slots зеркало рабочее на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Некоторые клубы автоматически начисляют приз на аккаунт игрока последствии исполненья условий получения, но случаются истории, когда бонус надо(надобно) активировать игроку самому. Есть несколько методов активации бонуса:
#4399 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino бонус казино сочи <a href=https://glvk.guru/>букмекерская контора зенит</a> приложения букмекерских контор казино без <a href=https://t.me/vchkogpu_ru>Светлана Ходченкова</a> Комарова Наталья Владимировна порно black russia казино 1×bet рабочее на сегодня гта онлайн казино казино 5 casino buzz champion casino
DiskiPlus casino на телефон DiskiPlus 1×bet на андроид <a href=https://www.diskiplus.ru/>DiskiPlus казино можно</a> DiskiPlus казино 1 DiskiPlus порно с Баталина Ольга Юрьевна <a href=https://www.diskiplus.ru>DiskiPlus пина casino</a> DiskiPlus 1×bet зеркало на сегодня DiskiPlus казино смотреть онлайн DiskiPlus casinos xyz DiskiPlus пин ап букмекерская контора DiskiPlus бесплатное казино DiskiPlus Фастова Елена Владимировна порно DiskiPlus казино 5
#4400 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Ирина Сидоркова казино рублях <a href=https://vestnik-jurnal.com/>порно с Каролина Севастьянова</a> порно с Елена Никитина, скелетонистка суть казино <a href=https://rhymes-punches.com/>1×bet слоты официальный сайт</a> porno Анна Сидорова, керлингистка порно с Сергей Бобровский (хоккей) 1×bet зеркало на сегодня 1×bet xyz букмекерская контора на андроид online casino 7k porno Илона Маркова, хоккеистка порно с Ирина Сидоркова
DiskiPlus скачать 1×bet на андроид DiskiPlus порно с Дарья Касаткина (теннис) <a href=https://www.diskiplus.ru/>DiskiPlus Самойлова Алла Владимировна порно</a> DiskiPlus почему в казино нет окон DiskiPlus casino online зеркало <a href=https://diskiplus.ru/>DiskiPlus почему в казино нет окон</a> DiskiPlus online casino DiskiPlus retro casino DiskiPlus 1×bet официальный DiskiPlus Разуваева Ксения Денисовна порно DiskiPlus песня казино DiskiPlus casino игровой автомат DiskiPlus Петрова Ольга Викторовна порно
#4401 Charlesgunnyhttp://filmkachat.ru
рабочее зеркало 1×slots
Бездепозитные призы прекрасный вариант безвозмездной игры в игровые автоматы. Многие юзеры сети не знают, что в казино возможно начать играть полностью безвозмездно, а потом вывести выигрыш на банковскую карту или электронный кошелек, иные не доверяют онлайн казино, а третьи удачно играют и выигрывают – и тотчас достаточно немалые суммы. <a href=http://filmkachat.ru/>1×slots сайт</a> В каждом казино с бездепозитным призом учтены вейджеровые условия. Это единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, нужно сделать определённое количество ставок. Чем круче приз, что, этим труднее выполнить условия, и наоборот.Обычно, бездепозитные призы выдаются под конкретные слоты с фиксированной ставкой, но их точно воспрещено использовать в игровых автоматах с современным джекпотом. Список игр, каких возможно использовать бездеп, Вы отыщите в описании промоакции или можете уточнить у службы заведения. <a href=https://www.empowher.com/groups/blogs-4/posts/modern-trends-professional-3d-architectural-visualisation-agency-servi>https://www.empowher.com/groups/blogs-4/posts/modern-trends-professional-3d-architectural-visualisation-agency-servi</a> В основном случаев благотворительные призы начисляются в кредитах, коие невозможно сразу исключить со счета. Прежде их нужно отыграть по установленным правилам. Эти требования принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже.Перед активацией главно пристально изучить условия акции. Чем ниже вейджер, что, этим больше потенциальная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, на которых можно пользоваться предложением. Если бездеп обхватывает ограниченный список игр, рекомендуется разузнать максимальные коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только что, нет случае, случае оператор не установил взыскательные лимитирования на максимальную необходимую ставки. 1× slots регистрация в 1×slots casino <a href=http://travel.navigator-mas.ru/user/Zacheryeduck/>http://travel.navigator-mas.ru/user/Zacheryeduck/</a>
рабочее зеркало 1×slots
1×slots зеркало на сегодня Для верификации аккаунта нужно предоставить специалистам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, а фотку банковской карты или экрана страницы электрического кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности. <a href=https://build-in.dp.ua/wr_board/tools.php?event=profile&pname=CharlesLoapy>https://build-in.dp.ua/wr_board/tools.php?event=profile&pname=CharlesLoapy</a> Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие появляются у новичков.Бездепозитные бонусы реальными средствами, которые возможно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадали. 1×slots акции
x1 slots 1хслотс регистрация перейти на 1×slots
В большинстве заведений сделать это возможно по e-mal, по номеру телефона, через социальную сеть либо гугл-аккаунт. Чаще всего, популярностью сервисы, такие как MoneyBookers и WebMoney, еще MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно обязательное правило. Финансовые средства выводятся только спустя ту платежную систему, которой пользовались для пополнения депо. Если же игрок получил бездепозитный покерный приз, требуется пополнить счет на наименьшую сумму, кот-ая составляет обычно 10 $.Получить приветственный приз имеют лишь свежие клиенты онлайн-казино. Способы описаны в критериях акции каждого легального казино, почаще всего это: <a href=https://peertrainer.com/LoungeCommunityThread.aspx?ForumID=1&ThreadID=316720>https://peertrainer.com/LoungeCommunityThread.aspx?ForumID=1&ThreadID=316720</a> Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации презента необходимо доказать электрическую почту и привязать аппарат; 1 х слотс зеркало Игрокам не следует принимать приветственный бонус как гарантированный способ получить большой выигрыш, но это замечательная вероятность без расходов оценить перечень казино.
1×slot регистрация
Но рядах азартных платформах похожие гонорары имеют получить теперь зарегистрированные пользователи. В таком случае, бонусы предоставляются масштабах уникальных акций или же некоторым игрокам вид акционного предложения, коие прибывает на почту с целью «возвратить» игрока в свое казино.Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. <a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=41823>1×slots официальный сайт зеркало</a> За привлечение друга ? в партнерской программки заказчик получает вознаграждение за привлечение свежих пользователей. Чаще всего казино приз за регистрацию без депо даёт вероятность запустить любой автомат. Но другого внимательно ознакомиться с условиями. Иногда для игры доступны только определённые модели. Если вы новичок и ничего не смыслите в гэмблинге, никакого начать знакомство с миром пыла непосредственно с «одноруких бандитов».Многие новички колеблются, собственно поощрительный приз надо будет отдавать, в если они выиграли у казино. Это полностью неопасно и накрепко. Выводя выигранные свои, игрок просто одергивает свое участие в игре и теряет уникальную возможность – безвозмездно увеличивать собственное вещественное положение. 1×slots официальный сайт скачать <a href=http://dwsm.co.kr/bbs/board.php?bo_table=free&wr_id=130992>http://dwsm.co.kr/bbs/board.php?bo_table=free&wr_id=130992</a>
онлайн казино 1×slots
Прежде чем активировать бездеп, необходимо увериться сомнений, что страна, уроженцем которой считается игрок, не входит в список не.Но существуют азартные заведения, готовые просто так вручить деньги на забаву. Для сего достаточно создать профиль. Чтобы исключить выигрыш, сначала необходимо выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа. <a href=http://sglpw.cn/home.php?mod=space&uid=331357>http://sglpw.cn/home.php?mod=space&uid=331357</a> Такие одобрения дозволяют даром протестировать свежее казино, разобраться с игровым ходом интернет слотов, заработать и вывести маленькую необходимую денег. 1 x slots casino Для тех, кто только подумывает испытывать собственную удачу, а для профессиональных игроков, разыскивающих новые площадки для выигрышей, основные лицензированные казино часто устраивают различные промоакции, и лучшее предложений прошедшее время – как для новичков, например и для профессиональных игроков – бездепозитный бонус за регистрацию.Вейджер (или вагер) ? это наименьшая сумма ставок, которую нужно устроить для вывода денежного приза. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение.
<b>Смотреть еще похожие новости:</b>
<a href=https://melhorlance.com.br/minha-conta/>1хслотс казино зеркало</a>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=212553>скачать 1×slots на андроид мобильная версия</a>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=76046&result=reply>1×slots официальный регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Каждый геймер должен сначала отчетливо выучить условия по получению и отыгрышу понравившегося дара. Если всё организует, поторопитесь забрать безвозмездные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик в начать вертеть барабаны топовых слотов. Не стоит сразу же отрицаться от приветственных даров в похожих казино. Администрация готова начислить средства или фриспины, хотя сначала работники обязаны увериться, собственно вы не мошенник. Дело в том, что развелось очень большое охотников за призами. Они научились дурачить систему и наваривать солидные суммы денег.
#4402 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
яндекс казино porno Алена Михайлова <a href=https://res-publika.com>Александра Бортич</a> ешь казино казино 1 <a href=https://rumafia.news/>1×bet бесплатно</a> pin up casino buzz 1×bet xbet xyz порно с Евгений Малкин (хоккей) букмекерские конторы в россии казино смотреть онлайн бесплатно Ходнева Светлана Владимировна порно 1×bet зеркало
DiskiPlus pin casino зеркало DiskiPlus porno Катерина Шпица <a href=https://diskiplus.ru>DiskiPlus porno Екатерина Ефременкова, шорт-трекистка</a> DiskiPlus Разуваева Ксения Денисовна порно DiskiPlus песня казино <a href=https://www.diskiplus.ru/>DiskiPlus ramenbet casino</a> DiskiPlus казино гта 5 DiskiPlus порно с Абрамченко Виктория Валериевна DiskiPlus casino на телефон DiskiPlus лучшие букмекерские конторы DiskiPlus какие казино DiskiPlus 1×bet зеркало рабочее xbet DiskiPlus win win casino
#4403 Charlesgunnyhttp://filmkachat.ru
1 x slots casino
При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток. <a href=http://filmkachat.ru/>1× slots регистрация в 1×slots casino</a> Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных призов принимаются достаточно высочайшие требования. Часто онлайн-казино советуют отыграть бонусное поощрение до ста один в игровых автоматах. Например, случае игрок получил безвозмездно 10 долларов, то необходимо будет отыграть их, поставив одну тыщу спинов по одному доллару любой. Стоит обозначить(означить), собственно не все казино выделяют возможность выступать на призы и не во всех развлекательных заведениях идентичные управляла для отыгрывания. Некоторые казино воспрещают играть на призы в блекджек либо ограничивают ставки до 5 %, что значительно наращивает в десятки раз число необходимых игр.Обычно для получения бонусов без депо, казино выдвигает лояльные и вполне выполнимые обстоятельства, но есть ряд действий коие запрещены и все причиной неприятные результаты: <a href=https://mega.nz/file/E6tG2Y6a#35AP8eRuVWDBW0vFRNmk3yz9lTf4-ohI6ETi78fc0BA>https://mega.nz/file/E6tG2Y6a#35AP8eRuVWDBW0vFRNmk3yz9lTf4-ohI6ETi78fc0BA</a> 1×slots регистрацию более популярный вариант это <a href=http://martialartsplanet.com/proxy.php?link=http://metplus-osk.ru/bitrix/rk.php?goto=http://optimacons.info/bitrix/click.php?goto=https://teletype.in/@urist555/xbnub8eXjAr>http://martialartsplanet.com/proxy.php?link=http://metplus-osk.ru/bitrix/rk.php?goto=http://optimacons.info/bitrix/click.php?goto=https://teletype.in/@urist555/xbnub8eXjAr</a>
1хслотс казино зеркало
<a href=http://check2go.net/my-account/>1×slots casino регистрация 1×slotscasino09k online</a> 1×slot казино зеркало <a href=http://www.zeobuilder.co.kr/board/bbs/board.php?bo_table=free&wr_id=545645>http://www.zeobuilder.co.kr/board/bbs/board.php?bo_table=free&wr_id=545645</a> Иногда у гостей сайта шансы возникнуть проблемы при активации полученного промо-кода. В этих случаях, необходимо обратиться за помощью в службу поддержки «Support». Для получения ответа, обязательно указывается определенная первопричина обращения и подтверждается информация дополнительными скриншотами. Если сложилась спорная обстановка, всегда можно адресоваться к главному регулятору или контролирующему органу, выдавшему данному заведению лицензионный документ. скачать 1×slots на андроид мобильная версия
1×slots официальный зеркало
Онлайн-казино с бездепозитными бонусами ставят клиентам обстоятельства для пользования бездепами, потому перед ролью в акции другого, как подробно ознакомиться со всеми правилами и нюансами акции. Условия все касаться получения приза, его использования и следующего вывода денежных средств в случае выигрыша. Существуют казино с призом за регистрацию, каких довольно востребованы фриспины в интернет казино впоследствии регистрации в определенных забавах. Они встречаются том почаще бесплатных поощрений или классических призов в казино без инвестициям. Например, игрок регистрирует счет, на который начисляются безвозмездные игры, бонус за регистрацию вид безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса в выигрывает истинные средства, которые в последствии можно успешно вывести из заведения на собственную платежную систему. То есть, есть все шансы вывести средства без рисков собственными финансами. Регистрация, за которую компьютерные получит бонусы, займет пару минут, а благодаря этому возможно увеличить 5 евро поощрений до тыс. И без всяких заморочек вывести их. <a href=http://www.getwayssolution.com/2019/12/how-do-you-read-or-write-file-on-server.html>http://www.getwayssolution.com/2019/12/how-do-you-read-or-write-file-on-server.html</a> Наши эксперты исследуют обстоятельства акции, этого в ручном режиме проверяют их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и параметры. Мы не рекламируем казино, а даем игрокам информацию о наихороших из них.При отыгрыше бонусных средств, необходимо учесть срок деянья бонуса и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный приз несомненно аннулирован. 1×slots официальный сайт зеркало рабочее Для получения бонуса надо(надобно) ознакомиться с программкой лояльности казино и сделать ставки на сумму, нужную для перехода на грядущий уровень.На бесплатные бонусы онлайн-казино практически всегда распространяется лимитирования по стране проживания посетителей. Даже случае для разрешается открывать счет и играть на деньги в заведении, это еще не значат, собственно для доступны not the slightest down payment bonuses.
1× slots регистрация в 1×slots casino
<a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=333882#pid333882>1×slots casino регистрация 1×slotscasino09k online</a> Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция имеет подробные правила, гиперссылка на которые обыкновенно находится в промообъявлении. В них указываются лимиты, вейджер, перечень доступных игр. Если оператор прячет данные о предложении, то воспользоваться им не стоит.Доступные игры – В неких азартных играх возможно понизить математическое приемущество казино до нескольких 10-х процента. В их количестве почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как правило, в таких забавах ставки идут в зачет вейджера не всецело. Например, возможность учитываться лишь 50%. В неких забавах бездепозитные бонусы вообщем нельзя отыгрывать. Да, у безвозмездных бонусов есть дефекты. Прежде всего, они обыкновенно небольшие. Кроме такого, обстоятельства вейджера по ним практически строгие. Но все же недоступность риска делает их довольно красивыми для посетителей.Бесплатный приз – кредиты, коие онлайн-казино начисляет посетителю, не принуждая его пополнять игровой счет. 1 хслот регистрация в 1×slots casino <a href=http://kumtigey.ru/bitrix/redirect.php?goto=http://tdabris.ru/bitrix/rk.php?goto=http://sonyatex.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/fwTfPZOI4eF>http://kumtigey.ru/bitrix/redirect.php?goto=http://tdabris.ru/bitrix/rk.php?goto=http://sonyatex.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/fwTfPZOI4eF</a>
1×slots зеркало сайта
Получить Бездепозитный бонус в интернет казино дело двух кликов. Другой момент, отыграть рекламную и соблюсти верховодила и обстоятельства отыгрыша. Под правилами предполагается не вагер, хотя и ограничения по максимальной ставке. Мы осознаем, собственно в кино все ставят на зеро и выигрывают. Призываем не создавать похожего. Перед активацией бонуса прочтите правила. Узнайте следующие факторы: Условия получения дара, за регистрацию, за депозит и многое. Ограничения по максимальной ставке. Зачастую не выше 350 рублей. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вращать автоматы, а вагер будет стоять на пространстве. Поэтому главно знать, в каких играх возможно осуществлять кратность денежного оборота. 2. Создать свежий профиль. Для регистрации нужно заполнить маленькую анкету либо зайдите в индивидуальный кабинет при помощи социальных сетей; <a href=http://miga2305.sinobsys.co.kr/bbs/board.php?bo_table=free&wr_id=910603>http://miga2305.sinobsys.co.kr/bbs/board.php?bo_table=free&wr_id=910603</a> 1×slots казино мобильная версия Вы наверняка, как и все любите получать презенты и бездепозитные призы казино. Игорные дома взяли в привычку одаривать гэмблеров приятными бонусами. Стать обладателем приветственного подарка можно за создание профиля либо пополнение счёта. Второй вариант более занимательный, так клубы готовы удвоить депозит! Но в вы новичок и только знакомитесь с миром пыла, какого-либо воспользуйтесь бонусом за регистрацию.
<b>Смотреть еще похожие новости:</b>
<a href=https://mcmon.ru/showthread.php?tid=124534>1×slots зеркало на сегодня</a>
<a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/6439–1×slots-ofitsialnyj-sajt-zerkalo-rabochee#6448>1×slots официальный сайт зеркало рабочее</a>
<a href=https://foro.vcheats.me/Hilo-board-%D0%B1%D0%BE%D1%80%D1%82-%D0%BF%D0%BE%D0%B4%D0%BD%D0%B8%D0%BC%D0%B0%D1%82%D1%8C%D1%81%D1%8F-%D0%BD%D0%B0-%D0%B1%D0%BE%D1%80%D1%82?pid=8372#pid8372>1×slots бездепозитный бонус за регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Популярность онлайн казино растёт и всё больше пользователей начинают проявлять азартными забавами. Бездепозитные бонусы 2022 года, это оригинальные подарки за регистрацию. С их подмогою новые игроки шансы получить благотворительные вращения либо деньги на баланс за одну регистрацию. С появлением игорных заведений в онлайне, бездепозитные бонусы стали известнейшим методом вербования игроков. Подобные акции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш сайт собрал наилучшие предложения из онлайна на 2022 год. Воспользуйтесь каким презентом и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить обстоятельства.
#4404 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало на сегодня
Бездепы с безвозмездными вращениями предоставляют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд платит казино. Число спинов ограничено и редко выше сотку. Если промоакция включает в себя много даровых игр, их начисление имеет быть разбито на количество дней. <a href=http://filmkachat.ru/>1х слотс зеркало регистрация в 1×slots casino</a> Денежные свои. Третий приз за регистрацию без депо – наличные. К сожалению, лишь знаменитые и пользующиеся клубы шансы уяснить средства в рублях или долларах. С их помощью появится насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед данным нужно исполнение конкретных условий. <a href=https://u.pcloud.link/publink/show?code=XZNQwV5ZNtDPSsk07bJazNAm6jpRESTTmoa7>https://u.pcloud.link/publink/show?code=XZNQwV5ZNtDPSsk07bJazNAm6jpRESTTmoa7</a> Бездепозитные бонусы – это самая небезинтересная и наиболее перспективная акция интернет-казино. Они числе другого, как фри-спинов, поэтому собственно выплаты в безвозмездных вращениях не гарантированы, ведь композиции на барабанах игрового аппарата могут не сложиться.Бездепозитный приз за регистрацию в казино с выводом средств в 2022 году — Наш ресурс дает игрокам важную информацию о самых новых, щедрых и проверенных бонусах в интернет казино, коие обновляются каждый день. 1×slot зеркало рабочее регистрации на телефон придет <a href=http://jbparadiez.org/member.php?action=profile&uid=13004>http://jbparadiez.org/member.php?action=profile&uid=13004</a> Акционные предложения от казино существуют в различных форматах. Часто призы даются в мена на депозит. Игрок вносит платеж и получает средства, благотворительные вращения прочие поощрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — картина бонуса, кот-ый гарантирован за исполнение конкретных деяний на сайте:Бoльшинcтвo азартных заведений выдвигают приблизительно однообразные, схожие условия и требования, коие необходимо выполнить, дабы получить бездепозитный бонус за регистрацию. Все их возможно соединить в раз перечень:
1×slots официальный регистрация
Такой безвозмездный эквивалент средств зачисляется на профиль юзера последствии осуществления требований и предназначаются они только для игрового процесса. Вывод таких вознаграждений вероятен только в осуществления вейджеровых условий.Бонус в казино без депозита содержит разные варианты: может быть приветственный бонус, акции в честь каких-то праздничных либо весомых дат, приз за вербование свежих игроков, лояльность и получение VIP-статуса. <a href=http://forum.survival-readiness.com/memberlist.php?mode=viewprofile&u=30498>1хслотс мобильная версия зеркало</a> 1×slots официальный сайт зеркало Бездепозитный приз за регистрацию в казино — это стартовый презент повторяющий денежного начисления или даровых вращений для новых игроков заведения, для получения которого не вносить депозит.Бонусы без депо при регистрации считаются самыми красивыми как для опытнейших игроков, например для и новичков. Получив такое вознаграждение, заказчик имеет играть на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а также обстоятельства их активации и выигрыша. <a href=http://i95340c1.bget.ru/index.php?subaction=userinfo&user=astonishingdome>http://i95340c1.bget.ru/index.php?subaction=userinfo&user=astonishingdome</a> Иногда в поощрения за регистрацию имеют выдаваться билеты для роли в турнирах. Условия их проведения очень отличаются, потому мы советуем ознакомиться с каждым предложением отдельно. 1×slots актуальное зеркало Необходимость отыгрыша. Вейджер такой повыше, чем для призов за депо. И пока свои не отыграны, исключить их нельзя.При забаве на бонусные свои запрещается выступать в игровые автоматы с современным джекпотом и игры из радела live casino. Кроме как, некоторые казино дают бездеп на один либо некоторое определенных слотов, и в других играх Вы не можете на их играть.
1×slots актуальное зеркало
Каждый игрок должен сначала отчетливо изучить условия по получению и отыгрышу понравившегося презента. Если всё организует, поторопитесь отобрать благотворительные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо момент начать вращать барабаны лучших слотов.Далее потребуется отыграть вагер и исключить выигрыш. Игрокам без навыка крупно повезло, они могут получить 10-ки подарков за 1 регистрацию. Если не сумели получить Бездепозитный приз, не беспокойтесь. Обратитесь в онлайн чат, оператор поможет решить проблему. <a href=https://xn–80apeih4a.xn–p1ai/communication/forum/messages/forum2/message4538/3108-zaymy-na-bolshuyu-summu?result=new#message4538>https://xn–80apeih4a.xn–p1ai/communication/forum/messages/forum2/message4538/3108-zaymy-na-bolshuyu-summu?result=new#message4538</a> Подтверждение индивидуальной информации. Все казино настоятельно от клиента пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и наличие у юзера иных аккаунтов (мультиаккаунт запрещен). 1×slots зеркало рабочее на сегодня Маркетинговая политического всех игорных интернет-клубов должна одевать разнородный нрав. И случае гонорары на депо служат для того, чтобы провоцировать заносить депозиты и поощрять теснее имеющих юзеров, то бездепозитный приз в казино либо бонус за регистрацию в казино, до всего, рассчитан на расширение базы покупателей.
казино 1×slots
Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном сайте и выполните вход в собственный кабинет, чтобы забрать благотворительные вращения с вейджером х40; <a href=https://nauc.info/forums/viewtopic.php?t=20605580>1×slots официальный сайт мобильная версия</a> 1×slots регистрация 1×slots casino 777 online <a href=http://dinskoi-raion.ru/forum/?PAGE_NAME=profile_view&UID=65716>http://dinskoi-raion.ru/forum/?PAGE_NAME=profile_view&UID=65716</a> Эффективность бездепов виде маркетингового инструмента расценили почти операторы. Малоизвестные площадки используют такие промоакции, чтобы скоро набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны неизменных гостей. Не все сайты, дающие презенты без депо, рекомендованы к игре. За симпатичным промоописанием могут скрываться неосуществимые условия отыгрыша и подводные камешки.
1× slots casino зеркало
Иногда в бездепа, казино дарует минимальный бонус (до 50 руб. ), ради которого не заморачиваться. <a href=https://forum.bandariklan.com/member.php?action=profile&uid=13997>https://forum.bandariklan.com/member.php?action=profile&uid=13997</a> Обыкновенные бездепозитные бонусы в размере от 3-х до двадцати долларов сделаны чтобы, чтобы, чтобы в забавы заходили все свежие и новые игроки. Здесь, скорее, несомненно лимитирование на наибольший выигрыш. Важно, дабы перед минимальным вкладом был отключен приз за 1-ое пополнение счета, и в не попадет на повторный вейджер.Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных ситуаций с казино, когда в отыгрыша бездепа вам не дадут исключить солидную сумму выигрыша. 1×slots официальный регистрация Срок активации и время на отыгрыш. Зачисление средств или фриспинов происходит при активации протяжении строго ограниченного периода, похожие требования предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать приз несколько дней либо том недель. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером.Многие игроки, оценив функционал казино, остаются выступать в нем и дальше ? на это и нацелено любое рекламную. Постоянные посетители заносят депозиты и проделывают ставки, обеспечивая длительную прибыль оператора. То есть, казино раздают бездепы новым пользователям для формирования лояльной аудитории.
<b>Смотреть еще похожие новости:</b>
<a href=http://sladkierecepti.5nx.ru/viewtopic.php?f=8&t=7539>1хслотс официальный сайт зеркало</a>
<a href=https://russiancomputerservice.ru/user/JosephCer/>рабочее зеркало 1×slots</a>
<a href=http://miupsik.ru/forums/showthread.php?tid=241226>1×slots регистрация 1×slotscasino 56 online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если идет об неповторимых услугах, возможность потребоваться регистрация в казино по ссылке с партнерского сайта. Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, the decision зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.
#4405 MichaelHahhttps://sale-weed-prague.com
thc vape delivery in prague <a href=https://sale-weed-prague.com/>https://sale-weed-prague.com</a>
#4406 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Виктория Баркова, легкоатлетка порно с Анастасия Потапова, теннисистка <a href=https://slon-ru.com/>приложения букмекерских контор на андроид</a> casino актуальное зеркало casino betting <a href=https://rucriminal.info/>приложения букмекерских контор</a> порно с Зырянова Анастасия Владимировна порно с Абрамченко Виктория Валериевна Валентина Матвиенко порно Москалькова Татьяна Николаевна порно casino андроид суть казино сайте букмекерской конторы фонбет
DiskiPlus 1go casino DiskiPlus Лут Оксана Николаевна порно <a href=https://diskiplus.ru/>DiskiPlus pin up casino пин</a> DiskiPlus почему казино DiskiPlus играющие казино онлайн <a href=https://www.diskiplus.ru/>DiskiPlus скачать 1×bet 1×bet xyz</a> DiskiPlus porno Анна Сидорова, керлингистка DiskiPlus пинко casino DiskiPlus 7k casino официальный сайт DiskiPlus букмекерская контора на андроид DiskiPlus 1×bet зеркало xbet DiskiPlus пин up casino DiskiPlus 1×bet зеркало на сегодня
#4407 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать pin casino фреш казино <a href=https://slon-ru.com/>Преподобная Надежда Александровна порно</a> скачать casino на андроид 1×bet официальный сайт 1×bet xyz <a href=https://slon-ru.com/>casino скачать приложение</a> скачать букмекерскую контору Шевцова Татьяна Викторовна порно скачать 1×bet Елена Лядова Фастова Елена Владимировна порно лучшие бесплатные онлайн казино мелбет букмекерская контора
DiskiPlus 1×bet официальный сайт 1×bet xyz DiskiPlus Попова Анна Юрьевна порно <a href=https://www.diskiplus.ru>DiskiPlus 1×bet</a> DiskiPlus порно с Алексей Миранчук (футбол) DiskiPlus Петрова Ольга Викторовна порно <a href=https://diskiplus.ru/>DiskiPlus casino игровой автомат</a> DiskiPlus 1×bet официальный скачать DiskiPlus казино пину DiskiPlus порно с Константин Тюкавин (футбол) DiskiPlus casino автомат DiskiPlus пина букмекерской конторы DiskiPlus казино смотреть DiskiPlus вавада казино
#4408 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия
Необходимость отыгрыша. Вейджер в этом случае выше, чем для бонусов за депозит. И пока средства не отыграны, вывести их невозможно. <a href=http://filmkachat.ru/>1×slots зеркало этих способов предполагает регистрацию</a> <a href=https://telegra.ph/Legal-Cannabis-Delivery-Services-Transform-Brantfords-Marijuana-Access-11–24>https://telegra.ph/Legal-Cannabis-Delivery-Services-Transform-Brantfords-Marijuana-Access-11–24</a> Бонус за регистрацию в казино без депозита с выводом денег надо(надобно) отыграть. Зачастую для отыгрыша может понадобиться сделать ставки на необходимую, в несколько 10-ов один превышающую необходимую приза или выигрыша.Бездепозитные призы казино за регистрацию в 2022 году — это возможность поиграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой либо количеством бесплатных вращений без внесения депозита. Не путайте деморежим с реальной забавой без надобности внесения депозита. 1×slots официальный сайт, скачать <a href=https://cesarcpyc85295.azzablog.com/29639880/the-cutting-fringe-of-nsfw-ai-discovering-the-features-of-undress-ai>https://cesarcpyc85295.azzablog.com/29639880/the-cutting-fringe-of-nsfw-ai-discovering-the-features-of-undress-ai</a> Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают приз по государствам. Вплоть до такого, собственно клуб может на игроков из Вашей государства, а бездеп мешает.Если простыми словами, бездепы – это определённая сумма средств либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать презенты. Но есть кое-какие аспекты. Существуют игорные жилища, которые перед тем как начислить призы настоятельно привязать телефонный, дать копии документов.
1×slots бонус за регистрацию
Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша призов. Заведения практически устанавливают максимальную ставку, допустимую по условиям вейждера.Для вывода средств приз нужно несомненно отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами акции и вариациями отыгрыша бездепозитного бонуса до его получения, чтобы избежать конфликтных обстановок. <a href=https://radios-collector.com/viewtopic.php?f=7&t=75329>1×slot казино зеркало</a> 1×slots казино зеркало Чтобы бездеп не был начислен на Ваш аккаунт, Вам не нужно активировать бонусный код. Если поощрение от казино было добавлено на Ваш акк автоматически, а Вы не планируете его использовать, обратитесь в саппорта с пожеланием отменить бездепозитный приз. <a href=https://marvelvsdc.faith/index.php?title=1win_plataforma_Oficial>https://marvelvsdc.faith/index.php?title=1win_plataforma_Oficial</a> 1 x slots casino
1×slots зеркало проходить регистрацию это отличный вариант
В разделе с бонусами активировать свой презент. Найти игры, для коих учтено одобрение и применять бонус по назначению. Необходимость отыгрыша. Вейджер такой повыше, чем для призов за депо. И пока свои не отыграны, исключить их нельзя. <a href=https://www.alivelink.org/Glory-Casino_282054.html>https://www.alivelink.org/Glory-Casino_282054.html</a> Акционные предложения от казино существуют в различных форматах. Часто бонусы даются в мена на депозит. Игрок заносит платеж и получает деньги, безвозмездные вращения прочие поощрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — вид приза, кот-ый гарантирован за исполнение конкретных поступков на сайте: скачать 1×slots официальный сайт Только выполнив все обстоятельства отыгрыша и дождавшись окончания проверки аккаунта, Вы можете оформить заявку на вывод средств и получить свои средства.
1×slots официальный регистрация
При верном раскладе бездепы — это прекрасный способ выступать на деньги без траты собственных средств. Есть количество рекомендаций, следуя коим можно извлечь максимально полезности из подобных промоакций казино. Играть идет только на лицензированных площадках. Скриптовые веб-сайты не только дурачат с бонусными предложениями, хотя и используют пиратский софт с измененным ГСЧ. Выиграть на этих автоматах нереально.Возьми собственный презент. Чаще всего бонус активируется незамедлительно последствии регистрации. Но посещают ситуации, когда надо(надобно) зайти в индивидуальный офис либо написать в справочную службу. Но рядах азартных платформах подобные вознаграждения все получить и уже зарегистрированные юзеры. В таком случае, призы предоставляются в уникальных промоакций либо же неким игрокам повторяющий акционного предложения, коие приходит на почту с целью «вернуть» игрока в свое казино. 1× slots сайт <a href=http://misojin.co/bbs/board.php?bo_table=free&wr_id=313730>http://misojin.co/bbs/board.php?bo_table=free&wr_id=313730</a> Можно. Вы всегда можете отрешиться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не создадите ставку.
1×slots регистрация 1×slots casino c2d ru
Теоретически, к безвозмездным призам возможно отнести например нарекаемые фриспины. Напомним, речь идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, поэтому что они деют только возможность делать ставки. Чтобы получить вероятность вывести прибыль с бездепозитного приза в казино, нужно выполнить ряд критерий:Наши эксперты исследуют обстоятельства акции, этого в ручном режиме проверяют их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие характеристики. Мы не рекламируем казино, а даем игрокам информацию о наилучших из них. <a href=https://linktr.ee/glavdorogadv2106>https://linktr.ee/glavdorogadv2106</a> Бездепозитный приз казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в этом и содержится основное отличие. 1×slots сайт Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном сайте и выполните вход в личный офис, чтобы забрать безвозмездные вращения с вейджером х40;
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.cvetq.info/viewtopic.php?f=8&t=282405>1×slots промокод при регистрации</a>
<a href=http://forum.cvetq.info/memberlist.php?mode=viewprofile&u=17326>зеркло казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Новички не обожают сразу же заносить депозит. Это обусловлено отсутствием опыта и сомненьем. К счастью, дни возможно получить бездепозитный бонус за регистрацию в казино. Неважно что начисляет система – фриспины или кредиты. В всяком случае вы не рискуете своими сбережениями. Это замечательная возможность запустить приглянувшийся видео разъем либо же испытать удачу в настольных забавах.
#4409 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерские конторы в россии казино большая <a href=https://specreporter.com/>casino вход</a> casino 7k рабочее 1×bet слоты 1×bet top <a href=https://rucriminal.info/>cat casino</a> Нургалиева Эльвира Рамиловна порно букмекерская контора фонбет официальный Приезжева Екатерина Геннадьевна порно 7k casino официальный сайт ешь казино porno Александра Степанова, фигуристка Анна Михалкова
DiskiPlus porno Александра Степанова, фигуристка DiskiPlus Попова Анна Юрьевна порно <a href=https://diskiplus.ru>DiskiPlus сайт казино зеркало</a> DiskiPlus сайт казино зеркало DiskiPlus почему в казино нет часов <a href=https://diskiplus.ru/>DiskiPlus официальные сайты казино</a> DiskiPlus пина букмекерской конторы DiskiPlus Комарова Наталья Владимировна порно DiskiPlus песня казино DiskiPlus ограбление казино DiskiPlus самое казино DiskiPlus порно с Федор Чалов (футбол) DiskiPlus Валентина Матвиенко порно
#4410 Charlesgunnyhttp://filmkachat.ru
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
На условиях отыгрыша бесплатных бонусов идет тормознуть подробнее. С ними связаны нюансы, которые невозможно оставить без внимания. <a href=http://filmkachat.ru/>1 x slots casino</a> <a href=https://linqto.me/n/gtji>https://linqto.me/n/gtji</a> Бездепозитный приз часто имеет замерзнуть легкодоступным сразу последствии окончания регистрации, поскольку правило единственным притязанием к нему считается регистрация, а после ревизия вашей свежей учетной записи. 1 x slots casino <a href=http://admbelgor.ru/bitrix/redirect.php?goto=http://clients1.google.co.zw/url?q=http://kirmuseum.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/UgbaO6vaIMY>http://admbelgor.ru/bitrix/redirect.php?goto=http://clients1.google.co.zw/url?q=http://kirmuseum.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/UgbaO6vaIMY</a> Для отыгрыша приза казино обязывает игрока поиграть на необходимую, в количество один превосходящую необходимую приобретенного бонуса — тут выгода компании очевидна.
1×slots казино зеркало
<a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=125293>1× slots сайт</a> сайт 1× slots casino Бездепозитный приз – это финансовое вознаграждение, коие выдается соучастнику забавы в казино, для его вербования и возникновения заинтересованности. Любой посетитель, кот-ый соответствует условиям выдачи подобного бездепозитного бонуса, имеет претендовать на получение вышеуказанного приза. Такое поощрение считается более действенным способом, дающим возможность стартовать в игре, не вкладывая собственных материальных средств.Не рекомендуем сломя голову хвататься за различные предложения получения средств без вложений. Вполне вполне, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем выглядит на 1-ый взор. Альтернативой является казино приз за депо. Мы предлагаем вам пару советов, спасибо которым у любого игрока будет возможность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом средств: <a href=https://baskino.zone/user/Chrisdyems/>https://baskino.zone/user/Chrisdyems/</a> Доступные игры – В некоторых азартных забавах возможно понизить математическое приемущество казино до нескольких десятых процента. В их количестве многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как управляло, в этих забавах ставки идут в зачет вейджера не полностью. Например, имеет учитываться только 50%. В неких играх бездепозитные бонусы вообще невозможно отыгрывать.4. Заберите подарок. Чаще всего бонус активируется незамедлительно после регистрации. Но посещают ситуации, когда надо(надобно) зайти в личный офис или написать в службу поддержки. 1×slots зеркало выигрыши обязательно пройдите регистрацию если В каждом казино с бездепозитным призом учтены вейджеровые условия. Это один-единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, нужно сделать определённое число ставок. Чем круче бонус, тем труднее выполнить условия, и напротив.
зеркло казино 1×slots
Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала быстрые выводы. Фишка выплат в, собственно достаточно выбрать платёжный инструмент и показать сумму. В большинстве случаев средства зачисляются на электрические кошельки в течение 15 мин., а на банковские карты – 1–3 трудящихся дня. <a href=http://elektrofahrrad-tests.de/forums/member.php?action=profile&uid=34595>http://elektrofahrrad-tests.de/forums/member.php?action=profile&uid=34595</a> Воспользоваться бездепом возможно не во всех игровых автоматах: казино вдруг уточняет ограничение для посетителей. Конечно, это можно посчитать неким неудобством для игрока, хотя справедливости необходимо, что выбор автоматов всё одинаково остаётся достаточно большим.Иногда в качестве одобрения за регистрацию все выдаваться билеты для участия в турнирах. Условия их проведения довольно выделяются, потому мы рекомендуем ознакомиться с каждым предложением раздельно. 1×slot зеркало рабочее этих способов предполагает регистрацию Обычно показатель повыше, чем для призов на депо. Не дивитесь, если он несомненно числе х100. Иногда завышенный коэффициент вейджера устанавливается для обитателей отдельных государств.
1хслотс казино зеркало
В некоторых интернет казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на сайте клуба и доказать свои контактные данные. Дополнительно потребуется активация промокода.Вы не в коем случае ни чем не рискуете, а только выигрываете и выводите на платежную систему, либо проигрываете предложенный приз, по мимо практической забавы на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, выучится регулировать менять ставки и линии, изучать бонусные игры и их выигрышные комбинации, да в просто зарядится кучей эмоций! Ведь вы будите играть на бонусные свои, которые возможно отыграть и исключить, но просто на демо счет, тем самым адреналин в крови еще повысится а пульс забьется с нередким ритмом! 1×slots официальный сайт скачать <a href=http://sovetonk.ru/forum/user/177794/>http://sovetonk.ru/forum/user/177794/</a> Риск-игра по равным шансам – Также казино имеет воспрещать выполнять условия по отыгрышу за раунда на удвоение, который предлагается в слотах, видео-покере и неких иных играх.
1×slots регистрацию более популярный вариант это
Фриспины. Бесплатные вращения предусмотрены для использования в видео-слотах. Внимательно читайте условия – они нередко выдаются для некоторых машин. В зависимости от клуба продоставляется делать определенное количество ставок. Кстати, современные игорные жилища дают вероятность заводить «одноруких бандитов». Обычно для получения призов без депозита, казино выдвигает приклнные и вполне выполнимые условия, хотя есть ряд действий которые воспрещены и шансы повлечь за собой досадные последствия: <a href=http://service.gepart.su/forum/?PAGE_NAME=profile_view&UID=4820>http://service.gepart.su/forum/?PAGE_NAME=profile_view&UID=4820</a> 1×slots официальный сайт скачать
<b>Смотреть еще похожие новости:</b>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=294135>1×slots зеркало</a>
<a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=53757>1×slot казино зеркало</a>
<a href=https://tabsgame.ru/user/Jamesbes/>скачать 1×slots на андроид мобильная версия</a>
<a href=https://irc.floobits.com/Jamesamiva>1×slots регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Многие казино деют в маркетинговых целях безвозмездные бонусы исключительно для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой сайт по партнерской ссылке с нашего портала. Вывод выигрыша с бездепозитных призов казино – великодушный подарок от азартных клубов. Но дабы вывести свой заработок, нужно выполнить ряд условий:
#4411 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Юлия Ефимова, пловчиха casinos xyz <a href=https://repost.news/>casino сегодня</a> казино регистрации водка казино <a href=https://res-publika.com>1×bet сайт</a> винлайн букмекерская контора официальный сайт лучшие казино бесплатно porno Катерина Шпица пинап казино casino игровой автомат Окладникова Ирина Андреевна порно порно с Захарова Мария Владимировна
DiskiPlus пари букмекерская контора DiskiPlus top casino <a href=https://diskiplus.ru/>DiskiPlus casino приложения</a> DiskiPlus официальное казино вход DiskiPlus букмекерская контора мостбет <a href=https://diskiplus.ru>DiskiPlus porno Анастасия Янькова, боксерка</a> DiskiPlus 1×bet вход DiskiPlus букмекерские конторы в россии DiskiPlus 1×bet телефон DiskiPlus Самойлова Алла Владимировна порно DiskiPlus официальные букмекерские конторы скачать DiskiPlus винлайн букмекерская контора официальный сайт DiskiPlus букмекерская контора на андроид
#4412 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
суть казино casino бонус <a href=https://kompromat1.online/>казино вулкан</a> retro casino Скоробогатова Ольга Николаевна порно <a href=https://strelochnik.com/>слоты казино</a> букмекерская контора бетсити порно с Захарова Мария Владимировна 1×bet официальный сайт 1×bet xyz casinos xyz официальные букмекерские конторы скачать porno Алена Михайлова porno Алена Косторная (фигурное катание)
DiskiPlus Приезжева Екатерина Геннадьевна порно DiskiPlus porno Марина Александрова <a href=https://diskiplus.ru/>DiskiPlus casino riobet</a> DiskiPlus скачать 1×bet DiskiPlus самое казино <a href=https://www.diskiplus.ru/>DiskiPlus Юдаева Ксения Валентиновна порно</a> DiskiPlus 1×bet зеркало xbet DiskiPlus букмекерская контора официальный сайт скачать DiskiPlus porno Ангелина Гончаренко, хоккеистка DiskiPlus pin casino зеркало DiskiPlus porno Яна Троянова DiskiPlus casino зеркало сайта DiskiPlus гта онлайн казино
#4413 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet бесплатно порно с Александр Головин (футбол) <a href=https://rucriminal.info/>Крючкова Полина Викторовна порно</a> 1×bet зеркало рабочее на сегодня какие казино <a href=https://sovsekretno.net/>casino автомат</a> pin ап casino up casino porno Алена Михайлова порно с Александр Большунов (лыжные гонки) 1×bet скачать бесплатно букмекерская контора фонбет официальный винлайн букмекерская контора
DiskiPlus casino актуальное зеркало DiskiPlus porno Марина Александрова <a href=https://diskiplus.ru/>DiskiPlus 1×bet сайт</a> DiskiPlus casino рабочее DiskiPlus Попова Анна Юрьевна порно <a href=https://diskiplus.ru>DiskiPlus Любимова Ольга Борисовна порно</a> DiskiPlus порно с Евгения Медведева DiskiPlus Петрова Ольга Викторовна порно DiskiPlus 1×bet 1хбет DiskiPlus казино фильм смотреть онлайн DiskiPlus Юдаева Ксения Валентиновна порно DiskiPlus vavada casino DiskiPlus порно с Елена Никитина, скелетонистка
#4414 Charlesgunnyhttp://filmkachat.ru
скачать 1×slots на андроид мобильная версия
Прибывшие на аккаунт финансы бездепозитные бонусы предназначаются, в основном, только для новоиспеченных юзеров, коие ранее не имели личного аккаунта в данном казино. Исходя из сего, случае ранее у игрока был изготовлен депо, то, по всей вероятности, у него больше не несомненно возможности рассчитывать на получение такового бонуса в конкретном заведении. <a href=http://filmkachat.ru/>1×slots акции</a> Срок активации и время на отыгрыш. Зачисление средств или фриспинов случается при активации в течение строго ограниченного периода, схожие притязания предъявляются и к срокам отыгрыша. Одни казино позволяют отыгрывать приз несколько дней или том месяцов. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером. <a href=https://hackaday.io/rendering>https://hackaday.io/rendering</a> Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция содержит подробные верховодила, ссылка на которые обыкновенно содержится в промообъявлении. В них указываются лимиты, вейджер, список доступных игр. Если оператор прячет данные о предложении, то пользоваться им не.Вознаграждения за получение VIP-статуса ? начисляются в программы преданности при достижении очередного уровня либо выдаются персонально менеджерами службы. 1×slots подтвердит вашу регистрацию если говорить <a href=http://021bababa.org/space-uid-495200.html>http://021bababa.org/space-uid-495200.html</a> Чаще всего интернет-казино предлагают бездепозитные бонусы новым пользователям. Эта промо-акция очень отлично завлекает начинающих, подталкивая их к открытию счета. Конечно, не все они становятся послушными посетителями, хотя сам прецедент регистрации аккаунта играет на руку заведению.
1×slots зеркало быструю регистрацию а также мгновенное
Каждая игровая платформа отличается критериями по получению и отыгрышу бездепов. В правилах детально расписаны временные рамки, за которые надо(надобно) прокрутить вейджер. Также не запамятовывайте тему наибольший объем ставки и максимальную необходимую выплаты. С другой стороны, чтобы получить бездепозитные призы казино, довольно потратить менее 1 минуты.После получения приза вывод средств для клиента несомненно недоступен времени, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо пара месяцов. Выводить деньги игрок может лишь последствии отыгрыша. 1×slots зеркало выигрыши обязательно пройдите регистрацию если Выбирайте наилучшие бесплатные бонусы счет обзоров на Casinoz – и пусть вас сопутствует счастье при отыгрыше бонусных кредитов! <a href=https://floobits.com/ScottPiess>https://floobits.com/ScottPiess</a> 1 xslots рабочее зеркало Но никогда не запамятовывайте внимательно разбирать правила роли в бонусных промоакциях. Если вы нарушите хотя бы одно условие, позже вы не сможете уладить недоразумение с администрацией.
1×slots casino регистрация 1×slotscasino09k online
<a href=https://pinshape.com/users/2743060-vykupavto0311#designs-tab-open>https://pinshape.com/users/2743060-vykupavto0311#designs-tab-open</a> Фриспины без депо или дополнительные средства посодействуют ближе познакомиться с игровой платформой и её функциями. За счёт презентов возможно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям из-за игры напротив живых крупье.Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного бонуса. 1×slots скачать на айфон
1×slots регистрация
Акции, приуроченные к календарным дням, случаются рассчитаны как на всех пользователей, так и на категории: примеру, презент на 8 марта девушкам-игрокам или мужикам на 23 февраля. Чем ниже велечину вейджера, тем легче отыграть и вывести бонус. Если Вы планируете заработать на бездепе, но просто ознакомиться с свежим игровым клубом, то стоит игнорировать призов с высоким вейджером их почти не реально отыграть. С ними Вы сможете только протестировать забавы заведения.Промокод – определённая комбинация знаков, которую необходимо установить в отвечающее поле при разработке учетной записи или активировать в личном профиле игрока в разделе с бонусами. В зависимости от интернет заведения каждый из них может вам предложить как бездепозитные деньги, например и бездепозитные фриспины, которые после успешной регистрации рухнут вам на ваш игровой баланс.Бездепы с безвозмездными вращениями деют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд уплачивает казино. Число спинов ограничено и изредка превышает сотню. Если акция содержит много бесплатных игр, их начисление может быть разбито на количество дней. 1×slots бонус за регистрацию <a href=https://smallpdf.com/file#s=a4e78a8b-e574–4cce-8041-d2d327ee7d28>https://smallpdf.com/file#s=a4e78a8b-e574–4cce-8041-d2d327ee7d28</a> На безвозмездные бонусы онлайн-казино практически постоянно распространяется лимитирования по стране проживания посетителей. Даже если вам разрешается раскрывать счет и выступать на деньги в заведении, это еще не означают, собственно для доступны not the slightest deposit bonuses.
1×slots рабочее зеркало
<a href=https://velorout.com.ua/user/Williamtrops/>https://velorout.com.ua/user/Williamtrops/</a> За привлечение друга ? в рамках партнерской программки клиент получает вознаграждение за вербование свежих юзеров. x1 slots 1хслотс регистрация перейти на 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://www.mshowto.org/forum/members/jamespauri.html>1×slots зеркало на сегодня</a>
<a href=https://fougerite.com/members/jamesstawl.14360/>1×slots официальный сайт мобильная версия</a>
<a href=https://www.bf-france.com/forums/profile/30064-rabofreeor/>1× slots casino зеркало</a>
<a href=http://shiftdelete.10tl.net/member.php?action=profile&uid=119629>казино 1×slots официальный сайт</a>
<a href=https://www.findaspermdonor.com/viewtopic.php?f=25&t=91755>1×слот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Новые клиенты онлайн-казино без первого депо шансы выяснить собственную удачливость. К что, этому же есть возможность конвертировать бездепы в настоящие средства за регистрацию в казино, однако для этого приз нужно отыграть сообразно условиям промоакции.
#4415 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пин ап casino гта казино <a href=https://kompromat1.online/>сайт винлайн букмекерская контора</a> porno Юлия Пересильд игры казино <a href=https://www.ossetia.tv/>порно с Илья Осипов (киберспорт)</a> яндекс игры казино почему казино скачиваемые казино 7k casino Нургалиева Эльвира Рамиловна порно букмекерские конторы бет casino buzz
DiskiPlus casino pin официальный DiskiPlus порно с Голикова Татьяна Алексеевна <a href=https://diskiplus.ru/>DiskiPlus порно с Матвей Сафонов (футбол)</a> DiskiPlus кент казино DiskiPlus porno Катерина Шпица <a href=https://diskiplus.ru/>DiskiPlus пин ап casino pin</a> DiskiPlus casino betting DiskiPlus pin up casino top top DiskiPlus casino зеркало сайта DiskiPlus ограбление казино DiskiPlus спорт букмекерская контора DiskiPlus порно с Алина Загитова, фигуристка казино
#4416 Charlesgunnyhttp://filmkachat.ru
1×slots на любой вкус как пройти регистрацию
Выбрать казино с бездепозитным бонусом. У нас на веб-сайте представлен список превосходнейших онлайн казино, которые предлагают своим игрокам щедрые призы за регистрацию. <a href=http://filmkachat.ru/>1 хслот регистрация в 1×slots casino</a> Бесплатный бонус – кредиты, коие онлайн-казино начислит клиенту, не принуждая его пополнять игровой счет.Если вы выбираете испытанное лицензионное интернет казино и выполните все обстоятельства получения бездепозитного приза, трудностей с получением подарка у Вас не возникнет. <a href=https://www.themoviedb.org/u/%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%B0%D0%B2%D1%82%D0%BE-%D1%81%D1%80%D0%BE%D1%87%D0%BD%D0%BE>https://www.themoviedb.org/u/%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%B0%D0%B2%D1%82%D0%BE-%D1%81%D1%80%D0%BE%D1%87%D0%BD%D0%BE</a> 1×slots казино мобильная версия <a href=https://kcapa.net/bbs/board.php?bo_table=free&wr_id=755162>https://kcapa.net/bbs/board.php?bo_table=free&wr_id=755162</a> Заработать на бездепозитных бонусах за регистрацию в казино имеет любой юзер, достигший совершеннолетия.Также есть онлайн-платформы азартных игр, которые используют раздачу бездепозитных призов в специальные даты (как для казино, например и для игрока). Помимо сего, действующие геймеры того имеют вероятность получить похожие бонусы за собственную работа (например, за увеличения значения либо за похожие заслуги).
1×slots зеркало регистрация в 1×slots casino
<a href=http://www.topboard.org/threads/1×slots-sajt-zerkalo.604628/>1×slots сайт зеркало</a> 1×slots на любой вкус как пройти регистрацию <a href=http://intentionalpress.com/author/jeffreyrit/>http://intentionalpress.com/author/jeffreyrit/</a> Фриспины предусмотрены для использования в видео слотах. Внимательно ознакомьтесь с критериями – частенько их выдают на некоторые автоматы. В зависимости от клуба, у вас выйдет устроить определённое число ставок. Кстати, продвинутые игорные жилища разрешают запускать любых «одноруких злодеев».Предложения с бездепозитными бонусами за регистрацию разрешают свежим заведениям привлечь аудиторию на собственный вебсайт. А игроки к получают возможность играть на реальные деньги без депо в казино и заработать маленький стартовый капитал, кот-ый разрешено исключить на карту банка или электрический кошелек. 1×slots casino регистрация 1×slots review live Мы собрали и опубликовали перечень наихороших бездепозитных казино с бонусами за регистрацию, коие гарантируют великодушные выигрыши и мгновенные выплаты.
1×slots официальный сайт скачать
Принципиальным различием бесплатных призов от призов на депозит считается недоступность необходимости заносить средства на аккаунт. Из-за этого их нередко именуют бездепозитными (not the slightest down payment bonuses).Получить приветственный бонус могут лишь новые клиенты онлайн-казино. Способы описаны в условиях акции каждого легального казино, почаще всего это: Отзывы читателей о бонусных акциях помогут составить впечатление, но не запамятовывайте о субъективности собственных комментариев.Доступные забавы – В некоторых азартных забавах можно понизить математическое преимущество казино до нескольких 10-х процента. В их числе почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как правило, в этих забавах ставки идут в зачет вейджера не полностью. Например, может учитываться только 50%. В неких играх бездепозитные призы вообщем невозможно отыгрывать. <a href=https://www.fitday.com/fitness/forums/members/glavdorogadv0307.html>https://www.fitday.com/fitness/forums/members/glavdorogadv0307.html</a> 1×slot зеркало рабочее регистрации на телефон придет Бездепозитный бонус предоставляется новому игроку за конкретные действия. Часто подарок повторяющий денег либо фриспинов выдается за регистрацию, благодаря чему пользователь получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.Oтыгpaть бонус с указанным вeйджepом, достичь нужно сдeлaть cтaвoк нa cумму, превосходящую размер приза в некоторое раз.
1×слот регистрация в 1×slots casino
Если речь об неповторимых услугах, имеет понадобиться регистрация в казино по ссылке с партнерского вебсайта.Классическая разновидность приза за творение аккаунта. Его превосходство содержится никаких, собственно заказчик возможность помощи избирать аппараты и создавать ставки в них. Иногда список игровых автоматов ограничен оператором, но все равно это лучше, чем один-единственный дешевый слот, как если, тогда, с использованием фриспинов. <a href=https://tabsgame.ru/user/Jamesbes/>1× slots casino зеркало</a> Объективные – объем бонуса, коэффициент и условия вейджера, необходимость внесения депозита для вывода средств;Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских руб. В критериях акции указано, собственно вейджер бездепозитного приза х20. Поэтому, дабы отыграть бонус, игроку будет нужно устроить ставок на 35*20=700 рублей. 1хслотс зеркало на сегодня <a href=https://pediascape.science/wiki/1win_Brasil_Cassino_Jogo>https://pediascape.science/wiki/1win_Brasil_Cassino_Jogo</a> Фриплей-бонусы. Бонусы за бесплатную игру есть только в неких клубах. Они зачисляются незамедлительно в сотворения профиля и срабатывают непродолжительное время. Если у вас нет медли потратить свои, они просто завершатся. Что касается времени, правило призы действуют протяжении 1-го часа.Как верховодило, при выводе денег, от играющего требуется только устроить минимальный лепта для того, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом собственный счет.
1хслотс зеркало на сегодня
Несмотря на то, собственно данный вариант стимуляции со стороны азартных платформ довольно моден в подобных игр, далековато не поклонникам казино известно, собственно являют собой бездепозитные бонусы казино и как непосредственно их возможно эксплуатировать.Приглашаем делиться воззреньями о бонусах. Это поможет другим пользователям выбирать более прибыльные предложения. <a href=http://xn–2u1bk4hqzh6qbb9ji3i0×g.com/bbs/board.php?bo_table=free&wr_id=37007>http://xn–2u1bk4hqzh6qbb9ji3i0×g.com/bbs/board.php?bo_table=free&wr_id=37007</a> Превышение максимальной ставки при отыгрыше. Система механически не предуведомляет о превышении ставки, поэтому о несоблюдении верховодил игрок имеет узнать уже в подачи запроса на вывод средств.Однако в условиях скрываются «подводные камешки», которые не позволят исключить крупную необходимую или же вы не успеете отыграть вейджер. Поэтому профессионалы советуют забрать бесплатные вращения за регистрацию в казино без депозита, дабы поднабраться навыка и получить реальный шанс на победу. 1×slots скачать на айфон
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.vn.ua/showthread.php?p=3273636#post3273636>1×slots casino зеркало</a>
<a href=https://masstr.net/showthread.php?tid=85312>казино 1×slots официальный сайт</a>
<a href=https://qualityprogamer.de/forum/showthread.php?tid=341165>casino 1×slot</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Как верховодило, новоприбывшие геймеры начала желают ознакомиться с способами ввода и вывода валютных средств и сроки исполнения поданных заказов чтобы конкретно разуметь, как скоро возможность вывести собственный казино приз за регистрацию без депо на электронный кошелек либо же банковскую карту. К счастью для всех играющих, внутри конкретных холдингов, все казино конкурируют меж собой. Ведь случае бы конкретную фирму представляло только одно онлайн-заведение, то вряд ли бы клиенты заметили казино с бонусом за регистрацию и имели бы рассчитывать лишь на вознаграждение в виде бонуса на 1-ое вложение. К любому заведению периодически по завлекать новых игроков, что, в, лишь на руку всем играющим.
#4417 JerrySperbhttps://ito-ss.co.jp/archives/248042
1×Bet promo code <a href=http://dr-samarai.com/2024/10/02/how-to-redeem-the-1×bet-promo-code-egypt-for-extra/>http://dr-samarai.com/2024/10/02/how-to-redeem-the-1×bet-promo-code-egypt-for-extra/</a> your chance to get bonuses on bets, free bets and exclusive promotions! Enter the code during registration and start playing with an increased deposit.
#4418 Robertwhavahttps://bip39-phrase.blogspot.com/2025/02/bip39-world-list-2048.html
Reliable and unique <a href=https://bip39-phrase.blogspot.com/2025/02/bip39-world-list-2048.html>bip39</a> Word List contains 2048 words needed to create seed phrases in crypto wallets. Allows you to safely manage private keys and guarantees the possibility of recovering funds.
#4419 AHoini
<a href=http://clrobur.com/bbs/board.php?bo_table=free&wr_id=2187058>vavada</a> <a href=http://suprememasterchinghai.net/bbs/board.php?bo_table=free&wr_id=3347626>vavada</a>
#4420 Charlesgunnyhttp://filmkachat.ru
1×slots casino зеркало рабочее
Бездепозитные призы — это подарки от казино в виде бонусных денег либо фриспинов для игровых автоматов, коие начисляются на акк игрока в процедуры регистрации на сайте заведения. Для получения этих поощрений депо не требуется.Так собственно приготовьтесь дать конфиденциальную информацию (пол, возраст, государство проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает не более суток, в чего удастся беспрепятственно выводить крупные выигрыши. <a href=http://filmkachat.ru/>1×slots сайт зеркало</a> Бездепы с безвозмездными вращениями предоставляют юзерам право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд платит казино. Число спинов ограничено и изредка выше сотку. Если промоакция включает в себя большое бесплатных игр, их начисление может быть разбито на некоторое дней. <a href=https://groups.google.com/u/2/g/shopavto>https://groups.google.com/u/2/g/shopavto</a> 1×slots регистрация 1×slots casino 777 online <a href=https://www.mikocon.com/home.php?mod=space&uid=233263>https://www.mikocon.com/home.php?mod=space&uid=233263</a>
1хслотс официальный сайт зеркало
Нет. Казино выдают благотворительные бонусы за регистрацию, чтобы, чтобы, дабы клиент мог ознакомиться с игровым заведением. А дабы исключить его, нужно выполнить условия отыгрыша. 1× slots регистрация в 1×slots casino Представленные на этой странице наихорошие бездеп бонусы в казино за регистрацию в 2022 году имеют оптимальные условия. После кропотливого анализа редакция портала составила рейтинг спецпредложений, каком гости Casino.ru имеют сортировать список по нескольким аспектам: по сумме, вейджеру, максимальной сумме вывода и т.д. <a href=http://www.heavymusic.ru/user/70832/>http://www.heavymusic.ru/user/70832/</a> 1×slots официальный регистрация Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.
1 х слотс зеркало
С не отыгранным призом запрещается превосходить размер максимальной ставки. Нарушение сего обстоятельства иметь аннулирование выигрыша.В игровых клубах без лицензии Вы покупаете „кота в мешке“ и когда неоднозначных обстановок нет возможности куда-то пожаловаться и обосновать свою правоту. Бездепозитные призы прекрасный вариант безвозмездной игры в игровые автоматы. Многие юзеры сети не знают, что в казино возможно начать играть абсолютно даром, а потом исключить выигрыш на банковскую карту или электронный кошелек, иные не доверяют интернет казино, а третьи успешно играют и выигрывают – и подчас довольно великие суммы.Как верховодило, при выводе финансов, от играющего требуется лишь сделать минимальный лепта для того, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом собственный счет. <a href=https://www.tadalive.com/blog/406090/%D1%8F%D0%BA-%D1%80%D0%BE%D0%B7%D1%80%D0%B0%D1%85%D1%83%D0%B2%D0%B0%D1%82%D0%B8-%D0%B2%D0%B0%D1%80%D1%82%D1%96%D1%81%D1%82%D1%8C-%D1%80%D0%B5%D0%BC%D0%BE%D0%BD%D1%82%D1%83-%D0%BA%D0%B2%D0%B0%D1%80%D1%82%D0%B8%D1%80%D0%B8-%D0%BF%D0%BE%D0%BA%D1%80%D0%BE%D0%BA%D0%BE%D0%B2%D0%B8%D0%B9-%D0%B3%D1%96%D0%B4/>https://www.tadalive.com/blog/406090/%D1%8F%D0%BA-%D1%80%D0%BE%D0%B7%D1%80%D0%B0%D1%85%D1%83%D0%B2%D0%B0%D1%82%D0%B8-%D0%B2%D0%B0%D1%80%D1%82%D1%96%D1%81%D1%82%D1%8C-%D1%80%D0%B5%D0%BC%D0%BE%D0%BD%D1%82%D1%83-%D0%BA%D0%B2%D0%B0%D1%80%D1%82%D0%B8%D1%80%D0%B8-%D0%BF%D0%BE%D0%BA%D1%80%D0%BE%D0%BA%D0%BE%D0%B2%D0%B8%D0%B9-%D0%B3%D1%96%D0%B4/</a> 1×slots регистрация 1×slotscasino 56 online
1×slots регистрация на сайте 1×slots ru com
Мы рекомендуем не открещиваться от сходственных предложений узнаваемых казино. Выделите несколько мин. На регистрацию, получите приз и попробуйте его отыграть. Может быть, сейчас удача несомненно на вашей стороне!Бездепозитные бонусы — это презенты от казино в виде бонусных денег либо фриспинов для игровых автоматов, которые начисляются на аккаунт игрока в процедуры регистрации на сайте заведения. Для получения таких поощрений депозит не требуется. <a href=https://www.thefamilylegion.se/viewtopic.php?f=4&t=11632>1×slots актуальное зеркало</a> Также существуют онлайн-платформы азартных игр, которые применяют раздачу бездепозитных призов в особые даты (как для казино, так и для игрока). Помимо сего, действующие геймеры также имеют вероятность получить похожие призы за свою деятельность (к примеру, за повышения значения либо за схожие заслуги).Осталось избрать казино с призом за регистрацию и сделать профиль. После активации презента выигрыш зависит от Фортуны и способностей. 1×slots регистрация 1×slots casino c2d ru <a href=https://665web.com/space-uid-25417.html>https://665web.com/space-uid-25417.html</a> Как только на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу в сего можно оставить заявку на вывод выигрыша. Кредиты прибыльно выделяются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом реальных средств и выделяют вероятность почувствовать азарт. Во-вторых – можно насладиться любой азартной игрой доступной на сайте. В вашем распоряжении находятся автоматы, настольные прибавленье, видео-покер, Live-дилеры.
1хслотс зеркало на сегодня
Во время игры в казино, выигрыши, приобретенные спасибо безвозмездным призовым фондам, суммируются и срабатывают в совместную сумму для отыгрывания. Однако, случае удача улыбнется и получится отыграть все бонусы, игровое заведение гарантированно допустит вывести денежные свои. Сумма вывода будет в от лимита, утвержденного непосредственно в этом учреждении. Поэтому, внимательно надо(надобно) разбирать управляла выдачи анлимитных депо.Иногда в бездепа, казино презентует минимальный приз (до 50 рублей), из-за которого не стоит заморачиваться. <a href=http://hydropower.ru/bitrix/redirect.php?goto=http://eagle-cable.ru/bitrix/redirect.php?goto=http://master-om.com/bitrix/redirect.php?goto=https://telegra.ph/Sokrashchenie-obema-uslug-po-zakonu-44-FZ-09–19>http://hydropower.ru/bitrix/redirect.php?goto=http://eagle-cable.ru/bitrix/redirect.php?goto=http://master-om.com/bitrix/redirect.php?goto=https://telegra.ph/Sokrashchenie-obema-uslug-po-zakonu-44-FZ-09–19</a> Многие азартные клубы ограничивают необходимую вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании акции, суммы Вы не можете вывести. Разница будет аннулирована, Вы числе не можете делать на нее ставки. 1хслотс мобильная версия зеркало С этими простыми советами любое казино с призом за регистрацию способно принести в разы больше выгоды и полезности.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.airsoft44.com/forum/index.php?action=profile;u=11896>1×slots официальный demo регистрация в 1×slots casino</a>
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=3196>x1 slots регистрация в 1×slots casino</a>
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-2090#post-59802>сайт 1× slots casino</a>
<a href=https://rolivka.online/forum/showthread.php?tid=30360>1×slots регистрация 1×slots casino c2d ru</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Таким образом онлайн казино получает вероятного игрока. Возможно в будущем или настоящем он захотит поиграть на средства деньги. Так трудятся бездепозитные призы в интернет казино. Здесь очень подходит выражение, благотворительные сыр посещает лишь в мышеловке. Начинающие игроки все не обдумывать опасность пыла. Однако времени понимания становится больше. Это тема для отдельного обсуждения.
#4421 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора официальный сайт порно с Анна Калинская (теннис) <a href=https://repost.news/>букмекерская контора зенит</a> порно с Анна Щербакова, фигуристка букмекерская контора фонбет официальный <a href=https://res-publika.com>порно с Федор Чалов (футбол)</a> 1×bet официальный слоты порно с Виктория Синицина, фигуристка 1×bet casino kent casino официальные сайты казино порно с Каролина Севастьянова казино рулетка
DiskiPlus 1×bet на андроид DiskiPlus казино 5 <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet рабочее на сегодня</a> DiskiPlus порно с Виктория Синицина, фигуристка DiskiPlus casino buzz <a href=https://diskiplus.ru>DiskiPlus 1×bet скачать приложение на андроид</a> DiskiPlus 1×bet зеркало рабочее xbet DiskiPlus Преподобная Надежда Александровна порно DiskiPlus Яровая Ирина Анатольевна порно DiskiPlus казино регистрации DiskiPlus казино большая DiskiPlus букмекерские контора ап DiskiPlus лучшая казино
#4422 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
kent casino рейтинг казино <a href=https://sovsekretno.net/>порно с Антропова Валентина Викторовна</a> бывшие казино Юдаева Ксения Валентиновна порно <a href=https://glvk.guru/>пинап казино</a> порно с Васильева Татьяна Викторовна лучшие казино бесплатно pin up casino официальный Самойлова Алла Владимировна порно фильмы казино рояль 1×slots casino casino регистрации
DiskiPlus порно с Дарья Касаткина (теннис) DiskiPlus почему казино <a href=https://diskiplus.ru/>DiskiPlus лучшие онлайн казино</a> DiskiPlus Львова-Белова Мария Алексеевна порно DiskiPlus казино вулкан <a href=https://www.diskiplus.ru/>DiskiPlus суть казино</a> DiskiPlus 1×bet скачать бесплатно DiskiPlus pin up casino buzz DiskiPlus казино смотреть DiskiPlus 1×bet вход DiskiPlus bitz casino DiskiPlus Матвиенко Валентина Ивановна порно DiskiPlus пин ап casino pin
#4423 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие возникают у начинающих. <a href=http://filmkachat.ru/>1×slots регистрация</a> Как прочие акции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такого предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих посетителей и позволяет им составить впечатление о функционале, не рискуя вескими суммами.Какие призы я могу еще получить считая бездепозитного приза за регистрацию в казино? По мимо бездепозитного бонуса, любое онлайн казино предлагает игрокам выгодное предложение на 1-ый депозит, вы совершаете депозит, ваш депозит увеличивается в двое либо в в трое, тем самым начать играть можно с больше крупной суммой, например же не забываем на вейджер на бонусы. <a href=https://devfolio.co/@archicgicom>https://devfolio.co/@archicgicom</a> Чтобы бездеп не был начислен на Ваш аккаунт, Вам не активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк автоматически, а Вы не планируете его применять, обратитесь в службу поддержки с пожеланием отменить бездепозитный бонус.3. Подтвердить данные. В зависимости от клуба, нужно привязать аппарат либо почту, указать персональную информацию; 1×slots рабочее зеркало на сегодня <a href=https://www.0574snyw.com/space-uid-176347.html>https://www.0574snyw.com/space-uid-176347.html</a> Классическая разновидность приза за творенье аккаунта. Его преимущество содержится в, что заказчик имеет помощи подбирать аппараты и делать ставки в них. Иногда перечень игровых автоматов ограничен оператором, но все точно это какого-либо, чем один-единственный доступный слот, как если, тогда, с использованием фриспинов.Призовые начисления без депо все предоставляться для роли в турнирах онлайн казино. Потратить перечисленные средства можно исключительно в рамках данной акции. Условия их проведения содержат лимитирования на список игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, другого, как выучить его правила.
1×slots акции
1×slots официальный сайт скачать на айфон <a href=http://rfbimpz.matchfishing.ru/bitrix/click.php?goto=http://tuning-soft.ru/bitrix/redirect.php?goto=http://gam.matchfishing.ru/bitrix/click.php?goto=https://teletype.in/@urist555/ERDzWwDYWAf>http://rfbimpz.matchfishing.ru/bitrix/click.php?goto=http://tuning-soft.ru/bitrix/redirect.php?goto=http://gam.matchfishing.ru/bitrix/click.php?goto=https://teletype.in/@urist555/ERDzWwDYWAf</a> Несмотря на то, собственно данный вариант стимуляции со стороны азартных платформ очень известен области подобных игр, далековато не всем почитателям казино знаменито, собственно сами бездепозитные призы казино и как именно их возможно эксплуатировать. казино 1× slots официальный сайт Получить Бездепозитный бонус в онлайн казино дело двух кликов. Другой момент, отыграть рекламную и соблюсти правила и обстоятельства отыгрыша. Под правилами подразумевается не вагер, хотя и ограничения по наибольшей ставке. Мы разумеем, что в кино все ставят на зеро и выигрывают. Призываем не делать похожего. Перед активацией приза прочитайте правила. Узнайте следующие моменты: Условия получения дара, за регистрацию, за депозит и многое. Ограничения по максимальной ставке. Зачастую не выше 350 руб. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах возможно отыгрывать вагер. Можно вращать автоматы, а вагер будет стоять на месте. Поэтому принципиально знать, в каких играх возможно совершать кратность валютного оборота.
1×slots регистрация 1×slotscasino09k online
Какие бонусы я могу еще получить не бездепозитного приза за регистрацию в казино? По мимо бездепозитного бонуса, каждое онлайн казино предлагает игрокам прибыльное предложение на первый депозит, вы совершаете депозит, ваш депозит возрастает в двое либо и в 3, что, этим самым начать играть можно с больше крупной суммой, например же не забываем про вейджер на призы. Этот тип бонуса несомненно добавлен на Ваш акк после удачной процедуры регистрации с использованием номера телефонного. Если избрать другой способ создания учетной записи, бездеп не будет добавлен на Ваш акк. <a href=https://google.at/url?q=https://doctorlazuta.by/>https://google.at/url?q=https://doctorlazuta.by/</a> 1хслотс зеркало
рабочее зеркало 1×slots
Минимального оборота. Этот лимит уточняется вейджером — пока игрок не поиграет на установленную сумму, вывод средств несомненно недоступен.Несмотря на то, собственно этот вариант стимуляции со стороны азартных платформ довольно востребован в сфере похожих игр, далековато многим поклонникам казино ведомо, собственно являют собой бездепозитные бонусы казино и как непосредственно их вполне эксплуатировать. Такой безвозмездный эквивалент средств зачисляется на профиль пользователя после воплощения требований и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений вероятен лишь последствии воплощения вейджеровых критерий.В игровых клубах без лицензии Вы покупаете „кота в мешке“ и когда неоднозначных ситуаций нет возможности куда-то посетовать и доказать собственную правоту. 1×slots бездепозитный бонус за регистрацию <a href=http://cheapbooks.cc/memberlist.php?mode=viewprofile&u=46736>http://cheapbooks.cc/memberlist.php?mode=viewprofile&u=46736</a> Бесплатные бонусы казино без депозита возможно получить вид валютных средств на бонусный счет (исключить их можно только последствии отыгрыша), фриспинов, игры или кешбэк-бонуса.Большинство интернет-казино из нашего топ-10 готовы порадовать вас неповторимыми промоакциями. Читайте о них в обзорах и на форуме.
1×slots сайт
Автоматы непопросту считаются наиболее модным азартным веселием. Чтобы усвоить управление и управляла, понадобится всего количество мин. Ваша задача сделать ставку, определить количество рабочих линий и возможно крутить тамбур. Если дисплее выпадет выигрышная композиция – вы выиграли! С данной задачей вам посодействуют управится бездепозитные бонусы казино.Многие азартные клубы ограничивают необходимую вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании акции, суммы Вы не сможете исключить. Разница будет аннулирована, Вы числе не можете создавать на нее ставки. Хотя бесплатные призы начисляются без депо, не исключено, что вам придется заносить средства. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты только последствии того, как новый клиент раз пополнит игровой счет. <a href=https://tulaart.ru/forum/index.php?action=profile;u=37708>https://tulaart.ru/forum/index.php?action=profile;u=37708</a> На странице представлены бездепозитные бонусы за регистрацию в казино редчайшая награда за коей гонятся все игроки как новенькие, например и мастера. Мы также уделяем большое внимание на наличие призов при составление рейтинга казино на средства. Бездепозитный приз это возможность выступать даром и выиграть настоящие средства.Все бесплатные бонусы кажутся заманчивыми. Кто же категорически от возможности сыграть в онлайн-казино, не рискуя средствами, хотя получая выигрыши. Но далеко не все бездепозитные бонусы в равной степени привлекательны для рассудительного посетителя. 1×slot казино зеркало Чаще всего казино приз за регистрацию без депозита даёт возможность запустить каждой автомат. Но превосходнее внимательно ознакомиться с критериями. Иногда для забавы доступны лишь определённые модели. Если вы новичок и ничего не смыслите в гэмблинге, другого, как начать знакомство с миром азарта непосредственно с «одноруких бандитов».
<b>Смотреть еще похожие новости:</b>
<a href=http://t954381g.bget.ru/user/JosephPiery/>1хслотс официальный сайт зеркало</a>
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=63235>1×slots официальный сайт, скачать</a>
<a href=http://check2go.net/my-account/>1 x slots</a>
<a href=http://timelesshourglass.com/requiem/memberlist.php?mode=viewprofile&u=821>1×slot официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
С не отыгранным бонусом воспрещается превышать объем наибольшей ставки. Нарушение этого условия виде аннулирование выигрыша. Срок активации и время на отыгрыш. Зачисление средств или фриспинов случается при активации на требовательно ограниченного периода, подобные требования предъявляются и к срокам отыгрыша. Одни казино позволяют отыгрывать бонус некоторое дней или том месяцов. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с неоправданно высоким вейджером.
#4424 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
человек казино казино рояль <a href=https://kompromat1.online/>porno Виктория Баркова, легкоатлетка</a> 1×bet официальный скачать Кузнецова Анна Юрьевна порно <a href=https://res-publika.com>букмекерские конторы в россии</a> казино смотреть онлайн бесплатно 7k casino скачать водка казино casino приложения зеркала официальных сайтов казино pin up casino пин ап порно с Никита Кучеров (хоккей)
DiskiPlus порно с Дарья Касаткина (теннис) DiskiPlus Юдаева Ксения Валентиновна порно <a href=https://diskiplus.ru>DiskiPlus casino скачать</a> DiskiPlus букмекерская контора официальный сайт скачать DiskiPlus порно с Алексей Миранчук (футбол) <a href=https://diskiplus.ru>DiskiPlus Александра Бортич</a> DiskiPlus casino online зеркало DiskiPlus приложения букмекерских контор DiskiPlus Манилова Алла Юрьевна порно DiskiPlus скачать 1×bet на андроид бесплатно DiskiPlus top casino DiskiPlus black russia казино DiskiPlus 1×bet слоты
#4425 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
бесплатные букмекерские конторы Львова-Белова Мария Алексеевна порно <a href=https://res-publika.com>Комарова Наталья Владимировна порно</a> cat casino casino betting <a href=https://krtka.info/>casino бездепозитный</a> casino 7k рабочее porno Юлия Канакина, скелетонистка порно с Зырянова Анастасия Владимировна казино вход Преподобная Надежда Александровна порно porno Нина Пирогова, хоккеистка порно с Петр Ян (ММА)
DiskiPlus casino online зеркало DiskiPlus casino betting <a href=https://www.diskiplus.ru>DiskiPlus 1×bet зеркало рабочее на сегодня</a> DiskiPlus 1×bet слоты официальный сайт DiskiPlus пин casino <a href=https://www.diskiplus.ru>DiskiPlus 1×bet на сегодня</a> DiskiPlus 1×bet слоты 1×bet top DiskiPlus porno Виктория Баркова, легкоатлетка DiskiPlus гта казино DiskiPlus порно с Александр Большунов (лыжные гонки) DiskiPlus 1×bet рабочее DiskiPlus porno Марина Александрова DiskiPlus casino скачать приложение
#4426 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
песня казино casino андроид <a href=https://krtka.info/>букмекерская контора</a> бывшие казино cometa casino <a href=https://specreporter.com/>сайты казино</a> порно с Виктория Синицина, фигуристка 1×bet официальный 1×bet xyz порно с Захарова Мария Владимировна бесплатное казино порно с Алина Загитова, фигуристка порно с Владимир Минеев (ММА) порно с Дарья Клишина, легкоатлетка
DiskiPlus официальные букмекерские конторы DiskiPlus casino pin официальный <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet рабочее</a> DiskiPlus Хорова Наталья Александровна порно DiskiPlus cometa casino <a href=https://www.diskiplus.ru/>DiskiPlus букмекерская контора фонбет официальный</a> DiskiPlus официальная казино DiskiPlus 1×bet зеркало слоты 1×bet xyz DiskiPlus букмекерская контора фонбет DiskiPlus казино смотреть онлайн бесплатно DiskiPlus порно с Александр Большунов (лыжные гонки) DiskiPlus up букмекерская контора DiskiPlus porno Анастасия Янькова, боксерка
#4427 AHoini
<a href=https://vds16244.timeblog.net/66310081/the-smart-trick-of-1win-cameroon-that-no-one-is-discussing>1win Cameroun</a> <a href=https://vds40505.bloginder.com/31089996/top-latest-five-1win-app-urban-news>1win Cameroun</a>
#4428 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet casino 1×bet зеркало рабочее xbet <a href=https://repost.news/>Самойлова Алла Владимировна порно</a> Фастова Елена Владимировна порно смотреть фильм казино <a href=https://vestnik-jurnal.com/>казино можно</a> 1×bet скачать приложение ап казино лучшие казино бесплатно Попова Анна Юрьевна порно Валентина Матвиенко порно казино фильм букмекерские конторы в россии
DiskiPlus пари букмекерская контора DiskiPlus казино онлайн <a href=https://diskiplus.ru>DiskiPlus ограбление казино</a> DiskiPlus Елизавета Боярская DiskiPlus смотреть фильм казино <a href=https://diskiplus.ru/>DiskiPlus порно с Арина и Дина Аверины, гимнастки</a> DiskiPlus симулятор казино DiskiPlus скачать букмекерскую контору на андроид DiskiPlus 7k casino зеркало рабочее DiskiPlus up casino официальный DiskiPlus пин casino DiskiPlus porno Вера Бирюкова, гимнастка DiskiPlus champion casino
#4429 Charlesgunnyhttp://filmkachat.ru
1×slots подтвердит вашу регистрацию если говорить
Представленные на данной странице превосходнейшие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, в котором гости Casino.ru могут сортировать перечень по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> <a href=https://forums.ngames.com/forum/league-of-angels/community-ab/general-discussion-ab/62083-%D1%8F%D0%BA-%D0%BF%D1%80%D0%B0%D1%86%D1%8E%D1%94-%D0%BF%D1%80%D0%BE%D1%84%D0%B5%D1%81%D1%96%D0%B9%D0%BD%D0%B8%D0%B9-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2%D0%B8%D0%BA%D1%83%D0%BF-%D0%BA%D0%B8%D1%97%D0%B2>https://forums.ngames.com/forum/league-of-angels/community-ab/general-discussion-ab/62083-%D1%8F%D0%BA-%D0%BF%D1%80%D0%B0%D1%86%D1%8E%D1%94-%D0%BF%D1%80%D0%BE%D1%84%D0%B5%D1%81%D1%96%D0%B9%D0%BD%D0%B8%D0%B9-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2%D0%B8%D0%BA%D1%83%D0%BF-%D0%BA%D0%B8%D1%97%D0%B2</a> Не хотите сыграть в азартные игры, не рискуя своими деньгами, но получая в все выплаты? Подобную возможность деют все наихорошие порталы с азартными развлечениями. В их количестве большое добросовестных и надежных интернет-казино на российском языке. Они завлекают новых юзеров разными поощрительными событиями, включая бездепозитные, либо благотворительные бонусы.Приглашаем делиться суждениями о призах. Это поможет иным пользователям подбирать более прибыльные предложения. 1х слотс зеркало регистрация в 1×slots casino <a href=https://sportavesti.ru/forums/users/xrumsitseo3005–2/>https://sportavesti.ru/forums/users/xrumsitseo3005–2/</a>
1хслотс рабочее зеркало на сегодня
Вообще перейдя в казино — верховодила одинаковы в получении бездепозитных бонусов, в стандартные правила входит: доказать эл. Почту и телефонный, заполнить собственный личный профиль, активировать промо код или активировать предложения во вкладке БОНУСЫ.Маркетинговая политического всех игорных интернет-клубов обязана носить различный характер. И в вознаграждения на депо работают для того, чтобы провоцировать вносить депозиты и поощрять уже место пользователей, то бездепозитный приз в казино либо бонус за регистрацию в казино, этого всего, рассчитан на расширение базы потребителей. <a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=307435#pid307435>1хслотс мобильная версия зеркало</a> 1 x slots Создание аккаунта. На сайте казино нужно открыть регистрационную форму и наполнить пустые поля личными данными. Иногда на данном шаге требуется указать лишь адрес электронной почты и пароль, хотя почаще надо наполнить анкету персональной информацией (ФИО, дата рождения, место проживания и т.д.). Нужно свидетельствовать только настоящие данные, потому впоследствие они будут проверены.Подтвердите регистрацию, дабы активировать Бездепозитный бонус с выводом, требуется заполнить личный профиль. Заполните пустопорожние поля истинными данными о для. <a href=http://forum.drustvogil-galad.si/index.php?action=profile;u=43745>http://forum.drustvogil-galad.si/index.php?action=profile;u=43745</a> Выполнив все требования оператора, клиент имеет оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем менее суток. Если дополнительно потребуется пройти функцию верификации, то срок увеличивается до 1–2 трудящихся дней. Для перевода используются банковские инструменты и электрические платежные системы. Второй метод подходит другого, как, так как основная транзакций такой осуществляются моментально. В связи со специфичностью функционирования банков обработка платежей может взятьвдолг(взятьвзаймы) до нескольких рабочих дней. рабочее зеркало 1×slots Бездепозитный приз по промо-коду несомненно доступен для игры, только никаких случае когда Вы активируете особый бонусный код в разделе с бонусами или укажите промокод при регистрации на сайте. В некоторых случаях, не активации кода, понадобиться подтвердить контактные данные игрока и заполнить анкету посетителя.Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.
1×slots на любой вкус как пройти регистрацию
Прежде чем активировать бездеп, необходимо убедиться что, нет, что государство, уроженцем которой считается игрок, не входит в список разрешенных. <a href=http://www.postcount.net/forum/member.php?117298-Miguelincat>http://www.postcount.net/forum/member.php?117298-Miguelincat</a> 1хлот регистрация в 1×slots casino Активация по промокоду используется в разных обликах бездепов. Если речь идет о приветственном призе, то комплект знаков можно узнать на главной страничке, в регистрационной форме либо письме, коие отправляется пользователю для доказательства e-mail. Акции могут проводиться совместно с партнерскими площадками. Обычно код располагается на стороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активизируется одноразовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном кабинете или начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем актуальный код для активации в описании каждого промо.При отыгрыше бонусных средств, необходимо учитывать срок деяния приза и время, которое дается на отыгрыш. По истечению заявленного медли, не отыгранный бонус будет аннулирован.
1×slots зеркало быструю регистрацию а также мгновенное
Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция содержит подробные верховодила, ссылка на которые обыкновенно содержится в промообъявлении. В них указываются лимиты, вейджер, список доступных игр. Если оператор прячет данные о предложении, то пользоваться им не.Новые клиенты онлайн-казино без первого депо имеют выяснить собственную удачливость. К что, этому же есть вероятность конвертировать бездепы в реальные средства за регистрацию в казино, впрочем достичь приз нужно отыграть сообразно условиям акции. <a href=https://acerfans.ru/faq/197-kak-polzovatsja-forumom.html>1 х слотс зеркало</a> Фриплей-бонусы встречаются только в некоторых клубах. Они зачисляются сразу в сотворения профиля и активны недолговременное время. Если не успеете истратить средства, они просто сгорят. Касаемо медли, правило бонусы активны в течение часа. Когда речь о валютных бонусах, казино всегда устанавливают условия вейджера, которые нужно выполнить, чтобы вывести выигрыш. 1×slot регистрация <a href=http://r66251ds.beget.tech/member.php?action=profile&uid=99290>http://r66251ds.beget.tech/member.php?action=profile&uid=99290</a> Игрокам стоит принимать приветственный бонус как гарантированный метод получить крупный выигрыш, хотя это отличная возможность без затрат оценить возможностей казино.Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?
1×slot казино зеркало
Индивидуальные поощрения выдаются за совершение деяний: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавленья либо официального посетителя для ПК. В большинстве казино действуют программы лояльности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на грядущий степень нередко сопрягается выдачей бездепа.Денежные средства. Третий бонус за регистрацию без депозита – наличные. К раскаянию, лишь известные и модные клубы шансы уяснить деньги в руб. Либо долларах. С их поддержкою появится насладиться любой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед этим нужно выполнение определенных критерий. На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению сего медли, Вы не можете активировать и получить бездепозитный бонус.В перечне требований к отыгрышу нередко присутствуют лимиты на ставки при забаве на собственные деньги. Так, в отыграть надо(надобно) 30 000 руб., а предельная сумма ограничена 30 рублями, то вертеть барабаны предстоит 1000 один. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам деяния акции. <a href=https://love-n-magic.ru/index.php?subaction=userinfo&user=Tyronekalse>https://love-n-magic.ru/index.php?subaction=userinfo&user=Tyronekalse</a> 1× слот зеркало Большинство клубов привлекают внимание игры за счёт различных даров. На 1 веб-сайтах можно получить виртуальные кредиты, которые откроют доступ ко всему софту. На других же, администрация предлагает безвозмездные вращения для запуска топовых онлайн слотов. Несмотря на различные промоакции, стоит выделить самые основные.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.donchillin.com/space-uid-382497.html>1хслотс зеркало</a>
<a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=889999>1×slots casino регистрация 1×slotscasino09k online</a>
<a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=14202>онлайн казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Перечисленные выше главные характеристики сочетают фактически каждый приз и являются стереотипными для бездепозитных бонусных начислений в казино.
#4430 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pinco casino Радченко Светлана Юрьевна порно <a href=https://www.ossetia.tv/>casino рабочее</a> казино большая официальные букмекерские конторы скачать <a href=https://vestnik-jurnal.com/>почему в казино нет часов</a> 1×bet рабочее на сегодня кент казино бесплатное казино 1×bet сайт 1×bet 1хбет казино онлайн бесплатно букмекерские конторы без депозита
DiskiPlus casino играть DiskiPlus казино смотреть онлайн <a href=https://www.diskiplus.ru>DiskiPlus Набиуллина Эльвира Сахипзадовна порно</a> DiskiPlus 1×bet скачать приложение DiskiPlus казино большая <a href=https://www.diskiplus.ru/>DiskiPlus слот casino</a> DiskiPlus порно с Матвей Сафонов (футбол) DiskiPlus porno Юлия Канакина, скелетонистка DiskiPlus букмекерская контора скачать приложение DiskiPlus vodka casino DiskiPlus порно с Евгения Медведева, фигуристка DiskiPlus казино ли DiskiPlus вавада казино
#4431 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
почему в казино нет окон пин up casino <a href=https://glvk.guru/>казино 1</a> casino зеркало сегодня порно с Каролина Севастьянова <a href=https://m.repost.news/>1×bet xbet xyz</a> kent casino casino рабочее букмекерские конторы в россии 1×bet зеркало рабочее на сегодня 1×bet xyz casino riobet кент казино макао казино
DiskiPlus скачать 1×bet на андроид DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz <a href=https://diskiplus.ru>DiskiPlus казино играть</a> DiskiPlus пин ап casino pin up top DiskiPlus Яровая Ирина Анатольевна порно <a href=https://www.diskiplus.ru/>DiskiPlus гта казино</a> DiskiPlus скачать сайт букмекерской конторы DiskiPlus Семёнова Татьяна Владимировна порно DiskiPlus casino betting DiskiPlus казино фильм смотреть онлайн DiskiPlus online casino DiskiPlus рейтинг казино DiskiPlus казино зеркало сегодня
#4432 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало рабочее
Для получения депозитного бонуса необходимо пополнить свой игровой баланс настоящими средствами. Вознаграждение можно получить либо при внесении первого депозита, или повторяющий фиксированного процента от внесённых средств. Так либо иначе, бонус поступит на счёт только последствии пополнения. <a href=http://filmkachat.ru/>1× slots зеркало</a> <a href=https://medium.com/@comcgifurniture/professional-cannabis-delivery-services-a-complete-guide-for-cambridge-residents-b435bbfcdc10>https://medium.com/@comcgifurniture/professional-cannabis-delivery-services-a-complete-guide-for-cambridge-residents-b435bbfcdc10</a> онлайн казино 1×slots <a href=https://loansnearme.com.au/author/harryfeaby/>https://loansnearme.com.au/author/harryfeaby/</a> Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депо имеет выделяться до 30 дней.
1× slots casino официальный сайт
Бездепозитный приз предоставляется новому игроку за определенные деяния. Часто презент вид средств или фриспинов выдается за регистрацию, благодаря чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.Возможность сыграть дополнительное соревнование (а от и количество) совершенно бесплатно, а выигрыш, тому, поступает на счёт игрока. <a href=https://talkonlinenews.com/viewtopic.php?t=4910>1×slots зеркало регистрация то дальше необходимо пройти</a> 1×slots зеркало на сегодня Многие новички сомневаются, что поощрительный приз не будет возвращать, числе в они выиграли у казино. Это абсолютно неопасно и надежно. Выводя выигранные средства, игрок просто останавливает свое роль в игре и теряет уникальную возможность – безвозмездно наращивать собственное вещественное положение.В количестве случаев безвозмездные бонусы начисляются в кредитах, которые невозможно незамедлительно исключить со счета. Прежде их нужно отыграть по установленным правилам. Эти требования принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже. <a href=https://fromkorea.kr/bbs/board.php?bo_table=free&wr_id=42028>https://fromkorea.kr/bbs/board.php?bo_table=free&wr_id=42028</a> 1×слотс казино
1хслот официальный сайт зеркало
Размер приза. В качестве бездепов обычно начисляют маленькие суммы, а когда речь идет о бонусах за депо, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино могут презентовать игроку до 2000$.Ограничения по забавам. Администрация воспрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, деньгами либо бесплатными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда деление выполняется по облику игр. Например, отыгрыш возможен на всех игровых аппаратах, хотя запрещен в настольных забавах и в разделе Live Casino. Бездепозитные призы, как уже ясно, считаются уникальной вероятностью приступать к игровому процессу абсолютно безвозмездно, другими выступать в интернет казино бесплатно и на имеющие средства сразу в регистрации аккаунта. Автоматы с этим депо имеют замерзнуть прекрасной вероятностью поиграть для почитателей азарта с определенными лимитированиями в денег. <a href=http://www.luisovalles.com/new/index.php?option=com_k2&view=itemlist&task=user&id=96540>http://www.luisovalles.com/new/index.php?option=com_k2&view=itemlist&task=user&id=96540</a> 1х слот 1хслотс регистрация перейти на 1×slots Бездепозитные призы начисляются только раз один. Не стоит открывать новые аккаунты, чтобы получить их повторно. Служба защищенности казино обязательно выявит «левого» соучастника и заблокирует. Если гость выполнит необходимые требования, отыграет собственную ставку и решит вывести личный выигрыш, то ему надо(надобно) сведению, что казино непременно потребует дать ксерокопии личных документов, чтобы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные средства исключить не получится.Большинство интернет-казино из нашего топ-10 готовы порадовать вас неповторимыми промоакциями. Читайте о них в обзорах и на форуме.
1×slots зеркало рабочее
<a href=http://theauction.com.au/my-account/>1×слотс казино</a> Наличие у игрока второго аккаунта. Запрещено создавать количество профилей для многократного получения бездепов.Мы собрали и выпустили перечень наихороших бездепозитных казино с бонусами за регистрацию, которые гарантируют щедрые выигрыши и моментальные выплаты. Бездепозитный бонус предоставляется новенькому игроку за определенные деяния. Часто подарок в виде денег или фриспинов выдается за регистрацию, спасибо чему юзер получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.Вывод выигрыша с бездепозитных бонусов казино – щедрый презент от азартных клубов. Но чтобы вывести собственный заработок, нужно выполнить ряд критерий: 1хслотс казино зеркало <a href=http://www.gurumeguri.com/userinfo.php?uid=24570#>http://www.gurumeguri.com/userinfo.php?uid=24570#</a> Бонус начисляется игроку незамедлительно последствии регистрации и прохождения верификации в казино и не настятельно от клиента внесения депо. Как верховодило, объем приза в подобном случае довольно умеренный, впрочем дозволяет новичкам познакомиться с забавой без риска настоящими средствами.Бездепозитные призы, как уже понятно, считаются уникальной вероятностью приступать к игровому процессу полностью безвозмездно, то есть играть в онлайн казино даром и на существующие средства сразу после регистрации аккаунта. Автоматы с этим депо могут стать прекрасной вероятностью сыграть для почитателей пыла с определенными ограничениями в денег.
1×slots промокод при регистрации 2025
При подмоги такого поощрения оператор имеет также завлекать посетителей, коие раньше показывали активность на веб-сайте, хотя по некий основанию перестали играть. В данном случае промокод высылается юзеру по электронной почте либо в виде SMS. <a href=https://uberant.com/article/2020729-the-purrfect-guide-to-traveling-with-your-feline-friend/>https://uberant.com/article/2020729-the-purrfect-guide-to-traveling-with-your-feline-friend/</a> 1×slots регистрация Представьте момент, когда при ставке в 10 руб. Вы получите подобное умножение. Миллион руб. За одно вращение, собственно абсолютно вероятно. Поэтому вопрос, сколько возможно выиграть остаётся не. Предлагаем проверить других. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный бонус и проверяйте фортуну в деле. Разумеется, исключить средства сложно. Однако шансы есть у всех.Но а случае вы теснее профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в интернет казино;
<b>Смотреть еще похожие новости:</b>
<a href=https://www.ldvd.nl/no-22-san-diego-place-rallies-very-last-boise-country-27–16?page=39#comment-237778>1хслот официальный сайт зеркало</a>
<a href=http://stranaua.ukrbb.net/viewtopic.php?f=2&t=66099>1×slots зеркало регистрация</a>
<a href=https://persiankittencat.com/grey-persian-cats-unraveling-the-charm-of-these-feline-beauties/#comment-63474>x1 slots регистрация в 1×slots casino</a>
<a href=https://forum.graylite.com/viewtopic.php?p=290105#p290105>1×slots промокод при регистрации 2025</a>
<a href=https://minifishtank.net/forum/showthread.php?tid=22781>1хслотс регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Отзывы читателей о бонусных промоакциях помогут составить эмоцию, но не запамятовывайте о субъективности собственных комментариев.
#4433 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора на андроид Шевцова Татьяна Викторовна порно <a href=https://th-royalgclub.com/>pin up casino пин ап</a> порно с Евгений Малкин (хоккей) зеркала официальных сайтов казино <a href=https://7club7.com/>спорт букмекерская контора</a> порно с Захарова Мария Владимировна 1×bet слоты порно с Владимир Минеев (ММА) Александра Бортич 1×bet бесплатно Александра Бортич букмекерская контора бетсити
DiskiPlus лучшие бесплатные онлайн казино DiskiPlus casino online зеркало <a href=https://diskiplus.ru/>DiskiPlus kent casino регистрация</a> DiskiPlus спорт букмекерская контора DiskiPlus казино проиграл <a href=https://diskiplus.ru>DiskiPlus порно с Аделия Петросян (фигурное катание)</a> DiskiPlus 1×bet зеркало рабочее на сегодня DiskiPlus кент казино DiskiPlus скачать 1×bet на андроид DiskiPlus porno Марина Александрова DiskiPlus скачать 1×bet 1×bet xyz DiskiPlus порно с Аделия Петросян (фигурное катание) DiskiPlus 1×bet скачать приложение на андроид
#4434 Charlesgunnyhttp://filmkachat.ru
1×слот регистрация в 1×slots casino
В реальное время получить бонус за регистрацию в казино довольно просто. Почти каждый игорный жилище с радостью даст средства или безвозмездные вращения. Многие игроки используют этим и не стесняются регистрироваться в любом клубе с прибыльными условиями. Кстати, это замечательная возможность придумать выигрышную тактику и сорвать куш. <a href=http://filmkachat.ru/>1хлот регистрация в 1×slots casino</a> <a href=https://www.ted.com/profiles/48491724>https://www.ted.com/profiles/48491724</a> За счёт спинов получится запустить разные интернет слоты, протестировать стратегии и поднабраться опыта. Фишка в, собственно вращения начисляются на лучшие аппараты с оригинальными опциями и высокой отдачей. Не забывайте, собственно в каждом акционном предложении учтены особые притязания – временные лимитирования, наибольший объем ставки, перечень дешевых игр. 1хслотс 1хслотс регистрация перейти на 1×slots <a href=http://okprint.kz/user/Charleshoods/>http://okprint.kz/user/Charleshoods/</a> Активация случается с помощью промокодов, которые вводятся в личном кабинете в регистрации. Среди спецпредложений в перечне Casino.ru содержатся эксклюзивные промокоды, которые доступны лишь посетителям портала. Другие способы начисления средств ? автоматическая активация сразу последствии творенья аккаунта и получение подарка по запросу в службу технической поддержки.
казино 1×slots
Любой выигрыш по ставке выше установленного лимита несомненно являться недействительным. То есть ставка не будет засчитана при отыгрыше, а случае выигрыша его сумма не поступит на счёт посетителя — итог игры будет полностью аннулирован.В каждом казино с бездепозитным бонусом предусмотрены вейджеровые обстоятельства. Это единственный «подводный камень», кот-ый стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, нужно сделать определённое число ставок. Чем круче приз, тем труднее выполнить обстоятельства, и наоборот. 1×slots зеркало регистрация то дальше необходимо пройти <a href=http://mernes.org/user/Michaellax/>http://mernes.org/user/Michaellax/</a> Вышеописанная причина и считается главным моментом, из-за которого операторы отдают доля своей прибыли на различные рекламные расходы и рекламные кампании. А наиболее действующим здесь станут выступать непосредственно бездепозитные бонусы казино 2022 с выводом за регистрацию.Бонус за регистрацию в казино без депозита с выводом средств нужно отыграть. Зачастую для отыгрыша возможность потребоваться устроить ставки на необходимую, в некоторое десятков раз превышающую сумму бонуса либо выигрыша. 1×slots официальный сайт зеркало B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax
1×slots казино зеркало
В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая приятная часть забавы. Важно, часто бездепозитные бонусы в казино выдаются с лимитированиями по максимальной выплате. В среднем возможно рассчитывать на выгода в несколько тыщ руб. Как вывести выигрыш с приза без депо. Придётся доказать аккаунт документально, в неких заведениях. Процедура верификации обязательна и делается каждым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате или прочитайте в правилах. <a href=http://mineralgroup.ru/index.php?subaction=userinfo&user=oceanicfirework>http://mineralgroup.ru/index.php?subaction=userinfo&user=oceanicfirework</a> Многие азартные клубы ограничивают необходимую вывода заработанную на призе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не можете вывести. Разница будет аннулирована, Вы том не можете создавать на нее ставки.Бездепозитный бонус по промо-коду несомненно доступен для забавы, только том, случае когда Вы активируете особый бонусный код в разделе с бонусами или укажите промокод при регистрации на сайте. В неких случаях, кроме активации кода, понадобиться подтвердить контактные данные игрока и наполнить анкету клиента. 1×slots промокод при регистрации 2025
1×slot регистрация
Постарайтесь отыграть вейджер, чтобы замечена возможность забыть заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электронной кошелёк, карту, аппарат.Для вывода средств бонус надо(надобно) несомненно отыграть законам, установленным казино. Внимательно ознакомьтесь с правилами акции и вариантами отыгрыша бездепозитного бонуса до его получения, чтобы избежать конфликтных ситуаций. <a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=13648>1×slot казино зеркало</a> Важно, удостоверьтесь в том, что раньше не регистрировались в выбранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи.Размер призов чаще всего чисто условный и не выше 50 рублей. Приятно, но осязаемым бустом в игре ли будет. Мы советуем не открещиваться от подобных предложений узнаваемых казино. Выделите некоторое мин. На регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сейчас удача несомненно на вашей стороне!Реже бонусы без депо начисляются постоянным игрокам. С их поддержкой администрация старается вычесть ценных посетителей либо вожделеет поблагодарить за преданность правильных гостей. Но намного почаще для сходственных целей применяются эти промоакции: 1хслотс мобильная версия зеркало <a href=https://eco-kamchatka.ru/user/DoctorLazutaSt/>https://eco-kamchatka.ru/user/DoctorLazutaSt/</a> Казино выделяет вероятность заработать и вывести реальные деньги на бездепозитных бонусах. Обычно, это малозначительная сумма, которую казино может себя позволить подарить игроку.
1×slots регистрацию процедура займет всего лишь
Приглашаем делиться воззрениями о бонусах. Это поможет иным юзерам выбирать наиболее выгодные предложения.Ограничения по играм. Администрация запрещает игрокам кое-какие игровые автоматы с бездепозитным призом, деньгами или бесплатными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда разделение производится по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, хотя запрещен в настольных забавах и в разделе Live Casino. <a href=https://keydirectories.co.uk/forum/profile/YvonneWisd>https://keydirectories.co.uk/forum/profile/YvonneWisd</a> Первый возникающий вопрос, это, зачем выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают свежих игроков. Последним легче начать забаву на деньги с подарка за регистрацию. Им надо пополнять баланс и тратить собственные свои. Новички получают безвозмездные спины или свои на счёт. С их помощью знакомятся с игровым ходом, крутят слоты и проделывают ставки в рулетке.Каждый из бездепозитных бонусов без пополнения 2022 имеет собственный определенный вейджер для отыгрыша, так же в каждом казино он устанавливается персонально — где то он х55 а где-то х30, повторюсь всюду по разному! 1хслотс мобильная версия зеркало Чем ниже велечину вейджера, что, этим проще отыграть и исключить приз. Если Вы расчитываете заработать на бездепе, но просто ознакомиться с новым игровым клубом, то стоит избегать бонусов с высочайшим вейджером их почти не реально отыграть. С ними Вы можете только протестировать игры заведения.Какие бонусы есть еще получить не бездепозитного приза за регистрацию в казино? По мимо бездепозитного приза, любое интернет казино предлагает игрокам прибыльное предложение на 1-ый депозит, вы совершаете депо, ваш депо возрастает в двое или том в трое, тем наиболее начать выступать можно с больше крупной суммой, так же не забываем про вейджер на бонусы.
<b>Смотреть еще похожие новости:</b>
<a href=http://nakupnidivadlo.cz/index.php/forum/3-pripominky/46563-pin-up-casino?start=342#236047>1×slots коды</a>
<a href=http://board.eternityrpc.com/thread-7-post-15279.html#pid15279>1×slots casino регистрация</a>
<a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=7757>1×slots сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Ограничения по забавам. Администрация воспрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, деньгами либо бесплатными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда деление выполняется по облику игр. Например, отыгрыш возможен на всех игровых аппаратах, хотя запрещен в настольных забавах и в разделе Live Casino. На страничке представлены бездепозитные призы за регистрацию в казино редчайшая награда за которой гонятся все игроки как новички, например и профессионалы. Мы также уделяем большое внимание на наличие бонусов при составление рейтинга казино на деньги. Бездепозитный приз это вероятность играть безвозмездно и выиграть настоящие средства.
#4435 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино рояль casino 7k рабочее <a href=https://rhymes-punches.com/>гта онлайн казино</a> казино фильм смотреть онлайн бесплатное казино <a href=https://specreporter.com/>porno Светлана Ходченкова</a> лучшие казино бесплатно porno Андрей Рублев (теннис) бесплатные букмекерские конторы казино гта 5 up casino Скоробогатова Ольга Николаевна порно Любимова Ольга Борисовна порно
DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus сайте букмекерской конторы фонбет <a href=https://www.diskiplus.ru>DiskiPlus порно с Карен Хачанов (теннис)</a> DiskiPlus casino сегодня DiskiPlus сайт винлайн букмекерская контора <a href=https://www.diskiplus.ru/>DiskiPlus лучшие онлайн казино</a> DiskiPlus casino скачать DiskiPlus porno Виктория Баркова, легкоатлетка DiskiPlus пинап казино DiskiPlus casino pin официальный DiskiPlus пин ап casino DiskiPlus Попова Анна Юрьевна порно DiskiPlus игры казино
#4436 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало сайта
Бездепозитные бонусы – это исключительно интересная и наиболее перспективная промоакция интернет-казино. Они даже другого, как фри-спинов, поэтому что выплаты в бесплатных вращениях не гарантированы, так комбинации на барабанах игрового аппарата могут не сложиться.Этот образ бонуса несомненно добавлен на Ваш акк последствии успешной процедуры регистрации с внедрением номера телефона. Если избрать иной метод творенья учетной записи, бездеп не будет добавлен на Ваш акк. <a href=http://filmkachat.ru/>1× slots casino зеркало</a> <a href=https://medium.com/@comcgifurniture/professional-weed-delivery-burlington-services-transform-local-cannabis-market-1e4f51451d6d>https://medium.com/@comcgifurniture/professional-weed-delivery-burlington-services-transform-local-cannabis-market-1e4f51451d6d</a> Бездепозитные бонусы казино за регистрацию в 2022 году — это вероятность сыграть за счёт заведения. Казино даёт клиенту шанс пользоваться определённой суммой или числом даровых вращений без внесения депозита. Не путайте деморежим с реальной игрой без необходимости внесения депо. казино 1×slots официальный сайт <a href=http://www.ccti.co.kr/bbs/board.php?bo_table=free&wr_id=653471>http://www.ccti.co.kr/bbs/board.php?bo_table=free&wr_id=653471</a> Для получения бонуса нужно пригласить в игру свежего посетителя. Казино начисляет пригласившему фиксированный процент от взносов приглашённого вид приза: чаще всего его объем не превышает 10%. Срок действия бонуса правило не выше месяца: пригласивший получает приз в зависимости от проигранных ставок приглашённого в 1-ый месяц забавы.Необходимость отыгрыша. Вейджер ситуации повыше, чем для бонусов за депозит. И пока средства не отыграны, исключить их нельзя.
1хслотс рабочее зеркало
Выиграть реальные средства в казино не пополняя счет – трудно, но возможно. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными бонусами и начните играть на бонусные свои. По статистике в одном из 10-ти заведений можно заработать маленькую необходимую денег помощью бонусных средств.Постарайтесь отыграть вейджер, чтобы замечена вероятность оставить заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электронной кошелёк, карту, телефон. <a href=https://australianwinerytours.com/tours/showthread.php?tid=303272>1хслот официальный сайт зеркало</a> 1×slots официальный сайт, скачать Стоит обозначить(означить), что бездепозитный бонус выдается лишь совершеннолетним новеньким, коие, тому, имеют пригласить личных приятелей и людей, также рассчитывающих на поощрительную программку лояльности. Подобная технология появилась между создающих онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры содействуют повышению собственной посещаемости, методом привлечения свежих игроков. Бонусы – это оригинальный шанс для потенциальных соучастников игры, которые шансы опробовать софт покер рума и увериться, станут ли они в него выступать либо нет. Новый игрок попробует средства силы с реальными оппонентами в казино.Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных требований, кроме неотъемлемой верификации. Если на веб-сайте предусмотрена обязательная процедура доказательства личности, то вывести выигрыш получится лишь последствии проверки данных. Приготовьтесь наполнить анкету и отправить в техподдержку документ, подтверждающий личность. <a href=http://www.apicarrara.it/modules.php?name=Journal&file=display&jid=5212>http://www.apicarrara.it/modules.php?name=Journal&file=display&jid=5212</a> Прочитайте управляла бонусной программы, какой желаете принять. Да, мы настоятельно советуем сделать это до регистрации. 1×slots официальный сайт мобильная версия скачать
1×slots casino регистрация
Верификация важна для дополнительной безопасности и помочь техподдержке выявить бонусхантеров и мошенников. Кстати, на платформах выводы крупных сумм доступны лишь в доказательства личности. Постарайтесь отыграть вейджер, дабы была возможность оставить заявку на выплату. Кстати, на всех сайтах, представленных в списке, доступны современные платёжные приборы. Вы сможете получить выигрыш на электрической кошелёк, карту, аппарат. <a href=https://makeitpersonal.co/williamscawn>https://makeitpersonal.co/williamscawn</a> Чем ниже велечину вейджера, что, этим проще отыграть и исключить приз. Если Вы расчитываете заработать на бездепе, но просто ознакомиться с свежим игровым клубом, то стоит избегать бонусов с высочайшим вейджером их почти не реально отыграть. С ними Вы можете только протестировать игры заведения.Фриспины начисляются по определенной ставке. После их активации игроку нужно запустить слот и убедиться, что в нем показываются безвозмездные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода в отыгрыша ориентируется оператором и изредка выше 5 000 рублей. 1×slots казино зеркало Далее требуется отыграть вагер и вывести выигрыш. Игрокам без опыта крупно подфартило, меня получить десятки презентов за одну регистрацию. Если не смогли получить Бездепозитный бонус, не волнуйтесь. Обратитесь в интернет чат, оператор поможет исправить.Для того, чтобы отыграть сумму вашего бездепозитного приза надо(надобно) выполнить обстоятельства вейджера. Очень часто фриспины даются на определенные слоты (book of ra, book of dead, book of sun), избирайте слот себя нраву, они все довольно красочные и качественные. Бездепозитные приз может быть валютным например и повторяющий фриспинов на слоты
1хслотс казино зеркало
Наши эксперты изучают условия акции, затем в ручном режиме проверяют их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие характеристики. Мы не рекламируем казино, а даем игрокам информацию о превосходнейших из них. 1хслотс официальный сайт зеркало <a href=http://filmsgood.ru/user/PorsedropKt/>http://filmsgood.ru/user/PorsedropKt/</a> Когда идет о валютных бонусах, казино постоянно устанавливают условия вейджера, коие необходимо выполнить, чтобы исключить выигрыш.
1× slots casino зеркало
1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, если не хотите замерзнуть жертвой жуликов либо впустую израсходовать время; <a href=http://discuss.the-knowledge.org/memberlist.php?mode=viewprofile&u=49086>http://discuss.the-knowledge.org/memberlist.php?mode=viewprofile&u=49086</a> Фриспины предусмотрены для использования в видео слотах. Внимательно ознакомьтесь с критериями – часто их выдают на кое-какие автоматы. В зависимости от клуба, у вас выйдет сделать определённое число ставок. Кстати, продвинутые игорные жилища позволяют запускать каждых «одноруких бандитов».Обычно, бездепозитные бонусы выдаются под конкретные слоты с фиксированной ставкой, но их наверняка воспрещено применять в игровых автоматах с прогрессивным джекпотом. Список игр, в которых можно применять бездеп, Вы найдете в описании промоакции или сможете уточнить у саппорта заведения. казино 1×slots официальный сайт
<b>Смотреть еще похожие новости:</b>
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=7609>рабочее зеркало 1×slots</a>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=338412>1×slots регистрацию процедура займет всего лишь</a>
<a href=http://forum.drustvogil-galad.si/index.php?action=profile;u=121557>1× slots регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вейджер (wager) – это коэффициент, кот-ый показывает на какую сумму необходимо сделать ставок, чтобы вывести бонус из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего приза, Вам нужно сделать ставок на необходимую: 500*70=3500 руб. Только всецело отыграв приз, Вы можете вывести свой выигрыш. Стоит отметить, собственно бездепозитный бонус выдается только совершеннолетним новичкам, коие, в свою очередь, все пригласить личных приятелей и знакомых, кроме претендующих на поощрительную программку лояльности. Подобная разработка замечена между конкурирующих онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению своей посещаемости, методом вербования свежих игроков. Бонусы – это уникальный шанс для потенциальных соучастников игры, коие имеют опробовать софт покер рума и убедиться, будут ли они в него играть либо нет. Новый игрок попробует свои силы с настоящими оппонентами в казино.
#4437 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
Обычно бездепозитные акции от казино, приходят на эл. Почту в дни рождения либо дни. В неких интернет казино возможно адресоваться в чат и как постоянному игроку, вполне вам предложат бездепозитное предложение.Необходимость отыгрыша. Вейджер в выше, чем для бонусов за депо. И же средства не отыграны, вывести их нельзя. <a href=http://filmkachat.ru/>1 х слотс зеркало</a> Выбирайте превосходнейшие безвозмездные бонусы с помощью обзоров на Casinoz – и пусть для сопутствует удача при отыгрыше бонусных кредитов! <a href=https://owntweet.com/thread/214642>https://owntweet.com/thread/214642</a> 1× slots casino официальный сайт <a href=http://pravilnayakorzinka.ru/bitrix/redirect.php?goto=http://goodshina23.ru/bitrix/redirect.php?goto=http://astek1c.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/Gz0OYEv7utD>http://pravilnayakorzinka.ru/bitrix/redirect.php?goto=http://goodshina23.ru/bitrix/redirect.php?goto=http://astek1c.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/Gz0OYEv7utD</a>
1×slots бездепозитный бонус за регистрацию
Как только вы отыграли вейджер и средства с бонусного баланса перебежали вас на реальный счет, Вы смело сможете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (сделать наименьший депо например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, вместе с депо). <a href=http://vn-info.net/user/Josephkam/>1×slots регистрация</a> 1×slot официальный сайт Верификация необходима для добавочной защищенности и помогает техподдержке выявить бонусхантеров и мошенников. Кстати, на платформах выводы солидных сумм доступны только последствии подтверждения личности. <a href=http://www.ctphome.com/bbs/home.php?mod=space&uid=66040>http://www.ctphome.com/bbs/home.php?mod=space&uid=66040</a> Практически все интернет казино с бездепозитным бонусом за регистрацию учитывает программку лояльности — систему поощрения неизменных клиентов, кот-ая состоит из колличества уровней. При достижении игроком еще значения на его счёт поступает бонус. Чем повыше степень — тем щедрее приз. 1×slot зеркало рабочее регистрации на телефон придет
1×slots официальный сайт зеркало
<a href=http://v90457cw.beget.tech/user/JulesSaips/>http://v90457cw.beget.tech/user/JulesSaips/</a> рабочее зеркало 1хслотс Особую изюминку видео слотам придают уникальные знакы. С их выходом активизируются различные призы. Вы можете запустить дополнительный уровень и увеличить сумму выигрыша. Есть знаки, которые сменяют ненужные составляющие и сами делают выигрышные комбо. Не стоит забывать и тему бонус-тур. После каждого счастливого спина есть шанс прирастить сумму выигрыша в два или хорошо раза.
1×slots регистрация
<a href=https://portugal-campings.com/pt/account/>1×слотс казино</a> Иногда для получения бонусов необходимо связаться с адептами саппорта. Удобнее всего с ними разговаривать в онлайн-сате, но время достаточно запроса по электрической почте. 1× slots casino официальный сайт <a href=https://www.digitalistings.com/author/ashleyfrege/>https://www.digitalistings.com/author/ashleyfrege/</a>
1×slots коды
При регистрации сомнений или ином интернет игральном заведении — вас дается раз шанс испытать собственную фортуну не внося свои монеты. Замечу что эту поощрительную услугу предоставляют не все интернет игровые площадки, а лишь великодушная половина из них. Которые мы подготовили для Вас в нашем перечне.Не стоит сразу же открещиваться от приветственных подарков в похожих казино. Администрация готова начислить средства либо фриспины, но предварительно работники обязаны убедиться, собственно вы не аферист. Дело том,, собственно развелось очень большое охотников за бонусами. Они научились накалывать систему и наваривать крупные суммы денег. Прежде чем активировать бездеп, необходимо убедиться никаких, собственно государство, уроженцем которой считается игрок, не заходит в перечень запрещенных.В количестве случаев безвозмездные призы начисляются в кредитах, коие нельзя незамедлительно исключить со счета. Прежде их нужно отыграть по установленным правилам. Эти требования принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д. ). О нем читайте ниже. <a href=https://wiki.dulovic.tech/index.php/User:Blanche92I>https://wiki.dulovic.tech/index.php/User:Blanche92I</a> Классическая разновидность приза за творенье аккаунта. Его преимущество содержится что, что клиент имеет помощи выбирать аппараты и создавать ставки в их. Иногда перечень игровых автоматов ограничен оператором, но все равно это какого-либо, чем единственный дешевый разъем, как когда с использованием фриспинов.Поспешите забрать бездепозитные призы за регистрацию в казино из представленного перечня. Все платформы не ведут законную деятельность, хотя и порадуют добросовестными результатами забавы, высочайшей отдачей, прыткими выплатами. 1×slots официальный регистрация
<b>Смотреть еще похожие новости:</b>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=108380&result=reply>1хслотс казино зеркало</a>
<a href=https://adminclub.org/showthread.php?tid=130586>1×slots официальный сайт скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для получения предоставленных призов для пригодиться — ПК либо мобильное устройство, и остальное дело за небольшим.
#4438 Charlesgunnyhttp://filmkachat.ru
1×slots официальный регистрация
Мы проделываем ударение на ключевых положениях управлял, рассказываем о территориальных лимитированиях и вкратце информируем о иных акциях обговариваемого казино.Бонус с зачислением средств на счет выделяет больше свободы поступков. Пользователь сам выбирает, каким образом распорядиться подаренными средствами. Здесь того все работать лимитирования на перечень дешевых игр, хотя обыкновенно эти рамки не например строги, как в рекламную с бесплатными вращениями. <a href=http://filmkachat.ru/>1×slots регистрация</a> Таким образом онлайн казино получает потенциального игрока. Возможно в или настоящем он захотит поиграть на средства деньги. Так трудятся бездепозитные призы в интернет казино. Здесь очень подходит выражение, безвозмездные сыр посещает лишь в мышеловке. Начинающие игроки шансы не осознавать опасность пыла. Однако со временем понимания делается больше. Это тема для отдельного обсуждения.Также посещают случаи, когда казино начислит обсужденный приз последствии регистрации свежего клиента по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам. <a href=https://speakerdeck.com/rendercgi1>https://speakerdeck.com/rendercgi1</a> 1×slots зеркало на сегодня <a href=http://upwater.co.kr/bbs/board.php?bo_table=free&wr_id=8689>http://upwater.co.kr/bbs/board.php?bo_table=free&wr_id=8689</a> Чтобы бездеп не был начислен на Ваш аккаунт, Вам не активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт механически, а Вы не расчитываете его применять, обратитесь в службу поддержки с пожеланием отменить бездепозитный приз.
1хслотс рабочее зеркало
Существуют казино с бонусом за регистрацию, каких очень востребованы фриспины в онлайн казино потом регистрации в определенных играх. Они встречаются и чаще безвозмездных поощрений или классических бонусов в казино без инвестициям. Например, игрок регистрирует счет, на кот-ый начисляются безвозмездные игры, бонус за регистрацию вид даровых фрспинов, вращения в игровом автомате. Во время игрового процесса игры выигрывает настоящие деньги, коие в последствии возможно удачно вывести из заведения на собственную платежную систему. То есть, все шансы исключить свои без рисков собственными финансами. Регистрация, какую геймер получит призы, займет пару минут, а спасибо данному можно прирастить 5 евро поощрений до тыс. И без всяких проблем исключить их.Для получения бонуса надо(надобно) ознакомиться с программкой лояльности казино и устроить ставки на сумму, необходимую для перехода на грядущий степень. 1×slots сайт <a href=http://www.dvorchany.grodno.by/user/FrankFlirl/>http://www.dvorchany.grodno.by/user/FrankFlirl/</a> Для верификации номера аппарата, в личном профиле изберите опцию „Подтвердить номер телефонного“ и введите в соответствующее фон код, полученный в sms-сообщении. 1×slots регистрация на сайте Как управляло, новоприбывшие игроки для хотят ознакомиться с способами ввода и вывода валютных средств и сроки исполнения поданных заказов чтобы четко понимать, как стремительно появится вывести собственный казино бонус за регистрацию без депо на электрический кошелек или же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино соперничают меж собой. Ведь если бы определенную компанию давало только одно онлайн-заведение, то навряд бы посетители заметили казино с призом за регистрацию и имели бы рассчитывать лишь на вознаграждение в виде бонуса на 1-ое инвестиция. К каждому заведению регулярно идет завлекать новых игроков, что, в итоге, только на руку всем играющим.Бездепозитный приз предоставляется новому игроку за определенные деянья. Часто презент вид денег или фриспинов выдается за регистрацию, благодаря чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.
1хслотс мобильная версия зеркало
Выбрать казино с бездепозитным бонусом. У нас на сайте представлен перечень лучших онлайн казино, которые предлагают своим игрокам великодушные призы за регистрацию. <a href=https://sims-game.com/user/DoctorLazutaSt/>https://sims-game.com/user/DoctorLazutaSt/</a> Но на некоторых азартных платформах подобные гонорары все получить и уже зарегистрированные пользователи. В таком случае, призы предоставляются в рамках оригинальных акций либо же неким геймерам в виде акционного предложения, которое приходит на почту с целью «вернуть» игрока в свое казино. x1 slots 1хслотс регистрация перейти на 1×slots У нас на веб-сайте Вы отыщите перечень бонусов без депозита в испытанных казино и подробную информацию то как их получить и использовать.
1×slots на любой вкус как пройти регистрацию
Получив собственный презент, Вы можете бесплатно выступать на настоящие деньги, а выполнив обстоятельства отыгрыша, исключить собственный выигрыш. Такой бесплатный эквивалент средств зачисляется на профиль юзера после воплощения требований и предназначаются они только для игрового процесса. Вывод этих вознаграждений возможен только после воплощения вейджеровых критерий.Простая процедура получения бездепозитного бонуса, кот-ая займет не более 2-х минут. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные. Иногда операторы настоятельно внесение минимального депозита перед выводом для верификации платежного инструмента. В неких казино данный депо также светит отыграть. 1хслот официальный сайт зеркало <a href=http://xn---54–6cdxn7akip.xn–p1ai/forum/memberlist.php?mode=viewprofile&u=54247>http://xn---54–6cdxn7akip.xn–p1ai/forum/memberlist.php?mode=viewprofile&u=54247</a> Особую изюминку видео слотам придают оригинальные знакы. С их в активизируются разные призы. Вы можете запустить дополнительный уровень и прирастить сумму выигрыша. Есть знаки, коие заменяют ненадобные составляющие и сами творят выигрышные комбо. Не стоит забывать и тему бонус-тур. После каждого успешного спина есть шанс прирастить необходимую выигрыша в 2 или хорошо раза.Подтверждение регистрации. Казино настоятельно привязки профиля к электрическому адресу и номеру аппарата. Для этого на e-mail отправляется письмо ссылаясь, а на телефонный ? текстовое извещение с кодом.
1×slots регистрация на 1хслотс
Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Во всех легальных онлайн-казино Беларуси необходимо подтверждение паспортных данных для забавы — это заявка правительства государства. <a href=https://www.callupcontact.com/b/businessprofile/_/9113642>https://www.callupcontact.com/b/businessprofile/_/9113642</a> У любого игорного клубы различные вейджеровые обстоятельства. Чтобы вы гарантировано смогли выполнить их, мы дадим несколько советов. Если система начислила небольшую необходимую, надо делать великие ставки – остановитесь на 10–30 центах. Как лишь сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В противном случае чем приглядеться к другому автомату.Промообъявления от казино не дают реальной картины и направлены на вербование внимания юзеров. Понять, как высоки шансы остаться в плюсе, позволит личный анализ условий предложения: 1×slots зеркало быструю регистрацию а также мгновенное
<b>Смотреть еще похожие новости:</b>
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=42386>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Стоит обозначить(означить), собственно бездепозитный приз выдается только взрослым новичкам, коие, же, могут пригласить личных приятелей и своих, кроме рассчитывающих на поощрительную программку преданности. Подобная разработка появилась среди конкурирующих онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению собственной популярности, методом привлечения свежих игроков. Бонусы – это оригинальный шанс для потенциальных соучастников игры, коие все опробовать софт покер рума и увериться, станут ли они в него выступать или нет. Новый игрок испробует свои силы с реальными оппонентами в казино. Простая процедура получения бездепозитного бонуса, которая займет менее 2-х минут. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные.
#4439 AHoini
<a href=https://vds74948.is-blog.com/36888983/lemon-casino-aplikacja-an-overview>lemon casino</a> <a href=https://heyanesthesia.com/forums/users/georgianaisabell/>1win Latviju</a>
#4440 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Анна Сидорова, керлингистка леон букмекерская контора <a href=https://kompromat1.online/>винлайн букмекерская контора</a> kometa casino сайт 1×bet слоты <a href=https://specreporter.com/>porno Дарья Мороз</a> порно с Ирина Сидоркова почему в казино не бывает настенных часов online casino 7k casino на телефон пина букмекерской конторы казино рулетка porno Мира Андреева (теннис)
DiskiPlus бесплатно играем казино DiskiPlus Анна Михалкова <a href=https://diskiplus.ru/>DiskiPlus 1×bet xbet</a> DiskiPlus вавада казино DiskiPlus казино вход <a href=https://diskiplus.ru/>DiskiPlus 1×bet зеркало на сегодня</a> DiskiPlus казино смотреть онлайн DiskiPlus пина букмекерской конторы DiskiPlus porno Мария Шарапова DiskiPlus pin up casino top top DiskiPlus 1×bet зеркало рабочее xbet DiskiPlus casino сайты DiskiPlus скачиваемые казино
#4441 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерские конторы бет up casino зеркало <a href=https://t.me/vchkogpu_ru>почему в казино нет часов</a> порно с Анна Калинская (теннис) casino автомат <a href=https://vestnik-jurnal.com/>Львова-Белова Мария Алексеевна порно</a> фреш казино Фастова Елена Владимировна порно porno Дарья Мороз casinos winning букмекерская контора казино 5 new casino
DiskiPlus бесплатно играем казино DiskiPlus порно с Каролина Севастьянова <a href=https://www.diskiplus.ru>DiskiPlus porno Алена Михайлова</a> DiskiPlus r7 casino DiskiPlus спорт букмекерская контора <a href=https://www.diskiplus.ru/>DiskiPlus порно с Евгения Медведева, фигуристка</a> DiskiPlus ramenbet casino DiskiPlus вавада казино DiskiPlus 1×bet зеркало DiskiPlus порно с Ирина Сидоркова DiskiPlus Черкесова Бэлла Мухарбиевна порно DiskiPlus pinco casino DiskiPlus пинко casino
#4442 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало
Нет. Для получения бездепозитного бонуса в казино необходима неотъемлемая регистрация на веб-сайте. Играть в слоты безвозмездно и без регистрации можно лишь в демо режиме. <a href=http://filmkachat.ru/>1хслотс зеркало</a> После получения бонуса вывод средств для клиента несомненно недоступен того, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя или чета недель. Выводить средства игрок сможет лишь последствии отыгрыша.Вейджер (либо вагер) ? это минимальная сумма ставок, коию необходимо сделать для вывода валютного приза. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение. <a href=https://u.pcloud.link/publink/show?code=XZdW1A0Zk0toVPKo9vh7QEDFEX963uNCNnKy>https://u.pcloud.link/publink/show?code=XZdW1A0Zk0toVPKo9vh7QEDFEX963uNCNnKy</a> При ирге на бонусные свои запрещается выступать в игровые автоматы с прогрессивным джекпотом и забавы из радела live casino. Кроме как, кое-какие казино дают бездеп на раз либо количество определенных слотов, и в иных играх Вы не сможете на их выступать. x1 slots 1хслотс регистрация перейти на 1×slots <a href=http://out4.ru/index.php?subaction=userinfo&user=chunkylexicon68>http://out4.ru/index.php?subaction=userinfo&user=chunkylexicon68</a> Обычно показатель повыше, чем для призов на депозит. Не изумляйтесь, случае он будет том х100. Иногда завышенный коэффициент вейджера устанавливается для обитателей отдельных стран.
1× slots casino официальный сайт
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=57978>1×slots зеркало видели такую регистрацию на</a> 1×slots зеркало видели такую регистрацию на Вышеописанная первопричина и является основным моментом, из-за которого операторы отдают часть своей выгоды на разные маркетинговые расходы и маркетинговые кампании. А самым действующим здесь будут выступать именно бездепозитные призы казино 2022 с выводом за регистрацию.Многие азартные клубы ограничивают сумму вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании акции, суммы Вы не можете исключить. Разница будет аннулирована, Вы даже не можете делать на нее ставки. <a href=http://freemovies.pl/user/Josephfoorn/>http://freemovies.pl/user/Josephfoorn/</a> Теоретически, к бесплатным бонусам можно отнести так именуемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, потому собственно они предоставляют лишь вероятность создавать ставки.Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются незамедлительно последствии творенья профиля и активны непродолжительное время. Если не успеете израсходовать свои, они попросту сгорят. Касаемо медли, как призы активны протяжении часа. 1хслот скачать
1×slots официальный сайт мобильная версия
Фриспины начисляются по конкретной ставке. После их активации игроку необходимо запустить слот и увериться, собственно в нем отображаются бесплатные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода после отыгрыша ориентируется оператором и изредка выше 5 000 руб.Риск-игра по одинаковым шансам – Также казино возможность запрещать скорпулезно обстоятельства по отыгрышу с помощью раунда на удвоение, кот-ый предлагается в слотах, видео-покере и некоторых других забавах. <a href=http://theaesoon.co.kr/bbs/board.php?bo_table=free&wr_id=101530>http://theaesoon.co.kr/bbs/board.php?bo_table=free&wr_id=101530</a> Для получения предоставленных призов для пригодиться — ПК или мобильное устройство, и остальное дело за малым. сайт 1× slots casino
1хслотс 1хслотс регистрация перейти на 1×slots
<a href=http://powercrop.it/chi-siamo/le-persone?page=53#comment-2692>1×slots регистрация на 1хслотс</a> Иногда для получения бонусов нужно спутаться с адептами службы. Удобнее всего с ними разговаривать в онлайн-сате, но время довольно запроса по электрической почте.Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке адепты онлайн-казино публикуют актуальную информацию о no deposit bonuses и других услугах. Казино выводит средства лишь на что, эту платежную систему, с котрой был сделан депо. То есть, для вывода бездепозитного приза, Вам поначалу нужно восполнить счет. В неких клубах узкий список методов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с этих платежных способов, коие доступны для вывода. 1×slots casino online регистрация <a href=http://lider1c.ru/communication/forum/messages/forum5/message8568/6539-glory-casino?result=new#message8568>http://lider1c.ru/communication/forum/messages/forum5/message8568/6539-glory-casino?result=new#message8568</a> Во всех легальных онлайн-казино Беларуси нужно свидетельство паспортных данных для забавы — это заявка правительства страны.Похожим образом трудится третий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения клиента или из-за с получения им VIP-статуса. Подарок предоставляется последствии воззвания в поддержку и ревизии.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Внесение депозита – Будьте готовы пополнить счет последствии отыгрыша бонуса. Это обычное требование верховодил для данного подобии промо-акций. Лучше заблаговременно уточнить, какую сумму надо(надобно) несомненно вносить на счет. Как управляло, речь идет о наименьшем депозите, но вы должны быть уверены, собственно он вас по карману.В качестве призов интернет казино часто предлагает выдачу фриспинов, словами даровых вращений игрового барабана. Виртуальные монеты можно применять для изучения в покерной школе или для забавы в казино. С не отыгранным призом запрещается превосходить объем максимальной ставки. Нарушение этого условия виде аннулирование выигрыша. <a href=http://patinated.info/honda/cb100/doku.php?id=фильмы_новинки_на_телефон>http://patinated.info/honda/cb100/doku.php?id=фильмы_новинки_на_телефон</a> Нет. Казино раздают бесплатные призы за регистрацию, чтобы, чтобы, дабы клиент возможность ознакомиться с игровым заведением. А чтобы исключить его, нужно выполнить обстоятельства отыгрыша. 1 хслот регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://masstr.net/member.php?action=profile&uid=27801>1хслотс зеркало</a>
<a href=http://mi.minfish.com/home.php?mod=space&uid=1196847>1× slots casino зеркало</a>
<a href=http://bikepacking.free.fr/forum/viewtopic.php?f=18&t=36911>1×slots зеркало сайта</a>
<a href=https://forum.dis-course.net/viewtopic.php?p=958566#p958566>1х слот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный приз часто возможность замерзнуть доступным незамедлительно последствии окончания регистрации, что правило единственным притязанием к нему является регистрация, а этого ревизия вашей свежей учетной записи.
#4443 Charlesgunnyhttp://filmkachat.ru
1хслот 1хслотс регистрация перейти на 1×slots
Отказ в прохождении верификации. Если заказчик не хочет либо не дать документы, подтверждающие его личность, профиль несомненно заблокирован совместно, вкупе со всеми бонусными начислениями.Бонус в казино без депо содержит различные варианты: такое быть приветственный приз, акции в честь каких-либо праздничных либо весомых дат, приз за вербование новых игроков, преданность и получение VIP-статуса. <a href=http://filmkachat.ru/>1хслотс 1хслотс регистрация перейти на 1×slots</a> Существует ли стратегии для отыгрыша бездепозитных призов? К огорчению нет, на выигрыши или проигрыши с призов, казино или игрок воздействовать имеет, отдача игр случается от создателей игр. <a href=https://vhearts.net/forums/thread/8949/>https://vhearts.net/forums/thread/8949/</a> 1×slots регистрация 1×slotscasino09k online <a href=https://www.tunionfans.com/home.php?mod=space&uid=5079>https://www.tunionfans.com/home.php?mod=space&uid=5079</a> Иногда в качестве бездепа, казино дарит наименьший бонус (до 50 руб. ), из-за которого надо заморачиваться.Активация случается с помощью промокодов, коие вводятся в личном кабинете последствии регистрации. Среди спецпредложений в списке Casino.ru содержатся эксклюзивные промокоды, которые доступны только посетителям портала. Другие способы начисления средств ? автоматическая активация незамедлительно в творенья аккаунта и получение подарка по запросу в службу технической помощи.
1хслотс казино зеркало
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=249916>1×slots casino регистрация 1×slotscasino09k online</a> 1×slots бездепозитный бонус за регистрацию Какие призы возможность еще получить кроме бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного бонуса, каждое интернет казино предлагает игрокам выгодное предложение на первый депозит, вы совершаете депо, ваш депозит возрастает в двое либо том в трое, что, этим наиболее начать играть возможно с более крупной суммой, например же не забываем про вейджер на бонусы. <a href=http://www.e10100.com/home.php?mod=space&uid=1657255&do=profile&from=space>http://www.e10100.com/home.php?mod=space&uid=1657255&do=profile&from=space</a> Для получения бонуса нужно пригласить в игру свежего посетителя. Казино начисляет пригласившему фиксированный процент от взносов приглашённого вид приза: чаще всего его объем не превышает 10%. Срок действия бонуса правило не выше месяца: пригласивший получает приз в зависимости от проигранных ставок приглашённого в 1-ый месяц забавы. 1×slots казино зеркало Наличие у игрока 2 аккаунта. Запрещено создавать несколько профилей для многократного получения бездепов.
1×slot казино зеркало
В случае с фриспинами без вейджера, Вам не придется отыгрывать свой выигрыш с даровых вращений. Прибыль, которую Вы заработаете на таком бездепе можно ставить на вывод без какого или отыгрыша. <a href=https://pyxc.ru/user/DoctorLazutaMn/>https://pyxc.ru/user/DoctorLazutaMn/</a> рабочее зеркало 1хслотс
1×slots акции
Вообще перейдя в казино — верховодила одинаковы в получении бездепозитных призов, в стандартные правила входит: подтвердить эл. Почту и телефон, наполнить собственный индивидуальный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ.B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. Сразу после активации промокода возможно воспользоваться даром. Как теснее упоминалось, бонусы случаются трёх обликов – фриспины, кредиты и фриплей-бонусы. 1×slots официальный регистрация <a href=https://magadan-mebel.ru/forum/user/2493/>https://magadan-mebel.ru/forum/user/2493/</a> В истиннее время получить бонус за регистрацию в казино довольно просто. Почти любой игорный дом с радостью даст средства или бесплатные вращения. Многие игроки пользуются этим и не смущяются регистрироваться в любом клубе с прибыльными критериями. Кстати, это замечательная возможность придумать выигрышную стратегию и сорвать куш.
1×slots зеркало видели такую регистрацию на
Отыграв бездепозитный бонус в казино с выводом тоже придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если схожее ограничение присутствует, то единоразово исключить получится только необходимую, не превосходящую размер приобретенного приза.Маркетинговая политика всех игорных интернет-клубов обязана носить различный нрав. И в вознаграждения на депо работают для того, дабы стимулировать заносить депозиты и поощрять уже существующих пользователей, то бездепозитный бонус в казино или бонус за регистрацию в казино, этого всего, рассчитан на расширение базы потребителей. <a href=http://fh79604z.bget.ru/index.php?subaction=userinfo&user=ordinarykook0>http://fh79604z.bget.ru/index.php?subaction=userinfo&user=ordinarykook0</a> Онлайн-казино с бездепозитными призами ставят посетителям условия для пользования бездепами, потому перед участием в промоакции лучше подробно ознакомиться со всеми правилами и аспектами акции. Условия шансы касаться получения приза, его применения и последующего вывода валютных средств когда выигрыша. казино 1× slots официальный сайт Способы получения бездепа различаются зависимо вида приза, который понравился игроку. Но вам или надо(надобно) быть зарегистрированным в легальном онлайн-казино и доказать свою личность. В общем виде пошаговая инструкция для получения бездепозитного бонуса выглядит например:Каждая игровая перрон отличается критериями по получению и отыгрышу бездепов. В правилах отчетливо расписаны кратковременные рамки, за коие нужно прокрутить вейджер. Также не запамятовывайте на максимальный размер ставки и максимальную необходимую выплаты. С другой стороны, дабы получить бездепозитные бонусы казино, достаточно израсходовать менее 1 минутки.
<b>Смотреть еще похожие новости:</b>
<a href=https://nztw.org/home.php?mod=space&uid=43957>1×slots коды</a>
<a href=https://forum.bandariklan.com/member.php?action=profile&uid=13758>1хслотс рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, a зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. Размер призов почаще всего чисто символический и не превышает 50 рублей. Приятно, хотя ощутимым бустом в игре ли станет.
#4444 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Дарья Клишина, легкоатлетка пин up casino <a href=https://kompromat1.online/>casino x</a> casino казино вулкан <a href=https://sovsekretno.net/>top casino</a> 1×bet xbet xyz Ходнева Светлана Владимировна порно лучшие онлайн казино casino играть порно с Арина и Дина Аверины, гимнастки пинко casino Приезжева Екатерина Геннадьевна порно
DiskiPlus казино смотреть DiskiPlus винлайн букмекерская контора официальный сайт <a href=https://diskiplus.ru/>DiskiPlus сайт казино зеркало</a> DiskiPlus 1×bet 1 DiskiPlus букмекерские контора ап <a href=https://diskiplus.ru/>DiskiPlus порно с Ирина Сидоркова</a> DiskiPlus 1×bet зеркало на сегодня 1×bet xyz DiskiPlus kent casino регистрация DiskiPlus Черкесова Бэлла Мухарбиевна порно DiskiPlus porno Дарья Клишина DiskiPlus Елизавета Боярская DiskiPlus казино ставка DiskiPlus казино 5
#4445 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet рабочее casino вход <a href=https://slon-ru.com/>букмекерская контора скачать приложение</a> porno Мария Шарапова casino 7k рабочее <a href=https://th-royalgclub.com/>пин casino</a> казино пин porno Александр Соболев (футбол) bet casino официальные зеркала казино букмекерская контора мостбет сайте букмекерской конторы фонбет casino рабочее
DiskiPlus винлайн букмекерская контора DiskiPlus 1×bet слоты <a href=https://diskiplus.ru/>DiskiPlus букмекерская контора на андроид</a> DiskiPlus ramenbet casino DiskiPlus 1×bet слоты 1×bet xyz <a href=https://www.diskiplus.ru/>DiskiPlus букмекерская контора фонбет официальный</a> DiskiPlus cometa casino DiskiPlus 1×bet зеркало xbet xyz DiskiPlus скачать casino на андроид DiskiPlus казино ли DiskiPlus porno Нина Пирогова, хоккеистка DiskiPlus букмекерскую контору пин DiskiPlus black russia казино
#4446 Charlesgunnyhttp://filmkachat.ru
1×slots сайт зеркало
Теоретически, к безвозмездным бонусам можно отнести так называемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, потому собственно они деют только возможность делать ставки.Иногда для получения бонусов необходимо связаться с адептами саппорта. Удобнее всего с ними собеседовать в онлайн-сате, хотя от довольно запроса по электронной почте. <a href=http://filmkachat.ru/>1× slots официальный</a> Бездепозитные призы, как уже ясно, являются оригинальной вероятностью к игровому процессу абсолютно бесплатно, то есть играть в интернет казино даром и на быть свои сразу в регистрации аккаунта. Автоматы с таким депозитом все замерзнуть великолепной возможностью поиграть для поклонников азарта с определенными ограничениями в финансах.У каждой забавы свои притязания по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система засчитает каждую ставку. В рулетке и покере сделать это намного сложнее. Именно поэтому например принципиально внимательно читать обстоятельства получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой игре, то новенькие попросту «спустят бонус на ветер». <a href=https://peertrainer.com/LoungeCommunityThread.aspx?ForumID=1&ThreadID=316722>https://peertrainer.com/LoungeCommunityThread.aspx?ForumID=1&ThreadID=316722</a> 1×slots официальный demo регистрация в 1×slots casino <a href=http://vn-info.net/user/Terryliake/>http://vn-info.net/user/Terryliake/</a> В основном случаев безвозмездные призы начисляются в кредитах, коие нельзя незамедлительно исключить со счета. Прежде их нужно отыграть по установленным правилам. Эти притязания принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже.Шаг 5. Использование и отыгрыш. Бездеп обязан быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.
1×slots рабочее зеркало на сегодня
Каждый новичок и профессиональный игрок грезят быстро стартануть и начать создавать реальные ставки. Для сего достаточно забрать презент, за кот-ый не выплачивать. В зависимости от игровой платформы, нужно создать профиль, привязать email либо телефон. После этого администрация начисляет щедрое вознаграждение повторяющий бесплатных вращений или виртуальных кредитов. 1×слот регистрация в 1×slots casino Доступные игры – В некоторых азартных играх возможно понизить математическое приемущество казино до нескольких десятых процента. В их количестве все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как правило, в таких забавах ставки идут в зачет вейджера не полностью. Например, имеет учитываться только 50%. В неких играх бездепозитные призы вообщем невозможно отыгрывать.Бонус за регистрацию в казино выдается только раз один на 1-го игрока. Но посещают дополнительные акции, в коих бездепы расступаются для постоянных клиентов и эти подарки Вы сможете получить больше одного раза. <a href=http://kioskindustry.ru/index.php?subaction=userinfo&user=cooinglimbo90>http://kioskindustry.ru/index.php?subaction=userinfo&user=cooinglimbo90</a> 1хслотс регистрация в 1×slots casino Бездеп с фриспинами может охватывать всю коллекцию игр на сайте или разработки одного провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш возможность быть выведен после такого, как юзер отыграет данную сумму. Возможность оценить полный перечень слотов — главное достоинство данной разновидности. Игроку становятся доступны те функции, которые отсутствуют в демонстрационном режиме, а вероятность выиграть реальные деньги прибавляет ярчайших азартных ощущений.Подтверждение регистрации. Казино настоятельно привязки профиля к электронному адресу и номеру телефона. Для этого на e-mail отчаливает письмо ссылаясь, а на телефонный ? текстовое сообщение с кодом.
1×slots регистрация 1×slots review live
Многие новенькие колеблются, собственно поощрительный приз не нужно несомненно отдавать, в случае они выиграли у казино. Это безусловно неопасно и надежно. Выводя выигранные свои, игрок просто останавливает свое роль деле и утрачивает уникальную вероятность – даром увеличивать личное вещественное положение. Почти все игровые клубы требуют свидетельство контактных данных игрока для получения бездепозитного приза.Отзывы читателей о бонусных акциях помогут составить эмоцию, но не запамятовывайте о субъективности собственных объяснений. <a href=https://www.mexicanservers.com/member.php?action=profile&uid=10955>https://www.mexicanservers.com/member.php?action=profile&uid=10955</a> Также учтите, собственно кое-какие игровые платформы сужают список государств, коие способны получить предложенный бездепозитный бонус за регистрацию. К образцу, есть онлайн-заведения, выдающие похожие призы лишь обитателям определенных стран. К образцу, онлайн казино 777 Оригинал дает бездепозитный приз только игрокам из России и стран СНГ. Или наоборот, снабжают вознаграждением всех, считая обитателей некоторых стран (как сего, следует внимательно изучать перечень, дабы потом не возникло практически вопросов и претензий).В современность очень просто получить бонус за регистрацию в казино. Практически любой игорный дом с готовностью начислит средства или бесплатные вращения. Многие гэмблеры используют этим и не стыдятся региться в любом клубе с прибыльными критериями. Кстати, это замечательная возможность выработать победную стратегию и сорвать джекпот. 1×slot регистрация Условия имеют разниться приятель от друга. Но такой приз возможность быть использован лишь для игрового процесса – полученные на счет деньги до того, как будут отыграны, вывести невозможно.Помните, собственно в неких забавах сумма ставки идет в зачет вейджера лишь отчасти. Так, в настольных и карточных играх только от 5% до 50% суммы ставки считаются как отыгранные средства, момент как в слотах идет в зачет все one hundred percent суммы.
1× slots сайт
Во всех законных онлайн-казино Беларуси необходимо подтверждение паспортных данных для забавы — это требование правительства страны.Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала резвые выводы. Фишка выплат что, нет, что достаточно выбрать платёжный инструмент и указать необходимую. В большинстве случаев средства зачисляются на электронные кошельки в течение 15 мин., а на банковские карты – 1–3 рабочих дня. 1×slots официальный зеркало <a href=http://avto.izmail.es/user/GlennGer/>http://avto.izmail.es/user/GlennGer/</a>
1хслот скачать
Oтыгpaть бонус с обозначенным вeйджepом, для этого нужно сдeлaть cтaвoк нa cумму, превышающую размер приза в количество один.Для получения предоставленных призов для пригодиться — ПК либо мобильное устройство, и остальное дело за небольшим. Oтыгpaть приз с обозначенным вeйджepом, достичь необходимо сдeлaть cтaвoк нa cумму, превышающую объем бонуса в количество раз. <a href=http://dns2.shadr.ru/user/Raymondliady/>http://dns2.shadr.ru/user/Raymondliady/</a> Бонус в казино без депозита имеет различные вариации: такое быть приветственный приз, промоакции в честь каких-либо дней либо важных дат, приз за привлечение свежих игроков, лояльность и получение VIP-статуса.Для всех бездепозитных призов функционирует наибольший предел на выигрыш. Он показывает предельную сумму, которую вы сможете получить, играя на бонусные кредиты. Как только для удастся выполнить притязания вейджера, допустимый максимально несомненно переведен с бонусного счета на главный, а остаток будет списан. 1×slots на любой вкус как пройти регистрацию Необходимость отыгрыша. Вейджер ситуации повыше, чем для призов за депо. И пока свои не отыграны, вывести их нельзя.
<b>Смотреть еще похожие новости:</b>
<a href=http://board.eternityrpc.com/thread-481-post-14468.html#pid14468>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<a href=https://techadron.com/forum/memberlist.php?mode=viewprofile&u=232>1×slot зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Когда идет о получении бездепозитных бонусов в казино, в первую очередь направьте на последующие условия:
#4447 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
7k casino зеркало на сегодня казино вход официальный сайт <a href=https://specreporter.com/>букмекерская контора бетсити</a> porno Алена Михайлова 1×bet casino <a href=https://th-royalgclub.com/>porno Александр Соболев (футбол)</a> 1×bet рабочее на сегодня водка казино casino промокод 7k casino скачать 7k casino официальный vodka casino букмекерская контора мостбет
DiskiPlus казино рояль смотреть DiskiPlus почему казино <a href=https://www.diskiplus.ru>DiskiPlus 7k casino сайт</a> DiskiPlus букмекерские конторы бет DiskiPlus казино ли <a href=https://diskiplus.ru>DiskiPlus 1×bet приложение</a> DiskiPlus порно с Анастасия Потапова, теннисистка DiskiPlus pinco casino DiskiPlus фильмы казино рояль DiskiPlus скачать букмекерскую контору DiskiPlus про казино DiskiPlus порно с Георгий Джикия (футбол) DiskiPlus 1×bet официальный 1×bet xyz
#4448 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию более популярный вариант это
Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала резвые выводы. Фишка выплат в, собственно довольно избрать платёжный инструмент и указать сумму. В большинстве случаев деньги зачисляются на электрические кошельки в течение 15 минут, а на банковские карты – 1–3 рабочих денька.Одним из предлогов отдавать привилегию одному либо иному заведению содержится в привлекательности предлагаемых промоакций и бесплатных предложений. Безвозмездные фриспины, выдаваемые без нужды делать какой-либо вклад, в списке находится далековато не в конце. <a href=http://filmkachat.ru/>1×slots регистрацию более популярный вариант это</a> Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс изучить игровые автоматы, научится регулировать менять ставки и полосы, исследовать бонусные игры и их выигрышные композиции, ну конечном просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные средства, коие возможно отыграть и исключить, не просто на демо счет, что, этим наиболее адреналин в крови еще повысится а пульс забьется с нередким ритмом! <a href=https://u.pcloud.link/publink/show?code=XZdW1A0Zk0toVPKo9vh7QEDFEX963uNCNnKy>https://u.pcloud.link/publink/show?code=XZdW1A0Zk0toVPKo9vh7QEDFEX963uNCNnKy</a> 1×slots зеркало регистрация то дальше необходимо пройти <a href=https://agro-info.biz.ua/wr_board/tools.php?event=profile&pname=Tyronehunse>https://agro-info.biz.ua/wr_board/tools.php?event=profile&pname=Tyronehunse</a> Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Фриспины — бесплатные вращения, коие позволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытных игроков фриспины считаются самым популярным и предпочтительным обликом бонуса — бесплатные вращения порой эффективнее и веселее в отыгрыше, чем другие облики бездепов.
1×slots бонус за регистрацию
<a href=https://www.findaspermdonor.com/viewtopic.php?f=25&t=87634>1×slots официальный demo регистрация в 1×slots casino</a> 1×slots официальный сайт скачать Но эти рамки не смущают в хайроллеров, поскольку коэффициенты на слотах позволяют рассчитывать на крупные выигрыши, ну некоторых автоматах разыгрывается прогрессивный джекпот.Выигрыши с бонусов без инвестициям практически привязаны к требованию по ставкам и могут быть обналичены только после исполнения данных требований. <a href=http://www.alltab.co.kr/bbs/board.php?bo_table=free&wr_id=708956>http://www.alltab.co.kr/bbs/board.php?bo_table=free&wr_id=708956</a> 1×slots казино зеркало
рабочее зеркало 1хслотс
<a href=http://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=6570>http://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=6570</a> Рассмотрим принцип его деяния на случае. Допустим, вы зарегались и возымели $10 no down payment bonus с вейджером х50. Это означает, собственно выигранные средства возможно несомненно выводить не раньше, чем в такого, как общая сумма ставок достигнет $500. 1×slots быструю регистрацию а также мгновенное
рабочее зеркало 1хслотс
Наш список содержит наилучшие бездепозитные бонусы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает проверку по принципиальным характеристикам: 1 x slots <a href=https://www.dmxzone.com/support/13984/topic/130474/>https://www.dmxzone.com/support/13984/topic/130474/</a> С другой стороны, намного проще отобрать бездепозитные фриспины за регистрацию в казино и прямо в начать вращать барабаны в наилучших слотах. Главная необыкновенность спинов том,, собственно они предусмотрены для лучших автоматов. Удастся не только пройти дополнительные раунды, хотя и увеличить необходимую выигрыша, заработать респины и внутриигровые подарки.Для выбора азартного заведения Вы сможете воспользоваться перечнем наших казино с бонусами за регистрацию. На нашем веб-сайте мы опубликовали перечень бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, собственно доля призов эксклюзивные и доступны лишь для посетителей нашего вебсайта по-специальному промо-коду или по оригинальной ссылке. Кроме как, для каждого приза мы подготовили подробный обозрение, в котором Вы узнаете как получить и отыграть одобрение и как вывести собственный выигрыш с бездепа.
1хслотс казино зеркало
Приветственный бонус без депо ? подарок за регистрацию. Выдается средствами, фриспинами либо баллами. В заключительном случае бонусные баллы применяются для роли в турнирах либо обмена на настоящие средства.Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депо имеет выделяться до 30 дней. Мы рекомендуем не отрицаться от похожих услуг знаменитых казино. Выделите некоторое минут на регистрацию, получите приз и попытайтесь его отыграть. Может быть, сегодня фортуна несомненно на вашей стороне!Некоторые сайты, этого чем провести регистрацию игроков, предлагают ответить на несколько базовых вопросов. Цель проведения сходственной викторины – выявить случайных людей, коие не имеют представления о покере, и не допустить получения ими призов. Если гость теснее играл в казино, то ответить на полтора 10 простых вопросов будет нетрудно. Очень часто, ответы можно отыскать на официальных веб-сайтах данных учреждений. <a href=http://domivka.biz.ua/wr_board/tools.php?event=profile&pname=redundantspeed9>http://domivka.biz.ua/wr_board/tools.php?event=profile&pname=redundantspeed9</a> Для верификации номера аппарата, в личном профиле выберите опцию „Подтвердить номер телефонного“ и введите в соответствующее поле код, полученный в sms-сообщении.Чаще всего казино приз за регистрацию без депо даёт вероятность запустить любой автомат. Но какого-либо внимательно ознакомиться с критериями. Иногда для игры доступны только определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, лучше начать знакомство с миром азарта непосредственно с «одноруких злодеев». 1хслотс официальный сайт зеркало Каждая игровая платформа выделяется условиями по получению и отыгрышу бездепов. В правилах отчетливо расписаны временные рамки, за коие нужно прокрутить вейджер. Также не запамятовывайте тему максимальный объем ставки и наивысшую необходимую выплаты. С иной стороны, дабы получить бездепозитные бонусы казино, довольно истратить менее 1 минуты.
<b>Смотреть еще похожие новости:</b>
<a href=https://swordmaster.org/user/JamesVok/>1×slots официальный сайт скачать на айфон</a>
<a href=http://soumoli.com/home.php?mod=space&uid=24916>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<a href=http://aficionado.pl/showthread.php?154440–1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D0%BD%D0%B0-%D1%81%D0%B5%D0%B3%D0%BE%D0%B4%D0%BD%D1%8F&p=174406>1×slots зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Простая процедура получения бездепозитного бонуса, которая займет менее 2-х минут. Для получения бездепов, достаточно зарегистрироваться и доказать контактные данные. Популярность интернет казино растёт и всё больше юзеров начинают интересоваться азартными играми. Бездепозитные призы 2022 года, это уникальные презенты за регистрацию. С их поддержкой свежие игроки могут получить безвозмездные вращения или средства на баланс за 1 регистрацию. С свет игорных заведений в интернете, бездепозитные призы стали популярнейшим способом привлечения игроков. Подобные промоакции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о которых мы расскажем. Наш вебсайт собрал лучшие предложения из интернета на 2022 год. Воспользуйтесь хоть подарком и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить условия.
#4449 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало подтвердит вашу регистрацию если говорить
Максимальная ставка ? устанавливается в еденице счета и ограничивает объем ставки за один спин. В случае ее превышения приз может быть аннулирован. Также в правилах может находиться запрет на размещение ставок конкретного облика, например, по одинаковым шансам в рулетке (другими, на чет или нечет, красное либо темное и т.д. ). <a href=http://filmkachat.ru/>1×slots зеркало регистрация</a> Во всех законных онлайн-казино Беларуси нужно свидетельство паспортных данных для забавы — это заявка правительства страны. <a href=https://speakerdeck.com/shopavto7>https://speakerdeck.com/shopavto7</a> Доступ к дару возможность раскрываться механически в введения промокода либо обращения в службу сайта. В первом случае от пользователя не потребуется практически поступков. Бездеп с активацией по коду встречается почаще всего. Игроку нужно установить совокупность знаков в графе, которая может пребывать в регистрационной форме в Личном кабинете. 1×slots казино мобильная версия <a href=http://behzistiardabil.ir/user/DoctorLazutaer/>http://behzistiardabil.ir/user/DoctorLazutaer/</a>
1×слотс казино
1×slot рабочее зеркало Рассмотрим принцип его деянья на случае. Допустим, вы зарегались и возымели $10 not the slightest down payment bonus с вейджером х50. Это значит, собственно выигранные деньги можно будет выводить не раньше, чем последствии как, как общая сумма ставок достигнет $500. <a href=https://www.yuliancaishang.com/space-uid-296911.html>https://www.yuliancaishang.com/space-uid-296911.html</a> Операторы гемблинга утверждают, что так они сражаются с бонус-хантерами. Впрочем, критики считают, что этим казино пробуют устроить из случайного постояльца постоянного игрока. казино 1× slots официальный сайт Фриспины начисляются по определенной ставке. После их активации игроку нужно запустить слот и убедиться, что в нем отображаются безвозмездные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода в отыгрыша ориентируется оператором и изредка превышает 5 000 руб.При исполнении условий отыгрыша и верификации, средства с бонусного счета переводятся на ведущей и все быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции находятся от избранной платежной системы.
1х слот регистрация в 1×slots casino
Основное управляло получения бездепа ? создаваемый аккаунт обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов строго воспрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депо необходимо блюсти простую очередность деяний.Обычно, бездепозитные призы выдаются под конкретные слоты с фиксированной ставкой, хотя их точно запрещено применять в игровых автоматах с современным джекпотом. Список игр, каких возможно использовать бездеп, Вы отыщите в описании промоакции либо можете уточнить у саппорта заведения. Варианты выигрыша зависят от Вашей удачи и условий игорного портала. Выше мы сказали, собственно некоторые бездепозитные призы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются они, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на средства, можно выиграть неописуемые суммы. Сегодняшние игровые автоматы или видео слоты, как их нарекают. Могут выдавать солидные умножение от х1.000 и повыше. Некоторые умножают ставку от х100.000.Получить Бездепозитный приз в интернет казино дело 2-ух кликов. Другой момент, отыграть рекламную и соблюсти управляла и условия отыгрыша. Под правилами подразумевается столько вагер, но и лимитирования по максимальной ставке. Мы осознаем, собственно в кинотеатр все ставят на зеро и выигрывают. Призываем не делать похожего. Перед активацией приза прочтите управляла. Узнайте последующие моменты: Условия получения подарка, за регистрацию, за депозит и прочее. Ограничения по наибольшей ставке. Зачастую не повыше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вращать автоматы, а вагер несомненно стоять на пространстве. Поэтому принципиально знать, в каких играх можно совершать кратность денежного оборота. <a href=https://formacion.somoscodenautas.com/forums/topic/%d0%b5%d1%81%d1%82%d0%b5%d1%81%d1%82%d0%b2%d0%b5%d0%bd%d0%bd%d0%b0%d1%8f-%d1%81%d1%81%d1%8b%d0%bb%d0%be%d1%87%d0%bd%d0%b0%d1%8f-%d0%bc%d0%b0%d1%81%d1%81%d0%b0/>https://formacion.somoscodenautas.com/forums/topic/%d0%b5%d1%81%d1%82%d0%b5%d1%81%d1%82%d0%b2%d0%b5%d0%bd%d0%bd%d0%b0%d1%8f-%d1%81%d1%81%d1%8b%d0%bb%d0%be%d1%87%d0%bd%d0%b0%d1%8f-%d0%bc%d0%b0%d1%81%d1%81%d0%b0/</a> Для получения депозитного приза необходимо пополнить свой игровой баланс реальными средствами. Вознаграждение можно получить либо при внесении первого депо, или вид фиксированного процента от внесённых средств. Так или другому, приз поступит на счёт только после пополнения. casino 1×slot
1×slots бездепозитный бонус за регистрацию
При забаве на бонусные свои запрещается выступать в игровые автоматы с современным джекпотом и игры из радела live casino. Кроме такого, кое-какие казино дают бездеп на один либо некоторое определенных слотов, и в других забавах Вы не сможете на их играть. <a href=http://miupsik.ru/forums/showthread.php?tid=249808>зеркло казино 1×slots</a> Самые свежие бездепозитные бонусы в казино за регистрацию 2022 года с выводом прибыли находятся на данной страничке. Посетитель имеет расценить условия получения и начать играть на средства без внесения депозита. При данном игроку важно осознавать, на каких условиях и какими способами у исключить приобретенный выигрыш. Для этого нужно оценить перечень присоединенных платежных систем. 1хслот 1хслотс регистрация перейти на 1×slots <a href=https://brp.bars.su/forum/?PAGE_NAME=profile_view&UID=49903>https://brp.bars.su/forum/?PAGE_NAME=profile_view&UID=49903</a> С другой стороны, намного легче забрать бездепозитные фриспины за регистрацию в казино и прямо момент начать вращать барабаны в наихороших слотах. Главная необыкновенность спинов что, что они предназначены для топовых автоматов. Удастся столько пройти дополнительные раунды, хотя и прирастить необходимую выигрыша, заработать респины прочие внутриигровые подарки.
1×slots casino online регистрация
Воспользоваться бездепом возможно не во всех игровых автоматах: казино вдруг устанавливает ограничение для посетителей. Конечно, это можно посчитать некоторым неудобством для игрока, но ради отметить, что выбор автоматов всё точно остаётся достаточно наибольшим. Бездепозитные бонусы за регистрацию в игровых автоматах для собственников онлайн-казино являются долею рекламной кампании, направленной на увеличение аудитории сайта. Так они продвигают свои бренды и завлекают новых клиентов.Не стоит путать забаву в демо и использование призов. В демонстрационном режиме игрок возможность оценить механику слота, сюжет и оформление. Но игра ведется на относительные кредиты, потому отсутствует главное ? ощущение азарта. Активируя промокод либо фриспины, заказчик как не тратит средства средства на игровые автоматы, но возможность сорвать реальный куш! <a href=http://fitagrunt.ru/index.php?subaction=userinfo&user=needylaziness22>http://fitagrunt.ru/index.php?subaction=userinfo&user=needylaziness22</a> 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Вывод выигрыша с бездепозитных призов казино – щедрый презент от азартных клубов. Но чтобы вывести собственный доход, нужно выполнить ряд условий:Бездепозитный бонус часто возможность стать доступным незамедлительно в завершения регистрации, поскольку как единственным требованием к нему является регистрация, а затем проверка вашей свежей учетной записи.
<b>Смотреть еще похожие новости:</b>
<a href=http://miupsik.ru/forums/showthread.php?tid=250012>1×slots актуальное зеркало</a>
<a href=https://www.mojaremiza.pl/forum/1×slot-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F>1×slots официальный сайт зеркало</a>
<a href=https://ragnarok.ch/forum/viewthread.php?thread_id=130107>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Суммы похожих предложений, случаев, колеблются от 3-х до 20 долларов, а вейджер на эти свои обязан составлять от 30 до шестидесяти один. Зачастую, величайшая сумма выигрыша здесь составит от одной до двух сотен $. Если игрок выиграет больше, то все средства шансы быть списанными до очень разрешенного выигрыша. Здесь замечена смысл выводить еще несуществующие деньги на свою платежную систему и далее отыскивать заведение с благоприятными под данную сумму релоадом или призом за первое пополнение счета. Есть некоторое подвидов бездепозитного вознаграждения, предлагаемого великим количеством заведений.
#4450 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Абрамченко Виктория Валериевна бывшие казино <a href=https://glvk.guru/>зеркала казино</a> 1×bet сейчас порно с Аделия Петросян (фигурное катание) <a href=https://krtka.info/>7k casino сайт</a> casino официальный сайт сайте букмекерской конторы фонбет 1×bet сайт 1×bet xyz скачать pin casino casino рабочее 7k casino бонус Любимова Ольга Борисовна порно
DiskiPlus porno Александр Соболев (футбол) DiskiPlus автомат казино <a href=https://diskiplus.ru/>DiskiPlus пин ап casino pin</a> DiskiPlus пинко casino DiskiPlus Светлана Ходченкова <a href=https://www.diskiplus.ru>DiskiPlus казино пину</a> DiskiPlus bitz casino DiskiPlus Лут Оксана Николаевна порно DiskiPlus casino зеркало сегодня DiskiPlus ограбление казино DiskiPlus порно с Гатагова Ольга Анатольевна DiskiPlus казино большая DiskiPlus казино зеркало сегодня
#4451 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet порно с Анастасия Потапова, теннисистка <a href=https://strelochnik.com/>букмекерская контора официальный сайт</a> букмекерскую контору пин казино вход <a href=https://repost.news/>casino регистрации</a> казино new casino casinos winning зеркала казино порно с Дронова Александра Викторовна порно с Константин Тюкавин (футбол) 1×slots casino
DiskiPlus pinco casino DiskiPlus ограбление казино <a href=https://diskiplus.ru>DiskiPlus Нургалиева Эльвира Рамиловна порно</a> DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus сайт винлайн букмекерская контора <a href=https://diskiplus.ru/>DiskiPlus 1×bet регистрация</a> DiskiPlus porno Илья Ковальчук (хоккей) DiskiPlus порно с Гатагова Ольга Анатольевна DiskiPlus официальные зеркала казино DiskiPlus где казино DiskiPlus Валентина Матвиенко порно DiskiPlus 1win casino DiskiPlus промокод 1×bet
#4452 Charlesgunnyhttp://filmkachat.ru
1×slots сайт
Фриплей-бонусы встречаются только в некоторых клубах. Они зачисляются незамедлительно после создания профиля и активны недолговременное время. Если не успеете истратить свои, они попросту сгорят. Касаемо времени, как бонусы активны протяжении часа. <a href=http://filmkachat.ru/>1×slots регистрация на сайте 1×slots ru com</a> Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном призе, то в первую очередь обратите внимание на велечину вейджера и срок, кот-ый дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть приз и вывести выигрыш. <a href=https://www.scutify.com/articles/2024–12–21-transforming-visualization-through-digital-innovation>https://www.scutify.com/articles/2024–12–21-transforming-visualization-through-digital-innovation</a> 1×slots сайт <a href=http://ivokb.ru/bitrix/redirect.php?goto=http://halitovo.ru/bitrix/rk.php?goto=http://excont.ru/bitrix/redirect.php?goto=https://telegra.ph/Ezhemesyachnoe-posobie-pensioneram-nagrazhdennym-znakom-otlichiya-pogranichnika-I-stepeni-09–19>http://ivokb.ru/bitrix/redirect.php?goto=http://halitovo.ru/bitrix/rk.php?goto=http://excont.ru/bitrix/redirect.php?goto=https://telegra.ph/Ezhemesyachnoe-posobie-pensioneram-nagrazhdennym-znakom-otlichiya-pogranichnika-I-stepeni-09–19</a> В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и если, тогда, спорных ситуаций нет возможности куда-то пожаловаться и доказать свою правоту.
1×slots зеркало регистрация в 1×slots casino
<a href=https://forum.vn.ua/member.php?u=73361>1×slots акции</a> 1×slots официальный сайт зеркало <a href=http://zc.xszrcw.com/home.php?mod=space&uid=401410&do=profile>http://zc.xszrcw.com/home.php?mod=space&uid=401410&do=profile</a> скачать 1×slots на андроид мобильная версия Доступ к дару может раскрываться автоматически в введения промокода или обращения в службу поддержки сайта. В первом случае от юзера не требуется никаких действий. Бездеп с активацией по коду встречается почаще всего. Игроку нужно установить совокупность символов в графе, которая возможность находиться в регистрационной форме в Личном офисе.Теоретически, к бесплатным призам можно отнести например называемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, поэтому что они предоставляют лишь вероятность делать ставки.
1хслот официальный сайт зеркало
Если вы выбрали себе некоторое брендов коие вам больше всего полюбились, для неизменной забавы! Таких гемблеров казино очень предпочитает и оценивает, за частую эти игроки становятся VIP игроками заведения, коим нередко поступают выгодные предложения в виде призов, например же туда заходит и бездепозитные. Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного бонуса достаточно пополнения баланса и подтверждения личности. В других же клубах, необходимо количество один прокрутить свой депозит.В онлайне слишком много скриптовых сайтов, коие принадлежат жуликам. Их основная цель – привлечь гэмблеров, пообещав не только щедрые подарки, но и солидные выигрыши. Так что некоторые веб-сайты предлагают получить за регистрацию числе $1 000. <a href=https://triberr.com/nodressio1>https://triberr.com/nodressio1</a> 1×slots регистрация 1×slotscasino 56 online
1×slots бонус за регистрацию
Новые посетители онлайн-казино без первого депо могут проверить свою удачливость. К что, этому же есть возможность преобразовать бездепы в настоящие деньги за регистрацию в казино, впрочем для этого бонус необходимо отыграть согласно условиям промоакции. 1хслотс 1хслотс регистрация перейти на 1×slots <a href=http://totusvlad.ru/bitrix/click.php?goto=http://guidestar.org/Account/Register?returnUrl=http://astrology.pro/link/?url=https://teletype.in/@urist_free/JRM1qMEg-o8>http://totusvlad.ru/bitrix/click.php?goto=http://guidestar.org/Account/Register?returnUrl=http://astrology.pro/link/?url=https://teletype.in/@urist_free/JRM1qMEg-o8</a> Чтобы самостоятельно убедиться в преимуществах бездепозитных бонусов, довольно зарегистрироваться в казино и получить поощрение.Постарайтесь отыграть вейджер, чтобы появилась вероятность оставить заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные приборы. Вы сможете получить выигрыш на электронной кошелёк, карту, аппарат.
1×slots промокод при регистрации
Главное превосходство спинов – возможность изучить разные слоты. Также удастся насладиться бонусными раундами, испытывать удачу в риск-туре и преувеличить выигрыш за счёт особенных знаков. Однако не только игровой процесс заслуживает внимание, ведь никакого сосредоточиться на реальном выигрыше.Основное верховодило получения бездепа ? творимый акк должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов взыскательно воспрещено. Проверка ведется по имени, e-mal, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депо нужно блюсти несложную очередность деяний. Для получения бездепа нужно пригласить в игру по реферальной ссылке нового клиента: он обязан зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на сумму, обозначенную в условиях промоакции. <a href=https://sergioyzsj55544.affiliatblogger.com/82468084/nude-ai-exploring-the-boundaries-of-technology-and-ethics>https://sergioyzsj55544.affiliatblogger.com/82468084/nude-ai-exploring-the-boundaries-of-technology-and-ethics</a> 1×slots зеркало этих способов предполагает регистрацию Также учтите, что кое-какие игровые платформы сузивают список государств, которые способны получить предложенный бездепозитный приз за регистрацию. К примеру, существуют онлайн-заведения, выдающие подобные бонусы только обитателям определенных стран. К образцу, интернет казино 777 Оригинал дает бездепозитный приз лишь игрокам из России и стран СНГ. Или напротив, пичкают вознаграждением всех, кроме обитателей неких государств (как сего, по пристально учить перечень, дабы потом не возникло практически вопросов и претензий).У нас на веб-сайте Вы отыщите список бонусов без депозита в испытанных казино и доскональную информацию о том как их получить и применять.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.pmpobc.ca/index.php?topic=147610.new#new>казино 1×slots официальный сайт</a>
<a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=143836>зеркала 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Такие поощрения позволяют безвозмездно протестировать свежее казино, разобраться с игровым процессом интернет слотов, заработать и вывести маленькую сумму денег. Проверка занимает от нескольких мин. До нескольких дней, спецы техподдержки могут запросить дополнительные документы или инициировать короткое общение по Skype.
#4453 Charlesgunnyhttp://filmkachat.ru
1×slot официальный сайт
Бонусные деньги – маленькая сумма денег для старта в новеньком казино. На бонусные деньги, обычно разрешается играть во все забавы, кроме слотов с прогрессивным джекпотом и игр из раздела live casino.Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? <a href=http://filmkachat.ru/>1×slos регистрация в 1×slots casino</a> Бездепозитные призы — это подарки от казино вид бонусных денег либо фриспинов для игровых автоматов, которые начисляются на акк игрока последствии процедуры регистрации на сайте заведения. Для получения этих поощрений депозит не потребуется.Все обожают получать презенты. Согласитесь, почти любой играющий человек будет безмерно счастлив, если получит безвозмездный подарок для игры в онлайн казино просто за регистрацию или же приз за внесенный депозит, так именуемые приветственные бонусы для новых игроков. Соответственно эти интернет клубы станут более востребованы и преимущественны у игроков при выборе казино для игры. Топ казино непрерывно обновляется и добавляются новые и занимательные игровые клубы с симпатичной бонусной политикой и всеми вероятными преимуществами, льготами, к которым относятся такие бонусы как фриспины за регистрацию, денежные бездепозитные призы, а великодушные бонусы за внесенный депо. <a href=https://divisionmidway.org/jobs/author/shopavto22/>https://divisionmidway.org/jobs/author/shopavto22/</a> Более солидные предложения встречаются довольно изредка. Зачастую они доступны только VIP-игрокам. В оставшихся случаях им наверняка сопутствуют очень жесткие условия отыгрыша. Также вероятны дополнительные условия и другие ограничения, прописанные в критериях и положения бонусной программы казино.Бонус за регистрацию в казино без депо с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша может потребоваться устроить ставки на сумму, в некоторое 10-ов один превосходящую сумму приза либо выигрыша. онлайн казино 1×slots <a href=http://goeu.ru/user/Davidhor/>http://goeu.ru/user/Davidhor/</a> Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша призов. Заведения постоянно устанавливают максимальную ставку, возможную по условиям вейждера.
1хслотс 1хслотс регистрация перейти на 1×slots
<a href=https://www.makinamania.net/index.php?topic=252212.new#new>скачать 1×slots официальный сайт</a> 1×slots бездепозитный бонус за регистрацию Наш список содержит превосходнейшие бездепозитные призы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает проверку по главным параметрам: <a href=http://xn–80aaghdc1brekc3alcdm.xn–p1ai/index.php?subaction=userinfo&user=tacittailor17>http://xn–80aaghdc1brekc3alcdm.xn–p1ai/index.php?subaction=userinfo&user=tacittailor17</a> 1хслотс рабочее зеркало Бoльшинcтвo азартных заведений выдвигают приблизительно одинаковые обстоятельства и притязания, коие необходимо выполнить, дабы получить бездепозитный бонус за регистрацию. Все их возможно соединить в раз список:
1×slots официальный сайт зеркало рабочее
За счёт спинов выйдет запустить различные интернет слоты, протестировать стратегии и поднабраться навыка. Фишка сомнений, что вращения начисляются на топовые аппараты с уникальными опциями и высокой отдачей. Не забывайте, собственно в любом акционном предложении учтены особые требования – временные ограничения, наибольший объем ставки, список дешевых игр. <a href=http://o91668l6.beget.tech/user/RenaldoGex/>http://o91668l6.beget.tech/user/RenaldoGex/</a> Для верификации аккаунта надо(надобно) дать спецам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, а также фотографию банковской карты либо экрана странички электронного кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности. 1×slots зеркало регистрацию более популярный вариант это
1×slots сайт
Операторы гемблинга заявляют, что так они борются с бонус-хантерами. Впрочем, критики считают, собственно данным казино пытаются сделать из случайного гостя неизменного игрока.Автоматическая активация первый самой комфортной, но ручной способ имеет перед ней преимущества. Прежде чем использовать вознаграждение от казино, стоит заранее определить, сколько медли требуется на выполнение всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала действия приза. Чтобы бездеп не был начислен на Ваш аккаунт, Вам надо активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк механически, а Вы не расчитываете его использовать, обратитесь в саппорта с просьбой отменить бездепозитный приз.Даже не выиграв солидную необходимую, игрок интересно проведет время, изнутри исследует работу площадки, воспримет геймплей автоматов. Все это без каких-либо финансовых рисков. Быть в курсе наилучших промоакций легко. Достаточно регулярно изучать список свежих онлайн казино с выводом приза без депозита в данном разделе. 1×slots официальный сайт зеркало <a href=https://www.0574snyw.com/space-uid-176013.html>https://www.0574snyw.com/space-uid-176013.html</a> Так же стоит выделить то, собственно в каждом онлайн казино установлен собственный максимальный кешаут на бездепозитный бонус. Как верховодило кешаут — это максимальная сумма денег, которая дешевая для вывода с бездепозитного бонуса.
1×slots коды
Нельзя разглядывать забаву на средства, как вариант заработка. Азартные забавы воспрещены для лиц младше 18 лет. Topcasinobonuses.mobi не зачинщиком азартных игр. Сайт носит информационный нрав.Мы подготовили список, где есть практически животрепещущие и новые бездепозитные призы казино, которые вы можете получить безвозмездно. Для наших юзеров есть особые предложения эксклюзивные призы, которые вы у не найдете, их мы обозначили специальной красноватой плашкой «Exclusive». <a href=https://www.birdpix.nl/profile.php?mode=viewprofile&u=126883>https://www.birdpix.nl/profile.php?mode=viewprofile&u=126883</a> Помните, собственно всевозможные нарушения правил сведут на нет ваши усилия, и вы скорее останетесь без начисленного вас бесплатного приза. Всегда изучайте верховодила начисления и условия вейджера. По хоть вопросам, на коие вы не можете других найти ответы, обращайтесь за разъяснениям и саппорт.Наличие у игрока 2 аккаунта. Запрещено творить несколько профилей для неоднократного получения бездепов. 1×slots зеркало выигрыши обязательно пройдите регистрацию если
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.visiteachapada.com/viewtopic.php?f=19&t=3344>1×slots бездепозитный бонус за регистрацию</a>
<a href=https://forum.eliteshost.com/showthread.php?tid=20149>1×slots официальный зеркало</a>
<a href=https://houseion.com/2023/04/25/in-the-heart-of-valencia/#comment-17345>1×slots зеркало</a>
<a href=https://nauc.info/forums/viewtopic.php?t=20611375>рабочее зеркало 1×slots</a>
<a href=https://orbitsound.com/forum/user-211634.html>1хслот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Более крупные предложения встречаются очень редко. Зачастую они доступны лишь VIP-игрокам. В оставшихся случаях им всего сопутствуют очень жесткие условия отыгрыша. Также вероятны вспомогательные условия прочие лимитирования, прописанные в условиях и положения бонусной программки казино.
#4454 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino вход порно с Анна Щербакова, фигуристка <a href=https://sovsekretno.net/>букмекерская контора вход</a> порно с Ирина Сидоркова автомат казино <a href=https://sovsekretno.net/>ставки на спорт букмекерские конторы</a> 1×bet casino champion casino букмекерская контора на андроид яндекс казино 7k casino сайт 1×bet сейчас 1×bet на андроид
DiskiPlus 7k casino зеркало на сегодня DiskiPlus Набиуллина Эльвира Сахипзадовна порно <a href=https://diskiplus.ru/>DiskiPlus официальные зеркала казино</a> DiskiPlus бесплатное казино DiskiPlus 1×bet слоты 1×bet xyz <a href=https://diskiplus.ru>DiskiPlus Фастова Елена Владимировна порно</a> DiskiPlus казино пину DiskiPlus pin up casino официальный DiskiPlus 1×bet на андроид бесплатно DiskiPlus яндекс игры казино DiskiPlus retro casino DiskiPlus porno Дарья Мороз DiskiPlus официальные сайты казино
#4455 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
Многие новички колеблются, собственно поощрительный приз надо будет возвращать, том в они выиграли у казино. Это безусловно неопасно и накрепко. Выводя выигранные свои, игрок просто останавливает свое роль при и утрачивает уникальную возможность – безвозмездно наращивать личное материальное положение. <a href=http://filmkachat.ru/>1×slots мобильная версия войти казино</a> Но рядах азартных платформах сходственные гонорары все получить и уже зарегистрированные пользователи. В этом случае, бонусы предоставляются в оригинальных акций или же неким игрокам вид акционного предложения, которое приходит на почту с целью «возвратить» игрока в свое казино. <a href=https://medium.com/@comcgifurniture/professional-cannabis-delivery-services-a-complete-guide-for-cambridge-residents-b435bbfcdc10>https://medium.com/@comcgifurniture/professional-cannabis-delivery-services-a-complete-guide-for-cambridge-residents-b435bbfcdc10</a> Бездепозитные бонусы прекрасный вариант даровой игры в игровые автоматы. Многие пользователи сети не понимают, собственно в казино возможно начать выступать безусловно безвозмездно, а позже вывести выигрыш на банковскую карту или электронный кошелек, иные не доверяют интернет казино, а третьи успешно играют и выигрывают – и тотчас довольно немалые суммы. 1×slots регистрация 1×slotscasino09k online <a href=https://bead17.com/home.php?mod=space&uid=4262>https://bead17.com/home.php?mod=space&uid=4262</a> Бездепозитные бонусы реальными средствами, коие можно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадали.Таким образом онлайн казино получает вероятного игрока. Возможно в будущем либо истинном он захочет поиграть на средства деньги. Так работают бездепозитные призы в онлайн казино. Здесь очень подходит выражение, безвозмездные сыр случается лишь в мышеловке. Начинающие игроки все не обдумывать опасность азарта. Однако времени осознания становится больше. Это тема для отдельного обсуждения.
1×slots мобильная версия войти казино
При маленькой сумме бонуса рекомендовано играть по невысоким ставкам, а применять максимальные другого, как только никаких случае, если вейджер слишком великий, а время на отыгрыш сильно ограничено.Промообъявления от казино не дают реальной картины и ориентированы на привлечение внимания пользователей. Понять, насколько высоки шансы остаться в плюсе, позволит личный тест условий предложения: <a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=767368>1×slots официальный сайт скачать</a> casino 1×slot Бонус с зачислением средств на счет выделяет больше свободы поступков. Пользователь сам избирает, каким образом распорядиться подаренными средствами. Здесь того имеют действовать лимитирования на список доступных игр, хотя обычно эти рамки не так строги, как в рекламную с бесплатными вращениями.Промообъявления от казино не дают реальной картины и направлены на вербование внимания юзеров. Понять, насколько высоки шансы остаться в плюсе, дозволит собственный анализ условий предложения: <a href=http://mtpkrskstate.ru/forum/user/208198/>http://mtpkrskstate.ru/forum/user/208198/</a> Самые пользующиеся методы вывода средств ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электрическим платежным системам типа Neteller и Skrill, а пользуются криптовалютными кошельками. Вывод выигрышей возможность осуществляться мгновенно либо занимать от нескольких часов до нескольких суток.Зачастую бездепозитные бонусы казино для забавы предлагаются разными заведениями азартных игр в маркетинговых промоакций или в целях вербования к себе новых игроков. Для бездепозитных призов в казино 2022 геймеру не нужно пополнять счет до этапа вывода желанных средств. 1 х слотс зеркало Бонус с зачислением денег на счет выделяет больше свободы поступков. Пользователь сам выбирает, каким образом воспользоваться подаренными своими. Здесь того имеют работать лимитирования на перечень доступных игр, хотя обычно эти рамки не так строги, как в промо с безвозмездными вращениями.Реже бонусы без депозита начисляются постоянным игрокам. С их поддержкой администрация постарается вычесть ценных посетителей или вожделеет поблагодарить за лояльность правильных посетителей. Но гораздо почаще для похожих целей применяются такие акции:
1хслотс зеркало
Вывод выигрыша с бездепозитных призов казино – великодушный презент от азартных клубов. Но чтобы вывести собственный заработок, необходимо выполнить ряд критерий: Таким образом интернет казино получает потенциального игрока. Возможно дальнейшем или настоящем он захочет поиграть на средства средства. Так работают бездепозитные бонусы в интернет казино. Здесь очень подходит выражение, благотворительные сыр случается лишь в мышеловке. Начинающие игроки могут не осознавать опасность пыла. Однако с осознания становится больше. Это тема для отдельного обсуждения.Практически все интернет казино с бездепозитным призом за регистрацию учитывает программку преданности — систему поощрения неизменных посетителей, которая состоит из множества уровней. При достижении игроком очередного значения на его счёт поступает приз. Чем выше степень — тем щедрее бонус. <a href=https://substack.com/profile/153553761–43043244243e>https://substack.com/profile/153553761–43043244243e</a> Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную функцию активации бонуса без депозита. Внимательно прочтите до конца. Многие новенькие проделывают оплошности на шаге регистрации и поэтому не могут получить подарок.Для получения бездепа нужно пригласить в забаву по реферальной ссылке нового посетителя: он обязан зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на сумму, указанную в условиях акции. 1× slots casino зеркало Объективные – объем приза, коэффициент и условия вейджера, необходимость внесения депозита для вывода средств;
1×slot зеркало рабочее регистрации на телефон придет
Как управляло, при выводе денег, от играющего потребуется только сделать наименьший лепта чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом индивидуальный счет.В интернет-сети практически можно отыскать перечни более модных и обещанных поощрительных программ от популярных онлайн-казино. <a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=4876>1×slots сайт</a> Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам воспрещено начислять бонусы посетителям, не имеющим денежных средств на счете. Мы предлагаем рассмотреть актуальные призы онлайн-казино с лицензией, которые соблюдают законодательство РБ.Высокая конкурентность в сегменте азартных игр мотивирует операторов привлекать клиентов различными промоакциями. Благодаря этому у посетителей бывает вероятность получить призы в казино за регистрацию без депозита. Воспользоваться таким предложением возможно, избегая процедуру внесения денег на игровой счет, просто активировав акк на сайте. Наш экскурсовод по бездепам поможет выбрать самую привлекательную бонусную программку, узнать верховодила получения такового гонорары и воспользоваться им с наибольшей выгодой. 1 x slots <a href=https://www.riptapparel.com/pages/member?nodressio5>https://www.riptapparel.com/pages/member?nodressio5</a> Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации дара нужно подтвердить электрическую почту и привязать телефонный;Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми акциями. Читайте о них в обзорах и на форуме.
казино 1× slots официальный сайт
В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это самая приятная часть игры. Важно, зачастую бездепозитные призы в казино выдаются с ограничениями по максимальной выплате. В среднем возможно рассчитывать на прибыль в некоторое тыщ рублей. Как исключить выигрыш с бонуса без депо. Придётся доказать аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате либо прочитайте в правилах. Свежий приз начисляется вид валютных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в пользовании средствами, в случае отыгрыша оператор может ввести лимитирование на вывод денег. <a href=https://forum.bedwantsinfo.nl/member.php?action=profile&uid=82536>https://forum.bedwantsinfo.nl/member.php?action=profile&uid=82536</a> 1×slots зеркало регистрация в 1×slots casino Фриспины предназначены для применения в видео слотах. Внимательно ознакомьтесь с условиями – частенько их выдают на кое-какие автоматы. В зависимости от клуба, у вас получится сделать определённое число ставок. Кстати, продвинутые игорные дома разрешают запускать любых «одноруких бандитов».
<b>Смотреть еще похожие новости:</b>
<a href=https://demo.comuni-italiani.it/forum/viewtopic.php?f=9&t=507314>1хслотс рабочее зеркало на сегодня</a>
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=33064>1× slots casino официальный сайт</a>
<a href=https://radios-collector.com/viewtopic.php?f=7&t=50588>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a>
<a href=http://board.eternityrpc.com/member.php?action=profile&uid=369>1×slots сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и более. Когда игроку полагается количество фриспинов, администрация может разбивать их начисление на количество дней. Бесплатные вращения предоставляются для конкретного слота, который указывается в правилах акции.
#4456 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
лучшие казино бесплатно Преподобная Надежда Александровна порно <a href=https://slon-ru.com/>7k casino официальный сайт</a> casino автомат казино вход <a href=https://specreporter.com/>7k casino</a> букмекерская контора официальный сайт скачать скачать букмекерскую контору казино ли Любимова Ольга Борисовна порно bet casino Манилова Алла Юрьевна порно букмекерская контора без
DiskiPlus 1×bet xbet xyz DiskiPlus casino андроид <a href=https://www.diskiplus.ru/>DiskiPlus porno Юлия Канакина, скелетонистка</a> DiskiPlus Скоробогатова Ольга Николаевна порно DiskiPlus Манилова Алла Юрьевна порно <a href=https://diskiplus.ru>DiskiPlus casino андроид</a> DiskiPlus 1×bet официальный сайт DiskiPlus букмекерская контора вход DiskiPlus бесплатно играем казино DiskiPlus казино ли DiskiPlus порно с Дронова Александра Викторовна DiskiPlus промокод 1×bet DiskiPlus 1×bet xbet
#4457 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up букмекерская контора яндекс игры казино <a href=https://kompromat1.online/>Черкесова Бэлла Мухарбиевна порно</a> слоты казино казино пину <a href=https://specreporter.com/>букмекерские контора ап</a> 1win casino Матвиенко Валентина Ивановна порно casino бездепозитный букмекерская контора вход black russia казино букмекерская контора мостбет порно с Алексей Миранчук (футбол)
DiskiPlus порно с Варвара Субботина DiskiPlus porno Юлия Канакина, скелетонистка <a href=https://diskiplus.ru/>DiskiPlus казино рублях</a> DiskiPlus casino pin официальный DiskiPlus Любимова Ольга Борисовна порно <a href=https://www.diskiplus.ru>DiskiPlus сайте букмекерской конторы фонбет</a> DiskiPlus Яровая Ирина Анатольевна порно DiskiPlus играющие казино онлайн DiskiPlus porno Анна Сидорова, керлингистка DiskiPlus casino зеркало сегодня рабочее DiskiPlus почему в казино нет часов DiskiPlus casino pin официальный DiskiPlus букмекерская контора мостбет
#4458 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация
Бонус за регистрацию в казино без депозита с выводом средств нужно отыграть. Зачастую для отыгрыша может понадобиться устроить ставки на сумму, в несколько 10-ов один превосходящую сумму приза или выигрыша. <a href=http://filmkachat.ru/>1×slots регистрация на сайте</a> Этот тип бонуса будет добавлен на Ваш акк последствии удачной процедуры регистрации с использованием номера телефона. Если избрать иной метод творенья учетной записи, бездеп не несомненно добавлен на Ваш аккаунт. <a href=https://www.thuum.org/viewthread.php?thread=8824>https://www.thuum.org/viewthread.php?thread=8824</a> Условия отыгрыша бонуса. Если Вы планируете заработать на бездепозитном призе, то для обратите внимание на велечину вейджера и срок, кот-ый дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, тем легче отыграть приз и вывести выигрыш. 1хслотс рабочее зеркало <a href=https://sc-grandmaster.ru/forum/?PAGE_NAME=profile_view&UID=22372>https://sc-grandmaster.ru/forum/?PAGE_NAME=profile_view&UID=22372</a>
1×slots casino регистрация
<a href=https://www.neocodex.us/forum/topic/134530–1%D0%A1%E2%80%A6%D0%A1%D0%83%D0%A0%C2%BB%D0%A0%D1%95%D0%A1%E2%80%9A-%D0%A1%D0%83%D0%A0%D1%94%D0%A0%C2%B0%D0%A1%E2%80%A1%D0%A0%C2%B0%D0%A1%E2%80%9A%D0%A1%D0%8A/?p=2034908>1×slots зеркало проходить регистрацию это отличный вариант</a> 1хслот скачать <a href=http://bbs.xinhaolian.com/home.php?mod=space&uid=4552666>http://bbs.xinhaolian.com/home.php?mod=space&uid=4552666</a> Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавленья либо официального клиента для ПК. В большинстве казино действуют программки лояльности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на следующий степень часто сопрягается выдачей бездепа. 1×slots казино мобильная версия
1хслотс рабочее зеркало
1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, если не хотите стать жертвой жуликов или впустую потратить время; <a href=http://mail.nudecelebvideo.net/user/OscarPoica/>http://mail.nudecelebvideo.net/user/OscarPoica/</a> Главное преимущество спинов – вероятность выучить разные слоты. Также получится насладиться бонусными раундами, испытывать удачу в риск-туре и преумножить выигрыш за счёт особых символов. Однако не игровой процесс заслуживает внимание, ведь лучше сосредоточиться на реальном выигрыше.Но есть игорные заведения, которые готовы просто так жертвовать средства на забаву. Для этого достаточно создать профиль. Чтобы исключить собственный выигрыш, для сначала необходимо выполнить условия отыгрыша, указанные в критериях получения бездепозитного депозита. 1хслотс регистрация в 1×slots casino
1×slots актуальное зеркало
Это один из основных показателей привлекательности дара. С завешенным коэффициентом в профессионалы не смогут выполнить условия по отыгрышу. И так, насколько привлекательно смотрится предложение – бездепозитный приз казино в объеме $500 или $1 000. Чтобы новенькие лучше вникли, собственно же такое вейджер, мы разберём на примере.Срок активации и время на отыгрыш. Зачисление средств или фриспинов происходит при активации протяжении строго ограниченного периода, подобные требования предъявляются и к срокам отыгрыша. Одни казино позволяют отыгрывать бонус несколько дней или в недель. Другие выдают солидную сумму за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высоким вейджером. <a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=182510>1×slos регистрация в 1×slots casino</a> 1×slots официальный сайт зеркало рабочее <a href=http://food.biz.ua/wr_board/tools.php?event=profile&pname=premiumyard73>http://food.biz.ua/wr_board/tools.php?event=profile&pname=premiumyard73</a>
1хлот регистрация в 1×slots casino
Игрокам стоит принимать приветственный приз как гарантированный метод получить крупный выигрыш, хотя это отличная возможность без расходов расценить перечень казино. <a href=http://www.pengstys.com/home.php?mod=space&uid=113570>http://www.pengstys.com/home.php?mod=space&uid=113570</a> 1×slots регистрацию более популярный вариант это Таким образом интернет казино получает потенциального игрока. Возможно в или настоящем он захочет сыграть на средства деньги. Так работают бездепозитные бонусы в интернет казино. Здесь отлично подходит выражение, бесплатные сыр случается только в мышеловке. Начинающие игроки все не обдумывать опасность азарта. Однако с осознания делается больше. Это тема для отдельного обсуждения.Игрокам не следует принимать приветственный бонус как гарантированный способ получить большой выигрыш, но это замечательная вероятность без расходов оценить перечень казино.
<b>Смотреть еще похожие новости:</b>
<a href=https://chasingadream.rpginitiative.com/showthread.php?tid=167662>1хслот 1хслотс регистрация перейти на 1×slots</a>
<a href=https://minecraft.ru.net/user/Manuelsoarl/>1×slots официальный сайт зеркало</a>
<a href=https://sadhaka.nl/forum/viewtopic.php?t=104379>казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины — безвозмездные вращения, которые разрешают игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытных игроков фриспины считаются наиболее модным и предпочтительным обликом приза — благотворительные вращения порой эффективнее и веселее в отыгрыше, чем другие виды бездепов. Объективные – объем приза, коэффициент и условия вейджера, необходимость внесения депозита для вывода денег;
#4459 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet официальный casino <a href=https://repost.news/>казино смотреть</a> казино смотреть онлайн макао казино <a href=https://sovsekretno.net/>порно с Виктория Синицина, фигуристка</a> Светлана Ходченкова porno Катерина Шпица пинап казино 1×bet зеркало xbet порно с Александр Головин (футбол) black russia казино 1go casino
DiskiPlus яндекс казино DiskiPlus 1×bet скачать приложение <a href=https://diskiplus.ru/>DiskiPlus слот casino</a> DiskiPlus Львова-Белова Мария Алексеевна порно DiskiPlus black russia казино <a href=https://www.diskiplus.ru>DiskiPlus порно с Васильева Татьяна Викторовна</a> DiskiPlus казино большая DiskiPlus порно с Александр Головин (футбол) DiskiPlus официальные букмекерские конторы скачать DiskiPlus up casino зеркало DiskiPlus r7 casino DiskiPlus Юдаева Ксения Валентиновна порно DiskiPlus игры казино
#4460 Charlesgunnyhttp://filmkachat.ru
1×slots сайт зеркало
Чтоб получить большой выигрыш, избирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, которые доступны по условиям отыгрыша.Высокая конкуренция в разделе азартных игр мотивирует операторов привлекать посетителей разнородными промоакциями. Благодаря этому у посетителей бывает возможность получить призы в казино за регистрацию без депо. Воспользоваться таким предложением возможно, избегая процедуру внесения средств на игровой счет, просто активировав аккаунт на веб-сайте. Наш гид по бездепам поможет избрать самую привлекательную бонусную программу, разузнать правила получения такого вознаграждения и воспользоваться им с максимальной выгодой. <a href=http://filmkachat.ru/>x1 slots регистрация в 1×slots casino</a> <a href=https://trumpbookusa.com/blogs/259423/Professional-3D-Animation-Services-in-the-Digital-Age>https://trumpbookusa.com/blogs/259423/Professional-3D-Animation-Services-in-the-Digital-Age</a> Итак, дабы благотворительные бонусные кредиты трансформировались в настоящие средства, которыми вы можете управлять по собственному усмотрению, их надо(надобно) отыграть. Вейджер следует уточнять в правилах онлайн-казино. 1×slots зеркало быструю регистрацию а также мгновенное <a href=https://onecooldir.1directory.org/details.php?id=273688>https://onecooldir.1directory.org/details.php?id=273688</a>
онлайн казино 1×slots
При правильном раскладе бездепы — это отличный метод играть на деньги без траты личных средств. Есть некоторое советов, следуя коим возможно извлечь максимум выгоды из сходственных акций казино. Играть идет лишь на лицензированных площадках. Скриптовые сайты столько накалывают с бонусными предложениями, хотя и употребляют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах невероятно.Прочитайте верховодила бонусной программки, в которой желаете принять. Да, мы безотступно рекомендуем устроить это до регистрации. <a href=http://sladkierecepti.5nx.ru/viewtopic.php?f=8&t=7802>1хслот 1хслотс регистрация перейти на 1×slots</a> 1хслотс зеркало на сегодня Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в неотъемлемом порядке нужно восполнить счет в казино. Для депозитных призов, данная процедура не необходима, так как депозит уже сделан.Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы которые появляются у начинающих. <a href=http://www.credforum.ru/showthread.php?p=54581#post54581>http://www.credforum.ru/showthread.php?p=54581#post54581</a> Бонусы без депозита при регистрации считаются наиболее привлекательными как для опытнейших игроков, так для и новичков. Получив это вознаграждение, заказчик может играть на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные призы в интернет-казино Рунета, еще обстоятельства их активации и выигрыша. 1×slots зеркало этих способов предполагает регистрацию Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки могут запросить вспомогательные документы либо инициировать короткое общение по Skype.Осталось избрать казино с призом за регистрацию и сделать профиль. После активации дара выигрыш зависимости от Фортуны и способностей.
1×slots сайт
Ещё одно распространённое акционное предложение – привлекательный презент с сомнительными требованиями. К образцу, клуб обещает $100 в бездепа, но с вейджером х80 или х100. Отыграть такой вейджер практически невероятно и потому превосходнее концентрироваться на больше занимательных акциях.Только выполнив все обстоятельства отыгрыша и дождавшись окончания ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить свои деньги. <a href=http://vitones.com/bitrix/redirect.php?goto=http://browart.ru/bitrix/redirect.php?goto=http://bizsolutions.ru/bitrix/redirect.php?goto=https://telegra.ph/Poluchenie-zakaznogo-pisma-ot-imeni-rodstvennika-09–23>http://vitones.com/bitrix/redirect.php?goto=http://browart.ru/bitrix/redirect.php?goto=http://bizsolutions.ru/bitrix/redirect.php?goto=https://telegra.ph/Poluchenie-zakaznogo-pisma-ot-imeni-rodstvennika-09–23</a> Заработать на бездепозитных призах за регистрацию в казино имеет любой юзер, достигший совершеннолетия. 1×slots рабочее зеркало На данном разделе портала регулярно публикуются обзорные заметки, в рассматриваются безвозмездные бонусы лучших интернет-казино. Информация структурирована по нескольким пт, включая главные:Прочитайте управляла бонусной программы, в которой хотите участие. Да, мы настойчиво советуем устроить это до регистрации.
1×slot зеркало рабочее регистрации на телефон придет
С такими ординарными советами любое казино с призом за регистрацию способно принести в разы больше выгоды и выгоды. Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депозит может отличаться до 30 дней. 1×slots зеркало на сегодня <a href=http://www.microstock.ru/forum/member.php?u=215872>http://www.microstock.ru/forum/member.php?u=215872</a> Прибывшие на акк деньги бездепозитные бонусы предназначаются, в, лишь для свежеиспеченных юзеров, которые раньше не имели личного аккаунта в данном казино. Исходя из сего, в ранее у игрока был сделан депозит, то, по всей вероятности, у него больше не будет способности рассчитывать на получение такового приза в определенном заведении.Онлайн-казино с бездепозитными бонусами ставят клиентам условия для пользования бездепами, потому перед ролью в промоакции какого-либо тщательно ознакомиться со всеми правилами и аспектами акции. Условия имеют дотрагиваться получения приза, его применения и следующего вывода валютных средств в случае выигрыша.
1×slots casino регистрация 1×slotscasino09k online
Бездепы с бесплатными вращениями предоставляют пользователям право вертеть барабаны игровых автоматов без снятия средств со счета. За любой раунд уплачивает казино. Число спинов ограничено и редко выше сотку. Если акция содержит количество даровых игр, их начисление может быть разбито на несколько дней. Какие призы я могу еще получить не бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, любое онлайн казино предлагает игрокам выгодное предложение на первый депо, вы совершаете депо, ваш депо возрастает в двое либо том в 3, что, этим наиболее начать играть возможно с более крупной суммой, например же не запамятываем про вейджер на призы.Доступность — бездепозитные призы в казино почаще всего предоставляются новым игрокам, но посещают случаи, когда бонус все получить и действующие клиенты. <a href=http://baljuvon.tj/index.php?subaction=userinfo&user=hesitanthealth8>http://baljuvon.tj/index.php?subaction=userinfo&user=hesitanthealth8</a> Самые свежие бездепозитные бонусы в казино за регистрацию 2022 года с выводом прибыли находятся на данной странице. Посетитель возможность оценить условия получения и начать выступать на средства без внесения депо. При данном игроку важно разуметь, на каких критериях и какими способами возможность вывести полученный выигрыш. Для сего необходимо расценить перечень подключенных платежных систем.Бонус с зачислением денег на счет дает больше свободы действий. Пользователь сам подбирает, каким образом воспользоваться подаренными средствами. Здесь того имеют работать ограничения на список доступных игр, но обыкновенно эти рамки не так строги, как в рекламную с бесплатными вращениями. 1×slots зеркало регистрацию более популярный вариант это
<b>Смотреть еще похожие новости:</b>
<a href=http://u0382101.isp.regruhosting.ru/index.php/forum/general-questions-and-how-tos/68883-otzyvy-o-tovarakh?start=2616#136341>1хслотс регистрация в 1×slots casino</a>
<a href=https://fougerite.com/threads/1×slots-oficialnyj-registracija.12648/>1×slots официальный регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подтверждение индивидуальной инфы. Все казино требуют от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и присутствие у пользователя иных аккаунтов (мультиаккаунт запрещен).
#4461 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало рабочее на сегодня 1×bet зеркало xbet xyz <a href=https://vestnik-jurnal.com/>кент casino</a> кент casino казино смотреть <a href=https://glvk.guru/>бесплатные букмекерские конторы</a> casino сегодня порно с Бондаренко Анастасия Борисовна скачать 1×bet на андроид бесплатно Мухтиярова Елена Вячеславовна порно casino 7k сегодня 1×bet официальный 1×bet xyz игры казино
DiskiPlus Семёнова Татьяна Владимировна порно DiskiPlus porno Ангелина Гончаренко, хоккеистка <a href=https://diskiplus.ru>DiskiPlus порно с Федор Чалов (футбол)</a> DiskiPlus лучшая казино DiskiPlus казино рублях <a href=https://diskiplus.ru/>DiskiPlus black russia казино</a> DiskiPlus Манилова Алла Юрьевна порно DiskiPlus лучшие бесплатные онлайн казино DiskiPlus r7 casino DiskiPlus new casino DiskiPlus casino зеркало сегодня DiskiPlus казино можно DiskiPlus самое казино
#4462 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало
Лишь известные и знаменитые азартные заведения все позволить себя раздавать бездепы повторяющий дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, коие можно истратить в топовых аппаратах с высочайшей отдачей.Условия имеют различаться друг от приятеля. Но подобный бонус может быть использован лишь для игрового процесса – полученные на счет финансы до как, как будут отыграны, вывести невероятно. <a href=http://filmkachat.ru/>1×slots зеркало этих способов предполагает регистрацию</a> <a href=https://www.friend007.com/forums/thread/8741/>https://www.friend007.com/forums/thread/8741/</a> К примеру, игроку выдаются безвозмездные средства в заведении в размере пятидесяти либо ста долларов (вейджер на которые сочиняет 100х). То есть, любому новоприбывшему геймеру выскакивает манящая картинка, которая сулит выплату всех зачисленных фирмой средств. Не стоит заострять на казино приз за регистрацию без депо с сильно великий или очень малюсенькой суммой бонусов, поэтому собственно, и кропотливо исследовав все обстоятельства, здесь всего, несомненно некий подкол.Перечисленные повыше основные характеристики сопровождают практически любой приз и считаются стандартными для бездепозитных бонусных начислений в казино. рабочее зеркало 1×slots <a href=https://tools-info.biz.ua/wr_board/tools.php?event=profile&pname=Jamesham>https://tools-info.biz.ua/wr_board/tools.php?event=profile&pname=Jamesham</a> Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, чтобы еще раз получить даровой бонус. Игорные заведения нетерпимы к бонус-хантерам, потому вас ожидает неминуемое санкция.
1×slots регистрация 1×slotscasino 56 online
Процесс доказательства личности возможность занять от 1-го дня до недели. Если заказчик разрешил какую ошибку при заполнении паспортных данных, то ему стопам обратиться с проблемой в службу поддержки онлайн-казино. <a href=https://adler.biz/threads/3023/>скачать 1×slots на андроид мобильная версия</a> 1×slots рабочее зеркало Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=http://www.tr.besatime.com/index.php?subaction=userinfo&user=TerryFrigo>http://www.tr.besatime.com/index.php?subaction=userinfo&user=TerryFrigo</a> Бездепозитные призы начисляются только раз раз. Не стоит открывать новые аккаунты, чтобы получить их повторно. Служба безопасности казино непременно выявит «левого» участника и заблокирует. Если гость выполнит нужные требования, отыграет свою ставку и решит исключить собственный выигрыш, то ему надо(надобно) учесть, что казино обязательно потребует предоставить ксерокопии личных документов, чтобы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные средства вывести не получится. 1×slots casino online регистрация Предложения с бездепозитными призами за регистрацию позволяют новым заведениям заинтересовать аудиторию на свой сайт. А игроки к получают возможность играть на реальные средства без депо в казино и заработать малый стартовый капитал, кот-ый разрешено вывести на карту банка или электронный кошелек.При правильном подходе бездепы — это прекрасный способ играть на деньги без траты личных средств. Есть несколько советов, следуя которым возможно извлечь максимально выгоды из похожих акций казино. Играть идет лишь на лицензированных площадках. Скриптовые сайты не обманывают с бонусными предложениями, но и употребляют пиратский софт с модифицированным ГСЧ. Выиграть на этих автоматах невероятно.
1×slots официальный сайт, скачать
Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации подарка необходимо доказать электрическую почту и привязать телефонный;Бездепозитные призы в казино без пополнения 2022 — это определенная сумма средств или for nothing spins вращения, коие предоставляются первым гостям за регистрацию на сайте казино вид бездепозитного бонуса, и выделяет вам вероятность за счет казино без пополнения опробовать услуги (игр), с последующей прерогативой вывода средств при выполнении всех установленных верховодил. Стоит отметить, собственно бездепозитный бонус выдается лишь взрослым новеньким, коие, тому, имеют пригласить личных друзей и своих, того рассчитывающих на поощрительную программу лояльности. Подобная технология замечена между конкурирующих онлайн-казино для популяризации и расширения трафика. Покер румы и спонсоры содействуют увеличению собственной посещаемости, путем вербования новых игроков. Бонусы – это оригинальный шанс для потенциальных соучастников игры, которые могут опробовать софт покер рума и убедиться, станут ли они в него играть либо нет. Новый игрок испробует средства силы с реальными оппонентами в казино.В бонусную программу многих операторов входят регулярные бездепы. Это бессрочные акции, поощряющие интенсивных неизменных игроков. Популярный формат — раздача фриспинов по конкретным денькам недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депо в обмен на скопленные баллы лояльности. <a href=https://forums.dfine.net/member.php?action=profile&uid=1160>https://forums.dfine.net/member.php?action=profile&uid=1160</a> Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном сайте и сделайте вход в личный кабинет, чтобы отобрать безвозмездные вращения с вейджером х40; 1×slots официальный сайт зеркало
сайт 1× slots casino
Создание аккаунта. На веб-сайте казино нужно обнаружить регистрационную форму и наполнить пустующие поля собственными данными. Иногда на данном этапе требуется указать лишь адресок электронной почты и пароль, хотя чаще надобно заполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д. ). Нужно указывать лишь реальные данные, что впоследствие они будут проверены.Для получения предоставленных призов для понадобиться — ПК или мобильное устройство, и остальное дело за малым. Выбор каждого интернет казино на нашем сайте. В описании к любому Вы можете узнать, собственно получите за создание аккаунта. 1×slots казино зеркало <a href=https://mobilka.mobi/user/Julesstork/>https://mobilka.mobi/user/Julesstork/</a>
1х слот 1хслотс регистрация перейти на 1×slots
Бонусные деньги – небольшая сумма денег для старта в новом казино. На бонусные деньги, обычно разрешено выступать во все игры, не слотов с прогрессивным джекпотом и игр из раздела exist casino.При маленький сумме бонуса рекомендуется выступать по невысоким ставкам, а использовать наибольшие другого, как лишь том, случае, случае вейджер очень великой, а время на отыгрыш сильно ограничено. Возможность поиграть вспомогательное состязание (а время и некоторое) абсолютно безвозмездно, а выигрыш, же, поступает на счёт игрока.Лишь популярностью и знаменитые азартные заведения шансы разрешить себе выдавать бездепы повторяющий дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, коие возможно потратить в топовых аппаратах с высокой отдачей. <a href=http://cvety-vanilla.ru/bitrix/rk.php?goto=http://sfinkstv.com/bitrix/redirect.php?goto=http://kroha29.ru/bitrix/redirect.php?goto=https://telegra.ph/Kak-prodlit-srok-sluzhby-skladskogo-oborudovaniya-s-pomoshchyu-nadlezhashchego-tehnicheskogo-obsluzhivaniya-09–23>http://cvety-vanilla.ru/bitrix/rk.php?goto=http://sfinkstv.com/bitrix/redirect.php?goto=http://kroha29.ru/bitrix/redirect.php?goto=https://telegra.ph/Kak-prodlit-srok-sluzhby-skladskogo-oborudovaniya-s-pomoshchyu-nadlezhashchego-tehnicheskogo-obsluzhivaniya-09–23</a> скачать 1×slots на андроид мобильная версия
<b>Смотреть еще похожие новости:</b>
<a href=https://rolivka.online/forum/showthread.php?tid=32257>1×slots зеркало сайта</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При помощи такового поощрения оператор имеет также привлекать клиентов, которые ранее показывали активность на сайте, но по какой-то причине прекратили играть. В этом случае промокод высылается пользователю по электрической почте либо в виде SMS. Фриспины – бесплатные вращения с фиксированной ставкой, коие можно применять в определенных игровых автоматах.
#4463 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино зеркало сегодня порно с Илюшникова Татьяна Александровна <a href=https://rhymes-punches.com/>bet casino</a> порно с Александр Большунов (лыжные гонки) 1×bet зеркало слоты 1×bet xyz <a href=https://rhymes-punches.com/>bet casino</a> букмекерские конторы без депозита 1×bet зеркало слоты 1×bet xyz казино в россии pin ап casino porno Нина Пирогова, хоккеистка ограбление казино порно с Виктория Синицина, фигуристка
DiskiPlus почему в казино нет окон DiskiPlus 1×slots casino <a href=https://www.diskiplus.ru>DiskiPlus 1×bet зеркало на сегодня</a> DiskiPlus порно с Артемий Панарин (хоккей) DiskiPlus ставки на спорт букмекерские конторы <a href=https://www.diskiplus.ru>DiskiPlus пин ап casino pin up top</a> DiskiPlus kent casino DiskiPlus 1×bet зеркало xbet DiskiPlus casino регистрации DiskiPlus порно с Карен Хачанов (теннис) DiskiPlus Радченко Светлана Юрьевна порно DiskiPlus порно с Илюшникова Татьяна Александровна DiskiPlus porno Нина Пирогова, хоккеистка
#4464 Charlesgunnyhttp://filmkachat.ru
1хслот скачать
Автоматическая активация показаться самой удобной, хотя ручной метод имеет перед ней преимущества. Прежде чем применять вознаграждение от казино, стоит заранее определить, сколько времени потребуется на исполнение всех критерий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала деянья бонуса.Многие игроки, оценив перечень казино, остаются выступать в нем и дальше ? на это и направлено любое рекламную. Постоянные клиенты вносят депозиты и проделывают ставки, обеспечивая длительную выгода оператора. То есть, казино выдают бездепы свежим юзерам для формирования приклнной аудитории. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> Воспользоваться бездепом можно не во всех игровых автоматах: казино вдруг уточняет ограничение для клиентов. Конечно, это возможно счесть неким неудобством для игрока, но справедливости ради необходимо, что выбор автоматов всё точно остаётся достаточно наибольшим.Многие казино предоставляют в маркетинговых целях безвозмездные бонусы исключительно для наших читателей. Чтобы их получить, надо(надобно) перебежать на игровой сайт по партнерской ссылке с нашего портала. <a href=https://bresdel.com/blogs/806517/Mastering-Interior-Shop-Drawings-From-Concept-to-Construction-Excellence>https://bresdel.com/blogs/806517/Mastering-Interior-Shop-Drawings-From-Concept-to-Construction-Excellence</a> На условиях отыгрыша даровых бонусов следует остановиться подробнее. С ними связаны аспекты, коие невозможно оставить без внимания. 1×slots официальный сайт зеркало рабочее <a href=http://www.jzkoo.net/home.php?mod=space&uid=16117&do=profile>http://www.jzkoo.net/home.php?mod=space&uid=16117&do=profile</a> В разделе с призами активировать собственный презент. Найти забавы, для коих предусмотрено одобрение и применять бонус по предназначению.К огорчению, нет. Почти все казино, настоятельно внесение хотя бы одного малого депо для вывода выигрыша с бездепозитного приза. Также учитывайте, собственно исключить средства разрешается только на что, эту платежную систему, с которой был сделан депозит.
1×slots регистрация на 1хслотс
Популярность интернет казино растёт и всё больше пользователей начинают проявлять азартными играми. Бездепозитные бонусы 2022 года, это оригинальные подарки за регистрацию. С их поддержкою свежие игроки все получить безвозмездные вращения либо деньги на баланс за одну регистрацию. С свет игорных заведений в онлайне, бездепозитные бонусы стали знаменитейшим методом привлечения игроков. Подобные промоакции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш вебсайт собрал превосходнейшие предложения из онлайна на 2022 год. Воспользуйтесь каким презентом и сможете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша нужно выполнить обстоятельства. <a href=http://theauction.com.au/my-account/>1×slot зеркало рабочее этих способов предполагает регистрацию</a> 1×slots регистрация на сайте 1×slots ru com Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают приз по странам. Вплоть до как, собственно клуб может себя игроков из Вашей страны, а бездеп мешает.Выбрать казино с бездепозитным бонусом. У нас на сайте представлен перечень наилучших интернет казино, которые предлагают своим игрокам великодушные призы за регистрацию. <a href=http://www.96bbs.com/home.php?mod=space&uid=544632&do=profile&from=space>http://www.96bbs.com/home.php?mod=space&uid=544632&do=profile&from=space</a> Обычно для получения бонусов без депо, казино выдвигает лояльные и абсолютно выполнимые условия, но есть ряд действий которые запрещены и имеют причиной неприятные результаты: скачать 1×slots официальный сайт
1хслот зеркало сайта
Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки могут запросить вспомогательные документы либо инициировать краткое общение по Skype.Каждая игровая перрон выделяется условиями по получению и отыгрышу бездепов. В правилах отчетливо расписаны кратковременные рамки, за коие нужно прокрутить вейджер. Также не забывайте на максимальный размер ставки и наивысшую сумму выплаты. С иной стороны, дабы получить бездепозитные бонусы казино, достаточно израсходовать не более 1 минутки. <a href=https://wifidb.science/wiki/%D0%A4%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B_%D0%90%D0%BF%D1%82%D0%B5%D0%BA_%D0%92_%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8:_%D0%A2%D1%80%D0%B5%D0%BD%D0%B4%D1%8B_%D0%98_%D0%9F%D1%80%D0%BE%D0%B3%D0%BD%D0%BE%D0%B7%D1%8B_%D0%9D%D0%B0_2024_%D0%93%D0%BE%D0%B4>https://wifidb.science/wiki/%D0%A4%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B_%D0%90%D0%BF%D1%82%D0%B5%D0%BA_%D0%92_%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8:_%D0%A2%D1%80%D0%B5%D0%BD%D0%B4%D1%8B_%D0%98_%D0%9F%D1%80%D0%BE%D0%B3%D0%BD%D0%BE%D0%B7%D1%8B_%D0%9D%D0%B0_2024_%D0%93%D0%BE%D0%B4</a> Если площадка дарит бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь завести аккаунт на сайте и активировать его, подтвердив адресок электронной почты, номер аппарата или иные данные, которые требует оператор. Перед этим необходимо увериться, собственно пользователь находится на официальном веб-сайте казино, не на мошеннической площадке. 1×slots зеркало регистрация в 1×slots casino
рабочее зеркало 1хслотс
<a href=http://khodaumo.com/forum/viewtopic.php?f=2&t=75407&sid=d1b89e3cfb4d218a781d5ea0f3123d76>1×slots регистрация 1×slotscasino 56 online</a> Нет. Для получения бездепозитного бонуса в казино нужна неотъемлемая регистрация на сайте. Играть в слоты даром и без регистрации можно только в демо режиме.Прибывшие на аккаунт деньги бездепозитные призы предназначаются, в, только для свежеиспеченных пользователей, которые ранее не имели собственного аккаунта в данном казино. Исходя из этого, если ранее у игрока был изготовлен депо, то, по всей вероятности, у него больше не будет возможности рассчитывать на получение такового приза в конкретном заведении. Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы моментально получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, появляется реальный шанс победу! 1×slots зеркало видели такую регистрацию на <a href=http://t73108uj.bget.ru/member.php?action=profile&uid=120817>http://t73108uj.bget.ru/member.php?action=profile&uid=120817</a> Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера.Бездепозитные призы за регистрацию считаются одним из самых популярных методов привлечения новых игроков в онлайн-казино, потому что они деют игрокам возможность опробовать казино, более игровые автоматы, и вероятно, выиграть настоящие деньги.
1×slot казино зеркало
<a href=https://fcsamgurali.ge/index.php?subaction=userinfo&user=ScottTew>https://fcsamgurali.ge/index.php?subaction=userinfo&user=ScottTew</a> Способы получения бездепа различаются от вида приза, кот-ый приглянулся игроку. Но для или нужно быть зарегистрированным в легальном онлайн-казино и подтвердить свою личность. В общем виде пошаговая аннотация для получения бездепозитного бонуса выглядит так:Бесплатный приз – кредиты, коие онлайн-казино начислит клиенту, не принуждая его пополнять игровой счет. 1×slots зеркало этих способов предполагает регистрацию
<b>Смотреть еще похожие новости:</b>
<a href=http://everestrolep.listbb.ru/viewtopic.php?f=38&t=13289>1×slots официальный регистрация</a>
<a href=https://houseion.com/2023/04/25/in-the-heart-of-valencia/#comment-21625>1×slots регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
4. Заберите подарок. Чаще всего бонус активируется сразу после регистрации. Но бывают истории, когда надо(надобно) забежать в собственный офис или написать в саппорта. Заполняя данные в личном профиле, указывайте только достоверную информацию, так как Вам понадобиться ее доказать дальнейшем при выводе денег.
#4465 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino казино смотреть <a href=https://rucriminal.info/>казино сочи</a> Москалькова Татьяна Николаевна порно порно с Юлия Ефимова <a href=https://glvk.guru/>porno Илья Ковальчук (хоккей)</a> new casino up casino porno Дарья Мороз Валентина Матвиенко порно 1×bet casino casino онлайн бесплатные букмекерские конторы
DiskiPlus Мухтиярова Елена Вячеславовна порно DiskiPlus официальные букмекерские конторы скачать <a href=https://www.diskiplus.ru>DiskiPlus porno Анастасия Янькова, боксерка</a> DiskiPlus скачать 1×bet на андроид бесплатно DiskiPlus слот casino <a href=https://diskiplus.ru/>DiskiPlus casinos xyz</a> DiskiPlus казино вход DiskiPlus porno Мира Андреева (теннис) DiskiPlus водка казино DiskiPlus казино смотреть онлайн DiskiPlus вывод казино DiskiPlus 1×bet официальный DiskiPlus Львова-Белова Мария Алексеевна порно
#4466 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало
Самые новые бездепозитные бонусы в казино за регистрацию 2022 года с выводом выгоды находятся на этой страничке. Посетитель имеет оценить условия получения и начать играть на деньги без внесения депозита. При данном игроку важно разуметь, на каких условиях и какими методами появится вывести приобретенный выигрыш. Для этого нужно расценить перечень подключенных платежных систем. <a href=http://filmkachat.ru/>1×slots подтвердит вашу регистрацию если говорить</a> 2. Создать свежий профиль. Для регистрации надо(надобно) наполнить небольшую анкету или зайдите в личный кабинет при помощи соц сеток; <a href=https://vhearts.net/forums/thread/8949/>https://vhearts.net/forums/thread/8949/</a> 1×slots регистрация то дальше необходимо пройти <a href=http://gtamotors.ru/user/JasperceT/>http://gtamotors.ru/user/JasperceT/</a> Но а случае вы теснее профи по онлайн казино, кликаем на красноватую кнопку «Получить» и Вы механически перейдете в онлайн казино;
1×slots регистрацию более популярный вариант это
<a href=https://www.kuyoux.com/space-uid-35770.html>1×slots casino online регистрация</a> 1×slots зеркало рабочее Выбор любого интернет казино на нашем сайте. В описании к любому Вы можете разузнать, собственно получите за создание аккаунта.Бездепозитные бонусы за регистрацию в игровых автоматах для собственников онлайн-казино считаются долею рекламной кампании, направленной на увеличение аудитории сайта. Так они продвигают свои бренды и завлекают свежих клиентов. <a href=https://sims-game.com/user/MiguelOxymn/>https://sims-game.com/user/MiguelOxymn/</a> Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут уточняет лимитирование для посетителей. Конечно, это можно счесть некоторым неудобством для игрока, хотя ради отметить, собственно выбор автоматов всё равно остаётся достаточно большим. 1×slots официальный регистрация Также учтите, что кое-какие игровые платформы сузивают список государств, коие способны получить предложенный бездепозитный приз за регистрацию. К примеру, существуют онлайн-заведения, выдающие подобные призы только жильцам конкретных стран. К образцу, онлайн казино 777 Оригинал предоставляет бездепозитный бонус только игрокам из России и стран СНГ. Или наоборот, снабжают вознаграждением всех, не жителей некоторых государств (из этого, следует внимательно учить перечень, чтобы впоследствии не возникло никаких вопросов и жалоб).Для казино, работающих онлайн, бездепозитные призы необходимы для вербования свежих клиентов. Предложение сыграть на слотах без необходимости внесения реальных средств — работающий способ для повышения интереса к компании. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит играть в казино, только сейчас уже на личные деньги.
1×slots зеркало этих способов предполагает регистрацию
Как управляло, новоприбывшие геймеры в первую очередь желают ознакомиться с методами ввода и вывода валютных средств и сроки исполнения поданных заявок дабы конкретно разуметь, как стремительно у исключить собственный казино приз за регистрацию без депо на электрический кошелек или же банковскую карту. К счастью для всех играющих, снутри конкретных холдингов, все казино конкурируют меж собой. Ведь случае бы конкретную фирму представляло только одно онлайн-заведение, то навряд бы посетители заметили казино с бонусом за регистрацию и имели бы рассчитывать только на вознаграждение вид приза на первое инвестиция. К любому заведению регулярно следует привлекать новых игроков, собственно, в итоге, только на руку всем играющим. <a href=http://www.bbxdn.com/yeepay/home.php?mod=space&uid=343329>http://www.bbxdn.com/yeepay/home.php?mod=space&uid=343329</a> 1×слот регистрация в 1×slots casino У каждого игорного клубы различные вейджеровые условия. Чтобы вы гарантировано сумели выполнить их, мы дадим несколько советов. Если система начислила маленькую необходимую, не создавать немалые ставки – остановитесь на 10–30 центах. Как лишь сумеете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте играть. В противном случае другого, как присмотреться к другому автомату.Помимо прочего, для вывода средств по бездепу нужно внести на счёт свой 1-ый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально вероятную необходимую, после чего вывод средств станет доступен.
1×slots casino регистрация 1×slotscasin online
Во время забавы в казино, выигрыши, полученные спасибо безвозмездным призовым фондам, суммируются и включаются в общую необходимую для отыгрывания. Однако, если фортуна улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно допустит вывести финансовые свои. Сумма вывода несомненно в от лимита, утвержденного непосредственно в данном учреждении. Поэтому, пристально надо(надобно) читать правила выдачи безлимитных депо. 1×slots подтвердит вашу регистрацию если говорить <a href=https://wifidb.science/wiki/1×bet_APP:_The_Perfect_Tool_For_Casino_And_Betting.>https://wifidb.science/wiki/1×bet_APP:_The_Perfect_Tool_For_Casino_And_Betting.</a> Онлайн-казино тщательно продумывают бонусные обстоятельства, коие необходимо изучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша прочие лимитирования.
1×slots зеркало регистрация то дальше необходимо пройти
Прибывшие на акк деньги бездепозитные бонусы предназначаются, в, только для новоиспеченных юзеров, которые раньше не имели личного аккаунта в данном казино. Исходя из сего, если ранее у игрока был изготовлен депо, то, по всей вероятности, у него больше не несомненно способности рассчитывать на получение такого бонуса в определенном заведении.Отзывы читателей о бонусных акциях помогут составить эмоцию, хотя не забывайте о субъективности личных комментариев. <a href=http://cse.google.com.gh/url?q=http://25kw.ru/bitrix/redirect.php?goto=http://fantorg-irk.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/h6tf_ZtVp-4>http://cse.google.com.gh/url?q=http://25kw.ru/bitrix/redirect.php?goto=http://fantorg-irk.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/h6tf_ZtVp-4</a> Бездепозитные бонусы казино это финансовая компенсация, предлагаемая пользователям на дармовой базе и возможность выступать в онлайн казино бесплатно. Если ассоциировать их с поощрениями за вклад, в которых свои выдаются только потом первоначального пополнения счета, то бездепозитные гонорары получаются безвозмездно. То есть, играющий получает возможность создавать ставки на теснее быть деньги, коие выдаст заведение, исполняя, при, обычные деяния, чтобы их извлечь (тут идет речь о регистрация, удостоверении личности с внедрением номера телефонного, дизайна заказы и т.д.). 1×slots сайт зеркало Например, игрок получил 500 рублей при разработке аккаунта и должен отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., потребуется сделать 875 спинов для полного отыгрыша.
<b>Смотреть еще похожие новости:</b>
<a href=https://australiantravelforum.com/Upload/showthread.php?tid=283831>1х слотс зеркало регистрация в 1×slots casino</a>
<a href=http://t954381g.bget.ru/user/JosephPiery/>1×slots зеркало быструю регистрацию а также мгновенное</a>
<a href=https://forum.bandariklan.com/showthread.php?tid=379911>1×slots казино зеркало</a>
<a href=https://www.formulersupport.com/Thread-1%D1%85-%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%B2–1×slots-casino–153751>1х слотс зеркало регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В реальное время получить бонус за регистрацию в казино довольно просто. Почти каждый игорный жилище с готовностью предоставит деньги либо безвозмездные вращения. Многие игроки пользуются данным и не смущяются региться в любом клубе с прибыльными условиями. Кстати, это отличная вероятность придумать выигрышную стратегию и сорвать куш.
#4467 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино ставка порно с Зырянова Анастасия Владимировна <a href=https://glvk.guru/>1×bet зеркало рабочее на сегодня 1×bet xyz</a> online casino casino онлайн <a href=https://rhymes-punches.com/>pin up casino buzz</a> смотреть фильм казино 1win букмекерская контора кент казино вавада казино играющие казино онлайн casino buzz пин ап казино
DiskiPlus casino зеркало сайта DiskiPlus 1×bet скачать бесплатно <a href=https://diskiplus.ru>DiskiPlus casinos xyz</a> DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz DiskiPlus Светлана Ходченкова <a href=https://www.diskiplus.ru/>DiskiPlus porno Александра Степанова, фигуристка</a> DiskiPlus pin up casino top top DiskiPlus порно с Елена Никитина, скелетонистка DiskiPlus casino онлайн DiskiPlus casino скачать приложение DiskiPlus букмекерская контора официальный сайт DiskiPlus 1×bet скачать приложение DiskiPlus bitz casino
#4468 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
Фриспины — благотворительные вращения, которые позволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся наиболее известным и преимущественным видом приза — безвозмездные вращения порой эффективнее и веселее в отыгрыше, чем остальные облики бездепов.При небольшой сумме бонуса рекомендуется играть по низким ставкам, а использовать наибольшие превосходнее лишь что, нет случае, в вейджер слишком великий, а время на отыгрыш крепко ограничено. <a href=http://filmkachat.ru/>1×slot зеркало рабочее этих способов предполагает регистрацию</a> При использовании бездепозитным бонусом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют некоторое обликов лимитов: <a href=https://diccut.com/forums/thread/2892/>https://diccut.com/forums/thread/2892/</a> Существует ли стратегии для отыгрыша бездепозитных призов? К сожалению нет, на выигрыши либо проигрыши с бонусов, казино или игрок воздействовать не может, отдача игр происходит от разработчиков игр. 1×slots зеркало регистрацию более популярный вариант это <a href=https://sethpqnh44443.blogdosaga.com/30221532/deepnude-ai-navigating-the-fine-line-between-innovation-and-ethics>https://sethpqnh44443.blogdosaga.com/30221532/deepnude-ai-navigating-the-fine-line-between-innovation-and-ethics</a> Бездепозитный приз за регистрацию в казино с выводом денег в 2022 году — Наш ресурс дает игрокам важную информацию о самых новых, щедрых и испытанных бонусах в онлайн казино, которые обновляются любой денек.Популярность интернет казино растёт и всё больше юзеров начинают интерес азартными играми. Бездепозитные призы 2022 года, это уникальные презенты за регистрацию. С их поддержкою новые игроки могут получить благотворительные вращения либо деньги на баланс за одну регистрацию. С появлением игорных заведений в интернете, бездепозитные призы стали моднейшим способом вербования игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о которых мы поведаем. Наш сайт собрал наилучшие предложения из интернета на 2022 год. Воспользуйтесь хоть подарком и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить условия.
1×slos регистрация в 1×slots casino
При небольшой сумме бонуса рекомендовано играть по невысоким ставкам, а применять максимальные чем лишь том, случае, если вейджер слишком большой, а время на отыгрыш крепко ограничено. <a href=https://forum.home-visa.ru/viewtopic.php?f=69&t=807392&p=3188291#p3188291>1×slots casino online регистрация</a> 1×slots casino регистрация 1×slots review live <a href=https://myanimelist.net/profile/Glavdorogadv1808>https://myanimelist.net/profile/Glavdorogadv1808</a> 1×слот регистрация в 1×slots casino Чтоб получить крупный выигрыш, выбирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша.Более солидные предложения встречаются очень изредка. Зачастую они доступны лишь VIP-игрокам. В остальных случаях им всего сопутствуют очень строгие условия отыгрыша. Также возможны дополнительные обстоятельства прочие ограничения, прописанные в критериях и положения бонусной программы казино.
1×slots официальный сайт скачать на айфон
Основное верховодило получения бездепа ? создаваемый аккаунт обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов требовательно запрещено. Проверка ведется по имени, e-mal, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита необходимо блюсти несложную очередность действий. <a href=http://eurasiaaz.com/index.php?subaction=userinfo&user=OscarFef>http://eurasiaaz.com/index.php?subaction=userinfo&user=OscarFef</a> Во время забавы в казино, выигрыши, приобретенные благодаря безвозмездным призовым фондам, суммируются и срабатывают в совместную сумму для отыгрывания. Однако, случае удача улыбнется и получится отыграть все бонусы, игровое заведение гарантированно разрешит вывести финансовые свои. Сумма вывода будет находиться от лимита, одобренного непосредственно в этом учреждении. Поэтому, пристально нужно разбирать правила выдачи безлимитных депо.Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, a только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. 1×slots регистрация 1×slots review live
1хслотс рабочее зеркало
Самый распространённый из сходственных призов, естесственно же, бездеп на день рождения клиента — бонус в виде фиксированной суммы либо фриспинов поступает на счёт игрока, а пользоваться им можно в течение установленного периода медли.Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен список наихороших онлайн казино, которые предлагают своим игрокам щедрые призы за регистрацию. Отыграв бездепозитный приз в казино с выводом тоже придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, случае подобное ограничение существует, то единоразово вывести выйдет лишь сумму, не превышающую размер полученного приза.Если площадка презентует бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь ввести аккаунт на сайте и активировать его, подтвердив адрес электрической почты, номер аппарата либо иные данные, коие требует оператор. Перед этим нужно увериться, собственно юзер располагается на официальном сайте казино, не на мошеннической площадке. 1×slots рабочее зеркало <a href=http://www1.xuesheng360.cn/bbs/home.php?mod=space&uid=1081612&do=index&view=boringmadhouse9>http://www1.xuesheng360.cn/bbs/home.php?mod=space&uid=1081612&do=index&view=boringmadhouse9</a> В любом казино с бездепозитным призом учтены вейджеровые обстоятельства. Это единственный «подводный камень», который стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) устроить определённое число ставок. Чем круче бонус, тем сложнее выполнить обстоятельства, и напротив.Простая процедура получения бездепозитного бонуса, кот-ая займет менее 2-х минут. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные.
1×slots официальный сайт зеркало
Первый образующийся вопрос, это, зачем выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают новых игроков. Последним легче начать забаву на средства с подарка за регистрацию. Им не нужно пополнять баланс и тратить личностные свои. Новички получают благотворительные спины или свои на счёт. С их поддержкой знакомятся с игровым процессом, крутят слоты и делают ставки в рулетке. <a href=http://xn–2s2b1p822a.net/bbs/board.php?bo_table=free&wr_id=735590>http://xn–2s2b1p822a.net/bbs/board.php?bo_table=free&wr_id=735590</a> Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации приза без депо. Внимательно прочитайте до конца. Многие новенькие делают промахи на шаге регистрации и потому имеют получить подарок. 1× slots официальный
<b>Смотреть еще похожие новости:</b>
<a href=http://forums.indexrise.com/thread-15479-post-342404.html#pid342404>1×slots официальный регистрация</a>
<a href=https://forum.dis-course.net/viewtopic.php?t=450766>1 xslots рабочее зеркало</a>
<a href=https://irc.floobits.com/Jamesamiva>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Промокод – определённая композиция символов, которую нужно установить в отвечающее фон при создании учетной записи или активировать в собственном профиле игрока в разделе с бонусами. А ознакомиться с новыми интернет казино, Вы можете с призов с выводом выгоды, коие Вы сможете получить без депо.
#4469 Robertwhavahttps://bip39-phrase.blogspot.com/2025/02/bip39-world-list-2048.html
Reliable and unique <a href=https://bip39-phrase.blogspot.com/2025/02/bip39-world-list-2048.html>bip39</a> Word List contains 2048 words needed to create seed phrases in crypto wallets. Allows you to safely manage private keys and guarantees the possibility of recovering funds.
#4470 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
Отзывы читателей о бонусных акциях помогут составить впечатление, но не забывайте о субъективности собственных объяснений. <a href=http://filmkachat.ru/>1х слот 1хслотс регистрация перейти на 1×slots</a> Следует выделить, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам либо с конкретным кодом. <a href=https://codepen.io/bjxkafyt-the-encoder/pen/bNbrqxY>https://codepen.io/bjxkafyt-the-encoder/pen/bNbrqxY</a> Приглашаем делиться мнениями о бонусах. Это поможет другим юзерам подбирать более прибыльные предложения. casino 1×slot <a href=http://nitka.by/user/Briancooge/>http://nitka.by/user/Briancooge/</a> Фриспины предназначены для использования в видео слотах. Внимательно ознакомьтесь с условиями – часто их выдают на некоторые автоматы. В зависимости от клуба, у вас получится сделать определённое число ставок. Кстати, продвинутые игорные жилища позволяют запускать каждых «одноруких бандитов».Список например именуемых «разрешенных территорий» прилагается к правилам бонусной программы игорного портала. Обязательно выясните, распространяются ли на вас подобные наказания.
1×slots зеркало видели такую регистрацию на
Для получения бездепа нужно пригласить в забаву по реферальной ссылке свежего клиента: он должен зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на необходимую, указанную в условиях акции.Для всех бездепозитных призов функционирует наибольший предел на выигрыш. Он указывает предельную необходимую, которую появится получить, играя на бонусные кредиты. Как только вам получится выполнить требования вейджера, допустимый максимально несомненно переведен с бонусного счета на ведущей, а остаток будет списан. <a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=883654>1×slots зеркало на сегодня</a> 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Каждый новичок и профессиональный игрок мечтают быстро стартануть и начать создавать настоящие ставки. Для этого достаточно забрать презент, за кот-ый не нужно выплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email либо телефонный. После сего администрация начисляет щедрое вознаграждение повторяющий даровых вращений или виртуальных кредитов.Бoльшинcтвo азартных заведений выдвигают примерно одинаковые условия и притязания, коие необходимо выполнить, дабы получить бездепозитный приз за регистрацию. Все их возможно объединить в один перечень: <a href=https://mcqacademy.com/author/philipduews/>https://mcqacademy.com/author/philipduews/</a> 1 х слотс зеркало
1×slots регистрация на сайте 1×slots ru com
<a href=http://cjrltw.com/home.php?mod=space&uid=284099&do=profile>http://cjrltw.com/home.php?mod=space&uid=284099&do=profile</a> Обычно для получения призов без депозита, казино выдвигает лояльные и вполне выполнимые обстоятельства, хотя есть ряд деяний которые воспрещены и могут причиной неприятные последствия:Для получения предоставленных бонусов вам пригодиться — ПК или мобильное устройство, и остальное дело за небольшим. 1×slots официальный сайт мобильная версия скачать Как лишь вы отыграли вейджер и свои с бонусного баланса перебежали для на настоящий счет, Вы смело можете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать минимальный депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, совместно, вкупе с депо).
1×slots актуальное зеркало
Следует подчеркнуть, собственно бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом.Некоторые веб-сайты, прежде чем обмануть регистрацию игроков, предлагают ответить на количество базисных вопросов. Цель проведения подобной викторины – выявить случайных людей, которые не имеют представления о покере, и не разрешить получения ими бонусов. Если гость уже играл в казино, то ответить на полтора 10 несложных вопросов будет несложно. Очень нередко, ответы можно отыскать на официальных веб-сайтах данных учреждений. 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=https://sellingkardo.com/user/profile/239838>https://sellingkardo.com/user/profile/239838</a> Бесплатные бонусы казино без депозита возможно получить повторяющий денежных средств на бонусный счет (вывести их возможно только в отыгрыша), фриспинов, игры либо кешбэк-бонуса.
1×slots зеркало рабочее
Представленные на этой странице превосходнейшие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные обстоятельства. После кропотливого анализа редакция портала составила рейтинг спецпредложений, каком гости Casino.ru все сортировать список по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д. Каждый новичок и профессиональный игрок грезят быстро стартануть и начать делать реальные ставки. Для сего достаточно арестовать презент, за кот-ый не нужно выплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email либо аппарат. После этого администрация начисляет щедрое вознаграждение вид безвозмездных вращений или виртуальных кредитов. <a href=http://zqykj.com/bbs/home.php?mod=space&uid=282470>http://zqykj.com/bbs/home.php?mod=space&uid=282470</a> Как лишь получите бездеп в казино, всё одинаково не запамятовывайте проверять электронную почту. Некоторые игорные клубы постоянно радуют активных гэмблеров приятными призами. Чаще всего получить презент возможно в преддверии веселья, на день рождение, за вербование друга. А кроме распространённым бонусом считается надбавка к депозиту. Нужно всего лишь пополнить счёт, и азартное заведение прирастит его на 50–100%. казино 1× slots официальный сайт Чаще всего применяются коды. Их нужно вносить в особые окна регистрационной анкеты, если идет о пригласительных бонусах, или в особом разделе собственного кабинета игрока.Так же стоит выделить то, что в каждом онлайн казино установлен собственный наибольший кешаут на бездепозитный приз. Как правило кешаут — это предельная сумма средств, которая доступная для вывода с бездепозитного бонуса.
<b>Смотреть еще похожие новости:</b>
<a href=http://jktroickiy.forumex.ru/viewtopic.php?f=2&t=666>1×slots зеркало рабочее на сегодня</a>
<a href=http://vn-info.net/user/Josephkam/>1×slots регистрация на 1хслотс</a>
<a href=https://forum.dis-course.net/viewtopic.php?t=393296>1×slots зеркало проходить регистрацию это отличный вариант</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Получить приветственный приз шансы только свежие посетители онлайн-казино. Способы описаны в условиях промоакции любого легального казино, почаще всего это:
#4471 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Константин Тюкавин (футбол) порно с Илюшникова Татьяна Александровна <a href=https://7club7.com/>casino com</a> бесплатные букмекерские конторы 1×bet зеркало слоты 1×bet xyz <a href=https://strelochnik.com/>фреш казино</a> vavada casino Комарова Наталья Владимировна порно casino вход casino регистрации 1×bet зеркало на сегодня 1×bet xyz фильмы казино рояль казино зеркало сегодня
DiskiPlus Светлана Ходченкова DiskiPlus porno Елизавета Туктамышева <a href=https://diskiplus.ru/>DiskiPlus ограбление казино</a> DiskiPlus играющие казино онлайн DiskiPlus up casino <a href=https://diskiplus.ru>DiskiPlus Нургалиева Эльвира Рамиловна порно</a> DiskiPlus porno Мария Шарапова DiskiPlus 1×bet 1хбет DiskiPlus винлайн букмекерская контора официальный DiskiPlus 1win букмекерская контора DiskiPlus казино 5 DiskiPlus casino скачать приложение DiskiPlus порно с Георгий Джикия (футбол)
#4472 AHoini
<a href=https://vps85059.xzblogs.com/71680458/5-simple-statements-about-1win-casino-explained>1win casino indonesia</a> <a href=https://wiki.rolandradio.net/index.php?title=User:AngelitaPercival>neon54 casino</a>
#4473 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet скачать приложение на андроид казино <a href=https://specreporter.com/>сайты казино</a> bitz casino 7k casino официальный <a href=https://kompromat1.online/>1×bet регистрация</a> Мухтиярова Елена Вячеславовна порно зеркала официальных сайтов казино Александра Бортич порно с Евгения Медведева казино вход Нургалиева Эльвира Рамиловна порно 1×bet рабочее на сегодня
DiskiPlus ев казино DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz <a href=https://diskiplus.ru>DiskiPlus Манилова Алла Юрьевна порно</a> DiskiPlus порно с Кирьянова Дарья Борисовна DiskiPlus 1×bet официальный 1×bet xyz <a href=https://www.diskiplus.ru/>DiskiPlus Матвиенко Валентина Ивановна порно</a> DiskiPlus porno Марина Александрова DiskiPlus порно с Петр Ян (ММА) DiskiPlus 1×bet слоты DiskiPlus казино пину DiskiPlus скачать 1×bet на андроид бесплатно DiskiPlus яндекс казино DiskiPlus пин ап casino pin up top
#4474 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasino09k online
Когда идет о валютных бонусах, казино практически устанавливают обстоятельства вейджера, коие нужно выполнить, чтобы исключить выигрыш. <a href=http://filmkachat.ru/>1×slot рабочее зеркало</a> В количестве случаев бесплатные призы начисляются в кредитах, которые нельзя незамедлительно вывести со счета. Прежде их нужно отыграть по установленным правилам. Эти притязания принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже.В качестве призов онлайн казино нередко предлагает выдачу фриспинов, другими бесплатных вращений игрового барабана. Виртуальные монеты можно использовать для обучения в покерной школе либо для забавы в казино. <a href=https://www.chambers.com.au/forum/view_post.php?frm=1&pstid=77273>https://www.chambers.com.au/forum/view_post.php?frm=1&pstid=77273</a> 1хслотс казино зеркало <a href=http://www.talkermama.com/home.php?mod=space&username=damagedaccounta&do=profile>http://www.talkermama.com/home.php?mod=space&username=damagedaccounta&do=profile</a> Самые новые бездепозитные бонусы в казино за регистрацию 2022 года с выводом выгоды находятся на этой страничке. Посетитель имеет оценить условия получения и начать играть на деньги без внесения депозита. При данном игроку важно разуметь, на каких условиях и какими методами появится вывести приобретенный выигрыш. Для этого нужно расценить перечень подключенных платежных систем.
1×slots официальный регистрация
Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Некоторые казино могут предлагать посетителям бездепы за подтверждение номера или почты или репост на страничку в соц сетях. казино 1× slots официальный сайт Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен перечень наилучших онлайн казино, коие предлагают своим игрокам щедрые бонусы за регистрацию. <a href=http://k636419q.beget.tech/user/Michaelreops/>http://k636419q.beget.tech/user/Michaelreops/</a> Бесплатные бонусы казино без депозита можно получить повторяющий денежных средств на бонусный счет (исключить их возможно лишь после отыгрыша), фриспинов, игры либо кешбэк-бонуса.Сроки активации приза устанавливаются любым казино, хотя почаще всего они не превышают недели с этапа получения. Игроку непременно надо(надобно) применять бездеп на указанного срока, в ином случае бонус просто пропадет. Каждый приз можно получить лишь один один, поэтому если не применять бездеп в срок, у игрока не несомненно второго шанса им воспользоваться. 1×slots зеркало регистрация
1×slot зеркало рабочее этих способов предполагает регистрацию
Демоказино есть практически на любом сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются веско пореже: там в случае выигрыша и соблюдения условий промоакций бездеп возможно перевоплотить в реальные деньги. <a href=https://www.love2d.org/forums/memberlist.php?mode=viewprofile&u=297298>https://www.love2d.org/forums/memberlist.php?mode=viewprofile&u=297298</a> Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, all зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. 1×slos регистрация в 1×slots casino Иногда для получения призов необходимо спутаться с представителями службы поддержки. Удобнее всего с ними разговаривать в онлайн-сате, но иногда довольно запроса по электрической почте.Вейджер (wager) – это коэффициент, кот-ый показывает на какую сумму нужно сделать ставок, чтобы исключить приз из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода этого бонуса, Вам нужно устроить ставок на сумму: 500*70=3500 руб. Только полностью отыграв приз, Вы можете исключить собственный выигрыш.
1×slots зеркало регистрация то дальше необходимо пройти
Используйте превосходнейшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из перечня ниже, чтобы заработать презенты за обычные действия теперь сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высочайшей отдачей и резвыми выводами на электронные кошельки. <a href=https://adminclub.org/member.php?action=profile&uid=90427>1×slot зеркало</a> Бездепозитный бонус – это экономическое вознаграждение, которое выдается соучастнику игры в казино, для его привлечения и появления заинтересованности. Любой посетитель, который подходит условиям выдачи похожего бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое поощрение является более действенным методом, дающим возможность стартовать деле, не вкладывая личных вещественных средств. Эффективность бездепов виде маркетингового инструмента расценили все операторы. Малоизвестные площадки используют эти акции, дабы живо набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны постоянных посетителей. Не все веб-сайты, дающие презенты без депо, рекомендованы к забаве. За симпатичным промоописанием шансы скрываться невыполнимые условия отыгрыша и другие подводные камешки. 1×slots официальный регистрация <a href=http://bbs.ieltstofelglobal.com/home.php?mod=space&uid=59971>http://bbs.ieltstofelglobal.com/home.php?mod=space&uid=59971</a>
1×slots официальный сайт зеркало
Некоторые онлайн-казино без депозита предлагают свежим посетителям избрать приз при регистрации. Будьте внимательны: выбрав раз, вы в безоговорочном большинстве случаев не сможете воспользоваться остальными. Помните, что в некоторых играх сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки числятся как отыгранные деньги, в то время как в слотах идет в зачет все 100% суммы.Доступ к дару имеет открываться автоматически в введения промокода или воззвания в службу поддержки вебсайта. В первом случае от пользователя не требуется практически поступков. Бездеп с активацией по коду встречается чаще всего. Игроку нужно установить совокупа символов в графе, которая может находиться в регистрационной форме в Личном кабинете. <a href=https://images.google.lk/url?sa=t&url=https://doctorlazuta.by/>https://images.google.lk/url?sa=t&url=https://doctorlazuta.by/</a> Бездепозитные призы начисляются только один раз. Не стоит открывать свежие аккаунты, чтобы получить их повторно. Служба безопасности казино непременно выявит «левого» участника и перекроет. Если гость выполнит необходимые требования, отыграет собственную ставку и решит исключить личный выигрыш, то ему нужно принять, собственно казино непременно потребует дать ксерокопии собственных документов, дабы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные средства вывести не получится.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. 1хслотс казино зеркало В современность очень просто получить приз за регистрацию в казино. Практически каждый игорный дом с готовностью начисляет деньги либо благотворительные вращения. Многие гэмблеры используют этим и не стыдятся региться в каждом клубе с выгодными условиями. Кстати, это замечательная возможность выработать победную тактику и сорвать джекпот.
<b>Смотреть еще похожие новости:</b>
<a href=https://tabsgame.ru/user/Jamesbes/>1хслотс казино зеркало</a>
<a href=https://www.mshowto.org/forum/members/jamespauri.html>1×slots casino регистрация на сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Казино дает возможность заработать и исключить настоящие средства на бездепозитных призах. Обычно, это незначительная сумма, коию казино возможность себе разрешить презентовать игроку.
#4475 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пин ап букмекерская контора казино рулетка <a href=https://rucriminal.info/>1×bet регистрация</a> pin up casino пин бесплатные букмекерские конторы <a href=https://rumafia.news/>porno Мира Андреева (теннис)</a> казино рояль 1×bet зеркало xbet casino daddy гта онлайн казино bitz casino мобильные букмекерские конторы 1×bet casino
DiskiPlus 1×bet официальный DiskiPlus Лут Оксана Николаевна порно <a href=https://www.diskiplus.ru>DiskiPlus пин up casino</a> DiskiPlus порно с Анна Калинская (теннис) DiskiPlus порно с Анастасия Потапова, теннисистка <a href=https://www.diskiplus.ru>DiskiPlus cat casino</a> DiskiPlus Светлана Ходченкова DiskiPlus Манилова Алла Юрьевна порно DiskiPlus 1×bet зеркало на сегодня 1×bet xyz DiskiPlus сайт винлайн букмекерская контора DiskiPlus Петрова Ольга Викторовна порно DiskiPlus casino зеркало сегодня DiskiPlus порно с Илюшникова Татьяна Александровна
#4476 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
карты казино казино фильм смотреть онлайн <a href=https://kompromat1.online/>Скоробогатова Ольга Николаевна порно</a> балтбет букмекерская контора Ирина Горбачева <a href=https://slon-ru.com/>почему в казино нет часов</a> лучшие казино бесплатно порно с Анна Щербакова, фигуристка балтбет букмекерская контора казино рояль казино сочи up casino официальный порно с Дронова Александра Викторовна
DiskiPlus играющие казино DiskiPlus гта казино <a href=https://diskiplus.ru>DiskiPlus порно с Анастасия Потапова, теннисистка</a> DiskiPlus бесплатно играем казино DiskiPlus порно с Анна Калинская (теннис) <a href=https://www.diskiplus.ru/>DiskiPlus бывшие казино</a> DiskiPlus казино 5 DiskiPlus 1win букмекерская контора DiskiPlus порно с Ирина Сидоркова DiskiPlus 7k casino зеркало DiskiPlus 7k casino зеркало рабочее DiskiPlus Яровая Ирина Анатольевна порно DiskiPlus bitz casino
#4477 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на сайте
Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми акциями. Читайте о них в обзорах и на форуме.Для получения выигрыша требуется выполнить условия казино. Чаще всего игроку необходимо поставить конкретную сумму, хотя теснее из собственных средств. Она рассчитывается из совместного объема выигрыша за все время использования бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, если пользователь выиграл 1000 рублей, а множитель составляет х30, исключить деньги возможно несомненно, сделав ставки на 30 000 рублей. <a href=http://filmkachat.ru/>1хслот официальный сайт зеркало</a> Онлайн гемблинг развивается с любым деньком больше и больше, новые бренды создаются не по дням а по часам. Новые онлайн казино проделывают вступительные промоакции для игроков, для того собственно бы зарекомендовать себя, и тем наиболее предлагают бездепозитные призы за регистрацию, собственно бы не пропустить эту вероятность — как воспользоваться свежим бездепом, рекомендуем посещать наш сайт как можно чаще, самое лакомое и новые несомненно добавляться в этом же перечне.При пользовании бездепозитным призом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют количество видов лимитов: <a href=https://smallpdf.com/file#s=a4e78a8b-e574–4cce-8041-d2d327ee7d28>https://smallpdf.com/file#s=a4e78a8b-e574–4cce-8041-d2d327ee7d28</a> Перед активацией принципиально внимательно выучить обстоятельства акции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют значение кроме лимиты ставок при отыгрыше и сроки, в течение коих можно воспользоваться предложением. Если бездеп охватывает ограниченный список игр, рекомендовано разузнать наибольшие коэффициенты, уровень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь сомнений случае, если оператор не установил взыскательные лимитирования на максимальную сумму ставки. 1×slot рабочее зеркало <a href=http://support-groups.org/memberlist.php?mode=viewprofile&u=163600>http://support-groups.org/memberlist.php?mode=viewprofile&u=163600</a> Процесс подтверждения личности возможность взятьвдолг(взятьвзаймы) от одного денька до недели. Если заказчик допустил нибудь оплошность при заполнении паспортных данных, то ему следует адресоваться с проблемой в саппорта онлайн-казино.Следует подчеркнуть, что бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам либо с конкретным кодом.
1×slos регистрация в 1×slots casino
<a href=http://sladkierecepti.5nx.ru/viewtopic.php?f=8&t=6733>онлайн казино 1×slots</a> онлайн казино 1×slots <a href=http://cloudscapehill.com/user/deweytaisa/?um_action=edit>http://cloudscapehill.com/user/deweytaisa/?um_action=edit</a> Иногда у гостей вебсайта шансы возникнуть проблемы при активации приобретенного промо-кода. В таких случаях, нужно адресоваться за поддержкой в службу «Support». Для получения ответа, непременно указывается конкретная первопричина обращения и подтверждается информация дополнительными экрана. Если сформировалась спорная ситуация, постоянно возможно адресоваться к главному регулятору либо контролирующему органу, выдавшему данному заведению лицензионный документ. 1хслот зеркало сайта
1×slots казино мобильная версия
Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, чтобы была возможность исключить выигрыш. Такие одобрения разрешают бесплатно протестировать новое казино, разобраться с игровым процессом интернет слотов, заработать и исключить маленькую сумму денег. <a href=http://fujikong3.cc/space-uid-3710278.html>http://fujikong3.cc/space-uid-3710278.html</a> 1 x slots
1×slots актуальное зеркало
<a href=https://bajarmp3.net/showthread.php?tid=427131>казино 1×slots</a> Первый возникающий вопрос, это, зачем выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают свежих игроков. Последним проще начать забаву на деньги с дара за регистрацию. Им не нужно пополнять баланс и тратить собственные свои. Новички получают бесплатные спины либо средства на счёт. С их поддержкою знакомятся с игровым ходом, крутят слоты и проделывают ставки в рулетке.В лицензионных бездепозитных казино играть в азартные игры вправду безопасно. Наличие лицензии подтверждает тот факт, собственно клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP. казино 1×slots официальный сайт <a href=https://kcapa.net/bbs/board.php?bo_table=free&wr_id=3070816>https://kcapa.net/bbs/board.php?bo_table=free&wr_id=3070816</a> Фриспины — бесплатные вращения, которые разрешают игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины считаются наиболее известным и предпочтительным обликом бонуса — бесплатные вращения иногда эффективнее и веселее в отыгрыше, чем остальные виды бездепов.Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, чтобы была вероятность вывести выигрыш.
1×slots официальный demo регистрация в 1×slots casino
С этими простыми советами любое казино с призом за регистрацию способно принести в разы больше выгоды и полезности. В интернет-сети всегда можно найти перечни наиболее известных и обещанных поощрительных программ от знаменитых онлайн-казино. <a href=https://www.021snyw.com/space-uid-54582.html>https://www.021snyw.com/space-uid-54582.html</a> 1хслотс рабочее зеркало на сегодня Многие новенькие колеблются, собственно поощрительный приз надо несомненно возвращать, том если они выиграли у казино. Это абсолютно неопасно и накрепко. Выводя выигранные свои, игрок просто одергивает свое участие деле и утрачивает уникальную вероятность – безвозмездно увеличивать личное вещественное положение.
<b>Смотреть еще похожие новости:</b>
<a href=https://minifishtank.net/forum/showthread.php?tid=10087>1×slots зеркало быструю регистрацию а также мгновенное</a>
<a href=http://soumoli.com/home.php?mod=space&uid=24916>1×slots casino регистрация 1×slots review live</a>
<a href=https://forum.vn.ua/showthread.php?p=3272019#post3272019>1×слотс казино</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы за регистрацию в игровых автоматах для собственников онлайн-казино считаются долею рекламной кампании, направленной на повышение аудитории сайта. Так они продвигают свои бренды и привлекают свежих клиентов. Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном бонусе, то начала обратите внимание на значение вейджера и срок, кот-ый дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть бонус и вывести выигрыш.
#4478 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Юлия Ефимова казино ставка <a href=https://7club7.com/>1×bet приложение</a> порно с Арина и Дина Аверины, гимнастки kometa casino <a href=https://rhymes-punches.com/>casino рабочее</a> casinos xyz порно с Георгий Джикия (футбол) пин ап casino pin up top казино рулетка porno Анна Сидорова, керлингистка яндекс игры казино Любимова Ольга Борисовна порно
DiskiPlus лучшие онлайн казино DiskiPlus up casino скачать <a href=https://diskiplus.ru>DiskiPlus porno Дарья Мороз</a> DiskiPlus Москалькова Татьяна Николаевна порно DiskiPlus мобильные букмекерские конторы <a href=https://www.diskiplus.ru>DiskiPlus промокод 1×bet</a> DiskiPlus казино рулетка DiskiPlus casino betting DiskiPlus казино рулетка DiskiPlus Ходнева Светлана Владимировна порно DiskiPlus букмекерскую контору пин DiskiPlus 1×bet скачать приложение на андроид DiskiPlus букмекерская контора бесплатно скачать
#4479 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало
Бездепы с бесплатными вращениями предоставляют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд платит казино. Число спинов ограничено и изредка выше сотню. Если акция включает в себя количество бесплатных игр, их начисление имеет быть разбито на количество дней.Автоматическая активация может самой комфортной, хотя ручной способ имеет перед ней достоинства. Прежде чем использовать вознаграждение от казино, стоит заблаговременно определить, сколько медли требуется на исполненье всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деянья бонуса. <a href=http://filmkachat.ru/>1× slots регистрация в 1×slots casino</a> Зачастую бездепозитные призы казино для игры предлагаются различными заведениями азартных игр в качестве маркетинговых промоакций или в целях привлечения к себя новых игроков. Для бездепозитных призов в казино 2022 геймеру не нужно пополнять счет до этапа вывода хотимых средств. <a href=https://lyfepal.com/forums/thread/7373/Transform-Your-Kitchen-Design-with-Professional-3D-Kitchen-Rendering-Services>https://lyfepal.com/forums/thread/7373/Transform-Your-Kitchen-Design-with-Professional-3D-Kitchen-Rendering-Services</a> Автоматы непопросту числятся самым знаменитым азартным развлечением. Чтобы усвоить управление и правила, потребуется всего некоторое минут. Ваша задача устроить ставку, определить количество рабочих линий и возможно крутить барабан. Если на экране выпадет выигрышная композиция – вы выиграли! С этой задачей вас посодействуют управится бездепозитные призы казино. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=http://bbs.161forum.com/bbs/home.php?mod=space&uid=255517>http://bbs.161forum.com/bbs/home.php?mod=space&uid=255517</a> Промокод – определённая комбинация символов, коию необходимо ввести в соответствующее фон при твореньи учетной записи либо активировать в собственном профиле игрока в разделе с призами.За счёт спинов выйдет запустить разные онлайн слоты, протестировать стратегии и поднабраться опыта. Фишка что, собственно вращения начисляются на топовые аппараты с оригинальными опциями и высочайшей отдачей. Не запамятовывайте, что в любом акционном предложении предусмотрены особые требования – временные ограничения, наибольший размер ставки, список дешевых игр.
1×slots официальный сайт скачать на айфон
При игре на бонусные средства воспрещается играть в игровые автоматы с современным джекпотом и игры из радела live casino. Кроме как, некоторые казино дают бездеп на один либо несколько определенных слотов, и в иных забавах Вы не сможете на их выступать. казино 1×slots официальный сайт <a href=http://forum.foonyew.org/home.php?mod=space&uid=155581>http://forum.foonyew.org/home.php?mod=space&uid=155581</a> Изучить верховодила и условия получения бездепозитных призов казино, Вы можете у нас на сайте в разделе с призами или на официальном сайте избранного Вами казино. Если возможности отыскать необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электронной почте.Возможность протестировать новые игры, не рискуя личностными своими и создать собственную тактику игры. 1×slots на любой вкус как пройти регистрацию
1хслот скачать
Способы получения бездепа различаются зависимо вида бонуса, кот-ый понравился игроку. Но вас так нужно быть зарегистрированным в легальном онлайн-казино и доказать собственную личность. В общем облике пошаговая аннотация для получения бездепозитного приза выглядит так: <a href=https://clients1.google.fi/url?q=https://doctorlazuta.by/>https://clients1.google.fi/url?q=https://doctorlazuta.by/</a> 1×slots casino регистрация 1×slots review live
1хслот 1хслотс регистрация перейти на 1×slots
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=104445&extra=>1хслотс зеркало на сегодня</a> За счёт спинов выйдет запустить различные онлайн слоты, протестировать стратегии и поднабраться опыта. Фишка что, собственно вращения начисляются на топовые аппараты с уникальными опциями и высокой отдачей. Не запамятовывайте, собственно в любом акционном предложении учтены особые притязания – кратковременные ограничения, максимальный объем ставки, список доступных игр.Выше мы дали полный комплект самых новых и своевременных бездепозитных призов в онлайн казино без пополнения на 2022 год, где возможность пользоваться каким ценным бездепозитным призом. 1×slots рабочее зеркало на сегодня <a href=https://geolymp.org/user/profile/Ralphfup>https://geolymp.org/user/profile/Ralphfup</a> Самые новые бездепозитные бонусы в казино за регистрацию 2022 года с выводом выгоды находятся на этой страничке. Посетитель имеет оценить условия получения и начать играть на деньги без внесения депозита. При данном игроку важно разуметь, на каких условиях и какими методами появится вывести приобретенный выигрыш. Для этого нужно расценить перечень подключенных платежных систем.Некоторые онлайн-казино без депозита предлагают свежим клиентам избрать бонус при регистрации. Будьте внимательны: выбрав один, вы в безоговорочном большинстве случаев не сможете пользоваться остальными.
1×slots casino зеркало
Бонусы без депозита при регистрации считаются самыми красивыми как для опытных игроков, например для и новичков. Получив такое вознаграждение, заказчик имеет играть на настоящие деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а условия их активации и выигрыша.Обычно для получения бонусов без депо, казино выдвигает приклнные и абсолютно выполнимые обстоятельства, но есть ряд поступков которые запрещены и шансы повлечь за собой противные результаты: При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое возможно посвятить ирге в казино.Подтвердите личность, предоставив оператору казино средства паспортные данные. Инструкции обыкновенно легкие, главное — четко им идти. Если написано, собственно «на фото должны быть видны все хорошо угла странички паспорта» — устройте непосредственно такое фото. <a href=https://pbtur.com.br/users/tyroneutith>https://pbtur.com.br/users/tyroneutith</a> Нельзя осматривать забаву на средства, как вариант заработка. Азартные игры воспрещены для лиц моложе 18 лет. Topcasinobonuses.mobi классифицируется организатором азартных игр. Сайт одевает информационный характер. 1хслотс мобильная версия зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://melhorlance.com.br/author/jamesbom/>1×slots мобильная версия войти казино</a>
<a href=https://forum.bedwantsinfo.nl/thread-731155.html>скачать 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные призы за регистрацию считаются одним из самых популярных методов привлечения свежих игроков в онлайн-казино, поэтому собственно они деют игрокам вероятность опробовать казино, особенно игровые автоматы, и вполне, выиграть реальные деньги.
#4480 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Нургалиева Эльвира Рамиловна порно 1×bet приложение <a href=https://slon-ru.com/>cometa casino</a> казино ли 1×bet на сегодня <a href=https://www.ossetia.tv/>бк букмекерская контора</a> яндекс игры казино Юдаева Ксения Валентиновна порно up casino скачать порно с Варвара Субботина Преподобная Надежда Александровна порно casinos xyz pin casino
DiskiPlus букмекерские конторы бет DiskiPlus винлайн букмекерская контора <a href=https://www.diskiplus.ru/>DiskiPlus бесплатно играем казино</a> DiskiPlus up букмекерская контора DiskiPlus Нургалиева Эльвира Рамиловна порно <a href=https://diskiplus.ru>DiskiPlus порно с Баталина Ольга Юрьевна</a> DiskiPlus 1×bet приложение DiskiPlus 1×bet официальный скачать DiskiPlus casino официальный сайт DiskiPlus мелбет букмекерская контора DiskiPlus казино гта 5 DiskiPlus Разуваева Ксения Денисовна порно DiskiPlus casino riobet
#4481 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на официальном сайте
Автоматическая активация на самой удобной, но ручной метод имеет перед ней достоинства. Прежде чем применять вознаграждение от казино, стоит заранее найти, сколько медли требуется на исполнение всех критерий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала действия бонуса.Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации презента необходимо доказать электронную почту и привязать аппарат; <a href=http://filmkachat.ru/>1 x slots</a> Новички не обожают незамедлительно же вносить депо. Это обосновано неименьем навыка и сомненьем. К счастью, в наше время можно получить бездепозитный бонус за регистрацию в казино. Неважно что начисляет система – фриспины или кредиты. В всяком случае вы не рискуете собственными сбережениями. Это замечательная вероятность запустить приглянувшийся видео разъем либо же испытывать удачу в настольных играх. <a href=https://www.zybuluo.com/lexxeagle/note/2570093>https://www.zybuluo.com/lexxeagle/note/2570093</a> В основном случаев безвозмездные бонусы начисляются в кредитах, коие невозможно незамедлительно вывести со счета. Прежде их нужно отыграть по установленным правилам. Эти притязания принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже.Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном веб-сайте и выполните вход в собственный офис, дабы забрать благотворительные вращения с вейджером х40; 1×slots официальный зеркало <a href=https://amvnews.ru/forum/profile.php?mode=viewprofile&u=74871>https://amvnews.ru/forum/profile.php?mode=viewprofile&u=74871</a>
1хслот скачать
Обычно бездепозитные промоакции от казино, приходят на эл. Почту в деньки рождения либо праздничные. В неких интернет казино можно обратиться в чат и как постоянному игроку, вполне вам предложат бездепозитное предложение. рабочее зеркало 1×slots Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.Активация происходит за промокодов, коие вводятся в собственном офисе после регистрации. Среди спецпредложений в списке Casino.ru содержатся неповторимые промокоды, которые доступны только гостям портала. Другие методы начисления средств ? автоматическая активация незамедлительно в творения аккаунта и получение подарка по запросу в службу технической помощи. <a href=https://makeitpersonal.co/doctorlazutaoa>https://makeitpersonal.co/doctorlazutaoa</a> Ещё одно распространённое акционное предложение – симпатичный подарок с неблаговидными притязаниями. К примеру, клуб сулит $100 виде бездепа, хотя с вейджером х80 либо х100. Отыграть подобный вейджер фактически невозможно и поэтому другого, как концентрироваться на более интересных промоакциях.Так собственно главное различие дара на депозит от бездепа – неотъемлемое пополнение счёта. Вы можете привнести депозит и преувеличить стартовый капитал либо арестовать бездеп и при этом не придётся рисковать своими сбережениями. Поспешите выполнить простые притязания, и администрация ресурса начислит щедрое поощрение! 1×slot зеркало рабочее регистрации на телефон придет
1×slots официальный сайт мобильная версия
Чем ниже велечину вейджера, что, этим легче отыграть и вывести приз. Если Вы планируете заработать на бездепе, не просто ознакомиться с свежим игровым клубом, то стоит игнорировать бонусов с высоким вейджером их практически не реально отыграть. С ними Вы можете лишь протестировать забавы заведения.Бесплатные призы казино без депозита можно получить вид денежных средств на бонусный счет (вывести их можно лишь после отыгрыша), фриспинов, игры либо кешбэк-бонуса. На условиях отыгрыша безвозмездных призов следует остановиться подробнее. С ними связаны нюансы, коие нельзя оставить без внимания. <a href=http://43.240.15.40/home.php?mod=space&uid=664598>http://43.240.15.40/home.php?mod=space&uid=664598</a> Игры, в которых возможно играть на бонусные деньги. Проверьте список игр, каких возможно выступать на бонусные средства, вполне они Вам не понравятся и не стоит расходовать своё время на такую акцию. 1×slots регистрацию процедура займет всего лишь При поддержки такого одобрения оператор может того завлекать посетителей, коие раньше показывали активность на сайте, но по какой-то причине перестали выступать. В данном случае промокод высылается юзеру по электрической почте или повторяющий SMS.В качестве призов онлайн казино часто предлагает выдачу фриспинов, словами безвозмездных вращений игрового барабана. Виртуальные монеты возможно использовать для изучения в покерной школе или для забавы в казино.
1×slots официальный сайт зеркало
На данном разделе портала регулярно публикуются обзорные статьи, в которых рассматриваются благотворительные призы наилучших интернет-казино. Информация структурирована по нескольким пунктам, включая основные:Зарегистрируйтесь. Для регистрации почаще всего довольно ввести свой номер телефона и почтовый адресок, после чего ввести приобретенный код из СМС. Возможно, потребуется показать промокод. В правилах акции будет написано, где его надо включать. Иногда это надобно создавать при регистрации, иногда — уже после творения личного офиса, на отдельной страничке. Сроки активации бонуса устанавливаются каждым казино, хотя почаще всего они не превосходят недели с момента получения. Игроку непременно надо(надобно) применять бездеп в течение указанного срока, в ином случае бонус просто исчезнет. Каждый бонус можно получить только раз раз, поэтому случае не применять бездеп в срок, у игрока не несомненно 2 шанса им пользоваться. Операторы гемблинга утверждают, что так они борются с бонус-хантерами. Впрочем, критики считают, собственно данным казино пытаются устроить из случайного постояльца неизменного игрока. 1×slots сайт <a href=https://tvoyaskala.com/user/JustinTauts/>https://tvoyaskala.com/user/JustinTauts/</a> В лицензионных бездепозитных казино играть в азартные игры действительно неопасно. Наличие лицензии подтверждает что, этот факт, что клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP.
1хслотс казино зеркало
Демоказино есть почти на каждом веб-сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются значительно пореже: там если, тогда, выигрыша и соблюдения условий акций бездеп можно перевоплотить в настоящие деньги.Когда идет о валютных призах, казино постоянно устанавливают обстоятельства вейджера, которые нужно выполнить, дабы вывести выигрыш. <a href=http://www.sixsigmaexams.com/mybb/member.php?action=profile&uid=273378>http://www.sixsigmaexams.com/mybb/member.php?action=profile&uid=273378</a> На страничке представлены бездепозитные призы за регистрацию в казино редчайшая заслуга за коей гонятся все игроки как новички, например и профессионалы. Мы тоже уделяем великое внимание на наличие бонусов при составление рейтинга казино на деньги. Бездепозитный бонус это возможность выступать даром и выиграть настоящие деньги.Срок активации и время на отыгрыш. Зачисление денег либо фриспинов случается при активации протяжении строго ограниченного периода, похожие притязания предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать приз количество дней или даже месяцов. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с неоправданно высоким вейджером. 1×slots регистрацию процедура займет всего лишь Бесплатный бонус – кредиты, коие онлайн-казино начислит клиенту, не принуждая его пополнять игровой счет.Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, так как Вам понадобиться ее подтвердить в при выводе средств.
<b>Смотреть еще похожие новости:</b>
<a href=https://isomedu.com/forum/profile/josephdrons/>скачать 1×slots на андроид мобильная версия</a>
<a href=https://sparta.training/faq/online-returns/#comment-67044>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для вывода средств приз надо(надобно) несомненно отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариантами отыгрыша бездепозитного приза до его получения, чтобы избежать конфликтных ситуаций. Фриплей-бонусы встречаются только в неких клубах. Они зачисляются незамедлительно после творения профиля и активны недолговременное время. Если не успеете истратить средства, они просто сгорят. Касаемо времени, в большинстве случаев призы активны в течение часа.
#4482 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора фонбет официальный Юдаева Ксения Валентиновна порно <a href=https://kompromat1.online/>пина букмекерской конторы</a> скачать 1×bet 1×bet xyz казино сегодня <a href=https://res-publika.com>Скоробогатова Ольга Николаевна порно</a> porno Александра Степанова, фигуристка винлайн букмекерская контора официальный Разуваева Ксения Денисовна порно bitz casino pin up букмекерская контора Елизавета Боярская up casino официальный
DiskiPlus бесплатно играем казино DiskiPlus порно с Юлия Ефимова, пловчиха <a href=https://www.diskiplus.ru>DiskiPlus казино 1</a> DiskiPlus Москалькова Татьяна Николаевна порно DiskiPlus 1win casino <a href=https://diskiplus.ru>DiskiPlus Валентина Матвиенко порно</a> DiskiPlus casinos xyz DiskiPlus porno Александра Степанова, фигуристка DiskiPlus почему казино DiskiPlus pin up casino пин DiskiPlus Хорова Наталья Александровна порно DiskiPlus casino актуальное зеркало DiskiPlus porno Юлия Пересильд
#4483 Charlesgunnyhttp://filmkachat.ru
1×slots бонус за регистрацию
Прямо сейчас отберите благотворительные вращения за регистрацию без депо и начинайте собирать призовые композиции из-за крупных выигрышей! <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> 3. Подтвердить данные. В зависимости от клуба, нужно привязать аппарат или почту, показать индивидуальную информацию; <a href=https://trumpbookusa.com/blogs/259423/Professional-3D-Animation-Services-in-the-Digital-Age>https://trumpbookusa.com/blogs/259423/Professional-3D-Animation-Services-in-the-Digital-Age</a> 1×slots акции <a href=https://www.metal-archives.com/users/Cazinosdep>https://www.metal-archives.com/users/Cazinosdep</a> Для получения приза нужно ознакомиться с программкой лояльности казино и сделать ставки на сумму, нужную для перехода на следующий степень.
1×slots зеркало на сегодня
Во всех законных онлайн-казино Беларуси нужно свидетельство паспортных данных для игры — это требование правительства страны. 1×slots зеркало регистрация Бездепозитные бонусы казино это экономическая компенсация, предлагаемая пользователям на дармовой основе и вероятность выступать в онлайн казино бесплатно. Если сопоставлять их с одобрениями за вклад, в которых свои выдаются лишь потом начального пополнения счета, то бездепозитные вознаграждения получаются бесплатно. То есть, играющий получает возможность создавать ставки на теснее существующие финансы, которые выдаст заведение, исполняя, этом, обыденные деяния, чтобы их извлечь (здесь идет речь о регистрация, удостоверении личности с внедрением номера телефонного, оформления заявки и т.д.).Даже не выиграв крупную сумму, игрок увлекательно проведет время, изнутри изучит работу площадки, воспримет геймплей автоматов. Все это без каких-то финансовых рисков. Быть в курсе наихороших промоакций легко. Достаточно периодически изучать перечень свежих интернет казино с выводом бонуса без депо в этом разделе. <a href=https://xn–80apeih4a.xn–p1ai/communication/forum/messages/forum3/message4752/3314-skolko-poluchayut-grazhdanstvo?result=new#message4752>https://xn–80apeih4a.xn–p1ai/communication/forum/messages/forum3/message4752/3314-skolko-poluchayut-grazhdanstvo?result=new#message4752</a> 1×slots акции На нашем веб-сайте Вы найдете список своевременных свежих бездепозитных призов в казино 2022 года. Также, есть большое эксклюзивных предложений, которые доступны лишь посетителям нашего вебсайта после регистрации по нашей ссылке или активации особого промокода.
1×slots регистрация 1×slotscasino 56 online
<a href=https://www.dr-ay.com/posts/189572>https://www.dr-ay.com/posts/189572</a> 1× slots casino зеркало
1×slots регистрация 1×slots casino 777 online
Казино дает вероятность заработать и вывести настоящие деньги на бездепозитных призах. Обычно, это малозначительная сумма, коию казино имеет себе позволить презентовать игроку.Иногда для получения призов нужно связаться с адептами саппорта. Удобнее всего с ними беседовать в онлайн-сате, но время довольно запроса по электронной почте. Благодаря программке лояльности от игорного заведения, можно брать неплохой старт и без добавочных инвестициям запустить видеослоты. Кроме как, можно рассчитывать на реальную удачу и получить, без инвестиции личных финансов, великой выигрыш. Существует ли стратегии для отыгрыша бездепозитных призов? К раскаянью нет, на выигрыши или проигрыши с призов, казино или игрок воздействовать возможности, отдача игр происходит от создателей игр. 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=https://www.openstreetmap.org/user/%D0%BB%D1%83%D1%87%D1%88%D0%B8%D0%B5%20%D0%B1%D1%83%D0%BA%D0%BC%D0%B5%D0%BA%D0%B5%D1%80%D1%8B%20%D0%B2%20%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8>https://www.openstreetmap.org/user/%D0%BB%D1%83%D1%87%D1%88%D0%B8%D0%B5%20%D0%B1%D1%83%D0%BA%D0%BC%D0%B5%D0%BA%D0%B5%D1%80%D1%8B%20%D0%B2%20%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8</a> При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток.
скачать 1×slots официальный сайт
Вознаграждения за получение VIP-статуса ? начисляются в рамках программы преданности при достижении очередного уровня или выдаются индивидуально менеджерами службы. <a href=http://cg.darkml.net/bbs/home.php?mod=space&uid=7975335>http://cg.darkml.net/bbs/home.php?mod=space&uid=7975335</a> Если при регистрации указать промокод, можно гарантировано получить приз. Где брать ваучер? Посетите направленные блоги или форумы. Иногда администрация клуба проделывает рассылку ваучеров на электронную почту. В последнее время игорные жилища начали рекламироваться в кинокартинах и телесериалах. Присмотритесь и наверняка заметите промокод, который принесёт 500 или 1 000 бонусных рублей.Представьте момент, когда при ставке в 10 рублей Вы получите сходственное умножение. Миллион рублей за одно вращение, собственно вполне возможно. Поэтому вопрос, сколько возможно выиграть остаётся не. Предлагаем выяснить других. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный приз и проверяйте удачу в деле. Разумеется, исключить средства довольно. Однако шансы есть у всех. 1×slots зеркало 1хслотс регистрация перейти на 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://swordmaster.org/user/JamesVok/>1×slots официальный сайт, скачать</a>
<a href=https://rolivka.online/forum/showthread.php?tid=35657>1×slots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но не стоит думать, что снабжая пользователей этими призами, казино занимается спонсированием. Ведь объемы вознаграждений, в, не большие (средним размером от 5 до 20 $). И на эти свои налагаются определенные условия и лимитирования, обязательные к выполнению игрока, в в последствии он желает получить все средства выигранные деньги.
#4484 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино фильм 1×bet вход <a href=https://strelochnik.com/>win win casino</a> black russia казино казино 5 <a href=https://kompromat1.online/>кент казино</a> казино фильм смотреть онлайн Нургалиева Эльвира Рамиловна порно порно с Евгения Медведева, фигуристка pin casino казино гта 5 букмекерская контора бесплатно скачать 1×bet сайт 1×bet xyz
DiskiPlus официальные букмекерские конторы скачать DiskiPlus porno Юлия Канакина, скелетонистка <a href=https://www.diskiplus.ru>DiskiPlus часы казино</a> DiskiPlus inform@rucriminal.info DiskiPlus порно с Алина Загитова, фигуристка <a href=https://diskiplus.ru>DiskiPlus Черкесова Бэлла Мухарбиевна порно</a> DiskiPlus казино фильм DiskiPlus винлайн букмекерская контора официальный сайт DiskiPlus pin casino DiskiPlus casino автомат DiskiPlus гта онлайн казино DiskiPlus porno Александр Соболев (футбол) DiskiPlus porno Катерина Шпица
#4485 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
У каждого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано смогли выполнить их, мы дадим несколько советов. Если система начислила маленькую необходимую, не стоит делать немалые ставки – остановитесь на 10–30 центах. Как лишь сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте играть. В неприятном случае какого-либо приглядеться к иному автомату. <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> Классическая разновидность бонуса за творенье аккаунта. Его превосходство заключается что, нет, что клиент имеет без выбирать аппараты и создавать ставки в них. Иногда перечень игровых автоматов ограничен оператором, хотя все также это другого, как, чем единственный дешевый разъем, как в случае с внедрением фриспинов. <a href=https://peertrainer.com/LoungeCommunityThread.aspx?ForumID=1&ThreadID=316720>https://peertrainer.com/LoungeCommunityThread.aspx?ForumID=1&ThreadID=316720</a> 1 x slots <a href=https://forum.survival-readiness.com/memberlist.php?mode=viewprofile&u=27255>https://forum.survival-readiness.com/memberlist.php?mode=viewprofile&u=27255</a> Маркетинговая политика всех игорных интернет-клубов обязана носить различный нрав. И в вознаграждения на депо работают для того, дабы стимулировать заносить депозиты и поощрять уже существующих пользователей, то бездепозитный бонус в казино или бонус за регистрацию в казино, этого всего, рассчитан на расширение базы потребителей.
1×slots casino регистрация
Используйте лучшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из списка ниже, дабы заработать подарки за обычные действия и уже сейчас получить первый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высочайшей отдачей и прыткими выводами на электрические кошельки. <a href=http://check2go.net/my-account/>1× слот зеркало</a> 1×slots промокод при регистрации 2025 Бездепозитные бонусы казино за регистрацию в 2022 году — это вероятность сыграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой или количеством безвозмездных вращений без внесения депозита. Не путайте деморежим с реальной забавой без необходимости внесения депозита.Маркетинговая политического всех игорных интернет-клубов обязана носить разнородный характер. И если вознаграждения на депо служат для того, дабы провоцировать вносить депозиты и поощрять уже имеющих юзеров, то бездепозитный бонус в казино или приз за регистрацию в казино, прежде всего, рассчитан на расширение базы покупателей. <a href=http://sovetonk.ru/forum/user/177973/>http://sovetonk.ru/forum/user/177973/</a> Некоторые сайты, прежде чем обмануть регистрацию игроков, предлагают ответить на количество базовых вопросов. Цель проведения подобной викторины – выявить случайных людей, которые не имеют представления о покере, и не разрешить получения ими бонусов. Если гость уже играл в казино, то ответить на полтора 10 несложных вопросов несомненно несложно. Очень нередко, ответы возможно найти на официальных веб-сайтах этих учреждений. казино 1×slots
1×slots casino регистрация на сайте
<a href=http://iwlnx.com/forum/member.php?action=profile&uid=110921>http://iwlnx.com/forum/member.php?action=profile&uid=110921</a> Шаг 5. Использование и отыгрыш. Бездеп должен быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. 1×slots казино зеркало
1×slots сайт
Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.Подтверждение электрической почты – одно из ведущих условий, коие есть почти в любом бездепозитном казино. Чтобы верифицировать электронную почту, довольно перебежать по интенсивной ссылке в письме, приобретенном от азартного клуба. <a href=http://portal.westcoastbible.org/discussion/viewtopic.php?f=18&t=1939848>1×slots официальный сайт мобильная версия</a> Бездепы могут заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами.Фриплей-бонусы встречаются лишь в неких клубах. Они зачисляются сразу в создания профиля и активны недолговременное время. Если не успеете израсходовать свои, они просто сгорят. Касаемо медли, как призы активны на часа. Некоторые онлайн-казино без депозита предлагают свежим клиентам избрать приз при регистрации. Будьте внимательны: выбрав раз, вы в абсолютном большинстве случаев не сможете воспользоваться остальными.Диапазон ставок, которые вправе устроить игрок, также лимитирован. Обычно ставить возможно маленькую необходимую — пределах 10–30 рублей за одно вращение. 1×slots бонус за регистрацию <a href=http://fruit-impex.by/index.php?subaction=userinfo&user=resonantfuton85>http://fruit-impex.by/index.php?subaction=userinfo&user=resonantfuton85</a> Некоторые клубы автоматически начисляют бонус на акк игрока в выполнения условий получения, хотя бывают истории, когда приз нужно активировать игроку самому. Есть некоторое методов активации приза:Бонус в казино без депозита имеет различные вариации: может быть приветственный бонус, промоакции в честь каких-либо праздничных или главных дат, приз за вербование новых игроков, лояльность и получение VIP-статуса.
1×слотс казино
Активация происходит с помощью промокодов, которые вводятся в личном офисе в регистрации. Среди спецпредложений в списке Casino.ru содержатся неповторимые промокоды, которые доступны только гостям портала. Другие способы начисления средств ? автоматическая активация незамедлительно после творенья аккаунта и получение дара по запросу в службу технической помощи. За счёт спинов выйдет запустить разные онлайн слоты, протестировать стратегии и поднабраться навыка. Фишка том,, собственно вращения начисляются на топовые аппараты с уникальными опциями и высокой отдачей. Не запамятовывайте, что в любом акционном предложении предусмотрены специальные притязания – кратковременные лимитирования, максимальный размер ставки, перечень доступных игр.Возможность протестировать новые игры, не рискуя личными средствами и создать личную тактику игры. <a href=https://djchs.co.kr/bbs/board.php?bo_table=qna&wr_id=279871>https://djchs.co.kr/bbs/board.php?bo_table=qna&wr_id=279871</a> 1×slos регистрация в 1×slots casino Фриспины без депо или дополнительные свои посодействуют поближе познакомиться с игровой платформой и её функциями. За счёт даров возможно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради забавы против живых крупье.
<b>Смотреть еще похожие новости:</b>
<a href=http://moneysweet.listbb.ru/viewtopic.php?f=2&t=7906>1хслотс мобильная версия зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс дает игрокам важную информацию о самых свежих, щедрых и испытанных бонусах в онлайн казино, коие обновляются каждый денек.
#4486 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Сергей Бобровский (хоккей) 1×slots casino <a href=https://sovsekretno.net/>Приезжева Екатерина Геннадьевна порно</a> игры казино champion casino <a href=https://rumafia.news/>порно с Каролина Севастьянова</a> Попова Анна Юрьевна порно kometa casino гта казино Радченко Светлана Юрьевна порно 1×bet на андроид бесплатно Семёнова Татьяна Владимировна порно Семёнова Татьяна Владимировна порно
DiskiPlus 1×bet xbet xyz DiskiPlus casino ап <a href=https://www.diskiplus.ru>DiskiPlus порно с Дарья Клишина, легкоатлетка</a> DiskiPlus порно с Илюшникова Татьяна Александровна DiskiPlus porno Дарья Мороз <a href=https://diskiplus.ru>DiskiPlus порно с Дарья Клишина, легкоатлетка</a> DiskiPlus порно с Артемий Панарин (хоккей) DiskiPlus top casino DiskiPlus пин ап casino pin DiskiPlus r7 casino DiskiPlus пинко casino DiskiPlus казино гта 5 DiskiPlus 1×bet зеркало рабочее xbet
#4487 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию более популярный вариант это
За привлечение приятеля ? в рамках партнерской программы заказчик получает вознаграждение за привлечение новых юзеров. <a href=http://filmkachat.ru/>рабочее зеркало 1×slots</a> <a href=https://airsoftc3.com/article/18052/How-Professional-3D-Modeling-Furniture-Transforms-Modern-Design-Industry>https://airsoftc3.com/article/18052/How-Professional-3D-Modeling-Furniture-Transforms-Modern-Design-Industry</a> 1×slots казино мобильная версия <a href=https://jasperjvfp42974.acidblog.net/61448316/deep-nude-the-ethical-dilemmas-and-technological-impacts-of-ai-driven-image-manipulation>https://jasperjvfp42974.acidblog.net/61448316/deep-nude-the-ethical-dilemmas-and-technological-impacts-of-ai-driven-image-manipulation</a>
1×slots на любой вкус как пройти регистрацию
Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.За вербование приятеля ? масштабах партнерской программы клиент получает вознаграждение за вербование новых юзеров. <a href=https://forums.scar-divi.com/topic/848945-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-1×-slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82/>казино 1× slots официальный сайт</a> 1×slots официальный зеркало рабочее Ещё одно распространённое акционное предложение – привлекательный подарок с неблаговидными притязаниями. К образцу, клуб сулит $100 виде бездепа, хотя с вейджером х80 или х100. Отыграть подобный вейджер фактически невозможно и поэтому превосходнее концентрироваться на больше занимательных акциях.В неких онлайн казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на сайте клуба и подтвердить средства контактные данные. Дополнительно потребуется активация промокода. <a href=http://mbdou-vishenka.ru/user/Patrickhoomb/>http://mbdou-vishenka.ru/user/Patrickhoomb/</a> Иногда в поощрения за регистрацию все выдаваться билеты для участия в турнирах. Условия их проведения очень отличаются, потому мы рекомендуем ознакомиться с каждым предложением отдельно.Фриспины — благотворительные вращения, которые позволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины считаются наиболее популярным и предпочтительным видом приза — благотворительные вращения порой эффективнее и веселее в отыгрыше, чем остальные виды бездепов. 1×slots зеркало рабочее на сегодня Объективные – размер приза, коэффициент и обстоятельства вейджера, надобность внесения депо для вывода денег;Вы не в коем случае ни же рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный бонус, по мимо практической забавы на бездепозитные бонусы, у Вас есть шанс изучить игровые автоматы, выучится регулировать изменять ставки и полосы, исследовать бонусные забавы и их выигрышные композиции, ну конечном просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные свои, коие можно отыграть и исключить, а не просто на демо счет, тем самым адреналин в крови еще больше повысится а пульс забьется с нередким ритмом!
1×slots casino регистрация
Но ни не запамятовывайте пристально читать управляла участия в бонусных промоакциях. Если вы нарушите хотя бы одно условие, позже вы не можете устроить недоразумение с администрацией.Бездепозитные бонусы — это подарки от казино в виде бонусных средств либо фриспинов для игровых автоматов, которые начисляются на акк игрока в процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депо не требуется. Шаг 4. Активация. Внимательно изучите условия, информацию по ограничениям и сроке действия бонусного предложения. Разобравшись с правилами, возможно активировать бонус в собственном кабинете (времени ? с использованием промокода) либо по запросу в саппорт.В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, необходимо обратиться в саппорта спустя лайв-чат на сайте казино. <a href=https://www.x-fta.com/foro/member.php?1262059-DoctorLazutaea>https://www.x-fta.com/foro/member.php?1262059-DoctorLazutaea</a> 1×slots официальный сайт скачать на айфон Отыграв бездепозитный бонус в казино с выводом тоже придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если схожее ограничение присутствует, то единоразово исключить получится только необходимую, не превосходящую размер приобретенного приза.Бездепозитный приз казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в этом и содержится главное отличие.
1х слотс зеркало регистрация в 1×slots casino
<a href=http://forums.indexrise.com/thread-309-post-372456.html#pid372456>1×slots официальный сайт, скачать</a> Минимального оборота. Этот лимит уточняется вейджером — же игрок не поиграет на установленную сумму, вывод средств несомненно недоступен.Вейджер (или вагер) ? это наименьшая сумма ставок, коию необходимо устроить для вывода денежного приза. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение. 1×slots регистрация 1×slotscasino09k online <a href=http://kafdp.or.kr/bbs/board.php?bo_table=free&wr_id=384308>http://kafdp.or.kr/bbs/board.php?bo_table=free&wr_id=384308</a> Внесение депо – Будьте готовы восполнить счет последствии отыгрыша приза. Это стандартное заявка управлял для данного на промо-акций. Лучше заблаговременно уточнить, какую сумму нужно несомненно вносить на счет. Как правило, речь о минимальном депозите, хотя вы обязаны быть уверены, собственно он вам по карману.При регистрации стопам свидетельствовать только достоверную информацию. Когда учетная запись несомненно активна, появится доступ в Личный кабинет. В нем можно избрать валюту, установить промокод и разузнать подробные управляла получения и отыгрыша бездепа. Краткая информация об промоакции нередко находится непосредственно на регистрационной форме.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Подтвердите регистрацию, дабы активировать Бездепозитный бонус с выводом, требуется заполнить индивидуальный профиль. Заполните пустопорожние поля реальными данными о для. <a href=http://web.symbol.rs/forum/member.php?action=profile&uid=637481>http://web.symbol.rs/forum/member.php?action=profile&uid=637481</a> Размер приза. В качестве бездепов обыкновенно начисляют большие суммы, а когда идет о бонусах за депо, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино могут презентовать игроку до 2000$.Для ревизии используются сканы паспортов, водительских удостоверений, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если юзер обнаружен в попытке завести вспомогательный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный список. При забаве на лицензионной площадке не стоит опасаться указывать достоверную персональную информацию (шифрование исключает утечку индивидуальных данных). x1 slots регистрация в 1×slots casino Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских руб. В критериях акции предписано, что вейджер бездепозитного приза х20. Поэтому, дабы отыграть приз, игроку будет необходимо устроить ставок на 35*20=700 руб.Подарки на определенные даты выделяются условиями получения. Если одобрение начисляют игроку на день рождения, то сумма обыкновенно в от совместного размера депо за год.
<b>Смотреть еще похожие новости:</b>
<a href=http://aficionado.pl/showthread.php?177606-x1-slots-1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%BF%D0%B5%D1%80%D0%B5%D0%B9%D1%82%D0%B8-%D0%BD%D0%B0–1×slots&p=198677>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<a href=https://forum.bedwantsinfo.nl/thread-723970.html>1×slots зеркало рабочее на сегодня</a>
<a href=https://irc.floobits.com/Jamesamiva>1×slots скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
После получения бонуса вывод средств для посетителя будет недоступен времени, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или чета недель. Выводить средства игрок может лишь последствии отыгрыша. В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это самая милая доля забавы. Важно, часто бездепозитные призы в казино выдаются с ограничениями по наибольшей выплате. В среднем возможно рассчитывать на прибыль в некоторое тысяч руб. Как исключить выигрыш с приза без депо. Придётся доказать акк документально, в некоторых заведениях. Процедура верификации неотклонима и делается каждым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате или прочтите в правилах.
#4488 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Шевцова Татьяна Викторовна порно porno Светлана Ходченкова <a href=https://th-royalgclub.com/>сайт казино вход</a> Любимова Ольга Борисовна порно казино проиграл <a href=https://res-publika.com>яндекс казино</a> unlim casino porno Юлия Пересильд букмекерскую контору пин порно с Арина и Дина Аверины, гимнастки официальные сайты казино pin up casino пин ап 1×bet на сегодня
DiskiPlus букмекерская контора зенит DiskiPlus 1×bet слоты официальный сайт <a href=https://www.diskiplus.ru>DiskiPlus реального казино</a> DiskiPlus 7k casino официальный DiskiPlus kent casino регистрация <a href=https://diskiplus.ru>DiskiPlus Светлана Ходченкова</a> DiskiPlus игры казино DiskiPlus Хорова Наталья Александровна порно DiskiPlus порно с Аделия Петросян (фигурное катание) DiskiPlus рабочее казино DiskiPlus 1×bet официальный слоты DiskiPlus игры казино DiskiPlus букмекерская контора
#4489 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация на сайте
Шаг 5. Использование и отыгрыш. Бездеп обязан быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. <a href=http://filmkachat.ru/>x1 slots регистрация в 1×slots casino</a> Отыграв бездепозитный бонус в казино с выводом также придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в сходственное лимитирование существует, то единоразово исключить получится только сумму, не превосходящую размер приобретенного бонуса.Способы получения бездепа различаются в зависимости от вида бонуса, который понравился игроку. Но вас так надо(надобно) быть зарегистрированным в легальном онлайн-казино и доказать собственную личность. В общем виде пошаговая аннотация для получения бездепозитного приза смотрится так: <a href=https://www.palscity.com/forums/thread/2083/>https://www.palscity.com/forums/thread/2083/</a> 1×slots казино зеркало <a href=http://viralcomms.com/bbs/board.php?bo_table=free&wr_id=466162>http://viralcomms.com/bbs/board.php?bo_table=free&wr_id=466162</a> Иногда в поощрения за регистрацию все выдаваться билеты для участия в турнирах. Условия их проведения очень отличаются, потому мы рекомендуем ознакомиться с каждым предложением отдельно.Доступ к подарку может открываться автоматически последствии введения промокода или обращения в службу поддержки сайта. В первом случае от пользователя не потребуется практически действий. Бездеп с активацией по коду встречается почаще всего. Игроку необходимо установить совокупность знаков в графе, кот-ая возможность пребывать в регистрационной форме в Личном офисе.
1×slots casino online регистрация
Такие одобрения разрешают бесплатно протестировать новое казино, разобраться с игровым процессом онлайн слотов, заработать и вывести маленькую сумму средств. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=https://cadetmove.ru/index.php?subaction=userinfo&user=Richardoravy>https://cadetmove.ru/index.php?subaction=userinfo&user=Richardoravy</a> В бонусную программу многих операторов входят систематические бездепы. Это пожизненные акции, поощряющие интенсивных постоянных игроков. Популярный формат — раздача фриспинов по конкретным дням недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают неизменные бонусы без депозита в размен на скопленные баллы лояльности. x1 slots 1хслотс регистрация перейти на 1×slots Одним из предлогов отдавать привилегию 1 либо иному заведению содержится в привлекательности предлагаемых промоакций и даровых предложений. Безвозмездные фриспины, выдаваемые без дела создавать какой-нибудь лепта, в списке находится далековато не в конце.
1× slots регистрация в 1×slots casino
Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, all зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.Риск-игра по одинаковым шансам – Также казино возможность запрещать исполнять условия по отыгрышу с помощью раунда на удвоение, который предлагается в слотах, видео-покере и некоторых иных забавах. В лицензионных бездепозитных казино выступать в азартные игры вправду безопасно. Наличие лицензии одобряет что, этот факт, собственно клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP. <a href=http://1chan.blog/100–2/?unapproved=669990&moderation-hash=4fd1557f8a4a7f27f921d4f1868ad443#comment-669990>http://1chan.blog/100–2/?unapproved=669990&moderation-hash=4fd1557f8a4a7f27f921d4f1868ad443#comment-669990</a> 1хслотс официальный сайт зеркало Обычно, бездепозитные призы выдаются под конкретные слоты с фиксированной ставкой, хотя их точно запрещено применять в игровых автоматах с современным джекпотом. Список игр, в которых возможно использовать бездеп, Вы отыщите в описании акции либо сможете уточнить у саппорта заведения.
1×slots бонус за регистрацию
К примеру, игроку выдаются бесплатные свои в заведении в размере пятидесяти либо ста $ (вейджер на коие составляет 100х). То есть, каждому новоприбывшему геймеру выскакивает манящая картинка, которая обещает выплату всех зачисленных фирмой средств. Не стоит заострять на казино бонус за регистрацию без депо с сильно большой или довольно малюсенькой суммой призов, потому собственно, и тщательно изучив все условия, тут скорее, несомненно какой-то подвох.Суммы подобных предложений, большинстве, колеблются от трех до двадцати долларов, а вейджер на эти средства должен составлять от тридцати до шестидесяти раз. Зачастую, большая сумма выигрыша здесь составит от одной до двух сотен долларов. Если игры выиграет больше, то все свои шансы быть списанными до максимально разрешенного выигрыша. Здесь появляется содержание выводить еще несуществующие деньги на собственную платежную систему и дальше искать заведение с подходящими под данную необходимую релоадом либо бонусом за 1-ое пополнение счета. Есть количество подвидов бездепозитного гонорары, предлагаемого наибольшим числом заведений. 1×slots регистрацию более популярный вариант это <a href=https://forex-arabic.com/members/179766-HarryMut>https://forex-arabic.com/members/179766-HarryMut</a> Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы мгновенно получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, замечена настоящий шанс победу!Почти все игровые клубы настоятельно свидетельство контактных данных игрока для получения бездепозитного приза.
1×slots актуальное зеркало
Допустим, за регистрацию вы получили бездеп в размере 2 000 рублей с вейджером х30. В этом случае предстоит сделать ставок, на общую необходимую в 60 000 руб. (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать реальные средства. Однако не запамятовывайте, что с каждого подарка выйдет исключить определённую необходимую (чаще всего не более $200).Почти все игровые клубы требуют свидетельство контактных данных игрока для получения бездепозитного приза. Автоматы непопросту числятся наиболее известным азартным весельем. Чтобы освоить управление и верховодила, потребуется всего количество мин. Ваша задача сделать ставку, определить число трудящихся линий и возможно вертеть барабан. Если на экране выпадет выигрышная комбинация – вы выиграли! С этой задачей для помогут управится бездепозитные призы казино.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 $. Если выдаются фриспины, их число изредка превышает нескольких десятков даровых вращений. <a href=http://amurvoda.ru/index.php?subaction=userinfo&user=tacitshield5>http://amurvoda.ru/index.php?subaction=userinfo&user=tacitshield5</a> Фриплей-бонусы встречаются только в некоторых клубах. Они зачисляются сразу последствии творения профиля и активны недолговременное время. Если не успеете истратить свои, они попросту сгорят. Касаемо медли, как бонусы активны протяжении часа.Начнём с как, собственно каждое рекламную за регистрацию подразумевает некие обстоятельства. Бездепозитные бонусы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность валютного оборота, нужная для исполнения критерий. Пример, получили безвозмездные вращения и выиграли с их 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 руб., неудачных либо выигрышных, неважно. После выполнения, бонусный баланс перейдёт на реальный и станет доступным к выводу. 1×slots бонус за регистрацию
<b>Смотреть еще похожие новости:</b>
<a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=48233>1хслотс казино зеркало</a>
<a href=https://praisenpray.org/forums/showthread.php?tid=95175>зеркло казино 1×slots</a>
<a href=https://creapnl.com/foros/tema/1×slots-casino-%d1%80%d0%b5%d0%b3%d0%b8%d1%81%d1%82%d1%80%d0%b0%d1%86%d0%b8%d1%8f-1×slotscasino09k-online-18/>1×slots casino регистрация 1×slotscasino09k online</a>
<a href=http://amazon.rx22.ru/memberlist.php?mode=viewprofile&u=255>1×slots официальный сайт скачать</a>
<a href=http://forums.indexrise.com/thread-2362-post-373706.html#pid373706>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вы скорее, например все любите получать подарки и бездепозитные призы казино. Игорные жилища брали в привычку одаривать гэмблеров приятными бонусами. Стать обладателем приветственного презента возможно за творенье профиля или пополнение счёта. Второй вариант более интересный, так клубы готовы удвоить депозит! Но в вы новичок и только знакомитесь с миром пыла, какого-либо воспользуйтесь призом за регистрацию. Можно. Вы постоянно сможете отрешиться от получения бездепозитного приза за регистрацию в казино, пока Вы не сделаете ставку.
#4490 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало подтвердит вашу регистрацию если говорить
Перечисленные повыше основные свойства сопровождают фактически любой приз и считаются стандартными для бездепозитных бонусных начислений в казино.Некоторые клубы механически начисляют бонус на акк игрока в выполнения критерий получения, но бывают истории, когда приз нужно активировать игроку самому. Есть количество методов активации бонуса: <a href=http://filmkachat.ru/>1× слот зеркало</a> Реже бонусы без депо начисляются неизменным игрокам. С их подмогою администрация старается вычесть ценных клиентов либо желает поблагодарить за лояльность верных гостей. Но гораздо чаще для похожих целей применяются эти промоакции:Воспользоваться бездепом возможно не во всех игровых автоматах: казино и тут устанавливает ограничение для клиентов. Конечно, это можно посчитать некоторым неудобством для игрока, но справедливости отметить, собственно выбор автоматов всё одинаково остаётся довольно наибольшим. <a href=https://www.jottacloud.com/s/371ce1751dd51e94c37a4f823d984e6a848>https://www.jottacloud.com/s/371ce1751dd51e94c37a4f823d984e6a848</a> На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не сможете активировать и получить бездепозитный приз.Иногда у гостей вебсайта все возникнуть трудности, задачи, препядствия при активации полученного промо-кода. В этих случаях, необходимо адресоваться за поддержкою в службу поддержки «Support». Для получения ответа, обязательно указывается конкретная первопричина воззвания и подтверждается информация дополнительными скриншотами. Если сформировалась спорная ситуация, всегда можно обратиться к основному регулятору либо контролирующему органу, выдавшему данному заведению лицензионный документ. 1×slots сайт зеркало <a href=http://crossstitch.pro/bitrix/redirect.php?goto=http://raychem.org/bitrix/rk.php?goto=http://tmkuzmin.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/JoS_14Am-wi>http://crossstitch.pro/bitrix/redirect.php?goto=http://raychem.org/bitrix/rk.php?goto=http://tmkuzmin.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/JoS_14Am-wi</a>
1×slots регистрация
Проверка занимает от нескольких мин. До нескольких дней, специалисты техподдержки все запросить вспомогательные документы или инициировать куцее общение по Skype. 1хслотс официальный сайт зеркало <a href=https://demo5651.asly.nl/index.php/author/healthyocclusio/>https://demo5651.asly.nl/index.php/author/healthyocclusio/</a> 1×slots зеркало на сегодня
1×slots промокод при регистрации
Акции, приуроченные к календарным праздникам, случаются рассчитаны как на всех пользователей, так и на категории: к, подарок на 8 марта девушкам-игрокам либо мужикам на 23 февраля. <a href=http://xn----7sbabja7ekbaahnetbi5o6b.xn–p1ai/profile.php?lookup=33095>http://xn----7sbabja7ekbaahnetbi5o6b.xn–p1ai/profile.php?lookup=33095</a> 1×slots регистрация на официальном сайте Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные способы и расценить необыкновенности, недоступные при ирге в демо режиме. Многие свежие посетители перебегают в число неизменных, а оператор получает длительную выгода.Во всех легальных онлайн-казино Беларуси необходимо свидетельство паспортных данных для забавы — это требование правительства государства.
1×slots официальный сайт зеркало рабочее
1×slots мобильная версия войти казино <a href=https://forex-arabic.com/members/181437-KennethBag>https://forex-arabic.com/members/181437-KennethBag</a>
1×slots регистрация 1×slotscasino09k online
После получения приза вывод средств для клиента несомненно недосегаем времени, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или чета месяцов. Выводить деньги игрок сможет лишь в отыгрыша. <a href=http://alex-zarya.ru/user/DavidSloth/>http://alex-zarya.ru/user/DavidSloth/</a> Подарки на конкретные даты выделяются критериями получения. Если поощрение начисляют игроку на день рождения, то сумма обыкновенно в от общего размера депо за прошедший год. 1×slots казино зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=3082>1хслотс казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Возьми свой подарок. Чаще всего бонус активизируется незамедлительно после регистрации. Но случаются истории, когда надо(надобно) зайти в личный офис либо написать в справочную службу.
#4491 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino на телефон 1×bet скачать бесплатно <a href=https://glvk.guru/>казино ставка</a> песня казино 1×bet бесплатно <a href=https://m.repost.news/>букмекерские конторы pin</a> casino скачать casino com pin up casino скачать 1×bet официальный слоты new casino букмекерская контора мостбет фильмы казино рояль
DiskiPlus букмекерская контора DiskiPlus порно с Диана Шнайдер (теннис) <a href=https://diskiplus.ru/>DiskiPlus порно с Аделия Петросян (фигурное катание)</a> DiskiPlus порно с Юлия Ефимова DiskiPlus 1go casino <a href=https://diskiplus.ru>DiskiPlus порно с Константин Тюкавин (футбол)</a> DiskiPlus пин ап букмекерская контора DiskiPlus порно с Елена Никитина, скелетонистка DiskiPlus Анна Михалкова DiskiPlus casino riobet DiskiPlus букмекерская контора официальный сайт скачать DiskiPlus casinos xyz DiskiPlus казино зеркало сегодня
#4492 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
сайты казино Юдаева Ксения Валентиновна порно <a href=https://strelochnik.com/>мобильные букмекерские конторы</a> букмекерская контора фонбет porno Екатерина Ефременкова, шорт-трекистка <a href=https://rhymes-punches.com/>casino</a> casino онлайн водка казино казино смотреть casino регистрации лучшие бесплатные онлайн казино включи казино вывод казино
DiskiPlus pin up casino пин ап DiskiPlus порно с Илюшникова Татьяна Александровна <a href=https://diskiplus.ru/>DiskiPlus 1×bet бесплатно</a> DiskiPlus casino riobet DiskiPlus мелбет букмекерская контора <a href=https://diskiplus.ru/>DiskiPlus casino скачать приложение</a> DiskiPlus Комарова Наталья Владимировна порно DiskiPlus букмекерская контора на андроид DiskiPlus 1×bet на сегодня DiskiPlus up casino зеркало DiskiPlus порно с Каролина Севастьянова DiskiPlus бк букмекерская контора DiskiPlus ограбление казино
#4493 AHoini
<a href=https://yogicentral.science/wiki/User:WarrenCaudle>1win casino moçambique</a> <a href=https://oerdigamers.info/index.php/User:JuanaFairfax>vavada</a>
#4494 Charlesgunnyhttp://filmkachat.ru
1хслотс мобильная версия зеркало
Создание аккаунта. На веб-сайте казино необходимо открыть регистрационную форму и заполнить порожние поля личностными данными. Иногда на этом этапе потребуется указать только адрес электрической почты и пароль, но чаще надо заполнить анкету индивидуальной информацией (ФИО, дата рождения, место проживания и т.д. ). Нужно указывать лишь реальные данные, потому впоследствие они будут проверены.Ниже указан актуальный список законных казино в Беларуси с бонусами на первый депозит. Вы можете попасть на официальный вебсайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. <a href=http://filmkachat.ru/>1×слотс казино</a> <a href=http://www.gothicpast.com/myomeka/posters/show/78646>http://www.gothicpast.com/myomeka/posters/show/78646</a> При верном раскладе бездепы — это прекрасный способ выступать на деньги без растраты личных средств. Есть некоторое советов, следуя которым возможно извлечь максимум выгоды из подобных акций казино. Играть стопам только на лицензированных площадках. Скриптовые сайты не дурачат с бонусными предложениями, но и употребляют пиратский софт с измененным ГСЧ. Выиграть на таких автоматах невероятно. скачать 1×slots на андроид мобильная версия <a href=https://truejesus.net/forums/member.php?action=profile&uid=5010>https://truejesus.net/forums/member.php?action=profile&uid=5010</a>
1хслотс рабочее зеркало
Новички не любят незамедлительно же вносить депо. Это обосновано отсутствием опыта и сомненьем. К счастью, в наше время можно получить бездепозитный бонус за регистрацию в казино. Неважно что начисляет система – фриспины или кредиты. В всяком случае вы не рискуете своими сбережениями. Это замечательная вероятность запустить понравившийся видео разъем либо же испытывать удачу в настольных играх.Бывают ли бездепозитные бонусы без вейджера? Бывают, в у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино. 1 хслот регистрация в 1×slots casino С не отыгранным бонусом воспрещается превышать размер наибольшей ставки. Нарушение сего обстоятельства будет аннулирование выигрыша. <a href=http://chemoform.ru/bitrix/redirect.php?goto=http://svetonik.ru/bitrix/redirect.php?goto=http://artglass.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/g_pysEANCds>http://chemoform.ru/bitrix/redirect.php?goto=http://svetonik.ru/bitrix/redirect.php?goto=http://artglass.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/g_pysEANCds</a> Диапазон ставок, которые вправе устроить игрок, того лимитирован. Обычно назначать возможно маленькую необходимую — около 10–30 рублей за одно вращение.Доступность — бездепозитные бонусы в казино почаще всего предоставляются свежим игрокам, хотя посещают случаи, когда бонус могут получить и действующие клиенты. 1× слот зеркало Можно. Вы практически можете отрешиться от получения бездепозитного приза за регистрацию в казино, пока Вы не сделаете ставку.
зеркала 1×slots
В каждом казино с бездепозитным бонусом учтены вейджеровые условия. Это один-единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) сделать определённое количество ставок. Чем круче приз, тем сложнее выполнить обстоятельства, и напротив.Изучить правила и условия получения бездепозитных бонусов казино, Вы можете у нас на сайте в разделе с призами либо на официальном сайте избранного Вами казино. Если не отыскать необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электронной почте. Представьте момент, когда при ставке в 10 рублей Вы получите схожее умножение. Миллион рублей за одно вращение, что вполне возможно. Поэтому вопрос, сколько можно выиграть остаётся не. Предлагаем выяснить без. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный бонус и инспектируйте удачу в деле. Разумеется, вывести деньги не так просто. Однако шансы есть у всех.Чем ниже значение вейджера, что, этим легче отыграть и исключить приз. Если Вы расчитываете заработать на бездепе, а не просто ознакомиться с свежим игровым клубом, то стоит игнорировать призов с высочайшим вейджером их практически не реально отыграть. С ними Вы сможете лишь протестировать забавы заведения. <a href=http://www.mallangpeach.com/bbs/board.php?bo_table=free&wr_id=1253843>http://www.mallangpeach.com/bbs/board.php?bo_table=free&wr_id=1253843</a> Основное различие что, что для получения бездепа нужно пополнять баланс в казино. Но считая сего, есть ряд прочих различий:Если вы избираете испытанное лицензионное онлайн казино и сделайте все условия получения бездепозитного приза, проблем с получением дара у Вас не возникнет. сайт 1× slots casino Чаще всего, модные сервисы, такие как MoneyBookers и WebMoney, еще MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно неотъемлемое управляло. Финансовые средства выводятся только спустя ту платежную систему, коей огромной для пополнения депо. Если же игрок получил бездепозитный покерный приз, потребуется восполнить счет на минимальную необходимую, которая составляет обыкновенно 10 $.Казино выделяет вероятность заработать и вывести реальные средства на бездепозитных призах. Обычно, это незначительная сумма, коию казино возможность для разрешить презентовать игроку.
1хслотс мобильная версия зеркало
Способы получения бездепа различаются от облика приза, кот-ый понравился игроку. Но для иначе нужно быть зарегистрированным в легальном онлайн-казино и доказать собственную личность. В общем виде пошаговая инструкция для получения бездепозитного приза выглядит так: 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=https://dokuwiki.stream/wiki/User:AlejandraHislop>https://dokuwiki.stream/wiki/User:AlejandraHislop</a>
1×slots на любой вкус как пройти регистрацию
Когда речь идет о получении бездепозитных призов в казино, в первую очередь обратите внимание на последующие условия: После получения бонуса вывод средств для клиента будет недоступен времени, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя или чета месяцов. Выводить средства игрок может только после отыгрыша. <a href=http://cqr3d.ru/index.php?subaction=userinfo&user=gloriousacne33>http://cqr3d.ru/index.php?subaction=userinfo&user=gloriousacne33</a> Вывод выигрыша с бездепозитных призов казино – щедрый подарок от азартных клубов. Но чтобы вывести собственный заработок, нужно выполнить ряд критерий: онлайн казино 1×slots Денежные свои. Третий приз за регистрацию без депо – наличные. К раскаянью, лишь известные и популярные клубы имеют уяснить деньги в руб. Либо долларах. С их подмогою вас насладиться любой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед этим нужно исполнение определенных условий.В разделе с бонусами активировать собственный презент. Найти игры, для которых предусмотрено одобрение и применять приз по назначению.
<b>Смотреть еще похожие новости:</b>
<a href=http://aficionado.pl/showthread.php?148741–1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%B2–1×slots-casino&p=168339>1хслотс регистрация в 1×slots casino</a>
<a href=http://b2s.bulwork.com/node/1581?page=75#comment-22239>1×slots casino регистрация на сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
После получения бонуса вывод средств для посетителя будет недоступен времени, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или чета недель. Выводить средства игрок может лишь последствии отыгрыша. Прежде чем активировать бездеп, необходимо убедиться что, что государство, гражданином коей является игрок, не входит в список не.
#4495 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Васильева Татьяна Викторовна казино смотреть онлайн бесплатно <a href=https://rumafia.news/>букмекерские конторы бет</a> casino buzz сайте букмекерской конторы фонбет <a href=https://rucriminal.info/>champion casino</a> Москалькова Татьяна Николаевна порно Лут Оксана Николаевна порно Семёнова Татьяна Владимировна порно почему казино Александра Бортич online casino официальный кент casino
DiskiPlus порно с Александр Большунов (лыжные гонки) DiskiPlus человек казино <a href=https://diskiplus.ru/>DiskiPlus pin casino зеркало</a> DiskiPlus казино фильм смотреть онлайн DiskiPlus Скворцова Вероника Игоревна порно <a href=https://www.diskiplus.ru/>DiskiPlus casino андроид</a> DiskiPlus порно с Антропова Валентина Викторовна DiskiPlus винлайн букмекерская контора официальный DiskiPlus букмекерская контора мостбет DiskiPlus букмекерские конторы в россии DiskiPlus 1×bet слоты 1×bet xyz DiskiPlus слоты казино DiskiPlus online casino 7k
#4496 Charlesgunnyhttp://filmkachat.ru
1× слот зеркало
Отказ в прохождении верификации. Если клиент не желает или возможности дать документы, подтверждающие его личность, профиль несомненно заблокирован вместе со всеми бонусными начислениями.Когда речь о получении бездепозитных бонусов в казино, начала обратите внимание на следующие условия: <a href=http://filmkachat.ru/>скачать 1×slots на андроид мобильная версия</a> В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и в случае неоднозначных обстановок нет возможности куда-то посетовать и обосновать свою правоту. <a href=https://www.empowher.com/groups/blogs-4/posts-33>https://www.empowher.com/groups/blogs-4/posts-33</a> 1×slots рабочее зеркало <a href=http://permitbeijing.com/forum/member.php?action=profile&uid=196449>http://permitbeijing.com/forum/member.php?action=profile&uid=196449</a>
1×slots скачать на айфон
Также бывают случаи, когда казино начислит оговоренный приз последствии регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам.Все безвозмездные призы кажутся заманчивыми. Кто же откажется от возможности сыграть в онлайн-казино, не рискуя средствами, но получая выигрыши. Но далеко не все бездепозитные бонусы одинаковой презентабельны для рассудительного клиента. 1×slots casino регистрация 1×slots review live <a href=https://www.google.gm/url?q=https://doctorlazuta.by/>https://www.google.gm/url?q=https://doctorlazuta.by/</a> 1×slots официальный сайт мобильная версия Как верховодило, новоприбывшие геймеры начала хотят ознакомиться с методами ввода и вывода валютных средств и сроки выполнения поданных заявок дабы четко осознавать, как скоро возможность исключить собственный казино приз за регистрацию без депо на электрический кошелек или же банковскую карту. К счастью для всех играющих, внутри определенных холдингов, все казино соперничают меж собой. Ведь случае бы определенную компанию давало лишь одно онлайн-заведение, то ли бы посетители заметили казино с бонусом за регистрацию и возможность бы рассчитывать лишь на вознаграждение повторяющий приза на 1-ое вложение. К любому заведению регулярно стопам завлекать свежих игроков, собственно, конечном, только на руку всем играющим.
онлайн казино 1×slots
<a href=http://bbs.cheaa.com/home.php?mod=space&uid=3199943>http://bbs.cheaa.com/home.php?mod=space&uid=3199943</a> зеркала 1×slots Промообъявления от казино не дают реальной картины и ориентированы на вербование внимания юзеров. Понять, насколько высоки шансы остаться в плюсе, дозволит личный анализ критерий предложения:Акционные предложения от казино есть в разных форматах. Часто бонусы даются в обмен на депо. Игрок вносит платеж и получает деньги, благотворительные вращения прочие одобрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — картина бонуса, кот-ый гарантирован за исполненье конкретных деяний на сайте:
1×slots зеркало рабочее на сегодня
После требуется привнести идентификационный платёж. Это пугает новичков больше всего. Нужно устроить минимальный депо в 100–500 рублей. Таким образом служба защищенности убедиться в, собственно платёжный способ принадлежит Вам. Данная процедура необходима для обеспечивания защищенности игровых счетов. Пример, Ваш акк взломают и выведут свои на собственный кошелёк. Будет крайне досадно. Поэтому верификация платёжной системы, это необходимый момент.К огорчению, нет. Почти все казино, просят внесение хотя бы 1-го минимального депо для вывода выигрыша с бездепозитного бонуса. Также учитывайте, собственно исключить средства разрешается лишь на ту платежную систему, с которой был изготовлен депо. В зависимости от онлайн заведения любой из них возможность вам предложить как бездепозитные деньги, например и бездепозитные фриспины, которые последствии удачной регистрации упадут вам на ваш игровой баланс.Важно, удостоверьтесь никаких, собственно ранее не регились в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи. 1×slots зеркало регистрацию более популярный вариант это <a href=http://www.krbibl.ru/index.php?subaction=userinfo&user=guiltlessmanacl>http://www.krbibl.ru/index.php?subaction=userinfo&user=guiltlessmanacl</a> При исполненьи критерий отыгрыша и верификации, деньги с бонусного счета переводятся на основной и имеют быть выведены на карту либо электрический кошелек. Лимиты на вывод и сроки проведения транзакции в от избранной платежной системы.Если площадка презентует бездеп за регистрацию, то процедура его получения проста. Нужно только ввести акк на веб-сайте и активировать его, подтвердив адрес электрической почты, номер телефона либо другие данные, коие настятельно оператор. Перед данным нужно убедиться, что юзер располагается на официальном сайте казино, но на жульнической площадке.
1×slots регистрация 1×slots review live
Как правило, при выводе финансов, от играющего потребуется только устроить наименьший вклад для того, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом личный счет.Бездепозитный приз предоставляется новенькому игроку за определенные действия. Часто презент вид средств либо фриспинов выдается за регистрацию, спасибо чему юзер получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. <a href=http://www.engel-und-waisen.de/index.php/Is_It_Legal_To_Use_The_1×bet_APP>http://www.engel-und-waisen.de/index.php/Is_It_Legal_To_Use_The_1×bet_APP</a> Сразу последствии активации промокода возможно пользоваться подарком. Как теснее упоминалось, бонусы бывают трёх обликов – фриспины, кредиты и фриплей-бонусы.1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, случае не желаете замерзнуть жертвой мошенников или впустую потратить время; 1×slots казино зеркало Подтверждение регистрации. Казино настоятельно привязки профиля к электронному адресу и номеру телефонного. Для этого на e-mail отправляется письмо со ссылкой, а на телефонный ? текстовое известье с кодом.
<b>Смотреть еще похожие новости:</b>
<a href=https://rolivka.online/forum/showthread.php?tid=31509>1×slots зеркало рабочее на сегодня</a>
<a href=http://diablo2r.cn/home.php?mod=space&uid=30130>1х слот 1хслотс регистрация перейти на 1×slots</a>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=68096&result=reply>скачать 1×slots на андроид мобильная версия</a>
<a href=https://swordmaster.org/user/JamesVok/>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Большинство клубов завлекают внимание в за счёт разнообразных презентов. На 1 сайтах можно получить виртуальные кредиты, которые откроют доступ ко всему софту. На других же, администрация предлагает безвозмездные вращения для запуска лучших онлайн слотов. Несмотря на различные промоакции, стоит выделить самые основные.
#4497 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet на андроид бесплатно casino зеркало сайта <a href=https://m.repost.news/>Любимова Ольга Борисовна порно</a> сайт 1×bet слоты пина букмекерской конторы <a href=https://www.ossetia.tv/>песня казино</a> казино смотреть онлайн бесплатно 1×bet зеркало рабочее 1win casino casino бездепозитный 7k casino сайт леон букмекерская контора 1×bet
DiskiPlus пина casino DiskiPlus Мухтиярова Елена Вячеславовна порно <a href=https://diskiplus.ru>DiskiPlus casino</a> DiskiPlus букмекерская контора леонов DiskiPlus порно с Федор Чалов (футбол) <a href=https://diskiplus.ru>DiskiPlus порно с Юлия Ефимова</a> DiskiPlus casino 7k рабочее DiskiPlus порно с Петр Ян (ММА) DiskiPlus porno Андрей Рублев (теннис) DiskiPlus скачать 1×bet на андроид DiskiPlus up casino зеркало DiskiPlus porno Марина Александрова DiskiPlus 1go casino
#4498 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на официальном сайте
Вейджер (либо вагер) ? это минимальная сумма ставок, коию нужно устроить для вывода денежного бонуса. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим красивее спецпредложение.У любого игорного клубы разные вейджеровые обстоятельства. Чтобы вы гарантировано смогли выполнить их, мы дадим несколько советов. Если система начислила небольшую сумму, надо делать великие ставки – остановитесь на 10–30 центах. Как лишь сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В неприятном случае другого, как приглядеться к иному автомату. <a href=http://filmkachat.ru/>1×slots сайт</a> Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?При отыгрыше бонусных средств, нужно учитывать срок действия приза и время, которое дается на отыгрыш. По истечению заявленного медли, не отыгранный приз несомненно аннулирован. <a href=https://www.find-topdeals.com/blogs/164113/%D0%A1%D1%80%D0%BE%D1%87%D0%BD%D1%8B%D0%B9-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%BE%D0%B1%D0%B8%D0%BB%D0%B5%D0%B9>https://www.find-topdeals.com/blogs/164113/%D0%A1%D1%80%D0%BE%D1%87%D0%BD%D1%8B%D0%B9-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%BE%D0%B1%D0%B8%D0%BB%D0%B5%D0%B9</a> Итак, дабы безвозмездные бонусные кредиты трансформировались в реальные деньги, которыми продоставляется управлять по собственному усмотрению, их надо(надобно) отыграть. Вейджер стопам уточнять в правилах онлайн-казино.Существуют казино с призом за регистрацию, каких очень модны фриспины в интернет казино впоследствии регистрации в конкретных играх. Они встречаются и чаще безвозмездных поощрений либо традиционных призов в казино без вложений. Например, игрок регистрирует счет, на кот-ый начисляются бесплатные забавы, бонус за регистрацию в виде даровых фрспинов, вращения в игровом автомате. Во время игрового процесса компьютерные выигрывает настоящие средства, коие в последствии можно успешно исключить из заведения на свою платежную систему. То есть, все шансы исключить свои без рисков собственными финансами. Регистрация, какую компьютерные получит призы, займет минут, а благодаря этому можно увеличить пять евро поощрений до тыс. И без всяких заморочек вывести их. 1×slots зеркало выигрыши обязательно пройдите регистрацию если <a href=http://fze.ohosure.org/bbs/home.php?mod=space&uid=96818>http://fze.ohosure.org/bbs/home.php?mod=space&uid=96818</a> 3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефонный либо почту, указать индивидуальную информацию;
1×slots скачать на айфон
1×slots официальный регистрация Если речь об неповторимых услугах, имеет понадобиться регистрация в казино по ссылке с партнерского сайта. <a href=https://sportavesti.ru/forums/users/xrumseo0906–2/>https://sportavesti.ru/forums/users/xrumseo0906–2/</a> Заработать на бездепозитных бонусах за регистрацию в казино имеет любой юзер, достигший совершеннолетия. 1×slots официальный сайт мобильная версия
1×slots зеркало на сегодня
Нет. Для получения бездепозитного приза в казино необходима обязательная регистрация на сайте. Играть в слоты даром и без регистрации можно лишь в демо режиме.Каждый новичок и профессиональный игрок грезят стремительно стартануть и начать создавать реальные ставки. Для сего довольно забрать подарок, за который надо платить. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email или телефонный. После этого администрация начисляет щедрое вознаграждение вид безвозмездных вращений либо виртуальных кредитов. Но на азартных платформах подобные вознаграждения шансы получить и уже зарегистрированные пользователи. В таком случае, бонусы предоставляются в уникальных промоакций или же некоторым игрокам вид акционного предложения, коие приходит на почту с целью «возвратить» игрока в свое казино.Начнём с такого, собственно каждое рекламную за регистрацию предполагает некие обстоятельства. Бездепозитные бонусы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, нужная для исполненья условий. Пример, возымели бесплатные вращения и выиграли с их 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 руб., проигрышных либо выигрышных, маловажно. После исполненья, бонусный баланс перейдёт на настоящий и станет доступным к выводу. <a href=https://kosmetikinstitut-milla.de/user/Patricksab/>https://kosmetikinstitut-milla.de/user/Patricksab/</a> Бездепы с бесплатными вращениями предоставляют пользователям право вертеть барабаны игровых автоматов без снятия средств со счета. За каждый раунд выплачивает казино. Число спинов ограничено и редко превышает сотку. Если акция включает в себя много бесплатных игр, их начисление возможность быть разбито на некоторое дней.На данном разделе портала регулярно публикуются обзорные заметки, в рассматриваются благотворительные призы превосходнейших интернет-казино. Информация структурирована по нескольким пунктам, включая главные: 1×slots зеркало 1хслотс регистрация перейти на 1×slots К сожалению, нет. Почти все казино, настоятельно внесение желая бы 1-го малого депозита для вывода выигрыша с бездепозитного бонуса. Также учитывайте, что вывести средства разрешается лишь на ту платежную систему, с коей был сделан депозит.Бонус за регистрацию в казино выдается только один один на одного игрока. Но посещают вспомогательные акции, масштабах коих бездепы расступаются для неизменных посетителей и такие презенты Вы сможете получить более 1-го раза.
1 хслот регистрация в 1×slots casino
<a href=https://test.soclanovtsy.ru/topic/54846–1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D0%B2%D1%8B%D0%B8%D0%B3%D1%80%D1%8B%D1%88%D0%B8-%D0%BE%D0%B1%D1%8F%D0%B7%D0%B0%D1%82%D0%B5%D0%BB%D1%8C%D0%BD%D0%BE-%D0%BF%D1%80%D0%BE%D0%B9%D0%B4%D0%B8%D1%82%D0%B5-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8E-%D0%B5%D1%81%D0%BB%D0%B8/>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a> Для получения приза нужно пригласить в забаву нового посетителя. Казино начислит пригласившему фиксированный процент от взносов приглашённого в виде бонуса: почаще всего его размер не выше 10%. Срок действия бонуса правило не превышает месяца: пригласивший получает приз зависимо проигранных ставок приглашённого в 1-ый луна забавы. Бoльшинcтвo азартных заведений выдвигают приблизительно одинаковые условия и притязания, которые необходимо выполнить, чтобы получить бездепозитный приз за регистрацию. Все их возможно объединить в раз перечень: рабочее зеркало 1хслотс <a href=http://moujmasti.com/member.php?20374-Frankhique>http://moujmasti.com/member.php?20374-Frankhique</a> В интернете количество узнаваемых игорных площадок с привлекательными акционными предложениями. Однако внимательно разбирать условия 10-ов предложений скором надоест, да и время отнимет много. Поэтому наша команда подготовила ТОП-3 сайтов с наилучшими бездепозитными призами:Как только получите бездеп в казино, всё также не запамятовывайте проверять электрическую почту. Некоторые игорные клубы день радуют интенсивных гэмблеров приятными призами. Чаще всего получить подарок возможно в преддверии веселья, на денек рождение, за вербование друга. А кроме распространённым бонусом считается надбавка к депозиту. Нужно не восполнить счёт, и азартное заведение прирастит его на 50–100%.
1×slots рабочее зеркало на сегодня
Бoльшинcтвo азартных заведений выдвигают приблизительно однообразные, схожие условия и требования, коие нужно выполнить, чтобы получить бездепозитный приз за регистрацию. Все их возможно объединить в один перечень: <a href=http://emseyi.com/index.php?qa=user&qa1=billowyspiral8>http://emseyi.com/index.php?qa=user&qa1=billowyspiral8</a> 2. Создать новый профиль. Для регистрации нужно заполнить небольшую анкету либо зайдите в собственный офис посредством соц сеток; 1×slots официальный сайт, скачать Каждый новичок и профессиональный игрок мечтают прытко стартануть и начать создавать настоящие ставки. Для сего достаточно отобрать подарок, за который не нужно платить. В зависимости от игровой платформы, надо(надобно) сделать профиль, привязать email или телефонный. После этого администрация начисляет щедрое вознаграждение повторяющий бесплатных вращений либо виртуальных кредитов.Автоматическая активация может самой удобной, хотя ручной метод содержит перед ней достоинства. Прежде чем применять вознаграждение от казино, стоит заблаговременно найти, сколько времени потребуется на исполненье всех критерий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала деянья бонуса.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=166308>1×slots быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный приз за регистрацию в казино с выводом средств в 2022 году — Наш ресурс дает игрокам актуальную информацию о самых свежих, щедрых и испытанных бонусах в интернет казино, которые обновляются каждый денек. Бездеп с фриспинами имеет обхватывать всю коллекцию игр на веб-сайте либо разработки одного провайдера. Обычно предлагается конкретный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш может быть выведен в того, как пользователь отыграет данную сумму. Возможность расценить полный перечень слотов — главное достоинство данной разновидности. Игроку становятся доступны те функции, которые отсутствуют в демонстрационном режиме, а вероятность выиграть настоящие средства добавляет ясных азартных чувств.
#4499 Charlesgunnyhttp://filmkachat.ru
1хслотс 1хслотс регистрация перейти на 1×slots
Автоматы непопросту числятся наиболее известным азартным весельем. Чтобы усвоить управление и правила, понадобится всего количество мин. Ваша задача устроить ставку, найти число трудящихся линий и можно крутить барабан. Если на выпадет выигрышная комбинация – вы выиграли! С этой задачей вас помогут управится бездепозитные призы казино. <a href=http://filmkachat.ru/>1хслотс зеркало</a> <a href=https://ilde2.upf.edu/clatmooc/v/ibq>https://ilde2.upf.edu/clatmooc/v/ibq</a> 1×slots регистрация на 1хслотс <a href=https://www.bhimchat.com/post/151204_v-razlichnyh-avtoshkolah-mogut-primenyatsya-raznoobraznye-metodiki-obucheniya-ne.html>https://www.bhimchat.com/post/151204_v-razlichnyh-avtoshkolah-mogut-primenyatsya-raznoobraznye-metodiki-obucheniya-ne.html</a> Например, игрок получил 500 рублей при твореньи аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 рублей, потребуется сделать 875 спинов для полного отыгрыша.Все бесплатные бонусы кажутся заманчивыми. Кто же категорически от возможности сыграть в онлайн-казино, не рискуя средствами, хотя получая выигрыши. Но далеко не все бездепозитные бонусы в равной степени привлекательны для рассудительного посетителя.
рабочее зеркало 1хслотс
1×slots казино мобильная версия Бездепозитный приз казино 2022 с выводом за регистрацию предоставляет вероятность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и выяснить качество работы службы поддержки. Довольно нередко, начиная игровой процесс, игрок уже отказывается останавливаться и проделывает настоящий вклад. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать даром возможно как раз таки с призом за регистрацию без необходимости заносить депозит.Заполняя данные в личном профиле, указывайте только достоверную информацию, так как Вам понадобиться ее подтвердить в при выводе денег. <a href=https://pediascape.science/wiki/1win_Brasil_Bet_Apostas>https://pediascape.science/wiki/1win_Brasil_Bet_Apostas</a> 1хслотс зеркало
1хслот скачать
Срок отыгрыша — это период, который наступает в момент активации бонуса и завершается с его закрытием. Пользователю необходимо уложиться в этот временной зазор, другому призовые средства аннулируются. Казино устанавливают список игр, ставки каких засчитываются при расчете отыгранных денег. Если тайтл не входит в данный перечень, то предоставляется быть недоступен для загрузки во время деяния бонусного предложения. Также бездепозитные призы имеют работать способом возвратить к забаве клиентов, пока приостановивших своё сотрудничество с фирмой: извещение о бездепе поступает на мобильный телефонный или почту.Обычно показатель повыше, чем для призов на депо. Не удивляйтесь, если он несомненно в х100. Иногда завышенный коэффициент вейджера устанавливается для обитателей отдельных стран. <a href=http://animemiru.ru/user/HenrySef/>http://animemiru.ru/user/HenrySef/</a> Бездепозитный приз – это экономическое вознаграждение, которое выдается участнику забавы в казино, для его привлечения и возникновения заинтригованности. Любой посетитель, кот-ый соответствует условиям выдачи сходственного бездепозитного бонуса, может претендовать на получение вышеуказанного приза. Такое поощрение считается наиболее действенным методом, дающим возможность стартовать при, не вкладывая личных материальных средств. 1×slots акции Обычно показатель выше, чем для призов на депозит. Не дивитесь, случае он будет в х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных стран.
1хслотс мобильная версия зеркало
Бездепозитные бонусы, как теснее ясно, считаются оригинальной вероятностью обратиться игровому процессу полностью безвозмездно, то есть играть в онлайн казино безвозмездно и на существующие средства незамедлительно после регистрации аккаунта. Автоматы с таким депо все стать прекрасной вероятностью сыграть для поклонников азарта с определенными лимитированиями в финансах. <a href=https://forum.lazarev.ru/memberlist.php?mode=viewprofile&u=167296>1×slots регистрация</a> 1×slots casino online регистрация <a href=http://whdf.ru/forum/user/85543/>http://whdf.ru/forum/user/85543/</a> Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам воспрещено начислять призы клиентам, не имеющим денежных средств на счете. Мы предлагаем осмотреть животрепещущие призы онлайн-казино с лицензией, которые соблюдают законодательство РБ.
скачать 1×slots официальный сайт
Итак, чтобы благотворительные бонусные кредиты превратились в реальные средства, которыми возможность распоряжаться по собственному усмотрению, их нужно отыграть. Вейджер следует уточнять в правилах онлайн-казино. <a href=http://lat-puzz.com/phpbb/memberlist.php?mode=viewprofile&u=99640>http://lat-puzz.com/phpbb/memberlist.php?mode=viewprofile&u=99640</a> Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен перечень превосходнейших онлайн казино, которые предлагают своим игрокам великодушные бонусы за регистрацию. 1×slots официальный сайт мобильная версия
<b>Смотреть еще похожие новости:</b>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=77215&result=reply>1×slots регистрация то дальше необходимо пройти</a>
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=37701>1×slots казино зеркало</a>
<a href=https://forum-macan.ru/viewtopic.php?t=23632>1×slots регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для вывода средств бонус надо(надобно) будет отыграть законам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариациями отыгрыша бездепозитного бонуса до его получения, чтобы избежать конфликтных обстановок.
#4500 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерские конторы pin водка казино <a href=https://res-publika.com>букмекерская контора бесплатно скачать</a> Юдаева Ксения Валентиновна порно казино играть <a href=https://www.ossetia.tv/>порно с Елена Никитина, скелетонистка</a> 1×bet зеркало рабочее официальные букмекерские конторы скачать porno Анна Сидорова, керлингистка скачать 1×bet на андроид 1×bet приложение casino зеркало сегодня рабочее casino приложения
DiskiPlus pin up casino официальный DiskiPlus рабочее казино <a href=https://www.diskiplus.ru/>DiskiPlus porno Дарья Клишина</a> DiskiPlus сайт 1×bet слоты DiskiPlus 7k casino официальный сайт <a href=https://www.diskiplus.ru/>DiskiPlus porno Виктория Баркова, легкоатлетка</a> DiskiPlus сайт 1×bet слоты DiskiPlus top casino DiskiPlus porno Игорь Акинфеев (футбол) DiskiPlus casino 7k рабочее DiskiPlus порно с Бондаренко Анастасия Борисовна DiskiPlus букмекерские контора ап DiskiPlus как выиграть в казино
#4501 Charlesgunnyhttp://filmkachat.ru
1х слот регистрация в 1×slots casino
Представьте момент, когда при ставке в 10 рублей Вы получите сходственное умножение. Миллион руб. За одно вращение, собственно вполне вероятно. Поэтому вопрос, сколько возможно выиграть остаётся закрытым. Предлагаем выяснить помощи. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный приз и инспектируйте удачу в деле. Разумеется, исключить средства сложно. Однако шансы есть у всех. <a href=http://filmkachat.ru/>1×slot рабочее зеркало</a> <a href=https://www.4yo.us/blogs/311034/From-Digital-Lines-to-Artistry-Modern-Approach-to-Sketch-Rendering>https://www.4yo.us/blogs/311034/From-Digital-Lines-to-Artistry-Modern-Approach-to-Sketch-Rendering</a> Наиболее пользующиеся вознаграждения среди гэмблеров – бездепозитные бонусы казино. Это не дивно, как можно получить бесплатные вращения или виртуальные кредиты, и при не придётся пополнять счёт, рисковать личностными средствами. Удастся насладиться различными увеселениями причем выиграть крупную необходимую, избегая серьёзного риска. 1хслотс зеркало <a href=http://xn–80adt5btj4c.xn–80asehdb/index.php?subaction=userinfo&user=dashingstripe85>http://xn–80adt5btj4c.xn–80asehdb/index.php?subaction=userinfo&user=dashingstripe85</a> Акции, приуроченные к календарным дням, бывают рассчитаны как на всех юзеров, так и на категории: к, подарок на 8 марта девушкам-игрокам либо мужикам на 23 февраля.
1× slots casino официальный сайт
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Допустим, за регистрацию вы получили бездеп в размере 2 000 руб. С вейджером х30. В данном случае светит устроить ставок, на совместную сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать настоящие деньги. Однако не забывайте, собственно с каждого подарка получится исключить определённую сумму (чаще всего менее $200).Также бездепозитные бонусы все работать способом возвратить к забаве клиентов, временно приостановивших своё сотрудничество с компанией: извещение о бездепе поступает на мобильный телефонный или почту. <a href=http://city-hall.nvkb.ru/forum/index.php/user/89488/>http://city-hall.nvkb.ru/forum/index.php/user/89488/</a> 1×slots зеркало Такие поощрения разрешают даром протестировать новое казино, разобраться с игровым ходом онлайн слотов, заработать и исключить небольшую сумму денег.
1хслотс казино зеркало
Принципиальным различием даровых призов от бонусов на депозит является неимение необходимости заносить средства на аккаунт. Из-за этого их часто нарекают бездепозитными (no down payment bonuses).В современность очень просто получить бонус за регистрацию в казино. Практически каждый игорный жилище с готовностью начислит средства или благотворительные вращения. Многие гэмблеры пользуются данным и не стесняются регистрироваться в каждом клубе с выгодными условиями. Кстати, это замечательная вероятность выработать победную тактику и сорвать джекпот. При регистрации следует указывать лишь достоверную информацию. Когда учетная запись будет активна, будет доступ в Личный офис. В нем можно избрать валюту, ввести промокод и узнать подробные верховодила получения и отыгрыша бездепа. Краткая информация об промоакции часто присутствует непосредственно на регистрационной форме. <a href=http://forums.worldsamba.org/member.php?action=profile&uid=137826>http://forums.worldsamba.org/member.php?action=profile&uid=137826</a> casino 1×slot В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, нужно адресоваться в саппорта через лайв-чат на сайте казино.На нашем веб-сайте Вы найдете перечень актуальных свежих бездепозитных бонусов в казино 2022 года. Также, есть большое неповторимых предложений, коие доступны только гостям нашего вебсайта после регистрации по нашей ссылке или активации специального промокода.
1× slots регистрация в 1×slots casino
Как верховодило, при выводе денег, от играющего требуется только устроить наименьший вклад для того, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом личный счет.Активация денежного гонорары случается механически после творения профиля либо использования промокода. Иногда операторы предъявляют вспомогательные притязания: подписаться на странички казино в социальных сетях либо на рассылку маркетинговых извещений, скачать и установить дополнительный софт и т.д. <a href=http://www.ihavethepussy.com/de/threads/164341-%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%B7%D0%A0%D1%91%D0%A0%D0%85%D0%A0%D1%95–1×slots-%D0%A0%D1%95%D0%A1%E2%80%9E%D0%A0%D1%91%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A0%C2%B0%D0%A0%C2%BB%D0%A1%D0%8A%D0%A0%D0%85%D0%A1%E2%80%B9%D0%A0%E2%84%96-%D0%A1%D0%83%D0%A0%C2%B0%D0%A0%E2%84%96%D0%A1%E2%80%9A?p=181834#post181834>казино 1×slots официальный сайт</a> Прежде чем активировать бездеп, нужно убедиться что, нет, что государство, уроженцем которой считается игрок, не заходит в перечень разрешенных.Вейджер (либо вагер) ? это минимальная сумма ставок, которую нужно сделать для вывода валютного бонуса. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение. 1 хслот регистрация в 1×slots casino <a href=http://www.ymapparel.com/bbs/board.php?bo_table=free&wr_id=403058>http://www.ymapparel.com/bbs/board.php?bo_table=free&wr_id=403058</a> Самые известные методы вывода средств ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электрическим платежным системам типа Neteller и Skrill, а также используют криптовалютными кошельками. Вывод выигрышей имеет осуществляться моментально или занимать от нескольких часов до нескольких суток.Заработать на бездепозитных бонусах за регистрацию в казино имеет каждый юзер, достигший совершеннолетия.
1×slots на любой вкус как пройти регистрацию
Для всех бездепозитных бонусов действует наибольший предел на выигрыш. Он показывает предельную необходимую, коию у получить, играя на бонусные кредиты. Как только вам получится выполнить требования вейджера, возможный максимально будет переведен с бонусного счета на ведущей, а остаток будет списан.Минимального оборота. Этот лимит уточняется вейджером — пока игрок не поиграет на установленную сумму, вывод средств несомненно недосегаем. <a href=http://nvkb.ru/forum/index.php/user/99666/>http://nvkb.ru/forum/index.php/user/99666/</a> Лишь пользующиеся и знаменитые азартные заведения все позволить себе выдавать бездепы в виде дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депо, которые возможно истратить в топовых аппаратах с высочайшей отдачей. 1×slots официальный сайт зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://www.bf-france.com/forums/profile/30064-rabofreeor/>казино 1× slots официальный сайт</a>
<a href=http://swissairways-va.com/phpBB3/memberlist.php?mode=viewprofile&u=3495>1×slots зеркало сайта</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но никогда не запамятовывайте внимательно разбирать верховодила роли в бонусных акциях. Если вы нарушите хотя бы одно условие, позже вы не сможете уладить недоразумение с администрацией. Зарегистрироваться в казино по особой ссылке либо с бонусным кодом. Подтвердить контактные данные (номер аппарата и электронную почту). Для подтверждения номера телефонного нужно в личном профиле показать собственный номер и нажать кнопку „Подтвердить номер аппарата“, далее Вы получите sms-сообщение с кодом, кот-ый нужно ввести в подходящее поле. Для подтверждения электронной почты, перейти по интенсивной ссылке в послании от казино.
#4502 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать 1×bet 1×bet xyz фреш казино <a href=https://slon-ru.com/>казино фильм онлайн</a> казино рублях casino 7k сегодня <a href=https://sovsekretno.net/>casino андроид</a> букмекерская контора на андроид порно с Алина Загитова casino 7k сегодня букмекерская контора на андроид скачать букмекерскую контору на андроид порно с Виктория Синицина, фигуристка пина casino
DiskiPlus 1×bet xbet DiskiPlus Петрова Ольга Викторовна порно <a href=https://diskiplus.ru>DiskiPlus яндекс игры казино</a> DiskiPlus порно с Васильева Татьяна Викторовна DiskiPlus up casino скачать <a href=https://diskiplus.ru/>DiskiPlus почему в казино нет окон</a> DiskiPlus букмекерская контора фонбет официальный DiskiPlus букмекерская контора скачать приложение DiskiPlus казино вход DiskiPlus casino 7k сегодня DiskiPlus казино играть DiskiPlus casino скачать приложение DiskiPlus porno Юлия Канакина, скелетонистка
#4503 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots review live
Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных призов принимаются достаточно высокие притязания. Часто онлайн-казино рекомендуют отыграть бонусное поощрение до ста один в игровых автоматах. Например, в игрок получил бесплатно десять $, то нужно будет отыграть их, поставив одну тысячу спинов по одному баксу любой. Стоит отметить, что не все казино дают возможность выступать на призы и не во всех развлекательных заведениях схожие верховодила для отыгрывания. Некоторые казино воспрещают играть на бонусы в блекджек либо ограничивают ставки до пяти процентов, что существенно наращивает в 10-ки один число нужных игр.Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=http://filmkachat.ru/>1×slots регистрацию более популярный вариант это</a> После потребуется привнести идентификационный платёж. Это пугает новичков больше всего. Нужно сделать наименьший депозит в 100–500 руб. Таким образом служба защищенности увериться что, нет, что платёжный способ принадлежит Вам. Данная процедура необходима для обеспечивания безопасности игровых счетов. Пример, Ваш аккаунт взломают и выведут свои на собственный кошелёк. Будет очень неприятно. Поэтому верификация платёжной системы, это важный момент.При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток. <a href=https://vhearts.net/forums/thread/8947/>https://vhearts.net/forums/thread/8947/</a> 1×slots официальный регистрация <a href=http://www.icecap.co.kr/bbs/board.php?bo_table=sub0403_en&wr_id=222672>http://www.icecap.co.kr/bbs/board.php?bo_table=sub0403_en&wr_id=222672</a> Можно. Вы всегда можете отрешиться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не создадите ставку.
1 x slots casino
У нас на сайте Вы отыщите список призов без депозита в проверенных казино и подробную информацию о том как их получить и применять.Разные казино имеют собственные правила по выведению выигрыша. Для бездепозитных призов принимаются достаточно высочайшие требования. Часто онлайн-казино советуют отыграть бонусное поощрение до ста раз в игровых автоматах. Например, случае игрок получил бесплатно десять $, то нужно будет отыграть их, поставив 1 тыщу спинов по 1 баксу каждый. Стоит отметить, собственно не все казино выделяют вероятность играть на призы и не во всех увеселительных заведениях схожие верховодила для отыгрывания. Некоторые казино воспрещают играть на призы в блекджек либо ограничивают ставки до пяти %, собственно существенно наращивает в 10-ки раз число необходимых игр. <a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1785#post-51349>x1 slots регистрация в 1×slots casino</a> 1× slots casino зеркало Новички не обожают незамедлительно же вносить депо. Это обосновано неименьем навыка и сомненьем. К счастью, в наше время можно получить бездепозитный бонус за регистрацию в казино. Неважно что начисляет система – фриспины или кредиты. В всяком случае вы не рискуете собственными сбережениями. Это замечательная вероятность запустить приглянувшийся видео разъем либо же испытывать удачу в настольных играх.Для получения выигрыша потребуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить определенную сумму, хотя уже из личных средств. Она рассчитывается из совместного объема выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, случае пользователь выиграл 1000 рублей, а множитель составляет х30, вывести деньги возможно несомненно, сделав ставки на 30 000 рублей. <a href=http://91075425.k216.opensrs.cn/home.php?mod=space&uid=1211346>http://91075425.k216.opensrs.cn/home.php?mod=space&uid=1211346</a> Во время забавы в казино, выигрыши, полученные спасибо безвозмездным призовым фондам, суммируются и включаются в совместную сумму для отыгрывания. Однако, случае удача улыбнется и выйдет отыграть все призы, игровое заведение гарантированно разрешит исключить денежные свои. Сумма вывода будет в от лимита, одобренного непосредственно в этом учреждении. Поэтому, пристально надо(надобно) разбирать верховодила выдачи безлимитных депо. 1 хслот регистрация в 1×slots casino Бонус за регистрацию в казино без депозита с выводом денег надо(надобно) отыграть. Зачастую для отыгрыша имеет потребоваться устроить ставки на необходимую, в несколько десятков раз превышающую необходимую бонуса или выигрыша.
1×slots регистрация на 1хслотс
Также существуют онлайн-платформы азартных игр, коие применяют раздачу бездепозитных бонусов в особые даты (как для казино, например и для игрока). Помимо этого, действующие геймеры кроме имеют вероятность получить похожие призы за собственную деятельность (к примеру, за увеличения значения либо за похожие заслуги). <a href=https://39504.org/member.php?action=profile&uid=26422>https://39504.org/member.php?action=profile&uid=26422</a> Прочитайте верховодила бонусной программы, какой хотите принять. Да, мы безотступно рекомендуем устроить это до регистрации.Бездепозитный бонус по промо-коду будет доступен для забавы, лишь что случае когда Вы активируете специальный бонусный код в разделе с призами либо укажите промокод при регистрации на веб-сайте. В неких случаях, считая активации кода, придется доказать контактные данные игрока и наполнить анкету клиента. 1×slots рабочее зеркало на сегодня Какие призы возможность еще получить кроме бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, каждое онлайн казино предлагает игрокам выгодное предложение на 1-ый депозит, вы совершаете депо, ваш депо возрастает в двое или том в трое, тем самым начать выступать можно с больше крупной суммой, например же не забываем тему вейджер на призы.
1×slots сайт зеркало
Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы которые появляются у новичков. Возьми собственный подарок. Чаще всего бонус активизируется сразу после регистрации. Но случаются ситуации, когда надо(надобно) забежать в личный офис либо написать в справочную службу.Также существуют онлайн-платформы азартных игр, которые применяют раздачу бездепозитных бонусов в особые даты (как для казино, так и для игрока). Помимо этого, действующие геймеры также имеют возможность получить похожие призы за собственную деятельность (к примеру, за повышения уровня или за похожие заслуги). 1хслотс мобильная версия зеркало <a href=https://rollerforum.volkerschulz.de/memberlist.php?mode=viewprofile&u=440659>https://rollerforum.volkerschulz.de/memberlist.php?mode=viewprofile&u=440659</a>
1хслотс официальный сайт зеркало
Акции, посвященные календарным праздникам, случаются рассчитаны как на всех пользователей, например и на категории: например, презент на 8 марта девушкам-игрокам или мужчинам на 23 февраля. Но такие рамки не смущают в хайроллеров, что коэффициенты на слотах дозволяют рассчитывать на солидные выигрыши, ну неких автоматах разыгрывается передовой джекпот. <a href=https://forum.vgatemall.com/member.php?action=profile&uid=96382>https://forum.vgatemall.com/member.php?action=profile&uid=96382</a> 1×slots casino зеркало рабочее Помните, что любые нарушения верховодил сведут на нет ваши старания, и вы скорее останетесь без начисленного вас бесплатного приза. Всегда изучайте правила начисления и условия вейджера. По хоть вопросам, на коие вы возможности помощи найти ответы, обращайтесь за объясненьям и саппорт.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/6975/#comment-308077>1×slots рабочее зеркало на сегодня</a>
<a href=http://6000ziyuan.com/forum.php?mod=viewthread&tid=142239&extra=>1хслотс зеркало на сегодня</a>
<a href=https://clubdefansde24.com/foro/viewtopic.php?t=18766>1хслотс регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы быстро получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, появляется настоящий шанс победу!
#4504 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать 1×bet на андроид бесплатно casino сегодня <a href=https://t.me/vchkogpu_ru>7k casino зеркало</a> бесплатно играем казино порно с Арина и Дина Аверины, гимнастки <a href=https://7club7.com/>пинко casino</a> up букмекерская контора порно с Никита Кучеров (хоккей) порно с Сергей Бобровский (хоккей) kent casino регистрация гта казино 1×bet на андроид спорт букмекерская контора
DiskiPlus порно с Анна Щербакова, фигуристка DiskiPlus сколько казино <a href=https://diskiplus.ru/>DiskiPlus человек казино</a> DiskiPlus casino играть DiskiPlus casino андроид <a href=https://diskiplus.ru/>DiskiPlus как выиграть в казино</a> DiskiPlus porno Юлия Канакина, скелетонистка DiskiPlus casino betting DiskiPlus сайт казино зеркало DiskiPlus сколько казино DiskiPlus 7k casino зеркало DiskiPlus casinos xyz DiskiPlus pin casino зеркало
#4505 Charlesgunnyhttp://filmkachat.ru
скачать 1×slots на андроид мобильная версия
Бонус без депозита за регистрацию в казино (бездепозитный приз) – это валютный подарок от клуба, кот-ый начисляется на акк игрока после регистрации в казино. Кроме творенья учетной записи, для получения бездепа, очень нередко потребуется ещё и доказать контактные данные игрока и/или активировать особый промо-код. <a href=http://filmkachat.ru/>1×slots зеркало на сегодня</a> Бездепозитные призы за регистрацию в игровых автоматах для владельцев онлайн-казино являются долею маркетинговой кампании, направленной на повышение аудитории сайта. Так они продвигают средства бренды и завлекают новых посетителей. <a href=https://plaza.rakuten.co.jp/prilla/diary/202411240004/>https://plaza.rakuten.co.jp/prilla/diary/202411240004/</a> Фриспины. Бесплатные вращения предусмотрены для использования в видео-слотах. Внимательно читайте условия – они нередко выдаются для некоторых машин. В зависимости от клуба вы можете делать конкретное число ставок. Кстати, современные игорные жилища выделяют возможность заводить «одноруких злодеев». 1×slots мобильная версия войти казино <a href=https://beckettgqzh18520.gynoblog.com/29766512/deep-nude-understanding-the-implications-of-ai-generated-imagery>https://beckettgqzh18520.gynoblog.com/29766512/deep-nude-understanding-the-implications-of-ai-generated-imagery</a>
1×slots рабочее зеркало
Многие азартные клубы ограничивают необходимую вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, обозначенной в описании промоакции, суммы Вы не сможете вывести. Разница будет аннулирована, Вы числе не сможете делать на нее ставки.Практически все онлайн казино с бездепозитным призом за регистрацию предусматривает программу лояльности — систему одобрения постоянных посетителей, которая произведено из множества уровней. При достижении игроком еще уровня на его счёт поступает бонус. Чем выше уровень — тем щедрее приз. <a href=https://radios-collector.com/viewtopic.php?f=7&t=95124>1×slots регистрация на 1хслотс</a> 1×slots регистрация 1×slots casino c2d ru Доступные забавы – В неких азартных забавах можно понизить математическое превосходство казино до нескольких 10-х процента. В их количестве почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как верховодило, в таких играх ставки идут в зачет вейджера не полностью. Например, возможность учитываться лишь 50%. В неких забавах бездепозитные бонусы вообще нельзя отыгрывать.Самый распространённый из сходственных бонусов, естесственно же, бездеп на день рождения посетителя — бонус в виде фиксированной суммы либо фриспинов поступает на счёт игрока, а пользоваться им можно протяжении установленного периода медли. <a href=http://www.kaseisyoji.com/home.php?mod=space&uid=525606>http://www.kaseisyoji.com/home.php?mod=space&uid=525606</a> Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную процедуру активации приза без депозита. Внимательно прочтите до конца. Многие новички делают ошибки на шаге регистрации и поэтому имеют получить презент.Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. casino 1×slot
1×slots сайт зеркало
Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке нужно пополнить счет в казино. Для депозитных бонусов, данная процедура не нужна, например как депозит теснее сделан.Внесение депо – Будьте готовы восполнить счет после отыгрыша приза. Это стандартное заявка управлял для этого подобии промо-акций. Лучше заблаговременно уточнить, какую сумму надо(надобно) будет заносить на счет. Как верховодило, речь идет о наименьшем депозите, но вы должны быть уверены, собственно он для по кармашку. <a href=https://tpang.co.kr/bbs/board.php?bo_table=free&wr_id=823382>https://tpang.co.kr/bbs/board.php?bo_table=free&wr_id=823382</a> 1×slots казино зеркало Акционные предложения от казино существуют в различных форматах. Часто призы даются в размен на депозит. Игрок вносит платеж и получает средства, бесплатные вращения и другие поощрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — вид приза, который гарантирован за исполненье конкретных деяний на сайте:Сроки активации бонуса устанавливаются любым казино, хотя почаще всего они не превосходят недели с момента получения. Игроку обязательно нужно применять бездеп в течение обозначенного срока, в ином случае бонус просто пропадет. Каждый бонус возможно получить лишь один один, поэтому в не использовать бездеп в срок, у игрока не несомненно 2 шанса им пользоваться.
1× slots зеркало
<a href=https://portugal-campings.com/pt/profile/jamescip/>рабочее зеркало 1хслотс</a> Принципиальным отличием безвозмездных бонусов от бонусов на депо считается отсутствие необходимости заносить средства на акк. Из-за сего их часто нарекают бездепозитными (no down payment bonuses).Выбирая бесплатный приз, пристально изучайте правила. Убедитесь, собственно для можно принимать роль в промоакции. Уточните, в каких играх возможно исполнять обстоятельства вейджера. При необходимости задавайте вопросы представителям саппорта. Для доказательства электрической почты, просто перейдите по активной ссылке в письме, приобретенном от игрового заведения. 1×slot регистрация <a href=https://calibreapp.com/tools/core-web-vitals-checker/ua-stroy.com?scheme=https&path=%2F&context=origin>https://calibreapp.com/tools/core-web-vitals-checker/ua-stroy.com?scheme=https&path=%2F&context=origin</a>
1×slots зеркало рабочее
Бездепозитные бонусы реальными деньгами, которые можно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадали. <a href=https://wiki.dailysocial.id/index.php?title=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D0%B5%D0%B9%D1%88%D0%B0%D1%8F%20%D0%BF%D0%B8%D1%86%D1%86%D0%B0%20%D0%BF%D1%80%D1%8F%D0%BC%D0%BE%20%D1%83%20%D1%81%D0%B5%D0%B1%D1%8F%20%D0%B4%D0%BE%D0%BC%D0%B0%20-%20%D0%B4%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%BF%D0%B8%D1%86%D1%86%D1%8B%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO>https://wiki.dailysocial.id/index.php?title=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D0%B5%D0%B9%D1%88%D0%B0%D1%8F%20%D0%BF%D0%B8%D1%86%D1%86%D0%B0%20%D0%BF%D1%80%D1%8F%D0%BC%D0%BE%20%D1%83%20%D1%81%D0%B5%D0%B1%D1%8F%20%D0%B4%D0%BE%D0%BC%D0%B0%20-%20%D0%B4%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%BF%D0%B8%D1%86%D1%86%D1%8B%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO</a> Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Мы советуем не отрицаться от подобных предложений узнаваемых казино. Выделите некоторое минут на регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сегодня фортуна несомненно на вашей стороне! 1×slots официальный сайт мобильная версия Хотя благотворительные призы начисляются без депо, не исключено, собственно вам понадобиться заносить деньги. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только в того, как свежий клиент первый пополнит игровой счет.Доступные забавы – В неких азартных играх можно понизить математическое преимущество казино до нескольких 10-х процента. В их количестве многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как верховодило, в этих забавах ставки идут в зачет вейджера не полностью. Например, возможность предусматриваться лишь 50%. В неких забавах бездепозитные бонусы вообще нельзя отыгрывать.
<b>Смотреть еще похожие новости:</b>
<a href=https://games-garant.ru/index.php?subaction=userinfo&user=Jamesneorm>1 x slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Многие казино деют в маркетинговых целях благотворительные призы самая для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой вебсайт по партнерской ссылке с нашего портала.
#4506 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino скачать приложение почему в казино нет часов <a href=https://7club7.com/>симулятор казино</a> казино фильм смотреть онлайн букмекерская контора мостбет <a href=https://m.repost.news/>сайт букмекерской конторы</a> 1×bet зеркало слоты Нургалиева Эльвира Рамиловна порно vodka casino casino riobet 7k casino сайт Матвиенко Валентина Ивановна порно casino актуальное зеркало
DiskiPlus про казино DiskiPlus скачать 1×bet 1×bet xyz <a href=https://www.diskiplus.ru>DiskiPlus porno Светлана Ходченкова</a> DiskiPlus casino бонус DiskiPlus 1×bet зеркало рабочее xbet <a href=https://www.diskiplus.ru>DiskiPlus 1×bet скачать приложение на андроид</a> DiskiPlus pin up casino buzz DiskiPlus казино в россии DiskiPlus пина casino DiskiPlus рабочее казино DiskiPlus casino рабочее зеркало DiskiPlus порно с Никита Кучеров (хоккей) DiskiPlus 7k casino зеркало на сегодня
#4507 Charlesgunnyhttp://filmkachat.ru
сайт 1× slots casino
Вознаграждения за получение VIP-статуса ? начисляются в рамках программки лояльности при достижении очередного значения или выдаются персонально менеджерами саппорта.Обыкновенные бездепозитные призы в размере от 3-х до двадцати долларов созданы для того, чтобы в игры заходили все свежие и свежие игроки. Здесь, скорее, несомненно лимитирование на максимальный выигрыш. Важно, дабы перед наименьшим вкладом был отключен приз за первое пополнение счета, и игры не попадет на повторный вейджер. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasino09k online</a> Однако далеко не все ресурсы предлагают своим клиентам бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено одобрение на первый депо в размере 100–200%. Это замечательная возможность преумножить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш.Если при регистрации показать промокод, возможно гарантировано получить приз. Где взять ваучер? Посетите на блоги либо форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В заключительное время игорные дома начали рекламироваться в фильмах и сериалах. Присмотритесь и всего заметите промокод, который принесёт 500 или 1 000 бонусных рублей. <a href=https://diigo.com/0y2r9w>https://diigo.com/0y2r9w</a> Для доказательства электрической почты, просто перейдите по активной ссылке в послании, приобретенном от игрового заведения. 1× slots официальный <a href=https://wiki.roboco.co/index.php/1win_Brasil_Website_Official>https://wiki.roboco.co/index.php/1win_Brasil_Website_Official</a>
1×slots рабочее зеркало
Обыкновенные бездепозитные бонусы в размере от трех до двадцати долларов созданы для того, дабы в забавы заходили все новые и свежие игроки. Здесь, всего, несомненно лимитирование на максимальный выигрыш. Важно, дабы перед минимальным вкладом был отключен приз за первое пополнение счета, и игры не попадет на повторный вейджер. x1 slots регистрация в 1×slots casino При верном раскладе бездепы — это прекрасный метод выступать на средства без траты собственных средств. Есть количество рекомендаций, следуя коим возможно извлечь максимум выгоды из сходственных акций казино. Играть по лишь на лицензированных площадках. Скриптовые веб-сайты не только врут с бонусными предложениями, хотя и используют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах невероятно. <a href=https://www.fortressrisk.com/user/doctorlazutakldoctorlazutakl1/>https://www.fortressrisk.com/user/doctorlazutakldoctorlazutakl1/</a> Нет. Для получения бездепозитного приза в казино необходима неотъемлемая регистрация на сайте. Играть в слоты даром и без регистрации возможно лишь в демо режиме.Если вы выбрали себе несколько брендов коие для больше всего приглянулись, для неизменной забавы! Таких гемблеров казино очень любит и ценит, за частую эти игроки становятся VIP игроками заведения, которым часто поступают выгодные предложения вид призов, так же туда входит и бездепозитные. 1×slots casino зеркало рабочее Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный приз, по мимо практической игры на бездепозитные призы, у Вас есть шанс выучить игровые автоматы, научится регулировать менять ставки и линии, изучать бонусные игры и их выигрышные комбинации, да в конце концов просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные средства, которые возможно отыграть и вывести, не просто на демо счет, что, этим наиболее адреналин в крови еще повысится а пульс забьется с частым ритмом!
1×slots зеркало этих способов предполагает регистрацию
Более солидные предложения встречаются очень изредка. Зачастую они доступны лишь VIP-игрокам. В остальных случаях им наверняка сопутствуют довольно жесткие условия отыгрыша. Также вероятны вспомогательные обстоятельства и другие ограничения, прописанные в условиях и положения бонусной программки казино.В перечне притязаний к отыгрышу нередко присутствуют лимиты на ставки при этой на собственные средства. Так, случае отыграть нужно 30 000 рублей, а максимальная сумма ограничена 30 рублями, то вращать барабаны светит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками условий по срокам деянья промоакции. <a href=https://cardvilla.cc/members/513378.html>https://cardvilla.cc/members/513378.html</a> Вейджер не более х30–35 считается приемлемым. Опытные игроки заявляют, что с таким вейджером реально остаться в плюсе, в правильно подойти к выбору игрового аппарата. 1×slots акции Срок отыгрыша — это этап, кот-ый начинается в момент активации приза и кончается с его закрытием. Пользователю нужно уложиться в данный временной промежуток, иначе призовые свои аннулируются. Казино устанавливают перечень игр, ставки в засчитываются при расчете отыгранных средств. Если тайтл не заходит в этот список, то ему быть недосегаем для загрузки в действия бонусного предложения.Условия могут различаться приятель от приятеля. Но подобный приз может быть использован только для игрового процесса – полученные на счет финансы до того, как будут отыграны, исключить нереально.
1×slots зеркало подтвердит вашу регистрацию если говорить
Чтобы бездеп не был начислен на Ваш акк, Вам не активировать бонусный код. Если поощрение от казино было добавлено на Ваш акк автоматически, а Вы не планируете его применять, обратитесь в службу поддержки с просьбой отменить бездепозитный бонус. Условия отыгрыша приза. Если Вы планируете заработать на бездепозитном призе, то в первую очередь обратите внимание на велечину вейджера и срок, который дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть бонус и вывести выигрыш. Бонус за регистрацию в казино выдается только раз раз на 1-го игрока. Но случаются вспомогательные акции, в коих бездепы раздаются для постоянных посетителей и такие подарки Вы сможете получить больше 1-го раза.Эффективность бездепов виде рекламного прибора оценили все операторы. Малоизвестные площадки используют такие промоакции, дабы прытко набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны постоянных гостей. Не все сайты, дающие презенты без депозита, рекомендованы к забаве. За привлекательным промоописанием могут скрываться неосуществимые условия отыгрыша и подводные камешки. 1×slots рабочее зеркало на сегодня <a href=http://drop-let.ru/index.php?subaction=userinfo&user=omniscientphobi>http://drop-let.ru/index.php?subaction=userinfo&user=omniscientphobi</a>
1×slots акции
Возможность протестировать новые забавы, не рискуя личностными средствами и создать личную тактику игры.В интернете очень много скриптовых сайтов, коие принадлежат плутам. Их основная задача – привлечь гэмблеров, пообещав не великодушные презенты, но и солидные выигрыши. Так что некоторые веб-сайты предлагают получить за регистрацию числе $1 000. <a href=https://love-n-magic.ru/index.php?subaction=userinfo&user=Craigmum>https://love-n-magic.ru/index.php?subaction=userinfo&user=Craigmum</a> Выбирайте наилучшие бесплатные бонусы с помощью обзоров на Casinoz – и пусть вас сопутствует счастье при отыгрыше бонусных кредитов! 1×slots официальный сайт зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://powercrop.it/chi-siamo/le-persone?page=25#comment-1256>1×slots casino регистрация 1×slotscasin online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Также бездепозитные бонусы шансы служить способом возвратить к игре клиентов, что приостановивших своё сотрудничество с фирмой: уведомление о бездепе поступает на мобильный телефонный либо почту.
#4508 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet официальный 1×bet xyz казино играть <a href=https://www.ossetia.tv/>1×bet скачать приложение на андроид</a> casino приложения inform@rucriminal.info <a href=https://m.repost.news/>pin up casino buzz</a> порно с Абрамченко Виктория Валериевна пина букмекерской конторы Нургалиева Эльвира Рамиловна порно реального казино 7k casino бонус карты казино макао казино
DiskiPlus casino рабочее DiskiPlus Валентина Матвиенко порно <a href=https://diskiplus.ru/>DiskiPlus игры казино</a> DiskiPlus порно с Анна Калинская (теннис) DiskiPlus pinco casino <a href=https://www.diskiplus.ru>DiskiPlus gama casino</a> DiskiPlus 1×bet официальный сайт DiskiPlus казино рояль смотреть DiskiPlus лучшие казино бесплатно DiskiPlus казино в россии DiskiPlus казино в россии DiskiPlus casino автомат DiskiPlus пин ап букмекерская контора
#4509 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino играть порно с Елена Никитина, скелетонистка <a href=https://res-publika.com>порно с Петр Ян (ММА)</a> пинко casino спорт букмекерская контора <a href=https://7club7.com/>порно с Никита Кучеров (хоккей)</a> казино онлайн бесплатно 1×bet casino бесплатно играем казино Крючкова Полина Викторовна порно порно с Анастасия Потапова, теннисистка букмекерские конторы в россии Самойлова Алла Владимировна порно
DiskiPlus 1×bet официальный слоты DiskiPlus pin up casino top top <a href=https://www.diskiplus.ru>DiskiPlus porno Яна Троянова</a> DiskiPlus порно с Арина и Дина Аверины, гимнастки DiskiPlus champion casino <a href=https://diskiplus.ru>DiskiPlus макао казино</a> DiskiPlus казино смотреть онлайн DiskiPlus Кузнецова Анна Юрьевна порно DiskiPlus porno Юлия Пересильд DiskiPlus казино онлайн DiskiPlus сайт букмекерской конторы DiskiPlus казино вход официальный сайт DiskiPlus где казино
#4510 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino зеркало сегодня рабочее порно с Карен Хачанов (теннис) <a href=https://sovsekretno.net/>скачать 1×bet на андроид</a> casinos winning спорт букмекерская контора <a href=https://repost.news/>1×bet официальный скачать</a> Попова Анна Юрьевна порно пари букмекерская контора пин ап букмекерская контора винлайн букмекерская контора букмекерская контора мостбет порно с Дарья Клишина, легкоатлетка up casino
DiskiPlus Светлана Ходченкова DiskiPlus Кузнецова Анна Юрьевна порно <a href=https://www.diskiplus.ru/>DiskiPlus как выиграть в казино</a> DiskiPlus включи казино DiskiPlus pin up casino пин ап <a href=https://diskiplus.ru/>DiskiPlus kometa casino</a> DiskiPlus 1×bet сайт 1×bet xyz DiskiPlus Анна Михалкова DiskiPlus казино рояль смотреть DiskiPlus слоты казино DiskiPlus официальные букмекерские конторы DiskiPlus пин ап casino DiskiPlus казино смотреть онлайн
#4511 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
В онлайне большое известных игорных площадок с привлекательными акционными предложениями. Однако внимательно разбирать обстоятельства 10-ов предложений в надоест, да и время отнимет количество. Поэтому наша команда подготовила ТОП-3 сайтов с лучшими бездепозитными призами: <a href=http://filmkachat.ru/>1×слот регистрация в 1×slots casino</a> Но есть игорные заведения, коие готовы просто например жертвовать деньги на игру. Для сего довольно создать профиль. Чтобы исключить собственный выигрыш, вас сначала нужно выполнить обстоятельства отыгрыша, обозначенные в критериях получения бездепозитного депозита.Если речь идет об неповторимых предложениях, имеет потребоваться регистрация в казино по ссылке с партнерского сайта. <a href=https://www.chambers.com.au/forum/view_post.php?frm=1&pstid=77273>https://www.chambers.com.au/forum/view_post.php?frm=1&pstid=77273</a> Теоретически, к бесплатным бонусам можно отнести так называемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, потому что они предоставляют лишь возможность делать ставки.Фриплей-бонусы. Бонусы за безвозмездную забаву есть только в неких клубах. Они зачисляются сразу после создания профиля и действуют непродолжительное время. Если у вас нет времени израсходовать свои, они просто закончатся. Что касается времени, как бонусы срабатывают в течение 1-го часа. 1×slots casino регистрация 1×slotscasin online <a href=https://23region.info/user/Justinacern/>https://23region.info/user/Justinacern/</a>
1×slots зеркало на сегодня
Бездепозитные призы за регистрацию в игровых автоматах для владельцев онлайн-казино являются долею рекламной кампании, направленной на повышение аудитории вебсайта. Так они продвигают свои бренды и завлекают свежих клиентов. казино 1×slots Ну и окончательно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: подобная добродушие повышает степень преданности клиентов к фирмы.Каждый геймер должен сначала детально выучить обстоятельства по получению и отыгрышу приглянувшегося подарка. Если всё организует, поспешите забрать бесплатные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо данный начать вращать барабаны топовых слотов. <a href=http://mrkarpiuk.xaa.pl/boards/shopping/member.php?action=profile&uid=45111>http://mrkarpiuk.xaa.pl/boards/shopping/member.php?action=profile&uid=45111</a> Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут уточняет лимитирование для клиентов. Конечно, это возможно счесть неким неудобством для игрока, хотя справедливости необходимо, собственно выбор автоматов всё также остаётся довольно большим.Вейджер менее х30–35 является применимым. Опытные игроки заявляют, собственно с этим вейджером реально остаться в плюсе, в правильно подойти к выбору игрового аппарата. 1×slots зеркало видели такую регистрацию на Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен список наилучших онлайн казино, которые предлагают своим игрокам великодушные бонусы за регистрацию.На бонусные начисления имеют быть установлены вспомогательные ограничения, которые Вы не приняли при отыгрыше. Пока бонус всецело не отыгран — деньги из казино не выводятся.
1×slots казино зеркало
Как лишь на виртуальном счету окажутся бонусные свои, поспешите отыграть вейджер. Сразу после этого возможно забыть заявку на вывод выигрыша. Кредиты выгодно выделяются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом настоящих средств и выделяют вероятность почувствовать азарт. Во-вторых – возможно насладиться любой азартной забавой доступной на веб-сайте. В вашем постановлении присутствуют автоматы, настольные прибавленье, видео-покер, Live-дилеры. Как только получите бездеп в казино, всё одинаково не запамятовывайте проверять электронную почту. Некоторые игорные клубы непрерывно веселят активных гэмблеров приятными призами. Чаще всего получить презент можно в преддверии праздника, на день рождение, за привлечение приятеля. А также распространённым призом считается надбавка к депозиту. Нужно всего лишь восполнить счёт, и азартное заведение увеличит его на 50–100%. <a href=https://bjdclub.ru/memberlist.php?mode=viewprofile&u=171283>https://bjdclub.ru/memberlist.php?mode=viewprofile&u=171283</a> 1хслотс рабочее зеркало При помощи такового одобрения оператор может того завлекать клиентов, коие раньше проявляли активность на сайте, хотя по какой-то основанию прекратили играть. В данном случае промокод высылается пользователю по электрической почте либо повторяющий SMS.
1× slots зеркало
Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную процедуру активации приза без депо. Внимательно прочтите до конца. Многие новички делают промахи на этапе регистрации и потому имеют получить презент. Такой казино бонус без депозита за регистрацию выдается игроку на час и активно используется данное предложение с 2017 года. Это как бы некая маскировка одобрения под бездепозитный. Суть всего сего сводится к что, этому, что геймеру на час выдается, например, 1000 $, а реклама утверждает о том, собственно каждой выигрыш можно несомненно дальнейшем оставить при себя. Но в играющий серьезно отнесется к данному предложению, то он попросту растеряет время. Ведь геймеру надо(надобно) несомненно выступать не главном аккаунте, а в тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (том всей тысячи) в правила вступят конкретные обстоятельства, где несомненно сказано, что максимальной суммой победы может быть лишь двести $ и деньги возможно применять только виде бонуса на первый вклад с вейджером 25 от суммы гонорары плюс сам депо. По результату выйдет, что игрок выигрывал себе 200% приз с вейджером на конкретную сумму. Короче разговаривая, это все не стоит вашего медли. казино 1×slots <a href=https://cromia.ua/forum/user/8863/>https://cromia.ua/forum/user/8863/</a>
рабочее зеркало 1хслотс
Игры, каких можно играть на бонусные средства. Проверьте список игр, в возможно играть на бонусные средства, возможно они Вам не понравятся и надо расходовать своё время на такую промоакцию. Многие новички колеблются, собственно поощрительный приз не будет возвращать, и в они выиграли у казино. Это безусловно безопасно и накрепко. Выводя выигранные средства, игрок просто останавливает свое роль деле и теряет уникальную вероятность – безвозмездно наращивать собственное вещественное положение.1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, в не желайте стать жертвой плутов или впустую истратить время; <a href=https://maps.google.sn/url?sa=t&url=https://doctorlazuta.by/>https://maps.google.sn/url?sa=t&url=https://doctorlazuta.by/</a> При поддержки такого поощрения оператор может также привлекать клиентов, которые раньше показывали активность на сайте, хотя по какой-то основанию перестали выступать. В данном случае промокод высылается юзеру по электрической почте либо повторяющий SMS.Промокод – определённая комбинация символов, коию нужно ввести в отвечающее фон при твореньи учетной записи либо активировать в собственном профиле игрока в разделе с бонусами. 1×slots официальный сайт, скачать Но не размышлять, собственно снабжая юзеров такими призами, казино увлекается спонсированием. Ведь объемы вознаграждений, в, не великие (средним объемом от 5 до 20 $). И на эти свои налагаются конкретные обстоятельства и лимитирования, обязательные к исполненью игрока, если в последствии он желает получить все средства выигранные финансы.Новички не обожают сразу же заносить депо. Это обусловлено неимением навыка и сомненьем. К счастью, наши возможно получить бездепозитный приз за регистрацию в казино. Неважно собственно начисляет система – фриспины либо кредиты. В любом случае вы не рискуете собственными сбережениями. Это отличная вероятность запустить понравившийся видео слот либо же испытать удачу в настольных забавах.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.eliteshost.com/showthread.php?tid=15810>1×slots актуальное зеркало</a>
<a href=https://www.allampolgar.hu/showthread.php?tid=3704>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, или проигрываете предложенный бонус, по мимо практической игры на бездепозитные призы, у Вас есть шанс выучить игровые автоматы, выучится регулировать менять ставки и линии, исследовать бонусные забавы и их выигрышные композиции, ну в просто зарядится кучей впечатлений! Ведь вы будите выступать на бонусные средства, которые можно отыграть и вывести, не просто на демо счет, тем наиболее адреналин в крови еще больше повысится а пульс забьется с частым ритмом!
#4512 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора вход top casino <a href=https://th-royalgclub.com/>1×bet регистрация</a> Юдаева Ксения Валентиновна порно букмекерская контора леонов <a href=https://rhymes-punches.com/>1go casino</a> порно с Илюшникова Татьяна Александровна 1×bet зеркало xbet лучшие букмекерские конторы 1×bet официальный 1×bet xyz порно с Анастасия Потапова, теннисистка лучшие казино бесплатно 1×bet на андроид бесплатно
DiskiPlus порно с Илья Осипов (киберспорт) DiskiPlus порно с Георгий Джикия (футбол) <a href=https://diskiplus.ru/>DiskiPlus сайты казино</a> DiskiPlus винлайн букмекерская контора официальный DiskiPlus 1×bet официальный слоты <a href=https://diskiplus.ru/>DiskiPlus Кузнецова Анна Юрьевна порно</a> DiskiPlus pin up casino buzz DiskiPlus Петрова Ольга Викторовна порно DiskiPlus Скоробогатова Ольга Николаевна порно DiskiPlus скачать 1×bet на андроид DiskiPlus сайт винлайн букмекерская контора DiskiPlus винлайн букмекерская контора DiskiPlus смотреть фильм казино
#4513 Jeffrymexhttp://=https://bip39-phrase.blogspot.com/2025/02/bip39-world-list-2048.html
The full special <a href=https://bip39-phrase.blogspot.com/2025/02/bip39-world-list-2048.html>bip39</a> Word List consists of 2048 words used to protect cryptocurrency wallets. Allows you to create backups and restore access to digital assets. Check out the full list.
#4514 Charlesgunnyhttp://filmkachat.ru
1× slots casino официальный сайт
Бездепозитные призы казино это финансовая компенсация, предлагаемая пользователям на дармовой базе и вероятность выступать в интернет казино даром. Если сравнивать их с поощрениями за вклад, в свои выдаются лишь потом первоначального пополнения счета, то бездепозитные вознаграждения получаются бесплатно. То есть, играющий получает возможность делать ставки на теснее быть финансы, которые выдаст заведение, выполняя, при, обычные деянья, чтобы их извлечь (тут идет о регистрация, удостоверении личности с внедрением номера телефонного, оформления заказы и т.д.). <a href=http://filmkachat.ru/>скачать 1×slots официальный сайт</a> Фриспины – благотворительные вращения с фиксированной ставкой, коие можно применять в определенных игровых автоматах. <a href=https://smallpdf.com/file#s=947e9bab-f7cd-45be-8e6d-7494ff661b35>https://smallpdf.com/file#s=947e9bab-f7cd-45be-8e6d-7494ff661b35</a> 1×slots актуальное зеркало <a href=http://www.fumankong4.cc/home.php?mod=space&username=RichardLodep>http://www.fumankong4.cc/home.php?mod=space&username=RichardLodep</a> Прибывшие на аккаунт финансы бездепозитные бонусы предназначаются, главном, лишь для свежеиспеченных юзеров, коие ранее не имели собственного аккаунта в данном казино. Исходя из сего, если раньше у игрока был изготовлен депозит, то, по всей вероятности, у него больше не несомненно способности рассчитывать на получение такового бонуса в определенном заведении.
1х слот регистрация в 1×slots casino
1×slots регистрацию более популярный вариант это Не трудно додуматься, собственно no deposit bonuses практически разу не посещают большими. Чаще всего речь о пяти–тридцати баксах (или эквиваленте данной суммы в другой валюте). <a href=http://mallds.com/bbs/board.php?bo_table=free&wr_id=193788>http://mallds.com/bbs/board.php?bo_table=free&wr_id=193788</a> Чаще всего применяются коды. Их надо(надобно) вносить в специальные окошки регистрационной анкеты, если речь о пригласительных бонусах, либо в определенном разделе собственного офиса игрока.Законодательство, регулирующее азартные забавы в разных государствах, влияние на возможности операторов. В итоге юзеры из отдельных регионов сталкиваются с лимитированиями со стороны казино. Это может быть как глубокий отказ в доступе, например и невозможность загружать игры отдельных изготовителей. 1×slots регистрация 1×slots casino c2d ru При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое возможно предназначить забаве в казино.Так же стоит выделить то, что в любом онлайн казино установлен собственный наибольший кешаут на бездепозитный бонус. Как правило кешаут — это максимальная сумма средств, кот-ая доступная для вывода с бездепозитного приза.
1×slots мобильная версия войти казино
Еще одно условие касается размеров ставки. Операторы устанавливают наивысшую необходимую, которую игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, избранной в Личном кабинете. При превышении лимита есть риск потерять бонуса. Существующие ограничения относятся и к определенным видам ставок. Например, играя в рулетку, клиент возможность столкнуться с запретом ставить фишки на шансы.Игры, каких можно играть на бонусные средства. Проверьте перечень игр, каких возможно играть на бонусные средства, возможно они Вам не понравятся и не расходовать своё время на такую акцию. <a href=http://trisinfronteras.com/davidcastro/component/k2/itemlist/user/455756-davidalelp>http://trisinfronteras.com/davidcastro/component/k2/itemlist/user/455756-davidalelp</a> С не отыгранным бонусом воспрещается превосходить объем максимальной ставки. Нарушение сего обстоятельства будет аннулирование выигрыша. 1×slots официальный сайт мобильная версия Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие появляются у новичков.
1×slots официальный сайт зеркало
Получить Бездепозитный приз в онлайн казино дело двух кликов. Другой момент, отыграть рекламную и соблюсти управляла и условия отыгрыша. Под правилами предполагается столько вагер, но и ограничения по наибольшей ставке. Мы осознаем, собственно в кино все ставят на зеро и выигрывают. Призываем не делать сходственного. Перед активацией бонуса прочтите управляла. Узнайте последующие факторы: Условия получения дара, за регистрацию, за депозит и другое. Ограничения по максимальной ставке. Зачастую не повыше 350 руб. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на пространстве. Поэтому принципиально знать, в каких играх возможно совершать кратность денежного оборота.Основное отличие что, нет, что для получения бездепа не пополнять баланс в казино. Но не этого, есть ряд и различий: Денежные свои. Третий приз за регистрацию без депо – наличные. К раскаянью, лишь известные и популярные клубы имеют уяснить деньги в руб. Либо долларах. С их подмогою вас насладиться любой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед этим нужно исполнение определенных условий. x1 slots 1хслотс регистрация перейти на 1×slots <a href=https://www.linkedin.com/post-inspector/inspect/ua-stroy.com>https://www.linkedin.com/post-inspector/inspect/ua-stroy.com</a>
1хслотс регистрация в 1×slots casino
Бездепозитные призы реальными деньгами, которые возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадались. Бонусные деньги – небольшая сумма средств для старта в новом казино. На бонусные деньги, обычно разрешено выступать во все игры, кроме слотов с прогрессивным джекпотом и игр из раздела exist casino. <a href=http://www.jcdqzdh.com/home.php?mod=space&uid=311948>http://www.jcdqzdh.com/home.php?mod=space&uid=311948</a> Возможность сыграть дополнительное состязание (а от и количество) совершенно бесплатно, а выигрыш, же, поступает на счёт игрока.При исполнении условий отыгрыша и верификации, деньги с бонусного счета переводятся на основной и все быть выведены на карту или электронный кошелек. Лимиты на вывод и сроки проведения транзакции зависимости от избранной платежной системы. зеркала 1×slots Размер приза. В качестве бездепов обыкновенно начисляют большие суммы, а когда идет о бонусах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то кое-какие казино шансы подарить игроку до 2000$.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.webdesignforum.com.au/member.php?action=profile&uid=31660>1хлот регистрация в 1×slots casino</a>
<a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=9700&TITLE_SEO=9700-kharakteristiki-tovarov&MID=527346&result=reply#message527346>1×slots casino регистрация на сайте</a>
<a href=http://board.eternityrpc.com/member.php?action=profile&uid=369>1×slots регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подтверждение индивидуальной инфы. Все казино требуют от посетителя пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и присутствие у пользователя иных аккаунтов (мультиаккаунт запрещен). Поспешите зарегистрироваться на официальном веб-сайте Клубника, дабы мгновенно получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, бывает реальный шанс победу!
#4515 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
гама казино casino зеркало сегодня <a href=https://sovsekretno.net/>black russia казино</a> Самойлова Алла Владимировна порно лучшие онлайн казино <a href=https://m.repost.news/>champion casino</a> пин ап casino 7k casino сайт casino бонус порно с Юлия Ефимова black russia казино приложения букмекерских контор new casino
DiskiPlus рейтинг казино DiskiPlus пин up casino <a href=https://www.diskiplus.ru>DiskiPlus Черкесова Бэлла Мухарбиевна порно</a> DiskiPlus Чулпан Хаматова DiskiPlus kent casino <a href=https://www.diskiplus.ru>DiskiPlus автомат казино</a> DiskiPlus 7k casino зеркало DiskiPlus слоты казино DiskiPlus фреш казино DiskiPlus pin up casino официальный DiskiPlus порно с Георгий Джикия (футбол) DiskiPlus 1×bet зеркало слоты 1×bet xyz DiskiPlus кент casino
#4516 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора фонбет официальный сайт pin up букмекерская контора <a href=https://rhymes-punches.com/>porno Илона Маркова, хоккеистка</a> макао казино симулятор казино <a href=https://kompromat1.online/>Елизавета Боярская</a> vodka casino casino скачать приложение porno Алена Михайлова porno Игорь Акинфеев (футбол) casino андроид порно с Кирьянова Дарья Борисовна champion casino
DiskiPlus букмекерская контора леонов DiskiPlus up casino скачать <a href=https://www.diskiplus.ru>DiskiPlus порно с Владимир Минеев (ММА)</a> DiskiPlus Анна Михалкова DiskiPlus играющие казино <a href=https://www.diskiplus.ru/>DiskiPlus porno Анастасия Янькова, боксерка</a> DiskiPlus porno Игорь Акинфеев (футбол) DiskiPlus casino бездепозитный DiskiPlus вавада казино DiskiPlus порно с Константин Тюкавин (футбол) DiskiPlus casinos xyz DiskiPlus винлайн букмекерская контора официальный DiskiPlus букмекерскую контору пин
#4517 Charlesgunnyhttp://filmkachat.ru
1 хслот регистрация в 1×slots casino
Фриспины без депо или вспомогательные свои посодействуют ближе познакомиться с игровой платформой и её функциями. За счёт даров возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за забавы против живых крупье.Возьми собственный подарок. Чаще всего бонус активируется сразу после регистрации. Но посещают истории, когда надо(надобно) зайти в личный офис или написать в справочную службу. <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino 56 online</a> <a href=https://app.degoo.com/share/hi1FahiiYBqJPnfRRsamrQ?ID=20401830865>https://app.degoo.com/share/hi1FahiiYBqJPnfRRsamrQ?ID=20401830865</a> 1 х слотс зеркало <a href=http://forum.jiquninfo.com/home.php?mod=space&uid=112213>http://forum.jiquninfo.com/home.php?mod=space&uid=112213</a> В неких онлайн казино для получения бездепозитных призов не довольно просто зарегистрироваться на веб-сайте клуба и доказать средства контактные данные. Дополнительно потребуется активация промокода.Заработать на бездепозитных бонусах за регистрацию в казино может каждый пользователь, достигший совершеннолетия.
1хслотс регистрация в 1×slots casino
1×slot официальный сайт <a href=https://bybak.com/home.php?mod=space&uid=4230926>https://bybak.com/home.php?mod=space&uid=4230926</a> Ещё одно распространённое акционное предложение – симпатичный подарок с сомнительными притязаниями. К образцу, клуб обещает $100 в качестве бездепа, но с вейджером х80 либо х100. Отыграть такой вейджер фактически невозможно и поэтому другого, как концентрироваться на больше занимательных промоакциях.Получить приветственный бонус имеют только новые клиенты онлайн-казино. Способы описаны в критериях промоакции каждого законного казино, почаще всего это: 1хслот зеркало
1× slots сайт
Бонусные средства – небольшая сумма денег для старта в новеньком казино. На бонусные деньги, обыкновенно разрешается играть во все игры, не слотов с прогрессивным джекпотом и игр из раздела live casino. <a href=http://nitka.by/user/ZacheryDrins/>http://nitka.by/user/ZacheryDrins/</a> 1×slots рабочее зеркало Прибывшие на акк деньги бездепозитные бонусы предназначаются, в, только для свежеиспеченных пользователей, коие ранее не имели собственного аккаунта в данном казино. Исходя из этого, случае раньше у игрока был изготовлен депозит, то, по всей вероятности, у него больше не будет способности рассчитывать на получение такового приза в определенном заведении.
1×slots казино мобильная версия
<a href=https://chasingadream.rpginitiative.com/showthread.php?tid=222737>казино 1×slots официальный сайт</a> Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских рублей. В условиях промоакции указано, что вейджер бездепозитного приза х20. Поэтому, чтобы отыграть приз, игроку будет необходимо сделать ставок на 35*20=700 рублей. Если площадка дарит бездеп за регистрацию, то процедура его получения проста. Нужно лишь завести акк на веб-сайте и активировать его, подтвердив адрес электрической почты, номер аппарата либо другие данные, которые просит оператор. Перед данным необходимо убедиться, собственно юзер располагается на официальном сайте казино, не на жульнической площадке. онлайн казино 1×slots <a href=https://seniordance.ru/forum/member.php/33788-Charlesvaf>https://seniordance.ru/forum/member.php/33788-Charlesvaf</a> Бездепозитный приз казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в этом и заключается главное различие.Но такие рамки не смущают даже хайроллеров, потому коэффициенты на слотах позволяют рассчитывать на крупные выигрыши, в неких автоматах разыгрывается прогрессивный джекпот.
1×slots рабочее зеркало на сегодня
Теоретически, к безвозмездным призам возможно отнести так нарекаемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, поэтому собственно они предоставляют только вероятность создавать ставки.Благодаря программе лояльности от игорного заведения, возможно брать превосходный старт и без дополнительных вложений запустить видеослоты. Кроме такого, возможно рассчитывать на реальную удачу и получить, без инвестиции личных денег, немалый выигрыш. Но есть азартные заведения, готовые просто например вручить средства на забаву. Для сего достаточно сделать профиль. Чтобы исключить выигрыш, сначала нужно выполнить вейджеровые условия, прописанные в критериях получения бездепа. <a href=https://www.levasche.it/shop/ashleytak/>https://www.levasche.it/shop/ashleytak/</a> Для получения бездепа нужно пригласить в игру по реферальной ссылке нового клиента: он должен зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на сумму, обозначенную в условиях акции. 1×slot зеркало рабочее регистрации на телефон придет
<b>Смотреть еще похожие новости:</b>
<a href=https://www.globalvision2000.com/forum/member.php?action=profile&uid=1072499>1× slots регистрация в 1×slots casino</a>
<a href=https://10nsk.ru/user/JosephSuple/>1хслотс рабочее зеркало</a>
<a href=http://sladkierecepti.5nx.ru/viewtopic.php?f=8&t=7594>1×slots casino регистрация 1×slots review live</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Акционные предложения от казино есть в различных форматах. Часто призы даются в мена на депозит. Игрок заносит платеж и получает средства, безвозмездные вращения прочие поощрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — вид бонуса, который гарантирован за исполненье определенных деяний на веб-сайте: Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала прыткие выводы. Фишка выплат в, что достаточно избрать платёжный инструмент и указать сумму. В большинстве случаев средства зачисляются на электрические кошельки в течение 15 минут, а на банковские карты – 1–3 рабочих дня.
#4518 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet слоты Шевцова Татьяна Викторовна порно <a href=https://th-royalgclub.com/>зеркала официальных сайтов казино</a> casinos xyz Набиуллина Эльвира Сахипзадовна порно <a href=https://res-publika.com>Москалькова Татьяна Николаевна порно</a> porno Яна Троянова 1×bet рабочее казино ли кент казино porno Нина Пирогова, хоккеистка Москалькова Татьяна Николаевна порно скачать 1×bet 1×bet xyz
DiskiPlus бывшие казино DiskiPlus Скворцова Вероника Игоревна порно <a href=https://www.diskiplus.ru/>DiskiPlus порно с Антропова Валентина Викторовна</a> DiskiPlus мелбет букмекерская контора DiskiPlus пин up casino <a href=https://www.diskiplus.ru>DiskiPlus casino вход</a> DiskiPlus 1×bet сейчас DiskiPlus сайте букмекерской конторы фонбет DiskiPlus casino сегодня DiskiPlus казино 1 DiskiPlus 1×bet сайт 1×bet xyz DiskiPlus бесплатно играем казино DiskiPlus porno Нина Пирогова, хоккеистка
#4519 AHoini
<a href=https://remingtonpwcfi.blog-mall.com/31036853/the-5-second-trick-for-1win-bet-н•њкµ>1win korea</a> <a href=https://vps16150.ka-blogs.com/83790815/1win-aviator-login-fundamentals-explained>1win south africa</a>
#4520 Charlesgunnyhttp://filmkachat.ru
1×slots подтвердит вашу регистрацию если говорить
Бездепозитные бонусы казино это финансовая компенсация, предлагаемая пользователям на дармовой базе и вероятность играть в интернет казино бесплатно. Если сопоставлять их с одобрениями за вклад, в которых свои выдаются лишь потом первоначального пополнения счета, то бездепозитные вознаграждения получаются даром. То есть, играющий получает вероятность создавать ставки на уже место деньги, коие выдаст заведение, выполняя, всем, обыденные деяния, дабы их извлечь (здесь речь о регистрация, удостоверении личности с использованием номера телефона, дизайна заказы и т.д. ). <a href=http://filmkachat.ru/>1х слот регистрация в 1×slots casino</a> Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция содержит доскональные управляла, ссылка на которые обыкновенно содержится в промообъявлении. В их указываются лимиты, вейджер, список доступных игр. Если оператор укрывает данные о предложении, то воспользоваться им надо. <a href=http://www.pvp.iq.pl/thread-5909.html>http://www.pvp.iq.pl/thread-5909.html</a> 1×slots рабочее зеркало на сегодня <a href=http://www.maxer.url.tw/bbs01/home.php?mod=space&uid=87451>http://www.maxer.url.tw/bbs01/home.php?mod=space&uid=87451</a> Не хотите поиграть в азартные игры, не рискуя своими средствами, хотя получая в все выплаты? Подобную возможность деют все наилучшие порталы с азартными увеселениями. В их количестве количество честных и надежных интернет-казино на русском языке. Они привлекают свежих юзеров разными поощрительными мероприятиями, включая бездепозитные, или благотворительные призы.
1×slot зеркало
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5041/#comment-606230>1×slot регистрация</a> 1×slots зеркало на сегодня <a href=http://atope.ru/user/HenryEdili/>http://atope.ru/user/HenryEdili/</a> Прежде всего, не запамятовывайте периодически заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом рассматривают наиболее занимательные предложения водящих игорных порталов. 1×slots сайт Перечисленные повыше основные характеристики сочетают фактически любой бонус и являются стереотипными для бездепозитных бонусных начислений в казино.Каждый из бездепозитных призов без пополнения 2022 имеет свой определенный вейджер для отыгрыша, так же в каждом казино он устанавливается индивидуально — где то он х55 а кое-где х30, повторюсь всюду по разному!
1×slots официальный сайт мобильная версия скачать
Максимальный объем ставки, который нельзя превышать же бонус не будет всецело отыгран. В случае нарушения сего верховодила, бонус и выигрыш с него станут аннулированы.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. <a href=https://letterboxd.com/vykupavto0311/>https://letterboxd.com/vykupavto0311/</a> скачать 1×slots на андроид мобильная версия Казино выводит деньги только на ту платежную систему, с котрой был сделан депозит. То есть, для вывода бездепозитного приза, Вам сначала нужно восполнить счет. В неких клубах ограниченный список способов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет именно с этих платежных методов, которые доступны для вывода.Бoльшинcтвo азартных заведений выдвигают примерно одинаковые обстоятельства и требования, коие нужно выполнить, чтобы получить бездепозитный бонус за регистрацию. Все их возможно объединить в один перечень:
1×slots casino online регистрация
<a href=http://nhomtruyen.com/members/jamesgaw.9280/>1×slots быструю регистрацию а также мгновенное</a> Фриспины без депозита либо дополнительные средства помогут поближе познакомиться с игровой платформой и её функциями. За счёт презентов можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради игры напротив живых крупье. 1хслотс регистрация в 1×slots casino <a href=http://vsyamebel34.ru/bitrix/redirect.php?goto=http://chestnocen.ru/bitrix/redirect.php?goto=http://talfish.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/H7EVtrD4t5J>http://vsyamebel34.ru/bitrix/redirect.php?goto=http://chestnocen.ru/bitrix/redirect.php?goto=http://talfish.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/H7EVtrD4t5J</a> Приглашаем делиться мнениями о призах. Это поможет другим юзерам подбирать более выгодные предложения.Когда речь идет о денежных призах, казино постоянно устанавливают обстоятельства вейджера, коие необходимо выполнить, дабы исключить выигрыш.
1×slots актуальное зеркало
Получить приветственный приз имеют лишь свежие клиенты онлайн-казино. Способы описаны в критериях акции каждого легального казино, почаще всего это: <a href=https://tw.8fun.net/bbs/home.php?mod=space&uid=318894&do=profile&from=space>https://tw.8fun.net/bbs/home.php?mod=space&uid=318894&do=profile&from=space</a> Если вы новичок в и только попали в неизведанную вами район пыла — счет услуг как бездепозитные призы без пополнения. 1×slots подтвердит вашу регистрацию если говорить Бездепозитный бонус за регистрацию в казино — это стартовый подарок в виде денежного начисления либо безвозмездных вращений для свежих игроков заведения, для получения которого не вносить депозит.
<b>Смотреть еще похожие новости:</b>
<a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/10447–1khlot-registratsiya-v-1×slots-casino#10475>1хлот регистрация в 1×slots casino</a>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=208804>1×slots зеркало быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Новички не обожают незамедлительно же заносить депозит. Это обосновано неименьем опыта и сомненьем. К счастью, наши возможно получить бездепозитный бонус за регистрацию в казино. Неважно собственно начисляет система – фриспины либо кредиты. В всяком случае вы не рискуете собственными сбережениями. Это замечательная возможность запустить понравившийся видео разъем или же испытать удачу в настольных забавах.
#4521 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Варвара Субботина porno Мира Андреева (теннис) <a href=https://t.me/vchkogpu_ru>porno Марина Александрова</a> казино рублях самое казино <a href=https://t.me/vchkogpu_ru>казино смотреть онлайн</a> porno Юлия Канакина, скелетонистка пин ап casino pin up top казино фильм онлайн порно с Максим Глушенков (футбол) Валентина Матвиенко порно casino ru порно с Аделия Петросян (фигурное катание)
DiskiPlus сколько казино DiskiPlus казино рублях <a href=https://www.diskiplus.ru>DiskiPlus букмекерские контора ап</a> DiskiPlus unlim casino DiskiPlus фильмы казино рояль <a href=https://www.diskiplus.ru>DiskiPlus казино можно</a> DiskiPlus Лут Оксана Николаевна порно DiskiPlus казино пин DiskiPlus казино рулетка DiskiPlus Окладникова Ирина Андреевна порно DiskiPlus порно с Елена Никитина, скелетонистка DiskiPlus ешь казино DiskiPlus лучшие букмекерские конторы
#4522 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up букмекерская контора официальные сайты казино <a href=https://sovsekretno.net/>1×bet xbet xyz</a> букмекерская контора бесплатно скачать pin up casino top top <a href=https://th-royalgclub.com/>пина casino</a> порно с Елена Никитина, скелетонистка букмекерская контора фонбет официальный 7k casino официальный сайт 1×bet на андроид порно с Васильева Татьяна Викторовна 1×bet зеркало рабочее скачать букмекерскую контору на андроид
DiskiPlus порно с Дронова Александра Викторовна DiskiPlus casino андроид <a href=https://www.diskiplus.ru/>DiskiPlus казино можно</a> DiskiPlus casino вход DiskiPlus скачать 1×bet <a href=https://diskiplus.ru>DiskiPlus спорт букмекерская контора</a> DiskiPlus человек казино DiskiPlus автомат казино DiskiPlus балтбет букмекерская контора DiskiPlus casino бонус DiskiPlus ап казино DiskiPlus лучшая казино DiskiPlus кент казино
#4523 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало рабочее
Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в социальных сетях, установку мобильного приложения или официального клиента для ПК. В большинстве казино действуют программки преданности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на грядущий уровень нередко с выдачей бездепа.В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, необходимо обратиться в саппорта через лайв-чат на сайте казино. <a href=http://filmkachat.ru/>1×slots зеркало рабочее на сегодня</a> Такой казино приз без депо за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это словно некая конспирация одобрения под бездепозитный. Суть всего этого сводится к тому, собственно игроку на час выдается, например, 1000 $, а реклама утверждает то, что любой выигрыш можно несомненно в будущем забыть при для. Но если играющий серьезно отнесется к этому предложению, то он просто растеряет время. Ведь геймеру надо(надобно) несомненно выступать не главном аккаунте, ну тренировочном и с ограниченным выбором автоматов и ставок. Да и если, тогда, выигрыша (и всей тысячи) в правила вступят конкретные обстоятельства, где будет сказано, собственно максимальной суммой победы возможность быть только двести долларов и деньги возможно использовать только в приза на первый лепта с вейджером 25 от суммы вознаграждения плюс сам депо. По итогу выйдет, что игрок выигрывал для 200% бонус с вейджером на определенную необходимую. Короче говоря, это все надо вашего медли.Большинство клубов завлекают внимание геймеров за счёт разнообразных подарков. На одних веб-сайтах возможно получить виртуальные кредиты, коие откроют доступ ко всему софту. На иных же, администрация предлагает благотворительные вращения для пуска топовых онлайн слотов. Несмотря на разные акции, стоит выделить самые основные. <a href=https://rant.li/9fsnh6hu13>https://rant.li/9fsnh6hu13</a> Этот образ приза несомненно добавлен на Ваш аккаунт в удачной процедуры регистрации с использованием номера телефонного. Если выбрать иной способ творения учетной записи, бездеп не несомненно добавлен на Ваш аккаунт. 1хслотс зеркало <a href=http://l2help.lt/user/DoctorLazutaOt/>http://l2help.lt/user/DoctorLazutaOt/</a>
казино 1× slots официальный сайт
Некоторые онлайн-казино без депозита предлагают свежим клиентам избрать бонус при регистрации. Будьте внимательны: выбрав раз, вы в безоговорочном большинстве случаев не сможете пользоваться остальными.Самый распространённый из сходственных бонусов, естесственно же, бездеп на день рождения клиента — бонус вид фиксированной суммы либо фриспинов поступает на счёт игрока, а воспользоваться им можно в течение установленного периода времени. <a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=68523&result=reply>1х слотс зеркало регистрация в 1×slots casino</a> 1×slots casino регистрация <a href=https://www.dnnsoftware.com/activity-feed/my-profile/userid/3208082>https://www.dnnsoftware.com/activity-feed/my-profile/userid/3208082</a> 1х слотс зеркало регистрация в 1×slots casino Фриспины начисляются по определенной ставке. После их активации игроку необходимо запустить слот и убедиться, что в нем показываются благотворительные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода последствии отыгрыша определяется оператором и редко превышает 5 000 рублей.Обычно показатель повыше, чем для бонусов на депо. Не удивляйтесь, если он несомненно даже х100. Иногда завышенный коэффициент вейджера уточняется для обитателей отдельных государств.
1×slots зеркало которую указывали при регистрации кстати
На странице представлены бездепозитные бонусы за регистрацию в казино редкая заслуга за коей гонятся все игроки как новенькие, так и мастера. Мы тоже уделяем огромное внимание на присутствие призов при формирование рейтинга казино на средства. Бездепозитный бонус это возможность выступать даром и выиграть реальные деньги. <a href=http://mp-web.ru/bitrix/redirect.php?goto=http://novosibirsk.kapri-z.ru/bitrix/redirect.php?goto=http://dikoved.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/IsDg9U2EAC4>http://mp-web.ru/bitrix/redirect.php?goto=http://novosibirsk.kapri-z.ru/bitrix/redirect.php?goto=http://dikoved.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/IsDg9U2EAC4</a> 1×slots сайт зеркало После получения приза вывод средств для посетителя будет недосегаем до, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или чета недель. Выводить средства игрок может только в отыгрыша.
1×slots регистрация на сайте
<a href=http://theauction.com.au/author/jamesflake/>1хслотс мобильная версия зеркало</a> Зачастую бездепозитные бонусы казино для забавы предлагаются разными заведениями азартных игр виде рекламных промоакций либо в целях привлечения к себя свежих игроков. Для бездепозитных призов в казино 2022 геймеру надо пополнять счет до этапа вывода хотимых средств. Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и. Когда игроку надеется количество фриспинов, администрация может разбивать их начисление на некоторое дней. Бесплатные вращения предоставляются для определенного слота, который указывается в правилах промоакции. 1×slots казино зеркало <a href=http://bbs.worldsu.org/home.php?mod=space&uid=223047>http://bbs.worldsu.org/home.php?mod=space&uid=223047</a> Также учтите, что кое-какие игровые платформы сужают список стран, которые способны получить предложенный бездепозитный приз за регистрацию. К примеру, существуют онлайн-заведения, выдающие похожие бонусы лишь жильцам конкретных стран. К образцу, онлайн казино 777 Оригинал предоставляет бездепозитный приз только игрокам из России и государств СНГ. Или наоборот, пичкают вознаграждением всех, считая жителей некоторых стран (следует сего, идет пристально учить список, дабы потом не возникло никаких вопросов и жалоб).Индивидуальные одобрения выдаются за совершение деяний: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавленья или официального посетителя для ПК. В большинстве казино действуют программки лояльности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на следующий степень часто сопровождается выдачей бездепа.
1×slots зеркало видели такую регистрацию на
Варианты выигрыша в от Вашей успеха и критерий игорного портала. Выше мы заявили, что некоторые бездепозитные бонусы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются и, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность современных игр на средства, возможно выиграть неописуемые суммы. Сегодняшние игровые автоматы либо видео слоты, как их называют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000.Нет. Казино раздают бесплатные призы за регистрацию, чтобы, чтобы, чтобы клиент возможность ознакомиться с игровым заведением. А чтобы вывести его, необходимо выполнить условия отыгрыша. <a href=http://jejubike.bizjeju.com/bbs3/board.php?bo_table=postscript&wr_id=899850>http://jejubike.bizjeju.com/bbs3/board.php?bo_table=postscript&wr_id=899850</a> Чтобы бездеп не был начислен на Ваш аккаунт, Вам не активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк автоматически, а Вы не планируете его применять, обратитесь в службу поддержки с пожеланием отменить бездепозитный бонус. 1× slots зеркало Такой безвозмездный эквивалент средств зачисляется на профиль пользователя последствии воплощения требований и предназначаются они лишь для игрового процесса. Вывод таких вознаграждений вероятен лишь после воплощения вейджеровых условий.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.neocodex.us/forum/topic/134527–1×slots-%D0%A1%D0%82%D0%A0%C2%B5%D0%A0%D1%96%D0%A0%D1%91%D0%A1%D0%83%D0%A1%E2%80%9A%D0%A1%D0%82%D0%A0%C2%B0%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A1%D0%8B-%D0%A0%D1%97%D0%A1%D0%82%D0%A0%D1%95%D0%A1%E2%80%A0%D0%A0%C2%B5%D0%A0%D2%91%D0%A1%D1%93%D0%A1%D0%82%D0%A0%C2%B0-%D0%A0%C2%B7%D0%A0%C2%B0%D0%A0%E2%84%96%D0%A0%D1%98%D0%A0%C2%B5%D0%A1%E2%80%9A-%D0%A0%D0%86%D0%A1%D0%83%D0%A0%C2%B5%D0%A0%D1%96%D0%A0%D1%95-%D0%A0%C2%BB%D0%A0%D1%91%D0%A1%E2%82%AC%D0%A1%D0%8A/?p=2034893>1× slots сайт</a>
<a href=https://nauc.info/forums/viewtopic.php?t=20389362>1×slots на любой вкус как пройти регистрацию</a>
<a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=148516>зеркло казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Превышение наибольшей ставки при отыгрыше. Система автоматически не предупреждает о превышении ставки, потому о нарушении правил игрок возможность узнать теснее в подачи запроса на вывод средств. Изучить правила и обстоятельства получения бездепозитных бонусов казино, Вы сможете у нас на сайте в разделе с призами или на официальном веб-сайте выбранного Вами казино. Если имеет найти необходимую информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал или по электрической почте.
#4524 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино гта 5 порно с Владимир Минеев (ММА) <a href=https://strelochnik.com/>человек казино</a> слоты казино 1×bet слоты 1×bet top <a href=https://glvk.guru/>автомат казино</a> букмекерские конторы бет Самойлова Алла Владимировна порно up casino pin casino Самойлова Алла Владимировна порно porno Юлия Канакина, скелетонистка pin up casino
DiskiPlus 1×bet зеркало xbet xyz DiskiPlus мелбет букмекерская контора <a href=https://diskiplus.ru/>DiskiPlus букмекерская контора официальный сайт</a> DiskiPlus песня казино DiskiPlus порно с Аделия Петросян (фигурное катание) <a href=https://diskiplus.ru/>DiskiPlus казино играть</a> DiskiPlus порно с Дарья Клишина, легкоатлетка DiskiPlus порно с Варвара Субботина DiskiPlus букмекерская контора леонов DiskiPlus 1×bet скачать приложение на андроид DiskiPlus Набиуллина Эльвира Сахипзадовна порно DiskiPlus порно с Алексей Миранчук (футбол) DiskiPlus пин ап casino pin
#4525 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало
Если речь об эксклюзивных услугах, может понадобиться регистрация в казино по ссылке с партнерского вебсайта.Даже не выиграв крупную сумму, игрок увлекательно проведет время, изнутри изучит работу площадки, воспримет геймплей автоматов. Все это без каких-то финансовых рисков. Быть в курсе наихороших промоакций легко. Достаточно периодически изучать перечень свежих интернет казино с выводом бонуса без депо в этом разделе. <a href=http://filmkachat.ru/>1×slots сайт</a> <a href=https://noosfero.ufba.br/lexxeagle/blog/professionalniy-vikup-avto-v-kieve-s-chestnoy-otsenkoy-na-meste>https://noosfero.ufba.br/lexxeagle/blog/professionalniy-vikup-avto-v-kieve-s-chestnoy-otsenkoy-na-meste</a> Если площадка дарит бездеп за регистрацию, то процедура его получения проста. Нужно только завести акк на веб-сайте и активировать его, подтвердив адресок электронной почты, номер телефона или другие данные, которые просит оператор. Перед данным необходимо убедиться, что пользователь находится на официальном веб-сайте казино, но на жульнической площадке. 1×slot зеркало <a href=http://bbs.zhizhuyx.com/home.php?mod=space&uid=10625951>http://bbs.zhizhuyx.com/home.php?mod=space&uid=10625951</a>
1×slots casino зеркало рабочее
<a href=https://forumauthority.com/thread-6662-post-39398.html#pid39398>1 xslots рабочее зеркало</a> 1хслотс казино зеркало <a href=https://www.theexeterdaily.co.uk/users/stevenshouh>https://www.theexeterdaily.co.uk/users/stevenshouh</a> Вознаграждения за получение VIP-статуса ? начисляются масштабах программки лояльности при достижении еще значения либо выдаются индивидуально менеджерами службы поддержки.Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. 1×slots официальный сайт зеркало Бездепозитный бонус – это экономическое вознаграждение, которое выдается участнику игры в казино, для его привлечения и появления заинтригованности. Любой гость, который подходит условиям выдачи похожего бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое одобрение является наиболее эффективным методом, дающим вероятность стартовать при, не вкладывая личных вещественных средств.
x1 slots 1хслотс регистрация перейти на 1×slots
Многие новенькие колеблются, что поощрительный приз надо будет возвращать, и случае они выиграли у казино. Это безусловно неопасно и накрепко. Выводя выигранные свои, игрок просто одергивает свое участие при и теряет уникальную возможность – даром увеличивать личное материальное положение.У каждой забавы свои требования по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система засчитает любую ставку. В рулетке и покере устроить это гораздо труднее. Именно поэтому например главно внимательно читать обстоятельства получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в каждой игре, то новенькие попросту «спустят бонус на ветер». <a href=https://www.9tj.net/home.php?mod=space&uid=206335>https://www.9tj.net/home.php?mod=space&uid=206335</a> Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. 1×slots официальный сайт мобильная версия Бездепы шансы заходить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой или баллами.
1×slots casino регистрация 1×slots review live
Начнём с такого, собственно каждое рекламную за регистрацию подразумевает некие обстоятельства. Бездепозитные бонусы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность валютного оборота, необходимая для исполненья условий. Пример, получили благотворительные вращения и выиграли с них 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 рублей, неудачных либо выигрышных, так. После исполненья, бонусный баланс перейдёт на реальный и будет доступным к выводу. Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. 1×slots коды <a href=https://opensourcebridge.science/wiki/%D0%A4%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B_%D0%9A%D0%BE%D1%84%D0%B5%D0%B9%D0%BD%D0%B8_%D0%92_%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8:_%D0%A1%D1%82%D0%B0%D0%B2%D0%BA%D0%B0_%D0%9D%D0%B0_2024_%D0%93%D0%BE%D0%B4>https://opensourcebridge.science/wiki/%D0%A4%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B_%D0%9A%D0%BE%D1%84%D0%B5%D0%B9%D0%BD%D0%B8_%D0%92_%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8:_%D0%A1%D1%82%D0%B0%D0%B2%D0%BA%D0%B0_%D0%9D%D0%B0_2024_%D0%93%D0%BE%D0%B4</a>
1×slots регистрация то дальше необходимо пройти
Призовые начисления без депозита все предоставляться для участия в турнирах интернет казино. Потратить перечисленные средства можно исключительно масштабах этой акции. Условия их проведения содержат лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться этим предложением, какого-либо изучить его верховодила. Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации приза без депо. Внимательно прочитайте до конца. Многие новенькие делают промахи на шаге регистрации и потому имеют получить подарок. <a href=https://www.google.de/url?sa=t&source=web&cd=3&ved=0CCYQFjAC&url=https://doctorlazuta.by/>https://www.google.de/url?sa=t&source=web&cd=3&ved=0CCYQFjAC&url=https://doctorlazuta.by/</a> 1×slots casino регистрация 1×slotscasin online Каждый из бездепозитных бонусов без пополнения 2022 имеет свой конкретный вейджер для отыгрыша, например же в каждом казино он устанавливается индивидуально — где то он х55 а кое-где х30, повторюсь всюду по разному!В интернете много известных игорных площадок с привлекательными акционными предложениями. Однако внимательно разбирать условия десятков услуг времени надоест, ну и время отнимет количество. Поэтому наша команда подготовила ТОП-3 вебсайтов с лучшими бездепозитными призами:
<b>Смотреть еще похожие новости:</b>
<a href=http://mandala-app.com/memberlist.php?mode=viewprofile&u=3447&sid=1689cb540389785383ea3971bd71c219>1×slot регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В перечне притязаний к отыгрышу часто присутствуют лимиты на ставки при забаве на личные средства. Так, случае отыграть нужно 30 000 рублей, а предельная сумма ограничена 30 рублями, то вертеть барабаны предстоит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками условий по срокам деяния акции. Доступные игры – В некоторых азартных забавах возможно понизить математическое приемущество казино до нескольких десятых процента. В их количестве многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как управляло, в этих забавах ставки идут в зачет вейджера не полностью. Например, имеет учитываться только 50%. В неких играх бездепозитные бонусы вообще невозможно отыгрывать.
#4526 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
фильмы казино рояль 1×bet официальный слоты <a href=https://specreporter.com/>casino daddy</a> порно с Владимир Минеев (ММА) Нургалиева Эльвира Рамиловна порно <a href=https://sovsekretno.net/>porno Алена Михайлова</a> казино пину порно с Каролина Севастьянова 1×bet скачать приложение pin up casino пин ап 1×bet сейчас играющие казино онлайн порно с Елена Никитина, скелетонистка
DiskiPlus вывод казино DiskiPlus скачать букмекерскую контору <a href=https://diskiplus.ru>DiskiPlus букмекерская контора скачать приложение</a> DiskiPlus online casino DiskiPlus 1×bet слоты 1×bet xyz <a href=https://www.diskiplus.ru>DiskiPlus casino сайты</a> DiskiPlus порно с Аделия Петросян (фигурное катание) DiskiPlus кент casino DiskiPlus порно с Анна Щербакова, фигуристка DiskiPlus porno Мира Андреева (теннис) DiskiPlus порно с Артемий Панарин (хоккей) DiskiPlus casino онлайн DiskiPlus Хорова Наталья Александровна порно
#4527 Charlesgunnyhttp://filmkachat.ru
1×slots мобильная версия войти казино
Объективные – размер бонуса, коэффициент и обстоятельства вейджера, необходимость внесения депо для вывода средств; <a href=http://filmkachat.ru/>1×slot зеркало</a> Фриплей-бонусы встречаются только в неких клубах. Они зачисляются незамедлительно после творения профиля и активны недолговременное время. Если не успеете истратить средства, они просто сгорят. Касаемо времени, в большинстве случаев призы активны в течение часа. <a href=https://vhearts.net/forums/thread/8948/>https://vhearts.net/forums/thread/8948/</a> Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить необыкновенности, труднодоступные при этой в демо режиме. Многие свежие клиенты переходят в число постоянных, а оператор получает долгосрочную выгода.При помощи такого одобрения оператор может кроме завлекать посетителей, коие ранее показывали активность на сайте, хотя по какой-то основанию перестали играть. В данном случае промокод высылается юзеру по электронной почте либо повторяющий SMS. 1×slot казино зеркало <a href=http://www.oicqt.com/home.php?mod=space&uid=530002>http://www.oicqt.com/home.php?mod=space&uid=530002</a> Важно, убедитесь сомнений, собственно раньше не регились в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи.
1хслотс официальный сайт зеркало
Постарайтесь отыграть вейджер, чтобы замечена вероятность забыть заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные приборы. Вы можете получить выигрыш на электрической кошелёк, карту, телефонный. 1хслотс регистрация в 1×slots casino Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации подарка нужно подтвердить электрическую почту и привязать телефонный; <a href=https://www.winners24.pl/member.php?action=profile&uid=56073>https://www.winners24.pl/member.php?action=profile&uid=56073</a> Максимальная ставка ? устанавливается в денежной счета и ограничивает объем ставки за один спин. В случае ее превышения бонус может быть аннулирован. Также в правилах может содержаться запрет на размещение ставок определенного вида, примеру, по одинаковым шансам в рулетке (другими, на чет либо нечет, красноватое либо темное и т.д.). 1хслотс мобильная версия зеркало Некоторые клубы механически начисляют приз на аккаунт игрока последствии исполненья критерий получения, хотя случаются истории, когда приз нужно активировать игроку самому. Есть несколько способов активации приза:
1х слот 1хслотс регистрация перейти на 1×slots
Новые клиенты онлайн-казино без первого депозита имеют выяснить собственную удачливость. К тому же есть вероятность конвертировать бездепы в настоящие средства за регистрацию в казино, однако желаемого бонус необходимо отыграть сообразно условиям промоакции. <a href=https://www.ag405hotel.com/bbs/board.php?bo_table=free&wr_id=578307>https://www.ag405hotel.com/bbs/board.php?bo_table=free&wr_id=578307</a> Фриплей-бонусы. Бонусы за безвозмездную забаву есть только в некоторых клубах. Они зачисляются незамедлительно в творенья профиля и действуют непродолжительное время. Если у вас нет медли израсходовать свои, они просто завершатся. Что касается медли, в большинстве случаев бонусы срабатывают на 1-го часа. 1×slots зеркало подтвердит вашу регистрацию если говорить Бездеп с фриспинами имеет обхватывать всю коллекцию игр на веб-сайте либо разработки 1-го провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш может быть выведен последствии того, как пользователь отыграет данную необходимую. Возможность оценить полный перечень слотов — основное достоинство этой разновидности. Игроку становятся доступны что, эти опции, которые отсутствуют в демонстрационном режиме, а вероятность выиграть настоящие деньги добавляет ярких азартных ощущений.
1×slots зеркало регистрация
Бывают ли бездепозитные призы без вейджера? Бывают, в у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино. <a href=http://link.5nx.ru/memberlist.php?mode=viewprofile&u=600>1хслотс казино зеркало</a> Шаг 5. Использование и отыгрыш. Бездеп должен быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.Основное отличие в том, собственно для получения бездепа нужно пополнять баланс в казино. Но кроме этого, есть ряд прочих отличий: 1×slots регистрация на сайте <a href=http://d992387h.bget.ru/user/TerryAvaix/>http://d992387h.bget.ru/user/TerryAvaix/</a> Кешбэк-бонус дает собой возврат фиксированного процента от ставки в случае поражения или же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%.Отыграв бездепозитный приз в казино с выводом также придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если подобное ограничение существует, то единоразово исключить получится лишь сумму, не превышающую объем приобретенного бонуса.
1×slots мобильная версия войти казино
Прежде чем активировать бездеп, нужно увериться что, нет, что государство, гражданином которой является игрок, не входит в перечень не.Для верификации аккаунта надо(надобно) дать специалистам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, а также фотографию банковской карты или снимок странички электрического кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для подтверждения личности. Для отыгрыша бонуса казино обязывает игрока сыграть на необходимую, в некоторое раз превышающую сумму приобретенного бонуса — здесь выгода компании очевидна.Можно ли в одном онлайн казино получить больше одного приза за регистрацию? Нет, так как в каждом интернет казино есть управляла, к коим надо(надобно) держаться, не творить 2 аккаута для получения бонусов, другому несомненно блокировка обоих аккаутов, не пытайтесь обмануть интернет казино, бонус за регистрацию выдаеться один раз одному личику. <a href=https://feado.ru/user/profile/2960>https://feado.ru/user/profile/2960</a> Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного бонуса.У каждого игорного заведения средства правила и условия. Но, дабы получить призы, нужно выполнить стереотипные деяния: 1×slots зеркало регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://australianwinerytours.com/tours/showthread.php?tid=230242>1×slots официальный сайт, скачать</a>
<a href=https://tabsgame.ru/user/Jamesbes/>онлайн казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
С другой стороны, намного проще забрать бездепозитные фриспины за регистрацию в казино и напрямик сейчас начать вертеть барабаны в превосходнейших слотах. Главная необыкновенность спинов в том, собственно они предназначены для топовых автоматов. Удастся не пройти вспомогательные раунды, хотя и увеличить необходимую выигрыша, заработать респины и другие внутриигровые подарки. Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают бонус по странам. Вплоть до такого, что клуб имеет брать игроков из Вашей страны, а бездеп не давать.
#4528 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Катерина Шпица сайт букмекерской конторы <a href=https://repost.news/>порно с Захарова Мария Владимировна</a> up casino зеркало самое казино <a href=https://m.repost.news/>Преподобная Надежда Александровна порно</a> приложения букмекерских контор cometa casino пари букмекерская контора бк букмекерская контора вывод казино vavada casino порно с Дарья Касаткина (теннис)
DiskiPlus казино фильм смотреть онлайн DiskiPlus porno Алена Михайлова <a href=https://diskiplus.ru/>DiskiPlus 7k casino бонус</a> DiskiPlus как выиграть в казино DiskiPlus casino сайты <a href=https://diskiplus.ru>DiskiPlus зеркала официальных сайтов казино</a> DiskiPlus up букмекерская контора DiskiPlus casino сегодня DiskiPlus казино рулетка DiskiPlus porno Нина Пирогова, хоккеистка DiskiPlus почему в казино нет часов DiskiPlus пари букмекерская контора DiskiPlus сайте букмекерской конторы фонбет
#4529 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало на сегодня
Зачастую бездепозитные призы казино для забавы предлагаются разными заведениями азартных игр виде маркетинговых промоакций или в целях привлечения к для новых игроков. Для бездепозитных бонусов в казино 2022 игроку не нужно пополнять счет до момента вывода хотимых средств. <a href=http://filmkachat.ru/>1×slots регистрация на сайте</a> Если площадка дарует бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь ввести акк на сайте и активировать его, подтвердив адресок электрической почты, номер телефонного либо иные данные, которые просит оператор. Перед данным нужно увериться, что пользователь находится на официальном веб-сайте казино, а не на жульнической площадке.Помните, собственно в некоторых играх сумма ставки идет в зачет вейджера лишь отчасти. Так, в настольных и карточных забавах только от 5% до 50% суммы ставки считаются как отыгранные деньги, тот как в слотах идет в зачет все 100% суммы. <a href=https://www.empowher.com/groups/blogs-4/posts/modern-trends-professional-3d-architectural-visualisation-agency-servi>https://www.empowher.com/groups/blogs-4/posts/modern-trends-professional-3d-architectural-visualisation-agency-servi</a> Иногда у посетителей вебсайта имеют возникнуть трудности, задачи, препядствия при активации полученного промо-кода. В таких случаях, необходимо адресоваться за поддержкою в службу поддержки «Support». Для получения ответа, обязательно указывается конкретная причина обращения и подтверждается информация дополнительными снимками. Если сложилась спорная обстановка, всегда можно обратиться к основному регулятору либо контролирующему органу, выдавшему данному заведению лицензионный документ. 1 x slots casino <a href=http://www.cnfoeng.com/bbs/board.php?bo_table=MAHA&wr_id=5228>http://www.cnfoeng.com/bbs/board.php?bo_table=MAHA&wr_id=5228</a> Наличие у игрока второго аккаунта. Запрещено творить некоторое профилей для неоднократного получения бездепов.
1×slots регистрация
Сразу в активации промокода можно воспользоваться даром. Как теснее упоминалось, бонусы посещают трёх видов – фриспины, кредиты и фриплей-бонусы.Для тех, кто лишь подумывает испытывать собственную фортуну, еще для проф игроков, отыскивающих свежие площадки для выигрышей, ведущие лицензированные казино нередко устраивают разные акции, и одно из лучших услуг прошедшее время – как для начинающих, например и для профессиональных игроков – бездепозитный приз за регистрацию. <a href=https://ragnarok.ch/forum/viewthread.php?thread_id=130513>1хслот официальный сайт зеркало</a> casino 1×slot <a href=https://codescript.ru/user/Tyroneunuck/>https://codescript.ru/user/Tyroneunuck/</a> Во всех легальных онлайн-казино Беларуси нужно свидетельство паспортных данных для игры — это заявка правительства страны. 1×slots зеркало на сегодня Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке представители онлайн-казино публикуют важную информацию о no down payment bonuses и других услугах.
1× slots официальный
К раскаянию, нет. Почти все казино, настоятельно внесение желая бы 1-го минимального депозита для вывода выигрыша с бездепозитного бонуса. Также учитывайте, что исключить средства разрешено лишь на ту платежную систему, с которой был изготовлен депо. Бездепозитный бонус казино 2022 с выводом за регистрацию предоставляет возможность ознакомиться игроку с лобби избранного заведения, определится в выборе игр и выяснить качество работы саппорта. Довольно нередко, начиная игровой процесс, игрок теснее не желает останавливаться и делает реальный вклад. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть даром возможно как один таки с призом за регистрацию без необходимости вносить депо.Прежде всего, не запамятовывайте периодически заглядывать на страничку обзоров бездепозитных призов. Они шаг за шагом оценивают более увлекательные предложения основных игорных порталов. <a href=https://fabricenetwork.mn.co/posts/61563262>https://fabricenetwork.mn.co/posts/61563262</a> 1×slots зеркало на сегодня Новички не обожают незамедлительно же вносить депозит. Это обосновано неименьем навыка и недоверием. К счастью, наши возможно получить бездепозитный бонус за регистрацию в казино. Неважно собственно начисляет система – фриспины или кредиты. В всяком случае вы не рискуете своими сбережениями. Это замечательная возможность запустить понравившийся видео слот либо же испытывать удачу в настольных играх.
1×slot официальный сайт
Пoдтвepдить личнocть клиента. Для успешного вывода средств, нужно доказать лицо клиента. Нa этaпe вepификaции пpoфиля, работники службы защищенности обязаны увериться, собственно у игрока не один аккаунт. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не может исключить свой выигрыш, если у него несомненно несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы.Также случаются случаи, когда казино начислит обсужденный бонус последствии регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам. <a href=http://naturetour.ru/communication/forum/messages/forum3/message23548/5248–1×-slots-registratsiya-v-1×slots-casino?sessid=8defa179adbd3f783d72bbf1af64b054&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1× slots регистрация в 1×slots casino</a> Как правило, новоприбывшие игроки начала желают ознакомиться с методами ввода и вывода денежных средств и сроки выполнения поданных заявок чтобы конкретно осознавать, как стремительно у вывести свой казино бонус за регистрацию без депо на электрический кошелек либо же банковскую карту. К счастью для всех играющих, внутри конкретных холдингов, все казино конкурируют меж собой. Ведь если бы определенную фирму давало только одно онлайн-заведение, то ли бы клиенты заметили казино с бонусом за регистрацию и возможность бы рассчитывать лишь на вознаграждение в виде приза на 1-ое вложение. К любому заведению периодически стопам привлекать свежих игроков, собственно, в, только на руку всем играющим. Мы подготовили список, где есть практически актуальные и новые бездепозитные призы казино, которые вам получить безвозмездно. Для наших юзеров есть специальные предложения неповторимые призы, которые вы ни не отыщите, их мы определили специальной красноватой плашкой «Exclusive». рабочее зеркало 1×slots <a href=http://alex-zarya.ru/user/ArnoldEmott/>http://alex-zarya.ru/user/ArnoldEmott/</a>
1×slots зеркало
Основное верховодило получения бездепа ? создаваемый акк обязан быть у пользователя первым и единственным. Наличие нескольких аккаунтов взыскательно воспрещено. Проверка проводится по имени, e-mal, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита нужно соблюдать несложную последовательность деяний.Доступные забавы – В некоторых азартных забавах возможно понизить математическое превосходство казино до нескольких 10-х процента. В их количестве многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как управляло, в таких играх ставки идут в зачет вейджера не полностью. Например, возможность учитываться лишь 50%. В некоторых забавах бездепозитные призы вообще невозможно отыгрывать. <a href=https://forum.show-master.ru/forum/index.php?PAGE_NAME=profile_view&UID=52150>https://forum.show-master.ru/forum/index.php?PAGE_NAME=profile_view&UID=52150</a> 1×slots зеркало рабочее Некоторые клубы автоматически начисляют бонус на аккаунт игрока в выполнения условий получения, хотя посещают ситуации, когда бонус надо(надобно) активировать игроку самому. Есть некоторое способов активации приза:Допустим, за регистрацию вы возымели бездеп в размере 2 000 руб. С вейджером х30. В этом случае предстоит сделать ставок, на общую необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать настоящие средства. Однако не забывайте, собственно с каждого дара получится вывести определённую сумму (почаще всего не более $200).
<b>Смотреть еще похожие новости:</b>
<a href=https://portugal-campings.com/pt/account/>1×slots актуальное зеркало</a>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=98155&result=reply>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы за регистрацию в игровых автоматах для владельцев онлайн-казино являются частью маркетинговой кампании, направленной на повышение аудитории вебсайта. Так они продвигают свои бренды и завлекают свежих посетителей.
#4530 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
лучшие букмекерские конторы смотреть фильм казино <a href=https://m.repost.news/>казино фильм онлайн</a> скачать 1×bet на андроид Мухтиярова Елена Вячеславовна порно <a href=https://www.ossetia.tv/>ramenbet casino</a> сайт казино зеркало Разуваева Ксения Денисовна порно Окладникова Ирина Андреевна порно Попова Анна Юрьевна порно казино сегодня porno Елизавета Туктамышева porno Андрей Рублев (теннис)
DiskiPlus 1×bet на андроид DiskiPlus Скворцова Вероника Игоревна порно <a href=https://diskiplus.ru/>DiskiPlus букмекерская контора на андроид</a> DiskiPlus Москалькова Татьяна Николаевна порно DiskiPlus casino 7k сегодня <a href=https://www.diskiplus.ru>DiskiPlus рокс казино</a> DiskiPlus порно с Сергей Бобровский (хоккей) DiskiPlus игры казино DiskiPlus Преподобная Надежда Александровна порно DiskiPlus up casino скачать DiskiPlus букмекерская контора зенит DiskiPlus 1×bet вход DiskiPlus казино рублях
#4531 Charlesgunnyhttp://filmkachat.ru
рабочее зеркало 1×slots
Бонусы без депозита при регистрации числятся самыми привлекательными как для опытнейших игроков, так для и начинающих. Получив это вознаграждение, заказчик имеет играть на настоящие деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а также обстоятельства их активации и выигрыша.Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного бонуса довольно пополнения баланса и подтверждения личности. В других же клубах, нужно количество раз прокрутить собственный депозит. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало</a> <a href=https://imageevent.com/lexxeagle/qwerty>https://imageevent.com/lexxeagle/qwerty</a> Представьте момент, когда при ставке в 10 рублей Вы получите схожее умножение. Миллион руб. За одно вращение, собственно вполне вероятно. Поэтому вопрос, сколько возможно выиграть остаётся открытым. Предлагаем выяснить самостоятельно. Регистрируйтесь в одном или нескольких онлайн казино, получайте Бездепозитный приз и инспектируйте удачу в деле. Разумеется, вывести средства сложно. Однако шансы есть у всех.Если вы выбрали для себя некоторое брендов которые вам больше всего полюбились, для неизменной забавы! Таких гемблеров казино очень любит и оценивает, за частую эти игроки становятся VIP игроками заведения, которым нередко поступают прибыльные предложения в виде призов, так же туда входит и бездепозитные. 1х слотс зеркало регистрация в 1×slots casino <a href=https://lorenzoghgg55667.digitollblog.com/30101419/deep-nude-ethical-concerns-and-the-impact-of-ai-on-privacy>https://lorenzoghgg55667.digitollblog.com/30101419/deep-nude-ethical-concerns-and-the-impact-of-ai-on-privacy</a>
1×slots casino регистрация 1×slots review live
Многие игроки, оценив возможностей казино, остаются играть в нем и далее ? на это и направлено каждое рекламную. Постоянные клиенты заносят депозиты и делают ставки, обеспечивая длительную прибыль оператора. То есть, казино выдают бездепы свежим юзерам для формирования приклнной аудитории.Создание аккаунта. На веб-сайте казино нужно обнаружить регистрационную форму и наполнить пустующие поля собственными данными. Иногда на этом шаге потребуется показать лишь адрес электрической почты и пароль, но почаще надобно наполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д.). Нужно указывать только реальные данные, потому впоследствие они станут испытаны. <a href=http://big.bestforums.org/viewtopic.php?f=7&t=18116>1×slots зеркало сайта</a> 1×slots рабочее зеркало на сегодня В большинстве заведений сделать это можно по e-mal, по номеру телефона, через социальную сеть или гугл-аккаунт.Если вы избираете проверенное лицензионное интернет казино и сделайте все обстоятельства получения бездепозитного приза, трудностей с получением дара у Вас не возникнет. <a href=https://xn–6-gtb4aicb3c6b.xn–p1ai/user/RichardTaunc/>https://xn–6-gtb4aicb3c6b.xn–p1ai/user/RichardTaunc/</a> В бонусную программу множества операторов входят систематические бездепы. Это бессрочные акции, поощряющие активных постоянных игроков. Популярный формат — раздача фриспинов по конкретным денькам недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депозита в мена на скопленные баллы преданности. 1×slots регистрация 1×slotscasino09k online У каждого игорного заведения средства правила и условия. Но, дабы получить призы, нужно выполнить стереотипные действия:Поспешите зарегистрироваться на официальном сайте Клубника, дабы быстро получить 33 безвозмездных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, замечена реальный шанс победу!
casino 1×slot
<a href=http://mbdou-vishenka.ru/user/TyroneUsesk/>http://mbdou-vishenka.ru/user/TyroneUsesk/</a> Бонус без депозита за регистрацию в казино (бездепозитный приз) – это денежный презент от клуба, который начисляется на акк игрока в регистрации в казино. Кроме творения учетной записи, для получения бездепа, очень нередко требуется ещё и подтвердить контактные данные игрока и/или активировать специальный промо-код.Пoдтвepдить личнocть клиента. Для успешного вывода средств, нужно доказать лицо клиента. Нa этaпe вepификaции пpoфиля, сотрудники службы безопасности обязаны увериться, собственно у игрока всего лишь раз аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не сможет исключить собственный выигрыш, случае у него будет несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы. 1× slots официальный
1×slos регистрация в 1×slots casino
Нет. Казино выдают бесплатные призы за регистрацию, чтобы, чтобы, чтобы заказчик имел ознакомиться с игровым заведением. А дабы исключить его, необходимо выполнить обстоятельства отыгрыша.Выбирая даровой приз, внимательно изучайте верховодила. Убедитесь, что вам можно на участие в промоакции. Уточните, в каких играх возможно выполнять условия вейджера. При надобности задавайте вопросы адептам саппорта. <a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=5386>1×slos регистрация в 1×slots casino</a> Нельзя рассматривать забаву на средства, как вариант заработка. Азартные забавы запрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не является зачинщиком азартных игр. Сайт носит информационный нрав.Бонус за регистрацию в казино выдается только раз один на 1-го игрока. Но бывают дополнительные промоакции, в рамках которых бездепы расступаются для постоянных посетителей и такие презенты Вы можете получить более 1-го раза. У каждого игорного заведения средства правила и условия. Но, чтобы получить призы, необходимо выполнить стандартные действия:Хотя бесплатные бонусы начисляются без депо, не исключено, собственно для понадобиться вносить средства. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь в как, как новый заказчик впервые пополнит игровой счет. 1х слот регистрация в 1×slots casino <a href=http://www.fcterc.gov.ng/index.php/member/1977/>http://www.fcterc.gov.ng/index.php/member/1977/</a> Выбирайте наихорошие бесплатные призы с помощью обзоров на Casinoz – и пусть вам сопутствует удача при отыгрыше бонусных кредитов!В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая приятная часть забавы. Важно, часто бездепозитные призы в казино выдаются с ограничениями по максимальной выплате. В среднем можно рассчитывать на прибыль в несколько тыщ рублей. Как исключить выигрыш с приза без депо. Придётся подтвердить акк документально, в некоторых заведениях. Процедура верификации обязательна и делается каждым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате либо прочитайте в правилах.
1×slot рабочее зеркало
Каждая игровая перрон отличается критериями по получению и отыгрышу бездепов. В правилах отчетливо расписаны кратковременные рамки, за коие нужно прокрутить вейджер. Также не запамятовывайте на максимальный размер ставки и максимальную необходимую выплаты. С другой стороны, дабы получить бездепозитные бонусы казино, достаточно израсходовать менее 1 минутки.В количестве случаев безвозмездные бонусы начисляются в кредитах, коие невозможно незамедлительно исключить со счета. Прежде их нужно отыграть по установленным правилам. Эти требования принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д.). О нем читайте ниже. <a href=https://xn–80apeih4a.xn–p1ai/communication/forum/messages/forum3/message4352/2925-ckachat-filmy?result=new#message4352>https://xn–80apeih4a.xn–p1ai/communication/forum/messages/forum3/message4352/2925-ckachat-filmy?result=new#message4352</a> Можно ли в одном онлайн казино получить больше одного приза за регистрацию? Нет, так как в каждом интернет казино есть управляла, к которым нужно придерживаться, не делать два аккаута для получения призов, другому будет блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, бонус за регистрацию выдаеться один один одному личику. рабочее зеркало 1хслотс Похожим образом трудится 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя либо из-за с получения им VIP-статуса. Подарок предоставляется последствии обращения в поддержку и ревизии.
<b>Смотреть еще похожие новости:</b>
<a href=http://sfessd.listbb.ru/memberlist.php?mode=viewprofile&u=86>1хслот скачать</a>
<a href=http://powercrop.it/chi-siamo/le-persone?page=9#comment-477>1×slots регистрация на сайте 1×slots ru com</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подтверждение электрической почты – одно из ведущих условий, которое есть практически в любом бездепозитном казино. Чтобы верифицировать электрическую почту, довольно перейти по интенсивной ссылке в письме, полученном от азартного клуба.
#4532 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
спорт букмекерская контора Ходнева Светлана Владимировна порно <a href=https://strelochnik.com/>букмекерские контора ап</a> Семёнова Татьяна Владимировна порно kent casino <a href=https://rumafia.news/>порно с Максим Глушенков (футбол)</a> порно с Георгий Джикия (футбол) порно с Илья Осипов (киберспорт) 7k casino сайт 1×bet зеркало рабочее на сегодня 1×bet xyz 1×bet слоты официальный сайт up букмекерская контора 1×bet на сегодня
DiskiPlus black russia казино DiskiPlus 7k casino зеркало <a href=https://diskiplus.ru>DiskiPlus porno Дарья Клишина</a> DiskiPlus new casino DiskiPlus включи казино <a href=https://www.diskiplus.ru>DiskiPlus почему казино</a> DiskiPlus вывод казино DiskiPlus pin up casino зеркало DiskiPlus up casino официальный DiskiPlus казино 1 DiskiPlus порно с Абрамченко Виктория Валериевна DiskiPlus 1×bet регистрация DiskiPlus порно с Петр Ян (ММА)
#4533 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало
Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке адепты онлайн-казино публикуют актуальную информацию о no deposit bonuses и других услугах. <a href=http://filmkachat.ru/>1×slots казино зеркало</a> <a href=https://www.swiatobrazu.pl/forumgaleria/thread/view/id/589>https://www.swiatobrazu.pl/forumgaleria/thread/view/id/589</a> Частенько новички не знают, как активировать презенты или вывести 1-ый выигрыш. Для подобных случаев наша команда обрисовала главные термины – собственно такое фриспины, вейджер, как его отыграть, для необходимо протекать верификацию. 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=https://xn----htbblufccvgdmek8j.xn–p1ai/forum/user/12413/>https://xn----htbblufccvgdmek8j.xn–p1ai/forum/user/12413/</a> Бездепозитные бонусы за регистрацию в игровых автоматах для собственников онлайн-казино являются частью маркетинговой кампании, направленной на повышение аудитории сайта. Так они продвигают свои бренды и завлекают свежих клиентов.
1 x slots casino
В любом казино с бездепозитным призом учтены вейджеровые обстоятельства. Это единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, нужно сделать определённое количество ставок. Чем круче приз, что, этим труднее выполнить условия, и напротив. <a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=128770>1хслотс официальный сайт зеркало</a> 1×slots зеркало быструю регистрацию а также мгновенное <a href=https://wifidb.science/wiki/User:April42M80439>https://wifidb.science/wiki/User:April42M80439</a> Oтыгpaть бонус с обозначенным вeйджepом, для этого необходимо сдeлaть cтaвoк нa cумму, превосходящую размер приза в некоторое раз.В большинстве заведений сделать это возможно по адресу электронной почты, по номеру телефонного, спустя социальную сеть либо гугл-аккаунт. 1×slots зеркало сайта Поспешите арестовать бездепозитные бонусы за регистрацию в казино из представленного списка. Все платформы столько ведут легальную деятельность, но и обрадуют честными результатами забавы, высочайшей отдачей, резвыми выплатами.
1×slots рабочее зеркало
<a href=http://came-spb.com/bitrix/redirect.php?goto=http://bogdarnya.shop/bitrix/click.php?goto=http://wsplast.ru/bitrix/redirect.php?goto=https://telegra.ph/Poshagovoe-rukovodstvo-po-zamene-processora-v-kompyutere-09–23>http://came-spb.com/bitrix/redirect.php?goto=http://bogdarnya.shop/bitrix/click.php?goto=http://wsplast.ru/bitrix/redirect.php?goto=https://telegra.ph/Poshagovoe-rukovodstvo-po-zamene-processora-v-kompyutere-09–23</a> 1×slots рабочее зеркало Существуют казино с призом за регистрацию, в очень известны фриспины в интернет казино впоследствии регистрации в конкретных забавах. Они встречаются том чаще бесплатных поощрений или традиционных бонусов в казино без вложений. Например, игрок регистрирует счет, на который начисляются безвозмездные игры, бонус за регистрацию вид даровых фрспинов, вращения в игровом автомате. Во время игрового процесса игрок выигрывает настоящие деньги, коие в последствии возможно успешно исключить из заведения на собственную платежную систему. То есть, есть шансы исключить средства без рисков своими деньгами. Регистрация, за которую компьютерные получит бонусы, займет минут, а спасибо этому возможно прирастить 5 евро поощрений до тыс. И без всяких проблем исключить их.Автоматическая активация кажется самой удобной, хотя ручной метод содержит перед ней превосходства. Прежде чем использовать вознаграждение от казино, стоит заблаговременно определить, сколько медли потребуется на выполнение всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деянья приза.
1× slots casino официальный сайт
Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, например как Вам придется ее доказать дальнейшем при выводе денег.В современность очень просто получить бонус за регистрацию в казино. Практически каждый игорный дом с готовностью начисляет средства либо благотворительные вращения. Многие гэмблеры пользуются этим и не стыдятся региться в любом клубе с прибыльными критериями. Кстати, это отличная возможность выработать победную тактику и сорвать джекпот. <a href=http://smpn1bejen.sch.id/forum/>1×slots casino регистрация 1×slotscasino09k online</a> Используйте лучшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из списка ниже, дабы заработать презенты за обычные деяния и уже сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высочайшей отдачей и быстрыми выводами на электрические кошельки. Шаг 4. Активация. Внимательно исследуйте обстоятельства, информацию по лимитированиям и сроке деянья бонусного предложения. Разобравшись с правилами, возможно активировать бонус в собственном кабинете (от ? с использованием промокода) или по запросу в саппорт.Прибывшие на акк финансы бездепозитные бонусы предназначаются, главном, лишь для новоиспеченных пользователей, которые раньше не имели личного аккаунта в данном казино. Исходя из этого, если ранее у игрока был изготовлен депозит, то, по всей вероятности, у него больше не несомненно возможности рассчитывать на получение такого бонуса в конкретном заведении. 1×slots регистрация то дальше необходимо пройти <a href=http://prf-r.ru/bitrix/redirect.php?goto=http://shelbygrooming.ru/bitrix/redirect.php?goto=http://clients1.google.com.sb/url?q=https://teletype.in/@urist555/txUML8urNzy>http://prf-r.ru/bitrix/redirect.php?goto=http://shelbygrooming.ru/bitrix/redirect.php?goto=http://clients1.google.com.sb/url?q=https://teletype.in/@urist555/txUML8urNzy</a> Диапазон ставок, которые вправе устроить игрок, также лимитирован. Обычно ставить возможно небольшую сумму — пределах 10–30 рублей за одно вращение.
1хслотс официальный сайт зеркало
Поспешите зарегистрироваться на официальном сайте Клубника, дабы мгновенно получить 33 безвозмездных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, появляется реальный шанс победу!Ознакомьтесь с нашим списком лучших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего перечня и получите бездеп сразу. Хватайте наихорошие бесплатные предложения ниже и выигрывайте великие средства, не рискуя! <a href=http://www.hucellbio.com/bbs/board.php?bo_table=free&wr_id=204450>http://www.hucellbio.com/bbs/board.php?bo_table=free&wr_id=204450</a> Важно, удостоверьтесь в том, что раньше не регились в избранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи.Обычно бездепозитные промоакции от казино, приходят на эл. Почту в дни рождения или праздничные. В некоторых интернет казино можно адресоваться в чат и как неизменному игроку, возможно вас предложат бездепозитное предложение. 1×slots быструю регистрацию а также мгновенное В онлайне очень много скриптовых сайтов, коие принадлежат плутам. Их главная цель – привлечь гэмблеров, пообещав не великодушные подарки, хотя и крупные выигрыши. Так собственно некоторые сайты предлагают получить за регистрацию и $1 000.Можно ли в одном интернет казино получить больше 1-го бонуса за регистрацию? Нет, например как в любом онлайн казино есть верховодила, к коим надо(надобно) держаться, не творить 2 аккаута для получения бонусов, по несомненно блокировка обоих аккаутов, не пытайтесь обмануть онлайн казино, приз за регистрацию выдаеться раз раз 1 лицу.
<b>Смотреть еще похожие новости:</b>
<a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=750144>1×slots зеркало рабочее</a>
<a href=https://www.neocodex.us/forum/topic/120221-getting-started-with-neocodex/page-3#entry2034910>1×slots зеркало проходить регистрацию это отличный вариант</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Шаг 5. Использование и отыгрыш. Бездеп обязан быть применен в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера.
#4534 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации
Бездепозитный бонус казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в данном и заключается основное отличие.Ещё одно распространённое акционное предложение – симпатичный презент с неблаговидными требованиями. К примеру, клуб сулит $100 в бездепа, хотя с вейджером х80 либо х100. Отыграть такой вейджер практически невозможно и поэтому какого-либо концентрироваться на больше занимательных акциях. <a href=http://filmkachat.ru/>1×slots зеркало этих способов предполагает регистрацию</a> <a href=https://www.empowher.com/groups/blogs-4/posts/revolutionizing-web-experiences-through-interactive-cgi-solutions>https://www.empowher.com/groups/blogs-4/posts/revolutionizing-web-experiences-through-interactive-cgi-solutions</a> 1×slots регистрация 1×slots review live <a href=https://ai.ceo/read-blog/225693>https://ai.ceo/read-blog/225693</a>
1×slots официальный регистрация
Так что главное отличие подарка на депо от бездепа – обязательное пополнение счёта. Вы можете привнести депо и преумножить стартовый капитал или забрать бездеп и при этом не придётся рисковать своими сбережениями. Поспешите выполнить обычные требования, и администрация ресурса начисляет щедрое одобрение! 1×slot зеркало рабочее этих способов предполагает регистрацию Многие казино предоставляют в маркетинговых целях благотворительные призы самая для наших читателей. Чтобы их получить, нужно перейти на игровой сайт по партнерской ссылке с нашего портала.Вышеописанная причина и считается основным моментом, из-за которого операторы отдают доля своей прибыли на различные маркетинговые затраты и рекламные кампании. А наиболее действенным тут станут выступать именно бездепозитные призы казино 2022 с выводом за регистрацию. <a href=https://google.sk/url?q=https://doctorlazuta.by/>https://google.sk/url?q=https://doctorlazuta.by/</a> Принципиальным отличием бесплатных призов от призов на депозит считается неименье надобности заносить средства на аккаунт. Из-за этого их часто называют бездепозитными (not the slightest down payment bonuses).Возьми свой подарок. Чаще всего бонус активируется незамедлительно после регистрации. Но посещают ситуации, когда нужно забежать в личный офис либо написать в справочную службу. 1× slots casino официальный сайт Фриспины. Бесплатные вращения предназначены для применения в видео-слотах. Внимательно читайте условия – они нередко выдаются для неких машин. В зависимости от клуба продоставляется создавать определенное число ставок. Кстати, современные игорные жилища дают возможность заводить «одноруких бандитов».
1×slots регистрация
Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном веб-сайте и выполните вход в личный кабинет, дабы отобрать благотворительные вращения с вейджером х40; В онлайне очень много скриптовых сайтов, которые принадлежат жуликам. Их основная задача – заинтересовать гэмблеров, пообещав не только великодушные презенты, но и крупные выигрыши. Так собственно кое-какие сайты предлагают получить за регистрацию в $1 000. <a href=http://radiator-batareya.com/bitrix/click.php?goto=http://meters.taipit.ru/bitrix/rk.php?goto=http://sns.51.ca/link.php?url=https://telegra.ph/Ezhemesyachnoe-posobie-pensioneram-nagrazhdennym-znakom-otlichiya-pogranichnika-I-stepeni-09–19>http://radiator-batareya.com/bitrix/click.php?goto=http://meters.taipit.ru/bitrix/rk.php?goto=http://sns.51.ca/link.php?url=https://telegra.ph/Ezhemesyachnoe-posobie-pensioneram-nagrazhdennym-znakom-otlichiya-pogranichnika-I-stepeni-09–19</a> Бездепозитные бонусы – это самая небезинтересная и наиболее перспективная промоакция интернет-казино. Они числе какого-либо фри-спинов, поэтому что выплаты в даровых вращениях не гарантированы, так комбинации на барабанах игрового аппарата шансы не сложиться.В зависимости от онлайн заведения каждый из них имеет вас предложить как бездепозитные деньги, так и бездепозитные фриспины, которые после успешной регистрации рухнут для на ваш игровой баланс. 1× слот зеркало Мы собрали и выпустили перечень превосходнейших бездепозитных казино с призами за регистрацию, коие гарантируют щедрые выигрыши и моментальные выплаты.
1×slots casino зеркало рабочее
Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша бонусов. Заведения практически устанавливают максимальную ставку, возможную по условиям вейждера. Новички не обожают сразу же вносить депозит. Это обосновано отсутствием опыта и сомнением. К счастью, в можно получить бездепозитный бонус за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В всяком случае вы не рискуете собственными сбережениями. Это отличная вероятность запустить приглянувшийся видео разъем или же испытывать удачу в настольных играх. 1×slots регистрация на сайте 1×slots ru com <a href=https://www.alpea.ru/forum/user/22298/>https://www.alpea.ru/forum/user/22298/</a> Заполняя данные в личном профиле, указывайте только достоверную информацию, так как Вам понадобиться ее подтвердить в будущем при выводе денег.
1×slot рабочее зеркало
Бездепозитные призы — это презенты от казино вид бонусных денег или фриспинов для игровых автоматов, коие начисляются на аккаунт игрока последствии процедуры регистрации на сайте заведения. Для получения этих поощрений депозит не потребуется. Игры, каких возможно играть на бонусные деньги. Проверьте список игр, в которых можно выступать на бонусные свои, вероятно они Вам не понравятся и не стоит расходовать своё время на эту промоакцию.На бонусные начисления могут быть установлены вспомогательные лимитирования, которые Вы не учли при отыгрыше. Пока бонус полностью не отыгран — средства из казино не выводятся. <a href=http://dotstroy.ru/userinfo.php?uid=41863>http://dotstroy.ru/userinfo.php?uid=41863</a> Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие возникают у начинающих. 1×slot зеркало рабочее регистрации на телефон придет
<b>Смотреть еще похожие новости:</b>
<a href=https://www.bf-france.com/forums/profile/30064-rabofreeor/>1×slot зеркало рабочее регистрации на телефон придет</a>
<a href=http://forum.survival-readiness.com/viewtopic.php?t=264794>1×slots регистрация на сайте</a>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/8623/#comment-354654>1х слот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Также посещают случаи, когда казино начисляет оговоренный приз в регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам. В большинстве заведений сделать это возможно по e-mal, по номеру аппарата, спустя социальную сеть либо гугл-аккаунт.
#4535 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino daddy лучшие букмекерские конторы <a href=https://th-royalgclub.com/>1×bet приложение</a> винлайн букмекерская контора официальный бесплатные букмекерские конторы <a href=https://repost.news/>porno Ангелина Гончаренко, хоккеистка</a> букмекерские контора ап порно с Абрамченко Виктория Валериевна casino зеркало сайта 7k casino бонус porno Юлия Пересильд сколько казино сайт казино вход
DiskiPlus Елизавета Боярская DiskiPlus бесплатно фильм казино <a href=https://www.diskiplus.ru>DiskiPlus винлайн букмекерская контора официальный сайт</a> DiskiPlus букмекерская контора фонбет DiskiPlus букмекерская контора мостбет <a href=https://diskiplus.ru/>DiskiPlus порно с Варвара Субботина</a> DiskiPlus 1go casino DiskiPlus casino официальный сайт DiskiPlus casino бонус DiskiPlus Шевцова Татьяна Викторовна порно DiskiPlus порно с Кирьянова Дарья Борисовна DiskiPlus казино гта 5 DiskiPlus Разуваева Ксения Денисовна порно
#4536 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
сайт pin up casino casinos winning <a href=https://vestnik-jurnal.com/>1×bet зеркало рабочее на сегодня 1×bet xyz</a> 1×bet зеркало букмекерская контора леонов <a href=https://strelochnik.com/>ставки на спорт букмекерские конторы</a> Валентина Матвиенко порно леон букмекерская контора 1×bet xbet xyz Радченко Светлана Юрьевна порно букмекерская контора вход casino сайты casino зеркало сегодня рабочее
DiskiPlus pin up букмекерская контора DiskiPlus casino ап <a href=https://www.diskiplus.ru>DiskiPlus 7k casino сайт</a> DiskiPlus скачать 1×bet 1×bet xyz DiskiPlus ограбление казино <a href=https://www.diskiplus.ru/>DiskiPlus porno Виктория Баркова, легкоатлетка</a> DiskiPlus casino вход DiskiPlus зеркала официальных сайтов казино DiskiPlus казино ставка DiskiPlus самое казино DiskiPlus песня казино DiskiPlus 1×bet сайт 1×bet xyz DiskiPlus бесплатно фильм казино
#4537 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора без мобильные букмекерские конторы <a href=https://rucriminal.info/>пин ап casino pin</a> inform@rucriminal.info up casino официальный <a href=https://rumafia.news/>песня казино</a> порно с Константин Тюкавин (футбол) спорт букмекерская контора pin casino зеркало пин ап букмекерская контора спорт букмекерская контора лучшие букмекерские конторы винлайн букмекерская контора официальный
DiskiPlus casino betting DiskiPlus приложения букмекерских контор <a href=https://www.diskiplus.ru>DiskiPlus 1×bet слоты 1×bet xyz</a> DiskiPlus официальное казино вход DiskiPlus 1×bet на сегодня <a href=https://diskiplus.ru>DiskiPlus про казино</a> DiskiPlus играющие казино онлайн DiskiPlus Елена Лядова DiskiPlus 7k casino сайт DiskiPlus 1×bet зеркало на сегодня DiskiPlus букмекерская контора на андроид DiskiPlus порно с Абрамченко Виктория Валериевна DiskiPlus фреш казино
#4538 AHoini
<a href=https://www.teacircle.co.in/como-usar-o-bonus-de-cassino-1win-brasil-guia-passo-a-passo/>1win mozambique</a> <a href=https://vds73727.kylieblog.com/30975473/fascination-about-1win>1win Cameroun</a>
#4539 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
Казино выводит деньги только на что, эту платежную систему, с котрой был сделан депо. То есть, для вывода бездепозитного бонуса, Вам поначалу нужно восполнить счет. В некоторых клубах ограниченный список методов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с этих платежных способов, коие доступны для вывода.Бездепы все заходить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой или баллами. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало</a> Можно. Вы практически сможете отказаться от получения бездепозитного приза за регистрацию в казино, же Вы не сделаете ставку.Подтвердите лицо, предоставив оператору казино свои паспортные данные. Инструкции обычно легкие, основное — конкретно им стопам. Если написано, что «на фото должны быть заметны все хорошо угла страницы паспорта» — устройте именно такое фото. <a href=https://www.facer.io/user/CA95QUBa2X>https://www.facer.io/user/CA95QUBa2X</a> рабочее зеркало 1×slots <a href=http://zc.xszrcw.com/home.php?mod=space&uid=422567&do=profile>http://zc.xszrcw.com/home.php?mod=space&uid=422567&do=profile</a> Бездепозитные призы за регистрацию являются одним из самых знаменитых методов привлечения свежих игроков в онлайн-казино, потому собственно они деют игрокам возможность опробовать казино, неподражаемо игровые автоматы, и вполне, выиграть настоящие средства.Индивидуальные поощрения выдаются за совершение действий: подписку на аккаунты площадки в социальных сетях, установку мобильного приложения либо официального посетителя для ПК. В большинстве казино срабатывают программки лояльности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на грядущий степень нередко сопрягается выдачей бездепа.
1хслотс зеркало на сегодня
<a href=http://6000ziyuan.com/forum.php?mod=viewthread&tid=137867&extra=>1×slots бездепозитный бонус за регистрацию</a> 1×slots регистрацию более популярный вариант это <a href=https://build-info.biz.ua/wr_board/tools.php?event=profile&pname=GlennPof>https://build-info.biz.ua/wr_board/tools.php?event=profile&pname=GlennPof</a> 1×slots актуальное зеркало Некоторые сайты, прежде чем провести регистрацию игроков, предлагают ответить на количество базовых вопросов. Цель проведения сходственной викторины – выявить случайных людей, которые не имеют представления о покере, и не допустить получения ими бонусов. Если посетитель теснее играл в казино, то ответить на полтора 10 простых вопросов несомненно несложно. Очень часто, ответы можно отыскать на официальных веб-сайтах данных учреждений.Подтвердите регистрацию, дабы активировать Бездепозитный бонус с выводом, потребуется наполнить индивидуальный профиль. Заполните пустые поля истинными данными о себе.
1хслот зеркало сайта
Вознаграждения за получение VIP-статуса ? начисляются в рамках программки лояльности при достижении очередного значения или выдаются персонально менеджерами службы. Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, a только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.К сожалению, нет. Почти все казино, настоятельно внесение желая бы 1-го малого депозита для вывода выигрыша с бездепозитного бонуса. Также учитывайте, что вывести средства разрешается лишь на ту платежную систему, с коей был сделан депозит. <a href=http://www.tronicb7records.com/new/index.php?option=com_k2&view=itemlist&task=user&id=94858>http://www.tronicb7records.com/new/index.php?option=com_k2&view=itemlist&task=user&id=94858</a> 1×slots регистрация 1×slots review live Раздача бонусов может быть посвящена разным датам: календарные дни, дни рождения игроков, юбилей открытия казино и т. Д. Подарок выдается в виде денег, фриспинов либо баллов для скопления и обмена на услуги оператора. Если юзер получает выигрыш, средства начисляются на его счет. Для вывода этой суммы понадобиться выполнить ряд требований.Бесплатные призы казино без депозита возможно получить вид денежных средств на бонусный счет (исключить их возможно только после отыгрыша), фриспинов, игры или кешбэк-бонуса.
1×slots зеркало регистрация в 1×slots casino
К примеру, игроку выдаются безвозмездные средства в заведении в размере пятидесяти или ста $ (вейджер на которые составляет 100х). То есть, каждому новоприбывшему геймеру выскакивает притягивающая картинка, кот-ая сулит выплату всех зачисленных фирмой средств. Не стоит обращать внимания на казино приз за регистрацию без депозита с слишком большой или очень малюсенькой суммой призов, поэтому собственно, том кропотливо выучив все обстоятельства, тут всего, несомненно некий подкол.Также случаются случаи, когда казино начислит обсужденный бонус после регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам. <a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/6761–1-khslot-registratsiya-v-1×slots-casino#6771>1 хслот регистрация в 1×slots casino</a> Однако в критериях скрываются «подводные камни», коие не разрешат вывести солидную необходимую либо же вы не успеете отыграть вейджер. Поэтому мастера рекомендуют арестовать благотворительные вращения за регистрацию в казино без депо, дабы поднабраться опыта и получить настоящий шанс на победу.Для доказательства электрической почты, просто перейдите по активной ссылке в послании, приобретенном от игрового заведения. 1 х слотс зеркало <a href=http://bazadivanov.ru/bitrix/redirect.php?goto=http://cio-hmao.ru/bitrix/rk.php?goto=http://ural-zitar.ru/bitrix/rk.php?goto=https://telegra.ph/Poshagovoe-rukovodstvo-po-registracii-akcionernogo-obshchestva-09–24>http://bazadivanov.ru/bitrix/redirect.php?goto=http://cio-hmao.ru/bitrix/rk.php?goto=http://ural-zitar.ru/bitrix/rk.php?goto=https://telegra.ph/Poshagovoe-rukovodstvo-po-registracii-akcionernogo-obshchestva-09–24</a>
1×slot зеркало
Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном веб-сайте и выполните вход в собственный кабинет, чтобы арестовать бесплатные вращения с вейджером х40;Если идет об эксклюзивных предложениях, может потребоваться регистрация в казино по ссылке с партнерского вебсайта. Суммы подобных предложений, в, колеблются от трех до 20 долларов, а вейджер на эти средства должен сочинять от 30 до шестидесяти один. Зачастую, наибольшая сумма выигрыша тут составит от одной до двух сотен $. Если компьютерные выиграет больше, то все средства могут быть списанными до очень разрешенного выигрыша. Здесь бывает смысл выводить еще несуществующие деньги на собственную платежную систему и далее искать заведение с благоприятными под данную необходимую релоадом или бонусом за 1-ое пополнение счета. Есть некоторое подвидов бездепозитного вознаграждения, предлагаемого большим количеством заведений.Каждый геймер обязан сначала отчетливо изучить условия по получению и отыгрышу приглянувшегося подарка. Если всё устраивает, поспешите арестовать благотворительные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик сейчас начать вертеть барабаны топовых слотов. <a href=http://tiokraft.ru/bitrix/click.php?goto=http://kafekrasoti-chita.ru/bitrix/redirect.php?goto=http://sinara-development.ru/bitrix/click.php?goto=https://teletype.in/@urist555/RnDfBxAcM6q>http://tiokraft.ru/bitrix/click.php?goto=http://kafekrasoti-chita.ru/bitrix/redirect.php?goto=http://sinara-development.ru/bitrix/click.php?goto=https://teletype.in/@urist555/RnDfBxAcM6q</a> На бонусные начисления могут быть установлены вспомогательные ограничения, которые Вы не сведению при отыгрыше. Пока бонус полностью не отыгран — деньги из казино не выводятся.Фриплей-бонусы. Бонусы за бесплатную игру есть только в некоторых клубах. Они зачисляются незамедлительно последствии творения профиля и действуют непродолжительное время. Если у вас нет времени истратить средства, они просто закончатся. Что дотрагивается медли, как призы срабатывают в течение 1-го часа. казино 1×slots официальный сайт Но есть игорные заведения, которые готовы просто так жертвовать средства на игру. Для этого достаточно сделать профиль. Чтобы вывести свой выигрыш, вас поначалу необходимо выполнить обстоятельства отыгрыша, указанные в условиях получения бездепозитного депозита.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/8503/#comment-349525>1×slots зеркало рабочее на сегодня</a>
<a href=https://astraclub.ru/album.php?albumid=239019>x1 slots регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для проверки используются сканы паспортов, водительских водительских, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если юзер обнаружен в попытке ввести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их обладатель попадает в темный список. При игре на лицензионной площадке не стоит опасаться указывать достоверную персональную информацию (шифрование исключает утечку индивидуальных данных).
#4540 Charlesgunnyhttp://filmkachat.ru
1×slot рабочее зеркало
Так собственно приготовьтесь дать конфиденциальную информацию (пол, возраст, страна проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает не более суток, после чего получится свободно выводить крупные выигрыши.Представленные на этой страничке наилучшие бездеп призы в казино за регистрацию в 2022 году имеют подходящие условия. После кропотливого анализа редакция портала составила рейтинг спецпредложений, в гости Casino.ru имеют сортировать перечень по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д. <a href=http://filmkachat.ru/>рабочее зеркало 1хслотс</a> <a href=https://u.pcloud.link/publink/show?code=XZNQwV5ZNtDPSsk07bJazNAm6jpRESTTmoa7>https://u.pcloud.link/publink/show?code=XZNQwV5ZNtDPSsk07bJazNAm6jpRESTTmoa7</a> Автоматическая активация кажется самой комфортной, но ручной метод имеет перед ней преимущества. Прежде чем применять вознаграждение от казино, стоит заблаговременно найти, сколько медли требуется на исполненье всех критерий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала действия приза.Изучить правила и условия получения бездепозитных бонусов казино, Вы можете у нас на сайте в разделе с призами либо на официальном сайте избранного Вами казино. Если не отыскать необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электронной почте. 1×slots регистрация на 1хслотс <a href=http://stroyrem-master.ru/user/DoctorLazutaoi/>http://stroyrem-master.ru/user/DoctorLazutaoi/</a>
рабочее зеркало 1×slots
<a href=https://masstr.net/member.php?action=profile&uid=27801>1 xslots рабочее зеркало</a> 1×slots акции Получив собственный подарок, Вы сможете бесплатно выступать на настоящие деньги, а выполнив условия отыгрыша, исключить свой выигрыш.Осталось выбрать казино с бонусом за регистрацию и сделать профиль. После активации презента выигрыш находится от Фортуны и способностей. <a href=http://xn–9d0br01aqnsdfay3c.kr/bbs/board.php?bo_table=free&wr_id=1316659>http://xn–9d0br01aqnsdfay3c.kr/bbs/board.php?bo_table=free&wr_id=1316659</a> Индивидуальные одобрения выдаются за совершение деяний: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавления либо официального клиента для ПК. В большинстве казино действуют программки лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на грядущий степень нередко сопрягается выдачей бездепа. 1×slots скачать на айфон Максимальная ставка ? устанавливается в денежной счета и ограничивает объем ставки за раз спин. В случае ее превышения бонус возможность быть аннулирован. Также в правилах может содержаться запрет на размещение ставок конкретного облика, примеру, по одинаковым шансам в рулетке (то есть, на чет либо нечет, красноватое либо черное и т.д. ).Для верификации номера телефонного, в собственном профиле выберите опцию „Подтвердить номер телефона“ и введите в соответствующее фон код, полученный в sms-сообщении.
1×slots зеркало рабочее на сегодня
Когда речь идет о денежных бонусах, казино всегда устанавливают условия вейджера, которые необходимо выполнить, дабы исключить выигрыш. <a href=http://beton.ru/communication/forum/?PAGE_NAME=profile_view&UID=36566>http://beton.ru/communication/forum/?PAGE_NAME=profile_view&UID=36566</a> Бездепозитный бонус часто возможность стать доступным незамедлительно в завершения регистрации, поскольку как единственным требованием к нему является регистрация, а затем проверка вашей свежей учетной записи. 1×slots зеркало выигрыши обязательно пройдите регистрацию если
1×slots быструю регистрацию а также мгновенное
В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая часть забавы. Важно, зачастую бездепозитные призы в казино выдаются с лимитированиями по максимальной выплате. В среднем можно рассчитывать на прибыль в несколько тыщ руб. Как вывести выигрыш с приза без депо. Придётся доказать акк документально, в некоторых заведениях. Процедура верификации обязательна и делается каждым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате или прочтите в правилах.Также учтите, что некоторые игровые платформы сужают перечень государств, которые готовы получить предложенный бездепозитный приз за регистрацию. К примеру, есть онлайн-заведения, выдающие сходственные призы только жильцам определенных стран. К образцу, онлайн казино 777 Оригинал предоставляет бездепозитный бонус только игрокам из России и государств СНГ. Или напротив, снабжают вознаграждением всех, не жителей неких стран (следует этого, идет пристально учить список, дабы впоследствии не возникло никаких вопросов и жалоб). Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы которые возникают у начинающих.Помимо остального, для вывода средств по бездепу нужно внести на счёт свой 1-ый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на мало вероятную сумму, после чего вывод средств будет доступен. 1х слот 1хслотс регистрация перейти на 1×slots <a href=http://akva.by/forum/index.php?action=profile;u=17510>http://akva.by/forum/index.php?action=profile;u=17510</a> Однако в критериях исчезают «подводные камни», коие не позволят исключить крупную сумму либо же вы не успеете отыграть вейджер. Поэтому мастера рекомендуют арестовать благотворительные вращения за регистрацию в казино без депо, дабы поднабраться навыка и получить реальный шанс на победу.Фриплей-бонусы. Бонусы за бесплатную игру есть только в некоторых клубах. Они зачисляются незамедлительно последствии творения профиля и действуют непродолжительное время. Если у вас нет времени истратить средства, они просто закончатся. Что дотрагивается медли, как призы срабатывают в течение 1-го часа.
1×slots регистрация 1×slots casino c2d ru
Чтобы играть даром на реальные деньги в казино, порой довольно просто зарегистрироваться. Иногда необходимо выполнить дополнительные действия.При регистрации что, нет либо ином онлайн игральном заведении — для дается один шанс испытывать свою фортуну не внося свои монеты. Замечу что такую поощрительную предложение предоставляют не все онлайн игровые площадки, а лишь великодушная середина(средина) из их. Которые мы подготовили для Вас в нашем списке. <a href=http://ambumed.ru/communication/forum/user/884/>http://ambumed.ru/communication/forum/user/884/</a> Чтобы самостоятельно убедиться в преимуществах бездепозитных призов, довольно зарегистрироваться в казино и получить одобрение. 1хслот зеркало сайта Так собственно основное отличие презента на депо от бездепа – обязательное пополнение счёта. Вы можете привнести депозит и преувеличить стартовый капитал или забрать бездеп и всем не придётся рисковать собственными сбережениями. Поспешите выполнить простые требования, и администрация ресурса начисляет щедрое одобрение!
<b>Смотреть еще похожие новости:</b>
<a href=https://isomedu.com/forum/profile/josephdrons/>1х слотс зеркало регистрация в 1×slots casino</a>
<a href=https://forum.bedwantsinfo.nl/thread-693258.html>1× слот зеркало</a>
<a href=https://qualityprogamer.de/forum/showthread.php?tid=237347>1×slots casino регистрация 1×slotscasino09k online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чаще всего, знаменитые сервисы, эти как MoneyBookers и WebMoney, еще MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное управляло. Финансовые средства выводятся лишь спустя ту платежную систему, которой популярностьюимели для пополнения депо. Если же игрок получил бездепозитный покерный бонус, требуется восполнить счет на минимальную сумму, которая сочиняет обычно десять $. Вейджер в переводе с британского значит «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша полученного бонуса, в нашем случае бездепозитного. Число ставок имеет — важно лишь набрать сумму, пропорциональную сумме поощрения.
#4541 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино смотреть онлайн бесплатно ramenbet casino <a href=https://specreporter.com/>порно с Анна Щербакова, фигуристка</a> casino casino зеркало сегодня рабочее <a href=https://www.ossetia.tv/>лучшие онлайн казино</a> бесплатные букмекерские конторы порно с Дарья Касаткина (теннис) гта казино casinos winning casino com Елизавета Боярская 1×bet зеркало xbet xyz
DiskiPlus кент казино DiskiPlus casino игровой автомат <a href=https://www.diskiplus.ru>DiskiPlus Москалькова Татьяна Николаевна порно</a> DiskiPlus ставки на спорт букмекерские конторы DiskiPlus казино рублях <a href=https://www.diskiplus.ru/>DiskiPlus рабочее казино</a> DiskiPlus казино рояль смотреть DiskiPlus сайте букмекерской конторы фонбет DiskiPlus casino рабочее DiskiPlus kometa casino DiskiPlus Кузнецова Анна Юрьевна порно DiskiPlus 1×bet на андроид DiskiPlus online casino
#4542 Charlesgunnyhttp://filmkachat.ru
1×slots бездепозитный бонус за регистрацию
Бонус в казино без депозита имеет различные вариации: может быть приветственный бонус, промоакции в честь каких-либо праздничных или главных дат, приз за вербование новых игроков, лояльность и получение VIP-статуса. <a href=http://filmkachat.ru/>1×slots на любой вкус как пройти регистрацию</a> Но эти рамки не смущают в хайроллеров, что коэффициенты на слотах дозволяют рассчитывать на солидные выигрыши, а в некоторых автоматах разыгрывается передовой джекпот. <a href=https://ai.ceo/read-blog/246294>https://ai.ceo/read-blog/246294</a> 1×slots зеркало видели такую регистрацию на <a href=http://www.xiaoditech.com/bbs/home.php?mod=space&uid=1741237>http://www.xiaoditech.com/bbs/home.php?mod=space&uid=1741237</a> Но существуют азартные заведения, готовые просто так вручить деньги на забаву. Для этого достаточно создать профиль. Чтобы вывести выигрыш, сначала нужно выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа.В списке притязаний к отыгрышу нередко присутствуют лимиты на ставки при игре на собственные средства. Так, в отыграть надо(надобно) 30 000 рублей, а предельная сумма ограничена 30 рублями, то вертеть барабаны светит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам действия акции.
1×slot рабочее зеркало
<a href=http://6000ziyuan.com/forum.php?mod=viewthread&tid=127025&extra=>1×slots сайт</a> 1×slots регистрация 1×slots casino 777 online <a href=https://beauvizw08520.mybloglicious.com/51280785/deepnude-ai-navigating-the-complexities-of-technology-and-ethics>https://beauvizw08520.mybloglicious.com/51280785/deepnude-ai-navigating-the-complexities-of-technology-and-ethics</a> В онлайне слишком количество скриптовых вебсайтов, коие принадлежат мошенникам. Их основная задача – привлечь гэмблеров, пообещав не щедрые подарки, но и крупные выигрыши. Так собственно кое-какие сайты предлагают получить за регистрацию том $1 000.Онлайн-казино с бездепозитными бонусами ставят посетителям обстоятельства для использования бездепами, потому перед участием в промоакции никакого досконально ознакомиться со всеми правилами и нюансами акции. Условия шансы прикасаться получения бонуса, его применения и последующего вывода валютных средств когда выигрыша. 1×slots регистрация 1×slots casino 777 online Прежде чем активировать бездеп, нужно убедиться что, нет, что государство, уроженцем которой считается игрок, не заходит в перечень разрешенных.Существуют казино с бонусом за регистрацию, в довольно известны фриспины в онлайн казино потом регистрации в определенных забавах. Они встречаются в почаще бесплатных поощрений или классических бонусов в казино без инвестициям. Например, игрок регистрирует счет, на который начисляются безвозмездные игры, приз за регистрацию вид безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса игры выигрывает истинные деньги, которые в последствии возможно удачно вывести из заведения на собственную платежную систему. То есть, есть все шансы вывести средства без рисков своими деньгами. Регистрация, за игрок получит бонусы, займет несколько, а спасибо данному возможно прирастить 5 евро поощрений до тысячи и без всяких проблем исключить их.
1× slots регистрация в 1×slots casino
<a href=https://www.digitalistings.com/author/miguelopich/>https://www.digitalistings.com/author/miguelopich/</a> Также посещают случаи, когда казино начисляет оговоренный приз последствии регистрации нового посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам. 1×slots зеркало 1хслотс регистрация перейти на 1×slots Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, научится регулировать менять ставки и линии, изучать бонусные забавы и их выигрышные композиции, да в просто зарядится кучей впечатлений! Ведь вы будите выступать на бонусные средства, которые возможно отыграть и вывести, а не просто на демо счет, что, этим самым адреналин в крови еще повысится а пульс забьется с частым ритмом!Зарегистрируйтесь. Для регистрации почаще всего достаточно установить свой номер телефонного и почтовый адресок, после чего установить приобретенный код из СМС. Возможно, требуется показать промокод. В правилах акции будет написано, где его надобно включать. Иногда это надобно создавать при регистрации, времени — уже в создания личного кабинета, на отдельной страничке.
1×slots официальный сайт зеркало
<a href=https://vredeenvermaak.be/users/jamesapofe/>1×slots регистрация 1×slots casino 777 online</a> 1х слот регистрация в 1×slots casino <a href=http://molbiol.ru/forums/index.php?showuser=1375358>http://molbiol.ru/forums/index.php?showuser=1375358</a> Реже призы без депозита начисляются неизменным игрокам. С их поддержкой администрация постарается вычесть ценных клиентов или желает поблагодарить за преданность верных посетителей. Но намного почаще для похожих целей применяются эти промоакции:Как правило, новоприбывшие геймеры начала хотят ознакомиться с методами ввода и вывода денежных средств и сроки выполнения поданных заказов чтобы четко осознавать, как скоро появится исключить собственный казино приз за регистрацию без депо на электронный кошелек либо же банковскую карту. К счастью для всех играющих, снутри конкретных холдингов, все казино соперничают между собой. Ведь в бы конкретную фирму давало лишь одно онлайн-заведение, то навряд бы клиенты заметили казино с призом за регистрацию и могли бы рассчитывать только на вознаграждение повторяющий бонуса на 1-ое инвестиция. К каждому заведению регулярно следует привлекать новых игроков, что, конечном, лишь на руку всем играющим.
1хслот официальный сайт зеркало
Чтоб получить большой выигрыш, избирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, которые доступны по условиям отыгрыша.При регистрации следует свидетельствовать лишь достоверную информацию. Когда учетная запись будет активна, появится доступ в Личный кабинет. В нем возможно избрать денежную, установить промокод и узнать доскональные верховодила получения и отыгрыша бездепа. Краткая информация об акции часто находится именно на регистрационной форме. <a href=http://www.zgyssyw.com/home.php?mod=space&uid=2922993&do=profile>http://www.zgyssyw.com/home.php?mod=space&uid=2922993&do=profile</a> Онлайн-казино кропотливо продумывают бонусные условия, коие нужно изучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и другие ограничения. 1 x slots casino Условия могут разниться приятель от друга. Но такой приз возможность быть применен только для игрового процесса – приобретенные на счет деньги до того, как станут отыграны, исключить нереально.Принципиальным различием безвозмездных бонусов от призов на депозит считается неимение необходимости вносить деньги на аккаунт. Из-за этого их часто именуют бездепозитными (no down payment bonuses).
<b>Смотреть еще похожие новости:</b>
<a href=http://forums.indexrise.com/thread-309-post-333744.html#pid333744>1×slots быструю регистрацию а также мгновенное</a>
<a href=http://forum.survival-readiness.com/viewtopic.php?t=268835>1×слот регистрация в 1×slots casino</a>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=181234>1×slots регистрация 1×slots casino 777 online</a>
<a href=https://www.mshowto.org/forum/members/jamespauri.html>1×slots регистрация на сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Риск-игра по равным шансам – Также казино возможность запрещать выполнять обстоятельства по отыгрышу с помощью раунда на удвоение, который предлагается в слотах, видео-покере и неких иных забавах.
#4543 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
промокод 1×bet Любимова Ольга Борисовна порно <a href=https://specreporter.com/>рабочие зеркала казино</a> букмекерская контора мостбет порно с Матвей Сафонов (футбол) <a href=https://rucriminal.info/>Юдаева Ксения Валентиновна порно</a> порно с Диана Шнайдер (теннис) сайт винлайн букмекерская контора 1×bet официальный xbet up casino ставки на спорт букмекерские конторы Елена Лядова вывод казино
DiskiPlus 1win букмекерская контора DiskiPlus Матвиенко Валентина Ивановна порно <a href=https://diskiplus.ru/>DiskiPlus пин casino</a> DiskiPlus яндекс игры казино DiskiPlus порно с Юлия Ефимова <a href=https://diskiplus.ru/>DiskiPlus казино регистрации</a> DiskiPlus почему казино DiskiPlus автомат казино DiskiPlus porno Анна Сидорова, керлингистка DiskiPlus online casino DiskiPlus 1×bet зеркало на сегодня 1×bet xyz DiskiPlus рабочее казино DiskiPlus демо казино
#4544 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Александр Головин (футбол) бесплатно фильм казино <a href=https://repost.news/>порно с Петр Ян (ММА)</a> casino скачать 1×bet слоты официальный сайт <a href=https://res-publika.com>порно с Владимир Минеев (ММА)</a> бесплатное казино casino betting Львова-Белова Мария Алексеевна порно pin up casino buzz зеркала официальных сайтов казино леон букмекерская контора порно с Зырянова Анастасия Владимировна
DiskiPlus Яровая Ирина Анатольевна порно DiskiPlus казино 5 <a href=https://www.diskiplus.ru>DiskiPlus casino 7k рабочее</a> DiskiPlus казино фильм онлайн DiskiPlus казино фильм онлайн <a href=https://diskiplus.ru>DiskiPlus яндекс игры казино</a> DiskiPlus casino buzz DiskiPlus pin ап casino DiskiPlus букмекерская контора без DiskiPlus мобильные букмекерские конторы DiskiPlus casino зеркало сайта DiskiPlus 1×bet рабочее DiskiPlus porno Юлия Канакина, скелетонистка
#4545 AHoini
<a href=https://yogurukid.ru/2024/10/06/revolutionizing-online-betting-1win-bГ©nin>1win benin</a> <a href=http://tabbykorea.com/bbs/board.php?bo_table=free&wr_id=10816>1win inscription</a>
#4546 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора официальный сайт пин up casino <a href=https://sovsekretno.net/>пина букмекерской конторы</a> Львова-Белова Мария Алексеевна порно porno Нина Пирогова, хоккеистка <a href=https://repost.news/>кент казино</a> порно с Евгения Медведева Елена Лядова 7k casino скачать Хорова Наталья Александровна порно казино официальные букмекерские конторы скачать pin up букмекерская контора
DiskiPlus букмекерская контора без DiskiPlus 1×bet слоты 1×bet xyz <a href=https://www.diskiplus.ru/>DiskiPlus gama casino</a> DiskiPlus 1×bet слоты 1×bet xyz DiskiPlus сайте букмекерской конторы фонбет <a href=https://diskiplus.ru/>DiskiPlus casino ап</a> DiskiPlus казино в россии DiskiPlus казино онлайн бесплатно DiskiPlus казино фильм смотреть онлайн DiskiPlus букмекерская контора вход DiskiPlus казино смотреть DiskiPlus казино гта 5 DiskiPlus порно с Арина и Дина Аверины, гимнастки
#4547 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало сайта
Используйте наилучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, дабы заработать презенты за простые деяния теперь сейчас получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и резвыми выводами на электронные кошельки. <a href=http://filmkachat.ru/>1хслотс официальный сайт зеркало</a> Размер ставки для забавы по бездепозитному бонусу (естесственно же, если, тогда,, когда он представлен в виде бонусных денежных средств) часто ниже, чем при этой на депозит. Ограничение будет работать до этапа отыгрыша приза. <a href=https://www.gift-me.net/blogs/229355/How-to-Create-Stunning-3D-Animation-Presentations-That-Captivate-Your>https://www.gift-me.net/blogs/229355/How-to-Create-Stunning-3D-Animation-Presentations-That-Captivate-Your</a> рабочее зеркало 1×slots <a href=http://pfb7978i.bget.ru/index.php?subaction=userinfo&user=RalphSycle>http://pfb7978i.bget.ru/index.php?subaction=userinfo&user=RalphSycle</a> На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не сможете активировать и получить бездепозитный бонус.Самый распространённый из похожих призов, конечно же, бездеп на день рождения клиента — приз вид фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им возможно в течение установленного периода медли.
1х слот 1хслотс регистрация перейти на 1×slots
1×slots официальный сайт скачать Чем ниже велечину вейджера, тем легче отыграть и вывести бонус. Если Вы планируете заработать на бездепе, но просто ознакомиться с свежим игровым клубом, то стоит игнорировать призов с высоким вейджером их почти не реально отыграть. С ними Вы сможете только протестировать забавы заведения. <a href=https://sciencewiki.science/wiki/User:RickyKohl4364>https://sciencewiki.science/wiki/User:RickyKohl4364</a> Фриплей-бонусы встречаются лишь в неких клубах. Они зачисляются незамедлительно после творенья профиля и активны непродолжительное время. Если не успеете израсходовать свои, они попросту сгорят. Касаемо времени, как призы активны протяжении часа. 1×slots регистрация на сайте Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и расценить необыкновенности, труднодоступные при забаве в демо режиме. Многие новые клиенты переходят в число неизменных, а оператор получает долгосрочную выгода.
1×slots зеркало регистрацию более популярный вариант это
Приветственный бездеп предоставляется хоть игроку только один один. Казино дерутся с так именуемыми бонусхантерами (от англ. Bonus Hunter — доброволец за бонусами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения подарка. Исключить подобные действия дозволяет верификация данных. Администрация вправе востребовать у посетителя доказать персональные данные, указанные при регистрации. Так что основное различие презента на депо от бездепа – обязательное пополнение счёта. Вы можете внести депо и преувеличить стартовый капитал либо отобрать бездеп и всем не придётся рисковать своими сбережениями. Поспешите выполнить простые требования, и администрация ресурса начислит щедрое одобрение!Бездепозитный бонус за регистрацию в казино — это стартовый презент в виде денежного начисления или безвозмездных вращений для свежих игроков заведения, для получения которого не нужно вносить депо. <a href=http://cosmostech.eu/technologyadvances/index.php?option=com_k2&view=itemlist&task=user&id=637160>http://cosmostech.eu/technologyadvances/index.php?option=com_k2&view=itemlist&task=user&id=637160</a> В онлайне большое знаменитых игорных площадок с привлекательными акционными предложениями. Однако внимательно читать обстоятельства 10-ов услуг скором надоест, ну и время отнимет много. Поэтому наша команда подготовила ТОП-3 сайтов с превосходнейшими бездепозитными призами: 1×slots казино мобильная версия В большинстве заведений устроить это возможно по адресу электронной почты, по номеру телефона, через социальную сеть либо гугл-аккаунт.Бездепозитный бонус за регистрацию в казино с выводом средств в 2022 году — Наш ресурс предоставляет игрокам важную информацию о самых новых, щедрых и испытанных призах в интернет казино, которые обновляются любой день.
1×slots зеркало регистрация в 1×slots casino
Фриспины начисляются по конкретной ставке. После их активации игроку необходимо запустить разъем и увериться, собственно в нем отображаются безвозмездные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода последствии отыгрыша определяется оператором и редко превышает 5 000 руб. <a href=http://3ak.cn/home.php?mod=space&uid=187057>1×slots регистрация 1×slots casino 777 online</a> Бонус с зачислением средств на счет выделяет больше свободы поступков. Пользователь сам избирает, каким образом воспользоваться подаренными средствами. Здесь кроме имеют действовать лимитирования на перечень дешевых игр, но обычно эти рамки не так строги, как в промо с бесплатными вращениями. 1×slots официальный сайт, скачать <a href=https://sklad-slabov.ru/forum/user/9532/>https://sklad-slabov.ru/forum/user/9532/</a> Выбирайте наихорошие благотворительные призы счет обзоров на Casinoz – и пусть вам сопутствует удача при отыгрыше бонусных кредитов!Реже призы без депозита начисляются неизменным игрокам. С их подмогою администрация старается удержать ценных посетителей или вожделеет поблагодарить за лояльность правильных гостей. Но гораздо чаще для сходственных целей используются эти акции:
1×slots официальный зеркало рабочее
При регистрации стопам указывать только достоверную информацию. Когда учетная запись несомненно активна, появится доступ в Личный кабинет. В нем возможно избрать денежную, установить промокод и разузнать доскональные верховодила получения и отыгрыша бездепа. Краткая информация об промоакции часто находится именно на регистрационной форме. Для всех бездепозитных призов функционирует максимальный предел на выигрыш. Он показывает максимальную необходимую, коию вы сможете получить, играя на бонусные кредиты. Как только вам получится выполнить притязания вейджера, дозволенный максимум несомненно переведен с бонусного счета на основной, а остаток будет списан. <a href=https://m1bar.com/user/JulesPoeno/>https://m1bar.com/user/JulesPoeno/</a> Например, игрок получил 500 руб. При создании аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 рублей, понадобится устроить 875 спинов для полного отыгрыша. 1×slots официальный сайт скачать Для получения депозитного бонуса необходимо восполнить собственный игровой баланс настоящими деньгами. Вознаграждение можно получить либо при внесении первого депо, либо повторяющий фиксированного процента от внесённых средств. Так либо по, бонус поступит на счёт лишь в пополнения.Следует выделить, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом.
<b>Смотреть еще похожие новости:</b>
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1855#post-53063>1×slots официальный сайт, скачать</a>
<a href=https://forum.oursson.ru/viewtopic.php?f=2&t=8520>1×slots на любой вкус как пройти регистрацию</a>
<a href=http://theauction.com.au/my-account/>сайт 1× slots casino</a>
<a href=https://australiantravelforum.com/Upload/showthread.php?tid=317798>1×slots регистрацию процедура займет всего лишь</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если вы новичок в этом деле и лишь попали в неизведанную вами область пыла — с помощью услуг как бездепозитные призы без пополнения. Чем ниже значение вейджера, тем легче отыграть и вывести приз. Если Вы планируете заработать на бездепе, не просто ознакомиться с новым игровым клубом, то стоит игнорировать призов с высоким вейджером их практически не реально отыграть. С ними Вы сможете лишь протестировать забавы заведения.
#4548 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Алина Загитова cat casino <a href=https://glvk.guru/>порно с Ирина Сидоркова</a> casino riobet букмекерские конторы в россии <a href=https://rhymes-punches.com/>официальная казино</a> порно с Карен Хачанов (теннис) мобильные букмекерские конторы 1×bet зеркало слоты слоты казино Анна Михалкова 1×bet зеркало porno Катерина Шпица
DiskiPlus porno Алена Михайлова DiskiPlus cometa casino <a href=https://diskiplus.ru/>DiskiPlus букмекерские конторы в россии</a> DiskiPlus pin up букмекерская контора DiskiPlus casino 7k рабочее <a href=https://diskiplus.ru>DiskiPlus Комарова Наталья Владимировна порно</a> DiskiPlus лучшие онлайн казино DiskiPlus сайт казино вход DiskiPlus ставки на спорт букмекерские конторы DiskiPlus 1×bet официальный xbet DiskiPlus реального казино DiskiPlus лучшие бесплатные онлайн казино DiskiPlus порно с Евгения Медведева
#4549 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на официальном сайте
Мы рекомендуем не отрицаться от похожих услуг знаменитых казино. Выделите несколько минут на регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сегодня удача несомненно на вашей стороне! <a href=http://filmkachat.ru/>1×slots casino регистрация</a> Важно, убедитесь никаких, что ранее не регились в избранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи. <a href=https://heyjinni.com/read-blog/177752>https://heyjinni.com/read-blog/177752</a> Фриспины без депозита или дополнительные свои помогут ближе познакомиться с игровой платформой и её функциями. За счёт даров возможно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради забавы напротив живых крупье. 1×slots промокод при регистрации <a href=http://sobaeksanrock.dgweb.kr/bbs/board.php?bo_table=free&wr_id=2483241>http://sobaeksanrock.dgweb.kr/bbs/board.php?bo_table=free&wr_id=2483241</a> Помните, что любые нарушения верховодил сведут на нет ваши старания, и вы наверняка останетесь без начисленного вам безвозмездного бонуса. Всегда изучайте правила начисления и обстоятельства вейджера. По любым вопросам, на которые вы возможности без отыскать ответы, обращайтесь за объясненьям и саппорт.Ознакомьтесь с нашим списком наилучших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего списка и получите бездеп сразу. Хватайте наихорошие безвозмездные предложения ниже и выигрывайте немалые средства, не рискуя!
1×slots зеркало выигрыши обязательно пройдите регистрацию если
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Можно. Вы постоянно сможете отказаться от получения бездепозитного приза за регистрацию в казино, же Вы не создадите ставку. <a href=http://xn---54–6cdxn7akip.xn–p1ai/forum/memberlist.php?mode=viewprofile&u=49942>http://xn---54–6cdxn7akip.xn–p1ai/forum/memberlist.php?mode=viewprofile&u=49942</a> Чтоб получить большой выигрыш, подбирайте игровые автоматы с максимальным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша. 1×slots рабочее зеркало Только выполнив все условия отыгрыша и дождавшись окончания ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить свои средства.
1хслот 1хслотс регистрация перейти на 1×slots
Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке необходимо пополнить счет в казино. Для депозитных призов, данная процедура не нужна, так как депо уже сделан. Одним из предлогов отдавать привилегию 1 либо другому заведению заключается в привлекательности предлагаемых акций и бесплатных предложений. Безвозмездные фриспины, выдаваемые без нужды создавать какой-нибудь лепта, в списке находится далеко не в конце.Бездепозитные бонусы начисляются лишь один один. Не стоит открывать свежие аккаунты, чтобы получить их повторно. Служба безопасности казино непременно выявит «левого» соучастника и перекроет. Если гость выполнит нужные притязания, отыграет собственную ставку и решит исключить личный выигрыш, то ему нужно сведению, что казино обязательно востребует предоставить ксерокопии личных документов, чтобы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои исключить не удастся. <a href=https://slovakia-forex.com/members/268837-ashleywer>https://slovakia-forex.com/members/268837-ashleywer</a> зеркло казино 1×slots Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, the decision зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.
1×slot рабочее зеркало
При пользовании бездепозитным призом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют количество обликов лимитов:Существуют казино с призом за регистрацию, в очень популярны фриспины в интернет казино впоследствии регистрации в определенных играх. Они встречаются числе чаще бесплатных поощрений либо классических призов в казино без инвестициям. Например, игрок регистрирует счет, на который начисляются безвозмездные игры, приз за регистрацию в виде бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса в выигрывает истинные деньги, которые в последствии возможно успешно вывести из заведения на собственную платежную систему. То есть, все шансы вывести средства без рисков своими деньгами. Регистрация, какую игры получит призы, займет пару минут, а благодаря этому можно прирастить 5 евро поощрений до тыс. И без всяких заморочек вывести их. <a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=32884>1×slots бонус за регистрацию</a> В некоторых онлайн казино для получения бездепозитных призов не достаточно просто зарегистрироваться на сайте клуба и подтвердить средства контактные данные. Дополнительно требуется активация промокода. Но на азартных платформах подобные вознаграждения имеют получить теперь зарегистрированные пользователи. В этом случае, бонусы предоставляются в рамках уникальных акций или же неким геймерам вид акционного предложения, которое прибывает на почту с целью «возвратить» игрока в свое казино. 1×slots регистрация на сайте <a href=http://forum.l2endless.com/member.php?action=profile&uid=5200>http://forum.l2endless.com/member.php?action=profile&uid=5200</a> Для выбора азартного заведения Вы можете воспользоваться перечнем наших казино с призами за регистрацию. На нашем сайте мы опубликовали перечень бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, что часть бонусов эксклюзивные и доступны только для посетителей нашего вебсайта по-специальному промо-коду или по уникальной ссылке. Кроме как, для каждого бонуса мы подготовили доскональный обозрение, в котором Вы узнаете как получить и отыграть одобрение и как исключить собственный выигрыш с бездепа.
1хлот регистрация в 1×slots casino
<a href=http://y90429l8.bget.ru/user/MichaelPhind/>http://y90429l8.bget.ru/user/MichaelPhind/</a> Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша бонусов. Заведения всегда устанавливают максимальную ставку, возможную по условиям вейждера.Таким образом, заведение пробует показать себя своим потенциальным игрокам, а такой маркетинговый ход как казино приз без депо за регистрацию завлекает очень много внимания к игорному заведению и обеспечивает неизменный струю свежих посетителей и грядущих посетителей игрового онлайн клуба. 1×slots зеркало выигрыши обязательно пройдите регистрацию если Для тех, кто только взвешивает испытывать свою удачу, а также для профессиональных игроков, ищущих свежие площадки для выигрышей, основные лицензированные казино нередко организуют разные промоакции, и одно из лучших предложений прошедшее время – как для новичков, например и для профессиональных игроков – бездепозитный бонус за регистрацию.
<b>Смотреть еще похожие новости:</b>
<a href=http://diablo2r.cn/home.php?mod=space&uid=30130>казино 1× slots официальный сайт</a>
<a href=http://www.fiat130.it/phpbb3/viewtopic.php?f=14&t=301975>1×slots рабочее зеркало на сегодня</a>
<a href=http://forum.survival-readiness.com/viewtopic.php?t=265974>1 x slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Максимальный размер ставки, который невозможно превосходить пока бонус не будет полностью отыгран. В случае нарушения сего управляла, приз и выигрыш с него станут аннулированы. Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, чтобы еще раз получить безвозмездный приз. Игорные заведения нетерпимы к бонус-хантерам, потому вас ожидает неизбежное санкция.
#4550 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало быструю регистрацию а также мгновенное
Такой бесплатный эквивалент средств зачисляется на профиль пользователя последствии воплощения притязаний и предназначаются они только для игрового процесса. Вывод этих вознаграждений возможен лишь в осуществления вейджеровых условий. <a href=http://filmkachat.ru/>зеркло казино 1×slots</a> Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша призов. Заведения практически устанавливают максимальную ставку, допустимую по условиям вейждера.Получать информацию о самых выгодных призах возможно без неизменного мониторинга новостей казино. Мы брали данную задачу на себя и постоянно смотрим за предложениями операторов, выбирая наихорошие из их. В этом разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список акций регулярно дополняется. В топ зашли самые новые бездепозитные бонусы за регистрацию в казино 2020, временные и замкнутые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и другим критериям. Если срок действия акции истек, она удаляется из перечня. <a href=https://www.palscity.com/forums/thread/2009/>https://www.palscity.com/forums/thread/2009/</a> Можно. Вы всегда сможете отрешиться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не создадите ставку. 1×slots casino зеркало рабочее <a href=https://www.freebeg.com/forum/member.php?action=profile&uid=23505>https://www.freebeg.com/forum/member.php?action=profile&uid=23505</a>
1хслотс зеркало
Рассмотрим принцип его деяния на случае. Допустим, вы зарегались и возымели $10 no down payment bonus с вейджером х50. Это означает, собственно выигранные средства возможно несомненно выводить не раньше, чем в такого, как общая сумма ставок достигнет $500.Сразу последствии активации промокода можно пользоваться презентом. Как уже упоминалось, бонусы случаются трёх видов – фриспины, кредиты и фриплей-бонусы. 1 x slots <a href=https://pbtur.com.br/users/terrydom>https://pbtur.com.br/users/terrydom</a> Благодаря программе лояльности от игорного заведения, возможно арестовать хороший старт и без дополнительных вложений запустить видеослоты. Кроме такого, можно рассчитывать на реальную удачу и получить, без инвестиции собственных денег, великой выигрыш. казино 1×slots официальный сайт
1×слотс казино
Бездепозитные бонусы, как теснее ясно, считаются оригинальной возможностью приступать к игровому процессу безусловно бескорыстно, другими играть в онлайн казино даром и на имеющие свои незамедлительно в регистрации аккаунта. Автоматы с таким депо шансы стать прекрасной возможностью сыграть для почитателей азарта с определенными лимитированиями в финансах.Подарки на дни ? посвященные праздничным датам, требующие условного отыгрыша или начисляются без это. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду. <a href=http://canadalondonchinese.com/home.php?mod=space&uid=260148>http://canadalondonchinese.com/home.php?mod=space&uid=260148</a> 1×slots коды Внесение депозита – Будьте готовы пополнить счет последствии отыгрыша бонуса. Это стандартное требование верховодил для данного типа промо-акций. Лучше заблаговременно уточнить, какую сумму нужно будет вносить на счет. Как управляло, идет о минимальном депозите, но вы должны быть убеждены, что он вам по кармашку.На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не можете активировать и получить бездепозитный приз.
1×slots зеркало быструю регистрацию а также мгновенное
Составленный специалистами Casino.ru список онлайн-казино с бездепозитным призом разрешает игрокам сравнить спецпредложения различных операторов. 1хслот зеркало <a href=https://www.feeder.mobi/members/jamesvon/profile/>https://www.feeder.mobi/members/jamesvon/profile/</a>
казино 1×slots официальный сайт
Не стоит незамедлительно же отказываться от приветственных подарков в сходственных казино. Администрация готова начислить деньги либо фриспины, но предварительно сотрудники должны убедиться, что вы не аферист. Дело в, собственно развелось слишком количество охотников за бонусами. Они выучились обманывать систему и зарабатывать крупные суммы средств.Вейджер не более х30–35 является применимым. Опытные игроки заявляют, что с этим вейджером реально остаться в плюсе, в правильно подойти к выбору игрового аппарата. <a href=https://gti-club.ru/forum/member.php?u=416530>https://gti-club.ru/forum/member.php?u=416530</a> Выбрать казино с бездепозитным бонусом. У нас на сайте представлен перечень наилучших интернет казино, которые предлагают своим игрокам великодушные призы за регистрацию. 1×slots casino регистрация Все любят получать презенты. Согласитесь, почти любой играющий человек будет безгранично рад, если получит даровой подарок для забавы в интернет казино просто за регистрацию либо же бонус за внесенный депо, например именуемые приветственные бонусы для новых игроков. Соответственно такие интернет клубы станут больше известны и предпочтительны у игроков при выборе казино для игры. Топ казино постоянно обновляется и прибавляются свежие и занимательные игровые клубы с симпатичной бонусной политикой и всеми возможными привилегиями, к которым относятся эти призы как фриспины за регистрацию, денежные бездепозитные призы, а также великодушные бонусы за внесенный депо.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На бонусные начисления могут быть установлены вспомогательные ограничения, коие Вы не сведению при отыгрыше. Пока бонус полностью не отыгран — деньги из казино не выводятся.
#4551 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино рулетка top casino <a href=https://krtka.info/>porno Юлия Пересильд</a> скачать 1×bet на андроид Светлана Ходченкова <a href=https://repost.news/>какие казино</a> играющие казино казино большая porno Елизавета Туктамышева казино фильм онлайн порно с Анастасия Потапова, теннисистка Чулпан Хаматова сайт букмекерской конторы
DiskiPlus порно с Зырянова Анастасия Владимировна DiskiPlus официальное казино вход <a href=https://diskiplus.ru/>DiskiPlus pin up casino buzz</a> DiskiPlus Шевцова Татьяна Викторовна порно DiskiPlus casino сегодня <a href=https://www.diskiplus.ru/>DiskiPlus порно с Александр Головин (футбол)</a> DiskiPlus Фастова Елена Владимировна порно DiskiPlus casino ап DiskiPlus сайт букмекерской конторы DiskiPlus 1×bet на сегодня DiskiPlus пин casino DiskiPlus порно с Карен Хачанов (теннис) DiskiPlus бесплатно фильм казино
#4552 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
Некоторые сайты, прежде чем провести регистрацию игроков, предлагают ответить на количество базовых вопросов. Цель проведения сходственной викторины – выявить случайных людей, которые не имеют представления о покере, и не допустить получения ими бонусов. Если посетитель теснее играл в казино, то ответить на полтора 10 простых вопросов несомненно несложно. Очень часто, ответы можно отыскать на официальных веб-сайтах данных учреждений. <a href=http://filmkachat.ru/>1 x slots casino</a> После требуется привнести идентификационный платёж. Это стращает начинающих больше всего. Нужно сделать минимальный депозит в 100–500 рублей. Таким образом служба защищенности убедиться том,, что платёжный способ принадлежит Вам. Данная процедура важна для обеспечивания защищенности игровых счетов. Пример, Ваш аккаунт взломают и выведут средства на собственный кошелёк. Будет крайне досадно. Поэтому верификация платёжной системы, это необходимый момент. <a href=https://www.empowher.com/groups/blogs-4/posts-33>https://www.empowher.com/groups/blogs-4/posts-33</a> В большинстве заведений устроить это возможно по адресу электронной почты, по номеру аппарата, через социальную сеть или гугл-аккаунт. 1х слот 1хслотс регистрация перейти на 1×slots <a href=http://shkola.mitrofanovka.ru/user/Mycsgoves/>http://shkola.mitrofanovka.ru/user/Mycsgoves/</a> Основное отличие в, что для получения бездепа не пополнять баланс в казино. Но считая этого, есть ряд прочих отличий:Онлайн-казино с бездепозитными бонусами ставят посетителям условия для использования бездепами, потому перед участием в акции какого-либо подробно ознакомиться со всеми правилами и аспектами промоакции. Условия могут дотрагиваться получения бонуса, его применения и последующего вывода валютных средств если, тогда, выигрыша.
1×slots актуальное зеркало
Постарайтесь отыграть вейджер, дабы замечена возможность забыть заявку на выплату. Кстати, на всех сайтах, представленных в списке, доступны современные платёжные приборы. Вы можете получить выигрыш на электронной кошелёк, карту, телефон. рабочее зеркало 1×slots Выбирайте наилучшие бесплатные призы с помощью обзоров на Casinoz – и пусть вам сопутствует удача при отыгрыше бонусных кредитов!Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских руб. В условиях акции предписано, что вейджер бездепозитного приза х20. Поэтому, чтобы отыграть бонус, игроку будет нужно сделать ставок на 35*20=700 руб. <a href=http://forums.ggcorp.me/space-uid-3859288.html>http://forums.ggcorp.me/space-uid-3859288.html</a> Иногда для получения призов необходимо спутаться с представителями службы поддержки. Удобнее всего с ними разговаривать в онлайн-сате, но иногда довольно запроса по электрической почте.Чтобы получить вероятность исключить выгода с бездепозитного бонуса в казино, необходимо выполнить ряд условий: 1×slots официальный сайт зеркало
1 х слотс зеркало
Прежде всего, не забывайте периодически заглядывать на страницу обзоров бездепозитных призов. Они шаг за шагом разглядывают более занимательные предложения водящих игорных порталов. Казино дает возможность заработать и исключить реальные средства на бездепозитных бонусах. Обычно, это малозначительная сумма, коию казино возможность для разрешить подарить игроку. <a href=https://dptotti.fic.edu.uy/mediawiki/index.php/Does_The_1×bet_APP_Offer_Early_Cash-Out_Options>https://dptotti.fic.edu.uy/mediawiki/index.php/Does_The_1×bet_APP_Offer_Early_Cash-Out_Options</a> 1×slot казино зеркало Шаг 4. Активация. Внимательно исследуйте обстоятельства, информацию по лимитированиям и сроке деянья бонусного предложения. Разобравшись с правилами, можно активировать приз в собственном кабинете (от ? с внедрением промокода) или по запросу в саппорт.B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax
1×slot рабочее зеркало
Не стоит путать игру в демо и внедрение призов. В демонстрационном режиме игрок может расценить механику слота, сюжет и оформление. Но игра проводится на условные кредиты, потому отсутствует главное ? ощущение азарта. Активируя промокод или фриспины, заказчик и не расходует средства деньги на игровые автоматы, но возможность сорвать реальный куш!1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, если не желаете стать жертвой плутов либо впустую израсходовать время; Казино выделяет возможность заработать и вывести реальные деньги на бездепозитных бонусах. Обычно, это малозначительная сумма, которую казино может для позволить презентовать игроку. 1хслотс казино зеркало <a href=https://wolvesbaneuo.com/wiki/index.php/User:JenniferPurves>https://wolvesbaneuo.com/wiki/index.php/User:JenniferPurves</a> Классическая разновидность приза за создание аккаунта. Его преимущество содержится том,, собственно клиент возможность помощи выбирать аппараты и делать ставки в них. Иногда список игровых автоматов ограничен оператором, но все точно это другого, как, чем единственный дешевый разъем, как когда с использованием фриспинов.Но эти рамки не смущают в хайроллеров, поскольку коэффициенты на слотах позволяют рассчитывать на крупные выигрыши, ну некоторых автоматах разыгрывается прогрессивный джекпот.
1×slots официальный зеркало
При ирге на бонусные свои воспрещается выступать в игровые автоматы с прогрессивным джекпотом и забавы из радела live casino. Кроме как, некоторые казино дают бездеп на один или количество конкретных слотов, и в иных играх Вы не сможете на них играть.Перед активацией главно пристально изучить условия промоакции. Чем ниже вейджер, тем больше возможная выгода игрока. Имеют значение также лимиты ставок при отыгрыше и сроки, на которых можно пользоваться предложением. Если бездеп обхватывает узкий список игр, рекомендовано узнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только сомнений случае, случае оператор не установил требовательные лимитирования на наивысшую сумму ставки. <a href=https://rg-mechanics.club/user/Deweyliesy/>https://rg-mechanics.club/user/Deweyliesy/</a> Также, учите, что бездепозитный бонус можно вывести лишь том, случае, когда будут исполнены все условия отыгрыша.Для отыгрыша бонуса казино обязует игрока сыграть на необходимую, в несколько один превышающую необходимую приобретенного приза — тут выгода фирмы очевидна. 1×slots зеркало регистрация в 1×slots casino Но рядах азартных платформах сходственные гонорары все получить и уже зарегистрированные юзеры. В этом случае, бонусы предоставляются масштабах оригинальных акций или же неким геймерам повторяющий акционного предложения, которое прибывает на почту с целью «вернуть» игрока в свое казино.Помимо прочего, для вывода средств по бездепу нужно внести на счёт свой первый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на мало возможную сумму, после чего вывод средств станет доступен.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.findaspermdonor.com/viewtopic.php?f=25&t=88793>1хлот регистрация в 1×slots casino</a>
<a href=https://forum.spherecommunity.net/User-JamesLop>скачать 1×slots официальный сайт</a>
<a href=https://www.katzenforum.at/forum/media/users/jamesagema.16012/>1× slots casino официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Также бывают случаи, когда казино начисляет оговоренный приз последствии регистрации нового посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам.
#4553 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
Для получения депозитного приза нужно пополнить свой игровой баланс реальными средствами. Вознаграждение возможно получить или при внесении первого депозита, или в виде фиксированного процента от внесённых средств. Так или другому, приз поступит на счёт только после пополнения.Как лишь получите бездеп в казино, всё точно не забывайте инспектировать электронную почту. Некоторые игорные клубы каждый веселят активных гэмблеров приятными призами. Чаще всего получить подарок возможно в преддверии праздника, на день рождение, за привлечение друга. А того распространённым бонусом считается надбавка к депозиту. Нужно чем пополнить счёт, и азартное заведение прирастит его на 50–100%. <a href=http://filmkachat.ru/>1×slots акции</a> Обычно для получения призов без депозита, казино выдвигает лояльные и абсолютно выполнимые обстоятельства, но есть ряд деяний которые запрещены и могут причиной неприятные последствия: <a href=https://telegra.ph/Legal-Cannabis-Delivery-Services-Transform-Brantfords-Marijuana-Access-11–24>https://telegra.ph/Legal-Cannabis-Delivery-Services-Transform-Brantfords-Marijuana-Access-11–24</a> Также бездепозитные бонусы могут служить способом вернуть к игре клиентов, временно приостановивших своё сотрудничество с компанией: уведомление о бездепе поступает на мобильный аппарат либо почту.Бонус с зачислением средств на счет дает больше свободы деяний. Пользователь сам выбирает, каким образом распорядиться подаренными средствами. Здесь того имеют работать ограничения на перечень доступных игр, хотя обыкновенно эти рамки не например строги, как в промо с бесплатными вращениями. 1×slots casino регистрация 1×slots review live <a href=https://xn–80abdzaxbkfak2ai0bzf4ce.xn–p1ai/communication/forum/messages/forum5/message14537/14230-vykup-avto?result=new#message14537>https://xn–80abdzaxbkfak2ai0bzf4ce.xn–p1ai/communication/forum/messages/forum5/message14537/14230-vykup-avto?result=new#message14537</a> Самые свежие бездепозитные бонусы в казино за регистрацию 2022 года с выводом выгоды присутствуют на этой страничке. Посетитель может расценить условия получения и начать играть на средства без внесения депозита. При этом игроку главно осознавать, на каких критериях и какими методами он сможет вывести полученный выигрыш. Для этого нужно расценить перечень подключенных платежных систем.
1×slots официальный сайт, скачать
<a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=7523&TITLE_SEO=7523-preobrazovatel-interfeysov-usb-rs485&MID=486779&result=reply#message486779>1×slos регистрация в 1×slots casino</a> 1хслотс казино зеркало <a href=https://rg-mechanics.club/user/Frankwes/>https://rg-mechanics.club/user/Frankwes/</a> B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. 1×slots зеркало регистрация в 1×slots casino Наш перечень содержит наилучшие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по важным параметрам:
1×slots официальный сайт скачать
Бездепозитные призы казино за регистрацию в 2022 году — это вероятность поиграть за счёт заведения. Казино даёт клиенту шанс пользоваться определённой суммой либо количеством даровых вращений без внесения депозита. Не путайте деморежим с реальной игрой без надобности внесения депо. Этот тип приза будет добавлен на Ваш акк после удачной процедуры регистрации с внедрением номера телефона. Если выбрать другой способ творенья учетной записи, бездеп не несомненно добавлен на Ваш акк. <a href=https://lustbb.com/user-10260.html>https://lustbb.com/user-10260.html</a> Способы получения бездепа различаются зависимо вида приза, кот-ый понравился игроку. Но вам иначе нужно быть зарегистрированным в законном онлайн-казино и доказать свою лицо. В общем виде пошаговая инструкция для получения бездепозитного приза выглядит так:Суммы подобных предложений, большинстве, колеблются от 3-х до 20 $, а вейджер на эти средства обязан сочинять от 30 до шестидесяти раз. Зачастую, наибольшая сумма выигрыша здесь составит от одной до двух сотен долларов. Если в выиграет больше, то все средства все быть списанными до очень разрешенного выигрыша. Здесь появляется смысл выводить еще несуществующие финансы на свою платежную систему и далее отыскивать заведение с подходящими под данную сумму релоадом либо призом за первое пополнение счета. Есть количество подвидов бездепозитного гонорары, предлагаемого наибольшим количеством заведений. 1 x slots casino
1×slots официальный сайт мобильная версия
Большинство интернет-казино из нашего топ-10 готовы повеселить вас эксклюзивными промоакциями. Читайте о них в обзорах и на форуме. 1×slots зеркало регистрация <a href=http://images.google.im/url?q=http://komus-med.ru/bitrix/click.php?goto=http://xn–80anc0ajbxbc.xn–p1ai/bitrix/rk.php?goto=https://teletype.in/@urist555/JxIy9fj69UE>http://images.google.im/url?q=http://komus-med.ru/bitrix/click.php?goto=http://xn–80anc0ajbxbc.xn–p1ai/bitrix/rk.php?goto=https://teletype.in/@urist555/JxIy9fj69UE</a>
1×slots регистрация на сайте 1×slots ru com
Призовые начисления без депозита шансы предоставляться для участия в турнирах онлайн казино. Потратить перечисленные деньги можно самая в рамках данной акции. Условия их проведения включают в себя ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться таким предложением, какого-либо выучить его верховодила. Диапазон ставок, которые вправе устроить игрок, кроме лимитирован. Обычно ставить возможно небольшую сумму — около 10–30 рублей за одно вращение. <a href=http://xn–80akpibjs0b3c.net/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://falcon-eyes.ru/bitrix/redirect.php?goto=http://svetonic.ru/bitrix/redirect.php?goto=https://telegra.ph/Obshchie-voprosy-k-vracham-MedAboutMe-09–19>http://xn–80akpibjs0b3c.net/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://falcon-eyes.ru/bitrix/redirect.php?goto=http://svetonic.ru/bitrix/redirect.php?goto=https://telegra.ph/Obshchie-voprosy-k-vracham-MedAboutMe-09–19</a> Ограничения по играм. Администрация воспрещает игрокам некоторые игровые автоматы с бездепозитным призом, средствами или безвозмездными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда дробление выполняется по виду игр. Например, отыгрыш возможен на всех игровых аппаратах, хотя запрещен в настольных играх и в разделе Live Casino.Наиболее известные гонорары между гэмблеров – бездепозитные призы казино. Это не изумительно, как возможно получить благотворительные вращения либо виртуальные кредиты, и всем не придётся пополнять счёт, рисковать собственными средствами. Удастся насладиться разнородными увеселениями причем выиграть солидную сумму, избегая серьёзного риска. 1хслотс рабочее зеркало Бонус без депо за регистрацию в казино (бездепозитный бонус) – это валютный подарок от клуба, кот-ый начисляется на аккаунт игрока после регистрации в казино. Кроме сотворения учетной записи, для получения бездепа, довольно часто потребуется ещё и доказать контактные данные игрока и/или активировать особый промо-код.
<b>Смотреть еще похожие новости:</b>
<a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/5909–1×slots-registratsiya-to-dalshe-neobkhodimo-projti#5918>1×slots регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выбирая бесплатный бонус, внимательно изучайте правила. Убедитесь, собственно вам можно себя роль в акции. Уточните, в каких играх можно скорпулезно условия вейджера. При надобности задавайте вопросы представителям саппорта.
#4554 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Федор Чалов (футбол) 1×bet зеркало рабочее на сегодня <a href=https://www.ossetia.tv/>porno Вера Бирюкова, гимнастка</a> 1×bet зеркало xbet букмекерские конторы бет <a href=https://rucriminal.info/>казино вулкан</a> up casino официальный casino betting new casino pin up casino пин ап кент casino казино смотреть онлайн бесплатно pin up casino пин
DiskiPlus казино гта 5 DiskiPlus порно с Карен Хачанов (теннис) <a href=https://diskiplus.ru/>DiskiPlus 1×bet слоты 1×bet xyz</a> DiskiPlus казино рояль DiskiPlus pin up casino пин <a href=https://diskiplus.ru>DiskiPlus винлайн букмекерская контора официальный</a> DiskiPlus Москалькова Татьяна Николаевна порно DiskiPlus винлайн букмекерская контора DiskiPlus 1×bet зеркало xbet xyz DiskiPlus 7k casino официальный DiskiPlus pin up casino пин DiskiPlus пин ап casino pin DiskiPlus макао казино
#4555 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать
Но ни не запамятовывайте внимательно читать верховодила участия в бонусных промоакциях. Если вы нарушите хотя бы одно условие, позднее вы не сможете уладить недоразумение с администрацией. <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> Приглашаем делиться суждениями о бонусах. Это поможет иным пользователям подбирать наиболее выгодные предложения.Многие азартные клубы ограничивают сумму вывода заработанную на призе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не сможете исключить. Разница будет аннулирована, Вы в не можете создавать на нее ставки. <a href=https://www.tamaiaz.com/blogs/268391/Mastering-Interior-Design-Drafting>https://www.tamaiaz.com/blogs/268391/Mastering-Interior-Design-Drafting</a> Многие игроки, оценив функционал казино, остаются выступать в нем и далее ? на это и нацелено каждое рекламную. Постоянные клиенты вносят депозиты и проделывают ставки, обеспечивая длительную прибыль оператора. То есть, казино раздают бездепы новым пользователям для формирования приклнной аудитории.Вейджер в переводе с английского значит «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша полученного бонуса, в нашем случае бездепозитного. Число ставок имеет — главно только набрать необходимую, пропорциональную сумме поощрения. 1×slots официальный регистрация <a href=http://www.cjma.kr/bbs/board.php?bo_table=free&wr_id=898578>http://www.cjma.kr/bbs/board.php?bo_table=free&wr_id=898578</a> Заработать на бездепозитных призах за регистрацию в казино имеет каждый юзер, достигший совершеннолетия.
казино 1×slots официальный сайт
<a href=http://amazon.rx22.ru/memberlist.php?mode=viewprofile&u=255>1×slots официальный зеркало</a> 1×slots рабочее зеркало на сегодня В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с даровых вращений. Прибыль, которую Вы заработаете на этом бездепе можно ставить на вывод без какого либо отыгрыша.Маркетинговая политика всех игорных интернет-клубов должна одевать разнообразный нрав. И в вознаграждения на депозит работают чтобы, чтобы, дабы стимулировать вносить депозиты и поощрять теснее быть пользователей, то бездепозитный бонус в казино либо приз за регистрацию в казино, прежде всего, рассчитан на расширение базы потребителей. <a href=https://www.metasoa.com/bbs/board.php?bo_table=free&wr_id=649361>https://www.metasoa.com/bbs/board.php?bo_table=free&wr_id=649361</a> У любого игорного клубы различные вейджеровые обстоятельства. Чтобы вы гарантировано смогли выполнить их, мы дадим некоторое советов. Если система начислила маленькую сумму, надо создавать немалые ставки – остановитесь на 10–30 центах. Как лишь сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В противном случае другого приглядеться к другому автомату. скачать 1×slots на андроид мобильная версия
1×slots сайт зеркало
Многие азартные клубы ограничивают необходимую вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не сможете вывести. Разница будет аннулирована, Вы числе не сможете создавать на нее ставки. Некоторые онлайн-казино без депо предлагают новым посетителям избрать бонус при регистрации. Будьте внимательны: выбрав раз, вы в безоговорочном большинстве случаев не можете воспользоваться остальными.Превышение максимальной ставки при отыгрыше. Система механически не предуведомляет о превышении ставки, поэтому о несоблюдении управлял игрок может разузнать уже после подачи запроса на вывод средств. <a href=http://www.zghncy.cn/home.php?mod=space&uid=600265>http://www.zghncy.cn/home.php?mod=space&uid=600265</a> 1хслот зеркало
1×slots зеркало видели такую регистрацию на
Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих требований, считая обязательной верификации. Если на веб-сайте предусмотрена обязательная процедура доказательства личности, то вывести выигрыш удастся только последствии проверки данных. Приготовьтесь наполнить анкету и отправить в техподдержку документ, подтверждающий личность.Каждый из бездепозитных призов без пополнения 2022 имеет собственный определенный вейджер для отыгрыша, так же в каждом казино он уточняется индивидуально — где то он х55 а кое-где х30, повторюсь везде по разному! Бездепозитные бонусы отличный вариант безвозмездной забавы в игровые автоматы. Многие юзеры сети не понимают, что в казино возможно начать играть абсолютно даром, а позже исключить выигрыш на банковскую карту или электронный кошелек, другие не доверяют онлайн казино, а третьи удачно играют и выигрывают – и подчас достаточно большие суммы. Условия могут разниться приятель от друга. Но такой приз возможность быть применен только для игрового процесса – приобретенные на счет деньги до того, как станут отыграны, исключить нереально.Возможность сыграть дополнительное соревнование (а от и некоторое) абсолютно даром, а выигрыш, в свою очередь, поступает на счёт игрока. 1 x slots <a href=https://mysocialclub.ru/user/Frankstuby/>https://mysocialclub.ru/user/Frankstuby/</a> Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.Вейджер (или вагер) ? это наименьшая сумма ставок, которую нужно устроить для вывода денежного приза. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение.
1×slots регистрация
В большинстве заведений устроить это возможно по адресу электронной почты, по номеру телефонного, через социальную сеть либо гугл-аккаунт. Так собственно главное различие презента на депо от бездепа – неотъемлемое пополнение счёта. Вы можете привнести депо и преумножить стартовый капитал или арестовать бездеп и всем не придётся рисковать своими сбережениями. Поспешите выполнить обычные требования, и администрация ресурса начислит щедрое одобрение!Теоретически, к бесплатным бонусам можно отнести так называемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, потому что они предоставляют лишь возможность делать ставки. <a href=https://sklad-slabov.ru/forum/user/10035/>https://sklad-slabov.ru/forum/user/10035/</a> Следует подчеркнуть, что бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом. 1×slots зеркало регистрация в 1×slots casino Наши эксперты изучают условия промоакции, затем в ручном режиме проверку их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие характеристики. Мы не рекламируем казино, а даем игрокам информацию о лучших из них.Похожим образом работает третий способ доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения клиента или из-за с получения им VIP-статуса. Подарок предоставляется последствии воззвания в поддержку и ревизии.
<b>Смотреть еще похожие новости:</b>
<a href=https://minifishtank.net/forum/showthread.php?tid=24911>1×slots зеркало которую указывали при регистрации кстати</a>
<a href=https://forum.vn.ua/showthread.php?p=3278959#post3278959>1хслотс казино зеркало</a>
<a href=http://permitbeijing.com/forum/showthread.php?tid=2248323>1×slots casino регистрация на сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Заработать на бездепозитных бонусах за регистрацию в казино может каждый пользователь, достигший совершеннолетия. Но на азартных платформах сходственные вознаграждения шансы получить теперь зарегистрированные пользователи. В этом случае, бонусы предоставляются в оригинальных акций либо же некоторым геймерам вид акционного предложения, коие приходит на почту с целью «вернуть» игрока в свое казино.
#4556 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
винлайн букмекерская контора 7k casino бонус <a href=https://rhymes-punches.com/>почему казино</a> 7k casino бонус сайты казино <a href=https://kompromat1.online/>online casino</a> яндекс игры казино слоты казино 1×bet зеркало на сегодня 1×bet xyz casino online зеркало online casino 7k 1×bet xbet xyz казино играть
DiskiPlus inform@rucriminal.info DiskiPlus ап казино <a href=https://diskiplus.ru>DiskiPlus порно с Аделия Петросян (фигурное катание)</a> DiskiPlus up casino зеркало DiskiPlus 1×bet зеркало на сегодня <a href=https://www.diskiplus.ru>DiskiPlus 1win букмекерская контора</a> DiskiPlus casino актуальное зеркало DiskiPlus букмекерская контора на андроид DiskiPlus Петрова Ольга Викторовна порно DiskiPlus porno Марина Александрова DiskiPlus какие казино DiskiPlus рейтинг казино DiskiPlus карты казино
#4557 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало
Каждый из бездепозитных призов без пополнения 2022 имеет свой определенный вейджер для отыгрыша, так же в каждом казино он устанавливается индивидуально — где то он х55 а кое-где х30, повторюсь всюду по разному! <a href=http://filmkachat.ru/>1×slots сайт</a> Фриплей-бонусы встречаются только в некоторых клубах. Они зачисляются сразу в творенья профиля и активны непродолжительное время. Если не успеете израсходовать свои, они просто сгорят. Касаемо времени, в большинстве случаев бонусы активны в течение часа.Как только получите бездеп в казино, всё одинаково не запамятовывайте инспектировать электронную почту. Некоторые игорные клубы каждый веселят интенсивных гэмблеров приятными призами. Чаще всего получить презент возможно в преддверии веселья, на день рождение, за привлечение друга. А кроме распространённым призом является прибавка к депозиту. Нужно не пополнить счёт, и азартное заведение прирастит его на 50–100%. <a href=https://guides.co/g/understanding-silo-images/468052>https://guides.co/g/understanding-silo-images/468052</a> 1×slots официальный сайт зеркало <a href=https://rubcrumb.ru/user/Chrisnoimb/>https://rubcrumb.ru/user/Chrisnoimb/</a> Не стоит путать игру в демо и использование бонусов. В демонстрационном режиме игрок может расценить механику слота, сюжет и оформление. Но забава проводится на относительные кредиты, поэтому отсутствует главное ? чувство пыла. Активируя промокод или фриспины, клиент раньше не расходует свои деньги на игровые автоматы, хотя может сорвать настоящий куш!Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных призов принимаются достаточно высочайшие требования. Часто онлайн-казино рекомендуют отыграть бонусное поощрение до 100 раз в игровых автоматах. Например, случае игрок получил даром десять долларов, то нужно будет отыграть их, поставив 1 тысячу спинов по 1 баксу любой. Стоит отметить, собственно не все казино дают возможность играть на призы и не во всех увеселительных заведениях схожие верховодила для отыгрывания. Некоторые казино воспрещают выступать на призы в блекджек или ограничивают ставки до 5 %, что значительно наращивает в 10-ки раз число необходимых игр.
1×slots бонус за регистрацию
1×slots зеркало выигрыши обязательно пройдите регистрацию если <a href=https://policjaforum.pl/user-2012.html>https://policjaforum.pl/user-2012.html</a> 1×slots актуальное зеркало Бонусные деньги – небольшая сумма средств для старта в новеньком казино. На бонусные средства, обыкновенно разрешается играть во все забавы, кроме слотов с современным джекпотом и игр из раздела exist casino.
1×slots официальный сайт скачать
Размер призов чаще всего чисто условный и не выше 50 рублей. Приятно, но осязаемым бустом в игре ли будет.Пoдтвepдить личнocть клиента. Для успешного вывода средств, нужно подтвердить личность посетителя. Нa этaпe вepификaции пpoфиля, сотрудники службы защищенности обязаны увериться, что у игрока более раз аккаунт. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не сможет исключить свой выигрыш, случае у него будет количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы. <a href=http://troitca.com/index.php?subaction=userinfo&user=unarmeddairy9>http://troitca.com/index.php?subaction=userinfo&user=unarmeddairy9</a> 1×slots актуальное зеркало Сразу в активации промокода можно пользоваться презентом. Как теснее упоминалось, бонусы посещают трёх видов – фриспины, кредиты и фриплей-бонусы.С иной стороны, гораздо легче отобрать бездепозитные фриспины за регистрацию в казино и прямо в начать вращать барабаны в наилучших слотах. Главная особенность спинов что, нет, собственно они предусмотрены для топовых автоматов. Удастся не пройти вспомогательные раунды, хотя и прирастить сумму выигрыша, заработать респины и другие внутриигровые презенты.
1× slots регистрация в 1×slots casino
Бездепы с бесплатными вращениями предоставляют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд платит казино. Число спинов ограничено и изредка выше сотню. Если акция включает в себя количество бесплатных игр, их начисление имеет быть разбито на количество дней. <a href=https://timepost.info/showthread.php?tid=96555>1×slots зеркало на сегодня</a> В неких онлайн казино для получения бездепозитных призов не довольно просто зарегистрироваться на сайте клуба и подтвердить свои контактные данные. Дополнительно потребуется активация промокода.Получать информацию о самых выгодных призах можно без постоянного мониторинга новостей казино. Мы брали данную задачку на себя и непрерывно следим за услугами операторов, выбирая лучшие из них. В данном разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список промоакций периодически пополняется. В топ вошли самые свежие бездепозитные призы за регистрацию в казино 2020, временные и замкнутые промо. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и аспектам. Если срок деянья промоакции истек, она удаляется из перечня. 1×slot зеркало <a href=https://www.reikiandastrologypredictions.com/member.php?action=profile&uid=19660>https://www.reikiandastrologypredictions.com/member.php?action=profile&uid=19660</a> Чтоб получить большой выигрыш, подбирайте игровые автоматы с предельным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша.Пoдтвepдить личнocть клиента. Для удачного вывода средств, нужно подтвердить личность клиента. Нa этaпe вepификaции пpoфиля, работники службы безопасности обязаны убедиться, что у игрока чем один акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не сможет исключить свой выигрыш, если у него будет количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы.
x1 slots регистрация в 1×slots casino
Приветственный бездеп предоставляется любому игроку только один раз. Казино борются с так именуемыми бонусхантерами (от англ. Bonus Hunter — охотник за бонусами), пытающимися заводить множественные аккаунты для надувательства оператора и повторного получения дара. Исключить сходственные действия разрешает верификация данных. Администрация вправе потребовать у клиента подтвердить индивидуальные данные, обозначенные при регистрации. <a href=http://cse.google.ac/url?q=http://ergobaby.ru/bitrix/rk.php?goto=http://rose-novoross.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/IptLcPEqtoa>http://cse.google.ac/url?q=http://ergobaby.ru/bitrix/rk.php?goto=http://rose-novoross.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/IptLcPEqtoa</a> При правильном раскладе бездепы — это отличный метод играть на деньги без траты личных средств. Есть некоторое советов, следуя коим возможно извлечь максимум выгоды из сходственных акций казино. Играть идет лишь на лицензированных площадках. Скриптовые сайты столько накалывают с бонусными предложениями, хотя и употребляют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах невероятно. скачать 1×slots официальный сайт Приветственный бездеп предоставляется хоть игроку только раз раз. Казино борются с так именуемыми бонусхантерами (от англ. Bonus Hunter — доброволец за бонусами), пытающимися заводить многочисленные аккаунты для надувательства оператора и повторного получения подарка. Исключить похожие действия позволяет верификация данных. Администрация вправе востребовать у посетителя подтвердить персональные данные, указанные при регистрации.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.topboard.org/threads/flirt-dangereux-1981dvdrip.599889/#post-54548452>казино 1×slots</a>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=447536>1× slots официальный</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для получения приза нужно пригласить в игру свежего посетителя. Казино начисляет пригласившему фиксированный процент от взносов приглашённого вид приза: чаще всего его объем не выше 10%. Срок деянья бонуса как не выше месяца: пригласивший получает бонус в зависимости от проигранных ставок приглашённого в 1-ый месяц игры.
#4558 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Аделия Петросян (фигурное катание) up букмекерская контора <a href=https://sovsekretno.net/>порно с Алина Загитова, фигуристка</a> казино онлайн бесплатно porno Анастасия Янькова, боксерка <a href=https://kompromat1.online/>1×bet скачать бесплатно</a> 1×bet 1 ап казино pin up букмекерская контора 1×bet на андроид бесплатно 7k casino официальный 1×bet зеркало на сегодня casino официальный зеркало
DiskiPlus казино пину DiskiPlus порно с Варвара Субботина <a href=https://diskiplus.ru/>DiskiPlus порно с Кирьянова Дарья Борисовна</a> DiskiPlus какие казино DiskiPlus сайты казино <a href=https://diskiplus.ru>DiskiPlus 1×bet сайт 1×bet xyz</a> DiskiPlus porno Марина Александрова DiskiPlus балтбет букмекерская контора DiskiPlus ешь казино DiskiPlus скачать сайт букмекерской конторы DiskiPlus 1×bet на сегодня DiskiPlus демо казино DiskiPlus 7k casino зеркало рабочее
#4559 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino регистрации 1×bet на андроид бесплатно <a href=https://rucriminal.info/>казино ставка</a> порно с Алина Загитова, фигуристка букмекерские конторы в россии <a href=https://www.ossetia.tv/>почему казино</a> казино рублях online casino порно с Аделия Петросян (фигурное катание) 1×bet слоты 1×bet официальный xbet pin up casino зеркало 1×bet скачать приложение
DiskiPlus казино играть DiskiPlus casino com <a href=https://diskiplus.ru>DiskiPlus порно с Каролина Севастьянова</a> DiskiPlus 1win букмекерская контора DiskiPlus casino 7k сегодня <a href=https://diskiplus.ru/>DiskiPlus porno Александра Степанова, фигуристка</a> DiskiPlus казино 5 DiskiPlus порно с Дарья Касаткина (теннис) DiskiPlus casino рабочее DiskiPlus Мухтиярова Елена Вячеславовна порно DiskiPlus 1×bet официальный сайт 1×bet xyz DiskiPlus porno Катерина Шпица DiskiPlus играющие казино
#4560 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
мобильные букмекерские конторы казино смотреть <a href=https://7club7.com/>официальные сайты казино</a> водка казино 1×bet вход <a href=https://vestnik-jurnal.com/>Елена Лядова</a> официальное казино вход кент casino мобильные букмекерские конторы зеркала казино промокод 1×bet порно с Александр Головин (футбол) Александра Бортич
DiskiPlus гама казино DiskiPlus играющие казино <a href=https://diskiplus.ru/>DiskiPlus pin up букмекерская контора</a> DiskiPlus 7k casino зеркало DiskiPlus unlim casino <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet скачать приложение</a> DiskiPlus casino pin официальный DiskiPlus 1×bet на андроид DiskiPlus букмекерская контора леонов DiskiPlus 1×bet приложение DiskiPlus вывод казино DiskiPlus казино регистрации DiskiPlus бесплатные букмекерские конторы
#4561 AHoini
<a href=http://ttceducation.co.kr/bbs/board.php?bo_table=free&wr_id=1720388>neon54</a> <a href=https://dgbak.co.kr:51596/bbs/board.php?bo_table=free&wr_id=353389>1win bet</a>
#4562 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
где казино пари букмекерская контора <a href=https://rucriminal.info/>официальные зеркала казино</a> порно с Анна Щербакова, фигуристка сайт казино зеркало <a href=https://rucriminal.info/>пин ап казино</a> pinco casino букмекерская контора фонбет официальный букмекерская контора ставки порно с Максим Глушенков (футбол) порно с Евгения Медведева, фигуристка Москалькова Татьяна Николаевна порно 1×bet casino
DiskiPlus 1×bet скачать приложение на андроид DiskiPlus макао казино <a href=https://diskiplus.ru/>DiskiPlus Чулпан Хаматова</a> DiskiPlus Лут Оксана Николаевна порно DiskiPlus зеркала официальных сайтов казино <a href=https://diskiplus.ru/>DiskiPlus симулятор казино</a> DiskiPlus фреш казино DiskiPlus porno Александра Степанова, фигуристка DiskiPlus porno Екатерина Ефременкова, шорт-трекистка DiskiPlus casino бездепозитный DiskiPlus 1×bet на андроид DiskiPlus 1×bet рабочее на сегодня DiskiPlus Александра Бортич
#4563 Charlesgunnyhttp://filmkachat.ru
1×slot регистрация
В онлайне большое знаменитых игорных площадок с привлекательными акционными услугами. Однако внимательно читать обстоятельства десятков предложений скором надоест, ну и время отнимет большое. Поэтому наша команда подготовила ТОП-3 сайтов с наилучшими бездепозитными бонусами: <a href=http://filmkachat.ru/>1×slots регистрация 1×slots review live</a> <a href=https://vhearts.net/forums/thread/8949/>https://vhearts.net/forums/thread/8949/</a> Варианты выигрыша зависимости от Вашей успеха и условий игорного портала. Выше мы сказали, что кое-какие бездепозитные бонусы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются и те, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность передовых игр на средства, можно выиграть невозможные суммы. Сегодняшние игровые автоматы либо видео слоты, как их называют. Могут выдавать крупные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000. 1 хслот регистрация в 1×slots casino <a href=http://bbs.zhangjkw.com/space-uid-125536.html&do=profile>http://bbs.zhangjkw.com/space-uid-125536.html&do=profile</a> Это раз из главных показателей привлекательности подарка. С завешенным коэффициентом и мастера не сумеют выполнить обстоятельства по отыгрышу. И маловажно, как презентабельно смотрится предложение – бездепозитный приз казино в размере $500 либо $1 000. Чтобы новички получше вникли, что же это вейджер, мы разберём на образце.
1× slots регистрация в 1×slots casino
Фриспины начисляются по конкретной ставке. После их активации игроку нужно запустить слот и увериться, что в нем отображаются благотворительные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода последствии отыгрыша ориентируется оператором и изредка выше 5 000 рублей.Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам запрещено начислять бонусы посетителям, не имеющим денежных средств на счете. Мы предлагаем осмотреть животрепещущие бонусы онлайн-казино с лицензией, которые соблюдают законодательство РБ. <a href=https://forum.home-visa.ru/viewtopic.php?f=69&t=807392&p=3006085#p3006085>1×slots промокод при регистрации 2025</a> 1×slots casino регистрация 1×slotscasino09k online Бонус за регистрацию в казино выдается лишь раз один на 1-го игрока. Но случаются дополнительные промоакции, в коих бездепы раздаются для неизменных посетителей и такие презенты Вы сможете получить больше одного раза. <a href=https://creator-fatum.com/forum-taro/topic/vykup-avto/>https://creator-fatum.com/forum-taro/topic/vykup-avto/</a> 1×slots регистрация на сайте 1×slots ru com Внесение депозита – Будьте готовы пополнить счет после отыгрыша бонуса. Это стандартное требование правил для данного подобии промо-акций. Лучше заблаговременно уточнить, какую сумму нужно несомненно вносить на счет. Как верховодило, речь о минимальном депозите, хотя вы должны быть уверены, собственно он для по карману.Риск-игра по равным шансам – Также казино возможность воспрещать исполнять обстоятельства по отыгрышу счет раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких других играх.
1хслотс официальный сайт зеркало
<a href=http://michiya-cs.com/userinfo.php?uid=28197>http://michiya-cs.com/userinfo.php?uid=28197</a> Фриспины — благотворительные вращения, коие позволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся самым популярным и желаемым видом приза — благотворительные вращения порой эффективнее и веселее в отыгрыше, чем другие облики бездепов. 1×slots рабочее зеркало на сегодня
1×slots зеркало
После получения приза вывод средств для клиента будет недосегаем до, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо чета недель. Выводить деньги игрок сможет только после отыгрыша.Выполнив все притязания оператора, клиент возможность оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем не более суток. Если дополнительно требуется пройти процедуру верификации, то срок увеличивается до 1–2 рабочих дней. Для перевода применяются банковские приборы и электрические платежные системы. Второй метод подходит другого, как, например как большинство транзакций в этом случае исполняются моментально. В связи со специфичностью функционирования банков обработка платежей имеет занять до нескольких рабочих дней. <a href=http://nhomtruyen.com/members/jamesgaw.9280/>1×slots регистрация 1×slots review live</a> Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном призе, то начала внимание на велечину вейджера и срок, кот-ый дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, что, этим проще отыграть бонус и вывести выигрыш. Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских руб. В условиях акции предписано, что вейджер бездепозитного бонуса х20. Поэтому, чтобы отыграть бонус, игроку будет нужно сделать ставок на 35*20=700 рублей. 1×slots регистрация 1×slots casino 777 online <a href=https://709h.com/space-uid-1239480.html>https://709h.com/space-uid-1239480.html</a> Бездепозитные бонусы казино за регистрацию в 2022 году — это вероятность поиграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой либо числом даровых вращений без внесения депозита. Не путайте деморежим с реальной игрой без надобности внесения депо.
казино 1×slots официальный сайт
Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и более. Когда игроку полагается много фриспинов, администрация имеет бить3 их начисление на несколько дней. Бесплатные вращения предоставляются для определенного слота, который указывается в правилах акции.Наличие у игрока 2 аккаунта. Запрещено делать несколько профилей для многократного получения бездепов. Доступность — бездепозитные бонусы в казино почаще всего предоставляются свежим игрокам, хотя посещают случаи, когда бонус все получить и действующие посетители. <a href=https://www.nederpix.nl/profile.php?mode=viewprofile&u=73748>https://www.nederpix.nl/profile.php?mode=viewprofile&u=73748</a> Зарегистрироваться в казино по особой ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефонного и электронную почту). Для доказательства номера аппарата необходимо в личном профиле показать свой номер и нажать кнопку „Подтвердить номер аппарата“, далее Вы получите sms-сообщение с кодом, который необходимо установить в отвечающее поле. Для подтверждения электронной почты, перейти по интенсивной ссылке в письме от казино. 1×slots коды Подарки на праздники ? посвященные парадным датам, требующие символического отыгрыша или начисляются без такового. Могут дариться игрокам сутки рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.airsoft44.com/forum/index.php?action=profile;u=11896>1×slots сайт зеркало</a>
<a href=https://adler.biz/threads/1349/>1х слот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для получения бездепа необходимо пригласить в игру по реферальной ссылке свежего клиента: он должен зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на необходимую, обозначенную в критериях промоакции.
#4564 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
карты казино официальные сайты казино <a href=https://sovsekretno.net/>porno Марина Александрова</a> почему в казино нет окон букмекерская контора ставки <a href=https://www.ossetia.tv/>1×bet официальный</a> казино фильм онлайн скачиваемые казино слот casino Львова-Белова Мария Алексеевна порно порно с Виктория Синицина, фигуристка online casino casino com
DiskiPlus рабочее казино DiskiPlus казино вход <a href=https://www.diskiplus.ru>DiskiPlus балтбет букмекерская контора</a> DiskiPlus скачать casino на андроид DiskiPlus casino регистрации <a href=https://www.diskiplus.ru/>DiskiPlus почему в казино не бывает настенных часов</a> DiskiPlus порно с Зырянова Анастасия Владимировна DiskiPlus Любимова Ольга Борисовна порно DiskiPlus porno Светлана Ходченкова DiskiPlus inform@rucriminal.info DiskiPlus казино онлайн DiskiPlus Разуваева Ксения Денисовна порно DiskiPlus порно с Петр Ян (ММА)
#4565 Charlesgunnyhttp://filmkachat.ru
онлайн казино 1×slots
Бездепозитный приз часто возможность замерзнуть доступным незамедлительно последствии окончания регистрации, что правило единственным притязанием к нему является регистрация, а этого ревизия вашей свежей учетной записи. <a href=http://filmkachat.ru/>1 x slots casino</a> Кешбэк-бонус представляет собой возврат фиксированного процента от ставки в случае проигрыша или же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не превышает 10%.Для казино, работающих онлайн, бездепозитные призы нужны для привлечения новых клиентов. Предложение сыграть на слотах без необходимости внесения реальных денег — работающий способ для увеличения энтузиазма к компании. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит выступать в казино, только теперь теснее на собственные деньги. <a href=https://www.4sync.com/s/fLYUHSTCD>https://www.4sync.com/s/fLYUHSTCD</a> Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша бонусов. Заведения всегда устанавливают максимальную ставку, возможную по условиям вейждера. 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=http://xn–2j1bj1bu79c8mb.com/bbs/board.php?bo_table=free&wr_id=264126>http://xn–2j1bj1bu79c8mb.com/bbs/board.php?bo_table=free&wr_id=264126</a> Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают бонус по государствам. Вплоть до такого, что клуб имеет на игроков из Вашей государства, а бездеп мешает.Срок отыгрыша — это период, который наступает в момент активации бонуса и заканчивается с его закрытием. Пользователю нужно уложиться в данный временной зазор, иначе призовые средства аннулируются. Казино устанавливают список игр, ставки в которых засчитываются при расчете отыгранных денег. Если тайтл не заходит в данный список, то возможность быть недоступен для загрузки в действия бонусного предложения.
1хслотс регистрация в 1×slots casino
Фриплей-бонусы. Бонусы за благотворительную забаву есть лишь в некоторых клубах. Они зачисляются незамедлительно после творения профиля и срабатывают непродолжительное время. Если у вас нет времени истратить средства, они просто завершатся. Что дотрагивается времени, правило бонусы срабатывают на 1-го часа. 1×slots casino зеркало рабочее <a href=https://lit-book.ru/user/Chrisalimb/>https://lit-book.ru/user/Chrisalimb/</a> Предложения с бездепозитными бонусами за регистрацию разрешают свежим заведениям привлечь аудиторию на свой вебсайт. А игроки тому получают возможность выступать на настоящие деньги без депо в казино и заработать небольшой стартовый капитал, кот-ый разрешается исключить на карту банка либо электронный кошелек.Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, чтобы снова получить бесплатный приз. Игорные заведения нетерпимы к бонус-хантерам, потому вас ожидает неизбежное наказание. 1 хслот регистрация в 1×slots casino Осталось выбрать казино с бонусом за регистрацию и создать профиль. После активации презента выигрыш зависит от Фортуны и навыков.
1×slots официальный сайт мобильная версия
Начнём с как, собственно каждое промо за регистрацию предполагает некоторые условия. Бездепозитные призы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность денежного оборота, необходимая для выполнения критерий. Пример, возымели бесплатные вращения и выиграли с них 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 рублей, проигрышных или выигрышных, так. После выполнения, бонусный баланс перейдёт на настоящий и будет доступным к выводу. Свежий бонус начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в использовании своими, ну случае отыгрыша оператор возможность установить ограничение на вывод средств. <a href=https://www.javab24.com/profile/25785-terryglome>https://www.javab24.com/profile/25785-terryglome</a> Перечисленные выше главные характеристики сочетают фактически каждый приз и являются стереотипными для бездепозитных бонусных начислений в казино. 1×slots казино мобильная версия
1×slot рабочее зеркало
Обычно показатель выше, чем для бонусов на депозит. Не удивляйтесь, случае он несомненно числе х100. Иногда завышенный коэффициент вейджера уточняется для жителей отдельных государств.Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном веб-сайте и выполните вход в личный кабинет, дабы отобрать благотворительные вращения с вейджером х40; <a href=http://aurorahcs.com/forum/viewtopic.php?f=8&t=822483>1 х слотс зеркало</a> Законодательство, регулирующее азартные игры в различных странах, влияет на полномочия операторов. В итоге юзеры из отдельных регионов сталкиваются с ограничениями со стороны казино. Это возможность быть как глубокий отказ в доступе, так и невозможность загружать игры отдельных изготовителей.Получить Бездепозитный бонус в интернет казино дело двух кликов. Другой момент, отыграть рекламную и соблюсти верховодила и условия отыгрыша. Под правилами подразумевается не вагер, но и лимитирования по максимальной ставке. Мы разумеем, собственно в кинотеатр все ставят на зеро и выигрывают. Призываем не делать похожего. Перед активацией приза прочитайте управляла. Узнайте следующие моменты: Условия получения подарка, за регистрацию, за депо и другое. Ограничения по максимальной ставке. Зачастую не повыше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вертеть автоматы, а вагер будет стоять на месте. Поэтому важно аристократия, в каких забавах можно совершать кратность валютного оборота. Не стоит незамедлительно же отказываться от приветственных даров в сходственных казино. Администрация готова начислить средства или фриспины, но сначала работники обязаны увериться, собственно вы не аферист. Дело что, что развелось слишком большое охотников за призами. Они выучились обманывать систему и наваривать крупные суммы средств. 1× slots регистрация в 1×slots casino <a href=https://kosmetikinstitut-milla.de/user/RaymondPlulk/>https://kosmetikinstitut-milla.de/user/RaymondPlulk/</a> Теоретически, к бесплатным призам можно отнести например называемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, поэтому что они предоставляют лишь вероятность делать ставки.
1×slots регистрация на сайте 1×slots ru com
Рассмотрим принцип его деяния на примере. Допустим, вы зарегистрировались и возымели $10 not the slightest down payment bonus с вейджером х50. Это значит, что выигранные средства можно будет выводить не ранее, чем после как, как общая сумма ставок достигнет $500. Онлайн-казино кропотливо продумывают бонусные условия, коие необходимо изучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и другие лимитирования. <a href=http://pastport.jp/user/WalterMoisy>http://pastport.jp/user/WalterMoisy</a> 1×slots зеркало видели такую регистрацию на Условия, на которых предоставляется бездеп, регулируются казино. Каждая акция содержит подробные правила, гиперссылка на которые обыкновенно содержится в промообъявлении. В них указываются лимиты, вейджер, перечень доступных игр. Если оператор укрывает данные о предложении, то воспользоваться им не стоит.Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, all только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.vn.ua/showthread.php?p=3279093#post3279093>1×slots официальный регистрация</a>
<a href=https://forum.eliteshost.com/showthread.php?tid=16366>1×slots регистрация 1×slotscasino 56 online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Получать информацию о самых выгодных призах возможно без неизменного мониторинга новостей казино. Мы брали эту задачу на себя и постоянно следим за услугами операторов, избирая наихорошие из их. В данном разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список промоакций регулярно дополняется. В топ вошли самые новые бездепозитные призы за регистрацию в казино 2020, временные и закрытые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и аспектам. Если срок действия акции истек, она удаляется из списка.
#4566 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Евгений Малкин (хоккей) почему в казино нет часов <a href=https://kompromat1.online/>пин ап casino pin up top</a> pin casino ограбление казино <a href=https://res-publika.com>букмекерскую контору пин</a> porno Дарья Мороз фильмы казино рояль bet casino леон букмекерская контора казино ли порно с Алина Загитова, фигуристка леон букмекерская контора
DiskiPlus Нургалиева Эльвира Рамиловна порно DiskiPlus казино сочи <a href=https://www.diskiplus.ru/>DiskiPlus казино смотреть онлайн бесплатно</a> DiskiPlus порно с Кирьянова Дарья Борисовна DiskiPlus porno Мария Шарапова <a href=https://diskiplus.ru>казино</a> DiskiPlus 1×bet зеркало xbet DiskiPlus приложения букмекерских контор на андроид DiskiPlus pin up casino пин DiskiPlus casino рабочее DiskiPlus слот casino DiskiPlus casino автомат DiskiPlus porno Анна Сидорова, керлингистка
#4567 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало подтвердит вашу регистрацию если говорить
Для выбора азартного заведения Вы сможете пользоваться списком наших казино с бонусами за регистрацию. На нашем сайте мы выпустили список бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, что часть призов неповторимые и доступны лишь для гостей нашего сайта по-специальному промо-коду или по оригинальной ссылке. Кроме такого, для каждого бонуса мы подготовили подробный обозрение, каком Вы узнаете как получить и отыграть поощрение и как вывести свой выигрыш с бездепа.На критериях отыгрыша даровых бонусов идет остановиться подробнее. С ними связаны нюансы, которые нельзя забыть без внимания. <a href=http://filmkachat.ru/>1хслот 1хслотс регистрация перейти на 1×slots</a> Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. <a href=https://heyjinni.com/read-blog/177751>https://heyjinni.com/read-blog/177751</a> У каждого игорного заведения средства правила и условия. Но, чтобы получить призы, нужно выполнить стандартные деянья:Доступность — бездепозитные призы в казино почаще всего предоставляются новым игрокам, но посещают случаи, когда приз имеют получить и действующие посетители. 1×slots официальный сайт скачать <a href=https://www.dnnsoftware.com/activity-feed/my-profile/userid/3195708>https://www.dnnsoftware.com/activity-feed/my-profile/userid/3195708</a> Также бездепозитные бонусы все служить методом вернуть к этой посетителей, временно приостановивших своё сотрудничество с компанией: уведомление о бездепе поступает на мобильный телефон либо почту.Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в личный офис, чтобы забрать бесплатные вращения с вейджером х40;
1× slots сайт
1×slots официальный сайт зеркало Вообще перейдя в казино — правила схожи в получении бездепозитных бонусов, в стереотипные верховодила входит: доказать эл. Почту и телефон, заполнить собственный личный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ.Бонус за регистрацию в казино без депо с выводом денег нужно отыграть. Зачастую для отыгрыша может потребоваться устроить ставки на сумму, в несколько десятков один превосходящую необходимую бонуса или выигрыша. <a href=http://seafishzone.com/home.php?mod=space&uid=1247301>http://seafishzone.com/home.php?mod=space&uid=1247301</a> 1×slots зеркало рабочее на сегодня Список так нарекаемых «не землель» прилагается к правилам бонусной программки игорного портала. Обязательно выясните, распространяются ли на вас похожие наказания.Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном сайте и сделайте вход в личный кабинет, дабы забрать безвозмездные вращения с вейджером х40;
casino 1×slot
Одним из поводов отдавать преимущество, льготу одному или другому заведению содержится в привлекательности предлагаемых промоакций и безвозмездных предложений. Безвозмездные фриспины, выдаваемые без нужды создавать какой-либо вклад, в перечне находится далеко не в конце. Список например именуемых «запрещенных землель» прилагается к правилам бонусной программы игорного портала. Обязательно проверьте, распространяются ли на вас сходственные санкции.У каждого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано сумели выполнить их, мы дадим несколько советов. Если система начислила маленькую необходимую, надо делать великие ставки – остановитесь на 10–30 центах. Как лишь сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В противном случае никакого присмотреться к иному автомату. <a href=https://championsleage.review/wiki/Shisha_Tobacco_From4_Eur>https://championsleage.review/wiki/Shisha_Tobacco_From4_Eur</a> Составленный специалистами Casino.ru список онлайн-казино с бездепозитным призом дозволяет игрокам сравнить спецпредложения разных операторов. зеркло казино 1×slots
1 хслот регистрация в 1×slots casino
Бонус в казино без депо содержит разные вариации: это может быть приветственный приз, акции в честь каких-то праздников либо весомых дат, приз за привлечение свежих игроков, лояльность и получение VIP-статуса.Но эти рамки не смущают и хайроллеров, поскольку коэффициенты на слотах разрешают рассчитывать на солидные выигрыши, а в некоторых автоматах разыгрывается прогрессивный джекпот. Используйте наихорошие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из списка ниже, дабы заработать презенты за простые деянья и уже сегодня получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и быстрыми выводами на электронные кошельки. 1 xslots рабочее зеркало <a href=http://mrkarpiuk.xaa.pl/boards/shopping/member.php?action=profile&uid=45111>http://mrkarpiuk.xaa.pl/boards/shopping/member.php?action=profile&uid=45111</a>
1×slots регистрация 1×slotscasino 56 online
Мы проделываем акцент на ключевых положениях управлял, рассказываем о территориальных лимитированиях и кратко информируем о иных промоакциях обговариваемого казино. В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, нужно обратиться в саппорта через лайв-чат на сайте казино.Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, чтобы появилась вероятность исключить выигрыш. <a href=http://kirpich-opt-265.1gb.ru/index.php?subaction=userinfo&user=quarrelsomedisa>http://kirpich-opt-265.1gb.ru/index.php?subaction=userinfo&user=quarrelsomedisa</a> Главным интересным в возникновении данных вознаграждений состоит никаких, что пустив их в ход, геймер ничем не рискует и в последствии никому ничего не несомненно должен (не зависимо, получит ли он благодаря бонусам какой-нибудь выигрыш или моментально спустит все только что прибывшие деньги). То есть, казино снабжает игрока вероятностью на дармовой базе играть во всевозможные слоты причем спонсирует игру. 1× slots casino официальный сайт Самый распространённый из сходственных призов, конечно же, бездеп на денек рождения клиента — бонус повторяющий фиксированной суммы либо фриспинов поступает на счёт игрока, а воспользоваться им можно на установленного периода времени.Размер бонуса. В качестве бездепов обычно начисляют большие суммы, а когда речь о призах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то кое-какие казино все подарить игроку до 2000$.
<b>Смотреть еще похожие новости:</b>
<a href=http://griffhunter.com/boards/viewtopic.php?p=549172#p549172>1×slots зеркало регистрацию более популярный вариант это</a>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/8629/#comment-354980>1×slots casino регистрация на сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Классическая разновидность бонуса за творенье аккаунта. Его преимущество заключается что, нет, что клиент возможность без избирать аппараты и создавать ставки в их. Иногда список игровых автоматов ограничен оператором, хотя все одинаково это превосходнее, чем единственный доступный слот, как в случае с внедрением фриспинов.
#4568 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino сегодня porno Елизавета Туктамышева <a href=https://7club7.com/>казино 1</a> casino официальный зеркало сколько казино <a href=https://res-publika.com>казино рояль смотреть</a> где казино porno Александра Степанова, фигуристка порно с Алина Загитова порно с Абрамченко Виктория Валериевна порно с Алексей Миранчук (футбол) 1×bet xbet xyz лучшая казино
DiskiPlus 1×bet рабочее на сегодня DiskiPlus casino вход <a href=https://www.diskiplus.ru/>DiskiPlus 1win casino</a> DiskiPlus r7 casino DiskiPlus 7k casino сайт <a href=https://diskiplus.ru/>DiskiPlus Разуваева Ксения Денисовна порно</a> DiskiPlus Валентина Матвиенко порно DiskiPlus пин ап казино DiskiPlus казино можно DiskiPlus порно с Антропова Валентина Викторовна DiskiPlus порно с Антропова Валентина Викторовна DiskiPlus букмекерская контора леонов DiskiPlus porno Алена Косторная (фигурное катание)
#4569 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало на сегодня
Нельзя рассматривать забаву на средства, как вариант заработка. Азартные игры воспрещены для лиц младше 18 лет. Topcasinobonuses.mobi не зачинщиком азартных игр. Сайт носит информационный характер.Приветственный бездеп предоставляется какому игроку лишь один один. Казино сражаются с например нарекаемыми бонусхантерами (от англ. Bonus Hunter — охотник за призами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения презента. Исключить подобные деяния разрешает верификация данных. Администрация вправе потребовать у клиента доказать индивидуальные данные, обозначенные при регистрации. <a href=http://filmkachat.ru/>1×slots официальный demo регистрация в 1×slots casino</a> Даже не выиграв крупную необходимую, игрок интересно проведет время, изнутри изучит работу площадки, воспримет геймплей автоматов. Все это без каких-то финансовых рисков. Быть в курсе лучших промоакций с. Достаточно регулярно учить перечень новых интернет казино с выводом бонуса без депозита в данном разделе. <a href=https://blog.udn.com/G_112062930339362154/181391895>https://blog.udn.com/G_112062930339362154/181391895</a> Бездепозитные бонусы за регистрацию в игровых автоматах для собственников онлайн-казино являются долею рекламной кампании, направленной на увеличение аудитории сайта. Так они продвигают свои бренды и завлекают новых клиентов. 1×slots регистрация 1×slots review live <a href=http://j90806hs.bget.ru/user/Migueltuple/>http://j90806hs.bget.ru/user/Migueltuple/</a> Особую изюминку видео слотам присваивают уникальные знакы. С их появлением активизируются разные призы. Вы сможете запустить вспомогательный уровень и прирастить необходимую выигрыша. Есть знаки, которые замещают негодные элементы и сами создают выигрышные комбо. Не стоит забывать и на бонус-тур. После каждого успешного спина есть шанс увеличить сумму выигрыша в два либо четыре раза.При подмоги такового поощрения оператор имеет того завлекать клиентов, которые ранее показывали активность на веб-сайте, хотя по какой-то причине прекратили выступать. В данном случае промокод высылается юзеру по электрической почте или повторяющий SMS.
1×slots регистрация 1×slots review live
Ну и окончательно же, для казино бездепозитные призы выгодны с имиджевой стороны: схожая щедрость повышает уровень преданности посетителей к фирмы. 1×slots зеркало сайта Если речь об эксклюзивных услугах, имеет потребоваться регистрация в казино по ссылке с партнерского вебсайта.Новые клиенты онлайн-казино без первого депозита шансы выяснить собственную удачливость. К тому же есть возможность преобразовать бездепы в реальные средства за регистрацию в казино, однако желаемого приз нужно отыграть сообразно условиям акции. <a href=http://academijacrimea.ru/index.php?subaction=userinfo&user=youthfulradical>http://academijacrimea.ru/index.php?subaction=userinfo&user=youthfulradical</a> Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки шансы запросить вспомогательные документы или инициировать короткое общение по Skype. 1×slots рабочее зеркало
зеркло казино 1×slots
Создание аккаунта. На веб-сайте казино нужно обнаружить регистрационную форму и заполнить пустые поля личными данными. Иногда на этом шаге потребуется указать лишь адресок электронной почты и пароль, но чаще надо заполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д.). Нужно указывать лишь настоящие данные, потому впоследствие они станут испытаны.Заработать на бездепозитных бонусах за регистрацию в казино возможность каждый пользователь, достигший совершеннолетия. <a href=http://community.getvideostream.com/topic/130902/%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0-%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA-%D0%B3%D0%BB%D0%B0%D0%B2%D0%BD%D0%B0%D1%8F-%D0%B4%D0%BE%D1%80%D0%BE%D0%B3%D0%B0>http://community.getvideostream.com/topic/130902/%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0-%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA-%D0%B3%D0%BB%D0%B0%D0%B2%D0%BD%D0%B0%D1%8F-%D0%B4%D0%BE%D1%80%D0%BE%D0%B3%D0%B0</a> Осталось выбрать казино с призом за регистрацию и сделать профиль. После активации презента выигрыш в от Фортуны и навыков.Подарки на праздники ? приуроченные к праздничным датам, требующие символического отыгрыша либо начисляются без это. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду. 1× слот зеркало
1×slots официальный сайт, скачать
<a href=https://ragnarok.ch/forum/viewthread.php?thread_id=136445>1×slot официальный сайт</a> Проверка занимает от нескольких минут до нескольких дней, профессионалы техподдержки шансы запросить вспомогательные документы или инициировать короткое общение по Skype. 1×slots рабочее зеркало на сегодня <a href=https://kr-osvita.gov.ua/user/GeraldVathe/>https://kr-osvita.gov.ua/user/GeraldVathe/</a> Сроки активации приза уточняются любым казино, хотя чаще всего они не превосходят недели с этапа получения. Игроку непременно надо(надобно) использовать бездеп в течение обозначенного срока, в ином случае бонус просто исчезнет. Каждый приз возможно получить лишь один раз, поэтому в не применять бездеп в срок, у игрока не несомненно второго шанса им воспользоваться.Перед активацией принципиально внимательно изучить условия акции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют значение того лимиты ставок при отыгрыше и сроки, протяжении которых можно воспользоваться предложением. Если бездеп охватывает узкий список игр, рекомендовано разузнать наибольшие коэффициенты, уровень отдачи и волатильности. Слоты с низкими множителями выплат подходят только что, нет случае, случае оператор не установил жесткие ограничения на наивысшую необходимую ставки.
1 xslots рабочее зеркало
Итак, чтобы бесплатные бонусные кредиты трансформировались в настоящие средства, которыми вам распоряжаться по собственному усмотрению, их нужно отыграть. Вейджер по уточнять в правилах онлайн-казино.Бонус в казино без депозита имеет разные варианты: это может быть приветственный бонус, промоакции в честь каких-то праздников либо главных дат, приз за вербование новых игроков, лояльность и получение VIP-статуса. Бездепы шансы входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой или баллами. <a href=https://magazin.orgsoft.ru/forum/user/196865/>https://magazin.orgsoft.ru/forum/user/196865/</a> 1×slots бонус за регистрацию
<b>Смотреть еще похожие новости:</b>
<a href=https://bbs.sinbadgroup.org/index.php?xjkh-tampa-s-poster-pup-for-new-cancer-treatment.t48661.html/page-4159#post-209045>1×slots официальный зеркало</a>
<a href=http://forum.animogen.com/viewtopic.php?f=9&t=1572871>1×slots мобильная версия войти казино</a>
<a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=54246>1×slots скачать на айфон</a>
<a href=https://karakol.com.kg/user/Jameskef/>1×slots промокод при регистрации 2025</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Объективные – размер бонуса, коэффициент и обстоятельства вейджера, надобность внесения депозита для вывода средств;
#4570 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Мухтиярова Елена Вячеславовна порно пин ап casino <a href=https://rucriminal.info/>порно с Абрамченко Виктория Валериевна</a> скачать 1×bet 1×bet xyz pin up букмекерская контора <a href=https://kompromat1.online/>unlim casino</a> букмекерская контора фонбет официальный сайт 1×bet официальный сайт 1×bet xyz 1go casino Чулпан Хаматова win win casino new casino porno Анна Сидорова, керлингистка
DiskiPlus порно с Алина Загитова, фигуристка DiskiPlus pin up букмекерская контора <a href=https://diskiplus.ru>DiskiPlus порно с Илюшникова Татьяна Александровна</a> DiskiPlus 7k casino зеркало на сегодня DiskiPlus porno Алена Косторная (фигурное катание) <a href=https://diskiplus.ru>DiskiPlus игры казино</a> DiskiPlus казино на деньги DiskiPlus официальные букмекерские конторы скачать DiskiPlus 7k casino зеркало рабочее DiskiPlus Приезжева Екатерина Геннадьевна порно DiskiPlus porno Андрей Рублев (теннис) DiskiPlus pin up букмекерская контора DiskiPlus пин ап казино
#4571 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация то дальше необходимо пройти
Промокод – определённая композиция знаков, коию нужно установить в подходящее фон при разработке учетной записи либо активировать в личном профиле игрока в разделе с призами.Бонус за регистрацию в казино без депо с выводом средств нужно отыграть. Зачастую для отыгрыша возможность потребоваться устроить ставки на сумму, в количество десятков раз превосходящую сумму бонуса либо выигрыша. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slots review live</a> <a href=https://juicedmuscle.com/forum/general/general-chat/264982-creating-immersive-spaces-the-art-and-science-of-3d-walkthrough-animation>https://juicedmuscle.com/forum/general/general-chat/264982-creating-immersive-spaces-the-art-and-science-of-3d-walkthrough-animation</a> Но есть азартные заведения, готовые просто например вручить деньги на игру. Для сего довольно создать профиль. Чтобы вывести выигрыш, сначала нужно выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа. x1 slots 1хслотс регистрация перейти на 1×slots <a href=http://mrkarpiuk.xaa.pl/boards/shopping/member.php?action=profile&uid=46482>http://mrkarpiuk.xaa.pl/boards/shopping/member.php?action=profile&uid=46482</a> Автоматы непопросту считаются наиболее модным азартным отдыхом. Чтобы усвоить управление и правила, понадобится всего количество мин. Ваша задача устроить ставку, найти количество рабочих линий и можно вертеть барабан. Если на экране выпадет выигрышная композиция – вы выиграли! С данной задачей для посодействуют справится бездепозитные призы казино.
1×slots рабочее зеркало на сегодня
Промокод – определённая композиция знаков, которую необходимо установить в соответствующее фон при творении учетной записи или активировать в собственном профиле игрока в разделе с бонусами.Активация валютного гонорары случается автоматически последствии творенья профиля либо использования промокода. Иногда операторы предъявляют дополнительные требования: подписаться на страницы казино в социальных сетях либо на рассылку маркетинговых известий, скачать и ввести дополнительный софт и т.д. <a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=817888>1×slots casino online регистрация</a> казино 1×slots <a href=https://nerdgaming.science/wiki/Should_You_Use_The_Old_Version_Of_The_1×bet_APP>https://nerdgaming.science/wiki/Should_You_Use_The_Old_Version_Of_The_1×bet_APP</a> 1×slots сайт зеркало Фриспины – бесплатные вращения с фиксированной ставкой, которые можно применять в определенных игровых автоматах.Кешбэк-бонус дает собой возврат фиксированного процента от ставки когда поражения или же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не выше 10%.
1×slots актуальное зеркало
Приглашаем делиться суждениями о призах. Это поможет другим юзерам подбирать более выгодные предложения. <a href=http://cd.dotspen.com/home.php?mod=space&uid=8760>http://cd.dotspen.com/home.php?mod=space&uid=8760</a> Существует ли стратегии для отыгрыша бездепозитных бонусов? К сожалению нет, на выигрыши или проигрыши с призов, казино либо игрок повлиять имеет, отдача игр происходит от разработчиков игр. 1×slots casino зеркало рабочее
1×slots казино зеркало
Все бесплатные призы кажутся заманчивыми. Кто же категорически от способности поиграть в онлайн-казино, не рискуя деньгами, хотя получая выигрыши. Но далековато не все бездепозитные бонусы в равной степени презентабельны для рассудительного клиента.Мы подготовили перечень, где есть постоянно актуальные и свежие бездепозитные призы казино, коие возможность получить даром. Для наших пользователей есть специальные предложения эксклюзивные призы, коие вы ни не найдете, их мы определили особой красноватой плашкой «Exclusive». x1 slots регистрация в 1×slots casino <a href=https://familydir.com/%D0%B1%D0%BB%D0%BE%D0%B3-%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0-%D1%8F%D0%BD%D0%B4%D0%B5%D0%BA%D1%81_456278.html>https://familydir.com/%D0%B1%D0%BB%D0%BE%D0%B3-%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0-%D1%8F%D0%BD%D0%B4%D0%B5%D0%BA%D1%81_456278.html</a> Фриспины без депозита или дополнительные свои посодействуют ближе познакомиться с игровой платформой и её функциями. За счёт даров можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям из-за игры напротив живых крупье.
1хслотс зеркало
Подарки на конкретные даты выделяются условиями получения. Если одобрение начисляют игроку на день рождения, то сумма обыкновенно зависит от общего объема депозитов последний год.В неких онлайн казино для получения бездепозитных призов не довольно просто зарегистрироваться на веб-сайте клуба и подтвердить свои контактные данные. Дополнительно требуется активация промокода. В лицензионных бездепозитных казино выступать в азартные забавы действительно безопасно. Наличие лицензии одобряет что, этот факт, собственно клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP.Приветственный бездеп предоставляется любому игроку лишь раз раз. Казино сражаются с например называемыми бонусхантерами (от англ. Bonus Hunter — доброволец за призами), пытающимися заводить многочисленные аккаунты для обмана оператора и повторного получения презента. Исключить похожие деянья дозволяет верификация данных. Администрация вправе востребовать у посетителя доказать персональные данные, указанные при регистрации. <a href=http://oktlife.ru/bitrix/click.php?goto=http://cbdd32.ru/bitrix/rk.php?goto=http://xn----7sbbabxxlndtm9c2d.xn–p1ai/bitrix/redirect.php?goto=https://teletype.in/@urist555/m_LZc7XGYDl>http://oktlife.ru/bitrix/click.php?goto=http://cbdd32.ru/bitrix/rk.php?goto=http://xn----7sbbabxxlndtm9c2d.xn–p1ai/bitrix/redirect.php?goto=https://teletype.in/@urist555/m_LZc7XGYDl</a> Когда речь идет о валютных призах, казино практически устанавливают условия вейджера, которые необходимо выполнить, чтобы исключить выигрыш.Так что приготовьтесь предоставить конфиденциальную информацию (пол, возраст, страна проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает не более суток, последствии чего удастся свободно выводить крупные выигрыши. 1×slots официальный demo регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://www.donchillin.com/space-uid-382497.html>1× slots casino официальный сайт</a>
<a href=http://griffhunter.com/boards/viewtopic.php?p=471451#p471451>1 xslots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Еще одно условие дотрагивается размеров ставки. Операторы устанавливают наивысшую сумму, которую игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, избранной в Личном офисе. При превышении лимита есть риск лишиться приза. Существующие ограничения относятся и к определенным видам ставок. Например, играя в рулетку, заказчик имеет столкнуться с запретом ставить фишки на шансы.
#4572 Charlesgunnyhttp://filmkachat.ru
рабочее зеркало 1хслотс
Список так нарекаемых «запрещенных землель» прилагается к правилам бонусной программки игорного портала. Обязательно выясните, распространяются ли на вас сходственные наказания.В игровых клубах без лицензии Вы покупаете „кота в мешке“ и если, тогда, неоднозначных обстановок нет возможности куда-то пожаловаться и доказать собственную правоту. <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> Для получения предоставленных призов для пригодиться — ПК или мобильное устройство, и остальное дело за небольшим. <a href=https://www.swiatobrazu.pl/forumgaleria/thread/view/id/589>https://www.swiatobrazu.pl/forumgaleria/thread/view/id/589</a> 1×slots официальный сайт зеркало <a href=https://www.tripadvisor.com/Profile/nodressio>https://www.tripadvisor.com/Profile/nodressio</a>
1×slots регистрация
1×slots зеркало подтвердит вашу регистрацию если говорить Простая процедура получения бездепозитного приза, которая займет менее 2-х мин. Для получения бездепов, достаточно зарегистрироваться и подтвердить контактные данные. <a href=http://netvoyne.ru/user/Craigvilky/>http://netvoyne.ru/user/Craigvilky/</a> Во всех легальных онлайн-казино Беларуси необходимо подтверждение паспортных данных для забавы — это заявка правительства государства.На данном разделе портала регулярно публикуются обзорные заметки, каких рассматриваются бесплатные бонусы превосходнейших интернет-казино. Информация структурирована по нескольким пунктам, включая главные: 1× slots casino официальный сайт
казино 1×slots официальный сайт
Некоторые онлайн-казино без депозита предлагают свежим клиентам выбрать приз при регистрации. Будьте внимательны: выбрав раз, вы в безусловном большинстве случаев не сможете воспользоваться остальными. <a href=https://qdprobot.com/qhb/home.php?mod=space&uid=137725>https://qdprobot.com/qhb/home.php?mod=space&uid=137725</a> 1×slots официальный сайт зеркало рабочее
1хслот зеркало сайта
Основное отличие никаких, что для получения бездепа не надо пополнять баланс в казино. Но считая этого, есть ряд и других отличий:Бездепы обыкновенно предлагают с отыгрышем — быстро вывести выигранные средства нельзя. Перевод средств со счета несомненно вероятен после того, как юзер выполнит все притязания казино, а сумма возможности превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, в течение коих заказчик вправе пользоваться предложением. Обычно они не превосходят нескольких дней последствии активации. <a href=https://rolivka.online/forum/showthread.php?tid=32429>1×slots коды</a> Выбор каждого онлайн казино на нашем сайте. В описании к любому Вы сможете узнать, собственно получите за создание аккаунта. 1×slots casino регистрация 1×slots review live <a href=http://bbs.guitarw.com/home.php?mod=space&uid=31874>http://bbs.guitarw.com/home.php?mod=space&uid=31874</a> Прочитайте управляла бонусной программки, какой хотите принять. Да, мы настоятельно советуем сделать это до регистрации.Также учтите, собственно некоторые игровые платформы сужают перечень стран, коие способны получить предложенный бездепозитный бонус за регистрацию. К примеру, существуют онлайн-заведения, выдающие сходственные призы только жильцам конкретных стран. К примеру, интернет казино 777 Оригинал дает бездепозитный бонус лишь игрокам из России и стран СНГ. Или наоборот, пичкают вознаграждением всех, считая обитателей некоторых государств (из этого, по пристально изучать список, чтобы впоследствии не возникло практически вопросов и претензий).
1×slots зеркало рабочее на сегодня
Таким образом интернет казино получает вероятного игрока. Возможно в или подлинном он захочет сыграть на средства средства. Так работают бездепозитные бонусы в интернет казино. Здесь очень подходит выражение, благотворительные сыр посещает только в мышеловке. Начинающие игроки шансы не осознавать опасность пыла. Однако со временем осознания становится больше. Это тема для отдельного обсуждения.Для выбора азартного заведения Вы сможете воспользоваться списком наших казино с призами за регистрацию. На нашем сайте мы выпустили перечень бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, что доля призов эксклюзивные и доступны лишь для посетителей нашего сайта по-специальному промо-коду или по уникальной ссылке. Кроме того, для каждого приза мы подготовили подробный обзор, в Вы узнаете как получить и отыграть поощрение и как исключить собственный выигрыш с бездепа. Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы которые появляются у новичков. <a href=https://www.walkaholic.me/user/26439-joshuatooks>https://www.walkaholic.me/user/26439-joshuatooks</a> На нашем сайте Вы отыщите список актуальных новых бездепозитных призов в казино 2022 года. Также, есть количество эксклюзивных предложений, которые доступны лишь посетителям нашего сайта последствии регистрации по нашей ссылке или активации особого промокода. 1×slots мобильная версия войти казино Но существуют азартные заведения, готовые просто так вручить деньги на забаву. Для сего достаточно создать профиль. Чтобы исключить выигрыш, сначала необходимо выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа.Поспешите отобрать бездепозитные призы за регистрацию в казино из представленного списка. Все платформы не водят легальную деятельность, но и обрадуют честными результатами игры, высочайшей отдачей, резвыми выплатами.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.kfz-gringer.at/index.php/forum/donec-eu-elit/76719–1×slots#76483>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<a href=http://griffhunter.com/boards/memberlist.php?mode=viewprofile&u=993>1×slots официальный зеркало</a>
<a href=http://vn-info.net/user/Josephkam/>1×slots рабочее зеркало</a>
<a href=https://www.goslog.ru/forum/messages/forum1/message18111/11-obrashcheniya-grazhdan?result=reply#message18111>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чаще всего применяются коды. Их нужно вносить в особые окна регистрационной анкеты, если идет о пригласительных бонусах, или в особом разделе собственного кабинета игрока.
#4573 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
лучшие бесплатные онлайн казино casino бонус <a href=https://res-publika.com>inform@rucriminal.info</a> 1×bet приложение 1×bet сайт <a href=https://www.ossetia.tv/>Ходнева Светлана Владимировна порно</a> 1×bet рабочее на сегодня казино сочи Фастова Елена Владимировна порно порно с Захарова Мария Владимировна букмекерскую контору пин порно с Зырянова Анастасия Владимировна 1×bet xbet xyz
DiskiPlus 1×bet официальный сайт DiskiPlus приложения букмекерских контор на андроид <a href=https://www.diskiplus.ru/>DiskiPlus pin up casino buzz</a> DiskiPlus лучшая казино DiskiPlus букмекерская контора фонбет официальный <a href=https://diskiplus.ru>DiskiPlus casino игровой автомат</a> DiskiPlus online casino 7k DiskiPlus рокс казино DiskiPlus порно с Максим Глушенков (футбол) DiskiPlus порно с Бондаренко Анастасия Борисовна DiskiPlus Москалькова Татьяна Николаевна порно DiskiPlus порно с Сергей Бобровский (хоккей) DiskiPlus casino на телефон
#4574 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
Но рядах азартных платформах подобные вознаграждения могут получить теперь зарегистрированные юзеры. В этом случае, бонусы предоставляются масштабах уникальных промоакций или же некоторым игрокам вид акционного предложения, которое приходит на почту с целью «возвратить» игрока в свое казино. <a href=http://filmkachat.ru/>1×slots зеркало на сегодня</a> Обычно бездепозитные акции от казино, приходят на эл. Почту в дни рождения либо дни. В неких интернет казино возможно адресоваться в чат и как постоянному игроку, вполне вам предложат бездепозитное предложение. <a href=https://heyjinni.com/read-blog/177753>https://heyjinni.com/read-blog/177753</a> 1×слот регистрация в 1×slots casino <a href=http://janews.com.au/modules/newbb/viewtopic.php?topic_id=6406&post_id=6406&order=DESC&viewmode=flat&pid=0&forum=12>http://janews.com.au/modules/newbb/viewtopic.php?topic_id=6406&post_id=6406&order=DESC&viewmode=flat&pid=0&forum=12</a> Чем ниже значение вейджера, тем легче отыграть и вывести бонус. Если Вы планируете заработать на бездепе, а не просто ознакомиться с свежим игровым клубом, то стоит игнорировать призов с высоким вейджером их практически не реально отыграть. С ними Вы сможете лишь протестировать забавы заведения.
1×slots регистрация 1×slotscasino09k online
Но эти рамки не смущают даже хайроллеров, что коэффициенты на слотах дозволяют рассчитывать на солидные выигрыши, а некоторых автоматах разыгрывается прогрессивный джекпот. 1×slots зеркало 1хслотс регистрация перейти на 1×slots Для вывода средств бонус надо(надобно) будет отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами акции и вариациями отыгрыша бездепозитного бонуса до его получения, дабы избежать конфликтных обстановок.Срок отыгрыша — это период, кот-ый наступает в момент активации бонуса и кончается с его закрытием. Пользователю нужно уложиться в этот временной промежуток, иначе призовые свои аннулируются. Казино устанавливают список игр, ставки в засчитываются при расчете отыгранных денег. Если тайтл не заходит в этот список, то предоставляется быть недоступен для загрузки во время деяния бонусного предложения. <a href=https://list.ly/glavdorogadv1605/>https://list.ly/glavdorogadv1605/</a> 1×slots casino регистрация 1×slotscasin online
1×slots рабочее зеркало на сегодня
<a href=http://zemli.com/index.php?subaction=userinfo&user=loutishquilt98>http://zemli.com/index.php?subaction=userinfo&user=loutishquilt98</a> 1×slots регистрацию более популярный вариант это
1×slots мобильная версия войти казино
Условия имеют разниться друг от приятеля. Но такой приз может быть использован только для игрового процесса – приобретенные на счет финансы до того, как станут отыграны, исключить невероятно.Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической забавы на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, выучится регулировать менять ставки и линии, исследовать бонусные забавы и их выигрышные комбинации, ну конечном просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные средства, которые можно отыграть и вывести, не просто на демо счет, что, этим самым адреналин в крови еще повысится а пульс забьется с частым ритмом! Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном призе, то в первую очередь обратите внимание на велечину вейджера и срок, кот-ый дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть приз и вывести выигрыш.Акции, посвященные календарным дням, бывают рассчитаны как на всех юзеров, так и на категории: например, презент на 8 марта девушкам-игрокам или мужикам на 23 февраля. В интернет-сети постоянно возможно отыскать перечни более известных и обещанных поощрительных программ от известных онлайн-казино. 1×slots зеркало этих способов предполагает регистрацию <a href=http://tm-ekb.ru/bitrix/redirect.php?goto=http://vikaart.ru/bitrix/redirect.php?goto=http://knigamir.com/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/G76viq3a61l>http://tm-ekb.ru/bitrix/redirect.php?goto=http://vikaart.ru/bitrix/redirect.php?goto=http://knigamir.com/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/G76viq3a61l</a> Частенько новички не знают, как активировать подарки либо вывести первый выигрыш. Для подобных случаев наша команда обрисовала основные определения – собственно такое фриспины, вейджер, как его отыграть, зачем необходимо протекать верификацию.Возможность поиграть вспомогательное состязание (а иногда и количество) совершенно даром, а выигрыш, к, поступает на счёт игрока.
1×slots зеркало на сегодня
Но на некоторых азартных платформах подобные вознаграждения могут получить теперь зарегистрированные пользователи. В этом случае, бонусы предоставляются в уникальных акций или же некоторым игрокам повторяющий акционного предложения, коие приходит на почту с целью «вернуть» игрока в свое казино.Бонусные деньги – маленькая сумма средств для старта в новеньком казино. На бонусные деньги, обыкновенно разрешено выступать во все игры, не слотов с современным джекпотом и игр из раздела live casino. Многие новички сомневаются, собственно поощрительный приз не несомненно возвращать, даже в они выиграли у казино. Это полностью безопасно и надежно. Выводя выигранные средства, игрок просто останавливает свое роль в игре и теряет уникальную вероятность – безвозмездно наращивать личное вещественное положение.Фриплей-бонусы. Бонусы за безвозмездную забаву есть лишь в некоторых клубах. Они зачисляются незамедлительно в творенья профиля и срабатывают недолговременное время. Если у вас нет времени истратить свои, они просто завершатся. Что дотрагивается медли, как призы срабатывают протяжении 1-го часа. <a href=http://bocauvietnam.com/member.php?1468690-Arnoldblite>http://bocauvietnam.com/member.php?1468690-Arnoldblite</a> Вообще перейдя в казино — управляла одинаковы в получении бездепозитных призов, в стереотипные верховодила входит: доказать эл. Почту и телефонный, заполнить собственный собственный профиль, активировать промо код или активировать предложения во вкладке БОНУСЫ.Чтоб получить крупный выигрыш, выбирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, которые доступны по условиям отыгрыша. x1 slots 1хслотс регистрация перейти на 1×slots Для получения приза надо(надобно) ознакомиться с программой лояльности казино и сделать ставки на необходимую, нужную для перехода на следующий степень.Допустим, за регистрацию вы получили бездеп в объеме 2 000 руб. С вейджером х30. В этом случае светит сделать ставок, на общую сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать настоящие деньги. Однако не забывайте, что с любого подарка получится вывести определённую необходимую (почаще всего менее $200).
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.bedwantsinfo.nl/thread-735752.html>1×slots бездепозитный бонус за регистрацию</a>
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=64444&extra=>1×slots регистрация на сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Приветственный бонус без депозита ? презент за регистрацию. Выдается средствами, фриспинами или баллами. В заключительном случае бонусные баллы используются для роли в турнирах или размена на реальные деньги. Так что сможете смело регистрироваться без всяких раздумий. Фортуна сегодня точно на вашей стороне. Не страшитесь, ведь следствие какого или ущерба Вам абсолютно не угрожает. С этими призами как без пополнения, Вы остаетесь лишь в плюсе, хотя не как не в минусе.
#4575 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
промокод 1×bet суть казино <a href=https://kompromat1.online/>порно с Артемий Панарин (хоккей)</a> мобильные букмекерские конторы фильмы казино рояль <a href=https://specreporter.com/>Комарова Наталья Владимировна порно</a> порно с Абрамченко Виктория Валериевна up casino зеркало пин ап букмекерская контора 1×bet рабочее казино зеркало сегодня 1×bet зеркало рабочее на сегодня 1×bet xyz pin up букмекерская контора
DiskiPlus букмекерская контора бетсити DiskiPlus Любимова Ольга Борисовна порно <a href=https://diskiplus.ru>DiskiPlus порно с Виктория Синицина, фигуристка</a> DiskiPlus Окладникова Ирина Андреевна порно DiskiPlus porno Марина Александрова <a href=https://diskiplus.ru/>DiskiPlus порно с Константин Тюкавин (футбол)</a> DiskiPlus 1×bet слоты 1×bet xyz DiskiPlus 1×bet слоты 1×bet xyz DiskiPlus unlim casino DiskiPlus порно с Гатагова Ольга Анатольевна DiskiPlus лучшие казино бесплатно DiskiPlus porno Юлия Канакина DiskiPlus порно с Зырянова Анастасия Владимировна
#4576 KennethEnambhttps://totocommunity.com
<a href=https://totocommunity.com>토토사이트</a> 토토사이트 커뮤니티: 안전한 베팅을 위한 길잡이
토토사이트 커뮤니티는 스포츠 베팅을 즐기는 사람들에게 단순한 정보 공유의 장을 넘어, 안전한 배팅 환경을 조성하는 데 중요한 역할을 합니다. 이곳에서는 초보자부터 전문가까지 다양한 사람들이 모여 베팅 전략을 논의하고, 신뢰할 수 있는 토토사이트를 추천하며, 먹튀 사고를 예방하기 위한 정보를 공유합니다. 특히, 사설 토토사이트의 위험성을 알리고, 이를 피할 수 있는 방법을 제시함으로써 사용자들이 더 안전하게 베팅을 즐길 수 있도록 돕습니다.
사설 토토사이트의 숨겨진 위험 사설 토토사이트는 정부의 규제를 받지 않기 때문에 다양한 문제를 일으킬 수 있습니다. 예를 들어, 공정하지 않은 배당률, 과장된 광고, 개인정보 유출 등이 대표적인 문제점입니다. 또한, 사설 토토사이트는 법적 문제로 인해 갑자기 사라지는 경우가 많아 사용자들이 금전적 손실을 입을 위험이 큽니다. 이런 이유로, 토토 커뮤니티에서는 사설 토토사이트보다는 규제를 받는 공식 사이트를 이용할 것을 권장합니다.
토토 커뮤니티가 제공하는 가치 토토 커뮤니티는 단순히 정보를 나누는 공간이 아니라, 사용자들이 안전하게 베팅할 수 있도록 돕는 네트워크입니다. 예를 들어, 새로운 토토사이트가 등장했을 때 커뮤니티 멤버들은 해당 사이트의 운영 주체, 결제 시스템, 사용자 리뷰 등을 꼼꼼히 검토합니다. 이를 통해 먹튀 사고를 미리 방지하고, 신뢰할 수 있는 사이트만을 추천합니다. 또한, 문제가 발생했을 때는 보증 사이트를 통해 사용자들이 손실을 최소화할 수 있도록 돕습니다.
어떻게 신뢰할 수 있는 토토사이트를 찾을까? 토토 커뮤니티에서는 신뢰할 수 있는 토토사이트를 찾기 위해 몇 가지 중요한 기준을 제시합니다. 먼저, 사이트의 운영 주체가 명확한지 확인하는 것이 중요합니다. 정부나 공인된 기관에서 관리하는 사이트라면 신뢰할 수 있습니다. 또한, 다른 사용자들의 리뷰를 참고하여 사이트의 신뢰성을 판단할 수 있습니다. 긍정적인 평가가 많고, 문제가 거의 없는 사이트라면 안전하게 이용할 수 있습니다.
결제 시스템도 중요한 확인 요소 중 하나입니다. 신용카드, 전자지갑 등 다양한 결제 방법을 지원하고, SSL 암호화를 통해 금융 정보를 보호하는 사이트라면 더욱 신뢰할 수 있습니다. 마지막으로, 온라인 커뮤니티나 포럼에서 해당 사이트에 대한 평판을 확인하는 것도 좋은 방법입니다. 다른 사용자들이 어떻게 평가하는지, 문제가 없는지 꼼꼼히 살펴보는 것이 중요합니다.
토토 커뮤니티의 보증 사이트 토토 커뮤니티에서는 먹튀 사고를 예방하기 위해 보증 사이트를 추천합니다. 이러한 사이트는 사용자들의 개인정보와 금융 정보를 보호하며, 문제가 발생했을 때 빠르게 해결할 수 있는 시스템을 갖추고 있습니다. 보증 사이트를 이용하면 안전하게 베팅을 즐길 수 있으며, 만약 문제가 생기더라도 커뮤니티의 도움을 받아 해결할 수 있습니다.
마무리 토토사이트 커뮤니티는 스포츠 베팅을 즐기는 사람들에게 안전하고 신뢰할 수 있는 정보를 제공하는 중요한 공간입니다. 사설 토토사이트의 위험성을 인지하고, 신뢰할 수 있는 사이트를 선택하는 것이 무엇보다 중요합니다. 토토 커뮤니티의 정보를 참고하여 안전한 베팅 환경을 조성하고, 스포츠 베팅을 더욱 즐겁게 즐기시길 바랍니다. 항상 책임감 있게 베팅에 임하는 것도 잊지 마세요!
#4577 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало сайта
Фриспины без депо или дополнительные свои помогут поближе познакомиться с игровой платформой и её функциями. За счёт даров можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради забавы против живых крупье. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots review live</a> Oтыгpaть бонус с указанным вeйджepом, результата нужно сдeлaть cтaвoк нa cумму, превосходящую размер приза в количество один.Бездепозитные бонусы – это исключительно интересная и более перспективная акция интернет-казино. Они числе никакого фри-спинов, поэтому что выплаты в безвозмездных вращениях не гарантированы, так комбинации на барабанах игрового аппарата могут не сложиться. <a href=https://www.swiatobrazu.pl/forumgaleria/thread/view/id/589>https://www.swiatobrazu.pl/forumgaleria/thread/view/id/589</a> Существуют казино с бонусом за регистрацию, каких довольно модны фриспины в интернет казино впоследствии регистрации в определенных забавах. Они встречаются и почаще бесплатных поощрений или классических призов в казино без вложений. Например, игрок регистрирует счет, на кот-ый начисляются безвозмездные игры, бонус за регистрацию повторяющий даровых фрспинов, вращения в игровом автомате. Во время игрового процесса игрок выигрывает истинные деньги, которые в последствии можно успешно исключить из заведения на собственную платежную систему. То есть, есть все шансы вывести свои без рисков собственными деньгами. Регистрация, за игрок получит бонусы, займет пару минут, а спасибо этому возможно прирастить 5 евро поощрений до тыс. И без всяких заморочек вывести их. 1хслотс рабочее зеркало <a href=http://ekspoteh.ru/index.php?name=account&op=info&uname=hugemotto79>http://ekspoteh.ru/index.php?name=account&op=info&uname=hugemotto79</a> Однако в критериях исчезают «подводные камни», коие не разрешат исключить солидную необходимую или же вы не успеете отыграть вейджер. Поэтому мастера рекомендуют арестовать бесплатные вращения за регистрацию в казино без депо, чтобы поднабраться навыка и получить настоящий шанс на победу.Такой бесплатный эквивалент средств зачисляется на профиль пользователя последствии воплощения притязаний и предназначаются они только для игрового процесса. Вывод этих вознаграждений возможен лишь в осуществления вейджеровых условий.
1×slot казино зеркало
Представьте момент, когда при ставке в 10 руб. Вы получите подобное умножение. Миллион руб. За одно вращение, что абсолютно вполне. Поэтому вопрос, сколько возможно выиграть остаётся не. Предлагаем выяснить других. Регистрируйтесь в одном либо нескольких интернет казино, получайте Бездепозитный приз и проверяйте удачу в деле. Разумеется, вывести средства сложно. Однако шансы есть у всех. 1× slots зеркало В бонусную программу многих операторов входят систематические бездепы. Это пожизненные акции, поощряющие активных постоянных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают неизменные бонусы без депо в мена на скопленные баллы лояльности.Зарегистрируйтесь. Для регистрации чаще всего довольно ввести собственный номер аппарата и почтовый адрес, в чего установить приобретенный код из СМС. Возможно, потребуется показать промокод. В правилах промоакции несомненно написано, где его хотелось вводить. Иногда это хотелось делать при регистрации, времени — уже последствии создания личного офиса, на отдельной страничке. <a href=http://urbino.fh-joanneum.at/trials/index.php?title=бесплатно_фильмы_торрент>http://urbino.fh-joanneum.at/trials/index.php?title=бесплатно_фильмы_торрент</a> Изучить правила и условия получения бездепозитных бонусов казино, Вы можете у нас на веб-сайте в разделе с бонусами либо на официальном веб-сайте избранного Вами казино. Если возможности найти нужную информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал либо по электронной почте.Предложения с бездепозитными бонусами за регистрацию разрешают свежим заведениям привлечь аудиторию на собственный вебсайт. А игроки тому получают вероятность выступать на настоящие деньги без депозита в казино и заработать маленькой стартовый капитал, который разрешается исключить на карту банка либо электрический кошелек. 1×slots промокод при регистрации Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, solid зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.Таким образом, заведение пробует показать себя своим потенциальным игрокам, а такой маркетинговый ход как казино приз без депо за регистрацию завлекает очень много внимания к игорному заведению и обеспечивает неизменный струю свежих посетителей и грядущих посетителей игрового онлайн клуба.
1×slots зеркало рабочее на сегодня
Вообще перейдя в казино — правила одинаковы в получении бездепозитных призов, в стереотипные управляла заходит: подтвердить эл. Почту и аппарат, наполнить собственный индивидуальный профиль, активировать промо код или активировать предложения во вкладке БОНУСЫ. <a href=https://www.clashfarmer.com/forum/member.php?action=profile&uid=45805>https://www.clashfarmer.com/forum/member.php?action=profile&uid=45805</a> Многие азартные клубы ограничивают сумму вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не сможете исключить. Разница несомненно аннулирована, Вы том не сможете создавать на нее ставки.В наше время очень просто получить бонус за регистрацию в казино. Практически каждый игорный дом с радостью начисляет деньги или благотворительные вращения. Многие гэмблеры используют этим и не стесняются регистрироваться в каждом клубе с прибыльными критериями. Кстати, это отличная вероятность выработать победную стратегию и сорвать джекпот. 1×slots скачать на айфон Если вы бывалый игрок, вы должны знать, что бонус без депо – редкая находка. Тем не, мы неделю исследуем онлайн, чтобы найти для вас наихорошие бездепозитные предложения.Активация денежного гонорары случается автоматически после создания профиля или применения промокода. Иногда операторы предъявляют вспомогательные требования: подписаться на страницы казино в соц сетях либо на рассылку маркетинговых сообщений, скачать и установить вспомогательный софт и т.д.
1×slots зеркало
Вывод выигрыша с бездепозитных призов казино – щедрый подарок от азартных клубов. Но дабы вывести свой доход, нужно выполнить ряд критерий: 1× slots официальный <a href=http://honevi.grodno.by/index.php?subaction=userinfo&user=Charlesorary>http://honevi.grodno.by/index.php?subaction=userinfo&user=Charlesorary</a>
1×slots зеркало
Отыграв бездепозитный бонус в казино с выводом также придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в сходственное ограничение существует, то единоразово исключить получится лишь необходимую, не превышающую размер полученного приза. <a href=http://www.xiaoditech.com/bbs/home.php?mod=space&uid=1738160>http://www.xiaoditech.com/bbs/home.php?mod=space&uid=1738160</a> Срок отыгрыша — это период, который наступает в момент активации бонуса и заканчивается с его закрытием. Пользователю нужно уложиться в данный временной зазор, иначе призовые средства аннулируются. Казино устанавливают список игр, ставки в которых засчитываются при расчете отыгранных денег. Если тайтл не заходит в данный список, то возможность быть недоступен для загрузки в действия бонусного предложения.Существует ли стратегии для отыгрыша бездепозитных бонусов? К огорчению нет, на выигрыши или проигрыши с призов, казино либо игрок воздействовать не может, отдача игр случается от создателей игр. 1×slots casino регистрация на сайте
<b>Смотреть еще похожие новости:</b>
<a href=https://minifishtank.net/forum/showthread.php?tid=612>1хслотс зеркало</a>
<a href=https://www.findaspermdonor.com/viewtopic.php?f=25&t=87680>1хслотс официальный сайт зеркало</a>
<a href=http://www.carshowsociety.com/forum.php/topic,11220.new.html#new>1 xslots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На безвозмездные призы онлайн-казино почти постоянно распространяется ограничения по стране проживания посетителей. Даже в вас разрешается раскрывать счет и выступать на средства в заведении, это еще не означают, собственно вам доступны no deposit bonuses.
#4578 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slots review live
Срок активации и время на отыгрыш. Зачисление средств или фриспинов происходит при активации протяжении строго ограниченного периода, похожие требования предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать бонус несколько дней либо и недель. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высочайшим вейджером.Так же стоит выделить то, собственно в каждом онлайн казино установлен свой максимальный кешаут на бездепозитный бонус. Как управляло кешаут — это предельная сумма средств, которая доступная для вывода с бездепозитного приза. <a href=http://filmkachat.ru/>1×slots на любой вкус как пройти регистрацию</a> Законодательство, регулирующее азартные забавы в различных государствах, оказывает на возможности операторов. В результате юзеры из отдельных регионов сталкиваются с лимитированиями со стороны казино. Это имеет быть как полный отказ в доступе, так и невозможность загружать забавы отдельных производителей. <a href=https://www.empowher.com/groups/blogs-4/posts/revolutionizing-web-experiences-through-interactive-cgi-solutions>https://www.empowher.com/groups/blogs-4/posts/revolutionizing-web-experiences-through-interactive-cgi-solutions</a> 1×slots регистрация 1×slotscasino09k online <a href=https://www.lightknotes.com/MyBB/member.php?action=profile&uid=15086>https://www.lightknotes.com/MyBB/member.php?action=profile&uid=15086</a> Новые посетители онлайн-казино без первого депозита шансы выяснить собственную удачливость. К что, этому же есть возможность преобразовать бездепы в реальные средства за регистрацию в казино, впрочем результата бонус необходимо отыграть согласно условиям промоакции.Чем ниже велечину вейджера, тем легче отыграть и вывести бонус. Если Вы расчитываете заработать на бездепе, но просто ознакомиться с свежим игровым клубом, то стоит игнорировать призов с высоким вейджером их почти не реально отыграть. С ними Вы сможете только протестировать забавы заведения.
1×slots казино мобильная версия
рабочее зеркало 1×slots Акционные предложения от казино существуют в разных форматах. Часто бонусы даются в размен на депо. Игрок вносит платеж и получает деньги, благотворительные вращения и другие одобрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — картина приза, кот-ый гарантирован за исполнение конкретных действий на сайте:При этой на бонусные средства воспрещается играть в игровые автоматы с прогрессивным джекпотом и забавы из радела exist casino. Кроме такого, некоторые казино выделяют бездеп на раз или некоторое конкретных слотов, и в иных играх Вы не можете на них выступать. <a href=https://www.xn–72c9aa5escud2b.com/webboard/index.php?action=profile;u=1716150>https://www.xn–72c9aa5escud2b.com/webboard/index.php?action=profile;u=1716150</a> Возьми свой подарок. Чаще всего бонус активируется сразу после регистрации. Но случаются истории, когда надо(надобно) забежать в собственный кабинет либо написать в справочную службу. 1×slots зеркало 1хслотс регистрация перейти на 1×slots
1×slots сайт
Для всех бездепозитных бонусов функционирует максимальный предел на выигрыш. Он указывает предельную сумму, которую вас получить, играя на бонусные кредиты. Как лишь вам удастся выполнить требования вейджера, допустимый максимум будет переведен с бонусного счета на основной, а остаток несомненно списан. На страничке представлены бездепозитные призы за регистрацию в казино редкая награда за коей гонятся все игроки как новенькие, например и профессионалы. Мы тоже уделяем великое внимание на присутствие бонусов при формирование рейтинга казино на средства. Бездепозитный бонус это вероятность играть бесплатно и выиграть реальные деньги.Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке представители онлайн-казино публикуют важную информацию о not the slightest down payment bonuses и других предложениях. <a href=http://agriexpert.kz/user/TravisCib/>http://agriexpert.kz/user/TravisCib/</a> Если площадка презентует бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь ввести аккаунт на сайте и активировать его, подтвердив адрес электрической почты, номер аппарата либо иные данные, коие требует оператор. Перед этим нужно увериться, собственно юзер располагается на официальном сайте казино, не на мошеннической площадке.Благодаря программке преданности от игорного заведения, возможно арестовать хороший старт и без дополнительных инвестициям запустить видеослоты. Кроме такого, можно рассчитывать на реальную удачу и получить, без вложения собственных финансов, большой выигрыш. рабочее зеркало 1×slots Не рекомендуем сломя голову хвататься за различные предложения получения средств без вложений. Вполне вполне, собственно бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем выглядит на первый взгляд. Альтернативой считается казино бонус за депо. Мы предлагаем вас пару советов, благодаря коим у каждого игрока несомненно вероятность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег:Чтобы выступать даром на реальные деньги в казино, порой довольно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные деяния.
1 xslots рабочее зеркало
Обычно бездепозитные промоакции от казино, прибывают на эл. Почту в деньки рождения либо дни. В неких интернет казино возможно адресоваться в чат и как постоянному игроку, возможно вас предложат бездепозитное предложение. 1 xslots рабочее зеркало <a href=https://carecepthealth.com/community/profile/jeffreypenue/>https://carecepthealth.com/community/profile/jeffreypenue/</a> Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, a зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.
1× slots зеркало
Каждый игрок должен сначала отчетливо изучить условия по получению и отыгрышу понравившегося презента. Если всё организует, поторопитесь отобрать благотворительные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо момент начать вращать барабаны лучших слотов. При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, коие можно предназначить этой в казино.Получить Бездепозитный приз в онлайн казино дело 2-ух кликов. Другой момент, отыграть рекламную и соблюсти правила и обстоятельства отыгрыша. Под правилами предполагается не вагер, хотя и ограничения по максимальной ставке. Мы осознаем, собственно в кино все ставят на зеро и выигрывают. Призываем не создавать похожего. Перед активацией приза прочтите управляла. Узнайте последующие факторы: Условия получения презента, за регистрацию, за депозит и многое. Ограничения по наибольшей ставке. Зачастую не повыше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах возможно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на пространстве. Поэтому главно аристократия, в каких забавах можно совершать кратность денежного оборота. <a href=https://www.backpagedir.com/Green-pharmacy-of-the-gardener-Official_413534.html>https://www.backpagedir.com/Green-pharmacy-of-the-gardener-Official_413534.html</a> Не желайте сыграть в азартные забавы, не рискуя своими деньгами, но получая в все выплаты? Подобную возможность деют многие наилучшие порталы с азартными развлечениями. В их числе большое добросовестных и надежных интернет-казино на российском языке. Они привлекают свежих юзеров разными поощрительными событиями, включая бездепозитные, либо бесплатные призы.Помимо прочего, для вывода средств по бездепу нужно внести на счёт свой первый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально вероятную необходимую, последствии чего вывод средств станет доступен. 1×slots промокод при регистрации 2025 Обыкновенные бездепозитные призы в размере от 3-х до 20 $ созданы чтобы, чтобы, дабы в игры заходили все свежие и свежие игроки. Здесь, скорее, будет лимитирование на максимальный выигрыш. Важно, дабы перед минимальным вкладом был отключен приз за 1-ое пополнение счета, и геймер не попадет на повторный вейджер.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Раздача бонусов может быть посвящена различным датам: календарные праздники, деньки рождения игроков, юбилей открытия казино и т. Д. Подарок выдается повторяющий денег, фриспинов либо баллов для скопления и обмена на предложения оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода этой суммы придется выполнить ряд требований. Более крупные предложения встречаются довольно редко. Зачастую они доступны только VIP-игрокам. В оставшихся случаях им скорее сопутствуют очень строгие обстоятельства отыгрыша. Также возможны дополнительные условия и лимитирования, прописанные в критериях и положения бонусной программы казино.
#4579 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet слоты 1×bet xyz рокс казино <a href=https://strelochnik.com/>1×bet слоты официальный сайт</a> сайт казино вход порно с Варвара Субботина <a href=https://kompromat1.online/>гама казино</a> порно с Антропова Валентина Викторовна казино проиграл букмекерская контора бесплатно скачать сайты казино часы казино casinos xyz казино фильм
DiskiPlus Манилова Алла Юрьевна порно DiskiPlus леон букмекерская контора <a href=https://www.diskiplus.ru>DiskiPlus casino зеркало сегодня</a> DiskiPlus pin ап casino DiskiPlus porno Марина Александрова <a href=https://www.diskiplus.ru>DiskiPlus сайт pin up casino</a> DiskiPlus зеркала официальных сайтов казино DiskiPlus Преподобная Надежда Александровна порно DiskiPlus казино смотреть DiskiPlus зеркала официальных сайтов казино DiskiPlus пина букмекерской конторы DiskiPlus 7k casino зеркало DiskiPlus порно с Георгий Джикия (футбол)
#4580 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
Нельзя разглядывать забаву на деньги, как вариант заработка. Азартные забавы запрещены для лиц младше 18 лет. Topcasinobonuses.mobi не организатором азартных игр. Сайт одевает информационный нрав.Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке необходимо пополнить счет в казино. Для депозитных бонусов, эта процедура не необходима, так как депозит уже изготовлен. <a href=http://filmkachat.ru/>1×slots промокод при регистрации</a> Перед активацией принципиально пристально изучить условия промоакции. Чем ниже вейджер, что, этим больше потенциальная выгода игрока. Имеют значение того лимиты ставок при отыгрыше и сроки, протяжении которых можно пользоваться предложением. Если бездеп охватывает узкий перечень игр, рекомендовано разузнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь что случае, случае оператор не установил требовательные лимитирования на наивысшую сумму ставки. <a href=https://app.degoo.com/share/hi1FahiiYBqJPnfRRsamrQ?ID=20401830865>https://app.degoo.com/share/hi1FahiiYBqJPnfRRsamrQ?ID=20401830865</a> 1×slot зеркало рабочее регистрации на телефон придет <a href=https://www.vancouverrowingclub.wiki/index.php/User:TresaBenavidez>https://www.vancouverrowingclub.wiki/index.php/User:TresaBenavidez</a> Как только вы отыграли вейджер и средства с бонусного баланса перебежали вам на настоящий счет, Вы смело можете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депо).
1×slots зеркало этих способов предполагает регистрацию
Каждый геймер должен сперва отчетливо изучить условия по получению и отыгрышу приглянувшегося презента. Если всё устраивает, поторопитесь арестовать бесплатные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик сейчас начать вертеть барабаны лучших слотов.Как правило, при выводе денег, от играющего требуется только сделать наименьший вклад для того, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом индивидуальный счет. <a href=https://astraclub.ru/album.php?albumid=233642>1× slots зеркало</a> онлайн казино 1×slots Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, дабы замечена вероятность вывести выигрыш.Также бездепозитные призы могут служить способом возвращать к игре посетителей, что приостановивших своё сотрудничество с фирмой: уведомление о бездепе поступает на мобильный аппарат или почту. <a href=https://ai-db.science/wiki/User:FFGBettye4>https://ai-db.science/wiki/User:FFGBettye4</a> 1×slots зеркало выигрыши обязательно пройдите регистрацию если
1×slots зеркало регистрацию более популярный вариант это
Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депо имеет выделяться до 30 дней. Наиболее модные вознаграждения между гэмблеров – бездепозитные бонусы казино. Это не изумительно, как можно получить безвозмездные вращения либо виртуальные кредиты, и при этом не придётся пополнять счёт, рисковать личностными средствами. Удастся насладиться различными развлечениями и даже выиграть солидную сумму, избегая серьёзного риска.Основное отличие что, что для получения бездепа нужно пополнять баланс в казино. Но кроме сего, есть ряд и других отличий: <a href=https://www.domestika.org/en/allxrum1805>https://www.domestika.org/en/allxrum1805</a> Прибывшие на аккаунт финансы бездепозитные призы предназначаются, в, только для новоиспеченных юзеров, коие ранее не имели собственного аккаунта в данном казино. Исходя из сего, в ранее у игрока был сделан депозит, то, по всей вероятности, у него больше не будет способности рассчитывать на получение такового бонуса в конкретном заведении. 1×slots официальный сайт мобильная версия скачать После потребуется привнести идентификационный платёж. Это стращает новичков больше всего. Нужно устроить минимальный депо в 100–500 руб. Таким образом служба защищенности убедиться сомнений, собственно платёжный метод принадлежит Вам. Данная процедура необходима для обеспечивания защищенности игровых счетов. Пример, Ваш аккаунт взломают и выведут свои на собственный кошелёк. Будет крайне неприятно. Поэтому верификация платёжной системы, это важный момент.Фриспины — бесплатные вращения, коие разрешают игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины числятся самым популярным и преимущественным видом бонуса — безвозмездные вращения иногда эффективнее и веселее в отыгрыше, чем остальные облики бездепов.
1×slots зеркало быструю регистрацию а также мгновенное
<a href=https://smm-seo.ru/members/rabofreeol.4209/>1×slots официальный сайт зеркало</a> Возможность протестировать свежие забавы, не рискуя личными средствами и разработать личную стратегию забавы. Наш список включает в себя наихорошие бездепозитные бонусы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по главным характеристикам:Да, у бесплатных призов есть дефекты. Прежде всего, они обычно небольшие. Кроме того, условия вейджера по ним постоянно строгие. Но таки недоступность риска делает их очень привлекательными для клиентов. 1×slots коды <a href=https://lustbb.com/member.php?action=profile&uid=5002>https://lustbb.com/member.php?action=profile&uid=5002</a> Бонусные средства – маленькая сумма денег для старта в новом казино. На бонусные средства, обыкновенно разрешается играть во все забавы, кроме слотов с современным джекпотом и игр из раздела live casino.
1х слот регистрация в 1×slots casino
Для казино, работающих интернет, бездепозитные призы необходимы для вербования новых посетителей. Предложение поиграть на слотах без надобности внесения реальных средств — работающий способ для увеличения энтузиазма к компании. После отыгрыша бездепа великоват шанс, собственно игроку понравится и он продолжит выступать в казино, лишь теперь теснее на собственные средства.Каждая игровая платформа отличается условиями по получению и отыгрышу бездепов. В правилах детально расписаны кратковременные рамки, за коие нужно прокрутить вейджер. Также не забывайте на максимальный объем ставки и наивысшую сумму выплаты. С другой стороны, дабы получить бездепозитные бонусы казино, довольно истратить менее 1 минутки. <a href=https://ai-db.science/index.php?title=Is_It_Legal_to_Use_the_1×bet_APP?>https://ai-db.science/index.php?title=Is_It_Legal_to_Use_the_1×bet_APP?</a> Промокод – определённая композиция символов, которую необходимо ввести в соответствующее поле при разработке учетной записи либо активировать в собственном профиле игрока в разделе с призами.Иногда виде одобрения за регистрацию могут выдаваться билеты для участия в турнирах. Условия их проведения довольно отличаются, потому мы рекомендуем ознакомиться с каждым предложением раздельно. 1×slots зеркало быструю регистрацию а также мгновенное
<b>Смотреть еще похожие новости:</b>
<a href=https://ragnarok.ch/forum/viewthread.php?thread_id=121403>1хслотс рабочее зеркало</a>
<a href=https://forum.dis-course.net/viewtopic.php?t=488381>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=https://www.rusdrama-az.com/support/51-sluzhba-tehnicheskoy-podderzhki-sayta.html>1хслотс зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Некоторые казино все предлагать клиентам бездепы за свидетельство номера либо почты или репост на страничку в соц сетях.
#4581 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino официальный сайт самое казино <a href=https://th-royalgclub.com/>pin up casino top top</a> букмекерская контора официальный сайт рабочее казино <a href=https://t.me/vchkogpu_ru>Петрова Ольга Викторовна порно</a> 7k casino скачать 7k casino официальный сайт зеркала казино 1×bet зеркало xbet пари букмекерская контора реального казино самое казино
DiskiPlus ап казино DiskiPlus порно с Елена Никитина, скелетонистка <a href=https://www.diskiplus.ru/>DiskiPlus бесплатные букмекерские конторы</a> DiskiPlus букмекерские контора ап DiskiPlus porno Катерина Шпица <a href=https://www.diskiplus.ru>DiskiPlus Лут Оксана Николаевна порно</a> DiskiPlus casino 7k рабочее DiskiPlus казино вулкан DiskiPlus букмекерская контора фонбет DiskiPlus 1×bet официальный сайт DiskiPlus сайт 1×bet слоты DiskiPlus симулятор казино DiskiPlus гта онлайн казино
#4582 Charlesgunnyhttp://filmkachat.ru
1× slots официальный
Диапазон ставок, коие вправе устроить игрок, также лимитирован. Обычно назначать возможно небольшую сумму — около 10–30 рублей за одно вращение.Операторы гемблинга заявляют, что так они сражаются с бонус-хантерами. Впрочем, критики считают, собственно этим казино пробуют устроить из случайного постояльца неизменного игрока. <a href=http://filmkachat.ru/>1хслотс мобильная версия зеркало</a> Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации подарка необходимо доказать электрическую почту и привязать телефонный; <a href=https://forums.ngames.com/forum/league-of-angels/community-ab/general-discussion-ab/62087-innovative-luxury-real-estate-marketing-ideas-that-actually-drive-premium-sales>https://forums.ngames.com/forum/league-of-angels/community-ab/general-discussion-ab/62087-innovative-luxury-real-estate-marketing-ideas-that-actually-drive-premium-sales</a> 1 х слотс зеркало <a href=https://www.scottsfasteners.com/users/renaldoidove>https://www.scottsfasteners.com/users/renaldoidove</a> В интернет-сети практически возможно отыскать перечни наиболее знаменитых и обещанных поощрительных программ от известных онлайн-казино.
1×slot рабочее зеркало
Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают бонус по государствам. Вплоть до такого, что клуб имеет себя игроков из Вашей государства, а бездеп мешает. 1×slots официальный сайт зеркало рабочее Чем ниже значение вейджера, что, этим проще отыграть и вывести бонус. Если Вы планируете заработать на бездепе, а не просто ознакомиться с новым игровым клубом, то стоит игнорировать бонусов с высоким вейджером их практически не реально отыграть. С ними Вы сможете только протестировать игры заведения.После требуется привнести идентификационный платёж. Это стращает новичков больше всего. Нужно устроить минимальный депозит в 100–500 рублей. Таким образом служба защищенности увериться что, собственно платёжный метод принадлежит Вам. Данная процедура важна для обеспечения защищенности игровых счетов. Пример, Ваш аккаунт взломают и выведут средства на собственный кошелёк. Будет крайне неприятно. Поэтому верификация платёжной системы, это важный момент. <a href=http://city-hall.nvkb.ru/forum/index.php/user/88826/>http://city-hall.nvkb.ru/forum/index.php/user/88826/</a> Ещё одно распространённое акционное предложение – привлекательный презент с неблаговидными требованиями. К образцу, клуб обещает $100 в бездепа, хотя с вейджером х80 или х100. Отыграть такой вейджер практически нереально и потому какого-либо концентрироваться на более заманчивых промоакциях. 1×slots casino зеркало рабочее Многие игроки, оценив функционал казино, остаются играть в нем и далее ? на это и нацелено любое рекламную. Постоянные клиенты заносят депозиты и делают ставки, обеспечивая длительную выгода оператора. То есть, казино раздают бездепы свежим пользователям для формирования приклнной аудитории.
x1 slots регистрация в 1×slots casino
Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном сайте и выполните вход в собственный офис, дабы арестовать благотворительные вращения с вейджером х40;Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. Помните, что в некоторых играх сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки числятся как отыгранные деньги, в то время как в слотах идет в зачет все 100% суммы.Даже не выиграв крупную сумму, игрок увлекательно проведет время, изнутри изучит работу площадки, воспримет геймплей автоматов. Все это без каких-то финансовых рисков. Быть в курсе наилучших промоакций с. Достаточно регулярно изучать перечень новых онлайн казино с выводом приза без депозита в данном разделе. <a href=http://happyplace.co.kr/bbs/board.php?bo_table=free&wr_id=48244>http://happyplace.co.kr/bbs/board.php?bo_table=free&wr_id=48244</a> 1×slots зеркало проходить регистрацию это отличный вариант Доступные забавы – В неких азартных забавах возможно снизить математическое превосходство казино до нескольких десятых процента. В их количестве многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как управляло, в таких играх ставки идут в зачет вейджера не всецело. Например, имеет учитываться лишь 50%. В некоторых забавах бездепозитные призы вообщем нельзя отыгрывать.
1×slots сайт
Похожим образом трудится 3-ий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя или в связи с получения им VIP-статуса. Подарок предоставляется в обращения в поддержку и ревизии.Возьми собственный презент. Чаще всего приз активируется незамедлительно после регистрации. Но посещают ситуации, когда надо(надобно) забежать в личный офис или написать в справочную службу. Обычно показатель повыше, чем для бонусов на депо. Не удивляйтесь, в он несомненно даже х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных стран. 1хслот скачать <a href=http://specforum.smartbuy.ru/bitrix/redirect.php?goto=http://tornado.nsk.ru/bitrix/redirect.php?goto=http://repository.kaznaru.edu.kz/cgi/set_lang?referrer=https://teletype.in/@urist555/bEM115TIt_T>http://specforum.smartbuy.ru/bitrix/redirect.php?goto=http://tornado.nsk.ru/bitrix/redirect.php?goto=http://repository.kaznaru.edu.kz/cgi/set_lang?referrer=https://teletype.in/@urist555/bEM115TIt_T</a> Превышение максимальной ставки при отыгрыше. Система автоматически не предуведомляет о превышении ставки, потому о несоблюдении правил игрок имеет узнать уже после подачи запроса на вывод средств.При отыгрыше бездепов, учитывайте кратковременные лимитирования. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток.
1×slots зеркало этих способов предполагает регистрацию
Некоторые клубы механически начисляют бонус на аккаунт игрока в исполненья условий получения, хотя случаются ситуации, когда бонус нужно активировать игроку самому. Есть количество способов активации приза:Бездепозитные бонусы – это исключительно занимательная и наиболее перспективная акция интернет-казино. Они том чем фри-спинов, поэтому собственно выплаты в бесплатных вращениях не гарантированы, ведь композиции на барабанах игрового аппарата все не сложиться. <a href=https://forex-arabic.com/members/180812-WalterUrite>https://forex-arabic.com/members/180812-WalterUrite</a> В большинстве заведений сделать это возможно по адресу электронной почты, по номеру телефонного, через социальную сеть либо гугл-аккаунт. казино 1×slots В зависимости от онлайн заведения каждый из их может для предложить как бездепозитные средства, так и бездепозитные фриспины, которые после удачной регистрации рухнут вас на ваш игровой баланс.Раздача призов возможность быть приурочена к различным датам: календарные праздники, деньки рождения игроков, юбилей открытия казино и т. Д. Подарок выдается в виде денег, фриспинов либо баллов для скопления и обмена на предложения оператора. Если пользователь получает выигрыш, деньги начисляются на его счет. Для вывода этой суммы понадобиться выполнить ряд требований.
<b>Смотреть еще похожие новости:</b>
<a href=https://forums.scar-divi.com/topic/610621–1×slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-1×slots-casino-c2d-ru/>1×slots регистрация 1×slots casino c2d ru</a>
<a href=http://www.airsoft44.com/forum/index.php?action=profile;u=11896>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Такой безвозмездный эквивалент средств зачисляется на профиль юзера после воплощения требований и предназначаются они лишь для игрового процесса. Вывод таких вознаграждений вероятен лишь в воплощения вейджеровых критерий. Демоказино есть почти на каждом веб-сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются значительно реже: там когда выигрыша и соблюдения критерий акций бездеп можно превратить в настоящие средства.
#4583 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino рабочее официальные букмекерские конторы <a href=https://repost.news/>1×bet бесплатно</a> зеркала казино официальная казино <a href=https://krtka.info/>суть казино</a> porno Алена Михайлова 1×bet скачать приложение сайт казино вход porno Яна Троянова casino сегодня казино ли гта казино
DiskiPlus букмекерские конторы в россии DiskiPlus 7k casino <a href=https://diskiplus.ru/>DiskiPlus зеркала казино</a> DiskiPlus porno Виктория Баркова, легкоатлетка DiskiPlus мелбет букмекерская контора <a href=https://www.diskiplus.ru/>DiskiPlus porno Дарья Мороз</a> DiskiPlus pin up casino скачать DiskiPlus Манилова Алла Юрьевна порно DiskiPlus casinos winning DiskiPlus ramenbet casino DiskiPlus porno Анастасия Янькова, боксерка DiskiPlus официальные букмекерские конторы DiskiPlus 1×bet зеркало на сегодня 1×bet xyz
#4584 Charlesgunnyhttp://filmkachat.ru
зеркала 1×slots
Ещё одно распространённое акционное предложение – привлекательный презент с сомнительными требованиями. К примеру, клуб сулит $100 в качестве бездепа, но с вейджером х80 или х100. Отыграть такой вейджер фактически нереально и поэтому другого, как концентрироваться на более заманчивых акциях. <a href=http://filmkachat.ru/>онлайн казино 1×slots</a> Бездепозитные призы — это подарки от казино в виде бонусных денег либо фриспинов для игровых автоматов, коие начисляются на аккаунт игрока последствии процедуры регистрации на сайте заведения. Для получения этих поощрений депо не требуется.Также бездепозитные бонусы все служить методом вернуть к этой посетителей, временно приостановивших своё сотрудничество с компанией: уведомление о бездепе поступает на мобильный телефон либо почту. <a href=https://xequte.com/forum/topic.asp?TOPIC_ID=15274>https://xequte.com/forum/topic.asp?TOPIC_ID=15274</a> 1хслотс официальный сайт зеркало <a href=https://beauvizw08520.mybloglicious.com/51280785/deepnude-ai-navigating-the-complexities-of-technology-and-ethics>https://beauvizw08520.mybloglicious.com/51280785/deepnude-ai-navigating-the-complexities-of-technology-and-ethics</a> Чаще всего интернет-казино предлагают бездепозитные призы новым юзерам. Эта промо-акция довольно эффективно завлекает начинающих, подталкивая их к открытию счета. Конечно, не все становятся преданными клиентами, хотя сам факт регистрации аккаунта играет на руку заведению.Исходя из этого, просто не присутствует разумных причин махнуть рукой на получение такого приза при регистрации. И, лишним, на такой безвозмездной базе у вас есть шансы выиграть средства и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, называют бесплатными интернет платформами для игр.
1 xslots рабочее зеркало
На данном разделе портала регулярно публикуются обзорные статьи, в которых рассматриваются благотворительные призы наилучших интернет-казино. Информация структурирована по нескольким пунктам, включая главные:Бездепозитный бонус нередко имеет стать легкодоступным сразу после окончания регистрации, потому правило единственным требованием к нему считается регистрация, а после проверка вашей свежей учетной записи. <a href=https://astraclub.ru/members/353998-Jameswow>1 xslots рабочее зеркало</a> казино 1× slots официальный сайт Процесс доказательства личности возможность взятьвдолг(взятьвзаймы) от 1-го дня до недели. Если клиент разрешил нибудь ошибку при заполнении паспортных данных, то ему идет обратиться с задачей в службу онлайн-казино. <a href=http://www.atego-club.ru/forum/member.php/137908-JamesNix>http://www.atego-club.ru/forum/member.php/137908-JamesNix</a> Необходимость отыгрыша. Вейджер такой выше, чем для бонусов за депозит. И же средства не отыграны, вывести их нельзя.Практически все интернет казино с бездепозитным призом за регистрацию учитывает программку преданности — систему поощрения неизменных посетителей, которая состоит из множества уровней. При достижении игроком очередного значения на его счёт поступает приз. Чем выше степень — тем щедрее бонус. казино 1× slots официальный сайт Иногда у гостей сайта могут возникнуть проблемы при активации полученного промо-кода. В этих случаях, нужно адресоваться за поддержкой в службу поддержки «Support». Для получения ответа, обязательно указывается конкретная первопричина воззвания и подтверждается информация дополнительными скриншотами. Если сложилась неоднозначная ситуация, всегда возможно адресоваться к главному регулятору либо контролирующему органу, выдавшему данному заведению лицензионный документ.Мы собрали и опубликовали список наилучших бездепозитных казино с бонусами за регистрацию, которые гарантируют великодушные выигрыши и мгновенные выплаты.
казино 1× slots официальный сайт
При регистрации в либо ином онлайн игральном заведении — для дается раз шанс испытать собственную удачу не внося свои монеты. Замечу что такую поощрительную предложение деют не все интернет игровые площадки, а лишь щедрая половина из них. Которые мы подготовили для Вас в нашем списке.Минимального оборота. Этот лимит уточняется вейджером — пока игрок не поиграет на установленную сумму, вывод средств несомненно недоступен. <a href=http://18245.ww.w.molifan.net/space-uid-2068858.html>http://18245.ww.w.molifan.net/space-uid-2068858.html</a> Итак, чтобы бесплатные бонусные кредиты трансформировались в настоящие средства, которыми вам распоряжаться по собственному усмотрению, их нужно отыграть. Вейджер по уточнять в правилах онлайн-казино. 1×slots казино зеркало
1×slots зеркало выигрыши обязательно пройдите регистрацию если
3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефонный либо почту, указать индивидуальную информацию; <a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1хслотс регистрация в 1×slots casino</a> Онлайн-казино тщательно продумывают бонусные обстоятельства, коие необходимо изучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша прочие лимитирования.Практически все интернет казино с бездепозитным призом за регистрацию предусматривает программку лояльности — систему поощрения постоянных посетителей, которая произведено из колличества уровней. При достижении игроком очередного уровня на его счёт поступает приз. Чем повыше степень — тем щедрее приз. Самые популярностью способы вывода денег ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам подобии Neteller и Skrill, еще используют криптовалютными кошельками. Вывод выигрышей имеет исполняться моментально либо развлекать от нескольких часов до нескольких суток.Некоторые клубы механически начисляют бонус на акк игрока в выполнения критерий получения, но бывают истории, когда приз нужно активировать игроку самому. Есть количество методов активации бонуса: 1×slot официальный сайт <a href=https://98e.fun/space-uid-7869970.html>https://98e.fun/space-uid-7869970.html</a> Oтыгpaть бонус с указанным вeйджepом, достичь нужно сдeлaть cтaвoк нa cумму, превосходящую объем бонуса в несколько раз.
1×slots регистрация 1×slots casino 777 online
Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного приза достаточно пополнения баланса и подтверждения личности. В других же клубах, необходимо количество один прокрутить собственный депо. 2. Создать свежий профиль. Для регистрации надо(надобно) заполнить маленькую анкету либо зайдите в личный кабинет при помощи соц сеток; <a href=http://www.kiripo.com/forum/member.php?action=profile&uid=1166276>http://www.kiripo.com/forum/member.php?action=profile&uid=1166276</a> 1×slots зеркало быструю регистрацию а также мгновенное Практически все интернет казино с бездепозитным бонусом за регистрацию учитывает программку лояльности — систему поощрения неизменных клиентов, кот-ая состоит из колличества уровней. При достижении игроком еще значения на его счёт поступает бонус. Чем повыше степень — тем щедрее приз.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.easysunnysunshine.com/memberlist.php?mode=viewprofile&u=18118>1×slots casino online регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепы шансы заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами.
#4585 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
официальные зеркала казино почему в казино нет часов <a href=https://sovsekretno.net/>про казино</a> букмекерские конторы в россии casinos xyz <a href=https://res-publika.com>как выиграть в казино</a> porno Екатерина Ефременкова, шорт-трекистка porno Анастасия Янькова, боксерка Разуваева Ксения Денисовна порно 7k casino зеркало рабочее 1×bet зеркало на сегодня 1×bet на сегодня 1×bet бесплатно
DiskiPlus букмекерская контора ставки DiskiPlus porno Илона Маркова, хоккеистка <a href=https://www.diskiplus.ru/>DiskiPlus пина букмекерской конторы</a> DiskiPlus porno Игорь Акинфеев (футбол) DiskiPlus casino зеркало сайта <a href=https://diskiplus.ru>DiskiPlus рабочие зеркала казино</a> DiskiPlus 1×bet зеркало рабочее DiskiPlus казино на деньги DiskiPlus Комарова Наталья Владимировна порно DiskiPlus почему в казино не бывает настенных часов DiskiPlus gama casino DiskiPlus porno Виктория Баркова, легкоатлетка DiskiPlus казино вход
#4586 Charlesgunnyhttp://filmkachat.ru
скачать 1×slots официальный сайт
Да, у бесплатных призов есть дефекты. Прежде всего, они обыкновенно большие. Кроме такого, условия вейджера по ним практически жесткие. Но все же неименье риска проделывает их довольно привлекательными для посетителей.4. Заберите презент. Чаще всего приз активируется незамедлительно в регистрации. Но посещают ситуации, когда надо(надобно) зайти в личный офис или написать в службу поддержки. <a href=http://filmkachat.ru/>1×slots casino зеркало рабочее</a> Ограничения по забавам. Администрация запрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, средствами или бесплатными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда разделенье выполняется по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, хотя запрещен в настольных играх и в разделе Live Casino.Как только получите бездеп в казино, всё также не запамятовывайте инспектировать электрическую почту. Некоторые игорные клубы непрерывно радуют активных гэмблеров приятными бонусами. Чаще всего получить подарок возможно в преддверии веселья, на день рождение, за привлечение друга. А того распространённым бонусом считается прибавка к депозиту. Нужно всего лишь восполнить счёт, и азартное заведение прирастит его на 50–100%. <a href=https://linqto.me/n/gtji>https://linqto.me/n/gtji</a> Для проверки используются сканы паспортов, водительских водительских, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если пользователь замечен в попытке завести вспомогательный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в темный перечень. При этой на лицензионной площадке не стоит опасаться свидетельствовать достоверную индивидуальную информацию (шифрование исключает утечку индивидуальных данных). 1×slots регистрация 1×slots review live <a href=http://forum.topgamesinc.com/member.php?1264933-tinybough58>http://forum.topgamesinc.com/member.php?1264933-tinybough58</a> Призовые начисления без депо могут предоставляться для роли в турнирах интернет казино. Потратить перечисленные средства возможно исключительно масштабах этой промоакции. Условия их проведения содержат лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться этим предложением, чем изучить его управляла.Как только вы отыграли вейджер и средства с бонусного баланса перешли вам на реальный счет, Вы неустрашимо можете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать наименьший депозит к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, совместно, вкупе с депозитом).
1×slots зеркало регистрация
казино 1×slots <a href=http://etalonmix.com/bitrix/redirect.php?goto=http://swiss-time.com.ua/bitrix/rk.php?goto=http://puradm.ru/bitrix/redirect.php?goto=https://telegra.ph/Ponimanie-shtrafov-za-perevozku-dopolnitelnyh-passazhirov-09–23>http://etalonmix.com/bitrix/redirect.php?goto=http://swiss-time.com.ua/bitrix/rk.php?goto=http://puradm.ru/bitrix/redirect.php?goto=https://telegra.ph/Ponimanie-shtrafov-za-perevozku-dopolnitelnyh-passazhirov-09–23</a> Приветственный приз без депо ? презент за регистрацию. Выдается средствами, фриспинами или баллами. В заключительном случае бонусные баллы используются для роли в турнирах или размена на настоящие средства. 1×slots зеркало на сегодня Проверка занимает от нескольких мин. До нескольких дней, спецы техподдержки все запросить дополнительные документы либо инициировать короткое общение по Skype.
1хслот зеркало сайта
Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. Многие казино предоставляют в рекламных целях бесплатные призы самая для наших читателей. Чтобы их получить, нужно перейти на игровой вебсайт по партнерской ссылке с нашего портала.Когда речь идет о получении бездепозитных призов в казино, для внимание на следующие обстоятельства: <a href=https://www.gamerlaunch.com/community/users/blog/6415433/2225859/board-osipovichi/?gid=535>https://www.gamerlaunch.com/community/users/blog/6415433/2225859/board-osipovichi/?gid=535</a> Осталось выбрать казино с бонусом за регистрацию и создать профиль. После активации подарка выигрыш находится от Фортуны и навыков. 1×слотс казино
зеркло казино 1×slots
Каждый из бездепозитных призов без пополнения 2022 имеет свой определенный вейджер для отыгрыша, например же в каждом казино он устанавливается индивидуально — где то он х55 а кое-где х30, повторюсь везде по разному! Но а в вы уже профи по онлайн казино, кликаем на красноватую кнопку «Получить» и Вы механически перейдете в интернет казино; Также, в этом случае необходимо доказать свой номер аппарата, результата код, полученный в смс-сообщении от клуба ввести в специальное поле в собственном кабинете игрока. 1×slots регистрация на сайте <a href=http://the-good.kr/bbs/board.php?bo_table=free&wr_id=588823>http://the-good.kr/bbs/board.php?bo_table=free&wr_id=588823</a> Бездепозитные бонусы казино за регистрацию в 2022 году — это вероятность сыграть за счёт заведения. Казино даёт клиенту шанс пользоваться определённой суммой или количеством безвозмездных вращений без внесения депозита. Не путайте деморежим с реальной игрой без необходимости внесения депо.
1×slot зеркало рабочее регистрации на телефон придет
Активация происходит за промокодов, которые вводятся в собственном офисе после регистрации. Среди спецпредложений в списке Casino.ru содержатся эксклюзивные промокоды, коие доступны лишь гостям портала. Другие способы начисления средств ? автоматическая активация незамедлительно последствии создания аккаунта и получение презента по запросу в службу технической поддержки.На бонусные начисления имеют быть установлены вспомогательные ограничения, которые Вы не приняли при отыгрыше. Пока бонус всецело не отыгран — деньги из казино не выводятся. <a href=http://gctech21.com/bbs/board.php?bo_table=free&wr_id=541307>http://gctech21.com/bbs/board.php?bo_table=free&wr_id=541307</a> Автоматы неспроста числятся самым популярным азартным веселием. Чтобы усвоить управление и верховодила, потребуется всего некоторое минут. Ваша задача устроить ставку, определить количество рабочих линий и возможно вертеть барабан. Если на выпадет выигрышная композиция – вы выиграли! С этой задачей для посодействуют управится бездепозитные призы казино.Бездепозитные бонусы настоящими деньгами, коие возможно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадали. скачать 1×slots на андроид мобильная версия Баланс игрока пополняется на подходящую необходимую. К ней используется вейджер, указанный в правилах промоакции. Вывести выигрыш можно будет после того, как пользователь устроит требуемый объем ставок из собственных средств. В редчайших случаях бездеп трудится в формате Free Play. На счет пользователя зачисляется большая сумма, и предоставляется малый срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по окончании этого периода сумма на счету будет превышать изначальную, то разницу возможно будет исключить либо использовать для последующих ставок.
<b>Смотреть еще похожие новости:</b>
<a href=http://board.eternityrpc.com/member.php?action=profile&uid=369>1×slots зеркало которую указывали при регистрации кстати</a>
<a href=http://nhomtruyen.com/members/jamesgaw.9280/>1х слот регистрация в 1×slots casino</a>
<a href=http://nexusroleplay.teamforum.ru/viewtopic.php?f=19&t=6965>1хслотс рабочее зеркало на сегодня</a>
<a href=http://forums.indexrise.com/thread-309-post-350047.html#pid350047>1×slots промокод при регистрации 2025</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Далее требуется отыграть вагер и вывести выигрыш. Игрокам без навыка крупно подфартило, есть получить десятки подарков за одну регистрацию. Если не смогли получить Бездепозитный бонус, не волнуйтесь. Обратитесь в онлайн чат, оператор поможет решить проблему.
#4587 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Матвей Сафонов (футбол) сайте букмекерской конторы фонбет <a href=https://7club7.com/>Ирина Горбачева</a> ограбление казино 1×bet слоты 1×bet xyz <a href=https://glvk.guru/>казино ставка</a> Львова-Белова Мария Алексеевна порно казино фильм казино рояль Анна Михалкова сайт винлайн букмекерская контора бесплатно играем казино porno Юлия Канакина, скелетонистка
DiskiPlus 1×bet на андроид DiskiPlus porno Марина Александрова <a href=https://www.diskiplus.ru>DiskiPlus pin up букмекерская контора</a> DiskiPlus casino рабочее DiskiPlus 1×bet официальный скачать <a href=https://diskiplus.ru>DiskiPlus официальная казино</a> DiskiPlus порно с Зырянова Анастасия Владимировна DiskiPlus casino актуальное зеркало DiskiPlus яндекс игры казино DiskiPlus 1×bet скачать приложение DiskiPlus порно с Карен Хачанов (теннис) DiskiPlus casino x DiskiPlus суть казино
#4588 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия скачать
Наш перечень содержит превосходнейшие бездепозитные бонусы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по главным параметрам: <a href=http://filmkachat.ru/>1×slots сайт зеркало</a> В истинное время получить бонус за регистрацию в казино довольно просто. Почти любой игорный жилище с готовностью предоставит деньги или бесплатные вращения. Многие игроки пользуются этим и не стесняются регистрироваться в любом клубе с прибыльными критериями. Кстати, это замечательная возможность придумать выигрышную тактику и сорвать куш. <a href=https://ai.ceo/read-blog/246294>https://ai.ceo/read-blog/246294</a> 1×slots казино мобильная версия <a href=https://sportavesti.ru/forums/users/xrumseo0906–2/>https://sportavesti.ru/forums/users/xrumseo0906–2/</a> Так что основное отличие подарка на депо от бездепа – обязательное пополнение счёта. Вы можете внести депо и преумножить стартовый капитал либо отобрать бездеп и этом не придётся рисковать собственными сбережениями. Поспешите выполнить обычные требования, и администрация ресурса начисляет щедрое одобрение!
1×slots официальный сайт мобильная версия скачать
Кешбэк-бонус представляет собой возврат фиксированного процента от ставки в случае проигрыша или же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не превышает 10%. 1×slots зеркало 1хслотс регистрация перейти на 1×slots Следует подчеркнуть, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом.Верификация необходима для добавочной безопасности и помогает техподдержке выявить бонусхантеров и мошенников. Кстати, рядах платформах выводы солидных сумм доступны лишь после доказательства личности. <a href=https://mrkitty.fun/member.php?action=profile&uid=756>https://mrkitty.fun/member.php?action=profile&uid=756</a> 1×slots мобильная версия войти казино
1хслот скачать
Подтверждение индивидуальной инфы. Все казино требуют от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и присутствие у юзера других аккаунтов (мультиаккаунт запрещен). В настоящее время получить бонус за регистрацию в казино довольно просто. Почти любой игорный дом с готовностью даст средства или безвозмездные вращения. Многие игроки используют данным и не смущяются регистрироваться в любом клубе с прибыльными условиями. Кстати, это отличная вероятность придумать выигрышную стратегию и сорвать куш. <a href=https://social.urgclub.com/read-blog/214040>https://social.urgclub.com/read-blog/214040</a> Такие поощрения разрешают безвозмездно протестировать свежее казино, разобраться с игровым процессом интернет слотов, заработать и исключить маленькую сумму денег.Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные способы и оценить необыкновенности, труднодоступные при ирге в демо режиме. Многие новые клиенты перебегают в число неизменных, а оператор получает длительную прибыль. 1×slots зеркало сайта Так же стоит выделить то, собственно в любом онлайн казино установлен свой наибольший кешаут на бездепозитный бонус. Как управляло кешаут — это предельная сумма средств, кот-ая доступная для вывода с бездепозитного приза.В некоторых онлайн казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на веб-сайте клуба и доказать свои контактные данные. Дополнительно потребуется активация промокода.
1×slots регистрация на сайте 1×slots ru com
Это раз из главных характеристик привлекательности дара. С завешенным коэффициентом числе профессионалы не смогут выполнить условия по отыгрышу. И так, насколько презентабельно смотрится предложение – бездепозитный бонус казино в размере $500 либо $1 000. Чтобы новенькие получше вдумались, что же это вейджер, мы разберём на образце.Бездепозитные призы, как теснее понятно, являются оригинальной вероятностью к игровому процессу полностью бесплатно, то есть играть в онлайн казино даром и на место средства сразу после регистрации аккаунта. Автоматы с этим депо могут замерзнуть великолепной возможностью сыграть для поклонников азарта с определенными лимитированиями в финансах. 1×slots сайт <a href=http://bbs.boway.net/home.php?mod=space&uid=1001344>http://bbs.boway.net/home.php?mod=space&uid=1001344</a> Доступность — бездепозитные бонусы в казино почаще всего предоставляются свежим игрокам, хотя случаются случаи, когда бонус имеют получить и действующие клиенты.
1× slots регистрация в 1×slots casino
Риск-игра по равным шансам – Также казино имеет воспрещать выполнять обстоятельства по отыгрышу с помощью раунда на удвоение, который предлагается в слотах, видео-покере и неких других играх.Однако далеко не все ресурсы предлагают своим клиентам бездепозитные призы за регистрацию в казино. В большинстве случаев учтено одобрение на 1-ый депозит в объеме 100–200%. Это замечательная возможность преувеличить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш. <a href=https://funcams.al/member.php?action=profile&uid=5969>https://funcams.al/member.php?action=profile&uid=5969</a> Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен список наихороших онлайн казино, коие предлагают своим игрокам щедрые бонусы за регистрацию.Не трудно додуматься, собственно no down payment bonuses практически ни не посещают большими. Чаще всего речь о пяти–тридцати баксах (или эквиваленте данной суммы в иной еденице). 1×slots зеркало на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=https://qualityprogamer.de/forum/showthread.php?tid=419104>1хслот скачать</a>
<a href=http://weeklywars.de/viewtopic.php?f=12&t=1111&p=483223#p483223>1×slots официальный сайт скачать на айфон</a>
<a href=https://g2clubs.com/healthy-workout/google/#comment-29517>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в собственный офис, чтобы отобрать безвозмездные вращения с вейджером х40; Получить приветственный приз шансы только новые посетители онлайн-казино. Способы описаны в условиях промоакции каждого законного казино, почаще всего это:
#4589 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
слот casino где казино <a href=https://th-royalgclub.com/>про казино</a> Комарова Наталья Владимировна порно бесплатно играем казино <a href=https://krtka.info/>пин ап casino pin</a> реального казино bitz casino 1×bet зеркало рабочее лучшие букмекерские конторы казино рояль смотреть 7k casino сайт букмекерской конторы
DiskiPlus 7k casino зеркало на сегодня DiskiPlus порно с Максим Глушенков (футбол) <a href=https://diskiplus.ru>DiskiPlus Светлана Ходченкова</a> DiskiPlus casino скачать приложение DiskiPlus скачать букмекерскую контору на андроид <a href=https://diskiplus.ru/>DiskiPlus порно с Константин Тюкавин (футбол)</a> DiskiPlus 1×bet официальный сайт 1×bet xyz DiskiPlus казино рояль смотреть DiskiPlus up casino официальный DiskiPlus официальное казино вход DiskiPlus porno Ангелина Гончаренко, хоккеистка DiskiPlus casino скачать DiskiPlus pin up casino официальный
#4590 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало
Бездепы с безвозмездными вращениями деют юзерам право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд выплачивает казино. Число спинов ограничено и изредка превышает сотню. Если промоакция включает в себя большое безвозмездных игр, их начисление имеет быть разбито на некоторое дней.Обычно бездепозитные промоакции от казино, прибывают на эл. Почту в дни рождения либо дни. В неких онлайн казино возможно обратиться в чат и как неизменному игроку, вполне вам предложат бездепозитное предложение. <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> Бонусные средства – маленькая сумма денег для старта в новом казино. На бонусные средства, обычно разрешено выступать во все игры, считая слотов с современным джекпотом и игр из раздела exist casino.С иной стороны, намного легче забрать бездепозитные фриспины за регистрацию в казино и напрямик данный начать вертеть барабаны в наилучших слотах. Главная необыкновенность спинов сомнений, что они предусмотрены для топовых автоматов. Удастся не только пройти вспомогательные раунды, но и увеличить необходимую выигрыша, заработать респины и внутриигровые презенты. <a href=https://blog.udn.com/G_112062930339362154/181391895>https://blog.udn.com/G_112062930339362154/181391895</a> 1хслотс рабочее зеркало <a href=http://www.glaschat.ru/glas-f/member.php?615916-Robertgries>http://www.glaschat.ru/glas-f/member.php?615916-Robertgries</a>
1×slots регистрация 1×slots casino c2d ru
1×slots зеркало выигрыши обязательно пройдите регистрацию если <a href=http://ru.monumentefunerare.md/index.php?subaction=userinfo&user=Davidtarty>http://ru.monumentefunerare.md/index.php?subaction=userinfo&user=Davidtarty</a> Бездепозитный приз по промо-коду несомненно доступен для забавы, лишь в случае когда Вы активируете особый бонусный код в разделе с призами либо укажите промокод при регистрации на сайте. В неких случаях, считая активации кода, придется подтвердить контактные данные игрока и заполнить анкету клиента. 1×слот регистрация в 1×slots casino
1 xslots рабочее зеркало
Как управляло, при выводе финансов, от играющего требуется только сделать наименьший вклад чтобы, чтобы, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом собственный счет. Мы подготовили перечень, где есть практически животрепещущие и свежие бездепозитные бонусы казино, коие вы можете получить даром. Для наших пользователей есть специальные предложения эксклюзивные бонусы, коие вы нигде не найдете, их мы обозначили специальной красной плашкой «Exclusive».2. Создать новый профиль. Для регистрации нужно наполнить небольшую анкету или зайдите в собственный офис посредством социальных сетей; <a href=http://hxzq.org.cn/space-uid-2007.html>http://hxzq.org.cn/space-uid-2007.html</a> Срок отыгрыша — это этап, который начинается в момент активации бонуса и завершается с его закрытием. Пользователю нужно уложиться в этот временной зазор, по призовые средства аннулируются. Казино устанавливают список игр, ставки каких засчитываются при расчете отыгранных средств. Если тайтл не входит в этот перечень, то предоставляется быть недосегаем для загрузки период деяния бонусного предложения. x1 slots регистрация в 1×slots casino Помните, что всевозможные нарушения правил сведут на нет ваши старания, и вы всего останетесь без начисленного вам дарового приза. Всегда изучайте управляла начисления и обстоятельства вейджера. По хоть вопросам, на коие вы не самостоятельно найти ответы, обращайтесь за объясненьям и саппорт.Обычно показатель выше, чем для призов на депозит. Не изумляйтесь, в он несомненно в х100. Иногда завышенный коэффициент вейджера устанавливается для обитателей отдельных стран.
1× slots официальный
Представьте момент, когда при ставке в 10 руб. Вы получите подобное умножение. Миллион рублей за одно вращение, что вполне вероятно. Поэтому вопрос, сколько можно выиграть остаётся закрытым. Предлагаем выяснить помощи. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный бонус и инспектируйте удачу в деле. Разумеется, вывести деньги сложно. Однако шансы есть у всех. <a href=http://b2s.bulwork.com/node/1581?page=81#comment-22554>1×slos регистрация в 1×slots casino</a> Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша бонусов. Заведения всегда устанавливают наивысшую ставку, возможную по условиям вейждера. Таким образом, заведение пробует показать себя своим потенциальным геймерам, а подобный рекламный ход как казино приз без депо за регистрацию привлекает довольно много внимания к игорному заведению и обеспечивает неизменный поток свежих гостей и будущих клиентов игрового онлайн клуба.Промообъявления от казино не дают реальной картины и ориентированы на вербование внимания пользователей. Понять, насколько высоки шансы остаться в плюсе, дозволит собственный тест условий предложения: 1×slots регистрация на 1хслотс <a href=http://bizon15.ru/index.php?subaction=userinfo&user=brokendynasty95>http://bizon15.ru/index.php?subaction=userinfo&user=brokendynasty95</a>
1хслотс регистрация в 1×slots casino
В разделе с бонусами активировать собственный подарок. Найти игры, для коих предусмотрено одобрение и применять приз по предназначению.Некоторые онлайн-казино без депо предлагают новым клиентам избрать приз при регистрации. Будьте внимательны: выбрав раз, вы в абсолютном большинстве случаев не сможете пользоваться остальными. <a href=http://minivenebi.ge/index.php?subaction=userinfo&user=nappyroster14>http://minivenebi.ge/index.php?subaction=userinfo&user=nappyroster14</a> Срок активации и время на отыгрыш. Зачисление денег либо фриспинов случается при активации протяжении строго ограниченного периода, подобные притязания предъявляются и к срокам отыгрыша. Одни казино позволяют отыгрывать бонус количество дней или в месяцов. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с необоснованно высоким вейджером.Бoльшинcтвo азартных заведений выдвигают приблизительно одинаковые обстоятельства и требования, коие необходимо выполнить, чтобы получить бездепозитный приз за регистрацию. Все их возможно объединить в раз перечень: казино 1× slots официальный сайт Активация по промокоду употребляется в разных обликах бездепов. Если идет о приветственном бонусе, то набор символов возможно разузнать на основной странице, в регистрационной форме либо письме, коие отправляется юзеру для доказательства адреса электронной почты. Акции шансы проводиться совместно с партнерскими площадками. Обычно код располагается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется одноразовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем актуальный код для активации в описании каждого рекламную.
<b>Смотреть еще похожие новости:</b>
<a href=https://sadhaka.nl/forum/viewtopic.php?t=102269>1×slots зеркало проходить регистрацию это отличный вариант</a>
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=4162>1×slots официальный сайт скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.
#4591 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино онлайн бесплатно букмекерская контора на андроид <a href=https://th-royalgclub.com/>1×bet xbet xyz</a> казино смотреть онлайн бесплатно casino автомат <a href=https://th-royalgclub.com/>porno Дарья Мороз</a> букмекерская контора фонбет официальный сайт casino рабочее casino riobet букмекерская контора бетсити порно с Владимир Минеев (ММА) Преподобная Надежда Александровна порно cat casino
DiskiPlus порно с Юлия Ефимова DiskiPlus porno Александр Соболев (футбол) <a href=https://diskiplus.ru/>DiskiPlus пин casino</a> DiskiPlus cat casino DiskiPlus inform@rucriminal.info <a href=https://diskiplus.ru/>DiskiPlus Лут Оксана Николаевна порно</a> DiskiPlus человек казино DiskiPlus порно с Анастасия Потапова, теннисистка DiskiPlus pin up букмекерская контора DiskiPlus порно с Илюшникова Татьяна Александровна DiskiPlus балтбет букмекерская контора DiskiPlus Кузнецова Анна Юрьевна порно DiskiPlus порно с Алина Загитова, фигуристка
#4592 Charlesgunnyhttp://filmkachat.ru
1×slots casino зеркало
Как лишь получите бездеп в казино, всё точно не забывайте инспектировать электронную почту. Некоторые игорные клубы каждый веселят активных гэмблеров приятными призами. Чаще всего получить подарок возможно в преддверии праздника, на день рождение, за привлечение друга. А того распространённым бонусом считается надбавка к депозиту. Нужно чем пополнить счёт, и азартное заведение прирастит его на 50–100%.Процесс подтверждения личности может занять от 1-го дня до недели. Если клиент разрешил нибудь оплошность при заполнении паспортных данных, то ему по адресоваться с задачей в службу поддержки онлайн-казино. <a href=http://filmkachat.ru/>1×slots казино зеркало</a> Вы всего, например все предпочитаете получать подарки и бездепозитные призы казино. Игорные дома брали в привычку одаривать гэмблеров приятными бонусами. Стать обладателем приветственного презента можно за творенье профиля либо пополнение счёта. Второй вариант более увлекательный, ведь клубы готовы удвоить депозит! Но случае вы новичок и только знакомитесь с миром пыла, какого-либо пользуйтесь призом за регистрацию.Как правило, при выводе финансов, от играющего требуется лишь устроить наименьший лепта чтобы, чтобы, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом индивидуальный счет. <a href=https://plaza.rakuten.co.jp/prilla/diary/202411240000/>https://plaza.rakuten.co.jp/prilla/diary/202411240000/</a> 1×slots казино мобильная версия <a href=http://shizheng.sabjy.com/home.php?mod=space&uid=17662>http://shizheng.sabjy.com/home.php?mod=space&uid=17662</a> Не желаете поиграть в азартные забавы, не рискуя своими средствами, хотя получая в все выплаты? Подобную возможность деют почти наилучшие порталы с азартными веселиями. В их числе количество правдивых и надежных интернет-казино на российском языке. Они привлекают свежих пользователей различными поощрительными мероприятиями, включая бездепозитные, или безвозмездные бонусы.Бездепозитные призы прекрасный вариант безвозмездной игры в игровые автоматы. Многие пользователи сети не знают, собственно в казино можно начать играть абсолютно безвозмездно, а потом исключить выигрыш на банковскую карту либо электронный кошелек, другие не доверяют интернет казино, а третьи удачно играют и выигрывают – и подчас довольно немалые суммы.
1хслотс рабочее зеркало
Все любят получать презенты. Согласитесь, практически любой играющий человек будет очень рад, в получит безвозмездный презент для забавы в интернет казино просто за регистрацию либо же бонус за внесенный депо, так называемые приветственные призы для новых игроков. Соответственно такие интернет клубы будут больше модны и предпочтительны у игроков при выборе казино для игры. Топ казино постоянно обновляется и добавляются свежие и занимательные игровые клубы с симпатичной бонусной политикой и всеми возможными привилегиями, к которым относятся такие призы как фриспины за регистрацию, денежные бездепозитные бонусы, а щедрые бонусы за внесенный депозит.Если площадка дарит бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь завести аккаунт на сайте и активировать его, подтвердив адресок электронной почты, номер аппарата или иные данные, которые требует оператор. Перед этим необходимо увериться, собственно пользователь находится на официальном веб-сайте казино, не на мошеннической площадке. <a href=https://australianwinerytours.com/tours/showthread.php?tid=309999>1×slots промокод при регистрации 2025</a> 1×слотс казино Бездепозитный приз казино 2022 с выводом за регистрацию дает вероятность ознакомиться игроку с лобби выбранного заведения, сориентироваться в выборе игр и проверить качество работы службы поддержки. Довольно часто, начиная игровой процесс, игрок уже отказывается останавливаться и проделывает настоящий лепта. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать даром возможно как раз таки с бонусом за регистрацию без надобности заносить депозит. <a href=http://www.livekavkaz.ru/index.php?subaction=userinfo&user=permissibleeyew>http://www.livekavkaz.ru/index.php?subaction=userinfo&user=permissibleeyew</a> 1×slots casino регистрация 1×slots review live Когда речь о получении бездепозитных бонусов в казино, для внимание на последующие условия:Представленные на этой страничке лучшие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, в котором гости Casino.ru могут сортировать список по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д.
1×slots зеркало регистрация
Бездепозитные призы — это подарки от казино в виде бонусных средств либо фриспинов для игровых автоматов, которые начисляются на аккаунт игрока после процедуры регистрации на сайте заведения. Для получения этих поощрений депозит не требуется. Новые клиенты онлайн-казино без первого депозита могут проверить свою удачливость. К что, этому же есть вероятность конвертировать бездепы в настоящие средства за регистрацию в казино, впрочем для этого бонус необходимо отыграть сообразно условиям акции.Фриспины без депо либо вспомогательные средства помогут поближе познакомиться с игровой платформой и её функциями. За счёт подарков возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям ради забавы против живых крупье. <a href=http://uplmegaporn.com/user/HarryDourl/>http://uplmegaporn.com/user/HarryDourl/</a> Размер бонуса. В качестве бездепов обыкновенно начисляют очень суммы, а когда речь о призах за депо, коие начисляются в процентном соотношении от суммы пополнения, то кое-какие казино могут подарить игроку до 2000$.Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации подарка нужно доказать электрическую почту и привязать телефонный; 1хслот скачать Бездепозитный бонус часто имеет стать легкодоступным незамедлительно после окончания регистрации, потому в большинстве случаев единственным требованием к нему считается регистрация, а этого проверка вашей новой учетной записи.Казино дает возможность заработать и исключить настоящие средства на бездепозитных призах. Обычно, это незначительная сумма, которую казино возможность себя позволить подарить игроку.
x1 slots 1хслотс регистрация перейти на 1×slots
Так же стоит выделить то, что в любом интернет казино установлен свой максимальный кешаут на бездепозитный бонус. Как управляло кешаут — это максимальная сумма средств, которая доступная для вывода с бездепозитного приза. Фриспины без депозита или вспомогательные свои помогут поближе познакомиться с игровой платформой и её функциями. За счёт даров возможно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради игры против живых крупье.Фриспины – благотворительные вращения с фиксированной ставкой, которые можно применять в конкретных игровых автоматах. 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=http://xn---34–5cdbkofs7abei8ade5bg9k.xn–p1ai/index.php?subaction=userinfo&user=uglybruise72>http://xn---34–5cdbkofs7abei8ade5bg9k.xn–p1ai/index.php?subaction=userinfo&user=uglybruise72</a> Индивидуальные поощрения выдаются за совершение деяний: подписку на аккаунты площадки в соц сетях, установку мобильного прибавленья или официального посетителя для ПК. В большинстве казино действуют программки лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на грядущий уровень часто сопровождается выдачей бездепа.
1×slots зеркало рабочее на сегодня
В большинстве заведений устроить это возможно по адресу электронной почты, по номеру телефона, через социальную сеть либо гугл-аккаунт. Помимо остального, для вывода средств по бездепу необходимо привнести на счёт собственный 1-ый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало возможную сумму, после чего вывод средств будет доступен.Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша бонусов. Заведения всегда устанавливают наивысшую ставку, возможную по условиям вейждера. <a href=https://tysonnwfn30741.livebloggs.com/36536983/ai-nude-app-the-future-of-content-moderation-and-privacy-protection>https://tysonnwfn30741.livebloggs.com/36536983/ai-nude-app-the-future-of-content-moderation-and-privacy-protection</a> Только выполнив все обстоятельства отыгрыша и дождавшись окончания ревизии аккаунта, Вы сможете оформить заявку на вывод средств и получить свои средства.Приветственный приз без депо ? презент за регистрацию. Выдается деньгами, фриспинами или баллами. В заключительном случае бонусные баллы используются для роли в турнирах либо обмена на настоящие деньги. 1×slots регистрация 1×slots review live
<b>Смотреть еще похожие новости:</b>
<a href=http://www.arka-bahce.org/forum/showthread.php?p=762623#post762623>сайт 1× slots casino</a>
<a href=http://permitbeijing.com/forum/showthread.php?tid=2252593>1х слот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Нет. Казино раздают безвозмездные призы за регистрацию, для того, дабы заказчик мог ознакомиться с игровым заведением. А чтобы исключить его, нужно выполнить условия отыгрыша.
#4593 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino c2d ru
Для получения бездепа нужно пригласить в забаву по реферальной ссылке нового посетителя: он обязан зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на сумму, указанную в условиях акции. <a href=http://filmkachat.ru/>1×slots официальный регистрация</a> <a href=https://linqto.me/n/gtji>https://linqto.me/n/gtji</a> Более крупные предложения встречаются довольно изредка. Зачастую они доступны только VIP-игрокам. В остальных случаях им наверняка сопутствуют довольно строгие обстоятельства отыгрыша. Также возможны вспомогательные условия и другие ограничения, прописанные в критериях и положения бонусной программы казино.Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в обязательном порядке необходимо пополнить счет в казино. Для депозитных бонусов, эта процедура не нужна, например как депо теснее изготовлен. 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=http://nawoicheuh.free.fr/index.php?file=Members&op=detail&autor=assortedcage16>http://nawoicheuh.free.fr/index.php?file=Members&op=detail&autor=assortedcage16</a>
1×slots официальный сайт мобильная версия скачать
Принципиальным различием бесплатных призов от призов на депозит считается недоступность необходимости заносить средства на аккаунт. Из-за этого их нередко именуют бездепозитными (not the slightest down payment bonuses).Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Большинство клубов завлекают внимание компьютерные за счёт различных даров. На одних сайтах можно получить виртуальные кредиты, коие откроют доступ ко всему софту. На иных же, администрация предлагает благотворительные вращения для запуска лучших интернет слотов. Несмотря на различные акции, стоит выделить самые главные.На данном разделе портала периодически публикуются обзорные заметки, в которых рассматриваются благотворительные призы наилучших интернет-казино. Информация структурирована по нескольким пт, включая главные: <a href=http://moujmasti.com/member.php?271892-exotictag53>http://moujmasti.com/member.php?271892-exotictag53</a> Существуют казино с бонусом за регистрацию, в довольно известны фриспины в онлайн казино потом регистрации в определенных забавах. Они встречаются даже почаще безвозмездных поощрений либо традиционных бонусов в казино без вложений. Например, игрок регистрирует счет, на который начисляются безвозмездные игры, приз за регистрацию в виде бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса геймер выигрывает настоящие деньги, коие в последствии возможно успешно вывести из заведения на свою платежную систему. То есть, есть шансы вывести свои без рисков собственными финансами. Регистрация, какую геймер получит бонусы, займет несколько, а спасибо этому можно увеличить пять евро поощрений до тысячи и без всяких заморочек исключить их. 1× slots регистрация в 1×slots casino
1×slots официальный сайт мобильная версия скачать
<a href=http://www.jzkoo.net/home.php?mod=space&uid=16117&do=profile>http://www.jzkoo.net/home.php?mod=space&uid=16117&do=profile</a> 3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефон или почту, указать индивидуальную информацию; казино 1×slots официальный сайт
1×slots бонус за регистрацию
Бездепозитный приз казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в этом и содержится главное различие.В наше время довольно просто получить бонус за регистрацию в казино. Практически любой игорный жилище с радостью начисляет деньги либо безвозмездные вращения. Многие гэмблеры пользуются этим и не смущяются региться в любом клубе с выгодными условиями. Кстати, это отличная вероятность выработать победную тактику и сорвать джекпот. <a href=https://forum.krymbezpravil.org.ua/memberlist.php?mode=viewprofile&u=10552>1×slots промокод при регистрации 2025</a> Но есть игорные заведения, которые готовы просто так жертвовать деньги на забаву. Для этого достаточно сделать профиль. Чтобы исключить свой выигрыш, вам поначалу нужно выполнить обстоятельства отыгрыша, обозначенные в критериях получения бездепозитного депо. 1× slots casino зеркало <a href=http://msfo-soft.ru/msfo/forum/messages/forum32/topic6440/message193324/?result=new#message193324>http://msfo-soft.ru/msfo/forum/messages/forum32/topic6440/message193324/?result=new#message193324</a>
1×slots регистрацию более популярный вариант это
Пoдтвepдить личнocть посетителя. Для удачного вывода средств, необходимо подтвердить лицо клиента. Нa этaпe вepификaции пpoфиля, работники службы защищенности обязаны убедиться, собственно у игрока не раз акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не может вывести свой выигрыш, случае у него несомненно количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы.Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. <a href=https://www.ccvgaming.com/forum/member.php?38840-JoshuaRaw&s=57d3c3fff5c4d4383abea5d165c8d491>https://www.ccvgaming.com/forum/member.php?38840-JoshuaRaw&s=57d3c3fff5c4d4383abea5d165c8d491</a> 1хслотс рабочее зеркало Вейджер (либо вагер) ? это минимальная сумма ставок, которую нужно устроить для вывода денежного бонуса. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим красивее спецпредложение.Выбор каждого интернет казино на нашем веб-сайте. В описании к каждому Вы можете разузнать, что получите за творение аккаунта.
<b>Смотреть еще похожие новости:</b>
<a href=http://sladkierecepti.5nx.ru/viewtopic.php?f=8&t=8329>зеркала 1×slots</a>
<a href=https://www.formulersupport.com/Thread-1×-slots-casino-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82–115770>1× slots casino официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Главное превосходство спинов – возможность изучить различные слоты. Также удастся насладиться бонусными раундами, испытать фортуну в риск-туре и преувеличить выигрыш за счёт особенных знаков. Однако столько игровой процесс заслуживает внимание, как никакого сосредоточиться на реальном выигрыше.
#4594 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Приезжева Екатерина Геннадьевна порно casino бонус <a href=https://strelochnik.com/>Черкесова Бэлла Мухарбиевна порно</a> pin up casino пин ап pin up casino зеркало <a href=https://repost.news/>Самойлова Алла Владимировна порно</a> букмекерская контора фонбет официальный сайт букмекерская контора Окладникова Ирина Андреевна порно bet casino казино казино смотреть онлайн 1×bet слоты
DiskiPlus казино пин DiskiPlus пин casino <a href=https://diskiplus.ru>DiskiPlus porno Дарья Клишина</a> DiskiPlus Львова-Белова Мария Алексеевна порно DiskiPlus зеркала официальных сайтов казино <a href=https://diskiplus.ru>DiskiPlus retro casino</a> DiskiPlus 1×bet сайт 1×bet xyz DiskiPlus pin casino DiskiPlus бесплатно играем казино DiskiPlus Радченко Светлана Юрьевна порно DiskiPlus как выиграть в казино DiskiPlus Москалькова Татьяна Николаевна порно DiskiPlus казино 5
#4595 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino 777 online
Во всех законных онлайн-казино Беларуси нужно свидетельство паспортных данных для забавы — это заявка правительства страны.Мы собрали и опубликовали список превосходнейших бездепозитных казино с бонусами за регистрацию, которые гарантируют щедрые выигрыши и мгновенные выплаты. <a href=http://filmkachat.ru/>1×slots на любой вкус как пройти регистрацию</a> <a href=https://app.degoo.com/share/hi1FahiiYBqJPnfRRsamrQ?ID=20401830865>https://app.degoo.com/share/hi1FahiiYBqJPnfRRsamrQ?ID=20401830865</a> На нашем сайте Вы найдете перечень своевременных новых бездепозитных призов в казино 2022 года. Также, есть количество эксклюзивных услуг, коие доступны лишь гостям нашего вебсайта в регистрации по нашей ссылке либо активации специального промокода.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро или 20 долларов. Если выдаются фриспины, их количество редко выше нескольких 10-ов безвозмездных вращений. 1хслотс рабочее зеркало <a href=http://psvhome.ru/user/Davidfus/>http://psvhome.ru/user/Davidfus/</a> Казино выводит средства лишь на что, эту платежную систему, с котрой был сделан депозит. То есть, для вывода бездепозитного бонуса, Вам сначала нужно пополнить счет. В некоторых клубах ограниченный перечень методов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с данных платежных способов, которые доступны для вывода.Иногда операторы просят внесение минимального депо перед выводом для верификации платежного инструмента. В некоторых казино данный депо также предстоит отыграть.
1×slots подтвердит вашу регистрацию если говорить
С другой стороны, гораздо проще отобрать бездепозитные фриспины за регистрацию в казино и напрямик данный начать вращать барабаны в наихороших слотах. Главная необыкновенность спинов в том, собственно они предназначены для лучших автоматов. Удастся не только пройти вспомогательные раунды, но и прирастить сумму выигрыша, заработать респины и внутриигровые подарки. 1×slots официальный зеркало рабочее Для тех, кто только подумывает испытывать свою удачу, еще для проф игроков, ищущих свежие площадки для выигрышей, ведущие лицензированные казино нередко организуют разные промоакции, и лучшее предложений за последнее время – как для новичков, так и для профессиональных игроков – бездепозитный бонус за регистрацию.Отказ в прохождении верификации. Если клиент не хочет либо не дать документы, подтверждающие его личность, профиль будет заблокирован вместе со всеми бонусными начислениями. <a href=https://cbz.minzdravao.ru/predlozhenie/vykup-avto-2>https://cbz.minzdravao.ru/predlozhenie/vykup-avto-2</a> Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, all зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. 1×slot зеркало рабочее этих способов предполагает регистрацию Благодаря программе преданности от игорного заведения, можно брать неплохой старт и без добавочных инвестициям запустить видеослоты. Кроме такого, возможно рассчитывать на реальную удачу и получить, без инвестиции личных денег, великой выигрыш.Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и. Когда игроку полагается много фриспинов, администрация может разбивать их начисление на несколько дней. Бесплатные вращения предоставляются для определенного слота, который указывается в правилах акции.
1× slots зеркало
<a href=https://www.ls1.com/forums/member.php?u=119338>https://www.ls1.com/forums/member.php?u=119338</a> При регистрации по указывать лишь достоверную информацию. Когда учетная запись будет активна, замечен доступ в Личный кабинет. В нем возможно избрать валюту, ввести промокод и узнать подробные управляла получения и отыгрыша бездепа. Краткая информация об промоакции нередко присутствует непосредственно на регистрационной форме. 1×slots сайт На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению этого времени, Вы не можете активировать и получить бездепозитный приз.
1×slots официальный сайт скачать
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-2030#post-57933>1× slots зеркало</a> Вы не в коем случае ни чем не рискуете, а только выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической забавы на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, научится регулировать менять ставки и полосы, изучать бонусные забавы и их выигрышные композиции, ну конечном просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные средства, которые возможно отыграть и исключить, а не просто на демо счет, тем самым адреналин в крови более повысится а пульс забьется с нередким ритмом!Зарегистрируйтесь. Для регистрации чаще всего довольно установить свой номер телефона и почтовый адресок, в чего ввести приобретенный код из СМС. Возможно, потребуется указать промокод. В правилах промоакции будет написано, где его бы вводить. Иногда это хотелось делать при регистрации, время — теснее после творенья собственного кабинета, на отдельной странице. Доступность — бездепозитные призы в казино почаще всего предоставляются новым игрокам, но посещают случаи, когда бонус все получить и действующие клиенты.Наиболее известные гонорары среди гэмблеров – бездепозитные бонусы казино. Это не изумительно, ведь возможно получить бесплатные вращения или виртуальные кредиты, и всем не придётся пополнять счёт, рисковать личными деньгами. Удастся насладиться разнородными развлечениями даже выиграть солидную сумму, избегая серьёзного риска. 1хслотс рабочее зеркало на сегодня <a href=https://forum.uoguide.com/memberlist.php?mode=viewprofile&u=710570>https://forum.uoguide.com/memberlist.php?mode=viewprofile&u=710570</a>
1×slots рабочее зеркало
Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?Как лишь на виртуальном счету окажутся бонусные свои, поспешите отыграть вейджер. Сразу в этого возможно забыть заявку на вывод выигрыша. Кредиты прибыльно отличаются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом настоящих средств и выделяют возможность почувствовать азарт. Во-вторых – возможно насладиться каждой азартной забавой доступной на веб-сайте. В вашем постановлении находятся автоматы, настольные прибавленье, видео-покер, Live-дилеры. <a href=http://agriexpert.kz/user/DoctorLazutasi/>http://agriexpert.kz/user/DoctorLazutasi/</a> Иногда виде поощрения за регистрацию шансы выдаваться билеты для роли в турнирах. Условия их проведения очень выделяются, потому мы советуем ознакомиться с каждым предложением отдельно. 1× slots регистрация в 1×slots casino Активация по промокоду употребляется в различных видах бездепов. Если речь о приветственном призе, то набор знаков возможно разузнать на главной странице, в регистрационной форме либо послании, которое отправляется пользователю для подтверждения адреса электронной почты. Акции шансы проводиться совместно с партнерскими площадками. Обычно код размещается на стороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активизируется разовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем важный код для активации в описании любого промо.
<b>Смотреть еще похожие новости:</b>
<a href=https://mit-bbs.com/viewtopic.php?t=202697>1хслотс зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Наличие у игрока второго аккаунта. Запрещено творить несколько профилей для многократного получения бездепов. Бездепы обычно предлагают с отыгрышем — быстро вывести выигранные средства невозможно. Перевод денег со счета будет возможен в такого, как юзер выполнит все притязания казино, а сумма не может превышать установленного правилами лимита. Условиями акции фиксируются сроки, на коих клиент вправе пользоваться предложением. Обычно они не превышают нескольких дней после активации.
#4596 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
смотреть фильм казино porno Анастасия Янькова, боксерка <a href=https://www.ossetia.tv/>кент casino</a> casino скачать приложение casino официальный зеркало <a href=https://repost.news/>порно с Анастасия Потапова, теннисистка</a> cometa casino скачать 1×bet на андроид porno Алена Михайлова 1×bet casino порно с Евгений Малкин (хоккей) букмекерские конторы бет порно с Федор Чалов (футбол)
DiskiPlus лучшие онлайн казино DiskiPlus порно с Федор Чалов (футбол) <a href=https://www.diskiplus.ru/>DiskiPlus casino сайты</a> DiskiPlus 1×bet 1хбет DiskiPlus самое казино <a href=https://www.diskiplus.ru/>DiskiPlus porno Мира Андреева (теннис)</a> DiskiPlus 1×bet на андроид DiskiPlus casino riobet DiskiPlus Шевцова Татьяна Викторовна порно DiskiPlus 1×bet телефон DiskiPlus 1×bet скачать приложение DiskiPlus porno Игорь Акинфеев (футбол) DiskiPlus 1×bet 1
#4597 AHoini
<a href=http://xn–289an1ad92ak6p.com/bbs/board.php?bo_table=free&wr_id=192324>vavada</a> <a href=https://emiliojswyc.blogmazing.com/29898521/1win-bet-indonesia-secrets>1win casino indonesia</a>
#4598 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация то дальше необходимо пройти
Бoльшинcтвo азартных заведений выдвигают примерно одинаковые обстоятельства и требования, коие нужно выполнить, чтобы получить бездепозитный бонус за регистрацию. Все их возможно объединить в один перечень: <a href=http://filmkachat.ru/>1× slots casino официальный сайт</a> Бездепозитные призы казино за регистрацию в 2022 году — это возможность поиграть за счёт заведения. Казино даёт клиенту шанс пользоваться определённой суммой или количеством безвозмездных вращений без внесения депо. Не путайте деморежим с реальной забавой без необходимости внесения депо.Допустим, за регистрацию вы возымели бездеп в размере 2 000 руб. С вейджером х30. В этом случае предстоит устроить ставок, на совместную сумму в 60 000 рублей (2 000 * 30 = 60 000). Когда сделайте условия по отыгрышу, придёт время заработать реальные деньги. Однако не запамятовывайте, собственно с каждого подарка получится вывести определённую необходимую (почаще всего не более $200). <a href=https://diccut.com/forums/thread/2892/>https://diccut.com/forums/thread/2892/</a> 1×slots быструю регистрацию а также мгновенное <a href=http://www.sazkar.info/member2395.html>http://www.sazkar.info/member2395.html</a> Приветственный бонус без депо ? подарок за регистрацию. Выдается средствами, фриспинами либо баллами. В последнем случае бонусные баллы применяются для роли в турнирах или обмена на настоящие средства.
1хслот 1хслотс регистрация перейти на 1×slots
Для ревизии используются сканы паспортов, водительских прав, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если пользователь обнаружен в попытке завести вспомогательный акк, все его учетные записи подвергаются блокировке, а их владелец попадает в черный перечень. При игре на лицензионной площадке надо бояться указывать достоверную персональную информацию (шифрование исключает утечку персональных данных). <a href=https://projects.sare.org/people/jamestrazy/>1хслотс официальный сайт зеркало</a> зеркло казино 1×slots В бонусную программу многих операторов входят систематические бездепы. Это пожизненные акции, поощряющие интенсивных постоянных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают постоянные бонусы без депо в размен на скопленные баллы лояльности.Получив свой подарок, Вы сможете даром выступать на настоящие деньги, а выполнив обстоятельства отыгрыша, вывести собственный выигрыш. <a href=http://community.checkinpro-hotel-software.com/memberlist.php?mode=viewprofile&u=487239>http://community.checkinpro-hotel-software.com/memberlist.php?mode=viewprofile&u=487239</a> Используйте превосходнейшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, чтобы заработать презенты за обычные деянья теперь сегодня получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высокой отдачей и прыткими выводами на электрические кошельки. 1×slots зеркало регистрация
1хслот официальный сайт зеркало
<a href=http://yunduost.com/home.php?mod=space&uid=20566>http://yunduost.com/home.php?mod=space&uid=20566</a> Вообще перейдя в казино — верховодила схожи в получении бездепозитных бонусов, в стереотипные верховодила заходит: подтвердить эл. Почту и телефонный, наполнить собственный личный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ.К примеру, игроку выдаются бесплатные свои в заведении в размере пятидесяти либо ста $ (вейджер на коие составляет 100х). То есть, каждому новоприбывшему геймеру выскакивает манящая картинка, которая обещает выплату всех зачисленных фирмой средств. Не стоит заострять на казино бонус за регистрацию без депо с сильно большой или довольно малюсенькой суммой призов, потому собственно, и тщательно изучив все условия, тут скорее, несомненно какой-то подвох. 1×slot рабочее зеркало
1хслотс официальный сайт зеркало
Обычно для получения бонусов без депо, казино выдвигает приклнные и абсолютно выполнимые обстоятельства, но есть ряд поступков которые запрещены и шансы повлечь за собой противные результаты:Размер призов почаще всего чисто условный и не превышает 50 руб. Приятно, хотя ощутимым бустом деле ли будет. Ну и естесственно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: схожая щедрость увеличивает степень преданности посетителей к компании.Исходя из сего, просто не существует разумных причин махнуть рукой на получение такового приза при регистрации. И, заметить,, на подобный безвозмездной базе у вас есть шансы выиграть средства и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные призы, называют бесплатными интернет платформами для игр. 1×slots на любой вкус как пройти регистрацию <a href=http://islamdini.kg/index.php?subaction=userinfo&user=uppityremorse22>http://islamdini.kg/index.php?subaction=userinfo&user=uppityremorse22</a> Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.
1×slots актуальное зеркало
<a href=https://xn–80abdzaxbkfak2ai0bzf4ce.xn–p1ai/communication/forum/user/43152/>https://xn–80abdzaxbkfak2ai0bzf4ce.xn–p1ai/communication/forum/user/43152/</a> Мы собрали и выпустили список лучших бездепозитных казино с бонусами за регистрацию, которые гарантируют щедрые выигрыши и моментальные выплаты.B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. 1×slot зеркало рабочее регистрации на телефон придет Самые популярные способы вывода средств ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам подобии Neteller и Skrill, а также используют криптовалютными кошельками. Вывод выигрышей имеет осуществляться моментально либо развлекать от нескольких часов до нескольких суток.Доступ к подарку может раскрываться механически после введения промокода либо воззвания в саппорта сайта. В первом случае от пользователя не потребуется никаких поступков. Бездеп с активацией по коду встречается почаще всего. Игроку нужно ввести совокупа символов в графе, которая имеет пребывать в регистрационной форме в Личном офисе.
<b>Смотреть еще похожие новости:</b>
<a href=https://demo.comuni-italiani.it/forum/memberlist.php?mode=viewprofile&u=18269>1×slots официальный сайт, скачать</a>
<a href=http://romb4×4.ru/forum/threads/1×slot-registracija.14662/>1×slot регистрация</a>
<a href=http://portal.westcoastbible.org/discussion/viewtopic.php?f=4&t=1937309>1× slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Верификация важна для дополнительной безопасности и может техподдержке выявить бонусхантеров и плутов. Кстати, на платформах выводы крупных сумм доступны только последствии доказательства личности.
#4599 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
7k casino сайт 1×bet на сегодня <a href=https://res-publika.com>рабочие зеркала казино</a> porno Нина Пирогова, хоккеистка 1×bet рабочее на сегодня <a href=https://res-publika.com>промокод 1×bet</a> Юдаева Ксения Валентиновна порно сайт казино вход пин up casino kometa casino Приезжева Екатерина Геннадьевна порно 1win casino bet casino
DiskiPlus приложения букмекерских контор DiskiPlus porno Алена Михайлова <a href=https://www.diskiplus.ru>DiskiPlus казино вход официальный сайт</a> DiskiPlus лучшие онлайн казино DiskiPlus 1×bet скачать бесплатно <a href=https://www.diskiplus.ru>DiskiPlus порно с Александр Большунов (лыжные гонки)</a> DiskiPlus Елизавета Боярская DiskiPlus porno Илона Маркова, хоккеистка DiskiPlus автомат казино DiskiPlus приложения букмекерских контор на андроид DiskiPlus порно с Гатагова Ольга Анатольевна DiskiPlus casino на телефон DiskiPlus скачать casino на андроид
#4600 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
Принципиальным различием даровых призов от призов на депо считается недоступность надобности заносить средства на акк. Из-за этого их нередко называют бездепозитными (not the slightest deposit bonuses).При малый сумме приза рекомендовано выступать по низким ставкам, а использовать максимальные лучше лишь сомнений случае, случае вейджер слишком большой, а время на отыгрыш сильно ограничено. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slots review live</a> Для получения бонуса нужно ознакомиться с программой преданности казино и сделать ставки на необходимую, необходимую для перехода на грядущий степень. <a href=https://ilde2.upf.edu/clatmooc/v/ibs>https://ilde2.upf.edu/clatmooc/v/ibs</a> Диапазон ставок, которые вправе сделать игрок, также лимитирован. Обычно назначать возможно маленькую необходимую — пределах 10–30 руб. За одно вращение.Размер ставки для забавы по бездепозитному бонусу (естесственно же, в случае, когда он представлен повторяющий бонусных валютных средств) зачастую ниже, чем при игре на депо. Ограничение несомненно работать до этапа отыгрыша приза. скачать 1×slots официальный сайт <a href=https://taupi.org/index.php?title=Прием_платежей_в_Telegram_>https://taupi.org/index.php?title=Прием_платежей_в_Telegram_</a> Онлайн-казино с бездепозитными бонусами ставят посетителям обстоятельства для пользования бездепами, потому перед ролью в промоакции другого, как досконально ознакомиться со всеми правилами и нюансами промоакции. Условия шансы касаться получения приза, его использования и следующего вывода валютных средств когда выигрыша.
1хслотс регистрация в 1×slots casino
Срок отыгрыша — это период, который наступает в момент активации бонуса и кончается с его закрытием. Пользователю необходимо уложиться в этот временной зазор, другому призовые средства аннулируются. Казино устанавливают список игр, ставки в засчитываются при расчете отыгранных средств. Если тайтл не входит в этот список, то возможность быть недоступен для загрузки период действия бонусного предложения.Также, учите, что бездепозитный бонус возможно вывести лишь сомнений случае, когда будут выполнены все условия отыгрыша. <a href=http://miupsik.ru/forums/showthread.php?tid=272794>1×slots зеркало видели такую регистрацию на</a> 1 хслот регистрация в 1×slots casino Возьми собственный подарок. Чаще всего приз активизируется сразу последствии регистрации. Но случаются ситуации, когда надо(надобно) зайти в собственный кабинет или написать в справочную службу.Для отыгрыша бонуса казино обязует игрока поиграть на сумму, в количество раз превосходящую необходимую полученного приза — здесь выгода фирмы очевидна. <a href=http://www.gameuseduniverse.com/member.php/168933-MycsgoSat>http://www.gameuseduniverse.com/member.php/168933-MycsgoSat</a> Индивидуальные одобрения выдаются за совершение деяний: подписку на аккаунты площадки в социальных сетях, установку мобильного приложения либо официального клиента для ПК. В большинстве казино действуют программки лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий уровень часто сопрягается выдачей бездепа. 1×slots регистрация 1×slots casino c2d ru
казино 1×slots официальный сайт
Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды присутствуют на этой странице. Посетитель возможность оценить обстоятельства получения и начать выступать на деньги без внесения депо. При этом игроку главно разуметь, на каких критериях и какими методами появится вывести полученный выигрыш. Для сего необходимо расценить список подключенных платежных систем.Для казино, работающих онлайн, бездепозитные бонусы нужны для вербования новых посетителей. Предложение сыграть на слотах без необходимости внесения настоящих денег — работающий метод для повышения энтузиазма к фирмы. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит выступать в казино, только сейчас теснее на личные деньги. <a href=https://www.divephotoguide.com/user/Trollfilm1408>https://www.divephotoguide.com/user/Trollfilm1408</a> Онлайн-казино с бездепозитными бонусами ставят посетителям обстоятельства для использования бездепами, потому перед участием в промоакции никакого досконально ознакомиться со всеми правилами и нюансами акции. Условия шансы прикасаться получения бонуса, его применения и последующего вывода валютных средств когда выигрыша. 1×slots зеркало выигрыши обязательно пройдите регистрацию если
1хслот скачать
Иногда виде одобрения за регистрацию могут выдаваться билеты для участия в турнирах. Условия их проведения довольно выделяются, поэтому мы рекомендуем ознакомиться с любым предложением раздельно. Срок активации и время на отыгрыш. Зачисление денег или фриспинов случается при активации протяжении взыскательно ограниченного периода, похожие требования предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать бонус некоторое дней или и недель. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером.Таким образом, заведение пытается продемонстрировать себя своим потенциальным геймерам, а подобный маркетинговый ход как казино бонус без депо за регистрацию завлекает очень большое внимания к игорному заведению и обеспечивает постоянный струю новых гостей и будущих посетителей игрового интернет клуба. На условиях отыгрыша даровых бонусов стопам остановиться подробнее. С ними связаны аспекты, коие нельзя оставить без внимания.Простая процедура получения бездепозитного приза, кот-ая займет не более 2-х мин. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=https://backpacker-footsteps.com/backpacker-footsteps-forum/profile/porsedropka/>https://backpacker-footsteps.com/backpacker-footsteps-forum/profile/porsedropka/</a> Промокод – определённая композиция знаков, коию нужно установить в соответствующее фон при творении учетной записи либо активировать в собственном профиле игрока в разделе с бонусами.Размер бонусов почаще всего чисто символический и не выше 50 руб. Приятно, хотя осязаемым бустом деле ли будет.
1хслотс регистрация в 1×slots casino
Как только получите бездеп в казино, всё одинаково не запамятовывайте проверять электронную почту. Некоторые игорные клубы непрерывно веселят активных гэмблеров приятными призами. Чаще всего получить презент можно в преддверии праздника, на день рождение, за привлечение приятеля. А также распространённым призом считается надбавка к депозиту. Нужно всего лишь восполнить счёт, и азартное заведение увеличит его на 50–100%.Постарайтесь отыграть вейджер, дабы замечена возможность оставить заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные приборы. Вы можете получить выигрыш на электронной кошелёк, карту, аппарат. Многие казино предоставляют в рекламных целях благотворительные призы самая для наших читателей. Чтобы их получить, надо(надобно) перебежать на игровой вебсайт по партнерской ссылке с нашего портала. <a href=http://sunshine2000.co.kr/bbs/board.php?bo_table=free&wr_id=110041>http://sunshine2000.co.kr/bbs/board.php?bo_table=free&wr_id=110041</a> 1×slots зеркало рабочее на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=3941>1×slots акции</a>
<a href=https://your-portal.at.ua/forum/33–367–3#88322>1×slots casino регистрация на сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В каждом казино с бездепозитным призом предусмотрены вейджеровые обстоятельства. Это один-единственный «подводный камень», кот-ый стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) устроить определённое число ставок. Чем круче приз, тем сложнее выполнить условия, и напротив.
#4601 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия скачать
Как только получите бездеп в казино, всё одинаково не запамятовывайте инспектировать электронную почту. Некоторые игорные клубы каждый веселят интенсивных гэмблеров приятными призами. Чаще всего получить презент возможно в преддверии веселья, на день рождение, за привлечение друга. А кроме распространённым призом является прибавка к депозиту. Нужно не пополнить счёт, и азартное заведение прирастит его на 50–100%. <a href=http://filmkachat.ru/>1×slots официальный demo регистрация в 1×slots casino</a> В бонусную программу многих операторов входят систематические бездепы. Это пожизненные акции, поощряющие интенсивных постоянных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают постоянные бонусы без депо в размен на скопленные баллы лояльности. <a href=https://kryza.network/read-blog/11467127>https://kryza.network/read-blog/11467127</a> Игрокам не следует принимать приветственный приз как гарантированный метод получить крупный выигрыш, хотя это отличная вероятность без расходов оценить перечень казино. 1хслотс 1хслотс регистрация перейти на 1×slots <a href=http://forum.inos.at/profile.php?id=891610>http://forum.inos.at/profile.php?id=891610</a>
1× slots casino официальный сайт
Выигрыши с бонусов без инвестициям всегда привязаны к притязанию по ставкам и имеют быть обналичены лишь в исполненья данных притязаний. <a href=https://bans.org.ua/index.php?topic=119843.new#new>1хслот 1хслотс регистрация перейти на 1×slots</a> 1×slots рабочее зеркало <a href=http://www.mallangpeach.com/bbs/board.php?bo_table=free&wr_id=540299>http://www.mallangpeach.com/bbs/board.php?bo_table=free&wr_id=540299</a> Вейджер (или вагер) ? это наименьшая сумма ставок, которую нужно устроить для вывода денежного приза. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение. казино 1×slots официальный сайт Ограничения по играм. Администрация запрещает игрокам кое-какие игровые автоматы с бездепозитным призом, деньгами или бесплатными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда разделение производится по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, хотя запрещен в настольных забавах и в разделе Live Casino.
1×slots официальный demo регистрация в 1×slots casino
Разные казино имеют собственные управляла по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высокие притязания. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до 100 раз в игровых автоматах. Например, в игрок получил даром десять $, то нужно несомненно отыграть их, поставив 1 тысячу спинов по 1 баксу каждый. Стоит отметить, что не все казино дают вероятность играть на бонусы и не во всех увеселительных заведениях схожие правила для отыгрывания. Некоторые казино запрещают выступать на бонусы в блекджек или ограничивают ставки до пяти процентов, собственно существенно увеличивает в 10-ки один количество нужных игр. Также учтите, что кое-какие игровые платформы сузивают список стран, коие способны получить предложенный бездепозитный бонус за регистрацию. К образцу, есть онлайн-заведения, выдающие сходственные бонусы лишь обитателям конкретных стран. К образцу, онлайн казино 777 Оригинал дает бездепозитный приз только игрокам из России и стран СНГ. Или напротив, пичкают вознаграждением всех, кроме жителей некоторых государств (следует этого, следует внимательно учить список, дабы потом не появилось практически вопросов и жалоб).Самые свежие бездепозитные бонусы в казино за регистрацию 2022 года с выводом прибыли находятся на данной страничке. Посетитель имеет расценить условия получения и начать играть на средства без внесения депозита. При данном игроку важно осознавать, на каких условиях и какими способами у исключить приобретенный выигрыш. Для этого нужно оценить перечень присоединенных платежных систем. <a href=https://google.co.il/url?q=https://doctorlazuta.by/>https://google.co.il/url?q=https://doctorlazuta.by/</a> Необходимость отыгрыша. Вейджер в повыше, чем для бонусов за депо. И же свои не отыграны, вывести их нельзя. 1×slots зеркало регистрация в 1×slots casino
1хслотс рабочее зеркало
Автоматическая активация может самой комфортной, но ручной способ имеет перед ней достоинства. Прежде чем применять вознаграждение от казино, стоит заранее найти, сколько времени требуется на исполнение всех критерий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала действия бонуса.Прочитайте правила бонусной программки, в которой желайте участие. Да, мы настойчиво советуем устроить это до регистрации. Подобные бонусы без депо предоставляются на больше выгодных критериях. Зачастую они покрупнее, а условия отыгрыша менее строгие. Какие призы возможность еще получить не бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, каждое интернет казино предлагает игрокам выгодное предложение на первый депозит, вы совершаете депо, ваш депозит увеличивается в двое либо даже в трое, тем наиболее начать выступать можно с более крупной суммой, например же не запамятываем про вейджер на призы. 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=https://www.morph.ro/users/MycsgoNed>https://www.morph.ro/users/MycsgoNed</a>
1×slots рабочее зеркало
Бездепозитный приз казино 2022 с выводом за регистрацию предоставляет возможность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и проверить качество работы саппорта. Довольно нередко, начиная игровой процесс, игрок уже отказывается останавливаться и проделывает настоящий лепта. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть безвозмездно вероятно как раз таки с бонусом за регистрацию без надобности вносить депозит.Далее требуется отыграть вагер и вывести выигрыш. Игрокам без опыта крупно повезло, меня получить десятки презентов за одну регистрацию. Если не сумели получить Бездепозитный бонус, не беспокойтесь. Обратитесь в интернет чат, оператор поможет решить проблему. <a href=http://yuk.su/forum/memberlist.php?mode=viewprofile&u=8257>http://yuk.su/forum/memberlist.php?mode=viewprofile&u=8257</a> Бездепозитный бонус нередко имеет замерзнуть доступным сразу в окончания регистрации, потому в большинстве случаев единственным требованием к нему является регистрация, а этого ревизия вашей новой учетной записи. рабочее зеркало 1×slots Отказ в прохождении верификации. Если клиент не хочет или имеет предоставить документы, подтверждающие его лицо, профиль несомненно заблокирован вместе со всеми бонусными начислениями.Призовые начисления без депо имеют предоставляться для роли в турнирах онлайн казино. Потратить перечисленные деньги возможно самая в рамках данной промоакции. Условия их проведения себе ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, другого выучить его правила.
<b>Смотреть еще похожие новости:</b>
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=101903&extra=>1×slots официальный сайт скачать</a>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=341911>1× slots casino официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Третитй бездепозитный бонус за регистрацию – валютные свои. К раскаянью, начислить рубли или баксы способны только знаменитые и популярностью клубы. С их помощью возможность насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком. Такой казино бонус без депо за регистрацию выдается игроку на час и активно используется данное предложение с 2017 года. Это словно какая-то конспирация одобрения под бездепозитный. Суть всего сего сводится к тому, собственно геймеру на час выдается, к примеру, 1000 $, а реклама повторяет про, что каждой выигрыш возможно несомненно в будущем оставить при себя. Но если играющий всерьез отнесется к данному предложению, то он попросту потеряет время. Ведь геймеру нужно будет выступать не в основном аккаунте, а тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (даже всей тыс. ) в управляла вступят конкретные обстоятельства, где несомненно сказано, собственно наибольшей суммой победы может быть лишь двести долларов и деньги можно применять лишь виде приза на 1-ый вклад с вейджером 25 от суммы вознаграждения плюс сам депо. По итогу получится, собственно игрок выигрывал себе 200% приз с вейджером на конкретную сумму. Короче разговаривая, это все не стоит вашего медли.
#4602 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать pin casino кент казино <a href=https://specreporter.com/>porno Юлия Пересильд</a> porno Илья Ковальчук (хоккей) ешь казино <a href=https://strelochnik.com/>champion casino</a> 1×bet сайт 1×bet xyz казино смотреть porno Елизавета Туктамышева 1×bet рабочее на сегодня пин ап казино porno Нина Пирогова, хоккеистка казино вход официальный сайт
DiskiPlus официальные сайты казино DiskiPlus pin up casino buzz <a href=https://diskiplus.ru/>DiskiPlus зеркала официальных сайтов казино</a> DiskiPlus casino зеркало сегодня DiskiPlus водка казино <a href=https://diskiplus.ru>DiskiPlus 1×bet сайт</a> DiskiPlus гта онлайн казино DiskiPlus casino сегодня DiskiPlus яндекс игры казино DiskiPlus pin up casino DiskiPlus casino промокод DiskiPlus букмекерская контора DiskiPlus пин ап casino
#4603 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Вейджер (wager) – это коэффициент, который показывает на какую сумму необходимо устроить ставок, чтобы вывести бонус из казино. Пример: Вы получили за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода этого бонуса, Вам нужно сделать ставок на сумму: 500*70=3500 руб. Только всецело отыграв приз, Вы сможете вывести свой выигрыш.Не трудно додуматься, собственно no down payment bonuses почти никогда не посещают большими. Чаще всего идет о пяти–тридцати долларах (или эквиваленте данной суммы в другой валюте). <a href=http://filmkachat.ru/>1× slots регистрация в 1×slots casino</a> Наши эксперты изучают условия промоакции, затем в ручном режиме проверку их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие характеристики. Мы не рекламируем казино, а даем игрокам информацию о лучших из них. <a href=https://www.ted.com/profiles/48491724>https://www.ted.com/profiles/48491724</a> В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с даровых вращений. Прибыль, которую Вы заработаете на таком бездепе можно назначать на вывод без какого либо отыгрыша.Для верификации номера телефонного, в собственном профиле выберите опцию „Подтвердить номер аппарата“ и введите в соответствующее фон код, приобретенный в sms-сообщении. 1×slots официальный зеркало рабочее <a href=https://forum.bandariklan.com/member.php?action=profile&uid=23166>https://forum.bandariklan.com/member.php?action=profile&uid=23166</a> Например, игрок получил 500 рублей при твореньи аккаунта и обязан отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 рублей, потребуется сделать 875 спинов для полного отыгрыша.Подтвердите регистрацию, дабы активировать Бездепозитный бонус с выводом, потребуется наполнить собственный профиль. Заполните пустопорожние поля настоящими данными о себе.
1×slots официальный зеркало рабочее
Денежные средства. Третий бонус за регистрацию без депо – наличные. К раскаянию, лишь знаменитые и знаменитые клубы все дать деньги в рублях или баксах. С их подмогою возможность насладиться каждой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед этим нужно выполнение определенных критерий. <a href=http://golf.blue-devil.eu/viewtopic.php?f=22&t=31708&sid=5f85ef070b912c07668fd35bd9223bab>1×slots сайт зеркало</a> 1×slots зеркало регистрация <a href=http://www.gurumeguri.com/userinfo.php?uid=26856#>http://www.gurumeguri.com/userinfo.php?uid=26856#</a> 1×slots регистрация то дальше необходимо пройти
1×slots регистрация
Более крупные предложения встречаются очень изредка. Зачастую они доступны лишь VIP-игрокам. В оставшихся случаях им наверняка сопутствуют очень жесткие обстоятельства отыгрыша. Также возможны вспомогательные условия и другие лимитирования, прописанные в условиях и положения бонусной программки казино. Каждая игровая перрон отличается критериями по получению и отыгрышу бездепов. В правилах детально расписаны временные рамки, за которые нужно прокрутить вейджер. Также не забывайте про максимальный размер ставки и наивысшую сумму выплаты. С иной стороны, дабы получить бездепозитные бонусы казино, довольно истратить менее 1 минуты. <a href=http://www.annunciogratis.net/author/anthonylal>http://www.annunciogratis.net/author/anthonylal</a> Фриспины без депо либо вспомогательные средства помогут поближе познакомиться с игровой платформой и её функциями. За счёт подарков возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям ради забавы против живых крупье. 1×slots скачать на айфон Так собственно можете храбро регистрироваться без всяких размышлений. Фортуна сегодня наверняка на вашей стороне. Не страшитесь, как последствие какого либо ущерба Вам совершенно не угрожает. С этими бонусами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе.
1×slots официальный сайт скачать
Прежде всего, не забывайте периодически заглядывать на страницу обзоров бездепозитных бонусов. Они шаг за шагом разглядывают наиболее интересные предложения ведущих игорных порталов. <a href=http://3ak.cn/home.php?mod=space&uid=187057>скачать 1×slots на андроид мобильная версия</a> 1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, случае не желаете замерзнуть жертвой жуликов или впустую израсходовать время; 1×slot зеркало рабочее регистрации на телефон придет <a href=http://popkrn.net/bbs/board.php?bo_table=free&wr_id=3728258>http://popkrn.net/bbs/board.php?bo_table=free&wr_id=3728258</a> Вейджер (либо вагер) ? это наименьшая сумма ставок, коию необходимо сделать для вывода денежного приза. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим красивее спецпредложение.Если вы выбираете проверенное лицензионное онлайн казино и выполните все обстоятельства получения бездепозитного бонуса, проблем с получением презента у Вас не возникнет.
сайт 1× slots casino
Изучить управляла и обстоятельства получения бездепозитных призов казино, Вы сможете у нас на сайте в разделе с бонусами либо на официальном веб-сайте выбранного Вами казино. Если не найти необходимую информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал либо по электронной почте.Прямо сейчас арестуйте безвозмездные вращения за регистрацию без депозита и начинайте коллекционировать призовые композиции из-за солидных выигрышей! <a href=https://craigslistdirectory.net/%D0%B7%D0%BD%D0%B0%D0%BA%D0%BE%D0%BC%D1%81%D1%82%D0%B2%D0%B0-%D0%B4%D0%BB%D1%8F-%D1%84%D0%BB%D0%B8%D1%80%D1%82%D0%B0-%D0%BC%D0%BE%D1%81%D0%BA%D0%B2%D0%B0_395208.html>https://craigslistdirectory.net/%D0%B7%D0%BD%D0%B0%D0%BA%D0%BE%D0%BC%D1%81%D1%82%D0%B2%D0%B0-%D0%B4%D0%BB%D1%8F-%D1%84%D0%BB%D0%B8%D1%80%D1%82%D0%B0-%D0%BC%D0%BE%D1%81%D0%BA%D0%B2%D0%B0_395208.html</a> Также учтите, собственно некоторые игровые платформы сужают список стран, которые способны получить предложенный бездепозитный бонус за регистрацию. К примеру, есть онлайн-заведения, выдающие похожие призы лишь жителям конкретных стран. К примеру, онлайн казино 777 Оригинал дает бездепозитный приз лишь игрокам из России и государств СНГ. Или наоборот, пичкают вознаграждением всех, кроме обитателей неких государств (исходя из этого, по пристально учить список, чтобы потом не появилось никаких вопросов и жалоб). 1×slots регистрация то дальше необходимо пройти Нет. Казино раздают благотворительные бонусы за регистрацию, для того, дабы клиент возможность ознакомиться с игровым заведением. А дабы вывести его, необходимо выполнить условия отыгрыша.Какие призы есть еще получить не бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, любое онлайн казино предлагает игрокам выгодное предложение на первый депозит, вы совершаете депо, ваш депозит увеличивается в двое либо в в трое, тем наиболее начать выступать возможно с более солидной суммой, так же не забываем на вейджер на бонусы.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.reisezielforum.de/viewtopic.php?t=369594>1×slots зеркало регистрация в 1×slots casino</a>
<a href=http://board.eternityrpc.com/member.php?action=profile&uid=369>1×slots официальный сайт зеркало</a>
<a href=https://qualityprogamer.de/forum/showthread.php?tid=401093>онлайн казино 1×slots</a>
<a href=http://6000ziyuan.com/forum.php?mod=viewthread&tid=102169&extra=>1×slots регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Мы собрали и опубликовали список наилучших бездепозитных казино с бонусами за регистрацию, которые гарантируют великодушные выигрыши и моментальные выплаты.
#4604 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
7k casino зеркало рабочее ставки на спорт букмекерские конторы <a href=https://rhymes-punches.com/>слоты казино</a> казино пин приложения букмекерских контор на андроид <a href=https://t.me/vchkogpu_ru>1×slots casino</a> Манилова Алла Юрьевна порно гама казино пин casino casino играть 1×bet 1 1×bet официальный xbet рокс казино
DiskiPlus реального казино DiskiPlus почему в казино нет окон <a href=https://www.diskiplus.ru/>DiskiPlus казино пин</a> DiskiPlus 1×bet слоты DiskiPlus casino игровой автомат <a href=https://www.diskiplus.ru>DiskiPlus Петрова Ольга Викторовна порно</a> DiskiPlus 1go casino DiskiPlus казино в россии DiskiPlus пин ап casino pin up top DiskiPlus champion casino DiskiPlus порно с Артемий Панарин (хоккей) DiskiPlus win win casino DiskiPlus casino зеркало сайта
#4605 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию процедура займет всего лишь
Изучить правила и обстоятельства получения бездепозитных призов казино, Вы можете у нас на веб-сайте в разделе с бонусами либо на официальном веб-сайте выбранного Вами казино. Если не можете отыскать нужную информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электрической почте.Так собственно приготовьтесь предоставить конфиденциальную информацию (пол, возраст, страна проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает не более суток, после чего удастся свободно выводить солидные выигрыши. <a href=http://filmkachat.ru/>1хслот зеркало сайта</a> <a href=https://www.hebergementweb.org/threads/kak-proisxodit-vykup-avto-vo-francii-vse-chto-nuzhno-znat.1925854/>https://www.hebergementweb.org/threads/kak-proisxodit-vykup-avto-vo-francii-vse-chto-nuzhno-znat.1925854/</a> Первый возникающий вопрос, это, зачем выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают новых игроков. Последним легче начать забаву на средства с дара за регистрацию. Им не нужно пополнять баланс и тратить собственные средства. Новички получают благотворительные спины или средства на счёт. С их поддержкою знакомятся с игровым процессом, крутят слоты и делают ставки в рулетке. 1×slot зеркало рабочее регистрации на телефон придет <a href=http://onlines.pro/user/DoctorLazutasn/>http://onlines.pro/user/DoctorLazutasn/</a>
1×slots регистрация на сайте
1×slos регистрация в 1×slots casino На критериях отыгрыша безвозмездных призов по тормознуть подробнее. С ними связаны нюансы, которые нельзя забыть без внимания. <a href=http://www.underworldralinwood.ca/forums/member.php?action=profile&uid=422034>http://www.underworldralinwood.ca/forums/member.php?action=profile&uid=422034</a> 1×slots рабочее зеркало Новички не любят незамедлительно же вносить депо. Это обусловлено неимением опыта и сомненьем. К счастью, в возможно получить бездепозитный приз за регистрацию в казино. Неважно собственно начислит система – фриспины или кредиты. В всяком случае вы не рискуете своими сбережениями. Это замечательная вероятность запустить понравившийся видео разъем либо же испытывать фортуну в настольных забавах.
1×slots регистрация 1×slots review live
При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, которое возможно посвятить игре в казино. <a href=http://www.rhl-mod.ru/members/97661-oscarcix/>http://www.rhl-mod.ru/members/97661-oscarcix/</a> x1 slots 1хслотс регистрация перейти на 1×slots Получать информацию о самых прибыльных призах можно без неизменного мониторинга новостей казино. Мы взяли данную задачку на себя и непрерывно следим за предложениями операторов, избирая наихорошие из их. В данном разделе собраны последние бездепы, промокоды к ним и условия их активации. Список промоакций периодически дополняется. В топ зашли самые свежие бездепозитные бонусы за регистрацию в казино 2020, временные и закрытые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и критериям. Если срок деяния акции истек, она удаляется из списка.
1×slots регистрация на 1хслотс
Получить приветственный приз шансы лишь новые посетители онлайн-казино. Способы описаны в критериях промоакции любого законного казино, почаще всего это: Не желайте сыграть в азартные игры, не рискуя средствами деньгами, но получая в все выплаты? Подобную вероятность предоставляют многие превосходнейшие порталы с азартными весельями. В их количестве много честных и надежных интернет-казино на русском языке. Они завлекают новых юзеров разными поощрительными событиями, включая бездепозитные, либо бесплатные призы.Прибывшие на аккаунт деньги бездепозитные бонусы предназначаются, главном, лишь для новоиспеченных юзеров, которые ранее не имели собственного аккаунта в данном казино. Исходя из этого, если ранее у игрока был изготовлен депозит, то, по всей вероятности, у него больше не несомненно способности рассчитывать на получение такового бонуса в конкретном заведении. 1хслотс рабочее зеркало <a href=https://magadan-mebel.ru/forum/user/437/>https://magadan-mebel.ru/forum/user/437/</a> Благодаря программке преданности от игорного заведения, возможно арестовать хороший старт и без дополнительных инвестициям запустить видеослоты. Кроме такого, можно рассчитывать на реальную удачу и получить, без вложения собственных финансов, большой выигрыш.Для всех бездепозитных призов функционирует наибольший лимит на выигрыш. Он показывает предельную необходимую, которую возможность получить, играя на бонусные кредиты. Как только вам получится выполнить требования вейджера, дозволенный максимально несомненно переведен с бонусного счета на ведущей, а остаток несомненно списан.
1×slots официальный сайт зеркало
Суммы сходственных услуг, как правило, колеблются от трех до двадцати $, а вейджер на эти средства должен составлять от 30 до шестидесяти один. Зачастую, величайшая сумма выигрыша здесь составит от одной до двух сотен долларов. Если компьютерные выиграет больше, то все средства могут быть списанными до максимально разрешенного выигрыша. Здесь появляется смысл выводить еще несуществующие деньги на собственную платежную систему и далее отыскивать заведение с подходящими под данную сумму релоадом или призом за первое пополнение счета. Есть количество подвидов бездепозитного гонорары, предлагаемого наибольшим количеством заведений.Максимальная ставка ? уточняется в еденице счета и ограничивает размер ставки за один спин. В случае ее превышения бонус возможность быть аннулирован. Также в правилах имеет содержаться запрет на размещение ставок определенного вида, например, по одинаковым шансам в рулетке (то есть, на чет или нечет, красноватое либо черное и т.д.). <a href=https://able2know.org/user/jamesdal/>https://able2know.org/user/jamesdal/</a> 1× slots зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://griffhunter.com/boards/viewtopic.php?p=470424#p470424>1×slots скачать на айфон</a>
<a href=http://mandala-app.com/forums/memberlist.php?mode=viewprofile&u=3447>1×slots официальный сайт мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Наиболее известные гонорары между гэмблеров – бездепозитные бонусы казино. Это не умопомрачительно, так можно получить безвозмездные вращения либо виртуальные кредиты, и всем не придётся пополнять счёт, рисковать личностными средствами. Удастся насладиться разнообразными веселиями даже выиграть солидную необходимую, избегая серьёзного риска.
#4606 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало слоты 1×bet xyz casino зеркало сегодня рабочее <a href=https://slon-ru.com/>суть казино</a> casino бонус мелбет букмекерская контора <a href=https://rumafia.news/>1×bet 1</a> бесплатное казино 1win casino Скоробогатова Ольга Николаевна порно ограбление казино порно с Антропова Валентина Викторовна порно с Елена Никитина, скелетонистка казино фильм смотреть онлайн
DiskiPlus Мухтиярова Елена Вячеславовна порно DiskiPlus казино гта 5 <a href=https://www.diskiplus.ru>DiskiPlus порно с Каролина Севастьянова</a> DiskiPlus официальные сайты казино DiskiPlus демо казино <a href=https://www.diskiplus.ru>DiskiPlus казино вулкан</a> DiskiPlus casino андроид DiskiPlus Александра Бортич DiskiPlus casino 7k сегодня DiskiPlus сайт букмекерской конторы DiskiPlus inform@rucriminal.info DiskiPlus пин ап казино DiskiPlus порно с Карен Хачанов (теннис)
#4607 Charlesgunnyhttp://filmkachat.ru
casino 1×slot
Получать информацию о самых прибыльных бонусах можно без неизменного мониторинга новостей казино. Мы брали эту задачу на себя и безпрерывно смотрим за услугами операторов, избирая лучшие из них. В этом разделе собраны заключительные бездепы, промокоды к ним и обстоятельства их активации. Список акций периодически дополняется. В топ вошли самые свежие бездепозитные бонусы за регистрацию в казино 2020, кратковременные и замкнутые промо. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и другим аспектам. Если срок деянья акции истек, она удаляется из перечня. <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino 56 online</a> При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток.На страничке представлены бездепозитные бонусы за регистрацию в казино редчайшая награда за которой гонятся все игроки как новички, например и профессионалы. Мы тоже уделяем огромное внимание на присутствие призов при составление рейтинга казино на средства. Бездепозитный приз это возможность играть бесплатно и выиграть настоящие деньги. <a href=https://www.scutify.com/articles/2024–12–21-transforming-visualization-through-digital-innovation>https://www.scutify.com/articles/2024–12–21-transforming-visualization-through-digital-innovation</a> При правильном подходе бездепы — это отличный способ играть на средства без растраты личных средств. Есть несколько советов, следуя коим возможно извлечь максимум полезности из похожих промоакций казино. Играть следует только на лицензированных площадках. Скриптовые сайты не только обманывают с бонусными услугами, но и используют пиратский софт с измененным ГСЧ. Выиграть на таких автоматах невозможно.Подарки на праздники ? приуроченные к праздничным датам, требующие условного отыгрыша либо начисляются без это. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду. 1×slots регистрация то дальше необходимо пройти <a href=http://ufb38096.bget.ru/index.php?subaction=userinfo&user=glamorousaxle49>http://ufb38096.bget.ru/index.php?subaction=userinfo&user=glamorousaxle49</a> Будьте внимательнее при ознакомлении с правилами во избежание происхожденья конфликтных ситуаций с казино, когда после отыгрыша бездепа вам не дадут вывести крупную сумму выигрыша.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.
1× slots casino официальный сайт
Бонус за регистрацию в казино выдается только раз один на 1-го игрока. Но посещают дополнительные акции, в коих бездепы расступаются для постоянных клиентов и эти подарки Вы сможете получить больше одного раза.Одним из поводов отдавать преимущество, льготу одному или иному заведению заключается в привлекательности предлагаемых акций и даровых предложений. Безвозмездные фриспины, выдаваемые без нужды создавать какой-либо вклад, в перечне располагается далековато не в конце. <a href=http://www.airsoft44.com/forum/index.php?action=profile;u=11896>1 х слотс зеркало</a> 1×slots акции Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке необходимо пополнить счет в казино. Для депозитных призов, эта процедура не нужна, например как депо теснее сделан.Выбор каждого интернет казино на нашем сайте. В описании к любому Вы можете узнать, собственно получите за творенье аккаунта. <a href=http://jkmulti.vip/bbs/board.php?bo_table=free&wr_id=5620167>http://jkmulti.vip/bbs/board.php?bo_table=free&wr_id=5620167</a> Процесс подтверждения личности может занять от одного денька до недели. Если клиент допустил какую ошибку при заполнении паспортных данных, то ему идет обратиться с задачей в службу поддержки онлайн-казино. 1 x slots
1×slots зеркало регистрацию более популярный вариант это
Если вы опытный игрок, вы обязаны аристократия, собственно приз без депозита – редкая находка. Тем не менее, мы в исследуем интернет, дабы найти вам наилучшие бездепозитные предложения.Казино выделяет возможность заработать и исключить реальные средства на бездепозитных бонусах. Обычно, это малозначительная сумма, которую казино может для разрешить подарить игроку. <a href=https://www.mexicanosenelmundo.com/member.php?action=profile&uid=21709>https://www.mexicanosenelmundo.com/member.php?action=profile&uid=21709</a> На благотворительные бонусы онлайн-казино почти практически распространяется ограничения по стране проживания клиентов. Даже если вас разрешено раскрывать счет и выступать на средства в заведении, это еще не означают, собственно вас доступны no down payment bonuses.Суммы подобных предложений, как правило, колеблются от 3-х до 20 $, а вейджер на эти свои обязан сочинять от тридцати до шестидесяти раз. Зачастую, большая сумма выигрыша здесь составит от одной до 2-ух сотен $. Если игры выиграет больше, то все средства шансы быть списанными до максимально разрешенного выигрыша. Здесь появляется смысл выводить еще несуществующие финансы на свою платежную систему и дальше находить заведение с подходящими под данную сумму релоадом или призом за 1-ое пополнение счета. Есть некоторое подвидов бездепозитного гонорары, предлагаемого великим количеством заведений. 1×slots официальный регистрация Главным нюансом в возникновении данных вознаграждений состоит в, что пустив их в ход, в ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он спасибо призам какой-нибудь выигрыш или мгновенно спустит все лишь что прибывшие финансы). То есть, казино снабжает игрока возможностью на дармовой базе выступать во всевозможные слоты причем спонсирует забаву.В неких онлайн казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на веб-сайте клуба и подтвердить средства контактные данные. Дополнительно требуется активация промокода.
1×slots рабочее зеркало на сегодня
Но такие рамки не смущают том хайроллеров, потому коэффициенты на слотах позволяют рассчитывать на крупные выигрыши, а в неких автоматах разыгрывается передовой джекпот. За привлечение приятеля ? масштабах партнерской программы заказчик получает вознаграждение за вербование новых пользователей.Как управляло, новоприбывшие игроки в первую очередь желают ознакомиться с методами ввода и вывода денежных средств и сроки исполнения поданных заказов дабы конкретно разуметь, как прытко меня вывести свой казино приз за регистрацию без депозита на электронный кошелек или же банковскую карту. К счастью для всех играющих, внутри определенных холдингов, все казино соперничают меж собой. Ведь случае бы определенную компанию представляло только одно онлайн-заведение, то навряд бы клиенты заметили казино с призом за регистрацию и возможность бы рассчитывать только на вознаграждение в виде бонуса на 1-ое вложение. К каждому заведению регулярно по завлекать новых игроков, что, в, только на руку всем играющим. Вейджер (либо вагер) ? это минимальная сумма ставок, коию необходимо устроить для вывода валютного приза. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, тем привлекательнее спецпредложение.Самые знаменитые способы вывода денег ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электрическим платежным системам подобии Neteller и Skrill, а пользуются криптовалютными кошельками. Вывод выигрышей возможность осуществляться моментально или занимать от нескольких часов до нескольких суток. 1×slots коды <a href=http://luisboquer.es/index.php?option=com_kunena&view=user&userid=134908>http://luisboquer.es/index.php?option=com_kunena&view=user&userid=134908</a>
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Новички не обожают сразу же заносить депозит. Это обусловлено отсутствием опыта и сомненьем. К счастью, дни возможно получить бездепозитный бонус за регистрацию в казино. Неважно что начисляет система – фриспины или кредиты. В всяком случае вы не рискуете своими сбережениями. Это замечательная возможность запустить приглянувшийся видео разъем либо же испытать удачу в настольных забавах. <a href=http://amorserial.ru/index.php?subaction=userinfo&user=anapage>http://amorserial.ru/index.php?subaction=userinfo&user=anapage</a> Во всех легальных онлайн-казино Беларуси необходимо подтверждение паспортных данных для забавы — это заявка правительства государства. 1×slots зеркало которую указывали при регистрации кстати Такой бесплатный эквивалент средств зачисляется на профиль юзера после осуществления притязаний и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений возможен только в осуществления вейджеровых условий.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.bandariklan.com/showthread.php?tid=369970>1× slots зеркало</a>
<a href=https://bajarmp3.net/showthread.php?tid=426990>1хслот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При отыгрыше бонусных средств, нужно учитывать срок деянья приза и время, которое дается на отыгрыш. По истечению заявленного времени, не отыгранный приз будет аннулирован. Баланс игрока дополняется на соответствующую необходимую. К ней используется вейджер, обозначенный в правилах акции. Вывести выигрыш можно несомненно последствии как, как юзер сделает требуемый размер ставок из собственных средств. В редчайших случаях бездеп работает в формате Free Play. На счет пользователя зачисляется большая сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по окончании сего периода сумма на счету будет превосходить изначальную, то разницу возможно будет исключить либо использовать для последующих ставок.
#4608 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Юлия Канакина гта онлайн казино <a href=https://kompromat1.online/>Приезжева Екатерина Геннадьевна порно</a> казино смотреть онлайн Преподобная Надежда Александровна порно <a href=https://m.repost.news/>black russia казино</a> ramenbet casino слот casino водка казино сайт казино вход 1×bet приложение casino играть официальные букмекерские конторы скачать
DiskiPlus какие казино DiskiPlus порно с Абрамченко Виктория Валериевна <a href=https://www.diskiplus.ru>DiskiPlus casino официальный зеркало</a> DiskiPlus 1×bet скачать приложение на андроид DiskiPlus Матвиенко Валентина Ивановна порно <a href=https://www.diskiplus.ru/>DiskiPlus слоты казино</a> DiskiPlus casino зеркало сайта DiskiPlus casino бездепозитный DiskiPlus порно с Алина Загитова, фигуристка DiskiPlus играющие казино DiskiPlus как выиграть в казино DiskiPlus porno Яна Троянова DiskiPlus пинко casino
#4609 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать букмекерскую контору casino сайты <a href=https://vestnik-jurnal.com/>лучшие онлайн казино</a> гта онлайн казино порно с Никита Кучеров (хоккей) <a href=https://rucriminal.info/>new casino</a> порно с Алина Загитова, фигуристка где казино casino 7k рабочее порно с Дронова Александра Викторовна букмекерская контора фонбет официальный сайт почему в казино нет часов казино ставка
DiskiPlus зеркала казино DiskiPlus casino андроид <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet слоты официальный сайт</a> DiskiPlus официальные зеркала казино DiskiPlus 1×bet сайт <a href=https://diskiplus.ru>DiskiPlus Самойлова Алла Владимировна порно</a> DiskiPlus 1×bet зеркало рабочее на сегодня DiskiPlus casino DiskiPlus porno Мария Шарапова DiskiPlus 1×slots casino DiskiPlus бесплатно фильм казино DiskiPlus порно с Каролина Севастьянова DiskiPlus букмекерская контора официальный сайт скачать
#4610 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт, скачать
Особую изюминку видео слотам придают уникальные знакы. С их появлением активируются разные призы. Вы сможете запустить вспомогательный степень и прирастить сумму выигрыша. Есть знаки, коие сменяют ненужные элементы и сами делают выигрышные комбо. Не стоит забывать и про бонус-тур. После любого счастливого спина есть шанс прирастить сумму выигрыша в 2 или четыре раза.Условия вывода выигрыша. В некоторых заведениях для успешного вывода с бездепозитного приза довольно пополнения баланса и доказательства личности. В иных же клубах, нужно несколько раз прокрутить собственный депо. <a href=http://filmkachat.ru/>1хслотс зеркало на сегодня</a> <a href=https://noosfero.ufba.br/lexxeagle/blog/professionalniy-vikup-avto-v-kieve-s-chestnoy-otsenkoy-na-meste>https://noosfero.ufba.br/lexxeagle/blog/professionalniy-vikup-avto-v-kieve-s-chestnoy-otsenkoy-na-meste</a> Фриспины предназначены для применения в видео слотах. Внимательно ознакомьтесь с критериями – часто их выдают на кое-какие автоматы. В зависимости от клуба, у вас получится устроить определённое число ставок. Кстати, продвинутые игорные жилища разрешают запускать каждых «одноруких злодеев». казино 1×slots <a href=http://bc4u.co.kr/bbs/board.php?bo_table=qa&wr_id=129855>http://bc4u.co.kr/bbs/board.php?bo_table=qa&wr_id=129855</a> Казино выводит средства лишь на что, эту платежную систему, с котрой был изготовлен депо. То есть, для вывода бездепозитного бонуса, Вам поначалу необходимо пополнить счет. В некоторых клубах узкий перечень методов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с данных платежных способов, коие доступны для вывода.Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс изучить игровые автоматы, научится регулировать менять ставки и полосы, исследовать бонусные игры и их выигрышные композиции, ну конечном просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные средства, коие возможно отыграть и исключить, не просто на демо счет, что, этим наиболее адреналин в крови еще повысится а пульс забьется с нередким ритмом!
казино 1×slots
Доступность — бездепозитные бонусы в казино почаще всего предоставляются свежим игрокам, но посещают случаи, когда бонус могут получить и действующие посетители. 1×slots официальный сайт скачать Также, учите, что бездепозитный бонус возможно вывести только том, случае, когда станут выполнены все обстоятельства отыгрыша.Зачастую бездепозитные призы казино для забавы предлагаются разными заведениями азартных игр в качестве рекламных акций или в целях вербования к себе свежих игроков. Для бездепозитных бонусов в казино 2022 игроку не пополнять счет до момента вывода желанных средств. <a href=https://deanmmki95061.xzblogs.com/70817569/checking-out-the-frontier-of-ai-pushed-confront-swap-films-a-deep-dive-into-deepnude>https://deanmmki95061.xzblogs.com/70817569/checking-out-the-frontier-of-ai-pushed-confront-swap-films-a-deep-dive-into-deepnude</a> 1×slots актуальное зеркало
зеркло казино 1×slots
Также, учите, что бездепозитный бонус можно исключить лишь никаких случае, когда станут исполнены все обстоятельства отыгрыша. <a href=http://xn–80aphfq.xn–p1ai/user/Ashleykef/>http://xn–80aphfq.xn–p1ai/user/Ashleykef/</a> Необходимость отыгрыша. Вейджер такой повыше, чем для бонусов за депо. И же средства не отыграны, вывести их невозможно. онлайн казино 1×slots Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских руб. В условиях промоакции указано, что вейджер бездепозитного бонуса х20. Поэтому, чтобы отыграть приз, игроку будет необходимо устроить ставок на 35*20=700 руб.Акционные предложения от казино существуют в различных форматах. Часто бонусы даются в размен на депо. Игрок заносит платеж и получает средства, безвозмездные вращения прочие одобрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — вид приза, кот-ый гарантирован за исполненье конкретных действий на сайте:
1×slots казино зеркало
Если при регистрации показать промокод, возможно гарантировано получить приз. Где брать ваучер? Посетите тематику блоги или форумы. Иногда администрация клуба делает рассылку ваучеров на электрическую почту. В заключительнее время игорные жилища начали афишироваться в кинокартинах и сериалах. Присмотритесь и скорее заметите промокод, который принесёт 500 либо 1 000 бонусных руб.Бездепозитные призы — это подарки от казино повторяющий бонусных средств либо фриспинов для игровых автоматов, коие начисляются на акк игрока в процедуры регистрации на сайте заведения. Для получения таких поощрений депозит не потребуется. Кешбэк-бонус дает собой возврат фиксированного процента от ставки когда проигрыша или же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%. казино 1×slots <a href=https://maps.google.com.uy/url?q=https://doctorlazuta.by/>https://maps.google.com.uy/url?q=https://doctorlazuta.by/</a>
онлайн казино 1×slots
Шаг 5. Использование и отыгрыш. Бездеп должен быть применен в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера.Бездепозитные бонусы реальными деньгами, коие возможно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадали. <a href=https://rovworld.com/members/jameskex/profile/>https://rovworld.com/members/jameskex/profile/</a> Третитй бездепозитный бонус за регистрацию – валютные средства. К сожалению, начислить рубли либо доллары готовы лишь известные и модные клубы. С их подмогою у насладиться каждой доступной игрой – автоматом, рулеткой, кено, блэкджеком. 1х слот регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.krymbezpravil.org.ua/memberlist.php?mode=viewprofile&u=10552>скачать 1×slots официальный сайт</a>
<a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=8645>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Не трудно догадаться, собственно no down payment bonuses практически никогда не бывают немаленькими. Чаще всего речь о пяти–тридцати баксах (или эквиваленте этой суммы в иной денежной). Акции, приуроченные к календарным праздничным, посещают рассчитаны как на всех юзеров, например и на категории: примеру, презент на 8 марта девушкам-игрокам либо мужикам на 23 февраля.
#4611 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало этих способов предполагает регистрацию
Большинство клубов завлекают внимание в за счёт разнообразных подарков. На 1 сайтах можно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает безвозмездные вращения для пуска лучших онлайн слотов. Несмотря на различные промоакции, стоит выделить самые главные. <a href=http://filmkachat.ru/>1хслотс зеркало на сегодня</a> <a href=https://band.us/band/96885593/post/2>https://band.us/band/96885593/post/2</a> Чтобы бездеп не был начислен на Ваш акк, Вам не нужно активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк автоматически, а Вы не планируете его использовать, обратитесь в службу поддержки с просьбой отменить бездепозитный бонус. 1×slots официальный сайт зеркало <a href=https://shilinka.ru/user/Forsedroper/>https://shilinka.ru/user/Forsedroper/</a>
1×slots регистрация на сайте 1×slots ru com
Частенько новички не знают, как активировать презенты или исключить 1-ый выигрыш. Для сходственных случаев наша команда обрисовала главные определения – собственно такое фриспины, вейджер, как его отыграть, зачем нужно проходить верификацию. <a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5151/#comment-620378>1×slots казино зеркало</a> 1хслотс регистрация в 1×slots casino Почти все игровые клубы настоятельно подтверждение контактных данных игрока для получения бездепозитного приза. <a href=https://fm.xndl.com/home.php?mod=space&uid=635499>https://fm.xndl.com/home.php?mod=space&uid=635499</a> Составленный знатоками Casino.ru перечень онлайн-казино с бездепозитным бонусом дозволяет игрокам сравнить спецпредложения различных операторов. 1× slots casino официальный сайт Чаще всего, знаменитые сервисы, такие как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное верховодило. Финансовые средства выводятся только через что, эту платежную систему, которой популярностьюимели для пополнения депозита. Если же игрок получил бездепозитный покерный бонус, требуется пополнить счет на минимальную необходимую, которая сочиняет обычно 10 $.
1×slots рабочее зеркало на сегодня
Фриплей-бонусы встречаются только в неких клубах. Они зачисляются сразу последствии сотворения профиля и активны недолговременное время. Если не успеете потратить средства, они просто сгорят. Касаемо медли, в большинстве случаев призы активны на часа. Однако далековато не все ресурсы предлагают своим посетителям бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено одобрение на 1-ый депо в объеме 100–200%. Это отличная возможность преумножить банкролл, прирастить время, проведённое за игрой и шансы сорвать большой куш.Так что можете храбро регистрироваться без всяких размышлений. Фортуна сегодня наверняка на вашей стороне. Не опасайтесь, как последствие какого или убытка Вам совершенно не грозит. С этими призами как без пополнения, Вы остаетесь лишь в плюсе, хотя не как не в минусе. <a href=https://bel-mebel.com/forum/user/3551/>https://bel-mebel.com/forum/user/3551/</a> 1хслотс казино зеркало Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации подарка нужно подтвердить электрическую почту и привязать телефонный;Для всех бездепозитных призов функционирует наибольший предел на выигрыш. Он показывает предельную сумму, которую вы сможете получить, играя на бонусные кредиты. Как только для удастся выполнить притязания вейджера, допустимый максимально несомненно переведен с бонусного счета на главный, а остаток будет списан.
1×slots официальный сайт мобильная версия
Операторы гемблинга заявляют, что так они борются с бонус-хантерами. Впрочем, критики считают, что данным казино пробуют устроить из случайного гостя неизменного игрока.Приветственный приз без депо ? презент за регистрацию. Выдается средствами, фриспинами либо баллами. В заключительном случае бонусные баллы используются для роли в турнирах или обмена на настоящие средства. <a href=http://kemsrr.forumex.ru/viewtopic.php?f=7&t=2068>1×slots регистрация на официальном сайте</a> В бонусную программку многих операторов входят регулярные бездепы. Это пожизненные промоакции, поощряющие активных неизменных игроков. Популярный формат — раздача фриспинов по конкретным дням недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают постоянные призы без депозита в размен на накопленные баллы преданности.Подтвердите лицо, предоставив оператору казино свои паспортные данные. Инструкции обычно легкие, основное — конкретно им по. Если написано, собственно «на фото должны быть заметны все хорошо угла страницы паспорта» — сделайте именно это фото. Подтвердите регистрацию, дабы активировать Бездепозитный бонус с выводом, требуется заполнить личный профиль. Заполните пустопорожние поля истинными данными о для. 1хслот официальный сайт зеркало <a href=https://kayurveda.co.kr/bbs/board.php?bo_table=free&wr_id=174855>https://kayurveda.co.kr/bbs/board.php?bo_table=free&wr_id=174855</a> Одним из поводов отдавать привилегию 1 или иному заведению заключается в привлекательности предлагаемых акций и даровых предложений. Безвозмездные фриспины, выдаваемые без дела создавать какой-нибудь вклад, в списке находится далеко не в конце.Как верховодило, при выводе денег, от играющего требуется лишь устроить минимальный лепта для того, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом собственный счет.
1×slots официальный сайт зеркало рабочее
Третитй бездепозитный бонус за регистрацию – денежные свои. К раскаянию, начислить рубли либо баксы готовы только знаменитые и пользующиеся клубы. С их поддержкою вас насладиться каждой доступной игрой – автоматом, рулеткой, кено, блэкджеком.Бездепозитные призы в казино без пополнения 2022 — это конкретная сумма средств или gorovyh spins вращения, которые предоставляются первым постояльцам за регистрацию на сайте казино в виде бездепозитного бонуса, и дает для вероятность с казино без пополнения опробовать предложения (игр), с дальнейшей прерогативой вывода средств при исполненьи всех установленных верховодил. Бездеп с фриспинами имеет обхватывать всю коллекцию игр на сайте либо разработки 1-го провайдера. Обычно предлагается определенный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш возможность быть выведен в такого, как пользователь отыграет эту необходимую. Возможность оценить глубокий возможностей слотов — основное совершенство этой разновидности. Игроку становятся доступны те функции, которые отсутствуют в демонстрационном режиме, а возможность выиграть настоящие средства прибавляет ярчайших азартных чувств.Сразу в активации промокода можно пользоваться даром. Как теснее упоминалось, призы случаются трёх обликов – фриспины, кредиты и фриплей-бонусы. <a href=http://www.molifan.net/space-uid-2339199.html>http://www.molifan.net/space-uid-2339199.html</a> 1× slots сайт Но рядах азартных платформах похожие гонорары имеют получить и уже зарегистрированные юзеры. В таком случае, призы предоставляются масштабах уникальных промоакций или же неким игрокам в виде акционного предложения, которое прибывает на почту с целью «возвратить» игрока в свое казино.Срок отыгрыша — это этап, кот-ый начинается в момент активации бонуса и заканчивается с его закрытием. Пользователю нужно уложиться в данный временной промежуток, иначе призовые свои аннулируются. Казино устанавливают перечень игр, ставки каких засчитываются при расчете отыгранных денег. Если тайтл не заходит в данный перечень, то ему быть недоступен для загрузки во время действия бонусного предложения.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.allampolgar.hu/showthread.php?tid=2681>1×slots официальный сайт скачать</a>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=239539>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a>
<a href=https://www.reisezielforum.de/viewtopic.php?t=354715>1×slots промокод при регистрации 2025</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В интернет-сети постоянно возможно найти списки более знаменитых и гарантированных поощрительных программ от известных онлайн-казино. В каждом казино с бездепозитным призом предусмотрены вейджеровые обстоятельства. Это один-единственный «подводный камень», кот-ый стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, нужно сделать определённое количество ставок. Чем круче бонус, тем сложнее выполнить условия, и наоборот.
#4612 AndrewNaicehttps://www.instagram.com/sellvia.dropshipping/
Check out Sellvia <a href=https://www.instagram.com/sellvia.dropshipping/>https://www.instagram.com/sellvia.dropshipping/</a> on Instagram for the hottest product ideas, store upgrades, and exclusive deals! Stay in the loop with our latest dropshipping tips and grab promo coupons to boost your business.
#4613 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
сайт казино вход porno Елизавета Туктамышева <a href=https://glvk.guru/>7k casino зеркало</a> porno Александр Соболев (футбол) казино пину <a href=https://7club7.com/>порно с Аделия Петросян (фигурное катание)</a> игры казино пари букмекерская контора порно с Илюшникова Татьяна Александровна порно с Максим Глушенков (футбол) ставки на спорт букмекерские конторы 1×bet 1хбет porno Юлия Канакина
DiskiPlus водка казино DiskiPlus промокод 1×bet <a href=https://www.diskiplus.ru>DiskiPlus про казино</a> DiskiPlus 7k casino зеркало на сегодня DiskiPlus казино фильм смотреть онлайн <a href=https://diskiplus.ru/>DiskiPlus 1×bet официальный сайт 1×bet xyz</a> DiskiPlus порно с Баталина Ольга Юрьевна DiskiPlus порно с Дарья Касаткина (теннис) DiskiPlus казино регистрации DiskiPlus 1×bet зеркало рабочее на сегодня DiskiPlus букмекерская контора леонов DiskiPlus вавада казино DiskiPlus porno Игорь Акинфеев (футбол)
#4614 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Нина Пирогова, хоккеистка porno Виктория Баркова, легкоатлетка <a href=https://res-publika.com>win win casino</a> vodka casino порно с Константин Тюкавин (футбол) <a href=https://sovsekretno.net/>порно с Федор Чалов (футбол)</a> скачать casino на андроид porno Алена Косторная (фигурное катание) скачать сайт букмекерской конторы порно с Голикова Татьяна Алексеевна скачать 1×bet 1×bet xyz порно с Максим Глушенков (футбол) casino играть
DiskiPlus как выиграть в казино DiskiPlus сайты казино <a href=https://diskiplus.ru>DiskiPlus 1×bet на андроид бесплатно</a> DiskiPlus букмекерская контора официальный сайт скачать DiskiPlus суть казино <a href=https://diskiplus.ru>DiskiPlus porno Нина Пирогова, хоккеистка</a> DiskiPlus Крючкова Полина Викторовна порно DiskiPlus casino бонус DiskiPlus официальные букмекерские конторы DiskiPlus cometa casino DiskiPlus почему в казино нет окон DiskiPlus porno Елизавета Туктамышева DiskiPlus порно с Петр Ян (ММА)
#4615 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на официальном сайте
При правильном раскладе бездепы — это отличный метод играть на средства без траты собственных средств. Есть некоторое рекомендаций, следуя которым можно извлечь максимум выгоды из похожих акций казино. Играть следует лишь на лицензированных площадках. Скриптовые сайты не накалывают с бонусными услугами, но и употребляют пиратский софт с модифицированным ГСЧ. Выиграть на этих автоматах нереально. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало</a> Суммы подобных предложений, случаев, колеблются от 3-х до 20 $, а вейджер на эти средства обязан составлять от тридцати до шестидесяти один. Зачастую, большая сумма выигрыша тут составит от одной до 2-ух сотен долларов. Если игры выиграет больше, то все средства имеют быть списанными до максимально разрешенного выигрыша. Здесь появляется смысл выводить еще несуществующие финансы на свою платежную систему и далее отыскивать заведение с подходящими под данную необходимую релоадом либо бонусом за 1-ое пополнение счета. Есть количество подвидов бездепозитного гонорары, предлагаемого наибольшим количеством заведений. <a href=https://forums.noria.com/topic/3d-visualization-excellence-transform-your-architectural-vision-into-reality>https://forums.noria.com/topic/3d-visualization-excellence-transform-your-architectural-vision-into-reality</a> Акционные предложения от казино есть в различных форматах. Часто призы даются в размен на депо. Игрок вносит платеж и получает средства, благотворительные вращения прочие одобрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — картина бонуса, кот-ый гарантирован за исполнение конкретных деяний на веб-сайте: 1×slots рабочее зеркало на сегодня <a href=http://goodjobdongguan.com/home.php?mod=space&uid=3066545>http://goodjobdongguan.com/home.php?mod=space&uid=3066545</a> Для казино, работающих онлайн, бездепозитные призы необходимы для привлечения новых посетителей. Предложение поиграть на слотах без надобности внесения настоящих средств — работающий метод для увеличения интереса к компании. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит играть в казино, лишь теперь уже на собственные деньги.Наиболее пользующиеся вознаграждения между гэмблеров – бездепозитные призы казино. Это не удивительно, как можно получить благотворительные вращения либо виртуальные кредиты, и этом не придётся пополнять счёт, рисковать собственными средствами. Удастся насладиться различными веселиями причем выиграть крупную необходимую, избегая серьёзного риска.
1хслотс регистрация в 1×slots casino
1×slos регистрация в 1×slots casino Бездепозитные призы реальными средствами, которые можно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадались.Также случаются случаи, когда казино начислит обсужденный бонус в регистрации нового клиента по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам. <a href=http://clubwings.ru/bitrix/click.php?goto=http://tekstil-pro.ru/bitrix/redirect.php?goto=http://deltabank.by/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/HLopMW09u2z>http://clubwings.ru/bitrix/click.php?goto=http://tekstil-pro.ru/bitrix/redirect.php?goto=http://deltabank.by/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/HLopMW09u2z</a> Бонус в казино без депо имеет различные вариации: это может быть приветственный приз, акции в честь каких-то праздничных или весомых дат, бонус за вербование свежих игроков, преданность и получение VIP-статуса.Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом прибыли присутствуют на данной странице. Посетитель возможность оценить условия получения и начать выступать на деньги без внесения депозита. При данном игроку важно осознавать, на каких условиях и какими способами он сможет вывести приобретенный выигрыш. Для этого нужно расценить перечень подключенных платежных систем. 1×slots рабочее зеркало
скачать 1×slots на андроид мобильная версия
<a href=http://agroinfo.biz.ua/wr_board/tools.php?event=profile&pname=expensivereside>http://agroinfo.biz.ua/wr_board/tools.php?event=profile&pname=expensivereside</a> 1×slots зеркало регистрация то дальше необходимо пройти Бездепозитные призы начисляются лишь раз один. Не стоит раскрывать новые аккаунты, чтобы получить их повторно. Служба безопасности казино непременно выявит «левого» участника и заблокирует. Если посетитель выполнит нужные притязания, отыграет собственную ставку и решит вывести личный выигрыш, то ему нужно сведению, собственно казино обязательно потребует предоставить ксерокопии собственных документов, дабы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные средства вывести не получится.Бонус начисляется игроку сразу последствии регистрации и прохождения верификации в казино и не просит от клиента внесения депозита. Как правило, объем бонуса в схожем случае довольно умеренный, впрочем дозволяет новеньким познакомиться с забавой без риска настоящими деньгами.
1×slots промокод при регистрации 2025
Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.Многие азартные клубы ограничивают необходимую вывода заработанную на призе. Сколько б Вы не выиграли, больше, указанной в описании акции, суммы Вы не можете исключить. Разница несомненно аннулирована, Вы и не сможете делать на нее ставки. Бездеп с фриспинами может охватывать всю коллекцию игр на сайте или разработки 1-го провайдера. Обычно предлагается конкретный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш возможность быть выведен в как, как юзер отыграет эту необходимую. Возможность оценить глубокий перечень слотов — главное совершенство этой разновидности. Игроку становятся доступны что, эти функции, которые отсутствуют в демонстрационном режиме, а возможность выиграть настоящие деньги добавляет ярчайших азартных чувств. 1×slots подтвердит вашу регистрацию если говорить <a href=http://198.199.122.222/doku.php?id=1win_brasil_online>http://198.199.122.222/doku.php?id=1win_brasil_online</a>
1хслотс мобильная версия зеркало
Мы подготовили перечень, где есть всегда животрепещущие и свежие бездепозитные бонусы казино, коие вам получить бесплатно. Для наших пользователей есть особые предложения неповторимые бонусы, которые вы нигде не отыщите, их мы определили особой красноватой плашкой «Exclusive».Промокод – определённая композиция знаков, коию нужно ввести в соответствующее фон при создании учетной записи или активировать в собственном профиле игрока в разделе с бонусами. Наиболее модные гонорары среди гэмблеров – бездепозитные призы казино. Это не дивно, так возможно получить безвозмездные вращения либо виртуальные кредиты, и при не придётся пополнять счёт, рисковать личностными средствами. Удастся насладиться разнообразными весельями и даже выиграть крупную необходимую, избегая серьёзного риска. <a href=http://dklada.ru/user/JeffreyMar/>http://dklada.ru/user/JeffreyMar/</a> Чем ниже велечину вейджера, что, этим проще отыграть и исключить бонус. Если Вы расчитываете заработать на бездепе, не просто ознакомиться с свежим игровым клубом, то стоит избегать бонусов с высоким вейджером их практически не реально отыграть. С ними Вы сможете лишь протестировать забавы заведения. 1×slots casino регистрация 1×slotscasino09k online
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.bedwantsinfo.nl/thread-720128.html>зеркло казино 1×slots</a>
<a href=http://kick.gain.tw/space.php?uid=4479892>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
У любого игорного клубы различные вейджеровые условия. Чтобы вы гарантировано смогли выполнить их, мы дадим несколько советов. Если система начислила небольшую сумму, надо делать великие ставки – остановитесь на 10–30 центах. Как лишь сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В неприятном случае превосходнее присмотреться к иному автомату.
#4616 AHoini
<a href=http://crjanghak.com/bbs/board.php?bo_table=free&wr_id=43385>1win</a> <a href=https://charlieyilos.blogthisbiz.com/36805569/x1slot-secrets>1×slots</a>
#4617 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало слоты 1×bet xyz vavada casino <a href=https://rucriminal.info/>kent casino</a> букмекерская контора фонбет официальный сайт casino вход <a href=https://th-royalgclub.com/>казино играть</a> букмекерская контора на андроид porno Марина Александрова бывшие казино up casino скачать порно с Константин Тюкавин (футбол) порно с Евгения Медведева, фигуристка почему в казино не бывает настенных часов
DiskiPlus casino buzz DiskiPlus 1×bet зеркало рабочее <a href=https://diskiplus.ru>DiskiPlus сайты казино</a> DiskiPlus про казино DiskiPlus пин ап casino <a href=https://diskiplus.ru/>DiskiPlus почему в казино нет окон</a> DiskiPlus porno Дарья Клишина DiskiPlus порно с Александр Большунов (лыжные гонки) DiskiPlus porno Юлия Пересильд DiskiPlus casino бездепозитный DiskiPlus приложения букмекерских контор DiskiPlus Лут Оксана Николаевна порно DiskiPlus 1×bet скачать бесплатно
#4618 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
включи казино pin casino зеркало <a href=https://th-royalgclub.com/>автомат казино</a> казино ставка порно с Арина и Дина Аверины, гимнастки <a href=https://t.me/vchkogpu_ru>лучшая казино</a> порно с Федор Чалов (футбол) приложения букмекерских контор на андроид винлайн букмекерская контора официальный порно с Диана Шнайдер (теннис) букмекерские конторы в россии пина букмекерской конторы Чулпан Хаматова
DiskiPlus фильмы казино рояль DiskiPlus порно с Алексей Миранчук (футбол) <a href=https://www.diskiplus.ru>DiskiPlus зеркала официальных сайтов казино</a> DiskiPlus 1×bet официальный слоты DiskiPlus 7k casino зеркало рабочее <a href=https://www.diskiplus.ru/>DiskiPlus Елена Лядова</a> DiskiPlus 1×bet слоты официальный сайт DiskiPlus лучшая казино DiskiPlus casino DiskiPlus porno Александра Степанова, фигуристка DiskiPlus порно с Гатагова Ольга Анатольевна DiskiPlus 1×bet 1 DiskiPlus 1×bet 1хбет
#4619 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать сайт букмекерской конторы 1×bet зеркало рабочее на сегодня <a href=https://rhymes-punches.com/>сайт pin up casino</a> 1×bet скачать приложение 1×bet официальный 1×bet xyz <a href=https://www.ossetia.tv/>суть казино</a> ставки на спорт букмекерские конторы приложения букмекерских контор порно с Федор Чалов (футбол) порно с Дарья Касаткина (теннис) Лут Оксана Николаевна порно порно с Евгения Медведева, фигуристка 1×bet зеркало слоты
DiskiPlus фильмы казино рояль DiskiPlus симулятор казино <a href=https://www.diskiplus.ru>DiskiPlus 1×bet официальный</a> DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz DiskiPlus casino актуальное зеркало <a href=https://www.diskiplus.ru>DiskiPlus букмекерская контора</a> DiskiPlus лучшие бесплатные онлайн казино DiskiPlus промокод 1×bet DiskiPlus casino сайты DiskiPlus Матвиенко Валентина Ивановна порно DiskiPlus порно с Константин Тюкавин (футбол) DiskiPlus porno Анна Сидорова, керлингистка DiskiPlus ап казино
#4620 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее на сегодня
Можно. Вы практически можете отказаться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не создадите ставку.Даже не выиграв крупную необходимую, игрок интересно проведет время, изнутри выучит работу площадки, воспримет геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе превосходнейших промоакций с. Достаточно регулярно учить перечень новых интернет казино с выводом приза без депозита в этом разделе. <a href=http://filmkachat.ru/>1× slots casino официальный сайт</a> <a href=https://joyrulez.com/blogs/23638/Mastering-the-Art-of-Interior-Design-Layout-From-Concept-to>https://joyrulez.com/blogs/23638/Mastering-the-Art-of-Interior-Design-Layout-From-Concept-to</a> Кешбэк-бонус представляет собой возврат фиксированного процента от ставки если, тогда, поражения либо же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не превышает 10%. 1хслот 1хслотс регистрация перейти на 1×slots <a href=https://magadan-mebel.ru/forum/user/442/>https://magadan-mebel.ru/forum/user/442/</a> Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Вы наверняка, например все любите получать презенты и бездепозитные бонусы казино. Игорные жилища взяли в привычку одаривать гэмблеров приятными призами. Стать обладателем приветственного подарка можно за творение профиля или пополнение счёта. Второй вариант больше интересный, ведь клубы готовы удвоить депо! Но если вы новичок и только знакомитесь с миром пыла, чем пользуйтесь призом за регистрацию.
1×slots официальный сайт зеркало
<a href=http://moneysweet.listbb.ru/memberlist.php?mode=viewprofile&u=6851>1 х слотс зеркало</a> 1×slots официальный сайт скачать Oтыгpaть бонус с указанным вeйджepом, для этого необходимо сдeлaть cтaвoк нa cумму, превышающую размер приза в количество раз.Маркетинговая деятеля всех игорных интернет-клубов обязана носить разнообразный характер. И если вознаграждения на депозит служат чтобы, чтобы, дабы стимулировать заносить депозиты и поощрять уже имеющих пользователей, то бездепозитный приз в казино либо бонус за регистрацию в казино, прежде всего, рассчитан на расширение базы потребителей. <a href=http://www.ocide.org/forum/index.php?action=profile;u=16720>http://www.ocide.org/forum/index.php?action=profile;u=16720</a> 1х слот 1хслотс регистрация перейти на 1×slots Да, у бесплатных призов есть дефекты. Прежде всего, они обычно большие. Кроме такого, обстоятельства вейджера по ним постоянно строгие. Но все неименье риска проделывает их очень привлекательными для посетителей.
x1 slots регистрация в 1×slots casino
Вышеописанная первопричина и считается основным интересным, следствии которого операторы отдают доля своей выгоды на различные маркетинговые расходы и маркетинговые кампании. А самым действующим здесь будут играть именно бездепозитные призы казино 2022 с выводом за регистрацию.Превышение наибольшей ставки при отыгрыше. Система автоматически не предостерегает о превышении ставки, потому о несоблюдении верховодил игрок имеет узнать уже в подачи запроса на вывод средств. <a href=http://bocauvietnam.com/member.php?1481386-KennethRut>http://bocauvietnam.com/member.php?1481386-KennethRut</a> 4. Заберите подарок. Чаще всего бонус активируется сразу после регистрации. Но посещают истории, когда нужно забежать в индивидуальный кабинет либо написать в службу поддержки.Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша бонусов. Заведения всегда устанавливают наивысшую ставку, допустимую по условиям вейждера. зеркло казино 1×slots Онлайн-казино тщательно продумывают бонусные условия, коие необходимо изучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и ограничения.
1хслотс мобильная версия зеркало
В некоторых интернет казино для получения бездепозитных призов не довольно просто зарегистрироваться на веб-сайте клуба и доказать средства контактные данные. Дополнительно потребуется активация промокода. <a href=https://australianwinerytours.com/tours/showthread.php?tid=203300>зеркло казино 1×slots</a> Ниже указан актуальный перечень легальных казино в Беларуси с призами на первый депо. Вы можете попасть на официальный сайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз. Обычно для получения бонусов без депо, казино выдвигает приклнные и вполне выполнимые условия, но есть ряд деяний которые воспрещены и шансы повлечь за собой досадные последствия: 1×slots casino зеркало <a href=https://www.bmwcoding.com/member.php?134418-Henryvor>https://www.bmwcoding.com/member.php?134418-Henryvor</a> Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и более. Когда игроку полагается количество фриспинов, администрация может разбивать их начисление на некоторое дней. Бесплатные вращения предоставляются для определенного слота, кот-ый указывается в правилах акции.Предложения с бездепозитными бонусами за регистрацию дозволяют новым заведениям заинтересовать аудиторию на собственный вебсайт. А игроки в свою очередь получают вероятность играть на реальные средства без депо в казино и заработать небольшой стартовый капитал, который разрешено вывести на карту банка либо электронный кошелек.
1×slots зеркало рабочее
На странице представлены бездепозитные бонусы за регистрацию в казино редчайшая заслуга за коей гонятся все игроки как новички, так и профессионалы. Мы также уделяем огромное внимание на наличие бонусов при составление рейтинга казино на средства. Бездепозитный приз это вероятность выступать безвозмездно и выиграть реальные средства. Такие одобрения разрешают бесплатно протестировать новое казино, разобраться с игровым процессом онлайн слотов, заработать и вывести маленькую сумму средств. <a href=https://uadplugins.club/memberlist.php?mode=viewprofile&u=173405>https://uadplugins.club/memberlist.php?mode=viewprofile&u=173405</a> Если площадка презентует бездеп за регистрацию, то процедура его получения ординарна. Нужно только ввести аккаунт на сайте и активировать его, подтвердив адресок электронной почты, номер телефона или иные данные, коие требует оператор. Перед этим нужно увериться, что пользователь находится на официальном веб-сайте казино, а не на мошеннической площадке. 1×slots casino регистрация на сайте Если ординарными словами, бездепы – это определённая сумма денег либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать презенты. Но есть некоторые аспекты. Существуют игорные жилища, которые перед что, этим как начислить призы просят привязать аппарат, дать копии документов.
<b>Смотреть еще похожие новости:</b>
<a href=https://your-portal.at.ua/forum/20–63222–2#88501>1хслот скачать</a>
<a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=13119>1хслотс рабочее зеркало</a>
<a href=http://smpn1bejen.sch.id/forum/>1×slots регистрация на 1хслотс</a>
<a href=http://vn-info.net/user/Josephkam/>1×slots зеркало видели такую регистрацию на</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Главным моментом в возникновении данных вознаграждений произведено в, собственно пустив их в ход, игры ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он спасибо призам какой-либо выигрыш либо мгновенно спустит все только что прибывшие деньги). То есть, казино снабжает игрока вероятностью на дармовой базе играть во различные слоты даже спонсирует забаву. Получить приветственный бонус имеют лишь свежие посетители онлайн-казино. Способы описаны в условиях акции любого законного казино, чаще всего это:
#4621 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
7k casino бонус ешь казино <a href=https://repost.news/>1×bet слоты официальный сайт</a> Крючкова Полина Викторовна порно порно с Гатагова Ольга Анатольевна <a href=https://res-publika.com>казино смотреть онлайн</a> porno Юлия Канакина, скелетонистка 7k casino официальный сайт бесплатно играем казино Петрова Ольга Викторовна порно порно с Евгения Медведева, фигуристка пин ап казино порно с Варвара Субботина
DiskiPlus porno Яна Троянова DiskiPlus скачать букмекерскую контору на андроид <a href=https://www.diskiplus.ru>DiskiPlus casino зеркало сегодня рабочее</a> DiskiPlus porno Андрей Рублев (теннис) DiskiPlus казино сегодня <a href=https://www.diskiplus.ru>DiskiPlus 1×bet на сегодня</a> DiskiPlus казино гта 5 DiskiPlus 1×bet рабочее DiskiPlus casino pin официальный DiskiPlus 1×bet регистрация DiskiPlus букмекерская контора на андроид DiskiPlus casino регистрации DiskiPlus Петрова Ольга Викторовна порно
#4622 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало
На страничке представлены бездепозитные призы за регистрацию в казино редкая заслуга за которой гонятся все игроки как новички, так и профессионалы. Мы тоже уделяем большое внимание на присутствие бонусов при формирование рейтинга казино на деньги. Бездепозитный бонус это вероятность играть безвозмездно и выиграть реальные деньги. <a href=http://filmkachat.ru/>1×slots официальный demo регистрация в 1×slots casino</a> Создание аккаунта. На сайте казино нужно обнаружить регистрационную форму и наполнить пустопорожние поля собственными данными. Иногда на данном этапе потребуется указать лишь адресок электронной почты и пароль, хотя чаще хотелось заполнить анкету персональной информацией (ФИО, дата рождения, место проживания и т.д. ). Нужно свидетельствовать только настоящие данные, потому впоследствие они будут испытаны. <a href=https://www.empowher.com/groups/blogs-4/posts-33>https://www.empowher.com/groups/blogs-4/posts-33</a> 1×slots зеркало <a href=https://forum.papbio.org/member.php?action=profile&uid=86180>https://forum.papbio.org/member.php?action=profile&uid=86180</a> Ниже указан важный список легальных казино в Беларуси с бонусами на первый депозит. Вы можете попасть на официальный сайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус.Для выбора азартного заведения Вы можете воспользоваться списком наших казино с призами за регистрацию. На нашем сайте мы выпустили список бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, что часть бонусов эксклюзивные и доступны только для посетителей нашего вебсайта по-специальному промо-коду либо по уникальной ссылке. Кроме такого, для каждого бонуса мы подготовили доскональный обзор, каком Вы узнаете как получить и отыграть поощрение и как исключить свой выигрыш с бездепа.
1×slots зеркало регистрацию более популярный вариант это
<a href=http://maddog-server.org/forum/showthread.php?tid=47499&pid=166720#pid166720>1×слотс казино</a> 1×slots сайт <a href=http://www.tiendahinchables.com/blog/%D0%BD%D0%BE%D0%B2%D1%8B%D0%B9-%D1%81%D0%B5%D1%80%D0%B2%D0%B8%D1%81-%D0%B4%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B8-%D0%BF%D0%B8%D1%86%D1%86%D1%8B-%D0%BD%D0%B0-%D0%B4%D0%BE%D0%BC-%D0%BE%D1%82-%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0-mucho.html>http://www.tiendahinchables.com/blog/%D0%BD%D0%BE%D0%B2%D1%8B%D0%B9-%D1%81%D0%B5%D1%80%D0%B2%D0%B8%D1%81-%D0%B4%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B8-%D0%BF%D0%B8%D1%86%D1%86%D1%8B-%D0%BD%D0%B0-%D0%B4%D0%BE%D0%BC-%D0%BE%D1%82-%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0-mucho.html</a> Популярность интернет казино растёт и всё больше пользователей начинают интерес азартными забавами. Бездепозитные призы 2022 года, это оригинальные презенты за регистрацию. С их подмогою свежие игроки шансы получить благотворительные вращения или средства на баланс за 1 регистрацию. С свет игорных заведений в онлайне, бездепозитные призы стали моднейшим способом вербования игроков. Подобные акции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш сайт собрал превосходнейшие предложения из интернета на 2022 год. Воспользуйтесь хоть презентом и сможете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить обстоятельства.Условия все различаться приятель от приятеля. Но подобный бонус имеет быть использован лишь для игрового процесса – полученные на счет деньги до такого, как станут отыграны, вывести нереально. 1×slots сайт
1×slots зеркало сайта
Самый распространённый из похожих бонусов, конечно же, бездеп на день рождения посетителя — приз в виде фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им можно протяжении установленного периода времени.Автоматы неспроста считаются наиболее известным азартным развлечением. Чтобы усвоить управление и управляла, понадобится всего несколько минут. Ваша задача сделать ставку, найти количество рабочих линий и возможно крутить барабан. Если дисплее выпадет выигрышная комбинация – вы выиграли! С этой задачей вас помогут управится бездепозитные призы казино. <a href=https://studypatent.com/bbs/board.php?bo_table=free&wr_id=816147>https://studypatent.com/bbs/board.php?bo_table=free&wr_id=816147</a> Стоит отметить, что бездепозитный приз выдается только совершеннолетним новичкам, которые, же, шансы пригласить собственных друзей и знакомых, также претендующих на поощрительную программку преданности. Подобная технология появилась среди конкуренцию онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры содействуют увеличению своей посещаемости, методом вербования свежих игроков. Бонусы – это оригинальный шанс для потенциальных соучастников забавы, которые имеют опробовать софт покер рума и увериться, станут ли они в него выступать или нет. Новый игрок испробует свои силы с реальными оппонентами в казино. зеркала 1×slots Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются сразу последствии творения профиля и активны непродолжительное время. Если не успеете израсходовать средства, они попросту сгорят. Касаемо времени, в большинстве случаев бонусы активны на часа.
1×slots официальный сайт мобильная версия скачать
<a href=https://koreanstudies.com/forum/viewtopic.php?t=129582>1хслотс регистрация в 1×slots casino</a> Несмотря на то, что этот вариант стимуляции со стороны азартных платформ довольно востребован в похожих игр, далековато многим почитателям казино известно, что сами бездепозитные бонусы казино и как именно их возможно эксплуатировать. Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских рублей. В условиях промоакции указано, собственно вейджер бездепозитного бонуса х20. Поэтому, чтобы отыграть бонус, игроку будет необходимо сделать ставок на 35*20=700 рублей.Выбор каждого интернет казино на нашем сайте. В описании к любому Вы можете узнать, собственно получите за творенье аккаунта. 1×slots промокод при регистрации 2025 <a href=http://mehfeel.net/mehfeel/blogs/post/25647>http://mehfeel.net/mehfeel/blogs/post/25647</a> Бoльшинcтвo азартных заведений выдвигают приблизительно однообразные, схожие условия и требования, коие нужно выполнить, чтобы получить бездепозитный приз за регистрацию. Все их возможно объединить в один перечень:
1×slot регистрация
Также посещают случаи, когда казино начислит обсужденный бонус после регистрации свежего клиента по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам. Бездепозитные бонусы за регистрацию в игровых автоматах для хозяев онлайн-казино являются долею рекламной кампании, направленной на повышение аудитории вебсайта. Так они продвигают свои бренды и привлекают свежих клиентов. <a href=https://uberant.com/article/2027837-the-art-of-professional-rendering-services/>https://uberant.com/article/2027837-the-art-of-professional-rendering-services/</a> Фриспины предназначены для применения в видео слотах. Внимательно ознакомьтесь с условиями – частенько их выдают на некоторые автоматы. В зависимости от клуба, у вас получится устроить определённое количество ставок. Кстати, продвинутые игорные дома разрешают запускать любых «одноруких злодеев». 1×slots зеркало быструю регистрацию а также мгновенное Как и акции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения являются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих гостей и разрешает им составить впечатление о функционале, не рискуя вескими суммами.
<b>Смотреть еще похожие новости:</b>
<a href=https://dev.eff.one/member.php?action=profile&uid=904>зеркала 1×slots</a>
<a href=https://astraclub.ru/album.php?albumid=237268>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Срок активации и время на отыгрыш. Зачисление денег либо фриспинов случается при активации на взыскательно ограниченного периода, похожие требования предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать бонус количество дней либо и месяцов. Другие выдают крупную необходимую за регистрацию, но время отыгрыша ограничивают несколькими часами с неоправданно высоким вейджером.
#4623 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Петрова Ольга Викторовна порно порно с Абрамченко Виктория Валериевна <a href=https://slon-ru.com/>сайт казино зеркало</a> букмекерская контора фонбет официальный 1×bet официальный 1×bet xyz <a href=https://th-royalgclub.com/>лучшие бесплатные онлайн казино</a> лучшие бесплатные онлайн казино порно с Матвей Сафонов (футбол) спорт букмекерская контора casino betting ограбление казино порно с Юлия Ефимова, пловчиха porno Дарья Мороз
DiskiPlus Анна Михалкова DiskiPlus casino <a href=https://diskiplus.ru>DiskiPlus 7k casino скачать</a> DiskiPlus casino DiskiPlus Юдаева Ксения Валентиновна порно <a href=https://diskiplus.ru/>DiskiPlus pin up casino top top</a> DiskiPlus cat casino DiskiPlus casino рабочее DiskiPlus казино онлайн бесплатно DiskiPlus Анна Михалкова DiskiPlus porno Юлия Канакина DiskiPlus слоты казино DiskiPlus порно с Каролина Севастьянова
#4624 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало
На бонусные начисления могут быть установлены дополнительные ограничения, которые Вы не сведению при отыгрыше. Пока бонус полностью не отыгран — деньги из казино не выводятся. <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino 56 online</a> Третитй бездепозитный бонус за регистрацию – валютные средства. К сожалению, начислить рубли либо доллары готовы лишь известные и модные клубы. С их подмогою у насладиться каждой доступной игрой – автоматом, рулеткой, кено, блэкджеком. <a href=https://divisionmidway.org/jobs/author/archicgi-com/>https://divisionmidway.org/jobs/author/archicgi-com/</a> Каждая игровая перрон выделяется критериями по получению и отыгрышу бездепов. В правилах отчетливо расписаны временные рамки, за которые надо(надобно) прокрутить вейджер. Также не запамятовывайте про наибольший размер ставки и максимальную необходимую выплаты. С иной стороны, чтобы получить бездепозитные призы казино, достаточно израсходовать не более 1 минуты.Фриспины без депозита либо вспомогательные свои посодействуют поближе познакомиться с игровой платформой и её функциями. За счёт подарков можно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за игры против живых крупье. 1×slot зеркало рабочее регистрации на телефон придет <a href=https://www.9tj.net/home.php?mod=space&uid=268163>https://www.9tj.net/home.php?mod=space&uid=268163</a> Верификация аккаунта. Лучше доказать личность незамедлительно в регистрации, дабы потом не было заморочек с выводом денег. Верификация имеет протекать 2-мя способами:Варианты выигрыша зависимости от Вашей успеха и условий игорного портала. Выше мы заявили, собственно некоторые бездепозитные бонусы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются другие, все, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на деньги, возможно выиграть неописуемые суммы. Сегодняшние игровые автоматы либо видео слоты, как их называют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые множат ставку от х100.000.
1×slots зеркало сайта
Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, чтобы замечена вероятность исключить выигрыш. <a href=http://www.carshowsociety.com/forum.php/topic,11220.new.html#new>1×slots официальный зеркало</a> 1×slot регистрация Прежде всего, не забывайте периодически заглядывать на страницу обзоров бездепозитных бонусов. Они шаг за шагом разглядывают наиболее интересные предложения ведущих игорных порталов. <a href=http://www.insem.co.kr/gn/bbs/board.php?bo_table=free&wr_id=801658>http://www.insem.co.kr/gn/bbs/board.php?bo_table=free&wr_id=801658</a> сайт 1× slots casino Прибывшие на аккаунт деньги бездепозитные призы предназначаются, в, только для свежеиспеченных пользователей, которые ранее не имели собственного аккаунта в данном казино. Исходя из этого, если ранее у игрока был изготовлен депо, то, по всей вероятности, у него больше не будет возможности рассчитывать на получение такового приза в конкретном заведении.К раскаянию, нет. Почти все казино, настоятельно внесение но бы одного минимального депо для вывода выигрыша с бездепозитного бонуса. Также учитывайте, что вывести средства разрешено только на что, эту платежную систему, с которой был изготовлен депозит.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
<a href=http://www.sg588.tw/home.php?mod=space&uid=522487>http://www.sg588.tw/home.php?mod=space&uid=522487</a> Бывают ли бездепозитные призы без вейджера? Бывают, в у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный приз за регистрацию устанавливается вейджер во всех казино. 1×slots регистрация
1× slots регистрация в 1×slots casino
<a href=https://nztw.org/home.php?mod=space&uid=43957>1хслот официальный сайт зеркало</a> Такие поощрения разрешают безвозмездно протестировать свежее казино, разобраться с игровым процессом интернет слотов, заработать и исключить маленькую сумму денег. Как правило, при выводе финансов, от играющего потребуется только устроить наименьший вклад для того, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом личный счет. скачать 1×slots на андроид мобильная версия <a href=https://stroyotzyvy.org/user/Jasperjag/>https://stroyotzyvy.org/user/Jasperjag/</a>
1×slots зеркало сайта
Зарегистрируйтесь. Для регистрации чаще всего довольно ввести свой номер телефонного и почтовый адресок, последствии чего установить полученный код из СМС. Возможно, потребуется указать промокод. В правилах акции будет написано, где его надо включать. Иногда это надобно создавать при регистрации, время — теснее последствии творенья собственного офиса, на отдельной страничке. <a href=http://metodkabinet.bolimi.kz/user/Edwardfoock/>http://metodkabinet.bolimi.kz/user/Edwardfoock/</a> Составленный знатоками Casino.ru список онлайн-казино с бездепозитным бонусом разрешает игрокам сопоставить спецпредложения разных операторов.Для казино, работающих интернет, бездепозитные бонусы необходимы для привлечения свежих посетителей. Предложение поиграть на слотах без надобности внесения настоящих денег — работающий способ для повышения интереса к компании. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит играть в казино, только сейчас теснее на собственные деньги. 1× slots официальный
<b>Смотреть еще похожие новости:</b>
<a href=http://skatefluckit.com/member.php?u=149708>казино 1×slots официальный сайт</a>
<a href=https://masstr.net/showthread.php?tid=85301>1×slots казино мобильная версия</a>
<a href=https://www.reisezielforum.de/viewtopic.php?p=447862#p447862>1×slots скачать на айфон</a>
<a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=768164>1×slots зеркало сайта</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Индивидуальные одобрения выдаются за совершение деяний: подписку на аккаунты площадки в социальных сетях, установку мобильного приложения либо официального клиента для ПК. В большинстве казино действуют программки лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий уровень часто сопрягается выдачей бездепа. Нет. Для получения бездепозитного бонуса в казино необходима обязательная регистрация на сайте. Играть в слоты даром и без регистрации возможно лишь в демо режиме.
#4625 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
фреш казино black russia казино <a href=https://kompromat1.online/>букмекерская контора фонбет официальный сайт</a> порно с Артемий Панарин (хоккей) casino вход <a href=https://vestnik-jurnal.com/>сайт pin up casino</a> porno Юлия Канакина букмекерская контора на андроид фильмы казино рояль 1×bet порно с Евгения Медведева леон букмекерская контора porno Александр Соболев (футбол)
DiskiPlus porno Игорь Акинфеев (футбол) DiskiPlus Нургалиева Эльвира Рамиловна порно <a href=https://diskiplus.ru>DiskiPlus 1×bet 1хбет</a> DiskiPlus cat casino DiskiPlus казино проиграл <a href=https://www.diskiplus.ru/>DiskiPlus pin up casino пин</a> DiskiPlus казино рублях DiskiPlus кент casino DiskiPlus 1go casino DiskiPlus гта казино DiskiPlus порно с Аделия Петросян (фигурное катание) DiskiPlus 1×bet официальный xbet DiskiPlus порно с Варвара Субботина
#4626 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
кент casino казино фильм <a href=https://t.me/vchkogpu_ru>реального казино</a> скачать 1×bet на андроид бесплатно фильмы казино рояль <a href=https://sovsekretno.net/>букмекерская контора фонбет официальный сайт</a> порно с Евгений Малкин (хоккей) 1×bet официальный xbet лучшие онлайн казино Валентина Матвиенко порно порно с Евгения Медведева казино ставка casino андроид
DiskiPlus винлайн букмекерская контора официальный сайт DiskiPlus 1×bet на андроид <a href=https://diskiplus.ru/>DiskiPlus мобильные букмекерские конторы</a> DiskiPlus 1×slots casino DiskiPlus порно с Георгий Джикия (футбол) <a href=https://diskiplus.ru/>DiskiPlus Скоробогатова Ольга Николаевна порно</a> DiskiPlus сайт казино вход DiskiPlus пинап казино DiskiPlus порно с Зырянова Анастасия Владимировна DiskiPlus демо казино DiskiPlus 1×bet бесплатно DiskiPlus 1×bet скачать приложение на андроид DiskiPlus букмекерская контора на андроид
#4627 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало сайта
Возьми свой подарок. Чаще всего бонус активируется незамедлительно в регистрации. Но бывают ситуации, когда нужно забежать в личный кабинет либо написать в справочную службу.Самые модные способы вывода средств ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электрическим платежным системам на Neteller и Skrill, а используют криптовалютными кошельками. Вывод выигрышей имеет осуществляться быстро или занимать от нескольких часов до нескольких суток. <a href=http://filmkachat.ru/>1×slots зеркало регистрация то дальше необходимо пройти</a> <a href=https://www.swiatobrazu.pl/forumgaleria/thread/view/id/590>https://www.swiatobrazu.pl/forumgaleria/thread/view/id/590</a> Онлайн-казино с бездепозитными бонусами ставят посетителям обстоятельства для пользования бездепами, потому перед ролью в промоакции другого, как досконально ознакомиться со всеми правилами и нюансами промоакции. Условия шансы касаться получения приза, его использования и следующего вывода валютных средств когда выигрыша. казино 1×slots официальный сайт <a href=https://www.theexeterdaily.co.uk/users/richardcap>https://www.theexeterdaily.co.uk/users/richardcap</a> Акционные предложения от казино есть в различных форматах. Часто бонусы даются в обмен на депо. Игрок заносит платеж и получает средства, благотворительные вращения и поощрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — вид приза, кот-ый гарантирован за выполнение конкретных действий на веб-сайте:
1×slots casino online регистрация
Возьми свой презент. Чаще всего приз активируется сразу в регистрации. Но бывают ситуации, когда нужно зайти в личный кабинет либо написать в справочную службу. 1×slots официальный сайт зеркало <a href=https://onecooldir.1directory.org/details.php?id=287245>https://onecooldir.1directory.org/details.php?id=287245</a> В случае установленного лимита на необходимую вывода выигрыша с бездепозитного бонуса, игрок не может исключить больше заявленной суммы. 1×slots регистрация 1×slotscasino09k online
1×slots зеркало видели такую регистрацию на
На данном разделе портала периодически публикуются обзорные статьи, каких рассматриваются бесплатные призы лучших интернет-казино. Информация структурирована по нескольким пт, включая основные: <a href=http://www.airsoft44.com/forum/index.php?action=profile;u=9948>http://www.airsoft44.com/forum/index.php?action=profile;u=9948</a> сайт 1× slots casino В интернет-сети всегда возможно найти списки более известных и обещанных поощрительных программ от известных онлайн-казино.Нельзя рассматривать игру на деньги, как вариант заработка. Азартные забавы запрещены для лиц младше 18 лет. Topcasinobonuses.mobi классифицируется зачинщиком азартных игр. Сайт носит информационный характер.
1×slots зеркало рабочее на сегодня
Например, игрок получил 500 рублей при разработке аккаунта и должен отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., потребуется сделать 875 спинов для полного отыгрыша.Некоторые онлайн-казино без депо предлагают новым посетителям избрать бонус при регистрации. Будьте внимательны: выбрав один, вы в безусловном большинстве случаев не можете пользоваться остальными. Обычно показатель выше, чем для призов на депо. Не удивляйтесь, если он несомненно числе х100. Иногда завышенный коэффициент вейджера устанавливается для обитателей отдельных стран.Как лишь на виртуальном счету окажутся бонусные свои, поторопитесь отыграть вейджер. Сразу после сего можно оставить заявку на вывод выигрыша. Кредиты прибыльно отличаются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом настоящих средств и выделяют вероятность почувствовать азарт. Во-вторых – возможно насладиться каждой азартной забавой доступной на сайте. В вашем постановлении находятся автоматы, настольные прибавленье, видео-покер, Live-дилеры. 1×slots зеркало сайта <a href=https://www.sex8.zone/home.php?mod=space&uid=9303288&do=profile>https://www.sex8.zone/home.php?mod=space&uid=9303288&do=profile</a> Максимальная ставка ? уточняется в еденице счета и ограничивает объем ставки за один спин. В случае ее превышения приз может быть аннулирован. Также в правилах может содержаться запрет на размещение ставок конкретного облика, примеру, по одинаковым шансам в рулетке (то есть, на чет или нечет, красноватое или темное и т.д.).Фриспины начисляются по конкретной ставке. После их активации игроку необходимо запустить разъем и увериться, собственно в нем отображаются безвозмездные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода последствии отыгрыша определяется оператором и редко превышает 5 000 руб.
1×slots бонус за регистрацию
Шаг 4. Активация. Внимательно исследуйте условия, информацию по лимитированиям и сроке деяния бонусного предложения. Разобравшись с правилами, можно активировать бонус в личном офисе (время ? с использованием промокода) или по запросу в саппорт. На условиях отыгрыша безвозмездных призов следует остановиться подробнее. С ними связаны нюансы, которые нельзя оставить без внимания. <a href=http://www.dronetr.net/forum/memberlist.php?mode=viewprofile&u=85749>http://www.dronetr.net/forum/memberlist.php?mode=viewprofile&u=85749</a> 1×slots регистрация то дальше необходимо пройти Бездепозитный бонус казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в данном и содержится главное различие.
<b>Смотреть еще похожие новости:</b>
<a href=http://powercrop.it/chi-siamo/le-persone?page=24#comment-1234>1×slots официальный сайт скачать</a>
<a href=http://b2s.bulwork.com/node/1581?page=83#comment-22672>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бывают ли бездепозитные бонусы без вейджера? Бывают, случае у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный приз за регистрацию устанавливается вейджер во всех казино.
#4628 Ремонт холодильников Smeg Москваhttps://remont-holodilnikov-smeg-tent.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт холодильников smeg сервис, можете посмотреть на сайте: <a href=https://remont-holodilnikov-smeg-tent.ru/>ремонт холодильников smeg рядом</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#4629 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать 1×bet на андроид бесплатно ставки на спорт букмекерские конторы <a href=https://rhymes-punches.com/>pin casino зеркало</a> Мухтиярова Елена Вячеславовна порно суть казино <a href=https://rumafia.news/>1×bet зеркало xbet</a> казино вход vavada casino porno Анна Сидорова, керлингистка Скоробогатова Ольга Николаевна порно 1×slots casino casino онлайн casino бонус
DiskiPlus Валентина Матвиенко порно DiskiPlus казино в россии <a href=https://www.diskiplus.ru/>DiskiPlus порно с Елена Никитина, скелетонистка</a> DiskiPlus пин ап casino pin DiskiPlus Матвиенко Валентина Ивановна порно <a href=https://diskiplus.ru>DiskiPlus вавада казино</a> DiskiPlus porno Илья Ковальчук (хоккей) DiskiPlus официальное казино вход DiskiPlus порно с Артемий Панарин (хоккей) DiskiPlus порно с Голикова Татьяна Алексеевна DiskiPlus сайты казино DiskiPlus казино смотреть DiskiPlus игры казино
#4630 AHoini
<a href=https://spencerdlqtw.idblogz.com/31053479/lemon-casino-kod-promocyjny-things-to-know-before-you-buy>lemon casino</a> <a href=https://krbda.co.kr/bbs/board.php?bo_table=free&wr_id=651877>lemon casino</a>
#4631 Ремонт холодильников Smeg Москваhttps://remont-holodilnikov-smeg-tent.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт холодильников smeg сервис, можете посмотреть на сайте: <a href=https://remont-holodilnikov-smeg-tent.ru/>ремонт холодильников smeg цены</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#4632 AHoini
<a href=https://vds83727.blogofoto.com/61716739/5-simple-techniques-for-bc-game-casino>bc.game casino</a> <a href=https://howbarely.biz/2024/10/06/advanced-betting-tips-for-1win-kenya>1win kenya</a>
#4633 AHoini
<a href=https://jilava.regis-online.ro/?q=ro/node/575523>vavada</a> <a href=http://tuttopavimenti.com/1win-app-download-para-android-apk-e-ios-versao-alem-disso-recente/>1win casino moçambique</a>
#4634 JamesFichttps://lordserial5.pet
смотреть сериал серии подряд хорошем <a href=https://lordserial5.pet/>https://lordserial5.pet</a>
#4635 Georgedumhttps://lordsserials.org
смотреть сериалы подряд без рекламы <a href=https://lordsserials.org/>https://lordsserials.org</a>
#4636 Georgenoxhttps://lordseriall6.org
смотреть сериалы 2022 сезон <a href=https://lordseriall6.org/>https://lordseriall6.org</a>
#4637 AHoini
<a href=https://jaidenlcxde.get-blogging.com/31027929/the-smart-trick-of-vavada-casino-that-no-one-is-discussing>vavada slovenija</a> <a href=https://vds29382.buyoutblog.com/30530831/about-1win-online-korea>1win korea</a>
#4638 Stephenvalhttps://track-casinos.online
Хотите почувствовать азарт? <a href=https://track-casinos.online/>сайт arkada casino</a> предлагает широкий выбор игр, честную систему выигрышей и мгновенные выплаты. Захватывающие слоты и бонусы ждут вас!
#4639 AHoini
<a href=https://vps38372.onzeblog.com/30486913/a-secret-weapon-for-1win-bet>1win romГўnia</a> <a href=https://peasconsulting.com/2024/10/10/bonus-ilman-talletusta-nettikasinoilla-vuonna-2024/>vavada casino Suomi</a>
#4640 Charlesgunnyhttp://filmkachat.ru
1×slots официальный demo регистрация в 1×slots casino
Как верховодило, при выводе денег, от играющего требуется только устроить минимальный лепта чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом собственный счет.Индивидуальные поощрения выдаются за совершение действий: подписку на аккаунты площадки в соц сетях, установку мобильного прибавленья либо официального клиента для ПК. В большинстве казино срабатывают программки лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий степень часто сопровождается выдачей бездепа. <a href=http://filmkachat.ru/>casino 1×slot</a> Для получения приза надо(надобно) пригласить в забаву свежего клиента. Казино начисляет пригласившему фиксированный процент от взносов приглашённого в виде приза: почаще всего его размер не превышает 10%. Срок деяния приза правило не выше месяца: пригласивший получает приз зависимо проигранных ставок приглашённого в 1-ый луна игры.Когда речь идет о получении бездепозитных призов в казино, в первую очередь обратите внимание на последующие условия: <a href=https://forum.highlite.com/showthread.php?tid=1882>https://forum.highlite.com/showthread.php?tid=1882</a> Практически все онлайн казино с бездепозитным призом за регистрацию предусматривает программу лояльности — систему поощрения неизменных клиентов, кот-ая произведено из большого значений. При достижении игроком одного значения на его счёт поступает бонус. Чем выше уровень — что, этим щедрее приз. 1х слот регистрация в 1×slots casino <a href=http://otdel.com.ua/index.php?subaction=userinfo&user=needlessgala39>http://otdel.com.ua/index.php?subaction=userinfo&user=needlessgala39</a>
1×slot казино зеркало
Пoдтвepдить личнocть клиента. Для успешного вывода средств, необходимо подтвердить личность посетителя. Нa этaпe вepификaции пpoфиля, работники службы безопасности обязаны увериться, что у игрока всего лишь раз акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не сможет исключить собственный выигрыш, в у него несомненно несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы. <a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=889615>рабочее зеркало 1×slots</a> 1×slots зеркало проходить регистрацию это отличный вариант Бездепы имеют входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами.Максимальная ставка ? устанавливается в денежной счета и ограничивает объем ставки за раз спин. В случае ее превышения приз возможность быть аннулирован. Также в правилах может содержаться запрет на размещение ставок определенного облика, к, по равным шансам в рулетке (словами, на чет либо нечет, красноватое или темное и т.д. ). <a href=http://www.bxbshop.co.kr/bbs/board.php?bo_table=free&wr_id=193908>http://www.bxbshop.co.kr/bbs/board.php?bo_table=free&wr_id=193908</a> В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с безвозмездных вращений. Прибыль, коию Вы заработаете на таком бездепе возможно ставить на вывод без какого или отыгрыша. 1хслотс официальный сайт зеркало
1×slots регистрация на 1хслотс
На нашем веб-сайте Вы найдете список своевременных новых бездепозитных бонусов в казино 2022 года. Также, есть количество эксклюзивных предложений, которые доступны только посетителям нашего сайта последствии регистрации по нашей ссылке либо активации особого промокода.Пoдтвepдить личнocть клиента. Для успешного вывода средств, нужно доказать личность посетителя. Нa этaпe вepификaции пpoфиля, сотрудники службы безопасности должны увериться, что у игрока чем один аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не сможет исключить собственный выигрыш, если у него будет несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы. <a href=https://creator-fatum.com/forum-taro/topic/vykup-avto/>https://creator-fatum.com/forum-taro/topic/vykup-avto/</a> 1×slots казино зеркало
1×slots официальный сайт скачать
Бездепозитные бонусы казино это экономическая компенсация, предлагаемая пользователям на дармовой базе и возможность выступать в интернет казино бесплатно. Если сравнивать их с одобрениями за лепта, каких средства выдаются лишь впоследствии первоначального пополнения счета, то бездепозитные вознаграждения получаются бесплатно. То есть, играющий получает возможность делать ставки на уже имеющие финансы, которые выдаст заведение, исполняя, при, обыденные действия, дабы их извлечь (тут речь о регистрация, удостоверении личности с внедрением номера телефона, дизайна заявки и т.д. ). <a href=https://www.fromrus.su/index.php?/profile/408-rabofreesn/>1×slots casino регистрация</a> рабочее зеркало 1×slots <a href=https://woodmancx.com/user/DoctorLazutaPl/>https://woodmancx.com/user/DoctorLazutaPl/</a> Как только получите бездеп в казино, всё точно не запамятовывайте инспектировать электрическую почту. Некоторые игорные клубы непрерывно веселят интенсивных гэмблеров приятными бонусами. Чаще всего получить презент можно в преддверии веселья, на денек рождение, за вербование друга. А того распространённым призом считается прибавка к депозиту. Нужно не восполнить счёт, и азартное заведение прирастит его на 50–100%.
казино 1×slots официальный сайт
Подтверждение индивидуальной информации. Все казино просят от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и присутствие у пользователя других аккаунтов (мультиаккаунт запрещен). Используйте наилучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из списка ниже, дабы заработать презенты за простые деяния теперь сегодня получить 1-ый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и резвыми выводами на электрические кошельки. <a href=https://modest-sparrow-m5p134.mystrikingly.com/>https://modest-sparrow-m5p134.mystrikingly.com/</a> 1хслотс рабочее зеркало Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых новых, щедрых и испытанных бонусах в онлайн казино, коие обновляются каждый день.При регистрации идет указывать лишь достоверную информацию. Когда учетная запись будет активна, будет доступ в Личный кабинет. В нем можно выбрать еденицу, ввести промокод и узнать доскональные управляла получения и отыгрыша бездепа. Краткая информация об промоакции часто находится именно на регистрационной форме.
<b>Смотреть еще похожие новости:</b>
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=83718&extra=>1хслотс рабочее зеркало</a>
<a href=https://swordmaster.org/user/JamesVok/>1×slots регистрация 1×slots casino c2d ru</a>
<a href=https://adler.biz/threads/3231/>1×slot зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы реальными деньгами, которые можно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадались. Для получения приза нужно пригласить в игру нового клиента. Казино начисляет пригласившему фиксированный процент от взносов приглашённого в виде приза: чаще всего его объем не превышает 10%. Срок действия приза правило не превышает месяца: пригласивший получает приз от проигранных ставок приглашённого в 1-ый луна забавы.
#4641 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Федор Чалов (футбол) casino рабочее <a href=https://specreporter.com/>casinos winning</a> 7k casino бонус букмекерская контора фонбет официальный <a href=https://rhymes-punches.com/>Ирина Горбачева</a> казино большая казино рублях champion casino porno Илона Маркова, хоккеистка casino рабочее зеркало рабочее казино казино вход официальный сайт
DiskiPlus casino com DiskiPlus порно с Диана Шнайдер (теннис) <a href=https://diskiplus.ru/>DiskiPlus казино 1</a> DiskiPlus black russia казино DiskiPlus карты казино <a href=https://www.diskiplus.ru>DiskiPlus Семёнова Татьяна Владимировна порно</a> DiskiPlus 1×bet на сегодня DiskiPlus пинап казино DiskiPlus казино большая DiskiPlus Преподобная Надежда Александровна порно DiskiPlus официальные букмекерские конторы DiskiPlus порно с Матвей Сафонов (футбол) DiskiPlus porno Игорь Акинфеев (футбол)
#4642 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
Приветственный бездеп предоставляется любому игроку лишь один раз. Казино сражаются с так нарекаемыми бонусхантерами (от англ. Bonus Hunter — доброволец за бонусами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения дара. Исключить сходственные деяния разрешает верификация данных. Администрация вправе востребовать у посетителя доказать персональные данные, указанные при регистрации.Выбирайте наилучшие безвозмездные призы с помощью обзоров на Casinoz – и пусть вас сопутствует удача при отыгрыше бонусных кредитов! <a href=http://filmkachat.ru/>1×slots зеркало которую указывали при регистрации кстати</a> Когда речь о денежных бонусах, казино практически устанавливают обстоятельства вейджера, которые необходимо выполнить, чтобы исключить выигрыш. <a href=https://www.uannounceit.com/article/1415>https://www.uannounceit.com/article/1415</a> Прежде чем активировать бездеп, необходимо убедиться сомнений, что страна, уроженцем коей считается игрок, не заходит в список запрещенных. 1×slots регистрация на сайте 1×slots ru com <a href=http://www.oclassedu.com/space-uid-16396.html>http://www.oclassedu.com/space-uid-16396.html</a> Как лишь получите бездеп в казино, всё равно не запамятовывайте проверять электронную почту. Некоторые игорные клубы каждый веселят интенсивных гэмблеров приятными бонусами. Чаще всего получить презент возможно в преддверии веселья, на денек рождение, за вербование друга. А того распространённым бонусом считается надбавка к депозиту. Нужно всего лишь восполнить счёт, и азартное заведение прирастит его на 50–100%.Заработать на бездепозитных бонусах за регистрацию в казино может каждый пользователь, достигший совершеннолетия.
1х слот 1хслотс регистрация перейти на 1×slots
С иной стороны, намного легче отобрать бездепозитные фриспины за регистрацию в казино и прямо в начать вращать барабаны в наилучших слотах. Главная особенность спинов что, нет, собственно они предусмотрены для лучших автоматов. Удастся столько пройти дополнительные раунды, но и увеличить сумму выигрыша, заработать респины и другие внутриигровые презенты.В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, нужно адресоваться в саппорта через лайв-чат на сайте казино. <a href=https://praisenpray.org/forums/showthread.php?tid=95976>скачать 1×slots официальный сайт</a> 1×slots зеркало видели такую регистрацию на Отыграв бездепозитный бонус в казино с выводом также придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если схожее лимитирование присутствует, то единоразово вывести получится только сумму, не превосходящую размер полученного приза.Приветственный бездеп предоставляется хоть игроку лишь один раз. Казино дерутся с например нарекаемыми бонусхантерами (от англ. Bonus Hunter — доброволец за призами), пытающимися заводить многочисленные аккаунты для надувательства оператора и повторного получения подарка. Исключить сходственные деяния позволяет верификация данных. Администрация вправе востребовать у клиента подтвердить персональные данные, указанные при регистрации. <a href=https://guides.co/a/6318>https://guides.co/a/6318</a> Максимальный размер ставки, который нельзя превосходить пока бонус не несомненно всецело отыгран. В случае нарушения этого правила, бонус и выигрыш с него станут аннулированы.Подарки на дни ? посвященные торжественным датам, требующие символического отыгрыша либо начисляются без того. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду. 1×slots сайт Ну и конечно же, для казино бездепозитные призы прибыльны с имиджевой стороны: схожая щедрость повышает степень преданности клиентов к фирмы.Реже призы без депозита начисляются постоянным игрокам. С их подмогою администрация старается вычесть ценных клиентов либо вожделеет поблагодарить за лояльность правильных посетителей. Но гораздо чаще для похожих целей применяются эти акции:
1х слотс зеркало регистрация в 1×slots casino
При отыгрыше бонусных средств, необходимо учесть срок деянья бонуса и время, которое дается на отыгрыш. По истечению заявленного времени, не отыгранный приз несомненно аннулирован.В интернет-сети всегда можно отыскать перечни наиболее известных и обещанных поощрительных программ от популярных онлайн-казино. <a href=http://krs-sro.ru/bitrix/redirect.php?goto=http://mordsrub.ru/bitrix/redirect.php?goto=http://chefworks.ru/bitrix/redirect.php?goto=https://telegra.ph/Kartochka-ucheta-materialov-Attache-M-17-ofsetnaya-A5–135195-mm-50-listov-09–23>http://krs-sro.ru/bitrix/redirect.php?goto=http://mordsrub.ru/bitrix/redirect.php?goto=http://chefworks.ru/bitrix/redirect.php?goto=https://telegra.ph/Kartochka-ucheta-materialov-Attache-M-17-ofsetnaya-A5–135195-mm-50-listov-09–23</a> 1×slots казино зеркало За привлечение приятеля ? в партнерской программки клиент получает вознаграждение за привлечение свежих юзеров.
1×slots официальный сайт зеркало
Процесс подтверждения личности может занять от одного дня до недели. Если заказчик допустил какую оплошность при заполнении паспортных данных, то ему стопам адресоваться с задачей в службу поддержки онлайн-казино. <a href=https://fougerite.com/threads/1×slots-zerkalo.13781/>1хслотс зеркало</a> Казино выводит средства только на ту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного приза, Вам сначала нужно пополнить счет. В некоторых клубах узкий перечень методов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет именно с этих платежных методов, которые доступны для вывода. Например, игрок получил 500 руб. При твореньи аккаунта и должен отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., потребуется устроить 875 спинов для полного отыгрыша. 1хслотс 1хслотс регистрация перейти на 1×slots <a href=http://www.makehp.co.kr/bbs/board.php?bo_table=free&wr_id=177679>http://www.makehp.co.kr/bbs/board.php?bo_table=free&wr_id=177679</a> Многие казино предоставляют в рекламных целях безвозмездные призы необыкновенно для наших читателей. Чтобы их получить, нужно перебежать на игровой сайт по партнерской ссылке с нашего портала.
1×slots зеркало
Бездепозитный приз казино 2022 с выводом за регистрацию предоставляет возможность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и проверить качество работы службы. Довольно нередко, начиная игровой процесс, игрок теснее отказывается останавливаться и делает реальный лепта. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать бесплатно вполне как раз таки с бонусом за регистрацию без надобности вносить депо.Бездепозитные призы прекрасный вариант безвозмездной игры в игровые автоматы. Многие пользователи сети не знают, собственно в казино можно начать играть абсолютно безвозмездно, а потом исключить выигрыш на банковскую карту либо электронный кошелек, другие не доверяют интернет казино, а третьи удачно играют и выигрывают – и подчас довольно немалые суммы. Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных требований, не неотъемлемой верификации. Если на веб-сайте учтена неотъемлемая процедура подтверждения личности, то исключить выигрыш получится лишь в проверки данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий личность.Для получения бездепа необходимо пригласить в забаву по реферальной ссылке нового клиента: он обязан зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на необходимую, указанную в условиях акции. <a href=https://metalverk.ru/forum/?PAGE_NAME=profile_view&UID=81446>https://metalverk.ru/forum/?PAGE_NAME=profile_view&UID=81446</a> 1×slots казино мобильная версия
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.drumjamapp.com/memberlist.php?mode=viewprofile&u=43982&sid=233b41ff54eb27077c97af5723fde4dd>1×slots casino online регистрация</a>
<a href=http://forum.survival-readiness.com/viewtopic.php?t=264418>1×slots зеркало проходить регистрацию это отличный вариант</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс дает игрокам важную информацию о самых новых, щедрых и проверенных призах в интернет казино, которые обновляются любой день. Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном сайте и выполните вход в личный офис, дабы отобрать благотворительные вращения с вейджером х40;
#4643 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало
На благотворительные призы онлайн-казино практически практически распространяется ограничения по стране проживания посетителей. Даже если вас разрешается открывать счет и выступать на деньги в заведении, это еще не значат, что вас доступны no deposit bonuses. <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> <a href=https://www.swiatobrazu.pl/forumgaleria/thread/view/id/590>https://www.swiatobrazu.pl/forumgaleria/thread/view/id/590</a> Законодательство, регулирующее азартные забавы в различных государствах, оказывает на возможности операторов. В итоге пользователи из отдельных регионов сталкиваются с ограничениями со стороны казино. Это возможность быть как глубокий отказ в доступе, например и невозможность загружать игры отдельных производителей.Существует ли стратегии для отыгрыша бездепозитных призов? К раскаянию нет, на выигрыши либо проигрыши с бонусов, казино либо игрок повлиять возможности, отдача игр происходит от создателей игр. 1 хслот регистрация в 1×slots casino <a href=http://zemli.com/index.php?subaction=userinfo&user=plantdemonstrat>http://zemli.com/index.php?subaction=userinfo&user=plantdemonstrat</a> Казино выводит средства только на что, эту платежную систему, с котрой был сделан депо. То есть, для вывода бездепозитного приза, Вам поначалу нужно восполнить счет. В некоторых клубах узкий перечень способов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет непосредственно с данных платежных методов, коие доступны для вывода.Такой безвозмездный эквивалент средств зачисляется на профиль пользователя после воплощения требований и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений вероятен лишь последствии воплощения вейджеровых критерий.
1×slots зеркало подтвердит вашу регистрацию если говорить
1×slots рабочее зеркало Выбрать казино с бездепозитным бонусом. У нас на сайте представлен список наихороших интернет казино, которые предлагают своим игрокам великодушные призы за регистрацию.Любой выигрыш по ставке выше установленного лимита будет являться недействительным. То есть ставка не будет засчитана при отыгрыше, ну случае выигрыша его сумма не поступит на счёт клиента — итог забавы несомненно всецело аннулирован. <a href=http://www.rapa1459.co.kr/bbs/board.php?bo_table=free&wr_id=508714>http://www.rapa1459.co.kr/bbs/board.php?bo_table=free&wr_id=508714</a> 1×slots казино мобильная версия
1×slots промокод при регистрации 2025
<a href=http://j67236dr.bget.ru/user/PatrickDraic/>http://j67236dr.bget.ru/user/PatrickDraic/</a> Многие новички колеблются, собственно поощрительный приз надо будет отдавать, в если они выиграли у казино. Это полностью неопасно и накрепко. Выводя выигранные свои, игрок просто одергивает свое участие в игре и теряет уникальную возможность – безвозмездно увеличивать собственное вещественное положение. 1× слот зеркало Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке адепты онлайн-казино публикуют актуальную информацию о not the slightest deposit bonuses прочих услугах.Выбирайте наилучшие бесплатные бонусы с помощью обзоров на Casinoz – и пусть вас сопутствует счастье при отыгрыше бонусных кредитов!
1×слотс казино
Онлайн-казино с бездепозитными призами ставят клиентам обстоятельства для пользования бездепами, поэтому перед участием в промоакции лучше тщательно ознакомиться со всеми правилами и нюансами промоакции. Условия имеют касаться получения бонуса, его использования и следующего вывода денежных средств когда выигрыша. <a href=https://www.reisezielforum.de/memberlist.php?mode=viewprofile&u=14074&sid=f30da19c372965e2f49d9a89c4b395d4>казино 1× slots официальный сайт</a> Иногда операторы требуют внесение малого депо перед выводом для верификации платежного инструмента. В неких казино данный депо также предстоит отыграть.Основное отличие никаких, что для получения бездепа не надо пополнять баланс в казино. Но считая этого, есть ряд и других отличий: 1×slots регистрация 1×slots casino 777 online <a href=http://sport-technology.ru/index.php?subaction=userinfo&user=sadcategory89>http://sport-technology.ru/index.php?subaction=userinfo&user=sadcategory89</a> Важно, убедитесь что, нет, собственно ранее не регистрировались в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи.
рабочее зеркало 1хслотс
Иногда виде поощрения за регистрацию шансы выдаваться билеты для участия в турнирах. Условия их проведения довольно отличаются, поэтому мы рекомендуем ознакомиться с любым предложением отдельно.Необходимость отыгрыша. Вейджер в этом случае повыше, чем для призов за депо. И пока свои не отыграны, вывести их нельзя. <a href=http://kasict.ru/bitrix/redirect.php?goto=http://arilla.ru/bitrix/redirect.php?goto=http://wello.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/DbQKN0iIUea>http://kasict.ru/bitrix/redirect.php?goto=http://arilla.ru/bitrix/redirect.php?goto=http://wello.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/DbQKN0iIUea</a> Но на некоторых азартных платформах подобные гонорары имеют получить и уже зарегистрированные юзеры. В этом случае, бонусы предоставляются масштабах оригинальных акций либо же неким геймерам в виде акционного предложения, которое прибывает на почту с целью «возвратить» игрока в свое казино.У каждого игорного заведения свои верховодила и условия. Но, чтобы получить бонусы, необходимо выполнить стандартные действия: 1×slot рабочее зеркало В разделе с бонусами активировать собственный подарок. Найти игры, для коих предусмотрено поощрение и использовать бонус по предназначению.Даже не выиграв крупную сумму, игрок увлекательно проведет время, изнутри выучит работу площадки, воспримет геймплей автоматов. Все это без каких-либо денежных рисков. Быть в курсе превосходнейших промоакций с. Достаточно периодически изучать перечень новых интернет казино с выводом бонуса без депозита в данном разделе.
<b>Смотреть еще похожие новости:</b>
<a href=https://showboysmedia.com/real-music/#comment-93179>1×slots акции</a>
<a href=https://forum.visiteachapada.com/viewtopic.php?f=19&t=3592>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<a href=https://www.sgomberisgombero.it/author/jamesapate/>сайт 1× slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Только выполнив все обстоятельства отыгрыша и дождавшись окончания проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить свои деньги. Только выполнив все условия отыгрыша и дождавшись завершения проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить свои средства.
#4644 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Гатагова Ольга Анатольевна 1×bet зеркало рабочее <a href=https://th-royalgclub.com/>r7 casino</a> Чулпан Хаматова пин ап casino pin <a href=https://m.repost.news/>1×bet официальный 1×bet xyz</a> казино вход casino зеркало сайта casino зеркало сегодня автомат казино порно с Илья Осипов (киберспорт) казино смотреть онлайн бесплатно пин casino
DiskiPlus казино смотреть DiskiPlus пина casino <a href=https://www.diskiplus.ru>DiskiPlus казино вулкан</a> DiskiPlus casinos winning DiskiPlus казино рояль смотреть <a href=https://www.diskiplus.ru/>DiskiPlus скачать букмекерскую контору</a> DiskiPlus Преподобная Надежда Александровна порно DiskiPlus порно с Гатагова Ольга Анатольевна DiskiPlus casino игровой автомат DiskiPlus смотреть фильм казино казино DiskiPlus Петрова Ольга Викторовна порно DiskiPlus 1×bet зеркало слоты
#4645 Thomasvedhttps://lordserialss.life
смотреть сериал регистрация <a href=https://lordserialss.life/>https://lordserialss.life</a>
#4646 Charlesgunnyhttp://filmkachat.ru
сайт 1× slots casino
Подтверждение индивидуальной информации. Все казино требуют от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у пользователя иных аккаунтов (мультиаккаунт запрещен). <a href=http://filmkachat.ru/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> <a href=https://hallbook.com.br/blogs/391183/Mastering-Interior-Shop-Drawings-A-Professional-Guide-to-Precision-and>https://hallbook.com.br/blogs/391183/Mastering-Interior-Shop-Drawings-A-Professional-Guide-to-Precision-and</a> Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша бонусов. Заведения всегда устанавливают наивысшую ставку, допустимую по условиям вейждера. 1 x slots casino <a href=http://fabnews.ru/forum/member.php?u=10327>http://fabnews.ru/forum/member.php?u=10327</a>
1хслотс казино зеркало
Прямо момент арестуйте безвозмездные вращения за регистрацию без депозита и начинайте собирать призовые композиции ради крупных выигрышей! казино 1×slots <a href=https://lavteam.org/user/Travispal/>https://lavteam.org/user/Travispal/</a> Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы была вероятность исключить выигрыш. 1×slots официальный регистрация
онлайн казино 1×slots
Иногда для получения призов нужно спутаться с представителями службы поддержки. Удобнее всего с ними разговаривать в онлайн-сате, желая иногда достаточно запроса по электрической почте.Бездепозитный приз – это финансовое вознаграждение, коие выдается соучастнику забавы в казино, для его привлечения и появления заинтересованности. Любой посетитель, кот-ый подходит условиям выдачи похожего бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое поощрение является наиболее действенным методом, дающим вероятность стартовать деле, не вкладывая собственных вещественных средств. <a href=http://www.dachamania.ru/photo_gallrey/profile.php?uid=56812>http://www.dachamania.ru/photo_gallrey/profile.php?uid=56812</a> Самые пользующиеся методы вывода средств ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электрическим платежным системам на Neteller и Skrill, а также пользуются криптовалютными кошельками. Вывод выигрышей возможность исполняться быстро или занимать от нескольких часов до нескольких суток. 1×slots casino регистрация
1×slots официальный регистрация
Некоторые казино все предлагать клиентам бездепы за подтверждение номера или почты или репост на страницу в соц сетях.Для отыгрыша бонуса казино обязует игрока поиграть на необходимую, в несколько раз превосходящую необходимую полученного приза — здесь выгода компании явна. <a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=343041>казино 1× slots официальный сайт</a> Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 долларов. Если выдаются фриспины, их число изредка превышает нескольких 10-ов безвозмездных вращений. Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, чтобы была вероятность вывести выигрыш. 1×slots бездепозитный бонус за регистрацию <a href=http://www.clean-ace8.com/bbs/board.php?bo_table=free&wr_id=104026>http://www.clean-ace8.com/bbs/board.php?bo_table=free&wr_id=104026</a>
1×slots подтвердит вашу регистрацию если говорить
Ниже указан актуальный список легальных казино в Беларуси с призами на 1-ый депо. Вы сможете попасть на официальный вебсайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз. <a href=https://bbs.lineagem.shop/home.php?mod=space&uid=2041129>https://bbs.lineagem.shop/home.php?mod=space&uid=2041129</a> Для получения бонуса нужно пригласить в игру нового посетителя. Казино начислит пригласившему фиксированный процент от взносов приглашённого вид бонуса: чаще всего его объем не выше 10%. Срок действия бонуса в большинстве случаев не превышает месяца: пригласивший получает бонус в зависимости от проигранных ставок приглашённого в первый месяц забавы.Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы которые возникают у начинающих. 1×slots casino регистрация Таким образом онлайн казино получает вероятного игрока. Возможно в или настоящем он захотит поиграть на средства средства. Так работают бездепозитные призы в онлайн казино. Здесь очень подходит выражение, бесплатные сыр посещает лишь в мышеловке. Начинающие игроки могут не осознавать опасность пыла. Однако времени осознания делается больше. Это тема для отдельного обсуждения.
<b>Смотреть еще похожие новости:</b>
<a href=http://miupsik.ru/forums/showthread.php?tid=391928>казино 1× slots официальный сайт</a>
<a href=https://forum.ltp-team.com/topic/91713–1×slots-oficialnyy-zerkalo/>1×slots официальный зеркало</a>
<a href=https://persiankittencat.com/grey-persian-cats-unraveling-the-charm-of-these-feline-beauties/#comment-55051>1×slots официальный зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Также есть онлайн-платформы азартных игр, которые применяют раздачу бездепозитных призов в специальные даты (как для казино, например и для игрока). Помимо этого, действующие геймеры кроме имеют возможность получить схожие бонусы за собственную деятельность (например, за повышения уровня или за похожие достижения).
#4647 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало на сегодня
Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и более. Когда игроку полагается большое фриспинов, администрация может бить3 их начисление на несколько дней. Бесплатные вращения предоставляются для конкретного слота, который указывается в правилах промоакции.Подтвердите личность, предоставив оператору казино средства паспортные данные. Инструкции обычно легкие, основное — конкретно им следовать. Если написано, собственно «на фото обязаны быть видны все четыре угла странички паспорта» — устройте именно это фото. <a href=http://filmkachat.ru/>1× слот зеркало</a> <a href=https://speakerdeck.com/shopavto7>https://speakerdeck.com/shopavto7</a> Игрокам не воспринимать приветственный бонус как гарантированный способ получить большой выигрыш, но это отличная возможность без затрат оценить функционал казино. 1× slots сайт <a href=http://193.16.101.6/index.php?title=фильмы_mp4_для_планшета>http://193.16.101.6/index.php?title=фильмы_mp4_для_планшета</a> Фриплей-бонусы. Бонусы за безвозмездную игру есть только в некоторых клубах. Они зачисляются незамедлительно в творенья профиля и действуют непродолжительное время. Если у вас нет времени израсходовать средства, они просто закончатся. Что дотрагивается времени, правило бонусы действуют на 1-го часа.3. Подтвердить данные. В зависимости от клуба, нужно привязать аппарат или почту, показать индивидуальную информацию;
1×slots актуальное зеркало
1×slots регистрация 1×slots casino 777 online <a href=http://www.xiaoditech.com/bbs/home.php?mod=space&uid=2348198>http://www.xiaoditech.com/bbs/home.php?mod=space&uid=2348198</a> Шаг 4. Активация. Внимательно изучите обстоятельства, информацию по ограничениям и сроке действия бонусного предложения. Разобравшись с правилами, возможно активировать бонус в собственном кабинете (время ? с внедрением промокода) либо по запросу в саппорт.Бонусные средства – маленькая сумма средств для старта в новом казино. На бонусные деньги, обычно разрешается играть во все игры, кроме слотов с прогрессивным джекпотом и игр из раздела live casino. 1×slots рабочее зеркало
1×slots коды
Выбор любого онлайн казино на нашем веб-сайте. В описании к любому Вы сможете узнать, собственно получите за творение аккаунта.Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, all зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. Высокая конкуренция в сегменте азартных игр доказывает операторов завлекать посетителей разнородными промоакциями. Благодаря данному у гостей бывает возможность получить бонусы в казино за регистрацию без депо. Воспользоваться таким предложением можно, минуя функцию внесения денег на игровой счет, просто активировав акк на сайте. Наш гид по бездепам поможет избрать самую симпатичную бонусную программу, разузнать правила получения такого гонорары и распорядиться им с наибольшей выгодой.Возможность протестировать свежие забавы, не рискуя личными своими и разработать личную стратегию забавы. <a href=https://dongfeng-club.ru/profile.php?id=7725>https://dongfeng-club.ru/profile.php?id=7725</a> 1 x slots
1×slots регистрация на 1хслотс
Фриспины — благотворительные вращения, которые разрешают игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся наиболее популярным и предпочтительным видом приза — бесплатные вращения порой эффективнее и веселее в отыгрыше, чем другие виды бездепов.Чтобы бездеп не был начислен на Ваш аккаунт, Вам надо активировать бонусный код. Если одобрение от казино было добавлено на Ваш аккаунт механически, а Вы не расчитываете его использовать, обратитесь в службу поддержки с просьбой отменить бездепозитный приз. Бонусы без депозита при регистрации считаются самыми красивыми как для опытных игроков, например для и новичков. Получив такое вознаграждение, клиент имеет выступать на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные призы в интернет-казино Рунета, а условия их активации и выигрыша. В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, необходимо обратиться в службу поддержки через лайв-чат на веб-сайте казино. 1×slots официальный сайт зеркало рабочее <a href=http://www.lemon-directory.com/%D0%B2%D0%BD%D0%B5%D1%88%D0%BD%D0%B8%D0%B5-%D1%81%D1%81%D1%8B%D0%BB%D0%BA%D0%B8-%D0%BA%D1%83%D0%BF%D0%B8%D1%82%D1%8C_456038.html>http://www.lemon-directory.com/%D0%B2%D0%BD%D0%B5%D1%88%D0%BD%D0%B8%D0%B5-%D1%81%D1%81%D1%8B%D0%BB%D0%BA%D0%B8-%D0%BA%D1%83%D0%BF%D0%B8%D1%82%D1%8C_456038.html</a> Акционные предложения от казино есть в разных форматах. Часто бонусы даются в мена на депо. Игрок заносит платеж и получает деньги, безвозмездные вращения и одобрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — картина бонуса, кот-ый гарантирован за выполнение определенных действий на веб-сайте:В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с безвозмездных вращений. Прибыль, которую Вы заработаете на этом бездепе можно ставить на вывод без какого или отыгрыша.
1×slots casino регистрация 1×slotscasino09k online
Бездепозитные бонусы отличный вариант бесплатной забавы в игровые автоматы. Многие пользователи сети не знают, что в казино возможно начать играть полностью безвозмездно, а потом исключить выигрыш на банковскую карту либо электрический кошелек, другие не доверяют онлайн казино, а третьи удачно играют и выигрывают – и подчас достаточно великие суммы. <a href=https://www.sportsheadsgames.com/profile/DoctorLazutaPi>https://www.sportsheadsgames.com/profile/DoctorLazutaPi</a> 1×slots зеркало рабочее на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=http://miupsik.ru/forums/showthread.php?tid=221219>рабочее зеркало 1хслотс</a>
<a href=http://forum.survival-readiness.com/viewtopic.php?t=250471>1×slots регистрация на 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
С не отыгранным бонусом воспрещается превосходить размер максимальной ставки. Нарушение сего условия последствия аннулирование выигрыша.
#4648 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора официальный сайт скачать сайт казино зеркало <a href=https://specreporter.com/>казино зеркало сегодня</a> про казино porno Ангелина Гончаренко, хоккеистка <a href=https://glvk.guru/>винлайн букмекерская контора официальный сайт</a> какие казино ставки на спорт букмекерские конторы up casino скачать букмекерская контора без зеркала казино pin casino зеркало сайт винлайн букмекерская контора
DiskiPlus порно с Анастасия Потапова, теннисистка DiskiPlus porno Илья Ковальчук (хоккей) <a href=https://www.diskiplus.ru>DiskiPlus 1×bet официальный</a> DiskiPlus 1×bet xbet DiskiPlus порно с Дарья Клишина, легкоатлетка <a href=https://www.diskiplus.ru/>DiskiPlus ставки на спорт букмекерские конторы</a> DiskiPlus казино сочи DiskiPlus казино большая DiskiPlus гта онлайн казино DiskiPlus порно с Илья Осипов (киберспорт) DiskiPlus пинап казино DiskiPlus up casino скачать DiskiPlus ставки на спорт букмекерские конторы
#4649 Charlesgunnyhttp://filmkachat.ru
казино 1×slots официальный сайт
Подтвердите регистрацию, чтобы активировать Бездепозитный бонус с выводом, потребуется наполнить индивидуальный профиль. Заполните пустующие поля реальными данными о себя.Подарки на определенные даты отличаются критериями получения. Если одобрение начисляют игроку на день рождения, то сумма обыкновенно в от совместного размера депо за год. <a href=http://filmkachat.ru/>1 х слотс зеркало</a> Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, solid зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.Бездепозитный бонус за регистрацию в казино с выводом средств в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых свежих, великодушных и проверенных призах в интернет казино, коие обновляются каждый день. <a href=https://emaze.me/shopavto>https://emaze.me/shopavto</a> Промообъявления от казино не дают реальной картины и направлены на привлечение внимания юзеров. Понять, как высоки шансы остаться в плюсе, дозволит личный тест условий предложения:Вы всего, скажем, как все предпочитаете получать подарки и бездепозитные бонусы казино. Игорные жилища взяли в повадку одаривать гэмблеров приятными бонусами. Стать обладателем приветственного подарка можно за создание профиля либо пополнение счёта. Второй вариант больше увлекательный, ведь клубы готовы удвоить депозит! Но случае вы новичок и только знакомитесь с миром азарта, другого, как пользуйтесь бонусом за регистрацию. 1хслот зеркало сайта <a href=http://www.imxy28.com/space-uid-359813.html>http://www.imxy28.com/space-uid-359813.html</a>
1×slots сайт
Ограничения по забавам. Администрация воспрещает игрокам кое-какие игровые автоматы с бездепозитным призом, деньгами либо бесплатными вращениями. Обычно, в правилах приводится глубокий список слотов для отыгрыша. Иногда разделенье выполняется по облику игр. Например, отыгрыш возможен на всех игровых аппаратах, хотя запрещен в настольных играх и в разделе Live Casino. <a href=https://www.donchillin.com/space-uid-382497.html>1×slots зеркало которую указывали при регистрации кстати</a> 1 x slots Третитй бездепозитный бонус за регистрацию – денежные средства. К раскаянью, начислить рубли либо баксы готовы только знаменитые и популярные клубы. С их помощью возможность насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком.Бездепозитный бонус по промо-коду будет доступен для игры, только что случае когда Вы активируете специальный бонусный код в разделе с призами либо укажите промокод при регистрации на сайте. В некоторых случаях, кроме активации кода, понадобиться доказать контактные данные игрока и наполнить анкету клиента. <a href=https://www.chordie.com/forum/profile.php?id=1980422>https://www.chordie.com/forum/profile.php?id=1980422</a> Бездепы обыкновенно предлагают с отыгрышем — мгновенно вывести выигранные свои невозможно. Перевод средств со счета будет возможен после как, как юзер выполнит все притязания казино, а сумма имеет превышать установленного правилами лимита. Условиями акции фиксируются сроки, на которых заказчик вправе воспользоваться предложением. Обычно они не превышают нескольких дней в активации.Бездепозитный бонус – это экономическое вознаграждение, которое выдается участнику игры в казино, для его привлечения и появления заинтригованности. Любой гость, который подходит условиям выдачи похожего бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое одобрение является наиболее эффективным методом, дающим вероятность стартовать при, не вкладывая личных вещественных средств. 1 x slots Так что сможете храбро региться без всяких раздумий. Фортуна сегодня точно на вашей стороне. Не бойтесь, ведь следствие какого либо ущерба Вам совершенно не грозит. С такими бонусами как без пополнения, Вы остаетесь только в плюсе, но не как не в минусе.Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных обстановок с казино, когда последствии отыгрыша бездепа вас не дадут вывести крупную необходимую выигрыша.
1×slots рабочее зеркало
В игровых клубах без лицензии Вы покупаете „кота в мешке“ и в случае спорных обстановок нет способности куда-то посетовать и обосновать свою правоту.Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных обстановок с казино, когда последствии отыгрыша бездепа вам не дадут вывести крупную необходимую выигрыша. <a href=https://posnara.com/bbs/board.php?bo_table=free&wr_id=403539>https://posnara.com/bbs/board.php?bo_table=free&wr_id=403539</a> казино 1×slots
1×slots зеркало регистрация
Наши эксперты исследуют обстоятельства акции, этого в ручном режиме проводят их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и параметры. Мы не рекламируем казино, а даем игрокам информацию о лучших из них. <a href=http://mandala-app.com/forums/memberlist.php?mode=viewprofile&u=3447>1×slots зеркало регистрация в 1×slots casino</a> Шаг 4. Активация. Внимательно изучите обстоятельства, информацию по лимитированиям и сроке деянья бонусного предложения. Разобравшись с правилами, можно активировать бонус в собственном офисе (время ? с внедрением промокода) либо по запросу в саппорт. Промообъявления от казино мешают реальной картины и направлены на вербование внимания юзеров. Понять, насколько высоки шансы остаться в плюсе, позволит собственный анализ условий предложения: 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=https://www.baronerosso.it/forum/members/114970_ralphphiff.html>https://www.baronerosso.it/forum/members/114970_ralphphiff.html</a> Классическая разновидность приза за творенье аккаунта. Его преимущество содержится том,, что клиент имеет помощи избирать аппараты и делать ставки в них. Иногда перечень игровых автоматов ограничен оператором, но все также это чем, чем единственный доступный слот, как когда с использованием фриспинов.
1× slots официальный
Бездепозитные бонусы начисляются только один раз. Не стоит открывать новые аккаунты, дабы получить их повторно. Служба безопасности казино обязательно выявит «левого» участника и перекроет. Если гость выполнит нужные требования, отыграет свою ставку и решит вывести личный выигрыш, то ему нужно принять, собственно казино непременно востребует предоставить ксерокопии собственных документов, чтобы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные средства вывести не получится. <a href=https://training.trainingstree.com/author/ashleygic/>https://training.trainingstree.com/author/ashleygic/</a> Третитй бездепозитный приз за регистрацию – валютные свои. К сожалению, начислить рубли или доллары готовы только знаменитые и популярные клубы. С их помощью вас насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком.В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, необходимо обратиться в саппорта через лайв-чат на веб-сайте казино. 1хслотс зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://www.goslog.ru/forum/messages/forum1/message10621/11-obrashcheniya-grazhdan?result=reply#message10621>1×slots сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Индивидуальные поощрения выдаются за совершение деяний: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавленья или официального клиента для ПК. В большинстве казино действуют программки преданности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий степень нередко сопровождается выдачей бездепа. При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, коие можно посвятить ирге в казино.
#4650 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
online casino порно с Артемий Панарин (хоккей) <a href=https://t.me/vchkogpu_ru>1×bet официальный скачать</a> 1×bet сайт 1×bet xyz porno Юлия Пересильд <a href=https://vestnik-jurnal.com/>1×bet официальный скачать</a> слоты казино казино вулкан автомат казино r7 casino black russia казино 1×bet скачать приложение на андроид казино ли
DiskiPlus букмекерская контора бетсити DiskiPlus porno Нина Пирогова, хоккеистка <a href=https://www.diskiplus.ru/>DiskiPlus порно с Гатагова Ольга Анатольевна</a> DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz DiskiPlus 1×bet сайт 1×bet xyz <a href=https://diskiplus.ru/>DiskiPlus порно с Диана Шнайдер (теннис)</a> DiskiPlus Самойлова Алла Владимировна порно DiskiPlus r7 casino DiskiPlus казино сочи DiskiPlus ограбление казино DiskiPlus бесплатно играем казино DiskiPlus винлайн букмекерская контора официальный DiskiPlus Светлана Ходченкова
#4651 Charlesgunnyhttp://filmkachat.ru
1хслотс регистрация в 1×slots casino
4. Заберите презент. Чаще всего бонус активизируется незамедлительно последствии регистрации. Но бывают ситуации, когда нужно забежать в собственный кабинет или написать в саппорта.Однако далеко не все ресурсы предлагают своим посетителям бездепозитные призы за регистрацию в казино. В большинстве случаев учтено поощрение на первый депозит в объеме 100–200%. Это отличная возможность преумножить банкролл, прирастить время, проведённое за игрой и шансы сорвать большой куш. <a href=http://filmkachat.ru/>1×slots зеркало регистрация в 1×slots casino</a> <a href=https://www.palscity.com/forums/thread/2083/>https://www.palscity.com/forums/thread/2083/</a> При исполнении критерий отыгрыша и верификации, средства с бонусного счета переводятся на основной и все быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции находятся от выбранной платежной системы.Предложения с бездепозитными бонусами за регистрацию разрешают свежим заведениям привлечь аудиторию на свой вебсайт. А игроки тому получают возможность выступать на настоящие деньги без депо в казино и заработать небольшой стартовый капитал, кот-ый разрешается исключить на карту банка либо электронный кошелек. 1×слотс казино <a href=http://ledsoft.ru/forum/?PAGE_NAME=message&FID=3&TID=11512&TITLE_SEO=11512-_-_&MID=12188&result=new#message12188>http://ledsoft.ru/forum/?PAGE_NAME=message&FID=3&TID=11512&TITLE_SEO=11512-_-_&MID=12188&result=new#message12188</a> При выполнении условий отыгрыша и верификации, деньги с бонусного счета переводятся на главный и шансы быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции находятся от выбранной платежной системы.
казино 1×slots
1×slots casino регистрация Шаг 5. Использование и отыгрыш. Бездеп обязан быть использован в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера. <a href=https://juliusnzjr42853.blogdun.com/30873764/deep-nude-ethical-concerns-and-the-impact-of-ai-on-privacy>https://juliusnzjr42853.blogdun.com/30873764/deep-nude-ethical-concerns-and-the-impact-of-ai-on-privacy</a> Демоказино есть почти на каждом сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются значительно реже: там в случае выигрыша и соблюдения условий промоакций бездеп возможно превратить в настоящие деньги.Шаг 4. Активация. Внимательно выучите условия, информацию по ограничениям и сроке деяния бонусного предложения. Разобравшись с правилами, можно активировать приз в личном офисе (иногда ? с внедрением промокода) либо по запросу в саппорт. казино 1×slots Будьте внимательнее при ознакомлении с правилами во избежание происхожденья конфликтных обстановок с казино, когда после отыгрыша бездепа вас не дадут вывести крупную необходимую выигрыша.Используйте наихорошие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из списка ниже, чтобы заработать подарки за простые деяния и уже сегодня получить 1-ый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высочайшей отдачей и прыткими выводами на электронные кошельки.
1×slots регистрация на официальном сайте
Бездепозитный приз – это экономическое вознаграждение, коие выдается участнику забавы в казино, для его вербования и возникновения заинтригованности. Любой посетитель, который соответствует условиям выдачи похожего бездепозитного бонуса, может претендовать на получение вышеуказанного приза. Такое одобрение считается наиболее действенным методом, дающим возможность стартовать в игре, не вкладывая собственных материальных средств.Да, у безвозмездных призов есть недостатки. Прежде всего, они обычно не. Кроме того, условия вейджера по ним практически жесткие. Но все же неименье риска проделывает их очень привлекательными для клиентов. <a href=https://clients1.google.com.ai/url?q=https://doctorlazuta.by/>https://clients1.google.com.ai/url?q=https://doctorlazuta.by/</a> онлайн казино 1×slots
1×slots зеркало этих способов предполагает регистрацию
Такие одобрения позволяют даром протестировать свежее казино, разобраться с игровым процессом интернет слотов, заработать и вывести маленькую необходимую средств. <a href=https://www.globalvision2000.com/forum/member.php?action=profile&uid=1072499>1хслотс рабочее зеркало на сегодня</a> Но на азартных платформах похожие вознаграждения имеют получить теперь зарегистрированные юзеры. В таком случае, призы предоставляются масштабах уникальных промоакций либо же некоторым геймерам в виде акционного предложения, коие прибывает на почту с целью «вернуть» игрока в свое казино. 1хслотс рабочее зеркало на сегодня <a href=http://www.getjob.us/usa-jobs-view/job-posting-890834.html>http://www.getjob.us/usa-jobs-view/job-posting-890834.html</a> Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного приза.
1×slots зеркало проходить регистрацию это отличный вариант
Призовые начисления без депо имеют предоставляться для роли в турнирах онлайн казино. Потратить перечисленные средства возможно самая в этой акции. Условия их проведения включают в себя лимитирования на список игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться таким предложением, какого-либо изучить его верховодила.Но на азартных платформах подобные вознаграждения шансы получить и уже зарегистрированные пользователи. В таком случае, бонусы предоставляются в уникальных промоакций или же некоторым игрокам вид акционного предложения, коие приходит на почту с целью «возвратить» игрока в свое казино. Бонус в казино без депо содержит различные вариации: такое быть приветственный приз, акции в честь каких-либо дней или важных дат, приз за привлечение новых игроков, преданность и получение VIP-статуса.Вейджер (wager) – это коэффициент, который показывает на какую сумму нужно сделать ставок, чтобы исключить приз из казино. Пример: Вы получили за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода этого приза, Вам необходимо сделать ставок на необходимую: 500*70=3500 рублей. Только всецело отыграв бонус, Вы сможете исключить свой выигрыш. <a href=http://boss.why3s.cc/boss/home.php?mod=space&uid=138446>http://boss.why3s.cc/boss/home.php?mod=space&uid=138446</a> Способы получения бездепа различаются от облика приза, который понравился игроку. Но вам так нужно быть зарегистрированным в легальном онлайн-казино и подтвердить собственную личность. В общем облике пошаговая аннотация для получения бездепозитного бонуса смотрится например:Диапазон ставок, коие вправе сделать игрок, также лимитирован. Обычно ставить можно небольшую сумму — пределах 10–30 руб. За одно вращение. 1×слотс казино
<b>Смотреть еще похожие новости:</b>
<a href=https://minecraft.ru.net/user/Manuelsoarl/>1×slots регистрация на сайте 1×slots ru com</a>
<a href=http://forum.puppylinux.pl/index.php?topic=793.new#new>скачать 1×slots официальный сайт</a>
<a href=https://www.fromrus.su/index.php?/topic/31354–1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D0%B1%D1%8B%D1%81%D1%82%D1%80%D1%83%D1%8E-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8E-%D0%B0-%D1%82%D0%B0%D0%BA%D0%B6%D0%B5-%D0%BC%D0%B3%D0%BD%D0%BE%D0%B2%D0%B5%D0%BD%D0%BD%D0%BE%D0%B5/>1×slots зеркало быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Свежий бонус начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в использовании своими, ну случае отыгрыша оператор имеет установить ограничение на вывод денег.
#4652 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet сайт 1×bet xyz казино вход официальный сайт <a href=https://kompromat1.online/>порно с Илья Осипов (киберспорт)</a> порно с Арина и Дина Аверины, гимнастки porno Игорь Акинфеев (футбол) <a href=https://slon-ru.com/>порно с Арина и Дина Аверины, гимнастки</a> Семёнова Татьяна Владимировна порно казино смотреть онлайн казино вход официальный сайт 7k casino 1×slots casino винлайн букмекерская контора официальный сайт Валентина Матвиенко порно
DiskiPlus бесплатно фильм казино DiskiPlus порно с Константин Тюкавин (футбол) <a href=https://www.diskiplus.ru>DiskiPlus человек казино</a> DiskiPlus Чулпан Хаматова DiskiPlus Ирина Горбачева <a href=https://diskiplus.ru>DiskiPlus почему в казино не бывает настенных часов</a> DiskiPlus 1×bet зеркало слоты 1×bet xyz DiskiPlus casino регистрации DiskiPlus pin up casino зеркало DiskiPlus сайт казино вход DiskiPlus Львова-Белова Мария Алексеевна порно DiskiPlus пинап казино DiskiPlus 1×bet зеркало рабочее xbet
#4653 ChrisRixhttps://lordsserial.xyz
лучшие сериалы 2023 смотреть онлайн <a href=https://lordsserial.xyz/>https://lordsserial.xyz</a>
#4654 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
Размер бонусов чаще всего чисто условный и не превышает 50 руб. Приятно, хотя ощутимым бустом в игре вряд ли станет. <a href=http://filmkachat.ru/>1хслот зеркало</a> За счёт спинов получится запустить разные интернет слоты, протестировать стратегии и поднабраться навыка. Фишка том,, что вращения начисляются на лучшие аппараты с уникальными опциями и высокой отдачей. Не забывайте, собственно в каждом акционном предложении учтены специальные притязания – временные лимитирования, наибольший объем ставки, список дешевых игр. <a href=https://peatix.com/group/16427473/activity>https://peatix.com/group/16427473/activity</a> Например, игрок получил 500 рублей при разработке аккаунта и должен отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 руб., понадобится сделать 875 спинов для полного отыгрыша. 1х слот 1хслотс регистрация перейти на 1×slots <a href=https://blogfreely.net/rabofree/vykup-avto-vladivostok>https://blogfreely.net/rabofree/vykup-avto-vladivostok</a>
1×slots зеркало регистрация то дальше необходимо пройти
Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен перечень превосходнейших онлайн казино, коие предлагают своим игрокам щедрые призы за регистрацию.Бездепозитный бонус нередко имеет стать легкодоступным сразу после окончания регистрации, что как единственным притязанием к нему считается регистрация, а затем проверка вашей новой учетной записи. <a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1 x slots</a> 1×slots рабочее зеркало на сегодня Бонусные деньги – маленькая сумма средств для старта в новеньком казино. На бонусные деньги, обыкновенно разрешается играть во все забавы, кроме слотов с прогрессивным джекпотом и игр из раздела live casino.Доступность — бездепозитные бонусы в казино почаще всего предоставляются свежим игрокам, хотя посещают случаи, когда бонус все получить и действующие посетители. <a href=http://koreasamsong.com/bbs/board.php?bo_table=free&wr_id=1665144>http://koreasamsong.com/bbs/board.php?bo_table=free&wr_id=1665144</a> казино 1×slots Диапазон ставок, коие вправе устроить игрок, кроме лимитирован. Обычно ставить возможно маленькую необходимую — пределах 10–30 рублей за одно вращение.А ознакомиться с новыми онлайн казино, Вы можете с бонусов с выводом прибыли, которые Вы сможете получить без депо.
1×slots casino регистрация
Такой безвозмездный эквивалент средств зачисляется на профиль юзера в воплощения притязаний и предназначаются они только для игрового процесса. Вывод таких вознаграждений вероятен только последствии осуществления вейджеровых условий. <a href=http://spectr-sb116.ru/user/PatrickZed/>http://spectr-sb116.ru/user/PatrickZed/</a> Некоторые клубы механически начисляют бонус на аккаунт игрока после исполнения условий получения, хотя случаются ситуации, когда бонус надо(надобно) активировать игроку самому. Есть количество методов активации приза:Разные казино имеют собственные управляла по выведению выигрыша. Для бездепозитных призов принимаются достаточно высочайшие требования. Часто онлайн-казино советуют отыграть бонусное одобрение до ста один в игровых автоматах. Например, в игрок получил бесплатно десять долларов, то нужно будет отыграть их, поставив 1 тысячу спинов по 1 баксу любой. Стоит обозначить(означить), что не все казино выделяют вероятность играть на призы и не во всех увеселительных заведениях идентичные управляла для отыгрывания. Некоторые казино запрещают выступать на призы в блекджек или ограничивают ставки до 5 %, собственно значительно увеличивает в десятки раз количество необходимых игр. 1×slots casino регистрация на сайте Наиболее знаменитые вознаграждения между гэмблеров – бездепозитные бонусы казино. Это не умопомрачительно, так можно получить благотворительные вращения или виртуальные кредиты, и при этом не придётся пополнять счёт, рисковать личными деньгами. Удастся насладиться различными увеселениями даже выиграть солидную сумму, избегая серьёзного риска.Размер бонуса. В качестве бездепов обыкновенно начисляют не суммы, а когда речь о призах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино имеют подарить игроку до 2000$.
1×slots коды
Поспешите зарегистрироваться на официальном сайте Клубника, дабы быстро получить 33 безвозмездных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, бывает реальный шанс победу! <a href=http://bikepacking.free.fr/forum/viewtopic.php?f=18&t=36196>1×slots casino регистрация</a> Как правило, при выводе финансов, от играющего требуется только устроить наименьший лепта для того, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом личный счет. Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, a зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.Также, учите, что бездепозитный приз возможно вывести только что случае, когда будут исполнены все обстоятельства отыгрыша. 1хслот зеркало <a href=http://i91215un.bget.ru/user/Zacheryeteda/>http://i91215un.bget.ru/user/Zacheryeteda/</a> Возможность протестировать новые забавы, не рискуя личностными своими и создать собственную стратегию игры.
1×slots казино зеркало
Такой казино приз без депо за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это словно некая маскировка одобрения под бездепозитный. Суть всего этого сводится к тому, собственно игроку на час выдается, к примеру, 1000 долларов, а реклама повторяет о том, собственно любой выигрыш возможно будет дальнейшем оставить при себе. Но в играющий всерьез отнесется к данному предложению, то он просто потеряет время. Ведь игроку нужно будет играть не в основном аккаунте, а тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (числе всей тыс. ) в верховодила вступят конкретные обстоятельства, где несомненно сказано, что максимальной суммой победы имеет быть только двести долларов и деньги можно использовать только в бонуса на первый лепта с вейджером 25 от суммы вознаграждения плюс сам депозит. По итогу получится, собственно игрок выигрывал для 200% приз с вейджером на конкретную сумму. Короче разговаривая, это все надо вашего времени. Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке адепты онлайн-казино публикуют актуальную информацию о not the slightest deposit bonuses и предложениях.Также случаются случаи, когда казино начислит обсужденный бонус после регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам. <a href=https://tulaart.ru/forum/index.php?action=profile;u=36608>https://tulaart.ru/forum/index.php?action=profile;u=36608</a> 1×slots сайт зеркало Получить приветственный приз имеют лишь свежие клиенты онлайн-казино. Способы описаны в критериях акции каждого легального казино, почаще всего это:
<b>Смотреть еще похожие новости:</b>
<a href=https://test.soclanovtsy.ru/topic/62916–1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D0%BF%D1%80%D0%BE%D1%85%D0%BE%D0%B4%D0%B8%D1%82%D1%8C-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8E-%D1%8D%D1%82%D0%BE-%D0%BE%D1%82%D0%BB%D0%B8%D1%87%D0%BD%D1%8B%D0%B9-%D0%B2%D0%B0%D1%80%D0%B8%D0%B0%D0%BD%D1%82/>1×slots зеркало проходить регистрацию это отличный вариант</a>
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=574087>1×slots зеркало быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подтверждение регистрации. Казино требуют привязки профиля к электрическому адресу и номеру телефонного. Для этого на e-mail отправляется послание со ссылкой, а на телефонный ? текстовое известие с кодом.
#4655 Charlesgunnyhttp://filmkachat.ru
1×slots сайт
Заработать на бездепозитных призах за регистрацию в казино имеет каждый юзер, достигший совершеннолетия.При регистрации что либо ином интернет игральном заведении — вам дается раз шанс испытать свою удачу не внося средства монеты. Замечу что такую поощрительную услугу деют не все онлайн игровые площадки, а только щедрая середина(средина) из их. Которые мы подготовили для Вас в нашем списке. <a href=http://filmkachat.ru/>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a> В наше время довольно просто получить бонус за регистрацию в казино. Практически каждый игорный жилище с готовностью начисляет средства либо благотворительные вращения. Многие гэмблеры используют этим и не смущяются регистрироваться в любом клубе с прибыльными условиями. Кстати, это замечательная вероятность выработать победную тактику и сорвать джекпот. <a href=https://juicedmuscle.com/forum/general/general-chat/264982-creating-immersive-spaces-the-art-and-science-of-3d-walkthrough-animation>https://juicedmuscle.com/forum/general/general-chat/264982-creating-immersive-spaces-the-art-and-science-of-3d-walkthrough-animation</a> Как правило, новоприбывшие геймеры в первую очередь хотят ознакомиться с способами ввода и вывода денежных средств и сроки исполнения поданных заявок чтобы конкретно осознавать, как живо меня исключить собственный казино приз за регистрацию без депозита на электронный кошелек либо же банковскую карту. К счастью для всех играющих, внутри конкретных холдингов, все казино конкурируют между собой. Ведь если бы конкретную фирму давало только одно онлайн-заведение, то вряд ли бы клиенты заметили казино с призом за регистрацию и возможность бы рассчитывать лишь на вознаграждение повторяющий приза на 1-ое инвестиция. К каждому заведению периодически идет завлекать свежих игроков, собственно, в, лишь на руку всем играющим.Некоторые онлайн-казино без депо предлагают новым посетителям выбрать бонус при регистрации. Будьте внимательны: выбрав один, вы в абсолютном большинстве случаев не можете пользоваться остальными. 1×slots сайт <a href=http://www.zgbbs.org/space-uid-171884.html>http://www.zgbbs.org/space-uid-171884.html</a> Иногда для получения призов необходимо спутаться с представителями службы поддержки. Удобнее всего с ними разговаривать в онлайн-сате, но иногда довольно запроса по электрической почте.В наше время довольно просто получить приз за регистрацию в казино. Практически любой игорный жилище с радостью начисляет средства или бесплатные вращения. Многие гэмблеры пользуются этим и не стесняются регистрироваться в каждом клубе с прибыльными условиями. Кстати, это замечательная вероятность выработать победную стратегию и сорвать джекпот.
casino 1×slot
Как лишь на виртуальном счету окажутся бонусные свои, поторопитесь отыграть вейджер. Сразу в этого возможно забыть заявку на вывод выигрыша. Кредиты выгодно отличаются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом настоящих средств и дают возможность ощутить азарт. Во-вторых – можно насладиться любой азартной игрой доступной на веб-сайте. В вашем распоряжении присутствуют автоматы, настольные прибавление, видео-покер, Live-дилеры.Oтыгpaть бонус с указанным вeйджepом, достичь нужно сдeлaть cтaвoк нa cумму, превосходящую объем бонуса в несколько раз. <a href=https://masstr.net/showthread.php?tid=131910>1×slots коды</a> 1хслотс рабочее зеркало на сегодня Также, учите, что бездепозитный бонус возможно вывести лишь что, нет случае, когда будут исполнены все обстоятельства отыгрыша. <a href=http://regata.yar.ru/component/kunena/%D0%BE%D0%B1%D0%BC%D0%B5%D0%BD-%D0%BE%D0%BF%D1%8B%D1%82%D0%BE%D0%BC/5546-%D1%81%D0%B0%D0%B9%D1%82-%D0%B7%D0%BD%D0%B0%D0%BA%D0%BE%D0%BC%D1%81%D1%82%D0%B2-%D1%84%D0%BB%D0%B8%D1%80%D1%82-%D1%81%D0%B8%D1%82%D0%B8#10587>http://regata.yar.ru/component/kunena/%D0%BE%D0%B1%D0%BC%D0%B5%D0%BD-%D0%BE%D0%BF%D1%8B%D1%82%D0%BE%D0%BC/5546-%D1%81%D0%B0%D0%B9%D1%82-%D0%B7%D0%BD%D0%B0%D0%BA%D0%BE%D0%BC%D1%81%D1%82%D0%B2-%D1%84%D0%BB%D0%B8%D1%80%D1%82-%D1%81%D0%B8%D1%82%D0%B8#10587</a> Каждая игровая платформа отличается условиями по получению и отыгрышу бездепов. В правилах детально расписаны кратковременные рамки, за коие нужно прокрутить вейджер. Также не забывайте про наибольший объем ставки и наивысшую сумму выплаты. С другой стороны, дабы получить бездепозитные призы казино, довольно истратить не более 1 минуты. 1хслотс казино зеркало Для получения депозитного бонуса нужно пополнить собственный игровой баланс реальными средствами. Вознаграждение можно получить или при внесении первого депозита, или в виде фиксированного процента от внесённых средств. Так или по, бонус поступит на счёт только в пополнения.
1×slots промокод при регистрации 2025
Денежные свои. Третий приз за регистрацию без депозита – наличные. К огорчению, лишь знаменитые и известные клубы все дать средства в руб. Либо долларах. С их подмогою у насладиться каждой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед данным необходимо исполненье конкретных критерий.Чаще всего используются коды. Их нужно заносить в специальные окошки регистрационной анкеты, случае речь о пригласительных призах, либо в особом разделе личного офиса игрока. <a href=https://www.stroimvmeste.com.ua/user/Davidvex/>https://www.stroimvmeste.com.ua/user/Davidvex/</a> Призовые начисления без депозита могут предоставляться для роли в турнирах интернет казино. Потратить перечисленные средства возможно исключительно масштабах данной акции. Условия их проведения содержат ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, другого выучить его управляла. 1×slots рабочее зеркало Мы собрали и опубликовали список лучших бездепозитных казино с призами за регистрацию, коие гарантируют щедрые выигрыши и мгновенные выплаты.
1×slots регистрация на 1хслотс
Обычно, бездепозитные бонусы выдаются под определенные слоты с фиксированной ставкой, но их точно воспрещено применять в игровых автоматах с современным джекпотом. Список игр, каких возможно использовать бездеп, Вы найдете в описании промоакции либо можете уточнить у службы поддержки заведения.В разделе с бонусами активировать собственный подарок. Найти забавы, для коих учтено одобрение и использовать бонус по назначению. Доступность — бездепозитные призы в казино почаще всего предоставляются новым игрокам, но случаются случаи, когда приз могут получить и действующие посетители.Осталось выбрать казино с бонусом за регистрацию и создать профиль. После активации подарка выигрыш находится от Фортуны и навыков. Многие игроки, оценив возможностей казино, остаются играть в нем и дальше ? на это и нацелено любое промо. Постоянные посетители заносят депозиты и проделывают ставки, обеспечивая долгосрочную прибыль оператора. То есть, казино раздают бездепы свежим юзерам для формирования лояльной аудитории. казино 1×slots официальный сайт <a href=http://damoa8949.com/bbs/board.php?bo_table=free&wr_id=84447>http://damoa8949.com/bbs/board.php?bo_table=free&wr_id=84447</a>
1× slots зеркало
Фриспины. Бесплатные вращения предусмотрены для применения в видео-слотах. Внимательно читайте условия – они часто выдаются для некоторых машин. В зависимости от клуба вы можете делать определенное количество ставок. Кстати, современные игорные дома дают вероятность заводить «одноруких бандитов».Фриспины – безвозмездные вращения с фиксированной ставкой, коие возможно применять в определенных игровых автоматах. Если простыми текстами, бездепы – это определённая сумма денег либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать презенты. Но есть кое-какие аспекты. Существуют игорные дома, коие перед что, этим как начислить призы просят привязать телефонный, дать копии документов.Иногда виде бездепа, казино дарует наименьший приз (до 50 рублей), из-за которого надо заморачиваться. <a href=http://shizheng.sabjy.com/home.php?mod=space&uid=18993>http://shizheng.sabjy.com/home.php?mod=space&uid=18993</a> зеркло казино 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=http://freedom.teamforum.ru/memberlist.php?mode=viewprofile&u=6332>1×slots казино мобильная версия</a>
<a href=https://radios-collector.com/viewtopic.php?f=7&t=49619>1×slots регистрация на 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чтобы получить возможность вывести выгода с бездепозитного бонуса в казино, нужно выполнить ряд критерий: В большинстве заведений устроить это возможно по e-mal, по номеру телефона, спустя социальную сеть либо гугл-аккаунт.
#4656 AHoini
<a href=https://messiahfouxb.atualblog.com/36648679/bc-game-options>bc.game casino</a> <a href=https://kisdiconference.kr/2022/bbs/board.php?bo_table=free&wr_id=3092644>vavada hr</a>
#4657 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino официальный зеркало casino промокод <a href=https://rumafia.news/>почему казино</a> скачать pin casino казино на деньги <a href=https://7club7.com/>винлайн букмекерская контора</a> 1×bet на андроид бесплатно фильм казино porno Андрей Рублев (теннис) casino актуальное зеркало 1×bet xbet porno Илья Ковальчук (хоккей) 1×bet официальный xbet
DiskiPlus casino pin официальный DiskiPlus casino официальный зеркало <a href=https://diskiplus.ru>DiskiPlus 1×bet слоты 1×bet xyz</a> DiskiPlus gama casino DiskiPlus 1win casino <a href=https://www.diskiplus.ru>DiskiPlus порно с Александр Головин (футбол)</a> DiskiPlus реального казино DiskiPlus почему в казино нет окон DiskiPlus 1×bet зеркало рабочее DiskiPlus казино рулетка DiskiPlus игры казино DiskiPlus pin up casino официальный DiskiPlus порно с Сергей Бобровский (хоккей)
#4658 Ремонт холодильников Smeg Москваhttps://remont-holodilnikov-smeg-tent.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали срочный ремонт холодильников smeg, можете посмотреть на сайте: <a href=https://remont-holodilnikov-smeg-tent.ru/>ремонт холодильников smeg в москве</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#4659 Charlesgunnyhttp://filmkachat.ru
казино 1×slots официальный сайт
За вербование приятеля ? масштабах партнерской программы клиент получает вознаграждение за вербование новых юзеров. <a href=http://filmkachat.ru/>1×slots официальный сайт мобильная версия скачать</a> В разделе с бонусами активировать собственный подарок. Найти забавы, для коих предусмотрено поощрение и использовать приз по назначению.Но ни не забывайте внимательно читать управляла роли в бонусных промоакциях. Если вы нарушите желая бы одно условие, позже вы не можете уладить недоразумение с администрацией. <a href=https://blog.udn.com/G_112062930339362154/181391691>https://blog.udn.com/G_112062930339362154/181391691</a> При игре на бонусные свои воспрещается выступать в игровые автоматы с современным джекпотом и игры из радела live casino. Кроме такого, кое-какие казино дают бездеп на раз или некоторое определенных слотов, и в иных забавах Вы не можете на них выступать. 1х слот регистрация в 1×slots casino <a href=https://nurnews.uz/user/JasperGat/>https://nurnews.uz/user/JasperGat/</a> Мы делаем ударение на ключевых положениях верховодил, рассказываем о территориальных ограничениях и вкратце информируем о иных промоакциях обговариваемого казино.
1×slots официальный сайт скачать
<a href=https://sparta.training/faq/online-returns/#comment-67033>1хслотс рабочее зеркало</a> 1хслот официальный сайт зеркало Выбор каждого интернет казино на нашем сайте. В описании к любому Вы сможете узнать, собственно получите за творенье аккаунта. <a href=http://www.zhuangxiuz.com/home.php?mod=space&uid=851825>http://www.zhuangxiuz.com/home.php?mod=space&uid=851825</a> Более солидные предложения встречаются очень изредка. Зачастую они доступны лишь VIP-игрокам. В остальных случаях им наверняка сопутствуют довольно жесткие условия отыгрыша. Также вероятны вспомогательные обстоятельства и другие ограничения, прописанные в условиях и положения бонусной программки казино.Но существуют азартные заведения, готовые просто например вручить деньги на игру. Для сего достаточно сделать профиль. Чтобы исключить выигрыш, сначала необходимо выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа. 1 x slots
1хслотс 1хслотс регистрация перейти на 1×slots
Постарайтесь отыграть вейджер, чтобы была возможность забыть заявку на выплату. Кстати, на всех веб-сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электрической кошелёк, карту, телефон.Для получения бонуса надо(надобно) ознакомиться с программкой преданности казино и устроить ставки на необходимую, необходимую для перехода на грядущий уровень. Раздача призов имеет быть посвящена разным датам: календарные праздничные, деньки рождения игроков, годовщина открытия казино и т. Д. Подарок выдается вид денег, фриспинов либо баллов для накопления и размена на предложения оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода этой суммы понадобиться выполнить ряд притязаний. <a href=http://center-uslug.com/bitrix/redirect.php?goto=http://shtormauto.ru/bitrix/redirect.php?goto=http://vksrs.com/bitrix/rk.php?goto=https://teletype.in/@urist555/ReQFWtV4oic>http://center-uslug.com/bitrix/redirect.php?goto=http://shtormauto.ru/bitrix/redirect.php?goto=http://vksrs.com/bitrix/rk.php?goto=https://teletype.in/@urist555/ReQFWtV4oic</a> Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, дабы снова получить безвозмездный бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ожидает неминуемое санкция.Подтвердите лицо, предоставив оператору казино свои паспортные данные. Инструкции обычно легкие, основное — конкретно им стопам. Если написано, что «на фото должны быть заметны все хорошо угла страницы паспорта» — устройте именно такое фото. скачать 1×slots на андроид мобильная версия Чаще всего интернет-казино предлагают бездепозитные призы свежим пользователям. Эта промо-акция довольно эффективно привлекает начинающих, подталкивая их к открытию счета. Конечно, не все они становятся преданными посетителями, хотя сам прецедент регистрации аккаунта играет на руку заведению.Составленный специалистами Casino.ru перечень онлайн-казино с бездепозитным призом позволяет игрокам сравнить спецпредложения разных операторов.
1×slots промокод при регистрации 2025
<a href=http://griffhunter.com/boards/viewtopic.php?p=561878#p561878>1×slots зеркало видели такую регистрацию на</a> 1×slots casino регистрация 1×slots review live <a href=http://shigebao.com.cn/home.php?mod=space&uid=1144781>http://shigebao.com.cn/home.php?mod=space&uid=1144781</a>
1×slots зеркало сайта
Ограничения по забавам. Администрация воспрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, деньгами либо бесплатными вращениями. Обычно, в правилах приводится глубокий список слотов для отыгрыша. Иногда дробленье выполняется по виду игр. Например, отыгрыш вероятен на всех игровых аппаратах, но запрещен в настольных забавах и в разделе Live Casino. Чтоб получить крупный выигрыш, подбирайте игровые автоматы с предельным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша. <a href=https://ceshi.xyhero.com/home.php?mod=space&uid=2312905&do=profile&from=space>https://ceshi.xyhero.com/home.php?mod=space&uid=2312905&do=profile&from=space</a> 1×slots официальный сайт мобильная версия скачать
<b>Смотреть еще похожие новости:</b>
<a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=9272>1хслотс зеркало</a>
<a href=https://www.neocodex.us/forum/topic/134347-how-do-i-use-neobyte-in-opera/?p=2034904>1×slots коды</a>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-4971/#comment-593501>1×slots актуальное зеркало</a>
<a href=https://masstr.net/member.php?action=profile&uid=27801>1× slots casino зеркало</a>
<a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=781606>1хслот официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Игрокам не следует принимать приветственный бонус как гарантированный метод получить большой выигрыш, но это замечательная вероятность без затрат оценить перечень казино. Когда идет о получении бездепозитных бонусов в казино, для направьте на следующие условия:
#4660 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Илона Маркова, хоккеистка казино 5 <a href=https://slon-ru.com/>porno Алена Михайлова</a> фильмы казино рояль фреш казино <a href=https://krtka.info/>играющие казино</a> казино можно porno Ангелина Гончаренко, хоккеистка casino buzz почему в казино нет часов porno Вера Бирюкова, гимнастка 1×bet зеркало xbet xyz casino зеркало сегодня рабочее
DiskiPlus Радченко Светлана Юрьевна порно DiskiPlus 1×bet на андроид <a href=https://diskiplus.ru>DiskiPlus 7k casino официальный сайт</a> DiskiPlus казино на деньги DiskiPlus казино вулкан <a href=https://diskiplus.ru/>DiskiPlus карты казино</a> DiskiPlus букмекерская контора официальный сайт скачать DiskiPlus casino приложения DiskiPlus Елена Лядова DiskiPlus casino riobet DiskiPlus ramenbet casino DiskiPlus 1×bet регистрация DiskiPlus porno Марина Александрова
#4661 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet слоты 1×bet xyz Фастова Елена Владимировна порно <a href=https://specreporter.com/>Скоробогатова Ольга Николаевна порно</a> зеркала официальных сайтов казино porno Мира Андреева (теннис) <a href=https://slon-ru.com/>порно с Виктория Синицина, фигуристка</a> букмекерская контора на андроид Фастова Елена Владимировна порно порно с Захарова Мария Владимировна Юдаева Ксения Валентиновна порно букмекерская контора 1×bet зеркало слоты 1×bet xyz casino buzz
DiskiPlus 1win casino DiskiPlus casino скачать приложение <a href=https://www.diskiplus.ru/>DiskiPlus лучшие бесплатные онлайн казино</a> DiskiPlus порно с Федор Чалов (футбол) DiskiPlus порно с Александр Головин (футбол) <a href=https://www.diskiplus.ru/>DiskiPlus казино рояль</a> DiskiPlus up букмекерская контора DiskiPlus porno Юлия Канакина, скелетонистка DiskiPlus скачать 1×bet 1×bet xyz DiskiPlus порно с Сергей Бобровский (хоккей) DiskiPlus up casino DiskiPlus 1×bet официальный 1×bet xyz DiskiPlus cat casino
#4662 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Евгения Медведева, фигуристка casino pin официальный <a href=https://slon-ru.com/>порно с Александр Большунов (лыжные гонки)</a> Елена Лядова casino сегодня <a href=https://slon-ru.com/>up casino</a> играющие казино win win casino скачать casino на андроид 7k casino официальный порно с Каролина Севастьянова порно с Владимир Минеев (ММА) pin up casino
DiskiPlus казино смотреть онлайн DiskiPlus букмекерская контора фонбет официальный <a href=https://diskiplus.ru/>DiskiPlus порно с Анна Щербакова, фигуристка</a> DiskiPlus бесплатные букмекерские конторы DiskiPlus casino pin официальный <a href=https://diskiplus.ru>DiskiPlus up букмекерская контора</a> DiskiPlus cometa casino DiskiPlus 1×bet скачать бесплатно DiskiPlus ставки на спорт букмекерские конторы DiskiPlus гта онлайн казино DiskiPlus букмекерская контора фонбет официальный сайт DiskiPlus букмекерская контора скачать приложение DiskiPlus kent casino
#4663 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало на сегодня
Как только вы отыграли вейджер и средства с бонусного баланса перебежали вам на настоящий счет, Вы смело можете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депо). <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, дабы еще раз получить бесплатный приз. Игорные заведения нетерпимы к бонус-хантерам, потому вас ждет неминуемое санкция.Способы получения бездепа различаются в зависимости от облика приза, кот-ый понравился игроку. Но вас иначе нужно быть зарегистрированным в легальном онлайн-казино и подтвердить свою личность. В общем облике пошаговая аннотация для получения бездепозитного бонуса выглядит так: <a href=https://noosfero.ufba.br/lexxeagle/blog/mastering-silo-images-integration-for-advanced-3d-architectural-visualization>https://noosfero.ufba.br/lexxeagle/blog/mastering-silo-images-integration-for-advanced-3d-architectural-visualization</a> При верном раскладе бездепы — это прекрасный способ играть на средства без растраты личных средств. Есть некоторое советов, следуя коим можно извлечь максимально пользы из сходственных промоакций казино. Играть по лишь на лицензированных площадках. Скриптовые сайты не накалывают с бонусными услугами, но и используют пиратский софт с модифицированным ГСЧ. Выиграть на этих автоматах невероятно.Зачастую бездепозитные бонусы казино для игры предлагаются различными заведениями азартных игр в качестве рекламных акций либо в целях вербования к себе свежих игроков. Для бездепозитных призов в казино 2022 геймеру не пополнять счет до этапа вывода желаемых средств. 1хслот скачать <a href=https://www.unifan.net/bbs/board.php?bo_table=free&wr_id=1483696>https://www.unifan.net/bbs/board.php?bo_table=free&wr_id=1483696</a> На бонусные начисления шансы быть установлены вспомогательные лимитирования, коие Вы не приняли при отыгрыше. Пока приз полностью не отыгран — деньги из казино не выводятся.Существуют казино с бонусом за регистрацию, в очень знамениты фриспины в онлайн казино впоследствии регистрации в конкретных забавах. Они встречаются том почаще безвозмездных поощрений либо классических призов в казино без инвестициям. Например, игрок регистрирует счет, на который начисляются бесплатные игры, бонус за регистрацию в виде безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса геймер выигрывает истинные средства, которые в последствии возможно удачно вывести из заведения на свою платежную систему. То есть, есть шансы исключить свои без рисков собственными финансами. Регистрация, за компьютерные получит призы, займет пару минут, а благодаря данному возможно увеличить 5 евро поощрений до тысячи и без всяких заморочек вывести их.
1хслотс 1хслотс регистрация перейти на 1×slots
Приглашаем делиться воззреньями о бонусах. Это поможет другим пользователям подбирать более прибыльные предложения. <a href=https://creapnl.com/foros/tema/1×slots-%d0%ba%d0%b0%d0%b7%d0%b8%d0%bd%d0%be-%d0%b7%d0%b5%d1%80%d0%ba%d0%b0%d0%bb%d0%be-110/>1×slots казино зеркало</a> 1×slots регистрация 1×slots casino 777 online Доступ к подарку может раскрываться автоматически в введения промокода или обращения в службу поддержки вебсайта. В первом случае от пользователя не потребуется практически действий. Бездеп с активацией по коду встречается чаще всего. Игроку необходимо установить совокупа символов в графе, которая имеет находиться в регистрационной форме в Личном кабинете.Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, all только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. <a href=https://johnathanvfov64185.liberty-blog.com/30405453/ai-nude-revolutionizing-content-moderation-and-privacy-protection>https://johnathanvfov64185.liberty-blog.com/30405453/ai-nude-revolutionizing-content-moderation-and-privacy-protection</a> 1×slots подтвердит вашу регистрацию если говорить
1хслотс казино зеркало
Вы наверняка, например все любите получать презенты и бездепозитные призы казино. Игорные жилища взяли в привычку одаривать гэмблеров приятными призами. Стать обладателем приветственного презента можно за создание профиля или пополнение счёта. Второй вариант более занимательный, как клубы готовы удвоить депозит! Но если вы новичок и лишь знакомитесь с миром азарта, лучше пользуйтесь бонусом за регистрацию.В качестве бонусов онлайн казино нередко предлагает выдачу фриспинов, то есть безвозмездных вращений игрового барабана. Виртуальные монеты возможно использовать для обучения в покерной школе либо для игры в казино. <a href=https://www.globaleconomicsucsb.com/blog/index.php?entryid=226549>https://www.globaleconomicsucsb.com/blog/index.php?entryid=226549</a> 1×slots рабочее зеркало
1×slots регистрацию процедура займет всего лишь
Бездепозитные призы реальными деньгами, которые возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадались.Иногда у посетителей сайта шансы возникнуть проблемы при активации приобретенного промо-кода. В таких случаях, нужно адресоваться за помощью в саппорта «Support». Для получения ответа, обязательно указывается конкретная первопричина обращения и подтверждается информация дополнительными скриншотами. Если сформировалась спорная обстановка, практически можно адресоваться к главному регулятору или контролирующему органу, выдавшему данному заведению лицензионный документ. казино 1× slots официальный сайт <a href=https://www.google.com.qa/url?q=https://doctorlazuta.by/>https://www.google.com.qa/url?q=https://doctorlazuta.by/</a> Иногда для получения бонусов необходимо спутаться с представителями саппорта. Удобнее всего с ними собеседовать в онлайн-сате, желая от достаточно запроса по электронной почте.Эффективность бездепов в качестве маркетингового прибора расценили почти операторы. Малоизвестные площадки используют такие промоакции, дабы скоро набрать базу. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны неизменных гостей. Не все веб-сайты, дающие презенты без депо, рекомендованы к игре. За привлекательным промоописанием могут скрываться невыполнимые обстоятельства отыгрыша и подводные камни.
1×slots casino регистрация 1×slots review live
<a href=https://trade-britanica.trade/index.php?title=скачать_кино>https://trade-britanica.trade/index.php?title=скачать_кино</a> Также существуют онлайн-платформы азартных игр, которые используют раздачу бездепозитных призов в специальные даты (как для казино, так и для игрока). Помимо сего, действующие игроки того имеют возможность получить похожие призы за свою деятельность (например, за увеличения уровня или за похожие достижения). 1×slots зеркало на сегодня Получить Бездепозитный бонус в онлайн казино дело 2-ух кликов. Другой момент, отыграть рекламную и соблюсти управляла и обстоятельства отыгрыша. Под правилами подразумевается не только вагер, хотя и ограничения по наибольшей ставке. Мы осознаем, собственно в кинотеатр все ставят на зеро и выигрывают. Призываем не создавать похожего. Перед активацией бонуса прочитайте управляла. Узнайте последующие моменты: Условия получения подарка, за регистрацию, за депозит и многое. Ограничения по максимальной ставке. Зачастую не повыше 350 рублей. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вращать автоматы, а вагер несомненно стоять на месте. Поэтому принципиально аристократия, в каких играх возможно совершать кратность валютного оборота.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.animogen.com/memberlist.php?mode=viewprofile&u=15333>1×slots casino регистрация на сайте</a>
<a href=http://tarratorriya.tforums.org/memberlist.php?mode=viewprofile&u=785>1 x slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если ординарными словами, бездепы – это определённая сумма средств или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать презенты. Но есть кое-какие нюансы. Существуют игорные жилища, которые перед что, этим как начислить призы просят привязать телефонный, дать копии документов. Иногда виде поощрения за регистрацию имеют выдаваться билеты для роли в турнирах. Условия их проведения очень отличаются, поэтому мы советуем ознакомиться с каждым предложением раздельно.
#4664 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1go casino порно с Арина и Дина Аверины, гимнастки <a href=https://rumafia.news/>7k casino</a> 1go casino порно с Каролина Севастьянова <a href=https://res-publika.com>casino зеркало сайта</a> Петрова Ольга Викторовна порно vodka casino почему в казино нет окон porno Анна Сидорова, керлингистка лучшие онлайн казино Ирина Горбачева вавада казино
DiskiPlus порно с Петр Ян (ММА) DiskiPlus порно с Варвара Субботина <a href=https://diskiplus.ru/>DiskiPlus porno Екатерина Ефременкова, шорт-трекистка</a> DiskiPlus пина casino DiskiPlus скачиваемые казино <a href=https://www.diskiplus.ru>DiskiPlus ев казино</a> DiskiPlus porno Александр Соболев (футбол) DiskiPlus porno Виктория Баркова, легкоатлетка DiskiPlus pin up casino официальный DiskiPlus Анна Михалкова DiskiPlus ставки на спорт букмекерские конторы DiskiPlus porno Анна Сидорова, керлингистка DiskiPlus ап казино
#4665 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Елена Лядова скачать 1×bet на андроид <a href=https://strelochnik.com/>почему в казино нет окон</a> 1×bet зеркало cometa casino <a href=https://rucriminal.info/>официальные сайты казино</a> casino зеркало сайта демо казино букмекерские контора ап сайт pin up casino casino андроид букмекерская контора бесплатно скачать 1×bet xbet
DiskiPlus 1×slots casino DiskiPlus гта казино <a href=https://diskiplus.ru/>DiskiPlus лучшие онлайн казино</a> DiskiPlus порно с Александр Головин (футбол) DiskiPlus рокс казино <a href=https://diskiplus.ru/>DiskiPlus porno Вера Бирюкова, гимнастка</a> DiskiPlus porno Мира Андреева (теннис) DiskiPlus ограбление казино DiskiPlus бесплатные букмекерские конторы DiskiPlus промокод 1×bet DiskiPlus скачать букмекерскую контору на андроид DiskiPlus casino на телефон DiskiPlus Нургалиева Эльвира Рамиловна порно
#4666 Charlesgunnyhttp://filmkachat.ru
1×slots casino зеркало
Необходимость отыгрыша. Вейджер в этом случае повыше, чем для призов за депо. И пока свои не отыграны, вывести их нельзя. <a href=http://filmkachat.ru/>1×slots зеркало сайта</a> <a href=https://guides.co/g/understanding-silo-images/468052>https://guides.co/g/understanding-silo-images/468052</a> Необходимость отыгрыша. Вейджер такой выше, чем для призов за депо. И же свои не отыграны, вывести их невозможно. 1×slots рабочее зеркало на сегодня <a href=https://opencollective.com/glavdorogadv1605>https://opencollective.com/glavdorogadv1605</a>
казино 1×slots официальный сайт
Высокая конкуренция в сегменте азартных игр доказывает операторов завлекать клиентов разнородными промоакциями. Благодаря этому у гостей замечена возможность получить призы в казино за регистрацию без депозита. Воспользоваться таким предложением можно, минуя функцию внесения денег на игровой счет, просто активировав акк на сайте. Наш экскурсовод по бездепам поможет выбрать самую привлекательную бонусную программу, разузнать правила получения такового вознаграждения и воспользоваться им с максимальной выгодой.Размер призов чаще всего чисто символический и не превышает 50 руб. Приятно, хотя осязаемым бустом в игре вряд ли станет. <a href=http://forum.l2endless.com/showthread.php?tid=344049>1хслотс казино зеркало</a> 1×slots официальный зеркало рабочее <a href=https://forum.expert-watch.com/index.php?action=profile;u=186060>https://forum.expert-watch.com/index.php?action=profile;u=186060</a> 1×slots регистрация 1×slots review live В онлайне слишком много скриптовых сайтов, коие принадлежат плутам. Их основная задача – заинтересовать гэмблеров, пообещав столько щедрые подарки, хотя и солидные выигрыши. Так собственно некоторые веб-сайты предлагают получить за регистрацию даже $1 000.Индивидуальные одобрения выдаются за совершение действий: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавленья или официального посетителя для ПК. В большинстве казино действуют программы преданности, присваивающие игрокам статусы за активность на сайте. Продвижение на грядущий степень нередко сопрягается выдачей бездепа.
1×slots регистрация 1×slots review live
Акции, посвященные календарным дням, посещают рассчитаны как на всех юзеров, так и на категории: примеру, подарок на 8 марта девушкам-игрокам либо мужикам на 23 февраля.На данном разделе портала регулярно публикуются обзорные статьи, в которых рассматриваются благотворительные бонусы превосходнейших интернет-казино. Информация структурирована по нескольким пт, включая основные: Срок отыгрыша — это этап, который наступает в момент активации приза и кончается с его закрытием. Пользователю нужно уложиться в данный временной промежуток, по призовые средства аннулируются. Казино устанавливают список игр, ставки каких засчитываются при расчете отыгранных средств. Если тайтл не заходит в этот перечень, то ему быть недоступен для загрузки период деяния бонусного предложения.Нельзя рассматривать игру на средства, как вариант заработка. Азартные игры воспрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не является зачинщиком азартных игр. Сайт одевает информационный характер. <a href=http://mashspec.ru/user/Zacheryaxoli/>http://mashspec.ru/user/Zacheryaxoli/</a> 1×slots казино зеркало Фриспины. Бесплатные вращения предусмотрены для использования в видео-слотах. Внимательно читайте обстоятельства – они часто выдаются для неких машин. В зависимости от клуба вам создавать определенное количество ставок. Кстати, современные игорные жилища дают вероятность заводить «одноруких бандитов».
1×slot рабочее зеркало
Бездепозитный приз за регистрацию в казино с выводом средств в 2022 году — Наш ресурс дает игрокам важную информацию о самых новых, великодушных и проверенных бонусах в интернет казино, коие обновляются любой день.В разделе с бонусами активировать свой подарок. Найти забавы, для коих предусмотрено одобрение и применять приз по назначению. Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, solid только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. 1×slots промокод при регистрации 2025 <a href=https://tvoyaskala.com/user/Forsedropmi/>https://tvoyaskala.com/user/Forsedropmi/</a> Не стоит сразу же открещиваться от приветственных презентов в сходственных казино. Администрация готова начислить средства или фриспины, хотя сначала работники обязаны убедиться, что вы не мошенник. Дело том,, собственно развелось слишком много охотников за бонусами. Они научились дурачить систему и наваривать крупные суммы денег.
1×slots подтвердит вашу регистрацию если говорить
Сроки активации приза уточняются каждым казино, но чаще всего они не превышают недели с этапа получения. Игроку непременно надо(надобно) использовать бездеп протяжении указанного срока, в ином случае приз просто исчезнет. Каждый приз можно получить только раз раз, потому случае не применять бездеп в срок, у игрока не будет второго шанса им воспользоваться.Бонус начисляется игроку незамедлительно после регистрации и прохождения верификации в казино и не требует от посетителя внесения депозита. Как правило, объем бонуса в схожем случае достаточно стыдливый, впрочем разрешает новичкам познакомиться с игрой без риска настоящими средствами. <a href=http://www.impk10.com/space-uid-317713.html>http://www.impk10.com/space-uid-317713.html</a> Еще одно условие дотрагивается объемов ставки. Операторы устанавливают наивысшую необходимую, которую игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, избранной в Личном кабинете. При превышении лимита есть риск лишиться приза. Существующие лимитирования относятся и к конкретным обликам ставок. Например, играя в рулетку, клиент может столкнуться с запретом ставить фишки на шансы.На страничке представлены бездепозитные призы за регистрацию в казино редкая награда за коей гонятся все игроки как новенькие, например и профессионалы. Мы тоже уделяем великое внимание на присутствие бонусов при формирование рейтинга казино на средства. Бездепозитный бонус это вероятность играть бесплатно и выиграть реальные деньги. 1×slot зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://www.ldvd.nl/jammer-3?page=16#comment-240082>1×slots casino регистрация 1×slots review live</a>
<a href=https://talkonlinenews.com/viewtopic.php?t=6310>1×slots casino online регистрация</a>
<a href=http://nhomtruyen.com/members/jamesgaw.9280/>1х слот регистрация в 1×slots casino</a>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=340844>зеркала 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подарки на конкретные даты выделяются критериями получения. Если поощрение начисляют игроку на день рождения, то сумма обыкновенно в от общего размера депо за прошедший год. Бoльшинcтвo азартных заведений выдвигают приблизительно однообразные, схожие обстоятельства и требования, коие необходимо выполнить, чтобы получить бездепозитный приз за регистрацию. Все их можно объединить в раз перечень:
#4667 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
online casino 7k porno Алена Михайлова <a href=https://rumafia.news/>up casino</a> gama casino 1win букмекерская контора <a href=https://rumafia.news/>pin up букмекерская контора</a> порно с Александр Головин (футбол) 1×bet сайт 1×bet xyz pin ап casino порно с Каролина Севастьянова 7k casino скачать скачиваемые казино порно с Анастасия Потапова, теннисистка
DiskiPlus рейтинг казино DiskiPlus порно с Зырянова Анастасия Владимировна <a href=https://diskiplus.ru/>DiskiPlus порно с Петр Ян (ММА)</a> DiskiPlus ап казино DiskiPlus Радченко Светлана Юрьевна порно <a href=https://diskiplus.ru/>DiskiPlus казино регистрации</a> DiskiPlus porno Андрей Рублев (теннис) DiskiPlus 1×bet xbet xyz DiskiPlus порно с Анна Калинская (теннис) DiskiPlus Набиуллина Эльвира Сахипзадовна порно DiskiPlus 1×bet сайт 1×bet xyz DiskiPlus 1×bet официальный сайт 1×bet xyz DiskiPlus букмекерская контора на андроид
#4668 Charlesgunnyhttp://filmkachat.ru
1×slot регистрация
Вышеописанная первопричина и является главным нюансом, следствии которого операторы отдают доля своей прибыли на различные маркетинговые затраты и маркетинговые кампании. А самым действенным тут станут выступать непосредственно бездепозитные бонусы казино 2022 с выводом за регистрацию. <a href=http://filmkachat.ru/>x1 slots 1хслотс регистрация перейти на 1×slots</a> Новички не обожают сразу же заносить депозит. Это обусловлено неимением навыка и недоверием. К счастью, в возможно получить бездепозитный приз за регистрацию в казино. Неважно собственно начислит система – фриспины либо кредиты. В любом случае вы не рискуете собственными сбережениями. Это отличная возможность запустить приглянувшийся видео слот или же испытать фортуну в настольных забавах. <a href=https://www.fanfiction.net/u/16465534/>https://www.fanfiction.net/u/16465534/</a> Выбрать казино с бездепозитным бонусом. У нас на сайте представлен список наилучших интернет казино, которые предлагают своим игрокам великодушные бонусы за регистрацию. 1хслотс регистрация в 1×slots casino <a href=http://domocontrol.ru/user/Harrytox/>http://domocontrol.ru/user/Harrytox/</a> Любой выигрыш по ставке повыше установленного лимита несомненно считаться недействительным. То есть ставка не будет засчитана при отыгрыше, а случае выигрыша его сумма не поступит на счёт посетителя — итог забавы будет полностью аннулирован.Зарегистрируйтесь. Для регистрации чаще всего довольно ввести свой номер аппарата и почтовый адресок, в чего установить полученный код из СМС. Возможно, требуется показать промокод. В правилах промоакции будет написано, где его надо вводить. Иногда это надо делать при регистрации, от — теснее после творенья личного офиса, на отдельной странице.
1×slots зеркало регистрация
1хслотс зеркало <a href=https://sporovo.by/user/PatrickScorm/>https://sporovo.by/user/PatrickScorm/</a> 1хслот 1хслотс регистрация перейти на 1×slots Важно, убедитесь том,, что раньше не регистрировались в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи.Более солидные предложения встречаются очень изредка. Зачастую они доступны лишь VIP-игрокам. В остальных случаях им всего сопутствуют очень строгие условия отыгрыша. Также возможны дополнительные обстоятельства прочие ограничения, прописанные в критериях и положения бонусной программы казино.
1×slots официальный сайт зеркало рабочее
Бездепозитные призы истинными средствами, которые можно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадались.Большинство клубов завлекают внимание игры за счёт различных подарков. На 1 сайтах возможно получить виртуальные кредиты, которые откроют доступ ко всему софту. На других же, администрация предлагает благотворительные вращения для запуска топовых интернет слотов. Несмотря на различные акции, стоит выделить самые главные. Промообъявления от казино мешают реальной картины и направлены на вербование внимания юзеров. Понять, насколько высоки шансы остаться в плюсе, позволит собственный анализ условий предложения: <a href=https://humorclub.ru/user/Edwardtok/>https://humorclub.ru/user/Edwardtok/</a> Бездепозитный бонус казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в этом и заключается главное различие. 1×slot зеркало рабочее регистрации на телефон придет Предложения с бездепозитными призами за регистрацию разрешают свежим заведениям заинтересовать аудиторию на собственный сайт. А игроки же получают возможность выступать на реальные средства без депозита в казино и заработать небольшой стартовый капитал, который разрешено вывести на карту банка либо электрический кошелек.Варианты выигрыша зависят от Вашей удачи и условий игорного портала. Выше мы сказали, что кое-какие бездепозитные призы в 2022 году выдаются с лимитированиями по максимальной выплате. Однако, остаются они, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность современных игр на средства, можно выиграть невозможные суммы. Сегодняшние игровые автоматы либо видео слоты, как их именуют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000.
1хслотс регистрация в 1×slots casino
При отыгрыше бонусных средств, нужно учитывать срок деянья бонуса и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный приз будет аннулирован. На данном разделе портала регулярно публикуются обзорные заметки, каких рассматриваются благотворительные призы превосходнейших интернет-казино. Информация структурирована по нескольким пт, включая главные: 1хслот зеркало сайта <a href=https://www.russiansuka.net/user/WalterVep/>https://www.russiansuka.net/user/WalterVep/</a> Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.
1×slots актуальное зеркало
В качестве бонусов онлайн казино часто предлагает выдачу фриспинов, словами даровых вращений игрового барабана. Виртуальные монеты возможно применять для обучения в покерной школе или для игры в казино.Приветственный бонус без депозита ? подарок за регистрацию. Выдается средствами, фриспинами либо баллами. В заключительном случае бонусные баллы используются для роли в турнирах или обмена на реальные деньги. <a href=http://fze.ohosure.org/bbs/home.php?mod=space&uid=95322>http://fze.ohosure.org/bbs/home.php?mod=space&uid=95322</a> Операторы гемблинга утверждают, собственно например они дерутся с бонус-хантерами. Впрочем, критики считают, что этим казино пытаются сделать из случайного гостя неизменного игрока. 1×slots рабочее зеркало на сегодня Возьми свой подарок. Чаще всего бонус активируется незамедлительно последствии регистрации. Но случаются истории, когда надо(надобно) зайти в индивидуальный кабинет либо написать в справочную службу.Также, учите, что бездепозитный приз можно исключить лишь сомнений случае, когда станут исполнены все условия отыгрыша.
<b>Смотреть еще похожие новости:</b>
<a href=http://b2s.bulwork.com/node/1581?page=123#comment-24681>1хслотс регистрация в 1×slots casino</a>
<a href=http://skatefluckit.com/member.php?u=149708>1×slot казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Разные казино имеют собственные управляла по выведению выигрыша. Для бездепозитных призов принимаются достаточно высочайшие притязания. Часто онлайн-казино рекомендуют отыграть бонусное поощрение до ста один в игровых автоматах. Например, если игрок получил безвозмездно 10 долларов, то необходимо несомненно отыграть их, поставив одну тысячу спинов по одному баксу каждый. Стоит обозначить(означить), что не все казино выделяют вероятность выступать на бонусы и не во всех увеселительных заведениях идентичные правила для отыгрывания. Некоторые казино воспрещают играть на призы в блекджек либо ограничивают ставки до пяти %, что значительно увеличивает в 10-ки раз количество необходимых игр. Многие казино деют в рекламных целях благотворительные призы исключительно для наших читателей. Чтобы их получить, нужно перебежать на игровой вебсайт по партнерской ссылке с нашего портала.
#4669 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало на сегодня 1×bet xyz кент casino <a href=https://res-publika.com>казино 1</a> где казино 1×bet <a href=https://res-publika.com>мелбет букмекерская контора</a> порно с Зырянова Анастасия Владимировна 1×bet слоты порно с Арина и Дина Аверины, гимнастки 1×bet сайт казино смотреть онлайн бесплатно Семёнова Татьяна Владимировна порно букмекерская контора скачать приложение
DiskiPlus porno Алена Косторная (фигурное катание) DiskiPlus Разуваева Ксения Денисовна порно <a href=https://www.diskiplus.ru>DiskiPlus букмекерская контора на андроид</a> DiskiPlus porno Светлана Ходченкова DiskiPlus порно с Юлия Ефимова, пловчиха <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet бесплатно</a> DiskiPlus букмекерская контора ставки DiskiPlus промокод 1×bet DiskiPlus винлайн букмекерская контора официальный DiskiPlus сайт казино зеркало DiskiPlus казино онлайн DiskiPlus 1×bet xbet xyz DiskiPlus казино большая
#4670 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на официальном сайте
Бонусные средства – небольшая сумма денег для старта в новом казино. На бонусные средства, обыкновенно разрешается играть во все игры, не слотов с прогрессивным джекпотом и игр из раздела live casino.Получив свой презент, Вы можете бесплатно играть на реальные деньги, а выполнив обстоятельства отыгрыша, вывести собственный выигрыш. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> Представленные на этой страничке превосходнейшие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, в котором гости Casino.ru шансы сортировать список по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д. <a href=https://groups.google.com/u/2/g/shopavto>https://groups.google.com/u/2/g/shopavto</a> 1×slots официальный регистрация <a href=https://jobs.host-panel.com/author/jaspervip/>https://jobs.host-panel.com/author/jaspervip/</a> В лицензионных бездепозитных казино играть в азартные забавы действительно безопасно. Наличие лицензии подтверждает что, этот прецедент, что клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP.Некоторые казино шансы предлагать посетителям бездепы за свидетельство номера либо почты либо репост на страничку в социальных сетях.
1хслотс зеркало
1×slots регистрация то дальше необходимо пройти Список так нарекаемых «разрешенных землель» прилагается к правилам бонусной программки игорного портала. Обязательно выясните, распространяются ли на вас сходственные наказания.Наш перечень включает в себя превосходнейшие бездепозитные бонусы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по главным характеристикам: <a href=http://www.ngo.ne.jp/userinfo.php?uid=34233>http://www.ngo.ne.jp/userinfo.php?uid=34233</a> Перед активацией важно внимательно изучить обстоятельства промоакции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют значение кроме лимиты ставок при отыгрыше и сроки, в течение которых можно пользоваться предложением. Если бездеп охватывает узкий список игр, рекомендуется узнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только никаких случае, в оператор не установил жесткие лимитирования на наивысшую необходимую ставки. 1хслот скачать Отзывы читателей о бонусных акциях помогут составить впечатление, но не забывайте о субъективности собственных объяснений.Приветственный приз без депо ? подарок за регистрацию. Выдается деньгами, фриспинами либо баллами. В последнем случае бонусные баллы применяются для участия в турнирах либо обмена на настоящие средства.
1×slot зеркало
Подарки на праздничные ? приуроченные к праздничным датам, требующие условного отыгрыша либо начисляются без такового. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду.Бонус за регистрацию в казино выдается только один раз на 1-го игрока. Но случаются вспомогательные промоакции, в коих бездепы раздаются для постоянных посетителей и эти презенты Вы можете получить более одного раза. Чтоб получить большой выигрыш, подбирайте игровые автоматы с максимальным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша. <a href=http://www.ingenieursdudimanche.lagob.fr/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0%20%D0%B4%D0%B7%D0%B5%D0%BD>http://www.ingenieursdudimanche.lagob.fr/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0%20%D0%B4%D0%B7%D0%B5%D0%BD</a> 1× slots casino официальный сайт
1×slots быструю регистрацию а также мгновенное
<a href=https://www.handmakersbrasil.com.br/topic/1084–1×slots-casino-online-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F/>1×slots casino online регистрация</a> 1×slot рабочее зеркало <a href=https://raygunmvp.com/user/frankcah-frankcah/?um_action=edit>https://raygunmvp.com/user/frankcah-frankcah/?um_action=edit</a> Если речь идет об неповторимых услугах, возможность понадобиться регистрация в казино по ссылке с партнерского сайта.Обыкновенные бездепозитные бонусы в объеме от 3-х до 20 долларов созданы для того, чтобы в игры заходили все свежие и новые игроки. Здесь, скорее, будет ограничение на наибольший выигрыш. Важно, чтобы перед наименьшим вкладом был отключен приз за 1-ое пополнение счета, и игрок не попадет на повторный вейджер.
1×slots casino регистрация 1×slotscasino09k online
Хотя благотворительные бонусы начисляются без депозита, не исключено, что вас понадобиться заносить деньги. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только в такого, как свежий клиент раз пополнит игровой счет.1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, в не желайте стать жертвой плутов или впустую истратить время; <a href=https://xn–vf4bq05ajlcqa.com/bbs/board.php?bo_table=inquiry&wr_id=222501>https://xn–vf4bq05ajlcqa.com/bbs/board.php?bo_table=inquiry&wr_id=222501</a> 1×slots casino регистрация 1×slotscasino09k online Такой казино приз без депо за регистрацию выдается игроку на час и активно используется данное предложение с 2017 года. Это словно какая-то маскировка одобрения под бездепозитный. Суть всего сего сводится к что, этому, собственно геймеру на час выдается, к примеру, 1000 долларов, а реклама утверждает про, что любой выигрыш можно несомненно дальнейшем забыть при для. Но случае играющий серьезно отнесется к этому предложению, то он попросту потеряет время. Ведь геймеру нужно будет выступать не в аккаунте, ну тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (числе всей тыс. ) в управляла вступят определенные обстоятельства, где несомненно сказано, собственно наибольшей суммой победы возможность быть только двести долларов и деньги возможно использовать лишь в качестве бонуса на 1-ый лепта с вейджером 25 от суммы гонорары плюс сам депо. По итогу получится, что игрок выигрывал для 200% приз с вейджером на конкретную необходимую. Короче говоря, это все не стоит вашего времени.Чтобы получить вероятность вывести выгода с бездепозитного приза в казино, нужно выполнить ряд критерий:
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Помните, что в неких забавах сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки считаются как отыгранные деньги, момент как в слотах идет в зачет все 100% суммы. Также учтите, что некоторые игровые платформы сузивают перечень стран, коие готовы получить предложенный бездепозитный бонус за регистрацию. К примеру, есть онлайн-заведения, выдающие подобные бонусы только жителям конкретных стран. К примеру, онлайн казино 777 Оригинал предоставляет бездепозитный бонус лишь игрокам из России и стран СНГ. Или наоборот, снабжают вознаграждением всех, считая жителей неких государств (из сего, стопам внимательно учить перечень, чтобы впоследствии не появилось никаких вопросов и жалоб).
#4671 AHoini
<a href=http://pr.lgubiz.net/bbs/board.php?bo_table=free&wr_id=717517>lemon casino online</a> <a href=http://kayurveda.co.kr/bbs/board.php?bo_table=free&wr_id=179665>neon54</a>
#4672 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
retro casino казино <a href=https://kompromat1.online/>casino актуальное зеркало</a> ограбление казино вавада казино <a href=https://m.repost.news/>Ходнева Светлана Владимировна порно</a> порно с Матвей Сафонов (футбол) порно с Алина Загитова, фигуристка porno Андрей Рублев (теннис) porno Екатерина Ефременкова, шорт-трекистка porno Ангелина Гончаренко, хоккеистка 1×bet зеркало pin up casino
DiskiPlus Черкесова Бэлла Мухарбиевна порно DiskiPlus casino вход <a href=https://www.diskiplus.ru>DiskiPlus casino рабочее зеркало</a> DiskiPlus пина букмекерской конторы DiskiPlus сайте букмекерской конторы фонбет <a href=https://diskiplus.ru/>DiskiPlus 7k casino зеркало на сегодня</a> DiskiPlus букмекерские конторы pin DiskiPlus 1×bet скачать приложение на андроид DiskiPlus porno Дарья Клишина DiskiPlus 1×bet casino DiskiPlus официальная казино DiskiPlus 7k casino зеркало рабочее DiskiPlus Яровая Ирина Анатольевна порно
#4673 Charlesgunnyhttp://filmkachat.ru
1× slots зеркало
Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в социальных сетях, установку мобильного приложения или официального клиента для ПК. В большинстве казино действуют программки преданности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на следующий уровень часто с выдачей бездепа. <a href=http://filmkachat.ru/>casino 1×slot</a> В качестве бонусов онлайн казино часто предлагает выдачу фриспинов, то есть безвозмездных вращений игрового барабана. Виртуальные монеты возможно применять для изучения в покерной школе либо для забавы в казино.Нет. Казино раздают бесплатные призы за регистрацию, чтобы, чтобы, чтобы заказчик возможность ознакомиться с игровым заведением. А дабы вывести его, нужно выполнить условия отыгрыша. <a href=https://www.find-topdeals.com/blogs/188338/Revolutionizing-Product-Marketing-Through-Dynamic-3D-Presentations>https://www.find-topdeals.com/blogs/188338/Revolutionizing-Product-Marketing-Through-Dynamic-3D-Presentations</a> После получения приза вывод средств для клиента будет недоступен того, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо пара недель. Выводить средства игрок может лишь в отыгрыша. 1×slots официальный сайт мобильная версия <a href=http://o96737zj.beget.tech/user/Davidgom/>http://o96737zj.beget.tech/user/Davidgom/</a> Автоматы неспроста числятся самым знаменитым азартным отдыхом. Чтобы освоить управление и верховодила, потребуется всего некоторое минут. Ваша задачка устроить ставку, найти число трудящихся линий и можно вертеть барабан. Если на экране выпадет выигрышная комбинация – вы выиграли! С этой задачей вас помогут справится бездепозитные призы казино.Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и расценить необыкновенности, труднодоступные при забаве в демо режиме. Многие новые клиенты переходят в число неизменных, а оператор получает длительную выгода.
1×slots рабочее зеркало на сегодня
<a href=http://complainanything.com/node/158?page=1024#comment-1457325>1×slots казино зеркало</a> 1×slots официальный сайт зеркало Многие игроки, оценив возможностей казино, остаются выступать в нем и дальше ? на это и нацелено каждое промо. Постоянные клиенты заносят депозиты и делают ставки, обеспечивая долгосрочную выгода оператора. То есть, казино раздают бездепы новым юзерам для формирования приклнной аудитории. <a href=http://www.01.com.hk/member.php?Action=viewprofile&username=DoctorLazutaKl>http://www.01.com.hk/member.php?Action=viewprofile&username=DoctorLazutaKl</a> 1×slots актуальное зеркало
1×slots casino зеркало рабочее
Максимальная ставка ? устанавливается в валюте счета и ограничивает размер ставки за раз спин. В случае ее превышения приз может быть аннулирован. Также в правилах имеет находиться запрет на размещение ставок конкретного вида, к, по одинаковым шансам в рулетке (словами, на чет или нечет, красноватое либо черное и т.д. ). Заработать на бездепозитных бонусах за регистрацию в казино может каждый пользователь, достигший совершеннолетия. <a href=https://modx.pro/users/glavdorogadv1808>https://modx.pro/users/glavdorogadv1808</a> Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депозит возможность выделяться до 30 дней.Для выбора азартного заведения Вы можете пользоваться перечнем наших казино с призами за регистрацию. На нашем сайте мы выпустили список бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, собственно часть призов неповторимые и доступны лишь для посетителей нашего вебсайта по-специальному промо-коду либо по оригинальной ссылке. Кроме такого, для каждого бонуса мы подготовили подробный обзор, в Вы узнаете как получить и отыграть одобрение и как исключить собственный выигрыш с бездепа. 1хслотс официальный сайт зеркало
1× slots casino зеркало
Как прочие промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых посетителей и разрешает им составить впечатление о функционале, не рискуя значительными суммами. В некоторых интернет казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на сайте клуба и подтвердить свои контактные данные. Дополнительно требуется активация промокода. 1×slots официальный регистрация <a href=https://www.socialwider.com/blog/590036/unraveling-the-captivating-allure-of-discovering-zanzibar/>https://www.socialwider.com/blog/590036/unraveling-the-captivating-allure-of-discovering-zanzibar/</a>
1×slots casino зеркало
Но есть азартные заведения, готовые просто так вручить деньги на игру. Для этого достаточно создать профиль. Чтобы вывести выигрыш, сначала нужно выполнить вейджеровые условия, прописанные в критериях получения бездепа.Бездепозитные бонусы реальными деньгами, коие возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадали. Если простыми текстами, бездепы – это определённая сумма денег либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать презенты. Но есть кое-какие аспекты. Существуют игорные дома, коие перед что, этим как начислить призы просят привязать телефонный, дать копии документов.Представленные на этой странице превосходнейшие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, в гости Casino.ru имеют сортировать перечень по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д. <a href=http://unix.t7y.ru/user/Donaldfus>http://unix.t7y.ru/user/Donaldfus</a> 1×slots casino зеркало Практически все интернет казино с бездепозитным бонусом за регистрацию предусматривает программку лояльности — систему поощрения неизменных клиентов, кот-ая состоит из множества уровней. При достижении игроком одного значения на его счёт поступает бонус. Чем повыше степень — что, этим щедрее бонус.
<b>Смотреть еще похожие новости:</b>
<a href=https://fougerite.com/threads/1×slots-skachat-na-ajfon.12630/>1×slots скачать на айфон</a>
<a href=https://praisenpray.org/forums/showthread.php?tid=103948>1×slots на любой вкус как пройти регистрацию</a>
<a href=https://forumsleague.org/forum/viewtopic.php?f=70&t=19230&p=381884#p381884>1×slots официальный зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Верификация аккаунта. Лучше подтвердить лицо сразу в регистрации, дабы позже не было проблем с выводом денег. Верификация имеет проходить двумя маршрутами:
#4674 Tyleroralfhttps://vibrometro1a.com
<a href=https://vibrometro1a.com>Balanceo dinamico</a> Aparatos de calibración: esencial para el funcionamiento estable y óptimo de las máquinas.
En el ámbito de la tecnología actual, donde la efectividad y la confiabilidad del aparato son de suma importancia, los sistemas de calibración juegan un tarea esencial. Estos equipos especializados están creados para calibrar y regular piezas dinámicas, ya sea en maquinaria manufacturera, medios de transporte de traslado o incluso en electrodomésticos caseros.
Para los expertos en soporte de dispositivos y los técnicos, trabajar con equipos de ajuste es importante para promover el funcionamiento estable y fiable de cualquier dispositivo dinámico. Gracias a estas herramientas innovadoras modernas, es posible reducir notablemente las oscilaciones, el zumbido y la esfuerzo sobre los rodamientos, mejorando la duración de partes caros.
De igual manera significativo es el tarea que cumplen los dispositivos de balanceo en la servicio al consumidor. El asistencia experto y el mantenimiento permanente aplicando estos dispositivos habilitan ofrecer asistencias de óptima nivel, incrementando la bienestar de los usuarios.
Para los titulares de proyectos, la contribución en unidades de balanceo y dispositivos puede ser fundamental para aumentar la efectividad y desempeño de sus dispositivos. Esto es especialmente importante para los inversores que dirigen reducidas y intermedias organizaciones, donde cada elemento cuenta.
Por otro lado, los sistemas de calibración tienen una vasta implementación en el campo de la seguridad y el gestión de calidad. Habilitan identificar eventuales errores, impidiendo reparaciones elevadas y perjuicios a los equipos. Además, los resultados obtenidos de estos dispositivos pueden usarse para optimizar métodos y incrementar la exposición en sistemas de consulta.
Las sectores de utilización de los sistemas de ajuste cubren diversas ramas, desde la elaboración de vehículos de dos ruedas hasta el seguimiento del medio ambiente. No interesa si se trata de extensas fabricaciones productivas o modestos establecimientos domésticos, los sistemas de balanceo son fundamentales para garantizar un rendimiento óptimo y sin riesgo de detenciones.
#4675 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
рейтинг казино casino pin официальный <a href=https://th-royalgclub.com/>win win casino</a> казино porno Александра Степанова, фигуристка <a href=https://krtka.info/>Хорова Наталья Александровна порно</a> порно с Петр Ян (ММА) пин up casino casino 7k сегодня гта онлайн казино casino игровой автомат casino игровой автомат 1×bet зеркало xbet
DiskiPlus букмекерская контора леонов DiskiPlus top casino <a href=https://diskiplus.ru>DiskiPlus букмекерская контора леонов</a> DiskiPlus Москалькова Татьяна Николаевна порно DiskiPlus new casino <a href=https://www.diskiplus.ru>DiskiPlus порно с Алексей Миранчук (футбол)</a> DiskiPlus бесплатно играем казино DiskiPlus casino онлайн DiskiPlus Александра Бортич DiskiPlus pin up casino официальный DiskiPlus Елена Лядова DiskiPlus casino online зеркало DiskiPlus porno Елизавета Туктамышева
#4676 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пин ап казино казино рулетка <a href=https://specreporter.com/>казино ставка</a> 7k casino зеркало рабочее казино <a href=https://rucriminal.info/>казино 5</a> 1×bet рабочее 1×bet рабочее порно с Владимир Минеев (ММА) порно с Васильева Татьяна Викторовна 1×bet официальный сайт Анна Михалкова порно с Захарова Мария Владимировна
DiskiPlus демо казино DiskiPlus porno Алена Михайлова <a href=https://www.diskiplus.ru/>DiskiPlus казино смотреть онлайн бесплатно</a> DiskiPlus bitz casino DiskiPlus vodka casino <a href=https://diskiplus.ru/>DiskiPlus Елизавета Боярская</a> DiskiPlus vodka casino DiskiPlus 1×bet сайт 1×bet xyz DiskiPlus 1×bet слоты DiskiPlus up букмекерская контора DiskiPlus порно с Аделия Петросян (фигурное катание) DiskiPlus порно с Аделия Петросян (фигурное катание) DiskiPlus 1×bet зеркало слоты
#4677 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet слоты porno Дарья Клишина <a href=https://glvk.guru/>официальная казино</a> 1×bet рабочее 1×bet официальный сайт <a href=https://vestnik-jurnal.com/>casinos winning</a> kent casino пинко casino букмекерская контора бесплатно скачать пари букмекерская контора 7k casino зеркало на сегодня казино вулкан лучшие бесплатные онлайн казино
DiskiPlus 1×bet слоты DiskiPlus pin up casino пин <a href=https://diskiplus.ru/>DiskiPlus спорт букмекерская контора</a> DiskiPlus букмекерская контора официальный сайт скачать DiskiPlus 7k casino бонус <a href=https://www.diskiplus.ru>DiskiPlus порно с Матвей Сафонов (футбол)</a> DiskiPlus официальные зеркала казино DiskiPlus casino зеркало сегодня DiskiPlus casino онлайн DiskiPlus 1×bet зеркало рабочее xbet DiskiPlus казино фильм смотреть онлайн DiskiPlus приложения букмекерских контор на андроид DiskiPlus porno Марина Александрова
#4678 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasin online
Обычно бездепозитные акции от казино, прибывают на эл. Почту в деньки рождения либо дни. В неких интернет казино возможно адресоваться в чат и как неизменному игроку, вполне для предложат бездепозитное предложение.Доступные забавы – В неких азартных забавах возможно понизить математическое превосходство казино до нескольких 10-х процента. В их количестве многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как верховодило, в этих забавах ставки идут в зачет вейджера не всецело. Например, имеет учитываться только 50%. В неких забавах бездепозитные призы вообще нельзя отыгрывать. <a href=http://filmkachat.ru/>1× slots зеркало</a> Подтвердите лицо, предоставив оператору казино средства паспортные данные. Инструкции обыкновенно легкие, основное — четко им следовать. Если написано, собственно «на фото должны быть заметны все четыре угла странички паспорта» — сделайте непосредственно такое фото. <a href=https://www.4yo.us/blogs/311034/From-Digital-Lines-to-Artistry-Modern-Approach-to-Sketch-Rendering>https://www.4yo.us/blogs/311034/From-Digital-Lines-to-Artistry-Modern-Approach-to-Sketch-Rendering</a> Получив собственный подарок, Вы можете безвозмездно выступать на настоящие средства, а выполнив обстоятельства отыгрыша, вывести собственный выигрыш. 1×slots актуальное зеркало <a href=http://spilov.ru/user/CharlesThuby/>http://spilov.ru/user/CharlesThuby/</a> Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную функцию активации приза без депо. Внимательно прочитайте до конца. Многие новенькие проделывают ошибки на этапе регистрации и поэтому не могут получить презент.
1×slots сайт
Бездепозитный бонус казино 2022 с выводом за регистрацию дает вероятность ознакомиться игроку с лобби избранного заведения, сориентироваться в выборе игр и выяснить качество работы службы поддержки. Довольно часто, начиная игровой процесс, игрок уже не желает останавливаться и проделывает настоящий вклад. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть безвозмездно вероятно как один таки с призом за регистрацию без необходимости заносить депозит.Почти все игровые клубы просят свидетельство контактных данных игрока для получения бездепозитного бонуса. <a href=http://u0382101.isp.regruhosting.ru/index.php/forum/general-questions-and-how-tos/68883-otzyvy-o-tovarakh?start=1458#131297>1×slots официальный сайт скачать на айфон</a> 1×slots подтвердит вашу регистрацию если говорить <a href=http://bbs.gdredi.com/space-uid-284035.html>http://bbs.gdredi.com/space-uid-284035.html</a> Чтобы бездеп не был начислен на Ваш аккаунт, Вам не активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт автоматически, а Вы не планируете его использовать, обратитесь в службу поддержки с пожеланием отменить бездепозитный бонус.Однако далековато не все ресурсы предлагают своим посетителям бездепозитные бонусы за регистрацию в казино. В большинстве случаев учтено одобрение на 1-ый депозит в размере 100–200%. Это отличная возможность преумножить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш. рабочее зеркало 1×slots В большинстве заведений сделать это возможно по e-mal, по номеру телефонного, спустя социальную сеть или гугл-аккаунт.При малый сумме приза рекомендуется выступать по низким ставкам, а использовать наибольшие превосходнее лишь сомнений случае, в вейджер очень большой, а время на отыгрыш крепко ограничено.
1×slots зеркало проходить регистрацию это отличный вариант
Шаг 4. Активация. Внимательно изучите обстоятельства, информацию по лимитированиям и сроке действия бонусного предложения. Разобравшись с правилами, возможно активировать бонус в собственном кабинете (времени ? с внедрением промокода) или по запросу в саппорт. <a href=http://smecenter.utcc.ac.th/index.php/component/users/?option=com_k2&view=itemlist&task=user&id=387338>http://smecenter.utcc.ac.th/index.php/component/users/?option=com_k2&view=itemlist&task=user&id=387338</a> Так что приготовьтесь предоставить конфиденциальную информацию (пол, возраст, страна проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает не более суток, после чего удастся беспрепятственно выводить солидные выигрыши.Бонусные средства – маленькая сумма денег для старта в новом казино. На бонусные деньги, обычно разрешено выступать во все игры, считая слотов с прогрессивным джекпотом и игр из раздела live casino. 1×slots официальный сайт мобильная версия Чаще всего казино бонус за регистрацию без депозита даёт вероятность запустить любой машина. Но другого внимательно ознакомиться с критериями. Иногда для забавы доступны лишь определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, другого, как начать знакомство с миром азарта непосредственно с «одноруких бандитов».Перед активацией важно пристально выучить обстоятельства акции. Чем ниже вейджер, тем больше возможная выгода игрока. Имеют значение также лимиты ставок при отыгрыше и сроки, на коих можно воспользоваться предложением. Если бездеп охватывает ограниченный перечень игр, рекомендуется разузнать максимальные коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только в том случае, в оператор не установил строгие ограничения на наивысшую необходимую ставки.
1×slots зеркало на сегодня
Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном сайте и сделайте вход в индивидуальный кабинет, чтобы отобрать бесплатные вращения с вейджером х40;4. Заберите презент. Чаще всего бонус активизируется сразу последствии регистрации. Но посещают ситуации, когда надо(надобно) забежать в индивидуальный кабинет либо написать в службу поддержки. Если вы бывалый игрок, вы обязаны аристократия, что бонус без депозита – редкая находка. Тем ниже, мы раз изучаем интернет, чтобы найти вам превосходнейшие бездепозитные предложения. Но есть игорные заведения, которые готовы просто например жертвовать деньги на игру. Для этого достаточно создать профиль. Чтобы исключить свой выигрыш, вам сначала необходимо выполнить обстоятельства отыгрыша, указанные в условиях получения бездепозитного депо.Для получения депозитного приза нужно восполнить собственный игровой баланс реальными деньгами. Вознаграждение возможно получить или при внесении первого депо, либо в виде фиксированного процента от внесённых средств. Так или другому, приз поступит на счёт лишь после пополнения. x1 slots регистрация в 1×slots casino <a href=http://www.mallangpeach.com/bbs/board.php?bo_table=free&wr_id=1038342>http://www.mallangpeach.com/bbs/board.php?bo_table=free&wr_id=1038342</a> С другой стороны, намного проще забрать бездепозитные фриспины за регистрацию в казино и прямо момент начать вертеть барабаны в наилучших слотах. Главная особенность спинов сомнений, что они предусмотрены для топовых автоматов. Удастся столько пройти дополнительные раунды, но и увеличить необходимую выигрыша, заработать респины и другие внутриигровые презенты.Способы получения бездепа различаются от облика приза, который понравился игроку. Но для или надо(надобно) быть зарегистрированным в легальном онлайн-казино и подтвердить свою личность. В общем виде пошаговая инструкция для получения бездепозитного приза смотрится например:
зеркло казино 1×slots
<a href=http://www.greenparking-dhd.com/bbs/board.php?bo_table=free&wr_id=206445>http://www.greenparking-dhd.com/bbs/board.php?bo_table=free&wr_id=206445</a> Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша призов. Заведения практически устанавливают максимальную ставку, допустимую по условиям вейждера.1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, в не желаете замерзнуть жертвой плутов либо впустую истратить время; 1× slots casino официальный сайт Риск-игра по равным шансам – Также казино имеет воспрещать выполнять обстоятельства по отыгрышу с помощью раунда на удвоение, который предлагается в слотах, видео-покере и неких других играх.К образцу, игроку выдаются безвозмездные средства в заведении в объеме пятидесяти либо 100 $ (вейджер на коие составляет 100х). То есть, любому новоприбывшему геймеру выскакивает манящая картинка, которая сулит выплату всех зачисленных фирмой средств. Не стоит внимания на казино приз за регистрацию без депозита с сильно великий или очень малюсенькой суммой призов, потому что, даже тщательно исследовав все условия, здесь скорее, несомненно некий подкол.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1× slots зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, all только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. Исходя из сего, просто не присутствует разумных оснований махнуть рукою на получение такого бонуса при регистрации. И, лишним, на подобный безвозмездной базе у вас есть все шансы выиграть средства и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, именуют безвозмездными онлайн платформами для игр.
#4679 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать сайт букмекерской конторы Скворцова Вероника Игоревна порно <a href=https://7club7.com/>1×bet xbet xyz</a> казино онлайн бесплатно бесплатно играем казино <a href=https://slon-ru.com/>симулятор казино</a> порно с Александр Большунов (лыжные гонки) 7k casino зеркало рейтинг казино скачать букмекерскую контору porno Виктория Баркова, легкоатлетка казино играть ramenbet casino
DiskiPlus порно с Алина Загитова DiskiPlus казино рулетка <a href=https://diskiplus.ru/>DiskiPlus pinco casino</a> DiskiPlus casino играть DiskiPlus букмекерскую контору пин <a href=https://www.diskiplus.ru>DiskiPlus casino зеркало сегодня</a> DiskiPlus официальное казино вход DiskiPlus 1win casino DiskiPlus Елена Лядова DiskiPlus Львова-Белова Мария Алексеевна порно DiskiPlus пин ап букмекерская контора DiskiPlus 1×bet официальный DiskiPlus pin up casino пин ап
#4680 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Дарья Касаткина (теннис) казино онлайн бесплатно <a href=https://strelochnik.com/>Нургалиева Эльвира Рамиловна порно</a> официальные букмекерские конторы скачать казино ли <a href=https://vestnik-jurnal.com/>букмекерская контора</a> 1×bet зеркало рабочее xbet 1×bet сейчас casino зеркало сегодня рабочее porno Катерина Шпица new casino винлайн букмекерская контора официальный сайт официальные букмекерские конторы
DiskiPlus официальное казино вход DiskiPlus сайт букмекерской конторы <a href=https://www.diskiplus.ru/>DiskiPlus часы казино</a> DiskiPlus демо казино DiskiPlus винлайн букмекерская контора официальный <a href=https://www.diskiplus.ru>DiskiPlus bitz casino</a> DiskiPlus porno Александр Соболев (футбол) DiskiPlus букмекерская контора бесплатно скачать DiskiPlus казино пину DiskiPlus казино рулетка DiskiPlus порно с Абрамченко Виктория Валериевна DiskiPlus вывод казино DiskiPlus Москалькова Татьяна Николаевна порно
#4681 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin casino porno Мария Шарапова <a href=https://glvk.guru/>букмекерская контора официальный сайт</a> 1×bet xbet porno Юлия Пересильд <a href=https://sovsekretno.net/>casino сайты</a> букмекерская контора мостбет casino com 1×bet зеркало xbet xyz водка казино яндекс игры казино казино ли какие казино
DiskiPlus яндекс игры казино DiskiPlus букмекерские конторы pin <a href=https://diskiplus.ru>DiskiPlus Кузнецова Анна Юрьевна порно</a> DiskiPlus up букмекерская контора DiskiPlus букмекерская контора бетсити <a href=https://diskiplus.ru/>DiskiPlus порно с Артемий Панарин (хоккей)</a> DiskiPlus порно с Александр Большунов (лыжные гонки) DiskiPlus букмекерская контора скачать приложение DiskiPlus porno Юлия Канакина DiskiPlus порно с Сергей Бобровский (хоккей) DiskiPlus кент казино DiskiPlus включи казино DiskiPlus 1×bet сайт 1×bet xyz
#4682 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало сайта
Разные казино имеют собственные управляла по выведению выигрыша. Для бездепозитных бонусов принимаются достаточно высочайшие требования. Часто онлайн-казино советуют отыграть бонусное поощрение до 100 раз в игровых автоматах. Например, если игрок получил бесплатно 10 долларов, то необходимо несомненно отыграть их, поставив одну тысячу спинов по одному доллару любой. Стоит отметить, собственно не все казино выделяют вероятность играть на призы и не во всех развлекательных заведениях идентичные верховодила для отыгрывания. Некоторые казино запрещают выступать на призы в блекджек либо ограничивают ставки до пяти процентов, собственно существенно увеличивает в десятки раз число необходимых игр. <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> <a href=https://www.friend007.com/forums/thread/8741/>https://www.friend007.com/forums/thread/8741/</a> 1×slots акции <a href=http://xn–80aeh5aeeb3a7a4f.xn–p1ai/forum/user/43056/>http://xn–80aeh5aeeb3a7a4f.xn–p1ai/forum/user/43056/</a>
1×slos регистрация в 1×slots casino
<a href=https://www.one2bay.de/forum/showthread.php?tid=495360>1×slots скачать на айфон</a> 1хслот 1хслотс регистрация перейти на 1×slots Вывод выигрыша с бездепозитных бонусов казино – великодушный подарок от азартных клубов. Но дабы исключить свой заработок, необходимо выполнить ряд критерий: <a href=https://0512.banx.co/space-uid-1572450.html&do=profile>https://0512.banx.co/space-uid-1572450.html&do=profile</a> 1×slot рабочее зеркало У любого игорного заведения средства верховодила и обстоятельства. Но, чтобы получить бонусы, необходимо выполнить стандартные действия:Бездепозитные бонусы прекрасный вариант безвозмездной забавы в игровые автоматы. Многие пользователи сети не знают, что в казино возможно начать выступать абсолютно безвозмездно, а потом вывести выигрыш на банковскую карту либо электрический кошелек, другие не доверяют онлайн казино, а третьи успешно играют и выигрывают – и тотчас достаточно великие суммы.
1×slots промокод при регистрации 2025
Доступ к дару возможность открываться автоматически последствии введения промокода или обращения в службу вебсайта. В первом случае от юзера не требуется практически действий. Бездеп с активацией по коду встречается чаще всего. Игроку необходимо установить совокупность знаков в графе, кот-ая возможность находиться в регистрационной форме в Личном кабинете.Некоторые казино все предлагать клиентам бездепы за подтверждение номера или почты или репост на страницу в соц сетях. Возможность протестировать свежие игры, не рискуя личными своими и создать собственную тактику забавы. <a href=https://zrz26.ru/user/Zacherylip/>https://zrz26.ru/user/Zacherylip/</a> Многие игроки, оценив функционал казино, остаются играть в нем и далее ? на это и направлено любое рекламную. Постоянные посетители вносят депозиты и проделывают ставки, обеспечивая длительную прибыль оператора. То есть, казино выдают бездепы свежим пользователям для формирования лояльной аудитории.Чаще всего используются коды. Их нужно заносить в особые окошки регистрационной анкеты, случае идет о пригласительных бонусах, либо в особом разделе собственного кабинета игрока. 1×slots рабочее зеркало
1×slots бонус за регистрацию
<a href=https://techadron.com/forum/memberlist.php?mode=viewprofile&u=232>1×slots casino регистрация 1×slotscasin online</a> В подавляющем большинстве случаев благотворительные бонусы начисляются в кредитах, коие нельзя сразу исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти требования принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже.Бездепозитный приз предоставляется новенькому игроку за конкретные деяния. Часто презент вид денег либо фриспинов выдается за регистрацию, спасибо чему юзер получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и более. Когда игроку полагается количество фриспинов, администрация может бить3 их начисление на некоторое дней. Бесплатные вращения предоставляются для определенного слота, кот-ый указывается в правилах промоакции. 1×slots сайт зеркало <a href=https://www.grandprixforums.com/members/53852.html>https://www.grandprixforums.com/members/53852.html</a> Выполнив все притязания оператора, клиент имеет оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит в среднем менее суток. Если дополнительно потребуется пройти процедуру верификации, то срок возрастает до 1–2 трудящихся дней. Для перевода используются банковские инструменты и электронные платежные системы. Второй способ подходит другого, например как основная транзакций такой осуществляются моментально. В связи со специфичностью функционирования банков обработка платежей возможность занять до нескольких рабочих дней.
1хслот зеркало
<a href=http://bitetheass.com/user/Raymonddig/>http://bitetheass.com/user/Raymonddig/</a> Бонус за регистрацию в казино выдается только один раз на одного игрока. Но бывают вспомогательные акции, масштабах которых бездепы расступаются для постоянных клиентов и эти подарки Вы можете получить более 1-го раза.Бoльшинcтвo азартных заведений выдвигают примерно одинаковые условия и требования, которые нужно выполнить, чтобы получить бездепозитный приз за регистрацию. Все их можно соединить в один список: 1хслотс мобильная версия зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://radios-collector.com/memberlist.php?mode=viewprofile&u=301>1×slots официальный сайт скачать</a>
<a href=https://fougerite.com/members/jamesstawl.14360/>1хслотс рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Кешбэк-бонус представляет собой возврат фиксированного процента от ставки в случае проигрыша либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%. У каждого игорного заведения свои управляла и условия. Но, дабы получить бонусы, необходимо выполнить стандартные действия:
#4683 Charlesgunnyhttp://filmkachat.ru
1х слот регистрация в 1×slots casino
Бонусные деньги – небольшая сумма денег для старта в новом казино. На бонусные деньги, обыкновенно разрешается выступать во все игры, не слотов с прогрессивным джекпотом и игр из раздела exist casino. <a href=http://filmkachat.ru/>1хслотс зеркало</a> Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и более. Когда игроку полагается количество фриспинов, администрация может разбивать их начисление на некоторое дней. Бесплатные вращения предоставляются для определенного слота, кот-ый указывается в правилах акции. <a href=https://www.swiatobrazu.pl/forumgaleria/thread/view/id/591>https://www.swiatobrazu.pl/forumgaleria/thread/view/id/591</a> Приветственный бездеп предоставляется какому игроку только один раз. Казино борются с например называемыми бонусхантерами (от англ. Bonus Hunter — доброволец за бонусами), пытающимися заводить многочисленные аккаунты для обмана оператора и повторного получения подарка. Исключить сходственные действия разрешает верификация данных. Администрация вправе востребовать у посетителя доказать индивидуальные данные, указанные при регистрации. скачать 1×slots на андроид мобильная версия <a href=http://turkteam.10tl.net/member.php?action=profile&uid=1557>http://turkteam.10tl.net/member.php?action=profile&uid=1557</a> Вы не в коем случае ни же рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, научится регулировать изменять ставки и полосы, исследовать бонусные забавы и их выигрышные комбинации, ну конечном просто зарядится кучей впечатлений! Ведь вы будите выступать на бонусные средства, коие можно отыграть и исключить, не просто на демо счет, что, этим наиболее адреналин в крови более повысится а пульс забьется с частым ритмом!
зеркло казино 1×slots
При забаве на бонусные средства запрещается выступать в игровые автоматы с современным джекпотом и игры из радела exist casino. Кроме как, кое-какие казино дают бездеп на раз либо количество определенных слотов, и в иных играх Вы не сможете на них выступать. <a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=352036>1×slots регистрация то дальше необходимо пройти</a> 1х слот 1хслотс регистрация перейти на 1×slots <a href=http://xn----ctbfqxicawkedu.xn–p1ai/index.php?subaction=userinfo&user=scandalouswater>http://xn----ctbfqxicawkedu.xn–p1ai/index.php?subaction=userinfo&user=scandalouswater</a> 1×slots официальный зеркало рабочее Верификация аккаунта. Лучше доказать личность сразу последствии регистрации, чтобы потом не было заморочек с выводом средств. Верификация может проходить 2-мя путями:
1хслот 1хслотс регистрация перейти на 1×slots
Даже не выиграв солидную необходимую, игрок увлекательно проведет время, изнутри изучит работу площадки, воспримет геймплей автоматов. Все это без каких-либо денежных рисков. Быть в курсе превосходнейших промоакций с. Достаточно периодически изучать список новых онлайн казино с выводом приза без депозита в этом разделе. Большинство клубов привлекают внимание игры за счёт разнообразных презентов. На 1 веб-сайтах можно получить виртуальные кредиты, которые откроют доступ ко всему софту. На иных же, администрация предлагает безвозмездные вращения для пуска лучших интернет слотов. Несмотря на различные промоакции, стоит выделить самые главные.Для тех, кто лишь взвешивает испытать свою фортуну, еще для проф игроков, отыскивающих новые площадки для выигрышей, основные лицензированные казино часто организуют разные промоакции, и одно из лучших предложений прошедшее время – как для начинающих, так и для профессиональных игроков – бездепозитный приз за регистрацию. <a href=https://adobeacrobat.cc/member.php?action=profile&uid=1133>https://adobeacrobat.cc/member.php?action=profile&uid=1133</a> Новички не любят незамедлительно же вносить депо. Это обосновано неимением опыта и недоверием. К счастью, в наше время возможно получить бездепозитный приз за регистрацию в казино. Неважно что начислит система – фриспины либо кредиты. В любом случае вы не рискуете собственными сбережениями. Это отличная вероятность запустить понравившийся видео слот либо же испытывать удачу в настольных играх.Новички не обожают сразу же вносить депозит. Это обосновано отсутствием опыта и сомненьем. К счастью, дни можно получить бездепозитный приз за регистрацию в казино. Неважно собственно начисляет система – фриспины или кредиты. В всяком случае вы не рискуете своими сбережениями. Это отличная возможность запустить приглянувшийся видео разъем либо же испытать удачу в настольных играх. 1×slots зеркало которую указывали при регистрации кстати
1×slots официальный demo регистрация в 1×slots casino
Эффективность бездепов в качестве маркетингового инструмента расценили все операторы. Малоизвестные площадки используют эти акции, чтобы прытко набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны неизменных гостей. Не все сайты, дающие презенты без депозита, рекомендованы к этой. За симпатичным промоописанием все скрываться неосуществимые обстоятельства отыгрыша и подводные камешки.В списке требований к отыгрышу нередко наличествуют лимиты на ставки при этой на собственные средства. Так, случае отыграть надо(надобно) 30 000 руб., а максимальная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 раз. Эта особенность затрудняет соблюдение игроками условий по срокам действия акции. <a href=https://redfist.de/RF-Online-Testforum/viewtopic.php?f=60&t=77349>1хслот зеркало сайта</a> Объективные – размер бонуса, коэффициент и условия вейджера, необходимость внесения депо для вывода средств;Приглашаем делиться сужденьями о бонусах. Это поможет другим юзерам избирать более выгодные предложения. На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению этого времени, Вы не сможете активировать и получить бездепозитный бонус.Как управляло, при выводе денег, от играющего требуется лишь сделать минимальный лепта чтобы, чтобы, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом личный счет. 1×slots регистрация 1×slots casino c2d ru <a href=http://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=4779>http://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=4779</a> Помните, что в неких играх сумма ставки идет в зачет вейджера лишь отчасти. Так, в настольных и карточных играх только от 5% до 50% суммы ставки числятся как отыгранные деньги, момент как в слотах идет в зачет все 100% суммы.
1×slots казино зеркало
Наличие у игрока второго аккаунта. Запрещено создавать некоторое профилей для неоднократного получения бездепов. <a href=http://kinofilm2017.ru/user/StevenVem/>http://kinofilm2017.ru/user/StevenVem/</a> Чтобы бездеп не был начислен на Ваш аккаунт, Вам не активировать бонусный код. Если одобрение от казино было добавлено на Ваш аккаунт механически, а Вы не расчитываете его использовать, обратитесь в саппорта с просьбой отменить бездепозитный приз.Фриспины. Бесплатные вращения предназначены для применения в видео-слотах. Внимательно читайте условия – они часто выдаются для неких машин. В зависимости от клуба вам создавать конкретное число ставок. Кстати, современные игорные жилища выделяют возможность заводить «одноруких бандитов». 1×slot зеркало рабочее этих способов предполагает регистрацию Прежде чем активировать бездеп, нужно убедиться сомнений, что страна, гражданином коей является игрок, не заходит в перечень разрешенных.
<b>Смотреть еще похожие новости:</b>
<a href=https://sadhaka.nl/forum/memberlist.php?mode=viewprofile&u=3268>1×slots сайт</a>
<a href=https://rolivka.online/forum/showthread.php?tid=28604>1× slots casino зеркало</a>
<a href=http://link.5nx.ru/viewtopic.php?f=5&t=4517>1×slots зеркало видели такую регистрацию на</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Исходя из этого, просто не существует осмысленных причин махнуть рукой на получение такового бонуса при регистрации. И, кстати, на подобный безвозмездной базе у вас есть все шансы выиграть деньги и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные призы, нарекают безвозмездными онлайн платформами для игр. Наличие у игрока 2 аккаунта. Запрещено творить некоторое профилей для неоднократного получения бездепов.
#4684 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Евгения Медведева, фигуристка казино онлайн бесплатно <a href=https://krtka.info/>Манилова Алла Юрьевна порно</a> казино фильм pin up casino пин ап <a href=https://rucriminal.info/>Львова-Белова Мария Алексеевна порно</a> online casino порно с Юлия Ефимова, пловчиха porno Ангелина Гончаренко, хоккеистка спорт букмекерская контора Елена Лядова Черкесова Бэлла Мухарбиевна порно порно с Зырянова Анастасия Владимировна
DiskiPlus 1×bet зеркало xbet xyz DiskiPlus porno Дарья Клишина <a href=https://diskiplus.ru>DiskiPlus up букмекерская контора</a> DiskiPlus casino pin официальный DiskiPlus сайте букмекерской конторы фонбет <a href=https://www.diskiplus.ru>DiskiPlus букмекерская контора ставки</a> DiskiPlus casino зеркало сайта DiskiPlus 1×bet телефон DiskiPlus casino на телефон DiskiPlus макао казино DiskiPlus порно с Алина Загитова DiskiPlus pin up casino DiskiPlus 1×bet casino
#4685 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало
Онлайн гемблинг развивается с каждым деньком больше и больше, свежие бренды создаются не по денькам а по часам. Новые интернет казино делают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и что, этим самым предлагают бездепозитные бонусы за регистрацию, собственно бы не упустить эту возможность — как пользоваться новым бездепом, советуем посещать наш вебсайт как возможно почаще, самое аппетитное и свежие несомненно добавляться в этом же перечне. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало рабочее</a> <a href=https://www.friend007.com/forums/thread/8741/>https://www.friend007.com/forums/thread/8741/</a> 1× slots casino зеркало <a href=https://baskino.zone/user/Terrynus/>https://baskino.zone/user/Terrynus/</a> Подтвердите регистрацию, дабы активировать Бездепозитный приз с выводом, потребуется заполнить индивидуальный профиль. Заполните пустующие поля настоящими данными о себя.Для проверки используются сканы паспортов, водительских водительских, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь замечен в попытке завести дополнительный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный список. При игре на лицензионной площадке не бояться указывать достоверную индивидуальную информацию (шифрование ликвидирует утечку персональных данных).
1×slots официальный сайт мобильная версия скачать
Автоматы непопросту числятся наиболее популярным азартным развлечением. Чтобы усвоить управление и управляла, понадобится всего количество мин. Ваша задача устроить ставку, найти число трудящихся линий и возможно вертеть барабан. Если дисплее выпадет выигрышная композиция – вы выиграли! С данной задачей для посодействуют справится бездепозитные призы казино. <a href=https://forum.eliteshost.com/member.php?action=profile&uid=8111>1×slots сайт зеркало</a> 1хслотс казино зеркало <a href=http://zvezdjuchki.ru/user/Travisnes/>http://zvezdjuchki.ru/user/Travisnes/</a> 1×slot рабочее зеркало
casino 1×slot
Постарайтесь отыграть вейджер, чтобы была возможность забыть заявку на выплату. Кстати, на всех веб-сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы можете получить выигрыш на электронной кошелёк, карту, телефонный.Фриплей-бонусы встречаются только в некоторых клубах. Они зачисляются сразу в творения профиля и активны непродолжительное время. Если не успеете истратить свои, они просто сгорят. Касаемо времени, как призы активны протяжении часа. <a href=https://www.usajobsindex.com/author/ashleyton/>https://www.usajobsindex.com/author/ashleyton/</a> Бездепозитные призы начисляются только один раз. Не стоит открывать новые аккаунты, чтобы получить их повторно. Служба защищенности казино обязательно выявит «левого» соучастника и заблокирует. Если гость выполнит нужные притязания, отыграет свою ставку и решит вывести личный выигрыш, то ему нужно к, собственно казино непременно востребует дать ксерокопии собственных документов, чтобы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные средства исключить не получится. 1×slots казино мобильная версия В истиннее время получить бонус за регистрацию в казино довольно просто. Почти любой игорный дом с готовностью даст средства или благотворительные вращения. Многие игроки пользуются этим и не стыдятся региться в любом клубе с выгодными критериями. Кстати, это отличная возможность выдумать выигрышную стратегию и сорвать куш.У каждой игры средства требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система засчитает любую ставку. В рулетке и покере сделать это намного труднее. Именно потому так важно внимательно разбирать условия получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой забаве, то новенькие просто «спустят бонус на ветер».
1×slots казино зеркало
Для отыгрыша приза казино обязует игрока сыграть на сумму, в некоторое раз превосходящую сумму приобретенного бонуса — тут выгода компании очевидна. 1×slots зеркало на сегодня <a href=https://christinanoto.sites.gettysburg.edu/education/pinaca-synthesis/----2?t=1723072736737>https://christinanoto.sites.gettysburg.edu/education/pinaca-synthesis/----2?t=1723072736737</a> В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с бесплатных вращений. Прибыль, коию Вы заработаете на этом бездепе можно назначать на вывод без какого либо отыгрыша.
1× слот зеркало
Однако далековато не все ресурсы предлагают своим клиентам бездепозитные призы за регистрацию в казино. В большинстве случаев предусмотрено одобрение на 1-ый депо в объеме 100–200%. Это замечательная возможность преумножить банкролл, увеличить время, проведённое за игрой и шансы сорвать большой куш. Нет. Казино выдают безвозмездные призы за регистрацию, чтобы, чтобы, дабы заказчик возможность ознакомиться с игровым заведением. А дабы вывести его, необходимо выполнить обстоятельства отыгрыша.Исходя из сего, просто не существует мудрых оснований махнуть рукой на получение такового бонуса при регистрации. И, не, на такой бесплатной основе у вас есть все шансы выиграть средства и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные призы, нарекают бесплатными интернет платформами для игр. <a href=http://market.digimatix.ru/bitrix/redirect.php?goto=http://enter-bio.ru/bitrix/redirect.php?goto=http://audit.tomsk.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/t_AOcUO9tmT>http://market.digimatix.ru/bitrix/redirect.php?goto=http://enter-bio.ru/bitrix/redirect.php?goto=http://audit.tomsk.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/t_AOcUO9tmT</a> Это также благотворительные финансы, которые поступают на аккаунты новоиспеченных игры в регистрирования. А особенность таких призов произведено сомнений, собственно обретенные деньги обязательно по применять в продолжении назначенного медли.Выиграть настоящие средства в казино не пополняя счет – трудно, хотя вероятно. Главное задаться целью и не нарушатьправила заведения. Выберите несколько казино с бездепзитными бонусами и начните играть на бонусные средства. По статистике в одном из 10-ти заведений возможно заработать маленькую сумму средств с бонусных средств. казино 1×slots официальный сайт Призовые начисления без депозита шансы предоставляться для участия в турнирах онлайн казино. Потратить перечисленные деньги можно самая в рамках данной акции. Условия их проведения включают в себя ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться таким предложением, какого-либо выучить его верховодила.На странице представлены бездепозитные призы за регистрацию в казино редчайшая заслуга за которой гонятся все игроки как новички, например и мастера. Мы тоже уделяем великое внимание на присутствие бонусов при формирование рейтинга казино на деньги. Бездепозитный приз это вероятность играть безвозмездно и выиграть реальные средства.
<b>Смотреть еще похожие новости:</b>
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1299#post-39381>1×slots сайт</a>
<a href=https://timepost.info/showthread.php?tid=107092>1хслот скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Предложения с бездепозитными бонусами за регистрацию дозволяют новым заведениям заинтересовать аудиторию на собственный вебсайт. А игроки в свою очередь получают возможность выступать на настоящие средства без депозита в казино и заработать небольшой стартовый капитал, кот-ый разрешено вывести на карту банка или электронный кошелек.
#4686 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино 1 Ирина Горбачева <a href=https://res-publika.com>1×bet xbet</a> песня казино kent casino <a href=https://th-royalgclub.com/>порно с Юлия Ефимова</a> казино проиграл casinos winning букмекерская контора леонов порно с Алина Загитова, фигуристка pin up casino top top 1×bet сайт порно с Евгения Медведева
DiskiPlus приложения букмекерских контор на андроид DiskiPlus порно с Никита Кучеров (хоккей) <a href=https://diskiplus.ru>DiskiPlus 1×bet</a> DiskiPlus porno Вера Бирюкова, гимнастка DiskiPlus casino ап <a href=https://www.diskiplus.ru>DiskiPlus 1×bet официальный слоты</a> DiskiPlus казино можно DiskiPlus casino играть DiskiPlus букмекерская контора ставки DiskiPlus online casino официальный DiskiPlus бесплатно играем казино DiskiPlus скачать сайт букмекерской конторы DiskiPlus Елизавета Боярская
#4687 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало
В настоящее время получить приз за регистрацию в казино довольно просто. Почти любой игорный жилище с радостью предоставит деньги или безвозмездные вращения. Многие игроки пользуются данным и не стыдятся региться в каждом клубе с прибыльными условиями. Кстати, это отличная вероятность выдумать выигрышную стратегию и сорвать куш.Простая процедура получения бездепозитного приза, кот-ая займет менее 2-х мин. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные. <a href=http://filmkachat.ru/>1×slots официальный сайт мобильная версия</a> Бездепозитный бонус казино 2022 с выводом за регистрацию предоставляет возможность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и выяснить качество работы саппорта. Довольно часто, начиная игровой процесс, игрок теснее отказывается останавливаться и делает реальный лепта. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть бесплатно возможно как раз таки с бонусом за регистрацию без надобности вносить депозит.Если площадка дарует бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь ввести акк на сайте и активировать его, подтвердив адресок электрической почты, номер телефонного либо иные данные, которые просит оператор. Перед данным нужно увериться, что пользователь находится на официальном веб-сайте казино, а не на жульнической площадке. <a href=https://wakelet.com/wake/-bCB6R6Fc7F319ngWQ1YF>https://wakelet.com/wake/-bCB6R6Fc7F319ngWQ1YF</a> Такие поощрения разрешают безвозмездно протестировать новое казино, разобраться с игровым процессом онлайн слотов, заработать и исключить небольшую сумму средств.Для вывода средств приз нужно будет отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами акции и вариантами отыгрыша бездепозитного приза до его получения, чтобы избежать конфликтных ситуаций. 1×slots casino зеркало <a href=http://witiai.cn/home.php?mod=space&uid=63701>http://witiai.cn/home.php?mod=space&uid=63701</a>
1×slots зеркало сайта
<a href=https://forum.dis-course.net/viewtopic.php?t=495553>сайт 1× slots casino</a> 1×slots скачать на айфон Это один из основных характеристик привлекательности презента. С завешенным коэффициентом том мастера не сумеют выполнить условия по отыгрышу. И важно, насколько презентабельно выглядит предложение – бездепозитный бонус казино в размере $500 либо $1 000. Чтобы новенькие лучше вдумались, собственно же такое вейджер, мы разберём на случае. <a href=https://sw-cross.ru/blog.php?cp=33>https://sw-cross.ru/blog.php?cp=33</a> Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, all лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и расценить особенности, недоступные при этой в демо режиме. Многие новые клиенты перебегают в количество неизменных, а оператор получает длительную прибыль. 1×slots зеркало рабочее на сегодня Благодаря программке преданности от игорного заведения, возможно брать неплохой старт и без дополнительных вложений запустить видеослоты. Кроме такого, возможно рассчитывать на реальную удачу и получить, без инвестиции личных финансов, большой выигрыш.Чаще всего интернет-казино предлагают бездепозитные бонусы новым пользователям. Эта промо-акция очень эффективно привлекает начинающих, подталкивая их к открытию счета. Конечно, не все они становятся преданными посетителями, но сам прецедент регистрации аккаунта играет на руку заведению.
1×slots бездепозитный бонус за регистрацию
B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. Бонусные средства – небольшая сумма денег для старта в новом казино. На бонусные средства, обычно разрешено выступать во все игры, не слотов с современным джекпотом и игр из раздела exist casino. <a href=https://paladinscounter.com/users/ArnoldHiecy>https://paladinscounter.com/users/ArnoldHiecy</a> Можно ли в одном онлайн казино получить больше 1-го приза за регистрацию? Нет, так как в каждом онлайн казино есть верховодила, к которым нужно держаться, не творить 2 аккаута для получения бонусов, другому несомненно блокировка обоих аккаутов, не пытайтесь перехитрить онлайн казино, приз за регистрацию выдаеться один один одному личику.Допустим, за регистрацию вы получили бездеп в размере 2 000 руб. С вейджером х30. В этом случае предстоит устроить ставок, на общую сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать реальные деньги. Однако не забывайте, собственно с каждого презента выйдет вывести определённую необходимую (чаще всего менее $200). 1×slots зеркало рабочее
1 x slots
Допустим, за регистрацию вы возымели бездеп в размере 2 000 руб. С вейджером х30. В этом случае светит устроить ставок, на совместную необходимую в 60 000 руб. (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать реальные средства. Однако не запамятовывайте, собственно с каждого подарка получится вывести определённую необходимую (чаще всего менее $200). 1×slots сайт <a href=https://lessons.drawspace.com/post/704586/revolutionize-your-marketing-with-3d-product-vis>https://lessons.drawspace.com/post/704586/revolutionize-your-marketing-with-3d-product-vis</a> Обычно, бездепозитные призы выдаются под конкретные слоты с фиксированной ставкой, хотя их точно запрещено применять в игровых автоматах с современным джекпотом. Список игр, в которых возможно использовать бездеп, Вы отыщите в описании акции либо сможете уточнить у саппорта заведения.
1×slot зеркало
На данном разделе портала периодически публикуются обзорные заметки, в рассматриваются безвозмездные бонусы наилучших интернет-казино. Информация структурирована по нескольким пт, включая главные:Как только на виртуальном счету окажутся бонусные средства, поспешите отыграть вейджер. Сразу последствии этого можно забыть заявку на вывод выигрыша. Кредиты прибыльно выделяются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом настоящих средств и дают вероятность почувствовать азарт. Во-вторых – возможно насладиться каждой азартной забавой доступной на веб-сайте. В вашем постановлении находятся автоматы, настольные прибавление, видео-покер, Live-дилеры. Акции, приуроченные к календарным праздникам, случаются рассчитаны как на всех пользователей, так и на категории: к, подарок на 8 марта девушкам-игрокам либо мужикам на 23 февраля. <a href=http://mrkarpiuk.xaa.pl/boards/shopping/member.php?action=profile&uid=55821>http://mrkarpiuk.xaa.pl/boards/shopping/member.php?action=profile&uid=55821</a> Так что можете неустрашимо региться без всяких размышлений. Фортуна сегодня наверняка на вашей стороне. Не побаивайтесь, ведь последствие какого или ущерба Вам совершенно не грозит. С этими бонусами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе. 1×слотс казино Также учтите, собственно кое-какие игровые платформы сужают список государств, которые способны получить предложенный бездепозитный бонус за регистрацию. К образцу, есть онлайн-заведения, выдающие похожие призы только жителям определенных государств. К образцу, онлайн казино 777 Оригинал дает бездепозитный бонус только игрокам из России и стран СНГ. Или напротив, снабжают вознаграждением всех, не жителей неких государств (исходя из сего, стопам внимательно учить перечень, чтобы потом не появилось практически вопросов и претензий).Только выполнив все условия отыгрыша и дождавшись завершения ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить средства средства.
<b>Смотреть еще похожие новости:</b>
<a href=http://angelandmax.teamforum.ru/memberlist.php?mode=viewprofile&u=640>1× slots официальный</a>
<a href=http://u0382101.isp.regruhosting.ru/index.php/forum/general-questions-and-how-tos/68883-otzyvy-o-tovarakh?start=165#125620>1×slots официальный зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Так собственно приготовьтесь предоставить секретную информацию (пол, возраст, страна проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев проверка данных занимает менее суток, в чего получится беспрепятственно выводить солидные выигрыши.
#4688 Charlesgunnyhttp://filmkachat.ru
1×slots бонус за регистрацию
Ещё одно распространённое акционное предложение – привлекательный подарок с сомнительными притязаниями. К примеру, клуб сулит $100 в качестве бездепа, но с вейджером х80 либо х100. Отыграть подобный вейджер фактически нереально и потому лучше концентрироваться на больше интересных акциях. <a href=http://filmkachat.ru/>1хслот 1хслотс регистрация перейти на 1×slots</a> Условия отыгрыша приза. Если Вы планируете заработать на бездепозитном призе, то для внимание на велечину вейджера и срок, кот-ый дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть приз и вывести выигрыш.Некоторые казино могут предлагать клиентам бездепы за свидетельство номера либо почты или репост на страницу в соц сетях. <a href=https://www.dr-ay.com/blogs/217116/Mastering-Architectural-Rendering-From-Vision-to-Visual-Reality>https://www.dr-ay.com/blogs/217116/Mastering-Architectural-Rendering-From-Vision-to-Visual-Reality</a> С другой стороны, гораздо легче забрать бездепозитные фриспины за регистрацию в казино и прямо в начать вертеть барабаны в наилучших слотах. Главная необыкновенность спинов никаких, собственно они предназначены для лучших автоматов. Удастся не пройти дополнительные раунды, хотя и прирастить необходимую выигрыша, заработать респины и другие внутриигровые презенты. 1× slots регистрация в 1×slots casino <a href=http://www.engel-und-waisen.de/index.php/How_To_Transfer_Your_Account_To_A_New_Device_Using_The_1×bet_APP>http://www.engel-und-waisen.de/index.php/How_To_Transfer_Your_Account_To_A_New_Device_Using_The_1×bet_APP</a> Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих притязаний, считая неотъемлемой верификации. Если на веб-сайте учтена неотъемлемая процедура подтверждения личности, то вывести выигрыш получится только последствии ревизии данных. Приготовьтесь наполнить анкету и выслать в техподдержку документ, подтверждающий лицо.Казино выводит средства только на ту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного приза, Вам сначала нужно пополнить счет. В некоторых клубах узкий перечень методов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет именно с этих платежных методов, которые доступны для вывода.
онлайн казино 1×slots
Максимальный объем ставки, кот-ый нельзя превосходить же приз не будет полностью отыгран. В случае нарушения этого управляла, бонус и выигрыш с него станут аннулированы.Вейджер менее х30–35 считается приемлемым. Опытные игроки утверждают, собственно с таким вейджером реально остаться в плюсе, случае верно подойти к выбору игрового аппарата. 1хслот официальный сайт зеркало Бездепозитный бонус – это финансовое вознаграждение, коие выдается участнику игры в казино, для его привлечения и появления заинтересованности. Любой гость, который подходит условиям выдачи похожего бездепозитного приза, имеет претендовать на получение вышеуказанного приза. Такое одобрение является более действенным способом, дающим возможность стартовать деле, не вкладывая собственных вещественных средств.На благотворительные призы онлайн-казино практически постоянно распространяется ограничения по стране проживания клиентов. Даже в вам разрешается открывать счет и играть на средства в заведении, это еще не значат, собственно для доступны no down payment bonuses. <a href=http://j67236dr.bget.ru/user/AnthonyCub/>http://j67236dr.bget.ru/user/AnthonyCub/</a> Заполняя данные в личном профиле, указывайте только достоверную информацию, так как Вам придется ее доказать дальнейшем при выводе средств.Для вывода средств бонус нужно будет отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами акции и вариациями отыгрыша бездепозитного бонуса до его получения, дабы избежать конфликтных обстановок. казино 1×slots официальный сайт Бездепы обычно предлагают с отыгрышем — моментально вывести выигранные средства нельзя. Перевод денег со счета будет вероятен в того, как пользователь выполнит все притязания казино, а сумма не быть выше установленного правилами лимита. Условиями промоакции фиксируются сроки, протяжении которых заказчик вправе воспользоваться предложением. Обычно они не превышают нескольких дней в активации.
1хслотс 1хслотс регистрация перейти на 1×slots
<a href=https://museobiblico.uniclaretiana.edu.co/community/profile/elkemccracken0/>https://museobiblico.uniclaretiana.edu.co/community/profile/elkemccracken0/</a> 4. Заберите презент. Чаще всего приз активируется незамедлительно в регистрации. Но случаются ситуации, когда надо(надобно) зайти в собственный офис или написать в службу. 1×slots casino зеркало рабочее Приветственный бонус без депозита ? презент за регистрацию. Выдается средствами, фриспинами или баллами. В последнем случае бонусные баллы применяются для участия в турнирах либо размена на настоящие деньги.
1 х слотс зеркало
Заполняя данные в личном профиле, указывайте лишь достоверную информацию, так как Вам понадобиться ее доказать дальнейшем при выводе средств.В качестве бонусов онлайн казино часто предлагает выдачу фриспинов, другими бесплатных вращений игрового барабана. Виртуальные монеты можно использовать для изучения в покерной школе или для игры в казино. <a href=http://u0382101.isp.regruhosting.ru/index.php/forum/general-questions-and-how-tos/68883-otzyvy-o-tovarakh?start=2991#138111>1×slots зеркало которую указывали при регистрации кстати</a> В некоторых интернет казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на сайте клуба и подтвердить свои контактные данные. Дополнительно требуется активация промокода. 1×slots сайт <a href=http://islamdini.kg/index.php?subaction=userinfo&user=illegalinvasion>http://islamdini.kg/index.php?subaction=userinfo&user=illegalinvasion</a>
1 xslots рабочее зеркало
Возможность поиграть дополнительное состязание (а времени и несколько) абсолютно бесплатно, а выигрыш, тому, поступает на счёт игрока.Простая процедура получения бездепозитного бонуса, кот-ая займет менее 2-х минут. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные. <a href=http://www.glife2120.ru/user/KennethBrece/>http://www.glife2120.ru/user/KennethBrece/</a> Еще одно условие касается объемов ставки. Операторы устанавливают наивысшую необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном кабинете. При превышении лимита есть риск потерять бонуса. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, заказчик может столкнуться с запретом назначать фишки на шансы.Для получения депозитного приза необходимо восполнить свой игровой баланс настоящими деньгами. Вознаграждение возможно получить либо при внесении первого депо, либо повторяющий фиксированного процента от внесённых средств. Так либо другому, приз поступит на счёт лишь последствии пополнения. 1×slots промокод при регистрации 2025 Самые свежие бездепозитные бонусы в казино за регистрацию 2022 года с выводом выгоды присутствуют на этой страничке. Посетитель может расценить условия получения и начать играть на средства без внесения депозита. При этом игроку главно осознавать, на каких критериях и какими методами он сможет вывести полученный выигрыш. Для этого нужно расценить перечень подключенных платежных систем.
<b>Смотреть еще похожие новости:</b>
<a href=https://ragnarok.ch/forum/viewthread.php?thread_id=134240>1×slots промокод при регистрации</a>
<a href=https://shopcms.vsupport.club/topic/6498-%D0%B3%D0%B4%D0%B5-%D0%BA%D1%83%D0%BF%D0%B8%D1%82%D1%8C-%D0%B5%D0%BA%D1%81%D1%82%D0%B0%D0%B7%D0%B8-%D1%81%D0%B0%D0%B9%D1%82-koks24cc-%D0%BA%D0%B0%D0%BA-%D0%BA%D1%83%D0%BF%D0%B8%D1%82%D1%8C-%D0%B5%D0%BA%D1%81%D1%82%D0%B0%D0%B7%D0%B8-%D1%81%D0%B0/page-64#entry95019>1хслотс мобильная версия зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные призы казино это экономическая компенсация, предлагаемая пользователям на дармовой базе и возможность выступать в интернет казино безвозмездно. Если ассоциировать их с поощрениями за лепта, в которых свои выдаются только потом первоначального пополнения счета, то бездепозитные вознаграждения получаются безвозмездно. То есть, играющий получает вероятность делать ставки на уже место финансы, которые выдаст заведение, исполняя, при, обычные деянья, дабы их извлечь (тут идет речь о регистрация, удостоверении личности с внедрением номера телефона, дизайна заказы и т.д. ).
#4689 Charlesgunnyhttp://filmkachat.ru
1хслот официальный сайт зеркало
Акционные предложения от казино существуют в разных форматах. Часто бонусы даются в размен на депо. Игрок вносит платеж и получает деньги, благотворительные вращения и другие одобрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — картина приза, кот-ый гарантирован за исполнение конкретных действий на сайте:На бесплатные бонусы онлайн-казино практически всегда распространяется лимитирования по стране проживания посетителей. Даже случае для разрешено раскрывать счет и выступать на средства в заведении, это еще не значат, что для доступны not the slightest down payment bonuses. <a href=http://filmkachat.ru/>1×slots подтвердит вашу регистрацию если говорить</a> Обычно, бездепозитные призы выдаются под определенные слоты с фиксированной ставкой, хотя их точно запрещено использовать в игровых автоматах с современным джекпотом. Список игр, в можно использовать бездеп, Вы отыщите в описании акции или можете уточнить у саппорта заведения. <a href=https://output.jsbin.com/kozot>https://output.jsbin.com/kozot</a> 1×slots регистрация на сайте <a href=https://www.harnessracingforum.com/member.php?113607-Tyronetab>https://www.harnessracingforum.com/member.php?113607-Tyronetab</a> На нашем веб-сайте Вы найдете перечень своевременных свежих бездепозитных призов в казино 2022 года. Также, есть большое эксклюзивных услуг, коие доступны лишь гостям нашего вебсайта после регистрации по нашей ссылке либо активации особого промокода.
1×slots зеркало регистрация
1хслотс 1хслотс регистрация перейти на 1×slots Для выбора азартного заведения Вы сможете пользоваться перечнем наших казино с призами за регистрацию. На нашем сайте мы опубликовали перечень бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, что часть бонусов неповторимые и доступны лишь для гостей нашего вебсайта по-специальному промо-коду или по оригинальной ссылке. Кроме такого, для каждого приза мы подготовили подробный обзор, в Вы узнаете как получить и отыграть одобрение и как вывести собственный выигрыш с бездепа. <a href=http://silabgarza.net/forums/member.php?action=profile&uid=216872>http://silabgarza.net/forums/member.php?action=profile&uid=216872</a> 1×slots casino регистрация на сайте
скачать 1×slots на андроид мобильная версия
В онлайне слишком много скриптовых сайтов, коие принадлежат жуликам. Их основная цель – привлечь гэмблеров, пообещав не только щедрые подарки, но и солидные выигрыши. Так что некоторые веб-сайты предлагают получить за регистрацию числе $1 000.Активация по промокоду употребляется в разных видах бездепов. Если идет о приветственном бонусе, то комплект символов можно узнать на крупнейшей страничке, в регистрационной форме или послании, которое отправляется пользователю для подтверждения e-mail. Акции могут проводиться совместно с партнерскими площадками. Обычно код размещается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется одноразовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем актуальный код для активации в описании каждого рекламную. Чаще всего казино бонус за регистрацию без депозита даёт вероятность запустить каждой автомат. Но чем внимательно ознакомиться с условиями. Иногда для забавы доступны только определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, лучше начать знакомство с миром пыла непосредственно с «одноруких бандитов».В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это самая милая часть забавы. Важно, часто бездепозитные бонусы в казино выдаются с лимитированиями по наибольшей выплате. В среднем можно рассчитывать на выгода в некоторое тыщ рублей. Как исключить выигрыш с приза без депо. Придётся подтвердить аккаунт документально, в некоторых заведениях. Процедура верификации обязательна и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате либо прочитайте в правилах. <a href=http://bbs.all4seiya.net/home.php?mod=space&uid=938946>http://bbs.all4seiya.net/home.php?mod=space&uid=938946</a> Обычно бездепозитные промоакции от казино, прибывают на эл. Почту в деньки рождения или праздники. В некоторых интернет казино возможно адресоваться в чат и как неизменному игроку, вероятно вас предложат бездепозитное предложение.Внесение депо – Будьте готовы восполнить счет в отыгрыша приза. Это обычное заявка верховодил для данного типа промо-акций. Лучше заблаговременно уточнить, какую необходимую нужно будет заносить на счет. Как управляло, идет о минимальном депозите, но вы обязаны быть уверены, что он вам по карману. 1× slots сайт Главное превосходство спинов – вероятность выучить различные слоты. Также удастся насладиться бонусными раундами, испытывать удачу в риск-туре и преувеличить выигрыш за счёт особых знаков. Однако столько игровой процесс заслуживает внимание, ведь лучше сосредоточиться на реальном выигрыше.
рабочее зеркало 1хслотс
Пoдтвepдить личнocть клиента. Для успешного вывода средств, нужно доказать личность клиента. Нa этaпe вepификaции пpoфиля, работники службы защищенности обязаны увериться, собственно у игрока более один акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не сможет вывести свой выигрыш, в у него несомненно несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы.Для казино, работающих интернет, бездепозитные призы нужны для привлечения новых клиентов. Предложение сыграть на слотах без необходимости внесения настоящих средств — работающий метод для повышения интереса к компании. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит выступать в казино, только теперь теснее на собственные средства. Это раз из главных показателей привлекательности подарка. С завешенным коэффициентом и мастера не сумеют выполнить обстоятельства по отыгрышу. И маловажно, как презентабельно смотрится предложение – бездепозитный приз казино в размере $500 либо $1 000. Чтобы новички получше вникли, что же это вейджер, мы разберём на образце.Но не размышлять, собственно снабжая юзеров такими призами, казино увлекается спонсированием. Ведь объемы вознаграждений, в, не великие (средним объемом от 5 до 20 $). И на эти свои налагаются конкретные обстоятельства и лимитирования, обязательные к исполненью игрока, если в последствии он желает получить все средства выигранные финансы. Частенько новенькие не разумеют, как активировать презенты либо исключить первый выигрыш. Для сходственных случаев наша команда обрисовала главные определения – собственно это фриспины, вейджер, как его отыграть, для необходимо протекать верификацию.Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте условия – они часто выдаются для некоторых машин. В зависимости от клуба вы можете делать определенное количество ставок. Кстати, современные игорные дома выделяют возможность заводить «одноруких злодеев». 1хлот регистрация в 1×slots casino <a href=https://www.google.com.ag/url?q=https://doctorlazuta.by/>https://www.google.com.ag/url?q=https://doctorlazuta.by/</a>
1хслотс рабочее зеркало
Суммы сходственных услуг, в, колеблются от трех до двадцати $, а вейджер на эти средства обязан сочинять от 30 до шестидесяти раз. Зачастую, наивеличайшая сумма выигрыша здесь составит от одной до 2-ух сотен $. Если игры выиграет больше, то все средства имеют быть списанными до очень разрешенного выигрыша. Здесь бывает смысл выводить еще несуществующие деньги на собственную платежную систему и далее находить заведение с благоприятными под данную необходимую релоадом или бонусом за первое пополнение счета. Есть несколько подвидов бездепозитного гонорары, предлагаемого великим количеством заведений.Высокая конкурентность в разделе азартных игр доказывает операторов привлекать клиентов различными акциями. Благодаря данному у посетителей замечена возможность получить бонусы в казино за регистрацию без депозита. Воспользоваться таким предложением возможно, избегая процедуру внесения денег на игровой счет, просто активировав акк на сайте. Наш экскурсовод по бездепам поможет избрать самую симпатичную бонусную программку, разузнать верховодила получения такого вознаграждения и распорядиться им с наибольшей выгодой. <a href=http://www.zghncy.cn/home.php?mod=space&uid=704049>http://www.zghncy.cn/home.php?mod=space&uid=704049</a> На условиях отыгрыша даровых бонусов идет остановиться подробнее. С ними связаны нюансы, коие нельзя забыть без внимания.Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала резвые выводы. Фишка выплат никаких, что достаточно избрать платёжный инструмент и указать сумму. В большинстве случаев средства зачисляются на электронные кошельки на 15 минут, а на банковские карты – 1–3 рабочих дня. 1×slots официальный регистрация
<b>Смотреть еще похожие новости:</b>
<a href=http://nhomtruyen.com/members/jamesgaw.9280/>1×slots регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Как только получите бездеп в казино, всё равно не забывайте инспектировать электронную почту. Некоторые игорные клубы непрерывно веселят интенсивных гэмблеров приятными бонусами. Чаще всего получить подарок можно в преддверии праздника, на день рождение, за вербование друга. А также распространённым призом считается надбавка к депозиту. Нужно всего лишь восполнить счёт, и азартное заведение увеличит его на 50–100%.
#4690 AHoini
<a href=https://cvinstitute.org/join-slotspalace-suomi-casino-today-and-start-winning/>slots palace</a> <a href=http://hearaon.co.kr/bbs/board.php?bo_table=free&wr_id=183312>vavada hr</a>
#4691 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet сейчас букмекерская контора фонбет официальный сайт <a href=https://www.ossetia.tv/>пари букмекерская контора</a> пин ап casino pin up top букмекерская контора вход <a href=https://th-royalgclub.com/>casinos winning</a> порно с Виктория Синицина, фигуристка porno Алена Михайлова бесплатные букмекерские конторы порно с Максим Глушенков (футбол) porno Илья Ковальчук (хоккей) 1×bet зеркало xbet xyz зеркала казино
DiskiPlus 1×bet 1хбет DiskiPlus почему в казино нет часов <a href=https://www.diskiplus.ru>DiskiPlus официальное казино вход</a> DiskiPlus ев казино DiskiPlus официальные сайты казино <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet официальный сайт</a> DiskiPlus порно с Алексей Миранчук (футбол) DiskiPlus кент casino DiskiPlus pin casino DiskiPlus Манилова Алла Юрьевна порно DiskiPlus 1×bet зеркало рабочее xbet DiskiPlus порно с Дронова Александра Викторовна DiskiPlus порно с Васильева Татьяна Викторовна
#4692 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация
Разные казино имеют личные управляла по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высокие притязания. Часто онлайн-казино рекомендуют отыграть бонусное поощрение до ста один в игровых автоматах. Например, случае игрок получил бесплатно 10 $, то необходимо будет отыграть их, поставив одну тыщу спинов по одному баксу любой. Стоит обозначить(означить), что не все казино дают вероятность выступать на призы и не во всех развлекательных заведениях схожие управляла для отыгрывания. Некоторые казино воспрещают играть на бонусы в блекджек или ограничивают ставки до 5 процентов, собственно значительно наращивает в 10-ки один число необходимых игр.Приветственный бездеп предоставляется хоть игроку лишь один раз. Казино дерутся с например нарекаемыми бонусхантерами (от англ. Bonus Hunter — доброволец за призами), пытающимися заводить многочисленные аккаунты для надувательства оператора и повторного получения подарка. Исключить сходственные деяния позволяет верификация данных. Администрация вправе востребовать у клиента подтвердить персональные данные, указанные при регистрации. <a href=http://filmkachat.ru/>1×slos регистрация в 1×slots casino</a> Подтвердите регистрацию, дабы активировать Бездепозитный бонус с выводом, потребуется наполнить индивидуальный профиль. Заполните пустующие поля настоящими данными о себя.Ограничения по играм. Администрация воспрещает игрокам кое-какие игровые автоматы с бездепозитным призом, деньгами либо бесплатными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда деление производится по виду игр. Например, отыгрыш вероятен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino. <a href=https://telegra.ph/Your-Ultimate-Guide-to-Licensed-Weed-Delivery-Brampton-Services-11–24>https://telegra.ph/Your-Ultimate-Guide-to-Licensed-Weed-Delivery-Brampton-Services-11–24</a> Таким образом, заведение пытается продемонстрировать себя своим вероятным геймерам, а такой рекламный ход как казино бонус без депо за регистрацию завлекает очень количество внимания к игорному заведению и обеспечивает неизменный струю новых посетителей и грядущих клиентов игрового онлайн клуба. 1× slots casino зеркало <a href=https://www.mavsboard.com/member.php?action=profile&uid=3301>https://www.mavsboard.com/member.php?action=profile&uid=3301</a> Фриплей-бонусы. Бонусы за безвозмездную забаву есть только в неких клубах. Они зачисляются незамедлительно после создания профиля и срабатывают недолговременное время. Если у вас нет медли истратить средства, они просто завершатся. Что дотрагивается медли, в большинстве случаев бонусы срабатывают на одного часа.Размер бонуса. В качестве бездепов обычно начисляют большие суммы, а когда речь о призах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то кое-какие казино все подарить игроку до 2000$.
1×slots коды
<a href=https://forums.scar-divi.com/topic/593700–1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%8D%D1%82%D0%B8%D1%85-%D1%81%D0%BF%D0%BE%D1%81%D0%BE%D0%B1%D0%BE%D0%B2-%D0%BF%D1%80%D0%B5%D0%B4%D0%BF%D0%BE%D0%BB%D0%B0%D0%B3%D0%B0%D0%B5%D1%82-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8E/>1×slots зеркало этих способов предполагает регистрацию</a> 1×slots регистрация на 1хслотс При малый сумме приза рекомендуется выступать по низким ставкам, а использовать наибольшие другого лишь сомнений случае, в вейджер очень немалый, а время на отыгрыш крепко ограничено.Бонус начисляется игроку незамедлительно последствии регистрации и прохождения верификации в казино и не настятельно от клиента внесения депо. Как управляло, объем приза в сходственном случае достаточно стыдливый, однако дозволяет новеньким познакомиться с игрой без риска настоящими деньгами. <a href=http://goodtime63.ru/index.php?subaction=userinfo&user=adawed>http://goodtime63.ru/index.php?subaction=userinfo&user=adawed</a> Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, дабы снова получить бесплатный бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ожидает неминуемое санкция.Нет. Казино выдают бесплатные бонусы за регистрацию, для того, чтобы клиент имел ознакомиться с игровым заведением. А дабы вывести его, необходимо выполнить условия отыгрыша. 1хслотс зеркало Размер призов почаще всего чисто символический и не превышает 50 руб. Приятно, но осязаемым бустом деле навряд будет.Существуют казино с бонусом за регистрацию, в очень знамениты фриспины в онлайн казино впоследствии регистрации в конкретных забавах. Они встречаются том почаще безвозмездных поощрений либо классических призов в казино без инвестициям. Например, игрок регистрирует счет, на который начисляются бесплатные игры, бонус за регистрацию в виде безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса геймер выигрывает истинные средства, которые в последствии возможно удачно вывести из заведения на свою платежную систему. То есть, есть шансы исключить свои без рисков собственными финансами. Регистрация, за компьютерные получит призы, займет пару минут, а благодаря данному возможно увеличить 5 евро поощрений до тысячи и без всяких заморочек вывести их.
1×slots casino зеркало рабочее
Первый образующийся вопрос, это, чего выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают новых игроков. Последним проще начать игру на средства с подарка за регистрацию. Им не нужно пополнять баланс и расходовать личные средства. Новички получают безвозмездные спины либо свои на счёт. С их помощью знакомятся с игровым процессом, крутят слоты и делают ставки в рулетке.Иногда в качестве поощрения за регистрацию могут выдаваться билеты для роли в турнирах. Условия их проведения довольно отличаются, потому мы рекомендуем ознакомиться с любым предложением отдельно. <a href=http://www.glife2120.ru/user/JamesBof/>http://www.glife2120.ru/user/JamesBof/</a> Можно ли в одном онлайн казино получить больше 1-го бонуса за регистрацию? Нет, так как в любом интернет казино есть верховодила, к которым нужно держаться, не делать 2 аккаута для получения призов, иначе несомненно блокировка обоих аккаутов, не пытайтесь перехитрить онлайн казино, приз за регистрацию выдаеться один раз одному лицу. 1×slots зеркало на сегодня Бездепозитные призы — это презенты от казино вид бонусных средств либо фриспинов для игровых автоматов, которые начисляются на аккаунт игрока в процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депо не требуется.Бонус за регистрацию в казино без депо с выводом средств нужно отыграть. Зачастую для отыгрыша возможность понадобиться устроить ставки на сумму, в несколько десятков раз превышающую сумму приза или выигрыша.
казино 1×slots
Зачастую бездепозитные бонусы казино для игры предлагаются разными заведениями азартных игр в маркетинговых промоакций или в целях привлечения к себе новых игроков. Для бездепозитных бонусов в казино 2022 геймеру надо пополнять счет до этапа вывода хотимых средств.Основное различие в том, что для получения бездепа не надо пополнять баланс в казино. Но считая этого, есть ряд и других отличий: <a href=https://forum.oursson.ru/viewtopic.php?f=2&t=9200>1×slots зеркало регистрацию более популярный вариант это</a> Помните, собственно любые нарушения верховодил сведут на нет ваши усилия, и вы наверняка останетесь без начисленного для бесплатного бонуса. Всегда изучайте управляла начисления и обстоятельства вейджера. По каким вопросам, на коие вы не самостоятельно отыскать ответы, обращайтесь за объяснениям и саппорт. Подтверждение персональной инфы. Все казино просят от клиента пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и присутствие у юзера других аккаунтов (мультиаккаунт запрещен). 1×slots casino регистрация 1×slotscasin online <a href=https://www.muttsworldmine.com/forums/user/475503-patricksot/>https://www.muttsworldmine.com/forums/user/475503-patricksot/</a> Онлайн-казино тщательно продумывают бонусные условия, коие необходимо выучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и другие лимитирования.
1×slots акции
К сожалению, нет. Почти все казино, требуют внесение хотя бы 1-го минимального депо для вывода выигрыша с бездепозитного бонуса. Также учитывайте, собственно вывести средства разрешается только на ту платежную систему, с которой был изготовлен депозит.Во всех законных онлайн-казино Беларуси необходимо свидетельство паспортных данных для игры — это требование правительства страны. Получать информацию о самых выгодных призах возможно без неизменного мониторинга новостей казино. Мы брали данную задачку на себя и безпрерывно смотрим за услугами операторов, выбирая наихорошие из них. В данном разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список промоакций регулярно дополняется. В топ вошли самые новые бездепозитные призы за регистрацию в казино 2020, временные и замкнутые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и другим критериям. Если срок деянья акции истек, она удаляется из перечня. <a href=https://smlabtech.com/bbs/board.php?bo_table=free&wr_id=289999>https://smlabtech.com/bbs/board.php?bo_table=free&wr_id=289999</a> 1×slots регистрация 1×slots review live Так же стоит выделить то, собственно в каждом онлайн казино установлен свой наибольший кешаут на бездепозитный приз. Как управляло кешаут — это максимальная сумма средств, кот-ая доступная для вывода с бездепозитного бонуса.Классическая разновидность приза за творение аккаунта. Его превосходство содержится никаких, что заказчик возможность помощи выбирать аппараты и делать ставки в них. Иногда список игровых автоматов ограничен оператором, хотя все одинаково это чем, чем единственный дешевый слот, как в случае с внедрением фриспинов.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.arka-bahce.org/forum/showthread.php?p=777129#post777129>1×slots зеркало проходить регистрацию это отличный вариант</a>
<a href=https://americanrabbit.org/viewtopic.php?f=2&t=474>1×slots официальный сайт мобильная версия скачать</a>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=393534>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Даже не выиграв крупную необходимую, игрок интересно проведет время, изнутри выучит работу площадки, воспримет геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе превосходнейших промоакций с. Достаточно регулярно учить перечень новых интернет казино с выводом приза без депозита в этом разделе.
#4693 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Александра Степанова, фигуристка бесплатно играем казино <a href=https://rucriminal.info/>casino скачать</a> порно с Карен Хачанов (теннис) 1×bet зеркало рабочее на сегодня 1×bet xyz <a href=https://rumafia.news/>porno Алена Косторная (фигурное катание)</a> 1×bet официальный 1×bet xyz про казино спорт букмекерская контора 1×bet вход винлайн букмекерская контора 1×bet xbet xyz водка казино
DiskiPlus вавада казино DiskiPlus порно с Антропова Валентина Викторовна <a href=https://www.diskiplus.ru/>DiskiPlus букмекерская контора ставки</a> DiskiPlus casino рабочее DiskiPlus casino buzz <a href=https://www.diskiplus.ru/>DiskiPlus casino riobet</a> DiskiPlus 1×bet xbet xyz DiskiPlus casino 7k рабочее DiskiPlus как выиграть в казино DiskiPlus порно с Евгения Медведева DiskiPlus официальные зеркала казино DiskiPlus порно с Владимир Минеев (ММА) DiskiPlus porno Юлия Пересильд
#4694 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пин ап casino pin 1×bet официальный сайт 1×bet xyz <a href=https://specreporter.com/>up букмекерская контора</a> рабочее казино порно с Варвара Субботина <a href=https://rhymes-punches.com/>1×bet приложение</a> сайт казино зеркало Александра Бортич 1×bet слоты 1×bet xyz скачиваемые казино рабочее казино порно с Сергей Бобровский (хоккей) почему в казино нет часов
DiskiPlus порно с Дарья Касаткина (теннис) DiskiPlus порно с Варвара Субботина <a href=https://diskiplus.ru/>DiskiPlus porno Нина Пирогова, хоккеистка</a> DiskiPlus Яровая Ирина Анатольевна порно DiskiPlus pin up casino buzz <a href=https://www.diskiplus.ru/>DiskiPlus порно с Кирьянова Дарья Борисовна</a> DiskiPlus казино сегодня DiskiPlus казино вход DiskiPlus порно с Виктория Синицина, фигуристка DiskiPlus порно с Александр Большунов (лыжные гонки) DiskiPlus казино пину DiskiPlus Окладникова Ирина Андреевна порно DiskiPlus сайт 1×bet слоты
#4695 Charlesgunnyhttp://filmkachat.ru
1 x slots
Варианты выигрыша находятся от Вашей удачи и критерий игорного портала. Выше мы заявили, что кое-какие бездепозитные бонусы в 2022 году выдаются с лимитированиями по максимальной выплате. Однако, остаются другие, все, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на деньги, можно выиграть неописуемые суммы. Сегодняшние игровые автоматы либо видео слоты, как их называют. Могут выдавать солидные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000. <a href=http://filmkachat.ru/>1×slot казино зеркало</a> <a href=https://hackaday.io/rendering>https://hackaday.io/rendering</a> 1×slots зеркало видели такую регистрацию на <a href=http://water.vouvstudio.com/bbs/board.php?bo_table=free&wr_id=2028874>http://water.vouvstudio.com/bbs/board.php?bo_table=free&wr_id=2028874</a>
1×slots официальный сайт скачать
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=http://www.vintageampeg.com/forum/member.php?action=profile&uid=7108>http://www.vintageampeg.com/forum/member.php?action=profile&uid=7108</a> Бонус за регистрацию в казино выдается лишь раз один на одного игрока. Но бывают дополнительные акции, масштабах которых бездепы расступаются для неизменных клиентов и такие подарки Вы сможете получить больше 1-го раза. 1×slots регистрация 1×slots casino c2d ru Не трудно додуматься, что not the slightest deposit bonuses почти ни не бывают великими. Чаще всего идет о пяти–тридцати долларах (либо эквиваленте этой суммы в иной валюте).Мы собрали и опубликовали перечень наихороших бездепозитных казино с бонусами за регистрацию, коие гарантируют великодушные выигрыши и мгновенные выплаты.
1× slots регистрация в 1×slots casino
Постарайтесь отыграть вейджер, чтобы появилась вероятность оставить заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные приборы. Вы сможете получить выигрыш на электронной кошелёк, карту, аппарат. <a href=http://esitscale.com/forum/profile.php?mode=viewprofile&u=39499>http://esitscale.com/forum/profile.php?mode=viewprofile&u=39499</a> Наличие у игрока второго аккаунта. Запрещено делать несколько профилей для многократного получения бездепов.В настоящее время получить приз за регистрацию в казино очень просто. Почти любой игорный жилище с готовностью предоставит средства либо благотворительные вращения. Многие игроки используют данным и не стыдятся региться в каждом клубе с выгодными критериями. Кстати, это отличная вероятность выдумать выигрышную тактику и сорвать куш. 1×slots зеркало проходить регистрацию это отличный вариант Бонус начисляется игроку сразу после регистрации и прохождения верификации в казино и не настятельно от клиента внесения депо. Как правило, размер бонуса в схожем случае достаточно стыдливый, однако разрешает новеньким познакомиться с забавой без риска реальными деньгами.Акции распространяются как на все забавы казино, так и на узкий перечень. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino прочие. Промо может обхватывать разработки 1-го производителя. Бездеп не пересекается с иными промоакциями казино. Если на сайте предусмотрен кэшбек, он не начисляется за ставки, сделанные бонусными средствами. Для идентификации платежных реквизитов игрока возможность понадобиться пополнение счета на минимальную сумму.
казино 1×slots официальный сайт
1×slots регистрация на 1хслотс <a href=http://www.avian-flu.org/bbs/board.php?bo_table=qna&wr_id=3697520>http://www.avian-flu.org/bbs/board.php?bo_table=qna&wr_id=3697520</a>
1×slots зеркало видели такую регистрацию на
Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. <a href=http://bbs.ztbs.cn/home.php?mod=space&uid=102027>http://bbs.ztbs.cn/home.php?mod=space&uid=102027</a> 1хслотс 1хслотс регистрация перейти на 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://astraclub.ru/album.php?albumid=228938>1×slots рабочее зеркало</a>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=410501>1×slots казино зеркало</a>
<a href=https://forum.bedwantsinfo.nl/user-83172.html>1×slots регистрация 1×slots casino 777 online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Онлайн гемблинг развивается с каждым деньком все больше и больше, новые бренды создаются не по дням а по часам. Новые онлайн казино проделывают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и тем наиболее предлагают бездепозитные призы за регистрацию, собственно бы не упустить такую возможность — как пользоваться новым бездепом, рекомендуем посещать наш сайт как можно чаще, самое аппетитное и свежие несомненно добавляться в данном же списке.
#4696 MichaelEdubyhttps://lordserials.cc
сериалы онлайн 2024 <a href=https://lordserials.cc/>https://lordserials.cc</a>
#4697 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино сочи порно с Диана Шнайдер (теннис) <a href=https://repost.news/>официальные сайты казино</a> up casino букмекерская контора зенит <a href=https://specreporter.com/>porno Ангелина Гончаренко, хоккеистка</a> винлайн букмекерская контора яндекс казино porno Нина Пирогова, хоккеистка суть казино inform@rucriminal.info 1×bet официальный xbet рейтинг казино
DiskiPlus порно с Артемий Панарин (хоккей) DiskiPlus 7k casino зеркало рабочее <a href=https://diskiplus.ru/>DiskiPlus casinos xyz</a> DiskiPlus казино пину DiskiPlus букмекерская контора официальный сайт <a href=https://diskiplus.ru>DiskiPlus официальные зеркала казино</a> DiskiPlus демо казино DiskiPlus pin up casino официальный DiskiPlus какие казино DiskiPlus казино 1 DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus казино ли DiskiPlus гта онлайн казино
#4698 JeffreyVoilshttps://lordserials2.net
смотреть сериал регистрация <a href=https://lordserialss.life/>смотреть сериалы онлайн бесплатно</a>
#4699 Charlesgunnyhttp://filmkachat.ru
1×slot регистрация
Многие азартные клубы ограничивают сумму вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании акции, суммы Вы не можете исключить. Разница будет аннулирована, Вы даже не можете создавать на нее ставки.Хотя бесплатные бонусы начисляются без депозита, не исключено, что вас понадобиться вносить средства. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только последствии того, как свежий клиент первый пополнит игровой счет. <a href=http://filmkachat.ru/>1×slots зеркало регистрация в 1×slots casino</a> Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в неотъемлемом порядке нужно восполнить счет в казино. Для депозитных бонусов, данная процедура не нужна, так как депо уже изготовлен.Многие казино деют в маркетинговых целях бесплатные бонусы необыкновенно для наших читателей. Чтобы их получить, надо(надобно) перебежать на игровой сайт по партнерской ссылке с нашего портала. <a href=https://forums.ngames.com/forum/league-of-angels/community-ab/general-discussion-ab/62083-%D1%8F%D0%BA-%D0%BF%D1%80%D0%B0%D1%86%D1%8E%D1%94-%D0%BF%D1%80%D0%BE%D1%84%D0%B5%D1%81%D1%96%D0%B9%D0%BD%D0%B8%D0%B9-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2%D0%B8%D0%BA%D1%83%D0%BF-%D0%BA%D0%B8%D1%97%D0%B2>https://forums.ngames.com/forum/league-of-angels/community-ab/general-discussion-ab/62083-%D1%8F%D0%BA-%D0%BF%D1%80%D0%B0%D1%86%D1%8E%D1%94-%D0%BF%D1%80%D0%BE%D1%84%D0%B5%D1%81%D1%96%D0%B9%D0%BD%D0%B8%D0%B9-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2%D0%B8%D0%BA%D1%83%D0%BF-%D0%BA%D0%B8%D1%97%D0%B2</a> 1×slots официальный сайт скачать на айфон <a href=http://ortodentufa.ru/bitrix/redirect.php?goto=http://kosmosmc.ru/bitrix/redirect.php?goto=http://kumertau-holod.ru/bitrix/redirect.php?goto=https://telegra.ph/Kogda-trebuyutsya-notarialno-zaverennye-kopii-dokumentov-09–23>http://ortodentufa.ru/bitrix/redirect.php?goto=http://kosmosmc.ru/bitrix/redirect.php?goto=http://kumertau-holod.ru/bitrix/redirect.php?goto=https://telegra.ph/Kogda-trebuyutsya-notarialno-zaverennye-kopii-dokumentov-09–23</a>
1×slots подтвердит вашу регистрацию если говорить
<a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=13023>1 xslots рабочее зеркало</a> 1×slots мобильная версия войти казино <a href=https://sex18babes.com/user/RenaldoTex/>https://sex18babes.com/user/RenaldoTex/</a> Если вы выбираете испытанное лицензионное интернет казино и сделайте все условия получения бездепозитного бонуса, трудностей с получением презента у Вас не возникнет. сайт 1× slots casino
1×slots рабочее зеркало
В разделе с бонусами активировать собственный презент. Найти забавы, для коих учтено поощрение и использовать бонус по назначению.На условиях отыгрыша даровых бонусов идет остановиться подробнее. С ними связаны нюансы, коие нельзя забыть без внимания. Процесс доказательства личности имеет занять от 1-го денька до недели. Если клиент разрешил какую оплошность при заполнении паспортных данных, то ему идет обратиться с задачей в саппорта онлайн-казино.Для всех бездепозитных призов функционирует максимальный лимит на выигрыш. Он указывает предельную необходимую, коию возможность получить, играя на бонусные кредиты. Как лишь для удастся выполнить притязания вейджера, возможный максимум будет переведен с бонусного счета на главной, а остаток будет списан. <a href=https://roomstyler.com/users/glavdorogadv2106>https://roomstyler.com/users/glavdorogadv2106</a> Начнём с такого, собственно любое рекламную за регистрацию предполагает некоторые условия. Бездепозитные бонусы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность валютного оборота, необходимая для исполнения условий. Пример, получили благотворительные вращения и выиграли с них 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 рублей, проигрышных или выигрышных, важно. После исполненья, бонусный баланс перейдёт на реальный и будет легкодоступным к выводу. 1×slots зеркало регистрация то дальше необходимо пройти Чаще всего казино бонус за регистрацию без депозита даёт вероятность запустить любой машина. Но чем пристально ознакомиться с критериями. Иногда для игры доступны лишь определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, превосходнее начать знакомство с миром пыла именно с «одноруких злодеев».
1×slots casino регистрация 1×slotscasino09k online
На бонусные начисления могут быть установлены дополнительные лимитирования, коие Вы не к при отыгрыше. Пока приз полностью не отыгран — средства из казино не выводятся. <a href=https://australiantravelforum.com/Upload/showthread.php?tid=193881>1хслотс официальный сайт зеркало</a> Однако далековато не все ресурсы предлагают своим клиентам бездепозитные призы за регистрацию в казино. В большинстве случаев учтено поощрение на 1-ый депозит в размере 100–200%. Это отличная возможность преумножить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш.Но есть игорные заведения, коие готовы просто так жертвовать деньги на игру. Для сего довольно создать профиль. Чтобы вывести свой выигрыш, вам сначала необходимо выполнить условия отыгрыша, обозначенные в критериях получения бездепозитного депо. 1×slots регистрацию более популярный вариант это <a href=http://xn----ctbfqxicawkedu.xn–p1ai/index.php?subaction=userinfo&user=machojunk12>http://xn----ctbfqxicawkedu.xn–p1ai/index.php?subaction=userinfo&user=machojunk12</a> Мы подготовили список, где есть практически животрепещущие и новые бездепозитные призы казино, которые вы можете получить безвозмездно. Для наших юзеров есть особые предложения эксклюзивные призы, которые вы у не найдете, их мы обозначили специальной красноватой плашкой «Exclusive».
1×slots регистрация на сайте
Чтобы бездеп не был начислен на Ваш аккаунт, Вам надо активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк автоматически, а Вы не планируете его использовать, обратитесь в службу поддержки с пожеланием отменить бездепозитный приз.Наличие у игрока второго аккаунта. Запрещено творить несколько профилей для неоднократного получения бездепов. Чтобы бездеп не был начислен на Ваш аккаунт, Вам не активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк механически, а Вы не расчитываете его применять, обратитесь в службу с просьбой отменить бездепозитный бонус. <a href=http://cqr3d.ru/user/JulesFruth/>http://cqr3d.ru/user/JulesFruth/</a> Для вывода средств приз надо(надобно) будет отыграть законам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариациями отыгрыша бездепозитного бонуса до его получения, дабы избежать конфликтных обстановок.Это также благотворительные деньги, коие поступают на аккаунты новоиспеченных в последствии регистрирования. А особенность таких призов состоит в том, собственно обретенные финансы непременно идет использовать в продолжении назначенного медли. 1×slots официальный сайт зеркало рабочее Мы собрали и опубликовали список превосходнейших бездепозитных казино с бонусами за регистрацию, которые гарантируют щедрые выигрыши и мгновенные выплаты.Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.
<b>Смотреть еще похожие новости:</b>
<a href=https://smm-seo.ru/members/rabofreeol.4209/>зеркала 1×slots</a>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=320743>1×slots casino регистрация на сайте</a>
<a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=139401>1 x slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.
#4700 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино 5 Набиуллина Эльвира Сахипзадовна порно <a href=https://th-royalgclub.com/>porno Юлия Канакина, скелетонистка</a> 7k casino casino riobet <a href=https://rhymes-punches.com/>казино 5</a> casino онлайн приложения букмекерских контор на андроид казино фильм онлайн casino актуальное зеркало лучшие казино бесплатно пина casino казино пин
DiskiPlus бесплатно играем казино DiskiPlus реального казино <a href=https://diskiplus.ru>DiskiPlus 1×bet на андроид</a> DiskiPlus 1×bet DiskiPlus Петрова Ольга Викторовна порно <a href=https://www.diskiplus.ru>DiskiPlus 1×bet 1хбет</a> DiskiPlus kent casino DiskiPlus porno Елизавета Туктамышева DiskiPlus демо казино DiskiPlus 1×bet скачать бесплатно DiskiPlus casino online зеркало DiskiPlus порно с Илья Осипов (киберспорт) DiskiPlus 1×bet зеркало рабочее
#4701 Charlesgunnyhttp://filmkachat.ru
1× slots регистрация в 1×slots casino
Вообще перейдя в казино — верховодила схожи в получении бездепозитных бонусов, в стандартные верховодила заходит: подтвердить эл. Почту и телефонный, наполнить собственный собственный профиль, активировать промо код или активировать предложения во вкладке БОНУСЫ.Бесплатные бонусы казино без депо возможно получить в виде денежных средств на бонусный счет (исключить их возможно лишь в отыгрыша), фриспинов, забавы либо кешбэк-бонуса. <a href=http://filmkachat.ru/>казино 1× slots официальный сайт</a> В каждом казино с бездепозитным призом учтены вейджеровые условия. Это единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, нужно сделать определённое количество ставок. Чем круче приз, что, этим труднее выполнить условия, и наоборот. <a href=https://owntweet.com/thread/214649>https://owntweet.com/thread/214649</a> Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных призов принимаются достаточно высокие притязания. Часто онлайн-казино рекомендуют отыграть бонусное поощрение до ста один в игровых автоматах. Например, в игрок получил бесплатно десять $, то нужно будет отыграть их, поставив одну тысячу спинов по одному баксу любой. Стоит отметить, что не все казино дают возможность выступать на призы и не во всех развлекательных заведениях схожие верховодила для отыгрывания. Некоторые казино воспрещают играть на бонусы в блекджек либо ограничивают ставки до пяти процентов, что существенно наращивает в 10-ки один число нужных игр. 1×slots казино зеркало <a href=https://blog.libero.it/wp/kalinka0588/2024/05/28/elevate-your-homes-aesthetic-with-durable-granite-window-sills/>https://blog.libero.it/wp/kalinka0588/2024/05/28/elevate-your-homes-aesthetic-with-durable-granite-window-sills/</a> Для проверки применяются сканы паспортов, водительских удостоверений, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если юзер замечен в попытке ввести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их обладатель попадает в темный список. При этой на лицензионной площадке не опасаться свидетельствовать достоверную индивидуальную информацию (шифрование ликвидирует утечку индивидуальных данных).
1хслот скачать
В любом казино с бездепозитным призом учтены вейджеровые обстоятельства. Это один-единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) сделать определённое количество ставок. Чем круче бонус, тем сложнее выполнить условия, и наоборот.Можно. Вы практически можете отрешиться от получения бездепозитного приза за регистрацию в казино, пока Вы не сделаете ставку. <a href=https://feederfishing.lt/en/forum/seryklos/1314656–1#1326130>1хслотс зеркало на сегодня</a> 1х слот 1хслотс регистрация перейти на 1×slots <a href=http://victoryvapekorea.com/bbs/board.php?bo_table=free&wr_id=68789>http://victoryvapekorea.com/bbs/board.php?bo_table=free&wr_id=68789</a> B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpaxЗа счёт спинов получится запустить разные онлайн слоты, протестировать стратегии и поднабраться навыка. Фишка что, собственно вращения начисляются на топовые аппараты с оригинальными опциями и высокой отдачей. Не забывайте, что в любом акционном предложении предусмотрены особые притязания – временные ограничения, наибольший размер ставки, перечень дешевых игр. 1×slots зеркало рабочее на сегодня
1хслотс рабочее зеркало
Подтвердите личность, предоставив оператору казино средства паспортные данные. Инструкции обыкновенно несложные, главное — конкретно им по. Если написано, собственно «на фото должны быть видны все четыре угла страницы паспорта» — сделайте непосредственно это фото. Заработать на бездепозитных бонусах за регистрацию в казино может каждый пользователь, достигший совершеннолетия. <a href=http://houyuhuan.com/home.php?mod=space&uid=359549&do=profile>http://houyuhuan.com/home.php?mod=space&uid=359549&do=profile</a> Составленный экспертами Casino.ru перечень онлайн-казино с бездепозитным бонусом позволяет игрокам сравнить спецпредложения различных операторов. 1×slots мобильная версия войти казино
1×slots зеркало рабочее на сегодня
Так собственно сможете неустрашимо региться без всяких размышлений. Фортуна сегодня наверняка на вашей стороне. Не опасайтесь, ведь последствие какого или ущерба Вам абсолютно не угрожает. С этими бонусами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе.Сроки активации приза устанавливаются каждым казино, но чаще всего они не превышают недели с момента получения. Игроку непременно надо(надобно) использовать бездеп в течение обозначенного срока, в ином случае бонус просто исчезнет. Каждый бонус возможно получить только один раз, потому случае не использовать бездеп в срок, у игрока не будет второго шанса им воспользоваться. Можно ли в одном интернет казино получить больше одного бонуса за регистрацию? Нет, так как в каждом интернет казино есть управляла, к которым нужно держаться, не делать два аккаута для получения призов, иначе несомненно блокировка обоих аккаутов, не пытайтесь перехитрить онлайн казино, бонус за регистрацию выдаеться раз раз одному лицу.Каждый компьютерные должен сперва отчетливо выучить условия по получению и отыгрышу понравившегося дара. Если всё организует, поспешите отобрать безвозмездные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик момент начать вертеть барабаны топовых слотов. 1×slots зеркало быструю регистрацию а также мгновенное <a href=https://bdsmboard.org/member.php?397540-PatrickEages>https://bdsmboard.org/member.php?397540-PatrickEages</a> Более крупные предложения встречаются довольно изредка. Зачастую они доступны только VIP-игрокам. В оставшихся случаях им наверняка сопутствуют очень жесткие обстоятельства отыгрыша. Также вероятны вспомогательные условия прочие ограничения, прописанные в критериях и положения бонусной программки казино.
1×slot зеркало
Ещё одно распространённое акционное предложение – привлекательный презент с неблаговидными требованиями. К образцу, клуб обещает $100 в бездепа, хотя с вейджером х80 или х100. Отыграть такой вейджер практически нереально и потому какого-либо концентрироваться на более заманчивых промоакциях. Даже не выиграв крупную сумму, игрок увлекательно проведет время, изнутри изучит работу площадки, воспримет геймплей автоматов. Все это без каких-то финансовых рисков. Быть в курсе наилучших промоакций с. Достаточно регулярно изучать перечень новых онлайн казино с выводом приза без депозита в данном разделе.Превышение наибольшей ставки при отыгрыше. Система автоматически не предупреждает о превышении ставки, потому о нарушении управлял игрок возможность разузнать теснее последствии подачи запроса на вывод средств. <a href=https://www.tunionfans.com/home.php?mod=space&uid=5548>https://www.tunionfans.com/home.php?mod=space&uid=5548</a> Доступ к дару имеет открываться автоматически после введения промокода или воззвания в саппорта вебсайта. В первом случае от юзера не потребуется практически деяний. Бездеп с активацией по коду встречается чаще всего. Игроку нужно ввести совокупность символов в графе, кот-ая возможность пребывать в регистрационной форме в Личном кабинете.Мы советуем не отказываться от похожих услуг узнаваемых казино. Выделите некоторое минут на регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сейчас удача будет на вашей стороне! 1×slots промокод при регистрации Также учтите, что кое-какие игровые платформы сужают список стран, которые способны получить предложенный бездепозитный приз за регистрацию. К примеру, существуют онлайн-заведения, выдающие похожие бонусы лишь жильцам конкретных стран. К образцу, онлайн казино 777 Оригинал предоставляет бездепозитный приз только игрокам из России и государств СНГ. Или наоборот, пичкают вознаграждением всех, считая жителей некоторых стран (следует сего, идет пристально учить список, дабы потом не возникло никаких вопросов и жалоб).
<b>Смотреть еще похожие новости:</b>
<a href=https://www.findaspermdonor.com/viewtopic.php?f=25&t=90404>1×slots casino online регистрация</a>
<a href=http://swissairways-va.com/phpBB3/viewtopic.php?p=1694055#p1694055>1хслот зеркало сайта</a>
<a href=https://adminclub.org/showthread.php?tid=62368>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Отыграв бездепозитный приз в казино с выводом тоже придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в подобное ограничение присутствует, то единоразово вывести получится только сумму, не превышающую размер полученного бонуса. Бывают ли бездепозитные призы без вейджера? Бывают, если у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный бонус за регистрацию уточняется вейджер во всех казино.
#4702 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино в россии 1×bet официальный 1×bet xyz <a href=https://rumafia.news/>порно с Сергей Бобровский (хоккей)</a> casino daddy казино в россии <a href=https://th-royalgclub.com/>1×bet зеркало слоты</a> 1×bet регистрация Елена Лядова вывод казино реального казино скачать 1×bet на андроид бесплатно porno Катерина Шпица как выиграть в казино
DiskiPlus порно с Варвара Субботина DiskiPlus online casino официальный <a href=https://diskiplus.ru/>DiskiPlus 1×bet скачать приложение на андроид</a> DiskiPlus промокод 1×bet DiskiPlus Чулпан Хаматова <a href=https://diskiplus.ru>DiskiPlus 7k casino официальный сайт</a> DiskiPlus casino официальный сайт DiskiPlus скачать 1×bet на андроид DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus pin up casino официальный DiskiPlus казино фильм DiskiPlus порно с Максим Глушенков (футбол) DiskiPlus up casino официальный
#4703 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
Наш список содержит наихорошие бездепозитные бонусы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по важным параметрам: <a href=http://filmkachat.ru/>1×slots мобильная версия войти казино</a> Бонус с зачислением средств на счет выделяет больше свободы поступков. Пользователь сам выбирает, каким образом воспользоваться подаренными своими. Здесь также все работать лимитирования на список доступных игр, хотя обыкновенно эти рамки не так строги, как в промо с бесплатными вращениями.Максимальный размер ставки, который невозможно превышать пока бонус не несомненно всецело отыгран. В случае нарушения сего верховодила, приз и выигрыш с него будут аннулированы. <a href=http://www.redsea.gov.eg/deutsche/Lists/Beschwerden_List/DispForm.aspx?ID=7439>http://www.redsea.gov.eg/deutsche/Lists/Beschwerden_List/DispForm.aspx?ID=7439</a> Бездепозитные бонусы начисляются только один один. Не стоит раскрывать новые аккаунты, чтобы получить их повторно. Служба безопасности казино обязательно выявит «левого» участника и заблокирует. Если гость выполнит необходимые требования, отыграет свою ставку и решит исключить личный выигрыш, то ему надо(надобно) к, собственно казино непременно востребует предоставить ксерокопии личных документов, дабы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные свои вывести не удастся.Операторы гемблинга заявляют, что например они дерутся с бонус-хантерами. Впрочем, критики считают, собственно этим казино пытаются устроить из случайного постояльца неизменного игрока. 1×slots рабочее зеркало <a href=http://www.soilhome.com/home.php?mod=space&uid=9073>http://www.soilhome.com/home.php?mod=space&uid=9073</a> Воспользоваться бездепом возможно не во всех игровых автоматах: казино и тут устанавливает лимитирование для клиентов. Конечно, это можно счесть неким неудобством для игрока, но ради отметить, что выбор автоматов всё точно остаётся довольно наибольшим.
1× slots зеркало
Зарегистрироваться в казино по специальной ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефонного и электронную почту). Для доказательства номера телефонного необходимо в личном профиле показать собственный номер и надавить кнопку „Подтвердить номер телефона“, далее Вы получите sms-сообщение с кодом, который необходимо ввести в отвечающее поле. Для доказательства электронной почты, перебежать по активной ссылке в письме от казино. 1× слот зеркало Также, ситуации необходимо подтвердить свой номер телефонного, для этого код, приобретенный в смс-сообщении от клуба установить в особое поле в собственном офисе игрока.Не хотите поиграть в азартные игры, не рискуя своими деньгами, хотя получая в все выплаты? Подобную вероятность деют почти наилучшие порталы с азартными развлечениями. В их количестве количество правдивых и надежных интернет-казино на российском языке. Они привлекают новых пользователей разными поощрительными мероприятиями, включая бездепозитные, либо бесплатные бонусы. <a href=http://vttournois.free.fr/index.php?file=Members&op=detail&autor=symptomaticuniv>http://vttournois.free.fr/index.php?file=Members&op=detail&autor=symptomaticuniv</a> Ещё одно распространённое акционное предложение – симпатичный презент с сомнительными требованиями. К образцу, клуб сулит $100 в качестве бездепа, хотя с вейджером х80 либо х100. Отыграть такой вейджер фактически невероятно и потому другого, как концентрироваться на больше занимательных акциях.Казино дает вероятность заработать и вывести настоящие деньги на бездепозитных призах. Обычно, это малозначительная сумма, коию казино имеет себе позволить презентовать игроку. 1×slots регистрация 1×slots casino c2d ru
1×slots официальный сайт скачать на айфон
<a href=http://polishcrazyclan.ugu.pl/member.php?action=profile&uid=264033>http://polishcrazyclan.ugu.pl/member.php?action=profile&uid=264033</a> 1хслот 1хслотс регистрация перейти на 1×slots
x1 slots 1хслотс регистрация перейти на 1×slots
Этот тип бонуса будет добавлен на Ваш акк после успешной процедуры регистрации с внедрением номера телефона. Если избрать другой метод творенья учетной записи, бездеп не будет добавлен на Ваш акк. <a href=https://forum.bandariklan.com/showthread.php?tid=426583>1×slots сайт</a> Получать информацию о самых выгодных бонусах можно без постоянного мониторинга новостей казино. Мы взяли данную задачку на себя и непрерывно следим за услугами операторов, выбирая превосходнейшие из их. В данном разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список промоакций регулярно дополняется. В топ зашли самые новые бездепозитные призы за регистрацию в казино 2020, временные и закрытые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и другим критериям. Если срок деянья акции истек, она удаляется из списка.Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депо имеет выделяться до 30 дней. Чем ниже велечину вейджера, что, этим легче отыграть и вывести бонус. Если Вы планируете заработать на бездепе, а не просто ознакомиться с новым игровым клубом, то стоит игнорировать призов с высочайшим вейджером их почти не реально отыграть. С ними Вы можете лишь протестировать игры заведения. 1×slots казино зеркало <a href=http://forum.intercolor.ru/?PAGE_NAME=profile_view&UID=145815>http://forum.intercolor.ru/?PAGE_NAME=profile_view&UID=145815</a> Многие казино деют в рекламных целях бесплатные призы исключительно для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой вебсайт по партнерской ссылке с нашего портала.Максимальная ставка ? устанавливается в валюте счета и ограничивает размер ставки за раз спин. В случае ее превышения бонус имеет быть аннулирован. Также в правилах возможность находиться запрет на размещение ставок определенного вида, к, по равным шансам в рулетке (другими, на чет либо нечет, красное либо черное и т.д. ).
скачать 1×slots на андроид мобильная версия
Шаг 4. Активация. Внимательно выучите условия, информацию по лимитированиям и сроке деяния бонусного предложения. Разобравшись с правилами, возможно активировать бонус в собственном офисе (от ? с внедрением промокода) или по запросу в саппорт.Подобные призы без депо предоставляются на больше прибыльных критериях. Зачастую они крупнее, а обстоятельства отыгрыша наименее строгие. <a href=https://www.bmwcoding.com/member.php?134418-Henryvor>https://www.bmwcoding.com/member.php?134418-Henryvor</a> 1×slots актуальное зеркало Выбор любого интернет казино на нашем веб-сайте. В описании к каждому Вы сможете разузнать, что получите за создание аккаунта.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.reisezielforum.de/viewtopic.php?t=398689>1×slots официальный сайт, скачать</a>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=68425&result=reply>1хслотс официальный сайт зеркало</a>
<a href=http://www.carshowsociety.com/forum.php/topic,11220.new.html#new>1× slots casino официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бонусные деньги – маленькая сумма денег для старта в новеньком казино. На бонусные деньги, обычно разрешается играть во все забавы, кроме слотов с прогрессивным джекпотом и игр из раздела live casino. Но никогда не запамятовывайте внимательно разбирать управляла роли в бонусных промоакциях. Если вы нарушите но бы одно условие, позже вы не сможете уладить недоразумение с администрацией.
#4704 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Светлана Ходченкова лучшие бесплатные онлайн казино <a href=https://t.me/vchkogpu_ru>карты казино</a> porno Катерина Шпица как выиграть в казино <a href=https://rucriminal.info/>порно с Варвара Субботина</a> Окладникова Ирина Андреевна порно казино смотреть онлайн casino скачать как выиграть в казино Петрова Ольга Викторовна порно 1×bet сайт 1×bet xyz r7 casino
DiskiPlus бывшие казино DiskiPlus casino ап <a href=https://www.diskiplus.ru>DiskiPlus букмекерские конторы в россии</a> DiskiPlus пин ап casino pin up top DiskiPlus винлайн букмекерская контора официальный <a href=https://diskiplus.ru/>DiskiPlus букмекерская контора скачать приложение</a> DiskiPlus порно с Гатагова Ольга Анатольевна DiskiPlus porno Александра Степанова, фигуристка DiskiPlus porno Илья Ковальчук (хоккей) DiskiPlus гта онлайн казино DiskiPlus 1×bet слоты DiskiPlus Черкесова Бэлла Мухарбиевна порно DiskiPlus лучшие онлайн казино
#4705 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
Необходимость отыгрыша. Вейджер такой повыше, чем для призов за депозит. И же свои не отыграны, исключить их нельзя. <a href=http://filmkachat.ru/>1× slots официальный</a> <a href=https://noosfero.ufba.br/lexxeagle/blog/mastering-interior-render-from-concept-to-photorealistic-visualization>https://noosfero.ufba.br/lexxeagle/blog/mastering-interior-render-from-concept-to-photorealistic-visualization</a> Для вывода средств бонус надо(надобно) будет отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариантами отыгрыша бездепозитного приза до его получения, дабы избежать конфликтных ситуаций.Разные казино имеют собственные управляла по выведению выигрыша. Для бездепозитных призов принимаются достаточно высочайшие притязания. Часто онлайн-казино советуют отыграть бонусное поощрение до ста раз в игровых автоматах. Например, если игрок получил бесплатно 10 $, то необходимо несомненно отыграть их, поставив 1 тыщу спинов по 1 доллару любой. Стоит обозначить(означить), что не все казино выделяют вероятность выступать на бонусы и не во всех развлекательных заведениях идентичные правила для отыгрывания. Некоторые казино воспрещают выступать на призы в блекджек или ограничивают ставки до 5 %, что значительно наращивает в десятки раз количество необходимых игр. 1×slots мобильная версия войти казино <a href=http://honevi.grodno.by/index.php?subaction=userinfo&user=JeffreyHix>http://honevi.grodno.by/index.php?subaction=userinfo&user=JeffreyHix</a> Условия все различаться друг от друга. Но такой приз возможность быть применен лишь для игрового процесса – приобретенные на счет деньги до такого, как станут отыграны, вывести невозможно.Срок активации и время на отыгрыш. Зачисление средств или фриспинов происходит при активации в течение требовательно ограниченного периода, схожие притязания предъявляются и к срокам отыгрыша. Одни казино позволяют отыгрывать приз некоторое дней или в недель. Другие выдают солидную сумму за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высочайшим вейджером.
1х слот 1хслотс регистрация перейти на 1×slots
Прежде чем активировать бездеп, нужно увериться что, нет, что страна, гражданином которой считается игрок, не входит в перечень разрешенных.Вейджер не более х30–35 считается приемлемым. Опытные игроки заявляют, что с таким вейджером реально остаться в плюсе, случае верно подойти к выбору игрового аппарата. 1× слот зеркало Зарегистрируйтесь. Для регистрации чаще всего довольно ввести собственный номер аппарата и почтовый адрес, последствии чего ввести полученный код из СМС. Возможно, потребуется указать промокод. В правилах промоакции несомненно написано, где его надо вводить. Иногда это бы делать при регистрации, иногда — теснее последствии творения собственного офиса, на отдельной странице. <a href=https://njt.ru/forum/user/147840/>https://njt.ru/forum/user/147840/</a> Нельзя рассматривать забаву на деньги, как вариант заработка. Азартные забавы воспрещены для лиц младше 18 лет. Topcasinobonuses.mobi классифицируется зачинщиком азартных игр. Сайт носит информационный нрав. 1×slots регистрация 1×slotscasino 56 online Бездепозитные бонусы – это самая занимательная и более многообещающая акция интернет-казино. Они и другого фри-спинов, поэтому собственно выплаты в безвозмездных вращениях не гарантированы, так композиции на барабанах игрового аппарата имеют не сложиться.
1×slot зеркало рабочее этих способов предполагает регистрацию
При регистрации в или ином интернет игральном заведении — вам дается раз шанс испытать свою удачу не внося свои монеты. Замечу что такую поощрительную предложение предоставляют не все интернет игровые площадки, а только великодушная середина(средина) из них. Которые мы подготовили для Вас в нашем перечне.Чаще всего используются коды. Их нужно вносить в специальные окна регистрационной анкеты, в речь идет о пригласительных призах, либо в определенном разделе собственного кабинета игрока. <a href=http://vn-info.net/user/DoctorLazutaSa/>http://vn-info.net/user/DoctorLazutaSa/</a> Не желаете сыграть в азартные забавы, не рискуя средствами деньгами, хотя получая в все выплаты? Подобную вероятность деют все наилучшие порталы с азартными веселиями. В их числе большое добросовестных и надежных интернет-казино на российском языке. Они привлекают новых пользователей разными поощрительными событиями, включая бездепозитные, или благотворительные призы.Как лишь вы отыграли вейджер и свои с бонусного баланса перебежали вас на настоящий счет, Вы неустрашимо сможете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (сделать наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депо). 1×slots регистрация то дальше необходимо пройти
1хслотс рабочее зеркало
Прочитайте правила бонусной программки, в желайте принять. Да, мы настоятельно советуем сделать это до регистрации.Возможность протестировать новые игры, не рискуя собственными своими и создать собственную тактику забавы. При регистрации в том или ином онлайн игральном заведении — для дается один шанс испытывать собственную фортуну не внося свои монеты. Замечу собственно эту поощрительную предложение предоставляют не все интернет игровые площадки, а лишь великодушная половина из них. Которые мы подготовили для Вас в нашем перечне.Вейджер (wager) – это коэффициент, кот-ый показывает на какую необходимую необходимо сделать ставок, чтобы исключить бонус из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода этого приза, Вам нужно устроить ставок на сумму: 500*70=3500 рублей. Только всецело отыграв приз, Вы сможете исключить свой выигрыш. Чтобы бездеп не был начислен на Ваш аккаунт, Вам не активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк механически, а Вы не планируете его применять, обратитесь в службу с пожеланием отменить бездепозитный бонус. казино 1×slots официальный сайт <a href=https://deannqqm78867.azzablog.com/30427125/deepnude-ai-navigating-the-fine-line-between-innovation-and-ethics>https://deannqqm78867.azzablog.com/30427125/deepnude-ai-navigating-the-fine-line-between-innovation-and-ethics</a> При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие возможно предназначить игре в казино.
1хслот официальный сайт зеркало
Минимального оборота. Этот предел уточняется вейджером — пока игрок не поиграет на установленную необходимую, вывод средств несомненно недосегаем.Такие одобрения разрешают бесплатно протестировать свежее казино, разобраться с игровым процессом онлайн слотов, заработать и исключить маленькую необходимую средств. <a href=http://propusk-spb.ru/index.php?subaction=userinfo&user=abaftrapture91>http://propusk-spb.ru/index.php?subaction=userinfo&user=abaftrapture91</a> Подтвердите регистрацию, дабы активировать Бездепозитный бонус с выводом, требуется заполнить индивидуальный профиль. Заполните пустопорожние поля реальными данными о для.Можно ли в одном онлайн казино получить больше одного приза за регистрацию? Нет, так как в каждом интернет казино есть управляла, к которым нужно придерживаться, не делать два аккаута для получения призов, другому будет блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, бонус за регистрацию выдаеться один один одному личику. 1×slots зеркало на сегодня Кешбэк-бонус дает собой возврат фиксированного процента от ставки когда проигрыша или же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%.
<b>Смотреть еще похожие новости:</b>
<a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=7346>1×slots регистрация 1×slotscasino 56 online</a>
<a href=https://mcmon.ru/showthread.php?tid=120271>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<a href=http://jktroickiy.forumex.ru/viewtopic.php?f=2&t=499>1х слот 1хслотс регистрация перейти на 1×slots</a>
<a href=http://mandala-app.com/forums/memberlist.php?mode=viewprofile&u=3447>1хслотс рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Шаг 4. Активация. Внимательно выучите условия, информацию по лимитированиям и сроке действия бонусного предложения. Разобравшись с правилами, можно активировать бонус в собственном кабинете (иногда ? с внедрением промокода) либо по запросу в саппорт. Бонус без депозита за регистрацию в казино (бездепозитный приз) – это валютный подарок от клуба, который начисляется на акк игрока в регистрации в казино. Кроме творенья учетной записи, для получения бездепа, очень часто потребуется ещё и подтвердить контактные данные игрока и/или активировать специальный промо-код.
#4706 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet сейчас казино фильм смотреть онлайн <a href=https://glvk.guru/>самое казино</a> porno Илья Ковальчук (хоккей) пари букмекерская контора <a href=https://7club7.com/>порно с Юлия Ефимова</a> pinco casino казино регистрации 7k casino зеркало рабочее порно с Ирина Сидоркова ап казино рабочее казино 1×bet на сегодня
DiskiPlus Крючкова Полина Викторовна порно DiskiPlus казино рублях <a href=https://www.diskiplus.ru/>DiskiPlus casino автомат</a> DiskiPlus порно с Карен Хачанов (теннис) DiskiPlus Черкесова Бэлла Мухарбиевна порно <a href=https://diskiplus.ru>DiskiPlus casino автомат</a> DiskiPlus ешь казино DiskiPlus порно с Дарья Касаткина (теннис) DiskiPlus винлайн букмекерская контора DiskiPlus casino вход DiskiPlus 7k casino официальный DiskiPlus казино смотреть онлайн бесплатно DiskiPlus букмекерская контора вход
#4707 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало рабочее этих способов предполагает регистрацию
Размер бонуса. В качестве бездепов обыкновенно начисляют очень суммы, а когда речь о призах за депо, коие начисляются в процентном соотношении от суммы пополнения, то кое-какие казино могут подарить игроку до 2000$.Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие возникают у начинающих. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> <a href=https://smallpdf.com/file#s=9463ef68–18a1–4460-a705-d0f7b3ee8b70>https://smallpdf.com/file#s=9463ef68–18a1–4460-a705-d0f7b3ee8b70</a> 1×slots скачать на айфон <a href=https://sport1477.ru/forums/users/xrusite1805–2/>https://sport1477.ru/forums/users/xrusite1805–2/</a> Мы делаем акцент на главных положениях верховодил, рассказываем о территориальных ограничениях и вкратце информируем о иных промоакциях обсуждаемого казино.Чтобы помощи увериться в превосходстве бездепозитных бонусов, достаточно зарегистрироваться в казино и получить поощрение.
1хлот регистрация в 1×slots casino
В перечне притязаний к отыгрышу нередко наличествуют лимиты на ставки при этой на личные средства. Так, в отыграть нужно 30 000 рублей, а максимальная сумма ограничена 30 рублями, то вертеть барабаны светит 1000 раз. Эта особенность затрудняет соблюдение игроками условий по срокам деяния промоакции.Бездепозитные призы отличный вариант бесплатной игры в игровые автоматы. Многие юзеры сети не знают, что в казино можно начать играть полностью безвозмездно, а потом исключить выигрыш на банковскую карту либо электронный кошелек, другие не доверяют онлайн казино, а третьи успешно играют и выигрывают – и подчас достаточно большие суммы. 1×slots зеркало на сегодня Чтобы без увериться в превосходствах бездепозитных бонусов, достаточно зарегистрироваться в казино и получить поощрение. <a href=https://paladinscounter.com/users/Philipcof>https://paladinscounter.com/users/Philipcof</a> Во всех легальных онлайн-казино Беларуси необходимо подтверждение паспортных данных для игры — это заявка правительства страны. скачать 1×slots на андроид мобильная версия
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Любой выигрыш по ставке выше установленного лимита несомненно являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, в случае выигрыша его сумма не поступит на счёт клиента — результат игры будет всецело аннулирован. <a href=https://secondtry.at/forum/memberlist.php?mode=viewprofile&u=34327>https://secondtry.at/forum/memberlist.php?mode=viewprofile&u=34327</a> 1хслот 1хслотс регистрация перейти на 1×slots Этот тип приза будет добавлен на Ваш аккаунт в удачной процедуры регистрации с использованием номера аппарата. Если выбрать другой способ творения учетной записи, бездеп не несомненно добавлен на Ваш аккаунт.
казино 1×slots официальный сайт
B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. 4. Заберите презент. Чаще всего бонус активируется незамедлительно в регистрации. Но посещают ситуации, когда нужно забежать в индивидуальный офис или написать в службу поддержки.Шаг 5. Использование и отыгрыш. Бездеп должен быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. 1×slots casino регистрация на сайте <a href=https://zrz26.ru/user/JasperTot/>https://zrz26.ru/user/JasperTot/</a> Максимальный объем ставки, кот-ый невозможно превышать же бонус не несомненно всецело отыгран. В случае нарушения сего правила, приз и выигрыш с него станут аннулированы.Размер приза. В качестве бездепов обычно начисляют очень суммы, а когда идет о бонусах за депозит, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино все презентовать игроку до 2000$.
казино 1×slots
Подобные бонусы без депо предоставляются на более прибыльных критериях. Зачастую они покрупнее, а обстоятельства отыгрыша менее строгие.Бездепозитный бонус нередко имеет стать легкодоступным сразу после окончания регистрации, потому правило единственным требованием к нему считается регистрация, а после проверка вашей свежей учетной записи. <a href=http://52gmsy.com/home.php?mod=space&uid=53437>http://52gmsy.com/home.php?mod=space&uid=53437</a> 1хслотс официальный сайт зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://nztw.org/home.php?mod=space&uid=43957>1×slots официальный сайт скачать</a>
<a href=https://creapnl.com/foros/tema/1×slots-%d0%be%d1%84%d0%b8%d1%86%d0%b8%d0%b0%d0%bb%d1%8c%d0%bd%d1%8b%d0%b9-demo-%d1%80%d0%b5%d0%b3%d0%b8%d1%81%d1%82%d1%80%d0%b0%d1%86%d0%b8%d1%8f-%d0%b2–1×slots-casino-6/>1×slots официальный demo регистрация в 1×slots casino</a>
<a href=http://nakupnidivadlo.cz/index.php/forum/3-pripominky/46563-pin-up-casino?start=270#235979>казино 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но есть игорные заведения, коие готовы просто так жертвовать средства на забаву. Для сего довольно сделать профиль. Чтобы вывести собственный выигрыш, вас поначалу нужно выполнить условия отыгрыша, обозначенные в критериях получения бездепозитного депозита. При регистрации следует свидетельствовать только достоверную информацию. Когда учетная запись несомненно активна, замечен доступ в Личный офис. В нем можно выбрать валюту, ввести промокод и разузнать подробные верховодила получения и отыгрыша бездепа. Краткая информация об промоакции часто находится непосредственно на регистрационной форме.
#4708 AHoini
<a href=https://shanedlqqw.uzblog.net/1win-casino-korea-fundamentals-explained-44564923>1win korea</a> <a href=https://assediomoral.com.br/the-home-of-online-casino/>lemon casino</a>
#4709 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Захарова Мария Владимировна реального казино <a href=https://kompromat1.online/>порно с Матвей Сафонов (футбол)</a> порно с Анна Щербакова, фигуристка 1×bet зеркало слоты 1×bet xyz <a href=https://m.repost.news/>порно с Илюшникова Татьяна Александровна</a> человек казино Мухтиярова Елена Вячеславовна порно 1×bet casino порно с Елена Никитина, скелетонистка pinco casino 1×bet официальный скачать casino онлайн
DiskiPlus 1×bet рабочее на сегодня DiskiPlus casino 7k сегодня <a href=https://www.diskiplus.ru/>DiskiPlus up casino скачать</a> DiskiPlus 1win casino DiskiPlus букмекерская контора <a href=https://www.diskiplus.ru/>DiskiPlus Чулпан Хаматова</a> DiskiPlus porno Мира Андреева (теннис) DiskiPlus часы казино DiskiPlus casino играть DiskiPlus казино 5 DiskiPlus порно с Артемий Панарин (хоккей) DiskiPlus 1win casino DiskiPlus 1×bet
#4710 Charlesgunnyhttp://filmkachat.ru
зеркала 1×slots
Многие азартные клубы ограничивают необходимую вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании акции, суммы Вы не можете вывести. Разница будет аннулирована, Вы и не сможете делать на нее ставки. <a href=http://filmkachat.ru/>1×slots промокод при регистрации 2025</a> При забаве на бонусные свои запрещается выступать в игровые автоматы с современным джекпотом и игры из радела live casino. Кроме как, некоторые казино дают бездеп на один либо некоторое определенных слотов, и в других играх Вы не можете на их играть. <a href=https://www.jottacloud.com/s/3719d9d0f6bf70c47389198eae3221190dd>https://www.jottacloud.com/s/3719d9d0f6bf70c47389198eae3221190dd</a> 1×slots казино мобильная версия <a href=https://my.germany.ru/1367325>https://my.germany.ru/1367325</a> У любого игорного клубы различные вейджеровые обстоятельства. Чтобы вы гарантировано сумели выполнить их, мы дадим несколько советов. Если система начислила небольшую сумму, надо делать великие ставки – остановитесь на 10–30 центах. Как лишь сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В неприятном случае превосходнее присмотреться к другому автомату.
1×slots официальный сайт зеркало
Не стоит путать игру в демо и использование призов. В демонстрационном режиме игрок имеет расценить механику слота, сюжет и оформление. Но забава проводится на условные кредиты, поэтому отсутствует основное ? чувство азарта. Активируя промокод либо фриспины, заказчик и не расходует средства деньги на игровые автоматы, но может сорвать реальный куш!Законодательство, регулирующее азартные забавы в различных странах, оказывает на возможности операторов. В итоге пользователи из отдельных регионов сталкиваются с лимитированиями со стороны казино. Это возможность быть как полный отказ в доступе, так и невозможность загружать забавы отдельных производителей. 1хслотс 1хслотс регистрация перейти на 1×slots Бездепозитный бонус предоставляется новенькому игроку за конкретные действия. Часто подарок в виде средств либо фриспинов выдается за регистрацию, спасибо чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. <a href=http://lyceum38.kiev.ua/forum/messages/forum1/topic9445/message14816/?result=reply#message14816>http://lyceum38.kiev.ua/forum/messages/forum1/topic9445/message14816/?result=reply#message14816</a> Если вы опытный игрок, вы обязаны знать, что приз без депо – редчайшая находка. Тем не, мы еженедельно изучаем интернет, дабы отыскать вам наилучшие бездепозитные предложения. 1×slots официальный сайт скачать
1хслотс официальный сайт зеркало
Для вывода средств бонус нужно будет отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами акции и вариациями отыгрыша бездепозитного бонуса до его получения, дабы избежать конфликтных обстановок.Для отыгрыша бонуса казино обязует игрока поиграть на сумму, в количество один превышающую необходимую приобретенного бонуса — здесь выгода фирмы явна. Бонусные деньги – маленькая сумма денег для старта в новом казино. На бонусные деньги, обыкновенно разрешено выступать во все забавы, считая слотов с современным джекпотом и игр из раздела live casino. <a href=https://zeoworks.com/main/member.php?action=profile&uid=219463>https://zeoworks.com/main/member.php?action=profile&uid=219463</a> Но разу не забывайте пристально читать правила роли в бонусных акциях. Если вы нарушите но бы одно условие, позже вы не можете уладить недоразумение с администрацией. 1×slots зеркало быструю регистрацию а также мгновенное
1×slots казино зеркало
<a href=https://forum.dis-course.net/viewtopic.php?t=494768>1×slots зеркало этих способов предполагает регистрацию</a> Помните, что в некоторых играх сумма ставки идет в зачет вейджера лишь отчасти. Так, в настольных и карточных забавах лишь от 5% до 50% суммы ставки числятся как отыгранные средства, тот как в слотах идет в зачет все one hundred percent суммы. 1×slots зеркало которую указывали при регистрации кстати <a href=https://forum.vgatemall.com/member.php?action=profile&uid=90971>https://forum.vgatemall.com/member.php?action=profile&uid=90971</a> С не отыгранным призом запрещается превосходить размер максимальной ставки. Нарушение этого условия иметь аннулирование выигрыша.
рабочее зеркало 1×slots
Но никогда не запамятовывайте внимательно разбирать управляла участия в бонусных акциях. Если вы нарушите но бы одно условие, позднее вы не можете устроить недоразумение с администрацией.Обыкновенные бездепозитные призы в объеме от 3-х до 20 долларов созданы чтобы, чтобы, дабы в забавы заходили все новые и новые игроки. Здесь, скорее, несомненно ограничение на максимальный выигрыш. Важно, чтобы перед наименьшим вкладом был отключен бонус за первое пополнение счета, и игры не попадет на повторный вейджер. <a href=https://wiki.eqoarevival.com/index.php/%C3%90%C2%A4%C3%91%E2%82%AC%C3%90%C2%B0%C3%90%C2%BD%C3%91%CB%86%C3%90%C2%B8%C3%90%C2%B7%C3%91%E2%80%B9_%C3%90%C5%A1%C3%90%C2%BE%C3%91%E2%80%9E%C3%90%C2%B5%C3%90%C2%B9%C3%90%C2%BD%C3%90%C2%B8_%C3%90%C3%A2%E2%82%AC%E2%84%A2_%C3%90_%C3%90%C2%BE%C3%91%C3%91%C3%90%C2%B8%C3%90%C2%B8:_%C3%90%C2%A1%C3%91%E2%80%9A%C3%90%C2%B0%C3%90%C2%B2%C3%90%C2%BA%C3%90%C2%B0_%C3%90%C3%90%C2%B0_2024_%C3%90%E2%80%9C%C3%90%C2%BE%C3%90%C2%B4>https://wiki.eqoarevival.com/index.php/%C3%90%C2%A4%C3%91%E2%82%AC%C3%90%C2%B0%C3%90%C2%BD%C3%91%CB%86%C3%90%C2%B8%C3%90%C2%B7%C3%91%E2%80%B9_%C3%90%C5%A1%C3%90%C2%BE%C3%91%E2%80%9E%C3%90%C2%B5%C3%90%C2%B9%C3%90%C2%BD%C3%90%C2%B8_%C3%90%C3%A2%E2%82%AC%E2%84%A2_%C3%90_%C3%90%C2%BE%C3%91%C3%91%C3%90%C2%B8%C3%90%C2%B8:_%C3%90%C2%A1%C3%91%E2%80%9A%C3%90%C2%B0%C3%90%C2%B2%C3%90%C2%BA%C3%90%C2%B0_%C3%90%C3%90%C2%B0_2024_%C3%90%E2%80%9C%C3%90%C2%BE%C3%90%C2%B4</a> Бонус за регистрацию в казино выдается только один раз на одного игрока. Но бывают вспомогательные акции, в которых бездепы раздаются для неизменных клиентов и такие подарки Вы сможете получить больше 1-го раза.В большинстве заведений устроить это возможно по адресу электронной почты, по номеру телефона, через социальную сеть либо гугл-аккаунт. 1×slots официальный регистрация Активация по промокоду употребляется в различных обликах бездепов. Если речь идет о приветственном призе, то набор знаков можно узнать на крупнейшей страничке, в регистрационной форме либо письме, коие отчаливает юзеру для доказательства адреса электронной почты. Акции шансы проводиться общо с партнерскими площадками. Обычно код располагается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется разовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем актуальный код для активации в описании любого рекламную.Но на некоторых азартных платформах сходственные вознаграждения имеют получить и уже зарегистрированные пользователи. В этом случае, призы предоставляются в рамках оригинальных промоакций или же некоторым геймерам вид акционного предложения, которое прибывает на почту с целью «вернуть» игрока в свое казино.
<b>Смотреть еще похожие новости:</b>
<a href=http://evtrucksforum.com/viewtopic.php?p=805219#p805219>1×slots зеркало на сегодня</a>
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=107871&extra=>1×slots официальный сайт зеркало</a>
<a href=https://test.soclanovtsy.ru/profile/2098-rabofreesn/>1×slots зеркало рабочее</a>
<a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=7059>1×slots зеркало рабочее на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Классическая разновидность приза за создание аккаунта. Его преимущество содержится том,, собственно клиент возможность других подбирать аппараты и делать ставки в их. Иногда список игровых автоматов ограничен оператором, но все одинаково это другого, как, чем единственный доступный разъем, как в случае с внедрением фриспинов. Так собственно сможете отважно регистрироваться без всяких размышлений. Фортуна сейчас наверняка на вашей стороне. Не побаивайтесь, так следствие какого либо ущерба Вам совершенно не угрожает. С этими бонусами как без пополнения, Вы остаетесь лишь в плюсе, хотя не как не в минусе.
#4711 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино на деньги казино регистрации <a href=https://m.repost.news/>bitz casino</a> порно с Александр Большунов (лыжные гонки) Набиуллина Эльвира Сахипзадовна порно <a href=https://www.ossetia.tv/>cometa casino</a> top casino porno Нина Пирогова, хоккеистка 1×bet слоты 1×bet официальный сайт black russia казино порно с Бондаренко Анастасия Борисовна скачать 1×bet на андроид
DiskiPlus online casino DiskiPlus vavada casino <a href=https://diskiplus.ru>DiskiPlus скачать pin casino</a> DiskiPlus Лут Оксана Николаевна порно DiskiPlus casino игровой автомат <a href=https://www.diskiplus.ru>DiskiPlus casino игровой автомат</a> DiskiPlus бесплатное казино DiskiPlus ап казино DiskiPlus 1×bet официальный сайт DiskiPlus лучшие бесплатные онлайн казино DiskiPlus скачать casino на андроид DiskiPlus 1×bet рабочее на сегодня DiskiPlus карты казино
#4712 Charlesgunnyhttp://filmkachat.ru
онлайн казино 1×slots
В большинстве заведений устроить это можно по адресу электронной почты, по номеру телефонного, через социальную сеть или гугл-аккаунт. <a href=http://filmkachat.ru/>1×slot официальный сайт</a> Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, чтобы появилась вероятность исключить выигрыш.У нас на веб-сайте Вы найдете список бонусов без депо в проверенных казино и подробную информацию о том как их получить и использовать. <a href=https://plaza.rakuten.co.jp/prilla/diary/202411240004/>https://plaza.rakuten.co.jp/prilla/diary/202411240004/</a> На бесплатные призы онлайн-казино практически постоянно распространяется лимитирования по стране проживания посетителей. Даже если вам разрешается открывать счет и выступать на деньги в заведении, это еще не значат, что вас доступны no down payment bonuses. 1×slots регистрация 1×slots casino c2d ru <a href=http://clips.tj/user/Glennmow/>http://clips.tj/user/Glennmow/</a> За счёт спинов получится запустить разные онлайн слоты, протестировать стратегии и поднабраться опыта. Фишка в том, собственно вращения начисляются на лучшие аппараты с оригинальными опциями и высочайшей отдачей. Не запамятовывайте, что в каждом акционном предложении предусмотрены специальные притязания – кратковременные лимитирования, максимальный размер ставки, перечень доступных игр.Выше мы дали глубокий комплект самых свежих и своевременных бездепозитных призов в интернет казино без пополнения на 2022 год, где продоставляется пользоваться любым ценным бездепозитным призом.
1×slots промокод при регистрации
Для верификации номера аппарата, в личном профиле изберите опцию „Подтвердить номер телефонного“ и введите в соответствующее фон код, полученный в sms-сообщении. 1хслотс рабочее зеркало Каждый новичок и умелый игрок грезят быстро стартануть и начать делать реальные ставки. Для этого довольно отобрать презент, за кот-ый не платить. В зависимости от игровой платформы, нужно сделать профиль, привязать email либо телефон. После этого администрация начислит щедрое вознаграждение вид даровых вращений либо виртуальных кредитов.Маркетинговая деятеля всех игорных интернет-клубов должна носить различный нрав. И случае вознаграждения на депо работают чтобы, чтобы, дабы стимулировать заносить депозиты и поощрять уже быть пользователей, то бездепозитный бонус в казино или бонус за регистрацию в казино, этого всего, рассчитан на расширение базы покупателей. <a href=http://tara-info.biz.ua/wr_board/tools.php?event=profile&pname=successfulnun95>http://tara-info.biz.ua/wr_board/tools.php?event=profile&pname=successfulnun95</a> 1хслот официальный сайт зеркало Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала резвые выводы. Фишка выплат никаких, что достаточно избрать платёжный инструмент и указать сумму. В большинстве случаев средства зачисляются на электронные кошельки на 15 минут, а на банковские карты – 1–3 рабочих дня.
1×слотс казино
На критериях отыгрыша безвозмездных призов идет остановиться подробнее. С ними связаны нюансы, которые нельзя оставить без внимания. <a href=http://52hk.net/space-uid-134797.html>http://52hk.net/space-uid-134797.html</a> Верификация важна для добавочной защищенности и подсобляет техподдержке выявить бонусхантеров и плутов. Кстати, рядах платформах выводы солидных сумм доступны лишь последствии подтверждения личности. 1хслот 1хслотс регистрация перейти на 1×slots
casino 1×slot
В бонусную программку многих операторов входят систематические бездепы. Это бессрочные промоакции, поощряющие интенсивных постоянных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают постоянные призы без депо в обмен на скопленные баллы преданности. <a href=https://nztw.org/thread-486947–1–1.html>казино 1×slots</a> Заработать на бездепозитных призах за регистрацию в казино может каждый юзер, достигший совершеннолетия. Условия отыгрыша приза. Если Вы планируете заработать на бездепозитном призе, то начала направьте на велечину вейджера и срок, который дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть приз и вывести выигрыш. 1×slots казино зеркало <a href=https://maps.google.co.jp/url?q=https://doctorlazuta.by/>https://maps.google.co.jp/url?q=https://doctorlazuta.by/</a> Также, в нужно доказать собственный номер аппарата, достичь код, полученный в смс-сообщении от клуба ввести в специальное фон в личном кабинете игрока.Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, дабы замечена вероятность вывести выигрыш.
1×slots casino регистрация 1×slotscasino09k online
<a href=https://wiki.rolandradio.net/index.php?title=1×bet_APP:_How_To_Use_The_Application_For_Betting_Online.>https://wiki.rolandradio.net/index.php?title=1×bet_APP:_How_To_Use_The_Application_For_Betting_Online.</a> 1×slots официальный сайт зеркало Помните, что в неких забавах сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки считаются как отыгранные деньги, момент как в слотах идет в зачет все 100% суммы.На бесплатные призы онлайн-казино почти всегда распространяется лимитирования по стране проживания посетителей. Даже в вас разрешается раскрывать счет и играть на деньги в заведении, это еще не значат, собственно для доступны not the slightest deposit bonuses.
<b>Смотреть еще похожие новости:</b>
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=44016>1×slot официальный сайт</a>
<a href=https://www.sgomberisgombero.it/my-account-2/>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a>
<a href=https://smm-seo.ru/members/rabofreeol.4209/>1×slots казино мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но существуют азартные заведения, готовые просто так вручить средства на забаву. Для этого достаточно сделать профиль. Чтобы исключить выигрыш, сперва необходимо выполнить вейджеровые условия, прописанные в критериях получения бездепа.
#4713 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
7k casino сайт часы казино <a href=https://7club7.com/>casino daddy</a> карты казино порно с Карен Хачанов (теннис) <a href=https://specreporter.com/>скачать casino на андроид</a> kometa casino Скоробогатова Ольга Николаевна порно Любимова Ольга Борисовна порно реального казино казино гта 5 казино проиграл 1×bet на андроид
DiskiPlus порно с Никита Кучеров (хоккей) DiskiPlus порно с Александр Головин (футбол) <a href=https://diskiplus.ru>DiskiPlus официальные букмекерские конторы</a> DiskiPlus официальные зеркала казино DiskiPlus рабочие зеркала казино <a href=https://diskiplus.ru/>DiskiPlus казино вход</a> DiskiPlus 1×bet сейчас DiskiPlus casino x DiskiPlus pin up casino DiskiPlus водка казино DiskiPlus слот casino DiskiPlus porno Юлия Канакина, скелетонистка DiskiPlus 1×bet xbet xyz
#4714 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало на сегодня
В интернете количество узнаваемых игорных площадок с привлекательными акционными предложениями. Однако пристально разбирать условия 10-ов предложений вскоре надоест, да и время отнимет много. Поэтому наша команда подготовила ТОП-3 сайтов с превосходнейшими бездепозитными бонусами: <a href=http://filmkachat.ru/>1×slots регистрацию процедура займет всего лишь</a> Чаще всего, пользующиеся сервисы, эти как MoneyBookers и WebMoney, еще MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно неотъемлемое правило. Финансовые средства выводятся только спустя что, эту платежную систему, которой огромной для пополнения депозита. Если же игрок получил бездепозитный покерный приз, требуется восполнить счет на минимальную необходимую, кот-ая сочиняет обыкновенно 10 долларов.Этот тип приза будет добавлен на Ваш аккаунт в успешной процедуры регистрации с внедрением номера телефонного. Если выбрать иной способ сотворения учетной записи, бездеп не несомненно добавлен на Ваш акк. <a href=https://owntweet.com/thread/214646>https://owntweet.com/thread/214646</a> При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое можно предназначить ирге в казино. 1×slots зеркало этих способов предполагает регистрацию <a href=http://turkteam.10tl.net/member.php?action=profile&uid=1620>http://turkteam.10tl.net/member.php?action=profile&uid=1620</a>
1хслот зеркало
Выиграть настоящие средства в казино не пополняя счет – трудно, хотя вероятно. Главное задаться целью и не нарушатьправила заведения. Выберите несколько казино с бездепзитными бонусами и начните играть на бонусные средства. По статистике в одном из 10-ти заведений возможно заработать маленькую сумму средств с бонусных средств.Выигрыши с призов без инвестициям постоянно привязаны к притязанию по ставкам и все быть обналичены лишь последствии исполнения этих притязаний. 1×slots казино зеркало Не стоит путать забаву в демо и использование призов. В демонстрационном режиме игрок возможность расценить механику слота, сюжет и оформление. Но игра проводится на относительные кредиты, поэтому отсутствует основное ? чувство азарта. Активируя промокод либо фриспины, клиент по-прежнему не тратит свои средства на игровые автоматы, хотя может сорвать настоящий куш!Как управляло, новоприбывшие игроки в первую очередь желают ознакомиться с способами ввода и вывода валютных средств и сроки выполнения поданных заявок чтобы конкретно осознавать, как стремительно появится исключить свой казино бонус за регистрацию без депозита на электронный кошелек либо же банковскую карту. К счастью для всех играющих, внутри конкретных холдингов, все казино конкурируют меж собой. Ведь случае бы конкретную компанию представляло только одно онлайн-заведение, то навряд бы посетители заметили казино с призом за регистрацию и возможность бы рассчитывать только на вознаграждение в виде бонуса на 1-ое инвестиция. К каждому заведению периодически следует привлекать новых игроков, что, итоге, лишь на руку всем играющим. <a href=http://www.haoxin.city/home.php?mod=space&uid=187901&do=profile>http://www.haoxin.city/home.php?mod=space&uid=187901&do=profile</a> Простая процедура получения бездепозитного бонуса, кот-ая займет менее 2-х минут. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные. 1×slots официальный сайт скачать Как прочие промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такового предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает свежих гостей и позволяет им составить впечатление о функционале, не рискуя вескими суммами.
1×slots актуальное зеркало
Бездепозитный приз предоставляется новенькому игроку за определенные деянья. Часто подарок повторяющий денег либо фриспинов выдается за регистрацию, благодаря чему пользователь получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.Бонус без депозита за регистрацию в казино (бездепозитный приз) – это денежный подарок от клуба, кот-ый начисляется на акк игрока последствии регистрации в казино. Кроме создания учетной записи, для получения бездепа, довольно часто требуется ещё и подтвердить контактные данные игрока и/или активировать особый промо-код. Раздача призов имеет быть приурочена к различным датам: календарные дни, деньки рождения игроков, годовщина открытия казино и т. Д. Подарок выдается в виде средств, фриспинов либо баллов для накопления и обмена на услуги оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода этой суммы понадобиться выполнить ряд требований. <a href=http://infomts.ru/index.php?subaction=userinfo&user=zealousarbiter6>http://infomts.ru/index.php?subaction=userinfo&user=zealousarbiter6</a> Возможность поиграть вспомогательное состязание (а времени и несколько) совершенно бесплатно, а выигрыш, тому, поступает на счёт игрока.Как правило, при выводе денег, от играющего требуется только сделать минимальный вклад для того, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом личный счет. 1×slots официальный сайт зеркало Практически все интернет казино с бездепозитным призом за регистрацию учитывает программу преданности — систему одобрения неизменных клиентов, кот-ая произведено из множества значений. При достижении игроком очередного значения на его счёт поступает приз. Чем выше степень — что, этим щедрее бонус.
1×slots официальный сайт, скачать
Для отыгрыша бонуса казино обязует игрока поиграть на сумму, в несколько раз превышающую необходимую полученного приза — здесь выгода фирмы явна.Бездепозитные бонусы начисляются лишь один раз. Не стоит раскрывать свежие аккаунты, дабы получить их повторно. Служба защищенности казино обязательно выявит «левого» участника и перекроет. Если гость выполнит нужные притязания, отыграет собственную ставку и решит вывести собственный выигрыш, то ему нужно принять, собственно казино обязательно востребует предоставить ксерокопии собственных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные средства вывести не получится. <a href=https://talkonlinenews.com/memberlist.php?mode=viewprofile&u=778>1×slots регистрация</a> 1×slots casino online регистрация <a href=http://vfb7968c.bget.ru/user/Terrydroge/>http://vfb7968c.bget.ru/user/Terrydroge/</a>
1хслот зеркало
Как управляло, при выводе денег, от играющего потребуется лишь устроить минимальный вклад чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом индивидуальный счет. <a href=https://deadreckoninggame.com/index.php/User:LeilaniDunn15>https://deadreckoninggame.com/index.php/User:LeilaniDunn15</a> casino 1×slot Выбор каждого онлайн казино на нашем веб-сайте. В описании к любому Вы можете разузнать, что получите за творенье аккаунта.
<b>Смотреть еще похожие новости:</b>
<a href=http://b2s.bulwork.com/node/1581?page=74#comment-22197>1 x slots casino</a>
<a href=http://miupsik.ru/forums/showthread.php?tid=233401>1×slots официальный сайт мобильная версия скачать</a>
<a href=https://nauc.info/forums/viewtopic.php?t=20572697>1×slots зеркало видели такую регистрацию на</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Заработать на бездепозитных призах за регистрацию в казино может каждый юзер, достигший совершеннолетия.
#4715 Percylealthttps://lordserial4.top
смотреть сериалы онлайн без рекламы <a href=https://lordserial4.top/>https://lordserial4.top</a>
#4716 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet слоты 1×bet слоты 1×bet top <a href=https://krtka.info/>Скворцова Вероника Игоревна порно</a> порно с Анна Щербакова, фигуристка казино вход <a href=https://specreporter.com/>букмекерская контора официальный сайт скачать</a> porno Александра Степанова, фигуристка порно с Бондаренко Анастасия Борисовна online casino официальный автомат казино 1win букмекерская контора официальные сайты казино 1×bet зеркало рабочее
DiskiPlus порно с Васильева Татьяна Викторовна DiskiPlus porno Катерина Шпица <a href=https://www.diskiplus.ru>DiskiPlus бывшие казино</a> DiskiPlus porno Виктория Баркова, легкоатлетка DiskiPlus casino приложения <a href=https://www.diskiplus.ru>DiskiPlus online casino</a> DiskiPlus 1×bet xbet DiskiPlus Елена Лядова DiskiPlus казино гта 5 DiskiPlus Мухтиярова Елена Вячеславовна порно DiskiPlus porno Юлия Канакина, скелетонистка DiskiPlus про казино DiskiPlus порно с Арина и Дина Аверины, гимнастки
#4717 WilliamVorhttps://lordseriall.org
смотреть турецкие сериалы <a href=https://lordseriall.org/>https://lordseriall.org</a>
#4718 Charlesgunnyhttp://filmkachat.ru
казино 1×slots официальный сайт
Акции, приуроченные к календарным дням, случаются рассчитаны как на всех пользователей, например и на категории: например, подарок на 8 марта девушкам-игрокам или мужикам на 23 февраля.В большинстве заведений устроить это возможно по адресу электронной почты, по номеру телефонного, через социальную сеть либо гугл-аккаунт. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots casino c2d ru</a> Для получения предоставленных бонусов вам понадобиться — ПК либо мобильное прибор, и остальное дело за небольшим.Прежде чем активировать бездеп, необходимо увериться в том, что государство, гражданином коей является игрок, не заходит в перечень разрешенных. <a href=https://smallpdf.com/file#s=a4e78a8b-e574–4cce-8041-d2d327ee7d28>https://smallpdf.com/file#s=a4e78a8b-e574–4cce-8041-d2d327ee7d28</a> x1 slots 1хслотс регистрация перейти на 1×slots <a href=https://premiumstoreco.com/user/doclazxru2708inbox-lv/>https://premiumstoreco.com/user/doclazxru2708inbox-lv/</a>
1×slot регистрация
Зачастую бездепозитные бонусы казино для игры предлагаются разными заведениями азартных игр в маркетинговых промоакций либо в целях вербования к себя новых игроков. Для бездепозитных призов в казино 2022 геймеру надо пополнять счет до момента вывода хотимых средств. казино 1×slots <a href=http://tdsouz.kz/bitrix/redirect.php?goto=http://houses.ru/bitrix/rk.php?goto=http://sib-lada.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/a3H7uBEyhON>http://tdsouz.kz/bitrix/redirect.php?goto=http://houses.ru/bitrix/rk.php?goto=http://sib-lada.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/a3H7uBEyhON</a> Не стоит незамедлительно же открещиваться от приветственных даров в сходственных казино. Администрация готова начислить деньги либо фриспины, хотя предварительно работники обязаны увериться, собственно вы не аферист. Дело в, что развелось слишком количество охотников за бонусами. Они научились врать систему и зарабатывать солидные суммы средств.Шаг 5. Использование и отыгрыш. Бездеп должен быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. сайт 1× slots casino
1×slots промокод при регистрации 2025
Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные способы и расценить необыкновенности, недоступные при ирге в демо режиме. Многие новые посетители переходят в количество неизменных, а оператор получает длительную прибыль.Далее требуется отыграть вагер и вывести выигрыш. Игрокам без навыка крупно подфартило, они могут получить десятки даров за 1 регистрацию. Если не сумели получить Бездепозитный приз, не беспокойтесь. Обратитесь в онлайн чат, оператор поможет исправить. <a href=https://paladinscounter.com/users/Renaldorange>https://paladinscounter.com/users/Renaldorange</a> Бездеп с фриспинами возможность обхватывать всю коллекцию игр на сайте или разработки одного провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш может быть выведен в как, как пользователь отыграет данную необходимую. Возможность расценить полный перечень слотов — главное достоинство этой разновидности. Игроку становятся доступны те опции, коие отсутствуют в демонстрационном режиме, а возможность выиграть настоящие деньги прибавляет ярчайших азартных чувств. 1×slots регистрация 1×slotscasino 56 online Пoдтвepдить личнocть клиента. Для удачного вывода средств, нужно подтвердить личность клиента. Нa этaпe вepификaции пpoфиля, сотрудники службы безопасности должны убедиться, собственно у игрока более один аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не может вывести свой выигрыш, если у него будет несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы.
1×slots промокод при регистрации
Выбор каждого онлайн казино на нашем веб-сайте. В описании к каждому Вы сможете разузнать, собственно получите за творение аккаунта. <a href=http://griffhunter.com/boards/memberlist.php?mode=viewprofile&u=993>1хслотс казино зеркало</a> 1×slots коды <a href=https://rus-crafting.ru/index.php?subaction=userinfo&user=PatrickInfam>https://rus-crafting.ru/index.php?subaction=userinfo&user=PatrickInfam</a> Можно ли в одном онлайн казино получить больше одного приза за регистрацию? Нет, например как в каждом онлайн казино есть правила, к коим нужно держаться, не делать 2 аккаута для получения бонусов, иначе будет блокировка обоих аккаутов, не пытайтесь перехитрить онлайн казино, приз за регистрацию выдаеться один один 1 личику.Казино дает вероятность заработать и вывести настоящие средства на бездепозитных бонусах. Обычно, это малозначительная сумма, коию казино может себя позволить подарить игроку.
1×slots коды
В перечне требований к отыгрышу часто присутствуют лимиты на ставки при ирге на собственные деньги. Так, случае отыграть нужно 30 000 рублей, а максимальная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 раз. Эта особенность затрудняет соблюдение игроками критерий по срокам деянья акции. Нет. Казино раздают благотворительные бонусы за регистрацию, для того, дабы заказчик мог ознакомиться с игровым заведением. А дабы вывести его, необходимо выполнить обстоятельства отыгрыша.Когда речь о валютных бонусах, казино всегда устанавливают условия вейджера, которые нужно выполнить, чтобы вывести выигрыш. <a href=http://cargo-200.ru/index.php?subaction=userinfo&user=ubiquitousnomin>http://cargo-200.ru/index.php?subaction=userinfo&user=ubiquitousnomin</a> 1×слот регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Мы советуем не открещиваться от подобных предложений известных казино. Выделите некоторое мин. На регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сейчас фортуна несомненно на вашей стороне!
#4719 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
Бездепозитный приз казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в данном и заключается главное отличие. <a href=http://filmkachat.ru/>1×slots зеркало</a> Для вывода средств приз нужно будет отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами акции и вариантами отыгрыша бездепозитного бонуса до его получения, дабы избежать конфликтных обстановок. <a href=https://www.themoviedb.org/u/archicgicom>https://www.themoviedb.org/u/archicgicom</a> 1×slots официальный сайт зеркало <a href=https://fromkorea.kr/bbs/board.php?bo_table=free&wr_id=111261>https://fromkorea.kr/bbs/board.php?bo_table=free&wr_id=111261</a> Изучить управляла и обстоятельства получения бездепозитных призов казино, Вы можете у нас на веб-сайте в разделе с призами либо на официальном сайте избранного Вами казино. Если не можете найти нужную информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал либо по электрической почте.Внесение депо – Будьте готовы пополнить счет после отыгрыша бонуса. Это обычное заявка верховодил для данного подобии промо-акций. Лучше заранее уточнить, какую сумму надо(надобно) будет заносить на счет. Как правило, идет о минимальном депозите, хотя вы должны быть убеждены, собственно он вас по карману.
1хслотс зеркало
1хслотс зеркало на сегодня <a href=https://sultantheme.com/vb4forum/member.php?25795-JulesAnnox>https://sultantheme.com/vb4forum/member.php?25795-JulesAnnox</a> 1× slots регистрация в 1×slots casino Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и более. Когда игроку полагается большое фриспинов, администрация может бить3 их начисление на некоторое дней. Бесплатные вращения предоставляются для определенного слота, кот-ый указывается в правилах акции.
1×slots промокод при регистрации
Этот образ приза будет добавлен на Ваш аккаунт последствии успешной процедуры регистрации с использованием номера телефонного. Если выбрать другой способ создания учетной записи, бездеп не несомненно добавлен на Ваш акк.Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депо может выделяться до 30 дней. <a href=https://www.forum-motorrad.net/members/25946-jasperved.html>https://www.forum-motorrad.net/members/25946-jasperved.html</a> 1×slots регистрация то дальше необходимо пройти
1хслот официальный сайт зеркало
Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 долларов. Если выдаются фриспины, их число редко превышает нескольких десятков бесплатных вращений. Срок отыгрыша — это этап, который начинается в момент активации бонуса и завершается с его закрытием. Пользователю нужно уложиться в этот временной зазор, по призовые средства аннулируются. Казино устанавливают список игр, ставки каких засчитываются при расчете отыгранных средств. Если тайтл не входит в этот перечень, то предоставляется быть недосегаем для загрузки период деяния бонусного предложения. 1хслот 1хслотс регистрация перейти на 1×slots <a href=http://silkhunter.com/index.php?title=Прием_платежей_для_high_risk>http://silkhunter.com/index.php?title=Прием_платежей_для_high_risk</a> Получив свой подарок, Вы сможете даром выступать на настоящие деньги, а выполнив обстоятельства отыгрыша, вывести собственный выигрыш.Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.
1х слотс зеркало регистрация в 1×slots casino
Если идет об неповторимых услугах, возможность потребоваться регистрация в казино по ссылке с партнерского сайта.Подтвердите регистрацию, дабы активировать Бездепозитный бонус с выводом, потребуется наполнить индивидуальный профиль. Заполните пустые поля истинными данными о себе. Иногда виде одобрения за регистрацию шансы выдаваться билеты для роли в турнирах. Условия их проведения очень отличаются, поэтому мы советуем ознакомиться с любым предложением отдельно.Хотя бесплатные бонусы начисляются без депозита, не исключено, что для придется вносить средства. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь после такого, как новый заказчик впервые пополнит игровой счет. <a href=https://full-chip.net/user/DoctorLazutaMn/>https://full-chip.net/user/DoctorLazutaMn/</a> Как управляло, при выводе финансов, от играющего потребуется только сделать наименьший вклад чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом личный счет. 1×slots регистрацию более популярный вариант это
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.l2endless.com/showthread.php?tid=417815>1 x slots casino</a>
<a href=https://adminclub.org/showthread.php?tid=67570>1×slots официальный сайт зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Активация по промокоду употребляется в различных видах бездепов. Если речь идет о приветственном призе, то набор знаков можно узнать на крупнейшей страничке, в регистрационной форме либо письме, коие отчаливает пользователю для подтверждения e-mail. Акции имеют проводиться общо с партнерскими площадками. Обычно код располагается на постороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активируется одноразовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном кабинете или начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем важный код для активации в описании любого промо.
#4720 Charlesgunnyhttp://filmkachat.ru
1×слотс казино
С не отыгранным призом запрещается превышать размер наибольшей ставки. Нарушение этого условия виде аннулирование выигрыша. <a href=http://filmkachat.ru/>1×slots официальный demo регистрация в 1×slots casino</a> Отыграв бездепозитный бонус в казино с выводом тоже придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, случае схожее лимитирование присутствует, то единоразово вывести выйдет лишь сумму, не превышающую размер полученного приза.Новички не любят сразу же вносить депо. Это обусловлено неименьем опыта и сомненьем. К счастью, в возможно получить бездепозитный приз за регистрацию в казино. Неважно что начислит система – фриспины либо кредиты. В всяком случае вы не рискуете своими сбережениями. Это замечательная возможность запустить приглянувшийся видео слот или же испытать удачу в настольных забавах. <a href=https://elearn.ellak.gr/mod/forum/discuss.php?d=31646>https://elearn.ellak.gr/mod/forum/discuss.php?d=31646</a> Иногда виде бездепа, казино дарит минимальный бонус (до 50 руб. ), ради которого не стоит заморачиваться. 1×slots зеркало регистрация в 1×slots casino <a href=http://poragovorit.com/index.php?subaction=userinfo&user=goofyhitch4>http://poragovorit.com/index.php?subaction=userinfo&user=goofyhitch4</a> Любой выигрыш по ставке повыше установленного лимита несомненно считаться недействительным. То есть ставка не будет засчитана при отыгрыше, ну случае выигрыша его сумма не поступит на счёт клиента — итог игры будет полностью аннулирован.Чтобы бездеп не был начислен на Ваш акк, Вам не активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк автоматически, а Вы не планируете его использовать, обратитесь в службу с просьбой отменить бездепозитный бонус.
1×slots официальный сайт мобильная версия
Акционные предложения от казино есть в разных форматах. Часто бонусы даются в размен на депо. Игрок вносит платеж и получает деньги, благотворительные вращения и поощрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — картина бонуса, который гарантирован за исполнение определенных действий на сайте:Заработать на бездепозитных бонусах за регистрацию в казино имеет каждый юзер, достигший совершеннолетия. <a href=https://test.soclanovtsy.ru/topic/56010–1×slots-casino-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-1×slotscasino09k-online/>1×slots casino регистрация 1×slotscasino09k online</a> 1×slots зеркало на сегодня <a href=http://msfo-soft.ru/msfo/forum/messages/forum24/topic11381/message320733/?result=new#message320733>http://msfo-soft.ru/msfo/forum/messages/forum24/topic11381/message320733/?result=new#message320733</a> Для получения бездепа необходимо пригласить в игру по реферальной ссылке свежего посетителя: он должен зарегистрироваться, пройти верификацию на сайте онлайн-казино и пополнить счёт на необходимую, указанную в условиях акции. 1хслотс мобильная версия зеркало Бесплатные бонусы казино без депо возможно получить повторяющий денежных средств на бонусный счет (исключить их можно лишь в отыгрыша), фриспинов, забавы либо кешбэк-бонуса.Бонус с зачислением денег на счет выделяет больше свободы действий. Пользователь сам подбирает, каким образом воспользоваться подаренными своими. Здесь кроме могут действовать лимитирования на список дешевых игр, но обычно эти рамки не так строги, как в рекламную с безвозмездными вращениями.
1×slots рабочее зеркало
Кешбэк-бонус представляет собой возврат фиксированного процента от ставки если, тогда, поражения или же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%.Приветственный бездеп предоставляется хоть игроку лишь раз один. Казино дерутся с например нарекаемыми бонусхантерами (от англ. Bonus Hunter — доброволец за призами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения презента. Исключить подобные деяния дозволяет верификация данных. Администрация вправе потребовать у клиента подтвердить персональные данные, обозначенные при регистрации. Мы подготовили список, где есть постоянно актуальные и новые бездепозитные бонусы казино, которые возможность получить бесплатно. Для наших пользователей есть особые предложения неповторимые бонусы, коие вы кого не найдете, их мы обозначили особой красной плашкой «Exclusive». <a href=http://www.fire-team.ru/forum/member.php?u=4998>http://www.fire-team.ru/forum/member.php?u=4998</a> Нет. Казино выдают бесплатные бонусы за регистрацию, чтобы, чтобы, дабы заказчик мог ознакомиться с игровым заведением. А дабы исключить его, нужно выполнить обстоятельства отыгрыша.Прочитайте верховодила бонусной программки, в желайте участие. Да, мы безотступно рекомендуем сделать это до регистрации. 1×slots официальный зеркало Фриспины без депо или дополнительные свои посодействуют поближе познакомиться с игровой платформой и её функциями. За счёт даров возможно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради забавы против живых крупье.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Бездепозитный бонус предоставляется новенькому игроку за конкретные действия. Часто презент повторяющий средств либо фриспинов выдается за регистрацию, благодаря чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.Вейджер в переводе с английского означает «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша полученного бонуса, в нашем случае бездепозитного. Число ставок не — главно лишь набрать сумму, пропорциональную сумме одобрения. <a href=http://brilliance.ru/forum/viewtopic.php?f=6&t=41093>1×slots регистрация на сайте 1×slots ru com</a> Если вы облюбовали себе несколько брендов которые для больше всего полюбились, для неизменной игры! Таких гемблеров казино очень предпочитает и оценивает, за частую такие игроки становятся VIP игроками заведения, которым часто поступают выгодные предложения в виде бонусов, так же туда заходит и бездепозитные.Не рекомендуем опрометью голову хвататься за различные предложения получения средств без инвестициям. Вполне возможно, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем выглядит на 1-ый взор. Альтернативой является казино бонус за депо. Мы предлагаем вам пару советов, спасибо которым у любого игрока несомненно возможность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег: 1хслотс рабочее зеркало <a href=https://craigslistdir.org/%D0%B1%D0%BB%D0%BE%D0%B3-%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0-%D0%B4%D0%B7%D0%B5%D0%BD_356813.html>https://craigslistdir.org/%D0%B1%D0%BB%D0%BE%D0%B3-%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0-%D0%B4%D0%B7%D0%B5%D0%BD_356813.html</a>
1×slots бонус за регистрацию
К образцу, игроку выдаются безвозмездные свои в заведении в объеме пятидесяти или 100 $ (вейджер на которые сочиняет 100х). То есть, любому новоприбывшему геймеру выскакивает манящая картинка, кот-ая сулит выплату всех зачисленных компанией средств. Не стоит заострять на казино бонус за регистрацию без депозита с сильно немалый или очень малеханькой суммой призов, поэтому собственно, даже тщательно выучив все условия, здесь всего, будет какой-то подвох. <a href=https://qualityprogamer.de/forum/member.php?action=profile&uid=28047>https://qualityprogamer.de/forum/member.php?action=profile&uid=28047</a> Казино выводит средства только на что, эту платежную систему, с котрой был сделан депо. То есть, для вывода бездепозитного приза, Вам поначалу нужно восполнить счет. В неких клубах узкий перечень методов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет именно с данных платежных методов, которые доступны для вывода.Представьте момент, когда при ставке в 10 рублей Вы получите сходственное умножение. Миллион руб. За одно вращение, собственно вполне вероятно. Поэтому вопрос, сколько возможно выиграть остаётся закрытым. Предлагаем выяснить помощи. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный приз и инспектируйте удачу в деле. Разумеется, исключить средства сложно. Однако шансы есть у всех. казино 1× slots официальный сайт Также учтите, что кое-какие игровые платформы сужают список стран, которые способны получить предложенный бездепозитный приз за регистрацию. К примеру, существуют онлайн-заведения, выдающие похожие бонусы лишь жильцам конкретных стран. К образцу, онлайн казино 777 Оригинал предоставляет бездепозитный приз только игрокам из России и государств СНГ. Или наоборот, пичкают вознаграждением всех, считая жителей некоторых стран (следует сего, идет пристально учить список, дабы потом не возникло никаких вопросов и жалоб).
<b>Смотреть еще похожие новости:</b>
<a href=https://talkonlinenews.com/viewtopic.php?t=5160>1хслотс зеркало на сегодня</a>
<a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=128996>1×slots актуальное зеркало</a>
<a href=https://nztw.org/forum.php?mod=viewthread&tid=412658&pid=719596&page=1&extra=#pid719596>1× слот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Этот образ бонуса несомненно добавлен на Ваш аккаунт в успешной процедуры регистрации с использованием номера телефонного. Если избрать иной метод творения учетной записи, бездеп не несомненно добавлен на Ваш акк. Почти все игровые клубы настоятельно свидетельство контактных данных игрока для получения бездепозитного бонуса.
#4721 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino промокод Шевцова Татьяна Викторовна порно <a href=https://slon-ru.com/>Семёнова Татьяна Владимировна порно</a> Скоробогатова Ольга Николаевна порно 7k casino скачать <a href=https://krtka.info/>мелбет букмекерская контора</a> casino betting up casino официальный Манилова Алла Юрьевна порно porno Александра Степанова, фигуристка скачать casino на андроид casino зеркало сайта porno Алена Михайлова
DiskiPlus яндекс казино DiskiPlus casino автомат <a href=https://diskiplus.ru/>DiskiPlus казино сегодня</a> DiskiPlus online casino DiskiPlus порно с Елена Никитина, скелетонистка <a href=https://diskiplus.ru/>DiskiPlus casino daddy</a> DiskiPlus порно с Федор Чалов (футбол) DiskiPlus pin casino DiskiPlus казино можно DiskiPlus зеркала официальных сайтов казино DiskiPlus скачать букмекерскую контору на андроид DiskiPlus порно с Александр Большунов (лыжные гонки) DiskiPlus win win casino
#4722 Charlesgunnyhttp://filmkachat.ru
1× slots casino официальный сайт
Принципиальным отличием бесплатных бонусов от призов на депо считается недоступность надобности вносить деньги на акк. Из-за сего их нередко называют бездепозитными (not the slightest deposit bonuses). <a href=http://filmkachat.ru/>1×slots акции</a> Самые известные методы вывода средств ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электрическим платежным системам подобии Neteller и Skrill, а также пользуются криптовалютными кошельками. Вывод выигрышей имеет осуществляться быстро или развлекать от нескольких часов до нескольких суток. <a href=http://prsync.com/cgifurniturecom/top-d-model-marketplaces-expert-guide-to-finding-quality-digital-assets-4446659/>http://prsync.com/cgifurniturecom/top-d-model-marketplaces-expert-guide-to-finding-quality-digital-assets-4446659/</a> Фриплей-бонусы. Бонусы за бесплатную забаву есть только в некоторых клубах. Они зачисляются сразу после сотворения профиля и срабатывают недолговременное время. Если у вас нет времени израсходовать средства, они просто завершатся. Что касается медли, в большинстве случаев призы действуют на 1-го часа. 1×slots официальный сайт зеркало <a href=http://link.ac/humor/user/Juleslew/>http://link.ac/humor/user/Juleslew/</a>
1×slot зеркало рабочее регистрации на телефон придет
Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депо возможность выделяться до 30 дней.В списке требований к отыгрышу часто наличествуют лимиты на ставки при забаве на личные деньги. Так, если отыграть надо(надобно) 30 000 руб., а предельная сумма ограничена 30 рублями, то вертеть барабаны предстоит 1000 один. Эта особенность затрудняет соблюдение игроками критерий по срокам деяния акции. 1×slots зеркало 1хслотс регистрация перейти на 1×slots Выбрать казино с бездепозитным бонусом. У нас на веб-сайте представлен перечень лучших онлайн казино, которые предлагают своим игрокам великодушные бонусы за регистрацию. <a href=https://wfgames.ru/user/Patrickprita/>https://wfgames.ru/user/Patrickprita/</a> Не хотите поиграть в азартные игры, не рискуя своими деньгами, но получая в все выплаты? Подобную возможность предоставляют почти наилучшие порталы с азартными увеселениями. В их количестве количество честных и надежных интернет-казино на российском языке. Они завлекают свежих юзеров разными поощрительными событиями, включая бездепозитные, либо благотворительные бонусы. 1×slots регистрация на 1хслотс
1×slots подтвердит вашу регистрацию если говорить
Однако в критериях исчезают «подводные камешки», которые не разрешат вывести солидную сумму или же вы не успеете отыграть вейджер. Поэтому мастера советуют отобрать благотворительные вращения за регистрацию в казино без депозита, чтобы поднабраться опыта и получить настоящий шанс на победу.Приветственный бездеп предоставляется какому игроку только один один. Казино сражаются с например называемыми бонусхантерами (от англ. Bonus Hunter — доброволец за призами), пытающимися заводить многочисленные аккаунты для обмана оператора и повторного получения подарка. Исключить сходственные действия дозволяет верификация данных. Администрация вправе потребовать у посетителя подтвердить персональные данные, обозначенные при регистрации. <a href=http://cos258.com/home.php?mod=space&uid=1528733>http://cos258.com/home.php?mod=space&uid=1528733</a> Теоретически, к безвозмездным бонусам можно отнести так называемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, поэтому собственно они деют только вероятность делать ставки. 1×slots официальный сайт зеркало Бездепозитный приз – это экономическое вознаграждение, коие выдается соучастнику игры в казино, для его привлечения и возникновения заинтригованности. Любой гость, который подходит условиям выдачи подобного бездепозитного приза, имеет претендовать на получение вышеуказанного приза. Такое поощрение является более действенным способом, дающим вероятность стартовать при, не вкладывая личных вещественных средств.Получать информацию о самых выгодных призах можно без постоянного мониторинга новостей казино. Мы брали данную задачку на себя и непрерывно следим за услугами операторов, выбирая лучшие из них. В данном разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список промоакций периодически пополняется. В топ вошли самые свежие бездепозитные призы за регистрацию в казино 2020, временные и замкнутые промо. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и аспектам. Если срок деянья промоакции истек, она удаляется из перечня.
казино 1×slots официальный сайт
<a href=https://www.formulersupport.com/Thread-1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D1%82%D0%BE-%D0%B4%D0%B0%D0%BB%D1%8C%D1%88%D0%B5-%D0%BD%D0%B5%D0%BE%D0%B1%D1%85%D0%BE%D0%B4%D0%B8%D0%BC%D0%BE-%D0%BF%D1%80%D0%BE%D0%B9%D1%82%D0%B8–124294>1×slots зеркало регистрация то дальше необходимо пройти</a> Срок активации и время на отыгрыш. Зачисление средств или фриспинов происходит при активации протяжении строго ограниченного периода, подобные требования предъявляются и к срокам отыгрыша. Одни казино позволяют отыгрывать бонус несколько дней или в недель. Другие выдают солидную сумму за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высоким вейджером. Некоторые сайты, прежде чем обмануть регистрацию игроков, предлагают ответить на несколько базовых вопросов. Цель проведения похожей викторины – выявить случайных людей, коие не имеют представления о покере, и не разрешить получения ими бонусов. Если гость уже играл в казино, то ответить на полтора 10 простых вопросов будет несложно. Очень нередко, ответы возможно отыскать на официальных сайтах данных учреждений. 1×slots зеркало регистрация то дальше необходимо пройти <a href=http://www.littleblackpearls.com/2014/01/chinese-new-year-year-of-good-luck.html>http://www.littleblackpearls.com/2014/01/chinese-new-year-year-of-good-luck.html</a>
1×slots официальный demo регистрация в 1×slots casino
Если вы облюбовали для себя количество брендов которые вас больше всего полюбились, для постоянной игры! Таких гемблеров казино довольно предпочитает и оценивает, за частую такие игроки становятся VIP игроками заведения, коим нередко поступают прибыльные предложения повторяющий бонусов, например же туда заходит и бездепозитные. <a href=http://mail.nudecelebvideo.net/user/DavidHouby/>http://mail.nudecelebvideo.net/user/DavidHouby/</a> Бездеп с фриспинами возможность охватывать всю коллекцию игр на сайте либо разработки одного провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш имеет быть выведен после того, как пользователь отыграет данную сумму. Возможность расценить полный перечень слотов — основное совершенство данной разновидности. Игроку становятся доступны те опции, коие отсутствуют в демонстрационном режиме, а вероятность выиграть настоящие средства добавляет ярких азартных чувств.Вообще перейдя в казино — верховодила схожи в получении бездепозитных бонусов, в стереотипные верховодила заходит: подтвердить эл. Почту и телефонный, наполнить собственный личный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ. 1×slots регистрацию более популярный вариант это Так собственно можете храбро регистрироваться без всяких размышлений. Фортуна сегодня наверняка на вашей стороне. Не страшитесь, как последствие какого либо ущерба Вам совершенно не угрожает. С этими бонусами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.infoknygos.lt/smforum/index.php?topic=76424.new#new>1× slots регистрация в 1×slots casino</a>
<a href=https://aircompare.us/forums/memberlist.php?mode=viewprofile&u=40074>1×slots регистрация 1×slots casino c2d ru</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Диапазон ставок, которые вправе устроить игрок, того лимитирован. Обычно назначать можно маленькую необходимую — около 10–30 рублей за одно вращение. Во время игры в казино, выигрыши, полученные спасибо бесплатным призовым фондам, суммируются и включаются в общую сумму для отыгрывания. Однако, в фортуна улыбнется и получится отыграть все призы, игровое заведение гарантированно разрешит исключить денежные свои. Сумма вывода несомненно находиться от лимита, одобренного непосредственно в этом учреждении. Поэтому, пристально надо(надобно) читать верховодила выдачи безлимитных депо.
#4723 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать сайт букмекерской конторы Анна Михалкова <a href=https://kompromat1.online/>гта онлайн казино</a> букмекерская контора бесплатно скачать 1×bet слоты 1×bet top <a href=https://rumafia.news/>porno Нина Пирогова, хоккеистка</a> как выиграть в казино порно с Федор Чалов (футбол) казино смотреть онлайн скачать сайт букмекерской конторы букмекерская контора фонбет 1×bet приложение букмекерская контора фонбет официальный
DiskiPlus приложения букмекерских контор DiskiPlus автомат казино <a href=https://diskiplus.ru/>DiskiPlus пин ап casino pin up top</a> DiskiPlus up casino официальный DiskiPlus porno Виктория Баркова, легкоатлетка <a href=https://www.diskiplus.ru/>DiskiPlus зеркала официальных сайтов казино</a> DiskiPlus casino регистрации DiskiPlus porno Анастасия Янькова, боксерка DiskiPlus porno Илона Маркова, хоккеистка DiskiPlus смотреть фильм казино DiskiPlus Приезжева Екатерина Геннадьевна порно DiskiPlus Окладникова Ирина Андреевна порно DiskiPlus букмекерская контора фонбет официальный сайт
#4724 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
сайте букмекерской конторы фонбет сайт винлайн букмекерская контора <a href=https://sovsekretno.net/>порно с Артемий Панарин (хоккей)</a> порно с Алина Загитова, фигуристка вывод казино <a href=https://7club7.com/>pin up casino скачать</a> сколько казино porno Юлия Канакина, скелетонистка пина букмекерской конторы 1×bet бесплатно up букмекерская контора официальное казино вход казино пин
DiskiPlus 1×bet официальный xbet DiskiPlus casino на телефон <a href=https://diskiplus.ru/>DiskiPlus казино смотреть онлайн</a> DiskiPlus рокс казино DiskiPlus мобильные букмекерские конторы <a href=https://diskiplus.ru/>DiskiPlus пин ап casino pin up top</a> DiskiPlus порно с Дарья Клишина, легкоатлетка DiskiPlus porno Катерина Шпица DiskiPlus 1×bet сайт DiskiPlus 7k casino зеркало рабочее DiskiPlus porno Илона Маркова, хоккеистка DiskiPlus Львова-Белова Мария Алексеевна порно DiskiPlus porno Мира Андреева (теннис)
#4725 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора бесплатно скачать сайт pin up casino <a href=https://m.repost.news/>винлайн букмекерская контора</a> играющие казино пари букмекерская контора <a href=https://repost.news/>Набиуллина Эльвира Сахипзадовна порно</a> скачать pin casino 1×bet бесплатно up букмекерская контора сайт казино зеркало пин casino зеркала казино 7k casino официальный
DiskiPlus 1×bet рабочее на сегодня DiskiPlus лучшие бесплатные онлайн казино <a href=https://www.diskiplus.ru/>DiskiPlus порно с Афонина Марина Игоревна</a> DiskiPlus гама казино DiskiPlus casino на телефон <a href=https://www.diskiplus.ru>DiskiPlus 1×bet слоты 1×bet top</a> DiskiPlus 1×bet вход DiskiPlus лучшие онлайн казино DiskiPlus официальная казино DiskiPlus пин ап букмекерская контора DiskiPlus официальные букмекерские конторы скачать казино DiskiPlus почему в казино нет часов
#4726 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на сайте 1×slots ru com
Выиграть настоящие средства в казино не пополняя счет – сложно, но вероятно. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными призами и начните играть на бонусные средства. По статистике каком-то 10-ти заведений возможно заработать маленькую необходимую средств с бонусных средств.Бонус за регистрацию в казино выдается лишь один раз на одного игрока. Но бывают вспомогательные акции, масштабах которых бездепы расступаются для неизменных клиентов и такие подарки Вы сможете получить более 1-го раза. <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> Для всех бездепозитных бонусов действует наибольший лимит на выигрыш. Он показывает максимальную сумму, которую возможность получить, играя на бонусные кредиты. Как только для удастся выполнить притязания вейджера, возможный максимально будет переведен с бонусного счета на ведущей, а остаток будет списан.Чаще всего используются коды. Их нужно заносить в специальные окошки регистрационной анкеты, случае речь о пригласительных призах, либо в особом разделе личного офиса игрока. <a href=https://www.hebergementweb.org/threads/mastering-the-art-of-product-lifestyle-images-from-concept-to-completion.2150185/>https://www.hebergementweb.org/threads/mastering-the-art-of-product-lifestyle-images-from-concept-to-completion.2150185/</a> Помимо остального, для вывода средств по бездепу необходимо привнести на счёт собственный 1-ый депозит — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально возможную сумму, последствии чего вывод средств станет доступен.Бонус с зачислением денег на счет дает больше свободы действий. Пользователь сам выбирает, каким образом распорядиться подаренными средствами. Здесь кроме имеют действовать ограничения на перечень доступных игр, но обычно эти рамки не так строги, как в рекламную с бесплатными вращениями. 1 xslots рабочее зеркало <a href=http://travelpoint.ge/user/Anthonyneomo/>http://travelpoint.ge/user/Anthonyneomo/</a>
1×slots актуальное зеркало
Более крупные предложения встречаются довольно изредка. Зачастую они доступны лишь VIP-игрокам. В оставшихся случаях им скорее сопутствуют довольно жесткие условия отыгрыша. Также возможны дополнительные обстоятельства и другие лимитирования, прописанные в критериях и положения бонусной программки казино. 1×slots зеркало 1хслотс регистрация перейти на 1×slots Бонус за регистрацию в казино без депозита с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша возможность понадобиться сделать ставки на необходимую, в количество 10-ов раз превышающую сумму приза либо выигрыша.Обычно, бездепозитные призы выдаются под конкретные слоты с фиксированной ставкой, хотя их точно воспрещено применять в игровых автоматах с современным джекпотом. Список игр, каких возможно применять бездеп, Вы найдете в описании акции либо можете уточнить у саппорта заведения. <a href=http://xn----ptbagsgdho0d.xn–p1ai/index.php?subaction=userinfo&user=brokenrat29>http://xn----ptbagsgdho0d.xn–p1ai/index.php?subaction=userinfo&user=brokenrat29</a> 1хслотс зеркало Необходимость отыгрыша. Вейджер в повыше, чем для бонусов за депозит. И же средства не отыграны, исключить их нельзя.B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.
1×slots зеркало видели такую регистрацию на
Приветственный приз без депо ? подарок за регистрацию. Выдается средствами, фриспинами либо баллами. В заключительном случае бонусные баллы используются для участия в турнирах или размена на реальные средства. Иногда операторы настоятельно внесение минимального депозита перед выводом для верификации платежного инструмента. В неких казино данный депо также светит отыграть. <a href=https://carecepthealth.com/community/profile/patrickrip/>https://carecepthealth.com/community/profile/patrickrip/</a> Бездепозитные призы начисляются лишь один раз. Не стоит открывать новые аккаунты, чтобы получить их повторно. Служба защищенности казино непременно выявит «левого» соучастника и перекроет. Если гость выполнит нужные притязания, отыграет собственную ставку и решит вывести собственный выигрыш, то ему надо(надобно) сведению, что казино обязательно востребует дать ксерокопии собственных документов, чтобы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные средства исключить не получится.Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция содержит доскональные правила, гиперссылка на которые обыкновенно содержится в промообъявлении. В их указываются лимиты, вейджер, перечень дешевых игр. Если оператор скрывает данные о предложении, то пользоваться им не. 1×slot зеркало рабочее регистрации на телефон придет Сразу последствии активации промокода возможно пользоваться подарком. Как теснее упоминалось, бонусы бывают трёх видов – фриспины, кредиты и фриплей-бонусы.
онлайн казино 1×slots
Онлайн-казино с бездепозитными бонусами ставят клиентам условия для пользования бездепами, потому перед ролью в промоакции никакого тщательно ознакомиться со всеми правилами и аспектами акции. Условия все дотрагиваться получения бонуса, его применения и следующего вывода денежных средств в случае выигрыша.Но надо думать, собственно снабжая юзеров этими призами, казино занимается спонсированием. Ведь объемы вознаграждений, в основном, не великие (средним размером от 5 до 20 долларов). И на эти средства налагаются конкретные обстоятельства и лимитирования, неотклонимые к исполненью игрока, в в последствии он вожделеет получить все свои выигранные деньги. <a href=http://powercrop.it/chi-siamo/le-persone?page=12#comment-635>1×slots регистрация 1×slots review live</a> Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке адепты онлайн-казино публикуют важную информацию о not the slightest down payment bonuses и предложениях.Наши эксперты исследуют обстоятельства акции, этого в ручном режиме проверку их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и параметры. Мы не рекламируем казино, а даем игрокам информацию о превосходнейших из их. 1×slots зеркало регистрация в 1×slots casino <a href=https://forum.expert-watch.com/index.php?action=profile;u=183219>https://forum.expert-watch.com/index.php?action=profile;u=183219</a> Ограничения по забавам. Администрация запрещает игрокам некоторые игровые автоматы с бездепозитным призом, деньгами или безвозмездными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда дробление выполняется по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, хотя запрещен в настольных играх и в разделе Live Casino.
1×slots регистрация то дальше необходимо пройти
Как только вы отыграли вейджер и свои с бонусного баланса перебежали вас на реальный счет, Вы неустрашимо сможете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (устроить наименьший депо например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депозитом).Превышение наибольшей ставки при отыгрыше. Система автоматически не предупреждает о превышении ставки, потому о нарушении управлял игрок имеет разузнать уже после подачи запроса на вывод средств. <a href=https://wiki.eqoarevival.com/index.php/User:FaithEdv7127417>https://wiki.eqoarevival.com/index.php/User:FaithEdv7127417</a> Каждый в должен сперва отчетливо изучить условия по получению и отыгрышу приглянувшегося подарка. Если всё устраивает, поторопитесь арестовать безвозмездные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо в начать вращать барабаны топовых слотов.Для верификации номера аппарата, в личном профиле выберите опцию „Подтвердить номер аппарата“ и введите в соответствующее поле код, приобретенный в sms-сообщении. 1×slots регистрацию более популярный вариант это Бонус за регистрацию в казино выдается лишь раз раз на одного игрока. Но посещают вспомогательные промоакции, масштабах коих бездепы расступаются для неизменных посетителей и эти презенты Вы можете получить больше 1-го раза.Фриспины – благотворительные вращения с фиксированной ставкой, которые возможно использовать в определенных игровых автоматах.
<b>Смотреть еще похожие новости:</b>
<a href=http://complainanything.com/node/158?page=920#comment-1119012>1хслотс казино зеркало</a>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=433596>1хслотс мобильная версия зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Какие призы я могу еще получить считая бездепозитного приза за регистрацию в казино? По мимо бездепозитного приза, любое интернет казино предлагает игрокам выгодное предложение на 1-ый депозит, вы совершаете депо, ваш депозит увеличивается в двое либо числе в трое, что, этим наиболее начать выступать возможно с больше крупной суммой, например же не забываем тему вейджер на бонусы. Используйте превосходнейшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из перечня ниже, чтобы заработать подарки за обычные действия и уже сейчас получить первый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высокой отдачей и резвыми выводами на электронные кошельки.
#4727 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
top casino porno Андрей Рублев (теннис) <a href=https://th-royalgclub.com/>win win casino</a> пина букмекерской конторы 1×bet вход <a href=https://7club7.com/>porno Алена Михайлова</a> pin casino bitz casino champion casino kent casino регистрация 1×bet скачать приложение на андроид up casino скачать порно с Евгения Медведева, фигуристка
DiskiPlus порно с Петр Ян (ММА) DiskiPlus порно с Арина и Дина Аверины, гимнастки <a href=https://diskiplus.ru/>DiskiPlus гта онлайн казино</a> DiskiPlus 1×bet официальный xbet DiskiPlus порно с Илья Осипов (киберспорт) <a href=https://www.diskiplus.ru/>DiskiPlus демо казино</a> DiskiPlus porno Игорь Акинфеев (футбол) DiskiPlus 1×bet скачать приложение DiskiPlus 1×bet зеркало xbet DiskiPlus Лут Оксана Николаевна порно DiskiPlus порно с Абрамченко Виктория Валериевна DiskiPlus порно с Арина и Дина Аверины, гимнастки DiskiPlus 1×bet зеркало рабочее на сегодня
#4728 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало
Бездепы шансы входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами.У нас на сайте Вы отыщите список бонусов без депозита в испытанных казино и подробную информацию то как их получить и применять. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало</a> <a href=https://www.find-topdeals.com/blogs/187723/Unlocking-the-Magic-of-Professional-Architectural-Render-Creation>https://www.find-topdeals.com/blogs/187723/Unlocking-the-Magic-of-Professional-Architectural-Render-Creation</a> Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, дабы замечена возможность исключить выигрыш.Ну и конечно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: сходственная добродушие увеличивает степень лояльности посетителей к фирмы. 1хслотс рабочее зеркало <a href=http://forum.cncprovn.com/members/202117-Jasperadomb>http://forum.cncprovn.com/members/202117-Jasperadomb</a> Таким образом, заведение пытается продемонстрировать себя своим вероятным геймерам, а подобный рекламный ход как казино бонус без депозита за регистрацию привлекает довольно количество внимания к игорному заведению и обеспечивает постоянный поток новых гостей и будущих клиентов игрового интернет клуба.Некоторые онлайн-казино без депо предлагают новым клиентам избрать бонус при регистрации. Будьте внимательны: выбрав один, вы в безоговорочном большинстве случаев не сможете пользоваться остальными.
1× slots casino зеркало
<a href=http://palais.beesims.com/phpbb/viewtopic.php?f=2&t=290801>1×slots зеркало сайта</a> рабочее зеркало 1хслотс Условия вывода выигрыша. В неких заведениях для успешного вывода с бездепозитного приза достаточно пополнения баланса и доказательства личности. В иных же клубах, необходимо количество один прокрутить свой депо. <a href=http://www.sdcssd.com/home.php?mod=space&uid=59094>http://www.sdcssd.com/home.php?mod=space&uid=59094</a> Для получения депозитного бонуса необходимо пополнить свой игровой баланс настоящими деньгами. Вознаграждение можно получить либо при внесении первого депозита, или повторяющий фиксированного процента от внесённых средств. Так либо другому, бонус поступит на счёт лишь после пополнения. 1×slots официальный сайт мобильная версия
1хслот зеркало сайта
Возьми свой подарок. Чаще всего бонус активируется незамедлительно последствии регистрации. Но случаются истории, когда надо(надобно) зайти в индивидуальный кабинет либо написать в справочную службу. Иногда операторы просят внесение минимального депозита перед выводом для верификации платежного инструмента. В некоторых казино данный депо того светит отыграть.Рассмотрим принцип его деянья на случае. Допустим, вы зарегистрировались и получили $10 no down payment bonus с вейджером х50. Это значит, что выигранные средства можно несомненно выводить не ранее, чем последствии такого, как общая сумма ставок достигнет $500. <a href=http://ets-kstovo.ru/index.php?subaction=userinfo&user=gainfulreproduc>http://ets-kstovo.ru/index.php?subaction=userinfo&user=gainfulreproduc</a> В случае установленного лимита на необходимую вывода выигрыша с бездепозитного приза, игрок не может вывести больше заявленной суммы. 1× slots casino официальный сайт Для тех, кто только взвешивает испытать собственную фортуну, а также для проф игроков, разыскивающих новые площадки для выигрышей, основные лицензированные казино нередко устраивают различные акции, и одно из лучших услуг за последнее время – как для начинающих, так и для проф игроков – бездепозитный приз за регистрацию.
скачать 1×slots официальный сайт
После требуется внести идентификационный платёж. Это стращает начинающих больше всего. Нужно сделать наименьший депо в 100–500 руб. Таким образом служба защищенности убедиться сомнений, что платёжный способ принадлежит Вам. Данная процедура необходима для обеспечивания безопасности игровых счетов. Пример, Ваш акк взломают и выведут средства на свой кошелёк. Будет очень неприятно. Поэтому верификация платёжной системы, это важный момент.Приветственный приз без депо ? подарок за регистрацию. Выдается деньгами, фриспинами или баллами. В последнем случае бонусные баллы используются для роли в турнирах либо обмена на настоящие деньги. Получить Бездепозитный приз в онлайн казино дело двух кликов. Другой момент, отыграть промо и соблюсти управляла и обстоятельства отыгрыша. Под правилами подразумевается не вагер, хотя и лимитирования по наибольшей ставке. Мы понимаем, что в кинотеатр все ставят на зеро и выигрывают. Призываем не создавать сходственного. Перед активацией бонуса прочитайте управляла. Узнайте следующие факторы: Условия получения презента, за регистрацию, за депозит и другое. Ограничения по наибольшей ставке. Зачастую не повыше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах возможно отыгрывать вагер. Можно вращать автоматы, а вагер будет стоять на пространстве. Поэтому принципиально аристократия, в каких забавах возможно осуществлять кратность денежного оборота. 1×slots официальный сайт зеркало рабочее <a href=https://morphomics.science/wiki/User:SusannaFalleni9>https://morphomics.science/wiki/User:SusannaFalleni9</a>
1× slots регистрация в 1×slots casino
В игровых клубах без лицензии Вы покупаете „кота в мешке“ и если, тогда, спорных обстановок нет возможности куда-то пожаловаться и обосновать собственную правоту.Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные способы и расценить необыкновенности, недоступные при ирге в демо режиме. Многие новые посетители переходят в количество неизменных, а оператор получает длительную прибыль. Главное превосходство спинов – возможность выучить разные слоты. Также получится насладиться бонусными раундами, испытывать фортуну в риск-туре и преумножить выигрыш за счёт особых символов. Однако не только игровой процесс заслуживает внимание, как никакого сосредоточиться на реальном выигрыше.На условиях отыгрыша даровых призов идет тормознуть подробнее. С ними связаны аспекты, коие невозможно забыть без внимания. <a href=https://lifeisfeudal.com/Discussions/question/%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D1%83%D0%BA%D1%80%D0%B0%D0%B8%D0%BD%D1%81%D0%BA%D0%B8%D1%85-%D0%BC%D0%B0%D1%88%D0%B8%D0%BD-%D0%B2-%D0%B3%D0%B5%D1%80%D0%BC%D0%B0%D0%BD%D0%B8%D0%B8>https://lifeisfeudal.com/Discussions/question/%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D1%83%D0%BA%D1%80%D0%B0%D0%B8%D0%BD%D1%81%D0%BA%D0%B8%D1%85-%D0%BC%D0%B0%D1%88%D0%B8%D0%BD-%D0%B2-%D0%B3%D0%B5%D1%80%D0%BC%D0%B0%D0%BD%D0%B8%D0%B8</a> 1×slots casino online регистрация
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.l2endless.com/member.php?action=profile&uid=6253>1хслотс рабочее зеркало</a>
<a href=http://aurorahcs.com/forum/memberlist.php?mode=viewprofile&u=168982>1×slots сайт</a>
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=815258>1× слот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Самые популярностью способы вывода денег ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам подобии Neteller и Skrill, еще используют криптовалютными кошельками. Вывод выигрышей имеет исполняться моментально либо развлекать от нескольких часов до нескольких суток. Составленный знатоками Casino.ru перечень онлайн-казино с бездепозитным бонусом дозволяет игрокам сравнить спецпредложения различных операторов.
#4729 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Матвей Сафонов (футбол) казино в россии <a href=https://strelochnik.com/>гта онлайн казино</a> 1×bet приложение Чулпан Хаматова <a href=https://www.ossetia.tv/>casinos winning</a> 1go casino vavada casino казино рояль порно с Алексей Миранчук (футбол) казино рояль смотреть букмекерские контора ап pin up casino скачать
DiskiPlus пари букмекерская контора DiskiPlus 7k casino зеркало <a href=https://diskiplus.ru/>DiskiPlus 1win casino</a> DiskiPlus 1×bet телефон DiskiPlus казино рояль <a href=https://www.diskiplus.ru/>DiskiPlus казино регистрации</a> DiskiPlus casino online зеркало DiskiPlus casino com DiskiPlus 1×bet рабочее DiskiPlus ставки на спорт букмекерские конторы DiskiPlus pin ап casino DiskiPlus Александра Бортич DiskiPlus лучшие казино бесплатно
#4730 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino c2d ru
Возьми свой подарок. Чаще всего бонус активируется незамедлительно в регистрации. Но посещают истории, когда надо(надобно) зайти в индивидуальный кабинет или написать в справочную службу. <a href=http://filmkachat.ru/>1×slos регистрация в 1×slots casino</a> <a href=https://webanketa.com/forms/6gtk2c9q6mqk8d34c8v32db6/>https://webanketa.com/forms/6gtk2c9q6mqk8d34c8v32db6/</a> 1×slots подтвердит вашу регистрацию если говорить <a href=https://australianweddingforum.com/weddings/member.php?action=profile&uid=9209>https://australianweddingforum.com/weddings/member.php?action=profile&uid=9209</a> Бездепы с безвозмездными вращениями деют юзерам право вертеть барабаны игровых автоматов без снятия средств со счета. За любой раунд выплачивает казино. Число спинов ограничено и редко превышает сотку. Если акция содержит много бесплатных игр, их начисление возможность быть разбито на несколько дней.
1×slots регистрация 1×slots casino c2d ru
1×slots зеркало проходить регистрацию это отличный вариант Обыкновенные бездепозитные призы в размере от трех до 20 $ созданы для того, дабы в забавы заходили все новые и новые игроки. Здесь, скорее, будет лимитирование на максимальный выигрыш. Важно, чтобы перед минимальным вкладом был отключен бонус за первое пополнение счета, и геймер не попадет на повторный вейджер. <a href=https://praisenpray.org/forums/member.php?action=profile&uid=67944>https://praisenpray.org/forums/member.php?action=profile&uid=67944</a> Вейджер в переводе с британского означает «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша полученного приза, в нашем случае бездепозитного. Число ставок значения — принципиально только набрать необходимую, пропорциональную сумме одобрения. 1×slots регистрация Как только получите бездеп в казино, всё одинаково не забывайте инспектировать электронную почту. Некоторые игорные клубы день радуют интенсивных гэмблеров приятными бонусами. Чаще всего получить подарок возможно в преддверии праздника, на день рождение, за привлечение друга. А того распространённым бонусом считается надбавка к депозиту. Нужно не восполнить счёт, и азартное заведение прирастит его на 50–100%.Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются незамедлительно последствии творенья профиля и активны недолговременное время. Если не успеете израсходовать средства, они просто сгорят. Касаемо времени, как призы активны на часа.
x1 slots 1хслотс регистрация перейти на 1×slots
Наличие у игрока второго аккаунта. Запрещено создавать некоторое профилей для неоднократного получения бездепов. Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие появляются у начинающих. <a href=https://www.fairyabc.com/home.php?mod=space&uid=112608>https://www.fairyabc.com/home.php?mod=space&uid=112608</a> 1×slots официальный сайт зеркало Также, ситуации необходимо доказать свой номер телефонного, чтобы код, полученный в смс-сообщении от клуба установить в особое фон в личном офисе игрока.
1×slots сайт зеркало
Выиграть реальные средства в казино не пополняя счет – трудно, хотя вероятно. Главное задаться целью и не нарушатьправила заведения. Выберите несколько казино с бездепзитными бонусами и начните выступать на бонусные свои. По статистике каком-то 10-ти заведений можно заработать небольшую сумму денег с бонусных средств. <a href=http://www.topboard.org/threads/1×slots-registracija-1×slotscasino09k-online.598454/>1×slots регистрация 1×slotscasino09k online</a> Самый распространённый из подобных бонусов, окончательно же, бездеп на день рождения клиента — приз вид фиксированной суммы либо фриспинов поступает на счёт игрока, а воспользоваться им можно в течение установленного периода медли.Иногда операторы просят внесение малого депо перед выводом для верификации платежного прибора. В неких казино этот депо кроме предстоит отыграть. Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?Можно ли в одном онлайн казино получить больше одного приза за регистрацию? Нет, так как в любом интернет казино есть правила, к которым надо(надобно) придерживаться, не делать 2 аккаута для получения бонусов, другому несомненно блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, приз за регистрацию выдаеться один один 1 лицу. 1×slots регистрацию процедура займет всего лишь <a href=http://www.biodat.ru/cgi/mwf/user_info.pl?uid=41904>http://www.biodat.ru/cgi/mwf/user_info.pl?uid=41904</a> Возможность протестировать новые забавы, не рискуя личностными своими и разработать собственную тактику игры.Суммы похожих услуг, в, колеблются от 3-х до 20 долларов, а вейджер на эти средства должен сочинять от тридцати до шестидесяти один. Зачастую, большая сумма выигрыша здесь составит от одной до 2-ух сотен $. Если игры выиграет больше, то все средства шансы быть списанными до максимально разрешенного выигрыша. Здесь бывает содержание выводить еще несуществующие финансы на собственную платежную систему и дальше находить заведение с подходящими под данную необходимую релоадом или бонусом за первое пополнение счета. Есть количество подвидов бездепозитного вознаграждения, предлагаемого наибольшим количеством заведений.
1×slots зеркало на сегодня
Иногда в качестве поощрения за регистрацию имеют выдаваться билеты для участия в турнирах. Условия их проведения довольно отличаются, потому мы советуем ознакомиться с каждым предложением раздельно. Если вы новичок данном и только попали в неизведанную вами область пыла — счет предложений как бездепозитные призы без пополнения. <a href=https://www.mikocon.com/home.php?mod=space&uid=212548>https://www.mikocon.com/home.php?mod=space&uid=212548</a> Простая процедура получения бездепозитного приза, которая займет не более 2-х мин. Для получения бездепов, достаточно зарегистрироваться и доказать контактные данные.Для казино, работающих онлайн, бездепозитные бонусы нужны для вербования новых посетителей. Предложение сыграть на слотах без необходимости внесения настоящих денег — работающий метод для повышения энтузиазма к фирмы. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит выступать в казино, только сейчас теснее на личные деньги. 1×slots регистрацию более популярный вариант это
<b>Смотреть еще похожие новости:</b>
<a href=https://www.formulersupport.com/Thread-1%D1%85%D1%81%D0%BB%D0%BE%D1%82-%D1%81%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C–173652>1хслот скачать</a>
<a href=https://mit-bbs.com/viewtopic.php?t=132747>1х слот регистрация в 1×slots casino</a>
<a href=https://dev.eff.one/forumdisplay.php?fid=10>1×slots мобильная версия войти казино</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Как правило, новоприбывшие геймеры начала хотят ознакомиться с способами ввода и вывода денежных средств и сроки исполнения поданных заявок дабы четко понимать, как живо они смогут исключить свой казино бонус за регистрацию без депозита на электрический кошелек либо же банковскую карту. К счастью для всех играющих, внутри определенных холдингов, все казино соперничают между собой. Ведь в бы конкретную компанию представляло только одно онлайн-заведение, то ли бы посетители заметили казино с призом за регистрацию и могли бы рассчитывать лишь на вознаграждение повторяющий приза на 1-ое инвестиция. К каждому заведению регулярно следует привлекать новых игроков, собственно, итоге, только на руку всем играющим.
#4731 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Алена Михайлова 1×bet регистрация <a href=https://strelochnik.com/>casino зеркало сегодня рабочее</a> Нургалиева Эльвира Рамиловна порно up букмекерская контора <a href=https://krtka.info/>online casino официальный</a> 1×bet casino casino играть казино рояль смотреть винлайн букмекерская контора официальный букмекерская контора фонбет официальный porno Александр Соболев (футбол) Манилова Алла Юрьевна порно
DiskiPlus автомат казино DiskiPlus играющие казино <a href=https://diskiplus.ru/>DiskiPlus Фастова Елена Владимировна порно</a> DiskiPlus porno Александра Степанова, фигуристка DiskiPlus 1×bet зеркало на сегодня <a href=https://www.diskiplus.ru>DiskiPlus винлайн букмекерская контора официальный сайт</a> DiskiPlus казино на деньги DiskiPlus casino betting DiskiPlus pin ап casino DiskiPlus почему в казино не бывает настенных часов DiskiPlus зеркала официальных сайтов казино DiskiPlus pin up casino DiskiPlus casino игровой автомат
#4732 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее
Казино дает возможность заработать и исключить реальные средства на бездепозитных бонусах. Обычно, это малозначительная сумма, коию казино возможность для разрешить подарить игроку. <a href=http://filmkachat.ru/>сайт 1× slots casino</a> <a href=https://linqto.me/n/gtji>https://linqto.me/n/gtji</a> 1хлот регистрация в 1×slots casino <a href=https://xn–80asucf0d.xn–j1al4b.xn–p1ai/index.php/component/k2/itemlist/user/128445>https://xn–80asucf0d.xn–j1al4b.xn–p1ai/index.php/component/k2/itemlist/user/128445</a> Да, у бесплатных призов есть недостатки. Прежде всего, они обычно очень. Кроме того, обстоятельства вейджера по ним всегда жесткие. Но все же недоступность риска делает их довольно привлекательными для посетителей.Условия вывода выигрыша. В неких заведениях для успешного вывода с бездепозитного бонуса довольно пополнения баланса и подтверждения личности. В иных же клубах, необходимо количество раз прокрутить свой депозит.
1×slots casino регистрация
За привлечение друга ? в рамках партнерской программы клиент получает вознаграждение за привлечение свежих юзеров. 1×slots зеркало которую указывали при регистрации кстати Обычно, бездепозитные бонусы выдаются под определенные слоты с фиксированной ставкой, но их точно воспрещено применять в игровых автоматах с современным джекпотом. Список игр, каких возможно использовать бездеп, Вы найдете в описании промоакции либо можете уточнить у службы поддержки заведения. <a href=http://www.ntsr.info/forum/user/98799/>http://www.ntsr.info/forum/user/98799/</a> Бонус за регистрацию в казино без депо с выводом денег нужно отыграть. Зачастую для отыгрыша имеет понадобиться сделать ставки на сумму, в количество десятков раз превышающую необходимую бонуса или выигрыша.Чаще всего интернет-казино предлагают бездепозитные призы новым юзерам. Эта промо-акция очень эффективно завлекает новичков, подталкивая их к открытию счета. Конечно, не они становятся послушными посетителями, хотя сам факт регистрации аккаунта играет на руку заведению. 1×slots промокод при регистрации Бездепозитные призы — это подарки от казино вид бонусных средств либо фриспинов для игровых автоматов, коие начисляются на аккаунт игрока после процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депозит не потребуется.
1×slots регистрация 1×slots casino c2d ru
Любой выигрыш по ставке выше установленного лимита несомненно считаться недействительным. То есть ставка не будет засчитана при отыгрыше, ну случае выигрыша его сумма не поступит на счёт клиента — итог игры несомненно всецело аннулирован. Законодательство, регулирующее азартные игры в различных государствах, влияет на полномочия операторов. В результате юзеры из отдельных регионов сталкиваются с лимитированиями со стороны казино. Это имеет быть как глубокий отказ в доступе, так и невозможность загружать игры отдельных производителей.Бездепы с безвозмездными вращениями предоставляют юзерам право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд выплачивает казино. Число спинов ограничено и изредка превышает сотню. Если акция включает в себя много бесплатных игр, их начисление возможность быть разбито на некоторое дней. <a href=http://d668804q.beget.tech/user/Oscardib/>http://d668804q.beget.tech/user/Oscardib/</a> Осталось выбрать казино с призом за регистрацию и сделать профиль. После активации презента выигрыш в от Фортуны и навыков. 1× slots casino зеркало Для подтверждения электронной почты, просто перейдите по интенсивной ссылке в письме, полученном от игрового заведения.Бездепозитные бонусы – это самая небезинтересная и более перспективная промоакция интернет-казино. Они числе лучше фри-спинов, поэтому что выплаты в бесплатных вращениях не гарантированы, ведь композиции на барабанах игрового аппарата имеют не сложиться.
1×slots скачать на айфон
В каждом казино с бездепозитным призом предусмотрены вейджеровые условия. Это единственный «подводный камень», который стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) устроить определённое число ставок. Чем круче бонус, тем труднее выполнить обстоятельства, и напротив.Обычно для получения призов без депозита, казино выдвигает приклнные и вполне выполнимые условия, но есть ряд действий коие воспрещены и имеют стать досадные результаты: Чтобы бездеп не был начислен на Ваш аккаунт, Вам надо активировать бонусный код. Если поощрение от казино было добавлено на Ваш акк механически, а Вы не расчитываете его применять, обратитесь в саппорта с просьбой отменить бездепозитный бонус.Самые модные способы вывода средств ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электрическим платежным системам на Neteller и Skrill, а используют криптовалютными кошельками. Вывод выигрышей возможность осуществляться мгновенно или занимать от нескольких часов до нескольких суток. 1хслотс рабочее зеркало на сегодня <a href=http://www.51bonjour.com/discuz/home.php?mod=space&uid=2779021>http://www.51bonjour.com/discuz/home.php?mod=space&uid=2779021</a> Исходя из этого, просто не присутствует осмысленных причин махнуть рукой на получение такового приза при регистрации. И, что, на такой безвозмездной базе у вас есть шансы выиграть деньги и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные призы, именуют бесплатными онлайн платформами для игр.
1×slots регистрация
Поспешите арестовать бездепозитные бонусы за регистрацию в казино из представленного списка. Все платформы не водят законную деятельность, но и порадуют правдивыми результатами забавы, высокой отдачей, прыткими выплатами. Представьте момент, когда при ставке в 10 руб. Вы получите схожее умножение. Миллион рублей за одно вращение, собственно абсолютно возможно. Поэтому вопрос, сколько возможно выиграть остаётся не. Предлагаем проверить других. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный приз и проверяйте фортуну в деле. Разумеется, вывести средства довольно. Однако шансы есть у всех.Благодаря программке преданности от игорного заведения, возможно брать неплохой старт и без дополнительных вложений запустить видеослоты. Кроме такого, возможно рассчитывать на реальную удачу и получить, без инвестиции личных финансов, большой выигрыш. <a href=http://m1bar.com/index.php?subaction=userinfo&user=yieldingocclusi>http://m1bar.com/index.php?subaction=userinfo&user=yieldingocclusi</a> Главное превосходство спинов – вероятность выучить различные слоты. Также удастся насладиться бонусными раундами, испытывать удачу в риск-туре и преувеличить выигрыш за счёт особых знаков. Однако столько игровой процесс заслуживает внимание, ведь лучше сосредоточиться на реальном выигрыше.Бездепозитные призы за регистрацию в игровых автоматах для хозяев онлайн-казино являются долею рекламной кампании, направленной на повышение аудитории вебсайта. Так они продвигают средства бренды и завлекают свежих посетителей. казино 1× slots официальный сайт
<b>Смотреть еще похожие новости:</b>
<a href=https://australiantravelforum.com/Upload/showthread.php?tid=285791>скачать 1×slots официальный сайт</a>
<a href=https://irc.floobits.com/Jamesamiva>казино 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Наш список включает в себя превосходнейшие бездепозитные бонусы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по принципиальным характеристикам:
#4733 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino актуальное зеркало casinos xyz <a href=https://kompromat1.online/>винлайн букмекерская контора</a> Петрова Ольга Викторовна порно unlim casino <a href=https://repost.news/>ев казино</a> скачать букмекерскую контору Разуваева Ксения Денисовна порно букмекерская контора фонбет официальный казино вулкан Светлана Ходченкова 1×bet регистрация vodka casino
DiskiPlus gama casino DiskiPlus букмекерская контора бесплатно скачать <a href=https://diskiplus.ru/>DiskiPlus 1×bet casino</a> DiskiPlus смотреть фильм казино DiskiPlus 1×bet xbet xyz <a href=https://diskiplus.ru>DiskiPlus лучшие букмекерские конторы</a> DiskiPlus gama casino DiskiPlus new casino DiskiPlus балтбет букмекерская контора DiskiPlus Разуваева Ксения Денисовна порно DiskiPlus porno Юлия Канакина DiskiPlus porno Дарья Мороз DiskiPlus казино на деньги
#4734 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на официальном сайте
Автоматическая активация взгляд самой комфортной, но ручной метод содержит перед ней преимущества. Прежде чем применять вознаграждение от казино, стоит заблаговременно определить, сколько времени потребуется на исполнение всех критерий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деянья бонуса. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> Размер приза. В качестве бездепов обыкновенно начисляют большие суммы, а когда идет о бонусах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то кое-какие казино шансы подарить игроку до 2000$. <a href=https://www.tamaiaz.com/blogs/268391/Mastering-Interior-Design-Drafting>https://www.tamaiaz.com/blogs/268391/Mastering-Interior-Design-Drafting</a> Приглашаем делиться воззреньями о бонусах. Это поможет другим пользователям избирать наиболее выгодные предложения.При маленькой сумме бонуса рекомендовано играть по невысоким ставкам, а применять максимальные другого, как только никаких случае, если вейджер слишком великий, а время на отыгрыш сильно ограничено. 1×slots рабочее зеркало <a href=http://www.en.besatime.com/index.php?subaction=userinfo&user=Jasperrah>http://www.en.besatime.com/index.php?subaction=userinfo&user=Jasperrah</a>
1×slots регистрация 1×slots casino c2d ru
Похожим образом работает 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения клиента или из-за с получения им VIP-статуса. Подарок предоставляется последствии воззвания в поддержку и ревизии. <a href=https://qualityprogamer.de/forum/showthread.php?tid=420705>x1 slots регистрация в 1×slots casino</a> 1×slots сайт зеркало При исполненьи условий отыгрыша и верификации, средства с бонусного счета переводятся на основной и могут быть выведены на карту либо электронный кошелек. Лимиты на вывод и сроки проведения транзакции находятся от избранной платежной системы.Постарайтесь отыграть вейджер, чтобы была возможность забыть заявку на выплату. Кстати, на всех веб-сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы можете получить выигрыш на электронной кошелёк, карту, телефонный. <a href=http://lsdsng.com/user/550567>http://lsdsng.com/user/550567</a> 1×slots зеркало регистрацию более популярный вариант это При верном раскладе бездепы — это отличный метод выступать на средства без растраты личных средств. Есть некоторое рекомендаций, следуя коим можно извлечь максимально выгоды из сходственных промоакций казино. Играть стопам лишь на лицензированных площадках. Скриптовые сайты столько накалывают с бонусными услугами, но и используют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах невозможно.Такие одобрения разрешают даром протестировать новое казино, разобраться с игровым ходом онлайн слотов, заработать и исключить небольшую необходимую средств.
1×slots официальный сайт зеркало рабочее
Чтоб получить крупный выигрыш, выбирайте игровые автоматы с предельным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша. <a href=http://h96375tu.bget.ru/member.php?action=profile&uid=127003>http://h96375tu.bget.ru/member.php?action=profile&uid=127003</a> Теоретически, к безвозмездным призам возможно отнести так называемые фриспины. Напомним, речь идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, потому собственно они деют только вероятность создавать ставки. 1×slots казино мобильная версия
1×slots casino регистрация
<a href=http://maddog-server.org/forum/showthread.php?tid=54027>1×slots регистрация на сайте</a> Прочитайте управляла бонусной программы, какой желайте принять. Да, мы настойчиво рекомендуем устроить это до регистрации. Наличие у игрока второго аккаунта. Запрещено создавать некоторое профилей для многократного получения бездепов.Варианты выигрыша находятся от Вашей удачи и критерий игорного портала. Выше мы сказали, собственно кое-какие бездепозитные бонусы в 2022 году выдаются с лимитированиями по максимальной выплате. Однако, остаются они, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность современных игр на деньги, возможно выиграть невозможные суммы. Сегодняшние игровые автоматы или видео слоты, как их нарекают. Могут выдавать крупные умножение от х1.000 и повыше. Некоторые умножают ставку от х100.000. 1× слот зеркало <a href=http://fb7707ng.bget.ru/user/Kennethgap/>http://fb7707ng.bget.ru/user/Kennethgap/</a>
1 xslots рабочее зеркало
Бонус без депо за регистрацию в казино (бездепозитный бонус) – это денежный презент от клуба, который начисляется на акк игрока последствии регистрации в казино. Кроме сотворения учетной записи, для получения бездепа, очень нередко требуется ещё и доказать контактные данные игрока и/или активировать особый промо-код.Активация по промокоду используется в разных видах бездепов. Если идет о приветственном бонусе, то набор знаков возможно узнать на крупнейшей страничке, в регистрационной форме либо послании, коие отправляется пользователю для доказательства e-mail. Акции все проводиться вместе с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется разовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем актуальный код для активации в описании каждого рекламную. <a href=https://www.birdpix.nl/profile.php?mode=viewprofile&u=126846>https://www.birdpix.nl/profile.php?mode=viewprofile&u=126846</a> Также учтите, собственно некоторые игровые платформы сужают список государств, которые способны получить предложенный бездепозитный бонус за регистрацию. К примеру, есть онлайн-заведения, выдающие сходственные бонусы лишь обитателям определенных государств. К примеру, интернет казино 777 Оригинал предоставляет бездепозитный приз лишь игрокам из России и государств СНГ. Или наоборот, снабжают вознаграждением всех, кроме жителей некоторых государств (как сего, идет пристально учить список, чтобы потом не появилось практически вопросов и претензий).Для получения выигрыша требуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить определенную необходимую, но теснее из собственных средств. Она рассчитывается из совместного размера выигрыша за все время использования бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, в пользователь выиграл 1000 рублей, а множитель составляет х30, вывести средства возможно несомненно, сделав ставки на 30 000 рублей. 1хслотс казино зеркало Но а в вы уже профи по онлайн казино, кликаем на красноватую кнопку «Получить» и Вы механически перейдете в интернет казино;Иногда в бездепа, казино дарует минимальный бонус (до 50 руб. ), ради которого не заморачиваться.
<b>Смотреть еще похожие новости:</b>
<a href=https://showboysmedia.com/real-music/#comment-60364>1×slots рабочее зеркало на сегодня</a>
<a href=https://www.lightknotes.com/MyBB/showthread.php?tid=152168>1×slots коды</a>
<a href=https://forums.scar-divi.com/topic/740564–1×slots-%D1%81%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C-%D0%BD%D0%B0-%D0%B0%D0%B9%D1%84%D0%BE%D0%BD/>1×slots скачать на айфон</a>
<a href=http://www.infoknygos.lt/smforum/index.php?topic=79113.new#new>1 хслот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Во время игры в казино, выигрыши, приобретенные благодаря бесплатным призовым фондам, суммируются и срабатывают в совместную сумму для отыгрывания. Однако, случае удача улыбнется и получится отыграть все призы, игровое заведение гарантированно разрешит исключить денежные средства. Сумма вывода будет зависеть от лимита, одобренного именно в этом учреждении. Поэтому, внимательно нужно разбирать управляла выдачи анлимитных депозитов.
#4735 Charlesgunnyhttp://filmkachat.ru
casino 1×slot
Прямо сейчас заберите бесплатные вращения за регистрацию без депо и начинайте собирать призовые композиции из-за солидных выигрышей! <a href=http://filmkachat.ru/>1×slot казино зеркало</a> <a href=https://graph.org/Transform-Your-Furniture-Ideas-into-Reality-A-Deep-Dive-into-3D-Design-Tools-11–22>https://graph.org/Transform-Your-Furniture-Ideas-into-Reality-A-Deep-Dive-into-3D-Design-Tools-11–22</a> 1×slots на любой вкус как пройти регистрацию <a href=http://bbs.weipubao.cn/home.php?mod=space&uid=4043312>http://bbs.weipubao.cn/home.php?mod=space&uid=4043312</a>
1×slot официальный сайт
1×slot зеркало <a href=http://bbs.xinhaolian.com/home.php?mod=space&uid=4019765>http://bbs.xinhaolian.com/home.php?mod=space&uid=4019765</a> Зарегистрируйтесь. Для регистрации почаще всего довольно ввести собственный номер аппарата и почтовый адрес, после чего установить приобретенный код из СМС. Возможно, потребуется указать промокод. В правилах промоакции будет написано, где его хотелось вводить. Иногда это надобно делать при регистрации, от — теснее последствии творенья собственного офиса, на отдельной странице. 1×slots зеркало регистрация то дальше необходимо пройти
1×slots промокод при регистрации
Бездепы все заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой либо баллами.Бездепозитные бонусы в казино без пополнения 2022 — это конкретная сумма средств либо vacant spins вращения, которые предоставляются первым гостям за регистрацию на сайте казино повторяющий бездепозитного бонуса, и дает для вероятность с казино без пополнения опробовать услуги (игр), с дальнейшей преимуществом, льготой вывода средств при выполнении всех установленных правил. <a href=https://cheaplocallocksmiths.co.uk/forum/profile/DelphiaBon>https://cheaplocallocksmiths.co.uk/forum/profile/DelphiaBon</a> Подтвердите личность, предоставив оператору казино средства паспортные данные. Инструкции обычно легкие, основное — четко им идти. Если написано, собственно «на фото обязаны быть видны все хорошо угла страницы паспорта» — устройте именно такое фото. 1×slots официальный demo регистрация в 1×slots casino Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической забавы на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, научится регулировать изменять ставки и линии, изучать бонусные забавы и их выигрышные комбинации, да счете просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные средства, коие можно отыграть и вывести, а не просто на демо счет, тем самым адреналин в крови еще больше повысится а пульс забьется с нередким ритмом!Чтобы бездеп не был начислен на Ваш акк, Вам не активировать бонусный код. Если одобрение от казино было добавлено на Ваш аккаунт механически, а Вы не расчитываете его применять, обратитесь в службу с просьбой отменить бездепозитный бонус.
1×slots зеркало которую указывали при регистрации кстати
Допустим, за регистрацию вы получили бездеп в размере 2 000 руб. С вейджером х30. В этом случае предстоит сделать ставок, на общую необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать реальные деньги. Однако не забывайте, что с любого дара выйдет исключить определённую сумму (почаще всего менее $200). Также бывают случаи, когда казино начислит оговоренный приз последствии регистрации свежего клиента по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам.Свежий бонус начисляется вид валютных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в пользовании средствами, в случае отыгрыша оператор возможность ввести ограничение на вывод денег. В любом казино с бездепозитным призом предусмотрены вейджеровые условия. Это один-единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, нужно устроить определённое количество ставок. Чем круче приз, тем сложнее выполнить условия, и наоборот.Бездепозитные бонусы – это исключительно небезинтересная и более многообещающая промоакция интернет-казино. Они числе другого, как фри-спинов, потому что выплаты в бесплатных вращениях не гарантированы, как комбинации на барабанах игрового аппарата могут не сложиться. 1×slots официальный сайт скачать на айфон <a href=http://fumankong3.cc/home.php?mod=space&uid=582168>http://fumankong3.cc/home.php?mod=space&uid=582168</a> Популярность онлайн казино растёт и всё больше юзеров начинают проявлять азартными играми. Бездепозитные призы 2022 года, это уникальные подарки за регистрацию. С их поддержкой новые игроки имеют получить безвозмездные вращения или средства на баланс за одну регистрацию. С выходом игорных заведений в интернете, бездепозитные призы стали популярнейшим методом вербования игроков. Подобные акции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о которых мы расскажем. Наш сайт собрал превосходнейшие предложения из интернета на 2022 год. Воспользуйтесь любым даром и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша нужно выполнить условия.Бесплатный приз – кредиты, коие онлайн-казино начисляет посетителю, не принуждая его пополнять игровой счет.
1×slos регистрация в 1×slots casino
Фриплей-бонусы. Бонусы за бесплатную игру есть лишь в неких клубах. Они зачисляются незамедлительно после творенья профиля и срабатывают недолговременное время. Если у вас нет времени истратить средства, они просто закончатся. Что касается времени, правило бонусы срабатывают протяжении одного часа. <a href=http://certificate.winko.net/bbs/board.php?bo_table=free&wr_id=151744>http://certificate.winko.net/bbs/board.php?bo_table=free&wr_id=151744</a> Иногда операторы требуют внесение малого депо перед выводом для верификации платежного прибора. В неких казино этот депо также светит отыграть. 1×slots casino регистрация Наличие у игрока второго аккаунта. Запрещено творить некоторое профилей для неоднократного получения бездепов.Для получения бонуса нужно ознакомиться с программкой преданности казино и устроить ставки на сумму, нужную для перехода на следующий степень.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.findaspermdonor.com/viewtopic.php?f=25&t=87557>1 x slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы казино за регистрацию в 2022 году — это возможность сыграть за счёт заведения. Казино даёт клиенту шанс пользоваться определённой суммой или количеством бесплатных вращений без внесения депо. Не путайте деморежим с реальной игрой без надобности внесения депозита. Для получения депозитного приза нужно пополнить свой игровой баланс реальными средствами. Вознаграждение возможно получить или при внесении первого депозита, или в виде фиксированного процента от внесённых средств. Так или другому, приз поступит на счёт только после пополнения.
#4736 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать 1×bet 1×bet официальный скачать <a href=https://glvk.guru/>online casino</a> казино без порно с Алексей Миранчук (футбол) <a href=https://t.me/vchkogpu_ru>new casino</a> casino com вавада казино Петрова Ольга Викторовна порно пин ап казино porno Александра Степанова, фигуристка casino online зеркало казино вход официальный сайт
DiskiPlus 1×bet xbet xyz DiskiPlus porno Дарья Клишина <a href=https://diskiplus.ru>DiskiPlus порно с Захарова Мария Владимировна</a> DiskiPlus фильмы казино рояль DiskiPlus up casino зеркало <a href=https://diskiplus.ru>DiskiPlus 7k casino зеркало</a> DiskiPlus фреш казино DiskiPlus играющие казино DiskiPlus 1win букмекерская контора DiskiPlus kent casino регистрация DiskiPlus порно с Анна Калинская (теннис) DiskiPlus самое казино DiskiPlus порно с Юлия Ефимова
#4737 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
карты казино рейтинг казино <a href=https://rhymes-punches.com/>casino рабочее</a> приложения букмекерских контор casino x <a href=https://kompromat1.online/>скачать 1×bet 1×bet xyz</a> рейтинг казино 1×bet xbet xyz Преподобная Надежда Александровна порно casino на телефон порно с Матвей Сафонов (футбол) porno Дарья Клишина букмекерская контора фонбет
DiskiPlus порно с Александр Головин (футбол) DiskiPlus букмекерская контора скачать приложение <a href=https://www.diskiplus.ru>DiskiPlus porno Светлана Ходченкова</a> DiskiPlus casino 7k рабочее DiskiPlus top casino <a href=https://www.diskiplus.ru/>DiskiPlus pin up casino пин ап</a> DiskiPlus porno Анастасия Янькова, боксерка DiskiPlus 1×bet зеркало рабочее DiskiPlus 1×bet зеркало DiskiPlus пари букмекерская контора DiskiPlus казино 1 DiskiPlus порно с Евгений Малкин (хоккей) DiskiPlus букмекерская контора
#4738 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino 777 online
Только выполнив все обстоятельства отыгрыша и дождавшись окончания проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить средства средства. <a href=http://filmkachat.ru/>1×slos регистрация в 1×slots casino</a> <a href=https://plaza.rakuten.co.jp/prilla/diary/202411240004/>https://plaza.rakuten.co.jp/prilla/diary/202411240004/</a> Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 $. Если выдаются фриспины, их количество редко превышает нескольких 10-ов даровых вращений.Для выбора азартного заведения Вы можете воспользоваться списком наших казино с бонусами за регистрацию. На нашем веб-сайте мы опубликовали перечень бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, что доля бонусов эксклюзивные и доступны лишь для гостей нашего сайта по-специальному промо-коду либо по оригинальной ссылке. Кроме того, для каждого бонуса мы подготовили подробный обозрение, в котором Вы узнаете как получить и отыграть одобрение и как исключить свой выигрыш с бездепа. 1×slots казино зеркало <a href=https://forum.kainkalabs.com:443/member.php?action=profile&uid=17955>https://forum.kainkalabs.com:443/member.php?action=profile&uid=17955</a>
сайт 1× slots casino
Главное преимущество спинов – вероятность выучить разные слоты. Также получится насладиться бонусными раундами, испытывать фортуну в риск-туре и преумножить выигрыш за счёт особенных символов. Однако столько игровой процесс заслуживает внимание, так превосходнее сосредоточиться на реальном выигрыше. 1×slots сайт Лишь известные и знаменитые азартные заведения все позволить себя раздавать бездепы повторяющий дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, коие можно истратить в топовых аппаратах с высочайшей отдачей. <a href=http://www.e-tax.it/userinfo.php?uid=192199>http://www.e-tax.it/userinfo.php?uid=192199</a> Принципиальным различием даровых бонусов от призов на депо считается неименье надобности заносить деньги на аккаунт. Из-за сего их часто называют бездепозитными (no down payment bonuses). 1×slots коды Используйте наилучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, дабы заработать презенты за простые деяния теперь сейчас получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и резвыми выводами на электронные кошельки.
1×slots регистрация на сайте 1×slots ru com
К сожалению, нет. Почти все казино, просят внесение желая бы одного минимального депозита для вывода выигрыша с бездепозитного бонуса. Также учитывайте, собственно исключить средства разрешается только на что, эту платежную систему, с которой был изготовлен депозит. Объективные – размер бонуса, коэффициент и условия вейджера, надобность внесения депо для вывода средств; <a href=http://bbs.ou-lei.com/home.php?mod=space&username=egekexus>http://bbs.ou-lei.com/home.php?mod=space&username=egekexus</a> 1хлот регистрация в 1×slots casino
1×slots casino зеркало
Как только получите бездеп в казино, всё одинаково не запамятовывайте проверять электронную почту. Некоторые игорные клубы непрерывно веселят интенсивных гэмблеров приятными призами. Чаще всего получить подарок можно в преддверии праздника, на день рождение, за вербование друга. А того распространённым призом является прибавка к депозиту. Нужно более пополнить счёт, и азартное заведение прирастит его на 50–100%. <a href=https://test.soclanovtsy.ru/topic/46223–1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F/>1×slots зеркало регистрация</a> Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция имеет подробные верховодила, ссылка на которые обыкновенно находится в промообъявлении. В их указываются лимиты, вейджер, список доступных игр. Если оператор прячет данные о предложении, то воспользоваться им не стоит. 1×slots официальный сайт зеркало <a href=https://horoshava.ru/forum/user/32975/>https://horoshava.ru/forum/user/32975/</a>
1×слот регистрация в 1×slots casino
<a href=https://xn–80apeih4a.xn–p1ai/communication/forum/messages/forum3/message4752/3314-skolko-poluchayut-grazhdanstvo?result=new#message4752>https://xn–80apeih4a.xn–p1ai/communication/forum/messages/forum3/message4752/3314-skolko-poluchayut-grazhdanstvo?result=new#message4752</a> 1×slots casino регистрация Верификация необходима для добавочной защищенности и помочь техподдержке выявить бонусхантеров и жуликов. Кстати, на некоторых платформах выводы солидных сумм доступны только после доказательства личности.Начнём с как, что любое промо за регистрацию подразумевает некоторые условия. Бездепозитные бонусы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, нужная для исполнения критерий. Пример, получили безвозмездные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 руб., неудачных или выигрышных, неважно. После выполнения, бонусный баланс перейдёт на настоящий и будет легкодоступным к выводу.
<b>Смотреть еще похожие новости:</b>
<a href=http://u0382101.isp.regruhosting.ru/index.php/forum/general-questions-and-how-tos/68883-otzyvy-o-tovarakh?start=2478#135817>1×slots зеркало сайта</a>
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1100#post-34552>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выиграть реальные средства в казино не пополняя счет – трудно, хотя возможно. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными бонусами и начните играть на бонусные свои. По статистике в 10-ти заведений можно заработать маленькую сумму средств за счет бонусных средств. Чаще всего интернет-казино предлагают бездепозитные призы новым пользователям. Эта промо-акция довольно отлично завлекает начинающих, подталкивая их к открытию счета. Конечно, не все становятся преданными посетителями, хотя сам факт регистрации аккаунта играет на руку заведению.
#4739 Charlesgunnyhttp://filmkachat.ru
1×slots подтвердит вашу регистрацию если говорить
Вейджер в переводе с британского означает «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша приобретенного бонуса, в нашем случае бездепозитного. Число ставок не — главно только набрать необходимую, пропорциональную сумме одобрения.За счёт спинов получится запустить различные интернет слоты, протестировать стратегии и поднабраться опыта. Фишка том,, что вращения начисляются на лучшие аппараты с уникальными опциями и высокой отдачей. Не запамятовывайте, собственно в каждом акционном предложении предусмотрены особые требования – кратковременные ограничения, наибольший размер ставки, список доступных игр. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало</a> <a href=https://playcode.io/2205736>https://playcode.io/2205736</a> казино 1×slots <a href=http://www.stmcu.co.kr/gn/bbs/board.php?bo_table=free&wr_id=763653>http://www.stmcu.co.kr/gn/bbs/board.php?bo_table=free&wr_id=763653</a> Свежий бонус начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в использовании средствами, а в случае отыгрыша оператор имеет установить ограничение на вывод денег.
1×slots casino зеркало рабочее
Иногда в качестве бездепа, казино дарит наименьший бонус (до 50 руб. ), из-за которого надо заморачиваться. 1×slots казино мобильная версия Итак, чтобы бесплатные бонусные кредиты превратились в настоящие средства, которыми вам распоряжаться по собственному усмотрению, их нужно отыграть. Вейджер идет уточнять в правилах онлайн-казино. <a href=http://www.credforum.ru/showthread.php?p=42685>http://www.credforum.ru/showthread.php?p=42685</a> Практически все онлайн казино с бездепозитным призом за регистрацию учитывает программку преданности — систему поощрения постоянных клиентов, кот-ая состоит из колличества значений. При достижении игроком очередного значения на его счёт поступает бонус. Чем повыше уровень — что, этим щедрее приз.Возможность протестировать свежие игры, не рискуя личными своими и создать личную тактику забавы. casino 1×slot Но а случае вы теснее профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы автоматически перейдете в онлайн казино;
зеркала 1×slots
Как прочие промоакции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения считаются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых посетителей и разрешает им составить эмоцию о функционале, не рискуя вескими суммами. <a href=http://victoryvapekorea.com/bbs/board.php?bo_table=free&wr_id=61814>http://victoryvapekorea.com/bbs/board.php?bo_table=free&wr_id=61814</a> Одним из предлогов отдавать привилегию 1 либо другому заведению заключается в привлекательности предлагаемых акций и безвозмездных услуг. Безвозмездные фриспины, выдаваемые без дела создавать какой-либо вклад, в списке находится далеко не в конце.Еще одно условие дотрагивается объемов ставки. Операторы устанавливают наивысшую необходимую, которую игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, избранной в Личном кабинете. При превышении лимита есть риск потерять бонуса. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, заказчик может столкнуться с запретом назначать фишки на шансы. 1×slots зеркало которую указывали при регистрации кстати
1×slots сайт зеркало
Наши эксперты изучают условия промоакции, затем в ручном режиме проверку их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие характеристики. Мы не рекламируем казино, а даем игрокам информацию о лучших из них. <a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5040/#comment-606170>1×slots casino регистрация</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=http://xsyywx.com/home.php?mod=space&uid=131744>http://xsyywx.com/home.php?mod=space&uid=131744</a> При регистрации стопам указывать только достоверную информацию. Когда учетная запись будет активна, замечен доступ в Личный офис. В нем можно выбрать валюту, ввести промокод и узнать доскональные управляла получения и отыгрыша бездепа. Краткая информация об промоакции нередко находится непосредственно на регистрационной форме.
казино 1×slots официальный сайт
Новички не любят незамедлительно же вносить депо. Это обосновано отсутствием опыта и сомненьем. К счастью, в наше время можно получить бездепозитный бонус за регистрацию в казино. Неважно что начисляет система – фриспины или кредиты. В всяком случае вы не рискуете своими сбережениями. Это замечательная вероятность запустить понравившийся видео разъем либо же испытывать удачу в настольных играх.В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, нужно обратиться в службу через лайв-чат на сайте казино. В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, нужно адресоваться в саппорта через лайв-чат на сайте казино.Внесение депозита – Будьте готовы пополнить счет после отыгрыша приза. Это обычное требование правил для данного подобии промо-акций. Лучше заранее уточнить, какую сумму нужно будет заносить на счет. Как управляло, речь о минимальном депозите, но вы обязаны быть убеждены, собственно он вас по кармашку. <a href=http://svyaz-stroi.ru/index.php?subaction=userinfo&user=undesirabledyna>http://svyaz-stroi.ru/index.php?subaction=userinfo&user=undesirabledyna</a> Также бездепозитные призы имеют служить методом вернуть к ирге клиентов, пока приостановивших своё сотрудничество с фирмой: уведомление о бездепе поступает на мобильный телефон или почту. зеркала 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://bbs.sinbadgroup.org/index.php?xjkh-tampa-s-poster-pup-for-new-cancer-treatment.t48661.html/page-4032#post-206106>1хслотс зеркало на сегодня</a>
<a href=http://everestrolep.listbb.ru/viewtopic.php?f=38&t=11561>1×slots зеркало сайта</a>
<a href=https://aircompare.us/forums/memberlist.php?mode=viewprofile&u=40074>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Суммы сходственных услуг, большинстве, колеблются от трех до 20 $, а вейджер на эти свои должен составлять от тридцати до шестидесяти один. Зачастую, наибольшая сумма выигрыша здесь составит от одной до 2-ух сотен долларов. Если геймер выиграет больше, то все свои все быть списанными до очень разрешенного выигрыша. Здесь появляется смысл выводить еще несуществующие деньги на свою платежную систему и далее искать заведение с благоприятными под данную необходимую релоадом или бонусом за 1-ое пополнение счета. Есть количество подвидов бездепозитного вознаграждения, предлагаемого великим количеством заведений.
#4740 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Чулпан Хаматова официальные зеркала казино <a href=https://m.repost.news/>лучшая казино</a> 7k casino сайт официальные зеркала казино <a href=https://m.repost.news/>casino регистрации</a> скачать pin casino порно с Алексей Миранчук (футбол) 1×bet на андроид бесплатно 1×bet на андроид порно с Зырянова Анастасия Владимировна porno Светлана Ходченкова бывшие казино
DiskiPlus скачать casino на андроид DiskiPlus porno Марина Александрова <a href=https://diskiplus.ru>DiskiPlus Светлана Ходченкова</a> DiskiPlus Мухтиярова Елена Вячеславовна порно DiskiPlus казино без <a href=https://diskiplus.ru/>DiskiPlus 1×bet зеркало на сегодня</a> DiskiPlus Манилова Алла Юрьевна порно DiskiPlus порно с Петр Ян (ММА) DiskiPlus 1win casino DiskiPlus cometa casino DiskiPlus casino официальный зеркало DiskiPlus букмекерская контора зенит DiskiPlus порно с Каролина Севастьянова
#4741 Davidaninshttps://vitasleep.ru
Интернет-магазин товаров <a href=https://vitasleep.ru/>https://vitasleep.ru</a> для здорового сна. В ассортименте: ортопедические матрасы, подушки, одеяла, постельное белье и аксессуары от проверенных брендов. Удобный выбор, доставка по России, гарантия качества. Забота о вашем комфорте и здоровом сне!
#4742 Charlesgunnyhttp://filmkachat.ru
1× slots casino официальный сайт
Для выбора азартного заведения Вы можете воспользоваться списком наших казино с призами за регистрацию. На нашем сайте мы опубликовали список бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, собственно доля призов неповторимые и доступны только для посетителей нашего вебсайта по-специальному промо-коду или по уникальной ссылке. Кроме как, для любого приза мы подготовили подробный обозрение, в котором Вы узнаете как получить и отыграть одобрение и как исключить собственный выигрыш с бездепа. <a href=http://filmkachat.ru/>1×slots подтвердит вашу регистрацию если говорить</a> <a href=https://www.hebergementweb.org/threads/kak-proisxodit-vykup-avto-vo-francii-vse-chto-nuzhno-znat.1925854/>https://www.hebergementweb.org/threads/kak-proisxodit-vykup-avto-vo-francii-vse-chto-nuzhno-znat.1925854/</a> Перечисленные выше главные свойства сопровождают фактически каждый бонус и считаются стереотипными для бездепозитных бонусных начислений в казино.Максимальная ставка ? уточняется в денежной счета и ограничивает объем ставки за раз спин. В случае ее превышения приз имеет быть аннулирован. Также в правилах возможность содержаться запрет на размещение ставок конкретного облика, к, по одинаковым шансам в рулетке (другими, на чет либо нечет, красноватое либо черное и т.д. ). 1×slots официальный сайт зеркало рабочее <a href=http://kiacarnival.ru/profile.php?u=ygajal>http://kiacarnival.ru/profile.php?u=ygajal</a> Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, чтобы была вероятность исключить выигрыш.
1×slots официальный сайт мобильная версия скачать
Иногда виде поощрения за регистрацию все выдаваться билеты для роли в турнирах. Условия их проведения довольно отличаются, поэтому мы советуем ознакомиться с любым предложением раздельно.Представленные на этой страничке наилучшие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные условия. После кропотливого анализа редакция портала составила рейтинг спецпредложений, в котором гости Casino.ru могут сортировать перечень по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д. <a href=http://aficionado.pl/showthread.php?121814-x1-slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%B2–1×slots-casino&p=140087>x1 slots регистрация в 1×slots casino</a> 1×слот регистрация в 1×slots casino Внесение депо – Будьте готовы восполнить счет после отыгрыша приза. Это стандартное требование правил для этого на промо-акций. Лучше заблаговременно уточнить, какую сумму надо(надобно) будет вносить на счет. Как правило, идет о наименьшем депозите, хотя вы должны быть уверены, что он для по карману. <a href=https://interesno.bbmy.ru/viewtopic.php?id=9076#p23821>https://interesno.bbmy.ru/viewtopic.php?id=9076#p23821</a> Для отыгрыша бонуса казино обязывает игрока поиграть на сумму, в количество один превышающую необходимую полученного бонуса — тут выгода фирмы явна.Пoдтвepдить личнocть клиента. Для успешного вывода средств, необходимо подтвердить личность посетителя. Нa этaпe вepификaции пpoфиля, работники службы безопасности обязаны увериться, что у игрока всего лишь раз акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не сможет исключить собственный выигрыш, в у него несомненно несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы. 1хслотс мобильная версия зеркало
1×slots мобильная версия войти казино
Помните, собственно в неких играх сумма ставки идет в зачет вейджера лишь частично. Так, в настольных и карточных играх только от 5% до 50% суммы ставки считаются как отыгранные деньги, момент как в слотах идет в зачет все one hundred percent суммы. <a href=http://bcbrg.com/bbs/board.php?bo_table=free&wr_id=47854>http://bcbrg.com/bbs/board.php?bo_table=free&wr_id=47854</a> 4. Заберите подарок. Чаще всего приз активируется сразу в регистрации. Но бывают ситуации, когда надо(надобно) зайти в личный кабинет или написать в саппорта. 1×slot зеркало рабочее регистрации на телефон придет Баланс игрока пополняется на подходящую необходимую. К ней применяется вейджер, обозначенный в правилах акции. Вывести выигрыш можно будет после такого, как юзер сделает требуемый размер ставок из личных средств. В редчайших случаях бездеп работает в формате Free Play. На счет пользователя зачисляется большая сумма, и предоставляется малый срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по завершении этого периода сумма на счету будет превосходить первоначальную, то разницу возможно несомненно исключить либо использовать для дальнейших ставок.
1×slots акции
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=899625>казино 1×slots официальный сайт</a> Однако в критериях скрываются «подводные камешки», которые не позволят исключить крупную сумму либо же вы не успеете отыграть вейджер. Поэтому профессионалы рекомендуют забрать бесплатные вращения за регистрацию в казино без депозита, чтобы поднабраться опыта и получить реальный шанс на победу.Вознаграждения за получение VIP-статуса ? начисляются в программы лояльности при достижении очередного значения или выдаются персонально менеджерами службы поддержки. x1 slots 1хслотс регистрация перейти на 1×slots <a href=https://fabricenetwork.mn.co/members/26411135>https://fabricenetwork.mn.co/members/26411135</a> Также, такой нужно доказать собственный номер телефона, достичь код, полученный в смс-сообщении от клуба ввести в особое поле в собственном офисе игрока.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Для получения бонуса надо(надобно) ознакомиться с программой преданности казино и сделать ставки на необходимую, необходимую для перехода на грядущий уровень. <a href=http://g95887q6.beget.tech/user/Zacheryrandy/>http://g95887q6.beget.tech/user/Zacheryrandy/</a> 1×slots зеркало регистрация
<b>Смотреть еще похожие новости:</b>
<a href=https://www.ldvd.nl/no-22-san-diego-place-rallies-very-last-boise-country-27–16?page=61#comment-238900>1×slots бонус за регистрацию</a>
<a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=4643>1х слот регистрация в 1×slots casino</a>
<a href=https://www.lightknotes.com/MyBB/showthread.php?tid=178262>1хслот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Операторы гемблинга заявляют, что так они борются с бонус-хантерами. Впрочем, критики считают, собственно данным казино пытаются сделать из случайного гостя неизменного игрока. Бездепозитные бонусы за регистрацию в игровых автоматах для собственников онлайн-казино являются частью рекламной кампании, направленной на повышение аудитории сайта. Так они продвигают средства бренды и завлекают новых клиентов.
#4743 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Юлия Пересильд букмекерские конторы pin <a href=https://rumafia.news/>7k casino зеркало</a> букмекерская контора мостбет Светлана Ходченкова <a href=https://repost.news/>1×bet зеркало рабочее xbet</a> casino ап реального казино казино большая porno Марина Александрова Семёнова Татьяна Владимировна порно порно с Варвара Субботина pin ап casino
DiskiPlus порно с Евгения Медведева, фигуристка DiskiPlus pin up casino зеркало <a href=https://diskiplus.ru>DiskiPlus порно с Абрамченко Виктория Валериевна</a> DiskiPlus casino играть DiskiPlus pin casino зеркало <a href=https://www.diskiplus.ru/>DiskiPlus casino buzz</a> DiskiPlus casino daddy DiskiPlus часы казино DiskiPlus казино без DiskiPlus порно с Дронова Александра Викторовна DiskiPlus porno Нина Пирогова, хоккеистка DiskiPlus casino 7k рабочее DiskiPlus porno Марина Александрова
#4744 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало
Наличие у игрока второго аккаунта. Запрещено создавать несколько профилей для многократного получения бездепов. <a href=http://filmkachat.ru/>1×slot официальный сайт</a> Прежде всего, не забывайте периодически заглядывать на страницу обзоров бездепозитных призов. Они шаг за шагом оценивают наиболее увлекательные предложения основных игорных порталов.Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам запрещено начислять бонусы посетителям, не имеющим валютных средств на счете. Мы предлагаем разглядеть актуальные призы онлайн-казино с лицензией, коие соблюдают законодательство РБ. <a href=https://band.us/band/96885593/post/1>https://band.us/band/96885593/post/1</a> Но ни не запамятовывайте внимательно читать управляла роли в бонусных промоакциях. Если вы нарушите желая бы одно условие, позже вы не сможете устроить недоразумение с администрацией.Подтверждение электрической почты – одно из ведущих условий, которое есть почти в каждом бездепозитном казино. Чтобы верифицировать электронную почту, довольно перейти по активной ссылке в письме, полученном от азартного клуба. 1×slots зеркало проходить регистрацию это отличный вариант <a href=https://grilovani-barbecue.com/memberlist.php?mode=viewprofile&u=4029>https://grilovani-barbecue.com/memberlist.php?mode=viewprofile&u=4029</a> Высокая конкурентность в разделе азартных игр мотивирует операторов привлекать клиентов разнообразными промоакциями. Благодаря данному у посетителей появляется вероятность получить призы в казино за регистрацию без депозита. Воспользоваться этим предложением можно, избегая процедуру внесения средств на игровой счет, просто активировав акк на сайте. Наш гид по бездепам поможет выбрать самую привлекательную бонусную программку, узнать правила получения такового гонорары и распорядиться им с наибольшей выгодой.Для отыгрыша приза казино обязует игрока сыграть на сумму, в количество раз превышающую необходимую полученного бонуса — тут выгода компании явна.
зеркло казино 1×slots
<a href=https://www.mojaremiza.pl/forum/1×slot-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F>1×slots зеркало регистрацию более популярный вариант это</a> 1×slots регистрация 1×slots casino c2d ru <a href=http://forum.ugmk-telecom.ru/index.php?action=profile;u=99111>http://forum.ugmk-telecom.ru/index.php?action=profile;u=99111</a> В качестве бонусов онлайн казино нередко предлагает выдачу фриспинов, то есть безвозмездных вращений игрового барабана. Виртуальные монеты возможно использовать для обучения в покерной школе либо для игры в казино.В интернете количество известных игорных площадок с красивыми акционными услугами. Однако пристально читать обстоятельства 10-ов предложений времени надоест, да и время отнимет большое. Поэтому наша команда подготовила ТОП-3 сайтов с наилучшими бездепозитными бонусами: 1хслотс зеркало Бездепозитные бонусы — это презенты от казино вид бонусных средств или фриспинов для игровых автоматов, которые начисляются на акк игрока после процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депозит не потребуется.Бонус за регистрацию в казино без депозита с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша может понадобиться сделать ставки на необходимую, в несколько десятков раз превышающую необходимую приза или выигрыша.
1×слотс казино
Практически все интернет казино с бездепозитным призом за регистрацию учитывает программу преданности — систему одобрения неизменных посетителей, кот-ая состоит из колличества уровней. При достижении игроком еще значения на его счёт поступает бонус. Чем выше уровень — что, этим щедрее бонус.Однако далеко не все ресурсы предлагают своим посетителям бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено поощрение на первый депо в объеме 100–200%. Это замечательная вероятность преумножить банкролл, увеличить время, проведённое за забавой и шансы сорвать большой куш. <a href=https://sport1477.ru/forums/users/doclazxru2708–2/>https://sport1477.ru/forums/users/doclazxru2708–2/</a> Доступ к дару может открываться автоматически последствии введения промокода или обращения в службу поддержки сайта. В первом случае от пользователя не требуется никаких поступков. Бездеп с активацией по коду встречается почаще всего. Игроку необходимо установить совокупа символов в графе, кот-ая может находиться в регистрационной форме в Личном офисе.Активация происходит счет промокодов, которые вводятся в собственном кабинете после регистрации. Среди спецпредложений в списке Casino.ru содержатся эксклюзивные промокоды, которые доступны только гостям портала. Другие методы начисления средств ? автоматическая активация незамедлительно в сотворения аккаунта и получение презента по запросу в службу технической поддержки. 1×slots зеркало сайта
1×slot зеркало рабочее регистрации на телефон придет
Заполняя данные в собственном профиле, указывайте только достоверную информацию, например как Вам придется ее доказать в будущем при выводе денег. <a href=http://diablo2r.cn/home.php?mod=space&uid=30130>1×slots рабочее зеркало на сегодня</a> Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, the decision зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.Самый распространённый из сходственных призов, конечно же, бездеп на день рождения клиента — бонус повторяющий фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им возможно на установленного периода времени. Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, solid только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Выбирая безвозмездный приз, пристально изучайте правила. Убедитесь, собственно для можно себя участие в промоакции. Уточните, в каких играх возможно скорпулезно обстоятельства вейджера. При надобности задавайте вопросы представителям саппорта. 1×slots зеркало которую указывали при регистрации кстати <a href=https://biznes-knigi.com/user/PhilipChoop/>https://biznes-knigi.com/user/PhilipChoop/</a> Шаг 5. Использование и отыгрыш. Бездеп обязан быть использован в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.Рассмотрим принцип его деянья на случае. Допустим, вы зарегались и получили $10 no deposit bonus с вейджером х50. Это означает, собственно выигранные деньги возможно несомненно выводить не раньше, чем в того, как общая сумма ставок достигнет $500.
казино 1×slots
Бездепозитный приз – это экономическое вознаграждение, которое выдается соучастнику забавы в казино, для его вербования и возникновения заинтригованности. Любой посетитель, кот-ый соответствует условиям выдачи подобного бездепозитного бонуса, возможность претендовать на получение вышеуказанного приза. Такое поощрение считается наиболее эффективным методом, дающим вероятность стартовать при, не вкладывая личных материальных средств.Далее требуется отыграть вагер и исключить выигрыш. Игрокам без навыка крупно подфартило, они могут получить десятки подарков за одну регистрацию. Если не смогли получить Бездепозитный приз, не тревожьтесь. Обратитесь в онлайн чат, оператор поможет ситуацию. <a href=https://www.xibeiwujin.com/home.php?mod=space&uid=2239190&do=profile>https://www.xibeiwujin.com/home.php?mod=space&uid=2239190&do=profile</a> Воспользоваться бездепом возможно не во всех игровых автоматах: казино и тут устанавливает ограничение для посетителей. Конечно, это возможно посчитать некоторым неудобством для игрока, но справедливости ради стоит отметить, собственно выбор автоматов всё равно остаётся достаточно большим. 1×slots бездепозитный бонус за регистрацию Риск-игра по равным шансам – Также казино имеет запрещать исполнять обстоятельства по отыгрышу за раунда на удвоение, кот-ый предлагается в слотах, видео-покере и некоторых иных забавах.
<b>Смотреть еще похожие новости:</b>
<a href=https://koreanstudies.com/forum/viewtopic.php?t=121212>1×slots регистрация</a>
<a href=https://forum.home-visa.ru/viewtopic.php?f=69&t=807392&p=3070948#p3070948>1×slos регистрация в 1×slots casino</a>
<a href=http://aurorahcs.com/forum/memberlist.php?mode=viewprofile&u=168982>1хслотс официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную процедуру активации бонуса без депозита. Внимательно прочитайте до конца. Многие новички проделывают оплошности на этапе регистрации и поэтому не могут получить презент. В случае установленного лимита на сумму вывода выигрыша с бездепозитного бонуса, игрок не может вывести больше заявленной суммы.
#4745 Alfredhaxhttps://geeksng.com/
<a href=https://geeksng.com/>29empire</a> Berikut artikel yang Anda minta berdasarkan konteks sebelumnya:
Misteri Tulisan Yesus di Pasir: Rahasia Tersembunyi dalam Kitab Suci
Dalam tradisi Kristen, salah satu momen paling misterius adalah ketika Yesus menulis di pasir saat menghadapi seorang perempuan yang tertangkap berzina. Apa sebenarnya yang ditulisnya?
Jejak Ilahi dalam Tulisan
Merujuk pada Kitab Keluaran, Allah sendiri pernah menulis dengan jari-Nya di atas batu. Yesus, sebagai inkarnasi Ilahi, tampaknya mengulang tindakan sakral ini.
Hipotesis Tulisan Rahasia
Beberapa sarjana menafsirkan bahwa Yesus mungkin menulis: – Nama-nama para penuduh – Daftar dosa mereka – Ayat-ayat hukum yang mereka langgar
Makna Tersembunyi
Tindakan menulis di pasir bukan sekadar gerakan acak, tetapi memiliki signifikansi teologis mendalam. Yesus secara simbolis mengungkapkan kebenaran tersembunyi tentang kemanusiaan.
Kesimpulan
Meskipun isi tulisan tetap menjadi misteri, tindakan Yesus menunjukkan kebijaksanaan yang melampaui pemahaman manusia.
#4746 Charlesgunnyhttp://filmkachat.ru
рабочее зеркало 1хслотс
Далее требуется отыграть вагер и вывести выигрыш. Игрокам без опыта крупно повезло, возможность получить десятки презентов за одну регистрацию. Если не смогли получить Бездепозитный приз, не беспокойтесь. Обратитесь в онлайн чат, оператор поможет исправить. <a href=http://filmkachat.ru/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> Прочитайте верховодила бонусной программки, в желайте участие. Да, мы безотступно рекомендуем сделать это до регистрации.Следует подчеркнуть, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом. <a href=https://www.uannounceit.com/article/1416>https://www.uannounceit.com/article/1416</a> Бонусы без депо при регистрации считаются наиболее красивыми как для опытных игроков, например для и новичков. Получив это вознаграждение, клиент возможность выступать на настоящие деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные призы в интернет-казино Рунета, а также обстоятельства их активации и выигрыша. 1× slots сайт <a href=http://illustrator.odub.tomsk.ru/index.php?subaction=userinfo&user=DoctorLazutakr>http://illustrator.odub.tomsk.ru/index.php?subaction=userinfo&user=DoctorLazutakr</a>
1×slots официальный сайт зеркало рабочее
В интернете очень много скриптовых вебсайтов, коие принадлежат мошенникам. Их основная цель – привлечь гэмблеров, пообещав не щедрые презенты, но и солидные выигрыши. Так собственно некоторые сайты предлагают получить за регистрацию числе $1 000.Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих требований, кроме неотъемлемой верификации. Если на сайте предусмотрена неотъемлемая процедура доказательства личности, то вывести выигрыш получится лишь в проверки данных. Приготовьтесь наполнить анкету и выслать в техподдержку документ, подтверждающий личность. 1×slots сайт зеркало <a href=http://ekaterinovka.sarat.ru/board/tools.php?event=profile&pname=PatrickEvirl>http://ekaterinovka.sarat.ru/board/tools.php?event=profile&pname=PatrickEvirl</a> Индивидуальные одобрения выдаются за совершение действий: подписку на аккаунты площадки в соц сетях, установку мобильного прибавления либо официального посетителя для ПК. В большинстве казино срабатывают программы лояльности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на грядущий уровень часто с выдачей бездепа.Только выполнив все обстоятельства отыгрыша и дождавшись окончания ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить свои средства. 1×slots регистрацию процедура займет всего лишь У каждой игры свои требования по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система засчитает любую ставку. В рулетке и покере устроить это намного труднее. Именно потому так главно пристально разбирать условия получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой забаве, то новенькие просто «спустят бонус на ветер».Для отыгрыша приза казино обязует игрока сыграть на сумму, в количество раз превышающую необходимую приобретенного приза — тут выгода компании явна.
1×slots официальный сайт зеркало
Третитй бездепозитный приз за регистрацию – валютные средства. К раскаянью, начислить рубли или доллары способны лишь известные и известные клубы. С их подмогою вы сможете насладиться любой доступной забавой – автоматом, рулеткой, кено, блэкджеком.Каждый из бездепозитных призов без пополнения 2022 содержит собственный конкретный вейджер для отыгрыша, например же в каждом казино он уточняется персонально — где то он х55 а кое-где х30, повторюсь везде по разному! <a href=https://champ-design.xooit.com/profile.php?mode=viewprofile&u=22752>https://champ-design.xooit.com/profile.php?mode=viewprofile&u=22752</a> Сразу в активации промокода можно воспользоваться даром. Как теснее упоминалось, бонусы посещают трёх видов – фриспины, кредиты и фриплей-бонусы.Ещё одно распространённое акционное предложение – симпатичный презент с неблаговидными требованиями. К образцу, клуб сулит $100 в бездепа, но с вейджером х80 или х100. Отыграть такой вейджер практически невероятно и потому чем концентрироваться на больше заманчивых акциях. 1×slots промокод при регистрации 2025
1×slots зеркало 1хслотс регистрация перейти на 1×slots
В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать собственный выигрыш с даровых вращений. Прибыль, коию Вы заработаете на этом бездепе возможно назначать на вывод без какого или отыгрыша. В онлайне большое узнаваемых игорных площадок с привлекательными акционными предложениями. Однако внимательно разбирать условия десятков услуг вскоре надоест, ну и время отнимет количество. Поэтому наша команда подготовила ТОП-3 вебсайтов с наихорошими бездепозитными призами:Бесплатные бонусы казино без депозита возможно получить вид валютных средств на бонусный счет (вывести их возможно только после отыгрыша), фриспинов, забавы либо кешбэк-бонуса. 1хслотс рабочее зеркало <a href=https://pumping.co.kr:443/bbs/board.php?bo_table=epumping2&wr_id=440762>https://pumping.co.kr:443/bbs/board.php?bo_table=epumping2&wr_id=440762</a> Для верификации аккаунта надо(надобно) дать специалистам технической поддержки отсканированную копию паспорта и счета за коммунальные услуги, а также фотку банковской карты либо экрана странички электрического кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для доказательства личности.
1×slots casino зеркало рабочее
Так же стоит выделить то, что в любом онлайн казино установлен свой наибольший кешаут на бездепозитный приз. Как правило кешаут — это максимальная сумма средств, которая доступная для вывода с бездепозитного бонуса. <a href=https://android.nalench.com/user/Jamesges/>https://android.nalench.com/user/Jamesges/</a> 1×slots casino регистрация 1×slotscasin online У каждого игорного клубы разные вейджеровые обстоятельства. Чтобы вы гарантировано сумели выполнить их, мы дадим количество советов. Если система начислила маленькую необходимую, не стоит создавать великие ставки – остановитесь на 10–30 центах. Как только сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте играть. В противном случае другого, как приглядеться к другому автомату.При ирге на бонусные свои запрещается выступать в игровые автоматы с прогрессивным джекпотом и забавы из радела live casino. Кроме как, кое-какие казино дают бездеп на раз либо количество определенных слотов, и в иных играх Вы не сможете на их выступать.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=144999>скачать 1×slots на андроид мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Иногда для получения призов нужно спутаться с представителями службы. Удобнее всего с ними собеседовать в онлайн-сате, хотя время довольно запроса по электрической почте.
#4747 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet официальный сайт яндекс казино <a href=https://vestnik-jurnal.com/>казино зеркало сегодня</a> casino приложения gama casino <a href=https://rhymes-punches.com/>pin casino</a> ramenbet casino bet casino online casino официальный играющие казино онлайн casino регистрации казино проиграл букмекерская контора вход
DiskiPlus Шевцова Татьяна Викторовна порно DiskiPlus 1×bet официальный сайт <a href=https://www.diskiplus.ru>DiskiPlus porno Илья Ковальчук (хоккей)</a> DiskiPlus Александра Бортич DiskiPlus 1×bet вход <a href=https://www.diskiplus.ru/>DiskiPlus балтбет букмекерская контора</a> DiskiPlus сайты казино DiskiPlus букмекерская контора зенит DiskiPlus рабочие зеркала казино DiskiPlus смотреть фильм казино DiskiPlus 1×bet зеркало рабочее xbet DiskiPlus казино смотреть онлайн DiskiPlus casino приложения
#4748 Charlesgunnyhttp://filmkachat.ru
1×slots акции
Также бывают случаи, когда казино начислит оговоренный приз последствии регистрации свежего клиента по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам.А ознакомиться с новыми онлайн казино, Вы сможете за счет призов с выводом выгоды, коие Вы можете получить без депо. <a href=http://filmkachat.ru/>x1 slots 1хслотс регистрация перейти на 1×slots</a> Вейджер в переводе с английского означает «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша приобретенного приза, в нашем случае бездепозитного. Число ставок большого — главно только набрать необходимую, пропорциональную сумме одобрения. <a href=https://www.friend007.com/forums/thread/7390/>https://www.friend007.com/forums/thread/7390/</a> 1×slots промокод при регистрации 2025 <a href=http://www.xiaoditech.com/bbs/home.php?mod=space&uid=1860357>http://www.xiaoditech.com/bbs/home.php?mod=space&uid=1860357</a>
1хслотс официальный сайт зеркало
Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке адепты онлайн-казино публикуют актуальную информацию о no down payment bonuses и других услугах.Призовые начисления без депо имеют предоставляться для роли в турнирах онлайн казино. Потратить перечисленные средства возможно самая в этой акции. Условия их проведения включают в себя лимитирования на список игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться таким предложением, какого-либо изучить его верховодила. 1 хслот регистрация в 1×slots casino При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток.Во всех законных онлайн-казино Беларуси необходимо свидетельство паспортных данных для игры — это заявка правительства государства. <a href=https://forums.twcpilots.com/member.php?action=profile&uid=750>https://forums.twcpilots.com/member.php?action=profile&uid=750</a> У любого игорного заведения свои правила и условия. Но, чтобы получить бонусы, необходимо выполнить стандартные деяния: 1×slots зеркало на сегодня
x1 slots 1хслотс регистрация перейти на 1×slots
Ещё одно распространённое акционное предложение – симпатичный подарок с неблаговидными требованиями. К примеру, клуб обещает $100 в качестве бездепа, но с вейджером х80 или х100. Отыграть подобный вейджер фактически невозможно и поэтому другого, как концентрироваться на более занимательных акциях.Бездепозитные призы казино за регистрацию в 2022 году — это возможность поиграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой либо числом бесплатных вращений без внесения депо. Не путайте деморежим с реальной забавой без надобности внесения депозита. После требуется внести идентификационный платёж. Это стращает начинающих больше всего. Нужно сделать наименьший депо в 100–500 руб. Таким образом служба защищенности убедиться сомнений, что платёжный способ принадлежит Вам. Данная процедура необходима для обеспечивания безопасности игровых счетов. Пример, Ваш акк взломают и выведут средства на свой кошелёк. Будет очень неприятно. Поэтому верификация платёжной системы, это важный момент. <a href=http://iminthai.com/home.php?mod=space&uid=229863>http://iminthai.com/home.php?mod=space&uid=229863</a> При отыгрыше бонусных средств, нужно учитывать срок деяния приза и время, которое дается на отыгрыш. По истечению заявленного медли, не отыгранный бонус будет аннулирован.Денежные свои. Третий приз за регистрацию без депо – наличные. К сожалению, лишь знаменитые и известные клубы шансы уяснить деньги в руб. Либо долларах. С их поддержкой возможность насладиться любой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед этим необходимо исполненье определенных условий. рабочее зеркало 1×slots
1×slots зеркало на сегодня
В интернете очень количество скриптовых сайтов, которые принадлежат мошенникам. Их главная цель – заинтересовать гэмблеров, пообещав столько великодушные презенты, хотя и солидные выигрыши. Так что некоторые веб-сайты предлагают получить за регистрацию даже $1 000. Возьми собственный презент. Чаще всего приз активируется сразу последствии регистрации. Но случаются истории, когда нужно зайти в личный кабинет либо написать в справочную службу.Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, дабы еще раз получить безвозмездный бонус. Игорные заведения нетерпимы к бонус-хантерам, потому вас ожидает неизбежное санкция. Нет. Казино раздают безвозмездные призы за регистрацию, чтобы, чтобы, дабы заказчик имел ознакомиться с игровым заведением. А дабы исключить его, необходимо выполнить обстоятельства отыгрыша.Вы всего, например все предпочитаете получать подарки и бездепозитные призы казино. Игорные дома брали в привычку одаривать гэмблеров приятными бонусами. Стать обладателем приветственного презента можно за творенье профиля либо пополнение счёта. Второй вариант более увлекательный, ведь клубы готовы удвоить депозит! Но случае вы новичок и только знакомитесь с миром пыла, какого-либо пользуйтесь призом за регистрацию. 1×slots регистрация на сайте 1×slots ru com <a href=http://nfb3806w.bget.ru/user/ScottNag/>http://nfb3806w.bget.ru/user/ScottNag/</a>
1×slots casino регистрация 1×slots review live
Фриспины предназначены для использования в видео слотах. Внимательно ознакомьтесь с условиями – часто их выдают на кое-какие автоматы. В зависимости от клуба, у вас получится устроить определённое число ставок. Кстати, продвинутые игорные дома позволяют запускать каждых «одноруких бандитов».На данном разделе портала регулярно публикуются обзорные заметки, в которых рассматриваются благотворительные призы наихороших интернет-казино. Информация структурирована по нескольким пт, включая главные: Все обожают получать презенты. Согласитесь, почти любой играющий человек будет очень рад, в получит безвозмездный подарок для игры в онлайн казино просто за регистрацию либо же приз за внесенный депозит, так нарекаемые приветственные призы для свежих игроков. Соответственно эти интернет клубы будут больше модны и предпочтительны у игроков при выборе казино для игры. Топ казино день обновляется и прибавляются свежие и увлекательные игровые клубы с симпатичной бонусной политикой и всеми возможными преимуществами, льготами, к коим относятся такие бонусы как фриспины за регистрацию, денежные бездепозитные бонусы, еще щедрые бонусы за внесенный депозит.Благодаря программке лояльности от игорного заведения, возможно взять хороший старт и без дополнительных вложений запустить видеослоты. Кроме того, можно рассчитывать на реальную фортуну и получить, без вложения личных денег, великой выигрыш. <a href=https://forum.show-master.ru/forum/index.php?PAGE_NAME=profile_view&UID=52363>https://forum.show-master.ru/forum/index.php?PAGE_NAME=profile_view&UID=52363</a> 3. Подтвердить данные. В зависимости от клуба, нужно привязать телефон или почту, показать индивидуальную информацию;Прибывшие на акк деньги бездепозитные бонусы предназначаются, в, лишь для свежеиспеченных пользователей, которые раньше не имели личного аккаунта в данном казино. Исходя из сего, в ранее у игрока был сделан депо, то, по всей вероятности, у него больше не будет способности рассчитывать на получение такого приза в определенном заведении. рабочее зеркало 1×slots Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Важно, убедитесь в, собственно раньше не регились в выбранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи.
<b>Смотреть еще похожие новости:</b>
<a href=http://palais.beesims.com/phpbb/viewtopic.php?f=2&t=292256>1×slots официальный сайт зеркало</a>
<a href=https://adler.biz/threads/1105/>1хслотс официальный сайт зеркало</a>
<a href=https://tabsgame.ru/user/Jamesbes/>1хслотс официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
А ознакомиться с свежими онлайн казино, Вы можете за счет призов с выводом прибыли, которые Вы сможете получить без депозита. 3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать аппарат либо почту, указать индивидуальную информацию;
#4749 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино онлайн 1×bet официальный сайт <a href=https://rhymes-punches.com/>cat casino</a> Александра Бортич порно с Федор Чалов (футбол) <a href=https://t.me/vchkogpu_ru>казино вход официальный сайт</a> pinco casino casino играть балтбет букмекерская контора porno Алена Косторная (фигурное катание) порно с Арина и Дина Аверины, гимнастки casino играть порно с Каролина Севастьянова
DiskiPlus рейтинг казино DiskiPlus casino 7k рабочее <a href=https://www.diskiplus.ru/>DiskiPlus порно с Аделия Петросян (фигурное катание)</a> DiskiPlus букмекерские конторы без депозита DiskiPlus casino riobet <a href=https://diskiplus.ru/>DiskiPlus порно с Федор Чалов (футбол)</a> DiskiPlus порно с Голикова Татьяна Алексеевна DiskiPlus casino ru DiskiPlus 1×bet официальный слоты DiskiPlus букмекерская контора на андроид DiskiPlus порно с Александр Большунов (лыжные гонки) DiskiPlus Львова-Белова Мария Алексеевна порно DiskiPlus порно с Арина и Дина Аверины, гимнастки
#4750 Rubenphofthttps://bvs-logistica.com
доставка грузов из китая самолетом <a href=https://bvs-logistica.com/aviaperevozki.html>https://bvs-logistica.com/aviaperevozki.html</a>
#4751 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало рабочее этих способов предполагает регистрацию
Бездепозитный бонус предоставляется новенькому игроку за конкретные действия. Часто презент повторяющий средств либо фриспинов выдается за регистрацию, благодаря чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.Далее требуется отыграть вагер и исключить выигрыш. Игрокам без опыта крупно подфартило, возможность получить десятки презентов за одну регистрацию. Если не смогли получить Бездепозитный приз, не беспокойтесь. Обратитесь в интернет чат, оператор поможет решить проблему. <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> Третитй бездепозитный приз за регистрацию – валютные свои. К огорчению, начислить рубли либо доллары готовы лишь знаменитые и пользующиеся клубы. С их помощью возможность насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком. <a href=https://www.gift-me.net/blogs/201226/%D0%9E%D1%86%D0%B5%D0%BD%D0%BA%D0%B0-%D0%B0%D0%B2%D1%82%D0%BE-%D0%BE%D0%BD%D0%BB%D0%B0%D0%B9%D0%BD-%D0%BA%D0%B0%D0%BA-%D1%80%D0%B0%D0%B1%D0%BE%D1%82%D0%B0%D0%B5%D1%82-%D0%B8-%D0%BD%D0%B0-%D1%87%D1%82%D0%BE-%D0%BE%D0%B1%D1%80%D0%B0%D1%82%D0%B8%D1%82%D1%8C-%D0%B2%D0%BD%D0%B8%D0%BC%D0%B0%D0%BD%D0%B8%D0%B5>https://www.gift-me.net/blogs/201226/%D0%9E%D1%86%D0%B5%D0%BD%D0%BA%D0%B0-%D0%B0%D0%B2%D1%82%D0%BE-%D0%BE%D0%BD%D0%BB%D0%B0%D0%B9%D0%BD-%D0%BA%D0%B0%D0%BA-%D1%80%D0%B0%D0%B1%D0%BE%D1%82%D0%B0%D0%B5%D1%82-%D0%B8-%D0%BD%D0%B0-%D1%87%D1%82%D0%BE-%D0%BE%D0%B1%D1%80%D0%B0%D1%82%D0%B8%D1%82%D1%8C-%D0%B2%D0%BD%D0%B8%D0%BC%D0%B0%D0%BD%D0%B8%D0%B5</a> Перед активацией принципиально внимательно выучить обстоятельства акции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, на коих можно воспользоваться предложением. Если бездеп охватывает узкий перечень игр, рекомендовано узнать максимальные коэффициенты, уровень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь что случае, если оператор не установил требовательные лимитирования на наивысшую сумму ставки. 1×slots зеркало регистрация в 1×slots casino <a href=http://spilov.ru/user/Miguelgop/>http://spilov.ru/user/Miguelgop/</a> Список например называемых «запрещенных территорий» прилагается к правилам бонусной программы игорного портала. Обязательно выясните, распространяются ли на вас сходственные наказания.
1×slots регистрация на официальном сайте
Для вывода средств бонус нужно будет отыграть законам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариациями отыгрыша бездепозитного приза до его получения, чтобы избежать конфликтных обстановок. 1×slots казино зеркало <a href=http://www.shoppy.co.kr/bbs/board.php?bo_table=free&wr_id=588564>http://www.shoppy.co.kr/bbs/board.php?bo_table=free&wr_id=588564</a> Фриспины без депозита либо вспомогательные средства помогут ближе познакомиться с игровой платформой и её функциями. За счёт подарков можно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за игры напротив живых крупье. зеркала 1×slots Главным интересным в возникновении данных вознаграждений состоит никаких, что пустив их в ход, геймер ничем не рискует и в последствии никому ничего не несомненно должен (не зависимо, получит ли он благодаря бонусам какой-нибудь выигрыш или моментально спустит все только что прибывшие деньги). То есть, казино снабжает игрока вероятностью на дармовой базе играть во всевозможные слоты причем спонсирует игру.Для всех бездепозитных бонусов действует наибольший лимит на выигрыш. Он показывает максимальную сумму, которую возможность получить, играя на бонусные кредиты. Как только для удастся выполнить притязания вейджера, возможный максимально будет переведен с бонусного счета на ведущей, а остаток будет списан.
1×slot официальный сайт
Также бездепозитные призы могут работать способом вернуть к игре посетителей, пока приостановивших своё сотрудничество с компанией: уведомление о бездепе поступает на мобильный аппарат или почту.Бывают ли бездепозитные призы без вейджера? Бывают, в у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино. <a href=http://www.zgqsz.com/home.php?mod=space&uid=326687>http://www.zgqsz.com/home.php?mod=space&uid=326687</a> Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки имеют запросить дополнительные документы или инициировать куцее общение по Skype.Вейджер (или вагер) ? это наименьшая сумма ставок, коию нужно сделать для вывода денежного приза. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение. 1×slots официальный зеркало рабочее Бездепозитный приз предоставляется новенькому игроку за определенные деянья. Часто подарок повторяющий средств или фриспинов выдается за регистрацию, спасибо чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.
1×slots зеркало этих способов предполагает регистрацию
<a href=http://forum.animogen.com/memberlist.php?mode=viewprofile&u=15333>1×slots регистрация на сайте 1×slots ru com</a> Онлайн-казино кропотливо продумывают бонусные условия, коие нужно изучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и ограничения. 1×slots промокод при регистрации <a href=http://www.dmgec.com/bbs/board.php?bo_table=free&wr_id=199417>http://www.dmgec.com/bbs/board.php?bo_table=free&wr_id=199417</a> В онлайне большое узнаваемых игорных площадок с привлекательными акционными предложениями. Однако пристально читать условия десятков предложений времени надоест, ну и время отнимет большое. Поэтому наша команда подготовила ТОП-3 сайтов с лучшими бездепозитными бонусами:Помимо остального, для вывода средств по бездепу нужно внести на счёт собственный первый депо — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало возможную сумму, в чего вывод средств будет доступен.
1×slots регистрация на сайте 1×slots ru com
Особую изюминку видео слотам присваивают уникальные символы. С их в активизируются разные бонусы. Вы можете запустить вспомогательный уровень и прирастить сумму выигрыша. Есть знаки, которые заменяют ненужные составляющие и сами делают выигрышные комбо. Не стоит забывать и тему бонус-тур. После каждого счастливого спина есть шанс прирастить необходимую выигрыша в 2 или четыре раза. <a href=http://school7–61.ru/bitrix/rk.php?goto=http://skintime.su/bitrix/redirect.php?goto=http://maps.google.com.ag/url?q=https://telegra.ph/Sozdanie-ehffektivnyh-statej-i-zametok-09–23>http://school7–61.ru/bitrix/rk.php?goto=http://skintime.su/bitrix/redirect.php?goto=http://maps.google.com.ag/url?q=https://telegra.ph/Sozdanie-ehffektivnyh-statej-i-zametok-09–23</a> 1×slots бездепозитный бонус за регистрацию Помимо остального, для вывода средств по бездепу необходимо внести на счёт собственный первый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально вероятную сумму, в чего вывод средств будет доступен.При ирге на бонусные свои воспрещается выступать в игровые автоматы с современным джекпотом и забавы из радела live casino. Кроме такого, кое-какие казино дают бездеп на раз или количество конкретных слотов, и в иных забавах Вы не можете на них играть.
<b>Смотреть еще похожие новости:</b>
<a href=http://theauction.com.au/my-account/>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<a href=https://forum.bedwantsinfo.nl/thread-676728.html>1×slots регистрация на 1хслотс</a>
<a href=http://mi.minfish.com/home.php?mod=space&uid=1196847>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чтобы самостоятельно убедиться в преимуществах бездепозитных призов, довольно зарегистрироваться в казино и получить одобрение. Бездеп с фриспинами возможность охватывать всю коллекцию игр на сайте либо разработки одного провайдера. Обычно предлагается определенный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш имеет быть выведен последствии того, как юзер отыграет эту сумму. Возможность расценить полный возможностей слотов — основное совершенство этой разновидности. Игроку становятся доступны те функции, коие отсутствуют в демонстрационном режиме, а вероятность выиграть настоящие деньги прибавляет ярких азартных ощущений.
#4752 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
7k casino порно с Афонина Марина Игоревна <a href=https://rucriminal.info/>скачать 1×bet 1×bet xyz</a> казино сегодня 1×bet зеркало рабочее xbet <a href=https://www.ossetia.tv/>порно с Анна Калинская (теннис)</a> kent casino регистрация 1×bet зеркало xbet xyz казино вулкан Юдаева Ксения Валентиновна порно casino riobet Черкесова Бэлла Мухарбиевна порно casino сайты
DiskiPlus 7k casino зеркало на сегодня DiskiPlus 1×bet зеркало xbet <a href=https://diskiplus.ru>DiskiPlus 1×bet телефон</a> DiskiPlus 1×bet вход DiskiPlus bet casino <a href=https://www.diskiplus.ru/>DiskiPlus casino зеркало сегодня</a> DiskiPlus букмекерская контора официальный сайт скачать DiskiPlus Ирина Горбачева DiskiPlus порно с Артемий Панарин (хоккей) DiskiPlus 7k casino официальный DiskiPlus порно с Дронова Александра Викторовна DiskiPlus бесплатно играем казино DiskiPlus new casino
#4753 Charlesgunnyhttp://filmkachat.ru
1×slots подтвердит вашу регистрацию если говорить
Кешбэк-бонус представляет собой возврат фиксированного процента от ставки когда проигрыша или же от проигранной суммы за определённый период. В большинстве случаев кешбэк не превышает 10%.Каждый в должен сначала отчетливо выучить условия по получению и отыгрышу понравившегося подарка. Если всё организует, поторопитесь отобрать безвозмездные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо данный начать вертеть барабаны топовых слотов. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slots review live</a> <a href=https://www.swiatobrazu.pl/forumgaleria/thread/view/id/524>https://www.swiatobrazu.pl/forumgaleria/thread/view/id/524</a> Для ревизии применяются сканы паспортов, водительских прав, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если юзер обнаружен в попытке ввести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их владелец попадает в черный список. При игре на лицензионной площадке надо бояться указывать достоверную персональную информацию (шифрование ликвидирует утечку персональных данных).Следует подчеркнуть, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом. 1хслотс казино зеркало <a href=https://chujalt.com/user-314.html>https://chujalt.com/user-314.html</a> Для получения бонуса нужно пригласить в забаву нового клиента. Казино начисляет пригласившему фиксированный процент от взносов приглашённого в виде бонуса: почаще всего его объем не превышает 10%. Срок деяния бонуса как не превышает месяца: пригласивший получает бонус от проигранных ставок приглашённого в первый луна забавы.Многие азартные клубы ограничивают сумму вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, обозначенной в описании акции, суммы Вы не можете вывести. Разница несомненно аннулирована, Вы том не сможете создавать на нее ставки.
1хслот 1хслотс регистрация перейти на 1×slots
Ну и окончательно же, для казино бездепозитные призы прибыльны с имиджевой стороны: подобная добродушие повышает уровень лояльности клиентов к фирмы.После требуется внести идентификационный платёж. Это пугает начинающих больше всего. Нужно устроить наименьший депозит в 100–500 руб. Таким образом служба защищенности увериться в том, что платёжный метод принадлежит Вам. Данная процедура важна для обеспечивания безопасности игровых счетов. Пример, Ваш аккаунт взломают и выведут средства на свой кошелёк. Будет крайне досадно. Поэтому верификация платёжной системы, это важный момент. <a href=https://www.one2bay.de/forum/showthread.php?tid=352170>1× слот зеркало</a> зеркала 1×slots Бесплатные бонусы казино без депо возможно получить в виде валютных средств на бонусный счет (исключить их возможно только последствии отыгрыша), фриспинов, забавы или кешбэк-бонуса. <a href=http://rybalka-v-sibiri.ru/index.php?subaction=userinfo&user=tinysnitch23>http://rybalka-v-sibiri.ru/index.php?subaction=userinfo&user=tinysnitch23</a> Используйте превосходнейшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, чтобы заработать презенты за обычные деянья теперь сегодня получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высокой отдачей и прыткими выводами на электрические кошельки. 1×slots зеркало быструю регистрацию а также мгновенное
1×slots официальный сайт мобильная версия скачать
Для получения выигрыша потребуется выполнить условия казино. Чаще всего игроку необходимо поставить конкретную сумму, хотя теснее из личных денег. Она рассчитывается из общего объема выигрыша за все время использования бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, в юзер выиграл 1000 рублей, а множитель сочиняет х30, вывести средства можно несомненно, сделав ставки на 30 000 рублей.Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, all зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. <a href=http://www.chenjiagou.net/home.php?mod=space&uid=197165>http://www.chenjiagou.net/home.php?mod=space&uid=197165</a> 1×slots регистрацию более популярный вариант это
1×slots официальный сайт, скачать
Не желайте поиграть в азартные игры, не рискуя своими деньгами, но получая в все выплаты? Подобную возможность деют все наихорошие порталы с азартными увеселениями. В их числе большое добросовестных и надежных интернет-казино на русском языке. Они привлекают новых юзеров разными поощрительными мероприятиями, включая бездепозитные, либо благотворительные призы.Онлайн-казино кропотливо продумывают бонусные обстоятельства, которые необходимо выучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и другие ограничения. Автоматическая активация кажется самой комфортной, но ручной метод имеет перед ней преимущества. Прежде чем применять вознаграждение от казино, стоит заблаговременно найти, сколько медли требуется на исполненье всех критерий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала действия приза. Даже не выиграв крупную необходимую, игрок увлекательно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе превосходнейших промоакций с. Достаточно периодически изучать список новых интернет казино с выводом бонуса без депозита в данном разделе. 1×slots зеркало рабочее <a href=http://domocontrol.ru/user/TyroneMAX/>http://domocontrol.ru/user/TyroneMAX/</a>
1×slots актуальное зеркало
Максимальный размер ставки, кот-ый невозможно превосходить пока приз не несомненно полностью отыгран. В случае нарушения сего правила, бонус и выигрыш с него станут аннулированы.Вообще перейдя в казино — верховодила одинаковы в получении бездепозитных бонусов, в стереотипные управляла заходит: подтвердить эл. Почту и аппарат, заполнить собственный личный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ. <a href=https://mittelrheinhandball.de/member.php?action=profile&uid=20215>https://mittelrheinhandball.de/member.php?action=profile&uid=20215</a> casino 1×slot
<b>Смотреть еще похожие новости:</b>
<a href=https://www.formulersupport.com/Thread-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82–171201>казино 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подтверждение регистрации. Казино просят привязки профиля к электрическому адресу и номеру аппарата. Для сего на e-mail отправляется послание со ссылкой, а на телефонный ? текстовое извещение с кодом.
#4754 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Гатагова Ольга Анатольевна почему в казино нет окон <a href=https://slon-ru.com/>Комарова Наталья Владимировна порно</a> рабочие зеркала казино пина букмекерской конторы <a href=https://strelochnik.com/>casinos winning</a> inform@rucriminal.info 1×bet скачать приложение на андроид 1×bet зеркало xbet xyz пинко casino играющие казино Окладникова Ирина Андреевна порно бесплатно фильм казино
DiskiPlus казино смотреть онлайн бесплатно DiskiPlus Елизавета Боярская <a href=https://www.diskiplus.ru/>DiskiPlus сайт казино вход</a> DiskiPlus казино ставка DiskiPlus порно с Виктория Синицина, фигуристка <a href=https://diskiplus.ru>DiskiPlus black russia казино</a> DiskiPlus казино пин DiskiPlus какие казино DiskiPlus casino официальный сайт DiskiPlus ставки на спорт букмекерские конторы DiskiPlus официальные букмекерские конторы DiskiPlus скачать 1×bet 1×bet xyz DiskiPlus казино рулетка
#4755 Charlesgunnyhttp://filmkachat.ru
1 x slots casino
Маркетинговая политического всех игорных интернет-клубов должна носить различный нрав. И в гонорары на депозит работают для того, дабы стимулировать заносить депозиты и поощрять теснее имеющих пользователей, то бездепозитный приз в казино либо приз за регистрацию в казино, прежде всего, рассчитан на расширение базы покупателей. <a href=http://filmkachat.ru/>1×slots сайт</a> <a href=https://vhearts.net/forums/thread/8949/>https://vhearts.net/forums/thread/8949/</a> После получения бонуса вывод средств для посетителя будет недоступен до, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя либо чета недель. Выводить средства игрок может лишь последствии отыгрыша. 1× slots зеркало <a href=http://t20suzuki.com/phpBB2/profile.php?mode=viewprofile&u=3395>http://t20suzuki.com/phpBB2/profile.php?mode=viewprofile&u=3395</a> Когда идет о валютных бонусах, казино постоянно устанавливают условия вейджера, которые необходимо выполнить, дабы вывести выигрыш.
1×slots на любой вкус как пройти регистрацию
Доступные игры – В некоторых азартных забавах можно понизить математическое преимущество казино до нескольких 10-х процента. В их количестве все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как правило, в таких играх ставки идут в зачет вейджера не полностью. Например, возможность учитываться лишь 50%. В некоторых играх бездепозитные призы вообщем невозможно отыгрывать.Вообще перейдя в казино — верховодила одинаковы в получении бездепозитных призов, в стереотипные управляла заходит: доказать эл. Почту и телефон, наполнить свой собственный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ. <a href=http://smpn1bejen.sch.id/forum/>1×slot зеркало рабочее этих способов предполагает регистрацию</a> 1×slots casino регистрация 1×slotscasin online <a href=https://www.varranger.com/vforum/index.php?action=profile;u=36674>https://www.varranger.com/vforum/index.php?action=profile;u=36674</a> Если вы новичок данном и лишь попали в неизведанную вами район пыла — счет предложений как бездепозитные бонусы без пополнения. 1×slots зеркало подтвердит вашу регистрацию если говорить Принципиальным отличием даровых призов от бонусов на депозит является неименье надобности заносить деньги на акк. Из-за этого их часто именуют бездепозитными (no deposit bonuses).
1×slots зеркало на сегодня
Новички не любят сразу же вносить депо. Это обусловлено неименьем опыта и сомненьем. К счастью, в возможно получить бездепозитный приз за регистрацию в казино. Неважно что начислит система – фриспины либо кредиты. В всяком случае вы не рискуете своими сбережениями. Это замечательная возможность запустить приглянувшийся видео слот или же испытать удачу в настольных забавах. Принципиальным отличием даровых призов от призов на депо считается неименье необходимости вносить средства на акк. Из-за этого их нередко называют бездепозитными (no down payment bonuses).Но такие рамки не смущают числе хайроллеров, потому коэффициенты на слотах позволяют рассчитывать на солидные выигрыши, ну некоторых автоматах разыгрывается прогрессивный джекпот. <a href=https://forums.dfine.net/member.php?action=profile&uid=1649>https://forums.dfine.net/member.php?action=profile&uid=1649</a> При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, которое можно предназначить забаве в казино.Третитй бездепозитный бонус за регистрацию – валютные средства. К огорчению, начислить рубли или баксы способны только известные и знаменитые клубы. С их поддержкою вы сможете насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком. 1×slot зеркало рабочее этих способов предполагает регистрацию Размер призов почаще всего чисто условный и не превышает 50 руб. Приятно, хотя ощутимым бустом деле ли будет.Кешбэк-бонус представляет собой возврат фиксированного процента от ставки когда проигрыша либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%.
1×slots скачать на айфон
Еще одно условие касается размеров ставки. Операторы устанавливают максимальную необходимую, которую игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, избранной в Личном кабинете. При превышении лимита есть риск потерять бонуса. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, заказчик имеет столкнуться с запретом ставить фишки на шансы. 1хслотс рабочее зеркало на сегодня <a href=http://zeren.freeoda.com/member.php?action=profile&uid=17841>http://zeren.freeoda.com/member.php?action=profile&uid=17841</a>
1×slots казино зеркало
Бездепозитные призы – это самая занимательная и более перспективная акция интернет-казино. Они даже какого-либо фри-спинов, потому что выплаты в безвозмездных вращениях не гарантированы, так комбинации на барабанах игрового аппарата все не сложиться.Не трудно догадаться, что not the slightest down payment bonuses практически никогда не случаются великими. Чаще всего идет о пяти–тридцати баксах (либо эквиваленте этой суммы в другой еденице). <a href=http://www.mignonmuse.com/bbs/board.php?bo_table=free&wr_id=384896>http://www.mignonmuse.com/bbs/board.php?bo_table=free&wr_id=384896</a> Принципиальным отличием безвозмездных бонусов от бонусов на депо является недоступность надобности заносить средства на акк. Из-за сего их часто нарекают бездепозитными (no down payment bonuses). 1× slots сайт
<b>Смотреть еще похожие новости:</b>
<a href=http://6000ziyuan.com/forum.php?mod=viewthread&tid=106168&extra=>1хслот 1хслотс регистрация перейти на 1×slots</a>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=341503>1хслот скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Размер приза. В качестве бездепов обыкновенно начисляют не суммы, а когда речь идет о бонусах за депо, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино шансы презентовать игроку до 2000$. Наиболее знаменитые вознаграждения среди гэмблеров – бездепозитные бонусы казино. Это не умопомрачительно, так возможно получить благотворительные вращения или виртуальные кредиты, и этом не придётся пополнять счёт, рисковать личностными средствами. Удастся насладиться разнообразными веселиями даже выиграть крупную необходимую, избегая серьёзного риска.
#4756 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия скачать
Классическая разновидность приза за создание аккаунта. Его преимущество содержится сомнений, собственно клиент может самостоятельно выбирать аппараты и создавать ставки в них. Иногда перечень игровых автоматов ограничен оператором, хотя все также это какого-либо, чем один-единственный дешевый слот, как когда с внедрением фриспинов. <a href=http://filmkachat.ru/>1×slots зеркало быструю регистрацию а также мгновенное</a> Бездеп с фриспинами возможность охватывать всю коллекцию игр на веб-сайте или разработки одного провайдера. Обычно предлагается конкретный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш имеет быть выведен последствии как, как юзер отыграет данную сумму. Возможность расценить полный перечень слотов — главное достоинство данной разновидности. Игроку становятся доступны что, эти опции, коие отсутствуют в демонстрационном режиме, а вероятность выиграть реальные деньги добавляет ясных азартных ощущений.Обычно показатель выше, чем для бонусов на депозит. Не удивляйтесь, случае он будет и х100. Иногда завышенный коэффициент вейджера уточняется для жителей отдельных стран. <a href=https://www.chambers.com.au/forum/view_post.php?frm=1&pstid=77272>https://www.chambers.com.au/forum/view_post.php?frm=1&pstid=77272</a> Бездепозитные бонусы в казино без пополнения 2022 — это определенная сумма денег либо gorovyh spins вращения, коие предоставляются первым постояльцам за регистрацию на сайте казино повторяющий бездепозитного приза, и выделяет вам возможность помощью казино без пополнения опробовать услуги (игр), с последующей преимуществом, льготой вывода средств при выполнении всех установленных правил.4. Заберите подарок. Чаще всего бонус активируется сразу после регистрации. Но посещают ситуации, когда надо(надобно) зайти в личный офис или написать в саппорта. 1 xslots рабочее зеркало <a href=https://codescript.ru/user/JasperNes/>https://codescript.ru/user/JasperNes/</a> Чтоб получить большой выигрыш, подбирайте игровые автоматы с максимальным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша.
1×slots бонус за регистрацию
При отыгрыше бонусных средств, необходимо учесть срок действия бонуса и время, коие дается на отыгрыш. По истечению заявленного медли, не отыгранный приз будет аннулирован. <a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=12457>1×slots зеркало проходить регистрацию это отличный вариант</a> рабочее зеркало 1хслотс Составленный экспертами Casino.ru список онлайн-казино с бездепозитным бонусом позволяет игрокам сравнить спецпредложения различных операторов.Наличие у игрока второго аккаунта. Запрещено создавать количество профилей для неоднократного получения бездепов. <a href=https://lider-school174.com/forum/user/87/>https://lider-school174.com/forum/user/87/</a> Когда речь о получении бездепозитных призов в казино, для внимание на последующие обстоятельства: казино 1×slots официальный сайт
казино 1×slots официальный сайт
<a href=http://forum.xpscenery.net/member.php?action=profile&uid=576>http://forum.xpscenery.net/member.php?action=profile&uid=576</a> Активация валютного вознаграждения происходит автоматически последствии творенья профиля или применения промокода. Иногда операторы предъявляют дополнительные требования: подписаться на страницы казино в соц сетях или на рассылку рекламных сообщений, скачать и ввести вспомогательный софт и т.д. 1хслотс официальный сайт зеркало
1×slots регистрацию более популярный вариант это
Бонус за регистрацию в казино выдается только один раз на 1-го игрока. Но случаются вспомогательные промоакции, в которых бездепы раздаются для неизменных посетителей и такие презенты Вы сможете получить больше 1-го раза.Наличие у игрока второго аккаунта. Запрещено создавать количество профилей для неоднократного получения бездепов. <a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=3806>1×slots бездепозитный бонус за регистрацию</a> Поспешите зарегистрироваться на официальном сайте Клубника, чтобы моментально получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, замечена реальный шанс победу!Фриплей-бонусы встречаются только в неких клубах. Они зачисляются сразу последствии творенья профиля и активны недолговременное время. Если не успеете израсходовать средства, они просто сгорят. Касаемо медли, как бонусы активны в течение часа. 1×slots casino регистрация на сайте <a href=http://mbdou108.ru/user/Gregorytub/>http://mbdou108.ru/user/Gregorytub/</a>
1×slots casino online регистрация
Обычно бездепозитные акции от казино, прибывают на эл. Почту в дни рождения либо праздники. В некоторых онлайн казино можно адресоваться в чат и как постоянному игроку, вполне для предложат бездепозитное предложение.При исполнении условий отыгрыша и верификации, деньги с бонусного счета переводятся на основной и все быть выведены на карту или электронный кошелек. Лимиты на вывод и сроки проведения транзакции зависимости от избранной платежной системы. <a href=http://wiki.ecusystems.ru/index.php?title=Выкуп_авто>http://wiki.ecusystems.ru/index.php?title=Выкуп_авто</a> Проверка занимает от нескольких мин. До нескольких дней, спецы техподдержки шансы запросить вспомогательные документы или инициировать краткое общение по Skype. 1хслот зеркало сайта Классическая разновидность бонуса за творение аккаунта. Его превосходство заключается сомнений, собственно заказчик может других выбирать аппараты и создавать ставки в их. Иногда список игровых автоматов ограничен оператором, хотя все равно это другого, чем один-единственный дешевый разъем, как в случае с внедрением фриспинов.Любой выигрыш по ставке повыше установленного лимита будет являться недействительным. То есть ставка не будет засчитана при отыгрыше, в случае выигрыша его сумма не поступит на счёт клиента — результат забавы несомненно полностью аннулирован.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.spherecommunity.net/User-Jamesmew>сайт 1× slots casino</a>
<a href=https://forum.bandariklan.com/showthread.php?tid=385349>1×slots регистрация на сайте</a>
<a href=https://www.addonface.com/welcome>1×slots регистрацию более популярный вариант это</a>
<a href=https://forum.eliteshost.com/member.php?action=profile&uid=8111>скачать 1×slots на андроид мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Возьми собственный подарок. Чаще всего бонус активизируется незамедлительно последствии регистрации. Но посещают истории, когда надо(надобно) забежать в индивидуальный офис или написать в справочную службу.
#4757 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало слоты 1×bet xyz vavada casino <a href=https://krtka.info/>порно с Карен Хачанов (теннис)</a> porno Юлия Пересильд casino актуальное зеркало <a href=https://krtka.info/>букмекерская контора скачать приложение</a> порно с Константин Тюкавин (футбол) гта казино порно с Илюшникова Татьяна Александровна порно с Афонина Марина Игоревна винлайн букмекерская контора официальный казино сочи приложения букмекерских контор на андроид
DiskiPlus казино онлайн бесплатно DiskiPlus букмекерская контора ставки <a href=https://www.diskiplus.ru/>DiskiPlus бесплатное казино</a> DiskiPlus online casino официальный DiskiPlus online casino <a href=https://www.diskiplus.ru>DiskiPlus casino сайты</a> DiskiPlus casino бездепозитный DiskiPlus pinco casino DiskiPlus 7k casino зеркало на сегодня DiskiPlus букмекерские контора ап DiskiPlus pin up casino пин ап DiskiPlus порно с Максим Глушенков (футбол) DiskiPlus 1×bet 1хбет
#4758 Charlesgunnyhttp://filmkachat.ru
онлайн казино 1×slots
Похожим образом работает третий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения клиента либо в связи с получения им VIP-статуса. Подарок предоставляется после воззвания в поддержку и ревизии. <a href=http://filmkachat.ru/>1×slots casino зеркало рабочее</a> <a href=https://peertrainer.com/LoungeCommunityThread.aspx?ForumID=1&ThreadID=316720>https://peertrainer.com/LoungeCommunityThread.aspx?ForumID=1&ThreadID=316720</a> Во всех легальных онлайн-казино Беларуси необходимо свидетельство паспортных данных для забавы — это требование правительства государства.Если вы выбираете проверенное лицензионное интернет казино и выполните все условия получения бездепозитного приза, проблем с получением дара у Вас не возникнет. 1×slots зеркало проходить регистрацию это отличный вариант <a href=https://chessdatabase.science/wiki/1×slots_%D0%9C%D0%BE%D0%B1%D0%B8%D0%BB%D1%8C%D0%BD%D0%B0%D1%8F_%D0%92%D0%B5%D1%80%D1%81%D0%B8%D1%8F_%D0%A1%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C_%D0%91%D0%B5%D1%81%D0%BF%D0%BB%D0%B0%D1%82%D0%BD%D0%BE_%D0%9D%D0%B0_%D0%90%D0%BD%D0%B4%D1%80%D0%BE%D0%B8%D0%B4>https://chessdatabase.science/wiki/1×slots_%D0%9C%D0%BE%D0%B1%D0%B8%D0%BB%D1%8C%D0%BD%D0%B0%D1%8F_%D0%92%D0%B5%D1%80%D1%81%D0%B8%D1%8F_%D0%A1%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C_%D0%91%D0%B5%D1%81%D0%BF%D0%BB%D0%B0%D1%82%D0%BD%D0%BE_%D0%9D%D0%B0_%D0%90%D0%BD%D0%B4%D1%80%D0%BE%D0%B8%D0%B4</a> Хотя безвозмездные бонусы начисляются без депо, не исключено, что вам придется заносить деньги. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь последствии как, как свежий заказчик первый пополнит игровой счет.
1×slots регистрация
Бездепозитные бонусы — это подарки от казино вид бонусных средств или фриспинов для игровых автоматов, коие начисляются на аккаунт игрока в процедуры регистрации на сайте заведения. Для получения этих поощрений депозит не потребуется. 1х слот регистрация в 1×slots casino <a href=https://cq.x7cq.vip/home.php?mod=space&uid=9146666>https://cq.x7cq.vip/home.php?mod=space&uid=9146666</a> Для всех бездепозитных бонусов функционирует наибольший предел на выигрыш. Он показывает максимальную сумму, которую возможность получить, играя на бонусные кредиты. Как только для получится выполнить требования вейджера, допустимый максимально будет переведен с бонусного счета на главной, а остаток будет списан. 1хслот скачать Наличие у игрока второго аккаунта. Запрещено делать несколько профилей для многократного получения бездепов.
1хслотс мобильная версия зеркало
Прибывшие на акк финансы бездепозитные призы предназначаются, в основном, только для свежеиспеченных пользователей, которые ранее не имели личного аккаунта в данном казино. Исходя из этого, если ранее у игрока был сделан депозит, то, по всей вероятности, у него больше не несомненно способности рассчитывать на получение такового приза в определенном заведении.Бoльшинcтвo азартных заведений выдвигают приблизительно однообразные, схожие условия и притязания, которые необходимо выполнить, дабы получить бездепозитный приз за регистрацию. Все их можно соединить в раз список: <a href=http://forumqservice.co.uk/member.php?action=profile&uid=5137>http://forumqservice.co.uk/member.php?action=profile&uid=5137</a> 1×slots зеркало регистрацию более популярный вариант это Активация по промокоду употребляется в различных видах бездепов. Если идет о приветственном бонусе, то набор символов возможно разузнать на крупнейшей странице, в регистрационной форме или письме, которое отчаливает пользователю для подтверждения e-mail. Акции имеют проводиться вместе с партнерскими площадками. Обычно код размещается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется одноразовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном кабинете либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем актуальный код для активации в описании любого промо.
1х слотс зеркало регистрация в 1×slots casino
Подтверждение регистрации. Казино настоятельно привязки профиля к электронному адресу и номеру телефона. Для этого на e-mail отчаливает письмо ссылаясь, а на телефонный ? текстовое сообщение с кодом. <a href=https://forum.dis-course.net/viewtopic.php?t=493506>1×slots регистрация</a> Баланс игрока дополняется на подобающую необходимую. К ней применяется вейджер, указанный в правилах промоакции. Вывести выигрыш можно будет после того, как пользователь сделает требуемый объем ставок из личных средств. В редчайших случаях бездеп трудится в формате Free Play. На счет пользователя зачисляется большая сумма, и предоставляется маленький срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по завершении сего периода сумма на счету будет превышать изначальную, то разницу возможно несомненно исключить или применять для последующих ставок. 1×slots регистрацию более популярный вариант это <a href=https://goblin-film.net/user/Raymondvot/>https://goblin-film.net/user/Raymondvot/</a>
1×slos регистрация в 1×slots casino
В случае установленного лимита на сумму вывода выигрыша с бездепозитного приза, игрок не сможет вывести больше заявленной суммы. Акции распространяются как на все игры казино, так и на узкий перечень. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и другие. Промо имеет охватывать разработки 1-го производителя. Бездеп не пересекается с другими акциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, изготовленные бонусными деньгами. Для идентификации платежных реквизитов игрока имеет понадобиться пополнение счета на наименьшую сумму. <a href=http://z914169g.bget.ru/user/WalterSloft/>http://z914169g.bget.ru/user/WalterSloft/</a> 1×slots регистрацию более популярный вариант это Эффективность бездепов в рекламного прибора расценили многие операторы. Малоизвестные площадки используют эти промоакции, дабы стремительно набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны неизменных посетителей. Не все сайты, дающие подарки без депозита, рекомендованы к этой. За привлекательным промоописанием все скрываться невыполнимые условия отыгрыша и подводные камешки.В большинстве заведений сделать это возможно по e-mal, по номеру телефона, спустя социальную сеть или гугл-аккаунт.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.azartweb2.com/threads/1×slots-zerkalo-vyigryshi-objazatelno-projdite-registraciju-esli.237265/>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a>
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=12133>1×slots на любой вкус как пройти регистрацию</a>
<a href=https://forum.pmpobc.ca/index.php?topic=130354.new#new>1×slots подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и. Когда игроку полагается много фриспинов, администрация имеет разбивать их начисление на количество дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах акции.
#4759 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet официальный сайт 1×bet xyz bitz casino <a href=https://rumafia.news/>porno Ангелина Гончаренко, хоккеистка</a> казино рояль casino 7k рабочее <a href=https://7club7.com/>вывод казино</a> букмекерские контора ап казино online casino официальный букмекерская контора фонбет человек казино порно с Юлия Ефимова букмекерская контора зенит
DiskiPlus 1×bet зеркало на сегодня 1×bet xyz DiskiPlus Кузнецова Анна Юрьевна порно <a href=https://www.diskiplus.ru>DiskiPlus скачать pin casino</a> DiskiPlus 1×bet официальный xbet DiskiPlus casino бонус <a href=https://diskiplus.ru>DiskiPlus 1×bet зеркало на сегодня</a> DiskiPlus промокод 1×bet DiskiPlus демо казино DiskiPlus 1×bet зеркало рабочее на сегодня DiskiPlus Крючкова Полина Викторовна порно DiskiPlus 1×bet телефон DiskiPlus 1×bet на андроид DiskiPlus официальные сайты казино
#4760 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино ставка casino скачать <a href=https://th-royalgclub.com/>макао казино</a> retro casino ап казино <a href=https://strelochnik.com/>casino pin официальный</a> vodka casino Мухтиярова Елена Вячеславовна порно 1×bet официальный слоты kent casino регистрация как выиграть в казино порно с Варвара Субботина Матвиенко Валентина Ивановна порно
DiskiPlus гта онлайн казино DiskiPlus скачать 1×bet 1×bet xyz <a href=https://www.diskiplus.ru>DiskiPlus букмекерские контора ап</a> DiskiPlus мобильные букмекерские конторы DiskiPlus 7k casino официальный сайт <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet зеркало рабочее</a> DiskiPlus казино в россии DiskiPlus casino DiskiPlus где казино DiskiPlus Преподобная Надежда Александровна порно DiskiPlus ограбление казино DiskiPlus 7k casino скачать DiskiPlus скачать 1×bet 1×bet xyz
#4761 Charlesgunnyhttp://filmkachat.ru
1хслот скачать
Во время забавы в казино, выигрыши, полученные спасибо безвозмездным призовым фондам, суммируются и включаются в общую необходимую для отыгрывания. Однако, если фортуна улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно допустит вывести финансовые свои. Сумма вывода несомненно в от лимита, утвержденного непосредственно в данном учреждении. Поэтому, пристально надо(надобно) читать правила выдачи безлимитных депо.Помните, что в некоторых забавах сумма ставки идет в зачет вейджера лишь частично. Так, в настольных и карточных играх только от 5% до 50% суммы ставки числятся как отыгранные деньги, на как в слотах идет в зачет все 100% суммы. <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> Теоретически, к бесплатным призам возможно отнести например нарекаемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, потому что они предоставляют лишь возможность создавать ставки. <a href=https://www.swiatobrazu.pl/forumgaleria/thread/view/id/589>https://www.swiatobrazu.pl/forumgaleria/thread/view/id/589</a> зеркло казино 1×slots <a href=http://bbs.xinhaolian.com/home.php?mod=space&uid=4021955>http://bbs.xinhaolian.com/home.php?mod=space&uid=4021955</a> Как только на виртуальном счету окажутся бонусные свои, поспешите отыграть вейджер. Сразу в этого возможно оставить заявку на вывод выигрыша. Кредиты выгодно выделяются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом настоящих средств и дают возможность почувствовать азарт. Во-вторых – можно насладиться каждой азартной забавой доступной на сайте. В вашем распоряжении присутствуют автоматы, настольные прибавление, видео-покер, Live-дилеры.
1×slots официальный зеркало
Не трудно додуматься, собственно no deposit bonuses практически разу не посещают большими. Чаще всего речь о пяти–тридцати баксах (или эквиваленте данной суммы в другой валюте). 1×slots casino online регистрация <a href=https://www.jjj555.com/home.php?mod=space&uid=1318401>https://www.jjj555.com/home.php?mod=space&uid=1318401</a> Фриплей-бонусы встречаются только в неких клубах. Они зачисляются незамедлительно после творения профиля и активны недолговременное время. Если не успеете истратить средства, они просто сгорят. Касаемо времени, в большинстве случаев призы активны в течение часа.Обычно показатель выше, чем для призов на депозит. Не удивляйтесь, если он несомненно том х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных стран. 1×slots официальный сайт скачать на айфон
казино 1×slots официальный сайт
Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке необходимо пополнить счет в казино. Для депозитных бонусов, данная процедура не необходима, например как депозит уже изготовлен. <a href=http://www.soe-parrot.com/home.php?mod=space&uid=168921>http://www.soe-parrot.com/home.php?mod=space&uid=168921</a> В реальное время получить приз за регистрацию в казино очень просто. Почти каждый игорный дом с радостью даст средства либо безвозмездные вращения. Многие игроки используют данным и не смущяются региться в каждом клубе с выгодными условиями. Кстати, это отличная вероятность выдумать выигрышную стратегию и сорвать куш. 1×slots зеркало рабочее на сегодня
1хслотс казино зеркало
Постарайтесь отыграть вейджер, дабы появилась вероятность оставить заявку на выплату. Кстати, на всех сайтах, представленных в списке, доступны современные платёжные приборы. Вы сможете получить выигрыш на электрической кошелёк, карту, аппарат.Классическая разновидность бонуса за творение аккаунта. Его преимущество содержится в, собственно клиент возможность без выбирать аппараты и создавать ставки в них. Иногда список игровых автоматов ограничен оператором, хотя все одинаково это лучше, чем единственный дешевый слот, как когда с внедрением фриспинов. Бездепозитный бонус казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в данном и заключается основное отличие. Более крупные предложения встречаются очень редко. Зачастую они доступны только VIP-игрокам. В остальных случаях им наверняка сопутствуют довольно строгие обстоятельства отыгрыша. Также вероятны дополнительные условия и лимитирования, прописанные в критериях и положения бонусной программы казино. 1×slots регистрация 1×slotscasino09k online <a href=http://camillacastro.us/forums/profile.php?id=174012>http://camillacastro.us/forums/profile.php?id=174012</a> Прежде всего, не запамятовывайте периодически заглядывать на страницу обзоров бездепозитных призов. Они шаг за шагом рассматривают более занимательные предложения водящих игорных порталов.
1×slot рабочее зеркало
Таким образом интернет казино получает потенциального игрока. Возможно в или истинном он захотит поиграть на свои средства. Так трудятся бездепозитные призы в интернет казино. Здесь хорошо подходит выражение, безвозмездные сыр случается только в мышеловке. Начинающие игроки могут не осознавать опасность азарта. Однако со временем осознания становится больше. Это тема для отдельного обсуждения. <a href=https://www.donchillin.com/space-uid-390455.html>https://www.donchillin.com/space-uid-390455.html</a> Главным нюансом в появлении этих вознаграждений состоит том,, что пустив их в ход, игрок ничем не рискует и в последствии никому ничего не будет должен (не зависимо, получит ли он спасибо бонусам какой-либо выигрыш либо моментально спустит все только собственно прибывшие деньги). То есть, казино снабжает игрока возможностью на дармовой базе выступать во всевозможные слоты причем спонсирует игру. скачать 1×slots на андроид мобильная версия Верификация аккаунта. Лучше подтвердить личность незамедлительно после регистрации, дабы позже не было проблем с выводом денег. Верификация может проходить двумя путями:Для вывода средств бонус нужно несомненно отыграть законам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариациями отыгрыша бездепозитного приза до его получения, чтобы избежать конфликтных обстановок.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/8637/#comment-355273>1×slots быструю регистрацию а также мгновенное</a>
<a href=https://smm-seo.ru/threads/1×slots-casino-zerkalo.35968/>1хслот скачать</a>
<a href=https://creapnl.com/foros/tema/1%d1%85%d1%81%d0%bb%d0%be%d1%82%d1%81–1%d1%85%d1%81%d0%bb%d0%be%d1%82%d1%81-%d1%80%d0%b5%d0%b3%d0%b8%d1%81%d1%82%d1%80%d0%b0%d1%86%d0%b8%d1%8f-%d0%bf%d0%b5%d1%80%d0%b5%d0%b9%d1%82%d0%b8-%d0%bd-14/>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чтобы играть безвозмездно на реальные средства в казино, порой довольно просто зарегистрироваться. Иногда необходимо выполнить дополнительные деянья. Демоказино есть практически на любом сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются веско пореже: там в случае выигрыша и соблюдения критерий промоакций бездеп можно превратить в настоящие деньги.
#4762 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.С иной стороны, гораздо легче арестовать бездепозитные фриспины за регистрацию в казино и прямо сейчас начать вращать барабаны в лучших слотах. Главная необыкновенность спинов сомнений, собственно они предназначены для топовых автоматов. Удастся не пройти вспомогательные раунды, хотя и прирастить сумму выигрыша, заработать респины и другие внутриигровые презенты. <a href=http://filmkachat.ru/>x1 slots регистрация в 1×slots casino</a> B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax <a href=http://prsync.com/shopavto/shopavto-is-a-car-buyout-service-operating-in-odessa-4371377/>http://prsync.com/shopavto/shopavto-is-a-car-buyout-service-operating-in-odessa-4371377/</a> 1×slots бездепозитный бонус за регистрацию <a href=https://zrz26.ru/user/Jefferyspaby/>https://zrz26.ru/user/Jefferyspaby/</a>
скачать 1×slots официальный сайт
<a href=http://swissairways-va.com/phpBB3/memberlist.php?mode=viewprofile&u=3495>рабочее зеркало 1×slots</a> 1хслотс казино зеркало Акции распространяются как на все забавы казино, так и на узкий список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и. Промо возможность охватывать разработки 1-го производителя. Бездеп не пересекается с другими акциями казино. Если на сайте предусмотрен кэшбек, он не начисляется за ставки, изготовленные бонусными средствами. Для идентификации платежных реквизитов игрока может потребоваться пополнение счета на минимальную необходимую. <a href=http://dobrknigi.ru/howto/?PAGE_NAME=profile_view&UID=20195>http://dobrknigi.ru/howto/?PAGE_NAME=profile_view&UID=20195</a> 1 хслот регистрация в 1×slots casino
1хслотс регистрация в 1×slots casino
Высокая конкурентность в разделе азартных игр мотивирует операторов привлекать посетителей различными акциями. Благодаря данному у посетителей появляется вероятность получить бонусы в казино за регистрацию без депо. Воспользоваться этим предложением возможно, избегая процедуру внесения средств на игровой счет, просто активировав аккаунт на веб-сайте. Наш гид по бездепам поможет избрать самую симпатичную бонусную программку, узнать верховодила получения такого гонорары и распорядиться им с наибольшей выгодой.Для вывода средств приз нужно будет отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами акции и вариантами отыгрыша бездепозитного бонуса до его получения, дабы избежать конфликтных обстановок. В зависимости от онлайн заведения любой из них имеет для предложить как бездепозитные деньги, например и бездепозитные фриспины, коие последствии успешной регистрации упадут для на ваш игровой баланс. <a href=https://www.donchillin.com/space-uid-357134.html>https://www.donchillin.com/space-uid-357134.html</a> В интернете очень большое скриптовых сайтов, которые принадлежат жуликам. Их основная задача – привлечь гэмблеров, пообещав не только щедрые подарки, хотя и солидные выигрыши. Так собственно кое-какие сайты предлагают получить за регистрацию и $1 000. 1хслотс 1хслотс регистрация перейти на 1×slots Условия, на коих предоставляется бездеп, регулируются казино. Каждая промоакция содержит доскональные верховодила, ссылка на которые обыкновенно находится в промообъявлении. В их указываются лимиты, вейджер, список дешевых игр. Если оператор скрывает данные о предложении, то воспользоваться им не стоит.Если простыми словами, бездепы – это определённая сумма средств либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать подарки. Но есть некоторые нюансы. Существуют игорные дома, коие перед что, этим как начислить бонусы просят привязать телефонный, дать копии документов.
онлайн казино 1×slots
<a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=142039>1×slots сайт зеркало</a> Но существуют азартные заведения, готовые просто так вручить деньги на забаву. Для этого достаточно создать профиль. Чтобы вывести выигрыш, сначала нужно выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа.Максимальная ставка ? устанавливается в денежной счета и ограничивает объем ставки за раз спин. В случае ее превышения приз возможность быть аннулирован. Также в правилах может содержаться запрет на размещение ставок определенного облика, к, по равным шансам в рулетке (словами, на чет либо нечет, красноватое или темное и т.д. ). Составленный знатоками Casino.ru перечень онлайн-казино с бездепозитным бонусом дозволяет игрокам сопоставить спецпредложения различных операторов.При маленькой сумме бонуса рекомендовано играть по невысоким ставкам, а использовать максимальные другого, как лишь в том случае, в вейджер слишком великой, а время на отыгрыш сильно ограничено. 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=http://blog.enotti.com.ua/add-review/?id=1398726>http://blog.enotti.com.ua/add-review/?id=1398726</a> В случае установленного лимита на сумму вывода выигрыша с бездепозитного бонуса, игрок не может исключить больше заявленной суммы.Бесплатный приз – кредиты, которые онлайн-казино начисляет посетителю, не принуждая его пополнять игровой счет.
1×slots регистрация на сайте
Заработать на бездепозитных бонусах за регистрацию в казино может каждый пользователь, достигший совершеннолетия. Мы подготовили список, где есть практически животрепещущие и новые бездепозитные призы казино, коие продоставляется получить бесплатно. Для наших пользователей есть особые предложения эксклюзивные призы, коие вы кого не отыщите, их мы определили особой красной плашкой «Exclusive».Иногда у посетителей сайта могут появиться проблемы при активации приобретенного промо-кода. В этих случаях, необходимо адресоваться за помощью в службу «Support». Для получения ответа, обязательно указывается конкретная причина воззвания и подтверждается информация дополнительными экрана. Если сформировалась неоднозначная ситуация, постоянно возможно адресоваться к главному регулятору или контролирующему органу, выдавшему данному заведению лицензионный документ. <a href=https://rollerforum.volkerschulz.de/memberlist.php?mode=viewprofile&u=442869>https://rollerforum.volkerschulz.de/memberlist.php?mode=viewprofile&u=442869</a> 1×slots зеркало проходить регистрацию это отличный вариант Выиграть настоящие деньги в казино не пополняя счет – сложно, хотя возможно. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными призами и начните выступать на бонусные средства. По статистике в 10-ти заведений возможно заработать маленькую необходимую средств за счет бонусных средств.За счёт спинов выйдет запустить различные онлайн слоты, протестировать стратегии и поднабраться навыка. Фишка в том, собственно вращения начисляются на топовые аппараты с оригинальными опциями и высокой отдачей. Не забывайте, что в каждом акционном предложении учтены специальные притязания – кратковременные лимитирования, наибольший размер ставки, перечень доступных игр.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.formulersupport.com/Thread-1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82-%D0%BC%D0%BE%D0%B1%D0%B8%D0%BB%D1%8C%D0%BD%D0%B0%D1%8F-%D0%B2%D0%B5%D1%80%D1%81%D0%B8%D1%8F-%D1%81%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C–138797>1×slots официальный сайт мобильная версия скачать</a>
<a href=https://uyghuryol.com/forum/viewtopic.php?f=8&t=260493>1×slots регистрация на 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для получения бонуса нужно пригласить в забаву свежего клиента. Казино начисляет пригласившему фиксированный процент от взносов приглашённого повторяющий бонуса: почаще всего его размер не превышает 10%. Срок действия приза в большинстве случаев не превышает месяца: пригласивший получает приз в зависимости от проигранных ставок приглашённого в 1-ый месяц игры.
#4763 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало на сегодня
Онлайн-казино с бездепозитными призами ставят посетителям обстоятельства для использования бездепами, поэтому перед участием в акции другого, как подробно ознакомиться со всеми правилами и нюансами промоакции. Условия шансы касаться получения бонуса, его использования и последующего вывода денежных средств если, тогда, выигрыша.В онлайне количество узнаваемых игорных площадок с красивыми акционными услугами. Однако пристально читать обстоятельства 10-ов предложений скором надоест, да и время отнимет количество. Поэтому наша команда подготовила ТОП-3 сайтов с превосходнейшими бездепозитными бонусами: <a href=http://filmkachat.ru/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> Не стоит сразу же отрицаться от приветственных презентов в сходственных казино. Администрация готова начислить деньги либо фриспины, но сначала сотрудники должны убедиться, что вы не мошенник. Дело что, что развелось слишком количество охотников за призами. Они научились накалывать систему и зарабатывать солидные суммы денег.Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, чтобы еще раз получить безвозмездный приз. Игорные заведения нетерпимы к бонус-хантерам, потому вас ждет неминуемое наказание. <a href=https://plaza.rakuten.co.jp/prilla/diary/202411240001/>https://plaza.rakuten.co.jp/prilla/diary/202411240001/</a> 1×slots регистрация на 1хслотс <a href=https://www.modernvespa.it/profile/3558-glennbrula/>https://www.modernvespa.it/profile/3558-glennbrula/</a> Отзывы читателей о бонусных акциях посодействуют составить эмоцию, но не забывайте о субъективности собственных комментариев.При малый сумме бонуса рекомендовано выступать по невысоким ставкам, а использовать максимальные какого-либо лишь том, случае, в вейджер очень немалый, а время на отыгрыш крепко ограничено.
скачать 1×slots на андроид мобильная версия
В интернете слишком количество скриптовых сайтов, коие принадлежат жуликам. Их главная цель – привлечь гэмблеров, пообещав не щедрые презенты, но и солидные выигрыши. Так собственно кое-какие сайты предлагают получить за регистрацию даже $1 000.Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен перечень наихороших онлайн казино, которые предлагают своим игрокам великодушные призы за регистрацию. 1×slots мобильная версия войти казино Индивидуальные поощрения выдаются за совершение деяний: подписку на аккаунты площадки в соц сетях, установку мобильного прибавления либо официального посетителя для ПК. В большинстве казино срабатывают программы лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на грядущий степень нередко сопровождается выдачей бездепа.Одним из поводов отдавать привилегию 1 или иному заведению содержится в привлекательности предлагаемых акций и бесплатных предложений. Безвозмездные фриспины, выдаваемые без нужды создавать какой-нибудь лепта, в списке находится далеко не в конце. <a href=https://scientific-programs.science/wiki/User:Lawerence7377>https://scientific-programs.science/wiki/User:Lawerence7377</a> Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депо имеет выделяться до 30 дней. 1×slots мобильная версия войти казино
1×slots официальный сайт скачать на айфон
<a href=http://www.stmcu.co.kr/gn/bbs/board.php?bo_table=free&wr_id=900871>http://www.stmcu.co.kr/gn/bbs/board.php?bo_table=free&wr_id=900871</a> 2. Создать новый профиль. Для регистрации надо(надобно) заполнить маленькую анкету или зайдите в личный офис при помощи соц сетей; 1×slots казино зеркало К примеру, игроку выдаются безвозмездные свои в заведении в объеме пятидесяти либо 100 долларов (вейджер на коие сочиняет 100х). То есть, каждому новоприбывшему игроку выскакивает манящая иллюстрация, кот-ая обещает выплату всех зачисленных компанией средств. Не стоит заострять на казино бонус за регистрацию без депозита с чрезмерно великой либо довольно маленькой суммой призов, потому что, и тщательно исследовав все обстоятельства, здесь вероятнее всего, несомненно какой-то подкол.Доступность — бездепозитные бонусы в казино чаще всего предоставляются свежим игрокам, но посещают случаи, когда бонус имеют получить и действующие клиенты.
1×slots casino регистрация
Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке адепты онлайн-казино публикуют актуальную информацию о not the slightest deposit bonuses и других предложениях. <a href=http://aurorahcs.com/forum/memberlist.php?mode=viewprofile&u=168982>1×slots промокод при регистрации 2025</a> Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы которые возникают у начинающих. Далее требуется отыграть вагер и вывести выигрыш. Игрокам без навыка крупно подфартило, у получить десятки даров за 1 регистрацию. Если не смогли получить Бездепозитный бонус, не беспокойтесь. Обратитесь в интернет чат, оператор поможет исправить.Бонусы без депозита при регистрации считаются самыми красивыми как для опытных игроков, например для и начинающих. Получив такое вознаграждение, заказчик имеет выступать на настоящие деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а условия их активации и выигрыша. 1×slots официальный demo регистрация в 1×slots casino <a href=http://www.kaseisyoji.com/home.php?mod=space&uid=482283>http://www.kaseisyoji.com/home.php?mod=space&uid=482283</a> Максимальный объем ставки, кот-ый невозможно превосходить пока бонус не будет полностью отыгран. В случае нарушения этого верховодила, приз и выигрыш с него станут аннулированы.
1×slots регистрация на сайте
Необходимость отыгрыша. Вейджер в повыше, чем для бонусов за депо. И пока средства не отыграны, вывести их невозможно. Лишь популярностью и знаменитые азартные заведения шансы позволить себе раздавать бездепы вид дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, которые можно израсходовать в лучших аппаратах с высочайшей отдачей.Для того, дабы отыграть необходимую вашего бездепозитного приза нужно выполнить условия вейджера. Очень часто фриспины даются на определенные слоты (book of ra, book of deceased, book of sun), выбирайте слот себя по, все довольно красивые и качественные. Бездепозитные бонус возможность быть денежным так и повторяющий фриспинов на слоты <a href=https://mobilka.mobi/user/Julesstork/>https://mobilka.mobi/user/Julesstork/</a> Максимальная ставка ? устанавливается в валюте счета и ограничивает объем ставки за раз спин. В случае ее превышения приз имеет быть аннулирован. Также в правилах имеет содержаться запрет на размещение ставок определенного облика, например, по одинаковым шансам в рулетке (словами, на чет либо нечет, красное либо темное и т.д.).К примеру, игроку выдаются безвозмездные средства в заведении в размере пятидесяти либо ста долларов (вейджер на которые сочиняет 100х). То есть, любому новоприбывшему геймеру выскакивает манящая картинка, которая сулит выплату всех зачисленных фирмой средств. Не стоит заострять на казино приз за регистрацию без депо с сильно великий или очень малюсенькой суммой бонусов, поэтому собственно, и кропотливо исследовав все обстоятельства, здесь всего, несомненно некий подкол. 1×slots подтвердит вашу регистрацию если говорить Иногда для получения призов необходимо связаться с адептами службы поддержки. Удобнее всего с ними беседовать в онлайн-сате, хотя иногда довольно запроса по электрической почте.Вышеописанная первопричина и является главным нюансом, следствии которого операторы отдают доля своей прибыли на различные маркетинговые затраты и маркетинговые кампании. А самым действенным тут станут выступать непосредственно бездепозитные бонусы казино 2022 с выводом за регистрацию.
<b>Смотреть еще похожие новости:</b>
<a href=http://vn-info.net/user/Josephkam/>1×slots официальный demo регистрация в 1×slots casino</a>
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=410527>1×slots регистрация на 1хслотс</a>
<a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=138190>1хслот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Иногда в качестве бездепа, казино презентует минимальный приз (до 50 рублей), ради которого не заморачиваться. В качестве бонусов интернет казино нередко предлагает выдачу фриспинов, словами даровых вращений игрового барабана. Виртуальные монеты можно использовать для изучения в покерной школе либо для забавы в казино.
#4764 BetanoCasinohttps://betano.directorio-de-casinos-mx.com
<a href=https://betano.directorio-de-casinos-mx.com>betano casino</a>
Upload client online casino Betano – win right now! <a href=https://betano.directorio-de-casinos-mx.com>http://www.betano.directorio-de-casinos-mx.com</a>
#4765 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало проходить регистрацию это отличный вариант
Третитй бездепозитный приз за регистрацию – валютные свои. К сожалению, начислить рубли либо баксы способны только знаменитые и популярностью клубы. С их поддержкою вас насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком. <a href=http://filmkachat.ru/>1×slots сайт зеркало</a> <a href=https://owntweet.com/thread/214642>https://owntweet.com/thread/214642</a> Бонус за регистрацию в казино без депо с выводом денег нужно отыграть. Зачастую для отыгрыша возможность потребоваться устроить ставки на сумму, в количество 10-ов один превосходящую сумму бонуса либо выигрыша.Oтыгpaть приз с обозначенным вeйджepом, чтобы нужно сдeлaть cтaвoк нa cумму, превосходящую размер приза в некоторое раз. 1×slots зеркало <a href=https://pbtur.com.br/users/kennethfraph>https://pbtur.com.br/users/kennethfraph</a> Высокая конкуренция в сегменте азартных игр мотивирует операторов завлекать клиентов различными промоакциями. Благодаря данному у посетителей замечена возможность получить призы в казино за регистрацию без депо. Воспользоваться таким предложением можно, минуя функцию внесения денег на игровой счет, просто активировав аккаунт на веб-сайте. Наш гид по бездепам поможет выбрать самую привлекательную бонусную программу, разузнать управляла получения такового вознаграждения и воспользоваться им с максимальной выгодой.
рабочее зеркало 1хслотс
1×slot рабочее зеркало <a href=http://tpprt.ru/bitrix/redirect.php?goto=http://learn.acbl.org/?URL=http://dobrotsen.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/UPZ-SE3l_Fj>http://tpprt.ru/bitrix/redirect.php?goto=http://learn.acbl.org/?URL=http://dobrotsen.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/UPZ-SE3l_Fj</a> Ознакомьтесь с нашим списком превосходнейших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего списка и получите бездеп сразу. Хватайте лучшие благотворительные предложения ниже и выигрывайте великие средства, не рискуя! 1хслот зеркало сайта Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.
1×slot официальный сайт
Вознаграждения за получение VIP-статуса ? начисляются в программки лояльности при достижении еще уровня либо выдаются персонально менеджерами службы. Но такие рамки не смущают и хайроллеров, потому коэффициенты на слотах разрешают рассчитывать на крупные выигрыши, ну неких автоматах разыгрывается передовой джекпот.Игры, в возможно выступать на бонусные средства. Проверьте список игр, в можно выступать на бонусные свои, возможно они Вам не понравятся и не расходовать своё время на эту промоакцию. <a href=http://www.nuursciencepedia.com/index.php/Benutzer:JeremiahInwood>http://www.nuursciencepedia.com/index.php/Benutzer:JeremiahInwood</a> Обычно для получения призов без депозита, казино выдвигает лояльные и абсолютно выполнимые обстоятельства, хотя есть ряд действий коие запрещены и могут причиной неприятные результаты:Иногда виде одобрения за регистрацию имеют выдаваться билеты для роли в турнирах. Условия их проведения довольно выделяются, потому мы рекомендуем ознакомиться с любым предложением отдельно. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
казино 1×slots официальный сайт
Если вы новичок в этом деле и только попали в неизведанную вами область азарта — счет услуг как бездепозитные призы без пополнения.Бывают ли бездепозитные призы без вейджера? Бывают, случае у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный приз за регистрацию устанавливается вейджер во всех казино. Изучить правила и условия получения бездепозитных бонусов казино, Вы можете у нас на веб-сайте в разделе с призами или на официальном сайте избранного Вами казино. Если не можете отыскать нужную информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электрической почте.На данном разделе портала регулярно публикуются обзорные заметки, в которых рассматриваются благотворительные призы наилучших интернет-казино. Информация структурирована по нескольким пт, включая основные: 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=http://www.gx777.info/music/portal/html/modules.php?name=Your_Account&op=userinfo&username=roomyruffian69>http://www.gx777.info/music/portal/html/modules.php?name=Your_Account&op=userinfo&username=roomyruffian69</a>
1хслотс рабочее зеркало на сегодня
<a href=http://bead17.com/home.php?mod=space&uid=3823>http://bead17.com/home.php?mod=space&uid=3823</a> Фриплей-бонусы. Бонусы за бесплатную игру есть лишь в неких клубах. Они зачисляются незамедлительно последствии творения профиля и срабатывают недолговременное время. Если у вас нет медли потратить средства, они просто завершатся. Что касается времени, в большинстве случаев бонусы действуют в течение 1-го часа. 1×слотс казино Процесс доказательства личности имеет занять от 1-го денька до недели. Если клиент разрешил какую оплошность при заполнении паспортных данных, то ему идет обратиться с задачей в саппорта онлайн-казино.
<b>Смотреть еще похожие новости:</b>
<a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=8028>1× slots регистрация в 1×slots casino</a>
<a href=http://xn–80akbkalsbeeafq6a6b2f.xn–p1ai/forum/messages/forum1/topic36584/message198308/?result=new>казино 1×slots официальный сайт</a>
<a href=https://forum.home-visa.ru/memberlist.php?mode=viewprofile&u=3536>1×slots зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Мы проделываем ударение на главных положениях верховодил, рассказываем о территориальных лимитированиях и вкратце информируем о других акциях обговариваемого казино. Приветственный бонус без депо ? подарок за регистрацию. Выдается средствами, фриспинами либо баллами. В последнем случае бонусные баллы применяются для роли в турнирах или обмена на настоящие средства.
#4766 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino бонус online casino официальный <a href=https://sovsekretno.net/>casino официальный сайт</a> Скворцова Вероника Игоревна порно top casino <a href=https://kompromat1.online/>скачать 1×bet</a> леон букмекерская контора 1×bet официальный слоты 1×bet на сегодня казино 5 скачать 1×bet порно с Аделия Петросян (фигурное катание) porno Мария Шарапова
DiskiPlus пин ап букмекерская контора DiskiPlus букмекерская контора без <a href=https://diskiplus.ru>DiskiPlus казино большая</a> DiskiPlus букмекерские конторы бет DiskiPlus казино проиграл <a href=https://diskiplus.ru>DiskiPlus порно с Дарья Касаткина (теннис)</a> DiskiPlus симулятор казино DiskiPlus casinos winning DiskiPlus 1×bet скачать приложение на андроид DiskiPlus казино 5 DiskiPlus рабочие зеркала казино DiskiPlus vodka casino DiskiPlus 7k casino скачать
#4767 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало рабочее регистрации на телефон придет
Обычно для получения бонусов без депозита, казино выдвигает приклнные и вполне выполнимые условия, но есть ряд действий которые воспрещены и шансы повлечь за собой противные последствия:1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, случае не желаете замерзнуть жертвой жуликов или впустую израсходовать время; <a href=http://filmkachat.ru/>1×slots casino зеркало рабочее</a> Список так называемых «разрешенных землель» прилагается к правилам бонусной программки игорного портала. Обязательно выясните, распространяются ли на вас сходственные наказания. <a href=https://diigo.com/0y2r93>https://diigo.com/0y2r93</a> У каждой игры свои требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система засчитает каждую ставку. В рулетке и покере устроить это гораздо труднее. Именно поэтому например главно пристально разбирать обстоятельства получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой ирге, то новички просто «спустят бонус на ветер». 1×slots казино зеркало <a href=http://wiki.hightgames.ru/index.php?title=%D0%A4%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B%20%D0%90%D0%97%D0%A1:%20%D0%9F%D0%B5%D1%80%D1%81%D0%BF%D0%B5%D0%BA%D1%82%D0%B8%D0%B2%D1%8B%20%D0%B8%20%D0%B2%D0%BE%D0%B7%D0%BC%D0%BE%D0%B6%D0%BD%D0%BE%D1%81%D1%82%D0%B8%20%D0%B2%20%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8>http://wiki.hightgames.ru/index.php?title=%D0%A4%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B%20%D0%90%D0%97%D0%A1:%20%D0%9F%D0%B5%D1%80%D1%81%D0%BF%D0%B5%D0%BA%D1%82%D0%B8%D0%B2%D1%8B%20%D0%B8%20%D0%B2%D0%BE%D0%B7%D0%BC%D0%BE%D0%B6%D0%BD%D0%BE%D1%81%D1%82%D0%B8%20%D0%B2%20%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8</a> Подтверждение электрической почты – одно из ведущих условий, коие есть почти в любом бездепозитном казино. Чтобы верифицировать электронную почту, довольно перебежать по интенсивной ссылке в письме, приобретенном от азартного клуба.Далее потребуется отыграть вагер и исключить выигрыш. Игрокам без опыта крупно подфартило, меня получить десятки презентов за одну регистрацию. Если не смогли получить Бездепозитный приз, не тревожьтесь. Обратитесь в онлайн чат, оператор поможет решить проблему.
1×slots casino регистрация 1×slotscasin online
<a href=http://theauction.com.au/my-account/>1×slots коды</a> 1×slots сайт В лицензионных бездепозитных казино выступать в азартные забавы действительно безопасно. Наличие лицензии подтверждает тот прецедент, что клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP. <a href=http://miupsik.ru/forums/member.php?action=profile&uid=3858>http://miupsik.ru/forums/member.php?action=profile&uid=3858</a> Некоторые веб-сайты, до чем провести регистрацию игроков, предлагают ответить на несколько базисных вопросов. Цель проведения сходственной викторины – выявить случайных людей, коие не имеют представления о покере, и не разрешить получения ими призов. Если гость уже играл в казино, то ответить на полтора 10 простых вопросов будет несложно. Очень часто, ответы можно отыскать на официальных веб-сайтах данных учреждений.Казино дает возможность заработать и исключить реальные средства на бездепозитных призах. Обычно, это незначительная сумма, которую казино возможность себя разрешить подарить игроку. 1×slots акции
1×slots официальный сайт скачать
Когда речь идет о получении бездепозитных призов в казино, для внимание на следующие условия: Для получения депозитного приза нужно восполнить собственный игровой баланс реальными деньгами. Вознаграждение возможно получить либо при внесении первого депозита, или вид фиксированного процента от внесённых средств. Так или по, приз поступит на счёт лишь в пополнения. <a href=https://notebooks.ru/forum/user/83156/>https://notebooks.ru/forum/user/83156/</a> 1×slots casino зеркало
1хслотс зеркало
Для получения предоставленных бонусов вас понадобиться — ПК или мобильное прибор, и остальное дело за малым. Какие призы возможность еще получить кроме бездепозитного приза за регистрацию в казино? По мимо бездепозитного приза, каждое интернет казино предлагает игрокам выгодное предложение на 1-ый депозит, вы совершаете депо, ваш депозит возрастает в двое или числе в 3, тем наиболее начать выступать возможно с более крупной суммой, например же не забываем про вейджер на призы.При использовании бездепозитным бонусом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют несколько видов лимитов: Фриспины начисляются по определенной ставке. После их активации игроку нужно запустить разъем и убедиться, что в нем показываются благотворительные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода последствии отыгрыша определяется оператором и редко превышает 5 000 рублей. 1×slots сайт <a href=https://2012614.com/home.php?mod=space&uid=82969&do=profile>https://2012614.com/home.php?mod=space&uid=82969&do=profile</a>
1×slot казино зеркало
Онлайн-казино с бездепозитными бонусами ставят клиентам обстоятельства для использования бездепами, поэтому перед участием в акции другого, как тщательно ознакомиться со всеми правилами и нюансами промоакции. Условия имеют прикасаться получения бонуса, его использования и последующего вывода валютных средств когда выигрыша.Условия имеют разниться приятель от друга. Но такой приз возможность быть использован лишь для игрового процесса – полученные на счет деньги до того, как будут отыграны, вывести невозможно. В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, нужно обратиться в саппорта через лайв-чат на веб-сайте казино. <a href=https://fabricenetwork.mn.co/members/26411135>https://fabricenetwork.mn.co/members/26411135</a> Для отыгрыша бонуса казино обязует игрока сыграть на сумму, в несколько один превосходящую необходимую полученного бонуса — тут выгода фирмы очевидна.Как и другие промоакции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такого предложения являются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает новых посетителей и разрешает им составить эмоцию о функционале, не рискуя вескими суммами. 1× слот зеркало Проверка занимает от нескольких минут до нескольких дней, профессионалы техподдержки все запросить вспомогательные документы или инициировать куцее общение по Skype.
<b>Смотреть еще похожие новости:</b>
<a href=https://your-portal.at.ua/forum/16–63253–2#88395>1хслот зеркало</a>
<a href=http://t954381g.bget.ru/user/JosephPiery/>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Перечисленные повыше основные характеристики сопровождают фактически каждый приз и считаются стереотипными для бездепозитных бонусных начислений в казино. Пoдтвepдить личнocть посетителя. Для удачного вывода средств, необходимо подтвердить личность посетителя. Нa этaпe вepификaции пpoфиля, сотрудники службы безопасности должны убедиться, что у игрока чем раз акк. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не сможет вывести собственный выигрыш, в у него будет некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы.
#4768 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора мостбет букмекерская контора фонбет официальный сайт <a href=https://repost.news/>casino андроид</a> online casino официальный Светлана Ходченкова <a href=https://rucriminal.info/>казино большая</a> porno Екатерина Ефременкова, шорт-трекистка сайты казино официальные букмекерские конторы скачать 1×bet casino Скворцова Вероника Игоревна порно casino вход почему в казино не бывает настенных часов
DiskiPlus Окладникова Ирина Андреевна порно DiskiPlus pin ап casino <a href=https://www.diskiplus.ru>DiskiPlus казино онлайн</a> DiskiPlus сайт винлайн букмекерская контора DiskiPlus Яровая Ирина Анатольевна порно <a href=https://www.diskiplus.ru>DiskiPlus Чулпан Хаматова</a> DiskiPlus champion casino DiskiPlus самое казино DiskiPlus online casino DiskiPlus букмекерская контора скачать приложение DiskiPlus порно с Карен Хачанов (теннис) DiskiPlus 1win casino DiskiPlus какие казино
#4769 Charlesgunnyhttp://filmkachat.ru
1×slots casino зеркало
Наличие у игрока второго аккаунта. Запрещено делать количество профилей для неоднократного получения бездепов. <a href=http://filmkachat.ru/>1×slots зеркало подтвердит вашу регистрацию если говорить</a> Для отыгрыша приза казино обязует игрока поиграть на сумму, в количество один превосходящую необходимую полученного приза — тут выгода фирмы явна. <a href=https://hackaday.io/rendering>https://hackaday.io/rendering</a> 1×slots казино мобильная версия <a href=https://www.asitorino.com/user/joshuaprant/?um_action=edit>https://www.asitorino.com/user/joshuaprant/?um_action=edit</a> Вейджер (wager) – это коэффициент, кот-ый демонстрирует на какую сумму необходимо сделать ставок, чтобы исключить приз из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего бонуса, Вам необходимо сделать ставок на необходимую: 500*70=3500 руб. Только всецело отыграв бонус, Вы сможете вывести свой выигрыш.Прочитайте правила бонусной программы, в хотите участвовать. Да, мы настоятельно рекомендуем устроить это до регистрации.
1×slots рабочее зеркало
Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных требований, считая неотъемлемой верификации. Если на веб-сайте учтена неотъемлемая процедура доказательства личности, то исключить выигрыш получится лишь в проверки данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий личность. 1×slots casino регистрация на сайте Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.Самые новые бездепозитные бонусы в казино за регистрацию 2022 года с выводом прибыли присутствуют на этой страничке. Посетитель имеет оценить обстоятельства получения и начать играть на средства без внесения депо. При данном игроку принципиально понимать, на каких критериях и какими способами у исключить полученный выигрыш. Для сего нужно оценить список присоединенных платежных систем. <a href=http://flightgear.jpn.org/userinfo.php?uid=41501#>http://flightgear.jpn.org/userinfo.php?uid=41501#</a> Обычно показатель выше, чем для призов на депозит. Не изумляйтесь, случае он будет числе х100. Иногда завышенный коэффициент вейджера уточняется для обитателей отдельных государств.Для доказательства электронной почты, просто перейдите по активной ссылке в послании, полученном от игрового заведения. рабочее зеркало 1×slots
казино 1×slots официальный сайт
Вышеописанная причина и считается основным нюансом, в которого операторы отдают доля собственной прибыли на разные маркетинговые затраты и маркетинговые кампании. А самым действенным тут станут выступать именно бездепозитные бонусы казино 2022 с выводом за регистрацию.За привлечение друга ? масштабах партнерской программы заказчик получает вознаграждение за вербование новых пользователей. <a href=http://www.xinsanwen2011.com/home.php?mod=space&uid=210089>http://www.xinsanwen2011.com/home.php?mod=space&uid=210089</a> Подобные бонусы без депозита предоставляются на более выгодных условиях. Зачастую они крупнее, а обстоятельства отыгрыша менее жесткие. 1х слотс зеркало регистрация в 1×slots casino Это один из главных показателей привлекательности дара. С завешенным коэффициентом числе профессионалы не сумеют выполнить обстоятельства по отыгрышу. И неважно, как привлекательно выглядит предложение – бездепозитный бонус казино в объеме $500 или $1 000. Чтобы новички получше вдумались, что же такое вейджер, мы разберём на примере.
онлайн казино 1×slots
Если вы опытный игрок, вы должны знать, что бонус без депо – редчайшая находка. Тем не менее, мы неделю изучаем интернет, чтобы найти вам наихорошие бездепозитные предложения. <a href=http://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=6268>1×slots зеркало подтвердит вашу регистрацию если говорить</a> Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных требований, считая обязательной верификации. Если на веб-сайте предусмотрена обязательная процедура доказательства личности, то исключить выигрыш удастся только после ревизии данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий личность.Подтверждение индивидуальной информации. Все казино просят от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и присутствие у пользователя других аккаунтов (мультиаккаунт запрещен). 1×slots casino регистрация 1×slots review live <a href=http://www.orlandogamers.org/forum/member.php?action=profile&uid=4270>http://www.orlandogamers.org/forum/member.php?action=profile&uid=4270</a>
1×slots официальный сайт скачать
Для получения бездепа необходимо пригласить в забаву по реферальной ссылке свежего клиента: он должен зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на сумму, обозначенную в критериях акции. <a href=https://www.uned-psicologia.com/index.php?action=profile;u=24186>https://www.uned-psicologia.com/index.php?action=profile;u=24186</a> 1хслот зеркало сайта B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpaxПри маленький сумме бонуса рекомендуется играть по невысоким ставкам, а применять наибольшие чем лишь никаких случае, если вейджер очень великой, а время на отыгрыш сильно ограничено.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.arka-bahce.org/forum/showthread.php?p=759479#post759479>рабочее зеркало 1×slots</a>
<a href=https://forums.scar-divi.com/topic/540410–1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5/>1×slots официальный сайт зеркало рабочее</a>
<a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=7603>1×slots регистрация 1×slots casino 777 online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Доступ к подарку возможность открываться механически в введения промокода либо обращения в службу поддержки сайта. В первом случае от юзера не требуется практически действий. Бездеп с активацией по коду встречается чаще всего. Игроку необходимо ввести совокупность знаков в графе, кот-ая возможность пребывать в регистрационной форме в Личном кабинете.
#4770 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
смотреть фильм казино Скоробогатова Ольга Николаевна порно <a href=https://glvk.guru/>Светлана Ходченкова</a> порно с Евгения Медведева, фигуристка Скворцова Вероника Игоревна порно <a href=https://rumafia.news/>casino com</a> букмекерские конторы pin Чулпан Хаматова слоты казино букмекерская контора бесплатно скачать casino riobet казино можно porno Светлана Ходченкова
DiskiPlus 1×bet сайт 1×bet xyz DiskiPlus казино зеркало сегодня <a href=https://diskiplus.ru>DiskiPlus bitz casino</a> DiskiPlus ramenbet casino DiskiPlus porno Екатерина Ефременкова, шорт-трекистка <a href=https://diskiplus.ru>DiskiPlus приложения букмекерских контор на андроид</a> DiskiPlus porno Екатерина Ефременкова, шорт-трекистка DiskiPlus сайт винлайн букмекерская контора DiskiPlus порно с Ирина Сидоркова DiskiPlus скачать букмекерскую контору DiskiPlus Лут Оксана Николаевна порно DiskiPlus букмекерская контора официальный сайт DiskiPlus сайт 1×bet слоты
#4771 Charlesgunnyhttp://filmkachat.ru
1× слот зеркало
Но существуют азартные заведения, готовые просто так вручить деньги на забаву. Для этого довольно создать профиль. Чтобы вывести выигрыш, сначала необходимо выполнить вейджеровые условия, прописанные в условиях получения бездепа.Обыкновенные бездепозитные бонусы в объеме от 3-х до двадцати долларов сделаны чтобы, чтобы, чтобы в игры заходили все свежие и свежие игроки. Здесь, всего, несомненно ограничение на наибольший выигрыш. Важно, дабы перед наименьшим вкладом был отключен приз за 1-ое пополнение счета, и геймер не попадет на повторный вейджер. <a href=http://filmkachat.ru/>1×slots регистрация на официальном сайте</a> Как лишь вы отыграли вейджер и средства с бонусного баланса перешли вас на реальный счет, Вы смело сможете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (устроить наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депозитом). <a href=https://output.jsbin.com/kozot>https://output.jsbin.com/kozot</a> 1×slots официальный demo регистрация в 1×slots casino <a href=https://www.varranger.com/vforum/index.php?action=profile;u=36240>https://www.varranger.com/vforum/index.php?action=profile;u=36240</a>
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Доступные забавы – В некоторых азартных забавах можно снизить математическое превосходство казино до нескольких 10-х процента. В их числе многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как правило, в этих забавах ставки идут в зачет вейджера не полностью. Например, возможность учитываться только 50%. В некоторых играх бездепозитные призы вообщем нельзя отыгрывать.Но есть игорные заведения, коие готовы просто так жертвовать деньги на игру. Для этого довольно создать профиль. Чтобы исключить собственный выигрыш, вам сначала необходимо выполнить условия отыгрыша, указанные в условиях получения бездепозитного депозита. 1 х слотс зеркало Бонус без депо за регистрацию в казино (бездепозитный приз) – это валютный подарок от клуба, который начисляется на акк игрока в регистрации в казино. Кроме создания учетной записи, для получения бездепа, довольно нередко требуется ещё и подтвердить контактные данные игрока и/или активировать особый промо-код.Получить приветственный бонус имеют только свежие посетители онлайн-казино. Способы описаны в условиях акции любого законного казино, почаще всего это: <a href=https://gitlab.com/sania1342931/minsky/-/issues/1>https://gitlab.com/sania1342931/minsky/-/issues/1</a> Промокод – определённая комбинация знаков, которую необходимо ввести в отвечающее поле при твореньи учетной записи либо активировать в личном профиле игрока в разделе с призами.На благотворительные призы онлайн-казино практически всегда распространяется ограничения по стране проживания посетителей. Даже случае для разрешается открывать счет и играть на деньги в заведении, это еще не означают, что для доступны not the slightest deposit bonuses. 1×slots официальный сайт скачать Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 поболее. Когда игроку надеется большое фриспинов, администрация может бить3 их начисление на несколько дней. Бесплатные вращения предоставляются для конкретного слота, который указывается в правилах промоакции.
1×slot официальный сайт
<a href=http://www.svit-world.kiev.ua/user/PatrickExcip/>http://www.svit-world.kiev.ua/user/PatrickExcip/</a> Операторы гемблинга утверждают, собственно например они дерутся с бонус-хантерами. Впрочем, критики считают, что этим казино пытаются сделать из случайного гостя неизменного игрока.Этот тип приза будет добавлен на Ваш аккаунт в успешной процедуры регистрации с внедрением номера телефонного. Если выбрать иной способ сотворения учетной записи, бездеп не несомненно добавлен на Ваш акк. рабочее зеркало 1×slots В случае установленного лимита на необходимую вывода выигрыша с бездепозитного бонуса, игрок не сможет вывести больше заявленной суммы.
1хслотс рабочее зеркало
Внесение депозита – Будьте готовы пополнить счет после отыгрыша бонуса. Это стандартное заявка управлял для данного типа промо-акций. Лучше заблаговременно уточнить, какую необходимую нужно будет вносить на счет. Как управляло, речь идет о минимальном депозите, хотя вы должны быть уверены, что он для по карману.Онлайн гемблинг развивается с любым днем все больше и больше, новые бренды создаются не по денькам а по часам. Новые интернет казино делают вступительные акции для игроков, для того что бы зарекомендовать себя, и что, этим наиболее предлагают бездепозитные призы за регистрацию, собственно бы не упустить эту вероятность — как пользоваться свежим бездепом, рекомендуем навещать наш сайт как возможно почаще, самое лакомое и новые будет добавляться в этом же списке. Можно. Вы всегда сможете отрешиться от получения бездепозитного бонуса за регистрацию в казино, же Вы не создадите ставку.Третитй бездепозитный приз за регистрацию – денежные свои. К огорчению, начислить рубли либо баксы готовы только знаменитые и знаменитые клубы. С их помощью вас насладиться каждой доступной игрой – автоматом, рулеткой, кено, блэкджеком. Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? 1×slots регистрация на официальном сайте <a href=https://dazhd.com/forum/user/1899/>https://dazhd.com/forum/user/1899/</a> Предложения с бездепозитными бонусами за регистрацию позволяют свежим заведениям привлечь аудиторию на свой вебсайт. А игроки в свою очередь получают возможность выступать на реальные средства без депозита в казино и заработать малый стартовый капитал, который разрешается исключить на карту банка или электрический кошелек.
1×slot зеркало
4. Заберите презент. Чаще всего приз активизируется незамедлительно в регистрации. Но случаются ситуации, когда нужно зайти в личный кабинет либо написать в службу. Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро либо 20 долларов. Если выдаются фриспины, их число изредка превышает нескольких десятков даровых вращений.Активация происходит за промокодов, коие вводятся в личном офисе после регистрации. Среди спецпредложений в перечне Casino.ru содержатся неповторимые промокоды, которые доступны только посетителям портала. Другие методы начисления средств ? автоматическая активация незамедлительно в творенья аккаунта и получение дара по запросу в службу технической поддержки. <a href=https://wlppr.net/user/KeithEnupt/>https://wlppr.net/user/KeithEnupt/</a> Казино выделяет вероятность заработать и исключить настоящие средства на бездепозитных бонусах. Обычно, это малозначительная сумма, которую казино имеет себе разрешить подарить игроку. 1×slots быструю регистрацию а также мгновенное После получения бонуса вывод средств для посетителя будет недосегаем того, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо пара месяцов. Выводить деньги игрок сможет только после отыгрыша.
<b>Смотреть еще похожие новости:</b>
<a href=https://sadhaka.nl/forum/viewtopic.php?t=104289>1×slots зеркало на сегодня</a>
<a href=https://forum.oursson.ru/viewtopic.php?f=2&t=11642>1хслот зеркало сайта</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Активация валютного вознаграждения случается автоматически последствии создания профиля либо использования промокода. Иногда операторы предъявляют вспомогательные требования: подписаться на страницы казино в социальных сетях либо на рассылку маркетинговых известий, скачать и установить дополнительный софт и т.д. С такими ординарными советами любое казино с призом за регистрацию способно принести в разы больше выгоды и выгоды.
#4772 AHoini
<a href=https://vds17171.worldblogged.com/36437280/5-tips-about-bc-casino-you-can-use-today>bc.game casino</a> <a href=https://vds60504.blogs100.com/30966696/vavada-казино-без-депозит-options>vavada online</a>
#4773 Charlesgunnyhttp://filmkachat.ru
1х слот 1хслотс регистрация перейти на 1×slots
Условия вывода выигрыша. В некоторых заведениях для успешного вывода с бездепозитного бонуса достаточно пополнения баланса и подтверждения личности. В иных же клубах, необходимо несколько один прокрутить свой депозит.Итак, дабы благотворительные бонусные кредиты превратились в настоящие средства, которыми вы можете управлять по своему усмотрению, их надо(надобно) отыграть. Вейджер по уточнять в правилах онлайн-казино. <a href=http://filmkachat.ru/>1×slots регистрация на 1хслотс</a> <a href=https://forums.ngames.com/forum/league-of-angels/community-ab/general-discussion-ab/62087-innovative-luxury-real-estate-marketing-ideas-that-actually-drive-premium-sales>https://forums.ngames.com/forum/league-of-angels/community-ab/general-discussion-ab/62087-innovative-luxury-real-estate-marketing-ideas-that-actually-drive-premium-sales</a> Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном бонусе, то начала обратите внимание на значение вейджера и срок, кот-ый дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть бонус и вывести выигрыш.Активация денежного вознаграждения случается механически последствии творения профиля или использования промокода. Иногда операторы предъявляют вспомогательные требования: подписаться на странички казино в соц сетях или на рассылку рекламных сообщений, скачать и ввести вспомогательный софт и т.д. 1×slots регистрация то дальше необходимо пройти <a href=https://fromdust.art/index.php?title=%C3%90%C2%A4%C3%91%E2%82%AC%C3%90%C2%B0%C3%90%C2%BD%C3%91%CB%86%C3%90%C2%B8%C3%90%C2%B7%C3%91%E2%80%B9_%C3%90%C3%90%C2%BF%C3%91%E2%80%9A%C3%90%C2%B5%C3%90%C2%BA_%C3%90%C3%A2%E2%82%AC%E2%84%A2_%C3%90_%C3%90%C2%BE%C3%91%C3%91%C3%90%C2%B8%C3%90%C2%B8:_%C3%90%C2%A2%C3%91%E2%82%AC%C3%90%C2%B5%C3%90%C2%BD%C3%90%C2%B4%C3%91%E2%80%B9_%C3%90%CB%9C_%C3%90%C5%B8%C3%91%E2%82%AC%C3%90%C2%BE%C3%90%C2%B3%C3%90%C2%BD%C3%90%C2%BE%C3%90%C2%B7%C3%91%E2%80%B9_%C3%90%C3%90%C2%B0_2024_%C3%90%E2%80%9C%C3%90%C2%BE%C3%90%C2%B4>https://fromdust.art/index.php?title=%C3%90%C2%A4%C3%91%E2%82%AC%C3%90%C2%B0%C3%90%C2%BD%C3%91%CB%86%C3%90%C2%B8%C3%90%C2%B7%C3%91%E2%80%B9_%C3%90%C3%90%C2%BF%C3%91%E2%80%9A%C3%90%C2%B5%C3%90%C2%BA_%C3%90%C3%A2%E2%82%AC%E2%84%A2_%C3%90_%C3%90%C2%BE%C3%91%C3%91%C3%90%C2%B8%C3%90%C2%B8:_%C3%90%C2%A2%C3%91%E2%82%AC%C3%90%C2%B5%C3%90%C2%BD%C3%90%C2%B4%C3%91%E2%80%B9_%C3%90%CB%9C_%C3%90%C5%B8%C3%91%E2%82%AC%C3%90%C2%BE%C3%90%C2%B3%C3%90%C2%BD%C3%90%C2%BE%C3%90%C2%B7%C3%91%E2%80%B9_%C3%90%C3%90%C2%B0_2024_%C3%90%E2%80%9C%C3%90%C2%BE%C3%90%C2%B4</a>
1хслотс зеркало на сегодня
Несмотря на то, что этот вариант стимуляции со стороны азартных платформ довольно популярен в сфере подобных игр, далековато многим почитателям казино ведомо, что по бездепозитные бонусы казино и как именно их возможно эксплуатировать.Если вы избираете проверенное лицензионное онлайн казино и сделайте все обстоятельства получения бездепозитного приза, проблем с получением подарка у Вас не возникнет. 1хслот зеркало В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и когда спорных ситуаций нет возможности куда-то пожаловаться и обосновать собственную правоту. <a href=http://wikimapia.org/forum/memberlist.php?mode=viewprofile&u=1316132>http://wikimapia.org/forum/memberlist.php?mode=viewprofile&u=1316132</a> Вознаграждения за получение VIP-статуса ? начисляются в программы преданности при достижении очередного уровня либо выдаются персонально менеджерами службы.1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, случае не желайте замерзнуть жертвой плутов либо впустую израсходовать время; 1×slot официальный сайт Пoдтвepдить личнocть посетителя. Для успешного вывода средств, нужно доказать лицо клиента. Нa этaпe вepификaции пpoфиля, работники службы безопасности обязаны убедиться, собственно у игрока не раз акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не может вывести собственный выигрыш, случае у него несомненно несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы.
казино 1×slots
Вывод выигрыша с бездепозитных призов казино – щедрый презент от азартных клубов. Но чтобы вывести собственный заработок, необходимо выполнить ряд условий:Свежий бонус начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в пользовании средствами, а случае отыгрыша оператор возможность ввести ограничение на вывод денег. Некоторые клубы автоматически начисляют бонус на аккаунт игрока в выполнения условий получения, хотя посещают ситуации, когда бонус надо(надобно) активировать игроку самому. Есть некоторое способов активации приза: <a href=http://wiki.life100.live/index.php?title=%D1%81%D0%B0%D0%B9%D1%82%20%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0>http://wiki.life100.live/index.php?title=%D1%81%D0%B0%D0%B9%D1%82%20%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0</a> Можно. Вы всегда сможете отрешиться от получения бездепозитного бонуса за регистрацию в казино, же Вы не создадите ставку.Пoдтвepдить личнocть клиента. Для успешного вывода средств, нужно доказать лицо клиента. Нa этaпe вepификaции пpoфиля, работники службы защищенности обязаны увериться, собственно у игрока не один аккаунт. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не может исключить свой выигрыш, если у него несомненно несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы. 1×слот регистрация в 1×slots casino
1хслотс казино зеркало
Чаще всего казино бонус за регистрацию без депо даёт возможность запустить каждой автомат. Но какого-либо пристально ознакомиться с критериями. Иногда для забавы доступны только определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, какого-либо начать знакомство с миром пыла именно с «одноруких бандитов».Шаг 4. Активация. Внимательно исследуйте условия, информацию по лимитированиям и сроке деянья бонусного предложения. Разобравшись с правилами, можно активировать приз в личном офисе (от ? с использованием промокода) или по запросу в саппорт. Большинство клубов завлекают внимание геймеров за счёт разнородных презентов. На 1 сайтах можно получить виртуальные кредиты, которые откроют доступ ко всему софту. На иных же, администрация предлагает бесплатные вращения для запуска лучших онлайн слотов. Несмотря на различные акции, стоит выделить самые главные.Составленный специалистами Casino.ru список онлайн-казино с бездепозитным бонусом позволяет игрокам сопоставить спецпредложения разных операторов. 1×slots зеркало которую указывали при регистрации кстати <a href=http://fitboss.ru/user/Gregorykic/>http://fitboss.ru/user/Gregorykic/</a>
1× slots casino зеркало
Поспешите арестовать бездепозитные бонусы за регистрацию в казино из представленного перечня. Все платформы не ведут легальную работа, хотя и порадуют правдивыми плодами забавы, высокой отдачей, прыткими выплатами.Для верификации номера телефона, в собственном профиле выберите опцию „Подтвердить номер телефона“ и введите в отвечающее фон код, полученный в sms-сообщении. <a href=http://melitopol.com.ua/forum/profile.php?mode=viewprofile&u=26244>http://melitopol.com.ua/forum/profile.php?mode=viewprofile&u=26244</a> Для выбора азартного заведения Вы можете пользоваться списком наших казино с бонусами за регистрацию. На нашем веб-сайте мы опубликовали список бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, собственно часть призов эксклюзивные и доступны лишь для гостей нашего сайта по-специальному промо-коду либо по уникальной ссылке. Кроме того, для любого приза мы подготовили подробный обзор, в Вы узнаете как получить и отыграть поощрение и как исключить свой выигрыш с бездепа. 1хслот 1хслотс регистрация перейти на 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://talkonlinenews.com/viewtopic.php?t=7618>1×slots официальный сайт скачать на айфон</a>
<a href=http://ledyardmachine.com/forum/User-Jameshoing>1 хслот регистрация в 1×slots casino</a>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5078/#comment-610220>казино 1×slots официальный сайт</a>
<a href=https://astraclub.ru/members/353998-Jameswow>1×слот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Сроки активации приза уточняются любым казино, но чаще всего они не превышают недели с момента получения. Игроку обязательно нужно применять бездеп в течение указанного срока, в ином случае бонус просто пропадет. Каждый приз можно получить лишь один раз, потому если не использовать бездеп в срок, у игрока не будет 2 шанса им воспользоваться. Но есть азартные заведения, готовые просто так вручить средства на забаву. Для этого достаточно сделать профиль. Чтобы исключить выигрыш, сперва необходимо выполнить вейджеровые условия, прописанные в условиях получения бездепа.
#4774 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
какие казино официальное казино вход <a href=https://res-publika.com>рокс казино</a> букмекерская контора играющие казино <a href=https://th-royalgclub.com/>porno Игорь Акинфеев (футбол)</a> cometa casino porno Илья Ковальчук (хоккей) водка казино 1×bet xbet балтбет букмекерская контора 1×bet официальный casino на телефон
DiskiPlus порно с Илюшникова Татьяна Александровна DiskiPlus 1×bet приложение <a href=https://diskiplus.ru>DiskiPlus 1×bet скачать приложение на андроид</a> DiskiPlus зеркала казино DiskiPlus пин ап casino pin up top <a href=https://diskiplus.ru>DiskiPlus porno Юлия Канакина, скелетонистка</a> DiskiPlus casino приложения DiskiPlus пин ап казино DiskiPlus бесплатно фильм казино DiskiPlus порно с Петр Ян (ММА) DiskiPlus макао казино DiskiPlus 1×bet скачать приложение DiskiPlus porno Нина Пирогова, хоккеистка
#4775 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Алена Косторная (фигурное катание) казино сегодня <a href=https://sovsekretno.net/>1win букмекерская контора</a> up casino сайты казино <a href=https://specreporter.com/>сайт винлайн букмекерская контора</a> Светлана Ходченкова porno Илона Маркова, хоккеистка 1×bet xbet букмекерскую контору пин казино вход симулятор казино casino x
DiskiPlus порно с Константин Тюкавин (футбол) DiskiPlus 1×bet скачать приложение <a href=https://www.diskiplus.ru/>DiskiPlus pinco casino</a> DiskiPlus порно с Дарья Клишина, легкоатлетка DiskiPlus casino андроид <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet слоты 1×bet top</a> DiskiPlus Радченко Светлана Юрьевна порно DiskiPlus 1win casino DiskiPlus букмекерская контора официальный сайт скачать DiskiPlus порно с Сергей Бобровский (хоккей) DiskiPlus Кузнецова Анна Юрьевна порно DiskiPlus автомат казино DiskiPlus букмекерская контора бесплатно скачать
#4776 Charlesgunnyhttp://filmkachat.ru
1 хслот регистрация в 1×slots casino
В неких онлайн казино для получения бездепозитных призов не довольно просто зарегистрироваться на веб-сайте клуба и подтвердить свои контактные данные. Дополнительно требуется активация промокода. <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> Акции, посвященные календарным праздничным, случаются рассчитаны как на всех пользователей, например и на категории: например, подарок на 8 марта девушкам-игрокам либо мужчинам на 23 февраля.Нельзя разглядывать забаву на средства, как вариант заработка. Азартные игры запрещены для лиц моложе 18 лет. Topcasinobonuses.mobi классифицируется организатором азартных игр. Сайт одевает информационный нрав. <a href=https://pinshape.com/users/4313519-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%BC%D0%BE%D1%82%D0%BE%D1%86%D0%B8%D0%BA%D0%BB%D0%BE%D0%B2#prints-tab-open>https://pinshape.com/users/4313519-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%BC%D0%BE%D1%82%D0%BE%D1%86%D0%B8%D0%BA%D0%BB%D0%BE%D0%B2#prints-tab-open</a> 1хслотс мобильная версия зеркало <a href=https://richmill.co.kr/kor/bbs/board.php?bo_table=free&wr_id=1015060>https://richmill.co.kr/kor/bbs/board.php?bo_table=free&wr_id=1015060</a> Необходимость отыгрыша. Вейджер в выше, чем для бонусов за депозит. И же средства не отыграны, исключить их невозможно.Бездепозитные бонусы прекрасный вариант бесплатной игры в игровые автоматы. Многие юзеры сети не понимают, что в казино можно начать выступать полностью даром, а потом вывести выигрыш на банковскую карту либо электронный кошелек, другие не доверяют интернет казино, а третьи успешно играют и выигрывают – и подчас довольно большие суммы.
1хслотс зеркало
1×slots зеркало Выше мы предоставили глубокий набор самых свежих и своевременных бездепозитных бонусов в онлайн казино без пополнения на 2022 год, где вам воспользоваться хоть ценным бездепозитным призом.При отыгрыше бонусных средств, нужно учитывать срок действия приза и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный бонус будет аннулирован. <a href=http://www.podrujka.com/user/Kennethlut/>http://www.podrujka.com/user/Kennethlut/</a> В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая приятная часть забавы. Важно, зачастую бездепозитные бонусы в казино выдаются с ограничениями по наибольшей выплате. В среднем возможно рассчитывать на выгода в количество тысяч руб. Как исключить выигрыш с бонуса без депозита. Придётся подтвердить акк документально, в неких заведениях. Процедура верификации обязательна и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате или прочитайте в правилах.Иногда виде одобрения за регистрацию шансы выдаваться билеты для участия в турнирах. Условия их проведения очень отличаются, поэтому мы советуем ознакомиться с любым предложением отдельно. 1×slots коды Необходимость отыгрыша. Вейджер ситуации повыше, чем для бонусов за депо. И же свои не отыграны, исключить их нельзя.
1хслотс регистрация в 1×slots casino
Это раз из главных характеристик привлекательности презента. С завешенным коэффициентом и мастера не смогут выполнить условия по отыгрышу. И так, насколько презентабельно смотрится предложение – бездепозитный приз казино в размере $500 либо $1 000. Чтобы новички получше вникли, что же такое вейджер, мы разберём на примере. <a href=http://testowik.ru/index.php/forum/user/52575-foregoingcrook4>http://testowik.ru/index.php/forum/user/52575-foregoingcrook4</a> 1×slots casino регистрация
1×slots casino зеркало рабочее
Бонус за регистрацию в казино выдается лишь раз раз на одного игрока. Но бывают вспомогательные промоакции, масштабах коих бездепы расступаются для неизменных клиентов и такие презенты Вы можете получить больше 1-го раза. Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, дабы еще раз получить безвозмездный бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ожидает неминуемое наказание. 1×slots официальный сайт скачать <a href=https://forum.spherecommunity.net/User-Robertceant>https://forum.spherecommunity.net/User-Robertceant</a> Обыкновенные бездепозитные бонусы в размере от трех до 20 долларов созданы для того, чтобы в забавы заходили все новые и свежие игроки. Здесь, скорее, несомненно лимитирование на наибольший выигрыш. Важно, чтобы перед наименьшим вкладом был отключен приз за первое пополнение счета, и геймер не попадет на повторный вейджер.
казино 1×slots
<a href=http://zlatremont.ru/index.php?subaction=userinfo&user=cooingintrospec>http://zlatremont.ru/index.php?subaction=userinfo&user=cooingintrospec</a> Основное различие в том, собственно для получения бездепа не надо пополнять баланс в казино. Но считая сего, есть ряд и других различий:Мы подготовили список, где есть всегда актуальные и свежие бездепозитные бонусы казино, которые вы можете получить бесплатно. Для наших пользователей есть особые предложения эксклюзивные призы, коие вы у не отыщите, их мы обозначили специальной красноватой плашкой «Exclusive». рабочее зеркало 1×slots Фриспины — безвозмездные вращения, которые дозволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины числятся наиболее знаменитым и преимущественным видом приза — безвозмездные вращения порой эффективнее и веселее в отыгрыше, чем другие виды бездепов.
<b>Смотреть еще похожие новости:</b>
<a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=4714>рабочее зеркало 1хслотс</a>
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=5462>1×slots зеркало этих способов предполагает регистрацию</a>
<a href=http://khodaumo.com/forum/viewtopic.php?f=2&t=75938&sid=eb2ac3c358c2a34f18ffc24884dced8c>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=http://miupsik.ru/forums/showthread.php?tid=340088>1×slots зеркало регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая милая доля игры. Важно, зачастую бездепозитные призы в казино выдаются с лимитированиями по наибольшей выплате. В среднем возможно рассчитывать на выгода в количество тыщ рублей. Как вывести выигрыш с приза без депозита. Придётся доказать аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате либо прочтите в правилах. Суммы подобных предложений, случаев, колеблются от трех до 20 $, а вейджер на эти свои обязан составлять от 30 до шестидесяти раз. Зачастую, величайшая сумма выигрыша здесь составит от одной до 2-ух сотен $. Если геймер выиграет больше, то все средства все быть списанными до максимально разрешенного выигрыша. Здесь бывает смысл выводить еще несуществующие деньги на свою платежную систему и дальше искать заведение с благоприятными под данную сумму релоадом или бонусом за первое пополнение счета. Есть количество подвидов бездепозитного вознаграждения, предлагаемого великим числом заведений.
#4777 Charlesgunnyhttp://filmkachat.ru
1× слот зеркало
У каждого игорного заведения свои верховодила и условия. Но, чтобы получить бонусы, необходимо выполнить стандартные действия: <a href=http://filmkachat.ru/>казино 1×slots</a> Вейджер (либо вагер) ? это наименьшая сумма ставок, которую необходимо устроить для вывода денежного приза. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим красивее спецпредложение.Прибывшие на аккаунт деньги бездепозитные бонусы предназначаются, главном, только для свежеиспеченных пользователей, коие ранее не имели собственного аккаунта в данном казино. Исходя из сего, случае ранее у игрока был сделан депо, то, по всей вероятности, у него больше не будет способности рассчитывать на получение такового приза в определенном заведении. <a href=https://ai.ceo/read-blog/246294>https://ai.ceo/read-blog/246294</a> Любой выигрыш по ставке выше установленного лимита будет считаться недействительным. То есть ставка не несомненно засчитана при отыгрыше, а случае выигрыша его сумма не поступит на счёт посетителя — результат игры будет полностью аннулирован.Для доказательства электронной почты, просто перейдите по интенсивной ссылке в письме, приобретенном от игрового заведения. 1×slots рабочее зеркало <a href=https://gadgetpage.ru/user/DavidCrice/>https://gadgetpage.ru/user/DavidCrice/</a> Если вы облюбовали для себя некоторое брендов которые вам больше всего приглянулись, для неизменной забавы! Таких гемблеров казино очень предпочитает и оценивает, за частую такие игроки становятся VIP игроками заведения, коим нередко поступают выгодные предложения в виде призов, например же туда входит и бездепозитные.Для доказательства электрической почты, просто перейдите по активной ссылке в письме, приобретенном от игрового заведения.
1×slots регистрация 1×slots casino c2d ru
Иногда операторы требуют внесение минимального депозита перед выводом для верификации платежного инструмента. В некоторых казино данный депозит также светит отыграть. <a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=7523&TITLE_SEO=7523-preobrazovatel-interfeysov-usb-rs485&MID=475444&result=reply#message475444>казино 1×slots</a> 1×slots рабочее зеркало Выигрыши с призов без инвестициям постоянно привязаны к требованию по ставкам и все быть обналичены только после выполнения данных требований. <a href=http://www.russtars.tv/user/Philipamaps/>http://www.russtars.tv/user/Philipamaps/</a> С этими простыми советами любое казино с призом за регистрацию способно принести в разы больше выгоды и выгоды.Если простыми текстами, бездепы – это определённая сумма денег либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать подарки. Но есть некоторые аспекты. Существуют игорные жилища, которые перед что, этим как начислить бонусы настоятельно привязать телефонный, дать копии документов. 1×slots официальный регистрация Раздача призов возможность быть приурочена к различным датам: календарные праздники, деньки рождения игроков, юбилей открытия казино и т. Д. Подарок выдается в виде денег, фриспинов либо баллов для скопления и обмена на предложения оператора. Если пользователь получает выигрыш, деньги начисляются на его счет. Для вывода этой суммы понадобиться выполнить ряд требований.
казино 1×slots
Чтоб получить большой выигрыш, избирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, которые доступны по условиям отыгрыша.Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы которые возникают у начинающих. <a href=https://www.mexicanservers.com/member.php?action=profile&uid=10109>https://www.mexicanservers.com/member.php?action=profile&uid=10109</a> 1× slots зеркало Когда речь идет о валютных призах, казино практически устанавливают условия вейджера, которые необходимо выполнить, чтобы исключить выигрыш.
1 хслот регистрация в 1×slots casino
Вы всего, скажем, как все любите получать подарки и бездепозитные призы казино. Игорные дома взяли в повадку одаривать гэмблеров приятными призами. Стать владельцем приветственного презента можно за создание профиля или пополнение счёта. Второй вариант больше занимательный, ведь клубы готовы удвоить депо! Но в вы новичок и только знакомитесь с миром азарта, чем воспользуйтесь призом за регистрацию. <a href=http://smpn1bejen.sch.id/forum/>1×slots рабочее зеркало</a> Поспешите отобрать бездепозитные призы за регистрацию в казино из представленного перечня. Все платформы не только ведут легальную работа, хотя и обрадуют добросовестными плодами игры, высочайшей отдачей, резвыми выплатами. рабочее зеркало 1хслотс <a href=https://www.hoyolab.com/article/30245801>https://www.hoyolab.com/article/30245801</a> Осталось избрать казино с призом за регистрацию и сделать профиль. После активации презента выигрыш в от Фортуны и способностей.Несмотря на то, собственно данный вариант стимуляции со стороны азартных платформ очень моден области похожих игр, далеко не всем поклонникам казино знаменито, что себе бездепозитные бонусы казино и как именно их вполне эксплуатировать.
1×slots коды
Ниже указан актуальный перечень законных казино в Беларуси с призами на первый депозит. Вы можете попасть на официальный вебсайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. <a href=http://www.zgbbs.org/space-uid-183291.html>http://www.zgbbs.org/space-uid-183291.html</a> Но эти рамки не смущают и хайроллеров, поскольку коэффициенты на слотах разрешают рассчитывать на солидные выигрыши, а в некоторых автоматах разыгрывается прогрессивный джекпот.В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать собственный выигрыш с бесплатных вращений. Прибыль, которую Вы заработаете на этом бездепе возможно ставить на вывод без какого или отыгрыша. 1×slots регистрация 1×slots casino 777 online Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша призов. Заведения постоянно устанавливают наивысшую ставку, допустимую по условиям вейждера.
<b>Смотреть еще похожие новости:</b>
<a href=https://test.soclanovtsy.ru/topic/26973-chicago-house-samples-loops-sounds/page/171/#comment-62824>1×slots регистрация 1×slotscasino09k online</a>
<a href=https://www.mshowto.org/forum/members/jamespauri.html>1×slots casino регистрация 1×slots review live</a>
<a href=https://021snyw.com/forum-673–1.html>1×slots регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бонус без депозита за регистрацию в казино (бездепозитный бонус) – это валютный презент от клуба, который начисляется на акк игрока после регистрации в казино. Кроме сотворения учетной записи, для получения бездепа, очень нередко требуется ещё и доказать контактные данные игрока и/или активировать специальный промо-код.
#4778 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
сайте букмекерской конторы фонбет порно с Алина Загитова <a href=https://glvk.guru/>1×bet зеркало рабочее xbet</a> песня казино букмекерская контора фонбет <a href=https://kompromat1.online/>казино рояль смотреть</a> 1go casino букмекерские конторы в россии скачать 1×bet на андроид casino регистрации 1×bet xbet xyz порно с Баталина Ольга Юрьевна кент casino
DiskiPlus зеркала казино DiskiPlus Лут Оксана Николаевна порно <a href=https://www.diskiplus.ru/>DiskiPlus Яровая Ирина Анатольевна порно</a> DiskiPlus casino com DiskiPlus up casino зеркало <a href=https://www.diskiplus.ru>DiskiPlus официальные букмекерские конторы</a> DiskiPlus букмекерская контора зенит DiskiPlus Самойлова Алла Владимировна порно DiskiPlus casino зеркало сегодня рабочее DiskiPlus порно с Баталина Ольга Юрьевна DiskiPlus порно с Каролина Севастьянова DiskiPlus автомат казино DiskiPlus casino рабочее зеркало
#4779 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало
Бонус начисляется игроку незамедлительно последствии регистрации и прохождения верификации в казино и не настятельно от клиента внесения депо. Как верховодило, объем приза в подобном случае довольно умеренный, впрочем дозволяет новичкам познакомиться с забавой без риска настоящими средствами. <a href=http://filmkachat.ru/>1хслот официальный сайт зеркало</a> <a href=https://ilde2.upf.edu/clatmooc/v/ibs>https://ilde2.upf.edu/clatmooc/v/ibs</a> 1×slots зеркало <a href=https://graddata.ru/user/Joshuarappy/>https://graddata.ru/user/Joshuarappy/</a>
1×slots сайт
Обычно показатель повыше, чем для бонусов на депо. Не дивитесь, если он будет и х100. Иногда завышенный коэффициент вейджера уточняется для обитателей отдельных стран.Фриплей-бонусы. Бонусы за бесплатную игру есть лишь в некоторых клубах. Они зачисляются незамедлительно в сотворения профиля и действуют недолговременное время. Если у вас нет времени израсходовать средства, они просто завершатся. Что касается медли, в большинстве случаев призы действуют протяжении 1-го часа. <a href=https://praisenpray.org/forums/showthread.php?tid=103717>1×slots регистрация то дальше необходимо пройти</a> 1×slots зеркало рабочее Шаг 5. Использование и отыгрыш. Бездеп обязан быть применен в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера. <a href=http://filmsgood.ru/user/DonaldEsOrb/>http://filmsgood.ru/user/DonaldEsOrb/</a> 1×slots коды Бездепозитный бонус предоставляется новенькому игроку за определенные действия. Часто подарок повторяющий денег либо фриспинов выдается за регистрацию, спасибо чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.Любой выигрыш по ставке повыше установленного лимита несомненно являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, а в случае выигрыша его сумма не поступит на счёт посетителя — итог забавы будет всецело аннулирован.
1хслотс рабочее зеркало на сегодня
Основное различие том,, собственно для получения бездепа нужно пополнять баланс в казино. Но считая этого, есть ряд и других отличий:В разделе с бонусами активировать свой подарок. Найти забавы, для коих предусмотрено одобрение и применять приз по назначению. Основное отличие в, что для получения бездепа не надо пополнять баланс в казино. Но не этого, есть ряд и других различий: <a href=https://sex18babes.com/user/JosephMen/>https://sex18babes.com/user/JosephMen/</a> Если при регистрации указать промокод, можно гарантировано получить приз. Где арестовать ваучер? Посетите на блоги или форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В заключительное время игорные дома начали афишироваться в кинокартинах и телесериалах. Присмотритесь и наверняка заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных руб. 1×слот регистрация в 1×slots casino Раздача бонусов возможность быть посвящена различным датам: календарные праздники, деньки рождения игроков, юбилей открытия казино и т. Д. Подарок выдается в виде средств, фриспинов или баллов для накопления и обмена на услуги оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд требований.Бездепозитные бонусы начисляются лишь один один. Не стоит раскрывать свежие аккаунты, дабы получить их повторно. Служба защищенности казино непременно выявит «левого» соучастника и перекроет. Если посетитель выполнит нужные притязания, отыграет свою ставку и решит исключить личный выигрыш, то ему нужно учесть, что казино обязательно потребует дать ксерокопии личных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои вывести не удастся.
1×slots регистрация 1×slotscasino09k online
В качестве призов онлайн казино нередко предлагает выдачу фриспинов, словами безвозмездных вращений игрового барабана. Виртуальные монеты можно применять для обучения в покерной школе либо для забавы в казино. Доступные забавы – В неких азартных играх можно понизить математическое преимущество казино до нескольких 10-х процента. В их количестве многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как верховодило, в этих забавах ставки идут в зачет вейджера не полностью. Например, возможность предусматриваться лишь 50%. В неких забавах бездепозитные бонусы вообще нельзя отыгрывать. 1хслотс мобильная версия зеркало <a href=https://www.autorepguide.com/member.php/7858-Tyronesex>https://www.autorepguide.com/member.php/7858-Tyronesex</a> Обычно бездепозитные акции от казино, прибывают на эл. Почту в деньки рождения либо праздники. В неких онлайн казино возможно адресоваться в чат и как постоянному игроку, вероятно вам предложат бездепозитное предложение.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Существуют казино с бонусом за регистрацию, в очень знамениты фриспины в онлайн казино впоследствии регистрации в конкретных забавах. Они встречаются том почаще безвозмездных поощрений либо классических призов в казино без инвестициям. Например, игрок регистрирует счет, на который начисляются бесплатные игры, бонус за регистрацию в виде безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса геймер выигрывает истинные средства, которые в последствии возможно удачно вывести из заведения на свою платежную систему. То есть, есть шансы исключить свои без рисков собственными финансами. Регистрация, за компьютерные получит призы, займет пару минут, а благодаря данному возможно увеличить 5 евро поощрений до тысячи и без всяких заморочек вывести их. B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax <a href=https://forum.vn.ua/member.php?u=85063>https://forum.vn.ua/member.php?u=85063</a> Условия могут разниться друг от приятеля. Но подобный бонус возможность быть использован только для игрового процесса – полученные на счет финансы до такого, как станут отыграны, исключить невероятно.Диапазон ставок, которые вправе сделать игрок, также лимитирован. Обычно назначать возможно маленькую необходимую — пределах 10–30 руб. За одно вращение. 1×slots официальный сайт мобильная версия скачать
<b>Смотреть еще похожие новости:</b>
<a href=https://elclasificadomx.com/author/jameslog/>1×slots промокод при регистрации 2025</a>
<a href=http://sladkierecepti.5nx.ru/viewtopic.php?f=8&t=6504>1×slots casino регистрация 1×slotscasin online</a>
<a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=8985>1×slots зеркало регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Популярность интернет казино растёт и всё больше пользователей начинают интерес азартными играми. Бездепозитные призы 2022 года, это оригинальные подарки за регистрацию. С их поддержкой свежие игроки могут получить благотворительные вращения либо средства на баланс за одну регистрацию. С выходом игорных заведений в интернете, бездепозитные бонусы стали моднейшим способом привлечения игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш сайт собрал наилучшие предложения из интернета на 2022 год. Воспользуйтесь хоть презентом и можете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить обстоятельства. Вообще перейдя в казино — управляла одинаковы в получении бездепозитных бонусов, в стандартные верховодила входит: доказать эл. Почту и аппарат, наполнить собственный личный профиль, активировать рекламную код либо активировать предложения во вкладке БОНУСЫ.
#4780 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Скоробогатова Ольга Николаевна порно casino зеркало сегодня <a href=https://rucriminal.info/>1×bet скачать бесплатно</a> pin casino porno Виктория Баркова, легкоатлетка <a href=https://slon-ru.com/>казино на деньги</a> casino на телефон casino Александра Бортич фильмы казино рояль букмекерская контора фонбет официальный casino riobet казино фильм онлайн
DiskiPlus 1×bet слоты официальный сайт DiskiPlus казино рояль <a href=https://www.diskiplus.ru>DiskiPlus porno Елизавета Туктамышева</a> DiskiPlus бесплатное казино DiskiPlus Хорова Наталья Александровна порно <a href=https://www.diskiplus.ru/>DiskiPlus pin up casino</a> DiskiPlus казино фильм онлайн DiskiPlus скачать букмекерскую контору DiskiPlus Шевцова Татьяна Викторовна порно DiskiPlus 1×bet xbet xyz DiskiPlus porno Андрей Рублев (теннис) DiskiPlus игры казино DiskiPlus букмекерская контора фонбет официальный
#4781 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Ангелина Гончаренко, хоккеистка 1×bet зеркало рабочее <a href=https://sovsekretno.net/>pin casino</a> казино гта 5 казино фильм <a href=https://t.me/vchkogpu_ru>мобильные букмекерские конторы</a> casino 7k сегодня демо казино casino регистрации 1×bet слоты Разуваева Ксения Денисовна порно bet casino винлайн букмекерская контора официальный сайт
DiskiPlus inform@rucriminal.info DiskiPlus водка казино <a href=https://www.diskiplus.ru>DiskiPlus какие казино</a> DiskiPlus порно с Александр Большунов (лыжные гонки) DiskiPlus new casino <a href=https://www.diskiplus.ru/>DiskiPlus casino вход</a> DiskiPlus casino играть DiskiPlus официальные сайты казино DiskiPlus 1×bet сайт DiskiPlus 7k casino бонус DiskiPlus vodka casino DiskiPlus Ходнева Светлана Владимировна порно DiskiPlus Приезжева Екатерина Геннадьевна порно
#4782 Charlesgunnyhttp://filmkachat.ru
1×slots акции
Еще одно условие касается объемов ставки. Операторы устанавливают максимальную необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, выбранной в Личном кабинете. При превышении лимита есть риск потерять бонуса. Существующие лимитирования относятся и к конкретным обликам ставок. Например, играя в рулетку, клиент возможность столкнуться с запретом назначать фишки на шансы. <a href=http://filmkachat.ru/>казино 1×slots</a> <a href=https://www.jottacloud.com/s/371ce1751dd51e94c37a4f823d984e6a848>https://www.jottacloud.com/s/371ce1751dd51e94c37a4f823d984e6a848</a> 1×slos регистрация в 1×slots casino <a href=http://tools174.ru/bitrix/redirect.php?goto=http://mr-wheels.ru/bitrix/click.php?goto=http://as-pigments.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/c_W3GpBiuIg>http://tools174.ru/bitrix/redirect.php?goto=http://mr-wheels.ru/bitrix/click.php?goto=http://as-pigments.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/c_W3GpBiuIg</a> Мы рекомендуем не отказываться от похожих предложений знаменитых казино. Выделите несколько минут на регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сейчас фортуна будет на вашей стороне!Для как, чтобы отыграть необходимую вашего бездепозитного приза нужно выполнить условия вейджера. Очень часто фриспины даются на определенные слоты (book of ra, book of lifeless, book of sun), избирайте разъем для по душе, все очень красивые и качественные. Бездепозитные бонус имеет быть денежным так и повторяющий фриспинов на слоты
1×slots casino регистрация 1×slots review live
1× slots зеркало Подтверждение электрической почты – одно из основных условий, которое есть практически в любом бездепозитном казино. Чтобы верифицировать электронную почту, довольно перейти по активной ссылке в письме, приобретенном от азартного клуба. <a href=http://www.xkfzbbs.com/home.php?mod=space&uid=68057>http://www.xkfzbbs.com/home.php?mod=space&uid=68057</a> 1х слотс зеркало регистрация в 1×slots casino Выполнив все требования оператора, заказчик возможность оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем менее суток. Если дополнительно потребуется пройти функцию верификации, то срок возрастает до 1–2 рабочих дней. Для перевода применяются банковские приборы и электронные платежные системы. Второй метод подходит другого, как, так как масса транзакций такой исполняются мгновенно. В связи со специфичностью функционирования банков обработка платежей может взятьвдолг(взятьвзаймы) до нескольких рабочих дней.
1×slots официальный зеркало рабочее
Прежде чем активировать бездеп, нужно убедиться том,, что государство, гражданином коей является игрок, не заходит в перечень не.Некоторые веб-сайты, до чем провести регистрацию игроков, предлагают ответить на некоторое базовых вопросов. Цель проведения подобной викторины – выявить случайных людей, которые не имеют представления о покере, и не разрешить получения ими бонусов. Если гость теснее играл в казино, то ответить на полтора десятка простых вопросов несомненно несложно. Очень нередко, ответы можно отыскать на официальных сайтах этих учреждений. Список так называемых «разрешенных землель» прилагается к правилам бонусной программки игорного портала. Обязательно проверьте, распространяются ли на вас подобные санкции. <a href=https://www.reikiandastrologypredictions.com/member.php?action=profile&uid=19541>https://www.reikiandastrologypredictions.com/member.php?action=profile&uid=19541</a> Чтобы бездеп не был начислен на Ваш аккаунт, Вам не нужно активировать бонусный код. Если поощрение от казино было добавлено на Ваш акк механически, а Вы не расчитываете его применять, обратитесь в саппорта с просьбой отменить бездепозитный бонус.Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, дабы снова получить бесплатный бонус. Игорные заведения нетерпимы к бонус-хантерам, потому вас ждет неминуемое санкция. 1×slots зеркало регистрация то дальше необходимо пройти
1×slots промокод при регистрации 2025
В лицензионных бездепозитных казино выступать в азартные игры действительно безопасно. Наличие лицензии подтверждает что, этот прецедент, собственно клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP. <a href=https://timepost.info/showthread.php?tid=110245>1× slots casino официальный сайт</a> На странице представлены бездепозитные бонусы за регистрацию в казино редкая награда за коей гонятся все игроки как новенькие, например и профессионалы. Мы тоже уделяем большое внимание на наличие призов при составление рейтинга казино на деньги. Бездепозитный приз это вероятность играть безвозмездно и выиграть реальные деньги.Да, у даровых бонусов есть дефекты. Прежде всего, они обычно очень. Кроме как, условия вейджера по ним постоянно жесткие. Но все неименье риска делает их очень привлекательными для посетителей. Отказ в прохождении верификации. Если заказчик не желает или не может предоставить документы, подтверждающие его личность, профиль несомненно заблокирован совместно, вкупе со всеми бонусными начислениями.При малый сумме приза рекомендовано играть по невысоким ставкам, а использовать максимальные превосходнее только никаких случае, случае вейджер слишком великой, а время на отыгрыш крепко ограничено. казино 1×slots <a href=https://premiumstoreco.com/user/xrumfilm1605inbox-lv/>https://premiumstoreco.com/user/xrumfilm1605inbox-lv/</a> Если при регистрации показать промокод, можно гарантировано получить приз. Где взять ваучер? Посетите направленные блоги либо форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В заключительнее время игорные жилища начали афишироваться в кинокартинах и телесериалах. Присмотритесь и скорее заметите промокод, кот-ый принесёт 500 или 1 000 бонусных руб.
скачать 1×slots на андроид мобильная версия
Иногда в бездепа, казино презентует минимальный бонус (до 50 руб. ), из-за которого не стоит заморачиваться.С не отыгранным бонусом запрещается превышать объем наибольшей ставки. Нарушение сего условия иметь аннулирование выигрыша. Благодаря программке преданности от игорного заведения, возможно взять неплохой старт и без дополнительных инвестициям запустить видеослоты. Кроме того, можно рассчитывать на реальную удачу и получить, без инвестиции личных финансов, великой выигрыш.Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке представители онлайн-казино публикуют важную информацию о no down payment bonuses и услугах. <a href=https://google.com.vn/url?q=https://doctorlazuta.by/>https://google.com.vn/url?q=https://doctorlazuta.by/</a> Размер приза. В качестве бездепов обыкновенно начисляют большие суммы, а когда идет о бонусах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то кое-какие казино шансы подарить игроку до 2000$.Зарегистрируйтесь. Для регистрации почаще всего довольно установить собственный номер аппарата и почтовый адресок, в чего ввести полученный код из СМС. Возможно, потребуется показать промокод. В правилах акции будет написано, где его надо включать. Иногда это надобно делать при регистрации, от — уже в создания собственного офиса, на отдельной страничке. 1хслотс официальный сайт зеркало Не стоит незамедлительно же отрицаться от приветственных подарков в похожих казино. Администрация готова начислить средства либо фриспины, но предварительно работники должны убедиться, собственно вы не аферист. Дело сомнений, собственно развелось слишком количество охотников за бонусами. Они научились накалывать систему и наваривать крупные суммы денег.
<b>Смотреть еще похожие новости:</b>
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=77660&extra=>x1 slots регистрация в 1×slots casino</a>
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=44656>1×slots регистрацию процедура займет всего лишь</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подарки на конкретные даты отличаются критериями получения. Если поощрение начисляют игроку на денек рождения, то сумма обычно зависимости от общего объема депозитов за прошедший год. Ниже указан актуальный перечень законных казино в Беларуси с призами на 1-ый депо. Вы сможете попасть на официальный вебсайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз.
#4783 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
up casino пин ап казино <a href=https://rumafia.news/>1go casino</a> букмекерская контора бетсити порно с Васильева Татьяна Викторовна <a href=https://t.me/vchkogpu_ru>порно с Бондаренко Анастасия Борисовна</a> порно с Сергей Бобровский (хоккей) порно с Бондаренко Анастасия Борисовна casino betting champion casino букмекерская контора без бесплатно играем казино 7k casino бонус
DiskiPlus казино большая DiskiPlus Нургалиева Эльвира Рамиловна порно <a href=https://diskiplus.ru/>DiskiPlus кент casino</a> DiskiPlus скачать 1×bet 1×bet xyz DiskiPlus реального казино <a href=https://www.diskiplus.ru/>DiskiPlus букмекерская контора леонов</a> DiskiPlus pin ап casino DiskiPlus порно с Петр Ян (ММА) DiskiPlus казино смотреть онлайн DiskiPlus казино ли DiskiPlus 1×bet официальный сайт 1×bet xyz DiskiPlus porno Александра Степанова, фигуристка DiskiPlus порно с Владимир Минеев (ММА)
#4784 Charlesgunnyhttp://filmkachat.ru
1×slots официальный demo регистрация в 1×slots casino
Чаще всего используются коды. Их нужно заносить в особые окна регистрационной анкеты, если идет о пригласительных бонусах, или в определенном разделе личного офиса игрока.Промокод – определённая комбинация знаков, коию необходимо установить в отвечающее фон при творении учетной записи или активировать в личном профиле игрока в разделе с призами. <a href=http://filmkachat.ru/>1×slots регистрацию более популярный вариант это</a> Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Нет. Для получения бездепозитного приза в казино нужна обязательная регистрация на веб-сайте. Играть в слоты безвозмездно и без регистрации можно только в демо режиме. <a href=https://elearn.ellak.gr/mod/forum/discuss.php?d=31646>https://elearn.ellak.gr/mod/forum/discuss.php?d=31646</a> казино 1×slots <a href=http://www.russtars.tv/user/ZacheryGoche/>http://www.russtars.tv/user/ZacheryGoche/</a>
1×slots актуальное зеркало
В настоящее время получить приз за регистрацию в казино очень просто. Почти каждый игорный жилище с готовностью предоставит деньги либо безвозмездные вращения. Многие игроки используют данным и не стесняются региться в каждом клубе с выгодными условиями. Кстати, это отличная вероятность выдумать выигрышную тактику и сорвать куш. <a href=http://www.ihavethepussy.com/de/threads/194858–1×slot-%D0%A0%C2%B7%D0%A0%C2%B5%D0%A1%D0%82%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%BB%D0%A0%D1%95?p=212392#post212392>1×slot зеркало</a> 1×slots регистрация на 1хслотс <a href=http://43.240.15.40/home.php?mod=space&uid=600990>http://43.240.15.40/home.php?mod=space&uid=600990</a> Для получения бездепа нужно пригласить в игру по реферальной ссылке нового клиента: он обязан зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на сумму, обозначенную в условиях промоакции.После получения приза вывод средств для клиента будет недосегаем до, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо чета недель. Выводить деньги игрок сможет только после отыгрыша. 1 x slots casino
1×slots актуальное зеркало
Бездепы с безвозмездными вращениями деют пользователям право вертеть барабаны игровых автоматов без снятия средств со счета. За любой раунд уплачивает казино. Число спинов ограничено и изредка превышает сотню. Если промоакция включает в себя количество бесплатных игр, их начисление возможность быть разбито на некоторое дней. <a href=http://www.makili-aliyev.com/2019/08/research-note-on-nagorno-karabakh.html>http://www.makili-aliyev.com/2019/08/research-note-on-nagorno-karabakh.html</a> Диапазон ставок, коие вправе сделать игрок, кроме лимитирован. Обычно ставить можно небольшую необходимую — около 10–30 рублей за одно вращение.Условия имеют разниться приятель от друга. Но такой приз имеет быть применен лишь для игрового процесса – полученные на счет деньги до того, как станут отыграны, исключить невозможно. сайт 1× slots casino В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, нужно обратиться в саппорта спустя лайв-чат на веб-сайте казино.
1×slot официальный сайт
Как и акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такого предложения являются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих посетителей и дозволяет им составить впечатление о функционале, не рискуя вескими совокупностями. Вышеописанная причина и является главным моментом, следствии которого операторы отдают часть собственной выгоды на разные маркетинговые расходы и маркетинговые кампании. А наиболее действенным здесь будут играть непосредственно бездепозитные призы казино 2022 с выводом за регистрацию.Диапазон ставок, коие вправе устроить игрок, также лимитирован. Обычно назначать можно маленькую необходимую — в 10–30 руб. За одно вращение. 1×slots бездепозитный бонус за регистрацию <a href=http://hkeverton.com/forumnew/home.php?mod=space&uid=172997>http://hkeverton.com/forumnew/home.php?mod=space&uid=172997</a>
1×slots зеркало регистрация то дальше необходимо пройти
Вейджер в переводе с британского означает «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша полученного приза, в нашем случае бездепозитного. Число ставок большого — главно только набрать сумму, пропорциональную сумме одобрения. <a href=http://www.mjzcnd.com/home.php?mod=space&uid=43334>http://www.mjzcnd.com/home.php?mod=space&uid=43334</a> Возможность сыграть дополнительное соревнование (а от и количество) совершенно бесплатно, а выигрыш, тому, поступает на счёт игрока. скачать 1×slots на андроид мобильная версия
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.home-visa.ru/memberlist.php?mode=viewprofile&u=3536>1×slots промокод при регистрации</a>
<a href=https://swordmaster.org/user/JamesVok/>1×slots официальный сайт зеркало рабочее</a>
<a href=https://forum.home-visa.ru/memberlist.php?mode=viewprofile&u=3536>1×slots casino зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Призовые начисления без депо могут предоставляться для участия в турнирах онлайн казино. Потратить перечисленные средства можно исключительно масштабах этой промоакции. Условия их проведения включают в себя ограничения на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, никакого изучить его правила. На критериях отыгрыша даровых бонусов стопам остановиться подробнее. С ними связаны аспекты, коие невозможно забыть без внимания.
#4785 KevinJefhttps://odnazhdy-v-skazketv.ru
увлекательный сериал <a href=https://odnazhdy-v-skazketv.ru/>однажды в сказке</a> о жизни сказочных персонажей в реальном мире. Интригующий сюжет, волшебные события и неожиданные тайны. Смотрите онлайн в высоком качестве прямо сейчас!
#4786 BetanoCasinohttps://betano.directorio-de-casinos-mx.com
<a href=https://betano.directorio-de-casinos-mx.com>https://www.betano.directorio-de-casinos-mx.com</a>
Download application bookmaker Betano – win right now! <a href=https://betano.directorio-de-casinos-mx.com>http://betano.directorio-de-casinos-mx.com</a>
#4787 Davidcekhttps://nakrytka.com
Раскрутка в соцсетях <a href=https://nakrytka.com/>https://nakrytka.com</a> без лишних затрат! Привлекаем реальную аудиторию, повышаем охваты и активность. Эффективные инструменты для роста вашего бренда.
#4788 Michaeleagewhttps://ebs2best.at
удобный маркетплейс <a href=https://ebs2best.at/>bs2site</a> с высоким уровнем анонимности и надежной системой защиты. Интуитивный интерфейс, проверенные продавцы и безопасные сделки делают его лучшим выбором для покупок.
#4789 Rickylekhttps://iberiaproperty.ru
Недвижимость на Северном Кипре <a href=https://iberiaproperty.ru/>https://iberiaproperty.ru</a> выгодные инвестиции и комфортная жизнь у моря. Апартаменты, виллы и пентхаусы по доступным ценам. Поможем выбрать лучший вариант и оформить покупку.
#4790 Richardunpahhttps://innproverka.ru
Хотите проверить компанию <a href=https://innproverka.ru/>https://innproverka.ru</a> по ИНН? Наш сервис поможет узнать подробную информацию о юридических лицах и ИП: статус, финансы, руководителей и возможные риски. Защищайте себя от ненадежных партнеров!
#4791 AHoini
<a href=https://www.localtrusted.co.uk/wiki/index.php?title=Dep%C3%B3sito_E_Saque_Na_1win_Mo%C3%A7ambique>1win casino moçambique</a> <a href=https://www.andreadanahe.com/magyar-online-kaszinok-ertekelesek-bonuszok-es-aktualis-hirek/>vavada</a>
#4792 Andrewrarhttps://playpromocode.com/
Бесплатные промокоды <a href=https://playpromocode.com/cs2/csgo-skins/>https://playpromocode.com/cs2/csgo-skins/</a> для ваших любимых игр! Получайте монеты, бустеры, скины и другие ценные награды. Мы собираем только проверенные коды и обновляем их каждый день.
#4793 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino betting слот casino <a href=https://slon-ru.com/>букмекерские конторы без депозита</a> Елена Лядова кент казино <a href=https://rhymes-punches.com/>casinos winning</a> казино онлайн приложения букмекерских контор казино на деньги casino 7k сегодня порно с Никита Кучеров (хоккей) 7k casino бонус порно с Ирина Сидоркова
DiskiPlus 1×bet casino DiskiPlus casino daddy <a href=https://diskiplus.ru>DiskiPlus Ходнева Светлана Владимировна порно</a> DiskiPlus букмекерская контора мостбет DiskiPlus фреш казино <a href=https://www.diskiplus.ru>DiskiPlus casino сегодня</a> DiskiPlus Ирина Горбачева DiskiPlus casino DiskiPlus гта казино DiskiPlus porno Алена Косторная (фигурное катание) DiskiPlus 1×bet сайт DiskiPlus 1×bet зеркало рабочее DiskiPlus casino бездепозитный
#4794 AHoini
<a href=https://vds41504.blogminds.com/5-tips-about-1win-gabon-you-can-use-today-28091029>1win Gabon</a> <a href=https://www.petinnate.com/list/index.php?page=user&action=pub_profile&id=337010>1win Latviju</a>
#4795 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке нужно восполнить счет в казино. Для депозитных призов, данная процедура не необходима, например как депозит уже сделан.Как и другие акции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такого предложения считаются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает новых посетителей и дозволяет им составить впечатление о функционале, не рискуя значительными совокупностями. <a href=http://filmkachat.ru/>1хслотс официальный сайт зеркало</a> <a href=https://webanketa.com/forms/6gtk2c9q6rqkcd1sc8wk4rhr/>https://webanketa.com/forms/6gtk2c9q6rqkcd1sc8wk4rhr/</a> Фриплей-бонусы. Бонусы за безвозмездную игру есть лишь в некоторых клубах. Они зачисляются сразу последствии создания профиля и действуют недолговременное время. Если у вас нет времени потратить свои, они просто завершатся. Что дотрагивается медли, в большинстве случаев призы срабатывают на одного часа.Вывод выигрыша с бездепозитных призов казино – великодушный подарок от азартных клубов. Но дабы вывести свой заработок, нужно выполнить ряд условий: 1×slots рабочее зеркало на сегодня <a href=https://www.polovw.it/foro/memberlist.php?mode=viewprofile&u=75329>https://www.polovw.it/foro/memberlist.php?mode=viewprofile&u=75329</a> Маркетинговая деятеля всех игорных интернет-клубов обязана носить разнообразный характер. И в вознаграждения на депозит работают чтобы, чтобы, дабы стимулировать заносить депозиты и поощрять уже место пользователей, то бездепозитный приз в казино или бонус за регистрацию в казино, до всего, рассчитан на расширение базы потребителей.
1×slots зеркало видели такую регистрацию на
Зарегистрируйтесь. Для регистрации чаще всего достаточно установить собственный номер телефонного и почтовый адрес, в чего установить полученный код из СМС. Возможно, требуется указать промокод. В правилах промоакции несомненно написано, где его хотелось вводить. Иногда это хотелось делать при регистрации, время — теснее последствии творенья собственного кабинета, на отдельной странице. 1×slots casino зеркало <a href=https://nordgoldjobs.com/forum/user/35134/>https://nordgoldjobs.com/forum/user/35134/</a> Изучить правила и условия получения бездепозитных бонусов казино, Вы сможете у нас на сайте в разделе с бонусами или на официальном веб-сайте выбранного Вами казино. Если возможности отыскать необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электронной почте. 1×slots официальный сайт зеркало
1хлот регистрация в 1×slots casino
Бездепозитные призы начисляются только один раз. Не стоит открывать свежие аккаунты, дабы получить их повторно. Служба безопасности казино обязательно выявит «левого» участника и заблокирует. Если посетитель выполнит нужные притязания, отыграет свою ставку и решит исключить личный выигрыш, то ему надо(надобно) принять, что казино обязательно потребует дать ксерокопии личных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные средства вывести не получится.Самые известные способы вывода средств ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электронным платежным системам на Neteller и Skrill, а также пользуются криптовалютными кошельками. Вывод выигрышей может исполняться моментально либо занимать от нескольких часов до нескольких суток. <a href=http://www.kssink.com/bbs/board.php?bo_table=free&wr_id=852081>http://www.kssink.com/bbs/board.php?bo_table=free&wr_id=852081</a> Бездепы обычно предлагают с отыгрышем — мгновенно вывести выигранные средства нельзя. Перевод средств со счета будет возможен в того, как пользователь выполнит все притязания казино, а сумма имеет превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, на коих клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней в активации.Но не стоит думать, что снабжая юзеров этими призами, казино увлекается спонсированием. Ведь объемы вознаграждений, главном, не большие (средним объемом от 5 до 20 долларов). И на эти средства налагаются конкретные условия и лимитирования, неотклонимые к исполненью игрока, случае в последствии он желает получить все средства выигранные финансы. 1×slots официальный сайт, скачать
1хслот зеркало сайта
Каждый компьютерные должен сперва детально изучить обстоятельства по получению и отыгрышу понравившегося презента. Если всё организует, поторопитесь отобрать безвозмездные спины за регистрацию в казино без депо с выводом и без отыгрыша и прямо в начать вращать барабаны топовых слотов.Вейджер в переводе с английского означает «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша приобретенного бонуса, в нашем случае бездепозитного. Число ставок имеет — принципиально лишь набрать необходимую, пропорциональную сумме поощрения. Обычно бездепозитные промоакции от казино, прибывают на эл. Почту в дни рождения или дни. В некоторых онлайн казино возможно обратиться в чат и как неизменному игроку, возможно вам предложат бездепозитное предложение. казино 1×slots <a href=http://ww.yeosunet.com/bbs/board.php?bo_table=free&wr_id=52315>http://ww.yeosunet.com/bbs/board.php?bo_table=free&wr_id=52315</a>
1хслот зеркало сайта
В любом казино с бездепозитным бонусом предусмотрены вейджеровые условия. Это один-единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) сделать определённое количество ставок. Чем круче приз, что, этим сложнее выполнить обстоятельства, и напротив.Многие казино предоставляют в маркетинговых целях благотворительные бонусы исключительно для наших читателей. Чтобы их получить, нужно перейти на игровой вебсайт по партнерской ссылке с нашего портала. Для выбора азартного заведения Вы можете воспользоваться списком наших казино с бонусами за регистрацию. На нашем веб-сайте мы выпустили список бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, собственно доля призов неповторимые и доступны только для гостей нашего вебсайта по-специальному промо-коду или по оригинальной ссылке. Кроме такого, для каждого приза мы подготовили доскональный обзор, каком Вы узнаете как получить и отыграть одобрение и как вывести собственный выигрыш с бездепа. <a href=https://www.spacepub.net/members/5050-Raymondtub?s=0b081afc5bc2046d3c6a5bedcbc50aa1>https://www.spacepub.net/members/5050-Raymondtub?s=0b081afc5bc2046d3c6a5bedcbc50aa1</a> В интернете много известных игорных площадок с красивыми акционными предложениями. Однако пристально читать обстоятельства 10-ов предложений в надоест, ну и время отнимет большое. Поэтому наша команда подготовила ТОП-3 сайтов с наилучшими бездепозитными призами: 1×slots casino зеркало рабочее Отказ в прохождении верификации. Если клиент не хочет или не дать документы, подтверждающие его личность, профиль несомненно заблокирован вместе со всеми бонусными начислениями.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1хслотс рабочее зеркало</a>
<a href=https://qualityprogamer.de/forum/showthread.php?tid=393966>скачать 1×slots на андроид мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы казино это финансовая компенсация, предлагаемая юзерам на дармовой базе и возможность выступать в онлайн казино бесплатно. Если сравнивать их с поощрениями за вклад, каких средства выдаются только потом первоначального пополнения счета, то бездепозитные вознаграждения получаются даром. То есть, играющий получает вероятность создавать ставки на теснее имеющие деньги, которые выдаст заведение, выполняя, этом, обыденные действия, дабы их извлечь (тут идет о регистрация, удостоверении личности с внедрением номера телефонного, оформления заказы и т.д.). Некоторые клубы автоматически начисляют приз на аккаунт игрока последствии исполнения критерий получения, хотя случаются истории, когда приз надо(надобно) активировать игроку самому. Есть количество методов активации приза:
#4796 ThomasMephttps://esportpromo.com
Промокоды для игр <a href=https://esportpromo.com/cs2/>https://esportpromo.com/cs2/</a> это бесплатные бонусы, скидки и эксклюзивные награды! Находите актуальные коды, используйте их и получайте максимум удовольствия от игры без лишних затрат.
#4797 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up casino пин ап Лут Оксана Николаевна порно <a href=https://glvk.guru/>1×slots casino</a> казино рояль смотреть казино большая <a href=https://www.ossetia.tv/>1×bet зеркало</a> скачать букмекерскую контору игры казино скачать 1×bet на андроид porno Светлана Ходченкова порно с Елена Никитина, скелетонистка букмекерскую контору пин ешь казино
DiskiPlus порно с Виктория Синицина, фигуристка DiskiPlus Семёнова Татьяна Владимировна порно <a href=https://www.diskiplus.ru>DiskiPlus porno Андрей Рублев (теннис)</a> DiskiPlus Валентина Матвиенко порно DiskiPlus играющие казино <a href=https://www.diskiplus.ru>DiskiPlus 1×bet xbet xyz</a> DiskiPlus Самойлова Алла Владимировна порно DiskiPlus porno Яна Троянова DiskiPlus ограбление казино DiskiPlus 1×bet зеркало слоты DiskiPlus casino официальный зеркало DiskiPlus порно с Афонина Марина Игоревна DiskiPlus Мухтиярова Елена Вячеславовна порно
#4798 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
Теоретически, к бесплатным призам можно отнести например именуемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, поэтому собственно они предоставляют только возможность создавать ставки. <a href=http://filmkachat.ru/>1×slots casino регистрация</a> <a href=https://codepen.io/bjxkafyt-the-encoder/pen/bNbrqxY>https://codepen.io/bjxkafyt-the-encoder/pen/bNbrqxY</a> Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, a зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. 1×slot казино зеркало <a href=https://boobs.red/user/Charlesdiurl/>https://boobs.red/user/Charlesdiurl/</a>
1х слот 1хслотс регистрация перейти на 1×slots
casino 1×slot <a href=http://www.ksmro.co.kr/bbs/board.php?bo_table=free&wr_id=477056>http://www.ksmro.co.kr/bbs/board.php?bo_table=free&wr_id=477056</a> В бонусную программу множества операторов входят систематические бездепы. Это бессрочные акции, поощряющие активных постоянных игроков. Популярный формат — раздача фриспинов по конкретным дням недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депо в обмен на скопленные баллы преданности.Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. 1×slots регистрация на 1хслотс Вейджер (wager) – это коэффициент, кот-ый демонстрирует на какую сумму необходимо устроить ставок, дабы вывести бонус из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего бонуса, Вам нужно устроить ставок на сумму: 500*70=3500 руб. Только всецело отыграв бонус, Вы можете исключить собственный выигрыш.
1×slots зеркало видели такую регистрацию на
Разные казино имеют собственные управляла по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высокие притязания. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до 100 раз в игровых автоматах. Например, в игрок получил даром десять $, то нужно несомненно отыграть их, поставив 1 тысячу спинов по 1 баксу каждый. Стоит отметить, что не все казино дают вероятность играть на бонусы и не во всех увеселительных заведениях схожие правила для отыгрывания. Некоторые казино запрещают выступать на бонусы в блекджек или ограничивают ставки до пяти процентов, собственно существенно увеличивает в 10-ки один количество нужных игр.Сроки активации бонуса устанавливаются любым казино, хотя чаще всего они не превосходят недели с момента получения. Игроку обязательно нужно применять бездеп протяжении указанного срока, в ином случае приз просто пропадет. Каждый бонус можно получить только раз один, потому если не применять бездеп в срок, у игрока не несомненно 2 шанса им пользоваться. <a href=http://meedent.ru/index.php?subaction=userinfo&user=offbeatardor66>http://meedent.ru/index.php?subaction=userinfo&user=offbeatardor66</a> Бездеп с фриспинами имеет обхватывать всю коллекцию игр на веб-сайте либо разработки 1-го провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш может быть выведен в такого, как пользователь отыграет эту необходимую. Возможность оценить полный функционал слотов — главное достоинство данной разновидности. Игроку становятся доступны что, эти функции, коие отсутствуют в демонстрационном режиме, а возможность выиграть настоящие средства прибавляет ярких азартных ощущений. 1хслотс официальный сайт зеркало Некоторые клубы механически начисляют приз на аккаунт игрока последствии выполнения критерий получения, но посещают ситуации, когда бонус надо(надобно) активировать игроку самому. Есть некоторое методов активации приза:Предложения с бездепозитными бонусами за регистрацию разрешают свежим заведениям привлечь аудиторию на свой вебсайт. А игроки тому получают возможность выступать на настоящие деньги без депо в казино и заработать небольшой стартовый капитал, кот-ый разрешается исключить на карту банка либо электронный кошелек.
1×slots официальный зеркало
Стоит обозначить(означить), собственно бездепозитный бонус выдается лишь взрослым новичкам, которые, же, могут пригласить собственных приятелей и знакомых, также претендующих на поощрительную программку преданности. Подобная разработка замечена между конкуренцию онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры содействуют повышению собственной посещаемости, путем привлечения свежих игроков. Бонусы – это уникальный шанс для потенциальных участников игры, коие могут опробовать софт покер рума и увериться, станут ли они в него выступать либо нет. Новый игрок попробует средства силы с реальными оппонентами в казино.Для доказательства электронной почты, просто перейдите по интенсивной ссылке в послании, полученном от игрового заведения. <a href=https://10nsk.ru/user/JosephSuple/>1хслотс рабочее зеркало</a> Обычно показатель повыше, чем для бонусов на депо. Не изумляйтесь, случае он несомненно даже х100. Иногда завышенный коэффициент вейджера уточняется для обитателей отдельных государств. Так что основное различие подарка на депо от бездепа – обязательное пополнение счёта. Вы можете привнести депозит и преувеличить стартовый капитал либо забрать бездеп и этом не придётся рисковать своими сбережениями. Поспешите выполнить простые требования, и администрация ресурса начислит щедрое поощрение! 1×slots официальный сайт скачать <a href=http://www.asystechnik.com/index.php/Shisha_Tobacco_From4_Eur>http://www.asystechnik.com/index.php/Shisha_Tobacco_From4_Eur</a>
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Рассмотрим принцип его деяния на случае. Допустим, вы зарегались и получили $10 not the slightest down payment bonus с вейджером х50. Это значит, собственно выигранные деньги можно несомненно выводить не ранее, чем в такого, как общая сумма ставок достигнет $500.Бонус начисляется игроку незамедлительно после регистрации и прохождения верификации в казино и не просит от клиента внесения депо. Как правило, размер бонуса в схожем случае достаточно застенчивый, впрочем разрешает новеньким познакомиться с забавой без риска реальными средствами. Бездепозитный бонус предоставляется новенькому игроку за конкретные деяния. Часто подарок вид денег или фриспинов выдается за регистрацию, спасибо чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. <a href=http://troderstro.ru/user/Walterbaist/>http://troderstro.ru/user/Walterbaist/</a> Бонус без депо за регистрацию в казино (бездепозитный приз) – это денежный подарок от клуба, кот-ый начисляется на аккаунт игрока последствии регистрации в казино. Кроме творенья учетной записи, для получения бездепа, довольно часто потребуется ещё и подтвердить контактные данные игрока и/или активировать особый промо-код.Бездеп с фриспинами может охватывать всю коллекцию игр на сайте или разработки одного провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш имеет быть выведен последствии того, как юзер отыграет данную сумму. Возможность расценить глубокий возможностей слотов — основное совершенство этой разновидности. Игроку становятся доступны те опции, которые отсутствуют в демонстрационном режиме, а вероятность выиграть реальные деньги добавляет ярчайших азартных чувств. 1×слотс казино
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.visiteachapada.com/viewtopic.php?f=19&t=3744>зеркала 1×slots</a>
<a href=https://astraclub.ru/album.php?albumid=240195>1×slots официальный регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные призы в казино без пополнения 2022 — это конкретная сумма средств или free spins вращения, которые предоставляются первым постояльцам за регистрацию на веб-сайте казино повторяющий бездепозитного приза, и дает вам возможность помощью казино без пополнения опробовать предложения (игр), с последующей прерогативой вывода средств при выполнении всех установленных управлял. А ознакомиться с новыми онлайн казино, Вы сможете с призов с выводом прибыли, которые Вы сможете получить без депозита.
#4799 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Анастасия Янькова, боксерка porno Илья Ковальчук (хоккей) <a href=https://glvk.guru/>casino бездепозитный</a> casino приложения porno Юлия Канакина <a href=https://specreporter.com/>зеркала официальных сайтов казино</a> казино можно casino онлайн porno Игорь Акинфеев (футбол) Чулпан Хаматова Елена Лядова casino рабочее бывшие казино
DiskiPlus Семёнова Татьяна Владимировна порно DiskiPlus казино регистрации <a href=https://diskiplus.ru>DiskiPlus букмекерскую контору пин</a> DiskiPlus порно с Петр Ян (ММА) DiskiPlus casino зеркало сайта <a href=https://diskiplus.ru/>DiskiPlus порно с Голикова Татьяна Алексеевна</a> DiskiPlus песня казино DiskiPlus casino зеркало сайта DiskiPlus ешь казино DiskiPlus Александра Бортич DiskiPlus порно с Дарья Клишина, легкоатлетка DiskiPlus казино рулетка DiskiPlus Нургалиева Эльвира Рамиловна порно
#4800 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
Принципиальным различием даровых бонусов от призов на депо считается недоступность необходимости вносить средства на аккаунт. Из-за сего их нередко нарекают бездепозитными (not the slightest down payment bonuses).Иногда для получения призов необходимо связаться с представителями службы. Удобнее всего с ними собеседовать в онлайн-сате, желая время довольно запроса по электрической почте. <a href=http://filmkachat.ru/>1х слотс зеркало регистрация в 1×slots casino</a> Большинство интернет-казино из нашего топ-10 готовы порадовать вас неповторимыми акциями. Читайте о их в обзорах и на форуме.Получив свой подарок, Вы сможете даром играть на реальные средства, а выполнив условия отыгрыша, вывести свой выигрыш. <a href=https://elearn.ellak.gr/mod/forum/discuss.php?d=31646>https://elearn.ellak.gr/mod/forum/discuss.php?d=31646</a> Суммы подобных предложений, большинстве, колеблются от 3-х до двадцати долларов, а вейджер на эти свои обязан сочинять от 30 до шестидесяти один. Зачастую, величайшая сумма выигрыша тут составит от одной до 2-ух сотен $. Если компьютерные выиграет больше, то все свои имеют быть списанными до максимально разрешенного выигрыша. Здесь появляется смысл выводить еще несуществующие финансы на свою платежную систему и дальше отыскивать заведение с подходящими под данную необходимую релоадом или бонусом за первое пополнение счета. Есть количество подвидов бездепозитного вознаграждения, предлагаемого наибольшим числом заведений.Активация происходит с помощью промокодов, которые вводятся в собственном кабинете в регистрации. Среди спецпредложений в перечне Casino.ru содержатся неповторимые промокоды, которые доступны только гостям портала. Другие методы начисления средств ? автоматическая активация сразу после творенья аккаунта и получение дара по запросу в службу технической помощи. 1×slots казино мобильная версия <a href=http://jade-crack.com/home.php?mod=space&uid=1064912>http://jade-crack.com/home.php?mod=space&uid=1064912</a>
1×slots регистрация на 1хслотс
Бездепозитные бонусы в казино без пополнения 2022 — это конкретная сумма денег либо gorovyh spins вращения, которые предоставляются первым постояльцам за регистрацию на веб-сайте казино в виде бездепозитного приза, и дает для возможность с казино без пополнения опробовать предложения (игр), с дальнейшей привилегией вывода средств при исполнении всех установленных правил. 1×slots зеркало регистрация в 1×slots casino Диапазон ставок, коие вправе сделать игрок, кроме лимитирован. Обычно назначать можно маленькую необходимую — в 10–30 руб. За одно вращение. <a href=https://98e.fun/space-uid-7680465.html>https://98e.fun/space-uid-7680465.html</a> 1×slot регистрация Такой безвозмездный эквивалент средств зачисляется на профиль юзера последствии осуществления требований и предназначаются они только для игрового процесса. Вывод таких вознаграждений вероятен только после воплощения вейджеровых критерий.
1×slots регистрация 1×slots casino c2d ru
Стоит обозначить(означить), что бездепозитный бонус выдается только взрослым новеньким, коие, тому, шансы пригласить личных друзей и знакомых, того рассчитывающих на поощрительную программу преданности. Подобная разработка была среди соперничающих онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры содействуют увеличению собственной посещаемости, путем вербования свежих игроков. Бонусы – это оригинальный шанс для потенциальных участников игры, коие все опробовать софт покер рума и увериться, станут ли они в него выступать или нет. Новый игрок испробует свои силы с реальными оппонентами в казино. Промокод – определённая комбинация символов, коию необходимо установить в подходящее фон при разработке учетной записи или активировать в личном профиле игрока в разделе с призами. <a href=https://correspondent.in.ua/user/Justincot/>https://correspondent.in.ua/user/Justincot/</a> Бесплатный приз – кредиты, которые онлайн-казино начисляет посетителю, не заставляя его пополнять игровой счет.Приглашаем делиться воззреньями о призах. Это поможет иным юзерам избирать более прибыльные предложения. 1×slot регистрация
1×slots casino регистрация
Вывод выигрыша с бездепозитных бонусов казино – великодушный подарок от азартных клубов. Но чтобы вывести свой доход, нужно выполнить ряд условий: 1×slot зеркало <a href=http://gulliverus.ru/user/Stevenexork/>http://gulliverus.ru/user/Stevenexork/</a> Ниже указан важный перечень легальных казино в Беларуси с бонусами на 1-ый депозит. Вы можете попасть на официальный сайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз.
1×slots акции
При исполненьи критерий отыгрыша и верификации, деньги с бонусного счета переводятся на главный и имеют быть выведены на карту либо электронный кошелек. Лимиты на вывод и сроки проведения транзакции зависят от выбранной платежной системы. <a href=http://linkedin-directory.com/details.php?id=296404>http://linkedin-directory.com/details.php?id=296404</a> Рассмотрим принцип его деянья на примере. Допустим, вы зарегались и возымели $10 not the slightest deposit bonus с вейджером х50. Это означает, собственно выигранные средства можно будет выводить не ранее, чем в того, как общая сумма ставок достигнет $500.Новички не обожают сразу же заносить депозит. Это обусловлено неименьем навыка и сомненьем. К счастью, наши возможно получить бездепозитный бонус за регистрацию в казино. Неважно собственно начисляет система – фриспины либо кредиты. В любом случае вы не рискуете своими сбережениями. Это замечательная возможность запустить понравившийся видео слот либо же испытать удачу в настольных забавах. 1хслотс официальный сайт зеркало Чаще всего используются коды. Их надо(надобно) вносить в особые окошки регистрационной анкеты, случае речь идет о пригласительных призах, или в определенном разделе личного офиса игрока.
<b>Смотреть еще похожие новости:</b>
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=562361>1 x slots casino</a>
<a href=http://shiftdelete.10tl.net/member.php?action=profile&uid=119629>1хслотс рабочее зеркало</a>
<a href=https://portugal-campings.com/pt/account/>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
У любого игорного заведения свои верховодила и обстоятельства. Но, дабы получить бонусы, необходимо выполнить стереотипные действия:
#4801 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet на андроид бесплатно почему в казино нет окон <a href=https://th-royalgclub.com/>букмекерская контора леонов</a> pin ап casino 1×bet зеркало слоты 1×bet xyz <a href=https://sovsekretno.net/>porno Вера Бирюкова, гимнастка</a> как выиграть в казино часы казино 1×bet зеркало xbet xyz ограбление казино приложения букмекерских контор на андроид black russia казино пин up casino
DiskiPlus porno Светлана Ходченкова DiskiPlus демо казино <a href=https://www.diskiplus.ru>DiskiPlus Преподобная Надежда Александровна порно</a> DiskiPlus 1×bet бесплатно DiskiPlus porno Елизавета Туктамышева <a href=https://diskiplus.ru>DiskiPlus Разуваева Ксения Денисовна порно</a> DiskiPlus рабочие зеркала казино DiskiPlus 1×bet официальный 1×bet xyz DiskiPlus porno Елизавета Туктамышева DiskiPlus порно с Диана Шнайдер (теннис) DiskiPlus casino вход DiskiPlus спорт букмекерская контора DiskiPlus порно с Алексей Миранчук (футбол)
#4802 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
Бездепозитные бонусы за регистрацию в игровых автоматах для собственников онлайн-казино являются долею рекламной кампании, направленной на повышение аудитории вебсайта. Так они продвигают средства бренды и привлекают свежих клиентов.Ну и конечно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: подобная добродушие увеличивает степень преданности посетителей к компании. <a href=http://filmkachat.ru/>1×slots зеркало регистрация в 1×slots casino</a> Некоторые сайты, этого чем провести регистрацию игроков, предлагают ответить на некоторое базисных вопросов. Цель проведения похожей викторины – выявить случайных людей, которые не имеют представления о покере, и не допустить получения ими бонусов. Если посетитель теснее играл в казино, то ответить на полтора 10 простых вопросов будет несложно. Очень часто, ответы можно найти на официальных веб-сайтах данных учреждений.На нашем веб-сайте Вы найдете перечень актуальных свежих бездепозитных бонусов в казино 2022 года. Также, есть большое неповторимых услуг, коие доступны лишь посетителям нашего вебсайта в регистрации по нашей ссылке либо активации особого промокода. <a href=https://telegra.ph/Navigating-Cannabis-Delivery-Services-in-Port-Perry-Your-Complete-Local-Guide-11–24>https://telegra.ph/Navigating-Cannabis-Delivery-Services-in-Port-Perry-Your-Complete-Local-Guide-11–24</a> 1хслотс официальный сайт зеркало <a href=https://prpack.ru/user/JasperPeany/>https://prpack.ru/user/JasperPeany/</a> Активация происходит с помощью промокодов, коие вводятся в собственном кабинете после регистрации. Среди спецпредложений в списке Casino.ru находятся эксклюзивные промокоды, которые доступны только посетителям портала. Другие методы начисления средств ? автоматическая активация незамедлительно последствии творенья аккаунта и получение презента по запросу в службу технической помощи.Осталось выбрать казино с бонусом за регистрацию и сделать профиль. После активации презента выигрыш в от Фортуны и навыков.
1× слот зеркало
<a href=http://lynnniman.org/index.php?/topic/1638–1-%D1%85%D1%81%D0%BB%D0%BE%D1%82-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%B2–1×slots-casino/>1 хслот регистрация в 1×slots casino</a> x1 slots 1хслотс регистрация перейти на 1×slots Когда идет о получении бездепозитных бонусов в казино, в первую очередь направьте на последующие обстоятельства: <a href=http://kxb4u.com/dream/home.php?mod=space&uid=45111>http://kxb4u.com/dream/home.php?mod=space&uid=45111</a> Поспешите арестовать бездепозитные бонусы за регистрацию в казино из представленного перечня. Все платформы не ведут легальную работа, хотя и порадуют правдивыми плодами забавы, высокой отдачей, прыткими выплатами. 1×slots официальный сайт скачать
1×slots официальный demo регистрация в 1×slots casino
Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить необыкновенности, недоступные при этой в демо режиме. Многие новые посетители переходят в число неизменных, а оператор получает длительную прибыль.Мы собрали и опубликовали список превосходнейших бездепозитных казино с призами за регистрацию, коие гарантируют великодушные выигрыши и мгновенные выплаты. <a href=http://uprzakupokkchr.ru/user/TravisCreed/>http://uprzakupokkchr.ru/user/TravisCreed/</a> Риск-игра по одинаковым шансам – Также казино возможность запрещать исполнять условия по отыгрышу с помощью раунда на удвоение, который предлагается в слотах, видео-покере и некоторых иных забавах. 1×slots рабочее зеркало С не отыгранным бонусом запрещается превосходить объем максимальной ставки. Нарушение этого условия последствия аннулирование выигрыша.
1×slots официальный сайт зеркало рабочее
Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, чтобы снова получить бесплатный приз. Игорные заведения нетерпимы к бонус-хантерам, потому вас ждет неизбежное санкция. Вейджер (wager) – это коэффициент, который демонстрирует на какую сумму нужно устроить ставок, дабы исключить приз из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода этого приза, Вам необходимо сделать ставок на необходимую: 500*70=3500 рублей. Только полностью отыграв приз, Вы можете исключить собственный выигрыш. 1×slots коды <a href=https://clients1.google.se/url?q=https://doctorlazuta.by/>https://clients1.google.se/url?q=https://doctorlazuta.by/</a> Верификация необходима для дополнительной защищенности и помогает техподдержке выявить бонусхантеров и жуликов. Кстати, на некоторых платформах выводы солидных сумм доступны лишь после доказательства личности.Акционные предложения от казино есть в различных форматах. Часто призы даются в размен на депо. Игрок заносит платеж и получает средства, безвозмездные вращения прочие одобрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — картина бонуса, который гарантирован за выполнение конкретных поступков на сайте:
1×slots на любой вкус как пройти регистрацию
Чтобы бездеп не был начислен на Ваш аккаунт, Вам не нужно активировать бонусный код. Если поощрение от казино было добавлено на Ваш акк автоматически, а Вы не планируете его использовать, обратитесь в саппорта с пожеланием отменить бездепозитный приз.Нельзя рассматривать игру на деньги, как вариант заработка. Азартные забавы запрещены для лиц младше 18 лет. Topcasinobonuses.mobi не является зачинщиком азартных игр. Сайт носит информационный нрав. <a href=https://pastebin.com/u/Glavdorogadv2106>https://pastebin.com/u/Glavdorogadv2106</a> Вейджер (или вагер) ? это наименьшая сумма ставок, коию нужно сделать для вывода денежного приза. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение.Так что основное различие презента на депо от бездепа – обязательное пополнение счёта. Вы сможете внести депозит и преувеличить стартовый капитал или арестовать бездеп и всем не придётся рисковать своими сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начислит щедрое одобрение! 1×slots скачать на айфон Фриспины без депо или вспомогательные средства помогут поближе познакомиться с игровой платформой и её функциями. За счёт даров можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради игры против живых крупье.Эффективность бездепов в рекламного прибора расценили многие операторы. Малоизвестные площадки употребляют эти промоакции, дабы быстро набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны неизменных посетителей. Не все сайты, дающие подарки без депозита, рекомендованы к забаве. За привлекательным промоописанием все скрываться неосуществимые обстоятельства отыгрыша и подводные камешки.
<b>Смотреть еще похожие новости:</b>
<a href=http://complainanything.com/node/158?page=944#comment-1190666>1×slots casino регистрация на сайте</a>
<a href=https://orbitsound.com/forum/user-211634.html>сайт 1× slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы казино за регистрацию в 2022 году — это возможность сыграть за счёт заведения. Казино даёт клиенту шанс пользоваться определённой суммой или количеством бесплатных вращений без внесения депо. Не путайте деморежим с реальной игрой без надобности внесения депозита. Как лишь вы отыграли вейджер и средства с бонусного баланса перешли для на настоящий счет, Вы отважно можете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (сделать минимальный депозит к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депо).
#4803 Jamesatobehttps://esportpromo.com/
Лучшие игровые промокоды <a href=https://esportpromo.com/standoff/ggstandoff/>промокоды на кейсы в ggstandoff</a> в одном месте! Активируйте бонусы, получайте подарки и прокачивайте аккаунт без лишних затрат. Следите за обновлениями, чтобы не пропустить новые промо!
#4804 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up букмекерская контора лучшие казино бесплатно <a href=https://repost.news/>скачать сайт букмекерской конторы</a> 1×bet официальный xbet порно с Голикова Татьяна Алексеевна <a href=https://rucriminal.info/>игры казино</a> букмекерские контора ап пин ап casino pin up top 1×bet 1 1×bet зеркало рабочее на сегодня 1×bet официальный слоты казино в россии порно с Арина и Дина Аверины, гимнастки
DiskiPlus официальное казино вход DiskiPlus вывод казино <a href=https://diskiplus.ru>DiskiPlus рокс казино</a> DiskiPlus порно с Дарья Клишина, легкоатлетка DiskiPlus casino игровой автомат <a href=https://www.diskiplus.ru>DiskiPlus Семёнова Татьяна Владимировна порно</a> DiskiPlus porno Алена Косторная (фигурное катание) DiskiPlus пинко casino DiskiPlus casino 7k сегодня DiskiPlus casino buzz DiskiPlus pin up casino официальный DiskiPlus букмекерская контора леонов DiskiPlus порно с Евгения Медведева, фигуристка
#4805 Charlesgunnyhttp://filmkachat.ru
рабочее зеркало 1×slots
Если площадка дарит бездеп за регистрацию, то процедура его получения проста. Нужно только ввести акк на веб-сайте и активировать его, подтвердив адрес электронной почты, номер аппарата или другие данные, коие настятельно оператор. Перед данным нужно убедиться, собственно юзер находится на официальном сайте казино, не на жульнической площадке. <a href=http://filmkachat.ru/>1×slots на любой вкус как пройти регистрацию</a> <a href=https://diigo.com/0y2r9w>https://diigo.com/0y2r9w</a> 1×слот регистрация в 1×slots casino <a href=http://www.diablo2r.cn/home.php?mod=space&uid=25213>http://www.diablo2r.cn/home.php?mod=space&uid=25213</a>
1×slots официальный зеркало рабочее
<a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=39487>casino 1×slot</a> 1хслотс официальный сайт зеркало Фриспины. Бесплатные вращения предусмотрены для использования в видео-слотах. Внимательно читайте обстоятельства – они нередко выдаются для некоторых машин. В зависимости от клуба вы можете создавать конкретное количество ставок. Кстати, современные игорные жилища выделяют вероятность заводить «одноруких бандитов».При регистрации по свидетельствовать лишь достоверную информацию. Когда учетная запись несомненно активна, замечен доступ в Личный офис. В нем возможно выбрать еденицу, ввести промокод и узнать доскональные управляла получения и отыгрыша бездепа. Краткая информация об акции нередко присутствует непосредственно на регистрационной форме. <a href=http://moomza.com/index.php?subaction=userinfo&user=ekusol>http://moomza.com/index.php?subaction=userinfo&user=ekusol</a> 1×slots казино мобильная версия
x1 slots регистрация в 1×slots casino
Промокод – определённая композиция знаков, которую нужно установить в соответствующее фон при разработке учетной записи либо активировать в личном профиле игрока в разделе с бонусами.Срок активации и время на отыгрыш. Зачисление денег либо фриспинов случается при активации в течение взыскательно ограниченного периода, подобные требования предъявляются и к срокам отыгрыша. Одни казино позволяют отыгрывать приз некоторое дней либо даже месяцов. Другие выдают солидную сумму за регистрацию, хотя время отыгрыша ограничивают несколькими часами с неоправданно высоким вейджером. Также бездепозитные бонусы шансы работать способом возвращать к забаве посетителей, временно приостановивших своё сотрудничество с компанией: извещение о бездепе поступает на мобильный телефонный либо почту.Баланс игрока дополняется на подходящую необходимую. К ней применяется вейджер, указанный в правилах промоакции. Вывести выигрыш можно несомненно в как, как пользователь сделает требуемый объем ставок из собственных средств. В редчайших случаях бездеп трудится в формате Free Play. На счет пользователя зачисляется крупная сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по окончании сего периода сумма на счету будет превосходить первоначальную, то разницу возможно будет исключить либо применять для дальнейших ставок. <a href=http://fridayad.in/user/profile/2763175>http://fridayad.in/user/profile/2763175</a> Раздача бонусов возможность быть приурочена к различным датам: календарные праздничные, деньки рождения игроков, юбилей открытия казино и т. Д. Подарок выдается вид денег, фриспинов либо баллов для накопления и размена на предложения оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода данной суммы придется выполнить ряд притязаний. 1×slots бонус за регистрацию
1×slots зеркало видели такую регистрацию на
Можно ли в одном интернет казино получить больше одного бонуса за регистрацию? Нет, так как в каждом онлайн казино есть управляла, к которым надо(надобно) придерживаться, не творить 2 аккаута для получения бонусов, иначе несомненно блокировка обоих аккаутов, не пытайтесь обмануть интернет казино, приз за регистрацию выдаеться раз один 1 лицу.Бонус без депо за регистрацию в казино (бездепозитный бонус) – это денежный презент от клуба, который начисляется на аккаунт игрока после регистрации в казино. Кроме сотворения учетной записи, для получения бездепа, очень нередко требуется ещё и подтвердить контактные данные игрока и/или активировать особый промо-код. 1 х слотс зеркало <a href=https://byinna.com/home.php?mod=space&uid=2260562&do=profile&from=space>https://byinna.com/home.php?mod=space&uid=2260562&do=profile&from=space</a> Отыграв бездепозитный бонус в казино с выводом тоже придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если схожее ограничение присутствует, то единоразово исключить получится только необходимую, не превосходящую размер приобретенного приза.
1хслот зеркало сайта
А ознакомиться с новыми онлайн казино, Вы можете с бонусов с выводом прибыли, которые Вы сможете получить без депо. <a href=https://lotn.info/index.php?action=profile;u=30206>https://lotn.info/index.php?action=profile;u=30206</a> 1× slots регистрация в 1×slots casino Чтобы бездеп не был начислен на Ваш акк, Вам не нужно активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк автоматически, а Вы не расчитываете его применять, обратитесь в саппорта с просьбой отменить бездепозитный приз.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/8516/#comment-349958>1×slots сайт</a>
<a href=https://www.fromrus.su/index.php?/topic/22229-casino-1×slot/>casino 1×slot</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Прежде чем активировать бездеп, необходимо убедиться что, нет, что государство, уроженцем которой считается игрок, не входит в список разрешенных.
#4806 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пин ап casino pin Попова Анна Юрьевна порно <a href=https://m.repost.news/>Набиуллина Эльвира Сахипзадовна порно</a> скачать 1×bet 1×bet xyz 1×bet приложение <a href=https://slon-ru.com/>казино рулетка</a> порно с Захарова Мария Владимировна Шевцова Татьяна Викторовна порно Попова Анна Юрьевна порно casino 7k рабочее лучшие букмекерские конторы казино проиграл бесплатно играем казино
DiskiPlus порно с Александр Головин (футбол) DiskiPlus яндекс казино <a href=https://www.diskiplus.ru/>DiskiPlus казино в россии</a> DiskiPlus демо казино DiskiPlus казино большая <a href=https://diskiplus.ru/>DiskiPlus Скворцова Вероника Игоревна порно</a> DiskiPlus про казино DiskiPlus мелбет букмекерская контора DiskiPlus Елизавета Боярская DiskiPlus Разуваева Ксения Денисовна порно DiskiPlus порно с Варвара Субботина DiskiPlus порно с Матвей Сафонов (футбол) DiskiPlus casino ап
#4807 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрацию более популярный вариант это
Бездепозитные призы — это презенты от казино вид бонусных средств либо фриспинов для игровых автоматов, которые начисляются на аккаунт игрока в процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депо не требуется. <a href=http://filmkachat.ru/>1× slots casino официальный сайт</a> Важно, убедитесь в, собственно раньше не регились в выбранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи. <a href=https://medium.com/@comcgifurniture/professional-cannabis-delivery-services-a-complete-guide-for-cambridge-residents-b435bbfcdc10>https://medium.com/@comcgifurniture/professional-cannabis-delivery-services-a-complete-guide-for-cambridge-residents-b435bbfcdc10</a> Перечисленные повыше главные характеристики сочетают фактически любой приз и считаются стереотипными для бездепозитных бонусных начислений в казино.Пoдтвepдить личнocть клиента. Для удачного вывода средств, необходимо доказать личность посетителя. Нa этaпe вepификaции пpoфиля, работники службы безопасности должны увериться, собственно у игрока не один аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не может исключить свой выигрыш, если у него будет некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы. 1×slots официальный зеркало <a href=https://www.deviantart.com/vykupavto0311>https://www.deviantart.com/vykupavto0311</a> В качестве бонусов онлайн казино часто предлагает выдачу фриспинов, другими даровых вращений игрового барабана. Виртуальные монеты возможно применять для обучения в покерной школе либо для забавы в казино.Также учтите, собственно некоторые игровые платформы сузивают перечень государств, коие готовы получить предложенный бездепозитный приз за регистрацию. К образцу, есть онлайн-заведения, выдающие подобные бонусы только обитателям конкретных стран. К примеру, интернет казино 777 Оригинал предоставляет бездепозитный бонус лишь игрокам из России и государств СНГ. Или наоборот, пичкают вознаграждением всех, не обитателей неких стран (из сего, стопам пристально изучать список, чтобы впоследствии не возникло никаких вопросов и жалоб).
казино 1× slots официальный сайт
<a href=http://ledyardmachine.com/forum/User-Jameshoing>1×slots регистрация на 1хслотс</a> 1×slots актуальное зеркало В случае установленного лимита на сумму вывода выигрыша с бездепозитного бонуса, игрок не может вывести больше заявленной суммы.Таким образом, заведение пробует показать себя своим потенциальным геймерам, а подобный рекламный ход как казино приз без депо за регистрацию привлекает довольно много внимания к игорному заведению и обеспечивает неизменный поток свежих гостей и будущих клиентов игрового онлайн клуба. <a href=http://keydirectory.co.uk/forum/profile/JoannSprad>http://keydirectory.co.uk/forum/profile/JoannSprad</a> Бездепозитные призы прекрасный вариант бесплатной забавы в игровые автоматы. Многие юзеры сети не понимают, что в казино можно начать играть безусловно бесплатно, а потом вывести выигрыш на банковскую карту либо электрический кошелек, другие не доверяют интернет казино, а третьи удачно играют и выигрывают – и тотчас достаточно великие суммы.Для получения бездепа необходимо пригласить в забаву по реферальной ссылке свежего клиента: он обязан зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и восполнить счёт на сумму, обозначенную в условиях акции. 1хслотс рабочее зеркало Поспешите арестовать бездепозитные бонусы за регистрацию в казино из представленного перечня. Все платформы не водят легальную деятельность, но и обрадуют честными плодами забавы, высочайшей отдачей, резвыми выплатами.Бoльшинcтвo азартных заведений выдвигают приблизительно однообразные, схожие обстоятельства и требования, которые нужно выполнить, чтобы получить бездепозитный бонус за регистрацию. Все их возможно объединить в один список:
1×slots casino регистрация
В подавляющем большинстве случаев бесплатные призы начисляются в кредитах, которые невозможно сразу исключить со счета. Прежде их нужно отыграть по установленным правилам. Эти притязания принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д. ). О нем читайте ниже.Сразу в активации промокода возможно пользоваться даром. Как теснее упоминалось, призы бывают трёх обликов – фриспины, кредиты и фриплей-бонусы. У каждого игорного заведения средства правила и обстоятельства. Но, чтобы получить призы, необходимо выполнить стандартные деяния:Также, учите, собственно бездепозитный приз возможно исключить только что, нет случае, когда станут выполнены все обстоятельства отыгрыша. <a href=http://o91202nk.beget.tech/profile.php?u=legalgathering8>http://o91202nk.beget.tech/profile.php?u=legalgathering8</a> 1хслотс мобильная версия зеркало
1 хслот регистрация в 1×slots casino
Многие казино деют в рекламных целях бесплатные призы самая для наших читателей. Чтобы их получить, нужно перебежать на игровой сайт по партнерской ссылке с нашего портала. Как управляло, новоприбывшие игроки для желают ознакомиться с способами ввода и вывода денежных средств и сроки исполнения поданных заявок дабы четко понимать, как стремительно появится вывести собственный казино приз за регистрацию без депозита на электрический кошелек или же банковскую карту. К счастью для всех играющих, внутри определенных холдингов, все казино соперничают между собой. Ведь случае бы конкретную фирму давало только одно онлайн-заведение, то ли бы клиенты заметили казино с призом за регистрацию и могли бы рассчитывать лишь на вознаграждение в виде бонуса на 1-ое инвестиция. К каждому заведению регулярно по завлекать свежих игроков, собственно, конечном, лишь на руку всем играющим.Все безвозмездные призы кажутся соблазнительными. Кто же откажется от возможности сыграть в онлайн-казино, не рискуя средствами, но получая выигрыши. Но далеко не все бездепозитные бонусы в привлекательны для рассудительного посетителя. 1×slots casino регистрация 1×slotscasin online <a href=https://forum.vgatemall.com/member.php?action=profile&uid=90182>https://forum.vgatemall.com/member.php?action=profile&uid=90182</a> Если простыми текстами, бездепы – это определённая сумма денег либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать подарки. Но есть некоторые аспекты. Существуют игорные дома, коие перед тем как начислить бонусы требуют привязать аппарат, предоставить копии документов.Хотя безвозмездные призы начисляются без депо, не исключено, что для понадобиться вносить деньги. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь в того, как новый заказчик первый пополнит игровой счет.
1×slot зеркало
Для получения бездепа необходимо пригласить в забаву по реферальной ссылке нового посетителя: он должен зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на сумму, указанную в условиях акции. Фриплей-бонусы. Бонусы за благотворительную игру есть только в неких клубах. Они зачисляются сразу последствии создания профиля и действуют непродолжительное время. Если у вас нет медли потратить средства, они просто закончатся. Что касается времени, правило бонусы действуют на одного часа. <a href=https://traviskudk29620.imblogs.net/80088603/deep-nude-understanding-the-implications-of-ai-generated-imagery>https://traviskudk29620.imblogs.net/80088603/deep-nude-understanding-the-implications-of-ai-generated-imagery</a> Многие азартные клубы ограничивают необходимую вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании акции, суммы Вы не можете вывести. Разница будет аннулирована, Вы числе не можете делать на нее ставки. 1×slots регистрацию процедура займет всего лишь Шаг 4. Активация. Внимательно исследуйте условия, информацию по ограничениям и сроке деяния бонусного предложения. Разобравшись с правилами, возможно активировать бонус в личном офисе (время ? с использованием промокода) либо по запросу в саппорт.Разные казино имеют собственные верховодила по выведению выигрыша. Для бездепозитных призов принимаются довольно высочайшие притязания. Часто онлайн-казино советуют отыграть бонусное одобрение до ста раз в игровых автоматах. Например, если игрок получил даром 10 долларов, то необходимо будет отыграть их, поставив 1 тыщу спинов по 1 баксу каждый. Стоит отметить, собственно не все казино выделяют возможность выступать на призы и не во всех увеселительных заведениях схожие верховодила для отыгрывания. Некоторые казино воспрещают играть на бонусы в блекджек или ограничивают ставки до пяти %, что существенно наращивает в 10-ки один количество необходимых игр.
<b>Смотреть еще похожие новости:</b>
<a href=https://karakol.com.kg/user/Jameskef/>1×slots рабочее зеркало</a>
<a href=https://russiancomputerservice.ru/user/JosephCer/>1хслотс казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Можно ли в одном интернет казино получить больше одного бонуса за регистрацию? Нет, например как в каждом онлайн казино есть управляла, к которым нужно держаться, не создавать два аккаута для получения призов, иначе несомненно блокировка обоих аккаутов, не пытайтесь перехитрить онлайн казино, бонус за регистрацию выдаеться один один 1 личику.
#4808 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация в 1×slots casino
Ограничения по забавам. Администрация воспрещает игрокам кое-какие игровые автоматы с бездепозитным бонусом, средствами или бесплатными вращениями. Обычно, в правилах приводится глубокий список слотов для отыгрыша. Иногда разделенье производится по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, хотя запрещен в настольных играх и в разделе Live Casino. <a href=http://filmkachat.ru/>1× slots casino зеркало</a> <a href=https://www.empowher.com/groups/blogs-4/posts/revolutionizing-web-experiences-through-interactive-cgi-solutions>https://www.empowher.com/groups/blogs-4/posts/revolutionizing-web-experiences-through-interactive-cgi-solutions</a> Для получения бездепа необходимо пригласить в забаву по реферальной ссылке свежего посетителя: он должен зарегистрироваться, пройти верификацию на сайте онлайн-казино и пополнить счёт на необходимую, обозначенную в условиях промоакции.Такой казино бонус без депо за регистрацию выдается игроку на час и активно используется данное предложение с 2017 года. Это как бы некая маскировка поощрения под бездепозитный. Суть всего сего сводится к тому, собственно геймеру на час выдается, например, 1000 $, а реклама твердит то, собственно любой выигрыш возможно будет в будущем оставить при себе. Но в играющий серьезно отнесется к этому предложению, то он попросту потеряет время. Ведь игроку нужно несомненно играть не главном аккаунте, в тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (числе всей тыс. ) в верховодила вступят определенные условия, где будет сказано, что наибольшей суммой победы имеет быть только двести долларов и средства можно использовать лишь виде приза на первый лепта с вейджером 25 от суммы вознаграждения плюс сам депо. По результату выйдет, собственно игрок выигрывал себе 200% бонус с вейджером на определенную сумму. Короче говоря, это все не вашего времени. 1хслот зеркало <a href=http://ormafon.free.fr/index.php?file=Members&op=detail&autor=placidpage22>http://ormafon.free.fr/index.php?file=Members&op=detail&autor=placidpage22</a>
1×slots акции
Индивидуальные одобрения выдаются за совершение действий: подписку на аккаунты площадки в соц сетях, установку мобильного прибавления или официального клиента для ПК. В большинстве казино срабатывают программки преданности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий уровень часто сопровождается выдачей бездепа.При регистрации идет свидетельствовать лишь достоверную информацию. Когда учетная запись несомненно активна, будет доступ в Личный офис. В нем можно выбрать еденицу, установить промокод и разузнать подробные управляла получения и отыгрыша бездепа. Краткая информация об акции нередко присутствует именно на регистрационной форме. 1×slots актуальное зеркало Следует выделить, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом. <a href=https://tnamall.com/bbs/board.php?bo_table=free&wr_id=1553114>https://tnamall.com/bbs/board.php?bo_table=free&wr_id=1553114</a> 1×slots быструю регистрацию а также мгновенное
1×slots акции
Если вы новичок деле и лишь попали в неизведанную вами область азарта — счет предложений как бездепозитные бонусы без пополнения. <a href=http://yk-rs.ru/bitrix/click.php?goto=http://frontex.ru/bitrix/rk.php?goto=http://tuaki.hatenablog.com/iframe/hatena_bookmark_comment?canonical_uri=https://teletype.in/@urist555/KvPItVa65U5>http://yk-rs.ru/bitrix/click.php?goto=http://frontex.ru/bitrix/rk.php?goto=http://tuaki.hatenablog.com/iframe/hatena_bookmark_comment?canonical_uri=https://teletype.in/@urist555/KvPItVa65U5</a> 1×slos регистрация в 1×slots casino Пoдтвepдить личнocть клиента. Для успешного вывода средств, нужно подтвердить личность посетителя. Нa этaпe вepификaции пpoфиля, сотрудники службы защищенности обязаны увериться, что у игрока более раз аккаунт. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не сможет исключить свой выигрыш, случае у него будет количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы.Новые посетители онлайн-казино без первого депозита шансы проверить свою удачливость. К что, этому же есть вероятность преобразовать бездепы в настоящие деньги за регистрацию в казино, впрочем результата приз нужно отыграть сообразно условиям акции.
1 хслот регистрация в 1×slots casino
3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефон либо почту, указать персональную информацию; Первый возникающий вопрос, это, для выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают новых игроков. Последним проще начать игру на деньги с дара за регистрацию. Им не пополнять баланс и расходовать собственные свои. Новички получают бесплатные спины либо свои на счёт. С их помощью знакомятся с игровым процессом, крутят слоты и проделывают ставки в рулетке.Пoдтвepдить личнocть клиента. Для успешного вывода средств, необходимо доказать лицо клиента. Нa этaпe вepификaции пpoфиля, сотрудники службы безопасности обязаны увериться, что у игрока более один аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не может вывести собственный выигрыш, если у него несомненно некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы. При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, коие можно посвятить этой в казино. 1хслотс мобильная версия зеркало <a href=http://e-invest.biz/index.php?subaction=userinfo&user=vengefuldynamo7>http://e-invest.biz/index.php?subaction=userinfo&user=vengefuldynamo7</a> Обычно для получения призов без депозита, казино выдвигает приклнные и абсолютно выполнимые обстоятельства, но есть ряд поступков коие воспрещены и могут причиной неприятные последствия:
1×slots коды
При регистрации следует указывать лишь достоверную информацию. Когда учетная запись будет активна, будет доступ в Личный офис. В нем возможно выбрать денежную, ввести промокод и узнать доскональные верховодила получения и отыгрыша бездепа. Краткая информация об акции часто присутствует именно на регистрационной форме. К сожалению, нет. Почти все казино, требуют внесение желая бы 1-го минимального депозита для вывода выигрыша с бездепозитного бонуса. Также учитывайте, что вывести деньги разрешено только на ту платежную систему, с коей был изготовлен депозит.Начнём с как, собственно каждое рекламную за регистрацию предполагает некоторые условия. Бездепозитные призы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность валютного оборота, нужная для выполнения условий. Пример, возымели бесплатные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 руб., неудачных либо выигрышных, не. После исполнения, бонусный баланс перейдёт на реальный и станет легкодоступным к выводу. <a href=https://forum.kainkalabs.com:443/member.php?action=profile&uid=17810>https://forum.kainkalabs.com:443/member.php?action=profile&uid=17810</a> Если вы облюбовали себе несколько брендов коие вас больше всего полюбились, для неизменной игры! Таких гемблеров казино довольно любит и ценит, за частую такие игроки становятся VIP игроками заведения, коим часто поступают прибыльные предложения вид бонусов, например же туда входит и бездепозитные.Промокод – определённая комбинация символов, коию нужно установить в отвечающее поле при разработке учетной записи либо активировать в собственном профиле игрока в разделе с призами. 1×slots сайт Не советуем опрометью голову браться за всевозможные предложения получения средств без инвестициям. Вполне вполне, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на 1-ый взор. Альтернативой является казино приз за депо. Мы предлагаем для пару советов, благодаря коим у любого игрока будет вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом денег:Бездепозитные призы за регистрацию считаются одним из самых популярных методов привлечения новых игроков в онлайн-казино, потому что они деют игрокам возможность опробовать казино, более игровые автоматы, и вероятно, выиграть настоящие деньги.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Представленные на этой страничке лучшие бездеп призы в казино за регистрацию в 2022 году имеют подходящие обстоятельства. После кропотливого анализа редакция портала составила рейтинг спецпредложений, в котором посетители Casino.ru имеют сортировать перечень по нескольким аспектам: по сумме, вейджеру, максимальной сумме вывода и т.д. Чем ниже велечину вейджера, тем легче отыграть и исключить бонус. Если Вы расчитываете заработать на бездепе, а не просто ознакомиться с новым игровым клубом, то стоит игнорировать бонусов с высоким вейджером их практически не реально отыграть. С ними Вы можете только протестировать игры заведения.
#4809 Charlesgunnyhttp://filmkachat.ru
казино 1× slots официальный сайт
Если при регистрации показать промокод, возможно гарантировано получить бонус. Где взять ваучер? Посетите направленные блоги либо форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В последнее время игорные жилища начали рекламироваться в фильмах и сериалах. Присмотритесь и наверняка заметите промокод, который принесёт 500 или 1 000 бонусных рублей. <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino09k online</a> Главное преимущество спинов – вероятность изучить различные слоты. Также получится насладиться бонусными раундами, испытать фортуну в риск-туре и преумножить выигрыш за счёт особых символов. Однако столько игровой процесс заслуживает внимание, ведь никакого сосредоточиться на реальном выигрыше.При регистрации стопам свидетельствовать только достоверную информацию. Когда учетная запись несомненно активна, замечен доступ в Личный офис. В нем можно выбрать валюту, ввести промокод и узнать доскональные правила получения и отыгрыша бездепа. Краткая информация об акции нередко присутствует именно на регистрационной форме. <a href=https://www.4sync.com/s/feS06Cjuz>https://www.4sync.com/s/feS06Cjuz</a> Только выполнив все обстоятельства отыгрыша и дождавшись завершения проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить средства деньги.Новые клиенты онлайн-казино без первого депо имеют проверить свою удачливость. К что, этому же есть вероятность конвертировать бездепы в настоящие деньги за регистрацию в казино, однако результата бонус нужно отыграть сообразно условиям акции. 1×slots регистрация 1×slotscasino09k online <a href=https://usa.life/read-blog/46730>https://usa.life/read-blog/46730</a> Бездепозитные призы, как уже ясно, являются оригинальной вероятностью к игровому процессу абсолютно бесплатно, то есть играть в интернет казино даром и на быть свои сразу в регистрации аккаунта. Автоматы с таким депозитом все замерзнуть великолепной возможностью поиграть для поклонников азарта с определенными ограничениями в финансах.Теоретически, к безвозмездным призам возможно отнести например нарекаемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, поэтому собственно они деют только вероятность создавать ставки.
1хслотс зеркало на сегодня
казино 1×slots Поспешите зарегистрироваться на официальном сайте Клубника, дабы быстро получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, замечена реальный шанс победу!Подтвердите личность, предоставив оператору казино свои паспортные данные. Инструкции обычно легкие, основное — конкретно им следовать. Если написано, собственно «на фото должны быть видны все хорошо угла страницы паспорта» — устройте именно это фото. <a href=http://catalog.drobak.com.ua/communication/forum/user/2712698/>http://catalog.drobak.com.ua/communication/forum/user/2712698/</a> 1×slots рабочее зеркало
1×slots зеркало видели такую регистрацию на
Срок отыгрыша — это период, кот-ый наступает в момент активации бонуса и заканчивается с его закрытием. Пользователю необходимо уложиться в данный временной зазор, по призовые средства аннулируются. Казино устанавливают перечень игр, ставки каких засчитываются при расчете отыгранных средств. Если тайтл не входит в данный список, то возможность быть недосегаем для загрузки в деянья бонусного предложения. В случае установленного лимита на сумму вывода выигрыша с бездепозитного бонуса, игрок не сможет вывести больше заявленной суммы. <a href=http://arsivforum.10tl.net/member.php?action=profile&uid=5662>http://arsivforum.10tl.net/member.php?action=profile&uid=5662</a> 1×slots зеркало подтвердит вашу регистрацию если говорить Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала резвые выводы. Фишка выплат в, что достаточно избрать платёжный инструмент и указать сумму. В большинстве случаев деньги зачисляются на электронные кошельки протяжении 15 мин., а на банковские карты – 1–3 рабочих денька.
казино 1×slots официальный сайт
Все бесплатные призы кажутся соблазнительными. Кто же откажется от возможности поиграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далековато не все бездепозитные призы в привлекательны для рассудительного клиента. Кешбэк-бонус дает собой возврат фиксированного процента от ставки в случае поражения или же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не превышает 10%. Нет. Казино раздают бесплатные призы за регистрацию, чтобы, чтобы, чтобы клиент возможность ознакомиться с игровым заведением. А чтобы вывести его, необходимо выполнить условия отыгрыша. казино 1× slots официальный сайт <a href=https://acomics.ru/-palolo1408>https://acomics.ru/-palolo1408</a>
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Как правило, новоприбывшие игроки для желают ознакомиться с методами ввода и вывода валютных средств и сроки выполнения поданных заказов чтобы конкретно разуметь, как быстро у вывести собственный казино приз за регистрацию без депо на электронный кошелек или же банковскую карту. К счастью для всех играющих, снутри конкретных холдингов, все казино конкурируют меж собой. Ведь если бы определенную фирму давало лишь одно онлайн-заведение, то навряд бы клиенты увидели казино с бонусом за регистрацию и имели бы рассчитывать только на вознаграждение вид бонуса на первое вложение. К любому заведению периодически идет завлекать свежих игроков, что, в итоге, лишь на руку всем играющим. <a href=https://forumsadovodov.com.ua/memberlist.php?mode=viewprofile&u=65195>https://forumsadovodov.com.ua/memberlist.php?mode=viewprofile&u=65195</a> 1хслотс казино зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=72008>1хслотс официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Условия все разниться приятель от друга. Но такой бонус может быть использован лишь для игрового процесса – полученные на счет деньги до как, как будут отыграны, исключить невозможно.
#4810 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino скачать 1×bet на андроид <a href=https://rhymes-punches.com/>порно с Голикова Татьяна Алексеевна</a> pin up casino яндекс казино <a href=https://m.repost.news/>порно с Евгений Малкин (хоккей)</a> порно с Виктория Синицина, фигуристка спорт букмекерская контора 1×bet официальный сайт 1×bet xyz порно с Георгий Джикия (футбол) казино смотреть онлайн бесплатно казино 1 Самойлова Алла Владимировна порно
DiskiPlus 1go casino DiskiPlus porno Илона Маркова, хоккеистка <a href=https://diskiplus.ru>DiskiPlus промокод 1×bet</a> DiskiPlus kent casino регистрация DiskiPlus бывшие казино <a href=https://diskiplus.ru/>DiskiPlus Львова-Белова Мария Алексеевна порно</a> DiskiPlus какие казино DiskiPlus букмекерская контора фонбет официальный сайт DiskiPlus Хорова Наталья Александровна порно DiskiPlus винлайн букмекерская контора официальный DiskiPlus порно с Георгий Джикия (футбол) DiskiPlus 1go casino DiskiPlus почему в казино нет часов
#4811 Charlesgunnyhttp://filmkachat.ru
1× slots зеркало
Размер ставки для забавы по бездепозитному бонусу (окончательно же, в случае, когда он представлен повторяющий бонусных валютных средств) зачастую ниже, чем при ирге на депозит. Ограничение несомненно работать до этапа отыгрыша приза.Акционные предложения от казино есть в разных форматах. Часто призы даются в мена на депозит. Игрок вносит платеж и получает средства, бесплатные вращения и другие поощрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — вид бонуса, который гарантирован за исполнение определенных поступков на веб-сайте: <a href=http://filmkachat.ru/>1×slots зеркало подтвердит вашу регистрацию если говорить</a> Для получения депозитного приза нужно восполнить свой игровой баланс реальными деньгами. Вознаграждение можно получить либо при внесении первого депо, либо в виде фиксированного процента от внесённых средств. Так или по, бонус поступит на счёт только последствии пополнения.Да, у даровых призов есть недостатки. Прежде всего, они обычно небольшие. Кроме того, обстоятельства вейджера по ним практически строгие. Но таки неимение риска делает их довольно красивыми для клиентов. <a href=http://prsync.com/archicgi/how-home-entertainment-flyarchitecture-transforms-modern-living-spaces-4518898/>http://prsync.com/archicgi/how-home-entertainment-flyarchitecture-transforms-modern-living-spaces-4518898/</a> Вообще перейдя в казино — верховодила схожи в получении бездепозитных бонусов, в стандартные верховодила заходит: подтвердить эл. Почту и телефонный, наполнить собственный собственный профиль, активировать промо код или активировать предложения во вкладке БОНУСЫ.Шаг 5. Использование и отыгрыш. Бездеп обязан быть использован в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. 1×slots рабочее зеркало <a href=https://strokedb.lighthouseapp.com/users/1948130>https://strokedb.lighthouseapp.com/users/1948130</a> Когда речь о получении бездепозитных призов в казино, для направьте на последующие условия:
1×slots официальный сайт зеркало
<a href=https://forum-macan.ru/memberlist.php?mode=viewprofile&u=1736>1×slots на любой вкус как пройти регистрацию</a> 1×slots регистрация 1×slotscasino09k online Третитй бездепозитный бонус за регистрацию – денежные свои. К раскаянью, начислить рубли или доллары способны только знаменитые и популярностью клубы. С их поддержкой у насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком. <a href=https://spencertbde45788.bloggazza.com/29606712/deepnude-ai-navigating-the-complexities-of-technology-and-ethics>https://spencertbde45788.bloggazza.com/29606712/deepnude-ai-navigating-the-complexities-of-technology-and-ethics</a> 1×slots зеркало видели такую регистрацию на
1×slots сайт
Чаще всего казино приз за регистрацию без депо даёт вероятность запустить любой машина. Но превосходнее пристально ознакомиться с критериями. Иногда для игры доступны лишь определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, другого начать знакомство с миром пыла непосредственно с «одноруких злодеев». <a href=https://www.scottsfasteners.com/users/michaelquevy>https://www.scottsfasteners.com/users/michaelquevy</a> Следует выделить, что бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам или с определенным кодом.Высокая конкурентность в разделе азартных игр мотивирует операторов привлекать посетителей разнородными промоакциями. Благодаря данному у посетителей появляется возможность получить бонусы в казино за регистрацию без депо. Воспользоваться этим предложением возможно, минуя функцию внесения денег на игровой счет, просто активировав аккаунт на веб-сайте. Наш экскурсовод по бездепам поможет избрать самую привлекательную бонусную программу, узнать правила получения такого гонорары и распорядиться им с максимальной выгодой. 1×slots официальный регистрация Многие казино деют в маркетинговых целях благотворительные бонусы исключительно для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой вебсайт по партнерской ссылке с нашего портала.Основное различие что, нет, собственно для получения бездепа нужно пополнять баланс в казино. Но считая сего, есть ряд прочих отличий:
1×slot официальный сайт
Не желаете поиграть в азартные игры, не рискуя своими деньгами, но получая в все выплаты? Подобную вероятность деют почти наилучшие порталы с азартными развлечениями. В их числе количество добросовестных и надежных интернет-казино на русском языке. Они привлекают новых пользователей различными поощрительными мероприятиями, включая бездепозитные, либо бесплатные бонусы. <a href=https://portugal-campings.com/pt/account/>1×slots регистрация то дальше необходимо пройти</a> Нет. Для получения бездепозитного приза в казино нужна обязательная регистрация на сайте. Играть в слоты безвозмездно и без регистрации возможно лишь в демо режиме.Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам воспрещено начислять призы клиентам, не имеющим денежных средств на счете. Мы предлагаем разглядеть животрепещущие бонусы онлайн-казино с лицензией, которые соблюдают законодательство РБ. сайт 1× slots casino <a href=https://krok.biz/forum/memberlist.php?mode=viewprofile&u=38226>https://krok.biz/forum/memberlist.php?mode=viewprofile&u=38226</a>
1×slots casino регистрация на сайте
Так собственно главное отличие подарка на депозит от бездепа – неотъемлемое пополнение счёта. Вы сможете внести депо и преумножить стартовый капитал либо забрать бездеп и этом не придётся рисковать собственными сбережениями. Поспешите выполнить простые требования, и администрация ресурса начислит щедрое поощрение! Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских рублей. В критериях промоакции указано, собственно вейджер бездепозитного приза х20. Поэтому, дабы отыграть приз, игроку несомненно необходимо устроить ставок на 35*20=700 руб. <a href=http://am_14264130.mongdol.net/bbs/board.php?bo_table=free&wr_id=107382>http://am_14264130.mongdol.net/bbs/board.php?bo_table=free&wr_id=107382</a> Бонус в казино без депозита имеет разные вариации: такое быть приветственный бонус, промоакции в честь каких-либо праздников или важных дат, приз за привлечение новых игроков, преданность и получение VIP-статуса.Бездепозитный приз часто возможность замерзнуть доступным сразу последствии окончания регистрации, поскольку в большинстве случаев единственным притязанием к нему считается регистрация, а этого ревизия вашей новой учетной записи. 1хслот 1хслотс регистрация перейти на 1×slots При верном раскладе бездепы — это прекрасный метод выступать на деньги без траты собственных средств. Есть количество рекомендаций, следуя которым можно извлечь максимально выгоды из сходственных акций казино. Играть по лишь на лицензированных площадках. Скриптовые веб-сайты не накалывают с бонусными предложениями, хотя и употребляют пиратский софт с модифицированным ГСЧ. Выиграть на этих автоматах нереально.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/8624/#comment-354683>1х слот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, чтобы еще раз получить бесплатный бонус. Игорные заведения нетерпимы к бонус-хантерам, потому вас ждет неминуемое наказание. Эффективность бездепов в маркетингового инструмента расценили все операторы. Малоизвестные площадки используют такие акции, дабы быстро набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны постоянных посетителей. Не все веб-сайты, дающие презенты без депо, рекомендованы к ирге. За привлекательным промоописанием все прятаться невыполнимые условия отыгрыша и подводные камешки.
#4812 AHoini
<a href=https://vds74950.blogzet.com/a-review-of-1win-casino-korea-45286409>1win korea</a> <a href=https://rafaelnvadi.dbblog.net/3812572/examine-this-report-on-vavada-registracija>vavada slovenija</a>
#4813 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Алина Загитова, фигуристка pin up casino <a href=https://strelochnik.com/>почему в казино нет часов</a> Радченко Светлана Юрьевна порно 1×bet телефон <a href=https://glvk.guru/>почему в казино нет окон</a> букмекерские конторы в россии винлайн букмекерская контора официальный сайт букмекерская контора фонбет официальный сайт пин ап casino pin приложения букмекерских контор 1×bet скачать бесплатно 1×bet официальный xbet
DiskiPlus порно с Сергей Бобровский (хоккей) DiskiPlus сайт букмекерской конторы <a href=https://diskiplus.ru/>DiskiPlus porno Нина Пирогова, хоккеистка</a> DiskiPlus казино на деньги DiskiPlus ев казино <a href=https://www.diskiplus.ru>DiskiPlus букмекерская контора зенит</a> DiskiPlus казино фильм DiskiPlus винлайн букмекерская контора DiskiPlus pin up casino официальный DiskiPlus casino зеркало сегодня DiskiPlus порно с Александр Головин (футбол) DiskiPlus игры казино DiskiPlus Чулпан Хаматова
#4814 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало
После получения приза вывод средств для посетителя будет недоступен до, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо чета недель. Выводить деньги игрок может только в отыгрыша. <a href=http://filmkachat.ru/>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a> <a href=https://devfolio.co/@shopavto>https://devfolio.co/@shopavto</a> В интернет-сети постоянно можно найти перечни более модных и гарантированных поощрительных программ от знаменитых онлайн-казино.Самый распространённый из подобных призов, естесственно же, бездеп на день рождения посетителя — приз вид фиксированной суммы либо фриспинов поступает на счёт игрока, а воспользоваться им можно протяжении установленного периода медли. сайт 1× slots casino <a href=http://xsyywx.com/home.php?mod=space&uid=257841>http://xsyywx.com/home.php?mod=space&uid=257841</a> Прямо сейчас заберите безвозмездные вращения за регистрацию без депозита и начинайте коллекционировать призовые композиции ради солидных выигрышей!
1×slots официальный зеркало
<a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=7523&TITLE_SEO=7523-preobrazovatel-interfeysov-usb-rs485&MID=467807&result=reply#message467807>1×slots casino регистрация 1×slotscasin online</a> 1×slots быструю регистрацию а также мгновенное Доступность — бездепозитные бонусы в казино почаще всего предоставляются новым игрокам, хотя случаются случаи, когда приз имеют получить и действующие посетители.Онлайн гемблинг развивается с любым деньком все больше и больше, новые бренды создаются не по денькам а по часам. Новые онлайн казино проделывают вступительные промоакции для игроков, для того собственно бы зарекомендовать себя, и тем наиболее предлагают бездепозитные призы за регистрацию, что бы не упустить такую вероятность — как пользоваться свежим бездепом, рекомендуем навещать наш сайт как возможно чаще, самое лакомое и новые несомненно добавляться в данном же перечне. <a href=https://bridge-clip.ru/user/Jamesspisk/>https://bridge-clip.ru/user/Jamesspisk/</a> Воспользоваться бездепом возможно не во всех игровых автоматах: казино и тут устанавливает лимитирование для посетителей. Конечно, это можно посчитать некоторым неудобством для игрока, хотя справедливости необходимо, собственно выбор автоматов всё одинаково остаётся довольно большим. 1×slot рабочее зеркало Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала резвые выводы. Фишка выплат в, собственно достаточно избрать платёжный инструмент и показать сумму. В большинстве случаев деньги зачисляются на электрические кошельки протяжении 15 минут, а на банковские карты – 1–3 рабочих дня.Когда идет о получении бездепозитных бонусов в казино, для обратите внимание на последующие условия:
1хслот зеркало
Также посещают случаи, когда казино начислит оговоренный приз последствии регистрации нового посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам.Наши специалисты изучают обстоятельства акции, затем в ручном режиме проверку их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие характеристики. Мы не рекламируем казино, а даем игрокам информацию о превосходнейших из них. <a href=https://codepen.io/gzpdhmag-the-reactor/pen/bGyLaXb>https://codepen.io/gzpdhmag-the-reactor/pen/bGyLaXb</a> 1×slots зеркало подтвердит вашу регистрацию если говорить Подтвердите лицо, предоставив оператору казино свои паспортные данные. Инструкции обычно легкие, основное — четко им стопам. Если написано, что «на фото обязаны быть заметны все хорошо угла странички паспорта» — устройте именно такое фото.После требуется привнести идентификационный платёж. Это пугает новичков больше всего. Нужно устроить наименьший депо в 100–500 руб. Таким образом служба защищенности убедиться в, собственно платёжный способ принадлежит Вам. Данная процедура важна для обеспечения защищенности игровых счетов. Пример, Ваш акк взломают и выведут средства на собственный кошелёк. Будет крайне неприятно. Поэтому верификация платёжной системы, это необходимый момент.
1×slots бонус за регистрацию
Кешбэк-бонус дает собой возврат фиксированного процента от ставки когда проигрыша или же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не выше 10%.Прежде чем активировать бездеп, нужно увериться никаких, собственно государство, уроженцем которой является игрок, не заходит в перечень не. Призовые начисления без депо все предоставляться для участия в турнирах интернет казино. Потратить перечисленные деньги возможно исключительно в данной промоакции. Условия их проведения себе ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, лучше изучить его верховодила.Бездепозитные бонусы за регистрацию являются одним из самых модных способов вербования новых игроков в онлайн-казино, поэтому собственно они предоставляют игрокам возможность опробовать казино, особенно игровые автоматы, и возможно, выиграть реальные средства. 1×slots регистрация <a href=http://www.oclassedu.com/space-uid-10008.html>http://www.oclassedu.com/space-uid-10008.html</a> Существуют казино с бонусом за регистрацию, каких очень модны фриспины в интернет казино впоследствии регистрации в определенных забавах. Они встречаются том чаще даровых поощрений или классических призов в казино без инвестициям. Например, игрок регистрирует счет, на кот-ый начисляются безвозмездные забавы, бонус за регистрацию вид бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса компьютерные выигрывает настоящие деньги, коие в последствии возможно успешно исключить из заведения на собственную платежную систему. То есть, есть шансы вывести средства без рисков собственными финансами. Регистрация, за в получит бонусы, займет минут, а спасибо этому можно прирастить 5 евро поощрений до тыс. И без всяких заморочек исключить их.
1×slots подтвердит вашу регистрацию если говорить
Обычно показатель повыше, чем для призов на депо. Не удивляйтесь, случае он будет даже х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных государств. <a href=http://agriexpert.kz/user/DoctorLazutasi/>http://agriexpert.kz/user/DoctorLazutasi/</a> Иногда виде бездепа, казино презентует наименьший приз (до 50 рублей), из-за которого надо заморачиваться.В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с бесплатных вращений. Прибыль, которую Вы заработаете на таком бездепе можно ставить на вывод без какого либо отыгрыша. 1×slots актуальное зеркало Подобные призы без депозита предоставляются на более выгодных условиях. Зачастую они покрупнее, а обстоятельства отыгрыша наименее строгие.
<b>Смотреть еще похожие новости:</b>
<a href=https://orbitsound.com/forum/user-211634.html>казино 1× slots официальный сайт</a>
<a href=http://forum.azartweb2.com/threads/1×slots-registracija-na-sajte-1×slots-ru-com.230198/>1×slots регистрация на сайте 1×slots ru com</a>
<a href=http://sfessd.listbb.ru/memberlist.php?mode=viewprofile&u=86>1× slots официальный</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подтверждение электронной почты – одно из главных критерий, коие есть практически в каждом бездепозитном казино. Чтобы верифицировать электрическую почту, довольно перебежать по активной ссылке в письме, полученном от азартного клуба. Размер призов почаще всего чисто условный и не превышает 50 руб. Приятно, хотя ощутимым бустом деле ли будет.
#4815 ForestJenhttps://microloans.kz
Нужны деньги срочно <a href=https://microloans.kz/>взять займ онлайн Казахстан</a> с быстрым одобрением и моментальным переводом на карту. Минимум документов, удобные условия и прозрачные ставки. Оформите займ прямо сейчас!
#4816 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin ап casino casino онлайн <a href=https://res-publika.com>Александра Бортич</a> casino x казино сочи <a href=https://rucriminal.info/>Разуваева Ксения Денисовна порно</a> яндекс казино casino автомат пинап казино порно с Захарова Мария Владимировна 1×bet официальный xbet сайте букмекерской конторы фонбет 1×bet сайт
DiskiPlus up casino официальный DiskiPlus 1×bet сайт 1×bet xyz <a href=https://www.diskiplus.ru>DiskiPlus 1×bet сайт</a> DiskiPlus букмекерская контора DiskiPlus скачать 1×bet 1×bet xyz <a href=https://www.diskiplus.ru/>DiskiPlus porno Александра Степанова, фигуристка</a> DiskiPlus букмекерские конторы в россии DiskiPlus казино фильм смотреть онлайн DiskiPlus 1×bet зеркало xbet DiskiPlus официальные букмекерские конторы DiskiPlus лучшие казино бесплатно DiskiPlus Попова Анна Юрьевна порно DiskiPlus 7k casino официальный сайт
#4817 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на сайте
Для получения депозитного бонуса необходимо восполнить собственный игровой баланс настоящими деньгами. Вознаграждение возможно получить или при внесении первого депозита, или вид фиксированного процента от внесённых средств. Так или по, бонус поступит на счёт только в пополнения.Большинство клубов привлекают внимание игроков за счёт различных подарков. На 1 веб-сайтах возможно получить виртуальные кредиты, которые откроют доступ ко всему софту. На иных же, администрация предлагает благотворительные вращения для пуска топовых интернет слотов. Несмотря на различные акции, стоит выделить самые основные. <a href=http://filmkachat.ru/>онлайн казино 1×slots</a> <a href=https://xequte.com/forum/topic.asp?TOPIC_ID=15274>https://xequte.com/forum/topic.asp?TOPIC_ID=15274</a> x1 slots 1хслотс регистрация перейти на 1×slots <a href=https://lider-school174.com/forum/user/71/>https://lider-school174.com/forum/user/71/</a> Для получения предоставленных бонусов для пригодиться — ПК или мобильное устройство, и остальное дело за малым.Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 поболее. Когда игроку надеется много фриспинов, администрация возможность бить3 их начисление на количество дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах промоакции.
1хслотс мобильная версия зеркало
В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая приятная доля игры. Важно, зачастую бездепозитные призы в казино выдаются с лимитированиями по наибольшей выплате. В среднем возможно рассчитывать на выгода в несколько тысяч руб. Как исключить выигрыш с приза без депо. Придётся подтвердить акк документально, в неких заведениях. Процедура верификации неотклонима и делается каждым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате или прочитайте в правилах. <a href=https://games-garant.ru/index.php?subaction=userinfo&user=Jamesneorm>1×slots быструю регистрацию а также мгновенное</a> 1×slots регистрация на официальном сайте Призовые начисления без депо могут предоставляться для роли в турнирах интернет казино. Потратить перечисленные средства возможно исключительно в данной промоакции. Условия их проведения в лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться таким предложением, другого, как изучить его управляла.Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных призов принимаются довольно высочайшие требования. Часто онлайн-казино советуют отыграть бонусное поощрение до ста раз в игровых автоматах. Например, если игрок получил даром десять долларов, то необходимо несомненно отыграть их, поставив 1 тысячу спинов по одному доллару любой. Стоит обозначить(означить), что не все казино выделяют возможность выступать на бонусы и не во всех развлекательных заведениях идентичные верховодила для отыгрывания. Некоторые казино запрещают выступать на призы в блекджек или ограничивают ставки до 5 %, собственно значительно наращивает в 10-ки один количество нужных игр. <a href=https://aryba.kg/user/DoctorLazutael/>https://aryba.kg/user/DoctorLazutael/</a> Зачастую бездепозитные призы казино для игры предлагаются различными заведениями азартных игр в качестве рекламных промоакций либо в целях вербования к себе новых игроков. Для бездепозитных бонусов в казино 2022 игроку не пополнять счет до момента вывода желанных средств. 1×slots зеркало регистрация то дальше необходимо пройти
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Фриспины. Бесплатные вращения предназначены для применения в видео-слотах. Внимательно читайте условия – они нередко выдаются для неких машин. В зависимости от клуба продоставляется создавать определенное число ставок. Кстати, современные игорные жилища дают возможность заводить «одноруких бандитов». <a href=http://catalog2.drobak.com.ua/communication/forum/user/2822593/>http://catalog2.drobak.com.ua/communication/forum/user/2822593/</a> У каждой игры средства требования по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система зачтет любую ставку. В рулетке и покере сделать это гораздо труднее. Именно поэтому так важно пристально разбирать обстоятельства получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой забаве, то новенькие просто «спустят бонус на ветер».Вознаграждения за получение VIP-статуса ? начисляются в рамках программы преданности при достижении очередного уровня или выдаются индивидуально менеджерами службы. 1×slots регистрация на 1хслотс
1×slots официальный регистрация
Такой безвозмездный эквивалент средств зачисляется на профиль пользователя после воплощения притязаний и предназначаются они лишь для игрового процесса. Вывод таких вознаграждений вероятен только в воплощения вейджеровых критерий. <a href=https://forum.pmpobc.ca/index.php?topic=147675.new#new>1×slots зеркало</a> Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, чтобы еще раз получить даровой приз. Игорные заведения нетерпимы к бонус-хантерам, потому вас ожидает неизбежное наказание.Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, чтобы еще раз получить даровой бонус. Игорные заведения нетерпимы к бонус-хантерам, потому вас ожидает неминуемое санкция. Индивидуальные поощрения выдаются за совершение деяний: подписку на аккаунты площадки в соц сетях, установку мобильного прибавления либо официального посетителя для ПК. В большинстве казино срабатывают программы лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на грядущий степень нередко сопровождается выдачей бездепа.Приветственный бездеп предоставляется хоть игроку лишь раз один. Казино дерутся с так называемыми бонусхантерами (от англ. Bonus Hunter — доброволец за призами), пытающимися заводить многочисленные аккаунты для обмана оператора и повторного получения презента. Исключить сходственные деянья позволяет верификация данных. Администрация вправе востребовать у посетителя доказать персональные данные, указанные при регистрации. 1×slots зеркало регистрация то дальше необходимо пройти <a href=http://mongdol.net/bbs/board.php?bo_table=free&wr_id=1432994>http://mongdol.net/bbs/board.php?bo_table=free&wr_id=1432994</a>
1хслотс официальный сайт зеркало
Большинство интернет-казино из нашего топ-10 готовы порадовать вас неповторимыми промоакциями. Читайте о них в обзорах и на форуме. Законодательство, регулирующее азартные игры в различных странах, влияние на полномочия операторов. В итоге юзеры из отдельных ареалов сталкиваются с лимитированиями со стороны казино. Это может быть как полный отказ в доступе, например и невозможность загружать забавы отдельных изготовителей. <a href=http://suvenir.k-78.ru/communication/forum/user/46954/>http://suvenir.k-78.ru/communication/forum/user/46954/</a> 1×slots рабочее зеркало на сегодня При регистрации по указывать только достоверную информацию. Когда учетная запись будет активна, замечен доступ в Личный кабинет. В нем возможно избрать денежную, ввести промокод и узнать подробные верховодила получения и отыгрыша бездепа. Краткая информация об акции часто находится непосредственно на регистрационной форме.
<b>Смотреть еще похожие новости:</b>
<a href=http://forums.indexrise.com/thread-309-post-409377.html#pid409377>1×slots официальный зеркало рабочее</a>
<a href=http://lider1c.ru/communication/forum/messages/forum5/message19471/15407–1×slots-mobilnaya-versiya-voyti-kazino?sessid=d1042484754535dc2dde5d52071b38d1&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1×slots мобильная версия войти казино</a>
<a href=https://creapnl.com/foros/tema/1×slots-%d0%b1%d0%be%d0%bd%d1%83%d1%81-%d0%b7%d0%b0-%d1%80%d0%b5%d0%b3%d0%b8%d1%81%d1%82%d1%80%d0%b0%d1%86%d0%b8%d1%8e-3/>1×slots бонус за регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подтвердите регистрацию, чтобы активировать Бездепозитный приз с выводом, потребуется наполнить собственный профиль. Заполните пустующие поля настоящими данными о себя.
#4818 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
сайт винлайн букмекерская контора порно с Варвара Субботина <a href=https://strelochnik.com/>казино пину</a> реального казино порно с Дарья Касаткина (теннис) <a href=https://vestnik-jurnal.com/>porno Елизавета Туктамышева</a> порно с Зырянова Анастасия Владимировна казино вулкан Ирина Горбачева Львова-Белова Мария Алексеевна порно букмекерская контора официальный сайт скачать 1×bet слоты 1×bet скачать приложение на андроид
DiskiPlus 7k casino зеркало на сегодня DiskiPlus официальные зеркала казино <a href=https://www.diskiplus.ru>DiskiPlus порно с Варвара Субботина</a> DiskiPlus unlim casino DiskiPlus казино играть <a href=https://www.diskiplus.ru>DiskiPlus gama casino</a> DiskiPlus яндекс казино DiskiPlus 1×bet официальный слоты DiskiPlus casino вход DiskiPlus Елена Лядова DiskiPlus casino 7k сегодня DiskiPlus винлайн букмекерская контора DiskiPlus скачать casino на андроид
#4819 Charlesgunnyhttp://filmkachat.ru
1×slot казино зеркало
Иногда для получения бонусов необходимо связаться с адептами службы поддержки. Удобнее всего с ними беседовать в онлайн-сате, желая времени достаточно запроса по электронной почте. <a href=http://filmkachat.ru/>1×slots казино мобильная версия</a> <a href=https://band.us/band/96885593/post/5>https://band.us/band/96885593/post/5</a> За счёт спинов выйдет запустить разные интернет слоты, протестировать стратегии и поднабраться опыта. Фишка что, что вращения начисляются на лучшие аппараты с уникальными опциями и высокой отдачей. Не запамятовывайте, что в любом акционном предложении учтены особые требования – временные ограничения, наибольший объем ставки, список доступных игр.Возьми свой подарок. Чаще всего бонус активируется незамедлительно в регистрации. Но посещают истории, когда надо(надобно) зайти в индивидуальный кабинет или написать в справочную службу. 1×slots зеркало проходить регистрацию это отличный вариант <a href=https://www.mexicanservers.com/member.php?action=profile&uid=10268>https://www.mexicanservers.com/member.php?action=profile&uid=10268</a> Сразу после активации промокода можно пользоваться презентом. Как уже упоминалось, бонусы посещают трёх видов – фриспины, кредиты и фриплей-бонусы.
скачать 1×slots официальный сайт
<a href=http://big.bestforums.org/viewtopic.php?f=7&t=10285>1×slots казино зеркало</a> казино 1×slots официальный сайт Условия вывода выигрыша. В неких заведениях для удачного вывода с бездепозитного приза довольно пополнения баланса и подтверждения личности. В иных же клубах, нужно несколько один прокрутить собственный депозит.На страничке представлены бездепозитные призы за регистрацию в казино редчайшая награда за коей гонятся все игроки как новички, например и профессионалы. Мы также уделяем огромное внимание на присутствие бонусов при составление рейтинга казино на деньги. Бездепозитный бонус это вероятность играть безвозмездно и выиграть реальные деньги. <a href=https://poldomy.pl/member.php?u=134587>https://poldomy.pl/member.php?u=134587</a> Бездепозитные призы отличный вариант даровой забавы в игровые автоматы. Многие юзеры сети не знают, что в казино возможно начать выступать полностью безвозмездно, а позже вывести выигрыш на банковскую карту либо электронный кошелек, иные не доверяют онлайн казино, а третьи успешно играют и выигрывают – и тотчас довольно великие суммы.Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, чтобы была вероятность вывести выигрыш. 1хслотс зеркало на сегодня
1×slots официальный сайт, скачать
В интернет-сети практически можно найти перечни более популярных и обещанных поощрительных программ от знаменитых онлайн-казино. Создание аккаунта. На веб-сайте казино нужно открыть регистрационную форму и наполнить пустопорожние поля собственными данными. Иногда на данном шаге требуется показать только адрес электрической почты и пароль, хотя почаще надобно заполнить анкету персональной информацией (ФИО, дата рождения, пространство проживания и т.д.). Нужно указывать лишь реальные данные, поскольку впоследствие они будут испытаны.Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в индивидуальный кабинет, дабы отобрать бесплатные вращения с вейджером х40; <a href=http://sempre-roma.com/bbs/home.php?mod=space&uid=485816>http://sempre-roma.com/bbs/home.php?mod=space&uid=485816</a> В лицензионных бездепозитных казино играть в азартные игры вправду неопасно. Наличие лицензии одобряет тот факт, что клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP.С иной стороны, намного проще отобрать бездепозитные фриспины за регистрацию в казино и напрямик момент начать вращать барабаны в превосходнейших слотах. Главная особенность спинов сомнений, что они предусмотрены для топовых автоматов. Удастся не пройти вспомогательные раунды, но и увеличить сумму выигрыша, заработать респины и внутриигровые подарки. 1× slots сайт Для получения выигрыша требуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить конкретную сумму, хотя теснее из собственных денег. Она рассчитывается из совместного размера выигрыша за всегда применения бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, если юзер выиграл 1000 руб., а множитель сочиняет х30, исключить средства можно несомненно, сделав ставки на 30 000 рублей.
1хслотс рабочее зеркало на сегодня
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/8168/#comment-340327>1×slots официальный зеркало рабочее</a> 1×slots регистрация 1×slots casino 777 online <a href=http://mobilka.mobi/index.php?subaction=userinfo&user=dapperfever44>http://mobilka.mobi/index.php?subaction=userinfo&user=dapperfever44</a> Новые клиенты онлайн-казино без первого депозита шансы выяснить собственную удачливость. К тому же есть вероятность конвертировать бездепы в реальные средства за регистрацию в казино, однако достичь приз нужно отыграть сообразно условиям акции.
1×slos регистрация в 1×slots casino
Одним из поводов отдавать привилегию 1 либо иному заведению заключается в привлекательности предлагаемых промоакций и даровых предложений. Безвозмездные фриспины, выдаваемые без дела делать какой-нибудь лепта, в списке располагается далековато не в конце.Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном сайте и выполните вход в собственный кабинет, чтобы забрать безвозмездные вращения с вейджером х40; Но на азартных платформах подобные гонорары шансы получить и уже зарегистрированные пользователи. В этом случае, призы предоставляются в рамках уникальных акций или же неким игрокам в виде акционного предложения, которое приходит на почту с целью «вернуть» игрока в свое казино.Нет. Казино раздают бесплатные бонусы за регистрацию, чтобы, чтобы, дабы заказчик мог ознакомиться с игровым заведением. А дабы вывести его, необходимо выполнить обстоятельства отыгрыша. <a href=https://rostovbike.ru/user-2493.html>https://rostovbike.ru/user-2493.html</a> 1×slots регистрация 1×slots casino c2d ru
<b>Смотреть еще похожие новости:</b>
<a href=http://link.5nx.ru/viewtopic.php?f=5&t=6693>казино 1×slots официальный сайт</a>
<a href=https://hiddeninthesand.com/blogs/news/2024/11/the-unfortunate-history-of-fraudulent-tally-hall-uploads/#comment-48962>1хслот зеркало</a>
<a href=http://sladkierecepti.5nx.ru/viewtopic.php?f=8&t=6746>1×slots бездепозитный бонус за регистрацию</a>
<a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1×slots официальный регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Денежные свои. Третий бонус за регистрацию без депозита – наличные. К огорчению, лишь знаменитые и популярностью клубы могут дать деньги в руб. Или долларах. С их поддержкой вы сможете насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед этим необходимо исполненье определенных условий. Законодательство, регулирующее азартные игры в различных странах, влияет на возможности операторов. В результате пользователи из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это имеет быть как полный отказ в доступе, например и невозможность загружать игры отдельных изготовителей.
#4820 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора мостбет лучшие онлайн казино <a href=https://vestnik-jurnal.com/>зеркала казино</a> 1×bet зеркало рабочее порно с Илья Осипов (киберспорт) <a href=https://strelochnik.com/>1×slots casino</a> букмекерские конторы в россии казино можно porno Анна Сидорова, керлингистка порно с Бондаренко Анастасия Борисовна porno Александра Степанова, фигуристка porno Нина Пирогова, хоккеистка порно с Дарья Касаткина (теннис)
DiskiPlus 7k casino зеркало на сегодня DiskiPlus 1×bet официальный <a href=https://www.diskiplus.ru>DiskiPlus сайт казино зеркало</a> DiskiPlus gama casino DiskiPlus up букмекерская контора <a href=https://diskiplus.ru/>DiskiPlus где казино</a> DiskiPlus 1win casino DiskiPlus pin up casino зеркало DiskiPlus 1×bet зеркало xbet xyz DiskiPlus пари букмекерская контора DiskiPlus Манилова Алла Юрьевна порно DiskiPlus казино 1 DiskiPlus 1×bet на сегодня
#4821 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную функцию активации приза без депозита. Внимательно прочитайте до конца. Многие новички проделывают ошибки на шаге регистрации и поэтому возможности получить подарок. <a href=http://filmkachat.ru/>x1 slots 1хслотс регистрация перейти на 1×slots</a> <a href=https://www.gift-me.net/blogs/201226/%D0%9E%D1%86%D0%B5%D0%BD%D0%BA%D0%B0-%D0%B0%D0%B2%D1%82%D0%BE-%D0%BE%D0%BD%D0%BB%D0%B0%D0%B9%D0%BD-%D0%BA%D0%B0%D0%BA-%D1%80%D0%B0%D0%B1%D0%BE%D1%82%D0%B0%D0%B5%D1%82-%D0%B8-%D0%BD%D0%B0-%D1%87%D1%82%D0%BE-%D0%BE%D0%B1%D1%80%D0%B0%D1%82%D0%B8%D1%82%D1%8C-%D0%B2%D0%BD%D0%B8%D0%BC%D0%B0%D0%BD%D0%B8%D0%B5>https://www.gift-me.net/blogs/201226/%D0%9E%D1%86%D0%B5%D0%BD%D0%BA%D0%B0-%D0%B0%D0%B2%D1%82%D0%BE-%D0%BE%D0%BD%D0%BB%D0%B0%D0%B9%D0%BD-%D0%BA%D0%B0%D0%BA-%D1%80%D0%B0%D0%B1%D0%BE%D1%82%D0%B0%D0%B5%D1%82-%D0%B8-%D0%BD%D0%B0-%D1%87%D1%82%D0%BE-%D0%BE%D0%B1%D1%80%D0%B0%D1%82%D0%B8%D1%82%D1%8C-%D0%B2%D0%BD%D0%B8%D0%BC%D0%B0%D0%BD%D0%B8%D0%B5</a> Можно ли в одном интернет казино получить больше одного приза за регистрацию? Нет, например как в каждом онлайн казино есть верховодила, к коим нужно держаться, не делать два аккаута для получения бонусов, по несомненно блокировка обоих аккаутов, не пытайтесь обмануть интернет казино, приз за регистрацию выдаеться один раз одному личику.Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. 1×slots casino online регистрация <a href=http://www.lstch.net/home.php?mod=space&uid=1292716>http://www.lstch.net/home.php?mod=space&uid=1292716</a> Подтверждение регистрации. Казино просят привязки профиля к электрическому адресу и номеру телефона. Для сего на e-mail отчаливает послание ссылаясь, а на телефон ? текстовое сообщение с кодом.Самый распространённый из похожих призов, конечно же, бездеп на денек рождения клиента — приз повторяющий фиксированной суммы или фриспинов поступает на счёт игрока, а воспользоваться им возможно протяжении установленного периода времени.
1хслот зеркало
<a href=https://www.ldvd.nl/no-22-san-diego-place-rallies-very-last-boise-country-27–16?page=50#comment-238336>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a> 1×slot казино зеркало <a href=http://silabgarza.net/forums/member.php?action=profile&uid=217000>http://silabgarza.net/forums/member.php?action=profile&uid=217000</a> 1×slots зеркало на сегодня
1×slots регистрация на сайте
Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.Но есть игорные заведения, которые готовы просто так жертвовать деньги на забаву. Для этого достаточно создать профиль. Чтобы исключить свой выигрыш, вам сначала нужно выполнить условия отыгрыша, указанные в условиях получения бездепозитного депо. <a href=http://www.link-pen.com/bbs/board.php?bo_table=free&wr_id=2158865>http://www.link-pen.com/bbs/board.php?bo_table=free&wr_id=2158865</a> Не стоит незамедлительно же открещиваться от приветственных даров в сходственных казино. Администрация готова начислить деньги либо фриспины, хотя предварительно работники обязаны увериться, собственно вы не аферист. Дело в, что развелось слишком количество охотников за бонусами. Они научились врать систему и зарабатывать солидные суммы средств. 1×slot зеркало рабочее регистрации на телефон придет
казино 1×slots официальный сайт
Индивидуальные поощрения выдаются за совершение действий: подписку на аккаунты площадки в социальных сетях, установку мобильного приложения либо официального посетителя для ПК. В большинстве казино срабатывают программки лояльности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на грядущий степень нередко сопрягается выдачей бездепа.На нашем сайте Вы найдете перечень своевременных новых бездепозитных призов в казино 2022 года. Также, есть количество эксклюзивных услуг, коие доступны лишь гостям нашего вебсайта в регистрации по нашей ссылке либо активации специального промокода. <a href=https://rolivka.online/forum/showthread.php?tid=34571>1×slots рабочее зеркало на сегодня</a> Акционные предложения от казино есть в разных форматах. Часто бонусы даются в размен на депо. Игрок вносит платеж и получает деньги, благотворительные вращения и поощрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — картина бонуса, который гарантирован за исполнение определенных действий на сайте: 1хслотс зеркало на сегодня <a href=http://xn–2q1b33lkuah98a.com/bbs/board.php?bo_table=free&wr_id=380534>http://xn–2q1b33lkuah98a.com/bbs/board.php?bo_table=free&wr_id=380534</a> Используйте лучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из перечня ниже, чтобы заработать презенты за обычные действия теперь сегодня получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и резвыми выводами на электрические кошельки.
1 хслот регистрация в 1×slots casino
Еще одно условие дотрагивается размеров ставки. Операторы устанавливают максимальную сумму, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, избранной в Личном офисе. При превышении лимита есть риск потерять приза. Существующие лимитирования относятся и к определенным видам ставок. Например, играя в рулетку, заказчик имеет столкнуться с запретом назначать фишки на шансы.Получив свой подарок, Вы сможете бесплатно выступать на настоящие деньги, а выполнив обстоятельства отыгрыша, исключить свой выигрыш. <a href=http://kuh-plus.ru/bitrix/redirect.php?goto=http://polinom.biz/bitrix/rk.php?goto=http://forum.raut.ru/bitrix/click.php?goto=https://telegra.ph/Kak-tochno-opisat-svoe-semejnoe-polozhenie-v-ankete-09–23>http://kuh-plus.ru/bitrix/redirect.php?goto=http://polinom.biz/bitrix/rk.php?goto=http://forum.raut.ru/bitrix/click.php?goto=https://telegra.ph/Kak-tochno-opisat-svoe-semejnoe-polozhenie-v-ankete-09–23</a> Выбирая даровой бонус, пристально изучайте управляла. Убедитесь, собственно для возможно брать роль в промоакции. Уточните, в каких забавах возможно исполнять обстоятельства вейджера. При надобности задавайте вопросы адептам саппорта. 1×slots зеркало быструю регистрацию а также мгновенное
<b>Смотреть еще похожие новости:</b>
<a href=https://bajarmp3.net/showthread.php?tid=426945>1×slots официальный demo регистрация в 1×slots casino</a>
<a href=https://www.one2bay.de/forum/showthread.php?tid=435707>рабочее зеркало 1хслотс</a>
<a href=https://creapnl.com/foros/tema/1×slots-%d1%81%d0%b0%d0%b9%d1%82–83/>1×slots сайт</a>
<a href=https://demo.comuni-italiani.it/forum/viewtopic.php?f=9&t=380256>1 x slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Список так нарекаемых «запрещенных землель» прилагается к правилам бонусной программы игорного портала. Обязательно выясните, распространяются ли на вас сходственные санкции. За счёт спинов получится запустить разные интернет слоты, протестировать стратегии и поднабраться опыта. Фишка сомнений, что вращения начисляются на лучшие аппараты с уникальными опциями и высочайшей отдачей. Не запамятовывайте, собственно в любом акционном предложении предусмотрены особые требования – временные ограничения, наибольший объем ставки, перечень дешевых игр.
#4822 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet сейчас 7k casino <a href=https://glvk.guru/>1×bet бесплатно</a> porno Яна Троянова 1×bet скачать приложение <a href=https://kompromat1.online/>порно с Дронова Александра Викторовна</a> 1×bet зеркало на сегодня 1×bet xyz почему в казино нет часов вавада казино ешь казино 1×bet регистрация казино рублях скачать 1×bet на андроид бесплатно
DiskiPlus Львова-Белова Мария Алексеевна порно DiskiPlus casino на телефон <a href=https://www.diskiplus.ru>DiskiPlus порно с Алексей Миранчук (футбол)</a> DiskiPlus porno Юлия Пересильд DiskiPlus казино пину <a href=https://www.diskiplus.ru/>DiskiPlus винлайн букмекерская контора официальный сайт</a> DiskiPlus порно с Зырянова Анастасия Владимировна DiskiPlus демо казино DiskiPlus casino скачать приложение DiskiPlus бесплатные букмекерские конторы DiskiPlus букмекерская контора леонов DiskiPlus porno Андрей Рублев (теннис) DiskiPlus гта казино
#4823 Michaelsnakehttp://tv.hd-720.biz
лучшие сериалы в 4K UHD фильмы <a href=http://tv.hd-720.biz/>смотреть фильмы онлайн без регистрации</a>
#4824 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало которую указывали при регистрации кстати
На данном разделе портала регулярно публикуются обзорные заметки, в рассматриваются безвозмездные призы лучших интернет-казино. Информация структурирована по нескольким пунктам, включая основные: <a href=http://filmkachat.ru/>1×slots официальный demo регистрация в 1×slots casino</a> <a href=https://www.4yo.us/blogs/171102/%D0%9A%D0%B0%D0%BA-%D1%80%D0%B0%D0%B1%D0%BE%D1%82%D0%B0%D0%B5%D1%82-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%BC%D0%BE%D1%82%D0%BE%D1%86%D0%B8%D0%BA%D0%BB%D0%BE%D0%B2>https://www.4yo.us/blogs/171102/%D0%9A%D0%B0%D0%BA-%D1%80%D0%B0%D0%B1%D0%BE%D1%82%D0%B0%D0%B5%D1%82-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%BC%D0%BE%D1%82%D0%BE%D1%86%D0%B8%D0%BA%D0%BB%D0%BE%D0%B2</a> Чтобы бездеп не был начислен на Ваш аккаунт, Вам надо активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк автоматически, а Вы не расчитываете его использовать, обратитесь в саппорта с просьбой отменить бездепозитный бонус.Помните, что в некоторых забавах сумма ставки идет в зачет вейджера лишь частично. Так, в настольных и карточных играх только от 5% до 50% суммы ставки считаются как отыгранные деньги, на как в слотах идет в зачет все one hundred percent суммы. 1×slots казино мобильная версия <a href=http://drop-let.ru/index.php?subaction=userinfo&user=absentgrump57>http://drop-let.ru/index.php?subaction=userinfo&user=absentgrump57</a> Отыграв бездепозитный приз в казино с выводом тоже придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, случае подобное лимитирование присутствует, то единоразово вывести выйдет только сумму, не превосходящую объем приобретенного бонуса.Максимальный размер ставки, который нельзя превышать же приз не несомненно всецело отыгран. В случае нарушения сего правила, приз и выигрыш с него будут аннулированы.
1×slots официальный сайт зеркало рабочее
Помимо прочего, для вывода средств по бездепу нужно привнести на счёт свой первый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально возможную необходимую, последствии чего вывод средств станет доступен.Осталось избрать казино с бонусом за регистрацию и сделать профиль. После активации подарка выигрыш находится от Фортуны и навыков. <a href=https://g2clubs.com/healthy-workout/google/#comment-28886>1×slots подтвердит вашу регистрацию если говорить</a> 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном бонусе, то начала направьте на значение вейджера и срок, кот-ый дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть бонус и исключить выигрыш. <a href=http://ordagr.ru/bitrix/redirect.php?goto=http://maps.google.ki/url?q=http://mrg-sbyt.ru/bitrix/rk.php?goto=https://telegra.ph/Kak-ne-popast-v-kreditnuyu-lovushku-ispolzuya-gosudarstvennye-uslugi-09–23>http://ordagr.ru/bitrix/redirect.php?goto=http://maps.google.ki/url?q=http://mrg-sbyt.ru/bitrix/rk.php?goto=https://telegra.ph/Kak-ne-popast-v-kreditnuyu-lovushku-ispolzuya-gosudarstvennye-uslugi-09–23</a> Бездепозитные призы, как уже понятно, являются оригинальной вероятностью приступать к игровому процессу абсолютно бесплатно, словами играть в онлайн казино даром и на имеющие средства сразу после регистрации аккаунта. Автоматы с таким депо все стать великолепной возможностью поиграть для почитателей азарта с определенными ограничениями в финансах. 1×slots регистрация 1×slots casino 777 online
рабочее зеркало 1хслотс
Размер призов чаще всего чисто условный и не выше 50 руб. Приятно, но осязаемым бустом деле навряд станет.При малый сумме приза рекомендуется выступать по низким ставкам, а использовать наибольшие какого-либо только в том случае, если вейджер очень великий, а время на отыгрыш сильно ограничено. Мы собрали и выпустили перечень лучших бездепозитных казино с бонусами за регистрацию, коие гарантируют щедрые выигрыши и моментальные выплаты.Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=https://98e.fun/space-uid-7890319.html>https://98e.fun/space-uid-7890319.html</a> 1×slots зеркало выигрыши обязательно пройдите регистрацию если Для получения выигрыша требуется выполнить условия казино. Чаще всего игроку необходимо поставить конкретную сумму, хотя теснее из собственных средств. Она рассчитывается из совместного объема выигрыша за все время использования бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, если пользователь выиграл 1000 рублей, а множитель составляет х30, исключить деньги возможно несомненно, сделав ставки на 30 000 рублей.
1×slots регистрация 1×slots review live
При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, которое можно посвятить забаве в казино.Важно, убедитесь в том, что ранее не регились в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи. 1×slots официальный demo регистрация в 1×slots casino <a href=https://www.ccbm8.com/home.php?mod=space&uid=1153342>https://www.ccbm8.com/home.php?mod=space&uid=1153342</a>
1×slot казино зеркало
Похожим образом трудится 3-ий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя или в связи с получения им VIP-статуса. Подарок предоставляется в обращения в поддержку и ревизии. Для всех бездепозитных бонусов действует наибольший предел на выигрыш. Он показывает предельную необходимую, коию у получить, играя на бонусные кредиты. Как только вам получится выполнить требования вейджера, возможный максимально будет переведен с бонусного счета на ведущей, а остаток будет списан. <a href=http://sabrina-online.su/wiki/index.php?title=Выкуп_авто>http://sabrina-online.su/wiki/index.php?title=Выкуп_авто</a> 1×slots официальный регистрация Составленный знатоками Casino.ru список онлайн-казино с бездепозитным призом дозволяет игрокам сопоставить спецпредложения различных операторов.Также случаются случаи, когда казино начисляет обсужденный приз в регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=13119>1× slots официальный</a>
<a href=http://complainanything.com/node/158?page=957#comment-1277696>1×slot рабочее зеркало</a>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=266704>1×slot официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный приз за регистрацию в казино — это стартовый подарок вид валютного начисления либо даровых вращений для новых игроков заведения, для получения которого не нужно вносить депо. Чаще всего, известные сервисы, эти как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно неотъемлемое управляло. Финансовые средства выводятся только спустя ту платежную систему, которой пользовались для пополнения депо. Если же игрок получил бездепозитный покерный бонус, потребуется восполнить счет на наименьшую сумму, кот-ая составляет обыкновенно 10 долларов.
#4825 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pinco casino казино гта 5 <a href=https://m.repost.news/>Нургалиева Эльвира Рамиловна порно</a> порно с Федор Чалов (футбол) казино вулкан <a href=https://vestnik-jurnal.com/>casino зеркало сегодня</a> porno Мария Шарапова скачать букмекерскую контору на андроид up букмекерская контора букмекерские конторы в россии Ходнева Светлана Владимировна порно 1×bet рабочее на сегодня 1×bet зеркало слоты 1×bet xyz
DiskiPlus 1×bet регистрация DiskiPlus bet casino <a href=https://diskiplus.ru/>DiskiPlus pin up casino зеркало</a> DiskiPlus Ходнева Светлана Владимировна порно DiskiPlus 1×bet официальный сайт <a href=https://diskiplus.ru/>DiskiPlus пин up casino</a> DiskiPlus сайт 1×bet слоты DiskiPlus почему в казино нет окон DiskiPlus лучшие онлайн казино DiskiPlus порно с Дронова Александра Викторовна DiskiPlus лучшая казино DiskiPlus лучшие бесплатные онлайн казино DiskiPlus лучшие онлайн казино
#4826 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino вход автомат казино <a href=https://strelochnik.com/>1×bet слоты 1×bet xyz</a> кент казино Радченко Светлана Юрьевна порно <a href=https://krtka.info/>порно с Захарова Мария Владимировна</a> скачать 1×bet 1×bet xyz вывод казино inform@rucriminal.info pin ап casino сайт pin up casino казино porno Екатерина Ефременкова, шорт-трекистка
DiskiPlus 1×bet бесплатно DiskiPlus up casino официальный <a href=https://diskiplus.ru/>DiskiPlus официальные букмекерские конторы скачать</a> DiskiPlus казино играть DiskiPlus 1×bet официальный xbet <a href=https://diskiplus.ru>DiskiPlus casino pin официальный</a> DiskiPlus ап казино DiskiPlus пин ап casino pin DiskiPlus porno Юлия Пересильд DiskiPlus Крючкова Полина Викторовна порно DiskiPlus скачать сайт букмекерской конторы DiskiPlus официальная казино DiskiPlus порно с Петр Ян (ММА)
#4827 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
Иногда виде одобрения за регистрацию могут выдаваться билеты для участия в турнирах. Условия их проведения очень отличаются, потому мы рекомендуем ознакомиться с любым предложением раздельно. <a href=http://filmkachat.ru/>1×slots казино зеркало</a> Возможность протестировать свежие забавы, не рискуя личными средствами и разработать личную стратегию забавы.Помните, собственно любые нарушения правил сведут на нет ваши усилия, и вы всего останетесь без начисленного для безвозмездного бонуса. Всегда изучайте управляла начисления и условия вейджера. По каким вопросам, на коие вы не можете без отыскать ответы, обращайтесь за объяснениям и саппорт. <a href=https://www.4yo.us/blogs/315801/Transforming-Modern-Kitchen-Design-Through-Digital-Visualization>https://www.4yo.us/blogs/315801/Transforming-Modern-Kitchen-Design-Through-Digital-Visualization</a> Обыкновенные бездепозитные призы в объеме от 3-х до 20 $ сделаны чтобы, чтобы, дабы в забавы заходили все свежие и новые игроки. Здесь, всего, будет ограничение на максимальный выигрыш. Важно, дабы перед наименьшим вкладом был отключен бонус за первое пополнение счета, и в не попадет на повторный вейджер. 1×slots промокод при регистрации <a href=http://www.gtcm.info/home.php?mod=space&uid=732661>http://www.gtcm.info/home.php?mod=space&uid=732661</a> Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке необходимо восполнить счет в казино. Для депозитных призов, данная процедура не необходима, например как депозит теснее сделан.С иной стороны, намного проще отобрать бездепозитные фриспины за регистрацию в казино и напрямик момент начать вращать барабаны в превосходнейших слотах. Главная особенность спинов сомнений, что они предусмотрены для топовых автоматов. Удастся не пройти вспомогательные раунды, но и увеличить сумму выигрыша, заработать респины и внутриигровые подарки.
1×slot официальный сайт
Эффективность бездепов в качестве маркетингового инструмента оценили почти операторы. Малоизвестные площадки употребляют эти промоакции, чтобы быстро набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны неизменных гостей. Не все веб-сайты, дающие презенты без депозита, рекомендованы к ирге. За симпатичным промоописанием могут скрываться неосуществимые условия отыгрыша и подводные камни.На страничке представлены бездепозитные призы за регистрацию в казино редчайшая заслуга за которой гонятся все игроки как новички, например и профессионалы. Мы также уделяем великое внимание на присутствие бонусов при составление рейтинга казино на деньги. Бездепозитный приз это вероятность выступать бесплатно и выиграть реальные деньги. 1×slots casino регистрация 1×slotscasin online <a href=http://womans-days.ru/index.php?subaction=userinfo&user=thinkableorphan>http://womans-days.ru/index.php?subaction=userinfo&user=thinkableorphan</a> 1×slots casino регистрация 1×slots review live В интернете слишком количество скриптовых сайтов, коие принадлежат жуликам. Их главная цель – привлечь гэмблеров, пообещав не щедрые презенты, но и солидные выигрыши. Так собственно кое-какие сайты предлагают получить за регистрацию даже $1 000.
1× слот зеркало
Список например именуемых «не территорий» прилагается к правилам бонусной программки игорного портала. Обязательно проверьте, распространяются ли на вас похожие наказания.В разделе с бонусами активировать собственный презент. Найти забавы, для коих учтено поощрение и использовать бонус по назначению. <a href=https://google.mn/url?q=https://doctorlazuta.by/>https://google.mn/url?q=https://doctorlazuta.by/</a> Также посещают случаи, когда казино начислит обсужденный бонус последствии регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам. 1 x slots У каждого игорного заведения свои управляла и условия. Но, чтобы получить призы, нужно выполнить стандартные деянья:Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и более. Когда игроку полагается много фриспинов, администрация возможность разбивать их начисление на количество дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах акции.
1×slots зеркало на сегодня
Отзывы читателей о бонусных промоакциях посодействуют составить впечатление, хотя не забывайте о субъективности личных комментариев.Какие бонусы у еще получить не бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, каждое онлайн казино предлагает игрокам выгодное предложение на 1-ый депозит, вы совершаете депо, ваш депо увеличивается в двое либо в в трое, тем наиболее начать выступать можно с больше крупной суммой, так же не запамятываем про вейджер на бонусы. Ограничения по играм. Администрация запрещает игрокам кое-какие игровые автоматы с бездепозитным призом, средствами или бесплатными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда разделенье производится по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, хотя запрещен в настольных забавах и в разделе Live Casino.Онлайн-казино с бездепозитными бонусами ставят посетителям условия для использования бездепами, поэтому перед участием в акции превосходнее досконально ознакомиться со всеми правилами и нюансами промоакции. Условия могут касаться получения бонуса, его применения и следующего вывода денежных средств если, тогда, выигрыша. 1×slots промокод при регистрации 2025 <a href=http://wiki.serialkiller.adele.im/doku.php?id=РР·_чего_состоит_диета_Елены_Малышевой>http://wiki.serialkiller.adele.im/doku.php?id=РР·_чего_состоит_диета_Елены_Малышевой</a> Доступные забавы – В неких азартных играх можно понизить математическое преимущество казино до нескольких 10-х процента. В их количестве многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как верховодило, в этих забавах ставки идут в зачет вейджера не полностью. Например, возможность предусматриваться лишь 50%. В неких забавах бездепозитные бонусы вообще нельзя отыгрывать.Бесплатный приз – кредиты, коие онлайн-казино начисляет посетителю, не принуждая его пополнять игровой счет.
1хслот 1хслотс регистрация перейти на 1×slots
Все обожают получать подарки. Согласитесь, почти каждый играющий человек будет безмерно счастлив, в получит даровой презент для забавы в онлайн казино просто за регистрацию или же приз за внесенный депо, например нарекаемые приветственные бонусы для новых игроков. Соответственно эти онлайн клубы будут больше модны и предпочтительны у игроков при выборе казино для забавы. Топ казино день обновляется и добавляются новые и увлекательные игровые клубы с привлекательной бонусной политикой и всеми возможными привилегиями, к коим относятся эти призы как фриспины за регистрацию, валютные бездепозитные бонусы, а также щедрые призы за внесенный депо.Свежий приз начисляется вид валютных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в использовании своими, ну случае отыгрыша оператор может установить лимитирование на вывод средств. Некоторые казино шансы предлагать посетителям бездепы за подтверждение номера либо почты либо репост на страничку в соц сетях.Ну и конечно же, для казино бездепозитные призы прибыльны с имиджевой стороны: подобная добродушие повышает уровень лояльности посетителей к компании. <a href=https://www.9tj.net/home.php?mod=space&uid=267404>https://www.9tj.net/home.php?mod=space&uid=267404</a> Для ревизии применяются сканы паспортов, водительских удостоверений, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь замечен в попытке завести вспомогательный акк, все его учетные записи подвергаются блокировке, а их владелец попадает в черный перечень. При ирге на лицензионной площадке надо бояться свидетельствовать достоверную индивидуальную информацию (шифрование ликвидирует утечку персональных данных). 1×slots регистрация то дальше необходимо пройти Не сложно додуматься, что no down payment bonuses практически ни не бывают немаленькими. Чаще всего речь идет о пяти–тридцати баксах (или эквиваленте данной суммы в другой валюте).В качестве бонусов интернет казино часто предлагает выдачу фриспинов, словами бесплатных вращений игрового барабана. Виртуальные монеты можно использовать для обучения в покерной школе или для забавы в казино.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.goslog.ru/forum/messages/forum1/message12014/11-obrashcheniya-grazhdan?result=reply#message12014>1×slots зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Верификация аккаунта. Лучше подтвердить лицо незамедлительно в регистрации, чтобы потом не было проблем с выводом средств. Верификация возможность проходить 2-мя маршрутами:
#4828 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Анна Щербакова, фигуристка порно с Афонина Марина Игоревна <a href=https://sovsekretno.net/>7k casino официальный сайт</a> Петрова Ольга Викторовна порно скачать сайт букмекерской конторы <a href=https://sovsekretno.net/>Фастова Елена Владимировна порно</a> porno Нина Пирогова, хоккеистка казино онлайн играющие казино онлайн Радченко Светлана Юрьевна порно самое казино порно с Евгений Малкин (хоккей) леон букмекерская контора
DiskiPlus автомат казино DiskiPlus 1×bet слоты 1×bet xyz <a href=https://www.diskiplus.ru>DiskiPlus retro casino</a> DiskiPlus казино ли DiskiPlus порно с Алина Загитова, фигуристка <a href=https://www.diskiplus.ru/>DiskiPlus порно с Ирина Сидоркова</a> DiskiPlus retro casino DiskiPlus демо казино DiskiPlus казино ли DiskiPlus смотреть фильм казино DiskiPlus casino рабочее DiskiPlus официальные зеркала казино DiskiPlus 7k casino
#4829 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
Так что основное различие презента на депо от бездепа – обязательное пополнение счёта. Вы сможете внести депозит и преувеличить стартовый капитал или арестовать бездеп и всем не придётся рисковать своими сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начислит щедрое одобрение! <a href=http://filmkachat.ru/>1хслотс казино зеркало</a> <a href=https://bresdel.com/blogs/806517/Mastering-Interior-Shop-Drawings-From-Concept-to-Construction-Excellence>https://bresdel.com/blogs/806517/Mastering-Interior-Shop-Drawings-From-Concept-to-Construction-Excellence</a> Обычно, бездепозитные призы выдаются под конкретные слоты с фиксированной ставкой, хотя их наверняка запрещено использовать в игровых автоматах с современным джекпотом. Список игр, каких возможно использовать бездеп, Вы отыщите в описании акции или сможете уточнить у службы поддержки заведения.На бонусные начисления имеют быть установлены вспомогательные лимитирования, которые Вы не учли при отыгрыше. Пока приз полностью не отыгран — деньги из казино не выводятся. 1×slots официальный сайт скачать на айфон <a href=http://a96549hg.bget.ru/user/Patricktress/>http://a96549hg.bget.ru/user/Patricktress/</a> Бездепозитные бонусы за регистрацию являются одним из самых популярных методов привлечения новых игроков в онлайн-казино, потому что они предоставляют игрокам вероятность опробовать казино, особенно игровые автоматы, и вполне, выиграть реальные деньги.Бездепозитные призы начисляются только раз раз. Не стоит раскрывать свежие аккаунты, чтобы получить их повторно. Служба безопасности казино непременно выявит «левого» участника и перекроет. Если гость выполнит нужные требования, отыграет собственную ставку и решит вывести личный выигрыш, то ему нужно к, собственно казино обязательно потребует предоставить ксерокопии личных документов, чтобы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои исключить не получится.
1×slots регистрация
Бездепы все заходить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами. <a href=https://karakol.com.kg/user/Jameskef/>1×slots зеркало</a> скачать 1×slots официальный сайт <a href=http://www.jet-links.com/1×%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D0%BF%D0%BE%D0%BB%D1%8C%D0%B7%D0%BE%D0%B2%D0%B0%D1%82%D0%B5%D0%BB%D0%B8_354663.html>http://www.jet-links.com/1×%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D0%BF%D0%BE%D0%BB%D1%8C%D0%B7%D0%BE%D0%B2%D0%B0%D1%82%D0%B5%D0%BB%D0%B8_354663.html</a> 1×slots официальный сайт зеркало
1×slots зеркало проходить регистрацию это отличный вариант
Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте условия – они часто выдаются для неких машин. В зависимости от клуба вам создавать определенное число ставок. Кстати, современные игорные жилища выделяют возможность заводить «одноруких бандитов». B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpaxБонус с зачислением денег на счет дает больше свободы действий. Пользователь сам подбирает, каким образом воспользоваться подаренными своими. Здесь также все работать ограничения на перечень дешевых игр, но обыкновенно эти рамки не например строги, как в промо с безвозмездными вращениями. <a href=http://bts.clanweb.eu/profile.php?lookup=41088>http://bts.clanweb.eu/profile.php?lookup=41088</a> Промокод – определённая комбинация символов, которую необходимо ввести в отвечающее поле при создании учетной записи или активировать в личном профиле игрока в разделе с призами. 1×slots казино зеркало Активация денежного гонорары случается механически в создания профиля или применения промокода. Иногда операторы предъявляют дополнительные требования: подписаться на странички казино в социальных сетях или на рассылку маркетинговых сообщений, скачать и установить вспомогательный софт и т.д.
1× slots сайт
Для получения приза надо(надобно) ознакомиться с программкой преданности казино и устроить ставки на сумму, необходимую для перехода на следующий уровень.Прибывшие на акк деньги бездепозитные бонусы предназначаются, в основном, лишь для новоиспеченных юзеров, коие ранее не имели личного аккаунта в данном казино. Исходя из сего, если раньше у игрока был изготовлен депо, то, по всей вероятности, у него больше не несомненно способности рассчитывать на получение такого приза в определенном заведении. 1×slots сайт зеркало <a href=https://forum.musicalpraxis.gr/forum/profile/georgettananker/>https://forum.musicalpraxis.gr/forum/profile/georgettananker/</a> Прибывшие на аккаунт деньги бездепозитные призы предназначаются, главном, лишь для новоиспеченных пользователей, коие ранее не имели собственного аккаунта в данном казино. Исходя из этого, случае раньше у игрока был сделан депозит, то, по всей вероятности, у него больше не будет возможности рассчитывать на получение такого бонуса в конкретном заведении.
1×slots промокод при регистрации 2025
Демоказино есть практически на каждом сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются существенно реже: там если, тогда, выигрыша и соблюдения критерий акций бездеп можно перевоплотить в настоящие деньги.Казино выводит средства только на ту платежную систему, с котрой был сделан депо. То есть, для вывода бездепозитного бонуса, Вам сначала нужно восполнить счет. В некоторых клубах узкий список способов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет именно с данных платежных способов, которые доступны для вывода. Однако далековато не все ресурсы предлагают своим посетителям бездепозитные призы за регистрацию в казино. В большинстве случаев учтено поощрение на 1-ый депозит в объеме 100–200%. Это отличная вероятность преувеличить банкролл, прирастить время, проведённое за игрой и шансы сорвать большой куш. <a href=http://copya.co.kr/bbs/board.php?bo_table=free&wr_id=40807>http://copya.co.kr/bbs/board.php?bo_table=free&wr_id=40807</a> Основное отличие том,, собственно для получения бездепа нужно пополнять баланс в казино. Но не этого, есть ряд и других отличий: 1×slots casino online регистрация
<b>Смотреть еще похожие новости:</b>
<a href=https://mycs.ge/index.php?subaction=userinfo&user=JamesDop>1×slots официальный сайт скачать</a>
<a href=http://g2clubs.com/healthy-workout/google/>1×slots актуальное зеркало</a>
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1979#post-56410>1×slots регистрация 1×slotscasino 56 online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, дабы появилась возможность исключить выигрыш.
#4830 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало
Каждый игры обязан сначала отчетливо изучить условия по получению и отыгрышу приглянувшегося подарка. Если всё организует, поспешите отобрать бесплатные спины за регистрацию в казино без депозита с выводом и без отыгрыша и напрямик в начать вращать барабаны топовых слотов.Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды присутствуют на данной страничке. Посетитель имеет оценить условия получения и начать играть на деньги без внесения депо. При этом игроку важно осознавать, на каких условиях и какими методами возможность вывести приобретенный выигрыш. Для сего необходимо оценить список подключенных платежных систем. <a href=http://filmkachat.ru/>1×slots коды</a> Мы собрали и выпустили перечень наихороших бездепозитных казино с бонусами за регистрацию, коие гарантируют великодушные выигрыши и мгновенные выплаты. <a href=https://menagerie.media/index.php?link1=read-blog&id=87720>https://menagerie.media/index.php?link1=read-blog&id=87720</a> 1×slots регистрация 1×slots casino 777 online <a href=https://faktes.ru/user/WilliamUncon/>https://faktes.ru/user/WilliamUncon/</a>
1× slots официальный
1×slots зеркало регистрация Это один из основных показателей привлекательности дара. С завешенным коэффициентом даже мастера не сумеют выполнить обстоятельства по отыгрышу. И маловажно, как привлекательно выглядит предложение – бездепозитный приз казино в объеме $500 или $1 000. Чтобы новички лучше вникли, собственно же такое вейджер, мы разберём на образце. <a href=http://forums.overhax.fun/member.php?action=profile&uid=10121>http://forums.overhax.fun/member.php?action=profile&uid=10121</a> Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.А ознакомиться с свежими интернет казино, Вы сможете помощью призов с выводом прибыли, которые Вы можете получить без депозита. рабочее зеркало 1×slots Все безвозмездные призы кажутся соблазнительными. Кто же откажется от возможности поиграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далеко не все бездепозитные бонусы в равной степени привлекательны для рассудительного клиента.Какие бонусы у еще получить считая бездепозитного приза за регистрацию в казино? По мимо бездепозитного бонуса, каждое интернет казино предлагает игрокам прибыльное предложение на 1-ый депо, вы совершаете депозит, ваш депо возрастает в двое или и в 3, что, этим самым начать играть можно с больше крупной суммой, например же не запамятываем тему вейджер на призы.
1× slots casino официальный сайт
Но есть игорные заведения, коие готовы просто например жертвовать средства на игру. Для сего довольно сделать профиль. Чтобы вывести собственный выигрыш, для поначалу необходимо выполнить обстоятельства отыгрыша, обозначенные в критериях получения бездепозитного депозита.Процесс доказательства личности возможность взятьвдолг(взятьвзаймы) от 1-го денька до недели. Если клиент разрешил какую-либо ошибку при заполнении паспортных данных, то ему идет обратиться с проблемой в службу онлайн-казино. <a href=http://unit.igaoche.com/home.php?mod=space&uid=979262>http://unit.igaoche.com/home.php?mod=space&uid=979262</a> 1×slots рабочее зеркало на сегодня 4. Заберите презент. Чаще всего приз активируется сразу в регистрации. Но случаются истории, когда надо(надобно) забежать в личный кабинет либо написать в саппорта.
1× slots зеркало
В большинстве заведений сделать это можно по e-mal, по номеру аппарата, спустя социальную сеть или гугл-аккаунт.Бездепозитные бонусы, как теснее понятно, являются уникальной возможностью к игровому процессу безусловно бескорыстно, другими выступать в интернет казино даром и на быть средства незамедлительно после регистрации аккаунта. Автоматы с таким депо имеют стать великолепной возможностью сыграть для поклонников пыла с определенными ограничениями в финансах. <a href=https://traderscrypt.com/forums/showthread.php?tid=5891&pid=8753#pid8753>1×slots регистрация 1×slots casino 777 online</a> Если вы новичок деле и только попали в неизведанную вами район пыла — с помощью предложений как бездепозитные бонусы без пополнения. 1х слот регистрация в 1×slots casino <a href=http://sols9.com/batheo/Forum/User-JasperMeemi>http://sols9.com/batheo/Forum/User-JasperMeemi</a> Нельзя осматривать игру на деньги, как вариант заработка. Азартные забавы запрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не является организатором азартных игр. Сайт одевает информационный нрав.Подарки на конкретные даты выделяются критериями получения. Если одобрение начисляют игроку на день рождения, то сумма обычно зависимости от совместного размера депо последний год.
1×slots скачать на айфон
<a href=http://silabgarza.net/forums/member.php?action=profile&uid=215756>http://silabgarza.net/forums/member.php?action=profile&uid=215756</a> Какие призы у еще получить кроме бездепозитного приза за регистрацию в казино? По мимо бездепозитного приза, любое интернет казино предлагает игрокам выгодное предложение на первый депозит, вы совершаете депо, ваш депо увеличивается в двое либо числе в трое, тем самым начать играть возможно с более крупной суммой, например же не забываем тему вейджер на бонусы. 1×slots зеркало рабочее на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=https://tabsgame.ru/user/Jamesbes/>1×slots сайт</a>
<a href=http://soumoli.com/home.php?mod=space&uid=24916>1×slots промокод при регистрации 2025</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Условия имеют различаться приятель от друга. Но такой приз имеет быть использован лишь для игрового процесса – приобретенные на счет финансы до того, как будут отыграны, исключить невозможно.
#4831 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino buzz Набиуллина Эльвира Сахипзадовна порно <a href=https://kompromat1.online/>казино ставка</a> champion casino 1×bet официальный скачать <a href=https://krtka.info/>porno Анастасия Янькова, боксерка</a> top casino casino betting 1×bet официальный слоты фреш казино сайт винлайн букмекерская контора почему в казино нет окон casino riobet
DiskiPlus букмекерская контора на андроид DiskiPlus казино фильм смотреть онлайн <a href=https://www.diskiplus.ru>DiskiPlus up casino официальный</a> DiskiPlus сколько казино DiskiPlus bitz casino <a href=https://diskiplus.ru>DiskiPlus 1×bet сайт 1×bet xyz</a> DiskiPlus казино пину DiskiPlus Светлана Ходченкова DiskiPlus pin casino зеркало DiskiPlus 1×bet зеркало рабочее DiskiPlus бк букмекерская контора DiskiPlus 1×bet регистрация DiskiPlus казино можно
#4832 Charlesgunnyhttp://filmkachat.ru
1×slots быструю регистрацию а также мгновенное
Так собственно приготовьтесь дать конфиденциальную информацию (пол, возраст, государство проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает не более суток, после чего получится беспрепятственно выводить солидные выигрыши.Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых свежих, великодушных и проверенных призах в интернет казино, которые обновляются каждый денек. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать на айфон</a> <a href=https://app.roll20.net/users/15345358/vykup-avariinykh-avto-p>https://app.roll20.net/users/15345358/vykup-avariinykh-avto-p</a> Вейджер (либо вагер) ? это наименьшая сумма ставок, которую необходимо устроить для вывода денежного приза. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим красивее спецпредложение. 1×slot казино зеркало <a href=http://bhidagt.hu/index.php/forum/user/44391-patheticoomph58>http://bhidagt.hu/index.php/forum/user/44391-patheticoomph58</a> Бонусы без депо при регистрации числятся самыми красивыми как для опытных игроков, например для и начинающих. Получив такое вознаграждение, клиент возможность выступать на настоящие средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а также условия их активации и выигрыша.
онлайн казино 1×slots
Бездепозитный бонус казино 2022 с выводом за регистрацию предоставляет вероятность ознакомиться игроку с лобби выбранного заведения, сориентироваться в выборе игр и выяснить качество работы службы поддержки. Довольно нередко, начиная игровой процесс, игрок уже не желает останавливаться и делает реальный вклад. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать безвозмездно вероятно как раз таки с призом за регистрацию без необходимости вносить депо. <a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=95585>1×slots бездепозитный бонус за регистрацию</a> 1 х слотс зеркало Если вы выбираете проверенное лицензионное интернет казино и сделайте все обстоятельства получения бездепозитного бонуса, проблем с получением дара у Вас не возникнет.Еще одно условие касается размеров ставки. Операторы устанавливают максимальную необходимую, которую игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, избранной в Личном кабинете. При превышении лимита есть риск потерять бонуса. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, заказчик имеет столкнуться с запретом ставить фишки на шансы. <a href=https://pediascape.science/wiki/User:IvaBeike0197201>https://pediascape.science/wiki/User:IvaBeike0197201</a> 1×slots зеркало на сегодня Бездепозитные призы за регистрацию в игровых автоматах для владельцев онлайн-казино являются долею маркетинговой кампании, направленной на повышение аудитории сайта. Так они продвигают свои бренды и завлекают свежих посетителей.
1×slots сайт
Выбор любого интернет казино на нашем веб-сайте. В описании к каждому Вы можете разузнать, собственно получите за творенье аккаунта.Подобные призы без депозита предоставляются на больше выгодных критериях. Зачастую они покрупнее, а условия отыгрыша наименее жесткие. <a href=http://tellmy.ru/user/PatrickLit/>http://tellmy.ru/user/PatrickLit/</a> 1×slots зеркало рабочее
1×slots casino регистрация на сайте
Теоретически, к бесплатным призам можно отнести так нарекаемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, поэтому что они предоставляют лишь вероятность создавать ставки.Условия, на которых предоставляется бездеп, регулируются казино. Каждая акция имеет доскональные верховодила, гиперссылка на коие обыкновенно находится в промообъявлении. В их указываются лимиты, вейджер, список доступных игр. Если оператор прячет данные о предложении, то воспользоваться им надо. В списке требований к отыгрышу часто присутствуют лимиты на ставки при игре на собственные средства. Так, в отыграть надо(надобно) 30 000 руб., а предельная сумма ограничена 30 рублями, то вертеть барабаны светит 1000 один. Эта особенность затрудняет соблюдение игроками условий по срокам деяния акции.После требуется внести идентификационный платёж. Это стращает новичков больше всего. Нужно сделать минимальный депо в 100–500 рублей. Таким образом служба защищенности увериться что, что платёжный способ принадлежит Вам. Данная процедура необходима для обеспечивания безопасности игровых счетов. Пример, Ваш акк взломают и выведут средства на свой кошелёк. Будет очень досадно. Поэтому верификация платёжной системы, это важный момент. 1×slots официальный сайт скачать <a href=https://www.notoutreview.com/author/craignew/>https://www.notoutreview.com/author/craignew/</a>
1хслотс официальный сайт зеркало
В большинстве заведений устроить это возможно по адресу электронной почты, по номеру телефона, через социальную сеть либо гугл-аккаунт.Подтверждение персональной информации. Все казино требуют от клиента пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и присутствие у пользователя других аккаунтов (мультиаккаунт запрещен). <a href=https://nitroporno.com/user/JamesSnine/>https://nitroporno.com/user/JamesSnine/</a> 1×slots casino регистрация 1×slotscasino09k online
<b>Смотреть еще похожие новости:</b>
<a href=http://t954381g.bget.ru/user/JosephPiery/>1хслотс казино зеркало</a>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=63275&result=reply>1×slots зеркало рабочее на сегодня</a>
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=5447>1×slots регистрация 1×slots casino c2d ru</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Итак, дабы бесплатные бонусные кредиты превратились в настоящие деньги, которыми возможность распоряжаться по собственному усмотрению, их надо(надобно) отыграть. Вейджер следует уточнять в правилах онлайн-казино.
#4833 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Константин Тюкавин (футбол) up casino зеркало <a href=https://7club7.com/>inform@rucriminal.info</a> скачать pin casino порно с Баталина Ольга Юрьевна <a href=https://www.ossetia.tv/>порно с Дронова Александра Викторовна</a> пина букмекерской конторы casino online зеркало 1×bet сайт казино вход Елена Лядова Москалькова Татьяна Николаевна порно порно с Алина Загитова, фигуристка
DiskiPlus porno Андрей Рублев (теннис) DiskiPlus букмекерские конторы в россии <a href=https://www.diskiplus.ru/>DiskiPlus up casino зеркало</a> DiskiPlus Любимова Ольга Борисовна порно DiskiPlus ramenbet casino <a href=https://www.diskiplus.ru/>DiskiPlus казино 1</a> DiskiPlus букмекерская контора мостбет DiskiPlus Черкесова Бэлла Мухарбиевна порно DiskiPlus pinco casino DiskiPlus порно с Алексей Миранчук (футбол) DiskiPlus букмекерская контора официальный сайт скачать DiskiPlus букмекерские конторы pin DiskiPlus 1×bet рабочее
#4834 AHoini
<a href=https://vds27271.elbloglibre.com/30427745/the-2-minute-rule-for-1-win-aviator>1win south africa</a> <a href=https://vps49493.dailyhitblog.com/35923210/the-best-side-of-1win-casino-cameroun>1win Cameroun</a>
#4835 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация на сайте
Не рекомендуем сломя голову браться за различные предложения получения средств без вложений. Вполне возможно, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на 1-ый взгляд. Альтернативой является казино бонус за депозит. Мы предлагаем вам пару советов, спасибо коим у любого игрока будет вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств:Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, чтобы была вероятность вывести выигрыш. <a href=http://filmkachat.ru/>1×slots бездепозитный бонус за регистрацию</a> <a href=https://telegra.ph/Legal-Cannabis-Delivery-Services-Transform-Brantfords-Marijuana-Access-11–24>https://telegra.ph/Legal-Cannabis-Delivery-Services-Transform-Brantfords-Marijuana-Access-11–24</a> Следует выделить, собственно бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с определенным кодом. 1х слот 1хслотс регистрация перейти на 1×slots <a href=http://veda.adrian.ru/doku.php?id=%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0%20%D1%80%D1%8F%D0%B4%D0%BE%D0%BC>http://veda.adrian.ru/doku.php?id=%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0%20%D1%80%D1%8F%D0%B4%D0%BE%D0%BC</a> Игрокам не следует принимать приветственный приз как гарантированный метод получить крупный выигрыш, хотя это замечательная вероятность без расходов расценить перечень казино.При отыгрыше бонусных средств, необходимо учесть срок деяния приза и время, которое дается на отыгрыш. По истечению заявленного медли, не отыгранный приз несомненно аннулирован.
1×slots официальный сайт зеркало
Фриплей-бонусы встречаются только в неких клубах. Они зачисляются сразу последствии создания профиля и активны недолговременное время. Если не успеете истратить свои, они просто сгорят. Касаемо времени, в большинстве случаев призы активны в течение часа.Более солидные предложения встречаются довольно изредка. Зачастую они доступны лишь VIP-игрокам. В оставшихся случаях им наверняка сопутствуют довольно жесткие условия отыгрыша. Также возможны дополнительные обстоятельства и другие ограничения, прописанные в критериях и положения бонусной программки казино. 1х слот регистрация в 1×slots casino <a href=http://drop-let.ru/index.php?subaction=userinfo&user=periodicepic44>http://drop-let.ru/index.php?subaction=userinfo&user=periodicepic44</a> Исходя из сего, просто не присутствует мудрых оснований махнуть рукою на получение такого приза при регистрации. И, лишним, на такой бесплатной основе у вас есть все шансы выиграть средства и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, нарекают бесплатными интернет платформами для игр.Также учтите, что некоторые игровые платформы сузивают перечень стран, коие способны получить предложенный бездепозитный бонус за регистрацию. К образцу, есть онлайн-заведения, выдающие сходственные призы лишь жильцам конкретных государств. К образцу, онлайн казино 777 Оригинал предоставляет бездепозитный приз только игрокам из России и стран СНГ. Или напротив, снабжают вознаграждением всех, кроме обитателей неких стран (следует сего, идет пристально учить список, чтобы потом не возникло никаких вопросов и жалоб). 1 x slots Отказ в прохождении верификации. Если заказчик не хочет либо возможности дать документы, подтверждающие его лицо, профиль несомненно заблокирован вместе со всеми бонусными начислениями.Вейджер менее х30–35 является применимым. Опытные игроки заявляют, что с этим вейджером реально остаться в плюсе, если правильно подойти к выбору игрового аппарата.
1×slots регистрация 1×slots casino 777 online
Баланс игрока дополняется на соответствующую необходимую. К ней используется вейджер, обозначенный в правилах акции. Вывести выигрыш возможно несомненно после того, как пользователь устроит требуемый размер ставок из собственных средств. В редчайших случаях бездеп трудится в формате Free Play. На счет юзера зачисляется большая сумма, и предоставляется маленький срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по завершении этого периода сумма на счету несомненно превышать изначальную, то разницу возможно будет исключить либо использовать для последующих ставок. <a href=https://acomics.ru/-Dissertat1508>https://acomics.ru/-Dissertat1508</a> 1×slots официальный регистрация Процесс доказательства личности может взятьвдолг(взятьвзаймы) от 1-го денька до недели. Если заказчик разрешил какую ошибку при заполнении паспортных данных, то ему следует обратиться с проблемой в службу поддержки онлайн-казино.
1×slots рабочее зеркало
Высокая конкурентность в разделе азартных игр мотивирует операторов привлекать клиентов разнообразными промоакциями. Благодаря данному у посетителей появляется вероятность получить призы в казино за регистрацию без депозита. Воспользоваться этим предложением можно, избегая процедуру внесения средств на игровой счет, просто активировав акк на сайте. Наш гид по бездепам поможет выбрать самую привлекательную бонусную программку, узнать правила получения такового гонорары и распорядиться им с наибольшей выгодой. <a href=https://elforodelpoker.com/presentaciones/1×slots-casino-online-t288013.html>1×slots casino online регистрация</a> На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не сможете активировать и получить бездепозитный приз.Вы скорее, как и все предпочитаете получать подарки и бездепозитные бонусы казино. Игорные дома брали в привычку одаривать гэмблеров приятными призами. Стать обладателем приветственного подарка можно за создание профиля либо пополнение счёта. Второй вариант более интересный, так клубы готовы удвоить депо! Но если вы новичок и только знакомитесь с миром пыла, лучше воспользуйтесь призом за регистрацию. Как лишь получите бездеп в казино, всё также не забывайте проверять электрическую почту. Некоторые игорные клубы день радуют активных гэмблеров приятными бонусами. Чаще всего получить подарок можно в преддверии праздника, на денек рождение, за вербование приятеля. А также распространённым бонусом считается надбавка к депозиту. Нужно более восполнить счёт, и азартное заведение увеличит его на 50–100%. 1×slots казино зеркало <a href=https://games-garant.ru/index.php?subaction=userinfo&user=PatrickScoox>https://games-garant.ru/index.php?subaction=userinfo&user=PatrickScoox</a> Бонусы без депо при регистрации считаются наиболее красивыми как для опытнейших игроков, так для и начинающих. Получив такое вознаграждение, клиент может играть на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а также условия их активации и выигрыша.Акции распространяются как на все игры казино, например и на узкий список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и другие. Промо возможность охватывать разработки одного производителя. Бездеп не пересекается с другими акциями казино. Если на сайте учтен кэшбек, он не начисляется за ставки, сделанные бонусными деньгами. Для идентификации платежных реквизитов игрока может потребоваться пополнение счета на минимальную необходимую.
1×slots casino зеркало рабочее
На нашем веб-сайте Вы отыщите список своевременных свежих бездепозитных бонусов в казино 2022 года. Также, есть большое эксклюзивных услуг, которые доступны только посетителям нашего вебсайта последствии регистрации по нашей ссылке или активации особого промокода. <a href=http://test-sida.noads.biz/home.php?mod=space&uid=62978>http://test-sida.noads.biz/home.php?mod=space&uid=62978</a> Лишь модные и знаменитые азартные заведения могут разрешить себя раздавать бездепы в виде добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, которые возможно истратить в топовых аппаратах с высокой отдачей.Срок активации и время на отыгрыш. Зачисление средств или фриспинов случается при активации в течение требовательно ограниченного периода, схожие притязания предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать бонус несколько дней или и недель. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высочайшим вейджером. 1×slots зеркало сайта
<b>Смотреть еще похожие новости:</b>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=98423&result=reply>1×slots casino зеркало рабочее</a>
<a href=http://miupsik.ru/forums/showthread.php?tid=364609>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Во всех законных онлайн-казино Беларуси нужно свидетельство паспортных данных для забавы — это требование правительства государства.
#4836 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots review live
Также, ситуации необходимо доказать свой номер телефонного, чтобы код, полученный в смс-сообщении от клуба установить в особое фон в личном офисе игрока. <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> Помните, что в некоторых забавах сумма ставки идет в зачет вейджера лишь частично. Так, в настольных и карточных забавах лишь от 5% до 50% суммы ставки считаются как отыгранные средства, в то время как в слотах идет в зачет все 100% суммы.Бездепозитный приз за регистрацию в казино с выводом средств в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых свежих, великодушных и испытанных бонусах в онлайн казино, коие обновляются каждый денек. <a href=https://www.hebergementweb.org/threads/kak-proisxodit-vykup-avto-vo-francii-vse-chto-nuzhno-znat.1925854/>https://www.hebergementweb.org/threads/kak-proisxodit-vykup-avto-vo-francii-vse-chto-nuzhno-znat.1925854/</a> Мы рекомендуем не открещиваться от похожих предложений знаменитых казино. Выделите несколько мин. На регистрацию, получите бонус и попробуйте его отыграть. Может быть, сейчас фортуна будет на вашей стороне! 1× slots официальный <a href=http://www.besatime.com/index.php?subaction=userinfo&user=DoctorLazutaOt>http://www.besatime.com/index.php?subaction=userinfo&user=DoctorLazutaOt</a> Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы которые возникают у новичков.Выбор каждого онлайн казино на нашем веб-сайте. В описании к любому Вы можете разузнать, что получите за творенье аккаунта.
1×slots официальный сайт зеркало
Предложения с бездепозитными бонусами за регистрацию позволяют новым заведениям привлечь аудиторию на свой вебсайт. А игроки в свою очередь получают вероятность играть на настоящие деньги без депо в казино и заработать маленький стартовый капитал, кот-ый разрешается исключить на карту банка или электронный кошелек.Необходимость отыгрыша. Вейджер такой выше, чем для бонусов за депо. И же свои не отыграны, вывести их нельзя. 1× slots сайт Бонус за регистрацию в казино без депо с выводом денег нужно отыграть. Зачастую для отыгрыша может потребоваться сделать ставки на сумму, в несколько 10-ов раз превосходящую необходимую бонуса либо выигрыша. <a href=http://www.svit-world.kiev.ua/user/CharlesHaw/>http://www.svit-world.kiev.ua/user/CharlesHaw/</a> 1х слот 1хслотс регистрация перейти на 1×slots Новые клиенты онлайн-казино без первого депо все выяснить свою удачливость. К что, этому же есть возможность конвертировать бездепы в настоящие средства за регистрацию в казино, впрочем результата бонус нужно отыграть согласно условиям промоакции.Так же стоит выделить то, что в каждом интернет казино установлен свой наибольший кешаут на бездепозитный приз. Как правило кешаут — это предельная сумма средств, которая дешевая для вывода с бездепозитного бонуса.
1×slots коды
3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефон либо почту, указать персональную информацию;Бездепозитный бонус – это финансовое вознаграждение, коие выдается соучастнику игры в казино, для его вербования и возникновения заинтересованности. Любой посетитель, который подходит условиям выдачи подобного бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое поощрение является наиболее эффективным методом, дающим вероятность стартовать при, не вкладывая собственных материальных средств. А ознакомиться с новыми интернет казино, Вы можете с бонусов с выводом прибыли, коие Вы можете получить без депозита. <a href=https://block-rosko-tradein.ru/bitrix/rk.php?goto=https://uconnect.ae/read-blog/159518>https://block-rosko-tradein.ru/bitrix/rk.php?goto=https://uconnect.ae/read-blog/159518</a> 1×slots на любой вкус как пройти регистрацию Для как, дабы отыграть сумму вашего бездепозитного приза нужно выполнить условия вейджера. Очень часто фриспины даются на конкретные слоты (book of ra, book of lifeless, book of sun), подбирайте слот для по душе, они все довольно красивые и высококачественные. Бездепозитные приз имеет быть валютным так и повторяющий фриспинов на слотыДля верификации номера аппарата, в собственном профиле изберите опцию „Подтвердить номер аппарата“ и введите в соответствующее поле код, приобретенный в sms-сообщении.
1×slots зеркало быструю регистрацию а также мгновенное
Обычно, бездепозитные призы выдаются под определенные слоты с фиксированной ставкой, хотя их наверняка воспрещено применять в игровых автоматах с современным джекпотом. Список игр, в возможно использовать бездеп, Вы найдете в описании промоакции или сможете уточнить у службы поддержки заведения.Это тоже благотворительные финансы, коие поступают на аккаунты новоиспеченных геймеров в регистрирования. А особенность этих бонусов произведено что, что обретенные финансы обязательно по использовать в продолжении назначенного медли. Основное отличие в, что для получения бездепа не надо пополнять баланс в казино. Но не этого, есть ряд и других различий: 1 хслот регистрация в 1×slots casino <a href=http://populardirectory.org/1×%D1%81%D0%BB%D0%BE%D1%82%D1%81–10-%D0%B5%D0%B2%D1%80%D0%BE-%D0%B8%D0%BB%D0%B8-%D0%B2-%D0%B4%D1%80%D1%83%D0%B3%D0%BE%D0%B9-%D1%8D%D0%BA%D0%B2%D0%B8%D0%B2%D0%B0%D0%BB%D0%B5%D0%BD%D1%82%D0%BD%D0%BE%D0%B9_308891.html>http://populardirectory.org/1×%D1%81%D0%BB%D0%BE%D1%82%D1%81–10-%D0%B5%D0%B2%D1%80%D0%BE-%D0%B8%D0%BB%D0%B8-%D0%B2-%D0%B4%D1%80%D1%83%D0%B3%D0%BE%D0%B9-%D1%8D%D0%BA%D0%B2%D0%B8%D0%B2%D0%B0%D0%BB%D0%B5%D0%BD%D1%82%D0%BD%D0%BE%D0%B9_308891.html</a>
1×slot регистрация
Oтыгpaть бонус с указанным вeйджepом, для этого необходимо сдeлaть cтaвoк нa cумму, превышающую объем приза в некоторое один. <a href=http://www.gektor.biz/forum/?PAGE_NAME=profile_view&UID=184595>http://www.gektor.biz/forum/?PAGE_NAME=profile_view&UID=184595</a> Наш перечень содержит наихорошие бездепозитные бонусы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по главным параметрам:Бонус за регистрацию в казино выдается лишь один один на 1-го игрока. Но случаются дополнительные акции, в коих бездепы раздаются для неизменных посетителей и такие подарки Вы сможете получить больше одного раза. 1×slots зеркало проходить регистрацию это отличный вариант Зарегистрироваться в казино по особой ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефона и электронную почту). Для доказательства номера аппарата необходимо в личном профиле указать свой номер и нажать кнопку „Подтвердить номер телефонного“, дальше Вы получите sms-сообщение с кодом, кот-ый нужно установить в соответствующее поле. Для доказательства электронной почты, перейти по активной ссылке в послании от казино.Используйте превосходнейшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из списка ниже, чтобы заработать презенты за обычные действия теперь сейчас получить первый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высочайшей отдачей и прыткими выводами на электронные кошельки.
<b>Смотреть еще похожие новости:</b>
<a href=https://nztw.org/forum.php?mod=viewthread&tid=414343&pid=721274&page=1&extra=#pid721274>1× slots casino зеркало</a>
<a href=https://swordmaster.org/user/JamesVok/>казино 1×slots официальный сайт</a>
<a href=https://www.digicube.de/forum/threads/538253–1×slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D1%82%D0%BE-%D0%B4%D0%B0%D0%BB%D1%8C%D1%88%D0%B5-%D0%BD%D0%B5%D0%BE%D0%B1%D1%85%D0%BE%D0%B4%D0%B8%D0%BC%D0%BE-%D0%BF%D1%80%D0%BE%D0%B9%D1%82%D0%B8?p=741917#post741917>1×slots регистрация то дальше необходимо пройти</a>
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=525670>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Не стоит сразу же открещиваться от приветственных презентов в подобных казино. Администрация готова начислить средства или фриспины, но сначала сотрудники должны убедиться, что вы не мошенник. Дело сомнений, собственно развелось слишком много охотников за бонусами. Они научились врать систему и наваривать крупные суммы средств.
#4837 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино вулкан casino зеркало сегодня <a href=https://rucriminal.info/>Москалькова Татьяна Николаевна порно</a> 1win casino porno Нина Пирогова, хоккеистка <a href=https://strelochnik.com/>порно с Анастасия Потапова, теннисистка</a> официальные зеркала казино леон букмекерская контора сайт винлайн букмекерская контора официальное казино вход играющие казино порно с Васильева Татьяна Викторовна казино сегодня
DiskiPlus зеркала казино DiskiPlus казино гта 5 <a href=https://diskiplus.ru/>DiskiPlus Самойлова Алла Владимировна порно</a> DiskiPlus играющие казино онлайн DiskiPlus букмекерская контора бесплатно скачать <a href=https://diskiplus.ru/>DiskiPlus сайт казино вход</a> DiskiPlus про казино DiskiPlus porno Ангелина Гончаренко, хоккеистка DiskiPlus казино гта 5 DiskiPlus 7k casino скачать DiskiPlus porno Марина Александрова DiskiPlus 7k casino зеркало на сегодня DiskiPlus официальная казино
#4838 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало 1хслотс регистрация перейти на 1×slots
На условиях отыгрыша безвозмездных призов стопам остановиться подробнее. С ними связаны аспекты, которые невозможно оставить без внимания. <a href=http://filmkachat.ru/>1× slots сайт</a> Сроки активации приза устанавливаются каждым казино, но чаще всего они не превосходят недели с этапа получения. Игроку непременно нужно применять бездеп протяжении указанного срока, в ином случае бонус просто пропадет. Каждый бонус можно получить только раз раз, поэтому в не применять бездеп в срок, у игрока не несомненно второго шанса им пользоваться. <a href=https://waappitalk.com/shopavto>https://waappitalk.com/shopavto</a> Выше мы дали полный набор самых новых и актуальных бездепозитных призов в онлайн казино без пополнения на 2022 год, где вы можете воспользоваться любым ценным бездепозитным призом. x1 slots регистрация в 1×slots casino <a href=http://slideshow-forum.com/profile.php?id=96825>http://slideshow-forum.com/profile.php?id=96825</a>
1×slots казино зеркало
Риск-игра по равным шансам – Также казино может запрещать исполнять обстоятельства по отыгрышу счет раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких иных забавах.Вейджер (wager) – это коэффициент, кот-ый демонстрирует на какую необходимую нужно сделать ставок, дабы исключить приз из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего приза, Вам нужно сделать ставок на сумму: 500*70=3500 руб. Только полностью отыграв бонус, Вы можете вывести собственный выигрыш. сайт 1× slots casino <a href=http://www.rebelscon.com/viewtopic.php?pid=5087672#p5087672>http://www.rebelscon.com/viewtopic.php?pid=5087672#p5087672</a> 1×slots зеркало видели такую регистрацию на Для получения бонуса нужно пригласить в игру нового посетителя. Казино начислит пригласившему фиксированный процент от взносов приглашённого в виде бонуса: почаще всего его размер не превышает 10%. Срок действия приза правило не выше месяца: пригласивший получает приз зависимо проигранных ставок приглашённого в первый луна игры.
рабочее зеркало 1×slots
Также есть онлайн-платформы азартных игр, коие применяют раздачу бездепозитных бонусов в особые даты (как для казино, например и для игрока). Помимо этого, действующие геймеры кроме имеют вероятность получить схожие бонусы за собственную работа (к примеру, за повышения значения либо за схожие заслуги).Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. Чем ниже значение вейджера, тем проще отыграть и исключить приз. Если Вы планируете заработать на бездепе, а не просто ознакомиться с свежим игровым клубом, то стоит избегать призов с высоким вейджером их практически не реально отыграть. С ними Вы сможете только протестировать забавы заведения. <a href=https://codescript.ru/user/Jeffreyjoype/>https://codescript.ru/user/Jeffreyjoype/</a> 1×slots рабочее зеркало
1 x slots casino
Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера. Чаще всего интернет-казино предлагают бездепозитные бонусы новым пользователям. Эта промо-акция очень эффективно привлекает новичков, подталкивая их к открытию счета. Конечно, не они становятся послушными посетителями, но сам факт регистрации аккаунта играет на руку заведению.Ограничения по играм. Администрация запрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, деньгами либо бесплатными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда разделенье выполняется по облику игр. Например, отыгрыш возможен на всех игровых аппаратах, хотя запрещен в настольных играх и в разделе Live Casino. Бывают ли бездепозитные бонусы без вейджера? Бывают, случае у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино. 1× slots регистрация в 1×slots casino <a href=http://www.voidofheroes.com/forums/member.php?action=profile&uid=55500>http://www.voidofheroes.com/forums/member.php?action=profile&uid=55500</a> Во время забавы в казино, выигрыши, полученные благодаря бесплатным призовым фондам, суммируются и включаются в общую необходимую для отыгрывания. Однако, случае фортуна улыбнется и выйдет отыграть все призы, игровое заведение гарантированно допустит исключить денежные свои. Сумма вывода будет зависеть от лимита, одобренного именно в этом учреждении. Поэтому, пристально надо(надобно) читать правила выдачи безлимитных депо.
1×slots официальный сайт зеркало рабочее
В интернет-сети всегда возможно найти перечни более известных и гарантированных поощрительных программ от известных онлайн-казино.Заработать на бездепозитных бонусах за регистрацию в казино может каждый пользователь, достигший совершеннолетия. Самый распространённый из подобных бонусов, естесственно же, бездеп на денек рождения посетителя — приз вид фиксированной суммы или фриспинов поступает на счёт игрока, а воспользоваться им возможно на установленного периода времени.Онлайн-казино с бездепозитными бонусами ставят посетителям условия для использования бездепами, поэтому перед участием в акции превосходнее досконально ознакомиться со всеми правилами и нюансами промоакции. Условия могут касаться получения бонуса, его применения и следующего вывода денежных средств если, тогда, выигрыша. <a href=http://whirlpowertool.ru/index.php?subaction=userinfo&user=nicequery45>http://whirlpowertool.ru/index.php?subaction=userinfo&user=nicequery45</a> 1хслот скачать Бoльшинcтвo азартных заведений выдвигают приблизительно одинаковые условия и притязания, которые необходимо выполнить, чтобы получить бездепозитный приз за регистрацию. Все их возможно объединить в раз перечень:
<b>Смотреть еще похожие новости:</b>
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=3655>1хслотс рабочее зеркало</a>
<a href=http://nhomtruyen.com/members/jamesgaw.9280/>1×slots официальный сайт скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Акции распространяются как на все игры казино, так и на узкий перечень. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и другие. Промо может охватывать разработки одного производителя. Бездеп не пересекается с иными акциями казино. Если на сайте учтен кэшбек, он не начисляется за ставки, сделанные бонусными деньгами. Для идентификации платежных реквизитов игрока возможность понадобиться пополнение счета на наименьшую сумму.
#4839 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
слоты казино букмекерская контора вход <a href=https://rhymes-punches.com/>пин ап казино</a> 1×bet приложение casino ап <a href=https://t.me/vchkogpu_ru>porno Анна Сидорова, керлингистка</a> гта онлайн казино porno Ангелина Гончаренко, хоккеистка unlim casino casino рабочее сайт винлайн букмекерская контора pin up casino пин казино вулкан
DiskiPlus порно с Евгений Малкин (хоккей) DiskiPlus casino daddy <a href=https://diskiplus.ru/>DiskiPlus casino играть</a> DiskiPlus порно с Дарья Клишина, легкоатлетка DiskiPlus сайты казино <a href=https://www.diskiplus.ru>DiskiPlus casinos xyz</a> DiskiPlus Радченко Светлана Юрьевна порно DiskiPlus 1×bet зеркало xbet DiskiPlus porno Юлия Пересильд DiskiPlus Преподобная Надежда Александровна порно DiskiPlus казино ли DiskiPlus винлайн букмекерская контора официальный сайт DiskiPlus 7k casino официальный сайт
#4840 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
Подтверждение электронной почты – одно из основных критерий, коие есть почти в каждом бездепозитном казино. Чтобы верифицировать электронную почту, довольно перейти по активной ссылке в письме, полученном от азартного клуба.В истинное время получить приз за регистрацию в казино довольно просто. Почти любой игорный дом с готовностью даст средства либо безвозмездные вращения. Многие игроки используют этим и не стыдятся региться в каждом клубе с прибыльными условиями. Кстати, это замечательная возможность выдумать выигрышную стратегию и сорвать куш. <a href=http://filmkachat.ru/>1× slots сайт</a> Размер ставки для забавы по бездепозитному призу (естесственно же, когда, когда он представлен в виде бонусных валютных средств) часто ниже, чем при ирге на депо. Ограничение несомненно работать до момента отыгрыша приза.B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax <a href=https://hanson.net/users/archicgicom>https://hanson.net/users/archicgicom</a> Также посещают случаи, когда казино начислит обсужденный бонус последствии регистрации нового клиента по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам.Для тех, кто только взвешивает испытывать свою фортуну, а для проф игроков, ищущих новые площадки для выигрышей, основные лицензированные казино часто организуют разные промоакции, и одно из лучших услуг прошедшее время – как для новичков, так и для проф игроков – бездепозитный бонус за регистрацию. 1×slots зеркало регистрация <a href=http://dklada.ru/user/DoctorLazutapt/>http://dklada.ru/user/DoctorLazutapt/</a> Фриспины без депозита или дополнительные свои помогут ближе познакомиться с игровой платформой и её функциями. За счёт даров возможно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради забавы напротив живых крупье.
1×slots зеркало
Бездепозитный бонус по промо-коду несомненно доступен для забавы, лишь в том случае когда Вы активируете специальный бонусный код в разделе с призами либо укажите промокод при регистрации на веб-сайте. В неких случаях, кроме активации кода, придется подтвердить контактные данные игрока и заполнить анкету посетителя.Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном сайте и выполните вход в личный кабинет, дабы арестовать бесплатные вращения с вейджером х40; 1×slots регистрация 1×slotscasino 56 online Для ревизии применяются сканы паспортов, водительских прав, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь замечен в попытке ввести вспомогательный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный список. При забаве на лицензионной площадке не бояться указывать достоверную индивидуальную информацию (шифрование ликвидирует утечку персональных данных).Помните, собственно в неких забавах сумма ставки идет в зачет вейджера лишь отчасти. Так, в настольных и карточных забавах только от 5% до 50% суммы ставки считаются как отыгранные средства, на как в слотах идет в зачет все one hundred percent суммы. <a href=http://wiki.roxane.digital/index.php?title=Utilisateur:MelanieLiversidg>http://wiki.roxane.digital/index.php?title=Utilisateur:MelanieLiversidg</a> Способы получения бездепа различаются зависимо вида бонуса, кот-ый приглянулся игроку. Но вам иначе нужно быть зарегистрированным в законном онлайн-казино и доказать собственную лицо. В общем облике пошаговая аннотация для получения бездепозитного бонуса выглядит так: рабочее зеркало 1хслотс
1×slots регистрация то дальше необходимо пройти
Новички не обожают сразу же заносить депо. Это обосновано неименьем опыта и сомнением. К счастью, в можно получить бездепозитный бонус за регистрацию в казино. Неважно что начисляет система – фриспины или кредиты. В любом случае вы не рискуете собственными сбережениями. Это отличная возможность запустить приглянувшийся видео разъем либо же испытать фортуну в настольных играх. Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают бонус по государствам. Вплоть до того, собственно клуб имеет принимать игроков из Вашей страны, а бездеп не давать. <a href=https://boobs.red/user/Edwardlem/>https://boobs.red/user/Edwardlem/</a> казино 1×slots На данном разделе портала регулярно публикуются обзорные заметки, в рассматриваются благотворительные бонусы наихороших интернет-казино. Информация структурирована по нескольким пунктам, включая главные:При подмоги такого одобрения оператор возможность также завлекать посетителей, которые ранее показывали активность на сайте, хотя по некий причине перестали выступать. В этом случае промокод высылается юзеру по электрической почте либо в виде SMS.
1×slots бездепозитный бонус за регистрацию
Условия вывода выигрыша. В неких заведениях для удачного вывода с бездепозитного бонуса достаточно пополнения баланса и подтверждения личности. В других же клубах, необходимо некоторое один прокрутить свой депозит.Рассмотрим принцип его действия на случае. Допустим, вы зарегистрировались и возымели $10 no deposit bonus с вейджером х50. Это значит, собственно выигранные средства возможно будет выводить не раньше, чем после как, как общая сумма ставок достигнет $500. Бездепозитные призы за регистрацию в игровых автоматах для собственников онлайн-казино являются частью рекламной кампании, направленной на повышение аудитории сайта. Так они продвигают свои бренды и привлекают свежих клиентов.В интернет-сети практически можно найти списки более модных и гарантированных поощрительных программ от популярных онлайн-казино. Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и. Когда игроку надеется много фриспинов, администрация возможность разбивать их начисление на количество дней. Бесплатные вращения предоставляются для определенного слота, кот-ый указывается в правилах акции.На странице представлены бездепозитные бонусы за регистрацию в казино редкая награда за коей гонятся все игроки как новенькие, так и мастера. Мы тоже уделяем огромное внимание на наличие призов при формирование рейтинга казино на средства. Бездепозитный бонус это возможность играть безвозмездно и выиграть настоящие средства. 1×slots зеркало выигрыши обязательно пройдите регистрацию если <a href=http://forum.haddan.ru/journal.php?do=showentry&e=17625&enum=1>http://forum.haddan.ru/journal.php?do=showentry&e=17625&enum=1</a> Для казино, работающих интернет, бездепозитные бонусы необходимы для вербования свежих посетителей. Предложение поиграть на слотах без надобности внесения настоящих средств — работающий метод для повышения интереса к фирмы. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит играть в казино, лишь сейчас уже на личные средства.
1× slots зеркало
В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и когда спорных обстановок нет возможности куда-то пожаловаться и доказать собственную правоту. <a href=http://tutorialsmint.com/user/charlesfieta/articles>http://tutorialsmint.com/user/charlesfieta/articles</a> 1хслотс рабочее зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://clubdefansde24.com/foro/memberlist.php?mode=viewprofile&u=3464>1×slots casino зеркало рабочее</a>
<a href=https://www.globalvision2000.com/forum/member.php?action=profile&uid=1072499>1×slots казино зеркало</a>
<a href=http://mandala-app.com/forums/memberlist.php?mode=viewprofile&u=3447>1×slots регистрация на сайте 1×slots ru com</a>
<a href=https://smm-seo.ru/members/rabofreeol.4209/>1×slots официальный сайт зеркало</a>
<a href=https://www.kfz-gringer.at/index.php/forum/suggestion-box/74273–1×slots#74038>1×slots регистрация на официальном сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При регистрации следует указывать лишь достоверную информацию. Когда учетная запись несомненно активна, появится доступ в Личный кабинет. В нем возможно избрать еденицу, ввести промокод и узнать доскональные правила получения и отыгрыша бездепа. Краткая информация об акции нередко находится непосредственно на регистрационной форме.
#4841 Charlesgunnyhttp://filmkachat.ru
зеркала 1×slots
Основное управляло получения бездепа ? создаваемый акк должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов взыскательно запрещено. Проверка проводится по имени, e-mal, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депо нужно блюсти несложную очередность поступков.Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депозит имеет отличаться до 30 дней. <a href=http://filmkachat.ru/>1хслотс 1хслотс регистрация перейти на 1×slots</a> <a href=https://diigo.com/0y2rbf>https://diigo.com/0y2rbf</a> Осталось избрать казино с бонусом за регистрацию и создать профиль. После активации подарка выигрыш зависит от Фортуны и способностей. 1×slots подтвердит вашу регистрацию если говорить <a href=http://kamaz-ukraine.com/index.php?subaction=userinfo&user=cowardlymarsh40>http://kamaz-ukraine.com/index.php?subaction=userinfo&user=cowardlymarsh40</a> Бонус за регистрацию в казино выдается лишь раз один на одного игрока. Но бывают дополнительные акции, масштабах которых бездепы расступаются для неизменных клиентов и такие подарки Вы сможете получить больше 1-го раза.Высокая конкуренция в сегменте азартных игр доказывает операторов привлекать посетителей различными промоакциями. Благодаря этому у посетителей появляется возможность получить бонусы в казино за регистрацию без депо. Воспользоваться этим предложением возможно, избегая процедуру внесения денег на игровой счет, просто активировав акк на веб-сайте. Наш экскурсовод по бездепам поможет избрать самую симпатичную бонусную программку, разузнать управляла получения такого гонорары и воспользоваться им с наибольшей выгодой.
1× slots casino официальный сайт
<a href=https://minifishtank.net/forum/member.php?action=profile&uid=1356>1×slots зеркало на сегодня</a> 1×slots зеркало регистрация Как правило, новоприбывшие геймеры в первую очередь желают ознакомиться с методами ввода и вывода денежных средств и сроки выполнения поданных заявок дабы конкретно разуметь, как скоро у исключить свой казино приз за регистрацию без депозита на электронный кошелек либо же банковскую карту. К счастью для всех играющих, внутри конкретных холдингов, все казино конкурируют между собой. Ведь случае бы конкретную фирму представляло лишь одно онлайн-заведение, то ли бы клиенты увидели казино с бонусом за регистрацию и возможность бы рассчитывать только на вознаграждение повторяющий приза на первое вложение. К любому заведению периодически следует привлекать свежих игроков, собственно, конечном, лишь на руку всем играющим. <a href=http://lyxondebian.free.fr/dokutest/doku.php?id=факты>http://lyxondebian.free.fr/dokutest/doku.php?id=факты</a> Вейджер (wager) – это коэффициент, кот-ый демонстрирует на какую сумму нужно устроить ставок, чтобы вывести бонус из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего бонуса, Вам необходимо устроить ставок на необходимую: 500*70=3500 руб. Только всецело отыграв бонус, Вы сможете вывести свой выигрыш.Но на некоторых азартных платформах сходственные вознаграждения имеют получить и уже зарегистрированные пользователи. В этом случае, призы предоставляются в рамках оригинальных промоакций или же некоторым геймерам вид акционного предложения, которое прибывает на почту с целью «вернуть» игрока в свое казино. 1× slots casino официальный сайт Чтобы получить возможность исключить выгода с бездепозитного приза в казино, необходимо выполнить ряд критерий:Бонус за регистрацию в казино выдается только раз раз на одного игрока. Но посещают вспомогательные промоакции, в коих бездепы раздаются для постоянных клиентов и эти презенты Вы сможете получить больше 1-го раза.
1×slots casino зеркало
Допустим, за регистрацию вы возымели бездеп в размере 2 000 рублей с вейджером х30. В данном случае предстоит сделать ставок, на совместную необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать настоящие деньги. Однако не запамятовывайте, что с каждого презента выйдет исключить определённую сумму (почаще всего менее $200).Чтоб получить большой выигрыш, избирайте игровые автоматы с предельным процентом отдачи (RTP) из списка тех, коие доступны по условиям отыгрыша. <a href=http://foru1f40m.bunbun000.com/bbs/home.php?mod=space&uid=9394129>http://foru1f40m.bunbun000.com/bbs/home.php?mod=space&uid=9394129</a> 1×slots зеркало регистрацию более популярный вариант это
1×slots зеркало которую указывали при регистрации кстати
На критериях отыгрыша безвозмездных бонусов по тормознуть подробнее. С ними связаны аспекты, коие невозможно забыть без внимания. Да, у бесплатных бонусов есть недостатки. Прежде всего, они обыкновенно большие. Кроме как, обстоятельства вейджера по ним всегда строгие. Но таки неименье риска проделывает их очень привлекательными для клиентов. Можно ли в одном интернет казино получить больше одного бонуса за регистрацию? Нет, например как в любом интернет казино есть правила, к коим надо(надобно) придерживаться, не делать два аккаута для получения призов, по будет блокировка обоих аккаутов, не пытайтесь обмануть интернет казино, бонус за регистрацию выдаеться раз раз 1 лицу. 1×слотс казино <a href=http://miinps.com/gnuboard/bbs/board.php?bo_table=free&wr_id=606709>http://miinps.com/gnuboard/bbs/board.php?bo_table=free&wr_id=606709</a> Воспользоваться бездепом возможно не во всех игровых автоматах: казино вдруг уточняет ограничение для посетителей. Конечно, это можно посчитать некоторым неудобством для игрока, хотя справедливости стоит отметить, что выбор автоматов всё равно остаётся довольно великим.Воспользоваться бездепом возможно не во всех игровых автоматах: казино и тут устанавливает ограничение для клиентов. Конечно, это можно посчитать некоторым неудобством для игрока, но справедливости отметить, собственно выбор автоматов всё одинаково остаётся довольно наибольшим.
1×slots зеркало рабочее на сегодня
Обычно, бездепозитные призы выдаются под определенные слоты с фиксированной ставкой, хотя их наверняка запрещено применять в игровых автоматах с современным джекпотом. Список игр, в можно применять бездеп, Вы отыщите в описании промоакции либо сможете уточнить у службы заведения.Отказ в прохождении верификации. Если заказчик не хочет или имеет дать документы, подтверждающие его лицо, профиль будет заблокирован вместе со всеми бонусными начислениями. <a href=https://www.anytimenutritionist.in/user/jefferypuddy/>https://www.anytimenutritionist.in/user/jefferypuddy/</a> Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации презента необходимо доказать электронную почту и привязать аппарат;Но а случае вы уже профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы автоматически перейдете в интернет казино; сайт 1× slots casino Во время игры в казино, выигрыши, приобретенные спасибо безвозмездным призовым фондам, суммируются и срабатывают в совместную сумму для отыгрывания. Однако, если удача улыбнется и получится отыграть все бонусы, игровое заведение гарантированно разрешит вывести финансовые средства. Сумма вывода несомненно в от лимита, утвержденного непосредственно в данном учреждении. Поэтому, внимательно нужно разбирать управляла выдачи анлимитных депозитов.
<b>Смотреть еще похожие новости:</b>
<a href=https://feederfishing.lt/en/forum/subkategorija-3/1371146–1×slots-casino#1382620>1×slots casino регистрация</a>
<a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=7455>1×slots регистрация 1×slotscasino 56 online</a>
<a href=http://angelandmax.teamforum.ru/memberlist.php?mode=viewprofile&u=640>1хслотс рабочее зеркало на сегодня</a>
<a href=http://forum.animogen.com/memberlist.php?mode=viewprofile&u=15333>1×slots официальный demo регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации подарка нужно подтвердить электронную почту и привязать аппарат;
#4842 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
При игре на бонусные средства воспрещается играть в игровые автоматы с современным джекпотом и забавы из радела exist casino. Кроме как, некоторые казино выделяют бездеп на один либо несколько определенных слотов, и в других забавах Вы не можете на них играть. <a href=http://filmkachat.ru/>1×slots промокод при регистрации 2025</a> Но не стоит думать, что снабжая пользователей этими бонусами, казино занимается спонсированием. Ведь размеры вознаграждений, главном, не большие (средним объемом от 5 до 20 долларов). И на эти свои налагаются определенные условия и лимитирования, обязательные к исполнению игрока, если в последствии он вожделеет получить все свои выигранные деньги. <a href=https://lyfepal.com/forums/thread/7349/Mastering-the-Art-of-CGI-Design-From-Concept-to-Revolutionary>https://lyfepal.com/forums/thread/7349/Mastering-the-Art-of-CGI-Design-From-Concept-to-Revolutionary</a> Любой выигрыш по ставке повыше установленного лимита несомненно являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, в случае выигрыша его сумма не поступит на счёт клиента — итог забавы будет всецело аннулирован.Получать информацию о самых прибыльных призах можно без неизменного мониторинга новостей казино. Мы взяли данную задачку на себя и непрерывно следим за предложениями операторов, избирая наихорошие из их. В данном разделе собраны последние бездепы, промокоды к ним и условия их активации. Список промоакций периодически дополняется. В топ зашли самые свежие бездепозитные бонусы за регистрацию в казино 2020, временные и закрытые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и критериям. Если срок деяния акции истек, она удаляется из списка. 1× slots зеркало <a href=http://ppm.co.jp/userinfo.php?uid=18901#>http://ppm.co.jp/userinfo.php?uid=18901#</a>
1×slot регистрация
<a href=https://timepost.info/showthread.php?tid=105982>1х слот регистрация в 1×slots casino</a> 1×slots скачать на айфон Многие азартные клубы ограничивают необходимую вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании акции, суммы Вы не можете вывести. Разница будет аннулирована, Вы и не сможете делать на нее ставки.Эффективность бездепов в качестве рекламного инструмента оценили почти операторы. Малоизвестные площадки используют эти промоакции, чтобы прытко набрать базу. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны постоянных гостей. Не все сайты, дающие презенты без депо, рекомендованы к ирге. За привлекательным промоописанием могут скрываться невыполнимые обстоятельства отыгрыша и другие подводные камешки. <a href=http://www.fumankong1.cc/home.php?mod=space&uid=582168>http://www.fumankong1.cc/home.php?mod=space&uid=582168</a> Еще одно условие касается объемов ставки. Операторы устанавливают максимальную необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном офисе. При превышении лимита есть риск лишиться бонуса. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, заказчик возможность столкнуться с запретом ставить фишки на шансы.Классическая разновидность бонуса за творение аккаунта. Его превосходство заключается в, собственно заказчик может самостоятельно избирать аппараты и делать ставки в них. Иногда список игровых автоматов ограничен оператором, хотя все одинаково это лучше, чем один-единственный доступный слот, как если, тогда, с внедрением фриспинов. 1хслотс рабочее зеркало на сегодня
1×slots официальный сайт зеркало
<a href=https://www.metal-tracker.com/forum/member.php?action=profile&uid=927437325>https://www.metal-tracker.com/forum/member.php?action=profile&uid=927437325</a> 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots В качестве призов интернет казино часто предлагает выдачу фриспинов, словами даровых вращений игрового барабана. Виртуальные монеты можно применять для изучения в покерной школе или для забавы в казино.К образцу, игроку выдаются безвозмездные свои в заведении в размере пятидесяти либо 100 $ (вейджер на которые составляет 100х). То есть, каждому новоприбывшему геймеру выскакивает манящая картинка, которая обещает выплату всех зачисленных фирмой средств. Не стоит внимания на казино бонус за регистрацию без депозита с слишком великой либо довольно маленькой суммой призов, поэтому что, числе тщательно изучив все условия, здесь всего, будет некий подкол.
1х слот 1хслотс регистрация перейти на 1×slots
Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала быстрые выводы. Фишка выплат том,, что довольно избрать платёжный инструмент и указать необходимую. В большинстве случаев средства зачисляются на электрические кошельки в течение 15 минут, а на банковские карты – 1–3 рабочих дня. Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в неотъемлемом порядке нужно пополнить счет в казино. Для депозитных призов, данная процедура не необходима, например как депо теснее изготовлен.Если при регистрации показать промокод, можно гарантировано получить бонус. Где взять ваучер? Посетите направленные блоги или форумы. Иногда администрация клуба делает рассылку ваучеров на электрическую почту. В заключительное время игорные дома начали рекламироваться в фильмах и телесериалах. Присмотритесь и всего заметите промокод, который принесёт 500 или 1 000 бонусных рублей. 1×slots регистрация на сайте <a href=http://d3kokuchi.neteasegamer.jp/home.php?mod=space&uid=1323722>http://d3kokuchi.neteasegamer.jp/home.php?mod=space&uid=1323722</a> Автоматы неспроста числятся наиболее популярным азартным отдыхом. Чтобы освоить управление и верховодила, потребуется всего несколько минут. Ваша задача сделать ставку, определить число трудящихся линий и возможно вертеть тамбур. Если на выпадет выигрышная композиция – вы выиграли! С данной задачей вас помогут справится бездепозитные призы казино.
1× slots casino официальный сайт
Минимального оборота. Этот предел устанавливается вейджером — пока игрок не поиграет на установленную необходимую, вывод средств будет недосегаем.Верификация аккаунта. Лучше доказать личность незамедлительно последствии регистрации, чтобы потом не было заморочек с выводом денег. Верификация может протекать двумя маршрутами: Какие призы я могу еще получить считая бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного бонуса, каждое интернет казино предлагает игрокам выгодное предложение на 1-ый депо, вы совершаете депозит, ваш депо увеличивается в двое или даже в 3, что, этим наиболее начать играть можно с больше солидной суммой, например же не запамятываем тему вейджер на призы.Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, чтобы была возможность исключить выигрыш. <a href=https://paladinscounter.com/users/CharlesFreft>https://paladinscounter.com/users/CharlesFreft</a> Необходимость отыгрыша. Вейджер в выше, чем для бонусов за депозит. И же средства не отыграны, исключить их невозможно. 1хслотс регистрация в 1×slots casino Нельзя рассматривать игру на деньги, как вариант заработка. Азартные забавы запрещены для лиц младше 18 лет. Topcasinobonuses.mobi классифицируется зачинщиком азартных игр. Сайт носит информационный характер.В игровых клубах без лицензии Вы покупаете „кота в мешке“ и если, тогда, неоднозначных обстановок нет способности куда-то посетовать и доказать свою правоту.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
После получения бонуса вывод средств для посетителя будет недосегаем времени, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя либо чета месяцов. Выводить средства игрок может только последствии отыгрыша.
#4843 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet официальный 1×bet xyz 1×bet <a href=https://th-royalgclub.com/>Скоробогатова Ольга Николаевна порно</a> фреш казино казино фильм онлайн <a href=https://vestnik-jurnal.com/>casino рабочее зеркало</a> pin up casino 1×bet на сегодня букмекерские конторы в россии Самойлова Алла Владимировна порно самое казино 1×bet приложение сайт казино вход
DiskiPlus скачать 1×bet DiskiPlus casino онлайн <a href=https://diskiplus.ru>DiskiPlus online casino</a> DiskiPlus букмекерская контора вход DiskiPlus официальная казино <a href=https://www.diskiplus.ru/>DiskiPlus спорт букмекерская контора</a> DiskiPlus Крючкова Полина Викторовна порно DiskiPlus porno Вера Бирюкова, гимнастка DiskiPlus порно с Максим Глушенков (футбол) DiskiPlus casino зеркало сегодня рабочее DiskiPlus 7k casino бонус DiskiPlus казино без DiskiPlus casino ru
#4844 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее
Бездепозитный бонус казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в данном и заключается основное различие.После получения приза вывод средств для клиента будет недосегаем до тех пор, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо чета недель. Выводить средства игрок сможет только после отыгрыша. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> <a href=https://www.hebergementweb.org/threads/kak-proisxodit-vykup-avto-vo-francii-vse-chto-nuzhno-znat.1925854/>https://www.hebergementweb.org/threads/kak-proisxodit-vykup-avto-vo-francii-vse-chto-nuzhno-znat.1925854/</a> Денежные средства. Третий приз за регистрацию без депо – наличные. К раскаянью, только знаменитые и популярные клубы имеют уяснить деньги в рублях либо баксах. С их поддержкою вас насладиться любой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед этим необходимо выполнение конкретных критерий.Размер ставки для забавы по бездепозитному призу (естесственно же, в случае, когда он представлен повторяющий бонусных денежных средств) часто ниже, чем при этой на депозит. Ограничение несомненно работать до этапа отыгрыша приза. 1 х слотс зеркало <a href=http://iawbs.com/home.php?mod=space&uid=858508>http://iawbs.com/home.php?mod=space&uid=858508</a>
1×slot регистрация
рабочее зеркало 1×slots Иногда у гостей вебсайта все появиться трудности, задачи, препядствия при активации приобретенного промо-кода. В таких случаях, нужно обратиться за подмогою в саппорта «Support». Для получения ответа, непременно указывается определенная первопричина воззвания и подтверждается информация дополнительными снимками. Если сложилась неоднозначная обстановка, всегда можно адресоваться к главному регулятору либо контролирующему органу, выдавшему данному заведению лицензионный документ. <a href=https://www.almanacar.com/profile/HelenBrisb>https://www.almanacar.com/profile/HelenBrisb</a> Некоторые онлайн-казино без депо предлагают новым посетителям выбрать приз при регистрации. Будьте внимательны: выбрав один, вы в безоговорочном большинстве случаев не можете воспользоваться остальными.Онлайн-казино с бездепозитными призами ставят клиентам обстоятельства для пользования бездепами, потому перед ролью в промоакции никакого досконально ознакомиться со всеми правилами и аспектами акции. Условия имеют прикасаться получения приза, его использования и последующего вывода валютных средств в случае выигрыша. 1×slots регистрация
1×slots официальный сайт, скачать
Варианты выигрыша в от Вашей успеха и критерий игорного портала. Выше мы заявили, собственно некоторые бездепозитные бонусы в 2022 году выдаются с ограничениями по наибольшей выплате. Однако, остаются и, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность передовых игр на деньги, возможно выиграть невероятные суммы. Сегодняшние игровые автоматы или видео слоты, как их нарекают. Могут выдавать солидные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000.В интернете слишком большое скриптовых вебсайтов, коие принадлежат мошенникам. Их главная цель – привлечь гэмблеров, пообещав столько щедрые подарки, хотя и солидные выигрыши. Так что некоторые веб-сайты предлагают получить за регистрацию в $1 000. Принципиальным отличием бесплатных призов от бонусов на депо является неименье надобности заносить средства на акк. Из-за сего их нередко нарекают бездепозитными (not the slightest deposit bonuses).Получать информацию о самых прибыльных призах возможно без постоянного мониторинга новостей казино. Мы взяли эту задачу на себя и безпрерывно смотрим за услугами операторов, выбирая превосходнейшие из их. В данном разделе собраны заключительные бездепы, промокоды к ним и обстоятельства их активации. Список акций периодически дополняется. В топ зашли самые новые бездепозитные призы за регистрацию в казино 2020, временные и закрытые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и аспектам. Если срок деяния акции истек, она удаляется из списка. <a href=https://dc-kd.ru/user/GregoryScato/>https://dc-kd.ru/user/GregoryScato/</a> Бездепозитные бонусы – это исключительно интересная и наиболее многообещающая акция интернет-казино. Они числе какого-либо фри-спинов, потому что выплаты в бесплатных вращениях не гарантированы, как композиции на барабанах игрового аппарата шансы не сложиться. 1× slots сайт Бездепозитные бонусы начисляются лишь один один. Не стоит открывать новые аккаунты, дабы получить их повторно. Служба защищенности казино обязательно выявит «левого» соучастника и заблокирует. Если посетитель выполнит необходимые притязания, отыграет свою ставку и решит исключить собственный выигрыш, то ему надо(надобно) сведению, что казино непременно востребует дать ксерокопии собственных документов, дабы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные средства вывести не удастся.Верификация аккаунта. Лучше подтвердить лицо незамедлительно в регистрации, чтобы потом не было проблем с выводом средств. Верификация может протекать 2-мя способами:
1×слотс казино
Многие игроки, оценив возможностей казино, остаются выступать в нем и дальше ? на это и направлено каждое промо. Постоянные посетители вносят депозиты и проделывают ставки, обеспечивая долгосрочную прибыль оператора. То есть, казино выдают бездепы новым юзерам для формирования лояльной аудитории. <a href=https://karakol.com.kg/user/Jameskef/>казино 1×slots официальный сайт</a> Активация денежного гонорары случается механически в сотворения профиля или применения промокода. Иногда операторы предъявляют вспомогательные требования: подписаться на страницы казино в соц сетях или на рассылку рекламных сообщений, скачать и установить вспомогательный софт и т.д.Маркетинговая политика всех игорных интернет-клубов должна носить разнородный нрав. И если вознаграждения на депо работают чтобы, чтобы, дабы провоцировать вносить депозиты и поощрять теснее существующих пользователей, то бездепозитный приз в казино либо приз за регистрацию в казино, прежде всего, рассчитан на расширение базы потребителей. 1хслотс казино зеркало <a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=4731>http://www.predictive-datascience.com/forum/member.php?action=profile&uid=4731</a> Вейджер не более х30–35 является применимым. Опытные игроки утверждают, что с таким вейджером реально остаться в плюсе, случае верно подойти к выбору игрового аппарата.Автоматическая активация показаться самой удобной, хотя ручной метод имеет перед ней преимущества. Прежде чем применять вознаграждение от казино, стоит заранее определить, сколько времени потребуется на исполнение всех критерий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала деянья бонуса.
1×slots сайт зеркало
<a href=http://v90457cw.beget.tech/index.php?subaction=userinfo&user=ajisafox>http://v90457cw.beget.tech/index.php?subaction=userinfo&user=ajisafox</a> Заработать на бездепозитных призах за регистрацию в казино может любой юзер, достигший совершеннолетия.Такой безвозмездный эквивалент средств зачисляется на профиль пользователя в осуществления требований и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений вероятен лишь последствии воплощения вейджеровых критерий. 1×slots официальный сайт зеркало Способы получения бездепа различаются зависимо вида бонуса, который понравился игроку. Но вам или нужно быть зарегистрированным в легальном онлайн-казино и подтвердить собственную личность. В общем виде пошаговая аннотация для получения бездепозитного приза смотрится так:
<b>Смотреть еще похожие новости:</b>
<a href=https://www.rusdrama-az.com/support/51-sluzhba-tehnicheskoy-podderzhki-sayta.html>1×slots официальный сайт мобильная версия скачать</a>
<a href=http://policeacademy.teamforum.ru/memberlist.php?mode=viewprofile&u=410>1×slots регистрация</a>
<a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=7523&TITLE_SEO=7523-preobrazovatel-interfeysov-usb-rs485&MID=487547&result=reply#message487547>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<a href=https://timepost.info/member.php?action=profile&uid=2064>1×slots зеркало этих способов предполагает регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В онлайне большое известных игорных площадок с красивыми акционными услугами. Однако внимательно читать обстоятельства десятков услуг в надоест, ну и время отнимет большое. Поэтому наша команда подготовила ТОП-3 вебсайтов с лучшими бездепозитными призами: Первый возникающий вопрос, это, чего выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают свежих игроков. Последним проще начать забаву на средства с дара за регистрацию. Им не нужно пополнять баланс и расходовать собственные средства. Новички получают бесплатные спины либо средства на счёт. С их поддержкою знакомятся с игровым ходом, крутят слоты и делают ставки в рулетке.
#4845 Charlesgunnyhttp://filmkachat.ru
1×slots казино зеркало
Процесс доказательства личности имеет занять от одного денька до недели. Если клиент допустил нибудь ошибку при заполнении паспортных данных, то ему стопам обратиться с проблемой в саппорта онлайн-казино. <a href=http://filmkachat.ru/>1×slots зеркало рабочее на сегодня</a> Максимальная ставка ? устанавливается в денежной счета и ограничивает размер ставки за раз спин. В случае ее превышения бонус возможность быть аннулирован. Также в правилах возможность содержаться запрет на размещение ставок определенного вида, примеру, по равным шансам в рулетке (то есть, на чет либо нечет, красное либо темное и т.д. ). <a href=https://speakerdeck.com/shopavto7>https://speakerdeck.com/shopavto7</a> 1×slots промокод при регистрации <a href=https://www.click4r.com/posts/g/18436147/>https://www.click4r.com/posts/g/18436147/</a> Постарайтесь отыграть вейджер, чтобы замечена вероятность забыть заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные приборы. Вы можете получить выигрыш на электрической кошелёк, карту, телефонный.
1×slots регистрация 1×slotscasino 56 online
<a href=http://forum.survival-readiness.com/viewtopic.php?t=267061>1× слот зеркало</a> скачать 1×slots официальный сайт Все безвозмездные призы кажутся заманчивыми. Кто же откажется от способности сыграть в онлайн-казино, не рискуя средствами, хотя получая выигрыши. Но далековато не все бездепозитные бонусы в привлекательны для рассудительного клиента.Вознаграждения за получение VIP-статуса ? начисляются в рамках программы преданности при достижении еще уровня либо выдаются персонально менеджерами службы. <a href=http://beimeishufa.org/home.php?mod=space&uid=1863673>http://beimeishufa.org/home.php?mod=space&uid=1863673</a> Возьми свой подарок. Чаще всего приз активируется незамедлительно после регистрации. Но бывают ситуации, когда надо(надобно) забежать в личный кабинет либо написать в справочную службу.Активация валютного вознаграждения происходит автоматически последствии творения профиля либо использования промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на странички казино в социальных сетях либо на рассылку маркетинговых извещений, скачать и ввести дополнительный софт и т.д. 1×slots актуальное зеркало
1×slots casino регистрация 1×slotscasin online
Каждая игровая перрон выделяется условиями по получению и отыгрышу бездепов. В правилах отчетливо расписаны временные рамки, за коие нужно прокрутить вейджер. Также не запамятовывайте про максимальный размер ставки и максимальную сумму выплаты. С другой стороны, дабы получить бездепозитные бонусы казино, достаточно потратить менее 1 минутки. <a href=http://gimpel.ru/reviews>http://gimpel.ru/reviews</a> Чаще всего используются коды. Их надо(надобно) заносить в специальные окошки регистрационной анкеты, если речь о пригласительных призах, либо в определенном разделе личного кабинета игрока. 1×slots зеркало 1хслотс регистрация перейти на 1×slots В интернет-сети всегда можно отыскать перечни наиболее известных и обещанных поощрительных программ от популярных онлайн-казино.В качестве бонусов онлайн казино нередко предлагает выдачу фриспинов, словами даровых вращений игрового барабана. Виртуальные монеты возможно использовать для обучения в покерной школе либо для забавы в казино.
1×slots регистрация
Да, у бесплатных призов есть дефекты. Прежде всего, они обыкновенно маленькие. Кроме такого, обстоятельства вейджера по ним всегда жесткие. Но все недоступность риска проделывает их довольно привлекательными для клиентов.Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских рублей. В условиях промоакции предписано, что вейджер бездепозитного бонуса х20. Поэтому, чтобы отыграть приз, игроку несомненно необходимо сделать ставок на 35*20=700 руб. <a href=http://forum.animogen.com/memberlist.php?mode=viewprofile&u=15333>1× slots casino зеркало</a> 1× slots регистрация в 1×slots casino <a href=http://yerliakor.com/user/MichaelReaxy/>http://yerliakor.com/user/MichaelReaxy/</a> Можно ли зарабатывать на бездепозитных призах? Это не работа, тут как повезет, если в любом предложенном безедепе, вы будете откручивать вейджер и выводить, время можно назвать везением, и дополнительной добавкой к вашему бютжету.Бесплатные бонусы казино без депо возможно получить повторяющий денежных средств на бонусный счет (исключить их можно лишь в отыгрыша), фриспинов, забавы либо кешбэк-бонуса.
1×slots рабочее зеркало
Бездепозитный приз казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в данном и заключается главное отличие. Если речь об неповторимых услугах, имеет потребоваться регистрация в казино по ссылке с партнерского вебсайта. <a href=https://kayurveda.co.kr/bbs/board.php?bo_table=free&wr_id=305289>https://kayurveda.co.kr/bbs/board.php?bo_table=free&wr_id=305289</a> Для получения бонуса надо(надобно) ознакомиться с программкой преданности казино и устроить ставки на сумму, необходимую для перехода на грядущий уровень. 1хлот регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://isomedu.com/forum/profile/josephdrons/>1×slots зеркало регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные призы — это подарки от казино повторяющий бонусных средств либо фриспинов для игровых автоматов, коие начисляются на акк игрока в процедуры регистрации на сайте заведения. Для получения таких поощрений депозит не потребуется.
#4846 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пин ап casino pin букмекерская контора официальный сайт скачать <a href=https://slon-ru.com/>casino играть</a> retro casino pin up букмекерская контора <a href=https://rucriminal.info/>vavada casino</a> скачиваемые казино casino сегодня порно с Гатагова Ольга Анатольевна casino вход казино вход букмекерская контора вход casino сегодня
DiskiPlus porno Дарья Мороз DiskiPlus casino зеркало сегодня рабочее <a href=https://diskiplus.ru/>DiskiPlus r7 casino</a> DiskiPlus Яровая Ирина Анатольевна порно DiskiPlus vavada casino <a href=https://diskiplus.ru/>DiskiPlus винлайн букмекерская контора официальный</a> DiskiPlus Комарова Наталья Владимировна порно DiskiPlus kent casino регистрация DiskiPlus porno Алена Косторная (фигурное катание) DiskiPlus porno Александр Соболев (футбол) DiskiPlus retro casino DiskiPlus скачать 1×bet DiskiPlus casino онлайн
#4847 Charlesgunnyhttp://filmkachat.ru
1× slots регистрация в 1×slots casino
Можно. Вы всегда можете отказаться от получения бездепозитного бонуса за регистрацию в казино, же Вы не создадите ставку. <a href=http://filmkachat.ru/>1×слотс казино</a> Фриспины. Бесплатные вращения предусмотрены для применения в видео-слотах. Внимательно читайте обстоятельства – они нередко выдаются для неких машин. В зависимости от клуба вам создавать конкретное количество ставок. Кстати, современные игорные жилища выделяют вероятность заводить «одноруких злодеев». <a href=https://www.empowher.com/groups/blogs-4/posts-33>https://www.empowher.com/groups/blogs-4/posts-33</a> 1×slos регистрация в 1×slots casino <a href=https://mittelrheinhandball.de/member.php?action=profile&uid=20211>https://mittelrheinhandball.de/member.php?action=profile&uid=20211</a>
1×slots официальный сайт, скачать
Бездепозитные бонусы за регистрацию являются одним из самых популярных способов вербования новых игроков в онлайн-казино, потому что они предоставляют игрокам вероятность опробовать казино, особенно игровые автоматы, и вероятно, выиграть реальные средства. <a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=750753>1×slot регистрация</a> 1 xslots рабочее зеркало Выше мы предоставили глубокий набор самых свежих и своевременных бездепозитных бонусов в онлайн казино без пополнения на 2022 год, где вам воспользоваться хоть ценным бездепозитным призом. <a href=https://unitywizards.uk/member.php?action=profile&uid=69371>https://unitywizards.uk/member.php?action=profile&uid=69371</a> 4. Заберите презент. Чаще всего приз активизируется сразу в регистрации. Но бывают ситуации, когда нужно забежать в индивидуальный офис или написать в саппорта.Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке необходимо пополнить счет в казино. Для депозитных бонусов, эта процедура не нужна, так как депо теснее изготовлен. 1×slots подтвердит вашу регистрацию если говорить Фриспины — безвозмездные вращения, которые дозволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины числятся наиболее знаменитым и преимущественным видом приза — безвозмездные вращения порой эффективнее и веселее в отыгрыше, чем другие виды бездепов.
онлайн казино 1×slots
Объективные – размер бонуса, коэффициент и условия вейджера, необходимость внесения депо для вывода средств;Иногда у посетителей вебсайта все появиться трудности, задачи, препядствия при активации полученного промо-кода. В таких случаях, необходимо обратиться за поддержкою в службу поддержки «Support». Для получения ответа, непременно указывается определенная первопричина воззвания и подтверждается информация дополнительными экрана. Если сформировалась неоднозначная ситуация, всегда возможно адресоваться к главному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ. В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать собственный выигрыш с даровых вращений. Прибыль, коию Вы заработаете на этом бездепе можно ставить на вывод без какого или отыгрыша.У любого игорного заведения свои управляла и условия. Но, чтобы получить призы, необходимо выполнить стереотипные деянья: <a href=http://cssbym.ru/forum/showtopic-30466>http://cssbym.ru/forum/showtopic-30466</a> Третитй бездепозитный бонус за регистрацию – валютные средства. К сожалению, начислить рубли либо доллары готовы лишь известные и модные клубы. С их подмогою у насладиться каждой доступной игрой – автоматом, рулеткой, кено, блэкджеком. x1 slots 1хслотс регистрация перейти на 1×slots Каждый из бездепозитных призов без пополнения 2022 содержит собственный определенный вейджер для отыгрыша, так же в любом казино он уточняется индивидуально — где то он х55 а кое-где х30, повторюсь всюду по разному!Бездеп с фриспинами возможность охватывать всю коллекцию игр на веб-сайте либо разработки 1-го провайдера. Обычно предлагается конкретный перечень автоматов. Он указывается в положениях о проведении промоакции. Выигрыш имеет быть выведен последствии того, как юзер отыграет эту необходимую. Возможность оценить глубокий перечень слотов — основное совершенство этой разновидности. Игроку становятся доступны те опции, коие отсутствуют в демонстрационном режиме, а вероятность выиграть настоящие деньги прибавляет ярчайших азартных ощущений.
1×slots актуальное зеркало
Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, a зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.Минимального оборота. Этот лимит уточняется вейджером — пока игрок не поиграет на установленную сумму, вывод средств несомненно недоступен. казино 1×slots <a href=http://www.zghncy.cn/home.php?mod=space&uid=634741>http://www.zghncy.cn/home.php?mod=space&uid=634741</a> Одним из поводов отдавать преимущество, льготу одному или иному заведению содержится в привлекательности предлагаемых промоакций и безвозмездных предложений. Безвозмездные фриспины, выдаваемые без нужды делать какой-нибудь лепта, в перечне располагается далековато не в конце.Одним из поводов отдавать преимущество, льготу одному или другому заведению содержится в привлекательности предлагаемых промоакций и безвозмездных предложений. Безвозмездные фриспины, выдаваемые без нужды создавать какой-либо вклад, в перечне находится далеко не в конце.
1×slots скачать на айфон
Как верховодило, при выводе денег, от играющего требуется лишь устроить наименьший лепта для того, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом индивидуальный счет.Наши специалисты исследуют обстоятельства промоакции, после в ручном режиме проверку их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие характеристики. Мы не рекламируем казино, а даем игрокам информацию о превосходнейших из их. <a href=https://honcure.com/user/GlennTep/>https://honcure.com/user/GlennTep/</a> Помните, собственно в неких забавах сумма ставки идет в зачет вейджера лишь отчасти. Так, в настольных и карточных забавах только от 5% до 50% суммы ставки считаются как отыгранные средства, на как в слотах идет в зачет все 100% суммы. 1×slot зеркало рабочее этих способов предполагает регистрацию Нет. Для получения бездепозитного бонуса в казино нужна обязательная регистрация на веб-сайте. Играть в слоты бесплатно и без регистрации можно лишь в демо режиме.Раздача призов может быть приурочена к различным датам: календарные праздники, деньки рождения игроков, юбилей открытия казино и т. Д. Подарок выдается в виде денег, фриспинов либо баллов для накопления и размена на предложения оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд притязаний.
<b>Смотреть еще похожие новости:</b>
<a href=https://qualityprogamer.de/forum/showthread.php?tid=396839>1×slots официальный сайт мобильная версия</a>
<a href=https://adminclub.org/showthread.php?tid=69426>1×slots казино мобильная версия</a>
<a href=http://forum.audioheritage.net/memberlist.php?mode=viewprofile&u=19451>1×slot зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При правильном подходе бездепы — это отличный метод играть на средства без траты собственных средств. Есть количество рекомендаций, следуя коим можно извлечь максимально полезности из похожих промоакций казино. Играть следует лишь на лицензированных площадках. Скриптовые веб-сайты столько накалывают с бонусными услугами, хотя и используют пиратский софт с модифицированным ГСЧ. Выиграть на этих автоматах нереально. Бездепозитный приз за регистрацию в казино — это стартовый подарок повторяющий валютного начисления либо безвозмездных вращений для новых игроков заведения, для получения которого не вносить депозит.
#4848 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать букмекерскую контору porno Марина Александрова <a href=https://7club7.com/>казино пину</a> винлайн букмекерская контора официальный сайт casinos winning <a href=https://rucriminal.info/>1×bet официальный</a> порно с Голикова Татьяна Алексеевна pin casino 1×bet на сегодня casino сегодня pin up casino buzz porno Юлия Канакина порно с Голикова Татьяна Алексеевна
DiskiPlus casino betting DiskiPlus порно с Варвара Субботина <a href=https://www.diskiplus.ru>DiskiPlus гама казино</a> DiskiPlus сайт казино вход DiskiPlus Москалькова Татьяна Николаевна порно <a href=https://www.diskiplus.ru/>DiskiPlus Окладникова Ирина Андреевна порно</a> DiskiPlus cometa casino DiskiPlus бесплатное казино DiskiPlus казино в россии DiskiPlus сайты казино DiskiPlus казино вулкан DiskiPlus 1×bet xbet xyz DiskiPlus где казино
#4849 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet xbet xyz gama casino <a href=https://vestnik-jurnal.com/>pin up casino</a> casino зеркало сайта пин up casino <a href=https://kompromat1.online/>7k casino скачать</a> порно с Артемий Панарин (хоккей) casino андроид букмекерская контора официальный сайт скачать cometa casino играющие казино приложения букмекерских контор 1×bet 1
DiskiPlus Самойлова Алла Владимировна порно DiskiPlus рокс казино <a href=https://diskiplus.ru/>DiskiPlus сколько казино</a> DiskiPlus bitz casino DiskiPlus inform@rucriminal.info <a href=https://www.diskiplus.ru/>DiskiPlus Петрова Ольга Викторовна порно</a> DiskiPlus Лут Оксана Николаевна порно DiskiPlus лучшие онлайн казино DiskiPlus 7k casino бонус DiskiPlus vodka casino DiskiPlus казино смотреть онлайн DiskiPlus 7k casino сайт DiskiPlus порно с Юлия Ефимова, пловчиха
#4850 Charlesgunnyhttp://filmkachat.ru
x1 slots 1хслотс регистрация перейти на 1×slots
Бонусные деньги – небольшая сумма средств для старта в новеньком казино. На бонусные деньги, обычно разрешено выступать во все игры, не слотов с прогрессивным джекпотом и игр из раздела exist casino.Для получения предоставленных бонусов вам понадобиться — ПК или мобильное прибор, и остальное дело за малым. <a href=http://filmkachat.ru/>1× slots casino зеркало</a> <a href=https://ilde2.upf.edu/clatmooc/v/ic2>https://ilde2.upf.edu/clatmooc/v/ic2</a> Первый возникающий вопрос, это, зачем выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают свежих игроков. Последним проще начать забаву на деньги с дара за регистрацию. Им не нужно пополнять баланс и тратить собственные свои. Новички получают бесплатные спины либо средства на счёт. С их поддержкою знакомятся с игровым ходом, крутят слоты и проделывают ставки в рулетке. 1×slots зеркало видели такую регистрацию на <a href=https://www.google.md/url?q=https://doctorlazuta.by/>https://www.google.md/url?q=https://doctorlazuta.by/</a>
1×slots регистрация 1×slotscasino09k online
Вейджер (либо вагер) ? это минимальная сумма ставок, которую необходимо сделать для вывода валютного бонуса. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение.Многие новички сомневаются, собственно поощрительный приз не несомненно отдавать, даже в они выиграли у казино. Это полностью неопасно и накрепко. Выводя выигранные средства, игрок просто одергивает свое участие при и утрачивает уникальную вероятность – безвозмездно увеличивать собственное материальное положение. <a href=https://forum.pmpobc.ca/index.php?topic=117622.new#new>1×slos регистрация в 1×slots casino</a> x1 slots регистрация в 1×slots casino <a href=http://beachhouse-living.com/index.php/component/kunena/user/18196-highfolks46>http://beachhouse-living.com/index.php/component/kunena/user/18196-highfolks46</a> Перед активацией главно внимательно изучить обстоятельства промоакции. Чем ниже вейджер, что, этим больше потенциальная выгода игрока. Имеют велечину также лимиты ставок при отыгрыше и сроки, на коих можно пользоваться предложением. Если бездеп обхватывает узкий список игр, рекомендовано разузнать наибольшие коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только никаких случае, случае оператор не установил строгие ограничения на наивысшую сумму ставки. 1×slots официальный сайт, скачать При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток.
1×slots зеркало сайта
Мы делаем акцент на главных положениях верховодил, рассказываем о территориальных ограничениях и вкратце информируем о иных промоакциях обсуждаемого казино. <a href=http://moj.webservis.ru/forums/profile.php?action=show&member=7142>http://moj.webservis.ru/forums/profile.php?action=show&member=7142</a> На нашем сайте Вы отыщите список актуальных новых бездепозитных бонусов в казино 2022 года. Также, есть много эксклюзивных услуг, коие доступны лишь гостям нашего вебсайта после регистрации по нашей ссылке или активации особого промокода. 1× slots casino официальный сайт
1×slots рабочее зеркало на сегодня
Максимальный объем ставки, кот-ый нельзя превышать же бонус не будет всецело отыгран. В случае нарушения этого управляла, бонус и выигрыш с него будут аннулированы. Если площадка презентует бездеп за регистрацию, то процедура его получения ординарна. Нужно только ввести акк на веб-сайте и активировать его, подтвердив адрес электрической почты, номер телефона или другие данные, коие настятельно оператор. Перед этим нужно увериться, что пользователь располагается на официальном сайте казино, но на жульнической площадке. Бонус в казино без депозита имеет разные разновидности: такое быть приветственный бонус, акции в честь каких-либо праздников или главных дат, бонус за вербование новых игроков, лояльность и получение VIP-статуса.Эффективность бездепов в маркетингового прибора оценили почти операторы. Малоизвестные площадки используют эти промоакции, чтобы скоро набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны неизменных гостей. Не все веб-сайты, дающие подарки без депо, рекомендованы к игре. За привлекательным промоописанием все прятаться неосуществимые условия отыгрыша и другие подводные камни. 1х слот 1хслотс регистрация перейти на 1×slots <a href=http://service.gepart.su/forum/?PAGE_NAME=profile_view&UID=3937>http://service.gepart.su/forum/?PAGE_NAME=profile_view&UID=3937</a> Объективные – размер бонуса, коэффициент и обстоятельства вейджера, необходимость внесения депо для вывода средств;Онлайн гемблинг развивается с каждым днем больше и больше, новые бренды создаются не по дням а по часам. Новые онлайн казино проделывают вступительные промоакции для игроков, для того собственно бы зарекомендовать себя, и тем самым предлагают бездепозитные призы за регистрацию, собственно бы не пропустить эту возможность — как пользоваться новым бездепом, советуем навещать наш сайт как можно чаще, самое вкусное и свежие будет добавляться в этом же списке.
1хлот регистрация в 1×slots casino
Мы подготовили список, где есть всегда актуальные и новые бездепозитные бонусы казино, коие продоставляется получить безвозмездно. Для наших пользователей есть специальные предложения эксклюзивные бонусы, коие вы у не отыщите, их мы определили особой красной плашкой «Exclusive».Такой казино бонус без депозита за регистрацию выдается игроку на час и активно употребляется данное предложение с 2017 года. Это как бы какая-то конспирация одобрения под бездепозитный. Суть всего этого сводится к тому, что геймеру на час выдается, к примеру, 1000 $, а реклама повторяет о том, что любой выигрыш возможно будет в забыть при себе. Но случае играющий всерьез отнесется к этому предложению, то он попросту потеряет время. Ведь геймеру надо(надобно) несомненно выступать не в основном аккаунте, а тренировочном и с ограниченным выбором автоматов и ставок. Да и если, тогда, выигрыша (числе всей тыс. ) в управляла вступят определенные условия, где будет сказано, собственно наибольшей суммой победы возможность быть только двести $ и средства возможно использовать только виде бонуса на 1-ый лепта с вейджером 25 от суммы гонорары плюс сам депо. По результату получится, что игрок выигрывал себе 200% бонус с вейджером на конкретную сумму. Короче говоря, это все не стоит вашего медли. Какие призы меня еще получить не бездепозитного приза за регистрацию в казино? По мимо бездепозитного бонуса, любое интернет казино предлагает игрокам выгодное предложение на 1-ый депо, вы совершаете депозит, ваш депозит возрастает в двое или и в трое, что, этим самым начать играть возможно с более солидной суммой, так же не забываем на вейджер на бонусы. <a href=http://msk-service.spb.ru/index.php?subaction=userinfo&user=absorbingsnitch>http://msk-service.spb.ru/index.php?subaction=userinfo&user=absorbingsnitch</a> 1хслотс 1хслотс регистрация перейти на 1×slots Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в индивидуальный офис, дабы арестовать бесплатные вращения с вейджером х40;
<b>Смотреть еще похожие новости:</b>
<a href=http://weeklywars.de/viewtopic.php?f=12&t=1129&p=485715#p485715>1×slots casino регистрация 1×slotscasino09k online</a>
<a href=https://www.ldvd.nl/no-22-san-diego-place-rallies-very-last-boise-country-27–16?page=48#comment-238233>1×slots сайт зеркало</a>
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=33433>1×slots промокод при регистрации</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
После получения бонуса вывод средств для посетителя несомненно недосегаем до тех пор, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо чета недель. Выводить деньги игрок сможет лишь после отыгрыша.
#4851 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Радченко Светлана Юрьевна порно суть казино <a href=https://rhymes-punches.com/>top casino</a> up casino лучшие казино бесплатно <a href=https://www.ossetia.tv/>букмекерская контора бетсити</a> казино играть смотреть фильм казино 1×bet бесплатно Преподобная Надежда Александровна порно порно с Дронова Александра Викторовна казино смотреть онлайн казино смотреть
DiskiPlus Юдаева Ксения Валентиновна порно DiskiPlus ставки на спорт букмекерские конторы <a href=https://www.diskiplus.ru>DiskiPlus pin ап casino</a> DiskiPlus порно с Алина Загитова DiskiPlus сайты казино <a href=https://diskiplus.ru/>DiskiPlus Скворцова Вероника Игоревна порно</a> DiskiPlus порно с Гатагова Ольга Анатольевна DiskiPlus 7k casino бонус DiskiPlus как выиграть в казино DiskiPlus casino ап DiskiPlus Окладникова Ирина Андреевна порно DiskiPlus casino рабочее DiskiPlus 1×bet зеркало слоты
#4852 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Нет. Для получения бездепозитного приза в казино нужна обязательная регистрация на сайте. Играть в слоты бесплатно и без регистрации можно только в демо режиме.Начнём с такого, собственно любое промо за регистрацию предполагает некоторые обстоятельства. Бездепозитные призы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность денежного оборота, нужная для исполнения условий. Пример, возымели благотворительные вращения и выиграли с их 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 руб., неудачных либо выигрышных, важно. После исполненья, бонусный баланс перейдёт на настоящий и будет доступным к выводу. <a href=http://filmkachat.ru/>казино 1× slots официальный сайт</a> Приветственный бездеп предоставляется любому игроку только один один. Казино дерутся с например нарекаемыми бонусхантерами (от англ. Bonus Hunter — доброволец за бонусами), пытающимися заводить многочисленные аккаунты для обмана оператора и повторного получения подарка. Исключить сходственные деяния дозволяет верификация данных. Администрация вправе потребовать у клиента доказать персональные данные, обозначенные при регистрации.Срок активации и время на отыгрыш. Зачисление средств или фриспинов случается при активации на строго ограниченного периода, подобные притязания предъявляются и к срокам отыгрыша. Одни казино позволяют отыгрывать приз несколько дней либо даже недель. Другие выдают солидную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с необоснованно высоким вейджером. <a href=https://pinshape.com/users/6460332-archicgi-com#designs-tab-open>https://pinshape.com/users/6460332-archicgi-com#designs-tab-open</a> 1×slots рабочее зеркало на сегодня <a href=http://fr994575.bget.ru/user/RaymondLen/>http://fr994575.bget.ru/user/RaymondLen/</a> Ограничения по забавам. Администрация воспрещает игрокам кое-какие игровые автоматы с бездепозитным бонусом, средствами или бесплатными вращениями. Обычно, в правилах приводится глубокий список слотов для отыгрыша. Иногда деление производится по виду игр. Например, отыгрыш возможен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino.Не трудно догадаться, собственно not the slightest down payment bonuses почти ни не посещают большими. Чаще всего идет о пяти–тридцати баксах (или эквиваленте данной суммы в иной еденице).
1×slots зеркало быструю регистрацию а также мгновенное
Приветственный бонус без депозита ? подарок за регистрацию. Выдается деньгами, фриспинами или баллами. В заключительном случае бонусные баллы используются для участия в турнирах либо обмена на настоящие деньги. 1×slot казино зеркало У любого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано сумели выполнить их, мы дадим несколько советов. Если система начислила небольшую необходимую, надо делать большие ставки – остановитесь на 10–30 центах. Как лишь сможете заработать примерно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В противном случае никакого приглядеться к иному автомату. <a href=http://behzistiardabil.ir/user/ChrisDetty/>http://behzistiardabil.ir/user/ChrisDetty/</a> При помощи такового поощрения оператор может также привлекать клиентов, которые раньше проявляли активность на веб-сайте, но по некий причине прекратили выступать. В этом случае промокод высылается пользователю по электрической почте или повторяющий SMS. 1хслот официальный сайт зеркало
1×slots casino регистрация 1×slotscasino09k online
Доступные игры – В некоторых азартных играх можно снизить математическое преимущество казино до нескольких десятых процента. В их количестве все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как правило, в этих играх ставки идут в зачет вейджера не всецело. Например, имеет предусматриваться только 50%. В неких забавах бездепозитные бонусы вообще нельзя отыгрывать. <a href=http://topexpert.digital/bitrix/redirect.php?goto=http://hubble.icmb.utexas.edu/api.php?action=http://tdholod.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/_UT3RQ5MNFu>http://topexpert.digital/bitrix/redirect.php?goto=http://hubble.icmb.utexas.edu/api.php?action=http://tdholod.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/_UT3RQ5MNFu</a> Самые пользующиеся методы вывода средств ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электрическим платежным системам типа Neteller и Skrill, еще используют криптовалютными кошельками. Вывод выигрышей может исполняться мгновенно или развлекать от нескольких часов до нескольких суток. 1х слот 1хслотс регистрация перейти на 1×slots Бездепозитные призы истинными деньгами, которые возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадали.Только выполнив все обстоятельства отыгрыша и дождавшись окончания проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить свои деньги.
1×slots подтвердит вашу регистрацию если говорить
Когда речь идет о получении бездепозитных призов в казино, в первую очередь направьте на следующие условия:Бездепозитные призы – это самая интересная и наиболее многообещающая акция интернет-казино. Они том чем фри-спинов, поэтому собственно выплаты в даровых вращениях не гарантированы, ведь комбинации на барабанах игрового аппарата имеют не сложиться. <a href=http://zxz.listbb.ru/memberlist.php?mode=viewprofile&u=925>1хслот зеркало</a> С не отыгранным бонусом запрещается превосходить объем максимальной ставки. Нарушение этого условия последствия аннулирование выигрыша.Мы собрали и опубликовали список превосходнейших бездепозитных казино с призами за регистрацию, коие гарантируют великодушные выигрыши и мгновенные выплаты. Вышеописанная причина и считается главным нюансом, следствии которого операторы отдают доля собственной прибыли на различные рекламные затраты и рекламные кампании. А наиболее действенным тут станут играть непосредственно бездепозитные бонусы казино 2022 с выводом за регистрацию. 1хслот зеркало <a href=http://bbs.ep360.cn/home.php?mod=space&uid=88094>http://bbs.ep360.cn/home.php?mod=space&uid=88094</a>
1хслотс рабочее зеркало
Можно ли в одном интернет казино получить больше 1-го бонуса за регистрацию? Нет, например как в любом интернет казино есть правила, к которым надо(надобно) придерживаться, не творить 2 аккаута для получения бонусов, иначе будет блокировка обоих аккаутов, не пытайтесь обмануть онлайн казино, бонус за регистрацию выдаеться раз раз одному личику. Но а в вы теснее профи по интернет казино, кликаем на красноватую кнопку «Получить» и Вы механически перейдете в интернет казино;Для казино, работающих интернет, бездепозитные бонусы нужны для привлечения свежих посетителей. Предложение поиграть на слотах без необходимости внесения реальных денег — работающий способ для увеличения интереса к компании. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит выступать в казино, лишь теперь уже на личные средства. <a href=http://www.odnopolchane.net/forum/member.php?u=608888>http://www.odnopolchane.net/forum/member.php?u=608888</a> 1×slot зеркало Так же стоит выделить то, собственно в каждом интернет казино установлен собственный наибольший кешаут на бездепозитный приз. Как управляло кешаут — это предельная сумма денег, которая дешевая для вывода с бездепозитного бонуса.
<b>Смотреть еще похожие новости:</b>
<a href=http://b2s.bulwork.com/node/1581?page=100#comment-23487>1×slots зеркало рабочее</a>
<a href=https://qualityprogamer.de/forum/showthread.php?tid=371333>1хслот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Принципиальным различием бесплатных бонусов от призов на депозит считается отсутствие надобности заносить средства на аккаунт. Из-за этого их нередко именуют бездепозитными (not the slightest deposit bonuses). Верификация необходима для дополнительной безопасности и помочь техподдержке выявить бонусхантеров и мошенников. Кстати, на некоторых платформах выводы крупных сумм доступны лишь после подтверждения личности.
#4853 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
винлайн букмекерская контора официальный сайт pin up букмекерская контора <a href=https://t.me/vchkogpu_ru>вывод казино</a> порно с Захарова Мария Владимировна Кузнецова Анна Юрьевна порно <a href=https://rhymes-punches.com/>пин ап casino</a> лучшие букмекерские конторы букмекерская контора фонбет официальный Елена Лядова online casino официальный online casino официальный 1×bet официальный слоты казино онлайн
DiskiPlus казино фильм смотреть онлайн DiskiPlus Разуваева Ксения Денисовна порно <a href=https://diskiplus.ru/>DiskiPlus porno Юлия Канакина, скелетонистка</a> DiskiPlus 1×bet бесплатно DiskiPlus казино регистрации <a href=https://www.diskiplus.ru>DiskiPlus 1×bet официальный сайт 1×bet xyz</a> DiskiPlus кент казино DiskiPlus порно с Васильева Татьяна Викторовна DiskiPlus 7k casino зеркало на сегодня DiskiPlus 1×bet официальный скачать DiskiPlus леон букмекерская контора DiskiPlus Разуваева Ксения Денисовна порно DiskiPlus 1×bet слоты 1×bet xyz
#4854 Charlesgunnyhttp://filmkachat.ru
1×slots сайт
Получить Бездепозитный приз в интернет казино дело двух кликов. Другой момент, отыграть промо и соблюсти верховодила и условия отыгрыша. Под правилами предполагается не только вагер, хотя и лимитирования по максимальной ставке. Мы разумеем, собственно в кино все ставят на зеро и выигрывают. Призываем не создавать подобного. Перед активацией бонуса прочтите верховодила. Узнайте следующие факторы: Условия получения дара, за регистрацию, за депозит и многое. Ограничения по наибольшей ставке. Зачастую не выше 350 руб. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вращать автоматы, а вагер несомненно стоять на пространстве. Поэтому важно знать, в каких играх возможно совершать кратность валютного оборота. <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации презента необходимо доказать электрическую почту и привязать аппарат; <a href=https://plaza.rakuten.co.jp/prilla/diary/202411240003/>https://plaza.rakuten.co.jp/prilla/diary/202411240003/</a> Подтверждение персональной информации. Все казино настоятельно от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и наличие у пользователя иных аккаунтов (мультиаккаунт запрещен).Наши специалисты изучают условия промоакции, этого в ручном режиме проверку их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и характеристики. Мы не рекламируем казино, а даем игрокам информацию о лучших из их. 1хслотс зеркало <a href=http://xn–2s2b1p822a.net/bbs/board.php?bo_table=free&wr_id=627694>http://xn–2s2b1p822a.net/bbs/board.php?bo_table=free&wr_id=627694</a> В игровых клубах без лицензии Вы покупаете „кота в мешке“ и в случае спорных обстановок нет возможности куда-то посетовать и доказать собственную правоту.
скачать 1×slots на андроид мобильная версия
Чтоб получить большой выигрыш, выбирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша.Каждый новичок и умелый игрок мечтают скоро стартануть и начать создавать настоящие ставки. Для этого довольно отобрать подарок, за который не нужно выплачивать. В зависимости от игровой платформы, нужно сделать профиль, привязать email или телефон. После этого администрация начислит щедрое вознаграждение повторяющий бесплатных вращений либо виртуальных кредитов. <a href=https://fougerite.com/threads/1×lot-registracija-v-1×slots-casino.14528/>1хлот регистрация в 1×slots casino</a> 1хслотс казино зеркало Нельзя осматривать игру на средства, как вариант заработка. Азартные забавы запрещены для лиц младше 18 лет. Topcasinobonuses.mobi не зачинщиком азартных игр. Сайт одевает информационный нрав.Подарки на определенные даты отличаются условиями получения. Если поощрение начисляют игроку на день рождения, то сумма обычно в от совместного размера депо последний год. <a href=https://imoodle.win/index.php?title=Can_You_Download_the_1×bet_APP_on_PC?>https://imoodle.win/index.php?title=Can_You_Download_the_1×bet_APP_on_PC?</a> Игрокам не воспринимать приветственный приз как гарантированный способ получить большой выигрыш, но это замечательная вероятность без расходов расценить перечень казино. 1×slots casino регистрация 1×slotscasino09k online Призовые начисления без депозита имеют предоставляться для роли в турнирах интернет казино. Потратить перечисленные средства возможно самая масштабах этой промоакции. Условия их проведения в лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться таким предложением, чем выучить его верховодила.В подавляющем большинстве случаев благотворительные бонусы начисляются в кредитах, коие нельзя сразу исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти требования принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже.
1×slots официальный сайт зеркало рабочее
Бездепозитный приз за регистрацию в казино с выводом денег в 2022 году — Наш ресурс дает игрокам актуальную информацию о самых новых, щедрых и проверенных призах в онлайн казино, коие обновляются любой день. <a href=https://www.metal-tracker.com/forum/member.php?action=profile&uid=927410293>https://www.metal-tracker.com/forum/member.php?action=profile&uid=927410293</a> Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации дара нужно подтвердить электронную почту и привязать телефон; 1×slots зеркало регистрация то дальше необходимо пройти
1×slots зеркало видели такую регистрацию на
Вейджер менее х30–35 считается применимым. Опытные игроки утверждают, что с таким вейджером реально остаться в плюсе, случае верно подойти к выбору игрового аппарата.В зависимости от онлайн заведения любой из их возможность вам предложить как бездепозитные средства, так и бездепозитные фриспины, коие последствии удачной регистрации рухнут вас на ваш игровой баланс. <a href=http://powercrop.it/chi-siamo/le-persone?page=23#comment-1163>1 xslots рабочее зеркало</a> Для доказательства электронной почты, просто перейдите по активной ссылке в письме, полученном от игрового заведения. В качестве бонусов онлайн казино нередко предлагает выдачу фриспинов, то есть безвозмездных вращений игрового барабана. Виртуальные монеты возможно использовать для обучения в покерной школе либо для игры в казино. 1 x slots casino <a href=https://cutetusy.cc/member.php?action=profile&uid=35628>https://cutetusy.cc/member.php?action=profile&uid=35628</a>
1×slots зеркало 1хслотс регистрация перейти на 1×slots
В количестве случаев благотворительные призы начисляются в кредитах, которые нельзя незамедлительно исключить со счета. Прежде их нужно отыграть по установленным правилам. Эти требования принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже.В интернете очень большое скриптовых сайтов, которые принадлежат жуликам. Их основная задача – привлечь гэмблеров, пообещав не только щедрые подарки, хотя и солидные выигрыши. Так собственно кое-какие сайты предлагают получить за регистрацию и $1 000. Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают бонус по государствам. Вплоть до такого, что клуб имеет на игроков из Вашей государства, а бездеп мешает. <a href=http://seafishzone.com/home.php?mod=space&uid=1417451>http://seafishzone.com/home.php?mod=space&uid=1417451</a> Но есть азартные заведения, готовые просто например вручить средства на игру. Для сего достаточно сделать профиль. Чтобы исключить выигрыш, сперва нужно выполнить вейджеровые обстоятельства, прописанные в критериях получения бездепа. 1×slot казино зеркало Для вывода средств бонус надо(надобно) несомненно отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариациями отыгрыша бездепозитного приза до его получения, дабы избежать конфликтных обстановок.
<b>Смотреть еще похожие новости:</b>
<a href=https://adminclub.org/showthread.php?tid=68312>1хслот скачать</a>
<a href=http://lider1c.ru/communication/forum/user/24774/>казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Высокая конкурентность в сегменте азартных игр мотивирует операторов привлекать клиентов разнородными промоакциями. Благодаря данному у гостей появляется вероятность получить призы в казино за регистрацию без депо. Воспользоваться таким предложением возможно, минуя процедуру внесения денег на игровой счет, просто активировав акк на сайте. Наш гид по бездепам поможет выбрать самую привлекательную бонусную программку, разузнать управляла получения такого гонорары и воспользоваться им с наибольшей выгодой. Бездепозитный приз по промо-коду будет доступен для игры, только что случае когда Вы активируете специальный бонусный код в разделе с призами или укажите промокод при регистрации на веб-сайте. В некоторых случаях, кроме активации кода, придется доказать контактные данные игрока и наполнить анкету клиента.
#4855 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Матвиенко Валентина Ивановна порно porno Елизавета Туктамышева <a href=https://strelochnik.com/>1×bet телефон</a> официальные зеркала казино казино <a href=https://slon-ru.com/>1×bet на андроид бесплатно</a> порно с Захарова Мария Владимировна win win casino 1×bet приложение pin up casino скачать пин casino букмекерская контора на андроид pin up casino
DiskiPlus Ходнева Светлана Владимировна порно DiskiPlus 1×bet зеркало на сегодня 1×bet xyz <a href=https://diskiplus.ru/>DiskiPlus порно с Дарья Клишина, легкоатлетка</a> DiskiPlus казино большая DiskiPlus casino buzz <a href=https://diskiplus.ru>DiskiPlus рабочее казино</a> DiskiPlus Львова-Белова Мария Алексеевна порно DiskiPlus 1×bet xbet xyz DiskiPlus порно с Петр Ян (ММА) DiskiPlus официальные букмекерские конторы DiskiPlus 7k casino зеркало DiskiPlus бесплатные букмекерские конторы DiskiPlus порно с Петр Ян (ММА)
#4856 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
леон букмекерская контора 1×bet сайт 1×bet xyz <a href=https://slon-ru.com/>pin up casino top top</a> казино сегодня вывод казино <a href=https://sovsekretno.net/>unlim casino</a> 1×bet регистрация казино сочи 1×bet регистрация промокод 1×bet Хорова Наталья Александровна порно букмекерская контора бетсити pin up casino пин ап
DiskiPlus pin casino зеркало DiskiPlus фильмы казино рояль <a href=https://diskiplus.ru/>DiskiPlus скачать 1×bet на андроид</a> DiskiPlus порно с Евгения Медведева, фигуристка DiskiPlus порно с Диана Шнайдер (теннис) <a href=https://www.diskiplus.ru>DiskiPlus порно с Баталина Ольга Юрьевна</a> DiskiPlus 1×bet 1хбет DiskiPlus win win casino DiskiPlus casino x DiskiPlus казино гта 5 DiskiPlus порно с Анастасия Потапова, теннисистка DiskiPlus Ходнева Светлана Владимировна порно DiskiPlus пина casino
#4857 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasino09k online
Многие азартные клубы ограничивают сумму вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не сможете исключить. Разница несомненно аннулирована, Вы в не можете создавать на нее ставки.Если площадка презентует бездеп за регистрацию, то процедура его получения проста. Нужно только завести акк на веб-сайте и активировать его, подтвердив адресок электронной почты, номер аппарата либо другие данные, которые требует оператор. Перед данным необходимо убедиться, собственно пользователь находится на официальном сайте казино, не на мошеннической площадке. <a href=http://filmkachat.ru/>1×slots casino регистрация</a> Поспешите зарегистрироваться на официальном сайте Клубника, дабы моментально получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, замечена настоящий шанс победу!Частенько новенькие не разумеют, как активировать подарки или исключить 1-ый выигрыш. Для сходственных случаев наша команда описала главные термины – собственно это фриспины, вейджер, как его отыграть, чего необходимо проходить верификацию. <a href=https://www.4sync.com/s/feS06Cjuz>https://www.4sync.com/s/feS06Cjuz</a> 1×slots casino регистрация на сайте <a href=http://fitagrunt.ru/index.php?subaction=userinfo&user=foamyswamp63>http://fitagrunt.ru/index.php?subaction=userinfo&user=foamyswamp63</a>
1хслотс мобильная версия зеркало
Большинство клубов привлекают внимание компьютерные за счёт различных презентов. На 1 веб-сайтах можно получить виртуальные кредиты, которые откроют доступ ко всему софту. На других же, администрация предлагает безвозмездные вращения для пуска лучших онлайн слотов. Несмотря на разные акции, стоит выделить самые основные.Бездепозитные призы истинными деньгами, которые возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадались. <a href=https://forum.ltp-team.com/topic/49221–1hslot-zerkalo/>1хслот зеркало</a> 1хслотс зеркало <a href=https://deti.liveforums.ru/viewtopic.php?id=10785&p=2#p229967>https://deti.liveforums.ru/viewtopic.php?id=10785&p=2#p229967</a> Получив собственный презент, Вы можете бесплатно выступать на настоящие деньги, а выполнив обстоятельства отыгрыша, исключить собственный выигрыш.У нас на веб-сайте Вы отыщите перечень бонусов без депозита в испытанных казино и подробную информацию то как их получить и использовать. 1×slots официальный зеркало рабочее Для казино, работающих интернет, бездепозитные бонусы необходимы для привлечения свежих клиентов. Предложение сыграть на слотах без надобности внесения реальных средств — работающий метод для повышения интереса к компании. После отыгрыша бездепа великоват шанс, собственно игроку понравится и он продолжит выступать в казино, только сейчас теснее на собственные средства.Лишь пользующиеся и знаменитые азартные заведения все позволить себе выдавать бездепы в виде дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, которые возможно истратить в лучших аппаратах с высокой отдачей.
1хслотс официальный сайт зеркало
В перечне требований к отыгрышу нередко присутствуют лимиты на ставки при забаве на собственные деньги. Так, в отыграть надо(надобно) 30 000 руб., а предельная сумма ограничена 30 рублями, то вертеть барабаны предстоит 1000 один. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам деяния акции.Автоматическая активация первый самой комфортной, хотя ручной метод содержит перед ней достоинства. Прежде чем использовать вознаграждение от казино, стоит заранее определить, сколько времени потребуется на исполненье всех критерий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала действия приза. Это тоже благотворительные финансы, которые поступают на аккаунты новоиспеченных компьютерные последствии регистрирования. А особенность таких призов произведено том,, собственно обретенные финансы обязательно следует применять в продолжении назначенного времени. <a href=https://www.love2d.org/forums/memberlist.php?mode=viewprofile&u=293735>https://www.love2d.org/forums/memberlist.php?mode=viewprofile&u=293735</a> Ну и конечно же, для казино бездепозитные бонусы прибыльны с имиджевой стороны: сходственная добродушие увеличивает степень преданности клиентов к фирмы.Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного бонуса. 1×slots сайт Новички не любят незамедлительно же вносить депо. Это обосновано отсутствием навыка и недоверием. К счастью, в наше время можно получить бездепозитный приз за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В любом случае вы не рискуете своими сбережениями. Это отличная возможность запустить понравившийся видео разъем или же испытать фортуну в настольных забавах.В лицензионных бездепозитных казино играть в азартные игры вправду неопасно. Наличие лицензии подтверждает тот факт, собственно клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP.
1 хслот регистрация в 1×slots casino
Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.Для получения выигрыша потребуется выполнить условия казино. Чаще всего игроку нужно поставить определенную сумму, хотя теснее из собственных средств. Она рассчитывается из общего размера выигрыша за всегда применения бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, если пользователь выиграл 1000 руб., а множитель составляет х30, вывести деньги возможно будет, сделав ставки на 30 000 рублей. <a href=https://russiancomputerservice.ru/user/JosephCer/>1хслотс официальный сайт зеркало</a> Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, дабы снова получить даровой бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ожидает неизбежное санкция.Получить Бездепозитный бонус в онлайн казино дело 2-ух кликов. Другой момент, отыграть промо и соблюсти правила и условия отыгрыша. Под правилами предполагается не только вагер, хотя и ограничения по наибольшей ставке. Мы разумеем, что в кинотеатр все ставят на зеро и выигрывают. Призываем не создавать сходственного. Перед активацией бонуса прочитайте верховодила. Узнайте последующие моменты: Условия получения дара, за регистрацию, за депо и многое. Ограничения по максимальной ставке. Зачастую не повыше 350 руб. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вращать автоматы, а вагер будет стоять на пространстве. Поэтому важно знать, в каких забавах можно осуществлять кратность валютного оборота. 1×slots рабочее зеркало <a href=https://www.professionistidelsuono.net/forums/member.php?action=profile&uid=240544>https://www.professionistidelsuono.net/forums/member.php?action=profile&uid=240544</a>
1×slots скачать на айфон
Перед активацией важно внимательно выучить обстоятельства промоакции. Чем ниже вейджер, тем больше возможная выгода игрока. Имеют значение кроме лимиты ставок при отыгрыше и сроки, на коих возможно воспользоваться предложением. Если бездеп охватывает узкий перечень игр, рекомендовано узнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь что случае, если оператор не установил требовательные ограничения на наивысшую сумму ставки.Каждая игровая платформа выделяется условиями по получению и отыгрышу бездепов. В правилах детально расписаны кратковременные рамки, за которые нужно прокрутить вейджер. Также не забывайте на максимальный размер ставки и максимальную необходимую выплаты. С другой стороны, чтобы получить бездепозитные призы казино, довольно израсходовать не более 1 минутки. Как лишь вы отыграли вейджер и средства с бонусного баланса перебежали для на реальный счет, Вы отважно можете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (сделать минимальный депо например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депозитом).Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция имеет доскональные правила, гиперссылка на коие обычно находится в промообъявлении. В их указываются лимиты, вейджер, перечень дешевых игр. Если оператор укрывает данные о предложении, то воспользоваться им надо. <a href=http://www.gwmph.cn/home.php?mod=space&username=savoydonor76>http://www.gwmph.cn/home.php?mod=space&username=savoydonor76</a> Если при регистрации указать промокод, можно гарантировано получить приз. Где брать ваучер? Посетите на блоги либо форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В последнее время игорные дома начали афишироваться в кинокартинах и телесериалах. Присмотритесь и скорее заметите промокод, который принесёт 500 либо 1 000 бонусных рублей. 1×slot рабочее зеркало Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, the decision зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.dis-course.net/memberlist.php?mode=viewprofile&u=37238>1×slots сайт зеркало</a>
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=556614>1×slots на любой вкус как пройти регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но на некоторых азартных платформах сходственные вознаграждения имеют получить теперь зарегистрированные юзеры. В таком случае, бонусы предоставляются масштабах оригинальных промоакций либо же некоторым геймерам повторяющий акционного предложения, коие прибывает на почту с целью «возвратить» игрока в свое казино. Если при регистрации показать промокод, можно гарантировано получить приз. Где арестовать ваучер? Посетите тематические блоги либо форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В заключительное время игорные жилища начали рекламироваться в фильмах и сериалах. Присмотритесь и наверняка заметите промокод, который принесёт 500 либо 1 000 бонусных рублей.
#4858 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up casino buzz Лут Оксана Николаевна порно <a href=https://krtka.info/>7k casino сайт</a> casino автомат Анна Михалкова <a href=https://repost.news/>casino 7k рабочее</a> 1×bet официальный сайт 1×bet xyz казино в россии Нургалиева Эльвира Рамиловна порно 1×bet скачать приложение 1×bet скачать приложение на андроид смотреть фильм казино casino зеркало сегодня
DiskiPlus промокод 1×bet DiskiPlus pin up casino официальный <a href=https://diskiplus.ru>DiskiPlus букмекерские конторы в россии</a> DiskiPlus кент casino DiskiPlus рокс казино <a href=https://diskiplus.ru>DiskiPlus porno Марина Александрова</a> DiskiPlus сайты казино DiskiPlus сайты казино DiskiPlus Александра Бортич DiskiPlus casino DiskiPlus pin up букмекерская контора DiskiPlus порно с Арина и Дина Аверины, гимнастки DiskiPlus ramenbet casino
#4859 Charlesgunnyhttp://filmkachat.ru
зеркло казино 1×slots
Максимальный объем ставки, который нельзя превышать же бонус не будет всецело отыгран. В случае нарушения сего верховодила, бонус и выигрыш с него станут аннулированы.Но есть игорные заведения, которые готовы просто так жертвовать средства на забаву. Для сего довольно создать профиль. Чтобы вывести свой выигрыш, вам сначала необходимо выполнить условия отыгрыша, указанные в условиях получения бездепозитного депозита. <a href=http://filmkachat.ru/>1 х слотс зеркало</a> <a href=https://www.tamaiaz.com/blogs/268391/Mastering-Interior-Design-Drafting>https://www.tamaiaz.com/blogs/268391/Mastering-Interior-Design-Drafting</a> 1×slots регистрация 1×slotscasino09k online <a href=https://series40.kiev.ua/user/Joshualex/>https://series40.kiev.ua/user/Joshualex/</a>
1×slots промокод при регистрации
После потребуется внести идентификационный платёж. Это стращает начинающих больше всего. Нужно сделать минимальный депозит в 100–500 рублей. Таким образом служба безопасности увериться никаких, что платёжный метод принадлежит Вам. Данная процедура необходима для обеспечивания безопасности игровых счетов. Пример, Ваш аккаунт взломают и выведут свои на свой кошелёк. Будет очень досадно. Поэтому верификация платёжной системы, это важный момент.В перечне требований к отыгрышу часто присутствуют лимиты на ставки при игре на личные деньги. Так, если отыграть нужно 30 000 рублей, а максимальная сумма ограничена 30 рублями, то вертеть барабаны светит 1000 раз. Эта особенность затрудняет соблюдение игроками условий по срокам деянья промоакции. 1×slots casino регистрация 1×slotscasin online Каждый новичок и профессиональный игрок мечтают живо стартануть и начать создавать настоящие ставки. Для этого довольно арестовать презент, за который не выплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email или телефон. После сего администрация начисляет щедрое вознаграждение повторяющий безвозмездных вращений либо виртуальных кредитов.Также, учите, что бездепозитный бонус можно исключить только в том случае, когда будут исполнены все условия отыгрыша. <a href=https://clients1.google.it/url?q=http%3A%2F%2Fdoctorlazuta.by>https://clients1.google.it/url?q=http%3A%2F%2Fdoctorlazuta.by</a> казино 1×slots официальный сайт Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную процедуру активации бонуса без депозита. Внимательно прочтите до конца. Многие новички проделывают ошибки на этапе регистрации и поэтому возможности получить презент.
1×slot зеркало рабочее этих способов предполагает регистрацию
Ну и окончательно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: подобная добродушие увеличивает степень лояльности посетителей к компании. Такой казино бонус без депо за регистрацию выдается игроку на час и активно используется данное предложение с 2017 года. Это как бы некая маскировка поощрения под бездепозитный. Суть всего сего сводится к тому, собственно геймеру на час выдается, например, 1000 $, а реклама твердит то, собственно любой выигрыш возможно будет в будущем оставить при себе. Но в играющий серьезно отнесется к этому предложению, то он попросту потеряет время. Ведь игроку нужно несомненно играть не главном аккаунте, в тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (числе всей тыс. ) в верховодила вступят определенные условия, где будет сказано, что наибольшей суммой победы имеет быть только двести долларов и средства можно использовать лишь виде приза на первый лепта с вейджером 25 от суммы вознаграждения плюс сам депо. По результату выйдет, собственно игрок выигрывал себе 200% бонус с вейджером на определенную сумму. Короче говоря, это все не вашего времени. <a href=http://androidplaymod.com/index.php?subaction=userinfo&user=nervousclaw17>http://androidplaymod.com/index.php?subaction=userinfo&user=nervousclaw17</a> 1×slots скачать на айфон В зависимости от онлайн заведения каждый из них может для предложить как бездепозитные деньги, так и бездепозитные фриспины, коие после успешной регистрации упадут для на ваш игровой баланс.Для казино, работающих интернет, бездепозитные призы необходимы для привлечения свежих посетителей. Предложение сыграть на слотах без необходимости внесения настоящих денег — работающий способ для увеличения энтузиазма к компании. После отыгрыша бездепа велик шанс, что игроку понравится и он продолжит играть в казино, лишь теперь теснее на собственные средства.
1×slots официальный сайт зеркало
Все обожают получать презенты. Согласитесь, практически любой играющий человек будет очень счастлив, если получит бесплатный подарок для забавы в онлайн казино просто за регистрацию либо же приз за внесенный депо, например называемые приветственные призы для новых игроков. Соответственно такие онлайн клубы станут более знамениты и предпочтительны у игроков при выборе казино для забавы. Топ казино каждый обновляется и добавляются свежие и занимательные игровые клубы с привлекательной бонусной политикой и всеми вероятными преимуществами, льготами, к которым относятся эти призы как фриспины за регистрацию, денежные бездепозитные бонусы, а щедрые бонусы за внесенный депо.Мы собрали и опубликовали перечень наихороших бездепозитных казино с призами за регистрацию, коие гарантируют щедрые выигрыши и моментальные выплаты. Операторы гемблинга заявляют, что так они дерутся с бонус-хантерами. Впрочем, критики считают, собственно данным казино пробуют устроить из случайного постояльца неизменного игрока. Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам воспрещено начислять бонусы посетителям, не имеющим денежных средств на счете. Мы предлагаем осмотреть актуальные призы онлайн-казино с лицензией, коие соблюдают законодательство РБ.Не советуем опрометью голову браться за всевозможные предложения получения средств без вложений. Вполне вполне, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на первый взгляд. Альтернативой является казино приз за депозит. Мы предлагаем вас пару советов, спасибо которым у любого игрока будет вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств: 1×slots официальный demo регистрация в 1×slots casino <a href=https://jaidenckra85285.ja-blog.com/30350420/deep-nude-ethical-concerns-and-the-impact-of-ai-on-privacy>https://jaidenckra85285.ja-blog.com/30350420/deep-nude-ethical-concerns-and-the-impact-of-ai-on-privacy</a>
1×slots бездепозитный бонус за регистрацию
Частенько новенькие не разумеют, как активировать презенты или исключить 1-ый выигрыш. Для подобных случаев наша команда описала главные термины – что это фриспины, вейджер, как его отыграть, чего нужно проходить верификацию. <a href=https://www.camry-club.ru/member.php?331302-Forsedropmn>https://www.camry-club.ru/member.php?331302-Forsedropmn</a> Как верховодило, при выводе денег, от играющего требуется лишь устроить минимальный лепта для того, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом собственный счет. 1хслотс мобильная версия зеркало Подтвердите регистрацию, дабы активировать Бездепозитный бонус с выводом, потребуется заполнить личный профиль. Заполните порожние поля реальными данными о себе.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, all только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.
#4860 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
какие казино казино рояль смотреть <a href=https://www.ossetia.tv/>Львова-Белова Мария Алексеевна порно</a> порно с Максим Глушенков (футбол) up casino официальный <a href=https://sovsekretno.net/>porno Светлана Ходченкова</a> black russia казино сайт букмекерской конторы 1×bet слоты 1×bet xyz где казино скачать pin casino казино смотреть онлайн казино смотреть
DiskiPlus new casino DiskiPlus 1×bet зеркало рабочее xbet <a href=https://diskiplus.ru>DiskiPlus казино вулкан</a> DiskiPlus bitz casino DiskiPlus порно с Петр Ян (ММА) <a href=https://www.diskiplus.ru>DiskiPlus суть казино</a> DiskiPlus 1×bet официальный сайт DiskiPlus 1×bet casino DiskiPlus порно с Афонина Марина Игоревна DiskiPlus водка казино DiskiPlus Преподобная Надежда Александровна порно DiskiPlus порно с Диана Шнайдер (теннис) DiskiPlus порно с Илья Осипов (киберспорт)
#4861 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
Бонус за регистрацию в казино выдается лишь раз один на одного игрока. Но бывают дополнительные акции, масштабах которых бездепы расступаются для неизменных клиентов и такие подарки Вы сможете получить больше 1-го раза.Бездепозитный приз по промо-коду несомненно доступен для игры, лишь сомнений случае когда Вы активируете особый бонусный код в разделе с бонусами либо укажите промокод при регистрации на сайте. В некоторых случаях, считая активации кода, придется подтвердить контактные данные игрока и заполнить анкету клиента. <a href=http://filmkachat.ru/>1×slots регистрация то дальше необходимо пройти</a> <a href=https://hackaday.io/rendering>https://hackaday.io/rendering</a> 1×slots зеркало <a href=http://uralsiz.ru/bitrix/redirect.php?goto=http://gorkysport.ru/bitrix/redirect.php?goto=http://fibo.guru/bitrix/redirect.php?goto=https://teletype.in/@urist555/IsDtOjnJrOi>http://uralsiz.ru/bitrix/redirect.php?goto=http://gorkysport.ru/bitrix/redirect.php?goto=http://fibo.guru/bitrix/redirect.php?goto=https://teletype.in/@urist555/IsDtOjnJrOi</a> Частенько новенькие не разумеют, как активировать презенты либо исключить первый выигрыш. Для сходственных случаев наша команда обрисовала главные определения – собственно это фриспины, вейджер, как его отыграть, для необходимо протекать верификацию.Проверка занимает от нескольких минут до нескольких дней, профессионалы техподдержки шансы запросить вспомогательные документы или инициировать короткое общение по Skype.
1×slots промокод при регистрации 2025
Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.Такой казино бонус без депозита за регистрацию выдается игроку на час и активно используется данное предложение с 2017 года. Это словно какая-то маскировка одобрения под бездепозитный. Суть всего сего сводится к что, этому, собственно игроку на час выдается, к примеру, 1000 $, а реклама твердит то, что любой выигрыш можно будет в будущем забыть при себя. Но если играющий всерьез отнесется к этому предложению, то он попросту растеряет время. Ведь игроку надо(надобно) несомненно выступать не в основном аккаунте, а тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (даже всей тысячи) в управляла вступят конкретные условия, где несомненно сказано, собственно наибольшей суммой победы может быть только двести долларов и деньги можно использовать лишь в приза на первый лепта с вейджером 25 от суммы гонорары плюс сам депозит. По итогу получится, собственно игрок выигрывал себе 200% бонус с вейджером на определенную необходимую. Короче говоря, это все не стоит вашего медли. <a href=https://australianwinerytours.com/tours/showthread.php?tid=202834&pid=334881#pid334881>1×slots регистрацию более популярный вариант это</a> 1×slots регистрацию более популярный вариант это Приглашаем делиться сужденьями о бонусах. Это поможет иным пользователям избирать более выгодные предложения.Бесплатный бонус – кредиты, коие онлайн-казино начислит клиенту, не заставляя его пополнять игровой счет. <a href=https://tflex.ru/forum/index.php?PAGE_NAME=profile_view&UID=87698>https://tflex.ru/forum/index.php?PAGE_NAME=profile_view&UID=87698</a> Более крупные предложения встречаются довольно изредка. Зачастую они доступны лишь VIP-игрокам. В оставшихся случаях им всего сопутствуют очень строгие условия отыгрыша. Также вероятны вспомогательные обстоятельства и другие ограничения, прописанные в критериях и положения бонусной программки казино. 1хслотс регистрация в 1×slots casino Зарегистрируйтесь. Для регистрации чаще всего довольно ввести свой номер аппарата и почтовый адресок, в чего установить полученный код из СМС. Возможно, требуется показать промокод. В правилах промоакции будет написано, где его надо вводить. Иногда это надо делать при регистрации, от — теснее после творенья личного офиса, на отдельной странице.После потребуется внести идентификационный платёж. Это стращает начинающих больше всего. Нужно сделать наименьший депозит в 100–500 руб. Таким образом служба безопасности увериться сомнений, что платёжный метод принадлежит Вам. Данная процедура важна для обеспечения безопасности игровых счетов. Пример, Ваш аккаунт взломают и выведут средства на свой кошелёк. Будет очень неприятно. Поэтому верификация платёжной системы, это важный момент.
1хслотс зеркало на сегодня
Чтобы получить возможность вывести выгода с бездепозитного бонуса в казино, нужно выполнить ряд критерий: <a href=https://adobeacrobat.cc/member.php?action=profile&uid=3054>https://adobeacrobat.cc/member.php?action=profile&uid=3054</a> Вейджер (либо вагер) ? это минимальная сумма ставок, которую необходимо устроить для вывода денежного бонуса. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение. казино 1×slots Возможность сыграть вспомогательное соревнование (а иногда и некоторое) совершенно даром, а выигрыш, тому, поступает на счёт игрока.
зеркло казино 1×slots
На критериях отыгрыша безвозмездных призов по тормознуть подробнее. С ними связаны нюансы, которые нельзя забыть без внимания.Чем ниже значение вейджера, тем легче отыграть и вывести бонус. Если Вы планируете заработать на бездепе, а не просто ознакомиться с свежим игровым клубом, то стоит игнорировать призов с высоким вейджером их практически не реально отыграть. С ними Вы сможете лишь протестировать забавы заведения. Бездепы обыкновенно предлагают с отыгрышем — моментально исключить выигранные свои невозможно. Перевод денег со счета несомненно вероятен после такого, как юзер выполнит все требования казино, а сумма не быть выше установленного правилами лимита. Условиями акции фиксируются сроки, протяжении которых заказчик вправе воспользоваться предложением. Обычно они не превышают нескольких дней последствии активации. 1×slots регистрация то дальше необходимо пройти <a href=http://fumankong3.cc/home.php?mod=space&uid=600395>http://fumankong3.cc/home.php?mod=space&uid=600395</a> Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых свежих, щедрых и испытанных призах в онлайн казино, которые обновляются каждый денек.
1×slots мобильная версия войти казино
Вознаграждения за получение VIP-статуса ? начисляются в рамках программы преданности при достижении очередного уровня или выдаются индивидуально менеджерами службы.Чем ниже значение вейджера, тем легче отыграть и вывести приз. Если Вы планируете заработать на бездепе, но просто ознакомиться с новым игровым клубом, то стоит избегать бонусов с высочайшим вейджером их практически не реально отыграть. С ними Вы сможете только протестировать забавы заведения. Как только вы отыграли вейджер и средства с бонусного баланса перебежали вам на реальный счет, Вы неустрашимо сможете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депо). <a href=https://unservfl.de/user-2168.html>https://unservfl.de/user-2168.html</a> Любой выигрыш по ставке повыше установленного лимита будет являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, ну случае выигрыша его сумма не поступит на счёт посетителя — результат игры несомненно всецело аннулирован.Акционные предложения от казино существуют в различных форматах. Часто призы даются в мена на депозит. Игрок заносит платеж и получает средства, благотворительные вращения и одобрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — вид приза, кот-ый гарантирован за исполнение конкретных действий на сайте: 1хслотс казино зеркало Так же стоит выделить то, собственно в каждом онлайн казино установлен свой максимальный кешаут на бездепозитный бонус. Как управляло кешаут — это предельная сумма средств, которая доступная для вывода с бездепозитного приза.
<b>Смотреть еще похожие новости:</b>
<a href=http://miupsik.ru/forums/showthread.php?tid=244550>1хлот регистрация в 1×slots casino</a>
<a href=http://sharecovid19story.com/memberlist.php?mode=viewprofile&u=5122>1×slots казино мобильная версия</a>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=103462&result=reply>1×slots рабочее зеркало на сегодня</a>
<a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1×slots зеркало регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Начнём с как, что любое рекламную за регистрацию предполагает некоторые обстоятельства. Бездепозитные бонусы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, необходимая для исполнения условий. Пример, получили благотворительные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 рублей, проигрышных либо выигрышных, маловажно. После исполнения, бонусный баланс перейдёт на настоящий и будет доступным к выводу.
#4862 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
Бездепозитные бонусы за регистрацию являются одним из самых популярных методов вербования свежих игроков в онлайн-казино, поэтому что они предоставляют игрокам вероятность опробовать казино, неподражаемо игровые автоматы, и вполне, выиграть реальные деньги. <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> Далее потребуется отыграть вагер и исключить выигрыш. Игрокам без опыта крупно повезло, возможность получить 10-ки презентов за 1 регистрацию. Если не сумели получить Бездепозитный приз, не волнуйтесь. Обратитесь в интернет чат, оператор поможет решить проблему. <a href=https://trumpbookusa.com/blogs/259423/Professional-3D-Animation-Services-in-the-Digital-Age>https://trumpbookusa.com/blogs/259423/Professional-3D-Animation-Services-in-the-Digital-Age</a> 1хслотс рабочее зеркало на сегодня <a href=https://bdsmboard.org/member.php?396662-Renaldorof>https://bdsmboard.org/member.php?396662-Renaldorof</a>
1×slots официальный сайт скачать на айфон
<a href=https://forum.oursson.ru/viewtopic.php?f=2&t=8245>1хслотс рабочее зеркало на сегодня</a> казино 1×slots официальный сайт B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.Операторы гемблинга утверждают, собственно например они борются с бонус-хантерами. Впрочем, критики считают, собственно данным казино пытаются сделать из случайного постояльца неизменного игрока. <a href=http://forum.moto-fan.pl/uzytkownik-geraldpax>http://forum.moto-fan.pl/uzytkownik-geraldpax</a> Раздача бонусов возможность быть посвящена различным датам: календарные праздники, деньки рождения игроков, юбилей открытия казино и т. Д. Подарок выдается в виде средств, фриспинов или баллов для накопления и обмена на услуги оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд требований.К образцу, игроку выдаются безвозмездные свои в заведении в размере пятидесяти или 100 $ (вейджер на коие сочиняет 100х). То есть, любому новоприбывшему игроку выскакивает притягивающая картинка, которая сулит выплату всех зачисленных фирмой средств. Не стоит обращать внимания на казино бонус за регистрацию без депо с чрезмерно великий или довольно махонькой суммой призов, поэтому собственно, том кропотливо исследовав все обстоятельства, тут вероятнее всего, будет какой-то подкол. 1×slots рабочее зеркало Призовые начисления без депо имеют предоставляться для роли в турнирах онлайн казино. Потратить перечисленные средства возможно самая в этой акции. Условия их проведения включают в себя лимитирования на список игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться таким предложением, какого-либо изучить его верховодила.
1хслотс рабочее зеркало на сегодня
Онлайн-казино с бездепозитными призами ставят клиентам обстоятельства для пользования бездепами, поэтому перед ролью в промоакции чем досконально ознакомиться со всеми правилами и нюансами акции. Условия имеют касаться получения приза, его использования и следующего вывода денежных средств в случае выигрыша. Прибывшие на акк финансы бездепозитные бонусы предназначаются, в основном, лишь для свежеиспеченных пользователей, коие раньше не имели личного аккаунта в данном казино. Исходя из этого, случае ранее у игрока был сделан депо, то, по всей вероятности, у него больше не будет возможности рассчитывать на получение такого приза в конкретном заведении.Чаще всего казино приз за регистрацию без депо даёт вероятность запустить каждой автомат. Но никакого внимательно ознакомиться с условиями. Иногда для игры доступны только определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, никакого начать знакомство с миром азарта непосредственно с «одноруких бандитов». <a href=http://r66227en.beget.tech/user/TyroneDrent/>http://r66227en.beget.tech/user/TyroneDrent/</a> Выбирая даровой бонус, пристально изучайте правила. Убедитесь, собственно вам возможно принимать участие в промоакции. Уточните, в каких забавах можно выполнять условия вейджера. При надобности задавайте вопросы представителям саппорта.В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с бесплатных вращений. Прибыль, которую Вы заработаете на этом бездепе можно назначать на вывод без какого либо отыгрыша. 1×slot зеркало
1хслот зеркало сайта
Чаще всего, модные сервисы, эти как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное верховодило. Финансовые свои выводятся только через ту платежную систему, которой успех для пополнения депозита. Если же игрок получил бездепозитный покерный приз, требуется восполнить счет на минимальную сумму, кот-ая сочиняет обыкновенно десять $. Воспользоваться бездепом возможно не во всех игровых автоматах: казино и тут уточняет ограничение для посетителей. Конечно, это можно счесть неким неудобством для игрока, хотя ради стоит отметить, что выбор автоматов всё равно остаётся достаточно наибольшим.Рассмотрим принцип его действия на случае. Допустим, вы зарегистрировались и получили $10 no down payment bonus с вейджером х50. Это означает, собственно выигранные деньги можно будет выводить не ранее, чем последствии такого, как общая сумма ставок достигнет $500. 1×slot официальный сайт <a href=https://www.pearltrees.com/kalinka0588/item548341230>https://www.pearltrees.com/kalinka0588/item548341230</a> Высокая конкуренция в разделе азартных игр мотивирует операторов завлекать клиентов разнообразными промоакциями. Благодаря этому у посетителей бывает возможность получить призы в казино за регистрацию без депо. Воспользоваться таким предложением возможно, избегая функцию внесения средств на игровой счет, просто активировав аккаунт на веб-сайте. Наш гид по бездепам поможет выбрать самую привлекательную бонусную программу, узнать правила получения такого вознаграждения и распорядиться им с наибольшей выгодой.За привлечение друга ? в рамках партнерской программки клиент получает вознаграждение за привлечение свежих юзеров.
1х слот регистрация в 1×slots casino
Не трудно додуматься, собственно not the slightest down payment bonuses почти никогда не посещают великими. Чаще всего речь идет о пяти–тридцати баксах (либо эквиваленте данной суммы в другой еденице).Подтверждение индивидуальной информации. Все казино просят от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и присутствие у юзера иных аккаунтов (мультиаккаунт запрещен). <a href=http://krovlya.dp.ua/index.php?subaction=userinfo&user=ceaselessfreewa>http://krovlya.dp.ua/index.php?subaction=userinfo&user=ceaselessfreewa</a> 1× slots зеркало Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми акциями. Читайте о них в обзорах и на форуме.Наиболее популярностью вознаграждения среди гэмблеров – бездепозитные призы казино. Это не умопомрачительно, как возможно получить безвозмездные вращения либо виртуальные кредиты, и при не придётся пополнять счёт, рисковать личностными деньгами. Удастся насладиться различными веселиями и даже выиграть солидную необходимую, избегая серьёзного риска.
<b>Смотреть еще похожие новости:</b>
<a href=https://minecraft.ru.net/user/Manuelsoarl/>1×slots официальный сайт скачать</a>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5108/#comment-613829>рабочее зеркало 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Помимо остального, для вывода средств по бездепу нужно внести на счёт собственный первый депо — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало возможную сумму, в чего вывод средств будет доступен. Многие новенькие сомневаются, что поощрительный приз не нужно несомненно возвращать, в в они выиграли у казино. Это безусловно безопасно и надежно. Выводя выигранные средства, игрок просто одергивает свое участие при и утрачивает уникальную вероятность – безвозмездно увеличивать личное материальное положение.
#4863 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino андроид 1×bet на андроид бесплатно <a href=https://repost.news/>cat casino</a> казино сочи казино <a href=https://rhymes-punches.com/>casino бездепозитный</a> cometa casino сайт букмекерской конторы вывод казино скачать 1×bet пин ап casino pin casino online зеркало скачать букмекерскую контору на андроид
DiskiPlus casinos winning DiskiPlus Окладникова Ирина Андреевна порно <a href=https://diskiplus.ru>DiskiPlus casino daddy</a> DiskiPlus песня казино DiskiPlus 1×bet скачать приложение на андроид <a href=https://www.diskiplus.ru/>DiskiPlus порно с Дарья Клишина, легкоатлетка</a> DiskiPlus ев казино DiskiPlus почему казино DiskiPlus винлайн букмекерская контора официальный DiskiPlus бк букмекерская контора DiskiPlus порно с Петр Ян (ММА) DiskiPlus porno Андрей Рублев (теннис) DiskiPlus букмекерская контора леонов
#4864 Charlesgunnyhttp://filmkachat.ru
1× slots зеркало
Для получения предоставленных бонусов вас пригодиться — ПК либо мобильное устройство, и остальное дело за небольшим. <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> В интернете много известных игорных площадок с красивыми акционными предложениями. Однако пристально читать обстоятельства 10-ов предложений в надоест, ну и время отнимет большое. Поэтому наша команда подготовила ТОП-3 сайтов с наилучшими бездепозитными призами: <a href=https://smallpdf.com/file#s=947e9bab-f7cd-45be-8e6d-7494ff661b35>https://smallpdf.com/file#s=947e9bab-f7cd-45be-8e6d-7494ff661b35</a> Подарки на праздничные ? приуроченные к торжественным датам, требующие символического отыгрыша или начисляются без это. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду.Для всех бездепозитных призов действует максимальный лимит на выигрыш. Он указывает предельную необходимую, коию вас получить, играя на бонусные кредиты. Как лишь вас удастся выполнить притязания вейджера, дозволенный максимум несомненно переведен с бонусного счета на основной, а остаток несомненно списан. 1×slot официальный сайт <a href=https://king.az/index.php?subaction=userinfo&user=Renaldoorina>https://king.az/index.php?subaction=userinfo&user=Renaldoorina</a>
1×slots скачать на айфон
Большинство клубов привлекают внимание игроков за счёт различных презентов. На 1 веб-сайтах возможно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает благотворительные вращения для пуска топовых онлайн слотов. Несмотря на различные акции, стоит выделить самые основные. <a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=396378>1×slots официальный сайт скачать</a> 1хслотс казино зеркало <a href=http://www.xiaoditech.com/bbs/home.php?mod=space&uid=2337319>http://www.xiaoditech.com/bbs/home.php?mod=space&uid=2337319</a> Существуют казино с призом за регистрацию, каких очень модны фриспины в интернет казино впоследствии регистрации в конкретных играх. Они встречаются и чаще безвозмездных поощрений либо традиционных призов в казино без вложений. Например, игрок регистрирует счет, на кот-ый начисляются бесплатные забавы, бонус за регистрацию в виде даровых фрспинов, вращения в игровом автомате. Во время игрового процесса компьютерные выигрывает настоящие средства, коие в последствии можно успешно исключить из заведения на свою платежную систему. То есть, все шансы исключить свои без рисков собственными финансами. Регистрация, какую компьютерные получит призы, займет минут, а благодаря этому можно увеличить пять евро поощрений до тыс. И без всяких заморочек вывести их.У любой забавы свои притязания по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система зачтет каждую ставку. В рулетке и покере сделать это намного сложнее. Именно поэтому так принципиально внимательно разбирать обстоятельства получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой забаве, то новички просто «спустят приз на ветер». 1×slots зеркало сайта Получить Бездепозитный бонус в интернет казино дело 2-ух кликов. Другой момент, отыграть рекламную и соблюсти верховодила и обстоятельства отыгрыша. Под правилами предполагается не только вагер, хотя и ограничения по наибольшей ставке. Мы понимаем, собственно в кинотеатр все ставят на зеро и выигрывают. Призываем не делать сходственного. Перед активацией бонуса прочтите правила. Узнайте последующие факторы: Условия получения презента, за регистрацию, за депозит и прочее. Ограничения по максимальной ставке. Зачастую не повыше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах можно отыгрывать вагер. Можно вращать автоматы, а вагер будет стоять на пространстве. Поэтому принципиально аристократия, в каких играх можно совершать кратность денежного оборота.
1×slots сайт зеркало
Если простыми словами, бездепы – это определённая сумма средств либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно брать подарки. Но есть некоторые нюансы. Существуют игорные жилища, которые перед что, этим как начислить призы настоятельно привязать аппарат, дать копии документов.Практически все интернет казино с бездепозитным призом за регистрацию предусматривает программку лояльности — систему одобрения постоянных клиентов, кот-ая произведено из множества уровней. При достижении игроком еще уровня на его счёт поступает приз. Чем выше уровень — что, этим щедрее приз. Фриспины без депо или дополнительные свои посодействуют поближе познакомиться с игровой платформой и её функциями. За счёт презентов можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради забавы напротив живых крупье.Представьте момент, когда при ставке в 10 рублей Вы получите подобное умножение. Миллион руб. За одно вращение, собственно абсолютно вероятно. Поэтому вопрос, сколько возможно выиграть остаётся открытым. Предлагаем проверить самостоятельно. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный приз и проверяйте фортуну в деле. Разумеется, вывести средства сложно. Однако шансы есть у всех. <a href=http://lineyka.org/user/Ralphemort/>http://lineyka.org/user/Ralphemort/</a> Итак, дабы благотворительные бонусные кредиты трансформировались в реальные средства, которыми вы можете управлять по своему усмотрению, их нужно отыграть. Вейджер идет уточнять в правилах онлайн-казино.В некоторых онлайн казино для получения бездепозитных призов не достаточно просто зарегистрироваться на веб-сайте клуба и подтвердить свои контактные данные. Дополнительно требуется активация промокода. 1×slot казино зеркало Бездепозитные призы за регистрацию в игровых автоматах для собственников онлайн-казино считаются долею маркетинговой кампании, направленной на повышение аудитории вебсайта. Так они продвигают средства бренды и привлекают новых клиентов.Фриспины начисляются по определенной ставке. После их активации игроку нужно запустить разъем и убедиться, собственно в нем отображаются безвозмездные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода после отыгрыша ориентируется оператором и изредка превышает 5 000 руб.
1×slots регистрация на сайте
Мы советуем не отрицаться от подобных предложений узнаваемых казино. Выделите некоторое минут на регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сегодня фортуна несомненно на вашей стороне! 1×slots акции <a href=http://bbs.zsby0943.com/home.php?mod=space&uid=1837591>http://bbs.zsby0943.com/home.php?mod=space&uid=1837591</a> Пoдтвepдить личнocть посетителя. Для успешного вывода средств, нужно доказать лицо посетителя. Нa этaпe вepификaции пpoфиля, сотрудники службы безопасности обязаны увериться, что у игрока всего лишь раз аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не может исключить собственный выигрыш, в у него несомненно некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы.Чтобы получить вероятность вывести прибыль с бездепозитного приза в казино, нужно выполнить ряд критерий:
1×slots casino online регистрация
Допустим, за регистрацию вы получили бездеп в размере 2 000 руб. С вейджером х30. В данном случае светит сделать ставок, на общую необходимую в 60 000 руб. (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать настоящие средства. Однако не запамятовывайте, что с каждого подарка получится исключить определённую сумму (почаще всего не более $200).В перечне притязаний к отыгрышу часто наличествуют лимиты на ставки при забаве на личные деньги. Так, если отыграть надо(надобно) 30 000 рублей, а максимальная сумма ограничена 30 рублями, то вертеть барабаны предстоит 1000 один. Эта особенность затрудняет соблюдение игроками условий по срокам действия акции. Для вывода средств приз нужно будет отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариациями отыгрыша бездепозитного приза до его получения, дабы избежать конфликтных обстановок.Верификация аккаунта. Лучше подтвердить лицо незамедлительно в регистрации, дабы позже не было проблем с выводом денег. Верификация имеет протекать двумя способами: <a href=https://opensourcebridge.science/wiki/1×bet_APP:_Best_Practices_For_Indian_IN_Bettors.>https://opensourcebridge.science/wiki/1×bet_APP:_Best_Practices_For_Indian_IN_Bettors.</a> 1×slots акции
<b>Смотреть еще похожие новости:</b>
<a href=http://nhomtruyen.com/members/jamesgaw.9280/>1× слот зеркало</a>
<a href=https://forumauthority.com/thread-6457-post-39192.html#pid39192>1×slots регистрация 1×slots review live</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Автоматы неспроста считаются самым известным азартным весельем. Чтобы освоить управление и правила, потребуется всего несколько минут. Ваша задачка сделать ставку, определить количество рабочих линий и можно крутить тамбур. Если на экране выпадет выигрышная комбинация – вы выиграли! С этой задачей вам помогут управится бездепозитные бонусы казино. Для отыгрыша приза казино обязует игрока сыграть на сумму, в количество раз превышающую необходимую приобретенного приза — тут выгода компании явна.
#4865 Charlesgunnyhttp://filmkachat.ru
1×slots казино зеркало
Бездепозитный бонус предоставляется новенькому игроку за определенные действия. Часто презент вид денег либо фриспинов выдается за регистрацию, спасибо чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. <a href=http://filmkachat.ru/>1×slots зеркало</a> Приглашаем делиться суждениями о призах. Это поможет другим пользователям избирать более выгодные предложения.Несмотря на то, собственно данный вариант стимуляции со стороны азартных платформ довольно популярен в сфере сходственных игр, далековато многим почитателям казино ведомо, что сами бездепозитные бонусы казино и как непосредственно их возможно эксплуатировать. <a href=https://www.trustlink.org/Ask-The-Community/Question/Business/The-Art-of-Professional-Interior-Design-Layout-Creating-Harmonious-Living-Spaces-16936>https://www.trustlink.org/Ask-The-Community/Question/Business/The-Art-of-Professional-Interior-Design-Layout-Creating-Harmonious-Living-Spaces-16936</a> Можно. Вы постоянно можете отрешиться от получения бездепозитного приза за регистрацию в казино, же Вы не создадите ставку. 1×slots официальный зеркало <a href=https://scientific-programs.science/wiki/User:TiaBinder692>https://scientific-programs.science/wiki/User:TiaBinder692</a> При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток.
1×slots подтвердит вашу регистрацию если говорить
1хслотс рабочее зеркало на сегодня <a href=https://nc750.ru/member.php?u=3577>https://nc750.ru/member.php?u=3577</a> Бывают ли бездепозитные призы без вейджера? Бывают, если у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино.Выбирая бесплатный бонус, внимательно изучайте верховодила. Убедитесь, что для возможно себя роль в промоакции. Уточните, в каких забавах возможно исполнять обстоятельства вейджера. При необходимости задавайте вопросы адептам саппорта. зеркло казино 1×slots Доступные забавы – В неких азартных забавах возможно снизить математическое превосходство казино до нескольких десятых процента. В их количестве многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как управляло, в таких играх ставки идут в зачет вейджера не всецело. Например, имеет учитываться лишь 50%. В некоторых забавах бездепозитные призы вообщем нельзя отыгрывать.
1×slots официальный сайт скачать
<a href=https://forum.gogobuyers.com/member.php?action=profile&uid=2022>https://forum.gogobuyers.com/member.php?action=profile&uid=2022</a> Верификация аккаунта. Лучше доказать лицо незамедлительно после регистрации, чтобы позже не было заморочек с выводом денег. Верификация может протекать 2-мя способами: 1×slots коды Чтобы бездеп не был начислен на Ваш аккаунт, Вам надо активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк механически, а Вы не расчитываете его использовать, обратитесь в саппорта с просьбой отменить бездепозитный приз.Размер бонуса. В качестве бездепов обыкновенно начисляют маленькие суммы, а когда идет о призах за депо, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино все презентовать игроку до 2000$.
онлайн казино 1×slots
Воспользоваться бездепом можно не во всех игровых автоматах: казино вдруг устанавливает лимитирование для посетителей. Конечно, это возможно счесть некоторым неудобством для игрока, но справедливости ради стоит отметить, что выбор автоматов всё одинаково остаётся достаточно великим. Если площадка дарует бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь ввести акк на сайте и активировать его, подтвердив адресок электрической почты, номер телефонного либо иные данные, которые просит оператор. Перед данным нужно увериться, что пользователь находится на официальном веб-сайте казино, а не на жульнической площадке.Сроки активации бонуса уточняются каждым казино, но чаще всего они не превосходят недели с момента получения. Игроку обязательно нужно использовать бездеп на обозначенного срока, в ином случае приз просто исчезнет. Каждый бонус возможно получить только раз раз, потому если не использовать бездеп в срок, у игрока не будет 2 шанса им пользоваться. 1×slots зеркало регистрацию более популярный вариант это <a href=http://iawbs.com/home.php?mod=space&uid=813694>http://iawbs.com/home.php?mod=space&uid=813694</a> Отыграв бездепозитный бонус в казино с выводом также придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если схожее ограничение существует, то единоразово исключить выйдет только сумму, не превышающую объем полученного приза.
x1 slots регистрация в 1×slots casino
Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских рублей. В условиях акции указано, что вейджер бездепозитного приза х20. Поэтому, дабы отыграть приз, игроку несомненно необходимо сделать ставок на 35*20=700 рублей. Игрокам не следует воспринимать приветственный приз как гарантированный способ получить крупный выигрыш, хотя это отличная вероятность без расходов оценить возможностей казино. <a href=http://a96549hg.bget.ru/user/Craigref/>http://a96549hg.bget.ru/user/Craigref/</a> Простая процедура получения бездепозитного бонуса, которая займет менее 2-х минут. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные.Новые посетители онлайн-казино без первого депо могут проверить свою удачливость. К что, этому же есть возможность преобразовать бездепы в реальные деньги за регистрацию в казино, впрочем для этого приз нужно отыграть согласно условиям акции. 1×slots быструю регистрацию а также мгновенное Похожим образом трудится 3-ий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя или в связи с получения им VIP-статуса. Подарок предоставляется в обращения в поддержку и проверки.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.survival-readiness.com/viewtopic.php?t=264479>1×slots коды</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
2. Создать новый профиль. Для регистрации надо(надобно) наполнить небольшую анкету или зайдите в собственный офис при помощи социальных сетей; К образцу, игроку выдаются безвозмездные свои в заведении в объеме пятидесяти или 100 $ (вейджер на которые сочиняет 100х). То есть, каждому новоприбывшему геймеру выскакивает манящая иллюстрация, которая обещает выплату всех зачисленных компанией средств. Не стоит обращать внимания на казино приз за регистрацию без депо с слишком великий либо довольно махонькой суммой призов, поэтому собственно, даже кропотливо изучив все обстоятельства, тут скорее, несомненно какой-то подвох.
#4866 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Дарья Клишина porno Юлия Канакина, скелетонистка <a href=https://strelochnik.com/>1×bet слоты 1×bet top</a> порно с Дарья Касаткина (теннис) Скоробогатова Ольга Николаевна порно <a href=https://rhymes-punches.com/>казино ли</a> Ходнева Светлана Владимировна порно гта казино porno Елизавета Туктамышева Радченко Светлана Юрьевна порно мобильные букмекерские конторы 1×bet рабочее казино пину
DiskiPlus порно с Голикова Татьяна Алексеевна DiskiPlus про казино <a href=https://www.diskiplus.ru/>DiskiPlus порно с Матвей Сафонов (футбол)</a> DiskiPlus гта казино DiskiPlus порно с Баталина Ольга Юрьевна <a href=https://www.diskiplus.ru/>DiskiPlus cometa casino</a> DiskiPlus пин up casino DiskiPlus porno Дарья Клишина DiskiPlus песня казино DiskiPlus 1×bet зеркало DiskiPlus Радченко Светлана Юрьевна порно DiskiPlus Крючкова Полина Викторовна порно DiskiPlus casino pin официальный
#4867 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало
Создание аккаунта. На сайте казино необходимо обнаружить регистрационную форму и наполнить пустые поля личными данными. Иногда на этом шаге потребуется указать только адрес электрической почты и пароль, но чаще надо заполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д.). Нужно указывать лишь настоящие данные, потому впоследствие они станут проверены. <a href=http://filmkachat.ru/>1× slots casino официальный сайт</a> Чаще всего, известные сервисы, эти как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно неотъемлемое управляло. Финансовые средства выводятся только спустя ту платежную систему, которой пользовались для пополнения депо. Если же игрок получил бездепозитный покерный бонус, потребуется восполнить счет на наименьшую сумму, кот-ая составляет обыкновенно 10 долларов.Промокод – определённая комбинация символов, которую нужно установить в соответствующее поле при творении учетной записи или активировать в собственном профиле игрока в разделе с бонусами. <a href=https://www.nitrnd.com/blogs/229798/Transforming-Dream-Kitchens-Through-Professional-3D-Rendering-Solutions>https://www.nitrnd.com/blogs/229798/Transforming-Dream-Kitchens-Through-Professional-3D-Rendering-Solutions</a> casino 1×slot <a href=http://www.ritual-letichev.km.ua/user/Davidgop/>http://www.ritual-letichev.km.ua/user/Davidgop/</a>
1×slots рабочее зеркало на сегодня
<a href=http://swissairways-va.com/phpBB3/memberlist.php?mode=viewprofile&u=3495>1×slots зеркало</a> 1×slots регистрация на официальном сайте <a href=https://lit-book.ru/user/DoctorLazutaol/>https://lit-book.ru/user/DoctorLazutaol/</a> 1×slots сайт Мы делаем ударение на главных положениях верховодил, рассказываем о территориальных ограничениях и вкратце информируем о иных промоакциях обговариваемого казино.
1× slots сайт
Фриспины предусмотрены для применения в видео слотах. Внимательно ознакомьтесь с условиями – часто их выдают на некоторые автоматы. В зависимости от клуба, у вас получится устроить определённое число ставок. Кстати, продвинутые игорные жилища разрешают запускать любых «одноруких бандитов». <a href=http://namiartsedu.com/bbs/board.php?bo_table=s7_5_eng&wr_id=670658>http://namiartsedu.com/bbs/board.php?bo_table=s7_5_eng&wr_id=670658</a> 1×slots официальный сайт, скачать Важно, удостоверьтесь что, собственно раньше не регились в выбранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи.
1×slots бездепозитный бонус за регистрацию
Эффективность бездепов виде маркетингового прибора расценили все операторы. Малоизвестные площадки используют эти промоакции, чтобы стремительно набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны постоянных посетителей. Не все веб-сайты, дающие презенты без депозита, рекомендованы к забаве. За симпатичным промоописанием могут скрываться невыполнимые обстоятельства отыгрыша прочие подводные камешки.Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы мгновенно получить 33 безвозмездных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, появляется реальный шанс победу! На нашем сайте Вы найдете перечень актуальных новых бездепозитных призов в казино 2022 года. Также, есть много эксклюзивных услуг, коие доступны лишь гостям нашего вебсайта после регистрации по нашей ссылке либо активации особого промокода.Мы собрали и опубликовали список превосходнейших бездепозитных казино с призами за регистрацию, коие гарантируют великодушные выигрыши и мгновенные выплаты. 1×slots регистрация 1×slots review live <a href=http://old.frontime.ru/wiki/doku.php?id=скачать_фильмы_на_телефон_бесплатно_без>http://old.frontime.ru/wiki/doku.php?id=скачать_фильмы_на_телефон_бесплатно_без</a>
скачать 1×slots на андроид мобильная версия
Так собственно приготовьтесь предоставить секретную информацию (пол, возраст, страна проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает менее суток, последствии чего получится свободно выводить крупные выигрыши. Прежде всего, не запамятовывайте периодически заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом рассматривают наиболее занимательные предложения водящих игорных порталов. <a href=http://www.511458.com/sa/home.php?mod=space&uid=543&do=profile>http://www.511458.com/sa/home.php?mod=space&uid=543&do=profile</a> онлайн казино 1×slots Выбрать казино с бездепозитным бонусом. У нас на веб-сайте представлен перечень лучших онлайн казино, которые предлагают своим игрокам великодушные бонусы за регистрацию.Бездепозитный приз казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби избранного заведения, определится в выборе игр и проверить качество работы службы. Довольно нередко, начиная игровой процесс, игрок уже отказывается останавливаться и проделывает реальный лепта. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать безвозмездно вполне как один таки с бонусом за регистрацию без надобности вносить депо.
<b>Смотреть еще похожие новости:</b>
<a href=https://sadhaka.nl/forum/viewtopic.php?t=102464>1×slots регистрация 1×slotscasino 56 online</a>
<a href=http://jktroickiy.forumex.ru/viewtopic.php?f=2&t=368>1хслот зеркало сайта</a>
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=35800>1×slots casino регистрация 1×slots review live</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные призы – это исключительно интересная и наиболее многообещающая акция интернет-казино. Они даже превосходнее фри-спинов, потому собственно выплаты в безвозмездных вращениях не гарантированы, так комбинации на барабанах игрового аппарата имеют не сложиться. В разделе с бонусами активировать свой презент. Найти игры, для коих учтено одобрение и применять бонус по назначению.
#4868 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
bet casino винлайн букмекерская контора официальный <a href=https://rumafia.news/>cat casino</a> 1×bet официальный скачать Мухтиярова Елена Вячеславовна порно <a href=https://rucriminal.info/>часы казино</a> балтбет букмекерская контора 1×bet официальный сайт пин casino 1go casino 1×bet слоты 1×bet top официальные зеркала казино casino бездепозитный
DiskiPlus порно с Антропова Валентина Викторовна DiskiPlus porno Елизавета Туктамышева <a href=https://diskiplus.ru/>DiskiPlus casino онлайн</a> DiskiPlus casino игровой автомат DiskiPlus порно с Константин Тюкавин (футбол) <a href=https://diskiplus.ru>DiskiPlus официальные букмекерские конторы скачать</a> DiskiPlus рабочие зеркала казино DiskiPlus вавада казино DiskiPlus порно с Александр Головин (футбол) DiskiPlus букмекерская контора без DiskiPlus букмекерские конторы pin DiskiPlus porno Илья Ковальчук (хоккей) DiskiPlus казино сочи
#4869 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×slots casino яндекс казино <a href=https://t.me/vchkogpu_ru>играющие казино онлайн</a> казино вход официальный сайт pin up букмекерская контора <a href=https://repost.news/>порно с Владимир Минеев (ММА)</a> пинап казино pinco casino porno Анна Сидорова, керлингистка porno Игорь Акинфеев (футбол) про казино unlim casino порно с Виктория Синицина, фигуристка
DiskiPlus bitz casino DiskiPlus порно с Евгения Медведева, фигуристка <a href=https://diskiplus.ru>DiskiPlus казино фильм смотреть онлайн</a> DiskiPlus официальная казино DiskiPlus казино вулкан <a href=https://diskiplus.ru/>DiskiPlus казино в россии</a> DiskiPlus казино смотреть онлайн DiskiPlus порно с Алина Загитова DiskiPlus Светлана Ходченкова DiskiPlus Анна Михалкова DiskiPlus casino 7k сегодня DiskiPlus казино пину DiskiPlus скачать букмекерскую контору
#4870 AHoini
<a href=https://www.vociferousvoid.org/hhh/doku.php?id=1win_casino_online-_conoce_los_te_minos_y_condiciones>1win</a> <a href=https://betawwfsiwebsite.mfpi.com.ph/1win-bet-official-website-egypt>1win casino</a>
#4871 AaronZithttps://t.me/s/hotdropcases
Ваши любимые кейсы CS:GO <a href=https://t.me/s/hotdropcases>https://t.me/s/hotdropcases</a> в одном месте! Большой выбор, удобный интерфейс и высокая вероятность выпадения редких предметов делают процесс открытия кейсов по-настоящему захватывающим.
#4872 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
мелбет букмекерская контора скачать 1×bet на андроид <a href=https://specreporter.com/>casino рабочее</a> 7k casino зеркало рабочее Разуваева Ксения Денисовна порно <a href=https://repost.news/>пина casino</a> porno Нина Пирогова, хоккеистка играющие казино порно с Карен Хачанов (теннис) casino рабочее зеркало 1×bet зеркало рабочее на сегодня 1×bet xyz кент казино casino бонус
DiskiPlus порно с Баталина Ольга Юрьевна DiskiPlus порно с Зырянова Анастасия Владимировна <a href=https://diskiplus.ru/>DiskiPlus казино смотреть</a> DiskiPlus porno Игорь Акинфеев (футбол) DiskiPlus человек казино <a href=https://www.diskiplus.ru/>DiskiPlus вавада казино</a> DiskiPlus реального казино DiskiPlus 7k casino зеркало рабочее DiskiPlus Преподобная Надежда Александровна порно DiskiPlus слоты казино DiskiPlus слоты казино DiskiPlus играющие казино онлайн DiskiPlus пин ап casino pin up top
#4873 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
Как только на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу последствии сего можно оставить заявку на вывод выигрыша. Кредиты выгодно отличаются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом реальных средств и выделяют возможность ощутить задор. Во-вторых – возможно насладиться каждой азартной забавой доступной на веб-сайте. В вашем постановлении присутствуют автоматы, настольные прибавление, видео-покер, Live-дилеры.Также, в этом случае необходимо подтвердить собственный номер телефонного, чтобы код, приобретенный в смс-сообщении от клуба установить в особое фон в собственном офисе игрока. <a href=http://filmkachat.ru/>1хслот зеркало</a> Если вы бывалый игрок, вы должны аристократия, что приз без депозита – редкая находка. Тем не менее, мы еженедельно изучаем интернет, чтобы отыскать для вас лучшие бездепозитные предложения.Но эти рамки не смущают даже хайроллеров, что коэффициенты на слотах дозволяют рассчитывать на солидные выигрыши, а некоторых автоматах разыгрывается прогрессивный джекпот. <a href=https://pinshape.com/users/6460332-archicgi-com#designs-tab-open>https://pinshape.com/users/6460332-archicgi-com#designs-tab-open</a> Для получения бонуса надо(надобно) ознакомиться с программкой лояльности казино и устроить ставки на необходимую, нужную для перехода на грядущий степень. 1х слотс зеркало регистрация в 1×slots casino <a href=http://damoa8949.com/bbs/board.php?bo_table=free&wr_id=148436>http://damoa8949.com/bbs/board.php?bo_table=free&wr_id=148436</a> Если вы облюбовали себе несколько брендов коие для больше всего приглянулись, для постоянной игры! Таких гемблеров казино довольно предпочитает и ценит, за частую такие игроки становятся VIP игроками заведения, коим часто поступают выгодные предложения повторяющий бонусов, например же туда заходит и бездепозитные.
1×slots казино зеркало
При регистрации стопам указывать лишь достоверную информацию. Когда учетная запись будет активна, будет доступ в Личный кабинет. В нем возможно избрать денежную, установить промокод и узнать доскональные правила получения и отыгрыша бездепа. Краткая информация об акции нередко присутствует именно на регистрационной форме. 1×slos регистрация в 1×slots casino Условия отыгрыша бонуса. Если Вы планируете заработать на бездепозитном бонусе, то для обратите внимание на велечину вейджера и срок, кот-ый дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть приз и вывести выигрыш. <a href=http://www.gtcm.info/home.php?mod=space&uid=927664>http://www.gtcm.info/home.php?mod=space&uid=927664</a> В игровых клубах без лицензии Вы покупаете „кота в мешке“ и если, тогда, неоднозначных обстановок нет способности куда-то посетовать и доказать свою правоту. 1×слотс казино
1×slots мобильная версия войти казино
Все любят получать презенты. Согласитесь, почти каждый играющий человек несомненно очень счастлив, случае получит бесплатный подарок для игры в интернет казино просто за регистрацию или же приз за внесенный депо, так называемые приветственные призы для новых игроков. Соответственно такие интернет клубы будут более востребованы и преимущественны у игроков при выборе казино для забавы. Топ казино день обновляется и добавляются свежие и интересные игровые клубы с симпатичной бонусной политикой и всеми возможными прерогативами, к которым относятся такие призы как фриспины за регистрацию, денежные бездепозитные бонусы, еще великодушные призы за внесенный депо.Варианты выигрыша находятся от Вашей успеха и условий игорного портала. Выше мы сказали, собственно некоторые бездепозитные бонусы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются они, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на средства, возможно выиграть неописуемые суммы. Сегодняшние игровые автоматы либо видео слоты, как их нарекают. Могут выдавать солидные умножение от х1.000 и выше. Некоторые множат ставку от х100.000. Многие казино предоставляют в рекламных целях благотворительные призы самая для наших читателей. Чтобы их получить, надо(надобно) перебежать на игровой вебсайт по партнерской ссылке с нашего портала. <a href=http://fottontuxedo.co.kr/bbs/board.php?bo_table=free&wr_id=2867690>http://fottontuxedo.co.kr/bbs/board.php?bo_table=free&wr_id=2867690</a> 1×slots акции При регистрации идет указывать только достоверную информацию. Когда учетная запись несомненно активна, замечен доступ в Личный офис. В нем возможно избрать валюту, установить промокод и разузнать подробные правила получения и отыгрыша бездепа. Краткая информация об промоакции часто присутствует непосредственно на регистрационной форме.
1×slots коды
Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро или 20 $. Если выдаются фриспины, их число редко превышает нескольких 10-ов бесплатных вращений. <a href=https://portugal-campings.com/pt/account/>1×slot рабочее зеркало</a> Как лишь получите бездеп в казино, всё точно не запамятовывайте проверять электрическую почту. Некоторые игорные клубы непрерывно веселят активных гэмблеров приятными призами. Чаще всего получить презент можно в преддверии веселья, на денек рождение, за привлечение друга. А того распространённым призом считается прибавка к депозиту. Нужно более восполнить счёт, и азартное заведение прирастит его на 50–100%. 1хслотс рабочее зеркало <a href=http://worldpoetry.cn/home.php?mod=space&uid=329458>http://worldpoetry.cn/home.php?mod=space&uid=329458</a> Поспешите отобрать бездепозитные призы за регистрацию в казино из представленного списка. Все платформы столько водят законную работа, хотя и порадуют правдивыми плодами игры, высокой отдачей, прыткими выплатами.Выбирая даровой приз, внимательно изучайте верховодила. Убедитесь, что вам можно на участие в промоакции. Уточните, в каких играх возможно выполнять условия вейджера. При надобности задавайте вопросы адептам саппорта.
1×slots рабочее зеркало
Прямо момент заберите бесплатные вращения за регистрацию без депо и начинайте коллекционировать призовые комбинации из-за солидных выигрышей!Онлайн гемблинг развивается с любым деньком все больше и больше, свежие бренды создаются не по денькам а по часам. Новые интернет казино делают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и что, этим наиболее предлагают бездепозитные призы за регистрацию, что бы не пропустить такую вероятность — как воспользоваться новым бездепом, рекомендуем навещать наш сайт как можно чаще, самое аппетитное и свежие несомненно добавляться в данном же списке. <a href=http://psvhome.ru/user/DarenKek/>http://psvhome.ru/user/DarenKek/</a> 1×slots зеркало регистрация Чаще всего используются коды. Их нужно заносить в специальные окошки регистрационной анкеты, в речь идет о пригласительных бонусах, или в определенном разделе собственного офиса игрока.
<b>Смотреть еще похожие новости:</b>
<a href=https://melhorlance.com.br/minha-conta/>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выигрыши с призов без инвестициям постоянно привязаны к требованию по ставкам и шансы быть обналичены лишь последствии выполнения данных требований.
#4874 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
С другой стороны, намного легче забрать бездепозитные фриспины за регистрацию в казино и прямо момент начать вращать барабаны в наихороших слотах. Главная необыкновенность спинов что, что они предназначены для топовых автоматов. Удастся столько пройти дополнительные раунды, хотя и прирастить необходимую выигрыша, заработать респины прочие внутриигровые подарки.Список так называемых «не территорий» прилагается к правилам бонусной программы игорного портала. Обязательно проверьте, распространяются ли на вас подобные санкции. <a href=http://filmkachat.ru/>1×slots casino online регистрация</a> Игрокам не принимать приветственный приз как гарантированный метод получить крупный выигрыш, но это отличная вероятность без расходов оценить перечень казино. <a href=https://www.uannounceit.com/article/1415>https://www.uannounceit.com/article/1415</a> сайт 1× slots casino <a href=https://www.theexeterdaily.co.uk/users/oscarglato>https://www.theexeterdaily.co.uk/users/oscarglato</a>
1×slots акции
1×slots сайт Мы подготовили список, где есть всегда актуальные и новые бездепозитные бонусы казино, коие продоставляется получить безвозмездно. Для наших пользователей есть специальные предложения эксклюзивные бонусы, коие вы у не отыщите, их мы определили особой красной плашкой «Exclusive».В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать собственный выигрыш с бесплатных вращений. Прибыль, которую Вы заработаете на этом бездепе возможно ставить на вывод без какого или отыгрыша. <a href=https://wolvesbaneuo.com/wiki/index.php/Shisha_Tobacco_From4_Eur>https://wolvesbaneuo.com/wiki/index.php/Shisha_Tobacco_From4_Eur</a> Основное управляло получения бездепа ? создаваемый акк обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов строго воспрещено. Проверка ведется по имени, e-mal, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита необходимо блюсти простую последовательность поступков.Бесплатные призы казино без депозита можно получить в виде денежных средств на бонусный счет (вывести их возможно лишь после отыгрыша), фриспинов, забавы или кешбэк-бонуса. 1× slots casino зеркало Бывают ли бездепозитные призы без вейджера? Бывают, в у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино.
казино 1×slots
Некоторые онлайн-казино без депо предлагают свежим клиентам избрать бонус при регистрации. Будьте внимательны: выбрав один, вы в абсолютном большинстве случаев не сможете воспользоваться остальными. Для получения предоставленных бонусов для понадобиться — ПК либо мобильное прибор, и остальное дело за небольшим. <a href=http://fh3806mj.bget.ru/index.php?subaction=userinfo&user=spuriousnurse49>http://fh3806mj.bget.ru/index.php?subaction=userinfo&user=spuriousnurse49</a> 1х слот регистрация в 1×slots casino Во всех законных онлайн-казино Беларуси необходимо свидетельство паспортных данных для забавы — это заявка правительства государства.Бонусы без депо при регистрации числятся самыми привлекательными как для опытнейших игроков, так для и новичков. Получив это вознаграждение, клиент возможность выступать на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а обстоятельства их активации и выигрыша.
1×slots зеркало этих способов предполагает регистрацию
Бездепозитные бонусы казино за регистрацию в 2022 году — это вероятность поиграть за счёт заведения. Казино даёт посетителю шанс пользоваться определённой суммой или количеством безвозмездных вращений без внесения депозита. Не путайте деморежим с реальной забавой без надобности внесения депо. <a href=https://acerfans.ru/user/JamesTed/>скачать 1×slots официальный сайт</a> Превышение максимальной ставки при отыгрыше. Система механически не предостерегает о превышении ставки, поэтому о несоблюдении правил игрок возможность разузнать теснее в подачи запроса на вывод средств.Онлайн гемблинг развивается с любым деньком все больше и больше, новые бренды создаются не по денькам а по часам. Новые интернет казино делают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и тем самым предлагают бездепозитные бонусы за регистрацию, собственно бы не упустить такую вероятность — как пользоваться свежим бездепом, советуем навещать наш сайт как можно почаще, самое лакомое и новые будет добавляться в данном же перечне. 1×slots на любой вкус как пройти регистрацию <a href=https://steamboatspringschat.com/forum/members/travisslame-1591.html>https://steamboatspringschat.com/forum/members/travisslame-1591.html</a>
1×slots зеркало проходить регистрацию это отличный вариант
Основное отличие том,, что для получения бездепа не надо пополнять баланс в казино. Но не этого, есть ряд и различий:Бездепозитные призы, как уже ясно, считаются уникальной вероятностью приступать к игровому процессу абсолютно безвозмездно, другими выступать в интернет казино бесплатно и на имеющие средства сразу в регистрации аккаунта. Автоматы с этим депо имеют замерзнуть прекрасной вероятностью поиграть для почитателей азарта с определенными лимитированиями в денег. <a href=http://wx.abcvote.cn/home.php?mod=space&uid=1718269>http://wx.abcvote.cn/home.php?mod=space&uid=1718269</a> Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша призов. Заведения практически устанавливают максимальную ставку, допустимую по условиям вейждера.Для верификации номера телефонного, в собственном профиле выберите опцию „Подтвердить номер аппарата“ и введите в соответствующее фон код, приобретенный в sms-сообщении. казино 1×slots Получив собственный подарок, Вы можете безвозмездно выступать на реальные средства, а выполнив обстоятельства отыгрыша, исключить собственный выигрыш.Каждый из бездепозитных призов без пополнения 2022 содержит собственный определенный вейджер для отыгрыша, так же в каждом казино он устанавливается персонально — где то он х55 а где-то х30, повторюсь всюду по разному!
<b>Смотреть еще похожие новости:</b>
<a href=https://praisenpray.org/forums/showthread.php?tid=104404>1×slots рабочее зеркало</a>
<a href=http://u0382101.isp.regruhosting.ru/index.php/forum/general-questions-and-how-tos/68883-otzyvy-o-tovarakh?start=3093#138708>1×slots официальный сайт, скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если вы выбрали себе некоторое брендов которые для больше всего приглянулись, для неизменной игры! Таких гемблеров казино очень любит и оценивает, за частую такие игроки становятся VIP игроками заведения, которым нередко поступают прибыльные предложения в виде призов, так же туда заходит и бездепозитные.
#4875 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
bet casino казино 5 <a href=https://www.ossetia.tv/>казино фильм смотреть онлайн</a> порно с Никита Кучеров (хоккей) букмекерская контора без <a href=https://rumafia.news/>порно с Дарья Клишина, легкоатлетка</a> почему в казино нет часов pin casino casino рабочее зеркало porno Александр Соболев (футбол) porno Александра Степанова, фигуристка pin up casino скачать играющие казино онлайн
DiskiPlus гта онлайн казино DiskiPlus гта казино <a href=https://diskiplus.ru/>DiskiPlus скачать 1×bet на андроид</a> DiskiPlus 1×bet официальный сайт 1×bet xyz DiskiPlus 1×bet официальный сайт 1×bet xyz <a href=https://www.diskiplus.ru>DiskiPlus Анна Михалкова</a> DiskiPlus букмекерская контора бетсити DiskiPlus 1×bet 1 DiskiPlus Лут Оксана Николаевна порно DiskiPlus porno Екатерина Ефременкова, шорт-трекистка DiskiPlus 1×bet официальный сайт 1×bet xyz DiskiPlus порно с Никита Кучеров (хоккей) DiskiPlus porno Александр Соболев (футбол)
#4876 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт, скачать
Законодательство, регулирующее азартные игры в различных странах, влияет на полномочия операторов. В итоге юзеры из отдельных регионов сталкиваются с ограничениями со стороны казино. Это возможность быть как глубокий отказ в доступе, так и невозможность загружать игры отдельных изготовителей. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasino09k online</a> В бонусную программку многих операторов входят регулярные бездепы. Это пожизненные промоакции, поощряющие интенсивных неизменных игроков. Популярный формат — раздача фриспинов по определенным дням недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают постоянные бонусы без депо в мена на накопленные баллы лояльности.Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. <a href=https://hackaday.io/rendering>https://hackaday.io/rendering</a> 1хлот регистрация в 1×slots casino <a href=https://bandit400.ru/user/Kennethfeamy/>https://bandit400.ru/user/Kennethfeamy/</a>
1×slots сайт
<a href=https://radios-collector.com/viewtopic.php?f=7&t=111149>1×slots актуальное зеркало</a> 1×slots казино зеркало <a href=http://slavia-certificate.by/bitrix/redirect.php?goto=http://it-formula.ru/bitrix/redirect.php?goto=http://uztravel.uz/bitrix/click.php?goto=https://telegra.ph/Ponimanie-procedur-gosudarstvennogo-uchrezhdeniya-po-vyplate-kompensacii-za-zaderzhku-otpuska-i-polozhenij-o-kompensacii-09–23>http://slavia-certificate.by/bitrix/redirect.php?goto=http://it-formula.ru/bitrix/redirect.php?goto=http://uztravel.uz/bitrix/click.php?goto=https://telegra.ph/Ponimanie-procedur-gosudarstvennogo-uchrezhdeniya-po-vyplate-kompensacii-za-zaderzhku-otpuska-i-polozhenij-o-kompensacii-09–23</a> Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих требований, считая обязательной верификации. Если на веб-сайте предусмотрена обязательная процедура доказательства личности, то вывести выигрыш удастся только последствии проверки данных. Приготовьтесь наполнить анкету и отправить в техподдержку документ, подтверждающий личность. 1хлот регистрация в 1×slots casino При маленькой сумме бонуса рекомендуется играть по низким ставкам, а применять максимальные никакого лишь никаких случае, в вейджер слишком великий, а время на отыгрыш крепко ограничено.При маленький сумме приза рекомендуется играть по низким ставкам, а применять наибольшие чем только в случае, случае вейджер слишком большой, а время на отыгрыш сильно ограничено.
1×slots регистрация
С другой стороны, намного легче забрать бездепозитные фриспины за регистрацию в казино и напрямик в начать вращать барабаны в лучших слотах. Главная необыкновенность спинов в том, что они предусмотрены для лучших автоматов. Удастся столько пройти дополнительные раунды, хотя и увеличить необходимую выигрыша, заработать респины и внутриигровые презенты.Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? В разделе с призами активировать свой презент. Найти игры, для которых предусмотрено одобрение и использовать приз по назначению.На странице представлены бездепозитные бонусы за регистрацию в казино редкая заслуга за коей гонятся все игроки как новенькие, так и мастера. Мы тоже уделяем огромное внимание на присутствие призов при формирование рейтинга казино на средства. Бездепозитный бонус это возможность выступать даром и выиграть реальные деньги. <a href=https://www.harnessracingforum.com/member.php?113306-GlennGrilk>https://www.harnessracingforum.com/member.php?113306-GlennGrilk</a> сайт 1× slots casino Некоторые казино имеют предлагать посетителям бездепы за свидетельство номера или почты или репост на страницу в социальных сетях.Одним из поводов отдавать преимущество, льготу одному либо другому заведению содержится в привлекательности предлагаемых акций и бесплатных услуг. Безвозмездные фриспины, выдаваемые без дела создавать какой-нибудь вклад, в списке располагается далеко не в конце.
1× slots официальный
1×slots рабочее зеркало на сегодня <a href=https://blackmarke7.com/user-39923.html>https://blackmarke7.com/user-39923.html</a>
казино 1×slots официальный сайт
Вывод выигрыша с бездепозитных бонусов казино – щедрый презент от азартных клубов. Но чтобы вывести собственный заработок, нужно выполнить ряд критерий: 2. Создать новый профиль. Для регистрации надо(надобно) заполнить маленькую анкету или зайдите в личный офис при помощи соц сетей;Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных требований, считая обязательной верификации. Если на веб-сайте предусмотрена обязательная процедура доказательства личности, то исключить выигрыш удастся только после ревизии данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий личность. <a href=http://fitboss.ru/user/OscarPlece/>http://fitboss.ru/user/OscarPlece/</a> При использовании бездепозитным призом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют некоторое видов лимитов:Главное превосходство спинов – возможность изучить разные слоты. Также получится насладиться бонусными раундами, испытать фортуну в риск-туре и преумножить выигрыш за счёт особых знаков. Однако не только игровой процесс заслуживает внимание, так другого, как сосредоточиться на реальном выигрыше. 1×slots официальный сайт, скачать
<b>Смотреть еще похожие новости:</b>
<a href=https://pbtur.com.br/users/jameshex>1×slot зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
С не отыгранным бонусом запрещается превосходить объем наибольшей ставки. Нарушение сего обстоятельства последствия аннулирование выигрыша. Наши эксперты исследуют условия акции, затем в ручном режиме проверку их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и характеристики. Мы не рекламируем казино, а даем игрокам информацию о наихороших из них.
#4877 CarloAdmiphttps://t.me/hotdropcases
Рискни и испытай удачу <a href=https://t.me/hotdropcases>https://t.me/hotdropcases</a> Шанс получить редкие и дорогие скины, широкий выбор кейсов и удобный интерфейс делают процесс открытия легким и захватывающим.
#4878 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Хорова Наталья Александровна порно порно с Елена Никитина, скелетонистка <a href=https://slon-ru.com/>порно с Александр Головин (футбол)</a> 1×bet рабочее на сегодня 1win букмекерская контора <a href=https://th-royalgclub.com/>7k casino зеркало рабочее</a> 1×bet зеркало на сегодня 1×bet xyz casino игровой автомат водка казино лучшие онлайн казино porno Елизавета Туктамышева букмекерские конторы pin порно с Никита Кучеров (хоккей)
DiskiPlus 1×bet сайт 1×bet xyz DiskiPlus пин casino <a href=https://www.diskiplus.ru/>DiskiPlus casino официальный сайт</a> казино DiskiPlus букмекерская контора официальный сайт <a href=https://www.diskiplus.ru/>DiskiPlus казино смотреть онлайн</a> DiskiPlus 1×bet 1 DiskiPlus 1×bet зеркало слоты 1×bet xyz DiskiPlus казино проиграл DiskiPlus Юдаева Ксения Валентиновна порно DiskiPlus порно с Голикова Татьяна Алексеевна DiskiPlus пина casino DiskiPlus официальная казино
#4879 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация
Наиболее известные вознаграждения между гэмблеров – бездепозитные бонусы казино. Это не удивительно, так можно получить благотворительные вращения либо виртуальные кредиты, и этом не придётся пополнять счёт, рисковать личностными деньгами. Удастся насладиться разнообразными развлечениями даже выиграть солидную необходимую, избегая серьёзного риска. <a href=http://filmkachat.ru/>1× slots casino официальный сайт</a> Прежде чем активировать бездеп, необходимо убедиться в, собственно государство, уроженцем коей является игрок, не заходит в список запрещенных.Самый распространённый из сходственных бонусов, естесственно же, бездеп на день рождения клиента — бонус вид фиксированной суммы либо фриспинов поступает на счёт игрока, а воспользоваться им можно в течение установленного периода времени. <a href=https://vhearts.net/forums/thread/8949/>https://vhearts.net/forums/thread/8949/</a> 1×slots рабочее зеркало на сегодня <a href=http://wwwwww.ternovka4school.org.ua/user/DoctorLazutaer/>http://wwwwww.ternovka4school.org.ua/user/DoctorLazutaer/</a> Этот тип приза будет добавлен на Ваш аккаунт после успешной процедуры регистрации с использованием номера телефона. Если избрать другой способ творения учетной записи, бездеп не будет добавлен на Ваш аккаунт.Условия, на коих предоставляется бездеп, регулируются казино. Каждая промоакция содержит подробные верховодила, ссылка на коие обыкновенно содержится в промообъявлении. В них указываются лимиты, вейджер, список доступных игр. Если оператор прячет данные о предложении, то воспользоваться им не стоит.
сайт 1× slots casino
Бездепозитные призы казино за регистрацию в 2022 году — это возможность поиграть за счёт заведения. Казино даёт клиенту шанс воспользоваться определённой суммой или числом даровых вращений без внесения депозита. Не путайте деморежим с реальной игрой без необходимости внесения депо.В интернет-сети всегда возможно найти перечни более модных и гарантированных поощрительных программ от популярных онлайн-казино. 1×slots официальный сайт скачать Наличие у игрока 2 аккаунта. Запрещено делать некоторое профилей для многократного получения бездепов. <a href=http://www.dmgec.com/bbs/board.php?bo_table=free&wr_id=205997>http://www.dmgec.com/bbs/board.php?bo_table=free&wr_id=205997</a> Если площадка презентует бездеп за регистрацию, то процедура его получения ординарна. Нужно только ввести аккаунт на сайте и активировать его, подтвердив адресок электронной почты, номер телефона или иные данные, коие требует оператор. Перед этим нужно увериться, что пользователь находится на официальном веб-сайте казино, а не на мошеннической площадке. 1×slots сайт Далее требуется отыграть вагер и исключить выигрыш. Игрокам без опыта крупно подфартило, есть получить десятки даров за одну регистрацию. Если не сумели получить Бездепозитный бонус, не тревожьтесь. Обратитесь в интернет чат, оператор поможет исправить.Бездепы все заходить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами.
1×slots зеркало рабочее на сегодня
Мы собрали и опубликовали список превосходнейших бездепозитных казино с призами за регистрацию, коие гарантируют великодушные выигрыши и мгновенные выплаты. <a href=https://www.mundoreptil.com/member.php?u=46911>https://www.mundoreptil.com/member.php?u=46911</a> 1× slots casino официальный сайт Этот тип бонуса будет добавлен на Ваш аккаунт в успешной процедуры регистрации с внедрением номера телефона. Если избрать иной метод создания учетной записи, бездеп не будет добавлен на Ваш акк.
1×slots зеркало которую указывали при регистрации кстати
На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не можете активировать и получить бездепозитный приз.Ограничения по играм. Администрация воспрещает игрокам кое-какие игровые автоматы с бездепозитным бонусом, средствами либо бесплатными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда разделение производится по виду игр. Например, отыгрыш возможен на всех игровых аппаратах, но запрещен в настольных забавах и в разделе Live Casino. Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. казино 1×slots <a href=https://repyourmaxfitness.com/user/terryfef/?um_action=edit>https://repyourmaxfitness.com/user/terryfef/?um_action=edit</a>
1хслотс рабочее зеркало
<a href=https://fanfiction.borda.ru/?1–10–1920–00004366–000–10001–0>https://fanfiction.borda.ru/?1–10–1920–00004366–000–10001–0</a> Поспешите забрать бездепозитные призы за регистрацию в казино из представленного перечня. Все платформы не ведут законную деятельность, хотя и порадуют добросовестными результатами забавы, высочайшей отдачей, прыткими выплатами.Так же стоит выделить то, собственно в любом онлайн казино установлен свой наибольший кешаут на бездепозитный приз. Как правило кешаут — это предельная сумма средств, которая дешевая для вывода с бездепозитного приза. 1×slots официальный сайт мобильная версия скачать Для выбора азартного заведения Вы можете воспользоваться перечнем наших казино с призами за регистрацию. На нашем веб-сайте мы опубликовали перечень бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, собственно доля бонусов эксклюзивные и доступны только для посетителей нашего вебсайта по-специальному промо-коду либо по уникальной ссылке. Кроме как, для любого приза мы подготовили доскональный обзор, в котором Вы узнаете как получить и отыграть одобрение и как исключить собственный выигрыш с бездепа.Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, дабы еще раз получить безвозмездный бонус. Игорные заведения нетерпимы к бонус-хантерам, потому вас ожидает неизбежное санкция.
<b>Смотреть еще похожие новости:</b>
<a href=http://stranaua.ukrbb.net/memberlist.php?mode=viewprofile&u=51731>1×slots официальный сайт мобильная версия</a>
<a href=https://pnwphotos.com/forum/index.php?threads/forgot-your-password-its-simple-to-reset-it.25038/#post-83005>1×slos регистрация в 1×slots casino</a>
<a href=https://mit-bbs.com/viewtopic.php?t=273292>1×slots зеркало этих способов предполагает регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Такой казино приз без депозита за регистрацию выдается игроку на час и энергично используется данное предложение с 2017 года. Это словно какая-то маскировка одобрения под бездепозитный. Суть всего этого сводится к тому, собственно игроку на час выдается, например, 1000 долларов, а реклама твердит о том, собственно каждой выигрыш возможно несомненно в забыть при себя. Но случае играющий серьезно отнесется к данному предложению, то он просто растеряет время. Ведь игроку надо(надобно) несомненно играть не в аккаунте, ну тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (числе всей тысячи) в управляла вступят определенные условия, где будет сказано, собственно наибольшей суммой победы может быть только двести долларов и средства возможно использовать только в качестве бонуса на 1-ый вклад с вейджером 25 от суммы вознаграждения плюс сам депо. По итогу выйдет, собственно игрок выигрывал себя 200% бонус с вейджером на определенную сумму. Короче разговаривая, это все не стоит вашего времени.
#4880 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора бесплатно скачать porno Илья Ковальчук (хоккей) <a href=https://rucriminal.info/>Фастова Елена Владимировна порно</a> casino бездепозитный пин ап casino <a href=https://strelochnik.com/>porno Мира Андреева (теннис)</a> 1×bet слоты официальный сайт порно с Артемий Панарин (хоккей) пина casino пин ап casino казино рублях букмекерские контора ап приложения букмекерских контор
DiskiPlus up casino официальный DiskiPlus casino игровой автомат <a href=https://diskiplus.ru>DiskiPlus Любимова Ольга Борисовна порно</a> DiskiPlus лучшая казино DiskiPlus казино фильм <a href=https://diskiplus.ru/>DiskiPlus pin up casino скачать</a> DiskiPlus Ходнева Светлана Владимировна порно DiskiPlus Ирина Горбачева DiskiPlus приложения букмекерских контор DiskiPlus 7k casino зеркало рабочее DiskiPlus почему в казино нет часов DiskiPlus casino андроид DiskiPlus скачать 1×bet на андроид бесплатно
#4881 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
ограбление казино казино онлайн бесплатно <a href=https://repost.news/>бесплатно играем казино</a> pin up casino buzz pin up casino пин ап <a href=https://sovsekretno.net/>casino зеркало сегодня</a> зеркала казино приложения букмекерских контор 1×bet слоты официальный сайт официальные букмекерские конторы скачать официальные букмекерские конторы скачать букмекерская контора на андроид гта онлайн казино
DiskiPlus 1×bet зеркало на сегодня 1×bet xyz DiskiPlus 1×bet зеркало рабочее <a href=https://www.diskiplus.ru>DiskiPlus почему в казино нет часов</a> DiskiPlus яндекс игры казино DiskiPlus 1×slots casino <a href=https://diskiplus.ru>DiskiPlus букмекерская контора официальный сайт</a> DiskiPlus казино в россии DiskiPlus Хорова Наталья Александровна порно DiskiPlus ramenbet casino DiskiPlus порно с Александр Головин (футбол) DiskiPlus букмекерская контора фонбет официальный сайт DiskiPlus porno Анна Сидорова, керлингистка DiskiPlus гама казино
#4882 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Кирьянова Дарья Борисовна casino pin официальный <a href=https://th-royalgclub.com/>Любимова Ольга Борисовна порно</a> Елена Лядова букмекерская контора официальный сайт скачать <a href=https://res-publika.com>Семёнова Татьяна Владимировна порно</a> casino daddy казино без играющие казино cat casino казино проиграл порно с Антропова Валентина Викторовна pinco casino
DiskiPlus ешь казино DiskiPlus 1×bet рабочее на сегодня <a href=https://diskiplus.ru>DiskiPlus porno Дарья Мороз</a> DiskiPlus зеркала официальных сайтов казино DiskiPlus гта онлайн казино <a href=https://diskiplus.ru>DiskiPlus порно с Виктория Синицина, фигуристка</a> DiskiPlus Анна Михалкова DiskiPlus casino официальный зеркало DiskiPlus porno Нина Пирогова, хоккеистка DiskiPlus online casino DiskiPlus казино смотреть DiskiPlus казино зеркало сегодня DiskiPlus включи казино
#4883 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия
Ознакомьтесь с нашим перечнем лучших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего перечня и получите бездеп сразу. Хватайте наихорошие безвозмездные предложения ниже и выигрывайте великие деньги, не рискуя! <a href=http://filmkachat.ru/>1хслотс рабочее зеркало</a> Таким образом интернет казино получает вероятного игрока. Возможно дальнейшем либо подлинном он захочет сыграть на свои средства. Так работают бездепозитные бонусы в онлайн казино. Здесь отлично подходит выражение, бесплатные сыр бывает только в мышеловке. Начинающие игроки могут не обдумывать опасность азарта. Однако времени осознания становится больше. Это тема для отдельного обсуждения.В любом казино с бездепозитным призом учтены вейджеровые обстоятельства. Это единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, нужно сделать определённое количество ставок. Чем круче приз, что, этим труднее выполнить условия, и напротив. <a href=https://app.degoo.com/share/hi1FahiiYBqJPnfRRsamrQ?ID=20401830865>https://app.degoo.com/share/hi1FahiiYBqJPnfRRsamrQ?ID=20401830865</a> При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие возможно посвятить этой в казино.Бездепозитный приз за регистрацию в казино с выводом денег в 2022 году — Наш ресурс дает игрокам важную информацию о самых новых, щедрых и испытанных бонусах в интернет казино, коие обновляются каждый день. 1×slots бонус за регистрацию <a href=http://bitetheass.com/user/Jameseruby/>http://bitetheass.com/user/Jameseruby/</a> Несмотря на то, что этот вариант стимуляции со стороны азартных платформ довольно популярен в сфере подобных игр, далековато многим почитателям казино ведомо, что по бездепозитные бонусы казино и как именно их возможно эксплуатировать.Это тоже безвозмездные деньги, которые поступают на аккаунты новоиспеченных в после регистрирования. А особенность таких призов состоит в, что обретенные финансы обязательно по использовать в продолжении назначенного времени.
1×slots официальный demo регистрация в 1×slots casino
При отыгрыше бездепов, учитывайте временные ограничения. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток.Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных призов принимаются достаточно высокие притязания. Часто онлайн-казино рекомендуют отыграть бонусное поощрение до ста один в игровых автоматах. Например, в игрок получил бесплатно десять $, то нужно будет отыграть их, поставив одну тысячу спинов по одному баксу любой. Стоит отметить, что не все казино дают возможность выступать на призы и не во всех развлекательных заведениях схожие верховодила для отыгрывания. Некоторые казино воспрещают играть на бонусы в блекджек либо ограничивают ставки до пяти процентов, что существенно наращивает в 10-ки один число нужных игр. x1 slots 1хслотс регистрация перейти на 1×slots Заработать на бездепозитных призах за регистрацию в казино может любой пользователь, достигший совершеннолетия. <a href=http://forum.industrialvideo.ir/member.php?action=profile&uid=4564>http://forum.industrialvideo.ir/member.php?action=profile&uid=4564</a> Наш перечень включает в себя лучшие бездепозитные бонусы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по принципиальным характеристикам: рабочее зеркало 1×slots Операторы гемблинга утверждают, собственно так они борются с бонус-хантерами. Впрочем, критики считают, собственно этим казино пробуют сделать из случайного постояльца постоянного игрока.Нет. Казино выдают бесплатные призы за регистрацию, чтобы, чтобы, чтобы заказчик мог ознакомиться с игровым заведением. А чтобы исключить его, нужно выполнить обстоятельства отыгрыша.
1×slots сайт
Для отыгрыша приза казино обязывает игрока сыграть на сумму, в количество один превышающую сумму приобретенного бонуса — тут выгода фирмы очевидна. В основном случаев благотворительные бонусы начисляются в кредитах, коие невозможно сразу исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти требования принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д. ). О нем читайте ниже. <a href=https://njt.ru/forum/user/207429/>https://njt.ru/forum/user/207429/</a> Бездепозитный приз казино 2022 с выводом за регистрацию дает вероятность ознакомиться игроку с лобби выбранного заведения, сориентироваться в выборе игр и проверить качество работы службы поддержки. Довольно часто, начиная игровой процесс, игрок уже отказывается останавливаться и проделывает настоящий лепта. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать даром возможно как раз таки с бонусом за регистрацию без надобности заносить депозит. 1×slots официальный зеркало рабочее Акции распространяются как на все игры казино, например и на ограниченный перечень. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino прочие. Промо имеет обхватывать разработки 1-го производителя. Бездеп не пересекается с другими промоакциями казино. Если на сайте предусмотрен кэшбек, он не начисляется за ставки, сделанные бонусными средствами. Для идентификации платежных реквизитов игрока возможность понадобиться пополнение счета на минимальную необходимую.Также бездепозитные бонусы могут работать способом вернуть к этой посетителей, пока приостановивших своё сотрудничество с фирмой: уведомление о бездепе поступает на мобильный телефонный или почту.
1×slots зеркало сайта
Реже бонусы без депо начисляются неизменным игрокам. С их помощью администрация старается удержать ценных клиентов или желает поблагодарить за преданность правильных посетителей. Но намного почаще для подобных целей используются такие акции:Вообще перейдя в казино — верховодила одинаковы в получении бездепозитных призов, в стандартные правила входит: подтвердить эл. Почту и телефон, наполнить собственный индивидуальный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ. Чаще всего используются коды. Их надо(надобно) заносить в специальные окна регистрационной анкеты, если речь о пригласительных призах, или в особом разделе собственного кабинета игрока.Выигрыши с бонусов без инвестициям практически привязаны к притязанию по ставкам и могут быть обналичены только после исполненья этих притязаний. 1×slots casino регистрация на сайте <a href=http://www.xy28zj.com/space-uid-266193.html>http://www.xy28zj.com/space-uid-266193.html</a> Разные казино имеют личные верховодила по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высокие притязания. Часто онлайн-казино рекомендуют отыграть бонусное поощрение до 100 раз в игровых автоматах. Например, если игрок получил даром 10 $, то необходимо несомненно отыграть их, поставив одну тыщу спинов по одному доллару каждый. Стоит отметить, собственно не все казино дают возможность выступать на бонусы и не во всех развлекательных заведениях схожие правила для отыгрывания. Некоторые казино воспрещают играть на бонусы в блекджек либо ограничивают ставки до пяти процентов, что существенно наращивает в 10-ки один число нужных игр.
1×slots сайт
Размер ставки для игры по бездепозитному бонусу (окончательно же, если, тогда,, когда он представлен повторяющий бонусных валютных средств) часто ниже, чем при игре на депозит. Ограничение несомненно работать до этапа отыгрыша бонуса. <a href=http://zc.xszrcw.com/home.php?mod=space&uid=450304&do=profile>http://zc.xszrcw.com/home.php?mod=space&uid=450304&do=profile</a> Иногда для получения бонусов необходимо связаться с адептами саппорта. Удобнее всего с ними беседовать в онлайн-сате, хотя от довольно запроса по электронной почте.Получать информацию о самых прибыльных бонусах можно без неизменного прогноза новостей казино. Мы взяли данную задачу на себя и безпрерывно смотрим за услугами операторов, выбирая лучшие из них. В данном разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список акций периодически пополняется. В топ вошли самые свежие бездепозитные призы за регистрацию в казино 2020, кратковременные и замкнутые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру прочим аспектам. Если срок действия промоакции истек, она удаляется из списка. 1×slots зеркало рабочее Бонус за регистрацию в казино выдается только раз раз на одного игрока. Но посещают вспомогательные промоакции, в коих бездепы раздаются для постоянных клиентов и эти презенты Вы сможете получить больше 1-го раза.Бонус без депозита за регистрацию в казино (бездепозитный приз) – это денежный презент от клуба, который начисляется на акк игрока в регистрации в казино. Кроме творения учетной записи, для получения бездепа, очень нередко требуется ещё и подтвердить контактные данные игрока и/или активировать специальный промо-код.
<b>Смотреть еще похожие новости:</b>
<a href=https://timepost.info/showthread.php?tid=41445>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<a href=https://fougerite.com/members/jamesstawl.14360/>1×slots зеркало регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Более солидные предложения встречаются очень редко. Зачастую они доступны лишь VIP-игрокам. В остальных случаях им наверняка сопутствуют довольно жесткие обстоятельства отыгрыша. Также вероятны вспомогательные условия прочие лимитирования, прописанные в критериях и положения бонусной программы казино. Денежные свои. Третий приз за регистрацию без депо – наличные. К раскаянью, только знаменитые и знаменитые клубы имеют дать средства в рублях или баксах. С их поддержкой возможность насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед данным необходимо исполнение конкретных условий.
#4884 Richardapetehttps://discord.com/invite/B5fF6pW8Cm
Пробуйте удачу <a href=https://discord.com/invite/B5fF6pW8Cm>https://discord.com/invite/B5fF6pW8Cm</a> CS:GO! Шанс получить редкие и дорогие скины, широкий выбор кейсов и удобный интерфейс делают процесс открытия легким и захватывающим.
#4885 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
7k casino официальный сайт 1×bet сайт 1×bet xyz <a href=https://specreporter.com/>porno Александра Степанова, фигуристка</a> porno Алена Косторная (фигурное катание) гта онлайн казино <a href=https://kompromat1.online/>порно с Абрамченко Виктория Валериевна</a> porno Дарья Клишина пинко casino бесплатное казино 1×bet зеркало рабочее 1×bet зеркало рабочее на сегодня casino играть Шевцова Татьяна Викторовна порно
DiskiPlus казино рояль DiskiPlus 1×bet вход <a href=https://diskiplus.ru>DiskiPlus pin up casino зеркало</a> DiskiPlus порно с Зырянова Анастасия Владимировна DiskiPlus pin up casino <a href=https://www.diskiplus.ru/>DiskiPlus включи казино</a> DiskiPlus пинко casino DiskiPlus porno Яна Троянова DiskiPlus kometa casino DiskiPlus Матвиенко Валентина Ивановна порно DiskiPlus порно с Виктория Синицина, фигуристка DiskiPlus Радченко Светлана Юрьевна порно DiskiPlus 1×bet официальный
#4886 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Обычно для получения бонусов без депо, казино выдвигает приклнные и абсолютно выполнимые условия, но есть ряд поступков коие запрещены и имеют стать неприятные результаты:К раскаянью, нет. Почти все казино, требуют внесение но бы одного малого депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, что вывести деньги разрешено только на что, эту платежную систему, с коей был сделан депозит. <a href=http://filmkachat.ru/>1 xslots рабочее зеркало</a> Как лишь получите бездеп в казино, всё точно не забывайте проверять электронную почту. Некоторые игорные клубы постоянно веселят интенсивных гэмблеров приятными призами. Чаще всего получить презент можно в преддверии праздника, на денек рождение, за вербование приятеля. А кроме распространённым призом является надбавка к депозиту. Нужно не пополнить счёт, и азартное заведение увеличит его на 50–100%.3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефонный либо почту, указать персональную информацию; <a href=https://noosfero.ufba.br/lexxeagle/blog/mastering-interior-render-from-concept-to-photorealistic-visualization>https://noosfero.ufba.br/lexxeagle/blog/mastering-interior-render-from-concept-to-photorealistic-visualization</a> 1×slots подтвердит вашу регистрацию если говорить <a href=http://rosttour.com/user/Renaldotix/>http://rosttour.com/user/Renaldotix/</a> Для верификации номера аппарата, в собственном профиле изберите опцию „Подтвердить номер телефонного“ и введите в подходящее фон код, полученный в sms-сообщении.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
1х слот 1хслотс регистрация перейти на 1×slots На нашем веб-сайте Вы отыщите список актуальных свежих бездепозитных бонусов в казино 2022 года. Также, есть много неповторимых услуг, коие доступны только гостям нашего сайта последствии регистрации по нашей ссылке или активации специального промокода.Получив собственный презент, Вы можете даром выступать на реальные средства, а выполнив условия отыгрыша, вывести свой выигрыш. <a href=https://imageevent.com/lexxeagle/qwerty>https://imageevent.com/lexxeagle/qwerty</a> Размер ставки для забавы по бездепозитному призу (окончательно же, если, тогда,, когда он представлен в виде бонусных валютных средств) часто ниже, чем при этой на депо. Ограничение будет действовать до момента отыгрыша бонуса.Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам воспрещено начислять призы посетителям, не имеющим денежных средств на счете. Мы предлагаем разглядеть животрепещущие призы онлайн-казино с лицензией, которые соблюдают законодательство РБ. 1×slots регистрация 1×slots casino 777 online
1 xslots рабочее зеркало
Бездепозитный бонус предоставляется новому игроку за определенные деянья. Часто подарок повторяющий средств либо фриспинов выдается за регистрацию, благодаря чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. При этой на бонусные средства запрещается играть в игровые автоматы с прогрессивным джекпотом и игры из радела live casino. Кроме того, некоторые казино выделяют бездеп на раз или некоторое конкретных слотов, и в иных забавах Вы не сможете на их выступать. <a href=http://ooo-esk.ru/index.php?subaction=userinfo&user=idioticsuccesso>http://ooo-esk.ru/index.php?subaction=userinfo&user=idioticsuccesso</a> Фриспины без депозита либо вспомогательные свои посодействуют ближе познакомиться с игровой платформой и её функциями. За счёт подарков возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям ради забавы напротив живых крупье. 1×slots на любой вкус как пройти регистрацию Ниже указан важный перечень законных казино в Беларуси с бонусами на первый депозит. Вы можете попасть на официальный сайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус.
1хслот официальный сайт зеркало
Максимальный размер ставки, кот-ый нельзя превышать же приз не несомненно всецело отыгран. В случае нарушения сего верховодила, приз и выигрыш с него станут аннулированы.Риск-игра по одинаковым шансам – Также казино возможность запрещать выполнять обстоятельства по отыгрышу счет раунда на удвоение, кот-ый предлагается в слотах, видео-покере и некоторых других забавах. Не хотите поиграть в азартные игры, не рискуя своими деньгами, хотя получая в все выплаты? Подобную вероятность деют почти наилучшие порталы с азартными развлечениями. В их количестве количество правдивых и надежных интернет-казино на российском языке. Они привлекают новых пользователей разными поощрительными мероприятиями, включая бездепозитные, либо бесплатные бонусы.Большинство клубов завлекают внимание геймеров за счёт разнообразных подарков. На одних веб-сайтах возможно получить виртуальные кредиты, коие откроют доступ ко всему софту. На иных же, администрация предлагает благотворительные вращения для пуска топовых онлайн слотов. Несмотря на разные акции, стоит выделить самые основные. 1×slots регистрация <a href=http://jinhyunmetal.com/bbs/board.php?bo_table=free&wr_id=21106>http://jinhyunmetal.com/bbs/board.php?bo_table=free&wr_id=21106</a>
1× slots зеркало
Бездепы обыкновенно предлагают с отыгрышем — моментально вывести выигранные свои невозможно. Перевод денег со счета несомненно возможен в того, как юзер выполнит все требования казино, а сумма не может быть выше установленного правилами лимита. Условиями акции фиксируются сроки, на коих заказчик вправе пользоваться предложением. Обычно они не превосходят нескольких дней в активации.Кешбэк-бонус представляет собой возврат фиксированного процента от ставки если, тогда, поражения или же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%. Следует подчеркнуть, собственно бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом.Бонус за регистрацию в казино без депозита с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша может понадобиться устроить ставки на сумму, в некоторое 10-ов один превышающую необходимую приза либо выигрыша. <a href=http://maskarad.bomba-piter.ru/user/ScottWolve/>http://maskarad.bomba-piter.ru/user/ScottWolve/</a> 1×slot регистрация
<b>Смотреть еще похожие новости:</b>
<a href=http://skatefluckit.com/member.php?u=149708>1×slots зеркало рабочее</a>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=382603>1×slots регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Условия шансы разниться приятель от приятеля. Но такой приз возможность быть применен лишь для игрового процесса – полученные на счет деньги до как, как будут отыграны, исключить невероятно.
#4887 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
лучшие казино бесплатно песня казино <a href=https://slon-ru.com/>porno Елизавета Туктамышева</a> porno Юлия Канакина Комарова Наталья Владимировна порно <a href=https://slon-ru.com/>сайт винлайн букмекерская контора</a> unlim casino casino riobet casino ru зеркала официальных сайтов казино играющие казино винлайн букмекерская контора официальный порно с Ирина Сидоркова
DiskiPlus букмекерская контора ставки DiskiPlus пинап казино <a href=https://www.diskiplus.ru/>DiskiPlus букмекерская контора мостбет</a> DiskiPlus casino на телефон DiskiPlus Петрова Ольга Викторовна порно <a href=https://www.diskiplus.ru>DiskiPlus Чулпан Хаматова</a> DiskiPlus cat casino DiskiPlus букмекерские конторы в россии DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz DiskiPlus casino buzz DiskiPlus up casino зеркало DiskiPlus казино на деньги DiskiPlus casino официальный зеркало
#4888 AHoini
<a href=https://vps27160.blog2learn.com/78462514/the-1win-diaries>1win Gabon</a> <a href=https://mylesagknp.answerblogs.com/30713379/helping-the-others-realize-the-advantages-of-vavada-casino-online>vavada slovenija</a>
#4889 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Шевцова Татьяна Викторовна порно порно с Голикова Татьяна Алексеевна <a href=https://m.repost.news/>Самойлова Алла Владимировна порно</a> играющие казино букмекерская контора ставки <a href=https://rhymes-punches.com/>смотреть фильм казино</a> casino официальный зеркало casino riobet casino betting слоты казино casino com часы казино где казино
DiskiPlus пин ап букмекерская контора DiskiPlus мелбет букмекерская контора <a href=https://www.diskiplus.ru>DiskiPlus букмекерская контора фонбет официальный</a> DiskiPlus букмекерская контора скачать приложение DiskiPlus порно с Ирина Сидоркова <a href=https://www.diskiplus.ru>DiskiPlus casino вход</a> DiskiPlus порно с Дронова Александра Викторовна DiskiPlus винлайн букмекерская контора официальный DiskiPlus Радченко Светлана Юрьевна порно DiskiPlus порно с Евгения Медведева DiskiPlus игры казино DiskiPlus Радченко Светлана Юрьевна порно DiskiPlus win win casino
#4890 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
Также бездепозитные призы могут служить способом возвращать к игре посетителей, что приостановивших своё сотрудничество с фирмой: уведомление о бездепе поступает на мобильный аппарат или почту.Бездепы имеют заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами. <a href=http://filmkachat.ru/>1×slots регистрация то дальше необходимо пройти</a> Онлайн гемблинг развивается с любым днем все больше и больше, новые бренды создаются не по денькам а по часам. Новые интернет казино делают вступительные акции для игроков, для того что бы зарекомендовать себя, и тем наиболее предлагают бездепозитные бонусы за регистрацию, собственно бы не упустить эту возможность — как воспользоваться свежим бездепом, рекомендуем навещать наш вебсайт как возможно почаще, самое вкусное и свежие будет добавляться в этом же списке. <a href=https://www.find-topdeals.com/blogs/188338/Revolutionizing-Product-Marketing-Through-Dynamic-3D-Presentations>https://www.find-topdeals.com/blogs/188338/Revolutionizing-Product-Marketing-Through-Dynamic-3D-Presentations</a> Возможность поиграть вспомогательное состязание (а время и некоторое) абсолютно безвозмездно, а выигрыш, же, поступает на счёт игрока.Самый распространённый из похожих бонусов, конечно же, бездеп на денек рождения клиента — приз вид фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им возможно на установленного периода времени. 1хслотс 1хслотс регистрация перейти на 1×slots <a href=http://g961713h.beget.tech/user/WilliamTwina/>http://g961713h.beget.tech/user/WilliamTwina/</a>
1х слот 1хслотс регистрация перейти на 1×slots
<a href=https://thetechmodders.com/forums/viewtopic.php?t=27183>1 xslots рабочее зеркало</a> 1×slots бездепозитный бонус за регистрацию На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не можете активировать и получить бездепозитный приз. <a href=https://sklad-slabov.ru/forum/user/7884/>https://sklad-slabov.ru/forum/user/7884/</a> Существуют казино с бонусом за регистрацию, каких очень популярны фриспины в интернет казино потом регистрации в конкретных играх. Они встречаются том чаще безвозмездных поощрений либо традиционных призов в казино без вложений. Например, игрок регистрирует счет, на который начисляются безвозмездные забавы, бонус за регистрацию повторяющий бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса компьютерные выигрывает истинные деньги, коие в последствии можно успешно исключить из заведения на свою платежную систему. То есть, есть все шансы исключить средства без рисков собственными деньгами. Регистрация, какую в получит бонусы, займет пару минут, а благодаря этому можно увеличить 5 евро поощрений до тысячи и без всяких заморочек вывести их.У каждой игры средства требования по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система зачтет любую ставку. В рулетке и покере устроить это гораздо сложнее. Именно потому так принципиально пристально читать обстоятельства получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в каждой этой, то новички попросту «спустят бонус на ветер». 1×slots промокод при регистрации А ознакомиться с свежими онлайн казино, Вы сможете помощью бонусов с выводом прибыли, которые Вы сможете получить без депозита.Выбрать казино с бездепозитным бонусом. У нас на сайте представлен список наилучших онлайн казино, которые предлагают своим игрокам великодушные призы за регистрацию.
1хслотс рабочее зеркало
<a href=https://zosh1.dv.kr.ua/user/Ashleyinirl/>https://zosh1.dv.kr.ua/user/Ashleyinirl/</a> Если ординарными текстами, бездепы – это определённая сумма денег или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно забирать подарки. Но есть кое-какие нюансы. Существуют игорные дома, коие перед что, этим как начислить призы требуют привязать телефон, предоставить копии документов. 1×slots регистрация 1×slots casino 777 online К огорчению, нет. Почти все казино, настоятельно внесение желая бы одного малого депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, что вывести средства разрешается лишь на ту платежную систему, с коей был сделан депо.При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, коие можно предназначить ирге в казино.
1×slots промокод при регистрации 2025
Прямо момент заберите благотворительные вращения за регистрацию без депо и начинайте собирать призовые композиции ради солидных выигрышей! <a href=https://your-portal.at.ua/forum/33–367–3#88201>1×slots официальный сайт, скачать</a> Какие бонусы есть еще получить кроме бездепозитного приза за регистрацию в казино? По мимо бездепозитного бонуса, любое онлайн казино предлагает игрокам прибыльное предложение на первый депозит, вы совершаете депозит, ваш депозит возрастает в двое или числе в трое, что, этим наиболее начать играть можно с больше солидной суммой, например же не запамятываем на вейджер на призы.Срок активации и время на отыгрыш. Зачисление средств либо фриспинов происходит при активации протяжении взыскательно ограниченного периода, подобные требования предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать приз количество дней или числе недель. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высочайшим вейджером. У каждого игорного клубы различные вейджеровые условия. Чтобы вы гарантировано смогли выполнить их, мы дадим количество советов. Если система начислила небольшую сумму, не делать немалые ставки – остановитесь на 10–30 центах. Как лишь сумеете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте играть. В противном случае чем приглядеться к иному автомату.Размер ставки для забавы по бездепозитному призу (конечно же, в случае, когда он представлен повторяющий бонусных денежных средств) зачастую ниже, чем при этой на депозит. Ограничение несомненно работать до момента отыгрыша бонуса. 1×slots зеркало на сегодня <a href=http://qarabagaaparanyol.az/index.php?subaction=userinfo&user=furtivedispatch>http://qarabagaaparanyol.az/index.php?subaction=userinfo&user=furtivedispatch</a> Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?Воспользоваться бездепом возможно не во всех игровых автоматах: казино вдруг уточняет ограничение для посетителей. Конечно, это возможно посчитать неким неудобством для игрока, но ради стоит отметить, собственно выбор автоматов всё одинаково остаётся достаточно наибольшим.
1×slots зеркало быструю регистрацию а также мгновенное
<a href=https://poldomy.pl/member.php?u=138244>https://poldomy.pl/member.php?u=138244</a> Какие бонусы есть еще получить кроме бездепозитного приза за регистрацию в казино? По мимо бездепозитного бонуса, любое онлайн казино предлагает игрокам прибыльное предложение на первый депозит, вы совершаете депозит, ваш депозит возрастает в двое или числе в трое, что, этим наиболее начать играть можно с больше солидной суммой, например же не запамятываем на вейджер на призы.Выигрыши с бонусов без вложений всегда привязаны к притязанию по ставкам и имеют быть обналичены лишь после выполнения этих требований. 1×slots зеркало подтвердит вашу регистрацию если говорить Это один из главных характеристик привлекательности презента. С завешенным коэффициентом и профессионалы не сумеют выполнить обстоятельства по отыгрышу. И не, насколько презентабельно смотрится предложение – бездепозитный бонус казино в размере $500 либо $1 000. Чтобы новенькие лучше вдумались, собственно же это вейджер, мы разберём на случае.Бесплатный приз – кредиты, которые онлайн-казино начисляет посетителю, не заставляя его пополнять игровой счет.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.globalvision2000.com/forum/member.php?action=profile&uid=1072499>x1 slots регистрация в 1×slots casino</a>
<a href=https://forum.graylite.com/viewtopic.php?p=364830#p364830>1× slots официальный</a>
<a href=http://forums.indexrise.com/user-307864.html>1хслот официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Игры, каких возможно играть на бонусные деньги. Проверьте список игр, в которых можно выступать на бонусные свои, вероятно они Вам не понравятся и не стоит расходовать своё время на эту промоакцию. Выбирайте лучшие безвозмездные призы за обзоров на Casinoz – и пусть вам сопутствует счастье при отыгрыше бонусных кредитов!
#4891 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация на сайте
Выиграть реальные средства в казино не пополняя счет – сложно, но возможно. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными бонусами и начните играть на бонусные свои. По статистике в одном из 10-ти заведений возможно заработать маленькую сумму денег за счет бонусных средств. <a href=http://filmkachat.ru/>1 хслот регистрация в 1×slots casino</a> Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, дабы появилась вероятность исключить выигрыш.Вообще перейдя в казино — правила одинаковы в получении бездепозитных бонусов, в стереотипные правила заходит: подтвердить эл. Почту и аппарат, заполнить собственный личный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ. <a href=https://linqto.me/n/gtji>https://linqto.me/n/gtji</a> 4. Заберите презент. Чаще всего приз активируется сразу последствии регистрации. Но посещают ситуации, когда нужно забежать в собственный кабинет либо написать в службу. 1×slots регистрацию процедура займет всего лишь <a href=https://rekordmeister.ru/user/RenaldoCluct/>https://rekordmeister.ru/user/RenaldoCluct/</a> Как правило, при выводе денег, от играющего потребуется только сделать минимальный вклад для того, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом индивидуальный счет.Такие поощрения разрешают безвозмездно протестировать свежее казино, разобраться с игровым ходом интернет слотов, заработать и вывести маленькую необходимую средств.
рабочее зеркало 1хслотс
Наиболее модные гонорары между гэмблеров – бездепозитные бонусы казино. Это не удивительно, ведь можно получить бесплатные вращения или виртуальные кредиты, и при этом не придётся пополнять счёт, рисковать собственными средствами. Удастся насладиться разнородными развлечениями даже выиграть крупную сумму, избегая серьёзного риска. 1×slots регистрация на сайте <a href=http://www.zghncy.cn/home.php?mod=space&uid=600375>http://www.zghncy.cn/home.php?mod=space&uid=600375</a> Вы не в коем случае ни чем не рискуете, а лишь выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической игры на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, научится регулировать менять ставки и полосы, изучать бонусные игры и их выигрышные композиции, да в просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные средства, коие можно отыграть и исключить, но просто на демо счет, тем самым адреналин в крови более повысится а пульс забьется с нередким ритмом! 1хслотс мобильная версия зеркало Доступность — бездепозитные бонусы в казино чаще всего предоставляются новым игрокам, хотя посещают случаи, когда бонус имеют получить и действующие клиенты.
1×slot зеркало
Демоказино есть практически на каждом сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются веско пореже: там когда выигрыша и соблюдения критерий акций бездеп можно перевоплотить в настоящие деньги. Отказ в прохождении верификации. Если клиент не хочет или имеет предоставить документы, подтверждающие его лицо, профиль несомненно заблокирован совместно, вкупе со всеми бонусными начислениями.Подобные призы без депозита предоставляются на более выгодных условиях. Зачастую они покрупнее, а обстоятельства отыгрыша наименее строгие. <a href=http://bguaji.com/space-uid-691582.html>http://bguaji.com/space-uid-691582.html</a> Самые популярные способы вывода денег ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам на Neteller и Skrill, а пользуются криптовалютными кошельками. Вывод выигрышей возможность исполняться быстро либо развлекать от нескольких часов до нескольких суток.При ирге на бонусные свои запрещается выступать в игровые автоматы с прогрессивным джекпотом и забавы из радела exist casino. Кроме того, кое-какие казино выделяют бездеп на раз или количество конкретных слотов, и в других играх Вы не можете на них играть. 1хслот скачать Как только на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу последствии сего можно оставить заявку на вывод выигрыша. Кредиты выгодно выделяются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом реальных средств и дают вероятность ощутить задор. Во-вторых – можно насладиться любой азартной игрой доступной на сайте. В вашем распоряжении присутствуют автоматы, настольные прибавление, видео-покер, Live-дилеры.
рабочее зеркало 1×slots
Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? <a href=https://acerfans.ru/faq/197-kak-polzovatsja-forumom.html>1×slots акции</a> При исполненьи условий отыгрыша и верификации, деньги с бонусного счета переводятся на главный и имеют быть выведены на карту либо электронный кошелек. Лимиты на вывод и сроки проведения транзакции зависят от избранной платежной системы.Законодательство, регулирующее азартные игры в различных странах, влияние на полномочия операторов. В итоге юзеры из отдельных ареалов сталкиваются с лимитированиями со стороны казино. Это может быть как полный отказ в доступе, например и невозможность загружать забавы отдельных изготовителей. Более солидные предложения встречаются очень редко. Зачастую они доступны лишь VIP-игрокам. В остальных случаях им наверняка сопутствуют довольно жесткие обстоятельства отыгрыша. Также вероятны вспомогательные условия прочие лимитирования, прописанные в критериях и положения бонусной программы казино.Наличие у игрока второго аккаунта. Запрещено делать количество профилей для многократного получения бездепов. 1× slots регистрация в 1×slots casino <a href=http://hatsat.bget.ru/user/AnthonyNig/>http://hatsat.bget.ru/user/AnthonyNig/</a> Обычно для получения призов без депозита, казино выдвигает приклнные и абсолютно выполнимые условия, хотя есть ряд деяний которые запрещены и имеют повлечь за собой противные последствия:
1×slots регистрация 1×slots casino c2d ru
Выигрыши с бонусов без вложений всегда привязаны к требованию по ставкам и могут быть обналичены только в исполненья данных требований. Чаще всего интернет-казино предлагают бездепозитные бонусы новым юзерам. Эта промо-акция довольно отлично завлекает новичков, подталкивая их к открытию счета. Конечно, не они становятся послушными посетителями, хотя сам факт регистрации аккаунта играет на руку заведению. <a href=http://avto.izmail.es/user/Jasperamelp/>http://avto.izmail.es/user/Jasperamelp/</a> Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам воспрещено начислять бонусы посетителям, не имеющим денежных средств на счете. Мы предлагаем осмотреть актуальные призы онлайн-казино с лицензией, которые соблюдают законодательство РБ. скачать 1×slots официальный сайт
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.ltp-team.com/topic/88380-kazino-1×slots-oficialnyy-sayt/>казино 1×slots официальный сайт</a>
<a href=http://forum.survival-readiness.com/memberlist.php?mode=viewprofile&u=30498>1×slots коды</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При регистрации никаких либо ином онлайн игральном заведении — для дается один шанс испытывать свою удачу не внося средства монеты. Замечу собственно такую поощрительную предложение деют не все онлайн игровые площадки, а только щедрая середина(средина) из их. Которые мы подготовили для Вас в нашем списке.
#4892 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino 7k сегодня retro casino <a href=https://www.ossetia.tv/>r7 casino</a> бесплатно играем казино pin up casino пин <a href=https://specreporter.com/>Черкесова Бэлла Мухарбиевна порно</a> casino играть casino бонус cat casino порно с Варвара Субботина бесплатно фильм казино где казино casino промокод
DiskiPlus 1go casino DiskiPlus порно с Юлия Ефимова, пловчиха <a href=https://www.diskiplus.ru>DiskiPlus пин casino</a> DiskiPlus 1×bet 1 DiskiPlus pin casino <a href=https://diskiplus.ru/>DiskiPlus букмекерские конторы в россии</a> DiskiPlus casino актуальное зеркало DiskiPlus пин ап казино DiskiPlus 1×bet на андроид DiskiPlus порно с Бондаренко Анастасия Борисовна DiskiPlus casino официальный зеркало DiskiPlus приложения букмекерских контор DiskiPlus гта казино
#4893 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
7k casino зеркало на сегодня up casino зеркало <a href=https://repost.news/>букмекерская контора без</a> casino официальный зеркало порно с Карен Хачанов (теннис) <a href=https://rhymes-punches.com/>pin up casino</a> порно с Матвей Сафонов (футбол) макао казино ап казино сайте букмекерской конторы фонбет сайт винлайн букмекерская контора человек казино ramenbet casino
DiskiPlus 1×bet на андроид бесплатно DiskiPlus porno Алена Косторная (фигурное катание) <a href=https://diskiplus.ru>DiskiPlus Крючкова Полина Викторовна порно</a> DiskiPlus 7k casino DiskiPlus casino скачать приложение <a href=https://www.diskiplus.ru/>DiskiPlus casino зеркало сегодня</a> DiskiPlus казино пин DiskiPlus pin casino зеркало DiskiPlus порно с Виктория Синицина, фигуристка DiskiPlus porno Елизавета Туктамышева DiskiPlus казино сегодня DiskiPlus kent casino регистрация DiskiPlus pin up casino top top
#4894 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet официальный xbet Светлана Ходченкова <a href=https://krtka.info/>казино</a> Шевцова Татьяна Викторовна порно 7k casino <a href=https://rucriminal.info/>букмекерские конторы без депозита</a> зеркала казино Елизавета Боярская vodka casino пина букмекерской конторы кент казино pin up букмекерская контора казино фильм онлайн
DiskiPlus Любимова Ольга Борисовна порно DiskiPlus 1×bet регистрация <a href=https://diskiplus.ru>DiskiPlus порно с Каролина Севастьянова</a> DiskiPlus porno Алена Михайлова DiskiPlus casino регистрации <a href=https://diskiplus.ru>DiskiPlus казино рулетка</a> казино DiskiPlus смотреть фильм казино DiskiPlus казино фильм онлайн DiskiPlus bet casino DiskiPlus водка казино DiskiPlus pin casino DiskiPlus сколько казино
#4895 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пин casino бывшие казино <a href=https://kompromat1.online/>1×bet бесплатно</a> Нургалиева Эльвира Рамиловна порно букмекерская контора официальный сайт скачать <a href=https://specreporter.com/>porno Анна Сидорова, керлингистка</a> 1×bet зеркало на сегодня up casino официальный скачать букмекерскую контору на андроид vavada casino про казино приложения букмекерских контор kent casino регистрация
DiskiPlus казино фильм DiskiPlus 1×slots casino <a href=https://www.diskiplus.ru>DiskiPlus ап казино</a> DiskiPlus casino online зеркало DiskiPlus мобильные букмекерские конторы <a href=https://diskiplus.ru>DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz</a> DiskiPlus порно с Афонина Марина Игоревна DiskiPlus скачать casino на андроид DiskiPlus казино фильм DiskiPlus 1×bet на андроид бесплатно DiskiPlus porno Илья Ковальчук (хоккей) DiskiPlus 1×bet зеркало рабочее DiskiPlus человек казино
#4896 Charlesgunnyhttp://filmkachat.ru
1х слот регистрация в 1×slots casino
Получить Бездепозитный бонус в интернет казино дело 2-ух кликов. Другой момент, отыграть промо и соблюсти правила и обстоятельства отыгрыша. Под правилами предполагается не только вагер, но и лимитирования по наибольшей ставке. Мы разумеем, что в кинотеатр все ставят на зеро и выигрывают. Призываем не создавать подобного. Перед активацией бонуса прочтите правила. Узнайте последующие факторы: Условия получения презента, за регистрацию, за депозит и многое. Ограничения по максимальной ставке. Зачастую не выше 350 руб. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вращать автоматы, а вагер будет стоять на пространстве. Поэтому важно аристократия, в каких забавах возможно совершать кратность денежного оборота. <a href=http://filmkachat.ru/>1 xslots рабочее зеркало</a> <a href=https://www.swiatobrazu.pl/forumgaleria/thread/view/id/590>https://www.swiatobrazu.pl/forumgaleria/thread/view/id/590</a> Иногда операторы требуют внесение малого депо перед выводом для верификации платежного инструмента. В неких казино данный депо также предстоит отыграть.Но существуют азартные заведения, готовые просто так вручить деньги на забаву. Для сего довольно создать профиль. Чтобы исключить выигрыш, сначала нужно выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа. 1хслотс мобильная версия зеркало <a href=https://forum.bedwantsinfo.nl/member.php?action=profile&uid=82989>https://forum.bedwantsinfo.nl/member.php?action=profile&uid=82989</a>
1хслотс официальный сайт зеркало
Помните, собственно в некоторых забавах сумма ставки идет в зачет вейджера только отчасти. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки числятся как отыгранные средства, момент как в слотах идет в зачет все 100% суммы. <a href=http://www.forum.kalor.ru/blog/anathanhtolzeoz8442/index_r-140599.html#r140599>1хслотс зеркало на сегодня</a> 1×slots рабочее зеркало на сегодня Частенько новенькие не знают, как активировать подарки или вывести 1-ый выигрыш. Для похожих случаев наша команда описала главные термины – собственно такое фриспины, вейджер, как его отыграть, чего нужно проходить верификацию. <a href=https://www.google.com.gh/url?q=https://doctorlazuta.by/>https://www.google.com.gh/url?q=https://doctorlazuta.by/</a> 1×slots промокод при регистрации 2025 Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и. Когда игроку полагается большое фриспинов, администрация имеет разбивать их начисление на некоторое дней. Бесплатные вращения предоставляются для конкретного слота, который указывается в правилах промоакции.В некоторых интернет казино для получения бездепозитных призов не довольно просто зарегистрироваться на веб-сайте клуба и доказать средства контактные данные. Дополнительно потребуется активация промокода.
1×slots быструю регистрацию а также мгновенное
У каждого игорного клубы разные вейджеровые обстоятельства. Чтобы вы гарантировано смогли выполнить их, мы дадим некоторое советов. Если система начислила небольшую сумму, не создавать немалые ставки – остановитесь на 10–30 центах. Как лишь сумеете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте играть. В противном случае превосходнее присмотреться к иному автомату. <a href=https://www.grandprixforums.com/members/54179.html>https://www.grandprixforums.com/members/54179.html</a> казино 1×slots Бездепозитные призы казино за регистрацию в 2022 году — это вероятность сыграть за счёт заведения. Казино даёт клиенту шанс воспользоваться определённой суммой либо числом даровых вращений без внесения депо. Не путайте деморежим с реальной игрой без надобности внесения депозита.Так же стоит выделить то, что в любом интернет казино установлен свой наибольший кешаут на бездепозитный приз. Как правило кешаут — это максимальная сумма денег, которая дешевая для вывода с бездепозитного бонуса.
1×slots регистрацию более популярный вариант это
На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению этого времени, Вы не сможете активировать и получить бездепозитный бонус. Для всех бездепозитных призов действует максимальный предел на выигрыш. Он указывает предельную необходимую, коию вы сможете получить, играя на бонусные кредиты. Как лишь вам удастся выполнить требования вейджера, допустимый максимально будет переведен с бонусного счета на главный, а остаток будет списан. рабочее зеркало 1хслотс <a href=https://scientific-programs.science/wiki/User:RobertoZinnbauer>https://scientific-programs.science/wiki/User:RobertoZinnbauer</a>
1×slots актуальное зеркало
Даже не выиграв крупную необходимую, игрок интересно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе превосходнейших промоакций легкостью. Достаточно регулярно изучать перечень свежих онлайн казино с выводом приза без депозита в данном разделе.Возможность сыграть вспомогательное соревнование (а времени и количество) совершенно бесплатно, а выигрыш, тому, поступает на счёт игрока. <a href=http://mos-it.ru/index.php?subaction=userinfo&user=exclusivebunch4>http://mos-it.ru/index.php?subaction=userinfo&user=exclusivebunch4</a> Бездепозитные бонусы реальными средствами, которые можно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадали.Частенько новички не знают, как активировать подарки или вывести 1-ый выигрыш. Для подобных случаев наша команда описала основные термины – что такое фриспины, вейджер, как его отыграть, чего нужно проходить верификацию. 1×slots casino зеркало рабочее Вейджер не более х30–35 является приемлемым. Опытные игроки утверждают, что с этим вейджером реально остаться в плюсе, случае правильно подойти к выбору игрового аппарата.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.survival-readiness.com/viewtopic.php?t=267063>скачать 1×slots официальный сайт</a>
<a href=https://demo.comuni-italiani.it/forum/viewtopic.php?f=9&t=520831>1× slots официальный</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Некоторые онлайн-казино без депо предлагают новым посетителям выбрать бонус при регистрации. Будьте внимательны: выбрав раз, вы в абсолютном большинстве случаев не сможете пользоваться остальными. Для получения бонуса надо(надобно) ознакомиться с программкой лояльности казино и устроить ставки на необходимую, необходимую для перехода на грядущий уровень.
#4897 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало
Реже призы без депозита начисляются неизменным игрокам. С их подмогою администрация старается удержать ценных посетителей или вожделеет поблагодарить за лояльность правильных гостей. Но гораздо чаще для сходственных целей используются эти акции:Размер ставки для игры по бездепозитному бонусу (естесственно же, если, тогда,, когда он представлен в виде бонусных валютных средств) зачастую ниже, чем при этой на депозит. Ограничение будет работать до этапа отыгрыша приза. <a href=http://filmkachat.ru/>1×slots зеркало видели такую регистрацию на</a> Вознаграждения за получение VIP-статуса ? начисляются масштабах программы лояльности при достижении одного уровня либо выдаются персонально менеджерами службы поддержки. <a href=https://telegra.ph/Navigating-Cannabis-Delivery-Services-in-Whitby-11–24>https://telegra.ph/Navigating-Cannabis-Delivery-Services-in-Whitby-11–24</a> Если вы новичок в и только попали в неизведанную вами район азарта — с помощью услуг как бездепозитные призы без пополнения. 1×slot регистрация <a href=https://latino-forex.com/members/233620-miguelroawn>https://latino-forex.com/members/233620-miguelroawn</a> Внесение депо – Будьте готовы восполнить счет в отыгрыша бонуса. Это обычное заявка верховодил для этого подобии промо-акций. Лучше заранее уточнить, какую сумму нужно будет заносить на счет. Как управляло, речь о минимальном депозите, но вы обязаны быть уверены, что он вас по карману.Важно, убедитесь том,, собственно раньше не регистрировались в выбранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи.
1×slots официальный зеркало
Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды присутствуют на этой странице. Посетитель имеет расценить обстоятельства получения и начать выступать на средства без внесения депо. При этом игроку принципиально разуметь, на каких критериях и какими способами него исключить полученный выигрыш. Для сего нужно расценить перечень подключенных платежных систем. 1× slots casino зеркало Исходя из этого, просто не существует осмысленных оснований махнуть рукою на получение такого приза при регистрации. И, будет, на подобный бесплатной базе у вас все шансы выиграть деньги и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, нарекают безвозмездными интернет платформами для игр. <a href=https://www.one2bay.de/forum/member.php?action=profile&uid=26091>https://www.one2bay.de/forum/member.php?action=profile&uid=26091</a> 1хслот 1хслотс регистрация перейти на 1×slots Верификация аккаунта. Лучше доказать лицо незамедлительно после регистрации, чтобы позже не было заморочек с выводом денег. Верификация может протекать 2-мя способами:
казино 1×slots
<a href=https://gamesgrom.com/user/Raymondpoent/>https://gamesgrom.com/user/Raymondpoent/</a> Раздача призов может быть приурочена к различным датам: календарные праздники, деньки рождения игроков, юбилей открытия казино и т. Д. Подарок выдается в виде денег, фриспинов либо баллов для накопления и размена на предложения оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд притязаний.Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских рублей. В критериях промоакции предписано, собственно вейджер бездепозитного бонуса х20. Поэтому, дабы отыграть бонус, игроку несомненно необходимо сделать ставок на 35*20=700 руб. 1хслот зеркало Необходимость отыгрыша. Вейджер в повыше, чем для призов за депо. И же средства не отыграны, исключить их невозможно.Существует ли стратегии для отыгрыша бездепозитных бонусов? К раскаянию нет, на выигрыши либо проигрыши с призов, казино либо игрок повлиять возможности, отдача игр случается от создателей игр.
1×слотс казино
Доступность — бездепозитные бонусы в казино чаще всего предоставляются свежим игрокам, но посещают случаи, когда бонус имеют получить и действующие клиенты. Для получения бонуса надо(надобно) пригласить в забаву свежего посетителя. Казино начисляет пригласившему фиксированный процент от взносов приглашённого вид бонуса: почаще всего его размер не выше 10%. Срок действия бонуса правило не превышает месяца: пригласивший получает бонус зависимо проигранных ставок приглашённого в 1-ый луна игры.4. Заберите подарок. Чаще всего бонус активируется незамедлительно последствии регистрации. Но бывают истории, когда надо(надобно) забежать в индивидуальный офис либо написать в службу поддержки. Сроки активации бонуса устанавливаются любым казино, хотя чаще всего они не превосходят недели с момента получения. Игроку обязательно нужно применять бездеп протяжении указанного срока, в ином случае приз просто пропадет. Каждый бонус можно получить только раз один, потому если не применять бездеп в срок, у игрока не несомненно 2 шанса им пользоваться. 1×slots казино мобильная версия <a href=https://stroyotzyvy.org/user/DoctorLazutasn/>https://stroyotzyvy.org/user/DoctorLazutasn/</a>
1хслотс зеркало на сегодня
Раздача призов возможность быть посвящена разным датам: календарные праздничные, дни рождения игроков, юбилей открытия казино и т. Д. Подарок выдается в виде денег, фриспинов либо баллов для накопления и размена на услуги оператора. Если юзер получает выигрыш, средства начисляются на его счет. Для вывода этой суммы понадобиться выполнить ряд притязаний. <a href=http://istinastroitelstva.xyz/index.php?subaction=userinfo&user=plausibleupshot>http://istinastroitelstva.xyz/index.php?subaction=userinfo&user=plausibleupshot</a> Исходя из сего, просто не существует мудрых причин махнуть рукой на получение такого бонуса при регистрации. И, лишним, на такой бесплатной базе у вас все шансы выиграть средства и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные призы, называют безвозмездными интернет платформами для игр. онлайн казино 1×slots У любого игорного заведения свои правила и обстоятельства. Но, дабы получить призы, нужно выполнить стандартные деяния:
<b>Смотреть еще похожие новости:</b>
<a href=http://lider1c.ru/communication/forum/messages/forum5/message19381/15317–1×-slots-registratsiya-v-1×slots-casino?sessid=642d29b613521a9972dd4b7217f5b825&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1× slots регистрация в 1×slots casino</a>
<a href=https://thetechmodders.com/forums/viewtopic.php?t=65582>1× слот зеркало</a>
<a href=https://forums.scar-divi.com/topic/674115–1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D1%82%D0%BE-%D0%B4%D0%B0%D0%BB%D1%8C%D1%88%D0%B5-%D0%BD%D0%B5%D0%BE%D0%B1%D1%85%D0%BE%D0%B4%D0%B8%D0%BC%D0%BE-%D0%BF%D1%80%D0%BE%D0%B9%D1%82%D0%B8/>1×slots зеркало регистрация то дальше необходимо пройти</a>
<a href=https://forum.ltp-team.com/topic/95904–1×slots-zerkalo-na-segodnya/>1×slots зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Стоит отметить, собственно бездепозитный бонус выдается только совершеннолетним новичкам, которые, же, могут пригласить личных приятелей и знакомых, кроме претендующих на поощрительную программу лояльности. Подобная разработка появилась среди соперничающих онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры способствуют увеличению своей популярности, методом привлечения новых игроков. Бонусы – это оригинальный шанс для потенциальных участников игры, коие все опробовать софт покер рума и увериться, станут ли они в него выступать или нет. Новый игрок испробует свои силы с реальными оппонентами в казино.
#4898 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Матвей Сафонов (футбол) porno Яна Троянова <a href=https://www.ossetia.tv/>casino на телефон</a> порно с Георгий Джикия (футбол) 1×bet сайт 1×bet xyz <a href=https://specreporter.com/>букмекерская контора бесплатно скачать</a> Самойлова Алла Владимировна порно casinos winning пин ап casino pin bitz casino casino онлайн casino com pin up casino
DiskiPlus букмекерская контора казино <a href=https://www.diskiplus.ru>DiskiPlus 1×bet официальный сайт 1×bet xyz</a> DiskiPlus 1×bet официальный слоты DiskiPlus скачать букмекерскую контору <a href=https://diskiplus.ru>DiskiPlus online casino</a> DiskiPlus Ходнева Светлана Владимировна порно DiskiPlus сайт казино вход DiskiPlus смотреть фильм казино DiskiPlus casino 7k рабочее DiskiPlus Кузнецова Анна Юрьевна порно DiskiPlus сайт казино вход DiskiPlus лучшие казино бесплатно
#4899 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора скачать приложение сайте букмекерской конторы фонбет <a href=https://sovsekretno.net/>vavada casino</a> включи казино kent casino <a href=https://repost.news/>казино вход официальный сайт</a> букмекерские контора ап почему в казино нет часов бесплатные букмекерские конторы казино большая 1win букмекерская контора букмекерская контора бетсити 1win букмекерская контора
DiskiPlus скачать 1×bet на андроид бесплатно DiskiPlus скачать 1×bet 1×bet xyz <a href=https://diskiplus.ru/>DiskiPlus казино пин</a> DiskiPlus порно с Александр Головин (футбол) DiskiPlus pin up casino пин <a href=https://www.diskiplus.ru>DiskiPlus porno Мария Шарапова</a> DiskiPlus Лут Оксана Николаевна порно DiskiPlus pin up casino DiskiPlus вывод казино DiskiPlus vavada casino DiskiPlus букмекерская контора скачать приложение DiskiPlus pin up casino пин ап DiskiPlus casino бонус
#4900 Richardsonsehttps://top10casinossites.lat
Спасибо, долго искал _________________ <a href=„https://top10casinosbonus.lat“>Free casino online</a>
#4901 MarvinWakhttps://m.youtube.com/@hotdrop-case
Откройте яркие кейсы CS:GO <a href=https://m.youtube.com/@hotdrop-case>кс кейсы</a> и получите шанс выиграть топовые скины! Широкий выбор кейсов, высокий шанс дропа и честная система обеспечат увлекательный опыт.
#4902 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
Как лишь вы отыграли вейджер и средства с бонусного баланса перешли вам на настоящий счет, Вы храбро можете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (устроить наименьший депо к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, совместно, вкупе с депо).Акции, приуроченные к календарным дням, случаются рассчитаны как на всех пользователей, например и на категории: примеру, презент на 8 марта девушкам-игрокам или мужчинам на 23 февраля. <a href=http://filmkachat.ru/>1× slots зеркало</a> Также случаются случаи, когда казино начисляет оговоренный бонус после регистрации нового посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам.Начнём с как, что каждое рекламную за регистрацию предполагает некие условия. Бездепозитные призы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, нужная для выполнения критерий. Пример, возымели бесплатные вращения и выиграли с них 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 рублей, неудачных или выигрышных, неважно. После выполнения, бонусный баланс перейдёт на настоящий и будет легкодоступным к выводу. <a href=https://www.chambers.com.au/forum/view_post.php?frm=1&pstid=77273>https://www.chambers.com.au/forum/view_post.php?frm=1&pstid=77273</a> Мы собрали и опубликовали список превосходнейших бездепозитных казино с призами за регистрацию, которые гарантируют великодушные выигрыши и моментальные выплаты. 1×slots сайт <a href=http://maglik.ru/user/RalphDeeno/>http://maglik.ru/user/RalphDeeno/</a> Так же стоит выделить то, что в любом интернет казино установлен собственный максимальный кешаут на бездепозитный бонус. Как верховодило кешаут — это максимальная сумма средств, которая дешевая для вывода с бездепозитного приза.Иногда для получения бонусов необходимо связаться с адептами службы поддержки. Удобнее всего с ними беседовать в онлайн-сате, желая времени достаточно запроса по электронной почте.
1×slots официальный сайт зеркало
Фриспины начисляются по конкретной ставке. После их активации игроку необходимо запустить разъем и убедиться, собственно в нем отображаются благотворительные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода в отыгрыша определяется оператором и редко превышает 5 000 рублей. 1× slots casino зеркало <a href=http://kranik32.ru/user/Tyronelet/>http://kranik32.ru/user/Tyronelet/</a> Многие новенькие колеблются, что поощрительный приз надо будет возвращать, и случае они выиграли у казино. Это безусловно неопасно и накрепко. Выводя выигранные свои, игрок просто одергивает свое участие при и теряет уникальную возможность – даром увеличивать личное материальное положение. 1× slots casino зеркало Какие бонусы я могу еще получить не бездепозитного приза за регистрацию в казино? По мимо бездепозитного бонуса, каждое онлайн казино предлагает игрокам прибыльное предложение на первый депозит, вы совершаете депозит, ваш депозит возрастает в двое либо и в 3, что, этим самым начать играть можно с больше крупной суммой, например же не забываем про вейджер на призы.Возможность протестировать свежие забавы, не рискуя собственными своими и разработать собственную стратегию забавы.
1×slots зеркало которую указывали при регистрации кстати
С другой стороны, гораздо легче забрать бездепозитные фриспины за регистрацию в казино и прямо момент начать вертеть барабаны в наилучших слотах. Главная особенность спинов что, собственно они предназначены для лучших автоматов. Удастся не пройти дополнительные раунды, но и прирастить необходимую выигрыша, заработать респины прочие внутриигровые подарки. <a href=http://ayaz-aktau.kz/index.php?subaction=userinfo&user=nullbroker56>http://ayaz-aktau.kz/index.php?subaction=userinfo&user=nullbroker56</a> 1хслотс официальный сайт зеркало Для получения бонуса нужно ознакомиться с программкой лояльности казино и устроить ставки на необходимую, нужную для перехода на следующий уровень.
1×slots регистрация 1×slots casino c2d ru
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=62731&extra=>1×slots casino зеркало</a> Зарегистрироваться в казино по специальной ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефона и электронную почту). Для подтверждения номера аппарата необходимо в собственном профиле показать свой номер и надавить кнопку „Подтвердить номер телефонного“, далее Вы получите sms-сообщение с кодом, который нужно установить в подходящее поле. Для подтверждения электронной почты, перебежать по интенсивной ссылке в послании от казино.Разные казино имеют собственные верховодила по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высочайшие притязания. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до ста один в игровых автоматах. Например, если игрок получил бесплатно десять $, то нужно будет отыграть их, поставив 1 тыщу спинов по 1 доллару любой. Стоит обозначить(означить), собственно не все казино дают вероятность выступать на призы и не во всех увеселительных заведениях схожие верховодила для отыгрывания. Некоторые казино воспрещают играть на бонусы в блекджек или ограничивают ставки до 5 процентов, собственно значительно увеличивает в 10-ки один число необходимых игр. 1×slots официальный сайт зеркало рабочее <a href=http://43.240.15.40/home.php?mod=space&uid=582147>http://43.240.15.40/home.php?mod=space&uid=582147</a> Создание аккаунта. На веб-сайте казино нужно обнаружить регистрационную форму и заполнить пустопорожние поля собственными данными. Иногда на данном шаге требуется показать только адресок электрической почты и пароль, но почаще надо заполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д. ). Нужно свидетельствовать только реальные данные, поскольку впоследствие они будут испытаны.
1хслотс 1хслотс регистрация перейти на 1×slots
Прочитайте верховодила бонусной программы, в которой желаете принять. Да, мы настойчиво советуем устроить это до регистрации.Бездепозитные призы начисляются лишь раз один. Не стоит раскрывать свежие аккаунты, чтобы получить их повторно. Служба защищенности казино непременно выявит «левого» соучастника и заблокирует. Если посетитель выполнит необходимые притязания, отыграет собственную ставку и решит исключить собственный выигрыш, то ему надо(надобно) к, что казино обязательно потребует дать ксерокопии личных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные свои исключить не удастся. Многие казино деют в рекламных целях бесплатные бонусы самая для наших читателей. Чтобы их получить, надо(надобно) перебежать на игровой сайт по партнерской ссылке с нашего портала.Многие казино деют в рекламных целях благотворительные призы самая для наших читателей. Чтобы их получить, надо(надобно) перебежать на игровой вебсайт по партнерской ссылке с нашего портала. <a href=http://moujmasti.com/member.php?12036-snottyadage3>http://moujmasti.com/member.php?12036-snottyadage3</a> Хотя безвозмездные призы начисляются без депо, не исключено, что для понадобиться вносить деньги. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь в того, как новый заказчик первый пополнит игровой счет.1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, если не желаете замерзнуть жертвой мошенников либо впустую потратить время; 1×slots рабочее зеркало на сегодня В лицензионных бездепозитных казино играть в азартные игры вправду неопасно. Наличие лицензии одобряет что, этот прецедент, что клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP.Особую изюминку видео слотам придают уникальные знакы. С их выходом активируются разные бонусы. Вы сможете запустить вспомогательный степень и прирастить необходимую выигрыша. Есть знаки, коие сменяют ненужные составляющие и сами создают выигрышные комбо. Не стоит забывать и про бонус-тур. После любого удачного спина есть шанс увеличить необходимую выигрыша в два либо четыре раза.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.visiteachapada.com/viewtopic.php?f=19&t=3840>1× slots сайт</a>
<a href=https://talkonlinenews.com/viewtopic.php?t=6467>1хслотс казино зеркало</a>
<a href=https://australiantravelforum.com/Upload/showthread.php?tid=245396>1×slot рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Все бесплатные бонусы кажутся заманчивыми. Кто же категорически от способности поиграть в онлайн-казино, не рискуя средствами, но получая выигрыши. Но далековато не все бездепозитные призы одинаковой презентабельны для рассудительного клиента. С такими ординарными советами любое казино с призом за регистрацию способно принести в разы больше выгоды и выгоды.
#4903 Ремонт iPad Air 2https://remont-ipad-air-2-belk.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт ipad air 2 цены, можете посмотреть на сайте: <a href=https://remont-ipad-air-2-belk.ru/>ремонт ipad air 2 цены</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#4904 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Андрей Рублев (теннис) порно с Каролина Севастьянова <a href=https://t.me/vchkogpu_ru>казино зеркало сегодня</a> букмекерская контора фонбет букмекерская контора на андроид <a href=https://glvk.guru/>казино смотреть онлайн</a> 1×bet зеркало рабочее на сегодня Мухтиярова Елена Вячеславовна порно реального казино порно с Артемий Панарин (хоккей) официальное казино вход кент casino зеркала официальных сайтов казино
DiskiPlus какие казино DiskiPlus casino зеркало сегодня рабочее <a href=https://www.diskiplus.ru/>DiskiPlus 7k casino зеркало на сегодня</a> DiskiPlus пин ап casino pin DiskiPlus porno Александра Степанова, фигуристка <a href=https://diskiplus.ru/>DiskiPlus казино онлайн бесплатно</a> DiskiPlus up casino скачать DiskiPlus букмекерская контора на андроид DiskiPlus 1×slots casino DiskiPlus балтбет букмекерская контора DiskiPlus включи казино DiskiPlus casino бездепозитный DiskiPlus почему в казино нет часов
#4905 AHoini
<a href=https://vds94948.post-blogs.com/51918126/a-secret-weapon-for-1win-app>1win Cameroun</a> <a href=https://studentbryansk.ru/2024/10/06/the-benefits-of-using-1win-uganda>1win uganda</a>
#4906 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало
Например, игрок получил 500 рублей при твореньи аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 руб., потребуется сделать 875 спинов для полного отыгрыша. <a href=http://filmkachat.ru/>1хслотс зеркало</a> При регистрации в том или ином интернет игральном заведении — для дается раз шанс испытать свою удачу не внося свои монеты. Замечу что такую поощрительную услугу предоставляют не все интернет игровые площадки, а только щедрая половина из них. Которые мы подготовили для Вас в нашем списке.Самые известные методы вывода денег ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам подобии Neteller и Skrill, еще пользуются криптовалютными кошельками. Вывод выигрышей имеет осуществляться мгновенно либо развлекать от нескольких часов до нескольких суток. <a href=https://www.swiatobrazu.pl/forumgaleria/thread/view/id/524>https://www.swiatobrazu.pl/forumgaleria/thread/view/id/524</a> 1хслот 1хслотс регистрация перейти на 1×slots <a href=https://australiantravelforum.com/Upload/member.php?action=profile&uid=1431>https://australiantravelforum.com/Upload/member.php?action=profile&uid=1431</a> Верификация аккаунта. Лучше подтвердить лицо незамедлительно в регистрации, дабы позже не было проблем с выводом денег. Верификация имеет протекать двумя способами:Процесс доказательства личности возможность взятьвдолг(взятьвзаймы) от 1-го дня до недели. Если клиент разрешил нибудь ошибку при заполнении паспортных данных, то ему идет обратиться с задачей в службу онлайн-казино.
1×slots casino регистрация 1×slotscasin online
Подтвердите регистрацию, чтобы активировать Бездепозитный приз с выводом, требуется заполнить собственный профиль. Заполните пустые поля настоящими данными о для. <a href=http://evtrucksforum.com/viewtopic.php?p=793478#p793478>1×slots рабочее зеркало на сегодня</a> 1×slots зеркало регистрация в 1×slots casino Хотя благотворительные призы начисляются без депо, не исключено, собственно вам придется заносить деньги. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь после как, как новый заказчик раз пополнит игровой счет.Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных требований, не обязательной верификации. Если на сайте предусмотрена обязательная процедура доказательства личности, то исключить выигрыш удастся лишь после проверки данных. Приготовьтесь заполнить анкету и отправить в техподдержку документ, подтверждающий личность. <a href=http://komunikacyjnerpg.cba.pl/member.php?action=profile&uid=239068>http://komunikacyjnerpg.cba.pl/member.php?action=profile&uid=239068</a> Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? 1×slots casino зеркало Например, игрок получил 500 руб. При творении аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 руб., потребуется устроить 875 спинов для полного отыгрыша.Казино дает возможность заработать и исключить настоящие средства на бездепозитных призах. Обычно, это незначительная сумма, коию казино возможность себе разрешить презентовать игроку.
1×slots зеркало регистрацию более популярный вариант это
Помните, собственно в некоторых играх сумма ставки идет в зачет вейджера только отчасти. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки считаются как отыгранные средства, в то время как в слотах идет в зачет все one hundred percent суммы. Такой бесплатный эквивалент средств зачисляется на профиль пользователя после воплощения притязаний и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений возможен лишь после воплощения вейджеровых критерий.Чтобы выступать бесплатно на настоящие средства в казино, не всегда достаточно просто зарегистрироваться. Иногда необходимо выполнить дополнительные деяния. <a href=http://deshignsongpa.com/bbs/board.php?bo_table=free&wr_id=291447>http://deshignsongpa.com/bbs/board.php?bo_table=free&wr_id=291447</a> Этот образ приза будет добавлен на Ваш аккаунт последствии успешной процедуры регистрации с внедрением номера телефонного. Если выбрать другой метод творенья учетной записи, бездеп не несомненно добавлен на Ваш акк. казино 1×slots официальный сайт После потребуется привнести идентификационный платёж. Это пугает начинающих больше всего. Нужно сделать минимальный депо в 100–500 руб. Таким образом служба безопасности убедиться никаких, что платёжный способ принадлежит Вам. Данная процедура важна для обеспечивания защищенности игровых счетов. Пример, Ваш акк взломают и выведут свои на собственный кошелёк. Будет крайне досадно. Поэтому верификация платёжной системы, это важный момент.1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, если не хотите стать жертвой мошенников или впустую израсходовать время;
1х слот регистрация в 1×slots casino
Также учтите, что некоторые игровые платформы сужают перечень стран, коие способны получить предложенный бездепозитный приз за регистрацию. К образцу, существуют онлайн-заведения, выдающие сходственные призы только жильцам конкретных государств. К примеру, интернет казино 777 Оригинал предоставляет бездепозитный бонус только игрокам из России и стран СНГ. Или наоборот, пичкают вознаграждением всех, не обитателей некоторых стран (следует этого, по пристально изучать список, чтобы потом не возникло никаких вопросов и жалоб). <a href=https://www.rusdrama-az.com/support/51-sluzhba-tehnicheskoy-podderzhki-sayta.html>1хслот скачать</a> Далее потребуется отыграть вагер и вывести выигрыш. Игрокам без навыка крупно подфартило, они могут получить десятки презентов за 1 регистрацию. Если не сумели получить Бездепозитный бонус, не беспокойтесь. Обратитесь в интернет чат, оператор поможет ситуацию. 1×slots коды <a href=http://muhaylovakoliba.1gb.ua/user/Jaspermug/>http://muhaylovakoliba.1gb.ua/user/Jaspermug/</a> Подарки на конкретные даты выделяются критериями получения. Если поощрение начисляют игроку на денек рождения, то сумма обычно зависимости от общего объема депозитов последний год.
1× slots casino зеркало
<a href=https://www.3yecao.org/home.php?mod=space&uid=35027>https://www.3yecao.org/home.php?mod=space&uid=35027</a> В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая приятная доля игры. Важно, часто бездепозитные бонусы в казино выдаются с лимитированиями по наибольшей выплате. В среднем можно рассчитывать на прибыль в количество тысяч рублей. Как исключить выигрыш с приза без депозита. Придётся доказать акк документально, в некоторых заведениях. Процедура верификации неотклонима и делается каждым игроком. О документальном доказательстве учетной записи спрашивайте в интернет чате или прочитайте в правилах. 1х слот регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=446389>1хслотс официальный сайт зеркало</a>
<a href=https://melhorlance.com.br/author/jamesbom/>1×slots регистрация на сайте 1×slots ru com</a>
<a href=https://qualityprogamer.de/forum/showthread.php?tid=397287>1×slots регистрация 1×slotscasino09k online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Риск-игра по одинаковым шансам – Также казино имеет запрещать исполнять условия по отыгрышу за раунда на удвоение, который предлагается в слотах, видео-покере и некоторых иных забавах. Казино выводит деньги лишь на что, эту платежную систему, с котрой был изготовлен депо. То есть, для вывода бездепозитного бонуса, Вам сначала нужно восполнить счет. В неких клубах узкий список способов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с данных платежных способов, коие доступны для вывода.
#4907 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
промокод 1×bet букмекерская контора на андроид <a href=https://slon-ru.com/>рабочее казино</a> Скоробогатова Ольга Николаевна порно порно с Алина Загитова, фигуристка <a href=https://rucriminal.info/>1×bet casino</a> порно с Илюшникова Татьяна Александровна скачать 1×bet на андроид букмекерскую контору пин макао казино Мухтиярова Елена Вячеславовна порно 1×bet на сегодня ев казино
DiskiPlus pin ап casino DiskiPlus букмекерская контора официальный сайт <a href=https://diskiplus.ru>DiskiPlus порно с Абрамченко Виктория Валериевна</a> DiskiPlus porno Илона Маркова, хоккеистка DiskiPlus леон букмекерская контора <a href=https://diskiplus.ru>DiskiPlus online casino официальный</a> DiskiPlus Набиуллина Эльвира Сахипзадовна порно DiskiPlus Елена Лядова DiskiPlus porno Екатерина Ефременкова, шорт-трекистка DiskiPlus реального казино DiskiPlus демо казино DiskiPlus фильмы казино рояль DiskiPlus porno Илья Ковальчук (хоккей)
#4908 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Анна Щербакова, фигуристка casino промокод <a href=https://repost.news/>1×bet на сегодня</a> включи казино суть казино <a href=https://krtka.info/>1×bet официальный</a> букмекерская контора бетсити почему в казино не бывает настенных часов 7k casino зеркало на сегодня порно с Илюшникова Татьяна Александровна мобильные букмекерские конторы casino бездепозитный яндекс игры казино
DiskiPlus kent casino DiskiPlus 1×bet официальный слоты <a href=https://diskiplus.ru/>DiskiPlus casino игровой автомат</a> DiskiPlus сайт казино вход DiskiPlus casinos winning <a href=https://www.diskiplus.ru/>DiskiPlus Яровая Ирина Анатольевна порно</a> DiskiPlus 7k casino официальный DiskiPlus porno Алена Косторная (фигурное катание) DiskiPlus porno Дарья Клишина DiskiPlus казино играть DiskiPlus 1×bet зеркало слоты 1×bet xyz DiskiPlus спорт букмекерская контора DiskiPlus 1×bet слоты официальный сайт
#4909 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino online зеркало скачать pin casino <a href=https://specreporter.com/>порно с Васильева Татьяна Викторовна</a> порно с Захарова Мария Владимировна казино пину <a href=https://res-publika.com>порно с Ирина Сидоркова</a> букмекерские конторы без депозита Окладникова Ирина Андреевна порно пин casino букмекерские контора ап Манилова Алла Юрьевна порно Ирина Горбачева играющие казино онлайн
DiskiPlus 1×bet официальный xbet DiskiPlus играющие казино <a href=https://www.diskiplus.ru>DiskiPlus casino зеркало сегодня рабочее</a> DiskiPlus мелбет букмекерская контора DiskiPlus порно с Гатагова Ольга Анатольевна <a href=https://www.diskiplus.ru/>DiskiPlus почему в казино нет часов</a> DiskiPlus unlim casino DiskiPlus porno Светлана Ходченкова DiskiPlus как выиграть в казино DiskiPlus порно с Аделия Петросян (фигурное катание) DiskiPlus букмекерская контора фонбет DiskiPlus скачать pin casino DiskiPlus порно с Матвей Сафонов (футбол)
#4910 Charlesgunnyhttp://filmkachat.ru
1×slots скачать на айфон
Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы моментально получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, появляется реальный шанс победу!Бездеп с фриспинами может охватывать всю коллекцию игр на сайте или разработки 1-го провайдера. Обычно предлагается определенный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш возможность быть выведен после как, как юзер отыграет эту необходимую. Возможность оценить глубокий возможностей слотов — основное совершенство этой разновидности. Игроку становятся доступны что, эти опции, коие отсутствуют в демонстрационном режиме, а возможность выиграть реальные деньги прибавляет ярчайших азартных ощущений. <a href=http://filmkachat.ru/>1×слотс казино</a> Для как, дабы отыграть необходимую вашего бездепозитного бонуса нужно выполнить условия вейджера. Очень нередко фриспины даются на конкретные слоты (book of ra, book of deceased, book of sun), подбирайте разъем себе по, все очень красивые и высококачественные. Бездепозитные бонус имеет быть денежным так и вид фриспинов на слоты1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, если не хотите замерзнуть жертвой жуликов либо впустую потратить время; <a href=https://letterboxd.com/lexxeagle/list/revolutionary-approaches-in-modern-virtual/>https://letterboxd.com/lexxeagle/list/revolutionary-approaches-in-modern-virtual/</a> Подобные призы без депозита предоставляются на больше прибыльных критериях. Зачастую они покрупнее, а условия отыгрыша наименее строгие.Операторы гемблинга утверждают, собственно так они борются с бонус-хантерами. Впрочем, критики считают, собственно этим казино пробуют сделать из случайного постояльца постоянного игрока. сайт 1× slots casino <a href=https://adobeacrobat.cc/member.php?action=profile&uid=1090>https://adobeacrobat.cc/member.php?action=profile&uid=1090</a> Каждая игровая платформа отличается критериями по получению и отыгрышу бездепов. В правилах детально расписаны временные рамки, за которые надо(надобно) прокрутить вейджер. Также не запамятовывайте тему наибольший объем ставки и максимальную необходимую выплаты. С другой стороны, чтобы получить бездепозитные призы казино, довольно потратить менее 1 минуты.Особую изюминку видео слотам присваивают оригинальные символы. С их в активируются различные бонусы. Вы сможете запустить дополнительный степень и увеличить необходимую выигрыша. Есть знаки, коие замещают негодные элементы и сами делают выигрышные комбо. Не стоит забывать и тему бонус-тур. После каждого счастливого спина есть шанс увеличить сумму выигрыша в два или хорошо раза.
casino 1×slot
<a href=https://nauc.info/forums/viewtopic.php?t=20594237>1×slots скачать на айфон</a> сайт 1× slots casino <a href=http://apatit.org.ua/user/Oscardet/>http://apatit.org.ua/user/Oscardet/</a> казино 1× slots официальный сайт Возможность протестировать новые игры, не рискуя личностными своими и разработать личную тактику забавы.
зеркло казино 1×slots
При отыгрыше бонусных средств, нужно учитывать срок деяния приза и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный бонус несомненно аннулирован.Мы собрали и опубликовали перечень превосходнейших бездепозитных казино с призами за регистрацию, которые гарантируют великодушные выигрыши и мгновенные выплаты. <a href=http://radshir.com/list/index.php?subaction=userinfo&user=PhilipHef>http://radshir.com/list/index.php?subaction=userinfo&user=PhilipHef</a> Чтобы получить вероятность вывести прибыль с бездепозитного бонуса в казино, нужно выполнить ряд условий: 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Ограничения по забавам. Администрация запрещает игрокам кое-какие игровые автоматы с бездепозитным призом, деньгами или безвозмездными вращениями. Обычно, в правилах приводится глубокий список слотов для отыгрыша. Иногда дробление выполняется по облику игр. Например, отыгрыш возможен на всех игровых аппаратах, хотя запрещен в настольных забавах и в разделе Live Casino.Если при регистрации показать промокод, возможно гарантировано получить приз. Где брать ваучер? Посетите тематику блоги или форумы. Иногда администрация клуба делает рассылку ваучеров на электрическую почту. В заключительнее время игорные жилища начали афишироваться в кинокартинах и сериалах. Присмотритесь и скорее заметите промокод, который принесёт 500 либо 1 000 бонусных руб.
1×slots зеркало регистрация то дальше необходимо пройти
Как правило, при выводе финансов, от играющего потребуется только сделать минимальный вклад для того, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом личный счет. Проверка занимает от нескольких мин. До нескольких дней, профессионалы техподдержки шансы запросить дополнительные документы или инициировать краткое общение по Skype. 1×slots официальный сайт зеркало <a href=http://www.tandemkf.com.ua/index.php?subaction=userinfo&user=succinctwarehou>http://www.tandemkf.com.ua/index.php?subaction=userinfo&user=succinctwarehou</a> Для получения бонуса нужно ознакомиться с программкой преданности казино и устроить ставки на сумму, нужную для перехода на грядущий уровень.
1×slots регистрация 1×slotscasino09k online
Прямо в заберите благотворительные вращения за регистрацию без депо и начинайте коллекционировать призовые композиции ради крупных выигрышей!Бездепозитные бонусы казино это экономическая компенсация, предлагаемая пользователям на дармовой основе и вероятность выступать в онлайн казино бесплатно. Если сопоставлять их с одобрениями за вклад, в которых свои выдаются лишь потом первоначального пополнения счета, то бездепозитные вознаграждения получаются безвозмездно. То есть, играющий получает вероятность создавать ставки на теснее существующие деньги, которые выдаст заведение, исполняя, этом, обычные деяния, дабы их извлечь (здесь идет речь о регистрация, удостоверении личности с использованием номера аппарата, оформления заказы и т.д. ). <a href=https://wiki.dulovic.tech/index.php/User:ChristoperDunros>https://wiki.dulovic.tech/index.php/User:ChristoperDunros</a> Можно ли зарабатывать на бездепозитных призах? Это не работа, тут как повезет, если в любом предложенном безедепе, вы будете откручивать вейджер и выводить, время возможно назвать везением, и дополнительной добавкой к вашему бютжету.Как только вы отыграли вейджер и средства с бонусного баланса перебежали вам на реальный счет, Вы неустрашимо сможете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депо). 1×slots на любой вкус как пройти регистрацию Бесплатный приз – кредиты, которые онлайн-казино начисляет посетителю, не заставляя его пополнять игровой счет.
<b>Смотреть еще похожие новости:</b>
<a href=http://big.bestforums.org/viewtopic.php?f=7&t=18037>1× slots casino зеркало</a>
<a href=https://hassicity.com/wp-content/plugins/smart-cookie-kit/res/empty.html>онлайн казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Можно ли в одном онлайн казино получить больше одного бонуса за регистрацию? Нет, так как в любом онлайн казино есть управляла, к коим нужно придерживаться, не создавать два аккаута для получения призов, другому несомненно блокировка обоих аккаутов, не пытайтесь обмануть онлайн казино, приз за регистрацию выдаеться один раз 1 личику. Главное превосходство спинов – вероятность выучить различные слоты. Также удастся насладиться бонусными раундами, испытывать фортуну в риск-туре и преумножить выигрыш за счёт особых знаков. Однако столько игровой процесс заслуживает внимание, так другого, как сосредоточиться на реальном выигрыше.
#4911 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet официальный скачать casino x <a href=https://krtka.info/>1×bet зеркало рабочее xbet</a> казино 1×bet сейчас <a href=https://www.ossetia.tv/>1×bet зеркало на сегодня</a> casino приложения официальная казино порно с Баталина Ольга Юрьевна 1×bet слоты 1×bet xyz скачать 1×bet на андроид лучшие онлайн казино ев казино
DiskiPlus 1×bet рабочее DiskiPlus Нургалиева Эльвира Рамиловна порно <a href=https://www.diskiplus.ru/>DiskiPlus бесплатные букмекерские конторы</a> DiskiPlus pin ап casino DiskiPlus casino com <a href=https://diskiplus.ru>DiskiPlus up casino</a> DiskiPlus 1×bet приложение DiskiPlus bet casino DiskiPlus kent casino DiskiPlus casino скачать DiskiPlus гама казино DiskiPlus пина casino DiskiPlus букмекерская контора леонов
#4912 Ремонт iPad Air 2 Москваhttps://remont-ipad-air-2-belk.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт ipad air 2 цены, можете посмотреть на сайте: <a href=https://remont-ipad-air-2-belk.ru/>срочный ремонт ipad air 2</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#4913 Charlesgunnyhttp://filmkachat.ru
1хслот 1хслотс регистрация перейти на 1×slots
Чем ниже значение вейджера, что, этим проще отыграть и вывести бонус. Если Вы планируете заработать на бездепе, а не просто ознакомиться с новым игровым клубом, то стоит игнорировать бонусов с высоким вейджером их практически не реально отыграть. С ними Вы сможете только протестировать игры заведения. <a href=http://filmkachat.ru/>1×slots зеркало на сегодня</a> Некоторые клубы механически начисляют приз на аккаунт игрока после исполнения критерий получения, но посещают ситуации, когда бонус надо(надобно) активировать игроку самому. Есть количество способов активации бонуса:При правильном раскладе бездепы — это отличный способ играть на деньги без траты собственных средств. Есть несколько рекомендаций, следуя которым можно извлечь максимум полезности из подобных промоакций казино. Играть идет только на лицензированных площадках. Скриптовые веб-сайты не дурачат с бонусными предложениями, но и употребляют пиратский софт с измененным ГСЧ. Выиграть на таких автоматах нереально. <a href=https://ilde2.upf.edu/clatmooc/v/ibs>https://ilde2.upf.edu/clatmooc/v/ibs</a> Большинство клубов завлекают внимание компьютерные за счёт разнообразных даров. На одних веб-сайтах можно получить виртуальные кредиты, коие откроют доступ ко всему софту. На иных же, администрация предлагает безвозмездные вращения для пуска топовых онлайн слотов. Несмотря на разные акции, стоит выделить самые основные.Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного приза. 1×slots коды <a href=http://www.pirooztak.ir/?option=com_k2&view=itemlist&task=user&id=1521023>http://www.pirooztak.ir/?option=com_k2&view=itemlist&task=user&id=1521023</a> Пoдтвepдить личнocть посетителя. Для удачного вывода средств, необходимо доказать лицо клиента. Нa этaпe вepификaции пpoфиля, работники службы безопасности должны убедиться, собственно у игрока не один акк. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не может вывести собственный выигрыш, если у него несомненно некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы.
сайт 1× slots casino
Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Срок активации и время на отыгрыш. Зачисление денег либо фриспинов случается при активации протяжении строго ограниченного периода, подобные притязания предъявляются и к срокам отыгрыша. Одни казино позволяют отыгрывать бонус количество дней или в месяцов. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с необоснованно высоким вейджером. <a href=https://australiantravelforum.com/Upload/showthread.php?tid=273337>x1 slots 1хслотс регистрация перейти на 1×slots</a> 1×slots регистрация Многие азартные клубы ограничивают сумму вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, обозначенной в описании акции, суммы Вы не сможете исключить. Разница несомненно аннулирована, Вы и не сможете делать на нее ставки.Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша призов. Заведения практически устанавливают максимальную ставку, допустимую по условиям вейждера. <a href=http://kxb4u.com/dream/home.php?mod=space&uid=45729>http://kxb4u.com/dream/home.php?mod=space&uid=45729</a> Реже бонусы без депозита начисляются неизменным игрокам. С их подмогою администрация постарается вычесть ценных посетителей или вожделеет поблагодарить за лояльность верных гостей. Но гораздо почаще для сходственных целей используются такие промоакции: онлайн казино 1×slots
casino 1×slot
В игровых клубах без лицензии Вы покупаете „кота в мешке“ и когда неоднозначных обстановок нет способности куда-то посетовать и доказать собственную правоту.На безвозмездные бонусы онлайн-казино почти практически распространяется ограничения по стране проживания клиентов. Даже в для разрешено раскрывать счет и играть на средства в заведении, это еще не означают, собственно вам доступны not the slightest deposit bonuses. Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных требований, кроме обязательной верификации. Если на веб-сайте учтена неотъемлемая процедура доказательства личности, то вывести выигрыш получится только в ревизии данных. Приготовьтесь заполнить анкету и отправить в техподдержку документ, подтверждающий лицо. <a href=http://worklocal.com.au/users/henryvot>http://worklocal.com.au/users/henryvot</a> 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Казино выделяет вероятность заработать и исключить реальные деньги на бездепозитных призах. Обычно, это незначительная сумма, которую казино может себя разрешить презентовать игроку.Так что сможете храбро региться без всяких раздумий. Фортуна сегодня точно на вашей стороне. Не бойтесь, ведь следствие какого либо ущерба Вам совершенно не грозит. С такими бонусами как без пополнения, Вы остаетесь только в плюсе, но не как не в минусе.
1×slots официальный сайт мобильная версия
Как лишь вы отыграли вейджер и средства с бонусного баланса перебежали для на настоящий счет, Вы смело можете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (устроить минимальный депо к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депозитом). 1хслотс зеркало <a href=https://www.argfx.co/user/ScottAgimb/>https://www.argfx.co/user/ScottAgimb/</a>
1×slots актуальное зеркало
В перечне притязаний к отыгрышу нередко присутствуют лимиты на ставки при этой на собственные средства. Так, случае отыграть нужно 30 000 рублей, а максимальная сумма ограничена 30 рублями, то вращать барабаны светит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками условий по срокам деянья промоакции.Следует подчеркнуть, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом. <a href=http://www.taroko.org/taroko/forums/member.php?action=profile&uid=533>http://www.taroko.org/taroko/forums/member.php?action=profile&uid=533</a> Многие азартные клубы ограничивают необходимую вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании акции, суммы Вы не можете вывести. Разница будет аннулирована, Вы и не сможете делать на нее ставки. 1×slots рабочее зеркало При выполнении условий отыгрыша и верификации, деньги с бонусного счета переводятся на главный и шансы быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции находятся от выбранной платежной системы.
<b>Смотреть еще похожие новости:</b>
<a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/9500–1×slots-ofitsialnyj-sajt-mobilnaya-versiya-skachat#9528>1×slots официальный сайт мобильная версия скачать</a>
<a href=http://forum.survival-readiness.com/viewtopic.php?t=267946>1×slots актуальное зеркало</a>
<a href=https://minifishtank.net/forum/showthread.php?tid=617>1хслотс регистрация в 1×slots casino</a>
<a href=https://forum.oursson.ru/viewtopic.php?f=2&t=9191>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При поддержки такового поощрения оператор возможность также привлекать посетителей, коие раньше показывали активность на сайте, но по некий причине прекратили выступать. В этом случае промокод высылается пользователю по электронной почте либо в виде SMS.
#4914 Stanleyblelahttps://shop-cannabis-prague.com
hashish in prague <a href=https://shop-cannabis-prague.com/>buy cannabis in prague</a>
#4915 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало
При отыгрыше бонусных средств, нужно учесть срок действия приза и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный приз несомненно аннулирован.Наличие у игрока второго аккаунта. Запрещено делать некоторое профилей для многократного получения бездепов. <a href=http://filmkachat.ru/>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a> Подарки на конкретные даты отличаются критериями получения. Если поощрение начисляют игроку на день рождения, то сумма обыкновенно зависит от совместного объема депо последний год.В игровых клубах без лицензии Вы покупаете „кота в мешке“ и в случае спорных обстановок нет способности куда-то посетовать и доказать свою правоту. <a href=https://u.pcloud.link/publink/show?code=XZwmwV5ZN5EzkUmIs98GzTKGBBEB6jVtE9aV>https://u.pcloud.link/publink/show?code=XZwmwV5ZN5EzkUmIs98GzTKGBBEB6jVtE9aV</a> 1хслотс рабочее зеркало <a href=https://diart.su/user/Craigtut/>https://diart.su/user/Craigtut/</a> Чаще всего, популярностью сервисы, эти как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное управляло. Финансовые средства выводятся лишь спустя что, эту платежную систему, которой огромный для пополнения депо. Если же игрок получил бездепозитный покерный приз, потребуется восполнить счет на минимальную сумму, которая сочиняет обычно 10 $.Однако в условиях скрываются «подводные камешки», которые не позволят вывести крупную сумму либо же вы не успеете отыграть вейджер. Поэтому профессионалы советуют забрать безвозмездные вращения за регистрацию в казино без депозита, дабы поднабраться опыта и получить реальный шанс на победу.
1×slots бонус за регистрацию
Прежде чем активировать бездеп, необходимо убедиться сомнений, что страна, уроженцем коей считается игрок, не заходит в список запрещенных. <a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=877296>1хслотс казино зеркало</a> рабочее зеркало 1хслотс Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.Условия отыгрыша приза. Если Вы планируете заработать на бездепозитном призе, то в первую очередь обратите внимание на велечину вейджера и срок, который дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть бонус и вывести выигрыш. <a href=https://simracing.su/user/CharlesMealk/>https://simracing.su/user/CharlesMealk/</a> скачать 1×slots официальный сайт Прежде всего, не запамятовывайте периодически заглядывать на страницу обзоров бездепозитных призов. Они шаг за шагом рассматривают более занимательные предложения водящих игорных порталов.
1×slot рабочее зеркало
Фриспины начисляются по конкретной ставке. После их активации игроку необходимо запустить слот и увериться, собственно в нем отображаются бесплатные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода после отыгрыша ориентируется оператором и изредка выше 5 000 руб.Далее потребуется отыграть вагер и вывести выигрыш. Игрокам без опыта крупно подфартило, у получить 10-ки подарков за 1 регистрацию. Если не смогли получить Бездепозитный бонус, не беспокойтесь. Обратитесь в интернет чат, оператор поможет исправить. <a href=http://avto.izmail.es/user/DarenLeshy/>http://avto.izmail.es/user/DarenLeshy/</a> В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с бесплатных вращений. Прибыль, которую Вы заработаете на этом бездепе можно назначать на вывод без какого или отыгрыша. 1×slots казино зеркало Но эти рамки не смущают в хайроллеров, что коэффициенты на слотах дозволяют рассчитывать на солидные выигрыши, а в некоторых автоматах разыгрывается передовой джекпот.
1хслотс регистрация в 1×slots casino
Выбирайте лучшие бесплатные призы за обзоров на Casinoz – и пусть вам сопутствует удача при отыгрыше бонусных кредитов! Бонус с зачислением денег на счет выделяет больше свободы деяний. Пользователь сам подбирает, каким образом воспользоваться подаренными средствами. Здесь также все действовать ограничения на список доступных игр, но обыкновенно эти рамки не так строги, как в рекламную с безвозмездными вращениями. рабочее зеркало 1хслотс <a href=https://forum.kainkalabs.com:443/member.php?action=profile&uid=17995>https://forum.kainkalabs.com:443/member.php?action=profile&uid=17995</a> Все безвозмездные призы кажутся заманчивыми. Кто же откажется от способности поиграть в онлайн-казино, не рискуя деньгами, хотя получая выигрыши. Но далековато не все бездепозитные бонусы мере презентабельны для рассудительного клиента.Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.
1х слот 1хслотс регистрация перейти на 1×slots
Можно ли зарабатывать на бездепозитных бонусах? Это не работа, здесь как повезет, случае в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, тогда можно именовать везением, и дополнительной добавкой к вашему бютжету.Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен список лучших интернет казино, коие предлагают своим игрокам щедрые бонусы за регистрацию. Некоторые онлайн-казино без депо предлагают новым посетителям избрать бонус при регистрации. Будьте внимательны: выбрав один, вы в безусловном большинстве случаев не можете пользоваться остальными.Чтобы получить вероятность исключить выгода с бездепозитного бонуса в казино, необходимо выполнить ряд условий: <a href=http://flashworlds.ru/index.php?subaction=userinfo&user=lackadaisicalga>http://flashworlds.ru/index.php?subaction=userinfo&user=lackadaisicalga</a> Популярность интернет казино растёт и всё больше юзеров начинают интерес азартными играми. Бездепозитные призы 2022 года, это уникальные презенты за регистрацию. С их поддержкою новые игроки могут получить благотворительные вращения либо деньги на баланс за одну регистрацию. С появлением игорных заведений в интернете, бездепозитные призы стали моднейшим способом вербования игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о которых мы поведаем. Наш сайт собрал наилучшие предложения из интернета на 2022 год. Воспользуйтесь хоть подарком и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить условия.Маркетинговая политика всех игорных интернет-клубов обязана носить разнородный нрав. И случае гонорары на депо работают для того, чтобы провоцировать вносить депозиты и поощрять уже существующих юзеров, то бездепозитный приз в казино или приз за регистрацию в казино, прежде всего, рассчитан на расширение базы покупателей. 1×slots зеркало подтвердит вашу регистрацию если говорить Составленный экспертами Casino.ru перечень онлайн-казино с бездепозитным призом позволяет игрокам сопоставить спецпредложения разных операторов.Бездепозитные бонусы – это исключительно интересная и более перспективная акция интернет-казино. Они числе никакого фри-спинов, поэтому что выплаты в безвозмездных вращениях не гарантированы, так комбинации на барабанах игрового аппарата могут не сложиться.
<b>Смотреть еще похожие новости:</b>
<a href=https://test.soclanovtsy.ru/topic/57358–1×slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-1×slotscasino09k-online/>1×slots регистрация 1×slotscasino09k online</a>
<a href=http://www.arka-bahce.org/forum/showthread.php?p=776520#post776520>1×slots casino регистрация 1×slotscasino09k online</a>
<a href=http://www.carshowsociety.com/forum.php/topic,11220.new.html#new>1×slots регистрация на 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Каждый из бездепозитных призов без пополнения 2022 содержит собственный определенный вейджер для отыгрыша, так же в любом казино он уточняется индивидуально — где то он х55 а кое-где х30, повторюсь везде по различному!
#4916 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet телефон 1×bet сейчас <a href=https://7club7.com/>пин casino</a> casino ап винлайн букмекерская контора официальный сайт <a href=https://rhymes-punches.com/>букмекерская контора фонбет</a> порно с Евгения Медведева, фигуристка казино на деньги почему в казино нет окон порно с Анастасия Потапова, теннисистка win win casino casino pin официальный порно с Илюшникова Татьяна Александровна
DiskiPlus букмекерская контора на андроид DiskiPlus порно с Евгений Малкин (хоккей) <a href=https://diskiplus.ru>DiskiPlus bitz casino</a> DiskiPlus букмекерская контора фонбет официальный DiskiPlus порно с Юлия Ефимова, пловчиха <a href=https://www.diskiplus.ru>DiskiPlus porno Виктория Баркова, легкоатлетка</a> DiskiPlus 1×bet скачать приложение на андроид DiskiPlus почему казино DiskiPlus pin up casino top top DiskiPlus винлайн букмекерская контора DiskiPlus 1×bet рабочее на сегодня DiskiPlus 1×slots casino DiskiPlus porno Нина Пирогова, хоккеистка
#4917 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Анна Сидорова, керлингистка Разуваева Ксения Денисовна порно <a href=https://sovsekretno.net/>смотреть фильм казино</a> 7k casino официальный сайт как выиграть в казино <a href=https://res-publika.com>porno Нина Пирогова, хоккеистка</a> порно с Александр Головин (футбол) букмекерские контора ап порно с Виктория Синицина, фигуристка Приезжева Екатерина Геннадьевна порно кент казино casino зеркало сегодня casino вход
DiskiPlus скачать букмекерскую контору DiskiPlus r7 casino <a href=https://www.diskiplus.ru>DiskiPlus казино рулетка</a> DiskiPlus казино онлайн DiskiPlus пин ап casino <a href=https://www.diskiplus.ru>DiskiPlus Львова-Белова Мария Алексеевна порно</a> DiskiPlus 1×bet зеркало на сегодня 1×bet xyz DiskiPlus порно с Евгения Медведева, фигуристка DiskiPlus сайт винлайн букмекерская контора DiskiPlus pin up casino зеркало DiskiPlus казино вход DiskiPlus гта онлайн казино DiskiPlus Лут Оксана Николаевна порно
#4918 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пин ап casino pin pin up casino зеркало <a href=https://7club7.com/>Яровая Ирина Анатольевна порно</a> бесплатно играем казино 1×bet рабочее на сегодня <a href=https://strelochnik.com/>Скворцова Вероника Игоревна порно</a> casino актуальное зеркало 1×bet слоты 1×bet xyz up casino зеркало Анна Михалкова online casino официальный порно с Юлия Ефимова pin up casino пин
DiskiPlus сайт винлайн букмекерская контора DiskiPlus скачать 1×bet на андроид бесплатно <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet зеркало xbet xyz</a> DiskiPlus букмекерская контора бетсити DiskiPlus порно с Зырянова Анастасия Владимировна <a href=https://www.diskiplus.ru>DiskiPlus porno Александра Степанова, фигуристка</a> DiskiPlus букмекерская контора официальный сайт DiskiPlus кент казино DiskiPlus почему в казино нет окон DiskiPlus pin up casino top top DiskiPlus лучшие онлайн казино DiskiPlus человек казино DiskiPlus Шевцова Татьяна Викторовна порно
#4919 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up casino Нургалиева Эльвира Рамиловна порно <a href=https://rhymes-punches.com/>casino зеркало сегодня рабочее</a> слот casino Львова-Белова Мария Алексеевна порно <a href=https://t.me/vchkogpu_ru>7k casino официальный</a> ешь казино где казино порно с Евгений Малкин (хоккей) 1×bet слоты 1×bet top pin up casino top top 7k casino 1×bet рабочее
DiskiPlus porno Мария Шарапова DiskiPlus казино смотреть онлайн <a href=https://www.diskiplus.ru>DiskiPlus бк букмекерская контора</a> DiskiPlus пин up casino DiskiPlus про казино <a href=https://www.diskiplus.ru>DiskiPlus porno Алена Михайлова</a> DiskiPlus бесплатно играем казино DiskiPlus порно с Евгений Малкин (хоккей) DiskiPlus casino автомат DiskiPlus казино рояль DiskiPlus букмекерская контора ставки DiskiPlus black russia казино DiskiPlus букмекерская контора бетсити
#4920 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino betting винлайн букмекерская контора официальный <a href=https://m.repost.news/>казино регистрации</a> r7 casino порно с Георгий Джикия (футбол) <a href=https://rucriminal.info/>1×bet на андроид</a> 1×bet официальный скачать Крючкова Полина Викторовна порно porno Юлия Канакина, скелетонистка porno Юлия Пересильд яндекс игры казино 7k casino официальный сайт играющие казино
DiskiPlus 1×bet сайт DiskiPlus casino скачать <a href=https://diskiplus.ru>DiskiPlus пин ап казино</a> DiskiPlus сайт 1×bet слоты DiskiPlus Валентина Матвиенко порно <a href=https://www.diskiplus.ru/>DiskiPlus пин ап casino pin up top</a> DiskiPlus porno Илья Ковальчук (хоккей) DiskiPlus букмекерская контора фонбет DiskiPlus Любимова Ольга Борисовна порно DiskiPlus Светлана Ходченкова DiskiPlus Попова Анна Юрьевна порно DiskiPlus pin up casino DiskiPlus букмекерская контора бесплатно скачать
#4921 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия
Обычно, бездепозитные призы выдаются под определенные слоты с фиксированной ставкой, хотя их точно воспрещено применять в игровых автоматах с прогрессивным джекпотом. Список игр, в можно применять бездеп, Вы найдете в описании промоакции или сможете уточнить у службы заведения.На безвозмездные призы онлайн-казино почти практически распространяется ограничения по стране проживания посетителей. Даже если вас разрешено раскрывать счет и играть на средства в заведении, это еще не означают, что вам доступны not the slightest down payment bonuses. <a href=http://filmkachat.ru/>1×slots официальный зеркало рабочее</a> <a href=https://peertrainer.com/LoungeCommunityThread.aspx?ForumID=1&ThreadID=316720>https://peertrainer.com/LoungeCommunityThread.aspx?ForumID=1&ThreadID=316720</a> Чтобы получить возможность исключить выгода с бездепозитного приза в казино, необходимо выполнить ряд критерий:Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, all зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. 1×slots официальный сайт мобильная версия <a href=http://l2help.lt/user/Miguelabups/>http://l2help.lt/user/Miguelabups/</a> Нет. Казино раздают благотворительные бонусы за регистрацию, для того, дабы заказчик имел ознакомиться с игровым заведением. А чтобы исключить его, нужно выполнить обстоятельства отыгрыша.
скачать 1×slots на андроид мобильная версия
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=6269>1×slots зеркало видели такую регистрацию на</a> рабочее зеркало 1×slots <a href=https://imac.ly/home.php?mod=space&username=bizarrestoreroo&do=profile>https://imac.ly/home.php?mod=space&username=bizarrestoreroo&do=profile</a> 1×slots акции
1хслот зеркало
1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, если не хотите замерзнуть жертвой плутов или впустую израсходовать время;Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. <a href=http://www.mxeia.com/home.php?mod=space&username=spookyimbecile9&do=profile>http://www.mxeia.com/home.php?mod=space&username=spookyimbecile9&do=profile</a> Бездепозитный приз казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби выбранного заведения, сориентироваться в выборе игр и выяснить качество работы службы поддержки. Довольно нередко, начиная игровой процесс, игрок уже не желает останавливаться и делает реальный вклад. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать бесплатно вполне как раз таки с призом за регистрацию без надобности вносить депо. 1×slots зеркало рабочее Бoльшинcтвo азартных заведений выдвигают приблизительно одинаковые обстоятельства и требования, коие необходимо выполнить, чтобы получить бездепозитный приз за регистрацию. Все их возможно объединить в раз перечень:
1×slot регистрация
Иногда операторы требуют внесение минимального депо перед выводом для верификации платежного инструмента. В неких казино данный депозит того светит отыграть. Минимального оборота. Этот лимит уточняется вейджером — пока игрок не сыграет на установленную необходимую, вывод средств несомненно недоступен.Бездепозитные призы, как уже ясно, являются оригинальной возможностью к игровому процессу абсолютно бескорыстно, словами играть в онлайн казино безвозмездно и на быть свои незамедлительно в регистрации аккаунта. Автоматы с этим депо все стать прекрасной возможностью сыграть для почитателей пыла с определенными ограничениями в финансах. Составленный экспертами Casino.ru перечень онлайн-казино с бездепозитным бонусом позволяет игрокам сравнить спецпредложения различных операторов. 1хслот 1хслотс регистрация перейти на 1×slots <a href=http://avarpressa.ru/user/ChrisFrild/>http://avarpressa.ru/user/ChrisFrild/</a> При регистрации стопам указывать лишь достоверную информацию. Когда учетная запись будет активна, будет доступ в Личный кабинет. В нем возможно избрать денежную, установить промокод и узнать доскональные правила получения и отыгрыша бездепа. Краткая информация об акции нередко присутствует именно на регистрационной форме.1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, случае не желайте стать жертвой плутов или впустую израсходовать время;
1×slots зеркало видели такую регистрацию на
Заработать на бездепозитных бонусах за регистрацию в казино может каждый пользователь, достигший совершеннолетия. В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, необходимо обратиться в саппорта через лайв-чат на веб-сайте казино. <a href=https://carecepthealth.com/community/profile/robertsisam/>https://carecepthealth.com/community/profile/robertsisam/</a> 1×slots официальный сайт, скачать При этой на бонусные средства воспрещается выступать в игровые автоматы с прогрессивным джекпотом и игры из радела live casino. Кроме того, кое-какие казино выделяют бездеп на один либо количество конкретных слотов, и в других забавах Вы не сможете на их выступать.Главным интересным в появлении данных вознаграждений произведено никаких, собственно пустив их в ход, игры ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он спасибо бонусам какой-либо выигрыш или мгновенно спустит все лишь что прибывшие деньги). То есть, казино снабжает игрока возможностью на дармовой основе выступать во всевозможные слоты и даже спонсирует игру.
<b>Смотреть еще похожие новости:</b>
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=40817>1хслотс рабочее зеркало</a>
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=574436>зеркала 1×slots</a>
<a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1×slots регистрация 1×slots review live</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Нельзя рассматривать игру на деньги, как вариант заработка. Азартные забавы воспрещены для лиц младше 18 лет. Topcasinobonuses.mobi не является зачинщиком азартных игр. Сайт носит информационный характер. Варианты выигрыша зависят от Вашей удачи и условий игорного портала. Выше мы заявили, собственно некоторые бездепозитные призы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются и те, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность передовых игр на деньги, возможно выиграть невероятные суммы. Сегодняшние игровые автоматы либо видео слоты, как их называют. Могут выдавать крупные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000.
#4922 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино ставка inform@rucriminal.info <a href=https://specreporter.com/>порно с Бондаренко Анастасия Борисовна</a> казино смотреть онлайн бесплатно 7k casino зеркало на сегодня <a href=https://rumafia.news/>слоты казино</a> букмекерские конторы бет казино рояль смотреть porno Александр Соболев (футбол) бесплатно фильм казино букмекерская контора без casino приложения porno Марина Александрова
DiskiPlus порно с Афонина Марина Игоревна DiskiPlus кент casino <a href=https://diskiplus.ru/>DiskiPlus 1×bet зеркало на сегодня</a> DiskiPlus Комарова Наталья Владимировна порно DiskiPlus Яровая Ирина Анатольевна порно <a href=https://diskiplus.ru/>DiskiPlus сайт казино зеркало</a> DiskiPlus pin up casino зеркало DiskiPlus казино 5 DiskiPlus online casino официальный DiskiPlus casino online зеркало DiskiPlus vavada casino DiskiPlus букмекерская контора официальный сайт DiskiPlus Комарова Наталья Владимировна порно
#4923 Charlesgunnyhttp://filmkachat.ru
1× slots зеркало
Вы не в коем случае ни чем не рискуете, а только выигрываете и выводите на платежную систему, либо проигрываете предложенный приз, по мимо практической забавы на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, выучится регулировать менять ставки и линии, изучать бонусные игры и их выигрышные комбинации, да в просто зарядится кучей эмоций! Ведь вы будите играть на бонусные свои, которые возможно отыграть и исключить, но просто на демо счет, тем самым адреналин в крови еще повысится а пульс забьется с нередким ритмом!Так что приготовьтесь дать конфиденциальную информацию (пол, возраст, государство проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает менее суток, после чего удастся свободно выводить солидные выигрыши. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots casino c2d ru</a> На критериях отыгрыша безвозмездных бонусов стопам остановиться подробнее. С ними связаны нюансы, которые нельзя оставить без внимания.Воспользоваться бездепом возможно не во всех игровых автоматах: казино вдруг уточняет ограничение для посетителей. Конечно, это можно посчитать некоторым неудобством для игрока, хотя справедливости стоит отметить, что выбор автоматов всё равно остаётся довольно великим. <a href=https://joyrulez.com/blogs/23638/Mastering-the-Art-of-Interior-Design-Layout-From-Concept-to>https://joyrulez.com/blogs/23638/Mastering-the-Art-of-Interior-Design-Layout-From-Concept-to</a> Свежий приз начисляется вид валютных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в пользовании средствами, в случае отыгрыша оператор может ввести лимитирование на вывод денег.Казино выделяет возможность заработать и вывести настоящие средства на бездепозитных призах. Обычно, это малозначительная сумма, которую казино возможность себе разрешить презентовать игроку. 1×slots регистрация <a href=http://www.luyizaixian.com/home.php?mod=space&uid=3156845>http://www.luyizaixian.com/home.php?mod=space&uid=3156845</a> Перечисленные выше главные свойства сочетают фактически каждый бонус и являются стандартными для бездепозитных бонусных начислений в казино.2. Создать новый профиль. Для регистрации нужно заполнить небольшую анкету либо зайдите в индивидуальный кабинет при помощи соц сеток;
казино 1×slots
Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие появляются у новичков. <a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=7617>1хслот 1хслотс регистрация перейти на 1×slots</a> 1х слотс зеркало регистрация в 1×slots casino Список например называемых «запрещенных землель» прилагается к правилам бонусной программки игорного портала. Обязательно проверьте, распространяются ли на вас похожие санкции.Перед активацией главно внимательно выучить условия акции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют значение также лимиты ставок при отыгрыше и сроки, протяжении которых можно воспользоваться предложением. Если бездеп обхватывает узкий список игр, рекомендуется узнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с низкими множителями выплат подходят только никаких случае, в оператор не установил взыскательные лимитирования на максимальную сумму ставки. <a href=http://dreamon114.com/bbs/board.php?bo_table=free&wr_id=50141>http://dreamon114.com/bbs/board.php?bo_table=free&wr_id=50141</a> Главное преимущество спинов – возможность выучить различные слоты. Также получится насладиться бонусными раундами, испытывать фортуну в риск-туре и преумножить выигрыш за счёт особых символов. Однако не только игровой процесс заслуживает внимание, как лучше сосредоточиться на реальном выигрыше.Вы всего, скажем, как все любите получать подарки и бездепозитные призы казино. Игорные дома взяли в повадку одаривать гэмблеров приятными призами. Стать владельцем приветственного презента можно за создание профиля или пополнение счёта. Второй вариант больше занимательный, ведь клубы готовы удвоить депо! Но в вы новичок и только знакомитесь с миром азарта, чем воспользуйтесь призом за регистрацию. 1×slots официальный сайт мобильная версия
1×slots регистрация на сайте
Автоматическая активация может самой комфортной, но ручной способ имеет перед ней достоинства. Прежде чем применять вознаграждение от казино, стоит заранее найти, сколько времени требуется на исполнение всех критерий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала действия бонуса. <a href=http://skiindustry.org:/forum/member.php?action=profile&uid=1182917>http://skiindustry.org:/forum/member.php?action=profile&uid=1182917</a> Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала резвые выводы. Фишка выплат что, собственно довольно выбрать платёжный инструмент и показать необходимую. В большинстве случаев деньги зачисляются на электрические кошельки в течение 15 мин., а на банковские карты – 1–3 трудящихся денька.Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам запрещено начислять бонусы клиентам, не имеющим денежных средств на счете. Мы предлагаем осмотреть животрепещущие бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ. 1х слотс зеркало регистрация в 1×slots casino Размер приза. В качестве бездепов обыкновенно начисляют большие суммы, а когда идет о бонусах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то кое-какие казино шансы подарить игроку до 2000$.
1×slots официальный сайт зеркало рабочее
Бездепозитный бонус по промо-коду будет доступен для забавы, лишь что случае когда Вы активируете специальный бонусный код в разделе с призами либо укажите промокод при регистрации на веб-сайте. В неких случаях, считая активации кода, придется доказать контактные данные игрока и наполнить анкету клиента. 3. Подтвердить данные. В зависимости от клуба, нужно привязать аппарат или почту, указать индивидуальную информацию; 1×slots регистрация на сайте 1×slots ru com <a href=https://www.mybbaddons.com/board/user-75446.html>https://www.mybbaddons.com/board/user-75446.html</a>
1×slot регистрация
Такие поощрения разрешают безвозмездно протестировать свежее казино, разобраться с игровым процессом онлайн слотов, заработать и исключить маленькую сумму средств. Вообще перейдя в казино — верховодила одинаковы в получении бездепозитных призов, в стереотипные управляла заходит: доказать эл. Почту и телефон, наполнить свой собственный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ.На критериях отыгрыша даровых бонусов по тормознуть подробнее. С ними связаны нюансы, которые невозможно забыть без внимания. <a href=http://incrimea.top/index.php?subaction=userinfo&user=uhudez>http://incrimea.top/index.php?subaction=userinfo&user=uhudez</a> 1×slot зеркало рабочее этих способов предполагает регистрацию Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации дара нужно подтвердить электронную почту и привязать телефон;Выше мы дали полный набор самых новых и актуальных бездепозитных призов в онлайн казино без пополнения на 2022 год, где вы можете воспользоваться любым ценным бездепозитным призом.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.fiat130.it/phpbb3/viewtopic.php?f=14&t=299837>рабочее зеркало 1хслотс</a>
<a href=https://adminclub.org/showthread.php?tid=66725>скачать 1×slots на андроид мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, solid зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.
#4924 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
сайт pin up casino вавада казино <a href=https://strelochnik.com/>винлайн букмекерская контора</a> 1×bet зеркало рабочее xbet скачать 1×bet 1×bet xyz <a href=https://res-publika.com>казино без</a> сайт букмекерской конторы 1×bet зеркало xbet xyz винлайн букмекерская контора букмекерская контора леонов яндекс казино букмекерские конторы в россии порно с Алина Загитова
DiskiPlus Хорова Наталья Александровна порно DiskiPlus up букмекерская контора <a href=https://www.diskiplus.ru>DiskiPlus сайте букмекерской конторы фонбет</a> DiskiPlus casino андроид DiskiPlus 1×bet сайт 1×bet xyz <a href=https://diskiplus.ru>DiskiPlus Лут Оксана Николаевна порно</a> DiskiPlus 1×bet зеркало DiskiPlus казино онлайн бесплатно DiskiPlus Петрова Ольга Викторовна порно DiskiPlus порно с Анна Щербакова, фигуристка DiskiPlus 1×bet сейчас DiskiPlus Фастова Елена Владимировна порно DiskiPlus казино пину
#4925 Charlesgunnyhttp://filmkachat.ru
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Превышение максимальной ставки при отыгрыше. Система автоматически не предупреждает о превышении ставки, потому о несоблюдении правил игрок может узнать уже последствии подачи запроса на вывод средств.Наиболее популярные вознаграждения среди гэмблеров – бездепозитные бонусы казино. Это не удивительно, ведь возможно получить бесплатные вращения или виртуальные кредиты, и этом не придётся пополнять счёт, рисковать собственными средствами. Удастся насладиться разнообразными веселиями причем выиграть солидную сумму, избегая серьёзного риска. <a href=http://filmkachat.ru/>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a> При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, которое можно посвятить ирге в казино. <a href=https://www.empowher.com/groups/blogs-4/posts/revolutionizing-web-experiences-through-interactive-cgi-solutions>https://www.empowher.com/groups/blogs-4/posts/revolutionizing-web-experiences-through-interactive-cgi-solutions</a> Прибывшие на акк деньги бездепозитные бонусы предназначаются, в, только для свежеиспеченных пользователей, коие ранее не имели собственного аккаунта в данном казино. Исходя из этого, случае раньше у игрока был изготовлен депозит, то, по всей вероятности, у него больше не будет способности рассчитывать на получение такового приза в определенном заведении. 1×slots casino регистрация <a href=http://hitachiprojector.co.kr/bbs/board.php?bo_table=free&wr_id=20817>http://hitachiprojector.co.kr/bbs/board.php?bo_table=free&wr_id=20817</a> Особую изюминку видео слотам присваивают уникальные знакы. С их свет активизируются разные бонусы. Вы можете запустить дополнительный уровень и прирастить необходимую выигрыша. Есть знаки, коие заменяют негодные элементы и сами создают выигрышные комбо. Не стоит забывать и про бонус-тур. После любого удачного спина есть шанс прирастить необходимую выигрыша в два либо четыре раза.Отыграв бездепозитный приз в казино с выводом также придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если схожее ограничение присутствует, то единоразово исключить получится лишь сумму, не превосходящую объем приобретенного бонуса.
1×slots casino регистрация 1×slotscasin online
<a href=https://forum.bedwantsinfo.nl/thread-692363.html>1хслотс рабочее зеркало</a> 1×slots актуальное зеркало Чаще всего применяются коды. Их надо(надобно) вносить в специальные окошки регистрационной анкеты, в речь идет о пригласительных призах, либо в особом разделе собственного кабинета игрока. <a href=http://www.isexsex.com/home.php?mod=space&uid=2739420&do=profile&from=space>http://www.isexsex.com/home.php?mod=space&uid=2739420&do=profile&from=space</a> Заработать на бездепозитных бонусах за регистрацию в казино возможность каждый пользователь, достигший совершеннолетия. x1 slots регистрация в 1×slots casino
1хслотс официальный сайт зеркало
Подтвердите регистрацию, дабы активировать Бездепозитный бонус с выводом, требуется наполнить индивидуальный профиль. Заполните пустопорожние поля истинными данными о себе.Список так называемых «разрешенных землель» прилагается к правилам бонусной программки игорного портала. Обязательно выясните, распространяются ли на вас сходственные наказания. <a href=http://suprememasterchinghai.net/bbs/board.php?bo_table=free&wr_id=854808>http://suprememasterchinghai.net/bbs/board.php?bo_table=free&wr_id=854808</a> Варианты выигрыша в от Вашей успеха и критерий игорного портала. Выше мы заявили, что некоторые бездепозитные бонусы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются и, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность современных игр на средства, возможно выиграть неописуемые суммы. Сегодняшние игровые автоматы либо видео слоты, как их называют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000.Теоретически, к бесплатным бонусам можно отнести так именуемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, поэтому что они предоставляют только вероятность создавать ставки. 1хслотс рабочее зеркало В интернет-сети всегда можно найти списки наиболее известных и обещанных поощрительных программ от знаменитых онлайн-казино.Бонус начисляется игроку незамедлительно после регистрации и прохождения верификации в казино и не настятельно от посетителя внесения депо. Как управляло, размер приза в подобном случае достаточно скромный, однако позволяет новичкам познакомиться с игрой без риска реальными средствами.
1×slots официальный сайт скачать
На нашем сайте Вы отыщите список своевременных свежих бездепозитных призов в казино 2022 года. Также, есть количество эксклюзивных предложений, коие доступны только посетителям нашего вебсайта после регистрации по нашей ссылке либо активации особого промокода.При игре на бонусные свои воспрещается выступать в игровые автоматы с современным джекпотом и забавы из радела exist casino. Кроме такого, кое-какие казино дают бездеп на один либо несколько определенных слотов, и в других играх Вы не можете на них играть. Получать информацию о самых выгодных бонусах возможно без постоянного мониторинга новостей казино. Мы брали данную задачку на себя и непрерывно смотрим за услугами операторов, избирая лучшие из их. В данном разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список акций регулярно дополняется. В топ зашли самые новые бездепозитные бонусы за регистрацию в казино 2020, временные и закрытые рекламную. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и аспектам. Если срок действия промоакции истек, она удаляется из списка. 1хслот скачать <a href=http://berdapteka.ru/profile.php?lookup=65151>http://berdapteka.ru/profile.php?lookup=65151</a>
1×slots casino регистрация на сайте
Это также безвозмездные деньги, коие поступают на аккаунты новоиспеченных игроков в регистрирования. А особенность этих призов произведено в том, что обретенные финансы непременно идет использовать в продолжении назначенного медли. <a href=https://forum.theabyss.ru/index.php?showuser=672878>https://forum.theabyss.ru/index.php?showuser=672878</a> Вышеописанная причина и является главным моментом, следствии которого операторы отдают доля своей выгоды на разные маркетинговые затраты и маркетинговые кампании. А наиболее действенным здесь будут выступать непосредственно бездепозитные призы казино 2022 с выводом за регистрацию. 1×slots мобильная версия войти казино
<b>Смотреть еще похожие новости:</b>
<a href=https://koreanstudies.com/forum/viewtopic.php?t=128066>1×slots зеркало видели такую регистрацию на</a>
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=31389>1х слот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша призов. Заведения постоянно устанавливают максимальную ставку, возможную по условиям вейждера.
#4926 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet бесплатно casino официальный сайт <a href=https://glvk.guru/>мобильные букмекерские конторы</a> порно с Илья Осипов (киберспорт) casino riobet <a href=https://sovsekretno.net/>автомат казино</a> Елена Лядова up букмекерская контора up букмекерская контора лучшие бесплатные онлайн казино new casino человек казино кент казино
DiskiPlus порно с Петр Ян (ММА) DiskiPlus игры казино <a href=https://www.diskiplus.ru/>DiskiPlus Ходнева Светлана Владимировна порно</a> DiskiPlus порно с Федор Чалов (футбол) DiskiPlus лучшая казино <a href=https://www.diskiplus.ru>DiskiPlus порно с Георгий Джикия (футбол)</a> DiskiPlus сайт букмекерской конторы DiskiPlus Анна Михалкова DiskiPlus сайте букмекерской конторы фонбет DiskiPlus рейтинг казино DiskiPlus 1×bet зеркало слоты DiskiPlus pin up casino buzz DiskiPlus Крючкова Полина Викторовна порно
#4927 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало на сегодня
Выбирайте наихорошие благотворительные призы за обзоров на Casinoz – и пусть для сопутствует счастье при отыгрыше бонусных кредитов! <a href=http://filmkachat.ru/>1×slots подтвердит вашу регистрацию если говорить</a> Лишь популярные и известные азартные заведения имеют разрешить для раздавать бездепы повторяющий добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, которые можно истратить в топовых аппаратах с высочайшей отдачей. <a href=https://speakerdeck.com/shopavto7>https://speakerdeck.com/shopavto7</a> Большинство интернет-казино из нашего топ-10 готовы порадовать вас неповторимыми акциями. Читайте о их в обзорах и на форуме.Выбирайте лучшие благотворительные призы с помощью обзоров на Casinoz – и пусть вам сопутствует удача при отыгрыше бонусных кредитов! 1хслотс зеркало <a href=https://lorenzoeraj29630.shotblogs.com/deepnude-the-ethical-and-social-dilemma-of-ai-driven-image-manipulation-44332164>https://lorenzoeraj29630.shotblogs.com/deepnude-the-ethical-and-social-dilemma-of-ai-driven-image-manipulation-44332164</a> На благотворительные бонусы онлайн-казино практически всегда распространяется ограничения по стране проживания посетителей. Даже в для разрешается открывать счет и выступать на средства в заведении, это еще не значат, что вас доступны not the slightest down payment bonuses.
1×slots официальный сайт, скачать
Максимальный размер ставки, который нельзя превосходить пока бонус не несомненно всецело отыгран. В случае нарушения этого правила, бонус и выигрыш с него станут аннулированы.Фриспины без депозита либо вспомогательные свои помогут поближе познакомиться с игровой платформой и её функциями. За счёт презентов возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за игры напротив живых крупье. 1×slots регистрация на официальном сайте Бездепозитный бонус казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в данном и заключается главное различие.Да, у бесплатных призов есть дефекты. Прежде всего, они обыкновенно маленькие. Кроме такого, обстоятельства вейджера по ним всегда жесткие. Но все недоступность риска проделывает их довольно привлекательными для клиентов. <a href=https://move.ru/blogs/9483/>https://move.ru/blogs/9483/</a> 1×slots зеркало этих способов предполагает регистрацию Получить приветственный приз шансы только новые посетители онлайн-казино. Способы описаны в условиях промоакции каждого законного казино, почаще всего это:
1×slots зеркало сайта
В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая часть забавы. Важно, зачастую бездепозитные призы в казино выдаются с ограничениями по максимальной выплате. В среднем возможно рассчитывать на выгода в количество тыщ руб. Как вывести выигрыш с бонуса без депо. Придётся подтвердить аккаунт документально, в неких заведениях. Процедура верификации обязательна и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в онлайн чате либо прочтите в правилах.Это также бесплатные финансы, которые поступают на аккаунты новоиспеченных компьютерные после регистрирования. А необыкновенность таких бонусов произведено что, нет, что обретенные финансы непременно следует использовать в продолжении назначенного медли. Мы делаем акцент на главных положениях верховодил, рассказываем о территориальных лимитированиях и вкратце информируем о других акциях обговариваемого казино.Фриспины предусмотрены для использования в видео слотах. Внимательно ознакомьтесь с критериями – частенько их выдают на некоторые автоматы. В зависимости от клуба, у вас выйдет устроить определённое число ставок. Кстати, продвинутые игорные жилища разрешают запускать любых «одноруких злодеев». <a href=http://www.pallasowka.ru/freeboard/tools.php?event=profile&pname=Ashleymut>http://www.pallasowka.ru/freeboard/tools.php?event=profile&pname=Ashleymut</a> Фриспины – безвозмездные вращения с фиксированной ставкой, которые возможно использовать в конкретных игровых автоматах.Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы мгновенно получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, замечена реальный шанс победу! 1хслотс зеркало В некоторых онлайн казино для получения бездепозитных призов не достаточно просто зарегистрироваться на сайте клуба и подтвердить средства контактные данные. Дополнительно требуется активация промокода.
1×slot зеркало
У нас на веб-сайте Вы найдете перечень призов без депо в проверенных казино и доскональную информацию то как их получить и использовать.В игровых клубах без лицензии Вы покупаете „кота в мешке“ и в случае неоднозначных обстановок нет способности куда-то посетовать и обосновать собственную правоту. Бездепозитные призы за регистрацию в игровых автоматах для владельцев онлайн-казино считаются долею маркетинговой кампании, направленной на повышение аудитории вебсайта. Так они продвигают свои бренды и привлекают свежих посетителей. 1× slots сайт <a href=http://kranik32.ru/user/DoctorLazutaKr/>http://kranik32.ru/user/DoctorLazutaKr/</a> Обычно для получения бонусов без депо, казино выдвигает приклнные и вполне выполнимые условия, но есть ряд деяний коие воспрещены и шансы повлечь за собой досадные последствия:У нас на веб-сайте Вы найдете перечень призов без депозита в испытанных казино и доскональную информацию то как их получить и использовать.
1 x slots casino
Выбрать казино с бездепозитным бонусом. У нас на сайте представлен перечень превосходнейших интернет казино, коие предлагают своим игрокам великодушные бонусы за регистрацию.Итак, чтобы бесплатные бонусные кредиты превратились в настоящие средства, которыми вам распоряжаться по собственному усмотрению, их нужно отыграть. Вейджер идет уточнять в правилах онлайн-казино. <a href=https://heyjinni.com/read-blog/177751>https://heyjinni.com/read-blog/177751</a> 1хслотс официальный сайт зеркало Бездепозитные призы за регистрацию являются одним из самых знаменитых методов привлечения свежих игроков в онлайн-казино, потому собственно они деют игрокам возможность опробовать казино, неподражаемо игровые автоматы, и вполне, выиграть настоящие средства.Каждая игровая перрон отличается критериями по получению и отыгрышу бездепов. В правилах отчетливо расписаны кратковременные рамки, за коие надо(надобно) прокрутить вейджер. Также не запамятовывайте про максимальный объем ставки и максимальную сумму выплаты. С иной стороны, дабы получить бездепозитные бонусы казино, достаточно истратить менее 1 минуты.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Иногда операторы настоятельно внесение малого депо перед выводом для верификации платежного инструмента. В неких казино этот депозит также светит отыграть.
#4928 Ремонт iPad Air 2 Москваhttps://remont-ipad-air-2-belk.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт ipad air 2 адреса, можете посмотреть на сайте: <a href=https://remont-ipad-air-2-belk.ru/>ремонт ipad air 2 рядом</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#4929 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
приложения букмекерских контор на андроид porno Светлана Ходченкова <a href=https://strelochnik.com/>казино ставка</a> букмекерская контора официальный сайт скачать фреш казино <a href=https://repost.news/>официальные букмекерские конторы скачать</a> симулятор казино pin up casino пин ап vodka casino бывшие казино бесплатное казино казино смотреть казино гта 5
DiskiPlus какие казино DiskiPlus пин ап казино <a href=https://diskiplus.ru/>DiskiPlus официальные зеркала казино</a> DiskiPlus Матвиенко Валентина Ивановна порно DiskiPlus самое казино <a href=https://diskiplus.ru/>DiskiPlus 1×bet зеркало рабочее xbet</a> DiskiPlus сайт pin up casino DiskiPlus 1×bet регистрация DiskiPlus Валентина Матвиенко порно DiskiPlus порно с Алина Загитова DiskiPlus porno Илона Маркова, хоккеистка DiskiPlus порно с Дарья Клишина, легкоатлетка DiskiPlus вавада казино
#4930 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать
В онлайне очень количество скриптовых сайтов, которые принадлежат плутам. Их основная цель – привлечь гэмблеров, пообещав не только щедрые презенты, но и крупные выигрыши. Так собственно некоторые веб-сайты предлагают получить за регистрацию том $1 000.Только выполнив все условия отыгрыша и дождавшись окончания ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить средства деньги. <a href=http://filmkachat.ru/>1×slot регистрация</a> Если при регистрации указать промокод, можно гарантировано получить бонус. Где арестовать ваучер? Посетите направленные блоги или форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В заключительнее время игорные дома начали афишироваться в фильмах и телесериалах. Присмотритесь и всего заметите промокод, который принесёт 500 или 1 000 бонусных руб. <a href=https://www.dr-ay.com/blogs/217116/Mastering-Architectural-Rendering-From-Vision-to-Visual-Reality>https://www.dr-ay.com/blogs/217116/Mastering-Architectural-Rendering-From-Vision-to-Visual-Reality</a> 1 x slots casino <a href=https://bajarmp3.net/member.php?action=profile&uid=4769>https://bajarmp3.net/member.php?action=profile&uid=4769</a>
1х слот регистрация в 1×slots casino
1×slots регистрацию процедура займет всего лишь Максимальная ставка ? уточняется в еденице счета и ограничивает размер ставки за раз спин. В случае ее превышения приз возможность быть аннулирован. Также в правилах возможность находиться запрет на размещение ставок конкретного облика, к, по равным шансам в рулетке (то есть, на чет или нечет, красное или черное и т.д. ).Рассмотрим принцип его действия на примере. Допустим, вы зарегистрировались и получили $10 no deposit bonus с вейджером х50. Это означает, что выигранные средства возможно несомненно выводить не раньше, чем последствии того, как общая сумма ставок достигнет $500. <a href=http://gameland.mzf.cz/profile.php?lookup=108131>http://gameland.mzf.cz/profile.php?lookup=108131</a> Если при регистрации показать промокод, можно гарантировано получить приз. Где арестовать ваучер? Посетите тематику блоги либо форумы. Иногда администрация клуба проделывает рассылку ваучеров на электронную почту. В заключительное время игорные жилища начали рекламироваться в кинокартинах и телесериалах. Присмотритесь и скорее заметите промокод, который принесёт 500 либо 1 000 бонусных рублей. 1×slots casino регистрация 1×slots review live Вознаграждения за получение VIP-статуса ? начисляются в программки лояльности при достижении еще уровня либо выдаются персонально менеджерами службы.
онлайн казино 1×slots
Наши специалисты изучают условия акции, этого в ручном режиме проверку их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и другие характеристики. Мы не рекламируем казино, а даем игрокам информацию о наихороших из их.Для получения депозитного бонуса необходимо восполнить свой игровой баланс настоящими средствами. Вознаграждение возможно получить либо при внесении первого депозита, или вид фиксированного процента от внесённых средств. Так или по, приз поступит на счёт только последствии пополнения. У каждого игорного заведения средства правила и условия. Но, дабы получить призы, нужно выполнить стереотипные действия: <a href=https://discussion.evernote.com/profile/541701-kachfil1/?tab=field_core_pfield12>https://discussion.evernote.com/profile/541701-kachfil1/?tab=field_core_pfield12</a> 1хслотс мобильная версия зеркало Но а если вы уже профи по интернет казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в онлайн казино;
1×slots регистрация 1×slots review live
Автоматы непопросту считаются наиболее модным азартным веселием. Чтобы усвоить управление и правила, понадобится всего количество мин. Ваша задачка устроить ставку, найти количество рабочих линий и можно крутить барабан. Если на выпадет выигрышная комбинация – вы выиграли! С данной задачей вам помогут справится бездепозитные бонусы казино. Бездепозитные призы прекрасный вариант безвозмездной игры в игровые автоматы. Многие пользователи сети не знают, собственно в казино можно начать играть абсолютно безвозмездно, а потом исключить выигрыш на банковскую карту либо электронный кошелек, другие не доверяют интернет казино, а третьи удачно играют и выигрывают – и подчас довольно немалые суммы.Подтверждение электронной почты – одно из ведущих критерий, коие есть практически в любом бездепозитном казино. Чтобы верифицировать электрическую почту, достаточно перебежать по интенсивной ссылке в послании, приобретенном от азартного клуба. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=http://www.bisound.com/forum/showthread.php?t=524882>http://www.bisound.com/forum/showthread.php?t=524882</a> Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам запрещено начислять призы посетителям, не имеющим валютных средств на счете. Мы предлагаем рассмотреть актуальные призы онлайн-казино с лицензией, коие соблюдают законодательство РБ.
казино 1× slots официальный сайт
Более солидные предложения встречаются довольно изредка. Зачастую они доступны только VIP-игрокам. В оставшихся случаях им наверняка сопутствуют очень жесткие условия отыгрыша. Также вероятны дополнительные условия и другие ограничения, прописанные в критериях и положения бонусной программы казино.Условия вывода выигрыша. В некоторых заведениях для успешного вывода с бездепозитного приза довольно пополнения баланса и доказательства личности. В иных же клубах, нужно некоторое раз прокрутить собственный депозит. Выполнив все требования оператора, клиент может оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит примерно менее суток. Если дополнительно потребуется пройти процедуру верификации, то срок возрастает до 1–2 трудящихся дней. Для перевода применяются банковские приборы и электрические платежные системы. Второй метод подходит превосходнее, например как основная транзакций в этом случае исполняются моментально. В связи со специфичностью функционирования банков обработка платежей может занять до нескольких трудящихся дней. <a href=http://avexima.ru/bitrix/redirect.php?goto=http://konkor-optika.ru/bitrix/redirect.php?goto=http://alt1.toolbarqueries.google.im/url?q=https://telegra.ph/Ponimanie-soderzhaniya-apellyacionnyh-zhalob-i-predstavlenij-v-sootvetstvii-so-statej-322-GPK-09–23>http://avexima.ru/bitrix/redirect.php?goto=http://konkor-optika.ru/bitrix/redirect.php?goto=http://alt1.toolbarqueries.google.im/url?q=https://telegra.ph/Ponimanie-soderzhaniya-apellyacionnyh-zhalob-i-predstavlenij-v-sootvetstvii-so-statej-322-GPK-09–23</a> 1хслотс казино зеркало Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.
<b>Смотреть еще похожие новости:</b>
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=455592>1×slots casino регистрация 1×slotscasino09k online</a>
<a href=http://6000ziyuan.com/forum.php?mod=forumdisplay&fid=2>1×slots зеркало этих способов предполагает регистрацию</a>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=250521>1×slot официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Новички не обожают незамедлительно же заносить депозит. Это обусловлено отсутствием опыта и сомнением. К счастью, наши возможно получить бездепозитный бонус за регистрацию в казино. Неважно собственно начисляет система – фриспины либо кредиты. В любом случае вы не рискуете своими сбережениями. Это замечательная возможность запустить приглянувшийся видео слот или же испытать фортуну в настольных играх.
#4931 Thomashautthttps://www.facebook.com/people/Hotdrop_CSGO/61550490187523/
Открывайте кейсы CS:GO <a href=https://www.facebook.com/people/Hotdrop_CSGO/61550490187523/>кейсы кс</a> с крутыми шансами на редкие скины. Удобный интерфейс, надежная система и огромный выбор кейсов сделают игру еще интереснее. Начните свой путь к топовым скинам прямо сейчас!
#4932 AHoini
<a href=https://chachamortors.com/bbs/board.php?bo_table=free&wr_id=1192687>vavada casino Suomi</a> <a href=https://vds06160.blogpayz.com/30538746/a-simple-key-for-tГ©lГ©charger-1win-unveiled>1win Gabon</a>
#4933 Charlesgunnyhttp://filmkachat.ru
1хслот 1хслотс регистрация перейти на 1×slots
Эффективность бездепов в маркетингового прибора расценили многие операторы. Малоизвестные площадки употребляют такие промоакции, чтобы быстро набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны постоянных гостей. Не все веб-сайты, дающие презенты без депозита, рекомендованы к этой. За симпатичным промоописанием шансы прятаться невыполнимые условия отыгрыша прочие подводные камешки.Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие появляются у начинающих. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots casino 777 online</a> На страничке представлены бездепозитные призы за регистрацию в казино редчайшая награда за коей гонятся все игроки как новенькие, например и профессионалы. Мы тоже уделяем великое внимание на наличие бонусов при составление рейтинга казино на деньги. Бездепозитный приз это возможность выступать безвозмездно и выиграть реальные деньги. <a href=https://medium.com/@comcgifurniture/your-complete-guide-to-premium-weed-delivery-pickering-and-local-cannabis-services-c284470081c0>https://medium.com/@comcgifurniture/your-complete-guide-to-premium-weed-delivery-pickering-and-local-cannabis-services-c284470081c0</a> Вы наверняка, например все предпочитаете получать презенты и бездепозитные призы казино. Игорные жилища брали в повадку одаривать гэмблеров приятными призами. Стать обладателем приветственного подарка возможно за создание профиля или пополнение счёта. Второй вариант более интересный, ведь клубы готовы удвоить депо! Но случае вы новичок и лишь знакомитесь с миром пыла, другого пользуйтесь бонусом за регистрацию. 1×slots официальный сайт зеркало рабочее <a href=http://kungur.hldns.ru/forum/profile.php?action=show&member=9180>http://kungur.hldns.ru/forum/profile.php?action=show&member=9180</a> Бонусные средства – небольшая сумма денег для старта в новом казино. На бонусные средства, обычно разрешено выступать во все игры, не слотов с современным джекпотом и игр из раздела exist casino.Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации презента нужно доказать электронную почту и привязать аппарат;
1×slots официальный зеркало
Условия отыгрыша приза. Если Вы планируете заработать на бездепозитном бонусе, то в первую очередь внимание на велечину вейджера и срок, который дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть приз и вывести выигрыш. 1×slots зеркало выигрыши обязательно пройдите регистрацию если <a href=http://mail.unnewsusa.com/bbs/board.php?bo_table=free&wr_id=2824835>http://mail.unnewsusa.com/bbs/board.php?bo_table=free&wr_id=2824835</a> B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpaxВ разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, необходимо адресоваться в службу спустя лайв-чат на сайте казино. 1хслотс официальный сайт зеркало
1хслот 1хслотс регистрация перейти на 1×slots
Доступ к подарку возможность раскрываться механически в введения промокода либо воззвания в саппорта вебсайта. В первом случае от юзера не потребуется практически действий. Бездеп с активацией по коду встречается чаще всего. Игроку нужно ввести совокупность знаков в графе, которая имеет пребывать в регистрационной форме в Личном кабинете.Можно ли в одном интернет казино получить больше одного приза за регистрацию? Нет, так как в любом онлайн казино есть верховодила, к коим надо(надобно) держаться, не создавать два аккаута для получения бонусов, другому будет блокировка обоих аккаутов, не пытайтесь обмануть онлайн казино, бонус за регистрацию выдаеться один раз одному лицу. Бонус без депо за регистрацию в казино (бездепозитный приз) – это валютный презент от клуба, кот-ый начисляется на акк игрока последствии регистрации в казино. Кроме творения учетной записи, для получения бездепа, довольно часто требуется ещё и доказать контактные данные игрока и/или активировать особый промо-код.Верификация необходима для дополнительной безопасности и помочь техподдержке выявить бонусхантеров и мошенников. Кстати, на некоторых платформах выводы крупных сумм доступны лишь после подтверждения личности. <a href=https://www.royalflower.co.kr/bbs/board.php?bo_table=free&wr_id=810767>https://www.royalflower.co.kr/bbs/board.php?bo_table=free&wr_id=810767</a> Доступные забавы – В неких азартных забавах возможно снизить математическое превосходство казино до нескольких десятых процента. В их количестве многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как управляло, в таких играх ставки идут в зачет вейджера не всецело. Например, имеет учитываться лишь 50%. В некоторых забавах бездепозитные призы вообщем нельзя отыгрывать.Вейджер (или вагер) ? это наименьшая сумма ставок, коию необходимо сделать для вывода валютного бонуса. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение. казино 1×slots официальный сайт Также есть онлайн-платформы азартных игр, коие применяют раздачу бездепозитных бонусов в особые даты (как для казино, например и для игрока). Помимо сего, действующие геймеры того имеют возможность получить схожие бонусы за собственную деятельность (к примеру, за увеличения уровня либо за схожие достижения).Многие азартные клубы ограничивают сумму вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, обозначенной в описании промоакции, суммы Вы не сможете вывести. Разница будет аннулирована, Вы в не можете создавать на нее ставки.
1хслот скачать
<a href=http://portal.westcoastbible.org/discussion/viewtopic.php?f=18&t=1956827>1×slots регистрация то дальше необходимо пройти</a> 1×slots официальный сайт мобильная версия <a href=http://iwlnx.com/forum/member.php?action=profile&uid=110921>http://iwlnx.com/forum/member.php?action=profile&uid=110921</a> Кешбэк-бонус дает собой возврат фиксированного процента от ставки когда проигрыша или же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не выше 10%.Фриспины – безвозмездные вращения с фиксированной ставкой, которые можно применять в конкретных игровых автоматах.
1×slot регистрация
Большинство клубов завлекают внимание компьютерные за счёт разнообразных подарков. На одних веб-сайтах можно получить виртуальные кредиты, которые откроют доступ ко всему софту. На иных же, администрация предлагает бесплатные вращения для пуска лучших онлайн слотов. Несмотря на разные промоакции, стоит выделить самые основные. Как прочие промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такового предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает свежих гостей и позволяет им составить впечатление о функционале, не рискуя вескими суммами. <a href=http://honevi.grodno.by/index.php?subaction=userinfo&user=RichardExomb>http://honevi.grodno.by/index.php?subaction=userinfo&user=RichardExomb</a> B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.Классическая разновидность приза за создание аккаунта. Его преимущество содержится том,, собственно клиент возможность других подбирать аппараты и делать ставки в их. Иногда список игровых автоматов ограничен оператором, но все одинаково это другого, как, чем единственный доступный разъем, как в случае с внедрением фриспинов. зеркала 1×slots Доступ к дару имеет открываться автоматически после введения промокода или воззвания в саппорта вебсайта. В первом случае от юзера не потребуется практически деяний. Бездеп с активацией по коду встречается чаще всего. Игроку нужно ввести совокупность символов в графе, кот-ая возможность пребывать в регистрационной форме в Личном кабинете.
<b>Смотреть еще похожие новости:</b>
<a href=http://complainanything.com/node/158?page=955#comment-1274601>скачать 1×slots официальный сайт</a>
<a href=https://nauc.info/forums/viewtopic.php?t=20572118>скачать 1×slots официальный сайт</a>
<a href=http://fin-molitor.com/forum/viewtopic.php?f=2&t=388096>1×slots промокод при регистрации</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины — бесплатные вращения, которые позволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины считаются наиболее знаменитым и желаемым обликом бонуса — благотворительные вращения порой эффективнее и веселее в отыгрыше, чем остальные облики бездепов. Для отыгрыша бонуса казино обязывает игрока поиграть на сумму, в количество один превышающую необходимую полученного бонуса — тут выгода фирмы явна.
#4934 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
промокод 1×bet 1×bet зеркало слоты 1×bet xyz <a href=https://rhymes-punches.com/>1×bet приложение</a> up casino bet casino <a href=https://glvk.guru/>porno Дарья Мороз</a> порно с Евгений Малкин (хоккей) официальные сайты казино kent casino porno Игорь Акинфеев (футбол) Елена Лядова казино онлайн win win casino
DiskiPlus Валентина Матвиенко порно DiskiPlus демо казино <a href=https://www.diskiplus.ru/>DiskiPlus часы казино</a> DiskiPlus 7k casino сайт DiskiPlus 1×bet 1хбет <a href=https://diskiplus.ru/>DiskiPlus casino официальный сайт</a> DiskiPlus 1×bet официальный сайт DiskiPlus pin up casino DiskiPlus букмекерская контора официальный сайт DiskiPlus скачать casino на андроид DiskiPlus 1×bet сейчас DiskiPlus фреш казино DiskiPlus казино смотреть онлайн
#4935 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пин ап casino pin casino pin официальный <a href=https://www.ossetia.tv/>скачать букмекерскую контору</a> 1×slots casino порно с Гатагова Ольга Анатольевна <a href=https://rumafia.news/>про казино</a> официальные сайты казино букмекерская контора бетсити порно с Георгий Джикия (футбол) порно с Федор Чалов (футбол) 1×bet зеркало на сегодня 1×bet xyz pin up casino пин букмекерская контора официальный сайт скачать
DiskiPlus bitz casino DiskiPlus макао казино <a href=https://www.diskiplus.ru>DiskiPlus casino онлайн</a> DiskiPlus casino com DiskiPlus букмекерская контора скачать приложение <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet сайт 1×bet xyz</a> DiskiPlus casinos xyz DiskiPlus казино играть DiskiPlus скачать сайт букмекерской конторы DiskiPlus 1×slots casino DiskiPlus unlim casino DiskiPlus лучшие букмекерские конторы DiskiPlus 1×bet телефон
#4936 Charlesgunnyhttp://filmkachat.ru
рабочее зеркало 1×slots
Бонус за регистрацию в казино выдается лишь один один на одного игрока. Но случаются вспомогательные акции, в рамках которых бездепы раздаются для неизменных посетителей и такие презенты Вы можете получить более одного раза.Прежде всего, не запамятовывайте регулярно заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом оценивают наиболее интересные предложения основных игорных порталов. <a href=http://filmkachat.ru/>1×slots сайт</a> Самые свежие бездепозитные бонусы в казино за регистрацию 2022 года с выводом прибыли находятся на данной странице. Посетитель возможность оценить условия получения и начать выступать на средства без внесения депо. При данном игроку важно разуметь, на каких критериях и какими способами возможность вывести полученный выигрыш. Для сего необходимо расценить перечень подключенных платежных систем. <a href=https://blog.udn.com/G_112062930339362154/181391895>https://blog.udn.com/G_112062930339362154/181391895</a> Приглашаем делиться сужденьями о бонусах. Это поможет другим пользователям подбирать более выгодные предложения. 1×slots зеркало проходить регистрацию это отличный вариант <a href=http://www.besatime.com/index.php?subaction=userinfo&user=Travispoolf>http://www.besatime.com/index.php?subaction=userinfo&user=Travispoolf</a> Реже бонусы без депо начисляются постоянным игрокам. С их помощью администрация старается удержать ценных посетителей или вожделеет поблагодарить за лояльность верных гостей. Но гораздо почаще для сходственных целей применяются эти промоакции:
1×slots casino регистрация
Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских руб. В условиях промоакции предписано, что вейджер бездепозитного бонуса х20. Поэтому, чтобы отыграть приз, игроку несомненно нужно сделать ставок на 35*20=700 руб.Самый распространённый из похожих бонусов, конечно же, бездеп на день рождения посетителя — приз в виде фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им можно протяжении установленного периода времени. <a href=https://forum.ltp-team.com/topic/86787–1×slots-zerkalo-na-segodnya/>1×slots зеркало на сегодня</a> 1×slots зеркало сайта Если простыми текстами, бездепы – это определённая сумма денег либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать подарки. Но есть некоторые аспекты. Существуют игорные дома, коие перед тем как начислить бонусы требуют привязать аппарат, предоставить копии документов.Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам запрещено начислять бонусы посетителям, не имеющим денежных средств на счете. Мы предлагаем осмотреть актуальные призы онлайн-казино с лицензией, коие соблюдают законодательство РБ. <a href=http://ru-adres.ru/index.php?subaction=userinfo&user=judicioustower6>http://ru-adres.ru/index.php?subaction=userinfo&user=judicioustower6</a> 1хслотс рабочее зеркало
1×slots регистрация 1×slotscasino 56 online
<a href=https://games-garant.ru/index.php?subaction=userinfo&user=DonaldHab>https://games-garant.ru/index.php?subaction=userinfo&user=DonaldHab</a> 1 x slots
1×slots регистрация на сайте
<a href=http://vn-info.net/user/Josephkam/>1×slots промокод при регистрации 2025</a> Высокая конкурентность в разделе азартных игр мотивирует операторов привлекать клиентов различными акциями. Благодаря этому у посетителей замечена вероятность получить призы в казино за регистрацию без депозита. Воспользоваться этим предложением возможно, избегая процедуру внесения средств на игровой счет, просто активировав аккаунт на веб-сайте. Наш экскурсовод по бездепам поможет выбрать самую привлекательную бонусную программку, узнать верховодила получения такового вознаграждения и воспользоваться им с максимальной выгодой.Бездепозитный бонус за регистрацию в казино с выводом средств в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых свежих, щедрых и проверенных призах в онлайн казино, коие обновляются каждый денек. Чаще всего применяются коды. Их надо(надобно) вносить в особые окна регистрационной анкеты, в речь идет о пригласительных бонусах, или в определенном разделе собственного кабинета игрока. 1× slots официальный <a href=https://forumniebiescy.pl/memberlist.php?mode=viewprofile&u=70654>https://forumniebiescy.pl/memberlist.php?mode=viewprofile&u=70654</a>
x1 slots регистрация в 1×slots casino
Казино выводит деньги только на что, эту платежную систему, с котрой был сделан депозит. То есть, для вывода бездепозитного приза, Вам сначала нужно пополнить счет. В неких клубах узкий список способов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с этих платежных способов, которые доступны для вывода.Подобные бонусы без депозита предоставляются на более прибыльных условиях. Зачастую они крупнее, а обстоятельства отыгрыша наименее жесткие. Также, учите, собственно бездепозитный приз можно исключить только никаких случае, когда станут выполнены все условия отыгрыша.Вейджер (wager) – это коэффициент, кот-ый показывает на какую необходимую необходимо сделать ставок, чтобы исключить приз из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода этого приза, Вам необходимо сделать ставок на сумму: 500*70=3500 руб. Только всецело отыграв бонус, Вы сможете вывести свой выигрыш. <a href=https://tpforums.org/forum/member.php?65444-ForsedropKi>https://tpforums.org/forum/member.php?65444-ForsedropKi</a> Предложения с бездепозитными призами за регистрацию дозволяют свежим заведениям привлечь аудиторию на собственный вебсайт. А игроки к получают возможность выступать на настоящие деньги без депо в казино и заработать маленький стартовый капитал, кот-ый разрешается исключить на карту банка или электрический кошелек. 1×slots официальный сайт зеркало Варианты выигрыша зависят от Вашей успеха и условий игорного портала. Выше мы сказали, что кое-какие бездепозитные бонусы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются другие, все, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность передовых игр на деньги, возможно выиграть невероятные суммы. Сегодняшние игровые автоматы либо видео слоты, как их именуют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.sgomberisgombero.it/my-account-2/>1×slots официальный зеркало рабочее</a>
<a href=https://traderscrypt.com/forums/showthread.php?tid=5891&pid=8796#pid8796>1×slots зеркало регистрация то дальше необходимо пройти</a>
<a href=https://www.lkgs.net/member.php/11965-JamesJax>рабочее зеркало 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Законодательство, регулирующее азартные забавы в различных государствах, влияет на возможности операторов. В итоге пользователи из отдельных ареалов сталкиваются с лимитированиями со стороны казино. Это возможность быть как полный отказ в доступе, так и невозможность загружать забавы отдельных производителей. Баланс игрока дополняется на соответствующую необходимую. К ней используется вейджер, обозначенный в правилах акции. Вывести выигрыш возможно несомненно после того, как пользователь устроит требуемый размер ставок из собственных средств. В редчайших случаях бездеп трудится в формате Free Play. На счет юзера зачисляется большая сумма, и предоставляется маленький срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по завершении этого периода сумма на счету несомненно превышать изначальную, то разницу возможно будет исключить либо использовать для последующих ставок.
#4937 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора бесплатно скачать мелбет букмекерская контора <a href=https://vestnik-jurnal.com/>порно с Евгения Медведева, фигуристка</a> Комарова Наталья Владимировна порно casino зеркало сайта <a href=https://www.ossetia.tv/>порно с Анастасия Потапова, теннисистка</a> porno Алена Косторная (фигурное катание) порно с Петр Ян (ММА) pin casino r7 casino порно с Юлия Ефимова, пловчиха бесплатно играем казино casino бонус
DiskiPlus Преподобная Надежда Александровна порно DiskiPlus порно с Сергей Бобровский (хоккей) <a href=https://www.diskiplus.ru/>DiskiPlus casinos xyz</a> DiskiPlus casino daddy DiskiPlus букмекерские конторы в россии <a href=https://diskiplus.ru/>DiskiPlus казино в россии</a> DiskiPlus 1×bet зеркало слоты 1×bet xyz DiskiPlus porno Светлана Ходченкова DiskiPlus порно с Сергей Бобровский (хоккей) DiskiPlus лучшие букмекерские конторы DiskiPlus рабочие зеркала казино казино DiskiPlus букмекерская контора зенит
#4938 Charlesgunnyhttp://filmkachat.ru
1×slots скачать на айфон
В большинстве заведений устроить это возможно по адресу электронной почты, по номеру телефонного, спустя социальную сеть либо гугл-аккаунт.Варианты выигрыша в от Вашей успеха и условий игорного портала. Выше мы сказали, что некоторые бездепозитные призы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются другие, все, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на деньги, можно выиграть неописуемые суммы. Сегодняшние игровые автоматы или видео слоты, как их именуют. Могут выдавать солидные умножение от х1.000 и выше. Некоторые множат ставку от х100.000. <a href=http://filmkachat.ru/>1×slots регистрацию процедура займет всего лишь</a> Выбрать казино с бездепозитным бонусом. У нас на сайте представлен список лучших интернет казино, коие предлагают своим игрокам щедрые призы за регистрацию. <a href=https://ai.ceo/read-blog/206569>https://ai.ceo/read-blog/206569</a> Для вывода средств бонус надо(надобно) несомненно отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариациями отыгрыша бездепозитного приза до его получения, чтобы избежать конфликтных ситуаций.Бездепозитный бонус – это финансовое вознаграждение, коие выдается соучастнику игры в казино, для его вербования и возникновения заинтересованности. Любой посетитель, который подходит условиям выдачи подобного бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое поощрение является наиболее эффективным методом, дающим вероятность стартовать при, не вкладывая собственных материальных средств. рабочее зеркало 1×slots <a href=http://w92248uq.bget.ru/user/Glennpoefe/>http://w92248uq.bget.ru/user/Glennpoefe/</a> Акционные предложения от казино есть в различных форматах. Часто призы даются в обмен на депо. Игрок вносит платеж и получает средства, бесплатные вращения и одобрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — вид бонуса, который гарантирован за выполнение определенных поступков на веб-сайте:Oтыгpaть приз с обозначенным вeйджepом, результата необходимо сдeлaть cтaвoк нa cумму, превосходящую объем приза в несколько раз.
1×slots официальный demo регистрация в 1×slots casino
1хслотс мобильная версия зеркало Большинство клубов завлекают внимание геймеров за счёт различных презентов. На 1 сайтах возможно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает благотворительные вращения для пуска топовых онлайн слотов. Несмотря на разные акции, стоит выделить самые главные. <a href=http://japan-lke.com/home.php?mod=space&uid=67573&do=profile>http://japan-lke.com/home.php?mod=space&uid=67573&do=profile</a> Если при регистрации показать промокод, можно гарантировано получить приз. Где арестовать ваучер? Посетите тематику блоги либо форумы. Иногда администрация клуба проделывает рассылку ваучеров на электронную почту. В заключительное время игорные жилища начали рекламироваться в кинокартинах и телесериалах. Присмотритесь и скорее заметите промокод, который принесёт 500 либо 1 000 бонусных рублей.Условия вывода выигрыша. В неких заведениях для удачного вывода с бездепозитного бонуса достаточно пополнения баланса и подтверждения личности. В других же клубах, необходимо некоторое один прокрутить свой депозит. 1×slots регистрация 1×slotscasino 56 online
рабочее зеркало 1хслотс
Бонусные средства – небольшая сумма денег для старта в новом казино. На бонусные средства, обычно разрешается выступать во все игры, не слотов с прогрессивным джекпотом и игр из раздела exist casino. Ниже указан актуальный перечень легальных казино в Беларуси с бонусами на 1-ый депозит. Вы сможете попасть на официальный вебсайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз. <a href=http://vrk3.org.ua/index.php?subaction=userinfo&user=harmoniouslesio>http://vrk3.org.ua/index.php?subaction=userinfo&user=harmoniouslesio</a> Вейджер менее х30–35 считается применимым. Опытные игроки утверждают, что с таким вейджером реально остаться в плюсе, случае верно подойти к выбору игрового аппарата. 1×slos регистрация в 1×slots casino Срок активации и время на отыгрыш. Зачисление средств либо фриспинов происходит при активации протяжении взыскательно ограниченного периода, подобные требования предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать приз количество дней или числе недель. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высочайшим вейджером.
1×slots подтвердит вашу регистрацию если говорить
Во всех легальных онлайн-казино Беларуси нужно подтверждение паспортных данных для игры — это требование правительства страны. Многие игроки, оценив функционал казино, остаются выступать в нем и далее ? на это и направлено любое рекламную. Постоянные клиенты заносят депозиты и проделывают ставки, обеспечивая длительную прибыль оператора. То есть, казино раздают бездепы свежим юзерам для формирования приклнной аудитории. Разные казино имеют собственные верховодила по выведению выигрыша. Для бездепозитных бонусов принимаются достаточно высокие притязания. Часто онлайн-казино советуют отыграть бонусное поощрение до 100 один в игровых автоматах. Например, в игрок получил бесплатно десять $, то необходимо будет отыграть их, поставив одну тыщу спинов по одному баксу любой. Стоит обозначить(означить), что не все казино дают возможность играть на призы и не во всех увеселительных заведениях идентичные верховодила для отыгрывания. Некоторые казино воспрещают выступать на бонусы в блекджек или ограничивают ставки до 5 %, что существенно увеличивает в 10-ки раз число нужных игр. 1хслотс казино зеркало <a href=http://forums.outdoorreview.com/member.php?378964-Ralphthany>http://forums.outdoorreview.com/member.php?378964-Ralphthany</a>
1×slots официальный сайт мобильная версия
<a href=https://biznes-knigi.com/user/Chrispoede/>https://biznes-knigi.com/user/Chrispoede/</a> При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, коие возможно посвятить забаве в казино.Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы мгновенно получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, замечена реальный шанс победу! 1×slots актуальное зеркало Промообъявления от казино мешают реальной картины и ориентированы на привлечение внимания пользователей. Понять, насколько высоки шансы остаться в плюсе, дозволит собственный тест критерий предложения:3. Подтвердить данные. В зависимости от клуба, нужно привязать телефонный либо почту, указать индивидуальную информацию;
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для отыгрыша приза казино обязывает игрока сыграть на сумму, в количество один превышающую необходимую приобретенного приза — тут выгода фирмы очевидна. Фриспины без депо либо дополнительные свои помогут поближе познакомиться с игровой платформой и её функциями. За счёт подарков возможно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям из-за игры напротив живых крупье.
#4939 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация на сайте
Когда речь о получении бездепозитных призов в казино, для внимание на последующие обстоятельства: <a href=http://filmkachat.ru/>1×slots зеркало быструю регистрацию а также мгновенное</a> Если вы новичок в этом деле и только попали в неизведанную вами район азарта — счет предложений как бездепозитные призы без пополнения. <a href=https://groups.google.com/u/1/g/3d-rendering-services>https://groups.google.com/u/1/g/3d-rendering-services</a> 1×slots сайт зеркало <a href=http://www.vintageampeg.com/forum/member.php?action=profile&uid=7121>http://www.vintageampeg.com/forum/member.php?action=profile&uid=7121</a> Но есть азартные заведения, готовые просто так вручить средства на забаву. Для этого довольно создать профиль. Чтобы вывести выигрыш, сперва необходимо выполнить вейджеровые условия, прописанные в условиях получения бездепа.Ну и окончательно же, для казино бездепозитные призы прибыльны с имиджевой стороны: сходственная щедрость повышает уровень преданности клиентов к компании.
1×slots регистрация на официальном сайте
В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая приятная доля забавы. Важно, часто бездепозитные бонусы в казино выдаются с ограничениями по максимальной выплате. В среднем возможно рассчитывать на прибыль в некоторое тысяч руб. Как исключить выигрыш с приза без депо. Придётся доказать аккаунт документально, в неких заведениях. Процедура верификации обязательна и делается каждым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате или прочитайте в правилах. <a href=https://acerfans.ru/user/JamesTed/>1×slots официальный сайт скачать</a> 1х слот 1хслотс регистрация перейти на 1×slots <a href=https://earthmyhome.com/User-9045>https://earthmyhome.com/User-9045</a> Практически все интернет казино с бездепозитным бонусом за регистрацию предусматривает программку преданности — систему одобрения постоянных клиентов, которая состоит из колличества значений. При достижении игроком очередного значения на его счёт поступает приз. Чем повыше степень — тем щедрее бонус.Доступ к дару может раскрываться механически в введения промокода либо обращения в саппорта вебсайта. В первом случае от юзера не потребуется никаких действий. Бездеп с активацией по коду встречается почаще всего. Игроку необходимо ввести совокупа знаков в графе, кот-ая может пребывать в регистрационной форме в Личном кабинете. 1хслотс рабочее зеркало на сегодня
1×slots casino регистрация 1×slots review live
<a href=https://tutorialslots.com/index.php?qa=77970&qa1=%D0%B1%D0%BB%D0%BE%D0%B3-%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0-%D1%8F%D0%BD%D0%B4%D0%B5%D0%BA%D1%81-%D0%B4%D0%B7%D0%B5%D0%BD-%D1%87%D0%B8%D1%82%D0%B0%D1%82%D1%8C>https://tutorialslots.com/index.php?qa=77970&qa1=%D0%B1%D0%BB%D0%BE%D0%B3-%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0-%D1%8F%D0%BD%D0%B4%D0%B5%D0%BA%D1%81-%D0%B4%D0%B7%D0%B5%D0%BD-%D1%87%D0%B8%D1%82%D0%B0%D1%82%D1%8C</a> 1хслотс казино зеркало
1×slots регистрация 1×slotscasino09k online
<a href=http://portal.westcoastbible.org/discussion/viewtopic.php?f=19&t=1924134>1хслотс официальный сайт зеркало</a> Вейджер (wager) – это коэффициент, который демонстрирует на какую необходимую нужно сделать ставок, дабы вывести приз из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода этого бонуса, Вам необходимо сделать ставок на сумму: 500*70=3500 рублей. Только полностью отыграв приз, Вы можете исключить собственный выигрыш. 1× slots casino зеркало <a href=http://323-klub.pl/member/ydymoguh/>http://323-klub.pl/member/ydymoguh/</a>
1× slots зеркало
Бездепозитные призы – это самая небезинтересная и наиболее многообещающая акция интернет-казино. Они даже превосходнее фри-спинов, потому что выплаты в даровых вращениях не гарантированы, так композиции на барабанах игрового аппарата шансы не сложиться.Третитй бездепозитный бонус за регистрацию – валютные средства. К раскаянию, начислить рубли либо доллары готовы только известные и знаменитые клубы. С их поддержкой вы сможете насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком. Бездепы обыкновенно предлагают с отыгрышем — быстро вывести выигранные средства невозможно. Перевод средств со счета несомненно возможен после как, как юзер выполнит все притязания казино, а сумма имеет превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, в течение коих клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней последствии активации.Многие новенькие сомневаются, что поощрительный приз не нужно несомненно возвращать, в в они выиграли у казино. Это безусловно безопасно и надежно. Выводя выигранные средства, игрок просто одергивает свое участие при и утрачивает уникальную вероятность – безвозмездно увеличивать личное материальное положение. <a href=http://hotelrocio.kr/bbs/board.php?bo_table=free&wr_id=199774>http://hotelrocio.kr/bbs/board.php?bo_table=free&wr_id=199774</a> x1 slots 1хслотс регистрация перейти на 1×slots Когда речь идет о денежных призах, казино практически устанавливают обстоятельства вейджера, коие необходимо выполнить, дабы исключить выигрыш.Будьте внимательнее при ознакомлении с правилами во избежание происхожденья конфликтных ситуаций с казино, когда последствии отыгрыша бездепа вам не дадут вывести крупную необходимую выигрыша.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Следует выделить, что бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом. Суммы похожих предложений, случаев, колеблются от 3-х до 20 долларов, а вейджер на эти свои должен составлять от тридцати до шестидесяти один. Зачастую, наибольшая сумма выигрыша тут составит от одной до двух сотен долларов. Если игрок выиграет больше, то все свои могут быть списанными до максимально разрешенного выигрыша. Здесь замечена содержание выводить еще несуществующие финансы на свою платежную систему и дальше отыскивать заведение с подходящими под данную сумму релоадом либо призом за 1-ое пополнение счета. Есть некоторое подвидов бездепозитного вознаграждения, предлагаемого большим числом заведений.
#4940 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
Выиграть настоящие деньги в казино не пополняя счет – трудно, но вероятно. Главное задаться целью и не нарушатьправила заведения. Выберите несколько казино с бездепзитными бонусами и начните выступать на бонусные свои. По статистике каком-то 10-ти заведений можно заработать маленькую сумму денег за счет бонусных средств.Вы скорее, например все любите получать подарки и бездепозитные призы казино. Игорные жилища брали в привычку одаривать гэмблеров приятными бонусами. Стать обладателем приветственного презента возможно за творенье профиля или пополнение счёта. Второй вариант более интересный, так клубы готовы удвоить депозит! Но в вы новичок и только знакомитесь с миром пыла, какого-либо воспользуйтесь призом за регистрацию. <a href=http://filmkachat.ru/>казино 1×slots</a> <a href=https://www.nitrnd.com/blogs/195900/%D0%90%D0%B2%D1%82%D0%BE-%D0%B2%D0%B8%D0%BA%D1%83%D0%BF>https://www.nitrnd.com/blogs/195900/%D0%90%D0%B2%D1%82%D0%BE-%D0%B2%D0%B8%D0%BA%D1%83%D0%BF</a> 1×slots бездепозитный бонус за регистрацию <a href=https://shopping.parceldeal.com/User-Daviddum>https://shopping.parceldeal.com/User-Daviddum</a>
1хслотс зеркало на сегодня
скачать 1×slots на андроид мобильная версия Во время игры в казино, выигрыши, приобретенные благодаря бесплатным призовым фондам, суммируются и срабатывают в общую сумму для отыгрывания. Однако, случае фортуна улыбнется и выйдет отыграть все призы, игровое заведение гарантированно допустит вывести денежные средства. Сумма вывода несомненно зависеть от лимита, утвержденного именно в этом учреждении. Поэтому, пристально надо(надобно) читать управляла выдачи анлимитных депо. <a href=https://www.digitalistings.com/author/glennexolo/>https://www.digitalistings.com/author/glennexolo/</a> Теоретически, к бесплатным бонусам можно отнести например именуемые фриспины. Напомним, речь идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, поэтому что они предоставляют лишь возможность делать ставки. 1хслотс рабочее зеркало Чтобы выступать бесплатно на настоящие деньги в казино, не всегда достаточно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные деяния.
рабочее зеркало 1хслотс
<a href=http://xn–80aa3cgn3d.kz/index.php?subaction=userinfo&user=alertinjury23>http://xn–80aa3cgn3d.kz/index.php?subaction=userinfo&user=alertinjury23</a> Бездепозитные бонусы казино за регистрацию в 2022 году — это возможность сыграть за счёт заведения. Казино даёт клиенту шанс воспользоваться определённой суммой или количеством даровых вращений без внесения депозита. Не путайте деморежим с реальной игрой без надобности внесения депо. 1×slots быструю регистрацию а также мгновенное
1×slots официальный сайт мобильная версия скачать
Промообъявления от казино мешают реальной картины и направлены на привлечение внимания юзеров. Понять, как высоки шансы остаться в плюсе, позволит личный анализ критерий предложения: 1×slots официальный сайт скачать <a href=https://notebooks.ru/forum/user/10253/>https://notebooks.ru/forum/user/10253/</a>
1хслот зеркало сайта
Приглашаем делиться воззрениями о бонусах. Это поможет другим юзерам избирать наиболее выгодные предложения.Бездепозитный приз за регистрацию в казино — это стартовый презент вид валютного начисления либо даровых вращений для новых игроков заведения, для получения которого не нужно заносить депо. <a href=http://bbs.cheaa.com./home.php?mod=space&uid=3301914>http://bbs.cheaa.com./home.php?mod=space&uid=3301914</a> 1×slot рабочее зеркало На безвозмездные призы онлайн-казино почти практически распространяется ограничения по стране проживания посетителей. Даже если вас разрешено раскрывать счет и играть на средства в заведении, это еще не означают, что вам доступны not the slightest down payment bonuses.
<b>Смотреть еще похожие новости:</b>
<a href=https://russiancomputerservice.ru/user/JosephCer/>1×slots casino зеркало рабочее</a>
<a href=http://forums.indexrise.com/thread-43462-post-332835.html#pid332835>1× slots casino зеркало</a>
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=56246>1×slots скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Частенько новенькие не знают, как активировать подарки либо исключить первый выигрыш. Для похожих случаев наша команда описала основные определения – что это фриспины, вейджер, как его отыграть, зачем нужно проходить верификацию. У нас на веб-сайте Вы найдете список бонусов без депо в проверенных казино и доскональную информацию про как их получить и использовать.
#4941 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino champion casino <a href=https://vestnik-jurnal.com/>казино без</a> про казино порно с Голикова Татьяна Алексеевна <a href=https://rumafia.news/>букмекерские конторы без депозита</a> про казино 1×bet на сегодня up букмекерская контора vodka casino porno Юлия Канакина porno Вера Бирюкова, гимнастка букмекерская контора бесплатно скачать
DiskiPlus сайте букмекерской конторы фонбет DiskiPlus porno Дарья Клишина <a href=https://www.diskiplus.ru>DiskiPlus 1×bet зеркало xbet xyz</a> DiskiPlus порно с Каролина Севастьянова DiskiPlus Яровая Ирина Анатольевна порно <a href=https://www.diskiplus.ru/>DiskiPlus casino скачать приложение</a> DiskiPlus porno Александр Соболев (футбол) DiskiPlus букмекерская контора бетсити DiskiPlus букмекерская контора мостбет DiskiPlus сайт казино вход DiskiPlus лучшая казино DiskiPlus Светлана Ходченкова DiskiPlus кент casino
#4942 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Константин Тюкавин (футбол) 1×bet 1хбет <a href=https://specreporter.com/>сайт винлайн букмекерская контора</a> казино сегодня casino бездепозитный <a href=https://kompromat1.online/>зеркала казино</a> казино ставка pin casino зеркало симулятор казино букмекерская контора фонбет казино фильм онлайн порно с Кирьянова Дарья Борисовна Яровая Ирина Анатольевна порно
DiskiPlus porno Илья Ковальчук (хоккей) DiskiPlus casino бездепозитный <a href=https://diskiplus.ru>DiskiPlus bitz casino</a> DiskiPlus casino автомат DiskiPlus Разуваева Ксения Денисовна порно <a href=https://diskiplus.ru/>DiskiPlus казино рублях</a> DiskiPlus порно с Кирьянова Дарья Борисовна DiskiPlus top casino DiskiPlus casino DiskiPlus 1×bet на андроид DiskiPlus казино рояль DiskiPlus 1×bet слоты 1×bet xyz DiskiPlus букмекерские конторы pin
#4943 Ремонт iPad Air 2 Москваhttps://remont-ipad-air-2-belk.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт ipad air 2 сервис, можете посмотреть на сайте: <a href=https://remont-ipad-air-2-belk.ru/>ремонт ipad air 2 адреса</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#4944 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
вавада казино champion casino <a href=https://sovsekretno.net/>1×bet официальный слоты</a> porno Дарья Мороз казино рублях <a href=https://7club7.com/>фильмы казино рояль</a> макао казино казино 1 часы казино porno Светлана Ходченкова 1×bet 1хбет Нургалиева Эльвира Рамиловна порно порно с Евгений Малкин (хоккей)
DiskiPlus порно с Матвей Сафонов (футбол) DiskiPlus porno Алена Михайлова <a href=https://diskiplus.ru>DiskiPlus porno Анастасия Янькова, боксерка</a> DiskiPlus 1×bet официальный 1×bet xyz DiskiPlus букмекерская контора бетсити <a href=https://diskiplus.ru/>DiskiPlus porno Ангелина Гончаренко, хоккеистка</a> DiskiPlus макао казино DiskiPlus Петрова Ольга Викторовна порно DiskiPlus 1×bet скачать бесплатно DiskiPlus casino онлайн DiskiPlus 1×bet зеркало на сегодня 1×bet xyz DiskiPlus рейтинг казино DiskiPlus почему казино
#4945 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало
Стоит отметить, что бездепозитный приз выдается лишь совершеннолетним новичкам, которые, к, все пригласить собственных приятелей и людей, также рассчитывающих на поощрительную программку преданности. Подобная технология появилась среди конкуренцию онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры способствуют увеличению своей посещаемости, путем привлечения новых игроков. Бонусы – это уникальный шанс для потенциальных участников забавы, коие имеют опробовать софт покер рума и увериться, будут ли они в него выступать или нет. Новый игрок испробует средства силы с настоящими оппонентами в казино. <a href=http://filmkachat.ru/>1×slots подтвердит вашу регистрацию если говорить</a> <a href=https://www.swiatobrazu.pl/forumgaleria/thread/view/id/591>https://www.swiatobrazu.pl/forumgaleria/thread/view/id/591</a> 1×slot зеркало <a href=http://metager.org/meta/settings?fokus=web&url=http://find.games.free.fr/visit.php/shop-elektromir.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/NIbaQbwSYpe>http://metager.org/meta/settings?fokus=web&url=http://find.games.free.fr/visit.php/shop-elektromir.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/NIbaQbwSYpe</a> Помните, что в неких играх сумма ставки идет в зачет вейджера лишь частично. Так, в настольных и карточных забавах только от 5% до 50% суммы ставки считаются как отыгранные деньги, тот как в слотах идет в зачет все one hundred percent суммы.Призовые начисления без депо имеют предоставляться для роли в турнирах интернет казино. Потратить перечисленные деньги возможно самая в данной акции. Условия их проведения включают в себя ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться этим предложением, другого, как выучить его управляла.
онлайн казино 1×slots
Классическая разновидность приза за творение аккаунта. Его превосходство заключается что, собственно заказчик имеет без избирать аппараты и делать ставки в них. Иногда список игровых автоматов ограничен оператором, но все также это лучше, чем единственный доступный слот, как в случае с внедрением фриспинов. 1×slots промокод при регистрации 4. Заберите презент. Чаще всего приз активируется сразу последствии регистрации. Но посещают ситуации, когда нужно забежать в собственный кабинет либо написать в службу.Сразу в активации промокода можно воспользоваться презентом. Как теснее упоминалось, призы случаются трёх обликов – фриспины, кредиты и фриплей-бонусы. <a href=https://forum.mpgames.ir/member.php?28464-FrankMeabe>https://forum.mpgames.ir/member.php?28464-FrankMeabe</a> 1×slots акции Можно ли зарабатывать на бездепозитных бонусах? Это не работа, здесь как повезет, в в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, тогда можно назвать везением, и добавочной добавкой к вашему бютжету.
1×slots зеркало рабочее
Объективные – размер бонуса, коэффициент и обстоятельства вейджера, надобность внесения депо для вывода средств;Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 долларов. Если выдаются фриспины, их количество редко выше нескольких 10-ов даровых вращений. <a href=https://sultantheme.com/vb4forum/member.php?13252-DeweySit>https://sultantheme.com/vb4forum/member.php?13252-DeweySit</a> Подтверждение регистрации. Казино требуют привязки профиля к электрическому адресу и номеру аппарата. Для этого на e-mail отчаливает послание ссылаясь, а на аппарат ? текстовое извещенье с кодом.Подтвердите регистрацию, чтобы активировать Бездепозитный приз с выводом, потребуется заполнить личный профиль. Заполните пустующие поля реальными данными о себя. 1×slots официальный регистрация Перечисленные повыше главные характеристики сопровождают практически каждый бонус и являются стандартными для бездепозитных бонусных начислений в казино.Также, в этом случае нужно доказать свой номер аппарата, чтобы код, приобретенный в смс-сообщении от клуба установить в специальное фон в личном кабинете игрока.
1×slots регистрация 1×slots review live
Демоказино есть почти на любом сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются значительно реже: там когда выигрыша и соблюдения критерий промоакций бездеп возможно перевоплотить в настоящие средства. Если простыми текстами, бездепы – это определённая сумма денег либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно забирать подарки. Но есть некоторые аспекты. Существуют игорные дома, коие перед тем как начислить призы просят привязать телефон, предоставить копии документов.Одним из поводов отдавать привилегию 1 или иному заведению заключается в привлекательности предлагаемых промоакций и даровых предложений. Безвозмездные фриспины, выдаваемые без дела делать какой-либо вклад, в списке располагается далековато не в конце. 1×slots казино мобильная версия <a href=http://liuwenzheng.com.cn/home.php?mod=space&uid=860514&do=profile>http://liuwenzheng.com.cn/home.php?mod=space&uid=860514&do=profile</a> Срок отыгрыша — это период, кот-ый наступает в момент активации приза и заканчивается с его закрытием. Пользователю необходимо уложиться в этот временной зазор, по призовые средства аннулируются. Казино устанавливают перечень игр, ставки в которых засчитываются при расчете отыгранных средств. Если тайтл не заходит в данный список, то возможность быть недоступен для загрузки в действия бонусного предложения.Выше мы предоставили глубокий комплект самых свежих и актуальных бездепозитных призов в интернет казино без пополнения на 2022 год, где вам пользоваться хоть ценным бездепозитным призом.
1×slots сайт зеркало
Получать информацию о самых прибыльных бонусах можно без неизменного мониторинга новостей казино. Мы брали эту задачу на себя и безпрерывно смотрим за услугами операторов, избирая лучшие из них. В этом разделе собраны заключительные бездепы, промокоды к ним и обстоятельства их активации. Список акций периодически дополняется. В топ вошли самые свежие бездепозитные бонусы за регистрацию в казино 2020, кратковременные и замкнутые промо. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и другим аспектам. Если срок деянья акции истек, она удаляется из перечня. <a href=http://www.bhl7.xyz/home.php?mod=space&uid=83432>http://www.bhl7.xyz/home.php?mod=space&uid=83432</a> Некоторые онлайн-казино без депозита предлагают свежим клиентам избрать бонус при регистрации. Будьте внимательны: выбрав раз, вы в безусловном большинстве случаев не можете воспользоваться остальными. 1×slots зеркало регистрация Шаг 5. Использование и отыгрыш. Бездеп обязан быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.Будьте внимательнее при ознакомлении с правилами во избежание появления конфликтных обстановок с казино, когда после отыгрыша бездепа для не дадут исключить солидную необходимую выигрыша.
<b>Смотреть еще похожие новости:</b>
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=277091>скачать 1×slots на андроид мобильная версия</a>
<a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1×slots промокод при регистрации 2025</a>
<a href=https://portugal-campings.com/pt/account/>1×slots зеркало регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Маркетинговая политика всех игорных интернет-клубов должна одевать разнородный нрав. И случае гонорары на депо работают для того, чтобы провоцировать вносить депозиты и поощрять теснее место юзеров, то бездепозитный бонус в казино или приз за регистрацию в казино, до всего, рассчитан на расширение базы покупателей.
#4946 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Илона Маркова, хоккеистка порно с Юлия Ефимова, пловчиха <a href=https://vestnik-jurnal.com/>пин ап казино</a> 7k casino официальный casino сегодня <a href=https://m.repost.news/>порно с Евгений Малкин (хоккей)</a> r7 casino почему казино порно с Анна Щербакова, фигуристка 1×bet зеркало unlim casino 1×bet официальный слоты пин up casino
DiskiPlus Чулпан Хаматова DiskiPlus casino игровой автомат <a href=https://diskiplus.ru/>DiskiPlus почему в казино нет часов</a> DiskiPlus pin up casino buzz DiskiPlus казино фильм онлайн <a href=https://www.diskiplus.ru/>DiskiPlus casino buzz</a> DiskiPlus казино смотреть онлайн бесплатно DiskiPlus казино на деньги DiskiPlus casino игровой автомат DiskiPlus 1×bet зеркало xbet DiskiPlus porno Катерина Шпица DiskiPlus black russia казино DiskiPlus casino зеркало сайта
#4947 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
black russia казино казино сочи <a href=https://www.ossetia.tv/>1×bet 1</a> Москалькова Татьяна Николаевна порно 1×bet слоты 1×bet top <a href=https://rucriminal.info/>порно с Юлия Ефимова</a> лучшие онлайн казино 1×bet зеркало рабочее на сегодня букмекерская контора ставки гта казино букмекерская контора вход скачать 1×bet на андроид бесплатно букмекерская контора без
DiskiPlus 1×bet зеркало на сегодня DiskiPlus Окладникова Ирина Андреевна порно <a href=https://www.diskiplus.ru>DiskiPlus porno Ангелина Гончаренко, хоккеистка</a> DiskiPlus casino ап DiskiPlus Разуваева Ксения Денисовна порно <a href=https://www.diskiplus.ru>DiskiPlus казино вулкан</a> DiskiPlus Окладникова Ирина Андреевна порно DiskiPlus автомат казино DiskiPlus 1×bet слоты 1×bet top DiskiPlus porno Анна Сидорова, керлингистка DiskiPlus casino рабочее DiskiPlus pin up casino buzz DiskiPlus champion casino
#4948 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet бесплатно букмекерские конторы без депозита <a href=https://rhymes-punches.com/>porno Мира Андреева (теннис)</a> casino на телефон сколько казино <a href=https://krtka.info/>почему в казино нет окон</a> порно с Афонина Марина Игоревна 1×bet официальный 1×bet xyz cometa casino скачать букмекерскую контору casino регистрации официальные букмекерские конторы скачать букмекерская контора зенит
DiskiPlus сайт казино зеркало DiskiPlus Черкесова Бэлла Мухарбиевна порно <a href=https://diskiplus.ru/>DiskiPlus зеркала казино</a> DiskiPlus pin up casino пин DiskiPlus Чулпан Хаматова <a href=https://diskiplus.ru/>DiskiPlus букмекерская контора официальный сайт</a> DiskiPlus лучшие казино бесплатно DiskiPlus пин ап букмекерская контора DiskiPlus казино рулетка DiskiPlus pin up casino пин ап DiskiPlus вывод казино DiskiPlus 1go casino DiskiPlus 1×bet официальный
#4949 Charlesgunnyhttp://filmkachat.ru
1×slots casino зеркало
Такие одобрения разрешают бесплатно протестировать новое казино, разобраться с игровым процессом интернет слотов, заработать и исключить маленькую сумму денег.Как только на виртуальном счету окажутся бонусные средства, поспешите отыграть вейджер. Сразу после сего можно оставить заявку на вывод выигрыша. Кредиты прибыльно выделяются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом реальных средств и выделяют вероятность почувствовать задор. Во-вторых – возможно насладиться каждой азартной забавой доступной на сайте. В вашем постановлении находятся автоматы, настольные приложение, видео-покер, Live-дилеры. <a href=http://filmkachat.ru/>1× slots официальный</a> <a href=https://www.4yo.us/blogs/171102/%D0%9A%D0%B0%D0%BA-%D1%80%D0%B0%D0%B1%D0%BE%D1%82%D0%B0%D0%B5%D1%82-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%BC%D0%BE%D1%82%D0%BE%D1%86%D0%B8%D0%BA%D0%BB%D0%BE%D0%B2>https://www.4yo.us/blogs/171102/%D0%9A%D0%B0%D0%BA-%D1%80%D0%B0%D0%B1%D0%BE%D1%82%D0%B0%D0%B5%D1%82-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%BC%D0%BE%D1%82%D0%BE%D1%86%D0%B8%D0%BA%D0%BB%D0%BE%D0%B2</a> Благодаря программе преданности от игорного заведения, можно взять превосходный старт и без добавочных инвестициям запустить видеослоты. Кроме того, можно рассчитывать на реальную фортуну и получить, без инвестиции личных финансов, великий выигрыш. онлайн казино 1×slots <a href=http://uralremput.ru/index.php?subaction=userinfo&user=idioticbliss61>http://uralremput.ru/index.php?subaction=userinfo&user=idioticbliss61</a>
1хслотс мобильная версия зеркало
казино 1×slots официальный сайт 1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, случае не желаете замерзнуть жертвой жуликов либо впустую истратить время; <a href=http://11499.ww.w.molifan.net/space-uid-2052144.html>http://11499.ww.w.molifan.net/space-uid-2052144.html</a> Иногда виде одобрения за регистрацию имеют выдаваться билеты для участия в турнирах. Условия их проведения очень выделяются, поэтому мы советуем ознакомиться с каждым предложением раздельно. 1× slots регистрация в 1×slots casino
1х слот регистрация в 1×slots casino
Но эти рамки не смущают числе хайроллеров, потому коэффициенты на слотах позволяют рассчитывать на крупные выигрыши, а в некоторых автоматах разыгрывается передовой джекпот.Подтвердите регистрацию, чтобы активировать Бездепозитный приз с выводом, требуется наполнить личный профиль. Заполните пустые поля реальными данными о себя. Так что приготовьтесь дать секретную информацию (пол, возраст, страна проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает менее суток, после чего удастся свободно выводить солидные выигрыши.Одним из поводов отдавать привилегию 1 либо иному заведению заключается в привлекательности предлагаемых промоакций и даровых предложений. Безвозмездные фриспины, выдаваемые без дела делать какой-нибудь лепта, в списке располагается далековато не в конце. <a href=https://ingenerseti.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=https%3A%2F%2Foctomo.co.uk%2Fpost%2F6901_gold-french-leaves-with-phenomenal-heat-resistance-and-impressive-absorbency-tha.html>https://ingenerseti.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=https%3A%2F%2Foctomo.co.uk%2Fpost%2F6901_gold-french-leaves-with-phenomenal-heat-resistance-and-impressive-absorbency-tha.html</a> Далее потребуется отыграть вагер и исключить выигрыш. Игрокам без опыта крупно подфартило, меня получить десятки презентов за одну регистрацию. Если не смогли получить Бездепозитный приз, не тревожьтесь. Обратитесь в онлайн чат, оператор поможет решить проблему. 1×slots на любой вкус как пройти регистрацию Например, игрок получил 500 рублей при твореньи аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 рублей, потребуется сделать 875 спинов для полного отыгрыша.
1 х слотс зеркало
Так что приготовьтесь дать конфиденциальную информацию (пол, возраст, государство проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает менее суток, последствии чего получится свободно выводить солидные выигрыши.Создание аккаунта. На веб-сайте казино необходимо обнаружить регистрационную форму и наполнить пустующие поля личностными данными. Иногда на этом этапе потребуется показать лишь адрес электрической почты и пароль, но чаще бы наполнить анкету индивидуальной информацией (ФИО, дата рождения, место проживания и т.д. ). Нужно свидетельствовать только реальные данные, потому впоследствие они станут проверены. Варианты выигрыша в от Вашей успеха и условий игорного портала. Выше мы заявили, собственно некоторые бездепозитные бонусы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются другие, все, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на средства, можно выиграть неописуемые суммы. Сегодняшние игровые автоматы или видео слоты, как их именуют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000.Также, в этом случае необходимо подтвердить собственный номер телефонного, чтобы код, приобретенный в смс-сообщении от клуба установить в особое фон в собственном офисе игрока. Казино выводит средства лишь на ту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного приза, Вам сначала необходимо пополнить счет. В неких клубах узкий перечень способов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет именно с данных платежных методов, которые доступны для вывода.При отыгрыше бонусных средств, нужно учесть срок действия приза и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный приз несомненно аннулирован. 1×slot рабочее зеркало <a href=https://www.modernvespa.it/profile/3667-frankalkah/>https://www.modernvespa.it/profile/3667-frankalkah/</a>
1×slots коды
2. Создать новый профиль. Для регистрации нужно заполнить небольшую анкету или зайдите в личный кабинет при помощи соц сетей;Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша призов. Заведения практически устанавливают максимальную ставку, допустимую по условиям вейждера. <a href=http://moujmasti.com/member.php?227138-Darenliady>http://moujmasti.com/member.php?227138-Darenliady</a> Наши эксперты исследуют обстоятельства акции, этого в ручном режиме проводят их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и параметры. Мы не рекламируем казино, а даем игрокам информацию о лучших из них.Вейджер не более х30–35 считается приемлемым. Опытные игроки утверждают, собственно с таким вейджером реально остаться в плюсе, в верно подойти к выбору игрового аппарата. 1хслотс казино зеркало С этими простыми советами любое казино с призом за регистрацию способно принести в разы больше выгоды и выгоды.
<b>Смотреть еще похожие новости:</b>
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=108021&extra=>1хслотс рабочее зеркало</a>
<a href=http://theauction.com.au/my-account/>сайт 1× slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если вы избираете испытанное лицензионное онлайн казино и сделайте все условия получения бездепозитного приза, проблем с получением дара у Вас не возникнет. Как лишь получите бездеп в казино, всё точно не запамятовывайте проверять электрическую почту. Некоторые игорные клубы постоянно веселят активных гэмблеров приятными призами. Чаще всего получить презент можно в преддверии веселья, на денек рождение, за вербование приятеля. А также распространённым призом является прибавка к депозиту. Нужно чем пополнить счёт, и азартное заведение увеличит его на 50–100%.
#4950 AHoini
<a href=https://vds52727.xzblogs.com/71679433/a-review-of-1win-casino-romГўnia>1win romГўnia</a> <a href=http://clubefox.com/?p=10829>neon54 casino</a>
#4951 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Алена Михайлова 1×bet зеркало xbet <a href=https://t.me/vchkogpu_ru>casino скачать</a> 1×bet зеркало xbet 1×bet casino <a href=https://rucriminal.info/>Кузнецова Анна Юрьевна порно</a> casino зеркало сайта casino сайт казино вход казино на деньги лучшая казино porno Дарья Клишина 1×bet скачать приложение на андроид
DiskiPlus pin up casino пин ап DiskiPlus casino вход <a href=https://www.diskiplus.ru/>DiskiPlus new casino</a> DiskiPlus порно с Никита Кучеров (хоккей) DiskiPlus мелбет букмекерская контора <a href=https://diskiplus.ru/>DiskiPlus букмекерская контора</a> DiskiPlus порно с Илья Осипов (киберспорт) DiskiPlus букмекерские конторы в россии DiskiPlus 1×bet слоты 1×bet top DiskiPlus казино 5 DiskiPlus порно с Юлия Ефимова, пловчиха DiskiPlus Елена Лядова DiskiPlus casino игровой автомат
#4952 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, the decision лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Стоит отметить, что бездепозитный приз выдается лишь взрослым новеньким, которые, к, шансы пригласить личных приятелей и своих, кроме рассчитывающих на поощрительную программку лояльности. Подобная технология замечена между конкуренцию онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению собственной посещаемости, методом вербования свежих игроков. Бонусы – это оригинальный шанс для вероятных участников игры, которые могут опробовать софт покер рума и убедиться, станут ли они в него играть или нет. Новый игрок испробует средства силы с реальными оппонентами в казино. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало</a> Доступ к дару имеет открываться автоматически в введения промокода или воззвания в службу поддержки вебсайта. В первом случае от пользователя не требуется практически поступков. Бездеп с активацией по коду встречается чаще всего. Игроку нужно установить совокупа символов в графе, которая может находиться в регистрационной форме в Личном кабинете. <a href=https://www.dr-ay.com/blogs/217116/Mastering-Architectural-Rendering-From-Vision-to-Visual-Reality>https://www.dr-ay.com/blogs/217116/Mastering-Architectural-Rendering-From-Vision-to-Visual-Reality</a> Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных притязаний, кроме неотъемлемой верификации. Если на веб-сайте предусмотрена неотъемлемая процедура доказательства личности, то исключить выигрыш получится лишь в ревизии данных. Приготовьтесь заполнить анкету и отправить в техподдержку документ, подтверждающий лицо. 1×slots официальный сайт, скачать <a href=http://www.xueyue8.cn/zblog/?id=16>http://www.xueyue8.cn/zblog/?id=16</a> Многие новички колеблются, что поощрительный приз не нужно несомненно возвращать, и если они выиграли у казино. Это безусловно неопасно и надежно. Выводя выигранные свои, игрок просто одергивает свое участие деле и теряет уникальную вероятность – бесплатно увеличивать личное вещественное положение.
1×slots мобильная версия войти казино
Акции, приуроченные к календарным праздничным, посещают рассчитаны как на всех пользователей, например и на категории: к, презент на 8 марта девушкам-игрокам либо мужикам на 23 февраля.Выбор любого интернет казино на нашем сайте. В описании к любому Вы можете узнать, что получите за творенье аккаунта. <a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=138061>1×slots официальный сайт зеркало</a> рабочее зеркало 1хслотс Для вывода средств бонус нужно несомненно отыграть законам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариациями отыгрыша бездепозитного приза до его получения, чтобы избежать конфликтных обстановок. <a href=http://donga-well-ageing.org/bbs/board.php?bo_table=free&wr_id=1375164>http://donga-well-ageing.org/bbs/board.php?bo_table=free&wr_id=1375164</a> В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно приятная часть забавы. Важно, зачастую бездепозитные бонусы в казино выдаются с лимитированиями по максимальной выплате. В среднем возможно рассчитывать на выгода в количество тысяч рублей. Как исключить выигрыш с приза без депо. Придётся подтвердить акк документально, в неких заведениях. Процедура верификации обязательна и делается каждым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате либо прочитайте в правилах. зеркло казино 1×slots Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам запрещено начислять бонусы посетителям, не имеющим денежных средств на счете. Мы предлагаем осмотреть актуальные призы онлайн-казино с лицензией, коие соблюдают законодательство РБ.
1×slots зеркало видели такую регистрацию на
<a href=https://gidro2000.com/forum-gidro/user/20920/>https://gidro2000.com/forum-gidro/user/20920/</a> 1×slots casino регистрация 1×slotscasino09k online Если площадка дарит бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь ввести аккаунт на сайте и активировать его, подтвердив адрес электрической почты, номер телефона или иные данные, коие просит оператор. Перед этим нужно увериться, что юзер располагается на официальном веб-сайте казино, но на жульнической площадке.Многие новички сомневаются, собственно поощрительный приз не несомненно возвращать, даже в они выиграли у казино. Это полностью безопасно и надежно. Выводя выигранные средства, игрок просто останавливает свое роль в игре и теряет уникальную вероятность – безвозмездно наращивать личное вещественное положение.
1×slots официальный demo регистрация в 1×slots casino
<a href=http://www.arka-bahce.org/forum/showthread.php?p=779109&posted=1#post779109>1×slots зеркало регистрация</a> Операторы гемблинга утверждают, что так они сражаются с бонус-хантерами. Впрочем, критики считают, собственно данным казино пробуют устроить из случайного гостя постоянного игрока.Еще одно условие касается размеров ставки. Операторы устанавливают наивысшую сумму, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, избранной в Личном кабинете. При превышении лимита есть риск потерять бонуса. Существующие ограничения относятся и к определенным видам ставок. Например, играя в рулетку, клиент имеет столкнуться с запретом ставить фишки на шансы. 1×slos регистрация в 1×slots casino <a href=https://masterarms.se/user/travisskity/>https://masterarms.se/user/travisskity/</a>
1×slots официальный сайт скачать на айфон
Одним из поводов отдавать преимущество, льготу одному или иному заведению содержится в привлекательности предлагаемых промоакций и безвозмездных предложений. Безвозмездные фриспины, выдаваемые без нужды делать какой-нибудь лепта, в перечне располагается далековато не в конце.Хотя благотворительные бонусы начисляются без депозита, не исключено, собственно вас понадобиться вносить деньги. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты лишь после как, как свежий заказчик впервые пополнит игровой счет. <a href=http://droid-comz.ru/user/StevenWetle/>http://droid-comz.ru/user/StevenWetle/</a> скачать 1×slots официальный сайт
<b>Смотреть еще похожие новости:</b>
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=37839>зеркала 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины — благотворительные вращения, коие позволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины считаются наиболее известным и желаемым обликом приза — бесплатные вращения иногда эффективнее и веселее в отыгрыше, чем другие виды бездепов. Иногда операторы требуют внесение минимального депозита перед выводом для верификации платежного прибора. В неких казино этот депо того предстоит отыграть.
#4953 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
лучшие бесплатные онлайн казино скачать pin casino <a href=https://glvk.guru/>винлайн букмекерская контора официальный</a> 1×bet приложение слот casino <a href=https://slon-ru.com/>букмекерская контора фонбет официальный сайт</a> casino регистрации casino ап vavada casino porno Виктория Баркова, легкоатлетка casino бездепозитный казино рублях почему казино
DiskiPlus porno Александра Степанова, фигуристка DiskiPlus porno Анна Сидорова, керлингистка <a href=https://diskiplus.ru/>DiskiPlus 1×bet зеркало слоты</a> DiskiPlus 1×bet зеркало xbet DiskiPlus казино вход официальный сайт <a href=https://diskiplus.ru/>DiskiPlus порно с Баталина Ольга Юрьевна</a> DiskiPlus 1×bet бесплатно DiskiPlus casino buzz DiskiPlus pin up casino DiskiPlus 1×bet официальный сайт DiskiPlus пинко casino DiskiPlus Львова-Белова Мария Алексеевна порно DiskiPlus вывод казино
#4954 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slotscasino09k online
Бездеп с фриспинами имеет обхватывать всю коллекцию игр на сайте либо разработки 1-го провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении акции. Выигрыш возможность быть выведен в того, как юзер отыграет данную необходимую. Возможность оценить полный функционал слотов — основное совершенство данной разновидности. Игроку становятся доступны те функции, коие отсутствуют в демонстрационном режиме, а вероятность выиграть реальные деньги добавляет ярчайших азартных ощущений.Многие игроки, оценив возможностей казино, остаются выступать в нем и далее ? на это и нацелено каждое рекламную. Постоянные клиенты вносят депозиты и делают ставки, обеспечивая долгосрочную выгода оператора. То есть, казино раздают бездепы новым пользователям для формирования лояльной аудитории. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasino09k online</a> 2. Создать свежий профиль. Для регистрации нужно заполнить маленькую анкету либо зайдите в собственный офис посредством соц сетей; <a href=https://www.hebergementweb.org/threads/mastering-the-art-of-product-lifestyle-images-from-concept-to-completion.2150185/>https://www.hebergementweb.org/threads/mastering-the-art-of-product-lifestyle-images-from-concept-to-completion.2150185/</a> Список например называемых «разрешенных землель» прилагается к правилам бонусной программы игорного портала. Обязательно проверьте, распространяются ли на вас похожие санкции.Индивидуальные поощрения выдаются за совершение деяний: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавленья или официального клиента для ПК. В большинстве казино действуют программки преданности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий степень нередко сопровождается выдачей бездепа. 1×slots зеркало <a href=https://kizkiuz.com/user/Renaldoorago/>https://kizkiuz.com/user/Renaldoorago/</a>
1×slot зеркало рабочее этих способов предполагает регистрацию
1× slots регистрация в 1×slots casino <a href=https://imoodle.win/index.php?title=%D0%A4%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B%20%D0%BA%D0%BE%D1%84%D0%B5%D0%B9%D0%BD%D0%B8%20%D1%81%D0%B0%D0%BC%D0%BE%D0%BE%D0%B1%D1%81%D0%BB%D1%83%D0%B6%D0%B8%D0%B2%D0%B0%D0%BD%D0%B8%D1%8F:%20%D0%9D%D0%BE%D0%B2%D1%8B%D0%B9%20%D1%82%D1%80%D0%B5%D0%BD%D0%B4%20%D0%B2%20%D0%B1%D0%B8%D0%B7%D0%BD%D0%B5%D1%81%D0%B5%20%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8>https://imoodle.win/index.php?title=%D0%A4%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B%20%D0%BA%D0%BE%D1%84%D0%B5%D0%B9%D0%BD%D0%B8%20%D1%81%D0%B0%D0%BC%D0%BE%D0%BE%D0%B1%D1%81%D0%BB%D1%83%D0%B6%D0%B8%D0%B2%D0%B0%D0%BD%D0%B8%D1%8F:%20%D0%9D%D0%BE%D0%B2%D1%8B%D0%B9%20%D1%82%D1%80%D0%B5%D0%BD%D0%B4%20%D0%B2%20%D0%B1%D0%B8%D0%B7%D0%BD%D0%B5%D1%81%D0%B5%20%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8</a> В большинстве заведений устроить это возможно по адресу электронной почты, по номеру телефонного, спустя социальную сеть либо гугл-аккаунт.Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы которые возникают у новичков. 1×slots зеркало 1хслотс регистрация перейти на 1×slots
казино 1×slots
Помните, собственно в некоторых играх сумма ставки идет в зачет вейджера лишь частично. Так, в настольных и карточных забавах только от 5% до 50% суммы ставки числятся как отыгранные деньги, на как в слотах идет в зачет все one hundred percent суммы.Получить приветственный бонус имеют только свежие посетители онлайн-казино. Способы описаны в критериях акции каждого легального казино, чаще всего это: Отказ в прохождении верификации. Если заказчик не желает либо имеет дать документы, подтверждающие его лицо, профиль будет заблокирован совместно, вкупе со всеми бонусными начислениями.Главным моментом в возникновении этих вознаграждений произведено сомнений, что пустив их в ход, игрок ничем не рискует и в последствии никому ничего не несомненно обязан (не зависимо, получит ли он благодаря призам какой-либо выигрыш или мгновенно спустит все только собственно прибывшие финансы). То есть, казино снабжает игрока вероятностью на дармовой основе выступать во различные слоты причем спонсирует забаву. <a href=http://onmedicina.ru/profile.php?u=ewyxumu>http://onmedicina.ru/profile.php?u=ewyxumu</a> Важно, удостоверьтесь никаких, что ранее не регистрировались в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи.Игры, в которых возможно играть на бонусные средства. Проверьте список игр, каких можно играть на бонусные средства, вполне они Вам не понравятся и не тратить своё время на эту промоакцию. 1× slots casino зеркало Бесплатные бонусы казино без депо можно получить вид валютных средств на бонусный счет (вывести их возможно лишь в отыгрыша), фриспинов, игры либо кешбэк-бонуса.
1×slots casino зеркало
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=185047>1хслотс рабочее зеркало на сегодня</a> Иногда у гостей сайта могут возникнуть проблемы при активации приобретенного промо-кода. В этих случаях, нужно адресоваться за помощью в службу «Support». Для получения ответа, обязательно указывается конкретная причина обращения и подтверждается информация дополнительными снимками. Если сложилась спорная обстановка, практически можно обратиться к основному регулятору или контролирующему органу, выдавшему данному заведению лицензионный документ. 1×slots зеркало регистрация то дальше необходимо пройти <a href=http://flowerwheel.synology.me/dokuwiki/doku.php?id=%D1%81%D0%B0%D0%B9%D1%82%20%D0%B7%D0%BD%D0%B0%D0%BA%D0%BE%D0%BC%D1%81%D1%82%D0%B2%20%D1%84%D0%BB%D0%B8%D1%80%D1%82%20%D1%81%D0%B8%D1%82%D0%B8>http://flowerwheel.synology.me/dokuwiki/doku.php?id=%D1%81%D0%B0%D0%B9%D1%82%20%D0%B7%D0%BD%D0%B0%D0%BA%D0%BE%D0%BC%D1%81%D1%82%D0%B2%20%D1%84%D0%BB%D0%B8%D1%80%D1%82%20%D1%81%D0%B8%D1%82%D0%B8</a> После требуется привнести идентификационный платёж. Это стращает начинающих больше всего. Нужно устроить минимальный депо в 100–500 рублей. Таким образом служба безопасности убедиться в том, что платёжный способ принадлежит Вам. Данная процедура важна для обеспечения безопасности игровых счетов. Пример, Ваш акк взломают и выведут средства на свой кошелёк. Будет крайне неприятно. Поэтому верификация платёжной системы, это важный момент.Ниже указан важный перечень легальных казино в Беларуси с бонусами на 1-ый депо. Вы можете попасть на официальный вебсайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус.
сайт 1× slots casino
Подтверждение персональной инфы. Все казино настоятельно от посетителя пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и наличие у пользователя иных аккаунтов (мультиаккаунт запрещен).Фриспины — благотворительные вращения, коие позволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины считаются наиболее известным и желаемым обликом приза — бесплатные вращения иногда эффективнее и веселее в отыгрыше, чем другие виды бездепов. Вейджер в переводе с британского означает «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша приобретенного приза, в нашем случае бездепозитного. Число ставок значения — важно лишь набрать сумму, пропорциональную сумме одобрения. <a href=https://games-garant.ru/index.php?subaction=userinfo&user=Arnoldasymn>https://games-garant.ru/index.php?subaction=userinfo&user=Arnoldasymn</a> В списке притязаний к отыгрышу нередко наличествуют лимиты на ставки при ирге на собственные средства. Так, случае отыграть нужно 30 000 рублей, а максимальная сумма ограничена 30 рублями, то вертеть барабаны предстоит 1000 один. Эта особенность затрудняет соблюдение игроками критерий по срокам деяния промоакции.Фриплей-бонусы. Бонусы за бесплатную забаву есть только в неких клубах. Они зачисляются незамедлительно в творенья профиля и срабатывают непродолжительное время. Если у вас нет медли истратить средства, они просто закончатся. Что касается времени, правило бонусы действуют протяжении 1-го часа. 1×slots казино мобильная версия
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.ltp-team.com/topic/78441–1×slots-zerkalo-rabochee/>1×slots зеркало рабочее</a>
<a href=https://www.kfz-gringer.at/index.php/forum/in-neque-arcu-vulputate-vitae/73476–1×-slots-casino#73241>сайт 1× slots casino</a>
<a href=https://australianwinerytours.com/tours/showthread.php?tid=300822>рабочее зеркало 1×slots</a>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5059/#comment-608026>1×slots регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чем ниже велечину вейджера, тем легче отыграть и вывести бонус. Если Вы расчитываете заработать на бездепе, но просто ознакомиться с свежим игровым клубом, то стоит игнорировать призов с высоким вейджером их почти не реально отыграть. С ними Вы сможете только протестировать забавы заведения.
#4955 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
песня казино порно с Никита Кучеров (хоккей) <a href=https://rhymes-punches.com/>букмекерская контора фонбет</a> casino buzz бк букмекерская контора <a href=https://th-royalgclub.com/>порно с Евгения Медведева, фигуристка</a> казино смотреть онлайн бесплатно 1×bet слоты официальный сайт 1×bet зеркало на сегодня букмекерские конторы pin casino зеркало сайта кент casino porno Виктория Баркова, легкоатлетка
DiskiPlus casino скачать приложение DiskiPlus самое казино <a href=https://diskiplus.ru>DiskiPlus официальные зеркала казино</a> DiskiPlus casino daddy DiskiPlus casino зеркало сегодня рабочее <a href=https://www.diskiplus.ru/>DiskiPlus лучшая казино</a> DiskiPlus порно с Арина и Дина Аверины, гимнастки DiskiPlus пина casino DiskiPlus бесплатные букмекерские конторы DiskiPlus почему в казино нет часов DiskiPlus бк букмекерская контора DiskiPlus спорт букмекерская контора DiskiPlus макао казино
#4956 Charlesgunnyhttp://filmkachat.ru
x1 slots 1хслотс регистрация перейти на 1×slots
Самые модные способы вывода средств ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электрическим платежным системам на Neteller и Skrill, а используют криптовалютными кошельками. Вывод выигрышей возможность осуществляться мгновенно или занимать от нескольких часов до нескольких суток.При небольшой сумме бонуса рекомендуется выступать по невысоким ставкам, а применять максимальные превосходнее лишь в том случае, если вейджер очень великий, а время на отыгрыш сильно ограничено. <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> Выбирайте лучшие безвозмездные призы за обзоров на Casinoz – и пусть вас сопутствует удача при отыгрыше бонусных кредитов! <a href=https://xequte.com/forum/topic.asp?TOPIC_ID=15274>https://xequte.com/forum/topic.asp?TOPIC_ID=15274</a> 1×slots казино зеркало <a href=https://tazovod.khalal.ru/forum/memberlist.php?mode=viewprofile&u=39456>https://tazovod.khalal.ru/forum/memberlist.php?mode=viewprofile&u=39456</a> Если простыми словами, бездепы – это определённая сумма денег или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно брать подарки. Но есть кое-какие аспекты. Существуют игорные жилища, коие перед тем как начислить бонусы просят привязать телефонный, дать копии документов.Фриспины предназначены для использования в видео слотах. Внимательно ознакомьтесь с условиями – часто их выдают на кое-какие автоматы. В зависимости от клуба, у вас выйдет сделать определённое количество ставок. Кстати, продвинутые игорные жилища разрешают запускать любых «одноруких злодеев».
1×slots зеркало этих способов предполагает регистрацию
Срок отыгрыша — это этап, который начинается в момент активации приза и завершается с его закрытием. Пользователю необходимо уложиться в данный временной зазор, по призовые средства аннулируются. Казино устанавливают перечень игр, ставки в которых засчитываются при расчете отыгранных средств. Если тайтл не входит в данный перечень, то возможность быть недосегаем для загрузки в действия бонусного предложения.Когда идет о валютных бонусах, казино практически устанавливают условия вейджера, которые необходимо выполнить, дабы вывести выигрыш. <a href=https://forum-macan.ru/viewtopic.php?t=11235>1×slots бездепозитный бонус за регистрацию</a> сайт 1× slots casino Вообще перейдя в казино — верховодила одинаковы в получении бездепозитных призов, в стандартные правила входит: подтвердить эл. Почту и телефон, наполнить собственный индивидуальный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ.Для всех бездепозитных призов действует наибольший предел на выигрыш. Он показывает максимальную сумму, коию появится получить, играя на бонусные кредиты. Как только вас удастся выполнить требования вейджера, возможный максимум несомненно переведен с бонусного счета на главный, а остаток несомненно списан. <a href=http://www.aina-company.com/bbs/board.php?bo_table=free&wr_id=1006663>http://www.aina-company.com/bbs/board.php?bo_table=free&wr_id=1006663</a> Также существуют онлайн-платформы азартных игр, которые применяют раздачу бездепозитных бонусов в специальные даты (как для казино, так и для игрока). Помимо сего, действующие геймеры также имеют возможность получить похожие призы за собственную работа (например, за повышения уровня или за схожие заслуги). 1хслотс мобильная версия зеркало Третитй бездепозитный приз за регистрацию – валютные свои. К раскаянью, начислить рубли или доллары готовы лишь известные и популярные клубы. С их помощью вы сможете насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком.
1×slots регистрация 1×slotscasino 56 online
Бездепозитные призы казино за регистрацию в 2022 году — это возможность поиграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой либо количеством безвозмездных вращений без внесения депо. Не путайте деморежим с реальной забавой без надобности внесения депозита. Акции, приуроченные к календарным дням, случаются рассчитаны как на всех юзеров, так и на категории: примеру, подарок на 8 марта девушкам-игрокам или мужчинам на 23 февраля. <a href=https://shgs.ru/forum/profile.php?mode=viewprofile&u=96554>https://shgs.ru/forum/profile.php?mode=viewprofile&u=96554</a> Когда речь о валютных призах, казино постоянно устанавливают обстоятельства вейджера, коие нужно выполнить, дабы исключить выигрыш. онлайн казино 1×slots Вы не в коем случае ни чем рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс изучить игровые автоматы, научится регулировать изменять ставки и полосы, изучать бонусные игры и их выигрышные комбинации, да счете просто зарядится кучей эмоций! Ведь вы будите играть на бонусные свои, коие возможно отыграть и исключить, а не просто на демо счет, что, этим наиболее адреналин в крови более повысится а пульс забьется с частым ритмом!
1×slot зеркало рабочее этих способов предполагает регистрацию
<a href=http://www.forum.kalor.ru/member/zaellayanextz8130/>1×slots официальный регистрация</a> В бонусную программу множества операторов входят регулярные бездепы. Это бессрочные акции, поощряющие интенсивных неизменных игроков. Популярный формат — раздача фриспинов по конкретным дням недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают постоянные призы без депозита в размен на накопленные баллы лояльности.За счёт спинов выйдет запустить разные онлайн слоты, протестировать стратегии и поднабраться опыта. Фишка в, собственно вращения начисляются на лучшие аппараты с уникальными опциями и высочайшей отдачей. Не запамятовывайте, что в каждом акционном предложении предусмотрены особые притязания – временные лимитирования, максимальный размер ставки, перечень доступных игр. 1×slots сайт зеркало <a href=https://sciencewiki.science/wiki/1×slots_%D0%90%D0%BD%D0%B4%D1%80%D0%BE%D0%B8%D0%B4>https://sciencewiki.science/wiki/1×slots_%D0%90%D0%BD%D0%B4%D1%80%D0%BE%D0%B8%D0%B4</a> Воспользоваться бездепом возможно не во всех игровых автоматах: казино вдруг уточняет ограничение для посетителей. Конечно, это возможно посчитать неким неудобством для игрока, но справедливости ради необходимо, собственно выбор автоматов всё также остаётся достаточно наибольшим.Так что можете отважно региться без всяких размышлений. Фортуна сегодня наверняка на вашей стороне. Не побаивайтесь, как последствие какого либо ущерба Вам совершенно не грозит. С такими призами как без пополнения, Вы остаетесь только в плюсе, но не как не в минусе.
1×slots промокод при регистрации 2025
Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного приза. Простая процедура получения бездепозитного бонуса, кот-ая займет менее 2-х минут. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные. <a href=https://we.riseup.net/lexxeagle/%D1%82%D1%83%D1%80%D0%B5%D1%86%D0%BA%D0%B8%D0%B5-%D1%81%D1%83%D0%B2%D0%B5%D0%BD%D0%B8%D1%80%D1%8B>https://we.riseup.net/lexxeagle/%D1%82%D1%83%D1%80%D0%B5%D1%86%D0%BA%D0%B8%D0%B5-%D1%81%D1%83%D0%B2%D0%B5%D0%BD%D0%B8%D1%80%D1%8B</a> 1×slots официальный сайт мобильная версия скачать B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpaxПриветственный бездеп предоставляется какому игроку только один раз. Казино сражаются с так называемыми бонусхантерами (от англ. Bonus Hunter — охотник за бонусами), пытающимися заводить многочисленные аккаунты для надувательства оператора и повторного получения подарка. Исключить похожие деянья позволяет верификация данных. Администрация вправе востребовать у посетителя доказать индивидуальные данные, указанные при регистрации.
<b>Смотреть еще похожие новости:</b>
<a href=https://nztw.org/home.php?mod=space&uid=43957>1хслот скачать</a>
<a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=9700&TITLE_SEO=9700-kharakteristiki-tovarov&MID=527542&result=reply#message527542>1×slots регистрация на сайте</a>
<a href=http://forum.puppylinux.pl/index.php?topic=826.new#new>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Классическая разновидность бонуса за творенье аккаунта. Его превосходство заключается что, нет, что клиент имеет без выбирать аппараты и создавать ставки в них. Иногда перечень игровых автоматов ограничен оператором, хотя все также это другого, как, чем единственный дешевый разъем, как в случае с внедрением фриспинов.
#4957 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
сайт 1×bet слоты Ирина Горбачева <a href=https://rucriminal.info/>1×bet зеркало слоты 1×bet xyz</a> сайт 1×bet слоты 1×bet зеркало рабочее на сегодня 1×bet xyz <a href=https://sovsekretno.net/>сайт винлайн букмекерская контора</a> porno Ангелина Гончаренко, хоккеистка автомат казино 1×bet зеркало на сегодня 1×bet xyz 1×bet xbet 1×bet официальный сайт 1×bet xyz casino официальный зеркало casino скачать приложение
DiskiPlus Хорова Наталья Александровна порно DiskiPlus порно с Алина Загитова, фигуристка <a href=https://diskiplus.ru>DiskiPlus 7k casino скачать</a> DiskiPlus 1×bet слоты DiskiPlus pin up casino buzz <a href=https://diskiplus.ru/>DiskiPlus бесплатно фильм казино</a> DiskiPlus кент casino DiskiPlus казино пин DiskiPlus казино большая DiskiPlus букмекерские конторы pin DiskiPlus мобильные букмекерские конторы DiskiPlus Светлана Ходченкова DiskiPlus казино вход официальный сайт
#4958 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasin online
Помните, собственно в неких играх сумма ставки идет в зачет вейджера только отчасти. Так, в настольных и карточных забавах лишь от 5% до 50% суммы ставки числятся как отыгранные средства, момент как в слотах идет в зачет все 100% суммы. <a href=http://filmkachat.ru/>1× slots официальный</a> <a href=https://peertrainer.com/LoungeCommunityThread.aspx?ForumID=1&ThreadID=316721>https://peertrainer.com/LoungeCommunityThread.aspx?ForumID=1&ThreadID=316721</a> 1× slots регистрация в 1×slots casino <a href=https://bustrader.uk/profile/PollyValli>https://bustrader.uk/profile/PollyValli</a> Мы проделываем акцент на главных положениях верховодил, рассказываем о территориальных ограничениях и вкратце информируем о иных промоакциях обсуждаемого казино.
1хслот зеркало
Oтыгpaть приз с обозначенным вeйджepом, чтобы необходимо сдeлaть cтaвoк нa cумму, превышающую размер бонуса в количество раз.Бездепозитный бонус по промо-коду несомненно доступен для игры, лишь в том случае когда Вы активируете особый бонусный код в разделе с призами либо укажите промокод при регистрации на сайте. В некоторых случаях, считая активации кода, понадобиться подтвердить контактные данные игрока и заполнить анкету посетителя. <a href=http://molifan.netwww.molifan.netwww.molifan.net/space-uid-2280308.html>1×slots зеркало на сегодня</a> 1×slots регистрация на сайте Как правило, при выводе денег, от играющего потребуется лишь сделать наименьший лепта для того, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом собственный счет.Но существуют азартные заведения, готовые просто так вручить средства на игру. Для сего достаточно создать профиль. Чтобы вывести выигрыш, сначала необходимо выполнить вейджеровые условия, прописанные в условиях получения бездепа. <a href=https://forumniebiescy.pl/memberlist.php?mode=viewprofile&u=70685>https://forumniebiescy.pl/memberlist.php?mode=viewprofile&u=70685</a> Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. 1×слотс казино
x1 slots 1хслотс регистрация перейти на 1×slots
Вейджер (wager) – это коэффициент, который показывает на какую сумму нужно устроить ставок, чтобы исключить бонус из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего бонуса, Вам необходимо сделать ставок на необходимую: 500*70=3500 руб. Только всецело отыграв бонус, Вы сможете исключить свой выигрыш.Чаще всего используются коды. Их нужно заносить в специальные окошки регистрационной анкеты, случае идет о пригласительных призах, либо в особом разделе собственного кабинета игрока. На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не сможете активировать и получить бездепозитный бонус. <a href=https://forum.cabal.playthisgame.com/member.php?1655676-Frankzem>https://forum.cabal.playthisgame.com/member.php?1655676-Frankzem</a> Как лишь на виртуальном счету окажутся бонусные свои, поторопитесь отыграть вейджер. Сразу последствии сего возможно забыть заявку на вывод выигрыша. Кредиты выгодно отличаются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом настоящих средств и выделяют вероятность ощутить задор. Во-вторых – возможно насладиться любой азартной игрой доступной на сайте. В вашем постановлении присутствуют автоматы, настольные прибавленье, видео-покер, Live-дилеры.Вейджер (или вагер) ? это наименьшая сумма ставок, коию необходимо сделать для вывода валютного приза. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, тем привлекательнее спецпредложение. 1хслот официальный сайт зеркало Бонус за регистрацию в казино выдается лишь один один на 1-го игрока. Но бывают дополнительные акции, в рамках которых бездепы расступаются для неизменных посетителей и такие подарки Вы можете получить более одного раза.Но не стоит думать, что снабжая юзеров этими призами, казино увлекается спонсированием. Ведь объемы вознаграждений, главном, не большие (средним объемом от 5 до 20 долларов). И на эти средства налагаются конкретные условия и лимитирования, неотклонимые к исполненью игрока, случае в последствии он желает получить все средства выигранные финансы.
казино 1×slots официальный сайт
Подобные бонусы без депо предоставляются на больше выгодных критериях. Зачастую они покрупнее, а условия отыгрыша менее строгие.Игры, каких можно играть на бонусные средства. Проверьте список игр, в возможно играть на бонусные средства, возможно они Вам не понравятся и надо расходовать своё время на такую промоакцию. На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не сможете активировать и получить бездепозитный приз. Для верификации аккаунта нужно предоставить специалистам технической поддержки отсканированную копию паспорта и счета за коммунальные предложения, а фотку банковской карты либо экрана страницы электронного кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для доказательства личности.Самые модные способы вывода денег ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам на Neteller и Skrill, еще используют криптовалютными кошельками. Вывод выигрышей может исполняться быстро или развлекать от нескольких часов до нескольких суток. 1×slots сайт зеркало <a href=https://forum.app.net/profile.aspx?id=08da7f6eb0698482b3de7de2951e0b8e>https://forum.app.net/profile.aspx?id=08da7f6eb0698482b3de7de2951e0b8e</a>
casino 1×slot
В большинстве заведений устроить это можно по e-mal, по номеру телефонного, через социальную сеть или гугл-аккаунт.Бездепозитные бонусы — это презенты от казино повторяющий бонусных средств или фриспинов для игровых автоматов, которые начисляются на акк игрока в процедуры регистрации на веб-сайте заведения. Для получения этих поощрений депо не требуется. Однако в критериях скрываются «подводные камни», которые не позволят вывести солидную необходимую или же вы не успеете отыграть вейджер. Поэтому профессионалы советуют арестовать безвозмездные вращения за регистрацию в казино без депо, дабы поднабраться навыка и получить реальный шанс на победу.Исходя из сего, просто не присутствует разумных оснований махнуть рукой на получение такого приза при регистрации. И, лишним, на такой бесплатной основе у вас все шансы выиграть деньги и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные призы, называют бесплатными онлайн платформами для игр. <a href=https://series40.kiev.ua/user/RichardAnism/>https://series40.kiev.ua/user/RichardAnism/</a> 1×slots сайт
<b>Смотреть еще похожие новости:</b>
<a href=https://www.kuyoux.com/space-uid-35770.html>1×slots регистрация на 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для тех, кто лишь взвешивает испытывать свою фортуну, а также для проф игроков, разыскивающих свежие площадки для выигрышей, ведущие лицензированные казино нередко организуют разные акции, и одно из лучших услуг прошедшее время – как для новичков, так и для проф игроков – бездепозитный приз за регистрацию. Многие азартные клубы ограничивают необходимую вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании акции, суммы Вы не можете вывести. Разница будет аннулирована, Вы и не сможете делать на нее ставки.
#4959 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало подтвердит вашу регистрацию если говорить
На странице представлены бездепозитные бонусы за регистрацию в казино редкая заслуга за которой гонятся все игроки как новички, так и мастера. Мы также уделяем огромное внимание на присутствие призов при формирование рейтинга казино на средства. Бездепозитный бонус это вероятность играть бесплатно и выиграть настоящие средства.Как управляло, новоприбывшие игроки в первую очередь хотят ознакомиться с методами ввода и вывода денежных средств и сроки исполнения поданных заказов дабы конкретно понимать, как стремительно они смогут исключить собственный казино бонус за регистрацию без депо на электронный кошелек либо же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино соперничают меж собой. Ведь если бы определенную компанию давало только одно онлайн-заведение, то вряд ли бы посетители заметили казино с бонусом за регистрацию и возможность бы рассчитывать только на вознаграждение вид бонуса на 1-ое вложение. К каждому заведению регулярно идет завлекать новых игроков, что, конечном, лишь на руку всем играющим. <a href=http://filmkachat.ru/>1×slot регистрация</a> Приглашаем делиться воззрениями о бонусах. Это поможет иным юзерам избирать более выгодные предложения.Особую изюминку видео слотам присваивают оригинальные знакы. С их свет активизируются разные призы. Вы сможете запустить дополнительный степень и увеличить необходимую выигрыша. Есть знаки, которые замещают негодные элементы и сами создают выигрышные комбо. Не стоит забывать и на бонус-тур. После любого удачного спина есть шанс прирастить сумму выигрыша в два либо четыре раза. <a href=https://forums.noria.com/topic/3d-visualization-excellence-transform-your-architectural-vision-into-reality>https://forums.noria.com/topic/3d-visualization-excellence-transform-your-architectural-vision-into-reality</a> Для получения бездепа нужно пригласить в игру по реферальной ссылке нового посетителя: он должен зарегистрироваться, пройти верификацию на сайте онлайн-казино и пополнить счёт на необходимую, указанную в критериях промоакции. 1×slots зеркало видели такую регистрацию на <a href=http://www.lspandeng.com.cn/home.php?mod=space&uid=277307>http://www.lspandeng.com.cn/home.php?mod=space&uid=277307</a>
1× slots зеркало
За счёт спинов получится запустить различные интернет слоты, протестировать стратегии и поднабраться навыка. Фишка что, нет, что вращения начисляются на лучшие аппараты с уникальными опциями и высокой отдачей. Не забывайте, собственно в каждом акционном предложении учтены специальные притязания – кратковременные лимитирования, максимальный объем ставки, перечень доступных игр.Для получения бездепа необходимо пригласить в забаву по реферальной ссылке свежего посетителя: он обязан зарегистрироваться, пройти верификацию на сайте онлайн-казино и пополнить счёт на сумму, обозначенную в условиях промоакции. <a href=http://www.nwoutpost.com/app/webroot/forum/viewtopic.php?f=8&t=60359>1× slots casino официальный сайт</a> 1×slots регистрация 1×slots review live <a href=http://jbparadiez.org/member.php?action=profile&uid=14134>http://jbparadiez.org/member.php?action=profile&uid=14134</a> 1×slot казино зеркало Бездепозитные бонусы за регистрацию считаются одним из самых знаменитых методов привлечения новых игроков в онлайн-казино, потому что они предоставляют игрокам вероятность опробовать казино, неподражаемо игровые автоматы, и возможно, выиграть реальные деньги.Автоматическая активация показаться самой комфортной, хотя ручной метод содержит перед ней преимущества. Прежде чем применять вознаграждение от казино, стоит заранее определить, сколько медли требуется на выполнение всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деяния бонуса.
1хлот регистрация в 1×slots casino
Онлайн-казино с бездепозитными призами ставят посетителям условия для пользования бездепами, потому перед ролью в промоакции никакого тщательно ознакомиться со всеми правилами и аспектами акции. Условия шансы прикасаться получения приза, его применения и следующего вывода денежных средств когда выигрыша.Наш список включает в себя наилучшие бездепозитные призы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по важным характеристикам: Основное отличие в, собственно для получения бездепа не пополнять баланс в казино. Но кроме этого, есть ряд и других отличий:Как только на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу последствии сего можно оставить заявку на вывод выигрыша. Кредиты выгодно выделяются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом реальных средств и дают вероятность ощутить задор. Во-вторых – можно насладиться любой азартной игрой доступной на сайте. В вашем распоряжении присутствуют автоматы, настольные прибавление, видео-покер, Live-дилеры. <a href=http://fr79056g.bget.ru/index.php?name=account&op=info&uname=endurablesuppli>http://fr79056g.bget.ru/index.php?name=account&op=info&uname=endurablesuppli</a> Бонус за регистрацию в казино без депозита с выводом денег нужно отыграть. Зачастую для отыгрыша возможность понадобиться сделать ставки на сумму, в некоторое 10-ов один превышающую необходимую бонуса либо выигрыша. 1×slots коды Важно, убедитесь сомнений, собственно раньше не регились в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи.
1×slots регистрация 1×slotscasino09k online
Для как, чтобы отыграть необходимую вашего бездепозитного приза нужно выполнить условия вейджера. Очень часто фриспины даются на конкретные слоты (book of ra, book of deceased, book of sun), подбирайте слот себе по душе, они все довольно очень и высококачественные. Бездепозитные бонус имеет быть валютным например и вид фриспинов на слотыПри исполнении условий отыгрыша и верификации, деньги с бонусного счета переводятся на главной и имеют быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции зависимости от избранной платежной системы. <a href=https://www.formulersupport.com/Thread-x1-slots-1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%BF%D0%B5%D1%80%D0%B5%D0%B9%D1%82%D0%B8-%D0%BD%D0%B0–1×slots–107219>x1 slots 1хслотс регистрация перейти на 1×slots</a> Иногда операторы требуют внесение минимального депозита перед выводом для верификации платежного инструмента. В некоторых казино этот депо кроме светит отыграть.Также бездепозитные бонусы могут работать способом возвращать к забаве клиентов, временно приостановивших своё сотрудничество с фирмой: уведомление о бездепе поступает на мобильный телефонный либо почту. 1×slots актуальное зеркало <a href=http://kochtagebuch.org/doku.php?id=Выкуп_авто>http://kochtagebuch.org/doku.php?id=Выкуп_авто</a>
1 x slots casino
Как лишь получите бездеп в казино, всё точно не запамятовывайте проверять электрическую почту. Некоторые игорные клубы непрерывно веселят активных гэмблеров приятными призами. Чаще всего получить презент можно в преддверии веселья, на денек рождение, за привлечение друга. А того распространённым призом считается прибавка к депозиту. Нужно более восполнить счёт, и азартное заведение прирастит его на 50–100%. <a href=http://hoiqt.com/user-5364.html>http://hoiqt.com/user-5364.html</a> рабочее зеркало 1хслотс Ограничения по играм. Администрация запрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, деньгами либо бесплатными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда разделенье выполняется по облику игр. Например, отыгрыш возможен на всех игровых аппаратах, хотя запрещен в настольных играх и в разделе Live Casino.
<b>Смотреть еще похожие новости:</b>
<a href=http://swissairways-va.com/phpBB3/memberlist.php?mode=viewprofile&u=3495>казино 1×slots официальный сайт</a>
<a href=http://forum.l2endless.com/showthread.php?tid=204565>casino 1×slot</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Каждый геймер должен сначала детально выучить обстоятельства по получению и отыгрышу приглянувшегося подарка. Если всё организует, поспешите забрать бесплатные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо данный начать вращать барабаны топовых слотов.
#4960 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерские контора ап казино онлайн бесплатно <a href=https://specreporter.com/>кент casino</a> порно с Максим Глушенков (футбол) up букмекерская контора <a href=https://7club7.com/>Радченко Светлана Юрьевна порно</a> пинап казино порно с Ирина Сидоркова порно с Диана Шнайдер (теннис) porno Елизавета Туктамышева порно с Ирина Сидоркова 1×bet скачать приложение порно с Алексей Миранчук (футбол)
DiskiPlus casino зеркало сегодня рабочее DiskiPlus включи казино <a href=https://www.diskiplus.ru>DiskiPlus скачать 1×bet 1×bet xyz</a> DiskiPlus 1×bet официальный DiskiPlus 1×bet зеркало на сегодня 1×bet xyz <a href=https://diskiplus.ru/>DiskiPlus зеркала официальных сайтов казино</a> DiskiPlus 1×bet бесплатно DiskiPlus Елизавета Боярская DiskiPlus казино онлайн бесплатно DiskiPlus гама казино DiskiPlus порно с Гатагова Ольга Анатольевна DiskiPlus porno Дарья Клишина DiskiPlus порно с Матвей Сафонов (футбол)
#4961 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало рабочее
Бонусы без депо при регистрации считаются наиболее красивыми как для опытных игроков, например для и новичков. Получив это вознаграждение, клиент возможность выступать на настоящие деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные призы в интернет-казино Рунета, а также обстоятельства их активации и выигрыша.Чаще всего казино приз за регистрацию без депо даёт вероятность запустить любой автомат. Но какого-либо внимательно ознакомиться с критериями. Иногда для игры доступны только определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, лучше начать знакомство с миром азарта непосредственно с «одноруких злодеев». <a href=http://filmkachat.ru/>1×slots зеркало рабочее на сегодня</a> На странице представлены бездепозитные призы за регистрацию в казино редкая заслуга за коей гонятся все игроки как новенькие, так и профессионалы. Мы тоже уделяем великое внимание на наличие бонусов при составление рейтинга казино на деньги. Бездепозитный приз это вероятность играть даром и выиграть настоящие средства.Зарегистрируйтесь. Для регистрации почаще всего довольно установить собственный номер телефона и почтовый адрес, после чего установить полученный код из СМС. Возможно, требуется указать промокод. В правилах акции будет написано, где его надобно включать. Иногда это надобно создавать при регистрации, время — уже после творения собственного офиса, на отдельной странице. <a href=https://connects.ctschicago.edu/forums/users/200497/>https://connects.ctschicago.edu/forums/users/200497/</a> 1×slots регистрация на сайте <a href=http://atope.ru/user/Michaelgor/>http://atope.ru/user/Michaelgor/</a> Более солидные предложения встречаются очень редко. Зачастую они доступны лишь VIP-игрокам. В оставшихся случаях им всего сопутствуют довольно строгие условия отыгрыша. Также вероятны дополнительные обстоятельства и лимитирования, прописанные в критериях и положения бонусной программки казино.Да, у даровых бонусов есть недостатки. Прежде всего, они обычно большие. Кроме того, условия вейджера по ним практически строгие. Но все же неименье риска делает их очень красивыми для посетителей.
1×slot официальный сайт
Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы которые появляются у новичков. казино 1×slots Подтверждение электронной почты – одно из главных условий, коие есть почти в любом бездепозитном казино. Чтобы верифицировать электрическую почту, довольно перейти по активной ссылке в письме, полученном от азартного клуба. <a href=https://analsex.tube/user/HarryGek/>https://analsex.tube/user/HarryGek/</a> У каждой игры средства требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система засчитает каждую ставку. В рулетке и покере сделать это намного труднее. Именно поэтому так главно внимательно читать обстоятельства получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой этой, то новички попросту «спустят бонус на ветер».Каждый компьютерные обязан сначала детально выучить обстоятельства по получению и отыгрышу приглянувшегося дара. Если всё организует, поторопитесь забрать благотворительные спины за регистрацию в казино без депозита с выводом и без отыгрыша и напрямик момент начать вращать барабаны лучших слотов. 1хслотс казино зеркало
1×slots регистрация на сайте 1×slots ru com
К сожалению, нет. Почти все казино, просят внесение желая бы одного минимального депозита для вывода выигрыша с бездепозитного бонуса. Также учитывайте, собственно исключить средства разрешается только на что, эту платежную систему, с которой был изготовлен депозит.Бездеп с фриспинами может обхватывать всю коллекцию игр на сайте или разработки 1-го провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении акции. Выигрыш возможность быть выведен после того, как пользователь отыграет данную необходимую. Возможность расценить полный функционал слотов — главное совершенство данной разновидности. Игроку становятся доступны те опции, коие отсутствуют в демонстрационном режиме, а возможность выиграть реальные деньги добавляет ясных азартных ощущений. В зависимости от интернет заведения каждый из них может вас предложить как бездепозитные средства, так и бездепозитные фриспины, которые последствии удачной регистрации упадут для на ваш игровой баланс. <a href=http://www.taroko.org/taroko/forums/member.php?action=profile&uid=471>http://www.taroko.org/taroko/forums/member.php?action=profile&uid=471</a> Исходя из сего, просто не существует мудрых оснований махнуть рукой на получение такового бонуса при регистрации. И, не, на такой бесплатной основе у вас есть все шансы выиграть средства и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные призы, нарекают бесплатными интернет платформами для игр. 1×slots зеркало на сегодня Иногда виде бездепа, казино презентует минимальный приз (до 50 рублей), из-за которого надо заморачиваться.Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, дабы появилась вероятность исключить выигрыш.
1×slots рабочее зеркало на сегодня
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=162649>1хслотс мобильная версия зеркало</a> Чаще всего интернет-казино предлагают бездепозитные призы новым пользователям. Эта промо-акция довольно отлично привлекает начинающих, подталкивая их к открытию счета. Конечно, не все они становятся преданными посетителями, хотя сам факт регистрации аккаунта играет на руку заведению. казино 1× slots официальный сайт <a href=http://catalog2.drobak.com.ua/communication/forum/user/2719280/>http://catalog2.drobak.com.ua/communication/forum/user/2719280/</a> Будьте внимательнее при ознакомлении с правилами во избежание появления конфликтных обстановок с казино, когда в отыгрыша бездепа вам не дадут исключить крупную необходимую выигрыша.
1×slots casino online регистрация
Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депозит имеет отличаться до 30 дней. Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке адепты онлайн-казино публикуют важную информацию о no deposit bonuses и услугах.Многие игроки, оценив перечень казино, остаются выступать в нем и далее ? на это и направлено каждое промо. Постоянные посетители заносят депозиты и проделывают ставки, обеспечивая долгосрочную выгода оператора. То есть, казино выдают бездепы новым юзерам для формирования приклнной аудитории. <a href=https://tsonlinevn.4it.top/User-Tyronefes>https://tsonlinevn.4it.top/User-Tyronefes</a> B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax 1 xslots рабочее зеркало На страничке представлены бездепозитные призы за регистрацию в казино редчайшая награда за которой гонятся все игроки как новички, например и профессионалы. Мы также уделяем большое внимание на наличие бонусов при составление рейтинга казино на деньги. Бездепозитный приз это вероятность играть безвозмездно и выиграть настоящие средства.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=142356>1 xslots рабочее зеркало</a>
<a href=https://masstr.net/showthread.php?tid=131953>1×slots скачать на айфон</a>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/8695/#comment-357514>сайт 1× slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Внесение депо – Будьте готовы пополнить счет после отыгрыша бонуса. Это обычное заявка управлял для этого типа промо-акций. Лучше заранее уточнить, какую необходимую нужно несомненно вносить на счет. Как правило, речь идет о наименьшем депозите, но вы обязаны быть убеждены, что он вам по кармашку.
#4962 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало на сегодня
Как верховодило, при выводе финансов, от играющего требуется только устроить минимальный лепта для того, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом личный счет.Если вы выбрали для себя несколько брендов коие вас больше всего полюбились, для неизменной забавы! Таких гемблеров казино очень любит и оценивает, за частую эти игроки становятся VIP игроками заведения, коим часто поступают прибыльные предложения в виде призов, так же туда входит и бездепозитные. <a href=http://filmkachat.ru/>1 xslots рабочее зеркало</a> Только выполнив все условия отыгрыша и дождавшись завершения проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить свои деньги.Размер бонуса. В качестве бездепов обыкновенно начисляют большие суммы, а когда речь о призах за депо, которые начисляются в процентном соотношении от суммы пополнения, то некоторые казино имеют презентовать игроку до 2000$. <a href=https://juicedmuscle.com/forum/general/general-chat/264982-creating-immersive-spaces-the-art-and-science-of-3d-walkthrough-animation>https://juicedmuscle.com/forum/general/general-chat/264982-creating-immersive-spaces-the-art-and-science-of-3d-walkthrough-animation</a> При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие можно посвятить ирге в казино. 1×slots сайт зеркало <a href=http://classicalmusicmp3freedownload.com/ja/index.php?title=Shisha_Tobacco_From4_Eur>http://classicalmusicmp3freedownload.com/ja/index.php?title=Shisha_Tobacco_From4_Eur</a> Срок отыгрыша — это период, который наступает в момент активации приза и завершается с его закрытием. Пользователю нужно уложиться в этот временной зазор, другому призовые средства аннулируются. Казино устанавливают список игр, ставки в которых засчитываются при расчете отыгранных денег. Если тайтл не входит в данный список, то ему быть недосегаем для загрузки период действия бонусного предложения.
1×slots зеркало регистрация в 1×slots casino
Для получения депозитного бонуса необходимо пополнить собственный игровой баланс настоящими средствами. Вознаграждение возможно получить либо при внесении первого депо, либо повторяющий фиксированного процента от внесённых средств. Так или другому, приз поступит на счёт лишь в пополнения.Составленный знатоками Casino.ru перечень онлайн-казино с бездепозитным призом дозволяет игрокам сравнить спецпредложения различных операторов. <a href=https://australianwinerytours.com/tours/showthread.php?tid=280123>1×slots casino регистрация на сайте</a> 1хслот зеркало Размер ставки для забавы по бездепозитному призу (естесственно же, когда, когда он представлен в виде бонусных валютных средств) часто ниже, чем при ирге на депозит. Ограничение несомненно работать до этапа отыгрыша приза.Вознаграждения за получение VIP-статуса ? начисляются в рамках программы преданности при достижении одного значения либо выдаются персонально менеджерами саппорта. <a href=https://www.stroimvmeste.com.ua/user/AnthonyGlymn/>https://www.stroimvmeste.com.ua/user/AnthonyGlymn/</a> Условия все различаться приятель от друга. Но такой приз имеет быть применен лишь для игрового процесса – приобретенные на счет деньги до как, как будут отыграны, вывести нереально. 1×slots казино зеркало Кешбэк-бонус дает собой возврат фиксированного процента от ставки в случае поражения или же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%.Самые пользующиеся методы вывода средств ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электрическим платежным системам на Neteller и Skrill, а также пользуются криптовалютными кошельками. Вывод выигрышей может осуществляться быстро или занимать от нескольких часов до нескольких суток.
1×slots сайт
Но на некоторых азартных платформах подобные гонорары могут получить и уже зарегистрированные юзеры. В таком случае, призы предоставляются в рамках оригинальных промоакций либо же некоторым игрокам повторяющий акционного предложения, коие приходит на почту с целью «вернуть» игрока в свое казино. Вейджер в переводе с английского значит «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша приобретенного бонуса, в нашем случае бездепозитного. Число ставок большого — важно лишь набрать сумму, пропорциональную сумме поощрения. <a href=https://vivicorp.com/bitrix/redirect.php?goto=https://speakerdeck.com/blackshisha0212>https://vivicorp.com/bitrix/redirect.php?goto=https://speakerdeck.com/blackshisha0212</a> Варианты выигрыша находятся от Вашей удачи и критерий игорного портала. Выше мы заявили, собственно некоторые бездепозитные призы в 2022 году выдаются с ограничениями по наибольшей выплате. Однако, остаются и те, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность современных игр на деньги, можно выиграть невозможные суммы. Сегодняшние игровые автоматы либо видео слоты, как их именуют. Могут выдавать солидные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000. сайт 1× slots casino Для получения предоставленных бонусов для пригодиться — ПК либо мобильное устройство, и остальное дело за небольшим.Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки могут запросить вспомогательные документы либо инициировать короткое общение по Skype.
1×slots зеркало подтвердит вашу регистрацию если говорить
<a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=3841>1×slot зеркало рабочее регистрации на телефон придет</a> Условия все различаться друг от друга. Но подобный приз возможность быть использован только для игрового процесса – полученные на счет финансы до такого, как будут отыграны, исключить невозможно.В случае установленного лимита на сумму вывода выигрыша с бездепозитного бонуса, игрок не может вывести больше заявленной суммы. 1 x slots <a href=https://kyleruung34321.ampedpages.com/nude-ai-exploring-the-boundaries-of-technology-and-ethics-57559025>https://kyleruung34321.ampedpages.com/nude-ai-exploring-the-boundaries-of-technology-and-ethics-57559025</a> Реже бонусы без депозита начисляются неизменным игрокам. С их поддержкою администрация старается удержать ценных посетителей или вожделеет поблагодарить за лояльность правильных гостей. Но намного почаще для подобных целей применяются такие промоакции:
1×slots зеркало регистрация в 1×slots casino
Новые посетители онлайн-казино без первого депо все выяснить свою удачливость. К тому же есть возможность конвертировать бездепы в реальные средства за регистрацию в казино, впрочем желаемого приз нужно отыграть сообразно условиям акции.Бездеп с фриспинами возможность обхватывать всю коллекцию игр на веб-сайте или разработки одного провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш имеет быть выведен в как, как юзер отыграет данную сумму. Возможность расценить полный функционал слотов — основное совершенство этой разновидности. Игроку становятся доступны те функции, которые отсутствуют в демонстрационном режиме, а вероятность выиграть реальные деньги прибавляет ярких азартных ощущений. <a href=https://raygunmvp.com/user/zacheryarody-zacheryarody/?um_action=edit>https://raygunmvp.com/user/zacheryarody-zacheryarody/?um_action=edit</a> В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, необходимо обратиться в службу поддержки спустя лайв-чат на веб-сайте казино.К сожалению, нет. Почти все казино, требуют внесение хотя бы 1-го минимального депо для вывода выигрыша с бездепозитного бонуса. Также учитывайте, собственно вывести средства разрешается только на ту платежную систему, с которой был изготовлен депозит. 1× slots зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.graylite.com/viewtopic.php?p=349524#p349524>1×slots зеркало которую указывали при регистрации кстати</a>
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=6022>1×slots зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Размер бонуса. В качестве бездепов обыкновенно начисляют не суммы, а когда речь о призах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино имеют подарить игроку до 2000$. Такой казино бонус без депозита за регистрацию выдается игроку на час и активно употребляется данное предложение с 2017 года. Это как бы некая конспирация одобрения под бездепозитный. Суть всего этого сводится к тому, собственно геймеру на час выдается, например, 1000 $, а реклама твердит о том, собственно любой выигрыш возможно будет в забыть при себя. Но если играющий всерьез отнесется к этому предложению, то он просто растеряет время. Ведь игроку нужно будет играть не в аккаунте, ну тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (числе всей тысячи) в управляла вступят конкретные обстоятельства, где несомненно сказано, что максимальной суммой победы имеет быть лишь двести $ и деньги возможно использовать лишь в качестве бонуса на 1-ый вклад с вейджером 25 от суммы гонорары плюс сам депозит. По итогу выйдет, что игрок выигрывал себе 200% приз с вейджером на определенную сумму. Короче разговаривая, это все надо вашего медли.
#4963 Charlesgunnyhttp://filmkachat.ru
1× slots зеркало
Ограничения по забавам. Администрация запрещает игрокам некоторые игровые автоматы с бездепозитным призом, деньгами или безвозмездными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда дробление выполняется по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, хотя запрещен в настольных играх и в разделе Live Casino. <a href=http://filmkachat.ru/>рабочее зеркало 1хслотс</a> Подарки на дни ? посвященные праздничным датам, требующие символического отыгрыша или начисляются без это. Могут дариться игрокам сутки рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду.Большинство клубов привлекают внимание в за счёт разнообразных презентов. На одних сайтах можно получить виртуальные кредиты, которые откроют доступ ко всему софту. На других же, администрация предлагает безвозмездные вращения для запуска топовых онлайн слотов. Несмотря на разные промоакции, стоит выделить самые основные. <a href=https://www.xaphyr.com/blogs/984858/Transform-Your-Space-Professional-Secrets-of-Interior-Design-Layout-Mastery>https://www.xaphyr.com/blogs/984858/Transform-Your-Space-Professional-Secrets-of-Interior-Design-Layout-Mastery</a> При регистрации сомнений либо ином интернет игральном заведении — вам дается один шанс испытывать собственную фортуну не внося средства монеты. Замечу что эту поощрительную предложение деют не все онлайн игровые площадки, а лишь щедрая середина(средина) из них. Которые мы подготовили для Вас в нашем списке. 1×slots сайт зеркало <a href=http://lineyka.org/user/Glenngap/>http://lineyka.org/user/Glenngap/</a> Баланс игрока дополняется на соответствующую необходимую. К ней применяется вейджер, обозначенный в правилах промоакции. Вывести выигрыш возможно несомненно последствии того, как пользователь сделает требуемый размер ставок из собственных средств. В редчайших случаях бездеп работает в формате Free Play. На счет пользователя зачисляется крупная сумма, и предоставляется небольшой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по завершении этого периода сумма на счету несомненно превосходить изначальную, то разность возможно будет исключить либо использовать для последующих ставок.Условия вывода выигрыша. В некоторых заведениях для успешного вывода с бездепозитного приза довольно пополнения баланса и доказательства личности. В иных же клубах, нужно некоторое раз прокрутить собственный депозит.
1×slots официальный сайт, скачать
В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, необходимо адресоваться в саппорта спустя лайв-чат на веб-сайте казино. <a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=195815>1 хслот регистрация в 1×slots casino</a> 1×slots бонус за регистрацию <a href=https://familydir.com/1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE_454948.html>https://familydir.com/1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE_454948.html</a> Существует ли стратегии для отыгрыша бездепозитных призов? К сожалению нет, на выигрыши или проигрыши с бонусов, казино либо игрок воздействовать не, отдача игр случается от создателей игр.Фриплей-бонусы встречаются только в некоторых клубах. Они зачисляются сразу после сотворения профиля и активны недолговременное время. Если не успеете потратить средства, они просто сгорят. Касаемо медли, в большинстве случаев призы активны в течение часа. 1 xslots рабочее зеркало
1× slots официальный
В качестве бонусов онлайн казино часто предлагает выдачу фриспинов, то есть безвозмездных вращений игрового барабана. Виртуальные монеты возможно применять для изучения в покерной школе либо для забавы в казино. Каждый новичок и умелый игрок мечтают скоро стартануть и начать делать настоящие ставки. Для сего довольно забрать подарок, за который не нужно платить. В зависимости от игровой платформы, нужно сделать профиль, привязать email либо телефонный. После этого администрация начисляет щедрое вознаграждение повторяющий бесплатных вращений или виртуальных кредитов.Несмотря на то, собственно данный вариант стимуляции со стороны азартных платформ довольно моден области подобных игр, далековато не всем поклонникам казино знаменито, что себе бездепозитные бонусы казино и как непосредственно их вероятно эксплуатировать. <a href=https://tsonlinevn.4it.top/User-ScottAmbib>https://tsonlinevn.4it.top/User-ScottAmbib</a> Мы собрали и выпустили список превосходнейших бездепозитных казино с призами за регистрацию, которые гарантируют щедрые выигрыши и моментальные выплаты.Третитй бездепозитный приз за регистрацию – денежные свои. К раскаянью, начислить рубли или баксы способны лишь знаменитые и популярностью клубы. С их помощью появится насладиться любой доступной игрой – автоматом, рулеткой, кено, блэкджеком. 1х слот регистрация в 1×slots casino Для отыгрыша приза казино обязует игрока сыграть на сумму, в некоторое раз превосходящую сумму приобретенного бонуса — тут выгода компании очевидна.Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.
1хслот зеркало
В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, нужно обратиться в службу спустя лайв-чат на сайте казино. <a href=https://www.xn–72c9aa5escud2b.com/webboard/index.php/topic,524485.new.html#new>1× слот зеркало</a> Для верификации аккаунта надо(надобно) предоставить профессионалам технической помощи отсканированную копию паспорта и счета за коммунальные предложения, а также фотку банковской карты либо снимок страницы электрического кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для доказательства личности.Если вы выбрали себе несколько брендов которые вас больше всего полюбились, для постоянной забавы! Таких гемблеров казино очень предпочитает и оценивает, за частую такие игроки становятся VIP игроками заведения, которым часто поступают прибыльные предложения в виде призов, так же туда входит и бездепозитные. Для отыгрыша бонуса казино обязует игрока сыграть на сумму, в некоторое раз превышающую сумму полученного приза — здесь выгода фирмы явна.B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax 1× слот зеркало <a href=https://m1bar.com/user/JamesTut/>https://m1bar.com/user/JamesTut/</a>
1×slots зеркало на сегодня
Прибывшие на аккаунт деньги бездепозитные призы предназначаются, в основном, только для новоиспеченных юзеров, которые ранее не имели собственного аккаунта в данном казино. Исходя из сего, если раньше у игрока был изготовлен депозит, то, по всей вероятности, у него больше не несомненно способности рассчитывать на получение такового бонуса в определенном заведении. В разделе с призами активировать свой презент. Найти игры, для которых учтено одобрение и применять бонус по предназначению. <a href=http://akademiyavodopad.ru/bitrix/redirect.php?goto=http://azon.ua/bitrix/redirect.php?goto=http://axioma-soft.ru/bitrix/redirect.php?goto=https://teletype.in/@urist_free/JRzK0FL4L_X>http://akademiyavodopad.ru/bitrix/redirect.php?goto=http://azon.ua/bitrix/redirect.php?goto=http://axioma-soft.ru/bitrix/redirect.php?goto=https://teletype.in/@urist_free/JRzK0FL4L_X</a> 1× slots сайт
<b>Смотреть еще похожие новости:</b>
<a href=https://your-portal.at.ua/forum/65–61323–10#88114>1× slots casino официальный сайт</a>
<a href=http://www.topboard.org/threads/1×slots-oficialnyj-sajt-skachat.598969/>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы – это исключительно занимательная и более перспективная промоакция интернет-казино. Они и лучше фри-спинов, потому что выплаты в безвозмездных вращениях не гарантированы, так композиции на барабанах игрового аппарата шансы не сложиться. Классическая разновидность бонуса за творенье аккаунта. Его преимущество содержится в, собственно клиент возможность без избирать аппараты и создавать ставки в их. Иногда список игровых автоматов ограничен оператором, хотя все также это чем, чем единственный доступный разъем, как в случае с внедрением фриспинов.
#4964 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Федор Чалов (футбол) casino 7k рабочее <a href=https://th-royalgclub.com/>1go casino</a> рейтинг казино казино смотреть онлайн <a href=https://specreporter.com/>1×bet зеркало на сегодня 1×bet xyz</a> фреш казино casino вход рейтинг казино porno Екатерина Ефременкова, шорт-трекистка балтбет букмекерская контора порно с Александр Большунов (лыжные гонки) казино вход официальный сайт
DiskiPlus casino сайты DiskiPlus 1×bet бесплатно <a href=https://diskiplus.ru>DiskiPlus приложения букмекерских контор</a> DiskiPlus порно с Баталина Ольга Юрьевна DiskiPlus букмекерская контора фонбет официальный <a href=https://www.diskiplus.ru>DiskiPlus 7k casino сайт</a> DiskiPlus porno Светлана Ходченкова DiskiPlus порно с Владимир Минеев (ММА) DiskiPlus new casino DiskiPlus вывод казино DiskiPlus порно с Карен Хачанов (теннис) DiskiPlus casino pin официальный DiskiPlus 1×bet на андроид бесплатно
#4965 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать
Также бездепозитные призы могут служить методом возвратить к ирге посетителей, что приостановивших своё сотрудничество с фирмой: извещение о бездепе поступает на мобильный телефонный либо почту. <a href=http://filmkachat.ru/>1×slots зеркало подтвердит вашу регистрацию если говорить</a> Размер призов чаще всего чисто символический и не превышает 50 руб. Приятно, хотя осязаемым бустом в игре вряд ли станет. <a href=https://www.nitrnd.com/blogs/229798/Transforming-Dream-Kitchens-Through-Professional-3D-Rendering-Solutions>https://www.nitrnd.com/blogs/229798/Transforming-Dream-Kitchens-Through-Professional-3D-Rendering-Solutions</a> Основное отличие сомнений, что для получения бездепа не пополнять баланс в казино. Но не этого, есть ряд и отличий:Бездепозитные призы казино это экономическая компенсация, предлагаемая пользователям на дармовой базе и возможность играть в онлайн казино безвозмездно. Если ассоциировать их с одобрениями за вклад, в средства выдаются только потом начального пополнения счета, то бездепозитные гонорары получаются бесплатно. То есть, играющий получает вероятность делать ставки на уже быть деньги, которые выдаст заведение, исполняя, при этом, обыденные деянья, чтобы их извлечь (здесь речь о регистрация, удостоверении личности с внедрением номера телефонного, дизайна заявки и т.д.). 1×slots сайт <a href=http://avtoserviskovrov.ru/index.php?subaction=userinfo&user=idioticvacuum91>http://avtoserviskovrov.ru/index.php?subaction=userinfo&user=idioticvacuum91</a>
1×slots рабочее зеркало
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=107618&extra=>1хслот зеркало сайта</a> 1×slots официальный сайт скачать Основное отличие сомнений, что для получения бездепа не пополнять баланс в казино. Но не этого, есть ряд и отличий:Самые свежие бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды присутствуют на этой страничке. Посетитель может оценить условия получения и начать выступать на средства без внесения депозита. При данном игроку важно осознавать, на каких условиях и какими способами возможность исключить приобретенный выигрыш. Для сего нужно расценить список присоединенных платежных систем. <a href=http://www.miranetwork.it/index.php?option=com_k2&view=itemlist&task=user&id=444652>http://www.miranetwork.it/index.php?option=com_k2&view=itemlist&task=user&id=444652</a> Активация денежного гонорары происходит механически последствии сотворения профиля или использования промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на страницы казино в соц сетях или на рассылку рекламных известий, скачать и установить вспомогательный софт и т.д. 1×slots casino регистрация 1×slotscasino09k online Превышение наибольшей ставки при отыгрыше. Система механически не предостерегает о превышении ставки, потому о несоблюдении управлял игрок имеет узнать уже в подачи запроса на вывод средств.Приветственный приз без депо ? презент за регистрацию. Выдается деньгами, фриспинами или баллами. В заключительном случае бонусные баллы используются для роли в турнирах либо обмена на настоящие деньги.
1×slots регистрация 1×slotscasino 56 online
В интернете слишком количество скриптовых сайтов, которые принадлежат мошенникам. Их основная цель – привлечь гэмблеров, пообещав столько щедрые презенты, но и крупные выигрыши. Так что кое-какие веб-сайты предлагают получить за регистрацию том $1 000.Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен перечень наилучших онлайн казино, коие предлагают своим игрокам щедрые бонусы за регистрацию. <a href=http://krasna-devica.ru/forum/puteshestviya/5434-s-turciey-pohozhe-oblom-gde-otdyhat-budem#comment-33393>http://krasna-devica.ru/forum/puteshestviya/5434-s-turciey-pohozhe-oblom-gde-otdyhat-budem#comment-33393</a> скачать 1×slots на андроид мобильная версия
казино 1×slots
Верификация необходима для добавочной защищенности и помочь техподдержке выявить бонусхантеров и жуликов. Кстати, рядах платформах выводы солидных сумм доступны лишь в подтверждения личности. <a href=https://forum.pmpobc.ca/index.php?topic=142601.new#new>1×slots промокод при регистрации 2025</a> Подарки на праздничные ? приуроченные к праздничным датам, требующие условного отыгрыша либо начисляются без такового. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду.Индивидуальные поощрения выдаются за совершение действий: подписку на аккаунты площадки в соц сетях, установку мобильного прибавленья либо официального клиента для ПК. В большинстве казино срабатывают программки лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий степень часто сопровождается выдачей бездепа. казино 1×slots официальный сайт <a href=https://isvip.ru/user/Chrisneape/>https://isvip.ru/user/Chrisneape/</a> Постарайтесь отыграть вейджер, чтобы появилась вероятность оставить заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные приборы. Вы сможете получить выигрыш на электрической кошелёк, карту, аппарат.Баланс игрока пополняется на подходящую сумму. К ней используется вейджер, обозначенный в правилах акции. Вывести выигрыш возможно несомненно в как, как пользователь устроит требуемый размер ставок из собственных средств. В редких случаях бездеп трудится в формате Free Play. На счет пользователя зачисляется крупная сумма, и предоставляется небольшой срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по окончании этого периода сумма на счету будет превосходить первоначальную, то разность возможно будет исключить либо применять для дальнейших ставок.
1х слот регистрация в 1×slots casino
1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, в не хотите стать жертвой мошенников или впустую потратить время; Благодаря программе лояльности от игорного заведения, можно брать неплохой старт и без добавочных вложений запустить видеослоты. Кроме как, возможно рассчитывать на реальную фортуну и получить, без инвестиции личных денег, великий выигрыш.В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно приятная часть игры. Важно, зачастую бездепозитные бонусы в казино выдаются с лимитированиями по наибольшей выплате. В среднем можно рассчитывать на прибыль в несколько тыщ руб. Как исключить выигрыш с бонуса без депозита. Придётся доказать аккаунт документально, в некоторых заведениях. Процедура верификации обязательна и делается каждым игроком. О документальном доказательстве учетной записи спрашивайте в интернет чате или прочитайте в правилах. <a href=https://r.rumedia.top/user/DoctorLazutakr/>https://r.rumedia.top/user/DoctorLazutakr/</a> 1×slots регистрация 1×slots review live
<b>Смотреть еще похожие новости:</b>
<a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1хслотс рабочее зеркало</a>
<a href=https://rolivka.online/forum/showthread.php?tid=28221>1×slots зеркало быструю регистрацию а также мгновенное</a>
<a href=http://moneysweet.listbb.ru/viewtopic.php?f=2&t=5167>1×slots официальный сайт зеркало рабочее</a>
<a href=http://fin-molitor.com/forum/viewtopic.php?f=2&t=452573>1×слот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Следует выделить, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом. Рассмотрим принцип его деяния на образце. Допустим, вы зарегались и возымели $10 no deposit bonus с вейджером х50. Это означает, что выигранные средства можно несомненно выводить не раньше, чем после как, как общая сумма ставок достигнет $500.
#4966 Charlesgunnyhttp://filmkachat.ru
1×slots акции
При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое возможно предназначить игре в казино.Для выбора азартного заведения Вы можете пользоваться списком наших казино с призами за регистрацию. На нашем сайте мы выпустили список бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, что часть призов неповторимые и доступны только для гостей нашего вебсайта по-специальному промо-коду или по оригинальной ссылке. Кроме того, для любого бонуса мы подготовили подробный обзор, каком Вы узнаете как получить и отыграть одобрение и как вывести собственный выигрыш с бездепа. <a href=http://filmkachat.ru/>1 хслот регистрация в 1×slots casino</a> <a href=https://guides.co/g/how-3d-property-tours-are-revolutionizing-real-estate-mark/474208>https://guides.co/g/how-3d-property-tours-are-revolutionizing-real-estate-mark/474208</a> Для получения предоставленных бонусов для понадобиться — ПК либо мобильное прибор, и остальное дело за небольшим.Также есть онлайн-платформы азартных игр, коие используют раздачу бездепозитных призов в особые даты (как для казино, например и для игрока). Помимо сего, действующие игроки кроме имеют вероятность получить схожие бонусы за свою работа (к примеру, за увеличения значения либо за похожие заслуги). 1 x slots casino <a href=http://images.google.co.hu/url?q=http://z13-moto.ru/bitrix/redirect.php?goto=http://texsar.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/93cwkxk9BEe>http://images.google.co.hu/url?q=http://z13-moto.ru/bitrix/redirect.php?goto=http://texsar.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/93cwkxk9BEe</a>
1×slots казино мобильная версия
1×slots скачать на айфон С другой стороны, намного легче забрать бездепозитные фриспины за регистрацию в казино и прямо момент начать вращать барабаны в наихороших слотах. Главная необыкновенность спинов что, что они предназначены для топовых автоматов. Удастся столько пройти дополнительные раунды, хотя и прирастить необходимую выигрыша, заработать респины прочие внутриигровые подарки. <a href=http://nawoicheuh.free.fr/index.php?file=Members&op=detail&autor=drydesperado25>http://nawoicheuh.free.fr/index.php?file=Members&op=detail&autor=drydesperado25</a> Верификация важна для дополнительной безопасности и подсобляет техподдержке выявить бонусхантеров и мошенников. Кстати, рядах платформах выводы крупных сумм доступны лишь в доказательства личности.Чтобы бездеп не был начислен на Ваш аккаунт, Вам не активировать бонусный код. Если поощрение от казино было добавлено на Ваш акк автоматически, а Вы не расчитываете его использовать, обратитесь в саппорта с просьбой отменить бездепозитный приз. 1×slots зеркало на сегодня
зеркло казино 1×slots
Для получения выигрыша потребуется выполнить обстоятельства казино. Чаще всего игроку нужно поставить конкретную необходимую, хотя теснее из личных средств. Она рассчитывается из совместного объема выигрыша за всегда использования бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, в юзер выиграл 1000 рублей, а множитель составляет х30, исключить деньги можно несомненно, сделав ставки на 30 000 руб.Чаще всего, знаменитые сервисы, такие как MoneyBookers и WebMoney, еще MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно обязательное верховодило. Финансовые свои выводятся лишь спустя что, эту платежную систему, которой огромной для пополнения депозита. Если же игрок получил бездепозитный покерный бонус, потребуется восполнить счет на минимальную сумму, кот-ая составляет обыкновенно десять $. Для получения выигрыша требуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить конкретную необходимую, но уже из личных денег. Она рассчитывается из совместного объема выигрыша за все время использования бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, в юзер выиграл 1000 рублей, а множитель сочиняет х30, исключить средства можно несомненно, сделав ставки на 30 000 руб.В онлайне количество узнаваемых игорных площадок с привлекательными акционными услугами. Однако внимательно разбирать обстоятельства десятков предложений в надоест, ну и время отнимет много. Поэтому наша команда подготовила ТОП-3 сайтов с лучшими бездепозитными призами: <a href=http://julia4tied.de/member.php?action=profile&uid=124044>http://julia4tied.de/member.php?action=profile&uid=124044</a> 1×slots подтвердит вашу регистрацию если говорить Реже призы без депо начисляются постоянным игрокам. С их помощью администрация постарается вычесть ценных посетителей или желает поблагодарить за преданность правильных гостей. Но намного почаще для похожих целей применяются эти промоакции:Для верификации номера аппарата, в личном профиле выберите опцию „Подтвердить номер телефонного“ и введите в соответствующее поле код, приобретенный в sms-сообщении.
1 x slots casino
Игрокам стоит воспринимать приветственный приз как гарантированный способ получить крупный выигрыш, но это отличная возможность без расходов расценить возможностей казино.Теоретически, к безвозмездным призам можно отнести например именуемые фриспины. Напомним, речь идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, поэтому что они предоставляют лишь вероятность создавать ставки. <a href=http://romb4×4.ru/forum/threads/1×slots-zerkalo-registracija-to-dalshe-neobxodimo-projti.21820/>1×slots зеркало регистрация то дальше необходимо пройти</a> Особую изюминку видео слотам придают оригинальные знакы. С их появлением активируются различные призы. Вы можете запустить дополнительный степень и прирастить необходимую выигрыша. Есть знаки, коие замещают ненужные составляющие и сами делают выигрышные комбо. Не стоит забывать и тему бонус-тур. После каждого удачного спина есть шанс прирастить сумму выигрыша в два или хорошо раза. 1хслот скачать <a href=https://raygunmvp.com/user/henrygob-henrygob/?um_action=edit>https://raygunmvp.com/user/henrygob-henrygob/?um_action=edit</a>
1хслотс официальный сайт зеркало
<a href=https://www.globalvision2000.com/forum/member.php?action=profile&uid=1062069>https://www.globalvision2000.com/forum/member.php?action=profile&uid=1062069</a> 1х слот регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://chasingadream.rpginitiative.com/showthread.php?tid=159285>1×slots зеркало видели такую регистрацию на</a>
<a href=http://forums.indexrise.com/thread-1096-post-362362.html#pid362362>1×slots зеркало регистрация в 1×slots casino</a>
<a href=http://board.eternityrpc.com/thread-481-post-16441.html#pid16441>1×slot регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.
#4967 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
мелбет букмекерская контора букмекерские конторы pin <a href=https://kompromat1.online/>1×bet скачать бесплатно</a> porno Елизавета Туктамышева казино фильм онлайн <a href=https://th-royalgclub.com/>порно с Сергей Бобровский (хоккей)</a> казино проиграл кент казино Валентина Матвиенко порно букмекерская контора зенит казино вход casino kometa casino
DiskiPlus Радченко Светлана Юрьевна порно DiskiPlus r7 casino <a href=https://www.diskiplus.ru>DiskiPlus как выиграть в казино</a> DiskiPlus леон букмекерская контора DiskiPlus casino ап <a href=https://diskiplus.ru/>DiskiPlus леон букмекерская контора</a> DiskiPlus porno Дарья Мороз DiskiPlus карты казино DiskiPlus up casino зеркало DiskiPlus 1×bet приложение DiskiPlus ramenbet casino DiskiPlus Любимова Ольга Борисовна порно DiskiPlus porno Екатерина Ефременкова, шорт-трекистка
#4968 Charlesgunnyhttp://filmkachat.ru
1×slot казино зеркало
Важно, убедитесь в, собственно раньше не регились в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи. <a href=http://filmkachat.ru/>1×slots мобильная версия войти казино</a> Только выполнив все условия отыгрыша и дождавшись завершения ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить средства средства.Во время забавы в казино, выигрыши, полученные спасибо безвозмездным призовым фондам, суммируются и включаются в совместную сумму для отыгрывания. Однако, случае удача улыбнется и выйдет отыграть все призы, игровое заведение гарантированно разрешит исключить денежные свои. Сумма вывода будет в от лимита, одобренного непосредственно в этом учреждении. Поэтому, пристально надо(надобно) разбирать верховодила выдачи безлимитных депо. <a href=https://xequte.com/forum/topic.asp?TOPIC_ID=15275>https://xequte.com/forum/topic.asp?TOPIC_ID=15275</a> B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpaxB миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. казино 1×slots официальный сайт <a href=https://istinastroitelstva.xyz/user/Julesrah/>https://istinastroitelstva.xyz/user/Julesrah/</a>
онлайн казино 1×slots
Демоказино есть почти на любом сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются значительно реже: там когда выигрыша и соблюдения критерий промоакций бездеп возможно перевоплотить в настоящие средства. <a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=297734>1 хслот регистрация в 1×slots casino</a> 1× slots сайт Если при регистрации указать промокод, возможно гарантировано получить приз. Где арестовать ваучер? Посетите определенную блоги либо форумы. Иногда администрация клуба проделывает рассылку ваучеров на электронную почту. В последнее время игорные жилища начали афишироваться в кинокартинах и сериалах. Присмотритесь и наверняка заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных руб.Бездепы имеют входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой или баллами. <a href=http://www.pizzakusadasi.com/author/leolanichol/>http://www.pizzakusadasi.com/author/leolanichol/</a> Далее требуется отыграть вагер и вывести выигрыш. Игрокам без опыта крупно повезло, меня получить 10-ки презентов за одну регистрацию. Если не сумели получить Бездепозитный приз, не волнуйтесь. Обратитесь в интернет чат, оператор поможет ситуацию.Можно ли в одном интернет казино получить больше одного бонуса за регистрацию? Нет, так как в любом интернет казино есть управляла, к коим нужно придерживаться, не создавать 2 аккаута для получения бонусов, другому несомненно блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, бонус за регистрацию выдаеться один раз одному лицу. 1×slots зеркало регистрация Иногда для получения бонусов необходимо связаться с адептами саппорта. Удобнее всего с ними разговаривать в онлайн-сате, но время достаточно запроса по электрической почте.
1×slots официальный сайт зеркало
Наличие у игрока 2 аккаунта. Запрещено творить количество профилей для неоднократного получения бездепов. <a href=http://duryunsan.kr/bbs/board.php?bo_table=free&wr_id=487542>http://duryunsan.kr/bbs/board.php?bo_table=free&wr_id=487542</a> 1×slots зеркало регистрация Игрокам стоит принимать приветственный приз как гарантированный метод получить крупный выигрыш, но это отличная возможность без затрат оценить перечень казино.В качестве призов онлайн казино нередко предлагает выдачу фриспинов, словами безвозмездных вращений игрового барабана. Виртуальные монеты можно применять для обучения в покерной школе либо для забавы в казино.
1×slots регистрация
Для выбора азартного заведения Вы сможете пользоваться перечнем наших казино с бонусами за регистрацию. На нашем веб-сайте мы опубликовали перечень бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, собственно доля призов неповторимые и доступны лишь для гостей нашего сайта по-специальному промо-коду или по оригинальной ссылке. Кроме как, для любого приза мы подготовили подробный обозрение, в Вы узнаете как получить и отыграть одобрение и как вывести собственный выигрыш с бездепа.С этими простыми советами каждое казино с призом за регистрацию способно принести в разы больше выгоды и выгоды. Приветственный бонус без депозита ? презент за регистрацию. Выдается средствами, фриспинами либо баллами. В последнем случае бонусные баллы применяются для роли в турнирах либо размена на реальные деньги. Для того, дабы отыграть сумму вашего бездепозитного бонуса надо(надобно) выполнить обстоятельства вейджера. Очень нередко фриспины даются на определенные слоты (book of ra, book of lifeless, book of sun), выбирайте разъем для по, они очень красивые и качественные. Бездепозитные приз может быть денежным так и в виде фриспинов на слотыВ случае установленного лимита на необходимую вывода выигрыша с бездепозитного бонуса, игрок не сможет исключить больше заявленной суммы. 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=http://www.pirobot.co.uk/doku.php?id=%D0%BE%D0%B1%D1%83%D1%87%D0%B5%D0%BD%D0%B8%D0%B5%20%D0%BD%D0%B0%20%D0%BF%D1%80%D0%B0%D0%B2%D0%B0>http://www.pirobot.co.uk/doku.php?id=%D0%BE%D0%B1%D1%83%D1%87%D0%B5%D0%BD%D0%B8%D0%B5%20%D0%BD%D0%B0%20%D0%BF%D1%80%D0%B0%D0%B2%D0%B0</a>
рабочее зеркало 1хслотс
Бонусные средства – небольшая сумма средств для старта в новом казино. На бонусные средства, обыкновенно разрешено выступать во все игры, считая слотов с современным джекпотом и игр из раздела exist casino.Лишь популярностью и известные азартные заведения шансы разрешить себя раздавать бездепы вид дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депо, коие возможно израсходовать в лучших аппаратах с высочайшей отдачей. <a href=http://koelnmedia2.de/fastelovend/member.php?action=showprofile&user_id=15987>http://koelnmedia2.de/fastelovend/member.php?action=showprofile&user_id=15987</a> Заработать на бездепозитных призах за регистрацию в казино может каждый юзер, достигший совершеннолетия.Заполняя данные в личном профиле, указывайте лишь достоверную информацию, например как Вам понадобиться ее подтвердить дальнейшем при выводе денег. казино 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=http://palais.beesims.com/phpbb/viewtopic.php?f=4&t=269883&p=361548#p361548>1×slots сайт</a>
<a href=https://rolivka.online/forum/showthread.php?tid=33600>1×слот регистрация в 1×slots casino</a>
<a href=https://rolivka.online/forum/showthread.php?tid=30003>1×slots акции</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Ознакомьтесь с нашим списком лучших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего списка и получите бездеп сразу. Хватайте наилучшие благотворительные предложения ниже и выигрывайте великие деньги, не рискуя!
#4969 AHoini
<a href=https://vds63616.getblogs.net/63039633/top-lemoncadino-secrets>lemon casino</a> <a href=https://elliotmtycf.theobloggers.com/36670627/the-definitive-guide-to-vavada-casino>vavada slovenija</a>
#4970 Charlesgunnyhttp://filmkachat.ru
1×slots на любой вкус как пройти регистрацию
Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, чтобы еще раз получить безвозмездный приз. Игорные заведения нетерпимы к бонус-хантерам, потому вас ждет неминуемое наказание. <a href=http://filmkachat.ru/>1×slots сайт</a> <a href=https://www.fanfiction.net/u/16465534/>https://www.fanfiction.net/u/16465534/</a> Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. 1×слотс казино <a href=http://sevartek.ru/index.php?subaction=userinfo&user=gaudyfolks36>http://sevartek.ru/index.php?subaction=userinfo&user=gaudyfolks36</a> Помните, что любые нарушения правил сведут на нет ваши старания, и вы наверняка останетесь без начисленного для дарового бонуса. Всегда изучайте правила начисления и обстоятельства вейджера. По любым вопросам, на которые вы имеет помощи отыскать ответы, обращайтесь за объяснениям и саппорт.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Одним из предлогов отдавать привилегию 1 либо иному заведению заключается в привлекательности предлагаемых акций и даровых услуг. Безвозмездные фриспины, выдаваемые без дела делать какой-нибудь лепта, в списке располагается далековато не в конце. 1хслот зеркало Для получения бонуса надо(надобно) пригласить в забаву нового клиента. Казино начислит пригласившему фиксированный процент от взносов приглашённого повторяющий бонуса: почаще всего его размер не превышает 10%. Срок действия приза правило не превышает месяца: пригласивший получает приз от проигранных ставок приглашённого в первый луна забавы. <a href=http://elite-models.cc/member.php?action=profile&uid=21522>http://elite-models.cc/member.php?action=profile&uid=21522</a> 1×slots актуальное зеркало Предложения с бездепозитными призами за регистрацию позволяют новым заведениям заинтересовать аудиторию на свой сайт. А игроки к получают возможность играть на реальные средства без депо в казино и заработать малый стартовый капитал, кот-ый разрешено вывести на карту банка или электронный кошелек.
1хлот регистрация в 1×slots casino
Но рядах азартных платформах сходственные гонорары все получить и уже зарегистрированные юзеры. В этом случае, бонусы предоставляются масштабах оригинальных акций или же неким геймерам повторяющий акционного предложения, которое прибывает на почту с целью «вернуть» игрока в свое казино.Приглашаем делиться сужденьями о призах. Это поможет другим пользователям выбирать наиболее прибыльные предложения. Лишь знаменитые и знаменитые азартные заведения могут позволить для выдавать бездепы в виде добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депо, коие возможно истратить в топовых аппаратах с высочайшей отдачей. <a href=https://66wangzhuan.com/home.php?mod=space&uid=333823>https://66wangzhuan.com/home.php?mod=space&uid=333823</a> Вы всего, скажем, как все любите получать презенты и бездепозитные призы казино. Игорные жилища брали в повадку одаривать гэмблеров приятными бонусами. Стать владельцем приветственного подарка можно за творение профиля либо пополнение счёта. Второй вариант больше увлекательный, как клубы готовы удвоить депозит! Но случае вы новичок и лишь знакомитесь с миром азарта, никакого пользуйтесь призом за регистрацию. 1хслот 1хслотс регистрация перейти на 1×slots
1хслот скачать
<a href=https://praisenpray.org/forums/showthread.php?tid=101155>1×slots официальный регистрация</a> Представьте момент, когда при ставке в 10 рублей Вы получите подобное умножение. Миллион рублей за одно вращение, что абсолютно вполне. Поэтому вопрос, сколько возможно выиграть остаётся закрытым. Предлагаем выяснить самостоятельно. Регистрируйтесь в одном или нескольких онлайн казино, получайте Бездепозитный бонус и проверяйте удачу в деле. Разумеется, вывести деньги сложно. Однако шансы есть у всех.Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют важную информацию о not the slightest down payment bonuses и других услугах. Ознакомьтесь с нашим списком наихороших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего списка и получите бездеп сразу. Хватайте лучшие безвозмездные предложения ниже и выигрывайте большие деньги, не рискуя!Если площадка дарит бездеп за регистрацию, то процедура его получения проста. Нужно лишь завести акк на веб-сайте и активировать его, подтвердив адрес электрической почты, номер аппарата либо другие данные, которые просит оператор. Перед данным необходимо убедиться, собственно юзер располагается на официальном сайте казино, не на жульнической площадке. 1×slots casino зеркало <a href=http://sols9.com/batheo/Forum/User-OscarBLawS>http://sols9.com/batheo/Forum/User-OscarBLawS</a> Игры, в которых возможно играть на бонусные средства. Проверьте список игр, каких можно играть на бонусные средства, вполне они Вам не понравятся и не тратить своё время на эту промоакцию.
1 x slots
Для тех, кто только подумывает испытывать свою удачу, еще для проф игроков, ищущих свежие площадки для выигрышей, ведущие лицензированные казино нередко организуют разные промоакции, и лучшее предложений за последнее время – как для новичков, так и для профессиональных игроков – бездепозитный бонус за регистрацию.Иногда у посетителей сайта шансы возникнуть проблемы при активации приобретенного промо-кода. В таких случаях, нужно адресоваться за помощью в саппорта «Support». Для получения ответа, обязательно указывается конкретная первопричина обращения и подтверждается информация дополнительными скриншотами. Если сформировалась спорная обстановка, практически можно адресоваться к главному регулятору или контролирующему органу, выдавшему данному заведению лицензионный документ. В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и если, тогда, неоднозначных обстановок нет возможности куда-то пожаловаться и обосновать собственную правоту. <a href=http://xn----ptbagsgdho0d.xn–p1ai/index.php?subaction=userinfo&user=hypnoticharbing>http://xn----ptbagsgdho0d.xn–p1ai/index.php?subaction=userinfo&user=hypnoticharbing</a> 1×slots рабочее зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://www.sgomberisgombero.it/my-account-2/>1×slots зеркало регистрацию более популярный вариант это</a>
<a href=http://theauction.com.au/author/jamesflake/>1× слот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вы не в коем случае ни чем рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, выучится регулировать изменять ставки и линии, изучать бонусные игры и их выигрышные композиции, да в просто зарядится кучей эмоций! Ведь вы будите играть на бонусные свои, которые можно отыграть и вывести, не просто на демо счет, тем самым адреналин в крови еще больше повысится а пульс забьется с частым ритмом! Выиграть настоящие деньги в казино не пополняя счет – сложно, но возможно. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными бонусами и начните играть на бонусные свои. По статистике в 10-ти заведений можно заработать маленькую сумму средств с бонусных средств.
#4971 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet xbet 1×bet скачать приложение <a href=https://kompromat1.online/>казино зеркало сегодня</a> 7k casino официальный казино сочи <a href=https://rucriminal.info/>самое казино</a> porno Алена Михайлова промокод 1×bet казино регистрации букмекерские контора ап казино рояль смотреть 1×bet бесплатно 1×bet сайт 1×bet xyz
DiskiPlus порно с Дронова Александра Викторовна DiskiPlus букмекерские конторы в россии <a href=https://diskiplus.ru/>DiskiPlus рабочее казино</a> DiskiPlus порно с Никита Кучеров (хоккей) DiskiPlus пина букмекерской конторы <a href=https://www.diskiplus.ru>DiskiPlus порно с Антропова Валентина Викторовна</a> DiskiPlus 1×bet зеркало DiskiPlus 7k casino официальный сайт DiskiPlus casino онлайн DiskiPlus винлайн букмекерская контора официальный DiskiPlus порно с Зырянова Анастасия Владимировна DiskiPlus порно с Анастасия Потапова, теннисистка DiskiPlus 1×bet на андроид
#4972 Charlesgunnyhttp://filmkachat.ru
1 х слотс зеркало
Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша бонусов. Заведения всегда устанавливают наивысшую ставку, возможную по условиям вейждера.Мы делаем акцент на ключевых положениях правил, рассказываем о территориальных ограничениях и кратко информируем о иных промоакциях обсуждаемого казино. <a href=http://filmkachat.ru/>1×slot регистрация</a> Бесплатные бонусы казино без депо возможно получить в виде денежных средств на бонусный счет (исключить их возможно лишь в отыгрыша), фриспинов, забавы либо кешбэк-бонуса.Промообъявления от казино не дают реальной картины и направлены на вербование внимания пользователей. Понять, как высоки шансы остаться в плюсе, дозволит личный тест условий предложения: <a href=https://www.jottacloud.com/s/3719d9d0f6bf70c47389198eae3221190dd>https://www.jottacloud.com/s/3719d9d0f6bf70c47389198eae3221190dd</a> Но есть азартные заведения, готовые просто так вручить средства на забаву. Для этого довольно создать профиль. Чтобы вывести выигрыш, сперва нужно выполнить вейджеровые условия, прописанные в критериях получения бездепа. 1хслотс рабочее зеркало на сегодня <a href=https://orbitalscoreboard.com/user/craigeling/>https://orbitalscoreboard.com/user/craigeling/</a>
зеркло казино 1×slots
<a href=https://showboysmedia.com/real-music/#comment-78402>1 xslots рабочее зеркало</a> 1хслотс мобильная версия зеркало 3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать аппарат или почту, указать персональную информацию; <a href=http://freemovies.pl/user/ZacheryEdumn/>http://freemovies.pl/user/ZacheryEdumn/</a> 1×slots зеркало регистрацию более популярный вариант это Как правило, новоприбывшие игроки для желают ознакомиться с методами ввода и вывода валютных средств и сроки выполнения поданных заказов чтобы конкретно разуметь, как быстро у вывести собственный казино приз за регистрацию без депо на электронный кошелек или же банковскую карту. К счастью для всех играющих, снутри конкретных холдингов, все казино конкурируют меж собой. Ведь если бы определенную фирму давало лишь одно онлайн-заведение, то навряд бы клиенты увидели казино с бонусом за регистрацию и имели бы рассчитывать только на вознаграждение вид бонуса на первое вложение. К любому заведению периодически идет завлекать свежих игроков, что, в итоге, лишь на руку всем играющим.
1×slots акции
Ещё одно распространённое акционное предложение – симпатичный презент с неблаговидными требованиями. К образцу, клуб сулит $100 в бездепа, но с вейджером х80 или х100. Отыграть такой вейджер фактически невероятно и потому никакого концентрироваться на более занимательных акциях. <a href=https://biocenter.pro/club/user/151705/blog/133691/>https://biocenter.pro/club/user/151705/blog/133691/</a> 1×slots сайт
1× slots регистрация в 1×slots casino
<a href=https://radios-collector.com/viewtopic.php?f=7&t=40247>1×slots регистрация на сайте 1×slots ru com</a> На бонусные начисления могут быть установлены вспомогательные лимитирования, которые Вы не сведению при отыгрыше. Пока бонус полностью не отыгран — деньги из казино не выводятся. 1× слот зеркало <a href=https://codescript.ru/user/RenaldoDip/>https://codescript.ru/user/RenaldoDip/</a> У каждого игорного клубы разные вейджеровые обстоятельства. Чтобы вы гарантировано смогли выполнить их, мы дадим несколько советов. Если система начислила маленькую сумму, не делать немалые ставки – остановитесь на 10–30 центах. Как только сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте выступать. В неприятном случае лучше приглядеться к другому автомату.
1хлот регистрация в 1×slots casino
<a href=https://www.mavsboard.com/member.php?action=profile&uid=2401>https://www.mavsboard.com/member.php?action=profile&uid=2401</a> Бездепозитный приз – это экономическое вознаграждение, которое выдается участнику игры в казино, для его привлечения и появления заинтригованности. Любой посетитель, который соответствует условиям выдачи подобного бездепозитного бонуса, может претендовать на получение вышеуказанного приза. Такое поощрение является наиболее действенным способом, дающим вероятность стартовать при, не вкладывая собственных материальных средств. 1×slots казино мобильная версия Баланс игрока дополняется на подходящую необходимую. К ней применяется вейджер, указанный в правилах промоакции. Вывести выигрыш возможно будет после как, как пользователь устроит требуемый размер ставок из личных средств. В редких случаях бездеп трудится в формате Free Play. На счет юзера зачисляется крупная сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по окончании сего периода сумма на счету несомненно превышать первоначальную, то разницу можно будет вывести или применять для последующих ставок.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.vn.ua/showthread.php?p=3277138#post3277138>1× слот зеркало</a>
<a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1×slots мобильная версия войти казино</a>
<a href=https://swordmaster.org/user/JamesVok/>1×slots промокод при регистрации 2025</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Большинство клубов привлекают внимание компьютерные за счёт разнородных даров. На одних веб-сайтах можно получить виртуальные кредиты, коие откроют доступ ко всему софту. На иных же, администрация предлагает бесплатные вращения для пуска лучших интернет слотов. Несмотря на различные промоакции, стоит выделить самые главные. Маркетинговая деятеля всех игорных интернет-клубов обязана носить разнообразный нрав. И случае вознаграждения на депо служат чтобы, чтобы, чтобы провоцировать вносить депозиты и поощрять уже существующих юзеров, то бездепозитный бонус в казино либо бонус за регистрацию в казино, до всего, рассчитан на расширение базы потребителей.
#4973 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Любимова Ольга Борисовна порно букмекерская контора без <a href=https://specreporter.com/>Лут Оксана Николаевна порно</a> pin up casino официальный порно с Илья Осипов (киберспорт) <a href=https://rumafia.news/>фреш казино</a> online casino официальный букмекерская контора без скачать pin casino порно с Илья Осипов (киберспорт) смотреть фильм казино 1×bet рабочее 1×bet на андроид бесплатно
DiskiPlus порно с Юлия Ефимова DiskiPlus букмекерские контора ап <a href=https://diskiplus.ru>DiskiPlus casino daddy</a> DiskiPlus макао казино DiskiPlus Валентина Матвиенко порно <a href=https://www.diskiplus.ru/>DiskiPlus симулятор казино</a> DiskiPlus Попова Анна Юрьевна порно DiskiPlus casino на телефон DiskiPlus скачать casino на андроид DiskiPlus лучшие бесплатные онлайн казино DiskiPlus порно с Баталина Ольга Юрьевна DiskiPlus порно с Артемий Панарин (хоккей) DiskiPlus сайте букмекерской конторы фонбет
#4974 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрацию более популярный вариант это
Когда речь идет о получении бездепозитных бонусов в казино, в первую очередь направьте на следующие обстоятельства: <a href=http://filmkachat.ru/>1×slots казино мобильная версия</a> Верификация важна для дополнительной безопасности и помочь техподдержке выявить бонусхантеров и мошенников. Кстати, на платформах выводы крупных сумм доступны лишь в доказательства личности. <a href=https://www.scutify.com/articles/2024–10–25------>https://www.scutify.com/articles/2024–10–25------</a> 1×slots официальный сайт мобильная версия <a href=http://www.tianranju.net/home.php?mod=space&uid=116303>http://www.tianranju.net/home.php?mod=space&uid=116303</a> Бездепозитный бонус казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в данном и заключается главное различие.
1×slot зеркало рабочее этих способов предполагает регистрацию
Так же стоит выделить то, собственно в любом онлайн казино установлен свой наибольший кешаут на бездепозитный бонус. Как управляло кешаут — это предельная сумма средств, кот-ая доступная для вывода с бездепозитного приза.Бездепозитные призы — это презенты от казино повторяющий бонусных денег или фриспинов для игровых автоматов, коие начисляются на акк игрока в процедуры регистрации на сайте заведения. Для получения таких поощрений депозит не требуется. 1×slots на любой вкус как пройти регистрацию Каждая игровая платформа отличается критериями по получению и отыгрышу бездепов. В правилах детально расписаны временные рамки, за которые надо(надобно) прокрутить вейджер. Также не запамятовывайте про максимальный размер ставки и максимальную сумму выплаты. С иной стороны, чтобы получить бездепозитные призы казино, достаточно потратить менее 1 минуты. <a href=http://terkab.ru/bitrix/redirect.php?goto=http://nnov.org/common/link.php?redir=http://esbt74.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/e2aK2_E8XX1>http://terkab.ru/bitrix/redirect.php?goto=http://nnov.org/common/link.php?redir=http://esbt74.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/e2aK2_E8XX1</a> Игры, каких можно играть на бонусные средства. Проверьте перечень игр, каких можно играть на бонусные свои, вполне они Вам не понравятся и не расходовать своё время на эту акцию.Исходя из сего, просто не присутствует разумных оснований махнуть рукой на получение такого приза при регистрации. И, что, на такой безвозмездной основе у вас все шансы выиграть деньги и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные призы, называют бесплатными интернет платформами для игр. 1хслотс мобильная версия зеркало Чаще всего, популярностью сервисы, эти как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно обязательное верховодило. Финансовые свои выводятся лишь через ту платежную систему, коей успех для пополнения депозита. Если же игрок получил бездепозитный покерный приз, потребуется восполнить счет на наименьшую сумму, которая сочиняет обыкновенно 10 $.
1×slots официальный сайт скачать
Прибывшие на акк деньги бездепозитные призы предназначаются, в основном, лишь для свежеиспеченных пользователей, которые раньше не имели собственного аккаунта в данном казино. Исходя из этого, случае раньше у игрока был сделан депозит, то, по всей вероятности, у него больше не будет способности рассчитывать на получение такого приза в определенном заведении. Если ординарными словами, бездепы – это определённая сумма средств или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать презенты. Но есть кое-какие аспекты. Существуют игорные дома, которые перед тем как начислить бонусы настоятельно привязать телефон, предоставить копии документов.Особую изюминку видео слотам присваивают оригинальные символы. С их появлением активизируются различные призы. Вы можете запустить дополнительный уровень и увеличить сумму выигрыша. Есть знаки, которые заменяют ненадобные элементы и сами делают выигрышные комбо. Не стоит забывать и на бонус-тур. После каждого счастливого спина есть шанс прирастить сумму выигрыша в 2 или хорошо раза. <a href=http://silkhunter.com/index.php?title=Выкуп_авто>http://silkhunter.com/index.php?title=Выкуп_авто</a> 1× slots casino зеркало
1×slots бонус за регистрацию
<a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=147320>1×slots зеркало рабочее</a> Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.Фриспины начисляются по конкретной ставке. После их активации игроку необходимо запустить слот и увериться, собственно в нем отображаются бесплатные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода после отыгрыша ориентируется оператором и изредка выше 5 000 руб. 1×slots регистрация на официальном сайте <a href=http://galion-shop.ru/bitrix/redirect.php?goto=http://alt1.toolbarqueries.google.cv/url?q=http://profkuhnya.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/4c_jOXJ3bTK>http://galion-shop.ru/bitrix/redirect.php?goto=http://alt1.toolbarqueries.google.cv/url?q=http://profkuhnya.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/4c_jOXJ3bTK</a> Следует подчеркнуть, собственно бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом.
1×slots сайт
С иной стороны, намного легче забрать бездепозитные фриспины за регистрацию в казино и напрямик момент начать вертеть барабаны в лучших слотах. Главная особенность спинов никаких, что они предназначены для топовых автоматов. Удастся не только пройти дополнительные раунды, но и увеличить необходимую выигрыша, заработать респины и другие внутриигровые подарки. Oтыгpaть бонус с обозначенным вeйджepом, результата нужно сдeлaть cтaвoк нa cумму, превышающую объем бонуса в количество раз.Бонус за регистрацию в казино выдается лишь один один на одного игрока. Но посещают дополнительные промоакции, в рамках которых бездепы расступаются для неизменных клиентов и эти презенты Вы можете получить более одного раза. <a href=http://www.176mw.net/home.php?mod=space&uid=546336>http://www.176mw.net/home.php?mod=space&uid=546336</a> 1хслотс официальный сайт зеркало Размер бонусов почаще всего чисто символический и не выше 50 руб. Приятно, хотя осязаемым бустом деле ли будет.
<b>Смотреть еще похожие новости:</b>
<a href=https://praisenpray.org/forums/showthread.php?tid=104036>1×slots зеркало</a>
<a href=http://romb4×4.ru/forum/threads/onlajn-kazino-1×slots.19173/>онлайн казино 1×slots</a>
<a href=https://www.lightknotes.com/MyBB/showthread.php?tid=167659>1хслотс зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax
#4975 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Алексей Миранчук (футбол) лучшие бесплатные онлайн казино <a href=https://krtka.info/>казино на деньги</a> часы казино casino вход <a href=https://repost.news/>1×bet зеркало рабочее на сегодня 1×bet xyz</a> kent casino Хорова Наталья Александровна порно пин ап casino 1×bet официальный сайт 1×bet xyz казино смотреть порно с Антропова Валентина Викторовна up casino
DiskiPlus Окладникова Ирина Андреевна порно DiskiPlus бесплатное казино <a href=https://diskiplus.ru>DiskiPlus сайт pin up casino</a> DiskiPlus самое казино DiskiPlus сайте букмекерской конторы фонбет <a href=https://diskiplus.ru>DiskiPlus яндекс казино</a> DiskiPlus слоты казино DiskiPlus 1×bet слоты 1×bet top DiskiPlus Петрова Ольга Викторовна порно DiskiPlus казино рояль DiskiPlus pin ап casino DiskiPlus 1×bet рабочее на сегодня DiskiPlus лучшая казино
#4976 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
Ознакомьтесь с нашим перечнем превосходнейших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего списка и получите бездеп незамедлительно. Хватайте превосходнейшие бесплатные предложения ниже и выигрывайте немалые деньги, не рискуя!Срок отыгрыша — это этап, который наступает в момент активации приза и заканчивается с его закрытием. Пользователю нужно уложиться в данный временной зазор, иначе призовые свои аннулируются. Казино устанавливают перечень игр, ставки в которых засчитываются при расчете отыгранных денег. Если тайтл не входит в этот перечень, то он может быть недоступен для загрузки во время действия бонусного предложения. <a href=http://filmkachat.ru/>скачать 1×slots официальный сайт</a> <a href=https://ai.ceo/read-blog/206569>https://ai.ceo/read-blog/206569</a> Автоматическая активация кажется самой удобной, хотя ручной метод содержит перед ней превосходства. Прежде чем использовать вознаграждение от казино, стоит заблаговременно определить, сколько медли потребуется на выполнение всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деянья приза. 1×slot рабочее зеркало <a href=https://maps.google.co.kr/url?q=https://doctorlazuta.by/>https://maps.google.co.kr/url?q=https://doctorlazuta.by/</a>
1×slot регистрация
1×slots регистрация на сайте Бонус начисляется игроку сразу в регистрации и прохождения верификации в казино и не просит от посетителя внесения депозита. Как верховодило, размер бонуса в подобном случае довольно застенчивый, впрочем разрешает новичкам познакомиться с забавой без риска реальными средствами.В истинное время получить бонус за регистрацию в казино очень просто. Почти каждый игорный дом с готовностью предоставит деньги или благотворительные вращения. Многие игроки пользуются этим и не смущяются регистрироваться в любом клубе с прибыльными условиями. Кстати, это отличная возможность придумать выигрышную тактику и сорвать куш. <a href=http://www.zqykj.com/bbs/home.php?mod=space&uid=246212>http://www.zqykj.com/bbs/home.php?mod=space&uid=246212</a> 1×slots рабочее зеркало Для казино, работающих онлайн, бездепозитные бонусы нужны для вербования свежих клиентов. Предложение поиграть на слотах без необходимости внесения реальных средств — работающий способ для увеличения энтузиазма к фирмы. После отыгрыша бездепа велик шанс, что игроку понравится и он продолжит играть в казино, лишь теперь теснее на собственные средства.
1×slots регистрация 1×slotscasino09k online
Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. Как управляло, новоприбывшие игроки в первую очередь хотят ознакомиться с методами ввода и вывода денежных средств и сроки исполнения поданных заказов дабы конкретно понимать, как стремительно они смогут исключить собственный казино бонус за регистрацию без депо на электронный кошелек либо же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино соперничают меж собой. Ведь если бы определенную компанию давало только одно онлайн-заведение, то вряд ли бы посетители заметили казино с бонусом за регистрацию и возможность бы рассчитывать только на вознаграждение вид бонуса на 1-ое вложение. К каждому заведению регулярно идет завлекать новых игроков, что, конечном, лишь на руку всем играющим.Многие новенькие колеблются, собственно поощрительный приз не нужно будет отдавать, том случае они выиграли у казино. Это безусловно безопасно и накрепко. Выводя выигранные средства, игрок просто одергивает свое роль в игре и утрачивает уникальную возможность – бесплатно увеличивать личное материальное положение. <a href=http://dle1.xn–31–6kc3bfr2e.xn–p1ai/index.php?subaction=userinfo&user=subduedtemptati>http://dle1.xn–31–6kc3bfr2e.xn–p1ai/index.php?subaction=userinfo&user=subduedtemptati</a> Если простыми текстами, бездепы – это определённая сумма денег либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно забирать подарки. Но есть некоторые нюансы. Существуют игорные жилища, которые перед что, этим как начислить бонусы настоятельно привязать телефон, предоставить копии документов. онлайн казино 1×slots Также бездепозитные призы могут работать способом вернуть к этой посетителей, что приостановивших своё сотрудничество с компанией: уведомление о бездепе поступает на мобильный телефонный либо почту.Если речь об неповторимых услугах, может понадобиться регистрация в казино по ссылке с партнерского сайта.
1×slots зеркало проходить регистрацию это отличный вариант
Обычно для получения бонусов без депозита, казино выдвигает приклнные и вполне выполнимые условия, но есть ряд действий которые воспрещены и шансы повлечь за собой противные последствия:В лицензионных бездепозитных казино играть в азартные игры вправду неопасно. Наличие лицензии одобряет тот факт, что клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP. Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных требований, кроме обязательной верификации. Если на веб-сайте учтена неотъемлемая процедура доказательства личности, то вывести выигрыш получится только в ревизии данных. Приготовьтесь заполнить анкету и отправить в техподдержку документ, подтверждающий лицо. 1×slot регистрация <a href=http://www.dbgjjs.com/home.php?mod=space&uid=481748>http://www.dbgjjs.com/home.php?mod=space&uid=481748</a>
1хслот зеркало
Если идет об неповторимых предложениях, возможность потребоваться регистрация в казино по ссылке с партнерского вебсайта. Начнём с того, что любое промо за регистрацию предполагает некоторые условия. Бездепозитные призы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность денежного оборота, необходимая для выполнения условий. Пример, возымели благотворительные вращения и выиграли с них 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 рублей, проигрышных или выигрышных, не. После исполнения, бонусный баланс перейдёт на настоящий и будет легкодоступным к выводу. <a href=http://www.concerthouse.co.kr/bbs/board.php?bo_table=free&wr_id=618248>http://www.concerthouse.co.kr/bbs/board.php?bo_table=free&wr_id=618248</a> На нашем сайте Вы отыщите список своевременных новых бездепозитных призов в казино 2022 года. Также, есть количество эксклюзивных услуг, которые доступны лишь посетителям нашего сайта в регистрации по нашей ссылке либо активации особого промокода.Диапазон ставок, которые вправе устроить игрок, того лимитирован. Обычно назначать возможно маленькую сумму — пределах 10–30 руб. За одно вращение. 1×slot зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://forumauthority.com/member.php?action=profile&uid=3484>1×slots официальный сайт мобильная версия</a>
<a href=https://ragnarok.ch/forum/viewthread.php?thread_id=130480>1×slots регистрация</a>
<a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=1126523#pid1126523>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Однако в критериях исчезают «подводные камни», коие не позволят исключить крупную сумму либо же вы не успеете отыграть вейджер. Поэтому мастера рекомендуют арестовать благотворительные вращения за регистрацию в казино без депо, дабы поднабраться навыка и получить реальный шанс на победу.
#4977 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
кент казино сайты казино <a href=https://th-royalgclub.com/>casino riobet</a> 1×bet xbet xyz пин ап casino pin up top <a href=https://repost.news/>играющие казино</a> Комарова Наталья Владимировна порно Ирина Горбачева букмекерская контора зенит порно с Никита Кучеров (хоккей) kometa casino online casino 7k суть казино
DiskiPlus online casino DiskiPlus порно с Алина Загитова <a href=https://www.diskiplus.ru>DiskiPlus казино вулкан</a> DiskiPlus porno Нина Пирогова, хоккеистка DiskiPlus букмекерская контора официальный сайт <a href=https://www.diskiplus.ru>DiskiPlus человек казино</a> DiskiPlus букмекерская контора без DiskiPlus vodka casino DiskiPlus top casino DiskiPlus порно с Варвара Субботина DiskiPlus 1×bet зеркало xbet DiskiPlus пин ап казино DiskiPlus casino официальный зеркало
#4978 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало рабочее
Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке необходимо пополнить счет в казино. Для депозитных призов, данная процедура не необходима, так как депозит уже изготовлен.При регистрации в том или ином онлайн игральном заведении — для дается один шанс испытывать собственную фортуну не внося свои монеты. Замечу собственно эту поощрительную предложение предоставляют не все интернет игровые площадки, а лишь великодушная половина из них. Которые мы подготовили для Вас в нашем перечне. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> <a href=https://hallbook.com.br/blogs/391183/Mastering-Interior-Shop-Drawings-A-Professional-Guide-to-Precision-and>https://hallbook.com.br/blogs/391183/Mastering-Interior-Shop-Drawings-A-Professional-Guide-to-Precision-and</a> Призовые начисления без депо все предоставляться для участия в турнирах онлайн казино. Потратить перечисленные деньги можно самая масштабах этой промоакции. Условия их проведения в лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться этим предложением, другого, как изучить его правила. 1хслот зеркало сайта <a href=https://opaseke.com/users/6982>https://opaseke.com/users/6982</a>
1×slots зеркало сайта
1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, в не хотите стать жертвой мошенников или впустую потратить время;Подарки на праздничные ? приуроченные к торжественным датам, требующие символического отыгрыша или начисляются без это. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду. 1×slots зеркало Для верификации аккаунта нужно предоставить специалистам технической поддержки отсканированную копию паспорта и счета за коммунальные предложения, а фотку банковской карты либо скриншот странички электрического кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для подтверждения личности.Если речь об эксклюзивных услугах, может понадобиться регистрация в казино по ссылке с партнерского сайта. <a href=http://camillacastro.us/forums/profile.php?id=168012>http://camillacastro.us/forums/profile.php?id=168012</a> 1×slots рабочее зеркало на сегодня
1× slots зеркало
В случае установленного лимита на сумму вывода выигрыша с бездепозитного бонуса, игрок не может вывести больше заявленной суммы.Бездепозитные призы казино это экономическая компенсация, предлагаемая пользователям на дармовой основе и вероятность играть в интернет казино безвозмездно. Если сопоставлять их с одобрениями за лепта, в свои выдаются лишь впоследствии начального пополнения счета, то бездепозитные гонорары получаются безвозмездно. То есть, играющий получает возможность делать ставки на уже место финансы, коие выдаст заведение, исполняя, всем, обычные действия, чтобы их извлечь (здесь идет речь о регистрация, удостоверении личности с использованием номера телефона, дизайна заявки и т.д. ). <a href=https://www.alivelink.org/%D0%BB%D1%83%D1%87%D1%88%D0%B0%D1%8F-%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0-%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA_292699.html>https://www.alivelink.org/%D0%BB%D1%83%D1%87%D1%88%D0%B0%D1%8F-%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0-%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA_292699.html</a> Каждый новичок и профессиональный игрок мечтают быстро стартануть и начать создавать настоящие ставки. Для этого достаточно забрать презент, за кот-ый не нужно выплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email либо телефонный. После сего администрация начисляет щедрое вознаграждение повторяющий даровых вращений или виртуальных кредитов.На страничке представлены бездепозитные призы за регистрацию в казино редчайшая заслуга за которой гонятся все игроки как новички, например и профессионалы. Мы также уделяем великое внимание на присутствие бонусов при составление рейтинга казино на деньги. Бездепозитный приз это вероятность выступать бесплатно и выиграть реальные деньги. 1×slots сайт Бездепозитные бонусы за регистрацию являются одним из самых популярных методов вербования свежих игроков в онлайн-казино, поэтому что они предоставляют игрокам вероятность опробовать казино, неподражаемо игровые автоматы, и вполне, выиграть реальные деньги.Бездепы шансы входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой или баллами.
1×slots казино зеркало
Выбирайте лучшие безвозмездные призы за обзоров на Casinoz – и пусть вам сопутствует удача при отыгрыше бонусных кредитов! <a href=https://games-garant.ru/index.php?subaction=userinfo&user=Jamesneorm>1×slots регистрация 1×slots casino c2d ru</a> Казино дает возможность заработать и исключить реальные деньги на бездепозитных бонусах. Обычно, это незначительная сумма, коию казино может для позволить подарить игроку. Диапазон ставок, коие вправе устроить игрок, кроме лимитирован. Обычно ставить возможно маленькую необходимую — пределах 10–30 рублей за одно вращение. 1×slots официальный сайт мобильная версия <a href=http://xn----ptbagsgdho0d.xn–p1ai/index.php?subaction=userinfo&user=brokenrat29>http://xn----ptbagsgdho0d.xn–p1ai/index.php?subaction=userinfo&user=brokenrat29</a> Нет. Казино раздают бесплатные призы за регистрацию, чтобы, чтобы, дабы заказчик возможность ознакомиться с игровым заведением. А чтобы исключить его, нужно выполнить обстоятельства отыгрыша.Почти все игровые клубы просят свидетельство контактных данных игрока для получения бездепозитного бонуса.
1×slots казино зеркало
Ну и окончательно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: схожая щедрость увеличивает степень преданности клиентов к фирмы. <a href=https://games-garant.ru/index.php?subaction=userinfo&user=GlenncoiCs>https://games-garant.ru/index.php?subaction=userinfo&user=GlenncoiCs</a> 1×slots казино мобильная версия Так что приготовьтесь дать конфиденциальную информацию (пол, возраст, государство проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает не более суток, в чего удастся свободно выводить крупные выигрыши.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=148321>1×slots официальный сайт мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Например, игрок получил 500 рублей при разработке аккаунта и должен отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 руб., понадобится сделать 875 спинов для полного отыгрыша.
#4979 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
официальные букмекерские конторы 1×bet зеркало рабочее на сегодня <a href=https://glvk.guru/>казино сочи</a> casino daddy casino регистрации <a href=https://slon-ru.com/>сайте букмекерской конторы фонбет</a> бк букмекерская контора pin up casino пин винлайн букмекерская контора официальный порно с Анастасия Потапова, теннисистка букмекерская контора официальный сайт win win casino казино в россии
DiskiPlus casino online зеркало DiskiPlus Ирина Горбачева <a href=https://www.diskiplus.ru>DiskiPlus porno Юлия Пересильд</a> DiskiPlus порно с Анна Щербакова, фигуристка DiskiPlus балтбет букмекерская контора <a href=https://www.diskiplus.ru/>DiskiPlus порно с Дарья Касаткина (теннис)</a> DiskiPlus скачать 1×bet на андроид DiskiPlus Хорова Наталья Александровна порно DiskiPlus 1×bet официальный сайт DiskiPlus букмекерская контора бетсити DiskiPlus casino buzz DiskiPlus Ирина Горбачева DiskiPlus Яровая Ирина Анатольевна порно
#4980 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
гта онлайн казино пина букмекерской конторы <a href=https://rhymes-punches.com/>pin up букмекерская контора</a> порно с Аделия Петросян (фигурное катание) мелбет букмекерская контора <a href=https://t.me/vchkogpu_ru>casino бездепозитный</a> 1×bet зеркало рабочее на сегодня casino на телефон казино онлайн пинап казино официальные букмекерские конторы скачать 1×bet сайт 1×bet слоты 1×bet top
DiskiPlus porno Алена Косторная (фигурное катание) DiskiPlus casino daddy <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet вход</a> DiskiPlus лучшие букмекерские конторы DiskiPlus порно с Варвара Субботина <a href=https://diskiplus.ru/>DiskiPlus porno Екатерина Ефременкова, шорт-трекистка</a> DiskiPlus порно с Константин Тюкавин (футбол) DiskiPlus сайт винлайн букмекерская контора DiskiPlus порно с Захарова Мария Владимировна DiskiPlus up casino скачать DiskiPlus Лут Оксана Николаевна порно DiskiPlus почему в казино нет окон DiskiPlus официальные букмекерские конторы
#4981 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Приезжева Екатерина Геннадьевна порно Анна Михалкова <a href=https://m.repost.news/>Чулпан Хаматова</a> лучшая казино 1×bet слоты 1×bet xyz <a href=https://rumafia.news/>Радченко Светлана Юрьевна порно</a> почему в казино нет часов казино пину unlim casino porno Александра Степанова, фигуристка порно с Захарова Мария Владимировна почему в казино не бывает настенных часов вавада казино
DiskiPlus казино 1 DiskiPlus casino скачать <a href=https://diskiplus.ru/>DiskiPlus porno Яна Троянова</a> DiskiPlus porno Илья Ковальчук (хоккей) DiskiPlus porno Мария Шарапова <a href=https://www.diskiplus.ru/>DiskiPlus бесплатно фильм казино</a> DiskiPlus карты казино DiskiPlus винлайн букмекерская контора официальный сайт DiskiPlus porno Елизавета Туктамышева DiskiPlus up casino DiskiPlus ограбление казино DiskiPlus казино 5 DiskiPlus casino скачать приложение
#4982 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
демо казино casino сегодня <a href=https://7club7.com/>porno Светлана Ходченкова</a> Матвиенко Валентина Ивановна порно бесплатно фильм казино <a href=https://th-royalgclub.com/>1×bet xbet</a> casino betting сайт винлайн букмекерская контора скачать сайт букмекерской конторы включи казино online casino 7k порно с Матвей Сафонов (футбол) казино
DiskiPlus 1×bet зеркало рабочее xbet DiskiPlus какие казино <a href=https://diskiplus.ru>DiskiPlus 7k casino официальный</a> DiskiPlus порно с Дарья Касаткина (теннис) DiskiPlus inform@rucriminal.info <a href=https://diskiplus.ru>DiskiPlus сайте букмекерской конторы фонбет</a> DiskiPlus Ходнева Светлана Владимировна порно DiskiPlus порно с Баталина Ольга Юрьевна DiskiPlus официальное казино вход DiskiPlus казино смотреть онлайн DiskiPlus porno Виктория Баркова, легкоатлетка DiskiPlus лучшие букмекерские конторы DiskiPlus казино смотреть онлайн
#4983 Charlesgunnyhttp://filmkachat.ru
1хслот скачать
Некоторые сайты, этого чем обмануть регистрацию игроков, предлагают ответить на количество базисных вопросов. Цель проведения подобной викторины – выявить случайных людей, которые не имеют представления о покере, и не допустить получения ими бонусов. Если гость теснее играл в казино, то ответить на полтора десятка простых вопросов будет нетрудно. Очень часто, ответы возможно найти на официальных сайтах данных учреждений. <a href=http://filmkachat.ru/>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a> В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая доля забавы. Важно, зачастую бездепозитные бонусы в казино выдаются с лимитированиями по максимальной выплате. В среднем можно рассчитывать на выгода в некоторое тысяч руб. Как вывести выигрыш с бонуса без депозита. Придётся подтвердить аккаунт документально, в некоторых заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате или прочтите в правилах. <a href=http://prsync.com/archicgi/how-home-entertainment-flyarchitecture-transforms-modern-living-spaces-4518898/>http://prsync.com/archicgi/how-home-entertainment-flyarchitecture-transforms-modern-living-spaces-4518898/</a> Осталось избрать казино с призом за регистрацию и сделать профиль. После активации подарка выигрыш находится от Фортуны и навыков. 1×slots актуальное зеркало <a href=https://bdsmboard.org/member.php?397540-PatrickEages>https://bdsmboard.org/member.php?397540-PatrickEages</a> Фриспины – благотворительные вращения с фиксированной ставкой, коие можно использовать в конкретных игровых автоматах.Популярность онлайн казино растёт и всё больше пользователей начинают интересоваться азартными забавами. Бездепозитные бонусы 2022 года, это уникальные подарки за регистрацию. С их поддержкою свежие игроки шансы получить бесплатные вращения или средства на баланс за одну регистрацию. С в игорных заведений в интернете, бездепозитные бонусы стали популярнейшим методом вербования игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш сайт собрал наихорошие предложения из интернета на 2022 год. Воспользуйтесь каким подарком и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить обстоятельства.
1хслот официальный сайт зеркало
<a href=https://showboysmedia.com/real-music/#comment-58974>1хслотс зеркало</a> 1×slots скачать на айфон Бесплатные бонусы казино без депозита возможно получить повторяющий денежных средств на бонусный счет (вывести их возможно только в отыгрыша), фриспинов, игры либо кешбэк-бонуса.Демоказино есть почти на любом веб-сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются значительно пореже: там в случае выигрыша и соблюдения критерий промоакций бездеп можно перевоплотить в настоящие деньги. <a href=https://personaljournal.ca/bbgatecom2512/luchshie-onlain-bukmekery>https://personaljournal.ca/bbgatecom2512/luchshie-onlain-bukmekery</a> 1хслотс зеркало Если при регистрации указать промокод, можно гарантировано получить бонус. Где арестовать ваучер? Посетите направленные блоги или форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В заключительнее время игорные дома начали афишироваться в фильмах и телесериалах. Присмотритесь и всего заметите промокод, который принесёт 500 или 1 000 бонусных руб.
зеркло казино 1×slots
Самые популярные методы вывода денег ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электрическим платежным системам типа Neteller и Skrill, а пользуются криптовалютными кошельками. Вывод выигрышей возможность осуществляться быстро или развлекать от нескольких часов до нескольких суток. <a href=https://www.4sync.com/s/fLYUHSTCD>https://www.4sync.com/s/fLYUHSTCD</a> 4. Заберите презент. Чаще всего бонус активизируется незамедлительно последствии регистрации. Но случаются ситуации, когда надо(надобно) забежать в собственный офис или написать в саппорта.Также, учите, собственно бездепозитный приз можно исключить только в случае, когда станут исполнены все обстоятельства отыгрыша. казино 1×slots официальный сайт Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную функцию активации приза без депо. Внимательно прочитайте до конца. Многие новенькие проделывают ошибки на этапе регистрации и поэтому не могут получить презент.
1×slots зеркало на сегодня
Кешбэк-бонус дает собой возврат фиксированного процента от ставки если, тогда, проигрыша или же от проигранной суммы за определённый период. В большинстве случаев кешбэк не превышает 10%. <a href=http://medforum.5nx.ru/viewtopic.php?f=4&t=5381>1×slots зеркало которую указывали при регистрации кстати</a> Казино выводит средства только на что, эту платежную систему, с котрой был сделан депо. То есть, для вывода бездепозитного приза, Вам поначалу нужно восполнить счет. В неких клубах узкий перечень методов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет именно с данных платежных методов, которые доступны для вывода.Поспешите арестовать бездепозитные призы за регистрацию в казино из представленного списка. Все платформы столько ведут легальную работа, но и порадуют правдивыми плодами игры, высочайшей отдачей, резвыми выплатами. Как и другие акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такого предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает новых посетителей и дозволяет им составить эмоцию о функционале, не рискуя значительными суммами.При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое возможно предназначить игре в казино. 1хслот скачать <a href=http://kskstroi.ru/bitrix/redirect.php?goto=http://ctoretail.ru/bitrix/redirect.php?goto=http://racii24.ru/bitrix/rk.php?goto=https://teletype.in/@urist_free/KKmPrfRTWPW>http://kskstroi.ru/bitrix/redirect.php?goto=http://ctoretail.ru/bitrix/redirect.php?goto=http://racii24.ru/bitrix/rk.php?goto=https://teletype.in/@urist_free/KKmPrfRTWPW</a> Несмотря на то, собственно данный вариант стимуляции со стороны азартных платформ довольно востребован области подобных игр, далеко не почитателям казино ведомо, что себе бездепозитные призы казино и как именно их вполне эксплуатировать.Как правило, при выводе финансов, от играющего потребуется только сделать минимальный вклад для того, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом личный счет.
1× slots зеркало
Помимо прочего, для вывода средств по бездепу нужно внести на счёт свой 1-ый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально вероятную необходимую, после чего вывод средств станет доступен. <a href=https://training.trainingstree.com/author/travisbrome/>https://training.trainingstree.com/author/travisbrome/</a> 1хслотс зеркало на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=93092>казино 1× slots официальный сайт</a>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=267356>1×slots сайт</a>
<a href=https://astraclub.ru/album.php?albumid=232296>1×slots зеркало рабочее на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Игры, в можно играть на бонусные деньги. Проверьте список игр, в возможно играть на бонусные средства, вероятно они Вам не понравятся и не стоит тратить своё время на эту промоакцию.
#4984 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
champion casino Светлана Ходченкова <a href=https://krtka.info/>сайт букмекерской конторы</a> 1×slots casino black russia казино <a href=https://vestnik-jurnal.com/>casino актуальное зеркало</a> 1×bet скачать бесплатно вавада казино леон букмекерская контора porno Светлана Ходченкова казино играть 1×bet официальный скачать pin casino зеркало
DiskiPlus 1×bet рабочее DiskiPlus песня казино <a href=https://diskiplus.ru/>DiskiPlus cat casino</a> DiskiPlus casino x DiskiPlus порно с Васильева Татьяна Викторовна <a href=https://www.diskiplus.ru/>DiskiPlus casino рабочее</a> DiskiPlus порно с Ирина Сидоркова DiskiPlus играющие казино онлайн DiskiPlus лучшие казино бесплатно DiskiPlus 1×bet бесплатно DiskiPlus 1×bet зеркало на сегодня DiskiPlus porno Юлия Канакина, скелетонистка DiskiPlus казино сочи
#4985 Charlesgunnyhttp://filmkachat.ru
1× slots зеркало
Не стоит сразу же отрицаться от приветственных даров в похожих казино. Администрация готова начислить средства или фриспины, хотя сначала работники обязаны увериться, собственно вы не мошенник. Дело в том, что развелось очень большое охотников за призами. Они научились дурачить систему и наваривать солидные суммы денег. <a href=http://filmkachat.ru/>1×slots зеркало на сегодня</a> Бездепозитный бонус за регистрацию в казино с выводом средств в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых свежих, щедрых и проверенных призах в онлайн казино, коие обновляются каждый денек. <a href=https://www.swiatobrazu.pl/forumgaleria/thread/view/id/589>https://www.swiatobrazu.pl/forumgaleria/thread/view/id/589</a> Внесение депозита – Будьте готовы пополнить счет последствии отыгрыша бонуса. Это обычное требование управлял для данного типа промо-акций. Лучше заблаговременно уточнить, какую необходимую надо(надобно) несомненно вносить на счет. Как верховодило, речь идет о минимальном депозите, хотя вы должны быть уверены, собственно он вас по кармашку. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=http://geolan-ksl.ru/forum/user/85290/>http://geolan-ksl.ru/forum/user/85290/</a> Фриспины — безвозмездные вращения, которые дозволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся самым популярным и преимущественным обликом бонуса — благотворительные вращения порой эффективнее и веселее в отыгрыше, чем другие облики бездепов.Можно ли зарабатывать на бездепозитных призах? Это не работа, здесь как повезет, если в любом предложенном безедепе, вы будете откручивать вейджер и выводить, это можно назвать везением, и дополнительной добавкой к вашему бюджету.
1×slots casino зеркало
Каждый игрок должен сперва отчетливо изучить условия по получению и отыгрышу понравившегося дара. Если всё устраивает, поспешите отобрать безвозмездные спины за регистрацию в казино без депо с выводом и без отыгрыша и прямо в начать вертеть барабаны топовых слотов.Промокод – определённая комбинация символов, которую нужно установить в соответствующее поле при творении учетной записи или активировать в собственном профиле игрока в разделе с бонусами. 1×slots casino регистрация Размер ставки для забавы по бездепозитному бонусу (естесственно же, когда, когда он представлен в виде бонусных денежных средств) часто ниже, чем при ирге на депозит. Ограничение несомненно действовать до момента отыгрыша бонуса. <a href=http://yinyue7.com/home.php?mod=space&uid=1064055&do=profile&from=space>http://yinyue7.com/home.php?mod=space&uid=1064055&do=profile&from=space</a> Верификация аккаунта. Лучше подтвердить лицо незамедлительно в регистрации, дабы позже не было проблем с выводом денег. Верификация имеет протекать двумя способами:Чаще всего казино бонус за регистрацию без депо даёт вероятность запустить любой автомат. Но лучше внимательно ознакомиться с критериями. Иногда для забавы доступны только определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, другого начать знакомство с миром пыла именно с «одноруких бандитов». казино 1×slots Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного бонуса достаточно пополнения баланса и доказательства личности. В других же клубах, нужно некоторое один прокрутить собственный депозит.
1хслотс казино зеркало
Ниже указан актуальный список законных казино в Беларуси с бонусами на первый депозит. Вы можете попасть на официальный вебсайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус.Акции, приуроченные к календарным праздникам, посещают рассчитаны как на всех пользователей, так и на категории: например, подарок на 8 марта девушкам-игрокам либо мужикам на 23 февраля. Вейджер (wager) – это коэффициент, который демонстрирует на какую сумму нужно устроить ставок, дабы вывести бонус из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода сего бонуса, Вам нужно устроить ставок на необходимую: 500*70=3500 рублей. Только полностью отыграв приз, Вы можете исключить собственный выигрыш.Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция имеет подробные правила, ссылка на которые обыкновенно находится в промообъявлении. В их указываются лимиты, вейджер, перечень дешевых игр. Если оператор укрывает данные о предложении, то пользоваться им надо. <a href=http://ppm.co.jp/userinfo.php?uid=17866#>http://ppm.co.jp/userinfo.php?uid=17866#</a> Чтобы помощи убедиться в превосходствах бездепозитных призов, довольно зарегистрироваться в казино и получить одобрение. casino 1×slot Иногда операторы просят внесение малого депозита перед выводом для верификации платежного прибора. В неких казино этот депозит того светит отыграть.
сайт 1× slots casino
Так же стоит выделить то, что в любом онлайн казино установлен свой максимальный кешаут на бездепозитный бонус. Как правило кешаут — это максимальная сумма средств, кот-ая доступная для вывода с бездепозитного приза. Однако в критериях исчезают «подводные камни», коие не позволят вывести крупную сумму или же вы не успеете отыграть вейджер. Поэтому мастера советуют забрать бесплатные вращения за регистрацию в казино без депо, дабы поднабраться навыка и получить реальный шанс на победу. 1х слот 1хслотс регистрация перейти на 1×slots <a href=http://www.jangwontech.net/en/bbs/board.php?bo_table=en_qna&wr_id=2101171>http://www.jangwontech.net/en/bbs/board.php?bo_table=en_qna&wr_id=2101171</a> Операторы гемблинга заявляют, собственно например они борются с бонус-хантерами. Впрочем, критики считают, что этим казино пробуют сделать из случайного постояльца постоянного игрока.Например, игрок получил 500 руб. При разработке аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 рублей, понадобится устроить 875 спинов для полного отыгрыша.
1×slots зеркало быструю регистрацию а также мгновенное
С такими простыми советами каждое казино с призом за регистрацию способно принести в разы больше выгоды и выгоды. Обычно для получения призов без депозита, казино выдвигает лояльные и вполне выполнимые обстоятельства, хотя есть ряд поступков которые запрещены и могут причиной досадные результаты:Минимального оборота. Этот предел уточняется вейджером — пока игрок не поиграет на установленную сумму, вывод средств несомненно недосегаем. <a href=http://gtamotors.ru/user/HenryGer/>http://gtamotors.ru/user/HenryGer/</a> Денежные средства. Третий приз за регистрацию без депо – наличные. К раскаянью, только знаменитые и популярные клубы имеют уяснить деньги в рублях либо баксах. С их поддержкою вас насладиться любой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед этим необходимо выполнение конкретных критерий. 1хслотс рабочее зеркало В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, необходимо обратиться в саппорта спустя лайв-чат на сайте казино.
<b>Смотреть еще похожие новости:</b>
<a href=http://aurorahcs.com/forum/viewtopic.php?f=8&t=823790>1×slots зеркало рабочее</a>
<a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=7523&TITLE_SEO=7523-preobrazovatel-interfeysov-usb-rs485&MID=474795&result=reply#message474795>1× slots регистрация в 1×slots casino</a>
<a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/7432–1khslot-1khslots-registratsiya-perejti-na-1×slots#7442>1хслот 1хслотс регистрация перейти на 1×slots</a>
<a href=https://tabsgame.ru/user/Jamesbes/>1×slots официальный зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Прочитайте управляла бонусной программки, какой хотите принять. Да, мы настоятельно советуем сделать это до регистрации. Однако в условиях исчезают «подводные камешки», которые не позволят исключить крупную сумму либо же вы не успеете отыграть вейджер. Поэтому профессионалы советуют арестовать благотворительные вращения за регистрацию в казино без депо, дабы поднабраться опыта и получить реальный шанс на победу.
#4986 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино сегодня 1×bet официальный скачать <a href=https://res-publika.com>казино онлайн</a> kometa casino casino бездепозитный <a href=https://glvk.guru/>бывшие казино</a> bitz casino bet casino букмекерская контора леонов casino на телефон online casino официальный рабочее казино как выиграть в казино
DiskiPlus казино смотреть онлайн бесплатно DiskiPlus casino автомат <a href=https://diskiplus.ru/>DiskiPlus porno Дарья Мороз</a> DiskiPlus букмекерская контора без DiskiPlus казино гта 5 <a href=https://www.diskiplus.ru/>DiskiPlus ограбление казино</a> DiskiPlus самое казино DiskiPlus играющие казино онлайн DiskiPlus букмекерская контора фонбет DiskiPlus 1×bet рабочее на сегодня DiskiPlus скачать 1×bet 1×bet xyz DiskiPlus порно с Александр Головин (футбол) DiskiPlus казино смотреть
#4987 Charlesgunnyhttp://filmkachat.ru
1хслот 1хслотс регистрация перейти на 1×slots
При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие можно посвятить этой в казино.Можно ли зарабатывать на бездепозитных бонусах? Это не работа, тут как повезет, в в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, время возможно назвать везением, и дополнительной добавкой к вашему бюджету. <a href=http://filmkachat.ru/>1хслот официальный сайт зеркало</a> <a href=https://forums.noria.com/topic/3d-visualization-excellence-transform-your-architectural-vision-into-reality>https://forums.noria.com/topic/3d-visualization-excellence-transform-your-architectural-vision-into-reality</a> Условия вывода выигрыша. В некоторых заведениях для успешного вывода с бездепозитного бонуса довольно пополнения баланса и доказательства личности. В других же клубах, нужно некоторое раз прокрутить собственный депо. 1×slots зеркало выигрыши обязательно пройдите регистрацию если <a href=https://www.forumklassika.ru/member.php?u=197669>https://www.forumklassika.ru/member.php?u=197669</a> Как верховодило, при выводе финансов, от играющего требуется только сделать минимальный вклад чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом собственный счет.Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, чтобы замечена возможность вывести выигрыш.
1×slots зеркало проходить регистрацию это отличный вариант
1х слот регистрация в 1×slots casino Бездепы с безвозмездными вращениями предоставляют юзерам право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд выплачивает казино. Число спинов ограничено и изредка превышает сотку. Если промоакция включает в себя количество безвозмездных игр, их начисление имеет быть разбито на некоторое дней. <a href=http://homemos.ru/bitrix/redirect.php?goto=http://bumagin5.ru/bitrix/redirect.php?goto=http://ldsp-shop.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/Mn6B2C-T4U5>http://homemos.ru/bitrix/redirect.php?goto=http://bumagin5.ru/bitrix/redirect.php?goto=http://ldsp-shop.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/Mn6B2C-T4U5</a> Мы собрали и выпустили список лучших бездепозитных казино с бонусами за регистрацию, коие гарантируют щедрые выигрыши и моментальные выплаты. 1×slots подтвердит вашу регистрацию если говорить
1хслотс рабочее зеркало
Чаще всего, известные сервисы, такие как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно обязательное управляло. Финансовые средства выводятся только спустя ту платежную систему, которой огромный для пополнения депозита. Если же игрок получил бездепозитный покерный бонус, потребуется восполнить счет на наименьшую необходимую, которая составляет обычно 10 $. Внесение депо – Будьте готовы пополнить счет последствии отыгрыша бонуса. Это стандартное заявка правил для этого подобии промо-акций. Лучше заблаговременно уточнить, какую сумму нужно несомненно вносить на счет. Как верховодило, речь о наименьшем депозите, но вы должны быть убеждены, собственно он для по карману.При регистрации что или ином интернет игральном заведении — вам дается раз шанс испытать собственную фортуну не внося свои монеты. Замечу что такую поощрительную услугу деют не все онлайн игровые площадки, а только щедрая середина(средина) из них. Которые мы подготовили для Вас в нашем списке. <a href=http://www.gearcup.cn/home.php?mod=space&uid=123310>http://www.gearcup.cn/home.php?mod=space&uid=123310</a> 1×slots зеркало быструю регистрацию а также мгновенное
1×slots зеркало регистрацию более популярный вариант это
Денежные средства. Третий приз за регистрацию без депо – наличные. К сожалению, только известные и пользующиеся клубы имеют уяснить средства в рублях или долларах. С их поддержкою вы сможете насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед данным необходимо исполнение конкретных критерий.Вы не в коем случае ни чем не рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической забавы на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, выучится регулировать менять ставки и линии, изучать бонусные игры и их выигрышные композиции, да счете просто зарядится кучей эмоций! Ведь вы будите играть на бонусные свои, которые возможно отыграть и вывести, но просто на демо счет, тем самым адреналин в крови еще повысится а пульс забьется с нередким ритмом! <a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=88805>1×slots регистрация 1×slots casino 777 online</a> Большинство интернет-казино из нашего топ-10 готовы порадовать вас эксклюзивными акциями. Читайте о их в обзорах и на форуме. 1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, в не желайте стать жертвой плутов или впустую истратить время;Принципиальным отличием бесплатных призов от бонусов на депозит является неимение необходимости вносить средства на акк. Из-за этого их нередко называют бездепозитными (not the slightest deposit bonuses). 1хслотс мобильная версия зеркало <a href=http://rvolchansk.ru/user/Glennwag/>http://rvolchansk.ru/user/Glennwag/</a>
1×slots скачать на айфон
Бездепозитные бонусы, как теснее ясно, считаются уникальной возможностью к игровому процессу безусловно бескорыстно, другими выступать в интернет казино бесплатно и на быть свои незамедлительно последствии регистрации аккаунта. Автоматы с этим депозитом шансы замерзнуть прекрасной вероятностью сыграть для поклонников пыла с определенными лимитированиями в денег. <a href=http://sglpw.cn/home.php?mod=space&username=JoshuaDat>http://sglpw.cn/home.php?mod=space&username=JoshuaDat</a> 1хслот скачать На страничке представлены бездепозитные призы за регистрацию в казино редчайшая награда за коей гонятся все игроки как новички, например и профессионалы. Мы также уделяем огромное внимание на присутствие бонусов при составление рейтинга казино на деньги. Бездепозитный бонус это вероятность играть безвозмездно и выиграть реальные деньги.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.forum.kalor.ru/1×slots-kazino-zerkalo-t5535.html>1×slots казино зеркало</a>
<a href=https://praisenpray.org/forums/showthread.php?tid=103669>1×slot регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На нашем сайте Вы отыщите список своевременных новых бездепозитных призов в казино 2022 года. Также, есть количество эксклюзивных услуг, которые доступны лишь посетителям нашего сайта в регистрации по нашей ссылке либо активации особого промокода. Только выполнив все обстоятельства отыгрыша и дождавшись окончания проверки аккаунта, Вы можете оформить заявку на вывод средств и получить средства деньги.
#4988 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало которую указывали при регистрации кстати
Заполняя данные в личном профиле, указывайте лишь достоверную информацию, так как Вам придется ее подтвердить в при выводе денег.Новые клиенты онлайн-казино без первого депозита шансы выяснить собственную удачливость. К тому же есть вероятность конвертировать бездепы в реальные средства за регистрацию в казино, однако достичь приз нужно отыграть сообразно условиям акции. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> Операторы гемблинга утверждают, что так они сражаются с бонус-хантерами. Впрочем, критики считают, собственно данным казино пытаются устроить из случайного гостя неизменного игрока. <a href=https://band.us/band/96885593/post/1>https://band.us/band/96885593/post/1</a> 1×slots регистрация на сайте 1×slots ru com <a href=https://www.myminifactory.com/users/nodressio1>https://www.myminifactory.com/users/nodressio1</a>
1×slots официальный сайт мобильная версия
При малый сумме приза рекомендуется выступать по низким ставкам, а использовать наибольшие превосходнее лишь сомнений случае, в вейджер очень большой, а время на отыгрыш крепко ограничено. <a href=https://forum.eliteshost.com/member.php?action=profile&uid=8111>1×slots официальный сайт мобильная версия</a> 1хслотс 1хслотс регистрация перейти на 1×slots Для всех бездепозитных призов функционирует максимальный предел на выигрыш. Он показывает предельную сумму, которую появится получить, играя на бонусные кредиты. Как только для удастся выполнить требования вейджера, дозволенный максимально несомненно переведен с бонусного счета на главной, а остаток несомненно списан. <a href=https://blog.naver.com/lexxeagle/223440583797>https://blog.naver.com/lexxeagle/223440583797</a> Если вы новичок в этом деле и лишь попали в неизведанную вами район азарта — счет услуг как бездепозитные призы без пополнения.В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая доля игры. Важно, зачастую бездепозитные призы в казино выдаются с ограничениями по наибольшей выплате. В среднем можно рассчитывать на прибыль в несколько тысяч рублей. Как исключить выигрыш с бонуса без депозита. Придётся подтвердить акк документально, в некоторых заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате либо прочтите в правилах. 1×slots регистрация 1×slotscasino09k online
1×slot казино зеркало
Самый распространённый из похожих призов, окончательно же, бездеп на день рождения посетителя — приз в виде фиксированной суммы либо фриспинов поступает на счёт игрока, а пользоваться им можно в течение установленного периода времени.Также посещают случаи, когда казино начисляет обсужденный приз последствии регистрации нового клиента по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам. <a href=https://images.google.co.th/url?q=https://doctorlazuta.by/>https://images.google.co.th/url?q=https://doctorlazuta.by/</a> Вы не в коем случае ни чем не рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный приз, по мимо практической забавы на бездепозитные бонусы, у Вас есть шанс изучить игровые автоматы, выучится регулировать изменять ставки и линии, изучать бонусные игры и их выигрышные композиции, ну счете просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные средства, коие можно отыграть и вывести, но просто на демо счет, что, этим наиболее адреналин в крови еще больше повысится а пульс забьется с нередким ритмом!Не хотите поиграть в азартные забавы, не рискуя своими средствами, хотя получая в все выплаты? Подобную возможность предоставляют все превосходнейшие порталы с азартными увеселениями. В их числе много правдивых и надежных интернет-казино на русском языке. Они завлекают свежих пользователей различными поощрительными событиями, включая бездепозитные, или благотворительные призы. 1×slots казино зеркало Некоторые веб-сайты, до чем обмануть регистрацию игроков, предлагают ответить на некоторое базисных вопросов. Цель проведения подобной викторины – выявить случайных людей, коие не имеют представления о покере, и не разрешить получения ими призов. Если гость уже играл в казино, то ответить на полтора десятка несложных вопросов будет нетрудно. Очень нередко, ответы возможно найти на официальных сайтах этих учреждений.
1×slot регистрация
Индивидуальные поощрения выдаются за совершение действий: подписку на аккаунты площадки в соц сетях, установку мобильного прибавленья или официального клиента для ПК. В большинстве казино срабатывают программки преданности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий уровень часто сопрягается выдачей бездепа.Такие одобрения разрешают даром протестировать новое казино, разобраться с игровым ходом онлайн слотов, заработать и исключить небольшую необходимую средств. <a href=https://games-garant.ru/index.php?subaction=userinfo&user=Jamesneorm>1×slot зеркало</a> Бонус с зачислением денег на счет выделяет больше свободы деяний. Пользователь сам избирает, каким образом воспользоваться подаренными средствами. Здесь того все действовать ограничения на список дешевых игр, хотя обычно эти рамки не например строги, как в рекламную с безвозмездными вращениями. 1×slot регистрация <a href=https://21micro-grid.com/space-uid-32703.html>https://21micro-grid.com/space-uid-32703.html</a> Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки могут запросить вспомогательные документы либо инициировать краткое общение по Skype.
1хслот зеркало сайта
Бездепы обычно предлагают с отыгрышем — моментально исключить выигранные средства нельзя. Перевод средств со счета несомненно возможен последствии того, как юзер выполнит все притязания казино, а сумма возможности быть выше установленного правилами лимита. Условиями акции фиксируются сроки, в течение которых заказчик вправе пользоваться предложением. Обычно они не превышают нескольких дней в активации.Бездепозитный бонус часто имеет замерзнуть легкодоступным незамедлительно последствии завершения регистрации, поскольку правило единственным требованием к нему является регистрация, а затем проверка вашей свежей учетной записи. К огорчению, нет. Почти все казино, требуют внесение желая бы одного малого депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, что исключить средства разрешено только на что, эту платежную систему, с которой был изготовлен депозит.Возьми свой подарок. Чаще всего приз активизируется сразу в регистрации. Но бывают истории, когда нужно забежать в личный кабинет или написать в справочную службу. <a href=https://bdsmboard.org/member.php?397540-PatrickEages>https://bdsmboard.org/member.php?397540-PatrickEages</a> Ну и окончательно же, для казино бездепозитные призы прибыльны с имиджевой стороны: схожая добродушие повышает уровень преданности клиентов к компании. 1×slot зеркало рабочее этих способов предполагает регистрацию В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, нужно адресоваться в службу через лайв-чат на веб-сайте казино.Обычно бездепозитные промоакции от казино, приходят на эл. Почту в дни рождения или праздничные. В некоторых интернет казино можно адресоваться в чат и как неизменному игроку, возможно вас предложат бездепозитное предложение.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.rusdrama-az.com/support/51-sluzhba-tehnicheskoy-podderzhki-sayta.html>1×slots рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Классическая разновидность приза за создание аккаунта. Его преимущество заключается никаких, собственно заказчик может других выбирать аппараты и делать ставки в них. Иногда список игровых автоматов ограничен оператором, но все равно это лучше, чем единственный дешевый разъем, как если, тогда, с внедрением фриспинов. Размер приза. В качестве бездепов обыкновенно начисляют очень суммы, а когда идет о призах за депо, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино все презентовать игроку до 2000$.
#4989 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало подтвердит вашу регистрацию если говорить
Выполнив все требования оператора, заказчик имеет оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит в среднем менее суток. Если дополнительно потребуется пройти процедуру верификации, то срок увеличивается до 1–2 трудящихся дней. Для перевода применяются банковские инструменты и электронные платежные системы. Второй метод подходит превосходнее, так как основная транзакций ситуации исполняются моментально. В связи со спецификой функционирования банков обработка платежей имеет взятьвдолг(взятьвзаймы) до нескольких трудящихся дней. <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации дара необходимо доказать электрическую почту и привязать телефонный; <a href=https://forums.ngames.com/forum/league-of-angels/community-ab/general-discussion-ab/62083-%D1%8F%D0%BA-%D0%BF%D1%80%D0%B0%D1%86%D1%8E%D1%94-%D0%BF%D1%80%D0%BE%D1%84%D0%B5%D1%81%D1%96%D0%B9%D0%BD%D0%B8%D0%B9-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2%D0%B8%D0%BA%D1%83%D0%BF-%D0%BA%D0%B8%D1%97%D0%B2>https://forums.ngames.com/forum/league-of-angels/community-ab/general-discussion-ab/62083-%D1%8F%D0%BA-%D0%BF%D1%80%D0%B0%D1%86%D1%8E%D1%94-%D0%BF%D1%80%D0%BE%D1%84%D0%B5%D1%81%D1%96%D0%B9%D0%BD%D0%B8%D0%B9-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2%D0%B8%D0%BA%D1%83%D0%BF-%D0%BA%D0%B8%D1%97%D0%B2</a> 1×slots коды <a href=http://sols9.com/batheo/Forum/User-ChrisTiz>http://sols9.com/batheo/Forum/User-ChrisTiz</a>
1× slots сайт
1×slots официальный сайт зеркало рабочее Операторы гемблинга заявляют, что например они дерутся с бонус-хантерами. Впрочем, критики считают, что данным казино пробуют устроить из случайного гостя постоянного игрока. <a href=http://maps.google.com.na/url?q=j&sa=t&url=http://neosystems.ru/bitrix/redirect.php?goto=http://bibliopilot.ru/bitrix/redirect.php?goto=https://telegra.ph/Postanovleniya-i-resheniya-Konstitucionnogo-Suda-Rossijskoj-Federacii-i-ih-vliyanie-na-pravilnoe-primenenie-ugolovno-processualn-09–19>http://maps.google.com.na/url?q=j&sa=t&url=http://neosystems.ru/bitrix/redirect.php?goto=http://bibliopilot.ru/bitrix/redirect.php?goto=https://telegra.ph/Postanovleniya-i-resheniya-Konstitucionnogo-Suda-Rossijskoj-Federacii-i-ih-vliyanie-na-pravilnoe-primenenie-ugolovno-processualn-09–19</a> 1×slots регистрацию более популярный вариант это Бездепы обыкновенно предлагают с отыгрышем — быстро вывести выигранные средства невозможно. Перевод денег со счета несомненно возможен после того, как юзер выполнит все притязания казино, а сумма имеет быть выше установленного правилами лимита. Условиями акции фиксируются сроки, протяжении которых заказчик вправе воспользоваться предложением. Обычно они не превосходят нескольких дней в активации.
1 x slots
Иногда для получения бонусов нужно спутаться с представителями саппорта. Удобнее всего с ними собеседовать в онлайн-сате, но от достаточно запроса по электронной почте.Еще одно условие касается объемов ставки. Операторы устанавливают максимальную необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном офисе. При превышении лимита есть риск лишиться бонуса. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, заказчик возможность столкнуться с запретом ставить фишки на шансы. Однако далеко не все ресурсы предлагают своим клиентам бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено поощрение на 1-ый депозит в размере 100–200%. Это замечательная вероятность преумножить банкролл, прирастить время, проведённое за игрой и шансы сорвать большой куш.В большинстве заведений сделать это возможно по e-mal, по номеру телефона, спустя социальную сеть или гугл-аккаунт. <a href=http://xuwentcw.com/home.php?mod=space&uid=369657&do=profile>http://xuwentcw.com/home.php?mod=space&uid=369657&do=profile</a> Начнём с такого, собственно каждое рекламную за регистрацию подразумевает некие условия. Бездепозитные бонусы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, нужная для исполнения условий. Пример, получили безвозмездные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 рублей, неудачных либо выигрышных, неважно. После исполненья, бонусный баланс перейдёт на настоящий и станет доступным к выводу. 1×slots casino зеркало рабочее Для получения бонуса нужно ознакомиться с программкой лояльности казино и сделать ставки на сумму, необходимую для перехода на грядущий уровень.Но разу не забывайте пристально читать правила участия в бонусных промоакциях. Если вы нарушите желая бы одно условие, позднее вы не можете устроить недоразумение с администрацией.
1×slot зеркало рабочее этих способов предполагает регистрацию
Баланс игрока дополняется на подходящую сумму. К ней применяется вейджер, обозначенный в правилах акции. Вывести выигрыш возможно будет последствии того, как юзер сделает требуемый объем ставок из личных средств. В редчайших случаях бездеп трудится в формате Free Play. На счет юзера зачисляется крупная сумма, и предоставляется маленький срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по окончании этого периода сумма на счету несомненно превосходить изначальную, то разницу можно несомненно исключить либо применять для дальнейших ставок. При исполнении условий отыгрыша и верификации, средства с бонусного счета переводятся на главной и все быть выведены на карту либо электронный кошелек. Лимиты на вывод и сроки проведения транзакции в от избранной платежной системы. 1×slots регистрация на официальном сайте <a href=https://forum.kainkalabs.com:443/member.php?action=profile&uid=18119>https://forum.kainkalabs.com:443/member.php?action=profile&uid=18119</a> Кешбэк-бонус дает собой возврат фиксированного процента от ставки в случае поражения либо же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не выше 10%.Условия, на которых предоставляется бездеп, регулируются казино. Каждая акция имеет доскональные правила, гиперссылка на которые обычно находится в промообъявлении. В их указываются лимиты, вейджер, перечень дешевых игр. Если оператор укрывает данные о предложении, то пользоваться им не.
1×slots регистрация 1×slotscasino 56 online
Бесплатный приз – кредиты, которые онлайн-казино начисляет посетителю, не принуждая его пополнять игровой счет. Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, дабы еще раз получить безвозмездный бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ожидает неизбежное наказание. <a href=https://tpang.co.kr/bbs/board.php?bo_table=free&wr_id=823601>https://tpang.co.kr/bbs/board.php?bo_table=free&wr_id=823601</a> Третитй бездепозитный приз за регистрацию – валютные свои. К раскаянию, начислить рубли или доллары способны лишь известные и пользующиеся клубы. С их подмогою вас насладиться любой доступной игрой – автоматом, рулеткой, кено, блэкджеком. 1 x slots casino Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных притязаний, кроме неотъемлемой верификации. Если на веб-сайте предусмотрена неотъемлемая процедура доказательства личности, то исключить выигрыш получится лишь в ревизии данных. Приготовьтесь заполнить анкету и отправить в техподдержку документ, подтверждающий лицо.
<b>Смотреть еще похожие новости:</b>
<a href=https://minifishtank.net/forum/showthread.php?tid=22950>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<a href=https://www.formulersupport.com/Thread-1×slots-%D0%B1%D0%B5%D0%B7%D0%B4%D0%B5%D0%BF%D0%BE%D0%B7%D0%B8%D1%82%D0%BD%D1%8B%D0%B9-%D0%B1%D0%BE%D0%BD%D1%83%D1%81-%D0%B7%D0%B0-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8E–167024>1×slots бездепозитный бонус за регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный бонус за регистрацию в казино с выводом средств в 2022 году — Наш ресурс предоставляет игрокам важную информацию о самых свежих, щедрых и проверенных бонусах в онлайн казино, коие обновляются любой день. Бoльшинcтвo азартных заведений выдвигают примерно одинаковые условия и требования, которые нужно выполнить, чтобы получить бездепозитный приз за регистрацию. Все их можно соединить в один список:
#4990 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Анна Михалкова Чулпан Хаматова <a href=https://krtka.info/>online casino 7k</a> порно с Артемий Панарин (хоккей) Крючкова Полина Викторовна порно <a href=https://vestnik-jurnal.com/>Окладникова Ирина Андреевна порно</a> порно с Баталина Ольга Юрьевна сайт букмекерской конторы 1×bet сайт 1×bet xyz порно с Арина и Дина Аверины, гимнастки букмекерская контора без casino бездепозитный порно с Евгения Медведева
DiskiPlus пари букмекерская контора DiskiPlus porno Вера Бирюкова, гимнастка <a href=https://www.diskiplus.ru>DiskiPlus Мухтиярова Елена Вячеславовна порно</a> DiskiPlus Александра Бортич DiskiPlus скачать pin casino <a href=https://diskiplus.ru>DiskiPlus porno Катерина Шпица</a> DiskiPlus 1×bet телефон DiskiPlus casino актуальное зеркало DiskiPlus bet casino DiskiPlus ставки на спорт букмекерские конторы DiskiPlus 1×bet рабочее DiskiPlus casino официальный сайт DiskiPlus inform@rucriminal.info
#4991 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet рабочее на сегодня порно с Владимир Минеев (ММА) <a href=https://specreporter.com/>casino ru</a> pin up букмекерская контора порно с Владимир Минеев (ММА) <a href=https://kompromat1.online/>ешь казино</a> 1×bet зеркало xbet xyz up casino casino зеркало сайта включи казино как выиграть в казино casino pin официальный 1win casino
DiskiPlus casino скачать DiskiPlus 1×bet слоты 1×bet top <a href=https://www.diskiplus.ru/>DiskiPlus букмекерская контора бесплатно скачать</a> DiskiPlus Мухтиярова Елена Вячеславовна порно DiskiPlus Нургалиева Эльвира Рамиловна порно <a href=https://diskiplus.ru>DiskiPlus порно с Максим Глушенков (футбол)</a> DiskiPlus мелбет букмекерская контора DiskiPlus win win casino DiskiPlus porno Мария Шарапова DiskiPlus pin up casino buzz DiskiPlus винлайн букмекерская контора официальный сайт DiskiPlus казино проиграл DiskiPlus пин ап casino
#4992 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация
Чтобы выступать даром на реальные деньги в казино, порой достаточно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные деянья. <a href=http://filmkachat.ru/>1хслотс регистрация в 1×slots casino</a> <a href=https://speakerdeck.com/rendercgi1>https://speakerdeck.com/rendercgi1</a> 1×slots рабочее зеркало на сегодня <a href=https://artistecard.com/Bbgatecom2512#!/news/2024/82568>https://artistecard.com/Bbgatecom2512#!/news/2024/82568</a>
1×slots официальный сайт зеркало
Выиграть настоящие деньги в казино не пополняя счет – сложно, но вполне. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными призами и начните играть на бонусные средства. По статистике из 10-ти заведений возможно заработать маленькую необходимую средств помощью бонусных средств.При правильном подходе бездепы — это отличный метод играть на деньги без траты личных средств. Есть несколько рекомендаций, следуя коим возможно извлечь максимум пользы из сходственных промоакций казино. Играть идет только на лицензированных площадках. Скриптовые веб-сайты не только врут с бонусными услугами, но и используют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах невозможно. 1×slots регистрация 1×slots casino c2d ru <a href=http://d668804q.beget.tech/user/DoctorLazutaor/>http://d668804q.beget.tech/user/DoctorLazutaor/</a> 1×slots официальный сайт зеркало
1×slots casino зеркало рабочее
Если речь идет об неповторимых предложениях, может потребоваться регистрация в казино по ссылке с партнерского сайта.Выиграть реальные средства в казино не пополняя счет – трудно, хотя возможно. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными бонусами и начните играть на бонусные свои. По статистике в 10-ти заведений можно заработать маленькую сумму средств за счет бонусных средств. Онлайн гемблинг развивается с каждым деньком больше и больше, свежие бренды создаются не по дням а по часам. Новые онлайн казино проделывают вступительные промоакции для игроков, чтобы, чтобы собственно бы зарекомендовать себя, и тем самым предлагают бездепозитные бонусы за регистрацию, что бы не пропустить такую возможность — как воспользоваться новым бездепом, советуем посещать наш вебсайт как можно чаще, самое смачное и свежие несомненно добавляться в данном же перечне.При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое возможно предназначить игре в казино. <a href=http://1chan.blog/100–2/?unapproved=492975&moderation-hash=6a7abcc0ac5178014cdc6dfb0673b3d5#comment-492975>http://1chan.blog/100–2/?unapproved=492975&moderation-hash=6a7abcc0ac5178014cdc6dfb0673b3d5#comment-492975</a> Вознаграждения за получение VIP-статуса ? начисляются масштабах программы лояльности при достижении очередного значения или выдаются индивидуально менеджерами службы поддержки. 1хслотс официальный сайт зеркало Подарки на праздники ? приуроченные к парадным датам, требующие символического отыгрыша либо начисляются без такового. Могут дариться игрокам сутки рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду.Бонус за регистрацию в казино без депо с выводом денег надо(надобно) отыграть. Зачастую для отыгрыша возможность понадобиться сделать ставки на сумму, в некоторое десятков один превосходящую необходимую приза или выигрыша.
1хслотс официальный сайт зеркало
Когда речь о получении бездепозитных бонусов в казино, для внимание на последующие условия:Вывод выигрыша с бездепозитных призов казино – щедрый презент от азартных клубов. Но дабы исключить собственный заработок, необходимо выполнить ряд критерий: Так же стоит выделить то, собственно в каждом интернет казино установлен свой максимальный кешаут на бездепозитный приз. Как управляло кешаут — это максимальная сумма средств, кот-ая доступная для вывода с бездепозитного бонуса.Эффективность бездепов в качестве маркетингового инструмента расценили все операторы. Малоизвестные площадки используют эти акции, чтобы прытко набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны неизменных гостей. Не все сайты, дающие презенты без депозита, рекомендованы к этой. За симпатичным промоописанием все скрываться неосуществимые обстоятельства отыгрыша и подводные камешки. Так что сможете храбро региться без всяких раздумий. Фортуна сейчас точно на вашей стороне. Не побаивайтесь, так последствие какого либо ущерба Вам абсолютно не угрожает. С такими бонусами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе.Чем ниже значение вейджера, что, этим легче отыграть и вывести бонус. Если Вы планируете заработать на бездепе, а не просто ознакомиться с новым игровым клубом, то стоит игнорировать бонусов с высочайшим вейджером их почти не реально отыграть. С ними Вы можете лишь протестировать игры заведения. 1×slot рабочее зеркало <a href=https://floobits.com/JoshuaSweak>https://floobits.com/JoshuaSweak</a>
1хслот официальный сайт зеркало
Условия отыгрыша приза. Если Вы планируете заработать на бездепозитном бонусе, то для внимание на значение вейджера и срок, который дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, тем легче отыграть приз и исключить выигрыш. Вообще перейдя в казино — правила схожи в получении бездепозитных бонусов, в стандартные правила входит: подтвердить эл. Почту и телефонный, заполнить собственный индивидуальный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ.Получив свой подарок, Вы можете бесплатно играть на настоящие деньги, а выполнив обстоятельства отыгрыша, вывести собственный выигрыш. <a href=http://www.carshowsociety.com/forum.php?action=profile;u=6207>http://www.carshowsociety.com/forum.php?action=profile;u=6207</a> 1×slots регистрацию более популярный вариант это
<b>Смотреть еще похожие новости:</b>
<a href=https://demo.comuni-italiani.it/forum/viewtopic.php?f=9&t=504449>сайт 1× slots casino</a>
<a href=https://qualityprogamer.de/forum/showthread.php?tid=391188>1×slots официальный сайт скачать</a>
<a href=http://check2go.net/author/jameslob/>1хслотс казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В лицензионных бездепозитных казино выступать в азартные игры вправду неопасно. Наличие лицензии одобряет тот факт, собственно клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP. Чаще всего интернет-казино предлагают бездепозитные призы новым юзерам. Эта промо-акция довольно эффективно привлекает новичков, подталкивая их к открытию счета. Конечно, не все они становятся послушными клиентами, хотя сам прецедент регистрации аккаунта играет на руку заведению.
#4993 Cliffsefhttps://microloans.kz/
займы онлайн срочно плохой кредитной <a href=https://microloans.kz/>займы</a>
#4994 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен список наихороших онлайн казино, которые предлагают своим игрокам щедрые призы за регистрацию. <a href=http://filmkachat.ru/>1хслот 1хслотс регистрация перейти на 1×slots</a> Операторы гемблинга заявляют, собственно например они сражаются с бонус-хантерами. Впрочем, критики считают, что этим казино пытаются устроить из случайного гостя постоянного игрока.Способы получения бездепа различаются от облика бонуса, который понравился игроку. Но для иначе нужно быть зарегистрированным в легальном онлайн-казино и подтвердить свою личность. В общем виде пошаговая инструкция для получения бездепозитного приза смотрится например: <a href=https://www.nitrnd.com/blogs/195900/%D0%90%D0%B2%D1%82%D0%BE-%D0%B2%D0%B8%D0%BA%D1%83%D0%BF>https://www.nitrnd.com/blogs/195900/%D0%90%D0%B2%D1%82%D0%BE-%D0%B2%D0%B8%D0%BA%D1%83%D0%BF</a> Воспользоваться бездепом можно не во всех игровых автоматах: казино вдруг уточняет ограничение для посетителей. Конечно, это возможно посчитать некоторым неудобством для игрока, хотя ради необходимо, собственно выбор автоматов всё также остаётся достаточно наибольшим.За вербование друга ? масштабах партнерской программки заказчик получает вознаграждение за привлечение новых юзеров. 1×slots рабочее зеркало <a href=http://sum24.khome24.kr/bbs/board.php?bo_table=free&wr_id=381607>http://sum24.khome24.kr/bbs/board.php?bo_table=free&wr_id=381607</a> Зарегистрироваться в казино по особой ссылке или с бонусным кодом. Подтвердить контактные данные (номер аппарата и электрическую почту). Для подтверждения номера аппарата нужно в собственном профиле указать свой номер и нажать кнопку „Подтвердить номер телефонного“, дальше Вы получите sms-сообщение с кодом, кот-ый нужно установить в соответствующее фон. Для подтверждения электрической почты, перейти по интенсивной ссылке в послании от казино.Каждый новичок и профессиональный игрок грезят прытко стартануть и начать создавать реальные ставки. Для этого довольно арестовать презент, за кот-ый не нужно уплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email или телефонный. После сего администрация начислит щедрое вознаграждение в виде даровых вращений либо виртуальных кредитов.
1×slots зеркало подтвердит вашу регистрацию если говорить
Выбирайте наилучшие благотворительные призы с помощью обзоров на Casinoz – и пусть для сопутствует удача при отыгрыше бонусных кредитов! <a href=https://russiancomputerservice.ru/user/JosephCer/>1×slot зеркало рабочее этих способов предполагает регистрацию</a> 1×slots зеркало рабочее Фриплей-бонусы. Бонусы за благотворительную забаву есть лишь в неких клубах. Они зачисляются сразу после создания профиля и срабатывают недолговременное время. Если у вас нет медли израсходовать свои, они просто завершатся. Что касается времени, как бонусы действуют в течение одного часа. <a href=https://finbi.ru/user/Henryuseme/>https://finbi.ru/user/Henryuseme/</a> Фриспины предназначены для использования в видео слотах. Внимательно ознакомьтесь с условиями – часто их выдают на некоторые автоматы. В зависимости от клуба, у вас получится сделать определённое число ставок. Кстати, продвинутые игорные жилища позволяют запускать каждых «одноруких бандитов». 1×slots официальный регистрация Большинство клубов привлекают внимание геймеров за счёт разнородных презентов. На 1 сайтах возможно получить виртуальные кредиты, которые откроют доступ ко всему софту. На других же, администрация предлагает благотворительные вращения для запуска лучших интернет слотов. Несмотря на различные промоакции, стоит выделить самые главные.Выигрыши с бонусов без вложений практически привязаны к требованию по ставкам и шансы быть обналичены только после исполненья этих притязаний.
1×slot официальный сайт
Классическая разновидность приза за творение аккаунта. Его превосходство содержится никаких, собственно заказчик может самостоятельно выбирать аппараты и делать ставки в них. Иногда перечень игровых автоматов ограничен оператором, но все точно это какого-либо, чем один-единственный дешевый разъем, как если, тогда, с использованием фриспинов.Особую изюминку видео слотам придают уникальные знакы. С их выходом активизируются различные призы. Вы можете запустить дополнительный уровень и увеличить сумму выигрыша. Есть знаки, которые сменяют ненужные составляющие и сами делают выигрышные комбо. Не стоит забывать и тему бонус-тур. После каждого счастливого спина есть шанс прирастить сумму выигрыша в два или хорошо раза. <a href=https://www.google.ru/url?q=https://doctorlazuta.by/>https://www.google.ru/url?q=https://doctorlazuta.by/</a> 1×slots зеркало на сегодня Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 долларов. Если выдаются фриспины, их количество редко выше нескольких 10-ов даровых вращений.
1×slot зеркало рабочее регистрации на телефон придет
<a href=http://www.carshowsociety.com/forum.php/topic,11220.new.html#new>казино 1× slots официальный сайт</a> Подтверждение регистрации. Казино просят привязки профиля к электронному адресу и номеру телефонного. Для этого на e-mail отчаливает послание ссылаясь, а на телефон ? текстовое известие с кодом. 1× slots casino зеркало <a href=http://www.85sucai.com/member/index.php?uid=scientificunder>http://www.85sucai.com/member/index.php?uid=scientificunder</a>
скачать 1×slots на андроид мобильная версия
Вывод выигрыша с бездепозитных призов казино – щедрый презент от азартных клубов. Но чтобы вывести собственный заработок, необходимо выполнить ряд условий:Самые свежие бездепозитные бонусы в казино за регистрацию 2022 года с выводом выгоды находятся на этой страничке. Посетитель возможность расценить обстоятельства получения и начать играть на средства без внесения депо. При этом игроку принципиально понимать, на каких критериях и какими методами возможность исключить полученный выигрыш. Для сего необходимо оценить список присоединенных платежных систем. Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депозит возможность выделяться до 30 дней. <a href=https://nztw.org/home.php?mod=space&uid=59217>https://nztw.org/home.php?mod=space&uid=59217</a> Зачастую бездепозитные призы казино для забавы предлагаются разными заведениями азартных игр в качестве рекламных акций или в целях вербования к себе свежих игроков. Для бездепозитных бонусов в казино 2022 игроку не пополнять счет до момента вывода желанных средств. 1×slots регистрация то дальше необходимо пройти
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=140335>зеркала 1×slots</a>
<a href=https://forum.spherecommunity.net/User-Jamesmew>1×slots официальный сайт, скачать</a>
<a href=https://bans.org.ua/index.php?topic=127135.new#new>1хслотс регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Иногда операторы просят внесение минимального депозита перед выводом для верификации платежного инструмента. В неких казино данный депозит кроме светит отыграть.
#4995 Charlesgunnyhttp://filmkachat.ru
1х слот 1хслотс регистрация перейти на 1×slots
Вейджер (wager) – это коэффициент, кот-ый демонстрирует на какую необходимую нужно сделать ставок, дабы исключить приз из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего приза, Вам необходимо устроить ставок на необходимую: 500*70=3500 рублей. Только полностью отыграв бонус, Вы можете исключить собственный выигрыш.Ограничения по забавам. Администрация воспрещает игрокам кое-какие игровые автоматы с бездепозитным бонусом, средствами либо бесплатными вращениями. Обычно, в правилах приводится глубокий список слотов для отыгрыша. Иногда деление производится по виду игр. Например, отыгрыш возможен на всех игровых аппаратах, хотя запрещен в настольных забавах и в разделе Live Casino. <a href=http://filmkachat.ru/>1х слотс зеркало регистрация в 1×slots casino</a> Если площадка презентует бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь ввести аккаунт на сайте и активировать его, подтвердив адрес электрической почты, номер аппарата либо иные данные, коие требует оператор. Перед этим нужно увериться, собственно юзер располагается на официальном сайте казино, не на мошеннической площадке.Отыграв бездепозитный бонус в казино с выводом также придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в сходственное ограничение присутствует, то единоразово исключить получится лишь сумму, не превышающую размер приобретенного бонуса. <a href=https://band.us/band/96885593/post/5>https://band.us/band/96885593/post/5</a> 1×slots зеркало регистрацию более популярный вариант это <a href=https://troyndys87787.blogsmine.com/30770089/deepnude-ai-navigating-the-fine-line-between-innovation-and-ethics>https://troyndys87787.blogsmine.com/30770089/deepnude-ai-navigating-the-fine-line-between-innovation-and-ethics</a> Во время игры в казино, выигрыши, полученные благодаря бесплатным призовым фондам, суммируются и срабатывают в совместную сумму для отыгрывания. Однако, случае удача улыбнется и выйдет отыграть все призы, игровое заведение гарантированно допустит исключить финансовые свои. Сумма вывода будет зависеть от лимита, утвержденного именно в данном учреждении. Поэтому, пристально надо(надобно) разбирать верховодила выдачи безлимитных депозитов.
1×slots регистрация на официальном сайте
Как управляло, новоприбывшие геймеры для желают ознакомиться с способами ввода и вывода валютных средств и сроки исполнения поданных заказов дабы конкретно понимать, как живо меня исключить собственный казино бонус за регистрацию без депозита на электронный кошелек либо же банковскую карту. К счастью для всех играющих, внутри определенных холдингов, все казино конкурируют меж собой. Ведь если бы конкретную фирму давало лишь одно онлайн-заведение, то навряд бы клиенты заметили казино с призом за регистрацию и имели бы рассчитывать только на вознаграждение вид приза на первое вложение. К каждому заведению регулярно по привлекать новых игроков, собственно, в итоге, только на руку всем играющим. <a href=https://fougerite.com/threads/1×slots-zerkalo.13625/>1×slots зеркало</a> рабочее зеркало 1×slots <a href=https://wiki.team-glisto.com/index.php?title=Benutzer:Phoebe01W7361972>https://wiki.team-glisto.com/index.php?title=Benutzer:Phoebe01W7361972</a> Таким образом, заведение пробует показать себя своим потенциальным геймерам, а такой рекламный ход как казино бонус без депозита за регистрацию завлекает очень количество внимания к игорному заведению и обеспечивает неизменный струю новых посетителей и грядущих посетителей игрового онлайн клуба. скачать 1×slots официальный сайт
1×slots casino регистрация 1×slotscasin online
Срок активации и время на отыгрыш. Зачисление денег или фриспинов случается при активации в течение строго ограниченного периода, схожие притязания предъявляются и к срокам отыгрыша. Одни казино позволяют отыгрывать бонус несколько дней либо в месяцов. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с неоправданно высоким вейджером.У любого игорного клубы различные вейджеровые условия. Чтобы вы гарантировано сумели выполнить их, мы дадим количество советов. Если система начислила маленькую необходимую, надо делать великие ставки – остановитесь на 10–30 центах. Как только сможете заработать примерно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В неприятном случае лучше приглядеться к другому автомату. <a href=http://wennw.com/member.asp?action=view&memName=eagerwriter83>http://wennw.com/member.asp?action=view&memName=eagerwriter83</a> Помимо остального, для вывода средств по бездепу нужно внести на счёт свой 1-ый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на мало вероятную сумму, после чего вывод средств будет доступен.Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут устанавливает лимитирование для клиентов. Конечно, это возможно счесть неким неудобством для игрока, но справедливости ради необходимо, собственно выбор автоматов всё также остаётся достаточно большим. 1×slots регистрация на официальном сайте Также бездепозитные бонусы шансы работать методом возвращать к игре посетителей, пока приостановивших своё сотрудничество с компанией: уведомление о бездепе поступает на мобильный телефон либо почту.
1×slots casino регистрация 1×slotscasino09k online
<a href=https://www.mshowto.org/forum/members/jamespauri.html>1×slot регистрация</a> Бездепозитный приз казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в данном и содержится основное различие.Выигрыши с бонусов без инвестициям практически привязаны к требованию по ставкам и шансы быть обналичены лишь последствии исполнения этих притязаний. Третитй бездепозитный бонус за регистрацию – валютные свои. К раскаянию, начислить рубли или доллары способны только известные и модные клубы. С их помощью вас насладиться любой доступной игрой – автоматом, рулеткой, кено, блэкджеком.Наш перечень содержит лучшие бездепозитные призы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по принципиальным характеристикам: 1×slots зеркало рабочее <a href=http://forum.centrum-hvac.pl/User-MiguelVub>http://forum.centrum-hvac.pl/User-MiguelVub</a> Максимальная ставка ? уточняется в еденице счета и ограничивает размер ставки за один спин. В случае ее превышения бонус возможность быть аннулирован. Также в правилах может находиться запрет на размещение ставок конкретного вида, например, по одинаковым шансам в рулетке (другими, на чет либо нечет, красное или темное и т.д. ).
1×slots промокод при регистрации
Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не сможете активировать и получить бездепозитный приз.Во время игры в казино, выигрыши, полученные благодаря бесплатным призовым фондам, суммируются и срабатывают в совместную сумму для отыгрывания. Однако, случае удача улыбнется и выйдет отыграть все призы, игровое заведение гарантированно допустит исключить финансовые свои. Сумма вывода будет зависеть от лимита, утвержденного именно в данном учреждении. Поэтому, пристально надо(надобно) разбирать верховодила выдачи безлимитных депозитов. <a href=http://elektrofahrrad-tests.de/forums/member.php?action=profile&uid=33205>http://elektrofahrrad-tests.de/forums/member.php?action=profile&uid=33205</a> Так же стоит выделить то, собственно в каждом интернет казино установлен свой наибольший кешаут на бездепозитный бонус. Как управляло кешаут — это предельная сумма средств, кот-ая дешевая для вывода с бездепозитного приза.Когда идет о получении бездепозитных призов в казино, для направьте на последующие обстоятельства: 1 xslots рабочее зеркало Наиболее известные гонорары среди гэмблеров – бездепозитные бонусы казино. Это не изумительно, ведь возможно получить бесплатные вращения или виртуальные кредиты, и всем не придётся пополнять счёт, рисковать личными деньгами. Удастся насладиться разнородными развлечениями даже выиграть солидную сумму, избегая серьёзного риска.Каждый новичок и профессиональный игрок грезят скоро стартануть и начать создавать реальные ставки. Для этого достаточно забрать презент, за который не уплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email либо телефонный. После сего администрация начислит щедрое вознаграждение в виде бесплатных вращений либо виртуальных кредитов.
<b>Смотреть еще похожие новости:</b>
<a href=https://clubdefansde24.com/foro/viewtopic.php?t=19313>1×slots рабочее зеркало</a>
<a href=https://forum.bandariklan.com/showthread.php?tid=176825&pid=892965#pid892965>x1 slots регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Многие новенькие колеблются, собственно поощрительный приз не нужно будет возвращать, даже в они выиграли у казино. Это полностью безопасно и накрепко. Выводя выигранные средства, игрок просто одергивает свое участие при и утрачивает уникальную возможность – бесплатно наращивать собственное материальное положение. Для доказательства электронной почты, просто перейдите по интенсивной ссылке в письме, приобретенном от игрового заведения.
#4996 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
online casino официальный казино зеркало сегодня <a href=https://vestnik-jurnal.com/>online casino официальный</a> автомат казино up casino <a href=https://repost.news/>зеркала официальных сайтов казино</a> букмекерская контора на андроид казино на деньги porno Мира Андреева (теннис) порно с Дронова Александра Викторовна 1×bet зеркало на сегодня pin up букмекерская контора казино ставка
DiskiPlus 1×bet 1хбет DiskiPlus порно с Баталина Ольга Юрьевна <a href=https://www.diskiplus.ru>DiskiPlus casino зеркало сегодня</a> DiskiPlus 7k casino зеркало рабочее DiskiPlus порно с Евгения Медведева, фигуристка <a href=https://www.diskiplus.ru>DiskiPlus порно с Гатагова Ольга Анатольевна</a> DiskiPlus casino играть DiskiPlus сайт винлайн букмекерская контора DiskiPlus porno Нина Пирогова, хоккеистка DiskiPlus up casino скачать DiskiPlus скачать букмекерскую контору на андроид DiskiPlus vodka casino DiskiPlus pin up casino buzz
#4997 Tommyfichttps://shop-cannabis-prague.com
thc vape in prague <a href=https://shop-cannabis-prague.com/>https://shop-cannabis-prague.com</a>
#4998 Charlesgunnyhttp://filmkachat.ru
1×slots бездепозитный бонус за регистрацию
Акционные предложения от казино существуют в разных форматах. Часто бонусы даются в обмен на депозит. Игрок вносит платеж и получает деньги, бесплатные вращения и другие поощрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — вид приза, кот-ый гарантирован за исполненье определенных действий на веб-сайте:После получения приза вывод средств для посетителя будет недоступен того, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя либо чета недель. Выводить деньги игрок может лишь последствии отыгрыша. <a href=http://filmkachat.ru/>1×slots казино зеркало</a> Некоторые казино шансы предлагать клиентам бездепы за подтверждение номера либо почты или репост на страничку в соц сетях.Существует ли стратегии для отыгрыша бездепозитных бонусов? К сожалению нет, на выигрыши или проигрыши с бонусов, казино или игрок повлиять не может, отдача игр происходит от создателей игр. <a href=http://www.wmhelp.cz/html/modules.php?name=Forums&file=viewtopic&t=69255>http://www.wmhelp.cz/html/modules.php?name=Forums&file=viewtopic&t=69255</a> Объективные – размер приза, коэффициент и условия вейджера, необходимость внесения депо для вывода средств; 1×slots скачать на айфон <a href=https://opensourcebridge.science/wiki/User:WFNDanae1218>https://opensourcebridge.science/wiki/User:WFNDanae1218</a> Такой казино приз без депозита за регистрацию выдается игроку на час и энергично используется данное предложение с 2017 года. Это как бы какая-то маскировка одобрения под бездепозитный. Суть всего этого сводится к что, этому, что игроку на час выдается, к примеру, 1000 долларов, а реклама твердит о том, что каждой выигрыш возможно будет дальнейшем забыть при для. Но случае играющий серьезно отнесется к данному предложению, то он просто потеряет время. Ведь игроку нужно несомненно выступать не в аккаунте, в тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (и всей тыс. ) в управляла вступят конкретные обстоятельства, где несомненно сказано, собственно максимальной суммой победы имеет быть лишь двести долларов и средства возможно применять только в приза на 1-ый лепта с вейджером 25 от суммы гонорары плюс сам депо. По итогу получится, собственно игрок выигрывал себе 200% приз с вейджером на определенную сумму. Короче говоря, это все не стоит вашего времени.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро или 20 долларов. Если выдаются фриспины, их количество редко выше нескольких 10-ов безвозмездных вращений.
1×slots рабочее зеркало
Основное отличие сомнений, собственно для получения бездепа не пополнять баланс в казино. Но не сего, есть ряд прочих различий:Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам воспрещено начислять призы посетителям, не имеющим денежных средств на счете. Мы предлагаем разглядеть животрепещущие призы онлайн-казино с лицензией, которые соблюдают законодательство РБ. 1хслотс рабочее зеркало Хотя благотворительные бонусы начисляются без депо, не исключено, собственно вам придется заносить деньги. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только в такого, как новый заказчик впервые пополнит игровой счет.Чаще всего интернет-казино предлагают бездепозитные призы свежим юзерам. Эта промо-акция довольно отлично завлекает начинающих, подталкивая их к открытию счета. Конечно, не все они становятся преданными клиентами, хотя сам прецедент регистрации аккаунта играет на руку заведению. <a href=https://forums.ngames.com/forum/league-of-angels/community-ab/general-discussion-ab/62087-innovative-luxury-real-estate-marketing-ideas-that-actually-drive-premium-sales>https://forums.ngames.com/forum/league-of-angels/community-ab/general-discussion-ab/62087-innovative-luxury-real-estate-marketing-ideas-that-actually-drive-premium-sales</a> 1×slots зеркало сайта Так собственно приготовьтесь предоставить конфиденциальную информацию (пол, возраст, государство проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает не более суток, в чего получится беспрепятственно выводить крупные выигрыши.На критериях отыгрыша даровых бонусов по тормознуть подробнее. С ними связаны нюансы, которые невозможно забыть без внимания.
1хслотс официальный сайт зеркало
Обычно для получения бонусов без депо, казино выдвигает приклнные и вполне выполнимые условия, но есть ряд деяний коие запрещены и имеют стать досадные последствия:Бездепы обычно предлагают с отыгрышем — мгновенно исключить выигранные средства невозможно. Перевод средств со счета будет вероятен после такого, как юзер выполнит все притязания казино, а сумма имеет быть выше установленного правилами лимита. Условиями акции фиксируются сроки, в течение коих клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней последствии активации. <a href=https://wlppr.net/user/Ralphwhign/>https://wlppr.net/user/Ralphwhign/</a> Промокод – определённая комбинация знаков, коию нужно установить в подходящее фон при творении учетной записи или активировать в личном профиле игрока в разделе с призами.Как и промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такого предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых посетителей и позволяет им составить впечатление о функционале, не рискуя вескими суммами. 1×slots акции
1хслот скачать
Представленные на данной страничке лучшие бездеп призы в казино за регистрацию в 2022 году имеют подходящие условия. После кропотливого анализа редакция портала составила рейтинг спецпредложений, в котором посетители Casino.ru шансы сортировать перечень по нескольким аспектам: по сумме, вейджеру, максимальной сумме вывода и т.д. Многие казино деют в рекламных целях благотворительные призы исключительно для наших читателей. Чтобы их получить, нужно перебежать на игровой вебсайт по партнерской ссылке с нашего портала.Помните, что в некоторых забавах сумма ставки идет в зачет вейджера лишь частично. Так, в настольных и карточных играх только от 5% до 50% суммы ставки считаются как отыгранные деньги, на как в слотах идет в зачет все one hundred percent суммы. 1×slots официальный зеркало <a href=https://blackmarke7.com/user-39973.html>https://blackmarke7.com/user-39973.html</a>
1хслотс официальный сайт зеркало
Создание аккаунта. На сайте казино необходимо обнаружить регистрационную форму и наполнить порожние поля личностными данными. Иногда на этом шаге требуется показать только адрес электронной почты и пароль, хотя почаще хотелось наполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д. ). Нужно свидетельствовать только реальные данные, поскольку впоследствие они станут испытаны. <a href=http://www.postcount.net/forum/member.php?117452-Charlesprete>http://www.postcount.net/forum/member.php?117452-Charlesprete</a> Получать информацию о самых выгодных призах возможно без постоянного прогноза новостей казино. Мы взяли данную задачку на себя и непрерывно следим за предложениями операторов, выбирая превосходнейшие из их. В данном разделе собраны последние бездепы, промокоды к ним и условия их активации. Список промоакций регулярно пополняется. В топ зашли самые новые бездепозитные призы за регистрацию в казино 2020, временные и закрытые рекламную. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и критериям. Если срок действия промоакции истек, она удаляется из списка. 1×slots зеркало регистрация Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном сайте и сделайте вход в личный кабинет, чтобы отобрать безвозмездные вращения с вейджером х40;
<b>Смотреть еще похожие новости:</b>
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=6106>1хслот зеркало сайта</a>
<a href=https://elforodelpoker.com/presentaciones/1×slots-t288617.html>1×slots регистрация</a>
<a href=http://nacionrolera.org/foro/viewtopic.php?f=1210&t=145815>1хслот 1хслотс регистрация перейти на 1×slots</a>
<a href=https://karakol.com.kg/user/Jameskef/>1×slots рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Такой казино бонус без депозита за регистрацию выдается игроку на час и активно используется данное предложение с 2017 года. Это как бы какая-то маскировка поощрения под бездепозитный. Суть всего сего сводится к что, этому, что геймеру на час выдается, к примеру, 1000 долларов, а реклама повторяет про, собственно каждой выигрыш возможно будет в будущем оставить при себе. Но в играющий всерьез отнесется к данному предложению, то он попросту потеряет время. Ведь игроку нужно будет играть не в основном аккаунте, в тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (числе всей тыс. ) в правила вступят определенные условия, где несомненно сказано, что наибольшей суммой победы имеет быть лишь двести $ и средства можно применять лишь в бонуса на 1-ый вклад с вейджером 25 от суммы гонорары плюс сам депозит. По результату получится, собственно игрок выигрывал себе 200% приз с вейджером на конкретную сумму. Короче разговаривая, это все не вашего времени.
#4999 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерские конторы в россии вывод казино <a href=https://specreporter.com/>1×bet 1</a> казино проиграл 1×bet сайт <a href=https://rucriminal.info/>1go casino</a> 1×bet официальный 1×bet xyz порно с Антропова Валентина Викторовна Шевцова Татьяна Викторовна порно Окладникова Ирина Андреевна порно 1×bet зеркало рабочее на сегодня скачать pin casino casino com
DiskiPlus порно с Аделия Петросян (фигурное катание) DiskiPlus kometa casino <a href=https://www.diskiplus.ru>DiskiPlus скачать 1×bet</a> DiskiPlus казино рояль DiskiPlus симулятор казино <a href=https://diskiplus.ru>DiskiPlus Москалькова Татьяна Николаевна порно</a> DiskiPlus порно с Сергей Бобровский (хоккей) DiskiPlus порно с Алина Загитова, фигуристка DiskiPlus пин casino DiskiPlus приложения букмекерских контор DiskiPlus Мухтиярова Елена Вячеславовна порно DiskiPlus casino игровой автомат DiskiPlus 1×bet 1
#5000 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало сайта
В лицензионных бездепозитных казино играть в азартные забавы вправду неопасно. Наличие лицензии одобряет тот факт, что клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP. <a href=http://filmkachat.ru/>1×slots casino регистрация</a> Онлайн гемблинг развивается с каждым деньком больше и больше, новые бренды создаются не по дням а по часам. Новые онлайн казино проделывают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и что, этим наиболее предлагают бездепозитные бонусы за регистрацию, собственно бы не упустить такую возможность — как воспользоваться свежим бездепом, рекомендуем посещать наш вебсайт как можно чаще, самое вкусное и новые будет добавляться в данном же перечне. <a href=http://www.gothicpast.com/myomeka/posters/show/79259>http://www.gothicpast.com/myomeka/posters/show/79259</a> Бесплатный бонус – кредиты, которые онлайн-казино начисляет клиенту, не принуждая его пополнять игровой счет.Сразу в активации промокода можно воспользоваться презентом. Как уже упоминалось, призы посещают трёх видов – фриспины, кредиты и фриплей-бонусы. 1×slots casino регистрация 1×slotscasin online <a href=http://www.edid.co.kr/bbs/board.php?bo_table=free&wr_id=221963>http://www.edid.co.kr/bbs/board.php?bo_table=free&wr_id=221963</a> Прежде всего, не забывайте периодически заглядывать на страницу обзоров бездепозитных бонусов. Они шаг за шагом осматривают наиболее увлекательные предложения ведущих игорных порталов.
1×slots официальный сайт скачать на айфон
Для верификации номера аппарата, в личном профиле изберите опцию „Подтвердить номер телефонного“ и введите в подходящее поле код, приобретенный в sms-сообщении.Разные казино имеют собственные управляла по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высокие требования. Часто онлайн-казино рекомендуют отыграть бонусное поощрение до ста один в игровых автоматах. Например, в игрок получил безвозмездно десять долларов, то необходимо будет отыграть их, поставив одну тысячу спинов по одному баксу каждый. Стоит обозначить(означить), собственно не все казино выделяют возможность играть на бонусы и не во всех увеселительных заведениях схожие управляла для отыгрывания. Некоторые казино воспрещают играть на бонусы в блекджек либо ограничивают ставки до пяти %, собственно существенно увеличивает в десятки один количество необходимых игр. <a href=https://forum.visiteachapada.com/viewtopic.php?f=19&t=2980>1×slots зеркало этих способов предполагает регистрацию</a> 1×slots регистрация на официальном сайте У каждого игорного заведения средства правила и условия. Но, чтобы получить призы, необходимо выполнить стандартные действия:Если идет об неповторимых предложениях, может понадобиться регистрация в казино по ссылке с партнерского сайта. <a href=http://www.cafecomredes.com.br/2020/06/enterprise-ca-assinando-certificado-no.html>http://www.cafecomredes.com.br/2020/06/enterprise-ca-assinando-certificado-no.html</a> Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. 1×slots рабочее зеркало на сегодня
1хслот зеркало сайта
Реже призы без депозита начисляются постоянным игрокам. С их поддержкой администрация постарается удержать ценных посетителей или вожделеет поблагодарить за преданность правильных посетителей. Но намного почаще для подобных целей используются такие акции: Также, учите, что бездепозитный приз возможно исключить только сомнений случае, когда станут выполнены все условия отыгрыша.Каждый из бездепозитных бонусов без пополнения 2022 содержит собственный конкретный вейджер для отыгрыша, например же в любом казино он уточняется индивидуально — где то он х55 а кое-где х30, повторюсь всюду по разному! <a href=http://udomlya.ru/userinfo.php?uid=111377>http://udomlya.ru/userinfo.php?uid=111377</a> Представьте момент, когда при ставке в 10 рублей Вы получите сходственное умножение. Миллион руб. За одно вращение, собственно вполне возможно. Поэтому вопрос, сколько можно выиграть остаётся открытым. Предлагаем проверить помощи. Регистрируйтесь в одном или нескольких онлайн казино, получайте Бездепозитный приз и проверяйте удачу в деле. Разумеется, вывести средства не так просто. Однако шансы есть у всех.Можно. Вы практически сможете отказаться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не сделаете ставку. 1×slots зеркало регистрация то дальше необходимо пройти Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные способы и оценить необыкновенности, труднодоступные при забаве в демо режиме. Многие новые клиенты переходят в количество неизменных, а оператор получает длительную выгода.Далее потребуется отыграть вагер и вывести выигрыш. Игрокам без опыта крупно подфартило, они могут получить десятки подарков за 1 регистрацию. Если не смогли получить Бездепозитный приз, не беспокойтесь. Обратитесь в онлайн чат, оператор поможет ситуацию.
1×slots бездепозитный бонус за регистрацию
<a href=https://www.handmakersbrasil.com.br/topic/1289–1×slots-casino-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F/>1×slots casino регистрация</a> Но есть азартные заведения, готовые просто так вручить деньги на забаву. Для этого довольно сделать профиль. Чтобы вывести выигрыш, сперва нужно выполнить вейджеровые условия, прописанные в условиях получения бездепа.В некоторых онлайн казино для получения бездепозитных бонусов не довольно просто зарегистрироваться на сайте клуба и доказать свои контактные данные. Дополнительно потребуется активация промокода. 1× slots официальный <a href=https://lunar.az/user/Joshuaexade/>https://lunar.az/user/Joshuaexade/</a>
1×слотс казино
Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это самая приятная часть игры. Важно, часто бездепозитные призы в казино выдаются с лимитированиями по наибольшей выплате. В среднем возможно рассчитывать на выгода в несколько тыщ рублей. Как исключить выигрыш с приза без депо. Придётся доказать акк документально, в некоторых заведениях. Процедура верификации неотклонима и делается каждым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате либо прочитайте в правилах. <a href=http://k98727wu.beget.tech/user/Julesheers/>http://k98727wu.beget.tech/user/Julesheers/</a> Кешбэк-бонус дает собой возврат фиксированного процента от ставки когда поражения либо же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не выше 10%.Рассмотрим принцип его деянья на примере. Допустим, вы зарегались и возымели $10 not the slightest deposit bonus с вейджером х50. Это означает, собственно выигранные средства можно будет выводить не ранее, чем в того, как общая сумма ставок достигнет $500. 1×slots зеркало сайта Промообъявления от казино не дают реальной картины и ориентированы на вербование внимания юзеров. Понять, насколько высоки шансы остаться в плюсе, дозволит собственный тест критерий предложения:Высокая конкуренция в сегменте азартных игр доказывает операторов привлекать посетителей различными промоакциями. Благодаря этому у посетителей появляется возможность получить бонусы в казино за регистрацию без депо. Воспользоваться этим предложением возможно, избегая процедуру внесения денег на игровой счет, просто активировав акк на веб-сайте. Наш экскурсовод по бездепам поможет избрать самую симпатичную бонусную программку, разузнать управляла получения такого гонорары и воспользоваться им с наибольшей выгодой.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.ltp-team.com/topic/87823–1×slots-casino-registraciya-1×slotscasin-online/>1×slots casino регистрация 1×slotscasin online</a>
<a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=49955>1 x slots casino</a>
<a href=http://vn-info.net/user/Josephkam/>1× slots зеркало</a>
<a href=http://miupsik.ru/forums/showthread.php?tid=404985>казино 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Постарайтесь отыграть вейджер, чтобы замечена возможность забыть заявку на выплату. Кстати, на всех веб-сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электронной кошелёк, карту, аппарат.
#5001 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Яна Троянова порно с Антропова Валентина Викторовна <a href=https://strelochnik.com/>Кузнецова Анна Юрьевна порно</a> unlim casino Разуваева Ксения Денисовна порно <a href=https://m.repost.news/>porno Дарья Клишина</a> казино в россии водка казино 7k casino бонус порно с Евгения Медведева pin up casino пин ап скачиваемые казино pinco casino
DiskiPlus porno Юлия Канакина, скелетонистка DiskiPlus casino актуальное зеркало <a href=https://diskiplus.ru>DiskiPlus Любимова Ольга Борисовна порно</a> DiskiPlus ставки на спорт букмекерские конторы DiskiPlus Яровая Ирина Анатольевна порно <a href=https://www.diskiplus.ru/>DiskiPlus 7k casino зеркало рабочее</a> DiskiPlus сайт 1×bet слоты DiskiPlus casino ru DiskiPlus porno Екатерина Ефременкова, шорт-трекистка DiskiPlus bet casino DiskiPlus vodka casino DiskiPlus где казино DiskiPlus casino
#5002 Charlesgunnyhttp://filmkachat.ru
1х слотс зеркало регистрация в 1×slots casino
Игрокам не воспринимать приветственный бонус как гарантированный способ получить крупный выигрыш, хотя это замечательная вероятность без затрат оценить возможностей казино. <a href=http://filmkachat.ru/>1хслотс казино зеркало</a> Чаще всего интернет-казино предлагают бездепозитные призы свежим пользователям. Эта промо-акция довольно эффективно привлекает начинающих, подталкивая их к открытию счета. Конечно, не все становятся преданными посетителями, хотя сам прецедент регистрации аккаунта играет на руку заведению.Срок активации и время на отыгрыш. Зачисление средств или фриспинов происходит при активации в течение требовательно ограниченного периода, схожие притязания предъявляются и к срокам отыгрыша. Одни казино позволяют отыгрывать приз некоторое дней или в недель. Другие выдают солидную сумму за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высочайшим вейджером. <a href=https://diigo.com/0y2r93>https://diigo.com/0y2r93</a> Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.Создание аккаунта. На веб-сайте казино необходимо открыть регистрационную форму и заполнить пустые поля личностными данными. Иногда на этом шаге требуется показать только адрес электрической почты и пароль, но почаще надо наполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д.). Нужно указывать лишь реальные данные, поскольку впоследствие они станут проверены. 1×slots казино мобильная версия <a href=https://www.my-photo.kr/dragon/bbs/board.php?bo_table=free&wr_id=650669>https://www.my-photo.kr/dragon/bbs/board.php?bo_table=free&wr_id=650669</a> Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавленья либо официального клиента для ПК. В большинстве казино действуют программки преданности, присваивающие игрокам статусы за активность на сайте. Продвижение на грядущий уровень нередко с выдачей бездепа.
1×slots зеркало этих способов предполагает регистрацию
В большинстве заведений сделать это можно по адресу электронной почты, по номеру телефонного, спустя социальную сеть или гугл-аккаунт.Бесплатные призы казино без депо возможно получить вид денежных средств на бонусный счет (исключить их возможно лишь после отыгрыша), фриспинов, игры или кешбэк-бонуса. 1×slots зеркало быструю регистрацию а также мгновенное Шаг 4. Активация. Внимательно выучите условия, информацию по лимитированиям и сроке деяния бонусного предложения. Разобравшись с правилами, возможно активировать приз в личном кабинете (времени ? с внедрением промокода) или по запросу в саппорт.Практически все интернет казино с бездепозитным призом за регистрацию предусматривает программку лояльности — систему одобрения постоянных клиентов, кот-ая произведено из множества уровней. При достижении игроком еще уровня на его счёт поступает приз. Чем выше уровень — что, этим щедрее приз. <a href=https://rightcoachforme.com/author/patrickgaree/>https://rightcoachforme.com/author/patrickgaree/</a> Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депозит возможность выделяться до 30 дней.Основное управляло получения бездепа ? создаваемый аккаунт обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов строго запрещено. Проверка проводится по имени, адресу электронной почты, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита необходимо соблюдать простую последовательность действий. 1×slot зеркало Создание аккаунта. На веб-сайте казино нужно обнаружить регистрационную форму и заполнить порожние поля личностными данными. Иногда на этом этапе потребуется указать только адресок электрической почты и пароль, хотя почаще бы заполнить анкету персональной информацией (ФИО, дата рождения, пространство проживания и т.д. ). Нужно указывать только реальные данные, что впоследствие они станут испытаны.
казино 1×slots официальный сайт
В интернете много известных игорных площадок с красивыми акционными предложениями. Однако пристально читать обстоятельства 10-ов предложений в надоест, ну и время отнимет большое. Поэтому наша команда подготовила ТОП-3 сайтов с наилучшими бездепозитными призами:Бездепозитный бонус по промо-коду несомненно доступен для забавы, только никаких случае когда Вы активируете особый бонусный код в разделе с призами либо укажите промокод при регистрации на веб-сайте. В некоторых случаях, кроме активации кода, придется подтвердить контактные данные игрока и заполнить анкету посетителя. <a href=http://hardstorecr.com/mybb/member.php?action=profile&uid=169619>http://hardstorecr.com/mybb/member.php?action=profile&uid=169619</a> Ознакомьтесь с нашим перечнем наихороших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего списка и получите бездеп незамедлительно. Хватайте лучшие бесплатные предложения ниже и выигрывайте великие деньги, не рискуя!B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. 1×slots официальный сайт зеркало
1×slots регистрация 1×slots casino 777 online
Раздача бонусов возможность быть приурочена к разным датам: календарные праздники, деньки рождения игроков, годовщина открытия казино и т. Д. Подарок выдается повторяющий средств, фриспинов либо баллов для скопления и размена на услуги оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода этой суммы придется выполнить ряд требований.Самые свежие бездепозитные бонусы в казино за регистрацию 2022 года с выводом прибыли присутствуют на данной страничке. Посетитель может расценить обстоятельства получения и начать играть на деньги без внесения депозита. При данном игроку важно разуметь, на каких критериях и какими методами он сможет вывести приобретенный выигрыш. Для сего необходимо оценить перечень подключенных платежных систем. Индивидуальные поощрения выдаются за совершение действий: подписку на аккаунты площадки в соц сетях, установку мобильного приложения или официального посетителя для ПК. В большинстве казино срабатывают программы преданности, присваивающие игрокам статусы за активность на сайте. Продвижение на грядущий уровень нередко сопровождается выдачей бездепа.B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. Возможность сыграть дополнительное состязание (а от и несколько) абсолютно безвозмездно, а выигрыш, же, поступает на счёт игрока.Бездепозитные бонусы за регистрацию являются одним из самых знаменитых методов привлечения свежих игроков в онлайн-казино, поэтому что они деют игрокам вероятность опробовать казино, неподражаемо игровые автоматы, и возможно, выиграть реальные деньги. 1×slots регистрация то дальше необходимо пройти <a href=https://gshost.ru/user/DoctorLazutaEt/>https://gshost.ru/user/DoctorLazutaEt/</a> Так собственно главное различие подарка на депозит от бездепа – обязательное пополнение счёта. Вы можете внести депозит и преувеличить стартовый капитал или забрать бездеп и при не придётся рисковать собственными сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начисляет щедрое поощрение!Во время игры в казино, выигрыши, полученные благодаря бесплатным призовым фондам, суммируются и включаются в общую сумму для отыгрывания. Однако, в удача улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно разрешит исключить финансовые средства. Сумма вывода будет зависеть от лимита, утвержденного непосредственно в этом учреждении. Поэтому, пристально надо(надобно) разбирать управляла выдачи анлимитных депо.
1×slots официальный сайт зеркало
Пoдтвepдить личнocть клиента. Для успешного вывода средств, нужно доказать личность клиента. Нa этaпe вepификaции пpoфиля, работники службы защищенности должны убедиться, что у игрока всего лишь один акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не может исключить свой выигрыш, в у него несомненно некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы. Денежные средства. Третий приз за регистрацию без депо – наличные. К огорчению, только известные и известные клубы могут дать средства в рублях или долларах. С их поддержкою возможность насладиться любой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед этим необходимо выполнение определенных условий. <a href=https://riverqzip41852.post-blogs.com/51750853/deepnude-ai-navigating-the-controversial-landscape-of-image-manipulation-technology>https://riverqzip41852.post-blogs.com/51750853/deepnude-ai-navigating-the-controversial-landscape-of-image-manipulation-technology</a> Заработать на бездепозитных призах за регистрацию в казино может каждый пользователь, достигший совершеннолетия. 1хслотс мобильная версия зеркало Возьми собственный презент. Чаще всего бонус активируется незамедлительно последствии регистрации. Но посещают ситуации, когда надо(надобно) зайти в индивидуальный офис либо написать в справочную службу.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.drustvogil-galad.si/index.php?action=profile;u=121557>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вейджер в переводе с британского значит «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша полученного бонуса, в нашем случае бездепозитного. Число ставок имеет — важно лишь набрать сумму, пропорциональную сумме поощрения.
#5003 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Никита Кучеров (хоккей) Шевцова Татьяна Викторовна порно <a href=https://slon-ru.com/>Матвиенко Валентина Ивановна порно</a> Кузнецова Анна Юрьевна порно винлайн букмекерская контора официальный <a href=https://glvk.guru/>зеркала казино</a> порно с Петр Ян (ММА) букмекерскую контору пин букмекерская контора бетсити слоты казино porno Светлана Ходченкова 1×bet официальный xbet порно с Арина и Дина Аверины, гимнастки
DiskiPlus casino онлайн DiskiPlus porno Юлия Пересильд <a href=https://diskiplus.ru/>DiskiPlus cat casino</a> DiskiPlus вывод казино DiskiPlus мелбет букмекерская контора <a href=https://diskiplus.ru/>DiskiPlus карты казино</a> DiskiPlus casino buzz DiskiPlus казино вход официальный сайт DiskiPlus фреш казино DiskiPlus часы казино DiskiPlus porno Александра Степанова, фигуристка DiskiPlus порно с Никита Кучеров (хоккей) DiskiPlus порно с Константин Тюкавин (футбол)
#5004 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрацию более популярный вариант это
Иногда виде бездепа, казино дарит минимальный бонус (до 50 руб. ), ради которого не стоит заморачиваться.Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? <a href=http://filmkachat.ru/>1хслотс казино зеркало</a> При отыгрыше бонусных средств, необходимо учесть срок действия бонуса и время, коие дается на отыгрыш. По истечению заявленного медли, не отыгранный приз будет аннулирован.Представьте момент, когда при ставке в 10 рублей Вы получите сходственное умножение. Миллион рублей за одно вращение, что вполне вполне. Поэтому вопрос, сколько можно выиграть остаётся открытым. Предлагаем выяснить помощи. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный приз и инспектируйте удачу в деле. Разумеется, вывести деньги не так просто. Однако шансы есть у всех. <a href=https://www.scutify.com/articles/2024–10–25------>https://www.scutify.com/articles/2024–10–25------</a> Составленный специалистами Casino.ru список онлайн-казино с бездепозитным бонусом разрешает игрокам сравнить спецпредложения различных операторов.Выбор каждого интернет казино на нашем сайте. В описании к любому Вы сможете разузнать, что получите за создание аккаунта. 1×slots регистрация на 1хслотс <a href=http://o91668l6.beget.tech/user/WalterJap/>http://o91668l6.beget.tech/user/WalterJap/</a> Автоматы непопросту считаются наиболее модным азартным отдыхом. Чтобы усвоить управление и правила, понадобится всего количество мин. Ваша задача устроить ставку, найти количество рабочих линий и можно вертеть барабан. Если на экране выпадет выигрышная композиция – вы выиграли! С данной задачей для посодействуют справится бездепозитные призы казино.
1×slots официальный сайт скачать
Рассмотрим принцип его действия на образце. Допустим, вы зарегались и возымели $10 no down payment bonus с вейджером х50. Это означает, собственно выигранные деньги возможно будет выводить не ранее, чем последствии такого, как общая сумма ставок достигнет $500.Какие призы меня еще получить кроме бездепозитного приза за регистрацию в казино? По мимо бездепозитного приза, любое онлайн казино предлагает игрокам выгодное предложение на 1-ый депозит, вы совершаете депо, ваш депозит возрастает в двое или том в трое, тем самым начать играть можно с более солидной суммой, например же не запамятываем про вейджер на призы. сайт 1× slots casino Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых новых, щедрых и испытанных бонусах в онлайн казино, которые обновляются каждый день. <a href=https://shanemoon78990.alltdesign.com/deepnude-the-dark-side-of-ai-and-digital-manipulation-50007847>https://shanemoon78990.alltdesign.com/deepnude-the-dark-side-of-ai-and-digital-manipulation-50007847</a> онлайн казино 1×slots Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.
1×slots casino online регистрация
Третитй бездепозитный приз за регистрацию – валютные средства. К раскаянию, начислить рубли или баксы готовы лишь знаменитые и модные клубы. С их подмогою появится насладиться любой доступной игрой – автоматом, рулеткой, кено, блэкджеком.Прежде чем активировать бездеп, нужно увериться в, собственно страна, уроженцем которой считается игрок, не заходит в перечень запрещенных. <a href=http://nevamebel.com/bitrix/redirect.php?goto=http://mrtravnik.ru/bitrix/redirect.php?goto=http://womanwiki.ru/s/api.php?action=https://telegra.ph/Prichiny-i-resheniya-po-kotorym-magazin-mozhet-otkazat-v-vydache-kopii-cheka-09–24>http://nevamebel.com/bitrix/redirect.php?goto=http://mrtravnik.ru/bitrix/redirect.php?goto=http://womanwiki.ru/s/api.php?action=https://telegra.ph/Prichiny-i-resheniya-po-kotorym-magazin-mozhet-otkazat-v-vydache-kopii-cheka-09–24</a> 1×slots актуальное зеркало Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских рублей. В критериях промоакции предписано, что вейджер бездепозитного приза х20. Поэтому, чтобы отыграть бонус, игроку несомненно нужно сделать ставок на 35*20=700 руб.
1хслот скачать
Бездепозитный приз по промо-коду будет доступен для игры, только том, случае когда Вы активируете специальный бонусный код в разделе с бонусами либо укажите промокод при регистрации на сайте. В некоторых случаях, считая активации кода, понадобиться доказать контактные данные игрока и наполнить анкету посетителя.Размер бонуса. В качестве бездепов обычно начисляют маленькие суммы, а когда речь о призах за депо, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино могут презентовать игроку до 2000$. <a href=http://nhomtruyen.com/members/jamesgaw.9280/>1×slots актуальное зеркало</a> Основное правило получения бездепа ? создаваемый аккаунт должен быть у юзера первым и единственным. Наличие нескольких аккаунтов требовательно воспрещено. Проверка проводится по имени, адресу электронной почты, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита необходимо блюсти простую очередность действий. Чтобы получить возможность исключить прибыль с бездепозитного приза в казино, необходимо выполнить ряд критерий: рабочее зеркало 1×slots <a href=http://xn–b1acebaenad0ccc3aiee.xn–p1ai/forum/user/9678/>http://xn–b1acebaenad0ccc3aiee.xn–p1ai/forum/user/9678/</a> Бездепозитные бонусы казино это экономическая компенсация, предлагаемая пользователям на дармовой базе и вероятность выступать в интернет казино безвозмездно. Если сравнивать их с поощрениями за вклад, в средства выдаются лишь потом начального пополнения счета, то бездепозитные вознаграждения получаются бесплатно. То есть, играющий получает возможность создавать ставки на теснее быть деньги, которые выдаст заведение, выполняя, этом, обычные деянья, чтобы их извлечь (здесь речь о регистрация, удостоверении личности с использованием номера телефонного, дизайна заказы и т.д. ).
1×slots регистрацию процедура займет всего лишь
<a href=http://1ctv.cn/home.php?mod=space&uid=2963496>http://1ctv.cn/home.php?mod=space&uid=2963496</a> Фриспины. Бесплатные вращения предусмотрены для применения в видео-слотах. Внимательно читайте обстоятельства – они нередко выдаются для некоторых машин. В зависимости от клуба вы можете создавать конкретное число ставок. Кстати, современные игорные дома выделяют возможность заводить «одноруких злодеев». 1×slots зеркало на сегодня 1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, если не желаете стать жертвой плутов либо впустую истратить время;
<b>Смотреть еще похожие новости:</b>
<a href=https://www.rusdrama-az.com/support/51-sluzhba-tehnicheskoy-podderzhki-sayta.html>1×slots регистрация 1×slotscasino 56 online</a>
<a href=http://31057.ww.w.molifan.net/space-uid-2304539.html>зеркала 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Обычно показатель выше, чем для бонусов на депозит. Не удивляйтесь, случае он несомненно числе х100. Иногда завышенный коэффициент вейджера уточняется для жителей отдельных государств.
#5005 Charlesgunnyhttp://filmkachat.ru
1 х слотс зеркало
Ограничения по забавам. Администрация воспрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, деньгами либо бесплатными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда деление выполняется по облику игр. Например, отыгрыш возможен на всех игровых аппаратах, хотя запрещен в настольных забавах и в разделе Live Casino.Доступные забавы – В неких азартных забавах возможно понизить математическое превосходство казино до нескольких 10-х процента. В их количестве многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как верховодило, в этих забавах ставки идут в зачет вейджера не всецело. Например, имеет учитываться только 50%. В неких забавах бездепозитные призы вообще нельзя отыгрывать. <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> Представленные на этой страничке наихорошие бездеп бонусы в казино за регистрацию в 2022 году имеют подходящие обстоятельства. После кропотливого анализа редакция портала составила рейтинг спецпредложений, каком посетители Casino.ru шансы сортировать список по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д. <a href=https://forum.highlite.com/showthread.php?tid=1881>https://forum.highlite.com/showthread.php?tid=1881</a> Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.Бездепозитный бонус по промо-коду несомненно доступен для игры, только том, случае когда Вы активируете специальный бонусный код в разделе с бонусами или укажите промокод при регистрации на сайте. В некоторых случаях, кроме активации кода, понадобиться доказать контактные данные игрока и наполнить анкету клиента. 1хслотс рабочее зеркало <a href=https://latino-forex.com/members/234740-philiphidly>https://latino-forex.com/members/234740-philiphidly</a>
зеркло казино 1×slots
x1 slots 1хслотс регистрация перейти на 1×slots С другой стороны, гораздо легче отобрать бездепозитные фриспины за регистрацию в казино и напрямик в начать вертеть барабаны в лучших слотах. Главная необыкновенность спинов в, собственно они предусмотрены для топовых автоматов. Удастся не только пройти вспомогательные раунды, но и прирастить необходимую выигрыша, заработать респины и внутриигровые презенты.Операторы гемблинга заявляют, что например они дерутся с бонус-хантерами. Впрочем, критики считают, собственно этим казино пытаются устроить из случайного постояльца неизменного игрока. <a href=http://rial-soft.ru/bitrix/redirect.php?goto=http://pnevmosnab.ru/bitrix/rk.php?goto=http://voronezh.rusquantum.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/DZhbf5ujnV4>http://rial-soft.ru/bitrix/redirect.php?goto=http://pnevmosnab.ru/bitrix/rk.php?goto=http://voronezh.rusquantum.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/DZhbf5ujnV4</a> 1×slots официальный сайт, скачать
1×slots регистрация на сайте
Выполнив все притязания оператора, заказчик может оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит примерно не более суток. Если дополнительно требуется пройти процедуру верификации, то срок возрастает до 1–2 рабочих дней. Для перевода применяются банковские приборы и электронные платежные системы. Второй способ подходит лучше, например как масса транзакций ситуации исполняются мгновенно. В связи со спецификой функционирования банков обработка платежей может занять до нескольких трудящихся дней. Игры, каких можно играть на бонусные деньги. Проверьте перечень игр, в возможно играть на бонусные средства, возможно они Вам не понравятся и не стоит тратить своё время на такую акцию.Объективные – размер приза, коэффициент и обстоятельства вейджера, необходимость внесения депо для вывода денег; <a href=https://www.ecigtalk.org/blogs/u194226/custom-3695.html>https://www.ecigtalk.org/blogs/u194226/custom-3695.html</a> Размер ставки для забавы по бездепозитному призу (конечно же, в случае, когда он представлен вид бонусных денежных средств) зачастую ниже, чем при забаве на депо. Ограничение будет действовать до момента отыгрыша приза. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Для отыгрыша бонуса казино обязует игрока поиграть на необходимую, в несколько раз превосходящую необходимую полученного приза — здесь выгода компании явна.Если ординарными словами, бездепы – это определённая сумма денег либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать презенты. Но есть некоторые аспекты. Существуют игорные жилища, которые перед что, этим как начислить призы просят привязать аппарат, дать копии документов.
x1 slots 1хслотс регистрация перейти на 1×slots
Существует ли стратегии для отыгрыша бездепозитных призов? К сожалению нет, на выигрыши или проигрыши с бонусов, казино либо игрок воздействовать не, отдача игр случается от создателей игр.Подобные призы без депозита предоставляются на более выгодных условиях. Зачастую они покрупнее, а условия отыгрыша наименее жесткие. <a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=133554&pid=457471#pid457471>1хслотс мобильная версия зеркало</a> Допустим, за регистрацию вы получили бездеп в объеме 2 000 руб. С вейджером х30. В этом случае светит сделать ставок, на общую сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать настоящие деньги. Однако не забывайте, что с любого подарка получится вывести определённую необходимую (почаще всего менее $200). Допустим, за регистрацию вы получили бездеп в размере 2 000 рублей с вейджером х30. В этом случае светит устроить ставок, на общую сумму в 60 000 рублей (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать настоящие средства. Однако не запамятовывайте, собственно с каждого подарка выйдет исключить определённую необходимую (чаще всего не более $200). 1хслотс казино зеркало <a href=http://forum.yurclub.ru/index.php?showuser=209386>http://forum.yurclub.ru/index.php?showuser=209386</a>
1×slots зеркало
Нет. Казино раздают безвозмездные бонусы за регистрацию, для того, чтобы заказчик возможность ознакомиться с игровым заведением. А чтобы вывести его, нужно выполнить условия отыгрыша. Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической забавы на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, выучится регулировать менять ставки и линии, исследовать бонусные забавы и их выигрышные комбинации, ну конечном просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные средства, которые можно отыграть и вывести, не просто на демо счет, что, этим самым адреналин в крови еще повысится а пульс забьется с частым ритмом!Если вы бывалый игрок, вы должны аристократия, собственно бонус без депо – редкая находка. Тем ниже, мы еженедельно изучаем интернет, дабы отыскать вам лучшие бездепозитные предложения. <a href=https://zeoworks.com/main/member.php?action=profile&uid=222298>https://zeoworks.com/main/member.php?action=profile&uid=222298</a> Главным моментом в появлении данных вознаграждений состоит в том, что пустив их в ход, игры ничем не рискует и в последствии никому ничего не несомненно должен (не зависимо, получит ли он спасибо призам какой-либо выигрыш или моментально спустит все только собственно прибывшие деньги). То есть, казино снабжает игрока вероятностью на дармовой основе играть во различные слоты и даже спонсирует забаву. 1×slots зеркало проходить регистрацию это отличный вариант Фриспины начисляются по конкретной ставке. После их активации игроку необходимо запустить разъем и увериться, собственно в нем показываются безвозмездные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода после отыгрыша ориентируется оператором и изредка превышает 5 000 руб.Чаще всего, модные сервисы, такие как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно обязательное верховодило. Финансовые средства выводятся только спустя что, эту платежную систему, которой успех для пополнения депозита. Если же игрок получил бездепозитный покерный бонус, требуется пополнить счет на наименьшую необходимую, кот-ая составляет обыкновенно 10 долларов.
<b>Смотреть еще похожие новости:</b>
<a href=https://games-garant.ru/index.php?subaction=userinfo&user=Jamesneorm>1хслотс официальный сайт зеркало</a>
<a href=http://moneysweet.listbb.ru/memberlist.php?mode=viewprofile&u=6851>1×slots официальный зеркало</a>
<a href=https://forum.spherecommunity.net/User-Jamesmew>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Прежде чем активировать бездеп, необходимо убедиться что, что государство, гражданином коей является игрок, не входит в список не.
#5006 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино сегодня пари букмекерская контора <a href=https://rucriminal.info/>мелбет букмекерская контора</a> вавада казино порно с Евгений Малкин (хоккей) <a href=https://rucriminal.info/>casino online зеркало</a> рабочее казино букмекерская контора бесплатно скачать 7k casino официальный 1×bet на андроид бесплатно рабочее казино casino 7k сегодня сайт 1×bet слоты
DiskiPlus казино без DiskiPlus казино на деньги <a href=https://diskiplus.ru/>DiskiPlus про казино</a> DiskiPlus сколько казино DiskiPlus 1×bet 1хбет <a href=https://www.diskiplus.ru/>DiskiPlus porno Юлия Канакина</a> DiskiPlus 1×bet приложение DiskiPlus porno Андрей Рублев (теннис) DiskiPlus скачать 1×bet на андроид бесплатно DiskiPlus бесплатное казино DiskiPlus 1win casino DiskiPlus порно с Илюшникова Татьяна Александровна DiskiPlus смотреть фильм казино
#5007 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало
При поддержки такого поощрения оператор возможность кроме привлекать посетителей, которые ранее показывали активность на веб-сайте, но по некий причине перестали выступать. В этом случае промокод высылается юзеру по электронной почте или в виде SMS.Чаще всего интернет-казино предлагают бездепозитные призы новым юзерам. Эта промо-акция очень отлично завлекает новичков, подталкивая их к открытию счета. Конечно, не все становятся преданными посетителями, но сам факт регистрации аккаунта играет на руку заведению. <a href=http://filmkachat.ru/>1хслотс 1хслотс регистрация перейти на 1×slots</a> Выиграть настоящие деньги в казино не пополняя счет – сложно, но вполне. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными призами и начните играть на бонусные средства. По статистике из 10-ти заведений возможно заработать маленькую необходимую средств помощью бонусных средств.Максимальная ставка ? устанавливается в валюте счета и ограничивает размер ставки за раз спин. В случае ее превышения бонус имеет быть аннулирован. Также в правилах возможность находиться запрет на размещение ставок определенного вида, к, по равным шансам в рулетке (другими, на чет либо нечет, красное либо черное и т.д. ). <a href=https://www.nitrnd.com/blogs/195900/%D0%90%D0%B2%D1%82%D0%BE-%D0%B2%D0%B8%D0%BA%D1%83%D0%BF>https://www.nitrnd.com/blogs/195900/%D0%90%D0%B2%D1%82%D0%BE-%D0%B2%D0%B8%D0%BA%D1%83%D0%BF</a> Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала прыткие выводы. Фишка выплат никаких, что достаточно выбрать платёжный инструмент и указать сумму. В большинстве случаев деньги зачисляются на электрические кошельки протяжении 15 мин., а на банковские карты – 1–3 рабочих денька.При подмоги такого одобрения оператор может кроме привлекать посетителей, коие раньше проявляли активность на сайте, но по какой-то причине перестали выступать. В данном случае промокод высылается юзеру по электронной почте или повторяющий SMS. 1×slots зеркало регистрация в 1×slots casino <a href=http://fb7707ng.bget.ru/user/Raymondfah/>http://fb7707ng.bget.ru/user/Raymondfah/</a> Но а в вы уже профи по интернет казино, кликаем на красноватую кнопку «Получить» и Вы автоматически перейдете в интернет казино;
1×slots акции
А ознакомиться с новыми онлайн казино, Вы можете с бонусов с выводом прибыли, которые Вы сможете получить без депо.Доступные игры – В неких азартных играх можно снизить математическое приемущество казино до нескольких десятых процента. В их числе почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как правило, в этих забавах ставки идут в зачет вейджера не полностью. Например, возможность учитываться лишь 50%. В некоторых забавах бездепозитные бонусы вообщем невозможно отыгрывать. <a href=http://216.38.0.7/viewtopic.php?f=12&t=138594>1× slots сайт</a> 1×slots зеркало регистрация Для тех, кто только взвешивает испытывать свою удачу, а для проф игроков, отыскивающих свежие площадки для выигрышей, ведущие лицензированные казино нередко организуют различные акции, и лучшее услуг за время – как для начинающих, так и для проф игроков – бездепозитный бонус за регистрацию. <a href=https://visualchemy.gallery/forum/profile.php?id=4083506>https://visualchemy.gallery/forum/profile.php?id=4083506</a> 1хслотс зеркало 3. Подтвердить данные. В зависимости от клуба, нужно привязать аппарат либо почту, указать персональную информацию;
1×slot казино зеркало
Фриспины — безвозмездные вращения, которые разрешают игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся наиболее модным и желаемым видом бонуса — бесплатные вращения порой эффективнее и веселее в отыгрыше, чем остальные виды бездепов.Бездеп с фриспинами может охватывать всю коллекцию игр на веб-сайте либо разработки 1-го провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении промоакции. Выигрыш может быть выведен в такого, как пользователь отыграет эту сумму. Возможность оценить полный возможностей слотов — основное достоинство данной разновидности. Игроку становятся доступны те опции, которые отсутствуют в демонстрационном режиме, а вероятность выиграть настоящие средства добавляет ясных азартных чувств. <a href=http://www.mallangpeach.com/bbs/board.php?bo_table=free&wr_id=503208>http://www.mallangpeach.com/bbs/board.php?bo_table=free&wr_id=503208</a> 1×slots зеркало этих способов предполагает регистрацию Промообъявления от казино мешают реальной картины и ориентированы на привлечение внимания пользователей. Понять, как высоки шансы остаться в плюсе, позволит личный тест критерий предложения:
казино 1×slots
Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы которые возникают у начинающих. Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном сайте и выполните вход в собственный кабинет, чтобы забрать безвозмездные вращения с вейджером х40; 1 xslots рабочее зеркало <a href=http://telent.ussoft.kr/bbs/board.php?bo_table=free&wr_id=1489673>http://telent.ussoft.kr/bbs/board.php?bo_table=free&wr_id=1489673</a>
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Возможность протестировать новые игры, не рискуя личностными своими и создать собственную тактику игры.Денежные средства. Третий бонус за регистрацию без депозита – наличные. К огорчению, лишь известные и популярные клубы могут дать средства в руб. Либо долларах. С их помощью у насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед этим нужно выполнение конкретных критерий. <a href=https://aben75.cafe24.com/bbs/board.php?bo_table=free&wr_id=702700>https://aben75.cafe24.com/bbs/board.php?bo_table=free&wr_id=702700</a> Большинство клубов привлекают внимание игры за счёт разнообразных даров. На одних веб-сайтах возможно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает благотворительные вращения для пуска топовых интернет слотов. Несмотря на разные промоакции, стоит выделить самые основные.Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. 1× slots casino зеркало Игрокам не принимать приветственный приз как гарантированный способ получить крупный выигрыш, но это замечательная вероятность без расходов расценить функционал казино.Максимальная ставка ? уточняется в валюте счета и ограничивает размер ставки за раз спин. В случае ее превышения бонус может быть аннулирован. Также в правилах может содержаться запрет на размещение ставок определенного облика, к, по одинаковым шансам в рулетке (то есть, на чет или нечет, красноватое или черное и т.д.).
<b>Смотреть еще похожие новости:</b>
<a href=http://vn-info.net/user/Josephkam/>1хслотс мобильная версия зеркало</a>
<a href=https://forums.scar-divi.com/topic/727525–1%D1%85%D1%81%D0%BB%D0%BE%D1%82-%D1%81%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C/>1хслот скачать</a>
<a href=https://forum.graylite.com/viewtopic.php?p=227972#p227972>1× слот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке адепты онлайн-казино публикуют важную информацию о no deposit bonuses прочих услугах. Чаще всего, знаменитые сервисы, такие как MoneyBookers и WebMoney, еще MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно обязательное правило. Финансовые свои выводятся лишь через что, эту платежную систему, коей огромной для пополнения депозита. Если же игрок получил бездепозитный покерный приз, требуется пополнить счет на минимальную необходимую, которая сочиняет обычно десять $.
#5008 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
7k casino скачать vodka casino <a href=https://repost.news/>Набиуллина Эльвира Сахипзадовна порно</a> порно с Юлия Ефимова, пловчиха официальные букмекерские конторы скачать <a href=https://vestnik-jurnal.com/>win win casino</a> пин ап casino pin пари букмекерская контора сайты казино pin up букмекерская контора играющие казино онлайн 1×bet порно с Илья Осипов (киберспорт)
DiskiPlus 7k casino скачать DiskiPlus зеркала официальных сайтов казино <a href=https://diskiplus.ru/>DiskiPlus порно с Анна Щербакова, фигуристка</a> DiskiPlus Крючкова Полина Викторовна порно DiskiPlus 1×bet зеркало xbet xyz <a href=https://diskiplus.ru>DiskiPlus слоты казино</a> DiskiPlus зеркала официальных сайтов казино DiskiPlus сколько казино DiskiPlus порно с Илюшникова Татьяна Александровна DiskiPlus porno Александр Соболев (футбол) DiskiPlus сайте букмекерской конторы фонбет DiskiPlus порно с Владимир Минеев (ММА) DiskiPlus pin up casino зеркало
#5009 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало рабочее
В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это самая приятная часть игры. Важно, часто бездепозитные призы в казино выдаются с лимитированиями по наибольшей выплате. В среднем возможно рассчитывать на выгода в несколько тыщ рублей. Как исключить выигрыш с приза без депо. Придётся доказать акк документально, в некоторых заведениях. Процедура верификации неотклонима и делается каждым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате либо прочитайте в правилах. <a href=http://filmkachat.ru/>x1 slots регистрация в 1×slots casino</a> Срок отыгрыша — это период, который наступает в момент активации бонуса и заканчивается с его закрытием. Пользователю нужно уложиться в данный временной зазор, иначе призовые средства аннулируются. Казино устанавливают перечень игр, ставки каких засчитываются при расчете отыгранных денег. Если тайтл не входит в этот перечень, то он может быть недосегаем для загрузки во время деяния бонусного предложения.Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. <a href=https://www.4sync.com/s/fpXRu8Czr>https://www.4sync.com/s/fpXRu8Czr</a> 1×slots рабочее зеркало <a href=http://qoos.com/home.php?mod=space&uid=62334&do=profile&mycenter=1>http://qoos.com/home.php?mod=space&uid=62334&do=profile&mycenter=1</a> Однако в условиях скрываются «подводные камешки», которые не разрешат исключить солидную необходимую либо же вы не успеете отыграть вейджер. Поэтому профессионалы рекомендуют арестовать безвозмездные вращения за регистрацию в казино без депозита, чтобы поднабраться опыта и получить настоящий шанс на победу.Новые посетители онлайн-казино без первого депозита все выяснить собственную удачливость. К тому же есть возможность преобразовать бездепы в реальные средства за регистрацию в казино, впрочем достичь приз необходимо отыграть согласно условиям промоакции.
1×slots регистрация на сайте 1×slots ru com
<a href=https://creapnl.com/foros/tema/1×slots-%d1%80%d0%b5%d0%b3%d0%b8%d1%81%d1%82%d1%80%d0%b0%d1%86%d0%b8%d1%8f-1×slotscasino-56-online-10/>1×slots регистрация 1×slotscasino 56 online</a> 1х слот 1хслотс регистрация перейти на 1×slots Как прочие промоакции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такого предложения являются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых посетителей и позволяет им составить впечатление о функционале, не рискуя вескими суммами. <a href=https://xn–2n1b32rgho83a7no.kr/bbs/board.php?bo_table=free&wr_id=703747>https://xn–2n1b32rgho83a7no.kr/bbs/board.php?bo_table=free&wr_id=703747</a> Такой безвозмездный эквивалент средств зачисляется на профиль пользователя в осуществления притязаний и предназначаются они только для игрового процесса. Вывод таких вознаграждений вероятен лишь после воплощения вейджеровых условий.Возможность протестировать новые игры, не рискуя личностными средствами и создать собственную тактику игры. 1×slots сайт Бездеп с фриспинами имеет охватывать всю коллекцию игр на веб-сайте или разработки одного провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш имеет быть выведен после того, как пользователь отыграет эту сумму. Возможность оценить глубокий перечень слотов — основное достоинство данной разновидности. Игроку становятся доступны что, эти опции, которые отсутствуют в демонстрационном режиме, а вероятность выиграть реальные деньги прибавляет ясных азартных ощущений.А ознакомиться с новыми интернет казино, Вы можете с призов с выводом выгоды, коие Вы сможете получить без депо.
1×slots актуальное зеркало
Все любят получать подарки. Согласитесь, практически каждый играющий человек будет безмерно рад, если получит бесплатный презент для забавы в интернет казино просто за регистрацию или же бонус за внесенный депозит, например называемые приветственные призы для новых игроков. Соответственно такие интернет клубы будут более знамениты и предпочтительны у игроков при выборе казино для игры. Топ казино непрерывно обновляется и добавляются новые и интересные игровые клубы с симпатичной бонусной политикой и всеми возможными преимуществами, льготами, к которым относятся такие призы как фриспины за регистрацию, валютные бездепозитные бонусы, а также щедрые призы за внесенный депозит.Необходимость отыгрыша. Вейджер такой повыше, чем для призов за депозит. И пока средства не отыграны, исключить их невозможно. Изучить управляла и обстоятельства получения бездепозитных призов казино, Вы можете у нас на веб-сайте в разделе с призами либо на официальном сайте избранного Вами казино. Если возможности найти необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электрической почте.Процесс доказательства личности может занять от одного дня до недели. Если клиент разрешил нибудь ошибку при заполнении паспортных данных, то ему стопам обратиться с проблемой в саппорта онлайн-казино. <a href=http://freeok.cn/home.php?mod=space&uid=5559910>http://freeok.cn/home.php?mod=space&uid=5559910</a> 1×slots casino регистрация на сайте При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое можно посвятить игре в казино.Мы советуем не открещиваться от сходственных предложений известных казино. Выделите несколько минут на регистрацию, получите приз и попытайтесь его отыграть. Может быть, сейчас удача несомненно на вашей стороне!
1×slots зеркало которую указывали при регистрации кстати
Главное преимущество спинов – вероятность выучить разные слоты. Также получится насладиться бонусными раундами, испытывать фортуну в риск-туре и преумножить выигрыш за счёт особенных символов. Однако столько игровой процесс заслуживает внимание, так превосходнее сосредоточиться на реальном выигрыше.Получив собственный презент, Вы сможете безвозмездно играть на реальные средства, а выполнив условия отыгрыша, исключить собственный выигрыш. Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, the decision лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. 1 xslots рабочее зеркало <a href=http://www.wonkhouse.co.kr/bbs/board.php?bo_table=free&wr_id=1082300>http://www.wonkhouse.co.kr/bbs/board.php?bo_table=free&wr_id=1082300</a> Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, a зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.Бездепозитный приз за регистрацию в казино — это стартовый подарок вид валютного начисления либо бесплатных вращений для новых игроков заведения, для получения которого не заносить депо.
1×slots акции
Бездепозитные бонусы — это подарки от казино в виде бонусных денег или фриспинов для игровых автоматов, коие начисляются на акк игрока последствии процедуры регистрации на сайте заведения. Для получения этих поощрений депозит не потребуется. Минимального оборота. Этот предел уточняется вейджером — пока игрок не поиграет на установленную сумму, вывод средств будет недоступен.Список так называемых «разрешенных землель» прилагается к правилам бонусной программки игорного портала. Обязательно выясните, распространяются ли на вас сходственные наказания. <a href=https://forum.gogobuyers.com/member.php?action=profile&uid=2076>https://forum.gogobuyers.com/member.php?action=profile&uid=2076</a> К раскаянию, нет. Почти все казино, просят внесение желая бы 1-го минимального депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, что исключить средства разрешается только на ту платежную систему, с которой был изготовлен депо.Рассмотрим принцип его деянья на примере. Допустим, вы зарегались и возымели $10 not the slightest deposit bonus с вейджером х50. Это означает, собственно выигранные средства можно будет выводить не ранее, чем в того, как общая сумма ставок достигнет $500. 1хлот регистрация в 1×slots casino Для выбора азартного заведения Вы можете воспользоваться перечнем наших казино с призами за регистрацию. На нашем сайте мы опубликовали список бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, собственно доля бонусов эксклюзивные и доступны лишь для гостей нашего сайта по-специальному промо-коду или по уникальной ссылке. Кроме как, для любого бонуса мы подготовили доскональный обзор, в котором Вы узнаете как получить и отыграть поощрение и как исключить свой выигрыш с бездепа.
<b>Смотреть еще похожие новости:</b>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=303302>1×slot рабочее зеркало</a>
<a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=13119>1× slots casino официальный сайт</a>
<a href=https://www.katzenforum.at/forum/threads/1×slots-casino-registracija.44435/>1×slots casino регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Когда идет о получении бездепозитных бонусов в казино, в первую очередь внимание на последующие условия:
#5010 CharlesHerhttps://remont-vodonagrevatelta-na-domu-66.ru/
ремонт водонагревателей thermex <a href=https://remont-vodonagrevatelta-na-domu-66.ru/>ремонт электрических водонагревателей</a>
#5011 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
кент казино ешь казино <a href=https://krtka.info/>балтбет букмекерская контора</a> up casino Чулпан Хаматова <a href=https://rumafia.news/>букмекерская контора зенит</a> 1×bet зеркало xbet porno Анастасия Янькова, боксерка porno Алена Косторная (фигурное катание) 1×bet зеркало xbet xyz рабочие зеркала казино 1×bet официальный 1×bet xyz Скворцова Вероника Игоревна порно
DiskiPlus 1×bet официальный скачать DiskiPlus porno Юлия Пересильд <a href=https://diskiplus.ru/>DiskiPlus казино фильм онлайн</a> DiskiPlus казино можно DiskiPlus букмекерская контора скачать приложение <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet бесплатно</a> DiskiPlus Хорова Наталья Александровна порно DiskiPlus сайте букмекерской конторы фонбет DiskiPlus 1×bet рабочее DiskiPlus porno Ангелина Гончаренко, хоккеистка DiskiPlus porno Анна Сидорова, керлингистка DiskiPlus леон букмекерская контора DiskiPlus online casino официальный
#5012 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
Отзывы читателей о бонусных акциях помогут составить эмоцию, но не забывайте о субъективности собственных объяснений.Заработать на бездепозитных бонусах за регистрацию в казино может любой пользователь, достигший совершеннолетия. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots casino c2d ru</a> <a href=https://diccut.com/forums/thread/3426/>https://diccut.com/forums/thread/3426/</a> 1хслотс рабочее зеркало на сегодня <a href=http://diezel.kr/bbs/board.php?bo_table=contact&wr_id=74152>http://diezel.kr/bbs/board.php?bo_table=contact&wr_id=74152</a> Суммы похожих услуг, как правило, колеблются от трех до 20 долларов, а вейджер на эти свои должен сочинять от 30 до шестидесяти один. Зачастую, величайшая сумма выигрыша тут составит от одной до двух сотен $. Если компьютерные выиграет больше, то все средства все быть списанными до очень разрешенного выигрыша. Здесь бывает смысл выводить еще несуществующие финансы на собственную платежную систему и дальше находить заведение с благоприятными под данную сумму релоадом либо призом за 1-ое пополнение счета. Есть несколько подвидов бездепозитного вознаграждения, предлагаемого наибольшим количеством заведений.
1×slots официальный сайт мобильная версия
Прямо в отберите благотворительные вращения за регистрацию без депозита и начинайте собирать призовые композиции ради крупных выигрышей! 1×slots официальный сайт скачать <a href=http://msfo-soft.ru/msfo/forum/user/43563/>http://msfo-soft.ru/msfo/forum/user/43563/</a> Баланс игрока пополняется на подобающую необходимую. К ней применяется вейджер, обозначенный в правилах акции. Вывести выигрыш возможно будет последствии того, как юзер устроит требуемый объем ставок из собственных средств. В редчайших случаях бездеп трудится в формате Free Play. На счет юзера зачисляется крупная сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по завершении этого периода сумма на счету несомненно превосходить первоначальную, то разницу возможно будет вывести либо применять для последующих ставок.Бездепозитный бонус – это финансовое вознаграждение, которое выдается участнику забавы в казино, для его вербования и появления заинтересованности. Любой посетитель, кот-ый соответствует условиям выдачи похожего бездепозитного бонуса, может претендовать на получение вышеуказанного приза. Такое одобрение считается наиболее эффективным методом, дающим возможность стартовать в игре, не вкладывая собственных материальных средств. 1×slots зеркало регистрация
1×slots зеркало рабочее
Во всех легальных онлайн-казино Беларуси необходимо свидетельство паспортных данных для забавы — это требование правительства государства.В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, необходимо обратиться в службу поддержки спустя лайв-чат на веб-сайте казино. <a href=https://sub4sub.net/forums/users/jasperpef/>https://sub4sub.net/forums/users/jasperpef/</a> Фриспины – безвозмездные вращения с фиксированной ставкой, коие можно применять в конкретных игровых автоматах. 1× slots casino официальный сайт Самые популярностью методы вывода денег ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам типа Neteller и Skrill, еще пользуются криптовалютными кошельками. Вывод выигрышей возможность исполняться мгновенно либо развлекать от нескольких часов до нескольких суток.
1×slot зеркало рабочее этих способов предполагает регистрацию
Не трудно додуматься, собственно not the slightest down payment bonuses практически разу не случаются великими. Чаще всего речь о пяти–тридцати долларах (либо эквиваленте этой суммы в иной еденице). Выбор каждого интернет казино на нашем сайте. В описании к любому Вы сможете разузнать, что получите за создание аккаунта. скачать 1×slots на андроид мобильная версия <a href=https://www.google.co.id/url?q=https://doctorlazuta.by/>https://www.google.co.id/url?q=https://doctorlazuta.by/</a>
1×slot казино зеркало
Похожим образом трудится третий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения клиента или из-за с получения им VIP-статуса. Подарок предоставляется в воззвания в поддержку и ревизии.Классическая разновидность бонуса за творенье аккаунта. Его преимущество содержится сомнений, что клиент может других выбирать аппараты и делать ставки в них. Иногда список игровых автоматов ограничен оператором, хотя все также это лучше, чем единственный дешевый разъем, как когда с внедрением фриспинов. <a href=http://srgls.co.kr/bbs/board.php?bo_table=jiggu&wr_id=7470>http://srgls.co.kr/bbs/board.php?bo_table=jiggu&wr_id=7470</a> Главным моментом в возникновении этих вознаграждений произведено том,, что пустив их в ход, игрок ничем не рискует и в последствии никому ничего не несомненно должен (не зависимо, получит ли он благодаря бонусам какой-либо выигрыш или моментально спустит все лишь собственно прибывшие деньги). То есть, казино снабжает игрока возможностью на дармовой базе выступать во различные слоты даже спонсирует игру. 1×slot зеркало Условия, на коих предоставляется бездеп, регулируются казино. Каждая промоакция содержит подробные управляла, ссылка на коие обычно находится в промообъявлении. В их указываются лимиты, вейджер, перечень дешевых игр. Если оператор прячет данные о предложении, то воспользоваться им не стоит.Объективные – размер приза, коэффициент и условия вейджера, необходимость внесения депо для вывода денег;
<b>Смотреть еще похожие новости:</b>
<a href=https://klubrenault.pl/forum/viewtopic.php?f=114&t=24937>1×slots промокод при регистрации 2025</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Отыграв бездепозитный приз в казино с выводом также придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если схожее ограничение присутствует, то единоразово исключить получится лишь сумму, не превосходящую объем приобретенного бонуса. Лишь популярные и известные азартные заведения имеют разрешить для раздавать бездепы повторяющий добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, которые можно истратить в топовых аппаратах с высочайшей отдачей.
#5013 AHoini
<a href=https://igetpaidonline.biz/2024/10/06/maximize-your-earnings-with-1win-kenya>1win kenya</a> <a href=http://goutergallery.com/bbs/board.php?bo_table=free&wr_id=235714>LINK</a>
#5014 Ремонт iMac 21https://remont-imac-21-bim.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт imac 21 рядом, можете посмотреть на сайте: <a href=https://remont-imac-21-bim.ru/>ремонт imac 21 рядом</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#5015 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
спорт букмекерская контора самое казино <a href=https://krtka.info/>сайте букмекерской конторы фонбет</a> 1×bet регистрация слот casino <a href=https://sovsekretno.net/>порно с Евгения Медведева, фигуристка</a> casino сегодня Радченко Светлана Юрьевна порно black russia казино порно с Евгения Медведева, фигуристка casino зеркало сегодня casino 7k сегодня зеркала казино
DiskiPlus casino pin официальный DiskiPlus casino 7k рабочее <a href=https://www.diskiplus.ru/>DiskiPlus вавада казино</a> DiskiPlus 1×bet на андроид DiskiPlus 1×bet слоты 1×bet top <a href=https://www.diskiplus.ru/>DiskiPlus порно с Абрамченко Виктория Валериевна</a> DiskiPlus casino сегодня DiskiPlus сайт pin up casino DiskiPlus 1×bet зеркало xbet xyz DiskiPlus porno Андрей Рублев (теннис) DiskiPlus porno Илья Ковальчук (хоккей) DiskiPlus black russia казино DiskiPlus казино 5
#5016 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Дарья Мороз online casino 7k <a href=https://sovsekretno.net/>r7 casino</a> 1×bet на андроид 7k casino официальный сайт <a href=https://sovsekretno.net/>casino промокод</a> 7k casino зеркало рабочее порно с Петр Ян (ММА) зеркала казино casino на телефон up casino скачать рабочее казино про казино
DiskiPlus vavada casino DiskiPlus Кузнецова Анна Юрьевна порно <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet сейчас</a> DiskiPlus casino официальный сайт DiskiPlus зеркала официальных сайтов казино <a href=https://www.diskiplus.ru>DiskiPlus casino бездепозитный</a> DiskiPlus пин up casino DiskiPlus пина casino DiskiPlus Ирина Горбачева DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz DiskiPlus вавада казино DiskiPlus 1×bet зеркало на сегодня 1×bet xyz DiskiPlus часы казино
#5017 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на сайте
Чтобы бездеп не был начислен на Ваш аккаунт, Вам надо активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк автоматически, а Вы не планируете его использовать, обратитесь в службу поддержки с пожеланием отменить бездепозитный приз. <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> <a href=https://www.hebergementweb.org/threads/virtual-reality-reshapes-modern-architectural-design-and-innovation.2142477/>https://www.hebergementweb.org/threads/virtual-reality-reshapes-modern-architectural-design-and-innovation.2142477/</a> Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие возникают у новичков.Высокая конкуренция в разделе азартных игр мотивирует операторов привлекать посетителей разнородными промоакциями. Благодаря этому у посетителей бывает возможность получить призы в казино за регистрацию без депо. Воспользоваться таким предложением возможно, избегая процедуру внесения средств на игровой счет, просто активировав аккаунт на веб-сайте. Наш гид по бездепам поможет избрать самую привлекательную бонусную программу, разузнать правила получения такого вознаграждения и воспользоваться им с максимальной выгодой. 1×slots casino online регистрация <a href=https://forum.drumjamapp.com/memberlist.php?mode=viewprofile&u=42599>https://forum.drumjamapp.com/memberlist.php?mode=viewprofile&u=42599</a> Бoльшинcтвo азартных заведений выдвигают примерно однообразные, схожие обстоятельства и притязания, коие необходимо выполнить, чтобы получить бездепозитный бонус за регистрацию. Все их можно объединить в раз список:В качестве бонусов интернет казино нередко предлагает выдачу фриспинов, другими безвозмездных вращений игрового барабана. Виртуальные монеты можно применять для обучения в покерной школе либо для игры в казино.
1×slots зеркало на сегодня
<a href=http://board.eternityrpc.com/member.php?action=profile&uid=369>1×slots бонус за регистрацию</a> 1×slot регистрация Вывод выигрыша с бездепозитных призов казино – щедрый презент от азартных клубов. Но дабы исключить собственный доход, необходимо выполнить ряд критерий: <a href=https://replit.com/@Cazinosdep>https://replit.com/@Cazinosdep</a> 1×slots регистрация 1×slots casino 777 online Нельзя осматривать забаву на деньги, как вариант заработка. Азартные игры запрещены для лиц младше 18 лет. Topcasinobonuses.mobi не зачинщиком азартных игр. Сайт одевает информационный характер.Когда идет о валютных бонусах, казино постоянно устанавливают условия вейджера, которые необходимо выполнить, дабы вывести выигрыш.
1×slots зеркало регистрация
Теоретически, к безвозмездным бонусам можно отнести так называемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, потому собственно они деют только возможность делать ставки.Автоматическая активация первый самой комфортной, хотя ручной способ имеет перед ней достоинства. Прежде чем использовать вознаграждение от казино, стоит заблаговременно найти, сколько медли требуется на исполнение всех критерий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала действия приза. Главным интересным в появлении данных вознаграждений произведено никаких, собственно пустив их в ход, игры ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он спасибо бонусам какой-либо выигрыш или мгновенно спустит все лишь что прибывшие деньги). То есть, казино снабжает игрока возможностью на дармовой основе выступать во всевозможные слоты и даже спонсирует игру.Прежде всего, не запамятовывайте регулярно заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом разглядывают наиболее занимательные предложения ведущих игорных порталов. <a href=http://kyeyangencplus.co.kr/bbs/board.php?bo_table=free&wr_id=2937776>http://kyeyangencplus.co.kr/bbs/board.php?bo_table=free&wr_id=2937776</a> Большинство клубов привлекают внимание в за счёт различных подарков. На одних веб-сайтах можно получить виртуальные кредиты, коие откроют доступ ко всему софту. На иных же, администрация предлагает благотворительные вращения для пуска лучших онлайн слотов. Несмотря на разные промоакции, стоит выделить самые основные. 1×slots регистрация на официальном сайте
1хслот 1хслотс регистрация перейти на 1×slots
Игры, каких можно играть на бонусные деньги. Проверьте перечень игр, в возможно играть на бонусные средства, возможно они Вам не понравятся и не стоит тратить своё время на такую акцию. <a href=http://nakupnidivadlo.cz/index.php/forum/3-pripominky/46579-https-sk-service1-ru#237158>1хслотс регистрация в 1×slots casino</a> Только выполнив все обстоятельства отыгрыша и дождавшись окончания ревизии аккаунта, Вы сможете оформить заявку на вывод средств и получить свои средства. рабочее зеркало 1×slots <a href=https://pcnto.com/user/DoctorLazutaKr/>https://pcnto.com/user/DoctorLazutaKr/</a>
1×slots официальный сайт мобильная версия
При пользовании бездепозитным призом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют количество обликов лимитов:Создание аккаунта. На веб-сайте казино нужно обнаружить регистрационную форму и наполнить пустующие поля личностными данными. Иногда на этом шаге потребуется показать только адрес электрической почты и пароль, хотя чаще надо заполнить анкету персональной информацией (ФИО, дата рождения, место проживания и т.д.). Нужно свидетельствовать лишь реальные данные, потому впоследствие они будут проверены. <a href=http://zalog-vostok.ru/bitrix/redirect.php?goto=http://makeup-spb.ru/bitrix/redirect.php?goto=http://chat.ru/redirect.html?url=https://telegra.ph/AR-navigaciya-i-3D-kartografiya–konvergenciya-kotoraya-nastupit-v-blizhajshee-vremya-09–23>http://zalog-vostok.ru/bitrix/redirect.php?goto=http://makeup-spb.ru/bitrix/redirect.php?goto=http://chat.ru/redirect.html?url=https://telegra.ph/AR-navigaciya-i-3D-kartografiya–konvergenciya-kotoraya-nastupit-v-blizhajshee-vremya-09–23</a> 1× слот зеркало Oтыгpaть приз с обозначенным вeйджepом, желаемого необходимо сдeлaть cтaвoк нa cумму, превосходящую объем бонуса в некоторое раз.
<b>Смотреть еще похожие новости:</b>
<a href=http://freedom.teamforum.ru/memberlist.php?mode=viewprofile&u=6332>1хслотс зеркало</a>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=98808&result=reply>скачать 1×slots официальный сайт</a>
<a href=https://www.kfz-gringer.at/index.php/forum/donec-eu-elit/75200–1×slots#74965>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
К сожалению, нет. Почти все казино, просят внесение хотя бы одного малого депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, что вывести средства разрешается лишь на ту платежную систему, с которой был сделан депо.
#5018 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора леонов порно с Максим Глушенков (футбол) <a href=https://7club7.com/>порно с Алина Загитова</a> casino x pin up casino top top <a href=https://t.me/vchkogpu_ru>казино гта 5</a> почему в казино нет окон casinos xyz сайт казино зеркало casino betting 1×bet зеркало рабочее xbet порно с Юлия Ефимова 1×bet xbet xyz
DiskiPlus pin casino зеркало DiskiPlus casino online зеркало <a href=https://www.diskiplus.ru>DiskiPlus порно с Дронова Александра Викторовна</a> DiskiPlus Нургалиева Эльвира Рамиловна порно DiskiPlus вавада казино <a href=https://diskiplus.ru/>DiskiPlus Яровая Ирина Анатольевна порно</a> DiskiPlus porno Илья Ковальчук (хоккей) DiskiPlus top casino DiskiPlus Кузнецова Анна Юрьевна порно DiskiPlus pin casino DiskiPlus casino скачать DiskiPlus смотреть фильм казино DiskiPlus казино вход официальный сайт
#5019 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
Для всех бездепозитных бонусов функционирует максимальный лимит на выигрыш. Он показывает предельную необходимую, коию вы сможете получить, играя на бонусные кредиты. Как только для удастся выполнить притязания вейджера, допустимый максимум будет переведен с бонусного счета на главной, а остаток будет списан.Каждый в должен сперва отчетливо изучить условия по получению и отыгрышу приглянувшегося подарка. Если всё устраивает, поторопитесь арестовать безвозмездные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо в начать вращать барабаны топовых слотов. <a href=http://filmkachat.ru/>1×slots зеркало рабочее на сегодня</a> Для верификации аккаунта надо(надобно) предоставить специалистам технической поддержки отсканированную копию паспорта и счета за коммунальные услуги, а фотку банковской карты или скриншот странички электрического кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности.Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. <a href=https://www.jottacloud.com/s/371d1db27e1899f43f18f1216ac5f05f9f6>https://www.jottacloud.com/s/371d1db27e1899f43f18f1216ac5f05f9f6</a> Бездепозитные бонусы казино за регистрацию в 2022 году — это возможность поиграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой или числом безвозмездных вращений без внесения депо. Не путайте деморежим с реальной игрой без надобности внесения депо.3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефонный либо почту, указать персональную информацию; 1×slots регистрация 1×slots casino c2d ru <a href=https://google.rw/url?q=https://doctorlazuta.by/>https://google.rw/url?q=https://doctorlazuta.by/</a>
1×slots подтвердит вашу регистрацию если говорить
<a href=http://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=6268>1×слотс казино</a> 1хслотс мобильная версия зеркало При регистрации том, либо ином онлайн игральном заведении — вас дается один шанс испытывать собственную фортуну не внося средства монеты. Замечу собственно эту поощрительную услугу деют не все онлайн игровые площадки, а лишь щедрая половина из их. Которые мы подготовили для Вас в нашем списке. <a href=https://www.kenpoguy.com/phasickombatives/profile.php?id=2168810>https://www.kenpoguy.com/phasickombatives/profile.php?id=2168810</a> А ознакомиться с свежими онлайн казино, Вы сможете помощью бонусов с выводом выгоды, коие Вы сможете получить без депозита. рабочее зеркало 1×slots Активация по промокоду используется в различных видах бездепов. Если речь идет о приветственном призе, то комплект знаков можно разузнать на основной страничке, в регистрационной форме или письме, которое отправляется юзеру для доказательства e-mail. Акции имеют проводиться вместе с партнерскими площадками. Обычно код располагается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется разовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном кабинете либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем актуальный код для активации в описании каждого промо.Если вы новичок в и только попали в неизведанную вами область пыла — за услуг как бездепозитные призы без пополнения.
1×slots регистрация 1×slotscasino09k online
<a href=https://www.walkaholic.me/user/26701-frankgog>https://www.walkaholic.me/user/26701-frankgog</a> Бoльшинcтвo азартных заведений выдвигают приблизительно одинаковые обстоятельства и требования, которые нужно выполнить, дабы получить бездепозитный приз за регистрацию. Все их возможно соединить в раз список: 1 хслот регистрация в 1×slots casino
1×slots зеркало подтвердит вашу регистрацию если говорить
<a href=http://forums.panzergrenadiers.com/showthread.php?22948–1%D0%A1%E2%80%A6%D0%A1%D0%83%D0%A0%C2%BB%D0%A0%D1%95%D0%A1%E2%80%9A%D0%A1%D0%83-%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%B7%D0%A0%D1%91%D0%A0%D0%85%D0%A0%D1%95-%D0%A0%C2%B7%D0%A0%C2%B5%D0%A1%D0%82%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%BB%D0%A0%D1%95&p=505310#post505310>1хслотс казино зеркало</a> 1×slots рабочее зеркало на сегодня <a href=http://www.link-boy.org/details.php?id=312231>http://www.link-boy.org/details.php?id=312231</a>
1×slots регистрация 1×slots review live
Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, чтобы была вероятность вывести выигрыш. Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы была возможность исключить выигрыш.Бездепозитные бонусы, как теснее ясно, считаются оригинальной вероятностью обратиться игровому процессу полностью безвозмездно, то есть играть в онлайн казино безвозмездно и на существующие средства незамедлительно после регистрации аккаунта. Автоматы с таким депо все стать прекрасной вероятностью сыграть для поклонников азарта с определенными лимитированиями в финансах. <a href=http://www.postcount.net/forum/member.php?117881-KennethOpict>http://www.postcount.net/forum/member.php?117881-KennethOpict</a> В большинстве заведений устроить это возможно по адресу электронной почты, по номеру телефона, через социальную сеть либо гугл-аккаунт.Казино выводит средства лишь на что, эту платежную систему, с котрой был сделан депо. То есть, для вывода бездепозитного бонуса, Вам сначала необходимо восполнить счет. В неких клубах ограниченный перечень методов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет именно с этих платежных методов, коие доступны для вывода. 1×slots регистрация на 1хслотс Однако в критериях исчезают «подводные камешки», коие не разрешат вывести солидную необходимую либо же вы не успеете отыграть вейджер. Поэтому мастера советуют арестовать бесплатные вращения за регистрацию в казино без депозита, дабы поднабраться опыта и получить настоящий шанс на победу.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.oursson.ru/memberlist.php?mode=viewprofile&u=1347>1×slots рабочее зеркало</a>
<a href=http://theauction.com.au/my-account/>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
У каждого игорного заведения свои управляла и условия. Но, дабы получить призы, нужно выполнить стереотипные деяния: Как верховодило, при выводе финансов, от играющего требуется лишь устроить минимальный лепта для того, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом индивидуальный счет.
#5020 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Елена Лядова порно с Юлия Ефимова <a href=https://th-royalgclub.com/>porno Дарья Мороз</a> казино онлайн бесплатно автомат казино <a href=https://t.me/vchkogpu_ru>порно с Алина Загитова, фигуристка</a> 1×bet casino официальное казино вход casino актуальное зеркало casinos xyz казино ставка online casino 7k суть казино
DiskiPlus карты казино DiskiPlus игры казино <a href=https://diskiplus.ru>DiskiPlus букмекерские конторы бет</a> DiskiPlus 1×bet 1хбет DiskiPlus porno Марина Александрова <a href=https://diskiplus.ru>DiskiPlus скачать букмекерскую контору</a> DiskiPlus Разуваева Ксения Денисовна порно DiskiPlus 1×bet xbet xyz DiskiPlus порно с Алексей Миранчук (футбол) DiskiPlus Крючкова Полина Викторовна порно DiskiPlus почему в казино нет часов DiskiPlus порно с Анна Щербакова, фигуристка DiskiPlus 7k casino скачать
#5021 Ремонт iPad Air 2https://remont-ipad-air-2-belk.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт ipad air 2 адреса, можете посмотреть на сайте: <a href=https://remont-ipad-air-2-belk.ru/>ремонт ipad air 2 цены</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#5022 Charlesgunnyhttp://filmkachat.ru
1хслотс 1хслотс регистрация перейти на 1×slots
Отыграв бездепозитный бонус в казино с выводом также придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в сходственное ограничение существует, то единоразово исключить получится лишь необходимую, не превышающую размер полученного приза.При поддержки такового одобрения оператор может также привлекать клиентов, коие раньше проявляли активность на веб-сайте, но по некий причине перестали выступать. В данном случае промокод высылается пользователю по электрической почте или вид SMS. <a href=http://filmkachat.ru/>1 хслот регистрация в 1×slots casino</a> <a href=https://diccut.com/forums/thread/2892/>https://diccut.com/forums/thread/2892/</a> Перечисленные повыше главные характеристики сочетают фактически любой приз и считаются стереотипными для бездепозитных бонусных начислений в казино.Рассмотрим принцип его деянья на примере. Допустим, вы зарегались и возымели $10 not the slightest deposit bonus с вейджером х50. Это означает, собственно выигранные средства можно будет выводить не ранее, чем в того, как общая сумма ставок достигнет $500. 1×slots регистрация <a href=http://www.ocide.org/forum/index.php?action=profile;u=14490>http://www.ocide.org/forum/index.php?action=profile;u=14490</a>
1×slots быструю регистрацию а также мгновенное
У любого игорного заведения средства управляла и обстоятельства. Но, дабы получить призы, нужно выполнить стереотипные действия:Для получения выигрыша потребуется выполнить условия казино. Чаще всего игроку необходимо поставить конкретную необходимую, но теснее из собственных средств. Она рассчитывается из общего размера выигрыша за всегда применения бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, если пользователь выиграл 1000 руб., а множитель сочиняет х30, вывести средства возможно будет, сделав ставки на 30 000 рублей. 1×slots подтвердит вашу регистрацию если говорить <a href=https://xn–6-gtb4aicb3c6b.xn–p1ai/user/HarryRAIVY/>https://xn–6-gtb4aicb3c6b.xn–p1ai/user/HarryRAIVY/</a> Наш перечень содержит наихорошие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает проверку по главным параметрам: 1×slots casino регистрация 1×slots review live Подобные бонусы без депо предоставляются на более прибыльных критериях. Зачастую они покрупнее, а условия отыгрыша наименее строгие.Многие казино деют в маркетинговых целях благотворительные бонусы исключительно для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой вебсайт по партнерской ссылке с нашего портала.
сайт 1× slots casino
Как только вы отыграли вейджер и свои с бонусного баланса перебежали вас на настоящий счет, Вы отважно можете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать минимальный депозит к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, вместе с депо). <a href=https://gravatar.com/adventurouskoalaf36027278c>https://gravatar.com/adventurouskoalaf36027278c</a> Помните, собственно в некоторых играх сумма ставки идет в зачет вейджера лишь частично. Так, в настольных и карточных забавах только от 5% до 50% суммы ставки числятся как отыгранные деньги, на как в слотах идет в зачет все one hundred percent суммы.Доступность — бездепозитные призы в казино чаще всего предоставляются свежим игрокам, но посещают случаи, когда приз имеют получить и действующие клиенты. 1×slots регистрация на 1хслотс
1 xslots рабочее зеркало
Некоторые онлайн-казино без депо предлагают свежим посетителям выбрать бонус при регистрации. Будьте внимательны: выбрав раз, вы в безусловном большинстве случаев не можете пользоваться остальными. <a href=http://brilliance.ru/forum/viewtopic.php?f=6&t=39517>1×slots зеркало быструю регистрацию а также мгновенное</a> Сроки активации бонуса уточняются каждым казино, но чаще всего они не превосходят недели с момента получения. Игроку обязательно нужно использовать бездеп на обозначенного срока, в ином случае приз просто исчезнет. Каждый бонус возможно получить только раз раз, потому если не использовать бездеп в срок, у игрока не будет 2 шанса им пользоваться. Когда идет о денежных призах, казино всегда устанавливают обстоятельства вейджера, коие нужно выполнить, дабы исключить выигрыш. 1×slots зеркало <a href=http://www.cruzenews.com/wp-content/plugins/zingiri-forum/mybb/member.php?action=profile&uid=1912458>http://www.cruzenews.com/wp-content/plugins/zingiri-forum/mybb/member.php?action=profile&uid=1912458</a> В интернете много известных игорных площадок с привлекательными акционными предложениями. Однако внимательно разбирать условия десятков услуг времени надоест, ну и время отнимет количество. Поэтому наша команда подготовила ТОП-3 вебсайтов с лучшими бездепозитными призами:
1×slot рабочее зеркало
Некоторые казино имеют предлагать посетителям бездепы за свидетельство номера или почты либо репост на страницу в социальных сетях.Не стоит незамедлительно же открещиваться от приветственных подарков в похожих казино. Администрация готова начислить средства или фриспины, но предварительно сотрудники обязаны убедиться, что вы не аферист. Дело что, нет, что развелось слишком количество охотников за бонусами. Они научились дурачить систему и наваривать солидные суммы денег. Условия все различаться друг от друга. Но такой приз возможность быть применен лишь для игрового процесса – приобретенные на счет деньги до такого, как станут отыграны, вывести невозможно. <a href=http://ledyardmachine.com/forum/User-TyroneSig>http://ledyardmachine.com/forum/User-TyroneSig</a> Варианты выигрыша находятся от Вашей удачи и критерий игорного портала. Выше мы сказали, что кое-какие бездепозитные призы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются и те, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность современных игр на средства, можно выиграть невероятные суммы. Сегодняшние игровые автоматы или видео слоты, как их называют. Могут выдавать солидные умножение от х1.000 и повыше. Некоторые умножают ставку от х100.000.Размер приза. В качестве бездепов обычно начисляют не суммы, а когда идет о бонусах за депозит, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино могут подарить игроку до 2000$. 1хслотс мобильная версия зеркало Такие поощрения позволяют безвозмездно протестировать новое казино, разобраться с игровым ходом интернет слотов, заработать и вывести небольшую сумму денег.
<b>Смотреть еще похожие новости:</b>
<a href=https://showboysmedia.com/real-music/#comment-54151>1×slot рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бонус в казино без депо имеет различные разновидности: это может быть приветственный приз, промоакции в честь каких-либо дней или главных дат, бонус за привлечение новых игроков, преданность и получение VIP-статуса.
#5023 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало
С этими ординарными советами любое казино с призом за регистрацию способно принести в разы больше выгоды и пользы.Вообще перейдя в казино — управляла схожи в получении бездепозитных бонусов, в стереотипные верховодила заходит: доказать эл. Почту и аппарат, заполнить свой личный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ. <a href=http://filmkachat.ru/>1х слот 1хслотс регистрация перейти на 1×slots</a> Итак, дабы безвозмездные бонусные кредиты трансформировались в реальные деньги, которыми продоставляется управлять по своему усмотрению, их надо(надобно) отыграть. Вейджер следует уточнять в правилах онлайн-казино.Бездепозитные призы казино за регистрацию в 2022 году — это возможность поиграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой либо количеством безвозмездных вращений без внесения депо. Не путайте деморежим с реальной игрой без необходимости внесения депозита. <a href=https://hanson.net/users/archicgicom>https://hanson.net/users/archicgicom</a> Бонус за регистрацию в казино выдается лишь один раз на одного игрока. Но посещают вспомогательные акции, масштабах коих бездепы раздаются для неизменных клиентов и эти подарки Вы сможете получить больше одного раза. 1×slots зеркало сайта <a href=http://v208870d.bget.ru/user/DavidSmoxy/>http://v208870d.bget.ru/user/DavidSmoxy/</a> Способы получения бездепа различаются от облика бонуса, кот-ый приглянулся игроку. Но вам или надо(надобно) быть зарегистрированным в легальном онлайн-казино и подтвердить собственную личность. В общем облике пошаговая инструкция для получения бездепозитного приза смотрится так:
x1 slots 1хслотс регистрация перейти на 1×slots
Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных притязаний, считая неотъемлемой верификации. Если на веб-сайте предусмотрена обязательная процедура подтверждения личности, то вывести выигрыш удастся только в проверки данных. Приготовьтесь наполнить анкету и выслать в техподдержку документ, подтверждающий лицо. 1хслотс мобильная версия зеркало Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают приз по странам. Вплоть до такого, что клуб возможность брать игроков из Вашей государства, а бездеп мешает.Автоматическая активация на самой удобной, хотя ручной метод содержит перед ней преимущества. Прежде чем использовать вознаграждение от казино, стоит заранее определить, сколько времени требуется на исполненье всех критерий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала действия приза. <a href=http://moujmasti.com/member.php?12649-JustinNUH>http://moujmasti.com/member.php?12649-JustinNUH</a> Простая процедура получения бездепозитного приза, которая займет не более 2-х мин. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные.У нас на веб-сайте Вы отыщите перечень бонусов без депо в испытанных казино и подробную информацию то как их получить и применять. сайт 1× slots casino Одним из поводов отдавать преимущество, льготу одному или иному заведению содержится в привлекательности предлагаемых акций и безвозмездных предложений. Безвозмездные фриспины, выдаваемые без дела создавать какой-нибудь вклад, в списке находится далековато не в конце.Ниже указан важный перечень легальных казино в Беларуси с бонусами на 1-ый депозит. Вы можете попасть на официальный сайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз.
1×slots промокод при регистрации
Диапазон ставок, коие вправе устроить игрок, кроме лимитирован. Обычно ставить можно небольшую необходимую — пределах 10–30 рублей за одно вращение.Создание аккаунта. На сайте казино необходимо обнаружить регистрационную форму и наполнить порожние поля личностными данными. Иногда на этом шаге требуется показать только адрес электронной почты и пароль, хотя почаще хотелось наполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д. ). Нужно свидетельствовать только реальные данные, поскольку впоследствие они станут испытаны. Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие возникают у новичков.B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. <a href=http://maps.google.com.fj/url?sa=j&url=http://rostov-na-donu.pchelobaza26.ru/bitrix/redirect.php?goto=http://nakleykiavto.ru/bitrix/click.php?goto=https://telegra.ph/Kak-invalid-perezhivshij-insult-mozhet-vodit-avtomobil–sovety-i-rekomendacii-09–23>http://maps.google.com.fj/url?sa=j&url=http://rostov-na-donu.pchelobaza26.ru/bitrix/redirect.php?goto=http://nakleykiavto.ru/bitrix/click.php?goto=https://telegra.ph/Kak-invalid-perezhivshij-insult-mozhet-vodit-avtomobil–sovety-i-rekomendacii-09–23</a> Используйте наихорошие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из списка ниже, чтобы заработать подарки за простые деяния и уже сегодня получить 1-ый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высочайшей отдачей и прыткими выводами на электронные кошельки. 1хслотс зеркало на сегодня Для вывода средств бонус надо(надобно) несомненно отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариациями отыгрыша бездепозитного бонуса до его получения, дабы избежать конфликтных обстановок.
1×slots регистрация 1×slotscasino 56 online
B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. 1×slot зеркало <a href=http://arkosgold.ru/index.php?subaction=userinfo&user=possessivedad38>http://arkosgold.ru/index.php?subaction=userinfo&user=possessivedad38</a> Иногда в качестве одобрения за регистрацию имеют выдаваться билеты для роли в турнирах. Условия их проведения очень отличаются, потому мы советуем ознакомиться с каждым предложением отдельно.В качестве призов интернет казино часто предлагает выдачу фриспинов, другими бесплатных вращений игрового барабана. Виртуальные монеты возможно применять для обучения в покерной школе или для забавы в казино.
рабочее зеркало 1хслотс
Чтоб получить крупный выигрыш, избирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша.Важно, удостоверьтесь никаких, собственно ранее не регились в выбранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи. <a href=https://clients1.google.com.cu/url?q=https://doctorlazuta.by/>https://clients1.google.com.cu/url?q=https://doctorlazuta.by/</a> Максимальный размер ставки, который невозможно превышать пока бонус не несомненно всецело отыгран. В случае нарушения сего верховодила, приз и выигрыш с него будут аннулированы. 1×slots зеркало рабочее
<b>Смотреть еще похожие новости:</b>
<a href=https://demo.comuni-italiani.it/forum/viewtopic.php?f=9&t=504295>1хслотс официальный сайт зеркало</a>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=102435&result=reply>1хслотс рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Получить Бездепозитный бонус в онлайн казино дело 2-ух кликов. Другой момент, отыграть рекламную и соблюсти управляла и обстоятельства отыгрыша. Под правилами подразумевается не только вагер, хотя и ограничения по наибольшей ставке. Мы осознаем, собственно в кинотеатр все ставят на зеро и выигрывают. Призываем не создавать похожего. Перед активацией бонуса прочитайте управляла. Узнайте последующие моменты: Условия получения подарка, за регистрацию, за депозит и многое. Ограничения по максимальной ставке. Зачастую не повыше 350 рублей. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вращать автоматы, а вагер несомненно стоять на месте. Поэтому принципиально аристократия, в каких играх возможно совершать кратность валютного оборота.
#5024 Charlesgunnyhttp://filmkachat.ru
рабочее зеркало 1×slots
Заполняя данные в собственном профиле, указывайте только достоверную информацию, так как Вам придется ее подтвердить дальнейшем при выводе средств.Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. <a href=http://filmkachat.ru/>1×slots казино мобильная версия</a> Как лишь получите бездеп в казино, всё равно не забывайте проверять электронную почту. Некоторые игорные клубы день радуют активных гэмблеров приятными призами. Чаще всего получить подарок возможно в преддверии праздника, на день рождение, за привлечение приятеля. А также распространённым бонусом является надбавка к депозиту. Нужно более пополнить счёт, и азартное заведение увеличит его на 50–100%. <a href=https://hackaday.io/rendering>https://hackaday.io/rendering</a> Подтвердите личность, предоставив оператору казино свои паспортные данные. Инструкции обычно несложные, главное — конкретно им идти. Если написано, что «на фото обязаны быть видны все хорошо угла страницы паспорта» — устройте именно это фото. 1×slots зеркало <a href=http://lnx.hotelresidencevillateresaischia.com/casamicciola/index.php?option=com_k2&view=itemlist&task=user&id=424755>http://lnx.hotelresidencevillateresaischia.com/casamicciola/index.php?option=com_k2&view=itemlist&task=user&id=424755</a> Благодаря программке лояльности от игорного заведения, возможно брать превосходный старт и без добавочных инвестициям запустить видеослоты. Кроме как, можно рассчитывать на реальную фортуну и получить, без инвестиции собственных финансов, великой выигрыш.
1×slot регистрация
<a href=http://big.bestforums.org/viewtopic.php?f=7&t=13008>x1 slots 1хслотс регистрация перейти на 1×slots</a> 1×slots официальный сайт, скачать Бездепы обыкновенно предлагают с отыгрышем — мгновенно вывести выигранные свои нельзя. Перевод денег со счета несомненно вероятен после как, как пользователь выполнит все притязания казино, а сумма возможности быть выше установленного правилами лимита. Условиями акции фиксируются сроки, в течение которых заказчик вправе воспользоваться предложением. Обычно они не превышают нескольких дней в активации. <a href=http://www.mmecaw.com/home.php?mod=space&uid=487767>http://www.mmecaw.com/home.php?mod=space&uid=487767</a> Максимальная ставка ? уточняется в денежной счета и ограничивает размер ставки за один спин. В случае ее превышения бонус имеет быть аннулирован. Также в правилах может находиться запрет на размещение ставок конкретного вида, к, по равным шансам в рулетке (другими, на чет или нечет, красноватое или черное и т.д. ). 1×slots промокод при регистрации 2025 3. Подтвердить данные. В зависимости от клуба, нужно привязать телефонный или почту, показать персональную информацию;Многие казино предоставляют в маркетинговых целях бесплатные призы необыкновенно для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой сайт по партнерской ссылке с нашего портала.
зеркло казино 1×slots
При поддержки такого одобрения оператор может также привлекать посетителей, коие раньше показывали активность на веб-сайте, хотя по некий основанию перестали играть. В данном случае промокод высылается пользователю по электрической почте или в виде SMS. <a href=http://www.gabiz.kr/g5/bbs/board.php?bo_table=free&wr_id=715594>http://www.gabiz.kr/g5/bbs/board.php?bo_table=free&wr_id=715594</a> 1× slots casino зеркало
x1 slots 1хслотс регистрация перейти на 1×slots
Объективные – объем бонуса, коэффициент и обстоятельства вейджера, надобность внесения депозита для вывода средств; <a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=416008>1×slots casino регистрация</a> Чтоб получить крупный выигрыш, подбирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша. 1× slots зеркало <a href=http://www.fiammeblu.it/profile.php?uid=29596>http://www.fiammeblu.it/profile.php?uid=29596</a> Вообще перейдя в казино — верховодила схожи в получении бездепозитных призов, в стандартные правила заходит: доказать эл. Почту и телефон, наполнить свой собственный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ.Похожим образом трудится 3-ий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя или в связи с получения им VIP-статуса. Подарок предоставляется последствии воззвания в поддержку и проверки.
1×slots регистрация 1×slotscasino09k online
Промообъявления от казино мешают реальной картины и ориентированы на привлечение внимания пользователей. Понять, как высоки шансы остаться в плюсе, дозволит личный тест условий предложения:Для получения приза нужно ознакомиться с программой преданности казино и сделать ставки на необходимую, нужную для перехода на следующий уровень. Бездепозитные призы, как уже понятно, являются уникальной вероятностью приступать к игровому процессу полностью бескорыстно, другими выступать в онлайн казино безвозмездно и на место свои сразу в регистрации аккаунта. Автоматы с этим депозитом могут стать прекрасной вероятностью поиграть для поклонников пыла с определенными лимитированиями в финансах. <a href=http://srgls.co.kr/bbs/board.php?bo_table=jiggu&wr_id=9521>http://srgls.co.kr/bbs/board.php?bo_table=jiggu&wr_id=9521</a> Фриспины без депозита либо вспомогательные средства помогут ближе познакомиться с игровой платформой и её функциями. За счёт даров возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за игры против живых крупье. 1×slots casino регистрация 1×slotscasino09k online
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.home-visa.ru/viewtopic.php?f=69&t=807392&p=2880197#p2880197>1×slots зеркало</a>
<a href=https://fougerite.com/threads/1×slots-kazino-zerkalo.12839/>1хслотс казино зеркало</a>
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=57418>1×slots регистрация на официальном сайте</a>
<a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1×slots промокод при регистрации 2025</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Максимальная ставка ? уточняется в денежной счета и ограничивает объем ставки за один спин. В случае ее превышения бонус может быть аннулирован. Также в правилах может содержаться запрет на размещение ставок определенного облика, например, по равным шансам в рулетке (словами, на чет либо нечет, красное или темное и т.д.). На условиях отыгрыша безвозмездных призов по тормознуть подробнее. С ними связаны аспекты, коие невозможно оставить без внимания.
#5025 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino сайты porno Мария Шарапова <a href=https://rucriminal.info/>pin up casino</a> балтбет букмекерская контора porno Вера Бирюкова, гимнастка <a href=https://krtka.info/>порно с Артемий Панарин (хоккей)</a> скачать 1×bet на андроид бесплатно букмекерская контора порно с Варвара Субботина реального казино porno Виктория Баркова, легкоатлетка porno Виктория Баркова, легкоатлетка ев казино
DiskiPlus балтбет букмекерская контора DiskiPlus порно с Голикова Татьяна Алексеевна <a href=https://www.diskiplus.ru/>DiskiPlus рейтинг казино</a> DiskiPlus бывшие казино DiskiPlus порно с Анастасия Потапова, теннисистка <a href=https://diskiplus.ru/>DiskiPlus пин ап casino pin up top</a> DiskiPlus скачать букмекерскую контору на андроид DiskiPlus порно с Афонина Марина Игоревна DiskiPlus смотреть фильм казино DiskiPlus 1×bet слоты официальный сайт DiskiPlus казино 5 DiskiPlus пинап казино DiskiPlus казино без
#5026 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Александра Бортич порно с Арина и Дина Аверины, гимнастки <a href=https://www.ossetia.tv/>букмекерская контора официальный сайт</a> casino ап букмекерская контора фонбет официальный сайт <a href=https://rhymes-punches.com/>официальные сайты казино</a> порно с Дронова Александра Викторовна porno Дарья Клишина порно с Виктория Синицина, фигуристка казино фильм смотреть онлайн 7k casino porno Яна Троянова казино на деньги
DiskiPlus Хорова Наталья Александровна порно DiskiPlus Радченко Светлана Юрьевна порно <a href=https://diskiplus.ru/>DiskiPlus kometa casino</a> DiskiPlus порно с Арина и Дина Аверины, гимнастки DiskiPlus casino online зеркало <a href=https://diskiplus.ru/>DiskiPlus Львова-Белова Мария Алексеевна порно</a> DiskiPlus pin up casino пин DiskiPlus про казино DiskiPlus casino бонус DiskiPlus casino андроид DiskiPlus pin ап casino DiskiPlus скачать 1×bet 1×bet xyz DiskiPlus casino на телефон
#5027 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
unlim casino вывод казино <a href=https://t.me/vchkogpu_ru>букмекерская контора без</a> автомат казино порно с Илюшникова Татьяна Александровна <a href=https://t.me/vchkogpu_ru>бесплатно фильм казино</a> pin up casino официальный порно с Алина Загитова казино вулкан porno Игорь Акинфеев (футбол) порно с Матвей Сафонов (футбол) букмекерскую контору пин porno Илона Маркова, хоккеистка
DiskiPlus 1×bet сайт 1×bet xyz DiskiPlus казино зеркало сегодня <a href=https://diskiplus.ru>DiskiPlus casino официальный сайт</a> DiskiPlus 1×bet слоты DiskiPlus порно с Бондаренко Анастасия Борисовна <a href=https://www.diskiplus.ru/>DiskiPlus Черкесова Бэлла Мухарбиевна порно</a> DiskiPlus порно с Артемий Панарин (хоккей) DiskiPlus играющие казино онлайн DiskiPlus casino DiskiPlus kometa casino DiskiPlus букмекерская контора фонбет официальный DiskiPlus пин ап casino DiskiPlus porno Нина Пирогова, хоккеистка
#5028 Charlesgunnyhttp://filmkachat.ru
1×slots casino зеркало
Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные способы и расценить особенности, труднодоступные при ирге в демо режиме. Многие свежие посетители переходят в число постоянных, а оператор получает длительную прибыль.Чаще всего, модные сервисы, такие как MoneyBookers и WebMoney, еще MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно обязательное управляло. Финансовые свои выводятся лишь спустя что, эту платежную систему, коей огромной для пополнения депо. Если же игрок получил бездепозитный покерный бонус, требуется пополнить счет на минимальную необходимую, кот-ая сочиняет обычно 10 $. <a href=http://filmkachat.ru/>1хслот зеркало сайта</a> При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, коие можно посвятить ирге в казино. <a href=https://diigo.com/0y2rbf>https://diigo.com/0y2rbf</a> 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=https://makeitpersonal.co/terrycirty>https://makeitpersonal.co/terrycirty</a> С такими простыми советами каждое казино с бонусом за регистрацию способно принести в разы больше выгоды и полезности.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Некоторые онлайн-казино без депозита предлагают свежим клиентам избрать бонус при регистрации. Будьте внимательны: выбрав один, вы в безоговорочном большинстве случаев не сможете пользоваться остальными. <a href=https://mcmon.ru/showthread.php?tid=143841>1× слот зеркало</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots В каждом казино с бездепозитным бонусом предусмотрены вейджеровые условия. Это один-единственный «подводный камень», кот-ый стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, нужно сделать определённое количество ставок. Чем круче приз, что, этим труднее выполнить условия, и наоборот. <a href=https://www.elektroroller-forum.de/memberlist.php?mode=viewprofile&u=441627>https://www.elektroroller-forum.de/memberlist.php?mode=viewprofile&u=441627</a> В качестве призов онлайн казино часто предлагает выдачу фриспинов, словами безвозмездных вращений игрового барабана. Виртуальные монеты можно использовать для изучения в покерной школе или для забавы в казино. 1×slots зеркало быструю регистрацию а также мгновенное При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток.
казино 1×slots
При ирге на бонусные свои воспрещается выступать в игровые автоматы с современным джекпотом и забавы из радела live casino. Кроме такого, кое-какие казино дают бездеп на раз или количество конкретных слотов, и в иных забавах Вы не можете на них играть.С не отыгранным призом воспрещается превосходить объем максимальной ставки. Нарушение сего условия иметь аннулирование выигрыша. <a href=https://lustbb.com/member.php?action=profile&uid=2839>https://lustbb.com/member.php?action=profile&uid=2839</a> В большинстве заведений устроить это возможно по e-mal, по номеру аппарата, через социальную сеть либо гугл-аккаунт.Для тех, кто только подумывает испытывать собственную удачу, а для профессиональных игроков, ищущих свежие площадки для выигрышей, водящие лицензированные казино нередко устраивают различные акции, и лучшее услуг за время – как для новичков, например и для проф игроков – бездепозитный бонус за регистрацию. 1×slots регистрация на сайте Обычно для получения бонусов без депозита, казино выдвигает приклнные и абсолютно выполнимые обстоятельства, хотя есть ряд поступков коие воспрещены и могут повлечь за собой досадные результаты:Онлайн-казино кропотливо продумывают бонусные условия, коие необходимо изучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и другие лимитирования.
1×slots официальный регистрация
Если при регистрации указать промокод, можно гарантировано получить бонус. Где взять ваучер? Посетите на блоги или форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В последнее время игорные дома начали рекламироваться в фильмах и телесериалах. Присмотритесь и всего заметите промокод, который принесёт 500 или 1 000 бонусных рублей. Вознаграждения за получение VIP-статуса ? начисляются в программки преданности при достижении одного уровня либо выдаются индивидуально менеджерами саппорта.Чаще всего, модные сервисы, эти как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное верховодило. Финансовые свои выводятся только через ту платежную систему, которой успех для пополнения депозита. Если же игрок получил бездепозитный покерный приз, требуется восполнить счет на минимальную сумму, кот-ая сочиняет обыкновенно десять $. 1×slots зеркало сайта <a href=http://perfectsolutionlabs.com/user/Jasperhut/>http://perfectsolutionlabs.com/user/Jasperhut/</a> Казино дает вероятность заработать и вывести настоящие деньги на бездепозитных призах. Обычно, это незначительная сумма, коию казино возможность себя позволить презентовать игроку.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, solid лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. Вейджер не более х30–35 является приемлемым. Опытные игроки заявляют, собственно с этим вейджером реально остаться в плюсе, в правильно подойти к выбору игрового аппарата. <a href=http://dikoms.ruwww.sharizhelaniy.ruwww.cloud-at-work.com/mac_jforum/user/profile/17334.page>http://dikoms.ruwww.sharizhelaniy.ruwww.cloud-at-work.com/mac_jforum/user/profile/17334.page</a> скачать 1×slots на андроид мобильная версия
<b>Смотреть еще похожие новости:</b>
<a href=https://australianwinerytours.com/tours/showthread.php?tid=233663>1хслотс рабочее зеркало на сегодня</a>
<a href=https://talkonlinenews.com/viewtopic.php?t=6359>1хслотс зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Также, учите, собственно бездепозитный приз возможно исключить только что, нет случае, когда станут выполнены все обстоятельства отыгрыша.
#5029 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
лучшая казино Окладникова Ирина Андреевна порно <a href=https://sovsekretno.net/>порно с Варвара Субботина</a> pin up casino inform@rucriminal.info <a href=https://slon-ru.com/>официальные зеркала казино</a> 1×bet скачать бесплатно ramenbet casino казино вход почему казино казино смотреть 7k casino сайт порно с Ирина Сидоркова
DiskiPlus Ирина Горбачева DiskiPlus porno Ангелина Гончаренко, хоккеистка <a href=https://diskiplus.ru/>DiskiPlus 1×bet casino</a> DiskiPlus up букмекерская контора DiskiPlus porno Дарья Клишина <a href=https://diskiplus.ru>DiskiPlus Манилова Алла Юрьевна порно</a> DiskiPlus Комарова Наталья Владимировна порно DiskiPlus 7k casino зеркало рабочее DiskiPlus casino 7k рабочее DiskiPlus kent casino регистрация DiskiPlus porno Дарья Клишина DiskiPlus inform@rucriminal.info DiskiPlus Манилова Алла Юрьевна порно
#5030 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Антропова Валентина Викторовна лучшие букмекерские конторы <a href=https://rumafia.news/>скачать сайт букмекерской конторы</a> сколько казино Москалькова Татьяна Николаевна порно <a href=https://th-royalgclub.com/>Крючкова Полина Викторовна порно</a> автомат казино фильмы казино рояль пин casino black russia казино пин ап букмекерская контора казино гта 5 online casino 7k
DiskiPlus inform@rucriminal.info DiskiPlus Манилова Алла Юрьевна порно <a href=https://www.diskiplus.ru>DiskiPlus casino онлайн</a> DiskiPlus пина casino DiskiPlus официальные сайты казино <a href=https://diskiplus.ru>DiskiPlus казино вход официальный сайт</a> DiskiPlus retro casino DiskiPlus почему в казино нет часов DiskiPlus 7k casino официальный сайт DiskiPlus casino бездепозитный DiskiPlus porno Андрей Рублев (теннис) DiskiPlus гама казино DiskiPlus Львова-Белова Мария Алексеевна порно
#5031 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
бывшие казино винлайн букмекерская контора официальный <a href=https://repost.news/>про казино</a> порно с Дронова Александра Викторовна casino андроид <a href=https://th-royalgclub.com/>казино проиграл</a> казино ли 1×bet официальный слоты порно с Диана Шнайдер (теннис) мобильные букмекерские конторы сайте букмекерской конторы фонбет букмекерская контора леонов casino приложения
DiskiPlus up casino DiskiPlus казино вход <a href=https://www.diskiplus.ru>DiskiPlus букмекерская контора фонбет официальный сайт</a> DiskiPlus 1×bet вход DiskiPlus ешь казино <a href=https://www.diskiplus.ru>DiskiPlus 1×bet рабочее на сегодня</a> DiskiPlus porno Екатерина Ефременкова, шорт-трекистка DiskiPlus водка казино DiskiPlus Яровая Ирина Анатольевна порно DiskiPlus букмекерская контора ставки DiskiPlus porno Андрей Рублев (теннис) DiskiPlus порно с Анастасия Потапова, теннисистка DiskiPlus casino вход
#5032 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало рабочее этих способов предполагает регистрацию
Более крупные предложения встречаются довольно изредка. Зачастую они доступны только VIP-игрокам. В остальных случаях им всего сопутствуют очень строгие обстоятельства отыгрыша. Также вероятны вспомогательные обстоятельства прочие ограничения, прописанные в условиях и положения бонусной программки казино.Практически все онлайн казино с бездепозитным призом за регистрацию учитывает программу преданности — систему поощрения неизменных посетителей, которая состоит из множества значений. При достижении игроком очередного уровня на его счёт поступает приз. Чем выше уровень — что, этим щедрее приз. <a href=http://filmkachat.ru/>1×slots официальный зеркало рабочее</a> Перед активацией важно пристально изучить условия промоакции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют значение кроме лимиты ставок при отыгрыше и сроки, в течение которых возможно воспользоваться предложением. Если бездеп охватывает ограниченный список игр, рекомендовано узнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с невысокими множителями выплат подходят лишь в случае, в оператор не установил жесткие лимитирования на наивысшую необходимую ставки. <a href=https://www.thuum.org/viewthread.php?thread=8824>https://www.thuum.org/viewthread.php?thread=8824</a> 1×slots официальный зеркало рабочее <a href=http://forums.outdoorreview.com/member.php?371147-PhilipWinge>http://forums.outdoorreview.com/member.php?371147-PhilipWinge</a> Условия могут различаться приятель от друга. Но подобный бонус может быть применен лишь для игрового процесса – полученные на счет деньги до как, как будут отыграны, вывести нереально.Отказ в прохождении верификации. Если клиент не хочет либо не предоставить документы, подтверждающие его лицо, профиль будет заблокирован совместно, вкупе со всеми бонусными начислениями.
1× slots регистрация в 1×slots casino
Это также безвозмездные финансы, которые поступают на аккаунты свежеиспеченных компьютерные последствии регистрирования. А особенность таких призов состоит сомнений, что обретенные финансы обязательно по использовать в продолжении назначенного медли. <a href=http://b2s.bulwork.com/node/1581?page=112#comment-24124>1 x slots casino</a> 1×slots официальный сайт зеркало рабочее Приветственный бездеп предоставляется какому игроку только один один. Казино сражаются с например называемыми бонусхантерами (от англ. Bonus Hunter — доброволец за призами), пытающимися заводить многочисленные аккаунты для обмана оператора и повторного получения подарка. Исключить сходственные действия дозволяет верификация данных. Администрация вправе потребовать у посетителя подтвердить персональные данные, обозначенные при регистрации. <a href=https://ide-ai.online/member.php?action=profile&uid=2395>https://ide-ai.online/member.php?action=profile&uid=2395</a> Не стоит путать игру в демо и внедрение бонусов. В демонстрационном режиме игрок имеет расценить механику слота, сюжет и оформление. Но забава ведется на относительные кредиты, потому отсутствует главное ? ощущение азарта. Активируя промокод либо фриспины, заказчик и не расходует свои деньги на игровые автоматы, хотя имеет сорвать реальный куш! 1×slots официальный сайт скачать Также, ситуации необходимо доказать свой номер телефонного, чтобы код, полученный в смс-сообщении от клуба установить в особое фон в личном офисе игрока.
1×slots быструю регистрацию а также мгновенное
B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая доля игры. Важно, часто бездепозитные призы в казино выдаются с лимитированиями по максимальной выплате. В среднем можно рассчитывать на прибыль в несколько тыщ рублей. Как вывести выигрыш с приза без депо. Придётся доказать аккаунт документально, в некоторых заведениях. Процедура верификации неотклонима и делается каждым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате либо прочтите в правилах. <a href=http://iroparis.ru/bitrix/redirect.php?goto=http://heatus.ru/bitrix/redirect.php?goto=http://autosound.smartprojects.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/kzmZPSCBo6s>http://iroparis.ru/bitrix/redirect.php?goto=http://heatus.ru/bitrix/redirect.php?goto=http://autosound.smartprojects.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/kzmZPSCBo6s</a> 1хслотс зеркало на сегодня У нас на веб-сайте Вы найдете список призов без депо в испытанных казино и доскональную информацию о том как их получить и использовать.Представленные на этой странице наилучшие бездеп бонусы в казино за регистрацию в 2022 году имеют подходящие обстоятельства. После тщательного анализа редакция портала составила рейтинг спецпредложений, в котором посетители Casino.ru все сортировать список по нескольким аспектам: по сумме, вейджеру, максимальной сумме вывода и т.д.
1×slots зеркало на сегодня
Практически все онлайн казино с бездепозитным призом за регистрацию предусматривает программу преданности — систему одобрения постоянных посетителей, которая произведено из множества значений. При достижении игроком очередного уровня на его счёт поступает приз. Чем выше уровень — что, этим щедрее бонус.Обычно, бездепозитные бонусы выдаются под конкретные слоты с фиксированной ставкой, хотя их точно воспрещено применять в игровых автоматах с современным джекпотом. Список игр, в возможно применять бездеп, Вы найдете в описании акции или можете уточнить у службы заведения. <a href=https://aircompare.us/forums/memberlist.php?mode=viewprofile&u=40074>1×slots коды</a> 1хслотс 1хслотс регистрация перейти на 1×slots <a href=https://maps.google.ro/url?sa=t&url=http%3A%2F%2Fdoctorlazuta.by>https://maps.google.ro/url?sa=t&url=http%3A%2F%2Fdoctorlazuta.by</a>
1хслотс рабочее зеркало
Чем ниже значение вейджера, тем легче отыграть и вывести приз. Если Вы планируете заработать на бездепе, не просто ознакомиться с новым игровым клубом, то стоит игнорировать призов с высоким вейджером их практически не реально отыграть. С ними Вы сможете лишь протестировать забавы заведения.Но разу не забывайте пристально читать управляла участия в бонусных промоакциях. Если вы нарушите желая бы одно условие, позже вы не можете уладить недоразумение с администрацией. <a href=http://receptom.ru/index.php?subaction=userinfo&user=ceaselesscore73>http://receptom.ru/index.php?subaction=userinfo&user=ceaselesscore73</a> 1×slots зеркало регистрация в 1×slots casino Новички не любят незамедлительно же заносить депо. Это обусловлено неименьем навыка и недоверием. К счастью, в наше время возможно получить бездепозитный бонус за регистрацию в казино. Неважно что начислит система – фриспины либо кредиты. В любом случае вы не рискуете собственными сбережениями. Это замечательная вероятность запустить понравившийся видео слот или же испытывать фортуну в настольных забавах.Получить Бездепозитный приз в интернет казино дело 2-ух кликов. Другой момент, отыграть рекламную и соблюсти правила и условия отыгрыша. Под правилами подразумевается столько вагер, хотя и ограничения по максимальной ставке. Мы разумеем, собственно в кинотеатр все ставят на зеро и выигрывают. Призываем не делать подобного. Перед активацией бонуса прочтите верховодила. Узнайте следующие факторы: Условия получения презента, за регистрацию, за депозит и другое. Ограничения по наибольшей ставке. Зачастую не выше 350 рублей. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах возможно отыгрывать вагер. Можно вращать автоматы, а вагер несомненно стоять на пространстве. Поэтому важно знать, в каких забавах возможно осуществлять кратность денежного оборота.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=143269>зеркала 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Лишь знаменитые и знаменитые азартные заведения могут позволить себя выдавать бездепы в виде дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депо, коие возможно израсходовать в лучших аппаратах с высокой отдачей.
#5033 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пин ап букмекерская контора винлайн букмекерская контора <a href=https://rhymes-punches.com/>casino на телефон</a> казино большая букмекерская контора официальный сайт скачать <a href=https://strelochnik.com/>букмекерская контора без</a> kometa casino казино онлайн бесплатно 1×bet скачать приложение up casino официальный casino riobet inform@rucriminal.info porno Нина Пирогова, хоккеистка
DiskiPlus игры казино DiskiPlus промокод 1×bet <a href=https://diskiplus.ru/>DiskiPlus pin casino</a> DiskiPlus балтбет букмекерская контора DiskiPlus бесплатно играем казино <a href=https://diskiplus.ru>DiskiPlus порно с Афонина Марина Игоревна</a> DiskiPlus гама казино DiskiPlus 1×slots casino DiskiPlus Набиуллина Эльвира Сахипзадовна порно DiskiPlus порно с Гатагова Ольга Анатольевна DiskiPlus казино смотреть онлайн бесплатно DiskiPlus porno Юлия Канакина, скелетонистка DiskiPlus пина casino
#5034 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало сайта
Несмотря на то, что этот вариант стимуляции со стороны азартных платформ очень популярен в сфере похожих игр, далеко не всем почитателям казино ведомо, что себе бездепозитные призы казино и как именно их вполне эксплуатировать. <a href=http://filmkachat.ru/>казино 1× slots официальный сайт</a> <a href=https://waappitalk.com/shopavto>https://waappitalk.com/shopavto</a> Баланс игрока дополняется на соответствующую необходимую. К ней используется вейджер, обозначенный в правилах акции. Вывести выигрыш возможно несомненно после того, как пользователь устроит требуемый размер ставок из собственных средств. В редчайших случаях бездеп трудится в формате Free Play. На счет юзера зачисляется большая сумма, и предоставляется маленький срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по завершении этого периода сумма на счету несомненно превышать изначальную, то разницу возможно будет исключить либо использовать для последующих ставок. 1×slots официальный сайт мобильная версия <a href=http://www.postcount.net/forum/member.php?117452-Charlesprete>http://www.postcount.net/forum/member.php?117452-Charlesprete</a> Пoдтвepдить личнocть посетителя. Для удачного вывода средств, нужно доказать лицо клиента. Нa этaпe вepификaции пpoфиля, сотрудники службы безопасности должны убедиться, собственно у игрока не один акк. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не может вывести свой выигрыш, если у него несомненно количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы.
1хслотс регистрация в 1×slots casino
Для верификации аккаунта надо(надобно) дать специалистам технической помощи отсканированную копию паспорта и счета за коммунальные предложения, еще фотографию банковской карты или снимок страницы электронного кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности. 1×slot зеркало Также учтите, что кое-какие игровые платформы сузивают перечень стран, коие способны получить предложенный бездепозитный приз за регистрацию. К примеру, есть онлайн-заведения, выдающие подобные бонусы лишь жильцам конкретных стран. К примеру, онлайн казино 777 Оригинал дает бездепозитный приз лишь игрокам из России и стран СНГ. Или напротив, пичкают вознаграждением всех, считая обитателей некоторых стран (исходя из этого, по внимательно учить перечень, чтобы впоследствии не возникло никаких вопросов и жалоб). <a href=http://foru1f40m.bunbun000.com/bbs/home.php?mod=space&uid=9394633>http://foru1f40m.bunbun000.com/bbs/home.php?mod=space&uid=9394633</a> 1хслот зеркало
1×slots casino регистрация 1×slotscasin online
<a href=http://forum.informatyk.edu.pl/member.php?action=profile&uid=13964>http://forum.informatyk.edu.pl/member.php?action=profile&uid=13964</a> 1×slots зеркало на сегодня Прежде чем активировать бездеп, нужно убедиться что, нет, что государство, уроженцем которой считается игрок, не заходит в перечень разрешенных.
онлайн казино 1×slots
Для получения предоставленных бонусов вам пригодиться — ПК либо мобильное прибор, и остальное дело за малым. 1×slots актуальное зеркало <a href=https://traviskudk29620.imblogs.net/80088603/deep-nude-understanding-the-implications-of-ai-generated-imagery>https://traviskudk29620.imblogs.net/80088603/deep-nude-understanding-the-implications-of-ai-generated-imagery</a> Бонусы без депо при регистрации числятся наиболее красивыми как для опытнейших игроков, например для и начинающих. Получив такое вознаграждение, клиент имеет выступать на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные призы в интернет-казино Рунета, еще обстоятельства их активации и выигрыша.Выбирая даровой приз, внимательно изучайте правила. Убедитесь, что вам можно себя участие в акции. Уточните, в каких играх можно исполнять обстоятельства вейджера. При необходимости задавайте вопросы представителям саппорта.
казино 1× slots официальный сайт
Обычно для получения бонусов без депо, казино выдвигает приклнные и абсолютно выполнимые условия, но есть ряд действий коие воспрещены и все повлечь за собой неприятные последствия: <a href=http://worklocal.com.au/users/arnoldoreli>http://worklocal.com.au/users/arnoldoreli</a> 1× slots регистрация в 1×slots casino Бездепозитный бонус за регистрацию в казино — это стартовый презент в виде валютного начисления либо даровых вращений для свежих игроков заведения, для получения которого не заносить депо.Главное преимущество спинов – возможность изучить разные слоты. Также получится насладиться бонусными раундами, испытать фортуну в риск-туре и преумножить выигрыш за счёт особенных символов. Однако не только игровой процесс заслуживает внимание, так чем сосредоточиться на реальном выигрыше.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.easysunnysunshine.com/memberlist.php?mode=viewprofile&u=18118>1×slots официальный сайт зеркало рабочее</a>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5105/#comment-613483>1× slots casino зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Все благотворительные бонусы кажутся соблазнительными. Кто же откажется от возможности сыграть в онлайн-казино, не рискуя средствами, но получая выигрыши. Но далеко не все бездепозитные призы одинаковой привлекательны для рассудительного посетителя.
#5035 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Юлия Канакина пин ап casino <a href=https://7club7.com/>кент казино</a> retro casino porno Екатерина Ефременкова, шорт-трекистка <a href=https://strelochnik.com/>букмекерская контора зенит</a> Любимова Ольга Борисовна порно букмекерская контора 1×bet зеркало xbet играющие казино casino зеркало сайта 7k casino зеркало рабочее porno Катерина Шпица
DiskiPlus скачать букмекерскую контору на андроид DiskiPlus гта онлайн казино <a href=https://www.diskiplus.ru>DiskiPlus спорт букмекерская контора</a> DiskiPlus 1×bet зеркало рабочее DiskiPlus казино вход официальный сайт <a href=https://diskiplus.ru/>DiskiPlus официальная казино</a> DiskiPlus porno Александр Соболев (футбол) DiskiPlus бк букмекерская контора DiskiPlus porno Ангелина Гончаренко, хоккеистка DiskiPlus top casino DiskiPlus Яровая Ирина Анатольевна порно DiskiPlus порно с Александр Головин (футбол) DiskiPlus демо казино
#5036 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало сайта
Подобные бонусы без депозита предоставляются на более выгодных критериях. Зачастую они крупнее, а обстоятельства отыгрыша наименее жесткие.При малый сумме приза рекомендуется выступать по низким ставкам, а применять максимальные превосходнее только никаких случае, в вейджер очень великий, а время на отыгрыш крепко ограничено. <a href=http://filmkachat.ru/>1хслотс официальный сайт зеркало</a> <a href=https://guides.co/g/how-3d-property-tours-are-revolutionizing-real-estate-mark/474208>https://guides.co/g/how-3d-property-tours-are-revolutionizing-real-estate-mark/474208</a> На критериях отыгрыша даровых бонусов по тормознуть подробнее. С ними связаны нюансы, коие нельзя забыть без внимания.Вы всего, скажем, как все любите получать презенты и бездепозитные призы казино. Игорные жилища брали в повадку одаривать гэмблеров приятными бонусами. Стать владельцем приветственного подарка можно за творение профиля либо пополнение счёта. Второй вариант больше увлекательный, как клубы готовы удвоить депозит! Но случае вы новичок и лишь знакомитесь с миром азарта, никакого пользуйтесь призом за регистрацию. 1×slots акции <a href=https://getcomixxx.com/index.php?subaction=userinfo&user=Daviddit>https://getcomixxx.com/index.php?subaction=userinfo&user=Daviddit</a> Если вы выбрали для себя несколько брендов коие для больше всего приглянулись, для неизменной забавы! Таких гемблеров казино довольно любит и ценит, за частую такие игроки становятся VIP игроками заведения, коим часто поступают выгодные предложения вид бонусов, так же туда заходит и бездепозитные.
1×slots зеркало
<a href=https://redfist.de/RF-Online-Testforum/viewtopic.php?f=105&t=81032>1×slots casino регистрация 1×slots review live</a> 1×slots официальный сайт скачать <a href=https://usolie-citi.ru/user/AnthonyTaupe/>https://usolie-citi.ru/user/AnthonyTaupe/</a> Превышение наибольшей ставки при отыгрыше. Система автоматически не предупреждает о превышении ставки, потому о нарушении правил игрок возможность узнать теснее в подачи запроса на вывод средств. 1×slots зеркало на сегодня Бездепозитный бонус за регистрацию в казино — это стартовый подарок вид денежного начисления или безвозмездных вращений для свежих игроков заведения, для получения которого не вносить депозит.
1хслотс официальный сайт зеркало
Постарайтесь отыграть вейджер, чтобы замечена возможность забыть заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электронной кошелёк, карту, аппарат. Практически все онлайн казино с бездепозитным призом за регистрацию предусматривает программу лояльности — систему одобрения постоянных посетителей, которая произведено из множества уровней. При достижении игроком еще уровня на его счёт поступает бонус. Чем выше уровень — тем щедрее приз. <a href=https://nc750.ru/member.php?u=3548>https://nc750.ru/member.php?u=3548</a> Чтобы играть бесплатно на настоящие деньги в казино, порой довольно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные деянья.Существуют казино с призом за регистрацию, в которых очень известны фриспины в онлайн казино впоследствии регистрации в конкретных забавах. Они встречаются числе чаще безвозмездных поощрений или традиционных бонусов в казино без вложений. Например, игрок регистрирует счет, на кот-ый начисляются безвозмездные забавы, приз за регистрацию повторяющий безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса геймер выигрывает истинные средства, коие в последствии можно удачно исключить из заведения на собственную платежную систему. То есть, есть все шансы исключить средства без рисков собственными деньгами. Регистрация, какую игры получит призы, займет несколько, а благодаря этому можно прирастить 5 евро поощрений до тысячи и без всяких заморочек исключить их. 1×slots казино зеркало Акции, приуроченные к календарным праздничным, бывают рассчитаны как на всех пользователей, например и на категории: например, презент на 8 марта девушкам-игрокам либо мужикам на 23 февраля.
1×slots рабочее зеркало на сегодня
Если вы бывалый игрок, вы должны аристократия, что бонус без депозита – редчайшая находка. Тем не менее, мы в изучаем интернет, чтобы отыскать вам наилучшие бездепозитные предложения. Свежий приз начисляется вид валютных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в использовании своими, ну случае отыгрыша оператор может установить лимитирование на вывод средств.Баланс игрока пополняется на подходящую сумму. К ней используется вейджер, обозначенный в правилах акции. Вывести выигрыш возможно несомненно в как, как пользователь устроит требуемый размер ставок из собственных средств. В редких случаях бездеп трудится в формате Free Play. На счет пользователя зачисляется крупная сумма, и предоставляется небольшой срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по окончании этого периода сумма на счету будет превосходить первоначальную, то разность возможно будет исключить либо применять для дальнейших ставок. 1хслот официальный сайт зеркало <a href=https://www.jangwoneyewear.com/bbs/board.php?bo_table=free&wr_id=2159338>https://www.jangwoneyewear.com/bbs/board.php?bo_table=free&wr_id=2159338</a>
1хслот 1хслотс регистрация перейти на 1×slots
Превышение наибольшей ставки при отыгрыше. Система автоматически не предуведомляет о превышении ставки, поэтому о несоблюдении верховодил игрок возможность разузнать теснее последствии подачи запроса на вывод средств.Раздача бонусов возможность быть посвящена разным датам: календарные праздничные, дни рождения игроков, юбилей открытия казино и т. Д. Подарок выдается повторяющий денег, фриспинов или баллов для скопления и размена на предложения оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода данной суммы придется выполнить ряд притязаний. Ниже указан актуальный перечень законных казино в Беларуси с бонусами на первый депозит. Вы можете попасть на официальный сайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз.Подтвердите регистрацию, чтобы активировать Бездепозитный бонус с выводом, потребуется наполнить личный профиль. Заполните пустые поля реальными данными о себя. <a href=http://www.tcwine.us/home.php?mod=space&uid=923561>http://www.tcwine.us/home.php?mod=space&uid=923561</a> К образцу, игроку выдаются безвозмездные средства в заведении в объеме пятидесяти либо 100 $ (вейджер на коие составляет 100х). То есть, любому новоприбывшему геймеру выскакивает манящая картинка, которая сулит выплату всех зачисленных фирмой средств. Не стоит внимания на казино приз за регистрацию без депозита с сильно великий или очень малюсенькой суммой призов, потому что, даже тщательно исследовав все условия, здесь скорее, несомненно некий подкол.Если при регистрации показать промокод, можно гарантировано получить приз. Где арестовать ваучер? Посетите тематику блоги либо форумы. Иногда администрация клуба проделывает рассылку ваучеров на электронную почту. В заключительное время игорные жилища начали рекламироваться в кинокартинах и телесериалах. Присмотритесь и скорее заметите промокод, который принесёт 500 либо 1 000 бонусных рублей. 1хслотс рабочее зеркало Бывают ли бездепозитные бонусы без вейджера? Бывают, в у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино.Такой казино приз без депо за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это словно некая маскировка одобрения под бездепозитный. Суть всего этого сводится к тому, собственно игроку на час выдается, к примеру, 1000 долларов, а реклама повторяет о том, собственно любой выигрыш возможно будет дальнейшем оставить при себе. Но в играющий всерьез отнесется к данному предложению, то он просто потеряет время. Ведь игроку нужно будет играть не в основном аккаунте, а тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (числе всей тыс. ) в верховодила вступят конкретные обстоятельства, где несомненно сказано, что максимальной суммой победы имеет быть только двести долларов и деньги можно использовать только в бонуса на первый лепта с вейджером 25 от суммы вознаграждения плюс сам депозит. По итогу получится, собственно игрок выигрывал для 200% приз с вейджером на конкретную сумму. Короче разговаривая, это все надо вашего времени.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.xn–72c9aa5escud2b.com/webboard/index.php/topic,516754.new.html#new>1×slots casino зеркало</a>
<a href=http://aficionado.pl/showthread.php?103152–1×slot-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE&p=120571>1×slot зеркало</a>
<a href=https://forum.oursson.ru/viewtopic.php?f=2&t=9597>казино 1× slots официальный сайт</a>
<a href=https://www.reisezielforum.de/viewtopic.php?t=401666>1×slots бонус за регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Наиболее модные вознаграждения среди гэмблеров – бездепозитные бонусы казино. Это не удивительно, так можно получить безвозмездные вращения или виртуальные кредиты, и при не придётся пополнять счёт, рисковать личными деньгами. Удастся насладиться различными веселиями и даже выиграть крупную необходимую, избегая серьёзного риска. B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.
#5037 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
фильмы казино рояль порно с Каролина Севастьянова <a href=https://rucriminal.info/>bet casino</a> человек казино фильмы казино рояль <a href=https://kompromat1.online/>ставки на спорт букмекерские конторы</a> порно с Абрамченко Виктория Валериевна карты казино Львова-Белова Мария Алексеевна порно сайт pin up casino сайт букмекерской конторы porno Дарья Клишина какие казино
DiskiPlus бесплатные букмекерские конторы DiskiPlus казино регистрации <a href=https://www.diskiplus.ru>DiskiPlus ставки на спорт букмекерские конторы</a> DiskiPlus casino играть DiskiPlus Нургалиева Эльвира Рамиловна порно <a href=https://diskiplus.ru>DiskiPlus человек казино</a> DiskiPlus букмекерская контора бетсити DiskiPlus 1×bet слоты 1×bet top DiskiPlus casino рабочее DiskiPlus ешь казино DiskiPlus Александра Бортич DiskiPlus рабочее казино DiskiPlus 1×bet зеркало
#5038 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino c2d ru
Вознаграждения за получение VIP-статуса ? начисляются в рамках программы преданности при достижении еще уровня либо выдаются персонально менеджерами службы.Для получения бонуса надо(надобно) пригласить в игру свежего посетителя. Казино начисляет пригласившему фиксированный процент от взносов приглашённого вид бонуса: почаще всего его объем не превышает 10%. Срок деянья бонуса в большинстве случаев не выше месяца: пригласивший получает бонус в зависимости от проигранных ставок приглашённого в первый месяц забавы. <a href=http://filmkachat.ru/>1×slots casino online регистрация</a> Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам воспрещено начислять бонусы посетителям, не имеющим денежных средств на счете. Мы предлагаем осмотреть актуальные призы онлайн-казино с лицензией, коие соблюдают законодательство РБ.Представьте момент, когда при ставке в 10 рублей Вы получите схожее умножение. Миллион рублей за одно вращение, что вполне возможно. Поэтому вопрос, сколько можно выиграть остаётся не. Предлагаем выяснить без. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный бонус и инспектируйте удачу в деле. Разумеется, вывести деньги не так просто. Однако шансы есть у всех. <a href=https://band.us/band/96885593/post/3>https://band.us/band/96885593/post/3</a> Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских рублей. В условиях промоакции указано, что вейджер бездепозитного приза х20. Поэтому, чтобы отыграть приз, игроку будет необходимо сделать ставок на 35*20=700 рублей. 1×slots рабочее зеркало <a href=https://elite-models.cc/member.php?action=profile&uid=23645>https://elite-models.cc/member.php?action=profile&uid=23645</a> Условия отыгрыша бонуса. Если Вы планируете заработать на бездепозитном призе, то для обратите внимание на велечину вейджера и срок, кот-ый дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, тем легче отыграть приз и вывести выигрыш.Однако в критериях скрываются «подводные камни», которые не позволят исключить солидную необходимую либо же вы не успеете отыграть вейджер. Поэтому профессионалы рекомендуют отобрать безвозмездные вращения за регистрацию в казино без депозита, дабы поднабраться навыка и получить реальный шанс на победу.
1×slots регистрация 1×slotscasino 56 online
1× slots casino официальный сайт Нельзя осматривать игру на средства, как вариант заработка. Азартные забавы воспрещены для лиц моложе 18 лет. Topcasinobonuses.mobi классифицируется зачинщиком азартных игр. Сайт одевает информационный характер.Объективные – объем бонуса, коэффициент и обстоятельства вейджера, надобность внесения депозита для вывода средств; <a href=http://aaaa164.cafe24.com/bbs/board.php?bo_table=gallery&wr_id=68236>http://aaaa164.cafe24.com/bbs/board.php?bo_table=gallery&wr_id=68236</a> Самый распространённый из похожих бонусов, конечно же, бездеп на день рождения посетителя — приз в виде фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им можно протяжении установленного периода времени. 1× slots регистрация в 1×slots casino Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации подарка нужно доказать электрическую почту и привязать телефонный;Этот образ приза несомненно добавлен на Ваш акк в успешной процедуры регистрации с использованием номера телефона. Если выбрать иной метод создания учетной записи, бездеп не несомненно добавлен на Ваш акк.
казино 1×slots
Демоказино есть практически на любом сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются веско реже: там если, тогда, выигрыша и соблюдения критерий промоакций бездеп возможно превратить в реальные средства.Также, учите, что бездепозитный приз можно исключить лишь что случае, когда будут выполнены все условия отыгрыша. <a href=http://www.ctphome.com/bbs/home.php?mod=space&uid=68107>http://www.ctphome.com/bbs/home.php?mod=space&uid=68107</a> 1×slos регистрация в 1×slots casino
1хслотс рабочее зеркало
Перед активацией принципиально внимательно изучить условия акции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют значение также лимиты ставок при отыгрыше и сроки, на коих возможно пользоваться предложением. Если бездеп охватывает ограниченный перечень игр, рекомендуется разузнать максимальные коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят лишь том, случае, случае оператор не установил взыскательные ограничения на максимальную необходимую ставки. <a href=http://big.bestforums.org/viewtopic.php?f=7&t=12759>1×слотс казино</a> Подарки на дни ? посвященные торжественным датам, требующие символического отыгрыша или начисляются без такового. Могут дариться игрокам сутки рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду.Следует подчеркнуть, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом. 1×slots рабочее зеркало на сегодня <a href=https://knpnewz.com/member.php?action=profile&uid=79511>https://knpnewz.com/member.php?action=profile&uid=79511</a> Вообще перейдя в казино — верховодила схожи в получении бездепозитных призов, в стандартные правила заходит: доказать эл. Почту и телефон, наполнить свой собственный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ.Подтверждение персональной инфы. Все казино просят от посетителя пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и присутствие у юзера иных аккаунтов (мультиаккаунт запрещен).
1×slots зеркало рабочее на сегодня
Мы делаем акцент на ключевых положениях правил, рассказываем о территориальных ограничениях и вкратце информируем о других промоакциях обговариваемого казино. <a href=http://arts.gpaeburgas.org/profile.php?uid=12312>http://arts.gpaeburgas.org/profile.php?uid=12312</a> 1× slots официальный Это один из основных показателей привлекательности дара. С завешенным коэффициентом даже мастера не сумеют выполнить обстоятельства по отыгрышу. И маловажно, как привлекательно выглядит предложение – бездепозитный приз казино в объеме $500 или $1 000. Чтобы новички лучше вникли, собственно же такое вейджер, мы разберём на образце.
<b>Смотреть еще похожие новости:</b>
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=106534&extra=>1×slots промокод при регистрации 2025</a>
<a href=https://minecraft.ru.net/user/Manuelsoarl/>1×slots рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В качестве бонусов онлайн казино часто предлагает выдачу фриспинов, другими бесплатных вращений игрового барабана. Виртуальные монеты можно использовать для изучения в покерной школе или для игры в казино.
#5039 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
vavada casino порно с Дронова Александра Викторовна <a href=https://t.me/vchkogpu_ru>букмекерская контора ставки</a> casino зеркало сайта порно с Петр Ян (ММА) <a href=https://slon-ru.com/>Фастова Елена Владимировна порно</a> официальное казино вход pin up casino скачать porno Виктория Баркова, легкоатлетка 1×bet зеркало слоты 1×bet xyz casino online зеркало porno Ангелина Гончаренко, хоккеистка casino игровой автомат
DiskiPlus как выиграть в казино DiskiPlus kent casino регистрация <a href=https://www.diskiplus.ru>DiskiPlus 1×bet зеркало на сегодня 1×bet xyz</a> DiskiPlus 1×slots casino DiskiPlus up casino <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet официальный сайт 1×bet xyz</a> DiskiPlus казино вулкан DiskiPlus песня казино DiskiPlus официальные букмекерские конторы DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz DiskiPlus Матвиенко Валентина Ивановна порно DiskiPlus casino андроид DiskiPlus porno Яна Троянова
#5040 Charlesgunnyhttp://filmkachat.ru
1×slots casino online регистрация
Бездепы все заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой либо баллами. <a href=http://filmkachat.ru/>1хслот 1хслотс регистрация перейти на 1×slots</a> <a href=https://emaze.me/shopavto>https://emaze.me/shopavto</a> 1×slots рабочее зеркало на сегодня <a href=http://g961713h.beget.tech/user/Travisoffib/>http://g961713h.beget.tech/user/Travisoffib/</a> Предложения с бездепозитными призами за регистрацию разрешают новым заведениям заинтересовать аудиторию на собственный сайт. А игроки же получают вероятность играть на реальные средства без депозита в казино и заработать маленькой стартовый капитал, который разрешено вывести на карту банка или электрический кошелек.
1х слот 1хслотс регистрация перейти на 1×slots
<a href=https://russiancomputerservice.ru/user/JosephCer/>1×slots бездепозитный бонус за регистрацию</a> 1×slot зеркало рабочее регистрации на телефон придет Процесс подтверждения личности возможность взятьвдолг(взятьвзаймы) от 1-го денька до недели. Если заказчик допустил какую-либо оплошность при заполнении паспортных данных, то ему идет адресоваться с задачей в службу поддержки онлайн-казино. <a href=https://wiki.mysupp.ru/index.php?title=Выкуп_авто>https://wiki.mysupp.ru/index.php?title=Выкуп_авто</a> Когда речь о денежных призах, казино постоянно устанавливают обстоятельства вейджера, которые нужно выполнить, чтобы вывести выигрыш. 1×slots официальный сайт, скачать
1×slot зеркало рабочее этих способов предполагает регистрацию
Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают бонус по странам. Вплоть до как, что клуб может на игроков из Вашей страны, а бездеп мешает.Существуют казино с бонусом за регистрацию, в очень знамениты фриспины в онлайн казино впоследствии регистрации в конкретных забавах. Они встречаются том почаще безвозмездных поощрений либо классических призов в казино без инвестициям. Например, игрок регистрирует счет, на который начисляются бесплатные игры, бонус за регистрацию в виде безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса геймер выигрывает истинные средства, которые в последствии возможно удачно вывести из заведения на свою платежную систему. То есть, есть шансы исключить свои без рисков собственными финансами. Регистрация, за компьютерные получит призы, займет пару минут, а благодаря данному возможно увеличить 5 евро поощрений до тысячи и без всяких заморочек вывести их. <a href=https://astraclub.ru/members/345542-RenaldoIdeob>https://astraclub.ru/members/345542-RenaldoIdeob</a> 1×slot зеркало рабочее этих способов предполагает регистрацию Для казино, работающих интернет, бездепозитные призы необходимы для привлечения свежих клиентов. Предложение сыграть на слотах без надобности внесения реальных средств — работающий метод для повышения энтузиазма к фирмы. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит играть в казино, лишь теперь теснее на личные средства.Похожим образом работает третий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения клиента либо в связи с получения им VIP-статуса. Подарок предоставляется после воззвания в поддержку и ревизии.
1×slots рабочее зеркало
Бонус начисляется игроку незамедлительно последствии регистрации и прохождения верификации в казино и не настятельно от клиента внесения депо. Как управляло, объем приза в сходственном случае достаточно стыдливый, однако дозволяет новеньким познакомиться с игрой без риска настоящими деньгами. 1×slots casino регистрация <a href=https://pipewiki.org/wiki/index.php/1×slots_%D0%A1%D0%B0%D0%B9%D1%82_%D0%97%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE>https://pipewiki.org/wiki/index.php/1×slots_%D0%A1%D0%B0%D0%B9%D1%82_%D0%97%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE</a> Ознакомьтесь с нашим перечнем наилучших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего перечня и получите бездеп незамедлительно. Хватайте наилучшие благотворительные предложения ниже и выигрывайте немалые средства, не рискуя!
1× slots регистрация в 1×slots casino
Чтоб получить большой выигрыш, подбирайте игровые автоматы с предельным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша. <a href=http://forum.gokturkvirtual.com/uye-williamnedia.html>http://forum.gokturkvirtual.com/uye-williamnedia.html</a> Также учтите, собственно некоторые игровые платформы сужают список государств, которые готовы получить предложенный бездепозитный бонус за регистрацию. К образцу, существуют онлайн-заведения, выдающие похожие призы только обитателям определенных государств. К образцу, интернет казино 777 Оригинал предоставляет бездепозитный бонус только игрокам из России и государств СНГ. Или наоборот, снабжают вознаграждением всех, кроме жителей неких государств (следует сего, следует пристально изучать список, дабы потом не появилось практически вопросов и претензий).Для получения бонуса надо(надобно) ознакомиться с программкой лояльности казино и сделать ставки на сумму, нужную для перехода на грядущий уровень. 1×slots официальный сайт мобильная версия Для верификации номера аппарата, в личном профиле выберите опцию „Подтвердить номер телефона“ и введите в отвечающее фон код, приобретенный в sms-сообщении.
<b>Смотреть еще похожие новости:</b>
<a href=https://acerfans.ru/user/JamesTed/>1×slots актуальное зеркало</a>
<a href=http://theauction.com.au/my-account/>1× слот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. Помните, собственно любые нарушения правил сведут на нет ваши старания, и вы скорее останетесь без начисленного для безвозмездного бонуса. Всегда изучайте правила начисления и условия вейджера. По каким вопросам, на которые вы не помощи отыскать ответы, обращайтесь за разъяснениям и саппорт.
#5041 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
up букмекерская контора скачать 1×bet 1×bet xyz <a href=https://strelochnik.com/>официальные букмекерские конторы</a> Москалькова Татьяна Николаевна порно букмекерские конторы без депозита <a href=https://th-royalgclub.com/>порно с Матвей Сафонов (футбол)</a> pin up casino скачать почему казино порно с Афонина Марина Игоревна казино сочи porno Дарья Мороз букмекерская контора бесплатно скачать порно с Абрамченко Виктория Валериевна
DiskiPlus bitz casino DiskiPlus porno Дарья Мороз <a href=https://www.diskiplus.ru/>DiskiPlus Попова Анна Юрьевна порно</a> DiskiPlus казино проиграл DiskiPlus букмекерские конторы в россии <a href=https://diskiplus.ru/>DiskiPlus пина букмекерской конторы</a> DiskiPlus винлайн букмекерская контора DiskiPlus официальные букмекерские конторы скачать DiskiPlus porno Александра Степанова, фигуристка DiskiPlus автомат казино DiskiPlus зеркала официальных сайтов казино DiskiPlus пин up casino DiskiPlus букмекерская контора
#5042 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на сайте 1×slots ru com
Можно ли наваривать на бездепозитных призах? Это не работа, здесь как повезет, если в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, за можно назвать везением, и дополнительной добавкой к вашему бютжету. <a href=http://filmkachat.ru/>1×slots коды</a> Активация по промокоду употребляется в разных видах бездепов. Если речь о приветственном призе, то комплект знаков можно разузнать на основной странице, в регистрационной форме либо письме, коие отчаливает юзеру для доказательства адреса электронной почты. Акции все проводиться общо с партнерскими площадками. Обычно код располагается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется одноразовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном кабинете или начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем важный код для активации в описании любого рекламную.Мы рекомендуем не отрицаться от сходственных услуг знаменитых казино. Выделите несколько мин. На регистрацию, получите приз и попробуйте его отыграть. Может быть, сейчас фортуна будет на вашей стороне! <a href=http://prsync.com/cgifurniturecom/top-d-model-marketplaces-expert-guide-to-finding-quality-digital-assets-4446659/>http://prsync.com/cgifurniturecom/top-d-model-marketplaces-expert-guide-to-finding-quality-digital-assets-4446659/</a> 1× slots casino зеркало <a href=https://receptsamogona.ru/user/Williamges/>https://receptsamogona.ru/user/Williamges/</a> Вейджер не более х30–35 является применимым. Опытные игроки утверждают, что с таким вейджером реально остаться в плюсе, случае верно подойти к выбору игрового аппарата.
1×slots официальный сайт мобильная версия скачать
1×slots зеркало рабочее <a href=http://www.hker2uk.com/home.php?mod=space&uid=918274>http://www.hker2uk.com/home.php?mod=space&uid=918274</a> Чаще всего, пользующиеся сервисы, эти как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно неотъемлемое управляло. Финансовые свои выводятся лишь через ту платежную систему, коей огромной для пополнения депо. Если же игрок получил бездепозитный покерный приз, потребуется восполнить счет на минимальную сумму, которая сочиняет обычно десять $. 1× slots casino официальный сайт Поспешите отобрать бездепозитные бонусы за регистрацию в казино из представленного перечня. Все платформы не только ведут легальную деятельность, но и порадуют правдивыми результатами забавы, высокой отдачей, прыткими выплатами.
1×slots казино зеркало
В большинстве заведений сделать это можно по адресу электронной почты, по номеру аппарата, через социальную сеть или гугл-аккаунт.Выбрать казино с бездепозитным бонусом. У нас на сайте представлен перечень наилучших интернет казино, коие предлагают своим игрокам щедрые призы за регистрацию. <a href=http://build-info.biz.ua/wr_board/tools.php?event=profile&pname=niceelite16>http://build-info.biz.ua/wr_board/tools.php?event=profile&pname=niceelite16</a> B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax 1 x slots casino Вейджер (wager) – это коэффициент, который показывает на какую необходимую нужно устроить ставок, дабы вывести бонус из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода этого приза, Вам нужно устроить ставок на сумму: 500*70=3500 рублей. Только полностью отыграв приз, Вы можете исключить собственный выигрыш.
1хлот регистрация в 1×slots casino
Все безвозмездные призы кажутся соблазнительными. Кто же откажется от возможности сыграть в онлайн-казино, не рискуя средствами, но получая выигрыши. Но далеко не все бездепозитные бонусы в привлекательны для рассудительного посетителя. Но есть азартные заведения, готовые просто так вручить деньги на игру. Для этого довольно создать профиль. Чтобы исключить выигрыш, сперва необходимо выполнить вейджеровые условия, прописанные в критериях получения бездепа. В качестве бонусов интернет казино нередко предлагает выдачу фриспинов, то есть безвозмездных вращений игрового барабана. Виртуальные монеты возможно применять для обучения в покерной школе либо для забавы в казино. 1×слот регистрация в 1×slots casino <a href=https://angelladydety.getbb.ru/viewtopic.php?f=39&t=36780&p=71661#p71661>https://angelladydety.getbb.ru/viewtopic.php?f=39&t=36780&p=71661#p71661</a>
1×slots промокод при регистрации
Теоретически, к безвозмездным бонусам возможно отнести например нарекаемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, поэтому собственно они предоставляют только возможность создавать ставки.В онлайне очень много скриптовых вебсайтов, которые принадлежат плутам. Их главная задача – заинтересовать гэмблеров, пообещав не только щедрые подарки, хотя и солидные выигрыши. Так что кое-какие сайты предлагают получить за регистрацию в $1 000. <a href=https://www.xn–72c9aa5escud2b.com/webboard/index.php?action=profile;u=2153462>https://www.xn–72c9aa5escud2b.com/webboard/index.php?action=profile;u=2153462</a> 1×slots промокод при регистрации 2025 Однако далековато не все ресурсы предлагают своим посетителям бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено одобрение на 1-ый депо в объеме 100–200%. Это отличная возможность преумножить банкролл, прирастить время, проведённое за игрой и шансы сорвать большой куш.
<b>Смотреть еще похожие новости:</b>
<a href=https://australiantravelforum.com/Upload/showthread.php?tid=266368>1×slots официальный сайт мобильная версия</a>
<a href=https://www.handmakersbrasil.com.br/topic/1442–1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE/>1×slots официальный зеркало</a>
<a href=https://uyghuryol.com/forum/memberlist.php?mode=viewprofile&u=91>рабочее зеркало 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При верном подходе бездепы — это отличный метод выступать на средства без траты собственных средств. Есть некоторое советов, следуя коим можно извлечь максимально полезности из похожих промоакций казино. Играть следует лишь на лицензированных площадках. Скриптовые сайты не обманывают с бонусными услугами, но и употребляют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах невозможно.
#5043 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casinos xyz казино рублях <a href=https://res-publika.com>1×bet приложение</a> фреш казино бесплатно играем казино <a href=https://m.repost.news/>включи казино</a> vavada casino казино вход букмекерские конторы без депозита Александра Бортич букмекерские конторы в россии бк букмекерская контора порно с Евгений Малкин (хоккей)
DiskiPlus porno Илья Ковальчук (хоккей) DiskiPlus 1×bet xbet xyz <a href=https://diskiplus.ru>DiskiPlus 1go casino</a> DiskiPlus 1×bet зеркало слоты 1×bet xyz DiskiPlus бк букмекерская контора <a href=https://diskiplus.ru/>DiskiPlus casino вход</a> DiskiPlus порно с Анастасия Потапова, теннисистка DiskiPlus Самойлова Алла Владимировна порно DiskiPlus 1×bet официальный DiskiPlus казино без DiskiPlus porno Вера Бирюкова, гимнастка DiskiPlus 1win casino DiskiPlus 7k casino зеркало рабочее
#5044 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
Принципиальным отличием безвозмездных призов от призов на депо является отсутствие надобности вносить средства на аккаунт. Из-за сего их часто именуют бездепозитными (not the slightest deposit bonuses). <a href=http://filmkachat.ru/>1×slots зеркало сайта</a> Получить приветственный приз шансы только новые посетители онлайн-казино. Способы описаны в условиях промоакции каждого законного казино, почаще всего это: <a href=https://owntweet.com/thread/214646>https://owntweet.com/thread/214646</a> 1×slots официальный сайт мобильная версия скачать <a href=http://rvolchansk.ru/user/KennethAqual/>http://rvolchansk.ru/user/KennethAqual/</a> В истиннее время получить бонус за регистрацию в казино очень просто. Почти любой игорный дом с радостью предоставит средства или благотворительные вращения. Многие игроки пользуются этим и не стесняются регистрироваться в каждом клубе с выгодными критериями. Кстати, это отличная вероятность придумать выигрышную стратегию и сорвать куш.
1×slots мобильная версия войти казино
<a href=http://6000ziyuan.com/forum.php?mod=viewthread&tid=110154&extra=>1× slots регистрация в 1×slots casino</a> 1×slots регистрация Для получения бездепа необходимо пригласить в игру по реферальной ссылке нового посетителя: он обязан зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на сумму, обозначенную в критериях промоакции.Для верификации номера телефонного, в собственном профиле изберите опцию „Подтвердить номер телефонного“ и введите в отвечающее поле код, приобретенный в sms-сообщении. <a href=http://wdty.org/home.php?mod=space&uid=262318>http://wdty.org/home.php?mod=space&uid=262318</a> 1×slots акции Ещё одно распространённое акционное предложение – привлекательный подарок с неблаговидными притязаниями. К примеру, клуб обещает $100 в бездепа, хотя с вейджером х80 либо х100. Отыграть подобный вейджер практически невероятно и потому превосходнее концентрироваться на более интересных промоакциях.Заполняя данные в собственном профиле, указывайте только достоверную информацию, например как Вам понадобиться ее доказать дальнейшем при выводе средств.
1×slots casino зеркало рабочее
Для всех бездепозитных призов действует наибольший предел на выигрыш. Он показывает предельную необходимую, коию появится получить, играя на бонусные кредиты. Как только для удастся выполнить требования вейджера, дозволенный максимально будет переведен с бонусного счета на главный, а остаток будет списан. Заполняя данные в личном профиле, указывайте только достоверную информацию, так как Вам понадобиться ее доказать дальнейшем при выводе денег. <a href=https://www.asitorino.com/user/scottrom/?um_action=edit>https://www.asitorino.com/user/scottrom/?um_action=edit</a> Иногда для получения бонусов необходимо спутаться с представителями службы. Удобнее всего с ними беседовать в онлайн-сате, хотя времени достаточно запроса по электрической почте. рабочее зеркало 1×slots Маркетинговая политика всех игорных интернет-клубов должна одевать разнообразный характер. И если вознаграждения на депо работают для того, дабы провоцировать вносить депозиты и поощрять уже имеющих пользователей, то бездепозитный приз в казино либо бонус за регистрацию в казино, до всего, рассчитан на расширение базы покупателей.Как правило, новоприбывшие геймеры начала хотят ознакомиться с методами ввода и вывода денежных средств и сроки выполнения поданных заказов чтобы четко осознавать, как скоро появится исключить собственный казино приз за регистрацию без депо на электронный кошелек либо же банковскую карту. К счастью для всех играющих, снутри конкретных холдингов, все казино соперничают между собой. Ведь в бы конкретную фирму давало лишь одно онлайн-заведение, то навряд бы клиенты заметили казино с призом за регистрацию и могли бы рассчитывать только на вознаграждение повторяющий бонуса на 1-ое инвестиция. К каждому заведению регулярно следует привлекать новых игроков, что, конечном, лишь на руку всем играющим.
1хслотс официальный сайт зеркало
Каждый из бездепозитных бонусов без пополнения 2022 содержит собственный конкретный вейджер для отыгрыша, так же в каждом казино он устанавливается персонально — где то он х55 а кое-где х30, повторюсь везде по различному!Казино выделяет возможность заработать и вывести настоящие средства на бездепозитных призах. Обычно, это незначительная сумма, коию казино возможность себе разрешить презентовать игроку. Максимальная ставка ? устанавливается в еденице счета и ограничивает объем ставки за раз спин. В случае ее превышения бонус имеет быть аннулирован. Также в правилах имеет содержаться запрет на размещение ставок конкретного вида, к, по одинаковым шансам в рулетке (другими, на чет или нечет, красноватое или черное и т.д.).При отыгрыше бездепов, учитывайте временные ограничения. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток. 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=https://smartseolink.org/details.php?id=370099>https://smartseolink.org/details.php?id=370099</a> В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с безвозмездных вращений. Прибыль, которую Вы заработаете на этом бездепе возможно ставить на вывод без какого или отыгрыша.Как верховодило, при выводе денег, от играющего требуется лишь сделать минимальный вклад чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом личный счет.
1хслотс регистрация в 1×slots casino
<a href=https://szkolenia.myslepozytywnie.pl/fora/watek/%d0%b2%d1%8b%d0%ba%d1%83%d0%bf-%d0%b0%d0%b2%d1%82%d0%be-3/>https://szkolenia.myslepozytywnie.pl/fora/watek/%d0%b2%d1%8b%d0%ba%d1%83%d0%bf-%d0%b0%d0%b2%d1%82%d0%be-3/</a> Да, у бесплатных призов есть недостатки. Прежде всего, они обычно очень. Кроме того, обстоятельства вейджера по ним всегда жесткие. Но все же недоступность риска делает их довольно привлекательными для посетителей. 1× slots официальный Далее потребуется отыграть вагер и исключить выигрыш. Игрокам без опыта крупно повезло, возможность получить 10-ки презентов за 1 регистрацию. Если не сумели получить Бездепозитный приз, не волнуйтесь. Обратитесь в интернет чат, оператор поможет решить проблему.
<b>Смотреть еще похожие новости:</b>
<a href=https://takesalary.com/the-day-ai-took-over-losing-my-job-as-a-content-writer/#comment-3634>1 x slots casino</a>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/8555/#comment-351248>1×slots регистрация на сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Когда речь о денежных призах, казино всегда устанавливают условия вейджера, которые необходимо выполнить, дабы вывести выигрыш. Создание аккаунта. На веб-сайте казино нужно обнаружить регистрационную форму и наполнить пустующие поля собственными данными. Иногда на данном этапе требуется указать лишь адресок электронной почты и пароль, хотя чаще надобно заполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д. ). Нужно указывать лишь реальные данные, что впоследствие они будут проверены.
#5045 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Преподобная Надежда Александровна порно порно с Елена Никитина, скелетонистка <a href=https://rucriminal.info/>порно с Дронова Александра Викторовна</a> pin up casino top top порно с Анна Калинская (теннис) <a href=https://th-royalgclub.com/>casinos winning</a> porno Илья Ковальчук (хоккей) порно с Гатагова Ольга Анатольевна лучшие онлайн казино порно с Арина и Дина Аверины, гимнастки букмекерские конторы без депозита бесплатное казино казино без
DiskiPlus пина букмекерской конторы DiskiPlus букмекерская контора <a href=https://www.diskiplus.ru>DiskiPlus 1×bet рабочее на сегодня</a> DiskiPlus бесплатные букмекерские конторы DiskiPlus порно с Алексей Миранчук (футбол) <a href=https://diskiplus.ru/>DiskiPlus порно с Алина Загитова, фигуристка</a> DiskiPlus казино рояль DiskiPlus порно с Каролина Севастьянова DiskiPlus porno Юлия Пересильд DiskiPlus porno Анастасия Янькова, боксерка DiskiPlus зеркала официальных сайтов казино DiskiPlus порно с Максим Глушенков (футбол) DiskiPlus online casino 7k
#5046 Charlesgunnyhttp://filmkachat.ru
1×slot регистрация
При регистрации идет указывать лишь достоверную информацию. Когда учетная запись будет активна, будет доступ в Личный кабинет. В нем можно выбрать еденицу, ввести промокод и узнать доскональные управляла получения и отыгрыша бездепа. Краткая информация об промоакции часто находится именно на регистрационной форме. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало рабочее</a> Онлайн-казино с бездепозитными призами ставят посетителям обстоятельства для использования бездепами, поэтому перед участием в акции другого досконально ознакомиться со всеми правилами и нюансами промоакции. Условия шансы прикасаться получения приза, его использования и последующего вывода валютных средств когда выигрыша.Также бывают случаи, когда казино начисляет оговоренный приз в регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам. <a href=https://www.jottacloud.com/s/371d1db27e1899f43f18f1216ac5f05f9f6>https://www.jottacloud.com/s/371d1db27e1899f43f18f1216ac5f05f9f6</a> Превышение наибольшей ставки при отыгрыше. Система автоматически не предостерегает о превышении ставки, потому о нарушении правил игрок возможность разузнать уже после подачи запроса на вывод средств. 1×slots официальный сайт скачать <a href=https://njt.ru/forum/user/178118/>https://njt.ru/forum/user/178118/</a> Перечисленные выше основные свойства сопровождают практически любой бонус и являются стереотипными для бездепозитных бонусных начислений в казино.
1хслотс регистрация в 1×slots casino
<a href=https://www.goslog.ru/forum/messages/forum1/message12159/11-obrashcheniya-grazhdan?result=reply#message12159>1×slots регистрация на сайте 1×slots ru com</a> 1×slots зеркало видели такую регистрацию на Как верховодило, при выводе денег, от играющего требуется лишь сделать минимальный вклад для того, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом собственный счет.Чтобы получить возможность исключить прибыль с бездепозитного бонуса в казино, необходимо выполнить ряд условий: <a href=http://clipartus.ru/user/Stevenhease/>http://clipartus.ru/user/Stevenhease/</a> Если при регистрации показать промокод, возможно гарантировано получить бонус. Где взять ваучер? Посетите тематические блоги либо форумы. Иногда администрация клуба делает рассылку ваучеров на электрическую почту. В заключительное время игорные дома начали афишироваться в фильмах и сериалах. Присмотритесь и скорее заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных руб.Для вывода средств приз надо(надобно) несомненно отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариантами отыгрыша бездепозитного бонуса до его получения, дабы избежать конфликтных ситуаций. 1×slots регистрация 1×slots casino 777 online Помните, собственно всевозможные нарушения правил сведут на нет ваши усилия, и вы наверняка останетесь без начисленного вас безвозмездного приза. Всегда изучайте верховодила начисления и обстоятельства вейджера. По каким вопросам, на которые вы имеет самостоятельно найти ответы, обращайтесь за объясненьям и саппорт.
1×slots casino регистрация 1×slotscasin online
Бездепозитные бонусы за регистрацию являются одним из самых известных способов вербования свежих игроков в онлайн-казино, поэтому собственно они предоставляют игрокам вероятность опробовать казино, тем игровые автоматы, и вероятно, выиграть реальные средства. <a href=https://auto-file.org/member.php?action=profile&uid=946954>https://auto-file.org/member.php?action=profile&uid=946954</a> Мы делаем ударение на ключевых положениях верховодил, рассказываем о территориальных лимитированиях и вкратце информируем о других промоакциях обсуждаемого казино.Онлайн-казино кропотливо продумывают бонусные обстоятельства, которые нужно изучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и ограничения. casino 1×slot Бездепозитные бонусы за регистрацию являются одним из самых известных способов вербования новых игроков в онлайн-казино, потому что они предоставляют игрокам возможность опробовать казино, необыкновенно игровые автоматы, и возможно, выиграть настоящие средства.
1×slots официальный сайт мобильная версия
Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить необыкновенности, недоступные при забаве в демо режиме. Многие новые клиенты переходят в количество постоянных, а оператор получает длительную выгода. <a href=https://forums.scar-divi.com/topic/570847–1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82-%D1%81%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C/>1×slots официальный сайт скачать</a> Если вы новичок данном и только попали в неизведанную вами район азарта — за услуг как бездепозитные бонусы без пополнения. Максимальный размер ставки, кот-ый нельзя превосходить пока бонус не несомненно полностью отыгран. В случае нарушения сего правила, бонус и выигрыш с него станут аннулированы. 1×slots на любой вкус как пройти регистрацию <a href=https://adminclub.org/member.php?action=profile&uid=96892>https://adminclub.org/member.php?action=profile&uid=96892</a>
1×slot рабочее зеркало
Самый распространённый из похожих бонусов, окончательно же, бездеп на день рождения посетителя — приз вид фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им возможно в течение установленного периода медли. После требуется привнести идентификационный платёж. Это стращает новичков больше всего. Нужно устроить минимальный депозит в 100–500 рублей. Таким образом служба защищенности увериться что, собственно платёжный метод принадлежит Вам. Данная процедура важна для обеспечения защищенности игровых счетов. Пример, Ваш аккаунт взломают и выведут средства на собственный кошелёк. Будет крайне неприятно. Поэтому верификация платёжной системы, это важный момент.Но разу не запамятовывайте внимательно разбирать правила участия в бонусных акциях. Если вы нарушите но бы одно условие, позднее вы не можете устроить недоразумение с администрацией. <a href=http://uprzakupokkchr.ru/user/Charlesnut/>http://uprzakupokkchr.ru/user/Charlesnut/</a> Однако далековато не все ресурсы предлагают своим клиентам бездепозитные бонусы за регистрацию в казино. В большинстве случаев учтено поощрение на первый депо в размере 100–200%. Это отличная возможность преумножить банкролл, увеличить время, проведённое за игрой и шансы сорвать крупный куш. 1×slots зеркало которую указывали при регистрации кстати Однако далеко не все ресурсы предлагают своим клиентам бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено одобрение на первый депо в размере 100–200%. Это замечательная возможность преумножить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.oursson.ru/viewtopic.php?f=2&t=12288>1×slots регистрация 1×slots casino c2d ru</a>
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=35802>1×slots зеркало регистрация</a>
<a href=http://www.carshowsociety.com/forum.php/topic,11220.new.html#new>1×slots зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Некоторые сайты, до чем обмануть регистрацию игроков, предлагают ответить на несколько базисных вопросов. Цель проведения сходственной викторины – выявить случайных людей, которые не имеют представления о покере, и не разрешить получения ими призов. Если посетитель уже играл в казино, то ответить на полтора десятка простых вопросов будет несложно. Очень нередко, ответы возможно отыскать на официальных веб-сайтах этих учреждений.
#5047 Charlesgunnyhttp://filmkachat.ru
1 x slots casino
В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с бесплатных вращений. Прибыль, которую Вы заработаете на таком бездепе можно ставить на вывод без какого либо отыгрыша. <a href=http://filmkachat.ru/>1×slots зеркало регистрация то дальше необходимо пройти</a> <a href=https://devfolio.co/@archicgicom>https://devfolio.co/@archicgicom</a> Таким образом онлайн казино получает вероятного игрока. Возможно дальнейшем или настоящем он захочет сыграть на средства средства. Так работают бездепозитные призы в интернет казино. Здесь отлично подходит выражение, благотворительные сыр бывает только в мышеловке. Начинающие игроки могут не осознавать опасность азарта. Однако течением понимания становится больше. Это тема для отдельного обсуждения. скачать 1×slots официальный сайт <a href=https://www.openstreetmap.org/user/%D0%9F%D1%80%D0%BE%D0%B3%D1%80%D0%B0%D0%BC%D0%BC%D0%B0%20%D0%92%D0%B5%D1%82%D0%B5%D1%80%D0%B8%D0%BD%D0%B0%D1%80%D0%BD%D0%B0%D1%8F%20%D0%BA%D0%BB%D0%B8%D0%BD%D0%B8%D0%BA%D0%B0>https://www.openstreetmap.org/user/%D0%9F%D1%80%D0%BE%D0%B3%D1%80%D0%B0%D0%BC%D0%BC%D0%B0%20%D0%92%D0%B5%D1%82%D0%B5%D1%80%D0%B8%D0%BD%D0%B0%D1%80%D0%BD%D0%B0%D1%8F%20%D0%BA%D0%BB%D0%B8%D0%BD%D0%B8%D0%BA%D0%B0</a> В случае установленного лимита на необходимую вывода выигрыша с бездепозитного приза, игрок не сможет вывести больше заявленной суммы.Как верховодило, новоприбывшие геймеры начала желают ознакомиться с способами ввода и вывода валютных средств и сроки исполнения поданных заказов чтобы конкретно разуметь, как скоро возможность вывести собственный казино приз за регистрацию без депо на электронный кошелек либо же банковскую карту. К счастью для всех играющих, внутри конкретных холдингов, все казино конкурируют меж собой. Ведь случае бы конкретную фирму представляло только одно онлайн-заведение, то вряд ли бы клиенты заметили казино с бонусом за регистрацию и имели бы рассчитывать лишь на вознаграждение в виде бонуса на 1-ое вложение. К любому заведению периодически по завлекать новых игроков, что, в, лишь на руку всем играющим.
1×slots официальный сайт скачать
1 x slots casino Во всех законных онлайн-казино Беларуси нужно свидетельство паспортных данных для игры — это заявка правительства государства. <a href=http://skiindustry.org:/forum/member.php?action=profile&uid=1172867>http://skiindustry.org:/forum/member.php?action=profile&uid=1172867</a> 1× slots регистрация в 1×slots casino
1хслотс рабочее зеркало
<a href=http://www.ppivn.vn/forum/user-30524.html>http://www.ppivn.vn/forum/user-30524.html</a> 1×slots зеркало на сегодня Бездепозитные бонусы – это исключительно небезинтересная и более перспективная промоакция интернет-казино. Они том другого фри-спинов, поэтому собственно выплаты в даровых вращениях не гарантированы, как композиции на барабанах игрового аппарата шансы не сложиться.
скачать 1×slots официальный сайт
Условия могут разниться друг от приятеля. Но подобный бонус возможность быть применен только для игрового процесса – полученные на счет деньги до как, как станут отыграны, вывести нереально.При регистрации в том или ином интернет игральном заведении — вас дается один шанс испытать собственную фортуну не внося свои монеты. Замечу что эту поощрительную предложение предоставляют не все онлайн игровые площадки, а только великодушная середина(средина) из них. Которые мы подготовили для Вас в нашем перечне. Мы собрали и опубликовали список лучших бездепозитных казино с бонусами за регистрацию, коие гарантируют великодушные выигрыши и мгновенные выплаты. 1хслотс рабочее зеркало на сегодня <a href=http://maskarad.bomba-piter.ru/user/AshleyHeelf/>http://maskarad.bomba-piter.ru/user/AshleyHeelf/</a> Риск-игра по равным шансам – Также казино имеет воспрещать исполнять обстоятельства по отыгрышу счет раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких других играх.
1×slots регистрация 1×slotscasino09k online
При помощи такого одобрения оператор имеет кроме завлекать клиентов, коие раньше проявляли активность на веб-сайте, хотя по некий основанию перестали играть. В этом случае промокод высылается юзеру по электрической почте или повторяющий SMS.При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток. <a href=http://wx.abcvote.cn/home.php?mod=space&uid=1718269>http://wx.abcvote.cn/home.php?mod=space&uid=1718269</a> казино 1× slots официальный сайт Обычно, бездепозитные бонусы выдаются под определенные слоты с фиксированной ставкой, хотя их наверняка запрещено применять в игровых автоматах с прогрессивным джекпотом. Список игр, каких можно применять бездеп, Вы найдете в описании акции либо сможете уточнить у службы заведения.Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция имеет подробные правила, ссылка на коие обычно находится в промообъявлении. В них указываются лимиты, вейджер, список доступных игр. Если оператор скрывает данные о предложении, то воспользоваться им не стоит.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Превышение наибольшей ставки при отыгрыше. Система автоматически не предостерегает о превышении ставки, потому о нарушении верховодил игрок может разузнать теснее в подачи запроса на вывод средств.
#5048 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
сайт казино вход казино на деньги <a href=https://specreporter.com/>ап казино</a> сайты казино порно с Баталина Ольга Юрьевна <a href=https://slon-ru.com/>бесплатно играем казино</a> букмекерские конторы pin порно с Константин Тюкавин (футбол) леон букмекерская контора порно с Анастасия Потапова, теннисистка win win casino 1×bet слоты 1×bet xyz порно с Афонина Марина Игоревна
DiskiPlus бесплатно играем казино DiskiPlus казино сочи <a href=https://diskiplus.ru/>DiskiPlus cometa casino</a> DiskiPlus 1×bet DiskiPlus пина casino <a href=https://diskiplus.ru>DiskiPlus казино 1</a> DiskiPlus Лут Оксана Николаевна порно DiskiPlus casino зеркало сайта DiskiPlus порно с Владимир Минеев (ММА) DiskiPlus казино ставка DiskiPlus porno Александр Соболев (футбол) DiskiPlus порно с Алина Загитова, фигуристка DiskiPlus леон букмекерская контора
#5049 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slots review live
Активация валютного вознаграждения происходит автоматически последствии творенья профиля или применения промокода. Иногда операторы предъявляют дополнительные требования: подписаться на страницы казино в соц сетях или на рассылку рекламных сообщений, скачать и ввести вспомогательный софт и т.д. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало</a> Мы делаем акцент на главных положениях управлял, рассказываем о территориальных лимитированиях и вкратце информируем о других промоакциях обговариваемого казино.В случае установленного лимита на сумму вывода выигрыша с бездепозитного бонуса, игрок не может исключить больше заявленной суммы. <a href=https://www.find-topdeals.com/blogs/188338/Revolutionizing-Product-Marketing-Through-Dynamic-3D-Presentations>https://www.find-topdeals.com/blogs/188338/Revolutionizing-Product-Marketing-Through-Dynamic-3D-Presentations</a> Максимальная ставка ? уточняется в еденице счета и ограничивает размер ставки за один спин. В случае ее превышения бонус возможность быть аннулирован. Также в правилах имеет содержаться запрет на размещение ставок определенного вида, например, по одинаковым шансам в рулетке (то есть, на чет или нечет, красноватое либо черное и т.д.). 1×slots зеркало выигрыши обязательно пройдите регистрацию если <a href=http://raid4×4.ru/memberlist.php?mode=viewprofile&u=6124>http://raid4×4.ru/memberlist.php?mode=viewprofile&u=6124</a>
1хслот зеркало сайта
Представленные на этой страничке превосходнейшие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные условия. После кропотливого анализа редакция портала составила рейтинг спецпредложений, каком гости Casino.ru могут сортировать перечень по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=https://acomics.ru/-Prostoysoft0105>https://acomics.ru/-Prostoysoft0105</a> 1×slots актуальное зеркало
1×slot зеркало
Верификация необходима для добавочной защищенности и помочь техподдержке выявить бонусхантеров и жуликов. Кстати, на некоторых платформах выводы солидных сумм доступны лишь последствии доказательства личности. <a href=http://l-avt.ru/support/dialog/?PAGE_NAME=profile_view&UID=67554>http://l-avt.ru/support/dialog/?PAGE_NAME=profile_view&UID=67554</a> В количестве случаев безвозмездные призы начисляются в кредитах, которые нельзя незамедлительно вывести со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже.Каждый из бездепозитных призов без пополнения 2022 содержит свой определенный вейджер для отыгрыша, например же в каждом казино он уточняется персонально — где то он х55 а где-то х30, повторюсь везде по различному! 1×slots регистрация Бездепозитные призы казино это финансовая компенсация, предлагаемая юзерам на дармовой основе и вероятность играть в онлайн казино безвозмездно. Если ассоциировать их с поощрениями за вклад, в свои выдаются только потом начального пополнения счета, то бездепозитные гонорары получаются безвозмездно. То есть, играющий получает вероятность создавать ставки на теснее место деньги, коие выдаст заведение, выполняя, всем, обычные деяния, чтобы их извлечь (здесь идет речь о регистрация, удостоверении личности с использованием номера аппарата, оформления заказы и т.д.).
1×slots зеркало подтвердит вашу регистрацию если говорить
Процесс доказательства личности может занять от 1-го дня до недели. Если клиент разрешил какую-либо ошибку при заполнении паспортных данных, то ему идет обратиться с задачей в службу поддержки онлайн-казино.Если речь идет об эксклюзивных предложениях, имеет понадобиться регистрация в казино по ссылке с партнерского вебсайта. <a href=https://clubdefansde24.com/foro/viewtopic.php?t=18816>1×slots казино мобильная версия</a> 1×slots зеркало проходить регистрацию это отличный вариант <a href=http://bbs.jiatuxueyuan.com/home.php?mod=space&uid=1614491>http://bbs.jiatuxueyuan.com/home.php?mod=space&uid=1614491</a> А ознакомиться с свежими онлайн казино, Вы сможете за счет бонусов с выводом прибыли, коие Вы сможете получить без депозита.
1хслот 1хслотс регистрация перейти на 1×slots
Чтобы бездеп не был начислен на Ваш акк, Вам не нужно активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт механически, а Вы не расчитываете его применять, обратитесь в саппорта с просьбой отменить бездепозитный бонус. Также посещают случаи, когда казино начислит оговоренный приз последствии регистрации нового посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам. <a href=https://biowiki.clinomics.com/index.php?title=РР·_чего_состоит_диета_Елены_Малышевой>https://biowiki.clinomics.com/index.php?title=РР·_чего_состоит_диета_Елены_Малышевой</a> Диапазон ставок, которые вправе устроить игрок, также лимитирован. Обычно назначать можно маленькую необходимую — в 10–30 руб. За одно вращение.4. Заберите презент. Чаще всего приз активизируется сразу последствии регистрации. Но случаются истории, когда нужно зайти в индивидуальный кабинет или написать в саппорта. 1×slots зеркало на сегодня Доступ к подарку возможность раскрываться автоматически после введения промокода либо обращения в саппорта сайта. В первом случае от юзера не потребуется никаких поступков. Бездеп с активацией по коду встречается почаще всего. Игроку нужно установить совокупность знаков в графе, которая может пребывать в регистрационной форме в Личном офисе.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.sgomberisgombero.it/my-account-2/>сайт 1× slots casino</a>
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=4255>1×slots рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Во всех законных онлайн-казино Беларуси нужно свидетельство паспортных данных для игры — это требование правительства страны.
#5050 Charlesgunnyhttp://filmkachat.ru
1×slots мобильная версия войти казино
Чтобы получить возможность вывести прибыль с бездепозитного приза в казино, нужно выполнить ряд условий:Бывают ли бездепозитные бонусы без вейджера? Бывают, в у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию уточняется вейджер во всех казино. <a href=http://filmkachat.ru/>1×slots зеркало регистрация то дальше необходимо пройти</a> <a href=http://prsync.com/archicgi/how-home-entertainment-flyarchitecture-transforms-modern-living-spaces-4518898/>http://prsync.com/archicgi/how-home-entertainment-flyarchitecture-transforms-modern-living-spaces-4518898/</a> 1×slots бездепозитный бонус за регистрацию <a href=http://dklada.ru/user/TravisOrima/>http://dklada.ru/user/TravisOrima/</a> Активация случается счет промокодов, коие вводятся в собственном офисе в регистрации. Среди спецпредложений в перечне Casino.ru находятся эксклюзивные промокоды, коие доступны только гостям портала. Другие методы начисления средств ? автоматическая активация сразу последствии создания аккаунта и получение дара по запросу в службу технической поддержки.
1×slots зеркало быструю регистрацию а также мгновенное
Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских рублей. В критериях промоакции указано, собственно вейджер бездепозитного приза х20. Поэтому, дабы отыграть приз, игроку несомненно необходимо устроить ставок на 35*20=700 руб.Вывод выигрыша с бездепозитных бонусов казино – великодушный подарок от азартных клубов. Но дабы исключить свой заработок, необходимо выполнить ряд критерий: 1×slots мобильная версия войти казино Поспешите отобрать бездепозитные бонусы за регистрацию в казино из представленного перечня. Все платформы не водят легальную деятельность, хотя и порадуют добросовестными результатами забавы, высокой отдачей, прыткими выплатами.Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих притязаний, считая неотъемлемой верификации. Если на веб-сайте учтена неотъемлемая процедура подтверждения личности, то вывести выигрыш получится только последствии ревизии данных. Приготовьтесь наполнить анкету и выслать в техподдержку документ, подтверждающий лицо. <a href=http://www.tianyecollege.com/home.php?mod=space&uid=38111&do=profile&from=space>http://www.tianyecollege.com/home.php?mod=space&uid=38111&do=profile&from=space</a> Бонус в казино без депозита имеет разные варианты: это может быть приветственный бонус, промоакции в честь каких-то праздников либо главных дат, бонус за вербование свежих игроков, лояльность и получение VIP-статуса.Минимального оборота. Этот предел уточняется вейджером — же игрок не поиграет на установленную необходимую, вывод средств будет недоступен. 1×slots промокод при регистрации
1 хслот регистрация в 1×slots casino
Выиграть настоящие деньги в казино не пополняя счет – сложно, хотя вероятно. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными призами и начните играть на бонусные свои. По статистике из 10-ти заведений возможно заработать небольшую сумму денег с бонусных средств. <a href=http://forums.indexrise.com/user-290492.html>http://forums.indexrise.com/user-290492.html</a> После требуется привнести идентификационный платёж. Это пугает новичков больше всего. Нужно сделать минимальный депо в 100–500 рублей. Таким образом служба безопасности убедиться том,, собственно платёжный способ принадлежит Вам. Данная процедура важна для обеспечения защищенности игровых счетов. Пример, Ваш аккаунт взломают и выведут свои на собственный кошелёк. Будет очень досадно. Поэтому верификация платёжной системы, это важный момент. 1×слотс казино Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.
1×slots на любой вкус как пройти регистрацию
Операторы гемблинга утверждают, что так они борются с бонус-хантерами. Впрочем, критики считают, что этим казино пробуют устроить из случайного постояльца постоянного игрока.Простая процедура получения бездепозитного приза, кот-ая займет менее 2-х мин. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные. 1× slots регистрация в 1×slots casino <a href=https://zrz26.ru/user/Jamescrush/>https://zrz26.ru/user/Jamescrush/</a>
1×slos регистрация в 1×slots casino
Бездепозитные бонусы — это подарки от казино вид бонусных средств или фриспинов для игровых автоматов, коие начисляются на аккаунт игрока в процедуры регистрации на сайте заведения. Для получения этих поощрений депозит не потребуется. <a href=https://unservfl.de/user-2500.html>https://unservfl.de/user-2500.html</a> Исходя из сего, просто не существует разумных оснований махнуть рукою на получение такового бонуса при регистрации. И, будет, на подобный безвозмездной основе у вас есть шансы выиграть деньги и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные бонусы, называют безвозмездными интернет платформами для игр.Ниже указан актуальный перечень легальных казино в Беларуси с призами на 1-ый депозит. Вы можете попасть на официальный сайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. 1×slots регистрацию более популярный вариант это Большинство клубов привлекают внимание компьютерные за счёт разнообразных даров. На 1 веб-сайтах можно получить виртуальные кредиты, которые откроют доступ ко всему софту. На других же, администрация предлагает бесплатные вращения для пуска лучших интернет слотов. Несмотря на разные промоакции, стоит выделить самые главные.
<b>Смотреть еще похожие новости:</b>
<a href=http://skatefluckit.com/member.php?u=149708>зеркло казино 1×slots</a>
<a href=https://www.donchillin.com/space-uid-382497.html>1х слот 1хслотс регистрация перейти на 1×slots</a>
<a href=https://forum.bandariklan.com/showthread.php?tid=176825&pid=943620#pid943620>1× slots регистрация в 1×slots casino</a>
<a href=http://swissairways-va.com/phpBB3/memberlist.php?mode=viewprofile&u=3495>1× слот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Шаг 4. Активация. Внимательно исследуйте условия, информацию по ограничениям и сроке деянья бонусного предложения. Разобравшись с правилами, возможно активировать приз в собственном офисе (времени ? с внедрением промокода) либо по запросу в саппорт. Для тех, кто лишь взвешивает испытывать свою фортуну, еще для профессиональных игроков, разыскивающих свежие площадки для выигрышей, ведущие лицензированные казино часто организуют разные акции, и лучшее предложений за время – как для новичков, например и для профессиональных игроков – бездепозитный бонус за регистрацию.
#5051 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Евгения Медведева, фигуристка винлайн букмекерская контора <a href=https://sovsekretno.net/>casino официальный зеркало</a> бк букмекерская контора casino онлайн <a href=https://repost.news/>пин ап casino pin</a> r7 casino porno Светлана Ходченкова пари букмекерская контора песня казино скачать 1×bet на андроид порно с Афонина Марина Игоревна Семёнова Татьяна Владимировна порно
DiskiPlus порно с Дарья Касаткина (теннис) DiskiPlus 1×bet зеркало xbet xyz <a href=https://www.diskiplus.ru/>DiskiPlus casino ru</a> DiskiPlus casino зеркало сегодня рабочее DiskiPlus почему в казино нет окон <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet зеркало слоты 1×bet xyz</a> DiskiPlus казино вулкан DiskiPlus 1×bet слоты 1×bet top DiskiPlus казино вход официальный сайт DiskiPlus Яровая Ирина Анатольевна порно DiskiPlus Шевцова Татьяна Викторовна порно DiskiPlus автомат казино DiskiPlus pin casino зеркало
#5052 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее
Воспользоваться бездепом возможно не во всех игровых автоматах: казино вдруг уточняет ограничение для клиентов. Конечно, это возможно счесть некоторым неудобством для игрока, хотя ради отметить, что выбор автоматов всё точно остаётся довольно великим. <a href=http://filmkachat.ru/>x1 slots регистрация в 1×slots casino</a> <a href=https://diigo.com/0y2rbf>https://diigo.com/0y2rbf</a> В зависимости от интернет заведения любой из них имеет вас предложить как бездепозитные средства, например и бездепозитные фриспины, коие после успешной регистрации рухнут вас на ваш игровой баланс.Доступ к подарку может открываться механически в введения промокода либо воззвания в саппорта вебсайта. В первом случае от пользователя не потребуется никаких действий. Бездеп с активацией по коду встречается чаще всего. Игроку нужно ввести совокупа символов в графе, которая имеет пребывать в регистрационной форме в Личном офисе. 1×slots casino регистрация <a href=https://www.donchillin.com/space-uid-356039.html>https://www.donchillin.com/space-uid-356039.html</a> Эффективность бездепов в качестве маркетингового инструмента оценили почти операторы. Малоизвестные площадки используют эти промоакции, чтобы стремительно набрать базу. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны постоянных гостей. Не все веб-сайты, дающие подарки без депозита, рекомендованы к забаве. За симпатичным промоописанием шансы прятаться неосуществимые условия отыгрыша и другие подводные камни.Возьми собственный презент. Чаще всего приз активируется сразу последствии регистрации. Но случаются истории, когда нужно зайти в личный кабинет либо написать в справочную службу.
1×slots регистрация на сайте 1×slots ru com
<a href=https://radios-collector.com/viewtopic.php?f=7&t=100446>1хслотс зеркало на сегодня</a> 1×slots casino регистрация 1×slots review live <a href=https://faktes.ru/user/CraigGuali/>https://faktes.ru/user/CraigGuali/</a> Когда речь о получении бездепозитных призов в казино, начала внимание на следующие обстоятельства:Свежий бонус начисляется в виде валютных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в пользовании своими, а в случае отыгрыша оператор возможность установить лимитирование на вывод денег. x1 slots 1хслотс регистрация перейти на 1×slots Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации подарка нужно доказать электрическую почту и привязать телефонный;Способы получения бездепа различаются от вида приза, который понравился игроку. Но вам в любом случае надо(надобно) быть зарегистрированным в законном онлайн-казино и доказать свою лицо. В общем облике пошаговая инструкция для получения бездепозитного приза смотрится так:
зеркло казино 1×slots
На нашем сайте Вы отыщите список актуальных свежих бездепозитных бонусов в казино 2022 года. Также, есть много неповторимых предложений, коие доступны лишь посетителям нашего вебсайта после регистрации по нашей ссылке или активации специального промокода.При правильном подходе бездепы — это отличный способ играть на деньги без растраты личных средств. Есть несколько советов, следуя которым можно извлечь максимально полезности из похожих промоакций казино. Играть стопам только на лицензированных площадках. Скриптовые сайты не дурачат с бонусными услугами, но и употребляют пиратский софт с измененным ГСЧ. Выиграть на этих автоматах невозможно. <a href=http://gulliverus.ru/user/TravisWrElt/>http://gulliverus.ru/user/TravisWrElt/</a> Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша бонусов. Заведения всегда устанавливают наивысшую ставку, возможную по условиям вейждера. 1×slots акции Каждый новичок и умелый игрок мечтают стремительно стартануть и начать создавать настоящие ставки. Для этого довольно забрать подарок, за который надо уплачивать. В зависимости от игровой платформы, нужно сделать профиль, привязать email или телефонный. После сего администрация начислит щедрое вознаграждение в виде даровых вращений либо виртуальных кредитов.
казино 1×slots
Такой казино приз без депозита за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это как бы какая-то конспирация поощрения под бездепозитный. Суть всего этого сводится к что, этому, собственно геймеру на час выдается, к примеру, 1000 долларов, а реклама твердит про, что каждой выигрыш возможно будет в будущем оставить при себя. Но в играющий серьезно отнесется к этому предложению, то он просто растеряет время. Ведь игроку нужно несомненно играть не главном аккаунте, ну тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (том всей тыс. ) в управляла вступят определенные условия, где несомненно сказано, собственно наибольшей суммой победы возможность быть лишь двести $ и деньги возможно применять лишь виде бонуса на первый лепта с вейджером 25 от суммы гонорары плюс сам депо. По результату выйдет, что игрок выигрывал себя 200% приз с вейджером на конкретную сумму. Короче разговаривая, это все надо вашего медли.Каждая игровая перрон выделяется условиями по получению и отыгрышу бездепов. В правилах отчетливо расписаны временные рамки, за коие нужно прокрутить вейджер. Также не запамятовывайте про максимальный размер ставки и максимальную сумму выплаты. С другой стороны, дабы получить бездепозитные бонусы казино, достаточно потратить менее 1 минутки. 2. Создать свежий профиль. Для регистрации нужно заполнить небольшую анкету либо зайдите в собственный кабинет посредством социальных сетей; 1×slots мобильная версия войти казино <a href=http://www.taroko.org/taroko/forums/member.php?action=profile&uid=604>http://www.taroko.org/taroko/forums/member.php?action=profile&uid=604</a> Законодательство, регулирующее азартные игры в различных государствах, влияние на полномочия операторов. В итоге юзеры из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это возможность быть как глубокий отказ в доступе, например и невозможность загружать забавы отдельных изготовителей.
1×slots зеркало регистрация в 1×slots casino
Возможность сыграть вспомогательное соревнование (а иногда и некоторое) совершенно даром, а выигрыш, тому, поступает на счёт игрока.Размер призов почаще всего чисто условный и не превышает 50 руб. Приятно, хотя ощутимым бустом деле ли будет. <a href=http://ruzland.ru/communication/forum/user/1898/>http://ruzland.ru/communication/forum/user/1898/</a> Представьте момент, когда при ставке в 10 рублей Вы получите сходственное умножение. Миллион рублей за одно вращение, собственно вполне возможно. Поэтому вопрос, сколько можно выиграть остаётся закрытым. Предлагаем проверить без. Регистрируйтесь в одном или нескольких онлайн казино, получайте Бездепозитный бонус и инспектируйте фортуну в деле. Разумеется, исключить деньги сложно. Однако шансы есть у всех. 1×slots актуальное зеркало Так же стоит выделить то, что в каждом интернет казино установлен собственный максимальный кешаут на бездепозитный приз. Как правило кешаут — это максимальная сумма денег, которая дешевая для вывода с бездепозитного бонуса.
<b>Смотреть еще похожие новости:</b>
<a href=http://big.bestforums.org/viewtopic.php?f=7&t=17714>1хслотс регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция содержит доскональные управляла, гиперссылка на коие обыкновенно содержится в промообъявлении. В них указываются лимиты, вейджер, перечень доступных игр. Если оператор скрывает данные о предложении, то воспользоваться им надо.
#5053 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пина букмекерской конторы 1×bet <a href=https://krtka.info/>1×bet официальный сайт</a> порно с Константин Тюкавин (футбол) 1×bet официальный сайт 1×bet xyz <a href=https://kompromat1.online/>porno Игорь Акинфеев (футбол)</a> играющие казино скачать 1×bet на андроид бесплатно porno Марина Александрова black russia казино слот casino реального казино casino на телефон
DiskiPlus casino com DiskiPlus ешь казино <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet на андроид</a> DiskiPlus порно с Евгения Медведева, фигуристка DiskiPlus kometa casino <a href=https://diskiplus.ru>DiskiPlus 1×bet вход</a> DiskiPlus пина casino DiskiPlus 1×bet официальный xbet DiskiPlus 1×bet официальный 1×bet xyz DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz DiskiPlus сайт букмекерской конторы DiskiPlus 1×bet casino DiskiPlus винлайн букмекерская контора официальный сайт
#5054 Charlesgunnyhttp://filmkachat.ru
1хслотс мобильная версия зеркало
Для получения бездепа нужно пригласить в забаву по реферальной ссылке нового клиента: он должен зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и восполнить счёт на сумму, указанную в условиях акции. <a href=http://filmkachat.ru/>1×slots регистрация то дальше необходимо пройти</a> Для подтверждения электрической почты, просто перейдите по интенсивной ссылке в послании, приобретенном от игрового заведения. <a href=https://noosfero.ufba.br/lexxeagle/blog/mastering-interior-render-from-concept-to-photorealistic-visualization>https://noosfero.ufba.br/lexxeagle/blog/mastering-interior-render-from-concept-to-photorealistic-visualization</a> Чаще всего, знаменитые сервисы, эти как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно неотъемлемое верховодило. Финансовые средства выводятся только спустя что, эту платежную систему, коей пользовались для пополнения депо. Если же игрок получил бездепозитный покерный бонус, потребуется пополнить счет на минимальную необходимую, кот-ая составляет обычно десять долларов.Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного приза достаточно пополнения баланса и подтверждения личности. В иных же клубах, нужно несколько один прокрутить свой депозит. 1×slots зеркало регистрация то дальше необходимо пройти <a href=https://ponysfm.com/users/Craiglib>https://ponysfm.com/users/Craiglib</a>
1×slots сайт зеркало
Как и другие акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такого предложения являются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает новых посетителей и дозволяет им составить впечатление о функционале, не рискуя вескими совокупностями. <a href=http://216.38.0.7/viewtopic.php?f=12&t=267644>1хслот зеркало сайта</a> 1×slots акции <a href=http://www.zpu-journal.ru/forum/view_profile.php?UID=295233>http://www.zpu-journal.ru/forum/view_profile.php?UID=295233</a> Некоторые сайты, этого чем обмануть регистрацию игроков, предлагают ответить на несколько базовых вопросов. Цель проведения похожей викторины – выявить случайных людей, коие не имеют представления о покере, и не разрешить получения ими бонусов. Если посетитель уже играл в казино, то ответить на полтора десятка простых вопросов несомненно нетрудно. Очень часто, ответы можно найти на официальных веб-сайтах данных учреждений. 1×slots рабочее зеркало
1×slots регистрацию процедура займет всего лишь
Прямо момент отберите благотворительные вращения за регистрацию без депозита и начинайте коллекционировать призовые композиции ради солидных выигрышей!В списке требований к отыгрышу часто присутствуют лимиты на ставки при игре на собственные средства. Так, в отыграть надо(надобно) 30 000 руб., а предельная сумма ограничена 30 рублями, то вертеть барабаны светит 1000 один. Эта особенность затрудняет соблюдение игроками условий по срокам деяния акции. <a href=http://slideshow-forum.com/profile.php?id=96787>http://slideshow-forum.com/profile.php?id=96787</a> Выбор любого онлайн казино на нашем веб-сайте. В описании к любому Вы сможете узнать, собственно получите за творение аккаунта.Необходимость отыгрыша. Вейджер в повыше, чем для бонусов за депозит. И же средства не отыграны, исключить их нельзя. 1×slots зеркало 1хслотс регистрация перейти на 1×slots
1хслот скачать
Когда речь идет о получении бездепозитных призов в казино, начала направьте на последующие обстоятельства:Минимального оборота. Этот предел уточняется вейджером — пока игрок не поиграет на установленную сумму, вывод средств будет недоступен. <a href=http://forums.panzergrenadiers.com/showthread.php?22874–1×slots-%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%B7%D0%A0%D1%91%D0%A0%D0%85%D0%A0%D1%95-%D0%A0%C2%B7%D0%A0%C2%B5%D0%A1%D0%82%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%BB%D0%A0%D1%95&p=503501#post503501>1×slots казино зеркало</a> Некоторые клубы автоматически начисляют бонус на аккаунт игрока последствии выполнения условий получения, хотя случаются ситуации, когда приз нужно активировать игроку самому. Есть количество способов активации приза: 1×slots зеркало регистрация в 1×slots casino <a href=http://halcom.cn/home.php?mod=space&uid=131833&do=profile>http://halcom.cn/home.php?mod=space&uid=131833&do=profile</a> В онлайне большое узнаваемых игорных площадок с привлекательными акционными предложениями. Однако внимательно разбирать условия десятков услуг вскоре надоест, ну и время отнимет количество. Поэтому наша команда подготовила ТОП-3 вебсайтов с наихорошими бездепозитными призами:Операторы гемблинга утверждают, собственно например они дерутся с бонус-хантерами. Впрочем, критики считают, что этим казино пытаются сделать из случайного гостя неизменного игрока.
1×slots зеркало регистрацию более популярный вариант это
У нас на сайте Вы отыщите перечень призов без депозита в испытанных казино и подробную информацию о том как их получить и применять. Поспешите зарегистрироваться на официальном сайте Клубника, чтобы моментально получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, появляется настоящий шанс победу!Приглашаем делиться воззрениями о призах. Это поможет другим пользователям избирать наиболее выгодные предложения. <a href=https://agroinfo.biz.ua/wr_board/tools.php?event=profile&pname=RaymondEmids>https://agroinfo.biz.ua/wr_board/tools.php?event=profile&pname=RaymondEmids</a> Вейджер в переводе с британского означает «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша приобретенного приза, в нашем случае бездепозитного. Число ставок не — важно только набрать необходимую, пропорциональную сумме одобрения.Выбирая бесплатный приз, внимательно изучайте правила. Убедитесь, собственно для возможно принимать роль в акции. Уточните, в каких играх можно выполнять обстоятельства вейджера. При необходимости задавайте вопросы представителям саппорта. 1×слот регистрация в 1×slots casino Фриплей-бонусы. Бонусы за безвозмездную игру есть лишь в некоторых клубах. Они зачисляются незамедлительно в творения профиля и действуют недолговременное время. Если у вас нет медли истратить свои, они просто закончатся. Что касается времени, в большинстве случаев бонусы срабатывают на 1-го часа.
<b>Смотреть еще похожие новости:</b>
<a href=https://karakol.com.kg/user/Jameskef/>1×slots зеркало регистрация то дальше необходимо пройти</a>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/8020/#comment-336041>1×slots зеркало быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если вы бывалый игрок, вы должны аристократия, что приз без депозита – редкая находка. Тем не менее, мы еженедельно изучаем интернет, чтобы отыскать для вас лучшие бездепозитные предложения. Но есть азартные заведения, готовые просто так вручить деньги на забаву. Для этого довольно сделать профиль. Чтобы вывести выигрыш, сперва нужно выполнить вейджеровые условия, прописанные в условиях получения бездепа.
#5055 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet casino casino <a href=https://7club7.com/>1×bet официальный xbet</a> 1×bet официальный xbet 1×bet скачать бесплатно <a href=https://m.repost.news/>пин ап casino pin up top</a> казино champion casino букмекерские конторы без депозита порно с Петр Ян (ММА) casino приложения casino сайты слот casino
DiskiPlus балтбет букмекерская контора DiskiPlus casino daddy <a href=https://www.diskiplus.ru>DiskiPlus pin up casino buzz</a> DiskiPlus как выиграть в казино DiskiPlus Львова-Белова Мария Алексеевна порно <a href=https://diskiplus.ru/>DiskiPlus бесплатно фильм казино</a> DiskiPlus порно с Бондаренко Анастасия Борисовна DiskiPlus casino зеркало сегодня рабочее DiskiPlus Приезжева Екатерина Геннадьевна порно DiskiPlus букмекерская контора на андроид DiskiPlus пин ап букмекерская контора DiskiPlus букмекерские конторы pin DiskiPlus пин casino
#5056 Robertjedhttps://cash-kuper.ru
Платформа Курьер Купер <a href=https://cash-kuper.ru/>https://cash-kuper.ru</a> открывает возможности для работы в доставке. Свободный график, прозрачная система оплаты и заказы поблизости – идеальный выбор для тех, кто ищет подработку или основной заработок.
#5057 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots casino c2d ru</a> Начнём с такого, что любое рекламную за регистрацию предполагает некоторые обстоятельства. Бездепозитные призы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность валютного оборота, нужная для исполненья условий. Пример, возымели бесплатные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 руб., проигрышных либо выигрышных, не. После выполнения, бонусный баланс перейдёт на реальный и станет легкодоступным к выводу. <a href=https://scrapbox.io/shopavto/%D0%A2%D0%B5%D1%80%D0%BC%D1%96%D0%BD%D0%BE%D0%B2%D0%B8%D0%B9_%D0%B2%D0%B8%D0%BA%D1%83%D0%BF_%D0%B0%D0%B2%D1%82%D0%BE:_%D1%8F%D0%BA_%D0%B2%D0%B8%D0%B3%D1%96%D0%B4%D0%BD%D0%BE_%D1%82%D0%B0_%D1%88%D0%B2%D0%B8%D0%B4%D0%BA%D0%BE_%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D1%82%D0%B8_%D1%82%D1%80%D0%B0%D0%BD%D1%81%D0%BF%D0%BE%D1%80%D1%82%D0%BD%D0%B8%D0%B9_%D0%B7%D0%B0%D1%81%D1%96%D0%B1>https://scrapbox.io/shopavto/%D0%A2%D0%B5%D1%80%D0%BC%D1%96%D0%BD%D0%BE%D0%B2%D0%B8%D0%B9_%D0%B2%D0%B8%D0%BA%D1%83%D0%BF_%D0%B0%D0%B2%D1%82%D0%BE:_%D1%8F%D0%BA_%D0%B2%D0%B8%D0%B3%D1%96%D0%B4%D0%BD%D0%BE_%D1%82%D0%B0_%D1%88%D0%B2%D0%B8%D0%B4%D0%BA%D0%BE_%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D1%82%D0%B8_%D1%82%D1%80%D0%B0%D0%BD%D1%81%D0%BF%D0%BE%D1%80%D1%82%D0%BD%D0%B8%D0%B9_%D0%B7%D0%B0%D1%81%D1%96%D0%B1</a> На данном разделе портала периодически публикуются обзорные статьи, в которых рассматриваются безвозмездные бонусы наилучших интернет-казино. Информация структурирована по нескольким пунктам, включая основные: 1×slots промокод при регистрации 2025 <a href=http://perfectbuilding.ru/index.php?subaction=userinfo&user=luxuriantbanist>http://perfectbuilding.ru/index.php?subaction=userinfo&user=luxuriantbanist</a> Бонус начисляется игроку незамедлительно в регистрации и прохождения верификации в казино и не требует от клиента внесения депозита. Как правило, размер бонуса в сходственном случае достаточно скромный, впрочем разрешает новеньким познакомиться с забавой без риска реальными средствами.
1×slots коды
Бездепозитные бонусы казино это финансовая компенсация, предлагаемая юзерам на дармовой базе и вероятность выступать в интернет казино даром. Если ассоциировать их с одобрениями за вклад, в средства выдаются только потом начального пополнения счета, то бездепозитные вознаграждения получаются даром. То есть, играющий получает вероятность делать ставки на теснее место деньги, коие выдаст заведение, исполняя, при, обычные деянья, дабы их извлечь (здесь идет речь о регистрация, удостоверении личности с использованием номера телефонного, дизайна заказы и т.д.). <a href=http://moneysweet.listbb.ru/viewtopic.php?f=2&t=5846>1× slots сайт</a> 1×slots зеркало рабочее на сегодня Бездепозитные бонусы в казино без пополнения 2022 — это определенная сумма средств либо gift spins вращения, которые предоставляются первым постояльцам за регистрацию на веб-сайте казино вид бездепозитного бонуса, и выделяет вас возможность за счет казино без пополнения опробовать услуги (игр), с последующей преимуществом, льготой вывода средств при исполнении всех установленных управлял. <a href=http://www.qazaqpen-club.kz/en/user/JasperVerty/>http://www.qazaqpen-club.kz/en/user/JasperVerty/</a> 1×slots регистрация 1×slots review live Но существуют азартные заведения, готовые просто так вручить деньги на забаву. Для сего довольно создать профиль. Чтобы исключить выигрыш, сначала нужно выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа.
1×slots зеркало регистрация в 1×slots casino
Чтобы бездеп не был начислен на Ваш аккаунт, Вам не нужно активировать бонусный код. Если поощрение от казино было добавлено на Ваш акк механически, а Вы не расчитываете его применять, обратитесь в саппорта с просьбой отменить бездепозитный бонус. Для выбора азартного заведения Вы можете воспользоваться перечнем наших казино с призами за регистрацию. На нашем веб-сайте мы опубликовали перечень бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, собственно доля бонусов эксклюзивные и доступны только для посетителей нашего вебсайта по-специальному промо-коду либо по уникальной ссылке. Кроме как, для любого приза мы подготовили доскональный обзор, в котором Вы узнаете как получить и отыграть одобрение и как исключить собственный выигрыш с бездепа. <a href=http://community.checkinpro-hotel-software.com/memberlist.php?mode=viewprofile&u=312014>http://community.checkinpro-hotel-software.com/memberlist.php?mode=viewprofile&u=312014</a> В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это самая милая часть забавы. Важно, часто бездепозитные бонусы в казино выдаются с лимитированиями по наибольшей выплате. В среднем можно рассчитывать на выгода в некоторое тыщ рублей. Как исключить выигрыш с приза без депо. Придётся подтвердить аккаунт документально, в некоторых заведениях. Процедура верификации обязательна и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате либо прочитайте в правилах.Выполнив все требования оператора, заказчик возможность оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит примерно менее суток. Если дополнительно потребуется пройти процедуру верификации, то срок возрастает до 1–2 трудящихся дней. Для перевода используются банковские инструменты и электронные платежные системы. Второй метод подходит чем, например как большинство транзакций в осуществляются моментально. В связи со спецификой функционирования банков обработка платежей возможность занять до нескольких трудящихся дней. 1×slots зеркало видели такую регистрацию на Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную функцию активации приза без депозита. Внимательно прочитайте до конца. Многие новички проделывают промахи на шаге регистрации и поэтому имеют получить презент.Акционные предложения от казино существуют в разных форматах. Часто призы даются в мена на депо. Игрок заносит платеж и получает деньги, бесплатные вращения и другие одобрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — вид приза, который гарантирован за исполнение конкретных деяний на веб-сайте:
1×slots зеркало этих способов предполагает регистрацию
Бездепы шансы входить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой либо баллами. <a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=276776>1×slots официальный зеркало</a> 1×slots регистрация на сайте 1×slots ru com <a href=https://mcmon.ru/member.php?action=profile&uid=135623>https://mcmon.ru/member.php?action=profile&uid=135623</a>
1×slots зеркало регистрация в 1×slots casino
В наше время очень просто получить приз за регистрацию в казино. Практически каждый игорный жилище с готовностью начислит деньги либо благотворительные вращения. Многие гэмблеры используют этим и не стесняются регистрироваться в каждом клубе с прибыльными критериями. Кстати, это отличная вероятность выработать победную тактику и сорвать джекпот.Бывают ли бездепозитные бонусы без вейджера? Бывают, если у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино. <a href=https://my.desktopnexus.com/Apostas1504/journal/-2022–38850/>https://my.desktopnexus.com/Apostas1504/journal/-2022–38850/</a> 1×slots зеркало выигрыши обязательно пройдите регистрацию если Казино дает возможность заработать и вывести настоящие средства на бездепозитных бонусах. Обычно, это малозначительная сумма, коию казино возможность себе позволить подарить игроку.Для подтверждения электрической почты, просто перейдите по активной ссылке в послании, полученном от игрового заведения.
<b>Смотреть еще похожие новости:</b>
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=77440&extra=>1×slots casino зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Призовые начисления без депо могут предоставляться для участия в турнирах онлайн казино. Потратить перечисленные средства можно исключительно масштабах этой промоакции. Условия их проведения включают в себя ограничения на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, никакого изучить его правила. Самый распространённый из похожих бонусов, конечно же, бездеп на денек рождения клиента — приз вид фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им возможно на установленного периода времени.
#5058 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet официальный сайт какие казино <a href=https://rumafia.news/>приложения букмекерских контор на андроид</a> гама казино гама казино <a href=https://kompromat1.online/>порно с Сергей Бобровский (хоккей)</a> гама казино 1×bet приложение Радченко Светлана Юрьевна порно казино в россии сайт казино вход яндекс игры казино Мухтиярова Елена Вячеславовна порно
DiskiPlus порно с Константин Тюкавин (футбол) DiskiPlus букмекерская контора фонбет официальный сайт <a href=https://diskiplus.ru>DiskiPlus порно с Александр Головин (футбол)</a> DiskiPlus 1×bet официальный DiskiPlus бесплатное казино <a href=https://diskiplus.ru/>DiskiPlus почему в казино нет окон</a> DiskiPlus ап казино DiskiPlus win win casino DiskiPlus официальные сайты казино DiskiPlus win win casino DiskiPlus пинап казино DiskiPlus 1×bet официальный DiskiPlus вавада казино
#5059 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора фонбет официальный порно с Александр Головин (футбол) <a href=https://vestnik-jurnal.com/>pin casino</a> самое казино Ходнева Светлана Владимировна порно <a href=https://repost.news/>casino автомат</a> зеркала казино cat casino букмекерская контора бесплатно скачать Фастова Елена Владимировна порно казино смотреть онлайн бесплатно почему казино играющие казино онлайн
DiskiPlus pin casino зеркало DiskiPlus казино играть <a href=https://diskiplus.ru>DiskiPlus Валентина Матвиенко порно</a> DiskiPlus букмекерская контора официальный сайт DiskiPlus 1×bet приложение <a href=https://diskiplus.ru>DiskiPlus Шевцова Татьяна Викторовна порно</a> DiskiPlus 1×bet сайт 1×bet xyz DiskiPlus порно с Арина и Дина Аверины, гимнастки DiskiPlus гта онлайн казино DiskiPlus vavada casino DiskiPlus гта казино DiskiPlus слоты казино DiskiPlus казино можно
#5060 Charlesgunnyhttp://filmkachat.ru
1хслот скачать
Проверка занимает от нескольких мин. До нескольких дней, спецы техподдержки могут запросить вспомогательные документы или инициировать краткое общение по Skype. <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> <a href=https://letterboxd.com/lexxeagle/list/revolutionary-approaches-in-modern-virtual/>https://letterboxd.com/lexxeagle/list/revolutionary-approaches-in-modern-virtual/</a> Казино дает вероятность заработать и исключить реальные средства на бездепозитных бонусах. Обычно, это незначительная сумма, коию казино может себе разрешить подарить игроку. 1×slot официальный сайт <a href=http://svetoch34.ru/bitrix/rk.php?goto=http://lagunashop.ru/bitrix/redirect.php?goto=http://yunona-medica.ru/bitrix/click.php?goto=https://teletype.in/@urid_pomosh/UZY7-nLBScr>http://svetoch34.ru/bitrix/rk.php?goto=http://lagunashop.ru/bitrix/redirect.php?goto=http://yunona-medica.ru/bitrix/click.php?goto=https://teletype.in/@urid_pomosh/UZY7-nLBScr</a> Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 поболее. Когда игроку полагается количество фриспинов, администрация может бить3 их начисление на некоторое дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах акции.
1×slots мобильная версия войти казино
Возьми собственный презент. Чаще всего бонус активируется незамедлительно последствии регистрации. Но посещают ситуации, когда надо(надобно) зайти в индивидуальный офис либо написать в справочную службу.Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских рублей. В условиях промоакции предписано, что вейджер бездепозитного бонуса х20. Поэтому, чтобы отыграть приз, игроку несомненно необходимо сделать ставок на 35*20=700 руб. <a href=https://praisenpray.org/forums/showthread.php?tid=103555>1×slots бездепозитный бонус за регистрацию</a> 1х слот 1хслотс регистрация перейти на 1×slots <a href=http://www.qazaqpen-club.kz/en/user/WalterWenna/>http://www.qazaqpen-club.kz/en/user/WalterWenna/</a> Маркетинговая деятеля всех игорных интернет-клубов обязана носить разнообразный нрав. И случае вознаграждения на депо служат чтобы, чтобы, чтобы провоцировать вносить депозиты и поощрять уже существующих юзеров, то бездепозитный бонус в казино либо бонус за регистрацию в казино, до всего, рассчитан на расширение базы потребителей. 1×slots зеркало регистрацию более популярный вариант это Бездепозитные бонусы за регистрацию в игровых автоматах для хозяев онлайн-казино считаются частью маркетинговой кампании, направленной на увеличение аудитории сайта. Так они продвигают средства бренды и привлекают новых посетителей.Бездепозитные призы – это самая интересная и наиболее многообещающая промоакция интернет-казино. Они числе чем фри-спинов, поэтому собственно выплаты в безвозмездных вращениях не гарантированы, как комбинации на барабанах игрового аппарата шансы не сложиться.
casino 1×slot
Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных обстановок с казино, когда в отыгрыша бездепа для не дадут вывести крупную необходимую выигрыша.Это раз из основных характеристик привлекательности дара. С завешенным коэффициентом и мастера не сумеют выполнить условия по отыгрышу. И маловажно, как презентабельно выглядит предложение – бездепозитный бонус казино в размере $500 либо $1 000. Чтобы новенькие попревосходнее вникли, что же это вейджер, мы разберём на образце. Как управляло, при выводе денег, от играющего потребуется только сделать минимальный лепта чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом собственный счет. <a href=https://xn–6-gtb4aicb3c6b.xn–p1ai/user/Williamvup/>https://xn–6-gtb4aicb3c6b.xn–p1ai/user/Williamvup/</a> 1×slot зеркало рабочее регистрации на телефон придет Промообъявления от казино мешают реальной картины и ориентированы на привлечение внимания пользователей. Понять, насколько высоки шансы остаться в плюсе, дозволит собственный тест критерий предложения:
1×slots сайт
У нас на веб-сайте Вы найдете перечень призов без депо в проверенных казино и доскональную информацию то как их получить и использовать.Бесплатный бонус – кредиты, коие онлайн-казино начислит клиенту, не заставляя его пополнять игровой счет. <a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=4912>1×slots регистрация то дальше необходимо пройти</a> Вейджер в переводе с английского значит «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша полученного бонуса, в нашем случае бездепозитного. Число ставок значения — принципиально лишь набрать сумму, пропорциональную сумме поощрения.Более солидные предложения встречаются довольно редко. Зачастую они доступны лишь VIP-игрокам. В оставшихся случаях им скорее сопутствуют очень строгие обстоятельства отыгрыша. Также вероятны дополнительные обстоятельства и ограничения, прописанные в критериях и положения бонусной программы казино. Если вы выбрали для себя несколько брендов которые вас больше всего приглянулись, для неизменной забавы! Таких гемблеров казино очень любит и ценит, за частую такие игроки становятся VIP игроками заведения, коим часто поступают прибыльные предложения повторяющий призов, например же туда входит и бездепозитные. 1×slots зеркало регистрация <a href=http://atlant-zkv.by/index.php?subaction=userinfo&user=merebyte46>http://atlant-zkv.by/index.php?subaction=userinfo&user=merebyte46</a> Если идет об неповторимых предложениях, возможность понадобиться регистрация в казино по ссылке с партнерского вебсайта.
1×slots зеркало видели такую регистрацию на
В интернете количество известных игорных площадок с привлекательными акционными предложениями. Однако внимательно читать условия десятков услуг скором надоест, да и время отнимет количество. Поэтому наша команда подготовила ТОП-3 сайтов с наихорошими бездепозитными бонусами: <a href=http://toji.kiukura.com/bbs/board.php?bo_table=free&wr_id=1258567>http://toji.kiukura.com/bbs/board.php?bo_table=free&wr_id=1258567</a> Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Большинство клубов привлекают внимание игроков за счёт различных презентов. На 1 веб-сайтах возможно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает благотворительные вращения для пуска топовых онлайн слотов. Несмотря на различные акции, стоит выделить самые основные. 1×slots casino зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://www.handmakersbrasil.com.br/topic/719–1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D0%BF%D1%80%D0%BE%D1%85%D0%BE%D0%B4%D0%B8%D1%82%D1%8C-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8E-%D1%8D%D1%82%D0%BE-%D0%BE%D1%82%D0%BB%D0%B8%D1%87%D0%BD%D1%8B%D0%B9-%D0%B2%D0%B0%D1%80%D0%B8%D0%B0%D0%BD%D1%82/>1×slots зеркало проходить регистрацию это отличный вариант</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Важно, удостоверьтесь сомнений, собственно ранее не регились в избранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи. Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы которые возникают у начинающих.
#5061 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Анастасия Потапова, теннисистка porno Мира Андреева (теннис) <a href=https://vestnik-jurnal.com/>где казино</a> up casino зеркало букмекерская контора официальный сайт <a href=https://repost.news/>1go casino</a> up букмекерская контора porno Игорь Акинфеев (футбол) porno Ангелина Гончаренко, хоккеистка порно с Евгений Малкин (хоккей) 1×bet слоты официальный сайт порно с Евгения Медведева казино смотреть
DiskiPlus casino официальный сайт DiskiPlus вавада казино <a href=https://diskiplus.ru>DiskiPlus Ирина Горбачева</a> DiskiPlus сайт казино зеркало DiskiPlus 1×bet регистрация <a href=https://diskiplus.ru/>DiskiPlus Мухтиярова Елена Вячеславовна порно</a> DiskiPlus песня казино DiskiPlus порно с Александр Головин (футбол) DiskiPlus casino скачать DiskiPlus porno Юлия Канакина DiskiPlus букмекерская контора официальный сайт DiskiPlus лучшие казино бесплатно DiskiPlus казино рояль смотреть
#5062 AHoini
<a href=http://cheongbong.com/bbs/board.php?bo_table=free&wr_id=76965>1win inscription</a> <a href=https://nextsemi-skku.co.kr/bbs/board.php?bo_table=free&wr_id=86375>neon54 casino</a>
#5063 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора на андроид casino регистрации <a href=https://res-publika.com>про казино</a> ев казино букмекерская контора мостбет <a href=https://t.me/vchkogpu_ru>pin up casino top top</a> black russia казино Радченко Светлана Юрьевна порно 1×bet зеркало рабочее bitz casino казино фильм онлайн букмекерские конторы в россии 1×bet зеркало рабочее на сегодня
DiskiPlus порно с Федор Чалов (футбол) DiskiPlus casino x <a href=https://www.diskiplus.ru/>DiskiPlus порно с Евгений Малкин (хоккей)</a> DiskiPlus водка казино DiskiPlus 1×bet скачать бесплатно <a href=https://www.diskiplus.ru>DiskiPlus casino вход</a> DiskiPlus 1×bet слоты 1×bet top DiskiPlus букмекерские конторы в россии DiskiPlus букмекерские конторы pin DiskiPlus pin up casino пин DiskiPlus зеркала казино DiskiPlus порно с Голикова Татьяна Алексеевна DiskiPlus casino на телефон
#5064 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Елена Лядова ешь казино <a href=https://strelochnik.com/>Хорова Наталья Александровна порно</a> 1×bet скачать бесплатно Фастова Елена Владимировна порно <a href=https://res-publika.com>Львова-Белова Мария Алексеевна порно</a> kent casino скачать casino на андроид ешь казино казино рояль смотреть pin up casino скачать букмекерская контора официальный сайт скачать porno Алена Косторная (фигурное катание)
DiskiPlus порно с Голикова Татьяна Алексеевна DiskiPlus казино смотреть онлайн <a href=https://www.diskiplus.ru/>DiskiPlus пин ап букмекерская контора</a> DiskiPlus casino промокод DiskiPlus 1×bet зеркало рабочее <a href=https://www.diskiplus.ru/>DiskiPlus букмекерские конторы pin</a> DiskiPlus играющие казино онлайн DiskiPlus фреш казино DiskiPlus порно с Юлия Ефимова, пловчиха DiskiPlus порно с Бондаренко Анастасия Борисовна DiskiPlus Матвиенко Валентина Ивановна порно DiskiPlus 1×bet на сегодня DiskiPlus скачать сайт букмекерской конторы
#5065 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на сайте 1×slots ru com
Следует выделить, что бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом.Необходимость отыгрыша. Вейджер в выше, чем для призов за депозит. И пока свои не отыграны, исключить их нельзя. <a href=http://filmkachat.ru/>1хслотс мобильная версия зеркало</a> Приветственный бонус без депо ? презент за регистрацию. Выдается средствами, фриспинами или баллами. В последнем случае бонусные баллы используются для роли в турнирах или размена на реальные деньги. <a href=http://www.pvp.iq.pl/thread-5909.html>http://www.pvp.iq.pl/thread-5909.html</a> Вообще перейдя в казино — правила одинаковы в получении бездепозитных бонусов, в стереотипные верховодила заходит: подтвердить эл. Почту и телефонный, заполнить свой собственный профиль, активировать рекламную код либо активировать предложения во вкладке БОНУСЫ. 1×slots зеркало регистрацию более популярный вариант это <a href=http://agriexpert.kz/user/Justinacoub/>http://agriexpert.kz/user/Justinacoub/</a>
1×slot регистрация
Для отыгрыша приза казино обязует игрока поиграть на сумму, в несколько раз превышающую сумму приобретенного бонуса — здесь выгода компании явна.Законодательство, регулирующее азартные забавы в разных странах, влияние на возможности операторов. В итоге юзеры из отдельных ареалов сталкиваются с лимитированиями со стороны казино. Это возможность быть как полный отказ в доступе, так и невозможность загружать игры отдельных производителей. <a href=https://feederfishing.lt/en/forum/parduodu/1330999–1×-1×slots-casino#1342473>1×слот регистрация в 1×slots casino</a> 1×slots бездепозитный бонус за регистрацию <a href=http://autobrands.lv/user/Julesvum/>http://autobrands.lv/user/Julesvum/</a> 1×slots регистрация на сайте Способы получения бездепа различаются от вида приза, кот-ый понравился игроку. Но вам в любом случае нужно быть зарегистрированным в легальном онлайн-казино и подтвердить собственную лицо. В общем виде пошаговая инструкция для получения бездепозитного бонуса выглядит например:Бездепы с безвозмездными вращениями деют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд уплачивает казино. Число спинов ограничено и изредка превышает сотню. Если акция содержит много бесплатных игр, их начисление может быть разбито на количество дней.
1хслотс регистрация в 1×slots casino
Рассмотрим на образце: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских рублей. В критериях акции указано, собственно вейджер бездепозитного приза х20. Поэтому, дабы отыграть бонус, игроку будет необходимо устроить ставок на 35*20=700 рублей.Зарегистрироваться в казино по особой ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефона и электрическую почту). Для подтверждения номера телефонного необходимо в личном профиле показать свой номер и надавить кнопку „Подтвердить номер телефонного“, дальше Вы получите sms-сообщение с кодом, кот-ый необходимо установить в подходящее фон. Для доказательства электронной почты, перебежать по интенсивной ссылке в письме от казино. <a href=http://www.xn–9i2bz3bx5fu3d8q5a.com/bbs/board.php?bo_table=free&wr_id=973481>http://www.xn–9i2bz3bx5fu3d8q5a.com/bbs/board.php?bo_table=free&wr_id=973481</a> Чем ниже велечину вейджера, тем проще отыграть и исключить приз. Если Вы расчитываете заработать на бездепе, не просто ознакомиться с свежим игровым клубом, то стоит избегать призов с высоким вейджером их практически не реально отыграть. С ними Вы сможете только протестировать забавы заведения. казино 1×slots Несмотря на то, собственно этот вариант стимуляции со стороны азартных платформ очень моден в похожих игр, далеко многим поклонникам казино ведомо, что являют собой бездепозитные бонусы казино и как непосредственно их вероятно эксплуатировать.Также учтите, собственно некоторые игровые платформы сузивают перечень государств, коие готовы получить предложенный бездепозитный приз за регистрацию. К образцу, есть онлайн-заведения, выдающие подобные бонусы только обитателям конкретных стран. К примеру, интернет казино 777 Оригинал предоставляет бездепозитный бонус лишь игрокам из России и государств СНГ. Или наоборот, пичкают вознаграждением всех, не обитателей неких стран (из сего, стопам пристально изучать список, чтобы впоследствии не возникло никаких вопросов и жалоб).
1×slots скачать на айфон
Да, у безвозмездных призов есть недостатки. Прежде всего, они обычно не. Кроме того, условия вейджера по ним практически жесткие. Но все же неименье риска проделывает их очень привлекательными для клиентов. <a href=https://radios-collector.com/viewtopic.php?f=7&t=110960>1хслотс зеркало на сегодня</a> 1×slots подтвердит вашу регистрацию если говорить <a href=http://www.gabiz.kr/g5/bbs/board.php?bo_table=free&wr_id=1120163>http://www.gabiz.kr/g5/bbs/board.php?bo_table=free&wr_id=1120163</a> Каждый новичок и умелый игрок мечтают стремительно стартануть и начать создавать настоящие ставки. Для этого довольно забрать подарок, за который надо уплачивать. В зависимости от игровой платформы, нужно сделать профиль, привязать email или телефонный. После сего администрация начислит щедрое вознаграждение в виде даровых вращений либо виртуальных кредитов.
зеркала 1×slots
Многие казино деют в рекламных целях безвозмездные призы необыкновенно для наших читателей. Чтобы их получить, надо(надобно) перебежать на игровой сайт по партнерской ссылке с нашего портала. Промообъявления от казино мешают реальной картины и ориентированы на привлечение внимания юзеров. Понять, насколько высоки шансы остаться в плюсе, дозволит собственный тест критерий предложения:Реже призы без депо начисляются постоянным игрокам. С их помощью администрация старается удержать ценных клиентов либо желает поблагодарить за преданность правильных посетителей. Но намного чаще для похожих целей применяются эти акции: <a href=http://fumankong1.cc/home.php?mod=space&uid=581967>http://fumankong1.cc/home.php?mod=space&uid=581967</a> 1хслотс рабочее зеркало на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-2025#post-57773>1×slots официальный сайт, скачать</a>
<a href=http://forum.survival-readiness.com/viewtopic.php?t=268817>1×slots подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Минимального оборота. Этот лимит уточняется вейджером — пока игрок не поиграет на установленную сумму, вывод средств несомненно недоступен.
#5066 Charlesgunnyhttp://filmkachat.ru
1×slots бонус за регистрацию
Для получения бонуса нужно пригласить в игру свежего посетителя. Казино начисляет пригласившему фиксированный процент от взносов приглашённого вид приза: чаще всего его объем не превышает 10%. Срок действия бонуса правило не выше месяца: пригласивший получает приз в зависимости от проигранных ставок приглашённого в 1-ый месяц забавы.Чаще всего казино бонус за регистрацию без депозита даёт вероятность запустить любой машина. Но чем пристально ознакомиться с критериями. Иногда для игры доступны лишь определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, превосходнее начать знакомство с миром пыла именно с «одноруких злодеев». <a href=http://filmkachat.ru/>1хслотс 1хслотс регистрация перейти на 1×slots</a> <a href=https://medium.com/@comcgifurniture/professional-cannabis-delivery-services-a-complete-guide-for-cambridge-residents-b435bbfcdc10>https://medium.com/@comcgifurniture/professional-cannabis-delivery-services-a-complete-guide-for-cambridge-residents-b435bbfcdc10</a> 1×slots на любой вкус как пройти регистрацию <a href=https://www.digitalistings.com/author/miguelopich/>https://www.digitalistings.com/author/miguelopich/</a>
1×slots официальный регистрация
<a href=http://theauction.com.au/my-account/>x1 slots регистрация в 1×slots casino</a> 1×slots зеркало регистрация то дальше необходимо пройти Минимального оборота. Этот предел устанавливается вейджером — пока игрок не сыграет на установленную необходимую, вывод средств будет недосегаем. <a href=https://forum.kainkalabs.com:443/member.php?action=profile&uid=19159>https://forum.kainkalabs.com:443/member.php?action=profile&uid=19159</a> казино 1×slots официальный сайт Так что основное отличие презента на депозит от бездепа – неотъемлемое пополнение счёта. Вы сможете внести депозит и преувеличить стартовый капитал или отобрать бездеп и при этом не придётся рисковать своими сбережениями. Поспешите выполнить простые требования, и администрация ресурса начисляет щедрое одобрение!Подтвердите регистрацию, чтобы активировать Бездепозитный бонус с выводом, потребуется наполнить собственный профиль. Заполните пустующие поля реальными данными о для.
1хслот скачать
Активация происходит счет промокодов, которые вводятся в собственном офисе после регистрации. Среди спецпредложений в списке Casino.ru находятся неповторимые промокоды, коие доступны только посетителям портала. Другие методы начисления средств ? автоматическая активация незамедлительно последствии сотворения аккаунта и получение подарка по запросу в службу технической помощи. <a href=http://duryunsan.kr/bbs/board.php?bo_table=free&wr_id=239956>http://duryunsan.kr/bbs/board.php?bo_table=free&wr_id=239956</a> 1хслот зеркало Новички не любят сразу же вносить депо. Это обусловлено неимением навыка и сомнением. К счастью, дни можно получить бездепозитный приз за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В любом случае вы не рискуете своими сбережениями. Это отличная вероятность запустить приглянувшийся видео слот либо же испытывать фортуну в настольных играх.Как прочие акции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такого предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих посетителей и позволяет им составить впечатление о функционале, не рискуя вескими суммами.
1×slots регистрация то дальше необходимо пройти
1хслотс зеркало <a href=http://www.orlandogamers.org/forum/member.php?action=profile&uid=8141>http://www.orlandogamers.org/forum/member.php?action=profile&uid=8141</a> Получить Бездепозитный бонус в онлайн казино дело 2-ух кликов. Другой момент, отыграть промо и соблюсти верховодила и обстоятельства отыгрыша. Под правилами подразумевается не вагер, но и лимитирования по наибольшей ставке. Мы понимаем, собственно в кино все ставят на зеро и выигрывают. Призываем не создавать сходственного. Перед активацией приза прочтите управляла. Узнайте следующие факторы: Условия получения дара, за регистрацию, за депо и прочее. Ограничения по максимальной ставке. Зачастую не выше 350 рублей. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вращать автоматы, а вагер несомненно стоять на пространстве. Поэтому главно знать, в каких забавах возможно совершать кратность денежного оборота.Иногда для получения бонусов необходимо связаться с адептами саппорта. Удобнее всего с ними разговаривать в онлайн-сате, но иногда достаточно запроса по электрической почте.
1×slots регистрация 1×slotscasino 56 online
Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 $. Если выдаются фриспины, их количество редко выше нескольких десятков бесплатных вращений.Большинство интернет-казино из нашего топ-10 готовы порадовать вас эксклюзивными акциями. Читайте о них в обзорах и на форуме. Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша бонусов. Заведения всегда устанавливают наивысшую ставку, допустимую по условиям вейждера.После требуется привнести идентификационный платёж. Это пугает новичков больше всего. Нужно устроить наименьший депо в 100–500 руб. Таким образом служба безопасности увериться что, что платёжный способ принадлежит Вам. Данная процедура необходима для обеспечения безопасности игровых счетов. Пример, Ваш аккаунт взломают и выведут свои на собственный кошелёк. Будет очень неприятно. Поэтому верификация платёжной системы, это важный момент. <a href=http://www.odnopolchane.net/forum/member.php?u=629406>http://www.odnopolchane.net/forum/member.php?u=629406</a> В случае установленного лимита на сумму вывода выигрыша с бездепозитного бонуса, игрок не сможет исключить больше заявленной суммы. казино 1× slots официальный сайт Необходимость отыгрыша. Вейджер в выше, чем для призов за депозит. И пока свои не отыграны, исключить их нельзя.Такой бесплатный эквивалент средств зачисляется на профиль юзера после воплощения притязаний и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений вероятен только последствии осуществления вейджеровых критерий.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.l2endless.com/showthread.php?tid=344843>1хслотс регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для вывода средств приз надо(надобно) несомненно отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами акции и вариациями отыгрыша бездепозитного приза до его получения, дабы избежать конфликтных обстановок. Бoльшинcтвo азартных заведений выдвигают приблизительно однообразные, схожие обстоятельства и требования, которые необходимо выполнить, чтобы получить бездепозитный приз за регистрацию. Все их возможно соединить в раз список:
#5067 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино большая зеркала казино <a href=https://krtka.info/>7k casino зеркало рабочее</a> букмекерская контора вход online casino <a href=https://th-royalgclub.com/>casino бездепозитный</a> casino бездепозитный рокс казино porno Андрей Рублев (теннис) казино ставка порно с Баталина Ольга Юрьевна 1×bet на андроид 1×bet официальный сайт
DiskiPlus 7k casino зеркало DiskiPlus бесплатное казино <a href=https://diskiplus.ru>DiskiPlus скачать 1×bet 1×bet xyz</a> DiskiPlus 1×bet официальный DiskiPlus up casino официальный <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet официальный слоты</a> DiskiPlus гама казино DiskiPlus порно с Александр Головин (футбол) DiskiPlus 7k casino скачать DiskiPlus Окладникова Ирина Андреевна порно DiskiPlus pin ап casino DiskiPlus казино проиграл DiskiPlus pin up casino пин ап
#5068 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasin online
Зарегистрироваться в казино по особой ссылке или с бонусным кодом. Подтвердить контактные данные (номер аппарата и электрическую почту). Для подтверждения номера аппарата нужно в собственном профиле указать свой номер и нажать кнопку „Подтвердить номер телефонного“, дальше Вы получите sms-сообщение с кодом, кот-ый нужно установить в соответствующее фон. Для подтверждения электрической почты, перейти по интенсивной ссылке в послании от казино.Нельзя осматривать игру на деньги, как вариант заработка. Азартные игры запрещены для лиц моложе 18 лет. Topcasinobonuses.mobi классифицируется организатором азартных игр. Сайт одевает информационный нрав. <a href=http://filmkachat.ru/>1×slot зеркало</a> На странице представлены бездепозитные призы за регистрацию в казино редчайшая заслуга за которой гонятся все игроки как новички, так и профессионалы. Мы также уделяем большое внимание на наличие призов при формирование рейтинга казино на деньги. Бездепозитный бонус это возможность выступать даром и выиграть реальные деньги. <a href=https://www.uannounceit.com/article/1416>https://www.uannounceit.com/article/1416</a> 1×slots официальный сайт мобильная версия скачать <a href=https://forum.ixbt.com/users.cgi?id=info:%3E1758725>https://forum.ixbt.com/users.cgi?id=info:%3E1758725</a>
1×slot зеркало
Для тех, кто лишь подумывает испытать собственную удачу, еще для профессиональных игроков, отыскивающих свежие площадки для выигрышей, ведущие лицензированные казино нередко устраивают различные акции, и лучшее предложений за последнее время – как для новичков, например и для профессиональных игроков – бездепозитный бонус за регистрацию. <a href=http://www.ihavethepussy.com/de/members/36184-Michaelbar?s=b2b1cd30cf75edc4e1f2dc689bc4fb6f>1×slots зеркало на сегодня</a> 1хслотс зеркало Бездепозитные призы за регистрацию в игровых автоматах для хозяев онлайн-казино являются частью маркетинговой кампании, направленной на повышение аудитории вебсайта. Так они продвигают средства бренды и завлекают свежих посетителей. <a href=https://marexwine.ru/forum/?PAGE_NAME=profile_view&UID=875>https://marexwine.ru/forum/?PAGE_NAME=profile_view&UID=875</a> Возможность сыграть дополнительное состязание (а времени и некоторое) абсолютно безвозмездно, а выигрыш, к, поступает на счёт игрока. 1×slots зеркало на сегодня Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.
1×slot рабочее зеркало
<a href=http://www.nefiskokulutarifler.com/search?q=%5Burl%3Dhttp%3A%2F%2Ffilmkachat.ru%5D%D1%81%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C+%D1%84%D0%B8%D0%BB%D1%8C%D0%BC%D1%8B+%D0%BD%D0%B0+%D1%82%D0%B5%D0%BB%D0%B5%D1%84%D0%BE%D0%BD+%D0%B1%D0%B5%D0%B7%5B%2Furl%5D+%D1%81%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C+%D1%84%D0%B8%D0%BB%D1%8C%D0%BC+%D0%BA%D0%BE%D0%BC%D0%B5%D0%B4%D0%B8%D1%8F>http://www.nefiskokulutarifler.com/search?q=%5Burl%3Dhttp%3A%2F%2Ffilmkachat.ru%5D%D1%81%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C+%D1%84%D0%B8%D0%BB%D1%8C%D0%BC%D1%8B+%D0%BD%D0%B0+%D1%82%D0%B5%D0%BB%D0%B5%D1%84%D0%BE%D0%BD+%D0%B1%D0%B5%D0%B7%5B%2Furl%5D+%D1%81%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C+%D1%84%D0%B8%D0%BB%D1%8C%D0%BC+%D0%BA%D0%BE%D0%BC%D0%B5%D0%B4%D0%B8%D1%8F</a> 1×slots зеркало проходить регистрацию это отличный вариант
1×slots регистрация на официальном сайте
Ограничения по забавам. Администрация запрещает игрокам кое-какие игровые автоматы с бездепозитным бонусом, деньгами либо бесплатными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда деление производится по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, но запрещен в настольных забавах и в разделе Live Casino. 1×slots casino регистрация 1×slots review live <a href=http://sabrina-online.su/wiki/index.php?title=%D1%84%D0%BB%D0%B8%D1%80%D1%82%D0%B0%20%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA%20%D0%B7%D0%BD%D0%B0%D0%BA%D0%BE%D0%BC%D1%81%D1%82%D0%B2%D0%B0%20%D0%BF%D0%BE%20%D0%B2%D0%B0%D1%82%D1%81%D0%B0%D0%BF%20%D0%BA%D0%BE%D0%BD%D1%82%D0%B0%D0%BA%D1%82%D0%B5>http://sabrina-online.su/wiki/index.php?title=%D1%84%D0%BB%D0%B8%D1%80%D1%82%D0%B0%20%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA%20%D0%B7%D0%BD%D0%B0%D0%BA%D0%BE%D0%BC%D1%81%D1%82%D0%B2%D0%B0%20%D0%BF%D0%BE%20%D0%B2%D0%B0%D1%82%D1%81%D0%B0%D0%BF%20%D0%BA%D0%BE%D0%BD%D1%82%D0%B0%D0%BA%D1%82%D0%B5</a> Способы получения бездепа различаются в зависимости от вида бонуса, кот-ый понравился игроку. Но вам в любом случае надо(надобно) быть зарегистрированным в законном онлайн-казино и подтвердить собственную личность. В общем облике пошаговая аннотация для получения бездепозитного приза выглядит например:
1×slots промокод при регистрации 2025
На безвозмездные призы онлайн-казино почти постоянно распространяется ограничения по стране проживания клиентов. Даже случае вас разрешено раскрывать счет и выступать на средства в заведении, это еще не означают, что для доступны no deposit bonuses.Теоретически, к бесплатным бонусам возможно отнести например именуемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, потому что они предоставляют лишь возможность делать ставки. Но рядах азартных платформах сходственные вознаграждения все получить и уже зарегистрированные пользователи. В этом случае, призы предоставляются масштабах уникальных акций либо же неким игрокам вид акционного предложения, коие приходит на почту с целью «вернуть» игрока в свое казино. <a href=https://masterarms.se/user/harrypoimb/>https://masterarms.se/user/harrypoimb/</a> Получить Бездепозитный бонус в интернет казино дело 2-ух кликов. Другой момент, отыграть промо и соблюсти верховодила и обстоятельства отыгрыша. Под правилами подразумевается не вагер, хотя и лимитирования по максимальной ставке. Мы понимаем, что в кинотеатр все ставят на зеро и выигрывают. Призываем не создавать похожего. Перед активацией приза прочитайте правила. Узнайте следующие моменты: Условия получения подарка, за регистрацию, за депо и другое. Ограничения по наибольшей ставке. Зачастую не выше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вращать автоматы, а вагер будет стоять на месте. Поэтому важно аристократия, в каких забавах можно осуществлять кратность валютного оборота. x1 slots 1хслотс регистрация перейти на 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=http://cozycotg.com/forum/memberlist.php?mode=viewprofile&u=72740>1×slots рабочее зеркало на сегодня</a>
<a href=https://karakol.com.kg/user/Jameskef/>1×slots подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, например как Вам придется ее подтвердить в будущем при выводе средств. 2. Создать новый профиль. Для регистрации нужно заполнить небольшую анкету или зайдите в собственный офис при помощи социальных сетей;
#5069 Charlesgunnyhttp://filmkachat.ru
1× слот зеркало
Помните, что любые нарушения верховодил сведут на нет ваши старания, и вы всего останетесь без начисленного вас бесплатного приза. Всегда изучайте верховодила начисления и обстоятельства вейджера. По любым вопросам, на которые вы не можете помощи найти ответы, обращайтесь за объяснениям и саппорт.Превышение наибольшей ставки при отыгрыше. Система автоматически не предуведомляет о превышении ставки, поэтому о несоблюдении верховодил игрок имеет узнать теснее после подачи запроса на вывод средств. <a href=http://filmkachat.ru/>1×slot рабочее зеркало</a> Бонус с зачислением средств на счет дает больше свободы деяний. Пользователь сам выбирает, каким образом распорядиться подаренными средствами. Здесь того имеют работать ограничения на перечень доступных игр, хотя обыкновенно эти рамки не например строги, как в промо с бесплатными вращениями.Когда речь идет о денежных призах, казино постоянно устанавливают обстоятельства вейджера, которые нужно выполнить, дабы вывести выигрыш. <a href=https://www.gift-me.net/blogs/228961/Transform-Your-Space-Professional-3D-Living-Room-Design-Made-Simple>https://www.gift-me.net/blogs/228961/Transform-Your-Space-Professional-3D-Living-Room-Design-Made-Simple</a> Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации презента необходимо подтвердить электрическую почту и привязать телефон;Доступ к дару может раскрываться автоматически после введения промокода или воззвания в службу вебсайта. В первом случае от пользователя не потребуется никаких деяний. Бездеп с активацией по коду встречается почаще всего. Игроку нужно установить совокупа символов в графе, которая имеет находиться в регистрационной форме в Личном офисе. 1×slots на любой вкус как пройти регистрацию <a href=http://domocontrol.ru/user/MiguelCiz/>http://domocontrol.ru/user/MiguelCiz/</a> Также существуют онлайн-платформы азартных игр, коие применяют раздачу бездепозитных призов в особые даты (как для казино, так и для игрока). Помимо этого, действующие геймеры кроме имеют вероятность получить схожие призы за собственную работа (к примеру, за повышения уровня или за схожие заслуги).
рабочее зеркало 1×slots
Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы моментально получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, появляется настоящий шанс победу! 1×slot официальный сайт Но не мыслить, что снабжая пользователей этими бонусами, казино увлекается спонсированием. Ведь объемы вознаграждений, в, не немалые (средним объемом от 5 до 20 $). И на эти свои налагаются определенные обстоятельства и ограничения, обязательные к выполнению игрока, если в последствии он вожделеет получить все свои выигранные финансы.Какие бонусы я могу еще получить не бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного бонуса, любое онлайн казино предлагает игрокам прибыльное предложение на первый депо, вы совершаете депозит, ваш депо увеличивается в двое либо и в трое, что, этим самым начать играть можно с больше солидной суммой, так же не запамятываем тему вейджер на бонусы. <a href=http://mail.clicksordirectory.com/details.php?id=428849>http://mail.clicksordirectory.com/details.php?id=428849</a> Когда идет о получении бездепозитных бонусов в казино, для обратите внимание на следующие обстоятельства:Для получения приза нужно ознакомиться с программкой лояльности казино и устроить ставки на необходимую, нужную для перехода на следующий степень. 1×slots сайт
1×slots рабочее зеркало
Таким образом, заведение пробует показать себя своим вероятным игрокам, а такой рекламный ход как казино бонус без депозита за регистрацию привлекает очень много внимания к игорному заведению и обеспечивает постоянный поток новых посетителей и грядущих посетителей игрового интернет клуба. <a href=http://www.fumankong4.cc/home.php?mod=space&uid=601078>http://www.fumankong4.cc/home.php?mod=space&uid=601078</a> Но есть игорные заведения, которые готовы просто так жертвовать средства на забаву. Для этого достаточно создать профиль. Чтобы исключить собственный выигрыш, для сначала необходимо выполнить условия отыгрыша, указанные в критериях получения бездепозитного депозита. 1× slots casino официальный сайт Шаг 4. Активация. Внимательно исследуйте условия, информацию по ограничениям и сроке деянья бонусного предложения. Разобравшись с правилами, можно активировать приз в личном офисе (от ? с использованием промокода) либо по запросу в саппорт.Также, учите, что бездепозитный приз можно исключить только в случае, когда будут исполнены все условия отыгрыша.
1×slots мобильная версия войти казино
Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации дара нужно подтвердить электронную почту и привязать телефонный;Чаще всего, популярностью сервисы, эти как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное управляло. Финансовые средства выводятся лишь спустя что, эту платежную систему, которой огромный для пополнения депо. Если же игрок получил бездепозитный покерный приз, потребуется восполнить счет на минимальную сумму, которая сочиняет обычно 10 $. 1×slots регистрация 1×slots casino c2d ru <a href=https://njt.ru/forum/user/183536/>https://njt.ru/forum/user/183536/</a> Пoдтвepдить личнocть клиента. Для удачного вывода средств, нужно подтвердить личность клиента. Нa этaпe вepификaции пpoфиля, работники службы безопасности обязаны убедиться, что у игрока чем один акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не сможет исключить свой выигрыш, если у него будет количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы.Только выполнив все обстоятельства отыгрыша и дождавшись окончания проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить средства деньги.
1×slots casino зеркало рабочее
Ниже указан важный перечень легальных казино в Беларуси с призами на первый депозит. Вы сможете попасть на официальный вебсайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз.Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс дает игрокам важную информацию о самых новых, щедрых и проверенных призах в интернет казино, которые обновляются любой день. Так собственно основное различие презента на депозит от бездепа – неотъемлемое пополнение счёта. Вы можете привнести депозит и преумножить стартовый капитал или арестовать бездеп и всем не придётся рисковать собственными сбережениями. Поспешите выполнить обычные требования, и администрация ресурса начислит щедрое одобрение!Бездепозитные призы в казино без пополнения 2022 — это определенная сумма денег или gorovyh spins вращения, коие предоставляются первым постояльцам за регистрацию на веб-сайте казино в виде бездепозитного приза, и выделяет вас возможность за счет казино без пополнения опробовать предложения (игр), с последующей прерогативой вывода средств при исполненьи всех установленных управлял. <a href=http://odetah.ru/index.php?subaction=userinfo&user=barbarousbanist>http://odetah.ru/index.php?subaction=userinfo&user=barbarousbanist</a> Представленные на этой страничке наихорошие бездеп бонусы в казино за регистрацию в 2022 году имеют подходящие обстоятельства. После кропотливого анализа редакция портала составила рейтинг спецпредложений, каком посетители Casino.ru шансы сортировать список по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д. 1×slot зеркало рабочее регистрации на телефон придет Фриспины — благотворительные вращения, коие позволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытных игроков фриспины считаются самым модным и предпочтительным обликом бонуса — бесплатные вращения иногда эффективнее и веселее в отыгрыше, чем остальные облики бездепов.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=37136>1×slots быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины без депо или дополнительные средства посодействуют ближе познакомиться с игровой платформой и её функциями. За счёт подарков возможно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям из-за игры против живых крупье. Заполняя данные в личном профиле, указывайте только достоверную информацию, например как Вам придется ее доказать в будущем при выводе денег.
#5070 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
официальное казино вход porno Виктория Баркова, легкоатлетка <a href=https://slon-ru.com/>пин up casino</a> казино фильм gama casino <a href=https://strelochnik.com/>casino ru</a> casino скачать 1×bet xbet казино ставка up букмекерская контора почему в казино нет окон casino daddy автомат казино
DiskiPlus казино играть DiskiPlus пин ап букмекерская контора <a href=https://diskiplus.ru/>DiskiPlus ограбление казино</a> DiskiPlus гта казино DiskiPlus почему в казино не бывает настенных часов <a href=https://www.diskiplus.ru>DiskiPlus 1×bet бесплатно</a> DiskiPlus Разуваева Ксения Денисовна порно DiskiPlus скачать casino на андроид DiskiPlus 7k casino официальный сайт DiskiPlus казино 5 DiskiPlus Анна Михалкова DiskiPlus casino актуальное зеркало DiskiPlus винлайн букмекерская контора официальный
#5071 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию процедура займет всего лишь
Как лишь получите бездеп в казино, всё равно не запамятовывайте инспектировать электронную почту. Некоторые игорные клубы каждый веселят интенсивных гэмблеров приятными призами. Чаще всего получить презент можно в преддверии веселья, на денек рождение, за привлечение друга. А того распространённым призом является надбавка к депозиту. Нужно чем пополнить счёт, и азартное заведение прирастит его на 50–100%. <a href=http://filmkachat.ru/>1хслот зеркало</a> Сразу в активации промокода можно воспользоваться даром. Как теснее упоминалось, бонусы посещают трёх видов – фриспины, кредиты и фриплей-бонусы. <a href=https://codepen.io/bjxkafyt-the-encoder/pen/bNbrqxY>https://codepen.io/bjxkafyt-the-encoder/pen/bNbrqxY</a> Реже призы без депо начисляются неизменным игрокам. С их поддержкой администрация старается удержать ценных посетителей или желает поблагодарить за лояльность правильных посетителей. Но гораздо чаще для похожих целей применяются такие акции: 1×slots мобильная версия войти казино <a href=http://miga114.co.kr/bbs/board.php?bo_table=free&wr_id=105031>http://miga114.co.kr/bbs/board.php?bo_table=free&wr_id=105031</a>
1×slots официальный сайт, скачать
Внесение депо – Будьте готовы пополнить счет в отыгрыша приза. Это стандартное требование верховодил для этого типа промо-акций. Лучше заблаговременно уточнить, какую сумму нужно будет вносить на счет. Как правило, идет о минимальном депозите, хотя вы обязаны быть уверены, собственно он вас по кармашку. рабочее зеркало 1хслотс Автоматы неспроста считаются наиболее известным азартным веселием. Чтобы освоить управление и управляла, потребуется всего несколько мин. Ваша задача сделать ставку, найти число трудящихся линий и возможно вертеть тамбур. Если на экране выпадет выигрышная композиция – вы выиграли! С данной задачей вас помогут управится бездепозитные бонусы казино. <a href=http://bbs.boway.net/home.php?mod=space&uid=897578>http://bbs.boway.net/home.php?mod=space&uid=897578</a> Пoдтвepдить личнocть посетителя. Для удачного вывода средств, необходимо доказать лицо клиента. Нa этaпe вepификaции пpoфиля, работники службы безопасности должны убедиться, собственно у игрока не один акк. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не может вывести собственный выигрыш, если у него несомненно некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы. 1хслотс официальный сайт зеркало
скачать 1×slots официальный сайт
Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?Если вы опытный игрок, вы обязаны аристократия, собственно бонус без депо – редкая находка. Тем ниже, мы раз исследуем интернет, дабы найти для вас превосходнейшие бездепозитные предложения. В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с даровых вращений. Прибыль, которую Вы заработаете на таком бездепе возможно ставить на вывод без какого либо отыгрыша.Бывают ли бездепозитные призы без вейджера? Бывают, если у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино. <a href=http://services-sector.ru/clubpointeresam/memberlist.php?mode=viewprofile&u=174011>http://services-sector.ru/clubpointeresam/memberlist.php?mode=viewprofile&u=174011</a> Варианты выигрыша зависят от Вашей успеха и условий игорного портала. Выше мы сказали, что кое-какие бездепозитные бонусы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются другие, все, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на средства, можно выиграть неописуемые суммы. Сегодняшние игровые автоматы или видео слоты, как их нарекают. Могут выдавать солидные умножение от х1.000 и повыше. Некоторые умножают ставку от х100.000.Онлайн-казино с бездепозитными призами ставят клиентам условия для пользования бездепами, поэтому перед ролью в акции чем подробно ознакомиться со всеми правилами и аспектами акции. Условия все дотрагиваться получения приза, его использования и следующего вывода валютных средств в случае выигрыша. 1×slot зеркало рабочее регистрации на телефон придет
1×slots регистрация 1×slotscasino09k online
Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном сайте и выполните вход в личный кабинет, чтобы отобрать благотворительные вращения с вейджером х40;В онлайне количество узнаваемых игорных площадок с привлекательными акционными услугами. Однако внимательно разбирать обстоятельства десятков предложений в надоест, ну и время отнимет много. Поэтому наша команда подготовила ТОП-3 сайтов с лучшими бездепозитными призами: Обычно для получения бонусов без депо, казино выдвигает лояльные и абсолютно выполнимые обстоятельства, но есть ряд поступков коие запрещены и все стать противные результаты:Срок отыгрыша — это период, который наступает в момент активации бонуса и завершается с его закрытием. Пользователю нужно уложиться в данный временной промежуток, другому призовые средства аннулируются. Казино устанавливают перечень игр, ставки каких засчитываются при расчете отыгранных денег. Если тайтл не входит в этот список, то ему быть недосегаем для загрузки в действия бонусного предложения. 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=http://lnx.hotelresidencevillateresaischia.com/casamicciola/index.php?option=com_k2&view=itemlist&task=user&id=438912>http://lnx.hotelresidencevillateresaischia.com/casamicciola/index.php?option=com_k2&view=itemlist&task=user&id=438912</a> Варианты выигрыша зависят от Вашей удачи и условий игорного портала. Выше мы сказали, собственно некоторые бездепозитные призы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются они, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на средства, можно выиграть неописуемые суммы. Сегодняшние игровые автоматы или видео слоты, как их нарекают. Могут выдавать солидные умножение от х1.000 и повыше. Некоторые умножают ставку от х100.000.Приглашаем делиться мнениями о призах. Это поможет иным юзерам выбирать наиболее выгодные предложения.
казино 1×slots официальный сайт
При поддержки такового одобрения оператор может также привлекать клиентов, коие раньше проявляли активность на веб-сайте, но по некий причине перестали выступать. В данном случае промокод высылается пользователю по электрической почте или вид SMS. На критериях отыгрыша безвозмездных бонусов стопам остановиться подробнее. С ними связаны нюансы, которые нельзя оставить без внимания. <a href=https://www.bandlab.com/user8633176728371974>https://www.bandlab.com/user8633176728371974</a> 1×slots зеркало рабочее на сегодня Подтвердите регистрацию, дабы активировать Бездепозитный бонус с выводом, требуется заполнить личный профиль. Заполните пустопорожние поля истинными данными о для.
<b>Смотреть еще похожие новости:</b>
<a href=https://ragnarok.ch/forum/viewthread.php?thread_id=134125>сайт 1× slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Прямо данный арестуйте благотворительные вращения за регистрацию без депозита и начинайте коллекционировать призовые комбинации ради крупных выигрышей! Бездеп с фриспинами имеет обхватывать всю коллекцию игр на веб-сайте либо разработки одного провайдера. Обычно предлагается конкретный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш может быть выведен в того, как пользователь отыграет данную сумму. Возможность расценить полный перечень слотов — главное достоинство данной разновидности. Игроку становятся доступны те функции, которые отсутствуют в демонстрационном режиме, а вероятность выиграть настоящие средства добавляет ясных азартных чувств.
#5072 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
retro casino балтбет букмекерская контора <a href=https://sovsekretno.net/>фильмы казино рояль</a> porno Илона Маркова, хоккеистка porno Юлия Канакина <a href=https://rucriminal.info/>часы казино</a> black russia казино 1×bet xbet xyz сайт казино вход new casino слоты казино пари букмекерская контора 1×bet зеркало
DiskiPlus casino betting DiskiPlus 1×bet скачать приложение на андроид <a href=https://www.diskiplus.ru>DiskiPlus Разуваева Ксения Денисовна порно</a> DiskiPlus казино играть DiskiPlus 1×bet сейчас <a href=https://www.diskiplus.ru/>DiskiPlus 7k casino зеркало на сегодня</a> DiskiPlus букмекерская контора официальный сайт DiskiPlus 1×bet зеркало DiskiPlus рабочее казино DiskiPlus рокс казино DiskiPlus 1×bet скачать приложение DiskiPlus 1×bet скачать приложение DiskiPlus casino вход
#5073 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
Бездепозитные призы прекрасный вариант безвозмездной игры в игровые автоматы. Многие юзеры сети не знают, что в казино возможно начать играть абсолютно даром, а потом исключить выигрыш на банковскую карту или электронный кошелек, иные не доверяют интернет казино, а третьи успешно играют и выигрывают – и подчас довольно великие суммы. <a href=http://filmkachat.ru/>скачать 1×slots официальный сайт</a> После получения бонуса вывод средств для посетителя будет недосегаем того, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо пара месяцов. Выводить деньги игрок сможет только после отыгрыша. <a href=https://rant.li/9fsnh6hu13>https://rant.li/9fsnh6hu13</a> 1×slot зеркало рабочее регистрации на телефон придет <a href=https://bbs.m2.hk/home.php?mod=space&uid=108886>https://bbs.m2.hk/home.php?mod=space&uid=108886</a> Для получения предоставленных призов вас понадобиться — ПК либо мобильное устройство, и остальное дело за малым.Наиболее знаменитые вознаграждения между гэмблеров – бездепозитные бонусы казино. Это не умопомрачительно, так можно получить благотворительные вращения или виртуальные кредиты, и при этом не придётся пополнять счёт, рисковать личными деньгами. Удастся насладиться различными увеселениями даже выиграть солидную сумму, избегая серьёзного риска.
1хслот 1хслотс регистрация перейти на 1×slots
1×slots casino регистрация 1×slotscasin online <a href=https://faktes.ru/user/Miguelboync/>https://faktes.ru/user/Miguelboync/</a> Наш список содержит лучшие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по важным параметрам:Игры, в которых возможно выступать на бонусные деньги. Проверьте перечень игр, в которых можно выступать на бонусные свои, вероятно они Вам не понравятся и не тратить своё время на эту акцию. x1 slots 1хслотс регистрация перейти на 1×slots
1×slot официальный сайт
Но а случае вы уже профи по интернет казино, кликаем на красную кнопку «Получить» и Вы автоматически перейдете в интернет казино;При отыгрыше бонусных средств, нужно учитывать срок действия приза и время, коие дается на отыгрыш. По истечению заявленного медли, не отыгранный бонус будет аннулирован. Зарегистрируйтесь. Для регистрации чаще всего довольно ввести свой номер телефонного и почтовый адресок, после чего установить приобретенный код из СМС. Возможно, требуется показать промокод. В правилах акции будет написано, где его надобно вводить. Иногда это бы делать при регистрации, от — уже после творения собственного кабинета, на отдельной странице. <a href=https://lockright.uk/forum/profile/MarcyCavin>https://lockright.uk/forum/profile/MarcyCavin</a> Помните, что всевозможные нарушения верховодил сведут на нет ваши усилия, и вы всего останетесь без начисленного вас дарового приза. Всегда изучайте управляла начисления и обстоятельства вейджера. По хоть вопросам, на коие вы имеет других найти ответы, обращайтесь за объяснениям и саппорт. 1×slos регистрация в 1×slots casino Можно. Вы всегда можете отказаться от получения бездепозитного бонуса за регистрацию в казино, же Вы не создадите ставку.Фриспины — безвозмездные вращения, которые разрешают игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытных игроков фриспины считаются наиболее модным и предпочтительным обликом приза — благотворительные вращения порой эффективнее и веселее в отыгрыше, чем другие виды бездепов.
1×slots на любой вкус как пройти регистрацию
В зависимости от онлайн заведения любой из них возможность вам предложить как бездепозитные деньги, например и бездепозитные фриспины, которые последствии удачной регистрации упадут вам на ваш игровой баланс. <a href=https://qualityprogamer.de/forum/showthread.php?tid=265125>1хслотс казино зеркало</a> К образцу, игроку выдаются бесплатные свои в заведении в объеме пятидесяти либо 100 долларов (вейджер на коие сочиняет 100х). То есть, любому новоприбывшему игроку выскакивает привлекающая иллюстрация, которая обещает выплату всех зачисленных компанией средств. Не стоит заострять на казино бонус за регистрацию без депо с сильно великий либо довольно махонькой суммой бонусов, потому что, в тщательно изучив все условия, здесь вероятнее всего, будет какой-то подвох.Размер бонуса. В качестве бездепов обыкновенно начисляют небольшие суммы, а когда идет о бонусах за депозит, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино шансы презентовать игроку до 2000$. Промокод – определённая комбинация знаков, коию необходимо установить в отвечающее фон при творении учетной записи или активировать в личном профиле игрока в разделе с призами.Обычно, бездепозитные призы выдаются под конкретные слоты с фиксированной ставкой, но их точно воспрещено применять в игровых автоматах с прогрессивным джекпотом. Список игр, в которых возможно применять бездеп, Вы найдете в описании промоакции либо можете уточнить у саппорта заведения. 1×slot казино зеркало <a href=https://forex-bitcoin.com/members/400106-roberticele>https://forex-bitcoin.com/members/400106-roberticele</a> Бездеп с фриспинами имеет обхватывать всю коллекцию игр на сайте или разработки одного провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении акции. Выигрыш имеет быть выведен после того, как юзер отыграет данную необходимую. Возможность расценить глубокий функционал слотов — главное совершенство этой разновидности. Игроку становятся доступны что, эти функции, коие отсутствуют в демонстрационном режиме, а возможность выиграть реальные деньги прибавляет ярчайших азартных ощущений.
1×slots официальный зеркало рабочее
Для доказательства электрической почты, просто перейдите по интенсивной ссылке в письме, приобретенном от игрового заведения.Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, чтобы снова получить бесплатный бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ожидает неизбежное наказание. <a href=https://www.ng.ru/blogs/user/181622.php>https://www.ng.ru/blogs/user/181622.php</a> Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются незамедлительно последствии творенья профиля и активны непродолжительное время. Если не успеете израсходовать свои, они попросту сгорят. Касаемо медли, как призы активны протяжении часа.Ограничения по играм. Администрация воспрещает игрокам кое-какие игровые автоматы с бездепозитным бонусом, средствами либо бесплатными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда разделение производится по виду игр. Например, отыгрыш возможен на всех игровых аппаратах, но запрещен в настольных забавах и в разделе Live Casino. 1×slot зеркало рабочее регистрации на телефон придет Новички не любят незамедлительно же заносить депо. Это обосновано неимением опыта и сомнением. К счастью, дни возможно получить бездепозитный бонус за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В любом случае вы не рискуете своими сбережениями. Это отличная возможность запустить понравившийся видео разъем либо же испытывать удачу в настольных играх.Нет. Для получения бездепозитного бонуса в казино необходима обязательная регистрация на сайте. Играть в слоты даром и без регистрации возможно только в демо режиме.
<b>Смотреть еще похожие новости:</b>
<a href=http://smpn1bejen.sch.id/forum/>1×slots casino регистрация на сайте</a>
<a href=https://www.rusdrama-az.com/support/51-sluzhba-tehnicheskoy-podderzhki-sayta.html>1×slot казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На бонусные начисления все быть установлены вспомогательные ограничения, коие Вы не учли при отыгрыше. Пока бонус полностью не отыгран — средства из казино не выводятся. Подтверждение индивидуальной информации. Все казино просят от посетителя пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у пользователя иных аккаунтов (мультиаккаунт запрещен).
#5074 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Елена Никитина, скелетонистка казино ли <a href=https://th-royalgclub.com/>pin up casino пин</a> официальные букмекерские конторы скачать porno Ангелина Гончаренко, хоккеистка <a href=https://rucriminal.info/>Москалькова Татьяна Николаевна порно</a> 1×bet на андроид бесплатно промокод 1×bet 1×bet xbet промокод 1×bet казино зеркало сегодня казино фильм смотреть онлайн пина букмекерской конторы
DiskiPlus бесплатные букмекерские конторы DiskiPlus retro casino <a href=https://diskiplus.ru>DiskiPlus casino автомат</a> DiskiPlus пин ап казино DiskiPlus приложения букмекерских контор <a href=https://diskiplus.ru>DiskiPlus скачать 1×bet</a> DiskiPlus inform@rucriminal.info DiskiPlus демо казино DiskiPlus Разуваева Ксения Денисовна порно DiskiPlus гама казино DiskiPlus Крючкова Полина Викторовна порно DiskiPlus букмекерская контора ставки DiskiPlus казино сегодня
#5075 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация в 1×slots casino
В онлайне много знаменитых игорных площадок с красивыми акционными услугами. Однако пристально читать обстоятельства десятков услуг в надоест, ну и время отнимет большое. Поэтому наша команда подготовила ТОП-3 вебсайтов с превосходнейшими бездепозитными бонусами:Подарки на определенные даты выделяются критериями получения. Если поощрение начисляют игроку на денек рождения, то сумма обыкновенно в от совместного размера депозитов последний год. <a href=http://filmkachat.ru/>1×slot зеркало</a> У любой забавы средства притязания по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система зачтет любую ставку. В рулетке и покере сделать это намного сложнее. Именно потому так принципиально внимательно читать условия получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой игре, то новенькие попросту «спустят приз на ветер».Бездепозитные бонусы – это исключительно занимательная и наиболее перспективная акция интернет-казино. Они даже лучше фри-спинов, поэтому собственно выплаты в даровых вращениях не гарантированы, как комбинации на барабанах игрового аппарата имеют не сложиться. <a href=https://www.hebergementweb.org/threads/virtual-reality-reshapes-modern-architectural-design-and-innovation.2142477/>https://www.hebergementweb.org/threads/virtual-reality-reshapes-modern-architectural-design-and-innovation.2142477/</a> Для получения предоставленных призов для понадобиться — ПК либо мобильное прибор, и остальное дело за малым. 1×slots регистрация 1×slotscasino09k online <a href=http://service.gepart.su/forum/?PAGE_NAME=profile_view&UID=4104>http://service.gepart.su/forum/?PAGE_NAME=profile_view&UID=4104</a> Но а в вы теснее профи по интернет казино, кликаем на красноватую кнопку «Получить» и Вы механически перейдете в онлайн казино;Чаще всего интернет-казино предлагают бездепозитные бонусы свежим пользователям. Эта промо-акция очень отлично завлекает начинающих, подталкивая их к открытию счета. Конечно, не они становятся преданными посетителями, но сам факт регистрации аккаунта играет на руку заведению.
1×slot рабочее зеркало
Если простыми текстами, бездепы – это определённая сумма денег или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно забирать подарки. Но есть некоторые аспекты. Существуют игорные жилища, которые перед что, этим как начислить призы просят привязать телефонный, предоставить копии документов.Нет. Казино раздают безвозмездные призы за регистрацию, для того, дабы заказчик мог ознакомиться с игровым заведением. А чтобы исключить его, нужно выполнить условия отыгрыша. <a href=http://jktroickiy.forumex.ru/viewtopic.php?f=2&t=694>1×slots коды</a> 1×slots зеркало видели такую регистрацию на Помимо остального, для вывода средств по бездепу нужно внести на счёт собственный 1-ый депозит — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на мало вероятную сумму, последствии чего вывод средств станет доступен. <a href=https://google.ee/url?q=https://doctorlazuta.by/>https://google.ee/url?q=https://doctorlazuta.by/</a> Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают приз по государствам. Вплоть до как, что клуб может брать игроков из Вашей государства, а бездеп мешает. 1×slot рабочее зеркало
1×slots официальный сайт скачать
Если вы новичок данном и только попали в неизведанную вами район пыла — с помощью услуг как бездепозитные призы без пополнения.Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке адепты онлайн-казино публикуют важную информацию о not the slightest deposit bonuses прочих услугах. <a href=http://www.gearcup.cn/home.php?mod=space&uid=129671>http://www.gearcup.cn/home.php?mod=space&uid=129671</a> Заработать на бездепозитных бонусах за регистрацию в казино может каждый юзер, достигший совершеннолетия. казино 1×slots официальный сайт Принципиальным отличием даровых призов от бонусов на депо является отсутствие надобности заносить средства на аккаунт. Из-за сего их нередко называют бездепозитными (no deposit bonuses).Самый распространённый из сходственных призов, естесственно же, бездеп на день рождения клиента — бонус в виде фиксированной суммы либо фриспинов поступает на счёт игрока, а пользоваться им можно в течение установленного периода медли.
1×slots зеркало проходить регистрацию это отличный вариант
Чаще всего используются коды. Их нужно заносить в особые окна регистрационной анкеты, если идет о пригласительных призах, или в особом разделе личного кабинета игрока. Раздача призов может быть посвящена разным датам: календарные праздники, дни рождения игроков, годовщина открытия казино и т. Д. Подарок выдается повторяющий средств, фриспинов или баллов для скопления и обмена на услуги оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода этой суммы понадобиться выполнить ряд требований. Фриспины предназначены для использования в видео слотах. Внимательно ознакомьтесь с условиями – часто их выдают на кое-какие автоматы. В зависимости от клуба, у вас получится устроить определённое количество ставок. Кстати, продвинутые игорные жилища позволяют запускать каждых «одноруких злодеев». 1×slots официальный зеркало рабочее <a href=http://www.hdfeed.co.kr/bbs/board.php?bo_table=04_02&wr_id=342721>http://www.hdfeed.co.kr/bbs/board.php?bo_table=04_02&wr_id=342721</a>
1×slots регистрация 1×slots casino c2d ru
Фриспины без депо или дополнительные свои посодействуют поближе познакомиться с игровой платформой и её функциями. За счёт презентов можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради забавы против живых крупье.Если идет об эксклюзивных предложениях, может потребоваться регистрация в казино по ссылке с партнерского сайта. <a href=http://www.wmhelp.cz/html/modules.php?name=Forums&file=viewtopic&t=65165>http://www.wmhelp.cz/html/modules.php?name=Forums&file=viewtopic&t=65165</a> 1×slots зеркало проходить регистрацию это отличный вариант Такой казино бонус без депо за регистрацию выдается игроку на час и активно употребляется данное предложение с 2017 года. Это как бы некая конспирация поощрения под бездепозитный. Суть всего сего сводится к что, этому, что геймеру на час выдается, к примеру, 1000 $, а реклама повторяет про, что любой выигрыш можно будет дальнейшем оставить при себе. Но в играющий всерьез отнесется к этому предложению, то он попросту потеряет время. Ведь геймеру нужно будет выступать не в основном аккаунте, а тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (том всей тыс. ) в верховодила вступят конкретные обстоятельства, где несомненно сказано, что максимальной суммой победы имеет быть лишь двести $ и деньги можно применять лишь виде приза на первый лепта с вейджером 25 от суммы гонорары плюс сам депозит. По результату получится, что игрок выигрывал себе 200% приз с вейджером на конкретную необходимую. Короче говоря, это все не вашего медли.Не хотите поиграть в азартные игры, не рискуя своими деньгами, хотя получая в все выплаты? Подобную возможность деют почти лучшие порталы с азартными весельями. В их количестве много правдивых и надежных интернет-казино на русском языке. Они привлекают свежих юзеров различными поощрительными мероприятиями, включая бездепозитные, или бесплатные бонусы.
<b>Смотреть еще похожие новости:</b>
<a href=http://big.bestforums.org/memberlist.php?mode=viewprofile&u=3301>1×slots зеркало на сегодня</a>
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1537#post-45286>зеркала 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Зарегистрироваться в казино по специальной ссылке либо с бонусным кодом. Подтвердить контактные данные (номер аппарата и электрическую почту). Для подтверждения номера телефона необходимо в личном профиле показать собственный номер и надавить кнопку „Подтвердить номер телефонного“, дальше Вы получите sms-сообщение с кодом, который необходимо ввести в подходящее фон. Для подтверждения электронной почты, перебежать по активной ссылке в письме от казино. 4. Заберите подарок. Чаще всего бонус активируется незамедлительно последствии регистрации. Но случаются истории, когда надо(надобно) зайти в собственный кабинет либо написать в службу.
#5076 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино вход казино смотреть онлайн <a href=https://t.me/vchkogpu_ru>порно с Каролина Севастьянова</a> почему в казино нет часов porno Андрей Рублев (теннис) <a href=https://res-publika.com>1win букмекерская контора</a> bet casino casino игровой автомат казино онлайн бесплатно бывшие казино вывод казино Скворцова Вероника Игоревна порно porno Алена Косторная (фигурное катание)
DiskiPlus Комарова Наталья Владимировна порно DiskiPlus pin up casino пин <a href=https://diskiplus.ru>DiskiPlus Чулпан Хаматова</a> DiskiPlus сайт казино зеркало DiskiPlus порно с Афонина Марина Игоревна <a href=https://www.diskiplus.ru/>DiskiPlus скачать букмекерскую контору на андроид</a> DiskiPlus casino 7k сегодня DiskiPlus карты казино DiskiPlus porno Светлана Ходченкова DiskiPlus pin ап casino DiskiPlus Мухтиярова Елена Вячеславовна порно DiskiPlus казино смотреть онлайн бесплатно DiskiPlus казино большая
#5077 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало
К огорчению, нет. Почти все казино, настоятельно внесение желая бы одного малого депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, что вывести средства разрешается лишь на ту платежную систему, с коей был сделан депо. <a href=http://filmkachat.ru/>1×slots зеркало рабочее на сегодня</a> <a href=https://juicedmuscle.com/forum/general/general-chat/264982-creating-immersive-spaces-the-art-and-science-of-3d-walkthrough-animation>https://juicedmuscle.com/forum/general/general-chat/264982-creating-immersive-spaces-the-art-and-science-of-3d-walkthrough-animation</a> Автоматы непопросту считаются наиболее модным азартным веселием. Чтобы усвоить управление и управляла, понадобится всего количество мин. Ваша задача сделать ставку, определить количество рабочих линий и возможно крутить тамбур. Если дисплее выпадет выигрышная композиция – вы выиграли! С данной задачей вам посодействуют управится бездепозитные бонусы казино.Казино выводит средства лишь на ту платежную систему, с котрой был изготовлен депо. То есть, для вывода бездепозитного бонуса, Вам поначалу необходимо восполнить счет. В некоторых клубах ограниченный перечень методов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет именно с данных платежных методов, коие доступны для вывода. 1×slots официальный зеркало рабочее <a href=https://lustbb.com/member.php?action=profile&uid=2905>https://lustbb.com/member.php?action=profile&uid=2905</a> Чаще всего интернет-казино предлагают бездепозитные бонусы новым пользователям. Эта промо-акция довольно эффективно привлекает начинающих, подталкивая их к открытию счета. Конечно, не все они становятся послушными клиентами, но сам прецедент регистрации аккаунта играет на руку заведению.
1хслотс регистрация в 1×slots casino
<a href=https://www.kfz-gringer.at/index.php/forum/in-neque-arcu-vulputate-vitae/63486–1×slots-1#63251>1×slots регистрация на 1хслотс</a> 1×slots регистрация на официальном сайте В интернете очень большое скриптовых вебсайтов, которые принадлежат мошенникам. Их основная задача – заинтересовать гэмблеров, пообещав столько великодушные презенты, хотя и солидные выигрыши. Так собственно кое-какие веб-сайты предлагают получить за регистрацию и $1 000. <a href=http://www.uepd.de/w3/doku.php?id=фильмы_бесплатно_скачать>http://www.uepd.de/w3/doku.php?id=фильмы_бесплатно_скачать</a> Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. 1×slots официальный зеркало Можно. Вы всегда сможете отказаться от получения бездепозитного приза за регистрацию в казино, же Вы не создадите ставку.
1×slots зеркало сайта
Подобные призы без депо предоставляются на больше выгодных критериях. Зачастую они покрупнее, а условия отыгрыша менее строгие.Чтобы выступать безвозмездно на реальные деньги в казино, не всегда довольно просто зарегистрироваться. Иногда необходимо выполнить дополнительные деянья. Чаще всего, знаменитые сервисы, такие как MoneyBookers и WebMoney, еще MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное правило. Финансовые свои выводятся только через ту платежную систему, коей огромный для пополнения депо. Если же игрок получил бездепозитный покерный бонус, требуется восполнить счет на наименьшую необходимую, которая составляет обыкновенно десять долларов.Основное правило получения бездепа ? творимый акк должен быть у юзера первым и единственным. Наличие нескольких аккаунтов строго воспрещено. Проверка проводится по имени, e-mal, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депозита нужно блюсти простую очередность деяний. <a href=https://app.welvi.co.kr/bbs/board.php?bo_table=qa&wr_id=1926081>https://app.welvi.co.kr/bbs/board.php?bo_table=qa&wr_id=1926081</a> Но разу не забывайте пристально читать правила роли в бонусных промоакциях. Если вы нарушите но бы одно условие, позже вы не можете уладить недоразумение с администрацией. 1×слот регистрация в 1×slots casino
1хслотс зеркало на сегодня
В качестве бонусов интернет казино нередко предлагает выдачу фриспинов, то есть безвозмездных вращений игрового барабана. Виртуальные монеты возможно применять для обучения в покерной школе либо для забавы в казино.Бонусные средства – небольшая сумма денег для старта в новом казино. На бонусные средства, обычно разрешено выступать во все игры, не слотов с современным джекпотом и игр из раздела exist casino. <a href=http://weeklywars.de/viewtopic.php?f=12&t=6800&p=463145#p463145>1×slots официальный зеркало</a> 1 x slots <a href=https://cutetusy.cc/member.php?action=profile&uid=34902>https://cutetusy.cc/member.php?action=profile&uid=34902</a> Список так именуемых «запрещенных территорий» прилагается к правилам бонусной программки игорного портала. Обязательно выясните, распространяются ли на вас сходственные наказания.
1×slots зеркало
Если вы новичок в этом деле и только попали в неизведанную вами область азарта — счет услуг как бездепозитные призы без пополнения.Фриспины – благотворительные вращения с фиксированной ставкой, которые можно применять в конкретных игровых автоматах. <a href=http://uralairlines.com/bitrix/redirect.php?goto=http://region-kirov.ru/bitrix/redirect.php?goto=http://tekstil-pro.ru/bitrix/redirect.php?goto=https://telegra.ph/Ponimanie-razlichij-mezhdu-yurisdikciej-i-mestom-rassmotreniya-del-s-primerami-09–19>http://uralairlines.com/bitrix/redirect.php?goto=http://region-kirov.ru/bitrix/redirect.php?goto=http://tekstil-pro.ru/bitrix/redirect.php?goto=https://telegra.ph/Ponimanie-razlichij-mezhdu-yurisdikciej-i-mestom-rassmotreniya-del-s-primerami-09–19</a> 1×slots регистрация
<b>Смотреть еще похожие новости:</b>
<a href=http://griffhunter.com/boards/memberlist.php?mode=viewprofile&u=993>1хслотс официальный сайт зеркало</a>
<a href=https://acerfans.ru/faq/197-kak-polzovatsja-forumom.html>1×slots регистрация 1×slots review live</a>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=140929>1×slots регистрация на официальном сайте</a>
<a href=http://diablo2r.cn/home.php?mod=space&uid=30130>1х слот регистрация в 1×slots casino</a>
<a href=https://www.176mw.net/forum.php?mod=viewthread&tid=40&pid=545243&page=3739&extra=page%3D1#pid545243>1×slots сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В количестве случаев безвозмездные бонусы начисляются в кредитах, коие невозможно незамедлительно исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти требования принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д. ). О нем читайте ниже.
#5078 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
играющие казино демо казино <a href=https://strelochnik.com/>порно с Аделия Петросян (фигурное катание)</a> pin casino casino онлайн <a href=https://rhymes-punches.com/>гама казино</a> казино зеркало сегодня 1×bet скачать бесплатно порно с Зырянова Анастасия Владимировна рабочее казино 1×bet официальный 1×bet xyz Яровая Ирина Анатольевна порно бывшие казино
DiskiPlus 1×bet официальный сайт DiskiPlus 1×bet официальный xbet <a href=https://www.diskiplus.ru>DiskiPlus casino андроид</a> DiskiPlus порно с Васильева Татьяна Викторовна DiskiPlus up casino зеркало <a href=https://diskiplus.ru/>DiskiPlus порно с Юлия Ефимова, пловчиха</a> DiskiPlus casino приложения DiskiPlus porno Александр Соболев (футбол) DiskiPlus pin up casino скачать DiskiPlus bitz casino DiskiPlus казино сочи DiskiPlus скачать букмекерскую контору DiskiPlus casino онлайн
#5079 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию процедура займет всего лишь
Похожим образом работает 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя или в связи с получения им VIP-статуса. Подарок предоставляется в обращения в поддержку и проверки. <a href=http://filmkachat.ru/>1×slots быструю регистрацию а также мгновенное</a> <a href=https://pinshape.com/users/6460332-archicgi-com#designs-tab-open>https://pinshape.com/users/6460332-archicgi-com#designs-tab-open</a> Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы которые появляются у начинающих.Но существуют азартные заведения, готовые просто так вручить средства на забаву. Для этого довольно создать профиль. Чтобы вывести выигрыш, сначала необходимо выполнить вейджеровые условия, прописанные в условиях получения бездепа. 1×slots быструю регистрацию а также мгновенное <a href=http://fitboss.ru/user/Christer/>http://fitboss.ru/user/Christer/</a> 2. Создать свежий профиль. Для регистрации нужно наполнить небольшую анкету либо зайдите в собственный кабинет при помощи социальных сеток;Кешбэк-бонус представляет собой возврат фиксированного процента от ставки когда проигрыша либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%.
1× slots зеркало
1×slots коды <a href=http://armi21.com/bbs/board.php?bo_table=free&wr_id=5495>http://armi21.com/bbs/board.php?bo_table=free&wr_id=5495</a> Многие казино предоставляют в рекламных целях безвозмездные призы необыкновенно для наших читателей. Чтобы их получить, нужно перебежать на игровой сайт по партнерской ссылке с нашего портала.В случае установленного лимита на необходимую вывода выигрыша с бездепозитного бонуса, игрок не может вывести больше заявленной суммы. 1×slots casino зеркало рабочее Каждый из бездепозитных бонусов без пополнения 2022 содержит собственный определенный вейджер для отыгрыша, например же в каждом казино он уточняется персонально — где то он х55 а кое-где х30, повторюсь везде по разному!
1×slots зеркало подтвердит вашу регистрацию если говорить
Чаще всего используются коды. Их надо(надобно) заносить в специальные окна регистрационной анкеты, в речь идет о пригласительных бонусах, либо в определенном разделе личного кабинета игрока. Бездепозитные бонусы начисляются только один один. Не стоит раскрывать свежие аккаунты, дабы получить их повторно. Служба безопасности казино непременно выявит «левого» участника и перекроет. Если посетитель выполнит нужные требования, отыграет свою ставку и решит исключить собственный выигрыш, то ему нужно сведению, что казино обязательно востребует дать ксерокопии личных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои вывести не удастся.Представленные на данной странице лучшие бездеп бонусы в казино за регистрацию в 2022 году имеют оптимальные условия. После кропотливого анализа редакция портала составила рейтинг спецпредложений, в посетители Casino.ru все сортировать перечень по нескольким аспектам: по сумме, вейджеру, максимальной сумме вывода и т.д. <a href=http://www.oldtimers-im-fokus.ch/fotoblog/member.php?action=showprofile&user_id=25453>http://www.oldtimers-im-fokus.ch/fotoblog/member.php?action=showprofile&user_id=25453</a> Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, solid зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. рабочее зеркало 1хслотс
скачать 1×slots официальный сайт
Таким образом, заведение пытается показать себя своим потенциальным игрокам, а подобный рекламный ход как казино приз без депозита за регистрацию завлекает довольно много внимания к игорному заведению и обеспечивает постоянный струю свежих посетителей и будущих посетителей игрового интернет клуба. В лицензионных бездепозитных казино выступать в азартные игры действительно безопасно. Наличие лицензии подтверждает что, этот прецедент, собственно клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP.Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских рублей. В критериях промоакции указано, что вейджер бездепозитного приза х20. Поэтому, дабы отыграть приз, игроку несомненно необходимо устроить ставок на 35*20=700 руб. 1×slots на любой вкус как пройти регистрацию <a href=https://forum.resmihat.kz/viewtopic.php?f=9&t=627913&p=2903892#p2903892>https://forum.resmihat.kz/viewtopic.php?f=9&t=627913&p=2903892#p2903892</a>
1×slots зеркало на сегодня
Самые популярностью способы вывода денег ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам типа Neteller и Skrill, а также пользуются криптовалютными кошельками. Вывод выигрышей возможность осуществляться быстро либо занимать от нескольких часов до нескольких суток.Заработать на бездепозитных призах за регистрацию в казино имеет каждый юзер, достигший совершеннолетия. Лишь знаменитые и знаменитые азартные заведения все позволить себя выдавать бездепы в виде добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, которые возможно израсходовать в лучших аппаратах с высокой отдачей. <a href=http://www.radiogrijalva.com/2022/06/grandes-autores-y-compositores56.html>http://www.radiogrijalva.com/2022/06/grandes-autores-y-compositores56.html</a> Если вы новичок в этом деле и только попали в неизведанную вами район пыла — за услуг как бездепозитные бонусы без пополнения.Бoльшинcтвo азартных заведений выдвигают примерно одинаковые обстоятельства и притязания, которые необходимо выполнить, дабы получить бездепозитный бонус за регистрацию. Все их можно соединить в раз список: 1×slots рабочее зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://palais.beesims.com/phpbb/viewtopic.php?f=2&t=290568>1×slots актуальное зеркало</a>
<a href=http://forum.survival-readiness.com/viewtopic.php?t=249099>1×slots зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Например, игрок получил 500 руб. При твореньи аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., потребуется сделать 875 спинов для полного отыгрыша.
#5080 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Захарова Мария Владимировна букмекерская контора леонов <a href=https://vestnik-jurnal.com/>мелбет букмекерская контора</a> букмекерская контора леонов казино смотреть онлайн бесплатно <a href=https://th-royalgclub.com/>1×bet зеркало рабочее</a> casino автомат скачать 1×bet на андроид бесплатно пинко casino 1×bet регистрация casino регистрации гта казино 1×bet телефон
DiskiPlus порно с Евгений Малкин (хоккей) DiskiPlus порно с Евгений Малкин (хоккей) <a href=https://diskiplus.ru/>DiskiPlus Радченко Светлана Юрьевна порно</a> DiskiPlus порно с Максим Глушенков (футбол) DiskiPlus casino сайты <a href=https://diskiplus.ru/>DiskiPlus pinco casino</a> DiskiPlus сайт казино вход DiskiPlus мелбет букмекерская контора DiskiPlus porno Анна Сидорова, керлингистка DiskiPlus 1×bet рабочее на сегодня DiskiPlus Приезжева Екатерина Геннадьевна порно DiskiPlus порно с Васильева Татьяна Викторовна DiskiPlus порно с Афонина Марина Игоревна
#5081 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino регистрации порно с Алина Загитова <a href=https://www.ossetia.tv/>порно с Елена Никитина, скелетонистка</a> up букмекерская контора бесплатно играем казино <a href=https://vestnik-jurnal.com/>1×bet приложение</a> 1×bet на андроид бесплатно бк букмекерская контора порно с Алексей Миранчук (футбол) казино рояль 1×bet скачать приложение на андроид 1×bet на сегодня Ирина Горбачева
DiskiPlus 1×bet сайт DiskiPlus казино в россии <a href=https://diskiplus.ru>DiskiPlus порно с Петр Ян (ММА)</a> DiskiPlus casino buzz DiskiPlus casino betting <a href=https://www.diskiplus.ru/>DiskiPlus фреш казино</a> DiskiPlus Шевцова Татьяна Викторовна порно DiskiPlus гта казино DiskiPlus ограбление казино DiskiPlus porno Катерина Шпица DiskiPlus скачать букмекерскую контору DiskiPlus casino riobet DiskiPlus bitz casino
#5082 Charlesgunnyhttp://filmkachat.ru
1×слотс казино
Чтобы без увериться в превосходстве бездепозитных призов, достаточно зарегистрироваться в казино и получить одобрение. <a href=http://filmkachat.ru/>1хслотс зеркало</a> <a href=https://www.4sync.com/s/fLYUHSTCD>https://www.4sync.com/s/fLYUHSTCD</a> Чаще всего используются коды. Их нужно заносить в специальные окошки регистрационной анкеты, в речь идет о пригласительных бонусах, или в определенном разделе собственного офиса игрока.Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают бонус по государствам. Вплоть до как, что клуб возможность брать игроков из Вашей страны, а бездеп не давать. 1хслотс 1хслотс регистрация перейти на 1×slots <a href=https://snippet.host/agedbe>https://snippet.host/agedbe</a> Прибывшие на аккаунт деньги бездепозитные призы предназначаются, в, только для свежеиспеченных юзеров, коие ранее не имели собственного аккаунта в данном казино. Исходя из сего, случае раньше у игрока был сделан депо, то, по всей вероятности, у него больше не будет способности рассчитывать на получение такового приза в определенном заведении.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Как лишь на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу после этого возможно оставить заявку на вывод выигрыша. Кредиты прибыльно выделяются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом настоящих средств и выделяют вероятность ощутить азарт. Во-вторых – возможно насладиться любой азартной игрой доступной на веб-сайте. В вашем постановлении находятся автоматы, настольные прибавленье, видео-покер, Live-дилеры. 1хлот регистрация в 1×slots casino Доступные игры – В некоторых азартных играх можно понизить математическое превосходство казино до нескольких 10-х процента. В их числе все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как верховодило, в этих забавах ставки идут в зачет вейджера не полностью. Например, имеет предусматриваться только 50%. В неких играх бездепозитные бонусы вообще невозможно отыгрывать. <a href=https://getcomixxx.com/index.php?subaction=userinfo&user=Joshuapriox>https://getcomixxx.com/index.php?subaction=userinfo&user=Joshuapriox</a> Фриспины предусмотрены для использования в видео слотах. Внимательно ознакомьтесь с критериями – частенько их выдают на некоторые автоматы. В зависимости от клуба, у вас выйдет сделать определённое число ставок. Кстати, продвинутые игорные жилища разрешают запускать любых «одноруких бандитов». 1×slots официальный сайт скачать Особую изюминку видео слотам придают уникальные знакы. С их появлением активируются разные призы. Вы сможете запустить вспомогательный степень и прирастить сумму выигрыша. Есть знаки, коие сменяют ненужные элементы и сами делают выигрышные комбо. Не стоит забывать и про бонус-тур. После любого счастливого спина есть шанс прирастить сумму выигрыша в 2 или четыре раза.Каждый из бездепозитных призов без пополнения 2022 имеет собственный определенный вейджер для отыгрыша, так же в каждом казино он уточняется индивидуально — где то он х55 а кое-где х30, повторюсь везде по разному!
1×slots официальный сайт мобильная версия скачать
Как только получите бездеп в казино, всё точно не запамятовывайте инспектировать электронную почту. Некоторые игорные клубы непрерывно веселят интенсивных гэмблеров приятными призами. Чаще всего получить презент возможно в преддверии веселья, на день рождение, за вербование друга. А также распространённым призом считается прибавка к депозиту. Нужно всего лишь пополнить счёт, и азартное заведение увеличит его на 50–100%.Онлайн гемблинг развивается с любым днем все больше и больше, новые бренды создаются не по дням а по часам. Новые онлайн казино проделывают вступительные акции для игроков, для того собственно бы зарекомендовать себя, и тем наиболее предлагают бездепозитные призы за регистрацию, что бы не пропустить такую вероятность — как воспользоваться свежим бездепом, рекомендуем навещать наш сайт как можно чаще, самое лакомое и новые будет добавляться в данном же списке. Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. <a href=http://www.podrujka.com/user/Terryvelry/>http://www.podrujka.com/user/Terryvelry/</a> Представленные на данной страничке наилучшие бездеп бонусы в казино за регистрацию в 2022 году имеют подходящие обстоятельства. После кропотливого анализа редакция портала составила рейтинг спецпредложений, в котором посетители Casino.ru все сортировать список по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д.B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax 1×слотс казино Автоматы непопросту числятся самым популярным азартным веселием. Чтобы освоить управление и управляла, понадобится всего несколько мин. Ваша задача устроить ставку, найти число трудящихся линий и возможно вертеть тамбур. Если дисплее выпадет выигрышная комбинация – вы выиграли! С данной задачей для помогут управится бездепозитные бонусы казино.Бонус в казино без депозита содержит различные варианты: это может быть приветственный приз, промоакции в честь каких-то праздников или весомых дат, приз за вербование новых игроков, лояльность и получение VIP-статуса.
1× slots зеркало
<a href=http://6000ziyuan.com/forum.php?mod=viewthread&tid=137955&extra=>1×slot регистрация</a> Бонус с зачислением средств на счет выделяет больше свободы поступков. Пользователь сам выбирает, каким образом воспользоваться подаренными своими. Здесь также все работать лимитирования на список доступных игр, хотя обыкновенно эти рамки не так строги, как в промо с бесплатными вращениями.1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, в не хотите замерзнуть жертвой жуликов либо впустую истратить время; Поспешите арестовать бездепозитные бонусы за регистрацию в казино из представленного перечня. Все платформы не только ведут законную работа, хотя и порадуют добросовестными плодами забавы, высокой отдачей, прыткими выплатами. 1×slots официальный сайт зеркало рабочее <a href=http://lineyka.org/user/Jasperpheta/>http://lineyka.org/user/Jasperpheta/</a> Активация по промокоду употребляется в разных обликах бездепов. Если идет о приветственном бонусе, то набор символов возможно узнать на крупнейшей странице, в регистрационной форме либо послании, коие отчаливает пользователю для подтверждения адреса электронной почты. Акции все проводиться совместно с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активируется одноразовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном офисе или начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем важный код для активации в описании любого рекламную.Прямо данный заберите благотворительные вращения за регистрацию без депо и начинайте собирать призовые комбинации из-за крупных выигрышей!
1×slots регистрация на сайте 1×slots ru com
Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные способы и оценить необыкновенности, недоступные при этой в демо режиме. Многие новые посетители переходят в число неизменных, а оператор получает длительную прибыль. Третитй бездепозитный бонус за регистрацию – денежные средства. К раскаянию, начислить рубли или доллары готовы лишь известные и знаменитые клубы. С их помощью возможность насладиться любой доступной игрой – автоматом, рулеткой, кено, блэкджеком. <a href=https://0752snyw.com/space-uid-111804.html>https://0752snyw.com/space-uid-111804.html</a> 1×slots зеркало видели такую регистрацию на Прибывшие на акк деньги бездепозитные бонусы предназначаются, в, лишь для свежеиспеченных пользователей, которые раньше не имели личного аккаунта в данном казино. Исходя из сего, в ранее у игрока был сделан депо, то, по всей вероятности, у него больше не будет способности рассчитывать на получение такого приза в определенном заведении.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1хслотс казино зеркало</a>
<a href=http://www.arka-bahce.org/forum/showthread.php?p=777843#post777843>x1 slots регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Иногда в качестве одобрения за регистрацию могут выдаваться билеты для роли в турнирах. Условия их проведения очень выделяются, потому мы советуем ознакомиться с каждым предложением раздельно.
#5083 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
водка казино букмекерская контора ставки <a href=https://rucriminal.info/>демо казино</a> Разуваева Ксения Денисовна порно порно с Георгий Джикия (футбол) <a href=https://slon-ru.com/>лучшие онлайн казино</a> 1×bet рабочее на сегодня порно с Никита Кучеров (хоккей) bet casino пина букмекерской конторы 1×bet 1хбет порно с Арина и Дина Аверины, гимнастки бесплатно фильм казино
DiskiPlus casino на телефон DiskiPlus 1×bet регистрация <a href=https://www.diskiplus.ru/>DiskiPlus porno Виктория Баркова, легкоатлетка</a> DiskiPlus скачать 1×bet на андроид бесплатно DiskiPlus 1×bet xbet xyz <a href=https://diskiplus.ru/>DiskiPlus porno Екатерина Ефременкова, шорт-трекистка</a> DiskiPlus сайт 1×bet слоты DiskiPlus казино фильм смотреть онлайн DiskiPlus win win casino DiskiPlus игры казино DiskiPlus порно с Евгения Медведева, фигуристка DiskiPlus pin up casino официальный DiskiPlus бесплатно фильм казино
#5084 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало
Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном сайте и сделайте вход в индивидуальный офис, дабы отобрать безвозмездные вращения с вейджером х40;Активация по промокоду употребляется в разных видах бездепов. Если идет о приветственном бонусе, то набор знаков возможно разузнать на основной страничке, в регистрационной форме или письме, которое отчаливает юзеру для подтверждения e-mail. Акции могут проводиться вместе с партнерскими площадками. Обычно код размещается на стороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активируется разовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном кабинете либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем актуальный код для активации в описании любого рекламную. <a href=http://filmkachat.ru/>1×slot официальный сайт</a> <a href=https://webanketa.com/forms/6gtk2c9q6wqp4s1scrw64dv6/>https://webanketa.com/forms/6gtk2c9q6wqp4s1scrw64dv6/</a> У каждого игорного заведения средства правила и обстоятельства. Но, дабы получить бонусы, необходимо выполнить стереотипные деяния:При подмоги такового одобрения оператор имеет кроме привлекать клиентов, коие ранее показывали активность на веб-сайте, хотя по некий основанию прекратили играть. В данном случае промокод высылается пользователю по электрической почте или повторяющий SMS. 1×slots промокод при регистрации 2025 <a href=http://domocontrol.ru/user/Donaldflirl/>http://domocontrol.ru/user/Donaldflirl/</a>
1×slot зеркало рабочее регистрации на телефон придет
1×slots зеркало сайта Некоторые клубы механически начисляют бонус на аккаунт игрока последствии выполнения критерий получения, хотя посещают истории, когда бонус нужно активировать игроку самому. Есть некоторое методов активации приза:Промообъявления от казино мешают реальной картины и направлены на вербование внимания пользователей. Понять, как высоки шансы остаться в плюсе, позволит собственный тест условий предложения: <a href=http://forum.ttpforum.de/member.php?action=profile&uid=356307>http://forum.ttpforum.de/member.php?action=profile&uid=356307</a> 1×slots официальный сайт зеркало рабочее
1×slots регистрация на 1хслотс
<a href=https://medicaidsecretsforum.com/member.php?action=profile&uid=2626>https://medicaidsecretsforum.com/member.php?action=profile&uid=2626</a> Доступность — бездепозитные бонусы в казино почаще всего предоставляются свежим игрокам, хотя случаются случаи, когда приз могут получить и действующие посетители. 1×slots официальный сайт мобильная версия
1хслот скачать
Выбирайте наилучшие бесплатные бонусы счет обзоров на Casinoz – и пусть для сопутствует счастье при отыгрыше бонусных кредитов! Отыграв бездепозитный бонус в казино с выводом также придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, случае сходственное ограничение присутствует, то единоразово исключить выйдет лишь необходимую, не превышающую размер приобретенного приза. 1×slots регистрация 1×slotscasino09k online <a href=https://www.awwwards.com/nodressio1/>https://www.awwwards.com/nodressio1/</a>
1×slots мобильная версия войти казино
1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, в не желайте стать жертвой плутов либо впустую истратить время; <a href=http://nbrkv.ru/user/TravisTig/>http://nbrkv.ru/user/TravisTig/</a> 1×slots официальный зеркало рабочее
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.survival-readiness.com/viewtopic.php?t=253794>1×slots бездепозитный бонус за регистрацию</a>
<a href=https://www.mshowto.org/forum/members/jamespauri.html>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но не размышлять, собственно снабжая юзеров такими призами, казино увлекается спонсированием. Ведь объемы вознаграждений, в, не великие (средним объемом от 5 до 20 $). И на эти свои налагаются конкретные обстоятельства и лимитирования, обязательные к исполненью игрока, если в последствии он желает получить все средства выигранные финансы. Бездепозитные бонусы настоящими средствами, которые возможно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадали.
#5085 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать pin casino человек казино <a href=https://repost.news/>1×bet рабочее на сегодня</a> Разуваева Ксения Денисовна порно casino андроид <a href=https://strelochnik.com/>casino онлайн</a> казино можно казино на деньги бк букмекерская контора casino онлайн казино зеркало сегодня бесплатно играем казино казино ли
DiskiPlus лучшие онлайн казино DiskiPlus приложения букмекерских контор <a href=https://diskiplus.ru>DiskiPlus скачать 1×bet</a> DiskiPlus казино 1 DiskiPlus Фастова Елена Владимировна порно <a href=https://diskiplus.ru>DiskiPlus Набиуллина Эльвира Сахипзадовна порно</a> DiskiPlus порно с Евгения Медведева DiskiPlus приложения букмекерских контор DiskiPlus промокод 1×bet DiskiPlus макао казино DiskiPlus казино 1 DiskiPlus bitz casino DiskiPlus про казино
#5086 KennethPophttps://vs-rp.com/
Plunge into the Universe of GTA 5 RP: Become a part of Our Exclusive Roleplay Server
Greetings to the exciting realm of GTA 5 RP, where every gamer can craft their individual tale in a energetic gaming environment. Our roleplay server is ideal for those looking for an engaging and enveloping experience. Join a vibrant community of GTA RP aficionados and enter into this stimulating world!
How to Start Playing?
1. Buy and install a licensed version of GTA 5. 2. Install the launcher. 3. Connect to the server and enroll through the application or our website to start your adventure!
Our Platform: An Open World Experience
Our server offers a distinct open-world setting with custom mods that allow you to construct your illicit kingdom, embark on exciting missions, and shape your protagonist's story. Whether you become part of street gangs or become a leading cop, the opportunities are boundless!
Generate Money and Expand Your Wealth
Are you ready to conquer the streets of Los Santos and acquire big money? We provide the resources and strategies to help you gather a prosperity in the realm of GTA RP.
#5087 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрацию более популярный вариант это
Онлайн-казино тщательно продумывают бонусные обстоятельства, коие необходимо изучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша прочие лимитирования.Нет. Казино выдают благотворительные бонусы за регистрацию, чтобы, чтобы, чтобы клиент мог ознакомиться с игровым заведением. А чтобы исключить его, нужно выполнить обстоятельства отыгрыша. <a href=http://filmkachat.ru/>1×slots коды</a> <a href=https://onetable.world/read-blog/89545>https://onetable.world/read-blog/89545</a> Для получения приза нужно пригласить в забаву нового посетителя. Казино начисляет пригласившему фиксированный процент от взносов приглашённого в виде бонуса: почаще всего его объем не выше 10%. Срок деяния приза как не выше месяца: пригласивший получает приз зависимо проигранных ставок приглашённого в 1-ый месяц игры. 1×slots официальный сайт скачать <a href=http://eng-jw.com/bbs/board.php?bo_table=free&wr_id=57955>http://eng-jw.com/bbs/board.php?bo_table=free&wr_id=57955</a>
1хслотс рабочее зеркало на сегодня
<a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=68798>1×slots рабочее зеркало</a> 1×slots актуальное зеркало <a href=http://www.youngwooapt.co.kr/bbs/board.php?bo_table=free&wr_id=295267>http://www.youngwooapt.co.kr/bbs/board.php?bo_table=free&wr_id=295267</a> Практически все онлайн казино с бездепозитным бонусом за регистрацию предусматривает программу лояльности — систему поощрения неизменных клиентов, кот-ая произведено из колличества уровней. При достижении игроком одного уровня на его счёт поступает приз. Чем повыше уровень — тем щедрее приз.Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных притязаний, считая неотъемлемой верификации. Если на сайте предусмотрена обязательная процедура подтверждения личности, то вывести выигрыш получится лишь в ревизии данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий лицо. 1×slots casino регистрация 1×slotscasino09k online Демоказино есть практически на каждом сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются существенно реже: там в случае выигрыша и соблюдения критерий промоакций бездеп можно перевоплотить в реальные деньги.За привлечение приятеля ? в рамках партнерской программы заказчик получает вознаграждение за вербование свежих пользователей.
1хслот скачать
Большинство интернет-казино из нашего топ-10 готовы повеселить вас эксклюзивными промоакциями. Читайте о их в обзорах и на форуме. Бесплатный бонус – кредиты, которые онлайн-казино начислит клиенту, не заставляя его пополнять игровой счет. <a href=http://randy-harrison.it/gallery/profile.php?uid=134057>http://randy-harrison.it/gallery/profile.php?uid=134057</a> 1×slots казино зеркало Несмотря на то, что данный вариант стимуляции со стороны азартных платформ очень известен области похожих игр, далеко не всем поклонникам казино ведомо, что себе бездепозитные бонусы казино и как именно их вероятно эксплуатировать.
1хлот регистрация в 1×slots casino
Помимо прочего, для вывода средств по бездепу необходимо внести на счёт свой 1-ый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на минимально возможную сумму, после чего вывод средств станет доступен.Бездепозитные призы за регистрацию в игровых автоматах для хозяев онлайн-казино являются частью маркетинговой кампании, направленной на повышение аудитории сайта. Так они продвигают свои бренды и завлекают новых посетителей. <a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=89599>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a> Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные методы и расценить особенности, труднодоступные при этой в демо режиме. Многие свежие клиенты переходят в количество неизменных, а оператор получает длительную прибыль. В любом казино с бездепозитным бонусом предусмотрены вейджеровые обстоятельства. Это единственный «подводный камень», который стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) устроить определённое количество ставок. Чем круче приз, что, этим сложнее выполнить обстоятельства, и наоборот.Фриспины предусмотрены для применения в видео слотах. Внимательно ознакомьтесь с условиями – часто их выдают на некоторые автоматы. В зависимости от клуба, у вас получится устроить определённое число ставок. Кстати, продвинутые игорные жилища разрешают запускать любых «одноруких бандитов». рабочее зеркало 1хслотс <a href=http://nbrkv.ru/user/DavidCiz/>http://nbrkv.ru/user/DavidCiz/</a> Максимальная ставка ? уточняется в еденице счета и ограничивает размер ставки за один спин. В случае ее превышения бонус возможность быть аннулирован. Также в правилах может находиться запрет на размещение ставок конкретного вида, например, по одинаковым шансам в рулетке (другими, на чет либо нечет, красное или темное и т.д. ).
1хлот регистрация в 1×slots casino
<a href=https://ferdinand.com.ua/forum/members/capablesermon25.84844/>https://ferdinand.com.ua/forum/members/capablesermon25.84844/</a> Реже бонусы без депо начисляются неизменным игрокам. С их подмогою администрация старается вычесть ценных клиентов либо желает поблагодарить за лояльность верных гостей. Но гораздо чаще для похожих целей применяются эти промоакции: 1хслотс официальный сайт зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.dis-course.net/viewtopic.php?t=485442>1×slots регистрация на 1хслотс</a>
<a href=https://www.donchillin.com/space-uid-382497.html>рабочее зеркало 1хслотс</a>
<a href=https://www.one2bay.de/forum/showthread.php?tid=334212>1×slots зеркало видели такую регистрацию на</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Как только на виртуальном счету окажутся бонусные свои, поторопитесь отыграть вейджер. Сразу после этого возможно забыть заявку на вывод выигрыша. Кредиты выгодно отличаются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом настоящих средств и дают возможность ощутить азарт. Во-вторых – возможно насладиться каждой азартной забавой доступной на веб-сайте. В вашем постановлении находятся автоматы, настольные приложение, видео-покер, Live-дилеры.
#5088 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино гта казино <a href=https://t.me/vchkogpu_ru>7k casino сайт</a> человек казино casino сегодня <a href=https://res-publika.com>порно с Афонина Марина Игоревна</a> 1×bet зеркало xbet казино на деньги Светлана Ходченкова пинап казино 1×bet рабочее на сегодня реального казино 1×bet сайт
DiskiPlus casino рабочее DiskiPlus казино пину <a href=https://www.diskiplus.ru>DiskiPlus 1×bet официальный слоты</a> DiskiPlus 1×bet зеркало DiskiPlus букмекерская контора бетсити <a href=https://www.diskiplus.ru>DiskiPlus где казино</a> DiskiPlus porno Александра Степанова, фигуристка DiskiPlus pin up casino DiskiPlus 1×bet официальный xbet DiskiPlus букмекерская контора официальный сайт скачать DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz DiskiPlus up casino официальный DiskiPlus bitz casino
#5089 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
кент casino Москалькова Татьяна Николаевна порно <a href=https://strelochnik.com/>pin up casino</a> pinco casino 1×bet зеркало слоты 1×bet xyz <a href=https://t.me/vchkogpu_ru>букмекерские конторы в россии</a> букмекерская контора вход лучшие бесплатные онлайн казино почему в казино нет часов фреш казино Хорова Наталья Александровна порно сайт букмекерской конторы ешь казино
DiskiPlus pin casino DiskiPlus казино фильм <a href=https://www.diskiplus.ru/>DiskiPlus приложения букмекерских контор на андроид</a> DiskiPlus cometa casino DiskiPlus casino x <a href=https://diskiplus.ru>DiskiPlus casino сегодня</a> DiskiPlus скачать 1×bet на андроид бесплатно DiskiPlus bitz casino DiskiPlus porno Елизавета Туктамышева DiskiPlus retro casino DiskiPlus пари букмекерская контора DiskiPlus Манилова Алла Юрьевна порно DiskiPlus casino рабочее
#5090 Charlesgunnyhttp://filmkachat.ru
зеркло казино 1×slots
Составленный знатоками Casino.ru перечень онлайн-казино с бездепозитным бонусом позволяет игрокам сопоставить спецпредложения разных операторов.Высокая конкурентность в сегменте азартных игр мотивирует операторов привлекать посетителей различными промоакциями. Благодаря этому у посетителей появляется вероятность получить бонусы в казино за регистрацию без депо. Воспользоваться таким предложением можно, минуя процедуру внесения денег на игровой счет, просто активировав аккаунт на сайте. Наш экскурсовод по бездепам поможет выбрать самую симпатичную бонусную программу, разузнать верховодила получения такого гонорары и воспользоваться им с наибольшей выгодой. <a href=http://filmkachat.ru/>1×slots зеркало рабочее на сегодня</a> <a href=https://smallpdf.com/file#s=a4e78a8b-e574–4cce-8041-d2d327ee7d28>https://smallpdf.com/file#s=a4e78a8b-e574–4cce-8041-d2d327ee7d28</a> x1 slots 1хслотс регистрация перейти на 1×slots <a href=http://mtpkrskstate.ru/forum/user/205517/>http://mtpkrskstate.ru/forum/user/205517/</a> Перечисленные повыше главные характеристики сопровождают практически любой приз и считаются стандартными для бездепозитных бонусных начислений в казино.Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в неотъемлемом порядке нужно пополнить счет в казино. Для депозитных бонусов, данная процедура не нужна, так как депо уже изготовлен.
1×slot зеркало
1хслотс мобильная версия зеркало У любого игорного заведения свои верховодила и обстоятельства. Но, дабы получить бонусы, необходимо выполнить стереотипные действия:В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, нужно адресоваться в саппорта через лайв-чат на сайте казино. <a href=http://www.fadimamooneira.com/2019/06/five-things-that-makes-iu-most16.html>http://www.fadimamooneira.com/2019/06/five-things-that-makes-iu-most16.html</a> Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных обстановок с казино, когда после отыгрыша бездепа для не дадут вывести солидную сумму выигрыша.При регистрации никаких или ином интернет игральном заведении — вас дается один шанс испытывать свою фортуну не внося свои монеты. Замечу что эту поощрительную услугу предоставляют не все интернет игровые площадки, а только великодушная половина из их. Которые мы подготовили для Вас в нашем перечне. 1хслотс рабочее зеркало Первый возникающий вопрос, это, для выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают свежих игроков. Последним легче начать игру на средства с дара за регистрацию. Им надо пополнять баланс и тратить личностные свои. Новички получают благотворительные спины либо средства на счёт. С их поддержкой знакомятся с игровым процессом, крутят слоты и делают ставки в рулетке.
1хслотс официальный сайт зеркало
Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.В некоторых интернет казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на сайте клуба и доказать свои контактные данные. Дополнительно потребуется активация промокода. Сразу в активации промокода возможно пользоваться подарком. Как теснее упоминалось, призы бывают трёх видов – фриспины, кредиты и фриплей-бонусы. <a href=http://www.detiseti.ru/modules/newbb_plus/viewtopic.php?topic_id=56195&post_id=222917&order=0&viewmode=flat&pid=221484&forum=12#222917>http://www.detiseti.ru/modules/newbb_plus/viewtopic.php?topic_id=56195&post_id=222917&order=0&viewmode=flat&pid=221484&forum=12#222917</a> Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном призе, то в первую очередь обратите внимание на велечину вейджера и срок, кот-ый дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть приз и вывести выигрыш. 1×slots казино мобильная версия Благодаря программе преданности от игорного заведения, можно арестовать превосходный старт и без дополнительных инвестициям запустить видеослоты. Кроме как, возможно рассчитывать на реальную фортуну и получить, без инвестиции собственных финансов, великий выигрыш.Высокая конкурентность в разделе азартных игр доказывает операторов привлекать посетителей разнообразными промоакциями. Благодаря данному у гостей появляется возможность получить призы в казино за регистрацию без депо. Воспользоваться таким предложением можно, минуя функцию внесения средств на игровой счет, просто активировав аккаунт на сайте. Наш экскурсовод по бездепам поможет избрать самую привлекательную бонусную программу, узнать управляла получения такового гонорары и распорядиться им с максимальной выгодой.
1× slots сайт
<a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=141881>1× слот зеркало</a> Перед активацией главно пристально изучить обстоятельства промоакции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют значение также лимиты ставок при отыгрыше и сроки, в течение которых возможно пользоваться предложением. Если бездеп обхватывает узкий список игр, рекомендуется узнать максимальные коэффициенты, уровень отдачи и волатильности. Слоты с низкими множителями выплат подходят только что случае, в оператор не установил взыскательные лимитирования на наивысшую сумму ставки.Выигрыши с призов без инвестициям постоянно привязаны к требованию по ставкам и все быть обналичены лишь в выполнения данных притязаний. 1×slots официальный сайт, скачать <a href=https://uberant.com/article/2020725-master-the-art-of-vibrating-screed-a-comprehensive-guide/>https://uberant.com/article/2020725-master-the-art-of-vibrating-screed-a-comprehensive-guide/</a>
1×slots регистрация 1×slots casino 777 online
Но а случае вы теснее профи по интернет казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в интернет казино;Подарки на конкретные даты выделяются условиями получения. Если поощрение начисляют игроку на денек рождения, то сумма обычно зависит от общего объема депозитов за год. Эффективность бездепов в маркетингового инструмента оценили все операторы. Малоизвестные площадки используют такие промоакции, дабы быстро набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны неизменных гостей. Не все сайты, дающие презенты без депозита, рекомендованы к игре. За симпатичным промоописанием шансы прятаться невыполнимые условия отыгрыша прочие подводные камешки.Более крупные предложения встречаются довольно изредка. Зачастую они доступны только VIP-игрокам. В оставшихся случаях им скорее сопутствуют очень строгие условия отыгрыша. Также возможны дополнительные обстоятельства и ограничения, прописанные в условиях и положения бонусной программки казино. <a href=http://misojin.co/bbs/board.php?bo_table=free&wr_id=405489>http://misojin.co/bbs/board.php?bo_table=free&wr_id=405489</a> Составленный специалистами Casino.ru список онлайн-казино с бездепозитным призом дозволяет игрокам сравнить спецпредложения разных операторов.Хотя бесплатные бонусы начисляются без депо, не исключено, что для понадобиться заносить деньги. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты только после того, как новый клиент раз пополнит игровой счет. 1×slots мобильная версия войти казино Баланс игрока дополняется на подходящую необходимую. К ней используется вейджер, обозначенный в правилах акции. Вывести выигрыш можно будет в того, как пользователь сделает требуемый размер ставок из личных средств. В редких случаях бездеп трудится в формате Free Play. На счет пользователя зачисляется большая сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по окончании этого периода сумма на счету будет превосходить изначальную, то разность возможно будет вывести или применять для последующих ставок.
<b>Смотреть еще похожие новости:</b>
<a href=https://sparta.training/faq/online-returns/#comment-70159>1хслотс зеркало</a>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=93124&result=reply>1×slots акции</a>
<a href=https://www.sgomberisgombero.it/my-account-2/>1×slots официальный demo регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный бонус казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в этом и содержится основное различие. Баланс игрока дополняется на соответствующую необходимую. К ней используется вейджер, обозначенный в правилах акции. Вывести выигрыш можно несомненно последствии как, как юзер сделает требуемый размер ставок из собственных средств. В редчайших случаях бездеп работает в формате Free Play. На счет пользователя зачисляется большая сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по окончании сего периода сумма на счету будет превосходить изначальную, то разницу возможно будет исключить либо использовать для последующих ставок.
#5091 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
бывшие казино up букмекерская контора <a href=https://m.repost.news/>casino на телефон</a> казино ли порно с Артемий Панарин (хоккей) <a href=https://rumafia.news/>букмекерская контора ставки</a> официальные букмекерские конторы приложения букмекерских контор на андроид промокод 1×bet pin casino Окладникова Ирина Андреевна порно порно с Александр Большунов (лыжные гонки) Скоробогатова Ольга Николаевна порно
DiskiPlus porno Мира Андреева (теннис) DiskiPlus яндекс игры казино <a href=https://www.diskiplus.ru>DiskiPlus лучшие букмекерские конторы</a> DiskiPlus казино онлайн бесплатно DiskiPlus казино сегодня <a href=https://www.diskiplus.ru/>DiskiPlus демо казино</a> DiskiPlus casino x DiskiPlus kometa casino DiskiPlus букмекерская контора официальный сайт DiskiPlus r7 casino DiskiPlus 7k casino зеркало на сегодня DiskiPlus порно с Афонина Марина Игоревна DiskiPlus порно с Артемий Панарин (хоккей)
#5092 Charlesgunnyhttp://filmkachat.ru
1 xslots рабочее зеркало
Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен перечень лучших интернет казино, коие предлагают своим игрокам щедрые бонусы за регистрацию.Прочитайте управляла бонусной программки, в желаете участвовать. Да, мы настоятельно советуем сделать это до регистрации. <a href=http://filmkachat.ru/>1×slots казино зеркало</a> Выбор любого интернет казино на нашем сайте. В описании к любому Вы можете узнать, что получите за творенье аккаунта.Подтверждение регистрации. Казино требуют привязки профиля к электронному адресу и номеру телефонного. Для сего на e-mail отправляется письмо ссылаясь, а на телефон ? текстовое сообщение с кодом. <a href=https://www.palscity.com/forums/thread/2083/>https://www.palscity.com/forums/thread/2083/</a> При регистрации сомнений или ином онлайн игральном заведении — вам дается один шанс испытывать собственную удачу не внося средства монеты. Замечу собственно такую поощрительную предложение деют не все интернет игровые площадки, а лишь великодушная середина(средина) из их. Которые мы подготовили для Вас в нашем списке.Важно, убедитесь том,, собственно раньше не регистрировались в выбранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи. 1×slos регистрация в 1×slots casino <a href=http://www.hdkinoteatr.com/index.php?subaction=userinfo&user=kaputlawsuit32>http://www.hdkinoteatr.com/index.php?subaction=userinfo&user=kaputlawsuit32</a>
1×slots бонус за регистрацию
1×slots зеркало которую указывали при регистрации кстати Ну и конечно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: подобная добродушие увеличивает степень преданности посетителей к компании.Представьте момент, когда при ставке в 10 руб. Вы получите схожее умножение. Миллион руб. За одно вращение, что вполне вполне. Поэтому вопрос, сколько возможно выиграть остаётся не. Предлагаем проверить самостоятельно. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный бонус и инспектируйте фортуну в деле. Разумеется, вывести средства не так просто. Однако шансы есть у всех. <a href=http://www.ihavethepussy.com/de/members/41653-Patrickdob>http://www.ihavethepussy.com/de/members/41653-Patrickdob</a> Фриспины начисляются по конкретной ставке. После их активации игроку нужно запустить слот и увериться, собственно в нем показываются безвозмездные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода в отыгрыша определяется оператором и редко выше 5 000 рублей.Каждая игровая перрон отличается критериями по получению и отыгрышу бездепов. В правилах отчетливо расписаны временные рамки, за которые надо(надобно) прокрутить вейджер. Также не запамятовывайте на наибольший объем ставки и максимальную сумму выплаты. С другой стороны, дабы получить бездепозитные призы казино, достаточно потратить не более 1 минутки. 1 х слотс зеркало
1×slots официальный сайт мобильная версия
<a href=https://tophatsec.com/forum/member.php?action=profile&uid=7032>https://tophatsec.com/forum/member.php?action=profile&uid=7032</a> Используйте наилучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из перечня ниже, дабы заработать презенты за обычные деянья теперь сейчас получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высокой отдачей и быстрыми выводами на электрические кошельки.Минимального оборота. Этот предел устанавливается вейджером — же игрок не сыграет на установленную сумму, вывод средств будет недосегаем. скачать 1×slots официальный сайт
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
<a href=https://www.allampolgar.hu/showthread.php?tid=3102>1хслотс рабочее зеркало</a> Операторы гемблинга утверждают, собственно например они дерутся с бонус-хантерами. Впрочем, критики считают, что данным казино пытаются сделать из случайного гостя постоянного игрока. зеркала 1×slots <a href=http://ntb.mpei.ru/bitrix/redirect.php?event1=gdocs&event2=opac&event3=&goto=http://google.com.sb/url?q=http://redmachine.ru/bitrix/redirect.php?goto=https://telegra.ph/Kak-legko-proverit-ne-zanizhena-li-vasha-pensiya-09–19>http://ntb.mpei.ru/bitrix/redirect.php?event1=gdocs&event2=opac&event3=&goto=http://google.com.sb/url?q=http://redmachine.ru/bitrix/redirect.php?goto=https://telegra.ph/Kak-legko-proverit-ne-zanizhena-li-vasha-pensiya-09–19</a> Иногда операторы настоятельно внесение малого депо перед выводом для верификации платежного прибора. В некоторых казино этот депозит кроме предстоит отыграть.
скачать 1×slots официальный сайт
Бездепозитные призы настоящими деньгами, которые возможно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадались.Многие казино деют в маркетинговых целях бесплатные бонусы самая для наших читателей. Чтобы их получить, нужно перейти на игровой сайт по партнерской ссылке с нашего портала. <a href=http://avarpressa.ru/user/JustinWravy/>http://avarpressa.ru/user/JustinWravy/</a> Фриплей-бонусы встречаются только в неких клубах. Они зачисляются сразу после создания профиля и активны недолговременное время. Если не успеете истратить свои, они просто сгорят. Касаемо медли, как бонусы активны протяжении часа.Если вы новичок деле и лишь попали в неизведанную вами область пыла — с помощью услуг как бездепозитные призы без пополнения. 1×slots зеркало регистрация В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, необходимо адресоваться в саппорта спустя лайв-чат на веб-сайте казино.
<b>Смотреть еще похожие новости:</b>
<a href=http://check2go.net/my-account/>1 xslots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Не стоит путать забаву в демо и использование призов. В демонстрационном режиме игрок возможность расценить механику слота, сюжет и оформление. Но игра проводится на относительные кредиты, поэтому отсутствует основное ? чувство азарта. Активируя промокод либо фриспины, клиент по-прежнему не тратит свои средства на игровые автоматы, хотя может сорвать настоящий куш!
#5093 Charlesgunnyhttp://filmkachat.ru
1×слотс казино
Одним из предлогов отдавать преимущество, льготу 1 или другому заведению заключается в привлекательности предлагаемых промоакций и безвозмездных услуг. Безвозмездные фриспины, выдаваемые без нужды создавать какой-нибудь вклад, в списке находится далековато не в конце.Важно, убедитесь что, нет, собственно ранее не регистрировались в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи. <a href=http://filmkachat.ru/>1×slot казино зеркало</a> <a href=https://diccut.com/forums/thread/3426/>https://diccut.com/forums/thread/3426/</a> На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению сего медли, Вы не можете активировать и получить бездепозитный приз. казино 1×slots <a href=http://community.checkinpro-hotel-software.com/memberlist.php?mode=viewprofile&u=298276>http://community.checkinpro-hotel-software.com/memberlist.php?mode=viewprofile&u=298276</a>
1×slots регистрация на официальном сайте
<a href=http://djdrewski.co.uk/lfsbangers/viewtopic.php?f=12&t=597&p=32217#p32217>1×slot рабочее зеркало</a> 1хслот зеркало <a href=http://www.aipingce.com/space-uid-119489.html>http://www.aipingce.com/space-uid-119489.html</a> На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не сможете активировать и получить бездепозитный приз. 1х слот 1хслотс регистрация перейти на 1×slots
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Также посещают случаи, когда казино начислит обсужденный бонус последствии регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам. В большинстве заведений сделать это можно по адресу электронной почты, по номеру аппарата, через социальную сеть или гугл-аккаунт. <a href=https://forums.dfine.net/member.php?action=profile&uid=1172>https://forums.dfine.net/member.php?action=profile&uid=1172</a> Однако далеко не все ресурсы предлагают своим посетителям бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено поощрение на первый депо в объеме 100–200%. Это замечательная вероятность преумножить банкролл, увеличить время, проведённое за забавой и шансы сорвать большой куш.Так что приготовьтесь предоставить конфиденциальную информацию (пол, возраст, страна проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает не более суток, последствии чего удастся свободно выводить крупные выигрыши. 1×slots зеркало выигрыши обязательно пройдите регистрацию если Обычно, бездепозитные призы выдаются под конкретные слоты с фиксированной ставкой, но их наверняка воспрещено применять в игровых автоматах с современным джекпотом. Список игр, в можно применять бездеп, Вы отыщите в описании акции либо можете уточнить у саппорта заведения.Так что сможете храбро региться без всяких раздумий. Фортуна сегодня точно на вашей стороне. Не бойтесь, ведь следствие какого либо ущерба Вам совершенно не грозит. С такими бонусами как без пополнения, Вы остаетесь только в плюсе, но не как не в минусе.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Для выбора азартного заведения Вы сможете пользоваться списком наших казино с бонусами за регистрацию. На нашем сайте мы выпустили список бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, собственно часть призов неповторимые и доступны только для гостей нашего вебсайта по-специальному промо-коду либо по оригинальной ссылке. Кроме как, для любого приза мы подготовили доскональный обзор, в Вы узнаете как получить и отыграть одобрение и как исключить свой выигрыш с бездепа.Бездепозитные бонусы реальными средствами, которые можно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадали. 1×slots официальный сайт мобильная версия скачать <a href=http://masyasha.ru/index.php?option=com_k2&view=itemlist&task=user&id=79973>http://masyasha.ru/index.php?option=com_k2&view=itemlist&task=user&id=79973</a> Следует выделить, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом.
1×slots официальный demo регистрация в 1×slots casino
При поддержки такого поощрения оператор имеет кроме привлекать клиентов, которые ранее показывали активность на сайте, хотя по какой-то причине прекратили выступать. В этом случае промокод высылается пользователю по электронной почте или вид SMS.Каждый новичок и умелый игрок грезят стремительно стартануть и начать делать реальные ставки. Для сего довольно арестовать подарок, за который надо уплачивать. В зависимости от игровой платформы, нужно сделать профиль, привязать email или аппарат. После этого администрация начислит щедрое вознаграждение вид безвозмездных вращений либо виртуальных кредитов. Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации бонуса без депозита. Внимательно прочитайте до конца. Многие новенькие делают ошибки на шаге регистрации и поэтому возможности получить презент. <a href=https://www.currencylovers.com/forums/member.php?action=profile&uid=86901>https://www.currencylovers.com/forums/member.php?action=profile&uid=86901</a> Обычно, бездепозитные призы выдаются под конкретные слоты с фиксированной ставкой, но их точно воспрещено использовать в игровых автоматах с современным джекпотом. Список игр, каких возможно использовать бездеп, Вы отыщите в описании промоакции или можете уточнить у службы заведения. сайт 1× slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://smm-seo.ru/threads/sajt-1×-slots-casino.35954/>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=47993>1×slot регистрация</a>
<a href=http://griffhunter.com/boards/viewtopic.php?p=506212#p506212>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
У нас на веб-сайте Вы найдете перечень призов без депозита в испытанных казино и подробную информацию то как их получить и применять. Прямо момент заберите бесплатные вращения за регистрацию без депо и начинайте коллекционировать призовые комбинации из-за солидных выигрышей!
#5094 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
сайт 1×bet слоты 1×bet зеркало слоты 1×bet xyz <a href=https://vestnik-jurnal.com/>почему казино</a> pin ап casino 1×bet телефон <a href=https://glvk.guru/>porno Александра Степанова, фигуристка</a> рокс казино казино можно букмекерская контора бетсити casinos xyz porno Яна Троянова 1×bet слоты casino
DiskiPlus casinos xyz DiskiPlus up букмекерская контора <a href=https://diskiplus.ru>DiskiPlus порно с Федор Чалов (футбол)</a> DiskiPlus porno Анна Сидорова, керлингистка DiskiPlus pin up casino top top <a href=https://diskiplus.ru/>DiskiPlus 1×bet слоты 1×bet top</a> DiskiPlus порно с Федор Чалов (футбол) DiskiPlus casino DiskiPlus букмекерская контора леонов DiskiPlus 1×bet на андроид бесплатно DiskiPlus Чулпан Хаматова DiskiPlus 1×bet зеркало DiskiPlus букмекерская контора фонбет
#5095 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее на сегодня
Нельзя разглядывать игру на деньги, как вариант заработка. Азартные игры воспрещены для лиц младше 18 лет. Topcasinobonuses.mobi не является организатором азартных игр. Сайт одевает информационный нрав. <a href=http://filmkachat.ru/>1×slots официальный зеркало</a> <a href=https://blog.udn.com/G_112062930339362154/181391883>https://blog.udn.com/G_112062930339362154/181391883</a> 3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефон либо почту, указать персональную информацию;Пoдтвepдить личнocть посетителя. Для успешного вывода средств, нужно подтвердить лицо клиента. Нa этaпe вepификaции пpoфиля, сотрудники службы защищенности обязаны убедиться, что у игрока более раз акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не сможет вывести собственный выигрыш, в у него несомненно количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы. 1×slots скачать на айфон <a href=http://rimko.biz/bitrix/redirect.php?goto=http://premium-flowers.ru/bitrix/redirect.php?goto=http://zoloto-odintsovo.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/NIbaQbwSYpe>http://rimko.biz/bitrix/redirect.php?goto=http://premium-flowers.ru/bitrix/redirect.php?goto=http://zoloto-odintsovo.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/NIbaQbwSYpe</a> Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, all лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.
1×слотс казино
Ознакомьтесь с нашим перечнем лучших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего перечня и получите бездеп сразу. Хватайте наихорошие безвозмездные предложения ниже и выигрывайте большие средства, не рискуя!Бонус в казино без депозита содержит различные разновидности: это может быть приветственный бонус, промоакции в честь каких-то дней или главных дат, бонус за вербование новых игроков, лояльность и получение VIP-статуса. <a href=https://australianwinerytours.com/tours/showthread.php?tid=319360>зеркала 1×slots</a> 1×slots официальный зеркало Не хотите поиграть в азартные игры, не рискуя своими деньгами, хотя получая в все выплаты? Подобную возможность деют почти лучшие порталы с азартными весельями. В их количестве много правдивых и надежных интернет-казино на русском языке. Они привлекают свежих юзеров различными поощрительными мероприятиями, включая бездепозитные, или бесплатные бонусы. <a href=https://cutetusy.cc/member.php?action=profile&uid=34902>https://cutetusy.cc/member.php?action=profile&uid=34902</a> Бывают ли бездепозитные бонусы без вейджера? Бывают, если у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино.Заработать на бездепозитных призах за регистрацию в казино имеет любой пользователь, достигший совершеннолетия. 1×slots зеркало рабочее Выше мы дали полный комплект самых новых и актуальных бездепозитных бонусов в интернет казино без пополнения на 2022 год, где вам воспользоваться любым ценным бездепозитным призом.Постарайтесь отыграть вейджер, чтобы замечена вероятность забыть заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электрической кошелёк, карту, телефон.
1 xslots рабочее зеркало
При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток. Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут уточняет ограничение для клиентов. Конечно, это можно посчитать неким неудобством для игрока, но справедливости отметить, что выбор автоматов всё равно остаётся довольно наибольшим.Бездепы все заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами. <a href=http://tickling.forum.cool/viewtopic.php?id=1186#p2355>http://tickling.forum.cool/viewtopic.php?id=1186#p2355</a> 1х слот 1хслотс регистрация перейти на 1×slots
1хслотс казино зеркало
Во время забавы в казино, выигрыши, приобретенные благодаря безвозмездным призовым фондам, суммируются и срабатывают в совместную сумму для отыгрывания. Однако, случае удача улыбнется и получится отыграть все бонусы, игровое заведение гарантированно разрешит вывести финансовые свои. Сумма вывода будет находиться от лимита, одобренного непосредственно в этом учреждении. Поэтому, пристально нужно разбирать правила выдачи безлимитных депо. Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция имеет доскональные правила, гиперссылка на коие обычно находится в промообъявлении. В их указываются лимиты, вейджер, перечень дешевых игр. Если оператор укрывает данные о предложении, то воспользоваться им надо. 1хслотс рабочее зеркало на сегодня <a href=https://www.appsvb.com/member.php?u=3485>https://www.appsvb.com/member.php?u=3485</a> Варианты выигрыша зависимости от Вашей успеха и условий игорного портала. Выше мы сказали, что некоторые бездепозитные призы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются и те, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на средства, можно выиграть невероятные суммы. Сегодняшние игровые автоматы либо видео слоты, как их называют. Могут выдавать солидные умножение от х1.000 и выше. Некоторые множат ставку от х100.000.Даже не выиграв солидную сумму, игрок увлекательно проведет время, изнутри изучит работу площадки, оценит геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе наихороших акций легкостью. Достаточно периодически учить перечень новых интернет казино с выводом бонуса без депозита в этом разделе.
x1 slots 1хслотс регистрация перейти на 1×slots
Каждый из бездепозитных призов без пополнения 2022 содержит собственный определенный вейджер для отыгрыша, так же в любом казино он уточняется персонально — где то он х55 а где-то х30, повторюсь везде по различному!Наиболее знаменитые гонорары между гэмблеров – бездепозитные призы казино. Это не умопомрачительно, так можно получить благотворительные вращения либо виртуальные кредиты, и всем не придётся пополнять счёт, рисковать личными деньгами. Удастся насладиться разнородными увеселениями даже выиграть крупную необходимую, избегая серьёзного риска. <a href=https://rekordmeister.ru/user/Deweysob/>https://rekordmeister.ru/user/Deweysob/</a> 1×slots регистрация то дальше необходимо пройти Допустим, за регистрацию вы возымели бездеп в размере 2 000 руб. С вейджером х30. В данном случае предстоит сделать ставок, на общую необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда выполните обстоятельства по отыгрышу, придёт время заработать настоящие деньги. Однако не запамятовывайте, собственно с любого презента выйдет исключить определённую необходимую (чаще всего менее $200).Бонус начисляется игроку сразу после регистрации и прохождения верификации в казино и не настятельно от клиента внесения депо. Как правило, размер бонуса в схожем случае достаточно стыдливый, однако разрешает новеньким познакомиться с забавой без риска реальными деньгами.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.arka-bahce.org/forum/showthread.php?p=779399&posted=1#post779399>1×slots casino зеркало рабочее</a>
<a href=http://swissairways-va.com/phpBB3/memberlist.php?mode=viewprofile&u=3495>1×slots сайт</a>
<a href=http://board.eternityrpc.com/member.php?action=profile&uid=369>1×slots рабочее зеркало на сегодня</a>
<a href=http://moneysweet.listbb.ru/viewtopic.php?f=2&t=6044>1×slots официальный demo регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала прыткие выводы. Фишка выплат сомнений, что достаточно выбрать платёжный инструмент и показать необходимую. В большинстве случаев средства зачисляются на электронные кошельки в течение 15 мин., а на банковские карты – 1–3 рабочих дня.
#5096 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Елизавета Туктамышева винлайн букмекерская контора официальный <a href=https://7club7.com/>retro casino</a> Окладникова Ирина Андреевна порно почему в казино не бывает настенных часов <a href=https://t.me/vchkogpu_ru>порно с Александр Головин (футбол)</a> casino официальный зеркало как выиграть в казино Матвиенко Валентина Ивановна порно casino рабочее casino онлайн казино смотреть лучшие бесплатные онлайн казино
DiskiPlus 1×bet зеркало на сегодня DiskiPlus зеркала официальных сайтов казино <a href=https://diskiplus.ru>DiskiPlus casino ru</a> DiskiPlus porno Марина Александрова DiskiPlus официальное казино вход <a href=https://diskiplus.ru>DiskiPlus ограбление казино</a> DiskiPlus винлайн букмекерская контора официальный сайт DiskiPlus casino pin официальный DiskiPlus порно с Петр Ян (ММА) DiskiPlus new casino DiskiPlus Приезжева Екатерина Геннадьевна порно DiskiPlus Яровая Ирина Анатольевна порно DiskiPlus зеркала официальных сайтов казино
#5097 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet сейчас 7k casino официальный сайт <a href=https://res-publika.com>Крючкова Полина Викторовна порно</a> porno Андрей Рублев (теннис) 1×bet слоты 1×bet xyz <a href=https://repost.news/>казино вход</a> kent casino казино гта 5 bet casino Петрова Ольга Викторовна порно порно с Анастасия Потапова, теннисистка порно с Илюшникова Татьяна Александровна casino ru
DiskiPlus porno Екатерина Ефременкова, шорт-трекистка DiskiPlus 7k casino зеркало <a href=https://www.diskiplus.ru/>DiskiPlus порно с Карен Хачанов (теннис)</a> DiskiPlus порно с Александр Большунов (лыжные гонки) DiskiPlus Попова Анна Юрьевна порно <a href=https://diskiplus.ru>DiskiPlus black russia казино</a> DiskiPlus 1×bet casino DiskiPlus порно с Дронова Александра Викторовна DiskiPlus 1×bet на сегодня DiskiPlus казино можно DiskiPlus лучшие бесплатные онлайн казино DiskiPlus 1×bet xbet xyz DiskiPlus pin up casino зеркало
#5098 Ремонт iMac 21 Москваhttps://remont-imac-21-bim.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт imac 21 адреса, можете посмотреть на сайте: <a href=https://remont-imac-21-bim.ru/>ремонт imac 21 в москве</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#5099 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию процедура займет всего лишь
Но существуют азартные заведения, готовые просто так вручить деньги на забаву. Для сего довольно сделать профиль. Чтобы исключить выигрыш, сперва необходимо выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа. <a href=http://filmkachat.ru/>1×slots быструю регистрацию а также мгновенное</a> <a href=https://band.us/band/96885593/post/3>https://band.us/band/96885593/post/3</a> 1×slots регистрация 1×slots review live <a href=http://mariland.org/index.php?subaction=userinfo&user=lyinginvestigat>http://mariland.org/index.php?subaction=userinfo&user=lyinginvestigat</a> Далее требуется отыграть вагер и вывести выигрыш. Игрокам без навыка крупно подфартило, есть получить десятки подарков за одну регистрацию. Если не смогли получить Бездепозитный бонус, не волнуйтесь. Обратитесь в онлайн чат, оператор поможет решить проблему.Все обожают получать подарки. Согласитесь, почти любой играющий человек будет очень счастлив, случае получит бесплатный презент для забавы в интернет казино просто за регистрацию либо же бонус за внесенный депозит, например называемые приветственные бонусы для свежих игроков. Соответственно эти онлайн клубы будут более модны и преимущественны у игроков при выборе казино для игры. Топ казино день обновляется и добавляются свежие и интересные игровые клубы с симпатичной бонусной политикой и всеми вероятными привилегиями, к коим относятся эти бонусы как фриспины за регистрацию, валютные бездепозитные призы, еще щедрые бонусы за внесенный депозит.
1х слотс зеркало регистрация в 1×slots casino
<a href=https://forum-macan.ru/viewtopic.php?t=3661>1×slots официальный сайт, скачать</a> онлайн казино 1×slots Чаще всего, известные сервисы, такие как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное управляло. Финансовые свои выводятся лишь через ту платежную систему, коей популярностьюимели для пополнения депо. Если же игрок получил бездепозитный покерный бонус, потребуется пополнить счет на наименьшую сумму, которая составляет обычно десять $.Самые свежие бездепозитные бонусы в казино за регистрацию 2022 года с выводом прибыли находятся на этой странице. Посетитель может расценить обстоятельства получения и начать выступать на средства без внесения депозита. При данном игроку принципиально разуметь, на каких критериях и какими способами он сможет исключить полученный выигрыш. Для этого нужно расценить перечень присоединенных платежных систем. <a href=http://38.104.231.181/doku.php?id=РР·_чего_состоит_диета_Елены_Малышевой>http://38.104.231.181/doku.php?id=РР·_чего_состоит_диета_Елены_Малышевой</a> Для верификации аккаунта нужно предоставить специалистам технической поддержки отсканированную копию паспорта и счета за коммунальные предложения, а фотку банковской карты либо скриншот странички электрического кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для подтверждения личности. 1×slots сайт зеркало
онлайн казино 1×slots
<a href=https://www.divephotoguide.com/user/cgifurniturecom>https://www.divephotoguide.com/user/cgifurniturecom</a> Бездепозитный бонус часто имеет замерзнуть легкодоступным незамедлительно последствии завершения регистрации, поскольку правило единственным требованием к нему является регистрация, а затем проверка вашей свежей учетной записи.Сразу последствии активации промокода возможно воспользоваться презентом. Как теснее упоминалось, бонусы посещают трёх обликов – фриспины, кредиты и фриплей-бонусы. 1×slots официальный сайт зеркало
1хслотс зеркало
На страничке представлены бездепозитные бонусы за регистрацию в казино редчайшая награда за которой гонятся все игроки как новички, так и мастера. Мы тоже уделяем большое внимание на присутствие призов при формирование рейтинга казино на деньги. Бездепозитный приз это вероятность выступать даром и выиграть реальные средства.Чаще всего используются коды. Их надо(надобно) заносить в специальные окошки регистрационной анкеты, случае речь о пригласительных призах, либо в определенном разделе личного офиса игрока. <a href=https://g2clubs.com/healthy-workout/google/#comment-29233>1×slots официальный зеркало рабочее</a> Не трудно догадаться, что no down payment bonuses почти никогда не случаются великими. Чаще всего идет о пяти–тридцати баксах (или эквиваленте этой суммы в иной денежной). Промокод – определённая комбинация знаков, коию необходимо ввести в отвечающее поле при твореньи учетной записи либо активировать в личном профиле игрока в разделе с призами.Да, у бесплатных призов есть дефекты. Прежде всего, они обыкновенно маленькие. Кроме такого, обстоятельства вейджера по ним всегда жесткие. Но все недоступность риска проделывает их довольно привлекательными для клиентов. 1×slots официальный сайт мобильная версия скачать <a href=https://prodvizheniyesayta.blogspot.com/2024/09/blog-post.html>https://prodvizheniyesayta.blogspot.com/2024/09/blog-post.html</a>
1хслотс рабочее зеркало
<a href=http://fitboss.ru/user/KennethFoepe/>http://fitboss.ru/user/KennethFoepe/</a> Срок активации и время на отыгрыш. Зачисление средств или фриспинов происходит при активации в течение взыскательно ограниченного периода, схожие требования предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать бонус некоторое дней либо числе месяцов. Другие выдают крупную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером.Для отыгрыша бонуса казино обязует игрока сыграть на необходимую, в некоторое один превышающую необходимую полученного бонуса — тут выгода компании явна. 1×slots casino регистрация на сайте
<b>Смотреть еще похожие новости:</b>
<a href=https://creapnl.com/foros/tema/1×slots-%d0%b7%d0%b5%d1%80%d0%ba%d0%b0%d0%bb%d0%be-%d1%80%d0%b5%d0%b3%d0%b8%d1%81%d1%82%d1%80%d0%b0%d1%86%d0%b8%d1%8f-%d0%b2–1×slots-casino-11/>1×slots зеркало регистрация в 1×slots casino</a>
<a href=http://complainanything.com/node/158?page=1026#comment-1463259>1× slots casino зеркало</a>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=133554&pid=386074#pid386074>1×slots зеркало этих способов предполагает регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Предложения с бездепозитными бонусами за регистрацию разрешают свежим заведениям привлечь аудиторию на свой вебсайт. А игроки тому получают возможность выступать на настоящие деньги без депо в казино и заработать небольшой стартовый капитал, кот-ый разрешается исключить на карту банка либо электронный кошелек.
#5100 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Москалькова Татьяна Николаевна порно Валентина Матвиенко порно <a href=https://glvk.guru/>букмекерская контора официальный сайт</a> порно с Евгения Медведева пин up casino <a href=https://m.repost.news/>вавада казино</a> винлайн букмекерская контора официальный сайт гама казино порно с Елена Никитина, скелетонистка casino 7k сегодня casino buzz pin up casino скачать порно с Бондаренко Анастасия Борисовна
DiskiPlus букмекерская контора ставки DiskiPlus ramenbet casino <a href=https://www.diskiplus.ru/>DiskiPlus казино на деньги</a> DiskiPlus порно с Гатагова Ольга Анатольевна DiskiPlus 7k casino скачать <a href=https://diskiplus.ru/>DiskiPlus винлайн букмекерская контора</a> DiskiPlus почему в казино не бывает настенных часов DiskiPlus 1×bet xbet DiskiPlus как выиграть в казино DiskiPlus casino зеркало сайта DiskiPlus up casino зеркало DiskiPlus про казино DiskiPlus casino на телефон
#5101 Charlesgunnyhttp://filmkachat.ru
1×slots официальный demo регистрация в 1×slots casino
Срок активации и время на отыгрыш. Зачисление средств или фриспинов случается при активации протяжении требовательно ограниченного периода, похожие притязания предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать бонус количество дней или том месяцов. Другие выдают крупную необходимую за регистрацию, но время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером. <a href=http://filmkachat.ru/>1хслотс рабочее зеркало</a> В разделе с призами активировать собственный презент. Найти игры, для коих учтено одобрение и использовать приз по предназначению. <a href=https://smallpdf.com/file#s=947e9bab-f7cd-45be-8e6d-7494ff661b35>https://smallpdf.com/file#s=947e9bab-f7cd-45be-8e6d-7494ff661b35</a> Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные способы и расценить особенности, недоступные при забаве в демо режиме. Многие новые посетители перебегают в количество неизменных, а оператор получает длительную прибыль. 1×slots официальный сайт, скачать <a href=http://best-realtors.com.ua/index.php?subaction=userinfo&user=decorouswater36>http://best-realtors.com.ua/index.php?subaction=userinfo&user=decorouswater36</a> Изучить правила и обстоятельства получения бездепозитных призов казино, Вы можете у нас на веб-сайте в разделе с бонусами либо на официальном веб-сайте выбранного Вами казино. Если имеет отыскать нужную информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал или по электрической почте.Новые посетители онлайн-казино без первого депозита шансы проверить свою удачливость. К тому же есть возможность преобразовать бездепы в настоящие деньги за регистрацию в казино, однако желаемого бонус необходимо отыграть согласно условиям промоакции.
1×slots регистрацию более популярный вариант это
В настоящее время получить приз за регистрацию в казино очень просто. Почти любой игорный жилище с готовностью предоставит средства либо благотворительные вращения. Многие игроки используют данным и не стыдятся региться в каждом клубе с выгодными критериями. Кстати, это отличная вероятность выдумать выигрышную тактику и сорвать куш.Во всех легальных онлайн-казино Беларуси нужно подтверждение паспортных данных для забавы — это заявка правительства государства. 1×slot регистрация Возьми собственный подарок. Чаще всего бонус активируется сразу в регистрации. Но бывают истории, когда надо(надобно) забежать в собственный кабинет или написать в справочную службу.Прямо сейчас заберите безвозмездные вращения за регистрацию без депо и начинайте коллекционировать призовые комбинации из-за солидных выигрышей! <a href=http://vttgauriac.fr/forum/memberlist.php?mode=viewprofile&u=5219>http://vttgauriac.fr/forum/memberlist.php?mode=viewprofile&u=5219</a> Поспешите арестовать бездепозитные призы за регистрацию в казино из представленного перечня. Все платформы не водят легальную работа, хотя и обрадуют добросовестными результатами игры, высочайшей отдачей, прыткими выплатами.Когда идет о получении бездепозитных бонусов в казино, начала направьте на следующие обстоятельства: 1×slots зеркало видели такую регистрацию на Oтыгpaть бонус с указанным вeйджepом, чтобы нужно сдeлaть cтaвoк нa cумму, превышающую размер бонуса в некоторое один.
1х слотс зеркало регистрация в 1×slots casino
При регистрации что, нет или ином интернет игральном заведении — вам дается раз шанс испытать свою фортуну не внося свои монеты. Замечу собственно такую поощрительную услугу предоставляют не все онлайн игровые площадки, а только щедрая середина(средина) из них. Которые мы подготовили для Вас в нашем перечне.Как управляло, при выводе денег, от играющего потребуется лишь устроить минимальный вклад чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом индивидуальный счет. <a href=http://www.marheavenj.net/public/gallery/member.php?action=showprofile&user_id=29278>http://www.marheavenj.net/public/gallery/member.php?action=showprofile&user_id=29278</a> 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Шаг 5. Использование и отыгрыш. Бездеп обязан быть использован в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера.
1×slots актуальное зеркало
Условия отыгрыша приза. Если Вы планируете заработать на бездепозитном призе, то для внимание на велечину вейджера и срок, кот-ый дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть приз и вывести выигрыш. <a href=https://forum.oursson.ru/viewtopic.php?f=2&t=8724>1хслотс зеркало на сегодня</a> Зачастую бездепозитные бонусы казино для забавы предлагаются различными заведениями азартных игр в качестве рекламных промоакций либо в целях вербования к для новых игроков. Для бездепозитных призов в казино 2022 геймеру не пополнять счет до этапа вывода желанных средств.Такие поощрения разрешают бесплатно протестировать свежее казино, разобраться с игровым процессом онлайн слотов, заработать и вывести небольшую необходимую денег. Размер приза. В качестве бездепов обычно начисляют маленькие суммы, а когда речь идет о бонусах за депозит, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино имеют презентовать игроку до 2000$. 1×слот регистрация в 1×slots casino <a href=https://sultantheme.com/vb4forum/member.php?25795-JulesAnnox>https://sultantheme.com/vb4forum/member.php?25795-JulesAnnox</a> Бонусные деньги – небольшая сумма денег для старта в новеньком казино. На бонусные средства, обыкновенно разрешено выступать во все забавы, не слотов с современным джекпотом и игр из раздела exist casino.
1×slots зеркало рабочее
Простая процедура получения бездепозитного бонуса, кот-ая займет не более 2-х минут. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные.Бездепозитные бонусы за регистрацию в игровых автоматах для хозяев онлайн-казино являются частью рекламной кампании, направленной на увеличение аудитории вебсайта. Так они продвигают свои бренды и завлекают новых посетителей. <a href=https://rollbol.com/blogs/1837235/%D0%92%D1%81%D0%B5-%D1%89%D0%BE-%D0%B2%D0%B8-%D0%BF%D0%BE%D0%B2%D0%B8%D0%BD%D0%BD%D1%96-%D0%B7%D0%BD%D0%B0%D1%82%D0%B8-%D0%BF%D1%80%D0%BE-%D0%BA%D0%B0%D1%88%D0%BB%D1%8E%D0%BA-%D0%BF%D1%80%D0%BE%D1%82%D0%BE%D0%BA%D0%BE%D0%BB-%D0%BB%D1%96%D0%BA%D1%83%D0%B2%D0%B0%D0%BD%D0%BD%D1%8F>https://rollbol.com/blogs/1837235/%D0%92%D1%81%D0%B5-%D1%89%D0%BE-%D0%B2%D0%B8-%D0%BF%D0%BE%D0%B2%D0%B8%D0%BD%D0%BD%D1%96-%D0%B7%D0%BD%D0%B0%D1%82%D0%B8-%D0%BF%D1%80%D0%BE-%D0%BA%D0%B0%D1%88%D0%BB%D1%8E%D0%BA-%D0%BF%D1%80%D0%BE%D1%82%D0%BE%D0%BA%D0%BE%D0%BB-%D0%BB%D1%96%D0%BA%D1%83%D0%B2%D0%B0%D0%BD%D0%BD%D1%8F</a> На данном разделе портала периодически публикуются обзорные статьи, каких рассматриваются бесплатные бонусы превосходнейших интернет-казино. Информация структурирована по нескольким пунктам, включая главные: 1×slots сайт
<b>Смотреть еще похожие новости:</b>
<a href=https://ragnarok.ch/forum/viewthread.php?thread_id=135942>1× slots casino зеркало</a>
<a href=https://www.kuyoux.com/space-uid-35770.html>онлайн казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При пользовании бездепозитным бонусом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют несколько обликов лимитов: Простая процедура получения бездепозитного бонуса, кот-ая займет не более 2-х минут. Для получения бездепов, достаточно зарегистрироваться и подтвердить контактные данные.
#5102 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Дронова Александра Викторовна порно с Абрамченко Виктория Валериевна <a href=https://m.repost.news/>1×bet бесплатно</a> pin up casino пин ап букмекерская контора фонбет официальный сайт <a href=https://rhymes-punches.com/>букмекерские конторы pin</a> пари букмекерская контора букмекерская контора мостбет casino buzz 1×bet xbet xyz порно с Антропова Валентина Викторовна casino бонус казино регистрации
DiskiPlus букмекерские конторы pin DiskiPlus porno Алена Косторная (фигурное катание) <a href=https://diskiplus.ru/>DiskiPlus casino ru</a> DiskiPlus казино рублях DiskiPlus Чулпан Хаматова <a href=https://diskiplus.ru>DiskiPlus казино зеркало сегодня</a> DiskiPlus 1×bet сайт DiskiPlus Нургалиева Эльвира Рамиловна порно DiskiPlus порно с Федор Чалов (футбол) DiskiPlus kent casino DiskiPlus скачать casino на андроид DiskiPlus casino официальный сайт DiskiPlus porno Александра Степанова, фигуристка
#5103 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать сайт букмекерской конторы порно с Варвара Субботина <a href=https://rumafia.news/>1×bet зеркало на сегодня 1×bet xyz</a> казино большая casino betting <a href=https://glvk.guru/>мобильные букмекерские конторы</a> up casino официальный пина casino казино онлайн 1×bet вход Светлана Ходченкова Светлана Ходченкова Преподобная Надежда Александровна порно
DiskiPlus казино пин DiskiPlus r7 casino <a href=https://diskiplus.ru>DiskiPlus букмекерская контора официальный сайт</a> DiskiPlus суть казино DiskiPlus 7k casino <a href=https://www.diskiplus.ru>DiskiPlus сколько казино</a> DiskiPlus промокод 1×bet DiskiPlus online casino DiskiPlus играющие казино онлайн DiskiPlus porno Александра Степанова, фигуристка DiskiPlus порно с Афонина Марина Игоревна DiskiPlus самое казино DiskiPlus порно с Алина Загитова
#5104 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация
Когда речь о валютных бонусах, казино всегда устанавливают условия вейджера, которые нужно выполнить, чтобы вывести выигрыш. <a href=http://filmkachat.ru/>1хслот официальный сайт зеркало</a> Если вы выбрали себе количество брендов коие вам больше всего полюбились, для неизменной забавы! Таких гемблеров казино довольно предпочитает и оценивает, за частую такие игроки становятся VIP игроками заведения, которым часто поступают выгодные предложения вид призов, так же туда заходит и бездепозитные. <a href=https://www.palscity.com/forums/thread/2078/>https://www.palscity.com/forums/thread/2078/</a> Размер бонуса. В качестве бездепов обыкновенно начисляют очень суммы, а когда речь о призах за депо, коие начисляются в процентном соотношении от суммы пополнения, то кое-какие казино могут подарить игроку до 2000$.Реже бонусы без депозита начисляются постоянным игрокам. С их помощью администрация старается удержать ценных клиентов либо желает поблагодарить за преданность правильных гостей. Но намного чаще для подобных целей используются такие акции: 1× слот зеркало <a href=https://games-garant.ru/index.php?subaction=userinfo&user=Henrytes>https://games-garant.ru/index.php?subaction=userinfo&user=Henrytes</a> Игрокам не следует принимать приветственный бонус как гарантированный метод получить большой выигрыш, но это замечательная вероятность без затрат оценить перечень казино.Так что приготовьтесь предоставить секретную информацию (пол, возраст, государство проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает не более суток, в чего удастся свободно выводить крупные выигрыши.
1×slots casino зеркало рабочее
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=135497&pid=651302#post_651302>1×slots регистрацию процедура займет всего лишь</a> 1×slots зеркало выигрыши обязательно пройдите регистрацию если Чаще всего, пользующиеся сервисы, эти как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно обязательное верховодило. Финансовые свои выводятся только спустя что, эту платежную систему, которой популярностьюимели для пополнения депо. Если же игрок получил бездепозитный покерный приз, потребуется восполнить счет на минимальную сумму, которая составляет обыкновенно десять $.Выбирая даровой бонус, внимательно изучайте верховодила. Убедитесь, что вас возможно брать участие в промоакции. Уточните, в каких играх возможно исполнять обстоятельства вейджера. При надобности задавайте вопросы адептам саппорта. <a href=http://rus-troika.ru/forum/profile.php?mode=viewprofile&u=354549>http://rus-troika.ru/forum/profile.php?mode=viewprofile&u=354549</a> 1х слот регистрация в 1×slots casino Иногда виде бездепа, казино презентует минимальный приз (до 50 рублей), из-за которого надо заморачиваться.Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам воспрещено начислять бонусы посетителям, не имеющим денежных средств на счете. Мы предлагаем рассмотреть животрепещущие бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ.
1×slots регистрация 1×slotscasino09k online
Но разу не забывайте пристально читать управляла участия в бонусных промоакциях. Если вы нарушите желая бы одно условие, позже вы не можете уладить недоразумение с администрацией. <a href=https://mcpe.ru.net/user/JamesAwact/>https://mcpe.ru.net/user/JamesAwact/</a> В большинстве заведений сделать это можно по e-mal, по номеру аппарата, спустя социальную сеть или гугл-аккаунт. 1×slots сайт
скачать 1×slots официальный сайт
Зарегистрироваться в казино по специальной ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефона и электронную почту). Для подтверждения номера телефонного необходимо в собственном профиле указать свой номер и надавить кнопку „Подтвердить номер телефонного“, дальше Вы получите sms-сообщение с кодом, кот-ый необходимо ввести в соответствующее фон. Для доказательства электронной почты, перебежать по интенсивной ссылке в письме от казино.Как правило, при выводе финансов, от играющего потребуется только устроить наименьший лепта чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом индивидуальный счет. Не стоит незамедлительно же открещиваться от приветственных презентов в похожих казино. Администрация готова начислить деньги или фриспины, но предварительно работники обязаны убедиться, что вы не аферист. Дело в том, собственно развелось очень много охотников за призами. Они выучились дурачить систему и наваривать крупные суммы денег. 1×slots зеркало на сегодня <a href=https://uadplugins.club/memberlist.php?mode=viewprofile&u=231671>https://uadplugins.club/memberlist.php?mode=viewprofile&u=231671</a> Исходя из сего, просто не присутствует осмысленных причин махнуть рукой на получение такового бонуса при регистрации. И, лишним, на подобный безвозмездной основе у вас есть шансы выиграть средства и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные бонусы, нарекают бесплатными интернет платформами для игр.Используйте лучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, чтобы заработать презенты за обычные деянья и уже сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высочайшей отдачей и прыткими выводами на электронные кошельки.
1×slots зеркало быструю регистрацию а также мгновенное
<a href=https://sklad-slabov.ru/forum/user/9196/>https://sklad-slabov.ru/forum/user/9196/</a> 2. Создать свежий профиль. Для регистрации нужно заполнить маленькую анкету либо зайдите в собственный офис посредством соц сетей; 1×slots регистрация на сайте 1×slots ru com Когда речь о валютных бонусах, казино всегда устанавливают обстоятельства вейджера, коие необходимо выполнить, чтобы исключить выигрыш.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.vn.ua/showthread.php?p=3276921#post3276921>1×slots зеркало которую указывали при регистрации кстати</a>
<a href=https://nauc.info/forums/viewtopic.php?t=20407883>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=https://smm-seo.ru/members/rabofreeol.4209/>1×slots официальный сайт мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Мы делаем ударение на главных положениях верховодил, рассказываем о территориальных ограничениях и вкратце информируем о иных промоакциях обговариваемого казино.
#5105 Charlesgunnyhttp://filmkachat.ru
казино 1×slots официальный сайт
Такой казино приз без депозита за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это как бы какая-то конспирация поощрения под бездепозитный. Суть всего этого сводится к что, этому, собственно геймеру на час выдается, к примеру, 1000 долларов, а реклама твердит про, что каждой выигрыш возможно будет в будущем оставить при себя. Но в играющий серьезно отнесется к этому предложению, то он просто растеряет время. Ведь игроку нужно несомненно играть не главном аккаунте, ну тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (том всей тыс. ) в управляла вступят определенные условия, где несомненно сказано, собственно наибольшей суммой победы возможность быть лишь двести $ и деньги возможно применять лишь виде бонуса на первый лепта с вейджером 25 от суммы гонорары плюс сам депо. По результату выйдет, что игрок выигрывал себя 200% приз с вейджером на конкретную сумму. Короче разговаривая, это все надо вашего медли. <a href=http://filmkachat.ru/>1хслот зеркало</a> Если вы избираете проверенное лицензионное онлайн казино и сделайте все обстоятельства получения бездепозитного приза, проблем с получением подарка у Вас не возникнет.Выбор любого онлайн казино на нашем сайте. В описании к каждому Вы можете разузнать, собственно получите за создание аккаунта. <a href=https://plaza.rakuten.co.jp/prilla/diary/202411240002/>https://plaza.rakuten.co.jp/prilla/diary/202411240002/</a> Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.Казино выделяет вероятность заработать и вывести настоящие деньги на бездепозитных бонусах. Обычно, это малозначительная сумма, коию казино возможность для позволить презентовать игроку. 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=http://dvkf.com.ua/index.php?subaction=userinfo&user=ovalcolleague1>http://dvkf.com.ua/index.php?subaction=userinfo&user=ovalcolleague1</a> Некоторые казино имеют предлагать клиентам бездепы за подтверждение номера или почты либо репост на страничку в соц сетях.Чтоб получить большой выигрыш, выбирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша.
1×slots актуальное зеркало
1×slots регистрация Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации бонуса без депо. Внимательно прочитайте до конца. Многие новенькие делают оплошности на шаге регистрации и потому возможности получить подарок. <a href=http://www.yyxw999.com/space-uid-21510.html>http://www.yyxw999.com/space-uid-21510.html</a> 1×slots регистрация то дальше необходимо пройти Фриспины – безвозмездные вращения с фиксированной ставкой, которые можно применять в определенных игровых автоматах.
1хслотс казино зеркало
У любого игорного заведения средства правила и обстоятельства. Но, дабы получить бонусы, необходимо выполнить стереотипные деянья: <a href=http://msfo-soft.ru/msfo/forum/user/39164/>http://msfo-soft.ru/msfo/forum/user/39164/</a> 1хлот регистрация в 1×slots casino Но на некоторых азартных платформах сходственные вознаграждения имеют получить теперь зарегистрированные юзеры. В таком случае, бонусы предоставляются масштабах оригинальных промоакций либо же некоторым геймерам повторяющий акционного предложения, коие прибывает на почту с целью «возвратить» игрока в свое казино.
1×slots сайт
Иногда у гостей сайта шансы возникнуть проблемы при активации приобретенного промо-кода. В этих случаях, необходимо обратиться за помощью в службу «Support». Для получения ответа, непременно указывается конкретная причина обращения и подтверждается информация дополнительными снимками. Если сложилась спорная ситуация, постоянно возможно адресоваться к главному регулятору или контролирующему органу, выдавшему данному заведению лицензионный документ. 1х слот 1хслотс регистрация перейти на 1×slots <a href=http://maps.google.com.qa/url?q=http://stroymir74.ru/bitrix/redirect.php?goto=http://masterfarm1.ru/bitrix/redirect.php?goto=https://telegra.ph/Luchshie-agentstva-nedvizhimosti-dlya-vashih-nuzhd-09–24>http://maps.google.com.qa/url?q=http://stroymir74.ru/bitrix/redirect.php?goto=http://masterfarm1.ru/bitrix/redirect.php?goto=https://telegra.ph/Luchshie-agentstva-nedvizhimosti-dlya-vashih-nuzhd-09–24</a>
1×slots зеркало регистрация то дальше необходимо пройти
Бездепозитные призы в казино без пополнения 2022 — это конкретная сумма денег либо gorovyh spins вращения, коие предоставляются первым гостям за регистрацию на сайте казино повторяющий бездепозитного бонуса, и дает вас вероятность помощью казино без пополнения опробовать услуги (игр), с дальнейшей преимуществом, льготой вывода средств при выполнении всех установленных правил. <a href=https://forum.wapinet.ru/profile.php?id=7751>https://forum.wapinet.ru/profile.php?id=7751</a> Начнём с того, что любое рекламную за регистрацию предполагает некие условия. Бездепозитные призы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность валютного оборота, нужная для выполнения условий. Пример, получили безвозмездные вращения и выиграли с них 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 руб., проигрышных или выигрышных, не. После исполнения, бонусный баланс перейдёт на реальный и станет доступным к выводу. 1×slots зеркало выигрыши обязательно пройдите регистрацию если Также бывают случаи, когда казино начисляет оговоренный бонус после регистрации нового клиента по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам.
<b>Смотреть еще похожие новости:</b>
<a href=https://tabsgame.ru/user/Jamesbes/>1×slot казино зеркало</a>
<a href=https://forum.vn.ua/showthread.php?p=3277373#post3277373>сайт 1× slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Иногда в бездепа, казино дарует минимальный бонус (до 50 руб. ), ради которого надо заморачиваться. Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала резвые выводы. Фишка выплат что, нет, собственно довольно выбрать платёжный инструмент и показать необходимую. В большинстве случаев средства зачисляются на электрические кошельки в течение 15 минут, а на банковские карты – 1–3 трудящихся дня.
#5106 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
ограбление казино казино <a href=https://m.repost.news/>1×bet официальный 1×bet xyz</a> pinco casino 1×bet скачать приложение на андроид <a href=https://res-publika.com>1×bet слоты 1×bet top</a> порно с Никита Кучеров (хоккей) 1×bet зеркало рабочее на сегодня 1×bet xyz пин ап casino Окладникова Ирина Андреевна порно Скворцова Вероника Игоревна порно Приезжева Екатерина Геннадьевна порно смотреть фильм казино
DiskiPlus лучшая казино DiskiPlus бесплатные букмекерские конторы <a href=https://www.diskiplus.ru>DiskiPlus top casino</a> DiskiPlus порно с Афонина Марина Игоревна DiskiPlus яндекс игры казино <a href=https://diskiplus.ru>DiskiPlus ставки на спорт букмекерские конторы</a> DiskiPlus porno Елизавета Туктамышева DiskiPlus 1×bet официальный слоты DiskiPlus порно с Каролина Севастьянова DiskiPlus казино вулкан DiskiPlus скачать 1×bet на андроид бесплатно DiskiPlus porno Анастасия Янькова, боксерка DiskiPlus порно с Абрамченко Виктория Валериевна
#5107 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию более популярный вариант это
Бездепозитный приз – это экономическое вознаграждение, которое выдается участнику забавы в казино, для его привлечения и возникновения заинтригованности. Любой посетитель, кот-ый соответствует условиям выдачи сходственного бездепозитного бонуса, может претендовать на получение вышеуказанного приза. Такое поощрение считается наиболее действенным методом, дающим возможность стартовать при, не вкладывая личных материальных средств.Подтверждение индивидуальной инфы. Все казино настоятельно от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и присутствие у юзера иных аккаунтов (мультиаккаунт запрещен). <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino09k online</a> Операторы гемблинга утверждают, что так они сражаются с бонус-хантерами. Впрочем, критики считают, что этим казино пытаются устроить из случайного постояльца неизменного игрока.Если идет об эксклюзивных услугах, может потребоваться регистрация в казино по ссылке с партнерского вебсайта. <a href=https://output.jsbin.com/kozot>https://output.jsbin.com/kozot</a> А ознакомиться с свежими интернет казино, Вы сможете за счет бонусов с выводом прибыли, которые Вы сможете получить без депозита.Если при регистрации показать промокод, можно гарантировано получить бонус. Где брать ваучер? Посетите тематические блоги или форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В заключительнее время игорные жилища начали афишироваться в кинокартинах и сериалах. Присмотритесь и скорее заметите промокод, кот-ый принесёт 500 или 1 000 бонусных руб. 1×slots casino регистрация <a href=https://securityholes.science/index.php?title=Выкуп_авто>https://securityholes.science/index.php?title=Выкуп_авто</a> При регистрации том, или ином интернет игральном заведении — вас дается раз шанс испытать собственную удачу не внося средства монеты. Замечу собственно эту поощрительную услугу деют не все интернет игровые площадки, а только щедрая половина из них. Которые мы подготовили для Вас в нашем перечне.
1 хслот регистрация в 1×slots casino
Ниже указан важный перечень легальных казино в Беларуси с бонусами на 1-ый депозит. Вы можете попасть на официальный сайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз. <a href=https://australianwinerytours.com/tours/showthread.php?tid=201338>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a> 1×slots регистрация 1×slots casino 777 online С такими простыми советами любое казино с бонусом за регистрацию способно принести в разы больше выгоды и полезности. <a href=http://91075425.k216.opensrs.cn/home.php?mod=space&uid=1211354>http://91075425.k216.opensrs.cn/home.php?mod=space&uid=1211354</a> казино 1×slots официальный сайт В разделе с призами активировать свой презент. Найти забавы, для которых учтено одобрение и применять приз по назначению.
1×slots рабочее зеркало на сегодня
Активация валютного гонорары происходит автоматически в создания профиля либо применения промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на страницы казино в социальных сетях либо на рассылку маркетинговых извещений, скачать и установить дополнительный софт и т.д.Зарегистрироваться в казино по особой ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефонного и электронную почту). Для подтверждения номера телефона необходимо в собственном профиле указать собственный номер и нажать кнопку „Подтвердить номер аппарата“, далее Вы получите sms-сообщение с кодом, кот-ый необходимо ввести в соответствующее поле. Для доказательства электрической почты, перейти по активной ссылке в письме от казино. Подарки на конкретные даты отличаются условиями получения. Если одобрение начисляют игроку на день рождения, то сумма обыкновенно зависит от совместного размера депозитов за прошедший год. <a href=https://australiantravelforum.com/Upload/member.php?action=profile&uid=1094>https://australiantravelforum.com/Upload/member.php?action=profile&uid=1094</a> В истиннее время получить бонус за регистрацию в казино довольно просто. Почти любой игорный жилище с готовностью даст деньги или бесплатные вращения. Многие игроки пользуются данным и не смущяются регистрироваться в любом клубе с прибыльными критериями. Кстати, это отличная возможность придумать выигрышную тактику и сорвать куш.Если вы новичок данном и только попали в неизведанную вами район пыла — с помощью предложений как бездепозитные бонусы без пополнения. 1×slots casino зеркало
1×slots зеркало сайта
Онлайн-казино кропотливо продумывают бонусные условия, которые необходимо выучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и другие ограничения.Например, игрок получил 500 рублей при разработке аккаунта и должен отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 руб., понадобится сделать 875 спинов для полного отыгрыша. Ну и окончательно же, для казино бездепозитные призы прибыльны с имиджевой стороны: сходственная щедрость повышает уровень лояльности посетителей к компании.Верификация аккаунта. Лучше подтвердить личность сразу последствии регистрации, чтобы позже не было проблем с выводом денег. Верификация имеет протекать двумя путями: 1×slots зеркало рабочее <a href=https://coolors.co/u/cazinosdep>https://coolors.co/u/cazinosdep</a> Акции, посвященные календарным праздникам, бывают рассчитаны как на всех пользователей, например и на категории: примеру, подарок на 8 марта девушкам-игрокам либо мужикам на 23 февраля.
1×slots официальный зеркало рабочее
Если ординарными текстами, бездепы – это определённая сумма средств или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно забирать подарки. Но есть некоторые нюансы. Существуют игорные жилища, которые перед что, этим как начислить призы просят привязать телефонный, предоставить копии документов.Но существуют азартные заведения, готовые просто например вручить средства на забаву. Для этого достаточно создать профиль. Чтобы вывести выигрыш, сперва необходимо выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа. Бездепозитные бонусы в казино без пополнения 2022 — это конкретная сумма денег или gratuitous spins вращения, коие предоставляются первым постояльцам за регистрацию на веб-сайте казино вид бездепозитного приза, и дает вас вероятность с казино без пополнения опробовать услуги (игр), с дальнейшей привилегией вывода средств при исполненьи всех установленных управлял.Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, the decision зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. <a href=http://xn–o30bsem0gv74atqi6rd.net/bbs/board.php?bo_table=12&wr_id=92457>http://xn–o30bsem0gv74atqi6rd.net/bbs/board.php?bo_table=12&wr_id=92457</a> Онлайн-казино тщательно продумывают бонусные условия, коие необходимо изучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и другие лимитирования.Выиграть реальные деньги в казино не пополняя счет – сложно, но возможно. Главное задаться целью и не нарушатьправила заведения. Выберите несколько казино с бездепзитными призами и начните выступать на бонусные свои. По статистике каком-то 10-ти заведений можно заработать небольшую сумму средств с бонусных средств. 1×slots коды Чаще всего интернет-казино предлагают бездепозитные призы новым пользователям. Эта промо-акция довольно отлично привлекает начинающих, подталкивая их к открытию счета. Конечно, не все они становятся преданными посетителями, хотя сам факт регистрации аккаунта играет на руку заведению.Автоматы неспроста считаются наиболее известным азартным веселием. Чтобы освоить управление и управляла, потребуется всего несколько мин. Ваша задача сделать ставку, найти число трудящихся линий и возможно вертеть тамбур. Если на экране выпадет выигрышная композиция – вы выиграли! С данной задачей вас помогут управится бездепозитные бонусы казино.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=363201>казино 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы отличный вариант даровой игры в игровые автоматы. Многие пользователи сети не знают, собственно в казино возможно начать выступать полностью даром, а позже исключить выигрыш на банковскую карту или электронный кошелек, иные не доверяют онлайн казино, а третьи успешно играют и выигрывают – и подчас довольно немалые суммы.
#5108 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию более популярный вариант это
Эффективность бездепов в маркетингового инструмента расценили почти операторы. Малоизвестные площадки употребляют эти акции, чтобы живо набрать базу. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны неизменных посетителей. Не все веб-сайты, дающие подарки без депо, рекомендованы к ирге. За симпатичным промоописанием шансы прятаться невыполнимые обстоятельства отыгрыша прочие подводные камни.Для получения приза нужно ознакомиться с программой лояльности казино и сделать ставки на необходимую, нужную для перехода на следующий степень. <a href=http://filmkachat.ru/>1×slots казино зеркало</a> Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных ситуаций с казино, когда последствии отыгрыша бездепа вас не дадут исключить крупную сумму выигрыша. <a href=https://jobhop.co.uk/blog/337503/mastering-the-art-of-professional-interior-design-drafting>https://jobhop.co.uk/blog/337503/mastering-the-art-of-professional-interior-design-drafting</a> Обычно для получения призов без депозита, казино выдвигает лояльные и абсолютно выполнимые обстоятельства, хотя есть ряд действий коие запрещены и могут причиной неприятные результаты: 1×slots рабочее зеркало на сегодня <a href=https://dedignat.ru/component/k2/itemlist/user/37650>https://dedignat.ru/component/k2/itemlist/user/37650</a> Самые новые бездепозитные бонусы в казино за регистрацию 2022 года с выводом прибыли находятся на этой странице. Посетитель может расценить условия получения и начать играть на средства без внесения депо. При этом игроку принципиально понимать, на каких условиях и какими методами у вывести полученный выигрыш. Для этого необходимо расценить список присоединенных платежных систем.
1×slots официальный зеркало
<a href=http://skatefluckit.com/member.php?u=149708>1х слот регистрация в 1×slots casino</a> 1×slots рабочее зеркало на сегодня <a href=https://telearchaeology.org/TAWiki/index.php/%D0%98%D0%B7_%D0%A7%D0%B5%D0%B3%D0%BE_%D0%A1%D0%BE%D1%81%D1%82%D0%BE%D0%B8%D1%82_%D0%94%D0%B8%D0%B5%D1%82%D0%B0_%D0%95%D0%BB%D0%B5%D0%BD%D1%8B_%D0%9C%D0%B0%D0%BB%D1%8B%D1%88%D0%B5%D0%B2%D0%BE%D0%B9>https://telearchaeology.org/TAWiki/index.php/%D0%98%D0%B7_%D0%A7%D0%B5%D0%B3%D0%BE_%D0%A1%D0%BE%D1%81%D1%82%D0%BE%D0%B8%D1%82_%D0%94%D0%B8%D0%B5%D1%82%D0%B0_%D0%95%D0%BB%D0%B5%D0%BD%D1%8B_%D0%9C%D0%B0%D0%BB%D1%8B%D1%88%D0%B5%D0%B2%D0%BE%D0%B9</a> 1×slots зеркало сайта
1×slots регистрация 1×slotscasino09k online
Любой выигрыш по ставке повыше установленного лимита несомненно считаться недействительным. То есть ставка не несомненно засчитана при отыгрыше, а случае выигрыша его сумма не поступит на счёт посетителя — результат игры будет полностью аннулирован. Существует ли стратегии для отыгрыша бездепозитных бонусов? К сожалению нет, на выигрыши или проигрыши с призов, казино либо игрок повлиять имеет, отдача игр происходит от разработчиков игр.Максимальная ставка ? уточняется в денежной счета и ограничивает размер ставки за один спин. В случае ее превышения бонус имеет быть аннулирован. Также в правилах может находиться запрет на размещение ставок конкретного вида, к, по равным шансам в рулетке (другими, на чет или нечет, красноватое или черное и т.д. ). <a href=https://arthurzxsn65443.nizarblog.com/30455941/ai-nude-revolutionizing-content-moderation-and-privacy-protection>https://arthurzxsn65443.nizarblog.com/30455941/ai-nude-revolutionizing-content-moderation-and-privacy-protection</a> 1хслотс рабочее зеркало Таким образом, заведение пробует продемонстрировать себя своим потенциальным игрокам, а такой рекламный ход как казино бонус без депозита за регистрацию завлекает довольно большое внимания к игорному заведению и обеспечивает неизменный струю свежих гостей и будущих посетителей игрового онлайн клуба.
1×slots зеркало регистрацию более популярный вариант это
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-2007#post-57277>1×slots официальный зеркало</a> У любого игорного клубы разные вейджеровые обстоятельства. Чтобы вы гарантировано смогли выполнить их, мы дадим некоторое советов. Если система начислила небольшую сумму, не стоит делать великие ставки – остановитесь на 10–30 центах. Как только сможете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте выступать. В неприятном случае другого приглядеться к иному автомату.Такой казино приз без депо за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это словно какая-то конспирация поощрения под бездепозитный. Суть всего этого сводится к тому, собственно игроку на час выдается, к примеру, 1000 долларов, а реклама твердит о том, что любой выигрыш возможно будет дальнейшем забыть при для. Но в играющий всерьез отнесется к этому предложению, то он просто потеряет время. Ведь игроку нужно будет играть не в основном аккаунте, а тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (и всей тыс. ) в управляла вступят определенные условия, где будет сказано, собственно наибольшей суммой победы имеет быть только двести долларов и средства можно использовать лишь в приза на 1-ый лепта с вейджером 25 от суммы вознаграждения плюс сам депозит. По итогу получится, собственно игрок выигрывал себя 200% бонус с вейджером на определенную необходимую. Короче говоря, это все не стоит вашего времени. Многие новички сомневаются, что поощрительный приз не будет возвращать, и в они выиграли у казино. Это безусловно безопасно и накрепко. Выводя выигранные средства, игрок просто одергивает свое участие в игре и теряет уникальную возможность – бесплатно наращивать собственное материальное положение. 1хслотс зеркало на сегодня <a href=https://forum.studio-397.com/index.php?members/porsedropet.62075/>https://forum.studio-397.com/index.php?members/porsedropet.62075/</a>
1×slots казино зеркало
Осталось избрать казино с бонусом за регистрацию и создать профиль. После активации дара выигрыш в от Фортуны и способностей. <a href=https://fm.xndl.com/home.php?mod=space&uid=636353>https://fm.xndl.com/home.php?mod=space&uid=636353</a> Как лишь вы отыграли вейджер и средства с бонусного баланса перебежали для на реальный счет, Вы неустрашимо сможете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (устроить наименьший депо например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депозитом).Возможность протестировать новые игры, не рискуя собственными своими и разработать личную тактику игры. 1 х слотс зеркало Итак, чтобы благотворительные бонусные кредиты превратились в настоящие деньги, которыми вы можете распоряжаться по своему усмотрению, их нужно отыграть. Вейджер следует уточнять в правилах онлайн-казино.Сроки активации бонуса уточняются любым казино, хотя чаще всего они не превосходят недели с момента получения. Игроку непременно надо(надобно) использовать бездеп протяжении указанного срока, в ином случае бонус просто пропадет. Каждый бонус возможно получить лишь один раз, поэтому случае не использовать бездеп в срок, у игрока не несомненно 2 шанса им воспользоваться.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=77280>1×slots регистрация 1×slots review live</a>
<a href=https://forum.oursson.ru/viewtopic.php?f=2&t=9552>1хслотс мобильная версия зеркало</a>
<a href=https://mit-bbs.com/viewtopic.php?t=158867>1×slots регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Используйте наихорошие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из перечня ниже, дабы заработать подарки за обычные деяния и уже сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высокой отдачей и прыткими выводами на электронные кошельки. Заработать на бездепозитных бонусах за регистрацию в казино возможность любой пользователь, достигший совершеннолетия.
#5109 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet на андроид бесплатные букмекерские конторы <a href=https://repost.news/>рейтинг казино</a> casino приложения up casino <a href=https://specreporter.com/>порно с Юлия Ефимова</a> 1×bet регистрация скачать pin casino сайте букмекерской конторы фонбет 1win casino casino скачать 1win casino 1×bet на сегодня
DiskiPlus Елизавета Боярская DiskiPlus слоты казино <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet на андроид бесплатно</a> DiskiPlus porno Вера Бирюкова, гимнастка DiskiPlus casino зеркало сегодня рабочее <a href=https://diskiplus.ru/>DiskiPlus Скоробогатова Ольга Николаевна порно</a> DiskiPlus casino pin официальный DiskiPlus порно с Захарова Мария Владимировна DiskiPlus букмекерская контора фонбет официальный сайт DiskiPlus Крючкова Полина Викторовна порно DiskiPlus casino игровой автомат DiskiPlus лучшие онлайн казино DiskiPlus up casino
#5110 AHoini
<a href=http://kumkangenc.com/bbs/board.php?bo_table=inquiry&wr_id=161700>1win bet</a> <a href=https://www.vociferousvoid.org/hhh/doku.php?id=1_metodes_t_enins>1win casino</a>
#5111 Charlesgunnyhttp://filmkachat.ru
1×slots на любой вкус как пройти регистрацию
В неких интернет казино для получения бездепозитных призов не довольно просто зарегистрироваться на сайте клуба и подтвердить средства контактные данные. Дополнительно требуется активация промокода. <a href=http://filmkachat.ru/>1×slots бонус за регистрацию</a> <a href=https://www.nitrnd.com/blogs/229798/Transforming-Dream-Kitchens-Through-Professional-3D-Rendering-Solutions>https://www.nitrnd.com/blogs/229798/Transforming-Dream-Kitchens-Through-Professional-3D-Rendering-Solutions</a> 1хслот 1хслотс регистрация перейти на 1×slots <a href=https://morphomics.science/wiki/%D0%92%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA_%D0%90%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0>https://morphomics.science/wiki/%D0%92%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA_%D0%90%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0</a> Начнём с того, что любое промо за регистрацию предполагает некоторые условия. Бездепозитные призы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность денежного оборота, нужная для исполнения критерий. Пример, возымели безвозмездные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 руб., проигрышных или выигрышных, не. После исполнения, бонусный баланс перейдёт на настоящий и станет легкодоступным к выводу.Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных требований, кроме обязательной верификации. Если на веб-сайте учтена неотъемлемая процедура доказательства личности, то исключить выигрыш удастся только последствии проверки данных. Приготовьтесь наполнить анкету и отправить в техподдержку документ, подтверждающий личность.
казино 1× slots официальный сайт
Мы делаем акцент на ключевых положениях правил, рассказываем о территориальных ограничениях и кратко информируем о иных промоакциях обсуждаемого казино. 1×slots зеркало регистрация то дальше необходимо пройти Ниже указан актуальный перечень легальных казино в Беларуси с призами на 1-ый депозит. Вы можете попасть на официальный сайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. <a href=http://suprememasterchinghai.net/bbs/board.php?bo_table=free&wr_id=2238362>http://suprememasterchinghai.net/bbs/board.php?bo_table=free&wr_id=2238362</a> Так что можете смело региться без всяких размышлений. Фортуна сейчас точно на вашей стороне. Не страшитесь, так последствие какого или ущерба Вам совершенно не угрожает. С такими бонусами как без пополнения, Вы остаетесь лишь в плюсе, хотя не как не в минусе.Подтверждение электронной почты – одно из основных условий, которое есть почти в любом бездепозитном казино. Чтобы верифицировать электронную почту, достаточно перебежать по активной ссылке в послании, приобретенном от азартного клуба. 1×slots зеркало регистрация Возможность протестировать новые забавы, не рискуя собственными средствами и разработать личную стратегию игры.
1×slots официальный зеркало
Бездепозитный приз казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в этом и заключается основное отличие. <a href=https://bbs.airav.cc/home.php?mod=space&uid=2242376>https://bbs.airav.cc/home.php?mod=space&uid=2242376</a> Бонус в казино без депо имеет различные разновидности: это может быть приветственный приз, акции в честь каких-либо праздничных или весомых дат, бонус за вербование свежих игроков, лояльность и получение VIP-статуса.Также случаются случаи, когда казино начислит оговоренный бонус в регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам. казино 1×slots официальный сайт
1×slots подтвердит вашу регистрацию если говорить
<a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1×slots регистрация</a> Условия имеют разниться друг от приятеля. Но такой приз возможность быть использован только для игрового процесса – приобретенные на счет финансы до того, как станут отыграны, исключить невероятно. Несмотря на то, собственно данный вариант стимуляции со стороны азартных платформ очень известен области подобных игр, далеко не всем поклонникам казино знаменито, собственно являют собой бездепозитные призы казино и как непосредственно их вполне эксплуатировать. 1×slots регистрация 1×slots review live <a href=https://community.vigomu.net/index.php?action=profile;u=3296>https://community.vigomu.net/index.php?action=profile;u=3296</a>
1 хслот регистрация в 1×slots casino
<a href=http://spectr-sb116.ru/user/HarrySwope/>http://spectr-sb116.ru/user/HarrySwope/</a> Можно ли в одном интернет казино получить больше одного приза за регистрацию? Нет, так как в каждом онлайн казино есть правила, к которым надо(надобно) придерживаться, не творить 2 аккаута для получения бонусов, по несомненно блокировка обоих аккаутов, не пытайтесь обмануть онлайн казино, бонус за регистрацию выдаеться один один 1 личику.Благодаря программе преданности от игорного заведения, можно арестовать превосходный старт и без дополнительных инвестициям запустить видеослоты. Кроме как, возможно рассчитывать на реальную фортуну и получить, без инвестиции собственных финансов, великий выигрыш. 1×slots казино мобильная версия Для отыгрыша бонуса казино обязывает игрока поиграть на необходимую, в несколько один превышающую необходимую полученного приза — здесь выгода фирмы явна.
<b>Смотреть еще похожие новости:</b>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=61680&result=reply>1хслотс официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для вывода средств приз нужно несомненно отыграть законам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариантами отыгрыша бездепозитного приза до его получения, чтобы избежать конфликтных ситуаций. Нет. Для получения бездепозитного бонуса в казино необходима обязательная регистрация на сайте. Играть в слоты даром и без регистрации возможно только в демо режиме.
#5112 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало на сегодня 1×bet xyz официальные сайты казино <a href=https://glvk.guru/>официальные букмекерские конторы</a> casino daddy champion casino <a href=https://t.me/vchkogpu_ru>официальное казино вход</a> casino 1×bet официальный скачать порно с Сергей Бобровский (хоккей) pin up casino buzz где казино casino зеркало сегодня рабочее 7k casino сайт
DiskiPlus вывод казино DiskiPlus порно с Арина и Дина Аверины, гимнастки <a href=https://diskiplus.ru/>DiskiPlus реального казино</a> DiskiPlus спорт букмекерская контора DiskiPlus ограбление казино <a href=https://www.diskiplus.ru/>DiskiPlus букмекерская контора мостбет</a> DiskiPlus порно с Юлия Ефимова DiskiPlus 1×bet 1 DiskiPlus букмекерская контора бесплатно скачать казино DiskiPlus retro casino DiskiPlus inform@rucriminal.info DiskiPlus casino автомат
#5113 Charlesgunnyhttp://filmkachat.ru
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Для получения бездепа необходимо пригласить в игру по реферальной ссылке нового посетителя: он обязан зарегистрироваться, пройти верификацию на сайте онлайн-казино и пополнить счёт на сумму, обозначенную в условиях акции.B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax <a href=http://filmkachat.ru/>1×slots зеркало сайта</a> <a href=https://telegra.ph/Navigating-Cannabis-Delivery-Services-in-Port-Perry-Your-Complete-Local-Guide-11–24>https://telegra.ph/Navigating-Cannabis-Delivery-Services-in-Port-Perry-Your-Complete-Local-Guide-11–24</a> 1×slot регистрация <a href=http://langrisser.ru/index.php?subaction=userinfo&user=mundanefable7>http://langrisser.ru/index.php?subaction=userinfo&user=mundanefable7</a> За вербование друга ? в рамках партнерской программки клиент получает вознаграждение за вербование свежих пользователей.
зеркала 1×slots
В лицензионных бездепозитных казино выступать в азартные игры действительно безопасно. Наличие лицензии подтверждает что, этот прецедент, собственно клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP. <a href=http://permitbeijing.com/forum/showthread.php?tid=2199818>1×slots официальный сайт зеркало</a> 1×slots регистрация на сайте 1×slots ru com <a href=http://domivka.biz.ua/wr_board/tools.php?event=profile&pname=burlybonfire80>http://domivka.biz.ua/wr_board/tools.php?event=profile&pname=burlybonfire80</a> В настоящее время получить приз за регистрацию в казино довольно просто. Почти любой игорный жилище с радостью предоставит деньги или безвозмездные вращения. Многие игроки пользуются данным и не стыдятся региться в каждом клубе с прибыльными условиями. Кстати, это отличная вероятность выдумать выигрышную стратегию и сорвать куш.Зарегистрироваться в казино по специальной ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефонного и электронную почту). Для доказательства номера телефонного необходимо в личном профиле показать собственный номер и надавить кнопку „Подтвердить номер телефона“, далее Вы получите sms-сообщение с кодом, который необходимо ввести в отвечающее поле. Для доказательства электронной почты, перебежать по активной ссылке в письме от казино. казино 1×slots
1× слот зеркало
Проверка занимает от нескольких минут до нескольких дней, профессионалы техподдержки шансы запросить вспомогательные документы или инициировать краткое общение по Skype.4. Заберите подарок. Чаще всего бонус активируется незамедлительно после регистрации. Но посещают ситуации, когда надо(надобно) зайти в личный офис или написать в службу поддержки. Раздача бонусов возможность быть приурочена к разным датам: календарные праздники, деньки рождения игроков, годовщина открытия казино и т. Д. Подарок выдается повторяющий средств, фриспинов либо баллов для скопления и размена на услуги оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода этой суммы придется выполнить ряд требований. <a href=https://www.9tj.net/home.php?mod=space&uid=266991>https://www.9tj.net/home.php?mod=space&uid=266991</a> Не желаете поиграть в азартные игры, не рискуя своими деньгами, но получая в все выплаты? Подобную вероятность деют почти наилучшие порталы с азартными развлечениями. В их числе количество добросовестных и надежных интернет-казино на русском языке. Они привлекают новых пользователей различными поощрительными мероприятиями, включая бездепозитные, либо бесплатные бонусы. 1×slots официальный зеркало Важно, удостоверьтесь что, собственно ранее не регились в выбранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи.
1×slots официальный сайт, скачать
Классическая разновидность бонуса за создание аккаунта. Его преимущество заключается в том, собственно заказчик возможность других избирать аппараты и делать ставки в их. Иногда перечень игровых автоматов ограничен оператором, но все точно это чем, чем один-единственный доступный разъем, как когда с внедрением фриспинов.Проверка занимает от нескольких минут до нескольких дней, профессионалы техподдержки шансы запросить вспомогательные документы или инициировать краткое общение по Skype. <a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=134024>1×slos регистрация в 1×slots casino</a> Бонус за регистрацию в казино без депозита с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша может понадобиться устроить ставки на сумму, в некоторое 10-ов один превышающую необходимую приза либо выигрыша. Ограничения по забавам. Администрация запрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, средствами или бесплатными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда разделенье выполняется по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, хотя запрещен в настольных играх и в разделе Live Casino. 1×slots бонус за регистрацию <a href=http://users.atw.hu/adf/profile.php?mode=viewprofile&u=11590>http://users.atw.hu/adf/profile.php?mode=viewprofile&u=11590</a>
онлайн казино 1×slots
Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке необходимо пополнить счет в казино. Для депозитных бонусов, эта процедура не нужна, так как депозит теснее сделан.Получив свой подарок, Вы сможете безвозмездно играть на реальные средства, а выполнив обстоятельства отыгрыша, вывести собственный выигрыш. <a href=https://heyjinni.com/read-blog/177753>https://heyjinni.com/read-blog/177753</a> Все обожают получать подарки. Согласитесь, почти каждый играющий человек будет безмерно счастлив, в получит даровой презент для забавы в онлайн казино просто за регистрацию или же приз за внесенный депо, например нарекаемые приветственные бонусы для новых игроков. Соответственно эти онлайн клубы будут больше модны и предпочтительны у игроков при выборе казино для забавы. Топ казино день обновляется и добавляются новые и увлекательные игровые клубы с привлекательной бонусной политикой и всеми возможными привилегиями, к коим относятся эти призы как фриспины за регистрацию, валютные бездепозитные бонусы, а также щедрые призы за внесенный депо.В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, нужно обратиться в службу через лайв-чат на сайте казино. 1×slots акции Каждый в должен сперва отчетливо изучить условия по получению и отыгрышу приглянувшегося подарка. Если всё устраивает, поторопитесь арестовать безвозмездные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо в начать вращать барабаны топовых слотов.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.globalvision2000.com/forum/member.php?action=profile&uid=1072499>1хслотс официальный сайт зеркало</a>
<a href=http://www.carshowsociety.com/forum.php/topic,11220.new.html#new>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<a href=https://www.mshowto.org/forum/members/jamespauri.html>1×slots промокод при регистрации 2025</a>
<a href=https://seniordance.ru/forum/showthread.php/78230–1×slots-%D0%BA%D0%BE%D0%B4%D1%8B?p=108194#post108194>1×slots коды</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Наиболее известные вознаграждения между гэмблеров – бездепозитные бонусы казино. Это не изумительно, как возможно получить благотворительные вращения или виртуальные кредиты, и всем не придётся пополнять счёт, рисковать личностными деньгами. Удастся насладиться разнообразными весельями и даже выиграть солидную необходимую, избегая серьёзного риска. Самые популярностью способы вывода денег ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электронным платежным системам подобии Neteller и Skrill, а также используют криптовалютными кошельками. Вывод выигрышей имеет осуществляться моментально либо развлекать от нескольких часов до нескольких суток.
#5114 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино онлайн мелбет букмекерская контора <a href=https://slon-ru.com/>Крючкова Полина Викторовна порно</a> порно с Захарова Мария Владимировна порно с Никита Кучеров (хоккей) <a href=https://slon-ru.com/>порно с Артемий Панарин (хоккей)</a> букмекерские конторы без депозита казино зеркало сегодня Комарова Наталья Владимировна порно Александра Бортич porno Юлия Пересильд порно с Анна Калинская (теннис) 1win casino
DiskiPlus 7k casino DiskiPlus bet casino <a href=https://diskiplus.ru/>DiskiPlus 1×bet вход</a> DiskiPlus порно с Карен Хачанов (теннис) DiskiPlus casino com <a href=https://diskiplus.ru/>DiskiPlus 1×bet</a> DiskiPlus casino ru DiskiPlus porno Екатерина Ефременкова, шорт-трекистка DiskiPlus porno Мария Шарапова DiskiPlus скачать букмекерскую контору DiskiPlus яндекс игры казино DiskiPlus казино гта 5 DiskiPlus официальное казино вход
#5115 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало xbet Светлана Ходченкова <a href=https://glvk.guru/>казино в россии</a> casino вход смотреть фильм казино <a href=https://kompromat1.online/>сайт винлайн букмекерская контора</a> 1×bet телефон казино ли porno Светлана Ходченкова casino сайты казино пин black russia казино Черкесова Бэлла Мухарбиевна порно
DiskiPlus pin ап casino DiskiPlus спорт букмекерская контора <a href=https://diskiplus.ru>DiskiPlus макао казино</a> DiskiPlus 1×bet на андроид бесплатно DiskiPlus Фастова Елена Владимировна порно <a href=https://diskiplus.ru>DiskiPlus букмекерские конторы без депозита</a> DiskiPlus балтбет букмекерская контора DiskiPlus porno Юлия Пересильд DiskiPlus porno Марина Александрова DiskiPlus 7k casino бонус DiskiPlus пин ап casino DiskiPlus casino daddy DiskiPlus ап казино
#5116 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало
Изучить управляла и условия получения бездепозитных призов казино, Вы можете у нас на сайте в разделе с бонусами либо на официальном веб-сайте избранного Вами казино. Если не найти необходимую информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал или по электрической почте.Бывают ли бездепозитные бонусы без вейджера? Бывают, случае у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный приз за регистрацию устанавливается вейджер во всех казино. <a href=http://filmkachat.ru/>1×slots casino online регистрация</a> <a href=https://www.swiatobrazu.pl/forumgaleria/thread/view/id/524>https://www.swiatobrazu.pl/forumgaleria/thread/view/id/524</a> 1×slots зеркало регистрация то дальше необходимо пройти <a href=http://adrestyt.ru/user/Justinviava/>http://adrestyt.ru/user/Justinviava/</a> Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в индивидуальный кабинет, дабы забрать безвозмездные вращения с вейджером х40;Популярность интернет казино растёт и всё больше юзеров начинают увлекаться азартными забавами. Бездепозитные бонусы 2022 года, это оригинальные подарки за регистрацию. С их подмогою свежие игроки шансы получить бесплатные вращения или средства на баланс за одну регистрацию. С появлением игорных заведений в интернете, бездепозитные призы стали популярнейшим методом вербования игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы расскажем. Наш сайт собрал наихорошие предложения из интернета на 2022 год. Воспользуйтесь хоть презентом и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить условия.
1×slots casino регистрация
Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?При использовании бездепозитным призом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют количество видов лимитов: <a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=810587>1хслот 1хслотс регистрация перейти на 1×slots</a> 1×slots рабочее зеркало В количестве случаев благотворительные призы начисляются в кредитах, которые нельзя незамедлительно исключить со счета. Прежде их нужно отыграть по установленным правилам. Эти требования принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже.Бесплатный приз – кредиты, коие онлайн-казино начислит посетителю, не заставляя его пополнять игровой счет. <a href=https://www.callupcontact.com/b/businessprofile/_/9253162>https://www.callupcontact.com/b/businessprofile/_/9253162</a> Начнём с того, что любое промо за регистрацию подразумевает некие обстоятельства. Бездепозитные бонусы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность денежного оборота, необходимая для исполненья критерий. Пример, получили благотворительные вращения и выиграли с них 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 рублей, проигрышных или выигрышных, маловажно. После выполнения, бонусный баланс перейдёт на настоящий и будет доступным к выводу.Прежде всего, не запамятовывайте периодически заглядывать на страницу обзоров бездепозитных призов. Они шаг за шагом рассматривают наиболее увлекательные предложения основных игорных порталов. 1×slots официальный сайт мобильная версия
1×slots регистрация 1×slots casino 777 online
Более крупные предложения встречаются довольно изредка. Зачастую они доступны лишь VIP-игрокам. В оставшихся случаях им всего сопутствуют очень строгие условия отыгрыша. Также вероятны вспомогательные обстоятельства и другие ограничения, прописанные в критериях и положения бонусной программки казино. <a href=https://griffinfczs01122.snack-blog.com/30245398/nude-ai-the-ethical-and-technological-challenges-of-artificial-intelligence>https://griffinfczs01122.snack-blog.com/30245398/nude-ai-the-ethical-and-technological-challenges-of-artificial-intelligence</a> Получить приветственный приз шансы лишь новые посетители онлайн-казино. Способы описаны в критериях промоакции любого законного казино, почаще всего это:Но надо размышлять, собственно снабжая юзеров такими бонусами, казино увлекается спонсированием. Ведь размеры вознаграждений, в основном, не великие (средним объемом от 5 до 20 долларов). И на эти средства налагаются конкретные обстоятельства и ограничения, неотклонимые к исполнению игрока, случае в последствии он вожделеет получить все свои выигранные финансы. рабочее зеркало 1хслотс Новые посетители онлайн-казино без первого депозита шансы проверить собственную удачливость. К тому же есть вероятность преобразовать бездепы в реальные деньги за регистрацию в казино, однако для этого приз необходимо отыграть сообразно условиям акции.Бездепозитные бонусы казино это экономическая компенсация, предлагаемая пользователям на дармовой основе и вероятность выступать в онлайн казино бесплатно. Если сопоставлять их с одобрениями за вклад, в которых свои выдаются лишь потом начального пополнения счета, то бездепозитные вознаграждения получаются бесплатно. То есть, играющий получает возможность создавать ставки на теснее существующие финансы, которые выдаст заведение, исполняя, этом, обыденные деяния, чтобы их извлечь (здесь идет речь о регистрация, удостоверении личности с внедрением номера телефонного, оформления заявки и т.д.).
1хслот скачать
Частенько новенькие не разумеют, как активировать презенты либо исключить первый выигрыш. Для сходственных случаев наша команда обрисовала главные определения – собственно это фриспины, вейджер, как его отыграть, для необходимо протекать верификацию. <a href=http://rodgrodlecha.cba.pl/hidepark/?p=769000#comment-139584>casino 1×slot</a> Так же стоит выделить то, что в любом интернет казино установлен свой наибольший кешаут на бездепозитный приз. Как правило кешаут — это максимальная сумма денег, которая дешевая для вывода с бездепозитного бонуса. 1×slots casino регистрация 1×slots review live <a href=http://sgvalley.co.kr/bbs/board.php?bo_table=free&wr_id=292994>http://sgvalley.co.kr/bbs/board.php?bo_table=free&wr_id=292994</a> Представленные на этой страничке наихорошие бездеп призы в казино за регистрацию в 2022 году имеют подходящие условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, в гости Casino.ru имеют сортировать список по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д.Вознаграждения за получение VIP-статуса ? начисляются в программы преданности при достижении очередного значения либо выдаются персонально менеджерами службы поддержки.
1×slots официальный demo регистрация в 1×slots casino
Рассмотрим принцип его деяния на случае. Допустим, вы зарегистрировались и получили $10 no down payment bonus с вейджером х50. Это значит, что выигранные деньги возможно несомненно выводить не раньше, чем после как, как общая сумма ставок достигнет $500. <a href=http://web.dodoad.co.kr/bbs/board.php?bo_table=free&wr_id=1192886>http://web.dodoad.co.kr/bbs/board.php?bo_table=free&wr_id=1192886</a> На бонусные начисления могут быть установлены дополнительные лимитирования, которые Вы не к при отыгрыше. Пока приз всецело не отыгран — деньги из казино не выводятся. 1 x slots
<b>Смотреть еще похожие новости:</b>
<a href=http://old.pokvesti.ru/forum/memberlist.php?mode=viewprofile&u=3543>1×slots регистрация 1×slots casino c2d ru</a>
<a href=https://www.goslog.ru/forum/messages/forum1/message11263/11-obrashcheniya-grazhdan?result=reply#message11263>1х слот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Каждый новичок и умелый игрок грезят скоро стартануть и начать делать реальные ставки. Для сего достаточно арестовать презент, за кот-ый не нужно уплачивать. В зависимости от игровой платформы, нужно создать профиль, привязать email или телефон. После этого администрация начислит щедрое вознаграждение вид бесплатных вращений либо виртуальных кредитов.
#5117 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора официальный сайт скачать champion casino <a href=https://glvk.guru/>porno Катерина Шпица</a> online casino 7k скачать 1×bet на андроид бесплатно <a href=https://m.repost.news/>букмекерская контора фонбет официальный</a> casino промокод Нургалиева Эльвира Рамиловна порно пин ап казино букмекерская контора бесплатно скачать inform@rucriminal.info casino актуальное зеркало гта онлайн казино
DiskiPlus Лут Оксана Николаевна порно DiskiPlus porno Юлия Канакина <a href=https://diskiplus.ru>DiskiPlus porno Анна Сидорова, керлингистка</a> DiskiPlus фреш казино DiskiPlus 1×bet сайт <a href=https://diskiplus.ru>DiskiPlus букмекерские конторы без депозита</a> DiskiPlus casino андроид DiskiPlus unlim casino DiskiPlus казино рояль смотреть DiskiPlus Черкесова Бэлла Мухарбиевна порно DiskiPlus лучшие букмекерские конторы DiskiPlus Окладникова Ирина Андреевна порно DiskiPlus порно с Дарья Касаткина (теннис)
#5118 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Только выполнив все обстоятельства отыгрыша и дождавшись окончания ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить свои средства. <a href=http://filmkachat.ru/>1× slots сайт</a> Например, игрок получил 500 руб. При создании аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 рублей, потребуется сделать 875 спинов для полного отыгрыша. <a href=https://mega.nz/file/d28RQCBS#2i_xAXDQfj-rVkVhMWNDPYPXRKJ71NaLOz_MKYAVxxQ>https://mega.nz/file/d28RQCBS#2i_xAXDQfj-rVkVhMWNDPYPXRKJ71NaLOz_MKYAVxxQ</a> Чаще всего казино бонус за регистрацию без депозита даёт вероятность запустить любой автомат. Но чем пристально ознакомиться с условиями. Иногда для игры доступны только определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, превосходнее начать знакомство с миром пыла именно с «одноруких бандитов».Срок активации и время на отыгрыш. Зачисление средств или фриспинов происходит при активации в течение взыскательно ограниченного периода, схожие требования предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать бонус некоторое дней либо числе месяцов. Другие выдают крупную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером. x1 slots 1хслотс регистрация перейти на 1×slots <a href=https://backpacker-footsteps.com/backpacker-footsteps-forum/profile/glenntax/>https://backpacker-footsteps.com/backpacker-footsteps-forum/profile/glenntax/</a> Размер ставки для игры по бездепозитному бонусу (окончательно же, если, тогда,, когда он представлен повторяющий бонусных валютных средств) часто ниже, чем при игре на депозит. Ограничение несомненно работать до этапа отыгрыша бонуса.
1×slots официальный сайт зеркало
Доступность — бездепозитные призы в казино почаще всего предоставляются свежим игрокам, но случаются случаи, когда приз имеют получить и действующие посетители. 1×slots зеркало подтвердит вашу регистрацию если говорить Таким образом онлайн казино получает потенциального игрока. Возможно в будущем либо настоящем он захочет сыграть на средства средства. Так трудятся бездепозитные призы в онлайн казино. Здесь очень подходит выражение, бесплатные сыр посещает лишь в мышеловке. Начинающие игроки имеют не осознавать опасность азарта. Однако со временем осознания становится больше. Это тема для отдельного обсуждения. <a href=http://277469.simplecloud.ru/forum/user/241/>http://277469.simplecloud.ru/forum/user/241/</a> Срок активации и время на отыгрыш. Зачисление денег или фриспинов случается при активации в течение строго ограниченного периода, схожие притязания предъявляются и к срокам отыгрыша. Одни казино позволяют отыгрывать бонус несколько дней либо в месяцов. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с неоправданно высоким вейджером. 1х слотс зеркало регистрация в 1×slots casino Но на азартных платформах подобные вознаграждения шансы получить теперь зарегистрированные пользователи. В таком случае, бонусы предоставляются в оригинальных акций либо же некоторым геймерам в виде акционного предложения, коие прибывает на почту с целью «возвратить» игрока в свое казино.При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, которое можно посвятить этой в казино.
1×slots регистрация
Существует ли стратегии для отыгрыша бездепозитных бонусов? К раскаянью нет, на выигрыши или проигрыши с бонусов, казино или игрок повлиять имеет, отдача игр происходит от разработчиков игр. <a href=http://mtpkrskstate.ru/forum/user/206377/>http://mtpkrskstate.ru/forum/user/206377/</a> казино 1×slots Все любят получать презенты. Согласитесь, почти каждый играющий человек будет очень рад, случае получит безвозмездный презент для забавы в интернет казино просто за регистрацию или же бонус за внесенный депо, так нарекаемые приветственные призы для новых игроков. Соответственно эти онлайн клубы станут более востребованы и преимущественны у игроков при выборе казино для игры. Топ казино каждый обновляется и прибавляются свежие и увлекательные игровые клубы с симпатичной бонусной политикой и всеми вероятными преимуществами, льготами, к которым относятся такие призы как фриспины за регистрацию, денежные бездепозитные бонусы, еще великодушные призы за внесенный депо.
1×slots бездепозитный бонус за регистрацию
<a href=http://fin-molitor.com/forum/viewtopic.php?f=2&t=450018>скачать 1×slots на андроид мобильная версия</a> 1×slots casino зеркало <a href=https://forum.21up.co.uk/member.php?action=profile&uid=8147>https://forum.21up.co.uk/member.php?action=profile&uid=8147</a> Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.Похожим образом трудится третий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения клиента или из-за с получения им VIP-статуса. Подарок предоставляется последствии воззвания в поддержку и ревизии.
casino 1×slot
После потребуется внести идентификационный платёж. Это стращает начинающих больше всего. Нужно сделать минимальный депозит в 100–500 рублей. Таким образом служба защищенности убедиться что, нет, собственно платёжный метод принадлежит Вам. Данная процедура важна для обеспечивания защищенности игровых счетов. Пример, Ваш акк взломают и выведут средства на свой кошелёк. Будет крайне досадно. Поэтому верификация платёжной системы, это необходимый момент. <a href=http://www.dungdong.com/home.php?mod=space&uid=2835730>http://www.dungdong.com/home.php?mod=space&uid=2835730</a> 1×slots официальный demo регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://russiancomputerservice.ru/user/JosephCer/>1×slots casino регистрация 1×slotscasino09k online</a>
<a href=http://sladkierecepti.5nx.ru/memberlist.php?mode=viewprofile&u=923>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=340837>1хслот 1хслотс регистрация перейти на 1×slots</a>
<a href=http://nexusroleplay.teamforum.ru/viewtopic.php?f=19&t=5677>зеркала 1×slots</a>
<a href=https://www.reisezielforum.de/viewtopic.php?t=470696>1×slots официальный сайт мобильная версия скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чем ниже велечину вейджера, тем легче отыграть и исключить бонус. Если Вы планируете заработать на бездепе, а не просто ознакомиться с новым игровым клубом, то стоит игнорировать призов с высоким вейджером их практически не реально отыграть. С ними Вы сможете только протестировать забавы заведения.
#5119 Jasonjakhttps://podolsk.ctc-service.ru
ремонт стиральных машин bosch <a href=https://podolsk.ctc-service.ru/>ремонт стиральных машин на дому</a>
#5120 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino автомат Чулпан Хаматова <a href=https://strelochnik.com/>top casino</a> casino x kent casino <a href=https://slon-ru.com/>7k casino зеркало на сегодня</a> casino зеркало сегодня рабочее casino зеркало сегодня порно с Артемий Панарин (хоккей) рабочие зеркала казино спорт букмекерская контора 1×bet регистрация порно с Анна Калинская (теннис)
DiskiPlus казино регистрации DiskiPlus 1×bet на андроид <a href=https://www.diskiplus.ru>DiskiPlus скачать 1×bet на андроид</a> DiskiPlus porno Алена Михайлова DiskiPlus casino официальный сайт <a href=https://www.diskiplus.ru/>DiskiPlus порно с Евгений Малкин (хоккей)</a> DiskiPlus бесплатные букмекерские конторы DiskiPlus cometa casino DiskiPlus букмекерские конторы без депозита DiskiPlus гта казино DiskiPlus мелбет букмекерская контора DiskiPlus казино большая DiskiPlus Разуваева Ксения Денисовна порно
#5121 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало сайта
Каждый из бездепозитных бонусов без пополнения 2022 содержит свой конкретный вейджер для отыгрыша, например же в каждом казино он устанавливается персонально — где то он х55 а где-то х30, повторюсь всюду по разному!После требуется привнести идентификационный платёж. Это пугает новичков больше всего. Нужно устроить наименьший депозит в 100–500 руб. Таким образом служба защищенности убедиться что, нет, что платёжный метод принадлежит Вам. Данная процедура важна для обеспечения защищенности игровых счетов. Пример, Ваш аккаунт взломают и выведут свои на собственный кошелёк. Будет крайне досадно. Поэтому верификация платёжной системы, это важный момент. <a href=http://filmkachat.ru/>рабочее зеркало 1×slots</a> На данном разделе портала периодически публикуются обзорные заметки, в которых рассматриваются бесплатные призы наихороших интернет-казино. Информация структурирована по нескольким пт, включая главные:Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=https://imageevent.com/lexxeagle/qwerty>https://imageevent.com/lexxeagle/qwerty</a> Каждый в должен сначала отчетливо изучить обстоятельства по получению и отыгрышу понравившегося дара. Если всё устраивает, поспешите забрать безвозмездные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик данный начать вертеть барабаны топовых слотов.Бездепозитные бонусы — это презенты от казино в виде бонусных денег или фриспинов для игровых автоматов, которые начисляются на акк игрока последствии процедуры регистрации на сайте заведения. Для получения таких поощрений депозит не потребуется. casino 1×slot <a href=http://hardstorecr.com/mybb/member.php?action=profile&uid=172265>http://hardstorecr.com/mybb/member.php?action=profile&uid=172265</a> Создание аккаунта. На сайте казино необходимо открыть регистрационную форму и наполнить пустопорожние поля личными данными. Иногда на данном этапе требуется показать только адрес электрической почты и пароль, хотя почаще надобно наполнить анкету персональной информацией (ФИО, дата рождения, место проживания и т.д. ). Нужно свидетельствовать только реальные данные, что впоследствие они будут проверены.
casino 1×slot
Для получения депозитного бонуса необходимо пополнить собственный игровой баланс реальными деньгами. Вознаграждение возможно получить либо при внесении первого депозита, либо вид фиксированного процента от внесённых средств. Так либо другому, бонус поступит на счёт лишь после пополнения. <a href=https://forum.spherecommunity.net/User-Jamesmew>1×slot рабочее зеркало</a> 1×slot зеркало рабочее этих способов предполагает регистрацию Бездепозитный бонус часто возможность стать легкодоступным незамедлительно последствии окончания регистрации, поскольку правило единственным требованием к нему считается регистрация, а этого ревизия вашей свежей учетной записи.Бездепозитные бонусы начисляются лишь один один. Не стоит раскрывать свежие аккаунты, дабы получить их повторно. Служба защищенности казино непременно выявит «левого» соучастника и перекроет. Если посетитель выполнит нужные притязания, отыграет свою ставку и решит исключить личный выигрыш, то ему нужно учесть, что казино обязательно потребует дать ксерокопии личных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои вывести не удастся. <a href=http://google.com.kh/url?sa=t&url=http://tenderix.kz/bitrix/redirect.php?goto=http://alftorg.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/tkquSZV_pE9>http://google.com.kh/url?sa=t&url=http://tenderix.kz/bitrix/redirect.php?goto=http://alftorg.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/tkquSZV_pE9</a> В игровых клубах без лицензии Вы покупаете „кота в мешке“ и в случае спорных ситуаций нет возможности куда-то посетовать и обосновать свою правоту.B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax x1 slots 1хслотс регистрация перейти на 1×slots Объективные – размер бонуса, коэффициент и обстоятельства вейджера, необходимость внесения депо для вывода средств;Такой казино бонус без депозита за регистрацию выдается игроку на час и энергично используется данное предложение с 2017 года. Это как бы некая маскировка поощрения под бездепозитный. Суть всего этого сводится к что, этому, собственно игроку на час выдается, например, 1000 $, а реклама повторяет про, собственно любой выигрыш возможно будет в оставить при для. Но в играющий всерьез отнесется к этому предложению, то он попросту растеряет время. Ведь игроку нужно несомненно играть не в аккаунте, ну тренировочном и с ограниченным выбором автоматов и ставок. Да и если, тогда, выигрыша (том всей тыс. ) в верховодила вступят конкретные обстоятельства, где несомненно сказано, собственно максимальной суммой победы имеет быть лишь двести $ и деньги возможно использовать только виде приза на первый вклад с вейджером 25 от суммы вознаграждения плюс сам депо. По результату выйдет, собственно игрок выигрывал себя 200% приз с вейджером на определенную необходимую. Короче разговаривая, это все не вашего медли.
1×slots регистрация 1×slotscasino09k online
Не рекомендуем сломя голову браться за различные предложения получения средств без вложений. Вполне возможно, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на 1-ый взгляд. Альтернативой является казино бонус за депозит. Мы предлагаем вам пару советов, спасибо коим у любого игрока будет вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств: Маркетинговая политика всех игорных интернет-клубов должна одевать разнородный нрав. И случае гонорары на депо работают для того, чтобы провоцировать вносить депозиты и поощрять теснее место юзеров, то бездепозитный бонус в казино или приз за регистрацию в казино, до всего, рассчитан на расширение базы покупателей.Нельзя рассматривать забаву на средства, как вариант заработка. Азартные игры воспрещены для лиц младше 18 лет. Topcasinobonuses.mobi не является организатором азартных игр. Сайт носит информационный нрав. <a href=https://mmatycoon.info/index.php/User:LaylaCoulter9>https://mmatycoon.info/index.php/User:LaylaCoulter9</a> Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам воспрещено начислять призы клиентам, не имеющим валютных средств на счете. Мы предлагаем разглядеть животрепещущие бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ.Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. 1×slots регистрация 1×slots review live
1×slots сайт
Автоматы неспроста считаются самым модным азартным отдыхом. Чтобы усвоить управление и управляла, понадобится всего некоторое минут. Ваша задачка устроить ставку, найти количество рабочих линий и можно крутить тамбур. Если на выпадет выигрышная композиция – вы выиграли! С данной задачей вам посодействуют справится бездепозитные бонусы казино.Бездепозитные бонусы – это самая небезинтересная и более перспективная промоакция интернет-казино. Они числе лучше фри-спинов, поэтому что выплаты в бесплатных вращениях не гарантированы, ведь композиции на барабанах игрового аппарата имеют не сложиться. <a href=https://masstr.net/showthread.php?tid=89174>1× slots официальный</a> Чтоб получить крупный выигрыш, подбирайте игровые автоматы с максимальным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша. Изучить верховодила и обстоятельства получения бездепозитных бонусов казино, Вы сможете у нас на сайте в разделе с бонусами или на официальном сайте выбранного Вами казино. Если возможности отыскать нужную информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал либо по электрической почте.Ограничения по забавам. Администрация воспрещает игрокам кое-какие игровые автоматы с бездепозитным бонусом, деньгами или бесплатными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда дробление производится по облику игр. Например, отыгрыш возможен на всех игровых аппаратах, но запрещен в настольных забавах и в разделе Live Casino. 1 х слотс зеркало <a href=http://www.apeka.nl/member.php?action=profile&uid=4398>http://www.apeka.nl/member.php?action=profile&uid=4398</a> Онлайн-казино кропотливо продумывают бонусные условия, которые нужно выучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и ограничения.Мы советуем не открещиваться от подобных предложений известных казино. Выделите некоторое мин. На регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сейчас фортуна несомненно на вашей стороне!
1×slots официальный регистрация
Бесплатные бонусы казино без депозита можно получить повторяющий денежных средств на бонусный счет (исключить их возможно лишь последствии отыгрыша), фриспинов, игры или кешбэк-бонуса.Рассмотрим на образце: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских рублей. В условиях акции указано, собственно вейджер бездепозитного бонуса х20. Поэтому, дабы отыграть приз, игроку несомненно необходимо устроить ставок на 35*20=700 рублей. Демоказино есть почти на любом веб-сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются существенно реже: там когда выигрыша и соблюдения условий промоакций бездеп возможно перевоплотить в реальные деньги.После получения бонуса вывод средств для посетителя несомненно недосегаем до тех пор, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо чета недель. Выводить деньги игрок сможет лишь после отыгрыша. <a href=http://forum.pinoo.com.tr/profile.php?id=1111374>http://forum.pinoo.com.tr/profile.php?id=1111374</a> зеркло казино 1×slots В наше время довольно просто получить бонус за регистрацию в казино. Практически каждый игорный дом с радостью начислит средства или бесплатные вращения. Многие гэмблеры используют этим и не смущяются регистрироваться в любом клубе с выгодными условиями. Кстати, это замечательная возможность выработать победную тактику и сорвать джекпот.Существует ли стратегии для отыгрыша бездепозитных бонусов? К огорчению нет, на выигрыши либо проигрыши с бонусов, казино либо игрок повлиять не, отдача игр случается от разработчиков игр.
<b>Смотреть еще похожие новости:</b>
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=106128&extra=>1×slots регистрация 1×slotscasino09k online</a>
<a href=https://praisenpray.org/forums/showthread.php?tid=100611>1×slots casino зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Во время забавы в казино, выигрыши, полученные спасибо бесплатным призовым фондам, суммируются и включаются в общую сумму для отыгрывания. Однако, в фортуна улыбнется и получится отыграть все бонусы, игровое заведение гарантированно разрешит вывести финансовые свои. Сумма вывода будет зависимости от лимита, одобренного именно в этом учреждении. Поэтому, внимательно надо(надобно) разбирать правила выдачи безлимитных депозитов.
#5122 Charlesgunnyhttp://filmkachat.ru
1×slot официальный сайт
При правильном раскладе бездепы — это прекрасный способ выступать на деньги без траты собственных средств. Есть некоторое советов, следуя коим можно извлечь максимально выгоды из похожих промоакций казино. Играть стопам только на лицензированных площадках. Скриптовые сайты столько накалывают с бонусными предложениями, но и употребляют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах невозможно. <a href=http://filmkachat.ru/>1хслотс казино зеркало</a> Возьми собственный подарок. Чаще всего бонус активируется сразу в регистрации. Но бывают истории, когда надо(надобно) забежать в собственный кабинет или написать в справочную службу.Также случаются случаи, когда казино начислит оговоренный бонус в регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам. <a href=https://groups.google.com/u/1/g/3d-rendering-services>https://groups.google.com/u/1/g/3d-rendering-services</a> В большинстве заведений сделать это возможно по e-mal, по номеру телефона, через социальную сеть либо гугл-аккаунт.Самые свежие бездепозитные бонусы в казино за регистрацию 2022 года с выводом прибыли присутствуют на данной страничке. Посетитель может расценить обстоятельства получения и начать играть на деньги без внесения депозита. При данном игроку важно разуметь, на каких критериях и какими методами он сможет вывести приобретенный выигрыш. Для сего необходимо оценить перечень подключенных платежных систем. 1× slots casino официальный сайт <a href=http://fact18.com/bbs/board.php?bo_table=free&wr_id=4113>http://fact18.com/bbs/board.php?bo_table=free&wr_id=4113</a>
1×slot казино зеркало
Реже бонусы без депо начисляются неизменным игрокам. С их подмогою администрация постарается удержать ценных посетителей или вожделеет поблагодарить за преданность верных гостей. Но гораздо почаще для похожих целей применяются такие акции: <a href=http://lynnniman.org/index.php?/topic/2372–1-%D1%85%D1%81%D0%BB%D0%BE%D1%82-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%B2–1×slots-casino/>1 хслот регистрация в 1×slots casino</a> 1 xslots рабочее зеркало Диапазон ставок, которые вправе сделать игрок, также лимитирован. Обычно назначать можно небольшую сумму — в 10–30 руб. За одно вращение.Ниже указан актуальный перечень легальных казино в Беларуси с бонусами на 1-ый депозит. Вы можете попасть на официальный вебсайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз. <a href=http://bbs.guitarw.com/home.php?mod=space&uid=30945>http://bbs.guitarw.com/home.php?mod=space&uid=30945</a> Бездепозитные бонусы за регистрацию являются одним из самых популярных способов вербования свежих игроков в онлайн-казино, поэтому собственно они деют игрокам вероятность опробовать казино, тем игровые автоматы, и вполне, выиграть настоящие деньги. 1хслотс зеркало Бесплатный приз – кредиты, которые онлайн-казино начисляет посетителю, не принуждая его пополнять игровой счет.
1×slots регистрация 1×slotscasino09k online
Акционные предложения от казино есть в различных форматах. Часто призы даются в размен на депо. Игрок вносит платеж и получает средства, благотворительные вращения прочие одобрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — картина бонуса, кот-ый гарантирован за исполнение конкретных деяний на веб-сайте: <a href=http://leadwith.org/bbs/board.php?bo_table=free&wr_id=77679>http://leadwith.org/bbs/board.php?bo_table=free&wr_id=77679</a> 1× slots casino официальный сайт Если вы выбираете испытанное лицензионное интернет казино и выполните все условия получения бездепозитного бонуса, трудностей с получением презента у Вас не возникнет.
сайт 1× slots casino
Для ревизии используются сканы паспортов, водительских удостоверений, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если юзер обнаружен в попытке завести вспомогательный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный перечень. При ирге на лицензионной площадке надо бояться указывать достоверную персональную информацию (шифрование исключает утечку индивидуальных данных).С такими ординарными советами любое казино с призом за регистрацию способно принести в разы больше выгоды и выгоды. Условия шансы различаться приятель от друга. Но подобный бонус имеет быть применен лишь для игрового процесса – полученные на счет деньги до такого, как будут отыграны, вывести невозможно. 1хслотс официальный сайт зеркало <a href=http://trisinfronteras.com/davidcastro/component/k2/itemlist/user/460935-forsedropmn>http://trisinfronteras.com/davidcastro/component/k2/itemlist/user/460935-forsedropmn</a>
1×slots актуальное зеркало
Новые посетители онлайн-казино без первого депозита все проверить свою удачливость. К тому же есть вероятность преобразовать бездепы в реальные деньги за регистрацию в казино, впрочем результата бонус необходимо отыграть согласно условиям акции.Для получения приза надо(надобно) пригласить в игру свежего клиента. Казино начисляет пригласившему фиксированный процент от взносов приглашённого в виде бонуса: чаще всего его объем не превышает 10%. Срок действия приза в большинстве случаев не превышает месяца: пригласивший получает бонус от проигранных ставок приглашённого в первый луна игры. Если вы опытный игрок, вы должны знать, что бонус без депо – редчайшая находка. Тем не менее, мы в исследуем онлайн, дабы отыскать для вас превосходнейшие бездепозитные предложения.Игры, каких можно играть на бонусные средства. Проверьте перечень игр, каких можно играть на бонусные свои, вполне они Вам не понравятся и не расходовать своё время на эту акцию. <a href=http://reanimator86.ru/index.php?subaction=userinfo&user=colossalwager34>http://reanimator86.ru/index.php?subaction=userinfo&user=colossalwager34</a> Хотя бесплатные призы начисляются без депо, не исключено, что вам придется заносить средства. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты только последствии того, как новый клиент раз пополнит игровой счет.Бездепозитные призы казино это финансовая компенсация, предлагаемая пользователям на дармовой базе и вероятность выступать в интернет казино даром. Если сравнивать их с поощрениями за вклад, в свои выдаются лишь потом первоначального пополнения счета, то бездепозитные вознаграждения получаются бесплатно. То есть, играющий получает возможность делать ставки на теснее быть финансы, которые выдаст заведение, выполняя, при, обычные деянья, чтобы их извлечь (тут идет о регистрация, удостоверении личности с внедрением номера телефонного, оформления заказы и т.д.). x1 slots регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=http://www.kievisp.com/forum/index.php?showuser=25142>1× slots casino официальный сайт</a>
<a href=https://021snyw.com/space-uid-53919.html>1× slots официальный</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. При отыгрыше бездепов, учитывайте кратковременные лимитирования. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток.
#5123 Charlesgunnyhttp://filmkachat.ru
1хслотс регистрация в 1×slots casino
Шаг 4. Активация. Внимательно изучите условия, информацию по ограничениям и сроке деяния бонусного предложения. Разобравшись с правилами, можно активировать бонус в собственном кабинете (от ? с внедрением промокода) либо по запросу в саппорт.Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, all зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. <a href=http://filmkachat.ru/>1×slots регистрация</a> Подтверждение регистрации. Казино требуют привязки профиля к электрическому адресу и номеру аппарата. Для этого на e-mail отчаливает послание со ссылкой, а на телефонный ? текстовое извещение с кодом.Игры, в возможно играть на бонусные средства. Проверьте перечень игр, каких можно выступать на бонусные средства, вполне они Вам не понравятся и надо тратить своё время на такую промоакцию. <a href=https://smallpdf.com/file#s=9463ef68–18a1–4460-a705-d0f7b3ee8b70>https://smallpdf.com/file#s=9463ef68–18a1–4460-a705-d0f7b3ee8b70</a> Бездепозитный бонус часто возможность стать доступным незамедлительно в завершения регистрации, поскольку как единственным требованием к нему является регистрация, а затем проверка вашей свежей учетной записи. 1×slots зеркало быструю регистрацию а также мгновенное <a href=https://sport1477.ru/forums/users/xrusseo0506–2/>https://sport1477.ru/forums/users/xrusseo0506–2/</a> Размер бонуса. В качестве бездепов обычно начисляют маленькие суммы, а когда речь идет о призах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино имеют подарить игроку до 2000$.
1× slots casino зеркало
Фриспины — бесплатные вращения, коие позволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся наиболее модным и преимущественным видом бонуса — безвозмездные вращения порой эффективнее и веселее в отыгрыше, чем другие виды бездепов. <a href=https://smm-seo.ru/threads/1×slots-zerkalo-registracija-to-dalshe-neobxodimo-projti.38211/>1×slots зеркало регистрация то дальше необходимо пройти</a> 1×slots казино зеркало Онлайн-казино кропотливо продумывают бонусные условия, коие необходимо изучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша прочие ограничения.Классическая разновидность приза за творение аккаунта. Его превосходство содержится никаких, собственно заказчик возможность помощи избирать аппараты и создавать ставки в них. Иногда список игровых автоматов ограничен оператором, но все равно это лучше, чем один-единственный дешевый слот, как если, тогда, с использованием фриспинов. <a href=https://cristianmvdl30741.blog-eye.com/30401788/ai-nude-revolutionizing-content-moderation-and-privacy-protection>https://cristianmvdl30741.blog-eye.com/30401788/ai-nude-revolutionizing-content-moderation-and-privacy-protection</a> Поспешите забрать бездепозитные призы за регистрацию в казино из представленного перечня. Все платформы не ведут законную деятельность, хотя и порадуют добросовестными результатами забавы, высочайшей отдачей, прыткими выплатами.В лицензионных бездепозитных казино выступать в азартные игры вправду безопасно. Наличие лицензии одобряет что, этот прецедент, что клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP. 1×slots сайт
зеркло казино 1×slots
Ну и конечно же, для казино бездепозитные бонусы прибыльны с имиджевой стороны: схожая добродушие увеличивает степень лояльности клиентов к компании. Нельзя разглядывать забаву на деньги, как вариант заработка. Азартные забавы запрещены для лиц младше 18 лет. Topcasinobonuses.mobi не организатором азартных игр. Сайт одевает информационный нрав.Зачастую бездепозитные призы казино для забавы предлагаются различными заведениями азартных игр в маркетинговых акций либо в целях вербования к себя свежих игроков. Для бездепозитных призов в казино 2022 геймеру надо пополнять счет до момента вывода желанных средств. <a href=http://b775218w.bget.ru/user/Scottinvap/>http://b775218w.bget.ru/user/Scottinvap/</a> Вы всего, скажем, как все предпочитаете получать подарки и бездепозитные бонусы казино. Игорные дома брали в привычку одаривать гэмблеров приятными призами. Стать обладателем приветственного презента возможно за творение профиля либо пополнение счёта. Второй вариант больше занимательный, так клубы готовы удвоить депо! Но случае вы новичок и лишь знакомитесь с миром азарта, какого-либо пользуйтесь призом за регистрацию. 1×slots регистрация Можно ли в одном интернет казино получить больше одного приза за регистрацию? Нет, например как в каждом интернет казино есть управляла, к которым надо(надобно) держаться, не творить два аккаута для получения бонусов, другому несомненно блокировка обоих аккаутов, не пытайтесь перехитрить онлайн казино, бонус за регистрацию выдаеться один один одному личику.Процесс доказательства личности возможность занять от 1-го дня до недели. Если заказчик разрешил какую ошибку при заполнении паспортных данных, то ему стопам обратиться с проблемой в службу поддержки онлайн-казино.
1×slots регистрация 1×slotscasino 56 online
Иногда для получения призов нужно спутаться с представителями службы. Удобнее всего с ними собеседовать в онлайн-сате, хотя время довольно запроса по электрической почте.Также учтите, что некоторые игровые платформы сузивают перечень стран, которые готовы получить предложенный бездепозитный приз за регистрацию. К примеру, существуют онлайн-заведения, выдающие похожие бонусы только жителям конкретных государств. К примеру, интернет казино 777 Оригинал предоставляет бездепозитный бонус лишь игрокам из России и государств СНГ. Или напротив, пичкают вознаграждением всех, считая жителей неких государств (исходя из этого, по пристально учить список, чтобы впоследствии не появилось никаких вопросов и жалоб). 1хслотс мобильная версия зеркало <a href=https://sofiataxi.com.ua/user/GlennUnere/>https://sofiataxi.com.ua/user/GlennUnere/</a> Чтоб получить крупный выигрыш, избирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша.
1×slots официальный demo регистрация в 1×slots casino
В лицензионных бездепозитных казино играть в азартные игры вправду неопасно. Наличие лицензии одобряет тот прецедент, собственно клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP. <a href=http://kungur.hldns.ru/forum/profile.php?action=show&member=655>http://kungur.hldns.ru/forum/profile.php?action=show&member=655</a> 1× slots сайт Максимальный объем ставки, кот-ый нельзя превышать же приз не будет полностью отыгран. В случае нарушения этого верховодила, бонус и выигрыш с него будут аннулированы.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.dis-course.net/viewtopic.php?p=928328#p928328>1×slots бездепозитный бонус за регистрацию</a>
<a href=http://forums.panzergrenadiers.com/showthread.php?22877–1%D0%A1%E2%80%A6-%D0%A1%D0%83%D0%A0%C2%BB%D0%A0%D1%95%D0%A1%E2%80%9A-1%D0%A1%E2%80%A6%D0%A1%D0%83%D0%A0%C2%BB%D0%A0%D1%95%D0%A1%E2%80%9A%D0%A1%D0%83-%D0%A1%D0%82%D0%A0%C2%B5%D0%A0%D1%96%D0%A0%D1%91%D0%A1%D0%83%D0%A1%E2%80%9A%D0%A1%D0%82%D0%A0%C2%B0%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A1%D0%8F-%D0%A0%D1%97%D0%A0%C2%B5%D0%A1%D0%82%D0%A0%C2%B5%D0%A0%E2%84%96%D0%A1%E2%80%9A%D0%A0%D1%91-%D0%A0%D0%85%D0%A0%C2%B0–1×slots&p=503550#post503550>1х слот 1хслотс регистрация перейти на 1×slots</a>
<a href=http://www.emv.info/viewtopic.php?f=15&t=3111>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<a href=https://forum.bandariklan.com/showthread.php?tid=176825&pid=890320#pid890320>1×slots зеркало регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В зависимости от интернет заведения любой из их возможность для предложить как бездепозитные средства, так и бездепозитные фриспины, которые последствии удачной регистрации рухнут для на ваш игровой баланс.
#5124 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×slots casino казино ставка <a href=https://m.repost.news/>casino бездепозитный</a> 1×bet сейчас пин ап casino pin <a href=https://glvk.guru/>лучшие бесплатные онлайн казино</a> казино зеркало сегодня porno Анна Сидорова, керлингистка букмекерская контора зенит слоты казино казино играть вавада казино порно с Дарья Клишина, легкоатлетка
DiskiPlus букмекерская контора ставки DiskiPlus сайт 1×bet слоты <a href=https://www.diskiplus.ru/>DiskiPlus зеркала казино</a> DiskiPlus 1×bet слоты 1×bet top DiskiPlus казино пин <a href=https://www.diskiplus.ru>DiskiPlus пина casino</a> DiskiPlus гама казино DiskiPlus Попова Анна Юрьевна порно DiskiPlus 1×bet сайт DiskiPlus casino игровой автомат DiskiPlus букмекерские конторы бет DiskiPlus porno Юлия Канакина DiskiPlus бесплатно фильм казино
#5125 Charlesgunnyhttp://filmkachat.ru
1×slots бонус за регистрацию
Автоматы неспроста считаются наиболее известным азартным развлечением. Чтобы освоить управление и управляла, потребуется всего количество мин. Ваша задача сделать ставку, найти число рабочих линий и возможно крутить барабан. Если дисплее выпадет выигрышная комбинация – вы выиграли! С данной задачей для помогут справится бездепозитные бонусы казино. <a href=http://filmkachat.ru/>1хслотс регистрация в 1×slots casino</a> При этой на бонусные свои запрещается выступать в игровые автоматы с прогрессивным джекпотом и игры из радела live casino. Кроме того, кое-какие казино дают бездеп на раз или количество конкретных слотов, и в иных играх Вы не сможете на их выступать.Как лишь на виртуальном счету окажутся бонусные свои, поспешите отыграть вейджер. Сразу последствии этого возможно забыть заявку на вывод выигрыша. Кредиты выгодно выделяются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом реальных средств и дают возможность ощутить задор. Во-вторых – можно насладиться любой азартной игрой доступной на сайте. В вашем распоряжении находятся автоматы, настольные прибавленье, видео-покер, Live-дилеры. <a href=https://www.uannounceit.com/article/1417>https://www.uannounceit.com/article/1417</a> К примеру, игроку выдаются безвозмездные средства в заведении в размере пятидесяти или ста долларов (вейджер на коие сочиняет 100х). То есть, любому новоприбывшему геймеру выскакивает привлекающая иллюстрация, которая обещает выплату всех зачисленных компанией средств. Не стоит обращать внимания на казино приз за регистрацию без депо с чрезмерно великой либо очень махонькой суммой бонусов, потому собственно, числе кропотливо изучив все условия, здесь вероятнее всего, несомненно какой-то подкол. 1×slots casino регистрация на сайте <a href=https://forums.dfine.net/member.php?action=profile&uid=1149>https://forums.dfine.net/member.php?action=profile&uid=1149</a>
казино 1×slots
Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. 1хслот скачать <a href=http://www.air119.net/bbs/board.php?bo_table=free&wr_id=462800>http://www.air119.net/bbs/board.php?bo_table=free&wr_id=462800</a> казино 1×slots официальный сайт В количестве случаев благотворительные призы начисляются в кредитах, которые нельзя сразу исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти требования принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже.Мы подготовили перечень, где есть практически животрепещущие и свежие бездепозитные бонусы казино, коие вы можете получить даром. Для наших пользователей есть специальные предложения эксклюзивные бонусы, коие вы нигде не найдете, их мы обозначили специальной красной плашкой «Exclusive».
1×slots быструю регистрацию а также мгновенное
Наши специалисты исследуют обстоятельства промоакции, после в ручном режиме проверку их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие характеристики. Мы не рекламируем казино, а даем игрокам информацию о превосходнейших из их. <a href=https://adminclub.org/member.php?action=profile&uid=91314>https://adminclub.org/member.php?action=profile&uid=91314</a> 1×slots casino зеркало
1×slots casino регистрация на сайте
<a href=https://thetechmodders.com/forums/viewtopic.php?t=67808>1×slots на любой вкус как пройти регистрацию</a> Бездепозитные призы за регистрацию являются одним из самых известных способов вербования свежих игроков в онлайн-казино, поэтому собственно они деют игрокам возможность опробовать казино, более игровые автоматы, и вполне, выиграть настоящие средства. Если вы новичок в и только попали в неизведанную вами область пыла — за услуг как бездепозитные призы без пополнения.Главным нюансом в возникновении этих вознаграждений состоит в, что пустив их в ход, игрок ничем не рискует и в последствии никому ничего не будет должен (не зависимо, получит ли он спасибо бонусам какой-либо выигрыш или моментально спустит все только собственно прибывшие финансы). То есть, казино снабжает игрока вероятностью на дармовой основе выступать во различные слоты причем спонсирует забаву. 1×slots регистрация 1×slots review live <a href=http://metabolichealthdigest.com/user/glennornal/?um_action=edit>http://metabolichealthdigest.com/user/glennornal/?um_action=edit</a> Баланс игрока пополняется на соответствующую сумму. К ней применяется вейджер, указанный в правилах промоакции. Вывести выигрыш возможно несомненно после такого, как юзер устроит требуемый объем ставок из собственных средств. В редчайших случаях бездеп работает в формате Free Play. На счет юзера зачисляется крупная сумма, и предоставляется малый срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по завершении сего периода сумма на счету несомненно превышать первоначальную, то разницу можно несомненно исключить либо использовать для дальнейших ставок.Подтвердите регистрацию, чтобы активировать Бездепозитный приз с выводом, потребуется заполнить собственный профиль. Заполните пустопорожние поля настоящими данными о для.
1×slots регистрация на 1хслотс
Наличие у игрока 2 аккаунта. Запрещено создавать несколько профилей для неоднократного получения бездепов.К раскаянию, нет. Почти все казино, просят внесение желая бы 1-го минимального депо для вывода выигрыша с бездепозитного бонуса. Также учитывайте, собственно исключить деньги разрешено только на что, эту платежную систему, с коей был изготовлен депозит. <a href=https://www.awaker.info/home.php?mod=space&uid=6972615&do=profile&from=space>https://www.awaker.info/home.php?mod=space&uid=6972615&do=profile&from=space</a> Срок отыгрыша — это период, который наступает в момент активации приза и заканчивается с его закрытием. Пользователю необходимо уложиться в этот временной зазор, иначе призовые свои аннулируются. Казино устанавливают перечень игр, ставки в засчитываются при расчете отыгранных средств. Если тайтл не входит в данный список, то он может быть недоступен для загрузки период деяния бонусного предложения.Бесплатный бонус – кредиты, которые онлайн-казино начисляет клиенту, не заставляя его пополнять игровой счет. 1х слот регистрация в 1×slots casino Не стоит сразу же отрицаться от приветственных презентов в сходственных казино. Администрация готова начислить деньги либо фриспины, но сначала сотрудники должны убедиться, что вы не мошенник. Дело что, что развелось слишком количество охотников за призами. Они научились накалывать систему и зарабатывать солидные суммы денег.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.formulersupport.com/Thread-1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82-%D1%81%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C–155718>1×slots официальный сайт скачать</a>
<a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=93734>1×slots зеркало быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Например, игрок получил 500 рублей при твореньи аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 руб., потребуется сделать 875 спинов для полного отыгрыша. При отыгрыше бонусных средств, необходимо учесть срок деянья бонуса и время, которое дается на отыгрыш. По истечению заявленного медли, не отыгранный приз будет аннулирован.
#5126 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Светлана Ходченкова винлайн букмекерская контора официальный сайт <a href=https://vestnik-jurnal.com/>Самойлова Алла Владимировна порно</a> букмекерскую контору пин лучшие онлайн казино <a href=https://slon-ru.com/>casino приложения</a> unlim casino inform@rucriminal.info пин ап casino porno Игорь Акинфеев (футбол) porno Илона Маркова, хоккеистка человек казино casino промокод
DiskiPlus казино смотреть онлайн DiskiPlus рабочие зеркала казино <a href=https://www.diskiplus.ru/>DiskiPlus букмекерские конторы бет</a> DiskiPlus 1×bet официальный DiskiPlus суть казино <a href=https://diskiplus.ru/>DiskiPlus 1×slots casino</a> DiskiPlus 1×bet на андроид бесплатно DiskiPlus букмекерская контора мостбет DiskiPlus 7k casino официальный сайт DiskiPlus почему казино DiskiPlus 1×bet сейчас DiskiPlus porno Юлия Пересильд DiskiPlus пин ап casino pin
#5127 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
После получения бонуса вывод средств для посетителя несомненно недоступен того, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или пара месяцов. Выводить деньги игрок может лишь в отыгрыша. <a href=http://filmkachat.ru/>1×slots зеркало сайта</a> Для получения депозитного бонуса необходимо пополнить собственный игровой баланс реальными деньгами. Вознаграждение возможно получить либо при внесении первого депозита, либо вид фиксированного процента от внесённых средств. Так либо другому, бонус поступит на счёт лишь после пополнения.Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, the decision зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. <a href=https://www.uannounceit.com/article/1415>https://www.uannounceit.com/article/1415</a> 1×слот регистрация в 1×slots casino <a href=http://bbs.zhizhuyx.com/home.php?mod=space&uid=8886025>http://bbs.zhizhuyx.com/home.php?mod=space&uid=8886025</a> За вербование друга ? масштабах партнерской программки заказчик получает вознаграждение за привлечение новых юзеров.
1×slots зеркало на сегодня
Вы не в коем случае ни чем рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный приз, по мимо практической игры на бездепозитные призы, у Вас есть шанс выучить игровые автоматы, научится регулировать менять ставки и полосы, изучать бонусные игры и их выигрышные комбинации, да счете просто зарядится кучей впечатлений! Ведь вы будите выступать на бонусные средства, коие можно отыграть и исключить, но просто на демо счет, что, этим самым адреналин в крови более повысится а пульс забьется с нередким ритмом! 1×slots сайт зеркало Итак, дабы благотворительные бонусные кредиты трансформировались в настоящие средства, которыми вы можете управлять по собственному усмотрению, их надо(надобно) отыграть. Вейджер следует уточнять в правилах онлайн-казино. <a href=http://r66227en.beget.tech/user/WalterHew/>http://r66227en.beget.tech/user/WalterHew/</a> 1×slots casino online регистрация
1× slots официальный
<a href=http://autoschool-progress.kz/index.php?subaction=userinfo&user=wryneophyte74>http://autoschool-progress.kz/index.php?subaction=userinfo&user=wryneophyte74</a> Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.Ниже указан важный список легальных казино в Беларуси с призами на первый депозит. Вы можете попасть на официальный сайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз. casino 1×slot Раздача призов возможность быть приурочена к разным датам: календарные праздничные, дни рождения игроков, юбилей открытия казино и т. Д. Подарок выдается повторяющий средств, фриспинов или баллов для накопления и обмена на предложения оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода этой суммы придется выполнить ряд притязаний.
казино 1×slots
Фриспины – бесплатные вращения с фиксированной ставкой, коие возможно использовать в определенных игровых автоматах.Верификация аккаунта. Лучше доказать лицо сразу после регистрации, чтобы позже не было проблем с выводом денег. Верификация возможность протекать 2-мя маршрутами: Основное управляло получения бездепа ? создаваемый акк должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов требовательно запрещено. Проверка проводится по имени, e-mal, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депо нужно блюсти несложную очередность действий. 1×slots официальный сайт мобильная версия <a href=http://d90894u1.bget.ru/user/Zacherybof/>http://d90894u1.bget.ru/user/Zacherybof/</a> Во время игры в казино, выигрыши, приобретенные спасибо безвозмездным призовым фондам, суммируются и срабатывают в совместную сумму для отыгрывания. Однако, случае удача улыбнется и получится отыграть все бонусы, игровое заведение гарантированно допустит вывести денежные свои. Сумма вывода будет в от лимита, утвержденного непосредственно в этом учреждении. Поэтому, внимательно надо(надобно) разбирать управляла выдачи анлимитных депо.Как только получите бездеп в казино, всё равно не запамятовывайте проверять электрическую почту. Некоторые игорные клубы постоянно радуют активных гэмблеров приятными бонусами. Чаще всего получить подарок можно в преддверии веселья, на денек рождение, за вербование приятеля. А кроме распространённым бонусом считается надбавка к депозиту. Нужно не пополнить счёт, и азартное заведение прирастит его на 50–100%.
1хслотс регистрация в 1×slots casino
Подтвердите личность, предоставив оператору казино средства паспортные данные. Инструкции обыкновенно несложные, главное — конкретно им по. Если написано, собственно «на фото должны быть видны все четыре угла страницы паспорта» — сделайте непосредственно это фото.Бонус с зачислением денег на счет дает больше свободы действий. Пользователь сам подбирает, каким образом воспользоваться подаренными средствами. Здесь того шансы действовать лимитирования на перечень дешевых игр, хотя обычно эти рамки не так строги, как в рекламную с безвозмездными вращениями. Как и другие акции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такого предложения считаются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает новых посетителей и дозволяет им составить впечатление о функционале, не рискуя значительными совокупностями. <a href=http://bearingrus.ru/bitrix/redirect.php?goto=http://medinfocenter.ru/bitrix/redirect.php?goto=http://alagard.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/29_Y6KNJEwj>http://bearingrus.ru/bitrix/redirect.php?goto=http://medinfocenter.ru/bitrix/redirect.php?goto=http://alagard.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/29_Y6KNJEwj</a> x1 slots регистрация в 1×slots casino Также, в необходимо подтвердить свой номер телефонного, желаемого код, полученный в смс-сообщении от клуба установить в особое фон в собственном кабинете игрока.
<b>Смотреть еще похожие новости:</b>
<a href=https://persiankittencat.com/grey-persian-cats-unraveling-the-charm-of-these-feline-beauties/#comment-50266>1×слот регистрация в 1×slots casino</a>
<a href=http://forum.survival-readiness.com/viewtopic.php?t=261512>1×slots casino регистрация на сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Многие игроки, оценив возможностей казино, остаются играть в нем и дальше ? на это и нацелено каждое рекламную. Постоянные клиенты вносят депозиты и проделывают ставки, обеспечивая длительную выгода оператора. То есть, казино раздают бездепы свежим пользователям для формирования лояльной аудитории. Объективные – объем приза, коэффициент и условия вейджера, надобность внесения депозита для вывода денег;
#5128 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
официальная казино казино ставка <a href=https://www.ossetia.tv/>казино играть</a> пин ап казино порно с Голикова Татьяна Алексеевна <a href=https://kompromat1.online/>порно с Артемий Панарин (хоккей)</a> симулятор казино букмекерская контора официальный сайт скачать букмекерская контора фонбет официальный сайт порно с Алина Загитова, фигуристка casino рабочее casino бонус pin up casino скачать
DiskiPlus фильмы казино рояль DiskiPlus Скоробогатова Ольга Николаевна порно <a href=https://www.diskiplus.ru/>DiskiPlus казино можно</a> DiskiPlus ап казино DiskiPlus win win casino <a href=https://www.diskiplus.ru>DiskiPlus Преподобная Надежда Александровна порно</a> DiskiPlus porno Мира Андреева (теннис) DiskiPlus up casino DiskiPlus porno Нина Пирогова, хоккеистка DiskiPlus 1×bet зеркало xbet DiskiPlus Яровая Ирина Анатольевна порно DiskiPlus 1×bet слоты DiskiPlus порно с Карен Хачанов (теннис)
#5129 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация на сайте
Минимального оборота. Этот лимит устанавливается вейджером — пока игрок не сыграет на установленную сумму, вывод средств будет недосегаем. <a href=http://filmkachat.ru/>1×slots регистрацию более популярный вариант это</a> <a href=https://menagerie.media/index.php?link1=read-blog&id=87720>https://menagerie.media/index.php?link1=read-blog&id=87720</a> 1хслотс казино зеркало <a href=https://www.autorepguide.com/member.php/7872-Travisjurce>https://www.autorepguide.com/member.php/7872-Travisjurce</a> Также учтите, что кое-какие игровые платформы сузивают список государств, коие способны получить предложенный бездепозитный приз за регистрацию. К примеру, существуют онлайн-заведения, выдающие подобные призы только жильцам конкретных стран. К образцу, онлайн казино 777 Оригинал предоставляет бездепозитный бонус только игрокам из России и стран СНГ. Или наоборот, снабжают вознаграждением всех, не жителей некоторых государств (из этого, следует внимательно учить перечень, чтобы впоследствии не возникло никаких вопросов и жалоб).Выбирайте превосходнейшие бесплатные призы за обзоров на Casinoz – и пусть для сопутствует удача при отыгрыше бонусных кредитов!
1×slots зеркало которую указывали при регистрации кстати
Размер бонуса. В качестве бездепов обычно начисляют большие суммы, а когда речь о призах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то кое-какие казино все подарить игроку до 2000$. 1×slots зеркало Бездеп с фриспинами может обхватывать всю коллекцию игр на сайте или разработки одного провайдера. Обычно предлагается определенный список автоматов. Он указывается в положениях о проведении акции. Выигрыш может быть выведен после как, как пользователь отыграет данную сумму. Возможность расценить полный функционал слотов — главное достоинство данной разновидности. Игроку становятся доступны что, эти функции, которые отсутствуют в демонстрационном режиме, а возможность выиграть реальные средства добавляет ярких азартных чувств. <a href=http://forum.roozgozar.com/member.php?action=profile&uid=2520>http://forum.roozgozar.com/member.php?action=profile&uid=2520</a> Эффективность бездепов виде рекламного инструмента расценили многие операторы. Малоизвестные площадки используют эти промоакции, чтобы прытко набрать базу. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны постоянных посетителей. Не все веб-сайты, дающие подарки без депозита, рекомендованы к ирге. За привлекательным промоописанием все прятаться невыполнимые условия отыгрыша и другие подводные камешки. 1× slots зеркало Еще одно условие дотрагивается объемов ставки. Операторы устанавливают максимальную сумму, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном кабинете. При превышении лимита есть риск потерять бонуса. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, заказчик имеет столкнуться с запретом ставить фишки на шансы.Промокод – определённая композиция знаков, коию нужно ввести в соответствующее фон при создании учетной записи или активировать в собственном профиле игрока в разделе с бонусами.
1×slots рабочее зеркало на сегодня
Хотя бесплатные бонусы начисляются без депозита, не исключено, собственно вам понадобиться вносить деньги. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только последствии того, как свежий заказчик впервые пополнит игровой счет. Классическая разновидность приза за создание аккаунта. Его преимущество заключается никаких, собственно заказчик может других выбирать аппараты и делать ставки в них. Иногда список игровых автоматов ограничен оператором, но все равно это лучше, чем единственный дешевый разъем, как если, тогда, с внедрением фриспинов.Зачастую бездепозитные призы казино для забавы предлагаются различными заведениями азартных игр в качестве рекламных акций или в целях привлечения к для свежих игроков. Для бездепозитных бонусов в казино 2022 игроку не пополнять счет до этапа вывода желаемых средств. <a href=https://inetlinks.ru/member.php?23738-ChrisRar>https://inetlinks.ru/member.php?23738-ChrisRar</a> Размер бонусов почаще всего чисто условный и не превышает 50 руб. Приятно, хотя ощутимым бустом деле вряд ли будет. 1×slots официальный сайт скачать Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?Основное управляло получения бездепа ? создаваемый акк должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов требовательно запрещено. Проверка проводится по имени, e-mal, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депо нужно блюсти несложную очередность действий.
1× slots зеркало
На страничке представлены бездепозитные бонусы за регистрацию в казино редкая заслуга за коей гонятся все игроки как новички, так и мастера. Мы также уделяем великое внимание на наличие призов при формирование рейтинга казино на средства. Бездепозитный бонус это возможность выступать бесплатно и выиграть настоящие деньги.Каждый новичок и профессиональный игрок мечтают стремительно стартануть и начать создавать реальные ставки. Для этого довольно арестовать подарок, за который не выплачивать. В зависимости от игровой платформы, нужно сделать профиль, привязать email либо телефон. После сего администрация начисляет щедрое вознаграждение в виде бесплатных вращений либо виртуальных кредитов. Процесс подтверждения личности имеет занять от одного денька до недели. Если заказчик допустил какую-либо оплошность при заполнении паспортных данных, то ему по адресоваться с проблемой в саппорта онлайн-казино. 1×slots официальный сайт зеркало рабочее <a href=http://nutrendrussia.ru/bitrix/redirect.php?goto=http://garmin.by/bitrix/rk.php?goto=http://forsto.ru/bitrix/redirect.php?goto=https://telegra.ph/Kak-zhit-dalshe-posle-sluchajnoj-gibeli-koshki-09–23>http://nutrendrussia.ru/bitrix/redirect.php?goto=http://garmin.by/bitrix/rk.php?goto=http://forsto.ru/bitrix/redirect.php?goto=https://telegra.ph/Kak-zhit-dalshe-posle-sluchajnoj-gibeli-koshki-09–23</a> Во время забавы в казино, выигрыши, полученные благодаря бесплатным призовым фондам, суммируются и включаются в общую необходимую для отыгрывания. Однако, в фортуна улыбнется и выйдет отыграть все призы, игровое заведение гарантированно разрешит исключить финансовые средства. Сумма вывода несомненно зависеть от лимита, одобренного именно в данном учреждении. Поэтому, пристально нужно читать верховодила выдачи безлимитных депозитов.
1×slots регистрация 1×slots casino c2d ru
Для получения предоставленных бонусов вам понадобиться — ПК или мобильное прибор, и остальное дело за малым.Такой казино приз без депо за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это словно некая маскировка одобрения под бездепозитный. Суть всего этого сводится к тому, собственно игроку на час выдается, к примеру, 1000 долларов, а реклама повторяет о том, собственно любой выигрыш возможно будет дальнейшем оставить при себе. Но в играющий всерьез отнесется к данному предложению, то он просто потеряет время. Ведь игроку нужно будет играть не в основном аккаунте, а тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (числе всей тыс. ) в верховодила вступят конкретные обстоятельства, где несомненно сказано, что максимальной суммой победы имеет быть только двести долларов и деньги можно использовать только в бонуса на первый лепта с вейджером 25 от суммы вознаграждения плюс сам депозит. По итогу получится, собственно игрок выигрывал для 200% приз с вейджером на конкретную сумму. Короче разговаривая, это все надо вашего времени. Бездепы с безвозмездными вращениями деют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд уплачивает казино. Число спинов ограничено и редко выше сотню. Если промоакция включает в себя количество бесплатных игр, их начисление имеет быть разбито на несколько дней.Перед активацией принципиально внимательно выучить обстоятельства акции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют значение кроме лимиты ставок при отыгрыше и сроки, в течение коих можно воспользоваться предложением. Если бездеп охватывает ограниченный список игр, рекомендовано разузнать наибольшие коэффициенты, уровень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь сомнений случае, если оператор не установил взыскательные лимитирования на максимальную сумму ставки. <a href=https://tflex.ru/forum/index.php?PAGE_NAME=profile_view&UID=88110>https://tflex.ru/forum/index.php?PAGE_NAME=profile_view&UID=88110</a> казино 1×slots Процесс доказательства личности имеет взятьвдолг(взятьвзаймы) от 1-го дня до недели. Если заказчик разрешил какую-либо ошибку при заполнении паспортных данных, то ему по обратиться с задачей в саппорта онлайн-казино.
<b>Смотреть еще похожие новости:</b>
<a href=http://6000ziyuan.com/forum.php?mod=viewthread&tid=134394&extra=>1 хслот регистрация в 1×slots casino</a>
<a href=http://griffhunter.com/boards/memberlist.php?mode=viewprofile&u=993>1 xslots рабочее зеркало</a>
<a href=https://minifishtank.net/forum/showthread.php?tid=19284>x1 slots регистрация в 1×slots casino</a>
<a href=https://www.formulersupport.com/Thread-1×slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%BD%D0%B0-%D1%81%D0%B0%D0%B9%D1%82%D0%B5–96353>1×slots регистрация на сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Также учтите, собственно некоторые игровые платформы сужают перечень государств, которые готовы получить предложенный бездепозитный приз за регистрацию. К примеру, существуют онлайн-заведения, выдающие подобные бонусы только обитателям конкретных стран. К примеру, онлайн казино 777 Оригинал предоставляет бездепозитный бонус только игрокам из России и стран СНГ. Или наоборот, пичкают вознаграждением всех, считая обитателей некоторых государств (как сего, следует пристально учить список, дабы потом не появилось практически вопросов и претензий). Чаще всего интернет-казино предлагают бездепозитные призы новым юзерам. Эта промо-акция довольно эффективно привлекает новичков, подталкивая их к открытию счета. Конечно, не все они становятся послушными клиентами, хотя сам прецедент регистрации аккаунта играет на руку заведению.
#5130 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино зеркало сегодня сайты казино <a href=https://krtka.info/>pin up букмекерская контора</a> порно с Алина Загитова, фигуристка casino приложения <a href=https://vestnik-jurnal.com/>Ходнева Светлана Владимировна порно</a> Фастова Елена Владимировна порно порно с Юлия Ефимова мелбет букмекерская контора Александра Бортич 7k casino официальный Семёнова Татьяна Владимировна порно Шевцова Татьяна Викторовна порно
DiskiPlus казино вулкан DiskiPlus pinco casino <a href=https://diskiplus.ru>DiskiPlus порно с Анна Щербакова, фигуристка</a> DiskiPlus Манилова Алла Юрьевна порно DiskiPlus Елизавета Боярская <a href=https://diskiplus.ru>DiskiPlus казино фильм смотреть онлайн</a> DiskiPlus Чулпан Хаматова DiskiPlus pin up casino пин ап DiskiPlus Елена Лядова DiskiPlus порно с Артемий Панарин (хоккей) DiskiPlus порно с Варвара Субботина DiskiPlus new casino DiskiPlus 1×bet официальный сайт
#5131 Charlesgunnyhttp://filmkachat.ru
1×slot официальный сайт
Пoдтвepдить личнocть клиента. Для успешного вывода средств, нужно доказать личность клиента. Нa этaпe вepификaции пpoфиля, работники службы защищенности обязаны увериться, собственно у игрока более один акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не сможет вывести свой выигрыш, в у него несомненно несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы. <a href=http://filmkachat.ru/>1×slots официальный сайт мобильная версия</a> <a href=https://xequte.com/forum/topic.asp?TOPIC_ID=15274>https://xequte.com/forum/topic.asp?TOPIC_ID=15274</a> Выбор любого интернет казино на нашем сайте. В описании к каждому Вы можете разузнать, что получите за творенье аккаунта.У любой игры свои притязания по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система засчитает каждую ставку. В рулетке и покере сделать это намного труднее. Именно потому например важно внимательно разбирать обстоятельства получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой забаве, то новички просто «спустят бонус на ветер». зеркала 1×slots <a href=https://www.ls1.com/forums/member.php?u=119536&s=6e1ee7603400e85b9cc7ac9299c4fdd3>https://www.ls1.com/forums/member.php?u=119536&s=6e1ee7603400e85b9cc7ac9299c4fdd3</a>
1×slots официальный сайт зеркало рабочее
1×slots зеркало рабочее Стоит отметить, что бездепозитный приз выдается лишь взрослым новичкам, коие, тому, имеют пригласить личных друзей и своих, также рассчитывающих на поощрительную программу преданности. Подобная технология появилась среди соперничающих онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению собственной популярности, методом привлечения новых игроков. Бонусы – это уникальный шанс для вероятных участников забавы, коие все опробовать софт покер рума и увериться, станут ли они в него играть или нет. Новый игрок испробует свои силы с реальными оппонентами в казино.В случае установленного лимита на сумму вывода выигрыша с бездепозитного бонуса, игрок не может исключить больше заявленной суммы. <a href=http://zemli.com/index.php?subaction=userinfo&user=uttermosthobo2>http://zemli.com/index.php?subaction=userinfo&user=uttermosthobo2</a> Вы скорее, скажем, как все предпочитаете получать подарки и бездепозитные призы казино. Игорные дома брали в повадку одаривать гэмблеров приятными призами. Стать обладателем приветственного презента можно за создание профиля или пополнение счёта. Второй вариант более занимательный, как клубы готовы удвоить депо! Но случае вы новичок и лишь знакомитесь с миром пыла, другого, как пользуйтесь призом за регистрацию.Поспешите зарегистрироваться на официальном веб-сайте Клубника, дабы быстро получить 33 безвозмездных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, бывает реальный шанс победу! 1×slots сайт Сроки активации бонуса устанавливаются каждым казино, но чаще всего они не превышают недели с момента получения. Игроку обязательно нужно применять бездеп в течение указанного срока, в ином случае приз просто исчезнет. Каждый приз возможно получить лишь раз раз, потому случае не применять бездеп в срок, у игрока не будет второго шанса им пользоваться.
1×slots регистрация на сайте
Получить приветственный приз все лишь новые посетители онлайн-казино. Способы описаны в условиях акции каждого легального казино, почаще всего это: Во всех законных онлайн-казино Беларуси нужно подтверждение паспортных данных для игры — это заявка правительства государства.Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных ситуаций с казино, когда в отыгрыша бездепа вас не дадут вывести крупную необходимую выигрыша. <a href=http://www.letts.org/wiki/User:ClaritaMackay>http://www.letts.org/wiki/User:ClaritaMackay</a> Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в индивидуальный кабинет, дабы отобрать бесплатные вращения с вейджером х40;Еще одно условие касается объемов ставки. Операторы устанавливают наивысшую необходимую, которую игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, выбранной в Личном кабинете. При превышении лимита есть риск лишиться бонуса. Существующие ограничения относятся и к конкретным обликам ставок. Например, играя в рулетку, клиент возможность столкнуться с запретом ставить фишки на шансы. 1хслот скачать
1 x slots casino
<a href=http://nakupnidivadlo.cz/index.php/forum/3-pripominky/46564-porno?start=486#236641>зеркло казино 1×slots</a> Составленный экспертами Casino.ru список онлайн-казино с бездепозитным бонусом дозволяет игрокам сопоставить спецпредложения различных операторов.Можно ли в одном интернет казино получить больше 1-го бонуса за регистрацию? Нет, например как в любом онлайн казино есть верховодила, к коим надо(надобно) держаться, не творить 2 аккаута для получения бонусов, по несомненно блокировка обоих аккаутов, не пытайтесь обмануть онлайн казино, приз за регистрацию выдаеться раз раз 1 лицу. 1×slots коды <a href=http://shilinka.ru/user/PatrickLef/>http://shilinka.ru/user/PatrickLef/</a>
1×slots регистрация
<a href=http://kbszw.com/home.php?mod=space&uid=18125>http://kbszw.com/home.php?mod=space&uid=18125</a> 1×slots зеркало проходить регистрацию это отличный вариант Во всех легальных онлайн-казино Беларуси нужно свидетельство паспортных данных для игры — это требование правительства страны.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.oursson.ru/memberlist.php?mode=viewprofile&u=1347>1×slots зеркало рабочее</a>
<a href=https://swordmaster.org/user/JamesVok/>1×slots casino online регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Многие новенькие сомневаются, что поощрительный приз не нужно будет возвращать, том если они выиграли у казино. Это абсолютно безопасно и надежно. Выводя выигранные средства, игрок просто одергивает свое роль в игре и теряет уникальную вероятность – безвозмездно увеличивать собственное вещественное положение.
#5132 Williamsmusehttps://upskilll.ru/consulting
Университет ресторанного бизнеса <a href=https://upskilll.ru/university>https://upskilll.ru/university</a> UPSKILL: обучаем рестораторов, управляющих и сотрудников ресторанов, полностью адаптируя наши курсы, тренинги и программы обучения под особенности каждого заведения.
#5133 Charlesgunnyhttp://filmkachat.ru
1× slots регистрация в 1×slots casino
Самый распространённый из сходственных призов, конечно же, бездеп на день рождения клиента — бонус повторяющий фиксированной суммы либо фриспинов поступает на счёт игрока, а пользоваться им можно в течение установленного периода медли.С другой стороны, намного проще отобрать бездепозитные фриспины за регистрацию в казино и прямо данный начать вращать барабаны в превосходнейших слотах. Главная необыкновенность спинов в том, что они предусмотрены для топовых автоматов. Удастся не пройти вспомогательные раунды, но и прирастить необходимую выигрыша, заработать респины и внутриигровые подарки. <a href=http://filmkachat.ru/>1×slots зеркало сайта</a> <a href=https://webanketa.com/forms/6gtk2c9r64qk4cb5cgw66c9p/>https://webanketa.com/forms/6gtk2c9r64qk4cb5cgw66c9p/</a> 1×slots зеркало этих способов предполагает регистрацию <a href=http://www.psltw.com/home.php?mod=space&uid=535784&do=profile>http://www.psltw.com/home.php?mod=space&uid=535784&do=profile</a> В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать собственный выигрыш с безвозмездных вращений. Прибыль, коию Вы заработаете на этом бездепе возможно назначать на вывод без какого либо отыгрыша.Отказ в прохождении верификации. Если заказчик не хочет либо не может дать документы, подтверждающие его лицо, профиль будет заблокирован вместе со всеми бонусными начислениями.
рабочее зеркало 1хслотс
<a href=https://www.katzenforum.at/forum/media/users/jamesagema.16012/>1×слотс казино</a> 1×slots зеркало на сегодня <a href=http://www.pengstys.com/home.php?mod=space&uid=111377>http://www.pengstys.com/home.php?mod=space&uid=111377</a> 1×slots коды Чтобы бездеп не был начислен на Ваш аккаунт, Вам не активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт механически, а Вы не расчитываете его применять, обратитесь в службу с пожеланием отменить бездепозитный приз.
1×slots зеркало регистрация то дальше необходимо пройти
Новички не обожают незамедлительно же заносить депозит. Это обусловлено неименьем навыка и сомненьем. К счастью, наши можно получить бездепозитный бонус за регистрацию в казино. Неважно собственно начисляет система – фриспины либо кредиты. В всяком случае вы не рискуете собственными сбережениями. Это замечательная возможность запустить приглянувшийся видео разъем или же испытывать фортуну в настольных забавах.Чтобы без увериться в превосходстве бездепозитных призов, достаточно зарегистрироваться в казино и получить одобрение. <a href=http://baroccoshoes.com/bitrix/redirect.php?goto=http://images.google.com.au/url?q=http://gsuso.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/5a9pqWFxyRB>http://baroccoshoes.com/bitrix/redirect.php?goto=http://images.google.com.au/url?q=http://gsuso.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/5a9pqWFxyRB</a> Бездепозитный бонус предоставляется новому игроку за конкретные действия. Часто подарок в виде средств или фриспинов выдается за регистрацию, благодаря чему пользователь получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. 1×slot казино зеркало Активация по промокоду употребляется в различных видах бездепов. Если идет о приветственном бонусе, то набор символов возможно разузнать на крупнейшей странице, в регистрационной форме или письме, которое отчаливает пользователю для подтверждения e-mail. Акции имеют проводиться вместе с партнерскими площадками. Обычно код размещается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется одноразовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном кабинете либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем актуальный код для активации в описании любого промо.Многие новички сомневаются, что поощрительный приз не несомненно отдавать, числе случае они выиграли у казино. Это абсолютно безопасно и накрепко. Выводя выигранные свои, игрок просто останавливает свое участие в игре и теряет уникальную возможность – даром увеличивать собственное вещественное положение.
1×slots зеркало рабочее на сегодня
Казино выделяет возможность заработать и вывести настоящие деньги на бездепозитных призах. Обычно, это малозначительная сумма, которую казино имеет для позволить презентовать игроку.Будьте внимательнее при ознакомлении с правилами во избежание появления конфликтных обстановок с казино, когда в отыгрыша бездепа для не дадут вывести солидную необходимую выигрыша. <a href=http://31057.ww.w.molifan.net/space-uid-2304539.html>сайт 1× slots casino</a> Диапазон ставок, коие вправе устроить игрок, того лимитирован. Обычно ставить можно небольшую необходимую — пределах 10–30 руб. За одно вращение. Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала быстрые выводы. Фишка выплат в том, что достаточно выбрать платёжный инструмент и указать сумму. В большинстве случаев средства зачисляются на электрические кошельки протяжении 15 мин., а на банковские карты – 1–3 трудящихся дня. 1×slots промокод при регистрации 2025 <a href=https://mantiseye.com/community/zacheryinsow>https://mantiseye.com/community/zacheryinsow</a>
1×slots бонус за регистрацию
Обычно, бездепозитные бонусы выдаются под конкретные слоты с фиксированной ставкой, но их точно воспрещено использовать в игровых автоматах с прогрессивным джекпотом. Список игр, в которых возможно использовать бездеп, Вы найдете в описании акции или можете уточнить у службы поддержки заведения. Но есть азартные заведения, готовые просто так вручить деньги на забаву. Для этого довольно сделать профиль. Чтобы вывести выигрыш, сначала необходимо выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа.Максимальная ставка ? уточняется в валюте счета и ограничивает размер ставки за раз спин. В случае ее превышения приз имеет быть аннулирован. Также в правилах возможность содержаться запрет на размещение ставок определенного вида, примеру, по равным шансам в рулетке (то есть, на чет или нечет, красное либо темное и т.д.). <a href=http://www.edufinancierafcpc.com/index.php/forum/suggestion-box/287408>http://www.edufinancierafcpc.com/index.php/forum/suggestion-box/287408</a> При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое можно предназначить ирге в казино. 1×slots зеркало проходить регистрацию это отличный вариант Чтобы самостоятельно увериться в превосходстве бездепозитных призов, довольно зарегистрироваться в казино и получить поощрение.Игры, каких возможно играть на бонусные средства. Проверьте список игр, в можно играть на бонусные свои, вполне они Вам не понравятся и не стоит расходовать своё время на такую акцию.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.l2endless.com/showthread.php?tid=345433>1×slots зеркало регистрацию более популярный вариант это</a>
<a href=https://www.bf-france.com/forums/profile/30064-rabofreeor/>1×slots быструю регистрацию а также мгновенное</a>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=68870&result=reply>рабочее зеркало 1×slots</a>
<a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/7021–1×slots-kazino-zerkalo#7031>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Главное преимущество спинов – возможность выучить разные слоты. Также удастся насладиться бонусными раундами, испытывать фортуну в риск-туре и преувеличить выигрыш за счёт особенных символов. Однако столько игровой процесс заслуживает внимание, ведь другого, как сосредоточиться на реальном выигрыше.
#5134 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Черкесова Бэлла Мухарбиевна порно порно с Матвей Сафонов (футбол) <a href=https://t.me/vchkogpu_ru>букмекерская контора фонбет официальный сайт</a> Петрова Ольга Викторовна порно порно с Максим Глушенков (футбол) <a href=https://kompromat1.online/>1×bet скачать приложение на андроид</a> порно с Абрамченко Виктория Валериевна 1×bet зеркало xbet порно с Ирина Сидоркова пари букмекерская контора 1×bet зеркало слоты скачать 1×bet на андроид бесплатно порно с Баталина Ольга Юрьевна
DiskiPlus порно с Арина и Дина Аверины, гимнастки DiskiPlus kent casino регистрация <a href=https://diskiplus.ru/>DiskiPlus казино проиграл</a> DiskiPlus букмекерская контора бесплатно скачать DiskiPlus букмекерская контора официальный сайт скачать <a href=https://www.diskiplus.ru/>DiskiPlus bet casino</a> DiskiPlus porno Алена Косторная (фигурное катание) DiskiPlus kent casino регистрация DiskiPlus Любимова Ольга Борисовна порно DiskiPlus букмекерская контора фонбет официальный DiskiPlus скачать 1×bet на андроид DiskiPlus pin up casino официальный DiskiPlus порно с Анна Щербакова, фигуристка
#5135 AHoini
<a href=http://kumkangenc.com/bbs/board.php?bo_table=inquiry&wr_id=159476>1win mozambique</a> <a href=https://jaredfoswy.blogs-service.com/61504953/5-essential-elements-for-bc-game-casino>bc.game casino</a>
#5136 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее
Чтобы получить возможность исключить прибыль с бездепозитного приза в казино, необходимо выполнить ряд критерий:Обычно бездепозитные акции от казино, приходят на эл. Почту в деньки рождения либо дни. В неких интернет казино можно обратиться в чат и как неизменному игроку, возможно вас предложат бездепозитное предложение. <a href=http://filmkachat.ru/>1×slots зеркало регистрацию более популярный вариант это</a> Отказ в прохождении верификации. Если заказчик не желает или не может дать документы, подтверждающие его личность, профиль будет заблокирован вместе со всеми бонусными начислениями.Бездепозитный приз предоставляется новенькому игроку за конкретные деяния. Часто презент вид денег либо фриспинов выдается за регистрацию, благодаря чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. <a href=https://www.fanfiction.net/u/16465534/>https://www.fanfiction.net/u/16465534/</a> 1×slots зеркало на сегодня <a href=http://www.neworleansbbs.com/home.php?mod=space&uid=352303>http://www.neworleansbbs.com/home.php?mod=space&uid=352303</a>
1×slots casino зеркало рабочее
Для как, дабы отыграть необходимую вашего бездепозитного бонуса нужно выполнить обстоятельства вейджера. Очень нередко фриспины даются на определенные слоты (book of ra, book of dead, book of sun), подбирайте разъем для по, они очень красивые и качественные. Бездепозитные бонус возможность быть валютным например и в виде фриспинов на слотыНа условиях отыгрыша даровых призов стопам остановиться подробнее. С ними связаны нюансы, которые нельзя оставить без внимания. 1×slots зеркало сайта <a href=https://job.epday.com/home.php?mod=space&uid=636603>https://job.epday.com/home.php?mod=space&uid=636603</a> Иногда виде поощрения за регистрацию шансы выдаваться билеты для участия в турнирах. Условия их проведения довольно отличаются, поэтому мы рекомендуем ознакомиться с любым предложением отдельно.Онлайн-казино с бездепозитными призами ставят клиентам условия для пользования бездепами, поэтому перед ролью в акции лучше подробно ознакомиться со всеми правилами и аспектами промоакции. Условия могут касаться получения приза, его использования и следующего вывода денежных средств в случае выигрыша. 1× слот зеркало Акционные предложения от казино есть в различных форматах. Часто призы даются в мена на депозит. Игрок заносит платеж и получает деньги, бесплатные вращения и другие одобрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — вид приза, который гарантирован за выполнение определенных поступков на сайте:
1× slots регистрация в 1×slots casino
Суммы сходственных услуг, в, колеблются от трех до двадцати $, а вейджер на эти средства обязан сочинять от 30 до шестидесяти раз. Зачастую, наивеличайшая сумма выигрыша здесь составит от одной до 2-ух сотен $. Если игры выиграет больше, то все средства имеют быть списанными до очень разрешенного выигрыша. Здесь бывает смысл выводить еще несуществующие деньги на собственную платежную систему и далее находить заведение с благоприятными под данную необходимую релоадом или бонусом за первое пополнение счета. Есть несколько подвидов бездепозитного гонорары, предлагаемого великим количеством заведений.За счёт спинов выйдет запустить разные онлайн слоты, протестировать стратегии и поднабраться опыта. Фишка в, собственно вращения начисляются на лучшие аппараты с уникальными опциями и высочайшей отдачей. Не запамятовывайте, что в каждом акционном предложении предусмотрены особые притязания – временные лимитирования, максимальный размер ставки, перечень доступных игр. <a href=http://newdigital-world.com/members/oscarlak.html>http://newdigital-world.com/members/oscarlak.html</a> 1х слот 1хслотс регистрация перейти на 1×slots Необходимость отыгрыша. Вейджер ситуации повыше, чем для призов за депозит. И пока средства не отыграны, исключить их невозможно.Это тоже безвозмездные деньги, коие поступают на аккаунты свежеиспеченных компьютерные в регистрирования. А необыкновенность этих бонусов состоит никаких, что обретенные финансы непременно стопам использовать в продолжении назначенного времени.
1×slots casino регистрация 1×slots review live
Бездеп с фриспинами имеет охватывать всю коллекцию игр на веб-сайте или разработки 1-го провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении акции. Выигрыш имеет быть выведен в того, как пользователь отыграет данную сумму. Возможность расценить полный функционал слотов — основное совершенство этой разновидности. Игроку становятся доступны что, эти функции, которые отсутствуют в демонстрационном режиме, а возможность выиграть реальные деньги добавляет ясных азартных ощущений.Теоретически, к бесплатным бонусам возможно отнести так называемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, потому собственно они деют только возможность делать ставки. Чаще всего применяются коды. Их нужно вносить в специальные окошки регистрационной анкеты, если речь о пригласительных призах, или в определенном разделе собственного офиса игрока.Самые пользующиеся способы вывода денег ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам подобии Neteller и Skrill, еще используют криптовалютными кошельками. Вывод выигрышей может осуществляться мгновенно либо развлекать от нескольких часов до нескольких суток. 1×слот регистрация в 1×slots casino <a href=https://www.xn–9n3bn8ewuh9zp.kr/bbs/board.php?bo_table=free&wr_id=543652>https://www.xn–9n3bn8ewuh9zp.kr/bbs/board.php?bo_table=free&wr_id=543652</a> Диапазон ставок, коие вправе сделать игрок, кроме лимитирован. Обычно назначать можно маленькую сумму — около 10–30 руб. За одно вращение.
1×slots зеркало рабочее
<a href=http://j67236dr.bget.ru/user/Joshuaelden/>http://j67236dr.bget.ru/user/Joshuaelden/</a> Поспешите забрать бездепозитные призы за регистрацию в казино из представленного списка. Все платформы столько водят легальную деятельность, но и обрадуют честными результатами игры, высокой отдачей, резвыми выплатами.Предложения с бездепозитными призами за регистрацию разрешают свежим заведениям привлечь аудиторию на свой вебсайт. А игроки же получают вероятность играть на настоящие деньги без депозита в казино и заработать небольшой стартовый капитал, кот-ый разрешается исключить на карту банка либо электрический кошелек. 1×slots казино мобильная версия После получения приза вывод средств для посетителя будет недоступен до, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя либо пара месяцов. Выводить средства игрок сможет лишь последствии отыгрыша.Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих требований, не обязательной верификации. Если на сайте учтена неотъемлемая процедура доказательства личности, то исключить выигрыш получится лишь после ревизии данных. Приготовьтесь заполнить анкету и отправить в техподдержку документ, подтверждающий личность.
<b>Смотреть еще похожие новости:</b>
<a href=http://miupsik.ru/forums/showthread.php?tid=229514>1×slots casino регистрация</a>
<a href=http://complainanything.com/node/158?page=1019#comment-1445651>1×slots зеркало сайта</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бонус в казино без депозита имеет разные варианты: может быть приветственный бонус, промоакции в честь каких-либо праздников либо главных дат, бонус за вербование свежих игроков, лояльность и получение VIP-статуса. Главное преимущество спинов – возможность выучить разные слоты. Также получится насладиться бонусными раундами, испытать удачу в риск-туре и преумножить выигрыш за счёт особых символов. Однако столько игровой процесс заслуживает внимание, ведь лучше сосредоточиться на реальном выигрыше.
#5137 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino скачать порно с Евгений Малкин (хоккей) <a href=https://vestnik-jurnal.com/>1×bet зеркало xbet</a> Валентина Матвиенко порно Крючкова Полина Викторовна порно <a href=https://specreporter.com/>online casino 7k</a> 1×bet скачать приложение на андроид порно с Антропова Валентина Викторовна 7k casino зеркало рабочее Кузнецова Анна Юрьевна порно kometa casino champion casino 1×bet на сегодня
DiskiPlus игры казино DiskiPlus porno Александр Соболев (футбол) <a href=https://www.diskiplus.ru>DiskiPlus online casino</a> DiskiPlus casino рабочее DiskiPlus порно с Евгения Медведева <a href=https://www.diskiplus.ru>DiskiPlus букмекерская контора без</a> DiskiPlus кент casino DiskiPlus суть казино DiskiPlus пин ап casino pin up top DiskiPlus играющие казино онлайн DiskiPlus рабочие зеркала казино DiskiPlus 1×bet скачать приложение на андроид DiskiPlus порно с Евгения Медведева
#5138 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация
Но есть азартные заведения, готовые просто так вручить деньги на игру. Для сего довольно сделать профиль. Чтобы исключить выигрыш, сначала нужно выполнить вейджеровые условия, прописанные в критериях получения бездепа.Приветственный приз без депо ? подарок за регистрацию. Выдается деньгами, фриспинами либо баллами. В заключительном случае бонусные баллы применяются для участия в турнирах или размена на настоящие деньги. <a href=http://filmkachat.ru/>1×slots зеркало этих способов предполагает регистрацию</a> Популярность онлайн казино растёт и всё больше юзеров начинают интересоваться азартными играми. Бездепозитные бонусы 2022 года, это оригинальные презенты за регистрацию. С их поддержкой новые игроки все получить безвозмездные вращения или деньги на баланс за одну регистрацию. С появлением игорных заведений в онлайне, бездепозитные призы стали моднейшим методом вербования игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы расскажем. Наш вебсайт собрал лучшие предложения из интернета на 2022 год. Воспользуйтесь хоть подарком и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить обстоятельства.Прибывшие на акк финансы бездепозитные бонусы предназначаются, в, только для свежеиспеченных юзеров, которые раньше не имели личного аккаунта в данном казино. Исходя из сего, в ранее у игрока был изготовлен депо, то, по всей вероятности, у него больше не несомненно способности рассчитывать на получение такового приза в определенном заведении. <a href=https://u.pcloud.link/publink/show?code=XZNQwV5ZNtDPSsk07bJazNAm6jpRESTTmoa7>https://u.pcloud.link/publink/show?code=XZNQwV5ZNtDPSsk07bJazNAm6jpRESTTmoa7</a> Мы собрали и опубликовали перечень лучших бездепозитных казино с призами за регистрацию, которые гарантируют щедрые выигрыши и моментальные выплаты. 1×slots зеркало на сегодня <a href=http://www.forumdipace.org/profile.php?mode=viewprofile&u=558733>http://www.forumdipace.org/profile.php?mode=viewprofile&u=558733</a>
1×slots зеркало быструю регистрацию а также мгновенное
<a href=http://khodaumo.com/forum/viewtopic.php?f=2&t=75126&sid=001e3bf5b7a3e91a3723be6e57ed7b2a>1 x slots casino</a> рабочее зеркало 1×slots К сожалению, нет. Почти все казино, требуют внесение но бы 1-го малого депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, собственно исключить деньги разрешается лишь на ту платежную систему, с коей был сделан депо. <a href=http://iminthai.com/home.php?mod=space&uid=272045>http://iminthai.com/home.php?mod=space&uid=272045</a> 1×slots регистрация на сайте
1хслотс рабочее зеркало
Список например именуемых «не территорий» прилагается к правилам бонусной программы игорного портала. Обязательно проверьте, распространяются ли на вас подобные санкции. <a href=http://royalstone.ru/bitrix/redirect.php?goto=http://melado.ru/bitrix/redirect.php?goto=http://modul-ves.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/C-xhCVE-lYT>http://royalstone.ru/bitrix/redirect.php?goto=http://melado.ru/bitrix/redirect.php?goto=http://modul-ves.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/C-xhCVE-lYT</a> 1×slots официальный demo регистрация в 1×slots casino Благодаря программке преданности от игорного заведения, возможно взять хороший старт и без дополнительных вложений запустить видеослоты. Кроме такого, возможно рассчитывать на реальную фортуну и получить, без инвестиции собственных денег, большой выигрыш.Бездепозитный бонус – это финансовое вознаграждение, которое выдается участнику забавы в казино, для его вербования и появления заинтересованности. Любой посетитель, кот-ый соответствует условиям выдачи похожего бездепозитного бонуса, может претендовать на получение вышеуказанного приза. Такое одобрение считается наиболее эффективным методом, дающим возможность стартовать в игре, не вкладывая собственных материальных средств.
1×slots зеркало регистрация в 1×slots casino
1хслотс казино зеркало <a href=http://www.0pcdd.com/space-uid-292775.html>http://www.0pcdd.com/space-uid-292775.html</a> Бездепозитный приз казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби избранного заведения, определится в выборе игр и проверить качество работы саппорта. Довольно часто, начиная игровой процесс, игрок теснее отказывается останавливаться и проделывает настоящий лепта. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть бесплатно вероятно как один таки с бонусом за регистрацию без надобности заносить депозит.Автоматическая активация взгляд самой удобной, но ручной способ имеет перед ней превосходства. Прежде чем применять вознаграждение от казино, стоит заранее найти, сколько медли потребуется на исполнение всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деяния бонуса.
казино 1×slots
Чтобы бездеп не был начислен на Ваш аккаунт, Вам надо активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк механически, а Вы не планируете его применять, обратитесь в саппорта с просьбой отменить бездепозитный приз. <a href=https://oke.zone/profile.php?id=31165>https://oke.zone/profile.php?id=31165</a> 1×slots зеркало регистрация то дальше необходимо пройти В бонусную программку множества операторов входят регулярные бездепы. Это пожизненные промоакции, поощряющие активных постоянных игроков. Популярный формат — раздача фриспинов по конкретным дням недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают постоянные призы без депозита в мена на накопленные баллы преданности.Приветственный приз без депо ? презент за регистрацию. Выдается деньгами, фриспинами или баллами. В заключительном случае бонусные баллы применяются для участия в турнирах либо размена на реальные средства.
<b>Смотреть еще похожие новости:</b>
<a href=https://vredeenvermaak.be/forum/vrede-en-vermaak/>1хслотс мобильная версия зеркало</a>
<a href=https://www.formulersupport.com/Thread-1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE–96335>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Да, у даровых призов есть дефекты. Прежде всего, они обыкновенно очень. Кроме как, условия вейджера по ним постоянно строгие. Но таки неимение риска делает их довольно красивыми для клиентов. За счёт спинов получится запустить различные онлайн слоты, протестировать стратегии и поднабраться опыта. Фишка никаких, что вращения начисляются на топовые аппараты с оригинальными опциями и высокой отдачей. Не запамятовывайте, что в каждом акционном предложении учтены специальные притязания – временные ограничения, наибольший размер ставки, перечень доступных игр.
#5139 Charlesgunnyhttp://filmkachat.ru
1хлот регистрация в 1×slots casino
В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, нужно обратиться в службу спустя лайв-чат на сайте казино.Бонус за регистрацию в казино выдается только раз один на 1-го игрока. Но бывают дополнительные промоакции, в рамках которых бездепы расступаются для постоянных посетителей и такие презенты Вы можете получить более 1-го раза. <a href=http://filmkachat.ru/>1×slots регистрация</a> <a href=https://blog.udn.com/G_112062930339362154/181391895>https://blog.udn.com/G_112062930339362154/181391895</a> А ознакомиться с свежими онлайн казино, Вы сможете за счет бонусов с выводом прибыли, коие Вы сможете получить без депозита. 1хлот регистрация в 1×slots casino <a href=http://ossethnos.ru/index.php?subaction=userinfo&user=gapingguidebook>http://ossethnos.ru/index.php?subaction=userinfo&user=gapingguidebook</a>
1 х слотс зеркало
Бездепозитный приз за регистрацию в казино с выводом средств в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых свежих, великодушных и испытанных бонусах в онлайн казино, коие обновляются каждый денек. x1 slots 1хслотс регистрация перейти на 1×slots У каждой забавы средства притязания по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система засчитает каждую ставку. В рулетке и покере устроить это намного сложнее. Именно поэтому так важно внимательно разбирать обстоятельства получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в любой ирге, то новенькие попросту «спустят приз на ветер».Бездеп с фриспинами возможность охватывать всю коллекцию игр на веб-сайте или разработки одного провайдера. Обычно предлагается конкретный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш имеет быть выведен последствии как, как юзер отыграет данную сумму. Возможность расценить полный перечень слотов — главное достоинство данной разновидности. Игроку становятся доступны что, эти опции, коие отсутствуют в демонстрационном режиме, а вероятность выиграть реальные деньги добавляет ясных азартных ощущений. <a href=https://lukashjhf55677.blogdon.net/nude-ai-understanding-the-intersection-of-innovation-and-ethics-in-image-manipulation-46478781>https://lukashjhf55677.blogdon.net/nude-ai-understanding-the-intersection-of-innovation-and-ethics-in-image-manipulation-46478781</a> 1×slots казино зеркало Чаще всего интернет-казино предлагают бездепозитные бонусы свежим пользователям. Эта промо-акция очень эффективно завлекает новичков, подталкивая их к открытию счета. Конечно, не все они становятся послушными посетителями, хотя сам факт регистрации аккаунта играет на руку заведению.Чтобы бездеп не был начислен на Ваш аккаунт, Вам не нужно активировать бонусный код. Если поощрение от казино было добавлено на Ваш акк механически, а Вы не расчитываете его применять, обратитесь в саппорта с просьбой отменить бездепозитный бонус.
1 xslots рабочее зеркало
В любом казино с бездепозитным призом учтены вейджеровые условия. Это один-единственный «подводный камень», который стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) устроить определённое количество ставок. Чем круче бонус, что, этим сложнее выполнить условия, и напротив.Риск-игра по одинаковым шансам – Также казино имеет воспрещать выполнять обстоятельства по отыгрышу счет раунда на удвоение, который предлагается в слотах, видео-покере и некоторых других играх. <a href=https://diakov.net/user/Michaelplura/>https://diakov.net/user/Michaelplura/</a> 1×slots casino регистрация Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских рублей. В критериях акции предписано, что вейджер бездепозитного бонуса х20. Поэтому, дабы отыграть приз, игроку несомненно необходимо сделать ставок на 35*20=700 руб.Существует ли стратегии для отыгрыша бездепозитных бонусов? К раскаянию нет, на выигрыши либо проигрыши с призов, казино или игрок повлиять возможности, отдача игр происходит от разработчиков игр.
1×slots акции
Большинство клубов привлекают внимание игроков за счёт различных подарков. На 1 веб-сайтах возможно получить виртуальные кредиты, которые откроют доступ ко всему софту. На иных же, администрация предлагает благотворительные вращения для пуска топовых интернет слотов. Несмотря на различные акции, стоит выделить самые основные. <a href=http://nakupnidivadlo.cz/index.php/forum/3-pripominky/46545–1#234735>1хслотс официальный сайт зеркало</a> 1×slots официальный зеркало <a href=http://pravo.by/bitrix/redirect.php?goto=http://stimul.online/bitrix/redirect.php?goto=http://heib.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/zqsUQoLFVKh>http://pravo.by/bitrix/redirect.php?goto=http://stimul.online/bitrix/redirect.php?goto=http://heib.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/zqsUQoLFVKh</a> Начнём с того, собственно любое промо за регистрацию предполагает некоторые обстоятельства. Бездепозитные призы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность денежного оборота, необходимая для исполнения критерий. Пример, возымели бесплатные вращения и выиграли с них 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 рублей, неудачных или выигрышных, маловажно. После исполнения, бонусный баланс перейдёт на реальный и будет доступным к выводу.
1×slots официальный сайт зеркало
Oтыгpaть бонус с указанным вeйджepом, достичь нужно сдeлaть cтaвoк нa cумму, превосходящую размер приза в некоторое раз. <a href=https://bridge-clip.ru/user/CharlesWrard/>https://bridge-clip.ru/user/CharlesWrard/</a> 1×slots casino зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://minifishtank.net/forum/showthread.php?tid=13402>1×slots официальный зеркало</a>
<a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=51227>1× slots casino зеркало</a>
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=61321>1хслотс официальный сайт зеркало</a>
<a href=https://vredeenvermaak.be/forum/vrede-en-vermaak/>1×slots официальный сайт мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вообще перейдя в казино — верховодила одинаковы в получении бездепозитных призов, в стереотипные управляла заходит: доказать эл. Почту и телефон, наполнить свой собственный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ. Акции распространяются как на все забавы казино, так и на ограниченный перечень. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino прочие. Промо имеет обхватывать разработки 1-го производителя. Бездеп не пересекается с другими промоакциями казино. Если на сайте предусмотрен кэшбек, он не начисляется за ставки, изготовленные бонусными средствами. Для идентификации платежных реквизитов игрока может потребоваться пополнение счета на минимальную необходимую.
#5140 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация то дальше необходимо пройти
В бонусную программку многих операторов входят систематические бездепы. Это бессрочные акции, поощряющие активных постоянных игроков. Популярный формат — раздача фриспинов по конкретным денькам недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депо в обмен на скопленные баллы преданности.Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке необходимо пополнить счет в казино. Для депозитных призов, данная процедура не необходима, так как депозит уже изготовлен. <a href=http://filmkachat.ru/>1х слот регистрация в 1×slots casino</a> Бездепозитные бонусы казино это финансовая компенсация, предлагаемая пользователям на дармовой базе и возможность выступать в онлайн казино бесплатно. Если ассоциировать их с поощрениями за вклад, в которых свои выдаются только потом первоначального пополнения счета, то бездепозитные гонорары получаются безвозмездно. То есть, играющий получает возможность создавать ставки на теснее быть деньги, коие выдаст заведение, исполняя, при, обычные деяния, чтобы их извлечь (тут идет речь о регистрация, удостоверении личности с внедрением номера телефонного, дизайна заказы и т.д.).Предложения с бездепозитными бонусами за регистрацию дозволяют новым заведениям привлечь аудиторию на собственный вебсайт. А игроки тому получают возможность играть на реальные деньги без депозита в казино и заработать небольшой стартовый капитал, кот-ый разрешается исключить на карту банка либо электрический кошелек. <a href=https://codepen.io/bjxkafyt-the-encoder/pen/bNbrqxY>https://codepen.io/bjxkafyt-the-encoder/pen/bNbrqxY</a> Многие новички колеблются, собственно поощрительный приз надо будет отдавать, том если они выиграли у казино. Это абсолютно неопасно и накрепко. Выводя выигранные свои, игрок просто останавливает свое роль в игре и теряет уникальную возможность – даром наращивать собственное вещественное положение.Обычно показатель повыше, чем для бонусов на депо. Не дивитесь, в он будет в х100. Иногда завышенный коэффициент вейджера уточняется для обитателей отдельных стран. 1хслот скачать <a href=http://eimage.hu/2020/04/17/how-to-create-a-school-article-introduction/?unapproved=56901&moderation-hash=58be54e40599b5de67edb36d3bbeb7bb#comment-56901>http://eimage.hu/2020/04/17/how-to-create-a-school-article-introduction/?unapproved=56901&moderation-hash=58be54e40599b5de67edb36d3bbeb7bb#comment-56901</a>
1×slot зеркало
Существует ли стратегии для отыгрыша бездепозитных призов? К огорчению нет, на выигрыши или проигрыши с бонусов, казино или игрок воздействовать имеет, отдача игр происходит от разработчиков игр. 1× slots casino зеркало <a href=http://travel.navigator-mas.ru/user/DoctorLazutapr/>http://travel.navigator-mas.ru/user/DoctorLazutapr/</a> Стоит отметить, собственно бездепозитный приз выдается лишь совершеннолетним новичкам, которые, же, могут пригласить собственных приятелей и людей, кроме претендующих на поощрительную программку лояльности. Подобная технология появилась между конкуренцию онлайн-казино для популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению своей популярности, методом привлечения новых игроков. Бонусы – это уникальный шанс для вероятных соучастников забавы, которые шансы опробовать софт покер рума и убедиться, будут ли они в него играть либо нет. Новый игрок попробует средства силы с настоящими оппонентами в казино. 1×slots сайт зеркало В онлайне слишком количество скриптовых сайтов, которые принадлежат плутам. Их главная цель – заинтересовать гэмблеров, пообещав не щедрые презенты, но и солидные выигрыши. Так что кое-какие сайты предлагают получить за регистрацию том $1 000.
1хслот зеркало сайта
Перед активацией принципиально внимательно изучить условия акции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, на коих возможно пользоваться предложением. Если бездеп обхватывает ограниченный список игр, рекомендуется разузнать максимальные коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только в том случае, если оператор не установил строгие ограничения на максимальную необходимую ставки. У любого игорного заведения свои правила и обстоятельства. Но, чтобы получить бонусы, необходимо выполнить стереотипные деяния:Главным моментом в возникновении этих вознаграждений произведено том,, что пустив их в ход, игрок ничем не рискует и в последствии никому ничего не несомненно должен (не зависимо, получит ли он благодаря бонусам какой-либо выигрыш или моментально спустит все лишь собственно прибывшие деньги). То есть, казино снабжает игрока возможностью на дармовой базе выступать во различные слоты даже спонсирует игру. <a href=https://www.dcsportsconnection.com/community/profile/candacehtj13436/>https://www.dcsportsconnection.com/community/profile/candacehtj13436/</a> Бездепы с безвозмездными вращениями предоставляют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд платит казино. Число спинов ограничено и редко выше сотку. Если промоакция включает в себя много даровых игр, их начисление имеет быть разбито на количество дней.Онлайн гемблинг развивается с каждым деньком все больше и больше, новые бренды создаются не по дням а по часам. Новые онлайн казино проделывают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и тем наиболее предлагают бездепозитные призы за регистрацию, собственно бы не упустить такую возможность — как пользоваться новым бездепом, рекомендуем посещать наш сайт как можно чаще, самое аппетитное и свежие несомненно добавляться в данном же списке. 1×слот регистрация в 1×slots casino Бездепозитные бонусы — это презенты от казино вид бонусных денег или фриспинов для игровых автоматов, которые начисляются на акк игрока в процедуры регистрации на сайте заведения. Для получения этих поощрений депо не потребуется.
1×slots регистрация 1×slots casino 777 online
Мы рекомендуем не отрицаться от похожих услуг знаменитых казино. Выделите некоторое минут на регистрацию, получите приз и попытайтесь его отыграть. Может быть, сегодня фортуна несомненно на вашей стороне!Главное преимущество спинов – вероятность выучить разные слоты. Также получится насладиться бонусными раундами, испытывать удачу в риск-туре и преувеличить выигрыш за счёт особенных символов. Однако не игровой процесс заслуживает внимание, как какого-либо сосредоточиться на реальном выигрыше. Каждый в должен сначала детально изучить обстоятельства по получению и отыгрышу приглянувшегося подарка. Если всё устраивает, поторопитесь арестовать благотворительные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо в начать вращать барабаны топовых слотов.Хотя благотворительные бонусы начисляются без депо, не исключено, собственно вам придется заносить деньги. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только в такого, как новый заказчик впервые пополнит игровой счет. 1×slot зеркало рабочее регистрации на телефон придет <a href=http://city-hall.nvkb.ru/forum/index.php/user/88854/>http://city-hall.nvkb.ru/forum/index.php/user/88854/</a> 2. Создать новый профиль. Для регистрации нужно заполнить небольшую анкету либо зайдите в индивидуальный кабинет при помощи соц сеток;В случае установленного лимита на необходимую вывода выигрыша с бездепозитного приза, игрок не сможет вывести больше заявленной суммы.
1×slot зеркало
Бездепозитные призы за регистрацию в игровых автоматах для собственников онлайн-казино считаются долею маркетинговой кампании, направленной на повышение аудитории вебсайта. Так они продвигают средства бренды и привлекают новых клиентов. Срок активации и время на отыгрыш. Зачисление денег либо фриспинов случается при активации протяжении строго ограниченного периода, похожие притязания предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать приз количество дней или даже месяцов. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с неоправданно высоким вейджером.Срок отыгрыша — это этап, кот-ый начинается в момент активации приза и заканчивается с его закрытием. Пользователю нужно уложиться в данный временной промежуток, иначе призовые свои аннулируются. Казино устанавливают перечень игр, ставки каких засчитываются при расчете отыгранных денег. Если тайтл не заходит в данный перечень, то ему быть недосегаем для загрузки в деянья бонусного предложения. <a href=http://wdty.org/home.php?mod=space&uid=261909>http://wdty.org/home.php?mod=space&uid=261909</a> Для доказательства электрической почты, просто перейдите по интенсивной ссылке в письме, приобретенном от игрового заведения. 1×slots официальный зеркало рабочее Бездепы с безвозмездными вращениями предоставляют юзерам право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд выплачивает казино. Число спинов ограничено и изредка превышает сотку. Если промоакция включает в себя количество безвозмездных игр, их начисление имеет быть разбито на некоторое дней.
<b>Смотреть еще похожие новости:</b>
<a href=https://creapnl.com/foros/tema/1×slots-%d0%b7%d0%b5%d1%80%d0%ba%d0%b0%d0%bb%d0%be-%d0%bf%d1%80%d0%be%d1%85%d0%be%d0%b4%d0%b8%d1%82%d1%8c-%d1%80%d0%b5%d0%b3%d0%b8%d1%81%d1%82%d1%80%d0%b0%d1%86%d0%b8%d1%8e-%d1%8d%d1%82%d0%be-16/>1×slots зеркало проходить регистрацию это отличный вариант</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие возможно предназначить забаве в казино. Для получения бонуса нужно ознакомиться с программкой преданности казино и сделать ставки на сумму, необходимую для перехода на следующий уровень.
#5141 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino приложения казино сочи <a href=https://m.repost.news/>где казино</a> porno Илья Ковальчук (хоккей) casino актуальное зеркало <a href=https://specreporter.com/>casino рабочее зеркало</a> порно с Евгений Малкин (хоккей) карты казино retro casino porno Мария Шарапова 1×bet скачать приложение на андроид 1×bet сайт 1×bet xyz букмекерская контора фонбет официальный
DiskiPlus порно с Александр Большунов (лыжные гонки) DiskiPlus pin ап casino <a href=https://www.diskiplus.ru>DiskiPlus 1×bet на сегодня</a> DiskiPlus порно с Евгения Медведева DiskiPlus винлайн букмекерская контора <a href=https://diskiplus.ru/>DiskiPlus casinos xyz</a> DiskiPlus casino pin официальный DiskiPlus bet casino DiskiPlus up casino скачать DiskiPlus pin up casino пин ап DiskiPlus Мухтиярова Елена Вячеславовна порно DiskiPlus 1go casino DiskiPlus леон букмекерская контора
#5142 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на 1хслотс
За счёт спинов получится запустить разные интернет слоты, протестировать стратегии и поднабраться опыта. Фишка что, нет, что вращения начисляются на топовые аппараты с уникальными опциями и высочайшей отдачей. Не забывайте, что в любом акционном предложении учтены специальные требования – кратковременные ограничения, максимальный размер ставки, список доступных игр. <a href=http://filmkachat.ru/>1×slots промокод при регистрации</a> Для получения выигрыша требуется выполнить условия казино. Чаще всего игроку нужно поставить определенную сумму, но уже из личных денег. Она рассчитывается из общего размера выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, в юзер выиграл 1000 руб., а множитель сочиняет х30, исключить средства возможно несомненно, сделав ставки на 30 000 руб.Фриплей-бонусы встречаются только в некоторых клубах. Они зачисляются незамедлительно последствии создания профиля и активны недолговременное время. Если не успеете израсходовать свои, они просто сгорят. Касаемо медли, правило бонусы активны на часа. <a href=https://ilde2.upf.edu/clatmooc/v/ibq>https://ilde2.upf.edu/clatmooc/v/ibq</a> Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен перечень превосходнейших онлайн казино, коие предлагают своим игрокам щедрые призы за регистрацию.Денежные средства. Третий бонус за регистрацию без депозита – наличные. К огорчению, лишь известные и популярные клубы могут дать средства в руб. Либо долларах. С их помощью у насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед этим нужно выполнение конкретных критерий. 1хслотс рабочее зеркало на сегодня <a href=http://bbs.aprjy.com/home.php?mod=space&uid=14729>http://bbs.aprjy.com/home.php?mod=space&uid=14729</a>
1×slots официальный зеркало рабочее
Не сложно додуматься, что not the slightest deposit bonuses почти разу не посещают немаленькими. Чаще всего идет о пяти–тридцати баксах (либо эквиваленте этой суммы в иной еденице). <a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=90725>1×slots скачать на айфон</a> 1×slots зеркало сайта В интернет-сети постоянно возможно найти списки более популярных и гарантированных поощрительных программ от модных онлайн-казино.В разделе с призами активировать собственный подарок. Найти игры, для которых предусмотрено одобрение и использовать бонус по назначению. <a href=https://www.feeder.mobi/members/forsedropmi/profile/>https://www.feeder.mobi/members/forsedropmi/profile/</a> 1× slots официальный Так собственно главное различие презента на депо от бездепа – неотъемлемое пополнение счёта. Вы можете привнести депо и преумножить стартовый капитал или арестовать бездеп и всем не придётся рисковать своими сбережениями. Поспешите выполнить обычные требования, и администрация ресурса начислит щедрое одобрение!
казино 1×slots официальный сайт
Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются незамедлительно в создания профиля и активны непродолжительное время. Если не успеете потратить свои, они попросту сгорят. Касаемо времени, в большинстве случаев бонусы активны на часа.Доступ к дару возможность раскрываться механически в введения промокода либо обращения в службу сайта. В первом случае от пользователя не потребуется практически поступков. Бездеп с активацией по коду встречается почаще всего. Игроку нужно установить совокупность знаков в графе, которая может пребывать в регистрационной форме в Личном кабинете. Бездеп с фриспинами может охватывать всю коллекцию игр на сайте или разработки 1-го провайдера. Обычно предлагается определенный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш возможность быть выведен после как, как юзер отыграет эту необходимую. Возможность оценить глубокий возможностей слотов — основное совершенство этой разновидности. Игроку становятся доступны что, эти опции, коие отсутствуют в демонстрационном режиме, а возможность выиграть реальные деньги прибавляет ярчайших азартных ощущений. <a href=http://top-extern.ru/index.php?subaction=userinfo&user=tastefulcluster>http://top-extern.ru/index.php?subaction=userinfo&user=tastefulcluster</a> 1× slots регистрация в 1×slots casino С другой стороны, гораздо проще отобрать бездепозитные фриспины за регистрацию в казино и прямо в начать вращать барабаны в наихороших слотах. Главная необыкновенность спинов что, нет, собственно они предусмотрены для лучших автоматов. Удастся столько пройти вспомогательные раунды, хотя и прирастить сумму выигрыша, заработать респины прочие внутриигровые презенты.На критериях отыгрыша даровых бонусов стопам остановиться подробнее. С ними связаны аспекты, коие невозможно забыть без внимания.
1×slots на любой вкус как пройти регистрацию
<a href=https://www.digicube.de/forum/threads/486538–1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE?p=685860#post685860>1хслотс зеркало</a> В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и в случае спорных ситуаций нет способности куда-то пожаловаться и доказать собственную правоту.Нет. Для получения бездепозитного бонуса в казино нужна неотъемлемая регистрация на сайте. Играть в слоты даром и без регистрации можно только в демо режиме. Также учтите, собственно некоторые игровые платформы сужают список стран, которые способны получить предложенный бездепозитный бонус за регистрацию. К примеру, есть онлайн-заведения, выдающие похожие призы лишь жителям конкретных стран. К примеру, онлайн казино 777 Оригинал дает бездепозитный приз лишь игрокам из России и государств СНГ. Или наоборот, пичкают вознаграждением всех, кроме обитателей неких государств (исходя из этого, по пристально учить список, чтобы потом не появилось никаких вопросов и жалоб).Как верховодило, новоприбывшие геймеры начала хотят ознакомиться с методами ввода и вывода валютных средств и сроки выполнения поданных заявок дабы четко осознавать, как скоро возможность исключить собственный казино приз за регистрацию без депо на электрический кошелек или же банковскую карту. К счастью для всех играющих, внутри определенных холдингов, все казино соперничают меж собой. Ведь случае бы определенную компанию давало лишь одно онлайн-заведение, то ли бы посетители заметили казино с бонусом за регистрацию и возможность бы рассчитывать лишь на вознаграждение повторяющий приза на 1-ое вложение. К любому заведению регулярно стопам завлекать свежих игроков, собственно, конечном, только на руку всем играющим. 1×slots регистрация на официальном сайте <a href=http://xn–b1afaaiqgeiqh0aidle1f1d3c.xn–p1ai/user/Joshuaopito/>http://xn–b1afaaiqgeiqh0aidle1f1d3c.xn–p1ai/user/Joshuaopito/</a> 3. Подтвердить данные. В зависимости от клуба, нужно привязать телефонный или почту, показать персональную информацию;Наш перечень содержит лучшие бездепозитные призы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит ревизию по важным характеристикам:
зеркала 1×slots
Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке адепты онлайн-казино публикуют актуальную информацию о not the slightest deposit bonuses прочих предложениях.Благодаря программке преданности от игорного заведения, можно арестовать неплохой старт и без добавочных инвестициям запустить видеослоты. Кроме того, возможно рассчитывать на реальную фортуну и получить, без вложения личных финансов, великий выигрыш. <a href=http://smecenter.utcc.ac.th/index.php/component/users/?option=com_k2&view=itemlist&task=user&id=396068>http://smecenter.utcc.ac.th/index.php/component/users/?option=com_k2&view=itemlist&task=user&id=396068</a> Выбор каждого онлайн казино на нашем веб-сайте. В описании к любому Вы сможете узнать, собственно получите за создание аккаунта. 1×slots казино мобильная версия
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.dis-course.net/viewtopic.php?p=935375#p935375>1×slots коды</a>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=246953>1×slots мобильная версия войти казино</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для казино, работающих онлайн, бездепозитные призы необходимы для привлечения свежих посетителей. Предложение сыграть на слотах без необходимости внесения настоящих средств — работающий метод для увеличения энтузиазма к компании. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит выступать в казино, лишь сейчас теснее на личные средства. Призовые начисления без депо имеют предоставляться для участия в турнирах интернет казино. Потратить перечисленные средства можно самая в рамках этой акции. Условия их проведения в лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, превосходнее изучить его верховодила.
#5143 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
включи казино 1×bet зеркало на сегодня <a href=https://slon-ru.com/>1×bet слоты официальный сайт</a> порно с Владимир Минеев (ММА) слот casino <a href=https://specreporter.com/>porno Мария Шарапова</a> porno Яна Троянова букмекерская контора зенит porno Елизавета Туктамышева порно с Артемий Панарин (хоккей) casino betting 1×bet рабочее Черкесова Бэлла Мухарбиевна порно
DiskiPlus пин ап букмекерская контора DiskiPlus рейтинг казино <a href=https://www.diskiplus.ru/>DiskiPlus Львова-Белова Мария Алексеевна порно</a> DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus рабочее казино <a href=https://diskiplus.ru>DiskiPlus скачать 1×bet на андроид</a> DiskiPlus pin up casino зеркало DiskiPlus 1×bet на андроид DiskiPlus 1×bet слоты 1×bet xyz DiskiPlus порно с Сергей Бобровский (хоккей) DiskiPlus 1×bet DiskiPlus порно с Каролина Севастьянова DiskiPlus спорт букмекерская контора
#5144 Charlesgunnyhttp://filmkachat.ru
1 x slots casino
Во всех законных онлайн-казино Беларуси необходимо подтверждение паспортных данных для игры — это требование правительства страны. <a href=http://filmkachat.ru/>1× слот зеркало</a> Особую изюминку видео слотам присваивают оригинальные символы. С их в активизируются различные бонусы. Вы можете запустить дополнительный уровень и увеличить необходимую выигрыша. Есть знаки, которые заменяют ненадобные составляющие и сами создают выигрышные комбо. Не стоит забывать и тему бонус-тур. После каждого успешного спина есть шанс увеличить необходимую выигрыша в два либо хорошо раза. <a href=https://gab.com/lexxeagle/posts/113498473251532232>https://gab.com/lexxeagle/posts/113498473251532232</a> 1хслотс регистрация в 1×slots casino <a href=http://elite-models.cc/member.php?action=profile&uid=20764>http://elite-models.cc/member.php?action=profile&uid=20764</a> Максимальный размер ставки, который нельзя превышать пока бонус не будет всецело отыгран. В случае нарушения этого правила, бонус и выигрыш с него станут аннулированы.
1×slots мобильная версия войти казино
Вознаграждения за получение VIP-статуса ? начисляются в программы преданности при достижении очередного уровня либо выдаются персонально менеджерами саппорта.Также учтите, что кое-какие игровые платформы сузивают перечень государств, коие способны получить предложенный бездепозитный приз за регистрацию. К примеру, есть онлайн-заведения, выдающие сходственные бонусы лишь жителям определенных стран. К примеру, онлайн казино 777 Оригинал предоставляет бездепозитный приз только игрокам из России и государств СНГ. Или наоборот, снабжают вознаграждением всех, не жителей неких стран (как сего, идет внимательно изучать список, чтобы потом не появилось никаких вопросов и претензий). <a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=250086>1хслотс официальный сайт зеркало</a> 1×slots регистрация 1×slots casino c2d ru <a href=http://boss.why3s.cc/boss/home.php?mod=space&uid=138446>http://boss.why3s.cc/boss/home.php?mod=space&uid=138446</a> 1×slots официальный зеркало рабочее Бездепозитные призы начисляются только один один. Не стоит раскрывать свежие аккаунты, чтобы получить их повторно. Служба безопасности казино обязательно выявит «левого» участника и заблокирует. Если гость выполнит нужные требования, отыграет свою ставку и решит вывести личный выигрыш, то ему надо(надобно) к, что казино непременно потребует дать ксерокопии собственных документов, чтобы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные свои вывести не удастся.
1×slots зеркало регистрация в 1×slots casino
Сразу в активации промокода возможно воспользоваться даром. Как уже упоминалось, призы бывают трёх видов – фриспины, кредиты и фриплей-бонусы. <a href=http://bbs.worldsu.org/home.php?mod=space&uid=201976>http://bbs.worldsu.org/home.php?mod=space&uid=201976</a> Выбирая безвозмездный приз, пристально изучайте управляла. Убедитесь, что для возможно брать участие в промоакции. Уточните, в каких забавах возможно выполнять обстоятельства вейджера. При необходимости задавайте вопросы адептам саппорта. 1хслот 1хслотс регистрация перейти на 1×slots Бонус начисляется игроку сразу после регистрации и прохождения верификации в казино и не требует от клиента внесения депо. Как правило, объем бонуса в схожем случае достаточно скромный, однако позволяет новеньким познакомиться с забавой без риска настоящими средствами.
1×slots зеркало видели такую регистрацию на
Как лишь вы отыграли вейджер и средства с бонусного баланса перебежали для на настоящий счет, Вы смело сможете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (устроить минимальный депозит к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депо).В списке требований к отыгрышу часто присутствуют лимиты на ставки при этой на личные средства. Так, в отыграть надо(надобно) 30 000 руб., а предельная сумма ограничена 30 рублями, то вращать барабаны светит 1000 один. Эта особенность затрудняет соблюдение игроками критерий по срокам действия промоакции. <a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/4317/#comment-238036>1×slots зеркало проходить регистрацию это отличный вариант</a> Фриспины без депозита или дополнительные свои посодействуют ближе познакомиться с игровой платформой и её функциями. За счёт даров можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям из-за игры напротив живых крупье.Рассмотрим на образце: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских руб. В условиях промоакции предписано, собственно вейджер бездепозитного бонуса х20. Поэтому, чтобы отыграть приз, игроку несомненно необходимо сделать ставок на 35*20=700 рублей. 1×slots регистрация то дальше необходимо пройти <a href=http://dle1.xn–31–6kc3bfr2e.xn–p1ai/index.php?subaction=userinfo&user=subduedtemptati>http://dle1.xn–31–6kc3bfr2e.xn–p1ai/index.php?subaction=userinfo&user=subduedtemptati</a> А ознакомиться с новыми онлайн казино, Вы можете помощью бонусов с выводом прибыли, коие Вы сможете получить без депозита.
x1 slots регистрация в 1×slots casino
Как правило, новоприбывшие геймеры начала хотят ознакомиться с способами ввода и вывода денежных средств и сроки исполнения поданных заявок дабы четко понимать, как живо они смогут исключить свой казино бонус за регистрацию без депозита на электрический кошелек либо же банковскую карту. К счастью для всех играющих, внутри определенных холдингов, все казино соперничают между собой. Ведь в бы конкретную компанию представляло только одно онлайн-заведение, то ли бы посетители заметили казино с призом за регистрацию и могли бы рассчитывать лишь на вознаграждение повторяющий приза на 1-ое инвестиция. К каждому заведению регулярно следует привлекать новых игроков, собственно, итоге, только на руку всем играющим. <a href=http://cniper.ru/bitrix/redirect.php?goto=http://t-s.by/bitrix/rk.php?goto=http://avantazh48.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/OReEcmyFiNa>http://cniper.ru/bitrix/redirect.php?goto=http://t-s.by/bitrix/rk.php?goto=http://avantazh48.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/OReEcmyFiNa</a> Поспешите арестовать бездепозитные призы за регистрацию в казино из представленного перечня. Все платформы столько водят законную работа, хотя и порадуют добросовестными плодами игры, высокой отдачей, прыткими выплатами. 1×slots казино мобильная версия Акции, приуроченные к календарным праздникам, случаются рассчитаны как на всех пользователей, так и на категории: например, подарок на 8 марта девушкам-игрокам или мужикам на 23 февраля.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.survival-readiness.com/viewtopic.php?t=253738>1хслотс зеркало</a>
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=798417>1× slots сайт</a>
<a href=http://weeklywars.de/memberlist.php?mode=viewprofile&u=860>1×slots официальный сайт зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вейджер (либо вагер) ? это минимальная сумма ставок, которую нужно устроить для вывода денежного приза. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение.
#5145 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
up casino скачать винлайн букмекерская контора официальный сайт <a href=https://slon-ru.com/>казино играть</a> 1×bet слоты 1×bet xyz порно с Анна Щербакова, фигуристка <a href=https://7club7.com/>почему в казино нет часов</a> играющие казино онлайн казино 5 букмекерские конторы pin казино в россии порно с Варвара Субботина 7k casino официальный порно с Бондаренко Анастасия Борисовна
DiskiPlus casino автомат DiskiPlus казино ставка <a href=https://diskiplus.ru/>DiskiPlus слоты казино</a> DiskiPlus казино сочи DiskiPlus карты казино <a href=https://diskiplus.ru/>DiskiPlus как выиграть в казино</a> DiskiPlus porno Яна Троянова DiskiPlus porno Алена Косторная (фигурное катание) DiskiPlus порно с Илюшникова Татьяна Александровна DiskiPlus как выиграть в казино DiskiPlus casino pin официальный DiskiPlus casino приложения DiskiPlus 1×bet телефон
#5146 Charlesgunnyhttp://filmkachat.ru
1хслот 1хслотс регистрация перейти на 1×slots
Онлайн-казино с бездепозитными бонусами ставят клиентам условия для пользования бездепами, потому перед ролью в промоакции никакого тщательно ознакомиться со всеми правилами и аспектами акции. Условия все дотрагиваться получения бонуса, его применения и следующего вывода денежных средств в случае выигрыша.Акционные предложения от казино есть в различных форматах. Часто бонусы даются в обмен на депо. Игрок заносит платеж и получает средства, благотворительные вращения и поощрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — вид приза, кот-ый гарантирован за выполнение конкретных действий на веб-сайте: <a href=http://filmkachat.ru/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> Бонус без депозита за регистрацию в казино (бездепозитный приз) – это валютный подарок от клуба, кот-ый начисляется на аккаунт игрока в регистрации в казино. Кроме создания учетной записи, для получения бездепа, довольно часто потребуется ещё и подтвердить контактные данные игрока и/или активировать специальный промо-код. <a href=https://hanson.net/users/ShopAvto>https://hanson.net/users/ShopAvto</a> Бездепозитный приз за регистрацию в казино — это стартовый презент повторяющий денежного начисления или безвозмездных вращений для новых игроков заведения, для получения которого не нужно вносить депо.В списке требований к отыгрышу часто наличествуют лимиты на ставки при игре на собственные средства. Так, случае отыграть надо(надобно) 30 000 рублей, а предельная сумма ограничена 30 рублями, то вертеть барабаны светит 1000 один. Эта особенность затрудняет соблюдение игроками условий по срокам деянья акции. 1хслотс 1хслотс регистрация перейти на 1×slots <a href=https://forum.blu-ray.com/member.php?u=921786>https://forum.blu-ray.com/member.php?u=921786</a> Акции распространяются как на все игры казино, так и на узкий перечень. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и. Промо возможность обхватывать разработки 1-го производителя. Бездеп не пересекается с иными акциями казино. Если на сайте предусмотрен кэшбек, он не начисляется за ставки, изготовленные бонусными деньгами. Для идентификации платежных реквизитов игрока возможность понадобиться пополнение счета на наименьшую сумму.В некоторых интернет казино для получения бездепозитных призов не достаточно просто зарегистрироваться на веб-сайте клуба и подтвердить средства контактные данные. Дополнительно требуется активация промокода.
1хслотс регистрация в 1×slots casino
Бездепозитные бонусы начисляются лишь один один. Не стоит открывать новые аккаунты, дабы получить их повторно. Служба защищенности казино обязательно выявит «левого» соучастника и заблокирует. Если посетитель выполнит необходимые притязания, отыграет свою ставку и решит исключить собственный выигрыш, то ему надо(надобно) сведению, что казино непременно востребует дать ксерокопии собственных документов, дабы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные средства вывести не удастся.Новички не любят незамедлительно же вносить депо. Это обосновано неименьем навыка и сомнением. К счастью, в наше время можно получить бездепозитный приз за регистрацию в казино. Неважно собственно начислит система – фриспины либо кредиты. В любом случае вы не рискуете собственными сбережениями. Это отличная вероятность запустить понравившийся видео слот или же испытывать фортуну в настольных играх. 1хслотс казино зеркало Можно. Вы практически можете отрешиться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не сделаете ставку.Отзывы читателей о бонусных акциях помогут составить эмоцию, но не забывайте о субъективности собственных объяснений. <a href=http://yunduost.com/home.php?mod=space&uid=20392>http://yunduost.com/home.php?mod=space&uid=20392</a> 1х слотс зеркало регистрация в 1×slots casino Самые популярные методы вывода денег ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электронным платежным системам подобии Neteller и Skrill, а также используют криптовалютными кошельками. Вывод выигрышей может осуществляться моментально либо занимать от нескольких часов до нескольких суток.
1×slots зеркало регистрацию более популярный вариант это
Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в неотъемлемом порядке необходимо восполнить счет в казино. Для депозитных призов, эта процедура не необходима, так как депозит уже сделан.Бесплатный бонус – кредиты, коие онлайн-казино начислит клиенту, не заставляя его пополнять игровой счет. Любой выигрыш по ставке выше установленного лимита несомненно являться недействительным. То есть ставка не будет засчитана при отыгрыше, ну случае выигрыша его сумма не поступит на счёт клиента — результат забавы несомненно полностью аннулирован.За вербование приятеля ? в партнерской программки заказчик получает вознаграждение за вербование свежих пользователей. <a href=https://training.trainingstree.com/author/anthonyirose/>https://training.trainingstree.com/author/anthonyirose/</a> Подарки на праздничные ? посвященные торжественным датам, требующие условного отыгрыша либо начисляются без это. Могут дариться игрокам сутки рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду.На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не сможете активировать и получить бездепозитный бонус. рабочее зеркало 1×slots Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.Превышение максимальной ставки при отыгрыше. Система механически не предостерегает о превышении ставки, поэтому о несоблюдении правил игрок возможность разузнать теснее в подачи запроса на вывод средств.
1× слот зеркало
Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации дара нужно подтвердить электронную почту и привязать телефонный;Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 поболее. Когда игроку надеется количество фриспинов, администрация имеет бить3 их начисление на некоторое дней. Бесплатные вращения предоставляются для определенного слота, кот-ый указывается в правилах промоакции. <a href=http://mandala-app.com/forums/memberlist.php?mode=viewprofile&u=3447>1×slots мобильная версия войти казино</a> В любом казино с бездепозитным бонусом учтены вейджеровые обстоятельства. Это единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) устроить определённое число ставок. Чем круче приз, тем труднее выполнить условия, и наоборот.Фриспины без депозита или вспомогательные средства посодействуют поближе познакомиться с игровой платформой и её функциями. За счёт подарков можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради забавы против живых крупье. 1хслотс мобильная версия зеркало <a href=https://lecointurc.com/users/mycsgozer>https://lecointurc.com/users/mycsgozer</a> Ниже указан актуальный перечень легальных казино в Беларуси с призами на первый депо. Вы можете попасть на официальный сайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз.
1×slot казино зеркало
Основное управляло получения бездепа ? творимый аккаунт обязан быть у пользователя первым и единственным. Наличие нескольких аккаунтов взыскательно запрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депозита необходимо соблюдать простую очередность поступков. <a href=https://raid4×4.ru/memberlist.php?mode=viewprofile&u=5415>https://raid4×4.ru/memberlist.php?mode=viewprofile&u=5415</a> 1×slots зеркало рабочее на сегодня Законодательство, регулирующее азартные игры в различных странах, влияет на полномочия операторов. В итоге юзеры из отдельных регионов сталкиваются с ограничениями со стороны казино. Это может быть как полный отказ в доступе, так и невозможность загружать забавы отдельных производителей.С другой стороны, гораздо проще арестовать бездепозитные фриспины за регистрацию в казино и прямо данный начать вертеть барабаны в наилучших слотах. Главная особенность спинов никаких, собственно они предназначены для топовых автоматов. Удастся не только пройти вспомогательные раунды, но и прирастить сумму выигрыша, заработать респины прочие внутриигровые подарки.
<b>Смотреть еще похожие новости:</b>
<a href=http://forums.indexrise.com/thread-2362-post-373207.html#pid373207>1хслотс мобильная версия зеркало</a>
<a href=https://adler.biz/threads/713/>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
У любого игорного клубы различные вейджеровые условия. Чтобы вы гарантировано смогли выполнить их, мы дадим количество советов. Если система начислила небольшую сумму, надо создавать большие ставки – остановитесь на 10–30 центах. Как лишь сможете заработать примерно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте играть. В противном случае превосходнее присмотреться к другому автомату. Денежные свои. Третий приз за регистрацию без депо – наличные. К сожалению, лишь знаменитые и пользующиеся клубы шансы уяснить средства в рублях или долларах. С их помощью появится насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед данным нужно исполнение конкретных условий.
#5147 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на официальном сайте
Выбирайте лучшие безвозмездные призы за обзоров на Casinoz – и пусть вам сопутствует счастье при отыгрыше бонусных кредитов!Возможность протестировать свежие игры, не рискуя личными своими и разработать собственную стратегию игры. <a href=http://filmkachat.ru/>1×slots casino регистрация</a> <a href=https://heyjinni.com/read-blog/177753>https://heyjinni.com/read-blog/177753</a> 1×slots зеркало на сегодня <a href=https://yogicentral.science/wiki/User:CarsonGadsden>https://yogicentral.science/wiki/User:CarsonGadsden</a> Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, так как Вам придется ее подтвердить в будущем при выводе средств.Для получения приза надо(надобно) пригласить в игру свежего клиента. Казино начисляет пригласившему фиксированный процент от взносов приглашённого в виде бонуса: чаще всего его объем не превышает 10%. Срок действия приза в большинстве случаев не превышает месяца: пригласивший получает бонус от проигранных ставок приглашённого в первый луна игры.
казино 1× slots официальный сайт
<a href=http://nacionrolera.org/foro/memberlist.php?mode=viewprofile&u=41202>1×slots casino регистрация 1×slots review live</a> 1хслот зеркало сайта <a href=https://www.reikiandastrologypredictions.com/member.php?action=profile&uid=20349>https://www.reikiandastrologypredictions.com/member.php?action=profile&uid=20349</a> Не стоит незамедлительно же отрицаться от приветственных подарков в похожих казино. Администрация готова начислить деньги либо фриспины, но предварительно работники должны убедиться, что вы не аферист. Дело сомнений, собственно развелось слишком количество охотников за призами. Они выучились дурачить систему и наваривать крупные суммы денег.При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток. 1×slots рабочее зеркало на сегодня Бездепозитный бонус предоставляется новому игроку за конкретные деянья. Часто подарок повторяющий средств либо фриспинов выдается за регистрацию, благодаря чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.
1×slot зеркало рабочее этих способов предполагает регистрацию
Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом прибыли присутствуют на этой странице. Посетитель возможность расценить обстоятельства получения и начать играть на деньги без внесения депо. При этом игроку принципиально понимать, на каких условиях и какими способами него вывести полученный выигрыш. Для этого нужно расценить перечень присоединенных платежных систем. <a href=http://zqykj.cn/bbs/home.php?mod=space&uid=254401>http://zqykj.cn/bbs/home.php?mod=space&uid=254401</a> Бездепозитные бонусы – это исключительно небезинтересная и более перспективная акция интернет-казино. Они том превосходнее фри-спинов, потому что выплаты в даровых вращениях не гарантированы, ведь композиции на барабанах игрового аппарата имеют не сложиться.Для казино, работающих онлайн, бездепозитные призы необходимы для вербования новых клиентов. Предложение сыграть на слотах без надобности внесения настоящих средств — работающий метод для повышения энтузиазма к фирмы. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит играть в казино, только сейчас теснее на собственные деньги. 1×slot официальный сайт Срок отыгрыша — это этап, кот-ый наступает в момент активации приза и кончается с его закрытием. Пользователю необходимо уложиться в этот временной промежуток, другому призовые средства аннулируются. Казино устанавливают список игр, ставки каких засчитываются при расчете отыгранных денег. Если тайтл не входит в данный список, то предоставляется быть недосегаем для загрузки во время деянья бонусного предложения.Лишь известные и знаменитые азартные заведения все позволить себя раздавать бездепы повторяющий дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, коие можно истратить в топовых аппаратах с высочайшей отдачей.
зеркло казино 1×slots
<a href=https://creapnl.com/foros/tema/1×slots-%d1%81%d0%ba%d0%b0%d1%87%d0%b0%d1%82%d1%8c-%d0%bd%d0%b0-%d0%b0%d0%b9%d1%84%d0%be%d0%bd-37/>1×slots скачать на айфон</a> Когда речь идет о получении бездепозитных призов в казино, начала обратите внимание на следующие условия:Приглашаем делиться сужденьями о бонусах. Это поможет иным юзерам избирать наиболее выгодные предложения. Фриспины предназначены для применения в видео слотах. Внимательно ознакомьтесь с условиями – частенько их выдают на кое-какие автоматы. В зависимости от клуба, у вас выйдет устроить определённое число ставок. Кстати, продвинутые игорные дома позволяют запускать любых «одноруких бандитов». 1×slots рабочее зеркало <a href=https://move.ru/blogs/9483/>https://move.ru/blogs/9483/</a> Размер приза. В качестве бездепов обыкновенно начисляют не суммы, а когда идет о бонусах за депо, которые начисляются в процентном соотношении от суммы пополнения, то некоторые казино могут презентовать игроку до 2000$.Некоторые клубы механически начисляют бонус на акк игрока после исполнения условий получения, но случаются ситуации, когда бонус нужно активировать игроку самому. Есть некоторое способов активации бонуса:
1×slots регистрация на сайте 1×slots ru com
Раздача бонусов может быть посвящена разным датам: календарные праздничные, дни рождения игроков, годовщина открытия казино и т. Д. Подарок выдается вид средств, фриспинов или баллов для накопления и размена на услуги оператора. Если юзер получает выигрыш, средства начисляются на его счет. Для вывода данной суммы придется выполнить ряд притязаний. <a href=http://youyanggse.co.kr/board/bbs/board.php?bo_table=free&wr_id=181265>http://youyanggse.co.kr/board/bbs/board.php?bo_table=free&wr_id=181265</a> Зарегистрируйтесь. Для регистрации чаще всего довольно ввести свой номер телефонного и почтовый адресок, последствии чего установить полученный код из СМС. Возможно, потребуется указать промокод. В правилах акции будет написано, где его надо включать. Иногда это надобно создавать при регистрации, время — теснее последствии творенья собственного офиса, на отдельной страничке.Иногда в качестве бездепа, казино дарует наименьший бонус (до 50 руб. ), ради которого не стоит заморачиваться. 1×slots зеркало быструю регистрацию а также мгновенное Казино выделяет возможность заработать и исключить настоящие деньги на бездепозитных бонусах. Обычно, это незначительная сумма, которую казино может себя позволить презентовать игроку.Также случаются случаи, когда казино начислит обсужденный бонус после регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам.
<b>Смотреть еще похожие новости:</b>
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1654#post-48197>1×slots casino зеркало рабочее</a>
<a href=https://www.digicube.de/forum/threads/499748–1×%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE?p=700969#post700969>1×слотс казино</a>
<a href=https://adler.biz/members/90/>1хслотс рабочее зеркало</a>
<a href=https://www.digicube.de/forum/threads/449104–1-%D1%85-%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE?p=646481#post646481>1 х слотс зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Помните, собственно любые нарушения верховодил сведут на нет ваши старания, и вы наверняка останетесь без начисленного вам бесплатного бонуса. Всегда изучайте управляла начисления и условия вейджера. По каким вопросам, на коие вы не можете помощи отыскать ответы, обращайтесь за разъяснениям и саппорт.
#5148 Свадебный фотограф Коломнаhttps://tenchat.ru/media/2981668-svadebniy-fotograf-v-kolomne--svadebnaya-fotosessiya-pod-klyuch
Ищете свадебного фотографа для идеальной свадебной фотосессии? Я помогу запечатлеть самые трогательные моменты вашего дня! Эмоции, искренность и индивидуальность в каждом кадре. заказать услугу и узнать подробнее – <a href=https://tenchat.ru/media/2981668-svadebniy-fotograf-v-kolomne–svadebnaya-fotosessiya-pod-klyuch>свадебная фотосессия</a>. Ваша история любви — в моих фотографиях!
#5149 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
песня казино порно с Кирьянова Дарья Борисовна <a href=https://m.repost.news/>casino 7k сегодня</a> Александра Бортич 1×bet <a href=https://strelochnik.com/>порно с Голикова Татьяна Алексеевна</a> casino riobet порно с Абрамченко Виктория Валериевна Комарова Наталья Владимировна порно porno Юлия Канакина букмекерская контора на андроид casino автомат Мухтиярова Елена Вячеславовна порно
DiskiPlus пари букмекерская контора DiskiPlus casino betting <a href=https://diskiplus.ru/>DiskiPlus букмекерская контора ставки</a> DiskiPlus 1×bet рабочее DiskiPlus скачать 1×bet 1×bet xyz <a href=https://diskiplus.ru>DiskiPlus Преподобная Надежда Александровна порно</a> DiskiPlus casino x DiskiPlus 1×bet зеркало слоты DiskiPlus лучшие бесплатные онлайн казино DiskiPlus porno Катерина Шпица DiskiPlus casino 7k сегодня DiskiPlus porno Нина Пирогова, хоккеистка DiskiPlus bitz casino
#5150 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet скачать приложение на андроид где казино <a href=https://slon-ru.com/>букмекерская контора фонбет</a> порно с Анна Щербакова, фигуристка порно с Карен Хачанов (теннис) <a href=https://slon-ru.com/>1×bet официальный сайт 1×bet xyz</a> pin up casino официальный лучшие букмекерские конторы порно с Никита Кучеров (хоккей) порно с Голикова Татьяна Алексеевна 1×bet зеркало рабочее порно с Сергей Бобровский (хоккей) casino betting
DiskiPlus букмекерская контора фонбет DiskiPlus леон букмекерская контора <a href=https://diskiplus.ru/>DiskiPlus винлайн букмекерская контора официальный</a> DiskiPlus казино сегодня DiskiPlus букмекерская контора бетсити <a href=https://www.diskiplus.ru/>DiskiPlus мобильные букмекерские конторы</a> DiskiPlus суть казино DiskiPlus букмекерская контора на андроид DiskiPlus 1×bet зеркало рабочее xbet DiskiPlus почему в казино нет часов DiskiPlus бесплатное казино DiskiPlus Юдаева Ксения Валентиновна порно DiskiPlus casino сайты
#5151 CasinoBonossinhttps://bonossin.directorio-de-casinos-mx.com
<a href=https://maps.google.co.zw/url?q=https://bonossin.directorio-de-casinos-mx.com/>https://bonossin.directorio-de-casinos-mx.com/</a> <a href=https://faltisova.blog.idnes.cz/redir.aspx?url=https://bonossin.directorio-de-casinos-mx.com/>https://bonossin.directorio-de-casinos-mx.com/</a> <a href=http://burmatours.us.xx3.kz/go.php?url=https://bonossin.directorio-de-casinos-mx.com/>https://bonossin.directorio-de-casinos-mx.com/</a> <a href=http://spirit.alrage.ru/?goto=https://bonossin.directorio-de-casinos-mx.com/>https://bonossin.directorio-de-casinos-mx.com/</a> <a href=https://www.bnro.ro/ChangeSiteVersion.aspx?v=d&returnUrl=https://bonossin.directorio-de-casinos-mx.com/>https://bonossin.directorio-de-casinos-mx.com/</a> <a href=http://9×movies.press.xx3.kz/go.php?url=https://bonossin.directorio-de-casinos-mx.com/>https://bonossin.directorio-de-casinos-mx.com/</a> <a href=http://ikoncomfort.ru/bitrix/rk.php?goto=https://bonossin.directorio-de-casinos-mx.com/>https://bonossin.directorio-de-casinos-mx.com/</a> <a href=https://escort-in-italia.com/setdisclaimeracceptedcookie.php?backurl=https://bonossin.directorio-de-casinos-mx.com/>https://bonossin.directorio-de-casinos-mx.com/</a> <a href=http://clickbuystick.eu/bitrix/redirect.php?event1=&event2=&event3=&goto=https://bonossin.directorio-de-casinos-mx.com/>https://bonossin.directorio-de-casinos-mx.com/</a> <a href=https://www2.sandbox.google.cat/url?sa=t&url=http%3A%2F%2Ft.me/s/worldcasinonet>https://bonossin.directorio-de-casinos-mx.com/</a> <a href=http://leimonopsude.cf.xx3.kz/go.php?url=https://bonossin.directorio-de-casinos-mx.com/-news-az.com/>https://bonossin.directorio-de-casinos-mx.com/</a> <a href=http://biriy-portal.info/rank.php?mode=link&id=492&url=https://bonossin.directorio-de-casinos-mx.com/>https://bonossin.directorio-de-casinos-mx.com/</a> <a href=http://professor-murmann.info/?url=https://bonossin.directorio-de-casinos-mx.com/>https://bonossin.directorio-de-casinos-mx.com/</a> <a href=http://rank-craft.com/bitrix/redirect.php?event1=news_out&event2=http2FE5EE%ECE7%FBE0+EE%E3F8%E5E0https://bonossin.directorio-de-casinos-mx.com/>https://bonossin.directorio-de-casinos-mx.com/</a> <a href=http://golmari.com/m/redirect.php?url=https://bonossin.directorio-de-casinos-mx.com/>https://bonossin.directorio-de-casinos-mx.com/</a>
Upload application online casino Bonossin – win right now! <a href=http://info.lawkorea.com/asp/_frame/index.asp?url=https://bonossin.directorio-de-casinos-mx.com/>https://bonossin.directorio-de-casinos-mx.com/</a> <a href=http://km10805.keymachine.de.xx3.kz/go.php?url=https://bonossin.directorio-de-casinos-mx.com/>https://bonossin.directorio-de-casinos-mx.com/</a> <a href=https://comedycoup.com/embed/f27e4bad029e8c2a2bf8737bf12439133dd4b977?shorturl=http%3A%2F%2Fdownload-bonossin.directorio-de-casinos-mx.com/-fr.com >https://bonossin.directorio-de-casinos-mx.com/</a> <a href=http://haohaibags.com/cn/productshow.asp?id=9&mnid=36974&mc=HL-J45&url=http%3A%2F%2Fdownload-bonossin.directorio-de-casinos-mx.com/-fr.com >https://bonossin.directorio-de-casinos-mx.com/</a> <a href=http://m.engl.uch.e.n.2.xx3.kz/go.php?url=https://bonossin.directorio-de-casinos-mx.com/>https://bonossin.directorio-de-casinos-mx.com/</a> <a href=http://home.hkesp.com/link.php?url=https://bonossin.directorio-de-casinos-mx.com/>https://bonossin.directorio-de-casinos-mx.com/</a> <a href=http://pytchleyhotelnorthampton.2day.uk/PytchleyHotelNorthampton/search/?url=https://bonossin.directorio-de-casinos-mx.com/>https://bonossin.directorio-de-casinos-mx.com/</a> <a href=https://zdrav-med.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=https://bonossin.directorio-de-casinos-mx.com/>https://bonossin.directorio-de-casinos-mx.com/</a> <a href=http://appliances.wikimart.ru.xx3.kz/go.php?url=https://bonossin.directorio-de-casinos-mx.com/>https://bonossin.directorio-de-casinos-mx.com/</a> <a href=http://w2k.motorline.cc/stats/url.asp?url=https://bonossin.directorio-de-casinos-mx.com/>https://bonossin.directorio-de-casinos-mx.com/</a> <a href=http://gostynogloszenia.pl/link.php?url=https://bonossin.directorio-de-casinos-mx.com/>https://bonossin.directorio-de-casinos-mx.com/</a> <a href=http://www.web2day.be/extern_link/3d7d7a3500/?url=https://bonossin.directorio-de-casinos-mx.com/>https://bonossin.directorio-de-casinos-mx.com/</a> <a href=http://www.matureluckytube.com/cgi-bin/crtr/out.cgi?id=889&l=topmain&u=https://bonossin.directorio-de-casinos-mx.com/>https://bonossin.directorio-de-casinos-mx.com/</a> <a href=https://vo-content.azurewebsites.net/Account/LoginEmail?ReturnUrl=http%3A%2F%2Fdownload-bonossin.directorio-de-casinos-mx.com/-fr.com >https://bonossin.directorio-de-casinos-mx.com/</a> <a href=https://hightopjobs.com/jobclick/?RedirectURL=&Domain=HighTopJobs.com&rgp_m=title16&et=4495https://bonossin.directorio-de-casinos-mx.com/>https://bonossin.directorio-de-casinos-mx.com/</a>
#5152 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать
Так же стоит выделить то, что в каждом онлайн казино установлен собственный максимальный кешаут на бездепозитный бонус. Как управляло кешаут — это предельная сумма денег, которая дешевая для вывода с бездепозитного приза.Обычно, бездепозитные бонусы выдаются под конкретные слоты с фиксированной ставкой, но их наверняка воспрещено применять в игровых автоматах с прогрессивным джекпотом. Список игр, в возможно применять бездеп, Вы найдете в описании промоакции либо сможете уточнить у службы поддержки заведения. <a href=http://filmkachat.ru/>1×slots регистрацию процедура займет всего лишь</a> К раскаянью, нет. Почти все казино, просят внесение но бы одного минимального депо для вывода выигрыша с бездепозитного приза. Также учитывайте, собственно исключить деньги разрешено только на что, эту платежную систему, с которой был изготовлен депо.Выбирайте наихорошие безвозмездные бонусы за обзоров на Casinoz – и пусть вас сопутствует счастье при отыгрыше бонусных кредитов! <a href=https://letterboxd.com/lexxeagle/list/revolutionary-approaches-in-modern-virtual/>https://letterboxd.com/lexxeagle/list/revolutionary-approaches-in-modern-virtual/</a> На данном разделе портала регулярно публикуются обзорные статьи, в которых рассматриваются благотворительные бонусы превосходнейших интернет-казино. Информация структурирована по нескольким пт, включая основные:Бездепозитные бонусы за регистрацию являются одним из самых известных способов вербования новых игроков в онлайн-казино, потому что они предоставляют игрокам возможность опробовать казино, более игровые автоматы, и возможно, выиграть реальные средства. 1 xslots рабочее зеркало <a href=http://maglik.ru/user/DavidMow/>http://maglik.ru/user/DavidMow/</a> Срок отыгрыша — это период, который наступает в момент активации приза и заканчивается с его закрытием. Пользователю необходимо уложиться в этот временной зазор, иначе призовые свои аннулируются. Казино устанавливают перечень игр, ставки в засчитываются при расчете отыгранных средств. Если тайтл не входит в данный список, то он может быть недоступен для загрузки период деяния бонусного предложения.
1×slots регистрация 1×slots casino c2d ru
Для казино, работающих интернет, бездепозитные бонусы нужны для привлечения свежих посетителей. Предложение поиграть на слотах без необходимости внесения реальных денег — работающий способ для увеличения интереса к компании. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит выступать в казино, лишь теперь уже на личные средства. 1×slots рабочее зеркало Самые знаменитые способы вывода денег ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электрическим платежным системам подобии Neteller и Skrill, а пользуются криптовалютными кошельками. Вывод выигрышей возможность осуществляться моментально или занимать от нескольких часов до нескольких суток. <a href=http://demo2-ecomm.in.ua/user/ForsedropKt/>http://demo2-ecomm.in.ua/user/ForsedropKt/</a> Бездепозитный бонус нередко имеет стать легкодоступным сразу после окончания регистрации, что как единственным притязанием к нему считается регистрация, а затем проверка вашей новой учетной записи.Бездепозитные бонусы казино это финансовая компенсация, предлагаемая юзерам на дармовой базе и возможность выступать в онлайн казино бесплатно. Если сравнивать их с поощрениями за вклад, каких средства выдаются только потом первоначального пополнения счета, то бездепозитные вознаграждения получаются даром. То есть, играющий получает вероятность создавать ставки на теснее имеющие деньги, которые выдаст заведение, выполняя, этом, обыденные действия, дабы их извлечь (тут идет о регистрация, удостоверении личности с внедрением номера телефонного, оформления заказы и т.д.). рабочее зеркало 1×slots Обыкновенные бездепозитные призы в размере от 3-х до 20 долларов сделаны чтобы, чтобы, дабы в забавы заходили все новые и новые игроки. Здесь, вероятнее всего, несомненно лимитирование на наибольший выигрыш. Важно, дабы перед минимальным вкладом был отключен приз за 1-ое пополнение счета, и игрок не попадет на повторный вейджер.
1×slot зеркало рабочее регистрации на телефон придет
<a href=http://www.mp-associes.com/en/index.php/blog/%D0%94%D0%B5%D0%BC%D0%B8%D1%81.html>http://www.mp-associes.com/en/index.php/blog/%D0%94%D0%B5%D0%BC%D0%B8%D1%81.html</a> 1×slots casino регистрация 1×slotscasino09k online Oтыгpaть бонус с указанным вeйджepом, достичь нужно сдeлaть cтaвoк нa cумму, превосходящую объем бонуса в несколько раз.
1×slot регистрация
Выбирая безвозмездный приз, внимательно изучайте правила. Убедитесь, что вас можно себя участие в акции. Уточните, в каких играх можно выполнять условия вейджера. При необходимости задавайте вопросы представителям саппорта. <a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=61927>1×slots казино зеркало</a> В зависимости от онлайн заведения каждый из них возможность вам предложить как бездепозитные средства, например и бездепозитные фриспины, коие после удачной регистрации упадут вам на ваш игровой баланс. Это тоже благотворительные деньги, коие поступают на аккаунты свежеиспеченных в в регистрирования. А особенность этих бонусов произведено что, нет, собственно обретенные деньги непременно по использовать в продолжении назначенного времени.Но эти рамки не смущают в хайроллеров, что коэффициенты на слотах дозволяют рассчитывать на солидные выигрыши, ну неких автоматах разыгрывается прогрессивный джекпот. рабочее зеркало 1×slots <a href=https://monroyhives.biz/author/jamesfen/>https://monroyhives.biz/author/jamesfen/</a> Вейджер менее х30–35 считается приемлемым. Опытные игроки заявляют, собственно с этим вейджером реально остаться в плюсе, в правильно подойти к выбору игрового аппарата.Список так называемых «разрешенных землель» прилагается к правилам бонусной программки игорного портала. Обязательно проверьте, распространяются ли на вас подобные санкции.
1×slots казино мобильная версия
Все обожают получать подарки. Согласитесь, почти каждый играющий человек несомненно сильно рад, случае получит безвозмездный подарок для игры в онлайн казино просто за регистрацию или же приз за внесенный депозит, так именуемые приветственные бонусы для новых игроков. Соответственно эти интернет клубы будут больше востребованы и преимущественны у игроков при выборе казино для игры. Топ казино непрерывно обновляется и прибавляются свежие и увлекательные игровые клубы с привлекательной бонусной политикой и всеми возможными привилегиями, к которым относятся такие бонусы как фриспины за регистрацию, денежные бездепозитные бонусы, а щедрые призы за внесенный депозит.Принципиальным отличием даровых призов от призов на депо считается неименье необходимости вносить средства на акк. Из-за этого их нередко называют бездепозитными (no down payment bonuses). <a href=https://sc-grandmaster.ru/forum/?PAGE_NAME=profile_view&UID=20625>https://sc-grandmaster.ru/forum/?PAGE_NAME=profile_view&UID=20625</a> С не отыгранным бонусом воспрещается превосходить размер максимальной ставки. Нарушение сего условия последствия аннулирование выигрыша. 1хслотс официальный сайт зеркало Следует выделить, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum-macan.ru/viewtopic.php?t=15794>1хслот скачать</a>
<a href=http://forum.l2endless.com/showthread.php?tid=411286>1×slot официальный сайт</a>
<a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=75195>1× slots официальный</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Основное правило получения бездепа ? творимый аккаунт должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов строго запрещено. Проверка ведется по имени, e-mal, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депо необходимо блюсти простую очередность поступков. Рассмотрим принцип его действия на случае. Допустим, вы зарегистрировались и возымели $10 no deposit bonus с вейджером х50. Это значит, что выигранные деньги можно будет выводить не раньше, чем в как, как общая сумма ставок достигнет $500.
#5153 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
black russia казино porno Светлана Ходченкова <a href=https://krtka.info/>зеркала казино</a> pin up casino top top порно с Матвей Сафонов (футбол) <a href=https://th-royalgclub.com/>Мухтиярова Елена Вячеславовна порно</a> pin up casino зеркало casino 7k сегодня букмекерская контора вход букмекерская контора официальный сайт 1×bet сайт вавада казино макао казино
DiskiPlus 1×bet слоты 1×bet xyz DiskiPlus слот casino <a href=https://diskiplus.ru/>DiskiPlus бесплатные букмекерские конторы</a> DiskiPlus 1×bet зеркало рабочее xbet DiskiPlus порно с Дронова Александра Викторовна <a href=https://www.diskiplus.ru>DiskiPlus 7k casino зеркало на сегодня</a> DiskiPlus porno Андрей Рублев (теннис) DiskiPlus порно с Елена Никитина, скелетонистка DiskiPlus автомат казино DiskiPlus ограбление казино DiskiPlus 1×bet зеркало на сегодня DiskiPlus порно с Анастасия Потапова, теннисистка DiskiPlus Скоробогатова Ольга Николаевна порно
#5154 Charlesgunnyhttp://filmkachat.ru
1×slots на любой вкус как пройти регистрацию
Выбирая бесплатный бонус, внимательно изучайте верховодила. Убедитесь, что для возможно себя роль в промоакции. Уточните, в каких забавах возможно исполнять обстоятельства вейджера. При необходимости задавайте вопросы адептам саппорта. <a href=http://filmkachat.ru/>1×slot рабочее зеркало</a> <a href=https://owntweet.com/thread/214646>https://owntweet.com/thread/214646</a> 1х слотс зеркало регистрация в 1×slots casino <a href=http://www.dendymaster.ru/forum/member.php?u=84241>http://www.dendymaster.ru/forum/member.php?u=84241</a> Максимальный размер ставки, кот-ый нельзя превышать же приз не несомненно всецело отыгран. В случае нарушения сего верховодила, приз и выигрыш с него станут аннулированы.
1хслотс 1хслотс регистрация перейти на 1×slots
Лишь знаменитые и знаменитые азартные заведения все позволить себя выдавать бездепы в виде добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, которые возможно израсходовать в лучших аппаратах с высокой отдачей. <a href=http://kick.gain.tw/viewthread.php?tid=5058171&extra=>1×slots casino регистрация на сайте</a> 1×slots casino зеркало рабочее <a href=http://www2.bio.ulaval.ca/landrylab/bioinfo/doku.php?id=РР·_чего_состоит_диета_Елены_Малышевой>http://www2.bio.ulaval.ca/landrylab/bioinfo/doku.php?id=РР·_чего_состоит_диета_Елены_Малышевой</a> Новички не любят сразу же вносить депо. Это обосновано неименьем опыта и сомненьем. К счастью, наши возможно получить бездепозитный приз за регистрацию в казино. Неважно собственно начислит система – фриспины или кредиты. В любом случае вы не рискуете своими сбережениями. Это отличная возможность запустить понравившийся видео слот или же испытать удачу в настольных играх.В современность очень просто получить приз за регистрацию в казино. Практически каждый игорный жилище с радостью начислит средства либо безвозмездные вращения. Многие гэмблеры используют данным и не стесняются регистрироваться в каждом клубе с прибыльными условиями. Кстати, это отличная возможность выработать победную тактику и сорвать джекпот. 1×slots официальный сайт мобильная версия
казино 1×slots
<a href=http://webhome123.com/plus/view.php?aid=22032>http://webhome123.com/plus/view.php?aid=22032</a> Размер ставки для игры по бездепозитному бонусу (окончательно же, если, тогда,, когда он представлен повторяющий бонусных валютных средств) часто ниже, чем при игре на депозит. Ограничение несомненно работать до этапа отыгрыша бонуса.Еще одно условие дотрагивается объемов ставки. Операторы устанавливают наивысшую сумму, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном офисе. При превышении лимита есть риск лишиться приза. Существующие ограничения относятся и к определенным обликам ставок. Например, играя в рулетку, клиент может столкнуться с запретом назначать фишки на шансы. 1хслот 1хслотс регистрация перейти на 1×slots Также есть онлайн-платформы азартных игр, которые используют раздачу бездепозитных бонусов в специальные даты (как для казино, например и для игрока). Помимо сего, действующие игроки также имеют возможность получить похожие бонусы за свою деятельность (например, за увеличения значения либо за похожие достижения).Выполнив все требования оператора, заказчик имеет оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит примерно не более суток. Если дополнительно требуется пройти процедуру верификации, то срок увеличивается до 1–2 трудящихся дней. Для перевода применяются банковские приборы и электрические платежные системы. Второй способ подходит лучше, так как большинство транзакций такой осуществляются моментально. В связи со спецификой функционирования банков обработка платежей возможность занять до нескольких трудящихся дней.
1×slots сайт
Необходимость отыгрыша. Вейджер ситуации выше, чем для призов за депозит. И же свои не отыграны, исключить их нельзя.Так собственно сможете неустрашимо регистрироваться без всяких раздумий. Фортуна сегодня наверняка на вашей стороне. Не бойтесь, ведь следствие какого либо убытка Вам абсолютно не грозит. С этими призами как без пополнения, Вы остаетесь только в плюсе, но не как не в минусе. <a href=https://portugal-campings.com/pt/account/>1×slot рабочее зеркало</a> Особую изюминку видео слотам присваивают оригинальные знакы. С их появлением активируются различные призы. Вы сможете запустить дополнительный уровень и увеличить сумму выигрыша. Есть знаки, коие сменяют ненадобные элементы и сами делают выигрышные комбо. Не стоит забывать и тему бонус-тур. После любого удачного спина есть шанс прирастить необходимую выигрыша в два либо четыре раза.Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, чтобы снова получить бесплатный бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ожидает неизбежное санкция. Иногда у посетителей сайта шансы возникнуть проблемы при активации приобретенного промо-кода. В таких случаях, нужно адресоваться за помощью в саппорта «Support». Для получения ответа, обязательно указывается конкретная первопричина обращения и подтверждается информация дополнительными скриншотами. Если сформировалась спорная обстановка, практически можно адресоваться к главному регулятору или контролирующему органу, выдавшему данному заведению лицензионный документ. 1×slots зеркало регистрация то дальше необходимо пройти <a href=http://agriexpert.kz/user/TravisCib/>http://agriexpert.kz/user/TravisCib/</a>
1×slots официальный сайт скачать
Зачастую бездепозитные бонусы казино для игры предлагаются разными заведениями азартных игр виде рекламных промоакций или в целях вербования к для свежих игроков. Для бездепозитных бонусов в казино 2022 геймеру надо пополнять счет до момента вывода хотимых средств. <a href=https://cometothecook.com/2024/06/22/glory-casino/>https://cometothecook.com/2024/06/22/glory-casino/</a> 1×slots регистрация 1×slots casino 777 online
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.vn.ua/showthread.php?p=3278972#post3278972>1×slots регистрация на сайте</a>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=355910>1×slots официальный сайт, скачать</a>
<a href=http://www.ihavethepussy.com/de/members/36184-Michaelbar?s=43e8f889ae2c867513164d3204c54c1c>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы, как теснее понятно, считаются уникальной возможностью приступать к игровому процессу полностью бескорыстно, другими выступать в онлайн казино бесплатно и на место средства незамедлительно после регистрации аккаунта. Автоматы с этим депо имеют стать прекрасной вероятностью сыграть для почитателей пыла с определенными лимитированиями в денег. Иногда операторы требуют внесение минимального депозита перед выводом для верификации платежного инструмента. В некоторых казино данный депозит также светит отыграть.
#5155 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet рабочее cat casino <a href=https://rhymes-punches.com/>гта казино</a> Попова Анна Юрьевна порно скачать 1×bet на андроид бесплатно <a href=https://rucriminal.info/>Скворцова Вероника Игоревна порно</a> 1×bet сейчас букмекерская контора зенит букмекерскую контору пин вывод казино Крючкова Полина Викторовна порно казино без казино ли
DiskiPlus пин ап казино DiskiPlus porno Алена Косторная (фигурное катание) <a href=https://www.diskiplus.ru/>DiskiPlus Валентина Матвиенко порно</a> DiskiPlus рокс казино DiskiPlus 1×bet рабочее на сегодня <a href=https://www.diskiplus.ru/>DiskiPlus порно с Максим Глушенков (футбол)</a> DiskiPlus пин ап букмекерская контора DiskiPlus casino актуальное зеркало DiskiPlus порно с Дронова Александра Викторовна DiskiPlus бесплатно фильм казино DiskiPlus пина casino DiskiPlus гама казино DiskiPlus порно с Константин Тюкавин (футбол)
#5156 Charlesgunnyhttp://filmkachat.ru
1× slots зеркало
Нельзя осматривать забаву на средства, как вариант заработка. Азартные забавы запрещены для лиц моложе 18 лет. Topcasinobonuses.mobi классифицируется организатором азартных игр. Сайт одевает информационный нрав. <a href=http://filmkachat.ru/>1хслот зеркало</a> <a href=https://menagerie.media/index.php?link1=read-blog&id=87720>https://menagerie.media/index.php?link1=read-blog&id=87720</a> Почти все игровые клубы настоятельно свидетельство контактных данных игрока для получения бездепозитного приза.4. Заберите презент. Чаще всего приз активируется незамедлительно в регистрации. Но случаются истории, когда нужно зайти в личный офис либо написать в службу поддержки. 1×slots официальный demo регистрация в 1×slots casino <a href=http://cheapbooks.cc/memberlist.php?mode=viewprofile&u=44881>http://cheapbooks.cc/memberlist.php?mode=viewprofile&u=44881</a> Практически все интернет казино с бездепозитным призом за регистрацию учитывает программку преданности — систему поощрения неизменных посетителей, которая состоит из множества уровней. При достижении игроком очередного значения на его счёт поступает приз. Чем выше степень — тем щедрее бонус.Подтверждение регистрации. Казино просят привязки профиля к электронному адресу и номеру телефонного. Для этого на e-mail отчаливает письмо со ссылкой, а на телефон ? текстовое извещенье с кодом.
1хслотс официальный сайт зеркало
1×slots коды <a href=http://julia4tied.de/member.php?action=profile&uid=131108>http://julia4tied.de/member.php?action=profile&uid=131108</a> 1×slots зеркало быструю регистрацию а также мгновенное
1хслотс рабочее зеркало
Обычно для получения бонусов без депо, казино выдвигает приклнные и вполне выполнимые условия, но есть ряд деяний которые воспрещены и шансы повлечь за собой досадные последствия:Мы делаем ударение на главных положениях правил, рассказываем о территориальных лимитированиях и вкратце информируем о других акциях обсуждаемого казино. <a href=https://www.mavsboard.com/member.php?action=profile&uid=2437>https://www.mavsboard.com/member.php?action=profile&uid=2437</a> Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации презента необходимо доказать электронную почту и привязать телефон; 1×slot зеркало Но есть азартные заведения, готовые просто например вручить средства на игру. Для этого довольно сделать профиль. Чтобы вывести выигрыш, сперва нужно выполнить вейджеровые условия, прописанные в критериях получения бездепа.Похожим образом трудится третий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя или в связи с получения им VIP-статуса. Подарок предоставляется после обращения в поддержку и проверки.
1×slot зеркало рабочее регистрации на телефон придет
<a href=https://www.fromrus.su/index.php?/profile/408-rabofreesn/>1×slots зеркало рабочее на сегодня</a> Итак, дабы бесплатные бонусные кредиты трансформировались в настоящие средства, которыми вам управлять по собственному усмотрению, их надо(надобно) отыграть. Вейджер по уточнять в правилах онлайн-казино.Минимального оборота. Этот лимит устанавливается вейджером — же игрок не поиграет на установленную сумму, вывод средств несомненно недосегаем. Популярность онлайн казино растёт и всё больше пользователей начинают интерес азартными играми. Бездепозитные призы 2022 года, это уникальные презенты за регистрацию. С их поддержкою новые игроки могут получить бесплатные вращения либо средства на баланс за одну регистрацию. С появлением игорных заведений в онлайне, бездепозитные призы стали наимоднейшим методом привлечения игроков. Подобные акции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш сайт собрал наихорошие предложения из интернета на 2022 год. Воспользуйтесь любым даром и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить обстоятельства.Бонус с зачислением средств на счет выделяет больше свободы поступков. Пользователь сам избирает, каким образом распорядиться подаренными средствами. Здесь того имеют действовать лимитирования на список доступных игр, хотя обычно эти рамки не так строги, как в рекламную с бесплатными вращениями. 1×slot рабочее зеркало <a href=http://www.e10100.com/home.php?mod=space&uid=1605783&do=profile&from=space>http://www.e10100.com/home.php?mod=space&uid=1605783&do=profile&from=space</a>
казино 1× slots официальный сайт
Популярность интернет казино растёт и всё больше пользователей начинают интерес азартными забавами. Бездепозитные призы 2022 года, это уникальные подарки за регистрацию. С их поддержкою свежие игроки могут получить бесплатные вращения либо средства на баланс за 1 регистрацию. С свет игорных заведений в интернете, бездепозитные бонусы стали популярнейшим способом привлечения игроков. Подобные акции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о которых мы поведаем. Наш сайт собрал наихорошие предложения из онлайна на 2022 год. Воспользуйтесь любым даром и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить условия.Также существуют онлайн-платформы азартных игр, коие применяют раздачу бездепозитных бонусов в особые даты (как для казино, так и для игрока). Помимо этого, действующие игроки кроме имеют возможность получить схожие призы за свою деятельность (к примеру, за повышения уровня или за схожие достижения). Шаг 4. Активация. Внимательно выучите условия, информацию по ограничениям и сроке деянья бонусного предложения. Разобравшись с правилами, можно активировать приз в личном офисе (иногда ? с использованием промокода) либо по запросу в саппорт.Основное различие том,, собственно для получения бездепа не пополнять баланс в казино. Но кроме этого, есть ряд прочих отличий: <a href=http://nutrendrussia.ru/bitrix/redirect.php?goto=http://garmin.by/bitrix/rk.php?goto=http://forsto.ru/bitrix/redirect.php?goto=https://telegra.ph/Kak-zhit-dalshe-posle-sluchajnoj-gibeli-koshki-09–23>http://nutrendrussia.ru/bitrix/redirect.php?goto=http://garmin.by/bitrix/rk.php?goto=http://forsto.ru/bitrix/redirect.php?goto=https://telegra.ph/Kak-zhit-dalshe-posle-sluchajnoj-gibeli-koshki-09–23</a> Во время игры в казино, выигрыши, приобретенные благодаря безвозмездным призовым фондам, суммируются и срабатывают в совместную необходимую для отыгрывания. Однако, случае фортуна улыбнется и получится отыграть все призы, игровое заведение гарантированно допустит вывести денежные свои. Сумма вывода несомненно в от лимита, одобренного непосредственно в данном учреждении. Поэтому, внимательно надо(надобно) читать управляла выдачи безлимитных депозитов.Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных требований, кроме неотъемлемой верификации. Если на веб-сайте предусмотрена обязательная процедура доказательства личности, то вывести выигрыш получится лишь последствии проверки данных. Приготовьтесь наполнить анкету и отправить в техподдержку документ, подтверждающий личность. 1×слот регистрация в 1×slots casino B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax
<b>Смотреть еще похожие новости:</b>
<a href=https://nauc.info/forums/viewtopic.php?t=20593736>1× slots зеркало</a>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=377229>1×slots регистрацию более популярный вариант это</a>
<a href=https://karakol.com.kg/user/Jameskef/>онлайн казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если вы выбрали себе некоторое брендов коие вам больше всего полюбились, для неизменной забавы! Таких гемблеров казино очень предпочитает и оценивает, за частую эти игроки становятся VIP игроками заведения, коим нередко поступают выгодные предложения в виде призов, например же туда заходит и бездепозитные. Активация по промокоду употребляется в различных обликах бездепов. Если идет о приветственном бонусе, то комплект символов возможно узнать на главной странице, в регистрационной форме или письме, которое отчаливает пользователю для доказательства e-mail. Акции шансы проводиться вместе с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активизируется разовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном кабинете или начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем важный код для активации в описании любого рекламную.
#5157 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet рабочее 1×bet сайт <a href=https://strelochnik.com/>лучшие онлайн казино</a> пинап казино зеркала казино <a href=https://repost.news/>порно с Дронова Александра Викторовна</a> игры казино кент casino 1×bet зеркало рабочее на сегодня букмекерская контора зенит гама казино porno Дарья Мороз 1×bet скачать приложение
DiskiPlus сайт казино вход DiskiPlus сайт 1×bet слоты <a href=https://diskiplus.ru/>DiskiPlus Преподобная Надежда Александровна порно</a> DiskiPlus скачать 1×bet на андроид бесплатно DiskiPlus казино большая <a href=https://diskiplus.ru>DiskiPlus рабочее казино</a> DiskiPlus порно с Кирьянова Дарья Борисовна DiskiPlus 1×bet телефон DiskiPlus Лут Оксана Николаевна порно DiskiPlus букмекерская контора официальный сайт DiskiPlus казино проиграл DiskiPlus 1×bet сайт 1×bet xyz DiskiPlus casino официальный зеркало
#5158 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
Не советуем сломя голову хвататься за различные предложения получения средств без инвестициям. Вполне вероятно, собственно бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на 1-ый взор. Альтернативой считается казино приз за депозит. Мы предлагаем вас пару советов, спасибо которым у любого игрока будет возможность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег: <a href=http://filmkachat.ru/>1×slots акции</a> <a href=https://www.fanfiction.net/u/16457165/>https://www.fanfiction.net/u/16457165/</a> Доступ к подарку может открываться механически в введения промокода либо воззвания в саппорта вебсайта. В первом случае от пользователя не потребуется никаких действий. Бездеп с активацией по коду встречается чаще всего. Игроку нужно ввести совокупа символов в графе, которая имеет пребывать в регистрационной форме в Личном офисе.У нас на веб-сайте Вы найдете список призов без депо в испытанных казино и подробную информацию о том как их получить и использовать. рабочее зеркало 1хслотс <a href=http://iwlnx.com/forum/member.php?action=profile&uid=107275>http://iwlnx.com/forum/member.php?action=profile&uid=107275</a>
1× slots регистрация в 1×slots casino
Отыграв бездепозитный приз в казино с выводом также придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если схожее ограничение присутствует, то единоразово исключить получится лишь сумму, не превосходящую объем приобретенного бонуса. казино 1×slots <a href=https://visualchemy.gallery/forum/profile.php?id=4048520>https://visualchemy.gallery/forum/profile.php?id=4048520</a> Обычно, бездепозитные призы выдаются под определенные слоты с фиксированной ставкой, но их наверняка воспрещено применять в игровых автоматах с прогрессивным джекпотом. Список игр, каких можно применять бездеп, Вы найдете в описании акции или можете уточнить у службы заведения.Самый распространённый из подобных бонусов, конечно же, бездеп на день рождения клиента — бонус повторяющий фиксированной суммы либо фриспинов поступает на счёт игрока, а воспользоваться им возможно протяжении установленного периода медли. 1×slots зеркало регистрация то дальше необходимо пройти
1×slots регистрация то дальше необходимо пройти
<a href=http://georgiantheatre.ge/user/DoctorLazutapn/>http://georgiantheatre.ge/user/DoctorLazutapn/</a> Каждая игровая платформа выделяется условиями по получению и отыгрышу бездепов. В правилах отчетливо расписаны временные рамки, за коие нужно прокрутить вейджер. Также не запамятовывайте про наибольший размер ставки и наивысшую сумму выплаты. С другой стороны, дабы получить бездепозитные бонусы казино, довольно потратить не более 1 минуты. 1×slot зеркало рабочее регистрации на телефон придет
1×slots официальный сайт зеркало
Для вывода средств приз надо(надобно) несомненно отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами акции и вариантами отыгрыша бездепозитного бонуса до его получения, дабы избежать конфликтных ситуаций. Бонус в казино без депозита имеет различные разновидности: может быть приветственный бонус, промоакции в честь каких-либо праздничных или главных дат, бонус за вербование новых игроков, преданность и получение VIP-статуса.А ознакомиться с свежими интернет казино, Вы сможете помощью призов с выводом выгоды, которые Вы можете получить без депо. Чем ниже велечину вейджера, что, этим легче отыграть и исключить бонус. Если Вы планируете заработать на бездепе, но просто ознакомиться с свежим игровым клубом, то стоит игнорировать призов с высоким вейджером их практически не реально отыграть. С ними Вы можете лишь протестировать игры заведения.Также, учите, что бездепозитный бонус можно исключить только в том случае, когда будут исполнены все условия отыгрыша. онлайн казино 1×slots <a href=https://happilymarketing.com/is-it-hard-to-learn-graphic-design/>https://happilymarketing.com/is-it-hard-to-learn-graphic-design/</a>
1×slot зеркало
Для всех бездепозитных бонусов действует наибольший предел на выигрыш. Он указывает предельную необходимую, которую появится получить, играя на бонусные кредиты. Как только вас получится выполнить требования вейджера, возможный максимально несомненно переведен с бонусного счета на основной, а остаток несомненно списан.Обычно, бездепозитные призы выдаются под определенные слоты с фиксированной ставкой, хотя их точно воспрещено применять в игровых автоматах с прогрессивным джекпотом. Список игр, в можно применять бездеп, Вы найдете в описании промоакции или сможете уточнить у службы заведения. Еще одно условие касается размеров ставки. Операторы устанавливают максимальную сумму, которую игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, избранной в Личном кабинете. При превышении лимита есть риск потерять приза. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, клиент имеет столкнуться с запретом назначать фишки на шансы. <a href=http://hefeiyechang.com/home.php?mod=space&uid=20183>http://hefeiyechang.com/home.php?mod=space&uid=20183</a> рабочее зеркало 1хслотс
<b>Смотреть еще похожие новости:</b>
<a href=https://sadhaka.nl/forum/viewtopic.php?t=103138>1×slots официальный сайт скачать</a>
<a href=http://theauction.com.au/my-account/>1хслот официальный сайт зеркало</a>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5031/#comment-605358>1×slots зеркало которую указывали при регистрации кстати</a>
<a href=http://romb4×4.ru/forum/threads/1×slots-kazino-mobilnaja-versija.20940/>1×slots казино мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные призы истинными средствами, которые возможно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадались.
#5159 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Петр Ян (ММА) black russia казино <a href=https://sovsekretno.net/>casino скачать приложение</a> винлайн букмекерская контора винлайн букмекерская контора <a href=https://m.repost.news/>автомат казино</a> Нургалиева Эльвира Рамиловна порно Фастова Елена Владимировна порно casino бонус скачать 1×bet на андроид пин ап casino pin up top суть казино casino промокод
DiskiPlus скачать 1×bet на андроид DiskiPlus kent casino регистрация <a href=https://diskiplus.ru/>DiskiPlus 1×bet регистрация</a> DiskiPlus porno Александра Степанова, фигуристка DiskiPlus 1×bet официальный сайт <a href=https://www.diskiplus.ru>DiskiPlus 1×bet xbet</a> DiskiPlus бк букмекерская контора DiskiPlus 1win букмекерская контора DiskiPlus porno Мария Шарапова DiskiPlus porno Анна Сидорова, керлингистка DiskiPlus casino DiskiPlus гта онлайн казино DiskiPlus Приезжева Екатерина Геннадьевна порно
#5160 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
фреш казино бк букмекерская контора <a href=https://www.ossetia.tv/>1×bet рабочее на сегодня</a> пина букмекерской конторы включи казино <a href=https://res-publika.com>Александра Бортич</a> пин casino 1×bet 1 порно с Баталина Ольга Юрьевна online casino официальный porno Дарья Мороз балтбет букмекерская контора казино фильм смотреть онлайн
DiskiPlus фреш казино DiskiPlus порно с Дарья Клишина, легкоатлетка <a href=https://diskiplus.ru>DiskiPlus Шевцова Татьяна Викторовна порно</a> DiskiPlus Александра Бортич DiskiPlus пин ап casino <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet xbet xyz</a> DiskiPlus почему в казино не бывает настенных часов DiskiPlus порно с Бондаренко Анастасия Борисовна DiskiPlus Разуваева Ксения Денисовна порно DiskiPlus казино пин DiskiPlus почему в казино не бывает настенных часов DiskiPlus casino промокод DiskiPlus pin casino
#5161 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрацию более популярный вариант это
Доступные игры – В некоторых азартных забавах возможно понизить математическое приемущество казино до нескольких десятых процента. В их количестве многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как управляло, в этих забавах ставки идут в зачет вейджера не полностью. Например, имеет учитываться только 50%. В неких играх бездепозитные бонусы вообще невозможно отыгрывать.Бездепозитные призы прекрасный вариант безвозмездной игры в игровые автоматы. Многие пользователи сети не знают, собственно в казино можно начать играть абсолютно безвозмездно, а потом исключить выигрыш на банковскую карту либо электронный кошелек, другие не доверяют интернет казино, а третьи удачно играют и выигрывают – и подчас довольно немалые суммы. <a href=http://filmkachat.ru/>казино 1×slots</a> Популярность интернет казино растёт и всё больше пользователей начинают интерес азартными забавами. Бездепозитные бонусы 2022 года, это оригинальные презенты за регистрацию. С их поддержкою свежие игроки все получить безвозмездные вращения либо деньги на баланс за 1 регистрацию. С в игорных заведений в онлайне, бездепозитные бонусы стали знаменитейшим способом привлечения игроков. Подобные промоакции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш вебсайт собрал наилучшие предложения из онлайна на 2022 год. Воспользуйтесь каким даром и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша необходимо выполнить обстоятельства. <a href=https://www.uannounceit.com/article/1416>https://www.uannounceit.com/article/1416</a> 1×slots бонус за регистрацию <a href=http://ivangandola.com/index.php/forum/user/2856-unadviseddome63>http://ivangandola.com/index.php/forum/user/2856-unadviseddome63</a>
казино 1×slots официальный сайт
Такой бесплатный эквивалент средств зачисляется на профиль пользователя в осуществления требований и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений возможен только после воплощения вейджеровых критерий. 1×slots официальный регистрация Каждая игровая перрон выделяется критериями по получению и отыгрышу бездепов. В правилах отчетливо расписаны временные рамки, за которые надо(надобно) прокрутить вейджер. Также не запамятовывайте на максимальный объем ставки и максимальную необходимую выплаты. С другой стороны, дабы получить бездепозитные бонусы казино, довольно потратить менее 1 минутки.В случае установленного лимита на необходимую вывода выигрыша с бездепозитного бонуса, игрок не может вывести больше заявленной суммы. <a href=http://forums.overhax.fun/member.php?action=profile&uid=4597>http://forums.overhax.fun/member.php?action=profile&uid=4597</a> Для тех, кто лишь подумывает испытывать собственную фортуну, еще для проф игроков, отыскивающих свежие площадки для выигрышей, ведущие лицензированные казино нередко устраивают разные акции, и одно из лучших услуг прошедшее время – как для начинающих, например и для профессиональных игроков – бездепозитный приз за регистрацию.1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, случае не желайте стать жертвой жуликов или впустую потратить время; 1×slot рабочее зеркало Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, solid только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.
1×slots зеркало быструю регистрацию а также мгновенное
Получить приветственный приз все лишь свежие посетители онлайн-казино. Способы описаны в условиях промоакции каждого легального казино, чаще всего это:Активация валютного вознаграждения происходит механически в сотворения профиля либо использования промокода. Иногда операторы предъявляют дополнительные требования: подписаться на страницы казино в социальных сетях или на рассылку рекламных сообщений, скачать и установить дополнительный софт и т.д. <a href=https://australianwinerytours.com/tours/member.php?action=profile&uid=1686>https://australianwinerytours.com/tours/member.php?action=profile&uid=1686</a> Изучить правила и обстоятельства получения бездепозитных бонусов казино, Вы сможете у нас на веб-сайте в разделе с бонусами либо на официальном веб-сайте выбранного Вами казино. Если имеет найти нужную информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал либо по электрической почте. 1хслотс казино зеркало
1хслотс зеркало
Одним из поводов отдавать привилегию одному либо иному заведению содержится в привлекательности предлагаемых промоакций и даровых предложений. Безвозмездные фриспины, выдаваемые без нужды делать какой-либо вклад, в списке находится далеко не в конце.Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. 1хслотс 1хслотс регистрация перейти на 1×slots <a href=http://www.zgqsz.com/home.php?mod=space&uid=326998>http://www.zgqsz.com/home.php?mod=space&uid=326998</a>
1×slots рабочее зеркало
Суммы похожих предложений, в, колеблются от 3-х до двадцати долларов, а вейджер на эти средства обязан сочинять от 30 до шестидесяти раз. Зачастую, большая сумма выигрыша тут составит от одной до двух сотен $. Если компьютерные выиграет больше, то все средства шансы быть списанными до максимально разрешенного выигрыша. Здесь бывает содержание выводить еще несуществующие финансы на собственную платежную систему и дальше находить заведение с подходящими под данную сумму релоадом либо призом за первое пополнение счета. Есть несколько подвидов бездепозитного гонорары, предлагаемого большим числом заведений. <a href=http://travel.navigator-mas.ru/user/Patrickpop/>http://travel.navigator-mas.ru/user/Patrickpop/</a> 1× slots зеркало
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Новички не любят сразу же заносить депозит. Это обусловлено неимением опыта и сомнением. К счастью, дни возможно получить бездепозитный приз за регистрацию в казино. Неважно собственно начислит система – фриспины либо кредиты. В любом случае вы не рискуете своими сбережениями. Это отличная возможность запустить понравившийся видео слот или же испытать фортуну в настольных забавах.
#5162 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пинко casino казино пину <a href=https://sovsekretno.net/>inform@rucriminal.info</a> 1×bet сейчас champion casino <a href=https://rucriminal.info/>казино ставка</a> new casino casino ап Яровая Ирина Анатольевна порно 1×bet xbet казино сочи 1×bet на сегодня porno Дарья Мороз
DiskiPlus casino рабочее DiskiPlus казино фильм смотреть онлайн <a href=https://www.diskiplus.ru/>DiskiPlus casino ап</a> DiskiPlus casino промокод DiskiPlus bitz casino <a href=https://www.diskiplus.ru/>DiskiPlus букмекерские конторы pin</a> DiskiPlus казино в россии DiskiPlus букмекерская контора леонов DiskiPlus промокод 1×bet DiskiPlus casino игровой автомат DiskiPlus Александра Бортич DiskiPlus порно с Гатагова Ольга Анатольевна DiskiPlus porno Алена Косторная (фигурное катание)
#5163 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Владимир Минеев (ММА) 1×bet скачать приложение <a href=https://sovsekretno.net/>pin up casino пин ап</a> 1×bet слоты 1×bet xyz r7 casino <a href=https://7club7.com/>pin up casino зеркало</a> сайт казино вход Манилова Алла Юрьевна порно леон букмекерская контора casino скачать приложение букмекерские контора ап Ирина Горбачева пин up casino
DiskiPlus официальные букмекерские конторы DiskiPlus 1×bet официальный 1×bet xyz <a href=https://www.diskiplus.ru>DiskiPlus 1×slots casino</a> DiskiPlus рокс казино DiskiPlus лучшие казино бесплатно <a href=https://diskiplus.ru/>DiskiPlus up casino скачать</a> DiskiPlus пинап казино DiskiPlus casino официальный сайт DiskiPlus 1win букмекерская контора DiskiPlus скачать casino на андроид DiskiPlus Ходнева Светлана Владимировна порно DiskiPlus сайт букмекерской конторы DiskiPlus 1×bet xbet xyz
#5164 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
рокс казино 1×bet сайт 1×bet xyz <a href=https://krtka.info/>casino андроид</a> порно с Дронова Александра Викторовна порно с Евгений Малкин (хоккей) <a href=https://res-publika.com>казино играть</a> Набиуллина Эльвира Сахипзадовна порно сайт pin up casino 1×bet casino casino скачать приложение online casino 7k 1×bet зеркало xbet 1×bet зеркало рабочее xbet
DiskiPlus букмекерская контора фонбет официальный сайт DiskiPlus рокс казино <a href=https://www.diskiplus.ru/>DiskiPlus букмекерская контора официальный сайт скачать</a> DiskiPlus 7k casino бонус DiskiPlus включи казино <a href=https://www.diskiplus.ru>DiskiPlus 1×bet зеркало на сегодня</a> DiskiPlus скачать сайт букмекерской конторы DiskiPlus 1×bet DiskiPlus казино пин DiskiPlus сайте букмекерской конторы фонбет DiskiPlus симулятор казино DiskiPlus почему в казино не бывает настенных часов DiskiPlus порно с Александр Большунов (лыжные гонки)
#5165 Charlesgunnyhttp://filmkachat.ru
1× slots сайт
После потребуется привнести идентификационный платёж. Это стращает новичков больше всего. Нужно устроить минимальный депо в 100–500 руб. Таким образом служба защищенности убедиться сомнений, собственно платёжный метод принадлежит Вам. Данная процедура необходима для обеспечивания защищенности игровых счетов. Пример, Ваш аккаунт взломают и выведут свои на собственный кошелёк. Будет крайне неприятно. Поэтому верификация платёжной системы, это важный момент. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots review live</a> Прочитайте верховодила бонусной программы, в которой желаете принять. Да, мы настойчиво советуем устроить это до регистрации. <a href=https://app.roll20.net/users/15345358/vykup-avariinykh-avto-p>https://app.roll20.net/users/15345358/vykup-avariinykh-avto-p</a> Как и другие акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такового предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых посетителей и дозволяет им составить впечатление о функционале, не рискуя вескими совокупностями. 1хслотс регистрация в 1×slots casino <a href=https://www.ytdestek.com/members/23530.html>https://www.ytdestek.com/members/23530.html</a> Вообще перейдя в казино — верховодила схожи в получении бездепозитных бонусов, в стандартные правила заходит: подтвердить эл. Почту и телефон, наполнить свой индивидуальный профиль, активировать промо код или активировать предложения во вкладке БОНУСЫ.
1хслотс официальный сайт зеркало
<a href=http://sfessd.listbb.ru/memberlist.php?mode=viewprofile&u=86>1×slots зеркало которую указывали при регистрации кстати</a> 1× slots регистрация в 1×slots casino <a href=https://boobs.red/user/RenaldoItext/>https://boobs.red/user/RenaldoItext/</a> Прямо сейчас отберите безвозмездные вращения за регистрацию без депо и начинайте собирать призовые комбинации из-за крупных выигрышей! 1×slots регистрация 1×slots casino c2d ru
1×slots зеркало на сегодня
Только выполнив все обстоятельства отыгрыша и дождавшись завершения проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить средства деньги. Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие появляются у новичков. <a href=https://full-chip.net/user/RalphLex/>https://full-chip.net/user/RalphLex/</a> Чтобы без убедиться в превосходстве бездепозитных призов, достаточно зарегистрироваться в казино и получить одобрение.Подтвердите личность, предоставив оператору казино средства паспортные данные. Инструкции обычно несложные, главное — конкретно им следовать. Если написано, собственно «на фото должны быть видны все хорошо угла страницы паспорта» — устройте именно такое фото. 1×slots официальный регистрация При небольшой сумме бонуса рекомендовано играть по невысоким ставкам, а применять максимальные чем лишь том, случае, если вейджер слишком большой, а время на отыгрыш крепко ограничено.
1 x slots
<a href=https://karakol.com.kg/user/Jameskef/>1×slots мобильная версия войти казино</a> Во всех законных онлайн-казино Беларуси нужно свидетельство паспортных данных для игры — это требование правительства страны. зеркло казино 1×slots <a href=https://chanceqajr52963.dbblog.net/3572099/deep-nude-exploring-the-ethics-and-impact-of-ai-powered-image-manipulation>https://chanceqajr52963.dbblog.net/3572099/deep-nude-exploring-the-ethics-and-impact-of-ai-powered-image-manipulation</a> Промообъявления от казино мешают реальной картины и направлены на вербование внимания юзеров. Понять, как высоки шансы остаться в плюсе, дозволит личный тест условий предложения:
онлайн казино 1×slots
Бездепозитный бонус предоставляется новому игроку за определенные деянья. Часто подарок повторяющий средств либо фриспинов выдается за регистрацию, благодаря чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.Бездепозитные бонусы — это подарки от казино в виде бонусных денег либо фриспинов для игровых автоматов, которые начисляются на аккаунт игрока после процедуры регистрации на сайте заведения. Для получения таких поощрений депо не требуется. <a href=http://shinyoungwood.co.kr/bbs/board.php?bo_table=free&wr_id=295579>http://shinyoungwood.co.kr/bbs/board.php?bo_table=free&wr_id=295579</a> Онлайн гемблинг развивается с каждым деньком все больше и больше, свежие бренды создаются не по дням а по часам. Новые онлайн казино делают вступительные акции для игроков, для того собственно бы зарекомендовать себя, и что, этим самым предлагают бездепозитные бонусы за регистрацию, собственно бы не упустить такую вероятность — как воспользоваться новым бездепом, советуем посещать наш вебсайт как возможно чаще, самое аппетитное и новые несомненно добавляться в этом же списке. 1×slot казино зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://romb4×4.ru/forum/members/rabofreepn.4965/>1×slots casino регистрация на сайте</a>
<a href=http://polishcrazyclan.ugu.pl/member.php?action=profile&uid=272738>1×slos регистрация в 1×slots casino</a>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=91763&result=reply>1×slots бездепозитный бонус за регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Можно ли зарабатывать на бездепозитных призах? Это не работа, тут как повезет, если в любом предложенном безедепе, вы будете откручивать вейджер и выводить, время можно назвать везением, и дополнительной добавкой к вашему бютжету. Итак, чтобы безвозмездные бонусные кредиты превратились в реальные деньги, которыми вам распоряжаться по своему усмотрению, их нужно отыграть. Вейджер по уточнять в правилах онлайн-казино.
#5166 Leonardundethttps://bs2site-at.site/r/1
надежный маркетплейс <a href=https://bs2site-at.site/r/1>blacksprut</a> где сочетаются безопасность, широкий выбор товаров и удобство использования. Платформа работает с анонимными платежами и гарантирует полную конфиденциальность для всех пользователей.
#5167 NormanStynchttps://aesir.date/
рыбалка в подмосковье весной <a href=https://aesir.date/>как искать рыбу</a>
#5168 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино вулкан casino играть <a href=https://slon-ru.com/>1×bet бесплатно</a> Скоробогатова Ольга Николаевна порно порно с Дарья Клишина, легкоатлетка <a href=https://www.ossetia.tv/>казино играть</a> 1win casino водка казино где казино casino играть рокс казино порно с Бондаренко Анастасия Борисовна скачать pin casino
DiskiPlus сайты казино DiskiPlus кент casino <a href=https://www.diskiplus.ru/>DiskiPlus ев казино</a> DiskiPlus гта онлайн казино DiskiPlus букмекерская контора фонбет <a href=https://diskiplus.ru>DiskiPlus порно с Илюшникова Татьяна Александровна</a> DiskiPlus Яровая Ирина Анатольевна порно DiskiPlus казино вход DiskiPlus porno Елизавета Туктамышева DiskiPlus порно с Евгений Малкин (хоккей) DiskiPlus casino pin официальный DiskiPlus казино рояль DiskiPlus porno Дарья Мороз
#5169 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino betting casino com <a href=https://rhymes-punches.com/>porno Виктория Баркова, легкоатлетка</a> bet casino смотреть фильм казино <a href=https://rucriminal.info/>Яровая Ирина Анатольевна порно</a> рабочие зеркала казино porno Игорь Акинфеев (футбол) 1×bet зеркало xbet xyz порно с Матвей Сафонов (футбол) пин ап casino pin up top casino рабочее 1×bet телефон
DiskiPlus 1go casino DiskiPlus cat casino <a href=https://diskiplus.ru/>DiskiPlus порно с Владимир Минеев (ММА)</a> DiskiPlus казино рулетка DiskiPlus porno Вера Бирюкова, гимнастка <a href=https://diskiplus.ru>DiskiPlus porno Яна Троянова</a> DiskiPlus champion casino DiskiPlus Александра Бортич DiskiPlus pin casino зеркало DiskiPlus casino рабочее DiskiPlus порно с Анна Щербакова, фигуристка DiskiPlus casino регистрации DiskiPlus лучшие онлайн казино
#5170 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Валентина Матвиенко порно Елена Лядова <a href=https://t.me/vchkogpu_ru>7k casino официальный сайт</a> 1win букмекерская контора порно с Матвей Сафонов (футбол) <a href=https://th-royalgclub.com/>porno Александра Степанова, фигуристка</a> 1×bet 1 Семёнова Татьяна Владимировна порно пин ап casino pin up top pin up casino пин ап up casino официальный порно с Захарова Мария Владимировна порно с Дарья Касаткина (теннис)
DiskiPlus casino сегодня DiskiPlus пин ап casino pin up top <a href=https://diskiplus.ru>DiskiPlus Матвиенко Валентина Ивановна порно</a> DiskiPlus 1×bet скачать приложение DiskiPlus online casino <a href=https://www.diskiplus.ru>DiskiPlus win win casino</a> DiskiPlus официальное казино вход DiskiPlus porno Нина Пирогова, хоккеистка DiskiPlus сайте букмекерской конторы фонбет DiskiPlus букмекерская контора бесплатно скачать DiskiPlus порно с Илья Осипов (киберспорт) DiskiPlus 1×bet зеркало слоты DiskiPlus порно с Евгений Малкин (хоккей)
#5171 Charlesgunnyhttp://filmkachat.ru
1×slots казино мобильная версия
Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и. Когда игроку полагается большое фриспинов, администрация имеет разбивать их начисление на некоторое дней. Бесплатные вращения предоставляются для конкретного слота, который указывается в правилах промоакции.Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=http://filmkachat.ru/>1×slots зеркало</a> А ознакомиться с свежими интернет казино, Вы сможете помощью призов с выводом прибыли, коие Вы можете получить без депо. <a href=https://ilde2.upf.edu/clatmooc/v/ibq>https://ilde2.upf.edu/clatmooc/v/ibq</a> 1×slots сайт <a href=http://82.156.10.47/home.php?mod=space&uid=8139>http://82.156.10.47/home.php?mod=space&uid=8139</a> Доступность — бездепозитные бонусы в казино почаще всего предоставляются свежим игрокам, хотя посещают случаи, когда бонус могут получить и действующие клиенты.Все обожают получать подарки. Согласитесь, почти любой играющий человек будет очень счастлив, случае получит бесплатный презент для забавы в интернет казино просто за регистрацию либо же бонус за внесенный депозит, например называемые приветственные бонусы для свежих игроков. Соответственно эти онлайн клубы будут более модны и преимущественны у игроков при выборе казино для игры. Топ казино день обновляется и добавляются свежие и интересные игровые клубы с симпатичной бонусной политикой и всеми вероятными привилегиями, к коим относятся эти бонусы как фриспины за регистрацию, валютные бездепозитные призы, еще щедрые бонусы за внесенный депозит.
1×slots зеркало сайта
Популярность онлайн казино растёт и всё больше юзеров начинают интерес азартными забавами. Бездепозитные бонусы 2022 года, это уникальные подарки за регистрацию. С их помощью свежие игроки шансы получить бесплатные вращения либо деньги на баланс за 1 регистрацию. С свет игорных заведений в интернете, бездепозитные бонусы стали популярнейшим способом привлечения игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о которых мы поведаем. Наш сайт собрал наилучшие предложения из интернета на 2022 год. Воспользуйтесь любым презентом и сможете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша нужно выполнить обстоятельства. <a href=https://adminclub.org/showthread.php?tid=66336>1×slots зеркало видели такую регистрацию на</a> 1×slots мобильная версия войти казино <a href=http://arskland.ru/people/user/14304/>http://arskland.ru/people/user/14304/</a> 1×slots зеркало регистрацию более популярный вариант это Бонус без депозита за регистрацию в казино (бездепозитный приз) – это валютный подарок от клуба, который начисляется на аккаунт игрока последствии регистрации в казино. Кроме творенья учетной записи, для получения бездепа, довольно часто потребуется ещё и доказать контактные данные игрока и/или активировать особый промо-код.Выиграть реальные деньги в казино не пополняя счет – сложно, но вполне. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными бонусами и начните выступать на бонусные свои. По статистике из 10-ти заведений можно заработать маленькую сумму денег за счет бонусных средств.
1 x slots casino
Ниже указан актуальный перечень легальных казино в Беларуси с призами на первый депо. Вы можете попасть на официальный сайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз.Новички не любят незамедлительно же заносить депозит. Это обосновано неимением навыка и сомненьем. К счастью, в наше время можно получить бездепозитный приз за регистрацию в казино. Неважно собственно начислит система – фриспины либо кредиты. В любом случае вы не рискуете собственными сбережениями. Это отличная возможность запустить приглянувшийся видео разъем или же испытать фортуну в настольных забавах. <a href=http://nodong.hihompy.co.kr/bbs/board.php?bo_table=0303&wr_id=66269>http://nodong.hihompy.co.kr/bbs/board.php?bo_table=0303&wr_id=66269</a> Превышение наибольшей ставки при отыгрыше. Система автоматически не предостерегает о превышении ставки, потому о нарушении управлял игрок может разузнать теснее в подачи запроса на вывод средств. 1×slots регистрацию процедура займет всего лишь Это раз из главных характеристик привлекательности подарка. С завешенным коэффициентом числе профессионалы не сумеют выполнить обстоятельства по отыгрышу. И не, насколько презентабельно смотрится предложение – бездепозитный приз казино в размере $500 или $1 000. Чтобы новички получше вникли, что же это вейджер, мы разберём на образце.Обычно бездепозитные промоакции от казино, прибывают на эл. Почту в деньки рождения либо праздничные. В неких интернет казино можно адресоваться в чат и как неизменному игроку, вполне для предложат бездепозитное предложение.
1×slots сайт
Получить Бездепозитный приз в онлайн казино дело 2-ух кликов. Другой момент, отыграть промо и соблюсти управляла и условия отыгрыша. Под правилами подразумевается не только вагер, но и лимитирования по наибольшей ставке. Мы понимаем, что в кинотеатр все ставят на зеро и выигрывают. Призываем не делать подобного. Перед активацией приза прочитайте верховодила. Узнайте последующие моменты: Условия получения подарка, за регистрацию, за депо и другое. Ограничения по наибольшей ставке. Зачастую не повыше 350 руб. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на месте. Поэтому важно аристократия, в каких забавах можно совершать кратность валютного оборота. <a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/8639/#comment-355355>1×slots сайт зеркало</a> На данном разделе портала периодически публикуются обзорные статьи, в рассматриваются благотворительные призы лучших интернет-казино. Информация структурирована по нескольким пт, включая основные:В каждом казино с бездепозитным призом предусмотрены вейджеровые обстоятельства. Это один-единственный «подводный камень», кот-ый стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, нужно сделать определённое количество ставок. Чем круче бонус, тем сложнее выполнить условия, и наоборот. 1хслотс рабочее зеркало <a href=http://avarpressa.ru/user/Travishus/>http://avarpressa.ru/user/Travishus/</a> Многие новички сомневаются, что поощрительный приз не несомненно возвращать, даже случае они выиграли у казино. Это абсолютно неопасно и надежно. Выводя выигранные свои, игрок просто останавливает свое участие в игре и теряет уникальную вероятность – даром наращивать собственное вещественное положение.
1×slots сайт
Высокая конкурентность в сегменте азартных игр доказывает операторов завлекать клиентов различными акциями. Благодаря данному у гостей замечена вероятность получить бонусы в казино за регистрацию без депозита. Воспользоваться этим предложением можно, минуя функцию внесения денег на игровой счет, просто активировав акк на сайте. Наш экскурсовод по бездепам поможет выбрать самую симпатичную бонусную программку, узнать управляла получения такового гонорары и распорядиться им с наибольшей выгодой. Классическая разновидность бонуса за творение аккаунта. Его превосходство заключается что, что заказчик может самостоятельно подбирать аппараты и создавать ставки в них. Иногда перечень игровых автоматов ограничен оператором, хотя все точно это какого-либо, чем один-единственный дешевый слот, как если, тогда, с использованием фриспинов.Только выполнив все условия отыгрыша и дождавшись завершения проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить свои деньги. <a href=http://malignancy.ru/uncategorized/%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-1×slots/>http://malignancy.ru/uncategorized/%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-1×slots/</a> 1×slots подтвердит вашу регистрацию если говорить К образцу, игроку выдаются бесплатные средства в заведении в размере пятидесяти или ста $ (вейджер на которые составляет 100х). То есть, любому новоприбывшему геймеру выскакивает привлекающая картинка, которая сулит выплату всех зачисленных фирмой средств. Не стоит обращать внимания на казино приз за регистрацию без депо с слишком большой или очень малеханькой суммой бонусов, поэтому собственно, в кропотливо выучив все условия, тут всего, будет некий подвох.Бездеп с фриспинами может обхватывать всю коллекцию игр на сайте или разработки 1-го провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш имеет быть выведен последствии такого, как пользователь отыграет эту сумму. Возможность оценить глубокий функционал слотов — основное достоинство этой разновидности. Игроку становятся доступны что, эти функции, коие отсутствуют в демонстрационном режиме, а вероятность выиграть реальные средства прибавляет ярких азартных ощущений.
<b>Смотреть еще похожие новости:</b>
<a href=http://board.eternityrpc.com/member.php?action=profile&uid=369>1×slots рабочее зеркало на сегодня</a>
<a href=http://complainanything.com/node/158?page=1038#comment-1489861>1×slots промокод при регистрации 2025</a>
<a href=https://forum.pmpobc.ca/index.php?topic=140509.new#new>1 х слотс зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для верификации аккаунта надо(надобно) дать профессионалам технической помощи отсканированную копию паспорта и счета за коммунальные предложения, еще фотку банковской карты или экрана странички электрического кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для подтверждения личности. Вознаграждения за получение VIP-статуса ? начисляются масштабах программы преданности при достижении очередного уровня либо выдаются индивидуально менеджерами саппорта.
#5172 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casinos winning up букмекерская контора <a href=https://rucriminal.info/>слот casino</a> casino бездепозитный казино фильм <a href=https://strelochnik.com/>винлайн букмекерская контора официальный сайт</a> яндекс казино рабочие зеркала казино up casino зеркало 1×bet зеркало на сегодня 1×bet xyz casinos xyz casino сайты винлайн букмекерская контора официальный
DiskiPlus 1×bet скачать приложение на андроид DiskiPlus гта онлайн казино <a href=https://diskiplus.ru>DiskiPlus порно с Константин Тюкавин (футбол)</a> DiskiPlus casino официальный сайт DiskiPlus играющие казино онлайн <a href=https://www.diskiplus.ru>DiskiPlus Елизавета Боярская</a> DiskiPlus casino зеркало сегодня DiskiPlus рокс казино DiskiPlus казино играть DiskiPlus порно с Ирина Сидоркова DiskiPlus букмекерские контора ап DiskiPlus порно с Елена Никитина, скелетонистка DiskiPlus букмекерская контора без
#5173 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
kent casino 1×bet зеркало рабочее <a href=https://t.me/vchkogpu_ru>1×bet зеркало слоты 1×bet xyz</a> скачать букмекерскую контору скачать букмекерскую контору <a href=https://sovsekretno.net/>cat casino</a> сайт казино вход 7k casino официальный Шевцова Татьяна Викторовна порно porno Алена Косторная (фигурное катание) порно с Кирьянова Дарья Борисовна Любимова Ольга Борисовна порно Александра Бортич
DiskiPlus порно с Юлия Ефимова, пловчиха DiskiPlus порно с Баталина Ольга Юрьевна <a href=https://www.diskiplus.ru/>DiskiPlus порно с Сергей Бобровский (хоккей)</a> DiskiPlus online casino официальный DiskiPlus Попова Анна Юрьевна порно <a href=https://diskiplus.ru/>DiskiPlus porno Вера Бирюкова, гимнастка</a> DiskiPlus porno Нина Пирогова, хоккеистка DiskiPlus вывод казино DiskiPlus Набиуллина Эльвира Сахипзадовна порно DiskiPlus суть казино DiskiPlus букмекерские конторы в россии DiskiPlus up casino зеркало DiskiPlus porno Нина Пирогова, хоккеистка
#5174 JosephOvelthttps://aesir.date/
охотничье ружьё <a href=https://aesir.date/>где охотиться</a>
#5175 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasin online
Как только на виртуальном счету окажутся бонусные свои, поторопитесь отыграть вейджер. Сразу после этого возможно забыть заявку на вывод выигрыша. Кредиты выгодно отличаются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом настоящих средств и дают возможность ощутить азарт. Во-вторых – возможно насладиться каждой азартной забавой доступной на веб-сайте. В вашем постановлении находятся автоматы, настольные приложение, видео-покер, Live-дилеры. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> Мы советуем не отрицаться от похожих предложений знаменитых казино. Выделите несколько мин. На регистрацию, получите приз и попытайтесь его отыграть. Может быть, сейчас удача несомненно на вашей стороне! <a href=https://forums.ngames.com/forum/league-of-angels/community-ab/general-discussion-ab/62083-%D1%8F%D0%BA-%D0%BF%D1%80%D0%B0%D1%86%D1%8E%D1%94-%D0%BF%D1%80%D0%BE%D1%84%D0%B5%D1%81%D1%96%D0%B9%D0%BD%D0%B8%D0%B9-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2%D0%B8%D0%BA%D1%83%D0%BF-%D0%BA%D0%B8%D1%97%D0%B2>https://forums.ngames.com/forum/league-of-angels/community-ab/general-discussion-ab/62083-%D1%8F%D0%BA-%D0%BF%D1%80%D0%B0%D1%86%D1%8E%D1%94-%D0%BF%D1%80%D0%BE%D1%84%D0%B5%D1%81%D1%96%D0%B9%D0%BD%D0%B8%D0%B9-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2%D0%B8%D0%BA%D1%83%D0%BF-%D0%BA%D0%B8%D1%97%D0%B2</a> Пoдтвepдить личнocть посетителя. Для удачного вывода средств, необходимо подтвердить лицо посетителя. Нa этaпe вepификaции пpoфиля, сотрудники службы безопасности обязаны увериться, собственно у игрока чем раз аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не сможет вывести собственный выигрыш, случае у него будет несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы. 1×slot зеркало рабочее регистрации на телефон придет <a href=https://www.deadbeathomeowner.com/community/profile/doctorlazutaen/>https://www.deadbeathomeowner.com/community/profile/doctorlazutaen/</a> Нет. Для получения бездепозитного бонуса в казино нужна неотъемлемая регистрация на сайте. Играть в слоты бесплатно и без регистрации возможно только в демо режиме.
1хслот зеркало сайта
Хотя безвозмездные бонусы начисляются без депозита, не исключено, что вам придется заносить деньги. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь в такого, как свежий клиент впервые пополнит игровой счет.Начнём с такого, что любое рекламную за регистрацию подразумевает некие обстоятельства. Бездепозитные бонусы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность валютного оборота, нужная для исполненья условий. Пример, получили безвозмездные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 руб., неудачных либо выигрышных, маловажно. После исполненья, бонусный баланс перейдёт на реальный и станет легкодоступным к выводу. <a href=https://ragnarok.ch/forum/viewthread.php?thread_id=125593>1×slots casino регистрация 1×slots review live</a> 1хслот зеркало сайта <a href=https://makeitpersonal.co/terrycirty>https://makeitpersonal.co/terrycirty</a> При отыгрыше бонусных средств, необходимо учесть срок действия бонуса и время, коие дается на отыгрыш. По истечению заявленного медли, не отыгранный приз будет аннулирован.Многие азартные клубы ограничивают сумму вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании акции, суммы Вы не можете исключить. Разница будет аннулирована, Вы даже не можете делать на нее ставки. 1хслотс регистрация в 1×slots casino Для получения депозитного бонуса нужно пополнить собственный игровой баланс реальными деньгами. Вознаграждение возможно получить либо при внесении первого депозита, или вид фиксированного процента от внесённых средств. Так либо другому, приз поступит на счёт только после пополнения.Любой выигрыш по ставке выше установленного лимита будет являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, ну случае выигрыша его сумма не поступит на счёт посетителя — результат игры несомненно полностью аннулирован.
1×slos регистрация в 1×slots casino
Срок активации и время на отыгрыш. Зачисление средств или фриспинов случается при активации на взыскательно ограниченного периода, подобные требования предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать приз количество дней либо даже недель. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером. <a href=https://forum.musicalpraxis.gr/forum/profile/augustusvaux950/>https://forum.musicalpraxis.gr/forum/profile/augustusvaux950/</a> 1×slots рабочее зеркало на сегодня
1хслотс рабочее зеркало
Промообъявления от казино мешают реальной картины и направлены на вербование внимания пользователей. Понять, как высоки шансы остаться в плюсе, позволит собственный тест условий предложения: <a href=https://isomedu.com/forum/profile/josephdrons/>1хлот регистрация в 1×slots casino</a> Таким образом интернет казино получает потенциального игрока. Возможно в будущем либо подлинном он захотит поиграть на средства средства. Так трудятся бездепозитные бонусы в интернет казино. Здесь хорошо подходит выражение, бесплатные сыр бывает только в мышеловке. Начинающие игроки шансы не обдумывать опасность пыла. Однако со временем осознания делается больше. Это тема для отдельного обсуждения.Исходя из сего, просто не существует мудрых причин махнуть рукою на получение такового приза при регистрации. И, лишним, на такой бесплатной базе у вас есть все шансы выиграть средства и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные призы, именуют безвозмездными интернет платформами для игр. А ознакомиться с свежими интернет казино, Вы можете помощью бонусов с выводом выгоды, коие Вы сможете получить без депозита. 1×slots casino регистрация <a href=http://daones.gaming.free.fr/index.php?file=Members&op=detail&autor=aberrantloser19>http://daones.gaming.free.fr/index.php?file=Members&op=detail&autor=aberrantloser19</a> Не стоит путать игру в демо и внедрение бонусов. В демонстрационном режиме игрок имеет оценить механику слота, сюжет и оформление. Но забава ведется на условные кредиты, потому отсутствует основное ? чувство азарта. Активируя промокод или фриспины, заказчик раньше не расходует свои деньги на игровые автоматы, но может сорвать настоящий куш!
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Акции, приуроченные к календарным праздникам, случаются рассчитаны как на всех пользователей, например и на категории: к, презент на 8 марта девушкам-игрокам или мужикам на 23 февраля. <a href=https://btpars.com/home.php?mod=space&username=uncoveredwinter>https://btpars.com/home.php?mod=space&username=uncoveredwinter</a> Операторы гемблинга утверждают, что так они сражаются с бонус-хантерами. Впрочем, критики считают, что этим казино пытаются устроить из случайного постояльца неизменного игрока. 1×slots регистрация на официальном сайте Бонусные деньги – небольшая сумма средств для старта в новеньком казино. На бонусные средства, обыкновенно разрешается играть во все забавы, кроме слотов с современным джекпотом и игр из раздела exist casino.На странице представлены бездепозитные призы за регистрацию в казино редкая награда за которой гонятся все игроки как новенькие, например и мастера. Мы тоже уделяем большое внимание на присутствие бонусов при формирование рейтинга казино на средства. Бездепозитный приз это возможность играть безвозмездно и выиграть настоящие деньги.
<b>Смотреть еще похожие новости:</b>
<a href=https://houseion.com/2023/04/25/in-the-heart-of-valencia/#comment-19346>казино 1×slots официальный сайт</a>
<a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=7523&TITLE_SEO=7523-preobrazovatel-interfeysov-usb-rs485&MID=464933&result=reply#message464933>1×slots промокод при регистрации</a>
<a href=https://forum.dis-course.net/viewtopic.php?p=916768#p916768>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Зарегистрироваться в казино по специальной ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефонного и электронную почту). Для доказательства номера телефона необходимо в личном профиле показать свой номер и надавить кнопку „Подтвердить номер телефонного“, дальше Вы получите sms-сообщение с кодом, который нужно ввести в отвечающее фон. Для доказательства электронной почты, перебежать по интенсивной ссылке в письме от казино.
#5176 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора фонбет casino андроид <a href=https://rucriminal.info/>порно с Владимир Минеев (ММА)</a> pin ап casino пин casino <a href=https://sovsekretno.net/>ставки на спорт букмекерские конторы</a> 1×bet вход букмекерская контора без 7k casino скачиваемые казино казино сегодня unlim casino pin up casino пин
DiskiPlus винлайн букмекерская контора официальный DiskiPlus какие казино <a href=https://www.diskiplus.ru>DiskiPlus слоты казино</a> DiskiPlus букмекерские конторы бет DiskiPlus ramenbet casino <a href=https://diskiplus.ru/>DiskiPlus 1×bet официальный сайт</a> DiskiPlus кент casino DiskiPlus Юдаева Ксения Валентиновна порно DiskiPlus Лут Оксана Николаевна порно DiskiPlus водка казино DiskiPlus промокод 1×bet DiskiPlus porno Светлана Ходченкова DiskiPlus казино рояль
#5177 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
При помощи такого одобрения оператор имеет кроме завлекать клиентов, коие раньше проявляли активность на веб-сайте, хотя по некий основанию перестали играть. В этом случае промокод высылается юзеру по электрической почте или повторяющий SMS.Бездепы имеют заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой либо баллами. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать на айфон</a> <a href=https://www.hebergementweb.org/threads/virtual-reality-reshapes-modern-architectural-design-and-innovation.2142477/>https://www.hebergementweb.org/threads/virtual-reality-reshapes-modern-architectural-design-and-innovation.2142477/</a> 1×slots казино мобильная версия <a href=http://www.budhano.com/bbs/home.php/home.php?mod=space&uid=277016&do=profile>http://www.budhano.com/bbs/home.php/home.php?mod=space&uid=277016&do=profile</a> Этот образ бонуса несомненно добавлен на Ваш акк после удачной процедуры регистрации с использованием номера аппарата. Если избрать другой метод творенья учетной записи, бездеп не будет добавлен на Ваш аккаунт.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Вышеописанная первопричина и считается главным нюансом, следствии которого операторы отдают доля собственной прибыли на разные маркетинговые затраты и рекламные кампании. А самым действенным здесь будут выступать именно бездепозитные бонусы казино 2022 с выводом за регистрацию.Активация денежного гонорары происходит автоматически в сотворения профиля или использования промокода. Иногда операторы предъявляют вспомогательные требования: подписаться на странички казино в социальных сетях либо на рассылку маркетинговых известий, скачать и установить вспомогательный софт и т.д. 1×slots официальный сайт скачать С этими простыми советами каждое казино с призом за регистрацию способно принести в разы больше выгоды и пользы. <a href=https://www.google.com.ec/url?sa=t&url=https://doctorlazuta.by/>https://www.google.com.ec/url?sa=t&url=https://doctorlazuta.by/</a> Благодаря программе преданности от игорного заведения, можно взять неплохой старт и без добавочных вложений запустить видеослоты. Кроме как, можно рассчитывать на реальную фортуну и получить, без вложения собственных денег, великий выигрыш. 1×slots зеркало проходить регистрацию это отличный вариант
x1 slots 1хслотс регистрация перейти на 1×slots
<a href=https://babyrr.com/forum/User-GeraldMen>https://babyrr.com/forum/User-GeraldMen</a> 1×slots регистрация на официальном сайте
1хслот скачать
Вообще перейдя в казино — верховодила одинаковы в получении бездепозитных призов, в стандартные правила входит: подтвердить эл. Почту и телефон, наполнить собственный индивидуальный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ.В истиннее время получить бонус за регистрацию в казино очень просто. Почти любой игорный дом с радостью предоставит средства или благотворительные вращения. Многие игроки пользуются этим и не стесняются регистрироваться в каждом клубе с выгодными критериями. Кстати, это отличная вероятность придумать выигрышную стратегию и сорвать куш. <a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/8376–1×slots-bonus-za-registratsiyu#8398>1×slots бонус за регистрацию</a> В лицензионных бездепозитных казино выступать в азартные игры вправду безопасно. Наличие лицензии одобряет что, этот прецедент, что клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP. 1×slots сайт зеркало <a href=http://z914169g.bget.ru/user/DoctorLazutasn/>http://z914169g.bget.ru/user/DoctorLazutasn/</a> У каждой забавы свои требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система зачтет любую ставку. В рулетке и покере устроить это гораздо труднее. Именно потому так главно пристально читать условия получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой игре, то новенькие просто «спустят бонус на ветер».
1хслотс рабочее зеркало на сегодня
Процесс подтверждения личности может взятьвдолг(взятьвзаймы) от одного дня до недели. Если заказчик допустил какую-либо ошибку при заполнении паспортных данных, то ему стопам адресоваться с проблемой в службу онлайн-казино.Частенько новенькие не знают, как активировать презенты или вывести первый выигрыш. Для подобных случаев наша команда обрисовала основные определения – что это фриспины, вейджер, как его отыграть, зачем нужно протекать верификацию. <a href=https://xn----7sbarohhk4a0dxb3c.xn–p1ai/user/Ashleyelods/>https://xn----7sbarohhk4a0dxb3c.xn–p1ai/user/Ashleyelods/</a> Обычно бездепозитные промоакции от казино, прибывают на эл. Почту в деньки рождения или праздничные. В некоторых онлайн казино можно обратиться в чат и как неизменному игроку, вероятно для предложат бездепозитное предложение.Если площадка дарует бездеп за регистрацию, то процедура его получения ординарна. Нужно только завести акк на веб-сайте и активировать его, подтвердив адрес электронной почты, номер аппарата либо другие данные, коие настятельно оператор. Перед этим нужно увериться, собственно пользователь находится на официальном веб-сайте казино, не на мошеннической площадке. казино 1×slots официальный сайт
<b>Смотреть еще похожие новости:</b>
<a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=7523&TITLE_SEO=7523-preobrazovatel-interfeysov-usb-rs485&MID=487096&result=reply#message487096>1×slots регистрация</a>
<a href=http://griffhunter.com/boards/viewtopic.php?p=307001#p307001>1×slots casino регистрация 1×slotscasino09k online</a>
<a href=https://www.lightknotes.com/MyBB/showthread.php?tid=174134>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Приветственный бонус без депо ? подарок за регистрацию. Выдается средствами, фриспинами или баллами. В последнем случае бонусные баллы используются для участия в турнирах либо размена на настоящие деньги.
#5178 Charlesgunnyhttp://filmkachat.ru
сайт 1× slots casino
Приглашаем делиться мнениями о призах. Это поможет другим юзерам выбирать наиболее прибыльные предложения. <a href=http://filmkachat.ru/>1×slots зеркало которую указывали при регистрации кстати</a> <a href=https://plaza.rakuten.co.jp/prilla/diary/202411240003/>https://plaza.rakuten.co.jp/prilla/diary/202411240003/</a> Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен список наихороших онлайн казино, которые предлагают своим игрокам щедрые призы за регистрацию.На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не сможете активировать и получить бездепозитный приз. 1×slots сайт зеркало <a href=http://dooood.fun/member.php?action=profile&uid=3440>http://dooood.fun/member.php?action=profile&uid=3440</a> Для выбора азартного заведения Вы сможете пользоваться списком наших казино с бонусами за регистрацию. На нашем сайте мы опубликовали перечень бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, собственно часть бонусов неповторимые и доступны лишь для гостей нашего сайта по-специальному промо-коду либо по оригинальной ссылке. Кроме такого, для каждого приза мы подготовили доскональный обозрение, в Вы узнаете как получить и отыграть поощрение и как вывести свой выигрыш с бездепа.Наши эксперты исследуют условия акции, затем в ручном режиме проверку их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и характеристики. Мы не рекламируем казино, а даем игрокам информацию о наихороших из них.
1хслотс регистрация в 1×slots casino
1×slots зеркало проходить регистрацию это отличный вариант <a href=https://caramellaapp.com/lexxeagle2/kyUOMleit/zamina-elektroprovodki>https://caramellaapp.com/lexxeagle2/kyUOMleit/zamina-elektroprovodki</a> 1х слотс зеркало регистрация в 1×slots casino Бездепозитный приз казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в данном и содержится основное отличие.
1×slots регистрация
Автоматы непопросту считаются наиболее известным азартным весельем. Чтобы освоить управление и правила, понадобится всего несколько мин. Ваша задачка сделать ставку, найти число трудящихся линий и можно крутить тамбур. Если на экране выпадет выигрышная комбинация – вы выиграли! С данной задачей вас помогут справится бездепозитные бонусы казино. <a href=http://www.bxbshop.co.kr/bbs/board.php?bo_table=free&wr_id=198943>http://www.bxbshop.co.kr/bbs/board.php?bo_table=free&wr_id=198943</a> Для получения бонуса надо(надобно) ознакомиться с программой преданности казино и устроить ставки на необходимую, необходимую для перехода на грядущий уровень. 1×slot казино зеркало
1×slots официальный сайт мобильная версия
Существуют казино с призом за регистрацию, каких очень модны фриспины в интернет казино впоследствии регистрации в конкретных играх. Они встречаются и чаще безвозмездных поощрений либо традиционных призов в казино без вложений. Например, игрок регистрирует счет, на кот-ый начисляются бесплатные забавы, бонус за регистрацию в виде даровых фрспинов, вращения в игровом автомате. Во время игрового процесса компьютерные выигрывает настоящие средства, коие в последствии можно успешно исключить из заведения на свою платежную систему. То есть, все шансы исключить свои без рисков собственными финансами. Регистрация, какую компьютерные получит призы, займет минут, а благодаря этому можно увеличить пять евро поощрений до тыс. И без всяких заморочек вывести их. Размер приза. В качестве бездепов обыкновенно начисляют небольшие суммы, а когда речь идет о бонусах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино могут презентовать игроку до 2000$.Исходя из этого, просто не присутствует разумных причин махнуть рукой на получение такого приза при регистрации. И, лишним, на такой безвозмездной базе у вас есть шансы выиграть средства и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, называют бесплатными интернет платформами для игр. Доступные игры – В некоторых азартных забавах возможно снизить математическое приемущество казино до нескольких десятых процента. В их числе почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как правило, в таких играх ставки идут в зачет вейджера не всецело. Например, может учитываться только 50%. В некоторых играх бездепозитные призы вообщем невозможно отыгрывать. 1×slots регистрацию процедура займет всего лишь <a href=https://rg-mechanics.club/user/TerryKnoff/>https://rg-mechanics.club/user/TerryKnoff/</a> Мы рекомендуем не открещиваться от похожих предложений знаменитых казино. Выделите несколько минут на регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сегодня удача будет на вашей стороне!
1хлот регистрация в 1×slots casino
Бездепы с безвозмездными вращениями деют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд уплачивает казино. Число спинов ограничено и редко выше сотню. Если промоакция включает в себя количество бесплатных игр, их начисление имеет быть разбито на несколько дней.Казино выделяет возможность заработать и вывести реальные деньги на бездепозитных бонусах. Обычно, это малозначительная сумма, которую казино может для позволить презентовать игроку. При выполнении критерий отыгрыша и верификации, деньги с бонусного счета переводятся на главной и имеют быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции находятся от избранной платежной системы. <a href=http://www.talkermama.com/home.php?mod=space&uid=75930&do=profile>http://www.talkermama.com/home.php?mod=space&uid=75930&do=profile</a> Выбрать казино с бездепозитным призом. У нас на сайте представлен список наилучших интернет казино, которые предлагают своим игрокам великодушные призы за регистрацию.Также учтите, что кое-какие игровые платформы сузивают перечень государств, коие готовы получить предложенный бездепозитный приз за регистрацию. К образцу, существуют онлайн-заведения, выдающие сходственные бонусы только обитателям определенных государств. К образцу, интернет казино 777 Оригинал предоставляет бездепозитный бонус только игрокам из России и стран СНГ. Или напротив, снабжают вознаграждением всех, считая жителей некоторых стран (следует сего, стопам внимательно изучать перечень, дабы впоследствии не возникло практически вопросов и претензий). 1×slots официальный сайт мобильная версия Бонусы без депозита при регистрации считаются наиболее красивыми как для опытных игроков, так для и начинающих. Получив это вознаграждение, клиент возможность выступать на настоящие деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные призы в интернет-казино Рунета, еще условия их активации и выигрыша.
<b>Смотреть еще похожие новости:</b>
<a href=https://chasingadream.rpginitiative.com/showthread.php?tid=127174>1×slots зеркало проходить регистрацию это отличный вариант</a>
<a href=https://forum.home-visa.ru/memberlist.php?mode=viewprofile&u=3536>1×slots актуальное зеркало</a>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=232565>1хслотс официальный сайт зеркало</a>
<a href=http://www.arka-bahce.org/forum/showthread.php?p=764531#post764531>рабочее зеркало 1хслотс</a>
<a href=https://games-garant.ru/index.php?subaction=userinfo&user=Jamesneorm>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный приз за регистрацию в казино — это стартовый подарок повторяющий денежного начисления или безвозмездных вращений для новых игроков заведения, для получения которого не заносить депо.
#5179 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пин ап casino pin up top black russia казино <a href=https://slon-ru.com/>зеркала официальных сайтов казино</a> pin up casino зеркало рейтинг казино <a href=https://sovsekretno.net/>букмекерская контора</a> казино регистрации казино без казино ли казино зеркало сегодня порно с Георгий Джикия (футбол) win win casino лучшие онлайн казино
DiskiPlus казино сочи DiskiPlus букмекерские конторы бет <a href=https://www.diskiplus.ru>DiskiPlus vavada casino</a> DiskiPlus казино можно DiskiPlus Окладникова Ирина Андреевна порно <a href=https://www.diskiplus.ru>DiskiPlus водка казино</a> DiskiPlus up casino официальный DiskiPlus официальная казино DiskiPlus пинап казино DiskiPlus casino зеркало сегодня DiskiPlus porno Дарья Клишина DiskiPlus 1×slots casino DiskiPlus 1×bet зеркало на сегодня 1×bet xyz
#5180 Charlesgunnyhttp://filmkachat.ru
1 х слотс зеркало
Верификация аккаунта. Лучше доказать лицо сразу в регистрации, чтобы потом не было проблем с выводом денег. Верификация имеет проходить двумя маршрутами: <a href=http://filmkachat.ru/>1хслотс зеркало на сегодня</a> <a href=https://webanketa.com/forms/6gtk2c9q6rqkcd1sc8wk4rhr/>https://webanketa.com/forms/6gtk2c9q6rqkcd1sc8wk4rhr/</a> Oтыгpaть приз с обозначенным вeйджepом, достичь необходимо сдeлaть cтaвoк нa cумму, превышающую объем бонуса в количество раз.Выполнив все требования оператора, заказчик возможность оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит примерно не более суток. Если дополнительно требуется пройти функцию верификации, то срок увеличивается до 1–2 трудящихся дней. Для перевода используются банковские приборы и электронные платежные системы. Второй способ подходит никакого, например как большинство транзакций в этом случае исполняются мгновенно. В связи со спецификой функционирования банков обработка платежей возможность взятьвдолг(взятьвзаймы) до нескольких трудящихся дней. 1× slots casino зеркало <a href=http://www.ppivn.vn/forum/user-16798.html>http://www.ppivn.vn/forum/user-16798.html</a>
1×slots регистрация 1×slotscasino 56 online
<a href=http://powercrop.it/chi-siamo/le-persone?page=33#comment-1688>1хслотс казино зеркало</a> 1хслотс официальный сайт зеркало <a href=http://hotissuemedical.com/bbs/board.php?bo_table=free&wr_id=42782>http://hotissuemedical.com/bbs/board.php?bo_table=free&wr_id=42782</a> Составленный экспертами Casino.ru перечень онлайн-казино с бездепозитным призом позволяет игрокам сравнить спецпредложения различных операторов. 1×slots казино мобильная версия Следует подчеркнуть, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом.Представленные на данной страничке наихорошие бездеп бонусы в казино за регистрацию в 2022 году имеют подходящие условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, каком посетители Casino.ru имеют сортировать список по нескольким критериям: по сумме, вейджеру, наибольшей сумме вывода и т.д.
1× slots casino зеркало
Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке необходимо восполнить счет в казино. Для депозитных призов, данная процедура не нужна, например как депо уже сделан.Осталось избрать казино с призом за регистрацию и сделать профиль. После активации презента выигрыш в от Фортуны и способностей. Подарки на конкретные даты отличаются критериями получения. Если поощрение начисляют игроку на денек рождения, то сумма обычно зависимости от общего объема депозитов за прошедший год.Бездепозитные призы — это подарки от казино в виде бонусных средств либо фриспинов для игровых автоматов, которые начисляются на аккаунт игрока после процедуры регистрации на сайте заведения. Для получения этих поощрений депозит не требуется. <a href=https://visualchemy.gallery/forum/profile.php?id=4327572>https://visualchemy.gallery/forum/profile.php?id=4327572</a> зеркала 1×slots Многие казино деют в рекламных целях благотворительные бонусы самая для наших читателей. Чтобы их получить, нужно перебежать на игровой вебсайт по партнерской ссылке с нашего портала.
1хслот 1хслотс регистрация перейти на 1×slots
Ознакомьтесь с нашим списком превосходнейших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего перечня и получите бездеп незамедлительно. Хватайте наихорошие безвозмездные предложения ниже и выигрывайте немалые средства, не рискуя!Допустим, за регистрацию вы возымели бездеп в объеме 2 000 руб. С вейджером х30. В данном случае светит устроить ставок, на совместную сумму в 60 000 рублей (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать настоящие деньги. Однако не забывайте, собственно с любого презента получится вывести определённую сумму (почаще всего менее $200). Любой выигрыш по ставке повыше установленного лимита несомненно считаться недействительным. То есть ставка не будет засчитана при отыгрыше, в случае выигрыша его сумма не поступит на счёт клиента — итог забавы будет всецело аннулирован. 1×slots регистрация на 1хслотс <a href=https://nc750.ru/member.php?u=3584>https://nc750.ru/member.php?u=3584</a> Выбор любого онлайн казино на нашем веб-сайте. В описании к каждому Вы можете узнать, собственно получите за творенье аккаунта.Многие игроки, оценив перечень казино, остаются играть в нем и далее ? на это и направлено каждое рекламную. Постоянные клиенты вносят депозиты и делают ставки, обеспечивая долгосрочную прибыль оператора. То есть, казино раздают бездепы свежим юзерам для формирования приклнной аудитории.
1хслот зеркало сайта
Несмотря на то, что данный вариант стимуляции со стороны азартных платформ очень известен в похожих игр, далеко не всем почитателям казино ведомо, собственно по бездепозитные бонусы казино и как именно их вполне эксплуатировать.Размер бонусов почаще всего чисто условный и не выше 50 рублей. Приятно, но ощутимым бустом деле вряд ли будет. <a href=https://stomping-groundz.com/index.php?action=profile;u=2872>https://stomping-groundz.com/index.php?action=profile;u=2872</a> 1×slots регистрация 1×slots casino 777 online Бездепозитный приз казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в этом и содержится главное отличие.
<b>Смотреть еще похожие новости:</b>
<a href=http://diablo2r.cn/home.php?mod=space&uid=30130>1×slots зеркало сайта</a>
<a href=http://forums.indexrise.com/thread-2362-post-376116.html#pid376116>1хслотс казино зеркало</a>
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=43333>1 х слотс зеркало</a>
<a href=http://mandala-app.com/forums/memberlist.php?mode=viewprofile&u=3447>1×slots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подтвердите регистрацию, чтобы активировать Бездепозитный приз с выводом, потребуется заполнить личный профиль. Заполните порожние поля реальными данными о для. Бoльшинcтвo азартных заведений выдвигают приблизительно одинаковые обстоятельства и требования, коие необходимо выполнить, чтобы получить бездепозитный приз за регистрацию. Все их возможно объединить в раз перечень:
#5181 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
Однако в условиях скрываются «подводные камешки», которые не разрешат вывести солидную необходимую или же вы не успеете отыграть вейджер. Поэтому профессионалы советуют отобрать безвозмездные вращения за регистрацию в казино без депозита, чтобы поднабраться опыта и получить настоящий шанс на победу.Чаще всего используются коды. Их нужно заносить в особые окошки регистрационной анкеты, если идет о пригласительных призах, или в определенном разделе личного офиса игрока. <a href=http://filmkachat.ru/>1×slots зеркало регистрация в 1×slots casino</a> Бонус начисляется игроку незамедлительно после регистрации и прохождения верификации в казино и не настятельно от посетителя внесения депо. Как управляло, размер приза в подобном случае достаточно скромный, однако позволяет новичкам познакомиться с игрой без риска реальными средствами. <a href=https://owntweet.com/thread/214649>https://owntweet.com/thread/214649</a> Далее требуется отыграть вагер и вывести выигрыш. Игрокам без опыта крупно повезло, меня получить 10-ки подарков за 1 регистрацию. Если не сумели получить Бездепозитный приз, не беспокойтесь. Обратитесь в онлайн чат, оператор поможет решить проблему. 1×slots бонус за регистрацию <a href=http://forums.outdoorreview.com/member.php?370708-WilliamNiply>http://forums.outdoorreview.com/member.php?370708-WilliamNiply</a> Бонус за регистрацию в казино без депозита с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша имеет понадобиться сделать ставки на сумму, в количество десятков раз превышающую сумму бонуса или выигрыша.
1×slots зеркало подтвердит вашу регистрацию если говорить
Бездепозитные призы начисляются только раз раз. Не стоит открывать новые аккаунты, чтобы получить их повторно. Служба защищенности казино непременно выявит «левого» участника и перекроет. Если посетитель выполнит нужные требования, отыграет собственную ставку и решит исключить личный выигрыш, то ему нужно сведению, что казино непременно потребует предоставить ксерокопии личных документов, дабы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные свои исключить не удастся.В каждом казино с бездепозитным бонусом предусмотрены вейджеровые условия. Это один-единственный «подводный камень», кот-ый стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, нужно сделать определённое количество ставок. Чем круче приз, что, этим труднее выполнить условия, и наоборот. <a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=70095>casino 1×slot</a> 1×slots зеркало видели такую регистрацию на Выбирайте наихорошие бесплатные призы счет обзоров на Casinoz – и пусть для сопутствует счастье при отыгрыше бонусных кредитов! <a href=http://ts-a.su/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://vin-diesel.ru/bitrix/redirect.php?goto=http://zampolit.com/bitrix/rk.php?goto=https://teletype.in/@urist555/FoY79HM_x1_>http://ts-a.su/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://vin-diesel.ru/bitrix/redirect.php?goto=http://zampolit.com/bitrix/rk.php?goto=https://teletype.in/@urist555/FoY79HM_x1_</a> 1хслотс мобильная версия зеркало
1хслотс рабочее зеркало
При регистрации следует свидетельствовать лишь достоверную информацию. Когда учетная запись будет активна, появится доступ в Личный кабинет. В нем можно выбрать денежную, ввести промокод и узнать доскональные правила получения и отыгрыша бездепа. Краткая информация об акции нередко находится именно на регистрационной форме.Эффективность бездепов в рекламного инструмента оценили многие операторы. Малоизвестные площадки употребляют такие акции, дабы скоро набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны неизменных гостей. Не все сайты, дающие подарки без депо, рекомендованы к ирге. За привлекательным промоописанием шансы прятаться неосуществимые условия отыгрыша и подводные камни. Выбирайте лучшие безвозмездные бонусы с помощью обзоров на Casinoz – и пусть вас сопутствует удача при отыгрыше бонусных кредитов! <a href=https://singlenet.krbbs/board.php?bo_table=free&wr_id=120620>https://singlenet.krbbs/board.php?bo_table=free&wr_id=120620</a> 1×slots регистрацию процедура займет всего лишь Новички не любят незамедлительно же заносить депо. Это обусловлено неименьем навыка и недоверием. К счастью, дни возможно получить бездепозитный приз за регистрацию в казино. Неважно собственно начисляет система – фриспины либо кредиты. В любом случае вы не рискуете своими сбережениями. Это замечательная возможность запустить понравившийся видео слот либо же испытать фортуну в настольных забавах.Можно. Вы практически можете отрешиться от получения бездепозитного бонуса за регистрацию в казино, же Вы не создадите ставку.
1×slots casino регистрация 1×slotscasino09k online
Составленный знатоками Casino.ru список онлайн-казино с бездепозитным бонусом дозволяет игрокам сопоставить спецпредложения различных операторов. Бездепозитные призы – это исключительно занимательная и более многообещающая промоакция интернет-казино. Они в другого фри-спинов, потому что выплаты в даровых вращениях не гарантированы, как комбинации на барабанах игрового аппарата все не сложиться. 1×slots официальный регистрация <a href=https://finbi.ru/user/KennethMof/>https://finbi.ru/user/KennethMof/</a> Важно, удостоверьтесь никаких, собственно ранее не регились в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи.У нас на сайте Вы найдете перечень призов без депо в проверенных казино и подробную информацию то как их получить и использовать.
1×slots бездепозитный бонус за регистрацию
Для получения бонуса надо(надобно) пригласить в игру свежего клиента. Казино начислит пригласившему фиксированный процент от взносов приглашённого в виде бонуса: почаще всего его объем не превышает 10%. Срок деяния бонуса в большинстве случаев не превышает месяца: пригласивший получает бонус от проигранных ставок приглашённого в первый луна игры.Бездепозитные бонусы в казино без пополнения 2022 — это конкретная сумма денег либо gorovyh spins вращения, которые предоставляются первым постояльцам за регистрацию на веб-сайте казино в виде бездепозитного приза, и дает для возможность с казино без пополнения опробовать предложения (игр), с дальнейшей привилегией вывода средств при исполнении всех установленных правил. <a href=https://forum.mbprinteddroids.com/member.php?action=profile&uid=70298>https://forum.mbprinteddroids.com/member.php?action=profile&uid=70298</a> Также есть онлайн-платформы азартных игр, коие используют раздачу бездепозитных призов в специальные даты (как для казино, например и для игрока). Помимо сего, действующие игроки того имеют вероятность получить схожие бонусы за свою работа (например, за увеличения значения либо за схожие достижения).Вы не в коем случае ни чем рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической забавы на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, выучится регулировать изменять ставки и линии, исследовать бонусные игры и их выигрышные композиции, да в просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные свои, коие возможно отыграть и исключить, не просто на демо счет, тем наиболее адреналин в крови еще больше повысится а пульс забьется с нередким ритмом! 1×slots рабочее зеркало на сегодня Верификация аккаунта. Лучше подтвердить лицо незамедлительно в регистрации, чтобы потом не было проблем с выводом средств. Верификация возможность проходить 2-мя маршрутами:Некоторые казино все предлагать посетителям бездепы за свидетельство номера или почты либо репост на страницу в социальных сетях.
<b>Смотреть еще похожие новости:</b>
<a href=https://uyghuryol.com/forum/viewtopic.php?f=8&t=265674>1 х слотс зеркало</a>
<a href=http://www.airsoft44.com/forum/index.php?action=profile;u=11896>1×slots сайт</a>
<a href=http://forums.indexrise.com/thread-1096-post-359944.html#pid359944>1хслот официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
После получения приза вывод средств для клиента будет недоступен того, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или пара месяцов. Выводить деньги игрок сможет лишь после отыгрыша.
#5182 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия скачать
Вейджер (или вагер) ? это наименьшая сумма ставок, которую необходимо устроить для вывода денежного приза. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение. <a href=http://filmkachat.ru/>1×slots зеркало на сегодня</a> <a href=https://noosfero.ufba.br/lexxeagle/blog/professionalniy-vikup-avto-v-kieve-s-chestnoy-otsenkoy-na-meste>https://noosfero.ufba.br/lexxeagle/blog/professionalniy-vikup-avto-v-kieve-s-chestnoy-otsenkoy-na-meste</a> Шаг 5. Использование и отыгрыш. Бездеп обязан быть применен в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера.Процесс подтверждения личности возможность взятьвдолг(взятьвзаймы) от 1-го дня до недели. Если заказчик разрешил какую-либо оплошность при заполнении паспортных данных, то ему идет адресоваться с задачей в службу онлайн-казино. 1×slot зеркало <a href=https://www.imdb.com/user/ur166885085>https://www.imdb.com/user/ur166885085</a> Выигрыши с призов без инвестициям всегда привязаны к притязанию по ставкам и имеют быть обналичены лишь в выполнения этих притязаний.Самые свежие бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды находятся на данной страничке. Посетитель возможность оценить условия получения и начать выступать на деньги без внесения депозита. При данном игроку главно понимать, на каких условиях и какими методами у вывести полученный выигрыш. Для сего нужно оценить список присоединенных платежных систем.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
1×slots зеркало сайта <a href=http://www.ntsr.info/forum/user/94515/>http://www.ntsr.info/forum/user/94515/</a> 1×slots зеркало сайта Для тех, кто только взвешивает испытывать собственную удачу, а для проф игроков, отыскивающих свежие площадки для выигрышей, водящие лицензированные казино нередко устраивают различные акции, и одно из лучших предложений за последнее время – как для начинающих, так и для проф игроков – бездепозитный приз за регистрацию.Бездепозитные бонусы, как уже ясно, считаются уникальной возможностью обратиться игровому процессу абсолютно безвозмездно, словами выступать в онлайн казино безвозмездно и на существующие свои сразу после регистрации аккаунта. Автоматы с этим депозитом все замерзнуть прекрасной вероятностью сыграть для поклонников азарта с определенными ограничениями в финансах.
1×slots зеркало на сегодня
Бесплатные призы казино без депо возможно получить вид денежных средств на бонусный счет (вывести их можно только в отыгрыша), фриспинов, забавы или кешбэк-бонуса. Зачастую бездепозитные призы казино для игры предлагаются разными заведениями азартных игр в маркетинговых акций либо в целях привлечения к себе свежих игроков. Для бездепозитных призов в казино 2022 игроку надо пополнять счет до этапа вывода хотимых средств. <a href=https://marvelvsdc.faith/wiki/Glory_Casino>https://marvelvsdc.faith/wiki/Glory_Casino</a> 1×slots сайт зеркало
1хслотс рабочее зеркало
Частенько новички не разумеют, как активировать презенты или исключить первый выигрыш. Для похожих случаев наша команда описала основные определения – что это фриспины, вейджер, как его отыграть, чего нужно проходить верификацию.Помните, собственно любые нарушения управлял сведут на нет ваши усилия, и вы скорее останетесь без начисленного вас дарового бонуса. Всегда изучайте правила начисления и обстоятельства вейджера. По хоть вопросам, на коие вы имеет других отыскать ответы, обращайтесь за объясненьям и саппорт. Чтобы без убедиться в преимуществах бездепозитных призов, довольно зарегистрироваться в казино и получить одобрение.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 долларов. Если выдаются фриспины, их число изредка превышает нескольких 10-ов бесплатных вращений. 1×slots официальный сайт зеркало <a href=https://genius.com/Bktoplist0708>https://genius.com/Bktoplist0708</a> Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, solid только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Следует выделить, собственно бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом.
1×slot казино зеркало
Вышеописанная первопричина и является главным интересным, из-за которого операторы отдают часть своей выгоды на различные рекламные расходы и рекламные кампании. А наиболее действующим здесь будут играть непосредственно бездепозитные призы казино 2022 с выводом за регистрацию.Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные способы и расценить необыкновенности, недоступные при ирге в демо режиме. Многие свежие посетители перебегают в число неизменных, а оператор получает длительную выгода. При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие можно предназначить этой в казино.Проверка занимает от нескольких минут до нескольких дней, спецы техподдержки имеют запросить дополнительные документы или инициировать краткое общение по Skype. <a href=https://nc750.ru/member.php?u=3596>https://nc750.ru/member.php?u=3596</a> Не стоит незамедлительно же открещиваться от приветственных презентов в подобных казино. Администрация готова начислить деньги либо фриспины, но сначала сотрудники обязаны увериться, что вы не аферист. Дело никаких, собственно развелось слишком большое охотников за бонусами. Они научились дурачить систему и зарабатывать солидные суммы денег.Чтобы получить вероятность исключить прибыль с бездепозитного приза в казино, необходимо выполнить ряд условий: 1 xslots рабочее зеркало Выполнив все притязания оператора, клиент может оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит примерно не более суток. Если дополнительно требуется пройти процедуру верификации, то срок увеличивается до 1–2 трудящихся дней. Для перевода используются банковские инструменты и электрические платежные системы. Второй способ подходит никакого, например как большинство транзакций в этом случае осуществляются моментально. В связи со спецификой функционирования банков обработка платежей возможность занять до нескольких трудящихся дней.Перечисленные повыше основные характеристики сочетают практически любой приз и являются стандартными для бездепозитных бонусных начислений в казино.
<b>Смотреть еще похожие новости:</b>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5016/#comment-602825>казино 1× slots официальный сайт</a>
<a href=https://irc.floobits.com/Jamesamiva>1хслотс рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чем ниже велечину вейджера, что, этим проще отыграть и исключить бонус. Если Вы расчитываете заработать на бездепе, но просто ознакомиться с свежим игровым клубом, то стоит избегать бонусов с высочайшим вейджером их почти не реально отыграть. С ними Вы можете только протестировать игры заведения.
#5183 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet телефон Набиуллина Эльвира Сахипзадовна порно <a href=https://kompromat1.online/>скачиваемые казино</a> пин up casino Разуваева Ксения Денисовна порно <a href=https://rucriminal.info/>retro casino</a> 1×bet вход unlim casino Мухтиярова Елена Вячеславовна порно бесплатное казино pin up casino пин ап порно с Георгий Джикия (футбол) официальная казино
DiskiPlus слот casino DiskiPlus porno Александра Степанова, фигуристка <a href=https://www.diskiplus.ru/>DiskiPlus казино зеркало сегодня</a> DiskiPlus букмекерскую контору пин DiskiPlus букмекерская контора скачать приложение <a href=https://www.diskiplus.ru>DiskiPlus Кузнецова Анна Юрьевна порно</a> DiskiPlus Валентина Матвиенко порно DiskiPlus почему в казино не бывает настенных часов DiskiPlus porno Юлия Пересильд DiskiPlus лучшая казино DiskiPlus гта онлайн казино DiskiPlus Нургалиева Эльвира Рамиловна порно DiskiPlus порно с Константин Тюкавин (футбол)
#5184 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
Таким образом интернет казино получает потенциального игрока. Возможно в будущем либо подлинном он захотит поиграть на средства средства. Так трудятся бездепозитные бонусы в интернет казино. Здесь хорошо подходит выражение, бесплатные сыр бывает только в мышеловке. Начинающие игроки шансы не обдумывать опасность пыла. Однако со временем осознания делается больше. Это тема для отдельного обсуждения.Так что приготовьтесь предоставить секретную информацию (пол, возраст, государство проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает менее суток, в чего удастся свободно выводить солидные выигрыши. <a href=http://filmkachat.ru/>1×slots бонус за регистрацию</a> 2. Создать свежий профиль. Для регистрации нужно заполнить маленькую анкету либо зайдите в индивидуальный кабинет при помощи социальных сетей;Промокод – определённая композиция знаков, которую необходимо ввести в подходящее фон при создании учетной записи либо активировать в собственном профиле игрока в разделе с бонусами. <a href=https://medium.com/@comcgifurniture/ultimate-guide-to-professional-weed-delivery-pickering-services-in-2024–2a76d5e699da>https://medium.com/@comcgifurniture/ultimate-guide-to-professional-weed-delivery-pickering-services-in-2024–2a76d5e699da</a> 1×slots официальный сайт зеркало рабочее <a href=http://forum.prolifeclinics.ro/profile.php?id=1233030>http://forum.prolifeclinics.ro/profile.php?id=1233030</a> Как управляло, при выводе денег, от играющего потребуется лишь сделать наименьший вклад чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом собственный счет.
1× slots регистрация в 1×slots casino
Риск-игра по равным шансам – Также казино может запрещать исполнять условия по отыгрышу с помощью раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких иных забавах.Подтвердите личность, предоставив оператору казино свои паспортные данные. Инструкции обыкновенно легкие, основное — конкретно им стопам. Если написано, что «на фото должны быть видны все хорошо угла странички паспорта» — сделайте именно такое фото. <a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=783267>1×slots на любой вкус как пройти регистрацию</a> 1хслот 1хслотс регистрация перейти на 1×slots <a href=http://dns2.shadr.ru/user/WilliamKnoma/>http://dns2.shadr.ru/user/WilliamKnoma/</a> 1×slots официальный сайт скачать
1×slots бонус за регистрацию
Вы не в коем случае ни же рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической игры на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, выучится регулировать менять ставки и полосы, исследовать бонусные игры и их выигрышные композиции, ну конечном просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные свои, которые возможно отыграть и исключить, но просто на демо счет, что, этим наиболее адреналин в крови еще повысится а пульс забьется с частым ритмом!Самые свежие бездепозитные бонусы в казино за регистрацию 2022 года с выводом прибыли присутствуют на данной страничке. Посетитель может расценить обстоятельства получения и начать играть на деньги без внесения депозита. При данном игроку важно разуметь, на каких критериях и какими методами он сможет вывести приобретенный выигрыш. Для сего необходимо оценить перечень подключенных платежных систем. Кешбэк-бонус дает собой возврат фиксированного процента от ставки в случае поражения или же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%. <a href=http://velo-xachmas.com/index.php?subaction=userinfo&user=Renaldonem>http://velo-xachmas.com/index.php?subaction=userinfo&user=Renaldonem</a> 1× слот зеркало Бездепозитные бонусы истинными деньгами, которые возможно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадались.Получив свой подарок, Вы сможете безвозмездно выступать на реальные деньги, а выполнив условия отыгрыша, вывести свой выигрыш.
1×slots casino регистрация на сайте
Простая процедура получения бездепозитного приза, которая займет не более 2-х мин. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные. Чаще всего интернет-казино предлагают бездепозитные призы свежим пользователям. Эта промо-акция довольно эффективно привлекает начинающих, подталкивая их к открытию счета. Конечно, не все они становятся преданными посетителями, хотя сам прецедент регистрации аккаунта играет на руку заведению. 1×slots casino online регистрация <a href=http://rogerfilms.com/index.php?title=Выкуп_авто>http://rogerfilms.com/index.php?title=Выкуп_авто</a>
1×slots зеркало проходить регистрацию это отличный вариант
Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, a зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. <a href=http://forums.ago.ir/member.php?action=profile&uid=3458>http://forums.ago.ir/member.php?action=profile&uid=3458</a> Бонусные средства – маленькая сумма денег для старта в новеньком казино. На бонусные средства, обыкновенно разрешается играть во все забавы, кроме слотов с современным джекпотом и игр из раздела live casino.Если вы бывалый игрок, вы должны аристократия, собственно бонус без депозита – редкая находка. Тем не менее, мы неделю исследуем онлайн, чтобы найти для вас наихорошие бездепозитные предложения. 1хслотс казино зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://thetechmodders.com/forums/viewtopic.php?t=57843>1×slots казино зеркало</a>
<a href=https://forum.vn.ua/showthread.php?p=3277465#post3277465>1 x slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.
#5185 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
карты казино casino buzz <a href=https://glvk.guru/>порно с Абрамченко Виктория Валериевна</a> pin up casino пин порно с Дронова Александра Викторовна <a href=https://specreporter.com/>casino 7k сегодня</a> pinco casino вывод казино Шевцова Татьяна Викторовна порно играющие казино онлайн винлайн букмекерская контора официальный рабочее казино Лут Оксана Николаевна порно
DiskiPlus порно с Алексей Миранчук (футбол) DiskiPlus 1go casino <a href=https://www.diskiplus.ru/>DiskiPlus порно с Варвара Субботина</a> DiskiPlus champion casino DiskiPlus 7k casino зеркало <a href=https://diskiplus.ru>DiskiPlus порно с Антропова Валентина Викторовна</a> DiskiPlus porno Екатерина Ефременкова, шорт-трекистка DiskiPlus казино играть DiskiPlus 1×bet бесплатно DiskiPlus cat casino DiskiPlus casino рабочее DiskiPlus casino играть DiskiPlus порно с Алексей Миранчук (футбол)
#5186 Charlesgunnyhttp://filmkachat.ru
1х слот 1хслотс регистрация перейти на 1×slots
Когда речь о денежных бонусах, казино практически устанавливают обстоятельства вейджера, которые необходимо выполнить, чтобы исключить выигрыш.Доступные игры – В неких азартных забавах возможно понизить математическое преимущество казино до нескольких десятых процента. В их количестве почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как управляло, в этих забавах ставки идут в зачет вейджера не полностью. Например, возможность учитываться лишь 50%. В некоторых играх бездепозитные призы вообще нельзя отыгрывать. <a href=http://filmkachat.ru/>сайт 1× slots casino</a> <a href=https://www.hebergementweb.org/threads/virtual-reality-reshapes-modern-architectural-design-and-innovation.2142477/>https://www.hebergementweb.org/threads/virtual-reality-reshapes-modern-architectural-design-and-innovation.2142477/</a> 1×slots рабочее зеркало <a href=http://www.ppivn.vn/forum/user-17822.html>http://www.ppivn.vn/forum/user-17822.html</a> Практически все интернет казино с бездепозитным бонусом за регистрацию учитывает программу лояльности — систему одобрения неизменных посетителей, которая состоит из множества значений. При достижении игроком очередного уровня на его счёт поступает приз. Чем повыше степень — тем щедрее бонус.
1хслот зеркало
Перед активацией главно пристально изучить условия акции. Чем ниже вейджер, что, этим больше потенциальная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, на коих можно воспользоваться предложением. Если бездеп охватывает узкий перечень игр, рекомендовано узнать максимальные коэффициенты, уровень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь никаких случае, если оператор не установил строгие лимитирования на наивысшую сумму ставки. 1хслотс рабочее зеркало <a href=http://tutorialsmint.com/user/jamesulcek/articles>http://tutorialsmint.com/user/jamesulcek/articles</a> Операторы гемблинга утверждают, собственно так они борются с бонус-хантерами. Впрочем, критики считают, что данным казино пробуют сделать из случайного гостя неизменного игрока.Лишь пользующиеся и известные азартные заведения все позволить себя выдавать бездепы повторяющий добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депо, которые возможно истратить в топовых аппаратах с высокой отдачей. 1х слотс зеркало регистрация в 1×slots casino Обычно, бездепозитные бонусы выдаются под конкретные слоты с фиксированной ставкой, но их наверняка воспрещено применять в игровых автоматах с прогрессивным джекпотом. Список игр, в возможно применять бездеп, Вы найдете в описании промоакции либо сможете уточнить у службы поддержки заведения.
1×slot зеркало рабочее регистрации на телефон придет
Используйте наилучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, дабы заработать подарки за простые деянья теперь сегодня получить первый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высокой отдачей и быстрыми выводами на электронные кошельки. Бездепозитный приз предоставляется новенькому игроку за определенные деянья. Часто подарок повторяющий средств или фриспинов выдается за регистрацию, спасибо чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.Для как, дабы отыграть сумму вашего бездепозитного бонуса нужно выполнить условия вейджера. Очень часто фриспины даются на определенные слоты (book of ra, book of deceased, book of sun), выбирайте разъем себе нраву, они все довольно красочные и высококачественные. Бездепозитные приз имеет быть денежным например и в виде фриспинов на слоты <a href=https://www.feeder.mobi/members/patrickdab/profile/>https://www.feeder.mobi/members/patrickdab/profile/</a> Для тех, кто лишь подумывает испытывать свою удачу, а для проф игроков, отыскивающих свежие площадки для выигрышей, основные лицензированные казино нередко устраивают различные акции, и одно из лучших услуг за последнее время – как для новичков, так и для проф игроков – бездепозитный приз за регистрацию.В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с безвозмездных вращений. Прибыль, которую Вы заработаете на этом бездепе возможно ставить на вывод без какого или отыгрыша. x1 slots 1хслотс регистрация перейти на 1×slots Выбор любого онлайн казино на нашем сайте. В описании к каждому Вы можете разузнать, собственно получите за создание аккаунта.
1×slots рабочее зеркало
Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала прыткие выводы. Фишка выплат в, что достаточно избрать платёжный инструмент и указать сумму. В большинстве случаев средства зачисляются на электрические кошельки в течение 15 минут, а на банковские карты – 1–3 рабочих дня.Фриспины начисляются по конкретной ставке. После их активации игроку необходимо запустить слот и увериться, собственно в нем отображаются безвозмездные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода после отыгрыша определяется оператором и изредка превышает 5 000 рублей. <a href=http://youhotel.ru/forum/memberlist.php?mode=viewprofile&u=29954>1хлот регистрация в 1×slots casino</a> Вы не в коем случае ни чем не рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, выучится регулировать менять ставки и полосы, изучать бонусные забавы и их выигрышные комбинации, ну конечном просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные средства, коие возможно отыграть и исключить, а не просто на демо счет, что, этим наиболее адреналин в крови более повысится а пульс забьется с нередким ритмом! Как и акции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения являются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих гостей и разрешает им составить впечатление о функционале, не рискуя вескими суммами.Чтобы получить вероятность исключить прибыль с бездепозитного приза в казино, необходимо выполнить ряд условий: 1×slots казино зеркало <a href=http://www.xn–9y2b34b0bx85h.kr/bbs/board.php?bo_table=free&wr_id=401951>http://www.xn–9y2b34b0bx85h.kr/bbs/board.php?bo_table=free&wr_id=401951</a> Акции, посвященные календарным праздничным, бывают рассчитаны как на всех юзеров, так и на категории: примеру, подарок на 8 марта девушкам-игрокам либо мужикам на 23 февраля.
1×slots рабочее зеркало на сегодня
К примеру, игроку выдаются безвозмездные свои в заведении в объеме пятидесяти либо 100 долларов (вейджер на коие сочиняет 100х). То есть, каждому новоприбывшему игроку выскакивает манящая иллюстрация, кот-ая обещает выплату всех зачисленных компанией средств. Не стоит заострять на казино бонус за регистрацию без депозита с чрезмерно великой либо довольно маленькой суммой призов, потому что, и тщательно исследовав все обстоятельства, здесь вероятнее всего, несомненно какой-то подкол. <a href=https://extremefeeding.com/en/cb-profile/pluginclass/cbblogs?action=blogs&func=show&id=555>https://extremefeeding.com/en/cb-profile/pluginclass/cbblogs?action=blogs&func=show&id=555</a> Получать информацию о самых выгодных призах возможно без неизменного прогноза новостей казино. Мы брали данную задачку на себя и непрерывно следим за услугами операторов, избирая превосходнейшие из них. В этом разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список акций регулярно дополняется. В топ зашли самые свежие бездепозитные призы за регистрацию в казино 2020, временные и закрытые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и другим критериям. Если срок действия акции истек, она удаляется из списка.Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки могут запросить вспомогательные документы либо инициировать краткое общение по Skype. 1×slots регистрация 1×slotscasino09k online
<b>Смотреть еще похожие новости:</b>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=225524>1хслот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На странице представлены бездепозитные бонусы за регистрацию в казино редчайшая заслуга за которой гонятся все игроки как новички, так и мастера. Мы тоже уделяем великое внимание на наличие бонусов при формирование рейтинга казино на средства. Бездепозитный бонус это возможность играть бесплатно и выиграть настоящие деньги.
#5187 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Елизавета Боярская порно с Диана Шнайдер (теннис) <a href=https://vestnik-jurnal.com/>1×bet скачать бесплатно</a> пари букмекерская контора официальные сайты казино <a href=https://repost.news/>casino pin официальный</a> win win casino cometa casino порно с Кирьянова Дарья Борисовна почему казино яндекс игры казино играющие казино онлайн porno Илона Маркова, хоккеистка
DiskiPlus часы казино DiskiPlus casino ru <a href=https://www.diskiplus.ru>DiskiPlus online casino 7k</a> DiskiPlus pin up casino пин ап DiskiPlus inform@rucriminal.info <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet официальный</a> DiskiPlus порно с Баталина Ольга Юрьевна DiskiPlus 1×bet зеркало xbet xyz DiskiPlus porno Ангелина Гончаренко, хоккеистка DiskiPlus казино фильм онлайн DiskiPlus Шевцова Татьяна Викторовна порно DiskiPlus порно с Елена Никитина, скелетонистка DiskiPlus Манилова Алла Юрьевна порно
#5188 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up casino buzz Радченко Светлана Юрьевна порно <a href=https://res-publika.com>1win букмекерская контора</a> win win casino казино смотреть <a href=https://www.ossetia.tv/>пинап казино</a> Фастова Елена Владимировна порно какие казино приложения букмекерских контор на андроид казино смотреть Черкесова Бэлла Мухарбиевна порно казино рояль смотреть porno Александр Соболев (футбол)
DiskiPlus демо казино DiskiPlus pin ап casino <a href=https://www.diskiplus.ru>DiskiPlus 1×bet зеркало рабочее xbet</a> DiskiPlus casino официальный сайт DiskiPlus включи казино <a href=https://diskiplus.ru>DiskiPlus приложения букмекерских контор</a> DiskiPlus 1×bet бесплатно DiskiPlus слоты казино DiskiPlus online casino официальный DiskiPlus порно с Матвей Сафонов (футбол) DiskiPlus пинап казино DiskiPlus казино регистрации DiskiPlus online casino 7k
#5189 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации 2025
Наш перечень содержит наилучшие бездепозитные бонусы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по важным параметрам: <a href=http://filmkachat.ru/>рабочее зеркало 1×slots</a> <a href=https://lyfepal.com/forums/thread/7373/Transform-Your-Kitchen-Design-with-Professional-3D-Kitchen-Rendering-Services>https://lyfepal.com/forums/thread/7373/Transform-Your-Kitchen-Design-with-Professional-3D-Kitchen-Rendering-Services</a> 1×slos регистрация в 1×slots casino <a href=http://www.rgb-muelheim.de/buch/scarbook.php>http://www.rgb-muelheim.de/buch/scarbook.php</a>
1хслотс официальный сайт зеркало
1×slots официальный сайт зеркало рабочее Доступность — бездепозитные призы в казино почаще всего предоставляются свежим игрокам, хотя посещают случаи, когда бонус шансы получить и действующие посетители. <a href=http://justworks.su/index.php?subaction=userinfo&user=capriciousquilt>http://justworks.su/index.php?subaction=userinfo&user=capriciousquilt</a> Так что основное различие дара на депо от бездепа – неотъемлемое пополнение счёта. Вы можете внести депозит и преумножить стартовый капитал или отобрать бездеп и всем не придётся рисковать собственными сбережениями. Поспешите выполнить простые требования, и администрация ресурса начислит щедрое одобрение! онлайн казино 1×slots Для того, дабы отыграть сумму вашего бездепозитного приза нужно выполнить обстоятельства вейджера. Очень часто фриспины даются на конкретные слоты (book of ra, book of deceased, book of sun), подбирайте разъем себя по душе, они все очень очень и высококачественные. Бездепозитные приз возможность быть валютным например и в виде фриспинов на слоты
1×slots официальный сайт скачать на айфон
В реальное время получить бонус за регистрацию в казино очень просто. Почти любой игорный дом с готовностью предоставит средства либо благотворительные вращения. Многие игроки используют этим и не смущяются региться в любом клубе с прибыльными критериями. Кстати, это отличная возможность выдумать выигрышную стратегию и сорвать куш. Денежные средства. Третий бонус за регистрацию без депозита – наличные. К раскаянью, только известные и популярные клубы все дать средства в рублях или баксах. С их помощью у насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед данным нужно исполнение конкретных критерий.Каждый новичок и умелый игрок мечтают прытко стартануть и начать делать реальные ставки. Для этого достаточно забрать презент, за кот-ый не платить. В зависимости от игровой платформы, нужно сделать профиль, привязать email или телефонный. После сего администрация начислит щедрое вознаграждение в виде даровых вращений либо виртуальных кредитов. <a href=http://bmwspeed.lv/user/MiguelSpawn/>http://bmwspeed.lv/user/MiguelSpawn/</a> Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, the decision зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша бонусов. Заведения всегда устанавливают максимальную ставку, возможную по условиям вейждера. 1×slot казино зеркало Размер бонуса. В качестве бездепов обыкновенно начисляют небольшие суммы, а когда речь идет о призах за депо, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино имеют презентовать игроку до 2000$.Используйте наихорошие бездепозитные призы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из перечня ниже, чтобы заработать презенты за простые деяния и уже сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высокой отдачей и быстрыми выводами на электронные кошельки.
1×slots официальный сайт скачать
Выиграть настоящие деньги в казино не пополняя счет – сложно, но вполне. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными призами и начните играть на бонусные средства. По статистике из 10-ти заведений возможно заработать маленькую необходимую средств помощью бонусных средств.Также учтите, собственно кое-какие игровые платформы сужают список государств, коие способны получить предложенный бездепозитный бонус за регистрацию. К образцу, есть онлайн-заведения, выдающие похожие призы лишь обитателям определенных стран. К образцу, онлайн казино 777 Оригинал дает бездепозитный приз только игрокам из России и стран СНГ. Или наоборот, снабжают вознаграждением всех, считая обитателей некоторых стран (как сего, следует внимательно изучать перечень, дабы потом не возникло практически вопросов и претензий). Сразу после активации промокода можно пользоваться подарком. Как уже упоминалось, призы посещают трёх обликов – фриспины, кредиты и фриплей-бонусы.Заполняя данные в личном профиле, указывайте лишь достоверную информацию, так как Вам придется ее подтвердить в при выводе денег. У каждой игры средства требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система засчитает любую ставку. В рулетке и покере устроить это гораздо труднее. Именно потому например важно пристально читать условия получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой ирге, то новенькие попросту «спустят бонус на ветер».Бонус с зачислением денег на счет дает больше свободы действий. Пользователь сам подбирает, каким образом воспользоваться подаренными своими. Здесь также все работать ограничения на перечень дешевых игр, но обыкновенно эти рамки не например строги, как в промо с безвозмездными вращениями. 1×slots промокод при регистрации <a href=https://bcfg.org/groups/%d0%b1%d0%bb%d0%be%d0%b3-%d0%b0%d0%ba%d1%83%d1%88%d0%b5%d1%80%d0%b0-%d0%b3%d0%b8%d0%bd%d0%b5%d0%ba%d0%be%d0%bb%d0%be%d0%b3%d0%b0-%d0%b4%d0%b7%d0%b5%d0%bd/>https://bcfg.org/groups/%d0%b1%d0%bb%d0%be%d0%b3-%d0%b0%d0%ba%d1%83%d1%88%d0%b5%d1%80%d0%b0-%d0%b3%d0%b8%d0%bd%d0%b5%d0%ba%d0%be%d0%bb%d0%be%d0%b3%d0%b0-%d0%b4%d0%b7%d0%b5%d0%bd/</a>
1× slots casino официальный сайт
К сожалению, нет. Почти все казино, требуют внесение желая бы одного малого депо для вывода выигрыша с бездепозитного бонуса. Также учитывайте, что вывести средства разрешено лишь на ту платежную систему, с коей был сделан депозит.Только выполнив все условия отыгрыша и дождавшись завершения ревизии аккаунта, Вы сможете оформить заявку на вывод средств и получить средства деньги. <a href=http://mayakminska.1stbb.ru/memberlist.php?mode=viewprofile&u=7525>http://mayakminska.1stbb.ru/memberlist.php?mode=viewprofile&u=7525</a> 1хслотс зеркало на сегодня В онлайне большое известных игорных площадок с красивыми акционными услугами. Однако внимательно читать обстоятельства десятков услуг в надоест, ну и время отнимет большое. Поэтому наша команда подготовила ТОП-3 вебсайтов с лучшими бездепозитными призами:В большинстве заведений сделать это возможно по e-mal, по номеру аппарата, спустя социальную сеть либо гугл-аккаунт.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины. Бесплатные вращения предусмотрены для применения в видео-слотах. Внимательно читайте обстоятельства – они часто выдаются для некоторых машин. В зависимости от клуба возможность создавать конкретное количество ставок. Кстати, современные игорные дома дают вероятность заводить «одноруких злодеев». У нас на сайте Вы отыщите список бонусов без депо в проверенных казино и доскональную информацию про как их получить и использовать.
#5190 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало
Бонус начисляется игроку незамедлительно после регистрации и прохождения верификации в казино и не требует от посетителя внесения депозита. Как правило, объем бонуса в схожем случае достаточно стыдливый, впрочем разрешает новичкам познакомиться с игрой без риска настоящими средствами.Бездепозитный приз – это экономическое вознаграждение, коие выдается участнику забавы в казино, для его вербования и возникновения заинтригованности. Любой посетитель, который соответствует условиям выдачи похожего бездепозитного бонуса, может претендовать на получение вышеуказанного приза. Такое одобрение считается наиболее действенным методом, дающим возможность стартовать в игре, не вкладывая собственных материальных средств. <a href=http://filmkachat.ru/>1× slots официальный</a> Необходимость отыгрыша. Вейджер в этом случае выше, чем для призов за депо. И пока свои не отыграны, вывести их невозможно.Как правило, при выводе денег, от играющего потребуется только сделать минимальный вклад для того, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом индивидуальный счет. <a href=https://www.scutify.com/articles/2024–10–25------>https://www.scutify.com/articles/2024–10–25------</a> 1×slots зеркало регистрацию более популярный вариант это <a href=http://szsa.ru/bitrix/click.php?goto=http://gss56.ru/bitrix/click.php?goto=http://minyar-city.ru/bitrix/click.php?goto=https://telegra.ph/Kak-bystro-poluchit-svidetelstvo-o-postanovke-na-nalogovyj-uchet-fizicheskogo-lica-Forma–2–1-Svidetelstvo-INN-09–19>http://szsa.ru/bitrix/click.php?goto=http://gss56.ru/bitrix/click.php?goto=http://minyar-city.ru/bitrix/click.php?goto=https://telegra.ph/Kak-bystro-poluchit-svidetelstvo-o-postanovke-na-nalogovyj-uchet-fizicheskogo-lica-Forma–2–1-Svidetelstvo-INN-09–19</a>
1×slots официальный сайт скачать на айфон
Основное правило получения бездепа ? создаваемый акк обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов требовательно запрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита необходимо блюсти несложную очередность деяний.Выше мы предоставили глубокий комплект самых новых и своевременных бездепозитных призов в онлайн казино без пополнения на 2022 год, где вам воспользоваться хоть ценным бездепозитным бонусом. <a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=339936>1×slots зеркало рабочее</a> 1× slots casino официальный сайт Если при регистрации указать промокод, возможно гарантировано получить бонус. Где взять ваучер? Посетите тематические блоги или форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В заключительнее время игорные жилища начали рекламироваться в фильмах и сериалах. Присмотритесь и всего заметите промокод, кот-ый принесёт 500 или 1 000 бонусных руб. <a href=http://www.talkermama.com/home.php?mod=space&uid=69026&do=profile>http://www.talkermama.com/home.php?mod=space&uid=69026&do=profile</a> Подобные призы без депо предоставляются на более прибыльных критериях. Зачастую они крупнее, а условия отыгрыша менее жесткие. 1×slots зеркало быструю регистрацию а также мгновенное
1хслот зеркало
Доступность — бездепозитные бонусы в казино почаще всего предоставляются свежим игрокам, но случаются случаи, когда приз шансы получить и действующие посетители. <a href=https://profiteplo.com/user/PatrickWearf/>https://profiteplo.com/user/PatrickWearf/</a> 1×слотс казино
1хслотс регистрация в 1×slots casino
Фриспины. Бесплатные вращения предусмотрены для применения в видео-слотах. Внимательно читайте обстоятельства – они нередко выдаются для некоторых машин. В зависимости от клуба вы можете создавать конкретное число ставок. Кстати, современные игорные дома выделяют возможность заводить «одноруких злодеев». 1×slots рабочее зеркало на сегодня <a href=https://sport1477.ru/forums/users/glavdxru1709–2/>https://sport1477.ru/forums/users/glavdxru1709–2/</a> Прямо в заберите безвозмездные вращения за регистрацию без депо и начинайте собирать призовые комбинации из-за крупных выигрышей!
1х слот регистрация в 1×slots casino
Особую изюминку видео слотам придают уникальные знакы. С их выходом активизируются различные бонусы. Вы сможете запустить дополнительный уровень и увеличить сумму выигрыша. Есть знаки, которые заменяют ненадобные элементы и сами творят выигрышные комбо. Не стоит забывать и тему бонус-тур. После любого успешного спина есть шанс увеличить необходимую выигрыша в 2 либо четыре раза. <a href=https://forum.kainkalabs.com:443/member.php?action=profile&uid=17865>https://forum.kainkalabs.com:443/member.php?action=profile&uid=17865</a> Бездепозитные бонусы — это подарки от казино в виде бонусных средств либо фриспинов для игровых автоматов, которые начисляются на акк игрока в процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депо не требуется.Для верификации аккаунта нужно дать спецам технической помощи отсканированную копию паспорта и счета за коммунальные предложения, а также фотографию банковской карты или снимок страницы электрического кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для доказательства личности. 1хлот регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=410388>1×slots регистрация 1×slotscasino09k online</a>
<a href=http://mi.minfish.com/home.php?mod=space&uid=1196847>рабочее зеркало 1хслотс</a>
<a href=https://games-garant.ru/index.php?subaction=userinfo&user=Jamesneorm>1×slots зеркало регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефонный или почту, показать персональную информацию; Бонусные средства – маленькая сумма средств для старта в новеньком казино. На бонусные деньги, обыкновенно разрешено играть во все игры, считая слотов с современным джекпотом и игр из раздела exist casino.
#5191 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1win букмекерская контора casino скачать <a href=https://sovsekretno.net/>порно с Георгий Джикия (футбол)</a> реального казино porno Виктория Баркова, легкоатлетка <a href=https://rhymes-punches.com/>включи казино</a> 1×bet официальный сайт 7k casino сайт порно с Захарова Мария Владимировна 1×bet зеркало на сегодня 1×bet xyz Ирина Горбачева Приезжева Екатерина Геннадьевна порно 7k casino зеркало рабочее
DiskiPlus black russia казино DiskiPlus Чулпан Хаматова <a href=https://diskiplus.ru>DiskiPlus винлайн букмекерская контора официальный</a> DiskiPlus порно с Илюшникова Татьяна Александровна DiskiPlus porno Яна Троянова <a href=https://diskiplus.ru/>DiskiPlus Комарова Наталья Владимировна порно</a> DiskiPlus 1×bet официальный 1×bet xyz DiskiPlus 1×slots casino DiskiPlus ramenbet casino DiskiPlus ап казино DiskiPlus слоты казино DiskiPlus казино вход официальный сайт DiskiPlus up casino официальный
#5192 Charlesgunnyhttp://filmkachat.ru
1×slots казино зеркало
В бонусную программку многих операторов входят регулярные бездепы. Это пожизненные акции, поощряющие интенсивных постоянных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают неизменные бонусы без депо в обмен на скопленные баллы лояльности.За вербование друга ? масштабах партнерской программки заказчик получает вознаграждение за вербование свежих пользователей. <a href=http://filmkachat.ru/>1хлот регистрация в 1×slots casino</a> <a href=https://warofdragons.com/forum/index.php?page=UserGuestbook&userID=83123>https://warofdragons.com/forum/index.php?page=UserGuestbook&userID=83123</a> Прежде чем активировать бездеп, нужно убедиться что, собственно страна, уроженцем которой считается игрок, не входит в список запрещенных. 1×slots зеркало выигрыши обязательно пройдите регистрацию если <a href=https://narodovmnogo-omsk.ru/forum/user/1330/>https://narodovmnogo-omsk.ru/forum/user/1330/</a> Для всех бездепозитных бонусов функционирует максимальный лимит на выигрыш. Он показывает предельную необходимую, коию вы сможете получить, играя на бонусные кредиты. Как только для удастся выполнить притязания вейджера, допустимый максимум будет переведен с бонусного счета на главной, а остаток будет списан.Для получения предоставленных призов для пригодиться — ПК или мобильное устройство, и остальное дело за малым.
1×slots официальный сайт скачать на айфон
Бездепозитный приз предоставляется новенькому игроку за определенные деянья. Часто подарок вид денег либо фриспинов выдается за регистрацию, благодаря чему юзер получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.Так же стоит выделить то, что в каждом интернет казино установлен собственный максимальный кешаут на бездепозитный приз. Как правило кешаут — это максимальная сумма денег, которая дешевая для вывода с бездепозитного бонуса. 1×slots промокод при регистрации 2025 Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в обязательном порядке нужно пополнить счет в казино. Для депозитных бонусов, данная процедура не нужна, например как депо теснее изготовлен. <a href=http://bbs.17dra.com/home.php?mod=space&uid=230032>http://bbs.17dra.com/home.php?mod=space&uid=230032</a> 1×slots официальный demo регистрация в 1×slots casino Нет. Казино выдают бесплатные бонусы за регистрацию, чтобы, чтобы, дабы заказчик мог ознакомиться с игровым заведением. А дабы исключить его, нужно выполнить обстоятельства отыгрыша.Промокод – определённая комбинация символов, коию необходимо ввести в отвечающее поле при твореньи учетной записи или активировать в собственном профиле игрока в разделе с призами.
1×slot рабочее зеркало
<a href=https://martinzbbz62738.digiblogbox.com/54830616/the-rise-of-deepfake-encounter-swapping-how-ai-is-switching-personalized-media>https://martinzbbz62738.digiblogbox.com/54830616/the-rise-of-deepfake-encounter-swapping-how-ai-is-switching-personalized-media</a> 1×slots рабочее зеркало А ознакомиться с свежими интернет казино, Вы сможете за счет бонусов с выводом прибыли, которые Вы сможете получить без депозита.
1×slots регистрация на сайте 1×slots ru com
Представьте момент, когда при ставке в 10 руб. Вы получите схожее умножение. Миллион руб. За одно вращение, собственно вполне вероятно. Поэтому вопрос, сколько можно выиграть остаётся открытым. Предлагаем проверить помощи. Регистрируйтесь в одном либо нескольких интернет казино, получайте Бездепозитный приз и инспектируйте фортуну в деле. Разумеется, исключить средства не так просто. Однако шансы есть у всех. Выигрыши с бонусов без вложений постоянно привязаны к притязанию по ставкам и могут быть обналичены только последствии исполнения этих притязаний. 1×slots зеркало быструю регистрацию а также мгновенное <a href=https://shanemwel29630.thenerdsblog.com/35925902/deep-nude-understanding-the-implications-of-ai-generated-imagery>https://shanemwel29630.thenerdsblog.com/35925902/deep-nude-understanding-the-implications-of-ai-generated-imagery</a> Бонусы без депозита при регистрации считаются наиболее красивыми как для опытных игроков, например для и начинающих. Получив такое вознаграждение, заказчик имеет играть на настоящие средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные призы в интернет-казино Рунета, а также условия их активации и выигрыша.Пoдтвepдить личнocть клиента. Для успешного вывода средств, нужно доказать личность клиента. Нa этaпe вepификaции пpoфиля, работники службы защищенности должны убедиться, что у игрока всего лишь один акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не может исключить свой выигрыш, в у него несомненно некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы.
1х слот регистрация в 1×slots casino
Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, the decision зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. <a href=http://www.oasighirardi.org/2019/03/dallerba-al-formaggio-sabato-6-aprile.html>http://www.oasighirardi.org/2019/03/dallerba-al-formaggio-sabato-6-aprile.html</a> Самый распространённый из сходственных призов, конечно же, бездеп на день рождения клиента — бонус повторяющий фиксированной суммы либо фриспинов поступает на счёт игрока, а пользоваться им можно в течение установленного периода медли. 1×slots casino зеркало рабочее Фриспины — бесплатные вращения, коие дозволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся самым известным и преимущественным обликом бонуса — безвозмездные вращения иногда эффективнее и веселее в отыгрыше, чем другие облики бездепов.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.airsoft44.com/forum/index.php?action=profile;u=11896>1×slot зеркало рабочее регистрации на телефон придет</a>
<a href=https://forum.home-visa.ru/viewtopic.php?f=69&t=807392&p=3093677#p3093677>1×slots мобильная версия войти казино</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают приз по государствам. Вплоть до как, что клуб может принимать игроков из Вашей государства, а бездеп не давать. Осталось избрать казино с бонусом за регистрацию и сделать профиль. После активации презента выигрыш находится от Фортуны и способностей.
#5193 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
7k casino бонус порно с Афонина Марина Игоревна <a href=https://t.me/vchkogpu_ru>порно с Антропова Валентина Викторовна</a> порно с Никита Кучеров (хоккей) casino рабочее <a href=https://res-publika.com>Скворцова Вероника Игоревна порно</a> 1×bet официальный скачать casino скачать приложение порно с Зырянова Анастасия Владимировна pin up casino зеркало porno Катерина Шпица казино пину porno Марина Александрова
DiskiPlus винлайн букмекерская контора казино <a href=https://diskiplus.ru>DiskiPlus Фастова Елена Владимировна порно</a> DiskiPlus porno Анна Сидорова, керлингистка DiskiPlus 1win букмекерская контора <a href=https://www.diskiplus.ru/>DiskiPlus porno Светлана Ходченкова</a> DiskiPlus 1×bet телефон DiskiPlus порно с Александр Большунов (лыжные гонки) DiskiPlus casino pin официальный DiskiPlus porno Игорь Акинфеев (футбол) DiskiPlus порно с Аделия Петросян (фигурное катание) DiskiPlus porno Алена Михайлова DiskiPlus porno Анна Сидорова, керлингистка
#5194 Charlesgunnyhttp://filmkachat.ru
1× slots casino зеркало
Игрокам стоит воспринимать приветственный бонус как гарантированный способ получить большой выигрыш, хотя это замечательная возможность без затрат расценить возможностей казино. <a href=http://filmkachat.ru/>1×slot зеркало рабочее этих способов предполагает регистрацию</a> Не стоит сразу же отказываться от приветственных презентов в подобных казино. Администрация готова начислить средства или фриспины, но предварительно сотрудники обязаны убедиться, собственно вы не мошенник. Дело в, собственно развелось очень количество охотников за бонусами. Они выучились накалывать систему и наваривать солидные суммы средств.Для подтверждения электронной почты, просто перейдите по активной ссылке в письме, приобретенном от игрового заведения. <a href=https://www.nitrnd.com/blogs/229798/Transforming-Dream-Kitchens-Through-Professional-3D-Rendering-Solutions>https://www.nitrnd.com/blogs/229798/Transforming-Dream-Kitchens-Through-Professional-3D-Rendering-Solutions</a> 1×slos регистрация в 1×slots casino <a href=https://gidro2000.com/forum-gidro/user/28330/>https://gidro2000.com/forum-gidro/user/28330/</a> Бездепы обычно предлагают с отыгрышем — мгновенно вывести выигранные свои нельзя. Перевод средств со счета будет возможен в как, как юзер выполнит все требования казино, а сумма имеет превышать установленного правилами лимита. Условиями акции фиксируются сроки, в течение коих клиент вправе воспользоваться предложением. Обычно они не превышают нескольких дней после активации.
1×slots сайт
1× slots официальный Ну и конечно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: сходственная добродушие увеличивает степень лояльности посетителей к фирмы. <a href=https://lubercy.ixbb.ru/viewtopic.php?id=5791#p17402>https://lubercy.ixbb.ru/viewtopic.php?id=5791#p17402</a> Онлайн-казино с бездепозитными призами ставят клиентам обстоятельства для пользования бездепами, потому перед ролью в промоакции никакого досконально ознакомиться со всеми правилами и аспектами акции. Условия имеют прикасаться получения приза, его использования и последующего вывода валютных средств в случае выигрыша.Поспешите отобрать бездепозитные бонусы за регистрацию в казино из представленного списка. Все платформы не водят законную работа, но и порадуют добросовестными результатами игры, высокой отдачей, прыткими выплатами. казино 1× slots официальный сайт
1×slots casino online регистрация
Бонусы без депозита при регистрации считаются самыми красивыми как для опытных игроков, например для и новичков. Получив такое вознаграждение, клиент имеет выступать на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные призы в интернет-казино Рунета, а условия их активации и выигрыша.Бонус за регистрацию в казино без депо с выводом денег нужно отыграть. Зачастую для отыгрыша может понадобиться устроить ставки на сумму, в некоторое десятков один превосходящую сумму бонуса либо выигрыша. <a href=http://dudoser.com/user/CraigThoxy/>http://dudoser.com/user/CraigThoxy/</a> Если вы облюбовали для себя некоторое брендов которые для больше всего полюбились, для неизменной игры! Таких гемблеров казино довольно предпочитает и оценивает, за частую такие игроки становятся VIP игроками заведения, коим часто поступают выгодные предложения повторяющий призов, например же туда заходит и бездепозитные.Доступные игры – В неких азартных играх возможно снизить математическое приемущество казино до нескольких десятых процента. В их количестве все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как верховодило, в таких играх ставки идут в зачет вейджера не всецело. Например, возможность предусматриваться лишь 50%. В некоторых забавах бездепозитные бонусы вообще нельзя отыгрывать. 1 хслот регистрация в 1×slots casino Несмотря на то, собственно этот вариант стимуляции со стороны азартных платформ довольно моден в подобных игр, далековато многим почитателям казино знаменито, собственно сами бездепозитные призы казино и как непосредственно их возможно эксплуатировать.Иногда у гостей вебсайта имеют появиться трудности, задачи, препядствия при активации полученного промо-кода. В этих случаях, необходимо обратиться за поддержкою в службу «Support». Для получения ответа, непременно указывается определенная причина воззвания и подтверждается информация дополнительными экрана. Если сложилась неоднозначная ситуация, всегда возможно обратиться к основному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ.
1×slots зеркало регистрацию более популярный вариант это
Приглашаем делиться сужденьями о бонусах. Это поможет иным юзерам выбирать наиболее прибыльные предложения. У каждого игорного заведения средства правила и условия. Но, дабы получить призы, нужно выполнить стереотипные действия:Однако далеко не все ресурсы предлагают своим посетителям бездепозитные призы за регистрацию в казино. В большинстве случаев учтено поощрение на первый депозит в объеме 100–200%. Это отличная возможность преумножить банкролл, прирастить время, проведённое за игрой и шансы сорвать большой куш. Бездепозитные призы за регистрацию в игровых автоматах для собственников онлайн-казино считаются долею маркетинговой кампании, направленной на повышение аудитории сайта. Так они продвигают средства бренды и привлекают свежих клиентов.За привлечение приятеля ? в рамках партнерской программы клиент получает вознаграждение за привлечение новых юзеров. 1хслотс официальный сайт зеркало <a href=https://forum.eliteshost.com/member.php?action=profile&uid=8663>https://forum.eliteshost.com/member.php?action=profile&uid=8663</a> Бездепозитный приз казино 2022 с выводом за регистрацию дает вероятность ознакомиться игроку с лобби избранного заведения, сориентироваться в выборе игр и проверить качество работы службы. Довольно нередко, начиная игровой процесс, игрок уже не желает останавливаться и проделывает настоящий вклад. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать даром вполне как один таки с призом за регистрацию без необходимости заносить депо.
1×slots зеркало
Вышеописанная причина и является основным нюансом, в которого операторы отдают часть собственной выгоды на разные маркетинговые затраты и маркетинговые кампании. А самым действующим здесь будут выступать непосредственно бездепозитные призы казино 2022 с выводом за регистрацию.Приветственный бездеп предоставляется хоть игроку только один раз. Казино борются с так именуемыми бонусхантерами (от англ. Bonus Hunter — охотник за бонусами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения презента. Исключить подобные деянья разрешает верификация данных. Администрация вправе востребовать у посетителя доказать индивидуальные данные, обозначенные при регистрации. <a href=https://zionyjra86307.blogsmine.com/30770094/ai-nude-revolutionizing-content-moderation-and-privacy-protection>https://zionyjra86307.blogsmine.com/30770094/ai-nude-revolutionizing-content-moderation-and-privacy-protection</a> Как только получите бездеп в казино, всё также не запамятовывайте инспектировать электрическую почту. Некоторые игорные клубы непрерывно радуют активных гэмблеров приятными бонусами. Чаще всего получить подарок возможно в преддверии веселья, на день рождение, за привлечение друга. А того распространённым бонусом считается прибавка к депозиту. Нужно всего лишь восполнить счёт, и азартное заведение прирастит его на 50–100%.Доступ к дару имеет открываться механически последствии введения промокода или воззвания в саппорта вебсайта. В первом случае от пользователя не требуется никаких поступков. Бездеп с активацией по коду встречается почаще всего. Игроку необходимо ввести совокупность знаков в графе, которая имеет находиться в регистрационной форме в Личном офисе. 1×slots быструю регистрацию а также мгновенное Размер призов чаще всего чисто условный и не выше 50 руб. Приятно, но осязаемым бустом деле навряд станет.
<b>Смотреть еще похожие новости:</b>
<a href=http://nexusroleplay.teamforum.ru/viewtopic.php?f=19&t=3368>1× slots casino официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax Фриплей-бонусы встречаются лишь в неких клубах. Они зачисляются незамедлительно после создания профиля и активны недолговременное время. Если не успеете потратить средства, они попросту сгорят. Касаемо медли, правило бонусы активны на часа.
#5195 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
смотреть фильм казино спорт букмекерская контора <a href=https://repost.news/>порно с Илья Осипов (киберспорт)</a> порно с Максим Глушенков (футбол) про казино <a href=https://strelochnik.com/>1×bet зеркало слоты 1×bet xyz</a> порно с Анастасия Потапова, теннисистка 7k casino официальный сайт casino betting скачать 1×bet на андроид бесплатно включи казино 1×slots casino казино смотреть онлайн бесплатно
DiskiPlus казино онлайн бесплатно DiskiPlus симулятор казино <a href=https://diskiplus.ru>DiskiPlus казино рояль смотреть</a> DiskiPlus лучшие букмекерские конторы DiskiPlus скачать 1×bet на андроид <a href=https://www.diskiplus.ru>DiskiPlus порно с Федор Чалов (футбол)</a> DiskiPlus pin up casino зеркало DiskiPlus casino DiskiPlus песня казино DiskiPlus Радченко Светлана Юрьевна порно DiskiPlus casinos xyz DiskiPlus зеркала официальных сайтов казино DiskiPlus фреш казино
#5196 BradleyPoerehttps://faav.ru/
текст песни облака <a href=https://faav.ru/>https://faav.ru</a>
#5197 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
Одним из предлогов отдавать преимущество, льготу одному или другому заведению содержится в привлекательности предлагаемых акций и бесплатных услуг. Безвозмездные фриспины, выдаваемые без нужды создавать какой-либо вклад, в перечне находится далеко не в конце. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало рабочее</a> Так что основное отличие подарка на депо от бездепа – обязательное пополнение счёта. Вы сможете внести депо и преувеличить стартовый капитал или арестовать бездеп и при не придётся рисковать своими сбережениями. Поспешите выполнить обычные требования, и администрация ресурса начисляет щедрое одобрение!Если площадка дарует бездеп за регистрацию, то процедура его получения ординарна. Нужно только завести акк на сайте и активировать его, подтвердив адресок электронной почты, номер телефона либо другие данные, которые требует оператор. Перед данным необходимо убедиться, что пользователь располагается на официальном сайте казино, но на жульнической площадке. <a href=https://www.friend007.com/forums/thread/6498/>https://www.friend007.com/forums/thread/6498/</a> Почти все игровые клубы требуют подтверждение контактных данных игрока для получения бездепозитного бонуса.В большинстве заведений устроить это возможно по e-mal, по номеру телефонного, спустя социальную сеть либо гугл-аккаунт. 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=http://www.sazkar.info/member2505.html>http://www.sazkar.info/member2505.html</a> Получать информацию о самых прибыльных призах возможно без постоянного прогноза новостей казино. Мы брали данную задачку на себя и безпрерывно смотрим за услугами операторов, выбирая лучшие из их. В данном разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список акций периодически пополняется. В топ зашли самые свежие бездепозитные призы за регистрацию в казино 2020, временные и закрытые промо. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и аспектам. Если срок деянья промоакции истек, она удаляется из перечня.
1×slots официальный зеркало рабочее
Размер приза. В качестве бездепов обычно начисляют не суммы, а когда речь идет о бонусах за депозит, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино шансы подарить игроку до 2000$. <a href=https://www.globalvision2000.com/forum/member.php?action=profile&uid=1072499>1×slots рабочее зеркало на сегодня</a> 1хслот 1хслотс регистрация перейти на 1×slots Почти все игровые клубы настоятельно подтверждение контактных данных игрока для получения бездепозитного бонуса.Бесплатный приз – кредиты, которые онлайн-казино начисляет посетителю, не принуждая его пополнять игровой счет. <a href=https://tysonffec72839.activablog.com/29027442/the-chopping-fringe-of-nsfw-ai-exploring-the-features-of-undress-ai>https://tysonffec72839.activablog.com/29027442/the-chopping-fringe-of-nsfw-ai-exploring-the-features-of-undress-ai</a> Составленный специалистами Casino.ru список онлайн-казино с бездепозитным призом дозволяет игрокам сопоставить спецпредложения разных операторов. 1×slots зеркало проходить регистрацию это отличный вариант
1×slots зеркало рабочее на сегодня
Для получения бездепа нужно пригласить в забаву по реферальной ссылке свежего посетителя: он обязан зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на необходимую, обозначенную в критериях акции.Высокая конкуренция в разделе азартных игр мотивирует операторов привлекать посетителей разнородными промоакциями. Благодаря этому у посетителей бывает возможность получить призы в казино за регистрацию без депо. Воспользоваться таким предложением возможно, избегая процедуру внесения средств на игровой счет, просто активировав аккаунт на веб-сайте. Наш гид по бездепам поможет избрать самую привлекательную бонусную программу, разузнать правила получения такого вознаграждения и воспользоваться им с максимальной выгодой. Например, игрок получил 500 рублей при создании аккаунта и обязан отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 рублей, понадобится сделать 875 спинов для полного отыгрыша. <a href=https://poldomy.pl/member.php?u=143504>https://poldomy.pl/member.php?u=143504</a> казино 1×slots официальный сайт Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном сайте и выполните вход в собственный кабинет, чтобы отобрать благотворительные вращения с вейджером х40;
1×slots зеркало которую указывали при регистрации кстати
Постарайтесь отыграть вейджер, чтобы появилась возможность забыть заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы можете получить выигрыш на электронной кошелёк, карту, аппарат. Доступные игры – В некоторых азартных забавах возможно понизить математическое приемущество казино до нескольких десятых процента. В их количестве многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как управляло, в этих забавах ставки идут в зачет вейджера не полностью. Например, имеет учитываться только 50%. В неких играх бездепозитные бонусы вообще невозможно отыгрывать. Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы которые появляются у начинающих. 1хслот зеркало <a href=https://www.events18.hk/home.php?mod=space&uid=46161>https://www.events18.hk/home.php?mod=space&uid=46161</a> Иногда для получения призов нужно спутаться с представителями службы поддержки. Удобнее всего с ними собеседовать в онлайн-сате, желая время достаточно запроса по электрической почте.Варианты выигрыша находятся от Вашей удачи и критерий игорного портала. Выше мы заявили, собственно некоторые бездепозитные бонусы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются и те, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность современных игр на средства, можно выиграть неописуемые суммы. Сегодняшние игровые автоматы либо видео слоты, как их именуют. Могут выдавать солидные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000.
1×slots casino регистрация на сайте
Все обожают получать презенты. Согласитесь, почти любой играющий человек несомненно беспредельно счастлив, в получит даровой подарок для игры в онлайн казино просто за регистрацию либо же приз за внесенный депо, так нарекаемые приветственные бонусы для свежих игроков. Соответственно эти онлайн клубы станут больше известны и преимущественны у игроков при выборе казино для забавы. Топ казино каждый обновляется и прибавляются свежие и увлекательные игровые клубы с привлекательной бонусной политикой и всеми вероятными привилегиями, к коим относятся эти бонусы как фриспины за регистрацию, денежные бездепозитные призы, еще великодушные бонусы за внесенный депо.Обычно для получения бонусов без депо, казино выдвигает приклнные и вполне выполнимые условия, но есть ряд деяний коие запрещены и имеют стать досадные последствия: <a href=http://droid-cash.ru/user/Josephrip/>http://droid-cash.ru/user/Josephrip/</a> Подтверждение персональной инфы. Все казино настоятельно от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и присутствие у пользователя иных аккаунтов (мультиаккаунт запрещен).Для получения бездепа необходимо пригласить в игру по реферальной ссылке свежего клиента: он должен зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на необходимую, обозначенную в критериях промоакции. 1×slot казино зеркало Помните, собственно всевозможные нарушения управлял сведут на нет ваши усилия, и вы наверняка останетесь без начисленного вам дарового бонуса. Всегда изучайте верховодила начисления и обстоятельства вейджера. По любым вопросам, на которые вы не других отыскать ответы, обращайтесь за разъяснениям и саппорт.Для получения бездепа нужно пригласить в игру по реферальной ссылке нового посетителя: он должен зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и восполнить счёт на необходимую, указанную в критериях промоакции.
<b>Смотреть еще похожие новости:</b>
<a href=https://talkonlinenews.com/viewtopic.php?t=4356>1×slots официальный сайт мобильная версия</a>
<a href=https://feederfishing.lt/en/forum/pasiulymai-ir-pastabos-administracijai/1348396–1#1359870>1хслотс зеркало на сегодня</a>
<a href=https://forum.oursson.ru/viewtopic.php?f=2&t=8671>скачать 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Создание аккаунта. На веб-сайте казино необходимо обнаружить регистрационную форму и наполнить пустующие поля личными данными. Иногда на этом этапе потребуется указать только адресок электронной почты и пароль, но почаще бы наполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д. ). Нужно свидетельствовать только реальные данные, поскольку впоследствие они станут испытаны. Популярность интернет казино растёт и всё больше юзеров начинают увлекаться азартными забавами. Бездепозитные бонусы 2022 года, это оригинальные подарки за регистрацию. С их подмогою свежие игроки шансы получить бесплатные вращения или средства на баланс за одну регистрацию. С появлением игорных заведений в интернете, бездепозитные призы стали популярнейшим методом вербования игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы расскажем. Наш сайт собрал наихорошие предложения из интернета на 2022 год. Воспользуйтесь хоть презентом и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить условия.
#5198 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
сайте букмекерской конторы фонбет сайт букмекерской конторы <a href=https://res-publika.com>винлайн букмекерская контора</a> порно с Каролина Севастьянова inform@rucriminal.info <a href=https://kompromat1.online/>порно с Юлия Ефимова</a> Любимова Ольга Борисовна порно казино онлайн casino 7k рабочее porno Анастасия Янькова, боксерка ставки на спорт букмекерские конторы bitz casino porno Катерина Шпица
DiskiPlus 7k casino DiskiPlus порно с Зырянова Анастасия Владимировна <a href=https://www.diskiplus.ru>DiskiPlus бесплатное казино</a> DiskiPlus порно с Матвей Сафонов (футбол) DiskiPlus ограбление казино <a href=https://www.diskiplus.ru/>DiskiPlus pin up casino официальный</a> DiskiPlus бесплатное казино DiskiPlus pin up casino пин ап DiskiPlus самое казино DiskiPlus кент casino DiskiPlus порно с Кирьянова Дарья Борисовна DiskiPlus porno Алена Михайлова DiskiPlus автомат казино
#5199 Timothysophttps://1wincasino.pl/
Лучшее онлайн казино <a href=https://1wincasino.pl/>https://1wincasino.pl</a> Огромный выбор автоматов, настольных игр и live-казино. Уникальные акции, приветственные бонусы и мгновенные выплаты сделают вашу игру еще интереснее.
#5200 DavidSmiffhttps://bs2site-at.site/r/1
Откройте для себя <a href=https://bs2site-at.site/r/1>bs2site at</a> возможности даркнет-рынка с тысячами предложений. Быстрая регистрация, надежные сделки и анонимность на каждом этапе.
#5201 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать
Новые клиенты онлайн-казино без первого депо могут проверить свою удачливость. К тому же есть вероятность конвертировать бездепы в настоящие деньги за регистрацию в казино, однако желаемого приз нужно отыграть сообразно условиям акции. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots casino 777 online</a> В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая приятная часть игры. Важно, часто бездепозитные бонусы в казино выдаются с ограничениями по максимальной выплате. В среднем можно рассчитывать на прибыль в несколько тыщ руб. Как вывести выигрыш с приза без депозита. Придётся доказать акк документально, в некоторых заведениях. Процедура верификации обязательна и делается каждым игроком. О документальном подтверждении учетной записи спрашивайте в онлайн чате или прочитайте в правилах. <a href=https://webanketa.com/forms/6gtk2c9q74qpaeb368vked9s/>https://webanketa.com/forms/6gtk2c9q74qpaeb368vked9s/</a> 1×slots зеркало регистрация в 1×slots casino <a href=http://www.haxorware.com/forums/member.php?action=profile&uid=282485>http://www.haxorware.com/forums/member.php?action=profile&uid=282485</a>
1хслот зеркало сайта
Сроки активации приза уточняются любым казино, но почаще всего они не превосходят недели с этапа получения. Игроку непременно надо(надобно) применять бездеп в течение обозначенного срока, в ином случае бонус просто пропадет. Каждый приз можно получить лишь раз один, потому если не применять бездеп в срок, у игрока не несомненно второго шанса им пользоваться.Для верификации аккаунта нужно дать спецам технической поддержки отсканированную копию паспорта и счета за коммунальные предложения, а также фотку банковской карты или снимок странички электрического кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности. 1×slots официальный сайт мобильная версия Бездепозитный бонус за регистрацию в казино — это стартовый презент повторяющий валютного начисления либо бесплатных вращений для свежих игроков заведения, для получения которого не нужно заносить депо. <a href=https://www.google.com.ng/url?sa=t&url=http%3A%2F%2Fdoctorlazuta.by>https://www.google.com.ng/url?sa=t&url=http%3A%2F%2Fdoctorlazuta.by</a> Большинство интернет-казино из нашего топ-10 готовы порадовать вас эксклюзивными акциями. Читайте о их в обзорах и на форуме.Фриспины начисляются по определенной ставке. После их активации игроку нужно запустить слот и убедиться, что в нем показываются бесплатные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода последствии отыгрыша ориентируется оператором и изредка выше 5 000 рублей. 1хслот 1хслотс регистрация перейти на 1×slots Возьми свой подарок. Чаще всего бонус активируется сразу после регистрации. Но случаются истории, когда надо(надобно) забежать в собственный кабинет либо написать в справочную службу.
1×slots бездепозитный бонус за регистрацию
Также существуют онлайн-платформы азартных игр, которые используют раздачу бездепозитных призов в особые даты (как для казино, например и для игрока). Помимо сего, действующие геймеры того имеют вероятность получить схожие призы за собственную работа (например, за увеличения значения или за похожие достижения). <a href=http://compcar.ru/forum/member.php?u=115663>http://compcar.ru/forum/member.php?u=115663</a> 1× слот зеркало Допустим, за регистрацию вы возымели бездеп в размере 2 000 руб. С вейджером х30. В этом случае предстоит сделать ставок, на общую необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать настоящие средства. Однако не забывайте, собственно с каждого дара получится вывести определённую сумму (почаще всего не более $200).
x1 slots регистрация в 1×slots casino
Доступные игры – В неких азартных играх возможно снизить математическое преимущество казино до нескольких десятых процента. В их количестве почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как управляло, в таких забавах ставки идут в зачет вейджера не всецело. Например, может предусматриваться только 50%. В неких забавах бездепозитные бонусы вообщем нельзя отыгрывать. <a href=https://forums.scar-divi.com/topic/596399–1×slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8E-%D0%BF%D1%80%D0%BE%D1%86%D0%B5%D0%B4%D1%83%D1%80%D0%B0-%D0%B7%D0%B0%D0%B9%D0%BC%D0%B5%D1%82-%D0%B2%D1%81%D0%B5%D0%B3%D0%BE-%D0%BB%D0%B8%D1%88%D1%8C/>1×slots регистрацию процедура займет всего лишь</a> 1×slots зеркало быструю регистрацию а также мгновенное <a href=http://www.tvoidom.galaxyhost.org/forums.php?m=posts&q=36597&n=last#bottom>http://www.tvoidom.galaxyhost.org/forums.php?m=posts&q=36597&n=last#bottom</a>
1×slot зеркало рабочее регистрации на телефон придет
Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации бонуса без депозита. Внимательно прочитайте до конца. Многие новенькие делают ошибки на шаге регистрации и поэтому возможности получить презент.Прочитайте управляла бонусной программки, в желайте участие. Да, мы настойчиво советуем устроить это до регистрации. <a href=https://bbs.yhmoli.net/space-uid-594084.html?do=profile>https://bbs.yhmoli.net/space-uid-594084.html?do=profile</a> 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=416893>1хслотс официальный сайт зеркало</a>
<a href=https://radios-collector.com/viewtopic.php?f=7&t=62961>1×slots зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Казино выводит деньги лишь на ту платежную систему, с котрой был изготовлен депо. То есть, для вывода бездепозитного приза, Вам поначалу необходимо восполнить счет. В неких клубах узкий перечень методов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет именно с этих платежных методов, которые доступны для вывода.
#5202 Charlesgunnyhttp://filmkachat.ru
1×slot регистрация
Если площадка презентует бездеп за регистрацию, то процедура его получения проста. Нужно только завести аккаунт на веб-сайте и активировать его, подтвердив адресок электронной почты, номер аппарата или иные данные, коие требует оператор. Перед этим необходимо увериться, что пользователь находится на официальном сайте казино, а не на жульнической площадке.Такой безвозмездный эквивалент средств зачисляется на профиль юзера последствии осуществления требований и предназначаются они только для игрового процесса. Вывод таких вознаграждений вероятен только после воплощения вейджеровых критерий. <a href=http://filmkachat.ru/>казино 1× slots официальный сайт</a> Активация происходит за промокодов, которые вводятся в собственном офисе в регистрации. Среди спецпредложений в списке Casino.ru находятся неповторимые промокоды, коие доступны только посетителям портала. Другие методы начисления средств ? автоматическая активация незамедлительно в сотворения аккаунта и получение дара по запросу в службу технической помощи.Перечисленные выше основные свойства сочетают практически каждый приз и являются стандартными для бездепозитных бонусных начислений в казино. <a href=https://wowgilden.net/forum-topic_475313.html>https://wowgilden.net/forum-topic_475313.html</a> Бездепозитный бонус – это финансовое вознаграждение, которое выдается участнику забавы в казино, для его вербования и появления заинтересованности. Любой посетитель, кот-ый соответствует условиям выдачи похожего бездепозитного бонуса, может претендовать на получение вышеуказанного приза. Такое одобрение считается наиболее эффективным методом, дающим возможность стартовать в игре, не вкладывая собственных материальных средств.Получать информацию о самых выгодных призах возможно без постоянного мониторинга новостей казино. Мы брали эту задачку на себя и непрерывно следим за предложениями операторов, избирая наилучшие из их. В этом разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список промоакций регулярно дополняется. В топ зашли самые новые бездепозитные бонусы за регистрацию в казино 2020, временные и закрытые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и другим критериям. Если срок деянья акции истек, она удаляется из перечня. x1 slots регистрация в 1×slots casino <a href=https://fa.earnvisits.com/index.php?page=user&action=pub_profile&id=167541>https://fa.earnvisits.com/index.php?page=user&action=pub_profile&id=167541</a>
рабочее зеркало 1×slots
<a href=https://tabsgame.ru/user/Jamesbes/>1×slots регистрация на официальном сайте</a> 1×slots официальный сайт скачать <a href=http://i0110.com/home.php?mod=space&uid=516655>http://i0110.com/home.php?mod=space&uid=516655</a> Мы проделываем акцент на главных положениях верховодил, рассказываем о территориальных ограничениях и кратко информируем о иных акциях обговариваемого казино. 1×slots регистрация на официальном сайте
1×slots зеркало на сегодня
Простая процедура получения бездепозитного приза, которая займет не более 2-х мин. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные. <a href=http://pervoe.online/bitrix/redirect.php?goto=http://g2p.ru/url_relay.php?url=http://upp7vos.ru/bitrix/redirect.php?goto=https://telegra.ph/Kratkoe-rukovodstvo-po-pokupke-i-prodazhe-akcij-paevyh-investicionnyh-fondov-09–19>http://pervoe.online/bitrix/redirect.php?goto=http://g2p.ru/url_relay.php?url=http://upp7vos.ru/bitrix/redirect.php?goto=https://telegra.ph/Kratkoe-rukovodstvo-po-pokupke-i-prodazhe-akcij-paevyh-investicionnyh-fondov-09–19</a> Наличие у игрока второго аккаунта. Запрещено творить количество профилей для неоднократного получения бездепов.Чтоб получить большой выигрыш, подбирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша. 1×slots официальный сайт мобильная версия скачать К образцу, игроку выдаются бесплатные свои в заведении в объеме пятидесяти или 100 $ (вейджер на коие составляет 100х). То есть, каждому новоприбывшему игроку выскакивает манящая иллюстрация, кот-ая обещает выплату всех зачисленных компанией средств. Не стоит внимания на казино бонус за регистрацию без депозита с слишком большой либо довольно махонькой суммой призов, потому что, и тщательно исследовав все условия, тут вероятнее всего, будет какой-то подвох.Доступ к подарку имеет открываться автоматически в введения промокода либо обращения в службу поддержки сайта. В первом случае от пользователя не требуется практически поступков. Бездеп с активацией по коду встречается почаще всего. Игроку нужно установить совокупа символов в графе, которая возможность находиться в регистрационной форме в Личном кабинете.
1×slots актуальное зеркало
Рассмотрим принцип его действия на образце. Допустим, вы зарегались и получили $10 no down payment bonus с вейджером х50. Это означает, собственно выигранные средства возможно будет выводить не раньше, чем в как, как общая сумма ставок достигнет $500. <a href=http://aficionado.pl/showthread.php?103293–1×slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%BD%D0%B0–1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81&p=120729>1×slots регистрация на 1хслотс</a> Все любят получать подарки. Согласитесь, почти любой играющий человек будет необъятно рад, если получит безвозмездный подарок для игры в онлайн казино просто за регистрацию либо же бонус за внесенный депо, например именуемые приветственные бонусы для свежих игроков. Соответственно такие интернет клубы станут более востребованы и предпочтительны у игроков при выборе казино для забавы. Топ казино постоянно обновляется и прибавляются новые и занимательные игровые клубы с симпатичной бонусной политикой и всеми вероятными привилегиями, к коим относятся такие призы как фриспины за регистрацию, денежные бездепозитные призы, а также щедрые бонусы за внесенный депозит. 1 x slots <a href=https://madonas5.baltuss.lv/member.php?action=profile&uid=66833>https://madonas5.baltuss.lv/member.php?action=profile&uid=66833</a>
1хслотс рабочее зеркало
Принципиальным отличием безвозмездных призов от бонусов на депо считается неимение надобности заносить деньги на акк. Из-за сего их нередко именуют бездепозитными (not the slightest deposit bonuses).Теоретически, к бесплатным бонусам можно отнести так именуемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, поэтому что они предоставляют только вероятность создавать ставки. На критериях отыгрыша бесплатных бонусов стопам остановиться подробнее. С ними связаны аспекты, коие нельзя оставить без внимания.Как верховодило, при выводе денег, от играющего потребуется лишь устроить минимальный вклад чтобы, чтобы, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом индивидуальный счет. <a href=https://maps.google.com.tr/url?q=https://doctorlazuta.by/>https://maps.google.com.tr/url?q=https://doctorlazuta.by/</a> Особую изюминку видео слотам придают уникальные знакы. С их выходом активизируются различные бонусы. Вы сможете запустить дополнительный уровень и увеличить сумму выигрыша. Есть знаки, которые заменяют ненадобные элементы и сами творят выигрышные комбо. Не стоит забывать и тему бонус-тур. После любого успешного спина есть шанс увеличить необходимую выигрыша в 2 либо четыре раза. 1×slots официальный сайт зеркало рабочее Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных притязаний, кроме неотъемлемой верификации. Если на сайте учтена обязательная процедура подтверждения личности, то вывести выигрыш удастся только последствии ревизии данных. Приготовьтесь наполнить анкету и отправить в техподдержку документ, подтверждающий личность.Только выполнив все обстоятельства отыгрыша и дождавшись окончания проверки аккаунта, Вы можете оформить заявку на вывод средств и получить свои средства.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.goslog.ru/forum/messages/forum1/message13297/11-obrashcheniya-grazhdan?result=reply#message13297>1хслотс рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные призы – это самая интересная и наиболее многообещающая промоакция интернет-казино. Они числе чем фри-спинов, поэтому собственно выплаты в безвозмездных вращениях не гарантированы, ведь комбинации на барабанах игрового аппарата имеют не сложиться. Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?
#5203 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора официальный сайт скачать букмекерская контора на андроид <a href=https://strelochnik.com/>porno Дарья Клишина</a> официальные букмекерские конторы скачать казино рояль <a href=https://strelochnik.com/>porno Катерина Шпица</a> 1×bet слоты официальный сайт лучшие бесплатные онлайн казино бесплатно играем казино 1×bet официальный сайт макао казино зеркала казино играющие казино онлайн
DiskiPlus online casino официальный DiskiPlus 1×bet casino <a href=https://diskiplus.ru>DiskiPlus porno Игорь Акинфеев (футбол)</a> DiskiPlus Нургалиева Эльвира Рамиловна порно DiskiPlus casino зеркало сегодня рабочее <a href=https://www.diskiplus.ru/>DiskiPlus приложения букмекерских контор на андроид</a> DiskiPlus порно с Александр Большунов (лыжные гонки) DiskiPlus яндекс игры казино DiskiPlus казино зеркало сегодня DiskiPlus сколько казино DiskiPlus порно с Арина и Дина Аверины, гимнастки DiskiPlus Александра Бортич DiskiPlus порно с Константин Тюкавин (футбол)
#5204 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация
Так что приготовьтесь дать секретную информацию (пол, возраст, государство проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает менее суток, после чего получится беспрепятственно выводить крупные выигрыши.В истинное время получить приз за регистрацию в казино очень просто. Почти любой игорный дом с радостью даст средства или бесплатные вращения. Многие игроки используют этим и не стесняются регистрироваться в каждом клубе с выгодными критериями. Кстати, это замечательная возможность выдумать выигрышную тактику и сорвать куш. <a href=http://filmkachat.ru/>1×slots регистрация на официальном сайте</a> <a href=https://postheaven.net/pafsi02hf4>https://postheaven.net/pafsi02hf4</a> Внесение депо – Будьте готовы восполнить счет после отыгрыша бонуса. Это обычное требование верховодил для этого подобии промо-акций. Лучше заранее уточнить, какую необходимую надо(надобно) несомненно заносить на счет. Как управляло, идет о наименьшем депозите, но вы обязаны быть убеждены, что он для по карману.Казино выделяет возможность заработать и исключить реальные деньги на бездепозитных призах. Обычно, это незначительная сумма, которую казино имеет для разрешить презентовать игроку. 1×slots регистрация 1×slotscasino 56 online <a href=http://certificate.winko.net/bbs/board.php?bo_table=free&wr_id=151744>http://certificate.winko.net/bbs/board.php?bo_table=free&wr_id=151744</a> Этот тип приза будет добавлен на Ваш аккаунт в успешной процедуры регистрации с внедрением номера телефонного. Если выбрать иной способ сотворения учетной записи, бездеп не несомненно добавлен на Ваш акк.
1хслотс официальный сайт зеркало
Подтверждение персональной инфы. Все казино настоятельно от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у пользователя других аккаунтов (мультиаккаунт запрещен). <a href=https://uyghuryol.com/forum/viewtopic.php?f=8&t=258480>x1 slots 1хслотс регистрация перейти на 1×slots</a> 1×slots зеркало регистрация <a href=http://www.jingsuanwu.com/home.php?mod=space&username=Harrywroke>http://www.jingsuanwu.com/home.php?mod=space&username=Harrywroke</a> Обычно, бездепозитные бонусы выдаются под конкретные слоты с фиксированной ставкой, но их точно запрещено использовать в игровых автоматах с прогрессивным джекпотом. Список игр, каких можно применять бездеп, Вы отыщите в описании акции либо можете уточнить у саппорта заведения.Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. 1×slots на любой вкус как пройти регистрацию Фриспины начисляются по конкретной ставке. После их активации игроку необходимо запустить разъем и убедиться, собственно в нем отображаются благотворительные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода в отыгрыша определяется оператором и редко превышает 5 000 рублей.Бездепозитные бонусы, как теснее ясно, считаются оригинальной возможностью обратиться игровому процессу безусловно бескорыстно, словами выступать в онлайн казино даром и на быть средства сразу после регистрации аккаунта. Автоматы с таким депо могут замерзнуть великолепной вероятностью сыграть для поклонников азарта с определенными лимитированиями в денег.
1×slots зеркало быструю регистрацию а также мгновенное
Чтобы без увериться в преимуществах бездепозитных призов, довольно зарегистрироваться в казино и получить поощрение.Не стоит путать забаву в демо и внедрение призов. В демонстрационном режиме игрок возможность оценить механику слота, сюжет и оформление. Но игра ведется на условные кредиты, потому отсутствует основное ? ощущение азарта. Активируя промокод либо фриспины, заказчик как не тратит средства средства на игровые автоматы, но возможность сорвать реальный куш! <a href=http://198.199.122.222/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%D0%B8%20%D0%BE%20%D0%B6%D0%B5%D0%BD%D1%81%D0%BA%D0%BE%D0%BC%20%D0%B7%D0%B4%D0%BE%D1%80%D0%BE%D0%B2%D1%8C%D0%B5>http://198.199.122.222/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%D0%B8%20%D0%BE%20%D0%B6%D0%B5%D0%BD%D1%81%D0%BA%D0%BE%D0%BC%20%D0%B7%D0%B4%D0%BE%D1%80%D0%BE%D0%B2%D1%8C%D0%B5</a> Казино выводит средства только на ту платежную систему, с котрой был сделан депозит. То есть, для вывода бездепозитного бонуса, Вам сначала необходимо восполнить счет. В неких клубах ограниченный перечень способов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с этих платежных методов, которые доступны для вывода.Но есть игорные заведения, коие готовы просто например жертвовать средства на забаву. Для сего достаточно сделать профиль. Чтобы исключить собственный выигрыш, для поначалу нужно выполнить обстоятельства отыгрыша, обозначенные в критериях получения бездепозитного депо. x1 slots регистрация в 1×slots casino Активация по промокоду используется в разных обликах бездепов. Если речь о приветственном бонусе, то комплект символов возможно разузнать на главной странице, в регистрационной форме или послании, которое отправляется юзеру для доказательства адреса электронной почты. Акции все проводиться совместно с партнерскими площадками. Обычно код размещается на стороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активизируется разовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем актуальный код для активации в описании каждого рекламную.Также учтите, собственно некоторые игровые платформы сузивают перечень государств, которые способны получить предложенный бездепозитный бонус за регистрацию. К примеру, есть онлайн-заведения, выдающие похожие призы лишь жильцам конкретных стран. К образцу, онлайн казино 777 Оригинал предоставляет бездепозитный приз только игрокам из России и стран СНГ. Или напротив, снабжают вознаграждением всех, не жителей некоторых стран (исходя из сего, идет пристально изучать список, чтобы потом не возникло практически вопросов и претензий).
казино 1× slots официальный сайт
Главное преимущество спинов – вероятность выучить разные слоты. Также получится насладиться бонусными раундами, испытывать удачу в риск-туре и преумножить выигрыш за счёт особых символов. Однако не игровой процесс заслуживает внимание, ведь лучше сосредоточиться на реальном выигрыше. 1хслотс мобильная версия зеркало <a href=http://www.truenorthis.com.au/mediawiki/index.php/User:FaithHedgepeth>http://www.truenorthis.com.au/mediawiki/index.php/User:FaithHedgepeth</a>
1×slots официальный зеркало рабочее
Основное правило получения бездепа ? творимый аккаунт должен быть у юзера первым и единственным. Наличие нескольких аккаунтов требовательно воспрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депо необходимо соблюдать простую последовательность деяний.В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, нужно адресоваться в службу через лайв-чат на веб-сайте казино. Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция имеет подробные управляла, ссылка на которые обычно находится в промообъявлении. В них указываются лимиты, вейджер, перечень доступных игр. Если оператор скрывает данные о предложении, то пользоваться им надо.Размер приза. В качестве бездепов обыкновенно начисляют очень суммы, а когда идет о бонусах за депозит, которые начисляются в процентном соотношении от суммы пополнения, то некоторые казино могут презентовать игроку до 2000$. <a href=https://africaadultblog.com/memberlist.php?mode=viewprofile&u=47498>https://africaadultblog.com/memberlist.php?mode=viewprofile&u=47498</a> Для тех, кто только взвешивает испытывать свою удачу, а для проф игроков, отыскивающих свежие площадки для выигрышей, ведущие лицензированные казино нередко организуют различные акции, и лучшее услуг за время – как для начинающих, так и для проф игроков – бездепозитный бонус за регистрацию. 1×slots регистрация то дальше необходимо пройти
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.oursson.ru/memberlist.php?mode=viewprofile&u=1347>1×slots зеркало рабочее</a>
<a href=https://g2clubs.com/healthy-workout/google/#comment-24046>1×slot зеркало рабочее регистрации на телефон придет</a>
<a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=13119>1хслотс официальный сайт зеркало</a>
<a href=http://mi.minfish.com/home.php?mod=space&uid=1196847>1×slot зеркало рабочее регистрации на телефон придет</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Объективные – размер приза, коэффициент и обстоятельства вейджера, надобность внесения депо для вывода денег; Далее требуется отыграть вагер и вывести выигрыш. Игрокам без навыка крупно повезло, возможность получить 10-ки презентов за 1 регистрацию. Если не сумели получить Бездепозитный приз, не тревожьтесь. Обратитесь в интернет чат, оператор поможет исправить.
#5205 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
online casino официальный porno Дарья Мороз <a href=https://t.me/vchkogpu_ru>казино регистрации</a> сколько казино вывод казино <a href=https://rhymes-punches.com/>1×bet сайт 1×bet xyz</a> казино смотреть онлайн casino online зеркало 1×bet зеркало xbet букмекерская контора официальный сайт 7k casino Анна Михалкова скачать pin casino
DiskiPlus casino актуальное зеркало DiskiPlus Лут Оксана Николаевна порно <a href=https://diskiplus.ru>DiskiPlus 1×slots casino</a> DiskiPlus porno Виктория Баркова, легкоатлетка DiskiPlus 1×bet casino <a href=https://www.diskiplus.ru/>DiskiPlus казино 5</a> DiskiPlus казино гта 5 DiskiPlus порно с Дронова Александра Викторовна DiskiPlus 1×bet xbet xyz DiskiPlus porno Светлана Ходченкова DiskiPlus казино вход DiskiPlus казино вход DiskiPlus 1×bet сейчас
#5206 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet официальный скачать официальные зеркала казино <a href=https://7club7.com/>казино можно</a> 7k casino зеркало на сегодня казино рояль смотреть <a href=https://krtka.info/>black russia казино</a> 1×bet сайт 1×bet xyz смотреть фильм казино букмекерская контора Любимова Ольга Борисовна порно порно с Георгий Джикия (футбол) casino скачать приложение скачать 1×bet на андроид бесплатно
DiskiPlus porno Катерина Шпица DiskiPlus гта казино <a href=https://www.diskiplus.ru/>DiskiPlus порно с Арина и Дина Аверины, гимнастки</a> DiskiPlus букмекерские конторы pin DiskiPlus Попова Анна Юрьевна порно <a href=https://www.diskiplus.ru/>DiskiPlus ап казино</a> DiskiPlus casino вход DiskiPlus ограбление казино DiskiPlus casino x DiskiPlus человек казино DiskiPlus порно с Антропова Валентина Викторовна DiskiPlus casino сегодня DiskiPlus Анна Михалкова
#5207 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
Нет. Для получения бездепозитного приза в казино необходима неотъемлемая регистрация на сайте. Играть в слоты даром и без регистрации возможно только в демо режиме.Бонус с зачислением денег на счет выделяет больше свободы поступков. Пользователь сам подбирает, каким образом распорядиться подаренными средствами. Здесь также шансы действовать лимитирования на список дешевых игр, хотя обыкновенно эти рамки не например строги, как в промо с безвозмездными вращениями. <a href=http://filmkachat.ru/>1×slots зеркало которую указывали при регистрации кстати</a> Но а случае вы уже профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы автоматически перейдете в интернет казино;Шаг 4. Активация. Внимательно изучите условия, информацию по ограничениям и сроке действия бонусного предложения. Разобравшись с правилами, можно активировать бонус в собственном кабинете (иногда ? с использованием промокода) или по запросу в саппорт. <a href=https://medium.com/@comcgifurniture/your-complete-guide-to-premium-weed-delivery-pickering-and-local-cannabis-services-c284470081c0>https://medium.com/@comcgifurniture/your-complete-guide-to-premium-weed-delivery-pickering-and-local-cannabis-services-c284470081c0</a> В разделе с бонусами активировать собственный подарок. Найти игры, для которых учтено поощрение и использовать приз по предназначению.Бездепозитный приз предоставляется новенькому игроку за конкретные действия. Часто презент вид средств либо фриспинов выдается за регистрацию, спасибо чему пользователь получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. 1×slots зеркало регистрация то дальше необходимо пройти <a href=http://mmjob.gapia.com/bbs/board.php?bo_table=free&wr_id=39228>http://mmjob.gapia.com/bbs/board.php?bo_table=free&wr_id=39228</a> Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут устанавливает лимитирование для посетителей. Конечно, это можно посчитать некоторым неудобством для игрока, но справедливости необходимо, собственно выбор автоматов всё также остаётся довольно наибольшим.Максимальная ставка ? уточняется в еденице счета и ограничивает размер ставки за один спин. В случае ее превышения бонус возможность быть аннулирован. Также в правилах может находиться запрет на размещение ставок конкретного вида, например, по одинаковым шансам в рулетке (другими, на чет либо нечет, красное или темное и т.д. ).
1×slots зеркало регистрация
Главное преимущество спинов – вероятность выучить различные слоты. Также удастся насладиться бонусными раундами, испытывать удачу в риск-туре и преувеличить выигрыш за счёт особенных символов. Однако не только игровой процесс заслуживает внимание, как превосходнее сосредоточиться на реальном выигрыше.Представленные на данной странице лучшие бездеп бонусы в казино за регистрацию в 2022 году имеют подходящие условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, в котором посетители Casino.ru могут сортировать перечень по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д. 1×slots на любой вкус как пройти регистрацию Поспешите забрать бездепозитные призы за регистрацию в казино из представленного списка. Все платформы не только ведут законную работа, хотя и порадуют правдивыми результатами игры, высокой отдачей, прыткими выплатами.Зачастую бездепозитные призы казино для игры предлагаются разными заведениями азартных игр в маркетинговых акций либо в целях привлечения к себе свежих игроков. Для бездепозитных призов в казино 2022 игроку надо пополнять счет до этапа вывода хотимых средств. <a href=http://www.brownale.se/sida/scguestbook/guestbook.php>http://www.brownale.se/sida/scguestbook/guestbook.php</a> Проверка занимает от нескольких минут до нескольких дней, профессионалы техподдержки шансы запросить вспомогательные документы или инициировать краткое общение по Skype. рабочее зеркало 1×slots Обычно бездепозитные акции от казино, приходят на эл. Почту в дни рождения либо праздники. В некоторых интернет казино можно адресоваться в чат и как неизменному игроку, вероятно вас предложат бездепозитное предложение.Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных притязаний, считая неотъемлемой верификации. Если на веб-сайте учтена неотъемлемая процедура подтверждения личности, то исключить выигрыш удастся только после проверки данных. Приготовьтесь заполнить анкету и отправить в техподдержку документ, подтверждающий лицо.
казино 1×slots
Индивидуальные поощрения выдаются за совершение действий: подписку на аккаунты площадки в социальных сетях, установку мобильного приложения либо официального посетителя для ПК. В большинстве казино срабатывают программки преданности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на грядущий уровень часто сопрягается выдачей бездепа.Oтыгpaть бонус с обозначенным вeйджepом, желаемого необходимо сдeлaть cтaвoк нa cумму, превосходящую объем приза в некоторое один. <a href=http://bazarweb.ru/forum.php?PAGE_NAME=profile_view&UID=31059>http://bazarweb.ru/forum.php?PAGE_NAME=profile_view&UID=31059</a> Для вывода средств бонус нужно будет отыграть законам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариациями отыгрыша бездепозитного приза до его получения, чтобы избежать конфликтных обстановок.Наши специалисты изучают обстоятельства акции, после в ручном режиме проверяют их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и другие характеристики. Мы не рекламируем казино, а даем игрокам информацию о наилучших из их. 1×slots зеркало подтвердит вашу регистрацию если говорить Условия шансы разниться друг от друга. Но такой бонус возможность быть применен только для игрового процесса – полученные на счет финансы до такого, как будут отыграны, исключить невероятно.Срок активации и время на отыгрыш. Зачисление денег или фриспинов происходит при активации на взыскательно ограниченного периода, схожие требования предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать приз количество дней либо даже недель. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с неоправданно высоким вейджером.
1×slots зеркало регистрация
Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и более. Когда игроку полагается большое фриспинов, администрация имеет разбивать их начисление на количество дней. Бесплатные вращения предоставляются для определенного слота, который указывается в правилах промоакции. <a href=http://brilliance.ru/forum/viewtopic.php?f=6&t=28606>1×slot зеркало рабочее этих способов предполагает регистрацию</a> В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, необходимо обратиться в службу поддержки спустя лайв-чат на сайте казино. 1хслотс регистрация в 1×slots casino <a href=http://xn–80aphfq.xn–p1ai/user/Deweyfep/>http://xn–80aphfq.xn–p1ai/user/Deweyfep/</a>
1×slots регистрация на официальном сайте
Бездепозитные бонусы в казино без пополнения 2022 — это определенная сумма денег либо gorovyh spins вращения, коие предоставляются первым постояльцам за регистрацию на сайте казино повторяющий бездепозитного приза, и выделяет вам возможность помощью казино без пополнения опробовать услуги (игр), с последующей преимуществом, льготой вывода средств при выполнении всех установленных правил.Таким образом, заведение пробует показать себя своим вероятным игрокам, а такой рекламный ход как казино приз без депозита за регистрацию завлекает очень много внимания к игорному заведению и обеспечивает постоянный струю свежих посетителей и будущих посетителей игрового онлайн клуба. <a href=http://665bao.com/space-uid-24987.html>http://665bao.com/space-uid-24987.html</a> 1×slot рабочее зеркало Выиграть настоящие средства в казино не пополняя счет – трудно, но возможно. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными призами и начните играть на бонусные средства. По статистике каком-то 10-ти заведений можно заработать небольшую необходимую денег за счет бонусных средств.Для получения бонуса нужно ознакомиться с программкой лояльности казино и устроить ставки на сумму, необходимую для перехода на грядущий уровень.
<b>Смотреть еще похожие новости:</b>
<a href=http://naturetour.ru/communication/forum/messages/forum3/message24348/6040–1×slot-kazino-zerkalo?sessid=425d6dee0bb241014f0a560af81b906f&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1×slot казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Размер призов почаще всего чисто условный и не превышает 50 рублей. Приятно, но ощутимым бустом при ли станет.
#5208 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
фильмы казино рояль 1×bet рабочее <a href=https://sovsekretno.net/>ешь казино</a> как выиграть в казино слот casino <a href=https://rucriminal.info/>порно с Евгения Медведева</a> казино проиграл слоты казино казино Яровая Ирина Анатольевна порно скачать casino на андроид порно с Юлия Ефимова 1×bet зеркало xbet
DiskiPlus казино зеркало сегодня DiskiPlus бесплатно фильм казино <a href=https://www.diskiplus.ru>DiskiPlus порно с Афонина Марина Игоревна</a> DiskiPlus порно с Антропова Валентина Викторовна DiskiPlus 1×bet на сегодня <a href=https://www.diskiplus.ru>DiskiPlus букмекерская контора скачать приложение</a> DiskiPlus сайт казино вход DiskiPlus casino бездепозитный DiskiPlus балтбет букмекерская контора DiskiPlus 1×bet зеркало на сегодня DiskiPlus casino betting DiskiPlus бывшие казино DiskiPlus Скворцова Вероника Игоревна порно
#5209 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
бк букмекерская контора казино 5 <a href=https://sovsekretno.net/>казино играть</a> bitz casino 1×bet на андроид <a href=https://glvk.guru/>водка казино</a> леон букмекерская контора 1×bet зеркало слоты 1×bet xyz порно с Варвара Субботина казино большая порно с Дарья Клишина, легкоатлетка порно с Алексей Миранчук (футбол) casino 7k сегодня
DiskiPlus 1×bet 1 DiskiPlus 7k casino сайт <a href=https://diskiplus.ru>DiskiPlus ев казино</a> DiskiPlus casino вход DiskiPlus как выиграть в казино <a href=https://www.diskiplus.ru/>DiskiPlus up casino скачать</a> DiskiPlus pin up casino пин DiskiPlus pin up casino зеркало DiskiPlus порно с Гатагова Ольга Анатольевна DiskiPlus порно с Елена Никитина, скелетонистка DiskiPlus porno Дарья Клишина DiskiPlus porno Светлана Ходченкова DiskiPlus 7k casino сайт
#5210 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
Бесплатные призы казино без депозита можно получить в виде валютных средств на бонусный счет (исключить их можно лишь после отыгрыша), фриспинов, игры либо кешбэк-бонуса. <a href=http://filmkachat.ru/>1×slots регистрация</a> Используйте лучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из списка ниже, дабы заработать подарки за обычные действия и уже сегодня получить первый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высочайшей отдачей и быстрыми выводами на электрические кошельки.Бездепы обыкновенно предлагают с отыгрышем — мгновенно вывести выигранные свои нельзя. Перевод денег со счета несомненно вероятен после как, как пользователь выполнит все притязания казино, а сумма возможности быть выше установленного правилами лимита. Условиями акции фиксируются сроки, в течение которых заказчик вправе воспользоваться предложением. Обычно они не превышают нескольких дней в активации. <a href=https://forms.yandex.com/cloud/6716307302848f0c3b0dc022/>https://forms.yandex.com/cloud/6716307302848f0c3b0dc022/</a> Так собственно приготовьтесь дать секретную информацию (пол, возраст, государство проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает менее суток, после чего получится беспрепятственно выводить солидные выигрыши.Также посещают случаи, когда казино начисляет обсужденный приз последствии регистрации нового клиента по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам. 1×slots зеркало этих способов предполагает регистрацию <a href=http://xn–80adazahw2c9an.xn–p1ai/user/DeweyNap/>http://xn–80adazahw2c9an.xn–p1ai/user/DeweyNap/</a> Способы получения бездепа различаются в зависимости от облика приза, который приглянулся игроку. Но для или надо(надобно) быть зарегистрированным в законном онлайн-казино и подтвердить свою лицо. В общем виде пошаговая инструкция для получения бездепозитного бонуса смотрится например:
1× slots сайт
Когда речь о валютных бонусах, казино всегда устанавливают условия вейджера, которые нужно выполнить, чтобы вывести выигрыш.В неких интернет казино для получения бездепозитных призов не довольно просто зарегистрироваться на сайте клуба и подтвердить средства контактные данные. Дополнительно требуется активация промокода. <a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=41304>1×slots casino online регистрация</a> 1×slots промокод при регистрации 2025 Как лишь на виртуальном счету окажутся бонусные свои, поторопитесь отыграть вейджер. Сразу после этого возможно оставить заявку на вывод выигрыша. Кредиты прибыльно отличаются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом настоящих средств и выделяют возможность почувствовать задор. Во-вторых – возможно насладиться каждой азартной забавой доступной на веб-сайте. В вашем распоряжении присутствуют автоматы, настольные приложение, видео-покер, Live-дилеры. <a href=https://qashvqt.uz/index.php?subaction=userinfo&user=OscarSkent>https://qashvqt.uz/index.php?subaction=userinfo&user=OscarSkent</a> Лишь популярные и знаменитые азартные заведения все позволить себя раздавать бездепы вид дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, коие возможно потратить в топовых аппаратах с высочайшей отдачей.При маленький сумме приза рекомендуется выступать по невысоким ставкам, а использовать максимальные лучше только что, нет случае, случае вейджер очень немалый, а время на отыгрыш сильно ограничено. скачать 1×slots на андроид мобильная версия Приглашаем делиться воззрениями о бонусах. Это поможет иным юзерам избирать более выгодные предложения.Любой выигрыш по ставке выше установленного лимита будет являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, а в случае выигрыша его сумма не поступит на счёт клиента — результат игры несомненно всецело аннулирован.
1×slots регистрация 1×slots casino c2d ru
<a href=http://www.fire-team.ru/forum/member.php?u=4975>http://www.fire-team.ru/forum/member.php?u=4975</a> 1×slots подтвердит вашу регистрацию если говорить Иногда в качестве одобрения за регистрацию имеют выдаваться билеты для роли в турнирах. Условия их проведения очень отличаются, потому мы советуем ознакомиться с каждым предложением отдельно.Индивидуальные поощрения выдаются за совершение действий: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавленья или официального посетителя для ПК. В большинстве казино действуют программы преданности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на грядущий степень нередко сопрягается выдачей бездепа.
1×slots зеркало проходить регистрацию это отличный вариант
Бонусы без депо при регистрации числятся наиболее привлекательными как для опытнейших игроков, так для и новичков. Получив это вознаграждение, клиент может играть на реальные средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные призы в интернет-казино Рунета, а также обстоятельства их активации и выигрыша.Новички не любят сразу же вносить депозит. Это обосновано неимением опыта и сомненьем. К счастью, в можно получить бездепозитный бонус за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В любом случае вы не рискуете своими сбережениями. Это замечательная вероятность запустить приглянувшийся видео разъем либо же испытать удачу в настольных забавах. Подтверждение регистрации. Казино требуют привязки профиля к электронному адресу и номеру аппарата. Для этого на e-mail отправляется послание ссылаясь, а на аппарат ? текстовое извещенье с кодом. 1×slots сайт зеркало <a href=http://r66227en.beget.tech/user/DonaldGut/>http://r66227en.beget.tech/user/DonaldGut/</a> Практически все интернет казино с бездепозитным бонусом за регистрацию предусматривает программку лояльности — систему одобрения постоянных клиентов, кот-ая произведено из большого уровней. При достижении игроком одного значения на его счёт поступает бонус. Чем повыше степень — тем щедрее бонус.Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских руб. В критериях промоакции предписано, собственно вейджер бездепозитного бонуса х20. Поэтому, чтобы отыграть бонус, игроку будет нужно устроить ставок на 35*20=700 руб.
1х слотс зеркало регистрация в 1×slots casino
<a href=https://morphomics.science/wiki/User:SusannaFalleni9>https://morphomics.science/wiki/User:SusannaFalleni9</a> При подмоги такого одобрения оператор может кроме привлекать посетителей, коие раньше проявляли активность на сайте, но по какой-то причине перестали выступать. В данном случае промокод высылается юзеру по электронной почте или повторяющий SMS. 1×слот регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5138/#comment-618351>1×slots регистрация на сайте 1×slots ru com</a>
<a href=https://forum.omolenko.com/viewtopic.php?p=204195>1×slots регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В истинное время получить бонус за регистрацию в казино очень просто. Почти каждый игорный дом с готовностью предоставит деньги или благотворительные вращения. Многие игроки пользуются этим и не смущяются регистрироваться в любом клубе с прибыльными условиями. Кстати, это отличная возможность придумать выигрышную тактику и сорвать куш.
#5211 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up casino buzz porno Анастасия Янькова, боксерка <a href=https://t.me/vchkogpu_ru>порно с Дарья Клишина, легкоатлетка</a> букмекерская контора леонов порно с Алексей Миранчук (футбол) <a href=https://t.me/vchkogpu_ru>1×bet официальный сайт</a> kometa casino porno Илья Ковальчук (хоккей) unlim casino unlim casino casino com Приезжева Екатерина Геннадьевна порно включи казино
DiskiPlus pin up casino buzz DiskiPlus 1×bet зеркало xbet <a href=https://www.diskiplus.ru>DiskiPlus 7k casino официальный сайт</a> DiskiPlus pin up casino top top DiskiPlus казино вход официальный сайт <a href=https://diskiplus.ru/>DiskiPlus букмекерская контора</a> DiskiPlus порно с Варвара Субботина DiskiPlus казино пину DiskiPlus Чулпан Хаматова DiskiPlus казино рояль DiskiPlus букмекерская контора DiskiPlus 7k casino скачать DiskiPlus скачать 1×bet
#5212 Charlesgunnyhttp://filmkachat.ru
1× slots сайт
Каждый игрок должен сначала детально выучить условия по получению и отыгрышу приглянувшегося дара. Если всё организует, поторопитесь забрать благотворительные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик данный начать вертеть барабаны лучших слотов. <a href=http://filmkachat.ru/>1×slots casino регистрация на сайте</a> Фриспины предназначены для использования в видео слотах. Внимательно ознакомьтесь с условиями – часто их выдают на некоторые автоматы. В зависимости от клуба, у вас выйдет сделать определённое число ставок. Кстати, продвинутые игорные жилища разрешают запускать каждых «одноруких бандитов».Подтверждение электронной почты – одно из главных условий, которое есть почти в каждом бездепозитном казино. Чтобы верифицировать электрическую почту, довольно перебежать по активной ссылке в послании, приобретенном от азартного клуба. <a href=https://emaze.me/shopavto>https://emaze.me/shopavto</a> 1хслот скачать <a href=https://valetinowiki.racing/wiki/%D0%90%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0_%D0%92_%D0%A0%D0%B0%D1%81%D1%81%D1%80%D0%BE%D1%87%D0%BA%D1%83>https://valetinowiki.racing/wiki/%D0%90%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0_%D0%92_%D0%A0%D0%B0%D1%81%D1%81%D1%80%D0%BE%D1%87%D0%BA%D1%83</a> Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.
1 х слотс зеркало
Промокод – определённая композиция символов, коию нужно ввести в отвечающее фон при разработке учетной записи либо активировать в собственном профиле игрока в разделе с бонусами.Получив свой подарок, Вы сможете даром выступать на настоящие деньги, а выполнив обстоятельства отыгрыша, вывести собственный выигрыш. 1хслотс официальный сайт зеркало <a href=https://travisvwvt49506.bloginder.com/30119954/the-chopping-fringe-of-nsfw-ai-exploring-the-options-of-undress-ai>https://travisvwvt49506.bloginder.com/30119954/the-chopping-fringe-of-nsfw-ai-exploring-the-options-of-undress-ai</a> Варианты выигрыша в от Вашей успеха и критерий игорного портала. Выше мы сказали, что кое-какие бездепозитные бонусы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются и, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на средства, возможно выиграть невероятные суммы. Сегодняшние игровые автоматы либо видео слоты, как их именуют. Могут выдавать солидные умножение от х1.000 и повыше. Некоторые умножают ставку от х100.000.В большинстве заведений устроить это возможно по адресу электронной почты, по номеру телефона, через социальную сеть либо гугл-аккаунт. казино 1×slots Выбрать казино с бездепозитным бонусом. У нас на веб-сайте представлен список превосходнейших онлайн казино, которые предлагают своим игрокам щедрые призы за регистрацию.В списке требований к отыгрышу часто наличествуют лимиты на ставки при забаве на личные средства. Так, если отыграть надо(надобно) 30 000 рублей, а предельная сумма ограничена 30 рублями, то вертеть барабаны светит 1000 один. Эта особенность затрудняет соблюдение игроками условий по срокам деянья промоакции.
1×slots регистрация
4. Заберите презент. Чаще всего бонус активируется сразу после регистрации. Но посещают ситуации, когда нужно забежать в собственный кабинет или написать в службу.Маркетинговая деятеля всех игорных интернет-клубов обязана носить различный характер. И случае гонорары на депо служат для того, чтобы провоцировать заносить депозиты и поощрять уже место юзеров, то бездепозитный приз в казино или бонус за регистрацию в казино, этого всего, рассчитан на расширение базы покупателей. <a href=https://about.me/glavdorogadv1606>https://about.me/glavdorogadv1606</a> Чем ниже значение вейджера, что, этим проще отыграть и вывести бонус. Если Вы планируете заработать на бездепе, а не просто ознакомиться с новым игровым клубом, то стоит игнорировать бонусов с высоким вейджером их практически не реально отыграть. С ними Вы сможете только протестировать игры заведения. 1хслотс рабочее зеркало Например, игрок получил 500 рублей при разработке аккаунта и обязан отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 руб., потребуется сделать 875 спинов для полного отыгрыша.
1×slots сайт
1х слот регистрация в 1×slots casino <a href=http://www.darkml.net/bbs/home.php?mod=space&uid=7967233>http://www.darkml.net/bbs/home.php?mod=space&uid=7967233</a> Например, игрок получил 500 руб. При создании аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 рублей, понадобится устроить 875 спинов для полного отыгрыша.В неких интернет казино для получения бездепозитных призов не довольно просто зарегистрироваться на сайте клуба и подтвердить свои контактные данные. Дополнительно требуется активация промокода.
1×slots регистрация 1×slots casino c2d ru
Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских руб. В критериях промоакции предписано, что вейджер бездепозитного приза х20. Поэтому, чтобы отыграть бонус, игроку будет нужно сделать ставок на 35*20=700 руб. <a href=http://hannubi.com/bbs/board.php?bo_table=free&wr_id=1175109>http://hannubi.com/bbs/board.php?bo_table=free&wr_id=1175109</a> К образцу, игроку выдаются бесплатные свои в заведении в объеме пятидесяти либо ста $ (вейджер на коие сочиняет 100х). То есть, любому новоприбывшему игроку выскакивает привлекающая картинка, кот-ая сулит выплату всех зачисленных фирмой средств. Не стоит обращать внимания на казино приз за регистрацию без депо с сильно великой либо очень маленькой суммой призов, поэтому собственно, числе тщательно выучив все обстоятельства, тут всего, несомненно некий подкол.Бездепозитный бонус нередко может стать доступным сразу последствии завершения регистрации, поскольку в большинстве случаев единственным притязанием к нему является регистрация, а этого проверка вашей свежей учетной записи. казино 1× slots официальный сайт Вознаграждения за получение VIP-статуса ? начисляются масштабах программы преданности при достижении одного значения или выдаются индивидуально менеджерами службы поддержки.
<b>Смотреть еще похожие новости:</b>
<a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=94793>1×slots зеркало быструю регистрацию а также мгновенное</a>
<a href=https://ragnarok.ch/forum/viewthread.php?thread_id=135902>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=http://forums.panzergrenadiers.com/showthread.php?22475–1×slots-%D0%A1%D0%82%D0%A0%C2%B0%D0%A0%C2%B1%D0%A0%D1%95%D0%A1%E2%80%A1%D0%A0%C2%B5%D0%A0%C2%B5-%D0%A0%C2%B7%D0%A0%C2%B5%D0%A1%D0%82%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%BB%D0%A0%D1%95&p=495282#post495282>1×slots рабочее зеркало</a>
<a href=https://adminclub.org/showthread.php?tid=67722>1× slots casino официальный сайт</a>
<a href=https://forum.spherecommunity.net/User-Jamesmew>зеркала 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.
#5213 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino промокод porno Вера Бирюкова, гимнастка <a href=https://kompromat1.online/>казино фильм</a> казино онлайн бесплатно casinos winning <a href=https://specreporter.com/>1×bet зеркало на сегодня 1×bet xyz</a> ограбление казино порно с Сергей Бобровский (хоккей) porno Марина Александрова казино смотреть Хорова Наталья Александровна порно букмекерские конторы в россии 1×bet официальный xbet
DiskiPlus вывод казино DiskiPlus как выиграть в казино <a href=https://diskiplus.ru/>DiskiPlus букмекерская контора бетсити</a> DiskiPlus casino betting DiskiPlus 1×bet скачать приложение на андроид <a href=https://diskiplus.ru/>DiskiPlus pin casino</a> DiskiPlus рабочее казино DiskiPlus суть казино DiskiPlus casino pin официальный DiskiPlus Шевцова Татьяна Викторовна порно DiskiPlus казино рояль DiskiPlus порно с Карен Хачанов (теннис) DiskiPlus casino daddy
#5214 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet xbet пин up casino <a href=https://7club7.com/>1×slots casino</a> почему казино порно с Баталина Ольга Юрьевна <a href=https://specreporter.com/>сайт казино вход</a> online casino официальный порно с Александр Головин (футбол) букмекерская контора фонбет официальный Семёнова Татьяна Владимировна порно 1×bet 1хбет гта онлайн казино porno Елизавета Туктамышева
DiskiPlus Черкесова Бэлла Мухарбиевна порно DiskiPlus casino зеркало сегодня <a href=https://www.diskiplus.ru>DiskiPlus приложения букмекерских контор на андроид</a> DiskiPlus porno Илона Маркова, хоккеистка DiskiPlus porno Юлия Канакина, скелетонистка <a href=https://diskiplus.ru/>DiskiPlus часы казино</a> DiskiPlus букмекерская контора официальный сайт DiskiPlus 1×bet бесплатно DiskiPlus pin up букмекерская контора DiskiPlus порно с Дарья Касаткина (теннис) DiskiPlus официальные зеркала казино DiskiPlus казино сегодня DiskiPlus pin casino
#5215 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slotscasino09k online
Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают приз по государствам. Вплоть до такого, что клуб возможность брать игроков из Вашей государства, а бездеп не давать. <a href=http://filmkachat.ru/>1хслотс официальный сайт зеркало</a> <a href=https://www.swiatobrazu.pl/forumgaleria/thread/view/id/591>https://www.swiatobrazu.pl/forumgaleria/thread/view/id/591</a> Если ординарными словами, бездепы – это определённая сумма денег или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать презенты. Но есть кое-какие нюансы. Существуют игорные жилища, коие перед что, этим как начислить бонусы просят привязать аппарат, предоставить копии документов.В игровых клубах без лицензии Вы покупаете „кота в мешке“ и когда спорных ситуаций нет способности куда-то посетовать и доказать свою правоту. 1×slots подтвердит вашу регистрацию если говорить <a href=https://australiantravelforum.com/Upload/member.php?action=profile&uid=986>https://australiantravelforum.com/Upload/member.php?action=profile&uid=986</a> Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном бонусе, то в первую очередь внимание на значение вейджера и срок, кот-ый дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, тем легче отыграть бонус и вывести выигрыш.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Приглашаем делиться мнениями о бонусах. Это поможет иным пользователям выбирать наиболее выгодные предложения.Получив собственный презент, Вы сможете даром выступать на настоящие средства, а выполнив условия отыгрыша, вывести собственный выигрыш. 1×slots актуальное зеркало <a href=https://xn–80abdzaxbkfak2ai0bzf4ce.xn–p1ai/communication/forum/user/37885/>https://xn–80abdzaxbkfak2ai0bzf4ce.xn–p1ai/communication/forum/user/37885/</a> Это тоже безвозмездные деньги, которые поступают на аккаунты свежеиспеченных игроков после регистрирования. А особенность таких призов состоит том,, что обретенные деньги обязательно идет применять в продолжении назначенного времени.Новые посетители онлайн-казино без первого депозита могут проверить собственную удачливость. К тому же есть вероятность преобразовать бездепы в реальные средства за регистрацию в казино, однако чтобы бонус необходимо отыграть согласно условиям промоакции. 1×slots casino регистрация 1×slots review live Бонус в казино без депо имеет разные разновидности: может быть приветственный приз, промоакции в честь каких-либо праздничных либо весомых дат, приз за вербование свежих игроков, преданность и получение VIP-статуса.Ну и естесственно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: подобная добродушие увеличивает уровень лояльности посетителей к компании.
казино 1×slots
<a href=https://forums.dfine.net/member.php?action=profile&uid=1177>https://forums.dfine.net/member.php?action=profile&uid=1177</a> 1×slots рабочее зеркало Можно ли в одном онлайн казино получить больше 1-го бонуса за регистрацию? Нет, так как в любом интернет казино есть управляла, к которым надо(надобно) придерживаться, не создавать 2 аккаута для получения призов, по будет блокировка обоих аккаутов, не пытайтесь перехитрить онлайн казино, бонус за регистрацию выдаеться раз один 1 лицу.
1×слотс казино
Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы которые появляются у новичков.Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депозит имеет выделяться до 30 дней. Таким образом интернет казино получает потенциального игрока. Возможно в либо подлинном он захочет сыграть на свои средства. Так работают бездепозитные бонусы в онлайн казино. Здесь хорошо подходит выражение, бесплатные сыр случается только в мышеловке. Начинающие игроки имеют не осознавать опасность азарта. Однако течением осознания делается больше. Это тема для отдельного обсуждения. 1×slots бездепозитный бонус за регистрацию <a href=https://igridsolutions.com/lagos/languages/blog-ginekologa.html>https://igridsolutions.com/lagos/languages/blog-ginekologa.html</a> Можно ли в одном интернет казино получить больше 1-го приза за регистрацию? Нет, например как в любом онлайн казино есть правила, к коим надо(надобно) держаться, не создавать два аккаута для получения бонусов, иначе несомненно блокировка обоих аккаутов, не пытайтесь обмануть онлайн казино, приз за регистрацию выдаеться один один 1 личику.Во всех легальных онлайн-казино Беларуси нужно свидетельство паспортных данных для забавы — это заявка правительства государства.
1×slots зеркало
Главное превосходство спинов – возможность выучить разные слоты. Также удастся насладиться бонусными раундами, испытывать удачу в риск-туре и преувеличить выигрыш за счёт особенных знаков. Однако не игровой процесс заслуживает внимание, так лучше сосредоточиться на реальном выигрыше. Однако в критериях скрываются «подводные камешки», коие не разрешат исключить солидную сумму или же вы не успеете отыграть вейджер. Поэтому профессионалы рекомендуют забрать безвозмездные вращения за регистрацию в казино без депозита, дабы поднабраться навыка и получить реальный шанс на победу.Oтыгpaть приз с указанным вeйджepом, желаемого нужно сдeлaть cтaвoк нa cумму, превосходящую объем приза в количество раз. <a href=https://istinastroitelstva.xyz/user/HenryFrago/>https://istinastroitelstva.xyz/user/HenryFrago/</a> Отыграв бездепозитный бонус в казино с выводом тоже придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, случае схожее лимитирование присутствует, то единоразово вывести выйдет лишь сумму, не превышающую размер полученного приза.Следует подчеркнуть, что бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом. рабочее зеркало 1хслотс Бездепы обыкновенно предлагают с отыгрышем — быстро вывести выигранные средства невозможно. Перевод средств со счета будет вероятен после как, как юзер выполнит все притязания казино, а сумма не может превышать установленного правилами лимита. Условиями акции фиксируются сроки, в течение коих заказчик вправе воспользоваться предложением. Обычно они не превышают нескольких дней последствии активации.Список так именуемых «не территорий» прилагается к правилам бонусной программки игорного портала. Обязательно проверьте, распространяются ли на вас сходственные наказания.
<b>Смотреть еще похожие новости:</b>
<a href=http://ledyardmachine.com/forum/User-Jameshoing>сайт 1× slots casino</a>
<a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=887688#pid887688>1×slots casino online регистрация</a>
<a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Представьте момент, когда при ставке в 10 руб. Вы получите подобное умножение. Миллион руб. За одно вращение, собственно абсолютно вполне. Поэтому вопрос, сколько возможно выиграть остаётся открытым. Предлагаем проверить самостоятельно. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный приз и проверяйте фортуну в деле. Разумеется, исключить средства не так просто. Однако шансы есть у всех.
#5216 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Мира Андреева (теннис) Хорова Наталья Александровна порно <a href=https://specreporter.com/>пин ап casino</a> 1×bet слоты 1×bet xyz Москалькова Татьяна Николаевна порно <a href=https://sovsekretno.net/>Львова-Белова Мария Алексеевна порно</a> pin up букмекерская контора букмекерские конторы бет автомат казино порно с Юлия Ефимова Хорова Наталья Александровна порно какие казино казино ставка
DiskiPlus пари букмекерская контора DiskiPlus 1×bet официальный слоты <a href=https://www.diskiplus.ru>DiskiPlus приложения букмекерских контор</a> DiskiPlus casino сайты DiskiPlus самое казино <a href=https://www.diskiplus.ru>DiskiPlus демо казино</a> DiskiPlus пин ап казино DiskiPlus ев казино DiskiPlus casino актуальное зеркало DiskiPlus Александра Бортич DiskiPlus казино ли DiskiPlus 1×bet зеркало на сегодня DiskiPlus букмекерские конторы бет
#5217 Charlesgunnyhttp://filmkachat.ru
1×slots на любой вкус как пройти регистрацию
Если простыми словами, бездепы – это определённая сумма средств либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно брать подарки. Но есть некоторые нюансы. Существуют игорные жилища, которые перед что, этим как начислить призы настоятельно привязать аппарат, дать копии документов. <a href=http://filmkachat.ru/>1хслотс рабочее зеркало</a> Получив собственный презент, Вы сможете даром выступать на реальные деньги, а выполнив обстоятельства отыгрыша, исключить свой выигрыш. <a href=https://lyfepal.com/forums/thread/7349/Mastering-the-Art-of-CGI-Design-From-Concept-to-Revolutionary>https://lyfepal.com/forums/thread/7349/Mastering-the-Art-of-CGI-Design-From-Concept-to-Revolutionary</a> Вышеописанная причина и является главным интересным, в которого операторы отдают часть собственной выгоды на различные маркетинговые затраты и рекламные кампании. А наиболее действующим здесь будут играть непосредственно бездепозитные бонусы казино 2022 с выводом за регистрацию.Получить Бездепозитный бонус в онлайн казино дело двух кликов. Другой момент, отыграть промо и соблюсти управляла и обстоятельства отыгрыша. Под правилами предполагается не вагер, хотя и ограничения по наибольшей ставке. Мы понимаем, что в кино все ставят на зеро и выигрывают. Призываем не создавать похожего. Перед активацией бонуса прочитайте управляла. Узнайте следующие факторы: Условия получения презента, за регистрацию, за депо и другое. Ограничения по максимальной ставке. Зачастую не выше 350 руб. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вертеть автоматы, а вагер будет стоять на месте. Поэтому главно аристократия, в каких забавах возможно осуществлять кратность валютного оборота. 1×slots casino регистрация 1×slotscasino09k online <a href=http://ukrpart.org/index.php?subaction=userinfo&user=joyousovertone5>http://ukrpart.org/index.php?subaction=userinfo&user=joyousovertone5</a>
1×slos регистрация в 1×slots casino
Для получения бонуса нужно пригласить в игру свежего посетителя. Казино начисляет пригласившему фиксированный процент от взносов приглашённого повторяющий приза: почаще всего его объем не выше 10%. Срок действия бонуса в большинстве случаев не выше месяца: пригласивший получает приз от проигранных ставок приглашённого в первый луна игры. 1×slot казино зеркало <a href=https://clients1.google.com.om/url?q=https://doctorlazuta.by/>https://clients1.google.com.om/url?q=https://doctorlazuta.by/</a> сайт 1× slots casino
казино 1×slots официальный сайт
Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавления либо официального клиента для ПК. В большинстве казино срабатывают программы преданности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на следующий степень нередко с выдачей бездепа.Для получения выигрыша требуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить конкретную необходимую, но теснее из собственных средств. Она рассчитывается из совместного объема выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, если пользователь выиграл 1000 рублей, а множитель составляет х30, вывести деньги возможно будет, сделав ставки на 30 000 рублей. Как верховодило, при выводе финансов, от играющего требуется лишь устроить минимальный вклад чтобы, чтобы, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом личный счет. <a href=https://forums.drdarkesoftwares.com/member.php?action=profile&uid=1980>https://forums.drdarkesoftwares.com/member.php?action=profile&uid=1980</a> Отказ в прохождении верификации. Если заказчик не желает либо возможности дать документы, подтверждающие его личность, профиль будет заблокирован совместно, вкупе со всеми бонусными начислениями.Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? 1×slots промокод при регистрации Зачастую бездепозитные бонусы казино для игры предлагаются различными заведениями азартных игр виде маркетинговых акций либо в целях привлечения к для новых игроков. Для бездепозитных призов в казино 2022 игроку надо пополнять счет до момента вывода желанных средств.Принципиальным отличием бесплатных бонусов от призов на депо считается недоступность необходимости заносить средства на акк. Из-за сего их часто именуют бездепозитными (no deposit bonuses).
1×slots официальный сайт зеркало рабочее
<a href=http://forum.exalto-emirates.com/memberlist.php?mode=viewprofile&u=69997>1×slots казино зеркало</a> У любого игорного клубы различные вейджеровые обстоятельства. Чтобы вы гарантировано смогли выполнить их, мы дадим некоторое советов. Если система начислила небольшую сумму, не стоит создавать немалые ставки – остановитесь на 10–30 центах. Как только сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте играть. В неприятном случае другого приглядеться к другому автомату. Чаще всего, популярные сервисы, такие как MoneyBookers и WebMoney, еще MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно неотъемлемое управляло. Финансовые средства выводятся лишь спустя что, эту платежную систему, коей успех для пополнения депо. Если же игрок получил бездепозитный покерный бонус, потребуется пополнить счет на наименьшую необходимую, которая составляет обычно 10 долларов. 1×slot зеркало рабочее регистрации на телефон придет <a href=https://www.sketchingpro.com/%d0%b7%d0%b0%d0%ba%d0%b0%d0%b7%d0%b0%d1%82%d1%8c-%d0%bf%d0%be%d0%ba%d1%83%d0%bf%d0%ba%d1%83-%d1%81%d1%81%d1%8b%d0%bb%d0%be%d0%ba-%d0%b4%d0%bb%d1%8f-%d0%bf%d1%80%d0%be%d0%b4%d0%b2%d0%b8%d0%b6%d0%b5/>https://www.sketchingpro.com/%d0%b7%d0%b0%d0%ba%d0%b0%d0%b7%d0%b0%d1%82%d1%8c-%d0%bf%d0%be%d0%ba%d1%83%d0%bf%d0%ba%d1%83-%d1%81%d1%81%d1%8b%d0%bb%d0%be%d0%ba-%d0%b4%d0%bb%d1%8f-%d0%bf%d1%80%d0%be%d0%b4%d0%b2%d0%b8%d0%b6%d0%b5/</a>
1×slots зеркало проходить регистрацию это отличный вариант
Некоторые клубы автоматически начисляют приз на аккаунт игрока в исполнения условий получения, хотя случаются истории, когда приз нужно активировать игроку самому. Есть некоторое способов активации приза:Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, the decision лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. В игровых клубах без лицензии Вы покупаете „кота в мешке“ и когда спорных ситуаций нет способности куда-то пожаловаться и доказать собственную правоту.Вы всего, например все любите получать подарки и бездепозитные призы казино. Игорные жилища брали в привычку одаривать гэмблеров приятными бонусами. Стать обладателем приветственного презента возможно за творение профиля или пополнение счёта. Второй вариант более интересный, ведь клубы готовы удвоить депо! Но если вы новичок и лишь знакомитесь с миром пыла, чем воспользуйтесь призом за регистрацию. <a href=https://ponysfm.com/users/Terryspoli>https://ponysfm.com/users/Terryspoli</a> Более солидные предложения встречаются очень редко. Зачастую они доступны только VIP-игрокам. В остальных случаях им всего сопутствуют довольно жесткие условия отыгрыша. Также вероятны дополнительные условия прочие ограничения, прописанные в критериях и положения бонусной программки казино. 1×slots регистрацию процедура займет всего лишь Наличие у игрока второго аккаунта. Запрещено творить несколько профилей для неоднократного получения бездепов.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.donchillin.com/space-uid-382497.html>1×slots зеркало проходить регистрацию это отличный вариант</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Возьми свой презент. Чаще всего приз активизируется незамедлительно последствии регистрации. Но посещают ситуации, когда нужно зайти в личный офис либо написать в справочную службу.
#5218 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора официальный сайт гта казино <a href=https://slon-ru.com/>Лут Оксана Николаевна порно</a> casinos winning ramenbet casino <a href=https://th-royalgclub.com/>porno Катерина Шпица</a> 1×bet бесплатно 1×bet официальный слоты букмекерская контора официальный сайт скачать слот casino Лут Оксана Николаевна порно порно с Баталина Ольга Юрьевна 1×bet слоты 1×bet top
DiskiPlus Светлана Ходченкова DiskiPlus скачать букмекерскую контору на андроид <a href=https://diskiplus.ru>DiskiPlus пина букмекерской конторы</a> DiskiPlus букмекерская контора официальный сайт скачать DiskiPlus порно с Аделия Петросян (фигурное катание) <a href=https://www.diskiplus.ru>DiskiPlus 1×bet слоты официальный сайт</a> DiskiPlus порно с Илья Осипов (киберспорт) DiskiPlus 1×bet официальный 1×bet xyz DiskiPlus официальное казино вход DiskiPlus 1×bet 1хбет DiskiPlus casino промокод DiskiPlus casino зеркало сегодня рабочее DiskiPlus casino betting
#5219 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
Новички не любят незамедлительно же вносить депо. Это обосновано отсутствием опыта и сомненьем. К счастью, в наше время можно получить бездепозитный бонус за регистрацию в казино. Неважно что начисляет система – фриспины или кредиты. В всяком случае вы не рискуете своими сбережениями. Это замечательная вероятность запустить понравившийся видео разъем либо же испытывать удачу в настольных играх. <a href=http://filmkachat.ru/>1×slots зеркало регистрацию более популярный вариант это</a> <a href=https://www.fanfiction.net/u/16465534/>https://www.fanfiction.net/u/16465534/</a> В случае установленного лимита на сумму вывода выигрыша с бездепозитного бонуса, игрок не сможет вывести больше заявленной суммы.Разные казино имеют собственные управляла по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высокие требования. Часто онлайн-казино рекомендуют отыграть бонусное поощрение до ста один в игровых автоматах. Например, в игрок получил безвозмездно десять долларов, то необходимо будет отыграть их, поставив одну тысячу спинов по одному баксу каждый. Стоит обозначить(означить), собственно не все казино выделяют возможность играть на бонусы и не во всех увеселительных заведениях схожие управляла для отыгрывания. Некоторые казино воспрещают играть на бонусы в блекджек либо ограничивают ставки до пяти %, собственно существенно увеличивает в десятки один количество необходимых игр. 1×slots регистрация то дальше необходимо пройти <a href=https://www.jutianwang.cn/home.php?mod=space&uid=3227&do=profile&from=space>https://www.jutianwang.cn/home.php?mod=space&uid=3227&do=profile&from=space</a> Создание аккаунта. На веб-сайте казино необходимо открыть регистрационную форму и заполнить пустые поля личностными данными. Иногда на этом шаге требуется показать только адрес электрической почты и пароль, но почаще надо наполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д.). Нужно указывать лишь реальные данные, поскольку впоследствие они станут проверены.
1хслотс регистрация в 1×slots casino
Иногда в качестве бездепа, казино презентует минимальный бонус (до 50 руб. ), ради которого не заморачиваться.Первый возникающий вопрос, это, чего выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают свежих игроков. Последним легче начать забаву на деньги с презента за регистрацию. Им не пополнять баланс и тратить личные свои. Новички получают благотворительные спины или средства на счёт. С их поддержкою знакомятся с игровым ходом, крутят слоты и проделывают ставки в рулетке. <a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=13119>1×slots зеркало регистрация в 1×slots casino</a> 1× slots сайт <a href=http://www.ogloszeniaezoteryczne.pl/author/jasperadach/>http://www.ogloszeniaezoteryczne.pl/author/jasperadach/</a> А ознакомиться с новыми интернет казино, Вы можете с призов с выводом прибыли, которые Вы сможете получить без депозита.1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, случае не желайте стать жертвой плутов или впустую израсходовать время; 1×slots официальный сайт зеркало Поспешите арестовать бездепозитные бонусы за регистрацию в казино из представленного списка. Все платформы не водят законную деятельность, но и порадуют правдивыми результатами забавы, высокой отдачей, прыткими выплатами.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Будьте внимательнее при ознакомлении с правилами во избежание происхожденья конфликтных ситуаций с казино, когда последствии отыгрыша бездепа вам не дадут исключить крупную необходимую выигрыша. Промообъявления от казино мешают реальной картины и ориентированы на привлечение внимания пользователей. Понять, как высоки шансы остаться в плюсе, дозволит личный тест условий предложения: <a href=http://behzistiardabil.ir/user/Zacheryexced/>http://behzistiardabil.ir/user/Zacheryexced/</a> Подтверждение персональной инфы. Все казино настоятельно от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у пользователя других аккаунтов (мультиаккаунт запрещен).Обычно бездепозитные промоакции от казино, прибывают на эл. Почту в деньки рождения или дни. В неких онлайн казино можно адресоваться в чат и как неизменному игроку, вероятно вам предложат бездепозитное предложение. 1 x slots Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депо может выделяться до 30 дней.
сайт 1× slots casino
<a href=http://ledyardmachine.com/forum/User-Jameshoing>рабочее зеркало 1×slots</a> Итак, дабы безвозмездные бонусные кредиты превратились в настоящие средства, которыми вы можете управлять по своему усмотрению, их нужно отыграть. Вейджер стопам уточнять в правилах онлайн-казино. Прибывшие на акк деньги бездепозитные призы предназначаются, в основном, лишь для свежеиспеченных пользователей, которые раньше не имели собственного аккаунта в данном казино. Исходя из этого, случае раньше у игрока был сделан депозит, то, по всей вероятности, у него больше не будет способности рассчитывать на получение такого приза в определенном заведении. 1× слот зеркало <a href=https://igia.cv.ua/index.php/forum/skrin-ka-propozitsij/668-fil-my-torrent-besplatno-bez-registratsii#325128>https://igia.cv.ua/index.php/forum/skrin-ka-propozitsij/668-fil-my-torrent-besplatno-bez-registratsii#325128</a> В интернете очень много скриптовых вебсайтов, коие принадлежат мошенникам. Их основная задача – привлечь гэмблеров, пообещав столько великодушные подарки, хотя и крупные выигрыши. Так собственно некоторые веб-сайты предлагают получить за регистрацию и $1 000.
1×slots зеркало регистрация в 1×slots casino
Чаще всего, модные сервисы, такие как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно неотъемлемое правило. Финансовые свои выводятся только через ту платежную систему, коей популярностьюимели для пополнения депозита. Если же игрок получил бездепозитный покерный бонус, требуется пополнить счет на наименьшую необходимую, кот-ая составляет обыкновенно десять долларов.Иногда операторы просят внесение минимального депо перед выводом для верификации платежного инструмента. В некоторых казино данный депо также предстоит отыграть. Чаще всего казино бонус за регистрацию без депозита даёт вероятность запустить каждой машина. Но чем пристально ознакомиться с критериями. Иногда для забавы доступны лишь определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, никакого начать знакомство с миром пыла непосредственно с «одноруких бандитов».Мы проделываем ударение на ключевых положениях правил, рассказываем о территориальных ограничениях и кратко информируем о иных акциях обсуждаемого казино. <a href=http://mebel-fabrik.com.ua/index.php?subaction=userinfo&user=spicyreproducti>http://mebel-fabrik.com.ua/index.php?subaction=userinfo&user=spicyreproducti</a> Бесплатные призы казино без депо возможно получить повторяющий денежных средств на бонусный счет (исключить их можно только после отыгрыша), фриспинов, забавы либо кешбэк-бонуса.Самые популярностью способы вывода денег ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам подобии Neteller и Skrill, еще используют криптовалютными кошельками. Вывод выигрышей имеет исполняться моментально либо развлекать от нескольких часов до нескольких суток. 1×slots регистрация 1×slots review live Отзывы читателей о бонусных промоакциях помогут составить впечатление, но не запамятовывайте о субъективности личных комментариев.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.digicube.de/forum/threads/489986–1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE?p=690180#post690180>1хслотс рабочее зеркало</a>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-4070/>1×slots регистрация на сайте 1×slots ru com</a>
<a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>казино 1×slots</a>
<a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=9700&TITLE_SEO=9700-kharakteristiki-tovarov&MID=521796&result=reply#message521796>1×slots официальный demo регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Онлайн-казино с бездепозитными бонусами ставят посетителям обстоятельства для использования бездепами, потому перед ролью в акции превосходнее досконально ознакомиться со всеми правилами и нюансами промоакции. Условия шансы дотрагиваться получения бонуса, его применения и последующего вывода денежных средств в случае выигрыша.
#5220 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пина casino скачать 1×bet на андроид бесплатно <a href=https://kompromat1.online/>pin up casino</a> casino игровой автомат скачиваемые казино <a href=https://rhymes-punches.com/>букмекерская контора без</a> сайт казино зеркало casino официальный сайт porno Яна Троянова casino онлайн Ходнева Светлана Владимировна порно порно с Антропова Валентина Викторовна Черкесова Бэлла Мухарбиевна порно
DiskiPlus porno Илья Ковальчук (хоккей) DiskiPlus casino riobet <a href=https://diskiplus.ru>DiskiPlus лучшие букмекерские конторы</a> DiskiPlus Попова Анна Юрьевна порно DiskiPlus 1win букмекерская контора <a href=https://diskiplus.ru>DiskiPlus 1×bet зеркало xbet xyz</a> DiskiPlus букмекерские конторы бет DiskiPlus букмекерская контора фонбет официальный DiskiPlus пин ап casino DiskiPlus букмекерская контора зенит DiskiPlus часы казино DiskiPlus porno Игорь Акинфеев (футбол) DiskiPlus casino официальный сайт
#5221 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino c2d ru
Следует выделить, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом.Большинство клубов привлекают внимание игры за счёт разнообразных даров. На одних веб-сайтах возможно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает благотворительные вращения для пуска топовых интернет слотов. Несмотря на разные промоакции, стоит выделить самые основные. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> Но ни не запамятовывайте внимательно разбирать управляла участия в бонусных промоакциях. Если вы нарушите но бы одно условие, позднее вы не сможете устроить недоразумение с администрацией.Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен список наилучших онлайн казино, коие предлагают своим игрокам великодушные призы за регистрацию. <a href=https://menagerie.media/index.php?link1=read-blog&id=91838>https://menagerie.media/index.php?link1=read-blog&id=91838</a> Активация валютного гонорары случается механически в сотворения профиля или использования промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на страницы казино в социальных сетях или на рассылку маркетинговых извещений, скачать и ввести вспомогательный софт и т.д. 1×slots официальный demo регистрация в 1×slots casino <a href=http://bbs.darkml.net/home.php?mod=space&uid=7982971>http://bbs.darkml.net/home.php?mod=space&uid=7982971</a> Бонус без депозита за регистрацию в казино (бездепозитный бонус) – это валютный подарок от клуба, кот-ый начисляется на аккаунт игрока в регистрации в казино. Кроме создания учетной записи, для получения бездепа, довольно часто требуется ещё и доказать контактные данные игрока и/или активировать специальный промо-код.Бездепозитные бонусы, как уже понятно, считаются оригинальной вероятностью приступать к игровому процессу абсолютно бесплатно, то есть выступать в интернет казино безвозмездно и на существующие средства незамедлительно в регистрации аккаунта. Автоматы с этим депо шансы замерзнуть прекрасной вероятностью сыграть для почитателей азарта с определенными лимитированиями в финансах.
1×slots официальный сайт мобильная версия
Получать информацию о самых прибыльных призах можно без постоянного прогноза новостей казино. Мы взяли эту задачу на себя и непрерывно смотрим за предложениями операторов, избирая наихорошие из них. В этом разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список промоакций регулярно дополняется. В топ вошли самые новые бездепозитные призы за регистрацию в казино 2020, временные и замкнутые промо. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и другим критериям. Если срок деянья акции истек, она удаляется из списка.Фриспины без депо либо дополнительные свои помогут ближе познакомиться с игровой платформой и её функциями. За счёт презентов возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за игры напротив живых крупье. <a href=https://chasingadream.rpginitiative.com/showthread.php?tid=140298>1×slot официальный сайт</a> 1хслотс официальный сайт зеркало <a href=https://www.alligator.spb.ru/forum/index.php?PAGE_NAME=profile_view&UID=78619>https://www.alligator.spb.ru/forum/index.php?PAGE_NAME=profile_view&UID=78619</a> Законодательство, регулирующее азартные игры в разных странах, влияние на возможности операторов. В результате пользователи из отдельных регионов сталкиваются с лимитированиями со стороны казино. Это может быть как глубокий отказ в доступе, например и невозможность загружать забавы отдельных производителей.Раздача призов имеет быть приурочена к разным датам: календарные праздничные, деньки рождения игроков, юбилей открытия казино и т. Д. Подарок выдается повторяющий денег, фриспинов либо баллов для накопления и размена на услуги оператора. Если юзер получает выигрыш, средства начисляются на его счет. Для вывода этой суммы придется выполнить ряд требований. 1хслотс казино зеркало Бoльшинcтвo азартных заведений выдвигают примерно однообразные, схожие условия и требования, которые нужно выполнить, чтобы получить бездепозитный приз за регистрацию. Все их можно объединить в один перечень:
1×slots регистрация 1×slots casino c2d ru
<a href=https://www.jaisonchacko.com/2020/06/lutyens-bakerloo-and-chausath-yogini-or.html>https://www.jaisonchacko.com/2020/06/lutyens-bakerloo-and-chausath-yogini-or.html</a> Вывод выигрыша с бездепозитных призов казино – великодушный подарок от азартных клубов. Но дабы вывести свой заработок, нужно выполнить ряд условий: 1 x slots
казино 1×slots официальный сайт
Так собственно сможете неустрашимо регистрироваться без всяких размышлений. Фортуна сейчас наверняка на вашей стороне. Не побаивайтесь, ведь следствие какого или ущерба Вам абсолютно не угрожает. С такими бонусами как без пополнения, Вы остаетесь только в плюсе, но не как не в минусе. <a href=http://www.arka-bahce.org/forum/showthread.php?p=761743#post761743>1х слот 1хслотс регистрация перейти на 1×slots</a> Мы собрали и выпустили список наихороших бездепозитных казино с бонусами за регистрацию, коие гарантируют великодушные выигрыши и мгновенные выплаты. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=http://psvhome.ru/user/Raymondanits/>http://psvhome.ru/user/Raymondanits/</a>
1×slots регистрация 1×slotscasino 56 online
Промокод – определённая комбинация знаков, коию необходимо ввести в подходящее фон при разработке учетной записи или активировать в личном профиле игрока в разделе с призами.Каждая игровая перрон отличается критериями по получению и отыгрышу бездепов. В правилах детально расписаны временные рамки, за которые нужно прокрутить вейджер. Также не забывайте про максимальный размер ставки и наивысшую сумму выплаты. С иной стороны, дабы получить бездепозитные бонусы казино, довольно истратить менее 1 минуты. Обычно бездепозитные промоакции от казино, прибывают на эл. Почту в деньки рождения либо праздничные. В неких интернет казино можно адресоваться в чат и как неизменному игроку, вполне для предложат бездепозитное предложение.Одним из поводов отдавать преимущество, льготу одному или иному заведению заключается в привлекательности предлагаемых акций и даровых предложений. Безвозмездные фриспины, выдаваемые без нужды создавать какой-либо вклад, в перечне располагается далековато не в конце. <a href=https://www.efunda.com/members/people/show_people.cfm?Usr=Dissertat1508>https://www.efunda.com/members/people/show_people.cfm?Usr=Dissertat1508</a> 1×slots зеркало проходить регистрацию это отличный вариант
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/6158/#comment-286545>1хслотс казино зеркало</a>
<a href=https://minifishtank.net/forum/showthread.php?tid=1321>1×slots зеркало на сегодня</a>
<a href=http://ledyardmachine.com/forum/User-Jameshoing>1×slots регистрация</a>
<a href=https://talkonlinenews.com/viewtopic.php?t=6597>1×slots зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
За вербование друга ? в рамках партнерской программки клиент получает вознаграждение за вербование новых юзеров.
#5222 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать букмекерскую контору на андроид r7 casino <a href=https://www.ossetia.tv/>1×bet xbet</a> реального казино 1×bet скачать приложение на андроид <a href=https://rumafia.news/>inform@rucriminal.info</a> почему в казино нет часов Елена Лядова porno Андрей Рублев (теннис) порно с Гатагова Ольга Анатольевна 1×bet на андроид бесплатно порно с Петр Ян (ММА) porno Виктория Баркова, легкоатлетка
DiskiPlus pin up casino top top DiskiPlus порно с Голикова Татьяна Алексеевна <a href=https://diskiplus.ru>DiskiPlus casino бонус</a> DiskiPlus гта казино DiskiPlus 7k casino скачать <a href=https://www.diskiplus.ru>DiskiPlus cometa casino</a> DiskiPlus inform@rucriminal.info DiskiPlus порно с Евгений Малкин (хоккей) DiskiPlus porno Дарья Мороз DiskiPlus porno Яна Троянова DiskiPlus слот casino DiskiPlus какие казино DiskiPlus porno Вера Бирюкова, гимнастка
#5223 Ремонт iMac 27https://remont-imac-27-mupt.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт imac 27, можете посмотреть на сайте: <a href=https://remont-imac-27-mupt.ru/>срочный ремонт imac 27</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#5224 DichaelPoirl
Hi there, I want to subscribe for this web site to obtain most up-to-date updates, thus where can i do it please help. <a href=https://xn-----7kcgiiy1bf2ancu8h.xn–p1ai>https://xn-----7kcgiiy1bf2ancu8h.xn–p1ai</a>
#5225 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Елизавета Боярская автомат казино <a href=https://vestnik-jurnal.com/>Фастова Елена Владимировна порно</a> порно с Петр Ян (ММА) казино сочи <a href=https://www.ossetia.tv/>1×bet зеркало xbet</a> 1×bet официальный сайт Радченко Светлана Юрьевна порно 1×bet слоты букмекерская контора 1×bet скачать бесплатно 1×bet рабочее 7k casino сайт
DiskiPlus Елизавета Боярская DiskiPlus 1×bet рабочее <a href=https://diskiplus.ru/>DiskiPlus 1×bet скачать приложение</a> DiskiPlus пин ап букмекерская контора DiskiPlus 1×bet сайт <a href=https://www.diskiplus.ru>DiskiPlus pin up casino официальный</a> DiskiPlus почему в казино нет окон DiskiPlus пин up casino DiskiPlus казино рулетка DiskiPlus 1×bet зеркало на сегодня DiskiPlus порно с Евгения Медведева DiskiPlus винлайн букмекерская контора DiskiPlus Приезжева Екатерина Геннадьевна порно
#5226 Charlesgunnyhttp://filmkachat.ru
сайт 1× slots casino
Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают приз по странам. Вплоть до такого, собственно клуб имеет на игроков из Вашей страны, а бездеп мешает.Начнём с как, что каждое промо за регистрацию предполагает некоторые условия. Бездепозитные бонусы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность денежного оборота, необходимая для выполнения критерий. Пример, получили благотворительные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 рублей, проигрышных или выигрышных, неважно. После исполнения, бонусный баланс перейдёт на настоящий и станет доступным к выводу. <a href=http://filmkachat.ru/>1×slots промокод при регистрации 2025</a> Начнём с такого, собственно любое промо за регистрацию предполагает некоторые обстоятельства. Бездепозитные призы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность денежного оборота, нужная для исполнения условий. Пример, возымели благотворительные вращения и выиграли с их 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 руб., неудачных либо выигрышных, важно. После исполненья, бонусный баланс перейдёт на настоящий и будет доступным к выводу.Условия отыгрыша бонуса. Если Вы планируете заработать на бездепозитном бонусе, то для обратите внимание на велечину вейджера и срок, кот-ый дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть приз и вывести выигрыш. <a href=https://noosfero.ufba.br/lexxeagle/blog/mastering-interior-render-from-concept-to-photorealistic-visualization>https://noosfero.ufba.br/lexxeagle/blog/mastering-interior-render-from-concept-to-photorealistic-visualization</a> После получения бонуса вывод средств для посетителя будет недосегаем времени, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя либо чета месяцов. Выводить средства игрок может только последствии отыгрыша. 1×slots коды <a href=http://mail.nudecelebvideo.net/user/DeweyMig/>http://mail.nudecelebvideo.net/user/DeweyMig/</a>
1×slots зеркало которую указывали при регистрации кстати
Когда идет о получении бездепозитных бонусов в казино, в первую очередь направьте на последующие обстоятельства: 1×slots зеркало регистрация <a href=https://www.usajobsindex.com/author/geraldmib/>https://www.usajobsindex.com/author/geraldmib/</a> Не стоит путать игру в демо и внедрение призов. В демонстрационном режиме игрок может расценить механику слота, сюжет и оформление. Но игра проводится на условные кредиты, потому отсутствует главное ? ощущение азарта. Активируя промокод или фриспины, заказчик и не расходует средства деньги на игровые автоматы, но возможность сорвать реальный куш! 1хслотс официальный сайт зеркало Допустим, за регистрацию вы возымели бездеп в объеме 2 000 рублей с вейджером х30. В этом случае предстоит устроить ставок, на общую сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать настоящие средства. Однако не забывайте, собственно с любого дара выйдет вывести определённую сумму (чаще всего менее $200).Однако далеко не все ресурсы предлагают своим клиентам бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено одобрение на первый депо в размере 100–200%. Это замечательная возможность преумножить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш.
1× slots сайт
Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке представители онлайн-казино публикуют актуальную информацию о not the slightest deposit bonuses и других услугах. Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.Большинство интернет-казино из нашего топ-10 готовы порадовать вас неповторимыми акциями. Читайте о их в обзорах и на форуме. <a href=https://google.so/url?q=https://doctorlazuta.by/>https://google.so/url?q=https://doctorlazuta.by/</a> 1×slots рабочее зеркало Основное правило получения бездепа ? создаваемый аккаунт обязан быть у пользователя первым и единственным. Наличие нескольких аккаунтов взыскательно запрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депо необходимо соблюдать несложную последовательность действий.
1×slots зеркало рабочее
Но никогда не запамятовывайте пристально разбирать правила участия в бонусных акциях. Если вы нарушите хотя бы одно условие, позднее вы не сможете устроить недоразумение с администрацией. <a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=31598>1×slots официальный demo регистрация в 1×slots casino</a> Иногда операторы настоятельно внесение малого депо перед выводом для верификации платежного инструмента. В неких казино этот депозит также светит отыграть.При пользовании бездепозитным бонусом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют некоторое обликов лимитов: 1×slots зеркало сайта <a href=https://scientific-programs.science/wiki/User:NicholSchnell2>https://scientific-programs.science/wiki/User:NicholSchnell2</a> Реже бонусы без депо начисляются постоянным игрокам. С их подмогою администрация старается вычесть ценных клиентов или желает поблагодарить за лояльность верных посетителей. Но намного чаще для похожих целей используются такие акции:
1×slots регистрация на сайте
Бoльшинcтвo азартных заведений выдвигают приблизительно одинаковые условия и требования, коие необходимо выполнить, чтобы получить бездепозитный приз за регистрацию. Все их возможно объединить в один перечень:Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депозит возможность отличаться до 30 дней. <a href=http://toolbarqueries.google.bt/url?q=http://browcosmetics.ru/bitrix/rk.php?goto=http://travi-krima.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/U4LTLXUwGt0>http://toolbarqueries.google.bt/url?q=http://browcosmetics.ru/bitrix/rk.php?goto=http://travi-krima.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/U4LTLXUwGt0</a> Также, учите, что бездепозитный бонус возможно исключить лишь в том случае, когда будут выполнены все обстоятельства отыгрыша. 1хслот зеркало Как управляло, при выводе денег, от играющего потребуется только сделать наименьший вклад чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом индивидуальный счет.
<b>Смотреть еще похожие новости:</b>
<a href=https://thetechmodders.com/forums/memberlist.php?mode=viewprofile&u=945>1×slots casino регистрация 1×slotscasin online</a>
<a href=http://6000ziyuan.com/forum.php?mod=forumdisplay&fid=2>1×slots регистрацию процедура займет всего лишь</a>
<a href=https://melhorlance.com.br/minha-conta/>1×slots зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но разу не забывайте пристально разбирать правила участия в бонусных акциях. Если вы нарушите желая бы одно условие, позднее вы не можете уладить недоразумение с администрацией.
#5227 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
kometa casino скачать букмекерскую контору на андроид <a href=https://krtka.info/>casino 7k сегодня</a> 1×bet на андроид бесплатно 1×bet зеркало рабочее на сегодня 1×bet xyz <a href=https://m.repost.news/>pin up casino пин ап</a> фреш казино porno Нина Пирогова, хоккеистка песня казино порно с Матвей Сафонов (футбол) букмекерская контора фонбет официальный сайт промокод 1×bet black russia казино
DiskiPlus про казино DiskiPlus букмекерская контора фонбет официальный сайт <a href=https://www.diskiplus.ru/>DiskiPlus букмекерская контора фонбет официальный сайт</a> DiskiPlus порно с Матвей Сафонов (футбол) DiskiPlus online casino 7k <a href=https://diskiplus.ru/>DiskiPlus пин ап казино</a> DiskiPlus букмекерская контора фонбет официальный DiskiPlus 1×bet официальный скачать DiskiPlus Лут Оксана Николаевна порно DiskiPlus лучшие бесплатные онлайн казино DiskiPlus букмекерская контора DiskiPlus 1×bet зеркало DiskiPlus букмекерскую контору пин
#5228 Charlesgunnyhttp://filmkachat.ru
1 x slots
Максимальный объем ставки, кот-ый нельзя превосходить пока приз не несомненно полностью отыгран. В случае нарушения сего управляла, приз и выигрыш с него будут аннулированы.Верификация необходима для добавочной защищенности и помочь техподдержке выявить бонусхантеров и жуликов. Кстати, на некоторых платформах выводы солидных сумм доступны только после доказательства личности. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало рабочее</a> <a href=http://www.gothicpast.com/myomeka/posters/show/78646>http://www.gothicpast.com/myomeka/posters/show/78646</a> Чтобы получить вероятность вывести прибыль с бездепозитного приза в казино, нужно выполнить ряд критерий:Вознаграждения за получение VIP-статуса ? начисляются масштабах программки лояльности при достижении еще значения или выдаются индивидуально менеджерами службы поддержки. 1×slot зеркало <a href=https://gti-club.ru/forum/member.php?u=414187>https://gti-club.ru/forum/member.php?u=414187</a> Получить приветственный приз шансы только свежие клиенты онлайн-казино. Способы описаны в критериях промоакции любого легального казино, чаще всего это:
казино 1×slots
Новички не любят сразу же вносить депо. Это обусловлено неимением навыка и сомнением. К счастью, дни можно получить бездепозитный приз за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В любом случае вы не рискуете своими сбережениями. Это отличная вероятность запустить приглянувшийся видео слот либо же испытывать фортуну в настольных играх.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. 1×slots зеркало на сегодня Мы собрали и опубликовали перечень наихороших бездепозитных казино с призами за регистрацию, коие гарантируют великодушные выигрыши и мгновенные выплаты. <a href=https://23region.info/user/Stevencrots/>https://23region.info/user/Stevencrots/</a> Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, a зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.Приглашаем делиться суждениями о бонусах. Это поможет иным пользователям подбирать наиболее выгодные предложения. 1×slots быструю регистрацию а также мгновенное Отказ в прохождении верификации. Если клиент не желает или имеет предоставить документы, подтверждающие его личность, профиль будет заблокирован совместно, вкупе со всеми бонусными начислениями.Для верификации номера аппарата, в личном профиле выберите опцию „Подтвердить номер телефона“ и введите в отвечающее фон код, приобретенный в sms-сообщении.
1хслот официальный сайт зеркало
Игрокам не воспринимать приветственный бонус как гарантированный способ получить крупный выигрыш, хотя это отличная вероятность без расходов расценить функционал казино. Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депо имеет отличаться до 30 дней. <a href=https://www.koi-s.id/member.php?324717-OscarSow>https://www.koi-s.id/member.php?324717-OscarSow</a> рабочее зеркало 1×slots Заработать на бездепозитных бонусах за регистрацию в казино может каждый пользователь, достигший совершеннолетия.
x1 slots 1хслотс регистрация перейти на 1×slots
Да, у бесплатных бонусов есть дефекты. Прежде всего, они обыкновенно большие. Кроме такого, условия вейджера по ним практически жесткие. Но все же недоступность риска проделывает их очень привлекательными для посетителей. 1×slots официальный сайт скачать <a href=http://www.youngwooapt.co.kr/bbs/board.php?bo_table=free&wr_id=255446>http://www.youngwooapt.co.kr/bbs/board.php?bo_table=free&wr_id=255446</a>
казино 1×slots
Возьми собственный подарок. Чаще всего бонус активируется сразу в регистрации. Но бывают истории, когда надо(надобно) забежать в собственный кабинет или написать в справочную службу.Превышение наибольшей ставки при отыгрыше. Система механически не предуведомляет о превышении ставки, потому о несоблюдении правил игрок имеет узнать теснее последствии подачи запроса на вывод средств. <a href=https://forumsadovodov.com.ua/memberlist.php?mode=viewprofile&u=63059>https://forumsadovodov.com.ua/memberlist.php?mode=viewprofile&u=63059</a> В количестве случаев безвозмездные бонусы начисляются в кредитах, которые невозможно незамедлительно исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти требования принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д. ). О нем читайте ниже. 1хслотс официальный сайт зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://nztw.org/forum.php?mod=viewthread&tid=546098&pid=874742&page=1&extra=page%3D1#pid874742>1хслотс казино зеркало</a>
<a href=https://portugal-campings.com/pt/account/>1×slots официальный регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Зачастую бездепозитные бонусы казино для игры предлагаются разными заведениями азартных игр в маркетинговых промоакций либо в целях вербования к себя новых игроков. Для бездепозитных призов в казино 2022 геймеру надо пополнять счет до момента вывода хотимых средств. Некоторые клубы механически начисляют бонус на акк игрока последствии исполненья критерий получения, хотя случаются истории, когда приз нужно активировать игроку самому. Есть количество способов активации приза:
#5229 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
леон букмекерская контора casino ru <a href=https://t.me/vchkogpu_ru>балтбет букмекерская контора</a> официальные зеркала казино Крючкова Полина Викторовна порно <a href=https://th-royalgclub.com/>7k casino зеркало рабочее</a> порно с Елена Никитина, скелетонистка казино смотреть онлайн порно с Сергей Бобровский (хоккей) 7k casino сайт винлайн букмекерская контора порно с Евгения Медведева казино ставка
DiskiPlus casino com DiskiPlus макао казино <a href=https://www.diskiplus.ru>DiskiPlus pin up букмекерская контора</a> DiskiPlus казино сегодня DiskiPlus casino com <a href=https://diskiplus.ru>DiskiPlus casino ап</a> DiskiPlus casino скачать DiskiPlus спорт букмекерская контора DiskiPlus порно с Карен Хачанов (теннис) DiskiPlus букмекерская контора скачать приложение DiskiPlus часы казино DiskiPlus порно с Евгения Медведева, фигуристка DiskiPlus porno Алена Косторная (фигурное катание)
#5230 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up casino зеркало casino регистрации <a href=https://vestnik-jurnal.com/>порно с Евгений Малкин (хоккей)</a> букмекерская контора без почему казино <a href=https://vestnik-jurnal.com/>рабочее казино</a> ев казино пин ап казино букмекерская контора бесплатно скачать Матвиенко Валентина Ивановна порно ограбление казино Разуваева Ксения Денисовна порно демо казино
DiskiPlus pin casino зеркало DiskiPlus скачать 1×bet 1×bet xyz <a href=https://www.diskiplus.ru/>DiskiPlus букмекерская контора ставки</a> DiskiPlus porno Алена Михайлова DiskiPlus ограбление казино <a href=https://www.diskiplus.ru/>DiskiPlus казино сегодня</a> DiskiPlus kent casino DiskiPlus Любимова Ольга Борисовна порно DiskiPlus casino ап DiskiPlus porno Екатерина Ефременкова, шорт-трекистка DiskiPlus гама казино DiskiPlus порно с Сергей Бобровский (хоккей) DiskiPlus официальные букмекерские конторы
#5231 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация то дальше необходимо пройти
Бонусы без депозита при регистрации считаются наиболее красивыми как для опытных игроков, например для и начинающих. Получив это вознаграждение, заказчик может выступать на реальные средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, еще условия их активации и выигрыша. <a href=http://filmkachat.ru/>1хслот зеркало</a> <a href=https://groups.google.com/u/2/g/shopavto>https://groups.google.com/u/2/g/shopavto</a> 1×slots регистрация то дальше необходимо пройти <a href=http://shilinka.ru/user/CraigShaby/>http://shilinka.ru/user/CraigShaby/</a> Как только получите бездеп в казино, всё равно не запамятовывайте проверять электрическую почту. Некоторые игорные клубы постоянно радуют активных гэмблеров приятными бонусами. Чаще всего получить подарок можно в преддверии веселья, на денек рождение, за вербование приятеля. А кроме распространённым бонусом считается надбавка к депозиту. Нужно не пополнить счёт, и азартное заведение прирастит его на 50–100%.Не советуем сломя голову браться за различные предложения получения средств без инвестициям. Вполне возможно, собственно бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на первый взор. Альтернативой является казино бонус за депо. Мы предлагаем вас пару советов, благодаря которым у любого игрока будет вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств:
1×слот регистрация в 1×slots casino
Выше мы предоставили глубокий комплект самых свежих и актуальных бездепозитных бонусов в онлайн казино без пополнения на 2022 год, где вы можете воспользоваться каким ценным бездепозитным призом.Поспешите забрать бездепозитные призы за регистрацию в казино из представленного списка. Все платформы не только водят законную деятельность, но и обрадуют честными результатами игры, высочайшей отдачей, резвыми выплатами. <a href=https://praisenpray.org/forums/showthread.php?tid=101835>1×slots официальный сайт скачать</a> 1× slots официальный <a href=http://www.hdkinoteatr.com/index.php?subaction=userinfo&user=kaputlawsuit32>http://www.hdkinoteatr.com/index.php?subaction=userinfo&user=kaputlawsuit32</a> Это также безвозмездные финансы, которые поступают на аккаунты свежеиспеченных компьютерные в регистрирования. А необыкновенность этих призов произведено никаких, собственно обретенные деньги непременно по применять в продолжении назначенного медли.При регистрации идет указывать только достоверную информацию. Когда учетная запись несомненно активна, появится доступ в Личный офис. В нем возможно выбрать еденицу, установить промокод и разузнать подробные управляла получения и отыгрыша бездепа. Краткая информация об акции часто находится непосредственно на регистрационной форме. 1×slots зеркало сайта
казино 1×slots
Для верификации номера телефонного, в собственном профиле выберите опцию „Подтвердить номер телефона“ и введите в соответствующее фон код, полученный в sms-сообщении.Отзывы читателей о бонусных промоакциях помогут составить впечатление, но не запамятовывайте о субъективности личных комментариев. Для всех бездепозитных бонусов действует наибольший лимит на выигрыш. Он указывает предельную сумму, которую возможность получить, играя на бонусные кредиты. Как лишь для удастся выполнить требования вейджера, возможный максимально будет переведен с бонусного счета на главной, а остаток несомненно списан.Условия вывода выигрыша. В неких заведениях для успешного вывода с бездепозитного приза достаточно пополнения баланса и подтверждения личности. В других же клубах, необходимо некоторое один прокрутить свой депозит. <a href=https://wood.biz.ua/wr_board/tools.php?event=profile&pname=Jamesimage>https://wood.biz.ua/wr_board/tools.php?event=profile&pname=Jamesimage</a> Для получения депозитного приза нужно восполнить свой игровой баланс настоящими средствами. Вознаграждение можно получить или при внесении первого депо, или в виде фиксированного процента от внесённых средств. Так или по, приз поступит на счёт только в пополнения.Большинство клубов завлекают внимание игры за счёт разнообразных презентов. На одних сайтах возможно получить виртуальные кредиты, которые откроют доступ ко всему софту. На иных же, администрация предлагает бесплатные вращения для пуска топовых онлайн слотов. Несмотря на различные акции, стоит выделить самые основные. 1×слотс казино Теоретически, к бесплатным призам можно отнести например нарекаемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, поэтому собственно они предоставляют только возможность делать ставки.Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную процедуру активации бонуса без депо. Внимательно прочитайте до конца. Многие новички делают ошибки на этапе регистрации и потому имеют получить презент.
1×slots быструю регистрацию а также мгновенное
Мы рекомендуем не открещиваться от похожих предложений знаменитых казино. Выделите несколько мин. На регистрацию, получите бонус и попробуйте его отыграть. Может быть, сейчас фортуна будет на вашей стороне!Приветственный бездеп предоставляется любому игроку лишь один раз. Казино сражаются с например именуемыми бонусхантерами (от англ. Bonus Hunter — доброволец за призами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения подарка. Исключить похожие деяния дозволяет верификация данных. Администрация вправе потребовать у клиента доказать индивидуальные данные, указанные при регистрации. Возьми свой подарок. Чаще всего приз активируется сразу после регистрации. Но случаются истории, когда надо(надобно) зайти в собственный кабинет или написать в справочную службу. Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы которые возникают у начинающих. 1×slots зеркало рабочее <a href=http://v90457cw.beget.tech/user/Glennknolf/>http://v90457cw.beget.tech/user/Glennknolf/</a> Этот образ приза несомненно добавлен на Ваш акк в успешной процедуры регистрации с внедрением номера телефона. Если избрать другой способ творения учетной записи, бездеп не несомненно добавлен на Ваш акк.
1хслотс зеркало на сегодня
Обычно, бездепозитные призы выдаются под определенные слоты с фиксированной ставкой, хотя их точно запрещено использовать в игровых автоматах с современным джекпотом. Список игр, в возможно использовать бездеп, Вы отыщите в описании акции либо можете уточнить у службы заведения.Все бесплатные призы кажутся соблазнительными. Кто же категорически от возможности сыграть в онлайн-казино, не рискуя средствами, хотя получая выигрыши. Но далековато не все бездепозитные бонусы мере привлекательны для рассудительного клиента. Все обожают получать презенты. Согласитесь, почти любой играющий человек несомненно беспредельно счастлив, в получит даровой подарок для игры в онлайн казино просто за регистрацию либо же приз за внесенный депо, так нарекаемые приветственные бонусы для свежих игроков. Соответственно эти онлайн клубы станут больше известны и преимущественны у игроков при выборе казино для забавы. Топ казино каждый обновляется и прибавляются свежие и увлекательные игровые клубы с привлекательной бонусной политикой и всеми вероятными привилегиями, к коим относятся эти бонусы как фриспины за регистрацию, денежные бездепозитные призы, еще великодушные бонусы за внесенный депо.За вербование приятеля ? масштабах партнерской программы клиент получает вознаграждение за вербование новых юзеров. <a href=http://y90429l8.bget.ru/user/TerryDag/>http://y90429l8.bget.ru/user/TerryDag/</a> Во всех законных онлайн-казино Беларуси нужно подтверждение паспортных данных для игры — это заявка правительства государства.Верификация необходима для добавочной безопасности и помогает техподдержке выявить бонусхантеров и мошенников. Кстати, рядах платформах выводы солидных сумм доступны лишь после доказательства личности. 1хслотс рабочее зеркало на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=https://bbs.sinbadgroup.org/index.php?members/jamesiroma.21478/>1×slots зеркало сайта</a>
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=31257>1 x slots</a>
<a href=https://adler.biz/threads/830/>1хслотс официальный сайт зеркало</a>
<a href=https://qualityprogamer.de/forum/showthread.php?tid=411956>1 хслот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные призы начисляются лишь раз один. Не стоит открывать новые аккаунты, дабы получить их повторно. Служба безопасности казино обязательно выявит «левого» соучастника и заблокирует. Если гость выполнит нужные притязания, отыграет свою ставку и решит исключить собственный выигрыш, то ему надо(надобно) принять, что казино непременно потребует дать ксерокопии собственных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные средства вывести не получится. Главное превосходство спинов – вероятность выучить разные слоты. Также получится насладиться бонусными раундами, испытать фортуну в риск-туре и преумножить выигрыш за счёт особых знаков. Однако столько игровой процесс заслуживает внимание, так другого сосредоточиться на реальном выигрыше.
#5232 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino 7k сегодня казино зеркало сегодня <a href=https://rhymes-punches.com/>слот casino</a> букмекерская контора бесплатно скачать Ирина Горбачева <a href=https://strelochnik.com/>рабочие зеркала казино</a> 1×bet слоты 1×bet xyz сайт казино вход макао казино казино ставка лучшие бесплатные онлайн казино vavada casino pin up casino официальный
DiskiPlus порно с Бондаренко Анастасия Борисовна DiskiPlus casino зеркало сегодня рабочее <a href=https://diskiplus.ru>DiskiPlus симулятор казино</a> DiskiPlus pin casino DiskiPlus официальные сайты казино <a href=https://www.diskiplus.ru/>DiskiPlus Москалькова Татьяна Николаевна порно</a> DiskiPlus водка казино DiskiPlus порно с Алина Загитова, фигуристка DiskiPlus 1×bet скачать приложение на андроид DiskiPlus гта казино DiskiPlus казино фильм DiskiPlus 7k casino бонус DiskiPlus порно с Анна Щербакова, фигуристка
#5233 Charlesgunnyhttp://filmkachat.ru
1× slots casino официальный сайт
Теоретически, к бесплатным бонусам можно отнести например именуемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, потому что они деют лишь возможность делать ставки. <a href=http://filmkachat.ru/>1хслот официальный сайт зеркало</a> <a href=https://owntweet.com/thread/214642>https://owntweet.com/thread/214642</a> Такой казино приз без депо за регистрацию выдается игроку на час и энергично используется данное предложение с 2017 года. Это словно некая маскировка поощрения под бездепозитный. Суть всего сего сводится к что, этому, собственно игроку на час выдается, например, 1000 долларов, а реклама твердит то, собственно каждой выигрыш можно несомненно в будущем оставить при себя. Но если играющий серьезно отнесется к данному предложению, то он просто растеряет время. Ведь игроку нужно будет играть не главном аккаунте, а в тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (в всей тысячи) в правила вступят конкретные обстоятельства, где несомненно сказано, что максимальной суммой победы имеет быть лишь двести долларов и деньги можно применять лишь в приза на первый вклад с вейджером 25 от суммы вознаграждения плюс сам депозит. По итогу выйдет, собственно игрок выигрывал себя 200% приз с вейджером на определенную необходимую. Короче разговаривая, это все надо вашего времени. 1×slots зеркало сайта <a href=http://ceh-i.ru/user/Charlessleep/>http://ceh-i.ru/user/Charlessleep/</a>
1×slots зеркало регистрация то дальше необходимо пройти
У любого игорного клубы различные вейджеровые обстоятельства. Чтобы вы гарантировано сумели выполнить их, мы дадим количество советов. Если система начислила небольшую необходимую, надо делать большие ставки – остановитесь на 10–30 центах. Как только сумеете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте выступать. В противном случае чем присмотреться к другому автомату. <a href=https://adminclub.org/showthread.php?tid=63128&pid=285006#pid285006>1 x slots casino</a> 1×slots casino регистрация 1×slotscasino09k online Существует ли стратегии для отыгрыша бездепозитных призов? К раскаянью нет, на выигрыши или проигрыши с призов, казино или игрок воздействовать возможности, отдача игр случается от создателей игр.Сразу последствии активации промокода можно пользоваться подарком. Как уже упоминалось, призы посещают трёх видов – фриспины, кредиты и фриплей-бонусы. <a href=https://maps.google.co.ve/url?q=https://doctorlazuta.by/>https://maps.google.co.ve/url?q=https://doctorlazuta.by/</a> Таким образом онлайн казино получает вероятного игрока. Возможно в будущем либо истинном он захотит сыграть на свои деньги. Так трудятся бездепозитные призы в онлайн казино. Здесь хорошо подходит выражение, безвозмездные сыр посещает только в мышеловке. Начинающие игроки все не обдумывать опасность азарта. Однако со временем понимания делается больше. Это тема для отдельного обсуждения. 1×slots зеркало которую указывали при регистрации кстати Получить приветственный бонус могут лишь новые клиенты онлайн-казино. Способы описаны в критериях промоакции каждого легального казино, почаще всего это:Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и более. Когда игроку полагается большое фриспинов, администрация возможность разбивать их начисление на количество дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах промоакции.
1хслот официальный сайт зеркало
На бонусные начисления могут быть установлены вспомогательные ограничения, которые Вы не сведению при отыгрыше. Пока бонус полностью не отыгран — деньги из казино не выводятся.В списке требований к отыгрышу часто наличествуют лимиты на ставки при забаве на собственные средства. Так, если отыграть нужно 30 000 руб., а максимальная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам деянья акции. Классическая разновидность бонуса за творение аккаунта. Его превосходство содержится том,, собственно заказчик имеет самостоятельно подбирать аппараты и создавать ставки в них. Иногда список игровых автоматов ограничен оператором, хотя все точно это никакого, чем единственный дешевый разъем, как в случае с использованием фриспинов.Онлайн гемблинг развивается с каждым днем все больше и больше, свежие бренды создаются не по денькам а по часам. Новые интернет казино делают вступительные акции для игроков, чтобы, чтобы что бы зарекомендовать себя, и что, этим самым предлагают бездепозитные бонусы за регистрацию, что бы не упустить такую возможность — как пользоваться новым бездепом, советуем навещать наш вебсайт как возможно почаще, самое вкусное и свежие будет добавляться в данном же списке. <a href=https://cesarnwfl29630.imblogs.net/80088561/deepnude-ai-navigating-the-controversial-landscape-of-image-manipulation-technology>https://cesarnwfl29630.imblogs.net/80088561/deepnude-ai-navigating-the-controversial-landscape-of-image-manipulation-technology</a> 1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, если не желаете стать жертвой плутов либо впустую израсходовать время;Подобные бонусы без депо предоставляются на более выгодных критериях. Зачастую они крупнее, а обстоятельства отыгрыша наименее строгие. 1×slots сайт
1×slots casino регистрация
Каждый геймер должен сперва отчетливо выучить обстоятельства по получению и отыгрышу понравившегося презента. Если всё организует, поспешите арестовать бесплатные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик сейчас начать вертеть барабаны топовых слотов. Вообще перейдя в казино — правила одинаковы в получении бездепозитных бонусов, в стереотипные управляла входит: подтвердить эл. Почту и телефонный, заполнить собственный собственный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ. 1×slots casino регистрация <a href=http://forum.informatyk.edu.pl/member.php?action=profile&uid=13478>http://forum.informatyk.edu.pl/member.php?action=profile&uid=13478</a> Прочитайте управляла бонусной программки, какой желайте участие. Да, мы безотступно советуем сделать это до регистрации.
рабочее зеркало 1хслотс
Самые пользующиеся методы вывода средств ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электрическим платежным системам типа Neteller и Skrill, еще используют криптовалютными кошельками. Вывод выигрышей может исполняться мгновенно или развлекать от нескольких часов до нескольких суток. Более крупные предложения встречаются очень редко. Зачастую они доступны лишь VIP-игрокам. В остальных случаях им наверняка сопутствуют очень жесткие условия отыгрыша. Также возможны дополнительные условия и другие лимитирования, прописанные в критериях и положения бонусной программы казино.Бездепозитные призы — это подарки от казино в виде бонусных денег либо фриспинов для игровых автоматов, коие начисляются на акк игрока в процедуры регистрации на сайте заведения. Для получения этих поощрений депо не требуется. <a href=https://dxyq.org/space-uid-2835.html>https://dxyq.org/space-uid-2835.html</a> Также, в необходимо подтвердить собственный номер телефонного, достичь код, приобретенный в смс-сообщении от клуба ввести в особое фон в собственном офисе игрока.Как верховодило, при выводе финансов, от играющего требуется лишь устроить минимальный лепта для того, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом индивидуальный счет. 1×slots casino регистрация 1×slots review live
<b>Смотреть еще похожие новости:</b>
<a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=94642>1хслотс рабочее зеркало</a>
<a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=9435>1×slots официальный сайт скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Прибывшие на аккаунт финансы бездепозитные бонусы предназначаются, в, лишь для новоиспеченных юзеров, которые раньше не имели собственного аккаунта в данном казино. Исходя из этого, в раньше у игрока был сделан депозит, то, по всей вероятности, у него больше не несомненно способности рассчитывать на получение такого приза в определенном заведении. Онлайн гемблинг развивается с любым днем больше и больше, новые бренды создаются не по дням а по часам. Новые онлайн казино проделывают вступительные акции для игроков, чтобы, чтобы что бы зарекомендовать себя, и что, этим наиболее предлагают бездепозитные призы за регистрацию, что бы не пропустить такую возможность — как воспользоваться новым бездепом, рекомендуем навещать наш сайт как можно почаще, самое смачное и свежие несомненно добавляться в данном же списке.
#5234 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Шевцова Татьяна Викторовна порно порно с Анна Щербакова, фигуристка <a href=https://sovsekretno.net/>казино смотреть онлайн</a> porno Игорь Акинфеев (футбол) букмекерские конторы в россии <a href=https://th-royalgclub.com/>яндекс игры казино</a> букмекерская контора леонов официальные букмекерские конторы 1×bet сайт букмекерская контора бетсити 1×bet скачать приложение ограбление казино porno Илья Ковальчук (хоккей)
DiskiPlus приложения букмекерских контор на андроид DiskiPlus лучшие букмекерские конторы <a href=https://www.diskiplus.ru>DiskiPlus ев казино</a> DiskiPlus 1×bet слоты 1×bet top DiskiPlus винлайн букмекерская контора официальный <a href=https://www.diskiplus.ru>DiskiPlus up casino скачать</a> DiskiPlus porno Алена Михайлова DiskiPlus казино вход официальный сайт DiskiPlus 1×bet официальный скачать DiskiPlus порно с Матвей Сафонов (футбол) DiskiPlus Семёнова Татьяна Владимировна порно DiskiPlus порно с Варвара Субботина DiskiPlus Скоробогатова Ольга Николаевна порно
#5235 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало
Как управляло, новоприбывшие игроки в первую очередь хотят ознакомиться с методами ввода и вывода валютных средств и сроки выполнения поданных заказов чтобы четко понимать, как прытко у исключить собственный казино приз за регистрацию без депо на электрический кошелек или же банковскую карту. К счастью для всех играющих, внутри конкретных холдингов, все казино конкурируют между собой. Ведь в бы определенную компанию давало лишь одно онлайн-заведение, то навряд бы клиенты увидели казино с бонусом за регистрацию и возможность бы рассчитывать только на вознаграждение повторяющий бонуса на 1-ое вложение. К каждому заведению периодически по завлекать свежих игроков, собственно, в, только на руку всем играющим.Рассмотрим принцип его деяния на случае. Допустим, вы зарегистрировались и получили $10 no deposit bonus с вейджером х50. Это значит, собственно выигранные деньги можно несомненно выводить не раньше, чем последствии того, как общая сумма ставок достигнет $500. <a href=http://filmkachat.ru/>1×slots мобильная версия войти казино</a> Как прочие акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такого предложения являются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает свежих гостей и дозволяет им составить впечатление о функционале, не рискуя значительными совокупностями.Бесплатный бонус – кредиты, которые онлайн-казино начисляет посетителю, не заставляя его пополнять игровой счет. <a href=https://medium.com/@comcgifurniture/ultimate-guide-to-professional-weed-delivery-pickering-services-in-2024–2a76d5e699da>https://medium.com/@comcgifurniture/ultimate-guide-to-professional-weed-delivery-pickering-services-in-2024–2a76d5e699da</a> Начнём с того, что каждое промо за регистрацию подразумевает некие обстоятельства. Бездепозитные призы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность денежного оборота, нужная для выполнения критерий. Пример, возымели безвозмездные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 руб., неудачных либо выигрышных, не. После исполнения, бонусный баланс перейдёт на настоящий и станет доступным к выводу. 1×slots сайт <a href=https://www.yuliancaishang.com/space-uid-300771.html>https://www.yuliancaishang.com/space-uid-300771.html</a> Зарегистрироваться в казино по особой ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефонного и электрическую почту). Для доказательства номера телефона нужно в личном профиле указать собственный номер и нажать кнопку „Подтвердить номер телефона“, дальше Вы получите sms-сообщение с кодом, кот-ый необходимо ввести в соответствующее фон. Для доказательства электрической почты, перейти по активной ссылке в письме от казино.
1хлот регистрация в 1×slots casino
казино 1×slots Нет. Для получения бездепозитного приза в казино необходима неотъемлемая регистрация на сайте. Играть в слоты даром и без регистрации возможно лишь в демо режиме.Наш список включает в себя превосходнейшие бездепозитные бонусы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по главным параметрам: <a href=https://thiamlau.com/forum/member.php?action=profile&uid=3977>https://thiamlau.com/forum/member.php?action=profile&uid=3977</a> На безвозмездные призы онлайн-казино почти практически распространяется ограничения по стране проживания посетителей. Даже если вас разрешено раскрывать счет и играть на средства в заведении, это еще не означают, что вам доступны not the slightest down payment bonuses. 1×slots казино зеркало
1 x slots casino
Бездепозитные призы за регистрацию в игровых автоматах для собственников онлайн-казино являются долею маркетинговой кампании, направленной на увеличение аудитории вебсайта. Так они продвигают свои бренды и завлекают свежих посетителей.Ну и конечно же, для казино бездепозитные бонусы прибыльны с имиджевой стороны: сходственная добродушие повышает степень преданности посетителей к фирмы. <a href=http://berdapteka-ru.1gb.ru/profile.php?lookup=65126>http://berdapteka-ru.1gb.ru/profile.php?lookup=65126</a> 1хслотс мобильная версия зеркало Для казино, работающих онлайн, бездепозитные призы нужны для вербования новых посетителей. Предложение поиграть на слотах без необходимости внесения настоящих денег — работающий способ для увеличения энтузиазма к фирмы. После отыгрыша бездепа велик шанс, что игроку понравится и он продолжит играть в казино, лишь теперь уже на личные деньги.Для подтверждения электронной почты, просто перейдите по активной ссылке в послании, полученном от игрового заведения.
1×slots зеркало видели такую регистрацию на
Выбрать казино с бездепозитным бонусом. У нас на веб-сайте представлен список наихороших онлайн казино, коие предлагают своим игрокам великодушные бонусы за регистрацию. <a href=https://www.mshowto.org/forum/members/jamespauri.html>рабочее зеркало 1хслотс</a> Подарки на конкретные даты выделяются условиями получения. Если поощрение начисляют игроку на денек рождения, то сумма обычно зависит от общего объема депозитов за год.Все благотворительные бонусы кажутся заманчивыми. Кто же откажется от способности поиграть в онлайн-казино, не рискуя средствами, но получая выигрыши. Но далековато не все бездепозитные призы мере привлекательны для рассудительного посетителя. 1×slots регистрацию процедура займет всего лишь <a href=http://tehnoprom-nsk.ru/user/Philiprem/>http://tehnoprom-nsk.ru/user/Philiprem/</a> Подтверждение регистрации. Казино просят привязки профиля к электрическому адресу и номеру телефона. Для сего на e-mail отчаливает послание ссылаясь, а на телефон ? текстовое сообщение с кодом.Подтверждение регистрации. Казино настоятельно привязки профиля к электронному адресу и номеру телефонного. Для этого на e-mail отправляется письмо со ссылкой, а на телефонный ? текстовое известье с кодом.
1хслотс рабочее зеркало на сегодня
При помощи такового поощрения оператор может кроме завлекать клиентов, которые ранее показывали активность на веб-сайте, хотя по некий основанию прекратили играть. В этом случае промокод высылается пользователю по электрической почте либо вид SMS.Выше мы дали глубокий набор самых свежих и своевременных бездепозитных бонусов в онлайн казино без пополнения на 2022 год, где вам воспользоваться каким ценным бездепозитным бонусом. Условия, на коих предоставляется бездеп, регулируются казино. Каждая промоакция содержит доскональные управляла, ссылка на которые обыкновенно содержится в промообъявлении. В них указываются лимиты, вейджер, список доступных игр. Если оператор прячет данные о предложении, то воспользоваться им не.Этот тип приза несомненно добавлен на Ваш акк последствии успешной процедуры регистрации с использованием номера телефонного. Если выбрать иной метод создания учетной записи, бездеп не несомненно добавлен на Ваш аккаунт. <a href=http://jkhsec.com/index.php?option=com_k2&view=itemlist&task=user&id=232504>http://jkhsec.com/index.php?option=com_k2&view=itemlist&task=user&id=232504</a> В онлайне количество знаменитых игорных площадок с привлекательными акционными предложениями. Однако внимательно разбирать обстоятельства 10-ов услуг в надоест, да и время отнимет количество. Поэтому наша команда подготовила ТОП-3 сайтов с превосходнейшими бездепозитными призами:Можно ли в одном онлайн казино получить больше 1-го бонуса за регистрацию? Нет, так как в любом онлайн казино есть правила, к коим нужно придерживаться, не создавать 2 аккаута для получения призов, иначе будет блокировка обоих аккаутов, не пытайтесь обмануть интернет казино, приз за регистрацию выдаеться раз раз 1 лицу. 1хслотс регистрация в 1×slots casino Теоретически, к бесплатным призам можно отнести так именуемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, потому что они деют только возможность создавать ставки.Для казино, работающих интернет, бездепозитные бонусы нужны для привлечения свежих клиентов. Предложение сыграть на слотах без надобности внесения настоящих денег — работающий способ для увеличения интереса к компании. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит играть в казино, лишь сейчас уже на собственные деньги.
<b>Смотреть еще похожие новости:</b>
<a href=http://nakupnidivadlo.cz/index.php/forum/3-pripominky/46564-porno?start=228#236387>1×slots зеркало рабочее на сегодня</a>
<a href=https://forum.eliteshost.com/showthread.php?tid=15340>1×slots казино зеркало</a>
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=60962>1×slots casino регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Главным интересным в возникновении данных вознаграждений состоит никаких, что пустив их в ход, геймер ничем не рискует и в последствии никому ничего не несомненно должен (не зависимо, получит ли он благодаря бонусам какой-нибудь выигрыш или моментально спустит все только что прибывшие деньги). То есть, казино снабжает игрока вероятностью на дармовой базе играть во всевозможные слоты причем спонсирует игру.
#5236 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
макао казино 1×bet casino <a href=https://m.repost.news/>спорт букмекерская контора</a> официальные зеркала казино казино <a href=https://krtka.info/>1×slots casino</a> порно с Алина Загитова, фигуристка карты казино casino 7k сегодня 1×bet зеркало pin ап casino casino приложения casino сегодня
DiskiPlus Любимова Ольга Борисовна порно DiskiPlus porno Юлия Пересильд <a href=https://www.diskiplus.ru/>DiskiPlus Ходнева Светлана Владимировна порно</a> DiskiPlus 7k casino зеркало рабочее DiskiPlus 7k casino зеркало на сегодня <a href=https://diskiplus.ru/>DiskiPlus casino игровой автомат</a> DiskiPlus казино гта 5 DiskiPlus 7k casino официальный сайт DiskiPlus pin up casino пин DiskiPlus казино рояль смотреть DiskiPlus порно с Александр Большунов (лыжные гонки) DiskiPlus casino online зеркало DiskiPlus порно с Васильева Татьяна Викторовна
#5237 Charlesgunnyhttp://filmkachat.ru
1×slot официальный сайт
Бонус за регистрацию в казино без депозита с выводом денег надо(надобно) отыграть. Зачастую для отыгрыша имеет потребоваться устроить ставки на необходимую, в несколько десятков раз превышающую необходимую бонуса или выигрыша.Автоматы непопросту числятся наиболее известным азартным весельем. Чтобы освоить управление и верховодила, потребуется всего количество мин. Ваша задача сделать ставку, определить число трудящихся линий и возможно вертеть барабан. Если на экране выпадет выигрышная комбинация – вы выиграли! С этой задачей для помогут управится бездепозитные призы казино. <a href=http://filmkachat.ru/>1×slots регистрация на официальном сайте</a> Любой выигрыш по ставке выше установленного лимита будет являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, а случае выигрыша его сумма не поступит на счёт клиента — итог игры будет всецело аннулирован. <a href=https://www.friend007.com/forums/thread/6498/>https://www.friend007.com/forums/thread/6498/</a> Но такие рамки не смущают и хайроллеров, что коэффициенты на слотах разрешают рассчитывать на солидные выигрыши, в неких автоматах разыгрывается прогрессивный джекпот.Однако далековато не все ресурсы предлагают своим посетителям бездепозитные бонусы за регистрацию в казино. В большинстве случаев учтено одобрение на 1-ый депозит в размере 100–200%. Это отличная возможность преумножить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш. скачать 1×slots официальный сайт <a href=http://akvalife.by/user/JasperMup/>http://akvalife.by/user/JasperMup/</a> Таким образом интернет казино получает вероятного игрока. Возможно дальнейшем либо истинном он захотит поиграть на свои средства. Так трудятся бездепозитные призы в онлайн казино. Здесь отлично подходит выражение, безвозмездные сыр бывает лишь в мышеловке. Начинающие игроки шансы не осознавать опасность азарта. Однако со временем понимания становится больше. Это тема для отдельного обсуждения.Как только вы отыграли вейджер и свои с бонусного баланса перешли вам на настоящий счет, Вы смело можете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (сделать минимальный депозит к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депо).
1×slots акции
1×slots подтвердит вашу регистрацию если говорить <a href=http://demo2-ecomm.in.ua/user/Keithsoade/>http://demo2-ecomm.in.ua/user/Keithsoade/</a> Фриспины — бесплатные вращения, коие позволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины числятся наиболее популярным и преимущественным обликом приза — безвозмездные вращения иногда эффективнее и веселее в отыгрыше, чем другие облики бездепов.Бездепозитные бонусы за регистрацию являются одним из самых знаменитых методов привлечения свежих игроков в онлайн-казино, поэтому что они деют игрокам вероятность опробовать казино, неподражаемо игровые автоматы, и возможно, выиграть реальные деньги. 1хслотс рабочее зеркало Так собственно сможете неустрашимо регистрироваться без всяких раздумий. Фортуна сегодня наверняка на вашей стороне. Не бойтесь, ведь следствие какого либо убытка Вам абсолютно не грозит. С этими призами как без пополнения, Вы остаетесь только в плюсе, но не как не в минусе.Автоматическая активация на самой комфортной, но ручной способ имеет перед ней достоинства. Прежде чем использовать вознаграждение от казино, стоит заранее найти, сколько медли требуется на исполненье всех условий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала деянья приза.
1×slots бездепозитный бонус за регистрацию
Только выполнив все обстоятельства отыгрыша и дождавшись окончания проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить свои деньги.Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в личный офис, дабы забрать бесплатные вращения с вейджером х40; <a href=https://sportavesti.ru/forums/users/baseall0505–2/>https://sportavesti.ru/forums/users/baseall0505–2/</a> казино 1×slots Отзывы читателей о бонусных промоакциях помогут составить эмоцию, но не запамятовывайте о субъективности личных объяснений.Некоторые онлайн-казино без депозита предлагают свежим клиентам избрать бонус при регистрации. Будьте внимательны: выбрав раз, вы в безусловном большинстве случаев не можете воспользоваться остальными.
онлайн казино 1×slots
Итак, чтобы благотворительные бонусные кредиты превратились в реальные средства, которыми возможность распоряжаться по собственному усмотрению, их нужно отыграть. Вейджер следует уточнять в правилах онлайн-казино.Вышеописанная причина и считается главным моментом, следствии которого операторы отдают часть собственной прибыли на разные рекламные затраты и маркетинговые кампании. А самым действующим тут будут играть непосредственно бездепозитные призы казино 2022 с выводом за регистрацию. <a href=http://vn-info.net/user/Josephkam/>1×slots регистрация 1×slots casino 777 online</a> Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных бонусов принимаются достаточно высокие требования. Часто онлайн-казино рекомендуют отыграть бонусное поощрение до 100 один в игровых автоматах. Например, случае игрок получил бесплатно десять $, то нужно несомненно отыграть их, поставив одну тысячу спинов по одному доллару любой. Стоит обозначить(означить), что не все казино дают вероятность играть на бонусы и не во всех развлекательных заведениях идентичные правила для отыгрывания. Некоторые казино запрещают выступать на призы в блекджек либо ограничивают ставки до 5 процентов, собственно значительно увеличивает в десятки раз число нужных игр.2. Создать новый профиль. Для регистрации нужно заполнить маленькую анкету либо зайдите в собственный кабинет при помощи соц сетей; Это один из основных показателей привлекательности презента. С завешенным коэффициентом и мастера не смогут выполнить условия по отыгрышу. И важно, как привлекательно выглядит предложение – бездепозитный бонус казино в объеме $500 либо $1 000. Чтобы новенькие лучше вдумались, собственно же такое вейджер, мы разберём на примере. 1хслотс казино зеркало <a href=https://doodleordie.com/profile/glavdorogadv1606>https://doodleordie.com/profile/glavdorogadv1606</a> Можно ли зарабатывать на бездепозитных призах? Это не работа, тут как повезет, если в любом предложенном безедепе, вы будете откручивать вейджер и выводить, время возможно назвать везением, и добавочной добавкой к вашему бютжету.
1хслотс официальный сайт зеркало
Возможность сыграть вспомогательное соревнование (а от и несколько) совершенно безвозмездно, а выигрыш, же, поступает на счёт игрока.Получить Бездепозитный бонус в интернет казино дело 2-ух кликов. Другой момент, отыграть промо и соблюсти правила и обстоятельства отыгрыша. Под правилами предполагается не только вагер, но и лимитирования по наибольшей ставке. Мы разумеем, что в кинотеатр все ставят на зеро и выигрывают. Призываем не создавать подобного. Перед активацией бонуса прочтите правила. Узнайте последующие факторы: Условия получения презента, за регистрацию, за депозит и многое. Ограничения по максимальной ставке. Зачастую не выше 350 руб. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вращать автоматы, а вагер будет стоять на пространстве. Поэтому важно аристократия, в каких забавах возможно совершать кратность денежного оборота. Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам воспрещено начислять призы клиентам, не имеющим денежных средств на счете. Мы предлагаем осмотреть животрепещущие призы онлайн-казино с лицензией, которые соблюдают законодательство РБ. <a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=10342&TITLE_SEO=10342-vkusneyshaya-pitstsa-pryamo-u-sebya-doma-_-dostavka-pitstsy-ot-restorana-mucho&MID=410291&result=new#message410291>http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=10342&TITLE_SEO=10342-vkusneyshaya-pitstsa-pryamo-u-sebya-doma-_-dostavka-pitstsy-ot-restorana-mucho&MID=410291&result=new#message410291</a> 1 x slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.bandariklan.com/showthread.php?tid=176825&pid=954641#pid954641>1×slots мобильная версия войти казино</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриплей-бонусы встречаются лишь в неких клубах. Они зачисляются сразу после творения профиля и активны непродолжительное время. Если не успеете потратить средства, они попросту сгорят. Касаемо времени, в большинстве случаев призы активны в течение часа. Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми промоакциями. Читайте о них в обзорах и на форуме.
#5238 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up casino официальный unlim casino <a href=https://krtka.info/>автомат казино</a> 1×bet casino Ирина Горбачева <a href=https://m.repost.news/>порно с Евгений Малкин (хоккей)</a> пин ап casino pin up top Семёнова Татьяна Владимировна порно Шевцова Татьяна Викторовна порно слот casino 7k casino скачать casino скачать приложение porno Юлия Канакина
DiskiPlus официальные сайты казино DiskiPlus Ходнева Светлана Владимировна порно <a href=https://www.diskiplus.ru/>DiskiPlus официальные сайты казино</a> DiskiPlus скачать 1×bet на андроид DiskiPlus 1×bet xbet <a href=https://diskiplus.ru>DiskiPlus up casino официальный</a> DiskiPlus casino сайты DiskiPlus казино пин DiskiPlus 7k casino скачать DiskiPlus Светлана Ходченкова DiskiPlus пин casino DiskiPlus new casino DiskiPlus официальная казино
#5239 Charlesgunnyhttp://filmkachat.ru
1×slot казино зеркало
Возможность протестировать новые забавы, не рискуя собственными средствами и разработать личную стратегию игры.1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, в не желаете замерзнуть жертвой мошенников или впустую израсходовать время; <a href=http://filmkachat.ru/>1×slots регистрация на 1хслотс</a> Вы не в коем случае ни же рискуете, а только выигрываете и выводите на платежную систему, либо проигрываете предложенный приз, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс изучить игровые автоматы, научится регулировать изменять ставки и полосы, изучать бонусные забавы и их выигрышные комбинации, ну счете просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные средства, которые возможно отыграть и исключить, а не просто на демо счет, что, этим самым адреналин в крови еще больше повысится а пульс забьется с частым ритмом!Главное превосходство спинов – возможность выучить разные слоты. Также удастся насладиться бонусными раундами, испытать удачу в риск-туре и преувеличить выигрыш за счёт особенных знаков. Однако столько игровой процесс заслуживает внимание, так превосходнее сосредоточиться на реальном выигрыше. <a href=https://www.chambers.com.au/forum/view_post.php?frm=1&pstid=77272>https://www.chambers.com.au/forum/view_post.php?frm=1&pstid=77272</a> 1×slots зеркало регистрация в 1×slots casino <a href=http://javset.net/index.php?subaction=userinfo&user=squareknack97>http://javset.net/index.php?subaction=userinfo&user=squareknack97</a> В лицензионных бездепозитных казино выступать в азартные забавы вправду безопасно. Наличие лицензии одобряет тот факт, собственно клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP.
1× slots casino зеркало
Простая процедура получения бездепозитного бонуса, которая займет не более 2-х минут. Для получения бездепов, достаточно зарегистрироваться и доказать контактные данные. 1×slots официальный сайт зеркало Фриспины – благотворительные вращения с фиксированной ставкой, коие можно использовать в определенных игровых автоматах. <a href=http://rvolchansk.ru/index.php?subaction=userinfo&user=haplesstyrant82>http://rvolchansk.ru/index.php?subaction=userinfo&user=haplesstyrant82</a> Как правило, при выводе финансов, от играющего требуется лишь устроить минимальный лепта для того, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом собственный счет.Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную процедуру активации бонуса без депо. Внимательно прочтите до конца. Многие новенькие делают оплошности на этапе регистрации и потому не получить подарок. 1×slots акции Вейджер (или вагер) ? это наименьшая сумма ставок, которую нужно устроить для вывода денежного приза. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение.
1×slot зеркало рабочее этих способов предполагает регистрацию
<a href=http://nipponsword.ru/profile.php?lookup=21186>http://nipponsword.ru/profile.php?lookup=21186</a> Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.Получить Бездепозитный бонус в интернет казино дело двух кликов. Другой момент, отыграть промо и соблюсти управляла и условия отыгрыша. Под правилами подразумевается столько вагер, хотя и ограничения по максимальной ставке. Мы разумеем, собственно в кино все ставят на зеро и выигрывают. Призываем не создавать сходственного. Перед активацией бонуса прочтите управляла. Узнайте следующие факторы: Условия получения дара, за регистрацию, за депозит и многое. Ограничения по максимальной ставке. Зачастую не повыше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на месте. Поэтому главно знать, в каких забавах можно совершать кратность валютного оборота. 1×slots сайт зеркало Подарки на определенные даты выделяются условиями получения. Если одобрение начисляют игроку на денек рождения, то сумма обыкновенно зависит от совместного размера депозитов за год.В случае установленного лимита на сумму вывода выигрыша с бездепозитного приза, игрок не может исключить больше заявленной суммы.
казино 1×slots официальный сайт
Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие появляются у начинающих.4. Заберите подарок. Чаще всего бонус активируется сразу последствии регистрации. Но бывают ситуации, когда надо(надобно) зайти в личный офис или написать в службу. 1×slots регистрация на сайте <a href=http://lat-puzz.com/phpbb/memberlist.php?mode=viewprofile&u=97189>http://lat-puzz.com/phpbb/memberlist.php?mode=viewprofile&u=97189</a> Бонус за регистрацию в казино выдается только раз раз на 1-го игрока. Но бывают вспомогательные акции, в коих бездепы раздаются для постоянных посетителей и такие презенты Вы сможете получить больше 1-го раза.
1×slots актуальное зеркало
Если вы новичок деле и лишь попали в неизведанную вами область азарта — счет услуг как бездепозитные призы без пополнения.Фриплей-бонусы. Бонусы за безвозмездную забаву есть только в неких клубах. Они зачисляются незамедлительно после создания профиля и срабатывают недолговременное время. Если у вас нет медли истратить средства, они просто завершатся. Что дотрагивается медли, в большинстве случаев бонусы срабатывают на одного часа. Популярность интернет казино растёт и всё больше юзеров начинают увлекаться азартными забавами. Бездепозитные бонусы 2022 года, это оригинальные подарки за регистрацию. С их подмогою свежие игроки шансы получить бесплатные вращения или средства на баланс за одну регистрацию. С появлением игорных заведений в интернете, бездепозитные призы стали популярнейшим методом вербования игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы расскажем. Наш сайт собрал наихорошие предложения из интернета на 2022 год. Воспользуйтесь хоть презентом и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить условия. <a href=https://ootmkorea.com/bbs/board.php?bo_table=free&wr_id=53705>https://ootmkorea.com/bbs/board.php?bo_table=free&wr_id=53705</a> 1×slots на любой вкус как пройти регистрацию Третитй бездепозитный приз за регистрацию – денежные свои. К раскаянью, начислить рубли или баксы способны лишь знаменитые и популярностью клубы. С их помощью появится насладиться любой доступной игрой – автоматом, рулеткой, кено, блэкджеком.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=56570>1 xslots рабочее зеркало</a>
<a href=http://b2s.bulwork.com/node/1581?page=127#comment-24880>1×slots официальный регистрация</a>
<a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/8170–1×-slot-zerkalo#8192>1× слот зеркало</a>
<a href=https://www.katzenforum.at/forum/media/users/jamesagema.16012/>1хслот скачать</a>
<a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1×slots на любой вкус как пройти регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины без депозита или дополнительные свои помогут ближе познакомиться с игровой платформой и её функциями. За счёт даров возможно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради забавы напротив живых крупье.
#5240 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casinos winning порно с Алина Загитова <a href=https://sovsekretno.net/>винлайн букмекерская контора официальный сайт</a> casino зеркало сегодня официальные зеркала казино <a href=https://m.repost.news/>вавада казино</a> сайт казино зеркало Чулпан Хаматова пин ап казино порно с Алексей Миранчук (футбол) Окладникова Ирина Андреевна порно рейтинг казино porno Нина Пирогова, хоккеистка
DiskiPlus 1×bet зеркало рабочее на сегодня DiskiPlus порно с Ирина Сидоркова <a href=https://diskiplus.ru/>DiskiPlus порно с Юлия Ефимова</a> DiskiPlus казино регистрации DiskiPlus как выиграть в казино <a href=https://diskiplus.ru>DiskiPlus букмекерские конторы бет</a> DiskiPlus казино онлайн DiskiPlus порно с Федор Чалов (футбол) DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus porno Марина Александрова DiskiPlus сайт 1×bet слоты DiskiPlus смотреть фильм казино DiskiPlus casino рабочее
#5241 Richardbizhttps://the-kinogo.club
kinogo романтические фильмы <a href=https://the-kinogo.club/>kinogo фильмы с лучшей графикой</a>
#5242 Charlesgunnyhttp://filmkachat.ru
1× slots официальный
Максимальная ставка ? устанавливается в еденице счета и ограничивает размер ставки за один спин. В случае ее превышения бонус может быть аннулирован. Также в правилах может находиться запрет на размещение ставок определенного вида, примеру, по равным шансам в рулетке (то есть, на чет или нечет, красное или темное и т.д.).Отзывы читателей о бонусных промоакциях помогут составить впечатление, но не запамятовывайте о субъективности личных комментариев. <a href=http://filmkachat.ru/>казино 1×slots</a> Бездепозитные бонусы — это подарки от казино вид бонусных средств или фриспинов для игровых автоматов, которые начисляются на аккаунт игрока последствии процедуры регистрации на сайте заведения. Для получения этих поощрений депозит не потребуется.Вознаграждения за получение VIP-статуса ? начисляются в программки лояльности при достижении еще уровня или выдаются индивидуально менеджерами службы. <a href=https://peertrainer.com/LoungeCommunityThread.aspx?ForumID=1&ThreadID=316721>https://peertrainer.com/LoungeCommunityThread.aspx?ForumID=1&ThreadID=316721</a> Самые свежие бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды находятся на данной страничке. Посетитель может расценить условия получения и начать выступать на средства без внесения депо. При этом игроку главно разуметь, на каких критериях и какими способами возможность вывести приобретенный выигрыш. Для сего нужно расценить перечень присоединенных платежных систем.Начнём с того, что любое промо за регистрацию предполагает некоторые условия. Бездепозитные бонусы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность валютного оборота, нужная для выполнения критерий. Пример, получили безвозмездные вращения и выиграли с них 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 рублей, проигрышных или выигрышных, так. После исполнения, бонусный баланс перейдёт на реальный и будет легкодоступным к выводу. 1×slots зеркало регистрация в 1×slots casino <a href=http://www.mxeia.com/home.php?mod=space&username=spookyimbecile9&do=profile>http://www.mxeia.com/home.php?mod=space&username=spookyimbecile9&do=profile</a>
1х слот регистрация в 1×slots casino
С иной стороны, намного проще отобрать бездепозитные фриспины за регистрацию в казино и напрямик момент начать вращать барабаны в превосходнейших слотах. Главная особенность спинов сомнений, что они предусмотрены для топовых автоматов. Удастся не пройти вспомогательные раунды, но и увеличить сумму выигрыша, заработать респины и внутриигровые подарки.Диапазон ставок, которые вправе устроить игрок, также лимитирован. Обычно ставить возможно небольшую сумму — пределах 10–30 рублей за одно вращение. 1×slots регистрация то дальше необходимо пройти <a href=https://senioredu.net/bbs/board.php?bo_table=free&wr_id=80583>https://senioredu.net/bbs/board.php?bo_table=free&wr_id=80583</a> 1×slots регистрация на сайте Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие появляются у новичков.
1×slots скачать на айфон
Бонусы без депозита при регистрации считаются наиболее красивыми как для опытнейших игроков, например для и начинающих. Получив такое вознаграждение, заказчик имеет играть на настоящие деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, еще обстоятельства их активации и выигрыша.Хотя бесплатные бонусы начисляются без депозита, не исключено, собственно вас придется заносить деньги. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только последствии как, как свежий заказчик впервые пополнит игровой счет. Любой выигрыш по ставке выше установленного лимита несомненно являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, в случае выигрыша его сумма не поступит на счёт посетителя — итог игры несомненно всецело аннулирован. <a href=http://multi-net.su/index.php?subaction=userinfo&user=eatabletutor81>http://multi-net.su/index.php?subaction=userinfo&user=eatabletutor81</a> 1×slots зеркало на сегодня
1×slots официальный сайт зеркало
<a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=5247>скачать 1×slots на андроид мобильная версия</a> Для верификации аккаунта надо(надобно) дать специалистам технической помощи отсканированную копию паспорта и счета за коммунальные предложения, еще фотографию банковской карты или снимок страницы электронного кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности. Заработать на бездепозитных призах за регистрацию в казино имеет любой пользователь, достигший совершеннолетия.Помните, что всевозможные нарушения правил сведут на нет ваши старания, и вы всего останетесь без начисленного вам дарового приза. Всегда изучайте управляла начисления и обстоятельства вейджера. По хоть вопросам, на коие вы не самостоятельно найти ответы, обращайтесь за объясненьям и саппорт. x1 slots 1хслотс регистрация перейти на 1×slots <a href=https://www.photoall.co.kr/bbs/board.php?bo_table=free&wr_id=1117706>https://www.photoall.co.kr/bbs/board.php?bo_table=free&wr_id=1117706</a> Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 поболее. Когда игроку надеется большое фриспинов, администрация возможность бить3 их начисление на несколько дней. Бесплатные вращения предоставляются для конкретного слота, который указывается в правилах промоакции.
1×slots актуальное зеркало
Когда речь о денежных призах, казино всегда устанавливают условия вейджера, которые нужно выполнить, чтобы исключить выигрыш. Для выбора азартного заведения Вы сможете пользоваться перечнем наших казино с призами за регистрацию. На нашем сайте мы опубликовали перечень бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, что часть бонусов неповторимые и доступны лишь для гостей нашего вебсайта по-специальному промо-коду или по оригинальной ссылке. Кроме такого, для каждого приза мы подготовили подробный обзор, в Вы узнаете как получить и отыграть одобрение и как вывести собственный выигрыш с бездепа. <a href=http://bmwspeed.lv/user/Deweyanymn/>http://bmwspeed.lv/user/Deweyanymn/</a> 1×slots регистрация на сайте Несмотря на то, что данный вариант стимуляции со стороны азартных платформ очень востребован в сходственных игр, далековато многим почитателям казино известно, что являют собой бездепозитные бонусы казино и как непосредственно их возможно эксплуатировать.1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, в не желайте замерзнуть жертвой мошенников либо впустую израсходовать время;
<b>Смотреть еще похожие новости:</b>
<a href=https://mcmon.ru/showthread.php?tid=149479>1х слот регистрация в 1×slots casino</a>
<a href=https://vredeenvermaak.be/users/jamesapofe/>1хслотс мобильная версия зеркало</a>
<a href=http://evtrucksforum.com/viewtopic.php?p=781383#p781383>1×slot официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для как, дабы отыграть сумму вашего бездепозитного бонуса нужно выполнить условия вейджера. Очень часто фриспины даются на определенные слоты (book of ra, book of deceased, book of sun), выбирайте разъем себе нраву, они все довольно красочные и высококачественные. Бездепозитные приз имеет быть денежным например и в виде фриспинов на слоты Некоторые казино шансы предлагать посетителям бездепы за свидетельство номера либо почты или репост на страницу в социальных сетях.
#5243 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Баталина Ольга Юрьевна вывод казино <a href=https://rucriminal.info/>бесплатное казино</a> Шевцова Татьяна Викторовна порно pin up casino <a href=https://rucriminal.info/>порно с Варвара Субботина</a> 1×bet телефон casino daddy пин ап букмекерская контора казино рояль смотреть порно с Ирина Сидоркова casino бонус Елизавета Боярская
DiskiPlus porno Вера Бирюкова, гимнастка DiskiPlus ограбление казино <a href=https://www.diskiplus.ru>DiskiPlus porno Марина Александрова</a> DiskiPlus porno Алена Михайлова DiskiPlus казино зеркало сегодня <a href=https://www.diskiplus.ru/>DiskiPlus играющие казино онлайн</a> DiskiPlus 7k casino зеркало на сегодня DiskiPlus официальное казино вход DiskiPlus сколько казино DiskiPlus casino игровой автомат DiskiPlus Светлана Ходченкова DiskiPlus пин ап casino pin up top DiskiPlus казино играть
#5244 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало выигрыши обязательно пройдите регистрацию если
При отыгрыше бонусных средств, нужно учесть срок деяния приза и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный приз несомненно аннулирован.Для тех, кто лишь подумывает испытывать свою удачу, а также для профессиональных игроков, разыскивающих свежие площадки для выигрышей, ведущие лицензированные казино часто организуют разные промоакции, и лучшее предложений за последнее время – как для новичков, например и для профессиональных игроков – бездепозитный бонус за регистрацию. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasin online</a> Способы получения бездепа различаются от облика бонуса, который понравился игроку. Но для иначе нужно быть зарегистрированным в легальном онлайн-казино и подтвердить свою личность. В общем виде пошаговая инструкция для получения бездепозитного приза смотрится например:Почти все игровые клубы настоятельно свидетельство контактных данных игрока для получения бездепозитного приза. <a href=https://dictanote.co/n/1138185/>https://dictanote.co/n/1138185/</a> Выиграть настоящие средства в казино не пополняя счет – трудно, хотя возможно. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными бонусами и начните играть на бонусные средства. По статистике в одном из 10-ти заведений возможно заработать маленькую необходимую денег с бонусных средств.Частенько новички не знают, как активировать подарки или исключить первый выигрыш. Для сходственных случаев наша команда обрисовала основные определения – собственно такое фриспины, вейджер, как его отыграть, чего нужно проходить верификацию. 1х слотс зеркало регистрация в 1×slots casino <a href=http://www.ts-gaminggroup.com/member.php?735658-Henrythaby>http://www.ts-gaminggroup.com/member.php?735658-Henrythaby</a> Активация по промокоду употребляется в различных обликах бездепов. Если речь идет о приветственном призе, то набор знаков можно узнать на крупнейшей страничке, в регистрационной форме либо письме, коие отчаливает юзеру для доказательства адреса электронной почты. Акции шансы проводиться общо с партнерскими площадками. Обычно код располагается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется разовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем актуальный код для активации в описании любого рекламную.Отыграв бездепозитный бонус в казино с выводом тоже придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если схожее ограничение присутствует, то единоразово исключить получится только необходимую, не превосходящую размер приобретенного приза.
1×slots регистрацию процедура займет всего лишь
Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы появилась возможность вывести выигрыш.Условия отыгрыша приза. Если Вы расчитываете заработать на бездепозитном призе, то для направьте на велечину вейджера и срок, кот-ый дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть бонус и исключить выигрыш. <a href=https://showboysmedia.com/real-music/#comment-57291>1×slots официальный зеркало рабочее</a> 1× slots официальный В лицензионных бездепозитных казино выступать в азартные забавы действительно безопасно. Наличие лицензии подтверждает что, этот прецедент, собственно клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP.На данном разделе портала периодически публикуются обзорные статьи, каких рассматриваются безвозмездные бонусы превосходнейших интернет-казино. Информация структурирована по нескольким пт, включая главные: <a href=http://mashspec.ru/user/OscarDanna/>http://mashspec.ru/user/OscarDanna/</a> Эффективность бездепов в качестве рекламного инструмента оценили все операторы. Малоизвестные площадки используют такие промоакции, чтобы живо набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны неизменных посетителей. Не все веб-сайты, дающие подарки без депо, рекомендованы к игре. За симпатичным промоописанием могут скрываться невыполнимые условия отыгрыша прочие подводные камешки.Возьми свой подарок. Чаще всего бонус активируется сразу после регистрации. Но случаются истории, когда надо(надобно) забежать в собственный кабинет либо написать в справочную службу. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
1×slots зеркало которую указывали при регистрации кстати
Помимо остального, для вывода средств по бездепу необходимо внести на счёт свой первый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало возможную сумму, после чего вывод средств станет доступен. <a href=http://webhome123.com/plus/view.php?aid=24359>http://webhome123.com/plus/view.php?aid=24359</a> Но а в вы теснее профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в онлайн казино;Для выбора азартного заведения Вы сможете пользоваться перечнем наших казино с призами за регистрацию. На нашем сайте мы опубликовали перечень бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, что доля призов неповторимые и доступны только для гостей нашего сайта по-специальному промо-коду либо по оригинальной ссылке. Кроме того, для каждого бонуса мы подготовили доскональный обзор, в Вы узнаете как получить и отыграть поощрение и как вывести собственный выигрыш с бездепа. 1×slots зеркало регистрацию более популярный вариант это
1×slots зеркало которую указывали при регистрации кстати
Предложения с бездепозитными бонусами за регистрацию позволяют новым заведениям заинтересовать аудиторию на собственный сайт. А игроки к получают возможность выступать на реальные средства без депозита в казино и заработать малый стартовый капитал, который разрешено исключить на карту банка или электрический кошелек. Иногда у посетителей вебсайта все появиться трудности, задачи, препядствия при активации приобретенного промо-кода. В таких случаях, необходимо обратиться за поддержкою в службу «Support». Для получения ответа, непременно указывается определенная причина обращения и подтверждается информация дополнительными экрана. Если сформировалась спорная обстановка, практически можно обратиться к основному регулятору или контролирующему органу, выдавшему этому заведению лицензионный документ.Верификация необходима для добавочной защищенности и помочь техподдержке выявить бонусхантеров и жуликов. Кстати, рядах платформах выводы солидных сумм доступны лишь в подтверждения личности. 1 х слотс зеркало <a href=https://chessdatabase.science/wiki/User:LelaTafoya42397>https://chessdatabase.science/wiki/User:LelaTafoya42397</a> Внесение депозита – Будьте готовы восполнить счет в отыгрыша приза. Это стандартное требование управлял для этого на промо-акций. Лучше заранее уточнить, какую сумму нужно несомненно заносить на счет. Как верховодило, речь идет о наименьшем депозите, но вы обязаны быть убеждены, что он вас по карману.
1×slots бонус за регистрацию
<a href=http://whvm.info/index.php?title=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D0%BD%D0%B0%20%D0%B4%D0%B7%D0%B5%D0%BD%D0%B5>http://whvm.info/index.php?title=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D0%BD%D0%B0%20%D0%B4%D0%B7%D0%B5%D0%BD%D0%B5</a> Максимальный размер ставки, кот-ый невозможно превышать же бонус не будет всецело отыгран. В случае нарушения сего правила, бонус и выигрыш с него будут аннулированы. 1×slots регистрацию более популярный вариант это Фриспины предназначены для применения в видео слотах. Внимательно ознакомьтесь с условиями – часто их выдают на кое-какие автоматы. В зависимости от клуба, у вас выйдет устроить определённое количество ставок. Кстати, продвинутые игорные жилища разрешают запускать каждых «одноруких бандитов».Бездепы с безвозмездными вращениями деют юзерам право вертеть барабаны игровых автоматов без снятия средств со счета. За любой раунд выплачивает казино. Число спинов ограничено и редко превышает сотку. Если акция содержит много бесплатных игр, их начисление возможность быть разбито на несколько дней.
<b>Смотреть еще похожие новости:</b>
<a href=https://masstr.net/member.php?action=profile&uid=27801>1хслот зеркало сайта</a>
<a href=http://sfessd.listbb.ru/memberlist.php?mode=viewprofile&u=86>1× slots официальный</a>
<a href=http://theauction.com.au/my-account/>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a>
<a href=http://molifan.netwww.molifan.netwww.molifan.net/space-uid-2280308.html>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На данном разделе портала регулярно публикуются обзорные заметки, в рассматриваются благотворительные бонусы превосходнейших интернет-казино. Информация структурирована по нескольким пунктам, включая главные:
#5245 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Анна Михалкова Ходнева Светлана Владимировна порно <a href=https://m.repost.news/>Москалькова Татьяна Николаевна порно</a> 7k casino скачать букмекерская контора мостбет <a href=https://kompromat1.online/>скачать 1×bet</a> 1×bet официальный реального казино Скворцова Вероника Игоревна порно pin up casino скачать Кузнецова Анна Юрьевна порно порно с Кирьянова Дарья Борисовна porno Илона Маркова, хоккеистка
DiskiPlus пин ап casino pin DiskiPlus порно с Владимир Минеев (ММА) <a href=https://diskiplus.ru/>DiskiPlus порно с Абрамченко Виктория Валериевна</a> DiskiPlus пин up casino DiskiPlus Нургалиева Эльвира Рамиловна порно <a href=https://diskiplus.ru/>DiskiPlus букмекерская контора скачать приложение</a> DiskiPlus винлайн букмекерская контора DiskiPlus казино рулетка DiskiPlus porno Алена Косторная (фигурное катание) DiskiPlus казино онлайн DiskiPlus порно с Константин Тюкавин (футбол) DiskiPlus порно с Константин Тюкавин (футбол) DiskiPlus порно с Алексей Миранчук (футбол)
#5246 Charlesgunnyhttp://filmkachat.ru
1×slots casino зеркало рабочее
Бездепозитный приз за регистрацию в казино — это стартовый подарок в виде денежного начисления либо бесплатных вращений для новых игроков заведения, для получения которого не нужно заносить депо. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots casino 777 online</a> Для проверки применяются сканы паспортов, водительских удостоверений, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если пользователь замечен в попытке ввести дополнительный акк, все его учетные записи подвергаются блокировке, а их владелец попадает в темный список. При забаве на лицензионной площадке не бояться указывать достоверную индивидуальную информацию (шифрование исключает утечку индивидуальных данных). <a href=https://getinkspired.com/ru/blog/519873/post/1478590/how-3d-visualization-companies-are-reshaping-global-business-landscapes/>https://getinkspired.com/ru/blog/519873/post/1478590/how-3d-visualization-companies-are-reshaping-global-business-landscapes/</a> Фриспины предусмотрены для использования в видео слотах. Внимательно ознакомьтесь с критериями – часто их выдают на кое-какие автоматы. В зависимости от клуба, у вас выйдет устроить определённое количество ставок. Кстати, продвинутые игорные дома позволяют запускать любых «одноруких злодеев». 1×slots зеркало рабочее на сегодня <a href=http://domocontrol.ru/user/GlennBub/>http://domocontrol.ru/user/GlennBub/</a> Бездепозитные призы реальными средствами, которые можно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадались.Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного приза.
казино 1× slots официальный сайт
<a href=https://dev.eff.one/forumdisplay.php?fid=10>казино 1×slots</a> зеркло казино 1×slots Бездепозитный бонус – это экономическое вознаграждение, коие выдается участнику игры в казино, для его привлечения и возникновения заинтересованности. Любой посетитель, который подходит условиям выдачи сходственного бездепозитного приза, может претендовать на получение вышеуказанного приза. Такое поощрение считается более действенным методом, дающим вероятность стартовать деле, не вкладывая собственных материальных средств. <a href=http://www.shoppy.co.kr/bbs/board.php?bo_table=free&wr_id=588564>http://www.shoppy.co.kr/bbs/board.php?bo_table=free&wr_id=588564</a> 1×slots зеркало 3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефон или почту, указать индивидуальную информацию;
1×slots быструю регистрацию а также мгновенное
Но никогда не запамятовывайте внимательно разбирать верховодила участия в бонусных промоакциях. Если вы нарушите хотя бы одно условие, позднее вы не сможете устроить недоразумение с администрацией. <a href=https://www.hubtamil.com/talk/member.php?1632279-Geralderary>https://www.hubtamil.com/talk/member.php?1632279-Geralderary</a> Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. 1×slots casino online регистрация
1×slots casino online регистрация
Для тех, кто только взвешивает испытать собственную фортуну, а также для профессиональных игроков, отыскивающих новые площадки для выигрышей, водящие лицензированные казино часто устраивают разные акции, и лучшее услуг за время – как для начинающих, например и для профессиональных игроков – бездепозитный бонус за регистрацию. <a href=https://your-portal.at.ua/forum/25–61303–3#88603>1×slots промокод при регистрации</a> Бонус с зачислением средств на счет дает больше свободы действий. Пользователь сам избирает, каким образом воспользоваться подаренными средствами. Здесь кроме шансы работать лимитирования на список доступных игр, хотя обыкновенно эти рамки не так строги, как в рекламную с безвозмездными вращениями.Чаще всего интернет-казино предлагают бездепозитные бонусы новым юзерам. Эта промо-акция очень отлично завлекает новичков, подталкивая их к открытию счета. Конечно, не они становятся послушными клиентами, но сам факт регистрации аккаунта играет на руку заведению. 1 хслот регистрация в 1×slots casino <a href=https://www.scottsfasteners.com/users/joshuaton>https://www.scottsfasteners.com/users/joshuaton</a>
1×slots зеркало
За счёт спинов получится запустить разные интернет слоты, протестировать стратегии и поднабраться навыка. Фишка что, нет, собственно вращения начисляются на лучшие аппараты с оригинальными опциями и высокой отдачей. Не забывайте, собственно в любом акционном предложении предусмотрены специальные требования – кратковременные лимитирования, максимальный размер ставки, список дешевых игр.Зарегистрироваться в казино по особой ссылке или с бонусным кодом. Подтвердить контактные данные (номер аппарата и электронную почту). Для доказательства номера аппарата нужно в собственном профиле указать свой номер и надавить кнопку „Подтвердить номер аппарата“, дальше Вы получите sms-сообщение с кодом, кот-ый необходимо ввести в соответствующее фон. Для доказательства электронной почты, перебежать по интенсивной ссылке в письме от казино. Прочитайте правила бонусной программки, какой хотите участвовать. Да, мы настоятельно рекомендуем устроить это до регистрации.Бездепозитные призы в казино без пополнения 2022 — это конкретная сумма денег либо gorovyh spins вращения, которые предоставляются первым постояльцам за регистрацию на сайте казино вид бездепозитного бонуса, и выделяет вам возможность за счет казино без пополнения опробовать услуги (игр), с дальнейшей прерогативой вывода средств при выполнении всех установленных верховодил. <a href=http://elektrofahrrad-tests.de/forums/member.php?action=profile&uid=40965>http://elektrofahrrad-tests.de/forums/member.php?action=profile&uid=40965</a> Можно ли в одном онлайн казино получить больше 1-го бонуса за регистрацию? Нет, так как в любом интернет казино есть управляла, к которым надо(надобно) придерживаться, не создавать 2 аккаута для получения призов, по будет блокировка обоих аккаутов, не пытайтесь перехитрить онлайн казино, бонус за регистрацию выдаеться раз один 1 лицу. 1×slots бездепозитный бонус за регистрацию
<b>Смотреть еще похожие новости:</b>
<a href=https://clubdefansde24.com/foro/memberlist.php?mode=viewprofile&u=3464>1хслотс казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
А ознакомиться с новыми онлайн казино, Вы можете помощью призов с выводом прибыли, которые Вы сможете получить без депо. Третитй бездепозитный приз за регистрацию – денежные средства. К огорчению, начислить рубли или баксы способны лишь известные и знаменитые клубы. С их поддержкою вы сможете насладиться каждой доступной игрой – автоматом, рулеткой, кено, блэкджеком.
#5247 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
cat casino порно с Петр Ян (ММА) <a href=https://www.ossetia.tv/>porno Яна Троянова</a> Скворцова Вероника Игоревна порно casino зеркало сегодня рабочее <a href=https://vestnik-jurnal.com/>Семёнова Татьяна Владимировна порно</a> порно с Абрамченко Виктория Валериевна porno Алена Косторная (фигурное катание) суть казино Александра Бортич официальные сайты казино ramenbet casino 1×bet на андроид бесплатно
DiskiPlus 7k casino официальный DiskiPlus порно с Васильева Татьяна Викторовна <a href=https://diskiplus.ru>DiskiPlus скачать букмекерскую контору на андроид</a> DiskiPlus сайты казино DiskiPlus 1×bet зеркало рабочее <a href=https://www.diskiplus.ru/>DiskiPlus casino 7k сегодня</a> DiskiPlus букмекерская контора зенит DiskiPlus порно с Алина Загитова, фигуристка DiskiPlus casino рабочее DiskiPlus 7k casino официальный DiskiPlus 1×bet скачать бесплатно DiskiPlus казино ли DiskiPlus порно с Захарова Мария Владимировна
#5248 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino 777 online
Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, так как Вам понадобиться ее подтвердить в при выводе средств. <a href=http://filmkachat.ru/>1×slots зеркало</a> Отказ в прохождении верификации. Если заказчик не желает либо имеет предоставить документы, подтверждающие его личность, профиль несомненно заблокирован совместно, вкупе со всеми бонусными начислениями. <a href=https://letterboxd.com/lexxeagle/list/revolutionary-approaches-in-modern-virtual/>https://letterboxd.com/lexxeagle/list/revolutionary-approaches-in-modern-virtual/</a> Простая процедура получения бездепозитного бонуса, кот-ая займет не более 2-х минут. Для получения бездепов, достаточно зарегистрироваться и доказать контактные данные.Мы собрали и выпустили список лучших бездепозитных казино с бонусами за регистрацию, коие гарантируют великодушные выигрыши и мгновенные выплаты. 1хслотс рабочее зеркало <a href=https://www.ccvgaming.com/forum/member.php?38840-JoshuaRaw&s=424971463d3182be4cfc83a61461eaf8>https://www.ccvgaming.com/forum/member.php?38840-JoshuaRaw&s=424971463d3182be4cfc83a61461eaf8</a> Многие новенькие колеблются, что поощрительный приз не будет возвращать, том в они выиграли у казино. Это абсолютно безопасно и надежно. Выводя выигранные свои, игрок просто останавливает свое роль деле и теряет уникальную возможность – безвозмездно наращивать личное вещественное положение.Условия имеют различаться приятель от друга. Но такой приз имеет быть использован лишь для игрового процесса – приобретенные на счет финансы до того, как будут отыграны, исключить невозможно.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
x1 slots 1хслотс регистрация перейти на 1×slots <a href=https://fromdust.art/index.php?title=User:NinaBartel7>https://fromdust.art/index.php?title=User:NinaBartel7</a> 1×slots зеркало видели такую регистрацию на
1х слотс зеркало регистрация в 1×slots casino
При этой на бонусные свои запрещается выступать в игровые автоматы с прогрессивным джекпотом и забавы из радела live casino. Кроме как, кое-какие казино дают бездеп на раз либо количество определенных слотов, и в других забавах Вы не можете на них играть. B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.Можно ли наваривать на бездепозитных призах? Это не работа, тут как повезет, в в любом предложенном безедепе, вы будете откручивать вейджер и выводить, это возможно назвать везением, и добавочной добавкой к вашему бюджету. <a href=http://randy-harrison.it/gallery/profile.php?uid=151923>http://randy-harrison.it/gallery/profile.php?uid=151923</a> 1×slots акции Активация по промокоду употребляется в различных обликах бездепов. Если речь идет о приветственном призе, то комплект символов можно разузнать на основной странице, в регистрационной форме или письме, которое отчаливает юзеру для подтверждения адреса электронной почты. Акции имеют проводиться вместе с партнерскими площадками. Обычно код располагается на стороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активируется одноразовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном кабинете или начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем важный код для активации в описании любого промо.
1хслот скачать
<a href=https://forum.krymbezpravil.org.ua/memberlist.php?mode=viewprofile&u=10552>1× slots регистрация в 1×slots casino</a> Бывают ли бездепозитные бонусы без вейджера? Бывают, если у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино. 1×slots казино мобильная версия <a href=https://safe1.co.kr/bbs/board.php?bo_table=free&wr_id=291219>https://safe1.co.kr/bbs/board.php?bo_table=free&wr_id=291219</a>
1×slots акции
<a href=http://ternovka4school.org.ua/user/Geraldtus/>http://ternovka4school.org.ua/user/Geraldtus/</a> Бонус с зачислением денег на счет выделяет больше свободы действий. Пользователь сам подбирает, каким образом воспользоваться подаренными своими. Здесь того имеют работать ограничения на список дешевых игр, хотя обычно эти рамки не так строги, как в промо с безвозмездными вращениями. 1хслотс рабочее зеркало на сегодня Создание аккаунта. На сайте казино необходимо обнаружить регистрационную форму и заполнить пустопорожние поля собственными данными. Иногда на этом шаге требуется указать только адресок электронной почты и пароль, хотя чаще надобно заполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д.). Нужно указывать только реальные данные, поскольку впоследствие они будут проверены.
<b>Смотреть еще похожие новости:</b>
<a href=http://jktroickiy.forumex.ru/viewtopic.php?f=2&t=874>1×slots сайт зеркало</a>
<a href=https://www.bf-france.com/forums/profile/30064-rabofreeor/>1 хслот регистрация в 1×slots casino</a>
<a href=https://forum.vn.ua/showthread.php?p=3278770#post3278770>1хлот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В списке требований к отыгрышу часто наличествуют лимиты на ставки при этой на личные деньги. Так, если отыграть надо(надобно) 30 000 руб., а предельная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 раз. Эта особенность затрудняет соблюдение игроками условий по срокам деянья акции.
#5249 Charlesgunnyhttp://filmkachat.ru
x1 slots 1хслотс регистрация перейти на 1×slots
Возможность сыграть дополнительное состязание (а от и количество) совершенно бесплатно, а выигрыш, же, поступает на счёт игрока. <a href=http://filmkachat.ru/>1хслот зеркало сайта</a> Во время игры в казино, выигрыши, полученные благодаря бесплатным призовым фондам, суммируются и включаются в общую сумму для отыгрывания. Однако, в удача улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно разрешит исключить финансовые средства. Сумма вывода будет зависеть от лимита, утвержденного непосредственно в этом учреждении. Поэтому, пристально надо(надобно) разбирать управляла выдачи анлимитных депо. <a href=https://ilde2.upf.edu/clatmooc/v/ibq>https://ilde2.upf.edu/clatmooc/v/ibq</a> Частенько новички не понимают, как активировать презенты либо исключить 1-ый выигрыш. Для подобных случаев наша команда описала основные определения – что это фриспины, вейджер, как его отыграть, для нужно протекать верификацию.Такой безвозмездный эквивалент средств зачисляется на профиль пользователя последствии осуществления притязаний и предназначаются они только для игрового процесса. Вывод таких вознаграждений вероятен только в осуществления вейджеровых условий. 1×slots зеркало на сегодня <a href=https://magazin.orgsoft.ru/forum/user/183843/>https://magazin.orgsoft.ru/forum/user/183843/</a> Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные методы и расценить необыкновенности, недоступные при игре в демо режиме. Многие свежие клиенты перебегают в число постоянных, а оператор получает долгосрочную выгода.Частенько новенькие не знают, как активировать подарки либо исключить первый выигрыш. Для похожих случаев наша команда описала основные определения – что это фриспины, вейджер, как его отыграть, зачем нужно проходить верификацию.
1×slots casino регистрация на сайте
Превышение максимальной ставки при отыгрыше. Система автоматически не предупреждает о превышении ставки, потому о несоблюдении правил игрок может узнать уже последствии подачи запроса на вывод средств. 1×slots регистрация 1×slots review live <a href=http://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=4779>http://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=4779</a> Промообъявления от казино мешают реальной картины и направлены на привлечение внимания юзеров. Понять, насколько высоки шансы остаться в плюсе, позволит собственный тест критерий предложения: x1 slots регистрация в 1×slots casino
онлайн казино 1×slots
Если площадка презентует бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь ввести акк на веб-сайте и активировать его, подтвердив адресок электронной почты, номер телефонного или другие данные, которые просит оператор. Перед данным необходимо убедиться, собственно юзер находится на официальном веб-сайте казино, но на жульнической площадке. <a href=http://www.hkfm.org/china/home.php?mod=space&uid=397162>http://www.hkfm.org/china/home.php?mod=space&uid=397162</a> 1×slots casino регистрация 1×slotscasin online Бонус за регистрацию в казино без депо с выводом денег надо(надобно) отыграть. Зачастую для отыгрыша имеет потребоваться устроить ставки на необходимую, в количество десятков раз превосходящую сумму бонуса или выигрыша.
1× slots casino зеркало
Вы не в коем случае ни же рискуете, а лишь выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической игры на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, выучится регулировать изменять ставки и линии, исследовать бонусные игры и их выигрышные комбинации, да счете просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные свои, коие можно отыграть и вывести, но просто на демо счет, что, этим наиболее адреналин в крови еще больше повысится а пульс забьется с частым ритмом! Можно ли зарабатывать на бездепозитных бонусах? Это не работа, здесь как повезет, в в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, тогда можно назвать везением, и добавочной добавкой к вашему бютжету. 1×slots официальный сайт скачать на айфон <a href=http://ip-sosnevo.ru/user/Deweybub/>http://ip-sosnevo.ru/user/Deweybub/</a>
1 x slots
Бездеп с фриспинами может обхватывать всю коллекцию игр на веб-сайте или разработки 1-го провайдера. Обычно предлагается конкретный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш может быть выведен после такого, как юзер отыграет эту необходимую. Возможность оценить глубокий перечень слотов — главное совершенство этой разновидности. Игроку становятся доступны те функции, коие отсутствуют в демонстрационном режиме, а вероятность выиграть настоящие средства прибавляет ясных азартных ощущений. <a href=https://pediascape.science/index.php?title=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D0%B4%D0%B7%D0%B5%D0%BD>https://pediascape.science/index.php?title=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D0%B4%D0%B7%D0%B5%D0%BD</a> На бонусные начисления имеют быть установлены дополнительные ограничения, которые Вы не приняли при отыгрыше. Пока бонус полностью не отыгран — средства из казино не выводятся. 1хлот регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://forums.scar-divi.com/topic/816757–1×slots-casino-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-1×slots-review-live/>1×slots casino регистрация 1×slots review live</a>
<a href=http://miupsik.ru/forums/showthread.php?tid=310247>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Обычно бездепозитные акции от казино, приходят на эл. Почту в дни рождения либо праздники. В некоторых интернет казино можно адресоваться в чат и как неизменному игроку, вероятно вас предложат бездепозитное предложение. Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются незамедлительно в сотворения профиля и активны недолговременное время. Если не успеете потратить свои, они попросту сгорят. Касаемо медли, как призы активны на часа.
#5250 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
up casino официальный порно с Бондаренко Анастасия Борисовна <a href=https://t.me/vchkogpu_ru>лучшие бесплатные онлайн казино</a> порно с Константин Тюкавин (футбол) porno Андрей Рублев (теннис) <a href=https://repost.news/>1×bet</a> 7k casino официальный гта онлайн казино Комарова Наталья Владимировна порно porno Елизавета Туктамышева приложения букмекерских контор 7k casino официальный Черкесова Бэлла Мухарбиевна порно
DiskiPlus porno Екатерина Ефременкова, шорт-трекистка DiskiPlus 1×bet зеркало на сегодня <a href=https://diskiplus.ru/>DiskiPlus 7k casino официальный</a> DiskiPlus 1×bet на андроид бесплатно DiskiPlus ешь казино <a href=https://diskiplus.ru>DiskiPlus пин ап casino</a> DiskiPlus porno Юлия Канакина, скелетонистка DiskiPlus пинап казино DiskiPlus букмекерская контора фонбет официальный DiskiPlus 1×bet сейчас DiskiPlus vodka casino DiskiPlus 1×bet официальный скачать DiskiPlus казино зеркало сегодня
#5251 Charlesgunnyhttp://filmkachat.ru
1× slots casino зеркало
Но есть игорные заведения, коие готовы просто так жертвовать деньги на игру. Для этого достаточно создать профиль. Чтобы вывести собственный выигрыш, для поначалу нужно выполнить условия отыгрыша, указанные в критериях получения бездепозитного депозита.Онлайн-казино кропотливо продумывают бонусные условия, которые необходимо выучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и другие ограничения. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> Можно. Вы всегда сможете отрешиться от получения бездепозитного приза за регистрацию в казино, же Вы не сделаете ставку. <a href=https://www.4yo.us/blogs/315801/Transforming-Modern-Kitchen-Design-Through-Digital-Visualization>https://www.4yo.us/blogs/315801/Transforming-Modern-Kitchen-Design-Through-Digital-Visualization</a> Третитй бездепозитный бонус за регистрацию – денежные средства. К огорчению, начислить рубли либо баксы способны лишь известные и знаменитые клубы. С их поддержкой у насладиться любой доступной игрой – автоматом, рулеткой, кено, блэкджеком. 1×slots коды <a href=http://www.hcceskalipa.cz/bazarek/iz-chego-sostoit-dieta-eleny-malyshevoi>http://www.hcceskalipa.cz/bazarek/iz-chego-sostoit-dieta-eleny-malyshevoi</a> Когда идет о получении бездепозитных бонусов в казино, для внимание на следующие обстоятельства:Чтобы получить вероятность вывести прибыль с бездепозитного бонуса в казино, нужно выполнить ряд условий:
1×slots регистрация то дальше необходимо пройти
<a href=https://surfaceprophets.com/threads/1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F.53506/>1×slots зеркало регистрация</a> 1×slots официальный сайт зеркало рабочее <a href=http://x4kurd.freetzi.com/member.php?action=profile&uid=83751>http://x4kurd.freetzi.com/member.php?action=profile&uid=83751</a> 1 x slots casino При отыгрыше бонусных средств, необходимо учесть срок деяния бонуса и время, которое дается на отыгрыш. По истечению заявленного медли, не отыгранный приз несомненно аннулирован.
1×slots бонус за регистрацию
Бездепы обычно предлагают с отыгрышем — мгновенно вывести выигранные средства нельзя. Перевод средств со счета будет возможен в того, как пользователь выполнит все притязания казино, а сумма имеет превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, на коих клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней в активации. С этими простыми советами каждое казино с призом за регистрацию способно принести в разы больше выгоды и выгоды.4. Заберите презент. Чаще всего приз активизируется незамедлительно после регистрации. Но посещают ситуации, когда надо(надобно) зайти в индивидуальный офис или написать в службу поддержки. <a href=http://xn–80abbjuadey5bv1e.xn–p1ai/index.php?subaction=userinfo&user=Arnoldsix>http://xn–80abbjuadey5bv1e.xn–p1ai/index.php?subaction=userinfo&user=Arnoldsix</a> Активация по промокоду употребляется в разных обликах бездепов. Если речь о приветственном призе, то комплект знаков можно разузнать на главной странице, в регистрационной форме или послании, которое отправляется юзеру для подтверждения e-mail. Акции шансы проводиться общо с партнерскими площадками. Обычно код располагается на постороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активируется одноразовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном кабинете либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем актуальный код для активации в описании любого рекламную.Получить Бездепозитный бонус в интернет казино дело двух кликов. Другой момент, отыграть промо и соблюсти управляла и условия отыгрыша. Под правилами подразумевается столько вагер, хотя и ограничения по максимальной ставке. Мы разумеем, собственно в кино все ставят на зеро и выигрывают. Призываем не создавать сходственного. Перед активацией бонуса прочтите управляла. Узнайте следующие факторы: Условия получения дара, за регистрацию, за депозит и многое. Ограничения по максимальной ставке. Зачастую не повыше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на месте. Поэтому главно знать, в каких забавах можно совершать кратность валютного оборота. 1×slots официальный сайт зеркало Самый распространённый из подобных бонусов, конечно же, бездеп на день рождения посетителя — бонус вид фиксированной суммы или фриспинов поступает на счёт игрока, а воспользоваться им возможно на установленного периода времени.Будьте внимательнее при ознакомлении с правилами во избежание появления конфликтных ситуаций с казино, когда в отыгрыша бездепа для не дадут исключить солидную сумму выигрыша.
1×slot зеркало рабочее этих способов предполагает регистрацию
При выполнении критерий отыгрыша и верификации, средства с бонусного счета переводятся на ведущей и все быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции зависимости от выбранной платежной системы.Доступные игры – В неких азартных играх возможно снизить математическое приемущество казино до нескольких десятых процента. В их количестве все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как верховодило, в таких играх ставки идут в зачет вейджера не всецело. Например, возможность предусматриваться лишь 50%. В некоторых забавах бездепозитные бонусы вообще нельзя отыгрывать. <a href=https://www.mshowto.org/forum/members/jamespauri.html>1×slots casino регистрация</a> Для получения предоставленных призов для понадобиться — ПК или мобильное устройство, и остальное дело за небольшим. 1×slots официальный сайт скачать на айфон <a href=http://tmml.top/home.php?mod=space&uid=99563>http://tmml.top/home.php?mod=space&uid=99563</a> Одним из предлогов отдавать привилегию 1 либо другому заведению содержится в привлекательности предлагаемых промоакций и бесплатных услуг. Безвозмездные фриспины, выдаваемые без дела делать какой-нибудь лепта, в списке находится далеко не в конце.
1×слот регистрация в 1×slots casino
Бездепозитный приз казино 2022 с выводом за регистрацию дает вероятность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и выяснить качество работы саппорта. Довольно часто, начиная игровой процесс, игрок уже отказывается останавливаться и проделывает настоящий вклад. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать даром вероятно как раз таки с бонусом за регистрацию без надобности вносить депозит.Благодаря программе лояльности от игорного заведения, можно брать неплохой старт и без добавочных вложений запустить видеослоты. Кроме как, возможно рассчитывать на реальную фортуну и получить, без инвестиции личных денег, великий выигрыш. <a href=https://boobs.red/user/RalphWhove/>https://boobs.red/user/RalphWhove/</a> При отыгрыше бонусных средств, необходимо учитывать срок деяния бонуса и время, которое дается на отыгрыш. По истечению заявленного медли, не отыгранный бонус будет аннулирован. 1×slot регистрация Самый распространённый из похожих призов, окончательно же, бездеп на день рождения посетителя — приз в виде фиксированной суммы либо фриспинов поступает на счёт игрока, а пользоваться им можно в течение установленного периода времени.Одним из поводов отдавать привилегию 1 или иному заведению содержится в привлекательности предлагаемых акций и бесплатных предложений. Безвозмездные фриспины, выдаваемые без дела делать какой-либо вклад, в списке располагается далеко не в конце.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.vn.ua/member.php?u=73361>1 х слотс зеркало</a>
<a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=96058>1× slots официальный</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выбрать казино с бездепозитным бонусом. У нас на сайте представлен перечень наилучших интернет казино, коие предлагают своим игрокам щедрые призы за регистрацию. Эффективность бездепов виде рекламного инструмента оценили многие операторы. Малоизвестные площадки используют такие промоакции, чтобы быстро набрать базу. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны постоянных гостей. Не все сайты, дающие подарки без депозита, рекомендованы к этой. За симпатичным промоописанием все скрываться неосуществимые обстоятельства отыгрыша прочие подводные камни.
#5252 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерские конторы бет Крючкова Полина Викторовна порно <a href=https://glvk.guru/>порно с Гатагова Ольга Анатольевна</a> букмекерские конторы бет скачать 1×bet на андроид <a href=https://th-royalgclub.com/>почему в казино нет часов</a> Разуваева Ксения Денисовна порно 1×bet 1хбет 1win casino 1×bet сейчас казино сегодня бк букмекерская контора Набиуллина Эльвира Сахипзадовна порно
DiskiPlus казино рублях DiskiPlus порно с Владимир Минеев (ММА) <a href=https://diskiplus.ru/>DiskiPlus скачиваемые казино</a> DiskiPlus Крючкова Полина Викторовна порно DiskiPlus black russia казино <a href=https://diskiplus.ru/>DiskiPlus часы казино</a> DiskiPlus леон букмекерская контора DiskiPlus казино вход официальный сайт DiskiPlus винлайн букмекерская контора официальный DiskiPlus скачать 1×bet на андроид DiskiPlus порно с Анна Щербакова, фигуристка DiskiPlus casino 7k сегодня DiskiPlus гта казино
#5253 Charlesgunnyhttp://filmkachat.ru
1×slots казино зеркало
Казино выводит деньги лишь на что, эту платежную систему, с котрой был изготовлен депо. То есть, для вывода бездепозитного приза, Вам сначала нужно восполнить счет. В некоторых клубах ограниченный перечень методов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет непосредственно с данных платежных методов, которые доступны для вывода.Акции распространяются как на все забавы казино, так и на узкий перечень. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino прочие. Промо имеет обхватывать разработки 1-го производителя. Бездеп не пересекается с иными промоакциями казино. Если на сайте учтен кэшбек, он не начисляется за ставки, сделанные бонусными деньгами. Для идентификации платежных реквизитов игрока может потребоваться пополнение счета на минимальную сумму. <a href=http://filmkachat.ru/>1×slots регистрация то дальше необходимо пройти</a> Можно ли в одном интернет казино получить больше одного приза за регистрацию? Нет, например как в каждом онлайн казино есть управляла, к коим надо(надобно) придерживаться, не создавать два аккаута для получения бонусов, по будет блокировка обоих аккаутов, не пытайтесь обмануть интернет казино, бонус за регистрацию выдаеться раз один 1 личику.Бездепозитные призы в казино без пополнения 2022 — это определенная сумма средств либо gratuitous spins вращения, которые предоставляются первым гостям за регистрацию на веб-сайте казино повторяющий бездепозитного приза, и дает для вероятность за счет казино без пополнения опробовать предложения (игр), с дальнейшей преимуществом, льготой вывода средств при исполнении всех установленных правил. <a href=https://www.gift-me.net/blogs/229355/How-to-Create-Stunning-3D-Animation-Presentations-That-Captivate-Your>https://www.gift-me.net/blogs/229355/How-to-Create-Stunning-3D-Animation-Presentations-That-Captivate-Your</a> 1×slots зеркало <a href=http://klrk.racingkart.pl/komunikaty/kamizelki-juz-dostepne/?unapproved=475794&moderation-hash=5d09ffdf6ca52ebbdc1b3009e3feaad7#comment-475794>http://klrk.racingkart.pl/komunikaty/kamizelki-juz-dostepne/?unapproved=475794&moderation-hash=5d09ffdf6ca52ebbdc1b3009e3feaad7#comment-475794</a> Создание аккаунта. На сайте казино нужно открыть регистрационную форму и наполнить пустые поля личными данными. Иногда на данном шаге требуется указать лишь адрес электронной почты и пароль, хотя почаще надо наполнить анкету персональной информацией (ФИО, дата рождения, место проживания и т.д.). Нужно свидетельствовать только настоящие данные, потому впоследствие они будут проверены.Приветственный бездеп предоставляется любому игроку лишь один раз. Казино сражаются с так называемыми бонусхантерами (от англ. Bonus Hunter — доброволец за призами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения дара. Исключить похожие деянья позволяет верификация данных. Администрация вправе востребовать у посетителя подтвердить индивидуальные данные, обозначенные при регистрации.
1×slots зеркало сайта
<a href=https://forum.home-visa.ru/viewtopic.php?f=69&t=807392&p=2813472#p2813472>1×slots регистрация 1×slotscasino09k online</a> 1×slots быструю регистрацию а также мгновенное Пoдтвepдить личнocть клиента. Для успешного вывода средств, необходимо доказать лицо клиента. Нa этaпe вepификaции пpoфиля, сотрудники службы безопасности обязаны увериться, что у игрока более один аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не может вывести собственный выигрыш, если у него несомненно некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы.Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие появляются у начинающих. <a href=http://lsdsng.com/user/609627>http://lsdsng.com/user/609627</a> 1×slots casino регистрация 1×slotscasin online
1× slots casino зеркало
<a href=https://www.google.rs/url?q=https://doctorlazuta.by/>https://www.google.rs/url?q=https://doctorlazuta.by/</a> Не рекомендуем сломя голову браться за различные предложения получения средств без инвестициям. Вполне вполне, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на 1-ый взор. Альтернативой является казино приз за депозит. Мы предлагаем вам пару советов, спасибо коим у каждого игрока будет возможность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег:Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, чтобы снова получить бесплатный приз. Игорные заведения нетерпимы к бонус-хантерам, потому вас ожидает неизбежное наказание. 1×slots зеркало на сегодня Выбор любого интернет казино на нашем сайте. В описании к каждому Вы можете разузнать, что получите за творенье аккаунта.
1×slots зеркало этих способов предполагает регистрацию
Бездеп с фриспинами может обхватывать всю коллекцию игр на сайте или разработки 1-го провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении акции. Выигрыш возможность быть выведен после того, как пользователь отыграет данную необходимую. Возможность расценить полный функционал слотов — главное совершенство данной разновидности. Игроку становятся доступны те опции, коие отсутствуют в демонстрационном режиме, а возможность выиграть реальные деньги добавляет ясных азартных ощущений. <a href=http://sladkierecepti.5nx.ru/viewtopic.php?f=8&t=7645>1хслот скачать</a> Казино выводит средства лишь на ту платежную систему, с котрой был сделан депо. То есть, для вывода бездепозитного бонуса, Вам сначала необходимо восполнить счет. В некоторых клубах узкий перечень методов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет непосредственно с данных платежных способов, которые доступны для вывода.Сроки активации бонуса устанавливаются любым казино, хотя почаще всего они не превосходят недели с этапа получения. Игроку обязательно надо(надобно) применять бездеп протяжении указанного срока, в ином случае приз просто исчезнет. Каждый приз можно получить только один раз, поэтому в не использовать бездеп в срок, у игрока не несомненно второго шанса им пользоваться. 1×slots зеркало регистрация <a href=http://www.stavenue.com/forum/index.php?action=profile;u=63164>http://www.stavenue.com/forum/index.php?action=profile;u=63164</a> Чаще всего используются коды. Их нужно заносить в особые окна регистрационной анкеты, если идет о пригласительных бонусах, или в определенном разделе личного офиса игрока.Многие новички колеблются, что поощрительный приз не будет возвращать, том если они выиграли у казино. Это безусловно безопасно и накрепко. Выводя выигранные свои, игрок просто одергивает свое участие при и теряет уникальную вероятность – безвозмездно увеличивать собственное материальное положение.
1×slots casino регистрация 1×slots review live
Бездепозитные бонусы реальными деньгами, коие возможно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадали.Если при регистрации показать промокод, возможно гарантировано получить бонус. Где арестовать ваучер? Посетите на блоги или форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В последнее время игорные жилища начали афишироваться в кинокартинах и телесериалах. Присмотритесь и скорее заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных рублей. <a href=https://www.mexicanservers.com/member.php?action=profile&uid=12208>https://www.mexicanservers.com/member.php?action=profile&uid=12208</a> Самый распространённый из подобных бонусов, конечно же, бездеп на день рождения посетителя — бонус вид фиксированной суммы или фриспинов поступает на счёт игрока, а воспользоваться им возможно на установленного периода времени. 1×slots зеркало этих способов предполагает регистрацию Благодаря программке лояльности от игорного заведения, возможно взять хороший старт и без дополнительных вложений запустить видеослоты. Кроме того, можно рассчитывать на реальную фортуну и получить, без вложения личных денег, великой выигрыш.Для казино, работающих интернет, бездепозитные призы необходимы для привлечения свежих клиентов. Предложение поиграть на слотах без надобности внесения реальных средств — работающий способ для увеличения интереса к компании. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит играть в казино, лишь теперь уже на собственные средства.
<b>Смотреть еще похожие новости:</b>
<a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/9136–1khslots-kazino-zerkalo#9161>1хслотс казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Нельзя рассматривать игру на деньги, как вариант заработка. Азартные забавы запрещены для лиц младше 18 лет. Topcasinobonuses.mobi не является организатором азартных игр. Сайт носит информационный характер.
#5254 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet скачать бесплатно яндекс казино <a href=https://th-royalgclub.com/>Скоробогатова Ольга Николаевна порно</a> скачиваемые казино демо казино <a href=https://strelochnik.com/>букмекерская контора официальный сайт скачать</a> скачать сайт букмекерской конторы порно с Георгий Джикия (футбол) пинко casino букмекерская контора скачать 1×bet на андроид 1×bet на сегодня casino играть
DiskiPlus pin up casino скачать DiskiPlus порно с Матвей Сафонов (футбол) <a href=https://diskiplus.ru>DiskiPlus винлайн букмекерская контора официальный сайт</a> DiskiPlus 1×bet регистрация DiskiPlus порно с Алина Загитова, фигуристка <a href=https://diskiplus.ru>DiskiPlus кент casino</a> DiskiPlus порно с Юлия Ефимова, пловчиха DiskiPlus порно с Юлия Ефимова DiskiPlus Юдаева Ксения Валентиновна порно DiskiPlus порно с Евгений Малкин (хоккей) DiskiPlus порно с Голикова Татьяна Алексеевна DiskiPlus порно с Васильева Татьяна Викторовна DiskiPlus игры казино
#5255 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino онлайн скачать букмекерскую контору <a href=https://rhymes-punches.com/>gama casino</a> пин up casino самое казино <a href=https://rucriminal.info/>мобильные букмекерские конторы</a> 1×slots casino casino daddy pin up casino buzz бесплатное казино казино смотреть онлайн бесплатно порно с Анна Щербакова, фигуристка new casino
DiskiPlus официальное казино вход DiskiPlus champion casino <a href=https://www.diskiplus.ru/>DiskiPlus официальные зеркала казино</a> DiskiPlus порно с Георгий Джикия (футбол) DiskiPlus порно с Петр Ян (ММА) <a href=https://www.diskiplus.ru>DiskiPlus porno Елизавета Туктамышева</a> DiskiPlus 1×bet xbet xyz DiskiPlus порно с Федор Чалов (футбол) DiskiPlus 1×bet casino DiskiPlus водка казино DiskiPlus casino промокод DiskiPlus inform@rucriminal.info DiskiPlus casino промокод
#5256 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало слоты 1×bet xyz порно с Диана Шнайдер (теннис) <a href=https://glvk.guru/>пин ап casino pin up top</a> casino buzz казино фильм <a href=https://krtka.info/>1×bet xbet xyz</a> пин ап casino Набиуллина Эльвира Сахипзадовна порно 1×bet слоты 1×bet xyz ramenbet casino сколько казино casino игровой автомат порно с Алина Загитова, фигуристка
DiskiPlus casino скачать DiskiPlus online casino <a href=https://www.diskiplus.ru>DiskiPlus казино 1</a> DiskiPlus про казино DiskiPlus играющие казино онлайн <a href=https://diskiplus.ru>DiskiPlus 7k casino зеркало</a> DiskiPlus официальное казино вход DiskiPlus порно с Дронова Александра Викторовна DiskiPlus up букмекерская контора DiskiPlus официальная казино DiskiPlus казино в россии DiskiPlus 1win casino DiskiPlus 7k casino зеркало рабочее
#5257 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Семёнова Татьяна Владимировна порно 1×bet скачать приложение на андроид <a href=https://glvk.guru/>официальные сайты казино</a> казино регистрации ап казино <a href=https://slon-ru.com/>vodka casino</a> pin casino casino игровой автомат пина букмекерской конторы бесплатно играем казино Попова Анна Юрьевна порно Разуваева Ксения Денисовна порно официальная казино
DiskiPlus почему казино DiskiPlus казино проиграл <a href=https://diskiplus.ru>DiskiPlus Матвиенко Валентина Ивановна порно</a> DiskiPlus casino рабочее зеркало DiskiPlus скачать 1×bet 1×bet xyz <a href=https://www.diskiplus.ru/>DiskiPlus букмекерские конторы без депозита</a> DiskiPlus пин ап casino pin up top DiskiPlus казино играть DiskiPlus рабочие зеркала казино DiskiPlus порно с Васильева Татьяна Викторовна DiskiPlus 1×bet xbet xyz DiskiPlus казино рояль смотреть DiskiPlus букмекерская контора фонбет
#5258 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino 777 online
Вейджер (либо вагер) ? это наименьшая сумма ставок, коию нужно устроить для вывода денежного приза. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение.Казино выделяет возможность заработать и вывести настоящие средства на бездепозитных призах. Обычно, это малозначительная сумма, которую казино возможность себе разрешить презентовать игроку. <a href=http://filmkachat.ru/>1×slots регистрация на 1хслотс</a> Бонус начисляется игроку незамедлительно после регистрации и прохождения верификации в казино и не требует от посетителя внесения депозита. Как правило, объем бонуса в схожем случае достаточно стыдливый, впрочем разрешает новичкам познакомиться с игрой без риска настоящими средствами.Игры, в возможно играть на бонусные средства. Проверьте перечень игр, каких можно выступать на бонусные средства, вполне они Вам не понравятся и надо тратить своё время на такую промоакцию. <a href=https://diigo.com/0y2r9w>https://diigo.com/0y2r9w</a> В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать собственный выигрыш с даровых вращений. Прибыль, коию Вы заработаете на этом бездепе возможно назначать на вывод без какого или отыгрыша.Когда идет о валютных бонусах, казино постоянно устанавливают условия вейджера, коие необходимо выполнить, чтобы исключить выигрыш. 1хслотс рабочее зеркало <a href=http://forum.combat-arnis.ru/profile.php?mode=viewprofile&u=334274>http://forum.combat-arnis.ru/profile.php?mode=viewprofile&u=334274</a>
1 хслот регистрация в 1×slots casino
Вы не в коем случае ни чем не рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической забавы на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, выучится регулировать менять ставки и линии, изучать бонусные игры и их выигрышные композиции, да счете просто зарядится кучей эмоций! Ведь вы будите играть на бонусные свои, которые возможно отыграть и вывести, но просто на демо счет, тем самым адреналин в крови еще повысится а пульс забьется с нередким ритмом!Бездеп с фриспинами возможность обхватывать всю коллекцию игр на сайте или разработки одного провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш может быть выведен после такого, как юзер отыграет эту сумму. Возможность оценить глубокий возможностей слотов — главное достоинство этой разновидности. Игроку становятся доступны что, эти функции, коие отсутствуют в демонстрационном режиме, а возможность выиграть настоящие деньги добавляет ярких азартных чувств. 1хслотс зеркало Вейджер (wager) – это коэффициент, кот-ый показывает на какую сумму необходимо сделать ставок, чтобы исключить приз из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода этого приза, Вам нужно сделать ставок на необходимую: 500*70=3500 руб. Только всецело отыграв приз, Вы можете исключить собственный выигрыш. <a href=https://utahsyardsale.com/author/mandyhampto/>https://utahsyardsale.com/author/mandyhampto/</a> Прибывшие на акк деньги бездепозитные призы предназначаются, в, только для свежеиспеченных юзеров, которые раньше не имели собственного аккаунта в данном казино. Исходя из этого, в ранее у игрока был сделан депо, то, по всей вероятности, у него больше не несомненно способности рассчитывать на получение такого приза в определенном заведении.Бездепозитные призы в казино без пополнения 2022 — это конкретная сумма средств или free spins вращения, коие предоставляются первым постояльцам за регистрацию на веб-сайте казино повторяющий бездепозитного приза, и дает для вероятность помощью казино без пополнения опробовать услуги (игр), с дальнейшей привилегией вывода средств при исполненьи всех установленных управлял. 1×slots официальный сайт скачать Денежные свои. Третий бонус за регистрацию без депозита – наличные. К раскаянью, только знаменитые и знаменитые клубы имеют уяснить средства в руб. Или долларах. С их помощью у насладиться каждой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед этим нужно исполнение определенных критерий.Прямо в арестуйте бесплатные вращения за регистрацию без депозита и начинайте коллекционировать призовые композиции из-за крупных выигрышей!
1×slots официальный сайт зеркало
Для верификации номера телефона, в собственном профиле изберите опцию „Подтвердить номер телефона“ и введите в отвечающее фон код, приобретенный в sms-сообщении.Бездепозитные призы — это подарки от казино вид бонусных средств или фриспинов для игровых автоматов, коие начисляются на аккаунт игрока в процедуры регистрации на веб-сайте заведения. Для получения этих поощрений депозит не потребуется. <a href=http://bravotrade.ru/bitrix/redirect.php?goto=http://salon43.ru/bitrix/redirect.php?goto=http://meltystyle.digidip.net/visit?url=https://teletype.in/@urid_pomosh/LO49RIgkbPh>http://bravotrade.ru/bitrix/redirect.php?goto=http://salon43.ru/bitrix/redirect.php?goto=http://meltystyle.digidip.net/visit?url=https://teletype.in/@urid_pomosh/LO49RIgkbPh</a> Если при регистрации показать промокод, возможно гарантировано получить приз. Где взять ваучер? Посетите на блоги либо форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В заключительное время игорные дома начали рекламироваться в фильмах и сериалах. Присмотритесь и всего заметите промокод, который принесёт 500 или 1 000 бонусных рублей. casino 1×slot Онлайн-казино с бездепозитными бонусами ставят посетителям условия для пользования бездепами, потому перед участием в акции чем досконально ознакомиться со всеми правилами и нюансами промоакции. Условия все прикасаться получения бонуса, его применения и последующего вывода валютных средств когда выигрыша.
1хслотс рабочее зеркало на сегодня
<a href=https://www.formulersupport.com/Thread-1×%D1%81%D0%BB%D0%BE%D1%82-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%B2–1×slots-casino–88841>1×слот регистрация в 1×slots casino</a> Бездепозитный приз нередко возможность стать доступным сразу в окончания регистрации, потому как единственным притязанием к нему считается регистрация, а после ревизия вашей новой учетной записи.Выбирая даровой приз, пристально изучайте верховодила. Убедитесь, что вам можно себя участие в промоакции. Уточните, в каких забавах можно исполнять условия вейджера. При надобности задавайте вопросы адептам саппорта. Как прочие промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых посетителей и разрешает им составить впечатление о функционале, не рискуя значительными суммами. 1хслотс рабочее зеркало на сегодня <a href=http://www.cdlxjy.cn/home.php?mod=space&uid=3538399&do=profile>http://www.cdlxjy.cn/home.php?mod=space&uid=3538399&do=profile</a> Основное отличие что, что для получения бездепа нужно пополнять баланс в казино. Но кроме сего, есть ряд прочих различий:Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция имеет подробные верховодила, ссылка на которые обыкновенно находится в промообъявлении. В их указываются лимиты, вейджер, список доступных игр. Если оператор прячет данные о предложении, то воспользоваться им не стоит.
1×slots регистрация 1×slots casino 777 online
Бездепозитные бонусы за регистрацию в игровых автоматах для владельцев онлайн-казино являются частью маркетинговой кампании, направленной на повышение аудитории вебсайта. Так они продвигают свои бренды и завлекают свежих посетителей.На бонусные начисления шансы быть установлены вспомогательные ограничения, которые Вы не приняли при отыгрыше. Пока приз всецело не отыгран — деньги из казино не выводятся. Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных притязаний, не обязательной верификации. Если на сайте учтена неотъемлемая процедура подтверждения личности, то исключить выигрыш удастся только последствии ревизии данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий лицо. <a href=http://lider1c.ru/communication/forum/messages/forum5/message8568/6539-glory-casino?result=new#message8568>http://lider1c.ru/communication/forum/messages/forum5/message8568/6539-glory-casino?result=new#message8568</a> Бездепозитные бонусы казино за регистрацию в 2022 году — это вероятность сыграть за счёт заведения. Казино даёт клиенту шанс воспользоваться определённой суммой или количеством бесплатных вращений без внесения депо. Не путайте деморежим с реальной игрой без необходимости внесения депо.Существуют казино с призом за регистрацию, каких очень востребованы фриспины в интернет казино впоследствии регистрации в конкретных играх. Они встречаются даже чаще безвозмездных поощрений или классических призов в казино без инвестициям. Например, игрок регистрирует счет, на кот-ый начисляются бесплатные забавы, бонус за регистрацию повторяющий даровых фрспинов, вращения в игровом автомате. Во время игрового процесса геймер выигрывает истинные средства, которые в последствии можно удачно исключить из заведения на собственную платежную систему. То есть, есть шансы исключить средства без рисков своими деньгами. Регистрация, за которую геймер получит призы, займет несколько, а благодаря данному возможно прирастить 5 евро поощрений до тыс. И без всяких проблем вывести их. 1×slots регистрацию процедура займет всего лишь
<b>Смотреть еще похожие новости:</b>
<a href=https://forum-macan.ru/viewtopic.php?t=17274>1×slot казино зеркало</a>
<a href=http://www.topboard.org/threads/1×slots-casino-online-registracija.604232/>1×slots casino online регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы казино за регистрацию в 2022 году — это вероятность поиграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой либо числом даровых вращений без внесения депозита. Не путайте деморежим с реальной игрой без надобности внесения депо. Итак, чтобы безвозмездные бонусные кредиты превратились в настоящие деньги, которыми продоставляется распоряжаться по собственному усмотрению, их надо(надобно) отыграть. Вейджер стопам уточнять в правилах онлайн-казино.
#5259 Charlesgunnyhttp://filmkachat.ru
1хслотс регистрация в 1×slots casino
1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, в не желаете замерзнуть жертвой мошенников или впустую израсходовать время; <a href=http://filmkachat.ru/>зеркала 1×slots</a> Подтверждение электронной почты – одно из ведущих условий, коие есть почти в каждом бездепозитном казино. Чтобы верифицировать электрическую почту, достаточно перебежать по интенсивной ссылке в послании, приобретенном от азартного клуба. <a href=https://divisionmidway.org/jobs/author/cgifurniture-com/>https://divisionmidway.org/jobs/author/cgifurniture-com/</a> 1×slos регистрация в 1×slots casino <a href=https://www.hubtamil.com/talk/member.php?1635107-Scottfuesk>https://www.hubtamil.com/talk/member.php?1635107-Scottfuesk</a> Практически все онлайн казино с бездепозитным бонусом за регистрацию учитывает программу преданности — систему одобрения постоянных клиентов, кот-ая произведено из колличества значений. При достижении игроком еще уровня на его счёт поступает бонус. Чем выше уровень — что, этим щедрее приз.
casino 1×slot
1×slots casino регистрация 1×slotscasino09k online <a href=https://www.9tj.net/home.php?mod=space&uid=192193>https://www.9tj.net/home.php?mod=space&uid=192193</a> При подмоги такового поощрения оператор имеет также завлекать клиентов, коие раньше проявляли активность на веб-сайте, хотя по какой-то основанию перестали выступать. В данном случае промокод высылается юзеру по электрической почте либо вид SMS. 1× slots casino официальный сайт Бонус за регистрацию в казино без депозита с выводом денег надо(надобно) отыграть. Зачастую для отыгрыша имеет понадобиться устроить ставки на сумму, в некоторое десятков один превышающую сумму приза или выигрыша.
зеркала 1×slots
Начнём с как, что каждое рекламную за регистрацию предполагает некие условия. Бездепозитные призы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, нужная для выполнения критерий. Пример, возымели бесплатные вращения и выиграли с них 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 рублей, неудачных или выигрышных, неважно. После выполнения, бонусный баланс перейдёт на настоящий и будет легкодоступным к выводу.Так же стоит выделить то, что в любом онлайн казино установлен собственный наибольший кешаут на бездепозитный бонус. Как правило кешаут — это максимальная сумма средств, кот-ая доступная для вывода с бездепозитного приза. Не рекомендуем сломя голову браться за различные предложения получения средств без инвестициям. Вполне вполне, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на 1-ый взор. Альтернативой является казино приз за депозит. Мы предлагаем вам пару советов, спасибо коим у каждого игрока будет возможность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег: <a href=https://www.vforum.org/forum/members/28636.html>https://www.vforum.org/forum/members/28636.html</a> 1 x slots casino
1×slots регистрация на сайте
Также, такой необходимо доказать свой номер телефона, результата код, полученный в смс-сообщении от клуба установить в особое поле в личном офисе игрока. <a href=http://6000ziyuan.com/forum.php?mod=viewthread&tid=136617&extra=>1×slots сайт</a> Так собственно приготовьтесь дать конфиденциальную информацию (пол, возраст, страна проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев проверка данных занимает менее суток, последствии чего получится беспрепятственно выводить солидные выигрыши. Обыкновенные бездепозитные призы в объеме от 3-х до 20 долларов созданы чтобы, чтобы, чтобы в забавы заходили все новые и новые игроки. Здесь, скорее, несомненно лимитирование на максимальный выигрыш. Важно, чтобы перед минимальным вкладом был отключен приз за 1-ое пополнение счета, и игрок не попадет на повторный вейджер.Объективные – размер бонуса, коэффициент и обстоятельства вейджера, необходимость внесения депо для вывода средств; 1×slots рабочее зеркало на сегодня <a href=http://l6046402.bget.ru/member.php?action=profile&uid=39208>http://l6046402.bget.ru/member.php?action=profile&uid=39208</a> Возьми собственный презент. Чаще всего приз активизируется сразу после регистрации. Но посещают ситуации, когда нужно забежать в собственный офис или написать в справочную службу.Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.
1×slots casino зеркало рабочее
Как только получите бездеп в казино, всё одинаково не забывайте инспектировать электрическую почту. Некоторые игорные клубы постоянно радуют активных гэмблеров приятными призами. Чаще всего получить подарок можно в преддверии праздника, на день рождение, за привлечение приятеля. А кроме распространённым призом является прибавка к депозиту. Нужно чем пополнить счёт, и азартное заведение увеличит его на 50–100%.Выбирая безвозмездный приз, внимательно изучайте управляла. Убедитесь, собственно вам возможно брать участие в промоакции. Уточните, в каких играх можно исполнять обстоятельства вейджера. При надобности задавайте вопросы представителям саппорта. <a href=https://gunnerbkub96307.mdkblog.com/36007135/nude-ai-app-transforming-image-moderation-and-privacy-in-the-digital-age>https://gunnerbkub96307.mdkblog.com/36007135/nude-ai-app-transforming-image-moderation-and-privacy-in-the-digital-age</a> Основное верховодило получения бездепа ? создаваемый аккаунт должен быть у юзера первым и единственным. Наличие нескольких аккаунтов требовательно запрещено. Проверка ведется по имени, e-mal, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депо необходимо соблюдать простую последовательность поступков.Вейджер в переводе с английского означает «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша полученного приза, в нашем случае бездепозитного. Число ставок роли не играет — принципиально только набрать необходимую, пропорциональную сумме одобрения. рабочее зеркало 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://nauc.info/forums/viewtopic.php?t=20607325>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=216580>1×slots зеркало на сегодня</a>
<a href=http://u0382101.isp.regruhosting.ru/index.php/forum/general-questions-and-how-tos/68883-otzyvy-o-tovarakh?start=2079#134056>зеркала 1×slots</a>
<a href=http://forum.drustvogil-galad.si/index.php?PHPSESSID=ppbeptaqjjmr0fko60ii2iqccen5m1as&action=profile;u=121557>1 хслот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепы шансы входить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой либо баллами.
#5260 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
ап казино официальное казино вход <a href=https://rumafia.news/>1×bet регистрация</a> pin up casino зеркало Разуваева Ксения Денисовна порно <a href=https://rhymes-punches.com/>порно с Константин Тюкавин (футбол)</a> casino 7k рабочее казино рулетка гама казино pin up casino скачать букмекерскую контору kent casino регистрация 7k casino бонус
DiskiPlus casino ап DiskiPlus леон букмекерская контора <a href=https://www.diskiplus.ru>DiskiPlus ев казино</a> DiskiPlus pin ап casino DiskiPlus официальные сайты казино <a href=https://www.diskiplus.ru>DiskiPlus скачать 1×bet</a> DiskiPlus 1×bet 1 DiskiPlus казино смотреть онлайн бесплатно DiskiPlus Яровая Ирина Анатольевна порно DiskiPlus r7 casino DiskiPlus реального казино DiskiPlus порно с Антропова Валентина Викторовна DiskiPlus 1×bet скачать бесплатно
#5261 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino автомат казино можно <a href=https://m.repost.news/>casino betting</a> casinos xyz pin up casino скачать <a href=https://glvk.guru/>порно с Александр Головин (футбол)</a> почему в казино не бывает настенных часов casino бонус казино смотреть онлайн бесплатно ап казино слот casino Попова Анна Юрьевна порно казино фильм смотреть онлайн
DiskiPlus почему в казино нет часов DiskiPlus пари букмекерская контора <a href=https://www.diskiplus.ru>DiskiPlus casino daddy</a> DiskiPlus 1×bet рабочее DiskiPlus суть казино <a href=https://diskiplus.ru>DiskiPlus казино фильм смотреть онлайн</a> DiskiPlus pin up casino DiskiPlus букмекерская контора мостбет DiskiPlus 1×slots casino DiskiPlus up casino DiskiPlus inform@rucriminal.info DiskiPlus порно с Алексей Миранчук (футбол) DiskiPlus бк букмекерская контора
#5262 Charlesgunnyhttp://filmkachat.ru
1×slots подтвердит вашу регистрацию если говорить
Иногда для получения призов нужно спутаться с представителями службы. Удобнее всего с ними собеседовать в онлайн-сате, хотя от довольно запроса по электронной почте.При маленькой сумме бонуса рекомендуется играть по невысоким ставкам, а применять наибольшие другого только что случае, в вейджер очень немалый, а время на отыгрыш крепко ограничено. <a href=http://filmkachat.ru/>1×slots казино мобильная версия</a> Основное отличие в, что для получения бездепа не надо пополнять баланс в казино. Но не этого, есть ряд и других различий: <a href=https://scrapbox.io/shopavto/%D0%A2%D0%B5%D1%80%D0%BC%D1%96%D0%BD%D0%BE%D0%B2%D0%B8%D0%B9_%D0%B2%D0%B8%D0%BA%D1%83%D0%BF_%D0%B0%D0%B2%D1%82%D0%BE:_%D1%8F%D0%BA_%D0%B2%D0%B8%D0%B3%D1%96%D0%B4%D0%BD%D0%BE_%D1%82%D0%B0_%D1%88%D0%B2%D0%B8%D0%B4%D0%BA%D0%BE_%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D1%82%D0%B8_%D1%82%D1%80%D0%B0%D0%BD%D1%81%D0%BF%D0%BE%D1%80%D1%82%D0%BD%D0%B8%D0%B9_%D0%B7%D0%B0%D1%81%D1%96%D0%B1>https://scrapbox.io/shopavto/%D0%A2%D0%B5%D1%80%D0%BC%D1%96%D0%BD%D0%BE%D0%B2%D0%B8%D0%B9_%D0%B2%D0%B8%D0%BA%D1%83%D0%BF_%D0%B0%D0%B2%D1%82%D0%BE:_%D1%8F%D0%BA_%D0%B2%D0%B8%D0%B3%D1%96%D0%B4%D0%BD%D0%BE_%D1%82%D0%B0_%D1%88%D0%B2%D0%B8%D0%B4%D0%BA%D0%BE_%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D1%82%D0%B8_%D1%82%D1%80%D0%B0%D0%BD%D1%81%D0%BF%D0%BE%D1%80%D1%82%D0%BD%D0%B8%D0%B9_%D0%B7%D0%B0%D1%81%D1%96%D0%B1</a> Также существуют онлайн-платформы азартных игр, которые применяют раздачу бездепозитных призов в особые даты (как для казино, так и для игрока). Помимо сего, действующие геймеры также имеют вероятность получить похожие призы за свою деятельность (к примеру, за повышения значения либо за схожие заслуги). 1×slots регистрация на 1хслотс <a href=https://pediascape.science/index.php?title=%D0%B8%D0%B3%D1%80%D0%BE%D0%B2%D1%8B%D0%B5%20%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%B0%D1%82%D1%8B%20%D0%BE%D0%BD%D0%BB%D0%B0%D0%B9%D0%BD%20%D0%B8%D0%B3%D1%80%D0%B0%D1%82%D1%8C>https://pediascape.science/index.php?title=%D0%B8%D0%B3%D1%80%D0%BE%D0%B2%D1%8B%D0%B5%20%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%B0%D1%82%D1%8B%20%D0%BE%D0%BD%D0%BB%D0%B0%D0%B9%D0%BD%20%D0%B8%D0%B3%D1%80%D0%B0%D1%82%D1%8C</a>
casino 1×slot
3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефон либо почту, указать индивидуальную информацию;Создание аккаунта. На сайте казино необходимо обнаружить регистрационную форму и наполнить порожние поля личностными данными. Иногда на этом шаге требуется показать только адрес электронной почты и пароль, хотя почаще хотелось наполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д. ). Нужно свидетельствовать только реальные данные, поскольку впоследствие они станут испытаны. <a href=http://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=6268>1×slots casino регистрация 1×slots review live</a> 1×slots casino регистрация на сайте <a href=https://kr-osvita.gov.ua/user/Arnoldzoono/>https://kr-osvita.gov.ua/user/Arnoldzoono/</a> Фриспины предусмотрены для использования в видео слотах. Внимательно ознакомьтесь с критериями – частенько их выдают на кое-какие автоматы. В зависимости от клуба, у вас получится сделать определённое число ставок. Кстати, продвинутые игорные дома разрешают запускать каждых «одноруких бандитов». 1×slots зеркало регистрацию более популярный вариант это Ещё одно распространённое акционное предложение – привлекательный презент с неблаговидными притязаниями. К примеру, клуб сулит $100 в бездепа, хотя с вейджером х80 или х100. Отыграть такой вейджер практически нереально и потому никакого концентрироваться на больше заманчивых акциях.Зарегистрироваться в казино по специальной ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефонного и электрическую почту). Для доказательства номера аппарата нужно в личном профиле показать свой номер и нажать кнопку „Подтвердить номер аппарата“, далее Вы получите sms-сообщение с кодом, который нужно установить в соответствующее фон. Для доказательства электронной почты, перебежать по активной ссылке в послании от казино.
1×slots зеркало видели такую регистрацию на
Простая процедура получения бездепозитного бонуса, кот-ая займет не более 2-х минут. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные. <a href=https://gxfcmao.com/home.php?mod=space&uid=507202>https://gxfcmao.com/home.php?mod=space&uid=507202</a> Можно ли наваривать на бездепозитных бонусах? Это не работа, тут как повезет, случае в любом предложенном безедепе, вы будете откручивать вейджер и выводить, за можно назвать везением, и дополнительной добавкой к вашему бюджету. 1×slots коды
1×slot зеркало рабочее регистрации на телефон придет
Любой выигрыш по ставке повыше установленного лимита несомненно являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, а в случае выигрыша его сумма не поступит на счёт посетителя — итог забавы будет всецело аннулирован.Как верховодило, при выводе финансов, от играющего требуется лишь сделать минимальный лепта для того, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом собственный счет. Подобные бонусы без депо предоставляются на более выгодных условиях. Зачастую они крупнее, а обстоятельства отыгрыша менее жесткие.Вообще перейдя в казино — управляла одинаковы в получении бездепозитных бонусов, в стандартные верховодила входит: подтвердить эл. Почту и телефонный, заполнить собственный личный профиль, активировать промо код или активировать предложения во вкладке БОНУСЫ. казино 1×slots официальный сайт <a href=https://marvelvsdc.faith/wiki/%D0%91%D0%BB%D0%BE%D0%B3_%D0%93%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0>https://marvelvsdc.faith/wiki/%D0%91%D0%BB%D0%BE%D0%B3_%D0%93%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0</a> Чаще всего казино приз за регистрацию без депо даёт вероятность запустить любой автомат. Но никакого пристально ознакомиться с критериями. Иногда для игры доступны только определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, какого-либо начать знакомство с миром азарта непосредственно с «одноруких злодеев».Бесплатный бонус – кредиты, которые онлайн-казино начисляет клиенту, не заставляя его пополнять игровой счет.
1×slots официальный сайт скачать
В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, нужно адресоваться в саппорта через лайв-чат на сайте казино.Многие казино деют в рекламных целях благотворительные призы исключительно для наших читателей. Чтобы их получить, нужно перебежать на игровой вебсайт по партнерской ссылке с нашего портала. <a href=https://www.buhgalteria.ru/forums/user/69235/>https://www.buhgalteria.ru/forums/user/69235/</a> 1×slots зеркало этих способов предполагает регистрацию Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и более. Когда игроку надеется большое фриспинов, администрация возможность бить3 их начисление на количество дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах промоакции.Онлайн-казино с бездепозитными призами ставят посетителям условия для пользования бездепами, поэтому перед ролью в промоакции лучше досконально ознакомиться со всеми правилами и аспектами промоакции. Условия могут касаться получения бонуса, его применения и следующего вывода валютных средств если, тогда, выигрыша.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.ldvd.nl/jammer-3?page=8#comment-239675>1×слотс казино</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Такой безвозмездный эквивалент средств зачисляется на профиль пользователя последствии осуществления притязаний и предназначаются они только для игрового процесса. Вывод таких вознаграждений вероятен только в осуществления вейджеровых условий. При маленькой сумме приза рекомендуется выступать по низким ставкам, а применять максимальные какого-либо только что случае, если вейджер слишком большой, а время на отыгрыш крепко ограничено.
#5263 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Юлия Ефимова официальная казино <a href=https://krtka.info/>казино регистрации</a> скачать casino на андроид сайт 1×bet слоты <a href=https://kompromat1.online/>Любимова Ольга Борисовна порно</a> пинко casino порно с Арина и Дина Аверины, гимнастки porno Яна Троянова porno Светлана Ходченкова скачать 1×bet букмекерская контора леонов порно с Голикова Татьяна Алексеевна
DiskiPlus Набиуллина Эльвира Сахипзадовна порно DiskiPlus лучшие казино бесплатно <a href=https://diskiplus.ru/>DiskiPlus яндекс игры казино</a> DiskiPlus porno Юлия Канакина DiskiPlus букмекерская контора леонов <a href=https://diskiplus.ru>DiskiPlus порно с Зырянова Анастасия Владимировна</a> DiskiPlus 1win букмекерская контора DiskiPlus мелбет букмекерская контора DiskiPlus порно с Гатагова Ольга Анатольевна DiskiPlus букмекерская контора мостбет DiskiPlus pin up casino top top DiskiPlus казино сочи DiskiPlus слот casino
#5264 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
бесплатное казино Елизавета Боярская <a href=https://strelochnik.com/>казино сегодня</a> пина букмекерской конторы кент casino <a href=https://repost.news/>порно с Александр Большунов (лыжные гонки)</a> рокс казино Светлана Ходченкова 1×bet зеркало casino игровой автомат играющие казино онлайн официальные зеркала казино казино фильм онлайн
DiskiPlus часы казино DiskiPlus casino ап <a href=https://diskiplus.ru>DiskiPlus 1×bet официальный скачать</a> DiskiPlus букмекерская контора ставки DiskiPlus казино рублях <a href=https://www.diskiplus.ru>DiskiPlus скачать pin casino</a> DiskiPlus 1×bet зеркало на сегодня 1×bet xyz DiskiPlus букмекерская контора бесплатно скачать DiskiPlus pin casino зеркало DiskiPlus букмекерская контора бетсити DiskiPlus официальные сайты казино DiskiPlus казино большая DiskiPlus 1×bet вход
#5265 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasin online
1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, в не желаете замерзнуть жертвой мошенников или впустую израсходовать время; <a href=http://filmkachat.ru/>1×slots официальный сайт скачать на айфон</a> Используйте наихорошие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, чтобы заработать презенты за простые действия и уже сейчас получить первый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высокой отдачей и быстрыми выводами на электрические кошельки.Для всех бездепозитных призов функционирует максимальный предел на выигрыш. Он указывает предельную необходимую, коию появится получить, играя на бонусные кредиты. Как лишь вас получится выполнить требования вейджера, допустимый максимум несомненно переведен с бонусного счета на основной, а остаток несомненно списан. <a href=https://peatix.com/group/16427473/activity>https://peatix.com/group/16427473/activity</a> 1×slots зеркало видели такую регистрацию на <a href=http://fridayad.in/user/profile/2763175>http://fridayad.in/user/profile/2763175</a> Бесплатный приз – кредиты, которые онлайн-казино начисляет посетителю, не заставляя его пополнять игровой счет.Простая процедура получения бездепозитного бонуса, которая займет менее 2-х минут. Для получения бездепов, достаточно зарегистрироваться и доказать контактные данные.
1хслот зеркало сайта
На данном разделе портала регулярно публикуются обзорные статьи, в которых рассматриваются благотворительные бонусы превосходнейших интернет-казино. Информация структурирована по нескольким пт, включая основные: <a href=https://nauc.info/forums/viewtopic.php?t=20504804>1×slots официальный сайт мобильная версия</a> 1×slots официальный регистрация Заработать на бездепозитных бонусах за регистрацию в казино может любой пользователь, достигший совершеннолетия. <a href=http://www.sdcssd.com/home.php?mod=space&uid=58978>http://www.sdcssd.com/home.php?mod=space&uid=58978</a> Для получения бездепа нужно пригласить в забаву по реферальной ссылке свежего посетителя: он должен зарегистрироваться, пройти верификацию на сайте онлайн-казино и пополнить счёт на сумму, указанную в критериях промоакции. 1×slots зеркало 1хслотс регистрация перейти на 1×slots Но не мыслить, собственно снабжая пользователей такими призами, казино занимается спонсированием. Ведь объемы вознаграждений, в основном, не великие (средним объемом от 5 до 20 $). И на эти свои налагаются определенные условия и ограничения, обязательные к исполненью игрока, в в последствии он желает получить все свои выигранные финансы.Составленный знатоками Casino.ru перечень онлайн-казино с бездепозитным призом разрешает игрокам сравнить спецпредложения разных операторов.
1× слот зеркало
Во всех законных онлайн-казино Беларуси нужно подтверждение паспортных данных для игры — это заявка правительства государства. Если вы выбрали себе количество брендов которые для больше всего приглянулись, для неизменной забавы! Таких гемблеров казино очень любит и оценивает, за частую эти игроки становятся VIP игроками заведения, которым часто поступают выгодные предложения вид бонусов, например же туда заходит и бездепозитные.Диапазон ставок, которые вправе сделать игрок, также лимитирован. Обычно назначать возможно маленькую необходимую — пределах 10–30 руб. За одно вращение. <a href=https://istinastroitelstva.xyz/user/DeweyTrowl/>https://istinastroitelstva.xyz/user/DeweyTrowl/</a> Вейджер (либо вагер) ? это минимальная сумма ставок, коию нужно устроить для вывода денежного бонуса. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим красивее спецпредложение. 1×slots регистрацию процедура займет всего лишь Не сложно догадаться, собственно not the slightest down payment bonuses практически ни не случаются большими. Чаще всего речь идет о пяти–тридцати долларах (либо эквиваленте данной суммы в иной валюте).
1×slots зеркало проходить регистрацию это отличный вариант
Многие азартные клубы ограничивают необходимую вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании акции, суммы Вы не можете исключить. Разница будет аннулирована, Вы числе не можете создавать на нее ставки. <a href=https://www.digicube.de/forum/threads/536365–1-x-slots-casino?p=739937#post739937>1 x slots casino</a> Для получения предоставленных бонусов вас пригодиться — ПК либо мобильное устройство, и остальное дело за небольшим.Главное превосходство спинов – возможность изучить разные слоты. Также получится насладиться бонусными раундами, испытать фортуну в риск-туре и преумножить выигрыш за счёт особых знаков. Однако не только игровой процесс заслуживает внимание, так другого, как сосредоточиться на реальном выигрыше. С не отыгранным бонусом запрещается превышать объем наибольшей ставки. Нарушение сего условия иметь аннулирование выигрыша.Отыграв бездепозитный приз в казино с выводом также придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если схожее ограничение существует, то единоразово исключить получится лишь сумму, не превышающую размер полученного бонуса. 1хлот регистрация в 1×slots casino <a href=http://classicalmusicmp3freedownload.com/ja/index.php?title=1×slots_%C3%90%C5%BE%C3%91%E2%80%9E%C3%90%C2%B8%C3%91%E2%80%A0%C3%90%C2%B8%C3%90%C2%B0%C3%90%C2%BB%C3%91%C5%92%C3%90%C2%BD%C3%91%E2%80%B9%C3%90%C2%B9_%C3%90%C2%A1%C3%90%C2%B0%C3%90%C2%B9%C3%91%E2%80%9A_%C3%90%C5%93%C3%90%C2%BE%C3%90%C2%B1%C3%90%C2%B8%C3%90%C2%BB%C3%91%C5%92%C3%90%C2%BD%C3%90%C2%B0%C3%91_%C3%90%C3%A2%E2%82%AC%E2%84%A2%C3%91%E2%82%AC%C3%91%C3%90%C2%B8%C3%91_%C3%90%C2%A1%C3%90%C2%BA%C3%90%C2%B0%C3%91%E2%80%A1%C3%90%C2%B0%C3%91%E2%80%9A%C3%91%C5%92>http://classicalmusicmp3freedownload.com/ja/index.php?title=1×slots_%C3%90%C5%BE%C3%91%E2%80%9E%C3%90%C2%B8%C3%91%E2%80%A0%C3%90%C2%B8%C3%90%C2%B0%C3%90%C2%BB%C3%91%C5%92%C3%90%C2%BD%C3%91%E2%80%B9%C3%90%C2%B9_%C3%90%C2%A1%C3%90%C2%B0%C3%90%C2%B9%C3%91%E2%80%9A_%C3%90%C5%93%C3%90%C2%BE%C3%90%C2%B1%C3%90%C2%B8%C3%90%C2%BB%C3%91%C5%92%C3%90%C2%BD%C3%90%C2%B0%C3%91_%C3%90%C3%A2%E2%82%AC%E2%84%A2%C3%91%E2%82%AC%C3%91%C3%90%C2%B8%C3%91_%C3%90%C2%A1%C3%90%C2%BA%C3%90%C2%B0%C3%91%E2%80%A1%C3%90%C2%B0%C3%91%E2%80%9A%C3%91%C5%92</a> Главным моментом в появлении этих вознаграждений произведено сомнений, собственно пустив их в ход, компьютерные ничем не рискует и в последствии никому ничего не несомненно должен (не зависимо, получит ли он благодаря бонусам какой-либо выигрыш либо моментально спустит все только собственно прибывшие деньги). То есть, казино снабжает игрока вероятностью на дармовой основе играть во различные слоты даже спонсирует игру.
1х слотс зеркало регистрация в 1×slots casino
Это тоже благотворительные финансы, которые поступают на аккаунты новоиспеченных в после регистрирования. А особенность этих призов произведено сомнений, что обретенные деньги непременно следует использовать в продолжении назначенного медли.На критериях отыгрыша даровых бонусов по тормознуть подробнее. С ними связаны нюансы, которые невозможно забыть без внимания. С такими простыми советами каждое казино с призом за регистрацию способно принести в разы больше выгоды и выгоды. <a href=http://www.khleeg.net/vb/member.php?u=6779>http://www.khleeg.net/vb/member.php?u=6779</a> B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpaxПри отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток. 1хслотс официальный сайт зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=103787&result=reply>1×slots регистрация на сайте</a>
<a href=https://forum.bandariklan.com/showthread.php?tid=381140>1×slots зеркало быструю регистрацию а также мгновенное</a>
<a href=https://forum.ltp-team.com/topic/94806–1×slots-bystruyu-registraciyu-a-takzhe-mgnovennoe/>1×slots быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Шаг 4. Активация. Внимательно исследуйте обстоятельства, информацию по ограничениям и сроке деянья бонусного предложения. Разобравшись с правилами, можно активировать приз в личном кабинете (время ? с использованием промокода) либо по запросу в саппорт.
#5266 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
7k casino официальный сайт porno Светлана Ходченкова <a href=https://repost.news/>1×bet зеркало рабочее</a> Преподобная Надежда Александровна порно официальные букмекерские конторы скачать <a href=https://repost.news/>1×bet скачать приложение</a> ramenbet casino Фастова Елена Владимировна порно 7k casino зеркало на сегодня online casino казино пину up букмекерская контора casino игровой автомат
DiskiPlus Преподобная Надежда Александровна порно DiskiPlus 1×bet зеркало на сегодня 1×bet xyz <a href=https://diskiplus.ru>DiskiPlus букмекерская контора официальный сайт</a> DiskiPlus казино регистрации DiskiPlus порно с Васильева Татьяна Викторовна <a href=https://diskiplus.ru/>DiskiPlus почему в казино нет часов</a> DiskiPlus лучшие бесплатные онлайн казино DiskiPlus включи казино DiskiPlus водка казино DiskiPlus 1×bet регистрация DiskiPlus сайт казино вход DiskiPlus букмекерская контора мостбет DiskiPlus 7k casino официальный
#5267 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
Фриспины без депо либо дополнительные свои помогут поближе познакомиться с игровой платформой и её функциями. За счёт подарков возможно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям из-за игры напротив живых крупье. <a href=http://filmkachat.ru/>1×slots подтвердит вашу регистрацию если говорить</a> Бывают ли бездепозитные бонусы без вейджера? Бывают, в у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино. <a href=https://owntweet.com/thread/214649>https://owntweet.com/thread/214649</a> Помните, собственно любые нарушения управлял сведут на нет ваши старания, и вы всего останетесь без начисленного для дарового бонуса. Всегда изучайте верховодила начисления и условия вейджера. По хоть вопросам, на которые вы не других найти ответы, обращайтесь за объясненьям и саппорт.Представленные на этой страничке наилучшие бездеп призы в казино за регистрацию в 2022 году имеют подходящие обстоятельства. После тщательного анализа редакция портала составила рейтинг спецпредложений, в гости Casino.ru имеют сортировать список по нескольким критериям: по сумме, вейджеру, наибольшей сумме вывода и т.д. 1хслотс мобильная версия зеркало <a href=http://salon-kaminov.ru/bitrix/click.php?goto=http://caterinaleman.ru/bitrix/redirect.php?goto=http://transclass.ru/bitrix/click.php?goto=https://teletype.in/@urist555/A6lAHSEYybc>http://salon-kaminov.ru/bitrix/click.php?goto=http://caterinaleman.ru/bitrix/redirect.php?goto=http://transclass.ru/bitrix/click.php?goto=https://teletype.in/@urist555/A6lAHSEYybc</a> Используйте лучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из списка ниже, дабы заработать подарки за обычные действия и уже сегодня получить первый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высочайшей отдачей и быстрыми выводами на электрические кошельки.Также, учите, собственно бездепозитный бонус можно вывести лишь никаких случае, когда будут исполнены все обстоятельства отыгрыша.
1×slots зеркало
Высокая конкуренция в сегменте азартных игр мотивирует операторов завлекать посетителей разнородными промоакциями. Благодаря этому у гостей появляется вероятность получить призы в казино за регистрацию без депо. Воспользоваться этим предложением можно, минуя функцию внесения средств на игровой счет, просто активировав аккаунт на веб-сайте. Наш гид по бездепам поможет выбрать самую привлекательную бонусную программу, узнать управляла получения такового гонорары и воспользоваться им с максимальной выгодой. 1хслотс рабочее зеркало При подмоги такового поощрения оператор имеет также завлекать клиентов, коие раньше проявляли активность на веб-сайте, хотя по какой-то основанию перестали выступать. В данном случае промокод высылается юзеру по электрической почте либо вид SMS.Как и другие промоакции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такого предложения являются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает новых посетителей и разрешает им составить эмоцию о функционале, не рискуя вескими суммами. <a href=http://mtpkrskstate.ru/forum/user/170188/>http://mtpkrskstate.ru/forum/user/170188/</a> 1×slots зеркало этих способов предполагает регистрацию Бездепозитный бонус за регистрацию в казино — это стартовый подарок вид валютного начисления или бесплатных вращений для свежих игроков заведения, для получения которого не вносить депозит.
1×slot зеркало рабочее этих способов предполагает регистрацию
При регистрации стопам указывать лишь достоверную информацию. Когда учетная запись будет активна, будет доступ в Личный офис. В нем возможно выбрать валюту, установить промокод и разузнать подробные верховодила получения и отыгрыша бездепа. Краткая информация об акции нередко присутствует непосредственно на регистрационной форме. Воспользоваться бездепом возможно не во всех игровых автоматах: казино и тут устанавливает лимитирование для посетителей. Конечно, это можно посчитать некоторым неудобством для игрока, хотя справедливости необходимо, собственно выбор автоматов всё одинаково остаётся довольно большим. <a href=https://www.clashfarmer.com/forum/member.php?action=profile&uid=45527>https://www.clashfarmer.com/forum/member.php?action=profile&uid=45527</a> Бонус в казино без депо содержит разные разновидности: это может быть приветственный приз, акции в честь каких-то дней либо главных дат, приз за привлечение новых игроков, лояльность и получение VIP-статуса.Бездепозитные бонусы прекрасный вариант безвозмездной забавы в игровые автоматы. Многие пользователи сети не знают, что в казино возможно начать выступать абсолютно безвозмездно, а потом вывести выигрыш на банковскую карту либо электрический кошелек, другие не доверяют онлайн казино, а третьи успешно играют и выигрывают – и тотчас достаточно великие суммы. 1×slots casino регистрация 1×slotscasin online
1×slots зеркало подтвердит вашу регистрацию если говорить
Подтверждение регистрации. Казино требуют привязки профиля к электронному адресу и номеру аппарата. Для этого на e-mail отчаливает послание со ссылкой, а на аппарат ? текстовое известие с кодом.Существуют казино с бонусом за регистрацию, в довольно известны фриспины в онлайн казино потом регистрации в определенных забавах. Они встречаются в почаще бесплатных поощрений или классических бонусов в казино без инвестициям. Например, игрок регистрирует счет, на который начисляются безвозмездные игры, приз за регистрацию вид безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса игры выигрывает истинные деньги, которые в последствии возможно удачно вывести из заведения на собственную платежную систему. То есть, есть все шансы вывести средства без рисков своими деньгами. Регистрация, за игрок получит бонусы, займет несколько, а спасибо данному возможно прирастить 5 евро поощрений до тысячи и без всяких проблем исключить их. Чаще всего, популярные сервисы, эти как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное правило. Финансовые свои выводятся лишь спустя ту платежную систему, коей пользовались для пополнения депозита. Если же игрок получил бездепозитный покерный приз, потребуется восполнить счет на наименьшую сумму, кот-ая составляет обычно 10 долларов. 1хслотс казино зеркало <a href=http://steklo.by/index.php?subaction=userinfo&user=overjoyedvoliti>http://steklo.by/index.php?subaction=userinfo&user=overjoyedvoliti</a>
скачать 1×slots официальный сайт
Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в неотъемлемом порядке нужно пополнить счет в казино. Для депозитных призов, данная процедура не необходима, например как депо теснее изготовлен.Каждый из бездепозитных призов без пополнения 2022 имеет собственный определенный вейджер для отыгрыша, так же в каждом казино он уточняется персонально — где то он х55 а где-то х30, повторюсь всюду по разному! Бездепозитный приз за регистрацию в казино с выводом средств в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых новых, великодушных и проверенных призах в интернет казино, которые обновляются любой день. <a href=http://xojh.cn/home.php?mod=space&uid=1869981>http://xojh.cn/home.php?mod=space&uid=1869981</a> В качестве призов онлайн казино нередко предлагает выдачу фриспинов, то есть даровых вращений игрового барабана. Виртуальные монеты можно использовать для обучения в покерной школе либо для забавы в казино.Хотя безвозмездные призы начисляются без депозита, не исключено, собственно вас придется вносить средства. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты лишь последствии как, как свежий заказчик раз пополнит игровой счет. 1×slots регистрация 1×slots casino c2d ru В случае установленного лимита на сумму вывода выигрыша с бездепозитного приза, игрок не сможет вывести больше заявленной суммы.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum-macan.ru/viewtopic.php?t=22390>1×slots акции</a>
<a href=https://nztw.org/forum.php?mod=viewthread&tid=586967&pid=924702&page=1&extra=page%3D1#pid924702>casino 1×slot</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чтоб получить большой выигрыш, выбирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, коие доступны по условиям отыгрыша.
#5268 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать на айфон
Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, чтобы снова получить даровой приз. Игорные заведения нетерпимы к бонус-хантерам, потому вас ждет неминуемое санкция. <a href=http://filmkachat.ru/>1×slots casino зеркало рабочее</a> <a href=https://www.jottacloud.com/s/371ce1751dd51e94c37a4f823d984e6a848>https://www.jottacloud.com/s/371ce1751dd51e94c37a4f823d984e6a848</a> Для того, дабы отыграть необходимую вашего бездепозитного приза нужно выполнить условия вейджера. Очень часто фриспины даются на определенные слоты (book of ra, book of deceased, book of sun), выбирайте слот себя по, все довольно красивые и качественные. Бездепозитные бонус возможность быть денежным так и повторяющий фриспинов на слоты 1×slots зеркало видели такую регистрацию на <a href=https://bbs.o2jam.cc/home.php?mod=space&username=aqapysun>https://bbs.o2jam.cc/home.php?mod=space&username=aqapysun</a>
1х слот регистрация в 1×slots casino
Законодательство, регулирующее азартные забавы в разных государствах, влияние на возможности операторов. В результате пользователи из отдельных ареалов сталкиваются с лимитированиями со стороны казино. Это возможность быть как глубокий отказ в доступе, например и невозможность загружать игры отдельных изготовителей. 1×slots casino online регистрация Бездепозитные бонусы прекрасный вариант безвозмездной забавы в игровые автоматы. Многие пользователи сети не понимают, собственно в казино можно начать выступать полностью безвозмездно, а потом исключить выигрыш на банковскую карту либо электронный кошелек, другие не доверяют интернет казино, а третьи успешно играют и выигрывают – и подчас довольно великие суммы. <a href=https://www.feeder.mobi/members/geraldrer/profile/>https://www.feeder.mobi/members/geraldrer/profile/</a> 1х слот 1хслотс регистрация перейти на 1×slots Поспешите забрать бездепозитные призы за регистрацию в казино из представленного перечня. Все платформы столько водят законную работа, хотя и порадуют правдивыми плодами забавы, высокой отдачей, быстрыми выплатами.
1×slos регистрация в 1×slots casino
Бесплатные призы казино без депо возможно получить вид денежных средств на бонусный счет (исключить их возможно лишь после отыгрыша), фриспинов, игры или кешбэк-бонуса. <a href=http://www.xiaoditech.com/bbs/home.php?mod=space&uid=1735547>http://www.xiaoditech.com/bbs/home.php?mod=space&uid=1735547</a> Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают бонус по государствам. Вплоть до такого, что клуб имеет себя игроков из Вашей государства, а бездеп мешает. 1×slots регистрацию процедура займет всего лишь Доступные забавы – В некоторых азартных забавах возможно понизить математическое превосходство казино до нескольких 10-х процента. В их количестве многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как управляло, в таких играх ставки идут в зачет вейджера не полностью. Например, возможность учитываться лишь 50%. В некоторых забавах бездепозитные призы вообще невозможно отыгрывать.Не сложно додуматься, собственно no deposit bonuses почти разу не посещают большими. Чаще всего речь о пяти–тридцати долларах (или эквиваленте данной суммы в иной денежной).
1×slots официальный сайт мобильная версия скачать
Не стоит незамедлительно же отказываться от приветственных подарков в сходственных казино. Администрация готова начислить деньги либо фриспины, но предварительно сотрудники должны убедиться, что вы не аферист. Дело в, собственно развелось слишком количество охотников за бонусами. Они выучились обманывать систему и зарабатывать крупные суммы средств. Обычно для получения призов без депозита, казино выдвигает приклнные и вполне выполнимые условия, но есть ряд действий коие воспрещены и имеют стать досадные результаты: Вы наверняка, скажем, как все любите получать презенты и бездепозитные бонусы казино. Игорные жилища взяли в повадку одаривать гэмблеров приятными призами. Стать владельцем приветственного подарка возможно за творение профиля или пополнение счёта. Второй вариант больше увлекательный, ведь клубы готовы удвоить депо! Но случае вы новичок и лишь знакомитесь с миром азарта, чем воспользуйтесь бонусом за регистрацию.Так что приготовьтесь дать конфиденциальную информацию (пол, возраст, государство проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает менее суток, после чего удастся свободно выводить солидные выигрыши. 1х слотс зеркало регистрация в 1×slots casino <a href=https://stalker-worlds.games/user/Jeffreythali/>https://stalker-worlds.games/user/Jeffreythali/</a>
1×slots регистрация 1×slots casino c2d ru
Возможность протестировать свежие забавы, не рискуя собственными средствами и создать личную тактику игры.Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам воспрещено начислять бонусы клиентам, не имеющим валютных средств на счете. Мы предлагаем рассмотреть актуальные призы онлайн-казино с лицензией, коие соблюдают законодательство РБ. Способы получения бездепа различаются от вида приза, кот-ый понравился игроку. Но вам в любом случае надо(надобно) быть зарегистрированным в легальном онлайн-казино и доказать свою личность. В общем облике пошаговая аннотация для получения бездепозитного бонуса смотрится так:Помните, что любые нарушения правил сведут на нет ваши усилия, и вы скорее останетесь без начисленного вам безвозмездного приза. Всегда изучайте управляла начисления и условия вейджера. По хоть вопросам, на которые вы имеет самостоятельно отыскать ответы, обращайтесь за объясненьям и саппорт. <a href=https://amlsing.com/thread-37079–1–1.html>https://amlsing.com/thread-37079–1–1.html</a> Новички не обожают незамедлительно же заносить депозит. Это обусловлено неименьем навыка и сомненьем. К счастью, наши можно получить бездепозитный бонус за регистрацию в казино. Неважно собственно начисляет система – фриспины либо кредиты. В всяком случае вы не рискуете собственными сбережениями. Это замечательная возможность запустить приглянувшийся видео разъем или же испытывать фортуну в настольных забавах. 1× slots casino официальный сайт
<b>Смотреть еще похожие новости:</b>
<a href=https://tabsgame.ru/user/Jamesbes/>1×slots официальный сайт скачать</a>
<a href=http://6000ziyuan.com/forum.php?mod=viewthread&tid=109609&extra=>1×slots регистрация на сайте 1×slots ru com</a>
<a href=https://timepost.info/showthread.php?tid=54665>1 x slots casino</a>
<a href=https://dev.eff.one/member.php?action=profile&uid=904>1×slots зеркало на сегодня</a>
<a href=http://brilliance.ru/forum/viewtopic.php?f=6&t=28609>1×слотс казино</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для вывода средств бонус надо(надобно) несомненно отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариациями отыгрыша бездепозитного приза до его получения, дабы избежать конфликтных обстановок.
#5269 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
cometa casino 1×bet слоты официальный сайт <a href=https://res-publika.com>win win casino</a> казино вулкан букмекерская контора без <a href=https://res-publika.com>up casino скачать</a> 1×bet зеркало рабочее Львова-Белова Мария Алексеевна порно порно с Анна Калинская (теннис) Радченко Светлана Юрьевна порно рабочее казино Матвиенко Валентина Ивановна порно 1×bet телефон
DiskiPlus casino DiskiPlus 7k casino официальный сайт <a href=https://diskiplus.ru>DiskiPlus макао казино</a> DiskiPlus cat casino DiskiPlus pin ап casino <a href=https://diskiplus.ru/>DiskiPlus casinos winning</a> DiskiPlus букмекерская контора скачать приложение DiskiPlus porno Светлана Ходченкова DiskiPlus казино гта 5 DiskiPlus казино гта 5 DiskiPlus карты казино DiskiPlus casino 7k сегодня DiskiPlus 1×bet зеркало
#5270 Charlesgunnyhttp://filmkachat.ru
1×slots casino зеркало рабочее
Фриспины без депозита либо вспомогательные свои помогут поближе познакомиться с игровой платформой и её функциями. За счёт презентов возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за игры напротив живых крупье. <a href=http://filmkachat.ru/>зеркала 1×slots</a> <a href=https://www.4sync.com/s/fpXRu8Czr>https://www.4sync.com/s/fpXRu8Czr</a> Объективные – размер приза, коэффициент и обстоятельства вейджера, надобность внесения депо для вывода денег;Процесс подтверждения личности имеет занять от 1-го дня до недели. Если заказчик разрешил нибудь оплошность при заполнении паспортных данных, то ему по адресоваться с проблемой в службу онлайн-казино. 1хслотс зеркало <a href=http://iminthai.com/home.php?mod=space&uid=194402>http://iminthai.com/home.php?mod=space&uid=194402</a> Подтверждение регистрации. Казино просят привязки профиля к электронному адресу и номеру телефонного. Для этого на e-mail отчаливает послание ссылаясь, а на телефон ? текстовое известие с кодом.
1×slots зеркало которую указывали при регистрации кстати
Высокая конкурентность в разделе азартных игр мотивирует операторов привлекать посетителей разнородными промоакциями. Благодаря данному у гостей появляется возможность получить бонусы в казино за регистрацию без депозита. Воспользоваться этим предложением можно, минуя процедуру внесения средств на игровой счет, просто активировав акк на веб-сайте. Наш экскурсовод по бездепам поможет выбрать самую привлекательную бонусную программку, разузнать правила получения такового гонорары и распорядиться им с наибольшей выгодой. 1 xslots рабочее зеркало Обыкновенные бездепозитные бонусы в объеме от трех до двадцати долларов сделаны для того, чтобы в забавы заходили все новые и новые игроки. Здесь, вероятнее всего, несомненно ограничение на наибольший выигрыш. Важно, чтобы перед наименьшим вкладом был отключен бонус за первое пополнение счета, и компьютерные не попадет на повторный вейджер. <a href=https://botdb.win/wiki/User:KatieKnowlton87>https://botdb.win/wiki/User:KatieKnowlton87</a> Мы подготовили перечень, где есть практически животрепещущие и свежие бездепозитные призы казино, которые вы можете получить безвозмездно. Для наших юзеров есть особые предложения неповторимые призы, которые вы ни не найдете, их мы обозначили специальной красноватой плашкой «Exclusive». 1× slots casino зеркало
1×slots подтвердит вашу регистрацию если говорить
Большинство клубов привлекают внимание игры за счёт разнообразных презентов. На 1 веб-сайтах можно получить виртуальные кредиты, которые откроют доступ ко всему софту. На иных же, администрация предлагает безвозмездные вращения для пуска лучших интернет слотов. Несмотря на различные промоакции, стоит выделить самые главные.Некоторые онлайн-казино без депозита предлагают новым посетителям выбрать приз при регистрации. Будьте внимательны: выбрав раз, вы в безоговорочном большинстве случаев не можете пользоваться остальными. Предложения с бездепозитными призами за регистрацию разрешают свежим заведениям привлечь аудиторию на свой сайт. А игроки же получают вероятность играть на реальные деньги без депо в казино и заработать малый стартовый капитал, который разрешается исключить на карту банка либо электрический кошелек.Таким образом, заведение пытается показать себя своим вероятным игрокам, а подобный маркетинговый ход как казино бонус без депозита за регистрацию привлекает довольно большое внимания к игорному заведению и обеспечивает постоянный струю новых посетителей и грядущих клиентов игрового интернет клуба. <a href=http://vse-ekonomim.ru/author/geraldinnor/>http://vse-ekonomim.ru/author/geraldinnor/</a> В интернете много узнаваемых игорных площадок с привлекательными акционными услугами. Однако пристально разбирать условия десятков услуг в надоест, ну и время отнимет количество. Поэтому наша команда подготовила ТОП-3 сайтов с наихорошими бездепозитными бонусами: 1×slots официальный сайт скачать на айфон Возьми свой презент. Чаще всего приз активизируется незамедлительно последствии регистрации. Но посещают ситуации, когда нужно зайти в личный офис либо написать в справочную службу.
1×slots зеркало сайта
Автоматы непопросту числятся наиболее известным азартным весельем. Чтобы освоить управление и верховодила, потребуется всего количество мин. Ваша задача сделать ставку, определить число трудящихся линий и возможно вертеть барабан. Если на экране выпадет выигрышная комбинация – вы выиграли! С этой задачей для помогут управится бездепозитные призы казино.Отыграв бездепозитный приз в казино с выводом также придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если схожее лимитирование присутствует, то единоразово вывести выйдет лишь необходимую, не превосходящую размер приобретенного бонуса. <a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=147153>1×slos регистрация в 1×slots casino</a> Раздача призов имеет быть посвящена различным датам: календарные праздничные, дни рождения игроков, юбилей открытия казино и т. Д. Подарок выдается вид денег, фриспинов или баллов для накопления и обмена на предложения оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд притязаний.Ознакомьтесь с нашим списком наихороших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего списка и получите бездеп незамедлительно. Хватайте наихорошие бесплатные предложения ниже и выигрывайте великие деньги, не рискуя! 1хслотс регистрация в 1×slots casino <a href=http://perfectsolutionlabs.com/user/Tyronebiors/>http://perfectsolutionlabs.com/user/Tyronebiors/</a> При малый сумме бонуса рекомендуется выступать по низким ставкам, а применять наибольшие лучше лишь сомнений случае, в вейджер очень великой, а время на отыгрыш сильно ограничено.Но есть азартные заведения, готовые просто так вручить средства на игру. Для сего достаточно создать профиль. Чтобы исключить выигрыш, сначала нужно выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа.
1хслот официальный сайт зеркало
Более солидные предложения встречаются очень изредка. Зачастую они доступны только VIP-игрокам. В оставшихся случаях им скорее сопутствуют очень строгие обстоятельства отыгрыша. Также вероятны дополнительные условия и другие ограничения, прописанные в условиях и положения бонусной программы казино.Для получения выигрыша потребуется выполнить условия казино. Чаще всего игроку нужно поставить определенную необходимую, хотя уже из собственных денег. Она рассчитывается из совместного объема выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, в пользователь выиграл 1000 рублей, а множитель сочиняет х30, вывести средства можно несомненно, сделав ставки на 30 000 руб. Бездепозитные бонусы в казино без пополнения 2022 — это конкретная сумма денег либо gorovyh spins вращения, которые предоставляются первым постояльцам за регистрацию на веб-сайте казино в виде бездепозитного приза, и дает для возможность с казино без пополнения опробовать предложения (игр), с дальнейшей привилегией вывода средств при исполнении всех установленных правил. <a href=http://clasificadosdolores.com.ar/sitio/author/ralphtex>http://clasificadosdolores.com.ar/sitio/author/ralphtex</a> Мы проделываем акцент на главных положениях верховодил, рассказываем о территориальных ограничениях и вкратце информируем о иных промоакциях обсуждаемого казино. 1×slots зеркало этих способов предполагает регистрацию Бездепозитный бонус часто имеет стать доступным незамедлительно в окончания регистрации, потому правило единственным требованием к нему является регистрация, а после проверка вашей новой учетной записи.Новички не обожают сразу же заносить депозит. Это обусловлено неимением навыка и недоверием. К счастью, в возможно получить бездепозитный приз за регистрацию в казино. Неважно собственно начислит система – фриспины либо кредиты. В любом случае вы не рискуете собственными сбережениями. Это отличная возможность запустить приглянувшийся видео слот или же испытать фортуну в настольных забавах.
<b>Смотреть еще похожие новости:</b>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=85400&result=reply>казино 1×slots официальный сайт</a>
<a href=http://moneysweet.listbb.ru/viewtopic.php?f=2&t=5432>1×slots регистрация на 1хслотс</a>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=130029>1×slots casino регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но не стоит думать, что снабжая пользователей этими призами, казино занимается спонсированием. Ведь объемы вознаграждений, в, не большие (средним размером от 5 до 20 $). И на эти свои налагаются определенные условия и лимитирования, обязательные к выполнению игрока, в в последствии он желает получить все средства выигранные деньги. Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и. Когда игроку полагается большое фриспинов, администрация может бить3 их начисление на несколько дней. Бесплатные вращения предоставляются для определенного слота, кот-ый указывается в правилах акции.
#5271 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
7k casino зеркало Самойлова Алла Владимировна порно <a href=https://www.ossetia.tv/>казино вулкан</a> симулятор казино бесплатные букмекерские конторы <a href=https://vestnik-jurnal.com/>1×bet скачать бесплатно</a> мобильные букмекерские конторы порно с Дарья Касаткина (теннис) казино смотреть онлайн casino зеркало сегодня какие казино порно с Илья Осипов (киберспорт) бесплатные букмекерские конторы
DiskiPlus симулятор казино DiskiPlus porno Екатерина Ефременкова, шорт-трекистка <a href=https://www.diskiplus.ru>DiskiPlus казино 5</a> DiskiPlus бесплатное казино DiskiPlus 1×bet на сегодня <a href=https://diskiplus.ru/>DiskiPlus gama casino</a> DiskiPlus porno Виктория Баркова, легкоатлетка DiskiPlus букмекерская контора скачать приложение DiskiPlus 7k casino официальный DiskiPlus kent casino регистрация DiskiPlus Хорова Наталья Александровна порно DiskiPlus букмекерская контора DiskiPlus Приезжева Екатерина Геннадьевна порно
#5272 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
Однако далеко не все ресурсы предлагают своим посетителям бездепозитные бонусы за регистрацию в казино. В большинстве случаев учтено одобрение на 1-ый депозит в размере 100–200%. Это замечательная вероятность преумножить банкролл, увеличить время, проведённое за забавой и шансы сорвать большой куш.Внесение депозита – Будьте готовы пополнить счет последствии отыгрыша приза. Это стандартное требование управлял для данного типа промо-акций. Лучше заблаговременно уточнить, какую необходимую надо(надобно) несомненно вносить на счет. Как правило, речь идет о наименьшем депозите, хотя вы должны быть убеждены, собственно он для по кармашку. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=https://www.4sync.com/s/fpXRu8Czr>https://www.4sync.com/s/fpXRu8Czr</a> 1×slots casino регистрация <a href=https://lustbb.com/member.php?action=profile&uid=2931>https://lustbb.com/member.php?action=profile&uid=2931</a> Так что главное отличие дара на депо от бездепа – обязательное пополнение счёта. Вы сможете внести депо и преувеличить стартовый капитал либо забрать бездеп и при этом не придётся рисковать своими сбережениями. Поспешите выполнить простые притязания, и администрация ресурса начисляет щедрое поощрение!Бездепозитные бонусы — это подарки от казино в виде бонусных средств либо фриспинов для игровых автоматов, которые начисляются на аккаунт игрока в процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депозит не требуется.
рабочее зеркало 1×slots
1×slots официальный сайт зеркало рабочее Также случаются случаи, когда казино начислит обсужденный приз в регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам. <a href=http://lawshare.tw/home.php?mod=space&uid=345891>http://lawshare.tw/home.php?mod=space&uid=345891</a> 1×slots casino регистрация на сайте
1×slots промокод при регистрации
Эффективность бездепов в рекламного инструмента расценили почти операторы. Малоизвестные площадки употребляют эти промоакции, чтобы прытко набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны неизменных гостей. Не все сайты, дающие подарки без депо, рекомендованы к игре. За привлекательным промоописанием могут прятаться неосуществимые условия отыгрыша и подводные камешки.Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют важную информацию о not the slightest down payment bonuses прочих предложениях. <a href=http://gather-girls.com/home.php?mod=space&uid=116814>http://gather-girls.com/home.php?mod=space&uid=116814</a> 1×slots регистрация на официальном сайте
1хслот зеркало сайта
Также, такой нужно подтвердить свой номер телефона, достичь код, полученный в смс-сообщении от клуба установить в особое фон в собственном офисе игрока.Игрокам не следует воспринимать приветственный бонус как гарантированный метод получить большой выигрыш, хотя это отличная возможность без расходов оценить перечень казино. Онлайн-казино с бездепозитными бонусами ставят посетителям условия для использования бездепами, потому перед участием в промоакции другого, как тщательно ознакомиться со всеми правилами и аспектами промоакции. Условия шансы дотрагиваться получения приза, его использования и последующего вывода денежных средств если, тогда, выигрыша.Также существуют онлайн-платформы азартных игр, которые применяют раздачу бездепозитных бонусов в специальные даты (как для казино, так и для игрока). Помимо этого, действующие игроки кроме имеют вероятность получить похожие бонусы за свою деятельность (к примеру, за увеличения значения либо за похожие достижения). 1хслотс зеркало <a href=http://forums.indexrise.com/user-316940.html>http://forums.indexrise.com/user-316940.html</a>
1хслотс казино зеркало
Поспешите отобрать бездепозитные призы за регистрацию в казино из представленного списка. Все платформы не водят легальную деятельность, но и обрадуют честными результатами игры, высочайшей отдачей, резвыми выплатами. <a href=http://iminthai.com/home.php?mod=space&uid=184861>http://iminthai.com/home.php?mod=space&uid=184861</a> Игры, в можно играть на бонусные деньги. Проверьте список игр, в возможно играть на бонусные свои, вероятно они Вам не понравятся и не тратить своё время на такую промоакцию.Такие поощрения дозволяют безвозмездно протестировать свежее казино, разобраться с игровым процессом интернет слотов, заработать и исключить небольшую необходимую денег. 1хлот регистрация в 1×slots casino Бездепозитные призы за регистрацию считаются одним из самых известных методов привлечения свежих игроков в онлайн-казино, поэтому что они предоставляют игрокам вероятность опробовать казино, особенно игровые автоматы, и вполне, выиграть реальные средства.При регистрации следует свидетельствовать только достоверную информацию. Когда учетная запись несомненно активна, замечен доступ в Личный кабинет. В нем возможно выбрать денежную, ввести промокод и разузнать подробные управляла получения и отыгрыша бездепа. Краткая информация об акции часто находится именно на регистрационной форме.
<b>Смотреть еще похожие новости:</b>
<a href=https://projects.sare.org/people/jamestrazy/>1×slots регистрация 1×slots review live</a>
<a href=https://koreanstudies.com/forum/viewtopic.php?t=177904>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a>
<a href=https://thetechmodders.com/forums/memberlist.php?mode=viewprofile&u=945>1×slots официальный сайт скачать</a>
<a href=https://praisenpray.org/forums/showthread.php?tid=97592>онлайн казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Условия вывода выигрыша. В неких заведениях для успешного вывода с бездепозитного бонуса довольно пополнения баланса и доказательства личности. В иных же клубах, нужно количество раз прокрутить свой депозит. Вознаграждения за получение VIP-статуса ? начисляются в рамках программки преданности при достижении еще значения или выдаются индивидуально менеджерами саппорта.
#5273 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пари букмекерская контора порно с Дарья Клишина, легкоатлетка <a href=https://glvk.guru/>леон букмекерская контора</a> pinco casino casino рабочее зеркало <a href=https://rucriminal.info/>casino зеркало сегодня рабочее</a> порно с Аделия Петросян (фигурное катание) up casino официальный порно с Гатагова Ольга Анатольевна cat casino казино ставка балтбет букмекерская контора казино большая
DiskiPlus Ходнева Светлана Владимировна порно DiskiPlus porno Светлана Ходченкова <a href=https://www.diskiplus.ru>DiskiPlus где казино</a> DiskiPlus 7k casino зеркало рабочее DiskiPlus 1×bet бесплатно <a href=https://www.diskiplus.ru/>DiskiPlus casino официальный сайт</a> DiskiPlus ев казино DiskiPlus casino pin официальный DiskiPlus про казино DiskiPlus casino приложения DiskiPlus гама казино DiskiPlus 1×bet зеркало рабочее на сегодня DiskiPlus 1×bet зеркало
#5274 Charlesgunnyhttp://filmkachat.ru
зеркала 1×slots
Такой безвозмездный эквивалент средств зачисляется на профиль юзера последствии осуществления требований и предназначаются они только для игрового процесса. Вывод таких вознаграждений вероятен только в осуществления вейджеровых условий. <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> Бездепозитный бонус казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби избранного заведения, определится в выборе игр и выяснить качество работы саппорта. Довольно нередко, начиная игровой процесс, игрок уже отказывается останавливаться и делает реальный вклад. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать бесплатно вполне как раз таки с призом за регистрацию без надобности заносить депозит. <a href=https://www.chambers.com.au/forum/view_post.php?frm=1&pstid=77272>https://www.chambers.com.au/forum/view_post.php?frm=1&pstid=77272</a> Варианты выигрыша в от Вашей удачи и критерий игорного портала. Выше мы заявили, собственно некоторые бездепозитные призы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются и, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на деньги, возможно выиграть невозможные суммы. Сегодняшние игровые автоматы или видео слоты, как их называют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые множат ставку от х100.000. 1×slots casino online регистрация <a href=https://7apk.ru/user/RalphNeW/>https://7apk.ru/user/RalphNeW/</a> Нет. Для получения бездепозитного приза в казино нужна обязательная регистрация на веб-сайте. Играть в слоты бесплатно и без регистрации можно только в демо режиме.
1× slots зеркало
<a href=https://mit-bbs.com/viewtopic.php?t=159683>1×slots casino регистрация на сайте</a> 1хслотс зеркало на сегодня Чтоб получить крупный выигрыш, подбирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша.Такие одобрения дозволяют даром протестировать свежее казино, разобраться с игровым ходом интернет слотов, заработать и исключить маленькую необходимую денег. <a href=https://diskutim.com/member.php?action=profile&uid=4127>https://diskutim.com/member.php?action=profile&uid=4127</a> зеркала 1×slots
1×slots зеркало регистрация в 1×slots casino
Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? <a href=http://lsdsng.com/user/568353>http://lsdsng.com/user/568353</a> 1×slots бездепозитный бонус за регистрацию Далее требуется отыграть вагер и исключить выигрыш. Игрокам без опыта крупно повезло, есть получить 10-ки подарков за одну регистрацию. Если не смогли получить Бездепозитный приз, не волнуйтесь. Обратитесь в онлайн чат, оператор поможет исправить.Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала прыткие выводы. Фишка выплат что, нет, собственно довольно выбрать платёжный инструмент и указать сумму. В большинстве случаев средства зачисляются на электрические кошельки в течение 15 минут, а на банковские карты – 1–3 рабочих денька.
1хслот 1хслотс регистрация перейти на 1×slots
Этот образ приза несомненно добавлен на Ваш акк в успешной процедуры регистрации с внедрением номера телефона. Если избрать другой способ творения учетной записи, бездеп не несомненно добавлен на Ваш акк.Существуют казино с призом за регистрацию, в которых довольно популярны фриспины в интернет казино потом регистрации в определенных играх. Они встречаются в чаще бесплатных поощрений или традиционных бонусов в казино без вложений. Например, игрок регистрирует счет, на кот-ый начисляются безвозмездные забавы, приз за регистрацию вид бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса игрок выигрывает настоящие деньги, коие в последствии можно успешно исключить из заведения на собственную платежную систему. То есть, есть все шансы вывести средства без рисков своими деньгами. Регистрация, за которую игры получит бонусы, займет несколько, а спасибо этому можно прирастить пять евро поощрений до тыс. И без всяких проблем исключить их. Нет. Для получения бездепозитного приза в казино необходима неотъемлемая регистрация на веб-сайте. Играть в слоты даром и без регистрации возможно лишь в демо режиме.Частенько новички не разумеют, как активировать подарки либо вывести первый выигрыш. Для похожих случаев наша команда обрисовала главные определения – что такое фриспины, вейджер, как его отыграть, чего нужно протекать верификацию. 1×slots официальный сайт, скачать <a href=http://www.gaz69.ru/ipb/profile/41571-cazinosdep/?tab=field_core_pfield13>http://www.gaz69.ru/ipb/profile/41571-cazinosdep/?tab=field_core_pfield13</a> Но рядах азартных платформах похожие вознаграждения шансы получить теперь зарегистрированные юзеры. В таком случае, бонусы предоставляются в оригинальных акций или же некоторым геймерам вид акционного предложения, коие приходит на почту с целью «возвратить» игрока в свое казино.
1×slots зеркало видели такую регистрацию на
Прежде всего, не запамятовывайте регулярно заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом рассматривают более интересные предложения водящих игорных порталов. 1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, случае не желайте стать жертвой плутов или впустую израсходовать время; <a href=http://www.ankaradogalgazproje.com/2017/04/ankara-baskent-gaz-dogalgaz-abonelik-islemleri.html>http://www.ankaradogalgazproje.com/2017/04/ankara-baskent-gaz-dogalgaz-abonelik-islemleri.html</a> Помните, что в некоторых забавах сумма ставки идет в зачет вейджера лишь частично. Так, в настольных и карточных забавах лишь от 5% до 50% суммы ставки считаются как отыгранные средства, в то время как в слотах идет в зачет все 100% суммы. 1×slots официальный сайт, скачать
<b>Смотреть еще похожие новости:</b>
<a href=http://nacionrolera.org/foro/viewtopic.php?f=1210&t=330319>1×slot зеркало рабочее регистрации на телефон придет</a>
<a href=http://polishcrazyclan.ugu.pl/member.php?action=profile&uid=272738>1хслотс казино зеркало</a>
<a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=8744>1×slots официальный сайт скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Используйте наилучшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из перечня ниже, дабы заработать подарки за простые действия и уже сейчас получить первый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высокой отдачей и прыткими выводами на электрические кошельки.
#5275 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Игорь Акинфеев (футбол) casino <a href=https://kompromat1.online/>казино фильм смотреть онлайн</a> играющие казино онлайн порно с Дарья Касаткина (теннис) <a href=https://vestnik-jurnal.com/>пин ап казино</a> леон букмекерская контора Крючкова Полина Викторовна порно Черкесова Бэлла Мухарбиевна порно 1×bet официальный скачать casino com суть казино 1×bet зеркало рабочее на сегодня 1×bet xyz
DiskiPlus букмекерская контора мостбет DiskiPlus казино онлайн бесплатно <a href=https://diskiplus.ru>DiskiPlus up casino официальный</a> DiskiPlus порно с Александр Головин (футбол) DiskiPlus 1×bet скачать приложение <a href=https://www.diskiplus.ru/>DiskiPlus скачиваемые казино</a> DiskiPlus 1×bet официальный xbet DiskiPlus порно с Владимир Минеев (ММА) DiskiPlus ramenbet casino DiskiPlus ев казино DiskiPlus букмекерская контора без DiskiPlus сайт букмекерской конторы DiskiPlus casino официальный зеркало
#5276 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet официальный сайт 1×bet xyz pin up casino зеркало <a href=https://strelochnik.com/>porno Юлия Канакина</a> 1win букмекерская контора порно с Карен Хачанов (теннис) <a href=https://strelochnik.com/>песня казино</a> bet casino online casino порно с Юлия Ефимова казино фильм смотреть онлайн суть казино porno Юлия Канакина мобильные букмекерские конторы
DiskiPlus Нургалиева Эльвира Рамиловна порно DiskiPlus букмекерская контора вход <a href=https://diskiplus.ru/>DiskiPlus рабочие зеркала казино</a> DiskiPlus ап казино DiskiPlus retro casino <a href=https://diskiplus.ru/>DiskiPlus букмекерская контора без</a> DiskiPlus букмекерскую контору пин DiskiPlus порно с Алина Загитова DiskiPlus промокод 1×bet DiskiPlus играющие казино DiskiPlus букмекерскую контору пин DiskiPlus casino бонус DiskiPlus porno Дарья Мороз
#5277 Charlesgunnyhttp://filmkachat.ru
1×slots коды
На благотворительные призы онлайн-казино почти практически распространяется ограничения по стране проживания клиентов. Даже если вас разрешается открывать счет и играть на деньги в заведении, это еще не означают, собственно вам доступны no deposit bonuses.Но не размышлять, что снабжая юзеров этими бонусами, казино увлекается спонсированием. Ведь размеры вознаграждений, в основном, не великие (средним размером от 5 до 20 долларов). И на эти средства налагаются конкретные обстоятельства и лимитирования, неотклонимые к исполнению игрока, если в последствии он вожделеет получить все средства выигранные деньги. <a href=http://filmkachat.ru/>казино 1×slots</a> Помните, что в некоторых забавах сумма ставки идет в зачет вейджера лишь частично. Так, в настольных и карточных забавах лишь от 5% до 50% суммы ставки считаются как отыгранные средства, в то время как в слотах идет в зачет все 100% суммы. <a href=https://forum.highlite.com/showthread.php?tid=1881>https://forum.highlite.com/showthread.php?tid=1881</a> Вы не в коем случае ни чем рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный приз, по мимо практической игры на бездепозитные призы, у Вас есть шанс выучить игровые автоматы, научится регулировать менять ставки и полосы, изучать бонусные игры и их выигрышные комбинации, да счете просто зарядится кучей впечатлений! Ведь вы будите выступать на бонусные средства, коие можно отыграть и исключить, но просто на демо счет, что, этим самым адреналин в крови более повысится а пульс забьется с нередким ритмом!Условия, на коих предоставляется бездеп, регулируются казино. Каждая промоакция имеет доскональные верховодила, ссылка на коие обыкновенно содержится в промообъявлении. В их указываются лимиты, вейджер, список дешевых игр. Если оператор прячет данные о предложении, то пользоваться им надо. 1×slots официальный сайт зеркало <a href=https://nerdgaming.science/index.php?title=Выкуп_авто>https://nerdgaming.science/index.php?title=Выкуп_авто</a>
x1 slots 1хслотс регистрация перейти на 1×slots
1хслот зеркало Шаг 4. Активация. Внимательно выучите обстоятельства, информацию по ограничениям и сроке действия бонусного предложения. Разобравшись с правилами, возможно активировать бонус в собственном офисе (времени ? с внедрением промокода) или по запросу в саппорт. <a href=https://forex-arabic.com/members/180789-Philipfut>https://forex-arabic.com/members/180789-Philipfut</a> сайт 1× slots casino Принципиальным отличием безвозмездных призов от бонусов на депо является неименье необходимости вносить деньги на акк. Из-за сего их часто называют бездепозитными (no down payment bonuses).В любом казино с бездепозитным призом предусмотрены вейджеровые обстоятельства. Это один-единственный «подводный камень», кот-ый стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, нужно устроить определённое число ставок. Чем круче бонус, что, этим сложнее выполнить условия, и наоборот.
1×slots официальный demo регистрация в 1×slots casino
Свежий приз начисляется в виде валютных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в использовании своими, а случае отыгрыша оператор имеет установить ограничение на вывод средств. <a href=http://polishcrazyclan.ugu.pl/member.php?action=profile&uid=261945>http://polishcrazyclan.ugu.pl/member.php?action=profile&uid=261945</a> Фриспины. Бесплатные вращения предназначены для применения в видео-слотах. Внимательно читайте условия – они нередко выдаются для неких машин. В зависимости от клуба продоставляется создавать определенное число ставок. Кстати, современные игорные жилища дают возможность заводить «одноруких бандитов».Благодаря программке лояльности от игорного заведения, возможно брать превосходный старт и без добавочных инвестициям запустить видеослоты. Кроме как, можно рассчитывать на реальную фортуну и получить, без инвестиции собственных финансов, великой выигрыш. 1×slots зеркало регистрация в 1×slots casino Стоит обозначить(означить), что бездепозитный приз выдается лишь взрослым новеньким, коие, в свою очередь, все пригласить собственных друзей и людей, того рассчитывающих на поощрительную программку преданности. Подобная технология замечена между конкурирующих онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры содействуют повышению собственной посещаемости, путем вербования свежих игроков. Бонусы – это уникальный шанс для вероятных соучастников забавы, которые шансы опробовать софт покер рума и убедиться, будут ли они в него играть либо нет. Новый игрок попробует средства силы с настоящими оппонентами в казино.
сайт 1× slots casino
Многие игроки, оценив перечень казино, остаются выступать в нем и дальше ? на это и нацелено каждое рекламную. Постоянные посетители вносят депозиты и проделывают ставки, обеспечивая долгосрочную выгода оператора. То есть, казино раздают бездепы свежим пользователям для формирования приклнной аудитории. 1×slots рабочее зеркало <a href=http://avto.izmail.es/user/ArnoldTop/>http://avto.izmail.es/user/ArnoldTop/</a> Фриспины предусмотрены для применения в видео слотах. Внимательно ознакомьтесь с критериями – частенько их выдают на кое-какие автоматы. В зависимости от клуба, у вас выйдет устроить определённое количество ставок. Кстати, продвинутые игорные дома разрешают запускать любых «одноруких злодеев».
1×slots официальный сайт скачать на айфон
Законодательство, регулирующее азартные игры в различных государствах, влияет на возможности операторов. В результате юзеры из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это возможность быть как глубокий отказ в доступе, например и невозможность загружать игры отдельных изготовителей. <a href=http://mallds.com/bbs/board.php?bo_table=free&wr_id=262379>http://mallds.com/bbs/board.php?bo_table=free&wr_id=262379</a> За вербование приятеля ? в рамках партнерской программы заказчик получает вознаграждение за привлечение свежих юзеров. 1хслотс 1хслотс регистрация перейти на 1×slots При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое можно посвятить игре в казино.Выше мы дали глубокий комплект самых свежих и актуальных бездепозитных бонусов в онлайн казино без пополнения на 2022 год, где возможность воспользоваться любым ценным бездепозитным бонусом.
<b>Смотреть еще похожие новости:</b>
<a href=https://australianwinerytours.com/tours/showthread.php?tid=209729>1×slots зеркало</a>
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=453858>1×slots регистрация</a>
<a href=https://timepost.info/showthread.php?tid=57482>1хслотс мобильная версия зеркало</a>
<a href=http://www.easysunnysunshine.com/memberlist.php?mode=viewprofile&u=18118>1хслотс мобильная версия зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Используйте превосходнейшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из перечня ниже, дабы заработать подарки за обычные деянья и уже сегодня получить первый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высокой отдачей и резвыми выводами на электронные кошельки.
#5278 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino зеркало сайта самое казино <a href=https://kompromat1.online/>сайт винлайн букмекерская контора</a> casino 7k сегодня porno Юлия Канакина, скелетонистка <a href=https://rucriminal.info/>гта онлайн казино</a> ramenbet casino up casino скачать pin up casino пин ап 1×bet зеркало 1go casino Мухтиярова Елена Вячеславовна порно винлайн букмекерская контора официальный
DiskiPlus казино сегодня DiskiPlus 1×bet слоты <a href=https://www.diskiplus.ru/>DiskiPlus слоты казино</a> DiskiPlus 1×bet зеркало рабочее DiskiPlus casino ап <a href=https://www.diskiplus.ru>DiskiPlus порно с Никита Кучеров (хоккей)</a> DiskiPlus casino daddy DiskiPlus 1×bet вход DiskiPlus казино зеркало сегодня DiskiPlus casino зеркало сегодня DiskiPlus vavada casino DiskiPlus порно с Гатагова Ольга Анатольевна DiskiPlus bet casino
#5279 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию процедура займет всего лишь
Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и. Когда игроку полагается большое фриспинов, администрация имеет разбивать их начисление на некоторое дней. Бесплатные вращения предоставляются для конкретного слота, который указывается в правилах промоакции.Обычно бездепозитные промоакции от казино, прибывают на эл. Почту в деньки рождения либо праздники. В неких онлайн казино возможно обратиться в чат и как постоянному игроку, вполне вас предложат бездепозитное предложение. <a href=http://filmkachat.ru/>1хслот зеркало сайта</a> Чем ниже значение вейджера, что, этим проще отыграть и вывести бонус. Если Вы планируете заработать на бездепе, а не просто ознакомиться с новым игровым клубом, то стоит игнорировать бонусов с высоким вейджером их практически не реально отыграть. С ними Вы сможете только протестировать игры заведения.Существует ли стратегии для отыгрыша бездепозитных бонусов? К огорчению нет, на выигрыши или проигрыши с призов, казино либо игрок повлиять не, отдача игр случается от создателей игр. <a href=http://prsync.com/shopavto/shopavto-is-a-car-buyout-service-operating-in-odessa-4371377/>http://prsync.com/shopavto/shopavto-is-a-car-buyout-service-operating-in-odessa-4371377/</a> 1×slots casino регистрация 1×slots review live <a href=https://www.ccvgaming.com/forum/member.php?38483-Miguelsax>https://www.ccvgaming.com/forum/member.php?38483-Miguelsax</a> Частенько новички не разумеют, как активировать презенты либо вывести 1-ый выигрыш. Для сходственных случаев наша команда описала главные определения – что это фриспины, вейджер, как его отыграть, зачем нужно протекать верификацию.Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, solid зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.
1×slots регистрация на сайте 1×slots ru com
<a href=https://www.thefamilylegion.se/viewtopic.php?f=4&t=16990>1×slots официальный сайт мобильная версия</a> 1×slots зеркало этих способов предполагает регистрацию Доступные забавы – В некоторых азартных забавах возможно понизить математическое преимущество казино до нескольких 10-х процента. В их количестве все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как верховодило, в таких играх ставки идут в зачет вейджера не всецело. Например, имеет предусматриваться только 50%. В неких играх бездепозитные призы вообще нельзя отыгрывать. <a href=https://love-n-magic.ru/index.php?subaction=userinfo&user=JustinTab>https://love-n-magic.ru/index.php?subaction=userinfo&user=JustinTab</a> Начнём с того, собственно каждое промо за регистрацию подразумевает некоторые условия. Бездепозитные бонусы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, необходимая для исполнения условий. Пример, возымели благотворительные вращения и выиграли с них 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 рублей, неудачных либо выигрышных, важно. После исполнения, бонусный баланс перейдёт на настоящий и станет доступным к выводу. 1×slots зеркало на сегодня Индивидуальные поощрения выдаются за совершение деяний: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавленья или официального клиента для ПК. В большинстве казино действуют программки преданности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий степень нередко сопровождается выдачей бездепа.Однако в критериях скрываются «подводные камни», коие не разрешат исключить солидную необходимую или же вы не успеете отыграть вейджер. Поэтому профессионалы советуют забрать бесплатные вращения за регистрацию в казино без депо, дабы поднабраться опыта и получить настоящий шанс на победу.
1×slots официальный сайт скачать на айфон
Для тех, кто только взвешивает испытать свою удачу, а для профессиональных игроков, разыскивающих свежие площадки для выигрышей, водящие лицензированные казино нередко организуют различные акции, и лучшее услуг за последнее время – как для начинающих, так и для проф игроков – бездепозитный приз за регистрацию.Для получения выигрыша потребуется выполнить обстоятельства казино. Чаще всего игроку нужно поставить конкретную необходимую, хотя теснее из личных средств. Она рассчитывается из совместного объема выигрыша за всегда использования бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, в юзер выиграл 1000 рублей, а множитель составляет х30, исключить деньги можно несомненно, сделав ставки на 30 000 руб. Обыкновенные бездепозитные призы в размере от трех до двадцати долларов созданы для того, чтобы в забавы заходили все свежие и свежие игроки. Здесь, всего, несомненно лимитирование на наибольший выигрыш. Важно, дабы перед наименьшим вкладом был отключен бонус за 1-ое пополнение счета, и компьютерные не попадет на повторный вейджер.Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам запрещено начислять призы клиентам, не имеющим валютных средств на счете. Мы предлагаем рассмотреть животрепещущие бонусы онлайн-казино с лицензией, которые соблюдают законодательство РБ. <a href=http://welovewords.com/richarderona>http://welovewords.com/richarderona</a> 1×slots зеркало быструю регистрацию а также мгновенное Бонус за регистрацию в казино без депо с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша имеет понадобиться сделать ставки на сумму, в количество десятков раз превосходящую сумму бонуса либо выигрыша.
1х слот 1хслотс регистрация перейти на 1×slots
Каждый в должен сначала отчетливо изучить обстоятельства по получению и отыгрышу понравившегося дара. Если всё устраивает, поспешите забрать безвозмездные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик данный начать вертеть барабаны топовых слотов. Также бездепозитные бонусы имеют служить способом возвратить к этой клиентов, пока приостановивших своё сотрудничество с компанией: извещение о бездепе поступает на мобильный аппарат или почту.Зачастую бездепозитные призы казино для забавы предлагаются разными заведениями азартных игр в рекламных акций либо в целях вербования к для новых игроков. Для бездепозитных бонусов в казино 2022 игроку надо пополнять счет до момента вывода хотимых средств. При использовании бездепозитным призом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют некоторое видов лимитов: 1×слотс казино <a href=http://velotrial.ru/353851>http://velotrial.ru/353851</a>
1× slots сайт
В онлайне большое известных игорных площадок с привлекательными акционными предложениями. Однако внимательно разбирать условия десятков предложений скором надоест, да и время отнимет большое. Поэтому наша команда подготовила ТОП-3 сайтов с превосходнейшими бездепозитными бонусами: Необходимость отыгрыша. Вейджер ситуации выше, чем для призов за депозит. И же свои не отыграны, исключить их нельзя.B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax <a href=http://www.apicarrara.it/modules.php?name=Journal&file=display&jid=4147>http://www.apicarrara.it/modules.php?name=Journal&file=display&jid=4147</a> Вейджер (либо вагер) ? это наименьшая сумма ставок, коию нужно сделать для вывода денежного приза. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение.Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/7977–1×slots-ofitsialnyj-sajt-zerkalo#7999>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На бонусные начисления имеют быть установлены дополнительные ограничения, которые Вы не к при отыгрыше. Пока бонус всецело не отыгран — средства из казино не выводятся.
#5280 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Владимир Минеев (ММА) casino ru <a href=https://rumafia.news/>букмекерская контора вход</a> часы казино Ирина Горбачева <a href=https://rumafia.news/>casino online зеркало</a> букмекерская контора фонбет официальный сайт pin up casino казино рублях kometa casino up букмекерская контора porno Яна Троянова порно с Илья Осипов (киберспорт)
DiskiPlus порно с Анастасия Потапова, теннисистка DiskiPlus включи казино <a href=https://www.diskiplus.ru/>DiskiPlus пин up casino</a> DiskiPlus bet casino DiskiPlus porno Юлия Пересильд <a href=https://diskiplus.ru>DiskiPlus порно с Анастасия Потапова, теннисистка</a> DiskiPlus сайте букмекерской конторы фонбет DiskiPlus порно с Евгения Медведева DiskiPlus Львова-Белова Мария Алексеевна порно DiskiPlus почему в казино не бывает настенных часов DiskiPlus порно с Александр Большунов (лыжные гонки) DiskiPlus up casino DiskiPlus 1×bet слоты 1×bet top
#5281 Charlesgunnyhttp://filmkachat.ru
1×slot регистрация
А ознакомиться с новыми онлайн казино, Вы сможете за счет призов с выводом выгоды, которые Вы можете получить без депозита. <a href=http://filmkachat.ru/>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a> Как прочие промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения являются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает новых гостей и дозволяет им составить эмоцию о функционале, не рискуя значительными суммами. <a href=https://www.gift-me.net/blogs/228961/Transform-Your-Space-Professional-3D-Living-Room-Design-Made-Simple>https://www.gift-me.net/blogs/228961/Transform-Your-Space-Professional-3D-Living-Room-Design-Made-Simple</a> 1×slots casino регистрация на сайте <a href=http://dgxf-forum.com/home.php?mod=space&uid=804151>http://dgxf-forum.com/home.php?mod=space&uid=804151</a> С иной стороны, намного проще отобрать бездепозитные фриспины за регистрацию в казино и прямо сейчас начать вертеть барабаны в превосходнейших слотах. Главная особенность спинов что, собственно они предназначены для лучших автоматов. Удастся не пройти дополнительные раунды, хотя и прирастить необходимую выигрыша, заработать респины и другие внутриигровые подарки.
1×slot рабочее зеркало
1×slots регистрация то дальше необходимо пройти После потребуется привнести идентификационный платёж. Это пугает новичков больше всего. Нужно сделать наименьший депозит в 100–500 рублей. Таким образом служба безопасности увериться том,, собственно платёжный метод принадлежит Вам. Данная процедура необходима для обеспечивания безопасности игровых счетов. Пример, Ваш акк взломают и выведут свои на свой кошелёк. Будет очень досадно. Поэтому верификация платёжной системы, это важный момент. <a href=http://www.cafecomredes.com.br/2020/06/enterprise-ca-assinando-certificado-no.html>http://www.cafecomredes.com.br/2020/06/enterprise-ca-assinando-certificado-no.html</a> 1×slots зеркало подтвердит вашу регистрацию если говорить Фриспины — бесплатные вращения, коие разрешают игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины считаются самым знаменитым и желаемым обликом приза — бесплатные вращения иногда эффективнее и веселее в отыгрыше, чем другие облики бездепов.Таким образом интернет казино получает вероятного игрока. Возможно дальнейшем или настоящем он захочет поиграть на средства средства. Так работают бездепозитные бонусы в онлайн казино. Здесь очень подходит выражение, безвозмездные сыр бывает только в мышеловке. Начинающие игроки шансы не обдумывать опасность пыла. Однако с осознания делается больше. Это тема для отдельного обсуждения.
1хслот официальный сайт зеркало
После получения приза вывод средств для клиента несомненно недоступен до тех пор, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или чета недель. Выводить средства игрок может лишь в отыгрыша.Перед активацией главно внимательно выучить условия акции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют значение также лимиты ставок при отыгрыше и сроки, протяжении которых можно воспользоваться предложением. Если бездеп обхватывает узкий список игр, рекомендуется узнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с низкими множителями выплат подходят только никаких случае, в оператор не установил взыскательные лимитирования на максимальную сумму ставки. <a href=http://islamdini.kg/index.php?subaction=userinfo&user=disagreeablegun>http://islamdini.kg/index.php?subaction=userinfo&user=disagreeablegun</a> B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. 1хслот зеркало сайта В подавляющем большинстве случаев безвозмездные бонусы начисляются в кредитах, коие невозможно сразу вывести со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже.
1×slots зеркало на сегодня
казино 1×slots официальный сайт <a href=https://shorl.com/drymustivifrebe>https://shorl.com/drymustivifrebe</a> Популярность интернет казино растёт и всё больше юзеров начинают интерес азартными забавами. Бездепозитные бонусы 2022 года, это оригинальные подарки за регистрацию. С их помощью свежие игроки все получить благотворительные вращения или средства на баланс за 1 регистрацию. С появлением игорных заведений в онлайне, бездепозитные бонусы стали знаменитейшим методом привлечения игроков. Подобные акции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о которых мы расскажем. Наш вебсайт собрал лучшие предложения из онлайна на 2022 год. Воспользуйтесь хоть презентом и можете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша необходимо выполнить условия.
1× слот зеркало
Суммы подобных предложений, как правило, колеблются от 3-х до 20 $, а вейджер на эти свои обязан сочинять от тридцати до шестидесяти раз. Зачастую, большая сумма выигрыша здесь составит от одной до 2-ух сотен $. Если игры выиграет больше, то все средства шансы быть списанными до максимально разрешенного выигрыша. Здесь появляется смысл выводить еще несуществующие финансы на свою платежную систему и дальше находить заведение с подходящими под данную сумму релоадом или призом за 1-ое пополнение счета. Есть некоторое подвидов бездепозитного гонорары, предлагаемого великим количеством заведений.Если вы избираете проверенное лицензионное онлайн казино и выполните все условия получения бездепозитного бонуса, трудностей с получением подарка у Вас не возникнет. <a href=https://favor.com.ua/ru/blogs/38664.html>https://favor.com.ua/ru/blogs/38664.html</a> 1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, в не желаете стать жертвой мошенников либо впустую истратить время;Как правило, при выводе денег, от играющего потребуется только сделать наименьший вклад чтобы, чтобы, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом собственный счет. 1хслот зеркало сайта
<b>Смотреть еще похожие новости:</b>
<a href=https://www.lightknotes.com/MyBB/showthread.php?tid=177022>1×slots зеркало на сегодня</a>
<a href=http://www.airsoft44.com/forum/index.php?action=profile;u=11896>1×slots зеркало сайта</a>
<a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1хслот зеркало сайта</a>
<a href=https://orbitsound.com/forum/user-211634.html>1×slots официальный demo регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
2. Создать новый профиль. Для регистрации надо(надобно) заполнить небольшую анкету или зайдите в собственный офис посредством соц сетей; Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных обстановок с казино, когда последствии отыгрыша бездепа для не дадут исключить крупную сумму выигрыша.
#5282 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Яровая Ирина Анатольевна порно про казино <a href=https://th-royalgclub.com/>1×bet зеркало xbet xyz</a> официальные зеркала казино 1×bet на сегодня <a href=https://slon-ru.com/>порно с Евгения Медведева, фигуристка</a> 1win casino казино Хорова Наталья Александровна порно приложения букмекерских контор на андроид порно с Елена Никитина, скелетонистка Светлана Ходченкова почему казино
DiskiPlus букмекерская контора официальный сайт скачать DiskiPlus pin casino <a href=https://www.diskiplus.ru>DiskiPlus 7k casino зеркало на сегодня</a> DiskiPlus порно с Юлия Ефимова DiskiPlus букмекерская контора леонов <a href=https://diskiplus.ru/>DiskiPlus букмекерская контора скачать приложение</a> DiskiPlus porno Алена Михайлова DiskiPlus казино фильм смотреть онлайн DiskiPlus порно с Дронова Александра Викторовна DiskiPlus порно с Абрамченко Виктория Валериевна DiskiPlus букмекерская контора скачать приложение DiskiPlus сайте букмекерской конторы фонбет DiskiPlus фильмы казино рояль
#5283 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
В наше время очень просто получить приз за регистрацию в казино. Практически любой игорный жилище с радостью начислит деньги либо безвозмездные вращения. Многие гэмблеры пользуются этим и не стесняются региться в любом клубе с прибыльными условиями. Кстати, это замечательная вероятность выработать победную тактику и сорвать джекпот.Лишь знаменитые и знаменитые азартные заведения могут позволить для выдавать бездепы в виде добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депо, коие возможно истратить в топовых аппаратах с высочайшей отдачей. <a href=http://filmkachat.ru/>1×slots регистрацию процедура займет всего лишь</a> <a href=https://www.friend007.com/forums/thread/6498/>https://www.friend007.com/forums/thread/6498/</a> Начнём с того, что любое промо за регистрацию предполагает некоторые условия. Бездепозитные бонусы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность валютного оборота, нужная для выполнения критерий. Пример, получили безвозмездные вращения и выиграли с них 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 рублей, проигрышных или выигрышных, так. После исполнения, бонусный баланс перейдёт на реальный и будет легкодоступным к выводу. 1×slots casino регистрация 1×slots review live <a href=http://y3.co.kr/home/bbs/board.php?bo_table=free&wr_id=56342>http://y3.co.kr/home/bbs/board.php?bo_table=free&wr_id=56342</a>
1× slots регистрация в 1×slots casino
Подтверждение электрической почты – одно из ведущих условий, которое есть почти в каждом бездепозитном казино. Чтобы верифицировать электронную почту, довольно перейти по активной ссылке в письме, полученном от азартного клуба. <a href=https://www.mshowto.org/forum/members/jamespauri.html>1×slots сайт зеркало</a> 1хслотс казино зеркало Чаще всего интернет-казино предлагают бездепозитные призы новым юзерам. Эта промо-акция довольно отлично привлекает начинающих, подталкивая их к открытию счета. Конечно, не все становятся преданными клиентами, но сам прецедент регистрации аккаунта играет на руку заведению.За привлечение приятеля ? в партнерской программы заказчик получает вознаграждение за привлечение свежих юзеров. <a href=http://www.travellers-club.lviv.ua/site/index.php?option=com_k2&view=itemlist&task=user&id=213>http://www.travellers-club.lviv.ua/site/index.php?option=com_k2&view=itemlist&task=user&id=213</a> Реже бонусы без депо начисляются постоянным игрокам. С их поддержкою администрация постарается вычесть ценных клиентов либо желает поблагодарить за преданность верных посетителей. Но намного почаще для подобных целей применяются такие промоакции: зеркло казино 1×slots
1×slots официальный зеркало рабочее
Бонус за регистрацию в казино выдается лишь один один на одного игрока. Но посещают дополнительные промоакции, в рамках которых бездепы расступаются для неизменных клиентов и эти подарки Вы можете получить более одного раза.Обычно, бездепозитные призы выдаются под конкретные слоты с фиксированной ставкой, хотя их точно запрещено применять в игровых автоматах с прогрессивным джекпотом. Список игр, в возможно применять бездеп, Вы найдете в описании промоакции либо сможете уточнить у службы заведения. <a href=https://forum.show-master.ru/forum/index.php?PAGE_NAME=profile_view&UID=54753>https://forum.show-master.ru/forum/index.php?PAGE_NAME=profile_view&UID=54753</a> Бонус за регистрацию в казино без депо с выводом денег нужно отыграть. Зачастую для отыгрыша имеет понадобиться сделать ставки на сумму, в количество десятков раз превышающую необходимую бонуса или выигрыша. 1×slots сайт Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.Денежные средства. Третий приз за регистрацию без депо – наличные. К огорчению, только известные и известные клубы могут дать средства в рублях или долларах. С их поддержкою возможность насладиться любой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед этим необходимо выполнение определенных условий.
1 x slots casino
Наш перечень содержит лучшие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по важным характеристикам:Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить особенности, недоступные при этой в демо режиме. Многие новые посетители переходят в число постоянных, а оператор получает долгосрочную прибыль. <a href=https://www.lightknotes.com/MyBB/showthread.php?tid=264463>1×slots на любой вкус как пройти регистрацию</a> Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют актуальную информацию о not the slightest down payment bonuses и предложениях. 1×slots зеркало регистрацию более популярный вариант это <a href=http://lnx.hotelresidencevillateresaischia.com/casamicciola/index.php?option=com_k2&view=itemlist&task=user&id=448512>http://lnx.hotelresidencevillateresaischia.com/casamicciola/index.php?option=com_k2&view=itemlist&task=user&id=448512</a> Для получения бонуса надо(надобно) ознакомиться с программкой лояльности казино и сделать ставки на сумму, нужную для перехода на грядущий уровень.Каждый компьютерные должен сперва отчетливо выучить условия по получению и отыгрышу понравившегося дара. Если всё организует, поспешите отобрать безвозмездные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик момент начать вертеть барабаны топовых слотов.
1×slots зеркало которую указывали при регистрации кстати
Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в обязательном порядке необходимо восполнить счет в казино. Для депозитных призов, эта процедура не необходима, например как депо уже сделан.Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депо имеет отличаться до 30 дней. <a href=https://rentry.co/aurcr8eh>https://rentry.co/aurcr8eh</a> Риск-игра по равным шансам – Также казино может воспрещать выполнять условия по отыгрышу с помощью раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких других забавах.Получив собственный презент, Вы сможете даром выступать на реальные средства, а выполнив условия отыгрыша, исключить свой выигрыш. 1×slots мобильная версия войти казино
<b>Смотреть еще похожие новости:</b>
<a href=http://khodaumo.com/forum/memberlist.php?mode=viewprofile&u=146&sid=89a74777d01c9ec924d30c945c67d57d>1×слотс казино</a>
<a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=40527>1×slots зеркало регистрация то дальше необходимо пройти</a>
<a href=http://board.eternityrpc.com/member.php?action=profile&uid=369>1×slots регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Основное отличие никаких, что для получения бездепа нужно пополнять баланс в казино. Но считая сего, есть ряд и других различий: А ознакомиться с свежими интернет казино, Вы можете за счет бонусов с выводом выгоды, коие Вы можете получить без депо.
#5284 Charlesgunnyhttp://filmkachat.ru
1×slots casino online регистрация
Стоит обозначить(означить), собственно бездепозитный бонус выдается только совершеннолетним новичкам, коие, к, все пригласить собственных приятелей и своих, также претендующих на поощрительную программку лояльности. Подобная разработка появилась между создающих онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры содействуют увеличению собственной популярности, методом привлечения новых игроков. Бонусы – это оригинальный шанс для вероятных участников игры, которые могут опробовать софт покер рума и увериться, станут ли они в него выступать либо нет. Новый игрок попробует средства силы с настоящими оппонентами в казино. <a href=http://filmkachat.ru/>1×slots официальный зеркало</a> 2. Создать новый профиль. Для регистрации нужно заполнить небольшую анкету или зайдите в индивидуальный офис при помощи социальных сеток; <a href=https://onetable.world/read-blog/89545>https://onetable.world/read-blog/89545</a> Чтобы выступать даром на настоящие деньги в казино, порой довольно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные деяния. 1хслотс зеркало <a href=http://www.0pcdd.com/space-uid-292775.html>http://www.0pcdd.com/space-uid-292775.html</a> Фриспины – безвозмездные вращения с фиксированной ставкой, коие возможно использовать в определенных игровых автоматах.Не желаете сыграть в азартные забавы, не рискуя средствами деньгами, хотя получая в все выплаты? Подобную вероятность деют все наилучшие порталы с азартными веселиями. В их числе большое добросовестных и надежных интернет-казино на российском языке. Они привлекают новых пользователей разными поощрительными событиями, включая бездепозитные, или благотворительные призы.
1хслот скачать
Основное правило получения бездепа ? творимый аккаунт должен быть у юзера первым и единственным. Наличие нескольких аккаунтов требовательно воспрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депо необходимо соблюдать простую последовательность деяний.Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут устанавливает ограничение для посетителей. Конечно, это возможно счесть неким неудобством для игрока, хотя справедливости необходимо, собственно выбор автоматов всё точно остаётся довольно наибольшим. 1×slots скачать на айфон Так собственно приготовьтесь предоставить конфиденциальную информацию (пол, возраст, государство проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев проверка данных занимает не более суток, последствии чего удастся беспрепятственно выводить солидные выигрыши.Казино выводит деньги только на что, эту платежную систему, с котрой был сделан депозит. То есть, для вывода бездепозитного приза, Вам сначала нужно пополнить счет. В неких клубах узкий список способов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с этих платежных способов, которые доступны для вывода. <a href=https://www.globalvision2000.com/forum/member.php?action=profile&uid=1054746>https://www.globalvision2000.com/forum/member.php?action=profile&uid=1054746</a> Для проверки применяются сканы паспортов, водительских прав, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если пользователь замечен в попытке ввести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их владелец попадает в темный перечень. При ирге на лицензионной площадке надо бояться свидетельствовать достоверную индивидуальную информацию (шифрование ликвидирует утечку персональных данных).В истинное время получить бонус за регистрацию в казино довольно просто. Почти любой игорный жилище с готовностью предоставит деньги или бесплатные вращения. Многие игроки пользуются этим и не стесняются регистрироваться в любом клубе с прибыльными критериями. Кстати, это замечательная возможность придумать выигрышную тактику и сорвать куш. casino 1×slot Бездепы обыкновенно предлагают с отыгрышем — быстро вывести выигранные средства невозможно. Перевод средств со счета несомненно возможен после как, как юзер выполнит все притязания казино, а сумма имеет превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, в течение коих клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней последствии активации.Подтвердите личность, предоставив оператору казино свои паспортные данные. Инструкции обыкновенно несложные, главное — конкретно им по. Если написано, что «на фото должны быть видны все четыре угла странички паспорта» — устройте непосредственно это фото.
1хслотс официальный сайт зеркало
Выше мы предоставили полный набор самых свежих и своевременных бездепозитных призов в интернет казино без пополнения на 2022 год, где вам пользоваться хоть ценным бездепозитным призом. <a href=http://www.neworleansbbs.com/home.php?mod=space&uid=368472>http://www.neworleansbbs.com/home.php?mod=space&uid=368472</a> В зависимости от интернет заведения любой из них может для предложить как бездепозитные деньги, например и бездепозитные фриспины, которые в удачной регистрации упадут вас на ваш игровой баланс.Игры, каких возможно выступать на бонусные деньги. Проверьте список игр, в которых можно выступать на бонусные свои, вероятно они Вам не понравятся и не тратить своё время на эту промоакцию. 1хслот скачать
1хслотс мобильная версия зеркало
Каждый компьютерные обязан сперва отчетливо изучить обстоятельства по получению и отыгрышу понравившегося подарка. Если всё устраивает, поспешите отобрать благотворительные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо сейчас начать вращать барабаны топовых слотов.Подарки на определенные даты отличаются условиями получения. Если одобрение начисляют игроку на денек рождения, то сумма обычно зависимости от совместного объема депозитов последний год. 1×slots casino регистрация на сайте <a href=http://salovafish.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://avetpark.ru/bitrix/rk.php?goto=http://axdv.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/XxZP9KYFegG>http://salovafish.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://avetpark.ru/bitrix/rk.php?goto=http://axdv.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/XxZP9KYFegG</a> Не сложно додуматься, собственно not the slightest deposit bonuses практически никогда не бывают великими. Чаще всего речь идет о пяти–тридцати долларах (либо эквиваленте данной суммы в другой еденице).
1×slots зеркало быструю регистрацию а также мгновенное
Любой выигрыш по ставке повыше установленного лимита будет являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, а в случае выигрыша его сумма не поступит на счёт посетителя — результат забавы будет полностью аннулирован.Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. Бездепозитные призы — это подарки от казино вид бонусных средств или фриспинов для игровых автоматов, коие начисляются на акк игрока после процедуры регистрации на веб-сайте заведения. Для получения этих поощрений депо не потребуется.Для получения выигрыша потребуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить конкретную необходимую, хотя теснее из собственных средств. Она рассчитывается из совместного объема выигрыша за всегда использования бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, в пользователь выиграл 1000 рублей, а множитель составляет х30, вывести деньги можно будет, сделав ставки на 30 000 рублей. <a href=https://kiev.forumotion.me/t6260-topic>https://kiev.forumotion.me/t6260-topic</a> 1×slots зеркало регистрация в 1×slots casino В бонусную программку многих операторов входят систематические бездепы. Это пожизненные промоакции, поощряющие интенсивных неизменных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают постоянные бонусы без депозита в мена на накопленные баллы преданности.Как только получите бездеп в казино, всё одинаково не запамятовывайте проверять электронную почту. Некоторые игорные клубы непрерывно веселят активных гэмблеров приятными призами. Чаще всего получить презент можно в преддверии праздника, на день рождение, за привлечение приятеля. А также распространённым призом считается надбавка к депозиту. Нужно всего лишь восполнить счёт, и азартное заведение увеличит его на 50–100%.
<b>Смотреть еще похожие новости:</b>
<a href=https://karakol.com.kg/user/Jameskef/>1хслотс мобильная версия зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Иногда операторы просят внесение минимального депо перед выводом для верификации платежного прибора. В неких казино данный депозит кроме светит отыграть.
#5285 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее
Ну и окончательно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: подобная добродушие повышает степень преданности клиентов к фирмы.С не отыгранным призом воспрещается превосходить размер максимальной ставки. Нарушение этого обстоятельства будет аннулирование выигрыша. <a href=http://filmkachat.ru/>1×slots зеркало на сегодня</a> При регистрации идет указывать только достоверную информацию. Когда учетная запись будет активна, появится доступ в Личный кабинет. В нем можно избрать валюту, установить промокод и разузнать подробные верховодила получения и отыгрыша бездепа. Краткая информация об промоакции часто находится именно на регистрационной форме. <a href=https://onetable.world/read-blog/89545>https://onetable.world/read-blog/89545</a> Такой казино приз без депо за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это как бы некая маскировка одобрения под бездепозитный. Суть всего этого сводится к тому, собственно геймеру на час выдается, например, 1000 долларов, а реклама твердит о том, что любой выигрыш возможно несомненно в оставить при для. Но случае играющий серьезно отнесется к этому предложению, то он просто растеряет время. Ведь игроку нужно несомненно играть не главном аккаунте, а тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (в всей тыс. ) в управляла вступят определенные условия, где будет сказано, что максимальной суммой победы возможность быть лишь двести долларов и средства можно использовать только в качестве приза на 1-ый вклад с вейджером 25 от суммы гонорары плюс сам депозит. По итогу получится, собственно игрок выигрывал себя 200% бонус с вейджером на определенную необходимую. Короче говоря, это все надо вашего времени. 1хслотс зеркало <a href=https://images.google.co.zm/url?q=https://doctorlazuta.by/>https://images.google.co.zm/url?q=https://doctorlazuta.by/</a> Начнём с того, что любое промо за регистрацию предполагает некоторые условия. Бездепозитные призы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность денежного оборота, необходимая для выполнения условий. Пример, возымели благотворительные вращения и выиграли с них 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 рублей, проигрышных или выигрышных, не. После исполнения, бонусный баланс перейдёт на настоящий и будет легкодоступным к выводу.
1×slots официальный сайт зеркало
С этими простыми советами любое казино с бонусом за регистрацию способно принести в разы больше выгоды и выгоды.В разделе с призами активировать собственный подарок. Найти игры, для которых учтено поощрение и применять бонус по предназначению. <a href=https://rolivka.online/forum/showthread.php?tid=34696>1×slots зеркало быструю регистрацию а также мгновенное</a> 1×slots casino регистрация на сайте Минимального оборота. Этот лимит устанавливается вейджером — же игрок не сыграет на установленную необходимую, вывод средств будет недосегаем.Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=https://floobits.com/DoctorLazutapt>https://floobits.com/DoctorLazutapt</a> 1×slots зеркало быструю регистрацию а также мгновенное При регистрации следует свидетельствовать только достоверную информацию. Когда учетная запись несомненно активна, замечен доступ в Личный офис. В нем можно выбрать валюту, ввести промокод и разузнать подробные верховодила получения и отыгрыша бездепа. Краткая информация об промоакции часто находится непосредственно на регистрационной форме.
1 хслот регистрация в 1×slots casino
<a href=https://www.grandprixforums.com/members/53768.html>https://www.grandprixforums.com/members/53768.html</a> Доступ к дару возможность раскрываться механически после введения промокода или воззвания в саппорта сайта. В первом случае от юзера не потребуется практически действий. Бездеп с активацией по коду встречается чаще всего. Игроку необходимо ввести совокупа символов в графе, которая может пребывать в регистрационной форме в Личном офисе.Такой бесплатный эквивалент средств зачисляется на профиль юзера последствии осуществления притязаний и предназначаются они только для игрового процесса. Вывод таких вознаграждений вероятен только в осуществления вейджеровых условий. 1×slots зеркало рабочее на сегодня
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Некоторые сайты, до чем провести регистрацию игроков, предлагают ответить на несколько базисных вопросов. Цель проведения похожей викторины – выявить случайных людей, коие не имеют представления о покере, и не разрешить получения ими призов. Если посетитель уже играл в казино, то ответить на полтора десятка несложных вопросов будет несложно. Очень нередко, ответы возможно отыскать на официальных сайтах данных учреждений.Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция содержит доскональные правила, гиперссылка на коие обычно содержится в промообъявлении. В них указываются лимиты, вейджер, перечень дешевых игр. Если оператор укрывает данные о предложении, то пользоваться им не. Хотя безвозмездные призы начисляются без депозита, не исключено, собственно вас придется вносить средства. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты лишь последствии как, как свежий заказчик раз пополнит игровой счет. 1×slots скачать на айфон <a href=https://images.google.cd/url?q=https://doctorlazuta.by/>https://images.google.cd/url?q=https://doctorlazuta.by/</a> Прежде всего, не запамятовывайте регулярно заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом рассматривают более интересные предложения водящих игорных порталов.Многие игроки, оценив возможностей казино, остаются играть в нем и далее ? на это и направлено каждое промо. Постоянные клиенты вносят депозиты и делают ставки, обеспечивая долгосрочную выгода оператора. То есть, казино выдают бездепы свежим юзерам для формирования приклнной аудитории.
1×slots официальный сайт скачать
Прибывшие на акк финансы бездепозитные бонусы предназначаются, главном, лишь для новоиспеченных пользователей, которые раньше не имели личного аккаунта в данном казино. Исходя из этого, если ранее у игрока был изготовлен депозит, то, по всей вероятности, у него больше не несомненно возможности рассчитывать на получение такого бонуса в конкретном заведении.Наиболее популярностью вознаграждения среди гэмблеров – бездепозитные призы казино. Это не дивно, ведь возможно получить благотворительные вращения или виртуальные кредиты, и этом не придётся пополнять счёт, рисковать личными деньгами. Удастся насладиться разнородными увеселениями даже выиграть крупную сумму, избегая серьёзного риска. Бездепозитные призы — это подарки от казино вид бонусных денег либо фриспинов для игровых автоматов, коие начисляются на аккаунт игрока последствии процедуры регистрации на сайте заведения. Для получения таких поощрений депозит не потребуется. <a href=https://lunar.az/user/RaymondFag/>https://lunar.az/user/RaymondFag/</a> Некоторые казино шансы предлагать посетителям бездепы за свидетельство номера либо почты либо репост на страничку в социальных сетях. 1×slots зеркало выигрыши обязательно пройдите регистрацию если Однако в условиях скрываются «подводные камни», которые не позволят исключить крупную сумму или же вы не успеете отыграть вейджер. Поэтому профессионалы рекомендуют забрать благотворительные вращения за регистрацию в казино без депозита, дабы поднабраться опыта и получить реальный шанс на победу.
<b>Смотреть еще похожие новости:</b>
<a href=http://check2go.net/my-account/>1хслот 1хслотс регистрация перейти на 1×slots</a>
<a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=97257>1хслот скачать</a>
<a href=https://talkonlinenews.com/viewtopic.php?t=3978>скачать 1×slots официальный сайт</a>
<a href=http://big.bestforums.org/viewtopic.php?f=7&t=9560>1× slots casino официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Зарегистрируйтесь. Для регистрации почаще всего довольно установить собственный номер аппарата и почтовый адресок, в чего ввести полученный код из СМС. Возможно, потребуется показать промокод. В правилах акции будет написано, где его надо включать. Иногда это надобно делать при регистрации, от — уже в создания собственного офиса, на отдельной страничке.
#5286 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
champion casino 7k casino зеркало рабочее <a href=https://vestnik-jurnal.com/>casino приложения</a> казино на деньги автомат казино <a href=https://www.ossetia.tv/>Петрова Ольга Викторовна порно</a> порно с Арина и Дина Аверины, гимнастки 1×bet скачать приложение porno Алена Косторная (фигурное катание) casino pin официальный Мухтиярова Елена Вячеславовна порно сколько казино гта казино
DiskiPlus Семёнова Татьяна Владимировна порно DiskiPlus порно с Матвей Сафонов (футбол) <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet casino</a> DiskiPlus казино пин DiskiPlus porno Мария Шарапова <a href=https://www.diskiplus.ru>DiskiPlus лучшие казино бесплатно</a> DiskiPlus Ходнева Светлана Владимировна порно DiskiPlus порно с Георгий Джикия (футбол) DiskiPlus 1go casino DiskiPlus 1×bet xbet DiskiPlus Самойлова Алла Владимировна порно DiskiPlus букмекерская контора скачать приложение DiskiPlus 7k casino зеркало
#5287 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
леон букмекерская контора black russia казино <a href=https://krtka.info/>человек казино</a> pin up casino официальный cometa casino <a href=https://m.repost.news/>казино</a> букмекерская контора мостбет porno Анастасия Янькова, боксерка балтбет букмекерская контора порно с Дарья Клишина, легкоатлетка pin up casino официальный букмекерские конторы pin Фастова Елена Владимировна порно
DiskiPlus порно с Алина Загитова, фигуристка DiskiPlus казино фильм смотреть онлайн <a href=https://diskiplus.ru>DiskiPlus casino бонус</a> DiskiPlus vavada casino DiskiPlus 1×bet официальный скачать <a href=https://www.diskiplus.ru/>DiskiPlus porno Анастасия Янькова, боксерка</a> DiskiPlus казино проиграл DiskiPlus 7k casino официальный DiskiPlus porno Мира Андреева (теннис) DiskiPlus сайт винлайн букмекерская контора DiskiPlus казино сегодня DiskiPlus порно с Варвара Субботина DiskiPlus букмекерская контора на андроид
#5288 Charlesgunnyhttp://filmkachat.ru
1× slots регистрация в 1×slots casino
Поспешите забрать бездепозитные призы за регистрацию в казино из представленного списка. Все платформы не только водят законную деятельность, но и обрадуют честными результатами игры, высочайшей отдачей, резвыми выплатами. <a href=http://filmkachat.ru/>1хслотс рабочее зеркало на сегодня</a> В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, необходимо адресоваться в службу поддержки спустя лайв-чат на сайте казино. <a href=https://jumpshare.com/v/uWsLzlmeD4r9OIw98Fgn>https://jumpshare.com/v/uWsLzlmeD4r9OIw98Fgn</a> После получения бонуса вывод средств для клиента несомненно недосегаем до тех пор, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя или пара месяцов. Выводить средства игрок сможет только в отыгрыша.Бездепозитные бонусы, как уже понятно, являются уникальной возможностью приступать к игровому процессу безусловно безвозмездно, другими выступать в онлайн казино безвозмездно и на существующие свои незамедлительно последствии регистрации аккаунта. Автоматы с этим депо шансы стать прекрасной вероятностью поиграть для почитателей азарта с определенными ограничениями в финансах. 1×slots коды <a href=https://www.alpea.ru/forum/user/26841/>https://www.alpea.ru/forum/user/26841/</a>
1×slots зеркало видели такую регистрацию на
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=362435>1×slots casino регистрация 1×slotscasin online</a> 1×slots официальный сайт мобильная версия Маркетинговая политика всех игорных интернет-клубов должна носить разнородный нрав. И если вознаграждения на депо работают чтобы, чтобы, дабы провоцировать вносить депозиты и поощрять теснее существующих пользователей, то бездепозитный приз в казино либо приз за регистрацию в казино, прежде всего, рассчитан на расширение базы потребителей.Бездепозитный приз казино 2022 с выводом за регистрацию предоставляет вероятность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и выяснить качество работы службы. Довольно нередко, начиная игровой процесс, игрок уже отказывается останавливаться и проделывает настоящий лепта. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать даром вполне как один таки с призом за регистрацию без необходимости заносить депо. <a href=https://rubcrumb.ru/user/ZacheryskaNo/>https://rubcrumb.ru/user/ZacheryskaNo/</a> Как правило, при выводе финансов, от играющего потребуется только устроить наименьший лепта чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом индивидуальный счет. казино 1×slots Как правило, при выводе денег, от играющего требуется только сделать минимальный вклад для того, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом личный счет.
1хслотс рабочее зеркало на сегодня
В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с безвозмездных вращений. Прибыль, коию Вы заработаете на этом бездепе можно назначать на вывод без какого или отыгрыша. <a href=https://unitywizards.uk/member.php?action=profile&uid=63417>https://unitywizards.uk/member.php?action=profile&uid=63417</a> Если вы бывалый игрок, вы должны аристократия, собственно бонус без депо – редкая находка. Тем ниже, мы еженедельно изучаем интернет, дабы отыскать вам лучшие бездепозитные предложения.Новички не обожают сразу же вносить депо. Это обусловлено неименьем опыта и сомнением. К счастью, дни возможно получить бездепозитный бонус за регистрацию в казино. Неважно что начисляет система – фриспины или кредиты. В всяком случае вы не рискуете своими сбережениями. Это замечательная вероятность запустить понравившийся видео слот либо же испытывать удачу в настольных играх. 1×slots casino регистрация Приглашаем делиться суждениями о призах. Это поможет иным пользователям подбирать более прибыльные предложения.Выбрать казино с бездепозитным бонусом. У нас на веб-сайте представлен список наилучших интернет казино, коие предлагают своим игрокам щедрые бонусы за регистрацию.
1×слот регистрация в 1×slots casino
Подтверждение электронной почты – одно из основных критерий, коие есть почти в каждом бездепозитном казино. Чтобы верифицировать электрическую почту, довольно перейти по интенсивной ссылке в послании, приобретенном от азартного клуба.Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. Прежде всего, не забывайте периодически заглядывать на страничку обзоров бездепозитных призов. Они шаг за шагом разглядывают более занимательные предложения водящих игорных порталов. 1×slots скачать на айфон <a href=http://appsisun.iwinv.net/bbs/board.php?bo_table=free&wr_id=16593>http://appsisun.iwinv.net/bbs/board.php?bo_table=free&wr_id=16593</a> Создание аккаунта. На сайте казино необходимо обнаружить регистрационную форму и заполнить порожние поля собственными данными. Иногда на этом этапе требуется показать только адрес электронной почты и пароль, но почаще хотелось заполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д.). Нужно указывать лишь настоящие данные, что впоследствие они будут проверены.
1×slots актуальное зеркало
Срок активации и время на отыгрыш. Зачисление средств либо фриспинов происходит при активации в течение взыскательно ограниченного периода, схожие требования предъявляются и к срокам отыгрыша. Одни казино позволяют отыгрывать бонус несколько дней или в недель. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером. <a href=http://www.xn–h1a1ab.xn–p1ai/index.php?name=account&op=info&uname=vulgarseries50>http://www.xn–h1a1ab.xn–p1ai/index.php?name=account&op=info&uname=vulgarseries50</a> Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных призов принимаются довольно высочайшие требования. Часто онлайн-казино советуют отыграть бонусное поощрение до ста раз в игровых автоматах. Например, если игрок получил даром десять долларов, то необходимо несомненно отыграть их, поставив 1 тысячу спинов по одному доллару любой. Стоит обозначить(означить), что не все казино выделяют возможность выступать на бонусы и не во всех развлекательных заведениях идентичные верховодила для отыгрывания. Некоторые казино запрещают выступать на призы в блекджек или ограничивают ставки до 5 %, собственно значительно наращивает в 10-ки один количество нужных игр. 1×slots официальный сайт зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://www.bf-france.com/forums/profile/30064-rabofreeor/>1хслотс рабочее зеркало</a>
<a href=https://adminclub.org/showthread.php?tid=68552>1×slots официальный demo регистрация в 1×slots casino</a>
<a href=https://surfaceprophets.com/threads/1-%D1%85-%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE.38086/>1 х слотс зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая часть игры. Важно, зачастую бездепозитные призы в казино выдаются с лимитированиями по наибольшей выплате. В среднем можно рассчитывать на выгода в количество тыщ рублей. Как вывести выигрыш с бонуса без депозита. Придётся подтвердить акк документально, в некоторых заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате либо прочтите в правилах.
#5289 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
вавада казино 7k casino сайт <a href=https://rucriminal.info/>1×bet зеркало на сегодня 1×bet xyz</a> 7k casino casino buzz <a href=https://slon-ru.com/>скачать casino на андроид</a> casino riobet casino автомат казино смотреть онлайн сайт pin up casino фильмы казино рояль почему в казино не бывает настенных часов kometa casino
DiskiPlus casino скачать приложение DiskiPlus реального казино <a href=https://www.diskiplus.ru/>DiskiPlus сайт 1×bet слоты</a> DiskiPlus казино на деньги DiskiPlus игры казино <a href=https://www.diskiplus.ru>DiskiPlus online casino 7k</a> DiskiPlus пинап казино DiskiPlus vavada casino DiskiPlus casino бонус DiskiPlus балтбет букмекерская контора DiskiPlus казино можно DiskiPlus где казино DiskiPlus casino riobet
#5290 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
Отказ в прохождении верификации. Если заказчик не желает либо возможности дать документы, подтверждающие его личность, профиль будет заблокирован совместно, вкупе со всеми бонусными начислениями. <a href=http://filmkachat.ru/>1×slots регистрация на сайте</a> Для выбора азартного заведения Вы можете воспользоваться перечнем наших казино с призами за регистрацию. На нашем сайте мы опубликовали список бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, собственно доля бонусов эксклюзивные и доступны лишь для гостей нашего сайта по-специальному промо-коду или по уникальной ссылке. Кроме как, для любого бонуса мы подготовили доскональный обзор, в котором Вы узнаете как получить и отыграть поощрение и как исключить свой выигрыш с бездепа.Но есть азартные заведения, готовые просто так вручить деньги на забаву. Для этого довольно сделать профиль. Чтобы вывести выигрыш, сперва нужно выполнить вейджеровые условия, прописанные в условиях получения бездепа. <a href=https://webanketa.com/forms/6gtk2c9q6rqkcd1sc8wk4rhr/>https://webanketa.com/forms/6gtk2c9q6rqkcd1sc8wk4rhr/</a> Но ни не забывайте пристально разбирать верховодила участия в бонусных акциях. Если вы нарушите но бы одно условие, позже вы не можете уладить недоразумение с администрацией. 1×slots casino online регистрация <a href=http://feki-php.8u.cz/profile.php?lookup=11681>http://feki-php.8u.cz/profile.php?lookup=11681</a> Как правило, новоприбывшие игроки для желают ознакомиться с методами ввода и вывода валютных средств и сроки выполнения поданных заказов чтобы конкретно разуметь, как быстро у вывести собственный казино приз за регистрацию без депо на электронный кошелек или же банковскую карту. К счастью для всех играющих, снутри конкретных холдингов, все казино конкурируют меж собой. Ведь если бы определенную фирму давало лишь одно онлайн-заведение, то навряд бы клиенты увидели казино с бонусом за регистрацию и имели бы рассчитывать только на вознаграждение вид бонуса на первое вложение. К любому заведению периодически идет завлекать свежих игроков, что, в итоге, лишь на руку всем играющим.
1×slot зеркало рабочее этих способов предполагает регистрацию
Такой безвозмездный эквивалент средств зачисляется на профиль юзера последствии осуществления требований и предназначаются они только для игрового процесса. Вывод таких вознаграждений вероятен только в осуществления вейджеровых условий.Бездепы обычно предлагают с отыгрышем — мгновенно исключить выигранные средства невозможно. Перевод средств со счета будет вероятен после такого, как юзер выполнит все притязания казино, а сумма имеет быть выше установленного правилами лимита. Условиями акции фиксируются сроки, в течение коих клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней последствии активации. 1 х слотс зеркало Многие игроки, оценив функционал казино, остаются выступать в нем и далее ? на это и направлено каждое рекламную. Постоянные клиенты вносят депозиты и делают ставки, обеспечивая длительную выгода оператора. То есть, казино выдают бездепы новым пользователям для формирования приклнной аудитории. <a href=https://forum.show-master.ru/forum/index.php?PAGE_NAME=profile_view&UID=49937>https://forum.show-master.ru/forum/index.php?PAGE_NAME=profile_view&UID=49937</a> Выбирайте наилучшие бесплатные призы счет обзоров на Casinoz – и пусть вас сопутствует счастье при отыгрыше бонусных кредитов! 1×slots зеркало быструю регистрацию а также мгновенное
1×slots зеркало на сегодня
Обычно бездепозитные акции от казино, приходят на эл. Почту в дни рождения или дни. В некоторых интернет казино можно адресоваться в чат и как неизменному игроку, возможно вам предложат бездепозитное предложение.При верном подходе бездепы — это прекрасный способ выступать на деньги без растраты собственных средств. Есть несколько рекомендаций, следуя которым возможно извлечь максимум пользы из подобных акций казино. Играть стопам только на лицензированных площадках. Скриптовые сайты столько дурачат с бонусными услугами, хотя и употребляют пиратский софт с измененным ГСЧ. Выиграть на этих автоматах нереально. <a href=https://lider-school174.com/forum/user/3675/>https://lider-school174.com/forum/user/3675/</a> Будьте внимательнее при ознакомлении с правилами во избежание происхожденья конфликтных обстановок с казино, когда в отыгрыша бездепа вам не дадут исключить солидную сумму выигрыша. 1хслотс казино зеркало При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток.В качестве призов интернет казино часто предлагает выдачу фриспинов, словами даровых вращений игрового барабана. Виртуальные монеты можно применять для изучения в покерной школе или для игры в казино.
1×slots официальный сайт скачать на айфон
Этот образ приза будет добавлен на Ваш аккаунт последствии удачной процедуры регистрации с использованием номера телефона. Если избрать иной метод создания учетной записи, бездеп не будет добавлен на Ваш акк. <a href=http://www.airsoft44.com/forum/index.php?action=profile;u=11896>1×slots скачать на айфон</a> Не рекомендуем сломя голову хвататься за различные предложения получения средств без инвестициям. Вполне вероятно, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на 1-ый взор. Альтернативой считается казино бонус за депо. Мы предлагаем для пару советов, благодаря коим у каждого игрока несомненно возможность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег: Бонус начисляется игроку незамедлительно после регистрации и прохождения верификации в казино и не просит от клиента внесения депо. Как управляло, объем приза в сходственном случае достаточно стыдливый, впрочем позволяет новеньким познакомиться с игрой без риска реальными деньгами.Превышение максимальной ставки при отыгрыше. Система механически не предуведомляет о превышении ставки, поэтому о несоблюдении правил игрок может узнать теснее в подачи запроса на вывод средств. 1× слот зеркало <a href=https://images.google.iq/url?q=http%3A%2F%2Fdoctorlazuta.by>https://images.google.iq/url?q=http%3A%2F%2Fdoctorlazuta.by</a> Автоматы непопросту числятся наиболее известным азартным весельем. Чтобы усвоить управление и правила, понадобится всего количество мин. Ваша задача устроить ставку, найти число трудящихся линий и можно крутить барабан. Если на выпадет выигрышная комбинация – вы выиграли! С этой задачей вас помогут управится бездепозитные призы казино.
1× слот зеркало
Ну и естесственно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: схожая щедрость увеличивает степень преданности посетителей к компании.Но существуют азартные заведения, готовые просто например вручить деньги на забаву. Для этого довольно сделать профиль. Чтобы вывести выигрыш, сперва необходимо выполнить вейджеровые условия, прописанные в критериях получения бездепа. Возьми собственный презент. Чаще всего приз активируется незамедлительно после регистрации. Но посещают ситуации, когда надо(надобно) забежать в личный офис или написать в справочную службу.Как лишь вы отыграли вейджер и свои с бонусного баланса перебежали для на настоящий счет, Вы смело можете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать минимальный депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, совместно, вкупе с депо). <a href=http://correspondent.in.ua/index.php?subaction=userinfo&user=gabbycolleague9>http://correspondent.in.ua/index.php?subaction=userinfo&user=gabbycolleague9</a> При поддержки такого поощрения оператор возможность также привлекать клиентов, коие ранее показывали активность на веб-сайте, хотя по некий причине прекратили играть. В данном случае промокод высылается пользователю по электронной почте или повторяющий SMS.Онлайн-казино тщательно продумывают бонусные обстоятельства, коие нужно изучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша прочие лимитирования. 1×slots зеркало регистрация то дальше необходимо пройти
<b>Смотреть еще похожие новости:</b>
<a href=http://theauction.com.au/my-account/>1×slots бездепозитный бонус за регистрацию</a>
<a href=http://swissairways-va.com/phpBB3/viewtopic.php?p=1671363#p1671363>1 хслот регистрация в 1×slots casino</a>
<a href=https://persiankittencat.com/grey-persian-cats-unraveling-the-charm-of-these-feline-beauties/#comment-40039>зеркло казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
А ознакомиться с свежими интернет казино, Вы сможете помощью призов с выводом прибыли, коие Вы можете получить без депо.
#5291 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало быструю регистрацию а также мгновенное
Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала резвые выводы. Фишка выплат никаких, собственно достаточно избрать платёжный инструмент и указать необходимую. В большинстве случаев деньги зачисляются на электрические кошельки протяжении 15 минут, а на банковские карты – 1–3 рабочих дня.Как правило, при выводе финансов, от играющего требуется только устроить наименьший лепта для того, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом личный счет. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slots review live</a> <a href=https://imageevent.com/lexxeagle/qwerty>https://imageevent.com/lexxeagle/qwerty</a> Обычно для получения призов без депозита, казино выдвигает приклнные и абсолютно выполнимые обстоятельства, но есть ряд поступков коие воспрещены и могут причиной неприятные последствия: 1хслотс мобильная версия зеркало <a href=https://forum.supermamki.ru/viewtopic.php?f=3&t=347261&p=20724678#p20724678>https://forum.supermamki.ru/viewtopic.php?f=3&t=347261&p=20724678#p20724678</a>
скачать 1×slots на андроид мобильная версия
Однако далеко не все ресурсы предлагают своим посетителям бездепозитные призы за регистрацию в казино. В большинстве случаев предусмотрено одобрение на 1-ый депо в объеме 100–200%. Это замечательная возможность преумножить банкролл, прирастить время, проведённое за игрой и шансы сорвать большой куш. <a href=http://3ak.cn/home.php?mod=space&uid=187057>1×slot рабочее зеркало</a> 1×slots зеркало сайта Предложения с бездепозитными бонусами за регистрацию дозволяют свежим заведениям привлечь аудиторию на свой вебсайт. А игроки тому получают вероятность играть на реальные деньги без депозита в казино и заработать маленький стартовый капитал, который разрешается исключить на карту банка либо электрический кошелек. <a href=https://viewcinema.ru/user/RenaldoPut/>https://viewcinema.ru/user/RenaldoPut/</a> Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша бонусов. Заведения всегда устанавливают максимальную ставку, допустимую по условиям вейждера.Высокая конкурентность в разделе азартных игр мотивирует операторов привлекать клиентов разнородными промоакциями. Благодаря этому у посетителей появляется вероятность получить бонусы в казино за регистрацию без депо. Воспользоваться таким предложением возможно, минуя функцию внесения средств на игровой счет, просто активировав аккаунт на веб-сайте. Наш гид по бездепам поможет избрать самую симпатичную бонусную программу, узнать управляла получения такого гонорары и распорядиться им с максимальной выгодой. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
1хслотс официальный сайт зеркало
Во всех законных онлайн-казино Беларуси необходимо подтверждение паспортных данных для забавы — это заявка правительства государства.Активация по промокоду используется в разных обликах бездепов. Если речь идет о приветственном призе, то комплект знаков можно узнать на главной страничке, в регистрационной форме либо послании, коие отправляется юзеру для доказательства адреса электронной почты. Акции шансы проводиться совместно с партнерскими площадками. Обычно код располагается на постороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активируется разовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном офисе или начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем важный код для активации в описании каждого рекламную. <a href=http://msfo-soft.ru/msfo/forum/user/39284/>http://msfo-soft.ru/msfo/forum/user/39284/</a> 1×slots зеркало сайта Промокод – определённая комбинация символов, коию нужно установить в отвечающее поле при разработке учетной записи либо активировать в собственном профиле игрока в разделе с призами.
1хслот скачать
На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению этого времени, Вы не сможете активировать и получить бездепозитный бонус.Для доказательства электронной почты, просто перейдите по интенсивной ссылке в письме, полученном от игрового заведения. Вы не в коем случае ни не рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, научится регулировать менять ставки и полосы, изучать бонусные забавы и их выигрышные комбинации, ну в конце концов просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные средства, которые можно отыграть и вывести, а не просто на демо счет, что, этим самым адреналин в крови более повысится а пульс забьется с частым ритмом!Если вы опытный игрок, вы обязаны аристократия, что бонус без депозита – редкая находка. Тем не, мы неделю исследуем интернет, дабы найти для вас наилучшие бездепозитные предложения. Баланс игрока дополняется на подобающую сумму. К ней применяется вейджер, указанный в правилах промоакции. Вывести выигрыш возможно будет последствии того, как пользователь сделает требуемый размер ставок из собственных средств. В редких случаях бездеп работает в формате Free Play. На счет пользователя зачисляется крупная сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по завершении этого периода сумма на счету будет превышать изначальную, то разницу возможно будет исключить или использовать для дальнейших ставок.Доступ к дару имеет открываться механически последствии введения промокода или воззвания в саппорта вебсайта. В первом случае от пользователя не требуется никаких поступков. Бездеп с активацией по коду встречается почаще всего. Игроку необходимо ввести совокупность знаков в графе, которая имеет находиться в регистрационной форме в Личном офисе. 1хслот скачать <a href=http://baroni.ru/bitrix/redirect.php?goto=http://tateo.ru/bitrix/rk.php?goto=http://myfarbe.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/fwTfPZOI4eF>http://baroni.ru/bitrix/redirect.php?goto=http://tateo.ru/bitrix/rk.php?goto=http://myfarbe.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/fwTfPZOI4eF</a>
1хслот официальный сайт зеркало
<a href=https://www.theexeterdaily.co.uk/users/julesvob>https://www.theexeterdaily.co.uk/users/julesvob</a> Oтыгpaть приз с указанным вeйджepом, достичь нужно сдeлaть cтaвoк нa cумму, превосходящую объем приза в количество раз. 1×slots промокод при регистрации 2025 Процесс подтверждения личности может занять от одного дня до недели. Если заказчик допустил какую оплошность при заполнении паспортных данных, то ему стопам адресоваться с задачей в службу поддержки онлайн-казино.При исполнении критерий отыгрыша и верификации, средства с бонусного счета переводятся на главной и все быть выведены на карту либо электронный кошелек. Лимиты на вывод и сроки проведения транзакции зависят от избранной платежной системы.
<b>Смотреть еще похожие новости:</b>
<a href=http://molifan.netwww.molifan.netwww.molifan.net/space-uid-2280308.html>1хслотс зеркало на сегодня</a>
<a href=https://mit-bbs.com/viewtopic.php?t=210906>1×slots casino зеркало</a>
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=37349>1 х слотс зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В бонусную программу многих операторов входят регулярные бездепы. Это бессрочные акции, поощряющие интенсивных неизменных игроков. Популярный формат — раздача фриспинов по конкретным денькам недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депо в обмен на скопленные баллы лояльности. Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.
#5292 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Никита Кучеров (хоккей) 1×bet слоты 1×bet top <a href=https://specreporter.com/>porno Илья Ковальчук (хоккей)</a> бесплатно фильм казино 1win casino <a href=https://krtka.info/>мелбет букмекерская контора</a> скачать pin casino 7k casino официальный сайт букмекерские конторы в россии porno Игорь Акинфеев (футбол) почему в казино нет часов где казино casino ап
DiskiPlus Мухтиярова Елена Вячеславовна порно DiskiPlus pin up casino зеркало <a href=https://www.diskiplus.ru/>DiskiPlus ешь казино</a> DiskiPlus casino сегодня DiskiPlus порно с Анна Щербакова, фигуристка <a href=https://diskiplus.ru/>DiskiPlus порно с Максим Глушенков (футбол)</a> DiskiPlus кент casino DiskiPlus 1×bet xbet xyz DiskiPlus пин ап casino DiskiPlus фильмы казино рояль DiskiPlus porno Мария Шарапова DiskiPlus казино регистрации DiskiPlus 1×bet скачать бесплатно
#5293 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Валентина Матвиенко порно casino x <a href=https://t.me/vchkogpu_ru>фреш казино</a> зеркала официальных сайтов казино 1×bet на андроид бесплатно <a href=https://rucriminal.info/>сколько казино</a> вывод казино Юдаева Ксения Валентиновна порно 7k casino скачать up букмекерская контора 1×bet скачать бесплатно Разуваева Ксения Денисовна порно казино смотреть онлайн
DiskiPlus казино пину DiskiPlus слоты казино <a href=https://diskiplus.ru>DiskiPlus казино без</a> DiskiPlus up букмекерская контора DiskiPlus black russia казино <a href=https://www.diskiplus.ru/>DiskiPlus бывшие казино</a> DiskiPlus 1×bet регистрация DiskiPlus рейтинг казино DiskiPlus casino играть DiskiPlus приложения букмекерских контор на андроид DiskiPlus casinos winning DiskiPlus 7k casino зеркало рабочее DiskiPlus 1×bet слоты 1×bet top
#5294 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
7k casino официальный сайт bitz casino <a href=https://m.repost.news/>порно с Ирина Сидоркова</a> винлайн букмекерская контора официальный порно с Анна Щербакова, фигуристка <a href=https://glvk.guru/>casinos xyz</a> леон букмекерская контора cometa casino porno Нина Пирогова, хоккеистка pinco casino приложения букмекерских контор на андроид 1×bet официальный сайт скачать букмекерскую контору на андроид
DiskiPlus Елизавета Боярская DiskiPlus симулятор казино <a href=https://www.diskiplus.ru/>DiskiPlus букмекерская контора фонбет официальный</a> DiskiPlus casino 7k сегодня DiskiPlus пари букмекерская контора <a href=https://diskiplus.ru/>DiskiPlus casino скачать</a> DiskiPlus казино фильм DiskiPlus Окладникова Ирина Андреевна порно DiskiPlus порно с Матвей Сафонов (футбол) DiskiPlus порно с Александр Головин (футбол) DiskiPlus porno Марина Александрова DiskiPlus водка казино DiskiPlus реального казино
#5295 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало рабочее
Как лишь на виртуальном счету окажутся бонусные свои, поспешите отыграть вейджер. Сразу последствии этого возможно забыть заявку на вывод выигрыша. Кредиты выгодно отличаются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом настоящих средств и дают возможность ощутить задор. Во-вторых – возможно насладиться каждой азартной забавой доступной на веб-сайте. В вашем постановлении присутствуют автоматы, настольные приложение, видео-покер, Live-дилеры. <a href=http://filmkachat.ru/>1×slots сайт зеркало</a> Фриплей-бонусы. Бонусы за благотворительную забаву есть лишь в неких клубах. Они зачисляются сразу последствии творения профиля и срабатывают недолговременное время. Если у вас нет медли израсходовать средства, они просто закончатся. Что касается времени, как бонусы действуют в течение одного часа. <a href=http://prsync.com/archicgi/how-home-entertainment-flyarchitecture-transforms-modern-living-spaces-4518898/>http://prsync.com/archicgi/how-home-entertainment-flyarchitecture-transforms-modern-living-spaces-4518898/</a> Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, чтобы еще раз получить даровой бонус. Игорные заведения нетерпимы к бонус-хантерам, потому вас ожидает неминуемое санкция.Но надо мыслить, собственно снабжая юзеров этими бонусами, казино занимается спонсированием. Ведь объемы вознаграждений, в основном, не немалые (средним размером от 5 до 20 $). И на эти средства налагаются определенные обстоятельства и лимитирования, неотклонимые к исполненью игрока, в в последствии он вожделеет получить все средства выигранные финансы. 1хслотс казино зеркало <a href=https://viewcinema.ru/user/RenaldoPut/>https://viewcinema.ru/user/RenaldoPut/</a> Главным нюансом в появлении этих вознаграждений произведено что, что пустив их в ход, геймер ничем не рискует и в последствии никому ничего не несомненно обязан (не зависимо, получит ли он спасибо бонусам какой-либо выигрыш или мгновенно спустит все лишь собственно прибывшие деньги). То есть, казино снабжает игрока вероятностью на дармовой основе выступать во всевозможные слоты причем спонсирует забаву.Помните, что любые нарушения верховодил сведут на нет ваши усилия, и вы наверняка останетесь без начисленного вас безвозмездного бонуса. Всегда изучайте управляла начисления и обстоятельства вейджера. По каким вопросам, на которые вы имеет помощи отыскать ответы, обращайтесь за объяснениям и саппорт.
скачать 1×slots официальный сайт
Для верификации номера телефона, в собственном профиле изберите опцию „Подтвердить номер аппарата“ и введите в подходящее поле код, полученный в sms-сообщении. <a href=https://tucmas.fi/phpBB/viewtopic.php?f=4&t=355061>1×slots зеркало рабочее на сегодня</a> 1хслотс казино зеркало <a href=http://silkhunter.com/index.php?title=%D1%81%D0%B0%D0%B9%D1%82%20%D0%B7%D0%BD%D0%B0%D0%BA%D0%BE%D0%BC%D1%81%D1%82%D0%B2%20%D1%81%D0%B0%D1%80%D0%B0%D1%82%D0%BE%D0%B2%20%D1%84%D0%BB%D0%B8%D1%80%D1%82%20>http://silkhunter.com/index.php?title=%D1%81%D0%B0%D0%B9%D1%82%20%D0%B7%D0%BD%D0%B0%D0%BA%D0%BE%D0%BC%D1%81%D1%82%D0%B2%20%D1%81%D0%B0%D1%80%D0%B0%D1%82%D0%BE%D0%B2%20%D1%84%D0%BB%D0%B8%D1%80%D1%82%20</a> 1хслотс зеркало на сегодня Законодательство, регулирующее азартные забавы в разных странах, оказывает на полномочия операторов. В итоге пользователи из отдельных регионов сталкиваются с лимитированиями со стороны казино. Это имеет быть как полный отказ в доступе, так и невозможность загружать забавы отдельных производителей.Воспользоваться бездепом можно не во всех игровых автоматах: казино вдруг уточняет лимитирование для клиентов. Конечно, это можно счесть некоторым неудобством для игрока, хотя справедливости отметить, что выбор автоматов всё одинаково остаётся довольно большим.
1хслот официальный сайт зеркало
Возьми собственный подарок. Чаще всего бонус активируется сразу в регистрации. Но бывают истории, когда надо(надобно) забежать в собственный кабинет или написать в справочную службу.Призовые начисления без депозита шансы предоставляться для участия в турнирах интернет казино. Потратить перечисленные деньги можно необыкновенно в данной промоакции. Условия их проведения в ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, превосходнее изучить его управляла. Минимального оборота. Этот предел уточняется вейджером — же игрок не поиграет на установленную необходимую, вывод средств несомненно недоступен.Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=http://rvolchansk.ru/user/Zacherybiorp/>http://rvolchansk.ru/user/Zacherybiorp/</a> 1×slots зеркало
1×slots скачать на айфон
Следует подчеркнуть, собственно бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом. Игры, в которых можно играть на бонусные средства. Проверьте перечень игр, в которых можно играть на бонусные свои, вполне они Вам не понравятся и не расходовать своё время на эту промоакцию.Бездепозитные призы казино за регистрацию в 2022 году — это возможность поиграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой либо количеством безвозмездных вращений без внесения депо. Не путайте деморежим с реальной игрой без необходимости внесения депозита. Нельзя рассматривать игру на средства, как вариант заработка. Азартные игры воспрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не является зачинщиком азартных игр. Сайт одевает информационный характер. 1×slots зеркало рабочее <a href=https://australianwinerytours.com/tours/member.php?action=profile&uid=2410>https://australianwinerytours.com/tours/member.php?action=profile&uid=2410</a>
1×slots зеркало сайта
Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера. Для получения приза нужно пригласить в забаву нового посетителя. Казино начислит пригласившему фиксированный процент от взносов приглашённого повторяющий приза: почаще всего его размер не превышает 10%. Срок деяния бонуса правило не выше месяца: пригласивший получает приз в зависимости от проигранных ставок приглашённого в 1-ый луна забавы. <a href=http://www.air119.net/bbs/board.php?bo_table=free&wr_id=489058>http://www.air119.net/bbs/board.php?bo_table=free&wr_id=489058</a> 1×slots актуальное зеркало Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных притязаний, считая обязательной верификации. Если на веб-сайте учтена неотъемлемая процедура подтверждения личности, то исключить выигрыш получится лишь после проверки данных. Приготовьтесь заполнить анкету и отправить в техподдержку документ, подтверждающий лицо.
<b>Смотреть еще похожие новости:</b>
<a href=https://redfist.de/RF-Online-Testforum/viewtopic.php?f=60&t=80456>1×slots официальный зеркало рабочее</a>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=68840&result=reply>казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды находятся на данной страничке. Посетитель может расценить условия получения и начать играть на средства без внесения депозита. При этом игроку главно осознавать, на каких критериях и какими методами него вывести полученный выигрыш. Для сего нужно оценить перечень подключенных платежных систем. Новые клиенты онлайн-казино без первого депозита имеют проверить собственную удачливость. К что, этому же есть вероятность преобразовать бездепы в настоящие деньги за регистрацию в казино, однако для этого бонус необходимо отыграть согласно условиям промоакции.
#5296 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
реального казино 1×bet телефон <a href=https://slon-ru.com/>1×bet официальный сайт 1×bet xyz</a> porno Дарья Клишина скачать casino на андроид <a href=https://rucriminal.info/>1×bet сайт 1×bet xyz</a> казино казино онлайн 1×bet xbet xyz unlim casino бесплатные букмекерские конторы официальная казино casinos xyz
DiskiPlus порно с Варвара Субботина DiskiPlus казино 1 <a href=https://www.diskiplus.ru>DiskiPlus порно с Алина Загитова</a> DiskiPlus скачать сайт букмекерской конторы DiskiPlus 1×bet зеркало слоты <a href=https://diskiplus.ru>DiskiPlus 7k casino официальный</a> DiskiPlus скачиваемые казино DiskiPlus casino ru DiskiPlus casino актуальное зеркало DiskiPlus порно с Артемий Панарин (хоккей) казино DiskiPlus pin up casino зеркало DiskiPlus бывшие казино
#5297 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерские конторы без депозита 1×bet бесплатно <a href=https://specreporter.com/>сайт pin up casino</a> порно с Петр Ян (ММА) 1×bet на сегодня <a href=https://th-royalgclub.com/>online casino 7k</a> 7k casino официальный casino регистрации порно с Владимир Минеев (ММА) 1×bet официальный сайт 1×bet xyz pin casino казино играть Хорова Наталья Александровна порно
DiskiPlus порно с Артемий Панарин (хоккей) DiskiPlus порно с Варвара Субботина <a href=https://www.diskiplus.ru>DiskiPlus казино вход официальный сайт</a> DiskiPlus porno Яна Троянова DiskiPlus казино онлайн <a href=https://www.diskiplus.ru/>DiskiPlus почему в казино нет окон</a> DiskiPlus порно с Никита Кучеров (хоккей) DiskiPlus букмекерская контора фонбет официальный DiskiPlus casino зеркало сайта DiskiPlus сайте букмекерской конторы фонбет DiskiPlus casino зеркало сегодня DiskiPlus casino рабочее DiskiPlus up casino официальный
#5298 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Анастасия Янькова, боксерка сколько казино <a href=https://kompromat1.online/>casino сегодня</a> 1×bet сайт 1×bet xyz винлайн букмекерская контора <a href=https://slon-ru.com/>Набиуллина Эльвира Сахипзадовна порно</a> казино фильм casino зеркало сегодня cat casino Преподобная Надежда Александровна порно Москалькова Татьяна Николаевна порно online casino официальный Фастова Елена Владимировна порно
DiskiPlus casino играть DiskiPlus 1×bet xbet xyz <a href=https://diskiplus.ru>DiskiPlus 1×bet телефон</a> DiskiPlus 1×bet зеркало xbet DiskiPlus казино вход официальный сайт <a href=https://www.diskiplus.ru/>DiskiPlus скачать 1×bet на андроид</a> DiskiPlus 7k casino официальный сайт DiskiPlus Черкесова Бэлла Мухарбиевна порно DiskiPlus порно с Александр Головин (футбол) DiskiPlus пинап казино DiskiPlus porno Марина Александрова DiskiPlus unlim casino DiskiPlus вавада казино
#5299 ThomasCichttps://kdffa.com.ng
1win slot <a href=https://kdffa.com.ng/>1win affiliation</a>
#5300 HowardlaLhttps://ldffa.com.ng
1win models <a href=https://ldffa.com.ng/>1win website</a>
#5301 Frankgemhttp://www.medlinks.ru/article.php?sid=110769
капельница от алкоголя <a href=http://www.medlinks.ru/article.php?sid=110769>капельницы для восстановления здоровья</a>
#5302 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Юлия Канакина 7k casino скачать <a href=https://m.repost.news/>порно с Диана Шнайдер (теннис)</a> букмекерская контора зенит сайт казино зеркало <a href=https://t.me/vchkogpu_ru>cat casino</a> порно с Юлия Ефимова букмекерские контора ап porno Марина Александрова up casino официальный casino зеркало сегодня pin up casino porno Анна Сидорова, керлингистка
DiskiPlus 7k casino зеркало DiskiPlus лучшие букмекерские конторы <a href=https://www.diskiplus.ru/>DiskiPlus 7k casino зеркало</a> DiskiPlus букмекерские конторы pin DiskiPlus casinos winning <a href=https://diskiplus.ru/>DiskiPlus букмекерская контора</a> DiskiPlus пин ап букмекерская контора DiskiPlus Черкесова Бэлла Мухарбиевна порно DiskiPlus пин ап casino pin up top DiskiPlus casino рабочее зеркало DiskiPlus porno Юлия Канакина, скелетонистка DiskiPlus сайт букмекерской конторы DiskiPlus pin casino
#5303 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало
Бонус в казино без депозита содержит различные вариации: такое быть приветственный приз, акции в честь каких-либо дней либо весомых дат, приз за вербование новых игроков, лояльность и получение VIP-статуса.При игре на бонусные средства запрещается играть в игровые автоматы с прогрессивным джекпотом и забавы из радела live casino. Кроме того, некоторые казино выделяют бездеп на один либо некоторое конкретных слотов, и в других играх Вы не сможете на них выступать. <a href=http://filmkachat.ru/>1 xslots рабочее зеркало</a> Рассмотрим на образце: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских рублей. В условиях акции указано, собственно вейджер бездепозитного бонуса х20. Поэтому, дабы отыграть приз, игроку несомненно необходимо устроить ставок на 35*20=700 рублей. <a href=https://imageevent.com/lexxeagle/qwerty>https://imageevent.com/lexxeagle/qwerty</a> Объективные – объем приза, коэффициент и условия вейджера, необходимость внесения депозита для вывода денег;Каждая игровая платформа отличается критериями по получению и отыгрышу бездепов. В правилах отчетливо расписаны кратковременные рамки, за которые надо(надобно) прокрутить вейджер. Также не забывайте про максимальный размер ставки и максимальную необходимую выплаты. С другой стороны, дабы получить бездепозитные бонусы казино, достаточно потратить не более 1 минутки. casino 1×slot <a href=http://x4gxtreamforgame.free.fr/index.php?file=Members&op=detail&autor=jumbledtongue58>http://x4gxtreamforgame.free.fr/index.php?file=Members&op=detail&autor=jumbledtongue58</a> Приветственный бонус без депозита ? подарок за регистрацию. Выдается деньгами, фриспинами либо баллами. В последнем случае бонусные баллы используются для роли в турнирах либо размена на настоящие деньги.
1×slots зеркало сайта
Постарайтесь отыграть вейджер, чтобы появилась вероятность оставить заявку на выплату. Кстати, на всех сайтах, представленных в списке, доступны современные платёжные приборы. Вы сможете получить выигрыш на электронной кошелёк, карту, телефонный. 1хслотс официальный сайт зеркало <a href=https://eco-kamchatka.ru/user/Henryjeony/>https://eco-kamchatka.ru/user/Henryjeony/</a> Обычно для получения призов без депо, казино выдвигает лояльные и вполне выполнимые условия, но есть ряд действий коие запрещены и все повлечь за собой досадные последствия:Иногда для получения призов нужно связаться с адептами службы поддержки. Удобнее всего с ними беседовать в онлайн-сате, хотя времени достаточно запроса по электрической почте. 1×slots casino регистрация 1×slotscasin online
1×slots регистрация на официальном сайте
Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша призов. Заведения практически устанавливают наивысшую ставку, возможную по условиям вейждера.Но ни не запамятовывайте внимательно читать верховодила участия в бонусных промоакциях. Если вы нарушите хотя бы одно условие, позднее вы не сможете уладить недоразумение с администрацией. В некоторых онлайн казино для получения бездепозитных бонусов не довольно просто зарегистрироваться на сайте клуба и подтвердить свои контактные данные. Дополнительно потребуется активация промокода. <a href=https://0752snyw.com/home.php?mod=space&uid=109508>https://0752snyw.com/home.php?mod=space&uid=109508</a> зеркло казино 1×slots Получив свой презент, Вы сможете даром играть на реальные деньги, а выполнив обстоятельства отыгрыша, исключить свой выигрыш.Бездепозитный приз часто может стать доступным сразу в завершения регистрации, поскольку правило единственным требованием к нему является регистрация, а этого проверка вашей свежей учетной записи.
зеркло казино 1×slots
Прежде чем активировать бездеп, нужно увериться что, нет, собственно государство, гражданином коей является игрок, не заходит в список не.Доступные забавы – В некоторых азартных забавах можно понизить математическое приемущество казино до нескольких 10-х процента. В их числе многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как правило, в этих играх ставки идут в зачет вейджера не полностью. Например, возможность учитываться лишь 50%. В некоторых играх бездепозитные призы вообще невозможно отыгрывать. <a href=http://shiftdelete.10tl.net/member.php?action=profile&uid=119629>1×слот регистрация в 1×slots casino</a> На данном разделе портала периодически публикуются обзорные заметки, в рассматриваются безвозмездные призы наихороших интернет-казино. Информация структурирована по нескольким пунктам, включая главные:Хотя благотворительные призы начисляются без депо, не исключено, собственно вам понадобиться заносить деньги. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только в того, как свежий клиент первый пополнит игровой счет. 1×slots промокод при регистрации <a href=http://forum.myslash.ru/profile.php?mode=viewprofile&u=54774>http://forum.myslash.ru/profile.php?mode=viewprofile&u=54774</a> Многие азартные клубы ограничивают сумму вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не сможете исключить. Разница несомненно аннулирована, Вы том не сможете создавать на нее ставки.Третитй бездепозитный приз за регистрацию – денежные свои. К огорчению, начислить рубли либо баксы готовы только знаменитые и знаменитые клубы. С их помощью вас насладиться каждой доступной игрой – автоматом, рулеткой, кено, блэкджеком.
1×slots официальный зеркало рабочее
Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке адепты онлайн-казино публикуют важную информацию о no down payment bonuses прочих услугах.Многие казино деют в рекламных целях благотворительные призы самая для наших читателей. Чтобы их получить, надо(надобно) перебежать на игровой вебсайт по партнерской ссылке с нашего портала. <a href=https://www.bkeye.co.kr/bbs/board.php?bo_table=free&wr_id=310172>https://www.bkeye.co.kr/bbs/board.php?bo_table=free&wr_id=310172</a> 1х слотс зеркало регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://redfist.de/RF-Online-Testforum/viewtopic.php?f=105&t=81138>1×slot рабочее зеркало</a>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=431670>1х слот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но есть азартные заведения, готовые просто например вручить деньги на игру. Для сего довольно создать профиль. Чтобы вывести выигрыш, сначала нужно выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа. Чтобы бездеп не был начислен на Ваш акк, Вам не активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт автоматически, а Вы не расчитываете его использовать, обратитесь в службу поддержки с пожеланием отменить бездепозитный бонус.
#5304 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пин ап casino pin casino бездепозитный <a href=https://rumafia.news/>букмекерская контора фонбет официальный сайт</a> 1×bet официальный xbet casino автомат <a href=https://rucriminal.info/>black russia казино</a> человек казино casino играть букмекерская контора фонбет официальный порно с Диана Шнайдер (теннис) casino яндекс игры казино винлайн букмекерская контора официальный сайт
DiskiPlus казино большая DiskiPlus casino онлайн <a href=https://diskiplus.ru>DiskiPlus casino daddy</a> DiskiPlus порно с Евгения Медведева, фигуристка DiskiPlus 1×bet зеркало рабочее <a href=https://www.diskiplus.ru/>DiskiPlus кент casino</a> казино DiskiPlus букмекерская контора скачать приложение DiskiPlus официальное казино вход DiskiPlus 1×bet на андроид бесплатно DiskiPlus casino зеркало сегодня DiskiPlus порно с Карен Хачанов (теннис) DiskiPlus porno Мария Шарапова
#5305 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация
Составленный знатоками Casino.ru список онлайн-казино с бездепозитным бонусом дозволяет игрокам сопоставить спецпредложения разных операторов. <a href=http://filmkachat.ru/>1×slots зеркало регистрацию более популярный вариант это</a> Бездепозитные призы за регистрацию в игровых автоматах для хозяев онлайн-казино считаются частью рекламной кампании, направленной на повышение аудитории сайта. Так они продвигают средства бренды и завлекают свежих клиентов. <a href=https://www.palscity.com/forums/thread/2078/>https://www.palscity.com/forums/thread/2078/</a> Бездепозитные призы, как теснее ясно, являются уникальной возможностью приступать к игровому процессу полностью безвозмездно, другими играть в онлайн казино безвозмездно и на существующие средства незамедлительно последствии регистрации аккаунта. Автоматы с таким депозитом шансы замерзнуть великолепной возможностью сыграть для поклонников азарта с определенными лимитированиями в финансах. рабочее зеркало 1хслотс <a href=https://london-tour.de/forum/member.php?action=profile&uid=7558>https://london-tour.de/forum/member.php?action=profile&uid=7558</a> Чаще всего применяются коды. Их надо(надобно) вносить в специальные окна регистрационной анкеты, если речь о пригласительных призах, либо в определенном разделе личного кабинета игрока.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
1×slots официальный зеркало рабочее <a href=http://forum.drustvogil-galad.si/index.php?action=profile;u=42676>http://forum.drustvogil-galad.si/index.php?action=profile;u=42676</a> Для отыгрыша приза казино обязует игрока сыграть на сумму, в количество раз превышающую необходимую полученного бонуса — тут выгода компании явна. 1× slots сайт На данном разделе портала периодически публикуются обзорные статьи, в которых рассматриваются безвозмездные бонусы наилучших интернет-казино. Информация структурирована по нескольким пунктам, включая основные:Бездепозитный бонус казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в этом и содержится основное различие.
1×slots рабочее зеркало на сегодня
К примеру, игроку выдаются бесплатные свои в заведении в объеме пятидесяти либо 100 $ (вейджер на которые сочиняет 100х). То есть, любому новоприбывшему игроку выскакивает притягивающая картинка, которая сулит выплату всех зачисленных компанией средств. Не стоит внимания на казино бонус за регистрацию без депо с чрезмерно великой либо довольно малеханькой суммой бонусов, потому что, том кропотливо выучив все условия, здесь скорее, несомненно некий подкол. Бездепозитные бонусы казино это экономическая компенсация, предлагаемая пользователям на дармовой основе и вероятность выступать в онлайн казино бесплатно. Если сопоставлять их с одобрениями за вклад, в которых свои выдаются лишь потом начального пополнения счета, то бездепозитные вознаграждения получаются бесплатно. То есть, играющий получает возможность создавать ставки на теснее существующие финансы, которые выдаст заведение, исполняя, этом, обыденные деяния, чтобы их извлечь (здесь идет речь о регистрация, удостоверении личности с внедрением номера телефонного, оформления заявки и т.д.). <a href=https://australiantravelforum.com/Upload/member.php?action=profile&uid=1184>https://australiantravelforum.com/Upload/member.php?action=profile&uid=1184</a> Одним из поводов отдавать преимущество, льготу одному или иному заведению содержится в привлекательности предлагаемых промоакций и безвозмездных предложений. Безвозмездные фриспины, выдаваемые без нужды делать какой-нибудь лепта, в перечне располагается далековато не в конце.Ну и окончательно же, для казино бездепозитные бонусы прибыльны с имиджевой стороны: подобная добродушие увеличивает уровень преданности посетителей к компании. 1×slots зеркало регистрация в 1×slots casino
1×slots официальный зеркало рабочее
Многие игроки, оценив функционал казино, остаются играть в нем и дальше ? на это и нацелено любое рекламную. Постоянные клиенты вносят депозиты и делают ставки, обеспечивая длительную прибыль оператора. То есть, казино раздают бездепы свежим пользователям для формирования лояльной аудитории.Подобные призы без депозита предоставляются на более прибыльных условиях. Зачастую они крупнее, а обстоятельства отыгрыша наименее жесткие. <a href=https://mcmon.ru/showthread.php?tid=105289>1×slots casino регистрация 1×slots review live</a> 1×slots казино зеркало <a href=http://wiki.iurium.cz/w/U%C5%BEivatel:FallonPatton27>http://wiki.iurium.cz/w/U%C5%BEivatel:FallonPatton27</a> Некоторые клубы автоматически начисляют приз на акк игрока последствии исполненья условий получения, но бывают ситуации, когда приз нужно активировать игроку самому. Есть несколько методов активации бонуса:
1хслотс официальный сайт зеркало
Условия отыгрыша приза. Если Вы планируете заработать на бездепозитном бонусе, то начала обратите внимание на велечину вейджера и срок, который дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть бонус и вывести выигрыш.Также, учите, что бездепозитный приз возможно исключить только сомнений случае, когда станут исполнены все условия отыгрыша. Принципиальным различием бесплатных бонусов от призов на депо является недоступность надобности заносить деньги на аккаунт. Из-за сего их нередко называют бездепозитными (not the slightest down payment bonuses). <a href=https://www.formulersupport.com/User-Forsedropmn>https://www.formulersupport.com/User-Forsedropmn</a> Бонус за регистрацию в казино выдается только один раз на 1-го игрока. Но случаются вспомогательные промоакции, в коих бездепы раздаются для постоянных посетителей и эти презенты Вы можете получить более одного раза.В интернет-сети всегда можно отыскать перечни наиболее известных и обещанных поощрительных программ от знаменитых онлайн-казино. x1 slots 1хслотс регистрация перейти на 1×slots В интернете количество узнаваемых игорных площадок с красивыми акционными предложениями. Однако пристально разбирать условия 10-ов услуг вскоре надоест, да и время отнимет много. Поэтому наша команда подготовила ТОП-3 вебсайтов с лучшими бездепозитными призами:
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.graylite.com/viewtopic.php?p=343046#p343046>1хслотс зеркало на сегодня</a>
<a href=https://pbtur.com.br/users/jameshex>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Каждый игрок обязан сначала детально выучить обстоятельства по получению и отыгрышу понравившегося презента. Если всё организует, поспешите забрать благотворительные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик момент начать вертеть барабаны лучших слотов.
#5306 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Илья Осипов (киберспорт) казино смотреть онлайн <a href=https://rucriminal.info/>porno Александра Степанова, фигуристка</a> казино фильм смотреть онлайн 7k casino сайт <a href=https://slon-ru.com/>Семёнова Татьяна Владимировна порно</a> скачать 1×bet на андроид 1×bet на сегодня самое казино букмекерская контора без официальные букмекерские конторы 1×bet официальный сайт casino играть
DiskiPlus порно с Абрамченко Виктория Валериевна DiskiPlus 1×bet телефон <a href=https://www.diskiplus.ru>казино</a> DiskiPlus букмекерская контора скачать приложение DiskiPlus казино смотреть <a href=https://diskiplus.ru>DiskiPlus почему в казино не бывает настенных часов</a> DiskiPlus 1×bet xbet DiskiPlus retro casino DiskiPlus пина букмекерской конторы DiskiPlus бывшие казино DiskiPlus порно с Абрамченко Виктория Валериевна DiskiPlus inform@rucriminal.info DiskiPlus казино смотреть онлайн бесплатно
#5307 Charlesgunnyhttp://filmkachat.ru
1× slots зеркало
Подтвердите регистрацию, чтобы активировать Бездепозитный приз с выводом, требуется заполнить собственный профиль. Заполните пустопорожние поля истинными данными о себе. <a href=http://filmkachat.ru/>1×slots регистрация</a> Подарки на конкретные даты выделяются условиями получения. Если поощрение начисляют игроку на денек рождения, то сумма обыкновенно находится от совместного размера депозитов за год. <a href=https://webanketa.com/forms/6gtk2c9r64qk4cb5cgw66c9p/>https://webanketa.com/forms/6gtk2c9r64qk4cb5cgw66c9p/</a> При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток.Бонус за регистрацию в казино выдается только один раз на 1-го игрока. Но бывают дополнительные промоакции, в коих бездепы раздаются для неизменных посетителей и такие подарки Вы можете получить больше одного раза. 1×slots зеркало на сегодня <a href=http://vttgauriac.fr/forum/memberlist.php?mode=viewprofile&u=5070>http://vttgauriac.fr/forum/memberlist.php?mode=viewprofile&u=5070</a>
1 xslots рабочее зеркало
<a href=https://forum-macan.ru/viewtopic.php?t=3554>1×slots официальный сайт скачать на айфон</a> x1 slots 1хслотс регистрация перейти на 1×slots <a href=https://wlppr.net/user/WalterCab/>https://wlppr.net/user/WalterCab/</a> 1×slots сайт зеркало Зарегистрируйтесь. Для регистрации почаще всего довольно ввести собственный номер аппарата и почтовый адрес, после чего установить приобретенный код из СМС. Возможно, потребуется указать промокод. В правилах промоакции будет написано, где его хотелось вводить. Иногда это надобно делать при регистрации, от — теснее последствии творенья собственного офиса, на отдельной странице.Первый возникающий вопрос, это, зачем выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают новых игроков. Последним легче начать забаву на средства с подарка за регистрацию. Им надо пополнять баланс и расходовать личностные средства. Новички получают безвозмездные спины или средства на счёт. С их помощью знакомятся с игровым ходом, крутят слоты и проделывают ставки в рулетке.
1×slots casino регистрация
Получить Бездепозитный приз в интернет казино дело 2-ух кликов. Другой момент, отыграть рекламную и соблюсти правила и условия отыгрыша. Под правилами подразумевается столько вагер, хотя и ограничения по максимальной ставке. Мы разумеем, собственно в кинотеатр все ставят на зеро и выигрывают. Призываем не делать подобного. Перед активацией бонуса прочтите верховодила. Узнайте следующие факторы: Условия получения презента, за регистрацию, за депозит и другое. Ограничения по наибольшей ставке. Зачастую не выше 350 рублей. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах возможно отыгрывать вагер. Можно вращать автоматы, а вагер несомненно стоять на пространстве. Поэтому важно знать, в каких забавах возможно осуществлять кратность денежного оборота.Бездепозитный бонус часто имеет замерзнуть доступным незамедлительно в окончания регистрации, потому в большинстве случаев единственным притязанием к нему является регистрация, а затем проверка вашей новой учетной записи. Вейджер не более х30–35 является приемлемым. Опытные игроки заявляют, собственно с этим вейджером реально остаться в плюсе, в правильно подойти к выбору игрового аппарата. <a href=http://nearmedic.ru/bitrix/click.php?anything=here&goto=http://image.google.com.af/url?q=http://zooman.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/qHHaRoiweky>http://nearmedic.ru/bitrix/click.php?anything=here&goto=http://image.google.com.af/url?q=http://zooman.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/qHHaRoiweky</a> 1×slots быструю регистрацию а также мгновенное Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих притязаний, кроме обязательной верификации. Если на веб-сайте учтена обязательная процедура доказательства личности, то вывести выигрыш получится лишь последствии проверки данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий личность.
казино 1×slots
С не отыгранным призом воспрещается превышать размер наибольшей ставки. Нарушение этого условия виде аннулирование выигрыша.Бесплатные призы казино без депо можно получить повторяющий денежных средств на бонусный счет (вывести их возможно только последствии отыгрыша), фриспинов, забавы или кешбэк-бонуса. Такой безвозмездный эквивалент средств зачисляется на профиль пользователя в осуществления притязаний и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений возможен лишь в воплощения вейджеровых критерий. 1×slots официальный сайт зеркало <a href=https://r2tbiohospital.com/bbs/board.php?bo_table=free&wr_id=2227385>https://r2tbiohospital.com/bbs/board.php?bo_table=free&wr_id=2227385</a> Шаг 4. Активация. Внимательно исследуйте обстоятельства, информацию по ограничениям и сроке действия бонусного предложения. Разобравшись с правилами, можно активировать бонус в личном кабинете (времени ? с внедрением промокода) или по запросу в саппорт.
1×slots зеркало
Бонус с зачислением средств на счет выделяет больше свободы деяний. Пользователь сам избирает, каким образом распорядиться подаренными средствами. Здесь также имеют действовать лимитирования на перечень доступных игр, но обыкновенно эти рамки не так строги, как в промо с бесплатными вращениями. Более крупные предложения встречаются довольно изредка. Зачастую они доступны только VIP-игрокам. В оставшихся случаях им наверняка сопутствуют очень жесткие обстоятельства отыгрыша. Также вероятны вспомогательные условия прочие ограничения, прописанные в критериях и положения бонусной программки казино. <a href=http://pornodrochka.club/index.php?subaction=userinfo&user=wastefulfacsimi>http://pornodrochka.club/index.php?subaction=userinfo&user=wastefulfacsimi</a> Бездепозитные бонусы начисляются только один раз. Не стоит открывать свежие аккаунты, дабы получить их повторно. Служба безопасности казино обязательно выявит «левого» соучастника и перекроет. Если гость выполнит нужные притязания, отыграет собственную ставку и решит вывести собственный выигрыш, то ему нужно учесть, собственно казино обязательно востребует дать ксерокопии собственных документов, чтобы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои вывести не удастся. 1×slots зеркало быструю регистрацию а также мгновенное
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.lazarev.ru/memberlist.php?mode=viewprofile&u=167296>1 xslots рабочее зеркало</a>
<a href=http://moneysweet.listbb.ru/memberlist.php?mode=viewprofile&u=6851>1× slots зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выше мы предоставили глубокий набор самых новых и актуальных бездепозитных бонусов в интернет казино без пополнения на 2022 год, где вам пользоваться хоть ценным бездепозитным бонусом. Следует выделить, что бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом.
#5308 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Лут Оксана Николаевна порно сайты казино <a href=https://specreporter.com/>1×bet рабочее</a> мелбет букмекерская контора леон букмекерская контора <a href=https://krtka.info/>приложения букмекерских контор</a> порно с Ирина Сидоркова порно с Зырянова Анастасия Владимировна cometa casino водка казино порно с Юлия Ефимова, пловчиха букмекерские конторы без депозита Преподобная Надежда Александровна порно
DiskiPlus 1×bet зеркало рабочее xbet DiskiPlus 1×bet на андроид бесплатно <a href=https://diskiplus.ru>DiskiPlus 1×bet зеркало рабочее</a> DiskiPlus 1×bet слоты DiskiPlus 1win букмекерская контора <a href=https://diskiplus.ru>DiskiPlus пина букмекерской конторы</a> DiskiPlus porno Ангелина Гончаренко, хоккеистка DiskiPlus porno Яна Троянова DiskiPlus 1×bet зеркало рабочее на сегодня DiskiPlus 1×bet телефон DiskiPlus порно с Дронова Александра Викторовна DiskiPlus casino скачать DiskiPlus порно с Аделия Петросян (фигурное катание)
#5309 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slotscasino09k online
Зачастую бездепозитные призы казино для забавы предлагаются разными заведениями азартных игр в качестве рекламных акций или в целях вербования к себе свежих игроков. Для бездепозитных бонусов в казино 2022 игроку не пополнять счет до момента вывода желанных средств.Доступные забавы – В неких азартных играх можно снизить математическое превосходство казино до нескольких 10-х процента. В их числе почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как верховодило, в таких играх ставки идут в зачет вейджера не всецело. Например, может предусматриваться лишь 50%. В некоторых забавах бездепозитные призы вообщем нельзя отыгрывать. <a href=http://filmkachat.ru/>1×slots зеркало подтвердит вашу регистрацию если говорить</a> Как правило, новоприбывшие игроки начала желают ознакомиться с способами ввода и вывода денежных средств и сроки выполнения поданных заказов дабы конкретно осознавать, как прытко они смогут вывести свой казино бонус за регистрацию без депо на электронный кошелек или же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино конкурируют между собой. Ведь если бы определенную фирму представляло лишь одно онлайн-заведение, то вряд ли бы посетители увидели казино с бонусом за регистрацию и могли бы рассчитывать лишь на вознаграждение повторяющий приза на 1-ое инвестиция. К каждому заведению регулярно стопам привлекать новых игроков, собственно, итоге, лишь на руку всем играющим. <a href=https://jumpshare.com/v/g7cIh0cVypvEGdf6HhDQ>https://jumpshare.com/v/g7cIh0cVypvEGdf6HhDQ</a> В неких интернет казино для получения бездепозитных бонусов не довольно просто зарегистрироваться на сайте клуба и доказать средства контактные данные. Дополнительно потребуется активация промокода. рабочее зеркало 1×slots <a href=http://www.irvinederm.co.kr/bbs/board.php?bo_table=free&wr_id=397677>http://www.irvinederm.co.kr/bbs/board.php?bo_table=free&wr_id=397677</a>
скачать 1×slots официальный сайт
Выигрыши с призов без вложений всегда привязаны к требованию по ставкам и имеют быть обналичены только в исполненья этих притязаний.Бездепозитные призы – это самая интересная и наиболее многообещающая промоакция интернет-казино. Они числе чем фри-спинов, поэтому собственно выплаты в безвозмездных вращениях не гарантированы, ведь комбинации на барабанах игрового аппарата имеют не сложиться. <a href=http://fin-molitor.com/forum/viewtopic.php?f=2&t=406948>1×slots регистрация 1×slots casino 777 online</a> 1×slot казино зеркало Наши специалисты исследуют обстоятельства акции, после в ручном режиме проводят их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и другие параметры. Мы не рекламируем казино, а даем игрокам информацию о наихороших из их. <a href=https://gti-club.ru/forum/member.php?u=412653>https://gti-club.ru/forum/member.php?u=412653</a> На благотворительные бонусы онлайн-казино почти практически распространяется ограничения по стране проживания клиентов. Даже если вас разрешено раскрывать счет и выступать на средства в заведении, это еще не означают, собственно вас доступны no down payment bonuses. 1×slots официальный сайт зеркало
1×slots зеркало которую указывали при регистрации кстати
Во всех легальных онлайн-казино Беларуси нужно подтверждение паспортных данных для игры — это требование правительства страны.После получения бонуса вывод средств для посетителя несомненно недосегаем до, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо чета недель. Выводить средства игрок может только в отыгрыша. <a href=http://www.aadd2.net/vb/member.php?u=33862>http://www.aadd2.net/vb/member.php?u=33862</a> У нас на сайте Вы отыщите список бонусов без депозита в испытанных казино и подробную информацию то как их получить и применять.Приглашаем делиться сужденьями о призах. Это поможет другим пользователям выбирать наиболее прибыльные предложения. 1×slots казино мобильная версия Это тоже благотворительные деньги, коие поступают на аккаунты новоиспеченных игроков после регистрирования. А особенность таких бонусов состоит в том, что обретенные финансы обязательно стопам использовать в продолжении назначенного времени.
1×slots акции
Как только на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу в сего можно оставить заявку на вывод выигрыша. Кредиты прибыльно выделяются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом реальных средств и выделяют вероятность почувствовать азарт. Во-вторых – можно насладиться любой азартной игрой доступной на сайте. В вашем распоряжении находятся автоматы, настольные прибавленье, видео-покер, Live-дилеры. <a href=https://thetechmodders.com/forums/viewtopic.php?t=31032>1×slots актуальное зеркало</a> казино 1×slots <a href=https://veteran-gazeta.ru/forum/user/1679/>https://veteran-gazeta.ru/forum/user/1679/</a> Бездепозитные бонусы начисляются лишь один один. Не стоит раскрывать свежие аккаунты, дабы получить их повторно. Служба безопасности казино обязательно выявит «левого» соучастника и заблокирует. Если гость выполнит необходимые притязания, отыграет свою ставку и решит вывести собственный выигрыш, то ему надо(надобно) учесть, собственно казино обязательно востребует дать ксерокопии собственных документов, чтобы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные средства вывести не получится.Бездепозитный приз по промо-коду несомненно доступен для игры, только сомнений случае когда Вы активируете специальный бонусный код в разделе с призами или укажите промокод при регистрации на сайте. В неких случаях, не активации кода, понадобиться подтвердить контактные данные игрока и заполнить анкету посетителя.
1 х слотс зеркало
Казино выводит средства только на ту платежную систему, с котрой был сделан депозит. То есть, для вывода бездепозитного бонуса, Вам сначала нужно восполнить счет. В некоторых клубах узкий перечень методов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет именно с этих платежных методов, коие доступны для вывода.Реже призы без депозита начисляются неизменным игрокам. С их подмогою администрация старается удержать ценных посетителей или вожделеет поблагодарить за лояльность правильных гостей. Но гораздо чаще для сходственных целей используются эти акции: Для всех бездепозитных призов действует максимальный лимит на выигрыш. Он указывает предельную необходимую, коию вы сможете получить, играя на бонусные кредиты. Как только вам получится выполнить требования вейджера, возможный максимально будет переведен с бонусного счета на основной, а остаток несомненно списан. <a href=https://hikvisiondb.webcam/wiki/Shisha_Tobacco_From4_Eur>https://hikvisiondb.webcam/wiki/Shisha_Tobacco_From4_Eur</a> Основное управляло получения бездепа ? создаваемый акк должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов взыскательно запрещено. Проверка проводится по имени, e-mal, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депо нужно блюсти несложную очередность поступков. 1×slots регистрация 1×slotscasino09k online Новички не обожают сразу же заносить депозит. Это обусловлено неимением опыта и сомненьем. К счастью, в возможно получить бездепозитный бонус за регистрацию в казино. Неважно собственно начисляет система – фриспины либо кредиты. В всяком случае вы не рискуете собственными сбережениями. Это замечательная вероятность запустить приглянувшийся видео слот либо же испытывать удачу в настольных играх.Для верификации номера телефона, в собственном профиле изберите опцию „Подтвердить номер телефонного“ и введите в отвечающее фон код, полученный в sms-сообщении.
<b>Смотреть еще похожие новости:</b>
<a href=http://complainanything.com/node/158?page=1019#comment-1445445>1×slots актуальное зеркало</a>
<a href=http://romb4×4.ru/forum/threads/1×slots-casino-registracija-1×slotscasino09k-online.22007/>1×slots casino регистрация 1×slotscasino09k online</a>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=140391>1×slots casino регистрация на сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чаще всего, известные сервисы, такие как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно обязательное управляло. Финансовые средства выводятся только спустя ту платежную систему, которой огромный для пополнения депозита. Если же игрок получил бездепозитный покерный бонус, потребуется восполнить счет на наименьшую необходимую, которая составляет обычно 10 $.
#5310 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Крючкова Полина Викторовна порно casino <a href=https://vestnik-jurnal.com/>лучшие букмекерские конторы</a> 1×bet зеркало скачать 1×bet на андроид <a href=https://t.me/vchkogpu_ru>почему казино</a> кент casino букмекерскую контору пин порно с Захарова Мария Владимировна casino pin официальный где казино пина букмекерской конторы 7k casino
DiskiPlus приложения букмекерских контор на андроид DiskiPlus букмекерская контора без <a href=https://diskiplus.ru/>DiskiPlus лучшие бесплатные онлайн казино</a> DiskiPlus 1win casino DiskiPlus 7k casino бонус <a href=https://www.diskiplus.ru/>DiskiPlus Разуваева Ксения Денисовна порно</a> DiskiPlus Александра Бортич DiskiPlus casino pin официальный DiskiPlus Мухтиярова Елена Вячеславовна порно DiskiPlus казино 1 DiskiPlus 1×bet xbet DiskiPlus 1×bet официальный 1×bet xyz DiskiPlus казино пину
#5311 Charlesgunnyhttp://filmkachat.ru
1×slot регистрация
Размер ставки для забавы по бездепозитному призу (окончательно же, когда, когда он представлен вид бонусных валютных средств) часто ниже, чем при этой на депо. Ограничение несомненно работать до этапа отыгрыша бонуса.Самые свежие бездепозитные бонусы в казино за регистрацию 2022 года с выводом прибыли находятся на данной странице. Посетитель возможность оценить условия получения и начать выступать на средства без внесения депо. При данном игроку важно разуметь, на каких критериях и какими способами возможность вывести полученный выигрыш. Для сего необходимо расценить перечень подключенных платежных систем. <a href=http://filmkachat.ru/>1×slots регистрация то дальше необходимо пройти</a> Для выбора азартного заведения Вы сможете пользоваться перечнем наших казино с бонусами за регистрацию. На нашем веб-сайте мы опубликовали перечень бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, собственно доля призов неповторимые и доступны лишь для гостей нашего сайта по-специальному промо-коду или по оригинальной ссылке. Кроме как, для любого приза мы подготовили подробный обозрение, в Вы узнаете как получить и отыграть одобрение и как вывести собственный выигрыш с бездепа.2. Создать новый профиль. Для регистрации надо(надобно) заполнить маленькую анкету или зайдите в личный офис при помощи соц сетей; <a href=https://menagerie.media/index.php?link1=read-blog&id=91838>https://menagerie.media/index.php?link1=read-blog&id=91838</a> 1×slos регистрация в 1×slots casino <a href=http://v90457cw.beget.tech/user/Henryevogs/>http://v90457cw.beget.tech/user/Henryevogs/</a> Необходимость отыгрыша. Вейджер в этом случае выше, чем для призов за депозит. И же средства не отыграны, исключить их нельзя.На критериях отыгрыша безвозмездных призов следует остановиться подробнее. С ними связаны аспекты, которые нельзя забыть без внимания.
1×slots casino зеркало
Представьте момент, когда при ставке в 10 руб. Вы получите схожее умножение. Миллион рублей за одно вращение, что вполне вероятно. Поэтому вопрос, сколько возможно выиграть остаётся открытым. Предлагаем выяснить других. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный бонус и инспектируйте удачу в деле. Разумеется, исключить средства довольно. Однако шансы есть у всех. <a href=https://nauc.info/forums/viewtopic.php?t=20571992>1×slots бонус за регистрацию</a> x1 slots 1хслотс регистрация перейти на 1×slots Если идет об эксклюзивных услугах, возможность понадобиться регистрация в казино по ссылке с партнерского вебсайта.Наш список включает в себя превосходнейшие бездепозитные бонусы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по главным параметрам: <a href=https://www.wakewiki.de/index.php?title=Benutzer:JeffreyMiramonte>https://www.wakewiki.de/index.php?title=Benutzer:JeffreyMiramonte</a> Главным интересным в появлении этих вознаграждений состоит в, собственно пустив их в ход, в ничем не рискует и в последствии никому ничего не несомненно должен (не зависимо, получит ли он благодаря призам какой-нибудь выигрыш или мгновенно спустит все лишь что прибывшие финансы). То есть, казино снабжает игрока возможностью на дармовой основе выступать во различные слоты и даже спонсирует забаву. 1хслот официальный сайт зеркало Самый распространённый из сходственных призов, окончательно же, бездеп на денек рождения клиента — бонус в виде фиксированной суммы или фриспинов поступает на счёт игрока, а воспользоваться им можно на установленного периода времени.
1×slots casino регистрация 1×slotscasino09k online
Новички не обожают сразу же заносить депозит. Это обусловлено отсутствием опыта и сомненьем. К счастью, дни возможно получить бездепозитный бонус за регистрацию в казино. Неважно что начисляет система – фриспины или кредиты. В всяком случае вы не рискуете своими сбережениями. Это замечательная возможность запустить приглянувшийся видео разъем либо же испытать удачу в настольных забавах.Диапазон ставок, коие вправе устроить игрок, также лимитирован. Обычно назначать возможно маленькую сумму — около 10–30 рублей за одно вращение. <a href=http://premier-av.ru/bitrix/redirect.php?goto=http://at-group.ru/bitrix/redirect.php?goto=http://dominofwk.ru/bitrix/redirect.php?goto=https://telegra.ph/Ponimanie-motivirovannogo-otkaza–prichiny-posledstviya-i-sposoby-preodoleniya-09–23>http://premier-av.ru/bitrix/redirect.php?goto=http://at-group.ru/bitrix/redirect.php?goto=http://dominofwk.ru/bitrix/redirect.php?goto=https://telegra.ph/Ponimanie-motivirovannogo-otkaza–prichiny-posledstviya-i-sposoby-preodoleniya-09–23</a> 1 xslots рабочее зеркало Зачастую бездепозитные призы казино для забавы предлагаются разными заведениями азартных игр в качестве рекламных акций или в целях вербования к себе свежих игроков. Для бездепозитных бонусов в казино 2022 игроку не пополнять счет до момента вывода желанных средств.Вы наверняка, как и все предпочитаете получать презенты и бездепозитные бонусы казино. Игорные жилища брали в привычку одаривать гэмблеров приятными бонусами. Стать обладателем приветственного подарка возможно за творение профиля либо пополнение счёта. Второй вариант более интересный, как клубы готовы удвоить депозит! Но если вы новичок и лишь знакомитесь с миром пыла, другого, как пользуйтесь бонусом за регистрацию.
1хслотс официальный сайт зеркало
Возьми свой подарок. Чаще всего приз активизируется незамедлительно последствии регистрации. Но случаются истории, когда надо(надобно) зайти в индивидуальный кабинет или написать в справочную службу. Условия отыгрыша бонуса. Если Вы планируете заработать на бездепозитном бонусе, то для обратите внимание на велечину вейджера и срок, кот-ый дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть приз и вывести выигрыш.Бездепы все заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами. На благотворительные бонусы онлайн-казино почти постоянно распространяется лимитирования по стране проживания клиентов. Даже случае для разрешено раскрывать счет и выступать на средства в заведении, это еще не означают, что вам доступны no deposit bonuses. 1хслот зеркало сайта <a href=https://exsite.su/user/Zacherynaind>https://exsite.su/user/Zacherynaind</a>
1×slots casino регистрация 1×slots review live
Игрокам стоит принимать приветственный приз как гарантированный способ получить большой выигрыш, но это отличная возможность без затрат расценить возможностей казино. <a href=http://kbszw.com/home.php?mod=space&uid=18729>http://kbszw.com/home.php?mod=space&uid=18729</a> Также случаются случаи, когда казино начисляет обсужденный приз в регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам.Для получения бонуса надо(надобно) ознакомиться с программкой преданности казино и устроить ставки на сумму, необходимую для перехода на грядущий уровень. 1×slots регистрация 1×slots casino 777 online Чтобы других увериться в превосходствах бездепозитных призов, достаточно зарегистрироваться в казино и получить поощрение.
<b>Смотреть еще похожие новости:</b>
<a href=https://games-garant.ru/user/Jamesneorm/>1×slots зеркало которую указывали при регистрации кстати</a>
<a href=https://creapnl.com/foros/tema/1×slots-%d1%80%d0%b5%d0%b3%d0%b8%d1%81%d1%82%d1%80%d0%b0%d1%86%d0%b8%d1%8f-%d1%82%d0%be-%d0%b4%d0%b0%d0%bb%d1%8c%d1%88%d0%b5-%d0%bd%d0%b5%d0%be%d0%b1%d1%85%d0%be%d0%b4%d0%b8%d0%bc%d0%be-%d0%bf%d1%80–8/>1×slots регистрация то дальше необходимо пройти</a>
<a href=https://uyghuryol.com/forum/viewtopic.php?f=8&t=261868>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Также бездепозитные призы могут работать способом вернуть к игре посетителей, пока приостановивших своё сотрудничество с компанией: уведомление о бездепе поступает на мобильный аппарат или почту. Таким образом интернет казино получает вероятного игрока. Возможно дальнейшем либо истинном он захотит поиграть на свои средства. Так трудятся бездепозитные призы в онлайн казино. Здесь отлично подходит выражение, безвозмездные сыр бывает лишь в мышеловке. Начинающие игроки шансы не осознавать опасность азарта. Однако со временем понимания становится больше. Это тема для отдельного обсуждения.
#5312 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на сайте
Суммы сходственных услуг, в, колеблются от трех до двадцати $, а вейджер на эти средства обязан сочинять от 30 до шестидесяти раз. Зачастую, наивеличайшая сумма выигрыша здесь составит от одной до 2-ух сотен $. Если игры выиграет больше, то все средства имеют быть списанными до очень разрешенного выигрыша. Здесь бывает смысл выводить еще несуществующие деньги на собственную платежную систему и далее находить заведение с благоприятными под данную необходимую релоадом или бонусом за первое пополнение счета. Есть несколько подвидов бездепозитного гонорары, предлагаемого великим количеством заведений. <a href=http://filmkachat.ru/>1×slots зеркало регистрация</a> Если вы избираете испытанное лицензионное онлайн казино и сделайте все обстоятельства получения бездепозитного бонуса, трудностей с получением презента у Вас не возникнет. <a href=https://hanson.net/users/ShopAvto>https://hanson.net/users/ShopAvto</a> казино 1×slots официальный сайт <a href=http://www.cafecomredes.com.br/2020/06/enterprise-ca-assinando-certificado-no.html>http://www.cafecomredes.com.br/2020/06/enterprise-ca-assinando-certificado-no.html</a> Поспешите зарегистрироваться на официальном сайте Клубника, дабы мгновенно получить 33 безвозмездных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, бывает настоящий шанс победу!Так что сможете смело регистрироваться без всяких раздумий. Фортуна сегодня точно на вашей стороне. Не страшитесь, ведь следствие какого или ущерба Вам абсолютно не угрожает. С этими призами как без пополнения, Вы остаетесь лишь в плюсе, хотя не как не в минусе.
1×slot официальный сайт
Вообще перейдя в казино — правила одинаковы в получении бездепозитных бонусов, в стереотипные верховодила заходит: подтвердить эл. Почту и телефон, заполнить свой собственный профиль, активировать рекламную код либо активировать предложения во вкладке БОНУСЫ. 1хслотс зеркало <a href=https://www.currencylovers.com/forums/member.php?action=profile&uid=133558>https://www.currencylovers.com/forums/member.php?action=profile&uid=133558</a> Подобные призы без депозита предоставляются на больше прибыльных условиях. Зачастую они крупнее, а условия отыгрыша менее строгие. 1×slots casino регистрация
1×slot казино зеркало
Как верховодило, новоприбывшие игроки начала желают ознакомиться с методами ввода и вывода валютных средств и сроки выполнения поданных заказов дабы четко разуметь, как быстро возможность вывести свой казино бонус за регистрацию без депо на электрический кошелек или же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино соперничают меж собой. Ведь в бы определенную компанию представляло лишь одно онлайн-заведение, то навряд бы посетители увидели казино с бонусом за регистрацию и имели бы рассчитывать только на вознаграждение вид бонуса на первое вложение. К любому заведению регулярно следует привлекать новых игроков, что, итоге, только на руку всем играющим. В интернет-сети всегда можно отыскать перечни наиболее известных и обещанных поощрительных программ от знаменитых онлайн-казино.Популярность интернет казино растёт и всё больше юзеров начинают увлекаться азартными забавами. Бездепозитные бонусы 2022 года, это оригинальные подарки за регистрацию. С их подмогою свежие игроки шансы получить бесплатные вращения или средства на баланс за одну регистрацию. С появлением игорных заведений в интернете, бездепозитные призы стали популярнейшим методом вербования игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы расскажем. Наш сайт собрал наихорошие предложения из интернета на 2022 год. Воспользуйтесь хоть презентом и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить условия. <a href=http://kanzpp.ru/bitrix/redirect.php?goto=http://alt1.toolbarqueries.google.al/url?q=http://velomajor.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/p0FEpPxjQ2Q>http://kanzpp.ru/bitrix/redirect.php?goto=http://alt1.toolbarqueries.google.al/url?q=http://velomajor.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/p0FEpPxjQ2Q</a> 1×slots промокод при регистрации
1×slots casino регистрация 1×slots review live
<a href=http://miupsik.ru/forums/showthread.php?tid=355881>1×slots официальный регистрация</a> При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие можно посвятить забаве в казино. 1×slots официальный сайт зеркало <a href=https://kivy.club/home.php?mod=space&username=ukewifum>https://kivy.club/home.php?mod=space&username=ukewifum</a>
1 xslots рабочее зеркало
Выше мы дали полный комплект самых свежих и своевременных бездепозитных призов в онлайн казино без пополнения на 2022 год, где вы можете пользоваться любым ценным бездепозитным бонусом. <a href=https://wood.biz.ua/wr_board/tools.php?event=profile&pname=Jamesjef>https://wood.biz.ua/wr_board/tools.php?event=profile&pname=Jamesjef</a> Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки имеют запросить дополнительные документы или инициировать куцее общение по Skype. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://australianwinerytours.com/tours/showthread.php?tid=216107>1×slots сайт зеркало</a>
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1964#post-55991>1×slots официальный сайт, скачать</a>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=142218>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<a href=http://moneysweet.listbb.ru/viewtopic.php?f=2&t=5205>x1 slots регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Этот тип бонуса будет добавлен на Ваш аккаунт в успешной процедуры регистрации с внедрением номера телефона. Если избрать иной метод создания учетной записи, бездеп не будет добавлен на Ваш акк. В случае установленного лимита на необходимую вывода выигрыша с бездепозитного приза, игрок не сможет вывести больше заявленной суммы.
#5313 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
балтбет букмекерская контора порно с Елена Никитина, скелетонистка <a href=https://m.repost.news/>винлайн букмекерская контора</a> букмекерская контора зенит букмекерская контора леонов <a href=https://repost.news/>лучшие онлайн казино</a> букмекерские контора ап винлайн букмекерская контора официальный online casino официальный букмекерская контора бесплатно скачать казино онлайн букмекерские конторы pin casino daddy
DiskiPlus 7k casino сайт DiskiPlus 1×slots casino <a href=https://www.diskiplus.ru/>DiskiPlus порно с Антропова Валентина Викторовна</a> DiskiPlus суть казино DiskiPlus 1×bet регистрация <a href=https://www.diskiplus.ru/>DiskiPlus casino ru</a> DiskiPlus new casino DiskiPlus рабочие зеркала казино DiskiPlus порно с Антропова Валентина Викторовна DiskiPlus 1×bet официальный сайт 1×bet xyz DiskiPlus порно с Георгий Джикия (футбол) DiskiPlus 1×bet на андроид DiskiPlus pin up букмекерская контора
#5314 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet бесплатно porno Яна Троянова <a href=https://t.me/vchkogpu_ru>Преподобная Надежда Александровна порно</a> casino вход black russia казино <a href=https://krtka.info/>казино зеркало сегодня</a> мобильные букмекерские конторы porno Яна Троянова слот casino официальные букмекерские конторы скачать porno Мира Андреева (теннис) порно с Бондаренко Анастасия Борисовна казино онлайн
DiskiPlus porno Мира Андреева (теннис) DiskiPlus pinco casino <a href=https://diskiplus.ru>DiskiPlus почему в казино нет часов</a> DiskiPlus букмекерскую контору пин DiskiPlus зеркала официальных сайтов казино <a href=https://diskiplus.ru>DiskiPlus casino рабочее зеркало</a> DiskiPlus 7k casino бонус DiskiPlus casino x DiskiPlus 1×bet слоты DiskiPlus porno Яна Троянова DiskiPlus online casino DiskiPlus 1×bet зеркало xbet xyz DiskiPlus casino online зеркало
#5315 Charlesgunnyhttp://filmkachat.ru
1хслотс регистрация в 1×slots casino
При правильном подходе бездепы — это отличный метод выступать на средства без растраты собственных средств. Есть несколько рекомендаций, следуя коим возможно извлечь максимум полезности из похожих промоакций казино. Играть по лишь на лицензированных площадках. Скриптовые сайты не обманывают с бонусными услугами, хотя и употребляют пиратский софт с измененным ГСЧ. Выиграть на этих автоматах нереально. <a href=http://filmkachat.ru/>1 х слотс зеркало</a> <a href=https://airsoftc3.com/article/18052/How-Professional-3D-Modeling-Furniture-Transforms-Modern-Design-Industry>https://airsoftc3.com/article/18052/How-Professional-3D-Modeling-Furniture-Transforms-Modern-Design-Industry</a> Денежные свои. Третий бонус за регистрацию без депозита – наличные. К раскаянию, лишь известные и знаменитые клубы могут дать средства в руб. Или долларах. С их подмогою появится насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед данным нужно исполненье определенных условий. casino 1×slot <a href=http://b775218w.bget.ru/user/TyroneAdora/>http://b775218w.bget.ru/user/TyroneAdora/</a> Приглашаем делиться воззрениями о бонусах. Это поможет другим юзерам избирать наиболее выгодные предложения.
1×slots регистрация на 1хслотс
Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, научится регулировать менять ставки и линии, изучать бонусные забавы и их выигрышные композиции, да в просто зарядится кучей впечатлений! Ведь вы будите выступать на бонусные средства, которые возможно отыграть и вывести, а не просто на демо счет, что, этим самым адреналин в крови еще повысится а пульс забьется с частым ритмом! 1×slots регистрация на сайте Многие новички сомневаются, что поощрительный приз не будет возвращать, числе в они выиграли у казино. Это абсолютно неопасно и надежно. Выводя выигранные средства, игрок просто останавливает свое роль в игре и теряет уникальную возможность – безвозмездно наращивать собственное вещественное положение.Внесение депо – Будьте готовы пополнить счет после отыгрыша бонуса. Это обычное требование верховодил для данного типа промо-акций. Лучше заблаговременно уточнить, какую необходимую нужно будет заносить на счет. Как правило, идет о наименьшем депозите, хотя вы обязаны быть уверены, собственно он вас по кармашку. <a href=https://bybak.com/home.php?mod=space&uid=4231194>https://bybak.com/home.php?mod=space&uid=4231194</a> За счёт спинов получится запустить различные интернет слоты, протестировать стратегии и поднабраться опыта. Фишка том,, что вращения начисляются на лучшие аппараты с уникальными опциями и высокой отдачей. Не запамятовывайте, собственно в каждом акционном предложении предусмотрены особые требования – кратковременные ограничения, наибольший размер ставки, список доступных игр.Высокая конкуренция в разделе азартных игр доказывает операторов завлекать посетителей различными промоакциями. Благодаря этому у посетителей замечена возможность получить призы в казино за регистрацию без депо. Воспользоваться таким предложением можно, минуя функцию внесения денег на игровой счет, просто активировав аккаунт на веб-сайте. Наш экскурсовод по бездепам поможет избрать самую привлекательную бонусную программку, узнать верховодила получения такового гонорары и распорядиться им с наибольшей выгодой. казино 1×slots У нас на сайте Вы отыщите список призов без депозита в проверенных казино и доскональную информацию о том как их получить и применять.Несмотря на то, собственно этот вариант стимуляции со стороны азартных платформ довольно популярен в сфере подобных игр, далеко не поклонникам казино ведомо, собственно себе бездепозитные призы казино и как именно их вероятно эксплуатировать.
1×slot регистрация
Выбирайте наихорошие безвозмездные призы за обзоров на Casinoz – и пусть вам сопутствует счастье при отыгрыше бонусных кредитов!В количестве случаев бесплатные призы начисляются в кредитах, которые невозможно незамедлительно вывести со счета. Прежде их нужно отыграть по установленным правилам. Эти требования принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже. Заработать на бездепозитных призах за регистрацию в казино может любой пользователь, достигший совершеннолетия. <a href=http://worldpoetry.cn/home.php?mod=space&username=expensivemadhou>http://worldpoetry.cn/home.php?mod=space&username=expensivemadhou</a> 1хслотс рабочее зеркало на сегодня
1×slots казино зеркало
Такой казино приз без депо за регистрацию выдается игроку на час и активно употребляется данное предложение с 2017 года. Это словно какая-то конспирация одобрения под бездепозитный. Суть всего сего сводится к тому, что геймеру на час выдается, к примеру, 1000 долларов, а реклама утверждает про, что каждой выигрыш можно несомненно дальнейшем забыть при для. Но в играющий серьезно отнесется к данному предложению, то он просто потеряет время. Ведь геймеру надо(надобно) будет выступать не в аккаунте, а в тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (и всей тысячи) в верховодила вступят определенные условия, где будет сказано, что наибольшей суммой победы может быть только двести долларов и средства можно применять лишь в качестве бонуса на 1-ый лепта с вейджером 25 от суммы гонорары плюс сам депозит. По итогу получится, что игрок выигрывал для 200% бонус с вейджером на конкретную сумму. Короче говоря, это все не вашего времени.Этот тип приза будет добавлен на Ваш аккаунт после успешной процедуры регистрации с использованием номера телефона. Если избрать другой способ творения учетной записи, бездеп не будет добавлен на Ваш аккаунт. 2. Создать новый профиль. Для регистрации надо(надобно) заполнить небольшую анкету или зайдите в собственный офис посредством соц сетей;При регистрации по указывать только достоверную информацию. Когда учетная запись будет активна, появится доступ в Личный кабинет. В нем возможно избрать денежную, ввести промокод и узнать доскональные верховодила получения и отыгрыша бездепа. Краткая информация об промоакции часто находится непосредственно на регистрационной форме. 1хслотс зеркало <a href=http://tellmy.ru/user/Robertdrusa/>http://tellmy.ru/user/Robertdrusa/</a> Выше мы предоставили полный комплект самых новых и своевременных бездепозитных бонусов в интернет казино без пополнения на 2022 год, где продоставляется воспользоваться любым ценным бездепозитным призом.
1×slots официальный регистрация
Фриплей-бонусы. Бонусы за бесплатную забаву есть только в некоторых клубах. Они зачисляются сразу после сотворения профиля и срабатывают недолговременное время. Если у вас нет времени израсходовать средства, они просто завершатся. Что касается медли, в большинстве случаев призы действуют на 1-го часа.Чтобы помощи увериться в преимуществах бездепозитных бонусов, достаточно зарегистрироваться в казино и получить поощрение. При подмоги такого одобрения оператор возможность также завлекать посетителей, которые ранее показывали активность на сайте, хотя по некий причине перестали выступать. В этом случае промокод высылается юзеру по электрической почте либо в виде SMS. <a href=http://t20suzuki.com/phpBB2/profile.php?mode=viewprofile&u=3337>http://t20suzuki.com/phpBB2/profile.php?mode=viewprofile&u=3337</a> Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, необходимо обратиться в службу поддержки спустя лайв-чат на веб-сайте казино. 1×slots промокод при регистрации 2025 Фриспины – благотворительные вращения с фиксированной ставкой, которые можно применять в конкретных игровых автоматах.Так собственно приготовьтесь предоставить секретную информацию (пол, возраст, государство проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает менее суток, последствии чего удастся беспрепятственно выводить крупные выигрыши.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=13119>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<a href=http://www.airsoft44.com/forum/index.php?action=profile;u=11896>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<a href=https://forum.oursson.ru/viewtopic.php?f=2&t=7960>1×slots зеркало рабочее на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но на некоторых азартных платформах подобные вознаграждения могут получить теперь зарегистрированные пользователи. В этом случае, бонусы предоставляются в уникальных акций или же некоторым игрокам повторяющий акционного предложения, коие приходит на почту с целью «вернуть» игрока в свое казино. Чаще всего казино приз за регистрацию без депо даёт вероятность запустить любой автомат. Но какого-либо внимательно ознакомиться с критериями. Иногда для игры доступны только определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, лучше начать знакомство с миром азарта непосредственно с «одноруких злодеев».
#5316 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
7k casino up casino зеркало <a href=https://repost.news/>casino riobet</a> casino pin официальный порно с Анастасия Потапова, теннисистка <a href=https://repost.news/>сколько казино</a> порно с Сергей Бобровский (хоккей) 7k casino зеркало на сегодня porno Илона Маркова, хоккеистка 7k casino зеркало casino официальный зеркало казино рояль скачать 1×bet на андроид
DiskiPlus самое казино DiskiPlus Лут Оксана Николаевна порно <a href=https://www.diskiplus.ru>DiskiPlus порно с Карен Хачанов (теннис)</a> DiskiPlus 1×bet на андроид бесплатно DiskiPlus casino сегодня <a href=https://diskiplus.ru/>DiskiPlus ап казино</a> DiskiPlus почему казино DiskiPlus казино гта 5 DiskiPlus сайты казино DiskiPlus porno Алена Косторная (фигурное катание) DiskiPlus порно с Захарова Мария Владимировна DiskiPlus 1go casino DiskiPlus казино рояль смотреть
#5317 Charlesgunnyhttp://filmkachat.ru
1× slots сайт
Приветственный приз без депо ? подарок за регистрацию. Выдается деньгами, фриспинами или баллами. В последнем случае бонусные баллы используются для роли в турнирах либо обмена на настоящие деньги. <a href=http://filmkachat.ru/>1хслотс регистрация в 1×slots casino</a> Самые новые бездепозитные бонусы в казино за регистрацию 2022 года с выводом прибыли присутствуют на этой странице. Посетитель имеет оценить обстоятельства получения и начать играть на деньги без внесения депозита. При данном игроку важно понимать, на каких условиях и какими методами него исключить полученный выигрыш. Для этого необходимо оценить список подключенных платежных систем.Выиграть реальные деньги в казино не пополняя счет – трудно, хотя возможно. Главное задаться целью и не нарушатьправила заведения. Выберите несколько казино с бездепзитными бонусами и начните играть на бонусные свои. По статистике каком-то 10-ти заведений можно заработать маленькую необходимую денег с бонусных средств. <a href=https://emaze.me/shopavto>https://emaze.me/shopavto</a> Самые популярные способы вывода средств ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электронным платежным системам подобии Neteller и Skrill, а используют криптовалютными кошельками. Вывод выигрышей может исполняться мгновенно или занимать от нескольких часов до нескольких суток. 1×slots рабочее зеркало на сегодня <a href=https://www.baronerosso.it/forum/members/115077_forsedroppt.html>https://www.baronerosso.it/forum/members/115077_forsedroppt.html</a>
1×slots зеркало регистрация в 1×slots casino
Шаг 5. Использование и отыгрыш. Бездеп обязан быть использован в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.Рассмотрим принцип его действия на образце. Допустим, вы зарегались и получили $10 not the slightest deposit bonus с вейджером х50. Это означает, собственно выигранные средства можно будет выводить не раньше, чем после как, как общая сумма ставок достигнет $500. <a href=https://redfist.de/RF-Online-Testforum/viewtopic.php?f=60&t=80124>1×slots официальный сайт скачать</a> 1хслот скачать <a href=https://app.welvi.co.kr/bbs/board.php?bo_table=qa&wr_id=1665071>https://app.welvi.co.kr/bbs/board.php?bo_table=qa&wr_id=1665071</a> Перечисленные выше главные характеристики сопровождают фактически любой бонус и считаются стереотипными для бездепозитных бонусных начислений в казино.Доступность — бездепозитные бонусы в казино почаще всего предоставляются свежим игрокам, но посещают случаи, когда бонус могут получить и действующие посетители. 1×slots рабочее зеркало
1×slots casino online регистрация
4. Заберите подарок. Чаще всего бонус активизируется сразу последствии регистрации. Но бывают истории, когда нужно забежать в личный кабинет либо написать в саппорта.Для вывода средств бонус надо(надобно) будет отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариациями отыгрыша бездепозитного приза до его получения, дабы избежать конфликтных обстановок. Бездепозитный бонус казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в этом и содержится основное отличие. <a href=https://www.deviantart.com/doctorlazuta/journal/transpornaya-company-1055047788>https://www.deviantart.com/doctorlazuta/journal/transpornaya-company-1055047788</a> 1×slots регистрация 1×slots casino c2d ru
1×slots регистрация 1×slots casino 777 online
Для вывода средств бонус нужно будет отыграть законам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариациями отыгрыша бездепозитного бонуса до его получения, дабы избежать конфликтных обстановок. <a href=http://216.38.0.7/viewtopic.php?f=12&t=208879>1×slots на любой вкус как пройти регистрацию</a> 1 х слотс зеркало <a href=http://issachar.mx/index.php?option=com_kunena&view=topic&catid=3&id=198147&Itemid=124#198141>http://issachar.mx/index.php?option=com_kunena&view=topic&catid=3&id=198147&Itemid=124#198141</a> Основное различие сомнений, что для получения бездепа не надо пополнять баланс в казино. Но считая сего, есть ряд прочих различий:
1×slot регистрация
Фриспины предусмотрены для применения в видео слотах. Внимательно ознакомьтесь с критериями – частенько их выдают на некоторые автоматы. В зависимости от клуба, у вас выйдет сделать определённое количество ставок. Кстати, продвинутые игорные жилища разрешают запускать любых «одноруких злодеев».Перед активацией важно внимательно изучить обстоятельства промоакции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют значение кроме лимиты ставок при отыгрыше и сроки, в течение которых можно пользоваться предложением. Если бездеп охватывает узкий список игр, рекомендуется узнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только никаких случае, в оператор не установил жесткие лимитирования на наивысшую необходимую ставки. <a href=https://premiumstoreco.com/user/xrumsetes2305inbox-lv/>https://premiumstoreco.com/user/xrumsetes2305inbox-lv/</a> 1х слот регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://www.kfz-gringer.at/index.php/forum/in-neque-arcu-vulputate-vitae/70789–1×slots#70554>1×slots сайт зеркало</a>
<a href=https://forum.bedwantsinfo.nl/thread-715049.html>x1 slots регистрация в 1×slots casino</a>
<a href=http://forum.audioheritage.net/memberlist.php?mode=viewprofile&u=19451>1×slots казино зеркало</a>
<a href=http://nhomtruyen.com/members/jamesgaw.9280/>1хслотс мобильная версия зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но есть игорные заведения, коие готовы просто так жертвовать деньги на игру. Для этого довольно создать профиль. Чтобы исключить собственный выигрыш, вам сначала необходимо выполнить условия отыгрыша, указанные в условиях получения бездепозитного депозита. Подтверждение персональной инфы. Все казино просят от посетителя пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и присутствие у пользователя иных аккаунтов (мультиаккаунт запрещен).
#5318 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация то дальше необходимо пройти
Большинство клубов привлекают внимание геймеров за счёт разнородных подарков. На 1 веб-сайтах можно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает безвозмездные вращения для запуска лучших интернет слотов. Несмотря на разные промоакции, стоит выделить самые главные.После получения бонуса вывод средств для посетителя будет недоступен до тех пор, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо пара недель. Выводить средства игрок может только последствии отыгрыша. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> <a href=https://jumpshare.com/v/uWsLzlmeD4r9OIw98Fgn>https://jumpshare.com/v/uWsLzlmeD4r9OIw98Fgn</a> Получить Бездепозитный приз в онлайн казино дело двух кликов. Другой момент, отыграть промо и соблюсти управляла и условия отыгрыша. Под правилами подразумевается не вагер, но и лимитирования по максимальной ставке. Мы осознаем, что в кино все ставят на зеро и выигрывают. Призываем не создавать похожего. Перед активацией приза прочитайте управляла. Узнайте следующие моменты: Условия получения подарка, за регистрацию, за депо и многое. Ограничения по наибольшей ставке. Зачастую не выше 350 руб. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах возможно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на месте. Поэтому главно знать, в каких забавах возможно осуществлять кратность валютного оборота.Внесение депо – Будьте готовы пополнить счет последствии отыгрыша бонуса. Это обычное заявка правил для данного типа промо-акций. Лучше заблаговременно уточнить, какую необходимую надо(надобно) будет вносить на счет. Как правило, речь о минимальном депозите, хотя вы должны быть уверены, собственно он вам по кармашку. 1×slots зеркало рабочее <a href=http://gticlub.lv/user/Miguelmoush/>http://gticlub.lv/user/Miguelmoush/</a>
1×slots акции
Для верификации аккаунта надо(надобно) дать специалистам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, а также фотографию банковской карты или снимок странички электрического кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для подтверждения личности.Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в социальных сетях, установку мобильного приложения или официального клиента для ПК. В большинстве казино действуют программки преданности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на грядущий уровень нередко с выдачей бездепа. <a href=https://isomedu.com/forum/profile/josephdrons/>1× slots регистрация в 1×slots casino</a> 1×slots регистрация 1×slots casino c2d ru Если вы облюбовали себе некоторое брендов коие для больше всего полюбились, для постоянной игры! Таких гемблеров казино довольно предпочитает и оценивает, за частую эти игроки становятся VIP игроками заведения, которым нередко поступают выгодные предложения в виде бонусов, так же туда заходит и бездепозитные. <a href=http://xn–bb0br5kvmftwn87bs3lywo.kr/bbs/board.php?bo_table=free&wr_id=26595>http://xn–bb0br5kvmftwn87bs3lywo.kr/bbs/board.php?bo_table=free&wr_id=26595</a> 1×slot зеркало Бездепозитный бонус нередко возможность стать доступным сразу в окончания регистрации, что правило единственным притязанием к нему является регистрация, а после проверка вашей новой учетной записи.Если вы избираете испытанное лицензионное онлайн казино и выполните все условия получения бездепозитного приза, проблем с получением дара у Вас не возникнет.
1×slots зеркало на сегодня
Новички не обожают сразу же заносить депозит. Это обосновано отсутствием навыка и сомнением. К счастью, дни можно получить бездепозитный бонус за регистрацию в казино. Неважно что начисляет система – фриспины либо кредиты. В любом случае вы не рискуете собственными сбережениями. Это отличная возможность запустить приглянувшийся видео слот или же испытать удачу в настольных играх. <a href=http://www.gwmph.cn/home.php?mod=space&username=taboodome65>http://www.gwmph.cn/home.php?mod=space&username=taboodome65</a> Казино дает возможность заработать и исключить настоящие средства на бездепозитных призах. Обычно, это незначительная сумма, коию казино возможность себе разрешить презентовать игроку. 1хслотс рабочее зеркало Внесение депозита – Будьте готовы восполнить счет после отыгрыша бонуса. Это обычное заявка правил для данного на промо-акций. Лучше заблаговременно уточнить, какую сумму нужно будет заносить на счет. Как верховодило, идет о наименьшем депозите, хотя вы должны быть уверены, что он вам по кармашку.Похожим образом работает 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения посетителя либо в связи с получения им VIP-статуса. Подарок предоставляется после обращения в поддержку и проверки.
1×slots казино мобильная версия
На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не сможете активировать и получить бездепозитный приз. <a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=8323>1×slots на любой вкус как пройти регистрацию</a> В разделе с бонусами активировать собственный презент. Найти игры, для коих предусмотрено поощрение и применять приз по предназначению. Также учтите, что кое-какие игровые платформы сузивают перечень стран, которые способны получить предложенный бездепозитный бонус за регистрацию. К образцу, есть онлайн-заведения, выдающие подобные призы только обитателям определенных государств. К образцу, интернет казино 777 Оригинал предоставляет бездепозитный бонус лишь игрокам из России и стран СНГ. Или наоборот, снабжают вознаграждением всех, считая обитателей некоторых стран (как сего, идет пристально учить список, чтобы впоследствии не появилось никаких вопросов и жалоб).Если вы выбираете испытанное лицензионное интернет казино и сделайте все обстоятельства получения бездепозитного приза, проблем с получением дара у Вас не возникнет. 1×slots официальный сайт скачать <a href=https://baskino.zone/user/Jamesprale/>https://baskino.zone/user/Jamesprale/</a>
1×slots casino регистрация 1×slots review live
Если вы опытный игрок, вы должны аристократия, собственно бонус без депозита – редкая находка. Тем не менее, мы еженедельно исследуем интернет, дабы отыскать для вас наихорошие бездепозитные предложения.Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депозит может выделяться до 30 дней. Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?Чтобы бездеп не был начислен на Ваш акк, Вам надо активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт автоматически, а Вы не планируете его применять, обратитесь в службу поддержки с пожеланием отменить бездепозитный приз. <a href=https://wlppr.net/user/PhilipSoiff/>https://wlppr.net/user/PhilipSoiff/</a> 1×slots рабочее зеркало Условия шансы различаться приятель от приятеля. Но такой приз имеет быть использован только для игрового процесса – полученные на счет деньги до того, как будут отыграны, исключить нереально.Представленные на этой странице превосходнейшие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, в гости Casino.ru имеют сортировать перечень по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.rusdrama-az.com/support/51-sluzhba-tehnicheskoy-podderzhki-sayta.html>1×slots промокод при регистрации</a>
<a href=https://g2clubs.com/healthy-workout/google/#comment-31562>казино 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала прыткие выводы. Фишка выплат том,, собственно достаточно избрать платёжный инструмент и показать необходимую. В большинстве случаев деньги зачисляются на электрические кошельки на 15 минут, а на банковские карты – 1–3 трудящихся денька.
#5319 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
гта казино казино онлайн <a href=https://th-royalgclub.com/>casino com</a> Чулпан Хаматова 1×bet 1хбет <a href=https://glvk.guru/>букмекерская контора леонов</a> казино ли Нургалиева Эльвира Рамиловна порно казино пину букмекерская контора мостбет кент казино порно с Алина Загитова казино можно
DiskiPlus 1win casino DiskiPlus включи казино <a href=https://www.diskiplus.ru>DiskiPlus 1×bet зеркало</a> DiskiPlus porno Елизавета Туктамышева DiskiPlus Любимова Ольга Борисовна порно <a href=https://diskiplus.ru>DiskiPlus casino pin официальный</a> DiskiPlus Разуваева Ксения Денисовна порно DiskiPlus казино рояль DiskiPlus леон букмекерская контора DiskiPlus porno Юлия Канакина DiskiPlus пин casino DiskiPlus vavada casino DiskiPlus букмекерская контора бесплатно скачать
#5320 Ремонт iPhone 12https://remont-iphone-12-zill.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт iphone 12 адреса, можете посмотреть на сайте: <a href=https://remont-iphone-12-zill.ru/>ремонт iphone 12 рядом</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#5321 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало рабочее
Процесс подтверждения личности имеет занять от 1-го дня до недели. Если заказчик разрешил нибудь оплошность при заполнении паспортных данных, то ему по адресоваться с проблемой в службу онлайн-казино. <a href=http://filmkachat.ru/>1×slots зеркало на сегодня</a> В лицензионных бездепозитных казино играть в азартные игры действительно неопасно. Наличие лицензии одобряет тот прецедент, что клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP. <a href=https://www.swiatobrazu.pl/forumgaleria/thread/view/id/524>https://www.swiatobrazu.pl/forumgaleria/thread/view/id/524</a> Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в обязательном порядке необходимо пополнить счет в казино. Для депозитных бонусов, эта процедура не нужна, например как депо теснее изготовлен. 1×slots актуальное зеркало <a href=http://forum.evony.com/member.php?1168242-AnthonykiC>http://forum.evony.com/member.php?1168242-AnthonykiC</a> Для тех, кто только подумывает испытывать собственную удачу, а для профессиональных игроков, разыскивающих новые площадки для выигрышей, основные лицензированные казино часто устраивают различные промоакции, и лучшее предложений прошедшее время – как для новичков, например и для профессиональных игроков – бездепозитный бонус за регистрацию.
x1 slots 1хслотс регистрация перейти на 1×slots
казино 1×slots официальный сайт Самые известные методы вывода денег ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электрическим платежным системам подобии Neteller и Skrill, а также используют криптовалютными кошельками. Вывод выигрышей возможность исполняться моментально или занимать от нескольких часов до нескольких суток. <a href=https://dedignat.ru/component/users/?option=com_k2&view=itemlist&task=user&id=22337>https://dedignat.ru/component/users/?option=com_k2&view=itemlist&task=user&id=22337</a> Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются незамедлительно в сотворения профиля и активны недолговременное время. Если не успеете потратить свои, они попросту сгорят. Касаемо медли, как призы активны на часа.Если площадка презентует бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь ввести аккаунт на сайте и активировать его, подтвердив адрес электрической почты, номер аппарата либо иные данные, коие требует оператор. Перед этим нужно увериться, собственно юзер располагается на официальном сайте казино, не на мошеннической площадке. 1×slots акции
1×slots зеркало регистрацию более популярный вариант это
Бездепозитный бонус по промо-коду несомненно доступен для игры, только том, случае когда Вы активируете специальный бонусный код в разделе с бонусами или укажите промокод при регистрации на сайте. В некоторых случаях, кроме активации кода, понадобиться доказать контактные данные игрока и наполнить анкету клиента.Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша бонусов. Заведения всегда устанавливают максимальную ставку, допустимую по условиям вейждера. Операторы гемблинга утверждают, что например они сражаются с бонус-хантерами. Впрочем, критики считают, что данным казино пробуют устроить из случайного постояльца постоянного игрока. <a href=https://mitao7.cc/home.php?mod=space&uid=20001&do=profile>https://mitao7.cc/home.php?mod=space&uid=20001&do=profile</a> 4. Заберите подарок. Чаще всего приз активируется незамедлительно после регистрации. Но бывают истории, когда нужно зайти в собственный офис или написать в службу.Вейджер в переводе с английского означает «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша полученного приза, в нашем случае бездепозитного. Число ставок роли не играет — главно только набрать сумму, пропорциональную сумме одобрения. 1×slots зеркало этих способов предполагает регистрацию Бездепозитные призы, как уже ясно, считаются уникальной вероятностью приступать к игровому процессу абсолютно безвозмездно, другими выступать в интернет казино бесплатно и на имеющие средства сразу в регистрации аккаунта. Автоматы с этим депо имеют замерзнуть прекрасной вероятностью поиграть для почитателей азарта с определенными лимитированиями в денег.
1×slots официальный зеркало
Бесплатный бонус – кредиты, которые онлайн-казино начисляет клиенту, не заставляя его пополнять игровой счет.Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном веб-сайте и выполните вход в индивидуальный кабинет, чтобы забрать безвозмездные вращения с вейджером х40; Верификация необходима для добавочной защищенности и подсобляет техподдержке выявить бонусхантеров и жуликов. Кстати, рядах платформах выводы крупных сумм доступны только в доказательства личности.При исполненьи критерий отыгрыша и верификации, средства с бонусного счета переводятся на ведущей и имеют быть выведены на карту или электронный кошелек. Лимиты на вывод и сроки проведения транзакции зависимости от выбранной платежной системы. 1хслотс казино зеркало <a href=https://bongatoken.com/user/GlennJet/>https://bongatoken.com/user/GlennJet/</a> Многие казино деют в маркетинговых целях безвозмездные бонусы необыкновенно для наших читателей. Чтобы их получить, надо(надобно) перебежать на игровой сайт по партнерской ссылке с нашего портала.Прочитайте правила бонусной программы, в хотите участвовать. Да, мы настойчиво советуем сделать это до регистрации.
1×slots официальный demo регистрация в 1×slots casino
Минимального оборота. Этот предел уточняется вейджером — пока игрок не поиграет на установленную сумму, вывод средств несомненно недосегаем.Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном призе, то для направьте на значение вейджера и срок, который дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, что, этим проще отыграть приз и вывести выигрыш. В онлайне большое узнаваемых игорных площадок с привлекательными акционными предложениями. Однако пристально читать условия десятков предложений времени надоест, ну и время отнимет большое. Поэтому наша команда подготовила ТОП-3 сайтов с лучшими бездепозитными бонусами:Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, чтобы замечена вероятность вывести выигрыш. <a href=https://civilpatrol.info/?q=petition/78174/filmy-besplatno-bez-registracii-bez-sms>https://civilpatrol.info/?q=petition/78174/filmy-besplatno-bez-registracii-bez-sms</a> Размер призов чаще всего чисто условный и не выше 50 рублей. Приятно, но осязаемым бустом в игре навряд станет.Фриспины – благотворительные вращения с фиксированной ставкой, которые можно применять в конкретных игровых автоматах. 1×slots зеркало проходить регистрацию это отличный вариант Необходимость отыгрыша. Вейджер в повыше, чем для призов за депозит. И пока средства не отыграны, вывести их невозможно.Игрокам не принимать приветственный приз как гарантированный метод получить крупный выигрыш, хотя это отличная возможность без расходов оценить функционал казино.
<b>Смотреть еще похожие новости:</b>
<a href=https://chasingadream.rpginitiative.com/showthread.php?tid=124905>1×slots актуальное зеркало</a>
<a href=http://brilliance.ru/forum/viewtopic.php?f=6&t=37713>1×slots официальный demo регистрация в 1×slots casino</a>
<a href=http://mandala-app.com/forums/memberlist.php?mode=viewprofile&u=3447>1×slots подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Простая процедура получения бездепозитного приза, которая займет не более 2-х мин. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные.
#5322 MelvinPoedahttps://potrebsojuz.ru
Отзывы о компаниях и работодателях <a href=https://potrebsojuz.ru/>https://potrebsojuz.ru</a> в одном месте. Узнайте реальное мнение сотрудников и клиентов, чтобы принять правильное решение при выборе работы или услуг.
#5323 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet официальный скачать 1×bet зеркало рабочее xbet <a href=https://repost.news/>casino вход</a> porno Светлана Ходченкова 1×bet зеркало слоты 1×bet xyz <a href=https://vestnik-jurnal.com/>какие казино</a> казино онлайн casino 1go casino porno Елизавета Туктамышева пин ап casino pin up top porno Илья Ковальчук (хоккей) pin up casino пин ап
DiskiPlus 1×bet официальный скачать DiskiPlus porno Мария Шарапова <a href=https://diskiplus.ru>DiskiPlus casino промокод</a> DiskiPlus зеркала казино DiskiPlus 1×bet зеркало рабочее на сегодня <a href=https://www.diskiplus.ru>DiskiPlus Нургалиева Эльвира Рамиловна порно</a> DiskiPlus ограбление казино DiskiPlus porno Александр Соболев (футбол) DiskiPlus Александра Бортич DiskiPlus лучшая казино DiskiPlus 1×bet официальный скачать DiskiPlus 1win букмекерская контора DiskiPlus казино вход
#5324 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasin online
Помните, собственно в некоторых играх сумма ставки идет в зачет вейджера лишь отчасти. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки числятся как отыгранные деньги, момент как в слотах идет в зачет все one hundred percent суммы. <a href=http://filmkachat.ru/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> Основное отличие в, собственно для получения бездепа не пополнять баланс в казино. Но не сего, есть ряд и отличий:Также бездепозитные бонусы все работать способом возвратить к игре посетителей, пока приостановивших своё сотрудничество с фирмой: извещение о бездепе поступает на мобильный телефонный или почту. <a href=http://prsync.com/archicgi/how-home-entertainment-flyarchitecture-transforms-modern-living-spaces-4518898/>http://prsync.com/archicgi/how-home-entertainment-flyarchitecture-transforms-modern-living-spaces-4518898/</a> На странице представлены бездепозитные бонусы за регистрацию в казино редкая награда за которой гонятся все игроки как новенькие, например и профессионалы. Мы также уделяем огромное внимание на наличие бонусов при составление рейтинга казино на средства. Бездепозитный приз это вероятность выступать безвозмездно и выиграть реальные средства. 1×slots сайт <a href=https://lustbb.com/member.php?action=profile&uid=5504>https://lustbb.com/member.php?action=profile&uid=5504</a> В бонусную программу множества операторов входят систематические бездепы. Это бессрочные акции, поощряющие активных постоянных игроков. Популярный формат — раздача фриспинов по конкретным денькам недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депозита в мена на скопленные баллы преданности.
1×slots casino регистрация на сайте
1×slot рабочее зеркало <a href=http://xn–b1afaaiqgeiqh0aidle1f1d3c.xn–p1ai/user/JamespreaW/>http://xn–b1afaaiqgeiqh0aidle1f1d3c.xn–p1ai/user/JamespreaW/</a> Как и другие акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых гостей и позволяет им составить впечатление о функционале, не рискуя вескими суммами.Ну и окончательно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: подобная добродушие увеличивает степень лояльности посетителей к компании. казино 1×slots официальный сайт
скачать 1×slots официальный сайт
Новички не любят незамедлительно же заносить депо. Это обусловлено неименьем навыка и недоверием. К счастью, дни возможно получить бездепозитный приз за регистрацию в казино. Неважно собственно начисляет система – фриспины либо кредиты. В любом случае вы не рискуете своими сбережениями. Это замечательная возможность запустить понравившийся видео слот либо же испытать фортуну в настольных забавах. Классическая разновидность бонуса за творенье аккаунта. Его преимущество содержится никаких, собственно клиент возможность помощи выбирать аппараты и создавать ставки в их. Иногда перечень игровых автоматов ограничен оператором, но все точно это превосходнее, чем единственный дешевый слот, как когда с использованием фриспинов. <a href=http://sglpw.cn/home.php?mod=space&uid=331357>http://sglpw.cn/home.php?mod=space&uid=331357</a> Стоит отметить, что бездепозитный приз выдается только совершеннолетним новеньким, которые, в свою очередь, все пригласить личных приятелей и знакомых, также рассчитывающих на поощрительную программу преданности. Подобная технология появилась между создающих онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры способствуют увеличению своей посещаемости, путем привлечения новых игроков. Бонусы – это уникальный шанс для вероятных участников забавы, коие все опробовать софт покер рума и увериться, станут ли они в него выступать либо нет. Новый игрок попробует свои силы с настоящими оппонентами в казино. 1хслотс мобильная версия зеркало Онлайн-казино с бездепозитными бонусами ставят посетителям условия для использования бездепами, поэтому перед участием в акции превосходнее досконально ознакомиться со всеми правилами и нюансами промоакции. Условия могут касаться получения бонуса, его применения и следующего вывода денежных средств если, тогда, выигрыша.
1×slots зеркало регистрация в 1×slots casino
При верном раскладе бездепы — это отличный метод играть на средства без траты собственных средств. Есть несколько советов, следуя которым возможно извлечь максимум полезности из похожих промоакций казино. Играть идет только на лицензированных площадках. Скриптовые сайты столько дурачат с бонусными предложениями, но и используют пиратский софт с измененным ГСЧ. Выиграть на таких автоматах нереально.B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax <a href=https://your-portal.at.ua/forum/3–63407–2#88063>1×slots рабочее зеркало на сегодня</a> Как только на виртуальном счету окажутся бонусные средства, поспешите отыграть вейджер. Сразу последствии этого можно оставить заявку на вывод выигрыша. Кредиты прибыльно выделяются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом реальных средств и дают возможность почувствовать азарт. Во-вторых – можно насладиться каждой азартной забавой доступной на веб-сайте. В вашем распоряжении находятся автоматы, настольные прибавленье, видео-покер, Live-дилеры.А ознакомиться с новыми онлайн казино, Вы можете с призов с выводом прибыли, которые Вы можете получить без депозита. Также бездепозитные призы все служить способом вернуть к ирге посетителей, пока приостановивших своё сотрудничество с фирмой: уведомление о бездепе поступает на мобильный телефонный либо почту.Итак, чтобы безвозмездные бонусные кредиты превратились в реальные деньги, которыми вам распоряжаться по своему усмотрению, их нужно отыграть. Вейджер по уточнять в правилах онлайн-казино. 1×slots регистрацию более популярный вариант это <a href=https://www.gaycn.top/home.php?mod=space&uid=1114762&do=profile>https://www.gaycn.top/home.php?mod=space&uid=1114762&do=profile</a> Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке нужно восполнить счет в казино. Для депозитных призов, данная процедура не нужна, например как депо теснее сделан.
1×slots зеркало быструю регистрацию а также мгновенное
На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не можете активировать и получить бездепозитный приз.Промокод – определённая композиция символов, коию нужно ввести в отвечающее фон при твореньи учетной записи либо активировать в собственном профиле игрока в разделе с призами. Иногда для получения бонусов необходимо спутаться с представителями службы. Удобнее всего с ними беседовать в онлайн-сате, но от довольно запроса по электронной почте.4. Заберите подарок. Чаще всего бонус активизируется сразу последствии регистрации. Но посещают ситуации, когда надо(надобно) забежать в индивидуальный кабинет или написать в службу. <a href=http://psvhome.ru/user/Scottblera/>http://psvhome.ru/user/Scottblera/</a> Однако в условиях исчезают «подводные камешки», коие не разрешат исключить солидную сумму либо же вы не успеете отыграть вейджер. Поэтому профессионалы рекомендуют отобрать безвозмездные вращения за регистрацию в казино без депо, дабы поднабраться навыка и получить реальный шанс на победу. 1×slots casino зеркало рабочее Исходя из сего, просто не присутствует разумных оснований махнуть рукою на получение такого бонуса при регистрации. И, лишним, на подобный безвозмездной базе у вас есть все шансы выиграть средства и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, именуют безвозмездными онлайн платформами для игр.
<b>Смотреть еще похожие новости:</b>
<a href=https://tabsgame.ru/user/Jamesbes/>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<a href=http://griffhunter.com/boards/viewtopic.php?p=509685#p509685>1×slots рабочее зеркало на сегодня</a>
<a href=http://molifan.netwww.molifan.netwww.molifan.net/space-uid-2280308.html>1×slots casino online регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Суммы сходственных предложений, как правило, колеблются от 3-х до 20 $, а вейджер на эти средства должен сочинять от тридцати до шестидесяти раз. Зачастую, наибольшая сумма выигрыша тут составит от одной до 2-ух сотен $. Если игрок выиграет больше, то все средства все быть списанными до максимально разрешенного выигрыша. Здесь бывает смысл выводить еще несуществующие финансы на собственную платежную систему и дальше отыскивать заведение с подходящими под данную сумму релоадом или бонусом за первое пополнение счета. Есть несколько подвидов бездепозитного гонорары, предлагаемого великим числом заведений. Бонус без депозита за регистрацию в казино (бездепозитный бонус) – это денежный презент от клуба, который начисляется на акк игрока после регистрации в казино. Кроме творения учетной записи, для получения бездепа, довольно нередко требуется ещё и подтвердить контактные данные игрока и/или активировать особый промо-код.
#5325 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на официальном сайте
Да, у даровых призов есть недостатки. Прежде всего, они обыкновенно большие. Кроме того, обстоятельства вейджера по ним практически жесткие. Но все неимение риска проделывает их очень привлекательными для клиентов. <a href=http://filmkachat.ru/>1×slots зеркало регистрация в 1×slots casino</a> При регистрации идет указывать лишь достоверную информацию. Когда учетная запись будет активна, появится доступ в Личный офис. В нем можно избрать валюту, установить промокод и узнать доскональные верховодила получения и отыгрыша бездепа. Краткая информация об промоакции нередко присутствует непосредственно на регистрационной форме.Также, учите, что бездепозитный бонус возможно вывести лишь что, нет случае, когда будут исполнены все обстоятельства отыгрыша. <a href=https://webanketa.com/forms/6gtk2c9q6wqp4s1scrw64dv6/>https://webanketa.com/forms/6gtk2c9q6wqp4s1scrw64dv6/</a> Бездепозитные призы казино за регистрацию в 2022 году — это возможность поиграть за счёт заведения. Казино даёт клиенту шанс пользоваться определённой суммой или количеством безвозмездных вращений без внесения депо. Не путайте деморежим с реальной забавой без необходимости внесения депо.Наш список включает в себя превосходнейшие бездепозитные бонусы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по главным параметрам: 1×slots рабочее зеркало <a href=https://www.market-directory.com/members/craigdix-2983.html>https://www.market-directory.com/members/craigdix-2983.html</a> Список например нарекаемых «разрешенных землель» прилагается к правилам бонусной программы игорного портала. Обязательно проверьте, распространяются ли на вас похожие санкции.В онлайне очень много скриптовых сайтов, которые принадлежат жуликам. Их основная задача – заинтересовать гэмблеров, пообещав не только великодушные презенты, но и крупные выигрыши. Так собственно кое-какие сайты предлагают получить за регистрацию в $1 000.
1× slots зеркало
Денежные свои. Третий бонус за регистрацию без депозита – наличные. К сожалению, только известные и модные клубы имеют дать деньги в рублях или долларах. С их поддержкой вы сможете насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед этим необходимо исполнение определенных критерий.Не рекомендуем опрометью голову браться за различные предложения получения средств без вложений. Вполне возможно, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на 1-ый взгляд. Альтернативой считается казино приз за депозит. Мы предлагаем вам пару советов, спасибо которым у любого игрока несомненно вероятность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег: <a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/8138/#comment-339496>1×слот регистрация в 1×slots casino</a> 1×слот регистрация в 1×slots casino Частенько новички не понимают, как активировать презенты или исключить первый выигрыш. Для подобных случаев наша команда обрисовала основные термины – что это фриспины, вейджер, как его отыграть, зачем нужно протекать верификацию. <a href=https://lustbb.com/member.php?action=profile&uid=2522>https://lustbb.com/member.php?action=profile&uid=2522</a> Перечисленные выше главные свойства сочетают фактически каждый бонус и являются стереотипными для бездепозитных бонусных начислений в казино.Большинство интернет-казино из нашего топ-10 готовы порадовать вас неповторимыми акциями. Читайте о них в обзорах и на форуме. 1×slots зеркало выигрыши обязательно пройдите регистрацию если Если вы опытный игрок, вы обязаны аристократия, собственно приз без депозита – редчайшая находка. Тем ниже, мы в изучаем интернет, дабы отыскать вам превосходнейшие бездепозитные предложения.А ознакомиться с новыми онлайн казино, Вы сможете за счет призов с выводом выгоды, которые Вы сможете получить без депозита.
1×slots актуальное зеркало
Бездепозитный бонус казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби избранного заведения, сориентироваться в выборе игр и проверить качество работы саппорта. Довольно часто, начиная игровой процесс, игрок теснее не желает останавливаться и делает реальный лепта. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть безвозмездно вероятно как один таки с бонусом за регистрацию без надобности вносить депо. Бездепозитные бонусы начисляются лишь один раз. Не стоит раскрывать свежие аккаунты, дабы получить их повторно. Служба безопасности казино непременно выявит «левого» участника и перекроет. Если посетитель выполнит нужные притязания, отыграет свою ставку и решит исключить собственный выигрыш, то ему нужно принять, собственно казино обязательно востребует предоставить ксерокопии собственных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные свои вывести не удастся.Как верховодило, при выводе денег, от играющего потребуется только сделать минимальный лепта для того, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом индивидуальный счет. <a href=http://www.bj1777.com/dzbbs/home.php?mod=space&username=overjoyedrainbo>http://www.bj1777.com/dzbbs/home.php?mod=space&username=overjoyedrainbo</a> Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных обстановок с казино, когда в отыгрыша бездепа вас не дадут исключить крупную сумму выигрыша.Классическая разновидность бонуса за творение аккаунта. Его превосходство заключается сомнений, собственно заказчик может других выбирать аппараты и создавать ставки в их. Иногда список игровых автоматов ограничен оператором, хотя все равно это другого, чем один-единственный дешевый разъем, как в случае с внедрением фриспинов. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
1×slots зеркало проходить регистрацию это отличный вариант
Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депо возможность отличаться до 30 дней. Воспользоваться бездепом можно не во всех игровых автоматах: казино вдруг устанавливает лимитирование для посетителей. Конечно, это возможно счесть некоторым неудобством для игрока, но справедливости ради стоит отметить, что выбор автоматов всё одинаково остаётся достаточно великим.Варианты выигрыша зависят от Вашей успеха и условий игорного портала. Выше мы сказали, что кое-какие бездепозитные призы в 2022 году выдаются с ограничениями по наибольшей выплате. Однако, остаются они, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность передовых игр на средства, можно выиграть неописуемые суммы. Сегодняшние игровые автоматы или видео слоты, как их именуют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000. 1 хслот регистрация в 1×slots casino <a href=https://bofh69.com/wiki/index.php/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%93%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0_%D0%94%D0%B7%D0%B5%D0%BD>https://bofh69.com/wiki/index.php/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%93%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0_%D0%94%D0%B7%D0%B5%D0%BD</a>
1×slots промокод при регистрации 2025
Такие поощрения позволяют бесплатно протестировать новое казино, разобраться с игровым процессом онлайн слотов, заработать и вывести небольшую сумму средств. <a href=http://art-metall.su/user/Glennstoni/>http://art-metall.su/user/Glennstoni/</a> Каждый геймер должен сперва отчетливо выучить обстоятельства по получению и отыгрышу понравившегося презента. Если всё организует, поспешите арестовать бесплатные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик сейчас начать вертеть барабаны топовых слотов.Для казино, работающих интернет, бездепозитные призы нужны для вербования новых посетителей. Предложение поиграть на слотах без необходимости внесения реальных средств — работающий способ для увеличения интереса к компании. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит играть в казино, лишь сейчас уже на собственные деньги. 1×slos регистрация в 1×slots casino Не стоит путать игру в демо и внедрение бонусов. В демонстрационном режиме игрок имеет расценить механику слота, сюжет и оформление. Но забава ведется на относительные кредиты, потому отсутствует главное ? ощущение азарта. Активируя промокод либо фриспины, заказчик и не расходует свои деньги на игровые автоматы, хотя имеет сорвать реальный куш!Обычно для получения призов без депозита, казино выдвигает приклнные и абсолютно выполнимые обстоятельства, но есть ряд поступков коие воспрещены и могут причиной неприятные последствия:
<b>Смотреть еще похожие новости:</b>
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=495252>1×slots регистрация 1×slots review live</a>
<a href=https://www.evangelie.eu/forum/forumdisplay.php?f=39>1×slots официальный сайт скачать</a>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=149895>1×slots регистрация на сайте 1×slots ru com</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Процесс доказательства личности может занять от 1-го денька до недели. Если клиент разрешил какую оплошность при заполнении паспортных данных, то ему по адресоваться с проблемой в службу поддержки онлайн-казино.
#5326 Clintonwhikehttps://st66606.cc/
ST666 hiện đang khẳng định vị thế là sân chơi giải trí trực tuyến quy mô lớn và cực kỳ uy tín. Tại trang chủ ST666, bạn sẽ khám phá hàng loạt game cá cược hấp dẫn như live casino, cược thể thao, bắn cá đổi thưởng, xổ số may mắn, v.v. với tỷ lệ cược ưu đãi. Đừng bỏ lỡ cơ hội trải nghiệm cá cược đỉnh cao ngay tại ST666 để tận hưởng cảm giác xanh chín và thắng lớn!
ST666 – Điểm Đến Giải Trí Trực Tuyến Hàng Đầu Cho Người Yêu Cá Cược
ST666 đang từng bước khẳng định vị thế của mình như một sân chơi giải trí trực tuyến quy mô lớn và cực kỳ uy tín trong cộng đồng người chơi cá cược. Với sự đa dạng trong các loại hình trò chơi cùng tỷ lệ cược hấp dẫn, ST666 mang đến cho người chơi những trải nghiệm đỉnh cao, đầy kịch tính và cơ hội thắng lớn.
Đa Dạng Trò Chơi, Đẳng Cấp Giải Trí Tại trang chủ ST666, bạn sẽ được khám phá một thế giới giải trí đa sắc màu với hàng loạt trò chơi cá cược hấp dẫn. Từ những trò chơi live casino đầy kịch tính, nơi bạn có thể tương tác trực tiếp với các dealer chuyên nghiệp, đến các trận cược thể thao sôi động, ST666 đáp ứng mọi nhu cầu của người chơi.
Đặc biệt, những ai yêu thích sự may rủi và cảm giác hồi hộp chắc chắn không thể bỏ qua các trò chơi như bắn cá đổi thưởng hay xổ số may mắn. Với tỷ lệ cược ưu đãi cùng phần thưởng hấp dẫn, ST666 là điểm đến lý tưởng để bạn thử vận may và tận hưởng những giây phút giải trí đỉnh cao.
Uy Tín Và An Toàn Tuyệt Đối Một trong những yếu tố giúp ST666 chiếm được lòng tin của đông đảo người chơi chính là sự uy tín và minh bạch trong mọi giao dịch. Hệ thống bảo mật tiên tiến cùng đội ngũ hỗ trợ chuyên nghiệp luôn sẵn sàng giải quyết mọi thắc mắc của người chơi, đảm bảo trải nghiệm cá cược của bạn luôn suôn sẻ và an toàn.
Cơ Hội Thắng Lớn, Trải Nghiệm Đỉnh Cao ST666 không chỉ là nơi để giải trí mà còn là địa chỉ lý tưởng để bạn thử thách bản thân và tìm kiếm cơ hội đổi đời. Với tỷ lệ cược hấp dẫn cùng nhiều chương trình khuyến mãi đặc biệt, ST666 mang đến cho người chơi cơ hội thắng lớn và tận hưởng cảm giác „xanh chín“ khó quên.
Kết Luận Nếu bạn đang tìm kiếm một sân chơi giải trí trực tuyến đẳng cấp, uy tín và đầy hứa hẹn, ST666 chính là sự lựa chọn hoàn hảo. Đừng bỏ lỡ cơ hội trải nghiệm những giây phút cá cược đỉnh cao và thử vận may của mình ngay hôm nay tại ST666. Hãy tham gia và khám phá thế giới giải trí đầy màu sắc, nơi niềm vui và phần thưởng lớn luôn chờ đón bạn!
ST666 – Nơi Giải Trí Gặp Cơ Hội!
#5327 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet сейчас казино сегодня <a href=https://krtka.info/>порно с Гатагова Ольга Анатольевна</a> 7k casino сайт 1×bet слоты 1×bet top <a href=https://vestnik-jurnal.com/>приложения букмекерских контор</a> порно с Елена Никитина, скелетонистка 1×bet xbet xyz casino x up букмекерская контора porno Андрей Рублев (теннис) 1×bet официальный скачать porno Андрей Рублев (теннис)
DiskiPlus Лут Оксана Николаевна порно DiskiPlus Чулпан Хаматова <a href=https://www.diskiplus.ru/>DiskiPlus Валентина Матвиенко порно</a> DiskiPlus 7k casino зеркало DiskiPlus casino зеркало сегодня рабочее <a href=https://diskiplus.ru>DiskiPlus казино вход</a> DiskiPlus бесплатно фильм казино DiskiPlus фильмы казино рояль DiskiPlus скачать casino на андроид DiskiPlus сколько казино DiskiPlus пари букмекерская контора DiskiPlus пина casino DiskiPlus яндекс казино
#5328 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
Подтверждение электрической почты – одно из основных условий, которое есть почти в любом бездепозитном казино. Чтобы верифицировать электрическую почту, довольно перебежать по интенсивной ссылке в письме, приобретенном от азартного клуба. <a href=http://filmkachat.ru/>1×slots официальный регистрация</a> Баланс игрока дополняется на подобающую сумму. К ней используется вейджер, указанный в правилах промоакции. Вывести выигрыш можно несомненно в как, как пользователь сделает требуемый размер ставок из личных средств. В редчайших случаях бездеп работает в формате Free Play. На счет пользователя зачисляется крупная сумма, и предоставляется малый срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по окончании этого периода сумма на счету несомненно превышать первоначальную, то разницу возможно несомненно вывести или применять для дальнейших ставок.Вышеописанная причина и считается основным нюансом, в которого операторы отдают доля собственной прибыли на разные маркетинговые затраты и маркетинговые кампании. А самым действенным тут станут выступать именно бездепозитные бонусы казино 2022 с выводом за регистрацию. <a href=https://mega.nz/file/d28RQCBS#2i_xAXDQfj-rVkVhMWNDPYPXRKJ71NaLOz_MKYAVxxQ>https://mega.nz/file/d28RQCBS#2i_xAXDQfj-rVkVhMWNDPYPXRKJ71NaLOz_MKYAVxxQ</a> 1×slots официальный сайт, скачать <a href=https://arch-news.net/user/jamesvoity/?um_action=edit>https://arch-news.net/user/jamesvoity/?um_action=edit</a> Любой выигрыш по ставке повыше установленного лимита несомненно считаться недействительным. То есть ставка не несомненно засчитана при отыгрыше, а случае выигрыша его сумма не поступит на счёт посетителя — результат игры будет полностью аннулирован.
1хслот официальный сайт зеркало
1×slots casino регистрация 1×slots review live Фриспины. Бесплатные вращения предусмотрены для использования в видео-слотах. Внимательно читайте условия – они нередко выдаются для некоторых машин. В зависимости от клуба продоставляется делать определенное количество ставок. Кстати, современные игорные жилища дают вероятность заводить «одноруких бандитов». <a href=http://perfectsolutionlabs.com/user/Patrickwowly/>http://perfectsolutionlabs.com/user/Patrickwowly/</a> 1×slots зеркало сайта Подтвердите личность, предоставив оператору казино свои паспортные данные. Инструкции обычно несложные, главное — конкретно им идти. Если написано, что «на фото обязаны быть видны все хорошо угла страницы паспорта» — устройте именно это фото.
casino 1×slot
Бездепозитные бонусы прекрасный вариант бесплатной игры в игровые автоматы. Многие юзеры сети не знают, собственно в казино можно начать играть абсолютно бесплатно, а позже исключить выигрыш на банковскую карту или электрический кошелек, другие не доверяют онлайн казино, а третьи успешно играют и выигрывают – и подчас довольно немалые суммы. <a href=http://server974265.nazwa.pl/kadraknurow/index.php/forum/cras-ut-turpis-libero/3258>http://server974265.nazwa.pl/kadraknurow/index.php/forum/cras-ut-turpis-libero/3258</a> После получения приза вывод средств для посетителя будет недоступен до, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо чета недель. Выводить деньги игрок может только в отыгрыша. 1× слот зеркало
1×slots официальный сайт скачать
Но существуют азартные заведения, готовые просто так вручить деньги на забаву. Для этого довольно создать профиль. Чтобы вывести выигрыш, сначала нужно выполнить вейджеровые условия, прописанные в условиях получения бездепа. Более солидные предложения встречаются довольно редко. Зачастую они доступны лишь VIP-игрокам. В оставшихся случаях им скорее сопутствуют очень строгие обстоятельства отыгрыша. Также вероятны дополнительные обстоятельства и ограничения, прописанные в критериях и положения бонусной программы казино. 1хслотс официальный сайт зеркало <a href=http://daones.gaming.free.fr/index.php?file=Members&op=detail&autor=selectivechair2>http://daones.gaming.free.fr/index.php?file=Members&op=detail&autor=selectivechair2</a> На данном разделе портала регулярно публикуются обзорные статьи, в рассматриваются безвозмездные бонусы лучших интернет-казино. Информация структурирована по нескольким пунктам, включая основные:
1×slots рабочее зеркало
Если речь идет об неповторимых предложениях, возможность понадобиться регистрация в казино по ссылке с партнерского вебсайта. <a href=https://google.ae/url?q=https://doctorlazuta.by/>https://google.ae/url?q=https://doctorlazuta.by/</a> У каждой игры средства требования по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система зачтет любую ставку. В рулетке и покере сделать это гораздо труднее. Именно поэтому так важно пристально разбирать обстоятельства получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой забаве, то новенькие просто «спустят бонус на ветер». 1×slots регистрация 1×slots casino 777 online Это также бесплатные финансы, коие поступают на аккаунты новоиспеченных в в регистрирования. А особенность таких призов произведено сомнений, что обретенные деньги непременно следует использовать в продолжении назначенного медли.
<b>Смотреть еще похожие новости:</b>
<a href=http://aficionado.pl/showthread.php?177465–1×slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8E-%D0%BF%D1%80%D0%BE%D1%86%D0%B5%D0%B4%D1%83%D1%80%D0%B0-%D0%B7%D0%B0%D0%B9%D0%BC%D0%B5%D1%82-%D0%B2%D1%81%D0%B5%D0%B3%D0%BE-%D0%BB%D0%B8%D1%88%D1%8C&p=198536>1×slots регистрацию процедура займет всего лишь</a>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=275350>казино 1×slots</a>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/member.php?action=profile&uid=36740>1×slots официальный регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Получив собственный подарок, Вы сможете даром играть на реальные деньги, а выполнив условия отыгрыша, исключить собственный выигрыш.
#5329 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации 2025
Не стоит сразу же отрицаться от приветственных презентов в похожих казино. Администрация готова начислить средства либо фриспины, хотя сначала работники обязаны убедиться, собственно вы не мошенник. Дело сомнений, что развелось слишком много охотников за бонусами. Они выучились врать систему и зарабатывать крупные суммы средств. <a href=http://filmkachat.ru/>1хслот зеркало</a> Выбор любого интернет казино на нашем веб-сайте. В описании к каждому Вы можете разузнать, собственно получите за творенье аккаунта. <a href=https://linqto.me/n/gtji>https://linqto.me/n/gtji</a> 1×slots регистрация на 1хслотс <a href=http://xn–80aphfq.xn–p1ai/user/JamesFoern/>http://xn–80aphfq.xn–p1ai/user/JamesFoern/</a> Многие азартные клубы ограничивают сумму вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, обозначенной в описании акции, суммы Вы не сможете исключить. Разница несомненно аннулирована, Вы и не сможете делать на нее ставки.Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают приз по государствам. Вплоть до как, что клуб имеет себя игроков из Вашей страны, а бездеп не давать.
x1 slots 1хслотс регистрация перейти на 1×slots
1 хслот регистрация в 1×slots casino Вейджер в переводе с английского значит «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша приобретенного приза, в нашем случае бездепозитного. Число ставок имеет — главно лишь набрать сумму, пропорциональную сумме поощрения. <a href=https://squishmallowswiki.com/index.php/User:KathrinLabonte>https://squishmallowswiki.com/index.php/User:KathrinLabonte</a> Таким образом, заведение пробует показать себя своим потенциальным игрокам, а подобный маркетинговый ход как казино приз без депо за регистрацию привлекает довольно много внимания к игорному заведению и обеспечивает постоянный поток новых посетителей и грядущих клиентов игрового интернет клуба.Кешбэк-бонус представляет собой возврат фиксированного процента от ставки если, тогда, поражения либо же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не выше 10%. 1×slots рабочее зеркало на сегодня Поспешите зарегистрироваться на официальном веб-сайте Клубника, дабы быстро получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, замечена реальный шанс победу!Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро или 20 долларов. Если выдаются фриспины, их количество редко превышает нескольких 10-ов безвозмездных вращений.
1×slots рабочее зеркало
Некоторые онлайн-казино без депозита предлагают свежим клиентам избрать бонус при регистрации. Будьте внимательны: выбрав раз, вы в безусловном большинстве случаев не можете воспользоваться остальными.Фриспины — бесплатные вращения, коие дозволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытных игроков фриспины считаются наиболее знаменитым и преимущественным обликом приза — благотворительные вращения порой эффективнее и веселее в отыгрыше, чем остальные облики бездепов. Как управляло, новоприбывшие игроки в первую очередь желают ознакомиться с способами ввода и вывода валютных средств и сроки выполнения поданных заявок чтобы конкретно осознавать, как стремительно появится исключить свой казино бонус за регистрацию без депозита на электронный кошелек либо же банковскую карту. К счастью для всех играющих, внутри конкретных холдингов, все казино конкурируют меж собой. Ведь случае бы конкретную компанию представляло только одно онлайн-заведение, то навряд бы посетители заметили казино с призом за регистрацию и возможность бы рассчитывать только на вознаграждение в виде бонуса на 1-ое инвестиция. К каждому заведению периодически следует привлекать новых игроков, что, итоге, лишь на руку всем играющим. <a href=https://q2answer.pctechtips.in/index.php/380011/%D0%B1%D0%BB%D0%BE%D0%B3-%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0-%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0>https://q2answer.pctechtips.in/index.php/380011/%D0%B1%D0%BB%D0%BE%D0%B3-%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0-%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0</a> На странице представлены бездепозитные призы за регистрацию в казино редкая заслуга за коей гонятся все игроки как новенькие, так и мастера. Мы также уделяем великое внимание на наличие бонусов при формирование рейтинга казино на деньги. Бездепозитный бонус это вероятность выступать даром и выиграть реальные средства.В бонусную программу множества операторов входят регулярные бездепы. Это пожизненные промоакции, поощряющие интенсивных неизменных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депо в мена на скопленные баллы лояльности. 1хслотс рабочее зеркало Рассмотрим принцип его деянья на случае. Допустим, вы зарегались и возымели $10 not the slightest down payment bonus с вейджером х50. Это значит, собственно выигранные деньги можно будет выводить не раньше, чем последствии как, как общая сумма ставок достигнет $500.Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера.
скачать 1×slots официальный сайт
Чтобы бездеп не был начислен на Ваш акк, Вам не нужно активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк механически, а Вы не расчитываете его применять, обратитесь в службу с просьбой отменить бездепозитный приз.С другой стороны, гораздо легче забрать бездепозитные фриспины за регистрацию в казино и напрямик данный начать вращать барабаны в наихороших слотах. Главная необыкновенность спинов что, нет, что они предусмотрены для топовых автоматов. Удастся не только пройти вспомогательные раунды, но и увеличить сумму выигрыша, заработать респины прочие внутриигровые презенты. Проверка занимает от нескольких минут до нескольких дней, спецы техподдержки имеют запросить вспомогательные документы или инициировать куцее общение по Skype. 1хслотс 1хслотс регистрация перейти на 1×slots <a href=http://cheapbooks.cc/memberlist.php?mode=viewprofile&u=44055>http://cheapbooks.cc/memberlist.php?mode=viewprofile&u=44055</a> Таким образом, заведение пробует продемонстрировать себя своим потенциальным геймерам, а подобный маркетинговый ход как казино приз без депо за регистрацию привлекает довольно количество внимания к игорному заведению и обеспечивает постоянный струю свежих гостей и будущих клиентов игрового интернет клуба.Вышеописанная первопричина и является главным нюансом, следствии которого операторы отдают доля своей прибыли на различные маркетинговые затраты и маркетинговые кампании. А самым действенным тут станут выступать непосредственно бездепозитные бонусы казино 2022 с выводом за регистрацию.
1×slots регистрация 1×slots casino 777 online
<a href=http://tvradios.top/index.php?subaction=userinfo&user=obsoletewrinkle>http://tvradios.top/index.php?subaction=userinfo&user=obsoletewrinkle</a> 1×slots зеркало регистрацию более популярный вариант это
<b>Смотреть еще похожие новости:</b>
<a href=http://nacionrolera.org/foro/viewtopic.php?f=1210&t=222959>1×slots регистрация на 1хслотс</a>
<a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если вы избираете испытанное лицензионное онлайн казино и выполните все обстоятельства получения бездепозитного приза, трудностей с получением презента у Вас не возникнет.
#5330 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации 2025
Верификация важна для добавочной безопасности и подсобляет техподдержке выявить бонусхантеров и плутов. Кстати, рядах платформах выводы крупных сумм доступны лишь последствии подтверждения личности. <a href=http://filmkachat.ru/>казино 1×slots</a> При отыгрыше бонусных средств, необходимо учесть срок деянья бонуса и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный приз несомненно аннулирован. <a href=https://u.pcloud.link/publink/show?code=XZdW1A0Zk0toVPKo9vh7QEDFEX963uNCNnKy>https://u.pcloud.link/publink/show?code=XZdW1A0Zk0toVPKo9vh7QEDFEX963uNCNnKy</a> Зарегистрируйтесь. Для регистрации почаще всего достаточно ввести свой номер аппарата и почтовый адрес, после чего установить приобретенный код из СМС. Возможно, требуется указать промокод. В правилах промоакции несомненно написано, где его хотелось вводить. Иногда это бы делать при регистрации, иногда — теснее в творения собственного кабинета, на отдельной страничке. 1 x slots casino <a href=https://coffeepeople.ru/memberlist.php?mode=viewprofile&u=39151>https://coffeepeople.ru/memberlist.php?mode=viewprofile&u=39151</a> Как и промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения являются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает свежих гостей и позволяет им составить впечатление о функционале, не рискуя вескими совокупностями.
1хслот официальный сайт зеркало
<a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=8085>1×slots зеркало регистрация то дальше необходимо пройти</a> 1×slots быструю регистрацию а также мгновенное Вейджер (wager) – это коэффициент, кот-ый демонстрирует на какую необходимую необходимо сделать ставок, дабы вывести приз из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода этого приза, Вам нужно устроить ставок на сумму: 500*70=3500 рублей. Только полностью отыграв приз, Вы можете вывести собственный выигрыш. <a href=http://www.zgbbs.org/space-uid-170950.html>http://www.zgbbs.org/space-uid-170950.html</a> 1×slots коды Бездепозитный бонус казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в данном и заключается основное отличие.
1×slots зеркало видели такую регистрацию на
Некоторые казино шансы предлагать посетителям бездепы за свидетельство номера или почты или репост на страничку в социальных сетях. <a href=https://forumsadovodov.com.ua/memberlist.php?mode=viewprofile&u=64578>https://forumsadovodov.com.ua/memberlist.php?mode=viewprofile&u=64578</a> 1×slots зеркало этих способов предполагает регистрацию Представленные на данной странице наихорошие бездеп бонусы в казино за регистрацию в 2022 году имеют подходящие обстоятельства. После тщательного анализа редакция портала составила рейтинг спецпредложений, в котором посетители Casino.ru шансы сортировать список по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д.На критериях отыгрыша безвозмездных бонусов идет тормознуть подробнее. С ними связаны аспекты, которые невозможно забыть без внимания.
1×slots официальный demo регистрация в 1×slots casino
Новички не любят незамедлительно же вносить депо. Это обосновано отсутствием опыта и недоверием. К счастью, в можно получить бездепозитный приз за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В всяком случае вы не рискуете собственными сбережениями. Это отличная вероятность запустить приглянувшийся видео разъем или же испытывать фортуну в настольных играх.При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток. <a href=https://test.soclanovtsy.ru/topic/32325–1×slots-%D0%B1%D0%BE%D0%BD%D1%83%D1%81-%D0%B7%D0%B0-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8E/>1×slots бонус за регистрацию</a> Наличие у игрока 2 аккаунта. Запрещено создавать несколько профилей для многократного получения бездепов. 1×slot казино зеркало <a href=http://www.tr.besatime.com/index.php?subaction=userinfo&user=GlennPhirm>http://www.tr.besatime.com/index.php?subaction=userinfo&user=GlennPhirm</a> Используйте наилучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, чтобы заработать презенты за простые деянья теперь сегодня получить 1-ый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высокой отдачей и быстрыми выводами на электронные кошельки.
casino 1×slot
<a href=http://emseyi.com/index.php?qa=user&qa1=murkyband9>http://emseyi.com/index.php?qa=user&qa1=murkyband9</a> 1×slots зеркало регистрация то дальше необходимо пройти Самые пользующиеся методы вывода средств ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электрическим платежным системам на Neteller и Skrill, а также пользуются криптовалютными кошельками. Вывод выигрышей возможность исполняться быстро или занимать от нескольких часов до нескольких суток.Наиболее популярностью гонорары между гэмблеров – бездепозитные призы казино. Это не изумительно, так возможно получить безвозмездные вращения либо виртуальные кредиты, и при не придётся пополнять счёт, рисковать собственными средствами. Удастся насладиться разнообразными весельями даже выиграть солидную необходимую, избегая серьёзного риска.
<b>Смотреть еще похожие новости:</b>
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-2074#post-59336>1×slots официальный сайт мобильная версия скачать</a>
<a href=https://bbs.sinbadgroup.org/index.php?xjkh-tampa-s-poster-pup-for-new-cancer-treatment.t48661.html/page-3513#post-195097>рабочее зеркало 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Прибывшие на акк деньги бездепозитные бонусы предназначаются, главном, лишь для свежеиспеченных пользователей, коие ранее не имели личного аккаунта в данном казино. Исходя из этого, в ранее у игрока был сделан депозит, то, по всей вероятности, у него больше не будет способности рассчитывать на получение такового приза в конкретном заведении.
#5331 Charlesgunnyhttp://filmkachat.ru
1×slots сайт
Для получения предоставленных бонусов вам понадобиться — ПК или мобильное прибор, и остальное дело за малым.Если вы избираете проверенное лицензионное онлайн казино и выполните все обстоятельства получения бездепозитного бонуса, проблем с получением подарка у Вас не возникнет. <a href=http://filmkachat.ru/>1×slots официальный регистрация</a> <a href=https://blog.udn.com/G_112062930339362154/181391904>https://blog.udn.com/G_112062930339362154/181391904</a> В перечне требований к отыгрышу часто наличествуют лимиты на ставки при забаве на личные средства. Так, в отыграть нужно 30 000 рублей, а предельная сумма ограничена 30 рублями, то вертеть барабаны светит 1000 один. Эта необыкновенность затрудняет соблюдение игроками условий по срокам действия промоакции.Акции распространяются как на все забавы казино, например и на ограниченный список. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и другие. Промо может охватывать разработки одного производителя. Бездеп не пересекается с другими промоакциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, сделанные бонусными средствами. Для идентификации платежных реквизитов игрока имеет потребоваться пополнение счета на минимальную необходимую. 1хслотс рабочее зеркало <a href=https://swordmaster.org/user/GeraldwheeW/>https://swordmaster.org/user/GeraldwheeW/</a> Если при регистрации показать промокод, можно гарантировано получить бонус. Где взять ваучер? Посетите определенную блоги или форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В заключительнее время игорные дома начали афишироваться в кинокартинах и сериалах. Присмотритесь и наверняка заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных руб.
1×slot регистрация
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=136603>1×slots зеркало проходить регистрацию это отличный вариант</a> 1×slots сайт <a href=https://www.weaselmods.net/member.php?action=profile&uid=3396>https://www.weaselmods.net/member.php?action=profile&uid=3396</a> Теоретически, к безвозмездным бонусам можно отнести например именуемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, поэтому собственно они предоставляют лишь вероятность создавать ставки.Одним из предлогов отдавать привилегию 1 или иному заведению заключается в привлекательности предлагаемых промоакций и бесплатных предложений. Безвозмездные фриспины, выдаваемые без нужды делать какой-либо лепта, в перечне находится далековато не в конце. 1×slots зеркало на сегодня
1×slots casino регистрация 1×slotscasino09k online
Если вы бывалый игрок, вы обязаны аристократия, собственно приз без депозита – редчайшая находка. Тем не, мы неделю исследуем онлайн, дабы найти для вас лучшие бездепозитные предложения.Отзывы читателей о бонусных акциях помогут составить эмоцию, хотя не запамятовывайте о субъективности личных комментариев. <a href=https://helheim5k.ru/users/jeffreyaffit>https://helheim5k.ru/users/jeffreyaffit</a> 1×slots зеркало быструю регистрацию а также мгновенное Минимального оборота. Этот лимит уточняется вейджером — же игрок не сыграет на установленную сумму, вывод средств будет недоступен.
1хслотс рабочее зеркало на сегодня
Но а в вы уже профи по интернет казино, кликаем на красноватую кнопку «Получить» и Вы автоматически перейдете в онлайн казино;Зарегистрироваться в казино по специальной ссылке либо с бонусным кодом. Подтвердить контактные данные (номер аппарата и электрическую почту). Для доказательства номера телефона нужно в личном профиле указать собственный номер и нажать кнопку „Подтвердить номер телефона“, далее Вы получите sms-сообщение с кодом, кот-ый нужно ввести в отвечающее фон. Для подтверждения электрической почты, перебежать по активной ссылке в послании от казино. Иногда в поощрения за регистрацию могут выдаваться билеты для роли в турнирах. Условия их проведения довольно отличаются, поэтому мы рекомендуем ознакомиться с любым предложением отдельно. Самый распространённый из похожих бонусов, конечно же, бездеп на денек рождения клиента — приз вид фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им возможно на установленного периода времени. 1×slots регистрация на 1хслотс <a href=https://steamboatspringschat.com/forum/members/michaelfes-1552.html>https://steamboatspringschat.com/forum/members/michaelfes-1552.html</a> Прибывшие на аккаунт финансы бездепозитные бонусы предназначаются, в основном, только для новоиспеченных пользователей, которые ранее не имели личного аккаунта в данном казино. Исходя из этого, в раньше у игрока был сделан депо, то, по всей вероятности, у него больше не будет способности рассчитывать на получение такого бонуса в определенном заведении.Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают бонус по государствам. Вплоть до того, что клуб возможность на игроков из Вашей государства, а бездеп не давать.
1×slots актуальное зеркало
Некоторые сайты, этого чем провести регистрацию игроков, предлагают ответить на некоторое базисных вопросов. Цель проведения похожей викторины – выявить случайных людей, которые не имеют представления о покере, и не допустить получения ими бонусов. Если посетитель теснее играл в казино, то ответить на полтора 10 простых вопросов будет несложно. Очень часто, ответы можно найти на официальных веб-сайтах данных учреждений.Чаще всего казино бонус за регистрацию без депо даёт вероятность запустить каждой машина. Но никакого внимательно ознакомиться с условиями. Иногда для забавы доступны только определённые модели. Если вы новичок и ничего не смыслите в гэмблинге, другого начать знакомство с миром азарта именно с «одноруких бандитов». <a href=https://bridge-clip.ru/user/Chrisdog/>https://bridge-clip.ru/user/Chrisdog/</a> 1×slots бездепозитный бонус за регистрацию Также бездепозитные бонусы все служить методом возвратить к этой клиентов, что приостановивших своё сотрудничество с фирмой: извещение о бездепе поступает на мобильный аппарат либо почту.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1×slots регистрация на 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Диапазон ставок, коие вправе устроить игрок, также лимитирован. Обычно ставить можно маленькую необходимую — пределах 10–30 рублей за одно вращение.
#5332 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
яндекс игры казино казино смотреть <a href=https://glvk.guru/>Черкесова Бэлла Мухарбиевна порно</a> часы казино скачать букмекерскую контору <a href=https://7club7.com/>человек казино</a> pin up casino buzz porno Юлия Канакина bitz casino casino зеркало сегодня 1×bet на андроид гама казино porno Анастасия Янькова, боксерка
DiskiPlus Семёнова Татьяна Владимировна порно DiskiPlus porno Юлия Канакина, скелетонистка <a href=https://diskiplus.ru>DiskiPlus симулятор казино</a> DiskiPlus casino зеркало сегодня DiskiPlus порно с Владимир Минеев (ММА) <a href=https://www.diskiplus.ru>DiskiPlus порно с Георгий Джикия (футбол)</a> DiskiPlus 7k casino официальный сайт DiskiPlus пин ап casino pin DiskiPlus винлайн букмекерская контора официальный сайт DiskiPlus рокс казино DiskiPlus порно с Абрамченко Виктория Валериевна DiskiPlus порно с Евгения Медведева DiskiPlus 1×bet официальный сайт
#5333 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало
Воспользоваться бездепом можно не во всех игровых автоматах: казино вдруг уточняет ограничение для посетителей. Конечно, это возможно посчитать некоторым неудобством для игрока, хотя ради необходимо, собственно выбор автоматов всё также остаётся достаточно наибольшим. <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> <a href=https://output.jsbin.com/kozot>https://output.jsbin.com/kozot</a> 1х слот регистрация в 1×slots casino <a href=http://xn–b1afaaiqgeiqh0aidle1f1d3c.xn–p1ai/user/JosephOxymn/>http://xn–b1afaaiqgeiqh0aidle1f1d3c.xn–p1ai/user/JosephOxymn/</a>
1×slots рабочее зеркало на сегодня
<a href=https://radios-collector.com/viewtopic.php?f=7&t=45238>1×slots регистрация 1×slotscasino09k online</a> casino 1×slot Подтверждение персональной информации. Все казино просят от клиента пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и наличие у юзера других аккаунтов (мультиаккаунт запрещен).Промообъявления от казино не дают реальной картины и ориентированы на вербование внимания юзеров. Понять, насколько высоки шансы остаться в плюсе, дозволит личный анализ критерий предложения: <a href=https://pediascape.science/index.php?title=%D0%B1%D0%B5%D1%81%D0%BF%D0%BB%D0%B0%D1%82%D0%BD%D0%B0%D1%8F%20%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0%20%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA>https://pediascape.science/index.php?title=%D0%B1%D0%B5%D1%81%D0%BF%D0%BB%D0%B0%D1%82%D0%BD%D0%B0%D1%8F%20%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0%20%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA</a> Для вывода средств приз надо(надобно) будет отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариантами отыгрыша бездепозитного приза до его получения, дабы избежать конфликтных обстановок.С такими ординарными советами каждое казино с бонусом за регистрацию способно принести в разы больше выгоды и выгоды. 1×slots скачать на айфон
1×slot зеркало рабочее регистрации на телефон придет
Таким образом, заведение пробует показать себя своим вероятным игрокам, а такой рекламный ход как казино приз без депозита за регистрацию привлекает довольно много внимания к игорному заведению и обеспечивает неизменный поток свежих посетителей и грядущих клиентов игрового онлайн клуба. <a href=http://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=6193>http://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=6193</a> Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. 1×slots зеркало сайта Некоторые клубы автоматически начисляют приз на акк игрока в исполнения условий получения, но случаются ситуации, когда приз надо(надобно) активировать игроку самому. Есть количество способов активации бонуса:Не сложно догадаться, что not the slightest deposit bonuses почти разу не случаются немаленькими. Чаще всего речь идет о пяти–тридцати долларах (либо эквиваленте этой суммы в другой денежной).
1хслотс зеркало на сегодня
Обычно для получения призов без депозита, казино выдвигает лояльные и абсолютно выполнимые обстоятельства, хотя есть ряд поступков которые воспрещены и могут повлечь за собой противные результаты: Разные казино имеют собственные верховодила по выведению выигрыша. Для бездепозитных бонусов принимаются достаточно высокие притязания. Часто онлайн-казино советуют отыграть бонусное поощрение до 100 один в игровых автоматах. Например, в игрок получил бесплатно десять $, то необходимо будет отыграть их, поставив одну тыщу спинов по одному баксу любой. Стоит обозначить(означить), что не все казино дают возможность играть на призы и не во всех увеселительных заведениях идентичные верховодила для отыгрывания. Некоторые казино воспрещают выступать на бонусы в блекджек или ограничивают ставки до 5 %, что существенно увеличивает в 10-ки раз число нужных игр.Получив свой презент, Вы можете безвозмездно выступать на настоящие средства, а выполнив обстоятельства отыгрыша, вывести свой выигрыш. 1×slots зеркало <a href=http://www.haxorware.com/forums/member.php?action=profile&uid=287644>http://www.haxorware.com/forums/member.php?action=profile&uid=287644</a> В интернете много знаменитых игорных площадок с красивыми акционными услугами. Однако пристально разбирать условия десятков предложений вскоре надоест, да и время отнимет большое. Поэтому наша команда подготовила ТОП-3 вебсайтов с наихорошими бездепозитными бонусами:
1× slots зеркало
Высокая конкурентность в сегменте азартных игр мотивирует операторов привлекать посетителей различными промоакциями. Благодаря этому у посетителей появляется вероятность получить бонусы в казино за регистрацию без депо. Воспользоваться таким предложением можно, минуя процедуру внесения денег на игровой счет, просто активировав аккаунт на сайте. Наш экскурсовод по бездепам поможет выбрать самую симпатичную бонусную программу, разузнать верховодила получения такого гонорары и воспользоваться им с наибольшей выгодой. Такой безвозмездный эквивалент средств зачисляется на профиль юзера последствии осуществления требований и предназначаются они только для игрового процесса. Вывод таких вознаграждений вероятен только после воплощения вейджеровых критерий. <a href=http://www.sazkar.info/member4093.html>http://www.sazkar.info/member4093.html</a> 1×slots сайт Превышение наибольшей ставки при отыгрыше. Система механически не предупреждает о превышении ставки, потому о несоблюдении верховодил игрок имеет разузнать уже после подачи запроса на вывод средств.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=30887>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=http://youboy.comwww.molifan.net/space-uid-2295552.html>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Лишь знаменитые и знаменитые азартные заведения могут позволить себя выдавать бездепы в виде дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депо, коие возможно израсходовать в лучших аппаратах с высокой отдачей. К раскаянью, нет. Почти все казино, требуют внесение хотя бы одного минимального депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, собственно вывести средства разрешается только на ту платежную систему, с коей был изготовлен депозит.
#5334 Charlesgunnyhttp://filmkachat.ru
1х слот регистрация в 1×slots casino
Автоматы непопросту считаются самым известным азартным весельем. Чтобы освоить управление и верховодила, потребуется всего некоторое минут. Ваша задача устроить ставку, найти число рабочих линий и возможно вертеть тамбур. Если на выпадет выигрышная композиция – вы выиграли! С данной задачей вас посодействуют управится бездепозитные бонусы казино.Баланс игрока дополняется на подобающую сумму. К ней используется вейджер, указанный в правилах промоакции. Вывести выигрыш можно несомненно в как, как пользователь сделает требуемый размер ставок из личных средств. В редчайших случаях бездеп работает в формате Free Play. На счет пользователя зачисляется крупная сумма, и предоставляется малый срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по окончании этого периода сумма на счету несомненно превышать первоначальную, то разницу возможно несомненно вывести или применять для дальнейших ставок. <a href=http://filmkachat.ru/>1×slots бездепозитный бонус за регистрацию</a> Возьми собственный презент. Чаще всего бонус активируется сразу после регистрации. Но бывают ситуации, когда нужно забежать в собственный офис либо написать в справочную службу.Маркетинговая политика всех игорных интернет-клубов обязана носить разнородный нрав. И случае гонорары на депо работают для того, чтобы провоцировать вносить депозиты и поощрять уже существующих юзеров, то бездепозитный приз в казино или приз за регистрацию в казино, прежде всего, рассчитан на расширение базы покупателей. <a href=https://owntweet.com/thread/214646>https://owntweet.com/thread/214646</a> Вейджер (wager) – это коэффициент, который демонстрирует на какую сумму нужно сделать ставок, дабы исключить бонус из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода этого бонуса, Вам нужно устроить ставок на сумму: 500*70=3500 рублей. Только всецело отыграв приз, Вы сможете исключить свой выигрыш.Срок активации и время на отыгрыш. Зачисление денег либо фриспинов случается при активации протяжении строго ограниченного периода, подобные притязания предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать бонус несколько дней либо числе недель. Другие выдают солидную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с необоснованно высочайшим вейджером. 1×slots акции <a href=http://megatv.kiev.ua/user/Waltersoape/>http://megatv.kiev.ua/user/Waltersoape/</a> Можно ли зарабатывать на бездепозитных призах? Это не работа, тут как повезет, если в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, это возможно назвать везением, и добавочной добавкой к вашему бютжету.Шаг 4. Активация. Внимательно изучите условия, информацию по ограничениям и сроке действия бонусного предложения. Разобравшись с правилами, можно активировать приз в личном офисе (времени ? с внедрением промокода) или по запросу в саппорт.
рабочее зеркало 1хслотс
1хслотс казино зеркало Таким образом интернет казино получает потенциального игрока. Возможно дальнейшем либо настоящем он захотит сыграть на средства средства. Так трудятся бездепозитные призы в интернет казино. Здесь очень подходит выражение, благотворительные сыр посещает только в мышеловке. Начинающие игроки могут не обдумывать опасность пыла. Однако с осознания становится больше. Это тема для отдельного обсуждения.Доступность — бездепозитные бонусы в казино чаще всего предоставляются новым игрокам, хотя бывают случаи, когда приз все получить и действующие посетители. <a href=https://forums.twcpilots.com/member.php?action=profile&uid=756>https://forums.twcpilots.com/member.php?action=profile&uid=756</a> Промообъявления от казино не дают реальной картины и ориентированы на привлечение внимания юзеров. Понять, насколько высоки шансы остаться в плюсе, дозволит собственный тест условий предложения:Вейджер (либо вагер) ? это минимальная сумма ставок, которую нужно сделать для вывода валютного бонуса. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим красивее спецпредложение. 1×slots скачать на айфон
1×slots казино зеркало
Следует подчеркнуть, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом. <a href=http://www.gwoman.ru/forum/?PAGE_NAME=profile_view&UID=54601>http://www.gwoman.ru/forum/?PAGE_NAME=profile_view&UID=54601</a> 1×slots актуальное зеркало
1×slots зеркало этих способов предполагает регистрацию
При малый сумме приза рекомендовано выступать по низким ставкам, а использовать максимальные другого только что случае, если вейджер слишком немалый, а время на отыгрыш крепко ограничено. 1хслотс рабочее зеркало <a href=https://strokedb.lighthouseapp.com/users/1947026>https://strokedb.lighthouseapp.com/users/1947026</a> Варианты выигрыша находятся от Вашей успеха и условий игорного портала. Выше мы заявили, что некоторые бездепозитные призы в 2022 году выдаются с лимитированиями по максимальной выплате. Однако, остаются другие, все, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на деньги, возможно выиграть невозможные суммы. Сегодняшние игровые автоматы либо видео слоты, как их именуют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000.Выигрыши с бонусов без вложений всегда привязаны к требованию по ставкам и могут быть обналичены только в исполненья данных требований.
1×slots бездепозитный бонус за регистрацию
Активация случается счет промокодов, коие вводятся в личном кабинете после регистрации. Среди спецпредложений в перечне Casino.ru содержатся эксклюзивные промокоды, которые доступны лишь гостям портала. Другие способы начисления средств ? автоматическая активация сразу последствии создания аккаунта и получение презента по запросу в службу технической поддержки. <a href=http://bbs.zhizhuyx.com/home.php?mod=space&username=otiwod>http://bbs.zhizhuyx.com/home.php?mod=space&username=otiwod</a> Начнём с того, что любое промо за регистрацию предполагает некоторые условия. Бездепозитные призы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность денежного оборота, нужная для исполнения критерий. Пример, возымели безвозмездные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 руб., проигрышных или выигрышных, не. После исполнения, бонусный баланс перейдёт на настоящий и станет легкодоступным к выводу.Для как, чтобы отыграть необходимую вашего бездепозитного бонуса надо(надобно) выполнить условия вейджера. Очень часто фриспины даются на конкретные слоты (book of ra, book of dead, book of sun), выбирайте слот себе по, они довольно очень и высококачественные. Бездепозитные приз может быть валютным например и в виде фриспинов на слоты 1×slots casino online регистрация
<b>Смотреть еще похожие новости:</b>
<a href=https://www.bf-france.com/forums/profile/30064-rabofreeor/>1× slots casino официальный сайт</a>
<a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=7700>1×slots быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чем ниже значение вейджера, тем проще отыграть и исключить бонус. Если Вы расчитываете заработать на бездепе, а не просто ознакомиться с новым игровым клубом, то стоит избегать призов с высочайшим вейджером их почти не реально отыграть. С ними Вы сможете только протестировать игры заведения.
#5335 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
7k casino зеркало рабочее 1×bet зеркало xbet <a href=https://rumafia.news/>мелбет букмекерская контора</a> казино гта 5 макао казино <a href=https://specreporter.com/>casino бонус</a> лучшие онлайн казино Александра Бортич pin up casino пин порно с Сергей Бобровский (хоккей) казино гта 5 porno Елизавета Туктамышева Крючкова Полина Викторовна порно
DiskiPlus kent casino регистрация DiskiPlus скачать pin casino <a href=https://diskiplus.ru/>DiskiPlus casino бонус</a> DiskiPlus Чулпан Хаматова DiskiPlus сайт казино зеркало <a href=https://www.diskiplus.ru/>DiskiPlus Скоробогатова Ольга Николаевна порно</a> DiskiPlus официальные букмекерские конторы DiskiPlus порно с Максим Глушенков (футбол) DiskiPlus порно с Илюшникова Татьяна Александровна DiskiPlus kent casino DiskiPlus 1×bet слоты 1×bet xyz DiskiPlus букмекерская контора фонбет официальный DiskiPlus скачать pin casino
#5336 Charlesgunnyhttp://filmkachat.ru
1× slots сайт
Если вы новичок данном и только попали в неизведанную вами область пыла — счет предложений как бездепозитные призы без пополнения. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slots review live</a> Какие призы меня еще получить считая бездепозитного приза за регистрацию в казино? По мимо бездепозитного приза, каждое интернет казино предлагает игрокам прибыльное предложение на 1-ый депозит, вы совершаете депозит, ваш депо увеличивается в двое или и в 3, что, этим наиболее начать выступать возможно с более солидной суммой, так же не забываем про вейджер на призы. <a href=https://www.chambers.com.au/forum/view_post.php?frm=1&pstid=77273>https://www.chambers.com.au/forum/view_post.php?frm=1&pstid=77273</a> Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке необходимо восполнить счет в казино. Для депозитных призов, эта процедура не необходима, так как депо уже изготовлен.Раздача призов имеет быть приурочена к различным датам: календарные дни, дни рождения игроков, юбилей открытия казино и т. Д. Подарок выдается повторяющий средств, фриспинов либо баллов для накопления и размена на предложения оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода этой суммы придется выполнить ряд притязаний. 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=http://elka54.ru/forum/?PAGE_NAME=profile_view&UID=102403>http://elka54.ru/forum/?PAGE_NAME=profile_view&UID=102403</a>
1хслотс зеркало
1хслот скачать Вышеописанная первопричина и считается основным моментом, следствии которого операторы отдают доля собственной выгоды на разные маркетинговые затраты и рекламные кампании. А самым действующим здесь станут выступать именно бездепозитные бонусы казино 2022 с выводом за регистрацию. <a href=https://bbs.airav.cc/home.php?mod=space&uid=2242376>https://bbs.airav.cc/home.php?mod=space&uid=2242376</a> 1×slots официальный сайт мобильная версия
1×slots casino регистрация 1×slots review live
При забаве на бонусные средства воспрещается выступать в игровые автоматы с современным джекпотом и забавы из радела exist casino. Кроме как, кое-какие казино выделяют бездеп на один либо несколько конкретных слотов, и в иных играх Вы не можете на них играть. Призовые начисления без депозита все предоставляться для участия в турнирах интернет казино. Потратить перечисленные средства можно исключительно масштабах этой акции. Условия их проведения содержат лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться этим предложением, какого-либо изучить его верховодила.Существуют казино с призом за регистрацию, каких довольно знамениты фриспины в онлайн казино потом регистрации в конкретных забавах. Они встречаются том чаще безвозмездных поощрений или классических призов в казино без вложений. Например, игрок регистрирует счет, на который начисляются безвозмездные забавы, бонус за регистрацию вид безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса игрок выигрывает истинные средства, которые в последствии можно удачно вывести из заведения на свою платежную систему. То есть, есть все шансы вывести свои без рисков собственными деньгами. Регистрация, за геймер получит призы, займет несколько, а благодаря этому можно увеличить пять евро поощрений до тыс. И без всяких заморочек исключить их. <a href=https://bestnet.ru/support/forum/index.php?PAGE_NAME=profile_view&UID=128767>https://bestnet.ru/support/forum/index.php?PAGE_NAME=profile_view&UID=128767</a> Чтобы других убедиться в преимуществах бездепозитных призов, достаточно зарегистрироваться в казино и получить одобрение.Возможность сыграть дополнительное состязание (а от и количество) совершенно бесплатно, а выигрыш, же, поступает на счёт игрока. 1хслот скачать Новички не обожают сразу же вносить депозит. Это обосновано отсутствием опыта и недоверием. К счастью, в наше время можно получить бездепозитный бонус за регистрацию в казино. Неважно собственно начисляет система – фриспины или кредиты. В всяком случае вы не рискуете собственными сбережениями. Это замечательная вероятность запустить приглянувшийся видео слот либо же испытывать удачу в настольных забавах.Зарегистрируйтесь. Для регистрации чаще всего довольно ввести свой номер телефона и почтовый адрес, после чего ввести полученный код из СМС. Возможно, требуется показать промокод. В правилах акции несомненно написано, где его хотелось вводить. Иногда это бы создавать при регистрации, времени — теснее после создания личного кабинета, на отдельной странице.
1× slots casino зеркало
Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации подарка необходимо подтвердить электронную почту и привязать аппарат;В зависимости от интернет заведения любой из их возможность для предложить как бездепозитные средства, например и бездепозитные фриспины, коие последствии удачной регистрации упадут вас на ваш игровой баланс. <a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=869971>1×slots регистрация 1×slots casino 777 online</a> В интернете слишком количество скриптовых вебсайтов, коие принадлежат плутам. Их главная цель – привлечь гэмблеров, пообещав столько великодушные подарки, хотя и крупные выигрыши. Так собственно кое-какие веб-сайты предлагают получить за регистрацию том $1 000.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. 1хслотс официальный сайт зеркало <a href=https://magadan-mebel.ru/forum/user/1118/>https://magadan-mebel.ru/forum/user/1118/</a> При выполнении условий отыгрыша и верификации, средства с бонусного счета переводятся на основной и все быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции зависимости от избранной платежной системы.Как управляло, при выводе денег, от играющего требуется только сделать наименьший вклад чтобы, чтобы, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом личный счет.
1×slots казино мобильная версия
Особую изюминку видео слотам присваивают оригинальные символы. С их в активируются различные бонусы. Вы сможете запустить дополнительный степень и увеличить необходимую выигрыша. Есть знаки, коие замещают негодные элементы и сами делают выигрышные комбо. Не стоит забывать и тему бонус-тур. После каждого счастливого спина есть шанс увеличить сумму выигрыша в два или хорошо раза.Для всех бездепозитных призов функционирует максимальный лимит на выигрыш. Он показывает максимальную сумму, коию вас получить, играя на бонусные кредиты. Как лишь вам удастся выполнить притязания вейджера, дозволенный максимум будет переведен с бонусного счета на главной, а остаток будет списан. В реальное время получить бонус за регистрацию в казино довольно просто. Почти каждый игорный жилище с радостью даст средства или безвозмездные вращения. Многие игроки используют этим и не стесняются регистрироваться в любом клубе с прибыльными условиями. Кстати, это замечательная возможность придумать выигрышную тактику и сорвать куш.Следует подчеркнуть, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам либо с конкретным кодом. <a href=https://bandit400.ru/user/RichardTrews/>https://bandit400.ru/user/RichardTrews/</a> Наш список включает в себя лучшие бездепозитные призы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по важным параметрам:Для тех, кто лишь подумывает испытывать свою удачу, а для проф игроков, разыскивающих свежие площадки для выигрышей, ведущие лицензированные казино часто устраивают различные акции, и одно из лучших услуг за последнее время – как для начинающих, например и для профессиональных игроков – бездепозитный приз за регистрацию. 1×slots зеркало регистрация Для всех бездепозитных призов действует наибольший предел на выигрыш. Он показывает максимальную сумму, коию появится получить, играя на бонусные кредиты. Как только вас удастся выполнить требования вейджера, возможный максимум несомненно переведен с бонусного счета на главный, а остаток несомненно списан.
<b>Смотреть еще похожие новости:</b>
<a href=https://nztw.org/home.php?mod=space&uid=43957>1×slot регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Прибывшие на аккаунт финансы бездепозитные призы предназначаются, в, только для новоиспеченных юзеров, коие ранее не имели собственного аккаунта в данном казино. Исходя из сего, в ранее у игрока был сделан депозит, то, по всей вероятности, у него больше не будет способности рассчитывать на получение такового бонуса в конкретном заведении. Помимо остального, для вывода средств по бездепу нужно внести на счёт собственный первый депозит — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало возможную сумму, после чего вывод средств будет доступен.
#5337 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
почему в казино не бывает настенных часов порно с Бондаренко Анастасия Борисовна <a href=https://7club7.com/>зеркала казино</a> porno Анастасия Янькова, боксерка Набиуллина Эльвира Сахипзадовна порно <a href=https://www.ossetia.tv/>зеркала казино</a> 1×bet 1хбет casino сегодня 1go casino Окладникова Ирина Андреевна порно 7k casino официальный vavada casino казино зеркало сегодня
DiskiPlus Кузнецова Анна Юрьевна порно DiskiPlus порно с Петр Ян (ММА) <a href=https://diskiplus.ru/>DiskiPlus рейтинг казино</a> DiskiPlus 1×bet официальный сайт 1×bet xyz DiskiPlus 1×bet скачать бесплатно <a href=https://diskiplus.ru>DiskiPlus 1×bet 1</a> DiskiPlus яндекс казино DiskiPlus казино смотреть DiskiPlus порно с Арина и Дина Аверины, гимнастки DiskiPlus casino промокод DiskiPlus порно с Анна Щербакова, фигуристка DiskiPlus автомат казино DiskiPlus приложения букмекерских контор на андроид
#5338 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
up casino официальный скачать pin casino <a href=https://sovsekretno.net/>мелбет букмекерская контора</a> 1×bet скачать приложение на андроид 1×bet официальный сайт <a href=https://t.me/vchkogpu_ru>официальные букмекерские конторы</a> фильмы казино рояль казино смотреть онлайн 1×bet официальный слоты порно с Федор Чалов (футбол) porno Игорь Акинфеев (футбол) реального казино porno Светлана Ходченкова
DiskiPlus порно с Зырянова Анастасия Владимировна DiskiPlus Львова-Белова Мария Алексеевна порно <a href=https://www.diskiplus.ru/>DiskiPlus казино онлайн</a> DiskiPlus casino betting DiskiPlus Хорова Наталья Александровна порно <a href=https://www.diskiplus.ru/>DiskiPlus смотреть фильм казино</a> DiskiPlus казино рояль DiskiPlus лучшие букмекерские конторы DiskiPlus винлайн букмекерская контора официальный сайт DiskiPlus kent casino DiskiPlus ограбление казино DiskiPlus казино смотреть DiskiPlus 1×bet скачать приложение на андроид
#5339 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало быструю регистрацию а также мгновенное
Бездепы имеют входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами. <a href=http://filmkachat.ru/>1×slots casino зеркало рабочее</a> Игрокам стоит принимать приветственный приз как гарантированный метод получить большой выигрыш, но это отличная возможность без расходов расценить перечень казино. <a href=https://webanketa.com/forms/6gtk2c9q6rqkcd1sc8wk4rhr/>https://webanketa.com/forms/6gtk2c9q6rqkcd1sc8wk4rhr/</a> Объективные – объем приза, коэффициент и условия вейджера, необходимость внесения депозита для вывода денег;Отказ в прохождении верификации. Если заказчик не желает либо не дать документы, подтверждающие его лицо, профиль несомненно заблокирован вместе со всеми бонусными начислениями. 1хслот официальный сайт зеркало <a href=http://shadowofthepast.forum.cool/viewtopic.php?id=495#p1533>http://shadowofthepast.forum.cool/viewtopic.php?id=495#p1533</a> Для всех бездепозитных бонусов функционирует наибольший предел на выигрыш. Он показывает максимальную сумму, которую возможность получить, играя на бонусные кредиты. Как только для получится выполнить требования вейджера, допустимый максимально будет переведен с бонусного счета на главной, а остаток будет списан.Чтобы бездеп не был начислен на Ваш аккаунт, Вам не активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк механически, а Вы не расчитываете его применять, обратитесь в службу с просьбой отменить бездепозитный бонус.
1×slots промокод при регистрации
1×slots официальный сайт зеркало рабочее <a href=https://www.sportnabiblioteka.bg/index.php?option=com_k2&view=itemlist&task=user&id=116455>https://www.sportnabiblioteka.bg/index.php?option=com_k2&view=itemlist&task=user&id=116455</a> 1×slots зеркало быструю регистрацию а также мгновенное Онлайн гемблинг развивается с любым деньком больше и больше, новые бренды создаются не по дням а по часам. Новые интернет казино проделывают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и тем наиболее предлагают бездепозитные призы за регистрацию, собственно бы не упустить эту возможность — как пользоваться новым бездепом, советуем навещать наш вебсайт как можно чаще, самое аппетитное и свежие несомненно добавляться в этом же списке.У каждого игорного заведения средства верховодила и условия. Но, дабы получить призы, нужно выполнить стандартные действия:
1×slots промокод при регистрации
Иногда у гостей вебсайта имеют возникнуть трудности, задачи, препядствия при активации приобретенного промо-кода. В этих случаях, необходимо адресоваться за помощью в саппорта «Support». Для получения ответа, непременно указывается конкретная причина воззвания и подтверждается информация дополнительными скриншотами. Если сложилась неоднозначная ситуация, всегда можно обратиться к основному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ. <a href=http://neptunexpress.ru/bitrix/redirect.php?goto=http://vibschool.ru/bitrix/redirect.php?goto=http://vaomos.news/bitrix/click.php?goto=https://telegra.ph/Kogda-nuzhno-menyat-registraciyu-po-mestu-zhitelstva-posle-prodazhi-kvartiry-YUridicheskie-trebovaniya-i-posledstviya-nesoblyude-09–19>http://neptunexpress.ru/bitrix/redirect.php?goto=http://vibschool.ru/bitrix/redirect.php?goto=http://vaomos.news/bitrix/click.php?goto=https://telegra.ph/Kogda-nuzhno-menyat-registraciyu-po-mestu-zhitelstva-posle-prodazhi-kvartiry-YUridicheskie-trebovaniya-i-posledstviya-nesoblyude-09–19</a> 1×slots зеркало рабочее
1×slot регистрация
Новички не любят сразу же заносить депозит. Это обусловлено неимением опыта и сомнением. К счастью, дни возможно получить бездепозитный приз за регистрацию в казино. Неважно собственно начислит система – фриспины либо кредиты. В любом случае вы не рискуете своими сбережениями. Это отличная возможность запустить понравившийся видео слот или же испытать фортуну в настольных забавах. Внесение депо – Будьте готовы восполнить счет в отыгрыша приза. Это обычное заявка верховодил для этого подобии промо-акций. Лучше заранее уточнить, какую необходимую надо(надобно) несомненно заносить на счет. Как управляло, речь идет о наименьшем депозите, хотя вы обязаны быть уверены, собственно он вас по карману. 1×slots зеркало выигрыши обязательно пройдите регистрацию если <a href=https://tools-info.biz.ua/wr_board/tools.php?event=profile&pname=TyroneReita>https://tools-info.biz.ua/wr_board/tools.php?event=profile&pname=TyroneReita</a> Операторы гемблинга утверждают, что так они борются с бонус-хантерами. Впрочем, критики считают, что данным казино пытаются устроить из случайного постояльца постоянного игрока.
1×slots casino регистрация 1×slots review live
Для того, чтобы отыграть необходимую вашего бездепозитного бонуса надо(надобно) выполнить обстоятельства вейджера. Очень нередко фриспины даются на определенные слоты (book of ra, book of lifeless, book of sun), избирайте слот себе нраву, все очень очень и качественные. Бездепозитные бонус возможность быть денежным например и вид фриспинов на слотыПосле потребуется привнести идентификационный платёж. Это пугает новичков больше всего. Нужно сделать минимальный депо в 100–500 руб. Таким образом служба защищенности убедиться сомнений, собственно платёжный метод принадлежит Вам. Данная процедура важна для обеспечивания защищенности игровых счетов. Пример, Ваш аккаунт взломают и выведут свои на собственный кошелёк. Будет крайне неприятно. Поэтому верификация платёжной системы, это необходимый момент. Можно. Вы всегда можете отрешиться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не создадите ставку. <a href=http://droid-cash.ru/user/Patrickseeva/>http://droid-cash.ru/user/Patrickseeva/</a> Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, the decision лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Главное превосходство спинов – вероятность выучить разные слоты. Также получится насладиться бонусными раундами, испытывать удачу в риск-туре и преувеличить выигрыш за счёт особенных символов. Однако не игровой процесс заслуживает внимание, так какого-либо сосредоточиться на реальном выигрыше. 1×slots официальный сайт скачать на айфон
<b>Смотреть еще похожие новости:</b>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=135586>1× slots casino зеркало</a>
<a href=http://t954381g.bget.ru/user/JosephPiery/>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При правильном раскладе бездепы — это отличный способ играть на деньги без траты собственных средств. Есть несколько рекомендаций, следуя которым можно извлечь максимум полезности из подобных промоакций казино. Играть идет только на лицензированных площадках. Скриптовые веб-сайты не дурачат с бонусными предложениями, но и употребляют пиратский софт с измененным ГСЧ. Выиграть на таких автоматах нереально.
#5340 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
гта онлайн казино казино пин <a href=https://sovsekretno.net/>1×bet слоты 1×bet xyz</a> Матвиенко Валентина Ивановна порно Черкесова Бэлла Мухарбиевна порно <a href=https://t.me/vchkogpu_ru>казино 1</a> 7k casino официальный демо казино порно с Евгения Медведева, фигуристка букмекерская контора бесплатно скачать 1×bet 1 казино фильм онлайн порно с Карен Хачанов (теннис)
DiskiPlus porno Анастасия Янькова, боксерка DiskiPlus порно с Виктория Синицина, фигуристка <a href=https://www.diskiplus.ru/>DiskiPlus pin up casino top top</a> DiskiPlus гта онлайн казино DiskiPlus Крючкова Полина Викторовна порно <a href=https://diskiplus.ru/>DiskiPlus 1×bet официальный слоты</a> DiskiPlus porno Катерина Шпица DiskiPlus Яровая Ирина Анатольевна порно DiskiPlus порно с Баталина Ольга Юрьевна DiskiPlus вывод казино DiskiPlus pin up casino top top DiskiPlus рокс казино DiskiPlus casino зеркало сегодня рабочее
#5341 KennethCrapehttps://adventuresinminecraft.com
Discover the Universe of Minecraft: Your Supreme Survival and Disorder Adventure Welcome to your Gateway to the Extremely Engaging and Engaging Minecraft Connected Adventure. Whether you’re a Builder, Fighter, Explorer, or Strategist, our Platform Offers Limitless Opportunities to Experience Endurance and Freedom Modes in Ways you’ve Not seen Previously.
Why Pick Explorations in Minecraft? Our Network is Built to Offer the Ultimate Minecraft Experience, Integrating Tailored Realms, Captivating Gameplay, and a Active Community. Discover, Conquer, and Design your own Adventures with Tailored Components Created for Any type of Player.
Main Features – Persistence and Chaos Options: Experience the Adrenaline of Overcoming against the odds or Immerse into Uncontrolled PvP Battles with no rules and full freedom. – Large Platform Ability: With Slots for up to 3,750 Users, the Fun never stops. – 24/7 Network Availability: Access Anytime to Experience Smooth, Consistent Mechanics. – Custom Resources: Explore our Carefully Designed Minecraft Worlds Filled with Modifications, Features, and Limited Products from our Virtual Store.
Distinctive Interaction Modes
Living Mode In Endurance Scenario, you’ll Traverse Vast Environments, Acquire Materials, and Create to your heart's content. Battle off Creatures, Collaborate with Teammates, or Accept on Single-Player Quests where only the Powerful Succeed. Freedom Mode For Gamers Seeking Disorder and Excitement, Disorder Scenario Delivers a Environment with No Rules. Engage in Intense PvP Engagements, Build Partnerships, or Dominate Enemies to Control the World. Here, Survival of the Best is the Sole Rule.
Unique Minecraft Components – Journey Terrains: Navigate Special Minecraft Challenges and Adventurous Challenges. – Market and Exchanges: Our Community-Driven Economy Permits you to Sell, Obtain, and Exchange Goods to Ascend the Levels and Build Your Identity as a Dominant Gamer. – Minecraft Inventory: Enter Unique Items, Improvements, and Statuses that Boost your Playstyle.
Minecraft Shop: Upgrade Your Interaction Our In-Game Shop Provides a Selection of Upgrades, Levels, and Assets to Match every Approach. From Budget-Friendly Contribution Cases to Exclusive Statuses, you can Achieve Additional Possibilities and Bring your Experience to the Top.
Popular Items – Donate Bundles (x10) – €1.00 – VIP – €1.40 – Elysium Tier – €20.00 – OWNER Rank – €40.00 – BOSS Level – €60.00
Top Tiers for Premier Users – CREATOR (€10.00) – Unlock Creative Options to Bring Out your Imagination. – Vanguard (€12.00) – Top Benefits and Special Features. – Paragon (€59.10) – Top Privileges for the Ultimate User. – Luminescent (€50.00) – Shine as a Elite Figure on the Server.
Join Our Active Minecraft Group We Strive in Forming a Welcoming, Active, and Welcoming Community. Whether you’re Facing RPG Tasks, Exploring Unique Zones, or Participating in Player-Driven PvP, there’s Forever something Different to Explore.
Elements You Can Look Forward To – Friendly Player Base: Interact With Passionate Minecraft Players from Globally. – Exciting Activities: Engage in Special Competitions, Events, and Global Events. – Dedicated Help: Our Team Provides Seamless Experience and Helps you with any Problems.
#5342 Charlesgunnyhttp://filmkachat.ru
скачать 1×slots на андроид мобильная версия
Простая процедура получения бездепозитного бонуса, которая займет не более 2-х мин. Для получения бездепов, достаточно зарегистрироваться и подтвердить контактные данные.Например, игрок получил 500 руб. При творении аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 рублей, понадобится устроить 875 спинов для полного отыгрыша. <a href=http://filmkachat.ru/>1×slots casino зеркало</a> <a href=https://forum.prusa3d.com/forum/profile/3d-product-rendering/>https://forum.prusa3d.com/forum/profile/3d-product-rendering/</a> Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских руб. В условиях акции предписано, что вейджер бездепозитного бонуса х20. Поэтому, чтобы отыграть бонус, игроку будет нужно сделать ставок на 35*20=700 рублей.Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала прыткие выводы. Фишка выплат том,, что достаточно избрать платёжный инструмент и показать сумму. В большинстве случаев деньги зачисляются на электронные кошельки в течение 15 мин., а на банковские карты – 1–3 трудящихся денька. 1хлот регистрация в 1×slots casino <a href=http://rtpsouth.com/UserProfile/tabid/69/userId/105840/Default.aspx>http://rtpsouth.com/UserProfile/tabid/69/userId/105840/Default.aspx</a> Наш перечень содержит наилучшие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по важным параметрам:
1×slots подтвердит вашу регистрацию если говорить
Иногда в бездепа, казино презентует наименьший приз (до 50 рублей), ради которого не стоит заморачиваться.При забаве на бонусные свои запрещается выступать в игровые автоматы с современным джекпотом и игры из радела live casino. Кроме такого, кое-какие казино выделяют бездеп на один или несколько конкретных слотов, и в иных забавах Вы не сможете на их выступать. <a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=5460>casino 1×slot</a> 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=https://www.spyfu.com/overview/domain?query=ua-car.com>https://www.spyfu.com/overview/domain?query=ua-car.com</a> 1×slots зеркало быструю регистрацию а также мгновенное Эффективность бездепов в качестве маркетингового инструмента оценили почти операторы. Малоизвестные площадки используют эти промоакции, чтобы стремительно набрать базу. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны постоянных гостей. Не все веб-сайты, дающие подарки без депозита, рекомендованы к забаве. За симпатичным промоописанием шансы прятаться неосуществимые условия отыгрыша и другие подводные камни.
1×slots регистрация
Чем ниже значение вейджера, тем проще отыграть и исключить приз. Если Вы планируете заработать на бездепе, а не просто ознакомиться с свежим игровым клубом, то стоит избегать призов с высоким вейджером их практически не реально отыграть. С ними Вы сможете только протестировать забавы заведения. В интернет-сети постоянно возможно отыскать списки наиболее модных и обещанных поощрительных программ от популярных онлайн-казино. <a href=https://wfgames.ru/user/Justinritle/>https://wfgames.ru/user/Justinritle/</a> Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, чтобы появилась вероятность исключить выигрыш. 1×slots регистрация 1×slots casino 777 online
1×slots бонус за регистрацию
В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, необходимо адресоваться в службу через лайв-чат на веб-сайте казино.Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депозит может отличаться до 30 дней. Мы подготовили перечень, где есть практически животрепещущие и свежие бездепозитные бонусы казино, коие вы можете получить даром. Для наших пользователей есть специальные предложения эксклюзивные бонусы, коие вы нигде не найдете, их мы обозначили специальной красной плашкой «Exclusive».Иногда виде бездепа, казино презентует наименьший приз (до 50 рублей), из-за которого надо заморачиваться. казино 1×slots официальный сайт <a href=https://eco-kamchatka.ru/user/Davidalalo/>https://eco-kamchatka.ru/user/Davidalalo/</a>
1×slots регистрацию процедура займет всего лишь
В настоящее время получить приз за регистрацию в казино очень просто. Почти любой игорный дом с готовностью предоставит деньги либо бесплатные вращения. Многие игроки пользуются данным и не смущяются региться в каждом клубе с выгодными критериями. Кстати, это отличная вероятность выдумать выигрышную стратегию и сорвать куш. <a href=https://www.buyfags.moe/User:Muhammad2040>https://www.buyfags.moe/User:Muhammad2040</a> Шаг 4. Активация. Внимательно изучите условия, информацию по лимитированиям и сроке действия бонусного предложения. Разобравшись с правилами, возможно активировать приз в собственном офисе (от ? с использованием промокода) либо по запросу в саппорт.При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток. 1×slots зеркало Большинство клубов привлекают внимание геймеров за счёт разнородных подарков. На 1 веб-сайтах можно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает безвозмездные вращения для запуска лучших интернет слотов. Несмотря на разные промоакции, стоит выделить самые главные.
<b>Смотреть еще похожие новости:</b>
<a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=12117>1×slots бонус за регистрацию</a>
<a href=https://bans.org.ua/index.php?action=profile;u=1331414>1×slots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Способы получения бездепа различаются зависимо вида бонуса, кот-ый приглянулся игроку. Но вас в любом случае надо(надобно) быть зарегистрированным в законном онлайн-казино и доказать свою лицо. В общем виде пошаговая инструкция для получения бездепозитного приза выглядит так: Итак, дабы благотворительные бонусные кредиты превратились в реальные деньги, которыми возможность управлять по собственному усмотрению, их надо(надобно) отыграть. Вейджер по уточнять в правилах онлайн-казино.
#5343 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино фильм смотреть онлайн порно с Матвей Сафонов (футбол) <a href=https://repost.news/>сайт pin up casino</a> казино онлайн казино 1 <a href=https://res-publika.com>1×bet xbet xyz</a> порно с Максим Глушенков (футбол) кент казино пина букмекерской конторы porno Мария Шарапова Львова-Белова Мария Алексеевна порно суть казино слоты казино
DiskiPlus 1×bet рабочее на сегодня DiskiPlus r7 casino <a href=https://www.diskiplus.ru>DiskiPlus порно с Дарья Касаткина (теннис)</a> DiskiPlus порно с Александр Головин (футбол) DiskiPlus официальные зеркала казино <a href=https://www.diskiplus.ru>DiskiPlus 1×bet зеркало рабочее на сегодня</a> DiskiPlus лучшие букмекерские конторы DiskiPlus винлайн букмекерская контора официальный DiskiPlus порно с Гатагова Ольга Анатольевна DiskiPlus porno Яна Троянова DiskiPlus играющие казино онлайн DiskiPlus букмекерская контора официальный сайт DiskiPlus порно с Гатагова Ольга Анатольевна
#5344 Ремонт фотоаппаратов Canon Москваhttps://remont-fotoapparatov-canon-bix.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт фотоаппаратов canon цены, можете посмотреть на сайте: <a href=https://remont-fotoapparatov-canon-bix.ru/>ремонт фотоаппаратов canon адреса</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#5345 Hermanleshttps://лисичкиночаг.рф/
Участки в Лисичкином Очаге <a href=https://лисичкиночаг.рф/>https://лисичкиночаг.рф</a> неподалеку от Серпухова. Тихий, зеленый поселок с прекрасной природой и удобной транспортной доступностью. Здесь вы сможете построить комфортное жилье для себя и своей семьи.
#5346 Emmettgrifehttps://лисичкиночаг.рф/uchastki-lisichkinochag
Лисичкин Очаг возле Серпухова <a href=https://лисичкиночаг.рф/uchastki-lisichkinochag>https://лисичкиночаг.рф/uchastki-lisichkinochag</a> идеальные участки для вашего будущего дома! Живописная природа, хорошая транспортная доступность и возможность подключения всех коммуникаций ждут вас.
#5347 Gichardcheks
Howdy! I realize this is somewhat off-topic however I had to ask. Does building a well-established website like yours take a large amount of work? I'm brand new to operating a blog but I do write in my diary every day. I'd like to start a blog so I can easily share my personal experience and feelings online. Please let me know if you have any kind of ideas or tips for brand new aspiring bloggers. Thankyou! <a href=https://usinsurancedirectory.com/>American Insurance Directory,</a>
#5348 Ремонт iPhone 12 Москваhttps://remont-iphone-12-zill.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали срочный ремонт iphone 12, можете посмотреть на сайте: <a href=https://remont-iphone-12-zill.ru/>ремонт iphone 12 адреса</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#5349 ThomasPourahttp://www.medlinks.ru/article.php?sid=11076
капельница от похмелья на дому клиника <a href=http://www.medlinks.ru/article.php?sid=110769>http://www.medlinks.ru/article.php?sid=110769</a>
#5350 PatrickNalhttps://plan-tg.ru/
Хотите раскрутить <a href=https://plan-tg.ru/>продвижение телеграм</a> мы знаем, как это сделать! Поможем увеличить охваты, привлечь активную аудиторию и вывести ваш контент на новый уровень.
#5351 QuintonskynChttps://toppromocodes.lol/
Ищете промокоды для игр <a href=https://toppromocodes.lol/cs2/>cs 2 промо код</a> наш сайт – ваш лучший помощник! Собираем актуальные игровые промокоды для бонусов, скидок и эксклюзивных наград. Наслаждайтесь играми с максимальной выгодой – воспользуйтесь промокодами уже сегодня!
#5352 AlbertGaMhttps://toppromocodes.lol/
Сайт игровых промокодов <a href=https://playpromocode.com/cs2/csgofast/>csgofast промокод</a> это ваш доступ к эксклюзивным бонусам и скидкам. Бесплатные награды, внутриигровая валюта и уникальные акции ждут вас. Успейте воспользоваться всеми возможностями!
#5353 poweAbisphttps://powerbanki.top/
В современном мире портативных технологий пауэрбанк является важным аксессуаром для пользователей телефонов и других переносных устройств. Это компактное зарядное устройство выступает как автономный источник питания с встроенным батареей, дающий возможность заряжать различные устройства где угодно. На рынке представлено множество моделей, включая передовые решения, такие как <a href=https://powerbanki.top/>Повербанк на айфон беспроводной на powerbanki.top </a>, которые дают возможность заряжать устройства даже в полевых условиях. Ключевыми характеристиками при выборе выступают емкость аккумулятора, количество портов, скорость зарядки и поддержка различных протоколов быстрой зарядки.
Пристальное внимание стоит уделить поиску повербанка для iPhone, рассматривая уникальность зарядки устройств Apple. Актуальные беспроводные power bank поддерживают технологию MagSafe, предоставляя максимально комфортное использование с iPhone 12 и более новыми моделями. При выборе следует обратить внимание на сертификацию MFi (Made for iPhone), которая подтверждает безопасность использования гаджета с устройствами Apple. Мощные модели с емкостью 50000 mAh способны обеспечить до 10–12 полных зарядов iPhone, а также работают для зарядки MacBook и других ноутбуков благодаря поддержке USB Power Delivery.
Источник: <a href=https://powerbanki.top/>https://powerbanki.top/ </a>
по вопросам самый лучший повербанк для айфона – пишите в Телеграм cjr76
#5354 Jamesbothttps://the-kinogo.net/
kinogo фильмы для компании <a href=https://the-kinogo.net/>kinogo фильмы про магию</a>
#5355 Arturokewhttps://the-kinogo.club
киного топ 100 фильмов <a href=https://the-kinogo.club/>киного российские сериалы</a>
#5356 Manuelincobhttps://oknovik74.ru
цена 1 метра пластикового окна <a href=https://oknovik74.ru/>окна милке дилерам от производителя</a>
#5357 KennethPophttps://vs-rp.com/
<a href=https://vs-rp.com/>Roleplay jobs</a> Immerse into the Universe of GTA 5 RP: Engage with Our Special Roleplay Server
Welcome to the captivating realm of GTA 5 RP, where every participant can develop their individual narrative in a vibrant gaming atmosphere. Our roleplay server is suitable for those desiring an engaging and immersive experience. Become part of a lively community of GTA RP aficionados and step into this exciting world!
How to Begin Playing?
1. Acquire and set up a valid version of GTA 5. 2. Install the launcher. 3. Join to the server and sign up through the game or our website to begin your adventure!
Our Environment: An Open World Experience
Our server offers a distinct open-world setting with tailored mods that allow you to build your illicit network, go on exciting missions, and mold your protagonist's narrative. Whether you engage with local gangs or become a elite cop, the opportunities are limitless!
Acquire Money and Grow Your Assets
Are you set to conquer the streets of Los Santos and make considerable money? We provide the resources and strategies to help you accumulate a prosperity in the universe of GTA RP.
#5358 Armandoinilthttps://storitelling.ru
Скачайте бесплатно книгу <a href=https://storitelling.ru/>https://storitelling.ru</a> по сторителлингу и узнайте, как создавать истории, которые цепляют с первых строк. Практические советы, примеры и вдохновение для всех, кто хочет освоить искусство рассказчика.
#5359 Ремонт iPad mini 3https://remont-ipad-mini-3-cut.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт ipad mini 3, можете посмотреть на сайте: <a href=https://remont-ipad-mini-3-cut.ru/>ремонт ipad mini 3 сервис</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#5360 Ремонт iPad Pro 12.9 Москваhttps://remont-ipad-pro-12-9-cog.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт ipad pro 12.9 рядом, можете посмотреть на сайте: <a href=https://remont-ipad-pro-12–9-cog.ru/>ремонт ipad pro 12.9 цены</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#5361 Ремонт iPad mini 3 Москваhttps://remont-ipad-mini-3-cut.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт ipad mini 3 рядом, можете посмотреть на сайте: <a href=https://remont-ipad-mini-3-cut.ru/>ремонт ipad mini 3</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#5362 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
Каждая игровая перрон отличается критериями по получению и отыгрышу бездепов. В правилах детально расписаны кратковременные рамки, за которые надо(надобно) прокрутить вейджер. Также не забывайте на наибольший размер ставки и максимальную сумму выплаты. С другой стороны, чтобы получить бездепозитные призы казино, достаточно потратить не более 1 минутки. <a href=http://filmkachat.ru/>1×slots зеркало на сегодня</a> Подтверждение персональной информации. Все казино требуют от клиента пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и присутствие у пользователя других аккаунтов (мультиаккаунт запрещен).Как лишь на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу в сего возможно забыть заявку на вывод выигрыша. Кредиты прибыльно выделяются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом реальных средств и выделяют возможность почувствовать задор. Во-вторых – возможно насладиться каждой азартной игрой доступной на сайте. В вашем распоряжении присутствуют автоматы, настольные приложение, видео-покер, Live-дилеры. <a href=https://ai.ceo/read-blog/225693>https://ai.ceo/read-blog/225693</a> 1×slots регистрация 1×slotscasino 56 online <a href=http://ru.monumentefunerare.md/index.php?subaction=userinfo&user=secretiveengine>http://ru.monumentefunerare.md/index.php?subaction=userinfo&user=secretiveengine</a> Казино дает вероятность заработать и исключить реальные средства на бездепозитных бонусах. Обычно, это незначительная сумма, коию казино может себе разрешить подарить игроку.Акционные предложения от казино существуют в различных форматах. Часто бонусы даются в размен на депо. Игрок вносит платеж и получает средства, безвозмездные вращения прочие поощрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — картина приза, который гарантирован за исполненье конкретных поступков на сайте:
1× slots сайт
B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это исключительно милая доля забавы. Важно, зачастую бездепозитные бонусы в казино выдаются с ограничениями по максимальной выплате. В среднем можно рассчитывать на прибыль в некоторое тысяч руб. Как вывести выигрыш с бонуса без депозита. Придётся подтвердить аккаунт документально, в неких заведениях. Процедура верификации обязательна и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате или прочтите в правилах. 1×slots казино мобильная версия <a href=http://peretok.ru/bitrix/redirect.php?goto=http://cnc-redalert.ru/goto/http://pila-online.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/HBKad8cSk3×>http://peretok.ru/bitrix/redirect.php?goto=http://cnc-redalert.ru/goto/http://pila-online.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/HBKad8cSk3×</a> 1×slots зеркало выигрыши обязательно пройдите регистрацию если
1×slots регистрацию более популярный вариант это
В разделе с призами активировать свой презент. Найти забавы, для которых учтено одобрение и применять приз по назначению.Бонус за регистрацию в казино без депо с выводом денег надо(надобно) отыграть. Зачастую для отыгрыша возможность потребоваться сделать ставки на необходимую, в количество десятков раз превышающую необходимую бонуса либо выигрыша. <a href=http://proect.org/index.php?subaction=userinfo&user=coherentrhythm5>http://proect.org/index.php?subaction=userinfo&user=coherentrhythm5</a> Также существуют онлайн-платформы азартных игр, коие применяют раздачу бездепозитных бонусов в особые даты (как для казино, так и для игрока). Помимо этого, действующие игроки кроме имеют возможность получить схожие призы за свою деятельность (к примеру, за повышения уровня или за схожие достижения). 1хслотс рабочее зеркало
1хслот зеркало
Для получения приза нужно пригласить в игру свежего клиента. Казино начисляет пригласившему фиксированный процент от взносов приглашённого в виде приза: почаще всего его размер не выше 10%. Срок действия приза в большинстве случаев не превышает месяца: пригласивший получает приз в зависимости от проигранных ставок приглашённого в первый луна игры. <a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/6964/#comment-307759>1×slots зеркало которую указывали при регистрации кстати</a> Суммы сходственных предложений, в, колеблются от 3-х до 20 $, а вейджер на эти средства обязан составлять от 30 до шестидесяти раз. Зачастую, величайшая сумма выигрыша здесь составит от одной до двух сотен $. Если игрок выиграет больше, то все свои имеют быть списанными до максимально разрешенного выигрыша. Здесь замечена смысл выводить еще несуществующие финансы на свою платежную систему и далее отыскивать заведение с благоприятными под данную сумму релоадом либо призом за первое пополнение счета. Есть количество подвидов бездепозитного гонорары, предлагаемого большим количеством заведений. Выиграть реальные средства в казино не пополняя счет – сложно, но вполне. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными бонусами и начните играть на бонусные средства. По статистике из 10-ти заведений можно заработать маленькую необходимую денег за счет бонусных средств.Наличие у игрока 2 аккаунта. Запрещено делать некоторое профилей для многократного получения бездепов. 1хслотс зеркало на сегодня <a href=https://www.humansoft.co.kr:443/bbs/board.php?bo_table=free&wr_id=1357001>https://www.humansoft.co.kr:443/bbs/board.php?bo_table=free&wr_id=1357001</a> С такими ординарными советами каждое казино с бонусом за регистрацию способно принести в разы больше выгоды и пользы.
1×slots официальный сайт зеркало рабочее
Как и акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такого предложения являются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых посетителей и разрешает им составить впечатление о функционале, не рискуя вескими суммами. <a href=https://stomping-groundz.com/index.php?action=profile;u=2807>https://stomping-groundz.com/index.php?action=profile;u=2807</a> Вообще перейдя в казино — верховодила схожи в получении бездепозитных призов, в стереотипные управляла заходит: доказать эл. Почту и аппарат, наполнить свой индивидуальный профиль, активировать рекламную код либо активировать предложения во вкладке БОНУСЫ. 1хслотс рабочее зеркало При исполненьи критерий отыгрыша и верификации, деньги с бонусного счета переводятся на ведущей и имеют быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции находятся от выбранной платежной системы.Чаще всего, популярные сервисы, эти как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно неотъемлемое верховодило. Финансовые средства выводятся лишь спустя что, эту платежную систему, которой огромный для пополнения депозита. Если же игрок получил бездепозитный покерный приз, потребуется пополнить счет на минимальную сумму, кот-ая сочиняет обычно 10 $.
<b>Смотреть еще похожие новости:</b>
<a href=https://test.soclanovtsy.ru/profile/2098-rabofreesn/>зеркло казино 1×slots</a>
<a href=https://portugal-campings.com/pt/account/>1×slots коды</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Внесение депо – Будьте готовы пополнить счет после отыгрыша бонуса. Это обычное требование верховодил для данного типа промо-акций. Лучше заблаговременно уточнить, какую необходимую нужно будет заносить на счет. Как правило, идет о наименьшем депозите, хотя вы обязаны быть уверены, собственно он вас по кармашку.
#5363 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино большая рокс казино <a href=https://m.repost.news/>1×bet зеркало рабочее</a> пин ап casino 1×bet зеркало рабочее на сегодня <a href=https://specreporter.com/>букмекерская контора ставки</a> букмекерская контора на андроид cometa casino 1×bet вход 1×bet официальный xbet up casino Мухтиярова Елена Вячеславовна порно Петрова Ольга Викторовна порно
DiskiPlus Анна Михалкова DiskiPlus casino официальный зеркало <a href=https://www.diskiplus.ru/>DiskiPlus букмекерская контора фонбет официальный сайт</a> DiskiPlus casino рабочее DiskiPlus сайт 1×bet слоты <a href=https://diskiplus.ru/>DiskiPlus 1×bet сейчас</a> DiskiPlus порно с Аделия Петросян (фигурное катание) DiskiPlus казино играть DiskiPlus порно с Бондаренко Анастасия Борисовна DiskiPlus casino официальный сайт DiskiPlus зеркала официальных сайтов казино DiskiPlus яндекс игры казино DiskiPlus Скворцова Вероника Игоревна порно
#5364 Charlesgunnyhttp://filmkachat.ru
зеркала 1×slots
Все обожают получать подарки. Согласитесь, практически любой играющий человек будет безгранично рад, в получит даровой презент для забавы в онлайн казино просто за регистрацию либо же бонус за внесенный депозит, например нарекаемые приветственные бонусы для свежих игроков. Соответственно эти онлайн клубы станут больше популярны и предпочтительны у игроков при выборе казино для игры. Топ казино каждый обновляется и прибавляются новые и увлекательные игровые клубы с привлекательной бонусной политикой и всеми вероятными прерогативами, к коим относятся эти бонусы как фриспины за регистрацию, валютные бездепозитные призы, а также щедрые бонусы за внесенный депозит.Чтобы получить возможность исключить прибыль с бездепозитного бонуса в казино, необходимо выполнить ряд условий: <a href=http://filmkachat.ru/>x1 slots 1хслотс регистрация перейти на 1×slots</a> Получить Бездепозитный бонус в интернет казино дело 2-ух кликов. Другой момент, отыграть промо и соблюсти правила и обстоятельства отыгрыша. Под правилами предполагается не только вагер, но и лимитирования по наибольшей ставке. Мы разумеем, что в кинотеатр все ставят на зеро и выигрывают. Призываем не создавать подобного. Перед активацией бонуса прочтите правила. Узнайте последующие факторы: Условия получения презента, за регистрацию, за депозит и многое. Ограничения по максимальной ставке. Зачастую не выше 350 руб. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вращать автоматы, а вагер будет стоять на пространстве. Поэтому важно аристократия, в каких забавах возможно совершать кратность денежного оборота. <a href=https://www.uannounceit.com/article/1417>https://www.uannounceit.com/article/1417</a> 1х слотс зеркало регистрация в 1×slots casino <a href=https://list.ly/list/Ajws-osnovni-ietapi-ta-siekrieti-suchasnogho-riemontu-kvartiri>https://list.ly/list/Ajws-osnovni-ietapi-ta-siekrieti-suchasnogho-riemontu-kvartiri</a>
1×slots зеркало регистрация то дальше необходимо пройти
<a href=https://your-portal.at.ua/forum/51–61959–3#88306>1×slots регистрация на сайте</a> 1× slots зеркало К раскаянью, нет. Почти все казино, настоятельно внесение хотя бы одного минимального депо для вывода выигрыша с бездепозитного приза. Также учитывайте, собственно вывести деньги разрешено только на ту платежную систему, с коей был сделан депо.Заполняя данные в личном профиле, указывайте только достоверную информацию, так как Вам придется ее доказать в при выводе денег. <a href=https://ani.me/p/mpstats0509/info>https://ani.me/p/mpstats0509/info</a> зеркло казино 1×slots Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды присутствуют на этой странице. Посетитель возможность оценить обстоятельства получения и начать выступать на деньги без внесения депо. При этом игроку главно разуметь, на каких критериях и какими методами появится вывести полученный выигрыш. Для сего необходимо расценить список подключенных платежных систем.
1×slot рабочее зеркало
При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток.Для выбора азартного заведения Вы сможете пользоваться перечнем наших казино с призами за регистрацию. На нашем сайте мы опубликовали перечень бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, что часть бонусов эксклюзивные и доступны лишь для посетителей нашего сайта по-специальному промо-коду либо по уникальной ссылке. Кроме того, для любого бонуса мы подготовили подробный обозрение, каком Вы узнаете как получить и отыграть поощрение и как исключить свой выигрыш с бездепа. <a href=https://tazovod.khalal.ru/forum/memberlist.php?mode=viewprofile&u=40649>https://tazovod.khalal.ru/forum/memberlist.php?mode=viewprofile&u=40649</a> 1хслотс официальный сайт зеркало Главное превосходство спинов – возможность выучить разные слоты. Также удастся насладиться бонусными раундами, испытать удачу в риск-туре и преувеличить выигрыш за счёт особенных знаков. Однако столько игровой процесс заслуживает внимание, так превосходнее сосредоточиться на реальном выигрыше.
1×slot зеркало
Внесение депозита – Будьте готовы пополнить счет последствии отыгрыша бонуса. Это стандартное требование правил для этого подобии промо-акций. Лучше заранее уточнить, какую сумму надо(надобно) несомненно вносить на счет. Как верховодило, речь о наименьшем депозите, хотя вы должны быть убеждены, собственно он для по кармашку. <a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=897037>1×slots казино зеркало</a> Бездепозитные бонусы реальными деньгами, коие возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадали.Выше мы предоставили глубокий набор самых новых и актуальных бездепозитных бонусов в интернет казино без пополнения на 2022 год, где возможность воспользоваться каким ценным бездепозитным призом. Бонус за регистрацию в казино без депозита с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша может понадобиться устроить ставки на сумму, в некоторое 10-ов один превышающую необходимую приза либо выигрыша. 1 x slots <a href=https://google.ru/url?q=https://doctorlazuta.by/>https://google.ru/url?q=https://doctorlazuta.by/</a>
1×slots зеркало на сегодня
В большинстве заведений сделать это возможно по адресу электронной почты, по номеру телефонного, через социальную сеть или гугл-аккаунт. Мы собрали и опубликовали перечень лучших бездепозитных казино с призами за регистрацию, коие гарантируют великодушные выигрыши и мгновенные выплаты. <a href=http://jade-crack.com/home.php?mod=space&uid=1037109>http://jade-crack.com/home.php?mod=space&uid=1037109</a> Бездепозитный приз часто может замерзнуть легкодоступным незамедлительно в окончания регистрации, что правило единственным требованием к нему считается регистрация, а этого проверка вашей новой учетной записи. 1×slots официальный зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://weeklywars.de/memberlist.php?mode=viewprofile&u=860>1×slots casino зеркало рабочее</a>
<a href=http://everestrolep.listbb.ru/viewtopic.php?f=38&t=11561>1×slots зеркало сайта</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Диапазон ставок, которые вправе сделать игрок, также лимитирован. Обычно назначать можно небольшую сумму — в 10–30 руб. За одно вращение. Ниже указан важный перечень законных казино в Беларуси с призами на 1-ый депозит. Вы сможете попасть на официальный сайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус.
#5365 Ремонт iPad mini 3https://remont-ipad-mini-3-cut.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт ipad mini 3 рядом, можете посмотреть на сайте: <a href=https://remont-ipad-mini-3-cut.ru/>ремонт ipad mini 3</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#5366 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
лучшие казино бесплатно 1×bet 1 <a href=https://rhymes-punches.com/>1×bet слоты официальный сайт</a> casino скачать 1×bet зеркало рабочее <a href=https://repost.news/>casino на телефон</a> скачать casino на андроид casino скачать 1×bet на сегодня бесплатные букмекерские конторы Хорова Наталья Александровна порно порно с Дарья Клишина, легкоатлетка casino зеркало сегодня рабочее
DiskiPlus казино смотреть онлайн бесплатно DiskiPlus up casino <a href=https://diskiplus.ru/>DiskiPlus сайт винлайн букмекерская контора</a> DiskiPlus казино без DiskiPlus porno Екатерина Ефременкова, шорт-трекистка <a href=https://diskiplus.ru>DiskiPlus сайт казино вход</a> DiskiPlus казино регистрации DiskiPlus Преподобная Надежда Александровна порно DiskiPlus казино ли DiskiPlus порно с Виктория Синицина, фигуристка DiskiPlus 1×bet скачать бесплатно DiskiPlus cat casino DiskiPlus pin up casino top top
#5367 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Попова Анна Юрьевна порно казино смотреть <a href=https://m.repost.news/>казино рублях</a> порно с Арина и Дина Аверины, гимнастки cat casino <a href=https://7club7.com/>1win casino</a> kometa casino букмекерская контора леонов гта онлайн казино порно с Ирина Сидоркова 1×bet зеркало на сегодня 1×bet xyz казино вулкан Кузнецова Анна Юрьевна порно
DiskiPlus порно с Бондаренко Анастасия Борисовна DiskiPlus симулятор казино <a href=https://diskiplus.ru/>DiskiPlus почему казино</a> DiskiPlus 1×bet зеркало xbet xyz DiskiPlus Елена Лядова <a href=https://www.diskiplus.ru/>DiskiPlus пинко casino</a> DiskiPlus порно с Елена Никитина, скелетонистка DiskiPlus 7k casino DiskiPlus играющие казино DiskiPlus Елена Лядова DiskiPlus 1×bet на андроид бесплатно DiskiPlus Москалькова Татьяна Николаевна порно DiskiPlus Елена Лядова
#5368 Charlesgunnyhttp://filmkachat.ru
1×slos регистрация в 1×slots casino
Доступные игры – В неких азартных играх возможно понизить математическое приемущество казино до нескольких 10-х процента. В их числе почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как верховодило, в этих забавах ставки идут в зачет вейджера не всецело. Например, имеет учитываться только 50%. В некоторых играх бездепозитные бонусы вообщем нельзя отыгрывать.Как верховодило, новоприбывшие геймеры в первую очередь желают ознакомиться с способами ввода и вывода валютных средств и сроки выполнения поданных заказов чтобы четко осознавать, как скоро они смогут вывести собственный казино бонус за регистрацию без депозита на электрический кошелек либо же банковскую карту. К счастью для всех играющих, снутри конкретных холдингов, все казино конкурируют между собой. Ведь случае бы конкретную фирму представляло только одно онлайн-заведение, то вряд ли бы посетители увидели казино с призом за регистрацию и возможность бы рассчитывать лишь на вознаграждение повторяющий бонуса на 1-ое вложение. К каждому заведению регулярно стопам завлекать новых игроков, собственно, итоге, только на руку всем играющим. <a href=http://filmkachat.ru/>casino 1×slot</a> При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток. <a href=https://ai.ceo/read-blog/246294>https://ai.ceo/read-blog/246294</a> Если при регистрации указать промокод, можно гарантировано получить бонус. Где взять ваучер? Посетите тематические блоги либо форумы. Иногда администрация клуба проделывает рассылку ваучеров на электронную почту. В заключительное время игорные дома начали рекламироваться в фильмах и телесериалах. Присмотритесь и всего заметите промокод, кот-ый принесёт 500 или 1 000 бонусных рублей.B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax 1×slots рабочее зеркало <a href=https://bybak.com/home.php?mod=space&uid=4232670>https://bybak.com/home.php?mod=space&uid=4232670</a>
1× slots сайт
Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша призов. Заведения всегда устанавливают максимальную ставку, допустимую по условиям вейждера. онлайн казино 1×slots <a href=http://sols9.com/batheo/Forum/User-JasperMeemi>http://sols9.com/batheo/Forum/User-JasperMeemi</a> Выбор любого интернет казино на нашем сайте. В описании к любому Вы сможете узнать, что получите за создание аккаунта. 1×slots официальный сайт скачать на айфон
1х слот регистрация в 1×slots casino
Особую изюминку видео слотам присваивают уникальные символы. С их появлением активизируются различные бонусы. Вы сможете запустить дополнительный степень и прирастить необходимую выигрыша. Есть знаки, коие заменяют ненадобные элементы и сами создают выигрышные комбо. Не стоит забывать и на бонус-тур. После каждого удачного спина есть шанс увеличить необходимую выигрыша в два или четыре раза. <a href=http://swisspaint.ru/bitrix/redirect.php?goto=http://movdpo.ru/go.php?url=http://valeriya-ivanovo.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/s9vQusA2oZV>http://swisspaint.ru/bitrix/redirect.php?goto=http://movdpo.ru/go.php?url=http://valeriya-ivanovo.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/s9vQusA2oZV</a> 1 х слотс зеркало
1× slots регистрация в 1×slots casino
Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Размер бонуса. В качестве бездепов обычно начисляют маленькие суммы, а когда речь идет о бонусах за депозит, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино шансы подарить игроку до 2000$. Наш перечень включает в себя превосходнейшие бездепозитные бонусы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит ревизию по важным параметрам:В качестве бонусов интернет казино нередко предлагает выдачу фриспинов, другими даровых вращений игрового барабана. Виртуальные монеты возможно использовать для изучения в покерной школе либо для игры в казино. 1хслотс казино зеркало <a href=https://correspondent.in.ua/user/CraigHak/>https://correspondent.in.ua/user/CraigHak/</a> Выбирая даровой бонус, пристально изучайте верховодила. Убедитесь, что вас можно на роль в акции. Уточните, в каких забавах возможно скорпулезно условия вейджера. При необходимости задавайте вопросы адептам саппорта.Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 поболее. Когда игроку полагается большое фриспинов, администрация возможность бить3 их начисление на некоторое дней. Бесплатные вращения предоставляются для определенного слота, кот-ый указывается в правилах акции.
зеркло казино 1×slots
Самый распространённый из похожих бонусов, конечно же, бездеп на денек рождения посетителя — приз в виде фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им возможно в течение установленного периода медли.Онлайн-казино с бездепозитными призами ставят клиентам обстоятельства для пользования бездепами, потому перед ролью в промоакции другого тщательно ознакомиться со всеми правилами и аспектами промоакции. Условия все касаться получения приза, его использования и последующего вывода валютных средств если, тогда, выигрыша. 4. Заберите подарок. Чаще всего бонус активизируется сразу в регистрации. Но посещают истории, когда нужно забежать в собственный кабинет либо написать в саппорта. <a href=http://oldpeoplewholikebirds.com/forum/memberlist.php?mode=viewprofile&u=232799>http://oldpeoplewholikebirds.com/forum/memberlist.php?mode=viewprofile&u=232799</a> 1×слотс казино
<b>Смотреть еще похожие новости:</b>
<a href=https://thetechmodders.com/forums/viewtopic.php?t=25443>1×slots зеркало регистрацию более популярный вариант это</a>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/member.php?action=profile&uid=36740>1×slots официальный сайт скачать</a>
<a href=https://mcmon.ru/showthread.php?tid=126518>1×slots casino зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Даже не выиграв солидную необходимую, игрок интересно проведет время, изнутри исследует работу площадки, воспримет геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе наилучших промоакций легко. Достаточно периодически учить перечень новых онлайн казино с выводом приза без депозита в этом разделе. Как верховодило, при выводе денег, от играющего требуется только устроить минимальный лепта чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом собственный счет.
#5369 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Арина и Дина Аверины, гимнастки Петрова Ольга Викторовна порно <a href=https://rhymes-punches.com/>порно с Максим Глушенков (футбол)</a> Манилова Алла Юрьевна порно казино <a href=https://strelochnik.com/>фильмы казино рояль</a> сайте букмекерской конторы фонбет online casino 7k Лут Оксана Николаевна порно вавада казино сайт букмекерской конторы букмекерская контора мостбет зеркала казино
DiskiPlus pin up casino скачать DiskiPlus 1×bet официальный скачать <a href=https://www.diskiplus.ru/>DiskiPlus porno Илья Ковальчук (хоккей)</a> DiskiPlus casino betting DiskiPlus пин casino <a href=https://diskiplus.ru>DiskiPlus Александра Бортич</a> DiskiPlus порно с Владимир Минеев (ММА) DiskiPlus ramenbet casino DiskiPlus сайт 1×bet слоты DiskiPlus porno Илона Маркова, хоккеистка DiskiPlus 7k casino зеркало рабочее DiskiPlus винлайн букмекерская контора официальный сайт DiskiPlus макао казино
#5370 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее
Создание аккаунта. На сайте казино необходимо открыть регистрационную форму и наполнить пустые поля собственными данными. Иногда на данном этапе требуется указать только адресок электронной почты и пароль, но чаще надобно заполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д.). Нужно свидетельствовать только настоящие данные, поскольку впоследствие они станут испытаны.Таким образом интернет казино получает потенциального игрока. Возможно в будущем либо истинном он захотит поиграть на свои деньги. Так трудятся бездепозитные бонусы в онлайн казино. Здесь очень подходит выражение, безвозмездные сыр случается лишь в мышеловке. Начинающие игроки имеют не обдумывать опасность пыла. Однако времени осознания делается больше. Это тема для отдельного обсуждения. <a href=http://filmkachat.ru/>рабочее зеркало 1×slots</a> <a href=https://band.us/band/96885593/post/3>https://band.us/band/96885593/post/3</a> Бесплатный бонус – кредиты, которые онлайн-казино начисляет клиенту, не принуждая его пополнять игровой счет.Зарегистрируйтесь. Для регистрации почаще всего довольно ввести свой номер телефонного и почтовый адресок, в чего ввести приобретенный код из СМС. Возможно, требуется указать промокод. В правилах акции будет написано, где его надобно вводить. Иногда это бы создавать при регистрации, времени — теснее после творения собственного кабинета, на отдельной странице. 1×slots официальный зеркало рабочее <a href=http://korea-shipping.co.kr/bbs/board.php?bo_table=free&wr_id=380610>http://korea-shipping.co.kr/bbs/board.php?bo_table=free&wr_id=380610</a> Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают приз по государствам. Вплоть до того, собственно клуб имеет принимать игроков из Вашей страны, а бездеп мешает.Чтобы других убедиться в превосходствах бездепозитных призов, довольно зарегистрироваться в казино и получить поощрение.
1×slots официальный сайт скачать
Риск-игра по одинаковым шансам – Также казино возможность воспрещать выполнять условия по отыгрышу с помощью раунда на удвоение, который предлагается в слотах, видео-покере и некоторых других играх.Бездепозитные бонусы прекрасный вариант даровой игры в игровые автоматы. Многие пользователи сети не понимают, собственно в казино возможно начать выступать безусловно безвозмездно, а позже вывести выигрыш на банковскую карту или электронный кошелек, иные не доверяют интернет казино, а третьи успешно играют и выигрывают – и тотчас довольно немалые суммы. 1×slots официальный регистрация Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы была вероятность исключить выигрыш.Представленные на данной страничке наилучшие бездеп бонусы в казино за регистрацию в 2022 году имеют подходящие обстоятельства. После кропотливого анализа редакция портала составила рейтинг спецпредложений, в котором посетители Casino.ru все сортировать список по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д. <a href=https://andyprrr01234.isblog.net/nude-ai-understanding-the-intersection-of-innovation-and-ethics-in-image-manipulation-47524224>https://andyprrr01234.isblog.net/nude-ai-understanding-the-intersection-of-innovation-and-ethics-in-image-manipulation-47524224</a> 1хслот скачать Не сложно догадаться, что not the slightest deposit bonuses почти разу не случаются немаленькими. Чаще всего речь идет о пяти–тридцати долларах (либо эквиваленте этой суммы в другой денежной).
1х слот регистрация в 1×slots casino
Возможность поиграть вспомогательное состязание (а иногда и количество) совершенно даром, а выигрыш, к, поступает на счёт игрока. Если при регистрации показать промокод, можно гарантировано получить бонус. Где арестовать ваучер? Посетите определенную блоги или форумы. Иногда администрация клуба делает рассылку ваучеров на электрическую почту. В последнее время игорные жилища начали рекламироваться в фильмах и телесериалах. Присмотритесь и скорее заметите промокод, который принесёт 500 или 1 000 бонусных рублей. <a href=http://creamshop.ru/bitrix/redirect.php?goto=http://television-planet.tv/go.php?url=http://livingshop.ru/bitrix/redirect.php?goto=https://teletype.in/@urist_free/W7L98qz18tZ>http://creamshop.ru/bitrix/redirect.php?goto=http://television-planet.tv/go.php?url=http://livingshop.ru/bitrix/redirect.php?goto=https://teletype.in/@urist_free/W7L98qz18tZ</a> Верификация аккаунта. Лучше доказать личность сразу последствии регистрации, дабы позже не было заморочек с выводом денег. Верификация может протекать двумя способами:Бездепозитные призы за регистрацию считаются одним из самых известных способов вербования свежих игроков в онлайн-казино, поэтому собственно они деют игрокам возможность опробовать казино, неподражаемо игровые автоматы, и возможно, выиграть настоящие средства. 1хслотс зеркало на сегодня Особую изюминку видео слотам придают оригинальные знакы. С их в активизируются разные призы. Вы можете запустить дополнительный уровень и прирастить сумму выигрыша. Есть знаки, коие заменяют ненадобные составляющие и сами творят выигрышные комбо. Не стоит забывать и тему бонус-тур. После каждого успешного спина есть шанс прирастить необходимую выигрыша в 2 или хорошо раза.Чаще всего, знаменитые сервисы, эти как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно неотъемлемое верховодило. Финансовые средства выводятся только спустя что, эту платежную систему, коей пользовались для пополнения депо. Если же игрок получил бездепозитный покерный бонус, потребуется пополнить счет на минимальную необходимую, кот-ая составляет обычно десять долларов.
казино 1×slots официальный сайт
После потребуется внести идентификационный платёж. Это стращает новичков больше всего. Нужно устроить наименьший депозит в 100–500 руб. Таким образом служба безопасности увериться в том, собственно платёжный способ принадлежит Вам. Данная процедура необходима для обеспечивания безопасности игровых счетов. Пример, Ваш аккаунт взломают и выведут средства на свой кошелёк. Будет очень досадно. Поэтому верификация платёжной системы, это важный момент. Нельзя осматривать игру на деньги, как вариант заработка. Азартные игры запрещены для лиц моложе 18 лет. Topcasinobonuses.mobi классифицируется организатором азартных игр. Сайт одевает информационный характер.Для верификации номера телефонного, в собственном профиле выберите опцию „Подтвердить номер аппарата“ и введите в подходящее поле код, приобретенный в sms-сообщении. зеркло казино 1×slots <a href=https://pcnto.com/user/OscarAvelf/>https://pcnto.com/user/OscarAvelf/</a> Наши эксперты изучают условия акции, после в ручном режиме проводят их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и параметры. Мы не рекламируем казино, а даем игрокам информацию о наихороших из них.При отыгрыше бездепов, учитывайте временные ограничения. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток.
скачать 1×slots официальный сайт
На критериях отыгрыша даровых бонусов стопам остановиться подробнее. С ними связаны аспекты, коие невозможно забыть без внимания.Доступность — бездепозитные призы в казино почаще всего предоставляются свежим игрокам, но посещают случаи, когда бонус имеют получить и действующие посетители. Подтвердите регистрацию, чтобы активировать Бездепозитный приз с выводом, потребуется наполнить личный профиль. Заполните пустые поля истинными данными о себе.Зарегистрируйтесь. Для регистрации почаще всего довольно установить собственный номер аппарата и почтовый адресок, в чего ввести полученный код из СМС. Возможно, потребуется показать промокод. В правилах акции будет написано, где его надо включать. Иногда это надобно делать при регистрации, от — уже в создания собственного офиса, на отдельной страничке. <a href=http://www.airsoft44.com/forum/index.php?action=profile;u=9440>http://www.airsoft44.com/forum/index.php?action=profile;u=9440</a> Ещё одно распространённое акционное предложение – симпатичный презент с неблаговидными требованиями. К образцу, клуб сулит $100 в бездепа, но с вейджером х80 или х100. Отыграть такой вейджер практически невероятно и потому чем концентрироваться на больше заманчивых акциях.Чтобы бездеп не был начислен на Ваш аккаунт, Вам надо активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт механически, а Вы не расчитываете его применять, обратитесь в службу с просьбой отменить бездепозитный приз. 1хслот скачать
<b>Смотреть еще похожие новости:</b>
<a href=https://acerfans.ru/faq/796-kak-vylozhit-na-forum-informaciju-iz-zhurnala.html>1× slots casino официальный сайт</a>
<a href=http://link.5nx.ru/viewtopic.php?f=5&t=5335>1×slots регистрация на сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Стоит обозначить(означить), собственно бездепозитный приз выдается только совершеннолетним новичкам, которые, тому, имеют пригласить собственных приятелей и знакомых, кроме рассчитывающих на поощрительную программку преданности. Подобная технология замечена среди конкуренцию онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению собственной популярности, путем вербования свежих игроков. Бонусы – это оригинальный шанс для потенциальных участников игры, коие шансы опробовать софт покер рума и увериться, будут ли они в него выступать либо нет. Новый игрок испробует средства силы с реальными оппонентами в казино. Превышение наибольшей ставки при отыгрыше. Система механически не предуведомляет о превышении ставки, потому о нарушении управлял игрок имеет узнать теснее в подачи запроса на вывод средств.
#5371 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasin online
Таким образом онлайн казино получает вероятного игрока. Возможно в будущем либо настоящем он захотит поиграть на свои средства. Так трудятся бездепозитные призы в онлайн казино. Здесь отлично подходит выражение, бесплатные сыр случается лишь в мышеловке. Начинающие игроки могут не осознавать опасность пыла. Однако течением понимания становится больше. Это тема для отдельного обсуждения.К сожалению, нет. Почти все казино, требуют внесение но бы одного минимального депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, что исключить средства разрешено лишь на что, эту платежную систему, с коей был изготовлен депо. <a href=http://filmkachat.ru/>1хслотс официальный сайт зеркало</a> <a href=https://www.jottacloud.com/s/371d1db27e1899f43f18f1216ac5f05f9f6>https://www.jottacloud.com/s/371d1db27e1899f43f18f1216ac5f05f9f6</a> 1×slots регистрация 1×slots review live <a href=https://myapple.pl/users/463001->https://myapple.pl/users/463001-</a> Иногда для получения призов нужно спутаться с адептами саппорта. Удобнее всего с ними собеседовать в онлайн-сате, желая времени довольно запроса по электрической почте.Наиболее знаменитые гонорары среди гэмблеров – бездепозитные призы казино. Это не умопомрачительно, ведь возможно получить безвозмездные вращения или виртуальные кредиты, и при этом не придётся пополнять счёт, рисковать собственными средствами. Удастся насладиться разнородными веселиями и даже выиграть крупную сумму, избегая серьёзного риска.
онлайн казино 1×slots
Выбирая даровой бонус, пристально изучайте правила. Убедитесь, собственно вам можно на участие в акции. Уточните, в каких забавах возможно скорпулезно обстоятельства вейджера. При надобности задавайте вопросы адептам саппорта.Для получения выигрыша требуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить определенную сумму, но уже из собственных денег. Она рассчитывается из общего объема выигрыша за всегда применения бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, случае пользователь выиграл 1000 руб., а множитель сочиняет х30, вывести деньги можно будет, сделав ставки на 30 000 руб. <a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=766261>1×slots зеркало которую указывали при регистрации кстати</a> 1×slots сайт зеркало Осталось выбрать казино с призом за регистрацию и создать профиль. После активации презента выигрыш зависимости от Фортуны и способностей. <a href=http://sam5foods.com/bbs/board.php?bo_table=free&wr_id=499720>http://sam5foods.com/bbs/board.php?bo_table=free&wr_id=499720</a> 1хслотс рабочее зеркало Как лишь на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу в этого возможно оставить заявку на вывод выигрыша. Кредиты прибыльно отличаются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом реальных средств и выделяют вероятность ощутить азарт. Во-вторых – можно насладиться любой азартной забавой доступной на сайте. В вашем распоряжении присутствуют автоматы, настольные прибавление, видео-покер, Live-дилеры.
1 x slots
Почти все игровые клубы требуют подтверждение контактных данных игрока для получения бездепозитного бонуса.На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не можете активировать и получить бездепозитный бонус. <a href=https://www.gamers-forum.com/member.php?106245-Julesced>https://www.gamers-forum.com/member.php?106245-Julesced</a> 1×slots рабочее зеркало на сегодня Не желаете поиграть в азартные забавы, не рискуя своими средствами, хотя получая в все выплаты? Подобную возможность деют почти наилучшие порталы с азартными веселиями. В их числе количество правдивых и надежных интернет-казино на российском языке. Они привлекают свежих пользователей различными поощрительными мероприятиями, включая бездепозитные, или безвозмездные бонусы.
1×slots casino регистрация
Выигрыши с призов без вложений всегда привязаны к требованию по ставкам и имеют быть обналичены только в исполненья этих притязаний. 1×slots акции <a href=https://www.jjj555.com/home.php?mod=space&uid=700281>https://www.jjj555.com/home.php?mod=space&uid=700281</a> Также учтите, собственно некоторые игровые платформы сужают список стран, которые готовы получить предложенный бездепозитный бонус за регистрацию. К образцу, существуют онлайн-заведения, выдающие подобные призы только жильцам конкретных государств. К образцу, интернет казино 777 Оригинал дает бездепозитный бонус лишь игрокам из России и стран СНГ. Или напротив, пичкают вознаграждением всех, не обитателей некоторых государств (из этого, следует пристально учить перечень, дабы впоследствии не возникло практически вопросов и жалоб).Реже бонусы без депозита начисляются постоянным игрокам. С их поддержкой администрация старается вычесть ценных посетителей либо желает поблагодарить за преданность верных посетителей. Но гораздо чаще для подобных целей применяются эти промоакции:
1хслот 1хслотс регистрация перейти на 1×slots
На условиях отыгрыша безвозмездных призов следует остановиться подробнее. С ними связаны аспекты, коие нельзя оставить без внимания. Когда идет о валютных бонусах, казино постоянно устанавливают условия вейджера, которые необходимо выполнить, дабы вывести выигрыш.Иногда у посетителей вебсайта могут возникнуть проблемы при активации приобретенного промо-кода. В этих случаях, нужно адресоваться за помощью в службу «Support». Для получения ответа, обязательно указывается конкретная первопричина обращения и подтверждается информация дополнительными снимками. Если сложилась спорная ситуация, всегда возможно обратиться к главному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ. <a href=http://www.cafecomredes.com.br/2020/06/enterprise-ca-assinando-certificado-no.html>http://www.cafecomredes.com.br/2020/06/enterprise-ca-assinando-certificado-no.html</a> 1×slots казино зеркало Помните, что всевозможные нарушения правил сведут на нет ваши усилия, и вы скорее останетесь без начисленного вас бесплатного бонуса. Всегда изучайте правила начисления и условия вейджера. По хоть вопросам, на которые вы возможности без отыскать ответы, обращайтесь за объяснениям и саппорт.
<b>Смотреть еще похожие новости:</b>
<a href=http://sharecovid19story.com/memberlist.php?mode=viewprofile&u=5122>1хслот скачать</a>
<a href=https://minifishtank.net/forum/showthread.php?tid=1358>1×slots промокод при регистрации</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вознаграждения за получение VIP-статуса ? начисляются масштабах программы лояльности при достижении одного уровня либо выдаются персонально менеджерами службы поддержки. Чтобы других убедиться в превосходстве бездепозитных бонусов, достаточно зарегистрироваться в казино и получить поощрение.
#5372 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрацию более популярный вариант это
Можно ли в одном онлайн казино получить больше одного бонуса за регистрацию? Нет, так как в любом интернет казино есть правила, к которым нужно придерживаться, не творить два аккаута для получения бонусов, иначе несомненно блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, бонус за регистрацию выдаеться один раз одному личику. <a href=http://filmkachat.ru/>x1 slots 1хслотс регистрация перейти на 1×slots</a> Самый распространённый из похожих бонусов, конечно же, бездеп на денек рождения посетителя — приз в виде фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им возможно в течение установленного периода медли.Бонус начисляется игроку сразу в регистрации и прохождения верификации в казино и не просит от клиента внесения депо. Как верховодило, размер приза в сходственном случае достаточно умеренный, впрочем позволяет новеньким познакомиться с игрой без риска настоящими деньгами. <a href=https://wallhaven.cc/user/CGI>https://wallhaven.cc/user/CGI</a> Поспешите забрать бездепозитные призы за регистрацию в казино из представленного перечня. Все платформы не ведут законную деятельность, хотя и порадуют правдивыми плодами забавы, высокой отдачей, резвыми выплатами. 1×slots зеркало регистрация в 1×slots casino <a href=https://forums.dfine.net/member.php?action=profile&uid=1177>https://forums.dfine.net/member.php?action=profile&uid=1177</a> Подтвердите личность, предоставив оператору казино свои паспортные данные. Инструкции обычно несложные, главное — конкретно им идти. Если написано, что «на фото обязаны быть видны все хорошо угла страницы паспорта» — устройте именно это фото.
1×slots официальный сайт скачать
Прямо момент заберите благотворительные вращения за регистрацию без депо и начинайте коллекционировать призовые комбинации из-за солидных выигрышей!Бездепозитные призы в казино без пополнения 2022 — это конкретная сумма средств или free spins вращения, которые предоставляются первым гостям за регистрацию на веб-сайте казино в виде бездепозитного бонуса, и дает для вероятность за счет казино без пополнения опробовать предложения (игр), с дальнейшей прерогативой вывода средств при исполнении всех установленных верховодил. 1×slots зеркало рабочее на сегодня Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие появляются у начинающих. <a href=https://www.clashfarmer.com/forum/member.php?action=profile&uid=45750>https://www.clashfarmer.com/forum/member.php?action=profile&uid=45750</a> Зарегистрируйтесь. Для регистрации чаще всего довольно установить свой номер телефона и почтовый адрес, последствии чего ввести приобретенный код из СМС. Возможно, требуется показать промокод. В правилах промоакции будет написано, где его надо включать. Иногда это надобно создавать при регистрации, время — уже после творенья личного кабинета, на отдельной страничке.Шаг 5. Использование и отыгрыш. Бездеп обязан быть использован в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. 1×slots зеркало быструю регистрацию а также мгновенное
x1 slots регистрация в 1×slots casino
Фриплей-бонусы встречаются только в некоторых клубах. Они зачисляются незамедлительно последствии творения профиля и активны непродолжительное время. Если не успеете потратить средства, они попросту сгорят. Касаемо времени, в большинстве случаев бонусы активны на часа.Зарегистрируйтесь. Для регистрации чаще всего довольно ввести собственный номер аппарата и почтовый адрес, в чего установить приобретенный код из СМС. Возможно, потребуется показать промокод. В правилах промоакции несомненно написано, где его хотелось вводить. Иногда это хотелось делать при регистрации, времени — уже последствии создания личного офиса, на отдельной страничке. Фриплей-бонусы. Бонусы за безвозмездную забаву есть только в некоторых клубах. Они зачисляются незамедлительно в творенья профиля и действуют непродолжительное время. Если у вас нет медли израсходовать свои, они просто завершатся. Что касается медли, в большинстве случаев бонусы срабатывают на 1-го часа. <a href=http://khleeg.net/vb/member.php?u=6056>http://khleeg.net/vb/member.php?u=6056</a> Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, a лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Некоторые веб-сайты, до чем провести регистрацию игроков, предлагают ответить на несколько базисных вопросов. Цель проведения сходственной викторины – выявить случайных людей, коие не имеют представления о покере, и не разрешить получения ими призов. Если гость уже играл в казино, то ответить на полтора 10 простых вопросов будет несложно. Очень часто, ответы можно отыскать на официальных веб-сайтах данных учреждений. 1×slots зеркало 1хслотс регистрация перейти на 1×slots Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.Вы наверняка, как и все предпочитаете получать презенты и бездепозитные призы казино. Игорные дома брали в привычку одаривать гэмблеров приятными бонусами. Стать владельцем приветственного подарка можно за создание профиля или пополнение счёта. Второй вариант больше занимательный, как клубы готовы удвоить депозит! Но если вы новичок и только знакомитесь с миром пыла, другого, как воспользуйтесь бонусом за регистрацию.
1×slots промокод при регистрации
Представленные на данной странице лучшие бездеп бонусы в казино за регистрацию в 2022 году имеют подходящие условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, в котором посетители Casino.ru могут сортировать перечень по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д. Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке адепты онлайн-казино публикуют актуальную информацию о not the slightest deposit bonuses и услугах.В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и если, тогда, неоднозначных ситуаций нет способности куда-то посетовать и обосновать собственную правоту. 1хслотс зеркало <a href=https://gamesgrom.com/user/Travisnaivy/>https://gamesgrom.com/user/Travisnaivy/</a>
1×slots мобильная версия войти казино
Несмотря на то, собственно данный вариант стимуляции со стороны азартных платформ очень востребован в сфере подобных игр, далековато не поклонникам казино ведомо, собственно себе бездепозитные призы казино и как именно их вполне эксплуатировать.Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных требований, кроме неотъемлемой верификации. Если на веб-сайте предусмотрена обязательная процедура доказательства личности, то вывести выигрыш получится лишь последствии проверки данных. Приготовьтесь наполнить анкету и отправить в техподдержку документ, подтверждающий личность. <a href=https://www.lightknotes.com/MyBB/member.php?action=profile&uid=19176>https://www.lightknotes.com/MyBB/member.php?action=profile&uid=19176</a> Но не думать, что снабжая пользователей такими призами, казино занимается спонсированием. Ведь размеры вознаграждений, главном, не немалые (средним размером от 5 до 20 $). И на эти средства налагаются определенные обстоятельства и ограничения, неотклонимые к исполненью игрока, если в последствии он вожделеет получить все свои выигранные финансы. 1×slots официальный сайт скачать Фриспины без депо либо дополнительные свои посодействуют ближе познакомиться с игровой платформой и её функциями. За счёт подарков возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за игры против живых крупье.
<b>Смотреть еще похожие новости:</b>
<a href=https://adminclub.org/showthread.php?tid=60931>1×slots casino регистрация 1×slotscasino09k online</a>
<a href=https://masstr.net/showthread.php?tid=103413>1×slots casino зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но есть игорные заведения, коие готовы просто так жертвовать деньги на игру. Для этого достаточно создать профиль. Чтобы вывести собственный выигрыш, для поначалу нужно выполнить условия отыгрыша, указанные в критериях получения бездепозитного депозита. На нашем сайте Вы отыщите список актуальных новых бездепозитных бонусов в казино 2022 года. Также, есть много эксклюзивных услуг, коие доступны лишь гостям нашего вебсайта после регистрации по нашей ссылке или активации особого промокода.
#5373 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало рабочее регистрации на телефон придет
Ниже указан актуальный список законных казино в Беларуси с призами на первый депо. Вы сможете попасть на официальный вебсайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. <a href=http://filmkachat.ru/>зеркала 1×slots</a> <a href=https://www.vevioz.com/forums/thread/4584/>https://www.vevioz.com/forums/thread/4584/</a> Подтвердите лицо, предоставив оператору казино свои паспортные данные. Инструкции обыкновенно несложные, главное — конкретно им стопам. Если написано, что «на фото должны быть заметны все четыре угла странички паспорта» — сделайте непосредственно это фото.Активация по промокоду употребляется в различных обликах бездепов. Если речь о приветственном бонусе, то комплект символов возможно узнать на главной страничке, в регистрационной форме либо послании, коие отправляется юзеру для подтверждения адреса электронной почты. Акции могут проводиться общо с партнерскими площадками. Обычно код размещается на стороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активируется разовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном офисе или начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем важный код для активации в описании любого рекламную. 1× slots зеркало <a href=https://oraclenana.com/MYBB3/user-4112.html>https://oraclenana.com/MYBB3/user-4112.html</a>
1хслот скачать
Любой выигрыш по ставке повыше установленного лимита будет являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, а в случае выигрыша его сумма не поступит на счёт посетителя — результат забавы будет полностью аннулирован.Вообще перейдя в казино — правила схожи в получении бездепозитных бонусов, в стандартные управляла заходит: подтвердить эл. Почту и телефон, наполнить собственный личный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ. 1хслот официальный сайт зеркало Бездепозитный бонус – это финансовое вознаграждение, которое выдается участнику игры в казино, для его привлечения и возникновения заинтригованности. Любой гость, кот-ый подходит условиям выдачи сходственного бездепозитного бонуса, имеет претендовать на получение вышеуказанного приза. Такое одобрение считается более эффективным методом, дающим вероятность стартовать в игре, не вкладывая личных вещественных средств. <a href=http://hardstorecr.com/mybb/member.php?action=profile&uid=122032>http://hardstorecr.com/mybb/member.php?action=profile&uid=122032</a> Главным моментом в появлении этих вознаграждений состоит том,, что пустив их в ход, в ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он спасибо призам какой-нибудь выигрыш или моментально спустит все только собственно прибывшие финансы). То есть, казино снабжает игрока вероятностью на дармовой базе играть во всевозможные слоты даже спонсирует забаву. скачать 1×slots на андроид мобильная версия При регистрации идет свидетельствовать только достоверную информацию. Когда учетная запись несомненно активна, будет доступ в Личный офис. В нем можно выбрать еденицу, установить промокод и разузнать доскональные верховодила получения и отыгрыша бездепа. Краткая информация об акции часто находится именно на регистрационной форме.При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток.
1×slots скачать на айфон
В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно приятная часть забавы. Важно, часто бездепозитные бонусы в казино выдаются с ограничениями по максимальной выплате. В среднем можно рассчитывать на прибыль в несколько тысяч руб. Как исключить выигрыш с бонуса без депо. Придётся подтвердить акк документально, в некоторых заведениях. Процедура верификации обязательна и делается каждым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате или прочитайте в правилах.Онлайн гемблинг развивается с каждым деньком больше и больше, свежие бренды создаются не по денькам а по часам. Новые интернет казино делают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и что, этим самым предлагают бездепозитные бонусы за регистрацию, собственно бы не упустить эту возможность — как пользоваться новым бездепом, советуем посещать наш вебсайт как возможно почаще, самое аппетитное и свежие несомненно добавляться в этом же перечне. <a href=https://www.mycncuk.com/members/76682-Charlessnore>https://www.mycncuk.com/members/76682-Charlessnore</a> Некоторые сайты, прежде чем обмануть регистрацию игроков, предлагают ответить на количество базисных вопросов. Цель проведения похожей викторины – выявить случайных людей, коие не имеют представления о покере, и не допустить получения ими бонусов. Если посетитель уже играл в казино, то ответить на полтора 10 простых вопросов несомненно несложно. Очень нередко, ответы возможно отыскать на официальных сайтах этих учреждений.Индивидуальные поощрения выдаются за совершение деяний: подписку на аккаунты площадки в соц сетях, установку мобильного прибавления либо официального посетителя для ПК. В большинстве казино срабатывают программки преданности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на грядущий степень часто с выдачей бездепа. 1×slots casino зеркало При использовании бездепозитным бонусом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют некоторое обликов лимитов:В интернет-сети всегда можно найти перечни наиболее известных и обещанных поощрительных программ от знаменитых онлайн-казино.
1×slots рабочее зеркало на сегодня
Мы советуем не отказываться от похожих услуг узнаваемых казино. Выделите некоторое минут на регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сейчас удача будет на вашей стороне! <a href=http://naturetour.ru/personal/profile/index.php?PAGE_NAME=profile_view&UID=2416>1×slots регистрацию процедура займет всего лишь</a> При регистрации стопам указывать лишь достоверную информацию. Когда учетная запись будет активна, будет доступ в Личный офис. В нем возможно выбрать валюту, установить промокод и разузнать подробные верховодила получения и отыгрыша бездепа. Краткая информация об акции нередко присутствует непосредственно на регистрационной форме. 1×slots сайт зеркало <a href=http://msfo-soft.ru/msfo/forum/user/38517/>http://msfo-soft.ru/msfo/forum/user/38517/</a> У каждой забавы средства притязания по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система засчитает каждую ставку. В рулетке и покере устроить это намного сложнее. Именно поэтому так важно внимательно разбирать обстоятельства получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в любой ирге, то новенькие попросту «спустят приз на ветер».
1×slots скачать на айфон
Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и более. Когда игроку полагается большое фриспинов, администрация возможность разбивать их начисление на количество дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах акции. В неких онлайн казино для получения бездепозитных призов не довольно просто зарегистрироваться на сайте клуба и подтвердить свои контактные данные. Дополнительно потребуется активация промокода.Зарегистрируйтесь. Для регистрации почаще всего довольно установить свой номер аппарата и почтовый адресок, после чего установить приобретенный код из СМС. Возможно, потребуется указать промокод. В правилах промоакции будет написано, где его бы вводить. Иногда это надо делать при регистрации, иногда — теснее в сотворения собственного кабинета, на отдельной страничке. <a href=https://pipewiki.org/wiki/index.php/%C3%90%C5%BE%C3%90%C2%B1%C3%91%C6%92%C3%91%E2%80%A1%C3%90%C2%B5%C3%90%C2%BD%C3%90%C2%B8%C3%90%C2%B5_%C3%90%C3%90%C2%B0_%C3%90%C5%B8%C3%91%E2%82%AC%C3%90%C2%B0%C3%90%C2%B2%C3%90%C2%B0_%C3%90%C3%A2%E2%82%AC%E2%84%A2%C3%90%C2%BB%C3%90%C2%B0%C3%90%C2%B4%C3%90%C2%B8%C2%B2%C3%90%C2%BE%C3%91%C3%91%E2%80%9A%C3%90%C2%BE%C3%90%C2%BA>https://pipewiki.org/wiki/index.php/%C3%90%C5%BE%C3%90%C2%B1%C3%91%C6%92%C3%91%E2%80%A1%C3%90%C2%B5%C3%90%C2%BD%C3%90%C2%B8%C3%90%C2%B5_%C3%90%C3%90%C2%B0_%C3%90%C5%B8%C3%91%E2%82%AC%C3%90%C2%B0%C3%90%C2%B2%C3%90%C2%B0_%C3%90%C3%A2%E2%82%AC%E2%84%A2%C3%90%C2%BB%C3%90%C2%B0%C3%90%C2%B4%C3%90%C2%B8%C2%B2%C3%90%C2%BE%C3%91%C3%91%E2%80%9A%C3%90%C2%BE%C3%90%C2%BA</a> Фриспины – безвозмездные вращения с фиксированной ставкой, коие возможно использовать в определенных игровых автоматах. 1×slots официальный регистрация Размер призов чаще всего чисто символический и не выше 50 руб. Приятно, но ощутимым бустом деле ли станет.
<b>Смотреть еще похожие новости:</b>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=133554&pid=441120#pid441120>1×slots регистрация 1×slotscasino09k online</a>
<a href=https://www.xn–72c9aa5escud2b.com/webboard/index.php/topic,528279.new.html#new>1 x slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Онлайн гемблинг развивается с любым днем все больше и больше, новые бренды создаются не по денькам а по часам. Новые интернет казино проделывают вступительные акции для игроков, чтобы, чтобы что бы зарекомендовать себя, и тем наиболее предлагают бездепозитные призы за регистрацию, что бы не пропустить эту возможность — как пользоваться новым бездепом, советуем посещать наш вебсайт как возможно почаще, самое лакомое и свежие несомненно добавляться в этом же списке. Простая процедура получения бездепозитного приза, кот-ая займет менее 2-х минут. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные.
#5374 Charlesgunnyhttp://filmkachat.ru
сайт 1× slots casino
С иной стороны, гораздо проще забрать бездепозитные фриспины за регистрацию в казино и прямо момент начать вращать барабаны в лучших слотах. Главная особенность спинов что, нет, что они предназначены для лучших автоматов. Удастся не только пройти дополнительные раунды, но и прирастить сумму выигрыша, заработать респины прочие внутриигровые подарки. <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> <a href=http://prsync.com/archicgi/how-home-entertainment-flyarchitecture-transforms-modern-living-spaces-4518898/>http://prsync.com/archicgi/how-home-entertainment-flyarchitecture-transforms-modern-living-spaces-4518898/</a> На условиях отыгрыша безвозмездных бонусов идет остановиться подробнее. С ними связаны аспекты, коие нельзя забыть без внимания. casino 1×slot <a href=https://www.mybbaddons.com/board/user-71633.html>https://www.mybbaddons.com/board/user-71633.html</a> Этот образ бонуса несомненно добавлен на Ваш аккаунт в успешной процедуры регистрации с использованием номера телефонного. Если избрать иной метод создания учетной записи, бездеп не будет добавлен на Ваш аккаунт.Бездепы обыкновенно предлагают с отыгрышем — быстро исключить выигранные свои невозможно. Перевод средств со счета несомненно возможен в того, как юзер выполнит все притязания казино, а сумма не может превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, в течение коих клиент вправе воспользоваться предложением. Обычно они не превосходят нескольких дней после активации.
1×slots официальный сайт зеркало
Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды присутствуют на данной страничке. Посетитель имеет оценить условия получения и начать играть на деньги без внесения депо. При этом игроку важно осознавать, на каких условиях и какими методами возможность вывести приобретенный выигрыш. Для сего необходимо оценить список подключенных платежных систем. 1хслот 1хслотс регистрация перейти на 1×slots <a href=http://kunigami-minibas.jp/userinfo.php?uid=17682#>http://kunigami-minibas.jp/userinfo.php?uid=17682#</a> Возможность сыграть вспомогательное соревнование (а от и некоторое) совершенно даром, а выигрыш, к, поступает на счёт игрока.В большинстве заведений устроить это возможно по адресу электронной почты, по номеру телефона, через социальную сеть либо гугл-аккаунт. 1×slots рабочее зеркало на сегодня Постарайтесь отыграть вейджер, дабы была возможность забыть заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электронной кошелёк, карту, телефон.
1×slots регистрация 1×slotscasino 56 online
Зарегистрироваться в казино по особой ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефона и электронную почту). Для подтверждения номера телефона нужно в личном профиле показать собственный номер и нажать кнопку „Подтвердить номер телефонного“, далее Вы получите sms-сообщение с кодом, который нужно установить в соответствующее поле. Для доказательства электронной почты, перебежать по активной ссылке в письме от казино.Заработать на бездепозитных призах за регистрацию в казино возможность каждый пользователь, достигший совершеннолетия. <a href=http://feki-php.8u.cz/profile.php?lookup=11552>http://feki-php.8u.cz/profile.php?lookup=11552</a> 1×slot регистрация Мы делаем акцент на главных положениях правил, рассказываем о территориальных ограничениях и вкратце информируем о других промоакциях обговариваемого казино.Для верификации аккаунта надо(надобно) дать спецам технической поддержки отсканированную копию паспорта и счета за коммунальные услуги, а фотку банковской карты либо экрана страницы электрического кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для доказательства личности.
1хслот официальный сайт зеркало
Вообще перейдя в казино — верховодила схожи в получении бездепозитных призов, в стандартные правила заходит: доказать эл. Почту и телефон, наполнить свой собственный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ. <a href=https://rolivka.online/forum/showthread.php?tid=34059>1×слотс казино</a> Ещё одно распространённое акционное предложение – симпатичный презент с неблаговидными требованиями. К образцу, клуб обещает $100 виде бездепа, но с вейджером х80 или х100. Отыграть подобный вейджер фактически невероятно и поэтому превосходнее концентрироваться на больше заманчивых акциях.При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток. 1×slots рабочее зеркало <a href=https://ads.kazakh-zerno.net/user/Jasperfub/>https://ads.kazakh-zerno.net/user/Jasperfub/</a>
1×slots промокод при регистрации
Помните, что всевозможные нарушения управлял сведут на нет ваши старания, и вы всего останетесь без начисленного вам безвозмездного приза. Всегда изучайте правила начисления и условия вейджера. По хоть вопросам, на которые вы возможности других найти ответы, обращайтесь за разъяснениям и саппорт. Если ординарными текстами, бездепы – это определённая сумма средств либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать презенты. Но есть кое-какие нюансы. Существуют игорные жилища, которые перед тем как начислить бонусы требуют привязать телефон, предоставить копии документов. <a href=https://forum.expert-watch.com/index.php?action=profile;u=186426>https://forum.expert-watch.com/index.php?action=profile;u=186426</a> Иногда у посетителей вебсайта имеют возникнуть трудности, задачи, препядствия при активации приобретенного промо-кода. В таких случаях, нужно адресоваться за подмогою в саппорта «Support». Для получения ответа, обязательно указывается конкретная причина воззвания и подтверждается информация дополнительными скриншотами. Если сформировалась неоднозначная обстановка, постоянно можно адресоваться к главному регулятору либо контролирующему органу, выдавшему данному заведению лицензионный документ. 1×slots casino регистрация 1×slots review live Бесплатный приз – кредиты, коие онлайн-казино начислит посетителю, не принуждая его пополнять игровой счет.Вознаграждения за получение VIP-статуса ? начисляются в программы преданности при достижении очередного уровня или выдаются персонально менеджерами службы.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.topboard.org/threads/1×slots-kazino-zerkalo.599731/>1хслотс казино зеркало</a>
<a href=https://www.xn–72c9aa5escud2b.com/webboard/index.php/topic,525713.new.html#new>1×slots зеркало сайта</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В современность довольно просто получить бонус за регистрацию в казино. Практически каждый игорный дом с радостью начислит деньги либо безвозмездные вращения. Многие гэмблеры пользуются этим и не стыдятся регистрироваться в каждом клубе с прибыльными условиями. Кстати, это отличная возможность выработать победную стратегию и сорвать джекпот. Следует выделить, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам либо с конкретным кодом.
#5375 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Антропова Валентина Викторовна лучшая казино <a href=https://www.ossetia.tv/>kent casino регистрация</a> Валентина Матвиенко порно kent casino <a href=https://th-royalgclub.com/>ешь казино</a> bet casino casino зеркало сегодня официальные букмекерские конторы пин up casino порно с Захарова Мария Владимировна порно с Арина и Дина Аверины, гимнастки казино пину
DiskiPlus up casino DiskiPlus порно с Евгения Медведева <a href=https://diskiplus.ru>DiskiPlus pin up casino зеркало</a> DiskiPlus Елизавета Боярская DiskiPlus porno Мария Шарапова <a href=https://diskiplus.ru/>DiskiPlus Кузнецова Анна Юрьевна порно</a> DiskiPlus 1×bet casino DiskiPlus кент казино DiskiPlus порно с Никита Кучеров (хоккей) DiskiPlus 1×bet регистрация DiskiPlus порно с Афонина Марина Игоревна DiskiPlus 1×bet зеркало на сегодня DiskiPlus порно с Варвара Субботина
#5376 Charlesgunnyhttp://filmkachat.ru
1× слот зеркало
Вейджер не более х30–35 является приемлемым. Опытные игроки заявляют, что с таким вейджером реально остаться в плюсе, если правильно подойти к выбору игрового аппарата. <a href=http://filmkachat.ru/>1×slots зеркало регистрация в 1×slots casino</a> Условия имеют разниться друг от друга. Но подобный бонус может быть применен лишь для игрового процесса – приобретенные на счет финансы до как, как станут отыграны, вывести невозможно. <a href=https://imageevent.com/lexxeagle/qwerty>https://imageevent.com/lexxeagle/qwerty</a> Исходя из этого, просто не присутствует разумных причин махнуть рукою на получение такого приза при регистрации. И, что, на подобный безвозмездной основе у вас есть шансы выиграть деньги и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные призы, называют безвозмездными интернет платформами для игр. 1хслотс зеркало <a href=http://antarestorg.ru/bitrix/rk.php?goto=http://browart.ru/bitrix/redirect.php?goto=http://jitsys.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/uWDuVAOxW1r>http://antarestorg.ru/bitrix/rk.php?goto=http://browart.ru/bitrix/redirect.php?goto=http://jitsys.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/uWDuVAOxW1r</a> Максимальная ставка ? устанавливается в денежной счета и ограничивает объем ставки за один спин. В случае ее превышения бонус может быть аннулирован. Также в правилах может содержаться запрет на размещение ставок определенного вида, примеру, по одинаковым шансам в рулетке (другими, на чет либо нечет, красноватое либо темное и т.д.).
1× slots зеркало
Условия вывода выигрыша. В неких заведениях для успешного вывода с бездепозитного бонуса довольно пополнения баланса и подтверждения личности. В иных же клубах, необходимо количество раз прокрутить свой депозит. 1×slos регистрация в 1×slots casino Бездепозитные призы за регистрацию считаются одним из самых модных методов привлечения свежих игроков в онлайн-казино, поэтому собственно они деют игрокам возможность опробовать казино, неподражаемо игровые автоматы, и вполне, выиграть настоящие деньги.Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную процедуру активации приза без депо. Внимательно прочитайте до конца. Многие новички делают оплошности на шаге регистрации и потому возможности получить презент. <a href=http://suhinfo.ru/index.php?title=настоящая_кровь_скачать>http://suhinfo.ru/index.php?title=настоящая_кровь_скачать</a> 1×slots быструю регистрацию а также мгновенное Размер ставки для забавы по бездепозитному бонусу (окончательно же, если, тогда,, когда он представлен повторяющий бонусных валютных средств) часто ниже, чем при этой на депо. Ограничение несомненно действовать до момента отыгрыша приза.
1 x slots
Также учтите, собственно некоторые игровые платформы сузивают список государств, коие готовы получить предложенный бездепозитный приз за регистрацию. К образцу, существуют онлайн-заведения, выдающие подобные призы лишь обитателям определенных государств. К примеру, онлайн казино 777 Оригинал дает бездепозитный приз лишь игрокам из России и стран СНГ. Или напротив, снабжают вознаграждением всех, не жителей некоторых государств (следует этого, идет внимательно изучать список, дабы потом не возникло практически вопросов и претензий).Автоматическая активация первый самой удобной, но ручной способ имеет перед ней превосходства. Прежде чем использовать вознаграждение от казино, стоит заблаговременно найти, сколько времени потребуется на исполненье всех критерий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала действия приза. <a href=http://fumankong1.cc/home.php?mod=space&uid=581967>http://fumankong1.cc/home.php?mod=space&uid=581967</a> Выигрыши с бонусов без вложений практически привязаны к притязанию по ставкам и имеют быть обналичены только в исполненья этих притязаний.Первый возникающий вопрос, это, чего выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают свежих игроков. Последним проще начать забаву на средства с дара за регистрацию. Им не нужно пополнять баланс и расходовать собственные средства. Новички получают бесплатные спины либо средства на счёт. С их поддержкою знакомятся с игровым ходом, крутят слоты и делают ставки в рулетке. 1хслотс официальный сайт зеркало
1× slots casino официальный сайт
<a href=https://radios-collector.com/viewtopic.php?f=7&t=67949>1×slots подтвердит вашу регистрацию если говорить</a> Помните, собственно всевозможные нарушения управлял сведут на нет ваши усилия, и вы наверняка останетесь без начисленного вам дарового бонуса. Всегда изучайте верховодила начисления и обстоятельства вейджера. По любым вопросам, на которые вы не других отыскать ответы, обращайтесь за разъяснениям и саппорт. 1×slots зеркало сайта <a href=https://djchs.co.kr/bbs/board.php?bo_table=qna&wr_id=298376>https://djchs.co.kr/bbs/board.php?bo_table=qna&wr_id=298376</a> Наш перечень включает в себя наихорошие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по принципиальным характеристикам:Далее потребуется отыграть вагер и вывести выигрыш. Игрокам без опыта крупно повезло, возможность получить десятки презентов за одну регистрацию. Если не смогли получить Бездепозитный бонус, не беспокойтесь. Обратитесь в интернет чат, оператор поможет исправить.
1хслотс официальный сайт зеркало
К сожалению, нет. Почти все казино, требуют внесение желая бы 1-го минимального депозита для вывода выигрыша с бездепозитного бонуса. Также учитывайте, что вывести деньги разрешено только на ту платежную систему, с коей был изготовлен депозит. Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы которые возникают у новичков.Вейджер менее х30–35 считается приемлемым. Опытные игроки заявляют, что с этим вейджером реально остаться в плюсе, случае верно подойти к выбору игрового аппарата. <a href=http://gticlub.lv/user/Oscarrix/>http://gticlub.lv/user/Oscarrix/</a> 1× slots casino официальный сайт
<b>Смотреть еще похожие новости:</b>
<a href=http://www.ihavethepussy.com/de/threads/233804–1×slots-%D0%A0%D1%95%D0%A1%E2%80%9E%D0%A0%D1%91%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A0%C2%B0%D0%A0%C2%BB%D0%A1%D0%8A%D0%A0%D0%85%D0%A1%E2%80%B9%D0%A0%E2%84%96-%D0%A0%C2%B7%D0%A0%C2%B5%D0%A1%D0%82%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%BB%D0%A0%D1%95-%D0%A1%D0%82%D0%A0%C2%B0%D0%A0%C2%B1%D0%A0%D1%95%D0%A1%E2%80%A1%D0%A0%C2%B5%D0%A0%C2%B5?p=252083#post252083>1×slots официальный зеркало рабочее</a>
<a href=https://nztw.org/forum.php?mod=viewthread&tid=570766&pid=904873&page=1&extra=#pid904873>1×slots официальный сайт скачать на айфон</a>
<a href=http://www.arka-bahce.org/forum/showthread.php?p=776516#post776516>1хлот регистрация в 1×slots casino</a>
<a href=https://australiantravelforum.com/Upload/showthread.php?tid=148131>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для получения предоставленных бонусов для пригодиться — ПК либо мобильное устройство, и остальное дело за небольшим.
#5377 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино сочи 1×bet на сегодня <a href=https://vestnik-jurnal.com/>макао казино</a> 1×bet слоты официальный сайт порно с Елена Никитина, скелетонистка <a href=https://www.ossetia.tv/>порно с Абрамченко Виктория Валериевна</a> скачать сайт букмекерской конторы какие казино casino betting pin up casino top top kometa casino 7k casino зеркало рабочее kent casino
DiskiPlus 1×bet официальный 1×bet xyz DiskiPlus макао казино <a href=https://diskiplus.ru>DiskiPlus pin up casino</a> DiskiPlus казино на деньги DiskiPlus порно с Ирина Сидоркова <a href=https://diskiplus.ru>DiskiPlus пин ап casino pin</a> DiskiPlus porno Юлия Канакина, скелетонистка DiskiPlus 1×bet сайт DiskiPlus зеркала официальных сайтов казино DiskiPlus сайт pin up casino DiskiPlus винлайн букмекерская контора официальный DiskiPlus сайт 1×bet слоты DiskiPlus демо казино
#5378 Charlesgunnyhttp://filmkachat.ru
1х слот регистрация в 1×slots casino
При игре на бонусные свои воспрещается играть в игровые автоматы с прогрессивным джекпотом и игры из радела exist casino. Кроме такого, кое-какие казино выделяют бездеп на один или количество конкретных слотов, и в других забавах Вы не сможете на их играть.Шаг 5. Использование и отыгрыш. Бездеп обязан быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. <a href=http://filmkachat.ru/>1 x slots casino</a> Oтыгpaть бонус с обозначенным вeйджepом, чтобы необходимо сдeлaть cтaвoк нa cумму, превышающую размер бонуса в несколько один. <a href=https://forum.highlite.com/showthread.php?tid=1881>https://forum.highlite.com/showthread.php?tid=1881</a> Вы не в коем случае ни чем рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической забавы на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, выучится регулировать изменять ставки и линии, исследовать бонусные игры и их выигрышные композиции, да в просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные свои, коие возможно отыграть и исключить, не просто на демо счет, тем наиболее адреналин в крови еще больше повысится а пульс забьется с нередким ритмом! 1×slots зеркало которую указывали при регистрации кстати <a href=https://baskino.zone/user/Jamesprale/>https://baskino.zone/user/Jamesprale/</a> На бонусные начисления все быть установлены дополнительные ограничения, коие Вы не приняли при отыгрыше. Пока бонус всецело не отыгран — деньги из казино не выводятся.Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в обязательном порядке необходимо восполнить счет в казино. Для депозитных призов, эта процедура не необходима, например как депозит теснее сделан.
1×slots сайт
1× slots официальный <a href=http://gold-sail.com.ua/bitrix/redirect.php?goto=http://metalgorstal.ru/bitrix/redirect.php?goto=http://vclis.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/-OelgdOCa4L>http://gold-sail.com.ua/bitrix/redirect.php?goto=http://metalgorstal.ru/bitrix/redirect.php?goto=http://vclis.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/-OelgdOCa4L</a> Частенько новички не понимают, как активировать презенты либо вывести первый выигрыш. Для подобных случаев наша команда описала основные термины – что такое фриспины, вейджер, как его отыграть, чего необходимо проходить верификацию.В разделе с призами активировать собственный презент. Найти забавы, для коих предусмотрено одобрение и применять бонус по предназначению. 1×slots регистрация то дальше необходимо пройти
1хслотс мобильная версия зеркало
В лицензионных бездепозитных казино выступать в азартные забавы вправду безопасно. Наличие лицензии подтверждает что, этот факт, собственно клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP.Шаг 5. Использование и отыгрыш. Бездеп обязан быть использован в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера. <a href=http://zeren.freeoda.com/member.php?action=profile&uid=7416>http://zeren.freeoda.com/member.php?action=profile&uid=7416</a> Прежде всего, не запамятовывайте регулярно заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом оценивают наиболее интересные предложения основных игорных порталов. 1×слот регистрация в 1×slots casino Денежные свои. Третий приз за регистрацию без депо – наличные. К сожалению, лишь знаменитые и пользующиеся клубы шансы уяснить средства в рублях или долларах. С их помощью появится насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед данным нужно исполнение конкретных условий.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
<a href=https://www.digicube.de/forum/threads/504799–1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5?p=706924#post706924>1×slots официальный сайт зеркало рабочее</a> Благодаря программке лояльности от игорного заведения, возможно брать хороший старт и без дополнительных инвестициям запустить видеослоты. Кроме такого, возможно рассчитывать на реальную удачу и получить, без инвестиции личных финансов, великой выигрыш.Стоит обозначить(означить), что бездепозитный приз выдается только совершеннолетним новичкам, которые, же, шансы пригласить собственных приятелей и знакомых, кроме претендующих на поощрительную программку преданности. Подобная разработка была среди соперничающих онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению своей популярности, методом привлечения свежих игроков. Бонусы – это уникальный шанс для вероятных участников забавы, коие шансы опробовать софт покер рума и увериться, будут ли они в него выступать или нет. Новый игрок попробует свои силы с настоящими оппонентами в казино. 1×slots casino зеркало рабочее <a href=https://maps.google.ro/url?sa=t&url=https://doctorlazuta.by/>https://maps.google.ro/url?sa=t&url=https://doctorlazuta.by/</a> Казино выводит средства только на ту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного приза, Вам сначала необходимо восполнить счет. В неких клубах узкий перечень способов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет непосредственно с этих платежных методов, которые доступны для вывода.
1хслотс 1хслотс регистрация перейти на 1×slots
Только выполнив все условия отыгрыша и дождавшись завершения проверки аккаунта, Вы можете оформить заявку на вывод средств и получить средства деньги. <a href=http://bneinoach.ru/forum/user/98705/>http://bneinoach.ru/forum/user/98705/</a> Поспешите арестовать бездепозитные бонусы за регистрацию в казино из представленного перечня. Все платформы не только ведут законную работа, хотя и порадуют добросовестными плодами забавы, высокой отдачей, прыткими выплатами. 1 х слотс зеркало При регистрации идет указывать лишь достоверную информацию. Когда учетная запись будет активна, появится доступ в Личный офис. В нем можно избрать валюту, установить промокод и узнать доскональные верховодила получения и отыгрыша бездепа. Краткая информация об промоакции нередко присутствует непосредственно на регистрационной форме.
<b>Смотреть еще похожие новости:</b>
<a href=https://minifishtank.net/forum/showthread.php?tid=763>1×slots бонус за регистрацию</a>
<a href=http://lynnniman.org/index.php?/topic/778–1×slots-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE/>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие появляются у новичков.
#5379 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
7k casino скачать casino pin официальный <a href=https://slon-ru.com/>porno Илона Маркова, хоккеистка</a> казино фильм сайт казино зеркало <a href=https://th-royalgclub.com/>винлайн букмекерская контора официальный</a> порно с Виктория Синицина, фигуристка игры казино casino daddy cometa casino букмекерские контора ап порно с Виктория Синицина, фигуристка ramenbet casino
DiskiPlus 7k casino зеркало DiskiPlus casino зеркало сегодня <a href=https://diskiplus.ru>DiskiPlus порно с Алина Загитова, фигуристка</a> DiskiPlus porno Дарья Клишина DiskiPlus букмекерская контора на андроид <a href=https://www.diskiplus.ru/>DiskiPlus пинап казино</a> DiskiPlus пин ап casino DiskiPlus казино рулетка DiskiPlus рабочие зеркала казино DiskiPlus казино ставка DiskiPlus porno Игорь Акинфеев (футбол) DiskiPlus casino приложения DiskiPlus порно с Карен Хачанов (теннис)
#5380 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия скачать
Для как, дабы отыграть сумму вашего бездепозитного приза надо(надобно) выполнить условия вейджера. Очень часто фриспины даются на определенные слоты (book of ra, book of dead, book of sun), подбирайте слот себя по, они все довольно красивые и высококачественные. Бездепозитные бонус имеет быть денежным например и повторяющий фриспинов на слоты <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> Рассмотрим на образце: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских рублей. В условиях промоакции предписано, что вейджер бездепозитного бонуса х20. Поэтому, дабы отыграть бонус, игроку будет необходимо устроить ставок на 35*20=700 руб. <a href=https://www.themoviedb.org/u/%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%B0%D0%B2%D1%82%D0%BE-%D1%81%D1%80%D0%BE%D1%87%D0%BD%D0%BE>https://www.themoviedb.org/u/%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%B0%D0%B2%D1%82%D0%BE-%D1%81%D1%80%D0%BE%D1%87%D0%BD%D0%BE</a> 1×slots официальный зеркало <a href=http://zlatremont.ru/index.php?subaction=userinfo&user=moaningdancer16>http://zlatremont.ru/index.php?subaction=userinfo&user=moaningdancer16</a>
1×slot регистрация
Процесс доказательства личности возможность взятьвдолг(взятьвзаймы) от 1-го денька до недели. Если клиент разрешил какую-либо ошибку при заполнении паспортных данных, то ему идет обратиться с проблемой в службу онлайн-казино. 1×slots регистрация то дальше необходимо пройти Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 долларов. Если выдаются фриспины, их число изредка превышает нескольких 10-ов безвозмездных вращений. <a href=https://biomolecula.ru/authors/31944>https://biomolecula.ru/authors/31944</a> Выбрать казино с бездепозитным бонусом. У нас на веб-сайте представлен список наилучших интернет казино, коие предлагают своим игрокам щедрые бонусы за регистрацию. 1×slot зеркало рабочее этих способов предполагает регистрацию Онлайн-казино кропотливо продумывают бонусные условия, которые нужно выучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и ограничения.Выигрыши с призов без инвестициям всегда привязаны к притязанию по ставкам и имеют быть обналичены лишь в выполнения этих притязаний.
1×slots акции
В лицензионных бездепозитных казино играть в азартные игры вправду безопасно. Наличие лицензии подтверждает тот факт, собственно клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP. <a href=http://kbszw.com/home.php?mod=space&uid=44109>http://kbszw.com/home.php?mod=space&uid=44109</a> Бонусы без депо при регистрации считаются самыми привлекательными как для опытнейших игроков, например для и начинающих. Получив такое вознаграждение, клиент может выступать на настоящие деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные призы в интернет-казино Рунета, а условия их активации и выигрыша. 1хслотс мобильная версия зеркало Представьте момент, когда при ставке в 10 руб. Вы получите сходственное умножение. Миллион рублей за одно вращение, собственно абсолютно возможно. Поэтому вопрос, сколько можно выиграть остаётся не. Предлагаем проверить других. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный приз и проверяйте удачу в деле. Разумеется, исключить деньги сложно. Однако шансы есть у всех.Чаще всего, модные сервисы, такие как MoneyBookers и WebMoney, еще MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно обязательное правило. Финансовые свои выводятся только спустя что, эту платежную систему, коей огромный для пополнения депозита. Если же игрок получил бездепозитный покерный приз, требуется восполнить счет на минимальную сумму, кот-ая составляет обычно 10 долларов.
1хслот официальный сайт зеркало
<a href=https://www.donchillin.com/space-uid-382497.html>1×slots зеркало подтвердит вашу регистрацию если говорить</a> У нас на сайте Вы отыщите список призов без депозита в проверенных казино и подробную информацию о том как их получить и применять.Онлайн гемблинг развивается с любым деньком все больше и больше, новые бренды создаются не по денькам а по часам. Новые интернет казино делают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и тем самым предлагают бездепозитные бонусы за регистрацию, собственно бы не упустить такую вероятность — как пользоваться свежим бездепом, советуем навещать наш сайт как можно почаще, самое лакомое и новые будет добавляться в данном же перечне. Фриспины. Бесплатные вращения предназначены для применения в видео-слотах. Внимательно читайте обстоятельства – они часто выдаются для неких машин. В зависимости от клуба возможность создавать конкретное число ставок. Кстати, современные игорные дома выделяют возможность заводить «одноруких злодеев». 1×slots casino регистрация на сайте <a href=https://www.one2bay.de/forum/member.php?action=profile&uid=26898>https://www.one2bay.de/forum/member.php?action=profile&uid=26898</a> B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.На условиях отыгрыша безвозмездных призов по тормознуть подробнее. С ними связаны аспекты, коие невозможно оставить без внимания.
1хлот регистрация в 1×slots casino
Классическая разновидность бонуса за творение аккаунта. Его превосходство заключается что, что заказчик может самостоятельно подбирать аппараты и создавать ставки в них. Иногда перечень игровых автоматов ограничен оператором, хотя все точно это какого-либо, чем один-единственный дешевый слот, как если, тогда, с использованием фриспинов.Бонусы без депо при регистрации числятся самыми привлекательными как для опытнейших игроков, например для и новичков. Получив такое вознаграждение, заказчик может играть на реальные средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а также обстоятельства их активации и выигрыша. Благодаря программке лояльности от игорного заведения, можно взять превосходный старт и без дополнительных инвестициям запустить видеослоты. Кроме того, возможно рассчитывать на реальную фортуну и получить, без вложения собственных финансов, великий выигрыш.Иногда для получения призов нужно спутаться с представителями службы. Удобнее всего с ними собеседовать в онлайн-сате, желая иногда довольно запроса по электронной почте. <a href=https://transcribe.frick.org/wiki/%d0%a4%d1%80%d0%b0%d0%bd%d1%88%d0%b8%d0%b7%d1%8b_%d0%90%d0%bf%d1%82%d0%b5%d0%ba_%d0%92_%d0%a0%d0%be%d1%81%d1%81%d0%b8%d0%b8:_%d0%a2%d1%80%d0%b5%d0%bd%d0%b4%d1%8b_%d0%98_%d0%9f%d1%80%d0%be%d0%b3%d0%bd%d0%be%d0%b7%d1%8b_%d0%9d%d0%b0_2024_%d0%93%d0%be%d0%b4>https://transcribe.frick.org/wiki/%d0%a4%d1%80%d0%b0%d0%bd%d1%88%d0%b8%d0%b7%d1%8b_%d0%90%d0%bf%d1%82%d0%b5%d0%ba_%d0%92_%d0%a0%d0%be%d1%81%d1%81%d0%b8%d0%b8:_%d0%a2%d1%80%d0%b5%d0%bd%d0%b4%d1%8b_%d0%98_%d0%9f%d1%80%d0%be%d0%b3%d0%bd%d0%be%d0%b7%d1%8b_%d0%9d%d0%b0_2024_%d0%93%d0%be%d0%b4</a> зеркала 1×slots Бездепозитный бонус казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в этом и заключается главное отличие.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=54783>1хлот регистрация в 1×slots casino</a>
<a href=https://www.findaspermdonor.com/memberlist.php?mode=viewprofile&u=13618>1×slots зеркало регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Помните, что всевозможные нарушения управлял сведут на нет ваши старания, и вы всего останетесь без начисленного вам безвозмездного приза. Всегда изучайте правила начисления и условия вейджера. По хоть вопросам, на которые вы возможности других найти ответы, обращайтесь за разъяснениям и саппорт.
#5381 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
up букмекерская контора скачать букмекерскую контору на андроид <a href=https://www.ossetia.tv/>casino pin официальный</a> 1×bet вход casino зеркало сегодня <a href=https://kompromat1.online/>пин ап букмекерская контора</a> казино пину порно с Дронова Александра Викторовна porno Алена Михайлова casino официальный зеркало kometa casino букмекерские контора ап 1×bet casino
DiskiPlus casino вход DiskiPlus порно с Константин Тюкавин (футбол) <a href=https://diskiplus.ru/>DiskiPlus казино играть</a> DiskiPlus ramenbet casino DiskiPlus сайт казино вход <a href=https://www.diskiplus.ru/>DiskiPlus почему в казино нет часов</a> DiskiPlus casino актуальное зеркало DiskiPlus почему в казино нет часов DiskiPlus букмекерская контора на андроид DiskiPlus 1×bet слоты 1×bet top DiskiPlus мелбет букмекерская контора DiskiPlus Елизавета Боярская DiskiPlus 1×slots casino
#5382 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия скачать
Казино выводит деньги только на что, эту платежную систему, с котрой был сделан депо. То есть, для вывода бездепозитного бонуса, Вам поначалу нужно восполнить счет. В некоторых клубах ограниченный список методов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с этих платежных способов, коие доступны для вывода.Такие поощрения позволяют бесплатно протестировать новое казино, разобраться с игровым процессом интернет слотов, заработать и исключить небольшую сумму денег. <a href=http://filmkachat.ru/>1×slots регистрация на 1хслотс</a> Активация происходит с помощью промокодов, которые вводятся в личном офисе последствии регистрации. Среди спецпредложений в списке Casino.ru находятся эксклюзивные промокоды, коие доступны лишь посетителям портала. Другие способы начисления средств ? автоматическая активация сразу в творения аккаунта и получение презента по запросу в службу технической помощи. <a href=https://app.roll20.net/users/15345358/vykup-avariinykh-avto-p>https://app.roll20.net/users/15345358/vykup-avariinykh-avto-p</a> В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с безвозмездных вращений. Прибыль, коию Вы заработаете на таком бездепе возможно назначать на вывод без какого либо отыгрыша. 1 хслот регистрация в 1×slots casino <a href=http://xn----7sbgabarzt9afbtggek.xn–p1ai/index.php?subaction=userinfo&user=skillfulrainbow>http://xn----7sbgabarzt9afbtggek.xn–p1ai/index.php?subaction=userinfo&user=skillfulrainbow</a> Процесс доказательства личности может взятьвдолг(взятьвзаймы) от 1-го денька до недели. Если заказчик допустил нибудь оплошность при заполнении паспортных данных, то ему идет обратиться с проблемой в службу поддержки онлайн-казино.
1×slots казино зеркало
1хслот официальный сайт зеркало В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и в случае спорных ситуаций нет способности куда-то посетовать и доказать собственную правоту. <a href=https://www.sitejabber.com/users/user8792>https://www.sitejabber.com/users/user8792</a> 1хслот зеркало сайта
зеркала 1×slots
Так собственно основное различие презента на депозит от бездепа – неотъемлемое пополнение счёта. Вы сможете внести депозит и преувеличить стартовый капитал либо арестовать бездеп и при не придётся рисковать собственными сбережениями. Поспешите выполнить простые притязания, и администрация ресурса начислит щедрое поощрение!Это также благотворительные деньги, коие поступают на аккаунты новоиспеченных игры последствии регистрирования. А особенность этих призов произведено том,, собственно обретенные финансы обязательно стопам применять в продолжении назначенного времени. Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам запрещено начислять призы посетителям, не имеющим валютных средств на счете. Мы предлагаем рассмотреть актуальные призы онлайн-казино с лицензией, коие соблюдают законодательство РБ. <a href=http://ledyardmachine.com/forum/User-ForsedropOl>http://ledyardmachine.com/forum/User-ForsedropOl</a> 1×slots актуальное зеркало Подтвердите регистрацию, чтобы активировать Бездепозитный приз с выводом, требуется заполнить собственный профиль. Заполните пустые поля настоящими данными о для.К образцу, игроку выдаются бесплатные свои в заведении в размере пятидесяти либо 100 долларов (вейджер на которые сочиняет 100х). То есть, любому новоприбывшему игроку выскакивает манящая картинка, кот-ая сулит выплату всех зачисленных фирмой средств. Не стоит обращать внимания на казино бонус за регистрацию без депозита с сильно большой или довольно малеханькой суммой бонусов, поэтому собственно, в тщательно изучив все обстоятельства, здесь скорее, несомненно какой-то подкол.
1× slots casino официальный сайт
3. Подтвердить данные. В зависимости от клуба, нужно привязать телефон или почту, показать персональную информацию;Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 поболее. Когда игроку надеется количество фриспинов, администрация имеет бить3 их начисление на некоторое дней. Бесплатные вращения предоставляются для определенного слота, кот-ый указывается в правилах промоакции. <a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>казино 1×slots</a> 1×slots рабочее зеркало на сегодня <a href=https://xn----7sbarohhk4a0dxb3c.xn–p1ai/user/Glennnon/>https://xn----7sbarohhk4a0dxb3c.xn–p1ai/user/Glennnon/</a> Отказ в прохождении верификации. Если заказчик не желает или возможности дать документы, подтверждающие его личность, профиль несомненно заблокирован вместе со всеми бонусными начислениями.Наш перечень содержит наихорошие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по главным характеристикам:
зеркло казино 1×slots
Представьте момент, когда при ставке в 10 рублей Вы получите сходственное умножение. Миллион руб. За одно вращение, собственно вполне возможно. Поэтому вопрос, сколько можно выиграть остаётся открытым. Предлагаем проверить помощи. Регистрируйтесь в одном или нескольких онлайн казино, получайте Бездепозитный приз и проверяйте удачу в деле. Разумеется, вывести средства не так просто. Однако шансы есть у всех. <a href=http://istinastroitelstva.xyz/index.php?subaction=userinfo&user=puffychief84>http://istinastroitelstva.xyz/index.php?subaction=userinfo&user=puffychief84</a> Таким образом онлайн казино получает потенциального игрока. Возможно в будущем либо истинном он захотит сыграть на свои деньги. Так трудятся бездепозитные призы в интернет казино. Здесь отлично подходит выражение, бесплатные сыр посещает лишь в мышеловке. Начинающие игроки все не осознавать опасность азарта. Однако течением понимания становится больше. Это тема для отдельного обсуждения. 1×slots официальный сайт, скачать Ещё одно распространённое акционное предложение – симпатичный презент с сомнительными притязаниями. К образцу, клуб сулит $100 виде бездепа, хотя с вейджером х80 или х100. Отыграть подобный вейджер фактически нереально и поэтому чем концентрироваться на более занимательных промоакциях.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.kuyoux.com/space-uid-35770.html>1×slots casino регистрация на сайте</a>
<a href=https://forum.oursson.ru/memberlist.php?mode=viewprofile&u=1347>1×slots регистрацию более популярный вариант это</a>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/8085/#comment-337997>казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чаще всего, пользующиеся сервисы, эти как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно неотъемлемое управляло. Финансовые свои выводятся лишь через ту платежную систему, коей огромной для пополнения депо. Если же игрок получил бездепозитный покерный приз, потребуется восполнить счет на минимальную сумму, которая сочиняет обычно десять $.
#5383 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
рабочее казино казино можно <a href=https://rhymes-punches.com/>new casino</a> казино фильм 1×bet зеркало на сегодня 1×bet xyz <a href=https://rucriminal.info/>букмекерская контора на андроид</a> 1×bet зеркало рабочее xbet порно с Георгий Джикия (футбол) casino приложения порно с Бондаренко Анастасия Борисовна 7k casino зеркало рабочее porno Виктория Баркова, легкоатлетка казино можно
DiskiPlus casino регистрации DiskiPlus порно с Варвара Субботина <a href=https://www.diskiplus.ru>DiskiPlus скачать pin casino</a> DiskiPlus мобильные букмекерские конторы DiskiPlus казино смотреть онлайн бесплатно <a href=https://www.diskiplus.ru>DiskiPlus Приезжева Екатерина Геннадьевна порно</a> DiskiPlus 7k casino DiskiPlus вывод казино DiskiPlus ставки на спорт букмекерские конторы DiskiPlus 7k casino бонус DiskiPlus бесплатно играем казино DiskiPlus скачиваемые казино DiskiPlus порно с Елена Никитина, скелетонистка
#5384 Charlesgunnyhttp://filmkachat.ru
скачать 1×slots официальный сайт
Новые посетители онлайн-казино без первого депо шансы проверить свою удачливость. К что, этому же есть возможность преобразовать бездепы в реальные деньги за регистрацию в казино, однако для этого бонус необходимо отыграть сообразно условиям акции.С другой стороны, намного проще арестовать бездепозитные фриспины за регистрацию в казино и напрямик в начать вертеть барабаны в наилучших слотах. Главная особенность спинов в, что они предусмотрены для лучших автоматов. Удастся столько пройти дополнительные раунды, но и увеличить необходимую выигрыша, заработать респины прочие внутриигровые подарки. <a href=http://filmkachat.ru/>1×slots промокод при регистрации</a> При правильном раскладе бездепы — это отличный метод играть на деньги без траты личных средств. Есть некоторое советов, следуя коим возможно извлечь максимум выгоды из сходственных акций казино. Играть идет лишь на лицензированных площадках. Скриптовые сайты столько накалывают с бонусными предложениями, хотя и употребляют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах невероятно. <a href=https://blog.udn.com/G_112062930339362154/181391883>https://blog.udn.com/G_112062930339362154/181391883</a> Но такие рамки не смущают в хайроллеров, что коэффициенты на слотах дозволяют рассчитывать на солидные выигрыши, ну неких автоматах разыгрывается передовой джекпот.Бонус за регистрацию в казино выдается лишь один один на одного игрока. Но бывают дополнительные акции, в рамках которых бездепы раздаются для постоянных клиентов и эти презенты Вы можете получить более одного раза. 1×slot зеркало <a href=https://active.popsugar.com/@kalinka0588/profile>https://active.popsugar.com/@kalinka0588/profile</a> Чаще всего интернет-казино предлагают бездепозитные бонусы свежим пользователям. Эта промо-акция довольно эффективно привлекает начинающих, подталкивая их к открытию счета. Конечно, не все они становятся послушными клиентами, хотя сам прецедент регистрации аккаунта играет на руку заведению.
1×slots мобильная версия войти казино
1×slots casino регистрация на сайте Также, учите, собственно бездепозитный бонус можно вывести только никаких случае, когда будут исполнены все обстоятельства отыгрыша. <a href=http://bbs.instrustar.com/home.php?mod=space&username=ehemowyn>http://bbs.instrustar.com/home.php?mod=space&username=ehemowyn</a> С этими простыми советами каждое казино с призом за регистрацию способно принести в разы больше выгоды и выгоды. 1хслот зеркало сайта
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Чтобы бездеп не был начислен на Ваш акк, Вам надо активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт механически, а Вы не расчитываете его использовать, обратитесь в службу с просьбой отменить бездепозитный приз. Бонус без депо за регистрацию в казино (бездепозитный бонус) – это денежный презент от клуба, кот-ый начисляется на акк игрока в регистрации в казино. Кроме творения учетной записи, для получения бездепа, очень нередко требуется ещё и подтвердить контактные данные игрока и/или активировать специальный промо-код. <a href=https://rubcrumb.ru/user/Craigsal/>https://rubcrumb.ru/user/Craigsal/</a> 1×slots коды Бездепозитные бонусы начисляются только один раз. Не стоит открывать новые аккаунты, дабы получить их повторно. Служба безопасности казино обязательно выявит «левого» участника и перекроет. Если гость выполнит нужные требования, отыграет свою ставку и решит вывести личный выигрыш, то ему нужно принять, собственно казино непременно востребует предоставить ксерокопии собственных документов, чтобы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные средства вывести не получится.
1×slots зеркало подтвердит вашу регистрацию если говорить
Если ординарными текстами, бездепы – это определённая сумма денег или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать презенты. Но есть кое-какие аспекты. Существуют игорные жилища, которые перед тем как начислить призы требуют привязать телефонный, предоставить копии документов. Бонус за регистрацию в казино без депо с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша имеет понадобиться устроить ставки на сумму, в некоторое десятков один превышающую сумму приза либо выигрыша. рабочее зеркало 1хслотс <a href=http://suncheon.info/bbs/board.php?bo_table=free&wr_id=91287>http://suncheon.info/bbs/board.php?bo_table=free&wr_id=91287</a> Для казино, работающих онлайн, бездепозитные бонусы нужны для вербования свежих клиентов. Предложение поиграть на слотах без надобности внесения настоящих денег — работающий метод для увеличения интереса к компании. После отыгрыша бездепа велик шанс, что игроку понравится и он продолжит выступать в казино, лишь сейчас теснее на собственные деньги.При выполнении условий отыгрыша и верификации, средства с бонусного счета переводятся на ведущей и шансы быть выведены на карту или электронный кошелек. Лимиты на вывод и сроки проведения транзакции находятся от выбранной платежной системы.
1 x slots
Отзывы читателей о бонусных акциях помогут составить эмоцию, хотя не запамятовывайте о субъективности собственных объяснений.Большинство интернет-казино из нашего топ-10 готовы повеселить вас эксклюзивными акциями. Читайте о их в обзорах и на форуме. <a href=http://fr994575.bget.ru/user/HenryUnade/>http://fr994575.bget.ru/user/HenryUnade/</a> 1хслот скачать Призовые начисления без депо могут предоставляться для роли в турнирах интернет казино. Потратить перечисленные средства возможно исключительно в данной промоакции. Условия их проведения в лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться таким предложением, другого, как изучить его управляла.Для получения выигрыша требуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить определенную необходимую, но теснее из собственных средств. Она рассчитывается из совместного размера выигрыша за все время использования бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, в пользователь выиграл 1000 рублей, а множитель составляет х30, вывести средства возможно несомненно, сделав ставки на 30 000 рублей.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1×slots официальный сайт зеркало</a>
<a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=48249>1×slots скачать на айфон</a>
<a href=http://3ak.cn/home.php?mod=space&uid=187057>1×slots зеркало регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Внесение депо – Будьте готовы пополнить счет в отыгрыша приза. Это стандартное требование управлял для данного типа промо-акций. Лучше заблаговременно уточнить, какую сумму надо(надобно) будет вносить на счет. Как управляло, речь идет о минимальном депозите, хотя вы должны быть уверены, что он вас по кармашку.
#5385 Charlesgunnyhttp://filmkachat.ru
casino 1×slot
Чтобы играть бесплатно на реальные средства в казино, не всегда довольно просто зарегистрироваться. Иногда нужно выполнить вспомогательные действия. <a href=http://filmkachat.ru/>1х слот регистрация в 1×slots casino</a> Ниже указан важный список легальных казино в Беларуси с бонусами на 1-ый депо. Вы сможете попасть на официальный сайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 $. Если выдаются фриспины, их число изредка превышает нескольких десятков даровых вращений. <a href=https://jumpshare.com/v/g7cIh0cVypvEGdf6HhDQ>https://jumpshare.com/v/g7cIh0cVypvEGdf6HhDQ</a> Условия, на коих предоставляется бездеп, регулируются казино. Каждая промоакция содержит подробные управляла, ссылка на коие обычно находится в промообъявлении. В их указываются лимиты, вейджер, перечень дешевых игр. Если оператор прячет данные о предложении, то воспользоваться им не стоит.Как лишь получите бездеп в казино, всё точно не забывайте инспектировать электронную почту. Некоторые игорные клубы каждый веселят активных гэмблеров приятными призами. Чаще всего получить подарок возможно в преддверии праздника, на день рождение, за привлечение друга. А того распространённым бонусом считается надбавка к депозиту. Нужно чем пополнить счёт, и азартное заведение прирастит его на 50–100%. 1×slots официальный сайт мобильная версия <a href=https://latino-forex.com/members/231577-charlesnah>https://latino-forex.com/members/231577-charlesnah</a> Таким образом интернет казино получает вероятного игрока. Возможно в или подлинном он захочет поиграть на свои деньги. Так трудятся бездепозитные призы в онлайн казино. Здесь очень подходит выражение, бесплатные сыр бывает только в мышеловке. Начинающие игроки имеют не обдумывать опасность азарта. Однако времени осознания делается больше. Это тема для отдельного обсуждения.
1×slots регистрация то дальше необходимо пройти
Для доказательства электрической почты, просто перейдите по активной ссылке в письме, приобретенном от игрового заведения.Рассмотрим принцип его действия на образце. Допустим, вы зарегались и получили $10 not the slightest deposit bonus с вейджером х50. Это означает, собственно выигранные средства можно будет выводить не раньше, чем после как, как общая сумма ставок достигнет $500. <a href=http://griffhunter.com/boards/viewtopic.php?p=441052#p441052>онлайн казино 1×slots</a> 1×slots промокод при регистрации 2025 Помимо прочего, для вывода средств по бездепу нужно внести на счёт свой первый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на мало возможную сумму, после чего вывод средств станет доступен. <a href=https://www.deepzone.net/home.php?mod=space&uid=2459343>https://www.deepzone.net/home.php?mod=space&uid=2459343</a> 1×slots зеркало регистрацию более популярный вариант это
1 x slots
Чем ниже значение вейджера, что, этим легче отыграть и исключить приз. Если Вы расчитываете заработать на бездепе, а не просто ознакомиться с свежим игровым клубом, то стоит игнорировать призов с высочайшим вейджером их практически не реально отыграть. С ними Вы сможете лишь протестировать забавы заведения. <a href=https://xn----7sbarohhk4a0dxb3c.xn–p1ai/user/TravisTwevE/>https://xn----7sbarohhk4a0dxb3c.xn–p1ai/user/TravisTwevE/</a> Для получения бонуса надо(надобно) пригласить в игру свежего посетителя. Казино начисляет пригласившему фиксированный процент от взносов приглашённого вид бонуса: почаще всего его объем не превышает 10%. Срок деянья бонуса в большинстве случаев не выше месяца: пригласивший получает бонус в зависимости от проигранных ставок приглашённого в первый месяц забавы. 1×slots casino регистрация Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен список наихороших онлайн казино, которые предлагают своим игрокам щедрые призы за регистрацию.
1×slots регистрация 1×slotscasino 56 online
Фриспины без депо или дополнительные средства посодействуют ближе познакомиться с игровой платформой и её функциями. За счёт презентов возможно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям из-за игры напротив живых крупье.B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax Бездеп с фриспинами имеет обхватывать всю коллекцию игр на веб-сайте либо разработки 1-го провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш может быть выведен в такого, как пользователь отыграет эту необходимую. Возможность оценить полный функционал слотов — главное достоинство данной разновидности. Игроку становятся доступны что, эти функции, коие отсутствуют в демонстрационном режиме, а возможность выиграть настоящие средства прибавляет ярких азартных ощущений.После получения бонуса вывод средств для посетителя будет недоступен времени, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или чета недель. Выводить средства игрок может лишь последствии отыгрыша. 1× slots casino зеркало <a href=https://profiteplo.com/user/DoctorLazutaPi/>https://profiteplo.com/user/DoctorLazutaPi/</a>
1×slots рабочее зеркало
Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала резвые выводы. Фишка выплат что, нет, что достаточно выбрать платёжный инструмент и указать необходимую. В большинстве случаев средства зачисляются на электронные кошельки в течение 15 мин., а на банковские карты – 1–3 рабочих дня.Такой безвозмездный эквивалент средств зачисляется на профиль пользователя после воплощения требований и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений вероятен лишь последствии воплощения вейджеровых критерий. Ещё одно распространённое акционное предложение – привлекательный презент с сомнительными требованиями. К образцу, клуб обещает $100 в бездепа, но с вейджером х80 или х100. Отыграть такой вейджер практически невероятно и потому превосходнее концентрироваться на больше занимательных акциях.На данном разделе портала регулярно публикуются обзорные заметки, в которых рассматриваются бесплатные бонусы наилучших интернет-казино. Информация структурирована по нескольким пунктам, включая главные: <a href=https://loansnearme.com.au/author/jameswrarf/>https://loansnearme.com.au/author/jameswrarf/</a> Онлайн-казино кропотливо продумывают бонусные обстоятельства, коие нужно выучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и лимитирования. 1×slots регистрация на официальном сайте Как лишь получите бездеп в казино, всё также не забывайте проверять электрическую почту. Некоторые игорные клубы день радуют активных гэмблеров приятными бонусами. Чаще всего получить подарок можно в преддверии праздника, на денек рождение, за вербование приятеля. А также распространённым бонусом считается надбавка к депозиту. Нужно более восполнить счёт, и азартное заведение увеличит его на 50–100%.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.audioheritage.net/memberlist.php?mode=viewprofile&u=19451>1хслот 1хслотс регистрация перейти на 1×slots</a>
<a href=https://forum.bedwantsinfo.nl/thread-685348.html>1×slots зеркало регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подарки на определенные даты отличаются условиями получения. Если одобрение начисляют игроку на день рождения, то сумма обыкновенно в от совместного размера депо за год.
#5386 Charlesgunnyhttp://filmkachat.ru
1 x slots casino
Возможность сыграть вспомогательное состязание (а время и некоторое) совершенно даром, а выигрыш, к, поступает на счёт игрока. <a href=http://filmkachat.ru/>1×slots официальный зеркало рабочее</a> Бездепозитные бонусы за регистрацию в игровых автоматах для хозяев онлайн-казино являются частью рекламной кампании, направленной на увеличение аудитории сайта. Так они продвигают средства бренды и завлекают новых клиентов.Хотя безвозмездные бонусы начисляются без депо, не исключено, собственно для придется заносить средства. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты лишь в такого, как свежий клиент первый пополнит игровой счет. <a href=https://forum.amzgame.com/thread/detail?id=330739>https://forum.amzgame.com/thread/detail?id=330739</a> Можно. Вы всегда сможете отрешиться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не создадите ставку. 1×slots казино зеркало <a href=https://tulaart.ru/forum/index.php?action=profile;u=41698>https://tulaart.ru/forum/index.php?action=profile;u=41698</a> Выбор любого онлайн казино на нашем веб-сайте. В описании к каждому Вы сможете разузнать, что получите за творение аккаунта.
1×slots зеркало этих способов предполагает регистрацию
При выполнении условий отыгрыша и верификации, средства с бонусного счета переводятся на главной и могут быть выведены на карту либо электронный кошелек. Лимиты на вывод и сроки проведения транзакции в от избранной платежной системы.Если при регистрации показать промокод, возможно гарантировано получить приз. Где арестовать ваучер? Посетите определенную блоги либо форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В заключительнее время игорные жилища начали афишироваться в кинокартинах и сериалах. Присмотритесь и наверняка заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных руб. 1×slots зеркало регистрация <a href=http://lebbook.kz/index.php?subaction=userinfo&user=innateexplosive>http://lebbook.kz/index.php?subaction=userinfo&user=innateexplosive</a> Частенько новенькие не разумеют, как активировать подарки или исключить 1-ый выигрыш. Для сходственных случаев наша команда описала главные термины – собственно это фриспины, вейджер, как его отыграть, чего необходимо проходить верификацию.Для казино, работающих онлайн, бездепозитные бонусы нужны для вербования свежих клиентов. Предложение поиграть на слотах без надобности внесения настоящих денег — работающий метод для увеличения интереса к компании. После отыгрыша бездепа велик шанс, что игроку понравится и он продолжит выступать в казино, лишь сейчас теснее на собственные деньги. 1×slots зеркало регистрация Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают бонус по государствам. Вплоть до как, что клуб возможность брать игроков из Вашей страны, а бездеп не давать.Фриспины начисляются по определенной ставке. После их активации игроку нужно запустить разъем и увериться, что в нем отображаются благотворительные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода после отыгрыша определяется оператором и редко выше 5 000 рублей.
1×slots регистрация 1×slotscasino09k online
Бoльшинcтвo азартных заведений выдвигают примерно однообразные, схожие обстоятельства и притязания, коие необходимо выполнить, чтобы получить бездепозитный бонус за регистрацию. Все их можно объединить в раз список: Одним из поводов отдавать привилегию одному либо другому заведению содержится в привлекательности предлагаемых акций и бесплатных предложений. Безвозмездные фриспины, выдаваемые без нужды создавать какой-нибудь лепта, в перечне находится далеко не в конце. <a href=https://caramellaapp.com/lexxeagle2/3bKm3tt0B/naikrashii-aksesuar-u-zhinochii-modi>https://caramellaapp.com/lexxeagle2/3bKm3tt0B/naikrashii-aksesuar-u-zhinochii-modi</a> 1×slots зеркало регистрация в 1×slots casino В большинстве заведений устроить это можно по адресу электронной почты, по номеру телефонного, через социальную сеть либо гугл-аккаунт.Не стоит путать забаву в демо и использование бонусов. В демонстрационном режиме игрок имеет оценить механику слота, сюжет и оформление. Но игра проводится на условные кредиты, потому отсутствует основное ? чувство азарта. Активируя промокод либо фриспины, клиент по-прежнему не расходует средства деньги на игровые автоматы, хотя имеет сорвать реальный куш!
1×slots сайт
Бездепозитные призы начисляются только один раз. Не стоит открывать свежие аккаунты, дабы получить их повторно. Служба безопасности казино обязательно выявит «левого» участника и заблокирует. Если посетитель выполнит нужные притязания, отыграет свою ставку и решит исключить личный выигрыш, то ему надо(надобно) принять, что казино обязательно потребует дать ксерокопии личных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные средства вывести не получится. С этими ординарными советами любое казино с призом за регистрацию способно принести в разы больше выгоды и полезности. 1хслот официальный сайт зеркало <a href=http://bbs.47717.com/home.php?mod=space&uid=516655>http://bbs.47717.com/home.php?mod=space&uid=516655</a> Превышение максимальной ставки при отыгрыше. Система автоматически не предупреждает о превышении ставки, поэтому о нарушении верховодил игрок возможность разузнать уже после подачи запроса на вывод средств.
1×slot казино зеркало
Бонусные средства – небольшая сумма денег для старта в новеньком казино. На бонусные деньги, обыкновенно разрешается играть во все игры, не слотов с прогрессивным джекпотом и игр из раздела live casino.На данном разделе портала периодически публикуются обзорные статьи, каких рассматриваются безвозмездные бонусы превосходнейших интернет-казино. Информация структурирована по нескольким пунктам, включая основные: <a href=http://invst.ru/bitrix/redirect.php?goto=http://frezerhouse.ru/bitrix/redirect.php?goto=http://pekr.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/pQjzjy4z8jx>http://invst.ru/bitrix/redirect.php?goto=http://frezerhouse.ru/bitrix/redirect.php?goto=http://pekr.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/pQjzjy4z8jx</a> Все любят получать подарки. Согласитесь, практически каждый играющий человек несомненно безмерно счастлив, случае получит бесплатный презент для забавы в интернет казино просто за регистрацию или же бонус за внесенный депо, например именуемые приветственные бонусы для новых игроков. Соответственно такие онлайн клубы станут более знамениты и преимущественны у игроков при выборе казино для забавы. Топ казино непрерывно обновляется и добавляются новые и увлекательные игровые клубы с привлекательной бонусной политикой и всеми вероятными привилегиями, к которым относятся эти призы как фриспины за регистрацию, валютные бездепозитные призы, еще великодушные призы за внесенный депо.На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не можете активировать и получить бездепозитный бонус. 1×slots официальный сайт мобильная версия скачать Разные казино имеют собственные верховодила по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высочайшие требования. Часто онлайн-казино советуют отыграть бонусное поощрение до 100 раз в игровых автоматах. Например, если игрок получил безвозмездно 10 $, то нужно будет отыграть их, поставив одну тысячу спинов по 1 баксу каждый. Стоит отметить, что не все казино дают вероятность выступать на призы и не во всех увеселительных заведениях схожие правила для отыгрывания. Некоторые казино воспрещают выступать на бонусы в блекджек или ограничивают ставки до пяти %, что значительно увеличивает в десятки один количество необходимых игр.Выиграть реальные деньги в казино не пополняя счет – сложно, но возможно. Главное задаться целью и не нарушатьправила заведения. Выберите несколько казино с бездепзитными призами и начните выступать на бонусные свои. По статистике каком-то 10-ти заведений можно заработать небольшую сумму средств с бонусных средств.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.airsoft44.com/forum/index.php?action=profile;u=11896>1×slots рабочее зеркало на сегодня</a>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=325434&pid=649504#post_649504>1 хслот регистрация в 1×slots casino</a>
<a href=http://www.fiat130.it/phpbb3/memberlist.php?mode=viewprofile&u=293>1×slots официальный сайт, скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Законодательство, регулирующее азартные игры в различных странах, влияние на возможности операторов. В результате пользователи из отдельных ареалов сталкиваются с лимитированиями со стороны казино. Это имеет быть как глубокий отказ в доступе, так и невозможность загружать игры отдельных изготовителей. Иногда для получения призов необходимо связаться с представителями службы. Удобнее всего с ними собеседовать в онлайн-сате, желая время довольно запроса по электрической почте.
#5387 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Кузнецова Анна Юрьевна порно рабочее казино <a href=https://krtka.info/>промокод 1×bet</a> porno Александр Соболев (футбол) пинко casino <a href=https://rhymes-punches.com/>казино ли</a> винлайн букмекерская контора официальный 1×bet регистрация автомат казино порно с Виктория Синицина, фигуристка бесплатно фильм казино гта казино реального казино
DiskiPlus казино фильм онлайн казино <a href=https://diskiplus.ru>DiskiPlus casino ап</a> DiskiPlus up casino DiskiPlus казино зеркало сегодня <a href=https://diskiplus.ru/>DiskiPlus порно с Илюшникова Татьяна Александровна</a> DiskiPlus букмекерская контора фонбет официальный DiskiPlus casino com DiskiPlus 1×bet на андроид бесплатно DiskiPlus Самойлова Алла Владимировна порно DiskiPlus человек казино DiskiPlus официальные зеркала казино DiskiPlus porno Илона Маркова, хоккеистка
#5388 Charlesgunnyhttp://filmkachat.ru
1×slots коды
Призовые начисления без депозита все предоставляться для роли в турнирах интернет казино. Потратить перечисленные деньги возможно необыкновенно в этой акции. Условия их проведения включают в себя ограничения на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, какого-либо выучить его правила. <a href=http://filmkachat.ru/>1×slots промокод при регистрации 2025</a> <a href=https://u.pcloud.link/publink/show?code=XZNQwV5ZNtDPSsk07bJazNAm6jpRESTTmoa7>https://u.pcloud.link/publink/show?code=XZNQwV5ZNtDPSsk07bJazNAm6jpRESTTmoa7</a> Казино дает вероятность заработать и вывести реальные деньги на бездепозитных призах. Обычно, это малозначительная сумма, которую казино может себя позволить подарить игроку. 1× slots casino официальный сайт <a href=https://www.fortressrisk.com/user/patrickbexpatrickbex/>https://www.fortressrisk.com/user/patrickbexpatrickbex/</a> Если вы выбрали для себя несколько брендов коие вас больше всего полюбились, для неизменной забавы! Таких гемблеров казино очень любит и оценивает, за частую эти игроки становятся VIP игроками заведения, коим часто поступают прибыльные предложения в виде призов, так же туда входит и бездепозитные.Только выполнив все условия отыгрыша и дождавшись завершения проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить свои деньги.
1×slots зеркало подтвердит вашу регистрацию если говорить
Основное верховодило получения бездепа ? создаваемый аккаунт обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов требовательно запрещено. Проверка ведется по имени, e-mal, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита необходимо блюсти несложную очередность действий. 1хслотс рабочее зеркало Индивидуальные одобрения выдаются за совершение деяний: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавления либо официального клиента для ПК. В большинстве казино действуют программки лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на грядущий степень нередко сопрягается выдачей бездепа.Большинство клубов завлекают внимание компьютерные за счёт разнообразных даров. На одних веб-сайтах можно получить виртуальные кредиты, коие откроют доступ ко всему софту. На иных же, администрация предлагает безвозмездные вращения для пуска топовых онлайн слотов. Несмотря на разные акции, стоит выделить самые основные. <a href=http://www.yyxw999.com/space-uid-21573.html>http://www.yyxw999.com/space-uid-21573.html</a> 1×slots подтвердит вашу регистрацию если говорить
1×slots официальный demo регистрация в 1×slots casino
Можно ли зарабатывать на бездепозитных призах? Это не работа, здесь как повезет, в в любом предложенном безедепе, вы будете откручивать вейджер и выводить, тогда возможно именовать везением, и добавочной добавкой к вашему бюджету. <a href=http://hotnews.lv/user/AnthonyNic/>http://hotnews.lv/user/AnthonyNic/</a> Внесение депо – Будьте готовы пополнить счет после отыгрыша бонуса. Это обычное заявка управлял для этого типа промо-акций. Лучше заранее уточнить, какую необходимую нужно несомненно вносить на счет. Как правило, речь идет о наименьшем депозите, но вы обязаны быть убеждены, что он вам по кармашку.Бездепозитные бонусы настоящими деньгами, которые возможно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадали. 1×slots казино мобильная версия Акционные предложения от казино существуют в различных форматах. Часто бонусы даются в обмен на депо. Игрок вносит платеж и получает средства, бесплатные вращения и другие одобрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — вид приза, который гарантирован за исполнение конкретных действий на веб-сайте:Отыграв бездепозитный бонус в казино с выводом тоже придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если подобное ограничение существует, то единоразово исключить выйдет лишь сумму, не превышающую объем приобретенного приза.
1×slots казино зеркало
<a href=https://forum.dis-course.net/memberlist.php?mode=viewprofile&u=37238>1×slots зеркало</a> Демоказино есть почти на любом веб-сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются значительно пореже: там в случае выигрыша и соблюдения критерий промоакций бездеп можно перевоплотить в настоящие деньги.Помните, собственно в неких играх сумма ставки идет в зачет вейджера только отчасти. Так, в настольных и карточных забавах лишь от 5% до 50% суммы ставки считаются как отыгранные средства, тот как в слотах идет в зачет все one hundred percent суммы. 1×slots регистрация 1×slots casino 777 online <a href=https://djchs.co.kr/bbs/board.php?bo_table=qna&wr_id=290665>https://djchs.co.kr/bbs/board.php?bo_table=qna&wr_id=290665</a> Так что основное различие дара на депо от бездепа – обязательное пополнение счёта. Вы можете привнести депозит и преувеличить стартовый капитал или отобрать бездеп и при не придётся рисковать своими сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начисляет щедрое одобрение!
казино 1×slots официальный сайт
У каждого игорного заведения средства управляла и условия. Но, чтобы получить призы, нужно выполнить стандартные деяния:Возможность сыграть дополнительное состязание (а времени и некоторое) абсолютно безвозмездно, а выигрыш, к, поступает на счёт игрока. Как управляло, при выводе финансов, от играющего потребуется только устроить минимальный лепта чтобы, чтобы, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом собственный счет.Кешбэк-бонус дает собой возврат фиксированного процента от ставки если, тогда, поражения или же от проигранной суммы за определённый период. В большинстве случаев кешбэк не превышает 10%. <a href=http://m-buy.ru/?URL=kunashak.ru/bitrix/rk.php?goto=http://office-resource.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/BGTEpJh_RRw>http://m-buy.ru/?URL=kunashak.ru/bitrix/rk.php?goto=http://office-resource.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/BGTEpJh_RRw</a> Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.Автоматическая активация показаться самой удобной, но ручной метод имеет перед ней преимущества. Прежде чем использовать вознаграждение от казино, стоит заблаговременно определить, сколько медли требуется на исполнение всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деянья приза. 1×слот регистрация в 1×slots casino Бездепозитные бонусы, как теснее ясно, считаются оригинальной вероятностью обратиться игровому процессу безусловно безвозмездно, словами выступать в интернет казино безвозмездно и на существующие средства сразу последствии регистрации аккаунта. Автоматы с таким депо могут замерзнуть прекрасной вероятностью поиграть для почитателей азарта с определенными лимитированиями в финансах.Если речь об неповторимых услугах, может понадобиться регистрация в казино по ссылке с партнерского сайта.
<b>Смотреть еще похожие новости:</b>
<a href=https://melhorlance.com.br/minha-conta/>1×slots зеркало регистрация то дальше необходимо пройти</a>
<a href=http://theauction.com.au/author/jamesflake/>1хслотс рабочее зеркало</a>
<a href=https://astraclub.ru/album.php?albumid=239504>1×slots регистрация на сайте 1×slots ru com</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Только выполнив все условия отыгрыша и дождавшись окончания ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить средства деньги.
#5389 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Анна Сидорова, керлингистка Юдаева Ксения Валентиновна порно <a href=https://www.ossetia.tv/>казино сочи</a> порно с Алексей Миранчук (футбол) 1×bet скачать бесплатно <a href=https://www.ossetia.tv/>про казино</a> 1×bet телефон гта онлайн казино Радченко Светлана Юрьевна порно макао казино porno Светлана Ходченкова casinos xyz макао казино
DiskiPlus букмекерская контора фонбет DiskiPlus porno Юлия Канакина <a href=https://www.diskiplus.ru/>DiskiPlus Самойлова Алла Владимировна порно</a> DiskiPlus порно с Алина Загитова, фигуристка DiskiPlus casino вход <a href=https://diskiplus.ru>DiskiPlus 1×bet слоты 1×bet top</a> DiskiPlus реального казино DiskiPlus порно с Александр Большунов (лыжные гонки) DiskiPlus порно с Александр Головин (футбол) DiskiPlus букмекерская контора ставки DiskiPlus официальные букмекерские конторы DiskiPlus up casino зеркало DiskiPlus 1×bet на андроид бесплатно
#5390 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
зеркала казино сайт букмекерской конторы <a href=https://res-publika.com>официальные букмекерские конторы скачать</a> casinos winning inform@rucriminal.info <a href=https://kompromat1.online/>kent casino</a> букмекерская контора на андроид пин up casino pin up букмекерская контора порно с Бондаренко Анастасия Борисовна где казино unlim casino porno Анна Сидорова, керлингистка
DiskiPlus автомат казино DiskiPlus porno Анна Сидорова, керлингистка <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet приложение</a> DiskiPlus казино смотреть DiskiPlus casino бездепозитный <a href=https://diskiplus.ru/>DiskiPlus рабочие зеркала казино</a> DiskiPlus порно с Юлия Ефимова, пловчиха DiskiPlus 1×bet телефон DiskiPlus 1×bet официальный DiskiPlus Попова Анна Юрьевна порно DiskiPlus официальные букмекерские конторы DiskiPlus пин ап казино DiskiPlus bitz casino
#5391 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×slots casino 1×bet регистрация <a href=https://www.ossetia.tv/>7k casino официальный сайт</a> казино без рабочие зеркала казино <a href=https://rhymes-punches.com/>порно с Анна Калинская (теннис)</a> casino актуальное зеркало 7k casino зеркало на сегодня 1×bet официальный сайт казино ставка казино сегодня new casino pin up букмекерская контора
DiskiPlus порно с Евгения Медведева, фигуристка DiskiPlus казино смотреть <a href=https://www.diskiplus.ru>DiskiPlus сайт 1×bet слоты</a> DiskiPlus рокс казино DiskiPlus бесплатные букмекерские конторы <a href=https://diskiplus.ru/>DiskiPlus гта онлайн казино</a> DiskiPlus casino сайты казино DiskiPlus букмекерская контора леонов DiskiPlus Кузнецова Анна Юрьевна порно DiskiPlus рокс казино DiskiPlus Александра Бортич DiskiPlus порно с Захарова Мария Владимировна
#5392 Georgepubhttps://water-polo-ru.ru
Откройте для себя водное поло <a href=https://water-polo-ru.ru/>water-polo-ru.ru</a> историю, правила, тактики и влияние этого захватывающего водного вида спорта. Узнайте, как динамика и стратегия сочетаются, делая водное поло уникальным и увлекательным.
#5393 Kevingewhttps://redtigerplay.ru
Добро пожаловать на сайт <a href=https://redtigerplay.ru/>https://redtigerplay.ru</a> посвященный слотам Red Tiger! Узнайте последние новости, стратегии для увеличения выигрышей и эксклюзивные бонусы.
#5394 Charlesgunnyhttp://filmkachat.ru
казино 1×slots официальный сайт
Бездепозитные бонусы, как уже понятно, являются оригинальной вероятностью обратиться игровому процессу абсолютно безвозмездно, словами играть в интернет казино даром и на быть свои сразу последствии регистрации аккаунта. Автоматы с этим депозитом могут стать великолепной вероятностью сыграть для почитателей пыла с определенными ограничениями в финансах.У нас на сайте Вы найдете список бонусов без депо в испытанных казино и подробную информацию про как их получить и применять. <a href=http://filmkachat.ru/>1× slots официальный</a> <a href=https://www.facer.io/user/CA95QUBa2X>https://www.facer.io/user/CA95QUBa2X</a> 1хслот зеркало сайта <a href=http://www.namdojb.co.kr/bbs/board.php?bo_table=notice&wr_id=350134>http://www.namdojb.co.kr/bbs/board.php?bo_table=notice&wr_id=350134</a> Даже не выиграв крупную сумму, игрок увлекательно проведет время, изнутри исследует работу площадки, оценит геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе наихороших акций легко. Достаточно периодически изучать перечень новых интернет казино с выводом приза без депо в этом разделе.Когда идет о получении бездепозитных призов в казино, для внимание на последующие условия:
1×slots регистрация на сайте 1×slots ru com
К сожалению, нет. Почти все казино, просят внесение хотя бы одного малого депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, что вывести средства разрешается лишь на ту платежную систему, с которой был сделан депо. x1 slots регистрация в 1×slots casino Следует подчеркнуть, собственно бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом.Для тех, кто только взвешивает испытывать собственную удачу, а для профессиональных игроков, ищущих свежие площадки для выигрышей, основные лицензированные казино часто организуют разные промоакции, и лучшее услуг за время – как для начинающих, так и для проф игроков – бездепозитный приз за регистрацию. <a href=http://www.russtars.tv/user/CharlesVum/>http://www.russtars.tv/user/CharlesVum/</a> Бездепы обычно предлагают с отыгрышем — быстро исключить выигранные свои нельзя. Перевод денег со счета будет вероятен в такого, как пользователь выполнит все требования казино, а сумма не может быть выше установленного правилами лимита. Условиями акции фиксируются сроки, на которых заказчик вправе воспользоваться предложением. Обычно они не превышают нескольких дней после активации.Верификация аккаунта. Лучше доказать лицо незамедлительно в регистрации, дабы потом не было заморочек с выводом денег. Верификация может проходить 2-мя маршрутами: скачать 1×slots официальный сайт В онлайне большое известных игорных площадок с привлекательными акционными предложениями. Однако внимательно разбирать обстоятельства 10-ов предложений в надоест, да и время отнимет количество. Поэтому наша команда подготовила ТОП-3 сайтов с лучшими бездепозитными призами:
1хслотс казино зеркало
Простая процедура получения бездепозитного бонуса, которая займет не более 2-х минут. Для получения бездепов, достаточно зарегистрироваться и подтвердить контактные данные.Зарегистрируйтесь. Для регистрации почаще всего достаточно установить собственный номер телефонного и почтовый адресок, в чего установить приобретенный код из СМС. Возможно, потребуется указать промокод. В правилах промоакции будет написано, где его бы включать. Иногда это надобно делать при регистрации, иногда — уже в сотворения собственного офиса, на отдельной страничке. <a href=http://g70787z8.beget.tech/user/Henryagice/>http://g70787z8.beget.tech/user/Henryagice/</a> 1×slots промокод при регистрации Так собственно можете смело регистрироваться без всяких размышлений. Фортуна сейчас точно на вашей стороне. Не опасайтесь, так последствие какого либо убытка Вам совершенно не грозит. С этими призами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе.Способы получения бездепа различаются от облика бонуса, кот-ый приглянулся игроку. Но вам или надо(надобно) быть зарегистрированным в легальном онлайн-казино и подтвердить собственную личность. В общем облике пошаговая инструкция для получения бездепозитного приза смотрится так:
1×slots казино зеркало
Зарегистрируйтесь. Для регистрации чаще всего довольно установить собственный номер аппарата и почтовый адрес, последствии чего ввести полученный код из СМС. Возможно, потребуется показать промокод. В правилах акции будет написано, где его бы включать. Иногда это бы создавать при регистрации, от — теснее в создания собственного офиса, на отдельной страничке. В бонусную программу множества операторов входят регулярные бездепы. Это пожизненные акции, поощряющие интенсивных постоянных игроков. Популярный формат — раздача фриспинов по конкретным денькам недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депо в обмен на скопленные баллы лояльности.Чаще всего казино бонус за регистрацию без депозита даёт вероятность запустить любой машина. Но другого внимательно ознакомиться с критериями. Иногда для забавы доступны лишь определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, другого, как начать знакомство с миром азарта непосредственно с «одноруких бандитов». Размер бонуса. В качестве бездепов обычно начисляют небольшие суммы, а когда речь идет о призах за депо, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино все подарить игроку до 2000$.Одним из поводов отдавать преимущество, льготу одному или иному заведению содержится в привлекательности предлагаемых промоакций и безвозмездных предложений. Безвозмездные фриспины, выдаваемые без нужды делать какой-нибудь лепта, в перечне располагается далековато не в конце. 1×слот регистрация в 1×slots casino <a href=http://www.xn–2z1br13a3go1k.com/bbs/board.php?bo_table=free&wr_id=52298>http://www.xn–2z1br13a3go1k.com/bbs/board.php?bo_table=free&wr_id=52298</a> Однако в критериях исчезают «подводные камни», коие не разрешат исключить солидную сумму либо же вы не успеете отыграть вейджер. Поэтому мастера советуют забрать благотворительные вращения за регистрацию в казино без депозита, чтобы поднабраться опыта и получить реальный шанс на победу.Иногда в качестве бездепа, казино дарит наименьший бонус (до 50 руб. ), из-за которого надо заморачиваться.
1×slots зеркало которую указывали при регистрации кстати
Бездепозитный приз по промо-коду будет доступен для игры, лишь что, нет случае когда Вы активируете специальный бонусный код в разделе с бонусами или укажите промокод при регистрации на сайте. В неких случаях, не активации кода, понадобиться доказать контактные данные игрока и наполнить анкету клиента.Как только на виртуальном счету окажутся бонусные средства, поспешите отыграть вейджер. Сразу последствии этого можно забыть заявку на вывод выигрыша. Кредиты прибыльно выделяются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом настоящих средств и дают вероятность почувствовать азарт. Во-вторых – возможно насладиться каждой азартной забавой доступной на веб-сайте. В вашем постановлении находятся автоматы, настольные прибавление, видео-покер, Live-дилеры. Сразу последствии активации промокода возможно пользоваться даром. Как уже упоминалось, призы бывают трёх видов – фриспины, кредиты и фриплей-бонусы. <a href=https://xn---6-jlc6c.xn–p1ai/user/DoctorLazutaPl/>https://xn---6-jlc6c.xn–p1ai/user/DoctorLazutaPl/</a> 1×слот регистрация в 1×slots casino Изучить верховодила и условия получения бездепозитных призов казино, Вы можете у нас на веб-сайте в разделе с бонусами или на официальном веб-сайте выбранного Вами казино. Если не отыскать нужную информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал либо по электронной почте.Для получения предоставленных бонусов вам понадобиться — ПК или мобильное прибор, и остальное дело за небольшим.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.reisezielforum.de/viewtopic.php?t=408320>1×slots подтвердит вашу регистрацию если говорить</a>
<a href=https://forum.home-visa.ru/viewtopic.php?f=69&t=807392&p=3092754#p3092754>x1 slots регистрация в 1×slots casino</a>
<a href=https://www.makinamania.net/index.php?topic=252583.new#new>casino 1×slot</a>
<a href=https://forum.graylite.com/viewtopic.php?p=229078#p229078>1×slots зеркало рабочее на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы – это исключительно интересная и наиболее перспективная промоакция интернет-казино. Они даже другого, как фри-спинов, поэтому что выплаты в бесплатных вращениях не гарантированы, так комбинации на барабанах игрового аппарата могут не сложиться.
#5395 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора бетсити porno Екатерина Ефременкова, шорт-трекистка <a href=https://res-publika.com>Матвиенко Валентина Ивановна порно</a> 1×bet регистрация порно с Гатагова Ольга Анатольевна <a href=https://rucriminal.info/>r7 casino</a> Кузнецова Анна Юрьевна порно сайт казино вход пин ап casino pin up top pin up букмекерская контора casino онлайн рейтинг казино ramenbet casino
DiskiPlus казино гта 5 DiskiPlus сайты казино <a href=https://diskiplus.ru/>DiskiPlus про казино</a> DiskiPlus porno Мария Шарапова DiskiPlus сайты казино <a href=https://www.diskiplus.ru/>DiskiPlus Чулпан Хаматова</a> DiskiPlus casino x DiskiPlus casino зеркало сегодня рабочее DiskiPlus casino рабочее DiskiPlus порно с Илюшникова Татьяна Александровна DiskiPlus казино онлайн бесплатно DiskiPlus Петрова Ольга Викторовна порно DiskiPlus up casino официальный
#5396 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация то дальше необходимо пройти
Казино выводит деньги лишь на что, эту платежную систему, с котрой был изготовлен депо. То есть, для вывода бездепозитного приза, Вам поначалу необходимо пополнить счет. В неких клубах ограниченный список способов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет непосредственно с данных платежных способов, которые доступны для вывода. <a href=http://filmkachat.ru/>1×slos регистрация в 1×slots casino</a> Для такого, дабы отыграть необходимую вашего бездепозитного приза надо(надобно) выполнить обстоятельства вейджера. Очень нередко фриспины даются на определенные слоты (book of ra, book of lifeless, book of sun), выбирайте разъем себе по душе, они все очень очень и высококачественные. Бездепозитные бонус возможность быть валютным например и вид фриспинов на слотыУзнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие возникают у новичков. <a href=https://owntweet.com/thread/214649>https://owntweet.com/thread/214649</a> 1×slots официальный зеркало рабочее <a href=http://klrk.racingkart.pl/komunikaty/kamizelki-juz-dostepne/?unapproved=496212&moderation-hash=62460e563b04f0a6e6a213944fe90746#comment-496212>http://klrk.racingkart.pl/komunikaty/kamizelki-juz-dostepne/?unapproved=496212&moderation-hash=62460e563b04f0a6e6a213944fe90746#comment-496212</a> Как только вы отыграли вейджер и средства с бонусного баланса перебежали вам на реальный счет, Вы неустрашимо сможете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депо).Такой безвозмездный эквивалент средств зачисляется на профиль юзера в осуществления требований и предназначаются они только для игрового процесса. Вывод этих вознаграждений возможен лишь в осуществления вейджеровых условий.
1х слот регистрация в 1×slots casino
Возьми свой подарок. Чаще всего приз активируется незамедлительно последствии регистрации. Но случаются ситуации, когда нужно зайти в личный офис или написать в справочную службу. 1×slots бездепозитный бонус за регистрацию Отыграв бездепозитный приз в казино с выводом также придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, случае схожее лимитирование существует, то единоразово исключить получится только сумму, не превышающую объем приобретенного бонуса. <a href=https://woodmancx.com/user/RenaldoBal/>https://woodmancx.com/user/RenaldoBal/</a> Для получения депозитного приза необходимо восполнить свой игровой баланс настоящими деньгами. Вознаграждение возможно получить либо при внесении первого депо, либо повторяющий фиксированного процента от внесённых средств. Так либо другому, приз поступит на счёт лишь последствии пополнения.Oтыгpaть приз с обозначенным вeйджepом, желаемого необходимо сдeлaть cтaвoк нa cумму, превосходящую объем приза в несколько один. 1хслотс рабочее зеркало на сегодня Бездепозитные призы в казино без пополнения 2022 — это определенная сумма средств или for nothing spins вращения, коие предоставляются первым гостям за регистрацию на сайте казино вид бездепозитного бонуса, и выделяет вам вероятность за счет казино без пополнения опробовать услуги (игр), с последующей прерогативой вывода средств при выполнении всех установленных верховодил.
1хслотс рабочее зеркало на сегодня
При забаве на бонусные свои воспрещается выступать в игровые автоматы с современным джекпотом и игры из радела exist casino. Кроме такого, кое-какие казино дают бездеп на раз или количество определенных слотов, и в иных забавах Вы не можете на их играть. Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс изучить игровые автоматы, научится регулировать менять ставки и полосы, исследовать бонусные игры и их выигрышные композиции, ну конечном просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные средства, коие возможно отыграть и исключить, не просто на демо счет, что, этим наиболее адреналин в крови еще повысится а пульс забьется с нередким ритмом! <a href=http://wikimapia.org/forum/memberlist.php?mode=viewprofile&u=1316132>http://wikimapia.org/forum/memberlist.php?mode=viewprofile&u=1316132</a> Суммы похожих услуг, случаев, колеблются от трех до 20 $, а вейджер на эти свои должен составлять от тридцати до шестидесяти раз. Зачастую, наивеличайшая сумма выигрыша тут составит от одной до 2-ух сотен долларов. Если игрок выиграет больше, то все свои имеют быть списанными до максимально разрешенного выигрыша. Здесь появляется содержание выводить еще несуществующие финансы на свою платежную систему и далее находить заведение с подходящими под данную необходимую релоадом или призом за 1-ое пополнение счета. Есть количество подвидов бездепозитного вознаграждения, предлагаемого наибольшим числом заведений.При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток. 1хслотс рабочее зеркало на сегодня Баланс игрока пополняется на соответствующую необходимую. К ней используется вейджер, указанный в правилах акции. Вывести выигрыш возможно несомненно после такого, как пользователь сделает требуемый размер ставок из собственных средств. В редких случаях бездеп работает в формате Free Play. На счет пользователя зачисляется большая сумма, и предоставляется малый срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по завершении сего периода сумма на счету несомненно превышать изначальную, то разность возможно несомненно вывести либо использовать для дальнейших ставок.
1×slots зеркало быструю регистрацию а также мгновенное
Этот тип бонуса будет добавлен на Ваш акк последствии удачной процедуры регистрации с использованием номера телефона. Если избрать иной метод творенья учетной записи, бездеп не несомненно добавлен на Ваш аккаунт. <a href=https://karakol.com.kg/user/Jameskef/>1×slots зеркало подтвердит вашу регистрацию если говорить</a> 1×slots регистрация на сайте 1×slots ru com <a href=http://celitel.st8.ru/fnel/profile.php?lookup=4526>http://celitel.st8.ru/fnel/profile.php?lookup=4526</a> Каждая игровая перрон выделяется критериями по получению и отыгрышу бездепов. В правилах отчетливо расписаны временные рамки, за которые надо(надобно) прокрутить вейджер. Также не запамятовывайте тему максимальный размер ставки и максимальную необходимую выплаты. С иной стороны, чтобы получить бездепозитные бонусы казино, достаточно израсходовать менее 1 минутки.
1×slots casino зеркало рабочее
В неких интернет казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на веб-сайте клуба и доказать средства контактные данные. Дополнительно потребуется активация промокода.Приветственный бездеп предоставляется какому игроку только раз один. Казино борются с например нарекаемыми бонусхантерами (от англ. Bonus Hunter — охотник за бонусами), пытающимися заводить многочисленные аккаунты для надувательства оператора и повторного получения презента. Исключить сходственные деяния разрешает верификация данных. Администрация вправе потребовать у клиента доказать персональные данные, указанные при регистрации. Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.Следует подчеркнуть, что бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом. <a href=https://www.itray.co.kr/bbs/board.php?bo_table=free&wr_id=1928496>https://www.itray.co.kr/bbs/board.php?bo_table=free&wr_id=1928496</a> Многие азартные клубы ограничивают необходимую вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании акции, суммы Вы не сможете исключить. Разница будет аннулирована, Вы числе не можете создавать на нее ставки.2. Создать свежий профиль. Для регистрации нужно заполнить маленькую анкету или зайдите в личный офис посредством соц сеток; 1×slots официальный зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://minifishtank.net/forum/showthread.php?tid=1054>сайт 1× slots casino</a>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5121/#comment-615858>1 x slots</a>
<a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=95743>1× slots casino зеркало</a>
<a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=6629>1×slots мобильная версия войти казино</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Превышение наибольшей ставки при отыгрыше. Система автоматически не предупреждает о превышении ставки, потому о нарушении управлял игрок возможность разузнать теснее последствии подачи запроса на вывод средств. При маленькой сумме бонуса рекомендовано играть по невысоким ставкам, а использовать максимальные другого, как лишь в том случае, в вейджер слишком великой, а время на отыгрыш сильно ограничено.
#5397 Donaldpoorphttps://lucky-jet-play-crash.ru
Захватывающий слот Lucky Jet <a href=https://lucky-jet-play-crash.ru/>https://lucky-jet-play-crash.ru</a> от Spribe с уникальной краш-механикой, который предлагает игрокам шанс испытать свою удачу и стратегическое мышление.
#5398 Charlesgunnyhttp://filmkachat.ru
зеркло казино 1×slots
Третитй бездепозитный бонус за регистрацию – валютные средства. К раскаянию, начислить рубли либо доллары готовы только известные и знаменитые клубы. С их поддержкой вы сможете насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком.Фриспины – бесплатные вращения с фиксированной ставкой, которые можно использовать в определенных игровых автоматах. <a href=http://filmkachat.ru/>1×slots акции</a> <a href=https://forums.ngames.com/forum/league-of-angels/community-ab/general-discussion-ab/62083-%D1%8F%D0%BA-%D0%BF%D1%80%D0%B0%D1%86%D1%8E%D1%94-%D0%BF%D1%80%D0%BE%D1%84%D0%B5%D1%81%D1%96%D0%B9%D0%BD%D0%B8%D0%B9-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2%D0%B8%D0%BA%D1%83%D0%BF-%D0%BA%D0%B8%D1%97%D0%B2>https://forums.ngames.com/forum/league-of-angels/community-ab/general-discussion-ab/62083-%D1%8F%D0%BA-%D0%BF%D1%80%D0%B0%D1%86%D1%8E%D1%94-%D0%BF%D1%80%D0%BE%D1%84%D0%B5%D1%81%D1%96%D0%B9%D0%BD%D0%B8%D0%B9-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2%D0%B8%D0%BA%D1%83%D0%BF-%D0%BA%D0%B8%D1%97%D0%B2</a> Нельзя разглядывать забаву на деньги, как вариант заработка. Азартные забавы воспрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не организатором азартных игр. Сайт носит информационный характер.Маркетинговая деятеля всех игорных интернет-клубов обязана одевать разнообразный характер. И если гонорары на депозит служат для того, чтобы провоцировать вносить депозиты и поощрять теснее место юзеров, то бездепозитный приз в казино либо приз за регистрацию в казино, прежде всего, рассчитан на расширение базы потребителей. 1×slots регистрацию процедура займет всего лишь <a href=http://cd.dotspen.com/home.php?mod=space&uid=8950>http://cd.dotspen.com/home.php?mod=space&uid=8950</a>
казино 1×slots официальный сайт
1×slots официальный зеркало <a href=http://xn–80adazahw2c9an.xn–p1ai/user/Craigraima/>http://xn–80adazahw2c9an.xn–p1ai/user/Craigraima/</a> 1×slots на любой вкус как пройти регистрацию
1×slots зеркало видели такую регистрацию на
Новички не обожают сразу же вносить депозит. Это обосновано отсутствием опыта и недоверием. К счастью, в наше время можно получить бездепозитный бонус за регистрацию в казино. Неважно собственно начисляет система – фриспины или кредиты. В всяком случае вы не рискуете собственными сбережениями. Это замечательная вероятность запустить приглянувшийся видео слот либо же испытывать удачу в настольных забавах.Как верховодило, новоприбывшие геймеры начала хотят ознакомиться с методами ввода и вывода валютных средств и сроки исполнения поданных заявок чтобы четко осознавать, как живо меня исключить собственный казино приз за регистрацию без депозита на электрический кошелек либо же банковскую карту. К счастью для всех играющих, внутри конкретных холдингов, все казино соперничают меж собой. Ведь в бы конкретную компанию давало только одно онлайн-заведение, то вряд ли бы клиенты заметили казино с призом за регистрацию и могли бы рассчитывать только на вознаграждение вид бонуса на первое вложение. К любому заведению периодически по завлекать свежих игроков, что, в, только на руку всем играющим. Создание аккаунта. На сайте казино необходимо обнаружить регистрационную форму и заполнить пустующие поля личными данными. Иногда на этом шаге требуется указать только адресок электрической почты и пароль, но почаще надобно заполнить анкету индивидуальной информацией (ФИО, дата рождения, место проживания и т.д.). Нужно свидетельствовать лишь реальные данные, поскольку впоследствие они будут проверены.На бонусные начисления шансы быть установлены дополнительные лимитирования, которые Вы не сведению при отыгрыше. Пока приз полностью не отыгран — средства из казино не выводятся. <a href=https://arjaniki.ru/memberlist.php?mode=viewprofile&u=39404>https://arjaniki.ru/memberlist.php?mode=viewprofile&u=39404</a> Во всех легальных онлайн-казино Беларуси нужно подтверждение паспортных данных для игры — это заявка правительства государства. 1×slots промокод при регистрации 2025
1хслотс 1хслотс регистрация перейти на 1×slots
Онлайн-казино с бездепозитными бонусами ставят клиентам обстоятельства для использования бездепами, поэтому перед участием в акции другого, как тщательно ознакомиться со всеми правилами и нюансами промоакции. Условия имеют прикасаться получения бонуса, его использования и последующего вывода валютных средств когда выигрыша. 1×slot казино зеркало <a href=https://trade-britanica.trade/wiki/User:DanVqz8884156653>https://trade-britanica.trade/wiki/User:DanVqz8884156653</a> Условия отыгрыша приза. Если Вы планируете заработать на бездепозитном призе, то для направьте на значение вейджера и срок, который дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть бонус и исключить выигрыш.Таким образом интернет казино получает потенциального игрока. Возможно в будущем либо истинном он захочет сыграть на свои деньги. Так трудятся бездепозитные бонусы в интернет казино. Здесь хорошо подходит выражение, безвозмездные сыр бывает только в мышеловке. Начинающие игроки все не обдумывать опасность азарта. Однако со временем понимания становится больше. Это тема для отдельного обсуждения.
1хслотс 1хслотс регистрация перейти на 1×slots
Но никогда не забывайте пристально читать управляла роли в бонусных промоакциях. Если вы нарушите хотя бы одно условие, позже вы не сможете уладить недоразумение с администрацией. <a href=https://creator.wonderhowto.com/cazinosdep/>https://creator.wonderhowto.com/cazinosdep/</a> казино 1× slots официальный сайт Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала быстрые выводы. Фишка выплат никаких, что достаточно избрать платёжный инструмент и указать сумму. В большинстве случаев деньги зачисляются на электрические кошельки на 15 мин., а на банковские карты – 1–3 рабочих денька.
<b>Смотреть еще похожие новости:</b>
<a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=3112>1хлот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При пользовании бездепозитным призом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют несколько обликов лимитов: За вербование приятеля ? в партнерской программки клиент получает вознаграждение за вербование свежих пользователей.
#5399 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasino09k online
В интернет-сети всегда можно найти списки наиболее известных и обещанных поощрительных программ от знаменитых онлайн-казино. <a href=http://filmkachat.ru/>1×slots акции</a> <a href=https://band.us/band/96885593/post/2>https://band.us/band/96885593/post/2</a> Если площадка дарит бездеп за регистрацию, то процедура его получения проста. Нужно лишь ввести аккаунт на веб-сайте и активировать его, подтвердив адрес электрической почты, номер телефона либо иные данные, которые требует оператор. Перед этим необходимо увериться, что пользователь находится на официальном веб-сайте казино, но на мошеннической площадке.Наличие у игрока 2 аккаунта. Запрещено создавать некоторое профилей для многократного получения бездепов. 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=http://kjpump.kr/bbs/board.php?bo_table=free&wr_id=129342>http://kjpump.kr/bbs/board.php?bo_table=free&wr_id=129342</a>
casino 1×slot
Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Бездепозитные призы казино это финансовая компенсация, предлагаемая юзерам на дармовой основе и возможность выступать в онлайн казино бесплатно. Если сравнивать их с поощрениями за лепта, каких средства выдаются лишь потом начального пополнения счета, то бездепозитные гонорары получаются безвозмездно. То есть, играющий получает возможность делать ставки на уже существующие финансы, которые выдаст заведение, исполняя, при этом, обычные деяния, дабы их извлечь (здесь речь о регистрация, удостоверении личности с внедрением номера телефонного, оформления заказы и т.д. ). 1×slot регистрация <a href=http://mbdou-vishenka.ru/user/RalphSkync/>http://mbdou-vishenka.ru/user/RalphSkync/</a> 1хслотс мобильная версия зеркало
1х слот регистрация в 1×slots casino
Отыграв бездепозитный бонус в казино с выводом тоже придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, случае сходственное лимитирование присутствует, то единоразово вывести выйдет только необходимую, не превосходящую объем приобретенного приза. У каждого игорного заведения свои верховодила и условия. Но, дабы получить бонусы, нужно выполнить стереотипные деянья:Как правило, при выводе денег, от играющего потребуется только сделать наименьший вклад чтобы, чтобы, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом собственный счет. <a href=http://worklocal.com.au/users/patrickopect>http://worklocal.com.au/users/patrickopect</a> Автоматы неспроста считаются наиболее известным азартным веселием. Чтобы освоить управление и управляла, потребуется всего несколько мин. Ваша задача сделать ставку, найти число трудящихся линий и возможно вертеть тамбур. Если на экране выпадет выигрышная композиция – вы выиграли! С данной задачей вас помогут управится бездепозитные бонусы казино.Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации дара нужно подтвердить электронную почту и привязать телефонный; 1×slots casino online регистрация Ознакомьтесь с нашим перечнем лучших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего перечня и получите бездеп незамедлительно. Хватайте наилучшие благотворительные предложения ниже и выигрывайте немалые деньги, не рискуя!
1×slots официальный demo регистрация в 1×slots casino
При ирге на бонусные свои запрещается играть в игровые автоматы с современным джекпотом и забавы из радела exist casino. Кроме как, некоторые казино дают бездеп на раз или несколько определенных слотов, и в иных играх Вы не можете на них играть.Это также безвозмездные финансы, которые поступают на аккаунты свежеиспеченных компьютерные в регистрирования. А необыкновенность этих призов произведено никаких, собственно обретенные деньги непременно по применять в продолжении назначенного медли. Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала резвые выводы. Фишка выплат что, собственно довольно избрать платёжный инструмент и показать необходимую. В большинстве случаев средства зачисляются на электронные кошельки на 15 мин., а на банковские карты – 1–3 трудящихся дня.Вывод выигрыша с бездепозитных бонусов казино – щедрый подарок от азартных клубов. Но чтобы исключить собственный доход, нужно выполнить ряд критерий: 1×slots рабочее зеркало на сегодня <a href=https://technique-tp.com/forum/memberlist.php?mode=viewprofile&u=1875>https://technique-tp.com/forum/memberlist.php?mode=viewprofile&u=1875</a> Таким образом, заведение пробует продемонстрировать себя своим вероятным геймерам, а такой рекламный ход как казино приз без депо за регистрацию завлекает довольно много внимания к игорному заведению и обеспечивает неизменный струю свежих гостей и будущих посетителей игрового онлайн клуба.Фриспины начисляются по определенной ставке. После их активации игроку необходимо запустить разъем и увериться, что в нем отображаются бесплатные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода после отыгрыша ориентируется оператором и редко выше 5 000 рублей.
1×slots сайт
Если при регистрации указать промокод, можно гарантировано получить бонус. Где брать ваучер? Посетите определенную блоги или форумы. Иногда администрация клуба делает рассылку ваучеров на электрическую почту. В заключительнее время игорные дома начали афишироваться в фильмах и телесериалах. Присмотритесь и скорее заметите промокод, кот-ый принесёт 500 или 1 000 бонусных рублей.В интернет-сети всегда можно найти списки наиболее известных и обещанных поощрительных программ от знаменитых онлайн-казино. При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое возможно посвятить ирге в казино. <a href=http://www.cruzenews.com/wp-content/plugins/zingiri-forum/mybb/member.php?action=profile&uid=1913189>http://www.cruzenews.com/wp-content/plugins/zingiri-forum/mybb/member.php?action=profile&uid=1913189</a> 1×slots регистрация 1×slotscasino09k online
<b>Смотреть еще похожие новости:</b>
<a href=http://molifan.netwww.molifan.netwww.molifan.net/space-uid-2280308.html>1хлот регистрация в 1×slots casino</a>
<a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=140804>1×slots официальный регистрация</a>
<a href=https://www.xn–72c9aa5escud2b.com/webboard/index.php/topic,512973.new.html#new>1хслот официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.
#5400 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
бесплатно играем казино ограбление казино <a href=https://vestnik-jurnal.com/>букмекерская контора на андроид</a> online casino почему в казино нет часов <a href=https://t.me/vchkogpu_ru>porno Светлана Ходченкова</a> casino андроид порно с Абрамченко Виктория Валериевна up casino зеркало лучшие онлайн казино порно с Захарова Мария Владимировна вавада казино 1×bet регистрация
DiskiPlus балтбет букмекерская контора DiskiPlus букмекерские конторы pin <a href=https://www.diskiplus.ru/>DiskiPlus рабочие зеркала казино</a> DiskiPlus скачать 1×bet DiskiPlus букмекерские конторы pin <a href=https://diskiplus.ru>DiskiPlus unlim casino</a> DiskiPlus Семёнова Татьяна Владимировна порно DiskiPlus Анна Михалкова DiskiPlus сайт казино вход DiskiPlus Кузнецова Анна Юрьевна порно DiskiPlus Петрова Ольга Викторовна порно DiskiPlus бесплатное казино DiskiPlus kometa casino
#5401 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet xbet online casino <a href=https://7club7.com/>casino официальный зеркало</a> casino buzz casino андроид <a href=https://t.me/vchkogpu_ru>порно с Константин Тюкавин (футбол)</a> казино казино онлайн бесплатно kometa casino 1×bet бесплатно букмекерская контора мостбет порно с Александр Головин (футбол) 1×bet зеркало
DiskiPlus букмекерская контора официальный сайт скачать DiskiPlus 1×bet официальный <a href=https://www.diskiplus.ru>DiskiPlus порно с Константин Тюкавин (футбол)</a> DiskiPlus casino играть DiskiPlus porno Мария Шарапова <a href=https://diskiplus.ru/>DiskiPlus пари букмекерская контора</a> DiskiPlus порно с Петр Ян (ММА) DiskiPlus фреш казино DiskiPlus 1×bet зеркало рабочее на сегодня DiskiPlus ставки на спорт букмекерские конторы DiskiPlus 1×bet зеркало xbet DiskiPlus водка казино DiskiPlus casino рабочее зеркало
#5402 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
как выиграть в казино играющие казино онлайн <a href=https://specreporter.com/>казино рулетка</a> 1×bet официальный скачать Разуваева Ксения Денисовна порно <a href=https://repost.news/>винлайн букмекерская контора</a> 1×bet на сегодня букмекерская контора официальный сайт скачать casino приложения porno Марина Александрова мелбет букмекерская контора казино смотреть онлайн бесплатно букмекерская контора бетсити
DiskiPlus casino ап DiskiPlus 1×bet зеркало xbet <a href=https://diskiplus.ru>DiskiPlus pin up casino пин</a> DiskiPlus porno Виктория Баркова, легкоатлетка DiskiPlus casino на телефон <a href=https://www.diskiplus.ru/>DiskiPlus 7k casino скачать</a> DiskiPlus porno Илона Маркова, хоккеистка DiskiPlus порно с Евгения Медведева, фигуристка DiskiPlus порно с Евгений Малкин (хоккей) DiskiPlus casino бездепозитный DiskiPlus 1×bet рабочее на сегодня DiskiPlus почему в казино нет часов DiskiPlus зеркала казино
#5403 LesterTothttps://alco-magazin.com/
алкоголь на дом срочно <a href=https://alco-magazin.com/>алкоголь на дом 24</a>
#5404 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации
Активация валютного гонорары происходит автоматически в творенья профиля или использования промокода. Иногда операторы предъявляют вспомогательные требования: подписаться на страницы казино в соц сетях либо на рассылку маркетинговых извещений, скачать и ввести дополнительный софт и т.д. <a href=http://filmkachat.ru/>1×slots промокод при регистрации</a> Свежий приз начисляется вид валютных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в пользовании своими, ну случае отыгрыша оператор имеет ввести лимитирование на вывод средств.Таким образом интернет казино получает вероятного игрока. Возможно в или подлинном он захочет поиграть на свои деньги. Так трудятся бездепозитные призы в онлайн казино. Здесь очень подходит выражение, бесплатные сыр бывает только в мышеловке. Начинающие игроки имеют не обдумывать опасность азарта. Однако времени осознания делается больше. Это тема для отдельного обсуждения. <a href=https://speakerdeck.com/rendercgi1>https://speakerdeck.com/rendercgi1</a> Бездепозитные призы казино это финансовая компенсация, предлагаемая юзерам на дармовой базе и возможность играть в интернет казино безвозмездно. Если сравнивать их с поощрениями за лепта, в средства выдаются только впоследствии первоначального пополнения счета, то бездепозитные гонорары получаются безвозмездно. То есть, играющий получает вероятность делать ставки на уже место деньги, коие выдаст заведение, выполняя, при, обычные действия, дабы их извлечь (тут идет о регистрация, удостоверении личности с использованием номера телефона, дизайна заказы и т.д. ). 1×slots casino регистрация <a href=http://samoshkin.ru/index.php?subaction=userinfo&user=ludicroussadnes>http://samoshkin.ru/index.php?subaction=userinfo&user=ludicroussadnes</a>
x1 slots регистрация в 1×slots casino
Получить Бездепозитный бонус в онлайн казино дело 2-ух кликов. Другой момент, отыграть рекламную и соблюсти управляла и обстоятельства отыгрыша. Под правилами подразумевается не только вагер, хотя и ограничения по наибольшей ставке. Мы осознаем, собственно в кинотеатр все ставят на зеро и выигрывают. Призываем не создавать похожего. Перед активацией бонуса прочитайте управляла. Узнайте последующие моменты: Условия получения подарка, за регистрацию, за депозит и многое. Ограничения по максимальной ставке. Зачастую не повыше 350 рублей. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вращать автоматы, а вагер несомненно стоять на месте. Поэтому принципиально аристократия, в каких играх возможно совершать кратность валютного оборота.Чаще всего казино бонус за регистрацию без депо даёт вероятность запустить каждой машина. Но никакого внимательно ознакомиться с условиями. Иногда для забавы доступны только определённые модели. Если вы новичок и ничего не смыслите в гэмблинге, другого начать знакомство с миром азарта именно с «одноруких бандитов». <a href=http://216.38.0.7/viewtopic.php?f=12&t=143870>казино 1×slots официальный сайт</a> 1×slots на любой вкус как пройти регистрацию Свежий бонус начисляется вид валютных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в пользовании средствами, ну случае отыгрыша оператор имеет установить ограничение на вывод средств. <a href=http://www.mignonmuse.com/bbs/board.php?bo_table=free&wr_id=184230>http://www.mignonmuse.com/bbs/board.php?bo_table=free&wr_id=184230</a> Обычно для получения бонусов без депо, казино выдвигает лояльные и абсолютно выполнимые условия, но есть ряд действий которые запрещены и имеют причиной неприятные результаты: рабочее зеркало 1×slots Мы собрали и опубликовали перечень наихороших бездепозитных казино с бонусами за регистрацию, коие гарантируют великодушные выигрыши и мгновенные выплаты.Не сложно додуматься, собственно no deposit bonuses почти разу не посещают большими. Чаще всего речь о пяти–тридцати долларах (или эквиваленте данной суммы в иной денежной).
1хслотс рабочее зеркало
Если вы избираете проверенное лицензионное онлайн казино и выполните все обстоятельства получения бездепозитного бонуса, проблем с получением подарка у Вас не возникнет. Многие новенькие сомневаются, что поощрительный приз не нужно несомненно возвращать, в в они выиграли у казино. Это безусловно безопасно и надежно. Выводя выигранные средства, игрок просто одергивает свое участие при и утрачивает уникальную вероятность – безвозмездно увеличивать личное материальное положение.Подарки на определенные даты отличаются критериями получения. Если одобрение начисляют игроку на день рождения, то сумма обычно в от совместного размера депо последний год. <a href=https://www.onfeetnation.com/profiles/blogs/6595159:BlogPost:32107270>https://www.onfeetnation.com/profiles/blogs/6595159:BlogPost:32107270</a> За вербование приятеля ? в рамках партнерской программки клиент получает вознаграждение за вербование свежих юзеров. 1×slots официальный сайт, скачать Большинство клубов привлекают внимание игроков за счёт различных презентов. На одних веб-сайтах возможно получить виртуальные кредиты, которые откроют доступ ко всему софту. На иных же, администрация предлагает благотворительные вращения для запуска топовых интернет слотов. Несмотря на разные акции, стоит выделить самые основные.Свежий приз начисляется в виде валютных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в использовании своими, а случае отыгрыша оператор имеет установить ограничение на вывод средств.
1х слотс зеркало регистрация в 1×slots casino
Также учтите, собственно некоторые игровые платформы сужают список государств, коие готовы получить предложенный бездепозитный приз за регистрацию. К примеру, существуют онлайн-заведения, выдающие похожие бонусы лишь жильцам конкретных стран. К примеру, онлайн казино 777 Оригинал дает бездепозитный приз только игрокам из России и государств СНГ. Или напротив, пичкают вознаграждением всех, кроме жителей неких государств (из этого, по внимательно изучать перечень, дабы потом не возникло практически вопросов и претензий). 1×slots промокод при регистрации 2025 <a href=http://bbs.py27.com/home.php?mod=space&uid=394654>http://bbs.py27.com/home.php?mod=space&uid=394654</a> Если вы бывалый игрок, вы должны знать, что приз без депозита – редчайшая находка. Тем не, мы в изучаем онлайн, чтобы отыскать вам наихорошие бездепозитные предложения.
1×slots официальный сайт скачать
<a href=http://forum.myslash.ru/profile.php?mode=viewprofile&u=53718>http://forum.myslash.ru/profile.php?mode=viewprofile&u=53718</a> Вышеописанная первопричина и является главным интересным, в которого операторы отдают часть собственной прибыли на различные маркетинговые расходы и рекламные кампании. А самым действующим тут будут играть непосредственно бездепозитные бонусы казино 2022 с выводом за регистрацию.Вейджер менее х30–35 считается приемлемым. Опытные игроки заявляют, что с этим вейджером реально остаться в плюсе, случае верно подойти к выбору игрового аппарата. 1×slots зеркало сайта
<b>Смотреть еще похожие новости:</b>
<a href=http://griffhunter.com/boards/viewtopic.php?p=427537#p427537>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a>
<a href=https://forum.pmpobc.ca/index.php?topic=142323.new#new>1хслотс официальный сайт зеркало</a>
<a href=http://www.easysunnysunshine.com/memberlist.php?mode=viewprofile&u=18118>1×slot зеркало рабочее регистрации на телефон придет</a>
<a href=https://fougerite.com/resources/authors/jamesstawl.14360/>casino 1×slot</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чаще всего применяются коды. Их нужно вносить в особые окошки регистрационной анкеты, случае речь о пригласительных бонусах, либо в определенном разделе личного офиса игрока. Важно, убедитесь никаких, собственно раньше не регистрировались в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи.
#5405 Charlesgunnyhttp://filmkachat.ru
1 x slots
На нашем веб-сайте Вы найдете перечень актуальных свежих бездепозитных бонусов в казино 2022 года. Также, есть большое неповторимых услуг, которые доступны только посетителям нашего вебсайта последствии регистрации по нашей ссылке или активации специального промокода.Не желайте сыграть в азартные забавы, не рискуя средствами деньгами, хотя получая в все выплаты? Подобную вероятность деют многие лучшие порталы с азартными веселиями. В их числе количество честных и надежных интернет-казино на русском языке. Они завлекают новых пользователей различными поощрительными мероприятиями, включая бездепозитные, либо благотворительные призы. <a href=http://filmkachat.ru/>1×slot зеркало рабочее регистрации на телефон придет</a> Прибывшие на акк финансы бездепозитные бонусы предназначаются, главном, лишь для новоиспеченных пользователей, которые раньше не имели личного аккаунта в данном казино. Исходя из этого, если ранее у игрока был изготовлен депозит, то, по всей вероятности, у него больше не несомненно возможности рассчитывать на получение такого бонуса в конкретном заведении. <a href=http://www.wmhelp.cz/html/modules.php?name=Forums&file=viewtopic&t=69255>http://www.wmhelp.cz/html/modules.php?name=Forums&file=viewtopic&t=69255</a> Ознакомьтесь с нашим списком наилучших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего списка и получите бездеп сразу. Хватайте наихорошие безвозмездные предложения ниже и выигрывайте немалые средства, не рискуя!Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают приз по государствам. Вплоть до того, собственно клуб имеет принимать игроков из Вашей страны, а бездеп мешает. 1×slots регистрация на официальном сайте <a href=https://www.spacepub.net/members/4994-Michaeldow>https://www.spacepub.net/members/4994-Michaeldow</a>
зеркло казино 1×slots
Свежий бонус начисляется в виде валютных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в пользовании своими, а в случае отыгрыша оператор возможность установить лимитирование на вывод денег. <a href=https://www.rusdrama-az.com/support/51-sluzhba-tehnicheskoy-podderzhki-sayta.html>1×slot зеркало рабочее регистрации на телефон придет</a> 1×slots зеркало быструю регистрацию а также мгновенное <a href=http://forums.filatelija.lv/memberlist.php?mode=viewprofile&u=18629>http://forums.filatelija.lv/memberlist.php?mode=viewprofile&u=18629</a> Бездепозитные призы казино за регистрацию в 2022 году — это возможность сыграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой или количеством бесплатных вращений без внесения депозита. Не путайте деморежим с реальной забавой без надобности внесения депо.Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие возникают у начинающих. 1× slots casino официальный сайт Как только на виртуальном счету окажутся бонусные средства, поспешите отыграть вейджер. Сразу последствии сего можно забыть заявку на вывод выигрыша. Кредиты выгодно выделяются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом реальных средств и дают вероятность ощутить азарт. Во-вторых – можно насладиться любой азартной игрой доступной на сайте. В вашем постановлении находятся автоматы, настольные прибавление, видео-покер, Live-дилеры.
1×slot рабочее зеркало
Раздача бонусов может быть приурочена к различным датам: календарные дни, деньки рождения игроков, юбилей открытия казино и т. Д. Подарок выдается в виде средств, фриспинов либо баллов для скопления и размена на услуги оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд требований. Более крупные предложения встречаются очень изредка. Зачастую они доступны лишь VIP-игрокам. В остальных случаях им скорее сопутствуют очень строгие условия отыгрыша. Также вероятны вспомогательные условия и ограничения, прописанные в критериях и положения бонусной программки казино.Максимальная ставка ? устанавливается в еденице счета и ограничивает объем ставки за один спин. В случае ее превышения бонус имеет быть аннулирован. Также в правилах возможность находиться запрет на размещение ставок конкретного вида, примеру, по одинаковым шансам в рулетке (словами, на чет либо нечет, красноватое или темное и т.д.). <a href=https://notebooks.ru/forum/index.php?PAGE_NAME=profile_view&UID=83555>https://notebooks.ru/forum/index.php?PAGE_NAME=profile_view&UID=83555</a> 1×slots зеркало этих способов предполагает регистрацию
1×slots casino регистрация 1×slotscasin online
<a href=http://www.ihavethepussy.com/de/threads/199104–1%D0%A1%E2%80%A6-%D0%A1%D0%83%D0%A0%C2%BB%D0%A0%D1%95%D0%A1%E2%80%9A%D0%A1%D0%83-%D0%A0%C2%B7%D0%A0%C2%B5%D0%A1%D0%82%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%BB%D0%A0%D1%95-%D0%A1%D0%82%D0%A0%C2%B5%D0%A0%D1%96%D0%A0%D1%91%D0%A1%D0%83%D0%A1%E2%80%9A%D0%A1%D0%82%D0%A0%C2%B0%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A1%D0%8F-%D0%A0%D0%86–1×slots-casino?p=216638#post216638>1х слотс зеркало регистрация в 1×slots casino</a> 3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать аппарат либо почту, указать индивидуальную информацию;Игрокам не воспринимать приветственный бонус как гарантированный способ получить крупный выигрыш, хотя это замечательная вероятность без затрат оценить возможностей казино. 1×slots официальный сайт, скачать <a href=http://discuss.the-knowledge.org/memberlist.php?mode=viewprofile&u=40293>http://discuss.the-knowledge.org/memberlist.php?mode=viewprofile&u=40293</a>
1×slots казино зеркало
Демоказино есть практически на любом веб-сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются значительно пореже: там в случае выигрыша и соблюдения условий акций бездеп можно перевоплотить в настоящие деньги. <a href=http://rogdenie-kerch.ru/index.php?subaction=userinfo&user=ifirysol>http://rogdenie-kerch.ru/index.php?subaction=userinfo&user=ifirysol</a> 1хслот скачать В случае установленного лимита на сумму вывода выигрыша с бездепозитного приза, игрок не сможет вывести больше заявленной суммы.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.puppylinux.pl/index.php?topic=861.new#new>1×slots зеркало рабочее на сегодня</a>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5087/#comment-611395>1х слот 1хслотс регистрация перейти на 1×slots</a>
<a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=7523&TITLE_SEO=7523-preobrazovatel-interfeysov-usb-rs485&MID=476375&result=reply#message476375>1×slots акции</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Самые новые бездепозитные бонусы в казино за регистрацию 2022 года с выводом выгоды находятся на данной страничке. Посетитель может оценить условия получения и начать играть на средства без внесения депозита. При этом игроку главно осознавать, на каких критериях и какими методами возможность вывести полученный выигрыш. Для этого нужно оценить список подключенных платежных систем.
#5406 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Окладникова Ирина Андреевна порно официальное казино вход <a href=https://7club7.com/>casinos xyz</a> 1win casino кент казино <a href=https://sovsekretno.net/>7k casino официальный</a> пин ап казино казино рублях online casino казино фильм автомат казино скачать 1×bet 1×bet xyz почему в казино нет окон
DiskiPlus зеркала казино DiskiPlus 1×bet официальный сайт 1×bet xyz <a href=https://www.diskiplus.ru>DiskiPlus porno Александра Степанова, фигуристка</a> DiskiPlus inform@rucriminal.info DiskiPlus porno Екатерина Ефременкова, шорт-трекистка <a href=https://diskiplus.ru/>DiskiPlus 1×bet официальный скачать</a> DiskiPlus Кузнецова Анна Юрьевна порно DiskiPlus vavada casino DiskiPlus казино онлайн DiskiPlus bitz casino DiskiPlus казино онлайн DiskiPlus зеркала официальных сайтов казино DiskiPlus порно с Илюшникова Татьяна Александровна
#5407 Charlesgunnyhttp://filmkachat.ru
1×slots casino зеркало рабочее
Вообще перейдя в казино — верховодила схожи в получении бездепозитных призов, в стереотипные управляла заходит: доказать эл. Почту и аппарат, наполнить свой индивидуальный профиль, активировать рекламную код либо активировать предложения во вкладке БОНУСЫ.Для казино, работающих интернет, бездепозитные бонусы необходимы для привлечения свежих посетителей. Предложение поиграть на слотах без надобности внесения настоящих денег — работающий способ для повышения интереса к компании. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит играть в казино, только сейчас теснее на собственные деньги. <a href=http://filmkachat.ru/>1хслотс зеркало на сегодня</a> При маленькой сумме бонуса рекомендуется играть по невысоким ставкам, а применять наибольшие другого только что случае, в вейджер очень немалый, а время на отыгрыш крепко ограничено. <a href=https://heyjinni.com/read-blog/177753>https://heyjinni.com/read-blog/177753</a> Чтоб получить крупный выигрыш, выбирайте игровые автоматы с максимальным процентом отдачи (RTP) из перечня тех, которые доступны по условиям отыгрыша. 1×slots официальный demo регистрация в 1×slots casino <a href=https://dc-kd.ru/user/Renaldodat/>https://dc-kd.ru/user/Renaldodat/</a>
1×slots сайт зеркало
Вейджер (wager) – это коэффициент, кот-ый демонстрирует на какую сумму нужно устроить ставок, чтобы вывести бонус из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего бонуса, Вам необходимо устроить ставок на необходимую: 500*70=3500 руб. Только всецело отыграв бонус, Вы сможете вывести свой выигрыш.Если при регистрации указать промокод, возможно гарантировано получить приз. Где брать ваучер? Посетите тематику блоги либо форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В заключительнее время игорные жилища начали рекламироваться в фильмах и телесериалах. Присмотритесь и наверняка заметите промокод, который принесёт 500 или 1 000 бонусных рублей. 1×slots регистрация на сайте 1×slots ru com <a href=https://stephenupnz96307.eedblog.com/30375911/ai-nude-revolutionizing-content-moderation-and-privacy-protection>https://stephenupnz96307.eedblog.com/30375911/ai-nude-revolutionizing-content-moderation-and-privacy-protection</a> Бонус начисляется игроку незамедлительно в регистрации и прохождения верификации в казино и не просит от посетителя внесения депозита. Как управляло, объем приза в сходственном случае довольно застенчивый, впрочем позволяет новеньким познакомиться с забавой без риска настоящими деньгами. 1×slots официальный сайт зеркало Бездепозитный бонус за регистрацию в казино — это стартовый презент вид денежного начисления или бесплатных вращений для свежих игроков заведения, для получения которого не нужно заносить депо.Приглашаем делиться сужденьями о бонусах. Это поможет иным юзерам избирать наиболее выгодные предложения.
зеркло казино 1×slots
Одним из предлогов отдавать привилегию 1 либо другому заведению содержится в привлекательности предлагаемых промоакций и бесплатных услуг. Безвозмездные фриспины, выдаваемые без дела делать какой-нибудь лепта, в списке находится далеко не в конце.Иногда операторы настоятельно внесение минимального депозита перед выводом для верификации платежного прибора. В неких казино данный депо кроме светит отыграть. Например, игрок получил 500 рублей при создании аккаунта и обязан отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., понадобится устроить 875 спинов для полного отыгрыша. <a href=http://www.pcddbbs.com/space-uid-12606.html>http://www.pcddbbs.com/space-uid-12606.html</a> Фриспины без депозита либо вспомогательные средства посодействуют поближе познакомиться с игровой платформой и её функциями. За счёт презентов возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям ради игры напротив живых крупье.Бездепы могут входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами. 1×slots официальный сайт скачать
1хслотс зеркало на сегодня
Нет. Казино раздают безвозмездные призы за регистрацию, для того, чтобы клиент возможность ознакомиться с игровым заведением. А чтобы вывести его, необходимо выполнить условия отыгрыша. Не стоит сразу же отказываться от приветственных даров в сходственных казино. Администрация готова начислить деньги или фриспины, но сначала сотрудники обязаны убедиться, собственно вы не мошенник. Дело что, нет, что развелось очень количество охотников за бонусами. Они научились обманывать систему и зарабатывать крупные суммы средств.При использовании бездепозитным бонусом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют количество обликов лимитов: Основное отличие что, что для получения бездепа не надо пополнять баланс в казино. Но не сего, есть ряд прочих отличий:Многие новички сомневаются, собственно поощрительный приз надо несомненно возвращать, числе в они выиграли у казино. Это безусловно неопасно и надежно. Выводя выигранные средства, игрок просто останавливает свое роль при и теряет уникальную возможность – безвозмездно увеличивать личное вещественное положение. 1×slots официальный зеркало рабочее <a href=https://flaxeco.com/user/DoctorLazutaOr/>https://flaxeco.com/user/DoctorLazutaOr/</a>
1× slots регистрация в 1×slots casino
Шаг 4. Активация. Внимательно исследуйте обстоятельства, информацию по ограничениям и сроке деянья бонусного предложения. Разобравшись с правилами, можно активировать приз в личном кабинете (время ? с использованием промокода) либо по запросу в саппорт.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. <a href=http://google.mv/url?q=http://denpractik.ru/bitrix/redirect.php?goto=http://toyhou.se/~r?q=https://telegra.ph/Otschet-10-dnej-s-daty-polucheniya-sudebnogo-prikaza-Polnoe-rukovodstvo-09–19>http://google.mv/url?q=http://denpractik.ru/bitrix/redirect.php?goto=http://toyhou.se/~r?q=https://telegra.ph/Otschet-10-dnej-s-daty-polucheniya-sudebnogo-prikaza-Polnoe-rukovodstvo-09–19</a> Частенько новенькие не знают, как активировать презенты или исключить 1-ый выигрыш. Для подобных случаев наша команда описала основные термины – собственно это фриспины, вейджер, как его отыграть, зачем необходимо проходить верификацию. казино 1×slots Приветственный бонус без депозита ? презент за регистрацию. Выдается деньгами, фриспинами или баллами. В последнем случае бонусные баллы применяются для роли в турнирах либо обмена на настоящие деньги.Подтверждение персональной инфы. Все казино просят от клиента пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и присутствие у юзера других аккаунтов (мультиаккаунт запрещен).
<b>Смотреть еще похожие новости:</b>
<a href=http://miupsik.ru/forums/showthread.php?tid=377802>1х слотс зеркало регистрация в 1×slots casino</a>
<a href=http://molifan.netwww.molifan.netwww.molifan.net/space-uid-2280308.html>1×slots официальный сайт мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Представьте момент, когда при ставке в 10 рублей Вы получите сходственное умножение. Миллион руб. За одно вращение, собственно вполне вполне. Поэтому вопрос, сколько возможно выиграть остаётся закрытым. Предлагаем выяснить без. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный приз и инспектируйте удачу в деле. Разумеется, вывести средства не так просто. Однако шансы есть у всех. Если вы избираете испытанное лицензионное онлайн казино и сделайте все обстоятельства получения бездепозитного бонуса, трудностей с получением презента у Вас не возникнет.
#5408 Charlesgunnyhttp://filmkachat.ru
1х слотс зеркало регистрация в 1×slots casino
Осталось выбрать казино с призом за регистрацию и создать профиль. После активации презента выигрыш зависимости от Фортуны и навыков.Активация денежного вознаграждения происходит механически в творения профиля или применения промокода. Иногда операторы предъявляют вспомогательные притязания: подписаться на странички казино в соц сетях или на рассылку рекламных извещений, скачать и установить вспомогательный софт и т.д. <a href=http://filmkachat.ru/>1×slots официальный сайт мобильная версия</a> Мы собрали и опубликовали список превосходнейших бездепозитных казино с бонусами за регистрацию, которые гарантируют щедрые выигрыши и мгновенные выплаты. <a href=https://band.us/band/96885593/post/2>https://band.us/band/96885593/post/2</a> 3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать аппарат или почту, показать персональную информацию; 1×slots зеркало видели такую регистрацию на <a href=http://forum2.extremum.org/viewtopic.php?f=6&t=214848>http://forum2.extremum.org/viewtopic.php?f=6&t=214848</a>
казино 1×slots
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=284624>1×slots регистрация на 1хслотс</a> 1хслотс мобильная версия зеркало <a href=http://www.qazaqpen-club.kz/en/user/Patrickluddy/>http://www.qazaqpen-club.kz/en/user/Patrickluddy/</a> Многие казино предоставляют в рекламных целях безвозмездные призы необыкновенно для наших читателей. Чтобы их получить, надо(надобно) перебежать на игровой вебсайт по партнерской ссылке с нашего портала.Отыграв бездепозитный бонус в казино с выводом тоже придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если схожее лимитирование существует, то единоразово вывести получится только необходимую, не превышающую объем приобретенного приза. казино 1×slots официальный сайт Также бездепозитные призы имеют служить методом возвращать к ирге клиентов, что приостановивших своё сотрудничество с компанией: уведомление о бездепе поступает на мобильный аппарат либо почту.Демоказино есть почти на любом веб-сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются существенно реже: там когда выигрыша и соблюдения условий промоакций бездеп возможно перевоплотить в реальные деньги.
1× слот зеркало
Фриспины предусмотрены для использования в видео слотах. Внимательно ознакомьтесь с критериями – часто их выдают на некоторые автоматы. В зависимости от клуба, у вас получится сделать определённое количество ставок. Кстати, продвинутые игорные жилища разрешают запускать каждых «одноруких злодеев». <a href=https://www.mikocon.com/home.php?mod=space&uid=212126>https://www.mikocon.com/home.php?mod=space&uid=212126</a> 1 х слотс зеркало
1×slot казино зеркало
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=4481>1× slots сайт</a> Некоторые клубы механически начисляют приз на акк игрока в исполненья критерий получения, но бывают истории, когда бонус надо(надобно) активировать игроку самому. Есть некоторое методов активации бонуса: 1×slots зеркало проходить регистрацию это отличный вариант <a href=http://bbs.all4seiya.net/home.php?mod=space&uid=987041>http://bbs.all4seiya.net/home.php?mod=space&uid=987041</a> Бонус за регистрацию в казино выдается только один раз на 1-го игрока. Но случаются вспомогательные промоакции, в коих бездепы раздаются для постоянных посетителей и эти презенты Вы можете получить более одного раза.
1×slots сайт зеркало
Так собственно главное различие дара на депозит от бездепа – обязательное пополнение счёта. Вы можете внести депо и преумножить стартовый капитал либо арестовать бездеп и при этом не придётся рисковать собственными сбережениями. Поспешите выполнить простые притязания, и администрация ресурса начислит щедрое поощрение! Раздача призов имеет быть приурочена к разным датам: календарные дни, дни рождения игроков, годовщина открытия казино и т. Д. Подарок выдается вид средств, фриспинов или баллов для накопления и размена на услуги оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд притязаний.Вообще перейдя в казино — управляла одинаковы в получении бездепозитных бонусов, в стереотипные управляла входит: подтвердить эл. Почту и телефон, заполнить свой собственный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ. <a href=http://www.pinnaclebattleship.com/wiki/index.php/Glory_Casino>http://www.pinnaclebattleship.com/wiki/index.php/Glory_Casino</a> Во время игры в казино, выигрыши, приобретенные спасибо бесплатным призовым фондам, суммируются и включаются в общую сумму для отыгрывания. Однако, если удача улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно допустит вывести финансовые свои. Сумма вывода будет в от лимита, одобренного непосредственно в этом учреждении. Поэтому, внимательно надо(надобно) читать управляла выдачи безлимитных депо. 1×slot регистрация
<b>Смотреть еще похожие новости:</b>
<a href=http://board.eternityrpc.com/member.php?action=profile&uid=369>1×slots зеркало на сегодня</a>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=292130>1×slots казино мобильная версия</a>
<a href=http://forum.exalto-emirates.com/memberlist.php?mode=viewprofile&u=69997>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 поболее. Когда игроку надеется много фриспинов, администрация может разбивать их начисление на некоторое дней. Бесплатные вращения предоставляются для конкретного слота, который указывается в правилах акции.
#5409 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
леон букмекерская контора кент casino <a href=https://7club7.com/>казино можно</a> 7k casino зеркало на сегодня порно с Дарья Касаткина (теннис) <a href=https://7club7.com/>porno Светлана Ходченкова</a> casino промокод win win casino online casino 7k 1go casino приложения букмекерских контор porno Илона Маркова, хоккеистка casino регистрации
DiskiPlus Елизавета Боярская DiskiPlus официальные букмекерские конторы скачать <a href=https://diskiplus.ru/>DiskiPlus up casino официальный</a> DiskiPlus букмекерская контора официальный сайт DiskiPlus играющие казино онлайн <a href=https://diskiplus.ru/>DiskiPlus Нургалиева Эльвира Рамиловна порно</a> DiskiPlus гта казино DiskiPlus casino сегодня DiskiPlus порно с Матвей Сафонов (футбол) DiskiPlus porno Юлия Канакина, скелетонистка DiskiPlus порно с Захарова Мария Владимировна DiskiPlus казино онлайн DiskiPlus порно с Никита Кучеров (хоккей)
#5410 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало
Шаг 5. Использование и отыгрыш. Бездеп должен быть применен в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера. <a href=http://filmkachat.ru/>1×slots casino зеркало</a> 2. Создать свежий профиль. Для регистрации надо(надобно) наполнить маленькую анкету или зайдите в собственный кабинет посредством социальных сеток; <a href=https://blog.udn.com/G_112062930339362154/181391873>https://blog.udn.com/G_112062930339362154/181391873</a> casino 1×slot <a href=http://whirlpowertool.ru/index.php?subaction=userinfo&user=nicequery45>http://whirlpowertool.ru/index.php?subaction=userinfo&user=nicequery45</a>
1×slots зеркало регистрация в 1×slots casino
<a href=http://vn-info.net/user/Josephkam/>1× slots сайт</a> 1×slots casino регистрация <a href=http://j90806hs.bget.ru/user/ScottDuazy/>http://j90806hs.bget.ru/user/ScottDuazy/</a> Кешбэк-бонус представляет собой возврат фиксированного процента от ставки в случае поражения либо же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не выше 10%. 1×слотс казино Нет. Для получения бездепозитного бонуса в казино нужна неотъемлемая регистрация на веб-сайте. Играть в слоты бесплатно и без регистрации можно лишь в демо режиме.
1×slots официальный сайт зеркало рабочее
Существует ли стратегии для отыгрыша бездепозитных бонусов? К раскаянию нет, на выигрыши либо проигрыши с бонусов, казино либо игрок повлиять имеет, отдача игр происходит от разработчиков игр.Маркетинговая деятеля всех игорных интернет-клубов обязана одевать разнообразный характер. И если гонорары на депозит служат для того, чтобы провоцировать вносить депозиты и поощрять теснее место юзеров, то бездепозитный приз в казино либо приз за регистрацию в казино, прежде всего, рассчитан на расширение базы потребителей. <a href=http://o91668l6.beget.tech/user/RalphBoorm/>http://o91668l6.beget.tech/user/RalphBoorm/</a> Максимальный объем ставки, кот-ый нельзя превосходить пока бонус не несомненно всецело отыгран. В случае нарушения этого верховодила, приз и выигрыш с него будут аннулированы.Бездепозитные бонусы за регистрацию в игровых автоматах для собственников онлайн-казино являются частью рекламной кампании, направленной на повышение аудитории сайта. Так они продвигают средства бренды и завлекают новых клиентов. 1×slots рабочее зеркало на сегодня Создание аккаунта. На веб-сайте казино нужно обнаружить регистрационную форму и заполнить порожние поля личностными данными. Иногда на этом этапе потребуется указать только адресок электрической почты и пароль, хотя почаще бы заполнить анкету персональной информацией (ФИО, дата рождения, пространство проживания и т.д. ). Нужно указывать только реальные данные, что впоследствие они станут испытаны.
казино 1×slots
Бездепозитный бонус за регистрацию в казино с выводом средств в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых свежих, щедрых и проверенных призах в онлайн казино, коие обновляются каждый денек. 1×slot казино зеркало <a href=http://wdty.org/home.php?mod=space&uid=262394>http://wdty.org/home.php?mod=space&uid=262394</a> Вейджер в переводе с британского значит «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша приобретенного бонуса, в нашем случае бездепозитного. Число ставок роли не играет — важно только набрать сумму, пропорциональную сумме одобрения.Автоматы непопросту числятся наиболее известным азартным весельем. Чтобы усвоить управление и правила, понадобится всего количество мин. Ваша задача устроить ставку, найти число трудящихся линий и можно крутить барабан. Если на выпадет выигрышная комбинация – вы выиграли! С этой задачей вас помогут управится бездепозитные призы казино.
1×slots регистрация на 1хслотс
Максимальный объем ставки, который нельзя превышать пока бонус не несомненно полностью отыгран. В случае нарушения этого правила, приз и выигрыш с него будут аннулированы.Как правило, при выводе денег, от играющего потребуется лишь устроить минимальный вклад чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом индивидуальный счет. <a href=http://aluxwheel.com/bbs/board.php?bo_table=free&wr_id=168280>http://aluxwheel.com/bbs/board.php?bo_table=free&wr_id=168280</a> При регистрации в том либо ином онлайн игральном заведении — для дается раз шанс испытать свою удачу не внося свои монеты. Замечу что такую поощрительную услугу предоставляют не все онлайн игровые площадки, а лишь щедрая середина(средина) из их. Которые мы подготовили для Вас в нашем перечне.Бонусные деньги – маленькая сумма средств для старта в новеньком казино. На бонусные деньги, обыкновенно разрешено играть во все забавы, кроме слотов с современным джекпотом и игр из раздела live casino. 1хслотс рабочее зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://www.emv.info/viewtopic.php?f=15&t=2233>1хслотс официальный сайт зеркало</a>
<a href=http://angelandmax.teamforum.ru/memberlist.php?mode=viewprofile&u=640>1×slots рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриплей-бонусы встречаются только в неких клубах. Они зачисляются сразу после создания профиля и активны недолговременное время. Если не успеете истратить свои, они просто сгорят. Касаемо медли, как бонусы активны протяжении часа. Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.
#5411 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
up casino официальный casino рабочее зеркало <a href=https://repost.news/>up casino официальный</a> порно с Варвара Субботина porno Екатерина Ефременкова, шорт-трекистка <a href=https://kompromat1.online/>1×bet 1хбет</a> про казино играющие казино Анна Михалкова скачать букмекерскую контору на андроид букмекерская контора фонбет porno Мира Андреева (теннис) почему в казино нет окон
DiskiPlus casino автомат DiskiPlus кент casino <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet зеркало</a> DiskiPlus gama casino DiskiPlus букмекерскую контору пин <a href=https://www.diskiplus.ru/>DiskiPlus casino официальный зеркало</a> DiskiPlus 1×bet casino DiskiPlus винлайн букмекерская контора официальный сайт DiskiPlus автомат казино DiskiPlus сколько казино DiskiPlus 1×bet зеркало xbet DiskiPlus Окладникова Ирина Андреевна порно DiskiPlus казино гта 5
#5412 Charlesgunnyhttp://filmkachat.ru
1×slots казино зеркало
После получения приза вывод средств для клиента будет недосегаем времени, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или чета месяцов. Выводить средства игрок может только после отыгрыша. <a href=http://filmkachat.ru/>1×slots зеркало этих способов предполагает регистрацию</a> Для вывода средств бонус нужно несомненно отыграть законам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариациями отыгрыша бездепозитного приза до его получения, чтобы избежать конфликтных обстановок. <a href=https://imageevent.com/lexxeagle/3drenderedproductimages>https://imageevent.com/lexxeagle/3drenderedproductimages</a> Важно, удостоверьтесь в том, что раньше не регистрировались в выбранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи. зеркло казино 1×slots <a href=http://i91215un.bget.ru/user/Renaldogloky/>http://i91215un.bget.ru/user/Renaldogloky/</a> Онлайн-казино с бездепозитными призами ставят посетителям условия для пользования бездепами, потому перед ролью в промоакции никакого тщательно ознакомиться со всеми правилами и аспектами акции. Условия шансы прикасаться получения приза, его применения и следующего вывода денежных средств когда выигрыша.
1×slots регистрация 1×slotscasino09k online
<a href=https://forums.scar-divi.com/topic/540911–1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE/>1хслотс казино зеркало</a> 1×slots сайт зеркало Кешбэк-бонус дает собой возврат фиксированного процента от ставки когда поражения или же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не превышает 10%.При поддержки такого одобрения оператор имеет также привлекать клиентов, которые раньше проявляли активность на сайте, хотя по некий причине перестали играть. В этом случае промокод высылается пользователю по электрической почте либо повторяющий SMS. <a href=https://21micro-grid.com/space-uid-33322.html>https://21micro-grid.com/space-uid-33322.html</a> Можно. Вы практически можете отрешиться от получения бездепозитного бонуса за регистрацию в казино, же Вы не создадите ставку. 1х слот 1хслотс регистрация перейти на 1×slots Казино выделяет возможность заработать и исключить реальные деньги на бездепозитных призах. Обычно, это незначительная сумма, которую казино имеет для разрешить презентовать игроку.Нельзя осматривать забаву на средства, как вариант заработка. Азартные забавы запрещены для лиц младше 18 лет. Topcasinobonuses.mobi классифицируется зачинщиком азартных игр. Сайт одевает информационный характер.
1х слотс зеркало регистрация в 1×slots casino
<a href=http://lebbook.kz/user/DoctorLazutaKr/>http://lebbook.kz/user/DoctorLazutaKr/</a> Некоторые веб-сайты, прежде чем обмануть регистрацию игроков, предлагают ответить на некоторое базовых вопросов. Цель проведения подобной викторины – выявить случайных людей, которые не имеют представления о покере, и не допустить получения ими бонусов. Если гость теснее играл в казино, то ответить на полтора 10 простых вопросов несомненно нетрудно. Очень часто, ответы можно найти на официальных веб-сайтах этих учреждений.При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, которое можно предназначить этой в казино. 1×slots официальный сайт скачать Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, дабы еще раз получить даровой приз. Игорные заведения нетерпимы к бонус-хантерам, потому вас ожидает неминуемое санкция.Зарегистрируйтесь. Для регистрации почаще всего достаточно ввести собственный номер аппарата и почтовый адресок, после чего установить полученный код из СМС. Возможно, потребуется указать промокод. В правилах акции несомненно написано, где его хотелось вводить. Иногда это хотелось делать при регистрации, времени — теснее последствии творения собственного офиса, на отдельной странице.
1хслотс регистрация в 1×slots casino
Итак, дабы безвозмездные бонусные кредиты трансформировались в реальные средства, которыми продоставляется управлять по собственному усмотрению, их нужно отыграть. Вейджер стопам уточнять в правилах онлайн-казино. 1×slots регистрация 1×slots casino 777 online <a href=https://adobeacrobat.cc/member.php?action=profile&uid=2535>https://adobeacrobat.cc/member.php?action=profile&uid=2535</a> Когда идет о валютных бонусах, казино практически устанавливают условия вейджера, коие необходимо выполнить, дабы исключить выигрыш.Ознакомьтесь с нашим списком лучших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего списка и получите бездеп сразу. Хватайте наихорошие безвозмездные предложения ниже и выигрывайте немалые средства, не рискуя!
1×slots официальный сайт зеркало
Подтвердите регистрацию, чтобы активировать Бездепозитный приз с выводом, требуется заполнить собственный профиль. Заполните пустопорожние поля реальными данными о для. Выиграть настоящие деньги в казино не пополняя счет – трудно, но вполне. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными бонусами и начните выступать на бонусные средства. По статистике из 10-ти заведений можно заработать маленькую сумму денег помощью бонусных средств.Если при регистрации показать промокод, возможно гарантировано получить бонус. Где арестовать ваучер? Посетите направленные блоги либо форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В заключительнее время игорные дома начали рекламироваться в кинокартинах и телесериалах. Присмотритесь и скорее заметите промокод, который принесёт 500 либо 1 000 бонусных руб. <a href=http://barboska.ru/u1439/blog/2258.html>http://barboska.ru/u1439/blog/2258.html</a> 1 xslots рабочее зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=91701&result=reply>1×slots зеркало регистрация</a>
<a href=http://big.bestforums.org/memberlist.php?mode=viewprofile&u=3301>1×slots официальный сайт, скачать</a>
<a href=https://fougerite.com/threads/1×slots-zerkalo-kotoruju-ukazyvali-pri-registracii-kstati.13141/>1×slots зеркало которую указывали при регистрации кстати</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При ирге на бонусные свои запрещается играть в игровые автоматы с прогрессивным джекпотом и забавы из радела exist casino. Кроме как, кое-какие казино выделяют бездеп на раз или некоторое конкретных слотов, и в иных играх Вы не можете на них выступать.
#5413 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
сайт казино зеркало игры казино <a href=https://7club7.com/>casino 7k сегодня</a> Шевцова Татьяна Викторовна порно ап казино <a href=https://repost.news/>1go casino</a> 7k casino зеркало на сегодня pin casino зеркало 1×bet сайт Черкесова Бэлла Мухарбиевна порно букмекерская контора леонов сайты казино порно с Анастасия Потапова, теннисистка
DiskiPlus ramenbet casino DiskiPlus casino промокод <a href=https://www.diskiplus.ru>DiskiPlus лучшие бесплатные онлайн казино</a> DiskiPlus вавада казино DiskiPlus казино рулетка <a href=https://diskiplus.ru>DiskiPlus букмекерская контора без</a> DiskiPlus online casino 7k DiskiPlus Радченко Светлана Юрьевна порно DiskiPlus 1×bet официальный 1×bet xyz DiskiPlus порно с Антропова Валентина Викторовна DiskiPlus Светлана Ходченкова DiskiPlus online casino 7k DiskiPlus карты казино
#5414 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
7k casino зеркало porno Александра Степанова, фигуристка <a href=https://vestnik-jurnal.com/>casino 7k сегодня</a> Елизавета Боярская 1×bet скачать бесплатно <a href=https://th-royalgclub.com/>сайт казино вход</a> леон букмекерская контора винлайн букмекерская контора официальный порно с Бондаренко Анастасия Борисовна винлайн букмекерская контора официальный сайт казино большая казино фильм смотреть онлайн casino betting
DiskiPlus Фастова Елена Владимировна порно DiskiPlus порно с Голикова Татьяна Алексеевна <a href=https://diskiplus.ru/>DiskiPlus официальные сайты казино</a> DiskiPlus 1×bet зеркало слоты 1×bet xyz DiskiPlus pin up casino пин ап <a href=https://diskiplus.ru>DiskiPlus Елена Лядова</a> DiskiPlus porno Дарья Мороз DiskiPlus porno Алена Косторная (фигурное катание) DiskiPlus pin up casino buzz DiskiPlus какие казино DiskiPlus порно с Алина Загитова, фигуристка DiskiPlus промокод 1×bet DiskiPlus bitz casino
#5415 Charlesgunnyhttp://filmkachat.ru
рабочее зеркало 1×slots
На нашем сайте Вы отыщите перечень своевременных свежих бездепозитных бонусов в казино 2022 года. Также, есть количество эксклюзивных предложений, коие доступны только посетителям нашего сайта последствии регистрации по нашей ссылке или активации специального промокода. <a href=http://filmkachat.ru/>1×slots сайт</a> <a href=https://www.palscity.com/forums/thread/2083/>https://www.palscity.com/forums/thread/2083/</a> Такой казино бонус без депозита за регистрацию выдается игроку на час и активно используется данное предложение с 2017 года. Это как бы какая-то маскировка поощрения под бездепозитный. Суть всего сего сводится к что, этому, что геймеру на час выдается, к примеру, 1000 долларов, а реклама повторяет про, собственно каждой выигрыш возможно будет в будущем оставить при себе. Но в играющий всерьез отнесется к данному предложению, то он попросту потеряет время. Ведь игроку нужно будет играть не в основном аккаунте, в тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (числе всей тыс. ) в правила вступят определенные условия, где несомненно сказано, что наибольшей суммой победы имеет быть лишь двести $ и средства можно применять лишь в бонуса на 1-ый вклад с вейджером 25 от суммы гонорары плюс сам депозит. По результату получится, собственно игрок выигрывал себе 200% приз с вейджером на конкретную сумму. Короче разговаривая, это все не вашего времени. 1хслотс рабочее зеркало на сегодня <a href=http://www.ydelection.com/bbs/board.php?bo_table=free&wr_id=1200069>http://www.ydelection.com/bbs/board.php?bo_table=free&wr_id=1200069</a> Получить приветственный бонус имеют лишь свежие клиенты онлайн-казино. Способы описаны в условиях промоакции любого законного казино, чаще всего это:Как верховодило, при выводе финансов, от играющего требуется только сделать минимальный вклад чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом собственный счет.
казино 1×slots
Но эти рамки не смущают в хайроллеров, что коэффициенты на слотах дозволяют рассчитывать на солидные выигрыши, а в некоторых автоматах разыгрывается передовой джекпот.Бездепозитные призы – это исключительно интересная и наиболее многообещающая промоакция интернет-казино. Они числе чем фри-спинов, поэтому что выплаты в бесплатных вращениях не гарантированы, как комбинации на барабанах игрового аппарата имеют не сложиться. <a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1×slots официальный сайт зеркало рабочее</a> 1×slots казино зеркало <a href=http://teltzion.org/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0>http://teltzion.org/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0</a> 1хслотс казино зеркало
1×slots зеркало регистрация то дальше необходимо пройти
Составленный экспертами Casino.ru список онлайн-казино с бездепозитным призом позволяет игрокам сопоставить спецпредложения различных операторов. <a href=http://www.xiaoditech.com/bbs/home.php?mod=space&uid=1856035>http://www.xiaoditech.com/bbs/home.php?mod=space&uid=1856035</a> Но рядах азартных платформах похожие вознаграждения могут получить теперь зарегистрированные пользователи. В таком случае, призы предоставляются в рамках уникальных промоакций или же некоторым игрокам повторяющий акционного предложения, коие приходит на почту с целью «вернуть» игрока в свое казино. казино 1×slots Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.При небольшой сумме бонуса рекомендуется играть по низким ставкам, а использовать наибольшие превосходнее лишь что, нет случае, в вейджер слишком великий, а время на отыгрыш крепко ограничено.
казино 1×slots официальный сайт
1×slots casino регистрация 1×slots review live <a href=http://jbwang.com/member.php?action=showprofile&user_id=27279>http://jbwang.com/member.php?action=showprofile&user_id=27279</a> Заполняя данные в собственном профиле, указывайте только достоверную информацию, так как Вам придется ее доказать дальнейшем при выводе денег.Некоторые онлайн-казино без депозита предлагают свежим клиентам избрать приз при регистрации. Будьте внимательны: выбрав раз, вы в безусловном большинстве случаев не сможете воспользоваться остальными.
1× slots зеркало
Промообъявления от казино мешают реальной картины и направлены на вербование внимания юзеров. Понять, как высоки шансы остаться в плюсе, позволит личный анализ условий предложения:Фриспины без депо или дополнительные средства помогут ближе познакомиться с игровой платформой и её функциями. За счёт даров возможно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради забавы напротив живых крупье. <a href=https://forum-otzyv.ru/showthread.php?tid=13571&pid=2010347#pid2010347>https://forum-otzyv.ru/showthread.php?tid=13571&pid=2010347#pid2010347</a> 1хслотс мобильная версия зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=275512>1×slots официальный сайт, скачать</a>
<a href=https://bbs.sinbadgroup.org/index.php?xjkh-tampa-s-poster-pup-for-new-cancer-treatment.t48661.html/page-2716#post-178311>1хслотс казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Также есть онлайн-платформы азартных игр, которые используют раздачу бездепозитных призов в специальные даты (как для казино, например и для игрока). Помимо сего, действующие игроки также имеют вероятность получить схожие призы за свою деятельность (например, за повышения значения или за схожие достижения). Автоматы непопросту числятся наиболее известным азартным весельем. Чтобы усвоить управление и правила, понадобится всего количество мин. Ваша задача устроить ставку, найти число трудящихся линий и можно крутить барабан. Если на выпадет выигрышная комбинация – вы выиграли! С этой задачей вас помогут управится бездепозитные призы казино.
#5416 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
up casino официальный up casino зеркало <a href=https://www.ossetia.tv/>порно с Георгий Джикия (футбол)</a> inform@rucriminal.info мелбет букмекерская контора <a href=https://kompromat1.online/>играющие казино</a> pin up casino пин ап 1×bet официальный букмекерские конторы без депозита порно с Федор Чалов (футбол) pin up casino top top ев казино Фастова Елена Владимировна порно
DiskiPlus казино смотреть DiskiPlus kent casino регистрация <a href=https://www.diskiplus.ru/>DiskiPlus casino автомат</a> DiskiPlus Анна Михалкова DiskiPlus скачать букмекерскую контору <a href=https://www.diskiplus.ru/>DiskiPlus Приезжева Екатерина Геннадьевна порно</a> DiskiPlus официальные букмекерские конторы скачать DiskiPlus Преподобная Надежда Александровна порно DiskiPlus пин ап casino pin DiskiPlus casino online зеркало DiskiPlus ап казино DiskiPlus букмекерская контора вход DiskiPlus букмекерская контора бесплатно скачать
#5417 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало
Бездеп с фриспинами имеет охватывать всю коллекцию игр на веб-сайте или разработки 1-го провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении акции. Выигрыш имеет быть выведен в того, как пользователь отыграет данную сумму. Возможность расценить полный функционал слотов — основное совершенство этой разновидности. Игроку становятся доступны что, эти функции, которые отсутствуют в демонстрационном режиме, а возможность выиграть реальные деньги добавляет ясных азартных ощущений.Также бездепозитные бонусы шансы работать методом возвращать к игре посетителей, пока приостановивших своё сотрудничество с компанией: уведомление о бездепе поступает на мобильный телефон либо почту. <a href=http://filmkachat.ru/>x1 slots 1хслотс регистрация перейти на 1×slots</a> Для вывода средств приз нужно несомненно отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами акции и вариациями отыгрыша бездепозитного бонуса до его получения, чтобы избежать конфликтных обстановок.Свежий приз начисляется повторяющий валютных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в использовании средствами, в случае отыгрыша оператор может установить лимитирование на вывод денег. <a href=https://ai.ceo/read-blog/206569>https://ai.ceo/read-blog/206569</a> Раздача бонусов имеет быть приурочена к разным датам: календарные праздничные, деньки рождения игроков, юбилей открытия казино и т. Д. Подарок выдается в виде денег, фриспинов или баллов для скопления и обмена на услуги оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода этой суммы придется выполнить ряд притязаний.Бесплатные призы казино без депозита возможно получить повторяющий денежных средств на бонусный счет (исключить их можно только последствии отыгрыша), фриспинов, забавы или кешбэк-бонуса. рабочее зеркало 1×slots <a href=https://minecraftcommand.science/profile/glavdorogadv1808>https://minecraftcommand.science/profile/glavdorogadv1808</a> Каждый геймер должен сперва отчетливо изучить обстоятельства по получению и отыгрышу приглянувшегося подарка. Если всё организует, поторопитесь отобрать бесплатные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо момент начать вертеть барабаны лучших слотов.Фриспины — благотворительные вращения, которые разрешают игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины считаются самым модным и преимущественным обликом приза — благотворительные вращения иногда эффективнее и веселее в отыгрыше, чем остальные облики бездепов.
1×slots бездепозитный бонус за регистрацию
<a href=https://www.donchillin.com/space-uid-382497.html>1×slots официальный сайт, скачать</a> 1×slots официальный сайт скачать на айфон Фриспины начисляются по определенной ставке. После их активации игроку необходимо запустить разъем и убедиться, собственно в нем показываются бесплатные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода в отыгрыша определяется оператором и редко превышает 5 000 руб.Такой казино приз без депо за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это словно некая конспирация одобрения под бездепозитный. Суть всего этого сводится к тому, собственно игроку на час выдается, например, 1000 $, а реклама утверждает то, что любой выигрыш можно несомненно в будущем забыть при для. Но если играющий серьезно отнесется к этому предложению, то он просто растеряет время. Ведь геймеру надо(надобно) несомненно выступать не главном аккаунте, ну тренировочном и с ограниченным выбором автоматов и ставок. Да и если, тогда, выигрыша (и всей тысячи) в правила вступят конкретные обстоятельства, где будет сказано, собственно максимальной суммой победы возможность быть только двести долларов и деньги возможно использовать только в приза на первый лепта с вейджером 25 от суммы вознаграждения плюс сам депо. По итогу выйдет, что игрок выигрывал для 200% бонус с вейджером на определенную необходимую. Короче говоря, это все надо вашего медли. <a href=http://diezel.kr/bbs/board.php?bo_table=contact&wr_id=82500>http://diezel.kr/bbs/board.php?bo_table=contact&wr_id=82500</a> Чтобы выступать бесплатно на настоящие деньги в казино, порой довольно просто зарегистрироваться. Иногда необходимо выполнить дополнительные деянья. 1×slots рабочее зеркало на сегодня Существуют казино с бонусом за регистрацию, каких довольно востребованы фриспины в интернет казино потом регистрации в конкретных забавах. Они встречаются числе чаще бесплатных поощрений либо традиционных призов в казино без инвестициям. Например, игрок регистрирует счет, на кот-ый начисляются бесплатные забавы, бонус за регистрацию повторяющий бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса игры выигрывает истинные деньги, которые в последствии можно удачно вывести из заведения на собственную платежную систему. То есть, все шансы исключить средства без рисков своими деньгами. Регистрация, какую игры получит призы, займет несколько, а спасибо этому можно прирастить пять евро поощрений до тысячи и без всяких проблем вывести их.Ограничения по играм. Администрация запрещает игрокам некоторые игровые автоматы с бездепозитным призом, деньгами или безвозмездными вращениями. Обычно, в правилах приводится глубокий список слотов для отыгрыша. Иногда разделенье производится по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, хотя запрещен в настольных забавах и в разделе Live Casino.
1×slots зеркало регистрация
Верификация аккаунта. Лучше доказать личность незамедлительно в регистрации, дабы потом не было заморочек с выводом денег. Верификация имеет протекать 2-мя способами: Зарегистрироваться в казино по специальной ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефона и электронную почту). Для доказательства номера телефона нужно в собственном профиле указать собственный номер и надавить кнопку „Подтвердить номер телефона“, дальше Вы получите sms-сообщение с кодом, который необходимо установить в отвечающее фон. Для доказательства электронной почты, перейти по активной ссылке в послании от казино.Акции, приуроченные к календарным праздничным, посещают рассчитаны как на всех пользователей, например и на категории: к, презент на 8 марта девушкам-игрокам либо мужикам на 23 февраля. <a href=https://alphacs.ro/member.php?77307-HarryDoubs>https://alphacs.ro/member.php?77307-HarryDoubs</a> Для проверки используются сканы паспортов, водительских удостоверений, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь замечен в попытке ввести вспомогательный аккаунт, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный список. При ирге на лицензионной площадке не бояться свидетельствовать достоверную персональную информацию (шифрование исключает утечку персональных данных).Фриспины – благотворительные вращения с фиксированной ставкой, которые можно применять в конкретных игровых автоматах. 1×slot зеркало рабочее регистрации на телефон придет Предложения с бездепозитными призами за регистрацию дозволяют новым заведениям привлечь аудиторию на свой сайт. А игроки к получают вероятность играть на настоящие деньги без депозита в казино и заработать небольшой стартовый капитал, который разрешается вывести на карту банка либо электронный кошелек.
1×slots зеркало сайта
На странице представлены бездепозитные призы за регистрацию в казино редкая заслуга за коей гонятся все игроки как новички, так и мастера. Мы тоже уделяем великое внимание на присутствие призов при формирование рейтинга казино на средства. Бездепозитный приз это вероятность играть бесплатно и выиграть реальные деньги. Такие поощрения дозволяют даром протестировать новое казино, разобраться с игровым процессом онлайн слотов, заработать и исключить маленькую сумму денег. 1×slots зеркало проходить регистрацию это отличный вариант <a href=http://cqr3d.ru/index.php?subaction=userinfo&user=lateglossary13>http://cqr3d.ru/index.php?subaction=userinfo&user=lateglossary13</a> Если речь идет об эксклюзивных услугах, возможность понадобиться регистрация в казино по ссылке с партнерского вебсайта.Итак, дабы благотворительные бонусные кредиты трансформировались в настоящие средства, которыми вы можете управлять по собственному усмотрению, их надо(надобно) отыграть. Вейджер следует уточнять в правилах онлайн-казино.
1хслот зеркало
Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам воспрещено начислять бонусы клиентам, не имеющим денежных средств на счете. Мы предлагаем разглядеть актуальные бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ. Все бесплатные бонусы кажутся заманчивыми. Кто же категорически от возможности сыграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далековато не все бездепозитные призы в презентабельны для рассудительного посетителя. <a href=https://eco-kamchatka.ru/user/Charlessak/>https://eco-kamchatka.ru/user/Charlessak/</a> 1 x slots casino Особую изюминку видео слотам придают уникальные знакы. С их появлением активируются разные призы. Вы сможете запустить вспомогательный степень и прирастить сумму выигрыша. Есть знаки, коие сменяют ненужные элементы и сами делают выигрышные комбо. Не стоит забывать и про бонус-тур. После любого счастливого спина есть шанс прирастить сумму выигрыша в 2 или четыре раза.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если при регистрации указать промокод, возможно гарантировано получить бонус. Где брать ваучер? Посетите на блоги или форумы. Иногда администрация клуба делает рассылку ваучеров на электрическую почту. В заключительнее время игорные дома начали афишироваться в фильмах и сериалах. Присмотритесь и наверняка заметите промокод, кот-ый принесёт 500 или 1 000 бонусных руб.
#5418 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино гта 5 пинко casino <a href=https://sovsekretno.net/>винлайн букмекерская контора официальный сайт</a> casino официальный зеркало порно с Захарова Мария Владимировна <a href=https://strelochnik.com/>porno Светлана Ходченкова</a> как выиграть в казино букмекерская контора леонов порно с Константин Тюкавин (футбол) порно с Кирьянова Дарья Борисовна online casino фреш казино pin up casino пин ап
DiskiPlus мобильные букмекерские конторы DiskiPlus porno Светлана Ходченкова <a href=https://www.diskiplus.ru>DiskiPlus Шевцова Татьяна Викторовна порно</a> DiskiPlus пин ап казино DiskiPlus порно с Арина и Дина Аверины, гимнастки <a href=https://www.diskiplus.ru>DiskiPlus porno Марина Александрова</a> DiskiPlus porno Алена Косторная (фигурное катание) DiskiPlus vodka casino DiskiPlus Скоробогатова Ольга Николаевна порно DiskiPlus казино без DiskiPlus 1×bet официальный скачать DiskiPlus где казино DiskiPlus casino официальный зеркало
#5419 Charlesgunnyhttp://filmkachat.ru
1×slots акции
Главное преимущество спинов – вероятность изучить различные слоты. Также получится насладиться бонусными раундами, испытывать фортуну в риск-туре и преувеличить выигрыш за счёт особенных знаков. Однако столько игровой процесс заслуживает внимание, ведь лучше сосредоточиться на реальном выигрыше.Oтыгpaть бонус с указанным вeйджepом, для этого необходимо сдeлaть cтaвoк нa cумму, превосходящую объем приза в несколько один. <a href=http://filmkachat.ru/>1×slots скачать на айфон</a> Например, игрок получил 500 руб. При разработке аккаунта и обязан отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 руб., потребуется сделать 875 спинов для полного отыгрыша.Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных обстановок с казино, когда последствии отыгрыша бездепа вам не дадут вывести солидную сумму выигрыша. <a href=https://www.zybuluo.com/comcgifurniture/note/2570100>https://www.zybuluo.com/comcgifurniture/note/2570100</a> Разные казино имеют личные управляла по выведению выигрыша. Для бездепозитных призов принимаются достаточно высокие притязания. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до 100 раз в игровых автоматах. Например, случае игрок получил даром 10 $, то нужно несомненно отыграть их, поставив одну тыщу спинов по одному баксу каждый. Стоит отметить, что не все казино дают вероятность выступать на бонусы и не во всех развлекательных заведениях схожие правила для отыгрывания. Некоторые казино воспрещают играть на призы в блекджек либо ограничивают ставки до 5 %, собственно значительно наращивает в 10-ки один количество необходимых игр.Далее потребуется отыграть вагер и исключить выигрыш. Игрокам без навыка крупно подфартило, есть получить десятки даров за одну регистрацию. Если не смогли получить Бездепозитный бонус, не волнуйтесь. Обратитесь в интернет чат, оператор поможет ситуацию. 1×slots актуальное зеркало <a href=http://illustrator.odub.tomsk.ru/index.php?subaction=userinfo&user=ArnoldBew>http://illustrator.odub.tomsk.ru/index.php?subaction=userinfo&user=ArnoldBew</a> На данном разделе портала регулярно публикуются обзорные заметки, каких рассматриваются бесплатные бонусы превосходнейших интернет-казино. Информация структурирована по нескольким пунктам, включая главные:Но эти рамки не смущают числе хайроллеров, что коэффициенты на слотах разрешают рассчитывать на крупные выигрыши, ну неких автоматах разыгрывается передовой джекпот.
1×slots официальный сайт мобильная версия скачать
Сразу после активации промокода можно пользоваться подарком. Как теснее упоминалось, бонусы случаются трёх обликов – фриспины, кредиты и фриплей-бонусы. 1× slots регистрация в 1×slots casino Доступные игры – В некоторых азартных играх можно снизить математическое преимущество казино до нескольких десятых процента. В их количестве все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как правило, в этих играх ставки идут в зачет вейджера не всецело. Например, имеет предусматриваться только 50%. В неких забавах бездепозитные бонусы вообще нельзя отыгрывать. <a href=https://casino993.com/bbs/board.php?bo_table=free&wr_id=138185>https://casino993.com/bbs/board.php?bo_table=free&wr_id=138185</a> Бездепозитный бонус предоставляется новому игроку за конкретные действия. Часто подарок в виде средств или фриспинов выдается за регистрацию, благодаря чему пользователь получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. 1×slots рабочее зеркало Подобные бонусы без депозита предоставляются на более прибыльных условиях. Зачастую они крупнее, а обстоятельства отыгрыша наименее жесткие.Процесс доказательства личности может занять от 1-го денька до недели. Если клиент разрешил какую оплошность при заполнении паспортных данных, то ему по адресоваться с проблемой в службу поддержки онлайн-казино.
1×slot официальный сайт
Во всех легальных онлайн-казино Беларуси нужно подтверждение паспортных данных для забавы — это заявка правительства государства. <a href=http://skladlekarstv.ru/bitrix/redirect.php?goto=http://li659–71.members.linode.com/?URL=tkmistral.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/PzA0Pk0ZKau>http://skladlekarstv.ru/bitrix/redirect.php?goto=http://li659–71.members.linode.com/?URL=tkmistral.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/PzA0Pk0ZKau</a> 1×slot регистрация При отыгрыше бонусных средств, нужно учесть срок действия приза и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный приз несомненно аннулирован.
казино 1×slots официальный сайт
<a href=https://mcmon.ru/showthread.php?tid=125822>1хслотс казино зеркало</a> 1хслот зеркало <a href=http://community.getvideostream.com/user/glavdorogadv1606>http://community.getvideostream.com/user/glavdorogadv1606</a>
1× slots casino официальный сайт
Максимальный размер ставки, который нельзя превышать же приз не несомненно всецело отыгран. В случае нарушения сего правила, бонус и выигрыш с него будут аннулированы.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 долларов. Если выдаются фриспины, их количество изредка выше нескольких десятков бесплатных вращений. Диапазон ставок, которые вправе устроить игрок, также лимитирован. Обычно назначать можно небольшую сумму — в 10–30 рублей за одно вращение.На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению этого времени, Вы не можете активировать и получить бездепозитный приз. <a href=http://behzistiardabil.ir/user/KennethleM/>http://behzistiardabil.ir/user/KennethleM/</a> 1×slots казино зеркало Третитй бездепозитный приз за регистрацию – валютные свои. К раскаянию, начислить рубли или доллары способны лишь известные и пользующиеся клубы. С их подмогою вас насладиться любой доступной игрой – автоматом, рулеткой, кено, блэкджеком.
<b>Смотреть еще похожие новости:</b>
<a href=https://adminclub.org/showthread.php?tid=59715>казино 1×slots</a>
<a href=http://nhomtruyen.com/members/jamesgaw.9280/>1×slots зеркало рабочее на сегодня</a>
<a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=145358>1×slots регистрация на сайте</a>
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=63263>1хлот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чтобы самостоятельно убедиться в превосходстве бездепозитных бонусов, довольно зарегистрироваться в казино и получить одобрение.
#5420 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet 1 porno Виктория Баркова, легкоатлетка <a href=https://strelochnik.com/>человек казино</a> пин ап casino порно с Анастасия Потапова, теннисистка <a href=https://glvk.guru/>Светлана Ходченкова</a> 1×bet официальный слоты рабочие зеркала казино порно с Илюшникова Татьяна Александровна порно с Алина Загитова porno Александра Степанова, фигуристка pin up casino top top porno Елизавета Туктамышева
DiskiPlus рокс казино DiskiPlus 1×bet сайт 1×bet xyz <a href=https://diskiplus.ru>DiskiPlus 1×bet зеркало рабочее xbet</a> DiskiPlus win win casino DiskiPlus casino вход <a href=https://diskiplus.ru>DiskiPlus casino ап</a> DiskiPlus рабочее казино DiskiPlus казино онлайн бесплатно DiskiPlus букмекерская контора бесплатно скачать DiskiPlus казино смотреть онлайн DiskiPlus up casino официальный DiskiPlus порно с Артемий Панарин (хоккей) DiskiPlus 1win букмекерская контора
#5421 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino 777 online
Но есть игорные заведения, которые готовы просто например жертвовать средства на забаву. Для сего достаточно сделать профиль. Чтобы вывести свой выигрыш, для поначалу нужно выполнить обстоятельства отыгрыша, обозначенные в критериях получения бездепозитного депо. <a href=http://filmkachat.ru/>1хслот зеркало сайта</a> <a href=https://band.us/band/96885593/post/1>https://band.us/band/96885593/post/1</a> 1×slots зеркало выигрыши обязательно пройдите регистрацию если <a href=http://www.aina-company.com/bbs/board.php?bo_table=free&wr_id=763072>http://www.aina-company.com/bbs/board.php?bo_table=free&wr_id=763072</a> Верификация необходима для добавочной защищенности и подсобляет техподдержке выявить бонусхантеров и мошенников. Кстати, на платформах выводы солидных сумм доступны только последствии подтверждения личности.
1×slots казино зеркало
Для получения предоставленных призов для понадобиться — ПК либо мобильное прибор, и остальное дело за малым. casino 1×slot Активация по промокоду употребляется в различных видах бездепов. Если идет о приветственном бонусе, то комплект знаков возможно узнать на основной странице, в регистрационной форме или письме, коие отчаливает юзеру для подтверждения адреса электронной почты. Акции все проводиться вместе с партнерскими площадками. Обычно код располагается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активируется разовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем важный код для активации в описании каждого рекламную.Игры, в которых возможно играть на бонусные средства. Проверьте список игр, каких можно играть на бонусные средства, вполне они Вам не понравятся и не тратить своё время на эту промоакцию. <a href=http://igropad.net/bitrix/redirect.php?goto=http://ruspeach.com/bitrix/redirect.php?goto=http://teplahatka.com/bitrix/redirect.php?goto=https://teletype.in/@urist555/KjL7fVuq3V->http://igropad.net/bitrix/redirect.php?goto=http://ruspeach.com/bitrix/redirect.php?goto=http://teplahatka.com/bitrix/redirect.php?goto=https://teletype.in/@urist555/KjL7fVuq3V-</a> Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды находятся на этой странице. Посетитель возможность оценить условия получения и начать выступать на средства без внесения депо. При этом игроку главно понимать, на каких условиях и какими способами появится исключить полученный выигрыш. Для этого нужно расценить список присоединенных платежных систем.Реже бонусы без депо начисляются неизменным игрокам. С их подмогою администрация постарается удержать ценных посетителей или вожделеет поблагодарить за преданность верных гостей. Но гораздо почаще для похожих целей применяются такие акции: 1×slots регистрация Казино выводит средства только на ту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного приза, Вам поначалу необходимо пополнить счет. В некоторых клубах узкий список методов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с данных платежных способов, которые доступны для вывода.
1×slots рабочее зеркало на сегодня
Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного приза достаточно пополнения баланса и подтверждения личности. В других же клубах, необходимо количество один прокрутить собственный депо.Большинство клубов привлекают внимание в за счёт разнообразных презентов. На одних сайтах можно получить виртуальные кредиты, которые откроют доступ ко всему софту. На других же, администрация предлагает безвозмездные вращения для запуска топовых онлайн слотов. Несмотря на разные промоакции, стоит выделить самые основные. Этот образ бонуса будет добавлен на Ваш аккаунт после успешной процедуры регистрации с использованием номера телефонного. Если избрать другой метод сотворения учетной записи, бездеп не будет добавлен на Ваш акк. <a href=http://radshir.com/list/index.php?subaction=userinfo&user=Darengew>http://radshir.com/list/index.php?subaction=userinfo&user=Darengew</a> Бонусы без депозита при регистрации считаются наиболее привлекательными как для опытнейших игроков, например для и начинающих. Получив такое вознаграждение, заказчик может играть на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, еще обстоятельства их активации и выигрыша.Такой казино приз без депо за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это как бы некая маскировка одобрения под бездепозитный. Суть всего этого сводится к тому, собственно геймеру на час выдается, например, 1000 долларов, а реклама твердит о том, что любой выигрыш возможно несомненно в оставить при для. Но случае играющий серьезно отнесется к этому предложению, то он просто растеряет время. Ведь игроку нужно несомненно играть не главном аккаунте, а тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (в всей тыс. ) в управляла вступят определенные условия, где будет сказано, что максимальной суммой победы возможность быть лишь двести долларов и средства можно использовать только в качестве приза на 1-ый вклад с вейджером 25 от суммы гонорары плюс сам депозит. По итогу получится, собственно игрок выигрывал себя 200% бонус с вейджером на определенную необходимую. Короче говоря, это все надо вашего времени. 1×slots casino зеркало Третитй бездепозитный бонус за регистрацию – денежные средства. К огорчению, начислить рубли либо баксы способны лишь известные и знаменитые клубы. С их поддержкой у насладиться любой доступной игрой – автоматом, рулеткой, кено, блэкджеком.
1×slot регистрация
<a href=http://weeklywars.de/viewtopic.php?f=12&t=7165&p=535634#p535634>зеркло казино 1×slots</a> Сразу в активации промокода возможно пользоваться подарком. Как теснее упоминалось, призы бывают трёх видов – фриспины, кредиты и фриплей-бонусы. Ну и конечно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: схожая добродушие повышает степень преданности клиентов к компании.Чаще всего казино бонус за регистрацию без депозита даёт возможность запустить каждой автомат. Но другого, как внимательно ознакомиться с критериями. Иногда для забавы доступны только определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, никакого начать знакомство с миром пыла непосредственно с «одноруких бандитов». 1 хслот регистрация в 1×slots casino <a href=https://urganchshahar.uz/user/JulesJed/>https://urganchshahar.uz/user/JulesJed/</a>
1×слот регистрация в 1×slots casino
Но такие рамки не смущают числе хайроллеров, потому коэффициенты на слотах позволяют рассчитывать на солидные выигрыши, ну некоторых автоматах разыгрывается прогрессивный джекпот.Демоказино есть практически на каждом сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются значительно пореже: там в случае выигрыша и соблюдения условий промоакций бездеп можно превратить в настоящие деньги. Во время забавы в казино, выигрыши, приобретенные спасибо безвозмездным призовым фондам, суммируются и включаются в общую необходимую для отыгрывания. Однако, в фортуна улыбнется и получится отыграть все бонусы, игровое заведение гарантированно разрешит вывести денежные средства. Сумма вывода несомненно находиться от лимита, одобренного непосредственно в этом учреждении. Поэтому, внимательно нужно читать правила выдачи анлимитных депо.Активация случается счет промокодов, коие вводятся в личном кабинете последствии регистрации. Среди спецпредложений в перечне Casino.ru находятся неповторимые промокоды, которые доступны только посетителям портала. Другие методы начисления средств ? автоматическая активация сразу после творения аккаунта и получение дара по запросу в службу технической помощи. <a href=http://zlatremont.ru/index.php?subaction=userinfo&user=domineeringwaif>http://zlatremont.ru/index.php?subaction=userinfo&user=domineeringwaif</a> 1×слотс казино
<b>Смотреть еще похожие новости:</b>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=285438>1×slots бонус за регистрацию</a>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=61630&result=reply>1×slots регистрация 1×slotscasino09k online</a>
<a href=http://aficionado.pl/showthread.php?123637-%D0%9E%D0%BD%D0%BB%D0%B0%D0%B9%D0%BD-%D0%BA%D0%B8%D0%BD%D0%BE%D1%82%D0%B5%D0%B0%D1%82%D1%80-%D0%B2%D1%81%D0%B5-%D0%BD%D0%BE%D0%B2%D0%B8%D0%BD%D0%BA%D0%B8–2024-%D0%B3%D0%BE%D0%B4%D0%B0&p=142040>1×slot зеркало</a>
<a href=https://projects.sare.org/people/jamestrazy/>1×slots акции</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Также существуют онлайн-платформы азартных игр, коие используют раздачу бездепозитных бонусов в особые даты (как для казино, например и для игрока). Помимо этого, действующие игроки кроме имеют возможность получить похожие призы за собственную работа (к примеру, за увеличения значения либо за схожие заслуги).
#5422 Charlesgunnyhttp://filmkachat.ru
рабочее зеркало 1хслотс
В бонусную программку многих операторов входят регулярные бездепы. Это пожизненные промоакции, поощряющие активных постоянных игроков. Популярный формат — раздача фриспинов по конкретным денькам недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают неизменные бонусы без депозита в размен на накопленные баллы преданности. <a href=http://filmkachat.ru/>1 xslots рабочее зеркало</a> Обычно показатель повыше, чем для бонусов на депозит. Не дивитесь, случае он будет том х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных стран.Поспешите арестовать бездепозитные призы за регистрацию в казино из представленного перечня. Все платформы не только водят легальную работа, хотя и обрадуют правдивыми результатами забавы, высокой отдачей, прыткими выплатами. <a href=http://www.gothicpast.com/myomeka/posters/show/79813>http://www.gothicpast.com/myomeka/posters/show/79813</a> Чаще всего казино бонус за регистрацию без депо даёт возможность запустить любой машина. Но превосходнее пристально ознакомиться с критериями. Иногда для игры доступны лишь определённые модели. Если вы новичок и ничего не смыслите в гэмблинге, какого-либо начать знакомство с миром азарта именно с «одноруких злодеев».Выбирайте превосходнейшие бесплатные призы за обзоров на Casinoz – и пусть для сопутствует удача при отыгрыше бонусных кредитов! 1×slots официальный сайт скачать <a href=https://www.levasche.it/shop/harrywoori/>https://www.levasche.it/shop/harrywoori/</a> Подтвердите личность, предоставив оператору казино средства паспортные данные. Инструкции обыкновенно легкие, главное — четко им идти. Если написано, что «на фото должны быть заметны все четыре угла странички паспорта» — устройте именно это фото.Подтвердите лицо, предоставив оператору казино свои паспортные данные. Инструкции обычно легкие, основное — конкретно им по. Если написано, собственно «на фото должны быть заметны все хорошо угла страницы паспорта» — сделайте именно это фото.
1×slots бонус за регистрацию
<a href=http://nacionrolera.org/foro/viewtopic.php?f=1210&t=224217>1×slots официальный зеркало рабочее</a> 1× slots регистрация в 1×slots casino Не хотите сыграть в азартные забавы, не рискуя средствами средствами, хотя получая в все выплаты? Подобную вероятность деют все наихорошие порталы с азартными развлечениями. В их числе большое добросовестных и надежных интернет-казино на русском языке. Они привлекают новых пользователей различными поощрительными мероприятиями, включая бездепозитные, или благотворительные призы.Онлайн-казино с бездепозитными бонусами ставят посетителям обстоятельства для пользования бездепами, потому перед ролью в промоакции другого, как досконально ознакомиться со всеми правилами и нюансами промоакции. Условия шансы касаться получения приза, его использования и следующего вывода валютных средств когда выигрыша. <a href=https://cbz.minzdravao.ru/predlozhenie/poslednie-novosti-2024>https://cbz.minzdravao.ru/predlozhenie/poslednie-novosti-2024</a> 1×slots casino online регистрация Многие казино деют в маркетинговых целях бесплатные бонусы самая для наших читателей. Чтобы их получить, нужно перейти на игровой сайт по партнерской ссылке с нашего портала.Автоматическая активация может самой удобной, хотя ручной способ имеет перед ней достоинства. Прежде чем использовать вознаграждение от казино, стоит заранее найти, сколько медли требуется на выполнение всех условий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала деяния приза.
1×slots рабочее зеркало на сегодня
Можно. Вы постоянно сможете отказаться от получения бездепозитного приза за регистрацию в казино, же Вы не создадите ставку. Новые клиенты онлайн-казино без первого депо все выяснить свою удачливость. К тому же есть возможность преобразовать бездепы в реальные средства за регистрацию в казино, впрочем результата приз необходимо отыграть согласно условиям промоакции. <a href=https://forum.papbio.org/member.php?action=profile&uid=89721>https://forum.papbio.org/member.php?action=profile&uid=89721</a> Каждый новичок и умелый игрок грезят стремительно стартануть и начать делать реальные ставки. Для сего довольно арестовать подарок, за который надо уплачивать. В зависимости от игровой платформы, нужно сделать профиль, привязать email или аппарат. После этого администрация начислит щедрое вознаграждение вид безвозмездных вращений либо виртуальных кредитов.Для верификации номера телефона, в собственном профиле изберите опцию „Подтвердить номер телефона“ и введите в отвечающее фон код, приобретенный в sms-сообщении. 1×slots casino зеркало рабочее Разные казино имеют собственные верховодила по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высочайшие требования. Часто онлайн-казино советуют отыграть бонусное поощрение до 100 раз в игровых автоматах. Например, если игрок получил безвозмездно 10 $, то нужно будет отыграть их, поставив одну тысячу спинов по 1 баксу каждый. Стоит отметить, что не все казино дают вероятность выступать на призы и не во всех увеселительных заведениях схожие правила для отыгрывания. Некоторые казино воспрещают выступать на бонусы в блекджек или ограничивают ставки до пяти %, что значительно увеличивает в десятки один количество необходимых игр.
1×slots официальный зеркало рабочее
У любого игорного клубы разные вейджеровые обстоятельства. Чтобы вы гарантировано смогли выполнить их, мы дадим некоторое советов. Если система начислила небольшую сумму, не стоит создавать великие ставки – остановитесь на 10–30 центах. Как лишь сумеете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте выступать. В противном случае превосходнее присмотреться к другому автомату.Каждый в должен сначала отчетливо выучить условия по получению и отыгрышу понравившегося подарка. Если всё организует, поторопитесь отобрать безвозмездные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо данный начать вертеть барабаны топовых слотов. <a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=265661>1×slots официальный зеркало рабочее</a> 4. Заберите презент. Чаще всего приз активизируется незамедлительно после регистрации. Но посещают ситуации, когда надо(надобно) зайти в индивидуальный офис или написать в службу поддержки.Нет. Для получения бездепозитного приза в казино нужна неотъемлемая регистрация на веб-сайте. Играть в слоты безвозмездно и без регистрации можно лишь в демо режиме. 1хслотс рабочее зеркало <a href=http://uplmegaporn.com/user/OscarJus/>http://uplmegaporn.com/user/OscarJus/</a>
1×slots официальный demo регистрация в 1×slots casino
Законодательство, регулирующее азартные игры в различных государствах, влияет на возможности операторов. В результате юзеры из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это возможность быть как глубокий отказ в доступе, например и невозможность загружать игры отдельных изготовителей.Все обожают получать подарки. Согласитесь, практически каждый играющий человек несомненно беспредельно рад, в получит даровой презент для забавы в интернет казино просто за регистрацию или же бонус за внесенный депо, так называемые приветственные призы для свежих игроков. Соответственно эти интернет клубы будут больше популярны и предпочтительны у игроков при выборе казино для забавы. Топ казино каждый обновляется и прибавляются свежие и интересные игровые клубы с привлекательной бонусной политикой и всеми возможными прерогативами, к коим относятся такие бонусы как фриспины за регистрацию, денежные бездепозитные бонусы, а также великодушные призы за внесенный депо. Чтобы выступать даром на реальные средства в казино, не всегда достаточно просто зарегистрироваться. Иногда необходимо выполнить дополнительные деяния.Призовые начисления без депо имеют предоставляться для участия в турнирах интернет казино. Потратить перечисленные средства можно самая в рамках этой акции. Условия их проведения в лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, превосходнее изучить его верховодила. <a href=http://vecmir.ru/index.php/vecmirlife/62313-overrateddrudge/profile>http://vecmir.ru/index.php/vecmirlife/62313-overrateddrudge/profile</a> Если вы облюбовали себе несколько брендов коие для больше всего приглянулись, для постоянной игры! Таких гемблеров казино довольно предпочитает и ценит, за частую такие игроки становятся VIP игроками заведения, коим часто поступают выгодные предложения повторяющий бонусов, например же туда заходит и бездепозитные. 1×slots зеркало которую указывали при регистрации кстати
<b>Смотреть еще похожие новости:</b>
<a href=https://forumauthority.com/member.php?action=profile&uid=3484>1×slots актуальное зеркало</a>
<a href=https://forum.spherecommunity.net/User-Jamesmew>1 xslots рабочее зеркало</a>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=220093>скачать 1×slots на андроид мобильная версия</a>
<a href=https://forum.spherecommunity.net/User-JamesLop>1×slot казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Автоматическая активация первый самой удобной, но ручной метод имеет перед ней преимущества. Прежде чем применять вознаграждение от казино, стоит заранее определить, сколько медли требуется на выполнение всех критерий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деяния приза. Подтверждение регистрации. Казино настоятельно привязки профиля к электронному адресу и номеру телефона. Для этого на e-mail отправляется послание со ссылкой, а на телефонный ? текстовое извещенье с кодом.
#5423 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино сегодня водка казино <a href=https://t.me/vchkogpu_ru>порно с Анна Калинская (теннис)</a> online casino официальный pin up casino <a href=https://rumafia.news/>часы казино</a> сайт pin up casino порно с Дронова Александра Викторовна порно с Юлия Ефимова букмекерская контора официальный сайт скачать pin casino 1×bet сейчас porno Мира Андреева (теннис)
DiskiPlus пина букмекерской конторы DiskiPlus карты казино <a href=https://www.diskiplus.ru/>DiskiPlus porno Александра Степанова, фигуристка</a> DiskiPlus почему в казино нет окон DiskiPlus зеркала официальных сайтов казино <a href=https://diskiplus.ru>DiskiPlus казино 1</a> DiskiPlus 1×bet официальный слоты DiskiPlus порно с Максим Глушенков (футбол) DiskiPlus скачать букмекерскую контору на андроид DiskiPlus 1×bet сайт DiskiPlus porno Катерина Шпица DiskiPlus pinco casino DiskiPlus retro casino
#5424 Charlesgunnyhttp://filmkachat.ru
1×slots казино мобильная версия
Практически все интернет казино с бездепозитным бонусом за регистрацию учитывает программу лояльности — систему одобрения неизменных посетителей, которая состоит из множества значений. При достижении игроком очередного уровня на его счёт поступает приз. Чем повыше степень — тем щедрее бонус.Oтыгpaть приз с обозначенным вeйджepом, чтобы нужно сдeлaть cтaвoк нa cумму, превосходящую размер приза в некоторое раз. <a href=http://filmkachat.ru/>1×slots зеркало на сегодня</a> Необходимость отыгрыша. Вейджер в этом случае выше, чем для призов за депозит. И пока средства не отыграны, исключить их невозможно. <a href=https://diigo.com/0y2rbf>https://diigo.com/0y2rbf</a> Если вы выбираете проверенное лицензионное интернет казино и сделайте все обстоятельства получения бездепозитного бонуса, трудностей с получением подарка у Вас не возникнет.Благодаря программке лояльности от игорного заведения, возможно взять хороший старт и без дополнительных вложений запустить видеослоты. Кроме такого, можно рассчитывать на реальную удачу и получить, без вложения личных финансов, великий выигрыш. 1×slots регистрация на официальном сайте <a href=http://xn–2j1bj1bu79c8mb.com/bbs/board.php?bo_table=free&wr_id=252021>http://xn–2j1bj1bu79c8mb.com/bbs/board.php?bo_table=free&wr_id=252021</a> Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.
1×slots зеркало сайта
1×слот регистрация в 1×slots casino Внесение депо – Будьте готовы пополнить счет после отыгрыша бонуса. Это обычное заявка управлял для этого типа промо-акций. Лучше заранее уточнить, какую необходимую нужно несомненно вносить на счет. Как правило, речь идет о наименьшем депозите, но вы обязаны быть убеждены, что он вам по кармашку.Вейджер менее х30–35 является применимым. Опытные игроки утверждают, собственно с таким вейджером реально остаться в плюсе, случае правильно подойти к выбору игрового аппарата. <a href=https://rafaelyfhg68901.blog-eye.com/30401829/nude-ai-the-ethical-and-technological-challenges-of-artificial-intelligence>https://rafaelyfhg68901.blog-eye.com/30401829/nude-ai-the-ethical-and-technological-challenges-of-artificial-intelligence</a> Практически все онлайн казино с бездепозитным бонусом за регистрацию предусматривает программку лояльности — систему одобрения неизменных клиентов, которая произведено из колличества значений. При достижении игроком одного значения на его счёт поступает приз. Чем повыше степень — тем щедрее бонус.Это тоже бесплатные финансы, которые поступают на аккаунты свежеиспеченных игры последствии регистрирования. А необыкновенность этих бонусов произведено что, что обретенные деньги обязательно следует применять в продолжении назначенного времени. 1×slots мобильная версия войти казино Ознакомьтесь с нашим списком наихороших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего списка и получите бездеп незамедлительно. Хватайте превосходнейшие безвозмездные предложения ниже и выигрывайте большие деньги, не рискуя!
1×slots актуальное зеркало
В онлайне очень много скриптовых вебсайтов, которые принадлежат плутам. Их главная задача – заинтересовать гэмблеров, пообещав не только щедрые подарки, хотя и солидные выигрыши. Так что кое-какие сайты предлагают получить за регистрацию в $1 000. <a href=http://solhyanggi.net/gb5/bbs/board.php?bo_table=free&wr_id=1410328>http://solhyanggi.net/gb5/bbs/board.php?bo_table=free&wr_id=1410328</a> Не стоит путать забаву в демо и использование бонусов. В демонстрационном режиме игрок возможность оценить механику слота, сюжет и оформление. Но забава ведется на относительные кредиты, поэтому отсутствует основное ? чувство пыла. Активируя промокод либо фриспины, клиент раньше не тратит свои средства на игровые автоматы, хотя может сорвать настоящий куш!Зарегистрироваться в казино по особой ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефонного и электронную почту). Для доказательства номера аппарата нужно в собственном профиле указать свой номер и нажать кнопку „Подтвердить номер телефона“, далее Вы получите sms-сообщение с кодом, кот-ый нужно установить в отвечающее поле. Для доказательства электрической почты, перейти по интенсивной ссылке в послании от казино. 1хслотс рабочее зеркало У любого игорного клубы разные вейджеровые обстоятельства. Чтобы вы гарантировано смогли выполнить их, мы дадим несколько советов. Если система начислила небольшую сумму, надо делать великие ставки – остановитесь на 10–30 центах. Как лишь сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В неприятном случае другого, как приглядеться к иному автомату.Принципиальным отличием безвозмездных призов от призов на депо является отсутствие надобности вносить средства на аккаунт. Из-за сего их часто именуют бездепозитными (not the slightest deposit bonuses).
1×slots рабочее зеркало на сегодня
<a href=https://www.ldvd.nl/no-22-san-diego-place-rallies-very-last-boise-country-27–16?page=25#comment-237075>1хслот скачать</a> Приветственный приз без депо ? подарок за регистрацию. Выдается деньгами, фриспинами либо баллами. В заключительном случае бонусные баллы используются для роли в турнирах или обмена на реальные средства.Существуют казино с бонусом за регистрацию, в которых очень популярны фриспины в онлайн казино впоследствии регистрации в конкретных забавах. Они встречаются в почаще безвозмездных поощрений или традиционных призов в казино без вложений. Например, игрок регистрирует счет, на который начисляются бесплатные игры, приз за регистрацию вид безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса геймер выигрывает истинные деньги, которые в последствии можно удачно вывести из заведения на свою платежную систему. То есть, все шансы исключить свои без рисков своими деньгами. Регистрация, какую геймер получит бонусы, займет несколько, а благодаря данному возможно прирастить пять евро поощрений до тыс. И без всяких заморочек исключить их. 1×slots официальный зеркало рабочее <a href=https://www.scentwear.kr/bbs/board.php?bo_table=free&wr_id=734016>https://www.scentwear.kr/bbs/board.php?bo_table=free&wr_id=734016</a> В количестве случаев бесплатные призы начисляются в кредитах, которые невозможно незамедлительно исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти требования принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже.
1×slots casino зеркало
Бездепозитные бонусы начисляются лишь раз один. Не стоит открывать новые аккаунты, дабы получить их повторно. Служба защищенности казино обязательно выявит «левого» соучастника и перекроет. Если гость выполнит необходимые притязания, отыграет собственную ставку и решит вывести личный выигрыш, то ему надо(надобно) принять, что казино обязательно востребует дать ксерокопии собственных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные свои исключить не удастся.Бесплатные бонусы казино без депо возможно получить повторяющий денежных средств на бонусный счет (исключить их можно лишь в отыгрыша), фриспинов, забавы либо кешбэк-бонуса. Верификация аккаунта. Лучше доказать личность незамедлительно последствии регистрации, чтобы потом не было заморочек с выводом денег. Верификация может протекать двумя маршрутами: <a href=http://www.sglpw.cn/home.php?mod=space&uid=325432>http://www.sglpw.cn/home.php?mod=space&uid=325432</a> За привлечение приятеля ? в рамках партнерской программы заказчик получает вознаграждение за вербование свежих юзеров.Бонус за регистрацию в казино без депозита с выводом средств нужно отыграть. Зачастую для отыгрыша может понадобиться устроить ставки на сумму, в несколько 10-ов один превосходящую сумму приза или выигрыша. 1× slots сайт
<b>Смотреть еще похожие новости:</b>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=135914>1×slots промокод при регистрации 2025</a>
<a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=36302>1×slots акции</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выигрыши с бонусов без инвестициям постоянно привязаны к требованию по ставкам и шансы быть обналичены лишь в выполнения данных притязаний. За привлечение приятеля ? в рамках партнерской программы заказчик получает вознаграждение за вербование свежих юзеров.
#5425 Melvincaucthttps://aviatrix-games.com/en
Aviatrix game <a href=https://aviatrix-games.com/en/>https://aviatrix-games.com/en/<a> has become a sensation in the world of crash games. Its unique format, featuring a rapidly growing multiplier and the possibility of an unexpected crash. Aviatrix crash game is at 1win, 1×bet, Mostbet, and Pin Up.
#5426 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
спорт букмекерская контора r7 casino <a href=https://rucriminal.info/>ешь казино</a> pin up casino пин porno Андрей Рублев (теннис) <a href=https://repost.news/>Ирина Горбачева</a> porno Ангелина Гончаренко, хоккеистка рабочее казино 7k casino официальный сайт 1×bet на сегодня vodka casino 7k casino зеркало сайт казино зеркало
DiskiPlus человек казино DiskiPlus 7k casino бонус <a href=https://diskiplus.ru/>DiskiPlus часы казино</a> DiskiPlus casino играть DiskiPlus 1×bet регистрация <a href=https://www.diskiplus.ru>DiskiPlus up casino скачать</a> DiskiPlus pin up букмекерская контора DiskiPlus порно с Бондаренко Анастасия Борисовна DiskiPlus казино рублях DiskiPlus Александра Бортич DiskiPlus казино пину DiskiPlus Шевцова Татьяна Викторовна порно DiskiPlus 1×bet официальный сайт 1×bet xyz
#5427 JeffreyJouffhttps://storitelling.ru
Скачайте бесплатно книгу <a href=https://storitelling.ru>https://storitelling.ru<a> по сторителлингу и узнайте, как создавать истории, которые цепляют с первых строк. Практические советы, примеры и вдохновение для всех, кто хочет освоить искусство рассказчика.
#5428 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино играть порно с Артемий Панарин (хоккей) <a href=https://specreporter.com/>казино регистрации</a> 1×bet официальный слоты Ходнева Светлана Владимировна порно <a href=https://t.me/vchkogpu_ru>симулятор казино</a> бк букмекерская контора букмекерские конторы в россии порно с Илюшникова Татьяна Александровна 1×bet зеркало xbet xyz скачать 1×bet на андроид porno Юлия Канакина порно с Зырянова Анастасия Владимировна
DiskiPlus casino DiskiPlus спорт букмекерская контора <a href=https://diskiplus.ru>DiskiPlus 1×bet зеркало</a> DiskiPlus r7 casino DiskiPlus скачать 1×bet 1×bet xyz <a href=https://www.diskiplus.ru>DiskiPlus pinco casino</a> DiskiPlus порно с Юлия Ефимова DiskiPlus 1×bet официальный 1×bet xyz DiskiPlus скачать 1×bet на андроид DiskiPlus 1×slots casino DiskiPlus включи казино DiskiPlus сайт казино вход DiskiPlus pin up casino зеркало
#5429 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало
Иногда операторы настоятельно внесение малого депозита перед выводом для верификации платежного прибора. В некоторых казино этот депозит кроме светит отыграть.На страничке представлены бездепозитные призы за регистрацию в казино редчайшая заслуга за которой гонятся все игроки как новички, например и профессионалы. Мы также уделяем великое внимание на присутствие бонусов при составление рейтинга казино на деньги. Бездепозитный приз это вероятность выступать бесплатно и выиграть реальные деньги. <a href=http://filmkachat.ru/>1×slots официальный зеркало</a> Обычно показатель повыше, чем для бонусов на депо. Не изумляйтесь, случае он будет даже х100. Иногда завышенный коэффициент вейджера уточняется для обитателей отдельных государств.Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных притязаний, не обязательной верификации. Если на сайте учтена неотъемлемая процедура подтверждения личности, то исключить выигрыш удастся только последствии ревизии данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий лицо. <a href=https://app.roll20.net/users/15345358/vykup-avariinykh-avto-p>https://app.roll20.net/users/15345358/vykup-avariinykh-avto-p</a> 1×slots зеркало регистрация то дальше необходимо пройти <a href=http://hotnews.lv/user/KennethKar/>http://hotnews.lv/user/KennethKar/</a> Любой выигрыш по ставке выше установленного лимита несомненно являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, в случае выигрыша его сумма не поступит на счёт посетителя — итог игры несомненно всецело аннулирован.
1×slots официальный сайт зеркало
Все любят получать презенты. Согласитесь, почти любой играющий человек несомненно сильно счастлив, в получит безвозмездный презент для забавы в интернет казино просто за регистрацию либо же бонус за внесенный депозит, так нарекаемые приветственные призы для свежих игроков. Соответственно эти онлайн клубы станут больше востребованы и преимущественны у игроков при выборе казино для забавы. Топ казино постоянно обновляется и добавляются свежие и интересные игровые клубы с симпатичной бонусной политикой и всеми возможными привилегиями, к которым относятся эти призы как фриспины за регистрацию, денежные бездепозитные призы, а щедрые призы за внесенный депозит.Представленные на данной страничке лучшие бездеп бонусы в казино за регистрацию в 2022 году имеют подходящие обстоятельства. После кропотливого анализа редакция портала составила рейтинг спецпредложений, каком посетители Casino.ru шансы сортировать список по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д. <a href=https://mcmon.ru/member.php?action=profile&uid=134611>1×slots casino online регистрация</a> 1×slots акции Отыграв бездепозитный бонус в казино с выводом также придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если схожее лимитирование присутствует, то единоразово вывести получится только сумму, не превосходящую размер полученного приза. <a href=https://www.love2d.org/forums/memberlist.php?mode=viewprofile&u=276876>https://www.love2d.org/forums/memberlist.php?mode=viewprofile&u=276876</a> Размер приза. В качестве бездепов обыкновенно начисляют небольшие суммы, а когда речь идет о бонусах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино могут презентовать игроку до 2000$. 1×slots casino регистрация 1×slotscasino09k online Фриспины без депо или дополнительные свои посодействуют поближе познакомиться с игровой платформой и её функциями. За счёт презентов можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради забавы напротив живых крупье.Казино выводит средства лишь на что, эту платежную систему, с котрой был сделан депо. То есть, для вывода бездепозитного бонуса, Вам сначала необходимо восполнить счет. В неких клубах ограниченный перечень методов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет именно с этих платежных методов, коие доступны для вывода.
1×slots зеркало рабочее на сегодня
<a href=https://tumgerl.rolbb.me/viewtopic.php?id=8097#p16045>https://tumgerl.rolbb.me/viewtopic.php?id=8097#p16045</a> Фриспины без депо либо дополнительные свои посодействуют поближе познакомиться с игровой платформой и её функциями. За счёт даров возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям ради игры напротив живых крупье. 1×slots регистрация на сайте 1×slots ru com Можно ли наваривать на бездепозитных бонусах? Это не работа, здесь как повезет, в в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, это можно именовать везением, и дополнительной добавкой к вашему бюджету.Воспользоваться бездепом возможно не во всех игровых автоматах: казино вдруг устанавливает ограничение для посетителей. Конечно, это можно посчитать некоторым неудобством для игрока, но ради отметить, что выбор автоматов всё точно остаётся достаточно наибольшим.
1хслотс официальный сайт зеркало
<a href=https://g2clubs.com/healthy-workout/google/#comment-31017>1×slots казино зеркало</a> При правильном раскладе бездепы — это отличный метод играть на средства без траты личных средств. Есть несколько советов, следуя коим можно извлечь максимально полезности из подобных промоакций казино. Играть по лишь на лицензированных площадках. Скриптовые веб-сайты не обманывают с бонусными предложениями, но и используют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах невозможно.Бездепы с безвозмездными вращениями деют юзерам право вертеть барабаны игровых автоматов без снятия средств со счета. За любой раунд выплачивает казино. Число спинов ограничено и редко превышает сотку. Если промоакция содержит большое безвозмездных игр, их начисление возможность быть разбито на несколько дней. 1×слот регистрация в 1×slots casino <a href=http://forum.foonyew.org/home.php?mod=space&uid=151375>http://forum.foonyew.org/home.php?mod=space&uid=151375</a> Ну и конечно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: сходственная добродушие увеличивает степень лояльности посетителей к фирмы.
1× слот зеркало
Ознакомьтесь с нашим списком превосходнейших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего списка и получите бездеп незамедлительно. Хватайте лучшие благотворительные предложения ниже и выигрывайте великие деньги, не рискуя! <a href=https://www.morph.ro/users/Porsedropor>https://www.morph.ro/users/Porsedropor</a> 1× slots casino зеркало Не стоит незамедлительно же отказываться от приветственных даров в сходственных казино. Администрация готова начислить средства или фриспины, но сначала сотрудники должны увериться, собственно вы не мошенник. Дело в том, что развелось очень большое охотников за бонусами. Они научились накалывать систему и наваривать крупные суммы денег.Фриплей-бонусы. Бонусы за безвозмездную забаву есть только в некоторых клубах. Они зачисляются незамедлительно в творенья профиля и действуют непродолжительное время. Если у вас нет медли израсходовать свои, они просто завершатся. Что касается медли, в большинстве случаев бонусы срабатывают на 1-го часа.
<b>Смотреть еще похожие новости:</b>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=158173>1хслотс рабочее зеркало</a>
<a href=http://check2go.net/author/jameslob/>1хслотс официальный сайт зеркало</a>
<a href=https://portugal-campings.com/pt/profile/jamescip/>скачать 1×slots на андроид мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Нет. Для получения бездепозитного бонуса в казино необходима обязательная регистрация на сайте. Играть в слоты безвозмездно и без регистрации можно лишь в демо режиме. Иногда у гостей вебсайта имеют появиться трудности, задачи, препядствия при активации полученного промо-кода. В этих случаях, необходимо обратиться за поддержкою в службу «Support». Для получения ответа, непременно указывается определенная причина воззвания и подтверждается информация дополнительными экрана. Если сложилась неоднозначная ситуация, всегда возможно обратиться к основному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ.
#5430 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Алексей Миранчук (футбол) букмекерская контора на андроид <a href=https://t.me/vchkogpu_ru>ап казино</a> пина casino приложения букмекерских контор на андроид <a href=https://7club7.com/>порно с Зырянова Анастасия Владимировна</a> casino скачать официальная казино 1×bet зеркало слоты 1×bet xyz порно с Сергей Бобровский (хоккей) Приезжева Екатерина Геннадьевна порно casino промокод up casino скачать
DiskiPlus porno Юлия Канакина DiskiPlus почему в казино не бывает настенных часов <a href=https://diskiplus.ru>DiskiPlus казино пину</a> DiskiPlus спорт букмекерская контора DiskiPlus 1×bet зеркало на сегодня <a href=https://diskiplus.ru>DiskiPlus казино смотреть онлайн бесплатно</a> DiskiPlus казино регистрации DiskiPlus Нургалиева Эльвира Рамиловна порно DiskiPlus бесплатно играем казино DiskiPlus new casino DiskiPlus зеркала официальных сайтов казино DiskiPlus casino рабочее зеркало DiskiPlus up букмекерская контора
#5431 Charlesgunnyhttp://filmkachat.ru
x1 slots 1хслотс регистрация перейти на 1×slots
Бесплатные бонусы казино без депозита можно получить повторяющий денежных средств на бонусный счет (исключить их возможно лишь последствии отыгрыша), фриспинов, игры или кешбэк-бонуса. <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> Так что основное различие презента на депо от бездепа – обязательное пополнение счёта. Вы сможете внести депозит и преувеличить стартовый капитал или арестовать бездеп и всем не придётся рисковать своими сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начислит щедрое одобрение! <a href=https://scrapbox.io/shopavto/%D0%A2%D0%B5%D1%80%D0%BC%D1%96%D0%BD%D0%BE%D0%B2%D0%B8%D0%B9_%D0%B2%D0%B8%D0%BA%D1%83%D0%BF_%D0%B0%D0%B2%D1%82%D0%BE:_%D1%8F%D0%BA_%D0%B2%D0%B8%D0%B3%D1%96%D0%B4%D0%BD%D0%BE_%D1%82%D0%B0_%D1%88%D0%B2%D0%B8%D0%B4%D0%BA%D0%BE_%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D1%82%D0%B8_%D1%82%D1%80%D0%B0%D0%BD%D1%81%D0%BF%D0%BE%D1%80%D1%82%D0%BD%D0%B8%D0%B9_%D0%B7%D0%B0%D1%81%D1%96%D0%B1>https://scrapbox.io/shopavto/%D0%A2%D0%B5%D1%80%D0%BC%D1%96%D0%BD%D0%BE%D0%B2%D0%B8%D0%B9_%D0%B2%D0%B8%D0%BA%D1%83%D0%BF_%D0%B0%D0%B2%D1%82%D0%BE:_%D1%8F%D0%BA_%D0%B2%D0%B8%D0%B3%D1%96%D0%B4%D0%BD%D0%BE_%D1%82%D0%B0_%D1%88%D0%B2%D0%B8%D0%B4%D0%BA%D0%BE_%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D1%82%D0%B8_%D1%82%D1%80%D0%B0%D0%BD%D1%81%D0%BF%D0%BE%D1%80%D1%82%D0%BD%D0%B8%D0%B9_%D0%B7%D0%B0%D1%81%D1%96%D0%B1</a> 1× slots сайт <a href=https://krok.biz/forum/memberlist.php?mode=viewprofile&u=38415>https://krok.biz/forum/memberlist.php?mode=viewprofile&u=38415</a> Индивидуальные одобрения выдаются за совершение деяний: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавленья или официального посетителя для ПК. В большинстве казино действуют программки лояльности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на следующий степень часто сопровождается выдачей бездепа.
1×slots сайт
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=167940>1×slot регистрация</a> 1 x slots casino Теоретически, к безвозмездным бонусам можно отнести например называемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, потому что они деют лишь вероятность делать ставки. <a href=http://c909201u.beget.tech/user/Joshuarok/>http://c909201u.beget.tech/user/Joshuarok/</a> Oтыгpaть приз с обозначенным вeйджepом, результата нужно сдeлaть cтaвoк нa cумму, превышающую объем приза в количество один.Приглашаем делиться воззреньями о призах. Это поможет другим юзерам выбирать наиболее прибыльные предложения. 1×slots casino online регистрация Как верховодило, при выводе денег, от играющего требуется лишь сделать минимальный лепта чтобы, чтобы, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом индивидуальный счет.Но на азартных платформах похожие гонорары шансы получить теперь зарегистрированные юзеры. В таком случае, бонусы предоставляются масштабах уникальных акций либо же неким игрокам в виде акционного предложения, коие приходит на почту с целью «возвратить» игрока в свое казино.
1×slots регистрацию более популярный вариант это
3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефон или почту, указать индивидуальную информацию; Не стоит сразу же отказываться от приветственных презентов в подобных казино. Администрация готова начислить средства или фриспины, но предварительно сотрудники обязаны убедиться, собственно вы не мошенник. Дело в, собственно развелось очень количество охотников за бонусами. Они выучились накалывать систему и наваривать солидные суммы средств. <a href=https://fishtrade3000.ru/forum/user/1157/>https://fishtrade3000.ru/forum/user/1157/</a> Чаще всего интернет-казино предлагают бездепозитные призы новым юзерам. Эта промо-акция довольно отлично привлекает начинающих, подталкивая их к открытию счета. Конечно, не все становятся преданными клиентами, но сам прецедент регистрации аккаунта играет на руку заведению.Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала быстрые выводы. Фишка выплат том,, что довольно избрать платёжный инструмент и указать необходимую. В большинстве случаев средства зачисляются на электрические кошельки в течение 15 минут, а на банковские карты – 1–3 рабочих дня. зеркло казино 1×slots Получив собственный презент, Вы можете даром играть на настоящие средства, а выполнив обстоятельства отыгрыша, исключить собственный выигрыш.
казино 1× slots официальный сайт
Во время забавы в казино, выигрыши, приобретенные спасибо безвозмездным призовым фондам, суммируются и включаются в совместную необходимую для отыгрывания. Однако, в удача улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно допустит исключить денежные свои. Сумма вывода несомненно зависеть от лимита, одобренного непосредственно в этом учреждении. Поэтому, внимательно нужно читать верховодила выдачи безлимитных депо. <a href=https://forum.vn.ua/showthread.php?p=3272770#post3272770>1×slots регистрацию процедура займет всего лишь</a> Бесплатный бонус – кредиты, которые онлайн-казино начислит клиенту, не заставляя его пополнять игровой счет.Для получения выигрыша требуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить конкретную необходимую, но теснее из собственных средств. Она рассчитывается из совместного объема выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, если пользователь выиграл 1000 рублей, а множитель составляет х30, вывести деньги возможно будет, сделав ставки на 30 000 рублей. 1×слот регистрация в 1×slots casino <a href=http://www.invest74.ru/index.php?action=profile;u=1829354>http://www.invest74.ru/index.php?action=profile;u=1829354</a> Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских руб. В критериях акции указано, собственно вейджер бездепозитного приза х20. Поэтому, чтобы отыграть приз, игроку несомненно нужно сделать ставок на 35*20=700 рублей.Зачастую бездепозитные призы казино для забавы предлагаются разными заведениями азартных игр в маркетинговых промоакций или в целях вербования к себя свежих игроков. Для бездепозитных призов в казино 2022 игроку не нужно пополнять счет до момента вывода желанных средств.
1×slots регистрация 1×slotscasino 56 online
Возможность сыграть вспомогательное соревнование (а времени и количество) совершенно бесплатно, а выигрыш, тому, поступает на счёт игрока. <a href=http://www.worldcultues.com/2020/11/200-cute-girls-instagram-bios-quotes.html>http://www.worldcultues.com/2020/11/200-cute-girls-instagram-bios-quotes.html</a> 1×slots регистрация на 1хслотс
<b>Смотреть еще похожие новости:</b>
<a href=https://your-portal.at.ua/forum/33–367–3#88190>рабочее зеркало 1хслотс</a>
<a href=https://your-portal.at.ua/forum/32–62332–8#88219>1хслот 1хслотс регистрация перейти на 1×slots</a>
<a href=http://weeklywars.de/memberlist.php?mode=viewprofile&u=860>1хслот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Как верховодило, при выводе денег, от играющего требуется лишь сделать минимальный вклад для того, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом собственный счет. Сразу в активации промокода можно воспользоваться презентом. Как уже упоминалось, призы посещают трёх видов – фриспины, кредиты и фриплей-бонусы.
#5432 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерские конторы бет скачать букмекерскую контору на андроид <a href=https://kompromat1.online/>1×bet зеркало рабочее на сегодня</a> порно с Варвара Субботина официальные букмекерские конторы скачать <a href=https://t.me/vchkogpu_ru>букмекерская контора вход</a> букмекерская контора фонбет официальный сайт бесплатное казино pin up casino официальный порно с Захарова Мария Владимировна лучшие казино бесплатно 1×bet зеркало ап казино
DiskiPlus pin up букмекерская контора DiskiPlus casino онлайн <a href=https://diskiplus.ru/>DiskiPlus casino com</a> DiskiPlus top casino DiskiPlus porno Алена Михайлова <a href=https://diskiplus.ru/>DiskiPlus casino андроид</a> DiskiPlus порно с Матвей Сафонов (футбол) DiskiPlus скачать сайт букмекерской конторы DiskiPlus водка казино DiskiPlus казино ли DiskiPlus 7k casino сайт DiskiPlus почему в казино не бывает настенных часов DiskiPlus Ирина Горбачева
#5433 Charlesgunnyhttp://filmkachat.ru
1×slots официальный demo регистрация в 1×slots casino
Но существуют азартные заведения, готовые просто так вручить деньги на игру. Для этого довольно создать профиль. Чтобы вывести выигрыш, сперва необходимо выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа. <a href=http://filmkachat.ru/>1хслотс рабочее зеркало</a> Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депозит имеет отличаться до 30 дней. <a href=https://ai.ceo/read-blog/225693>https://ai.ceo/read-blog/225693</a> Как только на виртуальном счету окажутся бонусные свои, поторопитесь отыграть вейджер. Сразу после этого возможно забыть заявку на вывод выигрыша. Кредиты выгодно отличаются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом настоящих средств и дают возможность ощутить азарт. Во-вторых – возможно насладиться каждой азартной забавой доступной на веб-сайте. В вашем постановлении находятся автоматы, настольные приложение, видео-покер, Live-дилеры. казино 1×slots <a href=https://63game.top/thread-127832–1–1.html>https://63game.top/thread-127832–1–1.html</a>
1хслотс 1хслотс регистрация перейти на 1×slots
1хслот зеркало сайта <a href=http://lider1c.ru/communication/forum/messages/forum3/message8243/6246-ssylochnaya-massa-onlayn?result=new#message8243>http://lider1c.ru/communication/forum/messages/forum3/message8243/6246-ssylochnaya-massa-onlayn?result=new#message8243</a> Для казино, работающих интернет, бездепозитные призы нужны для привлечения новых посетителей. Предложение сыграть на слотах без надобности внесения реальных денег — работающий способ для повышения интереса к компании. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит играть в казино, только теперь уже на собственные деньги. 1×slots зеркало проходить регистрацию это отличный вариант
1×slots зеркало регистрация
Поспешите арестовать бездепозитные бонусы за регистрацию в казино из представленного перечня. Все платформы не только ведут законную работа, хотя и порадуют правдивыми плодами забавы, высочайшей отдачей, быстрыми выплатами.Разные казино имеют собственные управляла по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высокие притязания. Часто онлайн-казино рекомендуют отыграть бонусное поощрение до 100 один в игровых автоматах. Например, в игрок получил безвозмездно 10 долларов, то нужно будет отыграть их, поставив одну тыщу спинов по 1 доллару любой. Стоит отметить, собственно не все казино дают возможность играть на бонусы и не во всех увеселительных заведениях идентичные управляла для отыгрывания. Некоторые казино запрещают выступать на бонусы в блекджек или ограничивают ставки до 5 %, собственно существенно увеличивает в десятки раз число необходимых игр. <a href=http://z914169g.bget.ru/user/Philipreore/>http://z914169g.bget.ru/user/Philipreore/</a> Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы мгновенно получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, бывает реальный шанс победу!Большинство клубов привлекают внимание игроков за счёт разнородных презентов. На 1 сайтах можно получить виртуальные кредиты, которые откроют доступ ко всему софту. На других же, администрация предлагает бесплатные вращения для запуска лучших интернет слотов. Несмотря на различные промоакции, стоит выделить самые главные. 1×slots бонус за регистрацию Не рекомендуем опрометью голову хвататься за различные предложения получения средств без инвестициям. Вполне вполне, что бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на первый взор. Альтернативой считается казино приз за депо. Мы предлагаем вам пару советов, спасибо коим у любого игрока несомненно вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств:Минимального оборота. Этот лимит уточняется вейджером — же игрок не поиграет на установленную необходимую, вывод средств будет недоступен.
1×slots рабочее зеркало
Подобные бонусы без депо предоставляются на более прибыльных критериях. Зачастую они покрупнее, а обстоятельства отыгрыша менее строгие. Бездеп с фриспинами возможность обхватывать всю коллекцию игр на сайте или разработки одного провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш может быть выведен после такого, как юзер отыграет эту сумму. Возможность оценить глубокий возможностей слотов — главное достоинство этой разновидности. Игроку становятся доступны что, эти функции, коие отсутствуют в демонстрационном режиме, а возможность выиграть настоящие деньги добавляет ярких азартных чувств.Денежные свои. Третий бонус за регистрацию без депозита – наличные. К раскаянью, только знаменитые и знаменитые клубы имеют уяснить средства в руб. Или долларах. С их помощью у насладиться каждой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед этим нужно исполнение определенных критерий. casino 1×slot <a href=http://www.aytastarim.net/user/Patrickcor/>http://www.aytastarim.net/user/Patrickcor/</a>
1×slot зеркало
В количестве случаев безвозмездные бонусы начисляются в кредитах, коие невозможно незамедлительно исключить со счета. Прежде их нужно отыграть по установленным правилам. Эти требования принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д.). О нем читайте ниже. Бездепозитный приз по промо-коду несомненно доступен для забавы, лишь в том случае когда Вы активируете особый бонусный код в разделе с бонусами или укажите промокод при регистрации на веб-сайте. В неких случаях, считая активации кода, придется подтвердить контактные данные игрока и заполнить анкету посетителя. <a href=https://securityholes.science/wiki/Glory_Casino>https://securityholes.science/wiki/Glory_Casino</a> 1×slots зеркало которую указывали при регистрации кстати Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную процедуру активации приза без депо. Внимательно прочитайте до конца. Многие новички делают оплошности на шаге регистрации и потому возможности получить презент.
<b>Смотреть еще похожие новости:</b>
<a href=https://elforodelpoker.com/presentaciones/1×slots-t288682.html>рабочее зеркало 1×slots</a>
<a href=https://www.goslog.ru/forum/messages/forum1/message14288/11-obrashcheniya-grazhdan?result=reply#message14288>1×слот регистрация в 1×slots casino</a>
<a href=https://forum.oursson.ru/viewtopic.php?f=2&t=9949>1× slots casino зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В неких онлайн казино для получения бездепозитных призов не довольно просто зарегистрироваться на веб-сайте клуба и подтвердить средства контактные данные. Дополнительно требуется активация промокода.
#5434 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino на телефон пин ап casino <a href=https://glvk.guru/>up casino зеркало</a> porno Светлана Ходченкова casino на телефон <a href=https://strelochnik.com/>casino ru</a> ев казино 1×bet 1 казино pin up casino пин ап pin up casino пин ап bitz casino яндекс игры казино
DiskiPlus казино 1 DiskiPlus порно с Анна Щербакова, фигуристка <a href=https://www.diskiplus.ru>DiskiPlus casino ап</a> DiskiPlus casino зеркало сайта DiskiPlus 7k casino сайт <a href=https://www.diskiplus.ru/>DiskiPlus up букмекерская контора</a> DiskiPlus порно с Зырянова Анастасия Владимировна DiskiPlus пин ап casino DiskiPlus порно с Юлия Ефимова, пловчиха DiskiPlus порно с Анна Калинская (теннис) DiskiPlus порно с Баталина Ольга Юрьевна DiskiPlus 7k casino зеркало рабочее DiskiPlus casino ru
#5435 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
7k casino официальный pin up casino пин <a href=https://7club7.com/>Любимова Ольга Борисовна порно</a> порно с Владимир Минеев (ММА) спорт букмекерская контора <a href=https://krtka.info/>Нургалиева Эльвира Рамиловна порно</a> porno Дарья Клишина casino скачать pin up casino зеркало винлайн букмекерская контора порно с Васильева Татьяна Викторовна бк букмекерская контора casino автомат
DiskiPlus 1go casino DiskiPlus pin casino зеркало <a href=https://www.diskiplus.ru/>DiskiPlus porno Марина Александрова</a> DiskiPlus бк букмекерская контора DiskiPlus porno Анна Сидорова, керлингистка <a href=https://www.diskiplus.ru/>DiskiPlus лучшие бесплатные онлайн казино</a> DiskiPlus online casino DiskiPlus порно с Елена Никитина, скелетонистка DiskiPlus порно с Аделия Петросян (фигурное катание) DiskiPlus porno Юлия Канакина, скелетонистка DiskiPlus 1×slots casino DiskiPlus 1×bet официальный скачать DiskiPlus приложения букмекерских контор на андроид
#5436 Mathewbyclehttps://bitqt-crypto.pro
Cryptocurrency trading service <a href=https://bitqt-crypto.top/>bitqt</a> with AI is automation and efficiency. Artificial intelligence monitors market dynamics, reduces risks and optimizes transactions. The perfect solution for beginners and professionals.
#5437 Danielnothttps://jogo-do-tigrinho.pro
online slots Jodo Do <a href=https://thejogotigrinho.pro/>Tigrinho</a> are a unique combination of excitement and pleasure. Discover a variety of themes, bonus games and jackpots. Play comfortably, enjoying the well-thought-out interface and the chance to hit the jackpot!
#5438 RussellIrrixhttps://zeus-vs-hades-download.ru
Исследуйте Zeus vs Hades <a href=https://zeus-vs-hades-download.ru>zeus vs hades download ru<a> Gods of War! Играйте бесплатно, получайте фриспины и узнайте все о слоте 2024 года!
#5439 Ремонт iPad Pro 12.9 Москваhttps://remont-ipad-pro-12-9-cog.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт ipad pro 12.9, можете посмотреть на сайте: <a href=https://remont-ipad-pro-12–9-cog.ru/>ремонт ipad pro 12.9</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#5440 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino актуальное зеркало казино сегодня <a href=https://strelochnik.com/>top casino</a> порно с Евгения Медведева up casino <a href=https://vestnik-jurnal.com/>1×bet слоты 1×bet xyz</a> ramenbet casino 1×bet официальный скачать ев казино Петрова Ольга Викторовна порно карты казино Скоробогатова Ольга Николаевна порно casino зеркало сайта
DiskiPlus casino приложения DiskiPlus Москалькова Татьяна Николаевна порно <a href=https://diskiplus.ru>DiskiPlus букмекерская контора скачать приложение</a> DiskiPlus кент казино DiskiPlus порно с Каролина Севастьянова <a href=https://diskiplus.ru/>DiskiPlus слоты казино</a> DiskiPlus порно с Федор Чалов (футбол) DiskiPlus casino бездепозитный DiskiPlus porno Ангелина Гончаренко, хоккеистка DiskiPlus пинап казино DiskiPlus казино гта 5 DiskiPlus симулятор казино DiskiPlus пин casino
#5441 Charlesgunnyhttp://filmkachat.ru
скачать 1×slots на андроид мобильная версия
Каждый новичок и профессиональный игрок грезят живо стартануть и начать делать настоящие ставки. Для этого достаточно отобрать подарок, за кот-ый не выплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email или телефон. После этого администрация начисляет щедрое вознаграждение повторяющий безвозмездных вращений либо виртуальных кредитов. <a href=http://filmkachat.ru/>1×slots коды</a> Отказ в прохождении верификации. Если заказчик не желает или не может предоставить документы, подтверждающие его личность, профиль несомненно заблокирован совместно, вкупе со всеми бонусными начислениями.Итак, дабы бесплатные бонусные кредиты превратились в реальные деньги, которыми вы можете управлять по своему усмотрению, их надо(надобно) отыграть. Вейджер идет уточнять в правилах онлайн-казино. <a href=https://www.empowher.com/groups/blogs-4/posts-33>https://www.empowher.com/groups/blogs-4/posts-33</a> Бонус начисляется игроку сразу последствии регистрации и прохождения верификации в казино и не настятельно от посетителя внесения депо. Как управляло, размер приза в схожем случае достаточно скромный, впрочем дозволяет новичкам познакомиться с игрой без риска реальными средствами. 1×slots зеркало которую указывали при регистрации кстати <a href=https://able2know.org/user/arnolddal/>https://able2know.org/user/arnolddal/</a>
1 x slots
Все любят получать подарки. Согласитесь, почти любой играющий человек несомненно бесконечно счастлив, в получит даровой подарок для игры в онлайн казино просто за регистрацию или же приз за внесенный депо, например нарекаемые приветственные призы для свежих игроков. Соответственно такие онлайн клубы будут более популярны и предпочтительны у игроков при выборе казино для игры. Топ казино непрерывно обновляется и добавляются свежие и интересные игровые клубы с симпатичной бонусной политикой и всеми возможными прерогативами, к которым относятся такие призы как фриспины за регистрацию, валютные бездепозитные бонусы, а также щедрые призы за внесенный депозит.Фриспины — благотворительные вращения, коие позволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся самым популярным и желаемым видом приза — благотворительные вращения порой эффективнее и веселее в отыгрыше, чем другие облики бездепов. 1 х слотс зеркало Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут устанавливает лимитирование для посетителей. Конечно, это можно посчитать неким неудобством для игрока, но справедливости стоит отметить, собственно выбор автоматов всё также остаётся достаточно большим.Прежде чем активировать бездеп, необходимо увериться в том, что государство, гражданином коей считается игрок, не входит в список запрещенных. <a href=http://www.tr.besatime.com/index.php?subaction=userinfo&user=WalterTWele>http://www.tr.besatime.com/index.php?subaction=userinfo&user=WalterTWele</a> Но надо думать, что снабжая юзеров такими призами, казино занимается спонсированием. Ведь объемы вознаграждений, главном, не большие (средним размером от 5 до 20 $). И на эти средства налагаются конкретные обстоятельства и лимитирования, неотклонимые к исполнению игрока, если в последствии он желает получить все свои выигранные деньги. скачать 1×slots официальный сайт В случае установленного лимита на сумму вывода выигрыша с бездепозитного приза, игрок не сможет вывести больше заявленной суммы.
1×slots подтвердит вашу регистрацию если говорить
Иногда операторы просят внесение минимального депозита перед выводом для верификации платежного прибора. В некоторых казино данный депо того предстоит отыграть. Фриспины без депозита либо вспомогательные свои посодействуют ближе познакомиться с игровой платформой и её функциями. За счёт подарков возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям ради забавы напротив живых крупье.Для выбора азартного заведения Вы можете воспользоваться списком наших казино с бонусами за регистрацию. На нашем веб-сайте мы опубликовали перечень бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, что доля бонусов эксклюзивные и доступны лишь для гостей нашего сайта по-специальному промо-коду либо по оригинальной ссылке. Кроме того, для каждого бонуса мы подготовили подробный обозрение, в котором Вы узнаете как получить и отыграть одобрение и как исключить свой выигрыш с бездепа. <a href=https://www.lifesshortlivefree.com/community/profile/kennethnow/>https://www.lifesshortlivefree.com/community/profile/kennethnow/</a> 1×slot казино зеркало Заработать на бездепозитных призах за регистрацию в казино имеет любой юзер, достигший совершеннолетия.Промокод – определённая композиция символов, коию нужно ввести в отвечающее фон при разработке учетной записи либо активировать в собственном профиле игрока в разделе с бонусами.
1×slots регистрация 1×slotscasino 56 online
Бездепозитный бонус часто возможность стать легкодоступным незамедлительно последствии завершения регистрации, поскольку в большинстве случаев единственным требованием к нему является регистрация, а этого проверка вашей новой учетной записи.Свежий приз начисляется вид валютных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в использовании своими, ну случае отыгрыша оператор может установить лимитирование на вывод средств. Также случаются случаи, когда казино начислит обсужденный бонус последствии регистрации свежего клиента по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам. 1×slot рабочее зеркало <a href=https://myportal.utt.edu.tt/ICS/_portletview_/Campus_Life/Campus_Groups/Safer/Discussion.jnz?portlet=Forums&screen=PostView&screenType=change&id=7c6987d7-afd1–40fe-acf8-fbeed9be8f4d>https://myportal.utt.edu.tt/ICS/_portletview_/Campus_Life/Campus_Groups/Safer/Discussion.jnz?portlet=Forums&screen=PostView&screenType=change&id=7c6987d7-afd1–40fe-acf8-fbeed9be8f4d</a>
1×slot зеркало рабочее этих способов предполагает регистрацию
Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. <a href=http://whdf.ru/forum/user/80346/>http://whdf.ru/forum/user/80346/</a> Подтверждение электронной почты – одно из главных критерий, коие есть почти в каждом бездепозитном казино. Чтобы верифицировать электрическую почту, довольно перебежать по активной ссылке в послании, полученном от азартного клуба.Отыграв бездепозитный бонус в казино с выводом тоже придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, случае сходственное ограничение присутствует, то единоразово вывести получится лишь необходимую, не превышающую размер приобретенного приза. 1×slots casino регистрация 1×slotscasino09k online Обыкновенные бездепозитные призы в размере от 3-х до 20 $ сделаны для того, дабы в игры заходили все свежие и новые игроки. Здесь, скорее, будет ограничение на наибольший выигрыш. Важно, дабы перед наименьшим вкладом был отключен приз за 1-ое пополнение счета, и компьютерные не попадет на повторный вейджер.
<b>Смотреть еще похожие новости:</b>
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=3794>1х слотс зеркало регистрация в 1×slots casino</a>
<a href=https://forum.spherecommunity.net/User-JamesLop>1×slots зеркало на сегодня</a>
<a href=https://persiankittencat.com/grey-persian-cats-unraveling-the-charm-of-these-feline-beauties/#comment-39781>1 x slots</a>
<a href=https://demo.comuni-italiani.it/forum/viewtopic.php?f=9&t=376272>1хслот официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Так что приготовьтесь предоставить секретную информацию (пол, возраст, государство проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает менее суток, в чего удастся свободно выводить солидные выигрыши.
#5442 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Гатагова Ольга Анатольевна карты казино <a href=https://kompromat1.online/>casino на телефон</a> porno Катерина Шпица порно с Евгений Малкин (хоккей) <a href=https://m.repost.news/>букмекерские конторы pin</a> сколько казино up casino скачать приложения букмекерских контор на андроид пин ап казино casino бездепозитный сайте букмекерской конторы фонбет порно с Гатагова Ольга Анатольевна
DiskiPlus сайт 1×bet слоты DiskiPlus casino сайты <a href=https://diskiplus.ru/>DiskiPlus pin up casino buzz</a> DiskiPlus пин ап casino pin DiskiPlus порно с Аделия Петросян (фигурное катание) <a href=https://diskiplus.ru>DiskiPlus букмекерская контора официальный сайт</a> DiskiPlus Юдаева Ксения Валентиновна порно DiskiPlus казино рояль смотреть DiskiPlus 1×bet регистрация DiskiPlus самое казино DiskiPlus Радченко Светлана Юрьевна порно DiskiPlus официальные букмекерские конторы DiskiPlus балтбет букмекерская контора
#5443 Charlesgunnyhttp://filmkachat.ru
1×slots casino online регистрация
Как верховодило, новоприбывшие геймеры начала хотят ознакомиться с методами ввода и вывода валютных средств и сроки исполнения поданных заявок чтобы четко осознавать, как живо меня исключить собственный казино приз за регистрацию без депозита на электрический кошелек либо же банковскую карту. К счастью для всех играющих, внутри конкретных холдингов, все казино соперничают меж собой. Ведь в бы конкретную компанию давало только одно онлайн-заведение, то вряд ли бы клиенты заметили казино с призом за регистрацию и могли бы рассчитывать только на вознаграждение вид бонуса на первое вложение. К любому заведению периодически по завлекать свежих игроков, что, в, только на руку всем играющим.Это раз из основных показателей привлекательности подарка. С завешенным коэффициентом в мастера не сумеют выполнить обстоятельства по отыгрышу. И маловажно, насколько привлекательно выглядит предложение – бездепозитный приз казино в объеме $500 либо $1 000. Чтобы новенькие получше вдумались, собственно же это вейджер, мы разберём на примере. <a href=http://filmkachat.ru/>1хслотс официальный сайт зеркало</a> <a href=https://wallhaven.cc/user/CGI>https://wallhaven.cc/user/CGI</a> Основное отличие что, нет, собственно для получения бездепа не надо пополнять баланс в казино. Но кроме этого, есть ряд и других отличий:В перечне притязаний к отыгрышу нередко наличествуют лимиты на ставки при этой на личные деньги. Так, если отыграть нужно 30 000 рублей, а максимальная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам действия промоакции. 1×slots промокод при регистрации <a href=http://www.0pcdd.com/space-uid-274620.html>http://www.0pcdd.com/space-uid-274620.html</a> Вышеописанная причина и является главным интересным, в которого операторы отдают часть собственной выгоды на различные маркетинговые затраты и рекламные кампании. А наиболее действующим здесь будут играть непосредственно бездепозитные бонусы казино 2022 с выводом за регистрацию.Вознаграждения за получение VIP-статуса ? начисляются в программки преданности при достижении одного уровня либо выдаются персонально менеджерами службы поддержки.
1×slots казино зеркало
<a href=https://www.xn–72c9aa5escud2b.com/webboard/index.php/topic,534795.new.html#new>казино 1×slots официальный сайт</a> 1×slots сайт Все бесплатные бонусы кажутся соблазнительными. Кто же категорически от способности поиграть в онлайн-казино, не рискуя деньгами, хотя получая выигрыши. Но далековато не все бездепозитные призы мере привлекательны для рассудительного посетителя.Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, чтобы появилась возможность вывести выигрыш. <a href=http://kolesomarket.ru/bitrix/redirect.php?goto=http://mvfd1.ru/bitrix/redirect.php?goto=http://220ds.ru/redirect?url=https://telegra.ph/Ponimanie-motivirovannogo-otkaza–prichiny-posledstviya-i-sposoby-preodoleniya-09–23>http://kolesomarket.ru/bitrix/redirect.php?goto=http://mvfd1.ru/bitrix/redirect.php?goto=http://220ds.ru/redirect?url=https://telegra.ph/Ponimanie-motivirovannogo-otkaza–prichiny-posledstviya-i-sposoby-preodoleniya-09–23</a> Максимальный объем ставки, который нельзя превышать же приз не несомненно всецело отыгран. В случае нарушения сего управляла, бонус и выигрыш с него станут аннулированы.Но а если вы уже профи по интернет казино, кликаем на красноватую кнопку «Получить» и Вы автоматически перейдете в онлайн казино; казино 1×slots официальный сайт Чаще всего используются коды. Их нужно заносить в особые окна регистрационной анкеты, если идет о пригласительных бонусах, или в определенном разделе личного офиса игрока.
1×slots зеркало проходить регистрацию это отличный вариант
<a href=https://yvavilebismovla.ge/user/Craigtwene/>https://yvavilebismovla.ge/user/Craigtwene/</a> У нас на сайте Вы отыщите список призов без депозита в проверенных казино и подробную информацию о том как их получить и применять. 1 xslots рабочее зеркало Фриспины без депозита или вспомогательные свои помогут поближе познакомиться с игровой платформой и её функциями. За счёт даров возможно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради игры против живых крупье.
1×slots регистрация 1×slots review live
Бонус с зачислением средств на счет выделяет больше свободы поступков. Пользователь сам выбирает, каким образом распорядиться подаренными своими. Здесь кроме могут работать ограничения на список доступных игр, но обыкновенно эти рамки не например строги, как в промо с бесплатными вращениями.Помимо прочего, для вывода средств по бездепу необходимо внести на счёт собственный 1-ый депо — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально возможную необходимую, после чего вывод средств станет доступен. Иногда в бездепа, казино презентует наименьший бонус (до 50 рублей), ради которого надо заморачиваться. 1х слот регистрация в 1×slots casino <a href=http://mipk.nngasu.ru/bitrix/click.php?goto=http://barkode.ru/bitrix/redirect.php?goto=http://dk-books.com/bitrix/click.php?goto=https://telegra.ph/Dogovor-kupli-prodazhi-avtomobilya-v-2024-godu-09–24>http://mipk.nngasu.ru/bitrix/click.php?goto=http://barkode.ru/bitrix/redirect.php?goto=http://dk-books.com/bitrix/click.php?goto=https://telegra.ph/Dogovor-kupli-prodazhi-avtomobilya-v-2024-godu-09–24</a>
1×slots официальный регистрация
Чтобы выступать даром на реальные деньги в казино, порой довольно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные деяния.Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных требований, кроме обязательной верификации. Если на веб-сайте учтена обязательная процедура подтверждения личности, то исключить выигрыш получится лишь после проверки данных. Приготовьтесь наполнить анкету и отправить в техподдержку документ, подтверждающий лицо. К примеру, игроку выдаются бесплатные свои в заведении в размере пятидесяти либо ста $ (вейджер на коие составляет 100х). То есть, каждому новоприбывшему геймеру выскакивает манящая картинка, которая обещает выплату всех зачисленных фирмой средств. Не стоит заострять на казино бонус за регистрацию без депо с сильно большой или довольно малюсенькой суммой призов, потому собственно, и тщательно изучив все условия, тут скорее, несомненно какой-то подвох. <a href=http://dom-dom.ru/bitrix/redirect.php?goto=http://jozgeix.matchfishing.ru/bitrix/click.php?goto=http://poznanie.com.ua/bitrix/redirect.php?goto=https://telegra.ph/Kak-vyrazhenie-blagodarnosti-mozhet-povliyat-na-okruzhayushchih-09–23>http://dom-dom.ru/bitrix/redirect.php?goto=http://jozgeix.matchfishing.ru/bitrix/click.php?goto=http://poznanie.com.ua/bitrix/redirect.php?goto=https://telegra.ph/Kak-vyrazhenie-blagodarnosti-mozhet-povliyat-na-okruzhayushchih-09–23</a> 1×slots зеркало рабочее Игрокам не следует принимать приветственный бонус как гарантированный метод получить крупный выигрыш, но это отличная возможность без расходов расценить функционал казино.Баланс игрока пополняется на соответствующую сумму. К ней используется вейджер, обозначенный в правилах акции. Вывести выигрыш можно несомненно в такого, как юзер сделает требуемый объем ставок из собственных средств. В редчайших случаях бездеп работает в формате Free Play. На счет пользователя зачисляется большая сумма, и предоставляется небольшой срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по завершении этого периода сумма на счету будет превосходить изначальную, то разность возможно несомненно исключить либо использовать для дальнейших ставок.
<b>Смотреть еще похожие новости:</b>
<a href=http://board.eternityrpc.com/member.php?action=profile&uid=369>1×slots быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Каждый новичок и умелый игрок грезят скоро стартануть и начать делать реальные ставки. Для сего достаточно забрать подарок, за кот-ый не выплачивать. В зависимости от игровой платформы, нужно сделать профиль, привязать email либо аппарат. После этого администрация начислит щедрое вознаграждение в виде безвозмездных вращений или виртуальных кредитов.
#5444 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало сайта
Постарайтесь отыграть вейджер, дабы была вероятность оставить заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные приборы. Вы сможете получить выигрыш на электрической кошелёк, карту, телефон.Если площадка дарует бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь ввести аккаунт на веб-сайте и активировать его, подтвердив адресок электрической почты, номер телефонного или другие данные, коие просит оператор. Перед данным необходимо убедиться, что юзер находится на официальном сайте казино, не на мошеннической площадке. <a href=http://filmkachat.ru/>1×slots зеркало регистрация</a> Поспешите отобрать бездепозитные призы за регистрацию в казино из представленного перечня. Все платформы не водят законную работа, но и порадуют добросовестными результатами игры, высокой отдачей, резвыми выплатами.Если площадка дарует бездеп за регистрацию, то процедура его получения ординарна. Нужно только завести акк на сайте и активировать его, подтвердив адрес электрической почты, номер телефона либо иные данные, которые требует оператор. Перед этим нужно убедиться, собственно пользователь располагается на официальном веб-сайте казино, а не на мошеннической площадке. <a href=https://www.zybuluo.com/lexxeagle/note/2570093>https://www.zybuluo.com/lexxeagle/note/2570093</a> 1×slots регистрация 1×slotscasino 56 online <a href=https://forum.kainkalabs.com:443/member.php?action=profile&uid=17865>https://forum.kainkalabs.com:443/member.php?action=profile&uid=17865</a> Фриспины без депозита или дополнительные свои посодействуют ближе познакомиться с игровой платформой и её функциями. За счёт даров можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям из-за игры напротив живых крупье.Отыграв бездепозитный бонус в казино с выводом тоже придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в сходственное ограничение присутствует, то единоразово вывести выйдет лишь необходимую, не превосходящую размер полученного приза.
1×slots сайт
Диапазон ставок, которые вправе сделать игрок, также лимитирован. Обычно назначать можно небольшую сумму — в 10–30 руб. За одно вращение. 1хслот зеркало сайта Зарегистрироваться в казино по специальной ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефона и электронную почту). Для доказательства номера телефонного нужно в собственном профиле указать собственный номер и нажать кнопку „Подтвердить номер телефонного“, далее Вы получите sms-сообщение с кодом, который нужно ввести в подходящее поле. Для подтверждения электрической почты, перейти по активной ссылке в послании от казино. <a href=http://vn-info.net/user/WalterJen/>http://vn-info.net/user/WalterJen/</a> Мы подготовили список, где есть практически животрепещущие и новые бездепозитные бонусы казино, которые продоставляется получить безвозмездно. Для наших юзеров есть особые предложения неповторимые бонусы, которые вы нигде не отыщите, их мы обозначили специальной красной плашкой «Exclusive». 1×slots casino зеркало рабочее Игры, каких возможно играть на бонусные средства. Проверьте список игр, в можно играть на бонусные свои, вполне они Вам не понравятся и не стоит расходовать своё время на такую акцию.Подтверждение регистрации. Казино настоятельно привязки профиля к электрическому адресу и номеру аппарата. Для сего на e-mail отправляется послание ссылаясь, а на телефон ? текстовое извещение с кодом.
1×slots casino регистрация 1×slotscasino09k online
Но есть игорные заведения, коие готовы просто так жертвовать средства на забаву. Для сего достаточно создать профиль. Чтобы вывести свой выигрыш, для поначалу нужно выполнить обстоятельства отыгрыша, обозначенные в условиях получения бездепозитного депозита.Наиболее пользующиеся гонорары среди гэмблеров – бездепозитные призы казино. Это не дивно, так возможно получить бесплатные вращения или виртуальные кредиты, и при не придётся пополнять счёт, рисковать личными деньгами. Удастся насладиться различными весельями причем выиграть крупную необходимую, избегая серьёзного риска. Как управляло, новоприбывшие игроки в первую очередь желают ознакомиться с методами ввода и вывода денежных средств и сроки исполнения поданных заказов дабы конкретно разуметь, как прытко меня вывести свой казино приз за регистрацию без депозита на электронный кошелек или же банковскую карту. К счастью для всех играющих, внутри определенных холдингов, все казино соперничают меж собой. Ведь случае бы определенную компанию представляло только одно онлайн-заведение, то навряд бы клиенты заметили казино с призом за регистрацию и возможность бы рассчитывать только на вознаграждение в виде бонуса на 1-ое вложение. К каждому заведению регулярно по завлекать новых игроков, что, в, только на руку всем играющим.Бездепозитные бонусы реальными средствами, которые можно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадали. <a href=http://jbparadiez.org/member.php?action=profile&uid=17655>http://jbparadiez.org/member.php?action=profile&uid=17655</a> Помните, что любые нарушения правил сведут на нет ваши усилия, и вы наверняка останетесь без начисленного для бесплатного бонуса. Всегда изучайте верховодила начисления и обстоятельства вейджера. По хоть вопросам, на которые вы имеет других найти ответы, обращайтесь за объяснениям и саппорт.Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте условия – они часто выдаются для некоторых машин. В зависимости от клуба вы можете делать определенное количество ставок. Кстати, современные игорные дома выделяют возможность заводить «одноруких злодеев». 1×slots регистрацию более популярный вариант это Как правило, при выводе финансов, от играющего потребуется только устроить наименьший вклад для того, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом личный счет.
1×slot официальный сайт
При помощи такого одобрения оператор имеет кроме завлекать клиентов, коие раньше проявляли активность на веб-сайте, хотя по некий основанию перестали играть. В этом случае промокод высылается юзеру по электрической почте или повторяющий SMS.Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депозит может отличаться до 30 дней. Подтвердите регистрацию, дабы активировать Бездепозитный бонус с выводом, потребуется наполнить собственный профиль. Заполните пустопорожние поля настоящими данными о себе. 1 x slots <a href=https://paladinscounter.com/users/TerrySuh>https://paladinscounter.com/users/TerrySuh</a> На условиях отыгрыша бесплатных призов следует остановиться подробнее. С ними связаны аспекты, коие нельзя оставить без внимания.Составленный специалистами Casino.ru перечень онлайн-казино с бездепозитным призом дозволяет игрокам сравнить спецпредложения различных операторов.
1×slots casino регистрация на сайте
Следует выделить, что бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом.Третитй бездепозитный приз за регистрацию – валютные свои. К сожалению, начислить рубли или доллары готовы только знаменитые и популярные клубы. С их помощью вас насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком. <a href=http://avto-el.com/index.php?subaction=userinfo&user=pricklybeast57>http://avto-el.com/index.php?subaction=userinfo&user=pricklybeast57</a> 1×slots зеркало проходить регистрацию это отличный вариант Воспользоваться бездепом возможно не во всех игровых автоматах: казино и тут устанавливает ограничение для посетителей. Конечно, это возможно посчитать неким неудобством для игрока, но справедливости ради стоит отметить, собственно выбор автоматов всё равно остаётся достаточно великим.
<b>Смотреть еще похожие новости:</b>
<a href=http://evtrucksforum.com/memberlist.php?mode=viewprofile&u=28289>1×slots зеркало регистрация</a>
<a href=https://smm-seo.ru/members/rabofreeol.4209/>1×slots подтвердит вашу регистрацию если говорить</a>
<a href=https://forum.spherecommunity.net/User-Jamesmew>1×slots регистрацию более популярный вариант это</a>
<a href=https://forum.oursson.ru/viewtopic.php?f=2&t=8856>1×slots официальный зеркало рабочее</a>
<a href=https://forumauthority.com/thread-6616-post-39271.html#pid39271>1×slots регистрацию процедура займет всего лишь</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выше мы предоставили глубокий набор самых свежих и своевременных бездепозитных бонусов в онлайн казино без пополнения на 2022 год, где продоставляется пользоваться каким ценным бездепозитным призом. После требуется внести идентификационный платёж. Это стращает начинающих больше всего. Нужно сделать наименьший депо в 100–500 руб. Таким образом служба защищенности убедиться сомнений, что платёжный способ принадлежит Вам. Данная процедура необходима для обеспечивания безопасности игровых счетов. Пример, Ваш акк взломают и выведут средства на свой кошелёк. Будет очень неприятно. Поэтому верификация платёжной системы, это важный момент.
#5445 Normanjoulahttps://toni-kroos.ru
Все о Тони Кроосе <a href=https://toni-kroos.ru/>toni kroos ru</a> на одном сайте: биография, актуальные новости, детальная статистика и эксклюзивные обновления о немецкой футбольной звезде. Присоединяйтесь к сообществу фанатов и будьте в курсе всех событий, связанных с Кроосом!
#5446 StevenAlushhttps://vseofootball.ru
Свежие футбольные новости <a href=https://vseofootball.ru/>https://vseofootball.ru</a> обзоры матчей, Лига чемпионов, статистика и лучшие букмекерские бонусы для ставок на спорт.
#5447 Jamessamhttps://games-ru.ru
Откройте мир мобильных игр <a href=https://games-ru.ru/>games-ru.ru/</a> рейтинги лучших проектов, тренды, советы и гайды. Играйте в популярные шутеры, RPG, стратегии и песочницы прямо на телефоне!
#5448 ErnestPlerahttps://jimmy-butler-az.org
Biography of footballer Joshua Kimmich <a href=https://jimmy-butler-az.org/>jimmy butler az org</a> personal life, wife and children. Career at Bayern Munich, statistics for Germany, work with Pep Guardiola, negotiations with Barcelona. Vice-captain at Euro 2024. Latest news for 2024.
#5449 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots review live
Как правило, при выводе финансов, от играющего потребуется только устроить наименьший лепта чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом индивидуальный счет. <a href=http://filmkachat.ru/>1×slots скачать на айфон</a> Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих требований, не неотъемлемой верификации. Если на веб-сайте предусмотрена неотъемлемая процедура доказательства личности, то вывести выигрыш получится только после ревизии данных. Приготовьтесь заполнить анкету и отправить в техподдержку документ, подтверждающий личность. <a href=https://vhearts.net/forums/thread/8947/>https://vhearts.net/forums/thread/8947/</a> Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.За счёт спинов выйдет запустить различные онлайн слоты, протестировать стратегии и поднабраться навыка. Фишка сомнений, что вращения начисляются на топовые аппараты с уникальными опциями и высочайшей отдачей. Не запамятовывайте, что в любом акционном предложении предусмотрены специальные требования – кратковременные ограничения, максимальный размер ставки, список доступных игр. казино 1×slots официальный сайт <a href=http://xn–2q1b33lkuah98a.com/bbs/board.php?bo_table=free&wr_id=380523>http://xn–2q1b33lkuah98a.com/bbs/board.php?bo_table=free&wr_id=380523</a> Допустим, за регистрацию вы получили бездеп в размере 2 000 рублей с вейджером х30. В этом случае светит устроить ставок, на общую сумму в 60 000 рублей (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать настоящие средства. Однако не запамятовывайте, собственно с каждого подарка выйдет исключить определённую необходимую (чаще всего не более $200).
1хслотс казино зеркало
<a href=https://chasingadream.rpginitiative.com/showthread.php?tid=159576>1хслот зеркало</a> 1×slots регистрацию более популярный вариант это Выигрыши с призов без вложений постоянно привязаны к притязанию по ставкам и все быть обналичены только после выполнения данных требований.Самые свежие бездепозитные бонусы в казино за регистрацию 2022 года с выводом выгоды находятся на данной странице. Посетитель имеет оценить условия получения и начать выступать на деньги без внесения депо. При данном игроку важно разуметь, на каких критериях и какими методами у вывести приобретенный выигрыш. Для этого необходимо оценить список присоединенных платежных систем. <a href=http://okprint.kz/user/Jasperlyday/>http://okprint.kz/user/Jasperlyday/</a> 1×slots акции Особую изюминку видео слотам присваивают оригинальные знакы. С их в активируются разные призы. Вы можете запустить вспомогательный степень и увеличить необходимую выигрыша. Есть знаки, которые сменяют ненужные элементы и сами делают выигрышные комбо. Не стоит забывать и тему бонус-тур. После любого успешного спина есть шанс увеличить необходимую выигрыша в два либо четыре раза.
1×slots casino регистрация 1×slotscasino09k online
Многие новички колеблются, собственно поощрительный приз надо будет отдавать, в если они выиграли у казино. Это полностью неопасно и накрепко. Выводя выигранные свои, игрок просто одергивает свое участие в игре и теряет уникальную возможность – безвозмездно увеличивать собственное вещественное положение. <a href=https://dc-kd.ru/user/Scottbiorp/>https://dc-kd.ru/user/Scottbiorp/</a> Но надо думать, собственно снабжая юзеров этими призами, казино занимается спонсированием. Ведь объемы вознаграждений, в основном, не великие (средним размером от 5 до 20 долларов). И на эти средства налагаются конкретные обстоятельства и лимитирования, неотклонимые к исполненью игрока, в в последствии он вожделеет получить все свои выигранные деньги. 1×slots регистрация на 1хслотс Прямо в отберите благотворительные вращения за регистрацию без депозита и начинайте собирать призовые композиции ради крупных выигрышей!Бонусные деньги – небольшая сумма средств для старта в новом казино. На бонусные деньги, обычно разрешено выступать во все игры, кроме слотов с прогрессивным джекпотом и игр из раздела exist casino.
зеркло казино 1×slots
Изучить правила и обстоятельства получения бездепозитных бонусов казино, Вы сможете у нас на сайте в разделе с бонусами либо на официальном веб-сайте выбранного Вами казино. Если имеет найти необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электрической почте.Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают приз по странам. Вплоть до такого, собственно клуб имеет на игроков из Вашей страны, а бездеп мешает. <a href=https://nztw.org/home.php?mod=space&uid=43957>1×slots официальный сайт скачать на айфон</a> На безвозмездные призы онлайн-казино практически всегда распространяется ограничения по стране проживания посетителей. Даже случае вас разрешено открывать счет и играть на средства в заведении, это еще не означают, собственно вам доступны no down payment bonuses.В каждом казино с бездепозитным призом предусмотрены вейджеровые обстоятельства. Это один-единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, нужно устроить определённое количество ставок. Чем круче бонус, что, этим труднее выполнить обстоятельства, и наоборот. 1хслотс официальный сайт зеркало <a href=http://bbs.all4seiya.net/home.php?mod=space&uid=939441>http://bbs.all4seiya.net/home.php?mod=space&uid=939441</a> Доступность — бездепозитные бонусы в казино почаще всего предоставляются свежим игрокам, хотя посещают случаи, когда бонус могут получить и действующие клиенты.
1хслотс рабочее зеркало
Реже призы без депозита начисляются неизменным игрокам. С их поддержкою администрация постарается вычесть ценных клиентов либо желает поблагодарить за преданность правильных посетителей. Но намного чаще для похожих целей используются такие акции: Обычно, бездепозитные бонусы выдаются под конкретные слоты с фиксированной ставкой, но их наверняка воспрещено применять в игровых автоматах с прогрессивным джекпотом. Список игр, в возможно применять бездеп, Вы найдете в описании промоакции либо сможете уточнить у службы поддержки заведения.Эффективность бездепов в качестве рекламного прибора оценили многие операторы. Малоизвестные площадки употребляют эти акции, дабы стремительно набрать базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны постоянных посетителей. Не все веб-сайты, дающие подарки без депозита, рекомендованы к ирге. За привлекательным промоописанием все прятаться невыполнимые обстоятельства отыгрыша и другие подводные камни. <a href=http://ultfoms.ru/user/ArnoldBar/>http://ultfoms.ru/user/ArnoldBar/</a> 1×slots казино зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=132097>1х слот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Основное отличие в, собственно для получения бездепа не пополнять баланс в казино. Но не сего, есть ряд и отличий:
#5450 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
ев казино казино онлайн бесплатно <a href=https://res-publika.com>порно с Константин Тюкавин (футбол)</a> casino daddy скачать 1×bet 1×bet xyz <a href=https://www.ossetia.tv/>порно с Евгений Малкин (хоккей)</a> top casino casino buzz 1×bet приложение официальные сайты казино Юдаева Ксения Валентиновна порно лучшие бесплатные онлайн казино порно с Анна Калинская (теннис)
DiskiPlus Елена Лядова DiskiPlus Радченко Светлана Юрьевна порно <a href=https://diskiplus.ru/>DiskiPlus почему в казино не бывает настенных часов</a> DiskiPlus 1×bet бесплатно DiskiPlus сайт казино зеркало <a href=https://diskiplus.ru/>DiskiPlus porno Мария Шарапова</a> DiskiPlus порно с Евгений Малкин (хоккей) DiskiPlus пин ап casino pin DiskiPlus 1×slots casino DiskiPlus Мухтиярова Елена Вячеславовна порно DiskiPlus скачать букмекерскую контору DiskiPlus casino сегодня DiskiPlus пин ап casino pin
#5451 Charlesgunnyhttp://filmkachat.ru
1×slots бездепозитный бонус за регистрацию
Большинство интернет-казино из нашего топ-10 готовы порадовать вас эксклюзивными промоакциями. Читайте о их в обзорах и на форуме.Чтобы получить вероятность исключить выгода с бездепозитного бонуса в казино, необходимо выполнить ряд условий: <a href=http://filmkachat.ru/>1×slots мобильная версия войти казино</a> <a href=https://mega.nz/file/d28RQCBS#2i_xAXDQfj-rVkVhMWNDPYPXRKJ71NaLOz_MKYAVxxQ>https://mega.nz/file/d28RQCBS#2i_xAXDQfj-rVkVhMWNDPYPXRKJ71NaLOz_MKYAVxxQ</a> На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не можете активировать и получить бездепозитный приз.Также учтите, собственно кое-какие игровые платформы сузивают список стран, коие способны получить предложенный бездепозитный приз за регистрацию. К образцу, есть онлайн-заведения, выдающие похожие бонусы лишь обитателям определенных государств. К примеру, онлайн казино 777 Оригинал дает бездепозитный приз лишь игрокам из России и стран СНГ. Или наоборот, снабжают вознаграждением всех, кроме жителей неких государств (исходя из сего, следует внимательно учить перечень, чтобы потом не возникло практически вопросов и претензий). 1хслотс рабочее зеркало <a href=https://zarctvo.ru/user/scottproob/>https://zarctvo.ru/user/scottproob/</a>
1×slots официальный регистрация
При выполнении критерий отыгрыша и верификации, деньги с бонусного счета переводятся на главной и имеют быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции находятся от избранной платежной системы.Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают приз по странам. Вплоть до того, что клуб имеет брать игроков из Вашей государства, а бездеп мешает. <a href=https://forum.spherecommunity.net/User-Jamesmew>1×slots сайт зеркало</a> 1×slots рабочее зеркало на сегодня Главное преимущество спинов – вероятность изучить различные слоты. Также получится насладиться бонусными раундами, испытывать фортуну в риск-туре и преумножить выигрыш за счёт особых символов. Однако не игровой процесс заслуживает внимание, так другого, как сосредоточиться на реальном выигрыше. <a href=https://destaquebrasil.com/inglaterra/author/jamestrorn/>https://destaquebrasil.com/inglaterra/author/jamestrorn/</a> 1×slots регистрация на 1хслотс Но на некоторых азартных платформах сходственные вознаграждения имеют получить и уже зарегистрированные пользователи. В этом случае, призы предоставляются в рамках оригинальных промоакций или же некоторым геймерам вид акционного предложения, которое прибывает на почту с целью «вернуть» игрока в свое казино.
1х слот 1хслотс регистрация перейти на 1×slots
Для тех, кто лишь взвешивает испытывать свою фортуну, а для профессиональных игроков, ищущих новые площадки для выигрышей, водящие лицензированные казино часто устраивают различные акции, и одно из лучших предложений за время – как для новичков, например и для профессиональных игроков – бездепозитный бонус за регистрацию.Наши эксперты исследуют условия промоакции, этого в ручном режиме проводят их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и параметры. Мы не рекламируем казино, а даем игрокам информацию о наихороших из них. Каждый из бездепозитных призов без пополнения 2022 имеет собственный определенный вейджер для отыгрыша, так же в каждом казино он уточняется персонально — где то он х55 а где-то х30, повторюсь всюду по разному!При маленький сумме бонуса рекомендуется играть по невысоким ставкам, а применять наибольшие чем лишь никаких случае, если вейджер очень великой, а время на отыгрыш сильно ограничено. <a href=https://pornodrochka.club/user/Frankdic/>https://pornodrochka.club/user/Frankdic/</a> 1×slots регистрация 1×slotscasino 56 online
1×slots официальный зеркало
Когда речь о получении бездепозитных призов в казино, для внимание на последующие условия: Подтвердите личность, предоставив оператору казино средства паспортные данные. Инструкции обыкновенно несложные, главное — четко им следовать. Если написано, собственно «на фото обязаны быть видны все четыре угла странички паспорта» — сделайте непосредственно это фото.Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. 1× slots casino зеркало <a href=http://helenos.pavel-rimsky.cz/doku.php?id=анвап_скачать_фильмы_на_телефон_хорошие>http://helenos.pavel-rimsky.cz/doku.php?id=анвап_скачать_фильмы_на_телефон_хорошие</a> С не отыгранным призом запрещается превышать объем наибольшей ставки. Нарушение сего условия последствия аннулирование выигрыша.
1хслотс 1хслотс регистрация перейти на 1×slots
Этот тип бонуса будет добавлен на Ваш аккаунт последствии успешной процедуры регистрации с внедрением номера аппарата. Если выбрать иной способ сотворения учетной записи, бездеп не несомненно добавлен на Ваш аккаунт.Выбирая даровой приз, пристально изучайте верховодила. Убедитесь, что вам можно себя участие в промоакции. Уточните, в каких забавах можно исполнять условия вейджера. При надобности задавайте вопросы адептам саппорта. <a href=https://bdsmboard.org/member.php?398321-HarryNeism>https://bdsmboard.org/member.php?398321-HarryNeism</a> Не стоит сразу же отказываться от приветственных презентов в сходственных казино. Администрация готова начислить деньги либо фриспины, но предварительно работники должны увериться, собственно вы не мошенник. Дело в том, собственно развелось слишком много охотников за призами. Они научились врать систему и зарабатывать солидные суммы средств.Бездепозитный приз – это экономическое вознаграждение, которое выдается соучастнику забавы в казино, для его вербования и возникновения заинтригованности. Любой посетитель, кот-ый соответствует условиям выдачи подобного бездепозитного бонуса, возможность претендовать на получение вышеуказанного приза. Такое поощрение считается наиболее эффективным методом, дающим вероятность стартовать при, не вкладывая личных материальных средств. зеркала 1×slots Для вывода средств бонус надо(надобно) будет отыграть законам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариантами отыгрыша бездепозитного приза до его получения, чтобы избежать конфликтных обстановок.
<b>Смотреть еще похожие новости:</b>
<a href=https://praisenpray.org/forums/showthread.php?tid=103790&pid=106893#pid106893>1× slots casino зеркало</a>
<a href=https://radios-collector.com/viewtopic.php?f=7&t=37097>1×slots сайт</a>
<a href=https://forum.pmpobc.ca/index.php?topic=147102.new#new>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но такие рамки не смущают в хайроллеров, что коэффициенты на слотах разрешают рассчитывать на солидные выигрыши, а в неких автоматах разыгрывается передовой джекпот. Чем ниже велечину вейджера, что, этим проще отыграть и исключить бонус. Если Вы расчитываете заработать на бездепе, но просто ознакомиться с новым игровым клубом, то стоит игнорировать призов с высоким вейджером их практически не реально отыграть. С ними Вы сможете только протестировать игры заведения.
#5452 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало на сегодня
Важно, удостоверьтесь в том, что ранее не регистрировались в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи. <a href=http://filmkachat.ru/>1× slots зеркало</a> <a href=https://pinshape.com/users/6460332-archicgi-com#designs-tab-open>https://pinshape.com/users/6460332-archicgi-com#designs-tab-open</a> Несмотря на то, собственно этот вариант стимуляции со стороны азартных платформ довольно востребован в сфере похожих игр, далековато многим поклонникам казино ведомо, собственно являют собой бездепозитные бонусы казино и как непосредственно их вполне эксплуатировать. 1×slots casino регистрация 1×slots review live <a href=http://nvkb.ru/forum/index.php/user/106570/>http://nvkb.ru/forum/index.php/user/106570/</a>
1×slots зеркало рабочее
Условия вывода выигрыша. В неких заведениях для удачного вывода с бездепозитного приза достаточно пополнения баланса и подтверждения личности. В иных же клубах, необходимо количество один прокрутить свой депозит.Раздача бонусов возможность быть посвящена разным датам: календарные праздничные, дни рождения игроков, юбилей открытия казино и т. Д. Подарок выдается повторяющий денег, фриспинов или баллов для скопления и размена на предложения оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода данной суммы придется выполнить ряд притязаний. 1×slots зеркало на сегодня <a href=http://kungur.hldns.ru/forum/profile.php?action=show&member=8812>http://kungur.hldns.ru/forum/profile.php?action=show&member=8812</a> Многие казино деют в рекламных целях бесплатные призы исключительно для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой вебсайт по партнерской ссылке с нашего портала.Важно, убедитесь том,, собственно раньше не регистрировались в выбранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи. 1×slots зеркало которую указывали при регистрации кстати
1×slots регистрация 1×slots casino c2d ru
Да, у бесплатных бонусов есть дефекты. Прежде всего, они обычно маленькие. Кроме того, обстоятельства вейджера по ним практически жесткие. Но все неименье риска делает их довольно красивыми для посетителей.Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных призов принимаются достаточно высочайшие требования. Часто онлайн-казино советуют отыграть бонусное поощрение до ста один в игровых автоматах. Например, случае игрок получил безвозмездно 10 долларов, то необходимо будет отыграть их, поставив одну тыщу спинов по одному доллару любой. Стоит обозначить(означить), собственно не все казино выделяют возможность выступать на призы и не во всех развлекательных заведениях идентичные управляла для отыгрывания. Некоторые казино воспрещают играть на призы в блекджек либо ограничивают ставки до 5 %, что значительно наращивает в десятки раз число необходимых игр. <a href=http://kons43.ru/bitrix/rk.php?goto=http://primesv.ru/bitrix/redirect.php?goto=http://globalgroup24.ru/bitrix/rk.php?goto=https://teletype.in/@urist_free/aiZFS5Io7Xw>http://kons43.ru/bitrix/rk.php?goto=http://primesv.ru/bitrix/redirect.php?goto=http://globalgroup24.ru/bitrix/rk.php?goto=https://teletype.in/@urist_free/aiZFS5Io7Xw</a> В зависимости от интернет заведения каждый из их возможность вас предложить как бездепозитные деньги, например и бездепозитные фриспины, которые после успешной регистрации рухнут для на ваш игровой баланс. 1×slots зеркало этих способов предполагает регистрацию Прибывшие на аккаунт деньги бездепозитные бонусы предназначаются, главном, только для свежеиспеченных пользователей, коие ранее не имели собственного аккаунта в данном казино. Исходя из сего, случае ранее у игрока был сделан депо, то, по всей вероятности, у него больше не будет способности рассчитывать на получение такового приза в определенном заведении.
1×slots зеркало которую указывали при регистрации кстати
Основное отличие в, что для получения бездепа не пополнять баланс в казино. Но считая этого, есть ряд прочих отличий: 1×slots актуальное зеркало <a href=https://gamesdrive.net/User-DoctorLazutaSr>https://gamesdrive.net/User-DoctorLazutaSr</a> Максимальная ставка ? устанавливается в валюте счета и ограничивает размер ставки за один спин. В случае ее превышения бонус может быть аннулирован. Также в правилах может находиться запрет на размещение ставок определенного вида, к, по одинаковым шансам в рулетке (другими, на чет или нечет, красноватое или темное и т.д.).
1×slots зеркало которую указывали при регистрации кстати
Вы не в коем случае ни же рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической забавы на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, научится регулировать изменять ставки и линии, исследовать бонусные игры и их выигрышные композиции, да в просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные свои, которые можно отыграть и вывести, не просто на демо счет, тем самым адреналин в крови еще больше повысится а пульс забьется с частым ритмом! Подтвердите регистрацию, чтобы активировать Бездепозитный приз с выводом, потребуется наполнить личный профиль. Заполните пустые поля истинными данными о себе. <a href=http://ww.yktech.biz/2015/bbs/board.php?bo_table=qna&wr_id=75386>http://ww.yktech.biz/2015/bbs/board.php?bo_table=qna&wr_id=75386</a> Получив свой подарок, Вы можете безвозмездно выступать на настоящие деньги, а выполнив обстоятельства отыгрыша, вывести свой выигрыш. 1×slots регистрация 1×slotscasino 56 online Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить особенности, труднодоступные при игре в демо режиме. Многие свежие клиенты перебегают в число постоянных, а оператор получает долгосрочную выгода.
<b>Смотреть еще похожие новости:</b>
<a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=814136>1×slots официальный сайт скачать</a>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=237036>1×slots официальный сайт, скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Получать информацию о самых прибыльных бонусах возможно без неизменного прогноза новостей казино. Мы брали данную задачку на себя и безпрерывно следим за услугами операторов, выбирая превосходнейшие из их. В этом разделе собраны заключительные бездепы, промокоды к ним и обстоятельства их активации. Список акций периодически пополняется. В топ вошли самые новые бездепозитные бонусы за регистрацию в казино 2020, кратковременные и замкнутые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и критериям. Если срок деянья акции истек, она удаляется из списка. В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это самая приятная часть игры. Важно, часто бездепозитные призы в казино выдаются с лимитированиями по наибольшей выплате. В среднем возможно рассчитывать на выгода в несколько тыщ рублей. Как исключить выигрыш с приза без депо. Придётся доказать акк документально, в некоторых заведениях. Процедура верификации неотклонима и делается каждым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате либо прочитайте в правилах.
#5453 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
ап казино porno Мира Андреева (теннис) <a href=https://kompromat1.online/>1go casino</a> casino зеркало сайта сайт винлайн букмекерская контора <a href=https://www.ossetia.tv/>Елизавета Боярская</a> 1×bet телефон как выиграть в казино 1×bet зеркало рабочее xbet включи казино букмекерская контора без казино 5 букмекерская контора официальный сайт скачать
DiskiPlus бывшие казино DiskiPlus порно с Абрамченко Виктория Валериевна <a href=https://www.diskiplus.ru>DiskiPlus порно с Евгения Медведева</a> DiskiPlus рокс казино DiskiPlus бк букмекерская контора <a href=https://diskiplus.ru/>DiskiPlus up casino зеркало</a> DiskiPlus casino betting DiskiPlus up casino скачать DiskiPlus gama casino DiskiPlus casino зеркало сайта DiskiPlus казино гта 5 DiskiPlus pin ап casino DiskiPlus cat casino
#5454 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало подтвердит вашу регистрацию если говорить
В бонусную программу множества операторов входят регулярные бездепы. Это бессрочные акции, поощряющие интенсивных постоянных игроков. Популярный формат — раздача фриспинов по конкретным денькам недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают неизменные бонусы без депозита в мена на накопленные баллы лояльности.Бонус начисляется игроку сразу в регистрации и прохождения верификации в казино и не настятельно от клиента внесения депозита. Как верховодило, объем бонуса в сходственном случае довольно скромный, однако разрешает новичкам познакомиться с игрой без риска настоящими средствами. <a href=http://filmkachat.ru/>1×slots скачать на айфон</a> Ознакомьтесь с нашим списком наихороших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего перечня и получите бездеп сразу. Хватайте наихорошие благотворительные предложения ниже и выигрывайте большие средства, не рискуя! <a href=https://peertrainer.com/LoungeCommunityThread.aspx?ForumID=1&ThreadID=316722>https://peertrainer.com/LoungeCommunityThread.aspx?ForumID=1&ThreadID=316722</a> Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам важную информацию о самых свежих, щедрых и проверенных бонусах в онлайн казино, коие обновляются каждый день.Также, в нужно доказать собственный номер аппарата, достичь код, полученный в смс-сообщении от клуба ввести в специальное фон в личном кабинете игрока. казино 1× slots официальный сайт <a href=http://www.icmms.co.kr/bbs/board.php?bo_table=free&wr_id=654054>http://www.icmms.co.kr/bbs/board.php?bo_table=free&wr_id=654054</a> Получать информацию о самых прибыльных призах можно без неизменного прогноза новостей казино. Мы брали эту задачку на себя и безпрерывно следим за предложениями операторов, избирая лучшие из них. В данном разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список акций регулярно дополняется. В топ вошли самые новые бездепозитные бонусы за регистрацию в казино 2020, кратковременные и замкнутые промо. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру прочим критериям. Если срок деяния промоакции истек, она удаляется из перечня.
скачать 1×slots на андроид мобильная версия
<a href=https://minifishtank.net/forum/showthread.php?tid=23668>1×slots официальный сайт скачать</a> 1× slots регистрация в 1×slots casino Фриспины без депо или вспомогательные средства помогут поближе познакомиться с игровой платформой и её функциями. За счёт даров можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради игры против живых крупье.Нет. Для получения бездепозитного приза в казино необходима неотъемлемая регистрация на сайте. Играть в слоты даром и без регистрации возможно только в демо режиме. <a href=http://www.searchdomainhere.com/1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE_296149.html>http://www.searchdomainhere.com/1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE_296149.html</a> 1×slots актуальное зеркало Получать информацию о самых выгодных бонусах можно без постоянного прогноза новостей казино. Мы взяли данную задачку на себя и непрерывно следим за предложениями операторов, избирая наихорошие из них. В этом разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список промоакций периодически дополняется. В топ зашли самые новые бездепозитные призы за регистрацию в казино 2020, временные и замкнутые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и другим аспектам. Если срок деянья акции истек, она удаляется из списка.
1х слотс зеркало регистрация в 1×slots casino
При помощи такого поощрения оператор возможность того завлекать посетителей, которые ранее показывали активность на сайте, хотя по какой-то основанию прекратили играть. В этом случае промокод высылается юзеру по электронной почте либо повторяющий SMS.У каждой игры свои требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система зачтет каждую ставку. В рулетке и покере сделать это гораздо труднее. Именно потому например главно внимательно читать обстоятельства получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в каждой этой, то новички попросту «спустят приз на ветер». <a href=http://bbs.xinhaolian.com/home.php?mod=space&uid=4499184>http://bbs.xinhaolian.com/home.php?mod=space&uid=4499184</a> 1× slots casino официальный сайт
1×slots сайт
Акции распространяются как на все игры казино, так и на ограниченный перечень. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и. Промо возможность охватывать разработки одного производителя. Бездеп не пересекается с другими промоакциями казино. Если на веб-сайте предусмотрен кэшбек, он не начисляется за ставки, изготовленные бонусными средствами. Для идентификации платежных реквизитов игрока может понадобиться пополнение счета на минимальную необходимую.Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают бонус по государствам. Вплоть до того, собственно клуб имеет принимать игроков из Вашей страны, а бездеп не давать. Доступные игры – В некоторых азартных играх можно снизить математическое преимущество казино до нескольких десятых процента. В их числе все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как управляло, в таких играх ставки идут в зачет вейджера не полностью. Например, может предусматриваться лишь 50%. В некоторых играх бездепозитные бонусы вообщем невозможно отыгрывать.Для как, чтобы отыграть необходимую вашего бездепозитного приза надо(надобно) выполнить обстоятельства вейджера. Очень нередко фриспины даются на конкретные слоты (book of ra, book of dead, book of sun), выбирайте слот себе по душе, они очень красивые и качественные. Бездепозитные бонус может быть валютным так и в виде фриспинов на слоты сайт 1× slots casino <a href=http://665bao.com/space-uid-26331.html>http://665bao.com/space-uid-26331.html</a> Если речь идет об эксклюзивных услугах, имеет потребоваться регистрация в казино по ссылке с партнерского сайта.
1×slots зеркало рабочее
Также бывают случаи, когда казино начислит оговоренный бонус последствии регистрации нового клиента по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам. В зависимости от интернет заведения каждый из них может вам предложить как бездепозитные деньги, например и бездепозитные фриспины, которые после успешной регистрации рухнут вам на ваш игровой баланс. <a href=http://bbs.py27.com/home.php?mod=space&uid=400038>http://bbs.py27.com/home.php?mod=space&uid=400038</a> Это тоже благотворительные деньги, коие поступают на аккаунты новоиспеченных игроков после регистрирования. А особенность таких бонусов состоит в том, что обретенные финансы обязательно стопам использовать в продолжении назначенного времени. 1×slots бонус за регистрацию
<b>Смотреть еще похожие новости:</b>
<a href=http://b2s.bulwork.com/node/1581?page=90#comment-23016>1хслотс рабочее зеркало</a>
<a href=http://forums.indexrise.com/thread-2362-post-378628.html#pid378628>1×slots регистрация 1×slots casino c2d ru</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Отзывы читателей о бонусных акциях помогут составить эмоцию, хотя не запамятовывайте о субъективности собственных объяснений.
#5455 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Алена Михайлова букмекерская контора официальный сайт <a href=https://th-royalgclub.com/>black russia казино</a> porno Ангелина Гончаренко, хоккеистка почему в казино не бывает настенных часов <a href=https://t.me/vchkogpu_ru>porno Алена Косторная (фигурное катание)</a> порно с Илюшникова Татьяна Александровна самое казино ешь казино porno Юлия Канакина kometa casino Шевцова Татьяна Викторовна порно играющие казино онлайн
DiskiPlus pin up casino официальный DiskiPlus 1×bet на андроид бесплатно <a href=https://diskiplus.ru>DiskiPlus kent casino</a> DiskiPlus букмекерская контора на андроид DiskiPlus пин up casino <a href=https://diskiplus.ru>DiskiPlus букмекерская контора вход</a> DiskiPlus 1×bet зеркало xbet xyz DiskiPlus демо казино DiskiPlus 1win букмекерская контора DiskiPlus pin up букмекерская контора DiskiPlus unlim casino DiskiPlus casino автомат DiskiPlus казино играть
#5456 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
Такой безвозмездный эквивалент средств зачисляется на профиль юзера после воплощения притязаний и предназначаются они только для игрового процесса. Вывод таких вознаграждений вероятен лишь последствии осуществления вейджеровых условий.Более солидные предложения встречаются очень редко. Зачастую они доступны лишь VIP-игрокам. В оставшихся случаях им скорее сопутствуют очень жесткие условия отыгрыша. Также вероятны дополнительные обстоятельства и лимитирования, прописанные в условиях и положения бонусной программки казино. <a href=http://filmkachat.ru/>1×slots акции</a> Так что основное отличие дара на депозит от бездепа – обязательное пополнение счёта. Вы сможете внести депозит и преувеличить стартовый капитал либо забрать бездеп и при не придётся рисковать собственными сбережениями. Поспешите выполнить простые притязания, и администрация ресурса начисляет щедрое поощрение!Даже не выиграв солидную необходимую, игрок увлекательно проведет время, изнутри изучит работу площадки, воспримет геймплей автоматов. Все это без каких-либо денежных рисков. Быть в курсе превосходнейших промоакций с. Достаточно периодически изучать список новых онлайн казино с выводом приза без депозита в этом разделе. <a href=https://divisionmidway.org/jobs/author/cgifurniture-com/>https://divisionmidway.org/jobs/author/cgifurniture-com/</a> Предложения с бездепозитными бонусами за регистрацию разрешают свежим заведениям заинтересовать аудиторию на собственный вебсайт. А игроки тому получают возможность играть на реальные деньги без депозита в казино и заработать малый стартовый капитал, который разрешается вывести на карту банка или электрический кошелек. 1×slots бездепозитный бонус за регистрацию <a href=http://0119ddd.com/bbs/board.php?bo_table=free&wr_id=130210>http://0119ddd.com/bbs/board.php?bo_table=free&wr_id=130210</a> Суммы похожих услуг, случаев, колеблются от трех до 20 $, а вейджер на эти средства должен составлять от тридцати до шестидесяти раз. Зачастую, большая сумма выигрыша здесь составит от одной до двух сотен долларов. Если в выиграет больше, то все средства могут быть списанными до очень разрешенного выигрыша. Здесь замечена содержание выводить еще несуществующие деньги на собственную платежную систему и далее находить заведение с благоприятными под данную сумму релоадом либо призом за 1-ое пополнение счета. Есть некоторое подвидов бездепозитного гонорары, предлагаемого великим количеством заведений.Бездепозитный приз казино 2022 с выводом за регистрацию дает вероятность ознакомиться игроку с лобби избранного заведения, сориентироваться в выборе игр и проверить качество работы службы. Довольно нередко, начиная игровой процесс, игрок теснее не желает останавливаться и проделывает реальный вклад. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать бесплатно вероятно как один таки с призом за регистрацию без необходимости вносить депо.
1×slots регистрация на сайте 1×slots ru com
1хслотс регистрация в 1×slots casino <a href=https://lustbb.com/member.php?action=profile&uid=5002>https://lustbb.com/member.php?action=profile&uid=5002</a> Акции, приуроченные к календарным дням, посещают рассчитаны как на всех юзеров, так и на категории: к, презент на 8 марта девушкам-игрокам или мужикам на 23 февраля.Бесплатные бонусы казино без депозита возможно получить повторяющий денежных средств на бонусный счет (вывести их возможно только в отыгрыша), фриспинов, игры либо кешбэк-бонуса. 1×slots официальный зеркало На бесплатные бонусы онлайн-казино практически постоянно распространяется лимитирования по стране проживания клиентов. Даже в для разрешается раскрывать счет и выступать на средства в заведении, это еще не значат, что вас доступны not the slightest down payment bonuses.
1×slots регистрация 1×slots casino 777 online
Как управляло, при выводе финансов, от играющего потребуется лишь сделать минимальный лепта чтобы, чтобы, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом собственный счет.На критериях отыгрыша даровых бонусов стопам остановиться подробнее. С ними связаны аспекты, коие невозможно забыть без внимания. <a href=http://ecsambo.org/index.php?subaction=userinfo&user=earsplittingres>http://ecsambo.org/index.php?subaction=userinfo&user=earsplittingres</a> В бонусную программу множества операторов входят регулярные бездепы. Это пожизненные промоакции, поощряющие интенсивных постоянных игроков. Популярный формат — раздача фриспинов по конкретным денькам недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депозита в обмен на скопленные баллы преданности. 1× slots зеркало Однако далеко не все ресурсы предлагают своим посетителям бездепозитные бонусы за регистрацию в казино. В большинстве случаев учтено поощрение на первый депозит в размере 100–200%. Это отличная вероятность преувеличить банкролл, прирастить время, проведённое за забавой и шансы сорвать крупный куш.
1×slots официальный сайт, скачать
Чаще всего интернет-казино предлагают бездепозитные бонусы новым юзерам. Эта промо-акция довольно отлично завлекает начинающих, подталкивая их к открытию счета. Конечно, не они становятся послушными клиентами, но сам прецедент регистрации аккаунта играет на руку заведению. <a href=https://hiddeninthesand.com/blogs/news/2024/11/the-unfortunate-history-of-fraudulent-tally-hall-uploads/#comment-48122>1хслотс официальный сайт зеркало</a> Если площадка дарует бездеп за регистрацию, то процедура его получения проста. Нужно лишь завести аккаунт на сайте и активировать его, подтвердив адресок электронной почты, номер телефонного либо иные данные, которые настятельно оператор. Перед данным необходимо убедиться, собственно юзер находится на официальном веб-сайте казино, а не на мошеннической площадке.Наши специалисты изучают условия промоакции, после в ручном режиме проводят их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие характеристики. Мы не рекламируем казино, а даем игрокам информацию о лучших из них. Частенько новенькие не разумеют, как активировать подарки либо вывести 1-ый выигрыш. Для подобных случаев наша команда обрисовала основные определения – что такое фриспины, вейджер, как его отыграть, зачем необходимо проходить верификацию.Ограничения по играм. Администрация воспрещает игрокам некоторые игровые автоматы с бездепозитным призом, средствами или безвозмездными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда дробление выполняется по виду игр. Например, отыгрыш возможен на всех игровых аппаратах, хотя запрещен в настольных играх и в разделе Live Casino. 1×slots рабочее зеркало на сегодня <a href=https://trade-britanica.trade/wiki/User:DPQLinnea11>https://trade-britanica.trade/wiki/User:DPQLinnea11</a>
казино 1×slots официальный сайт
Призовые начисления без депозита все предоставляться для участия в турнирах интернет казино. Потратить перечисленные средства можно исключительно масштабах этой акции. Условия их проведения содержат лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться этим предложением, какого-либо изучить его верховодила. <a href=http://flightgear.jpn.org/userinfo.php?uid=46430#>http://flightgear.jpn.org/userinfo.php?uid=46430#</a> 1×slots мобильная версия войти казино
<b>Смотреть еще похожие новости:</b>
<a href=http://www.carshowsociety.com/forum.php/topic,11220.new.html#new>1×slots официальный сайт зеркало</a>
<a href=https://melhorlance.com.br/minha-conta/>1×slots зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Казино выделяет вероятность заработать и вывести реальные средства на бездепозитных бонусах. Обычно, это незначительная сумма, которую казино имеет себе разрешить презентовать игроку. Выбирайте лучшие благотворительные призы за обзоров на Casinoz – и пусть вам сопутствует счастье при отыгрыше бонусных кредитов!
#5457 DominicFexhttps://dizayn-interera213.ru
дизайнер студия интерьера <a href=https://dizayn-interera213.ru/>https://dizayn-interera213.ru</a>
#5458 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало
Многие казино деют в маркетинговых целях благотворительные бонусы исключительно для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой вебсайт по партнерской ссылке с нашего портала.Вейджер не более х30–35 считается приемлемым. Опытные игроки заявляют, что с таким вейджером реально остаться в плюсе, в правильно подойти к выбору игрового аппарата. <a href=http://filmkachat.ru/>1× slots casino официальный сайт</a> Также бездепозитные бонусы могут работать методом вернуть к этой клиентов, временно приостановивших своё сотрудничество с компанией: извещение о бездепе поступает на мобильный телефон или почту.Стоит обозначить(означить), что бездепозитный бонус выдается лишь совершеннолетним новеньким, коие, тому, имеют пригласить личных приятелей и людей, также рассчитывающих на поощрительную программку лояльности. Подобная технология появилась между создающих онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры содействуют повышению собственной посещаемости, методом привлечения свежих игроков. Бонусы – это оригинальный шанс для потенциальных соучастников игры, которые шансы опробовать софт покер рума и увериться, станут ли они в него выступать либо нет. Новый игрок попробует средства силы с реальными оппонентами в казино. <a href=https://band.us/band/96885593/post/5>https://band.us/band/96885593/post/5</a> 1х слот 1хслотс регистрация перейти на 1×slots <a href=http://1k9g.com/space-uid-197161.html>http://1k9g.com/space-uid-197161.html</a> Все любят получать подарки. Согласитесь, почти каждый играющий человек несомненно сильно рад, если получит безвозмездный презент для забавы в интернет казино просто за регистрацию либо же приз за внесенный депозит, например называемые приветственные призы для новых игроков. Соответственно эти интернет клубы будут больше известны и преимущественны у игроков при выборе казино для забавы. Топ казино день обновляется и добавляются новые и интересные игровые клубы с симпатичной бонусной политикой и всеми вероятными преимуществами, льготами, к которым относятся эти призы как фриспины за регистрацию, денежные бездепозитные призы, а также щедрые призы за внесенный депозит.
1×slots казино зеркало
Новые посетители онлайн-казино без первого депозита шансы проверить собственную удачливость. К тому же есть вероятность преобразовать бездепы в реальные деньги за регистрацию в казино, однако для этого приз необходимо отыграть сообразно условиям акции. 1×slots казино мобильная версия Некоторые клубы автоматически начисляют приз на аккаунт игрока после исполнения условий получения, но посещают ситуации, когда бонус надо(надобно) активировать игроку самому. Есть несколько методов активации бонуса:Как лишь на виртуальном счету окажутся бонусные свои, поспешите отыграть вейджер. Сразу после этого возможно оставить заявку на вывод выигрыша. Кредиты выгодно отличаются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом реальных средств и дают возможность ощутить задор. Во-вторых – возможно насладиться каждой азартной забавой доступной на веб-сайте. В вашем постановлении присутствуют автоматы, настольные прибавление, видео-покер, Live-дилеры. <a href=https://nowwedws.com/bbs/board.php?bo_table=free&wr_id=986230>https://nowwedws.com/bbs/board.php?bo_table=free&wr_id=986230</a> Эффективность бездепов виде рекламного прибора расценили почти операторы. Малоизвестные площадки используют такие акции, чтобы прытко набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны постоянных посетителей. Не все веб-сайты, дающие презенты без депо, рекомендованы к игре. За привлекательным промоописанием шансы прятаться невыполнимые обстоятельства отыгрыша и подводные камни.Для верификации номера аппарата, в личном профиле выберите опцию „Подтвердить номер аппарата“ и введите в соответствующее поле код, приобретенный в sms-сообщении. 1×slots зеркало регистрация в 1×slots casino В интернете большое знаменитых игорных площадок с красивыми акционными предложениями. Однако внимательно читать обстоятельства десятков предложений времени надоест, ну и время отнимет большое. Поэтому наша команда подготовила ТОП-3 вебсайтов с лучшими бездепозитными бонусами:
скачать 1×slots официальный сайт
Лишь популярные и знаменитые азартные заведения все позволить себя раздавать бездепы вид дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, коие возможно потратить в топовых аппаратах с высочайшей отдачей.В истиннее время получить приз за регистрацию в казино довольно просто. Почти любой игорный жилище с радостью даст средства либо безвозмездные вращения. Многие игроки используют данным и не стесняются региться в каждом клубе с выгодными критериями. Кстати, это замечательная вероятность выдумать выигрышную стратегию и сорвать куш. Законодательство, регулирующее азартные забавы в разных странах, влияет на возможности операторов. В результате пользователи из отдельных регионов сталкиваются с лимитированиями со стороны казино. Это имеет быть как полный отказ в доступе, так и невозможность загружать игры отдельных производителей.На данном разделе портала периодически публикуются обзорные заметки, в которых рассматриваются благотворительные призы наилучших интернет-казино. Информация структурирована по нескольким пт, включая главные: <a href=https://sklad-slabov.ru/forum/user/9571/>https://sklad-slabov.ru/forum/user/9571/</a> 1×slots регистрация то дальше необходимо пройти Доступность — бездепозитные бонусы в казино чаще всего предоставляются новым игрокам, хотя бывают случаи, когда приз имеют получить и действующие клиенты.В случае установленного лимита на необходимую вывода выигрыша с бездепозитного бонуса, игрок не может исключить больше заявленной суммы.
рабочее зеркало 1×slots
1× slots официальный <a href=http://www.discovery-sport-club.ru/club/blog.php?cp=4512>http://www.discovery-sport-club.ru/club/blog.php?cp=4512</a> Бонус за регистрацию в казино без депо с выводом денег надо(надобно) отыграть. Зачастую для отыгрыша имеет потребоваться устроить ставки на необходимую, в количество десятков раз превосходящую сумму бонуса или выигрыша.В любом казино с бездепозитным призом предусмотрены вейджеровые условия. Это один-единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, нужно устроить определённое количество ставок. Чем круче приз, тем сложнее выполнить условия, и наоборот.
1×slot зеркало
Самые пользующиеся методы вывода средств ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электрическим платежным системам на Neteller и Skrill, еще пользуются криптовалютными кошельками. Вывод выигрышей имеет исполняться моментально или занимать от нескольких часов до нескольких суток.Шаг 5. Использование и отыгрыш. Бездеп должен быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. Бездепозитные призы в казино без пополнения 2022 — это определенная сумма денег или gratuitous spins вращения, которые предоставляются первым постояльцам за регистрацию на веб-сайте казино в виде бездепозитного бонуса, и выделяет для вероятность с казино без пополнения опробовать услуги (игр), с дальнейшей привилегией вывода средств при выполнении всех установленных правил. <a href=http://34.100.254.176/home.php?mod=space&uid=2339324&do=profile&from=space>http://34.100.254.176/home.php?mod=space&uid=2339324&do=profile&from=space</a> В перечне притязаний к отыгрышу нередко присутствуют лимиты на ставки при этой на собственные средства. Так, случае отыграть нужно 30 000 рублей, а максимальная сумма ограничена 30 рублями, то вращать барабаны светит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками условий по срокам деянья промоакции. 1 хслот регистрация в 1×slots casino Для отыгрыша приза казино обязывает игрока поиграть на сумму, в некоторое раз превосходящую сумму полученного бонуса — здесь выгода компании явна.Постарайтесь отыграть вейджер, чтобы замечена вероятность забыть заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электрической кошелёк, карту, телефон.
<b>Смотреть еще похожие новости:</b>
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=474978>1×slots официальный сайт мобильная версия скачать</a>
<a href=https://forum.bedwantsinfo.nl/thread-734276.html>1хслотс рабочее зеркало</a>
<a href=http://theauction.com.au/my-account/>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
С не отыгранным бонусом запрещается превышать объем наибольшей ставки. Нарушение сего условия иметь аннулирование выигрыша. Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, solid зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.
#5459 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
лучшие онлайн казино демо казино <a href=https://rhymes-punches.com/>гта казино</a> кент казино online casino <a href=https://sovsekretno.net/>порно с Каролина Севастьянова</a> скачать сайт букмекерской конторы пинко casino 1×bet слоты официальный сайт 1go casino porno Катерина Шпица бк букмекерская контора приложения букмекерских контор
DiskiPlus porno Алена Косторная (фигурное катание) DiskiPlus казино на деньги <a href=https://diskiplus.ru/>DiskiPlus порно с Дарья Касаткина (теннис)</a> DiskiPlus 1×bet зеркало рабочее xbet DiskiPlus букмекерские контора ап <a href=https://diskiplus.ru/>DiskiPlus порно с Каролина Севастьянова</a> DiskiPlus porno Александр Соболев (футбол) DiskiPlus казино фильм онлайн DiskiPlus букмекерская контора DiskiPlus порно с Евгений Малкин (хоккей) DiskiPlus pinco casino DiskiPlus 1×bet 1 DiskiPlus Разуваева Ксения Денисовна порно
#5460 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Константин Тюкавин (футбол) мобильные букмекерские конторы <a href=https://repost.news/>casino pin официальный</a> букмекерская контора скачать приложение pin up casino top top <a href=https://rucriminal.info/>Любимова Ольга Борисовна порно</a> Манилова Алла Юрьевна порно порно с Евгений Малкин (хоккей) водка казино porno Анна Сидорова, керлингистка 7k casino скачать винлайн букмекерская контора букмекерская контора фонбет официальный
DiskiPlus леон букмекерская контора DiskiPlus порно с Юлия Ефимова <a href=https://www.diskiplus.ru>DiskiPlus pin up casino официальный</a> DiskiPlus Ходнева Светлана Владимировна порно DiskiPlus порно с Арина и Дина Аверины, гимнастки <a href=https://diskiplus.ru>DiskiPlus Набиуллина Эльвира Сахипзадовна порно</a> DiskiPlus porno Елизавета Туктамышева DiskiPlus new casino DiskiPlus порно с Карен Хачанов (теннис) DiskiPlus гта онлайн казино DiskiPlus Лут Оксана Николаевна порно DiskiPlus retro casino DiskiPlus гта онлайн казино
#5461 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало которую указывали при регистрации кстати
Бездепозитный бонус за регистрацию в казино — это стартовый презент вид денежного начисления либо безвозмездных вращений для свежих игроков заведения, для получения которого надо вносить депо. <a href=http://filmkachat.ru/>1×slots зеркало</a> Теоретически, к бесплатным бонусам возможно отнести например именуемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, потому что они предоставляют лишь возможность делать ставки.Верификация важна для дополнительной безопасности и подсобляет техподдержке выявить бонусхантеров и плутов. Кстати, на платформах выводы крупных сумм доступны лишь в подтверждения личности. <a href=https://gab.com/lexxeagle/posts/113498473251532232>https://gab.com/lexxeagle/posts/113498473251532232</a> А ознакомиться с свежими онлайн казино, Вы сможете помощью призов с выводом выгоды, которые Вы сможете получить без депо. 1×slots рабочее зеркало <a href=http://kinglish.com/bbs/board.php?bo_table=review&wr_id=332804>http://kinglish.com/bbs/board.php?bo_table=review&wr_id=332804</a> Существуют казино с призом за регистрацию, в очень известны фриспины в интернет казино впоследствии регистрации в конкретных забавах. Они встречаются том чаще бесплатных поощрений или традиционных бонусов в казино без вложений. Например, игрок регистрирует счет, на который начисляются безвозмездные игры, бонус за регистрацию вид даровых фрспинов, вращения в игровом автомате. Во время игрового процесса игрок выигрывает настоящие деньги, коие в последствии возможно успешно исключить из заведения на собственную платежную систему. То есть, есть шансы исключить средства без рисков своими деньгами. Регистрация, за которую компьютерные получит бонусы, займет минут, а спасибо этому возможно прирастить 5 евро поощрений до тыс. И без всяких проблем исключить их.
1хслотс казино зеркало
Подарки на определенные даты выделяются условиями получения. Если одобрение начисляют игроку на денек рождения, то сумма обыкновенно зависит от совместного размера депозитов за год.Подарки на конкретные даты отличаются критериями получения. Если поощрение начисляют игроку на день рождения, то сумма обыкновенно в от совместного размера депозитов за прошедший год. 1×slot регистрация <a href=http://haudyhome.com/bbs/board.php?bo_table=free&wr_id=43682>http://haudyhome.com/bbs/board.php?bo_table=free&wr_id=43682</a> 1×slots casino регистрация 1×slotscasin online
1хслот официальный сайт зеркало
<a href=http://foru1f40m.bunbun000.com/bbs/home.php?mod=space&uid=9394204>http://foru1f40m.bunbun000.com/bbs/home.php?mod=space&uid=9394204</a> Для того, дабы отыграть сумму вашего бездепозитного бонуса надо(надобно) выполнить обстоятельства вейджера. Очень нередко фриспины даются на определенные слоты (book of ra, book of lifeless, book of sun), выбирайте разъем для по, они очень красивые и качественные. Бездепозитные приз может быть денежным так и в виде фриспинов на слотыБудьте внимательнее при ознакомлении с правилами во избежание появления конфликтных обстановок с казино, когда в отыгрыша бездепа вас не дадут вывести солидную сумму выигрыша. 1×slots актуальное зеркало
1×slots казино мобильная версия
Вейджер (wager) – это коэффициент, кот-ый показывает на какую сумму необходимо устроить ставок, чтобы исключить бонус из казино. Пример: Вы получили за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода сего приза, Вам нужно устроить ставок на необходимую: 500*70=3500 руб. Только всецело отыграв бонус, Вы сможете вывести свой выигрыш. 1×slots официальный сайт, скачать <a href=https://lustbb.com/member.php?action=profile&uid=2654>https://lustbb.com/member.php?action=profile&uid=2654</a> Выше мы предоставили глубокий набор самых свежих и своевременных бездепозитных бонусов в онлайн казино без пополнения на 2022 год, где продоставляется пользоваться каким ценным бездепозитным призом.Приветственный бонус без депозита ? подарок за регистрацию. Выдается средствами, фриспинами либо баллами. В последнем случае бонусные баллы применяются для участия в турнирах или размена на реальные средства.
1× slots casino официальный сайт
Внесение депозита – Будьте готовы пополнить счет последствии отыгрыша бонуса. Это обычное требование верховодил для данного подобии промо-акций. Лучше заблаговременно уточнить, какую сумму надо(надобно) несомненно вносить на счет. Как управляло, речь идет о наименьшем депозите, но вы должны быть уверены, собственно он вас по карману.Обычно, бездепозитные призы выдаются под конкретные слоты с фиксированной ставкой, но их наверняка воспрещено применять в игровых автоматах с современным джекпотом. Список игр, в можно применять бездеп, Вы отыщите в описании акции либо можете уточнить у саппорта заведения. Внесение депо – Будьте готовы восполнить счет после отыгрыша бонуса. Это стандартное заявка правил для этого на промо-акций. Лучше заблаговременно уточнить, какую необходимую надо(надобно) несомненно заносить на счет. Как верховодило, речь о минимальном депозите, но вы обязаны быть уверены, собственно он вам по карману.Зачастую бездепозитные бонусы казино для игры предлагаются различными заведениями азартных игр виде маркетинговых промоакций или в целях привлечения к себя свежих игроков. Для бездепозитных призов в казино 2022 геймеру не нужно пополнять счет до этапа вывода желаемых средств. <a href=http://san-shinnik.by/bitrix/redirect.php?goto=http://rad-star.ru/bitrix/redirect.php?goto=http://kotatsu2030.hatenablog.com/iframe/hatena_bookmark_comment?canonical_uri=https://teletype.in/@urist555/i5XkxyQ9h5C>http://san-shinnik.by/bitrix/redirect.php?goto=http://rad-star.ru/bitrix/redirect.php?goto=http://kotatsu2030.hatenablog.com/iframe/hatena_bookmark_comment?canonical_uri=https://teletype.in/@urist555/i5XkxyQ9h5C</a> Вейджер в переводе с английского значит «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша приобретенного приза, в нашем случае бездепозитного. Число ставок не — принципиально только набрать сумму, пропорциональную сумме одобрения. 1хслотс казино зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://check2go.net/my-account/>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<a href=https://isomedu.com/forum/profile/josephdrons/>казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.
#5462 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Мария Шарапова Хорова Наталья Александровна порно <a href=https://specreporter.com/>казино гта 5</a> казино онлайн бесплатно online casino официальный <a href=https://krtka.info/>1×bet на андроид бесплатно</a> pin casino зеркало скачать букмекерскую контору на андроид pin ап casino 1×bet зеркало на сегодня порно с Каролина Севастьянова 1×bet xbet xyz казино сочи
DiskiPlus промокод 1×bet DiskiPlus сайт казино вход <a href=https://diskiplus.ru/>DiskiPlus 1×bet официальный сайт 1×bet xyz</a> DiskiPlus кент казино DiskiPlus 1×bet рабочее <a href=https://diskiplus.ru/>DiskiPlus бк букмекерская контора</a> DiskiPlus porno Виктория Баркова, легкоатлетка DiskiPlus casino автомат DiskiPlus casino online зеркало DiskiPlus win win casino DiskiPlus порно с Голикова Татьяна Алексеевна DiskiPlus официальное казино вход DiskiPlus unlim casino
#5463 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация в 1×slots casino
Например, игрок получил 500 руб. При создании аккаунта и обязан отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 рублей, понадобится устроить 875 спинов для полного отыгрыша. <a href=http://filmkachat.ru/>казино 1×slots</a> <a href=http://prsync.com/archicgi/how-home-entertainment-flyarchitecture-transforms-modern-living-spaces-4518898/>http://prsync.com/archicgi/how-home-entertainment-flyarchitecture-transforms-modern-living-spaces-4518898/</a> Постарайтесь отыграть вейджер, чтобы была возможность забыть заявку на выплату. Кстати, на всех веб-сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы можете получить выигрыш на электронной кошелёк, карту, телефонный.Зарегистрируйтесь. Для регистрации чаще всего довольно ввести свой номер телефона и почтовый адрес, после чего ввести полученный код из СМС. Возможно, требуется показать промокод. В правилах акции несомненно написано, где его хотелось вводить. Иногда это бы создавать при регистрации, времени — теснее после создания личного кабинета, на отдельной странице. 1×slots casino online регистрация <a href=https://poldomy.pl/member.php?u=143504>https://poldomy.pl/member.php?u=143504</a> В качестве призов онлайн казино нередко предлагает выдачу фриспинов, другими бесплатных вращений игрового барабана. Виртуальные монеты можно использовать для обучения в покерной школе либо для забавы в казино.
1×slots зеркало
<a href=https://bbs.sinbadgroup.org/index.php?xjkh-tampa-s-poster-pup-for-new-cancer-treatment.t48661.html/page-3464#post-194082>1×slots регистрация на официальном сайте</a> 1× slots регистрация в 1×slots casino <a href=https://nrns-games.com/index.php?action=profile;u=40945>https://nrns-games.com/index.php?action=profile;u=40945</a> 1×slots зеркало которую указывали при регистрации кстати
1×slots официальный зеркало рабочее
В большинстве заведений сделать это возможно по e-mal, по номеру телефонного, спустя социальную сеть или гугл-аккаунт. <a href=https://holodforum.ru/member.php?u=94763&vmid=4286#vmessage4286>https://holodforum.ru/member.php?u=94763&vmid=4286#vmessage4286</a> Бездепозитный приз – это финансовое вознаграждение, коие выдается соучастнику забавы в казино, для его привлечения и появления заинтересованности. Любой посетитель, кот-ый подходит условиям выдачи похожего бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое поощрение является наиболее действенным методом, дающим вероятность стартовать деле, не вкладывая собственных вещественных средств.Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке нужно пополнить счет в казино. Для депозитных бонусов, эта процедура не нужна, так как депо уже изготовлен. 1×slots актуальное зеркало Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают приз по странам. Вплоть до как, собственно клуб может на игроков из Вашей страны, а бездеп не давать.
1×слотс казино
Вы не в коем случае ни не рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, научится регулировать менять ставки и полосы, изучать бонусные забавы и их выигрышные комбинации, ну в конце концов просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные средства, которые можно отыграть и вывести, а не просто на демо счет, что, этим самым адреналин в крови более повысится а пульс забьется с частым ритмом! 1× slots casino зеркало <a href=http://zzwind.is-programmer.com/guestbook/>http://zzwind.is-programmer.com/guestbook/</a>
1хслот 1хслотс регистрация перейти на 1×slots
Для получения выигрыша потребуется выполнить обстоятельства казино. Чаще всего игроку нужно поставить определенную необходимую, но уже из личных денег. Она рассчитывается из общего размера выигрыша за всегда применения бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, случае юзер выиграл 1000 руб., а множитель сочиняет х30, вывести средства можно будет, сделав ставки на 30 000 руб.Не сложно догадаться, что no deposit bonuses почти ни не бывают немаленькими. Чаще всего речь идет о пяти–тридцати баксах (или эквиваленте данной суммы в другой денежной). Пoдтвepдить личнocть посетителя. Для удачного вывода средств, необходимо подтвердить лицо посетителя. Нa этaпe вepификaции пpoфиля, работники службы защищенности обязаны убедиться, что у игрока более один аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не сможет исключить собственный выигрыш, случае у него будет количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы.Фриспины — благотворительные вращения, коие позволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытных игроков фриспины считаются самым модным и предпочтительным обликом бонуса — бесплатные вращения иногда эффективнее и веселее в отыгрыше, чем остальные облики бездепов. <a href=https://images.google.iq/url?q=http%3A%2F%2Fdoctorlazuta.by>https://images.google.iq/url?q=http%3A%2F%2Fdoctorlazuta.by</a> Первый образующийся вопрос, это, для выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают свежих игроков. Последним проще начать игру на деньги с дара за регистрацию. Им не нужно пополнять баланс и расходовать личные средства. Новички получают бесплатные спины либо свои на счёт. С их подмогою знакомятся с игровым ходом, крутят слоты и проделывают ставки в рулетке.Простая процедура получения бездепозитного приза, кот-ая займет не более 2-х минут. Для получения бездепов, достаточно зарегистрироваться и подтвердить контактные данные. x1 slots 1хслотс регистрация перейти на 1×slots Игрокам не принимать приветственный бонус как гарантированный способ получить крупный выигрыш, но это отличная возможность без расходов расценить перечень казино.
<b>Смотреть еще похожие новости:</b>
<a href=https://australiantravelforum.com/Upload/showthread.php?tid=260445>1×slots регистрацию более популярный вариант это</a>
<a href=http://romb4×4.ru/forum/threads/1×slots-na-ljuboj-vkus-kak-projti-registraciju.17276/>1×slots на любой вкус как пройти регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для получения предоставленных бонусов вас понадобиться — ПК либо мобильное прибор, и остальное дело за малым.
#5464 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino промокод пин ап казино <a href=https://vestnik-jurnal.com/>7k casino</a> 1×bet зеркало xbet xyz казино ли <a href=https://t.me/vchkogpu_ru>сайт букмекерской конторы</a> 7k casino зеркало казино онлайн пинко casino Разуваева Ксения Денисовна порно порно с Матвей Сафонов (футбол) porno Яна Троянова казино в россии
DiskiPlus online casino 7k DiskiPlus где казино <a href=https://diskiplus.ru>DiskiPlus casino рабочее зеркало</a> DiskiPlus porno Александр Соболев (футбол) DiskiPlus Любимова Ольга Борисовна порно <a href=https://diskiplus.ru>DiskiPlus Шевцова Татьяна Викторовна порно</a> DiskiPlus 1×bet скачать бесплатно DiskiPlus реального казино DiskiPlus Фастова Елена Владимировна порно DiskiPlus pin casino зеркало DiskiPlus pin up casino top top DiskiPlus pin up casino пин DiskiPlus casino riobet
#5465 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера. <a href=http://filmkachat.ru/>1×slots скачать на айфон</a> <a href=https://www.artstation.com/user-47518283/profile>https://www.artstation.com/user-47518283/profile</a> Осталось выбрать казино с призом за регистрацию и создать профиль. После активации подарка выигрыш зависимости от Фортуны и навыков. 1 х слотс зеркало <a href=https://securityholes.science/index.php?title=mp4_фильмы>https://securityholes.science/index.php?title=mp4_фильмы</a> Но эти рамки не смущают в хайроллеров, что коэффициенты на слотах дозволяют рассчитывать на солидные выигрыши, ну неких автоматах разыгрывается прогрессивный джекпот.Таким образом, заведение пробует продемонстрировать себя своим вероятным геймерам, а такой маркетинговый ход как казино бонус без депо за регистрацию привлекает очень количество внимания к игорному заведению и обеспечивает неизменный поток новых гостей и грядущих клиентов игрового онлайн клуба.
1× slots зеркало
Бездепозитные призы настоящими средствами, коие можно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадали.Бездепозитные бонусы — это подарки от казино в виде бонусных средств либо фриспинов для игровых автоматов, которые начисляются на аккаунт игрока последствии процедуры регистрации на веб-сайте заведения. Для получения этих поощрений депо не потребуется. <a href=https://australiantravelforum.com/Upload/showthread.php?tid=237551>1хслотс казино зеркало</a> 1×slots коды При поддержки такого поощрения оператор возможность также привлекать клиентов, коие ранее показывали активность на веб-сайте, хотя по некий причине прекратили играть. В данном случае промокод высылается пользователю по электронной почте или повторяющий SMS. <a href=https://alphacs.ro/member.php?76789-Zacherychoto>https://alphacs.ro/member.php?76789-Zacherychoto</a> 1×slots на любой вкус как пройти регистрацию
1хслотс рабочее зеркало на сегодня
Чем ниже велечину вейджера, тем легче отыграть и исключить приз. Если Вы расчитываете заработать на бездепе, но просто ознакомиться с свежим игровым клубом, то стоит избегать призов с высочайшим вейджером их почти не реально отыграть. С ними Вы можете лишь протестировать забавы заведения. <a href=https://www.zybuluo.com/lexxeagle/note/2570094>https://www.zybuluo.com/lexxeagle/note/2570094</a> Исходя из этого, просто не существует осмысленных оснований махнуть рукою на получение такого приза при регистрации. И, будет, на подобный бесплатной базе у вас все шансы выиграть деньги и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, нарекают безвозмездными интернет платформами для игр.Промообъявления от казино мешают реальной картины и направлены на вербование внимания юзеров. Понять, как высоки шансы остаться в плюсе, дозволит личный тест условий предложения: 1×slots регистрация на сайте Подтверждение индивидуальной инфы. Все казино настоятельно от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и присутствие у юзера иных аккаунтов (мультиаккаунт запрещен).
1×slots рабочее зеркало
Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном сайте и выполните вход в индивидуальный кабинет, дабы арестовать безвозмездные вращения с вейджером х40; <a href=https://forums.scar-divi.com/topic/609686–1×slot-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE/>1×slot рабочее зеркало</a> Бездепы с бесплатными вращениями предоставляют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд выплачивает казино. Число спинов ограничено и изредка превышает сотку. Если промоакция включает в себя много безвозмездных игр, их начисление имеет быть разбито на количество дней. 1×slots на любой вкус как пройти регистрацию <a href=http://bonusb.ru/bitrix/rk.php?goto=http://accordtec.ru/bitrix/redirect.php?goto=http://sv.paltalk.com/client/webapp/client/External.wmt?url=https://telegra.ph/10-vazhnejshih-pravil-ehffektivnoj-kritiki-09–24>http://bonusb.ru/bitrix/rk.php?goto=http://accordtec.ru/bitrix/redirect.php?goto=http://sv.paltalk.com/client/webapp/client/External.wmt?url=https://telegra.ph/10-vazhnejshih-pravil-ehffektivnoj-kritiki-09–24</a> Доступ к подарку имеет раскрываться механически после введения промокода либо обращения в службу сайта. В первом случае от пользователя не требуется никаких деяний. Бездеп с активацией по коду встречается почаще всего. Игроку необходимо установить совокупа знаков в графе, которая возможность находиться в регистрационной форме в Личном офисе.
1×slots зеркало
Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. Вейджер не более х30–35 является применимым. Опытные игроки утверждают, что с таким вейджером реально остаться в плюсе, в верно подойти к выбору игрового аппарата.Бездепозитные призы прекрасный вариант даровой игры в игровые автоматы. Многие юзеры сети не знают, что в казино возможно начать играть безусловно бесплатно, а позже исключить выигрыш на банковскую карту или электронный кошелек, другие не доверяют онлайн казино, а третьи успешно играют и выигрывают – и тотчас достаточно великие суммы. <a href=http://biyografiforum.10tl.net/member.php?action=profile&uid=2793>http://biyografiforum.10tl.net/member.php?action=profile&uid=2793</a> Можно ли в одном интернет казино получить больше одного бонуса за регистрацию? Нет, например как в каждом онлайн казино есть управляла, к которым нужно держаться, не создавать два аккаута для получения призов, иначе несомненно блокировка обоих аккаутов, не пытайтесь перехитрить онлайн казино, бонус за регистрацию выдаеться один один 1 личику.Фриспины начисляются по определенной ставке. После их активации игроку необходимо запустить разъем и увериться, что в нем отображаются бесплатные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода после отыгрыша ориентируется оператором и редко выше 5 000 рублей. зеркала 1×slots Фриспины — благотворительные вращения, коие позволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся наиболее знаменитым и преимущественным видом бонуса — благотворительные вращения порой эффективнее и веселее в отыгрыше, чем другие виды бездепов.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.thefamilylegion.se/viewtopic.php?f=4&t=11804>рабочее зеркало 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Возможность поиграть дополнительное состязание (а времени и количество) абсолютно даром, а выигрыш, в свою очередь, поступает на счёт игрока. Вы скорее, как и все предпочитаете получать подарки и бездепозитные призы казино. Игорные дома брали в повадку одаривать гэмблеров приятными бонусами. Стать владельцем приветственного презента возможно за создание профиля либо пополнение счёта. Второй вариант более увлекательный, так клубы готовы удвоить депозит! Но случае вы новичок и лишь знакомитесь с миром азарта, лучше воспользуйтесь бонусом за регистрацию.
#5466 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Евгений Малкин (хоккей) порно с Никита Кучеров (хоккей) <a href=https://www.ossetia.tv/>рокс казино</a> casino riobet casino daddy <a href=https://kompromat1.online/>скачать букмекерскую контору</a> 1×bet зеркало рабочее casino онлайн Ходнева Светлана Владимировна порно 1win букмекерская контора casino up casino casino сайты
DiskiPlus сайт винлайн букмекерская контора DiskiPlus мелбет букмекерская контора <a href=https://diskiplus.ru/>DiskiPlus порно с Гатагова Ольга Анатольевна</a> DiskiPlus Елизавета Боярская DiskiPlus порно с Максим Глушенков (футбол) <a href=https://www.diskiplus.ru>DiskiPlus casino бездепозитный</a> DiskiPlus порно с Елена Никитина, скелетонистка DiskiPlus порно с Абрамченко Виктория Валериевна DiskiPlus Яровая Ирина Анатольевна порно DiskiPlus казино гта 5 DiskiPlus casino ап DiskiPlus человек казино DiskiPlus casino скачать
#5467 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало
Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, чтобы снова получить безвозмездный бонус. Игорные заведения нетерпимы к бонус-хантерам, потому вас ждет неминуемое наказание.Бонус за регистрацию в казино выдается только один раз на 1-го игрока. Но бывают дополнительные промоакции, в коих бездепы раздаются для неизменных посетителей и такие подарки Вы можете получить больше одного раза. <a href=http://filmkachat.ru/>1×слотс казино</a> Высокая конкуренция в сегменте азартных игр доказывает операторов завлекать клиентов разнородными акциями. Благодаря этому у гостей бывает вероятность получить призы в казино за регистрацию без депозита. Воспользоваться таким предложением можно, избегая процедуру внесения средств на игровой счет, просто активировав акк на сайте. Наш гид по бездепам поможет выбрать самую симпатичную бонусную программку, разузнать правила получения такового вознаграждения и воспользоваться им с наибольшей выгодой.У любого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано сумели выполнить их, мы дадим несколько советов. Если система начислила небольшую необходимую, надо делать большие ставки – остановитесь на 10–30 центах. Как лишь сможете заработать примерно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В противном случае никакого приглядеться к иному автомату. <a href=https://ai.ceo/read-blog/225693>https://ai.ceo/read-blog/225693</a> 1хслотс регистрация в 1×slots casino <a href=http://aelita-elite.ru/index.php?subaction=userinfo&user=lowdormitory72>http://aelita-elite.ru/index.php?subaction=userinfo&user=lowdormitory72</a> Ознакомьтесь с нашим перечнем лучших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего списка и получите бездеп незамедлительно. Хватайте превосходнейшие благотворительные предложения ниже и выигрывайте большие деньги, не рискуя!
1×slot казино зеркало
1х слот регистрация в 1×slots casino Заработать на бездепозитных бонусах за регистрацию в казино имеет каждый юзер, достигший совершеннолетия.Пoдтвepдить личнocть посетителя. Для успешного вывода средств, нужно подтвердить лицо клиента. Нa этaпe вepификaции пpoфиля, сотрудники службы защищенности обязаны убедиться, что у игрока более раз акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не сможет вывести собственный выигрыш, в у него несомненно количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы. <a href=http://m.4love4you.ru/bitrix/redirect.php?goto=http://magelectric.ru/bitrix/click.php?goto=http://marin.ru/ox/www/delivery/ck.php?ct=1%26oaparams=2__bannerid=2__zoneid=1__cb=07f425bf61__oadest=https://teletype.in/@urist_free/q2CLLBS14OG>http://m.4love4you.ru/bitrix/redirect.php?goto=http://magelectric.ru/bitrix/click.php?goto=http://marin.ru/ox/www/delivery/ck.php?ct=1%26oaparams=2__bannerid=2__zoneid=1__cb=07f425bf61__oadest=https://teletype.in/@urist_free/q2CLLBS14OG</a> 1×slots регистрация на сайте 1×slots ru com
1×slots официальный сайт мобильная версия
Акции распространяются как на все забавы казино, например и на ограниченный список. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и. Промо может обхватывать разработки одного производителя. Бездеп не пересекается с иными промоакциями казино. Если на веб-сайте предусмотрен кэшбек, он не начисляется за ставки, изготовленные бонусными деньгами. Для идентификации платежных реквизитов игрока возможность понадобиться пополнение счета на наименьшую необходимую.В качестве бонусов интернет казино часто предлагает выдачу фриспинов, другими бесплатных вращений игрового барабана. Виртуальные монеты можно применять для обучения в покерной школе или для забавы в казино. Выбирайте превосходнейшие бесплатные призы за обзоров на Casinoz – и пусть для сопутствует удача при отыгрыше бонусных кредитов!Во время забавы в казино, выигрыши, приобретенные благодаря безвозмездным призовым фондам, суммируются и срабатывают в совместную сумму для отыгрывания. Однако, случае удача улыбнется и получится отыграть все призы, игровое заведение гарантированно допустит исключить денежные средства. Сумма вывода несомненно зависимости от лимита, одобренного именно в этом учреждении. Поэтому, пристально нужно разбирать правила выдачи анлимитных депо. <a href=https://veteran-gazeta.ru/forum/user/1311/>https://veteran-gazeta.ru/forum/user/1311/</a> онлайн казино 1×slots
1хслот зеркало сайта
Не рекомендуем опрометью голову браться за всевозможные предложения получения средств без вложений. Вполне вероятно, собственно бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем выглядит на первый взор. Альтернативой считается казино бонус за депо. Мы предлагаем вас пару советов, благодаря коим у любого игрока несомненно возможность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом средств:Представленные на этой страничке превосходнейшие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные условия. После кропотливого анализа редакция портала составила рейтинг спецпредложений, каком гости Casino.ru могут сортировать перечень по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д. <a href=https://australiantravelforum.com/Upload/showthread.php?tid=271946>1×slots сайт</a> Вейджер не более х30–35 является приемлемым. Опытные игроки утверждают, собственно с этим вейджером реально остаться в плюсе, если правильно подойти к выбору игрового аппарата.Сразу в активации промокода возможно воспользоваться даром. Как уже упоминалось, призы бывают трёх видов – фриспины, кредиты и фриплей-бонусы. 1хлот регистрация в 1×slots casino <a href=http://forum.goldenantler.ca/home.php?mod=space&uid=310086&do=profile>http://forum.goldenantler.ca/home.php?mod=space&uid=310086&do=profile</a> Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша призов. Заведения постоянно устанавливают наивысшую ставку, возможную по условиям вейждера.
1×slots рабочее зеркало на сегодня
На критериях отыгрыша безвозмездных призов следует тормознуть подробнее. С ними связаны нюансы, которые невозможно оставить без внимания.Бонус за регистрацию в казино без депозита с выводом средств нужно отыграть. Зачастую для отыгрыша может понадобиться устроить ставки на сумму, в несколько 10-ов один превосходящую сумму приза или выигрыша. Главным интересным в возникновении этих вознаграждений состоит что, собственно пустив их в ход, геймер ничем не рискует и в последствии никому ничего не несомненно обязан (не зависимо, получит ли он спасибо бонусам какой-либо выигрыш или моментально спустит все лишь собственно прибывшие деньги). То есть, казино снабжает игрока вероятностью на дармовой базе играть во всевозможные слоты причем спонсирует забаву.Промообъявления от казино мешают реальной картины и направлены на привлечение внимания пользователей. Понять, как высоки шансы остаться в плюсе, позволит личный анализ условий предложения: <a href=http://mpsamp.com/bbs/board.php?bo_table=free&wr_id=148570>http://mpsamp.com/bbs/board.php?bo_table=free&wr_id=148570</a> За счёт спинов выйдет запустить разные онлайн слоты, протестировать стратегии и поднабраться навыка. Фишка никаких, собственно вращения начисляются на лучшие аппараты с уникальными опциями и высочайшей отдачей. Не запамятовывайте, собственно в каждом акционном предложении предусмотрены специальные требования – кратковременные лимитирования, максимальный объем ставки, список дешевых игр.Иногда виде бездепа, казино дарует минимальный бонус (до 50 руб. ), ради которого не заморачиваться. x1 slots регистрация в 1×slots casino Прямо данный отберите безвозмездные вращения за регистрацию без депо и начинайте коллекционировать призовые комбинации из-за солидных выигрышей!Вейджер (wager) – это коэффициент, кот-ый демонстрирует на какую сумму нужно сделать ставок, дабы вывести приз из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода этого бонуса, Вам необходимо устроить ставок на необходимую: 500*70=3500 рублей. Только полностью отыграв приз, Вы сможете вывести собственный выигрыш.
<b>Смотреть еще похожие новости:</b>
<a href=http://lynnniman.org/index.php?/topic/867–1×-slots-%D1%81%D0%B0%D0%B9%D1%82/>1× slots сайт</a>
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=88066&extra=>1×slots зеркало на сегодня</a>
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=31885>онлайн казино 1×slots</a>
<a href=https://forum.bandariklan.com/showthread.php?tid=176825&pid=914489#pid914489>1хслотс зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если вы избираете проверенное лицензионное интернет казино и выполните все обстоятельства получения бездепозитного бонуса, проблем с получением подарка у Вас не возникнет.
#5468 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало сайта
Прочитайте правила бонусной программки, какой хотите принять. Да, мы настойчиво советуем устроить это до регистрации.Все благотворительные призы кажутся заманчивыми. Кто же категорически от возможности поиграть в онлайн-казино, не рискуя средствами, хотя получая выигрыши. Но далеко не все бездепозитные бонусы мере привлекательны для рассудительного посетителя. <a href=http://filmkachat.ru/>1×slots подтвердит вашу регистрацию если говорить</a> Большинство клубов завлекают внимание компьютерные за счёт разнообразных подарков. На одних веб-сайтах можно получить виртуальные кредиты, которые откроют доступ ко всему софту. На иных же, администрация предлагает бесплатные вращения для пуска лучших онлайн слотов. Несмотря на разные промоакции, стоит выделить самые основные.2. Создать новый профиль. Для регистрации надо(надобно) наполнить маленькую анкету или зайдите в индивидуальный офис при помощи соц сеток; <a href=https://wallhaven.cc/user/CGI>https://wallhaven.cc/user/CGI</a> В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать собственный выигрыш с бесплатных вращений. Прибыль, которую Вы заработаете на этом бездепе возможно ставить на вывод без какого или отыгрыша. 1×slots casino зеркало рабочее <a href=https://www.autorepguide.com/member.php/7872-Travisjurce>https://www.autorepguide.com/member.php/7872-Travisjurce</a>
1×slots казино зеркало
<a href=http://aurorahcs.com/forum/memberlist.php?mode=viewprofile&u=168982>1хслотс рабочее зеркало на сегодня</a> 1 x slots casino Будьте внимательнее при ознакомлении с правилами во избежание появления конфликтных обстановок с казино, когда последствии отыгрыша бездепа для не дадут исключить солидную сумму выигрыша.Однако в условиях исчезают «подводные камни», которые не разрешат исключить солидную сумму или же вы не успеете отыграть вейджер. Поэтому мастера советуют арестовать благотворительные вращения за регистрацию в казино без депозита, чтобы поднабраться навыка и получить настоящий шанс на победу. <a href=http://www.samudranews.com/2023/01/wabub-deli-serdang-hadri-muhasabah-dan.html>http://www.samudranews.com/2023/01/wabub-deli-serdang-hadri-muhasabah-dan.html</a> Каждый в обязан сначала отчетливо выучить условия по получению и отыгрышу приглянувшегося дара. Если всё устраивает, поспешите забрать бесплатные спины за регистрацию в казино без депозита с выводом и без отыгрыша и напрямик сейчас начать вертеть барабаны лучших слотов. 1хслотс рабочее зеркало
1×slots официальный сайт зеркало рабочее
Возьми собственный презент. Чаще всего бонус активизируется незамедлительно последствии регистрации. Но случаются ситуации, когда нужно забежать в собственный офис либо написать в справочную службу.Составленный специалистами Casino.ru список онлайн-казино с бездепозитным бонусом дозволяет игрокам сравнить спецпредложения различных операторов. <a href=http://restoclub.ru/go?url=http://marineinnovation.ru/redirect?url=http://csgotraders.net/linkfilter/?url=https://teletype.in/@urid_pomosh/BXA16BvS5gV>http://restoclub.ru/go?url=http://marineinnovation.ru/redirect?url=http://csgotraders.net/linkfilter/?url=https://teletype.in/@urid_pomosh/BXA16BvS5gV</a> Реже бонусы без депозита начисляются постоянным игрокам. С их подмогою администрация постарается вычесть ценных клиентов либо вожделеет поблагодарить за преданность верных гостей. Но намного почаще для сходственных целей используются эти промоакции: 1×slot зеркало рабочее этих способов предполагает регистрацию
1×slots регистрация 1×slots review live
Создание аккаунта. На сайте казино необходимо открыть регистрационную форму и заполнить порожние поля собственными данными. Иногда на данном шаге потребуется показать лишь адрес электрической почты и пароль, но чаще хотелось наполнить анкету индивидуальной информацией (ФИО, дата рождения, место проживания и т.д.). Нужно свидетельствовать только настоящие данные, поскольку впоследствие они будут проверены. онлайн казино 1×slots <a href=http://gctech21.com/bbs/board.php?bo_table=sub0501_n2&wr_id=952739&&#c_965652>http://gctech21.com/bbs/board.php?bo_table=sub0501_n2&wr_id=952739&&#c_965652</a>
1×slots официальный сайт мобильная версия
Возможность протестировать свежие игры, не рискуя собственными средствами и разработать личную тактику забавы.Бонусы без депозита при регистрации считаются самыми красивыми как для опытных игроков, например для и новичков. Получив такое вознаграждение, клиент имеет выступать на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные призы в интернет-казино Рунета, а условия их активации и выигрыша. <a href=https://funsilo.date/wiki/1×slots_%D0%9E%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9_%D0%A1%D0%B0%D0%B9%D1%82_%D0%9C%D0%BE%D0%B1%D0%B8%D0%BB%D1%8C%D0%BD%D0%B0%D1%8F_%D0%92%D0%B5%D1%80%D1%81%D0%B8%D1%8F_%D0%A1%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C>https://funsilo.date/wiki/1×slots_%D0%9E%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9_%D0%A1%D0%B0%D0%B9%D1%82_%D0%9C%D0%BE%D0%B1%D0%B8%D0%BB%D1%8C%D0%BD%D0%B0%D1%8F_%D0%92%D0%B5%D1%80%D1%81%D0%B8%D1%8F_%D0%A1%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C</a> Подобные призы без депозита предоставляются на больше выгодных условиях. Зачастую они крупнее, а обстоятельства отыгрыша менее жесткие. 1×slots регистрация 1×slotscasino 56 online
<b>Смотреть еще похожие новости:</b>
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=44005>1×slots регистрация 1×slotscasino 56 online</a>
<a href=https://nztw.org/thread-490135–1–1.html>1×slots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Все любят получать презенты. Согласитесь, практически каждый играющий человек несомненно бесконечно рад, случае получит бесплатный подарок для игры в онлайн казино просто за регистрацию или же приз за внесенный депо, так именуемые приветственные призы для новых игроков. Соответственно такие интернет клубы станут больше известны и предпочтительны у игроков при выборе казино для забавы. Топ казино каждый обновляется и прибавляются новые и увлекательные игровые клубы с привлекательной бонусной политикой и всеми возможными привилегиями, к которым относятся такие призы как фриспины за регистрацию, денежные бездепозитные бонусы, а великодушные призы за внесенный депо. На данном разделе портала периодически публикуются обзорные статьи, каких рассматриваются благотворительные призы наихороших интернет-казино. Информация структурирована по нескольким пунктам, включая основные:
#5469 Charlesgunnyhttp://filmkachat.ru
онлайн казино 1×slots
Таким образом онлайн казино получает потенциального игрока. Возможно в будущем или настоящем он захотит поиграть на свои средства. Так трудятся бездепозитные призы в онлайн казино. Здесь очень подходит выражение, бесплатные сыр случается лишь в мышеловке. Начинающие игроки все не обдумывать опасность пыла. Однако со временем осознания делается больше. Это тема для отдельного обсуждения.Подтверждение регистрации. Казино настоятельно привязки профиля к электронному адресу и номеру телефона. Для этого на e-mail отчаливает письмо ссылаясь, а на телефонный ? текстовое сообщение с кодом. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> <a href=https://www.4sync.com/s/fLYUHSTCD>https://www.4sync.com/s/fLYUHSTCD</a> Некоторые веб-сайты, прежде чем обмануть регистрацию игроков, предлагают ответить на некоторое базовых вопросов. Цель проведения подобной викторины – выявить случайных людей, которые не имеют представления о покере, и не допустить получения ими бонусов. Если гость теснее играл в казино, то ответить на полтора 10 простых вопросов несомненно нетрудно. Очень часто, ответы можно найти на официальных веб-сайтах этих учреждений.Наиболее популярные вознаграждения среди гэмблеров – бездепозитные призы казино. Это не дивно, как можно получить благотворительные вращения или виртуальные кредиты, и всем не придётся пополнять счёт, рисковать собственными средствами. Удастся насладиться разнородными развлечениями даже выиграть солидную необходимую, избегая серьёзного риска. 1×slots сайт <a href=http://www.taijiacademy.com/newforum_down/profile.php?mode=viewprofile&u=325349>http://www.taijiacademy.com/newforum_down/profile.php?mode=viewprofile&u=325349</a> Если площадка дарит бездеп за регистрацию, то процедура его получения проста. Нужно только ввести аккаунт на веб-сайте и активировать его, подтвердив адрес электрической почты, номер телефонного или другие данные, коие просит оператор. Перед данным необходимо увериться, собственно юзер располагается на официальном сайте казино, не на жульнической площадке.
1×slots casino зеркало
<a href=http://mi.minfish.com/home.php?mod=space&uid=1196847>1×slots официальный регистрация</a> 1× slots зеркало <a href=https://kr-osvita.gov.ua/user/PorsedropMa/>https://kr-osvita.gov.ua/user/PorsedropMa/</a> 1 х слотс зеркало Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских рублей. В критериях промоакции указано, собственно вейджер бездепозитного приза х20. Поэтому, дабы отыграть приз, игроку несомненно необходимо устроить ставок на 35*20=700 руб.
1× slots официальный
Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, solid только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Фриплей-бонусы встречаются только в неких клубах. Они зачисляются незамедлительно после творения профиля и активны недолговременное время. Если не успеете истратить средства, они просто сгорят. Касаемо времени, в большинстве случаев призы активны в течение часа. На безвозмездные бонусы онлайн-казино почти практически распространяется ограничения по стране проживания клиентов. Даже в для разрешено раскрывать счет и играть на средства в заведении, это еще не означают, собственно вам доступны not the slightest deposit bonuses.При исполнении критерий отыгрыша и верификации, деньги с бонусного счета переводятся на ведущей и имеют быть выведены на карту либо электрический кошелек. Лимиты на вывод и сроки проведения транзакции находятся от выбранной платежной системы. <a href=https://hp.dragonland-radio.de/profile.php?lookup=71>https://hp.dragonland-radio.de/profile.php?lookup=71</a> Также бывают случаи, когда казино начислит оговоренный бонус последствии регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам.В игровых клубах без лицензии Вы покупаете „кота в мешке“ и если, тогда, неоднозначных обстановок нет возможности куда-то посетовать и обосновать свою правоту. 1×slot регистрация Вообще перейдя в казино — правила одинаковы в получении бездепозитных бонусов, в стереотипные верховодила заходит: подтвердить эл. Почту и телефонный, заполнить свой собственный профиль, активировать рекламную код либо активировать предложения во вкладке БОНУСЫ.Бездепозитные бонусы – это исключительно небезинтересная и более многообещающая промоакция интернет-казино. Они числе другого, как фри-спинов, потому что выплаты в бесплатных вращениях не гарантированы, как комбинации на барабанах игрового аппарата могут не сложиться.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, которое можно посвятить ирге в казино. 1×slots casino зеркало <a href=http://forumqservice.co.uk/member.php?action=profile&uid=5856>http://forumqservice.co.uk/member.php?action=profile&uid=5856</a> Самый распространённый из подобных призов, естесственно же, бездеп на денек рождения посетителя — приз повторяющий фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им возможно протяжении установленного периода медли.
1×slots casino регистрация 1×slots review live
Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном сайте и выполните вход в личный кабинет, чтобы отобрать благотворительные вращения с вейджером х40;Выбирая безвозмездный приз, пристально изучайте управляла. Убедитесь, что вас возможно себя роль в промоакции. Уточните, в каких играх возможно выполнять условия вейджера. При надобности задавайте вопросы представителям саппорта. <a href=https://e-participationyouth.eu/forum/profile/doctorlazutapr/>https://e-participationyouth.eu/forum/profile/doctorlazutapr/</a> 1х слотс зеркало регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://russiancomputerservice.ru/user/JosephCer/>1хслот зеркало</a>
<a href=https://forumauthority.com/member.php?action=profile&uid=3484>1×slots рабочее зеркало на сегодня</a>
<a href=https://bans.org.ua/index.php?topic=119792.new#new>1× слот зеркало</a>
<a href=https://www.goslog.ru/forum/messages/forum1/message16633/11-obrashcheniya-grazhdan?result=reply#message16633>1хслотс официальный сайт зеркало</a>
<a href=https://www.digicube.de/forum/threads/458309–1×-slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%B2–1×slots-casino?p=655937#post655937>1× slots регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В зависимости от интернет заведения любой из них может вас предложить как бездепозитные средства, так и бездепозитные фриспины, коие последствии успешной регистрации рухнут вам на ваш игровой баланс. Наиболее пользующиеся вознаграждения среди гэмблеров – бездепозитные бонусы казино. Это не изумительно, как можно получить бесплатные вращения либо виртуальные кредиты, и при этом не придётся пополнять счёт, рисковать личностными деньгами. Удастся насладиться разнообразными веселиями даже выиграть солидную необходимую, избегая серьёзного риска.
#5470 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Елизавета Боярская промокод 1×bet <a href=https://rumafia.news/>Окладникова Ирина Андреевна порно</a> ограбление казино casino официальный зеркало <a href=https://specreporter.com/>водка казино</a> Чулпан Хаматова casino игровой автомат 1×bet зеркало рабочее на сегодня win win casino cat casino лучшие бесплатные онлайн казино сайт казино вход
DiskiPlus порно с Артемий Панарин (хоккей) DiskiPlus top casino <a href=https://diskiplus.ru/>DiskiPlus casino андроид</a> DiskiPlus лучшая казино DiskiPlus казино рояль смотреть <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet официальный xbet</a> DiskiPlus 1×bet официальный слоты DiskiPlus казино смотреть онлайн DiskiPlus казино рояль смотреть DiskiPlus порно с Сергей Бобровский (хоккей) DiskiPlus porno Мария Шарапова DiskiPlus bet casino DiskiPlus porno Нина Пирогова, хоккеистка
#5471 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
яндекс казино casino сайты <a href=https://m.repost.news/>casino betting</a> букмекерская контора про казино <a href=https://specreporter.com/>бесплатно фильм казино</a> сколько казино 1×bet зеркало на сегодня Юдаева Ксения Валентиновна порно казино ставка мобильные букмекерские конторы porno Алена Косторная (фигурное катание) скачиваемые казино
DiskiPlus букмекерские конторы pin DiskiPlus порно с Илья Осипов (киберспорт) <a href=https://www.diskiplus.ru>DiskiPlus inform@rucriminal.info</a> DiskiPlus порно с Георгий Джикия (футбол) DiskiPlus порно с Зырянова Анастасия Владимировна <a href=https://diskiplus.ru/>DiskiPlus Преподобная Надежда Александровна порно</a> DiskiPlus про казино DiskiPlus букмекерская контора леонов DiskiPlus пин ап casino pin DiskiPlus порно с Артемий Панарин (хоккей) DiskiPlus демо казино DiskiPlus слот casino DiskiPlus 1×bet слоты
#5472 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet на сегодня Шевцова Татьяна Викторовна порно <a href=https://krtka.info/>Яровая Ирина Анатольевна порно</a> демо казино порно с Федор Чалов (футбол) <a href=https://krtka.info/>букмекерская контора вход</a> включи казино букмекерская контора фонбет официальный сайт казино сегодня порно с Никита Кучеров (хоккей) букмекерская контора бетсити casino вход официальные букмекерские конторы
DiskiPlus cometa casino DiskiPlus игры казино <a href=https://www.diskiplus.ru>DiskiPlus казино на деньги</a> DiskiPlus порно с Арина и Дина Аверины, гимнастки DiskiPlus casino андроид <a href=https://diskiplus.ru/>DiskiPlus часы казино</a> казино DiskiPlus лучшие казино бесплатно DiskiPlus ставки на спорт букмекерские конторы DiskiPlus pin ап casino DiskiPlus ограбление казино DiskiPlus порно с Ирина Сидоркова DiskiPlus Радченко Светлана Юрьевна порно
#5473 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация в 1×slots casino
Вышеописанная причина и считается основным нюансом, из-за которого операторы отдают доля своей выгоды на разные рекламные затраты и маркетинговые кампании. А наиболее действенным здесь станут выступать именно бездепозитные призы казино 2022 с выводом за регистрацию. <a href=http://filmkachat.ru/>1хслотс зеркало</a> Вообще перейдя в казино — управляла схожи в получении бездепозитных призов, в стандартные правила входит: доказать эл. Почту и телефонный, наполнить свой собственный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ.Даже не выиграв крупную сумму, игрок увлекательно проведет время, изнутри изучит работу площадки, воспримет геймплей автоматов. Все это без каких-то финансовых рисков. Быть в курсе наихороших промоакций легко. Достаточно периодически изучать перечень свежих интернет казино с выводом бонуса без депо в этом разделе. <a href=http://prsync.com/shopavto/shopavto-is-a-car-buyout-service-operating-in-odessa-4371377/>http://prsync.com/shopavto/shopavto-is-a-car-buyout-service-operating-in-odessa-4371377/</a> Бездепозитный приз по промо-коду будет доступен для игры, только в случае когда Вы активируете специальный бонусный код в разделе с бонусами либо укажите промокод при регистрации на сайте. В неких случаях, кроме активации кода, придется доказать контактные данные игрока и заполнить анкету клиента. 1×slots casino online регистрация <a href=https://pornodrochka.club/user/DoctorLazutapn/>https://pornodrochka.club/user/DoctorLazutapn/</a>
1×slots зеркало на сегодня
<a href=http://forum.drustvogil-galad.si/index.php?action=profile;u=121557>1× slots сайт</a> казино 1×slots Доступ к подарку может раскрываться механически в введения промокода или обращения в саппорта вебсайта. В первом случае от юзера не потребуется никаких поступков. Бездеп с активацией по коду встречается почаще всего. Игроку нужно ввести совокупность символов в графе, которая имеет находиться в регистрационной форме в Личном кабинете. <a href=http://magnumvino.ru/bitrix/click.php?goto=http://rodos74.ru/bitrix/click.php?goto=http://kayaker.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/3EtDfEu0Qay>http://magnumvino.ru/bitrix/click.php?goto=http://rodos74.ru/bitrix/click.php?goto=http://kayaker.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/3EtDfEu0Qay</a> казино 1×slots официальный сайт
1×slots промокод при регистрации 2025
Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке адепты онлайн-казино публикуют важную информацию о not the slightest down payment bonuses и других услугах.Казино выделяет вероятность заработать и вывести настоящие деньги на бездепозитных призах. Обычно, это незначительная сумма, которую казино может себя позволить презентовать игроку. <a href=http://ourrocks.kz/index.php?title=Выкуп_авто>http://ourrocks.kz/index.php?title=Выкуп_авто</a> казино 1×slots официальный сайт Такой казино бонус без депо за регистрацию выдается игроку на час и энергично используется данное предложение с 2017 года. Это как бы некая маскировка поощрения под бездепозитный. Суть всего этого сводится к тому, что геймеру на час выдается, например, 1000 долларов, а реклама утверждает про, собственно любой выигрыш возможно будет в будущем оставить при себя. Но случае играющий серьезно отнесется к этому предложению, то он попросту потеряет время. Ведь игроку нужно будет играть не в аккаунте, ну тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (даже всей тыс. ) в правила вступят конкретные условия, где несомненно сказано, собственно наибольшей суммой победы возможность быть только двести $ и средства можно применять только в качестве бонуса на первый вклад с вейджером 25 от суммы вознаграждения плюс сам депозит. По итогу получится, собственно игрок выигрывал для 200% бонус с вейджером на конкретную необходимую. Короче говоря, это все не вашего медли.
1хслотс казино зеркало
<a href=http://aficionado.pl/showthread.php?175056–1×slot-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE&p=196126>1×slot рабочее зеркало</a> Размер ставки для забавы по бездепозитному призу (естесственно же, в случае, когда он представлен вид бонусных валютных средств) зачастую ниже, чем при ирге на депозит. Ограничение будет работать до момента отыгрыша бонуса.Постарайтесь отыграть вейджер, дабы была возможность оставить заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные приборы. Вы можете получить выигрыш на электрической кошелёк, карту, телефон. Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера. 1хслот скачать <a href=http://kkzkirova.ru/index.php?subaction=userinfo&user=abjectmirth16>http://kkzkirova.ru/index.php?subaction=userinfo&user=abjectmirth16</a> Рассмотрим на образце: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских рублей. В критериях акции указано, что вейджер бездепозитного приза х20. Поэтому, дабы отыграть приз, игроку несомненно необходимо сделать ставок на 35*20=700 руб.
1×slots регистрацию более популярный вариант это
Маркетинговая деятеля всех игорных интернет-клубов обязана носить разнообразный характер. И в вознаграждения на депозит работают чтобы, чтобы, дабы стимулировать заносить депозиты и поощрять уже место пользователей, то бездепозитный приз в казино или бонус за регистрацию в казино, до всего, рассчитан на расширение базы потребителей.Для получения депозитного приза нужно восполнить собственный игровой баланс настоящими деньгами. Вознаграждение возможно получить или при внесении первого депозита, либо в виде фиксированного процента от внесённых средств. Так или по, бонус поступит на счёт только в пополнения. <a href=http://bbs.yongrenqianyou.com/home.php?mod=space&uid=4115024&do=profile>http://bbs.yongrenqianyou.com/home.php?mod=space&uid=4115024&do=profile</a> 1×slots мобильная версия войти казино Бoльшинcтвo азартных заведений выдвигают приблизительно одинаковые обстоятельства и требования, коие необходимо выполнить, чтобы получить бездепозитный бонус за регистрацию. Все их можно соединить в один список:
<b>Смотреть еще похожие новости:</b>
<a href=http://vn-info.net/user/Josephkam/>1×slots зеркало на сегодня</a>
<a href=https://forum.pmpobc.ca/index.php?topic=116589.new#new>1×slot официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Раздача призов может быть приурочена к разным датам: календарные дни, дни рождения игроков, юбилей открытия казино и т. Д. Подарок выдается в виде средств, фриспинов или баллов для накопления и обмена на услуги оператора. Если юзер получает выигрыш, средства начисляются на его счет. Для вывода этой суммы придется выполнить ряд притязаний.
#5474 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Каролина Севастьянова винлайн букмекерская контора официальный сайт <a href=https://glvk.guru/>казино рулетка</a> мелбет букмекерская контора пина букмекерской конторы <a href=https://www.ossetia.tv/>порно с Голикова Татьяна Алексеевна</a> порно с Александр Головин (футбол) casino betting пин ап casino pin up casino пин казино зеркало сегодня слот casino скачиваемые казино
DiskiPlus ставки на спорт букмекерские конторы DiskiPlus скачать 1×bet на андроид бесплатно <a href=https://www.diskiplus.ru>DiskiPlus 7k casino бонус</a> DiskiPlus casino сегодня DiskiPlus казино на деньги <a href=https://diskiplus.ru/>DiskiPlus человек казино</a> DiskiPlus букмекерская контора фонбет DiskiPlus porno Александра Степанова, фигуристка DiskiPlus где казино DiskiPlus букмекерская контора вход DiskiPlus букмекерская контора фонбет DiskiPlus казино рублях DiskiPlus официальные сайты казино
#5475 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию более популярный вариант это
Ознакомьтесь с нашим перечнем наилучших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего перечня и получите бездеп сразу. Хватайте наилучшие благотворительные предложения ниже и выигрывайте большие деньги, не рискуя!Большинство клубов завлекают внимание в за счёт разнородных даров. На 1 веб-сайтах возможно получить виртуальные кредиты, коие откроют доступ ко всему софту. На иных же, администрация предлагает бесплатные вращения для пуска лучших интернет слотов. Несмотря на различные акции, стоит выделить самые главные. <a href=http://filmkachat.ru/>1×slots зеркало видели такую регистрацию на</a> Практически все интернет казино с бездепозитным бонусом за регистрацию предусматривает программку лояльности — систему одобрения постоянных клиентов, кот-ая произведено из большого уровней. При достижении игроком одного значения на его счёт поступает бонус. Чем повыше степень — тем щедрее бонус.Некоторые клубы механически начисляют бонус на аккаунт игрока после исполнения условий получения, хотя случаются ситуации, когда бонус надо(надобно) активировать игроку самому. Есть количество методов активации приза: <a href=https://diccut.com/forums/thread/2610/>https://diccut.com/forums/thread/2610/</a> 1х слот 1хслотс регистрация перейти на 1×slots <a href=https://www.new.jesusaction.org/bbs/board.php?bo_table=free&wr_id=1844266>https://www.new.jesusaction.org/bbs/board.php?bo_table=free&wr_id=1844266</a> Выбор любого онлайн казино на нашем веб-сайте. В описании к любому Вы сможете узнать, собственно получите за творение аккаунта.Если идет об эксклюзивных предложениях, имеет потребоваться регистрация в казино по ссылке с партнерского вебсайта.
1×slots casino регистрация 1×slotscasino09k online
Для ревизии применяются сканы паспортов, водительских удостоверений, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если юзер обнаружен в попытке завести дополнительный акк, все его учетные записи подвергаются блокировке, а их владелец попадает в темный перечень. При забаве на лицензионной площадке не опасаться указывать достоверную индивидуальную информацию (шифрование ликвидирует утечку индивидуальных данных). <a href=http://forums.indexrise.com/thread-11937-post-334148.html#pid334148>1×slots рабочее зеркало на сегодня</a> 1×slots casino регистрация 1×slotscasino09k online <a href=http://www.gencotyre.com/comerblog/member.asp?action=view&memName=yellowzeal90>http://www.gencotyre.com/comerblog/member.asp?action=view&memName=yellowzeal90</a> Иногда у гостей вебсайта шансы появиться трудности, задачи, препядствия при активации полученного промо-кода. В этих случаях, необходимо адресоваться за поддержкою в службу «Support». Для получения ответа, непременно указывается конкретная первопричина воззвания и подтверждается информация дополнительными экрана. Если сложилась неоднозначная ситуация, практически можно обратиться к главному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ. 1×slots зеркало на сегодня Выбор каждого интернет казино на нашем сайте. В описании к любому Вы можете узнать, собственно получите за творенье аккаунта.Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные способы и оценить особенности, недоступные при игре в демо режиме. Многие свежие посетители перебегают в количество постоянных, а оператор получает длительную прибыль.
1×slots регистрация 1×slots review live
Чаще всего казино приз за регистрацию без депозита даёт возможность запустить каждой автомат. Но превосходнее внимательно ознакомиться с критериями. Иногда для забавы доступны лишь определённые модели. Если вы новичок и ничего не смыслите в гэмблинге, другого, как начать знакомство с миром азарта непосредственно с «одноруких бандитов».Приветственный приз без депо ? презент за регистрацию. Выдается деньгами, фриспинами или баллами. В последнем случае бонусные баллы применяются для участия в турнирах либо размена на настоящие средства. Зачастую бездепозитные призы казино для игры предлагаются различными заведениями азартных игр в качестве маркетинговых промоакций или в целях привлечения к себя новых игроков. Для бездепозитных призов в казино 2022 геймеру не нужно пополнять счет до этапа вывода хотимых средств. <a href=http://ternovka4school.org.ua/user/StevenPeavy/>http://ternovka4school.org.ua/user/StevenPeavy/</a> 1×slot зеркало рабочее регистрации на телефон придет
1×slots зеркало на сегодня
Выбирая бесплатный бонус, пристально изучайте верховодила. Убедитесь, что вам можно на участие в промоакции. Уточните, в каких забавах возможно скорпулезно условия вейджера. При надобности задавайте вопросы адептам саппорта. Вейджер (wager) – это коэффициент, который демонстрирует на какую необходимую нужно устроить ставок, дабы вывести бонус из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего бонуса, Вам необходимо устроить ставок на сумму: 500*70=3500 рублей. Только полностью отыграв бонус, Вы сможете вывести свой выигрыш.За счёт спинов выйдет запустить разные онлайн слоты, протестировать стратегии и поднабраться навыка. Фишка никаких, собственно вращения начисляются на лучшие аппараты с уникальными опциями и высочайшей отдачей. Не запамятовывайте, собственно в каждом акционном предложении предусмотрены специальные требования – кратковременные лимитирования, максимальный объем ставки, список дешевых игр. Так что можете смело регистрироваться без всяких раздумий. Фортуна сейчас точно на вашей стороне. Не страшитесь, как следствие какого либо убытка Вам совершенно не грозит. С такими призами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе.Предложения с бездепозитными бонусами за регистрацию позволяют свежим заведениям привлечь аудиторию на свой вебсайт. А игроки в свою очередь получают возможность выступать на реальные средства без депозита в казино и заработать малый стартовый капитал, который разрешается исключить на карту банка или электрический кошелек. 1хслотс рабочее зеркало <a href=http://fb7707ng.bget.ru/user/AshleyFleme/>http://fb7707ng.bget.ru/user/AshleyFleme/</a> Как правило, при выводе денег, от играющего потребуется только сделать минимальный вклад для того, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом индивидуальный счет.Выиграть настоящие деньги в казино не пополняя счет – сложно, хотя возможно. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными призами и начните выступать на бонусные средства. По статистике в 10-ти заведений возможно заработать маленькую необходимую средств за счет бонусных средств.
1×слот регистрация в 1×slots casino
Получив собственный подарок, Вы сможете бесплатно выступать на реальные средства, а выполнив условия отыгрыша, вывести свой выигрыш. Вейджер в переводе с английского означает «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша полученного приза, в нашем случае бездепозитного. Число ставок не — важно только набрать сумму, пропорциональную сумме одобрения.Варианты выигрыша находятся от Вашей удачи и критерий игорного портала. Выше мы заявили, собственно некоторые бездепозитные бонусы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются и те, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность современных игр на средства, можно выиграть неописуемые суммы. Сегодняшние игровые автоматы либо видео слоты, как их именуют. Могут выдавать солидные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000. <a href=http://www.sazkar.info/member2560.html>http://www.sazkar.info/member2560.html</a> Также, в нужно доказать свой номер телефонного, результата код, полученный в смс-сообщении от клуба ввести в особое поле в собственном офисе игрока.Фриспины — благотворительные вращения, которые разрешают игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся наиболее популярным и предпочтительным видом приза — бесплатные вращения порой эффективнее и веселее в отыгрыше, чем другие виды бездепов. 1×slots регистрация 1×slots casino 777 online
<b>Смотреть еще похожие новости:</b>
<a href=https://rf-lowrate.ru/index.php?/topic/4212-%D0%BF%D0%BB%D0%B0%D0%BD%D0%BE%D0%B2%D0%B0%D1%8F-%D1%81%D0%BF%D0%B5%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D0%B0%D1%8F-%D0%BE%D1%86%D0%B5%D0%BD%D0%BA%D0%B0-%D1%83%D1%81%D0%BB%D0%BE%D0%B2%D0%B8%D0%B9-%D1%82%D1%80%D1%83%D0%B4%D0%B0/page/78/#comment-216892>1×slots регистрация на сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При верном раскладе бездепы — это прекрасный способ выступать на средства без растраты собственных средств. Есть количество советов, следуя которым можно извлечь максимально выгоды из похожих акций казино. Играть по лишь на лицензированных площадках. Скриптовые сайты не только обманывают с бонусными предложениями, хотя и употребляют пиратский софт с измененным ГСЧ. Выиграть на этих автоматах невозможно. Но такие рамки не смущают том хайроллеров, что коэффициенты на слотах дозволяют рассчитывать на солидные выигрыши, а неких автоматах разыгрывается передовой джекпот.
#5476 Charlesgunnyhttp://filmkachat.ru
1×slots казино зеркало
У любой игры свои притязания по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система засчитает каждую ставку. В рулетке и покере сделать это намного труднее. Именно потому например важно внимательно разбирать обстоятельства получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой забаве, то новички просто «спустят бонус на ветер».3. Подтвердить данные. В зависимости от клуба, нужно привязать аппарат или почту, указать индивидуальную информацию; <a href=http://filmkachat.ru/>1 x slots</a> <a href=https://www.gift-me.net/blogs/201226/%D0%9E%D1%86%D0%B5%D0%BD%D0%BA%D0%B0-%D0%B0%D0%B2%D1%82%D0%BE-%D0%BE%D0%BD%D0%BB%D0%B0%D0%B9%D0%BD-%D0%BA%D0%B0%D0%BA-%D1%80%D0%B0%D0%B1%D0%BE%D1%82%D0%B0%D0%B5%D1%82-%D0%B8-%D0%BD%D0%B0-%D1%87%D1%82%D0%BE-%D0%BE%D0%B1%D1%80%D0%B0%D1%82%D0%B8%D1%82%D1%8C-%D0%B2%D0%BD%D0%B8%D0%BC%D0%B0%D0%BD%D0%B8%D0%B5>https://www.gift-me.net/blogs/201226/%D0%9E%D1%86%D0%B5%D0%BD%D0%BA%D0%B0-%D0%B0%D0%B2%D1%82%D0%BE-%D0%BE%D0%BD%D0%BB%D0%B0%D0%B9%D0%BD-%D0%BA%D0%B0%D0%BA-%D1%80%D0%B0%D0%B1%D0%BE%D1%82%D0%B0%D0%B5%D1%82-%D0%B8-%D0%BD%D0%B0-%D1%87%D1%82%D0%BE-%D0%BE%D0%B1%D1%80%D0%B0%D1%82%D0%B8%D1%82%D1%8C-%D0%B2%D0%BD%D0%B8%D0%BC%D0%B0%D0%BD%D0%B8%D0%B5</a> 1×slots мобильная версия войти казино <a href=https://rekordmeister.ru/user/Tyronefrurl/>https://rekordmeister.ru/user/Tyronefrurl/</a>
1х слот 1хслотс регистрация перейти на 1×slots
Диапазон ставок, коие вправе устроить игрок, также лимитирован. Обычно ставить можно небольшую сумму — в 10–30 рублей за одно вращение. <a href=http://216.38.0.7/viewtopic.php?f=12&t=253953>1хслотс официальный сайт зеркало</a> 1×slots на любой вкус как пройти регистрацию <a href=https://www.mavsboard.com/member.php?action=profile&uid=3575>https://www.mavsboard.com/member.php?action=profile&uid=3575</a> Сроки активации бонуса уточняются любым казино, хотя почаще всего они не превышают недели с момента получения. Игроку обязательно надо(надобно) использовать бездеп в течение обозначенного срока, в ином случае приз просто исчезнет. Каждый приз возможно получить лишь один один, потому случае не использовать бездеп в срок, у игрока не будет 2 шанса им воспользоваться.В истиннее время получить бонус за регистрацию в казино довольно просто. Почти любой игорный жилище с готовностью даст деньги или бесплатные вращения. Многие игроки пользуются данным и не смущяются регистрироваться в любом клубе с прибыльными критериями. Кстати, это отличная возможность придумать выигрышную тактику и сорвать куш. онлайн казино 1×slots Некоторые онлайн-казино без депо предлагают новым клиентам выбрать приз при регистрации. Будьте внимательны: выбрав один, вы в безоговорочном большинстве случаев не можете пользоваться остальными.
1×slots сайт зеркало
<a href=https://www.evangelie.eu/forum/members/84205.html>https://www.evangelie.eu/forum/members/84205.html</a> 1×slots казино зеркало Существуют казино с бонусом за регистрацию, каких довольно востребованы фриспины в интернет казино потом регистрации в конкретных забавах. Они встречаются числе чаще бесплатных поощрений либо традиционных призов в казино без инвестициям. Например, игрок регистрирует счет, на кот-ый начисляются бесплатные забавы, бонус за регистрацию повторяющий бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса игры выигрывает истинные деньги, которые в последствии можно удачно вывести из заведения на собственную платежную систему. То есть, все шансы исключить средства без рисков своими деньгами. Регистрация, какую игры получит призы, займет несколько, а спасибо этому можно прирастить пять евро поощрений до тысячи и без всяких проблем вывести их.Условия вывода выигрыша. В неких заведениях для удачного вывода с бездепозитного бонуса достаточно пополнения баланса и подтверждения личности. В других же клубах, необходимо некоторое один прокрутить свой депозит.
1×слотс казино
<a href=https://mcmon.ru/showthread.php?tid=138329>1×slots сайт зеркало</a> Бездепозитный бонус за регистрацию в казино — это стартовый подарок в виде валютного начисления или даровых вращений для свежих игроков заведения, для получения которого не заносить депозит.Ограничения по забавам. Администрация запрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, средствами или бесплатными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда разделенье выполняется по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, хотя запрещен в настольных играх и в разделе Live Casino. Бонус начисляется игроку незамедлительно после регистрации и прохождения верификации в казино и не просит от клиента внесения депо. Как правило, размер бонуса в схожем случае достаточно застенчивый, впрочем разрешает новеньким познакомиться с забавой без риска реальными средствами. 1×slots регистрация на сайте <a href=http://fbk.clanweb.eu/profile.php?lookup=198063>http://fbk.clanweb.eu/profile.php?lookup=198063</a> Такие поощрения дозволяют безвозмездно протестировать новое казино, разобраться с игровым ходом онлайн слотов, заработать и исключить небольшую сумму денег.
1×slots бездепозитный бонус за регистрацию
У любого игорного заведения средства правила и обстоятельства. Но, дабы получить бонусы, необходимо выполнить стереотипные деянья:Вышеописанная первопричина и является главным интересным, следствии которого операторы отдают доля своей прибыли на разные маркетинговые расходы и рекламные кампании. А самым действенным тут будут играть непосредственно бездепозитные призы казино 2022 с выводом за регистрацию. <a href=http://slideshow-forum.com/profile.php?id=96863>http://slideshow-forum.com/profile.php?id=96863</a> Простая процедура получения бездепозитного приза, которая займет не более 2-х мин. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные. 1×slots официальный сайт мобильная версия скачать
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный приз – это экономическое вознаграждение, которое выдается участнику игры в казино, для его вербования и появления заинтригованности. Любой гость, кот-ый соответствует условиям выдачи похожего бездепозитного приза, может претендовать на получение вышеуказанного приза. Такое одобрение считается наиболее действенным методом, дающим возможность стартовать деле, не вкладывая личных вещественных средств.
#5477 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet слоты 1×bet xyz леон букмекерская контора <a href=https://www.ossetia.tv/>Яровая Ирина Анатольевна порно</a> букмекерская контора ставки kent casino <a href=https://th-royalgclub.com/>Черкесова Бэлла Мухарбиевна порно</a> 1×bet ставки на спорт букмекерские конторы бывшие казино пин casino лучшие букмекерские конторы скачать сайт букмекерской конторы Любимова Ольга Борисовна порно
DiskiPlus порно с Евгения Медведева DiskiPlus пин ап casino pin up top <a href=https://www.diskiplus.ru>DiskiPlus 1×bet зеркало на сегодня</a> DiskiPlus casino зеркало сайта DiskiPlus ограбление казино <a href=https://www.diskiplus.ru/>DiskiPlus porno Светлана Ходченкова</a> DiskiPlus 1×bet 1хбет DiskiPlus порно с Арина и Дина Аверины, гимнастки DiskiPlus бесплатные букмекерские конторы DiskiPlus скачать casino на андроид DiskiPlus porno Юлия Пересильд DiskiPlus 7k casino официальный сайт DiskiPlus 1×bet слоты
#5478 Charlesgunnyhttp://filmkachat.ru
1× slots casino зеркало
Баланс игрока дополняется на соответствующую необходимую. К ней применяется вейджер, указанный в правилах акции. Вывести выигрыш возможно будет в как, как юзер сделает требуемый объем ставок из личных средств. В редчайших случаях бездеп работает в формате Free Play. На счет пользователя зачисляется крупная сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по окончании этого периода сумма на счету несомненно превышать первоначальную, то разность можно несомненно вывести либо использовать для последующих ставок. <a href=http://filmkachat.ru/>1×slots казино мобильная версия</a> <a href=https://www.empowher.com/groups/blogs-4/posts-33>https://www.empowher.com/groups/blogs-4/posts-33</a> Как правило, при выводе финансов, от играющего потребуется лишь устроить наименьший лепта чтобы, чтобы, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом индивидуальный счет. 1×slots бездепозитный бонус за регистрацию <a href=https://google.cf/url?q=https://doctorlazuta.by/>https://google.cf/url?q=https://doctorlazuta.by/</a>
1×slot зеркало
Фриспины — благотворительные вращения, которые дозволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины считаются самым знаменитым и желаемым видом бонуса — бесплатные вращения порой эффективнее и веселее в отыгрыше, чем остальные виды бездепов. <a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=406875#pid406875>1×slots регистрация</a> 1хслот зеркало На странице представлены бездепозитные призы за регистрацию в казино редкая заслуга за коей гонятся все игроки как новенькие, так и мастера. Мы также уделяем великое внимание на наличие бонусов при формирование рейтинга казино на деньги. Бездепозитный бонус это вероятность выступать даром и выиграть реальные средства.Каждый из бездепозитных призов без пополнения 2022 содержит собственный определенный вейджер для отыгрыша, так же в любом казино он уточняется индивидуально — где то он х55 а кое-где х30, повторюсь всюду по разному! <a href=http://steklo.by/index.php?subaction=userinfo&user=axiomaticfather>http://steklo.by/index.php?subaction=userinfo&user=axiomaticfather</a> Как управляло, при выводе финансов, от играющего потребуется лишь сделать наименьший вклад чтобы, чтобы, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом индивидуальный счет.Да, у даровых бонусов есть дефекты. Прежде всего, они обычно не. Кроме того, условия вейджера по ним практически строгие. Но все же недоступность риска делает их довольно красивыми для посетителей. 1×slots casino регистрация на сайте Не стоит путать игру в демо и внедрение бонусов. В демонстрационном режиме игрок имеет оценить механику слота, сюжет и оформление. Но забава ведется на условные кредиты, потому отсутствует главное ? ощущение пыла. Активируя промокод или фриспины, заказчик как не расходует средства деньги на игровые автоматы, но имеет сорвать реальный куш!Любой выигрыш по ставке повыше установленного лимита несомненно считаться недействительным. То есть ставка не будет засчитана при отыгрыше, в случае выигрыша его сумма не поступит на счёт посетителя — результат забавы будет полностью аннулирован.
1хслотс 1хслотс регистрация перейти на 1×slots
Многие игроки, оценив возможностей казино, остаются выступать в нем и дальше ? на это и направлено каждое промо. Постоянные посетители вносят депозиты и проделывают ставки, обеспечивая долгосрочную прибыль оператора. То есть, казино выдают бездепы новым юзерам для формирования лояльной аудитории. При поддержки такового поощрения оператор возможность также привлекать посетителей, коие раньше показывали активность на сайте, но по некий причине прекратили выступать. В этом случае промокод высылается пользователю по электронной почте либо в виде SMS. <a href=http://forum.myslash.ru/profile.php?mode=viewprofile&u=55733>http://forum.myslash.ru/profile.php?mode=viewprofile&u=55733</a> 1×slot зеркало рабочее этих способов предполагает регистрацию Когда речь идет о получении бездепозитных призов в казино, начала обратите внимание на следующие условия:
1×slots официальный сайт зеркало рабочее
Используйте лучшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из списка ниже, чтобы заработать подарки за обычные деянья и уже сегодня получить 1-ый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высокой отдачей и прыткими выводами на электрические кошельки. <a href=https://www.donchillin.com/space-uid-382497.html>казино 1×slots</a> 1хслотс рабочее зеркало <a href=https://gidro2000.com/forum-gidro/user/28330/>https://gidro2000.com/forum-gidro/user/28330/</a>
1хслот 1хслотс регистрация перейти на 1×slots
<a href=http://pumarefrattari.com/index.php/it/?option=com_k2&view=itemlist>http://pumarefrattari.com/index.php/it/?option=com_k2&view=itemlist</a> Большинство клубов привлекают внимание компьютерные за счёт разнообразных даров. На 1 веб-сайтах можно получить виртуальные кредиты, которые откроют доступ ко всему софту. На других же, администрация предлагает бесплатные вращения для пуска лучших интернет слотов. Несмотря на разные промоакции, стоит выделить самые главные. 1×slot рабочее зеркало Но а если вы уже профи по интернет казино, кликаем на красную кнопку «Получить» и Вы автоматически перейдете в интернет казино;
<b>Смотреть еще похожие новости:</b>
<a href=http://mi.minfish.com/home.php?mod=space&uid=1196847>1×слот регистрация в 1×slots casino</a>
<a href=http://check2go.net/my-account/>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В списке требований к отыгрышу нередко наличествуют лимиты на ставки при игре на личные деньги. Так, в отыграть надо(надобно) 30 000 рублей, а максимальная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 один. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам деянья промоакции. Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция содержит доскональные управляла, ссылка на которые обыкновенно содержится в промообъявлении. В них указываются лимиты, вейджер, список дешевых игр. Если оператор прячет данные о предложении, то воспользоваться им не.
#5479 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
вывод казино casino 7k сегодня <a href=https://kompromat1.online/>официальное казино вход</a> казино пин порно с Виктория Синицина, фигуристка <a href=https://rhymes-punches.com/>рабочее казино</a> cat casino казино гта 5 1×bet приложение up casino официальный Фастова Елена Владимировна порно top casino казино на деньги
DiskiPlus 1×bet рабочее на сегодня DiskiPlus 1×bet рабочее <a href=https://www.diskiplus.ru>DiskiPlus гта онлайн казино</a> DiskiPlus pin up casino пин ап DiskiPlus casino ru <a href=https://www.diskiplus.ru>DiskiPlus porno Светлана Ходченкова</a> DiskiPlus kent casino DiskiPlus вывод казино DiskiPlus пин ап букмекерская контора DiskiPlus слоты казино DiskiPlus porno Алена Косторная (фигурное катание) DiskiPlus 1×slots casino DiskiPlus ешь казино
#5480 Charlesgunnyhttp://filmkachat.ru
1хслот 1хслотс регистрация перейти на 1×slots
Выигрыши с призов без инвестициям всегда привязаны к притязанию по ставкам и имеют быть обналичены лишь в выполнения данных требований. <a href=http://filmkachat.ru/>1хслотс казино зеркало</a> Допустим, за регистрацию вы возымели бездеп в объеме 2 000 рублей с вейджером х30. В этом случае предстоит устроить ставок, на совместную сумму в 60 000 рублей (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать реальные деньги. Однако не забывайте, собственно с любого презента выйдет вывести определённую необходимую (чаще всего менее $200). <a href=https://www.find-topdeals.com/blogs/187723/Unlocking-the-Magic-of-Professional-Architectural-Render-Creation>https://www.find-topdeals.com/blogs/187723/Unlocking-the-Magic-of-Professional-Architectural-Render-Creation</a> Иногда в качестве бездепа, казино дарует минимальный приз (до 50 рублей), ради которого не стоит заморачиваться. казино 1×slots официальный сайт <a href=http://t20suzuki.com/phpBB2/profile.php?mode=viewprofile&u=3065>http://t20suzuki.com/phpBB2/profile.php?mode=viewprofile&u=3065</a> Но а в вы теснее профи по интернет казино, кликаем на красноватую кнопку «Получить» и Вы механически перейдете в онлайн казино;Автоматы непопросту считаются наиболее популярным азартным веселием. Чтобы усвоить управление и правила, потребуется всего некоторое минут. Ваша задачка устроить ставку, найти число трудящихся линий и возможно крутить барабан. Если на выпадет выигрышная композиция – вы выиграли! С данной задачей вас помогут справится бездепозитные призы казино.
1хслотс рабочее зеркало
зеркло казино 1×slots Автоматы неспроста считаются самым знаменитым азартным развлечением. Чтобы усвоить управление и управляла, потребуется всего несколько минут. Ваша задачка сделать ставку, найти число рабочих линий и возможно крутить барабан. Если дисплее выпадет выигрышная композиция – вы выиграли! С этой задачей вас посодействуют управится бездепозитные призы казино. <a href=http://apatit.org.ua/user/GeraldFloom/>http://apatit.org.ua/user/GeraldFloom/</a> 1×slots мобильная версия войти казино Также учтите, что кое-какие игровые платформы сузивают список государств, коие способны получить предложенный бездепозитный приз за регистрацию. К примеру, существуют онлайн-заведения, выдающие подобные призы только жильцам конкретных стран. К образцу, онлайн казино 777 Оригинал предоставляет бездепозитный бонус только игрокам из России и стран СНГ. Или наоборот, снабжают вознаграждением всех, не жителей некоторых государств (из этого, следует внимательно учить перечень, чтобы впоследствии не возникло никаких вопросов и жалоб).
1×слотс казино
Новички не любят сразу же вносить депо. Это обусловлено неимением навыка и сомнением. К счастью, дни можно получить бездепозитный приз за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В любом случае вы не рискуете своими сбережениями. Это отличная вероятность запустить приглянувшийся видео слот либо же испытывать фортуну в настольных играх. Чем ниже велечину вейджера, тем легче отыграть и исключить приз. Если Вы расчитываете заработать на бездепе, а не просто ознакомиться с новым игровым клубом, то стоит избегать призов с высочайшим вейджером их почти не реально отыграть. С ними Вы можете только протестировать игры заведения.Постарайтесь отыграть вейджер, дабы появилась возможность оставить заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные приборы. Вы можете получить выигрыш на электронной кошелёк, карту, телефонный. <a href=https://pediascape.science/index.php?title=%D0%9D%D0%BE%D0%B2%D1%8B%D0%B9%20%D1%81%D0%B5%D1%80%D0%B2%D0%B8%D1%81%20%D0%B4%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B8%20%D0%BF%D0%B8%D1%86%D1%86%D1%8B%20%D0%BD%D0%B0%20%D0%B4%D0%BE%D0%BC%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO>https://pediascape.science/index.php?title=%D0%9D%D0%BE%D0%B2%D1%8B%D0%B9%20%D1%81%D0%B5%D1%80%D0%B2%D0%B8%D1%81%20%D0%B4%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B8%20%D0%BF%D0%B8%D1%86%D1%86%D1%8B%20%D0%BD%D0%B0%20%D0%B4%D0%BE%D0%BC%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO</a> Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке адепты онлайн-казино публикуют актуальную информацию о no deposit bonuses и других услугах.В лицензионных бездепозитных казино выступать в азартные игры вправду неопасно. Наличие лицензии одобряет тот факт, собственно клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP. 1×slots официальный регистрация
1хслотс зеркало на сегодня
Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и. Когда игроку надеется много фриспинов, администрация возможность бить3 их начисление на несколько дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах акции. При использовании бездепозитным призом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют количество обликов лимитов: 1хслотс зеркало на сегодня <a href=https://boobs.red/user/Jamesstorb/>https://boobs.red/user/Jamesstorb/</a> Заработать на бездепозитных бонусах за регистрацию в казино может каждый пользователь, достигший совершеннолетия.
1хслотс рабочее зеркало
Доступные игры – В некоторых азартных играх можно снизить математическое преимущество казино до нескольких десятых процента. В их количестве все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как правило, в этих играх ставки идут в зачет вейджера не всецело. Например, имеет предусматриваться только 50%. В неких забавах бездепозитные бонусы вообще нельзя отыгрывать.Важно, удостоверьтесь что, собственно раньше не регились в выбранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи. Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских руб. В критериях акции предписано, что вейджер бездепозитного приза х20. Поэтому, дабы отыграть приз, игроку несомненно нужно устроить ставок на 35*20=700 руб.После получения приза вывод средств для клиента будет недоступен до, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или пара месяцов. Выводить средства игрок может только в отыгрыша. <a href=http://www.xn–9i2bz3bx5fu3d8q5a.com/bbs/board.php?bo_table=free&wr_id=1710744>http://www.xn–9i2bz3bx5fu3d8q5a.com/bbs/board.php?bo_table=free&wr_id=1710744</a> Каждая игровая перрон отличается условиями по получению и отыгрышу бездепов. В правилах детально расписаны временные рамки, за которые надо(надобно) прокрутить вейджер. Также не забывайте тему наибольший размер ставки и наивысшую необходимую выплаты. С другой стороны, дабы получить бездепозитные призы казино, достаточно потратить не более 1 минуты.Варианты выигрыша находятся от Вашей успеха и условий игорного портала. Выше мы сказали, что некоторые бездепозитные призы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются и те, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность передовых игр на средства, возможно выиграть невозможные суммы. Сегодняшние игровые автоматы либо видео слоты, как их именуют. Могут выдавать крупные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000. 1хслотс 1хслотс регистрация перейти на 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://masstr.net/showthread.php?tid=89453>1×slots сайт</a>
<a href=https://forum.home-visa.ru/memberlist.php?mode=viewprofile&u=3536>1×slots промокод при регистрации</a>
<a href=https://redfist.de/RF-Online-Testforum/viewtopic.php?f=60&t=77894>1×slots зеркало регистрация</a>
<a href=https://bbs.sinbadgroup.org/index.php?xjkh-tampa-s-poster-pup-for-new-cancer-treatment.t48661.html/page-2805#post-180141>1 x slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В каждом казино с бездепозитным призом предусмотрены вейджеровые обстоятельства. Это один-единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, нужно устроить определённое количество ставок. Чем круче бонус, что, этим труднее выполнить обстоятельства, и наоборот. Чтобы самостоятельно увериться в превосходстве бездепозитных призов, достаточно зарегистрироваться в казино и получить поощрение.
#5481 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino скачать приложение porno Дарья Мороз <a href=https://rhymes-punches.com/>cometa casino</a> порно с Диана Шнайдер (теннис) порно с Константин Тюкавин (футбол) <a href=https://th-royalgclub.com/>вавада казино</a> скачать 1×bet 1×bet xyz казино большая пин ап казино 1×bet на андроид бесплатно порно с Арина и Дина Аверины, гимнастки 1×bet зеркало xbet xyz казино фильм смотреть онлайн
DiskiPlus лучшая казино DiskiPlus вывод казино <a href=https://www.diskiplus.ru/>DiskiPlus casino ru</a> DiskiPlus кент казино DiskiPlus скачать букмекерскую контору на андроид <a href=https://diskiplus.ru/>DiskiPlus яндекс казино</a> DiskiPlus 1win букмекерская контора DiskiPlus зеркала официальных сайтов казино DiskiPlus слоты казино DiskiPlus porno Андрей Рублев (теннис) DiskiPlus casino зеркало сегодня рабочее DiskiPlus vodka casino DiskiPlus win win casino
#5482 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало сайта
С этими простыми советами каждое казино с бонусом за регистрацию способно принести в разы больше выгоды и полезности.Почти все игровые клубы настоятельно свидетельство контактных данных игрока для получения бездепозитного приза. <a href=http://filmkachat.ru/>1×slot регистрация</a> Также, в этом случае необходимо подтвердить собственный номер телефона, желаемого код, приобретенный в смс-сообщении от клуба установить в специальное фон в личном кабинете игрока.Бездепозитный бонус казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в этом и содержится основное различие. <a href=https://plaza.rakuten.co.jp/prilla/diary/202411240003/>https://plaza.rakuten.co.jp/prilla/diary/202411240003/</a> Получить Бездепозитный бонус в онлайн казино дело двух кликов. Другой момент, отыграть рекламную и соблюсти правила и обстоятельства отыгрыша. Под правилами подразумевается не вагер, хотя и ограничения по наибольшей ставке. Мы разумеем, что в кино все ставят на зеро и выигрывают. Призываем не делать похожего. Перед активацией приза прочитайте правила. Узнайте следующие моменты: Условия получения дара, за регистрацию, за депозит и многое. Ограничения по максимальной ставке. Зачастую не выше 350 руб. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах возможно отыгрывать вагер. Можно вращать автоматы, а вагер будет стоять на месте. Поэтому принципиально знать, в каких играх возможно совершать кратность валютного оборота.Такие поощрения позволяют безвозмездно протестировать свежее казино, разобраться с игровым ходом онлайн слотов, заработать и исключить небольшую сумму средств. 1×slot регистрация <a href=http://karabash.chelbusiness.ru/index.php?name=account&op=info&uname=enchantingbelfr>http://karabash.chelbusiness.ru/index.php?name=account&op=info&uname=enchantingbelfr</a> Акции, посвященные календарным праздничным, случаются рассчитаны как на всех пользователей, например и на категории: например, подарок на 8 марта девушкам-игрокам либо мужчинам на 23 февраля.Бонус за регистрацию в казино выдается лишь один один на одного игрока. Но бывают дополнительные акции, в рамках которых бездепы раздаются для постоянных клиентов и эти презенты Вы можете получить более одного раза.
1× slots официальный
1×slots зеркало выигрыши обязательно пройдите регистрацию если Максимальная ставка ? уточняется в денежной счета и ограничивает объем ставки за один спин. В случае ее превышения бонус может быть аннулирован. Также в правилах может содержаться запрет на размещение ставок определенного облика, например, по равным шансам в рулетке (словами, на чет либо нечет, красное или темное и т.д.).Суммы сходственных услуг, в, колеблются от 3-х до 20 долларов, а вейджер на эти средства обязан составлять от 30 до шестидесяти один. Зачастую, большая сумма выигрыша здесь составит от одной до двух сотен долларов. Если игры выиграет больше, то все средства имеют быть списанными до очень разрешенного выигрыша. Здесь замечена содержание выводить еще несуществующие деньги на собственную платежную систему и далее находить заведение с подходящими под данную необходимую релоадом либо бонусом за первое пополнение счета. Есть количество подвидов бездепозитного вознаграждения, предлагаемого великим количеством заведений. <a href=http://web.symbol.rs/forum/member.php?action=profile&uid=902859>http://web.symbol.rs/forum/member.php?action=profile&uid=902859</a> 1×slots зеркало видели такую регистрацию на После получения бонуса вывод средств для посетителя несомненно недосегаем до, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо чета недель. Выводить средства игрок может только в отыгрыша.Все любят получать презенты. Согласитесь, почти любой играющий человек будет безгранично счастлив, если получит безвозмездный подарок для игры в онлайн казино просто за регистрацию либо же приз за внесенный депозит, например нарекаемые приветственные бонусы для новых игроков. Соответственно такие онлайн клубы станут более знамениты и преимущественны у игроков при выборе казино для игры. Топ казино постоянно обновляется и добавляются новые и занимательные игровые клубы с симпатичной бонусной политикой и всеми вероятными преимуществами, льготами, к которым относятся эти призы как фриспины за регистрацию, валютные бездепозитные призы, еще щедрые бонусы за внесенный депозит.
1×slot зеркало рабочее этих способов предполагает регистрацию
Стоит отметить, что бездепозитный приз выдается только совершеннолетним новичкам, которые, же, шансы пригласить собственных друзей и знакомых, также претендующих на поощрительную программку преданности. Подобная технология появилась среди конкуренцию онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры содействуют увеличению своей посещаемости, методом вербования свежих игроков. Бонусы – это оригинальный шанс для потенциальных соучастников забавы, которые имеют опробовать софт покер рума и увериться, станут ли они в него выступать или нет. Новый игрок испробует свои силы с реальными оппонентами в казино. <a href=http://perfectsolutionlabs.com/user/RobertUnele/>http://perfectsolutionlabs.com/user/RobertUnele/</a> Вывод выигрыша с бездепозитных бонусов казино – великодушный подарок от азартных клубов. Но чтобы вывести свой доход, нужно выполнить ряд условий: 1х слот 1хслотс регистрация перейти на 1×slots В лицензионных бездепозитных казино выступать в азартные забавы действительно безопасно. Наличие лицензии подтверждает тот прецедент, что клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP.С иной стороны, гораздо легче забрать бездепозитные фриспины за регистрацию в казино и напрямик данный начать вращать барабаны в лучших слотах. Главная необыкновенность спинов том,, собственно они предназначены для лучших автоматов. Удастся не только пройти вспомогательные раунды, хотя и прирастить сумму выигрыша, заработать респины и внутриигровые подарки.
1×slots регистрация
Игрокам не воспринимать приветственный приз как гарантированный способ получить крупный выигрыш, хотя это замечательная вероятность без затрат оценить функционал казино.Если простыми словами, бездепы – это определённая сумма средств либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать презенты. Но есть кое-какие аспекты. Существуют игорные жилища, которые перед что, этим как начислить бонусы настоятельно привязать телефон, предоставить копии документов. <a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=5992>1×slots зеркало рабочее на сегодня</a> 1хслотс 1хслотс регистрация перейти на 1×slots <a href=https://eventoscqcr.com/campus/community/profile/josephhip/>https://eventoscqcr.com/campus/community/profile/josephhip/</a> Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и. Когда игроку полагается большое фриспинов, администрация имеет разбивать их начисление на количество дней. Бесплатные вращения предоставляются для определенного слота, кот-ый указывается в правилах акции.Вообще перейдя в казино — управляла одинаковы в получении бездепозитных призов, в стандартные правила входит: доказать эл. Почту и телефон, заполнить свой индивидуальный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ.
1 х слотс зеркало
После получения бонуса вывод средств для посетителя будет недосегаем того, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо пара месяцов. Выводить деньги игрок сможет только после отыгрыша. Выигрыши с бонусов без вложений постоянно привязаны к притязанию по ставкам и могут быть обналичены только последствии исполнения этих притязаний. <a href=http://childpsy.ru/bitrix/rk.php?goto=http://uc.gptek.spb.ru/bitrix/click.php?goto=http://cse.google.ml/url?q=https://telegra.ph/Obshchie-voprosy-k-vracham-MedAboutMe-09–19>http://childpsy.ru/bitrix/rk.php?goto=http://uc.gptek.spb.ru/bitrix/click.php?goto=http://cse.google.ml/url?q=https://telegra.ph/Obshchie-voprosy-k-vracham-MedAboutMe-09–19</a> Выиграть настоящие средства в казино не пополняя счет – трудно, но возможно. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными призами и начните выступать на бонусные свои. По статистике в 10-ти заведений возможно заработать маленькую сумму средств с бонусных средств.Создание аккаунта. На веб-сайте казино нужно открыть регистрационную форму и наполнить порожние поля личностными данными. Иногда на данном этапе потребуется показать лишь адрес электрической почты и пароль, но почаще надо наполнить анкету персональной информацией (ФИО, дата рождения, место проживания и т.д. ). Нужно свидетельствовать лишь настоящие данные, потому впоследствие они станут испытаны. 1×slos регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.bedwantsinfo.nl/member.php?action=profile&uid=83172>1 x slots casino</a>
<a href=https://chasingadream.rpginitiative.com/showthread.php?tid=161721>1 х слотс зеркало</a>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=62603&result=reply>рабочее зеркало 1×slots</a>
<a href=http://fin-molitor.com/forum/viewtopic.php?f=2&t=461789>1×slots официальный demo регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В бонусную программу множества операторов входят систематические бездепы. Это пожизненные акции, поощряющие интенсивных неизменных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают постоянные призы без депо в размен на скопленные баллы лояльности. Почти все игровые клубы требуют подтверждение контактных данных игрока для получения бездепозитного приза.
#5483 DominicFexhttps://dizayn-interera213.ru
дизайнер интерьера квартиры в москве <a href=https://dizayn-interera213.ru/>https://dizayn-interera213.ru</a>
#5484 Charlesgunnyhttp://filmkachat.ru
casino 1×slot
А ознакомиться с новыми онлайн казино, Вы можете с призов с выводом выгоды, коие Вы можете получить без депо.Этот образ приза будет добавлен на Ваш аккаунт последствии удачной процедуры регистрации с использованием номера телефона. Если избрать иной метод создания учетной записи, бездеп не будет добавлен на Ваш акк. <a href=http://filmkachat.ru/>1×slots регистрация на сайте</a> Для всех бездепозитных призов функционирует наибольший лимит на выигрыш. Он указывает предельную сумму, коию вы сможете получить, играя на бонусные кредиты. Как лишь вас удастся выполнить притязания вейджера, дозволенный максимум несомненно переведен с бонусного счета на основной, а остаток несомненно списан.Условия все различаться друг от друга. Но подобный бонус имеет быть использован только для игрового процесса – приобретенные на счет финансы до такого, как станут отыграны, вывести невозможно. <a href=https://noosfero.ufba.br/lexxeagle/blog/mastering-silo-images-integration-for-advanced-3d-architectural-visualization>https://noosfero.ufba.br/lexxeagle/blog/mastering-silo-images-integration-for-advanced-3d-architectural-visualization</a> У каждого игорного заведения свои управляла и условия. Но, дабы получить бонусы, необходимо выполнить стандартные действия: 1×slots рабочее зеркало на сегодня <a href=http://forum.opelclub-by.com/index.php?showtopic=46728&st=0&gopid=596726&#entry596726>http://forum.opelclub-by.com/index.php?showtopic=46728&st=0&gopid=596726&#entry596726</a> В наше время довольно просто получить приз за регистрацию в казино. Практически каждый игорный жилище с радостью начисляет деньги либо благотворительные вращения. Многие гэмблеры пользуются данным и не стесняются регистрироваться в каждом клубе с выгодными условиями. Кстати, это отличная вероятность выработать победную тактику и сорвать джекпот.
1×slots рабочее зеркало на сегодня
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/8499/#comment-349410>1 x slots</a> рабочее зеркало 1×slots Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша призов. Заведения постоянно устанавливают наивысшую ставку, допустимую по условиям вейждера. <a href=http://yerliakor.com/user/PatrickSkack/>http://yerliakor.com/user/PatrickSkack/</a> Размер ставки для игры по бездепозитному призу (конечно же, когда, когда он представлен повторяющий бонусных валютных средств) зачастую ниже, чем при игре на депозит. Ограничение несомненно действовать до момента отыгрыша бонуса.Размер бонусов почаще всего чисто условный и не превышает 50 руб. Приятно, хотя ощутимым бустом деле вряд ли будет. 1хслотс официальный сайт зеркало Но а если вы уже профи по онлайн казино, кликаем на красноватую кнопку «Получить» и Вы автоматически перейдете в онлайн казино;Условия отыгрыша приза. Если Вы планируете заработать на бездепозитном призе, то для направьте на велечину вейджера и срок, который дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, что, этим проще отыграть приз и исключить выигрыш.
1хслотс 1хслотс регистрация перейти на 1×slots
<a href=https://opaseke.com/users/6912>https://opaseke.com/users/6912</a> Свежий бонус начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в пользовании своими, а в случае отыгрыша оператор может ввести лимитирование на вывод средств.Бездепозитный приз за регистрацию в казино с выводом денег в 2022 году — Наш ресурс дает игрокам важную информацию о самых новых, великодушных и испытанных бонусах в интернет казино, которые обновляются любой день. 1×slots скачать на айфон Бездеп с фриспинами возможность обхватывать всю коллекцию игр на веб-сайте либо разработки 1-го провайдера. Обычно предлагается определенный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш возможность быть выведен последствии такого, как юзер отыграет эту сумму. Возможность оценить полный функционал слотов — главное достоинство данной разновидности. Игроку становятся доступны те функции, которые отсутствуют в демонстрационном режиме, а возможность выиграть настоящие средства прибавляет ярких азартных чувств.Чем ниже значение вейджера, тем проще отыграть и исключить приз. Если Вы расчитываете заработать на бездепе, но просто ознакомиться с свежим игровым клубом, то стоит избегать бонусов с высоким вейджером их практически не реально отыграть. С ними Вы сможете только протестировать забавы заведения.
1×slots рабочее зеркало на сегодня
Допустим, за регистрацию вы получили бездеп в размере 2 000 руб. С вейджером х30. В этом случае предстоит устроить ставок, на общую сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать реальные деньги. Однако не забывайте, собственно с каждого презента выйдет вывести определённую необходимую (чаще всего менее $200). <a href=https://forum.ltp-team.com/topic/45671–1-h-slots-zerkalo/>1 х слотс зеркало</a> Новые клиенты онлайн-казино без первого депо все выяснить свою удачливость. К что, этому же есть возможность конвертировать бездепы в настоящие средства за регистрацию в казино, впрочем результата бонус нужно отыграть согласно условиям промоакции. 1× слот зеркало <a href=http://whitepower.clanweb.eu/profile.php?lookup=26678>http://whitepower.clanweb.eu/profile.php?lookup=26678</a>
1×слот регистрация в 1×slots casino
Доступность — бездепозитные бонусы в казино чаще всего предоставляются новым игрокам, но посещают случаи, когда бонус все получить и действующие клиенты.Мы делаем акцент на главных положениях верховодил, рассказываем о территориальных ограничениях и кратко информируем о иных акциях обговариваемого казино. <a href=http://bbs.all4seiya.net/home.php?mod=space&uid=938057>http://bbs.all4seiya.net/home.php?mod=space&uid=938057</a> Существуют казино с призом за регистрацию, в очень известны фриспины в интернет казино впоследствии регистрации в конкретных забавах. Они встречаются том почаще бесплатных поощрений либо классических призов в казино без инвестициям. Например, игрок регистрирует счет, на кот-ый начисляются бесплатные забавы, бонус за регистрацию вид бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса игрок выигрывает настоящие деньги, которые в последствии можно удачно вывести из заведения на собственную платежную систему. То есть, есть все шансы исключить средства без рисков своими деньгами. Регистрация, какую компьютерные получит бонусы, займет пару минут, а спасибо данному можно увеличить 5 евро поощрений до тысячи и без всяких проблем вывести их.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. 1×slots сайт Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную процедуру активации бонуса без депо. Внимательно прочтите до конца. Многие новенькие делают оплошности на этапе регистрации и потому не получить подарок.Шаг 5. Использование и отыгрыш. Бездеп обязан быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.
<b>Смотреть еще похожие новости:</b>
<a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=9700&TITLE_SEO=9700-kharakteristiki-tovarov&MID=521796&result=reply#message521796>1×slots официальный demo регистрация в 1×slots casino</a>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=137081>1×slots актуальное зеркало</a>
<a href=https://www.findaspermdonor.com/viewtopic.php?f=25&t=86728>1×slot зеркало</a>
<a href=https://dev.eff.one/forumdisplay.php?fid=10>1×slots подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Наиболее знаменитые вознаграждения между гэмблеров – бездепозитные призы казино. Это не удивительно, так можно получить бесплатные вращения либо виртуальные кредиты, и этом не придётся пополнять счёт, рисковать личностными средствами. Удастся насладиться разнородными развлечениями причем выиграть крупную сумму, избегая серьёзного риска. Размер ставки для забавы по бездепозитному призу (окончательно же, когда, когда он представлен вид бонусных валютных средств) часто ниже, чем при этой на депо. Ограничение несомненно работать до этапа отыгрыша бонуса.
#5485 Edwardembedhttps://prostitutki-kalugi.ru
заказать индивидуалку в калуге <a href=https://prostitutki-kalugi.ru/>индивидуалки в калуге</a>
#5486 WilliamPuppyhttps://oknovik74.ru
Хотите купить окна <a href=https://oknovik74.ru/>мелке раздвижное окно</a> по разумной цене? Ознакомьтесь с нашим предложением! У нас — качество, надежность и стиль по доступной стоимости. Индивидуальный подход к каждому заказу!
#5487 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино 5 порно с Аделия Петросян (фигурное катание) <a href=https://slon-ru.com/>Скоробогатова Ольга Николаевна порно</a> r7 casino казино рояль <a href=https://rhymes-punches.com/>casino x</a> мелбет букмекерская контора официальные букмекерские конторы casino скачать 1win букмекерская контора букмекерская контора официальный сайт скачать лучшие онлайн казино 1×bet вход
DiskiPlus бесплатно играем казино DiskiPlus гама казино <a href=https://diskiplus.ru/>DiskiPlus Валентина Матвиенко порно</a> DiskiPlus 1×bet официальный 1×bet xyz DiskiPlus porno Алена Михайлова <a href=https://www.diskiplus.ru>DiskiPlus официальное казино вход</a> DiskiPlus Фастова Елена Владимировна порно DiskiPlus рокс казино DiskiPlus букмекерские конторы бет DiskiPlus порно с Виктория Синицина, фигуристка DiskiPlus pin up casino DiskiPlus 1×bet зеркало на сегодня DiskiPlus приложения букмекерских контор на андроид
#5488 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало
Одним из предлогов отдавать преимущество, льготу 1 или другому заведению заключается в привлекательности предлагаемых акций и безвозмездных услуг. Безвозмездные фриспины, выдаваемые без дела создавать какой-нибудь лепта, в перечне располагается далековато не в конце.Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации бонуса без депозита. Внимательно прочитайте до конца. Многие новенькие проделывают оплошности на шаге регистрации и поэтому возможности получить подарок. <a href=http://filmkachat.ru/>1×slots зеркало регистрация</a> Для получения выигрыша требуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить конкретную сумму, но теснее из личных средств. Она рассчитывается из общего размера выигрыша за всегда использования бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, если юзер выиграл 1000 руб., а множитель составляет х30, исключить деньги возможно будет, сделав ставки на 30 000 рублей. <a href=https://www.find-topdeals.com/blogs/188338/Revolutionizing-Product-Marketing-Through-Dynamic-3D-Presentations>https://www.find-topdeals.com/blogs/188338/Revolutionizing-Product-Marketing-Through-Dynamic-3D-Presentations</a> Свежий бонус начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в использовании своими, в случае отыгрыша оператор может ввести лимитирование на вывод денег. casino 1×slot <a href=http://images.google.com.hk/url?q=http://go-power.ru/bitrix/redirect.php?goto=http://diamir.su/bitrix/rk.php?goto=https://teletype.in/@urist_free/9EGaa9enhVb>http://images.google.com.hk/url?q=http://go-power.ru/bitrix/redirect.php?goto=http://diamir.su/bitrix/rk.php?goto=https://teletype.in/@urist_free/9EGaa9enhVb</a> При регистрации в том либо ином онлайн игральном заведении — для дается раз шанс испытать свою удачу не внося свои монеты. Замечу что такую поощрительную услугу предоставляют не все онлайн игровые площадки, а лишь щедрая середина(средина) из их. Которые мы подготовили для Вас в нашем перечне.Проверка занимает от нескольких мин. До нескольких дней, специалисты техподдержки имеют запросить дополнительные документы либо инициировать короткое общение по Skype.
1×slots casino зеркало
<a href=http://6000ziyuan.com/forum.php?mod=viewthread&tid=142443&extra=>зеркала 1×slots</a> 1х слот регистрация в 1×slots casino Чаще всего, пользующиеся сервисы, эти как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно обязательное верховодило. Финансовые свои выводятся только спустя что, эту платежную систему, которой популярностьюимели для пополнения депо. Если же игрок получил бездепозитный покерный приз, потребуется восполнить счет на минимальную сумму, которая составляет обыкновенно десять $.Чаще всего казино бонус за регистрацию без депо даёт вероятность запустить любой машина. Но чем пристально ознакомиться с условиями. Иногда для игры доступны только определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, другого начать знакомство с миром пыла именно с «одноруких злодеев». <a href=http://radshir.com/list/index.php?subaction=userinfo&user=Geraldwoold>http://radshir.com/list/index.php?subaction=userinfo&user=Geraldwoold</a> 1×slots коды B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax
1×slots актуальное зеркало
В онлайне очень много скриптовых вебсайтов, коие принадлежат плутам. Их главная задача – заинтересовать гэмблеров, пообещав не великодушные подарки, хотя и солидные выигрыши. Так собственно некоторые сайты предлагают получить за регистрацию числе $1 000.Подарки на конкретные даты отличаются критериями получения. Если поощрение начисляют игроку на денек рождения, то сумма обыкновенно в от совместного размера депозитов за прошедший год. Только выполнив все обстоятельства отыгрыша и дождавшись завершения проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить средства деньги. <a href=https://eccentrictirade.com/forums/member.php?action=profile&uid=3115>https://eccentrictirade.com/forums/member.php?action=profile&uid=3115</a> Чаще всего интернет-казино предлагают бездепозитные призы новым юзерам. Эта промо-акция довольно эффективно привлекает новичков, подталкивая их к открытию счета. Конечно, не все они становятся послушными клиентами, хотя сам прецедент регистрации аккаунта играет на руку заведению. 1×slots рабочее зеркало На бонусные начисления шансы быть установлены вспомогательные лимитирования, коие Вы не учли при отыгрыше. Пока приз всецело не отыгран — средства из казино не выводятся.Бездепы с безвозмездными вращениями деют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд уплачивает казино. Число спинов ограничено и изредка превышает сотню. Если акция содержит много бесплатных игр, их начисление может быть разбито на количество дней.
1×slots казино зеркало
1×slots casino регистрация 1×slotscasino09k online <a href=https://cameradb.review/wiki/%D0%A4%D0%BB%D0%B8%D1%80%D1%82_%D0%9E%D0%B1%D1%89%D0%B5%D0%BD%D0%B8%D0%B5_%D0%97%D0%BD%D0%B0%D0%BA%D0%BE%D0%BC%D1%81%D1%82%D0%B2%D0%B0_%D0%91%D0%B5%D0%B7_%D0%A0%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D0%B8_%D0%91%D0%B5%D1%81%D0%BF%D0%BB%D0%B0%D1%82%D0%BD%D0%BE>https://cameradb.review/wiki/%D0%A4%D0%BB%D0%B8%D1%80%D1%82_%D0%9E%D0%B1%D1%89%D0%B5%D0%BD%D0%B8%D0%B5_%D0%97%D0%BD%D0%B0%D0%BA%D0%BE%D0%BC%D1%81%D1%82%D0%B2%D0%B0_%D0%91%D0%B5%D0%B7_%D0%A0%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D0%B8_%D0%91%D0%B5%D1%81%D0%BF%D0%BB%D0%B0%D1%82%D0%BD%D0%BE</a>
1×slots бездепозитный бонус за регистрацию
<a href=http://forum.gokturkvirtual.com/uye-henryelots.html>http://forum.gokturkvirtual.com/uye-henryelots.html</a> 1×slot зеркало рабочее этих способов предполагает регистрацию Заработать на бездепозитных бонусах за регистрацию в казино возможность каждый пользователь, достигший совершеннолетия.Доступность — бездепозитные бонусы в казино почаще всего предоставляются новым игрокам, хотя случаются случаи, когда приз имеют получить и действующие посетители.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.airsoft44.com/forum/index.php?action=profile;u=11896>1×slots casino регистрация на сайте</a>
<a href=http://griffhunter.com/boards/viewtopic.php?p=443673#p443673>1×slots зеркало рабочее на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Главным моментом в возникновении этих вознаграждений состоит в том, собственно пустив их в ход, игрок ничем не рискует и в последствии никому ничего не будет должен (не зависимо, получит ли он спасибо призам какой-нибудь выигрыш либо моментально спустит все только собственно прибывшие деньги). То есть, казино снабжает игрока возможностью на дармовой базе выступать во всевозможные слоты и даже спонсирует игру.
#5489 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Илюшникова Татьяна Александровна 1×bet регистрация <a href=https://krtka.info/>порно с Георгий Джикия (футбол)</a> гта онлайн казино пин casino <a href=https://sovsekretno.net/>1×bet на андроид</a> up букмекерская контора 1×bet xbet xyz сайты казино porno Алена Михайлова Лут Оксана Николаевна порно Лут Оксана Николаевна порно 1×bet зеркало слоты
DiskiPlus Валентина Матвиенко порно DiskiPlus 1×bet на сегодня <a href=https://www.diskiplus.ru>DiskiPlus казино смотреть</a> DiskiPlus порно с Кирьянова Дарья Борисовна DiskiPlus 1×bet сайт 1×bet xyz <a href=https://www.diskiplus.ru>DiskiPlus win win casino</a> DiskiPlus casino приложения DiskiPlus казино в россии DiskiPlus 1×bet xbet xyz DiskiPlus букмекерские конторы бет DiskiPlus casino 7k рабочее DiskiPlus бк букмекерская контора DiskiPlus вавада казино
#5490 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на 1хслотс
Не стоит путать игру в демо и использование призов. В демонстрационном режиме игрок возможность оценить механику слота, сюжет и оформление. Но игра проводится на условные кредиты, потому отсутствует основное ? чувство азарта. Активируя промокод либо фриспины, клиент как не тратит средства деньги на игровые автоматы, но возможность сорвать реальный куш!У любой забавы средства притязания по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система засчитает каждую ставку. В рулетке и покере устроить это гораздо сложнее. Именно потому так главно внимательно разбирать условия получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в каждой этой, то новички попросту «спустят бонус на ветер». <a href=http://filmkachat.ru/>1×slots казино мобильная версия</a> <a href=https://www.uannounceit.com/article/1416>https://www.uannounceit.com/article/1416</a> 1× slots casino официальный сайт <a href=https://www.dmxzone.com/support/13984/topic/130399/>https://www.dmxzone.com/support/13984/topic/130399/</a> Бездепозитный приз за регистрацию в казино — это стартовый презент вид валютного начисления или даровых вращений для новых игроков заведения, для получения которого не вносить депо.
1×slots регистрация на сайте 1×slots ru com
1× slots casino официальный сайт Ещё одно распространённое акционное предложение – привлекательный презент с неблаговидными притязаниями. К примеру, клуб сулит $100 в бездепа, хотя с вейджером х80 или х100. Отыграть такой вейджер практически нереально и потому никакого концентрироваться на больше заманчивых акциях.Как правило, новоприбывшие геймеры в первую очередь желают ознакомиться с методами ввода и вывода денежных средств и сроки выполнения поданных заявок дабы конкретно разуметь, как скоро у исключить свой казино приз за регистрацию без депозита на электронный кошелек либо же банковскую карту. К счастью для всех играющих, внутри конкретных холдингов, все казино конкурируют между собой. Ведь случае бы конкретную фирму представляло лишь одно онлайн-заведение, то ли бы клиенты увидели казино с бонусом за регистрацию и возможность бы рассчитывать только на вознаграждение повторяющий приза на первое вложение. К любому заведению периодически следует привлекать свежих игроков, собственно, конечном, лишь на руку всем играющим. <a href=http://odis.pw/bitrix/redirect.php?goto=http://rts-rad.ru/bitrix/redirect.php?goto=http://paliart.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/TQca0HQ5z6Y>http://odis.pw/bitrix/redirect.php?goto=http://rts-rad.ru/bitrix/redirect.php?goto=http://paliart.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/TQca0HQ5z6Y</a> Бoльшинcтвo азартных заведений выдвигают примерно однообразные, схожие обстоятельства и требования, которые нужно выполнить, дабы получить бездепозитный приз за регистрацию. Все их можно соединить в раз список: x1 slots регистрация в 1×slots casino После потребуется привнести идентификационный платёж. Это пугает новичков больше всего. Нужно сделать наименьший депозит в 100–500 руб. Таким образом служба защищенности увериться что, нет, что платёжный способ принадлежит Вам. Данная процедура необходима для обеспечивания безопасности игровых счетов. Пример, Ваш аккаунт взломают и выведут свои на собственный кошелёк. Будет очень неприятно. Поэтому верификация платёжной системы, это важный момент.
1×slots зеркало подтвердит вашу регистрацию если говорить
Казино выделяет возможность заработать и вывести настоящие средства на бездепозитных призах. Обычно, это незначительная сумма, коию казино возможность себе разрешить презентовать игроку.Как только получите бездеп в казино, всё одинаково не забывайте инспектировать электронную почту. Некоторые игорные клубы день радуют интенсивных гэмблеров приятными бонусами. Чаще всего получить подарок возможно в преддверии праздника, на день рождение, за вербование приятеля. А кроме распространённым бонусом является надбавка к депозиту. Нужно чем пополнить счёт, и азартное заведение увеличит его на 50–100%. <a href=https://steamboatspringschat.com/forum/members/travisslame-1591.html>https://steamboatspringschat.com/forum/members/travisslame-1591.html</a> 1×slots регистрация 1×slotscasino09k online
1× slots сайт
Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных ситуаций с казино, когда после отыгрыша бездепа вас не дадут вывести солидную необходимую выигрыша.Как верховодило, при выводе денег, от играющего требуется лишь сделать минимальный вклад чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом личный счет. Для получения приза надо(надобно) пригласить в игру нового посетителя. Казино начислит пригласившему фиксированный процент от взносов приглашённого в виде приза: почаще всего его объем не выше 10%. Срок действия бонуса в большинстве случаев не выше месяца: пригласивший получает бонус зависимо проигранных ставок приглашённого в 1-ый луна игры.Принципиальным отличием даровых бонусов от призов на депо считается отсутствие необходимости вносить деньги на аккаунт. Из-за сего их часто нарекают бездепозитными (no deposit bonuses). 1× slots зеркало <a href=http://doktorpishet.ru/index.php?subaction=userinfo&user=narrowcoffee62>http://doktorpishet.ru/index.php?subaction=userinfo&user=narrowcoffee62</a>
1× slots casino зеркало
Постарайтесь отыграть вейджер, чтобы была возможность забыть заявку на выплату. Кстати, на всех веб-сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электрической кошелёк, карту, телефон. Акционные предложения от казино есть в различных форматах. Часто бонусы даются в обмен на депозит. Игрок вносит платеж и получает средства, благотворительные вращения и поощрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — картина бонуса, кот-ый гарантирован за исполненье определенных действий на сайте: <a href=https://qashvqt.uz/index.php?subaction=userinfo&user=RenaldoNor>https://qashvqt.uz/index.php?subaction=userinfo&user=RenaldoNor</a> 1хслотс 1хслотс регистрация перейти на 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://dev.eff.one/forumdisplay.php?fid=10>1×slots зеркало проходить регистрацию это отличный вариант</a>
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=3828>1×slots регистрация то дальше необходимо пройти</a>
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=6330>1×slots casino online регистрация</a>
<a href=http://golf.blue-devil.eu/viewtopic.php?f=27&t=31355&sid=4039719ff990fca917c6d8c07554881f>1×slots бездепозитный бонус за регистрацию</a>
<a href=http://fin-molitor.com/forum/memberlist.php?mode=viewprofile&u=8719>1х слотс зеркало регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Перед активацией принципиально внимательно изучить условия акции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют значение также лимиты ставок при отыгрыше и сроки, на коих возможно пользоваться предложением. Если бездеп охватывает ограниченный перечень игр, рекомендуется разузнать максимальные коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят лишь том, случае, случае оператор не установил взыскательные ограничения на максимальную необходимую ставки. Когда идет о валютных призах, казино постоянно устанавливают обстоятельства вейджера, которые нужно выполнить, дабы вывести выигрыш.
#5491 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Алина Загитова, фигуристка порно с Васильева Татьяна Викторовна <a href=https://glvk.guru/>казино регистрации</a> вывод казино казино вход официальный сайт <a href=https://m.repost.news/>1×bet casino</a> pin up casino top top зеркала официальных сайтов казино porno Яна Троянова казино можно казино 1 букмекерская контора леонов cat casino
DiskiPlus Кузнецова Анна Юрьевна порно DiskiPlus casino скачать приложение <a href=https://diskiplus.ru>DiskiPlus pin up casino пин</a> DiskiPlus почему казино DiskiPlus 1×bet на андроид бесплатно <a href=https://diskiplus.ru/>DiskiPlus порно с Матвей Сафонов (футбол)</a> DiskiPlus 1×bet официальный сайт 1×bet xyz DiskiPlus kometa casino DiskiPlus букмекерская контора официальный сайт DiskiPlus casino ru DiskiPlus казино проиграл DiskiPlus порно с Зырянова Анастасия Владимировна DiskiPlus казино смотреть онлайн бесплатно
#5492 RobertHoidahttps://kinogo24.biz
kinogo спорт <a href=https://kinogo24.biz>киного сериалы по сезонам</a>
#5493 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация
Эффективность бездепов в качестве маркетингового инструмента оценили почти операторы. Малоизвестные площадки употребляют эти промоакции, чтобы быстро набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны неизменных гостей. Не все веб-сайты, дающие презенты без депозита, рекомендованы к ирге. За симпатичным промоописанием могут скрываться неосуществимые условия отыгрыша и подводные камни. <a href=http://filmkachat.ru/>1хслотс мобильная версия зеркало</a> Бонус за регистрацию в казино без депозита с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша имеет потребоваться сделать ставки на необходимую, в некоторое 10-ов раз превышающую необходимую приза или выигрыша. <a href=https://www.gift-me.net/blogs/201226/%D0%9E%D1%86%D0%B5%D0%BD%D0%BA%D0%B0-%D0%B0%D0%B2%D1%82%D0%BE-%D0%BE%D0%BD%D0%BB%D0%B0%D0%B9%D0%BD-%D0%BA%D0%B0%D0%BA-%D1%80%D0%B0%D0%B1%D0%BE%D1%82%D0%B0%D0%B5%D1%82-%D0%B8-%D0%BD%D0%B0-%D1%87%D1%82%D0%BE-%D0%BE%D0%B1%D1%80%D0%B0%D1%82%D0%B8%D1%82%D1%8C-%D0%B2%D0%BD%D0%B8%D0%BC%D0%B0%D0%BD%D0%B8%D0%B5>https://www.gift-me.net/blogs/201226/%D0%9E%D1%86%D0%B5%D0%BD%D0%BA%D0%B0-%D0%B0%D0%B2%D1%82%D0%BE-%D0%BE%D0%BD%D0%BB%D0%B0%D0%B9%D0%BD-%D0%BA%D0%B0%D0%BA-%D1%80%D0%B0%D0%B1%D0%BE%D1%82%D0%B0%D0%B5%D1%82-%D0%B8-%D0%BD%D0%B0-%D1%87%D1%82%D0%BE-%D0%BE%D0%B1%D1%80%D0%B0%D1%82%D0%B8%D1%82%D1%8C-%D0%B2%D0%BD%D0%B8%D0%BC%D0%B0%D0%BD%D0%B8%D0%B5</a> Но есть игорные заведения, коие готовы просто например жертвовать деньги на забаву. Для этого довольно сделать профиль. Чтобы вывести собственный выигрыш, вас сначала необходимо выполнить обстоятельства отыгрыша, обозначенные в критериях получения бездепозитного депо.Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=http://worldpoetry.cn/home.php?mod=space&uid=328850>http://worldpoetry.cn/home.php?mod=space&uid=328850</a> Многие игроки, оценив перечень казино, остаются играть в нем и далее ? на это и нацелено каждое рекламную. Постоянные клиенты вносят депозиты и делают ставки, обеспечивая долгосрочную выгода оператора. То есть, казино раздают бездепы новым юзерам для формирования лояльной аудитории.
1×slots промокод при регистрации 2025
Если вы выбрали для себя некоторое брендов которые вам больше всего полюбились, для неизменной забавы! Таких гемблеров казино очень любит и оценивает, за частую эти игроки становятся VIP игроками заведения, которым нередко поступают прибыльные предложения в виде призов, так же туда входит и бездепозитные. <a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=66219&extra=>1хлот регистрация в 1×slots casino</a> 1×slot рабочее зеркало Промообъявления от казино не дают реальной картины и ориентированы на привлечение внимания пользователей. Понять, как высоки шансы остаться в плюсе, дозволит личный тест критерий предложения: <a href=http://armi21.com/bbs/board.php?bo_table=free&wr_id=94033>http://armi21.com/bbs/board.php?bo_table=free&wr_id=94033</a> Несмотря на то, собственно этот вариант стимуляции со стороны азартных платформ очень популярен в сфере сходственных игр, далеко не всем поклонникам казино известно, что себе бездепозитные бонусы казино и как непосредственно их возможно эксплуатировать.Возьми свой подарок. Чаще всего бонус активируется незамедлительно последствии регистрации. Но случаются истории, когда надо(надобно) зайти в индивидуальный кабинет либо написать в справочную службу. 1× slots официальный При отыгрыше бонусных средств, необходимо учесть срок деяния приза и время, которое дается на отыгрыш. По истечению заявленного медли, не отыгранный приз несомненно аннулирован.
1хслотс рабочее зеркало
Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и более. Когда игроку полагается большое фриспинов, администрация может бить3 их начисление на несколько дней. Бесплатные вращения предоставляются для конкретного слота, который указывается в правилах промоакции. <a href=https://rafaelqajr52963.develop-blog.com/36710005/nude-ai-app-transforming-image-moderation-and-privacy-in-the-digital-age>https://rafaelqajr52963.develop-blog.com/36710005/nude-ai-app-transforming-image-moderation-and-privacy-in-the-digital-age</a> 1×slots коды В списке притязаний к отыгрышу нередко присутствуют лимиты на ставки при ирге на собственные средства. Так, если отыграть нужно 30 000 руб., а максимальная сумма ограничена 30 рублями, то вертеть барабаны предстоит 1000 один. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам деяния акции.Размер бонусов почаще всего чисто символический и не выше 50 руб. Приятно, хотя осязаемым бустом деле ли будет.
1×slots казино мобильная версия
Если вы выбрали себе количество брендов которые вас больше всего приглянулись, для неизменной игры! Таких гемблеров казино очень предпочитает и оценивает, за частую эти игроки становятся VIP игроками заведения, коим часто поступают прибыльные предложения вид призов, так же туда заходит и бездепозитные. Фриспины предназначены для применения в видео слотах. Внимательно ознакомьтесь с критериями – часто их выдают на кое-какие автоматы. В зависимости от клуба, у вас получится сделать определённое число ставок. Кстати, продвинутые игорные дома разрешают запускать каждых «одноруких бандитов».Вейджер не более х30–35 является приемлемым. Опытные игроки заявляют, что с таким вейджером реально остаться в плюсе, если правильно подойти к выбору игрового аппарата. 1×slot зеркало рабочее регистрации на телефон придет <a href=http://67352.ww.w.molifan.net/space-uid-2177598.html>http://67352.ww.w.molifan.net/space-uid-2177598.html</a> При поддержки такового поощрения оператор может также привлекать посетителей, которые ранее показывали активность на сайте, но по какой-то причине прекратили выступать. В данном случае промокод высылается пользователю по электронной почте либо в виде SMS.
1×slots акции
При регистрации следует свидетельствовать только достоверную информацию. Когда учетная запись будет активна, появится доступ в Личный офис. В нем возможно выбрать еденицу, ввести промокод и узнать подробные управляла получения и отыгрыша бездепа. Краткая информация об промоакции нередко находится непосредственно на регистрационной форме.С иной стороны, гораздо легче арестовать бездепозитные фриспины за регистрацию в казино и напрямик в начать вертеть барабаны в наихороших слотах. Главная особенность спинов в том, собственно они предназначены для лучших автоматов. Удастся не только пройти дополнительные раунды, хотя и увеличить сумму выигрыша, заработать респины прочие внутриигровые презенты. Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.Для верификации номера телефонного, в собственном профиле выберите опцию „Подтвердить номер аппарата“ и введите в подходящее поле код, приобретенный в sms-сообщении. <a href=http://www.en.besatime.com/index.php?subaction=userinfo&user=HenryTap>http://www.en.besatime.com/index.php?subaction=userinfo&user=HenryTap</a> 1хслот скачать Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала быстрые выводы. Фишка выплат в том, что достаточно выбрать платёжный инструмент и указать сумму. В большинстве случаев средства зачисляются на электрические кошельки протяжении 15 мин., а на банковские карты – 1–3 трудящихся дня.Принципиальным различием даровых призов от бонусов на депозит является неимение необходимости заносить средства на аккаунт. Из-за этого их часто нарекают бездепозитными (no down payment bonuses).
<b>Смотреть еще похожие новости:</b>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=186583>1хслот зеркало сайта</a>
<a href=http://check2go.net/my-account/>1×slots зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные призы — это презенты от казино повторяющий бонусных средств или фриспинов для игровых автоматов, которые начисляются на акк игрока последствии процедуры регистрации на сайте заведения. Для получения этих поощрений депозит не потребуется. Пoдтвepдить личнocть посетителя. Для успешного вывода средств, нужно доказать лицо посетителя. Нa этaпe вepификaции пpoфиля, сотрудники службы безопасности обязаны увериться, что у игрока всего лишь раз аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не может исключить собственный выигрыш, в у него несомненно некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы.
#5494 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Екатерина Ефременкова, шорт-трекистка песня казино <a href=https://t.me/vchkogpu_ru>порно с Ирина Сидоркова</a> 1×bet сайт 1×bet xyz сайт казино зеркало <a href=https://specreporter.com/>скачать 1×bet на андроид</a> казино вход casino андроид порно с Анна Калинская (теннис) казино без скачать 1×bet 1×bet слоты 1×bet xyz сколько казино
DiskiPlus 1×bet зеркало на сегодня 1×bet xyz DiskiPlus gama casino <a href=https://www.diskiplus.ru>DiskiPlus black russia казино</a> DiskiPlus 1×bet зеркало рабочее xbet DiskiPlus казино онлайн <a href=https://diskiplus.ru/>DiskiPlus включи казино</a> DiskiPlus 1×bet рабочее на сегодня DiskiPlus porno Мария Шарапова DiskiPlus Кузнецова Анна Юрьевна порно DiskiPlus 1×bet 1хбет DiskiPlus букмекерские конторы бет DiskiPlus лучшие букмекерские конторы DiskiPlus пин ап букмекерская контора
#5495 Charlesgunnyhttp://filmkachat.ru
1×slots казино зеркало
Существует ли стратегии для отыгрыша бездепозитных бонусов? К сожалению нет, на выигрыши или проигрыши с бонусов, казино либо игрок воздействовать не может, отдача игр случается от разработчиков игр.В случае установленного лимита на необходимую вывода выигрыша с бездепозитного бонуса, игрок не может вывести больше заявленной суммы. <a href=http://filmkachat.ru/>1хслотс казино зеркало</a> Не желайте сыграть в азартные забавы, не рискуя своими деньгами, но получая в все выплаты? Подобную возможность деют многие наилучшие порталы с азартными развлечениями. В их числе большое добросовестных и надежных интернет-казино на российском языке. Они привлекают свежих юзеров разными поощрительными событиями, включая бездепозитные, либо бесплатные призы. <a href=https://www.swiatobrazu.pl/forumgaleria/thread/view/id/591>https://www.swiatobrazu.pl/forumgaleria/thread/view/id/591</a> В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая доля забавы. Важно, часто бездепозитные бонусы в казино выдаются с лимитированиями по максимальной выплате. В среднем можно рассчитывать на выгода в количество тысяч рублей. Как вывести выигрыш с бонуса без депозита. Придётся подтвердить аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается каждым игроком. О документальном подтверждении учетной записи спрашивайте в онлайн чате либо прочитайте в правилах.Поспешите забрать бездепозитные призы за регистрацию в казино из представленного списка. Все платформы не только водят законную деятельность, но и обрадуют честными результатами игры, высочайшей отдачей, резвыми выплатами. 1 хслот регистрация в 1×slots casino <a href=https://istinastroitelstva.xyz/user/Forsedropol/>https://istinastroitelstva.xyz/user/Forsedropol/</a> Приглашаем делиться суждениями о призах. Это поможет иным юзерам подбирать более прибыльные предложения.
1хслотс регистрация в 1×slots casino
В интернете слишком количество скриптовых вебсайтов, которые принадлежат жуликам. Их основная задача – заинтересовать гэмблеров, пообещав не только щедрые презенты, но и солидные выигрыши. Так что кое-какие веб-сайты предлагают получить за регистрацию числе $1 000.Отыграв бездепозитный бонус в казино с выводом также придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, случае схожее лимитирование присутствует, то единоразово исключить получится только необходимую, не превосходящую объем приобретенного бонуса. 1×slots рабочее зеркало <a href=http://j67236dr.bget.ru/user/AnthonyCub/>http://j67236dr.bget.ru/user/AnthonyCub/</a> В интернете много знаменитых игорных площадок с красивыми акционными услугами. Однако пристально разбирать условия десятков предложений вскоре надоест, да и время отнимет большое. Поэтому наша команда подготовила ТОП-3 вебсайтов с наихорошими бездепозитными бонусами: скачать 1×slots на андроид мобильная версия
1×slots на любой вкус как пройти регистрацию
В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, необходимо обратиться в службу поддержки спустя лайв-чат на сайте казино.Выполнив все притязания оператора, заказчик может оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит примерно не более суток. Если дополнительно требуется пройти процедуру верификации, то срок возрастает до 1–2 рабочих дней. Для перевода применяются банковские приборы и электронные платежные системы. Второй способ подходит лучше, например как масса транзакций ситуации исполняются мгновенно. В связи со спецификой функционирования банков обработка платежей может занять до нескольких трудящихся дней. <a href=http://www.dvorchany.grodno.by/user/Ashleypioms/>http://www.dvorchany.grodno.by/user/Ashleypioms/</a> 1×slots бездепозитный бонус за регистрацию Когда речь о денежных бонусах, казино практически устанавливают обстоятельства вейджера, которые необходимо выполнить, чтобы исключить выигрыш.
зеркло казино 1×slots
Приветственный приз без депозита ? презент за регистрацию. Выдается деньгами, фриспинами либо баллами. В заключительном случае бонусные баллы применяются для роли в турнирах или обмена на реальные средства. <a href=http://www.deonnyn.com/PSPA/memberlist.php?mode=viewprofile&u=559&sid=238731c39b141b4b8180bc1206b4be82>онлайн казино 1×slots</a> Бездепы все входить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой либо баллами.В наше время очень просто получить приз за регистрацию в казино. Практически любой игорный жилище с готовностью начисляет средства или бесплатные вращения. Многие гэмблеры используют данным и не стыдятся региться в любом клубе с выгодными критериями. Кстати, это замечательная вероятность выработать победную тактику и сорвать джекпот. 1× slots зеркало <a href=https://sketchfab.com/Vykupavto0311>https://sketchfab.com/Vykupavto0311</a> Бездепозитный бонус – это экономическое вознаграждение, которое выдается участнику игры в казино, для его привлечения и появления заинтересованности. Любой посетитель, который соответствует условиям выдачи похожего бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое одобрение считается более действенным способом, дающим возможность стартовать в игре, не вкладывая собственных материальных средств.
1хслот 1хслотс регистрация перейти на 1×slots
В некоторых онлайн казино для получения бездепозитных призов не достаточно просто зарегистрироваться на сайте клуба и подтвердить средства контактные данные. Дополнительно требуется активация промокода. <a href=https://www.cfd-online.com/Forums/members/jamesveids.html>https://www.cfd-online.com/Forums/members/jamesveids.html</a> 1хслот зеркало сайта Если вы бывалый игрок, вы обязаны аристократия, собственно бонус без депо – редкая находка. Тем ниже, мы еженедельно изучаем онлайн, чтобы найти для вас наихорошие бездепозитные предложения.Этот тип приза будет добавлен на Ваш акк последствии удачной процедуры регистрации с внедрением номера аппарата. Если выбрать другой способ сотворения учетной записи, бездеп не будет добавлен на Ваш аккаунт.
<b>Смотреть еще похожие новости:</b>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=60329&result=reply>1хслотс зеркало на сегодня</a>
<a href=https://feederfishing.lt/en/forum/parduodu/1238256-x1-slots-1×slots-casino#1249730>x1 slots регистрация в 1×slots casino</a>
<a href=https://your-portal.at.ua/forum/20–63222–2#88501>1×slots регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездеп с фриспинами имеет обхватывать всю коллекцию игр на веб-сайте либо разработки одного провайдера. Обычно предлагается конкретный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш может быть выведен в того, как пользователь отыграет данную сумму. Возможность расценить полный перечень слотов — главное достоинство данной разновидности. Игроку становятся доступны те функции, которые отсутствуют в демонстрационном режиме, а вероятность выиграть настоящие средства добавляет ясных азартных чувств. В случае установленного лимита на сумму вывода выигрыша с бездепозитного приза, игрок не может вывести больше заявленной суммы.
#5496 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало рабочее этих способов предполагает регистрацию
Шаг 4. Активация. Внимательно исследуйте обстоятельства, информацию по лимитированиям и сроке деяния бонусного предложения. Разобравшись с правилами, можно активировать приз в собственном кабинете (иногда ? с внедрением промокода) или по запросу в саппорт. <a href=http://filmkachat.ru/>x1 slots регистрация в 1×slots casino</a> <a href=https://lyfepal.com/forums/thread/7373/Transform-Your-Kitchen-Design-with-Professional-3D-Kitchen-Rendering-Services>https://lyfepal.com/forums/thread/7373/Transform-Your-Kitchen-Design-with-Professional-3D-Kitchen-Rendering-Services</a> Так собственно основное отличие презента на депо от бездепа – обязательное пополнение счёта. Вы можете привнести депозит и преувеличить стартовый капитал или забрать бездеп и всем не придётся рисковать собственными сбережениями. Поспешите выполнить простые требования, и администрация ресурса начисляет щедрое одобрение!Суммы сходственных предложений, в, колеблются от 3-х до двадцати $, а вейджер на эти средства обязан сочинять от тридцати до шестидесяти один. Зачастую, наивеличайшая сумма выигрыша здесь составит от одной до 2-ух сотен $. Если компьютерные выиграет больше, то все свои могут быть списанными до максимально разрешенного выигрыша. Здесь бывает содержание выводить еще несуществующие деньги на собственную платежную систему и далее находить заведение с подходящими под данную необходимую релоадом или призом за первое пополнение счета. Есть несколько подвидов бездепозитного вознаграждения, предлагаемого большим количеством заведений. 1×slots зеркало проходить регистрацию это отличный вариант <a href=http://www.god123.xyz/home.php?mod=space&uid=1031491>http://www.god123.xyz/home.php?mod=space&uid=1031491</a> Демоказино есть практически на каждом веб-сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются существенно пореже: там если, тогда, выигрыша и соблюдения условий акций бездеп можно превратить в реальные деньги.При ирге на бонусные свои запрещается выступать в игровые автоматы с прогрессивным джекпотом и забавы из радела live casino. Кроме как, кое-какие казино дают бездеп на раз либо количество определенных слотов, и в иных играх Вы не сможете на их выступать.
казино 1× slots официальный сайт
Процесс подтверждения личности может взятьвдолг(взятьвзаймы) от одного денька до недели. Если клиент допустил какую оплошность при заполнении паспортных данных, то ему следует адресоваться с задачей в службу поддержки онлайн-казино.В интернет-сети постоянно можно отыскать списки наиболее популярных и обещанных поощрительных программ от популярных онлайн-казино. 1×slots casino зеркало рабочее Осталось избрать казино с призом за регистрацию и сделать профиль. После активации презента выигрыш зависимости от Фортуны и навыков. <a href=http://scancity.ru/bitrix/click.php?anything=here&goto=http://onegaland.ru/bitrix/click.php?goto=http://sozmir.ru/bitrix/rk.php?goto=https://telegra.ph/Rasprostranennye-oshibki-pri-provedenii-audita-gosudarstvennyh-sluzhashchih-Interesnye-sluchai-iz-praktiki-2020–2021-godov-09–24>http://scancity.ru/bitrix/click.php?anything=here&goto=http://onegaland.ru/bitrix/click.php?goto=http://sozmir.ru/bitrix/rk.php?goto=https://telegra.ph/Rasprostranennye-oshibki-pri-provedenii-audita-gosudarstvennyh-sluzhashchih-Interesnye-sluchai-iz-praktiki-2020–2021-godov-09–24</a> Сразу последствии активации промокода можно пользоваться презентом. Как теснее упоминалось, призы посещают трёх обликов – фриспины, кредиты и фриплей-бонусы.Каждая игровая перрон выделяется критериями по получению и отыгрышу бездепов. В правилах детально расписаны временные рамки, за которые нужно прокрутить вейджер. Также не забывайте про наибольший объем ставки и наивысшую сумму выплаты. С другой стороны, чтобы получить бездепозитные бонусы казино, достаточно израсходовать менее 1 минутки. 1×slots официальный зеркало рабочее Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную функцию активации бонуса без депозита. Внимательно прочтите до конца. Многие новенькие проделывают промахи на этапе регистрации и поэтому не получить подарок.
1×slots регистрация на сайте 1×slots ru com
Срок активации и время на отыгрыш. Зачисление денег либо фриспинов происходит при активации в течение требовательно ограниченного периода, схожие притязания предъявляются и к срокам отыгрыша. Одни казино позволяют отыгрывать бонус некоторое дней или числе месяцов. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высоким вейджером.Рассмотрим принцип его деянья на случае. Допустим, вы зарегались и получили $10 no deposit bonus с вейджером х50. Это означает, собственно выигранные деньги возможно несомненно выводить не раньше, чем в того, как общая сумма ставок достигнет $500. <a href=https://ruisoon.com/space-uid-37518.html>https://ruisoon.com/space-uid-37518.html</a> Суммы подобных предложений, как правило, колеблются от 3-х до 20 $, а вейджер на эти свои обязан сочинять от тридцати до шестидесяти раз. Зачастую, большая сумма выигрыша здесь составит от одной до 2-ух сотен $. Если игры выиграет больше, то все средства шансы быть списанными до максимально разрешенного выигрыша. Здесь появляется смысл выводить еще несуществующие финансы на свою платежную систему и дальше находить заведение с подходящими под данную сумму релоадом или призом за 1-ое пополнение счета. Есть некоторое подвидов бездепозитного гонорары, предлагаемого великим количеством заведений. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
1×slots зеркало быструю регистрацию а также мгновенное
Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, a зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. Для получения предоставленных призов вас пригодиться — ПК или мобильное устройство, и остальное дело за малым.Подтверждение электронной почты – одно из ведущих условий, коие есть почти в каждом бездепозитном казино. Чтобы верифицировать электрическую почту, достаточно перебежать по интенсивной ссылке в послании, приобретенном от азартного клуба. 1×slots зеркало видели такую регистрацию на <a href=https://pdn-forum.bpgs.de/memberlist.php?mode=viewprofile&u=1859>https://pdn-forum.bpgs.de/memberlist.php?mode=viewprofile&u=1859</a> Разные казино имеют собственные верховодила по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высочайшие притязания. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до ста один в игровых автоматах. Например, если игрок получил бесплатно десять $, то нужно будет отыграть их, поставив 1 тыщу спинов по 1 доллару любой. Стоит обозначить(означить), собственно не все казино дают вероятность выступать на призы и не во всех увеселительных заведениях схожие верховодила для отыгрывания. Некоторые казино воспрещают играть на бонусы в блекджек или ограничивают ставки до 5 процентов, собственно значительно увеличивает в 10-ки один число необходимых игр.
1×slots регистрация 1×slots review live
Активация происходит с помощью промокодов, коие вводятся в личном кабинете после регистрации. Среди спецпредложений в списке Casino.ru содержатся неповторимые промокоды, которые доступны только гостям портала. Другие методы начисления средств ? автоматическая активация сразу в творенья аккаунта и получение презента по запросу в службу технической поддержки. Приглашаем делиться воззреньями о бонусах. Это поможет иным пользователям выбирать наиболее прибыльные предложения.Особую изюминку видео слотам присваивают уникальные знакы. С их в активизируются разные бонусы. Вы сможете запустить вспомогательный уровень и прирастить сумму выигрыша. Есть знаки, коие замещают ненадобные элементы и сами создают выигрышные комбо. Не стоит забывать и про бонус-тур. После любого удачного спина есть шанс прирастить необходимую выигрыша в 2 или четыре раза. <a href=https://yandexforum.ru:443/member.php?u=292207>https://yandexforum.ru:443/member.php?u=292207</a> С такими ординарными советами каждое казино с бонусом за регистрацию способно принести в разы больше выгоды и выгоды.Мы подготовили список, где есть постоянно актуальные и новые бездепозитные бонусы казино, коие возможность получить даром. Для наших пользователей есть специальные предложения неповторимые призы, коие вы у не найдете, их мы определили специальной красноватой плашкой «Exclusive». зеркала 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=290266>1×slots подтвердит вашу регистрацию если говорить</a>
<a href=https://qualityprogamer.de/forum/showthread.php?tid=238944>1хслотс зеркало</a>
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=4452>1×slos регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Можно ли в одном онлайн казино получить больше 1-го приза за регистрацию? Нет, например как в любом интернет казино есть верховодила, к коим нужно держаться, не создавать два аккаута для получения призов, другому будет блокировка обоих аккаутов, не пытайтесь перехитрить онлайн казино, бонус за регистрацию выдаеться один раз одному личику.
#5497 Charlesgunnyhttp://filmkachat.ru
зеркала 1×slots
Вейджер в переводе с британского значит «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша приобретенного бонуса, в нашем случае бездепозитного. Число ставок большого — главно лишь набрать необходимую, пропорциональную сумме одобрения. <a href=http://filmkachat.ru/>1× slots официальный</a> Особую изюминку видео слотам придают уникальные знакы. С их появлением активизируются разные призы. Вы можете запустить вспомогательный уровень и прирастить сумму выигрыша. Есть знаки, которые заменяют ненадобные составляющие и сами создают выигрышные комбо. Не стоит забывать и про бонус-тур. После любого удачного спина есть шанс прирастить необходимую выигрыша в 2 либо четыре раза. <a href=https://playcode.io/2205736>https://playcode.io/2205736</a> Любой выигрыш по ставке повыше установленного лимита будет являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, ну случае выигрыша его сумма не поступит на счёт посетителя — результат игры несомненно всецело аннулирован. 1×slots зеркало выигрыши обязательно пройдите регистрацию если <a href=http://copybook.xyz/forum/viewtopic.php?topic_id=8070&post_id=8077&order=DESC&viewmode=flat&pid=0&forum=4#forumpost8077>http://copybook.xyz/forum/viewtopic.php?topic_id=8070&post_id=8077&order=DESC&viewmode=flat&pid=0&forum=4#forumpost8077</a> Наши специалисты изучают условия промоакции, после в ручном режиме проводят их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие характеристики. Мы не рекламируем казино, а даем игрокам информацию о лучших из них.
1×slots сайт зеркало
1×slots официальный сайт мобильная версия Риск-игра по одинаковым шансам – Также казино возможность запрещать исполнять условия по отыгрышу за раунда на удвоение, который предлагается в слотах, видео-покере и неких других играх. <a href=https://food.biz.ua/wr_board/tools.php?event=profile&pname=HarrySwaps>https://food.biz.ua/wr_board/tools.php?event=profile&pname=HarrySwaps</a> Если ординарными текстами, бездепы – это определённая сумма средств либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать презенты. Но есть кое-какие нюансы. Существуют игорные жилища, которые перед тем как начислить бонусы требуют привязать телефон, предоставить копии документов. 1×slot зеркало Получить приветственный приз шансы лишь новые посетители онлайн-казино. Способы описаны в критериях промоакции любого законного казино, почаще всего это:
1×slots регистрация 1×slotscasino 56 online
<a href=https://thehyipforum.ru/member.php?u=14491>https://thehyipforum.ru/member.php?u=14491</a> 1хлот регистрация в 1×slots casino
1×slots акции
При регистрации том, либо ином онлайн игральном заведении — для дается раз шанс испытать собственную удачу не внося средства монеты. Замечу собственно такую поощрительную предложение деют не все онлайн игровые площадки, а лишь щедрая середина(средина) из них. Которые мы подготовили для Вас в нашем списке.Для получения бездепа нужно пригласить в игру по реферальной ссылке свежего клиента: он обязан зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на необходимую, обозначенную в критериях промоакции. Во всех законных онлайн-казино Беларуси необходимо подтверждение паспортных данных для забавы — это требование правительства государства.Ещё одно распространённое акционное предложение – симпатичный презент с сомнительными требованиями. К образцу, клуб сулит $100 виде бездепа, но с вейджером х80 или х100. Отыграть такой вейджер фактически невозможно и поэтому другого, как концентрироваться на больше занимательных акциях. 1хслот скачать <a href=https://graddata.ru/user/JamesFuelm/>https://graddata.ru/user/JamesFuelm/</a> Таким образом, заведение пробует показать себя своим потенциальным игрокам, а такой маркетинговый ход как казино приз без депо за регистрацию завлекает очень много внимания к игорному заведению и обеспечивает неизменный струю свежих посетителей и грядущих посетителей игрового онлайн клуба.
1хслотс рабочее зеркало
Вейджер менее х30–35 является применимым. Опытные игроки заявляют, что с этим вейджером реально остаться в плюсе, случае правильно подойти к выбору игрового аппарата.У каждого игорного заведения средства управляла и условия. Но, чтобы получить призы, нужно выполнить стандартные деяния: <a href=http://intextv.by/forum/user/57378/>http://intextv.by/forum/user/57378/</a> Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации подарка необходимо доказать электрическую почту и привязать телефон;Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. 1×slots зеркало регистрация Используйте превосходнейшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из списка ниже, дабы заработать подарки за обычные действия теперь сегодня получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и быстрыми выводами на электрические кошельки.Некоторые клубы автоматически начисляют бонус на акк игрока после исполненья критерий получения, но бывают ситуации, когда приз нужно активировать игроку самому. Есть несколько способов активации приза:
<b>Смотреть еще похожие новости:</b>
<a href=http://complainanything.com/node/158?page=1034#comment-1476364>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<a href=http://miupsik.ru/forums/showthread.php?tid=398210>1×slot зеркало рабочее регистрации на телефон придет</a>
<a href=https://forumauthority.com/member.php?action=profile&uid=3484>1× slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Мы проделываем акцент на главных положениях верховодил, рассказываем о территориальных ограничениях и кратко информируем о иных акциях обговариваемого казино.
#5498 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерские конторы бет Юдаева Ксения Валентиновна порно <a href=https://specreporter.com/>букмекерская контора ставки</a> порно с Дронова Александра Викторовна up casino скачать <a href=https://slon-ru.com/>порно с Антропова Валентина Викторовна</a> казино 1 1×bet официальный слоты казино онлайн бесплатно бесплатные букмекерские конторы казино смотреть скачать букмекерскую контору водка казино
DiskiPlus Любимова Ольга Борисовна порно DiskiPlus букмекерская контора фонбет официальный сайт <a href=https://www.diskiplus.ru/>DiskiPlus casino скачать приложение</a> DiskiPlus казино рулетка DiskiPlus porno Нина Пирогова, хоккеистка <a href=https://www.diskiplus.ru/>DiskiPlus porno Дарья Клишина</a> DiskiPlus бк букмекерская контора DiskiPlus 1×bet сайт DiskiPlus водка казино DiskiPlus пин casino DiskiPlus 1×bet зеркало слоты DiskiPlus vodka casino DiskiPlus казино смотреть онлайн бесплатно
#5499 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
часы казино лучшие казино бесплатно <a href=https://rumafia.news/>букмекерская контора ставки</a> порно с Артемий Панарин (хоккей) порно с Зырянова Анастасия Владимировна <a href=https://7club7.com/>казино ли</a> рокс казино играющие казино porno Мария Шарапова порно с Александр Большунов (лыжные гонки) Кузнецова Анна Юрьевна порно bitz casino Радченко Светлана Юрьевна порно
DiskiPlus porno Ангелина Гончаренко, хоккеистка DiskiPlus пин ап casino pin <a href=https://www.diskiplus.ru>DiskiPlus porno Марина Александрова</a> DiskiPlus 1×bet зеркало DiskiPlus официальные сайты казино <a href=https://diskiplus.ru/>DiskiPlus porno Александра Степанова, фигуристка</a> DiskiPlus casino скачать приложение DiskiPlus порно с Дарья Касаткина (теннис) DiskiPlus бесплатное казино DiskiPlus casinos xyz DiskiPlus 1×bet официальный xbet DiskiPlus casino официальный зеркало DiskiPlus Юдаева Ксения Валентиновна порно
#5500 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало рабочее этих способов предполагает регистрацию
Иногда у посетителей сайта могут появиться проблемы при активации приобретенного промо-кода. В этих случаях, необходимо адресоваться за помощью в службу «Support». Для получения ответа, обязательно указывается конкретная причина воззвания и подтверждается информация дополнительными экрана. Если сформировалась неоднозначная ситуация, постоянно возможно адресоваться к главному регулятору или контролирующему органу, выдавшему данному заведению лицензионный документ.Все обожают получать презенты. Согласитесь, почти любой играющий человек несомненно необъятно рад, случае получит безвозмездный подарок для забавы в интернет казино просто за регистрацию либо же приз за внесенный депозит, так называемые приветственные бонусы для свежих игроков. Соответственно такие онлайн клубы станут более знамениты и преимущественны у игроков при выборе казино для игры. Топ казино непрерывно обновляется и прибавляются свежие и занимательные игровые клубы с симпатичной бонусной политикой и всеми вероятными преимуществами, льготами, к коим относятся такие призы как фриспины за регистрацию, валютные бездепозитные призы, а щедрые бонусы за внесенный депозит. <a href=http://filmkachat.ru/>зеркала 1×slots</a> Это также благотворительные деньги, коие поступают на аккаунты свежеиспеченных игры после регистрирования. А необыкновенность таких бонусов произведено что, что обретенные финансы непременно по применять в продолжении назначенного времени. <a href=https://www.hebergementweb.org/threads/virtual-reality-reshapes-modern-architectural-design-and-innovation.2142477/>https://www.hebergementweb.org/threads/virtual-reality-reshapes-modern-architectural-design-and-innovation.2142477/</a> Фриспины начисляются по определенной ставке. После их активации игроку нужно запустить разъем и убедиться, собственно в нем отображаются безвозмездные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода после отыгрыша ориентируется оператором и изредка превышает 5 000 руб. 1×slots официальный сайт мобильная версия скачать <a href=http://mail.nudecelebvideo.net/user/Patrickwaf/>http://mail.nudecelebvideo.net/user/Patrickwaf/</a>
1×slots зеркало 1хслотс регистрация перейти на 1×slots
1×slots скачать на айфон Вообще перейдя в казино — правила схожи в получении бездепозитных призов, в стандартные правила входит: доказать эл. Почту и телефон, наполнить свой собственный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ. <a href=https://seo.valutahosting.it/it/www/osipovichi.com>https://seo.valutahosting.it/it/www/osipovichi.com</a> Многие азартные клубы ограничивают сумму вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании акции, суммы Вы не можете исключить. Разница несомненно аннулирована, Вы даже не можете делать на нее ставки.Однако в условиях скрываются «подводные камни», которые не позволят исключить крупную сумму или же вы не успеете отыграть вейджер. Поэтому профессионалы рекомендуют забрать благотворительные вращения за регистрацию в казино без депозита, дабы поднабраться опыта и получить реальный шанс на победу. 1×slots казино мобильная версия
1×slot зеркало рабочее регистрации на телефон придет
Не сложно додуматься, что not the slightest deposit bonuses почти разу не посещают немаленькими. Чаще всего идет о пяти–тридцати баксах (либо эквиваленте этой суммы в иной еденице). <a href=https://sportcar.moscow/user/RalphRek/>https://sportcar.moscow/user/RalphRek/</a> Приветственный приз без депозита ? презент за регистрацию. Выдается деньгами, фриспинами либо баллами. В заключительном случае бонусные баллы применяются для роли в турнирах или обмена на реальные средства.Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам воспрещено начислять бонусы посетителям, не имеющим денежных средств на счете. Мы предлагаем осмотреть актуальные призы онлайн-казино с лицензией, которые соблюдают законодательство РБ. 1 xslots рабочее зеркало При ирге на бонусные свои воспрещается играть в игровые автоматы с прогрессивным джекпотом и забавы из радела live casino. Кроме такого, некоторые казино выделяют бездеп на раз либо некоторое конкретных слотов, и в иных играх Вы не сможете на их выступать.Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы быстро получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, появляется настоящий шанс победу!
1×slots официальный сайт зеркало рабочее
Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. Операторы гемблинга заявляют, собственно например они сражаются с бонус-хантерами. Впрочем, критики считают, что этим казино пытаются устроить из случайного гостя постоянного игрока.Новые посетители онлайн-казино без первого депо имеют проверить свою удачливость. К тому же есть вероятность преобразовать бездепы в настоящие средства за регистрацию в казино, однако достичь бонус нужно отыграть согласно условиям акции. Онлайн гемблинг развивается с каждым деньком больше и больше, свежие бренды создаются не по дням а по часам. Новые онлайн казино проделывают вступительные промоакции для игроков, чтобы, чтобы собственно бы зарекомендовать себя, и что, этим самым предлагают бездепозитные призы за регистрацию, что бы не пропустить такую вероятность — как пользоваться новым бездепом, советуем посещать наш сайт как можно чаще, самое аппетитное и новые несомненно добавляться в данном же перечне.Также существуют онлайн-платформы азартных игр, которые применяют раздачу бездепозитных бонусов в специальные даты (как для казино, так и для игрока). Помимо сего, действующие геймеры также имеют возможность получить похожие призы за собственную работа (например, за повышения уровня или за схожие заслуги). 1×slots зеркало регистрация <a href=http://mongdol.net/bbs/board.php?bo_table=free&wr_id=2726987>http://mongdol.net/bbs/board.php?bo_table=free&wr_id=2726987</a>
1×slots официальный зеркало
Сроки активации приза устанавливаются каждым казино, хотя чаще всего они не превосходят недели с момента получения. Игроку непременно надо(надобно) использовать бездеп протяжении указанного срока, в ином случае приз просто исчезнет. Каждый приз возможно получить только один один, потому случае не использовать бездеп в срок, у игрока не несомненно второго шанса им воспользоваться.Шаг 5. Использование и отыгрыш. Бездеп обязан быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. Таким образом интернет казино получает потенциального игрока. Возможно в будущем либо истинном он захотит поиграть на свои деньги. Так трудятся бездепозитные бонусы в онлайн казино. Здесь очень подходит выражение, безвозмездные сыр случается лишь в мышеловке. Начинающие игроки имеют не обдумывать опасность пыла. Однако времени осознания делается больше. Это тема для отдельного обсуждения. <a href=https://xn–80aa6acmqdpq.xn–p1ai/user/JasperSed/>https://xn–80aa6acmqdpq.xn–p1ai/user/JasperSed/</a> Вейджер не более х30–35 является применимым. Опытные игроки утверждают, что с таким вейджером реально остаться в плюсе, случае верно подойти к выбору игрового аппарата.Активация по промокоду употребляется в различных обликах бездепов. Если речь идет о приветственном бонусе, то комплект знаков возможно разузнать на крупнейшей страничке, в регистрационной форме либо послании, которое отправляется юзеру для подтверждения e-mail. Акции имеют проводиться общо с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активируется разовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном кабинете или начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем важный код для активации в описании каждого рекламную. 1×slot казино зеркало В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и если, тогда, неоднозначных ситуаций нет способности куда-то пожаловаться и обосновать свою правоту.
<b>Смотреть еще похожие новости:</b>
<a href=https://elclasificadomx.com/author/jameslog/>1×slots сайт зеркало</a>
<a href=http://forums.indexrise.com/thread-1096-post-331409.html#pid331409>1×slots регистрацию процедура займет всего лишь</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Прежде чем активировать бездеп, нужно увериться в, собственно страна, уроженцем которой считается игрок, не заходит в перечень запрещенных. Заполняя данные в собственном профиле, указывайте только достоверную информацию, так как Вам придется ее доказать дальнейшем при выводе денег.
#5501 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино фильм включи казино <a href=https://th-royalgclub.com/>порно с Карен Хачанов (теннис)</a> Попова Анна Юрьевна порно казино смотреть <a href=https://strelochnik.com/>порно с Антропова Валентина Викторовна</a> 1go casino Львова-Белова Мария Алексеевна порно porno Алена Косторная (фигурное катание) яндекс казино казино ставка ограбление казино ап казино
DiskiPlus porno Анастасия Янькова, боксерка DiskiPlus casino x <a href=https://diskiplus.ru>DiskiPlus порно с Бондаренко Анастасия Борисовна</a> DiskiPlus лучшие бесплатные онлайн казино DiskiPlus new casino <a href=https://diskiplus.ru/>DiskiPlus букмекерская контора на андроид</a> DiskiPlus букмекерская контора официальный сайт DiskiPlus сайт pin up casino DiskiPlus казино сочи DiskiPlus порно с Карен Хачанов (теннис) DiskiPlus порно с Анастасия Потапова, теннисистка DiskiPlus 1×bet сайт 1×bet xyz DiskiPlus 1×bet слоты официальный сайт
#5502 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
официальная казино casino riobet <a href=https://t.me/vchkogpu_ru>официальные зеркала казино</a> порно с Васильева Татьяна Викторовна Анна Михалкова <a href=https://vestnik-jurnal.com/>порно с Георгий Джикия (футбол)</a> casino актуальное зеркало лучшие казино бесплатно Скоробогатова Ольга Николаевна порно как выиграть в казино Елена Лядова букмекерская контора официальный сайт unlim casino
DiskiPlus пина casino DiskiPlus 1×bet зеркало рабочее <a href=https://diskiplus.ru>DiskiPlus 1×bet слоты 1×bet xyz</a> DiskiPlus porno Ангелина Гончаренко, хоккеистка DiskiPlus porno Алена Михайлова <a href=https://www.diskiplus.ru/>DiskiPlus как выиграть в казино</a> DiskiPlus букмекерские конторы pin DiskiPlus 1×bet официальный сайт 1×bet xyz DiskiPlus мобильные букмекерские конторы DiskiPlus 7k casino DiskiPlus рейтинг казино DiskiPlus лучшие бесплатные онлайн казино DiskiPlus casino играть
#5503 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация то дальше необходимо пройти
Бездепозитные бонусы казино за регистрацию в 2022 году — это возможность поиграть за счёт заведения. Казино даёт посетителю шанс пользоваться определённой суммой или числом безвозмездных вращений без внесения депо. Не путайте деморежим с реальной забавой без необходимости внесения депо. <a href=http://filmkachat.ru/>1хслот зеркало</a> Эффективность бездепов в качестве маркетингового прибора оценили почти операторы. Малоизвестные площадки употребляют такие акции, дабы живо набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны неизменных гостей. Не все сайты, дающие презенты без депо, рекомендованы к забаве. За симпатичным промоописанием имеют скрываться неосуществимые обстоятельства отыгрыша и подводные камни. <a href=https://plaza.rakuten.co.jp/prilla/diary/202411240004/>https://plaza.rakuten.co.jp/prilla/diary/202411240004/</a> 1×slots регистрацию более популярный вариант это <a href=http://548382.com/home.php?mod=space&uid=13956>http://548382.com/home.php?mod=space&uid=13956</a>
1×slots зеркало проходить регистрацию это отличный вариант
После требуется привнести идентификационный платёж. Это стращает новичков больше всего. Нужно устроить минимальный депозит в 100–500 рублей. Таким образом служба защищенности увериться что, собственно платёжный метод принадлежит Вам. Данная процедура важна для обеспечения защищенности игровых счетов. Пример, Ваш аккаунт взломают и выведут средства на собственный кошелёк. Будет крайне неприятно. Поэтому верификация платёжной системы, это важный момент.Максимальная ставка ? уточняется в валюте счета и ограничивает объем ставки за один спин. В случае ее превышения приз имеет быть аннулирован. Также в правилах может находиться запрет на размещение ставок конкретного облика, например, по одинаковым шансам в рулетке (другими, на чет или нечет, красноватое или черное и т.д.). x1 slots регистрация в 1×slots casino <a href=https://kosmetikinstitut-milla.de/user/DoctorLazutaKa/>https://kosmetikinstitut-milla.de/user/DoctorLazutaKa/</a> Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. 1хслотс официальный сайт зеркало
1×slots зеркало регистрация
Допустим, за регистрацию вы получили бездеп в размере 2 000 рублей с вейджером х30. В этом случае предстоит сделать ставок, на общую необходимую в 60 000 руб. (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать реальные средства. Однако не запамятовывайте, что с каждого подарка выйдет исключить определённую необходимую (чаще всего не более $200). <a href=http://i-willtech.co.kr/bbs/board.php?bo_table=free&wr_id=514154>http://i-willtech.co.kr/bbs/board.php?bo_table=free&wr_id=514154</a> 1×slots зеркало этих способов предполагает регистрацию Наличие у игрока второго аккаунта. Запрещено делать количество профилей для неоднократного получения бездепов.Допустим, за регистрацию вы получили бездеп в объеме 2 000 рублей с вейджером х30. В данном случае предстоит сделать ставок, на общую сумму в 60 000 рублей (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать настоящие деньги. Однако не забывайте, что с любого дара выйдет исключить определённую сумму (почаще всего не более $200).
1×slots официальный зеркало рабочее
Благодаря программе преданности от игорного заведения, можно взять превосходный старт и без добавочных инвестициям запустить видеослоты. Кроме того, можно рассчитывать на реальную фортуну и получить, без инвестиции личных финансов, великий выигрыш.В интернете слишком количество скриптовых сайтов, коие принадлежат жуликам. Их главная задача – привлечь гэмблеров, пообещав не великодушные презенты, но и солидные выигрыши. Так что некоторые сайты предлагают получить за регистрацию том $1 000. <a href=https://your-portal.at.ua/forum/12–61956–2#88383>1×slots мобильная версия войти казино</a> Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, дабы замечена возможность исключить выигрыш. 1×slots бонус за регистрацию <a href=https://nrns-games.com/index.php?action=profile;u=40961>https://nrns-games.com/index.php?action=profile;u=40961</a> Бездепозитный приз предоставляется новенькому игроку за определенные деянья. Часто подарок повторяющий средств или фриспинов выдается за регистрацию, спасибо чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.
1×слот регистрация в 1×slots casino
Если вы новичок деле и лишь попали в неизведанную вами район пыла — счет предложений как бездепозитные бонусы без пополнения.Какие призы у еще получить кроме бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, каждое интернет казино предлагает игрокам выгодное предложение на 1-ый депо, вы совершаете депо, ваш депо увеличивается в двое либо в в 3, тем самым начать выступать возможно с более крупной суммой, так же не забываем тему вейджер на бонусы. <a href=https://list.ly/glavdorogadv1605/>https://list.ly/glavdorogadv1605/</a> Обычно для получения призов без депозита, казино выдвигает лояльные и вполне выполнимые условия, хотя есть ряд деяний коие воспрещены и все стать неприятные последствия:Даже не выиграв солидную необходимую, игрок увлекательно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-либо денежных рисков. Быть в курсе наихороших акций с. Достаточно регулярно учить перечень свежих онлайн казино с выводом приза без депо в этом разделе. 1×слот регистрация в 1×slots casino Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша призов. Заведения практически устанавливают максимальную ставку, допустимую по условиям вейждера.
<b>Смотреть еще похожие новости:</b>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=133554&pid=372901#pid372901>1×slots акции</a>
<a href=http://portal.westcoastbible.org/discussion/viewtopic.php?f=18&t=1966281>1×slots скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Ну и конечно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: сходственная добродушие увеличивает степень лояльности посетителей к фирмы. Мы делаем ударение на главных положениях управлял, рассказываем о территориальных лимитированиях и вкратце информируем о иных промоакциях обсуждаемого казино.
#5504 Bobbyweapehttps://the-kinogo.net
киного новинки <a href=https://the-kinogo.net>kinogo фильмы для компании</a>
#5505 Brianjonhttps://kinogo24.biz
kinogo фильмы ужасов <a href=https://kinogo24.biz>киного рейтинги</a>
#5506 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало
В истинное время получить бонус за регистрацию в казино очень просто. Почти каждый игорный дом с готовностью предоставит деньги или благотворительные вращения. Многие игроки пользуются этим и не смущяются регистрироваться в любом клубе с прибыльными условиями. Кстати, это отличная возможность придумать выигрышную тактику и сорвать куш. <a href=http://filmkachat.ru/>1×slots официальный demo регистрация в 1×slots casino</a> <a href=https://blog.udn.com/G_112062930339362154/181391873>https://blog.udn.com/G_112062930339362154/181391873</a> Свежий приз начисляется в виде валютных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в пользовании средствами, а случае отыгрыша оператор имеет ввести ограничение на вывод денег. 1хслот зеркало <a href=http://www.khleeg.net/vb/member.php?u=7799>http://www.khleeg.net/vb/member.php?u=7799</a> Также учтите, собственно кое-какие игровые платформы сужают список государств, которые готовы получить предложенный бездепозитный приз за регистрацию. К примеру, существуют онлайн-заведения, выдающие похожие бонусы только жителям определенных стран. К примеру, интернет казино 777 Оригинал дает бездепозитный бонус лишь игрокам из России и государств СНГ. Или наоборот, пичкают вознаграждением всех, считая жителей некоторых государств (исходя из этого, по внимательно изучать перечень, дабы впоследствии не появилось практически вопросов и претензий).Третитй бездепозитный приз за регистрацию – денежные свои. К раскаянию, начислить рубли либо доллары готовы лишь знаменитые и пользующиеся клубы. С их помощью появится насладиться любой доступной игрой – автоматом, рулеткой, кено, блэкджеком.
1×slots актуальное зеркало
Допустим, за регистрацию вы возымели бездеп в размере 2 000 руб. С вейджером х30. В этом случае предстоит устроить ставок, на совместную сумму в 60 000 рублей (2 000 * 30 = 60 000). Когда сделайте условия по отыгрышу, придёт время заработать реальные деньги. Однако не запамятовывайте, собственно с каждого подарка получится вывести определённую необходимую (почаще всего не более $200). <a href=https://bookings.co.th/coupon/author/jamesrhisp/>рабочее зеркало 1хслотс</a> 1 хслот регистрация в 1×slots casino Приглашаем делиться суждениями о бонусах. Это поможет иным пользователям подбирать наиболее прибыльные предложения. <a href=https://connercltc18529.suomiblog.com/nude-ai-app-navigating-the-balance-between-privacy-and-technology-45959359>https://connercltc18529.suomiblog.com/nude-ai-app-navigating-the-balance-between-privacy-and-technology-45959359</a> За счёт спинов получится запустить различные интернет слоты, протестировать стратегии и поднабраться навыка. Фишка в том, что вращения начисляются на топовые аппараты с оригинальными опциями и высокой отдачей. Не забывайте, что в каждом акционном предложении предусмотрены особые требования – временные лимитирования, максимальный объем ставки, список доступных игр. 1×slots официальный сайт зеркало рабочее Если речь идет об эксклюзивных услугах, возможность понадобиться регистрация в казино по ссылке с партнерского сайта.
1×slots регистрация
Мы собрали и выпустили перечень превосходнейших бездепозитных казино с призами за регистрацию, коие гарантируют щедрые выигрыши и моментальные выплаты.Иногда операторы требуют внесение малого депо перед выводом для верификации платежного инструмента. В неких казино данный депо также предстоит отыграть. Бездепозитные призы прекрасный вариант даровой игры в игровые автоматы. Многие пользователи сети не знают, собственно в казино можно начать выступать безусловно даром, а потом вывести выигрыш на банковскую карту либо электрический кошелек, иные не доверяют интернет казино, а третьи успешно играют и выигрывают – и тотчас довольно большие суммы. <a href=http://tekst-pesni.ru/index.php?name=account&op=info&uname=glossydispatch9>http://tekst-pesni.ru/index.php?name=account&op=info&uname=glossydispatch9</a> А ознакомиться с свежими интернет казино, Вы сможете помощью призов с выводом прибыли, которые Вы можете получить без депозита.Каждая игровая платформа отличается критериями по получению и отыгрышу бездепов. В правилах отчетливо расписаны кратковременные рамки, за которые надо(надобно) прокрутить вейджер. Также не забывайте про максимальный размер ставки и максимальную необходимую выплаты. С другой стороны, дабы получить бездепозитные бонусы казино, достаточно потратить не более 1 минутки. 1×slots актуальное зеркало
1×slot казино зеркало
Варианты выигрыша в от Вашей удачи и критерий игорного портала. Выше мы заявили, собственно некоторые бездепозитные призы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются и, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на деньги, возможно выиграть невозможные суммы. Сегодняшние игровые автоматы или видео слоты, как их называют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые множат ставку от х100.000. Составленный экспертами Casino.ru перечень онлайн-казино с бездепозитным призом позволяет игрокам сопоставить спецпредложения разных операторов. 1×slots зеркало регистрацию более популярный вариант это <a href=https://aben75.cafe24.com/bbs/board.php?bo_table=free&wr_id=159799>https://aben75.cafe24.com/bbs/board.php?bo_table=free&wr_id=159799</a>
1хслотс казино зеркало
За счёт спинов получится запустить различные онлайн слоты, протестировать стратегии и поднабраться навыка. Фишка никаких, что вращения начисляются на топовые аппараты с оригинальными опциями и высочайшей отдачей. Не забывайте, что в любом акционном предложении предусмотрены специальные притязания – временные ограничения, максимальный объем ставки, перечень доступных игр.Бонус в казино без депо имеет разные вариации: может быть приветственный бонус, акции в честь каких-либо праздничных либо важных дат, бонус за привлечение свежих игроков, преданность и получение VIP-статуса. В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и когда спорных ситуаций нет способности куда-то посетовать и доказать собственную правоту.Некоторые онлайн-казино без депозита предлагают свежим посетителям избрать приз при регистрации. Будьте внимательны: выбрав раз, вы в безоговорочном большинстве случаев не можете пользоваться остальными. <a href=http://www.graphicalyzer.x10.mx/member.php?u=142697>http://www.graphicalyzer.x10.mx/member.php?u=142697</a> 1× slots официальный
<b>Смотреть еще похожие новости:</b>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=223306>1×слотс казино</a>
<a href=https://www.findaspermdonor.com/viewtopic.php?f=25&t=88288>1×slots акции</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но надо думать, что снабжая пользователей такими бонусами, казино увлекается спонсированием. Ведь размеры вознаграждений, в основном, не большие (средним объемом от 5 до 20 $). И на эти свои налагаются определенные условия и ограничения, обязательные к выполнению игрока, в в последствии он желает получить все средства выигранные финансы.
#5507 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino сайты 1×bet рабочее <a href=https://slon-ru.com/>порно с Арина и Дина Аверины, гимнастки</a> играющие казино порно с Матвей Сафонов (футбол) <a href=https://kompromat1.online/>слоты казино</a> 1win букмекерская контора Любимова Ольга Борисовна порно 7k casino бонус online casino казино в россии porno Александра Степанова, фигуристка казино онлайн бесплатно
DiskiPlus casino зеркало сегодня DiskiPlus пин up casino <a href=https://diskiplus.ru/>DiskiPlus казино фильм</a> DiskiPlus Преподобная Надежда Александровна порно DiskiPlus 1win casino <a href=https://diskiplus.ru>DiskiPlus casino зеркало сегодня</a> DiskiPlus порно с Афонина Марина Игоревна DiskiPlus букмекерская контора официальный сайт скачать DiskiPlus 1×bet официальный 1×bet xyz DiskiPlus casino зеркало сайта DiskiPlus 1win casino DiskiPlus песня казино DiskiPlus Разуваева Ксения Денисовна порно
#5508 RobertoNalhttps://the-kinogo.club
киного 720p <a href=https://the-kinogo.club>kinogo документальные фильмы</a>
#5509 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало рабочее xbet порно с Абрамченко Виктория Валериевна <a href=https://kompromat1.online/>рейтинг казино</a> сайт 1×bet слоты casino betting <a href=https://glvk.guru/>1×bet 1хбет</a> порно с Федор Чалов (футбол) 1×bet porno Вера Бирюкова, гимнастка 7k casino зеркало на сегодня фреш казино порно с Арина и Дина Аверины, гимнастки 1×bet casino
DiskiPlus играющие казино онлайн DiskiPlus лучшие бесплатные онлайн казино <a href=https://diskiplus.ru>DiskiPlus порно с Никита Кучеров (хоккей)</a> DiskiPlus pin up casino зеркало DiskiPlus яндекс игры казино <a href=https://diskiplus.ru>DiskiPlus champion casino</a> DiskiPlus cat casino DiskiPlus Окладникова Ирина Андреевна порно DiskiPlus 7k casino официальный DiskiPlus казино на деньги DiskiPlus порно с Константин Тюкавин (футбол) DiskiPlus пин ап casino DiskiPlus порно с Федор Чалов (футбол)
#5510 Charlesgunnyhttp://filmkachat.ru
1×slot казино зеркало
Это раз из главных показателей привлекательности дара. С завешенным коэффициентом в профессионалы не смогут выполнить обстоятельства по отыгрышу. И маловажно, как привлекательно смотрится предложение – бездепозитный приз казино в объеме $500 или $1 000. Чтобы новички попревосходнее вникли, что же это вейджер, мы разберём на образце. <a href=http://filmkachat.ru/>1×slot зеркало рабочее регистрации на телефон придет</a> Чаще всего, популярностью сервисы, такие как MoneyBookers и WebMoney, еще MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно обязательное правило. Финансовые средства выводятся только спустя ту платежную систему, которой пользовались для пополнения депо. Если же игрок получил бездепозитный покерный приз, требуется пополнить счет на наименьшую сумму, кот-ая составляет обычно 10 $. <a href=https://medium.com/@comcgifurniture/professional-cannabis-delivery-services-guide-for-vaughan-residents-92cc5d9c40b3>https://medium.com/@comcgifurniture/professional-cannabis-delivery-services-guide-for-vaughan-residents-92cc5d9c40b3</a> Можно. Вы всегда сможете отказаться от получения бездепозитного бонуса за регистрацию в казино, же Вы не создадите ставку.В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, необходимо обратиться в саппорта через лайв-чат на веб-сайте казино. 1× slots зеркало <a href=http://bbs.9438.net/home.php?mod=space&uid=36689>http://bbs.9438.net/home.php?mod=space&uid=36689</a>
1×slots регистрация 1×slotscasino 56 online
Также существуют онлайн-платформы азартных игр, коие применяют раздачу бездепозитных бонусов в особые даты (как для казино, так и для игрока). Помимо этого, действующие геймеры кроме имеют возможность получить похожие бонусы за собственную работа (к примеру, за увеличения уровня либо за похожие заслуги).Бонусы без депозита при регистрации считаются наиболее привлекательными как для опытных игроков, например для и новичков. Получив это вознаграждение, клиент возможность играть на настоящие деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные призы в интернет-казино Рунета, а также условия их активации и выигрыша. <a href=https://forum-macan.ru/memberlist.php?mode=viewprofile&u=1736>рабочее зеркало 1×slots</a> 1х слот регистрация в 1×slots casino <a href=https://forum.show-master.ru/forum/index.php?PAGE_NAME=profile_view&UID=50283>https://forum.show-master.ru/forum/index.php?PAGE_NAME=profile_view&UID=50283</a> 1×slots актуальное зеркало Бездеп с фриспинами может обхватывать всю коллекцию игр на сайте или разработки 1-го провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении акции. Выигрыш возможность быть выведен после того, как пользователь отыграет данную необходимую. Возможность расценить полный функционал слотов — главное совершенство данной разновидности. Игроку становятся доступны те опции, коие отсутствуют в демонстрационном режиме, а возможность выиграть реальные деньги добавляет ясных азартных ощущений.
1×slots зеркало сайта
Практически все интернет казино с бездепозитным бонусом за регистрацию предусматривает программу преданности — систему одобрения постоянных посетителей, кот-ая состоит из большого значений. При достижении игроком одного значения на его счёт поступает приз. Чем повыше уровень — тем щедрее бонус.На благотворительные бонусы онлайн-казино практически постоянно распространяется ограничения по стране проживания посетителей. Даже случае вам разрешается раскрывать счет и выступать на деньги в заведении, это еще не означают, собственно вас доступны no down payment bonuses. Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам воспрещено начислять призы посетителям, не имеющим валютных средств на счете. Мы предлагаем разглядеть актуальные призы онлайн-казино с лицензией, которые соблюдают законодательство РБ. <a href=http://dooood.fun/member.php?action=profile&uid=3979>http://dooood.fun/member.php?action=profile&uid=3979</a> При регистрации что, нет либо ином онлайн игральном заведении — для дается один шанс испытывать свою фортуну не внося свои монеты. Замечу что такую поощрительную предложение предоставляют не все онлайн игровые площадки, а лишь великодушная середина(средина) из их. Которые мы подготовили для Вас в нашем списке.Шаг 5. Использование и отыгрыш. Бездеп обязан быть использован в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. 1×slots бонус за регистрацию Ну и конечно же, для казино бездепозитные бонусы прибыльны с имиджевой стороны: подобная щедрость повышает степень преданности клиентов к фирмы.
1×slots зеркало регистрация то дальше необходимо пройти
Бездепозитный приз казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в этом и заключается основное различие. <a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=56270>1×slots официальный demo регистрация в 1×slots casino</a> Зарегистрируйтесь. Для регистрации почаще всего достаточно установить свой номер телефонного и почтовый адресок, последствии чего ввести полученный код из СМС. Возможно, требуется указать промокод. В правилах акции будет написано, где его надо включать. Иногда это бы создавать при регистрации, иногда — теснее в сотворения собственного кабинета, на отдельной странице. 1× слот зеркало <a href=https://dc-kd.ru/user/Kennethpar/>https://dc-kd.ru/user/Kennethpar/</a> С этими ординарными советами каждое казино с призом за регистрацию способно принести в разы больше выгоды и полезности.
1× slots регистрация в 1×slots casino
Первый образующийся вопрос, это, для выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают новых игроков. Последним проще начать забаву на деньги с подарка за регистрацию. Им надо пополнять баланс и расходовать личные средства. Новички получают безвозмездные спины или свои на счёт. С их подмогою знакомятся с игровым ходом, крутят слоты и проделывают ставки в рулетке. Вознаграждения за получение VIP-статуса ? начисляются в рамках программки лояльности при достижении очередного значения или выдаются персонально менеджерами службы.Чем ниже велечину вейджера, тем легче отыграть и вывести бонус. Если Вы планируете заработать на бездепе, но просто ознакомиться с свежим игровым клубом, то стоит игнорировать призов с высоким вейджером их почти не реально отыграть. С ними Вы сможете только протестировать забавы заведения. <a href=https://collinzjrz85296.bloguetechno.com/nude-ai-exploring-the-boundaries-of-technology-and-ethics-65623863>https://collinzjrz85296.bloguetechno.com/nude-ai-exploring-the-boundaries-of-technology-and-ethics-65623863</a> Иногда операторы требуют внесение минимального депозита перед выводом для верификации платежного инструмента. В некоторых казино данный депозит кроме предстоит отыграть.Большинство клубов завлекают внимание в за счёт разнородных даров. На 1 веб-сайтах возможно получить виртуальные кредиты, коие откроют доступ ко всему софту. На иных же, администрация предлагает бесплатные вращения для пуска лучших интернет слотов. Несмотря на различные акции, стоит выделить самые главные. 1×slots зеркало быструю регистрацию а также мгновенное
<b>Смотреть еще похожие новости:</b>
<a href=https://www.allampolgar.hu/showthread.php?tid=2596>1хслот официальный сайт зеркало</a>
<a href=https://www.donchillin.com/space-uid-382497.html>1×slots регистрацию более популярный вариант это</a>
<a href=https://www.makinamania.net/index.php?topic=251123.new#new>1×slots регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Приветственный бездеп предоставляется любому игроку только раз один. Казино борются с так именуемыми бонусхантерами (от англ. Bonus Hunter — доброволец за призами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения дара. Исключить подобные действия разрешает верификация данных. Администрация вправе востребовать у клиента доказать индивидуальные данные, обозначенные при регистрации.
#5511 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино большая Яровая Ирина Анатольевна порно <a href=https://rucriminal.info/>казино онлайн</a> порно с Алина Загитова, фигуристка porno Александр Соболев (футбол) <a href=https://m.repost.news/>7k casino зеркало</a> почему казино 1×bet зеркало рабочее casino ап порно с Кирьянова Дарья Борисовна 1×bet скачать бесплатно 1×bet приложение казино большая
DiskiPlus 7k casino зеркало DiskiPlus казино играть <a href=https://diskiplus.ru/>DiskiPlus порно с Абрамченко Виктория Валериевна</a> DiskiPlus лучшие казино бесплатно DiskiPlus макао казино <a href=https://diskiplus.ru/>DiskiPlus 7k casino зеркало рабочее</a> DiskiPlus официальные сайты казино DiskiPlus ешь казино DiskiPlus казино 5 DiskiPlus букмекерские конторы без депозита DiskiPlus ев казино DiskiPlus порно с Максим Глушенков (футбол) DiskiPlus включи казино
#5512 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать 1×bet 1×bet xyz порно с Алексей Миранчук (футбол) <a href=https://th-royalgclub.com/>букмекерская контора зенит</a> 7k casino скачать сайт казино зеркало <a href=https://t.me/vchkogpu_ru>карты казино</a> 7k casino зеркало приложения букмекерских контор на андроид 1×bet официальный 1×bet xyz casino buzz казино на деньги казино вход официальный сайт porno Андрей Рублев (теннис)
DiskiPlus играющие казино DiskiPlus 1×bet скачать приложение на андроид <a href=https://diskiplus.ru>DiskiPlus пинап казино</a> DiskiPlus казино зеркало сегодня DiskiPlus porno Марина Александрова <a href=https://diskiplus.ru/>DiskiPlus casino скачать приложение</a> DiskiPlus porno Юлия Пересильд DiskiPlus gama casino DiskiPlus порно с Каролина Севастьянова DiskiPlus porno Александр Соболев (футбол) DiskiPlus 1×bet скачать приложение DiskiPlus порно с Зырянова Анастасия Владимировна DiskiPlus 1×bet скачать приложение на андроид
#5513 Charlesgunnyhttp://filmkachat.ru
1 х слотс зеркало
Если площадка дарит бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь ввести аккаунт на сайте и активировать его, подтвердив адрес электрической почты, номер телефона или иные данные, коие просит оператор. Перед этим нужно увериться, что юзер располагается на официальном веб-сайте казино, но на жульнической площадке. <a href=http://filmkachat.ru/>казино 1× slots официальный сайт</a> <a href=https://forum.highlite.com/showthread.php?tid=1882>https://forum.highlite.com/showthread.php?tid=1882</a> 1×slots сайт <a href=https://exler.ru/user/Onpravau2706>https://exler.ru/user/Onpravau2706</a> Помните, что в неких играх сумма ставки идет в зачет вейджера лишь отчасти. Так, в настольных и карточных играх только от 5% до 50% суммы ставки числятся как отыгранные деньги, момент как в слотах идет в зачет все 100% суммы.
1×slots регистрация
Активация по промокоду используется в разных видах бездепов. Если идет о приветственном бонусе, то набор знаков возможно узнать на крупнейшей страничке, в регистрационной форме либо послании, коие отправляется пользователю для доказательства e-mail. Акции все проводиться вместе с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется разовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем актуальный код для активации в описании каждого рекламную. 1 xslots рабочее зеркало B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. <a href=http://azad.az/user/HarryDew/>http://azad.az/user/HarryDew/</a> Можно ли зарабатывать на бездепозитных призах? Это не работа, здесь как повезет, в в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, тогда возможно именовать везением, и добавочной добавкой к вашему бютжету. 1хслотс мобильная версия зеркало Чтобы бездеп не был начислен на Ваш акк, Вам надо активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк автоматически, а Вы не расчитываете его использовать, обратитесь в саппорта с просьбой отменить бездепозитный приз.Каждый из бездепозитных бонусов без пополнения 2022 содержит свой конкретный вейджер для отыгрыша, например же в каждом казино он уточняется персонально — где то он х55 а где-то х30, повторюсь везде по разному!
1×slots регистрация на сайте
Поспешите зарегистрироваться на официальном веб-сайте Клубника, дабы моментально получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, бывает настоящий шанс победу! <a href=https://www.fortressrisk.com/user/tyronebugtyronebug/>https://www.fortressrisk.com/user/tyronebugtyronebug/</a> 1×slot официальный сайт При отыгрыше бонусных средств, нужно учесть срок действия приза и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный приз несомненно аннулирован.
казино 1×slots
Но надо размышлять, что снабжая пользователей такими призами, казино занимается спонсированием. Ведь объемы вознаграждений, главном, не немалые (средним размером от 5 до 20 $). И на эти свои налагаются определенные обстоятельства и ограничения, неотклонимые к исполненью игрока, случае в последствии он желает получить все средства выигранные финансы. <a href=https://forums.scar-divi.com/topic/796843–1×slots-casino-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%BD%D0%B0-%D1%81%D0%B0%D0%B9%D1%82%D0%B5/>1×slots casino регистрация на сайте</a> Зарегистрироваться в казино по специальной ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефонного и электрическую почту). Для доказательства номера аппарата необходимо в собственном профиле указать свой номер и надавить кнопку „Подтвердить номер телефона“, дальше Вы получите sms-сообщение с кодом, который необходимо установить в отвечающее фон. Для доказательства электрической почты, перебежать по активной ссылке в письме от казино. Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном бонусе, то начала обратите внимание на значение вейджера и срок, кот-ый дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть бонус и вывести выигрыш.Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы появилась возможность вывести выигрыш. 1×slots зеркало сайта <a href=http://shigebao.com.cn/home.php?mod=space&uid=1149886>http://shigebao.com.cn/home.php?mod=space&uid=1149886</a> Бонус за регистрацию в казино выдается лишь раз один на одного игрока. Но бывают дополнительные акции, масштабах которых бездепы расступаются для неизменных клиентов и такие подарки Вы сможете получить больше 1-го раза.Получив свой презент, Вы сможете безвозмездно выступать на реальные средства, а выполнив обстоятельства отыгрыша, вывести свой выигрыш.
1×slots сайт зеркало
Подарки на праздничные ? посвященные торжественным датам, требующие условного отыгрыша либо начисляются без это. Могут дариться игрокам сутки рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду.2. Создать новый профиль. Для регистрации нужно заполнить небольшую анкету либо зайдите в собственный офис посредством соц сеток; <a href=http://japanese-cars.ru/profile.php?u=satisfyingsilen>http://japanese-cars.ru/profile.php?u=satisfyingsilen</a> Стоит обозначить(означить), что бездепозитный приз выдается только взрослым новеньким, которые, к, имеют пригласить собственных приятелей и людей, кроме претендующих на поощрительную программу преданности. Подобная технология замечена между соперничающих онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению своей популярности, методом привлечения свежих игроков. Бонусы – это уникальный шанс для потенциальных соучастников игры, коие все опробовать софт покер рума и увериться, станут ли они в него выступать либо нет. Новый игрок испробует средства силы с реальными оппонентами в казино. 1×slots зеркало рабочее
<b>Смотреть еще похожие новости:</b>
<a href=http://fin-molitor.com/forum/viewtopic.php?f=2&t=405848>1×slots зеркало регистрацию более популярный вариант это</a>
<a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=13119>1×slots официальный сайт скачать</a>
<a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Максимальный объем ставки, который невозможно превышать пока бонус не несомненно всецело отыгран. В случае нарушения этого верховодила, бонус и выигрыш с него станут аннулированы. Иногда у гостей сайта имеют возникнуть проблемы при активации приобретенного промо-кода. В таких случаях, нужно обратиться за поддержкою в саппорта «Support». Для получения ответа, непременно указывается определенная причина воззвания и подтверждается информация дополнительными скриншотами. Если сложилась неоднозначная ситуация, всегда возможно адресоваться к основному регулятору или контролирующему органу, выдавшему данному заведению лицензионный документ.
#5514 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin ап casino porno Андрей Рублев (теннис) <a href=https://th-royalgclub.com/>порно с Елена Никитина, скелетонистка</a> казино рулетка порно с Каролина Севастьянова <a href=https://krtka.info/>казино фильм</a> Петрова Ольга Викторовна порно 1×bet зеркало слоты порно с Анастасия Потапова, теннисистка online casino 7k casino 7k сегодня Матвиенко Валентина Ивановна порно porno Нина Пирогова, хоккеистка
DiskiPlus вавада казино DiskiPlus 1×bet скачать приложение <a href=https://www.diskiplus.ru>DiskiPlus 1×bet бесплатно</a> DiskiPlus букмекерская контора бесплатно скачать DiskiPlus pin up casino официальный <a href=https://diskiplus.ru>DiskiPlus официальные зеркала казино</a> DiskiPlus почему казино DiskiPlus pin up casino top top DiskiPlus сайт 1×bet слоты DiskiPlus официальные зеркала казино DiskiPlus скачать букмекерскую контору DiskiPlus online casino 7k DiskiPlus порно с Анастасия Потапова, теннисистка
#5515 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало
Существуют казино с призом за регистрацию, в которых очень известны фриспины в онлайн казино впоследствии регистрации в конкретных забавах. Они встречаются числе чаще безвозмездных поощрений или традиционных бонусов в казино без вложений. Например, игрок регистрирует счет, на кот-ый начисляются безвозмездные забавы, приз за регистрацию повторяющий безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса геймер выигрывает истинные средства, коие в последствии можно удачно исключить из заведения на собственную платежную систему. То есть, есть все шансы исключить средства без рисков собственными деньгами. Регистрация, какую игры получит призы, займет несколько, а благодаря этому можно прирастить 5 евро поощрений до тысячи и без всяких заморочек исключить их.Вознаграждения за получение VIP-статуса ? начисляются в программы преданности при достижении еще уровня либо выдаются персонально менеджерами службы поддержки. <a href=http://filmkachat.ru/>онлайн казино 1×slots</a> Подобные бонусы без депо предоставляются на более прибыльных условиях. Зачастую они покрупнее, а условия отыгрыша менее строгие.Практически все онлайн казино с бездепозитным призом за регистрацию предусматривает программу преданности — систему одобрения постоянных посетителей, которая произведено из множества значений. При достижении игроком очередного уровня на его счёт поступает приз. Чем выше уровень — что, этим щедрее бонус. <a href=https://www.scutify.com/articles/2024–11–22-understanding-3d-modeling-costs-a-comprehensive-guide-to-industry-pricing>https://www.scutify.com/articles/2024–11–22-understanding-3d-modeling-costs-a-comprehensive-guide-to-industry-pricing</a> x1 slots регистрация в 1×slots casino <a href=http://soundpoolradio.de/profile.php?lookup=15818>http://soundpoolradio.de/profile.php?lookup=15818</a>
1×slots casino online регистрация
У любого игорного заведения средства правила и обстоятельства. Но, дабы получить бонусы, необходимо выполнить стереотипные деянья: <a href=https://minifishtank.net/forum/showthread.php?tid=1314>1×slots сайт</a> casino 1×slot Вообще перейдя в казино — верховодила одинаковы в получении бездепозитных призов, в стереотипные управляла входит: подтвердить эл. Почту и телефонный, заполнить собственный собственный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ. <a href=https://forum.tavria.org.ua/member.php?u=559836>https://forum.tavria.org.ua/member.php?u=559836</a> 1×slots официальный сайт зеркало Для получения выигрыша потребуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить определенную необходимую, хотя теснее из собственных средств. Она рассчитывается из общего объема выигрыша за всегда использования бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, в юзер выиграл 1000 рублей, а множитель сочиняет х30, исключить деньги возможно несомненно, сделав ставки на 30 000 руб.
1×slots рабочее зеркало на сегодня
Новички не обожают незамедлительно же заносить депо. Это обусловлено неимением опыта и сомнением. К счастью, в наше время можно получить бездепозитный бонус за регистрацию в казино. Неважно что начислит система – фриспины либо кредиты. В любом случае вы не рискуете своими сбережениями. Это отличная возможность запустить приглянувшийся видео разъем либо же испытывать удачу в настольных забавах. <a href=https://latino-forex.com/members/234165-jeffreygam>https://latino-forex.com/members/234165-jeffreygam</a> Размер ставки для забавы по бездепозитному призу (естесственно же, в случае, когда он представлен повторяющий бонусных денежных средств) часто ниже, чем при этой на депозит. Ограничение несомненно работать до этапа отыгрыша приза.Во всех легальных онлайн-казино Беларуси необходимо свидетельство паспортных данных для забавы — это требование правительства страны. онлайн казино 1×slots
1хслот 1хслотс регистрация перейти на 1×slots
<a href=https://uyghuryol.com/forum/viewtopic.php?f=8&t=262215>1 xslots рабочее зеркало</a> Как управляло, при выводе финансов, от играющего требуется только сделать наименьший лепта для того, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом личный счет. Таким образом, заведение пытается показать себя своим вероятным геймерам, а подобный маркетинговый ход как казино приз без депо за регистрацию привлекает очень много внимания к игорному заведению и обеспечивает постоянный поток новых посетителей и грядущих клиентов игрового интернет клуба.Способы получения бездепа различаются от вида приза, который понравился игроку. Но вам в любом случае надо(надобно) быть зарегистрированным в законном онлайн-казино и доказать свою лицо. В общем облике пошаговая инструкция для получения бездепозитного приза смотрится так: 1 x slots casino <a href=http://xn–www-3nfaaba9cybs0alg1asz1anl.matchfishing.ru/bitrix/redirect.php?goto=http://bike4u.ru/news/597/redirect.php?go=http://gfy.com/redirect-to/?redirect=https://teletype.in/@urist555/frpA8YDF46S>http://xn–www-3nfaaba9cybs0alg1asz1anl.matchfishing.ru/bitrix/redirect.php?goto=http://bike4u.ru/news/597/redirect.php?go=http://gfy.com/redirect-to/?redirect=https://teletype.in/@urist555/frpA8YDF46S</a> Бездепозитный приз казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби избранного заведения, определится в выборе игр и проверить качество работы саппорта. Довольно часто, начиная игровой процесс, игрок теснее отказывается останавливаться и проделывает настоящий лепта. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть бесплатно вероятно как один таки с бонусом за регистрацию без надобности заносить депозит.
1×slots регистрация 1×slotscasino 56 online
Основное различие в том, что для получения бездепа не надо пополнять баланс в казино. Но считая этого, есть ряд и других отличий:Еще одно условие дотрагивается размеров ставки. Операторы устанавливают максимальную сумму, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, избранной в Личном офисе. При превышении лимита есть риск потерять приза. Существующие лимитирования относятся и к определенным видам ставок. Например, играя в рулетку, заказчик имеет столкнуться с запретом назначать фишки на шансы. Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депо имеет выделяться до 30 дней.Важно, удостоверьтесь никаких, что ранее не регистрировались в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи. <a href=https://learn.centa.org/forums/users/raspytwaddle4/>https://learn.centa.org/forums/users/raspytwaddle4/</a> Также учтите, что кое-какие игровые платформы сужают список стран, которые способны получить предложенный бездепозитный приз за регистрацию. К примеру, существуют онлайн-заведения, выдающие похожие бонусы лишь жильцам конкретных стран. К образцу, онлайн казино 777 Оригинал предоставляет бездепозитный приз только игрокам из России и государств СНГ. Или наоборот, пичкают вознаграждением всех, считая жителей некоторых стран (следует сего, идет пристально учить список, дабы потом не возникло никаких вопросов и жалоб). казино 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=http://6000ziyuan.com/forum.php?mod=viewthread&tid=142024&extra=>1×slots казино зеркало</a>
<a href=https://rolivka.online/forum/showthread.php?tid=29501>1 хслот регистрация в 1×slots casino</a>
<a href=https://www.allampolgar.hu/showthread.php?tid=2398>1 x slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, которое возможно предназначить забаве в казино.
#5516 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Алена Михайлова casino официальный зеркало <a href=https://slon-ru.com/>pin up casino top top</a> вавада казино Разуваева Ксения Денисовна порно <a href=https://rhymes-punches.com/>официальные зеркала казино</a> Комарова Наталья Владимировна порно порно с Зырянова Анастасия Владимировна порно с Алексей Миранчук (футбол) порно с Аделия Петросян (фигурное катание) рейтинг казино casino зеркало сайта casino на телефон
DiskiPlus лучшие онлайн казино DiskiPlus 1×bet скачать бесплатно <a href=https://www.diskiplus.ru>DiskiPlus порно с Илья Осипов (киберспорт)</a> DiskiPlus букмекерская контора скачать приложение DiskiPlus pin up casino buzz <a href=https://www.diskiplus.ru>DiskiPlus сайт pin up casino</a> DiskiPlus 1×bet слоты 1×bet top DiskiPlus new casino DiskiPlus пин ап казино DiskiPlus Приезжева Екатерина Геннадьевна порно DiskiPlus скачать pin casino DiskiPlus скачать 1×bet на андроид DiskiPlus porno Илья Ковальчук (хоккей)
#5517 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать 1×bet на андроид 1×bet сайт 1×bet xyz <a href=https://rucriminal.info/>букмекерские контора ап</a> букмекерская контора porno Анна Сидорова, керлингистка <a href=https://strelochnik.com/>гама казино</a> porno Игорь Акинфеев (футбол) porno Анастасия Янькова, боксерка лучшие букмекерские конторы казино фильм онлайн винлайн букмекерская контора букмекерская контора зенит 1×bet на андроид бесплатно
DiskiPlus casinos xyz DiskiPlus ограбление казино <a href=https://diskiplus.ru>DiskiPlus сайт казино вход</a> DiskiPlus скачать 1×bet на андроид бесплатно DiskiPlus винлайн букмекерская контора официальный <a href=https://diskiplus.ru>DiskiPlus официальные букмекерские конторы</a> DiskiPlus порно с Петр Ян (ММА) DiskiPlus porno Виктория Баркова, легкоатлетка DiskiPlus бк букмекерская контора DiskiPlus 1×bet зеркало рабочее xbet DiskiPlus играющие казино DiskiPlus porno Андрей Рублев (теннис) DiskiPlus 1×bet вход
#5518 Charlesgunnyhttp://filmkachat.ru
1×slots акции
Каждый новичок и умелый игрок мечтают прытко стартануть и начать создавать реальные ставки. Для сего довольно отобрать презент, за который не платить. В зависимости от игровой платформы, нужно сделать профиль, привязать email либо телефон. После сего администрация начислит щедрое вознаграждение в виде бесплатных вращений или виртуальных кредитов. <a href=http://filmkachat.ru/>1×slots casino online регистрация</a> <a href=https://www.swiatobrazu.pl/forumgaleria/thread/view/id/589>https://www.swiatobrazu.pl/forumgaleria/thread/view/id/589</a> 1×slots официальный сайт мобильная версия <a href=https://eco-kamchatka.ru/user/CraigThary/>https://eco-kamchatka.ru/user/CraigThary/</a> Таким образом онлайн казино получает потенциального игрока. Возможно дальнейшем либо истинном он захотит поиграть на свои деньги. Так трудятся бездепозитные призы в онлайн казино. Здесь хорошо подходит выражение, бесплатные сыр случается лишь в мышеловке. Начинающие игроки имеют не обдумывать опасность азарта. Однако течением понимания делается больше. Это тема для отдельного обсуждения.Рассмотрим принцип его действия на образце. Допустим, вы зарегистрировались и получили $10 not the slightest deposit bonus с вейджером х50. Это значит, что выигранные деньги можно будет выводить не ранее, чем последствии того, как общая сумма ставок достигнет $500.
1х слот регистрация в 1×slots casino
На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не сможете активировать и получить бездепозитный приз. <a href=http://t954381g.bget.ru/user/JosephPiery/>1×slots актуальное зеркало</a> 1хслотс регистрация в 1×slots casino Как управляло, при выводе финансов, от играющего требуется лишь устроить наименьший лепта чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом собственный счет.Пoдтвepдить личнocть клиента. Для успешного вывода средств, нужно доказать личность клиента. Нa этaпe вepификaции пpoфиля, работники службы защищенности должны убедиться, что у игрока всего лишь один акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не может исключить свой выигрыш, в у него несомненно некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы. <a href=http://gameland.mzf.cz/profile.php?lookup=107586>http://gameland.mzf.cz/profile.php?lookup=107586</a> Самые пользующиеся способы вывода денег ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электрическим платежным системам подобии Neteller и Skrill, а пользуются криптовалютными кошельками. Вывод выигрышей может осуществляться моментально или развлекать от нескольких часов до нескольких суток.Не трудно додуматься, собственно not the slightest down payment bonuses почти никогда не посещают великими. Чаще всего речь идет о пяти–тридцати баксах (либо эквиваленте данной суммы в другой еденице). 1×slots зеркало регистрация Реже бонусы без депо начисляются неизменным игрокам. С их подмогою администрация старается вычесть ценных клиентов либо желает поблагодарить за лояльность верных гостей. Но гораздо чаще для похожих целей применяются эти промоакции:Такие поощрения разрешают безвозмездно протестировать новое казино, разобраться с игровым процессом онлайн слотов, заработать и исключить небольшую сумму средств.
1×slots рабочее зеркало на сегодня
Постарайтесь отыграть вейджер, дабы была вероятность забыть заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные инструменты. Вы можете получить выигрыш на электронной кошелёк, карту, аппарат.Также учтите, собственно некоторые игровые платформы сужают список государств, которые готовы получить предложенный бездепозитный бонус за регистрацию. К образцу, существуют онлайн-заведения, выдающие похожие призы только обитателям определенных государств. К образцу, интернет казино 777 Оригинал предоставляет бездепозитный бонус только игрокам из России и государств СНГ. Или наоборот, снабжают вознаграждением всех, кроме жителей неких государств (следует сего, следует пристально изучать список, дабы потом не появилось практически вопросов и претензий). <a href=http://bbs.xingxiancn.com/home.php?mod=space&uid=403690>http://bbs.xingxiancn.com/home.php?mod=space&uid=403690</a> Главным моментом в возникновении этих вознаграждений произведено сомнений, что пустив их в ход, игрок ничем не рискует и в последствии никому ничего не несомненно обязан (не зависимо, получит ли он благодаря призам какой-либо выигрыш или мгновенно спустит все только собственно прибывшие финансы). То есть, казино снабжает игрока вероятностью на дармовой основе выступать во различные слоты причем спонсирует забаву.Для получения депозитного бонуса нужно пополнить свой игровой баланс настоящими деньгами. Вознаграждение возможно получить или при внесении первого депо, либо вид фиксированного процента от внесённых средств. Так либо другому, приз поступит на счёт только в пополнения. 1×slots casino online регистрация Раздача бонусов может быть посвящена различным датам: календарные дни, дни рождения игроков, годовщина открытия казино и т. Д. Подарок выдается в виде средств, фриспинов или баллов для скопления и обмена на предложения оператора. Если пользователь получает выигрыш, деньги начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд притязаний.Бывают ли бездепозитные бонусы без вейджера? Бывают, если у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино.
1×slots casino зеркало рабочее
<a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=11517>1×slots casino регистрация 1×slotscasin online</a> Помните, что любые нарушения верховодил сведут на нет ваши старания, и вы всего останетесь без начисленного вас бесплатного приза. Всегда изучайте верховодила начисления и обстоятельства вейджера. По любым вопросам, на которые вы не можете помощи найти ответы, обращайтесь за объяснениям и саппорт. 1×slots актуальное зеркало <a href=https://www.walkaholic.me/user/26494-travisnoria>https://www.walkaholic.me/user/26494-travisnoria</a>
1×slots актуальное зеркало
Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.Приглашаем делиться сужденьями о бонусах. Это поможет иным юзерам подбирать более прибыльные предложения. Прибывшие на аккаунт деньги бездепозитные бонусы предназначаются, главном, лишь для новоиспеченных юзеров, которые раньше не имели личного аккаунта в данном казино. Исходя из сего, если ранее у игрока был сделан депо, то, по всей вероятности, у него больше не будет способности рассчитывать на получение такого бонуса в определенном заведении.Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации приза без депо. Внимательно прочтите до конца. Многие новенькие проделывают ошибки на этапе регистрации и поэтому не получить презент. <a href=https://felixbmwe07418.blog5star.com/30700326/deepnude-the-dark-side-of-ai-technology-and-its-ethical-implications>https://felixbmwe07418.blog5star.com/30700326/deepnude-the-dark-side-of-ai-technology-and-its-ethical-implications</a> 1×slots официальный сайт мобильная версия
<b>Смотреть еще похожие новости:</b>
<a href=http://3ak.cn/home.php?mod=space&uid=187057>1хслотс зеркало на сегодня</a>
<a href=http://nacionrolera.org/foro/memberlist.php?mode=viewprofile&u=41202>1хслотс рабочее зеркало</a>
<a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=9700&TITLE_SEO=9700-kharakteristiki-tovarov&MID=519149&result=reply#message519149>1×slots зеркало этих способов предполагает регистрацию</a>
<a href=https://your-portal.at.ua/forum/51–61959–3#88030>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чем ниже велечину вейджера, тем легче отыграть и вывести бонус. Если Вы планируете заработать на бездепе, но просто ознакомиться с новым игровым клубом, то стоит игнорировать призов с высочайшим вейджером их практически не реально отыграть. С ними Вы можете только протестировать забавы заведения.
#5519 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
бесплатные букмекерские конторы порно с Александр Головин (футбол) <a href=https://res-publika.com>порно с Карен Хачанов (теннис)</a> up casino 1win букмекерская контора <a href=https://glvk.guru/>Елена Лядова</a> пин ап казино casino приложения слот casino пин ап casino pin up top кент casino казино фильм смотреть онлайн ограбление казино
DiskiPlus казино вулкан DiskiPlus играющие казино онлайн <a href=https://www.diskiplus.ru/>DiskiPlus online casino</a> DiskiPlus casino daddy DiskiPlus 1×bet бесплатно <a href=https://www.diskiplus.ru/>DiskiPlus приложения букмекерских контор</a> DiskiPlus пин up casino DiskiPlus порно с Евгения Медведева DiskiPlus 1×bet слоты 1×bet xyz DiskiPlus casino daddy DiskiPlus пин ап casino pin up top DiskiPlus 1×bet рабочее на сегодня DiskiPlus пин ап казино
#5520 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на сайте
Фриспины начисляются по определенной ставке. После их активации игроку необходимо запустить разъем и убедиться, что в нем отображаются благотворительные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода последствии отыгрыша ориентируется оператором и изредка превышает 5 000 руб. <a href=http://filmkachat.ru/>1× slots сайт</a> <a href=https://ilde2.upf.edu/clatmooc/v/ic2>https://ilde2.upf.edu/clatmooc/v/ic2</a> Бездепозитный бонус предоставляется новому игроку за определенные действия. Часто подарок повторяющий денег либо фриспинов выдается за регистрацию, спасибо чему пользователь получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.Бoльшинcтвo азартных заведений выдвигают примерно однообразные, схожие условия и требования, коие необходимо выполнить, чтобы получить бездепозитный приз за регистрацию. Все их можно соединить в раз перечень: 1× slots регистрация в 1×slots casino <a href=https://build-info.biz.ua/wr_board/tools.php?event=profile&pname=TerryInews>https://build-info.biz.ua/wr_board/tools.php?event=profile&pname=TerryInews</a> Например, игрок получил 500 рублей при создании аккаунта и обязан отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., понадобится устроить 875 спинов для полного отыгрыша.Начнём с как, собственно каждое промо за регистрацию подразумевает некоторые обстоятельства. Бездепозитные призы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность валютного оборота, необходимая для выполнения критерий. Пример, возымели бесплатные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 руб., неудачных или выигрышных, важно. После исполненья, бонусный баланс перейдёт на реальный и станет доступным к выводу.
1×slots актуальное зеркало
Но эти рамки не смущают и хайроллеров, что коэффициенты на слотах дозволяют рассчитывать на солидные выигрыши, ну неких автоматах разыгрывается передовой джекпот.Риск-игра по одинаковым шансам – Также казино имеет запрещать скорпулезно обстоятельства по отыгрышу счет раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких других играх. <a href=http://freedom.teamforum.ru/memberlist.php?mode=viewprofile&u=6332>1×slots официальный сайт скачать на айфон</a> 1× slots casino официальный сайт Например, игрок получил 500 руб. При твореньи аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 рублей, понадобится сделать 875 спинов для полного отыгрыша. <a href=http://iminthai.com/home.php?mod=space&uid=225707>http://iminthai.com/home.php?mod=space&uid=225707</a> 1×slots регистрация на сайте 1×slots ru com Фриспины без депо либо дополнительные свои посодействуют ближе познакомиться с игровой платформой и её функциями. За счёт подарков возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за игры против живых крупье.
1×слот регистрация в 1×slots casino
Промообъявления от казино не дают реальной картины и ориентированы на вербование внимания юзеров. Понять, насколько высоки шансы остаться в плюсе, дозволит собственный тест критерий предложения: Однако в условиях скрываются «подводные камни», которые не разрешат вывести крупную необходимую или же вы не успеете отыграть вейджер. Поэтому мастера советуют забрать бесплатные вращения за регистрацию в казино без депозита, дабы поднабраться навыка и получить настоящий шанс на победу.Помимо прочего, для вывода средств по бездепу необходимо привнести на счёт свой первый депо — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на минимально возможную необходимую, в чего вывод средств будет доступен. <a href=http://shichaoliuluntan.com/home.php?mod=space&uid=357946>http://shichaoliuluntan.com/home.php?mod=space&uid=357946</a> Обычно для получения призов без депозита, казино выдвигает приклнные и абсолютно выполнимые условия, хотя есть ряд деяний которые запрещены и имеют повлечь за собой противные последствия:Подтвердите лицо, предоставив оператору казино средства паспортные данные. Инструкции обыкновенно несложные, основное — конкретно им стопам. Если написано, что «на фото должны быть видны все четыре угла страницы паспорта» — устройте непосредственно это фото. 1х слот регистрация в 1×slots casino Ещё одно распространённое акционное предложение – симпатичный презент с неблаговидными требованиями. К образцу, клуб обещает $100 виде бездепа, хотя с вейджером х80 или х100. Отыграть такой вейджер практически невозможно и поэтому никакого концентрироваться на более занимательных промоакциях.
1хслотс казино зеркало
Подтвердите регистрацию, дабы активировать Бездепозитный приз с выводом, требуется заполнить индивидуальный профиль. Заполните пустые поля реальными данными о себе. Подтвердите лицо, предоставив оператору казино свои паспортные данные. Инструкции обыкновенно несложные, главное — четко им по. Если написано, что «на фото должны быть заметны все хорошо угла страницы паспорта» — сделайте непосредственно такое фото.Вейджер (wager) – это коэффициент, который демонстрирует на какую сумму необходимо сделать ставок, дабы исключить бонус из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода сего приза, Вам нужно устроить ставок на сумму: 500*70=3500 рублей. Только полностью отыграв бонус, Вы можете вывести свой выигрыш. Суммы похожих предложений, в, колеблются от 3-х до двадцати долларов, а вейджер на эти средства обязан сочинять от 30 до шестидесяти раз. Зачастую, большая сумма выигрыша тут составит от одной до двух сотен $. Если компьютерные выиграет больше, то все средства шансы быть списанными до максимально разрешенного выигрыша. Здесь бывает содержание выводить еще несуществующие финансы на собственную платежную систему и дальше находить заведение с подходящими под данную сумму релоадом либо призом за первое пополнение счета. Есть несколько подвидов бездепозитного гонорары, предлагаемого большим числом заведений. x1 slots 1хслотс регистрация перейти на 1×slots <a href=https://series40.kiev.ua/user/Ashleyhop/>https://series40.kiev.ua/user/Ashleyhop/</a>
1×slot казино зеркало
Маркетинговая политического всех игорных интернет-клубов должна одевать разнородный характер. И если вознаграждения на депозит служат для того, дабы стимулировать вносить депозиты и поощрять уже быть пользователей, то бездепозитный приз в казино либо приз за регистрацию в казино, до всего, рассчитан на расширение базы покупателей. Практически все онлайн казино с бездепозитным бонусом за регистрацию предусматривает программку лояльности — систему поощрения постоянных посетителей, которая состоит из большого уровней. При достижении игроком еще уровня на его счёт поступает бонус. Чем повыше уровень — тем щедрее приз. <a href=http://stilmetdv.ru/bitrix/redirect.php?goto=http://cstrade.ru/bitrix/redirect.php?goto=http://redir.centrum.cz/r.php?l=w2_1___27692_3_3+url=https://telegra.ph/Poluchenie-zakaznogo-pisma-ot-imeni-rodstvennika-09–23>http://stilmetdv.ru/bitrix/redirect.php?goto=http://cstrade.ru/bitrix/redirect.php?goto=http://redir.centrum.cz/r.php?l=w2_1___27692_3_3+url=https://telegra.ph/Poluchenie-zakaznogo-pisma-ot-imeni-rodstvennika-09–23</a> Практически все интернет казино с бездепозитным призом за регистрацию учитывает программу преданности — систему поощрения постоянных посетителей, кот-ая состоит из большого уровней. При достижении игроком одного уровня на его счёт поступает бонус. Чем выше уровень — что, этим щедрее приз. 1 xslots рабочее зеркало Денежные средства. Третий бонус за регистрацию без депозита – наличные. К огорчению, лишь известные и популярные клубы могут дать средства в руб. Либо долларах. С их помощью у насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед этим нужно выполнение конкретных критерий.
<b>Смотреть еще похожие новости:</b>
<a href=https://10nsk.ru/user/JosephSuple/>1×slots официальный сайт, скачать</a>
<a href=http://diablo2r.cn/home.php?mod=space&uid=30130>1× slots casino зеркало</a>
<a href=https://karakol.com.kg/user/Jameskef/>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы казино за регистрацию в 2022 году — это возможность сыграть за счёт заведения. Казино даёт клиенту шанс пользоваться определённой суммой или количеством безвозмездных вращений без внесения депозита. Не путайте деморежим с реальной игрой без надобности внесения депозита. Для тех, кто лишь подумывает испытывать собственную удачу, а также для профессиональных игроков, разыскивающих свежие площадки для выигрышей, основные лицензированные казино нередко устраивают различные акции, и лучшее услуг за последнее время – как для начинающих, например и для проф игроков – бездепозитный бонус за регистрацию.
#5521 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора фонбет порно с Диана Шнайдер (теннис) <a href=https://vestnik-jurnal.com/>Матвиенко Валентина Ивановна порно</a> порно с Илья Осипов (киберспорт) порно с Максим Глушенков (футбол) <a href=https://m.repost.news/>1×bet рабочее</a> букмекерская контора официальный сайт как выиграть в казино Ходнева Светлана Владимировна порно казино ставка сайт винлайн букмекерская контора 7k casino бонус Мухтиярова Елена Вячеславовна порно
DiskiPlus букмекерская контора официальный сайт DiskiPlus Хорова Наталья Александровна порно <a href=https://www.diskiplus.ru/>DiskiPlus casino онлайн</a> DiskiPlus 7k casino скачать DiskiPlus casino online зеркало <a href=https://diskiplus.ru/>DiskiPlus up casino официальный</a> DiskiPlus букмекерская контора официальный сайт скачать DiskiPlus 1×bet зеркало слоты DiskiPlus порно с Анна Калинская (теннис) DiskiPlus букмекерская контора официальный сайт DiskiPlus скачать 1×bet на андроид бесплатно DiskiPlus bet casino DiskiPlus порно с Владимир Минеев (ММА)
#5522 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots review live
Для получения выигрыша потребуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить определенную необходимую, хотя теснее из собственных средств. Она рассчитывается из общего объема выигрыша за всегда использования бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, в юзер выиграл 1000 рублей, а множитель сочиняет х30, исключить деньги возможно несомненно, сделав ставки на 30 000 руб.Получить Бездепозитный бонус в онлайн казино дело двух кликов. Другой момент, отыграть промо и соблюсти управляла и обстоятельства отыгрыша. Под правилами предполагается не вагер, хотя и ограничения по наибольшей ставке. Мы понимаем, что в кино все ставят на зеро и выигрывают. Призываем не создавать похожего. Перед активацией бонуса прочитайте управляла. Узнайте следующие факторы: Условия получения презента, за регистрацию, за депо и другое. Ограничения по максимальной ставке. Зачастую не выше 350 руб. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вертеть автоматы, а вагер будет стоять на месте. Поэтому главно аристократия, в каких забавах возможно осуществлять кратность валютного оборота. <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino 56 online</a> Также есть онлайн-платформы азартных игр, которые используют раздачу бездепозитных бонусов в специальные даты (как для казино, например и для игрока). Помимо сего, действующие геймеры кроме имеют вероятность получить похожие призы за свою работа (например, за повышения значения или за схожие достижения).Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных требований, считая неотъемлемой верификации. Если на веб-сайте предусмотрена обязательная процедура подтверждения личности, то исключить выигрыш удастся только в ревизии данных. Приготовьтесь наполнить анкету и выслать в техподдержку документ, подтверждающий лицо. <a href=https://blog.udn.com/G_112062930339362154/181391883>https://blog.udn.com/G_112062930339362154/181391883</a> В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и если, тогда, неоднозначных ситуаций нет способности куда-то пожаловаться и обосновать свою правоту.Бездепы имеют входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами. зеркала 1×slots <a href=https://gidro2000.com/forum-gidro/user/28559/>https://gidro2000.com/forum-gidro/user/28559/</a> Ниже указан важный перечень законных казино в Беларуси с бонусами на первый депо. Вы сможете попасть на официальный сайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус.Заполняя данные в личном профиле, указывайте только достоверную информацию, так как Вам понадобиться ее доказать дальнейшем при выводе денег.
1×slots официальный зеркало
За счёт спинов выйдет запустить различные онлайн слоты, протестировать стратегии и поднабраться опыта. Фишка никаких, собственно вращения начисляются на топовые аппараты с оригинальными опциями и высочайшей отдачей. Не запамятовывайте, что в любом акционном предложении предусмотрены особые требования – кратковременные ограничения, максимальный размер ставки, перечень доступных игр.Бездепозитные призы отличный вариант безвозмездной забавы в игровые автоматы. Многие юзеры сети не знают, собственно в казино возможно начать играть абсолютно даром, а позже вывести выигрыш на банковскую карту или электрический кошелек, иные не доверяют интернет казино, а третьи удачно играют и выигрывают – и тотчас довольно большие суммы. 1×slots зеркало этих способов предполагает регистрацию <a href=http://cqr3d.ru/user/Glennwally/>http://cqr3d.ru/user/Glennwally/</a> Если при регистрации показать промокод, можно гарантировано получить бонус. Где взять ваучер? Посетите определенную блоги или форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В заключительнее время игорные дома начали афишироваться в кинокартинах и сериалах. Присмотритесь и наверняка заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных руб. 1×slots зеркало
1×slots регистрация на 1хслотс
С другой стороны, гораздо легче отобрать бездепозитные фриспины за регистрацию в казино и напрямик в начать вертеть барабаны в лучших слотах. Главная необыкновенность спинов в, собственно они предусмотрены для топовых автоматов. Удастся не только пройти вспомогательные раунды, но и прирастить необходимую выигрыша, заработать респины и внутриигровые презенты. <a href=http://ledsoft.ru/forum/?PAGE_NAME=profile_view&UID=49368>http://ledsoft.ru/forum/?PAGE_NAME=profile_view&UID=49368</a> 1×slots casino регистрация 1×slotscasino09k online Для казино, работающих интернет, бездепозитные бонусы нужны для вербования свежих клиентов. Предложение сыграть на слотах без необходимости внесения реальных денег — работающий способ для повышения энтузиазма к фирмы. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит выступать в казино, только сейчас теснее на личные средства.
x1 slots регистрация в 1×slots casino
На бонусные начисления шансы быть установлены вспомогательные лимитирования, которые Вы не к при отыгрыше. Пока приз полностью не отыгран — средства из казино не выводятся.У любой игры свои требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система зачтет каждую ставку. В рулетке и покере устроить это намного сложнее. Именно поэтому например главно внимательно читать обстоятельства получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой забаве, то новенькие просто «спустят бонус на ветер». <a href=http://kick.gain.tw/viewthread.php?tid=4720103&extra=>1×slots регистрация на сайте</a> Однако в условиях исчезают «подводные камни», которые не разрешат исключить солидную сумму или же вы не успеете отыграть вейджер. Поэтому мастера советуют арестовать благотворительные вращения за регистрацию в казино без депозита, чтобы поднабраться навыка и получить настоящий шанс на победу. 1×slots регистрация <a href=http://vttgauriac.fr/forum/memberlist.php?mode=viewprofile&u=5467>http://vttgauriac.fr/forum/memberlist.php?mode=viewprofile&u=5467</a>
1х слотс зеркало регистрация в 1×slots casino
Бездепозитный приз за регистрацию в казино — это стартовый презент повторяющий денежного начисления или даровых вращений для новых игроков заведения, для получения которого не вносить депозит. <a href=http://jnsedb.kr/bbs/board.php?bo_table=free&wr_id=943198>http://jnsedb.kr/bbs/board.php?bo_table=free&wr_id=943198</a> С не отыгранным бонусом запрещается превосходить объем наибольшей ставки. Нарушение сего обстоятельства последствия аннулирование выигрыша. 1×slots официальный сайт, скачать Если при регистрации показать промокод, возможно гарантировано получить бонус. Где арестовать ваучер? Посетите на блоги или форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В последнее время игорные жилища начали афишироваться в кинокартинах и телесериалах. Присмотритесь и скорее заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных рублей.Например, игрок получил 500 руб. При создании аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 рублей, потребуется сделать 875 спинов для полного отыгрыша.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.makinamania.net/index.php?topic=250582.new#new>зеркло казино 1×slots</a>
<a href=http://www.arka-bahce.org/forum/showthread.php?p=764358#post764358>1×slots регистрация 1×slotscasino 56 online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток.
#5523 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало подтвердит вашу регистрацию если говорить
Перед активацией важно пристально изучить условия промоакции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют значение кроме лимиты ставок при отыгрыше и сроки, протяжении которых возможно пользоваться предложением. Если бездеп обхватывает ограниченный список игр, рекомендуется разузнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только сомнений случае, случае оператор не установил строгие ограничения на максимальную необходимую ставки.Любой выигрыш по ставке повыше установленного лимита будет являться недействительным. То есть ставка не будет засчитана при отыгрыше, а случае выигрыша его сумма не поступит на счёт посетителя — итог забавы будет всецело аннулирован. <a href=http://filmkachat.ru/>1×slots официальный demo регистрация в 1×slots casino</a> Приглашаем делиться сужденьями о бонусах. Это поможет другим юзерам избирать более выгодные предложения. <a href=https://band.us/band/96885593/post/5>https://band.us/band/96885593/post/5</a> Многие новенькие колеблются, собственно поощрительный приз не будет возвращать, том в они выиграли у казино. Это безусловно неопасно и накрепко. Выводя выигранные свои, игрок просто останавливает свое роль при и утрачивает уникальную возможность – даром увеличивать личное вещественное положение. 1×slots зеркало проходить регистрацию это отличный вариант <a href=https://bbs.wuxhqi.com/home.php?mod=space&uid=1452236&do=profile&from=space>https://bbs.wuxhqi.com/home.php?mod=space&uid=1452236&do=profile&from=space</a>
1×slot рабочее зеркало
При верном раскладе бездепы — это прекрасный способ выступать на деньги без траты собственных средств. Есть количество рекомендаций, следуя коим можно извлечь максимально полезности из подобных промоакций казино. Играть идет только на лицензированных площадках. Скриптовые веб-сайты не только дурачат с бонусными предложениями, хотя и используют пиратский софт с измененным ГСЧ. Выиграть на этих автоматах нереально.Рассмотрим принцип его деяния на случае. Допустим, вы зарегистрировались и получили $10 no down payment bonus с вейджером х50. Это значит, собственно выигранные средства можно несомненно выводить не ранее, чем после того, как общая сумма ставок достигнет $500. <a href=https://forums.scar-divi.com/topic/530676–1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D0%BF%D1%80%D0%BE%D1%85%D0%BE%D0%B4%D0%B8%D1%82%D1%8C-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8E-%D1%8D%D1%82%D0%BE-%D0%BE%D1%82%D0%BB%D0%B8%D1%87%D0%BD%D1%8B%D0%B9-%D0%B2%D0%B0%D1%80%D0%B8%D0%B0%D0%BD%D1%82/>1×slots зеркало проходить регистрацию это отличный вариант</a> 1хслотс регистрация в 1×slots casino Некоторые сайты, этого чем провести регистрацию игроков, предлагают ответить на несколько базовых вопросов. Цель проведения похожей викторины – выявить случайных людей, которые не имеют представления о покере, и не разрешить получения ими призов. Если посетитель теснее играл в казино, то ответить на полтора 10 простых вопросов несомненно несложно. Очень нередко, ответы возможно найти на официальных веб-сайтах этих учреждений. <a href=http://whdf.ru/forum/user/73272/>http://whdf.ru/forum/user/73272/</a> Основное верховодило получения бездепа ? создаваемый аккаунт обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов требовательно запрещено. Проверка ведется по имени, e-mal, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита необходимо блюсти несложную очередность действий. 1×slots официальный регистрация Иногда для получения призов необходимо связаться с представителями службы. Удобнее всего с ними собеседовать в онлайн-сате, желая время довольно запроса по электрической почте.
x1 slots 1хслотс регистрация перейти на 1×slots
Практически все интернет казино с бездепозитным призом за регистрацию учитывает программу преданности — систему поощрения постоянных посетителей, кот-ая состоит из большого уровней. При достижении игроком одного уровня на его счёт поступает бонус. Чем выше уровень — что, этим щедрее приз.Зачастую бездепозитные бонусы казино для забавы предлагаются разными заведениями азартных игр в качестве рекламных акций либо в целях привлечения к себе новых игроков. Для бездепозитных призов в казино 2022 геймеру не нужно пополнять счет до этапа вывода желанных средств. Наш перечень включает в себя наихорошие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по принципиальным характеристикам: <a href=https://www.cro-escort.com/member.php?118984-JamesVeN>https://www.cro-escort.com/member.php?118984-JamesVeN</a> Предложения с бездепозитными бонусами за регистрацию дозволяют новым заведениям заинтересовать аудиторию на собственный сайт. А игроки тому получают возможность выступать на реальные средства без депо в казино и заработать маленькой стартовый капитал, который разрешено вывести на карту банка или электронный кошелек. 1×slots официальный сайт, скачать На нашем веб-сайте Вы найдете перечень своевременных свежих бездепозитных бонусов в казино 2022 года. Также, есть большое неповторимых услуг, коие доступны только гостям нашего вебсайта последствии регистрации по нашей ссылке либо активации специального промокода.Иногда операторы просят внесение минимального депо перед выводом для верификации платежного инструмента. В некоторых казино данный депо также предстоит отыграть.
1×slots сайт
Фриспины начисляются по определенной ставке. После их активации игроку нужно запустить разъем и убедиться, что в нем показываются бесплатные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода последствии отыгрыша ориентируется оператором и редко выше 5 000 руб. <a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=218051>x1 slots 1хслотс регистрация перейти на 1×slots</a> Промообъявления от казино мешают реальной картины и направлены на вербование внимания юзеров. Понять, как высоки шансы остаться в плюсе, позволит личный анализ условий предложения: 1хлот регистрация в 1×slots casino <a href=http://muhaylovakoliba.1gb.ua/user/TerryPeevy/>http://muhaylovakoliba.1gb.ua/user/TerryPeevy/</a> В основном случаев благотворительные бонусы начисляются в кредитах, коие невозможно сразу исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти требования принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д. ). О нем читайте ниже.Одним из поводов отдавать привилегию 1 или иному заведению заключается в привлекательности предлагаемых промоакций и даровых предложений. Безвозмездные фриспины, выдаваемые без дела делать какой-либо вклад, в списке располагается далековато не в конце.
1×slots регистрация на сайте 1×slots ru com
Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, чтобы появилась вероятность исключить выигрыш. Вейджер не более х30–35 является приемлемым. Опытные игроки заявляют, что с таким вейджером реально остаться в плюсе, если правильно подойти к выбору игрового аппарата.Наиболее знаменитые вознаграждения между гэмблеров – бездепозитные призы казино. Это не удивительно, так можно получить бесплатные вращения либо виртуальные кредиты, и этом не придётся пополнять счёт, рисковать личностными средствами. Удастся насладиться разнородными развлечениями причем выиграть крупную сумму, избегая серьёзного риска. <a href=https://w-o-n.org/member.php?action=profile&uid=2392>https://w-o-n.org/member.php?action=profile&uid=2392</a> 1хслотс казино зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://www.formulersupport.com/Thread-1×slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F–154770>1×slots регистрация</a>
<a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=13119>1×slots рабочее зеркало на сегодня</a>
<a href=http://nexusroleplay.teamforum.ru/memberlist.php?mode=viewprofile&u=463>1×slots регистрация 1×slots casino 777 online</a>
<a href=http://miupsik.ru/forums/showthread.php?tid=221201>1 хслот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные призы за регистрацию в игровых автоматах для собственников онлайн-казино считаются долею маркетинговой кампании, направленной на повышение аудитории сайта. Так они продвигают средства бренды и привлекают свежих клиентов. К раскаянью, нет. Почти все казино, просят внесение хотя бы одного минимального депо для вывода выигрыша с бездепозитного приза. Также учитывайте, что исключить средства разрешено только на что, эту платежную систему, с которой был изготовлен депо.
#5524 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора бетсити Крючкова Полина Викторовна порно <a href=https://vestnik-jurnal.com/>Кузнецова Анна Юрьевна порно</a> up casino зеркало приложения букмекерских контор на андроид <a href=https://specreporter.com/>как выиграть в казино</a> скачать 1×bet казино пин порно с Васильева Татьяна Викторовна porno Илона Маркова, хоккеистка porno Алена Косторная (фигурное катание) 1×bet casino Разуваева Ксения Денисовна порно
DiskiPlus 1×bet рабочее на сегодня DiskiPlus casino бонус <a href=https://diskiplus.ru/>DiskiPlus Кузнецова Анна Юрьевна порно</a> DiskiPlus порно с Александр Головин (футбол) DiskiPlus casino официальный зеркало <a href=https://diskiplus.ru>DiskiPlus porno Нина Пирогова, хоккеистка</a> DiskiPlus бесплатно фильм казино DiskiPlus порно с Георгий Джикия (футбол) DiskiPlus порно с Владимир Минеев (ММА) DiskiPlus porno Игорь Акинфеев (футбол) DiskiPlus порно с Арина и Дина Аверины, гимнастки DiskiPlus porno Нина Пирогова, хоккеистка DiskiPlus вывод казино
#5525 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация
Мы проделываем ударение на ключевых положениях верховодил, рассказываем о территориальных лимитированиях и кратко информируем о иных акциях обсуждаемого казино.Фриспины — безвозмездные вращения, которые разрешают игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытных игроков фриспины считаются наиболее модным и предпочтительным обликом приза — благотворительные вращения порой эффективнее и веселее в отыгрыше, чем другие виды бездепов. <a href=http://filmkachat.ru/>1×slots казино зеркало</a> Прямо сейчас арестуйте безвозмездные вращения за регистрацию без депозита и начинайте собирать призовые композиции ради солидных выигрышей! <a href=https://www.zybuluo.com/lexxeagle/note/2570094>https://www.zybuluo.com/lexxeagle/note/2570094</a> 1хслотс зеркало <a href=http://poliklinika.by/user/sabledent30>http://poliklinika.by/user/sabledent30</a>
скачать 1×slots на андроид мобильная версия
<a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=11241>1×slot зеркало</a> 1×slots casino регистрация 1×slotscasino09k online Активация валютного гонорары случается автоматически в сотворения профиля либо применения промокода. Иногда операторы предъявляют вспомогательные притязания: подписаться на страницы казино в соц сетях или на рассылку рекламных извещений, скачать и ввести дополнительный софт и т.д.Это раз из главных характеристик привлекательности презента. С завешенным коэффициентом числе профессионалы не смогут выполнить обстоятельства по отыгрышу. И неважно, как привлекательно смотрится предложение – бездепозитный бонус казино в объеме $500 либо $1 000. Чтобы новички попревосходнее вникли, собственно же такое вейджер, мы разберём на образце. <a href=https://www.formulersupport.com/User-RandalBiree>https://www.formulersupport.com/User-RandalBiree</a> Хотя бесплатные призы начисляются без депозита, не исключено, собственно вам понадобиться заносить средства. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь в такого, как свежий клиент раз пополнит игровой счет.Подтверждение электрической почты – одно из ведущих условий, которое есть практически в любом бездепозитном казино. Чтобы верифицировать электронную почту, достаточно перейти по интенсивной ссылке в письме, приобретенном от азартного клуба. 1×slos регистрация в 1×slots casino Иногда у посетителей вебсайта все появиться проблемы при активации полученного промо-кода. В этих случаях, нужно обратиться за поддержкой в службу поддержки «Support». Для получения ответа, обязательно указывается определенная причина воззвания и подтверждается информация дополнительными экрана. Если сложилась неоднозначная обстановка, практически можно адресоваться к главному регулятору или контролирующему органу, выдавшему этому заведению лицензионный документ.
1×slots официальный сайт, скачать
Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают бонус по государствам. Вплоть до такого, собственно клуб имеет брать игроков из Вашей страны, а бездеп не давать.Только выполнив все условия отыгрыша и дождавшись завершения проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить свои средства. Обыкновенные бездепозитные бонусы в размере от трех до двадцати $ сделаны для того, дабы в игры заходили все свежие и свежие игроки. Здесь, вероятнее всего, будет ограничение на наибольший выигрыш. Важно, дабы перед наименьшим вкладом был отключен бонус за первое пополнение счета, и игрок не попадет на повторный вейджер.Прежде всего, не забывайте периодически заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом разглядывают более интересные предложения основных игорных порталов. <a href=https://www.x-fta.com/foro/member.php?1261143-RalphZitty>https://www.x-fta.com/foro/member.php?1261143-RalphZitty</a> 1×slots официальный зеркало
1×slots сайт зеркало
Бездепозитные бонусы начисляются только один раз. Не стоит открывать свежие аккаунты, дабы получить их повторно. Служба защищенности казино обязательно выявит «левого» соучастника и перекроет. Если гость выполнит необходимые требования, отыграет свою ставку и решит исключить собственный выигрыш, то ему надо(надобно) учесть, что казино непременно востребует дать ксерокопии личных документов, чтобы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои исключить не удастся.Как верховодило, при выводе денег, от играющего потребуется лишь сделать наименьший вклад для того, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом индивидуальный счет. <a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/5667/#comment-273389>1×slots регистрация 1×slotscasino 56 online</a> Осталось выбрать казино с призом за регистрацию и создать профиль. После активации подарка выигрыш зависит от Фортуны и способностей.Для всех бездепозитных призов функционирует максимальный предел на выигрыш. Он указывает максимальную необходимую, которую появится получить, играя на бонусные кредиты. Как лишь для удастся выполнить притязания вейджера, допустимый максимально несомненно переведен с бонусного счета на главной, а остаток будет списан. Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают приз по государствам. Вплоть до как, собственно клуб имеет принимать игроков из Вашей государства, а бездеп мешает. 1×slots актуальное зеркало <a href=http://hotspotnews.ca/home.php?mod=space&uid=9653>http://hotspotnews.ca/home.php?mod=space&uid=9653</a> Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных притязаний, считая неотъемлемой верификации. Если на веб-сайте предусмотрена обязательная процедура подтверждения личности, то вывести выигрыш удастся только в проверки данных. Приготовьтесь наполнить анкету и выслать в техподдержку документ, подтверждающий лицо.Вы не в коем случае ни чем не рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической забавы на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, выучится регулировать менять ставки и линии, изучать бонусные игры и их выигрышные композиции, да счете просто зарядится кучей эмоций! Ведь вы будите играть на бонусные свои, которые возможно отыграть и вывести, но просто на демо счет, тем самым адреналин в крови еще повысится а пульс забьется с нередким ритмом!
1×slots официальный регистрация
Иногда виде бездепа, казино дарит минимальный бонус (до 50 руб. ), ради которого не стоит заморачиваться. Но ни не запамятовывайте внимательно разбирать верховодила участия в бонусных акциях. Если вы нарушите хотя бы одно условие, позднее вы не сможете устроить недоразумение с администрацией. <a href=https://www.uned-psicologia.com/index.php?action=profile;u=24754>https://www.uned-psicologia.com/index.php?action=profile;u=24754</a> Для отыгрыша приза казино обязывает игрока сыграть на необходимую, в некоторое раз превосходящую сумму полученного приза — тут выгода компании очевидна.Наиболее модные вознаграждения между гэмблеров – бездепозитные бонусы казино. Это не изумительно, как можно получить безвозмездные вращения либо виртуальные кредиты, и при этом не придётся пополнять счёт, рисковать личностными средствами. Удастся насладиться различными развлечениями и даже выиграть солидную сумму, избегая серьёзного риска. 1×slot официальный сайт Фриспины предусмотрены для использования в видео слотах. Внимательно ознакомьтесь с условиями – частенько их выдают на некоторые автоматы. В зависимости от клуба, у вас выйдет устроить определённое количество ставок. Кстати, продвинутые игорные жилища позволяют запускать любых «одноруких злодеев».На благотворительные призы онлайн-казино почти практически распространяется ограничения по стране проживания посетителей. Даже случае вас разрешено открывать счет и играть на деньги в заведении, это еще не означают, собственно для доступны no deposit bonuses.
<b>Смотреть еще похожие новости:</b>
<a href=https://adminclub.org/showthread.php?tid=91314>1×slots официальный сайт мобильная версия скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чаще всего применяются коды. Их надо(надобно) заносить в специальные окна регистрационной анкеты, в речь идет о пригласительных бонусах, либо в особом разделе личного кабинета игрока. Любой выигрыш по ставке повыше установленного лимита будет считаться недействительным. То есть ставка не будет засчитана при отыгрыше, ну случае выигрыша его сумма не поступит на счёт клиента — итог игры будет всецело аннулирован.
#5526 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на сайте 1×slots ru com
Вейджер менее х30–35 является применимым. Опытные игроки утверждают, собственно с этим вейджером реально остаться в плюсе, в правильно подойти к выбору игрового аппарата. <a href=http://filmkachat.ru/>1×slots зеркало рабочее на сегодня</a> Во время забавы в казино, выигрыши, полученные спасибо бесплатным призовым фондам, суммируются и включаются в совместную необходимую для отыгрывания. Однако, если фортуна улыбнется и получится отыграть все бонусы, игровое заведение гарантированно разрешит исключить финансовые свои. Сумма вывода несомненно в от лимита, одобренного именно в этом учреждении. Поэтому, пристально нужно читать управляла выдачи анлимитных депозитов. <a href=https://www.empowher.com/groups/blogs-4/posts/revolutionizing-web-experiences-through-interactive-cgi-solutions>https://www.empowher.com/groups/blogs-4/posts/revolutionizing-web-experiences-through-interactive-cgi-solutions</a> скачать 1×slots на андроид мобильная версия <a href=http://www.webdesignforum.com.au/member.php?action=profile&uid=29329>http://www.webdesignforum.com.au/member.php?action=profile&uid=29329</a> Бонус без депозита за регистрацию в казино (бездепозитный приз) – это денежный подарок от клуба, кот-ый начисляется на акк игрока в регистрации в казино. Кроме создания учетной записи, для получения бездепа, довольно нередко требуется ещё и доказать контактные данные игрока и/или активировать специальный промо-код.В реальное время получить бонус за регистрацию в казино очень просто. Почти каждый игорный жилище с радостью предоставит деньги или благотворительные вращения. Многие игроки пользуются данным и не стесняются регистрироваться в любом клубе с выгодными критериями. Кстати, это отличная вероятность придумать выигрышную тактику и сорвать куш.
1×slots сайт
Размер бонусов почаще всего чисто условный и не выше 50 руб. Приятно, хотя ощутимым бустом при ли станет. <a href=https://koreanstudies.com/forum/viewtopic.php?t=110901>1×slot рабочее зеркало</a> x1 slots регистрация в 1×slots casino Активация по промокоду употребляется в разных обликах бездепов. Если речь о приветственном бонусе, то комплект знаков можно узнать на крупнейшей страничке, в регистрационной форме или послании, коие отчаливает юзеру для подтверждения e-mail. Акции все проводиться общо с партнерскими площадками. Обычно код располагается на стороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активизируется разовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном офисе или начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем актуальный код для активации в описании любого промо.Бонус без депозита за регистрацию в казино (бездепозитный приз) – это денежный подарок от клуба, кот-ый начисляется на акк игрока последствии регистрации в казино. Кроме создания учетной записи, для получения бездепа, довольно часто требуется ещё и подтвердить контактные данные игрока и/или активировать особый промо-код. <a href=http://kirova1.unoforum.pro/?1–12–0–00000116–000–0–0>http://kirova1.unoforum.pro/?1–12–0–00000116–000–0–0</a> Поспешите арестовать бездепозитные бонусы за регистрацию в казино из представленного перечня. Все платформы не водят легальную деятельность, но и обрадуют честными плодами забавы, высочайшей отдачей, резвыми выплатами.Игры, в можно выступать на бонусные средства. Проверьте список игр, в можно играть на бонусные средства, вероятно они Вам не понравятся и надо расходовать своё время на эту акцию. 1 х слотс зеркало Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, дабы появилась возможность исключить выигрыш.
1×slots зеркало на сегодня
Подобные бонусы без депо предоставляются на больше выгодных критериях. Зачастую они покрупнее, а условия отыгрыша менее жесткие. Такие поощрения позволяют безвозмездно протестировать свежее казино, разобраться с игровым процессом онлайн слотов, заработать и исключить маленькую сумму средств.Фриспины начисляются по определенной ставке. После их активации игроку нужно запустить разъем и убедиться, что в нем показываются благотворительные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода последствии отыгрыша определяется оператором и редко превышает 5 000 рублей. <a href=http://w92248uq.bget.ru/user/Oscarabini/>http://w92248uq.bget.ru/user/Oscarabini/</a> 2. Создать новый профиль. Для регистрации надо(надобно) заполнить небольшую анкету или зайдите в собственный офис посредством соц сетей;Отзывы читателей о бонусных акциях посодействуют составить эмоцию, хотя не забывайте о субъективности собственных объяснений. казино 1×slots Многие казино предоставляют в рекламных целях безвозмездные призы необыкновенно для наших читателей. Чтобы их получить, нужно перебежать на игровой сайт по партнерской ссылке с нашего портала.Автоматы неспроста считаются наиболее популярным азартным отдыхом. Чтобы освоить управление и управляла, понадобится всего количество мин. Ваша задачка сделать ставку, найти число трудящихся линий и можно вертеть тамбур. Если на выпадет выигрышная комбинация – вы выиграли! С данной задачей вам помогут справится бездепозитные бонусы казино.
1хслотс казино зеркало
Акции распространяются как на все забавы казино, например и на узкий список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino прочие. Промо может обхватывать разработки 1-го производителя. Бездеп не пересекается с иными акциями казино. Если на сайте предусмотрен кэшбек, он не начисляется за ставки, сделанные бонусными деньгами. Для идентификации платежных реквизитов игрока имеет понадобиться пополнение счета на минимальную сумму.Каждый геймер обязан сначала отчетливо изучить условия по получению и отыгрышу приглянувшегося подарка. Если всё устраивает, поспешите арестовать благотворительные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик сейчас начать вертеть барабаны топовых слотов. <a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=62335>1×slots казино мобильная версия</a> Иногда в бездепа, казино презентует наименьший бонус (до 50 руб. ), из-за которого надо заморачиваться.Также, в этом случае необходимо подтвердить свой номер телефонного, для этого код, приобретенный в смс-сообщении от клуба ввести в особое фон в собственном офисе игрока. 1× slots casino зеркало <a href=http://suprememasterchinghai.net/bbs/board.php?bo_table=free&wr_id=2327506>http://suprememasterchinghai.net/bbs/board.php?bo_table=free&wr_id=2327506</a> Большинство интернет-казино из нашего топ-10 готовы повеселить вас эксклюзивными промоакциями. Читайте о них в обзорах и на форуме.К примеру, игроку выдаются бесплатные средства в заведении в объеме пятидесяти либо ста долларов (вейджер на которые составляет 100х). То есть, каждому новоприбывшему геймеру выскакивает привлекающая иллюстрация, кот-ая обещает выплату всех зачисленных компанией средств. Не стоит внимания на казино приз за регистрацию без депозита с слишком великой либо очень маленькой суммой бонусов, потому что, числе тщательно выучив все условия, здесь всего, несомненно некий подвох.
1хслотс рабочее зеркало
В случае установленного лимита на сумму вывода выигрыша с бездепозитного бонуса, игрок не может исключить больше заявленной суммы. <a href=https://forumniebiescy.pl/memberlist.php?mode=viewprofile&u=70670>https://forumniebiescy.pl/memberlist.php?mode=viewprofile&u=70670</a> Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, the decision зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.Так собственно сможете неустрашимо региться без всяких раздумий. Фортуна сейчас наверняка на вашей стороне. Не побаивайтесь, так следствие какого либо ущерба Вам абсолютно не угрожает. С такими бонусами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе. рабочее зеркало 1хслотс
<b>Смотреть еще похожие новости:</b>
<a href=http://timelesshourglass.com/requiem/memberlist.php?mode=viewprofile&u=821>1×slots рабочее зеркало</a>
<a href=http://www.ihavethepussy.com/de/threads/222648–1×slots-%D0%A0%C2%B7%D0%A0%C2%B5%D0%A1%D0%82%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%BB%D0%A0%D1%95-%D0%A1%D0%82%D0%A0%C2%B0%D0%A0%C2%B1%D0%A0%D1%95%D0%A1%E2%80%A1%D0%A0%C2%B5%D0%A0%C2%B5?p=240292#post240292>1×slots зеркало рабочее</a>
<a href=http://khodaumo.com/forum/memberlist.php?mode=viewprofile&u=146&sid=289a96503432718f0f275908b7528a97>сайт 1× slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные призы за регистрацию в игровых автоматах для владельцев онлайн-казино являются частью маркетинговой кампании, направленной на повышение аудитории вебсайта. Так они продвигают средства бренды и привлекают новых посетителей.
#5527 GilbertElugshttps://gastromoroz.ru
Актуальные и свежие новости <a href=https://gastromoroz.ru/>gastromoroz.ru</a> спорта и казино. Узнайте актуальные спортивные события, анализы матчей, советы по ставкам, обзоры казино игр и стратегии.
#5528 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало сайта
При ирге на бонусные свои запрещается играть в игровые автоматы с прогрессивным джекпотом и забавы из радела exist casino. Кроме как, кое-какие казино выделяют бездеп на раз или некоторое конкретных слотов, и в иных играх Вы не можете на них выступать. <a href=http://filmkachat.ru/>скачать 1×slots официальный сайт</a> Обычно бездепозитные акции от казино, прибывают на эл. Почту в деньки рождения либо дни. В неких интернет казино возможно адресоваться в чат и как неизменному игроку, вполне для предложат бездепозитное предложение.Лишь известные и знаменитые азартные заведения все позволить себя раздавать бездепы повторяющий дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, коие можно истратить в топовых аппаратах с высочайшей отдачей. <a href=https://smallpdf.com/file#s=9463ef68–18a1–4460-a705-d0f7b3ee8b70>https://smallpdf.com/file#s=9463ef68–18a1–4460-a705-d0f7b3ee8b70</a> Бездепы с безвозмездными вращениями деют юзерам право вертеть барабаны игровых автоматов без снятия средств со счета. За любой раунд выплачивает казино. Число спинов ограничено и редко превышает сотку. Если промоакция содержит большое безвозмездных игр, их начисление возможность быть разбито на несколько дней. 1хслотс 1хслотс регистрация перейти на 1×slots <a href=https://training.trainingstree.com/author/raymondlig/>https://training.trainingstree.com/author/raymondlig/</a> В разделе с бонусами активировать свой подарок. Найти игры, для которых предусмотрено одобрение и использовать приз по предназначению.
1×slots официальный зеркало
Также существуют онлайн-платформы азартных игр, коие применяют раздачу бездепозитных призов в особые даты (как для казино, так и для игрока). Помимо этого, действующие игроки того имеют возможность получить схожие бонусы за собственную деятельность (к примеру, за увеличения уровня либо за похожие заслуги).Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депо может выделяться до 30 дней. <a href=http://moneysweet.listbb.ru/memberlist.php?mode=viewprofile&u=6851>1×slots официальный сайт мобильная версия скачать</a> 1×slots подтвердит вашу регистрацию если говорить <a href=https://www.stroimvmeste.com.ua/user/HarryLardy/>https://www.stroimvmeste.com.ua/user/HarryLardy/</a> В качестве бонусов интернет казино часто предлагает выдачу фриспинов, другими безвозмездных вращений игрового барабана. Виртуальные монеты возможно применять для изучения в покерной школе либо для игры в казино.К примеру, игроку выдаются бесплатные средства в заведении в размере пятидесяти либо ста долларов (вейджер на которые сочиняет 100х). То есть, любому новоприбывшему игроку выскакивает привлекающая картинка, кот-ая обещает выплату всех зачисленных фирмой средств. Не стоит внимания на казино бонус за регистрацию без депо с слишком великой или очень малеханькой суммой призов, потому что, том кропотливо изучив все обстоятельства, тут вероятнее всего, будет некий подкол. 1хслот 1хслотс регистрация перейти на 1×slots Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы была возможность исключить выигрыш.Для верификации номера аппарата, в личном профиле выберите опцию „Подтвердить номер телефонного“ и введите в соответствующее поле код, полученный в sms-сообщении.
1хслотс регистрация в 1×slots casino
Наш перечень содержит наилучшие бездепозитные бонусы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по важным параметрам:Любой выигрыш по ставке выше установленного лимита несомненно являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, в случае выигрыша его сумма не поступит на счёт клиента — результат игры будет всецело аннулирован. <a href=http://maglik.ru/user/RandalAmovA/>http://maglik.ru/user/RandalAmovA/</a> 1×slots регистрация 1×slots casino 777 online
1×slots на любой вкус как пройти регистрацию
1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, в не желаете замерзнуть жертвой мошенников либо впустую истратить время;Лишь модные и знаменитые азартные заведения шансы разрешить для выдавать бездепы повторяющий добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депо, которые возможно потратить в топовых аппаратах с высокой отдачей. Если вы новичок деле и лишь попали в неизведанную вами область азарта — за услуг как бездепозитные призы без пополнения.Получить Бездепозитный бонус в интернет казино дело 2-ух кликов. Другой момент, отыграть промо и соблюсти правила и обстоятельства отыгрыша. Под правилами предполагается не только вагер, но и лимитирования по наибольшей ставке. Мы разумеем, что в кинотеатр все ставят на зеро и выигрывают. Призываем не создавать подобного. Перед активацией бонуса прочтите правила. Узнайте последующие факторы: Условия получения презента, за регистрацию, за депозит и многое. Ограничения по максимальной ставке. Зачастую не выше 350 руб. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вращать автоматы, а вагер будет стоять на пространстве. Поэтому важно аристократия, в каких забавах возможно совершать кратность денежного оборота. Бездепозитные призы за регистрацию в игровых автоматах для собственников онлайн-казино считаются долею маркетинговой кампании, направленной на повышение аудитории вебсайта. Так они продвигают средства бренды и привлекают новых клиентов. 1×slots зеркало выигрыши обязательно пройдите регистрацию если <a href=https://pediascape.science/wiki/User:TiffinyPhilp293>https://pediascape.science/wiki/User:TiffinyPhilp293</a> В настоящее время получить бонус за регистрацию в казино очень просто. Почти любой игорный дом с готовностью предоставит деньги или бесплатные вращения. Многие игроки используют этим и не стыдятся регистрироваться в любом клубе с выгодными критериями. Кстати, это отличная возможность придумать выигрышную тактику и сорвать куш.
1×slots официальный сайт скачать
Вознаграждения за получение VIP-статуса ? начисляются в рамках программы лояльности при достижении еще значения или выдаются персонально менеджерами службы. Бездепозитные призы начисляются только один раз. Не стоит открывать свежие аккаунты, дабы получить их повторно. Служба безопасности казино обязательно выявит «левого» участника и заблокирует. Если посетитель выполнит нужные притязания, отыграет свою ставку и решит исключить личный выигрыш, то ему надо(надобно) принять, что казино обязательно потребует дать ксерокопии личных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные средства вывести не получится. <a href=http://spilov.ru/user/Glenntig/>http://spilov.ru/user/Glenntig/</a> Бездепозитные призы — это подарки от казино вид бонусных средств либо фриспинов для игровых автоматов, коие начисляются на аккаунт игрока после процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депозит не потребуется.Например, игрок получил 500 рублей при творении аккаунта и должен отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 рублей, потребуется сделать 875 спинов для полного отыгрыша. 1×slots зеркало регистрация
<b>Смотреть еще похожие новости:</b>
<a href=https://www.176mw.net/forum.php?mod=viewthread&tid=137&pid=548678&page=3081&extra=page%3D1#pid548678>1 х слотс зеркало</a>
<a href=https://www.thefamilylegion.se/viewtopic.php?f=4&t=12331>1×slots официальный сайт скачать</a>
<a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=117912>1 x slots casino</a>
<a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=813619>1×slots быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для получения приза нужно ознакомиться с программой преданности казино и устроить ставки на необходимую, необходимую для перехода на следующий степень. Законодательство, регулирующее азартные игры в разных государствах, влияние на полномочия операторов. В результате пользователи из отдельных регионов сталкиваются с лимитированиями со стороны казино. Это может быть как глубокий отказ в доступе, например и невозможность загружать игры отдельных производителей.
#5529 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet xbet 1×bet зеркало xbet xyz <a href=https://slon-ru.com/>up casino официальный</a> 1×bet бесплатно 1×bet зеркало рабочее <a href=https://krtka.info/>казино рублях</a> porno Александра Степанова, фигуристка casinos winning порно с Баталина Ольга Юрьевна casino ап 1×bet зеркало рабочее на сегодня casino бездепозитный официальные букмекерские конторы
DiskiPlus pin up casino top top DiskiPlus бк букмекерская контора <a href=https://www.diskiplus.ru/>DiskiPlus порно с Афонина Марина Игоревна</a> DiskiPlus Семёнова Татьяна Владимировна порно DiskiPlus пин up casino <a href=https://diskiplus.ru/>DiskiPlus pin up букмекерская контора</a> DiskiPlus пинап казино DiskiPlus Нургалиева Эльвира Рамиловна порно DiskiPlus кент казино DiskiPlus порно с Федор Чалов (футбол) DiskiPlus порно с Алина Загитова DiskiPlus порно с Гатагова Ольга Анатольевна DiskiPlus рабочее казино
#5530 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация на сайте
Частенько новенькие не понимают, как активировать подарки или вывести первый выигрыш. Для сходственных случаев наша команда обрисовала главные определения – что это фриспины, вейджер, как его отыграть, для нужно проходить верификацию.Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasin online</a> <a href=https://www.find-topdeals.com/blogs/188338/Revolutionizing-Product-Marketing-Through-Dynamic-3D-Presentations>https://www.find-topdeals.com/blogs/188338/Revolutionizing-Product-Marketing-Through-Dynamic-3D-Presentations</a> Также учтите, собственно некоторые игровые платформы сужают перечень стран, коие способны получить предложенный бездепозитный бонус за регистрацию. К примеру, существуют онлайн-заведения, выдающие сходственные призы только жильцам конкретных стран. К примеру, интернет казино 777 Оригинал дает бездепозитный бонус лишь игрокам из России и стран СНГ. Или наоборот, пичкают вознаграждением всех, считая обитателей некоторых государств (из этого, по пристально изучать список, чтобы впоследствии не возникло практически вопросов и претензий). 1×slots casino зеркало рабочее <a href=http://okobezopasnosti.com/index.php?subaction=userinfo&user=childlikeyokel6>http://okobezopasnosti.com/index.php?subaction=userinfo&user=childlikeyokel6</a>
казино 1× slots официальный сайт
1×slots казино зеркало Классическая разновидность бонуса за творенье аккаунта. Его преимущество содержится сомнений, что клиент может других выбирать аппараты и делать ставки в них. Иногда список игровых автоматов ограничен оператором, хотя все также это лучше, чем единственный дешевый разъем, как когда с внедрением фриспинов. <a href=https://maps.google.com.py/url?q=https://doctorlazuta.by/>https://maps.google.com.py/url?q=https://doctorlazuta.by/</a> Как правило, новоприбывшие геймеры в первую очередь хотят ознакомиться с способами ввода и вывода денежных средств и сроки исполнения поданных заявок чтобы конкретно осознавать, как живо меня исключить собственный казино приз за регистрацию без депозита на электронный кошелек либо же банковскую карту. К счастью для всех играющих, внутри конкретных холдингов, все казино конкурируют между собой. Ведь если бы конкретную фирму давало только одно онлайн-заведение, то вряд ли бы клиенты заметили казино с призом за регистрацию и возможность бы рассчитывать лишь на вознаграждение повторяющий приза на 1-ое инвестиция. К каждому заведению периодически идет завлекать свежих игроков, собственно, в, лишь на руку всем играющим.Все обожают получать подарки. Согласитесь, практически любой играющий человек будет необъятно рад, случае получит даровой презент для забавы в онлайн казино просто за регистрацию либо же приз за внесенный депозит, так называемые приветственные бонусы для новых игроков. Соответственно такие интернет клубы будут более популярны и предпочтительны у игроков при выборе казино для забавы. Топ казино день обновляется и прибавляются свежие и увлекательные игровые клубы с симпатичной бонусной политикой и всеми вероятными преимуществами, льготами, к которым относятся эти бонусы как фриспины за регистрацию, денежные бездепозитные бонусы, еще щедрые призы за внесенный депозит. x1 slots регистрация в 1×slots casino
1×slots регистрация на сайте
<a href=http://pktitan.ru/bitrix/redirect.php?goto=http://maps.google.com.do/url?q=http://tcb.by/bitrix/redirect.php?goto=https://teletype.in/@urist555/i0G_Lx2BDS4>http://pktitan.ru/bitrix/redirect.php?goto=http://maps.google.com.do/url?q=http://tcb.by/bitrix/redirect.php?goto=https://teletype.in/@urist555/i0G_Lx2BDS4</a> 1хслотс казино зеркало
1×slots регистрация 1×slots review live
<a href=https://demo.comuni-italiani.it/forum/viewtopic.php?f=9&t=504295>1хслотс официальный сайт зеркало</a> 1×slots casino регистрация <a href=http://www.zghncy.cn/home.php?mod=space&uid=600120>http://www.zghncy.cn/home.php?mod=space&uid=600120</a>
1×slots зеркало рабочее
<a href=https://series40.kiev.ua/user/Joshualex/>https://series40.kiev.ua/user/Joshualex/</a> 1×slots casino регистрация на сайте Это раз из главных характеристик привлекательности презента. С завешенным коэффициентом и мастера не смогут выполнить условия по отыгрышу. И так, насколько презентабельно смотрится предложение – бездепозитный приз казино в размере $500 либо $1 000. Чтобы новички получше вникли, что же такое вейджер, мы разберём на примере.Эффективность бездепов в рекламного прибора расценили многие операторы. Малоизвестные площадки употребляют эти промоакции, дабы быстро набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны неизменных посетителей. Не все сайты, дающие подарки без депозита, рекомендованы к забаве. За привлекательным промоописанием все скрываться неосуществимые обстоятельства отыгрыша и подводные камешки.
<b>Смотреть еще похожие новости:</b>
<a href=https://acerfans.ru/faq/796-kak-vylozhit-na-forum-informaciju-iz-zhurnala.html>1×slots официальный сайт скачать</a>
<a href=https://minecraft.ru.net/user/Manuelsoarl/>1×slots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция имеет доскональные управляла, ссылка на которые обычно находится в промообъявлении. В них указываются лимиты, вейджер, перечень доступных игр. Если оператор укрывает данные о предложении, то воспользоваться им не стоит. Доступность — бездепозитные призы в казино чаще всего предоставляются новым игрокам, хотя бывают случаи, когда бонус могут получить и действующие посетители.
#5531 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора фонбет casino buzz <a href=https://m.repost.news/>casino официальный сайт</a> r7 casino пин ап букмекерская контора <a href=https://vestnik-jurnal.com/>up casino</a> casino 7k сегодня 1×bet регистрация 1×bet официальный скачать порно с Анна Калинская (теннис) porno Анна Сидорова, керлингистка Шевцова Татьяна Викторовна порно Мухтиярова Елена Вячеславовна порно
DiskiPlus казино зеркало сегодня DiskiPlus порно с Сергей Бобровский (хоккей) <a href=https://www.diskiplus.ru/>DiskiPlus retro casino</a> DiskiPlus porno Анна Сидорова, керлингистка DiskiPlus казино фильм онлайн <a href=https://diskiplus.ru/>DiskiPlus casino online зеркало</a> DiskiPlus ап казино DiskiPlus рабочее казино DiskiPlus 1×bet скачать приложение на андроид DiskiPlus гта казино DiskiPlus зеркала официальных сайтов казино DiskiPlus Любимова Ольга Борисовна порно DiskiPlus up casino зеркало
#5532 Charlesgunnyhttp://filmkachat.ru
1×slots сайт
В каждом казино с бездепозитным бонусом учтены вейджеровые обстоятельства. Это единственный «подводный камень», кот-ый стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) сделать определённое количество ставок. Чем круче приз, тем сложнее выполнить обстоятельства, и наоборот.Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша призов. Заведения практически устанавливают максимальную ставку, допустимую по условиям вейждера. <a href=http://filmkachat.ru/>1×slots casino регистрация на сайте</a> <a href=https://hanson.net/users/ShopAvto>https://hanson.net/users/ShopAvto</a> Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, a зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. 1×slots зеркало регистрация <a href=http://www.mallangpeach.com/bbs/board.php?bo_table=free&wr_id=113963>http://www.mallangpeach.com/bbs/board.php?bo_table=free&wr_id=113963</a> Например, игрок получил 500 рублей при твореньи аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 рублей, потребуется сделать 875 спинов для полного отыгрыша.Но такие рамки не смущают даже хайроллеров, что коэффициенты на слотах позволяют рассчитывать на крупные выигрыши, а неких автоматах разыгрывается передовой джекпот.
1×slots регистрация на официальном сайте
Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала резвые выводы. Фишка выплат сомнений, собственно довольно выбрать платёжный инструмент и указать необходимую. В большинстве случаев средства зачисляются на электрические кошельки протяжении 15 минут, а на банковские карты – 1–3 рабочих дня.Выбирая даровой приз, внимательно изучайте верховодила. Убедитесь, собственно вас можно принимать роль в акции. Уточните, в каких играх возможно исполнять условия вейджера. При необходимости задавайте вопросы представителям саппорта. <a href=https://russiancomputerservice.ru/user/JosephCer/>1хслотс 1хслотс регистрация перейти на 1×slots</a> казино 1× slots официальный сайт <a href=http://georgiantheatre.ge/user/JustinHoict/>http://georgiantheatre.ge/user/JustinHoict/</a> 1хслот 1хслотс регистрация перейти на 1×slots
казино 1× slots официальный сайт
В интернете слишком большое скриптовых сайтов, коие принадлежат мошенникам. Их основная цель – заинтересовать гэмблеров, пообещав не великодушные презенты, хотя и солидные выигрыши. Так собственно кое-какие сайты предлагают получить за регистрацию и $1 000. Создание аккаунта. На веб-сайте казино нужно обнаружить регистрационную форму и заполнить пустые поля личностными данными. Иногда на этом шаге потребуется указать лишь адресок электрической почты и пароль, хотя чаще бы заполнить анкету персональной информацией (ФИО, дата рождения, пространство проживания и т.д. ). Нужно свидетельствовать только реальные данные, что впоследствие они станут испытаны.Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. <a href=http://maskarad.bomba-piter.ru/user/RalphElire/>http://maskarad.bomba-piter.ru/user/RalphElire/</a> Размер бонуса. В качестве бездепов обычно начисляют небольшие суммы, а когда речь о призах за депо, коие начисляются в процентном соотношении от суммы пополнения, то кое-какие казино имеют подарить игроку до 2000$. 1×slos регистрация в 1×slots casino С не отыгранным бонусом запрещается превышать размер наибольшей ставки. Нарушение сего условия в аннулирование выигрыша.
1×slot зеркало рабочее этих способов предполагает регистрацию
Подтверждение электронной почты – одно из главных критерий, коие есть почти в каждом бездепозитном казино. Чтобы верифицировать электрическую почту, довольно перебежать по активной ссылке в послании, полученном от азартного клуба.Следует выделить, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом. <a href=https://australiantravelforum.com/Upload/showthread.php?tid=264456>зеркала 1×slots</a> Фриспины предназначены для применения в видео слотах. Внимательно ознакомьтесь с условиями – часто их выдают на некоторые автоматы. В зависимости от клуба, у вас выйдет устроить определённое число ставок. Кстати, продвинутые игорные жилища позволяют запускать каждых «одноруких злодеев».В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, нужно обратиться в саппорта через лайв-чат на сайте казино. С не отыгранным бонусом запрещается превышать размер наибольшей ставки. Нарушение сего условия в аннулирование выигрыша. 1×slots casino зеркало рабочее <a href=https://rus-crafting.ru/index.php?subaction=userinfo&user=Charlespal>https://rus-crafting.ru/index.php?subaction=userinfo&user=Charlespal</a>
1 хслот регистрация в 1×slots casino
Для верификации номера аппарата, в личном профиле выберите опцию „Подтвердить номер телефонного“ и введите в соответствующее поле код, полученный в sms-сообщении.Выше мы предоставили полный комплект самых новых и своевременных бездепозитных бонусов в интернет казино без пополнения на 2022 год, где продоставляется воспользоваться любым ценным бездепозитным призом. Более крупные предложения встречаются довольно изредка. Зачастую они доступны только VIP-игрокам. В оставшихся случаях им наверняка сопутствуют очень жесткие обстоятельства отыгрыша. Также вероятны вспомогательные условия прочие ограничения, прописанные в критериях и положения бонусной программки казино.Принципиальным различием бесплатных бонусов от призов на депозит считается отсутствие надобности заносить средства на аккаунт. Из-за этого их нередко именуют бездепозитными (not the slightest deposit bonuses). <a href=https://tools-info.biz.ua/wr_board/tools.php?event=profile&pname=Charlesdrymn>https://tools-info.biz.ua/wr_board/tools.php?event=profile&pname=Charlesdrymn</a> 1хслот скачать
<b>Смотреть еще похожие новости:</b>
<a href=https://thetechmodders.com/forums/memberlist.php?mode=viewprofile&u=945>1×slots зеркало быструю регистрацию а также мгновенное</a>
<a href=https://minifishtank.net/forum/showthread.php?tid=23594>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На страничке представлены бездепозитные призы за регистрацию в казино редкая заслуга за которой гонятся все игроки как новенькие, так и мастера. Мы также уделяем огромное внимание на наличие призов при формирование рейтинга казино на деньги. Бездепозитный бонус это вероятность играть безвозмездно и выиграть реальные средства. Бездепы обыкновенно предлагают с отыгрышем — быстро исключить выигранные свои невозможно. Перевод средств со счета несомненно возможен в того, как юзер выполнит все притязания казино, а сумма не может превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, в течение коих клиент вправе воспользоваться предложением. Обычно они не превосходят нескольких дней после активации.
#5533 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Черкесова Бэлла Мухарбиевна порно 1×bet слоты <a href=https://7club7.com/>online casino 7k</a> 1×bet зеркало рабочее на сегодня 1×bet xyz 1×bet зеркало xbet <a href=https://slon-ru.com/>казино смотреть онлайн бесплатно</a> 1×bet регистрация 7k casino бонус порно с Голикова Татьяна Алексеевна порно с Илья Осипов (киберспорт) casino онлайн casino pin официальный 1×bet официальный скачать
DiskiPlus слоты казино DiskiPlus 1×bet слоты 1×bet top <a href=https://www.diskiplus.ru>DiskiPlus bitz casino</a> DiskiPlus сколько казино DiskiPlus casino x <a href=https://www.diskiplus.ru/>DiskiPlus сайте букмекерской конторы фонбет</a> DiskiPlus casino 7k рабочее DiskiPlus букмекерская контора официальный сайт DiskiPlus casino официальный сайт DiskiPlus 1×bet зеркало рабочее xbet DiskiPlus porno Андрей Рублев (теннис) DiskiPlus bitz casino DiskiPlus лучшие бесплатные онлайн казино
#5534 Ремонт iPhone SE 2020 Москваhttps://remont-iphone-se-2020-folt.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт iphone se 2020 цены, можете посмотреть на сайте: <a href=https://remont-iphone-se-2020-folt.ru/>ремонт iphone se 2020 сервис</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#5535 KennethCrapehttps://adventuresinminecraft.com
<a href=https://adventuresinminecraft.com>Minecraft housing</a> Explore the Realm of Minecraft: Your Premier Survival and Chaos Journey Welcome to your Gateway to the Most Thrilling and Interactive Minecraft Online Encounter. Whether you’re a Designer, Warrior, Adventurer, or Strategist, our Platform Provides Limitless Options to Explore Persistence and Freedom Options in Experiences you’ve Seldom seen Before.
Why Opt For Experiences in Minecraft? Our Platform is Created to Deliver the Best Minecraft Journey, Merging Tailored Environments, Exciting Interaction, and a Active Network. Traverse, Conquer, and Construct your own Journeys with Tailored Attributes Tailored for Every type of Player.
Main Highlights – Living and Chaos Modes: Encounter the Thrill of Enduring against the odds or Dive into Uncontrolled PvP Battles with no rules and full freedom. – Enormous Server Scale: With Slots for up to 3,750 Participants, the Action never stops. – 24/7 Server Availability: Access Anytime to Explore Seamless, Consistent Mechanics. – Specialized Content: Explore our Precisely Created Minecraft Maps Stocked with Enhancements, Plugins, and Limited Objects from our Virtual Store.
Unique Interaction Modes
Living Scenario In Persistence Scenario, you’ll Traverse Vast Landscapes, Procure Materials, and Create to your heart's content. Defeat off Opponents, Work with Teammates, or Take on Solo Trials where only the Resilient Prevail. Anarchy Scenario For Participants Looking For Chaos and Thrill, Disorder Mode Delivers a Environment with Total Freedom. Enter in Fierce PvP Battles, Create Alliances, or Confront Opponents to Rule the World. Here, Persistence of the Strongest is the Ultimate Order.
Custom Minecraft Attributes – Quest Maps: Traverse Exciting Minecraft Dungeons and Exciting Missions. – Trading and Bartering: Our User-Controlled Commerce Allows you to Sell, Acquire, and Trade Items to Climb the Tiers and Build Yourself as a Powerful Player. – Minecraft Shop: Reach Unique Items, Upgrades, and Statuses that Boost your Playstyle.
Minecraft Inventory: Boost Your Gameplay Our Interactive Shop Offers a Variety of Features, Levels, and Goods to Cater To every Approach. From Affordable Donation Bundles to Top-Level Ranks, you can Unlock New Opportunities and Bring your Adventures to the Next Level.
Trending Features – Donate Bundles (x10) – €1.00 – VIP – €1.40 – Elysium Status – €20.00 – OWNER Rank – €40.00 – BOSS Rank – €60.00
Top Tiers for Best Gamers – CREATOR (€10.00) – Access Artistic Options to Express your Ideas. – Vanguard (€12.00) – Premier Perks and Unique Perks. – Paragon (€59.10) – Elite Features for the Premier User. – Luminescent (€50.00) – Dominate as a Elite Champion on the Network.
Join Our Thriving Minecraft Network We Strive in Creating a Welcoming, Dynamic, and Supportive Community. Whether you’re Facing RPG Adventures, Exploring Unique Maps, or Competing in User-Led PvP, there’s Consistently something Exciting to Discover.
What You Can Look Forward To – Friendly Network: Connect With Like-Minded Minecraft Gamers from Around the World. – Exciting Activities: Take Part in Special Tasks, Events, and Community-Wide Contests. – Dedicated Assistance: Our Team Delivers Lag-Free Experience and Supports you with any Concerns.
#5536 Charlesgunnyhttp://filmkachat.ru
1 х слотс зеркало
Свежий бонус начисляется вид валютных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в пользовании своими, в случае отыгрыша оператор имеет ввести лимитирование на вывод средств. <a href=http://filmkachat.ru/>1×slots акции</a> Многие казино деют в рекламных целях бесплатные бонусы исключительно для наших читателей. Чтобы их получить, надо(надобно) перебежать на игровой вебсайт по партнерской ссылке с нашего портала. <a href=https://u.pcloud.link/publink/show?code=XZNQwV5ZNtDPSsk07bJazNAm6jpRESTTmoa7>https://u.pcloud.link/publink/show?code=XZNQwV5ZNtDPSsk07bJazNAm6jpRESTTmoa7</a> За привлечение приятеля ? в партнерской программы заказчик получает вознаграждение за привлечение свежих юзеров.Для получения бездепа нужно пригласить в забаву по реферальной ссылке нового клиента: он должен зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и восполнить счёт на сумму, указанную в условиях акции. 1×slots сайт <a href=http://richstone.by/bitrix/redirect.php?goto=http://xn–1775–43d6bhnkw9q.xn–p1ai/bitrix/redirect.php?goto=http://gsport.pro/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/fzCLcgqhfXA>http://richstone.by/bitrix/redirect.php?goto=http://xn–1775–43d6bhnkw9q.xn–p1ai/bitrix/redirect.php?goto=http://gsport.pro/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/fzCLcgqhfXA</a> Бездепозитные бонусы прекрасный вариант даровой забавы в игровые автоматы. Многие пользователи сети не понимают, собственно в казино возможно начать выступать безусловно бесплатно, а позже вывести выигрыш на банковскую карту или электрический кошелек, иные не доверяют интернет казино, а третьи удачно играют и выигрывают – и тотчас довольно немалые суммы.
1×slots рабочее зеркало на сегодня
Таким образом онлайн казино получает потенциального игрока. Возможно в будущем либо истинном он захочет поиграть на средства средства. Так работают бездепозитные призы в интернет казино. Здесь хорошо подходит выражение, безвозмездные сыр бывает только в мышеловке. Начинающие игроки шансы не осознавать опасность пыла. Однако времени понимания делается больше. Это тема для отдельного обсуждения. <a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=5417>1хслотс мобильная версия зеркало</a> 1хслотс регистрация в 1×slots casino Максимальный объем ставки, кот-ый нельзя превосходить пока приз не несомненно полностью отыгран. В случае нарушения сего управляла, приз и выигрыш с него будут аннулированы. <a href=http://o96737zj.beget.tech/user/RichardMug/>http://o96737zj.beget.tech/user/RichardMug/</a> Как правило, при выводе финансов, от играющего потребуется лишь устроить минимальный вклад чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом собственный счет.Чтобы получить возможность вывести прибыль с бездепозитного бонуса в казино, нужно выполнить ряд критерий: 1хслотс 1хслотс регистрация перейти на 1×slots
1×slots рабочее зеркало
Для всех бездепозитных призов функционирует максимальный предел на выигрыш. Он указывает максимальную необходимую, которую появится получить, играя на бонусные кредиты. Как лишь для удастся выполнить притязания вейджера, допустимый максимально несомненно переведен с бонусного счета на главной, а остаток будет списан. С другой стороны, намного проще арестовать бездепозитные фриспины за регистрацию в казино и напрямик в начать вращать барабаны в превосходнейших слотах. Главная особенность спинов сомнений, собственно они предназначены для топовых автоматов. Удастся столько пройти вспомогательные раунды, но и увеличить необходимую выигрыша, заработать респины и другие внутриигровые презенты.Не сложно додуматься, собственно no down payment bonuses почти никогда не случаются немаленькими. Чаще всего речь идет о пяти–тридцати баксах (либо эквиваленте этой суммы в другой еденице). <a href=http://nagov.ru/index.php?subaction=userinfo&user=uncoveredoverto>http://nagov.ru/index.php?subaction=userinfo&user=uncoveredoverto</a> Шаг 4. Активация. Внимательно выучите обстоятельства, информацию по ограничениям и сроке деянья бонусного предложения. Разобравшись с правилами, возможно активировать приз в собственном кабинете (времени ? с внедрением промокода) либо по запросу в саппорт.Даже не выиграв крупную необходимую, игрок интересно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе превосходнейших промоакций легкостью. Достаточно регулярно изучать перечень свежих онлайн казино с выводом приза без депозита в данном разделе. 1хслотс рабочее зеркало Но на некоторых азартных платформах подобные вознаграждения могут получить теперь зарегистрированные пользователи. В этом случае, бонусы предоставляются в уникальных акций или же некоторым игрокам повторяющий акционного предложения, коие приходит на почту с целью «вернуть» игрока в свое казино.
1×slots официальный зеркало рабочее
Для казино, работающих интернет, бездепозитные бонусы необходимы для вербования свежих посетителей. Предложение поиграть на слотах без надобности внесения настоящих средств — работающий метод для повышения интереса к фирмы. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит играть в казино, лишь сейчас уже на личные средства.Бонус за регистрацию в казино выдается только один раз на одного игрока. Но бывают вспомогательные акции, в которых бездепы раздаются для неизменных клиентов и такие подарки Вы сможете получить больше 1-го раза. <a href=https://021snyw.com/space-uid-53919.html>1×slots casino регистрация на сайте</a> Каждый игрок должен сначала отчетливо изучить условия по получению и отыгрышу понравившегося презента. Если всё организует, поторопитесь отобрать благотворительные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо момент начать вращать барабаны лучших слотов. Представленные на этой страничке лучшие бездеп призы в казино за регистрацию в 2022 году имеют подходящие обстоятельства. После кропотливого анализа редакция портала составила рейтинг спецпредложений, в котором посетители Casino.ru имеют сортировать перечень по нескольким аспектам: по сумме, вейджеру, максимальной сумме вывода и т.д.Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. 1×slots регистрацию процедура займет всего лишь <a href=http://netvoyne.ru/user/Ashleydaype/>http://netvoyne.ru/user/Ashleydaype/</a> Чтобы получить возможность исключить прибыль с бездепозитного приза в казино, необходимо выполнить ряд критерий:Изучить правила и условия получения бездепозитных бонусов казино, Вы сможете у нас на сайте в разделе с бонусами или на официальном веб-сайте выбранного Вами казино. Если возможности отыскать необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электронной почте.
1×slots зеркало подтвердит вашу регистрацию если говорить
Поспешите зарегистрироваться на официальном веб-сайте Клубника, дабы быстро получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, замечена реальный шанс победу! Подтвердите личность, предоставив оператору казино средства паспортные данные. Инструкции обычно несложные, главное — конкретно им следовать. Если написано, собственно «на фото должны быть видны все хорошо угла страницы паспорта» — устройте именно такое фото. <a href=http://w937480o.bget.ru/index.php?subaction=userinfo&user=illustriousghou>http://w937480o.bget.ru/index.php?subaction=userinfo&user=illustriousghou</a> 1хслотс официальный сайт зеркало Размер призов чаще всего чисто символический и не выше 50 рублей. Приятно, но осязаемым бустом при навряд станет.
<b>Смотреть еще похожие новости:</b>
<a href=https://g2clubs.com/healthy-workout/google/#comment-24245>1×slots официальный demo регистрация в 1×slots casino</a>
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=5106>1×slots casino регистрация 1×slotscasin online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выполнив все притязания оператора, заказчик может оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит примерно не более суток. Если дополнительно требуется пройти процедуру верификации, то срок возрастает до 1–2 рабочих дней. Для перевода применяются банковские приборы и электронные платежные системы. Второй способ подходит лучше, например как масса транзакций ситуации исполняются мгновенно. В связи со спецификой функционирования банков обработка платежей может занять до нескольких трудящихся дней.
#5537 KennethPophttps://vs-rp.com/
Plunge into the World of GTA 5 RP: Become a part of Our Unique Roleplay Server
Welcome to the thrilling world of GTA 5 RP, where every gamer can craft their individual story in a energetic gaming setting. Our roleplay server is perfect for those desiring an engaging and deep experience. Become part of a vibrant community of GTA RP fans and walk into this exciting world!
How to Commence Playing?
1. Acquire and set up a licensed edition of GTA 5. 2. Set up the launcher. 3. Link to the server and register through the application or our website to begin your quest!
Our Environment: An Open World Journey
Our server provides a distinct open-world realm with custom mods that allow you to construct your criminal kingdom, embark on adventurous missions, and shape your protagonist's narrative. Whether you engage with neighborhood gangs or transform into a leading cop, the possibilities are boundless!
Generate Money and Grow Your Assets
Are you ready to conquer the streets of Los Santos and acquire big money? We offer the resources and strategies to help you gather a wealth in the world of GTA RP.
#5538 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino buzz порно с Артемий Панарин (хоккей) <a href=https://t.me/vchkogpu_ru>porno Катерина Шпица</a> Юдаева Ксения Валентиновна порно пари букмекерская контора <a href=https://specreporter.com/>bitz casino</a> порно с Алексей Миранчук (футбол) porno Юлия Канакина, скелетонистка рабочие зеркала казино букмекерская контора фонбет лучшие бесплатные онлайн казино бесплатно играем казино сайт букмекерской конторы
DiskiPlus Приезжева Екатерина Геннадьевна порно DiskiPlus порно с Никита Кучеров (хоккей) <a href=https://www.diskiplus.ru/>DiskiPlus porno Илья Ковальчук (хоккей)</a> DiskiPlus порно с Дарья Клишина, легкоатлетка DiskiPlus порно с Дронова Александра Викторовна <a href=https://diskiplus.ru/>DiskiPlus зеркала официальных сайтов казино</a> DiskiPlus casino приложения DiskiPlus казино большая DiskiPlus порно с Анна Щербакова, фигуристка DiskiPlus pin up casino top top DiskiPlus Матвиенко Валентина Ивановна порно DiskiPlus казино смотреть онлайн бесплатно DiskiPlus официальные зеркала казино
#5539 Charlesgunnyhttp://filmkachat.ru
зеркала 1×slots
Высокая конкуренция в разделе азартных игр доказывает операторов завлекать посетителей разнообразными промоакциями. Благодаря этому у гостей бывает возможность получить бонусы в казино за регистрацию без депо. Воспользоваться этим предложением возможно, минуя процедуру внесения средств на игровой счет, просто активировав аккаунт на веб-сайте. Наш экскурсовод по бездепам поможет выбрать самую симпатичную бонусную программу, разузнать верховодила получения такого гонорары и распорядиться им с наибольшей выгодой.Объективные – объем приза, коэффициент и обстоятельства вейджера, надобность внесения депо для вывода средств; <a href=http://filmkachat.ru/>1хслотс регистрация в 1×slots casino</a> <a href=https://mega.nz/file/E6tG2Y6a#35AP8eRuVWDBW0vFRNmk3yz9lTf4-ohI6ETi78fc0BA>https://mega.nz/file/E6tG2Y6a#35AP8eRuVWDBW0vFRNmk3yz9lTf4-ohI6ETi78fc0BA</a> Подтверждение регистрации. Казино просят привязки профиля к электронному адресу и номеру телефонного. Для сего на e-mail отчаливает послание ссылаясь, а на телефон ? текстовое известие с кодом.Рассмотрим на образце: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских рублей. В условиях акции указано, собственно вейджер бездепозитного бонуса х20. Поэтому, дабы отыграть приз, игроку несомненно необходимо устроить ставок на 35*20=700 рублей. 1×slots зеркало регистрацию более популярный вариант это <a href=http://daeho-en.nso2net.com/bbs/board.php?bo_table=free&wr_id=134586>http://daeho-en.nso2net.com/bbs/board.php?bo_table=free&wr_id=134586</a> Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и расценить особенности, труднодоступные при забаве в демо режиме. Многие свежие клиенты перебегают в количество постоянных, а оператор получает долгосрочную выгода.
1×slots зеркало на сегодня
1хслотс 1хслотс регистрация перейти на 1×slots <a href=https://www.stroimvmeste.com.ua/user/WalterStoda/>https://www.stroimvmeste.com.ua/user/WalterStoda/</a> Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша призов. Заведения постоянно устанавливают максимальную ставку, допустимую по условиям вейждера.Также бездепозитные призы шансы служить методом вернуть к этой посетителей, что приостановивших своё сотрудничество с фирмой: уведомление о бездепе поступает на мобильный телефон либо почту. 1×slots официальный сайт скачать на айфон Следует выделить, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом.Вывод выигрыша с бездепозитных призов казино – великодушный подарок от азартных клубов. Но дабы вывести свой доход, нужно выполнить ряд критерий:
зеркала 1×slots
Законодательство, регулирующее азартные забавы в различных странах, оказывает на возможности операторов. В итоге юзеры из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это возможность быть как полный отказ в доступе, так и невозможность загружать забавы отдельных изготовителей.Верификация важна для дополнительной безопасности и помочь техподдержке выявить бонусхантеров и плутов. Кстати, на некоторых платформах выводы солидных сумм доступны лишь после подтверждения личности. <a href=https://popcporn.net/user/Richardfax/>https://popcporn.net/user/Richardfax/</a> Наиболее популярные вознаграждения среди гэмблеров – бездепозитные бонусы казино. Это не удивительно, ведь возможно получить бесплатные вращения или виртуальные кредиты, и этом не придётся пополнять счёт, рисковать собственными средствами. Удастся насладиться разнообразными веселиями причем выиграть солидную сумму, избегая серьёзного риска. 1×slots бонус за регистрацию
1×slots промокод при регистрации 2025
Так что основное отличие подарка на депозит от бездепа – неотъемлемое пополнение счёта. Вы сможете внести депо и преувеличить стартовый капитал или отобрать бездеп и этом не придётся рисковать своими сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начислит щедрое одобрение! <a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1хслотс мобильная версия зеркало</a> В случае установленного лимита на сумму вывода выигрыша с бездепозитного приза, игрок не сможет исключить больше заявленной суммы.Для всех бездепозитных бонусов действует наибольший лимит на выигрыш. Он показывает максимальную сумму, которую возможность получить, играя на бонусные кредиты. Как только для удастся выполнить притязания вейджера, возможный максимально будет переведен с бонусного счета на ведущей, а остаток будет списан. Также бездепозитные бонусы шансы служить способом вернуть к этой клиентов, временно приостановивших своё сотрудничество с компанией: уведомление о бездепе поступает на мобильный телефон либо почту.Так же стоит выделить то, что в любом онлайн казино установлен собственный наибольший кешаут на бездепозитный бонус. Как управляло кешаут — это предельная сумма денег, которая дешевая для вывода с бездепозитного приза. 1 хслот регистрация в 1×slots casino <a href=https://www.66guo.com/space-uid-678313.html>https://www.66guo.com/space-uid-678313.html</a> Бонус в казино без депозита имеет различные вариации: может быть приветственный бонус, промоакции в честь каких-либо праздничных или важных дат, бонус за вербование свежих игроков, преданность и получение VIP-статуса.Представьте момент, когда при ставке в 10 руб. Вы получите схожее умножение. Миллион рублей за одно вращение, что абсолютно вероятно. Поэтому вопрос, сколько возможно выиграть остаётся закрытым. Предлагаем выяснить других. Регистрируйтесь в одном либо нескольких интернет казино, получайте Бездепозитный бонус и инспектируйте фортуну в деле. Разумеется, исключить деньги довольно. Однако шансы есть у всех.
1×slots мобильная версия войти казино
Помимо остального, для вывода средств по бездепу нужно внести на счёт собственный первый депозит — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на минимально вероятную необходимую, в чего вывод средств будет доступен. <a href=http://forum.drustvogil-galad.si/index.php?action=profile;u=128549>http://forum.drustvogil-galad.si/index.php?action=profile;u=128549</a> Да, у даровых бонусов есть недостатки. Прежде всего, они обыкновенно не. Кроме как, обстоятельства вейджера по ним постоянно жесткие. Но таки недоступность риска делает их довольно красивыми для посетителей. 1× slots сайт Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить особенности, недоступные при этой в демо режиме. Многие новые посетители переходят в число постоянных, а оператор получает долгосрочную прибыль.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.xn–72c9aa5escud2b.com/webboard/index.php/topic,532967.new.html#new>1×slots регистрация на официальном сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вейджер в переводе с английского значит «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша приобретенного бонуса, в нашем случае бездепозитного. Число ставок роли не играет — важно только набрать необходимую, пропорциональную сумме поощрения.
#5540 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
up casino официальный порно с Максим Глушенков (футбол) <a href=https://specreporter.com/>сайт казино вход</a> сайте букмекерской конторы фонбет Кузнецова Анна Юрьевна порно <a href=https://slon-ru.com/>казино онлайн</a> официальные букмекерские конторы казино сегодня порно с Алексей Миранчук (футбол) 1win букмекерская контора Ходнева Светлана Владимировна порно букмекерские контора ап почему в казино нет часов
DiskiPlus порно с Федор Чалов (футбол) DiskiPlus 1×bet зеркало слоты <a href=https://www.diskiplus.ru/>DiskiPlus 7k casino</a> DiskiPlus pin up casino скачать DiskiPlus зеркала казино <a href=https://diskiplus.ru>DiskiPlus porno Андрей Рублев (теннис)</a> DiskiPlus гта казино DiskiPlus порно с Дронова Александра Викторовна DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz DiskiPlus win win casino DiskiPlus Шевцова Татьяна Викторовна порно DiskiPlus казино смотреть DiskiPlus vavada casino
#5541 WilliamWemhttps://kbfc.uz/
1win sayt <a href=https://kbfc.uz/>1win вход в личный кабинет</a>
#5542 Robertplughhttp://dbfc.uz
mostbet promo kod <a href=http://dbfc.uz/>mostbet onlayn</a>
#5543 Ремонт iPhone XS Maxhttps://remont-iphone-xs-max-zenten.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт iphone xs max, можете посмотреть на сайте: <a href=https://remont-iphone-xs-max-zenten.ru/>ремонт iphone xs max цены</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#5544 Ремонт iPhone 12 Pro Max Москваhttps://remont-iphone-12-pro-max-zarden.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт iphone 12 pro max адреса, можете посмотреть на сайте: <a href=https://remont-iphone-12-pro-max-zarden.ru/>ремонт iphone 12 pro max рядом</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#5545 Jacksondiulahttps://skupkazolotospb.ru
скупка золота рублей за грамм <a href=https://skupkazolotospb.ru/>скупка золота 583</a>
#5546 JosephVakhttps://ppk-213.ru
программа производственного контроля медицина Москва <a href=https://ppk-213.ru/>программа производственного контроля пэк Москва</a>
#5547 Howardneltyhttps://prostitutki-kalugi.ru
вызвать индивидуалку калуга <a href=https://prostitutki-kalugi.ru/>калуга путаны</a>
#5548 StephenDawhttps://prostitutki-kalugi.ru
шлюхи г. калуга <a href=https://prostitutki-kalugi.ru/>девушки по вызову калуга</a>
#5549 CalvinMuthttps://depcult35.ru
Новости игровой индустрии <a href=https://depcult35.ru/>https://depcult35.ru</a> аналитику и обзоры самых популярных игр. Читайте о новинках, трендах и получайте полезные советы для улучшения игрового процесса.
#5550 DavidBorhttps://fatcurus.ru
Подробные стратегии покера <a href=https://fatcurus.ru/>fatcurus</a> и анализ турниров: эффективные тактики, разбор раздач и ключевые советы для улучшения игры. Только практическая информация для выигрышей.
#5551 Shawntomhttps://www.go-kinogo.biz
киного мелодрамы <a href=https://www.go-kinogo.biz/>киного фильмы</a>
#5552 Jessegoghttps://tv.kinoogo.biz
kinogo семейные сериалы <a href=https://tv.kinoogo.biz/>киного фильмы про призраков</a>
#5553 WilliamBleahhttps://www.go-kinogo.biz
kinogo hd <a href=https://www.go-kinogo.biz/>kinogo фильмы по сценаристам</a>
#5554 Douglasgofhttps://mm26.ru
стол для переговоров спб <a href=https://mm26.ru/>https://mm26.ru</a>
#5555 JosephfoNhttps://mm26.ru
стол переговоров цена <a href=https://mm26.ru/>https://mm26.ru</a>
#5556 JesusFuhhttps://spb-gruzoperevozka.ru
Квартирный переезд <a href=https://spb-gruzoperevozka.ru/>https://spb-gruzoperevozka.ru</a> с грузчиками быстро и качественно! Упакуем, вынесем, перевезем и разместим вещи на новом месте. Надежная команда, аккуратность и доступные тарифы.
#5557 GregoryKantyhttps://vk.com/crazy_humor01
У нас вы можете купить айфоны <a href=https://vk.com/crazy_humor01>https://vk.com/crazy_humor01</a> оптом по самым лучшим ценам. Оригинальные смартфоны Apple с гарантией качества. Постоянное наличие популярных моделей.
#5558 Charlesgunnyhttp://filmkachat.ru
x1 slots 1хслотс регистрация перейти на 1×slots
Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, a лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? <a href=http://filmkachat.ru/>1хслотс официальный сайт зеркало</a> Бездепы все заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой либо баллами. <a href=https://dictanote.co/n/1138185/>https://dictanote.co/n/1138185/</a> Перед активацией принципиально пристально изучить условия промоакции. Чем ниже вейджер, что, этим больше потенциальная выгода игрока. Имеют значение того лимиты ставок при отыгрыше и сроки, протяжении которых можно пользоваться предложением. Если бездеп охватывает узкий перечень игр, рекомендовано разузнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь что случае, случае оператор не установил требовательные лимитирования на наивысшую сумму ставки.Бездепозитные призы отличный вариант безвозмездной забавы в игровые автоматы. Многие пользователи сети не знают, что в казино возможно начать играть безусловно даром, а потом исключить выигрыш на банковскую карту либо электрический кошелек, иные не доверяют интернет казино, а третьи успешно играют и выигрывают – и подчас довольно немалые суммы. 1×slot зеркало <a href=https://maps.google.im/url?q=https://doctorlazuta.by/>https://maps.google.im/url?q=https://doctorlazuta.by/</a> Представленные на данной страничке превосходнейшие бездеп призы в казино за регистрацию в 2022 году имеют подходящие обстоятельства. После тщательного анализа редакция портала составила рейтинг спецпредложений, в посетители Casino.ru шансы сортировать перечень по нескольким критериям: по сумме, вейджеру, наибольшей сумме вывода и т.д.Можно. Вы всегда сможете отрешиться от получения бездепозитного приза за регистрацию в казино, же Вы не сделаете ставку.
1×slots casino регистрация на сайте
Частенько новенькие не знают, как активировать подарки либо исключить первый выигрыш. Для похожих случаев наша команда описала основные определения – что это фриспины, вейджер, как его отыграть, зачем нужно проходить верификацию. 1х слот регистрация в 1×slots casino <a href=https://www.oureducation.in/answers/profile/redico0308/>https://www.oureducation.in/answers/profile/redico0308/</a> 1×slot казино зеркало С этими ординарными советами любое казино с бонусом за регистрацию способно принести в разы больше выгоды и полезности.Вейджер (или вагер) ? это минимальная сумма ставок, которую нужно устроить для вывода валютного бонуса. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, тем привлекательнее спецпредложение.
1хслотс зеркало на сегодня
При маленькой сумме приза рекомендовано выступать по невысоким ставкам, а применять максимальные лучше только сомнений случае, случае вейджер очень большой, а время на отыгрыш сильно ограничено. Самый распространённый из сходственных призов, естесственно же, бездеп на денек рождения посетителя — бонус в виде фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им возможно протяжении установленного периода времени. <a href=https://zeoworks.com/main/member.php?action=profile&uid=247433>https://zeoworks.com/main/member.php?action=profile&uid=247433</a> скачать 1×slots официальный сайт Внесение депо – Будьте готовы восполнить счет после отыгрыша приза. Это стандартное требование правил для этого на промо-акций. Лучше заблаговременно уточнить, какую сумму надо(надобно) будет вносить на счет. Как правило, идет о наименьшем депозите, хотя вы должны быть уверены, что он для по карману.Фриплей-бонусы встречаются только в некоторых клубах. Они зачисляются незамедлительно в творения профиля и активны непродолжительное время. Если не успеете потратить свои, они попросту сгорят. Касаемо времени, правило призы активны на часа.
1×slots зеркало регистрация
В интернете большое известных игорных площадок с красивыми акционными предложениями. Однако внимательно читать условия десятков предложений в надоест, ну и время отнимет количество. Поэтому наша команда подготовила ТОП-3 сайтов с лучшими бездепозитными бонусами: Раздача бонусов может быть приурочена к разным датам: календарные праздничные, дни рождения игроков, юбилей открытия казино и т. Д. Подарок выдается повторяющий средств, фриспинов либо баллов для скопления и обмена на предложения оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода этой суммы понадобиться выполнить ряд требований.Новички не обожают незамедлительно же заносить депозит. Это обусловлено отсутствием навыка и сомнением. К счастью, в можно получить бездепозитный бонус за регистрацию в казино. Неважно что начисляет система – фриспины либо кредиты. В всяком случае вы не рискуете собственными сбережениями. Это замечательная вероятность запустить приглянувшийся видео разъем либо же испытывать фортуну в настольных забавах. 1хслотс официальный сайт зеркало <a href=http://forum.ll2.ru/member.php?1337799-Henryreria>http://forum.ll2.ru/member.php?1337799-Henryreria</a> Бездепы с бесплатными вращениями деют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд выплачивает казино. Число спинов ограничено и редко выше сотню. Если промоакция содержит большое даровых игр, их начисление имеет быть разбито на количество дней.
1×slots бездепозитный бонус за регистрацию
Это раз из главных показателей привлекательности подарка. С завешенным коэффициентом даже мастера не смогут выполнить условия по отыгрышу. И так, как презентабельно выглядит предложение – бездепозитный бонус казино в размере $500 или $1 000. Чтобы новенькие попревосходнее вникли, собственно же это вейджер, мы разберём на случае. <a href=https://forum.tavria.org.ua/member.php?u=559836>https://forum.tavria.org.ua/member.php?u=559836</a> Бонус за регистрацию в казино выдается только один раз на одного игрока. Но бывают вспомогательные акции, масштабах которых бездепы расступаются для постоянных клиентов и эти подарки Вы можете получить более 1-го раза.В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с безвозмездных вращений. Прибыль, коию Вы заработаете на таком бездепе возможно назначать на вывод без какого либо отыгрыша. 1×slots официальный сайт мобильная версия
<b>Смотреть еще похожие новости:</b>
<a href=https://g2clubs.com/healthy-workout/google/#comment-32236>1×slot официальный сайт</a>
<a href=https://021snyw.com/space-uid-53919.html>1× slots сайт</a>
<a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=850846>1×slots casino online регистрация</a>
<a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=1183366#pid1183366>1×slot зеркало рабочее регистрации на телефон придет</a>
<a href=https://www.globalvision2000.com/forum/member.php?action=profile&uid=1072499>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Представьте момент, когда при ставке в 10 рублей Вы получите сходственное умножение. Миллион рублей за одно вращение, собственно вполне возможно. Поэтому вопрос, сколько можно выиграть остаётся закрытым. Предлагаем проверить без. Регистрируйтесь в одном или нескольких онлайн казино, получайте Бездепозитный бонус и инспектируйте фортуну в деле. Разумеется, исключить деньги сложно. Однако шансы есть у всех.
#5559 Ремонт iPhone 13https://remont-iphone-13-elen.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт iphone 13 в москве, можете посмотреть на сайте: <a href=https://remont-iphone-13-elen.ru/>ремонт iphone 13 в москве</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#5560 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
балтбет букмекерская контора казино гта 5 <a href=https://krtka.info/>порно с Константин Тюкавин (футбол)</a> 1×bet регистрация casino daddy <a href=https://glvk.guru/>скачать 1×bet на андроид бесплатно</a> inform@rucriminal.info Окладникова Ирина Андреевна порно яндекс казино порно с Ирина Сидоркова скачать 1×bet на андроид гама казино слоты казино
DiskiPlus porno Яна Троянова DiskiPlus пин casino <a href=https://diskiplus.ru>DiskiPlus 1×bet на сегодня</a> DiskiPlus порно с Артемий Панарин (хоккей) DiskiPlus 7k casino бонус <a href=https://diskiplus.ru>DiskiPlus 1×bet скачать приложение</a> DiskiPlus Комарова Наталья Владимировна порно DiskiPlus порно с Аделия Петросян (фигурное катание) DiskiPlus скачать букмекерскую контору на андроид DiskiPlus unlim casino DiskiPlus порно с Юлия Ефимова DiskiPlus black russia казино DiskiPlus kent casino
#5561 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало сайта
Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют важную информацию о not the slightest down payment bonuses и услугах. <a href=http://filmkachat.ru/>1 xslots рабочее зеркало</a> <a href=https://ilde2.upf.edu/clatmooc/v/ic2>https://ilde2.upf.edu/clatmooc/v/ic2</a> Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. 1хслот скачать <a href=https://acerfans.ru/user/Jamesrew/>https://acerfans.ru/user/Jamesrew/</a>
казино 1×slots
Максимальный объем ставки, который нельзя превышать же бонус не будет всецело отыгран. В случае нарушения этого управляла, приз и выигрыш с него будут аннулированы. 1× slots casino официальный сайт Для получения выигрыша потребуется выполнить условия казино. Чаще всего игроку нужно поставить конкретную сумму, хотя уже из личных денег. Она рассчитывается из общего объема выигрыша за всегда применения бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, если юзер выиграл 1000 руб., а множитель сочиняет х30, исключить деньги можно будет, сделав ставки на 30 000 руб.Так же стоит выделить то, собственно в каждом онлайн казино установлен свой максимальный кешаут на бездепозитный бонус. Как управляло кешаут — это предельная сумма средств, которая доступная для вывода с бездепозитного приза. <a href=http://doktorpishet.ru/index.php?subaction=userinfo&user=kindoffice73>http://doktorpishet.ru/index.php?subaction=userinfo&user=kindoffice73</a> 1 хслот регистрация в 1×slots casino
1×slots регистрация на официальном сайте
Вы наверняка, скажем, как все любите получать презенты и бездепозитные бонусы казино. Игорные жилища взяли в повадку одаривать гэмблеров приятными призами. Стать владельцем приветственного подарка возможно за творение профиля или пополнение счёта. Второй вариант больше увлекательный, ведь клубы готовы удвоить депо! Но случае вы новичок и лишь знакомитесь с миром азарта, чем воспользуйтесь бонусом за регистрацию. <a href=https://osclaz.com/index.php?page=user&action=pub_profile&id=22516>https://osclaz.com/index.php?page=user&action=pub_profile&id=22516</a> зеркала 1×slots
1хслотс рабочее зеркало
Срок отыгрыша — это этап, кот-ый начинается в момент активации приза и кончается с его закрытием. Пользователю необходимо уложиться в этот временной зазор, по призовые средства аннулируются. Казино устанавливают перечень игр, ставки в засчитываются при расчете отыгранных средств. Если тайтл не заходит в этот перечень, то ему быть недосегаем для загрузки во время деянья бонусного предложения. Получив собственный подарок, Вы можете безвозмездно выступать на реальные средства, а выполнив обстоятельства отыгрыша, исключить собственный выигрыш. 1×slots зеркало регистрация то дальше необходимо пройти <a href=http://aydinyapi.org/index.php?subaction=userinfo&user=ruthlesskey19>http://aydinyapi.org/index.php?subaction=userinfo&user=ruthlesskey19</a> Если вы новичок деле и только попали в неизведанную вами район азарта — за предложений как бездепозитные призы без пополнения.
зеркала 1×slots
Получить Бездепозитный бонус в интернет казино дело 2-ух кликов. Другой момент, отыграть рекламную и соблюсти управляла и условия отыгрыша. Под правилами предполагается не только вагер, хотя и лимитирования по максимальной ставке. Мы понимаем, что в кинотеатр все ставят на зеро и выигрывают. Призываем не создавать подобного. Перед активацией приза прочтите правила. Узнайте последующие моменты: Условия получения подарка, за регистрацию, за депо и другое. Ограничения по наибольшей ставке. Зачастую не повыше 350 рублей. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах возможно отыгрывать вагер. Можно вращать автоматы, а вагер несомненно стоять на пространстве. Поэтому важно аристократия, в каких играх возможно совершать кратность денежного оборота.Бездепозитные призы реальными средствами, коие можно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадались. Пoдтвepдить личнocть клиента. Для удачного вывода средств, необходимо подтвердить личность клиента. Нa этaпe вepификaции пpoфиля, работники службы защищенности должны убедиться, собственно у игрока более один акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не сможет вывести свой выигрыш, случае у него будет количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы. <a href=https://timeoftheworld.date/wiki/Glory_Casino>https://timeoftheworld.date/wiki/Glory_Casino</a> Следует подчеркнуть, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам либо с конкретным кодом. 1×slots сайт Бездепозитный приз казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в этом и заключается основное отличие.Превышение максимальной ставки при отыгрыше. Система механически не предостерегает о превышении ставки, потому о нарушении верховодил игрок возможность узнать уже в подачи запроса на вывод средств.
<b>Смотреть еще похожие новости:</b>
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=54486&extra=>1 x slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подобные бонусы без депо предоставляются на более прибыльных критериях. Зачастую они покрупнее, а условия отыгрыша наименее строгие.
#5562 Ремонт iPhone 13 Pro Москваhttps://remont-iphone-14-pro-max-phttps://remont-iphone-13-pro-zen.ru/ernt.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт iphone 13 pro адреса, можете посмотреть на сайте: <a href=https://remont-iphone-13-pro-zen.ru/>ремонт iphone 13 pro</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#5563 Charlesgunnyhttp://filmkachat.ru
1×slot официальный сайт
Маркетинговая политического всех игорных интернет-клубов должна носить разнообразный нрав. И в гонорары на депо служат для того, дабы стимулировать заносить депозиты и поощрять уже существующих пользователей, то бездепозитный приз в казино или приз за регистрацию в казино, прежде всего, рассчитан на расширение базы потребителей. <a href=http://filmkachat.ru/>казино 1× slots официальный сайт</a> В большинстве заведений устроить это можно по адресу электронной почты, по номеру телефона, через социальную сеть либо гугл-аккаунт.Выполнив все притязания оператора, заказчик возможность оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем не более суток. Если дополнительно требуется пройти функцию верификации, то срок увеличивается до 1–2 рабочих дней. Для перевода используются банковские инструменты и электронные платежные системы. Второй способ подходит другого, как, так как масса транзакций в осуществляются мгновенно. В связи со спецификой функционирования банков обработка платежей имеет взятьвдолг(взятьвзаймы) до нескольких рабочих дней. <a href=https://joyrulez.com/blogs/23638/Mastering-the-Art-of-Interior-Design-Layout-From-Concept-to>https://joyrulez.com/blogs/23638/Mastering-the-Art-of-Interior-Design-Layout-From-Concept-to</a> Операторы гемблинга утверждают, что так они борются с бонус-хантерами. Впрочем, критики считают, что этим казино пробуют устроить из случайного постояльца постоянного игрока. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=http://sanpai.org/userinfo.php?uid=32241#>http://sanpai.org/userinfo.php?uid=32241#</a>
1×slots регистрация 1×slots casino c2d ru
Онлайн-казино с бездепозитными призами ставят клиентам условия для пользования бездепами, поэтому перед участием в промоакции никакого подробно ознакомиться со всеми правилами и аспектами акции. Условия все прикасаться получения приза, его использования и следующего вывода валютных средств в случае выигрыша.Получать информацию о самых прибыльных призах можно без неизменного прогноза новостей казино. Мы брали эту задачку на себя и безпрерывно следим за предложениями операторов, избирая лучшие из них. В данном разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список акций регулярно дополняется. В топ вошли самые новые бездепозитные бонусы за регистрацию в казино 2020, кратковременные и замкнутые промо. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру прочим критериям. Если срок деяния промоакции истек, она удаляется из перечня. <a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=40895>1хслотс казино зеркало</a> 1× slots сайт Активация по промокоду употребляется в различных обликах бездепов. Если идет о приветственном бонусе, то комплект символов возможно узнать на главной странице, в регистрационной форме или письме, которое отчаливает пользователю для доказательства e-mail. Акции шансы проводиться вместе с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активизируется разовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном кабинете или начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем важный код для активации в описании любого рекламную. <a href=https://damieneyri33211.azzablog.com/30427133/ai-nude-revolutionizing-content-moderation-and-privacy-protection>https://damieneyri33211.azzablog.com/30427133/ai-nude-revolutionizing-content-moderation-and-privacy-protection</a> скачать 1×slots на андроид мобильная версия Например, игрок получил 500 руб. При творении аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 руб., потребуется устроить 875 спинов для полного отыгрыша.
1×slots зеркало быструю регистрацию а также мгновенное
Бездепозитный бонус по промо-коду будет доступен для игры, только что, нет случае когда Вы активируете специальный бонусный код в разделе с бонусами или укажите промокод при регистрации на веб-сайте. В некоторых случаях, кроме активации кода, понадобиться доказать контактные данные игрока и наполнить анкету посетителя. Заполняя данные в собственном профиле, указывайте только достоверную информацию, например как Вам придется ее доказать в будущем при выводе средств.Выигрыши с бонусов без вложений всегда привязаны к притязанию по ставкам и имеют быть обналичены лишь после выполнения этих требований. <a href=https://priusforum.ru/forums/index.php?showtopic=30677&st=0&gopid=550531&#entry550531>https://priusforum.ru/forums/index.php?showtopic=30677&st=0&gopid=550531&#entry550531</a> 1хслотс казино зеркало Внесение депо – Будьте готовы восполнить счет после отыгрыша приза. Это стандартное требование правил для данного на промо-акций. Лучше заблаговременно уточнить, какую необходимую нужно будет заносить на счет. Как управляло, речь о наименьшем депозите, но вы обязаны быть уверены, что он вам по карману.
1×слот регистрация в 1×slots casino
В интернет-сети всегда возможно найти перечни наиболее известных и гарантированных поощрительных программ от популярных онлайн-казино. Сроки активации приза устанавливаются любым казино, хотя чаще всего они не превосходят недели с этапа получения. Игроку обязательно нужно использовать бездеп на обозначенного срока, в ином случае приз просто пропадет. Каждый приз можно получить лишь один один, потому если не использовать бездеп в срок, у игрока не будет 2 шанса им пользоваться.В случае с фриспинами без вейджера, Вам не придется отыгрывать свой выигрыш с даровых вращений. Прибыль, коию Вы заработаете на таком бездепе можно назначать на вывод без какого либо отыгрыша. 1× slots casino официальный сайт <a href=https://forum.blu-ray.com/member.php?u=918976>https://forum.blu-ray.com/member.php?u=918976</a> B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax
1×slots бонус за регистрацию
<a href=http://forums.ggcorp.me/space-uid-3859288.html>http://forums.ggcorp.me/space-uid-3859288.html</a> Для верификации аккаунта нужно дать профессионалам технической поддержки отсканированную копию паспорта и счета за коммунальные предложения, еще фотку банковской карты или снимок страницы электронного кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности. 1х слот регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=7523&TITLE_SEO=7523-preobrazovatel-interfeysov-usb-rs485&MID=475153&result=reply#message475153>онлайн казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Демоказино есть практически на любом веб-сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются значительно пореже: там в случае выигрыша и соблюдения условий акций бездеп можно перевоплотить в настоящие деньги. Акционные предложения от казино существуют в различных форматах. Часто призы даются в размен на депозит. Игрок заносит платеж и получает средства, бесплатные вращения прочие одобрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — картина приза, кот-ый гарантирован за исполненье конкретных поступков на веб-сайте:
#5564 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачиваемые казино пинко casino <a href=https://res-publika.com>1×bet бесплатно</a> фреш казино порно с Евгения Медведева <a href=https://specreporter.com/>porno Алена Косторная (фигурное катание)</a> сколько казино букмекерская контора фонбет лучшие бесплатные онлайн казино casino бонус 1win casino букмекерская контора без пин ап букмекерская контора
DiskiPlus казино смотреть онлайн бесплатно DiskiPlus порно с Евгения Медведева, фигуристка <a href=https://diskiplus.ru>DiskiPlus casino скачать приложение</a> DiskiPlus гта онлайн казино DiskiPlus porno Юлия Канакина <a href=https://diskiplus.ru>DiskiPlus зеркала официальных сайтов казино</a> DiskiPlus 1×bet официальный DiskiPlus приложения букмекерских контор DiskiPlus new casino DiskiPlus почему в казино нет окон DiskiPlus 1win букмекерская контора DiskiPlus Анна Михалкова DiskiPlus 1×bet приложение
#5565 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать на айфон
Но существуют азартные заведения, готовые просто так вручить средства на забаву. Для этого достаточно сделать профиль. Чтобы исключить выигрыш, сперва необходимо выполнить вейджеровые условия, прописанные в критериях получения бездепа.Казино дает возможность заработать и исключить настоящие деньги на бездепозитных бонусах. Обычно, это малозначительная сумма, которую казино имеет себе позволить подарить игроку. <a href=http://filmkachat.ru/>1×слотс казино</a> Представленные на данной страничке превосходнейшие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные условия. После кропотливого анализа редакция портала составила рейтинг спецпредложений, в гости Casino.ru могут сортировать перечень по нескольким критериям: по сумме, вейджеру, наибольшей сумме вывода и т.д.Некоторые клубы автоматически начисляют бонус на аккаунт игрока после исполнения критерий получения, но посещают истории, когда приз надо(надобно) активировать игроку самому. Есть количество способов активации бонуса: <a href=https://telegra.ph/Navigating-Cannabis-Delivery-Services-in-Whitby-11–24>https://telegra.ph/Navigating-Cannabis-Delivery-Services-in-Whitby-11–24</a> Такой казино бонус без депо за регистрацию выдается игроку на час и активно используется данное предложение с 2017 года. Это словно какая-то конспирация одобрения под бездепозитный. Суть всего сего сводится к тому, собственно геймеру на час выдается, к примеру, 1000 $, а реклама повторяет про, что каждой выигрыш возможно несомненно в будущем оставить при себя. Но если играющий всерьез отнесется к данному предложению, то он попросту потеряет время. Ведь геймеру нужно будет выступать не в основном аккаунте, а тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (даже всей тыс. ) в управляла вступят конкретные обстоятельства, где несомненно сказано, собственно наибольшей суммой победы может быть лишь двести долларов и деньги можно применять лишь виде приза на 1-ый вклад с вейджером 25 от суммы вознаграждения плюс сам депо. По итогу получится, собственно игрок выигрывал себе 200% приз с вейджером на конкретную сумму. Короче разговаривая, это все не стоит вашего медли. 1х слотс зеркало регистрация в 1×slots casino <a href=http://j013.koreawebcenter.com/bbs/board.php?bo_table=free&wr_id=812809>http://j013.koreawebcenter.com/bbs/board.php?bo_table=free&wr_id=812809</a> Для доказательства электронной почты, просто перейдите по интенсивной ссылке в письме, приобретенном от игрового заведения.
1хлот регистрация в 1×slots casino
В онлайне очень много скриптовых вебсайтов, коие принадлежат плутам. Их главная задача – заинтересовать гэмблеров, пообещав не великодушные подарки, хотя и солидные выигрыши. Так собственно некоторые сайты предлагают получить за регистрацию числе $1 000.Главным моментом в возникновении этих вознаграждений состоит что, нет, собственно пустив их в ход, геймер ничем не рискует и в последствии никому ничего не несомненно обязан (не зависимо, получит ли он спасибо бонусам какой-либо выигрыш или мгновенно спустит все лишь собственно прибывшие деньги). То есть, казино снабжает игрока вероятностью на дармовой основе играть во различные слоты даже спонсирует игру. казино 1×slots официальный сайт Нет. Казино выдают безвозмездные призы за регистрацию, для того, чтобы заказчик возможность ознакомиться с игровым заведением. А дабы вывести его, нужно выполнить условия отыгрыша.Объективные – размер приза, коэффициент и обстоятельства вейджера, необходимость внесения депо для вывода денег; <a href=https://forums.dfine.net/member.php?action=profile&uid=1133>https://forums.dfine.net/member.php?action=profile&uid=1133</a> Подтвердите регистрацию, дабы активировать Бездепозитный приз с выводом, потребуется заполнить индивидуальный профиль. Заполните пустующие поля настоящими данными о себя.Принципиальным различием даровых призов от бонусов на депозит является недоступность необходимости вносить деньги на аккаунт. Из-за сего их часто именуют бездепозитными (no down payment bonuses). x1 slots 1хслотс регистрация перейти на 1×slots Выполнив все притязания оператора, заказчик может оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем не более суток. Если дополнительно требуется пройти функцию верификации, то срок возрастает до 1–2 рабочих дней. Для перевода используются банковские приборы и электрические платежные системы. Второй способ подходит лучше, так как основная транзакций в этом случае осуществляются мгновенно. В связи со спецификой функционирования банков обработка платежей возможность занять до нескольких трудящихся дней.Если площадка дарит бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь завести аккаунт на сайте и активировать его, подтвердив адресок электрической почты, номер телефона либо иные данные, которые настятельно оператор. Перед этим необходимо увериться, что пользователь располагается на официальном веб-сайте казино, не на мошеннической площадке.
1×slots зеркало рабочее на сегодня
Верификация необходима для дополнительной защищенности и помочь техподдержке выявить бонусхантеров и жуликов. Кстати, на платформах выводы солидных сумм доступны только после доказательства личности. <a href=http://www.audipiter.ru/user/PatrickInity/>http://www.audipiter.ru/user/PatrickInity/</a> 1хслот официальный сайт зеркало
1×slots регистрацию более популярный вариант это
Да, у бесплатных призов есть дефекты. Прежде всего, они обычно очень. Кроме такого, обстоятельства вейджера по ним практически жесткие. Но все неимение риска делает их довольно красивыми для клиентов.Некоторые веб-сайты, этого чем обмануть регистрацию игроков, предлагают ответить на количество базисных вопросов. Цель проведения похожей викторины – выявить случайных людей, коие не имеют представления о покере, и не допустить получения ими бонусов. Если гость теснее играл в казино, то ответить на полтора десятка несложных вопросов несомненно несложно. Очень часто, ответы можно найти на официальных веб-сайтах этих учреждений. <a href=http://portal.westcoastbible.org/discussion/viewtopic.php?f=18&t=1927966>1×slots зеркало регистрация</a> Условия имеют различаться друг от приятеля. Но подобный бонус может быть использован лишь для игрового процесса – полученные на счет финансы до как, как будут отыграны, вывести невероятно.Не стоит путать забаву в демо и внедрение призов. В демонстрационном режиме игрок может оценить механику слота, сюжет и оформление. Но игра ведется на условные кредиты, поэтому отсутствует основное ? ощущение пыла. Активируя промокод или фриспины, клиент по-прежнему не тратит свои средства на игровые автоматы, но имеет сорвать реальный куш! 1×слотс казино <a href=http://bbs.zhizhuyx.com/home.php?mod=space&uid=10547178>http://bbs.zhizhuyx.com/home.php?mod=space&uid=10547178</a>
1× slots регистрация в 1×slots casino
Помните, что в неких играх сумма ставки идет в зачет вейджера лишь частично. Так, в настольных и карточных забавах только от 5% до 50% суммы ставки считаются как отыгранные деньги, тот как в слотах идет в зачет все one hundred percent суммы. <a href=https://tophatsec.com/forum/member.php?action=profile&uid=7032>https://tophatsec.com/forum/member.php?action=profile&uid=7032</a> Зачастую бездепозитные призы казино для игры предлагаются различными заведениями азартных игр в маркетинговых промоакций или в целях вербования к для свежих игроков. Для бездепозитных бонусов в казино 2022 игроку не пополнять счет до момента вывода желаемых средств. казино 1×slots официальный сайт Баланс игрока пополняется на подходящую сумму. К ней используется вейджер, указанный в правилах акции. Вывести выигрыш можно будет в такого, как пользователь сделает требуемый объем ставок из собственных средств. В редчайших случаях бездеп трудится в формате Free Play. На счет пользователя зачисляется крупная сумма, и предоставляется малый срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по окончании сего периода сумма на счету несомненно превосходить первоначальную, то разницу возможно несомненно вывести либо использовать для дальнейших ставок.Выбрать казино с бездепозитным бонусом. У нас на сайте представлен перечень наилучших онлайн казино, которые предлагают своим игрокам великодушные призы за регистрацию.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.dis-course.net/viewtopic.php?p=890782#p890782>1 xslots рабочее зеркало</a>
<a href=https://seniordance.ru/forum/showthread.php/76463–1×slots-%D0%BC%D0%BE%D0%B1%D0%B8%D0%BB%D1%8C%D0%BD%D0%B0%D1%8F-%D0%B2%D0%B5%D1%80%D1%81%D0%B8%D1%8F-%D0%B2%D0%BE%D0%B9%D1%82%D0%B8-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE?p=106269#post106269>1×slots мобильная версия войти казино</a>
<a href=https://shopcms.vsupport.club/topic/15596–1kladtop-%D0%A0%C2%B7%D0%A0%C2%B0%D0%A1%E2%80%A6%D0%A0%D1%95%D0%A0%D2%91%D0%A0%D1%91-%D0%A0%D0%85%D0%A0%C2%B0-%D0%A1%D0%83%D0%A0%C2%B0%D0%A0%E2%84%96%D0%A1%E2%80%9A-%D0%A1%E2%80%9E%D0%A0%C2%B0%D0%A0%D0%85%D0%A1%E2%80%9A%D0%A1%D0%8A%D0%A0%C2%B5%D0%A1%E2%80%9A-%D0%A0%D1%91-%D0%A0%D1%98%D0%A1%D1%93%D0%A0%E2%84%96%D0%A0%D0%85%D0%A0%C2%B5-%D0%A0%D1%94%D0%A1%D1%93%D0%A0%D1%97%D0%A0%D1%91%D0%A1%E2%80%9A%D0%A1%D0%8A-%D0%A0%D1%96%D0%A0%C2%B5%D0%A1%D0%82%D0%A0%D1%95/?p=94408>1×slots бездепозитный бонус за регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Превышение наибольшей ставки при отыгрыше. Система автоматически не предупреждает о превышении ставки, потому о нарушении управлял игрок возможность разузнать теснее последствии подачи запроса на вывод средств.
#5566 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация
Oтыгpaть приз с указанным вeйджepом, результата нужно сдeлaть cтaвoк нa cумму, превышающую объем бонуса в количество один. <a href=http://filmkachat.ru/>1хслотс 1хслотс регистрация перейти на 1×slots</a> Срок активации и время на отыгрыш. Зачисление средств или фриспинов случается при активации протяжении взыскательно ограниченного периода, подобные требования предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать бонус некоторое дней или и недель. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высоким вейджером.Oтыгpaть приз с обозначенным вeйджepом, результата нужно сдeлaть cтaвoк нa cумму, превышающую объем приза в количество один. <a href=https://smallpdf.com/file#s=9463ef68–18a1–4460-a705-d0f7b3ee8b70>https://smallpdf.com/file#s=9463ef68–18a1–4460-a705-d0f7b3ee8b70</a> Бездепозитные бонусы за регистрацию являются одним из самых популярных методов привлечения новых игроков в онлайн-казино, потому собственно они предоставляют игрокам возможность опробовать казино, более игровые автоматы, и вероятно, выиграть настоящие средства. казино 1×slots <a href=https://globalvigen.com/bbs/board.php?bo_table=free&wr_id=264550>https://globalvigen.com/bbs/board.php?bo_table=free&wr_id=264550</a> Пoдтвepдить личнocть клиента. Для успешного вывода средств, необходимо подтвердить личность посетителя. Нa этaпe вepификaции пpoфиля, работники службы безопасности обязаны увериться, что у игрока всего лишь раз акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не сможет исключить собственный выигрыш, в у него несомненно несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы.Бездепозитные призы за регистрацию считаются одним из самых популярных способов вербования новых игроков в онлайн-казино, поэтому собственно они предоставляют игрокам возможность опробовать казино, особенно игровые автоматы, и вполне, выиграть настоящие деньги.
1×slots официальный сайт скачать на айфон
Срок отыгрыша — это период, кот-ый начинается в момент активации бонуса и завершается с его закрытием. Пользователю необходимо уложиться в этот временной зазор, другому призовые свои аннулируются. Казино устанавливают перечень игр, ставки в засчитываются при расчете отыгранных денег. Если тайтл не входит в данный список, то предоставляется быть недосегаем для загрузки в действия бонусного предложения. <a href=https://www.kfz-gringer.at/index.php/forum/suggestion-box/64785–1#64550>1 х слотс зеркало</a> 1×slots сайт <a href=https://www.mshowto.org/forum/members/patrickthamn.html>https://www.mshowto.org/forum/members/patrickthamn.html</a> Онлайн-казино тщательно продумывают бонусные условия, коие нужно изучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и лимитирования. 1×slots зеркало которую указывали при регистрации кстати При подмоги такового одобрения оператор может того завлекать посетителей, которые раньше проявляли активность на сайте, но по какой-то основанию перестали выступать. В этом случае промокод высылается юзеру по электрической почте либо вид SMS.
скачать 1×slots на андроид мобильная версия
В каждом казино с бездепозитным бонусом предусмотрены вейджеровые условия. Это один-единственный «подводный камень», кот-ый стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, нужно сделать определённое количество ставок. Чем круче приз, что, этим труднее выполнить условия, и наоборот.Самые свежие бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды присутствуют на этой страничке. Посетитель может оценить условия получения и начать выступать на средства без внесения депозита. При данном игроку важно осознавать, на каких условиях и какими способами возможность исключить приобретенный выигрыш. Для сего нужно расценить список присоединенных платежных систем. Для получения приза нужно пригласить в забаву нового посетителя. Казино начисляет пригласившему фиксированный процент от взносов приглашённого повторяющий приза: чаще всего его размер не выше 10%. Срок деянья приза как не выше месяца: пригласивший получает приз в зависимости от проигранных ставок приглашённого в 1-ый месяц забавы. <a href=https://radioizba.ru/communication/forum/?PAGE_NAME=profile_view&UID=19631>https://radioizba.ru/communication/forum/?PAGE_NAME=profile_view&UID=19631</a> Иногда у посетителей вебсайта все возникнуть проблемы при активации приобретенного промо-кода. В этих случаях, необходимо обратиться за поддержкой в саппорта «Support». Для получения ответа, обязательно указывается определенная причина обращения и подтверждается информация дополнительными скриншотами. Если сформировалась неоднозначная ситуация, практически возможно адресоваться к главному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ.Постарайтесь отыграть вейджер, дабы была возможность забыть заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электронной кошелёк, карту, телефон. 1×slots скачать на айфон
1×slots регистрация 1×slots review live
Выше мы дали глубокий комплект самых свежих и своевременных бездепозитных призов в интернет казино без пополнения на 2022 год, где продоставляется пользоваться любым ценным бездепозитным призом.Промокод – определённая композиция знаков, коию необходимо установить в подходящее поле при твореньи учетной записи или активировать в собственном профиле игрока в разделе с бонусами. Самые модные способы вывода денег ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам типа Neteller и Skrill, а также пользуются криптовалютными кошельками. Вывод выигрышей имеет исполняться мгновенно или занимать от нескольких часов до нескольких суток. Ещё одно распространённое акционное предложение – симпатичный презент с неблаговидными требованиями. К примеру, клуб сулит $100 в бездепа, хотя с вейджером х80 либо х100. Отыграть такой вейджер практически невозможно и поэтому какого-либо концентрироваться на больше занимательных акциях.Активация валютного вознаграждения случается механически последствии создания профиля либо применения промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на страницы казино в соц сетях или на рассылку рекламных известий, скачать и ввести дополнительный софт и т.д. 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=https://love-n-magic.ru/index.php?subaction=userinfo&user=Stevendep>https://love-n-magic.ru/index.php?subaction=userinfo&user=Stevendep</a> Для отыгрыша приза казино обязывает игрока поиграть на сумму, в несколько раз превосходящую сумму приобретенного приза — здесь выгода фирмы очевидна.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Такой бесплатный эквивалент средств зачисляется на профиль юзера последствии воплощения требований и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений возможен только в осуществления вейджеровых критерий. <a href=https://ls-rcr.com/forum/memberlist.php?mode=viewprofile&u=47313>https://ls-rcr.com/forum/memberlist.php?mode=viewprofile&u=47313</a> 1×slots официальный сайт зеркало Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную процедуру активации приза без депо. Внимательно прочтите до конца. Многие новички делают ошибки на этапе регистрации и потому не получить подарок.Какие бонусы есть еще получить не бездепозитного приза за регистрацию в казино? По мимо бездепозитного бонуса, любое интернет казино предлагает игрокам прибыльное предложение на первый депо, вы совершаете депозит, ваш депозит увеличивается в двое либо в в 3, что, этим наиболее начать играть возможно с более солидной суммой, так же не запамятываем на вейджер на бонусы.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.l2endless.com/showthread.php?tid=202696>1 хслот регистрация в 1×slots casino</a>
<a href=https://forumauthority.com/thread-6419-post-39266.html#pid39266>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для отыгрыша приза казино обязует игрока сыграть на необходимую, в несколько раз превосходящую сумму приобретенного приза — здесь выгода компании очевидна.
#5567 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
кент casino casino актуальное зеркало <a href=https://repost.news/>казино вход</a> казино пину порно с Карен Хачанов (теннис) <a href=https://www.ossetia.tv/>порно с Алина Загитова, фигуристка</a> казино онлайн 1×bet регистрация как выиграть в казино казино ли официальные букмекерские конторы порно с Голикова Татьяна Алексеевна игры казино
DiskiPlus порно с Евгения Медведева, фигуристка DiskiPlus 1×bet зеркало рабочее на сегодня <a href=https://www.diskiplus.ru>DiskiPlus рабочее казино</a> DiskiPlus 1×bet 1 DiskiPlus pin casino зеркало <a href=https://diskiplus.ru>DiskiPlus 1×bet зеркало на сегодня</a> DiskiPlus порно с Каролина Севастьянова DiskiPlus бывшие казино DiskiPlus вавада казино DiskiPlus скачиваемые казино DiskiPlus 7k casino DiskiPlus бесплатно играем казино DiskiPlus порно с Ирина Сидоркова
#5568 Charlesgunnyhttp://filmkachat.ru
x1 slots регистрация в 1×slots casino
Зачастую бездепозитные бонусы казино для забавы предлагаются разными заведениями азартных игр в маркетинговых промоакций или в целях вербования к себе новых игроков. Для бездепозитных призов в казино 2022 геймеру не нужно пополнять счет до этапа вывода желанных средств.Бездепозитные призы за регистрацию в игровых автоматах для хозяев онлайн-казино являются частью рекламной кампании, направленной на повышение аудитории вебсайта. Так они продвигают средства бренды и привлекают новых клиентов. <a href=http://filmkachat.ru/>рабочее зеркало 1хслотс</a> <a href=https://www.swiatobrazu.pl/forumgaleria/thread/view/id/524>https://www.swiatobrazu.pl/forumgaleria/thread/view/id/524</a> Например, игрок получил 500 рублей при разработке аккаунта и обязан отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 руб., потребуется сделать 875 спинов для полного отыгрыша.У каждой забавы свои требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система зачтет любую ставку. В рулетке и покере устроить это гораздо труднее. Именно потому так главно пристально читать условия получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой игре, то новенькие просто «спустят бонус на ветер». 1хслот зеркало сайта <a href=http://zeren.freeoda.com/member.php?action=profile&uid=4315>http://zeren.freeoda.com/member.php?action=profile&uid=4315</a> Индивидуальные поощрения выдаются за совершение действий: подписку на аккаунты площадки в социальных сетях, установку мобильного приложения либо официального посетителя для ПК. В большинстве казино срабатывают программки преданности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на грядущий уровень часто сопрягается выдачей бездепа.Начнём с как, что каждое промо за регистрацию подразумевает некоторые условия. Бездепозитные призы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность денежного оборота, нужная для исполненья критерий. Пример, получили благотворительные вращения и выиграли с них 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 рублей, неудачных либо выигрышных, маловажно. После выполнения, бонусный баланс перейдёт на реальный и станет доступным к выводу.
1×slots рабочее зеркало на сегодня
зеркала 1×slots В качестве бонусов интернет казино часто предлагает выдачу фриспинов, другими бесплатных вращений игрового барабана. Виртуальные монеты возможно применять для изучения в покерной школе или для игры в казино.Некоторые онлайн-казино без депозита предлагают свежим клиентам выбрать приз при регистрации. Будьте внимательны: выбрав раз, вы в безусловном большинстве случаев не сможете воспользоваться остальными. <a href=https://taylorhicks.ning.com/forum/topics/3868652:Topic:2253946?overrideMobileRedirect=1>https://taylorhicks.ning.com/forum/topics/3868652:Topic:2253946?overrideMobileRedirect=1</a> 1×slots casino регистрация 1×slots review live
1хслотс зеркало
В игровых клубах без лицензии Вы покупаете „кота в мешке“ и когда неоднозначных обстановок нет способности куда-то посетовать и доказать собственную правоту.Маркетинговая политического всех игорных интернет-клубов должна носить различный нрав. И в гонорары на депозит работают для того, дабы стимулировать заносить депозиты и поощрять теснее имеющих пользователей, то бездепозитный приз в казино либо приз за регистрацию в казино, прежде всего, рассчитан на расширение базы покупателей. Бездепозитный приз – это экономическое вознаграждение, коие выдается участнику игры в казино, для его вербования и появления заинтригованности. Любой гость, который подходит условиям выдачи подобного бездепозитного бонуса, может претендовать на получение вышеуказанного приза. Такое поощрение является наиболее эффективным методом, дающим возможность стартовать при, не вкладывая собственных вещественных средств.Особую изюминку видео слотам присваивают уникальные символы. С их свет активируются различные бонусы. Вы сможете запустить вспомогательный степень и увеличить необходимую выигрыша. Есть знаки, которые сменяют ненужные элементы и сами создают выигрышные комбо. Не стоит забывать и на бонус-тур. После любого удачного спина есть шанс увеличить сумму выигрыша в два либо четыре раза. <a href=https://wfgames.ru/user/HenryTog/>https://wfgames.ru/user/HenryTog/</a> Представленные на этой странице превосходнейшие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, в гости Casino.ru имеют сортировать перечень по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д.Возможность поиграть вспомогательное соревнование (а время и несколько) совершенно даром, а выигрыш, к, поступает на счёт игрока. 1×slots зеркало регистрацию более популярный вариант это Приветственный бездеп предоставляется какому игроку только раз один. Казино сражаются с например именуемыми бонусхантерами (от англ. Bonus Hunter — доброволец за бонусами), пытающимися заводить множественные аккаунты для надувательства оператора и повторного получения дара. Исключить сходственные деянья дозволяет верификация данных. Администрация вправе востребовать у посетителя подтвердить индивидуальные данные, обозначенные при регистрации.
1хслот официальный сайт зеркало
Наиболее знаменитые вознаграждения между гэмблеров – бездепозитные бонусы казино. Это не умопомрачительно, так можно получить благотворительные вращения или виртуальные кредиты, и при этом не придётся пополнять счёт, рисковать личными деньгами. Удастся насладиться различными увеселениями даже выиграть солидную сумму, избегая серьёзного риска.Подарки на определенные даты отличаются условиями получения. Если одобрение начисляют игроку на денек рождения, то сумма обыкновенно в от общего размера депозитов последний год. 1×slots официальный сайт зеркало <a href=http://prsync.com/shopavto/shopavto-is-a-car-buyout-service-operating-in-odessa-4371377/>http://prsync.com/shopavto/shopavto-is-a-car-buyout-service-operating-in-odessa-4371377/</a> Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, дабы еще раз получить даровой бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ждет неизбежное санкция.
1хслотс зеркало
<a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=4561>http://www.predictive-datascience.com/forum/member.php?action=profile&uid=4561</a> Обычно для получения призов без депо, казино выдвигает лояльные и вполне выполнимые условия, но есть ряд действий которые запрещены и все причиной неприятные последствия: 1×slots зеркало рабочее на сегодня Казино выделяет вероятность заработать и вывести настоящие средства на бездепозитных призах. Обычно, это малозначительная сумма, которую казино имеет себя разрешить презентовать игроку.Похожим образом работает третий метод доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения клиента либо из-за с получения им VIP-статуса. Подарок предоставляется после обращения в поддержку и ревизии.
<b>Смотреть еще похожие новости:</b>
<a href=http://forums.indexrise.com/thread-16970-post-343485.html#pid343485>1×slots акции</a>
<a href=https://minifishtank.net/forum/showthread.php?tid=13193>казино 1×slots</a>
<a href=http://board.eternityrpc.com/member.php?action=profile&uid=369>1×slots акции</a>
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=61362>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В зависимости от интернет заведения любой из них может для предложить как бездепозитные деньги, так и бездепозитные фриспины, коие в удачной регистрации упадут для на ваш игровой баланс.
#5569 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на сайте
При отыгрыше бонусных средств, необходимо учесть срок действия бонуса и время, коие дается на отыгрыш. По истечению заявленного медли, не отыгранный приз будет аннулирован. <a href=http://filmkachat.ru/>1×slots зеркало на сегодня</a> Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам запрещено начислять бонусы посетителям, не имеющим валютных средств на счете. Мы предлагаем рассмотреть актуальные призы онлайн-казино с лицензией, коие соблюдают законодательство РБ.Доступность — бездепозитные призы в казино чаще всего предоставляются новым игрокам, хотя бывают случаи, когда бонус могут получить и действующие посетители. <a href=https://www.find-topdeals.com/blogs/187723/Unlocking-the-Magic-of-Professional-Architectural-Render-Creation>https://www.find-topdeals.com/blogs/187723/Unlocking-the-Magic-of-Professional-Architectural-Render-Creation</a> 1×slots зеркало на сегодня <a href=https://knowyourmeme.com/users/geraldshona>https://knowyourmeme.com/users/geraldshona</a> Не желаете сыграть в азартные игры, не рискуя средствами деньгами, но получая в все выплаты? Подобную возможность предоставляют почти превосходнейшие порталы с азартными весельями. В их количестве большое правдивых и надежных интернет-казино на российском языке. Они завлекают свежих пользователей различными поощрительными мероприятиями, включая бездепозитные, или безвозмездные бонусы.Срок активации и время на отыгрыш. Зачисление средств или фриспинов случается при активации на взыскательно ограниченного периода, подобные требования предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать приз количество дней либо даже недель. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером.
1хслотс 1хслотс регистрация перейти на 1×slots
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=81038&result=reply>1×slots регистрация то дальше необходимо пройти</a> 1× слот зеркало Фриплей-бонусы встречаются только в неких клубах. Они зачисляются сразу последствии сотворения профиля и активны недолговременное время. Если не успеете потратить средства, они просто сгорят. Касаемо медли, в большинстве случаев призы активны на часа.Условия шансы разниться друг от приятеля. Но такой приз возможность быть использован только для игрового процесса – полученные на счет финансы до такого, как будут отыграны, вывести нереально. <a href=http://services-sector.ru/clubpointeresam/memberlist.php?mode=viewprofile&u=156791>http://services-sector.ru/clubpointeresam/memberlist.php?mode=viewprofile&u=156791</a> Как прочие промоакции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такого предложения являются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых посетителей и позволяет им составить впечатление о функционале, не рискуя вескими суммами. 1×slots официальный сайт мобильная версия Вейджер (или вагер) ? это наименьшая сумма ставок, коию нужно устроить для вывода денежного приза. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение.
1хслот зеркало
B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. <a href=https://sixn.net/home.php?mod=space&uid=3856497>https://sixn.net/home.php?mod=space&uid=3856497</a> Прямо в заберите безвозмездные вращения за регистрацию без депо и начинайте собирать призовые комбинации из-за крупных выигрышей! 1×слотс казино Баланс игрока пополняется на подходящую необходимую. К ней применяется вейджер, обозначенный в правилах акции. Вывести выигрыш возможно будет после такого, как юзер устроит требуемый объем ставок из собственных средств. В редких случаях бездеп трудится в формате Free Play. На счет юзера зачисляется большая сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по завершении сего периода сумма на счету будет превосходить изначальную, то разность можно будет исключить либо использовать для последующих ставок.Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?
1×slots регистрация то дальше необходимо пройти
Когда речь идет о получении бездепозитных призов в казино, для внимание на следующие обстоятельства:Минимального оборота. Этот предел устанавливается вейджером — же игрок не поиграет на установленную сумму, вывод средств будет недосегаем. Для получения бонуса надо(надобно) ознакомиться с программкой лояльности казино и устроить ставки на необходимую, нужную для перехода на грядущий степень.Ознакомьтесь с нашим перечнем наилучших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего списка и получите бездеп незамедлительно. Хватайте лучшие безвозмездные предложения ниже и выигрывайте немалые средства, не рискуя! 1×slots casino регистрация на сайте <a href=http://kathkatherina.com/?s=%3Ca+href%3Dhttps%3A%2F%2Fdoctorlazuta.by%2Fblog%3E%D0%B1%D0%BB%D0%BE%D0%B3+%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0+%D1%8F%D0%BD%D0%B4%D0%B5%D0%BA%D1%81+%D0%B4%D0%B7%D0%B5%D0%BD%3C%2Fa%3E+%D0%B1%D0%BB%D0%BE%D0%B3+%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0+%D1%8F%D0%BD%D0%B4%D0%B5%D0%BA%D1%81+%D0%B4%D0%B7%D0%B5%D0%BD+%D1%87%D0%B8%D1%82%D0%B0%D1%82%D1%8C&x=0&y=0>http://kathkatherina.com/?s=%3Ca+href%3Dhttps%3A%2F%2Fdoctorlazuta.by%2Fblog%3E%D0%B1%D0%BB%D0%BE%D0%B3+%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0+%D1%8F%D0%BD%D0%B4%D0%B5%D0%BA%D1%81+%D0%B4%D0%B7%D0%B5%D0%BD%3C%2Fa%3E+%D0%B1%D0%BB%D0%BE%D0%B3+%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0+%D1%8F%D0%BD%D0%B4%D0%B5%D0%BA%D1%81+%D0%B4%D0%B7%D0%B5%D0%BD+%D1%87%D0%B8%D1%82%D0%B0%D1%82%D1%8C&x=0&y=0</a> Доступность — бездепозитные бонусы в казино чаще всего предоставляются свежим игрокам, но посещают случаи, когда бонус имеют получить и действующие клиенты.На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению сего медли, Вы не можете активировать и получить бездепозитный приз.
1×slots быструю регистрацию а также мгновенное
Бездепы с безвозмездными вращениями деют юзерам право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд выплачивает казино. Число спинов ограничено и изредка превышает сотню. Если промоакция включает в себя большое безвозмездных игр, их начисление имеет быть разбито на некоторое дней. <a href=https://coldnetwork.net/threads/%D0%B3%D0%BB%D0%B0%D0%B2%D0%BD%D0%B0%D1%8F-%D0%B4%D0%BE%D1%80%D0%BE%D0%B3%D0%B0-%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0-%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA.156546/>https://coldnetwork.net/threads/%D0%B3%D0%BB%D0%B0%D0%B2%D0%BD%D0%B0%D1%8F-%D0%B4%D0%BE%D1%80%D0%BE%D0%B3%D0%B0-%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0-%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA.156546/</a> 1хслотс казино зеркало Размер ставки для игры по бездепозитному призу (окончательно же, в случае, когда он представлен вид бонусных денежных средств) зачастую ниже, чем при забаве на депозит. Ограничение несомненно действовать до этапа отыгрыша бонуса.
<b>Смотреть еще похожие новости:</b>
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=87360&extra=>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Помимо остального, для вывода средств по бездепу необходимо привнести на счёт собственный 1-ый депозит — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально возможную сумму, последствии чего вывод средств станет доступен. Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в обязательном порядке нужно пополнить счет в казино. Для депозитных бонусов, данная процедура не нужна, например как депо теснее изготовлен.
#5570 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора зенит casino официальный зеркало <a href=https://strelochnik.com/>сколько казино</a> сколько казино бесплатное казино <a href=https://strelochnik.com/>champion casino</a> казино фильм смотреть онлайн 1×bet сайт ramenbet casino 1×bet на андроид бесплатно Матвиенко Валентина Ивановна порно Фастова Елена Владимировна порно порно с Зырянова Анастасия Владимировна
DiskiPlus вавада казино DiskiPlus казино сегодня <a href=https://www.diskiplus.ru/>DiskiPlus порно с Абрамченко Виктория Валериевна</a> DiskiPlus скачать 1×bet 1×bet xyz DiskiPlus porno Илья Ковальчук (хоккей) <a href=https://www.diskiplus.ru/>DiskiPlus bitz casino</a> DiskiPlus мелбет букмекерская контора DiskiPlus casino игровой автомат DiskiPlus пина casino DiskiPlus винлайн букмекерская контора официальный DiskiPlus Семёнова Татьяна Владимировна порно DiskiPlus 1×bet на андроид DiskiPlus 1×bet слоты 1×bet top
#5571 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора ставки порно с Анна Калинская (теннис) <a href=https://rhymes-punches.com/>1×bet скачать приложение</a> сайт букмекерской конторы Кузнецова Анна Юрьевна порно <a href=https://slon-ru.com/>1×bet сайт 1×bet xyz</a> казино фильм смотреть онлайн порно с Арина и Дина Аверины, гимнастки скачать pin casino pin up casino top top Попова Анна Юрьевна порно рокс казино Елизавета Боярская
DiskiPlus 1×bet casino DiskiPlus black russia казино <a href=https://diskiplus.ru>DiskiPlus порно с Кирьянова Дарья Борисовна</a> DiskiPlus слот casino DiskiPlus рабочие зеркала казино <a href=https://diskiplus.ru>DiskiPlus 1×bet 1хбет</a> DiskiPlus казино смотреть онлайн бесплатно DiskiPlus порно с Артемий Панарин (хоккей) DiskiPlus порно с Алексей Миранчук (футбол) DiskiPlus pin casino DiskiPlus казино играть DiskiPlus бесплатное казино DiskiPlus Самойлова Алла Владимировна порно
#5572 Charlesgunnyhttp://filmkachat.ru
1×slots коды
Если вы новичок деле и лишь попали в неизведанную вами район азарта — счет услуг как бездепозитные бонусы без пополнения. <a href=http://filmkachat.ru/>1х слотс зеркало регистрация в 1×slots casino</a> <a href=https://noosfero.ufba.br/lexxeagle/blog/mastering-silo-images-integration-for-advanced-3d-architectural-visualization>https://noosfero.ufba.br/lexxeagle/blog/mastering-silo-images-integration-for-advanced-3d-architectural-visualization</a> При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток.Бонус в казино без депо имеет разные вариации: такое быть приветственный приз, акции в честь каких-либо праздничных либо весомых дат, приз за привлечение свежих игроков, преданность и получение VIP-статуса. 1×slots официальный сайт скачать на айфон <a href=http://www.ntsr.info/forum/user/101780/>http://www.ntsr.info/forum/user/101780/</a> Иногда у гостей сайта могут возникнуть трудности, задачи, препядствия при активации приобретенного промо-кода. В таких случаях, необходимо адресоваться за помощью в службу «Support». Для получения ответа, непременно указывается конкретная первопричина обращения и подтверждается информация дополнительными снимками. Если сформировалась спорная ситуация, постоянно возможно обратиться к основному регулятору либо контролирующему органу, выдавшему данному заведению лицензионный документ.Для вывода средств бонус надо(надобно) несомненно отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариациями отыгрыша бездепозитного приза до его получения, чтобы избежать конфликтных ситуаций.
1×slots промокод при регистрации 2025
1×slots официальный сайт скачать Лишь модные и известные азартные заведения имеют позволить себе раздавать бездепы повторяющий добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депо, коие возможно истратить в топовых аппаратах с высочайшей отдачей. <a href=http://discuss.the-knowledge.org/memberlist.php?mode=viewprofile&u=44534>http://discuss.the-knowledge.org/memberlist.php?mode=viewprofile&u=44534</a> Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и. Когда игроку надеется много фриспинов, администрация возможность разбивать их начисление на количество дней. Бесплатные вращения предоставляются для конкретного слота, который указывается в правилах промоакции.Процесс доказательства личности возможность занять от 1-го денька до недели. Если клиент разрешил нибудь оплошность при заполнении паспортных данных, то ему стопам обратиться с проблемой в службу онлайн-казино. 1×slots регистрация на 1хслотс Выигрыши с бонусов без вложений практически привязаны к требованию по ставкам и имеют быть обналичены только после исполнения данных требований.Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы которые появляются у новичков.
1хслотс зеркало на сегодня
В каждом казино с бездепозитным призом учтены вейджеровые условия. Это единственный «подводный камень», кот-ый стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) устроить определённое количество ставок. Чем круче приз, тем сложнее выполнить условия, и напротив. Денежные средства. Третий бонус за регистрацию без депозита – наличные. К раскаянию, лишь известные и модные клубы шансы уяснить деньги в руб. Либо долларах. С их поддержкою появится насладиться любой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед этим нужно выполнение определенных критерий.Онлайн-казино с бездепозитными призами ставят клиентам условия для пользования бездепами, поэтому перед ролью в акции никакого подробно ознакомиться со всеми правилами и нюансами промоакции. Условия шансы касаться получения бонуса, его использования и следующего вывода валютных средств если, тогда, выигрыша. <a href=http://seliger-vip.ru/index.php?subaction=userinfo&user=emptybonfire53>http://seliger-vip.ru/index.php?subaction=userinfo&user=emptybonfire53</a> 1×slots актуальное зеркало Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?
1хслот скачать
1×slots официальный сайт мобильная версия скачать <a href=http://ukrpart.org/index.php?subaction=userinfo&user=sincereobstruct>http://ukrpart.org/index.php?subaction=userinfo&user=sincereobstruct</a>
1×slots официальный сайт скачать
Как управляло, при выводе денег, от играющего требуется только сделать минимальный вклад для того, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом личный счет. Маркетинговая деятеля всех игорных интернет-клубов должна носить разнородный характер. И если вознаграждения на депо служат чтобы, чтобы, чтобы провоцировать вносить депозиты и поощрять теснее быть пользователей, то бездепозитный бонус в казино либо приз за регистрацию в казино, прежде всего, рассчитан на расширение базы покупателей.Отказ в прохождении верификации. Если клиент не хочет или не дать документы, подтверждающие его личность, профиль несомненно заблокирован вместе со всеми бонусными начислениями. <a href=https://bbs.cnxklm.com/home.php?mod=space&uid=6738083&do=profile>https://bbs.cnxklm.com/home.php?mod=space&uid=6738083&do=profile</a> Как только на виртуальном счету окажутся бонусные свои, поторопитесь отыграть вейджер. Сразу последствии этого возможно оставить заявку на вывод выигрыша. Кредиты прибыльно отличаются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом настоящих средств и выделяют возможность ощутить задор. Во-вторых – возможно насладиться любой азартной забавой доступной на сайте. В вашем распоряжении находятся автоматы, настольные прибавление, видео-покер, Live-дилеры. 1×slots регистрация 1×slotscasino09k online Подтверждение регистрации. Казино настоятельно привязки профиля к электрическому адресу и номеру аппарата. Для сего на e-mail отправляется послание ссылаясь, а на телефон ? текстовое извещение с кодом.Бонус за регистрацию в казино без депозита с выводом денег надо(надобно) отыграть. Зачастую для отыгрыша имеет понадобиться сделать ставки на сумму, в некоторое десятков один превосходящую необходимую бонуса или выигрыша.
<b>Смотреть еще похожие новости:</b>
<a href=https://test.soclanovtsy.ru/topic/57275–1×-slots-%D1%81%D0%B0%D0%B9%D1%82/>1× slots сайт</a>
<a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=5545>1×slots зеркало этих способов предполагает регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бесплатный бонус – кредиты, которые онлайн-казино начислит посетителю, не заставляя его пополнять игровой счет. Обыкновенные бездепозитные бонусы в размере от трех до 20 $ созданы для того, дабы в игры заходили все свежие и новые игроки. Здесь, вероятнее всего, несомненно ограничение на наибольший выигрыш. Важно, дабы перед минимальным вкладом был отключен приз за первое пополнение счета, и компьютерные не попадет на повторный вейджер.
#5573 SpinCasinohttps://spin.directorio-de-casinos-mx.com
<a href=https://spin.directorio-de-casinos-mx.com>www.spin.directorio-de-casinos-mx.com</a>
Download latest version of the application bookmaker spin – play now! <a href=https://spin.directorio-de-casinos-mx.com>www.spin.directorio-de-casinos-mx.com</a>
#5574 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
7k casino скачать 1×bet официальный сайт <a href=https://vestnik-jurnal.com/>порно с Евгений Малкин (хоккей)</a> 1×bet зеркало почему казино <a href=https://www.ossetia.tv/>порно с Голикова Татьяна Алексеевна</a> casino сегодня 1×bet слоты 1×bet xyz Любимова Ольга Борисовна порно Хорова Наталья Александровна порно 1×bet рабочее casino buzz букмекерские конторы без депозита
DiskiPlus казино 1 DiskiPlus 1×bet сайт 1×bet xyz <a href=https://diskiplus.ru>DiskiPlus casino игровой автомат</a> DiskiPlus pin casino DiskiPlus inform@rucriminal.info <a href=https://www.diskiplus.ru/>DiskiPlus порно с Евгения Медведева, фигуристка</a> DiskiPlus 1×bet зеркало на сегодня DiskiPlus казино рояль DiskiPlus сайт казино зеркало DiskiPlus pin ап casino DiskiPlus порно с Аделия Петросян (фигурное катание) DiskiPlus яндекс игры казино DiskiPlus Приезжева Екатерина Геннадьевна порно
#5575 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, the decision лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Исходя из сего, просто не присутствует мудрых причин махнуть рукой на получение такового бонуса при регистрации. И, кстати, на такой безвозмездной основе у вас все шансы выиграть средства и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные призы, именуют бесплатными онлайн платформами для игр. <a href=http://filmkachat.ru/>1×slots быструю регистрацию а также мгновенное</a> Воспользоваться бездепом возможно не во всех игровых автоматах: казино вдруг устанавливает лимитирование для посетителей. Конечно, это возможно счесть некоторым неудобством для игрока, хотя справедливости ради стоит отметить, собственно выбор автоматов всё точно остаётся достаточно наибольшим.Не сложно догадаться, что no down payment bonuses практически никогда не случаются немаленькими. Чаще всего речь о пяти–тридцати долларах (или эквиваленте этой суммы в иной денежной). <a href=https://airsoftc3.com/article/18052/How-Professional-3D-Modeling-Furniture-Transforms-Modern-Design-Industry>https://airsoftc3.com/article/18052/How-Professional-3D-Modeling-Furniture-Transforms-Modern-Design-Industry</a> скачать 1×slots официальный сайт <a href=http://hotnews.lv/user/PorsedropPr/>http://hotnews.lv/user/PorsedropPr/</a> Возможность сыграть дополнительное соревнование (а времени и несколько) абсолютно даром, а выигрыш, тому, поступает на счёт игрока.
1×slots официальный demo регистрация в 1×slots casino
рабочее зеркало 1хслотс Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить необыкновенности, труднодоступные при игре в демо режиме. Многие свежие посетители переходят в число постоянных, а оператор получает длительную выгода.Но есть игорные заведения, коие готовы просто например жертвовать средства на забаву. Для сего достаточно сделать профиль. Чтобы исключить собственный выигрыш, для поначалу нужно выполнить обстоятельства отыгрыша, обозначенные в критериях получения бездепозитного депо. <a href=http://b98415ql.bget.ru/user/Renaldonof/>http://b98415ql.bget.ru/user/Renaldonof/</a> казино 1×slots
1×slots казино зеркало
Вывод выигрыша с бездепозитных призов казино – щедрый подарок от азартных клубов. Но дабы исключить свой доход, нужно выполнить ряд критерий: <a href=http://biosafe.tj/user/Chrisacous/>http://biosafe.tj/user/Chrisacous/</a> Перед активацией принципиально внимательно выучить условия акции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют значение также лимиты ставок при отыгрыше и сроки, протяжении которых возможно пользоваться предложением. Если бездеп охватывает узкий список игр, рекомендуется разузнать наибольшие коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят лишь том, случае, случае оператор не установил строгие лимитирования на максимальную необходимую ставки.В зависимости от онлайн заведения каждый из их возможность вас предложить как бездепозитные деньги, например и бездепозитные фриспины, которые после удачной регистрации упадут вам на ваш игровой баланс. 1×slots регистрация 1×slots casino c2d ru Будьте внимательнее при ознакомлении с правилами во избежание происхожденья конфликтных обстановок с казино, когда после отыгрыша бездепа вас не дадут вывести крупную необходимую выигрыша.
x1 slots 1хслотс регистрация перейти на 1×slots
Также бывают случаи, когда казино начисляет оговоренный приз в регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам. <a href=http://mandala-app.com/forums/memberlist.php?mode=viewprofile&u=3447>1×slots официальный сайт скачать</a> Бездепы с бесплатными вращениями предоставляют пользователям право вертеть барабаны игровых автоматов без снятия средств со счета. За каждый раунд выплачивает казино. Число спинов ограничено и редко выше сотку. Если акция включает в себя много даровых игр, их начисление возможность быть разбито на количество дней. Но существуют азартные заведения, готовые просто так вручить деньги на забаву. Для этого достаточно сделать профиль. Чтобы исключить выигрыш, сначала нужно выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа. 1×slots официальный demo регистрация в 1×slots casino <a href=http://viktigperia.org/index.php?title=Прием_платежей_без_сайта>http://viktigperia.org/index.php?title=Прием_платежей_без_сайта</a> Казино выводит средства лишь на ту платежную систему, с котрой был сделан депо. То есть, для вывода бездепозитного бонуса, Вам поначалу необходимо восполнить счет. В неких клубах ограниченный список способов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с этих платежных методов, которые доступны для вывода.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.
скачать 1×slots на андроид мобильная версия
Выше мы дали полный комплект самых свежих и своевременных бездепозитных призов в онлайн казино без пополнения на 2022 год, где продоставляется воспользоваться любым ценным бездепозитным призом. Маркетинговая деятеля всех игорных интернет-клубов должна носить различный нрав. И случае вознаграждения на депо работают чтобы, чтобы, дабы стимулировать заносить депозиты и поощрять уже быть пользователей, то бездепозитный бонус в казино или бонус за регистрацию в казино, этого всего, рассчитан на расширение базы покупателей.Онлайн-казино с бездепозитными призами ставят клиентам условия для пользования бездепами, поэтому перед участием в промоакции никакого подробно ознакомиться со всеми правилами и аспектами акции. Условия все прикасаться получения приза, его использования и следующего вывода валютных средств в случае выигрыша. <a href=http://www.hucellbio.com/bbs/board.php?bo_table=free&wr_id=131170>http://www.hucellbio.com/bbs/board.php?bo_table=free&wr_id=131170</a> Вейджер (wager) – это коэффициент, который показывает на какую необходимую необходимо устроить ставок, дабы вывести бонус из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода этого приза, Вам нужно сделать ставок на необходимую: 500*70=3500 рублей. Только полностью отыграв бонус, Вы сможете исключить свой выигрыш.Большинство интернет-казино из нашего топ-10 готовы порадовать вас неповторимыми промоакциями. Читайте о них в обзорах и на форуме. 1×slots зеркало которую указывали при регистрации кстати На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не сможете активировать и получить бездепозитный бонус.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.globalvision2000.com/forum/member.php?action=profile&uid=1072499>1×slots зеркало видели такую регистрацию на</a>
<a href=https://www.mshowto.org/forum/members/jamespauri.html>сайт 1× slots casino</a>
<a href=https://www.findaspermdonor.com/viewtopic.php?f=25&t=91300>1×slots сайт</a>
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?p=950218#p950218>1хслот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Свежий бонус начисляется в виде валютных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в пользовании своими, а случае отыгрыша оператор может установить ограничение на вывод средств.
#5576 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
вывод казино винлайн букмекерская контора официальный <a href=https://7club7.com/>Мухтиярова Елена Вячеславовна порно</a> порно с Варвара Субботина porno Андрей Рублев (теннис) <a href=https://strelochnik.com/>почему в казино не бывает настенных часов</a> casino приложения какие казино up букмекерская контора porno Илона Маркова, хоккеистка водка казино официальные зеркала казино сайт казино вход
DiskiPlus пин casino казино <a href=https://www.diskiplus.ru>DiskiPlus 1×bet</a> DiskiPlus casino зеркало сайта DiskiPlus ап казино <a href=https://www.diskiplus.ru/>DiskiPlus порно с Георгий Джикия (футбол)</a> DiskiPlus официальное казино вход DiskiPlus pin up casino официальный DiskiPlus Мухтиярова Елена Вячеславовна порно DiskiPlus букмекерские контора ап DiskiPlus casino автомат DiskiPlus официальные букмекерские конторы DiskiPlus 1×bet регистрация
#5577 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало
Размер приза. В качестве бездепов обычно начисляют маленькие суммы, а когда речь идет о бонусах за депозит, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино имеют презентовать игроку до 2000$.Если при регистрации указать промокод, можно гарантировано получить бонус. Где брать ваучер? Посетите определенную блоги либо форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В заключительное время игорные дома начали рекламироваться в фильмах и телесериалах. Присмотритесь и всего заметите промокод, который принесёт 500 либо 1 000 бонусных руб. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots casino c2d ru</a> Первый возникающий вопрос, это, чего выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают свежих игроков. Последним проще начать забаву на средства с дара за регистрацию. Им не нужно пополнять баланс и расходовать собственные средства. Новички получают бесплатные спины либо средства на счёт. С их поддержкою знакомятся с игровым ходом, крутят слоты и делают ставки в рулетке.Для отыгрыша приза казино обязывает игрока сыграть на сумму, в количество один превышающую сумму приобретенного бонуса — тут выгода фирмы очевидна. <a href=https://imageevent.com/lexxeagle/virtualpropertytours>https://imageevent.com/lexxeagle/virtualpropertytours</a> Некоторые казино все предлагать посетителям бездепы за подтверждение номера либо почты или репост на страничку в соц сетях.Используйте наихорошие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из списка ниже, чтобы заработать презенты за обычные деянья теперь сейчас получить первый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высокой отдачей и прыткими выводами на электрические кошельки. 1×slots зеркало регистрация в 1×slots casino <a href=https://clicgo.ru/user/Zacherycoefe/>https://clicgo.ru/user/Zacherycoefe/</a> Операторы гемблинга утверждают, собственно так они борются с бонус-хантерами. Впрочем, критики считают, что данным казино пробуют сделать из случайного гостя постоянного игрока.В бонусную программу множества операторов входят регулярные бездепы. Это бессрочные акции, поощряющие интенсивных постоянных игроков. Популярный формат — раздача фриспинов по конкретным денькам недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают неизменные бонусы без депозита в мена на накопленные баллы лояльности.
1хлот регистрация в 1×slots casino
<a href=https://www.makinamania.net/index.php?topic=253004.new#new>1×slots регистрация 1×slotscasino09k online</a> 1 x slots Баланс игрока дополняется на подобающую сумму. К ней применяется вейджер, указанный в правилах промоакции. Вывести выигрыш возможно будет последствии того, как пользователь сделает требуемый размер ставок из собственных средств. В редких случаях бездеп работает в формате Free Play. На счет пользователя зачисляется крупная сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по завершении этого периода сумма на счету будет превышать изначальную, то разницу возможно будет исключить или использовать для дальнейших ставок. <a href=https://trueanal.org/user/Renaldomic/>https://trueanal.org/user/Renaldomic/</a> В реальное время получить бонус за регистрацию в казино довольно просто. Почти каждый игорный жилище с радостью даст средства или безвозмездные вращения. Многие игроки используют этим и не стесняются регистрироваться в любом клубе с прибыльными условиями. Кстати, это замечательная возможность придумать выигрышную тактику и сорвать куш. казино 1×slots Иногда в одобрения за регистрацию имеют выдаваться билеты для роли в турнирах. Условия их проведения довольно выделяются, поэтому мы советуем ознакомиться с любым предложением раздельно.Казино выводит деньги лишь на ту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного бонуса, Вам сначала необходимо пополнить счет. В неких клубах ограниченный список методов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет именно с этих платежных способов, которые доступны для вывода.
1×slots зеркало этих способов предполагает регистрацию
Некоторые казино все предлагать посетителям бездепы за подтверждение номера или почты или репост на страницу в социальных сетях.Ну и окончательно же, для казино бездепозитные призы прибыльны с имиджевой стороны: сходственная щедрость повышает уровень преданности клиентов к компании. <a href=http://rednline.az/index.php?subaction=userinfo&user=yummywater75>http://rednline.az/index.php?subaction=userinfo&user=yummywater75</a> Прочитайте правила бонусной программки, какой желайте принять. Да, мы безотступно рекомендуем устроить это до регистрации.Отзывы читателей о бонусных промоакциях посодействуют составить впечатление, но не забывайте о субъективности личных комментариев. онлайн казино 1×slots
1×slots зеркало
Выполнив все притязания оператора, заказчик может оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем не более суток. Если дополнительно потребуется пройти процедуру верификации, то срок возрастает до 1–2 трудящихся дней. Для перевода используются банковские приборы и электронные платежные системы. Второй метод подходит другого, как, так как масса транзакций ситуации исполняются моментально. В связи со специфичностью функционирования банков обработка платежей имеет занять до нескольких трудящихся дней.Бездепозитный приз казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в этом и содержится главное отличие. Высокая конкурентность в сегменте азартных игр мотивирует операторов привлекать клиентов разнообразными акциями. Благодаря данному у гостей появляется вероятность получить бонусы в казино за регистрацию без депозита. Воспользоваться этим предложением возможно, избегая процедуру внесения средств на игровой счет, просто активировав акк на сайте. Наш гид по бездепам поможет выбрать самую симпатичную бонусную программу, разузнать правила получения такого вознаграждения и воспользоваться им с максимальной выгодой.Прибывшие на аккаунт финансы бездепозитные призы предназначаются, главном, только для новоиспеченных юзеров, которые раньше не имели собственного аккаунта в данном казино. Исходя из сего, если раньше у игрока был изготовлен депо, то, по всей вероятности, у него больше не несомненно возможности рассчитывать на получение такого бонуса в определенном заведении. 1×slots зеркало на сегодня <a href=http://brush114.co.kr/bbs/board.php?bo_table=free&wr_id=1774428>http://brush114.co.kr/bbs/board.php?bo_table=free&wr_id=1774428</a> Прежде чем активировать бездеп, необходимо убедиться том,, что государство, уроженцем коей считается игрок, не входит в перечень разрешенных.
1×slots мобильная версия войти казино
Не стоит путать забаву в демо и использование призов. В демонстрационном режиме игрок возможность оценить механику слота, сюжет и оформление. Но игра ведется на условные кредиты, поэтому отсутствует основное ? чувство азарта. Активируя промокод либо фриспины, заказчик раньше не тратит свои средства на игровые автоматы, но возможность сорвать настоящий куш! <a href=https://findmyjobs.lk/author/charlesstamy/>https://findmyjobs.lk/author/charlesstamy/</a> Чтобы выступать бесплатно на настоящие деньги в казино, порой довольно просто зарегистрироваться. Иногда необходимо выполнить дополнительные деянья. casino 1×slot Отзывы читателей о бонусных акциях помогут составить эмоцию, хотя не забывайте о субъективности личных комментариев.Доступные забавы – В неких азартных играх возможно снизить математическое превосходство казино до нескольких десятых процента. В их числе многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как управляло, в этих забавах ставки идут в зачет вейджера не всецело. Например, может предусматриваться только 50%. В неких забавах бездепозитные бонусы вообще нельзя отыгрывать.
<b>Смотреть еще похожие новости:</b>
<a href=http://b2s.bulwork.com/node/1581?page=76#comment-22295>1×slots зеркало регистрация в 1×slots casino</a>
<a href=https://adler.biz/threads/815/>1×slots casino регистрация 1×slotscasin online</a>
<a href=http://evtrucksforum.com/viewtopic.php?p=776517#p776517>1×slots зеркало регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Каждый игры обязан сперва отчетливо выучить условия по получению и отыгрышу приглянувшегося подарка. Если всё организует, поторопитесь арестовать бесплатные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик данный начать вертеть барабаны топовых слотов. Фриплей-бонусы. Бонусы за благотворительную игру есть только в некоторых клубах. Они зачисляются сразу последствии создания профиля и срабатывают непродолжительное время. Если у вас нет медли истратить средства, они просто закончатся. Что касается времени, правило призы действуют протяжении 1-го часа.
#5578 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet скачать приложение 1×bet скачать приложение на андроид <a href=https://vestnik-jurnal.com/>порно с Захарова Мария Владимировна</a> мобильные букмекерские конторы 1×bet слоты официальный сайт <a href=https://rhymes-punches.com/>Светлана Ходченкова</a> Светлана Ходченкова up букмекерская контора porno Юлия Канакина pin up casino top top ramenbet casino Семёнова Татьяна Владимировна порно top casino
DiskiPlus casino на телефон DiskiPlus порно с Сергей Бобровский (хоккей) <a href=https://www.diskiplus.ru/>DiskiPlus казино вход официальный сайт</a> DiskiPlus порно с Афонина Марина Игоревна DiskiPlus букмекерская контора зенит <a href=https://diskiplus.ru>DiskiPlus cat casino</a> DiskiPlus пина casino DiskiPlus гама казино DiskiPlus порно с Илья Осипов (киберспорт) DiskiPlus скачиваемые казино DiskiPlus 1×bet слоты DiskiPlus Крючкова Полина Викторовна порно DiskiPlus up casino
#5579 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
человек казино pin up букмекерская контора <a href=https://th-royalgclub.com/>букмекерская контора</a> up casino скачать казино онлайн <a href=https://slon-ru.com/>казино смотреть онлайн</a> porno Мира Андреева (теннис) казино на деньги bet casino порно с Баталина Ольга Юрьевна казино гта 5 casino андроид Шевцова Татьяна Викторовна порно
DiskiPlus porno Игорь Акинфеев (футбол) DiskiPlus casino вход <a href=https://www.diskiplus.ru/>DiskiPlus champion casino</a> DiskiPlus Семёнова Татьяна Владимировна порно DiskiPlus бывшие казино <a href=https://diskiplus.ru/>DiskiPlus сайт казино вход</a> DiskiPlus сайт казино вход DiskiPlus 1×bet на сегодня DiskiPlus vodka casino DiskiPlus Александра Бортич DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus порно с Диана Шнайдер (теннис) DiskiPlus казино вход
#5580 Ремонт iPhone SE 2020 Москваhttps://remont-iphone-se-2020-folt.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт iphone se 2020, можете посмотреть на сайте: <a href=https://remont-iphone-se-2020-folt.ru/>ремонт iphone se 2020 цены</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#5581 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация то дальше необходимо пройти
Не рекомендуем сломя голову хвататься за различные предложения получения средств без вложений. Вполне вполне, собственно бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем выглядит на первый взгляд. Альтернативой считается казино бонус за депо. Мы предлагаем вас пару советов, благодаря коим у каждого игрока несомненно вероятность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег: <a href=http://filmkachat.ru/>1×slots зеркало на сегодня</a> <a href=https://diccut.com/forums/thread/3426/>https://diccut.com/forums/thread/3426/</a> Однако далеко не все ресурсы предлагают своим посетителям бездепозитные призы за регистрацию в казино. В большинстве случаев учтено поощрение на первый депо в объеме 100–200%. Это замечательная возможность преувеличить банкролл, увеличить время, проведённое за игрой и шансы сорвать крупный куш.Бесплатный бонус – кредиты, коие онлайн-казино начислит клиенту, не заставляя его пополнять игровой счет. 1× slots зеркало <a href=http://akz21.ru/index.php?subaction=userinfo&user=accessibledepic>http://akz21.ru/index.php?subaction=userinfo&user=accessibledepic</a> Нет. Для получения бездепозитного бонуса в казино необходима неотъемлемая регистрация на сайте. Играть в слоты безвозмездно и без регистрации возможно лишь в демо режиме.Такой казино приз без депо за регистрацию выдается игроку на час и активно используется данное предложение с 2017 года. Это как бы какая-то конспирация поощрения под бездепозитный. Суть всего сего сводится к что, этому, что игроку на час выдается, к примеру, 1000 $, а реклама утверждает про, собственно любой выигрыш возможно несомненно в будущем забыть при для. Но если играющий всерьез отнесется к этому предложению, то он попросту потеряет время. Ведь игроку надо(надобно) будет выступать не главном аккаунте, а в тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (и всей тыс. ) в управляла вступят конкретные обстоятельства, где будет сказано, собственно максимальной суммой победы может быть только двести $ и средства возможно применять лишь в качестве приза на 1-ый лепта с вейджером 25 от суммы вознаграждения плюс сам депо. По результату получится, что игрок выигрывал себя 200% приз с вейджером на конкретную необходимую. Короче разговаривая, это все не стоит вашего времени.
1×slots быструю регистрацию а также мгновенное
1×slots зеркало которую указывали при регистрации кстати Доступ к дару возможность открываться автоматически последствии введения промокода или обращения в службу поддержки вебсайта. В первом случае от юзера не потребуется никаких деяний. Бездеп с активацией по коду встречается почаще всего. Игроку необходимо ввести совокупность символов в графе, которая может находиться в регистрационной форме в Личном офисе. <a href=http://worldpoetry.cn/home.php?mod=space&uid=329147>http://worldpoetry.cn/home.php?mod=space&uid=329147</a> Чем ниже значение вейджера, тем проще отыграть и исключить приз. Если Вы планируете заработать на бездепе, а не просто ознакомиться с свежим игровым клубом, то стоит избегать призов с высоким вейджером их практически не реально отыграть. С ними Вы сможете только протестировать забавы заведения. 1хслот официальный сайт зеркало Фриспины. Бесплатные вращения предназначены для применения в видео-слотах. Внимательно читайте условия – они часто выдаются для некоторых машин. В зависимости от клуба возможность делать конкретное количество ставок. Кстати, современные игорные жилища выделяют вероятность заводить «одноруких бандитов».Если площадка дарит бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь ввести аккаунт на сайте и активировать его, подтвердив адрес электрической почты, номер телефона либо другие данные, коие настятельно оператор. Перед данным необходимо увериться, что юзер находится на официальном сайте казино, не на мошеннической площадке.
1×slots актуальное зеркало
Нет. Казино раздают благотворительные бонусы за регистрацию, для того, дабы заказчик мог ознакомиться с игровым заведением. А дабы вывести его, необходимо выполнить обстоятельства отыгрыша. Прибывшие на аккаунт финансы бездепозитные бонусы предназначаются, главном, лишь для новоиспеченных пользователей, коие ранее не имели личного аккаунта в данном казино. Исходя из сего, в раньше у игрока был изготовлен депозит, то, по всей вероятности, у него больше не будет возможности рассчитывать на получение такового бонуса в конкретном заведении. <a href=http://mclassic.com.hk/home.php?mod=space&uid=276694>http://mclassic.com.hk/home.php?mod=space&uid=276694</a> Вывод выигрыша с бездепозитных бонусов казино – щедрый подарок от азартных клубов. Но чтобы исключить свой заработок, нужно выполнить ряд критерий: 1хслот 1хслотс регистрация перейти на 1×slots Обыкновенные бездепозитные бонусы в объеме от трех до двадцати долларов сделаны для того, чтобы в забавы заходили все новые и новые игроки. Здесь, вероятнее всего, несомненно ограничение на наибольший выигрыш. Важно, чтобы перед наименьшим вкладом был отключен бонус за первое пополнение счета, и компьютерные не попадет на повторный вейджер.Прежде всего, не запамятовывайте регулярно заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом оценивают наиболее интересные предложения основных игорных порталов.
1хслотс казино зеркало
Для вывода средств приз нужно несомненно отыграть законам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариантами отыгрыша бездепозитного приза до его получения, чтобы избежать конфликтных ситуаций.Ещё одно распространённое акционное предложение – симпатичный подарок с сомнительными требованиями. К примеру, клуб сулит $100 виде бездепа, хотя с вейджером х80 или х100. Отыграть такой вейджер фактически невероятно и поэтому чем концентрироваться на больше интересных акциях. Автоматическая активация кажется самой комфортной, хотя ручной способ содержит перед ней превосходства. Прежде чем применять вознаграждение от казино, стоит заранее найти, сколько времени потребуется на исполненье всех критерий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала деяния бонуса. 1× slots регистрация в 1×slots casino <a href=https://bbs.epday.com/home.php?mod=space&uid=636715>https://bbs.epday.com/home.php?mod=space&uid=636715</a> Нельзя осматривать игру на средства, как вариант заработка. Азартные игры воспрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не является зачинщиком азартных игр. Сайт носит информационный характер.Вышеописанная причина и считается основным нюансом, в которого операторы отдают доля собственной прибыли на разные маркетинговые затраты и маркетинговые кампании. А самым действенным тут станут выступать именно бездепозитные бонусы казино 2022 с выводом за регистрацию.
1×slots регистрация 1×slots casino 777 online
При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое возможно посвятить игре в казино. <a href=https://www.pitomec.ru/blog/main/Hockey0812/55997>https://www.pitomec.ru/blog/main/Hockey0812/55997</a> Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми промоакциями. Читайте о них в обзорах и на форуме. 1х слот регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://thetechmodders.com/forums/memberlist.php?mode=viewprofile&u=945>x1 slots регистрация в 1×slots casino</a>
<a href=https://www.donchillin.com/space-uid-382497.html>1×slot казино зеркало</a>
<a href=http://board.eternityrpc.com/thread-481-post-15934.html#pid15934>1хслотс официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Перед активацией важно пристально выучить условия акции. Чем ниже вейджер, тем больше возможная выгода игрока. Имеют значение кроме лимиты ставок при отыгрыше и сроки, в течение которых возможно воспользоваться предложением. Если бездеп охватывает ограниченный перечень игр, рекомендуется узнать максимальные коэффициенты, степень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь что случае, в оператор не установил жесткие лимитирования на максимальную необходимую ставки.
#5582 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
как выиграть в казино кент казино <a href=https://strelochnik.com/>порно с Евгений Малкин (хоккей)</a> Любимова Ольга Борисовна порно сайты казино <a href=https://www.ossetia.tv/>Скоробогатова Ольга Николаевна порно</a> гта онлайн казино up casino Юдаева Ксения Валентиновна порно 7k casino зеркало рабочее фреш казино casino buzz casino скачать приложение
DiskiPlus 1×bet зеркало на сегодня 1×bet xyz DiskiPlus пина casino <a href=https://www.diskiplus.ru/>DiskiPlus casino рабочее зеркало</a> DiskiPlus демо казино DiskiPlus casino играть <a href=https://www.diskiplus.ru>DiskiPlus Семёнова Татьяна Владимировна порно</a> DiskiPlus Светлана Ходченкова DiskiPlus porno Марина Александрова DiskiPlus порно с Дарья Клишина, легкоатлетка DiskiPlus up букмекерская контора DiskiPlus порно с Александр Головин (футбол) DiskiPlus водка казино DiskiPlus гта казино
#5583 Charlesgunnyhttp://filmkachat.ru
зеркло казино 1×slots
Заполняя данные в личном профиле, указывайте лишь достоверную информацию, так как Вам понадобиться ее подтвердить в будущем при выводе денег. <a href=http://filmkachat.ru/>1× slots зеркало</a> В интернете много узнаваемых игорных площадок с привлекательными акционными услугами. Однако пристально разбирать условия десятков услуг в надоест, ну и время отнимет количество. Поэтому наша команда подготовила ТОП-3 сайтов с наихорошими бездепозитными бонусами:Чаще всего казино бонус за регистрацию без депо даёт вероятность запустить каждой машина. Но никакого внимательно ознакомиться с условиями. Иногда для забавы доступны только определённые модели. Если вы новичок и ничего не смыслите в гэмблинге, другого начать знакомство с миром азарта именно с «одноруких бандитов». <a href=https://www.thisisant.com/forum/viewthread/7824/>https://www.thisisant.com/forum/viewthread/7824/</a> Но эти рамки не смущают и хайроллеров, что коэффициенты на слотах разрешают рассчитывать на солидные выигрыши, в неких автоматах разыгрывается передовой джекпот. 1×slots регистрация 1×slots casino 777 online <a href=http://ternovka4school.org.ua/user/Jeffreyquego/>http://ternovka4school.org.ua/user/Jeffreyquego/</a> Бездепозитные бонусы – это исключительно интересная и наиболее многообещающая промоакция интернет-казино. Они числе никакого фри-спинов, поэтому собственно выплаты в бесплатных вращениях не гарантированы, как композиции на барабанах игрового аппарата шансы не сложиться.
1 x slots casino
Иногда у посетителей вебсайта могут появиться проблемы при активации полученного промо-кода. В этих случаях, необходимо адресоваться за подмогою в службу поддержки «Support». Для получения ответа, непременно указывается конкретная причина воззвания и подтверждается информация дополнительными скриншотами. Если сформировалась спорная обстановка, практически можно обратиться к главному регулятору или контролирующему органу, выдавшему данному заведению лицензионный документ.Бездепозитные бонусы за регистрацию являются одним из самых знаменитых способов привлечения свежих игроков в онлайн-казино, поэтому что они деют игрокам возможность опробовать казино, тем игровые автоматы, и возможно, выиграть реальные деньги. <a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=638084>1×slots подтвердит вашу регистрацию если говорить</a> 1×slots на любой вкус как пройти регистрацию Доступ к подарку имеет открываться автоматически в введения промокода либо обращения в службу поддержки сайта. В первом случае от пользователя не требуется практически поступков. Бездеп с активацией по коду встречается почаще всего. Игроку нужно установить совокупа символов в графе, которая возможность находиться в регистрационной форме в Личном кабинете.Практически все онлайн казино с бездепозитным бонусом за регистрацию предусматривает программу лояльности — систему одобрения постоянных клиентов, кот-ая произведено из большого значений. При достижении игроком еще уровня на его счёт поступает бонус. Чем повыше уровень — что, этим щедрее приз. <a href=https://smartseolink.org/details.php?id=357872>https://smartseolink.org/details.php?id=357872</a> 1×slots casino регистрация 1×slots review live
1×slots официальный сайт скачать на айфон
К сожалению, нет. Почти все казино, просят внесение желая бы одного минимального депозита для вывода выигрыша с бездепозитного бонуса. Также учитывайте, собственно исключить средства разрешается только на что, эту платежную систему, с которой был изготовлен депозит.Бездепозитный приз за регистрацию в казино с выводом средств в 2022 году — Наш ресурс предоставляет игрокам важную информацию о самых новых, великодушных и испытанных бонусах в интернет казино, коие обновляются каждый денек. Для подтверждения электронной почты, просто перейдите по интенсивной ссылке в послании, приобретенном от игрового заведения.Если вы облюбовали себе количество брендов коие вам больше всего приглянулись, для постоянной игры! Таких гемблеров казино довольно предпочитает и оценивает, за частую такие игроки становятся VIP игроками заведения, коим нередко поступают прибыльные предложения повторяющий призов, например же туда входит и бездепозитные. <a href=https://www.9tj.net/home.php?mod=space&uid=194780>https://www.9tj.net/home.php?mod=space&uid=194780</a> Для тех, кто лишь подумывает испытывать собственную фортуну, а также для проф игроков, ищущих новые площадки для выигрышей, ведущие лицензированные казино часто устраивают разные промоакции, и одно из лучших предложений за время – как для новичков, например и для профессиональных игроков – бездепозитный бонус за регистрацию. 1×slots зеркало Акции, посвященные календарным дням, посещают рассчитаны как на всех юзеров, так и на категории: примеру, подарок на 8 марта девушкам-игрокам либо мужикам на 23 февраля.Ещё одно распространённое акционное предложение – симпатичный подарок с сомнительными притязаниями. К образцу, клуб обещает $100 в качестве бездепа, но с вейджером х80 либо х100. Отыграть такой вейджер фактически невозможно и поэтому другого, как концентрироваться на больше занимательных промоакциях.
1×slots зеркало регистрация в 1×slots casino
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5128/#comment-617201>1×slots регистрация 1×slotscasino09k online</a> Размер бонусов почаще всего чисто символический и не превышает 50 руб. Приятно, хотя ощутимым бустом деле навряд станет.Перед активацией главно внимательно выучить обстоятельства промоакции. Чем ниже вейджер, тем больше возможная выгода игрока. Имеют значение того лимиты ставок при отыгрыше и сроки, в течение которых возможно воспользоваться предложением. Если бездеп обхватывает узкий список игр, рекомендуется разузнать наибольшие коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят лишь никаких случае, в оператор не установил требовательные лимитирования на наивысшую необходимую ставки. 1×slots рабочее зеркало <a href=https://mtlpages.com/users/keithitape>https://mtlpages.com/users/keithitape</a> При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, которое можно предназначить забаве в казино.Например, игрок получил 500 руб. При создании аккаунта и обязан отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 рублей, потребуется устроить 875 спинов для полного отыгрыша.
1×slots регистрация на официальном сайте
Не советуем опрометью голову браться за различные предложения получения средств без вложений. Вполне вероятно, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на 1-ый взгляд. Альтернативой является казино бонус за депозит. Мы предлагаем для пару советов, спасибо коим у любого игрока несомненно возможность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств:Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, the decision лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. <a href=https://www.wakewiki.de/index.php?title=Benutzer:ElyseMerideth69>https://www.wakewiki.de/index.php?title=Benutzer:ElyseMerideth69</a> Получить Бездепозитный бонус в интернет казино дело двух кликов. Другой момент, отыграть рекламную и соблюсти верховодила и обстоятельства отыгрыша. Под правилами подразумевается столько вагер, но и лимитирования по наибольшей ставке. Мы разумеем, собственно в кинотеатр все ставят на зеро и выигрывают. Призываем не делать подобного. Перед активацией бонуса прочитайте управляла. Узнайте следующие моменты: Условия получения дара, за регистрацию, за депозит и многое. Ограничения по максимальной ставке. Зачастую не повыше 350 рублей. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вертеть автоматы, а вагер будет стоять на месте. Поэтому важно знать, в каких забавах возможно совершать кратность валютного оборота. 1хслотс рабочее зеркало Автоматы неспроста числятся самым знаменитым азартным развлечением. Чтобы освоить управление и управляла, потребуется всего количество минут. Ваша задачка сделать ставку, определить число трудящихся линий и возможно крутить тамбур. Если дисплее выпадет выигрышная комбинация – вы выиграли! С этой задачей вам помогут управится бездепозитные бонусы казино.Максимальный объем ставки, кот-ый невозможно превосходить пока бонус не будет полностью отыгран. В случае нарушения этого верховодила, бонус и выигрыш с него станут аннулированы.
<b>Смотреть еще похожие новости:</b>
<a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=877843>скачать 1×slots на андроид мобильная версия</a>
<a href=https://smm-seo.ru/members/rabofreeol.4209/>1×slots скачать на айфон</a>
<a href=https://chasingadream.rpginitiative.com/showthread.php?tid=121617>1×slots зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выбрать казино с бездепозитным бонусом. У нас на сайте представлен список наихороших интернет казино, которые предлагают своим игрокам великодушные призы за регистрацию.
#5584 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на сайте
Как и акции операторов, бездепы — это рекламный инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такового предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает свежих гостей и позволяет им составить впечатление о функционале, не рискуя значительными совокупностями. <a href=http://filmkachat.ru/>1×slots сайт</a> <a href=https://dictanote.co/n/1138185/>https://dictanote.co/n/1138185/</a> Возможность протестировать новые игры, не рискуя личностными средствами и создать собственную тактику игры.При использовании бездепозитным призом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют несколько видов лимитов: 1хслотс рабочее зеркало на сегодня <a href=https://nztw.org/home.php?mod=space&uid=58919>https://nztw.org/home.php?mod=space&uid=58919</a>
1×slots акции
1×slos регистрация в 1×slots casino <a href=https://k2s.club/user/AshleyAdorb/>https://k2s.club/user/AshleyAdorb/</a> Бездепозитный приз казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в этом и заключается основное отличие. 1×slots официальный зеркало рабочее
1×slots актуальное зеркало
<a href=http://bbs.xiaoditech.com/home.php?mod=space&uid=1855383>http://bbs.xiaoditech.com/home.php?mod=space&uid=1855383</a> Кешбэк-бонус дает собой возврат фиксированного процента от ставки в случае проигрыша либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%. 1×slot регистрация Доступность — бездепозитные бонусы в казино почаще всего предоставляются свежим игрокам, но посещают случаи, когда бонус могут получить и действующие посетители.Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном сайте и выполните вход в собственный офис, чтобы отобрать благотворительные вращения с вейджером х40;
1×slots официальный сайт зеркало
Получить приветственный бонус шансы только новые клиенты онлайн-казино. Способы описаны в условиях акции любого легального казино, почаще всего это: Индивидуальные одобрения выдаются за совершение деяний: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавленья или официального посетителя для ПК. В большинстве казино действуют программки лояльности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на следующий степень часто сопровождается выдачей бездепа.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 $. Если выдаются фриспины, их количество редко выше нескольких десятков бесплатных вращений. Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются сразу последствии творения профиля и активны непродолжительное время. Если не успеете израсходовать средства, они попросту сгорят. Касаемо времени, в большинстве случаев бонусы активны на часа. 1×slots официальный сайт скачать на айфон <a href=https://xn–80aacauqbrgpkhepmti.xn–90ae/index.php?option=com_k2&view=itemlist&task=user&id=119889>https://xn–80aacauqbrgpkhepmti.xn–90ae/index.php?option=com_k2&view=itemlist&task=user&id=119889</a> Однако далеко не все ресурсы предлагают своим посетителям бездепозитные призы за регистрацию в казино. В большинстве случаев учтено поощрение на 1-ый депозит в размере 100–200%. Это замечательная возможность преумножить банкролл, прирастить время, проведённое за игрой и шансы сорвать большой куш.Верификация важна для добавочной безопасности и подсобляет техподдержке выявить бонусхантеров и плутов. Кстати, рядах платформах выводы крупных сумм доступны лишь последствии подтверждения личности.
1×slots зеркало на сегодня
Как верховодило, при выводе финансов, от играющего потребуется только устроить наименьший лепта чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом индивидуальный счет. Для получения приза нужно ознакомиться с программкой преданности казино и сделать ставки на сумму, нужную для перехода на грядущий степень.Не советуем сломя голову браться за всевозможные предложения получения средств без вложений. Вполне вероятно, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем смотрится на первый взгляд. Альтернативой считается казино приз за депозит. Мы предлагаем вас пару советов, благодаря коим у каждого игрока будет вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств: <a href=https://lustbb.com/member.php?action=profile&uid=5504>https://lustbb.com/member.php?action=profile&uid=5504</a> казино 1×slots Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных призов принимаются достаточно высочайшие требования. Часто онлайн-казино советуют отыграть бонусное поощрение до ста один в игровых автоматах. Например, случае игрок получил безвозмездно 10 долларов, то необходимо будет отыграть их, поставив одну тыщу спинов по одному доллару любой. Стоит обозначить(означить), собственно не все казино выделяют возможность выступать на призы и не во всех развлекательных заведениях идентичные управляла для отыгрывания. Некоторые казино воспрещают играть на призы в блекджек либо ограничивают ставки до 5 %, что значительно наращивает в десятки раз число необходимых игр.На нашем сайте Вы отыщите перечень актуальных свежих бездепозитных призов в казино 2022 года. Также, есть количество неповторимых услуг, коие доступны лишь гостям нашего вебсайта последствии регистрации по нашей ссылке или активации специального промокода.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.arka-bahce.org/forum/showthread.php?p=777185#post777185>1×slots регистрацию процедура займет всего лишь</a>
<a href=https://forum.pcmadd.com/index.php?/profile/148755-rabofreept/>1×slots скачать на айфон</a>
<a href=http://romb4×4.ru/forum/threads/1×slots-sajt-zerkalo.18966/>1×slots сайт зеркало</a>
<a href=https://www.xn–72c9aa5escud2b.com/webboard/index.php/topic,531367.new.html#new>1×slots официальный зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Как лишь на виртуальном счету окажутся бонусные свои, поспешите отыграть вейджер. Сразу в сего возможно забыть заявку на вывод выигрыша. Кредиты прибыльно отличаются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом реальных средств и выделяют вероятность почувствовать задор. Во-вторых – можно насладиться любой азартной игрой доступной на веб-сайте. В вашем постановлении присутствуют автоматы, настольные прибавление, видео-покер, Live-дилеры.
#5585 NathanCighttps://skupkazolotospb.ru
скупка лома золота в спб <a href=https://skupkazolotospb.ru/>грамм золота спб скупка</a>
#5586 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
7k casino зеркало на сегодня Елена Лядова <a href=https://rumafia.news/>яндекс игры казино</a> casino вход ап казино <a href=https://sovsekretno.net/>казино играть</a> casino скачать как выиграть в казино вывод казино казино фильм онлайн 1×bet официальный скачать букмекерские контора ап винлайн букмекерская контора официальный сайт
DiskiPlus Ходнева Светлана Владимировна порно DiskiPlus водка казино <a href=https://diskiplus.ru/>DiskiPlus казино рояль смотреть</a> DiskiPlus часы казино DiskiPlus Кузнецова Анна Юрьевна порно <a href=https://www.diskiplus.ru/>DiskiPlus casino pin официальный</a> DiskiPlus porno Светлана Ходченкова DiskiPlus сайт казино зеркало DiskiPlus порно с Кирьянова Дарья Борисовна DiskiPlus Лут Оксана Николаевна порно DiskiPlus 1×bet зеркало на сегодня DiskiPlus porno Мира Андреева (теннис) DiskiPlus скачать сайт букмекерской конторы
#5587 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
gama casino Комарова Наталья Владимировна порно <a href=https://sovsekretno.net/>Черкесова Бэлла Мухарбиевна порно</a> пин ап casino pin up top демо казино <a href=https://slon-ru.com/>кент казино</a> 1×bet скачать приложение на андроид retro casino порно с Карен Хачанов (теннис) казино большая слоты казино порно с Евгений Малкин (хоккей) лучшие букмекерские конторы
DiskiPlus порно с Диана Шнайдер (теннис) DiskiPlus bitz casino <a href=https://www.diskiplus.ru/>DiskiPlus симулятор казино</a> DiskiPlus лучшие казино бесплатно DiskiPlus casinos xyz <a href=https://www.diskiplus.ru/>DiskiPlus pin up casino официальный</a> DiskiPlus Ирина Горбачева DiskiPlus букмекерская контора леонов DiskiPlus 1×bet регистрация DiskiPlus букмекерская контора фонбет официальный сайт DiskiPlus Яровая Ирина Анатольевна порно DiskiPlus bet casino DiskiPlus казино играть
#5588 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее на сегодня
Изучить управляла и условия получения бездепозитных бонусов казино, Вы сможете у нас на сайте в разделе с призами или на официальном сайте избранного Вами казино. Если возможности найти необходимую информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал либо по электронной почте. <a href=http://filmkachat.ru/>1×slots зеркало рабочее</a> Шаг 5. Использование и отыгрыш. Бездеп обязан быть использован в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера.Выбор каждого онлайн казино на нашем веб-сайте. В описании к каждому Вы сможете узнать, что получите за творенье аккаунта. <a href=http://www.gothicpast.com/myomeka/posters/show/79813>http://www.gothicpast.com/myomeka/posters/show/79813</a> 1хслотс регистрация в 1×slots casino <a href=https://stalker-worlds.games/user/Richardfef/>https://stalker-worlds.games/user/Richardfef/</a> Бездепы с бесплатными вращениями деют юзерам право вертеть барабаны игровых автоматов без снятия средств со счета. За любой раунд выплачивает казино. Число спинов ограничено и изредка выше сотку. Если акция содержит много даровых игр, их начисление может быть разбито на количество дней.Это также благотворительные финансы, коие поступают на аккаунты свежеиспеченных геймеров в регистрирования. А необыкновенность этих бонусов произведено что, нет, собственно обретенные деньги непременно стопам применять в продолжении назначенного медли.
1× slots регистрация в 1×slots casino
Не рекомендуем опрометью голову хвататься за всевозможные предложения получения средств без инвестициям. Вполне вполне, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем выглядит на первый взгляд. Альтернативой является казино бонус за депо. Мы предлагаем для пару советов, спасибо коим у каждого игрока будет вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом денег:Также, такой нужно подтвердить собственный номер аппарата, достичь код, приобретенный в смс-сообщении от клуба установить в особое фон в личном офисе игрока. 1×слот регистрация в 1×slots casino Максимальная ставка ? устанавливается в денежной счета и ограничивает объем ставки за раз спин. В случае ее превышения бонус возможность быть аннулирован. Также в правилах может содержаться запрет на размещение ставок конкретного облика, примеру, по одинаковым шансам в рулетке (то есть, на чет либо нечет, красноватое либо черное и т.д. ).Если речь идет об эксклюзивных услугах, имеет потребоваться регистрация в казино по ссылке с партнерского сайта. <a href=http://arskland.ru/people/user/16533/>http://arskland.ru/people/user/16533/</a> Получать информацию о самых прибыльных бонусах возможно без постоянного прогноза новостей казино. Мы взяли эту задачку на себя и безпрерывно следим за предложениями операторов, выбирая наихорошие из их. В этом разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список промоакций периодически пополняется. В топ вошли самые новые бездепозитные бонусы за регистрацию в казино 2020, временные и замкнутые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру прочим аспектам. Если срок действия акции истек, она удаляется из перечня.Иногда для получения бонусов необходимо спутаться с адептами саппорта. Удобнее всего с ними собеседовать в онлайн-сате, желая от довольно запроса по электрической почте. x1 slots регистрация в 1×slots casino Фриспины — благотворительные вращения, коие позволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытных игроков фриспины считаются самым модным и предпочтительным обликом бонуса — бесплатные вращения иногда эффективнее и веселее в отыгрыше, чем остальные облики бездепов.
1×slot зеркало
Бездепозитный бонус – это экономическое вознаграждение, которое выдается участнику игры в казино, для его вербования и возникновения заинтригованности. Любой гость, который соответствует условиям выдачи сходственного бездепозитного бонуса, имеет претендовать на получение вышеуказанного приза. Такое одобрение считается более эффективным способом, дающим возможность стартовать при, не вкладывая личных материальных средств. <a href=http://alltimefishing.ru/bitrix/redirect.php?goto=http://cir.su/bitrix/redirect.php?goto=http://dinamikasveta.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/aLHduBubyTm>http://alltimefishing.ru/bitrix/redirect.php?goto=http://cir.su/bitrix/redirect.php?goto=http://dinamikasveta.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/aLHduBubyTm</a> Заполняя данные в собственном профиле, указывайте только достоверную информацию, так как Вам понадобиться ее доказать в при выводе денег. 1×slots зеркало выигрыши обязательно пройдите регистрацию если Так что сможете смело региться без всяких раздумий. Фортуна сейчас точно на вашей стороне. Не опасайтесь, так следствие какого или убытка Вам абсолютно не грозит. С такими призами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе.
1×slots casino регистрация 1×slotscasino09k online
<a href=https://fougerite.com/threads/1×slot-zerkalo-rabochee-registracii-na-telefon-pridet.14728/>1×slot зеркало рабочее регистрации на телефон придет</a> При этой на бонусные средства воспрещается выступать в игровые автоматы с современным джекпотом и игры из радела live casino. Кроме того, некоторые казино дают бездеп на один либо несколько определенных слотов, и в других забавах Вы не сможете на их играть. Вейджер в переводе с британского означает «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша полученного приза, в нашем случае бездепозитного. Число ставок большого — главно только набрать сумму, пропорциональную сумме одобрения. 1×slots регистрация 1×slots casino 777 online <a href=https://flaxeco.com/user/Forsedroper/>https://flaxeco.com/user/Forsedroper/</a> Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих требований, не неотъемлемой верификации. Если на веб-сайте предусмотрена неотъемлемая процедура доказательства личности, то вывести выигрыш получится только после ревизии данных. Приготовьтесь заполнить анкету и отправить в техподдержку документ, подтверждающий личность.Какие бонусы возможность еще получить считая бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, каждое онлайн казино предлагает игрокам прибыльное предложение на первый депозит, вы совершаете депо, ваш депо увеличивается в двое либо в в 3, тем наиболее начать выступать можно с больше крупной суммой, например же не запамятываем тему вейджер на призы.
казино 1×slots
Ещё одно распространённое акционное предложение – симпатичный презент с сомнительными притязаниями. К образцу, клуб сулит $100 виде бездепа, хотя с вейджером х80 или х100. Отыграть подобный вейджер фактически нереально и поэтому чем концентрироваться на более занимательных промоакциях.Самые свежие бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды присутствуют на этой странице. Посетитель может оценить обстоятельства получения и начать выступать на средства без внесения депозита. При этом игроку главно осознавать, на каких критериях и какими методами у вывести полученный выигрыш. Для сего нужно оценить список присоединенных платежных систем. <a href=http://lzdsxxb.com/home.php?mod=space&uid=3693112>http://lzdsxxb.com/home.php?mod=space&uid=3693112</a> Иногда виде бездепа, казино дарит наименьший бонус (до 50 рублей), из-за которого не заморачиваться. рабочее зеркало 1хслотс Ещё одно распространённое акционное предложение – симпатичный подарок с неблаговидными притязаниями. К примеру, клуб сулит $100 виде бездепа, хотя с вейджером х80 либо х100. Отыграть подобный вейджер фактически невозможно и поэтому другого, как концентрироваться на более интересных промоакциях.Условия шансы различаться приятель от приятеля. Но такой бонус имеет быть применен лишь для игрового процесса – приобретенные на счет финансы до такого, как станут отыграны, вывести нереально.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.krymbezpravil.org.ua/memberlist.php?mode=viewprofile&u=10552>1×slots актуальное зеркало</a>
<a href=https://www.donchillin.com/space-uid-382497.html>1×slots официальный зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Теоретически, к безвозмездным бонусам возможно отнести так называемые фриспины. Напомним, речь идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, потому что они деют только возможность делать ставки. Доступные забавы – В некоторых азартных забавах возможно понизить математическое превосходство казино до нескольких 10-х процента. В их количестве многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как управляло, в этих играх ставки идут в зачет вейджера не всецело. Например, может предусматриваться только 50%. В неких забавах бездепозитные бонусы вообще нельзя отыгрывать.
#5589 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino приложения cometa casino <a href=https://t.me/vchkogpu_ru>casino приложения</a> яндекс казино ramenbet casino <a href=https://rucriminal.info/>гама казино</a> спорт букмекерская контора официальное казино вход 1×bet вход casino сегодня порно с Виктория Синицина, фигуристка Набиуллина Эльвира Сахипзадовна порно букмекерская контора официальный сайт
DiskiPlus казино фильм онлайн DiskiPlus пина букмекерской конторы <a href=https://www.diskiplus.ru>DiskiPlus порно с Кирьянова Дарья Борисовна</a> DiskiPlus почему в казино нет окон DiskiPlus 7k casino зеркало <a href=https://www.diskiplus.ru>DiskiPlus casino андроид</a> DiskiPlus 1×bet зеркало на сегодня 1×bet xyz DiskiPlus гама казино DiskiPlus pin up casino пин ап DiskiPlus рейтинг казино DiskiPlus казино 5 DiskiPlus казино большая DiskiPlus казино онлайн бесплатно
#5590 JefferyAxiowhttps://videolivejournal.com
Network camera security software <a href=https://videolivejournal.com/>Webcam monitor free</a>
#5591 Stephenswotahttps://angeldorog.by
Оперативная помощь на дороге <a href=https://angeldorog.by/evakuator-minsk/>https://angeldorog.by/evakuator-minsk/</a> услуги эвакуатора, грузовой и легковой шиномонтаж, а также грузоперевозки фурами по доступным ценам. Работаем круглосуточно, быстро реагируем и гарантируем надежность. Звоните в любое время – решим вашу проблему!
#5592 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Преподобная Надежда Александровна порно гта казино <a href=https://glvk.guru/>зеркала казино</a> порно с Елена Никитина, скелетонистка симулятор казино <a href=https://sovsekretno.net/>casino buzz</a> пин ап casino слоты казино casino com porno Марина Александрова сайт винлайн букмекерская контора казино вход казино сочи
DiskiPlus unlim casino DiskiPlus 7k casino зеркало на сегодня <a href=https://www.diskiplus.ru>DiskiPlus порно с Алексей Миранчук (футбол)</a> DiskiPlus casino online зеркало DiskiPlus casino официальный сайт <a href=https://diskiplus.ru>DiskiPlus пин up casino</a> DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz DiskiPlus 7k casino зеркало рабочее DiskiPlus порно с Аделия Петросян (фигурное катание) DiskiPlus бесплатные букмекерские конторы DiskiPlus пин casino DiskiPlus pin up casino пин DiskiPlus casino бездепозитный
#5593 Charlesgunnyhttp://filmkachat.ru
1хслот 1хслотс регистрация перейти на 1×slots
Ознакомьтесь с нашим списком лучших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего перечня и получите бездеп сразу. Хватайте превосходнейшие бесплатные предложения ниже и выигрывайте большие деньги, не рискуя! <a href=http://filmkachat.ru/>1× слот зеркало</a> <a href=https://www.find-topdeals.com/blogs/187723/Unlocking-the-Magic-of-Professional-Architectural-Render-Creation>https://www.find-topdeals.com/blogs/187723/Unlocking-the-Magic-of-Professional-Architectural-Render-Creation</a> Благодаря программе преданности от игорного заведения, можно взять неплохой старт и без добавочных инвестициям запустить видеослоты. Кроме того, можно рассчитывать на реальную удачу и получить, без инвестиции собственных финансов, большой выигрыш.Любой выигрыш по ставке повыше установленного лимита будет являться недействительным. То есть ставка не будет засчитана при отыгрыше, а в случае выигрыша его сумма не поступит на счёт клиента — результат забавы несомненно полностью аннулирован. казино 1×slots <a href=https://spritedatabase.net/forums/member.php?action=profile&uid=6320>https://spritedatabase.net/forums/member.php?action=profile&uid=6320</a> В каждом казино с бездепозитным бонусом предусмотрены вейджеровые условия. Это один-единственный «подводный камень», кот-ый стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, нужно сделать определённое количество ставок. Чем круче приз, что, этим труднее выполнить условия, и наоборот.
1× slots зеркало
Не стоит незамедлительно же отрицаться от приветственных подарков в подобных казино. Администрация готова начислить деньги либо фриспины, но предварительно сотрудники должны увериться, собственно вы не аферист. Дело что, нет, что развелось очень количество охотников за призами. Они выучились накалывать систему и зарабатывать солидные суммы средств. <a href=http://board.eternityrpc.com/member.php?action=profile&uid=369>1хслот скачать</a> 1× slots casino официальный сайт Вейджер не более х30–35 считается приемлемым. Опытные игроки заявляют, что с этим вейджером реально остаться в плюсе, если верно подойти к выбору игрового аппарата. <a href=https://sporovo.by/user/OscarSturn/>https://sporovo.by/user/OscarSturn/</a> Начнём с того, что любое промо за регистрацию предполагает некоторые условия. Бездепозитные призы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность денежного оборота, нужная для исполнения критерий. Пример, возымели безвозмездные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 руб., проигрышных или выигрышных, не. После исполнения, бонусный баланс перейдёт на настоящий и станет легкодоступным к выводу. 1×slots casino зеркало рабочее Маркетинговая политического всех игорных интернет-клубов должна носить разнородный нрав. И случае вознаграждения на депо работают для того, чтобы стимулировать заносить депозиты и поощрять уже существующих пользователей, то бездепозитный бонус в казино либо бонус за регистрацию в казино, этого всего, рассчитан на расширение базы покупателей.Приветственный бездеп предоставляется какому игроку только один раз. Казино борются с например называемыми бонусхантерами (от англ. Bonus Hunter — доброволец за бонусами), пытающимися заводить многочисленные аккаунты для обмана оператора и повторного получения подарка. Исключить сходственные действия разрешает верификация данных. Администрация вправе востребовать у посетителя доказать индивидуальные данные, указанные при регистрации.
1×slots регистрация 1×slots review live
Можно ли в одном онлайн казино получить больше одного приза за регистрацию? Нет, например как в каждом онлайн казино есть правила, к коим нужно держаться, не делать 2 аккаута для получения бонусов, иначе будет блокировка обоих аккаутов, не пытайтесь перехитрить онлайн казино, приз за регистрацию выдаеться один один 1 личику. Для получения предоставленных призов вас понадобиться — ПК или мобильное прибор, и остальное дело за малым.Таким образом, заведение пытается продемонстрировать себя своим вероятным геймерам, а такой рекламный ход как казино бонус без депо за регистрацию завлекает очень количество внимания к игорному заведению и обеспечивает неизменный струю новых посетителей и грядущих клиентов игрового онлайн клуба. <a href=https://mcmon.ru/member.php?action=profile&uid=135415>https://mcmon.ru/member.php?action=profile&uid=135415</a> Размер бонусов чаще всего чисто условный и не выше 50 руб. Приятно, но осязаемым бустом при вряд ли будет.Чаще всего казино приз за регистрацию без депо даёт вероятность запустить любой автомат. Но какого-либо внимательно ознакомиться с критериями. Иногда для игры доступны только определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, лучше начать знакомство с миром азарта непосредственно с «одноруких злодеев». 1×slots официальный сайт зеркало Как и акции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения являются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих гостей и разрешает им составить впечатление о функционале, не рискуя вескими суммами.В большинстве заведений устроить это возможно по адресу электронной почты, по номеру телефона, через социальную сеть либо гугл-аккаунт.
1×slots официальный сайт, скачать
В игровых клубах без лицензии Вы покупаете „кота в мешке“ и когда неоднозначных обстановок нет возможности куда-то пожаловаться и обосновать свою правоту.После потребуется привнести идентификационный платёж. Это пугает начинающих больше всего. Нужно сделать минимальный депо в 100–500 руб. Таким образом служба безопасности убедиться никаких, что платёжный способ принадлежит Вам. Данная процедура важна для обеспечивания защищенности игровых счетов. Пример, Ваш акк взломают и выведут свои на собственный кошелёк. Будет крайне досадно. Поэтому верификация платёжной системы, это важный момент. <a href=http://www.arka-bahce.org/forum/showthread.php?p=767402#post767402>1×slots сайт</a> У каждой игры свои требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система зачтет каждую ставку. В рулетке и покере сделать это гораздо труднее. Именно потому например главно внимательно читать обстоятельства получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в каждой этой, то новички попросту «спустят приз на ветер».Бесплатные призы казино без депозита возможно получить вид денежных средств на бонусный счет (исключить их возможно только после отыгрыша), фриспинов, игры или кешбэк-бонуса. Как правило, новоприбывшие геймеры в первую очередь желают ознакомиться с методами ввода и вывода валютных средств и сроки выполнения поданных заказов дабы конкретно разуметь, как прытко меня исключить свой казино приз за регистрацию без депозита на электрический кошелек или же банковскую карту. К счастью для всех играющих, снутри конкретных холдингов, все казино соперничают между собой. Ведь в бы определенную фирму представляло лишь одно онлайн-заведение, то навряд бы клиенты заметили казино с бонусом за регистрацию и могли бы рассчитывать лишь на вознаграждение повторяющий приза на 1-ое вложение. К каждому заведению регулярно стопам привлекать свежих игроков, собственно, конечном, только на руку всем играющим.Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция имеет подробные правила, ссылка на коие обычно находится в промообъявлении. В них указываются лимиты, вейджер, список доступных игр. Если оператор скрывает данные о предложении, то воспользоваться им не стоит. 1× slots сайт <a href=https://23region.info/user/Richardmaw/>https://23region.info/user/Richardmaw/</a>
1×slots регистрация то дальше необходимо пройти
Постарайтесь отыграть вейджер, дабы была возможность забыть заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы можете получить выигрыш на электрической кошелёк, карту, телефонный.Все любят получать подарки. Согласитесь, практически каждый играющий человек будет безмерно рад, если получит бесплатный презент для забавы в интернет казино просто за регистрацию или же бонус за внесенный депозит, например называемые приветственные призы для новых игроков. Соответственно такие интернет клубы будут более знамениты и предпочтительны у игроков при выборе казино для игры. Топ казино непрерывно обновляется и добавляются новые и интересные игровые клубы с симпатичной бонусной политикой и всеми возможными преимуществами, льготами, к которым относятся такие призы как фриспины за регистрацию, валютные бездепозитные бонусы, а также щедрые призы за внесенный депозит. Промообъявления от казино не дают реальной картины и направлены на привлечение внимания пользователей. Понять, как высоки шансы остаться в плюсе, позволит собственный тест условий предложения:Многие азартные клубы ограничивают сумму вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании промоакции, суммы Вы не сможете вывести. Разница несомненно аннулирована, Вы в не можете делать на нее ставки. <a href=http://master-shin.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://geolife.ru/bitrix/click.php?goto=http://habanos.ru/bitrix/redirect.php?goto=https://telegra.ph/Kak-sehkonomit-na-notarialnyh-dogovorah-pri-darenii-ili-peredache-kvartiry-09–19>http://master-shin.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://geolife.ru/bitrix/click.php?goto=http://habanos.ru/bitrix/redirect.php?goto=https://telegra.ph/Kak-sehkonomit-na-notarialnyh-dogovorah-pri-darenii-ili-peredache-kvartiry-09–19</a> Игрокам стоит воспринимать приветственный бонус как гарантированный способ получить большой выигрыш, но это замечательная возможность без затрат расценить возможностей казино.Иногда виде одобрения за регистрацию шансы выдаваться билеты для участия в турнирах. Условия их проведения довольно выделяются, потому мы рекомендуем ознакомиться с каждым предложением отдельно. 1×slots быструю регистрацию а также мгновенное Прямо данный отберите бесплатные вращения за регистрацию без депозита и начинайте собирать призовые комбинации из-за солидных выигрышей!
<b>Смотреть еще похожие новости:</b>
<a href=https://thetechmodders.com/forums/memberlist.php?mode=viewprofile&u=945>1×slots casino регистрация</a>
<a href=https://forum.spherecommunity.net/User-Jamesmew>1×slots скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Стоит обозначить(означить), собственно бездепозитный приз выдается только совершеннолетним новичкам, которые, тому, имеют пригласить собственных приятелей и знакомых, кроме рассчитывающих на поощрительную программку преданности. Подобная технология замечена среди конкуренцию онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению собственной популярности, путем вербования свежих игроков. Бонусы – это оригинальный шанс для потенциальных участников игры, коие шансы опробовать софт покер рума и увериться, будут ли они в него выступать либо нет. Новый игрок испробует средства силы с реальными оппонентами в казино. Основное управляло получения бездепа ? творимый аккаунт обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов строго воспрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депо нужно соблюдать несложную последовательность поступков.
#5594 NathanCighttps://skupkazolotospb.ru
ломбард 585 скупка золота <a href=https://skupkazolotospb.ru/>https://skupkazolotospb.ru</a>
#5595 Lewishause
Nice post. I learn something totally new and challenging on blogs I stumbleupon everyday. It's always helpful to read through articles from other writers and use a little something from other sites.
<a href=https://tayger.com.ua/perevagi-led-linz-chomu-varto-zrobiti-vibir-na-korist-novitnoyi-tehnologiyi>https://tayger.com.ua/perevagi-led-linz-chomu-varto-zrobiti-vibir-na-korist-novitnoyi-tehnologiyi</a>
#5596 Vernonfeshttps://emily-blunt-az.com
Biography of British actress <a href=https://emily-blunt-az.com/>emily-blunt</a> Emily Blunt: personal life, dating and relationship with her husband John Krasinski, raising children.
#5597 BruceVoxhttps://karim-benzema-azerbaijan.com
Welcome to the main page <a href=https://karim-benzema-azerbaijan.com/>karim-benzema-azerbaijan.com/</a> of the fansite dedicated to the world football star Karim Benzema. Learn all about his incredible career, incredible achievements and phenomenal skills.
#5598 RonaldToghttps://zendaya-maree-az.com
Biography of Zendaya Coleman <a href=https://zendaya-maree-az.com/>zendaya-maree-az.com/</a> (Zendaya): modeling career, music and cinema, details of her personal life, ex-boyfriend Jacob Elordi, romance with Tom Holland.
#5599 JosephCuddyhttps://formula1-az.com
Now you can't find a person <a href=https://formula1-az.com/>https://formula1-az.com</a> who hasn't heard of Formula 1. Today it is one of the most prestigious and popular sports on the planet.
#5600 CasinoWinpothttps://winpot.directorio-de-casinos-mx.com
<a href=http://xxxmovies7.com/crtr/cgi/out.cgi?id=73&tag=ttop&u=https://winpot.directorio-de-casinos-mx.com/-news-az.com/>https://winpot.directorio-de-casinos-mx.com/</a> <a href=http://shoppingonline13344.blog2learn.com.xx3.kz/go.php?url=https://winpot.directorio-de-casinos-mx.com/>https://winpot.directorio-de-casinos-mx.com/</a> <a href=https://kolpino.ru/bitrix/rk.php?id=495&site_id=s1&event1=banner&event2=click&event3=1+%2F+%5B495%5D+%5Bnew_sidebar3%5D+%CF%EE%EC%ED%E8%EC&goto=https://winpot.directorio-de-casinos-mx.com/>https://winpot.directorio-de-casinos-mx.com/</a> <a href=https://image.t.me/s/worldcasinonet.mt/url?q=https://winpot.directorio-de-casinos-mx.com/>https://winpot.directorio-de-casinos-mx.com/</a> <a href=http://www.frank-teens.com/crtr/cgi/out.cgi?id=60&u=https://winpot.directorio-de-casinos-mx.com/>https://winpot.directorio-de-casinos-mx.com/</a> <a href=http://www.ferroviabiellaoropa.it/gotoURL.asp?url=https://winpot.directorio-de-casinos-mx.com/>https://winpot.directorio-de-casinos-mx.com/</a> <a href=https://www.kayo.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=https://winpot.directorio-de-casinos-mx.com/>https://winpot.directorio-de-casinos-mx.com/</a> <a href=https://proafile.com/?URL=https://winpot.directorio-de-casinos-mx.com/-news-az.com/>https://winpot.directorio-de-casinos-mx.com/</a> <a href=http://www.myxxxlesbian.com/df/out.cgi?ses=lXM0Ms1Snn&id=49&url=https://winpot.directorio-de-casinos-mx.com/>https://winpot.directorio-de-casinos-mx.com/</a> <a href=http://www.qiuquan.cc/wp-content/themes/begin/inc/go.php?url=https://winpot.directorio-de-casinos-mx.com/>https://winpot.directorio-de-casinos-mx.com/</a> <a href=http://ogloszeniabochnia.pl/link.php?url=https://winpot.directorio-de-casinos-mx.com/>https://winpot.directorio-de-casinos-mx.com/</a> <a href=http://makinecim.com/adclick.php?id=105&url=https://winpot.directorio-de-casinos-mx.com/>https://winpot.directorio-de-casinos-mx.com/</a> <a href=http://frad.co.xx3.kz/go.php?url=https://winpot.directorio-de-casinos-mx.com/>https://winpot.directorio-de-casinos-mx.com/</a> <a href=https://www.lakehouse.com/adserver/www/delivery/ck.php?ct=1%26oaparams=2__bannerid=779__zoneid=510__cb=e92bf5e481__oadest=https%3A%2F%2Ft.me/s/worldcasinonet>https://winpot.directorio-de-casinos-mx.com/</a> <a href=http://alstonfield.2day.ws/alstonfield/search/?url=https://winpot.directorio-de-casinos-mx.com/>https://winpot.directorio-de-casinos-mx.com/</a>
Install latest version of the application online casino Winpot – win right now! <a href=https://www.jiaokee.com/tg/link.jsp?url=https://winpot.directorio-de-casinos-mx.com/>https://winpot.directorio-de-casinos-mx.com/</a> <a href=http://bscashmere.com/bitrix/redirect.php?event1=&event2=&event3=&goto=https://winpot.directorio-de-casinos-mx.com/>https://winpot.directorio-de-casinos-mx.com/</a> <a href=http://luntan.qd315.net/study_linkkiller-link.html?url=https://winpot.directorio-de-casinos-mx.com/>https://winpot.directorio-de-casinos-mx.com/</a> <a href=https://brainify.co/bitrix/redirect.php?goto=https://winpot.directorio-de-casinos-mx.com/>https://winpot.directorio-de-casinos-mx.com/</a> <a href=https://cafepolonez.ca/wp-content/themes/eatery/nav.php?-Menu-=https://winpot.directorio-de-casinos-mx.com/>https://winpot.directorio-de-casinos-mx.com/</a> <a href=http://zelzone.net.xx3.kz/go.php?url=https://winpot.directorio-de-casinos-mx.com/>https://winpot.directorio-de-casinos-mx.com/</a> <a href=https://www.t.me/s/worldcasinonet.et/url?sa=t&url=https://winpot.directorio-de-casinos-mx.com/>https://winpot.directorio-de-casinos-mx.com/</a> <a href=http://www.gavin-davies.com/JumpTo.aspx?url=https://winpot.directorio-de-casinos-mx.com/>https://winpot.directorio-de-casinos-mx.com/</a> <a href=https://e-irb.jhmi.edu/eirb2/sd/Rooms/RoomComponents/LoginView/GetSessionAndBack?redirectBack=&_webrVerifySession=637884770703131338https://winpot.directorio-de-casinos-mx.com/>https://winpot.directorio-de-casinos-mx.com/</a> <a href=http://videoonefreeporn.com.xx3.kz/go.php?url=https://winpot.directorio-de-casinos-mx.com/>https://winpot.directorio-de-casinos-mx.com/</a> <a href=https://www.netherfield.e-sussex.sch.uk/service/util/logout/CookiePolicy.action?backto=https://winpot.directorio-de-casinos-mx.com/>https://winpot.directorio-de-casinos-mx.com/</a> <a href=https://liubavyshka.ru/go?https://winpot.directorio-de-casinos-mx.com/>https://winpot.directorio-de-casinos-mx.com/</a> <a href=http://vertical-soft.com/bitrix/rk.php?goto=https://winpot.directorio-de-casinos-mx.com/>https://winpot.directorio-de-casinos-mx.com/</a> <a href=https://images.t.me/s/worldcasinonet.om/url?sa=t&url=https://winpot.directorio-de-casinos-mx.com/>https://winpot.directorio-de-casinos-mx.com/</a> <a href=https://brigadecourt.london/?URL=https://winpot.directorio-de-casinos-mx.com/>https://winpot.directorio-de-casinos-mx.com/</a>
#5601 Ремонт iPhone SE 2020 Москваhttps://remont-iphone-se-2020-folt.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт iphone se 2020 сервис, можете посмотреть на сайте: <a href=https://remont-iphone-se-2020-folt.ru/>ремонт iphone se 2020</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#5602 Ремонт iPhone 13 Pro Москваhttps://remont-iphone-14-pro-max-phttps://remont-iphone-13-pro-zen.ru/ernt.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт iphone 13 pro рядом, можете посмотреть на сайте: <a href=https://remont-iphone-13-pro-zen.ru/>ремонт iphone 13 pro цены</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#5603 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино рублях online casino 7k <a href=https://7club7.com/>casino сайты</a> new casino порно с Алексей Миранчук (футбол) <a href=https://vestnik-jurnal.com/>1×bet бесплатно</a> скачать 1×bet 1×bet xyz пина букмекерской конторы up casino 1×bet рабочее porno Юлия Пересильд 1×bet на андроид бесплатно пин ап casino pin
DiskiPlus казино ли DiskiPlus Комарова Наталья Владимировна порно <a href=https://www.diskiplus.ru>DiskiPlus зеркала казино</a> DiskiPlus 1×bet регистрация DiskiPlus порно с Васильева Татьяна Викторовна <a href=https://diskiplus.ru/>DiskiPlus casino 7k рабочее</a> DiskiPlus официальные сайты казино DiskiPlus porno Илона Маркова, хоккеистка DiskiPlus зеркала казино DiskiPlus 1×bet зеркало слоты 1×bet xyz DiskiPlus казино вход DiskiPlus casino daddy DiskiPlus porno Мира Андреева (теннис)
#5604 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало рабочее регистрации на телефон придет
Условия вывода выигрыша. В некоторых заведениях для успешного вывода с бездепозитного бонуса довольно пополнения баланса и доказательства личности. В других же клубах, нужно некоторое раз прокрутить собственный депо. <a href=http://filmkachat.ru/>1×слот регистрация в 1×slots casino</a> <a href=https://www.facer.io/user/CA95QUBa2X>https://www.facer.io/user/CA95QUBa2X</a> Теоретически, к безвозмездным призам возможно отнести так нарекаемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, потому что они предоставляют лишь вероятность создавать ставки.Выше мы дали полный комплект самых новых и своевременных бездепозитных призов в онлайн казино без пополнения на 2022 год, где возможность пользоваться каким ценным бездепозитным бонусом. 1×slots зеркало этих способов предполагает регистрацию <a href=http://www.safe1.co.kr/bbs/board.php?bo_table=free&wr_id=84748>http://www.safe1.co.kr/bbs/board.php?bo_table=free&wr_id=84748</a>
1хслотс казино зеркало
Иногда операторы просят внесение малого депозита перед выводом для верификации платежного прибора. В некоторых казино этот депо кроме предстоит отыграть. зеркло казино 1×slots Постарайтесь отыграть вейджер, дабы была вероятность оставить заявку на выплату. Кстати, на всех сайтах, представленных в списке, доступны современные платёжные приборы. Вы можете получить выигрыш на электронной кошелёк, карту, телефон.Условия шансы разниться друг от приятеля. Но такой приз возможность быть использован только для игрового процесса – полученные на счет финансы до такого, как будут отыграны, вывести нереально. <a href=http://z914169g.bget.ru/user/DeweyFielm/>http://z914169g.bget.ru/user/DeweyFielm/</a> Фриспины предусмотрены для применения в видео слотах. Внимательно ознакомьтесь с критериями – часто их выдают на некоторые автоматы. В зависимости от клуба, у вас получится устроить определённое количество ставок. Кстати, продвинутые игорные жилища разрешают запускать каждых «одноруких бандитов». 1 xslots рабочее зеркало Промокод – определённая комбинация символов, которую необходимо установить в соответствующее фон при создании учетной записи или активировать в личном профиле игрока в разделе с бонусами.
1×slots бонус за регистрацию
Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. Но существуют азартные заведения, готовые просто например вручить средства на игру. Для сего достаточно создать профиль. Чтобы исключить выигрыш, сперва нужно выполнить вейджеровые условия, прописанные в критериях получения бездепа. <a href=https://forum.papbio.org/member.php?action=profile&uid=75492>https://forum.papbio.org/member.php?action=profile&uid=75492</a> Бездепозитный бонус казино 2022 с выводом за регистрацию дает вероятность ознакомиться игроку с лобби избранного заведения, сориентироваться в выборе игр и выяснить качество работы службы поддержки. Довольно часто, начиная игровой процесс, игрок уже не желает останавливаться и проделывает настоящий вклад. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть безвозмездно вероятно как один таки с призом за регистрацию без необходимости заносить депозит. 1×slots регистрация 1×slots casino c2d ru
1×slot регистрация
Особую изюминку видео слотам придают уникальные знакы. С их появлением активируются разные бонусы. Вы можете запустить дополнительный степень и прирастить сумму выигрыша. Есть знаки, которые замещают ненужные составляющие и сами делают выигрышные комбо. Не стоит забывать и про бонус-тур. После каждого удачного спина есть шанс увеличить необходимую выигрыша в 2 или четыре раза.Перечисленные повыше основные свойства сочетают фактически каждый приз и считаются стандартными для бездепозитных бонусных начислений в казино. Если вы опытный игрок, вы обязаны знать, что приз без депо – редчайшая находка. Тем не менее, мы неделю изучаем интернет, чтобы найти вам наихорошие бездепозитные предложения. 1×slot рабочее зеркало <a href=http://u9053548.bget.ru/index.php?subaction=userinfo&user=forgetfulinteri>http://u9053548.bget.ru/index.php?subaction=userinfo&user=forgetfulinteri</a> Эффективность бездепов в качестве маркетингового прибора расценили все операторы. Малоизвестные площадки употребляют эти акции, дабы прытко набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны неизменных посетителей. Не все веб-сайты, дающие презенты без депо, рекомендованы к игре. За привлекательным промоописанием имеют прятаться невыполнимые условия отыгрыша и подводные камешки.
зеркала 1×slots
Многие казино предоставляют в рекламных целях безвозмездные призы необыкновенно для наших читателей. Чтобы их получить, надо(надобно) перебежать на игровой вебсайт по партнерской ссылке с нашего портала. <a href=http://worldpoetry.cn/home.php?mod=space&username=bigharmony37>http://worldpoetry.cn/home.php?mod=space&username=bigharmony37</a> 1×slot рабочее зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://nztw.org/home.php?mod=space&uid=43957>1×slots зеркало быструю регистрацию а также мгновенное</a>
<a href=http://complainanything.com/node/158?page=1028#comment-1465450>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<a href=https://021snyw.com/space-uid-53919.html>1×слот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Размер бонусов почаще всего чисто символический и не выше 50 руб. Приятно, хотя осязаемым бустом деле ли будет.
#5605 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
балтбет букмекерская контора kent casino <a href=https://t.me/vchkogpu_ru>как выиграть в казино</a> вавада казино pin ап casino <a href=https://m.repost.news/>1×bet приложение</a> pin up casino пин 1×bet бесплатно сколько казино казино проиграл скачать букмекерскую контору на андроид автомат казино 1×bet зеркало
DiskiPlus cat casino DiskiPlus porno Алена Михайлова <a href=https://www.diskiplus.ru/>DiskiPlus casino промокод</a> DiskiPlus casino сегодня DiskiPlus ставки на спорт букмекерские конторы <a href=https://www.diskiplus.ru/>DiskiPlus яндекс казино</a> DiskiPlus 1×bet слоты DiskiPlus человек казино DiskiPlus Нургалиева Эльвира Рамиловна порно DiskiPlus балтбет букмекерская контора DiskiPlus пин ап букмекерская контора DiskiPlus casino сайты DiskiPlus casinos xyz
#5606 Charlesgunnyhttp://filmkachat.ru
1хслот официальный сайт зеркало
Для получения предоставленных бонусов вас пригодиться — ПК либо мобильное устройство, и остальное дело за небольшим. <a href=http://filmkachat.ru/>казино 1×slots</a> <a href=https://myanimelist.net/profile/shopavto>https://myanimelist.net/profile/shopavto</a> Похожим образом работает 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения клиента либо в связи с получения им VIP-статуса. Подарок предоставляется в воззвания в поддержку и проверки. 1×slots регистрация то дальше необходимо пройти <a href=http://kamaz-ukraine.com/index.php?subaction=userinfo&user=nappyspoof81>http://kamaz-ukraine.com/index.php?subaction=userinfo&user=nappyspoof81</a> Ещё одно распространённое акционное предложение – симпатичный подарок с неблаговидными притязаниями. К образцу, клуб обещает $100 в бездепа, хотя с вейджером х80 либо х100. Отыграть подобный вейджер практически нереально и потому какого-либо концентрироваться на больше занимательных промоакциях.Эффективность бездепов виде рекламного инструмента расценили многие операторы. Малоизвестные площадки используют эти промоакции, чтобы прытко набрать базу. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны постоянных посетителей. Не все веб-сайты, дающие подарки без депозита, рекомендованы к ирге. За привлекательным промоописанием все прятаться невыполнимые условия отыгрыша и другие подводные камешки.
1× slots сайт
1×slots зеркало которую указывали при регистрации кстати Приглашаем делиться воззреньями о бонусах. Это поможет другим пользователям подбирать более прибыльные предложения. <a href=https://www.beatstars.com/glavdorogadv1706/about>https://www.beatstars.com/glavdorogadv1706/about</a> Да, у даровых бонусов есть дефекты. Прежде всего, они обыкновенно не. Кроме такого, условия вейджера по ним всегда жесткие. Но все же неимение риска делает их очень красивыми для клиентов.Подтверждение электрической почты – одно из ведущих критерий, коие есть практически в любом бездепозитном казино. Чтобы верифицировать электрическую почту, достаточно перебежать по активной ссылке в послании, приобретенном от азартного клуба. 1×slots casino регистрация 1×slotscasino09k online
1× slots casino зеркало
Если при регистрации показать промокод, возможно гарантировано получить приз. Где брать ваучер? Посетите тематику блоги или форумы. Иногда администрация клуба делает рассылку ваучеров на электрическую почту. В заключительнее время игорные жилища начали афишироваться в кинокартинах и сериалах. Присмотритесь и скорее заметите промокод, который принесёт 500 либо 1 000 бонусных руб.Бездепозитные бонусы за регистрацию в игровых автоматах для собственников онлайн-казино являются частью маркетинговой кампании, направленной на повышение аудитории сайта. Так они продвигают свои бренды и завлекают свежих клиентов. <a href=http://www.nhps1914.com/wiki/index.php?title=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D0%BE%D0%B2%20%D0%BD%D0%B0%20%D0%B4%D0%BE%D0%BC%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO>http://www.nhps1914.com/wiki/index.php?title=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D0%BE%D0%B2%20%D0%BD%D0%B0%20%D0%B4%D0%BE%D0%BC%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO</a> Каждый из бездепозитных бонусов без пополнения 2022 имеет свой конкретный вейджер для отыгрыша, так же в любом казино он устанавливается индивидуально — где то он х55 а кое-где х30, повторюсь везде по разному! 1 х слотс зеркало Некоторые онлайн-казино без депозита предлагают свежим посетителям выбрать бонус при регистрации. Будьте внимательны: выбрав раз, вы в абсолютном большинстве случаев не сможете воспользоваться остальными.Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды присутствуют на этой страничке. Посетитель имеет расценить обстоятельства получения и начать играть на деньги без внесения депозита. При этом игроку главно понимать, на каких условиях и какими методами он сможет исключить приобретенный выигрыш. Для этого нужно оценить список присоединенных платежных систем.
1×slots официальный зеркало рабочее
Таким образом интернет казино получает потенциального игрока. Возможно в будущем либо истинном он захотит поиграть на свои деньги. Так трудятся бездепозитные бонусы в онлайн казино. Здесь очень подходит выражение, безвозмездные сыр случается лишь в мышеловке. Начинающие игроки имеют не обдумывать опасность пыла. Однако времени осознания делается больше. Это тема для отдельного обсуждения. Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.Бездепы обычно предлагают с отыгрышем — быстро исключить выигранные свои нельзя. Перевод средств со счета будет вероятен в того, как пользователь выполнит все притязания казино, а сумма не быть выше установленного правилами лимита. Условиями акции фиксируются сроки, на которых клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней последствии активации. Выбирайте наилучшие бесплатные бонусы с помощью обзоров на Casinoz – и пусть вас сопутствует счастье при отыгрыше бонусных кредитов!С не отыгранным бонусом воспрещается превосходить размер максимальной ставки. Нарушение этого обстоятельства виде аннулирование выигрыша. 1×slots промокод при регистрации 2025 <a href=http://www.atego-club.ru/forum/member.php/118486-Charlesvob>http://www.atego-club.ru/forum/member.php/118486-Charlesvob</a> Рассмотрим принцип его деяния на примере. Допустим, вы зарегистрировались и возымели $10 not the slightest down payment bonus с вейджером х50. Это значит, что выигранные средства можно будет выводить не ранее, чем после как, как общая сумма ставок достигнет $500.Демоказино есть практически на любом сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются веско пореже: там в случае выигрыша и соблюдения условий промоакций бездеп возможно перевоплотить в реальные деньги.
1× slots официальный
<a href=http://patron-moto.ru/bitrix/rk.php?goto=http://ivushka-mebel.ru/bitrix/redirect.php?goto=http://salon-kaminov.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/omqEkd0Hq79>http://patron-moto.ru/bitrix/rk.php?goto=http://ivushka-mebel.ru/bitrix/redirect.php?goto=http://salon-kaminov.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/omqEkd0Hq79</a> Для верификации номера телефонного, в личном профиле выберите опцию „Подтвердить номер телефонного“ и введите в подходящее фон код, полученный в sms-сообщении. 1×slots casino зеркало рабочее
<b>Смотреть еще похожие новости:</b>
<a href=https://masstr.net/showthread.php?tid=126430>1×slots бонус за регистрацию</a>
<a href=https://www.globalvision2000.com/forum/member.php?action=profile&uid=1072499>1×slots регистрация 1×slots casino c2d ru</a>
<a href=https://acerfans.ru/user/JamesTed/>1хслот скачать</a>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5138/#comment-618362>1×slots регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Практически все онлайн казино с бездепозитным бонусом за регистрацию предусматривает программку лояльности — систему поощрения постоянных клиентов, которая произведено из колличества значений. При достижении игроком очередного уровня на его счёт поступает приз. Чем повыше степень — тем щедрее приз. Перечисленные выше главные свойства сочетают фактически каждый бонус и являются стереотипными для бездепозитных бонусных начислений в казино.
#5607 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
unlim casino порно с Гатагова Ольга Анатольевна <a href=https://slon-ru.com/>букмекерская контора фонбет</a> лучшие букмекерские конторы ramenbet casino <a href=https://res-publika.com>1×bet сайт 1×bet xyz</a> букмекерская контора фонбет официальный сайт пин ап букмекерская контора казино вход лучшие букмекерские конторы порно с Варвара Субботина 1×bet скачать приложение на андроид порно с Георгий Джикия (футбол)
DiskiPlus букмекерская контора DiskiPlus 1×bet casino <a href=https://diskiplus.ru/>DiskiPlus порно с Бондаренко Анастасия Борисовна</a> DiskiPlus пина casino DiskiPlus casino промокод <a href=https://diskiplus.ru>DiskiPlus скачать 1×bet на андроид</a> DiskiPlus Преподобная Надежда Александровна порно DiskiPlus 1×bet слоты официальный сайт DiskiPlus pin up casino официальный DiskiPlus букмекерскую контору пин DiskiPlus сайт казино зеркало DiskiPlus порно с Матвей Сафонов (футбол) DiskiPlus казино смотреть онлайн бесплатно
#5608 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Поспешите отобрать бездепозитные бонусы за регистрацию в казино из представленного списка. Все платформы не только водят законную деятельность, но и обрадуют честными результатами забавы, высочайшей отдачей, быстрыми выплатами.При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, коие можно посвятить ирге в казино. <a href=http://filmkachat.ru/>x1 slots 1хслотс регистрация перейти на 1×slots</a> Зарегистрироваться в казино по особой ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефонного и электронную почту). Для подтверждения номера телефона необходимо в собственном профиле указать собственный номер и нажать кнопку „Подтвердить номер аппарата“, далее Вы получите sms-сообщение с кодом, кот-ый необходимо ввести в соответствующее поле. Для доказательства электрической почты, перейти по активной ссылке в письме от казино.При этой на бонусные средства воспрещается играть в игровые автоматы с прогрессивным джекпотом и забавы из радела exist casino. Кроме такого, кое-какие казино выделяют бездеп на раз или количество конкретных слотов, и в иных забавах Вы не сможете на них выступать. <a href=https://heyjinni.com/read-blog/177753>https://heyjinni.com/read-blog/177753</a> рабочее зеркало 1хслотс <a href=https://pcnto.com/user/Jamesstoxy/>https://pcnto.com/user/Jamesstoxy/</a>
1×slots регистрация 1×slots review live
Чтобы бездеп не был начислен на Ваш аккаунт, Вам не активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт автоматически, а Вы не планируете его применять, обратитесь в службу с пожеланием отменить бездепозитный бонус. <a href=https://forum.oursson.ru/viewtopic.php?f=2&t=9497>casino 1×slot</a> зеркло казино 1×slots B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? <a href=https://velorout.com.ua/user/RalphPed/>https://velorout.com.ua/user/RalphPed/</a> Принципиальным различием даровых призов от призов на депо считается недоступность надобности заносить средства на акк. Из-за этого их нередко называют бездепозитными (not the slightest deposit bonuses).Можно ли наваривать на бездепозитных призах? Это не работа, здесь как повезет, в в любом предложенном безедепе, вы будете откручивать вейджер и выводить, время возможно именовать везением, и добавочной добавкой к вашему бютжету. 1хлот регистрация в 1×slots casino Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша призов. Заведения постоянно устанавливают максимальную ставку, допустимую по условиям вейждера.
1хслот зеркало
Казино выделяет возможность заработать и вывести настоящие деньги на бездепозитных призах. Обычно, это незначительная сумма, коию казино имеет себе позволить презентовать игроку.Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских рублей. В критериях промоакции предписано, собственно вейджер бездепозитного приза х20. Поэтому, чтобы отыграть бонус, игроку будет нужно устроить ставок на 35*20=700 рублей.На страничке представлены бездепозитные бонусы за регистрацию в казино редчайшая награда за которой гонятся все игроки как новички, так и мастера. Мы тоже уделяем большое внимание на присутствие призов при формирование рейтинга казино на деньги. Бездепозитный приз это вероятность выступать даром и выиграть реальные средства. <a href=https://tulaart.ru/forum/index.php?action=profile;u=34370>https://tulaart.ru/forum/index.php?action=profile;u=34370</a> 1×slots casino online регистрация Помимо остального, для вывода средств по бездепу нужно внести на счёт собственный первый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на мало возможную необходимую, последствии чего вывод средств будет доступен.Для получения предоставленных бонусов для понадобиться — ПК либо мобильное прибор, и остальное дело за небольшим.
1хслотс регистрация в 1×slots casino
В бонусную программу множества операторов входят регулярные бездепы. Это бессрочные акции, поощряющие интенсивных постоянных игроков. Популярный формат — раздача фриспинов по конкретным денькам недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают неизменные бонусы без депозита в мена на накопленные баллы лояльности. <a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=13119>1×slots зеркало регистрация то дальше необходимо пройти</a> Даже не выиграв крупную необходимую, игрок увлекательно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе превосходнейших промоакций с. Достаточно периодически изучать список новых интернет казино с выводом бонуса без депозита в данном разделе.Главным моментом в возникновении этих вознаграждений состоит в том, собственно пустив их в ход, игрок ничем не рискует и в последствии никому ничего не будет должен (не зависимо, получит ли он спасибо призам какой-нибудь выигрыш либо моментально спустит все только собственно прибывшие деньги). То есть, казино снабжает игрока возможностью на дармовой базе выступать во всевозможные слоты и даже спонсирует игру. Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных обстановок с казино, когда последствии отыгрыша бездепа вам не дадут вывести солидную сумму выигрыша.Реже призы без депозита начисляются постоянным игрокам. С их подмогою администрация старается вычесть ценных клиентов либо вожделеет поблагодарить за лояльность правильных посетителей. Но гораздо чаще для похожих целей применяются эти акции: 1× slots casino официальный сайт <a href=http://www.lifelvzhou.org/bbs/home.php?mod=space&uid=318439&do=profile>http://www.lifelvzhou.org/bbs/home.php?mod=space&uid=318439&do=profile</a> 3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефон или почту, показать индивидуальную информацию;
1×slots официальный сайт скачать
Демоказино есть практически на любом сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются существенно пореже: там когда выигрыша и соблюдения условий промоакций бездеп можно перевоплотить в настоящие средства.Приглашаем делиться сужденьями о бонусах. Это поможет иным пользователям избирать более выгодные предложения. <a href=http://www.makehp.co.kr/bbs/board.php?bo_table=free&wr_id=174181>http://www.makehp.co.kr/bbs/board.php?bo_table=free&wr_id=174181</a> Новички не обожают незамедлительно же заносить депо. Это обусловлено неимением опыта и сомнением. К счастью, в наше время можно получить бездепозитный бонус за регистрацию в казино. Неважно что начислит система – фриспины либо кредиты. В любом случае вы не рискуете своими сбережениями. Это отличная возможность запустить приглянувшийся видео разъем либо же испытывать удачу в настольных забавах.Но надо думать, собственно снабжая юзеров этими призами, казино увлекается спонсированием. Ведь размеры вознаграждений, в, не великие (средним объемом от 5 до 20 долларов). И на эти средства налагаются конкретные обстоятельства и ограничения, неотклонимые к выполнению игрока, если в последствии он желает получить все свои выигранные деньги. 1хслотс 1хслотс регистрация перейти на 1×slots На страничке представлены бездепозитные бонусы за регистрацию в казино редчайшая заслуга за коей гонятся все игроки как новички, так и профессионалы. Мы также уделяем огромное внимание на наличие призов при составление рейтинга казино на деньги. Бездепозитный бонус это вероятность выступать даром и выиграть реальные средства.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При регистрации идет свидетельствовать только достоверную информацию. Когда учетная запись несомненно активна, появится доступ в Личный кабинет. В нем возможно выбрать еденицу, установить промокод и разузнать доскональные правила получения и отыгрыша бездепа. Краткая информация об акции нередко находится именно на регистрационной форме. Бездепозитный приз за регистрацию в казино — это стартовый подарок повторяющий денежного начисления или безвозмездных вращений для новых игроков заведения, для получения которого не заносить депо.
#5609 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino на телефон casino актуальное зеркало <a href=https://slon-ru.com/>casino buzz</a> рабочие зеркала казино up букмекерская контора <a href=https://repost.news/>1×bet приложение</a> пин casino порно с Алексей Миранчук (футбол) 1×bet слоты официальный сайт champion casino win win casino порно с Анна Щербакова, фигуристка 7k casino зеркало
DiskiPlus 1×bet зеркало на сегодня 1×bet xyz DiskiPlus фреш казино <a href=https://diskiplus.ru/>DiskiPlus gama casino</a> DiskiPlus букмекерская контора скачать приложение DiskiPlus казино сегодня <a href=https://www.diskiplus.ru>DiskiPlus casino сайты</a> DiskiPlus ешь казино DiskiPlus скачать 1×bet на андроид бесплатно DiskiPlus Кузнецова Анна Юрьевна порно DiskiPlus порно с Дронова Александра Викторовна DiskiPlus официальные зеркала казино DiskiPlus Скоробогатова Ольга Николаевна порно DiskiPlus porno Дарья Мороз
#5610 Charlesgunnyhttp://filmkachat.ru
1×slots бездепозитный бонус за регистрацию
Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, the decision лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. <a href=http://filmkachat.ru/>1х слот 1хслотс регистрация перейти на 1×slots</a> Бездепозитные бонусы, как уже ясно, являются уникальной вероятностью приступать к игровому процессу абсолютно бескорыстно, то есть играть в онлайн казино безвозмездно и на имеющие средства сразу в регистрации аккаунта. Автоматы с таким депозитом имеют стать прекрасной возможностью поиграть для почитателей азарта с определенными лимитированиями в денег. <a href=https://groups.google.com/u/1/g/3d-rendering-services>https://groups.google.com/u/1/g/3d-rendering-services</a> скачать 1×slots официальный сайт <a href=https://atoms.rocks/member.php?action=profile&uid=42024>https://atoms.rocks/member.php?action=profile&uid=42024</a>
1хслотс регистрация в 1×slots casino
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-2015#post-57488>1×slots зеркало регистрацию более популярный вариант это</a> 1×slot зеркало рабочее регистрации на телефон придет Так собственно приготовьтесь предоставить секретную информацию (пол, возраст, страна проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев проверка данных занимает менее суток, в чего получится беспрепятственно выводить солидные выигрыши. <a href=https://www.exler.ru/user/Glavdorogadv1605>https://www.exler.ru/user/Glavdorogadv1605</a> Итак, чтобы благотворительные бонусные кредиты превратились в реальные средства, которыми возможность распоряжаться по собственному усмотрению, их нужно отыграть. Вейджер следует уточнять в правилах онлайн-казино.Размер ставки для забавы по бездепозитному бонусу (конечно же, если, тогда,, когда он представлен вид бонусных денежных средств) часто ниже, чем при этой на депо. Ограничение будет работать до этапа отыгрыша приза. 1×slots официальный регистрация 1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, случае не хотите стать жертвой плутов либо впустую израсходовать время;Но такие рамки не смущают числе хайроллеров, потому коэффициенты на слотах позволяют рассчитывать на солидные выигрыши, ну некоторых автоматах разыгрывается прогрессивный джекпот.
x1 slots регистрация в 1×slots casino
Возможность протестировать свежие игры, не рискуя личностными средствами и создать личную тактику забавы. <a href=http://tmml.top/home.php?mod=space&uid=95923>http://tmml.top/home.php?mod=space&uid=95923</a> После получения приза вывод средств для клиента несомненно недосегаем времени, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или чета месяцов. Выводить деньги игрок сможет лишь в отыгрыша.Иногда операторы просят внесение минимального депо перед выводом для верификации платежного инструмента. В неких казино данный депозит того светит отыграть. 1× slots casino официальный сайт
1× slots casino зеркало
Oтыгpaть бонус с обозначенным вeйджepом, чтобы нужно сдeлaть cтaвoк нa cумму, превосходящую объем приза в некоторое раз.Игрокам не воспринимать приветственный бонус как гарантированный способ получить большой выигрыш, но это замечательная вероятность без затрат оценить функционал казино. 1×slots casino зеркало <a href=http://forum.moderncompany.de/profile.php?lookup=15894>http://forum.moderncompany.de/profile.php?lookup=15894</a> Зарегистрируйтесь. Для регистрации чаще всего довольно установить собственный номер аппарата и почтовый адрес, последствии чего ввести полученный код из СМС. Возможно, потребуется показать промокод. В правилах акции будет написано, где его бы включать. Иногда это бы создавать при регистрации, от — теснее в создания собственного офиса, на отдельной страничке.Бонусы без депозита при регистрации считаются наиболее красивыми как для опытнейших игроков, например для и начинающих. Получив такое вознаграждение, заказчик имеет играть на настоящие деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, еще обстоятельства их активации и выигрыша.
1 x slots
Таким образом онлайн казино получает вероятного игрока. Возможно в или настоящем он захотит поиграть на средства средства. Так работают бездепозитные призы в онлайн казино. Здесь очень подходит выражение, бесплатные сыр посещает лишь в мышеловке. Начинающие игроки могут не осознавать опасность пыла. Однако времени осознания делается больше. Это тема для отдельного обсуждения. Иногда в бездепа, казино презентует минимальный бонус (до 50 руб. ), из-за которого не стоит заморачиваться. <a href=https://clashofcryptos.trade/wiki/%D0%90%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D1%8B>https://clashofcryptos.trade/wiki/%D0%90%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D1%8B</a> 1×slots мобильная версия войти казино
<b>Смотреть еще похожие новости:</b>
<a href=http://aficionado.pl/showthread.php?110139-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%B0–1×slots&p=127943>зеркала 1×slots</a>
<a href=http://youboy.comwww.molifan.net/space-uid-2295552.html>1×slots casino регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Создание аккаунта. На сайте казино необходимо обнаружить регистрационную форму и заполнить пустующие поля личными данными. Иногда на этом шаге требуется указать только адресок электрической почты и пароль, но почаще надобно заполнить анкету индивидуальной информацией (ФИО, дата рождения, место проживания и т.д.). Нужно свидетельствовать лишь реальные данные, поскольку впоследствие они будут проверены. Акции распространяются как на все забавы казино, так и на узкий список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и другие. Промо возможность охватывать разработки одного производителя. Бездеп не пересекается с иными акциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, изготовленные бонусными деньгами. Для идентификации платежных реквизитов игрока может потребоваться пополнение счета на наименьшую сумму.
#5611 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet 7k casino зеркало на сегодня <a href=https://m.repost.news/>1×bet на андроид</a> 1×bet зеркало рабочее на сегодня казино вход официальный сайт <a href=https://th-royalgclub.com/>Кузнецова Анна Юрьевна порно</a> балтбет букмекерская контора cometa casino почему в казино нет часов casinos winning казино вулкан скачать букмекерскую контору на андроид Чулпан Хаматова
DiskiPlus casino регистрации DiskiPlus 1×bet зеркало <a href=https://diskiplus.ru>DiskiPlus Шевцова Татьяна Викторовна порно</a> DiskiPlus inform@rucriminal.info DiskiPlus 1×bet на андроид <a href=https://www.diskiplus.ru/>DiskiPlus порно с Каролина Севастьянова</a> DiskiPlus официальное казино вход DiskiPlus 1×bet 1 DiskiPlus казино 1 DiskiPlus самое казино DiskiPlus 1×bet скачать бесплатно DiskiPlus porno Мира Андреева (теннис) DiskiPlus пин ап casino pin
#5612 https://pgslot-online.to/https://pgslot-online.to/
pgslot-online.to
#5613 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Радченко Светлана Юрьевна порно casino бонус <a href=https://repost.news/>casino официальный зеркало</a> яндекс игры казино casinos xyz <a href=https://rucriminal.info/>online casino 7k</a> Александра Бортич порно с Бондаренко Анастасия Борисовна porno Анна Сидорова, керлингистка 1×bet зеркало на сегодня 1×bet зеркало рабочее на сегодня 1×bet xyz почему казино casino ru
DiskiPlus казино ли DiskiPlus букмекерская контора бесплатно скачать <a href=https://www.diskiplus.ru/>DiskiPlus пина casino</a> DiskiPlus Ирина Горбачева DiskiPlus casino 7k рабочее <a href=https://diskiplus.ru/>DiskiPlus букмекерская контора зенит</a> DiskiPlus inform@rucriminal.info DiskiPlus казино пин DiskiPlus пин ап казино DiskiPlus 1×bet зеркало xbet xyz DiskiPlus порно с Евгения Медведева, фигуристка DiskiPlus почему казино DiskiPlus cat casino
#5614 PG SLOThttps://mickeypath.com/
PG SLOT
#5615 Charlesgunnyhttp://filmkachat.ru
1 x slots
Подарки на праздники ? приуроченные к парадным датам, требующие символического отыгрыша либо начисляются без такового. Могут дариться игрокам сутки рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду. <a href=http://filmkachat.ru/>1×slots бонус за регистрацию</a> Некоторые клубы механически начисляют бонус на акк игрока после выполнения критерий получения, хотя посещают ситуации, когда приз нужно активировать игроку самому. Есть некоторое способов активации приза:Некоторые казино имеют предлагать посетителям бездепы за свидетельство номера либо почты или репост на страничку в социальных сетях. <a href=https://trumpbookusa.com/blogs/259423/Professional-3D-Animation-Services-in-the-Digital-Age>https://trumpbookusa.com/blogs/259423/Professional-3D-Animation-Services-in-the-Digital-Age</a> 1×slots рабочее зеркало на сегодня <a href=https://forums.dfine.net/member.php?action=profile&uid=1176>https://forums.dfine.net/member.php?action=profile&uid=1176</a> Воспользоваться бездепом можно не во всех игровых автоматах: казино вдруг уточняет ограничение для клиентов. Конечно, это можно счесть некоторым неудобством для игрока, но ради стоит отметить, что выбор автоматов всё точно остаётся достаточно большим.Для ревизии применяются сканы паспортов, водительских удостоверений, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если юзер обнаружен в попытке завести дополнительный акк, все его учетные записи подвергаются блокировке, а их владелец попадает в темный перечень. При забаве на лицензионной площадке не опасаться указывать достоверную индивидуальную информацию (шифрование ликвидирует утечку индивидуальных данных).
1хслотс зеркало
<a href=https://timepost.info/showthread.php?tid=75484>1х слот 1хслотс регистрация перейти на 1×slots</a> казино 1× slots официальный сайт <a href=https://www.sportchap.ru/user/DoctorLazutaEr/>https://www.sportchap.ru/user/DoctorLazutaEr/</a> Если вы новичок в и только попали в неизведанную вами район пыла — с помощью предложений как бездепозитные бонусы без пополнения.Максимальный объем ставки, кот-ый нельзя превосходить же приз не будет полностью отыгран. В случае нарушения этого управляла, бонус и выигрыш с него станут аннулированы. 1×slots зеркало рабочее на сегодня
1×slots зеркало этих способов предполагает регистрацию
Для получения депозитного бонуса необходимо пополнить свой игровой баланс настоящими средствами. Вознаграждение можно получить или при внесении первого депо, либо повторяющий фиксированного процента от внесённых средств. Так либо другому, бонус поступит на счёт только после пополнения.Шаг 4. Активация. Внимательно исследуйте обстоятельства, информацию по ограничениям и сроке действия бонусного предложения. Разобравшись с правилами, можно активировать бонус в личном кабинете (времени ? с внедрением промокода) или по запросу в саппорт. <a href=http://00mall.biz/bbs/board.php?bo_table=free&wr_id=228354>http://00mall.biz/bbs/board.php?bo_table=free&wr_id=228354</a> 1×slots зеркало выигрыши обязательно пройдите регистрацию если За привлечение друга ? в рамках партнерской программки клиент получает вознаграждение за вербование свежих юзеров.
1хслотс официальный сайт зеркало
В подавляющем большинстве случаев безвозмездные бонусы начисляются в кредитах, коие невозможно сразу вывести со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже.Однако в условиях скрываются «подводные камни», которые не разрешат вывести крупную необходимую или же вы не успеете отыграть вейджер. Поэтому мастера советуют забрать бесплатные вращения за регистрацию в казино без депозита, дабы поднабраться навыка и получить настоящий шанс на победу. <a href=https://www.formulersupport.com/Thread-1×slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%BD%D0%B0-%D1%81%D0%B0%D0%B9%D1%82%D0%B5–153505>1×slots регистрация на сайте</a> 1×slots регистрация 1×slotscasino 56 online <a href=https://www.camry-club.ru/member.php?319913-TravisCrora>https://www.camry-club.ru/member.php?319913-TravisCrora</a> 2. Создать новый профиль. Для регистрации надо(надобно) наполнить маленькую анкету либо зайдите в личный кабинет при помощи соц сеток;Для такого, чтобы отыграть сумму вашего бездепозитного бонуса надо(надобно) выполнить условия вейджера. Очень нередко фриспины даются на конкретные слоты (book of ra, book of dead, book of sun), выбирайте разъем для нраву, они очень красивые и высококачественные. Бездепозитные бонус имеет быть денежным например и вид фриспинов на слоты
1×slots зеркало регистрация то дальше необходимо пройти
Но никогда не запамятовывайте внимательно разбирать управляла участия в бонусных акциях. Если вы нарушите но бы одно условие, позднее вы не можете устроить недоразумение с администрацией. Процесс подтверждения личности имеет занять от одного денька до недели. Если клиент допустил какую-либо оплошность при заполнении паспортных данных, то ему следует адресоваться с проблемой в службу онлайн-казино. <a href=http://klotzlube.ru/forum/user/256023/>http://klotzlube.ru/forum/user/256023/</a> 1хслотс рабочее зеркало на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=https://sadhaka.nl/forum/viewtopic.php?t=102652>скачать 1×slots на андроид мобильная версия</a>
<a href=http://theauction.com.au/my-account/>1×slots казино зеркало</a>
<a href=https://mit-bbs.com/viewtopic.php?t=131273>1×slots регистрация 1×slotscasino09k online</a>
<a href=http://www.arka-bahce.org/forum/showthread.php?p=777157#post777157>1хслотс зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Классическая разновидность приза за создание аккаунта. Его превосходство содержится сомнений, что клиент имеет самостоятельно выбирать аппараты и создавать ставки в них. Иногда список игровых автоматов ограничен оператором, хотя все одинаково это превосходнее, чем единственный дешевый слот, как в случае с использованием фриспинов. При отыгрыше бонусных средств, нужно учитывать срок действия приза и время, коие дается на отыгрыш. По истечению заявленного медли, не отыгранный бонус будет аннулирован.
#5616 Ремонт iPhone 14 Prohttps://remont-iphone-14-pro-pull.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт iphone 14 pro адреса, можете посмотреть на сайте: <a href=https://remont-iphone-14-pro-pull.ru/>ремонт iphone 14 pro сервис</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#5617 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
Также существуют онлайн-платформы азартных игр, которые применяют раздачу бездепозитных призов в особые даты (как для казино, так и для игрока). Помимо сего, действующие геймеры также имеют вероятность получить похожие призы за свою деятельность (к примеру, за повышения значения либо за схожие заслуги).Если вы избираете испытанное лицензионное онлайн казино и выполните все условия получения бездепозитного приза, проблем с получением дара у Вас не возникнет. <a href=http://filmkachat.ru/>1×slots зеркало</a> <a href=https://menagerie.media/index.php?link1=read-blog&id=87720>https://menagerie.media/index.php?link1=read-blog&id=87720</a> Для получения депозитного бонуса нужно пополнить свой игровой баланс настоящими деньгами. Вознаграждение возможно получить либо при внесении первого депо, либо в виде фиксированного процента от внесённых средств. Так или по, приз поступит на счёт только последствии пополнения. 1× slots casino зеркало <a href=http://www.daongil.com/bbs/board.php?bo_table=free&wr_id=354528>http://www.daongil.com/bbs/board.php?bo_table=free&wr_id=354528</a> Акционные предложения от казино есть в разных форматах. Часто призы даются в мена на депозит. Игрок вносит платеж и получает деньги, бесплатные вращения и поощрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — картина бонуса, который гарантирован за выполнение определенных деяний на веб-сайте:
1×slot регистрация
Мы собрали и опубликовали перечень наихороших бездепозитных казино с бонусами за регистрацию, которые гарантируют щедрые выигрыши и мгновенные выплаты. 1×slots сайт <a href=https://www.aura-invest.com/bbs/board.php?bo_table=free&wr_id=1455139>https://www.aura-invest.com/bbs/board.php?bo_table=free&wr_id=1455139</a> Бездепозитный бонус предоставляется новенькому игроку за конкретные действия. Часто подарок повторяющий денег или фриспинов выдается за регистрацию, благодаря чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. 1×slot зеркало рабочее регистрации на телефон придет Прочитайте управляла бонусной программки, в желайте участие. Да, мы настойчиво советуем устроить это до регистрации.
1 хслот регистрация в 1×slots casino
Также учтите, собственно кое-какие игровые платформы сузивают список стран, коие способны получить предложенный бездепозитный бонус за регистрацию. К образцу, существуют онлайн-заведения, выдающие подобные бонусы лишь обитателям конкретных государств. К примеру, интернет казино 777 Оригинал дает бездепозитный приз лишь игрокам из России и стран СНГ. Или наоборот, пичкают вознаграждением всех, кроме обитателей некоторых государств (исходя из сего, по внимательно изучать перечень, чтобы потом не появилось практически вопросов и претензий). <a href=http://g70787z8.beget.tech/user/Oscarliemi/>http://g70787z8.beget.tech/user/Oscarliemi/</a> Если вы бывалый игрок, вы должны знать, собственно бонус без депозита – редчайшая находка. Тем не, мы в изучаем интернет, чтобы найти вам лучшие бездепозитные предложения. 1×slots casino регистрация 1×slotscasino09k online
1×slots регистрация 1×slots casino c2d ru
В большинстве заведений сделать это можно по адресу электронной почты, по номеру телефонного, через социальную сеть либо гугл-аккаунт.Поспешите забрать бездепозитные бонусы за регистрацию в казино из представленного списка. Все платформы столько водят законную работа, но и порадуют правдивыми плодами забавы, высокой отдачей, быстрыми выплатами. <a href=https://persiankittencat.com/bathroom-vanity-cabinet-ideas/#comment-62890>1×slots официальный demo регистрация в 1×slots casino</a> Обычно показатель повыше, чем для призов на депо. Не удивляйтесь, случае он будет даже х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных государств.Чтоб получить крупный выигрыш, подбирайте игровые автоматы с максимальным процентом отдачи (RTP) из перечня тех, которые доступны по условиям отыгрыша. Такой казино приз без депозита за регистрацию выдается игроку на час и активно употребляется данное предложение с 2017 года. Это словно какая-то конспирация одобрения под бездепозитный. Суть всего сего сводится к что, этому, собственно игроку на час выдается, к примеру, 1000 $, а реклама повторяет то, что каждой выигрыш можно несомненно в забыть при себе. Но если играющий всерьез отнесется к данному предложению, то он просто растеряет время. Ведь геймеру надо(надобно) несомненно выступать не главном аккаунте, в тренировочном и с ограниченным выбором автоматов и ставок. Да и если, тогда, выигрыша (в всей тысячи) в верховодила вступят определенные обстоятельства, где будет сказано, что максимальной суммой победы может быть лишь двести долларов и деньги возможно использовать лишь виде приза на 1-ый лепта с вейджером 25 от суммы гонорары плюс сам депо. По результату выйдет, что игрок выигрывал себе 200% приз с вейджером на определенную сумму. Короче разговаривая, это все надо вашего времени. 1хслотс официальный сайт зеркало <a href=http://ceh-i.ru/user/StevenMes/>http://ceh-i.ru/user/StevenMes/</a> При пользовании бездепозитным призом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют количество видов лимитов:Но такие рамки не смущают числе хайроллеров, поскольку коэффициенты на слотах разрешают рассчитывать на крупные выигрыши, в неких автоматах разыгрывается прогрессивный джекпот.
1×slots официальный сайт скачать на айфон
Помните, собственно любые нарушения управлял сведут на нет ваши усилия, и вы скорее останетесь без начисленного вас дарового бонуса. Всегда изучайте правила начисления и обстоятельства вейджера. По хоть вопросам, на коие вы имеет других отыскать ответы, обращайтесь за объясненьям и саппорт.Бездепозитный бонус казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в этом и содержится основное различие. Бонус за регистрацию в казино без депо с выводом денег нужно отыграть. Зачастую для отыгрыша возможность потребоваться сделать ставки на необходимую, в несколько десятков раз превосходящую сумму бонуса или выигрыша.Как управляло, при выводе денег, от играющего требуется лишь сделать минимальный лепта чтобы, чтобы, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом личный счет. <a href=http://buhtarma.ru/users/ofifewake>http://buhtarma.ru/users/ofifewake</a> 1×slots официальный сайт зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://russiancomputerservice.ru/user/JosephCer/>1хслотс казино зеркало</a>
<a href=http://aficionado.pl/showthread.php?125676–1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%B2–1×slots-casino&p=144163>1хслотс регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины предназначены для использования в видео слотах. Внимательно ознакомьтесь с условиями – часто их выдают на некоторые автоматы. В зависимости от клуба, у вас получится сделать определённое число ставок. Кстати, продвинутые игорные жилища позволяют запускать каждых «одноруких бандитов». Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.
#5618 Charlesgunnyhttp://filmkachat.ru
1×слотс казино
Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.Акционные предложения от казино есть в различных форматах. Часто бонусы даются в обмен на депозит. Игрок вносит платеж и получает деньги, безвозмездные вращения и другие поощрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — картина приза, кот-ый гарантирован за исполненье конкретных поступков на веб-сайте: <a href=http://filmkachat.ru/>1×slots зеркало быструю регистрацию а также мгновенное</a> Такие поощрения дозволяют даром протестировать свежее казино, разобраться с игровым ходом онлайн слотов, заработать и вывести небольшую необходимую средств.Простая процедура получения бездепозитного приза, которая займет не более 2-х мин. Для получения бездепов, достаточно зарегистрироваться и доказать контактные данные. <a href=https://divisionmidway.org/jobs/author/archicgi-com/>https://divisionmidway.org/jobs/author/archicgi-com/</a> Для вывода средств бонус надо(надобно) будет отыграть законам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариациями отыгрыша бездепозитного бонуса до его получения, чтобы избежать конфликтных обстановок.Частенько новички не разумеют, как активировать презенты либо исключить первый выигрыш. Для сходственных случаев наша команда обрисовала основные определения – что это фриспины, вейджер, как его отыграть, зачем необходимо протекать верификацию. рабочее зеркало 1×slots <a href=https://www.giantbomb.com/profile/glavdorogadv310/blog/avtoshkola-vladivostok-glavnaia-doroga/277999/>https://www.giantbomb.com/profile/glavdorogadv310/blog/avtoshkola-vladivostok-glavnaia-doroga/277999/</a>
1хслотс мобильная версия зеркало
1×slots casino online регистрация Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют актуальную информацию о not the slightest deposit bonuses и других предложениях.Не рекомендуем сломя голову хвататься за различные предложения получения средств без вложений. Вполне возможно, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на первый взгляд. Альтернативой считается казино бонус за депозит. Мы предлагаем для пару советов, спасибо которым у каждого игрока несомненно возможность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом средств: <a href=https://www.mikocon.com/home.php?mod=space&uid=227695>https://www.mikocon.com/home.php?mod=space&uid=227695</a> 1×слотс казино
1×slots официальный сайт мобильная версия
Большинство клубов привлекают внимание игроков за счёт различных подарков. На 1 веб-сайтах возможно получить виртуальные кредиты, которые откроют доступ ко всему софту. На других же, администрация предлагает безвозмездные вращения для пуска топовых онлайн слотов. Несмотря на разные промоакции, стоит выделить самые основные. <a href=http://community.checkinpro-hotel-software.com/memberlist.php?mode=viewprofile&u=322193>http://community.checkinpro-hotel-software.com/memberlist.php?mode=viewprofile&u=322193</a> Принципиальным отличием бесплатных бонусов от бонусов на депозит является отсутствие необходимости вносить деньги на аккаунт. Из-за сего их часто нарекают бездепозитными (no down payment bonuses).Для казино, работающих интернет, бездепозитные призы нужны для вербования новых клиентов. Предложение поиграть на слотах без надобности внесения настоящих средств — работающий способ для увеличения энтузиазма к фирмы. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит выступать в казино, только сейчас теснее на личные средства. 1×slots коды Чаще всего, знаменитые сервисы, такие как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное верховодило. Финансовые средства выводятся только через что, эту платежную систему, которой популярностьюимели для пополнения депозита. Если же игрок получил бездепозитный покерный бонус, требуется пополнить счет на минимальную необходимую, которая сочиняет обычно 10 $.
1х слот 1хслотс регистрация перейти на 1×slots
<a href=https://elclasificadomx.com/author/jameslog/>1×slots официальный сайт зеркало</a> Наиболее популярные вознаграждения среди гэмблеров – бездепозитные бонусы казино. Это не удивительно, ведь возможно получить бесплатные вращения или виртуальные кредиты, и этом не придётся пополнять счёт, рисковать собственными средствами. Удастся насладиться разнообразными веселиями причем выиграть солидную сумму, избегая серьёзного риска.Подтверждение электронной почты – одно из ведущих критерий, коие есть практически в каждом бездепозитном казино. Чтобы верифицировать электронную почту, достаточно перейти по активной ссылке в послании, полученном от азартного клуба. зеркала 1×slots <a href=http://ufb38096.bget.ru/index.php?subaction=userinfo&user=aspiringoutlaw2>http://ufb38096.bget.ru/index.php?subaction=userinfo&user=aspiringoutlaw2</a> Бездепозитные бонусы отличный вариант даровой игры в игровые автоматы. Многие пользователи сети не понимают, что в казино возможно начать играть абсолютно безвозмездно, а позже исключить выигрыш на банковскую карту либо электрический кошелек, иные не доверяют онлайн казино, а третьи успешно играют и выигрывают – и подчас достаточно великие суммы.Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и расценить необыкновенности, труднодоступные при забаве в демо режиме. Многие новые клиенты переходят в число неизменных, а оператор получает долгосрочную выгода.
1×slots casino регистрация
Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен список лучших интернет казино, коие предлагают своим игрокам щедрые бонусы за регистрацию. <a href=http://l-avt.ru/support/dialog/?PAGE_NAME=profile_view&UID=58083>http://l-avt.ru/support/dialog/?PAGE_NAME=profile_view&UID=58083</a> рабочее зеркало 1×slots Реже бонусы без депо начисляются неизменным игрокам. С их подмогою администрация старается вычесть ценных клиентов либо желает поблагодарить за лояльность верных гостей. Но гораздо чаще для похожих целей применяются эти промоакции:
<b>Смотреть еще похожие новости:</b>
<a href=https://isomedu.com/forum/profile/josephdrons/>1×slots подтвердит вашу регистрацию если говорить</a>
<a href=http://complainanything.com/node/158?page=939#comment-1182076>1хслотс рабочее зеркало</a>
<a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=770927>1× слот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Акционные предложения от казино существуют в разных форматах. Часто призы даются в мена на депозит. Игрок заносит платеж и получает средства, безвозмездные вращения прочие поощрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — картина приза, кот-ый гарантирован за исполнение конкретных поступков на сайте:
#5619 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino игровой автомат лучшие онлайн казино <a href=https://slon-ru.com/>pin up букмекерская контора</a> 7k casino сайт рабочее казино <a href=https://kompromat1.online/>casino приложения</a> Матвиенко Валентина Ивановна порно казино рояль смотреть порно с Диана Шнайдер (теннис) porno Игорь Акинфеев (футбол) водка казино pin up casino официальный порно с Ирина Сидоркова
DiskiPlus пинко casino DiskiPlus почему в казино не бывает настенных часов <a href=https://www.diskiplus.ru>DiskiPlus porno Илона Маркова, хоккеистка</a> DiskiPlus казино онлайн бесплатно DiskiPlus порно с Дронова Александра Викторовна <a href=https://diskiplus.ru>DiskiPlus porno Анна Сидорова, керлингистка</a> DiskiPlus 1×bet зеркало слоты 1×bet xyz DiskiPlus официальные сайты казино DiskiPlus casinos winning DiskiPlus букмекерские контора ап DiskiPlus pin up casino пин DiskiPlus casino зеркало сегодня рабочее DiskiPlus казино сочи
#5620 Ремонт iPhone 14 Pro Maxhttps://remont-iphone-14-pro-max-pernt.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт iphone 14 pro max в москве, можете посмотреть на сайте: <a href=https://remont-iphone-14-pro-max-pernt.ru/>ремонт iphone 14 pro max</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#5621 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация
Приглашаем делиться суждениями о призах. Это поможет иным пользователям подбирать более прибыльные предложения.Операторы гемблинга заявляют, собственно например они сражаются с бонус-хантерами. Впрочем, критики считают, что этим казино пытаются устроить из случайного гостя постоянного игрока. <a href=http://filmkachat.ru/>1×slots официальный сайт мобильная версия скачать</a> <a href=https://forum.highlite.com/showthread.php?tid=1882>https://forum.highlite.com/showthread.php?tid=1882</a> Бездепозитные бонусы начисляются только раз один. Не стоит раскрывать свежие аккаунты, дабы получить их повторно. Служба безопасности казино обязательно выявит «левого» участника и заблокирует. Если посетитель выполнит необходимые требования, отыграет свою ставку и решит исключить личный выигрыш, то ему нужно к, собственно казино непременно потребует предоставить ксерокопии личных документов, дабы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные свои вывести не удастся.Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают приз по государствам. Вплоть до как, собственно клуб имеет принимать игроков из Вашей государства, а бездеп мешает. 1×slots зеркало быструю регистрацию а также мгновенное <a href=https://www.webviki.ru/osipovichi.com>https://www.webviki.ru/osipovichi.com</a>
1× slots зеркало
<a href=http://swissairways-va.com/phpBB3/viewtopic.php?p=1659857#p1659857>1×slots регистрация то дальше необходимо пройти</a> 1×slots зеркало на сегодня Помните, собственно любые нарушения управлял сведут на нет ваши старания, и вы наверняка останетесь без начисленного вас бесплатного приза. Всегда изучайте правила начисления и обстоятельства вейджера. По каким вопросам, на коие вы возможности без найти ответы, обращайтесь за разъяснениям и саппорт. <a href=https://kameronuqjw98765.ziblogs.com/30390102/deepnude-ai-navigating-the-fine-line-between-innovation-and-ethics>https://kameronuqjw98765.ziblogs.com/30390102/deepnude-ai-navigating-the-fine-line-between-innovation-and-ethics</a> Но ни не запамятовывайте внимательно разбирать управляла участия в бонусных промоакциях. Если вы нарушите но бы одно условие, позднее вы не сможете устроить недоразумение с администрацией.Помните, собственно в некоторых играх сумма ставки идет в зачет вейджера лишь отчасти. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки числятся как отыгранные деньги, момент как в слотах идет в зачет все one hundred percent суммы. 1×slots зеркало видели такую регистрацию на Постарайтесь отыграть вейджер, дабы замечена возможность забыть заявку на выплату. Кстати, на всех сайтах, представленных в списке, доступны современные платёжные приборы. Вы можете получить выигрыш на электронной кошелёк, карту, телефон.Получить Бездепозитный бонус в интернет казино дело 2-ух кликов. Другой момент, отыграть промо и соблюсти верховодила и обстоятельства отыгрыша. Под правилами предполагается столько вагер, хотя и ограничения по максимальной ставке. Мы осознаем, что в кинотеатр все ставят на зеро и выигрывают. Призываем не создавать подобного. Перед активацией бонуса прочтите правила. Узнайте следующие факторы: Условия получения подарка, за регистрацию, за депо и прочее. Ограничения по максимальной ставке. Зачастую не выше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах возможно отыгрывать вагер. Можно вертеть автоматы, а вагер будет стоять на пространстве. Поэтому принципиально знать, в каких играх возможно осуществлять кратность денежного оборота.
1× слот зеркало
С такими простыми советами любое казино с бонусом за регистрацию способно принести в разы больше выгоды и полезности. <a href=http://www.jjrun.kr/bbs/board.php?bo_table=free&wr_id=407052>http://www.jjrun.kr/bbs/board.php?bo_table=free&wr_id=407052</a> Это один из главных показателей привлекательности дара. С завешенным коэффициентом числе профессионалы не сумеют выполнить обстоятельства по отыгрышу. И неважно, как привлекательно выглядит предложение – бездепозитный бонус казино в объеме $500 или $1 000. Чтобы новички получше вдумались, что же такое вейджер, мы разберём на примере. 1×slots рабочее зеркало на сегодня
x1 slots 1хслотс регистрация перейти на 1×slots
Для вывода средств приз надо(надобно) несомненно отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами акции и вариациями отыгрыша бездепозитного бонуса до его получения, чтобы избежать конфликтных ситуаций.Вейджер не более х30–35 считается приемлемым. Опытные игроки утверждают, собственно с таким вейджером реально остаться в плюсе, в верно подойти к выбору игрового аппарата. Еще одно условие касается размеров ставки. Операторы устанавливают максимальную сумму, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном офисе. При превышении лимита есть риск потерять бонуса. Существующие ограничения относятся и к определенным видам ставок. Например, играя в рулетку, заказчик имеет столкнуться с запретом назначать фишки на шансы.Чаще всего интернет-казино предлагают бездепозитные призы новым юзерам. Эта промо-акция довольно эффективно привлекает новичков, подталкивая их к открытию счета. Конечно, не все они становятся послушными клиентами, хотя сам прецедент регистрации аккаунта играет на руку заведению. скачать 1×slots на андроид мобильная версия <a href=http://lat-puzz.com/phpbb/memberlist.php?mode=viewprofile&u=97032>http://lat-puzz.com/phpbb/memberlist.php?mode=viewprofile&u=97032</a>
1×slot регистрация
Выиграть реальные средства в казино не пополняя счет – сложно, хотя возможно. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными призами и начните играть на бонусные свои. По статистике в 10-ти заведений возможно заработать небольшую необходимую средств за счет бонусных средств. <a href=https://biowiki.clinomics.com/index.php?title=скачать_новинки_кино>https://biowiki.clinomics.com/index.php?title=скачать_новинки_кино</a> Бездепозитный бонус – это финансовое вознаграждение, которое выдается соучастнику забавы в казино, для его привлечения и возникновения заинтересованности. Любой посетитель, кот-ый соответствует условиям выдачи похожего бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое одобрение считается более действенным способом, дающим вероятность стартовать деле, не вкладывая личных материальных средств. 1×slots регистрация на официальном сайте
<b>Смотреть еще похожие новости:</b>
<a href=http://check2go.net/author/jameslob/>1×slots бездепозитный бонус за регистрацию</a>
<a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=462376#pid462376>1×slots быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Составленный специалистами Casino.ru список онлайн-казино с бездепозитным призом дозволяет игрокам сравнить спецпредложения разных операторов. Бездепозитный приз предоставляется новенькому игроку за конкретные деяния. Часто презент в виде денег или фриспинов выдается за регистрацию, спасибо чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.
#5622 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Анна Сидорова, керлингистка Черкесова Бэлла Мухарбиевна порно <a href=https://res-publika.com>1×bet зеркало xbet</a> официальное казино вход букмекерская контора леонов <a href=https://th-royalgclub.com/>1×bet casino</a> ставки на спорт букмекерские конторы человек казино официальные букмекерские конторы казино проиграл букмекерская контора фонбет casino зеркало сегодня винлайн букмекерская контора
DiskiPlus рейтинг казино DiskiPlus Петрова Ольга Викторовна порно <a href=https://www.diskiplus.ru>DiskiPlus casino betting</a> DiskiPlus смотреть фильм казино DiskiPlus champion casino <a href=https://www.diskiplus.ru/>DiskiPlus Черкесова Бэлла Мухарбиевна порно</a> DiskiPlus пин ап casino pin DiskiPlus порно с Илья Осипов (киберспорт) DiskiPlus pin up casino пин ап DiskiPlus бесплатно играем казино DiskiPlus казино рублях DiskiPlus 1×bet зеркало DiskiPlus порно с Голикова Татьяна Алексеевна
#5623 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало на сегодня
Простая процедура получения бездепозитного приза, кот-ая займет менее 2-х мин. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные.Если при регистрации указать промокод, возможно гарантировано получить приз. Где взять ваучер? Посетите тематические блоги либо форумы. Иногда администрация клуба проделывает рассылку ваучеров на электронную почту. В заключительное время игорные дома начали афишироваться в кинокартинах и сериалах. Присмотритесь и наверняка заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных руб. <a href=http://filmkachat.ru/>x1 slots регистрация в 1×slots casino</a> Для получения предоставленных бонусов вам понадобиться — ПК либо мобильное прибор, и остальное дело за небольшим.Подтверждение регистрации. Казино требуют привязки профиля к электронному адресу и номеру телефонного. Для сего на e-mail отправляется письмо ссылаясь, а на телефон ? текстовое сообщение с кодом. <a href=https://forums.ngames.com/forum/league-of-angels/community-ab/general-discussion-ab/62087-innovative-luxury-real-estate-marketing-ideas-that-actually-drive-premium-sales>https://forums.ngames.com/forum/league-of-angels/community-ab/general-discussion-ab/62087-innovative-luxury-real-estate-marketing-ideas-that-actually-drive-premium-sales</a> 1×slots промокод при регистрации 2025 <a href=http://flexitime.mvps.kr/bbs/board.php?bo_table=free&wr_id=1775320?>http://flexitime.mvps.kr/bbs/board.php?bo_table=free&wr_id=1775320?</a>
x1 slots регистрация в 1×slots casino
1хслотс казино зеркало <a href=http://certificate.winko.net/bbs/board.php?bo_table=free&wr_id=173396>http://certificate.winko.net/bbs/board.php?bo_table=free&wr_id=173396</a> Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера. 1×slots casino зеркало 1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, случае не желайте замерзнуть жертвой жуликов либо впустую потратить время;Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в социальных сетях, установку мобильного приложения или официального клиента для ПК. В большинстве казино действуют программки преданности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на грядущий уровень нередко с выдачей бездепа.
1×slots зеркало видели такую регистрацию на
Если простыми текстами, бездепы – это определённая сумма денег либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно забирать подарки. Но есть кое-какие нюансы. Существуют игорные жилища, которые перед тем как начислить бонусы настоятельно привязать аппарат, предоставить копии документов. Чаще всего используются коды. Их надо(надобно) заносить в специальные окошки регистрационной анкеты, если идет о пригласительных призах, либо в определенном разделе личного офиса игрока.Размер бонуса. В качестве бездепов обычно начисляют маленькие суммы, а когда речь идет о бонусах за депозит, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино шансы подарить игроку до 2000$. <a href=http://damoa8949.com/bbs/board.php?bo_table=free&wr_id=5973>http://damoa8949.com/bbs/board.php?bo_table=free&wr_id=5973</a> 1хслотс мобильная версия зеркало Исходя из сего, просто не присутствует мудрых причин махнуть рукой на получение такового бонуса при регистрации. И, кстати, на такой безвозмездной основе у вас все шансы выиграть средства и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные призы, именуют бесплатными онлайн платформами для игр.
1×slots регистрация 1×slots casino 777 online
Основное верховодило получения бездепа ? творимый аккаунт должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов требовательно запрещено. Проверка проводится по имени, адресу электронной почты, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депо нужно соблюдать несложную очередность поступков. <a href=https://rolivka.online/forum/showthread.php?tid=33870>1хслот скачать</a> Но а случае вы теснее профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в интернет казино;Некоторые онлайн-казино без депозита предлагают свежим посетителям избрать приз при регистрации. Будьте внимательны: выбрав раз, вы в безусловном большинстве случаев не сможете воспользоваться остальными. 1×slots официальный сайт, скачать <a href=http://3.248.198.109/doku.php?id=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%BF%D0%B8%D1%86%D1%86%D1%8B%20%D0%B8%D0%B7%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO>http://3.248.198.109/doku.php?id=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%BF%D0%B8%D1%86%D1%86%D1%8B%20%D0%B8%D0%B7%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO</a>
1×slots casino регистрация на сайте
Свежий приз начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в пользовании средствами, ну случае отыгрыша оператор может установить лимитирование на вывод средств.Активация происходит за промокодов, которые вводятся в личном кабинете последствии регистрации. Среди спецпредложений в списке Casino.ru содержатся неповторимые промокоды, которые доступны лишь посетителям портала. Другие способы начисления средств ? автоматическая активация незамедлительно в сотворения аккаунта и получение дара по запросу в службу технической помощи. <a href=https://polonistyka.com/user-2/charlesunofs/>https://polonistyka.com/user-2/charlesunofs/</a> Фриспины начисляются по конкретной ставке. После их активации игроку нужно запустить слот и убедиться, собственно в нем отображаются бесплатные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода после отыгрыша определяется оператором и изредка превышает 5 000 руб. 1×slots официальный зеркало рабочее Перечисленные выше основные свойства сочетают фактически каждый бонус и являются стереотипными для бездепозитных бонусных начислений в казино.Итак, дабы благотворительные бонусные кредиты трансформировались в реальные средства, которыми вы можете управлять по своему усмотрению, их нужно отыграть. Вейджер идет уточнять в правилах онлайн-казино.
<b>Смотреть еще похожие новости:</b>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=272398>1×slots на любой вкус как пройти регистрацию</a>
<a href=https://rolivka.online/forum/showthread.php?tid=28624>1×slot регистрация</a>
<a href=https://www.kfz-gringer.at/index.php/forum/welcome-mat/64234–1×slots-1×slots-review-live#63999>1×slots регистрация 1×slots review live</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Внесение депо – Будьте готовы пополнить счет в отыгрыша приза. Это стандартное требование управлял для данного типа промо-акций. Лучше заблаговременно уточнить, какую сумму надо(надобно) будет вносить на счет. Как управляло, речь идет о минимальном депозите, хотя вы должны быть уверены, что он вас по кармашку.
#5624 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Захарова Мария Владимировна порно с Алексей Миранчук (футбол) <a href=https://slon-ru.com/>рокс казино</a> букмекерская контора без pin casino <a href=https://strelochnik.com/>casino актуальное зеркало</a> порно с Юлия Ефимова, пловчиха casino online зеркало порно с Дронова Александра Викторовна скачать 1×bet на андроид бесплатно букмекерская контора на андроид букмекерская контора официальный сайт скачать ограбление казино
DiskiPlus пина casino DiskiPlus porno Илья Ковальчук (хоккей) <a href=https://diskiplus.ru>DiskiPlus про казино</a> DiskiPlus порно с Юлия Ефимова DiskiPlus кент казино <a href=https://diskiplus.ru>DiskiPlus приложения букмекерских контор на андроид</a> DiskiPlus казино пину DiskiPlus casino официальный зеркало DiskiPlus казино вулкан DiskiPlus casino pin официальный DiskiPlus Кузнецова Анна Юрьевна порно DiskiPlus порно с Александр Головин (футбол) DiskiPlus Любимова Ольга Борисовна порно
#5625 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало рабочее
Промокод – определённая композиция знаков, коию необходимо установить в подходящее поле при твореньи учетной записи либо активировать в собственном профиле игрока в разделе с бонусами.Обычно для получения призов без депозита, казино выдвигает лояльные и абсолютно выполнимые обстоятельства, хотя есть ряд поступков которые воспрещены и могут повлечь за собой противные результаты: <a href=http://filmkachat.ru/>1×slots регистрация</a> Акции распространяются как на все игры казино, так и на ограниченный перечень. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и другие. Промо возможность охватывать разработки одного производителя. Бездеп не пересекается с другими промоакциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, изготовленные бонусными средствами. Для идентификации платежных реквизитов игрока возможность потребоваться пополнение счета на наименьшую необходимую.Бонус начисляется игроку сразу в регистрации и прохождения верификации в казино и не настятельно от клиента внесения депозита. Как управляло, размер приза в подобном случае довольно скромный, впрочем позволяет новичкам познакомиться с игрой без риска настоящими средствами. <a href=https://plaza.rakuten.co.jp/prilla/diary/202411240001/>https://plaza.rakuten.co.jp/prilla/diary/202411240001/</a> 1×slot зеркало рабочее регистрации на телефон придет <a href=http://munservis.mirniy.ru/index.php?subaction=userinfo&user=excitedemissary>http://munservis.mirniy.ru/index.php?subaction=userinfo&user=excitedemissary</a>
1х слот 1хслотс регистрация перейти на 1×slots
В настоящее время получить приз за регистрацию в казино довольно просто. Почти любой игорный дом с радостью даст средства либо благотворительные вращения. Многие игроки используют этим и не стесняются региться в любом клубе с выгодными критериями. Кстати, это замечательная вероятность выдумать выигрышную тактику и сорвать куш.Даже не выиграв крупную необходимую, игрок увлекательно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе превосходнейших промоакций с. Достаточно периодически изучать список новых интернет казино с выводом бонуса без депозита в данном разделе. 1×slots регистрация на официальном сайте При исполнении условий отыгрыша и верификации, деньги с бонусного счета переводятся на главный и могут быть выведены на карту либо электронный кошелек. Лимиты на вывод и сроки проведения транзакции в от избранной платежной системы. <a href=http://www.tronicb7records.com/new/index.php?option=com_k2&view=itemlist&task=user&id=94930>http://www.tronicb7records.com/new/index.php?option=com_k2&view=itemlist&task=user&id=94930</a> Вейджер менее х30–35 считается приемлемым. Опытные игроки заявляют, собственно с таким вейджером реально остаться в плюсе, если верно подойти к выбору игрового аппарата.Любой выигрыш по ставке выше установленного лимита будет являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, ну случае выигрыша его сумма не поступит на счёт клиента — итог игры несомненно всецело аннулирован. рабочее зеркало 1×slots Верификация важна для дополнительной безопасности и подсобляет техподдержке выявить бонусхантеров и плутов. Кстати, на платформах выводы крупных сумм доступны лишь в подтверждения личности.
1×slots промокод при регистрации
В интернете слишком много скриптовых сайтов, которые принадлежат плутам. Их главная задача – привлечь гэмблеров, пообещав не только щедрые презенты, хотя и солидные выигрыши. Так что кое-какие сайты предлагают получить за регистрацию том $1 000. <a href=http://specialacel.hu/component/community/demonicsocialit/profile>http://specialacel.hu/component/community/demonicsocialit/profile</a> Диапазон ставок, которые вправе сделать игрок, кроме лимитирован. Обычно ставить можно маленькую необходимую — около 10–30 руб. За одно вращение. 1хслотс официальный сайт зеркало
1×slot зеркало
<a href=https://melhorlance.com.br/minha-conta/>1хслот зеркало сайта</a> К образцу, игроку выдаются безвозмездные средства в заведении в размере пятидесяти или ста долларов (вейджер на коие составляет 100х). То есть, каждому новоприбывшему геймеру выскакивает привлекающая иллюстрация, кот-ая обещает выплату всех зачисленных фирмой средств. Не стоит обращать внимания на казино приз за регистрацию без депозита с слишком немалый или очень маленькой суммой призов, поэтому собственно, числе тщательно изучив все обстоятельства, тут вероятнее всего, будет какой-то подвох.Бездепозитный бонус казино 2022 с выводом за регистрацию предоставляет вероятность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и проверить качество работы службы поддержки. Довольно часто, начиная игровой процесс, игрок теснее не желает останавливаться и делает реальный вклад. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать даром вполне как один таки с призом за регистрацию без надобности заносить депозит. Подтверждение электрической почты – одно из основных критерий, коие есть практически в любом бездепозитном казино. Чтобы верифицировать электронную почту, достаточно перейти по интенсивной ссылке в письме, полученном от азартного клуба. 1×slots зеркало регистрация то дальше необходимо пройти <a href=https://mega-games.pl/user/CraigAcrop/>https://mega-games.pl/user/CraigAcrop/</a> Как только на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу последствии этого можно оставить заявку на вывод выигрыша. Кредиты выгодно выделяются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом настоящих средств и дают возможность ощутить азарт. Во-вторых – возможно насладиться каждой азартной забавой доступной на сайте. В вашем распоряжении находятся автоматы, настольные приложение, видео-покер, Live-дилеры.
1×slots зеркало регистрация в 1×slots casino
Зарегистрируйтесь. Для регистрации почаще всего достаточно установить свой номер телефонного и почтовый адресок, последствии чего ввести полученный код из СМС. Возможно, требуется указать промокод. В правилах акции будет написано, где его надо включать. Иногда это бы создавать при регистрации, иногда — теснее в сотворения собственного кабинета, на отдельной странице. <a href=https://biznes-knigi.com/user/Josephdog/>https://biznes-knigi.com/user/Josephdog/</a> 1×slots рабочее зеркало на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=http://miupsik.ru/forums/showthread.php?tid=246532>1×slots зеркало регистрацию более популярный вариант это</a>
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=494237>1×slots сайт</a>
<a href=https://forum.bandariklan.com/showthread.php?tid=388758>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=36372>1×slots casino регистрация 1×slotscasin online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бесплатные бонусы казино без депо возможно получить в виде денежных средств на бонусный счет (исключить их возможно лишь в отыгрыша), фриспинов, забавы либо кешбэк-бонуса. Нельзя рассматривать забаву на средства, как вариант заработка. Азартные игры воспрещены для лиц младше 18 лет. Topcasinobonuses.mobi не является организатором азартных игр. Сайт носит информационный нрав.
#5626 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пинко casino Приезжева Екатерина Геннадьевна порно <a href=https://slon-ru.com/>казино фильм смотреть онлайн</a> букмекерская контора фонбет официальный сайт зеркала официальных сайтов казино <a href=https://strelochnik.com/>Юдаева Ксения Валентиновна порно</a> бесплатные букмекерские конторы пин up casino 1×bet сайт спорт букмекерская контора casinos xyz казино вход официальный сайт человек казино
DiskiPlus porno Марина Александрова DiskiPlus часы казино <a href=https://www.diskiplus.ru>DiskiPlus Нургалиева Эльвира Рамиловна порно</a> DiskiPlus casino игровой автомат DiskiPlus пин up casino <a href=https://www.diskiplus.ru>DiskiPlus вывод казино</a> DiskiPlus pinco casino DiskiPlus up casino скачать DiskiPlus слоты казино DiskiPlus яндекс казино DiskiPlus порно с Александр Головин (футбол) DiskiPlus порно с Алексей Миранчук (футбол) DiskiPlus 1×slots casino
#5627 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Ирина Горбачева pin up casino top top <a href=https://strelochnik.com/>1×bet</a> почему в казино нет окон ап казино <a href=https://www.ossetia.tv/>porno Илья Ковальчук (хоккей)</a> Валентина Матвиенко порно порно с Диана Шнайдер (теннис) скачать 1×bet на андроид порно с Сергей Бобровский (хоккей) порно с Евгения Медведева casino скачать приложение Фастова Елена Владимировна порно
DiskiPlus kent casino DiskiPlus казино пину <a href=https://diskiplus.ru>DiskiPlus 1×bet зеркало</a> DiskiPlus скачиваемые казино DiskiPlus казино регистрации <a href=https://www.diskiplus.ru>DiskiPlus леон букмекерская контора</a> DiskiPlus букмекерская контора мостбет DiskiPlus лучшие онлайн казино DiskiPlus champion casino DiskiPlus казино зеркало сегодня DiskiPlus porno Алена Косторная (фигурное катание) DiskiPlus кент казино DiskiPlus зеркала казино
#5628 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Набиуллина Эльвира Сахипзадовна порно порно с Афонина Марина Игоревна <a href=https://strelochnik.com/>ramenbet casino</a> букмекерская контора зенит смотреть фильм казино <a href=https://rhymes-punches.com/>порно с Анна Калинская (теннис)</a> бывшие казино порно с Васильева Татьяна Викторовна Ирина Горбачева казино онлайн казино сегодня porno Мира Андреева (теннис) ешь казино
DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus porno Анна Сидорова, керлингистка <a href=https://diskiplus.ru/>DiskiPlus демо казино</a> DiskiPlus порно с Илюшникова Татьяна Александровна DiskiPlus porno Марина Александрова <a href=https://www.diskiplus.ru/>DiskiPlus играющие казино</a> DiskiPlus Скоробогатова Ольга Николаевна порно DiskiPlus Радченко Светлана Юрьевна порно DiskiPlus водка казино DiskiPlus pin casino зеркало DiskiPlus Хорова Наталья Александровна порно DiskiPlus букмекерская контора бесплатно скачать DiskiPlus самое казино
#5629 Charlesgunnyhttp://filmkachat.ru
1×slots бонус за регистрацию
Сроки активации бонуса устанавливаются каждым казино, хотя почаще всего они не превосходят недели с этапа получения. Игроку обязательно нужно применять бездеп в течение указанного срока, в ином случае бонус просто исчезнет. Каждый бонус возможно получить только один один, поэтому в не использовать бездеп в срок, у игрока не несомненно 2 шанса им воспользоваться. <a href=http://filmkachat.ru/>1 х слотс зеркало</a> Возьми собственный презент. Чаще всего бонус активизируется сразу в регистрации. Но бывают истории, когда надо(надобно) забежать в собственный кабинет либо написать в справочную службу.Благодаря программке преданности от игорного заведения, можно брать хороший старт и без дополнительных инвестициям запустить видеослоты. Кроме как, можно рассчитывать на реальную фортуну и получить, без инвестиции личных денег, великий выигрыш. <a href=http://prsync.com/shopavto/shopavto-is-a-car-buyout-service-operating-in-odessa-4371377/>http://prsync.com/shopavto/shopavto-is-a-car-buyout-service-operating-in-odessa-4371377/</a> 1хслотс зеркало на сегодня <a href=http://cc.koreaapp.kr/bbs/board.php?bo_table=free&wr_id=2722793>http://cc.koreaapp.kr/bbs/board.php?bo_table=free&wr_id=2722793</a> Получать информацию о самых прибыльных бонусах можно без неизменного прогноза новостей казино. Мы взяли данную задачу на себя и безпрерывно смотрим за услугами операторов, выбирая лучшие из них. В данном разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список акций периодически пополняется. В топ вошли самые свежие бездепозитные призы за регистрацию в казино 2020, кратковременные и замкнутые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру прочим аспектам. Если срок действия промоакции истек, она удаляется из списка.
1×slots актуальное зеркало
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=378469>1×slots зеркало регистрацию более популярный вариант это</a> 1×slots casino регистрация 1×slotscasin online При регистрации следует свидетельствовать только достоверную информацию. Когда учетная запись будет активна, замечен доступ в Личный офис. В нем можно выбрать валюту, установить промокод и узнать доскональные верховодила получения и отыгрыша бездепа. Краткая информация об акции нередко находится именно на регистрационной форме.Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного приза достаточно пополнения баланса и доказательства личности. В других же клубах, нужно некоторое один прокрутить собственный депо. <a href=http://dooood.fun/member.php?action=profile&uid=3335>http://dooood.fun/member.php?action=profile&uid=3335</a> 1×slots зеркало сайта
1×slots официальный сайт скачать
Каждая игровая платформа отличается критериями по получению и отыгрышу бездепов. В правилах отчетливо расписаны кратковременные рамки, за которые надо(надобно) прокрутить вейджер. Также не забывайте про максимальный размер ставки и максимальную необходимую выплаты. С другой стороны, дабы получить бездепозитные бонусы казино, достаточно потратить не более 1 минутки. <a href=http://youlong.vip/home.php?mod=space&uid=58699>http://youlong.vip/home.php?mod=space&uid=58699</a> Но не думать, собственно снабжая пользователей такими бонусами, казино занимается спонсированием. Ведь размеры вознаграждений, в, не великие (средним размером от 5 до 20 долларов). И на эти средства налагаются определенные обстоятельства и ограничения, обязательные к исполнению игрока, случае в последствии он вожделеет получить все свои выигранные финансы. 1×slots casino зеркало рабочее
1 х слотс зеркало
4. Заберите презент. Чаще всего приз активируется незамедлительно в регистрации. Но посещают ситуации, когда надо(надобно) зайти в личный офис или написать в службу поддержки.Выполнив все требования оператора, заказчик может оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит примерно менее суток. Если дополнительно потребуется пройти функцию верификации, то срок возрастает до 1–2 трудящихся дней. Для перевода используются банковские инструменты и электронные платежные системы. Второй способ подходит чем, так как масса транзакций в осуществляются мгновенно. В связи со спецификой функционирования банков обработка платежей возможность взятьвдолг(взятьвзаймы) до нескольких трудящихся дней. 1×slots зеркало сайта <a href=https://buketik39.ru/user/RenaldoGem/>https://buketik39.ru/user/RenaldoGem/</a>
1×slot зеркало рабочее регистрации на телефон придет
В бонусную программу многих операторов входят регулярные бездепы. Это бессрочные акции, поощряющие активных неизменных игроков. Популярный формат — раздача фриспинов по определенным дням недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают постоянные бонусы без депозита в размен на скопленные баллы лояльности. <a href=https://www.covoiturage.cm/author/samararenne/>https://www.covoiturage.cm/author/samararenne/</a> В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с безвозмездных вращений. Прибыль, коию Вы заработаете на этом бездепе возможно ставить на вывод без какого или отыгрыша. 1×slots зеркало сайта
<b>Смотреть еще похожие новости:</b>
<a href=https://karakol.com.kg/user/Jameskef/>1×slots регистрация на 1хслотс</a>
<a href=http://mi.minfish.com/home.php?mod=space&uid=1196847>1×slots регистрацию процедура займет всего лишь</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? Любой выигрыш по ставке выше установленного лимита будет считаться недействительным. То есть ставка не будет засчитана при отыгрыше, а в случае выигрыша его сумма не поступит на счёт посетителя — результат игры несомненно полностью аннулирован.
#5630 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino игровой автомат Александра Бортич <a href=https://specreporter.com/>пин ап букмекерская контора</a> Ирина Горбачева букмекерская контора леонов <a href=https://7club7.com/>1×bet слоты</a> винлайн букмекерская контора официальный сайт 1×bet зеркало рабочее champion casino пин ап букмекерская контора официальные букмекерские конторы 1×bet зеркало рабочее на сегодня букмекерская контора скачать приложение
DiskiPlus 1×bet официальный сайт DiskiPlus top casino <a href=https://www.diskiplus.ru>DiskiPlus 1×bet зеркало на сегодня</a> DiskiPlus Чулпан Хаматова DiskiPlus казино вход <a href=https://diskiplus.ru/>DiskiPlus порно с Зырянова Анастасия Владимировна</a> DiskiPlus букмекерскую контору пин DiskiPlus casino автомат DiskiPlus порно с Петр Ян (ММА) DiskiPlus pin up casino top top DiskiPlus казино сегодня DiskiPlus бк букмекерская контора DiskiPlus porno Екатерина Ефременкова, шорт-трекистка
#5631 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации 2025
За счёт спинов выйдет запустить различные онлайн слоты, протестировать стратегии и поднабраться навыка. Фишка сомнений, что вращения начисляются на топовые аппараты с уникальными опциями и высочайшей отдачей. Не запамятовывайте, что в любом акционном предложении предусмотрены специальные требования – кратковременные ограничения, максимальный размер ставки, список доступных игр.Прежде чем активировать бездеп, нужно увериться том,, собственно страна, гражданином коей является игрок, не заходит в перечень запрещенных. <a href=http://filmkachat.ru/>1×slots промокод при регистрации</a> <a href=https://www.tadalive.com/blog/446712/why-every-dream-home-needs-a-solid-interior-design-plan/>https://www.tadalive.com/blog/446712/why-every-dream-home-needs-a-solid-interior-design-plan/</a> Выполнив все требования оператора, заказчик имеет оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит примерно не более суток. Если дополнительно требуется пройти процедуру верификации, то срок увеличивается до 1–2 трудящихся дней. Для перевода применяются банковские приборы и электрические платежные системы. Второй способ подходит лучше, так как большинство транзакций такой осуществляются моментально. В связи со спецификой функционирования банков обработка платежей возможность занять до нескольких трудящихся дней. 1×slots официальный demo регистрация в 1×slots casino <a href=http://doka-baza.ru/bitrix/rk.php?goto=http://lillozav.com/bitrix/redirect.php?goto=http://goldservice116.ru/bitrix/rk.php?goto=https://telegra.ph/Voprosy-Federalnoj-migracionnoj-sluzhby-09–23>http://doka-baza.ru/bitrix/rk.php?goto=http://lillozav.com/bitrix/redirect.php?goto=http://goldservice116.ru/bitrix/rk.php?goto=https://telegra.ph/Voprosy-Federalnoj-migracionnoj-sluzhby-09–23</a> При регистрации по указывать лишь достоверную информацию. Когда учетная запись будет активна, замечен доступ в Личный кабинет. В нем возможно избрать валюту, ввести промокод и узнать подробные управляла получения и отыгрыша бездепа. Краткая информация об промоакции нередко присутствует непосредственно на регистрационной форме.Бездепозитные призы истинными средствами, которые можно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадались.
1×slots актуальное зеркало
1хслотс рабочее зеркало на сегодня <a href=http://fr994575.bget.ru/user/Joshuafaw/>http://fr994575.bget.ru/user/Joshuafaw/</a> Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. 1хслот официальный сайт зеркало
1хслотс зеркало
Размер приза. В качестве бездепов обычно начисляют маленькие суммы, а когда речь идет о бонусах за депо, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино могут презентовать игроку до 2000$.Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, the decision лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. <a href=http://tmwip-chelm.org.pl/profile.php?lookup=19080>http://tmwip-chelm.org.pl/profile.php?lookup=19080</a> Но существуют азартные заведения, готовые просто так вручить средства на забаву. Для этого достаточно сделать профиль. Чтобы исключить выигрыш, сперва необходимо выполнить вейджеровые условия, прописанные в критериях получения бездепа. 1× slots регистрация в 1×slots casino С не отыгранным призом воспрещается превосходить объем наибольшей ставки. Нарушение сего обстоятельства виде аннулирование выигрыша.Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды присутствуют на этой странице. Посетитель имеет расценить обстоятельства получения и начать выступать на средства без внесения депо. При этом игроку принципиально разуметь, на каких критериях и какими способами него исключить полученный выигрыш. Для сего нужно расценить перечень подключенных платежных систем.
x1 slots 1хслотс регистрация перейти на 1×slots
Высокая конкурентность в разделе азартных игр мотивирует операторов привлекать клиентов разнородными промоакциями. Благодаря этому у посетителей появляется вероятность получить бонусы в казино за регистрацию без депо. Воспользоваться таким предложением возможно, минуя функцию внесения средств на игровой счет, просто активировав аккаунт на веб-сайте. Наш гид по бездепам поможет избрать самую симпатичную бонусную программу, узнать управляла получения такого гонорары и распорядиться им с максимальной выгодой.Чаще всего казино приз за регистрацию без депо даёт возможность запустить любой машина. Но лучше пристально ознакомиться с критериями. Иногда для игры доступны лишь определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, превосходнее начать знакомство с миром азарта именно с «одноруких злодеев». Активация происходит за промокодов, коие вводятся в личном офисе после регистрации. Среди спецпредложений в перечне Casino.ru содержатся неповторимые промокоды, которые доступны только посетителям портала. Другие методы начисления средств ? автоматическая активация незамедлительно в творенья аккаунта и получение дара по запросу в службу технической поддержки. Прочитайте правила бонусной программки, какой желайте принять. Да, мы безотступно рекомендуем устроить это до регистрации. 1×slots зеркало видели такую регистрацию на <a href=http://128.199.110.255/home.php?mod=space&uid=311995>http://128.199.110.255/home.php?mod=space&uid=311995</a> Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.
сайт 1× slots casino
Для получения приза нужно ознакомиться с программой лояльности казино и сделать ставки на сумму, нужную для перехода на следующий степень.Фриплей-бонусы встречаются только в некоторых клубах. Они зачисляются незамедлительно последствии творения профиля и активны непродолжительное время. Если не успеете потратить средства, они попросту сгорят. Касаемо времени, в большинстве случаев бонусы активны на часа. Эффективность бездепов в качестве рекламного прибора оценили все операторы. Малоизвестные площадки используют эти промоакции, чтобы живо набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны неизменных посетителей. Не все сайты, дающие презенты без депо, рекомендованы к забаве. За симпатичным промоописанием шансы скрываться неосуществимые обстоятельства отыгрыша прочие подводные камни. <a href=https://nakhodka-lib.ru/forums/users/natalia51z/edit/?updated=true/users/natalia51z/>https://nakhodka-lib.ru/forums/users/natalia51z/edit/?updated=true/users/natalia51z/</a> 1×slots официальный зеркало рабочее Для отыгрыша бонуса казино обязывает игрока сыграть на сумму, в некоторое раз превосходящую необходимую приобретенного приза — тут выгода фирмы явна.Доступ к дару возможность раскрываться механически после введения промокода или воззвания в саппорта сайта. В первом случае от юзера не потребуется практически действий. Бездеп с активацией по коду встречается чаще всего. Игроку необходимо ввести совокупа символов в графе, которая может пребывать в регистрационной форме в Личном офисе.
<b>Смотреть еще похожие новости:</b>
<a href=https://portugal-campings.com/pt/profile/jamescip/>1хслотс рабочее зеркало</a>
<a href=https://nztw.org/forum.php?mod=viewthread&tid=563185&pid=895244&page=1&extra=page%3D1#pid895244>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Одним из поводов отдавать преимущество, льготу одному или иному заведению содержится в привлекательности предлагаемых промоакций и безвозмездных предложений. Безвозмездные фриспины, выдаваемые без нужды делать какой-нибудь лепта, в перечне располагается далековато не в конце.
#5632 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Илья Осипов (киберспорт) порно с Алексей Миранчук (футбол) <a href=https://res-publika.com>скачать 1×bet на андроид бесплатно</a> букмекерские конторы без депозита казино ли <a href=https://th-royalgclub.com/>казино вход</a> Матвиенко Валентина Ивановна порно pin up casino казино сочи ramenbet casino Хорова Наталья Александровна порно porno Игорь Акинфеев (футбол) официальные букмекерские конторы скачать
DiskiPlus казино регистрации DiskiPlus casino зеркало сегодня рабочее <a href=https://diskiplus.ru>DiskiPlus яндекс казино</a> DiskiPlus порно с Юлия Ефимова, пловчиха DiskiPlus Валентина Матвиенко порно <a href=https://diskiplus.ru/>DiskiPlus 1×bet скачать приложение</a> DiskiPlus пина casino DiskiPlus Фастова Елена Владимировна порно DiskiPlus porno Андрей Рублев (теннис) DiskiPlus бесплатные букмекерские конторы DiskiPlus сайты казино DiskiPlus официальные зеркала казино DiskiPlus Валентина Матвиенко порно
#5633 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало на сегодня
Бонус начисляется игроку незамедлительно последствии регистрации и прохождения верификации в казино и не настятельно от посетителя внесения депозита. Как правило, размер приза в схожем случае довольно умеренный, впрочем разрешает новичкам познакомиться с игрой без риска реальными деньгами.Но не думать, что снабжая пользователей такими призами, казино занимается спонсированием. Ведь размеры вознаграждений, главном, не немалые (средним размером от 5 до 20 $). И на эти средства налагаются определенные обстоятельства и ограничения, неотклонимые к исполненью игрока, если в последствии он вожделеет получить все свои выигранные финансы. <a href=http://filmkachat.ru/>зеркала 1×slots</a> Перед активацией принципиально пристально выучить обстоятельства промоакции. Чем ниже вейджер, тем больше возможная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, протяжении коих возможно воспользоваться предложением. Если бездеп обхватывает ограниченный перечень игр, рекомендуется разузнать наибольшие коэффициенты, уровень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь в случае, если оператор не установил взыскательные ограничения на наивысшую сумму ставки.Иногда для получения призов нужно спутаться с представителями службы поддержки. Удобнее всего с ними разговаривать в онлайн-сате, желая иногда достаточно запроса по электрической почте. <a href=https://www.gift-me.net/blogs/201226/%D0%9E%D1%86%D0%B5%D0%BD%D0%BA%D0%B0-%D0%B0%D0%B2%D1%82%D0%BE-%D0%BE%D0%BD%D0%BB%D0%B0%D0%B9%D0%BD-%D0%BA%D0%B0%D0%BA-%D1%80%D0%B0%D0%B1%D0%BE%D1%82%D0%B0%D0%B5%D1%82-%D0%B8-%D0%BD%D0%B0-%D1%87%D1%82%D0%BE-%D0%BE%D0%B1%D1%80%D0%B0%D1%82%D0%B8%D1%82%D1%8C-%D0%B2%D0%BD%D0%B8%D0%BC%D0%B0%D0%BD%D0%B8%D0%B5>https://www.gift-me.net/blogs/201226/%D0%9E%D1%86%D0%B5%D0%BD%D0%BA%D0%B0-%D0%B0%D0%B2%D1%82%D0%BE-%D0%BE%D0%BD%D0%BB%D0%B0%D0%B9%D0%BD-%D0%BA%D0%B0%D0%BA-%D1%80%D0%B0%D0%B1%D0%BE%D1%82%D0%B0%D0%B5%D1%82-%D0%B8-%D0%BD%D0%B0-%D1%87%D1%82%D0%BE-%D0%BE%D0%B1%D1%80%D0%B0%D1%82%D0%B8%D1%82%D1%8C-%D0%B2%D0%BD%D0%B8%D0%BC%D0%B0%D0%BD%D0%B8%D0%B5</a> На безвозмездные бонусы онлайн-казино практически постоянно распространяется ограничения по стране проживания клиентов. Даже случае вас разрешено раскрывать счет и играть на деньги в заведении, это еще не означают, собственно вас доступны no deposit bonuses. рабочее зеркало 1хслотс <a href=https://snippet.host/agedbe>https://snippet.host/agedbe</a>
1×slots зеркало
Некоторые сайты, до чем обмануть регистрацию игроков, предлагают ответить на количество базисных вопросов. Цель проведения подобной викторины – выявить случайных людей, которые не имеют представления о покере, и не разрешить получения ими призов. Если гость уже играл в казино, то ответить на полтора 10 несложных вопросов несомненно нетрудно. Очень часто, ответы возможно найти на официальных сайтах данных учреждений. 1× slots регистрация в 1×slots casino Чаще всего интернет-казино предлагают бездепозитные бонусы новым юзерам. Эта промо-акция очень отлично завлекает начинающих, подталкивая их к открытию счета. Конечно, не все становятся преданными посетителями, но сам прецедент регистрации аккаунта играет на руку заведению. <a href=http://www.sglpw.cn/home.php?mod=space&uid=349682>http://www.sglpw.cn/home.php?mod=space&uid=349682</a> сайт 1× slots casino
1× slots casino зеркало
Также бездепозитные бонусы имеют работать методом вернуть к забаве клиентов, временно приостановивших своё сотрудничество с компанией: уведомление о бездепе поступает на мобильный телефонный или почту.Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. Бонус за регистрацию в казино без депо с выводом средств нужно отыграть. Зачастую для отыгрыша может понадобиться сделать ставки на сумму, в некоторое 10-ов один превосходящую сумму приза либо выигрыша. <a href=http://www.scrapblog.cz/2016/11/kalendarovy-maraton-2016–9-den.html>http://www.scrapblog.cz/2016/11/kalendarovy-maraton-2016–9-den.html</a> В бонусную программу множества операторов входят регулярные бездепы. Это бессрочные акции, поощряющие интенсивных неизменных игроков. Популярный формат — раздача фриспинов по конкретным дням недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают постоянные призы без депозита в размен на накопленные баллы лояльности.Для отыгрыша приза казино обязывает игрока поиграть на необходимую, в некоторое раз превышающую сумму приобретенного приза — тут выгода фирмы очевидна. 1×slots зеркало этих способов предполагает регистрацию Список например нарекаемых «разрешенных территорий» прилагается к правилам бонусной программки игорного портала. Обязательно проверьте, распространяются ли на вас похожие наказания.При забаве на бонусные свои запрещается выступать в игровые автоматы с современным джекпотом и игры из радела live casino. Кроме как, некоторые казино дают бездеп на один либо некоторое определенных слотов, и в других играх Вы не можете на их играть.
1×slots зеркало регистрация в 1×slots casino
Иногда в качестве бездепа, казино дарит минимальный бонус (до 50 руб. ), ради которого не заморачиваться.Наличие у игрока второго аккаунта. Запрещено создавать количество профилей для неоднократного получения бездепов. В онлайне слишком большое скриптовых сайтов, которые принадлежат жуликам. Их главная задача – заинтересовать гэмблеров, пообещав не великодушные подарки, хотя и крупные выигрыши. Так что кое-какие веб-сайты предлагают получить за регистрацию том $1 000. Получать информацию о самых выгодных призах возможно без неизменного мониторинга новостей казино. Мы брали эту задачу на себя и постоянно следим за услугами операторов, избирая наихорошие из их. В данном разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список промоакций регулярно дополняется. В топ вошли самые новые бездепозитные призы за регистрацию в казино 2020, временные и закрытые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и аспектам. Если срок действия акции истек, она удаляется из списка.Игры, в можно выступать на бонусные средства. Проверьте список игр, в можно играть на бонусные средства, вероятно они Вам не понравятся и надо расходовать своё время на эту акцию. 1×slots casino регистрация 1×slotscasino09k online <a href=http://rabotalnr.ru/users/alacu>http://rabotalnr.ru/users/alacu</a> Если площадка презентует бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь завести акк на сайте и активировать его, подтвердив адрес электрической почты, номер аппарата или иные данные, коие требует оператор. Перед этим нужно увериться, собственно пользователь находится на официальном веб-сайте казино, не на мошеннической площадке.
1×slots быструю регистрацию а также мгновенное
В некоторых онлайн казино для получения бездепозитных бонусов не довольно просто зарегистрироваться на сайте клуба и доказать свои контактные данные. Дополнительно потребуется активация промокода. Для получения приза нужно ознакомиться с программой лояльности казино и сделать ставки на сумму, нужную для перехода на следующий степень.Если вы выбрали себе количество брендов которые вас больше всего приглянулись, для неизменной игры! Таких гемблеров казино очень предпочитает и оценивает, за частую эти игроки становятся VIP игроками заведения, коим часто поступают прибыльные предложения вид призов, так же туда заходит и бездепозитные. <a href=http://shina.su/bitrix/redirect.php?goto=http://seaforum.aqualogo.ru/go/?http://ppfinsurance.ru/bitrix/redirect.php?goto=https://telegra.ph/Svezhij-vzglyad-na-Omoda-S5–sovremennyj-sedan-kotoryj-vydelyaetsya-09–23>http://shina.su/bitrix/redirect.php?goto=http://seaforum.aqualogo.ru/go/?http://ppfinsurance.ru/bitrix/redirect.php?goto=https://telegra.ph/Svezhij-vzglyad-na-Omoda-S5–sovremennyj-sedan-kotoryj-vydelyaetsya-09–23</a> 1× slots официальный Когда идет о валютных бонусах, казино практически устанавливают условия вейджера, которые необходимо выполнить, чтобы вывести выигрыш.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.arka-bahce.org/forum/showthread.php?p=764578#post764578>1 x slots casino</a>
<a href=http://miupsik.ru/forums/showthread.php?tid=222247>1×slots официальный сайт скачать</a>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=136134>1× slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Изучить управляла и обстоятельства получения бездепозитных бонусов казино, Вы сможете у нас на сайте в разделе с призами либо на официальном сайте избранного Вами казино. Если возможности найти необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электрической почте.
#5634 Charlesgunnyhttp://filmkachat.ru
1×slot казино зеркало
В интернет-сети практически возможно отыскать списки более знаменитых и гарантированных поощрительных программ от модных онлайн-казино. <a href=http://filmkachat.ru/>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a> Условия, на коих предоставляется бездеп, регулируются казино. Каждая промоакция имеет доскональные верховодила, гиперссылка на коие обыкновенно находится в промообъявлении. В их указываются лимиты, вейджер, список дешевых игр. Если оператор скрывает данные о предложении, то воспользоваться им не. <a href=https://ilde2.upf.edu/clatmooc/v/ibq>https://ilde2.upf.edu/clatmooc/v/ibq</a> Осталось избрать казино с призом за регистрацию и сделать профиль. После активации подарка выигрыш находится от Фортуны и навыков. зеркала 1×slots <a href=https://clients1.google.cd/url?q=https://doctorlazuta.by/>https://clients1.google.cd/url?q=https://doctorlazuta.by/</a> Если вы опытный игрок, вы обязаны знать, что приз без депозита – редчайшая находка. Тем не менее, мы раз исследуем онлайн, чтобы найти для вас превосходнейшие бездепозитные предложения.Во всех легальных онлайн-казино Беларуси необходимо подтверждение паспортных данных для игры — это заявка правительства страны.
1×slots актуальное зеркало
Вывод выигрыша с бездепозитных бонусов казино – великодушный презент от азартных клубов. Но дабы вывести собственный доход, необходимо выполнить ряд условий:Чтобы получить возможность вывести выгода с бездепозитного приза в казино, нужно выполнить ряд критерий: <a href=https://www.reisezielforum.de/viewtopic.php?t=348907>1×slots регистрация то дальше необходимо пройти</a> 1 x slots Большинство клубов привлекают внимание компьютерные за счёт разнородных презентов. На 1 сайтах можно получить виртуальные кредиты, коие откроют доступ ко всему софту. На иных же, администрация предлагает бесплатные вращения для пуска лучших интернет слотов. Несмотря на различные акции, стоит выделить самые основные.Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном сайте и выполните вход в собственный офис, чтобы отобрать благотворительные вращения с вейджером х40; <a href=http://kolesomarket.ru/bitrix/redirect.php?goto=http://mvfd1.ru/bitrix/redirect.php?goto=http://220ds.ru/redirect?url=https://telegra.ph/Ponimanie-motivirovannogo-otkaza–prichiny-posledstviya-i-sposoby-preodoleniya-09–23>http://kolesomarket.ru/bitrix/redirect.php?goto=http://mvfd1.ru/bitrix/redirect.php?goto=http://220ds.ru/redirect?url=https://telegra.ph/Ponimanie-motivirovannogo-otkaza–prichiny-posledstviya-i-sposoby-preodoleniya-09–23</a> Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша призов. Заведения практически устанавливают максимальную ставку, возможную по условиям вейждера. 1×slots официальный сайт мобильная версия скачать
зеркло казино 1×slots
Раздача бонусов возможность быть посвящена разным датам: календарные праздники, деньки рождения игроков, годовщина открытия казино и т. Д. Подарок выдается вид денег, фриспинов или баллов для скопления и обмена на услуги оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд требований.Бонус начисляется игроку сразу последствии регистрации и прохождения верификации в казино и не настятельно от клиента внесения депо. Как верховодило, размер бонуса в подобном случае достаточно умеренный, однако дозволяет новичкам познакомиться с игрой без риска реальными средствами. <a href=https://www.uned-psicologia.com/index.php?action=profile;u=50332>https://www.uned-psicologia.com/index.php?action=profile;u=50332</a> скачать 1×slots официальный сайт
1×slots зеркало которую указывали при регистрации кстати
Бездепозитные бонусы настоящими средствами, которые можно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадались.Многие игроки, оценив функционал казино, остаются играть в нем и далее ? на это и нацелено каждое промо. Постоянные посетители заносят депозиты и делают ставки, обеспечивая долгосрочную прибыль оператора. То есть, казино раздают бездепы новым пользователям для формирования лояльной аудитории. <a href=https://your-portal.at.ua/forum/8–4200–18#88484>1×slots официальный сайт скачать на айфон</a> Разные казино имеют личные управляла по выведению выигрыша. Для бездепозитных призов принимаются достаточно высокие притязания. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до ста один в игровых автоматах. Например, в игрок получил даром десять долларов, то необходимо несомненно отыграть их, поставив 1 тыщу спинов по одному доллару любой. Стоит обозначить(означить), собственно не все казино выделяют возможность играть на бонусы и не во всех развлекательных заведениях идентичные управляла для отыгрывания. Некоторые казино запрещают играть на призы в блекджек либо ограничивают ставки до 5 процентов, собственно существенно наращивает в 10-ки раз число нужных игр.Чтобы помощи убедиться в превосходствах бездепозитных призов, довольно зарегистрироваться в казино и получить одобрение. Казино выводит средства только на ту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного приза, Вам сначала нужно пополнить счет. В некоторых клубах узкий перечень методов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет именно с этих платежных методов, которые доступны для вывода. 1×slots сайт зеркало <a href=http://d90432w9.beget.tech/user/Ashleydix/>http://d90432w9.beget.tech/user/Ashleydix/</a>
1хслотс казино зеркало
Наличие у игрока 2 аккаунта. Запрещено делать некоторое профилей для многократного получения бездепов.Бездепозитный бонус казино 2022 с выводом за регистрацию предоставляет возможность ознакомиться игроку с лобби избранного заведения, сориентироваться в выборе игр и проверить качество работы службы. Довольно нередко, начиная игровой процесс, игрок теснее не желает останавливаться и делает реальный лепта. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть даром вполне как один таки с призом за регистрацию без необходимости заносить депо. Но разу не запамятовывайте пристально разбирать верховодила участия в бонусных промоакциях. Если вы нарушите желая бы одно условие, позднее вы не можете уладить недоразумение с администрацией.Заработать на бездепозитных бонусах за регистрацию в казино возможность любой пользователь, достигший совершеннолетия. <a href=http://coool-craft.4fan.cz/profile.php?lookup=11778>http://coool-craft.4fan.cz/profile.php?lookup=11778</a> 1×slot рабочее зеркало Допустим, за регистрацию вы возымели бездеп в размере 2 000 руб. С вейджером х30. В этом случае предстоит устроить ставок, на совместную сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать настоящие деньги. Однако не запамятовывайте, собственно с каждого дара получится вывести определённую сумму (почаще всего не более $200).
<b>Смотреть еще похожие новости:</b>
<a href=https://g2clubs.com/healthy-workout/google/#comment-24729>1×slots официальный зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Получив собственный подарок, Вы можете бесплатно играть на настоящие деньги, а выполнив условия отыгрыша, исключить собственный выигрыш.
#5635 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино фильм смотреть онлайн порно с Елена Никитина, скелетонистка <a href=https://7club7.com/>casino сайты</a> порно с Варвара Субботина казино в россии <a href=https://t.me/vchkogpu_ru>казино вход</a> почему в казино нет окон Матвиенко Валентина Ивановна порно порно с Евгений Малкин (хоккей) фильмы казино рояль букмекерская контора фонбет официальный приложения букмекерских контор казино рояль смотреть
DiskiPlus сайт винлайн букмекерская контора DiskiPlus 1×bet рабочее на сегодня <a href=https://diskiplus.ru>DiskiPlus porno Анна Сидорова, керлингистка</a> DiskiPlus букмекерская контора зенит DiskiPlus лучшие бесплатные онлайн казино <a href=https://diskiplus.ru>DiskiPlus порно с Сергей Бобровский (хоккей)</a> DiskiPlus пина букмекерской конторы DiskiPlus порно с Баталина Ольга Юрьевна DiskiPlus сайт 1×bet слоты DiskiPlus порно с Диана Шнайдер (теннис) DiskiPlus Чулпан Хаматова DiskiPlus бесплатные букмекерские конторы DiskiPlus casino зеркало сегодня рабочее
#5636 bet365Casinohttps://bet365.directorio-de-casinos-mx.com
<a href=https://sajha.com/sajha/html/sajhalink.cfm?site=https://bet365.directorio-de-casinos-mx.com/>https://bet365.directorio-de-casinos-mx.com/</a> <a href=http://wescan.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=https://bet365.directorio-de-casinos-mx.com/>https://bet365.directorio-de-casinos-mx.com/</a> <a href=https://www.mexicorent.com.mx/lang_redirect.php?lang=en&dest=https://bet365.directorio-de-casinos-mx.com/>https://bet365.directorio-de-casinos-mx.com/</a> <a href=http://zip-url.com/index.php?url=https://bet365.directorio-de-casinos-mx.com/>https://bet365.directorio-de-casinos-mx.com/</a> <a href=http://materik.ru/bitrix/rk.php?goto=https://bet365.directorio-de-casinos-mx.com/>https://bet365.directorio-de-casinos-mx.com/</a> <a href=https://www.girlznation.com/cgi-bin/atc/out.cgi?id=50&l=side&u=https://bet365.directorio-de-casinos-mx.com/>https://bet365.directorio-de-casinos-mx.com/</a> <a href=https://ezproxy.pratt.edu/login?url=https://bet365.directorio-de-casinos-mx.com/>https://bet365.directorio-de-casinos-mx.com/</a> <a href=http://www.256rgb.com/uchome/upload/link.php?url=https://bet365.directorio-de-casinos-mx.com/>https://bet365.directorio-de-casinos-mx.com/</a> <a href=https://image.t.me/s/worldbet365.directorio-de-casinos-mx.com/net.iq/url?q=https://bet365.directorio-de-casinos-mx.com/>https://bet365.directorio-de-casinos-mx.com/</a> <a href=http://www.motheronboys.com/cgi-bin/out.cgi?click=9.jpg.7658&url=iuuq;00epoputfoeuphbmmfsz/nf0https://bet365.directorio-de-casinos-mx.com/>https://bet365.directorio-de-casinos-mx.com/</a> <a href=http://ivregiongaz.ru/bitrix/rk.php?goto=https://bet365.directorio-de-casinos-mx.com/>https://bet365.directorio-de-casinos-mx.com/</a> <a href=http://clients1.t.me/s/worldbet365.directorio-de-casinos-mx.com/net.br.xx3.kz/go.php?url=https://bet365.directorio-de-casinos-mx.com/>https://bet365.directorio-de-casinos-mx.com/</a> <a href=https://www.veterinariodifiducia.it/Jump.aspx?gotourl=https://bet365.directorio-de-casinos-mx.com/>https://bet365.directorio-de-casinos-mx.com/</a> <a href=https://images.google.sh/url?q=https://bet365.directorio-de-casinos-mx.com/>https://bet365.directorio-de-casinos-mx.com/</a> <a href=http://web.netidc.com.xx3.kz/go.php?url=https://bet365.directorio-de-casinos-mx.com/>https://bet365.directorio-de-casinos-mx.com/</a>
Upload client online casino bet365 – play now! <a href=http://www.backpacker.no/go.php?url=https://bet365.directorio-de-casinos-mx.com/>https://bet365.directorio-de-casinos-mx.com/</a> <a href=https://jobcomfortable.com/jobclick/?RedirectURL=https://bet365.directorio-de-casinos-mx.com/>https://bet365.directorio-de-casinos-mx.com/</a> <a href=http://grazianosbroggio.com.xx3.kz/go.php?url=https://bet365.directorio-de-casinos-mx.com/>https://bet365.directorio-de-casinos-mx.com/</a> <a href=http://preciouslife.jp/wp/?wptouch_switch=mobile&redirect=https://bet365.directorio-de-casinos-mx.com/>https://bet365.directorio-de-casinos-mx.com/</a> <a href=https://ei.chaturbate.com/external_link/?url=https://bet365.directorio-de-casinos-mx.com/>https://bet365.directorio-de-casinos-mx.com/</a> <a href=http://www.monteko.kz/go/url=https://bet365.directorio-de-casinos-mx.com/>https://bet365.directorio-de-casinos-mx.com/</a> <a href=http://www.m-thong.com/go.php?go=www.mongodb.com/community/forums/t/mug-helsinki-in-house-ai-models-and-mobile-game-servers/264613>https://bet365.directorio-de-casinos-mx.com/</a> <a href=http://www.kicking.com/frames.asp?url=https://bet365.directorio-de-casinos-mx.com/>https://bet365.directorio-de-casinos-mx.com/</a> <a href=http://alt1.toolbarqueries.google.be/url?q=https://bet365.directorio-de-casinos-mx.com/>https://bet365.directorio-de-casinos-mx.com/</a> <a href=http://kproxy.dongguk.edu/_Lib_Proxy_Url/https://bet365.directorio-de-casinos-mx.com/>https://bet365.directorio-de-casinos-mx.com/</a> <a href=https://mamazin.by/bitrix/redirect.php?goto=https://bet365.directorio-de-casinos-mx.com/>https://bet365.directorio-de-casinos-mx.com/</a> <a href=http://www.cheapmicrowaveovens.co.uk/go.php?url=https://bet365.directorio-de-casinos-mx.com/>https://bet365.directorio-de-casinos-mx.com/</a> <a href=https://game-tournaments.com/go?url=https://bet365.directorio-de-casinos-mx.com/>https://bet365.directorio-de-casinos-mx.com/</a> <a href=https://bestrevie.ws/r/46678c091e3ae21e328f865434774f917baebabe-MDEyMDE5?url=https://bet365.directorio-de-casinos-mx.com/>https://bet365.directorio-de-casinos-mx.com/</a> <a href=http://minskportal.ru/go/url=https://bet365.directorio-de-casinos-mx.com/>https://bet365.directorio-de-casinos-mx.com/</a>
#5637 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
Частенько новички не разумеют, как активировать презенты либо исключить 1-ый выигрыш. Для сходственных случаев наша команда обрисовала основные термины – собственно такое фриспины, вейджер, как его отыграть, для необходимо проходить верификацию.Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке адепты онлайн-казино публикуют важную информацию о no down payment bonuses прочих предложениях. <a href=http://filmkachat.ru/>1×slots зеркало быструю регистрацию а также мгновенное</a> Чаще всего, известные сервисы, эти как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно неотъемлемое верховодило. Финансовые средства выводятся лишь через ту платежную систему, которой огромной для пополнения депо. Если же игрок получил бездепозитный покерный бонус, потребуется пополнить счет на наименьшую необходимую, которая сочиняет обыкновенно десять $.Бездепозитный приз предоставляется новенькому игроку за конкретные деяния. Часто презент вид денег либо фриспинов выдается за регистрацию, благодаря чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. <a href=https://webanketa.com/forms/6gtk2c9q74qpaeb368vked9s/>https://webanketa.com/forms/6gtk2c9q74qpaeb368vked9s/</a> Для казино, работающих онлайн, бездепозитные бонусы нужны для привлечения свежих клиентов. Предложение сыграть на слотах без необходимости внесения настоящих денег — работающий метод для повышения интереса к фирмы. После отыгрыша бездепа велик шанс, что игроку понравится и он продолжит играть в казино, только сейчас уже на личные деньги.Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке адепты онлайн-казино публикуют актуальную информацию о not the slightest deposit bonuses и других предложениях. 1×slots регистрация 1×slotscasino 56 online <a href=https://forum.eliteshost.com/member.php?action=profile&uid=7995>https://forum.eliteshost.com/member.php?action=profile&uid=7995</a> За привлечение приятеля ? в партнерской программки клиент получает вознаграждение за привлечение новых пользователей.
скачать 1×slots на андроид мобильная версия
<a href=https://www.goslog.ru/forum/messages/forum1/message16912/11-obrashcheniya-grazhdan?result=reply#message16912>1×slots рабочее зеркало на сегодня</a> 1×slots официальный сайт зеркало Важно, убедитесь том,, что раньше не регистрировались в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи. <a href=https://www.modernvespa.it/profile/3537-migueltix/>https://www.modernvespa.it/profile/3537-migueltix/</a> 1×slots casino регистрация Подтвердите личность, предоставив оператору казино средства паспортные данные. Инструкции обыкновенно несложные, главное — четко им стопам. Если написано, что «на фото обязаны быть видны все четыре угла странички паспорта» — устройте непосредственно такое фото.Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке необходимо пополнить счет в казино. Для депозитных призов, эта процедура не нужна, например как депо теснее сделан.
1×slots зеркало рабочее
Даже не выиграв крупную сумму, игрок увлекательно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-либо финансовых рисков. Быть в курсе лучших акций с. Достаточно регулярно изучать список свежих интернет казино с выводом бонуса без депо в данном разделе.Если вы новичок в этом деле и только попали в неизведанную вами область азарта — счет услуг как бездепозитные призы без пополнения. <a href=http://www.jingsuanwu.com/home.php?mod=space&username=Jamesfew>http://www.jingsuanwu.com/home.php?mod=space&username=Jamesfew</a> 1×slots на любой вкус как пройти регистрацию Постарайтесь отыграть вейджер, чтобы появилась вероятность оставить заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные приборы. Вы сможете получить выигрыш на электронной кошелёк, карту, аппарат.Бесплатные бонусы казино без депозита можно получить в виде валютных средств на бонусный счет (исключить их возможно только последствии отыгрыша), фриспинов, забавы либо кешбэк-бонуса.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Законодательство, регулирующее азартные забавы в разных странах, влияние на возможности операторов. В итоге пользователи из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это возможность быть как полный отказ в доступе, например и невозможность загружать забавы отдельных изготовителей.Главным нюансом в появлении этих вознаграждений произведено что, что пустив их в ход, геймер ничем не рискует и в последствии никому ничего не несомненно обязан (не зависимо, получит ли он спасибо бонусам какой-либо выигрыш или мгновенно спустит все лишь собственно прибывшие деньги). То есть, казино снабжает игрока вероятностью на дармовой основе выступать во всевозможные слоты причем спонсирует забаву. Классическая разновидность бонуса за творенье аккаунта. Его преимущество содержится никаких, собственно клиент возможность помощи выбирать аппараты и создавать ставки в их. Иногда перечень игровых автоматов ограничен оператором, но все точно это превосходнее, чем единственный дешевый слот, как когда с использованием фриспинов.Способы получения бездепа различаются от облика бонуса, который понравился игроку. Но для иначе нужно быть зарегистрированным в легальном онлайн-казино и подтвердить свою личность. В общем виде пошаговая инструкция для получения бездепозитного приза смотрится например: 1× slots зеркало <a href=https://paladinscounter.com/users/PorsedropMa>https://paladinscounter.com/users/PorsedropMa</a> Исходя из сего, просто не присутствует осмысленных причин махнуть рукой на получение такового бонуса при регистрации. И, лишним, на подобный безвозмездной основе у вас есть шансы выиграть средства и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные бонусы, нарекают бесплатными интернет платформами для игр.
1×slots регистрация на официальном сайте
Фриплей-бонусы. Бонусы за благотворительную забаву есть лишь в неких клубах. Они зачисляются сразу последствии творения профиля и срабатывают недолговременное время. Если у вас нет медли израсходовать средства, они просто закончатся. Что касается времени, как бонусы действуют в течение одного часа.Иногда в одобрения за регистрацию все выдаваться билеты для участия в турнирах. Условия их проведения довольно выделяются, потому мы рекомендуем ознакомиться с любым предложением раздельно. Ну и естесственно же, для казино бездепозитные призы выгодны с имиджевой стороны: подобная щедрость увеличивает степень преданности клиентов к компании.Прочитайте верховодила бонусной программки, в хотите участвовать. Да, мы настойчиво рекомендуем устроить это до регистрации. <a href=https://wol.co.kr/bbs/board.php?bo_table=free&wr_id=1272514>https://wol.co.kr/bbs/board.php?bo_table=free&wr_id=1272514</a> Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы замечена вероятность исключить выигрыш.Для проверки используются сканы паспортов, водительских прав, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если юзер обнаружен в попытке ввести дополнительный акк, все его учетные записи подвергаются блокировке, а их владелец попадает в темный перечень. При ирге на лицензионной площадке не стоит опасаться указывать достоверную персональную информацию (шифрование исключает утечку индивидуальных данных). скачать 1×slots официальный сайт
<b>Смотреть еще похожие новости:</b>
<a href=http://aficionado.pl/showthread.php?126168–1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE&p=144681>1×slots зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Поспешите арестовать бездепозитные бонусы за регистрацию в казино из представленного перечня. Все платформы не только ведут законную работа, хотя и порадуют добросовестными плодами забавы, высокой отдачей, прыткими выплатами.
#5638 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Гатагова Ольга Анатольевна Анна Михалкова <a href=https://strelochnik.com/>pin up casino зеркало</a> сайт казино вход водка казино <a href=https://rhymes-punches.com/>1×bet зеркало слоты 1×bet xyz</a> 1×bet официальный pin up casino пин ап казино смотреть онлайн играющие казино онлайн Семёнова Татьяна Владимировна порно порно с Владимир Минеев (ММА) vavada casino
DiskiPlus 7k casino зеркало DiskiPlus Яровая Ирина Анатольевна порно <a href=https://diskiplus.ru/>DiskiPlus casino игровой автомат</a> DiskiPlus сайт pin up casino DiskiPlus приложения букмекерских контор на андроид <a href=https://www.diskiplus.ru>DiskiPlus лучшие казино бесплатно</a> DiskiPlus порно с Ирина Сидоркова DiskiPlus 1×bet слоты 1×bet xyz DiskiPlus casino промокод DiskiPlus Радченко Светлана Юрьевна порно DiskiPlus рабочие зеркала казино DiskiPlus Любимова Ольга Борисовна порно DiskiPlus casino официальный зеркало
#5639 Charlesgunnyhttp://filmkachat.ru
1 х слотс зеркало
Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Зачастую бездепозитные призы казино для забавы предлагаются различными заведениями азартных игр в качестве рекламных акций либо в целях вербования к для свежих игроков. Для бездепозитных призов в казино 2022 игроку не пополнять счет до момента вывода желанных средств. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots casino 777 online</a> Важно, удостоверьтесь что, собственно ранее не регились в выбранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи. <a href=https://plaza.rakuten.co.jp/prilla/diary/202411240004/>https://plaza.rakuten.co.jp/prilla/diary/202411240004/</a> 1×slot официальный сайт <a href=https://www.alpea.ru/forum/user/26854/>https://www.alpea.ru/forum/user/26854/</a> В каждом казино с бездепозитным бонусом учтены вейджеровые обстоятельства. Это единственный «подводный камень», кот-ый стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) сделать определённое количество ставок. Чем круче приз, тем сложнее выполнить обстоятельства, и наоборот.
1хслот зеркало сайта
<a href=https://www.katzenforum.at/forum/threads/rabochee-zerkalo-1×slots.44837/>рабочее зеркало 1×slots</a> 1хслотс рабочее зеркало Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, чтобы снова получить безвозмездный приз. Игорные заведения нетерпимы к бонус-хантерам, потому вас ожидает неминуемое наказание.Новые посетители онлайн-казино без первого депозита шансы проверить собственную удачливость. К тому же есть вероятность преобразовать бездепы в реальные деньги за регистрацию в казино, однако для этого приз необходимо отыграть сообразно условиям акции. <a href=http://furnitura-best.ru/bitrix/redirect.php?goto=http://bpk.ru/bitrix/redirect.php?goto=http://individ.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/OrfID3hgoSM>http://furnitura-best.ru/bitrix/redirect.php?goto=http://bpk.ru/bitrix/redirect.php?goto=http://individ.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/OrfID3hgoSM</a> 1× slots casino зеркало
1×slots регистрация 1×slots casino c2d ru
Следует выделить, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом. Чаще всего интернет-казино предлагают бездепозитные призы свежим юзерам. Эта промо-акция очень отлично завлекает новичков, подталкивая их к открытию счета. Конечно, не все становятся преданными посетителями, хотя сам факт регистрации аккаунта играет на руку заведению.Если вы новичок данном и только попали в неизведанную вами область пыла — счет предложений как бездепозитные призы без пополнения. <a href=http://nbcenter.ge/index.php?subaction=userinfo&user=deepbigot93>http://nbcenter.ge/index.php?subaction=userinfo&user=deepbigot93</a> Бездепозитные призы настоящими средствами, коие возможно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадали.Вейджер в переводе с британского означает «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша приобретенного приза, в нашем случае бездепозитного. Число ставок не — важно только набрать необходимую, пропорциональную сумме одобрения. 1×slots рабочее зеркало на сегодня Так что приготовьтесь предоставить конфиденциальную информацию (пол, возраст, государство проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает менее суток, в чего получится свободно выводить солидные выигрыши.
1хслотс казино зеркало
Активация по промокоду используется в различных видах бездепов. Если речь о приветственном бонусе, то комплект символов можно узнать на крупнейшей странице, в регистрационной форме либо послании, коие отправляется пользователю для доказательства e-mail. Акции имеют проводиться совместно с партнерскими площадками. Обычно код размещается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активируется разовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном кабинете либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем актуальный код для активации в описании любого рекламную. <a href=https://australianwinerytours.com/tours/showthread.php?tid=299341>1×slots зеркало которую указывали при регистрации кстати</a> Чтобы получить возможность исключить выгода с бездепозитного бонуса в казино, нужно выполнить ряд условий:Возможность протестировать свежие забавы, не рискуя личными средствами и создать собственную стратегию игры. 1×slots подтвердит вашу регистрацию если говорить <a href=http://zeren.freeoda.com/member.php?action=profile&uid=4468>http://zeren.freeoda.com/member.php?action=profile&uid=4468</a> Шаг 4. Активация. Внимательно изучите условия, информацию по ограничениям и сроке действия бонусного предложения. Разобравшись с правилами, можно активировать бонус в собственном кабинете (иногда ? с использованием промокода) или по запросу в саппорт.
1×slots бонус за регистрацию
При исполненьи критерий отыгрыша и верификации, средства с бонусного счета переводятся на главной и имеют быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции зависят от выбранной платежной системы. Итак, дабы безвозмездные бонусные кредиты трансформировались в настоящие средства, которыми вам распоряжаться по своему усмотрению, их надо(надобно) отыграть. Вейджер стопам уточнять в правилах онлайн-казино. <a href=http://toolbarqueries.google.ba/url?q=http://gtss.ru/bitrix/rk.php?goto=http://es.paltalk.com/client/webapp/client/External.wmt?url=https://telegra.ph/Dolzhniki-vyzvannye-k-sudebnym-pristavam-cherez-portal-gosuslug-09–24>http://toolbarqueries.google.ba/url?q=http://gtss.ru/bitrix/rk.php?goto=http://es.paltalk.com/client/webapp/client/External.wmt?url=https://telegra.ph/Dolzhniki-vyzvannye-k-sudebnym-pristavam-cherez-portal-gosuslug-09–24</a> Вы не в коем случае ни не рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный бонус, по мимо практической игры на бездепозитные призы, у Вас есть шанс выучить игровые автоматы, выучится регулировать менять ставки и полосы, исследовать бонусные игры и их выигрышные композиции, ну в конце концов просто зарядится кучей впечатлений! Ведь вы будите выступать на бонусные средства, коие возможно отыграть и исключить, не просто на демо счет, что, этим самым адреналин в крови еще повысится а пульс забьется с нередким ритмом! 1×slots актуальное зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=37062>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=774956>1×slots быструю регистрацию а также мгновенное</a>
<a href=https://forumauthority.com/thread-6579-post-39054.html#pid39054>1хслотс казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но есть азартные заведения, готовые просто например вручить деньги на игру. Для сего достаточно сделать профиль. Чтобы исключить выигрыш, сперва нужно выполнить вейджеровые обстоятельства, прописанные в критериях получения бездепа. Акции, посвященные календарным праздничным, случаются рассчитаны как на всех пользователей, например и на категории: например, подарок на 8 марта девушкам-игрокам либо мужчинам на 23 февраля.
#5640 Charlesgunnyhttp://filmkachat.ru
1× slots casino зеркало
Такие поощрения разрешают даром протестировать новое казино, разобраться с игровым ходом онлайн слотов, заработать и исключить небольшую сумму денег. <a href=http://filmkachat.ru/>1хслотс официальный сайт зеркало</a> Если вы новичок деле и лишь попали в неизведанную вами область пыла — счет услуг как бездепозитные бонусы без пополнения.Каждый игрок должен сперва отчетливо изучить условия по получению и отыгрышу понравившегося дара. Если всё устраивает, поспешите отобрать безвозмездные спины за регистрацию в казино без депо с выводом и без отыгрыша и прямо в начать вертеть барабаны топовых слотов. <a href=https://emaze.me/shopavto>https://emaze.me/shopavto</a> казино 1×slots официальный сайт <a href=http://samsoberi.ru/index.php?subaction=userinfo&user=resolutefluid80>http://samsoberi.ru/index.php?subaction=userinfo&user=resolutefluid80</a> Когда речь о денежных призах, казино всегда устанавливают условия вейджера, которые нужно выполнить, чтобы исключить выигрыш.Казино дает возможность заработать и исключить настоящие деньги на бездепозитных бонусах. Обычно, это малозначительная сумма, которую казино имеет себе позволить подарить игроку.
1× slots регистрация в 1×slots casino
1× slots регистрация в 1×slots casino Казино выводит деньги лишь на ту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного бонуса, Вам сначала необходимо пополнить счет. В неких клубах ограниченный список методов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет именно с этих платежных способов, которые доступны для вывода. <a href=http://www.god123.xyz/home.php?mod=space&uid=1042601>http://www.god123.xyz/home.php?mod=space&uid=1042601</a> В некоторых интернет казино для получения бездепозитных призов не довольно просто зарегистрироваться на сайте клуба и доказать свои контактные данные. Дополнительно потребуется активация промокода.Первый образующийся вопрос, это, зачем выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают свежих игроков. Последним легче начать забаву на деньги с дара за регистрацию. Им надо пополнять баланс и расходовать личные свои. Новички получают бесплатные спины либо свои на счёт. С их помощью знакомятся с игровым процессом, крутят слоты и проделывают ставки в рулетке. 1×slots зеркало подтвердит вашу регистрацию если говорить Отыграв бездепозитный бонус в казино с выводом тоже придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, случае схожее лимитирование присутствует, то единоразово вывести выйдет лишь сумму, не превышающую размер полученного приза.
казино 1×slots официальный сайт
Фриплей-бонусы. Бонусы за безвозмездную забаву есть только в неких клубах. Они зачисляются сразу последствии творенья профиля и срабатывают непродолжительное время. Если у вас нет медли истратить средства, они просто завершатся. Что касается медли, в большинстве случаев призы срабатывают на 1-го часа.Обычно для получения бонусов без депозита, казино выдвигает лояльные и вполне выполнимые обстоятельства, но есть ряд поступков коие запрещены и имеют причиной досадные результаты: <a href=https://starity.hu/profil/479780-glavdorogadv2708/>https://starity.hu/profil/479780-glavdorogadv2708/</a> Условия отыгрыша приза. Если Вы планируете заработать на бездепозитном бонусе, то для обратите внимание на значение вейджера и срок, кот-ый дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, что, этим проще отыграть приз и исключить выигрыш. 1×слот регистрация в 1×slots casino
рабочее зеркало 1хслотс
<a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=295739#pid295739>1×slots зеркало которую указывали при регистрации кстати</a> Обычно показатель выше, чем для призов на депозит. Не удивляйтесь, если он будет даже х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных стран.Сроки активации бонуса устанавливаются каждым казино, хотя почаще всего они не превышают недели с этапа получения. Игроку обязательно надо(надобно) использовать бездеп в течение указанного срока, в ином случае бонус просто исчезнет. Каждый приз возможно получить лишь раз один, потому случае не использовать бездеп в срок, у игрока не несомненно 2 шанса им воспользоваться. 1×slots регистрация на 1хслотс <a href=http://megatv.kiev.ua/user/Davidsouby/>http://megatv.kiev.ua/user/Davidsouby/</a> Суммы сходственных услуг, большинстве, колеблются от трех до 20 $, а вейджер на эти свои должен составлять от тридцати до шестидесяти один. Зачастую, наибольшая сумма выигрыша здесь составит от одной до 2-ух сотен долларов. Если геймер выиграет больше, то все свои все быть списанными до очень разрешенного выигрыша. Здесь появляется смысл выводить еще несуществующие деньги на свою платежную систему и далее искать заведение с благоприятными под данную необходимую релоадом или бонусом за 1-ое пополнение счета. Есть количество подвидов бездепозитного вознаграждения, предлагаемого великим количеством заведений.
1×slots официальный сайт, скачать
Выбор любого интернет казино на нашем сайте. В описании к любому Вы сможете узнать, что получите за создание аккаунта. <a href=https://escortexxx.ca/author/geraldtot/>https://escortexxx.ca/author/geraldtot/</a> Прямо момент отберите благотворительные вращения за регистрацию без депозита и начинайте коллекционировать призовые композиции ради солидных выигрышей!Но эти рамки не смущают даже хайроллеров, поскольку коэффициенты на слотах позволяют рассчитывать на крупные выигрыши, а некоторых автоматах разыгрывается прогрессивный джекпот. 1хслот 1хслотс регистрация перейти на 1×slots Онлайн-казино с бездепозитными бонусами ставят клиентам обстоятельства для использования бездепами, поэтому перед ролью в акции какого-либо тщательно ознакомиться со всеми правилами и нюансами промоакции. Условия все прикасаться получения бонуса, его использования и следующего вывода денежных средств если, тогда, выигрыша.Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных притязаний, не обязательной верификации. Если на сайте учтена неотъемлемая процедура подтверждения личности, то исключить выигрыш удастся только последствии ревизии данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий лицо.
<b>Смотреть еще похожие новости:</b>
<a href=https://smm-seo.ru/members/rabofreeol.4209/>1×slots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выбор любого онлайн казино на нашем сайте. В описании к любому Вы сможете узнать, собственно получите за творенье аккаунта.
#5641 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
гта онлайн казино играющие казино онлайн <a href=https://th-royalgclub.com/>porno Юлия Канакина</a> ставки на спорт букмекерские конторы online casino официальный <a href=https://vestnik-jurnal.com/>1×bet приложение</a> porno Александр Соболев (футбол) букмекерские конторы без депозита Крючкова Полина Викторовна порно pin up casino пин Крючкова Полина Викторовна порно 1×bet 1 casino com
DiskiPlus автомат казино DiskiPlus порно с Петр Ян (ММА) <a href=https://www.diskiplus.ru/>DiskiPlus почему в казино нет окон</a> DiskiPlus кент casino DiskiPlus 1×bet слоты 1×bet top <a href=https://diskiplus.ru/>DiskiPlus retro casino</a> DiskiPlus водка казино DiskiPlus порно с Ирина Сидоркова DiskiPlus 1×bet зеркало рабочее DiskiPlus porno Илона Маркова, хоккеистка DiskiPlus приложения букмекерских контор на андроид DiskiPlus online casino официальный DiskiPlus 1×bet слоты 1×bet xyz
#5642 Charlesgunnyhttp://filmkachat.ru
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
В интернет-сети всегда можно отыскать перечни наиболее известных и обещанных поощрительных программ от знаменитых онлайн-казино.Когда речь о денежных бонусах, казино постоянно устанавливают условия вейджера, которые необходимо выполнить, чтобы исключить выигрыш. <a href=http://filmkachat.ru/>1×слотс казино</a> Подарки на праздничные ? приуроченные к праздничным датам, требующие условного отыгрыша либо начисляются без такового. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду. <a href=https://www.uannounceit.com/article/1416>https://www.uannounceit.com/article/1416</a> Прямо данный заберите благотворительные вращения за регистрацию без депо и начинайте коллекционировать призовые комбинации из-за крупных выигрышей!Получать информацию о самых прибыльных бонусах возможно без постоянного мониторинга новостей казино. Мы брали эту задачку на себя и непрерывно следим за услугами операторов, выбирая лучшие из их. В этом разделе собраны последние бездепы, промокоды к ним и условия их активации. Список акций регулярно пополняется. В топ зашли самые свежие бездепозитные призы за регистрацию в казино 2020, временные и замкнутые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и другим аспектам. Если срок деянья акции истек, она удаляется из списка. 1×slots рабочее зеркало на сегодня <a href=https://kcapa.net/bbs/board.php?bo_table=free&wr_id=869317>https://kcapa.net/bbs/board.php?bo_table=free&wr_id=869317</a> Список например именуемых «запрещенных территорий» прилагается к правилам бонусной программы игорного портала. Обязательно проверьте, распространяются ли на вас похожие санкции.Бездепозитные призы казино за регистрацию в 2022 году — это возможность сыграть за счёт заведения. Казино даёт клиенту шанс воспользоваться определённой суммой либо числом бесплатных вращений без внесения депо. Не путайте деморежим с реальной забавой без надобности внесения депозита.
1×slots зеркало регистрация
казино 1×slots В зависимости от онлайн заведения каждый из них может для предложить как бездепозитные деньги, так и бездепозитные фриспины, коие после успешной регистрации упадут для на ваш игровой баланс. <a href=http://whdf.ru/forum/user/89606/>http://whdf.ru/forum/user/89606/</a> Также учтите, что кое-какие игровые платформы сузивают список государств, которые готовы получить предложенный бездепозитный приз за регистрацию. К образцу, есть онлайн-заведения, выдающие подобные бонусы лишь жителям определенных государств. К образцу, онлайн казино 777 Оригинал предоставляет бездепозитный приз только игрокам из России и государств СНГ. Или напротив, снабжают вознаграждением всех, не жителей неких стран (исходя из сего, стопам внимательно учить перечень, дабы потом не появилось никаких вопросов и жалоб).Следует выделить, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом. casino 1×slot Какие призы есть еще получить считая бездепозитного приза за регистрацию в казино? По мимо бездепозитного бонуса, любое интернет казино предлагает игрокам прибыльное предложение на первый депо, вы совершаете депозит, ваш депозит возрастает в двое или даже в 3, что, этим самым начать играть возможно с более солидной суммой, например же не забываем тему вейджер на призы.Помните, что в некоторых играх сумма ставки идет в зачет вейджера лишь отчасти. Так, в настольных и карточных забавах лишь от 5% до 50% суммы ставки числятся как отыгранные средства, тот как в слотах идет в зачет все one hundred percent суммы.
1×slots актуальное зеркало
Также посещают случаи, когда казино начисляет оговоренный приз последствии регистрации нового посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам. Лишь модные и знаменитые азартные заведения могут разрешить себя раздавать бездепы в виде добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, которые возможно истратить в топовых аппаратах с высокой отдачей. <a href=https://betty-margaret.mn.co/posts/66376479>https://betty-margaret.mn.co/posts/66376479</a> Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам воспрещено начислять призы посетителям, не имеющим денежных средств на счете. Мы предлагаем разглядеть животрепещущие призы онлайн-казино с лицензией, которые соблюдают законодательство РБ.Ниже указан актуальный список легальных казино в Беларуси с призами на 1-ый депозит. Вы можете попасть на официальный вебсайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз. 1х слотс зеркало регистрация в 1×slots casino
1×slots казино зеркало
Для выбора азартного заведения Вы можете воспользоваться перечнем наших казино с призами за регистрацию. На нашем веб-сайте мы выпустили список бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, что доля призов эксклюзивные и доступны только для посетителей нашего вебсайта по-специальному промо-коду или по уникальной ссылке. Кроме как, для любого бонуса мы подготовили подробный обзор, в котором Вы узнаете как получить и отыграть одобрение и как исключить собственный выигрыш с бездепа.Исходя из сего, просто не присутствует разумных оснований махнуть рукою на получение такого бонуса при регистрации. И, лишним, на подобный безвозмездной базе у вас есть все шансы выиграть средства и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, именуют безвозмездными онлайн платформами для игр. <a href=https://tabsgame.ru/user/Jamesbes/>1хлот регистрация в 1×slots casino</a> Доступность — бездепозитные бонусы в казино почаще всего предоставляются новым игрокам, хотя случаются случаи, когда бонус могут получить и действующие посетители.Во всех законных онлайн-казино Беларуси нужно свидетельство паспортных данных для игры — это требование правительства страны. 1×slots casino регистрация 1×slotscasin online <a href=https://riseaboveyourstory.com/%d0%b0%d0%b2%d1%82%d0%be%d1%88%d0%ba%d0%be%d0%bb%d0%b0-%d0%b2%d0%bb%d0%b0%d0%b4%d0%b8%d0%b2%d0%be%d1%81%d1%82%d0%be%d0%ba/>https://riseaboveyourstory.com/%d0%b0%d0%b2%d1%82%d0%be%d1%88%d0%ba%d0%be%d0%bb%d0%b0-%d0%b2%d0%bb%d0%b0%d0%b4%d0%b8%d0%b2%d0%be%d1%81%d1%82%d0%be%d0%ba/</a> Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских руб. В условиях акции указано, что вейджер бездепозитного бонуса х20. Поэтому, дабы отыграть приз, игроку несомненно необходимо сделать ставок на 35*20=700 руб.
1×slots регистрация на сайте 1×slots ru com
В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно приятная часть забавы. Важно, зачастую бездепозитные бонусы в казино выдаются с лимитированиями по максимальной выплате. В среднем возможно рассчитывать на выгода в количество тысяч рублей. Как исключить выигрыш с приза без депо. Придётся подтвердить акк документально, в неких заведениях. Процедура верификации обязательна и делается каждым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате либо прочитайте в правилах. При исполнении критерий отыгрыша и верификации, деньги с бонусного счета переводятся на ведущей и имеют быть выведены на карту либо электрический кошелек. Лимиты на вывод и сроки проведения транзакции находятся от выбранной платежной системы. <a href=http://nontota.com/wikicorporativa/doku.php?id=РР·_чего_состоит_диета_Елены_Малышевой>http://nontota.com/wikicorporativa/doku.php?id=РР·_чего_состоит_диета_Елены_Малышевой</a> 1хслот 1хслотс регистрация перейти на 1×slots Раздача призов может быть приурочена к различным датам: календарные праздники, деньки рождения игроков, юбилей открытия казино и т. Д. Подарок выдается в виде денег, фриспинов либо баллов для накопления и размена на предложения оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд притязаний.Каждый игры обязан сперва отчетливо выучить условия по получению и отыгрышу приглянувшегося подарка. Если всё организует, поторопитесь арестовать бесплатные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик данный начать вертеть барабаны топовых слотов.
<b>Смотреть еще похожие новости:</b>
<a href=https://shopcms.vsupport.club/topic/327-%D0%BE%D0%B1%D0%BC%D0%B5%D0%BD-%D0%BC%D0%BE%D0%B4%D1%83%D0%BB%D1%8F%D0%BC%D0%B8-%D0%B8-%D1%88%D0%B0%D0%B1%D0%BB%D0%BE%D0%BD%D0%B0%D0%BC%D0%B8/page-5#entry93756>1×slots официальный сайт скачать на айфон</a>
<a href=https://forum.spherecommunity.net/User-Jamesmew>1×slots рабочее зеркало</a>
<a href=https://karakol.com.kg/user/Jameskef/>1×slots регистрация 1×slotscasino09k online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Верификация аккаунта. Лучше доказать личность сразу последствии регистрации, дабы позже не было заморочек с выводом средств. Верификация имеет проходить 2-мя способами:
#5643 Charlesgunnyhttp://filmkachat.ru
1хлот регистрация в 1×slots casino
Каждый из бездепозитных бонусов без пополнения 2022 содержит собственный определенный вейджер для отыгрыша, например же в каждом казино он уточняется персонально — где то он х55 а кое-где х30, повторюсь везде по разному!Выбирайте превосходнейшие безвозмездные бонусы за обзоров на Casinoz – и пусть вам сопутствует счастье при отыгрыше бонусных кредитов! <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino 56 online</a> <a href=https://output.jsbin.com/kozot>https://output.jsbin.com/kozot</a> казино 1×slots <a href=http://elektrofahrrad-tests.de/forums/member.php?action=profile&uid=34210>http://elektrofahrrad-tests.de/forums/member.php?action=profile&uid=34210</a> Реже призы без депо начисляются постоянным игрокам. С их помощью администрация постарается вычесть ценных посетителей или желает поблагодарить за преданность правильных гостей. Но намного почаще для похожих целей применяются эти промоакции:Для верификации аккаунта нужно предоставить профессионалам технической поддержки отсканированную копию паспорта и счета за коммунальные предложения, еще фотку банковской карты или скриншот страницы электрического кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для доказательства личности.
1×slots сайт
<a href=https://g2clubs.com/healthy-workout/google/#comment-28427>1хслотс рабочее зеркало</a> 1×slots зеркало видели такую регистрацию на Ну и окончательно же, для казино бездепозитные призы прибыльны с имиджевой стороны: подобная добродушие повышает уровень лояльности клиентов к фирмы. <a href=https://honcure.com/user/ArnoldEsody/>https://honcure.com/user/ArnoldEsody/</a> Для получения бонуса нужно пригласить в игру свежего посетителя. Казино начисляет пригласившему фиксированный процент от взносов приглашённого повторяющий приза: почаще всего его объем не выше 10%. Срок действия бонуса в большинстве случаев не выше месяца: пригласивший получает приз от проигранных ставок приглашённого в первый луна игры.Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. 1×slots регистрация 1×slots review live К раскаянью, нет. Почти все казино, настоятельно внесение хотя бы одного малого депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, что вывести средства разрешается лишь на ту платежную систему, с которой был сделан депо.Ограничения по играм. Администрация запрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, деньгами либо бесплатными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда разделенье выполняется по облику игр. Например, отыгрыш возможен на всех игровых аппаратах, хотя запрещен в настольных играх и в разделе Live Casino.
скачать 1×slots официальный сайт
<a href=https://metalverk.ru/forum/?PAGE_NAME=profile_view&UID=74179>https://metalverk.ru/forum/?PAGE_NAME=profile_view&UID=74179</a> Но не мыслить, собственно снабжая пользователей такими призами, казино занимается спонсированием. Ведь объемы вознаграждений, в основном, не великие (средним объемом от 5 до 20 $). И на эти свои налагаются определенные условия и ограничения, обязательные к исполненью игрока, в в последствии он желает получить все свои выигранные финансы.Бездепозитные бонусы истинными деньгами, коие возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадали. 1хлот регистрация в 1×slots casino
казино 1×slots
Новые посетители онлайн-казино без первого депо имеют проверить свою удачливость. К что, этому же есть вероятность конвертировать бездепы в настоящие деньги за регистрацию в казино, впрочем для этого бонус необходимо отыграть согласно условиям промоакции. скачать 1×slots официальный сайт <a href=https://velorout.com.ua/user/Richardvak/>https://velorout.com.ua/user/Richardvak/</a> Прибывшие на акк финансы бездепозитные призы предназначаются, в основном, только для свежеиспеченных пользователей, коие раньше не имели личного аккаунта в данном казино. Исходя из сего, в раньше у игрока был сделан депо, то, по всей вероятности, у него больше не будет возможности рассчитывать на получение такого приза в определенном заведении.
зеркала 1×slots
На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению этого времени, Вы не сможете активировать и получить бездепозитный бонус.Бонус за регистрацию в казино выдается лишь раз один на одного игрока. Но бывают дополнительные акции, масштабах которых бездепы расступаются для неизменных клиентов и такие подарки Вы сможете получить больше 1-го раза. <a href=http://bbs.boway.net/home.php?mod=space&uid=906960>http://bbs.boway.net/home.php?mod=space&uid=906960</a> 1×slots официальный зеркало рабочее Как правило, при выводе финансов, от играющего требуется лишь устроить наименьший лепта чтобы, чтобы, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом индивидуальный счет.
<b>Смотреть еще похожие новости:</b>
<a href=http://youboy.comwww.molifan.net/space-uid-2295552.html>1×slots рабочее зеркало на сегодня</a>
<a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=141683>1хслот официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Размер приза. В качестве бездепов обыкновенно начисляют большие суммы, а когда идет о бонусах за депо, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино могут презентовать игроку до 2000$. Реже бонусы без депо начисляются неизменным игрокам. С их поддержкой администрация постарается удержать ценных посетителей или желает поблагодарить за преданность верных гостей. Но намного почаще для подобных целей используются такие промоакции:
#5644 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
up casino официальный casino рабочее зеркало <a href=https://www.ossetia.tv/>porno Александр Соболев (футбол)</a> 1×bet автомат казино <a href=https://vestnik-jurnal.com/>казино рояль</a> почему в казино не бывает настенных часов человек казино Манилова Алла Юрьевна порно porno Анна Сидорова, керлингистка порно с Евгений Малкин (хоккей) официальные букмекерские конторы леон букмекерская контора
DiskiPlus порно с Виктория Синицина, фигуристка DiskiPlus казино ставка <a href=https://diskiplus.ru/>DiskiPlus 1×bet зеркало рабочее на сегодня</a> DiskiPlus балтбет букмекерская контора DiskiPlus pin up casino пин <a href=https://www.diskiplus.ru/>DiskiPlus букмекерская контора бетсити</a> DiskiPlus смотреть фильм казино DiskiPlus bitz casino DiskiPlus casino андроид DiskiPlus скачать 1×bet на андроид DiskiPlus гта казино DiskiPlus балтбет букмекерская контора DiskiPlus Матвиенко Валентина Ивановна порно
#5645 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Георгий Джикия (футбол) Самойлова Алла Владимировна порно <a href=https://t.me/vchkogpu_ru>casino приложения</a> букмекерская контора бесплатно скачать слот casino <a href=https://glvk.guru/>промокод 1×bet</a> casino рабочее почему в казино нет окон casino pin официальный casino ап казино сегодня ставки на спорт букмекерские конторы казино рояль
DiskiPlus пинап казино DiskiPlus 7k casino зеркало <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz</a> DiskiPlus букмекерская контора без DiskiPlus букмекерская контора леонов <a href=https://diskiplus.ru/>DiskiPlus букмекерская контора официальный сайт</a> DiskiPlus порно с Антропова Валентина Викторовна DiskiPlus порно с Захарова Мария Владимировна DiskiPlus 1win букмекерская контора DiskiPlus 1×bet сайт 1×bet xyz DiskiPlus пин ап casino DiskiPlus казино фильм смотреть онлайн DiskiPlus porno Катерина Шпица
#5646 Charlesgunnyhttp://filmkachat.ru
казино 1×slots официальный сайт
Начнём с такого, собственно каждое рекламную за регистрацию подразумевает некие условия. Бездепозитные бонусы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, нужная для исполнения условий. Пример, получили безвозмездные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 рублей, неудачных либо выигрышных, неважно. После исполненья, бонусный баланс перейдёт на настоящий и станет доступным к выводу. <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> <a href=https://www.thuum.org/viewthread.php?thread=8824>https://www.thuum.org/viewthread.php?thread=8824</a> Заполняя данные в собственном профиле, указывайте только достоверную информацию, например как Вам придется ее доказать в будущем при выводе денег.Отыграв бездепозитный приз в казино с выводом также придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если схожее ограничение присутствует, то единоразово исключить получится лишь сумму, не превосходящую объем приобретенного бонуса. 1хслотс официальный сайт зеркало <a href=http://www.hucellbio.com/bbs/board.php?bo_table=free&wr_id=164078>http://www.hucellbio.com/bbs/board.php?bo_table=free&wr_id=164078</a> В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, необходимо обратиться в саппорта спустя лайв-чат на сайте казино.Бездепозитные бонусы начисляются только один раз. Не стоит раскрывать свежие аккаунты, чтобы получить их повторно. Служба защищенности казино непременно выявит «левого» участника и перекроет. Если посетитель выполнит необходимые требования, отыграет собственную ставку и решит вывести личный выигрыш, то ему нужно учесть, собственно казино обязательно востребует предоставить ксерокопии личных документов, чтобы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные свои исключить не удастся.
1×slots рабочее зеркало на сегодня
Наши эксперты исследуют обстоятельства промоакции, затем в ручном режиме проводят их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и параметры. Мы не рекламируем казино, а даем игрокам информацию о превосходнейших из них.Если идет об неповторимых предложениях, возможность понадобиться регистрация в казино по ссылке с партнерского вебсайта. 1×slots зеркало рабочее Одним из предлогов отдавать преимущество, льготу одному либо другому заведению содержится в привлекательности предлагаемых акций и бесплатных услуг. Безвозмездные фриспины, выдаваемые без нужды создавать какой-нибудь лепта, в перечне находится далеко не в конце.За счёт спинов выйдет запустить разные онлайн слоты, протестировать стратегии и поднабраться опыта. Фишка в, собственно вращения начисляются на лучшие аппараты с уникальными опциями и высочайшей отдачей. Не запамятовывайте, что в каждом акционном предложении предусмотрены особые притязания – временные лимитирования, максимальный размер ставки, перечень доступных игр. <a href=https://www.awaker.info/home.php?mod=space&uid=7081302&do=profile&from=space>https://www.awaker.info/home.php?mod=space&uid=7081302&do=profile&from=space</a> Каждый игрок обязан сперва детально изучить обстоятельства по получению и отыгрышу приглянувшегося презента. Если всё устраивает, поспешите арестовать бесплатные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик момент начать вращать барабаны лучших слотов.Подтвердите регистрацию, дабы активировать Бездепозитный бонус с выводом, потребуется заполнить индивидуальный профиль. Заполните порожние поля истинными данными о себя. казино 1×slots
1×slots зеркало видели такую регистрацию на
Превышение наибольшей ставки при отыгрыше. Система механически не предуведомляет о превышении ставки, поэтому о нарушении правил игрок может разузнать теснее последствии подачи запроса на вывод средств. <a href=https://sciencewiki.science/wiki/Shisha_Tobacco_From4_Eur>https://sciencewiki.science/wiki/Shisha_Tobacco_From4_Eur</a> Каждый геймер должен сперва отчетливо выучить обстоятельства по получению и отыгрышу понравившегося презента. Если всё организует, поспешите арестовать бесплатные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик сейчас начать вертеть барабаны топовых слотов. 1×slots рабочее зеркало на сегодня Многие азартные клубы ограничивают необходимую вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании акции, суммы Вы не можете исключить. Разница будет аннулирована, Вы числе не можете создавать на нее ставки.
1 хслот регистрация в 1×slots casino
Когда речь о получении бездепозитных призов в казино, начала обратите внимание на последующие условия:Акции, посвященные календарным праздничным, бывают рассчитаны как на всех юзеров, например и на категории: примеру, презент на 8 марта девушкам-игрокам или мужчинам на 23 февраля. Получать информацию о самых выгодных бонусах можно без постоянного мониторинга новостей казино. Мы взяли данную задачку на себя и непрерывно следим за услугами операторов, выбирая превосходнейшие из их. В данном разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список промоакций регулярно дополняется. В топ зашли самые новые бездепозитные призы за регистрацию в казино 2020, временные и закрытые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и другим критериям. Если срок деянья акции истек, она удаляется из списка.После получения бонуса вывод средств для посетителя будет недоступен до, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя либо чета недель. Выводить средства игрок может лишь последствии отыгрыша. 1×slot зеркало рабочее регистрации на телефон придет <a href=http://www.lighttoguideourfeet.com/member.php?u=1448578>http://www.lighttoguideourfeet.com/member.php?u=1448578</a> Ограничения по забавам. Администрация запрещает игрокам кое-какие игровые автоматы с бездепозитным призом, деньгами либо безвозмездными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда дробленье производится по облику игр. Например, отыгрыш возможен на всех игровых аппаратах, хотя запрещен в настольных играх и в разделе Live Casino.Игрокам не воспринимать приветственный приз как гарантированный метод получить крупный выигрыш, хотя это отличная возможность без затрат расценить функционал казино.
1× slots casino зеркало
Но есть азартные заведения, готовые просто например вручить средства на забаву. Для сего достаточно сделать профиль. Чтобы исключить выигрыш, сначала нужно выполнить вейджеровые условия, прописанные в критериях получения бездепа. Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Маркетинговая политика всех игорных интернет-клубов должна одевать разнообразный нрав. И в гонорары на депозит работают чтобы, чтобы, чтобы стимулировать заносить депозиты и поощрять теснее существующих пользователей, то бездепозитный приз в казино либо бонус за регистрацию в казино, до всего, рассчитан на расширение базы потребителей. <a href=https://radio-wave.ru/forum/member.php?5650-ForsedropMt>https://radio-wave.ru/forum/member.php?5650-ForsedropMt</a> Бездепозитный приз по промо-коду будет доступен для забавы, лишь в случае когда Вы активируете особый бонусный код в разделе с бонусами либо укажите промокод при регистрации на веб-сайте. В неких случаях, не активации кода, понадобиться доказать контактные данные игрока и наполнить анкету посетителя. 1×slots официальный регистрация Срок активации и время на отыгрыш. Зачисление средств или фриспинов случается при активации в течение требовательно ограниченного периода, схожие притязания предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать бонус несколько дней или и недель. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высочайшим вейджером.Бездепозитный приз казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в этом и содержится основное отличие.
<b>Смотреть еще похожие новости:</b>
<a href=http://permitbeijing.com/forum/showthread.php?tid=2228141>1×slots официальный сайт зеркало рабочее</a>
<a href=https://nauc.info/forums/viewtopic.php?t=20394924>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<a href=https://adminclub.org/showthread.php?tid=93800>1×slots официальный сайт зеркало</a>
<a href=http://fin-molitor.com/forum/memberlist.php?mode=viewprofile&u=8719>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Некоторые веб-сайты, прежде чем провести регистрацию игроков, предлагают ответить на некоторое базисных вопросов. Цель проведения подобной викторины – выявить случайных людей, которые не имеют представления о покере, и не допустить получения ими призов. Если гость теснее играл в казино, то ответить на полтора 10 несложных вопросов будет несложно. Очень нередко, ответы возможно отыскать на официальных сайтах этих учреждений. Во всех законных онлайн-казино Беларуси необходимо подтверждение паспортных данных для забавы — это требование правительства страны.
#5647 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
реального казино букмекерская контора зенит <a href=https://sovsekretno.net/>pin casino зеркало</a> black russia казино porno Алена Косторная (фигурное катание) <a href=https://rucriminal.info/>casino рабочее зеркало</a> фреш казино 7k casino официальный pin up casino пин ап up casino скачать porno Илья Ковальчук (хоккей) casino 7k сегодня порно с Евгений Малкин (хоккей)
DiskiPlus порно с Петр Ян (ММА) DiskiPlus kent casino регистрация <a href=https://www.diskiplus.ru/>казино</a> DiskiPlus казино фильм DiskiPlus win win casino <a href=https://diskiplus.ru/>DiskiPlus 1×bet на андроид бесплатно</a> DiskiPlus 7k casino официальный сайт DiskiPlus казино онлайн бесплатно DiskiPlus kometa casino DiskiPlus porno Андрей Рублев (теннис) DiskiPlus 1×bet слоты 1×bet top DiskiPlus пин up casino DiskiPlus букмекерские конторы без депозита
#5648 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
Обычно для получения призов без депозита, казино выдвигает лояльные и абсолютно выполнимые обстоятельства, хотя есть ряд действий которые запрещены и все стать неприятные результаты: <a href=http://filmkachat.ru/>1×slots официальный сайт, скачать</a> Призовые начисления без депозита шансы предоставляться для роли в турнирах онлайн казино. Потратить перечисленные деньги возможно необыкновенно в данной промоакции. Условия их проведения себе ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться этим предложением, чем выучить его управляла. <a href=https://diigo.com/0y2r93>https://diigo.com/0y2r93</a> Подобные бонусы без депозита предоставляются на больше прибыльных условиях. Зачастую они крупнее, а условия отыгрыша наименее строгие.На критериях отыгрыша бесплатных призов стопам тормознуть подробнее. С ними связаны нюансы, коие невозможно забыть без внимания. 1хлот регистрация в 1×slots casino <a href=https://www.professionistidelsuono.net/forums/member.php?action=profile&uid=127172>https://www.professionistidelsuono.net/forums/member.php?action=profile&uid=127172</a> Подтверждение индивидуальной информации. Все казино настоятельно от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и присутствие у юзера иных аккаунтов (мультиаккаунт запрещен).
1×slots быструю регистрацию а также мгновенное
Размер приза. В качестве бездепов обыкновенно начисляют очень суммы, а когда речь идет о бонусах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино имеют презентовать игроку до 2000$. 1×slots казино зеркало <a href=https://www.google.com.ec/url?sa=t&url=https://doctorlazuta.by/>https://www.google.com.ec/url?sa=t&url=https://doctorlazuta.by/</a> Некоторые клубы автоматически начисляют приз на акк игрока последствии исполненья критерий получения, но бывают истории, когда приз нужно активировать игроку самому. Есть несколько способов активации бонуса:Риск-игра по одинаковым шансам – Также казино возможность воспрещать выполнять условия по отыгрышу с помощью раунда на удвоение, который предлагается в слотах, видео-покере и некоторых других играх. казино 1× slots официальный сайт
скачать 1×slots официальный сайт
Подарки на праздники ? приуроченные к праздничным датам, требующие условного отыгрыша либо начисляются без такового. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду. Можно ли зарабатывать на бездепозитных бонусах? Это не работа, тут как повезет, в в любом предложенном безедепе, вы будете откручивать вейджер и выводить, время можно назвать везением, и добавочной добавкой к вашему бютжету.Вейджер (или вагер) ? это наименьшая сумма ставок, которую нужно устроить для вывода денежного бонуса. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение. <a href=http://www.geze-gen.com/member.php/522907-Forsedropsa>http://www.geze-gen.com/member.php/522907-Forsedropsa</a> рабочее зеркало 1хслотс Чаще всего, знаменитые сервисы, такие как MoneyBookers и WebMoney, еще MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно обязательное правило. Финансовые свои выводятся лишь через что, эту платежную систему, коей огромной для пополнения депозита. Если же игрок получил бездепозитный покерный приз, требуется пополнить счет на минимальную необходимую, которая сочиняет обычно десять $.
1×slots официальный сайт скачать
Пoдтвepдить личнocть клиента. Для успешного вывода средств, нужно доказать лицо клиента. Нa этaпe вepификaции пpoфиля, работники службы защищенности обязаны увериться, собственно у игрока не один аккаунт. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не может исключить свой выигрыш, если у него несомненно несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы.При маленький сумме приза рекомендовано играть по низким ставкам, а использовать наибольшие какого-либо только в случае, если вейджер слишком великой, а время на отыгрыш крепко ограничено. <a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=160&p=1394826#p1394826>1 хслот регистрация в 1×slots casino</a> Во всех легальных онлайн-казино Беларуси необходимо подтверждение паспортных данных для игры — это заявка правительства страны. casino 1×slot <a href=http://forum.evony.com/member.php?1342925-emukuh>http://forum.evony.com/member.php?1342925-emukuh</a> Иногда для получения бонусов необходимо спутаться с представителями службы. Удобнее всего с ними беседовать в онлайн-сате, но от довольно запроса по электронной почте.
1хслотс рабочее зеркало на сегодня
Принципиальным отличием даровых призов от призов на депозит является неимение надобности вносить средства на акк. Из-за сего их часто нарекают бездепозитными (no down payment bonuses).Разные казино имеют личные управляла по выведению выигрыша. Для бездепозитных призов принимаются достаточно высокие притязания. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до 100 раз в игровых автоматах. Например, случае игрок получил даром 10 $, то нужно несомненно отыграть их, поставив одну тыщу спинов по одному баксу каждый. Стоит отметить, что не все казино дают вероятность выступать на бонусы и не во всех развлекательных заведениях схожие правила для отыгрывания. Некоторые казино воспрещают играть на призы в блекджек либо ограничивают ставки до 5 %, собственно значительно наращивает в 10-ки один количество необходимых игр. Выбирая безвозмездный приз, пристально изучайте правила. Убедитесь, собственно для можно себя участие в промоакции. Уточните, в каких играх возможно скорпулезно обстоятельства вейджера. При надобности задавайте вопросы представителям саппорта. <a href=https://gamesdrive.net/User-Terrypaund>https://gamesdrive.net/User-Terrypaund</a> Простая процедура получения бездепозитного приза, кот-ая займет менее 2-х мин. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные.Также бывают случаи, когда казино начислит оговоренный бонус последствии регистрации нового клиента по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам. 1хслотс зеркало Помните, собственно в неких забавах сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки числятся как отыгранные средства, на как в слотах идет в зачет все 100% суммы.
<b>Смотреть еще похожие новости:</b>
<a href=http://sladkierecepti.5nx.ru/viewtopic.php?f=8&t=4773>1×slots регистрация то дальше необходимо пройти</a>
<a href=http://forums.panzergrenadiers.com/showthread.php?23401–1×-slots-%D0%A0%D1%95%D0%A1%E2%80%9E%D0%A0%D1%91%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A0%C2%B0%D0%A0%C2%BB%D0%A1%D0%8A%D0%A0%D0%85%D0%A1%E2%80%B9%D0%A0%E2%84%96&p=509490#post509490>1× slots официальный</a>
<a href=http://shiftdelete.10tl.net/member.php?action=profile&uid=119629>1×slots регистрацию процедура займет всего лишь</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Мы собрали и выпустили перечень наилучших бездепозитных казино с бонусами за регистрацию, коие гарантируют великодушные выигрыши и моментальные выплаты.
#5649 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерские конторы pin Хорова Наталья Александровна порно <a href=https://rhymes-punches.com/>порно с Евгения Медведева</a> букмекерская контора вход porno Катерина Шпица <a href=https://sovsekretno.net/>лучшие букмекерские конторы</a> почему казино бесплатное казино зеркала казино cometa casino bitz casino рейтинг казино Черкесова Бэлла Мухарбиевна порно
DiskiPlus сайт казино вход DiskiPlus часы казино <a href=https://www.diskiplus.ru>DiskiPlus казино онлайн</a> DiskiPlus пинко casino DiskiPlus pin casino зеркало <a href=https://diskiplus.ru>DiskiPlus про казино</a> DiskiPlus порно с Сергей Бобровский (хоккей) DiskiPlus казино в россии DiskiPlus porno Екатерина Ефременкова, шорт-трекистка DiskiPlus champion casino DiskiPlus 1×bet зеркало xbet DiskiPlus 1×bet зеркало слоты 1×bet xyz DiskiPlus porno Мария Шарапова
#5650 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Лут Оксана Николаевна порно порно с Зырянова Анастасия Владимировна <a href=https://www.ossetia.tv/>букмекерские контора ап</a> inform@rucriminal.info гама казино <a href=https://kompromat1.online/>порно с Абрамченко Виктория Валериевна</a> casino андроид казино вход вывод казино казино вход официальный сайт 7k casino зеркало на сегодня казино в россии 1×bet зеркало на сегодня 1×bet xyz
DiskiPlus где казино DiskiPlus демо казино <a href=https://diskiplus.ru/>DiskiPlus казино рояль смотреть</a> DiskiPlus cat casino DiskiPlus porno Юлия Пересильд <a href=https://diskiplus.ru>DiskiPlus сайт 1×bet слоты</a> DiskiPlus официальные зеркала казино DiskiPlus рокс казино DiskiPlus porno Юлия Пересильд DiskiPlus скачать сайт букмекерской конторы DiskiPlus зеркала казино DiskiPlus Лут Оксана Николаевна порно DiskiPlus лучшая казино
#5651 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
Еще одно условие касается объемов ставки. Операторы устанавливают максимальную необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном офисе. При превышении лимита есть риск потерять приза. Существующие лимитирования относятся и к определенным видам ставок. Например, играя в рулетку, клиент может столкнуться с запретом назначать фишки на шансы.В перечне притязаний к отыгрышу часто присутствуют лимиты на ставки при игре на собственные средства. Так, в отыграть надо(надобно) 30 000 рублей, а предельная сумма ограничена 30 рублями, то вертеть барабаны предстоит 1000 один. Эта особенность затрудняет соблюдение игроками условий по срокам действия акции. <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> Эффективность бездепов виде маркетингового прибора расценили все операторы. Малоизвестные площадки употребляют такие акции, дабы быстро набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны неизменных посетителей. Не все веб-сайты, дающие подарки без депозита, рекомендованы к этой. За симпатичным промоописанием шансы прятаться неосуществимые условия отыгрыша прочие подводные камни.При игре на бонусные средства воспрещается играть в игровые автоматы с современным джекпотом и игры из радела live casino. Кроме такого, кое-какие казино выделяют бездеп на раз или несколько определенных слотов, и в иных играх Вы не сможете на них выступать. <a href=https://telegra.ph/Your-Ultimate-Guide-to-Licensed-Weed-Delivery-Brampton-Services-11–24>https://telegra.ph/Your-Ultimate-Guide-to-Licensed-Weed-Delivery-Brampton-Services-11–24</a> Можно. Вы постоянно можете отрешиться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не сделаете ставку.Иногда у посетителей вебсайта шансы появиться трудности, задачи, препядствия при активации полученного промо-кода. В этих случаях, необходимо адресоваться за подмогою в службу поддержки «Support». Для получения ответа, обязательно указывается конкретная первопричина обращения и подтверждается информация дополнительными снимками. Если сформировалась спорная обстановка, постоянно можно обратиться к главному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ. 1×slot зеркало рабочее регистрации на телефон придет <a href=http://rasxodki.shop/bitrix/redirect.php?goto=http://itovari.ru/bitrix/redirect.php?goto=http://osen.by/bitrix/click.php?goto=https://telegra.ph/Kak-predsedatel-mozhet-ogranichit-ili-otklyuchit-ehlektrichestvo-iz-za-dolgov-i-kak-ih-pogasit-09–23>http://rasxodki.shop/bitrix/redirect.php?goto=http://itovari.ru/bitrix/redirect.php?goto=http://osen.by/bitrix/click.php?goto=https://telegra.ph/Kak-predsedatel-mozhet-ogranichit-ili-otklyuchit-ehlektrichestvo-iz-za-dolgov-i-kak-ih-pogasit-09–23</a>
1хслот зеркало
<a href=https://www.formulersupport.com/Thread-%D0%B7%D0%B5%D1%80%D0%BA%D0%BB%D0%BE-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-1×slots–106495>зеркло казино 1×slots</a> 1×slots зеркало рабочее на сегодня При поддержки такого поощрения оператор может также завлекать посетителей, коие ранее показывали активность на веб-сайте, но по какой-то причине перестали выступать. В этом случае промокод высылается юзеру по электронной почте или в виде SMS. <a href=http://bbs.17dra.com/home.php?mod=space&uid=231449>http://bbs.17dra.com/home.php?mod=space&uid=231449</a> Не стоит путать игру в демо и внедрение бонусов. В демонстрационном режиме игрок возможность расценить механику слота, сюжет и оформление. Но игра проводится на условные кредиты, потому отсутствует главное ? чувство азарта. Активируя промокод либо фриспины, заказчик как не расходует свои деньги на игровые автоматы, хотя имеет сорвать реальный куш!А ознакомиться с свежими онлайн казино, Вы сможете за счет бонусов с выводом выгоды, коие Вы можете получить без депо. 1×slots официальный сайт скачать
x1 slots 1хслотс регистрация перейти на 1×slots
Не трудно додуматься, собственно not the slightest deposit bonuses почти разу не бывают большими. Чаще всего речь идет о пяти–тридцати баксах (либо эквиваленте данной суммы в другой еденице). <a href=http://web.symbol.rs/forum/member.php?action=profile&uid=659729>http://web.symbol.rs/forum/member.php?action=profile&uid=659729</a> Обыкновенные бездепозитные бонусы в объеме от 3-х до 20 $ сделаны чтобы, чтобы, дабы в игры заходили все новые и новые игроки. Здесь, вероятнее всего, будет ограничение на максимальный выигрыш. Важно, чтобы перед минимальным вкладом был отключен приз за первое пополнение счета, и геймер не попадет на повторный вейджер. 1× slots официальный Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных ситуаций с казино, когда в отыгрыша бездепа вас не дадут исключить крупную сумму выигрыша.1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, случае не желайте замерзнуть жертвой жуликов либо впустую потратить время;
1×slots сайт
<a href=https://praisenpray.org/forums/member.php?action=profile&uid=63121>1хслотс мобильная версия зеркало</a> При исполнении условий отыгрыша и верификации, деньги с бонусного счета переводятся на главной и имеют быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции зависимости от избранной платежной системы.2. Создать свежий профиль. Для регистрации нужно наполнить небольшую анкету или зайдите в личный кабинет при помощи социальных сеток; 1×slots официальный сайт скачать <a href=https://www.formulersupport.com/User-KennethSnips>https://www.formulersupport.com/User-KennethSnips</a> Несмотря на то, собственно данный вариант стимуляции со стороны азартных платформ очень востребован в сфере подобных игр, далековато не поклонникам казино ведомо, собственно себе бездепозитные призы казино и как именно их вполне эксплуатировать.
1×slots зеркало регистрация в 1×slots casino
Бонус без депо за регистрацию в казино (бездепозитный бонус) – это валютный подарок от клуба, кот-ый начисляется на аккаунт игрока после регистрации в казино. Кроме сотворения учетной записи, для получения бездепа, довольно часто потребуется ещё и доказать контактные данные игрока и/или активировать особый промо-код. Но ни не забывайте внимательно читать управляла роли в бонусных промоакциях. Если вы нарушите желая бы одно условие, позже вы не можете уладить недоразумение с администрацией.Условия шансы разниться приятель от приятеля. Но такой бонус может быть использован только для игрового процесса – приобретенные на счет финансы до того, как станут отыграны, исключить невозможно. <a href=http://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=4968>http://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=4968</a> На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению этого времени, Вы не можете активировать и получить бездепозитный бонус. 1×slots официальный demo регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://masstr.net/member.php?action=profile&uid=27801>1хслотс казино зеркало</a>
<a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=53056>1×slots бездепозитный бонус за регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для проверки применяются сканы паспортов, водительских водительских, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если юзер обнаружен в попытке завести вспомогательный аккаунт, все его учетные записи подвергаются блокировке, а их обладатель попадает в темный список. При забаве на лицензионной площадке не стоит бояться свидетельствовать достоверную персональную информацию (шифрование ликвидирует утечку индивидуальных данных). Доступность — бездепозитные бонусы в казино чаще всего предоставляются новым игрокам, хотя бывают случаи, когда приз все получить и действующие посетители.
#5652 DavidDahhttps://www.netware.biz
ssl ftp client <a href=https://www.usbspace.com/>simple ftp client</a>
#5653 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало
Не стоит путать забаву в демо и использование призов. В демонстрационном режиме игрок возможность оценить механику слота, сюжет и оформление. Но игра ведется на относительные кредиты, потому отсутствует главное ? ощущение азарта. Активируя промокод либо фриспины, заказчик как не тратит средства средства на игровые автоматы, но возможность сорвать реальный куш! <a href=http://filmkachat.ru/>1хслот зеркало сайта</a> <a href=https://u.pcloud.link/publink/show?code=XZNQwV5ZNtDPSsk07bJazNAm6jpRESTTmoa7>https://u.pcloud.link/publink/show?code=XZNQwV5ZNtDPSsk07bJazNAm6jpRESTTmoa7</a> В качестве бонусов онлайн казино часто предлагает выдачу фриспинов, то есть безвозмездных вращений игрового барабана. Виртуальные монеты возможно использовать для изучения в покерной школе либо для забавы в казино.Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются незамедлительно в сотворения профиля и активны недолговременное время. Если не успеете потратить свои, они попросту сгорят. Касаемо медли, как призы активны на часа. 1×slots официальный сайт зеркало <a href=http://www.djngo.or.kr/gb5/bbs/board.php?bo_table=free&wr_id=1608741>http://www.djngo.or.kr/gb5/bbs/board.php?bo_table=free&wr_id=1608741</a> Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, a лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.
1×slots рабочее зеркало на сегодня
Подтвердите лицо, предоставив оператору казино свои паспортные данные. Инструкции обычно легкие, основное — конкретно им стопам. Если написано, что «на фото должны быть заметны все хорошо угла страницы паспорта» — устройте именно такое фото.Также, учите, собственно бездепозитный приз возможно вывести только том, случае, когда будут исполнены все обстоятельства отыгрыша. <a href=https://www.goslog.ru/forum/messages/forum1/message15841/11-obrashcheniya-grazhdan?result=reply#message15841>1хслотс казино зеркало</a> 1×slots сайт Какие призы есть еще получить не бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, любое онлайн казино предлагает игрокам выгодное предложение на первый депозит, вы совершаете депо, ваш депозит увеличивается в двое либо в в трое, тем наиболее начать выступать возможно с более солидной суммой, так же не забываем на вейджер на бонусы. <a href=http://phdynasty.ru/bitrix/redirect.php?goto=http://titanquest.org.ua/go?http://iskam.czu.cz/Localize/ChangeLang?returnUrl=https://teletype.in/@urid_pomosh/p5ipT6S_zlS>http://phdynasty.ru/bitrix/redirect.php?goto=http://titanquest.org.ua/go?http://iskam.czu.cz/Localize/ChangeLang?returnUrl=https://teletype.in/@urid_pomosh/p5ipT6S_zlS</a> Для вывода средств бонус надо(надобно) будет отыграть законам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариациями отыгрыша бездепозитного бонуса до его получения, чтобы избежать конфликтных обстановок. 1×slots официальный сайт скачать
1×slots регистрация
<a href=http://v208870d.bget.ru/user/CharlesGicky/>http://v208870d.bget.ru/user/CharlesGicky/</a> Все безвозмездные призы кажутся заманчивыми. Кто же откажется от способности сыграть в онлайн-казино, не рискуя деньгами, хотя получая выигрыши. Но далеко не все бездепозитные бонусы одинаковой презентабельны для рассудительного клиента.Заработать на бездепозитных призах за регистрацию в казино возможность любой пользователь, достигший совершеннолетия. рабочее зеркало 1хслотс В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая приятная доля игры. Важно, зачастую бездепозитные призы в казино выдаются с лимитированиями по наибольшей выплате. В среднем возможно рассчитывать на выгода в несколько тысяч руб. Как исключить выигрыш с приза без депо. Придётся подтвердить акк документально, в неких заведениях. Процедура верификации неотклонима и делается каждым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате или прочитайте в правилах.
казино 1×slots
Чтоб получить крупный выигрыш, выбирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша.Для тех, кто лишь подумывает испытать собственную фортуну, еще для профессиональных игроков, разыскивающих новые площадки для выигрышей, ведущие лицензированные казино часто устраивают разные промоакции, и одно из лучших предложений за время – как для новичков, например и для профессиональных игроков – бездепозитный приз за регистрацию. Главным моментом в появлении данных вознаграждений состоит сомнений, что пустив их в ход, в ничем не рискует и в последствии никому ничего не будет должен (не зависимо, получит ли он благодаря призам какой-либо выигрыш или мгновенно спустит все лишь собственно прибывшие деньги). То есть, казино снабжает игрока возможностью на дармовой базе выступать во всевозможные слоты и даже спонсирует забаву.В интернет-сети всегда можно найти списки более знаменитых и гарантированных поощрительных программ от модных онлайн-казино. казино 1×slots <a href=https://cms.webprojectmockup.com/Crippticllc/community/profile/uojbenny5030272/>https://cms.webprojectmockup.com/Crippticllc/community/profile/uojbenny5030272/</a> Следует выделить, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом.
1×slots зеркало проходить регистрацию это отличный вариант
Бездепозитные бонусы казино за регистрацию в 2022 году — это вероятность сыграть за счёт заведения. Казино даёт клиенту шанс пользоваться определённой суммой или количеством безвозмездных вращений без внесения депозита. Не путайте деморежим с реальной игрой без необходимости внесения депо.Как управляло, при выводе денег, от играющего потребуется только устроить минимальный вклад чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом собственный счет. <a href=http://ekopromkonsalt.ru/index.php?subaction=userinfo&user=productivenymph>http://ekopromkonsalt.ru/index.php?subaction=userinfo&user=productivenymph</a> Классическая разновидность бонуса за создание аккаунта. Его преимущество содержится никаких, что клиент может других выбирать аппараты и создавать ставки в их. Иногда перечень игровых автоматов ограничен оператором, хотя все равно это другого, чем один-единственный дешевый разъем, как в случае с использованием фриспинов. 1×slots регистрация 1×slotscasino09k online
<b>Смотреть еще похожие новости:</b>
<a href=https://bbs.sinbadgroup.org/index.php?xjkh-tampa-s-poster-pup-for-new-cancer-treatment.t48661.html/page-4013#post-205539>x1 slots регистрация в 1×slots casino</a>
<a href=http://weeklywars.de/viewtopic.php?f=12&t=9384&p=463330#p463330>1 xslots рабочее зеркало</a>
<a href=http://sfessd.listbb.ru/memberlist.php?mode=viewprofile&u=86>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Казино выделяет возможность заработать и вывести настоящие средства на бездепозитных призах. Обычно, это малозначительная сумма, которую казино возможность себе разрешить презентовать игроку. Большинство клубов привлекают внимание игры за счёт различных презентов. На 1 сайтах возможно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает благотворительные вращения для запуска топовых интернет слотов. Несмотря на различные акции, стоит выделить самые главные.
#5654 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пинап казино porno Игорь Акинфеев (футбол) <a href=https://slon-ru.com/>casino онлайн</a> 1win casino ограбление казино <a href=https://res-publika.com>скачать сайт букмекерской конторы</a> cat casino порно с Афонина Марина Игоревна casino официальный сайт 1×bet зеркало xbet почему в казино нет окон симулятор казино casinos xyz
DiskiPlus 1×bet скачать приложение на андроид DiskiPlus сайты казино <a href=https://www.diskiplus.ru/>DiskiPlus bitz casino</a> DiskiPlus pin casino DiskiPlus зеркала казино <a href=https://diskiplus.ru>DiskiPlus букмекерская контора фонбет официальный</a> DiskiPlus скачать pin casino DiskiPlus скачать 1×bet DiskiPlus порно с Алина Загитова, фигуристка DiskiPlus букмекерская контора DiskiPlus porno Юлия Канакина DiskiPlus порно с Георгий Джикия (футбол) DiskiPlus казино в россии
#5655 Charlesgunnyhttp://filmkachat.ru
1×slos регистрация в 1×slots casino
При забаве на бонусные свои запрещается выступать в игровые автоматы с современным джекпотом и игры из радела live casino. Кроме такого, кое-какие казино выделяют бездеп на один или несколько конкретных слотов, и в иных забавах Вы не сможете на их выступать.Иногда виде бездепа, казино дарует минимальный бонус (до 50 руб. ), из-за которого надо заморачиваться. <a href=http://filmkachat.ru/>1×slots casino зеркало рабочее</a> <a href=https://mega.nz/file/d28RQCBS#2i_xAXDQfj-rVkVhMWNDPYPXRKJ71NaLOz_MKYAVxxQ>https://mega.nz/file/d28RQCBS#2i_xAXDQfj-rVkVhMWNDPYPXRKJ71NaLOz_MKYAVxxQ</a> Онлайн гемблинг развивается с каждым днем больше и больше, новые бренды создаются не по дням а по часам. Новые онлайн казино проделывают вступительные акции для игроков, для того собственно бы зарекомендовать себя, и тем самым предлагают бездепозитные бонусы за регистрацию, собственно бы не упустить эту возможность — как пользоваться свежим бездепом, советуем посещать наш вебсайт как возможно почаще, самое вкусное и новые будет добавляться в этом же перечне.Каждый в должен сначала отчетливо выучить условия по получению и отыгрышу понравившегося подарка. Если всё организует, поторопитесь отобрать безвозмездные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо данный начать вертеть барабаны топовых слотов. 1×slos регистрация в 1×slots casino <a href=http://0119ddd.com/bbs/board.php?bo_table=free&wr_id=130210>http://0119ddd.com/bbs/board.php?bo_table=free&wr_id=130210</a>
x1 slots 1хслотс регистрация перейти на 1×slots
Приветственный приз без депозита ? презент за регистрацию. Выдается деньгами, фриспинами или баллами. В последнем случае бонусные баллы используются для участия в турнирах или размена на реальные деньги. 1×slots официальный сайт зеркало Фриспины. Бесплатные вращения предусмотрены для применения в видео-слотах. Внимательно читайте условия – они нередко выдаются для неких машин. В зависимости от клуба вам создавать определенное количество ставок. Кстати, современные игорные жилища дают возможность заводить «одноруких злодеев». <a href=https://gti-club.ru/forum/member.php?u=410969>https://gti-club.ru/forum/member.php?u=410969</a> 1×slots casino регистрация на сайте
1×slots зеркало видели такую регистрацию на
<a href=https://pdn-forum.bpgs.de/memberlist.php?mode=viewprofile&u=1856>https://pdn-forum.bpgs.de/memberlist.php?mode=viewprofile&u=1856</a> 1×slots зеркало на сегодня
1×slots зеркало регистрацию более популярный вариант это
Минимального оборота. Этот лимит уточняется вейджером — пока игрок не поиграет на установленную сумму, вывод средств несомненно недосегаем. Подобные бонусы без депо предоставляются на больше выгодных критериях. Зачастую они покрупнее, а условия отыгрыша менее строгие.В каждом казино с бездепозитным призом предусмотрены вейджеровые обстоятельства. Это один-единственный «подводный камень», кот-ый стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) устроить определённое число ставок. Чем круче приз, тем сложнее выполнить условия, и напротив. 1хслотс мобильная версия зеркало <a href=http://beton.ru/communication/forum/?PAGE_NAME=profile_view&UID=35796>http://beton.ru/communication/forum/?PAGE_NAME=profile_view&UID=35796</a> Денежные свои. Третий бонус за регистрацию без депозита – наличные. К огорчению, лишь знаменитые и популярностью клубы могут дать деньги в руб. Или долларах. С их поддержкой вы сможете насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед этим необходимо исполненье определенных условий.
1×slots зеркало которую указывали при регистрации кстати
Большинство интернет-казино из нашего топ-10 готовы порадовать вас неповторимыми акциями. Читайте о их в обзорах и на форуме.В интернете слишком много скриптовых сайтов, которые принадлежат плутам. Их главная задача – привлечь гэмблеров, пообещав не только щедрые презенты, хотя и солидные выигрыши. Так что кое-какие сайты предлагают получить за регистрацию том $1 000. <a href=http://www.thedreammate.com/home/bbs/board.php?bo_table=free&wr_id=1350355>http://www.thedreammate.com/home/bbs/board.php?bo_table=free&wr_id=1350355</a> 1×slots на любой вкус как пройти регистрацию
<b>Смотреть еще похожие новости:</b>
<a href=http://powercrop.it/chi-siamo/le-persone?page=9#comment-455>1×slots бездепозитный бонус за регистрацию</a>
<a href=https://mycs.ge/index.php?subaction=userinfo&user=JamesDop>1×slots casino регистрация 1×slotscasino09k online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чаще всего интернет-казино предлагают бездепозитные призы свежим юзерам. Эта промо-акция очень отлично завлекает новичков, подталкивая их к открытию счета. Конечно, не все становятся преданными посетителями, хотя сам факт регистрации аккаунта играет на руку заведению.
#5656 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пина букмекерской конторы порно с Петр Ян (ММА) <a href=https://www.ossetia.tv/>casino бездепозитный</a> porno Марина Александрова гама казино <a href=https://rhymes-punches.com/>porno Юлия Канакина, скелетонистка</a> porno Алена Михайлова скачать сайт букмекерской конторы официальные зеркала казино Юдаева Ксения Валентиновна порно порно с Васильева Татьяна Викторовна казино зеркало сегодня online casino 7k
DiskiPlus porno Светлана Ходченкова DiskiPlus казино сегодня <a href=https://www.diskiplus.ru>DiskiPlus реального казино</a> DiskiPlus сайт казино вход DiskiPlus скачать 1×bet 1×bet xyz <a href=https://diskiplus.ru/>DiskiPlus порно с Каролина Севастьянова</a> DiskiPlus 1×bet сейчас DiskiPlus Набиуллина Эльвира Сахипзадовна порно DiskiPlus порно с Анна Калинская (теннис) DiskiPlus рокс казино DiskiPlus казино смотреть DiskiPlus официальная казино DiskiPlus букмекерская контора фонбет официальный
#5657 Charlesgunnyhttp://filmkachat.ru
x1 slots 1хслотс регистрация перейти на 1×slots
Бездепозитный приз – это экономическое вознаграждение, коие выдается участнику забавы в казино, для его вербования и возникновения заинтригованности. Любой посетитель, который соответствует условиям выдачи похожего бездепозитного бонуса, может претендовать на получение вышеуказанного приза. Такое одобрение считается наиболее действенным методом, дающим возможность стартовать в игре, не вкладывая собственных материальных средств.Бездепы имеют входить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой либо баллами. <a href=http://filmkachat.ru/>зеркала 1×slots</a> Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные методы и расценить особенности, недоступные при забаве в демо режиме. Многие свежие посетители переходят в количество постоянных, а оператор получает долгосрочную выгода. <a href=https://www.zybuluo.com/comcgifurniture/note/2570100>https://www.zybuluo.com/comcgifurniture/note/2570100</a> 1×slots бонус за регистрацию <a href=http://doctor-klin.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://n-l-e.ru/bitrix/redirect.php?goto=http://naruto.su/link.ext.php?url=https://teletype.in/@urist555/2NbbvUNfERE>http://doctor-klin.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://n-l-e.ru/bitrix/redirect.php?goto=http://naruto.su/link.ext.php?url=https://teletype.in/@urist555/2NbbvUNfERE</a>
1×slots регистрация на сайте
Отыграв бездепозитный бонус в казино с выводом также придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если подобное ограничение присутствует, то единоразово исключить получится лишь сумму, не превосходящую объем приобретенного бонуса.Стоит обозначить(означить), собственно бездепозитный бонус выдается только совершеннолетним новеньким, коие, тому, имеют пригласить личных друзей и знакомых, также рассчитывающих на поощрительную программу преданности. Подобная разработка появилась среди соперничающих онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению своей популярности, методом вербования новых игроков. Бонусы – это оригинальный шанс для вероятных участников забавы, коие все опробовать софт покер рума и убедиться, станут ли они в него выступать либо нет. Новый игрок попробует свои силы с настоящими оппонентами в казино. <a href=https://karakol.com.kg/user/Jameskef/>1×slots регистрация на сайте</a> 1×slots рабочее зеркало на сегодня Вейджер (либо вагер) ? это минимальная сумма ставок, которую нужно устроить для вывода денежного бонуса. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим красивее спецпредложение.Получить приветственный приз могут только новые клиенты онлайн-казино. Способы описаны в условиях промоакции любого легального казино, чаще всего это: <a href=https://gadgetpage.ru/user/Jamesgapse/>https://gadgetpage.ru/user/Jamesgapse/</a> Вейджер (wager) – это коэффициент, который демонстрирует на какую сумму нужно устроить ставок, дабы вывести приз из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода сего бонуса, Вам необходимо сделать ставок на необходимую: 500*70=3500 руб. Только полностью отыграв бонус, Вы можете вывести собственный выигрыш.Автоматическая активация может самой комфортной, хотя ручной способ имеет перед ней достоинства. Прежде чем использовать вознаграждение от казино, стоит заблаговременно определить, сколько медли требуется на исполненье всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деянья бонуса. 1×slots регистрацию процедура займет всего лишь
1х слот 1хслотс регистрация перейти на 1×slots
Для вывода средств бонус надо(надобно) будет отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариантами отыгрыша бездепозитного приза до его получения, чтобы избежать конфликтных ситуаций. <a href=http://clipartus.ru/user/PorsedropSr/>http://clipartus.ru/user/PorsedropSr/</a> Поспешите забрать бездепозитные призы за регистрацию в казино из представленного перечня. Все платформы не ведут законную деятельность, хотя и порадуют правдивыми плодами забавы, высокой отдачей, резвыми выплатами. 1×slots регистрация 1×slotscasino 56 online
1×slots официальный зеркало
Но эти рамки не смущают числе хайроллеров, что коэффициенты на слотах разрешают рассчитывать на крупные выигрыши, ну неких автоматах разыгрывается прогрессивный джекпот. 1×slots казино мобильная версия <a href=https://yogaasanas.science/wiki/User:DaniloBayly2251>https://yogaasanas.science/wiki/User:DaniloBayly2251</a> Вейджер в переводе с английского означает «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша полученного бонуса, в нашем случае бездепозитного. Число ставок роли не играет — главно только набрать необходимую, пропорциональную сумме поощрения.Самые популярные способы вывода денег ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам на Neteller и Skrill, а пользуются криптовалютными кошельками. Вывод выигрышей возможность исполняться быстро либо развлекать от нескольких часов до нескольких суток.
1×slots регистрация 1×slots casino 777 online
Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, the decision зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.Сроки активации бонуса устанавливаются любым казино, но чаще всего они не превосходят недели с этапа получения. Игроку обязательно нужно применять бездеп на обозначенного срока, в ином случае бонус просто исчезнет. Каждый бонус можно получить только один раз, поэтому если не применять бездеп в срок, у игрока не будет второго шанса им пользоваться. <a href=https://dvi.dp.ua/wr_board/tools.php?event=profile&pname=CharlesHem>https://dvi.dp.ua/wr_board/tools.php?event=profile&pname=CharlesHem</a> 1×slots казино мобильная версия Создание аккаунта. На сайте казино необходимо открыть регистрационную форму и заполнить порожние поля собственными данными. Иногда на данном шаге потребуется показать лишь адрес электрической почты и пароль, но чаще хотелось наполнить анкету индивидуальной информацией (ФИО, дата рождения, место проживания и т.д.). Нужно свидетельствовать только настоящие данные, поскольку впоследствие они будут проверены.Бездепы могут заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами.
<b>Смотреть еще похожие новости:</b>
<a href=http://theauction.com.au/my-account/>1×slots зеркало на сегодня</a>
<a href=https://forum.home-visa.ru/memberlist.php?mode=viewprofile&u=3536>онлайн казино 1×slots</a>
<a href=https://swordmaster.org/user/JamesVok/>1хслотс официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Условия отыгрыша бонуса. Если Вы планируете заработать на бездепозитном бонусе, то для направьте на велечину вейджера и срок, который дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть приз и исключить выигрыш.
#5658 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Илюшникова Татьяна Александровна порно с Матвей Сафонов (футбол) <a href=https://rhymes-punches.com/>porno Катерина Шпица</a> pin up casino top top Окладникова Ирина Андреевна порно <a href=https://krtka.info/>Попова Анна Юрьевна порно</a> официальные сайты казино casino игровой автомат casino онлайн рейтинг казино бывшие казино 1×bet официальный сайт 1×bet xyz скачать 1×bet
DiskiPlus казино вулкан DiskiPlus pin up casino buzz <a href=https://diskiplus.ru>DiskiPlus 1×bet вход</a> DiskiPlus порно с Максим Глушенков (футбол) DiskiPlus бывшие казино <a href=https://diskiplus.ru>DiskiPlus casinos winning</a> DiskiPlus Шевцова Татьяна Викторовна порно DiskiPlus сайте букмекерской конторы фонбет DiskiPlus porno Елизавета Туктамышева DiskiPlus 7k casino бонус DiskiPlus порно с Анастасия Потапова, теннисистка DiskiPlus porno Юлия Канакина, скелетонистка DiskiPlus pin up casino пин ап
#5659 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее на сегодня
Высокая конкуренция в разделе азартных игр доказывает операторов завлекать посетителей разнородными акциями. Благодаря данному у гостей бывает возможность получить бонусы в казино за регистрацию без депо. Воспользоваться этим предложением можно, минуя функцию внесения средств на игровой счет, просто активировав аккаунт на веб-сайте. Наш гид по бездепам поможет избрать самую симпатичную бонусную программу, разузнать управляла получения такого вознаграждения и распорядиться им с максимальной выгодой. <a href=http://filmkachat.ru/>1×slots зеркало видели такую регистрацию на</a> Бездепозитные призы за регистрацию в игровых автоматах для хозяев онлайн-казино являются частью рекламной кампании, направленной на повышение аудитории вебсайта. Так они продвигают свои бренды и завлекают свежих посетителей. <a href=https://onetable.world/read-blog/89545>https://onetable.world/read-blog/89545</a> 1×slots зеркало этих способов предполагает регистрацию <a href=http://megatv.kiev.ua/user/DavidWrata/>http://megatv.kiev.ua/user/DavidWrata/</a> Каждый новичок и профессиональный игрок грезят прытко стартануть и начать создавать реальные ставки. Для этого достаточно арестовать презент, за кот-ый не уплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email или аппарат. После сего администрация начислит щедрое вознаграждение в виде безвозмездных вращений либо виртуальных кредитов.
1хслот зеркало
Иногда для получения призов необходимо спутаться с представителями службы поддержки. Удобнее всего с ними разговаривать в онлайн-сате, но иногда довольно запроса по электрической почте. 1хслотс казино зеркало В наше время довольно просто получить приз за регистрацию в казино. Практически любой игорный дом с радостью начисляет деньги либо безвозмездные вращения. Многие гэмблеры используют этим и не смущяются региться в любом клубе с прибыльными критериями. Кстати, это отличная возможность выработать победную стратегию и сорвать джекпот. <a href=http://geolan-ksl.ru/forum/user/84645/>http://geolan-ksl.ru/forum/user/84645/</a> Прежде чем активировать бездеп, необходимо убедиться сомнений, что государство, гражданином коей считается игрок, не входит в список запрещенных. 1хслотс официальный сайт зеркало
1хлот регистрация в 1×slots casino
В онлайне очень количество скриптовых вебсайтов, коие принадлежат плутам. Их главная задача – заинтересовать гэмблеров, пообещав столько щедрые подарки, хотя и солидные выигрыши. Так что кое-какие сайты предлагают получить за регистрацию даже $1 000.Законодательство, регулирующее азартные забавы в различных государствах, оказывает на полномочия операторов. В итоге юзеры из отдельных регионов сталкиваются с лимитированиями со стороны казино. Это может быть как глубокий отказ в доступе, например и невозможность загружать игры отдельных производителей. <a href=https://www.palscity.com/forums/thread/2009/>https://www.palscity.com/forums/thread/2009/</a> Чаще всего применяются коды. Их надо(надобно) вносить в специальные окошки регистрационной анкеты, в речь идет о пригласительных призах, либо в особом разделе собственного кабинета игрока.2. Создать новый профиль. Для регистрации надо(надобно) наполнить небольшую анкету либо зайдите в собственный офис посредством социальных сеток; 1×slots casino регистрация 1×slotscasino09k online Существуют казино с бонусом за регистрацию, в довольно известны фриспины в онлайн казино потом регистрации в определенных забавах. Они встречаются в почаще бесплатных поощрений или классических бонусов в казино без инвестициям. Например, игрок регистрирует счет, на который начисляются безвозмездные игры, приз за регистрацию вид безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса игры выигрывает истинные деньги, которые в последствии возможно удачно вывести из заведения на собственную платежную систему. То есть, есть все шансы вывести средства без рисков своими деньгами. Регистрация, за игрок получит бонусы, займет несколько, а спасибо данному возможно прирастить 5 евро поощрений до тысячи и без всяких проблем исключить их.
1×слот регистрация в 1×slots casino
Выполнив все требования оператора, заказчик имеет оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит в среднем менее суток. Если дополнительно потребуется пройти процедуру верификации, то срок увеличивается до 1–2 трудящихся дней. Для перевода применяются банковские инструменты и электронные платежные системы. Второй метод подходит превосходнее, так как основная транзакций ситуации исполняются моментально. В связи со спецификой функционирования банков обработка платежей имеет взятьвдолг(взятьвзаймы) до нескольких трудящихся дней.Вы не в коем случае ни чем рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный приз, по мимо практической забавы на бездепозитные бонусы, у Вас есть шанс изучить игровые автоматы, научится регулировать изменять ставки и линии, изучать бонусные забавы и их выигрышные комбинации, да в просто зарядится кучей эмоций! Ведь вы будите играть на бонусные свои, которые можно отыграть и вывести, но просто на демо счет, тем наиболее адреналин в крови более повысится а пульс забьется с частым ритмом! Индивидуальные поощрения выдаются за совершение действий: подписку на аккаунты площадки в соц сетях, установку мобильного прибавленья или официального посетителя для ПК. В большинстве казино срабатывают программы преданности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на грядущий степень нередко с выдачей бездепа. Доступ к дару возможность открываться механически последствии введения промокода либо воззвания в службу сайта. В первом случае от юзера не требуется никаких поступков. Бездеп с активацией по коду встречается почаще всего. Игроку нужно ввести совокупность знаков в графе, кот-ая может пребывать в регистрационной форме в Личном офисе.Фриспины без депо либо дополнительные свои посодействуют ближе познакомиться с игровой платформой и её функциями. За счёт подарков возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за игры против живых крупье. 1×slots официальный сайт зеркало <a href=https://forum.fne82.org/profile.php?id=532464>https://forum.fne82.org/profile.php?id=532464</a>
1 xslots рабочее зеркало
Выигрыши с призов без вложений постоянно привязаны к притязанию по ставкам и все быть обналичены только после выполнения данных требований. <a href=https://lotn.info/index.php?action=profile;u=30272>https://lotn.info/index.php?action=profile;u=30272</a> Но такие рамки не смущают даже хайроллеров, поскольку коэффициенты на слотах позволяют рассчитывать на крупные выигрыши, а неких автоматах разыгрывается прогрессивный джекпот. 1 x slots casino Объективные – размер приза, коэффициент и обстоятельства вейджера, надобность внесения депо для вывода денег;Проверка занимает от нескольких минут до нескольких дней, профессионалы техподдержки все запросить вспомогательные документы либо инициировать куцее общение по Skype.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=1126375#pid1126375>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если при регистрации указать промокод, можно гарантировано получить приз. Где брать ваучер? Посетите на блоги либо форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В последнее время игорные дома начали афишироваться в кинокартинах и телесериалах. Присмотритесь и скорее заметите промокод, который принесёт 500 либо 1 000 бонусных рублей.
#5660 Charlesgunnyhttp://filmkachat.ru
1×slots на любой вкус как пройти регистрацию
Иногда у гостей вебсайта имеют появиться трудности, задачи, препядствия при активации полученного промо-кода. В этих случаях, необходимо обратиться за поддержкою в службу «Support». Для получения ответа, непременно указывается определенная причина воззвания и подтверждается информация дополнительными экрана. Если сложилась неоднозначная ситуация, всегда возможно обратиться к основному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ.Не сложно додуматься, собственно not the slightest down payment bonuses почти разу не бывают большими. Чаще всего речь о пяти–тридцати долларах (или эквиваленте этой суммы в другой денежной). <a href=http://filmkachat.ru/>1×slots casino зеркало рабочее</a> Бонус в казино без депо содержит разные вариации: может быть приветственный приз, промоакции в честь каких-либо праздничных либо важных дат, приз за привлечение новых игроков, лояльность и получение VIP-статуса.Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные способы и оценить особенности, недоступные при игре в демо режиме. Многие новые посетители переходят в число неизменных, а оператор получает долгосрочную прибыль. <a href=https://community.wongcw.com/blogs/934091/Transform-Your-Space-with-a-Professional-Interior-Design-Plan-That>https://community.wongcw.com/blogs/934091/Transform-Your-Space-with-a-Professional-Interior-Design-Plan-That</a> Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных ситуаций с казино, когда после отыгрыша бездепа для не дадут вывести солидную необходимую выигрыша.Для выбора азартного заведения Вы сможете пользоваться перечнем наших казино с бонусами за регистрацию. На нашем веб-сайте мы опубликовали перечень бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, собственно доля призов неповторимые и доступны лишь для гостей нашего сайта по-специальному промо-коду или по оригинальной ссылке. Кроме как, для любого приза мы подготовили подробный обозрение, в Вы узнаете как получить и отыграть одобрение и как вывести собственный выигрыш с бездепа. 1×slots зеркало видели такую регистрацию на <a href=https://www.varranger.com/vforum/index.php?action=profile;u=36199>https://www.varranger.com/vforum/index.php?action=profile;u=36199</a> В настоящее время получить бонус за регистрацию в казино довольно просто. Почти любой игорный дом с готовностью даст средства или безвозмездные вращения. Многие игроки используют данным и не смущяются регистрироваться в любом клубе с прибыльными условиями. Кстати, это отличная вероятность придумать выигрышную стратегию и сорвать куш.Бездепозитные бонусы – это исключительно занимательная и более перспективная промоакция интернет-казино. Они и какого-либо фри-спинов, поэтому собственно выплаты в безвозмездных вращениях не гарантированы, ведь комбинации на барабанах игрового аппарата все не сложиться.
1×slots сайт
Существует ли стратегии для отыгрыша бездепозитных бонусов? К сожалению нет, на выигрыши или проигрыши с бонусов, казино или игрок повлиять не может, отдача игр происходит от создателей игр. 1×slots коды Законодательство, регулирующее азартные игры в разных странах, влияние на возможности операторов. В результате пользователи из отдельных регионов сталкиваются с лимитированиями со стороны казино. Это может быть как глубокий отказ в доступе, например и невозможность загружать забавы отдельных производителей. <a href=http://www.dbgjjs.com/home.php?mod=space&uid=463153>http://www.dbgjjs.com/home.php?mod=space&uid=463153</a> 1×slots сайт зеркало
1хслотс рабочее зеркало на сегодня
Чаще всего казино приз за регистрацию без депо даёт возможность запустить каждой автомат. Но чем пристально ознакомиться с условиями. Иногда для игры доступны только определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, лучше начать знакомство с миром пыла именно с «одноруких злодеев».Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. Наши специалисты изучают условия акции, этого в ручном режиме проверку их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и другие характеристики. Мы не рекламируем казино, а даем игрокам информацию о наихороших из их.Так что сможете храбро региться без всяких раздумий. Фортуна сегодня точно на вашей стороне. Не бойтесь, ведь следствие какого либо ущерба Вам совершенно не грозит. С такими бонусами как без пополнения, Вы остаетесь только в плюсе, но не как не в минусе. <a href=https://www.christiandaily.co.kr/service/bbs/board.php?bo_table=free&wr_id=728321>https://www.christiandaily.co.kr/service/bbs/board.php?bo_table=free&wr_id=728321</a> Высокая конкуренция в разделе азартных игр доказывает операторов завлекать клиентов разнообразными акциями. Благодаря данному у гостей замечена возможность получить призы в казино за регистрацию без депозита. Воспользоваться этим предложением возможно, избегая функцию внесения средств на игровой счет, просто активировав акк на веб-сайте. Наш гид по бездепам поможет избрать самую привлекательную бонусную программку, узнать правила получения такового вознаграждения и распорядиться им с максимальной выгодой.Способы получения бездепа различаются в зависимости от вида приза, который приглянулся игроку. Но вас в любом случае нужно быть зарегистрированным в легальном онлайн-казино и доказать свою лицо. В общем облике пошаговая аннотация для получения бездепозитного приза выглядит например: зеркала 1×slots
онлайн казино 1×slots
Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депо возможность отличаться до 30 дней. Размер бонусов почаще всего чисто символический и не превышает 50 рублей. Приятно, хотя ощутимым бустом в игре навряд будет.В перечне требований к отыгрышу нередко присутствуют лимиты на ставки при забаве на собственные деньги. Так, в отыграть надо(надобно) 30 000 руб., а предельная сумма ограничена 30 рублями, то вертеть барабаны предстоит 1000 один. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам деяния акции. 1хслот зеркало <a href=https://www.ccvgaming.com/forum/member.php?43674-DoctorLazutasn>https://www.ccvgaming.com/forum/member.php?43674-DoctorLazutasn</a>
1хслотс казино зеркало
Существуют казино с бонусом за регистрацию, в довольно популярны фриспины в онлайн казино впоследствии регистрации в определенных играх. Они встречаются том чаще бесплатных поощрений или классических призов в казино без вложений. Например, игрок регистрирует счет, на кот-ый начисляются безвозмездные забавы, бонус за регистрацию повторяющий безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса игрок выигрывает настоящие деньги, которые в последствии можно успешно вывести из заведения на свою платежную систему. То есть, есть шансы вывести свои без рисков своими финансами. Регистрация, за компьютерные получит призы, займет несколько, а спасибо данному можно прирастить пять евро поощрений до тыс. И без всяких заморочек вывести их. <a href=http://www.sante-cinnamon.kr/bbs/board.php?bo_table=free&wr_id=308546>http://www.sante-cinnamon.kr/bbs/board.php?bo_table=free&wr_id=308546</a> 1×slots рабочее зеркало С не отыгранным призом запрещается превышать объем наибольшей ставки. Нарушение сего условия последствия аннулирование выигрыша.Если площадка презентует бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь завести акк на сайте и активировать его, подтвердив адресок электронной почты, номер аппарата либо иные данные, которые требует оператор. Перед этим нужно убедиться, что пользователь находится на официальном веб-сайте казино, но на мошеннической площадке.
<b>Смотреть еще похожие новости:</b>
<a href=https://mcmon.ru/showthread.php?tid=126104>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<a href=https://forums.scar-divi.com/topic/815093–1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D0%BC%D0%BE%D0%B1%D0%B8%D0%BB%D1%8C%D0%BD%D0%B0%D1%8F-%D0%B2%D0%B5%D1%80%D1%81%D0%B8%D1%8F-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE/>1хслотс мобильная версия зеркало</a>
<a href=http://swissairways-va.com/phpBB3/memberlist.php?mode=viewprofile&u=3495>1хслотс официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Индивидуальные одобрения выдаются за совершение деяний: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавленья или официального посетителя для ПК. В большинстве казино действуют программки лояльности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на следующий степень часто сопровождается выдачей бездепа. В списке требований к отыгрышу часто присутствуют лимиты на ставки при этой на личные средства. Так, в отыграть надо(надобно) 30 000 руб., а предельная сумма ограничена 30 рублями, то вращать барабаны светит 1000 один. Эта особенность затрудняет соблюдение игроками критерий по срокам действия промоакции.
#5661 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino на телефон игры казино <a href=https://rhymes-punches.com/>букмекерская контора официальный сайт скачать</a> online casino porno Андрей Рублев (теннис) <a href=https://slon-ru.com/>1×bet зеркало слоты 1×bet xyz</a> Кузнецова Анна Юрьевна порно porno Илья Ковальчук (хоккей) 1×bet официальный online casino Разуваева Ксения Денисовна порно Черкесова Бэлла Мухарбиевна порно casino
DiskiPlus porno Александр Соболев (футбол) DiskiPlus букмекерские конторы бет <a href=https://diskiplus.ru>DiskiPlus порно с Каролина Севастьянова</a> DiskiPlus casino играть DiskiPlus 1×bet регистрация <a href=https://www.diskiplus.ru/>DiskiPlus казино фильм</a> DiskiPlus Валентина Матвиенко порно DiskiPlus пин ап casino pin up top DiskiPlus почему в казино нет окон DiskiPlus Мухтиярова Елена Вячеславовна порно DiskiPlus человек казино DiskiPlus букмекерская контора DiskiPlus casino com
#5662 Charlesgunnyhttp://filmkachat.ru
1×slots на любой вкус как пройти регистрацию
Сразу последствии активации промокода можно воспользоваться подарком. Как уже упоминалось, бонусы случаются трёх видов – фриспины, кредиты и фриплей-бонусы. <a href=http://filmkachat.ru/>1× slots официальный</a> Прибывшие на аккаунт деньги бездепозитные бонусы предназначаются, главном, только для свежеиспеченных пользователей, коие ранее не имели собственного аккаунта в данном казино. Исходя из сего, случае ранее у игрока был сделан депо, то, по всей вероятности, у него больше не будет способности рассчитывать на получение такового приза в определенном заведении.Доступные забавы – В некоторых азартных забавах можно понизить математическое преимущество казино до нескольких 10-х процента. В их числе почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как правило, в этих забавах ставки идут в зачет вейджера не полностью. Например, может учитываться только 50%. В неких играх бездепозитные призы вообщем невозможно отыгрывать. <a href=https://www.emaze.com/@ALIWWWIIQ/looking-to-give-yourhome-a-stunning-makeover-house>https://www.emaze.com/@ALIWWWIIQ/looking-to-give-yourhome-a-stunning-makeover-house</a> Ниже указан актуальный перечень легальных казино в Беларуси с бонусами на 1-ый депозит. Вы сможете попасть на официальный вебсайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз.Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. 1×slots промокод при регистрации 2025 <a href=https://mantiseye.com/community/scotthycle>https://mantiseye.com/community/scotthycle</a> Например, игрок получил 500 руб. При творении аккаунта и должен отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 рублей, понадобится устроить 875 спинов для полного отыгрыша.Также учтите, собственно кое-какие игровые платформы сузивают список государств, коие готовы получить предложенный бездепозитный бонус за регистрацию. К примеру, существуют онлайн-заведения, выдающие сходственные призы лишь обитателям определенных стран. К примеру, интернет казино 777 Оригинал предоставляет бездепозитный бонус только игрокам из России и стран СНГ. Или наоборот, снабжают вознаграждением всех, кроме обитателей некоторых стран (как сего, следует пристально учить список, чтобы потом не появилось практически вопросов и претензий).
1×slots официальный зеркало
Как только получите бездеп в казино, всё одинаково не запамятовывайте проверять электронную почту. Некоторые игорные клубы непрерывно веселят активных гэмблеров приятными призами. Чаще всего получить презент можно в преддверии праздника, на день рождение, за привлечение приятеля. А также распространённым призом считается надбавка к депозиту. Нужно всего лишь восполнить счёт, и азартное заведение увеличит его на 50–100%. 1×slots зеркало на сегодня <a href=http://onlineboxing.net/jforum/user/profile/261835.page>http://onlineboxing.net/jforum/user/profile/261835.page</a> Какие призы у еще получить кроме бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного бонуса, любое интернет казино предлагает игрокам выгодное предложение на первый депозит, вы совершаете депо, ваш депо возрастает в двое или в в трое, что, этим самым начать играть возможно с больше солидной суммой, например же не запамятываем тему вейджер на призы.Отказ в прохождении верификации. Если клиент не желает или не дать документы, подтверждающие его лицо, профиль несомненно заблокирован вместе со всеми бонусными начислениями. 1×слотс казино
1×slots официальный сайт, скачать
Заработать на бездепозитных бонусах за регистрацию в казино может каждый юзер, достигший совершеннолетия.С такими ординарными советами каждое казино с бонусом за регистрацию способно принести в разы больше выгоды и выгоды. Для получения бонуса нужно пригласить в игру свежего посетителя. Казино начисляет пригласившему фиксированный процент от взносов приглашённого повторяющий приза: почаще всего его объем не выше 10%. Срок действия бонуса в большинстве случаев не выше месяца: пригласивший получает приз от проигранных ставок приглашённого в первый луна игры. <a href=https://xn–80ae1aidok.xn–p1ai/users/boundlesslunati>https://xn–80ae1aidok.xn–p1ai/users/boundlesslunati</a> Получив свой подарок, Вы можете бесплатно играть на настоящие средства, а выполнив условия отыгрыша, вывести собственный выигрыш.К примеру, игроку выдаются бесплатные свои в заведении в размере пятидесяти либо ста долларов (вейджер на которые сочиняет 100х). То есть, каждому новоприбывшему игроку выскакивает притягивающая картинка, кот-ая сулит выплату всех зачисленных компанией средств. Не стоит внимания на казино бонус за регистрацию без депо с сильно большой либо довольно махонькой суммой призов, потому что, в кропотливо выучив все условия, здесь всего, несомненно какой-то подкол. 1×slots сайт Бездепозитные призы казино за регистрацию в 2022 году — это возможность поиграть за счёт заведения. Казино даёт посетителю шанс пользоваться определённой суммой либо числом даровых вращений без внесения депозита. Не путайте деморежим с реальной забавой без надобности внесения депозита.
1× slots официальный
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=42556>1×slots casino online регистрация</a> Подарки на конкретные даты выделяются условиями получения. Если поощрение начисляют игроку на день рождения, то сумма обыкновенно зависит от общего объема депо за прошедший год. Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, дабы еще раз получить безвозмездный бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ждет неизбежное наказание. 1хслотс казино зеркало <a href=http://ru.monumentefunerare.md/index.php?subaction=userinfo&user=Forsedropor>http://ru.monumentefunerare.md/index.php?subaction=userinfo&user=Forsedropor</a>
1×slots регистрация 1×slots review live
Третитй бездепозитный приз за регистрацию – денежные средства. К сожалению, начислить рубли либо доллары готовы лишь известные и популярные клубы. С их поддержкой вы сможете насладиться любой доступной игрой – автоматом, рулеткой, кено, блэкджеком. Получив собственный подарок, Вы сможете безвозмездно выступать на настоящие средства, а выполнив условия отыгрыша, исключить свой выигрыш.При регистрации в или ином интернет игральном заведении — вам дается раз шанс испытать свою удачу не внося свои монеты. Замечу что такую поощрительную предложение предоставляют не все интернет игровые площадки, а только великодушная середина(средина) из них. Которые мы подготовили для Вас в нашем перечне. <a href=http://littleyaksa.yodev.net/bbs/board.php?bo_table=free&wr_id=6375111>http://littleyaksa.yodev.net/bbs/board.php?bo_table=free&wr_id=6375111</a> Бывают ли бездепозитные призы без вейджера? Бывают, случае у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный приз за регистрацию устанавливается вейджер во всех казино.В интернете большое знаменитых игорных площадок с красивыми акционными предложениями. Однако внимательно читать обстоятельства десятков предложений времени надоест, ну и время отнимет большое. Поэтому наша команда подготовила ТОП-3 вебсайтов с лучшими бездепозитными бонусами: 1×slots регистрация 1×slotscasino09k online При игре на бонусные свои воспрещается выступать в игровые автоматы с современным джекпотом и забавы из радела exist casino. Кроме такого, кое-какие казино дают бездеп на один либо несколько определенных слотов, и в других играх Вы не можете на них играть.
<b>Смотреть еще похожие новости:</b>
<a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=5564>1хслотс официальный сайт зеркало</a>
<a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=68660>1×slots casino регистрация</a>
<a href=http://b2s.bulwork.com/node/1581?page=88#comment-22879>скачать 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 поболее. Когда игроку надеется большое фриспинов, администрация возможность бить3 их начисление на несколько дней. Бесплатные вращения предоставляются для конкретного слота, который указывается в правилах промоакции.
#5663 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало
Размер ставки для забавы по бездепозитному призу (окончательно же, если, тогда,, когда он представлен в виде бонусных валютных средств) часто ниже, чем при этой на депо. Ограничение будет действовать до момента отыгрыша бонуса. <a href=http://filmkachat.ru/>1×slots зеркало подтвердит вашу регистрацию если говорить</a> <a href=https://plaza.rakuten.co.jp/prilla/diary/202411240003/>https://plaza.rakuten.co.jp/prilla/diary/202411240003/</a> В перечне требований к отыгрышу часто наличествуют лимиты на ставки при забаве на личные средства. Так, в отыграть нужно 30 000 рублей, а предельная сумма ограничена 30 рублями, то вертеть барабаны светит 1000 один. Эта необыкновенность затрудняет соблюдение игроками условий по срокам действия промоакции. 1×slots официальный сайт скачать на айфон <a href=http://fh7980px.bget.ru/member.php?action=profile&uid=30909>http://fh7980px.bget.ru/member.php?action=profile&uid=30909</a> Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки имеют запросить вспомогательные документы либо инициировать короткое общение по Skype.Вы не в коем случае ни чем не рискуете, а только выигрываете и выводите на платежную систему, либо проигрываете предложенный приз, по мимо практической забавы на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, выучится регулировать менять ставки и линии, изучать бонусные игры и их выигрышные комбинации, да в просто зарядится кучей эмоций! Ведь вы будите играть на бонусные свои, которые возможно отыграть и исключить, но просто на демо счет, тем самым адреналин в крови еще повысится а пульс забьется с нередким ритмом!
1хслотс рабочее зеркало на сегодня
Классическая разновидность бонуса за творение аккаунта. Его превосходство заключается сомнений, собственно заказчик может других выбирать аппараты и создавать ставки в их. Иногда список игровых автоматов ограничен оператором, хотя все равно это другого, чем один-единственный дешевый разъем, как в случае с внедрением фриспинов.Почти все игровые клубы требуют подтверждение контактных данных игрока для получения бездепозитного бонуса. 1×slots зеркало на сегодня Чтобы самостоятельно увериться в превосходстве бездепозитных призов, довольно зарегистрироваться в казино и получить поощрение. <a href=https://quantrinet.com/forum/member.php?u=669042>https://quantrinet.com/forum/member.php?u=669042</a> 1×slots регистрацию более популярный вариант это У каждого игорного заведения свои управляла и обстоятельства. Но, чтобы получить призы, необходимо выполнить стандартные деянья:
1×slots рабочее зеркало на сегодня
Подтверждение электронной почты – одно из главных критерий, которое есть практически в каждом бездепозитном казино. Чтобы верифицировать электрическую почту, достаточно перейти по активной ссылке в послании, полученном от азартного клуба. Все любят получать презенты. Согласитесь, практически любой играющий человек будет безмерно счастлив, в получит безвозмездный презент для забавы в интернет казино просто за регистрацию либо же бонус за внесенный депо, например именуемые приветственные призы для свежих игроков. Соответственно такие онлайн клубы станут более модны и предпочтительны у игроков при выборе казино для забавы. Топ казино постоянно обновляется и добавляются новые и интересные игровые клубы с симпатичной бонусной политикой и всеми вероятными прерогативами, к коим относятся эти призы как фриспины за регистрацию, валютные бездепозитные призы, а также великодушные бонусы за внесенный депо.Для того, чтобы отыграть необходимую вашего бездепозитного бонуса надо(надобно) выполнить условия вейджера. Очень нередко фриспины даются на конкретные слоты (book of ra, book of deceased, book of sun), избирайте слот себе нраву, все довольно красочные и высококачественные. Бездепозитные приз может быть денежным так и вид фриспинов на слоты <a href=https://www.harnessracingforum.com/member.php?114678-Ralphlaume>https://www.harnessracingforum.com/member.php?114678-Ralphlaume</a> Для ревизии применяются сканы паспортов, водительских прав, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если юзер обнаружен в попытке завести вспомогательный акк, все его учетные записи подвергаются блокировке, а их владелец попадает в темный список. При игре на лицензионной площадке надо опасаться указывать достоверную персональную информацию (шифрование ликвидирует утечку индивидуальных данных). 1× slots официальный Наш перечень включает в себя наихорошие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по принципиальным характеристикам:В зависимости от онлайн заведения каждый из их возможность вас предложить как бездепозитные средства, например и бездепозитные фриспины, коие после удачной регистрации рухнут вам на ваш игровой баланс.
1×слотс казино
Зарегистрироваться в казино по специальной ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефонного и электрическую почту). Для подтверждения номера телефона необходимо в собственном профиле указать собственный номер и надавить кнопку „Подтвердить номер аппарата“, дальше Вы получите sms-сообщение с кодом, кот-ый необходимо установить в подходящее поле. Для подтверждения электронной почты, перейти по активной ссылке в послании от казино.Игры, каких можно играть на бонусные средства. Проверьте список игр, в возможно играть на бонусные средства, возможно они Вам не понравятся и надо расходовать своё время на такую промоакцию. Бездепы с бесплатными вращениями деют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд выплачивает казино. Число спинов ограничено и редко выше сотню. Если промоакция содержит большое даровых игр, их начисление имеет быть разбито на количество дней.Каждый из бездепозитных бонусов без пополнения 2022 содержит собственный конкретный вейджер для отыгрыша, например же в любом казино он уточняется индивидуально — где то он х55 а кое-где х30, повторюсь всюду по разному! В игровых клубах без лицензии Вы покупаете „кота в мешке“ и когда спорных ситуаций нет возможности куда-то пожаловаться и обосновать собственную правоту. 1×slots официальный сайт мобильная версия скачать <a href=https://v7.toonanime.co/user/Ashleyupsek/>https://v7.toonanime.co/user/Ashleyupsek/</a> Новые посетители онлайн-казино без первого депозита шансы проверить собственную удачливость. К тому же есть вероятность преобразовать бездепы в реальные деньги за регистрацию в казино, однако для этого приз необходимо отыграть сообразно условиям акции.3. Подтвердить данные. В зависимости от клуба, нужно привязать телефонный или почту, показать персональную информацию;
1×slots рабочее зеркало
Бездепозитные призы реальными деньгами, коие возможно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадались. <a href=http://www.detskiy-mir.net/index.php?subaction=userinfo&user=uncoverednarrat>http://www.detskiy-mir.net/index.php?subaction=userinfo&user=uncoverednarrat</a> Онлайн гемблинг развивается с любым деньком все больше и больше, новые бренды создаются не по денькам а по часам. Новые интернет казино делают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и тем самым предлагают бездепозитные бонусы за регистрацию, собственно бы не упустить такую вероятность — как пользоваться свежим бездепом, советуем навещать наш сайт как можно почаще, самое лакомое и новые будет добавляться в данном же перечне.Как управляло, новоприбывшие игроки начала желают ознакомиться с способами ввода и вывода денежных средств и сроки выполнения поданных заявок дабы конкретно разуметь, как скоро у исключить собственный казино приз за регистрацию без депозита на электрический кошелек либо же банковскую карту. К счастью для всех играющих, снутри конкретных холдингов, все казино соперничают между собой. Ведь в бы конкретную фирму давало только одно онлайн-заведение, то навряд бы клиенты заметили казино с бонусом за регистрацию и могли бы рассчитывать лишь на вознаграждение в виде приза на первое вложение. К любому заведению периодически стопам завлекать свежих игроков, собственно, конечном, только на руку всем играющим. рабочее зеркало 1×slots При подмоги такового поощрения оператор может кроме завлекать посетителей, которые раньше проявляли активность на сайте, но по какой-то основанию перестали играть. В этом случае промокод высылается пользователю по электронной почте либо в виде SMS.
<b>Смотреть еще похожие новости:</b>
<a href=http://complainanything.com/node/158?page=991#comment-1366845>1×slots регистрация 1×slots casino c2d ru</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Возьми собственный презент. Чаще всего бонус активизируется незамедлительно последствии регистрации. Но случаются ситуации, когда нужно забежать в собственный офис либо написать в справочную службу.
#5664 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее
При маленькой сумме бонуса рекомендуется выступать по низким ставкам, а применять максимальные никакого лишь в том случае, случае вейджер очень немалый, а время на отыгрыш сильно ограничено. <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> Демоказино есть практически на каждом сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются веско реже: там если, тогда, выигрыша и соблюдения критерий акций бездеп можно превратить в настоящие средства. <a href=https://jumpshare.com/v/g7cIh0cVypvEGdf6HhDQ>https://jumpshare.com/v/g7cIh0cVypvEGdf6HhDQ</a> 1хслот официальный сайт зеркало <a href=http://nvkb.ru/forum/index.php/user/100248/>http://nvkb.ru/forum/index.php/user/100248/</a>
1×slots casino зеркало рабочее
Бездепозитные призы за регистрацию в игровых автоматах для собственников онлайн-казино считаются долею маркетинговой кампании, направленной на повышение аудитории вебсайта. Так они продвигают средства бренды и привлекают новых клиентов. 1× slots casino зеркало Акции распространяются как на все игры казино, так и на узкий перечень. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и другие. Промо имеет охватывать разработки 1-го производителя. Бездеп не пересекается с другими акциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, изготовленные бонусными деньгами. Для идентификации платежных реквизитов игрока имеет понадобиться пополнение счета на наименьшую сумму. <a href=http://bank-garantiya.ru/index.php?subaction=userinfo&user=apatheticadage7>http://bank-garantiya.ru/index.php?subaction=userinfo&user=apatheticadage7</a> Автоматическая активация кажется самой комфортной, но ручной метод имеет перед ней преимущества. Прежде чем применять вознаграждение от казино, стоит заблаговременно найти, сколько медли требуется на исполненье всех критерий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала действия приза. 1×slots зеркало на сегодня После получения приза вывод средств для посетителя будет недоступен до, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо чета недель. Выводить деньги игрок может только в отыгрыша.
1×slots казино зеркало
<a href=http://www.apressadadesainha.com/2021/09/polos-masculinas-da-soinyou-mens-polos.html>http://www.apressadadesainha.com/2021/09/polos-masculinas-da-soinyou-mens-polos.html</a> 1×slos регистрация в 1×slots casino Выбирайте наихорошие безвозмездные бонусы счет обзоров на Casinoz – и пусть вас сопутствует удача при отыгрыше бонусных кредитов!
1×slots официальный сайт скачать
<a href=http://check2go.net/author/jameslob/>1×slots зеркало</a> Представьте момент, когда при ставке в 10 рублей Вы получите сходственное умножение. Миллион руб. За одно вращение, собственно абсолютно вполне. Поэтому вопрос, сколько можно выиграть остаётся не. Предлагаем проверить без. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный приз и проверяйте фортуну в деле. Разумеется, вывести деньги не так просто. Однако шансы есть у всех. скачать 1×slots официальный сайт <a href=https://clicgo.ru/user/Patrickgobia/>https://clicgo.ru/user/Patrickgobia/</a> Такие поощрения позволяют даром протестировать новое казино, разобраться с игровым процессом онлайн слотов, заработать и исключить маленькую необходимую средств.При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, коие можно посвятить этой в казино.
1×slots регистрацию процедура займет всего лишь
Представленные на этой странице превосходнейшие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, в гости Casino.ru имеют сортировать перечень по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д. <a href=https://www.mobime.ru/forum/topic1483.html#6>https://www.mobime.ru/forum/topic1483.html#6</a> Не желаете сыграть в азартные игры, не рискуя средствами деньгами, но получая в все выплаты? Подобную вероятность деют почти наилучшие порталы с азартными весельями. В их количестве количество честных и надежных интернет-казино на российском языке. Они привлекают новых юзеров разными поощрительными мероприятиями, включая бездепозитные, либо бесплатные бонусы. 1хслотс зеркало на сегодня Для верификации номера телефона, в личном профиле выберите опцию „Подтвердить номер телефона“ и введите в отвечающее поле код, полученный в sms-сообщении.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.ihavethepussy.com/de/threads/202922–1×slos-%D0%A1%D0%82%D0%A0%C2%B5%D0%A0%D1%96%D0%A0%D1%91%D0%A1%D0%83%D0%A1%E2%80%9A%D0%A1%D0%82%D0%A0%C2%B0%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A1%D0%8F-%D0%A0%D0%86–1×slots-casino?p=220456#post220456>1×slos регистрация в 1×slots casino</a>
<a href=http://link.5nx.ru/viewtopic.php?f=5&t=5742>1×slots зеркало которую указывали при регистрации кстати</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Представленные на данной страничке превосходнейшие бездеп призы в казино за регистрацию в 2022 году имеют подходящие обстоятельства. После тщательного анализа редакция портала составила рейтинг спецпредложений, в посетители Casino.ru шансы сортировать перечень по нескольким критериям: по сумме, вейджеру, наибольшей сумме вывода и т.д.
#5665 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino скачать приложение porno Мира Андреева (теннис) <a href=https://rucriminal.info/>1×bet зеркало рабочее</a> 1×bet официальный сайт pin casino зеркало <a href=https://th-royalgclub.com/>casinos winning</a> online casino 7k лучшая казино порно с Бондаренко Анастасия Борисовна casino com up casino скачать online casino casino скачать
DiskiPlus порно с Никита Кучеров (хоккей) DiskiPlus 1×bet зеркало xbet <a href=https://www.diskiplus.ru/>DiskiPlus Нургалиева Эльвира Рамиловна порно</a> DiskiPlus 1×bet xbet xyz DiskiPlus Петрова Ольга Викторовна порно <a href=https://diskiplus.ru>DiskiPlus 1×bet зеркало на сегодня 1×bet xyz</a> DiskiPlus лучшие бесплатные онлайн казино DiskiPlus 1×slots casino DiskiPlus сколько казино DiskiPlus официальные букмекерские конторы скачать DiskiPlus бесплатные букмекерские конторы DiskiPlus как выиграть в казино DiskiPlus ограбление казино
#5666 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
лучшие букмекерские конторы порно с Константин Тюкавин (футбол) <a href=https://rucriminal.info/>почему в казино не бывает настенных часов</a> букмекерские конторы в россии букмекерские конторы без депозита <a href=https://vestnik-jurnal.com/>1×bet сайт</a> 7k casino зеркало на сегодня букмекерская контора Ирина Горбачева casino рабочее порно с Петр Ян (ММА) порно с Дронова Александра Викторовна ставки на спорт букмекерские конторы
DiskiPlus порно с Дронова Александра Викторовна DiskiPlus 7k casino зеркало на сегодня <a href=https://diskiplus.ru/>DiskiPlus up casino официальный</a> DiskiPlus online casino официальный DiskiPlus казино пин <a href=https://www.diskiplus.ru/>DiskiPlus бывшие казино</a> DiskiPlus скачать casino на андроид DiskiPlus порно с Гатагова Ольга Анатольевна DiskiPlus букмекерская контора леонов DiskiPlus официальное казино вход DiskiPlus самое казино DiskiPlus pin up casino зеркало DiskiPlus вавада казино
#5667 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
Какие призы возможность еще получить кроме бездепозитного приза за регистрацию в казино? По мимо бездепозитного приза, каждое интернет казино предлагает игрокам выгодное предложение на 1-ый депозит, вы совершаете депо, ваш депозит возрастает в двое или числе в 3, тем наиболее начать выступать возможно с более крупной суммой, например же не забываем про вейджер на призы.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. <a href=http://filmkachat.ru/>1×slots регистрация на официальном сайте</a> На бонусные начисления имеют быть установлены вспомогательные ограничения, коие Вы не приняли при отыгрыше. Пока бонус всецело не отыгран — деньги из казино не выводятся.Во время игры в казино, выигрыши, полученные спасибо безвозмездным призовым фондам, суммируются и срабатывают в общую сумму для отыгрывания. Однако, в удача улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно допустит исключить денежные средства. Сумма вывода будет зависимости от лимита, одобренного именно в этом учреждении. Поэтому, пристально нужно читать правила выдачи безлимитных депозитов. <a href=https://hanson.net/users/archicgicom>https://hanson.net/users/archicgicom</a> Чтобы выступать даром на настоящие деньги в казино, порой довольно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные деяния. 1×slots зеркало регистрация в 1×slots casino <a href=http://www.ccbb210.com/home.php?mod=space&uid=198028&do=profile>http://www.ccbb210.com/home.php?mod=space&uid=198028&do=profile</a> При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие можно посвятить ирге в казино.
1×slots официальный сайт зеркало рабочее
<a href=https://www.lightknotes.com/MyBB/showthread.php?tid=196304>1×slot регистрация</a> 1×slots зеркало выигрыши обязательно пройдите регистрацию если <a href=https://ootmkorea.com/bbs/board.php?bo_table=free&wr_id=42704>https://ootmkorea.com/bbs/board.php?bo_table=free&wr_id=42704</a> 1хслот скачать
1×slots зеркало подтвердит вашу регистрацию если говорить
Помимо остального, для вывода средств по бездепу нужно внести на счёт собственный первый депозит — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало возможную сумму, после чего вывод средств будет доступен. <a href=http://honevi.grodno.by/index.php?subaction=userinfo&user=HarryJat>http://honevi.grodno.by/index.php?subaction=userinfo&user=HarryJat</a> В бонусную программку множества операторов входят систематические бездепы. Это пожизненные промоакции, поощряющие интенсивных неизменных игроков. Популярный формат — раздача фриспинов по конкретным дням недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депо в мена на скопленные баллы лояльности.Доступные игры – В некоторых азартных забавах возможно снизить математическое приемущество казино до нескольких десятых процента. В их числе почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как правило, в таких играх ставки идут в зачет вейджера не всецело. Например, может учитываться только 50%. В некоторых играх бездепозитные призы вообщем невозможно отыгрывать. 1×slot казино зеркало
1 х слотс зеркало
Приглашаем делиться мнениями о призах. Это поможет другим юзерам выбирать более выгодные предложения.Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депозит возможность отличаться до 30 дней. Чтобы играть безвозмездно на реальные деньги в казино, не всегда довольно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные действия.Также случаются случаи, когда казино начислит обсужденный приз в регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам. 1×slots зеркало <a href=https://v7.toonanime.co/user/PatrickDig/>https://v7.toonanime.co/user/PatrickDig/</a> Бонус в казино без депо имеет разные разновидности: это может быть приветственный бонус, промоакции в честь каких-то праздничных или важных дат, бонус за привлечение свежих игроков, преданность и получение VIP-статуса.Иногда для получения бонусов нужно связаться с адептами службы. Удобнее всего с ними собеседовать в онлайн-сате, хотя времени достаточно запроса по электронной почте.
1 xslots рабочее зеркало
Условия могут различаться друг от приятеля. Но подобный бонус возможность быть использован только для игрового процесса – приобретенные на счет финансы до как, как будут отыграны, вывести невозможно.Для проверки используются сканы паспортов, водительских водительских, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если пользователь замечен в попытке завести вспомогательный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в темный перечень. При этой на лицензионной площадке не стоит опасаться свидетельствовать достоверную индивидуальную информацию (шифрование исключает утечку индивидуальных данных). Как правило, при выводе финансов, от играющего потребуется только устроить наименьший лепта чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом индивидуальный счет. <a href=http://www.stmcu.co.kr/gn/bbs/board.php?bo_table=free&wr_id=1033232>http://www.stmcu.co.kr/gn/bbs/board.php?bo_table=free&wr_id=1033232</a> Помимо прочего, для вывода средств по бездепу нужно внести на счёт свой первый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на мало возможную сумму, после чего вывод средств станет доступен.Условия, на которых предоставляется бездеп, регулируются казино. Каждая акция содержит подробные верховодила, гиперссылка на которые обычно находится в промообъявлении. В них указываются лимиты, вейджер, перечень доступных игр. Если оператор скрывает данные о предложении, то воспользоваться им не. 1 хслот регистрация в 1×slots casino После потребуется привнести идентификационный платёж. Это стращает начинающих больше всего. Нужно устроить минимальный депозит в 100–500 руб. Таким образом служба безопасности убедиться сомнений, что платёжный метод принадлежит Вам. Данная процедура необходима для обеспечивания защищенности игровых счетов. Пример, Ваш акк взломают и выведут свои на свой кошелёк. Будет очень неприятно. Поэтому верификация платёжной системы, это необходимый момент.
<b>Смотреть еще похожие новости:</b>
<a href=http://maddog-server.org/forum/showthread.php?tid=13754&pid=158696#pid158696>1хслотс казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Этот тип приза будет добавлен на Ваш аккаунт в удачной процедуры регистрации с использованием номера аппарата. Если выбрать другой способ творения учетной записи, бездеп не несомненно добавлен на Ваш аккаунт. Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, чтобы была вероятность вывести выигрыш.
#5668 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1win casino Окладникова Ирина Андреевна порно <a href=https://repost.news/>bet casino</a> водка казино 7k casino зеркало рабочее <a href=https://repost.news/>pin up casino пин</a> porno Игорь Акинфеев (футбол) порно с Артемий Панарин (хоккей) online casino официальный часы казино inform@rucriminal.info гама казино Любимова Ольга Борисовна порно
DiskiPlus 1×bet рабочее DiskiPlus 1×bet слоты 1×bet xyz <a href=https://www.diskiplus.ru/>DiskiPlus гта казино</a> DiskiPlus фильмы казино рояль DiskiPlus porno Алена Косторная (фигурное катание) <a href=https://diskiplus.ru/>DiskiPlus казино смотреть онлайн бесплатно</a> DiskiPlus казино регистрации DiskiPlus pin up casino пин ап DiskiPlus винлайн букмекерская контора официальный DiskiPlus Скоробогатова Ольга Николаевна порно DiskiPlus гта онлайн казино DiskiPlus casino ru DiskiPlus порно с Голикова Татьяна Алексеевна
#5669 Charlesgunnyhttp://filmkachat.ru
x1 slots 1хслотс регистрация перейти на 1×slots
Как только получите бездеп в казино, всё также не запамятовывайте проверять электрическую почту. Некоторые игорные клубы день радуют интенсивных гэмблеров приятными призами. Чаще всего получить подарок возможно в преддверии веселья, на денек рождение, за вербование друга. А кроме распространённым бонусом считается надбавка к депозиту. Нужно не восполнить счёт, и азартное заведение прирастит его на 50–100%.Условия вывода выигрыша. В неких заведениях для успешного вывода с бездепозитного бонуса довольно пополнения баланса и доказательства личности. В иных же клубах, нужно некоторое раз прокрутить свой депозит. <a href=http://filmkachat.ru/>1× slots зеркало</a> Но такие рамки не смущают и хайроллеров, потому коэффициенты на слотах дозволяют рассчитывать на солидные выигрыши, в некоторых автоматах разыгрывается передовой джекпот. <a href=https://noosfero.ufba.br/lexxeagle/blog/professionalniy-vikup-avto-v-kieve-s-chestnoy-otsenkoy-na-meste>https://noosfero.ufba.br/lexxeagle/blog/professionalniy-vikup-avto-v-kieve-s-chestnoy-otsenkoy-na-meste</a> На данном разделе портала периодически публикуются обзорные статьи, каких рассматриваются бесплатные призы наихороших интернет-казино. Информация структурирована по нескольким пт, включая основные: casino 1×slot <a href=http://sehoeng.com/bbs/board.php?bo_table=pro_qna_eng&wr_id=56081>http://sehoeng.com/bbs/board.php?bo_table=pro_qna_eng&wr_id=56081</a>
1×slots официальный сайт скачать на айфон
x1 slots регистрация в 1×slots casino <a href=https://animeworld.ruhelp.com/viewtopic.php?id=3695>https://animeworld.ruhelp.com/viewtopic.php?id=3695</a> Получить Бездепозитный приз в интернет казино дело двух кликов. Другой момент, отыграть рекламную и соблюсти верховодила и обстоятельства отыгрыша. Под правилами подразумевается не только вагер, но и лимитирования по максимальной ставке. Мы понимаем, собственно в кино все ставят на зеро и выигрывают. Призываем не делать сходственного. Перед активацией приза прочтите управляла. Узнайте следующие факторы: Условия получения подарка, за регистрацию, за депозит и многое. Ограничения по наибольшей ставке. Зачастую не выше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на месте. Поэтому важно аристократия, в каких играх возможно совершать кратность денежного оборота. 1×slots промокод при регистрации 2025
1×slots официальный сайт зеркало
Подарки на праздники ? приуроченные к праздничным датам, требующие условного отыгрыша либо начисляются без такового. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду.Многие азартные клубы ограничивают сумму вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании акции, суммы Вы не сможете вывести. Разница несомненно аннулирована, Вы в не сможете создавать на нее ставки. <a href=http://www.fxwenxue.com/home.php?mod=space&uid=687151>http://www.fxwenxue.com/home.php?mod=space&uid=687151</a> Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются незамедлительно в сотворения профиля и активны недолговременное время. Если не успеете израсходовать средства, они попросту сгорят. Касаемо медли, как призы активны протяжении часа. 1×slots быструю регистрацию а также мгновенное Игры, каких возможно играть на бонусные деньги. Проверьте список игр, в которых можно выступать на бонусные свои, вероятно они Вам не понравятся и не стоит расходовать своё время на эту промоакцию.
1 xslots рабочее зеркало
Бездепозитные призы – это самая занимательная и более многообещающая акция интернет-казино. Они том превосходнее фри-спинов, потому собственно выплаты в даровых вращениях не гарантированы, ведь композиции на барабанах игрового аппарата имеют не сложиться.При регистрации сомнений либо ином интернет игральном заведении — вам дается раз шанс испытать свою фортуну не внося средства монеты. Замечу собственно такую поощрительную предложение предоставляют не все интернет игровые площадки, а лишь щедрая середина(средина) из их. Которые мы подготовили для Вас в нашем перечне. Для выбора азартного заведения Вы можете воспользоваться перечнем наших казино с призами за регистрацию. На нашем веб-сайте мы опубликовали перечень бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, что доля бонусов эксклюзивные и доступны лишь для посетителей нашего сайта по-специальному промо-коду или по уникальной ссылке. Кроме того, для каждого бонуса мы подготовили подробный обозрение, в котором Вы узнаете как получить и отыграть поощрение и как вывести собственный выигрыш с бездепа. 1×slots casino online регистрация <a href=https://tflex.ru/forum/index.php?PAGE_NAME=profile_view&UID=89178>https://tflex.ru/forum/index.php?PAGE_NAME=profile_view&UID=89178</a> Пoдтвepдить личнocть клиента. Для удачного вывода средств, необходимо подтвердить лицо посетителя. Нa этaпe вepификaции пpoфиля, сотрудники службы защищенности должны убедиться, собственно у игрока всего лишь раз акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не сможет исключить свой выигрыш, в у него будет некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы.Главным моментом в возникновении этих вознаграждений состоит что, нет, собственно пустив их в ход, геймер ничем не рискует и в последствии никому ничего не несомненно обязан (не зависимо, получит ли он спасибо бонусам какой-либо выигрыш или мгновенно спустит все лишь собственно прибывшие деньги). То есть, казино снабжает игрока вероятностью на дармовой основе играть во различные слоты даже спонсирует игру.
1×slots бонус за регистрацию
Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс дает игрокам важную информацию о самых новых, щедрых и проверенных призах в интернет казино, которые обновляются любой день.В онлайне очень большое скриптовых вебсайтов, которые принадлежат жуликам. Их главная задача – привлечь гэмблеров, пообещав не только щедрые подарки, но и крупные выигрыши. Так что некоторые веб-сайты предлагают получить за регистрацию в $1 000. Реже бонусы без депо начисляются постоянным игрокам. С их поддержкой администрация старается вычесть ценных посетителей либо вожделеет поблагодарить за преданность правильных гостей. Но намного почаще для сходственных целей применяются эти промоакции: <a href=https://www.google.com/search?hl=zh-CN&q=site%3Adoctorlazuta.by>https://www.google.com/search?hl=zh-CN&q=site%3Adoctorlazuta.by</a> Многие азартные клубы ограничивают необходимую вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не сможете вывести. Разница будет аннулирована, Вы числе не сможете создавать на нее ставки.Чаще всего казино бонус за регистрацию без депозита даёт вероятность запустить любой автомат. Но чем пристально ознакомиться с условиями. Иногда для игры доступны только определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, превосходнее начать знакомство с миром пыла именно с «одноруких бандитов». 1хслотс официальный сайт зеркало Выбирая бесплатный бонус, внимательно изучайте правила. Убедитесь, собственно вам можно себя роль в акции. Уточните, в каких играх можно скорпулезно условия вейджера. При надобности задавайте вопросы представителям саппорта.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=34571>1× slots casino официальный сайт</a>
<a href=http://www.forum.kalor.ru/1×-slots-oficialniy-t5232.html>1× slots официальный</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В подавляющем большинстве случаев безвозмездные призы начисляются в кредитах, коие нельзя сразу вывести со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже. Можно ли наваривать на бездепозитных призах? Это не работа, здесь как повезет, в в любом предложенном безедепе, вы будете откручивать вейджер и выводить, время возможно именовать везением, и добавочной добавкой к вашему бютжету.
#5670 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино смотреть Любимова Ольга Борисовна порно <a href=https://res-publika.com>порно с Ирина Сидоркова</a> казино можно порно с Алексей Миранчук (футбол) <a href=https://sovsekretno.net/>1×bet официальный</a> бк букмекерская контора Хорова Наталья Александровна порно Валентина Матвиенко порно 1×bet зеркало рабочее xbet win win casino порно с Максим Глушенков (футбол) Скоробогатова Ольга Николаевна порно
DiskiPlus porno Нина Пирогова, хоккеистка DiskiPlus где казино <a href=https://diskiplus.ru/>DiskiPlus казино смотреть</a> DiskiPlus online casino 7k DiskiPlus слот casino <a href=https://www.diskiplus.ru/>DiskiPlus букмекерские конторы в россии</a> DiskiPlus online casino официальный DiskiPlus скачать 1×bet на андроид бесплатно DiskiPlus бесплатно играем казино DiskiPlus официальное казино вход DiskiPlus porno Илона Маркова, хоккеистка DiskiPlus скачать букмекерскую контору на андроид DiskiPlus win win casino
#5671 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало сайта
Условия отыгрыша приза. Если Вы расчитываете заработать на бездепозитном призе, то в первую очередь внимание на велечину вейджера и срок, кот-ый дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, что, этим проще отыграть приз и исключить выигрыш.В интернете слишком количество скриптовых сайтов, коие принадлежат жуликам. Их главная задача – привлечь гэмблеров, пообещав не великодушные презенты, но и солидные выигрыши. Так что некоторые сайты предлагают получить за регистрацию том $1 000. <a href=http://filmkachat.ru/>1× слот зеркало</a> Также бездепозитные бонусы имеют работать методом вернуть к этой клиентов, пока приостановивших своё сотрудничество с компанией: извещение о бездепе поступает на мобильный телефон либо почту.Подобные призы без депозита предоставляются на более прибыльных условиях. Зачастую они крупнее, а обстоятельства отыгрыша наименее строгие. <a href=https://www.friend007.com/forums/thread/7390/>https://www.friend007.com/forums/thread/7390/</a> казино 1×slots официальный сайт <a href=http://foru1f40m.bunbun000.com/bbs/home.php?mod=space&uid=9400323>http://foru1f40m.bunbun000.com/bbs/home.php?mod=space&uid=9400323</a> Для тех, кто только подумывает испытывать свою фортуну, а для проф игроков, отыскивающих новые площадки для выигрышей, ведущие лицензированные казино часто устраивают различные промоакции, и лучшее услуг за время – как для начинающих, так и для профессиональных игроков – бездепозитный бонус за регистрацию.
1×slots регистрация 1×slotscasino 56 online
1×slots casino регистрация 1×slotscasin online <a href=http://uprzakupokkchr.ru/user/GeraldQuess/>http://uprzakupokkchr.ru/user/GeraldQuess/</a> Представьте момент, когда при ставке в 10 руб. Вы получите подобное умножение. Миллион руб. За одно вращение, собственно абсолютно вполне. Поэтому вопрос, сколько возможно выиграть остаётся открытым. Предлагаем проверить самостоятельно. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный приз и проверяйте фортуну в деле. Разумеется, исключить средства не так просто. Однако шансы есть у всех. 1×slots регистрация на официальном сайте
1×slots регистрация 1×slotscasino 56 online
Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных притязаний, считая неотъемлемой верификации. Если на сайте предусмотрена обязательная процедура подтверждения личности, то вывести выигрыш получится лишь в ревизии данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий лицо.Такой безвозмездный эквивалент средств зачисляется на профиль юзера в осуществления требований и предназначаются они только для игрового процесса. Вывод этих вознаграждений возможен лишь в осуществления вейджеровых условий. Активация по промокоду употребляется в различных обликах бездепов. Если речь идет о приветственном бонусе, то комплект знаков возможно разузнать на крупнейшей страничке, в регистрационной форме либо послании, которое отправляется юзеру для подтверждения e-mail. Акции имеют проводиться общо с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активируется разовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном кабинете или начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем важный код для активации в описании каждого рекламную. <a href=https://analsex.tube/user/Robertbob/>https://analsex.tube/user/Robertbob/</a> Почти все игровые клубы требуют свидетельство контактных данных игрока для получения бездепозитного приза.Oтыгpaть бонус с указанным вeйджepом, достичь нужно сдeлaть cтaвoк нa cумму, превосходящую размер приза в некоторое раз. 1×slots регистрация на сайте
1×slots актуальное зеркало
На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не можете активировать и получить бездепозитный приз. Бездепозитный приз по промо-коду несомненно доступен для забавы, лишь в том случае когда Вы активируете особый бонусный код в разделе с бонусами или укажите промокод при регистрации на веб-сайте. В неких случаях, считая активации кода, придется подтвердить контактные данные игрока и заполнить анкету посетителя. 1×slots casino регистрация 1×slotscasin online <a href=http://xn–80abbjuadey5bv1e.xn–p1ai/index.php?subaction=userinfo&user=ZacheryMab>http://xn–80abbjuadey5bv1e.xn–p1ai/index.php?subaction=userinfo&user=ZacheryMab</a>
1×слот регистрация в 1×slots casino
Чаще всего казино бонус за регистрацию без депозита даёт вероятность запустить любой машина. Но лучше внимательно ознакомиться с условиями. Иногда для игры доступны только определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, превосходнее начать знакомство с миром пыла именно с «одноруких бандитов».Каждая игровая платформа отличается критериями по получению и отыгрышу бездепов. В правилах отчетливо расписаны кратковременные рамки, за которые надо(надобно) прокрутить вейджер. Также не забывайте про максимальный размер ставки и максимальную необходимую выплаты. С другой стороны, дабы получить бездепозитные бонусы казино, достаточно потратить не более 1 минутки. Даже не выиграв крупную необходимую, игрок увлекательно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-либо денежных рисков. Быть в курсе лучших акций легко. Достаточно регулярно учить список новых онлайн казино с выводом бонуса без депо в этом разделе. <a href=https://www.theexeterdaily.co.uk/users/doctorlazutaot>https://www.theexeterdaily.co.uk/users/doctorlazutaot</a> Начнём с такого, что любое рекламную за регистрацию предполагает некие обстоятельства. Бездепозитные призы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность денежного оборота, нужная для выполнения критерий. Пример, получили бесплатные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 руб., проигрышных или выигрышных, не. После исполнения, бонусный баланс перейдёт на реальный и будет легкодоступным к выводу.Во время забавы в казино, выигрыши, полученные спасибо бесплатным призовым фондам, суммируются и включаются в общую сумму для отыгрывания. Однако, в фортуна улыбнется и получится отыграть все бонусы, игровое заведение гарантированно разрешит вывести финансовые свои. Сумма вывода будет зависимости от лимита, одобренного именно в этом учреждении. Поэтому, внимательно надо(надобно) разбирать правила выдачи безлимитных депозитов. 1хслот 1хслотс регистрация перейти на 1×slots Вейджер (либо вагер) ? это наименьшая сумма ставок, коию нужно устроить для вывода денежного приза. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение.
<b>Смотреть еще похожие новости:</b>
<a href=https://minecraft.ru.net/user/Manuelsoarl/>1хслотс зеркало на сегодня</a>
<a href=http://powercrop.it/chi-siamo/le-persone?page=12#comment-639>1хслотс официальный сайт зеркало</a>
<a href=http://www.airsoft44.com/forum/index.php?action=profile;u=11896>1×slots казино зеркало</a>
<a href=https://elclasificadomx.com/author/jameslog/>1×slots регистрация 1×slots review live</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В каждом казино с бездепозитным бонусом предусмотрены вейджеровые условия. Это один-единственный «подводный камень», который стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) устроить определённое число ставок. Чем круче бонус, тем сложнее выполнить обстоятельства, и наоборот.
#5672 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet слоты 1×bet top сколько казино <a href=https://7club7.com/>казино рояль</a> pin ап casino ramenbet casino <a href=https://specreporter.com/>1×bet рабочее на сегодня</a> порно с Константин Тюкавин (футбол) пинко casino casino игровой автомат pin up casino скачать 1×bet на андроид бесплатно порно с Сергей Бобровский (хоккей) 1×bet скачать приложение
DiskiPlus бк букмекерская контора DiskiPlus Валентина Матвиенко порно <a href=https://www.diskiplus.ru/>DiskiPlus реального казино</a> DiskiPlus Анна Михалкова DiskiPlus Попова Анна Юрьевна порно <a href=https://www.diskiplus.ru/>DiskiPlus скачать casino на андроид</a> DiskiPlus лучшие бесплатные онлайн казино DiskiPlus бесплатно играем казино DiskiPlus порно с Васильева Татьяна Викторовна DiskiPlus слоты казино DiskiPlus порно с Баталина Ольга Юрьевна DiskiPlus симулятор казино DiskiPlus Ирина Горбачева
#5673 Charlesgunnyhttp://filmkachat.ru
сайт 1× slots casino
Бесплатные бонусы казино без депозита возможно получить вид валютных средств на бонусный счет (вывести их возможно лишь в отыгрыша), фриспинов, забавы либо кешбэк-бонуса. <a href=http://filmkachat.ru/>1×slot зеркало</a> Бездепозитные призы прекрасный вариант безвозмездной забавы в игровые автоматы. Многие юзеры сети не знают, собственно в казино можно начать выступать полностью бесплатно, а потом вывести выигрыш на банковскую карту или электронный кошелек, другие не доверяют интернет казино, а третьи удачно играют и выигрывают – и тотчас довольно немалые суммы.Объективные – объем приза, коэффициент и условия вейджера, необходимость внесения депозита для вывода денег; <a href=https://divisionmidway.org/jobs/author/cgifurniture-com/>https://divisionmidway.org/jobs/author/cgifurniture-com/</a> Первый возникающий вопрос, это, чего выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают свежих игроков. Последним легче начать игру на деньги с подарка за регистрацию. Им надо пополнять баланс и расходовать личностные средства. Новички получают благотворительные спины либо свои на счёт. С их поддержкой знакомятся с игровым процессом, крутят слоты и проделывают ставки в рулетке.У каждого игорного клубы разные вейджеровые обстоятельства. Чтобы вы гарантировано сумели выполнить их, мы дадим количество советов. Если система начислила маленькую необходимую, не делать большие ставки – остановитесь на 10–30 центах. Как только сумеете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте выступать. В неприятном случае никакого приглядеться к иному автомату. 1×slots зеркало на сегодня <a href=http://www.dmgec.com/bbs/board.php?bo_table=free&wr_id=278027>http://www.dmgec.com/bbs/board.php?bo_table=free&wr_id=278027</a> Если идет об неповторимых предложениях, может понадобиться регистрация в казино по ссылке с партнерского сайта.В любом казино с бездепозитным бонусом предусмотрены вейджеровые условия. Это один-единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) сделать определённое количество ставок. Чем круче приз, что, этим сложнее выполнить обстоятельства, и напротив.
скачать 1×slots официальный сайт
Условия имеют разниться друг от приятеля. Но подобный приз может быть применен лишь для игрового процесса – полученные на счет финансы до такого, как будут отыграны, исключить нереально.При отыгрыше бонусных средств, нужно учесть срок действия приза и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный приз несомненно аннулирован. 1×slots зеркало на сегодня Не стоит сразу же отказываться от приветственных даров в похожих казино. Администрация готова начислить деньги либо фриспины, хотя сначала сотрудники должны убедиться, что вы не аферист. Дело в, собственно развелось очень большое охотников за бонусами. Они выучились обманывать систему и наваривать крупные суммы средств. <a href=http://etalon-stroy.ru/bitrix/redirect.php?goto=http://stimvideo.ru/redirect?url=http://pro-balans.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/bH9ho8j0ej4>http://etalon-stroy.ru/bitrix/redirect.php?goto=http://stimvideo.ru/redirect?url=http://pro-balans.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/bH9ho8j0ej4</a> Первый образующийся вопрос, это, для выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают новых игроков. Последним легче начать игру на деньги с презента за регистрацию. Им надо пополнять баланс и тратить личностные свои. Новички получают безвозмездные спины или свои на счёт. С их помощью знакомятся с игровым процессом, крутят слоты и проделывают ставки в рулетке. 1× slots casino официальный сайт
1хслотс рабочее зеркало
Иногда у посетителей сайта могут появиться трудности, задачи, препядствия при активации полученного промо-кода. В этих случаях, необходимо обратиться за поддержкою в службу поддержки «Support». Для получения ответа, обязательно указывается определенная причина воззвания и подтверждается информация дополнительными скриншотами. Если сложилась неоднозначная обстановка, постоянно можно обратиться к основному регулятору или контролирующему органу, выдавшему этому заведению лицензионный документ.Наши специалисты изучают обстоятельства акции, после в ручном режиме проводят их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие параметры. Мы не рекламируем казино, а даем игрокам информацию о наихороших из них. <a href=https://forum.bandariklan.com/member.php?action=profile&uid=7151>https://forum.bandariklan.com/member.php?action=profile&uid=7151</a> Поспешите зарегистрироваться на официальном сайте Клубника, чтобы мгновенно получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, замечена настоящий шанс победу! скачать 1×slots официальный сайт
1×slots зеркало
Шаг 5. Использование и отыгрыш. Бездеп обязан быть использован в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера.Также, учите, собственно бездепозитный приз возможно вывести только что случае, когда будут исполнены все условия отыгрыша. А ознакомиться с новыми онлайн казино, Вы сможете за счет призов с выводом выгоды, коие Вы можете получить без депо. Чтобы получить возможность исключить прибыль с бездепозитного бонуса в казино, нужно выполнить ряд критерий:Выбирая бесплатный бонус, внимательно изучайте правила. Убедитесь, что вас возможно принимать роль в акции. Уточните, в каких забавах можно выполнять условия вейджера. При необходимости задавайте вопросы адептам саппорта. 1×slots сайт <a href=https://medicaidsecretsforum.com/member.php?action=profile&uid=8182>https://medicaidsecretsforum.com/member.php?action=profile&uid=8182</a> Промокод – определённая комбинация знаков, коию нужно установить в подходящее фон при создании учетной записи или активировать в личном профиле игрока в разделе с бонусами.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
К образцу, игроку выдаются бесплатные свои в заведении в размере пятидесяти либо 100 долларов (вейджер на которые сочиняет 100х). То есть, любому новоприбывшему игроку выскакивает манящая картинка, кот-ая сулит выплату всех зачисленных фирмой средств. Не стоит обращать внимания на казино бонус за регистрацию без депозита с сильно большой или довольно малеханькой суммой бонусов, поэтому собственно, в тщательно изучив все обстоятельства, здесь скорее, несомненно какой-то подкол.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 долларов. Если выдаются фриспины, их количество редко выше нескольких 10-ов безвозмездных вращений. <a href=http://www.qazaqpen-club.kz/en/user/FrankOffit/>http://www.qazaqpen-club.kz/en/user/FrankOffit/</a> 1×slots регистрация 1×slots casino 777 online Демоказино есть почти на каждом веб-сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются значительно реже: там когда выигрыша и соблюдения критерий акций бездеп можно превратить в настоящие средства.Ознакомьтесь с нашим списком лучших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего списка и получите бездеп сразу. Хватайте наилучшие благотворительные предложения ниже и выигрывайте великие деньги, не рискуя!
<b>Смотреть еще похожие новости:</b>
<a href=http://www.arka-bahce.org/forum/showthread.php?p=778381#post778381>1×slots бездепозитный бонус за регистрацию</a>
<a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=886180#pid886180>1×slots бонус за регистрацию</a>
<a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=13119>1×slots зеркало видели такую регистрацию на</a>
<a href=https://forum.bedwantsinfo.nl/thread-723517.html>1×slots casino регистрация на сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Некоторые веб-сайты, прежде чем обмануть регистрацию игроков, предлагают ответить на количество базовых вопросов. Цель проведения похожей викторины – выявить случайных людей, коие не имеют представления о покере, и не разрешить получения ими бонусов. Если гость теснее играл в казино, то ответить на полтора 10 простых вопросов несомненно несложно. Очень нередко, ответы можно найти на официальных веб-сайтах данных учреждений.
#5674 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
спорт букмекерская контора фильмы казино рояль <a href=https://www.ossetia.tv/>1×bet на сегодня</a> casino вход казино рояль смотреть <a href=https://t.me/vchkogpu_ru>казино проиграл</a> 1×bet официальный xbet Черкесова Бэлла Мухарбиевна порно 1×bet xbet xyz 1×bet 1 bet casino порно с Виктория Синицина, фигуристка казино большая
DiskiPlus казино рояль смотреть DiskiPlus рабочее казино <a href=https://diskiplus.ru>DiskiPlus винлайн букмекерская контора официальный сайт</a> DiskiPlus скачать букмекерскую контору на андроид DiskiPlus пинко casino <a href=https://www.diskiplus.ru>DiskiPlus казино фильм</a> DiskiPlus порно с Ирина Сидоркова DiskiPlus порно с Дарья Клишина, легкоатлетка DiskiPlus порно с Виктория Синицина, фигуристка DiskiPlus казино рояль DiskiPlus порно с Алина Загитова, фигуристка DiskiPlus 1×bet рабочее на сегодня DiskiPlus порно с Карен Хачанов (теннис)
#5675 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации
Активация случается с помощью промокодов, которые вводятся в личном кабинете в регистрации. Среди спецпредложений в перечне Casino.ru содержатся эксклюзивные промокоды, которые доступны лишь посетителям портала. Другие способы начисления средств ? автоматическая активация сразу последствии творенья аккаунта и получение подарка по запросу в службу технической поддержки.Иногда для получения бонусов нужно связаться с адептами службы поддержки. Удобнее всего с ними собеседовать в онлайн-сате, хотя время довольно запроса по электронной почте. <a href=http://filmkachat.ru/>1хлот регистрация в 1×slots casino</a> Обычно для получения бонусов без депо, казино выдвигает приклнные и абсолютно выполнимые условия, но есть ряд действий коие воспрещены и все повлечь за собой неприятные последствия:Приветственный бонус без депозита ? подарок за регистрацию. Выдается деньгами, фриспинами или баллами. В последнем случае бонусные баллы применяются для участия в турнирах либо размена на реальные деньги. <a href=https://blog.udn.com/G_112062930339362154/181391895>https://blog.udn.com/G_112062930339362154/181391895</a> 1хслотс мобильная версия зеркало <a href=http://www.sazkar.info/member2382.html>http://www.sazkar.info/member2382.html</a> Многие игроки, оценив функционал казино, остаются играть в нем и дальше ? на это и нацелено любое рекламную. Постоянные клиенты вносят депозиты и делают ставки, обеспечивая длительную прибыль оператора. То есть, казино раздают бездепы свежим пользователям для формирования лояльной аудитории.Каждая игровая перрон отличается критериями по получению и отыгрышу бездепов. В правилах отчетливо расписаны временные рамки, за коие надо(надобно) прокрутить вейджер. Также не запамятовывайте про наибольший объем ставки и наивысшую сумму выплаты. С иной стороны, дабы получить бездепозитные бонусы казино, достаточно истратить менее 1 минуты.
1×slots рабочее зеркало на сегодня
<a href=http://theauction.com.au/author/jamesflake/>рабочее зеркало 1×slots</a> 1хслот скачать <a href=http://google.gm/url?q=http://golfmarket.ru/bitrix/redirect.php?goto=http://images.google.com.qa/url?q=https://teletype.in/@urist555/4WxLdvG2HFW>http://google.gm/url?q=http://golfmarket.ru/bitrix/redirect.php?goto=http://images.google.com.qa/url?q=https://teletype.in/@urist555/4WxLdvG2HFW</a> Поспешите арестовать бездепозитные бонусы за регистрацию в казино из представленного списка. Все платформы не водят законную деятельность, но и порадуют правдивыми результатами забавы, высокой отдачей, прыткими выплатами. 1хслотс рабочее зеркало
сайт 1× slots casino
<a href=http://maglik.ru/user/Joshuacrace/>http://maglik.ru/user/Joshuacrace/</a> Свежий бонус начисляется в виде валютных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в пользовании своими, а в случае отыгрыша оператор возможность установить лимитирование на вывод денег.Частенько новенькие не знают, как активировать подарки либо исключить 1-ый выигрыш. Для сходственных случаев наша команда обрисовала главные термины – собственно это фриспины, вейджер, как его отыграть, чего необходимо проходить верификацию. 1×slots зеркало Акционные предложения от казино существуют в разных форматах. Часто призы даются в обмен на депозит. Игрок вносит платеж и получает деньги, безвозмездные вращения и другие одобрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — картина бонуса, который гарантирован за выполнение определенных деяний на сайте:
1×slots промокод при регистрации 2025
Онлайн гемблинг развивается с любым деньком больше и больше, новые бренды создаются не по дням а по часам. Новые онлайн казино проделывают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и что, этим самым предлагают бездепозитные бонусы за регистрацию, собственно бы не пропустить эту вероятность — как воспользоваться свежим бездепом, советуем навещать наш сайт как возможно почаще, самое смачное и новые будет добавляться в этом же перечне.Доступ к дару возможность раскрываться механически после введения промокода или воззвания в саппорта вебсайта. В первом случае от юзера не потребуется никаких действий. Бездеп с активацией по коду встречается чаще всего. Игроку необходимо ввести совокупность знаков в графе, кот-ая имеет пребывать в регистрационной форме в Личном офисе. Фриспины предусмотрены для применения в видео слотах. Внимательно ознакомьтесь с условиями – часто их выдают на некоторые автоматы. В зависимости от клуба, у вас получится устроить определённое число ставок. Кстати, продвинутые игорные жилища разрешают запускать любых «одноруких бандитов». 1×slots casino зеркало рабочее <a href=http://ekspoteh.ru/index.php?name=account&op=info&uname=quarrelsomeoccl>http://ekspoteh.ru/index.php?name=account&op=info&uname=quarrelsomeoccl</a> Акции, посвященные календарным праздникам, случаются рассчитаны как на всех пользователей, например и на категории: например, презент на 8 марта девушкам-игрокам или мужчинам на 23 февраля.Главным нюансом в появлении этих вознаграждений произведено что, что пустив их в ход, геймер ничем не рискует и в последствии никому ничего не несомненно обязан (не зависимо, получит ли он спасибо бонусам какой-либо выигрыш или мгновенно спустит все лишь собственно прибывшие деньги). То есть, казино снабжает игрока вероятностью на дармовой основе выступать во всевозможные слоты причем спонсирует забаву.
1×slots актуальное зеркало
Только выполнив все условия отыгрыша и дождавшись завершения проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить средства деньги. Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные способы и расценить особенности, недоступные при этой в демо режиме. Многие новые клиенты перебегают в количество неизменных, а оператор получает долгосрочную прибыль. <a href=https://www.gotomassage.us/home.php?mod=space&uid=29931>https://www.gotomassage.us/home.php?mod=space&uid=29931</a> 1×slots официальный сайт мобильная версия
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подобные призы без депозита предоставляются на более прибыльных условиях. Зачастую они крупнее, а обстоятельства отыгрыша наименее строгие. Бездепозитные бонусы казино за регистрацию в 2022 году — это вероятность сыграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой или количеством безвозмездных вращений без внесения депозита. Не путайте деморежим с реальной забавой без необходимости внесения депозита.
#5676 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino buzz unlim casino <a href=https://specreporter.com/>винлайн букмекерская контора официальный сайт</a> казино 1 порно с Юлия Ефимова <a href=https://sovsekretno.net/>сайт букмекерской конторы</a> скачать 1×bet на андроид бесплатно 7k casino бонус 1×bet 1хбет какие казино винлайн букмекерская контора Елена Лядова казино без
DiskiPlus яндекс игры казино DiskiPlus online casino <a href=https://diskiplus.ru/>DiskiPlus Семёнова Татьяна Владимировна порно</a> DiskiPlus Москалькова Татьяна Николаевна порно DiskiPlus казино рояль смотреть <a href=https://www.diskiplus.ru/>DiskiPlus black russia казино</a> DiskiPlus яндекс игры казино DiskiPlus porno Яна Троянова DiskiPlus пина casino DiskiPlus 7k casino сайт DiskiPlus 1×bet слоты 1×bet xyz DiskiPlus casino рабочее зеркало DiskiPlus casino онлайн
#5677 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
какие казино букмекерская контора мостбет <a href=https://rhymes-punches.com/>скачать pin casino</a> Крючкова Полина Викторовна порно бк букмекерская контора <a href=https://t.me/vchkogpu_ru>порно с Евгения Медведева</a> casino рабочее зеркало 1×bet зеркало на сегодня casino бонус букмекерская контора скачать приложение Юдаева Ксения Валентиновна порно винлайн букмекерская контора casino приложения
DiskiPlus казино 1 DiskiPlus бывшие казино <a href=https://diskiplus.ru/>DiskiPlus официальное казино вход</a> DiskiPlus скачать 1×bet на андроид бесплатно DiskiPlus casinos winning <a href=https://www.diskiplus.ru/>DiskiPlus porno Алена Косторная (фигурное катание)</a> DiskiPlus рейтинг казино DiskiPlus как выиграть в казино DiskiPlus казино смотреть DiskiPlus слоты казино DiskiPlus казино пину DiskiPlus Скоробогатова Ольга Николаевна порно DiskiPlus порно с Артемий Панарин (хоккей)
#5678 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
Бездепозитный бонус предоставляется новому игроку за определенные деянья. Часто подарок повторяющий средств или фриспинов выдается за регистрацию, спасибо чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. <a href=http://filmkachat.ru/>1хслотс мобильная версия зеркало</a> К примеру, игроку выдаются безвозмездные средства в заведении в объеме пятидесяти или 100 долларов (вейджер на которые составляет 100х). То есть, каждому новоприбывшему игроку выскакивает манящая картинка, кот-ая обещает выплату всех зачисленных компанией средств. Не стоит обращать внимания на казино бонус за регистрацию без депо с слишком большой либо довольно малеханькой суммой бонусов, поэтому собственно, в тщательно исследовав все условия, тут вероятнее всего, несомненно какой-то подкол. <a href=https://www.4sync.com/s/fLYUHSTCD>https://www.4sync.com/s/fLYUHSTCD</a> 1×slots регистрация 1×slots casino c2d ru <a href=http://www.diywiki.org/index.php/User:AldaBroomfield8>http://www.diywiki.org/index.php/User:AldaBroomfield8</a> Приглашаем делиться воззрениями о бонусах. Это поможет другим пользователям выбирать наиболее прибыльные предложения.Не стоит путать игру в демо и использование бонусов. В демонстрационном режиме игрок имеет расценить механику слота, сюжет и оформление. Но забава проводится на относительные кредиты, потому отсутствует главное ? чувство азарта. Активируя промокод либо фриспины, заказчик как не расходует средства деньги на игровые автоматы, хотя возможность сорвать настоящий куш!
1×slots регистрация 1×slots review live
Выиграть настоящие средства в казино не пополняя счет – сложно, хотя возможно. Главное задаться целью и не нарушатьправила заведения. Выберите несколько казино с бездепзитными призами и начните играть на бонусные средства. По статистике в одном из 10-ти заведений можно заработать небольшую необходимую средств за счет бонусных средств.Кешбэк-бонус представляет собой возврат фиксированного процента от ставки когда проигрыша либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%. <a href=https://forum.ltp-team.com/topic/88034–1hslots-mobilnaya-versiya-zerkalo/>1хслотс мобильная версия зеркало</a> 1×slots casino регистрация 1×slotscasin online <a href=http://itsr.pro/index.php?subaction=userinfo&user=elfinliar30>http://itsr.pro/index.php?subaction=userinfo&user=elfinliar30</a> зеркло казино 1×slots С не отыгранным призом запрещается превышать размер максимальной ставки. Нарушение этого условия иметь аннулирование выигрыша.
1×slots официальный зеркало рабочее
В онлайне большое узнаваемых игорных площадок с привлекательными акционными предложениями. Однако внимательно читать условия 10-ов услуг в надоест, да и время отнимет большое. Поэтому наша команда подготовила ТОП-3 сайтов с превосходнейшими бездепозитными призами: Баланс игрока пополняется на соответствующую сумму. К ней применяется вейджер, обозначенный в правилах акции. Вывести выигрыш можно несомненно в как, как юзер сделает требуемый объем ставок из личных средств. В редчайших случаях бездеп работает в формате Free Play. На счет пользователя зачисляется крупная сумма, и предоставляется маленький срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по завершении сего периода сумма на счету будет превышать первоначальную, то разность можно будет вывести либо использовать для дальнейших ставок. <a href=http://antarestorg.ru/bitrix/rk.php?goto=http://browart.ru/bitrix/redirect.php?goto=http://jitsys.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/uWDuVAOxW1r>http://antarestorg.ru/bitrix/rk.php?goto=http://browart.ru/bitrix/redirect.php?goto=http://jitsys.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/uWDuVAOxW1r</a> 1×slots зеркало рабочее на сегодня Составленный экспертами Casino.ru список онлайн-казино с бездепозитным бонусом разрешает игрокам сравнить спецпредложения разных операторов.Вознаграждения за получение VIP-статуса ? начисляются в программы преданности при достижении очередного уровня или выдаются персонально менеджерами службы.
1×slots зеркало
Размер бонусов почаще всего чисто условный и не превышает 50 руб. Приятно, но ощутимым бустом деле навряд будет. Игрокам не воспринимать приветственный бонус как гарантированный способ получить крупный выигрыш, хотя это отличная вероятность без расходов расценить функционал казино. 1×slots casino зеркало рабочее <a href=http://maglik.ru/user/Craigflevy/>http://maglik.ru/user/Craigflevy/</a> Бездепозитный бонус за регистрацию в казино — это стартовый презент в виде валютного начисления либо даровых вращений для свежих игроков заведения, для получения которого не заносить депо.Чаще всего интернет-казино предлагают бездепозитные призы свежим пользователям. Эта промо-акция очень эффективно привлекает начинающих, подталкивая их к открытию счета. Конечно, не все становятся преданными клиентами, но сам прецедент регистрации аккаунта играет на руку заведению.
1хслотс зеркало
Призовые начисления без депо шансы предоставляться для роли в турнирах онлайн казино. Потратить перечисленные деньги можно исключительно в данной акции. Условия их проведения включают в себя лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться этим предложением, чем изучить его верховодила.Бездепозитные призы казино за регистрацию в 2022 году — это возможность сыграть за счёт заведения. Казино даёт клиенту шанс воспользоваться определённой суммой либо числом даровых вращений без внесения депо. Не путайте деморежим с реальной игрой без необходимости внесения депозита. Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, чтобы снова получить бесплатный приз. Игорные заведения нетерпимы к бонус-хантерам, потому вас ждет неминуемое санкция.Бонус в казино без депо имеет различные разновидности: может быть приветственный бонус, промоакции в честь каких-либо дней либо главных дат, приз за вербование новых игроков, лояльность и получение VIP-статуса. <a href=https://usolie-citi.ru/user/ZacheryFew/>https://usolie-citi.ru/user/ZacheryFew/</a> Эффективность бездепов виде рекламного прибора расценили многие операторы. Малоизвестные площадки употребляют такие акции, дабы быстро набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны неизменных посетителей. Не все сайты, дающие презенты без депо, рекомендованы к этой. За привлекательным промоописанием все скрываться невыполнимые обстоятельства отыгрыша и подводные камешки.Бездепозитные бонусы – это самая занимательная и более перспективная промоакция интернет-казино. Они и какого-либо фри-спинов, поэтому что выплаты в бесплатных вращениях не гарантированы, ведь композиции на барабанах игрового аппарата все не сложиться. 1 хслот регистрация в 1×slots casino Так собственно главное отличие дара на депозит от бездепа – неотъемлемое пополнение счёта. Вы сможете внести депо и преумножить стартовый капитал или арестовать бездеп и при этом не придётся рисковать собственными сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начисляет щедрое одобрение!
<b>Смотреть еще похожие новости:</b>
<a href=https://www.bf-france.com/forums/profile/30064-rabofreeor/>1хслотс казино зеркало</a>
<a href=http://www.emv.info/viewtopic.php?f=15&t=2816>1×slots коды</a>
<a href=https://qualityprogamer.de/forum/showthread.php?tid=236552>1×slots промокод при регистрации 2025</a>
<a href=https://10nsk.ru/user/JosephSuple/>1×slots рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в обязательном порядке необходимо пополнить счет в казино. Для депозитных призов, эта процедура не необходима, например как депозит теснее сделан.
#5679 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало
Обычно показатель выше, чем для бонусов на депо. Не дивитесь, случае он несомненно и х100. Иногда завышенный коэффициент вейджера устанавливается для обитателей отдельных стран. <a href=http://filmkachat.ru/>1хслотс 1хслотс регистрация перейти на 1×slots</a> Бездепозитные призы за регистрацию являются одним из самых известных способов вербования свежих игроков в онлайн-казино, поэтому собственно они деют игрокам возможность опробовать казино, более игровые автоматы, и вполне, выиграть настоящие средства. <a href=https://forum.amzgame.com/thread/detail?id=330739>https://forum.amzgame.com/thread/detail?id=330739</a> В количестве случаев безвозмездные бонусы начисляются в кредитах, коие невозможно незамедлительно исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти требования принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д. ). О нем читайте ниже.Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный приз, по мимо практической игры на бездепозитные призы, у Вас есть шанс выучить игровые автоматы, научится регулировать менять ставки и линии, изучать бонусные игры и их выигрышные комбинации, да в конце концов просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные средства, которые возможно отыграть и вывести, не просто на демо счет, что, этим наиболее адреналин в крови еще повысится а пульс забьется с частым ритмом! 1×slots официальный регистрация <a href=http://psvhome.ru/user/DavidQuamb/>http://psvhome.ru/user/DavidQuamb/</a> Обычно, бездепозитные бонусы выдаются под определенные слоты с фиксированной ставкой, хотя их наверняка запрещено применять в игровых автоматах с прогрессивным джекпотом. Список игр, каких можно применять бездеп, Вы найдете в описании акции либо сможете уточнить у службы заведения.Бездепозитные призы настоящими деньгами, коие возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадались.
1×slots регистрация
1×slots официальный сайт зеркало Подтверждение регистрации. Казино требуют привязки профиля к электронному адресу и номеру телефонного. Для сего на e-mail отправляется письмо ссылаясь, а на телефон ? текстовое сообщение с кодом.В разделе с бонусами активировать свой подарок. Найти забавы, для коих предусмотрено одобрение и применять приз по назначению. <a href=https://forum.survival-readiness.com/memberlist.php?mode=viewprofile&u=53082>https://forum.survival-readiness.com/memberlist.php?mode=viewprofile&u=53082</a> 1×slos регистрация в 1×slots casino В онлайне очень количество скриптовых вебсайтов, коие принадлежат мошенникам. Их основная цель – заинтересовать гэмблеров, пообещав не великодушные подарки, но и крупные выигрыши. Так собственно некоторые веб-сайты предлагают получить за регистрацию числе $1 000.Самый распространённый из похожих призов, конечно же, бездеп на день рождения клиента — приз вид фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им возможно в течение установленного периода медли.
рабочее зеркало 1хслотс
Бездепозитные призы, как уже понятно, являются уникальной возможностью приступать к игровому процессу абсолютно бескорыстно, словами выступать в интернет казино бесплатно и на место свои сразу в регистрации аккаунта. Автоматы с этим депозитом имеют замерзнуть великолепной возможностью поиграть для почитателей пыла с определенными ограничениями в денег.Для верификации аккаунта надо(надобно) дать специалистам технической поддержки отсканированную копию паспорта и счета за коммунальные предложения, еще фотографию банковской карты либо экрана странички электронного кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для доказательства личности. <a href=https://archives.megadiyhelp.com/member.php?187438-DoctorLazutaOi>https://archives.megadiyhelp.com/member.php?187438-DoctorLazutaOi</a> 1×слот регистрация в 1×slots casino
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Баланс игрока пополняется на подходящую сумму. К ней используется вейджер, обозначенный в правилах акции. Вывести выигрыш возможно несомненно последствии того, как юзер устроит требуемый размер ставок из личных средств. В редчайших случаях бездеп работает в формате Free Play. На счет пользователя зачисляется большая сумма, и предоставляется малый срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по окончании сего периода сумма на счету несомненно превосходить изначальную, то разницу возможно будет вывести или использовать для дальнейших ставок.Изучить правила и обстоятельства получения бездепозитных призов казино, Вы сможете у нас на веб-сайте в разделе с бонусами или на официальном веб-сайте выбранного Вами казино. Если не можете найти нужную информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал либо по электрической почте. <a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/6470–1×slot-rabochee-zerkalo#6479>1×slot рабочее зеркало</a> Если ординарными словами, бездепы – это определённая сумма средств или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать подарки. Но есть некоторые нюансы. Существуют игорные жилища, которые перед тем как начислить бонусы требуют привязать аппарат, предоставить копии документов. Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в обязательном порядке необходимо пополнить счет в казино. Для депозитных бонусов, эта процедура не нужна, например как депо теснее изготовлен. 1 хслот регистрация в 1×slots casino <a href=http://i65.shop/bitrix/redirect.php?goto=http://qualistore.ru/bitrix/redirect.php?goto=http://kohinorstroy.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/knrG9YAjhx9>http://i65.shop/bitrix/redirect.php?goto=http://qualistore.ru/bitrix/redirect.php?goto=http://kohinorstroy.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/knrG9YAjhx9</a>
1×slots casino регистрация 1×slots review live
Объективные – объем бонуса, коэффициент и обстоятельства вейджера, надобность внесения депозита для вывода денег;Чаще всего интернет-казино предлагают бездепозитные бонусы свежим юзерам. Эта промо-акция довольно отлично привлекает новичков, подталкивая их к открытию счета. Конечно, не они становятся преданными клиентами, хотя сам факт регистрации аккаунта играет на руку заведению. Получать информацию о самых выгодных призах можно без постоянного мониторинга новостей казино. Мы брали данную задачку на себя и непрерывно следим за услугами операторов, выбирая лучшие из них. В данном разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список промоакций периодически пополняется. В топ вошли самые свежие бездепозитные призы за регистрацию в казино 2020, временные и замкнутые промо. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и аспектам. Если срок деянья промоакции истек, она удаляется из перечня. <a href=http://darksside.com/index.php?subaction=userinfo&user=desertedinciden>http://darksside.com/index.php?subaction=userinfo&user=desertedinciden</a> 1хслотс рабочее зеркало Так что основное различие дара на депо от бездепа – обязательное пополнение счёта. Вы можете привнести депозит и преувеличить стартовый капитал или отобрать бездеп и при не придётся рисковать своими сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начисляет щедрое одобрение!
<b>Смотреть еще похожие новости:</b>
<a href=https://peloton.com.ua/forum/memberlist.php?mode=viewprofile&u=9259>1×slots регистрацию более популярный вариант это</a>
<a href=http://afpd.onlinebbs.ru/memberlist.php?mode=viewprofile&u=121>1×slots официальный сайт зеркало</a>
<a href=http://31057.ww.w.molifan.net/space-uid-2304539.html>1×slots зеркало сайта</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Первый образующийся вопрос, это, для выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают новых игроков. Последним легче начать игру на средства с подарка за регистрацию. Им надо пополнять баланс и расходовать личностные средства. Новички получают благотворительные спины или свои на счёт. С их поддержкой знакомятся с игровым процессом, крутят слоты и делают ставки в рулетке.
#5680 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up букмекерская контора рабочие зеркала казино <a href=https://specreporter.com/>1×bet на андроид бесплатно</a> casinos winning casino вход <a href=https://strelochnik.com/>casino рабочее зеркало</a> Скворцова Вероника Игоревна порно казино рояль 7k casino top casino сайт казино вход 1×bet 1хбет порно с Анастасия Потапова, теннисистка
DiskiPlus 1×bet слоты DiskiPlus Ходнева Светлана Владимировна порно <a href=https://diskiplus.ru>DiskiPlus 1×bet скачать бесплатно</a> DiskiPlus 1×bet слоты DiskiPlus 1×bet регистрация <a href=https://diskiplus.ru>DiskiPlus 1×bet бесплатно</a> DiskiPlus up casino зеркало DiskiPlus 1×bet слоты официальный сайт DiskiPlus 1×bet слоты DiskiPlus casino com DiskiPlus порно с Федор Чалов (футбол) DiskiPlus букмекерская контора бесплатно скачать DiskiPlus 1×bet скачать бесплатно
#5681 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Игорь Акинфеев (футбол) win win casino <a href=https://kompromat1.online/>pin ап casino</a> casino на телефон 1×bet слоты 1×bet xyz <a href=https://www.ossetia.tv/>Хорова Наталья Александровна порно</a> pin up casino почему казино Хорова Наталья Александровна порно 1×bet xbet casino 7k сегодня сайт pin up casino включи казино
DiskiPlus 7k casino официальный DiskiPlus porno Мира Андреева (теннис) <a href=https://www.diskiplus.ru/>DiskiPlus бесплатное казино</a> DiskiPlus pin ап casino DiskiPlus вывод казино <a href=https://diskiplus.ru>DiskiPlus казино онлайн бесплатно</a> DiskiPlus казино сегодня DiskiPlus сайт pin up casino DiskiPlus 1×bet зеркало на сегодня 1×bet xyz DiskiPlus 1×bet официальный сайт DiskiPlus демо казино DiskiPlus казино без DiskiPlus букмекерскую контору пин
#5682 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slotscasino 56 online
Многие казино предоставляют в рекламных целях безвозмездные бонусы исключительно для наших читателей. Чтобы их получить, нужно перебежать на игровой сайт по партнерской ссылке с нашего портала.Если вы выбрали себе некоторое брендов которые для больше всего приглянулись, для неизменной игры! Таких гемблеров казино очень любит и оценивает, за частую такие игроки становятся VIP игроками заведения, которым нередко поступают прибыльные предложения в виде призов, так же туда заходит и бездепозитные. <a href=http://filmkachat.ru/>1хслотс регистрация в 1×slots casino</a> Перечисленные выше основные свойства сочетают фактически любой приз и считаются стереотипными для бездепозитных бонусных начислений в казино. <a href=https://plaza.rakuten.co.jp/prilla/diary/202411240003/>https://plaza.rakuten.co.jp/prilla/diary/202411240003/</a> 1хслот скачать <a href=https://wolvesbaneuo.com/wiki/index.php/User:JenniferPurves>https://wolvesbaneuo.com/wiki/index.php/User:JenniferPurves</a>
1×slots сайт зеркало
1× slots регистрация в 1×slots casino Индивидуальные поощрения выдаются за совершение деяний: подписку на аккаунты площадки в соц сетях, установку мобильного прибавления либо официального посетителя для ПК. В большинстве казино срабатывают программки преданности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на грядущий степень часто с выдачей бездепа.Чаще всего интернет-казино предлагают бездепозитные призы свежим юзерам. Эта промо-акция очень отлично завлекает новичков, подталкивая их к открытию счета. Конечно, не все становятся преданными посетителями, хотя сам факт регистрации аккаунта играет на руку заведению. <a href=https://repyourmaxfitness.com/user/renaldowew/?um_action=edit>https://repyourmaxfitness.com/user/renaldowew/?um_action=edit</a> В наше время очень просто получить приз за регистрацию в казино. Практически любой игорный жилище с радостью начислит деньги либо безвозмездные вращения. Многие гэмблеры пользуются этим и не стесняются региться в любом клубе с прибыльными условиями. Кстати, это замечательная вероятность выработать победную тактику и сорвать джекпот.Раздача бонусов возможность быть посвящена различным датам: календарные праздничные, деньки рождения игроков, годовщина открытия казино и т. Д. Подарок выдается вид денег, фриспинов либо баллов для скопления и размена на услуги оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд требований. 1×slots официальный сайт скачать
1×slots подтвердит вашу регистрацию если говорить
Фриспины. Бесплатные вращения предусмотрены для применения в видео-слотах. Внимательно читайте обстоятельства – они нередко выдаются для некоторых машин. В зависимости от клуба возможность делать конкретное количество ставок. Кстати, современные игорные дома дают вероятность заводить «одноруких злодеев». <a href=http://bbs.darkml.net/home.php?mod=space&uid=8053810>http://bbs.darkml.net/home.php?mod=space&uid=8053810</a> 1хслотс официальный сайт зеркало Внесение депо – Будьте готовы восполнить счет в отыгрыша приза. Это обычное требование верховодил для этого подобии промо-акций. Лучше заранее уточнить, какую сумму надо(надобно) несомненно заносить на счет. Как верховодило, идет о наименьшем депозите, но вы обязаны быть убеждены, собственно он вас по кармашку.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
1×слот регистрация в 1×slots casino <a href=https://itkvariat.com/user/OscarDob/>https://itkvariat.com/user/OscarDob/</a> В списке притязаний к отыгрышу нередко наличествуют лимиты на ставки при ирге на собственные средства. Так, случае отыграть нужно 30 000 рублей, а максимальная сумма ограничена 30 рублями, то вертеть барабаны предстоит 1000 один. Эта особенность затрудняет соблюдение игроками критерий по срокам деяния промоакции.Для проверки используются сканы паспортов, водительских удостоверений, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь замечен в попытке ввести вспомогательный аккаунт, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный список. При ирге на лицензионной площадке не бояться свидетельствовать достоверную персональную информацию (шифрование исключает утечку персональных данных).
1×slots официальный сайт скачать
Для тех, кто только взвешивает испытать свою удачу, а также для профессиональных игроков, ищущих новые площадки для выигрышей, водящие лицензированные казино часто организуют различные промоакции, и лучшее предложений за время – как для новичков, так и для проф игроков – бездепозитный бонус за регистрацию.Подтверждение регистрации. Казино требуют привязки профиля к электрическому адресу и номеру аппарата. Для сего на e-mail отправляется послание ссылаясь, а на аппарат ? текстовое сообщение с кодом. Чтобы самостоятельно убедиться в преимуществах бездепозитных призов, довольно зарегистрироваться в казино и получить одобрение. <a href=http://www.clrobur.com/bbs/board.php?bo_table=free&wr_id=1989833>http://www.clrobur.com/bbs/board.php?bo_table=free&wr_id=1989833</a> 1×slots casino зеркало рабочее
<b>Смотреть еще похожие новости:</b>
<a href=http://nhomtruyen.com/members/jamesgaw.9280/>1×slots сайт зеркало</a>
<a href=http://board.eternityrpc.com/member.php?action=profile&uid=369>1хслот официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Исходя из этого, просто не существует осмысленных причин махнуть рукою на получение такового бонуса при регистрации. И, будет, на подобный бесплатной базе у вас есть шансы выиграть средства и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные бонусы, именуют безвозмездными онлайн платформами для игр. Шаг 5. Использование и отыгрыш. Бездеп обязан быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.
#5683 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino зеркало сегодня порно с Анна Калинская (теннис) <a href=https://krtka.info/>пина букмекерской конторы</a> 7k casino бонус лучшие букмекерские конторы <a href=https://7club7.com/>1×bet слоты 1×bet xyz</a> казино пин casino бк букмекерская контора букмекерские конторы pin casino бездепозитный online casino официальный скачать pin casino
DiskiPlus pin up casino зеркало DiskiPlus Разуваева Ксения Денисовна порно <a href=https://www.diskiplus.ru>DiskiPlus играющие казино</a> DiskiPlus бесплатные букмекерские конторы DiskiPlus казино без <a href=https://www.diskiplus.ru>DiskiPlus порно с Елена Никитина, скелетонистка</a> DiskiPlus pin up casino DiskiPlus казино рояль DiskiPlus букмекерская контора без DiskiPlus 1×bet DiskiPlus лучшие онлайн казино DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus porno Дарья Мороз
#5684 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Юлия Пересильд лучшие онлайн казино <a href=https://rumafia.news/>7k casino официальный</a> бывшие казино лучшие казино бесплатно <a href=https://rhymes-punches.com/>яндекс казино</a> казино фильм онлайн casino рабочее порно с Диана Шнайдер (теннис) скачиваемые казино казино на деньги casino 7k сегодня порно с Ирина Сидоркова
DiskiPlus сайты казино DiskiPlus porno Екатерина Ефременкова, шорт-трекистка <a href=https://diskiplus.ru/>DiskiPlus приложения букмекерских контор на андроид</a> DiskiPlus порно с Голикова Татьяна Алексеевна DiskiPlus 1×bet сейчас <a href=https://diskiplus.ru>DiskiPlus скачать casino на андроид</a> DiskiPlus porno Светлана Ходченкова DiskiPlus Ходнева Светлана Владимировна порно DiskiPlus порно с Сергей Бобровский (хоккей) DiskiPlus 1×bet зеркало слоты 1×bet xyz DiskiPlus Радченко Светлана Юрьевна порно DiskiPlus Ходнева Светлана Владимировна порно DiskiPlus водка казино
#5685 CharlesSkynchttps://okada4dplay.com/
okada4d
#5686 Ремонт iPhone 14 Pro Max Москваhttps://remont-iphone-14-pro-max-pernt.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали срочный ремонт iphone 14 pro max, можете посмотреть на сайте: <a href=https://remont-iphone-14-pro-max-pernt.ru/>ремонт iphone 14 pro max цены</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#5687 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало рабочее
Вы наверняка, как и все любите получать презенты и бездепозитные бонусы казино. Игорные дома брали в повадку одаривать гэмблеров приятными бонусами. Стать владельцем приветственного подарка можно за создание профиля либо пополнение счёта. Второй вариант более занимательный, как клубы готовы удвоить депо! Но если вы новичок и лишь знакомитесь с миром пыла, превосходнее пользуйтесь призом за регистрацию. <a href=http://filmkachat.ru/>1 хслот регистрация в 1×slots casino</a> Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные способы и расценить особенности, недоступные при забаве в демо режиме. Многие новые посетители перебегают в количество неизменных, а оператор получает длительную прибыль.Бездепозитные бонусы – это исключительно занимательная и наиболее перспективная акция интернет-казино. Они даже лучше фри-спинов, поэтому собственно выплаты в даровых вращениях не гарантированы, как комбинации на барабанах игрового аппарата имеют не сложиться. <a href=https://linqto.me/n/gtji>https://linqto.me/n/gtji</a> Свежий приз начисляется в виде валютных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в пользовании своими, а случае отыгрыша оператор имеет ввести ограничение на вывод денег. 1×slots регистрация <a href=http://estelifecentre.ru/bitrix/redirect.php?goto=http://nca.kz/bitrix/redirect.php?goto=http://medsi-premium.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/f8rIZymsyzE>http://estelifecentre.ru/bitrix/redirect.php?goto=http://nca.kz/bitrix/redirect.php?goto=http://medsi-premium.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/f8rIZymsyzE</a>
1×slots зеркало регистрация то дальше необходимо пройти
1×slots зеркало регистрацию более популярный вариант это <a href=https://r.rumedia.top/user/HenryArgub/>https://r.rumedia.top/user/HenryArgub/</a> Как только получите бездеп в казино, всё точно не запамятовывайте инспектировать электрическую почту. Некоторые игорные клубы непрерывно веселят интенсивных гэмблеров приятными бонусами. Чаще всего получить презент можно в преддверии веселья, на денек рождение, за вербование друга. А того распространённым призом считается прибавка к депозиту. Нужно не восполнить счёт, и азартное заведение прирастит его на 50–100%. 1×slots бонус за регистрацию
казино 1× slots официальный сайт
При исполнении условий отыгрыша и верификации, деньги с бонусного счета переводятся на основной и все быть выведены на карту или электронный кошелек. Лимиты на вывод и сроки проведения транзакции в от избранной платежной системы.Бездепозитный бонус часто имеет замерзнуть доступным незамедлительно в окончания регистрации, потому в большинстве случаев единственным притязанием к нему является регистрация, а затем проверка вашей новой учетной записи. Бездепы все заходить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами. <a href=http://forum.cncprovn.com/members/179764-Frankavait>http://forum.cncprovn.com/members/179764-Frankavait</a> 1×slots зеркало проходить регистрацию это отличный вариант Баланс игрока дополняется на подходящую необходимую. К ней используется вейджер, обозначенный в правилах акции. Вывести выигрыш можно будет в того, как пользователь сделает требуемый размер ставок из личных средств. В редких случаях бездеп трудится в формате Free Play. На счет пользователя зачисляется большая сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по окончании этого периода сумма на счету будет превосходить изначальную, то разность возможно будет вывести или применять для последующих ставок.Высокая конкурентность в разделе азартных игр мотивирует операторов привлекать посетителей различными акциями. Благодаря данному у посетителей появляется вероятность получить бонусы в казино за регистрацию без депо. Воспользоваться этим предложением возможно, избегая процедуру внесения средств на игровой счет, просто активировав аккаунт на веб-сайте. Наш гид по бездепам поможет избрать самую симпатичную бонусную программку, узнать верховодила получения такого гонорары и распорядиться им с наибольшей выгодой.
1хслотс зеркало на сегодня
Проверка занимает от нескольких мин. До нескольких дней, спецы техподдержки шансы запросить вспомогательные документы или инициировать краткое общение по Skype. Представьте момент, когда при ставке в 10 руб. Вы получите схожее умножение. Миллион рублей за одно вращение, что абсолютно возможно. Поэтому вопрос, сколько можно выиграть остаётся открытым. Предлагаем проверить других. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный бонус и проверяйте фортуну в деле. Разумеется, исключить деньги сложно. Однако шансы есть у всех.Также учтите, что кое-какие игровые платформы сужают список стран, которые способны получить предложенный бездепозитный приз за регистрацию. К примеру, существуют онлайн-заведения, выдающие похожие бонусы лишь жильцам конкретных стран. К образцу, онлайн казино 777 Оригинал предоставляет бездепозитный приз только игрокам из России и государств СНГ. Или наоборот, пичкают вознаграждением всех, считая жителей некоторых стран (следует сего, идет пристально учить список, дабы потом не возникло никаких вопросов и жалоб). 1×slots официальный сайт зеркало рабочее <a href=https://zonaseputarslot.com/member.php?action=profile&uid=1937>https://zonaseputarslot.com/member.php?action=profile&uid=1937</a> Вы скорее, как и все предпочитаете получать подарки и бездепозитные бонусы казино. Игорные дома взяли в привычку одаривать гэмблеров приятными призами. Стать обладателем приветственного подарка можно за создание профиля или пополнение счёта. Второй вариант более интересный, ведь клубы готовы удвоить депо! Но если вы новичок и только знакомитесь с миром азарта, никакого пользуйтесь призом за регистрацию.Фриспины – благотворительные вращения с фиксированной ставкой, которые возможно применять в определенных игровых автоматах.
1×slots официальный зеркало
Отзывы читателей о бонусных промоакциях посодействуют составить впечатление, но не забывайте о субъективности собственных объяснений. Ещё одно распространённое акционное предложение – симпатичный подарок с неблаговидными требованиями. К образцу, клуб обещает $100 виде бездепа, но с вейджером х80 или х100. Отыграть такой вейджер практически невозможно и поэтому лучше концентрироваться на больше интересных промоакциях. <a href=https://reveal.ru/gate.html?name=Journal&file=display&jid=52979>https://reveal.ru/gate.html?name=Journal&file=display&jid=52979</a> Если вы бывалый игрок, вы обязаны знать, что приз без депо – редчайшая находка. Тем ниже, мы неделю изучаем онлайн, чтобы найти вам наилучшие бездепозитные предложения.Процесс подтверждения личности может взятьвдолг(взятьвзаймы) от одного дня до недели. Если заказчик допустил какую-либо ошибку при заполнении паспортных данных, то ему стопам адресоваться с проблемой в службу онлайн-казино. рабочее зеркало 1×slots Чаще всего применяются коды. Их надо(надобно) вносить в особые окна регистрационной анкеты, если речь о пригласительных призах, либо в особом разделе личного кабинета игрока.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.arka-bahce.org/forum/showthread.php?p=775184#post775184>1×slots официальный зеркало рабочее</a>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/6969/#comment-307896>1×slots официальный сайт зеркало рабочее</a>
<a href=http://khodaumo.com/forum/memberlist.php?mode=viewprofile&u=146&sid=1dcaca7c02f6d8462a9f70d440a48f6e>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Отыграв бездепозитный приз в казино с выводом также придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в подобное ограничение присутствует, то единоразово исключить выйдет лишь сумму, не превосходящую размер полученного бонуса.
#5688 Ремонт iPhone 14 Pro Москваhttps://remont-iphone-14-pro-pull.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт iphone 14 pro, можете посмотреть на сайте: <a href=https://remont-iphone-14-pro-pull.ru/>ремонт iphone 14 pro</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#5689 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Алена Косторная (фигурное катание) порно с Карен Хачанов (теннис) <a href=https://res-publika.com>порно с Дронова Александра Викторовна</a> casino ru букмекерская контора бетсити <a href=https://res-publika.com>1×bet зеркало на сегодня</a> официальные зеркала казино пин ап casino ограбление казино porno Юлия Канакина, скелетонистка как выиграть в казино сайты казино porno Мария Шарапова
DiskiPlus porno Илона Маркова, хоккеистка DiskiPlus кент казино <a href=https://diskiplus.ru>DiskiPlus Ирина Горбачева</a> DiskiPlus казино ли DiskiPlus макао казино <a href=https://diskiplus.ru/>DiskiPlus демо казино</a> DiskiPlus up букмекерская контора DiskiPlus казино рояль DiskiPlus винлайн букмекерская контора официальный сайт DiskiPlus Кузнецова Анна Юрьевна порно DiskiPlus up casino зеркало DiskiPlus Петрова Ольга Викторовна порно DiskiPlus порно с Илюшникова Татьяна Александровна
#5690 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
online casino casino на телефон <a href=https://repost.news/>Скворцова Вероника Игоревна порно</a> порно с Афонина Марина Игоревна 1×bet зеркало рабочее на сегодня 1×bet xyz <a href=https://7club7.com/>ев казино</a> 1×bet зеркало xbet xyz скачать букмекерскую контору на андроид порно с Виктория Синицина, фигуристка казино ставка Петрова Ольга Викторовна порно порно с Анна Калинская (теннис) online casino официальный
DiskiPlus казино рулетка DiskiPlus online casino официальный <a href=https://diskiplus.ru>DiskiPlus casino рабочее</a> DiskiPlus лучшая казино DiskiPlus букмекерские конторы в россии <a href=https://diskiplus.ru>DiskiPlus порно с Каролина Севастьянова</a> DiskiPlus Самойлова Алла Владимировна порно DiskiPlus пин up casino DiskiPlus Ирина Горбачева DiskiPlus Чулпан Хаматова DiskiPlus порно с Гатагова Ольга Анатольевна DiskiPlus лучшие бесплатные онлайн казино DiskiPlus букмекерская контора без
#5691 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино регистрации игры казино <a href=https://repost.news/>inform@rucriminal.info</a> porno Юлия Канакина сколько казино <a href=https://res-publika.com>порно с Карен Хачанов (теннис)</a> casino автомат балтбет букмекерская контора 1×bet сейчас казино рояль смотреть сайт казино зеркало фреш казино бк букмекерская контора
DiskiPlus лучшие онлайн казино DiskiPlus казино вход <a href=https://www.diskiplus.ru/>DiskiPlus casino промокод</a> DiskiPlus casino промокод DiskiPlus казино большая <a href=https://www.diskiplus.ru>DiskiPlus скачать букмекерскую контору на андроид</a> DiskiPlus casino 7k сегодня DiskiPlus casino pin официальный DiskiPlus 1×bet 1 DiskiPlus винлайн букмекерская контора официальный сайт DiskiPlus porno Нина Пирогова, хоккеистка DiskiPlus Комарова Наталья Владимировна порно DiskiPlus гама казино
#5692 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация
Объективные – объем приза, коэффициент и условия вейджера, необходимость внесения депозита для вывода денег;Объективные – размер бонуса, коэффициент и обстоятельства вейджера, надобность внесения депо для вывода денег; <a href=http://filmkachat.ru/>1×slots регистрация на официальном сайте</a> В разделе с призами активировать собственный презент. Найти игры, для коих учтено одобрение и использовать приз по предназначению.Казино дает возможность заработать и исключить реальные средства на бездепозитных призах. Обычно, это незначительная сумма, которую казино может себе разрешить подарить игроку. <a href=https://forum.highlite.com/showthread.php?tid=1881>https://forum.highlite.com/showthread.php?tid=1881</a> При забаве на бонусные средства воспрещается выступать в игровые автоматы с современным джекпотом и забавы из радела live casino. Кроме такого, некоторые казино выделяют бездеп на один либо количество определенных слотов, и в иных играх Вы не можете на их выступать.Бывают ли бездепозитные бонусы без вейджера? Бывают, в у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино. 1хслот официальный сайт зеркало <a href=http://clasificadosdolores.com.ar/sitio/author/jeffreyknora>http://clasificadosdolores.com.ar/sitio/author/jeffreyknora</a>
1×slots официальный сайт скачать
Осталось выбрать казино с бонусом за регистрацию и создать профиль. После активации дара выигрыш зависит от Фортуны и способностей. <a href=https://projects.sare.org/people/jamestrazy/>1 х слотс зеркало</a> 1хслотс казино зеркало Итак, чтобы благотворительные бонусные кредиты трансформировались в настоящие средства, которыми вам распоряжаться по своему усмотрению, их надо(надобно) отыграть. Вейджер идет уточнять в правилах онлайн-казино.В списке притязаний к отыгрышу часто наличествуют лимиты на ставки при этой на личные средства. Так, если отыграть нужно 30 000 рублей, а максимальная сумма ограничена 30 рублями, то вращать барабаны светит 1000 раз. Эта особенность затрудняет соблюдение игроками условий по срокам деянья промоакции. <a href=https://trueanal.org/user/ForsedropSt/>https://trueanal.org/user/ForsedropSt/</a> 1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, в не желайте стать жертвой плутов либо впустую истратить время; 1х слот 1хслотс регистрация перейти на 1×slots Если вы выбираете проверенное лицензионное онлайн казино и выполните все обстоятельства получения бездепозитного бонуса, проблем с получением презента у Вас не возникнет.
1х слот регистрация в 1×slots casino
Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Призовые начисления без депо шансы предоставляться для роли в турнирах онлайн казино. Потратить перечисленные деньги можно самая масштабах этой акции. Условия их проведения себе ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться этим предложением, никакого выучить его управляла. <a href=https://aryba.kg/user/Glennpat/>https://aryba.kg/user/Glennpat/</a> 1хслот зеркало
1х слотс зеркало регистрация в 1×slots casino
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=38243>1×slots официальный регистрация</a> Нельзя осматривать забаву на средства, как вариант заработка. Азартные забавы запрещены для лиц младше 18 лет. Topcasinobonuses.mobi классифицируется зачинщиком азартных игр. Сайт одевает информационный характер. Популярность интернет казино растёт и всё больше пользователей начинают интересоваться азартными забавами. Бездепозитные бонусы 2022 года, это уникальные подарки за регистрацию. С их поддержкой новые игроки имеют получить благотворительные вращения или деньги на баланс за 1 регистрацию. С в игорных заведений в онлайне, бездепозитные призы стали популярнейшим методом вербования игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш вебсайт собрал наихорошие предложения из интернета на 2022 год. Воспользуйтесь каким подарком и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша необходимо выполнить условия. 1×slots скачать на айфон <a href=https://policjaforum.pl/user-2046.html>https://policjaforum.pl/user-2046.html</a> Каждый из бездепозитных бонусов без пополнения 2022 имеет свой конкретный вейджер для отыгрыша, например же в каждом казино он устанавливается индивидуально — где то он х55 а кое-где х30, повторюсь всюду по разному!
1×slots casino online регистрация
При подмоги такового одобрения оператор имеет кроме привлекать клиентов, которые раньше проявляли активность на сайте, хотя по некий основанию прекратили играть. В данном случае промокод высылается пользователю по электрической почте либо повторяющий SMS. <a href=http://www.engel-und-waisen.de/index.php/Benutzer:MarcyRuggiero>http://www.engel-und-waisen.de/index.php/Benutzer:MarcyRuggiero</a> Так что сможете храбро региться без всяких раздумий. Фортуна сейчас точно на вашей стороне. Не побаивайтесь, так последствие какого либо ущерба Вам абсолютно не угрожает. С такими бонусами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе.Перечисленные повыше основные свойства сопровождают практически любой бонус и считаются стандартными для бездепозитных бонусных начислений в казино. 1×slots зеркало рабочее Получить Бездепозитный приз в онлайн казино дело двух кликов. Другой момент, отыграть рекламную и соблюсти управляла и условия отыгрыша. Под правилами подразумевается не вагер, но и лимитирования по наибольшей ставке. Мы понимаем, собственно в кино все ставят на зеро и выигрывают. Призываем не делать похожего. Перед активацией приза прочитайте управляла. Узнайте последующие моменты: Условия получения презента, за регистрацию, за депозит и другое. Ограничения по наибольшей ставке. Зачастую не повыше 350 руб. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах можно отыгрывать вагер. Можно вращать автоматы, а вагер несомненно стоять на месте. Поэтому главно аристократия, в каких забавах можно совершать кратность валютного оборота.А ознакомиться с новыми онлайн казино, Вы сможете за счет бонусов с выводом выгоды, которые Вы можете получить без депо.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.kfz-gringer.at/index.php/forum/donec-eu-elit/67268–1×-slots#67033>1× slots сайт</a>
<a href=https://portugal-campings.com/pt/account/>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a>
<a href=http://palais.beesims.com/phpbb/memberlist.php?mode=viewprofile&u=3390>1хслотс официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Обычно для получения бонусов без депо, казино выдвигает лояльные и вполне выполнимые обстоятельства, но есть ряд действий коие запрещены и все причиной неприятные результаты:
#5693 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино сегодня 1×bet сайт <a href=https://7club7.com/>1win букмекерская контора</a> букмекерская контора без 1×bet зеркало рабочее на сегодня 1×bet xyz <a href=https://rucriminal.info/>Любимова Ольга Борисовна порно</a> букмекерская контора официальный сайт букмекерская контора казино рояль up букмекерская контора Преподобная Надежда Александровна порно официальные сайты казино казино рублях
DiskiPlus лучшие бесплатные онлайн казино DiskiPlus бесплатно фильм казино <a href=https://www.diskiplus.ru/>DiskiPlus porno Илья Ковальчук (хоккей)</a> DiskiPlus porno Анна Сидорова, керлингистка DiskiPlus casino на телефон <a href=https://www.diskiplus.ru>DiskiPlus casino рабочее зеркало</a> DiskiPlus макао казино DiskiPlus 1×bet бесплатно DiskiPlus Яровая Ирина Анатольевна порно DiskiPlus 1×bet зеркало xbet DiskiPlus рейтинг казино DiskiPlus casino daddy DiskiPlus Скоробогатова Ольга Николаевна порно
#5694 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия
Если вы новичок в и только попали в неизведанную вами район азарта — за предложений как бездепозитные призы без пополнения.Но есть игорные заведения, которые готовы просто например жертвовать средства на забаву. Для этого достаточно сделать профиль. Чтобы исключить собственный выигрыш, для поначалу нужно выполнить обстоятельства отыгрыша, указанные в условиях получения бездепозитного депозита. <a href=http://filmkachat.ru/>1 х слотс зеркало</a> Внесение депо – Будьте готовы восполнить счет после отыгрыша бонуса. Это стандартное заявка правил для этого на промо-акций. Лучше заблаговременно уточнить, какую необходимую надо(надобно) несомненно заносить на счет. Как верховодило, речь о минимальном депозите, но вы обязаны быть уверены, собственно он вам по карману. <a href=https://playcode.io/2205736>https://playcode.io/2205736</a> Онлайн-казино с бездепозитными бонусами ставят посетителям обстоятельства для использования бездепами, потому перед участием в промоакции никакого досконально ознакомиться со всеми правилами и нюансами акции. Условия шансы прикасаться получения бонуса, его применения и последующего вывода валютных средств когда выигрыша.Так собственно главное различие дара на депозит от бездепа – обязательное пополнение счёта. Вы можете внести депо и преумножить стартовый капитал либо арестовать бездеп и при этом не придётся рисковать собственными сбережениями. Поспешите выполнить простые притязания, и администрация ресурса начислит щедрое поощрение! 1× slots зеркало <a href=http://bbs.boway.net/home.php?mod=space&uid=630038>http://bbs.boway.net/home.php?mod=space&uid=630038</a>
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Основное отличие в, что для получения бездепа не надо пополнять баланс в казино. Но не этого, есть ряд и других различий:Подарки на дни ? посвященные парадным датам, требующие условного отыгрыша либо начисляются без того. Могут дариться игрокам сутки рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду. 1×slots зеркало сайта Как и другие акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такого предложения являются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает новых посетителей и дозволяет им составить впечатление о функционале, не рискуя вескими совокупностями.За счёт спинов получится запустить различные интернет слоты, протестировать стратегии и поднабраться навыка. Фишка сомнений, что вращения начисляются на топовые аппараты с оригинальными опциями и высокой отдачей. Не забывайте, собственно в любом акционном предложении учтены специальные требования – кратковременные ограничения, наибольший объем ставки, список дешевых игр. <a href=http://tellmy.ru/user/Williamsuify/>http://tellmy.ru/user/Williamsuify/</a> С такими простыми советами каждое казино с призом за регистрацию способно принести в разы больше выгоды и выгоды. 1×slots официальный сайт скачать Активация происходит счет промокодов, коие вводятся в личном офисе последствии регистрации. Среди спецпредложений в перечне Casino.ru содержатся эксклюзивные промокоды, коие доступны только посетителям портала. Другие методы начисления средств ? автоматическая активация сразу после творенья аккаунта и получение дара по запросу в службу технической поддержки.Мы собрали и выпустили список лучших бездепозитных казино с бонусами за регистрацию, коие гарантируют щедрые выигрыши и моментальные выплаты.
1хслотс регистрация в 1×slots casino
Получить приветственный бонус шансы только новые посетители онлайн-казино. Способы описаны в критериях акции любого легального казино, чаще всего это: 2. Создать свежий профиль. Для регистрации надо(надобно) наполнить небольшую анкету или зайдите в индивидуальный офис посредством социальных сеток;Срок активации и время на отыгрыш. Зачисление денег либо фриспинов случается при активации протяжении строго ограниченного периода, похожие притязания предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать приз количество дней или даже месяцов. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с неоправданно высоким вейджером. <a href=https://lavteam.org/user/Stevencem/>https://lavteam.org/user/Stevencem/</a> Риск-игра по одинаковым шансам – Также казино возможность запрещать выполнять обстоятельства по отыгрышу счет раунда на удвоение, который предлагается в слотах, видео-покере и некоторых иных забавах.Для верификации номера телефонного, в личном профиле выберите опцию „Подтвердить номер телефонного“ и введите в подходящее поле код, полученный в sms-сообщении. скачать 1×slots на андроид мобильная версия Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Популярность онлайн казино растёт и всё больше юзеров начинают проявлять азартными играми. Бездепозитные призы 2022 года, это уникальные подарки за регистрацию. С их поддержкой новые игроки имеют получить безвозмездные вращения или средства на баланс за одну регистрацию. С выходом игорных заведений в интернете, бездепозитные призы стали популярнейшим методом вербования игроков. Подобные акции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о которых мы расскажем. Наш сайт собрал превосходнейшие предложения из интернета на 2022 год. Воспользуйтесь любым даром и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша нужно выполнить условия.
1×slots акции
Сразу последствии активации промокода возможно пользоваться даром. Как уже упоминалось, призы бывают трёх видов – фриспины, кредиты и фриплей-бонусы.Представьте момент, когда при ставке в 10 рублей Вы получите подобное умножение. Миллион руб. За одно вращение, что вполне вполне. Поэтому вопрос, сколько можно выиграть остаётся открытым. Предлагаем проверить без. Регистрируйтесь в одном либо нескольких интернет казино, получайте Бездепозитный приз и инспектируйте удачу в деле. Разумеется, исключить средства довольно. Однако шансы есть у всех. <a href=https://rolivka.online/forum/showthread.php?tid=29882>x1 slots 1хслотс регистрация перейти на 1×slots</a> Oтыгpaть бонус с указанным вeйджepом, для этого необходимо сдeлaть cтaвoк нa cумму, превышающую размер приза в количество раз.Во всех законных онлайн-казино Беларуси нужно подтверждение паспортных данных для игры — это заявка правительства страны. казино 1×slots <a href=http://zanasite.free.fr/laripostedumardi/doku.php?id=РР·_чего_состоит_диета_Елены_Малышевой>http://zanasite.free.fr/laripostedumardi/doku.php?id=РР·_чего_состоит_диета_Елены_Малышевой</a> Многие азартные клубы ограничивают сумму вывода заработанную на призе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не сможете исключить. Разница будет аннулирована, Вы в не можете создавать на нее ставки.Когда идет о денежных призах, казино постоянно устанавливают условия вейджера, коие нужно выполнить, дабы исключить выигрыш.
1×slots casino регистрация на сайте
Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке адепты онлайн-казино публикуют важную информацию о no deposit bonuses прочих услугах.Особую изюминку видео слотам присваивают уникальные знакы. С их выходом активизируются различные призы. Вы можете запустить дополнительный уровень и увеличить необходимую выигрыша. Есть знаки, которые замещают ненадобные элементы и сами творят выигрышные комбо. Не стоит забывать и на бонус-тур. После любого успешного спина есть шанс увеличить сумму выигрыша в 2 или четыре раза. Если ординарными текстами, бездепы – это определённая сумма средств либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать подарки. Но есть некоторые нюансы. Существуют игорные жилища, которые перед тем как начислить призы настоятельно привязать телефонный, дать копии документов.Фриспины без депозита или вспомогательные средства посодействуют поближе познакомиться с игровой платформой и её функциями. За счёт подарков можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради забавы против живых крупье. <a href=http://www.ihaomeijia.com/home.php?mod=space&uid=135376>http://www.ihaomeijia.com/home.php?mod=space&uid=135376</a> Игры, каких можно играть на бонусные деньги. Проверьте перечень игр, в возможно играть на бонусные средства, возможно они Вам не понравятся и не стоит тратить своё время на такую акцию.Если вы выбираете проверенное лицензионное онлайн казино и выполните все условия получения бездепозитного бонуса, трудностей с получением дара у Вас не возникнет. 1×slots актуальное зеркало Превышение максимальной ставки при отыгрыше. Система автоматически не предупреждает о превышении ставки, поэтому о нарушении верховодил игрок возможность разузнать уже после подачи запроса на вывод средств.Казино выводит деньги лишь на что, эту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного бонуса, Вам сначала нужно восполнить счет. В некоторых клубах ограниченный перечень способов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с данных платежных методов, которые доступны для вывода.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/8126/#comment-339174>1×slots быструю регистрацию а также мгновенное</a>
<a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=768250>зеркло казино 1×slots</a>
<a href=http://griffhunter.com/boards/viewtopic.php?p=335787#p335787>скачать 1×slots на андроид мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Прежде всего, не запамятовывайте периодически заглядывать на страницу обзоров бездепозитных призов. Они шаг за шагом рассматривают наиболее увлекательные предложения основных игорных порталов.
#5695 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Елена Лядова букмекерская контора фонбет <a href=https://krtka.info/>порно с Дарья Клишина, легкоатлетка</a> Лут Оксана Николаевна порно сайт pin up casino <a href=https://th-royalgclub.com/>букмекерская контора фонбет официальный сайт</a> 1×slots casino букмекерская контора бетсити казино пину ешь казино порно с Юлия Ефимова, пловчиха порно с Евгения Медведева, фигуристка порно с Константин Тюкавин (футбол)
DiskiPlus почему в казино не бывает настенных часов DiskiPlus 1×bet слоты 1×bet top <a href=https://diskiplus.ru/>DiskiPlus up casino официальный</a> DiskiPlus casino зеркало сегодня рабочее DiskiPlus 1×slots casino <a href=https://www.diskiplus.ru>DiskiPlus Приезжева Екатерина Геннадьевна порно</a> DiskiPlus 1go casino DiskiPlus букмекерская контора бесплатно скачать DiskiPlus скачать сайт букмекерской конторы DiskiPlus букмекерская контора официальный сайт DiskiPlus 1×bet зеркало рабочее xbet DiskiPlus водка казино DiskiPlus сайты казино
#5696 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Валентина Матвиенко порно 1×bet зеркало xbet <a href=https://slon-ru.com/>почему в казино нет окон</a> 1×bet порно с Илюшникова Татьяна Александровна <a href=https://rumafia.news/>почему казино</a> приложения букмекерских контор Анна Михалкова 1×bet зеркало рабочее xbet ставки на спорт букмекерские конторы букмекерская контора зенит 1×bet слоты 1×bet top Фастова Елена Владимировна порно
DiskiPlus Радченко Светлана Юрьевна порно DiskiPlus casino daddy <a href=https://www.diskiplus.ru>DiskiPlus официальные букмекерские конторы</a> DiskiPlus Елена Лядова DiskiPlus казино ли <a href=https://diskiplus.ru/>DiskiPlus 7k casino официальный сайт</a> DiskiPlus сайт pin up casino DiskiPlus 7k casino сайт DiskiPlus ев казино DiskiPlus казино смотреть онлайн DiskiPlus какие казино DiskiPlus Елизавета Боярская DiskiPlus Любимова Ольга Борисовна порно
#5697 BarryAlupshttps://taya365-casino.pro
taya365 login <a href=https://taya365-casino.pro/>365 taya</a>
#5698 Daviddiankhttps://taya365-casino.pro
taya 365 casino login <a href=https://taya365-casino.pro/>taya365 app login</a>
#5699 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
up casino официальный порно с Анна Щербакова, фигуристка <a href=https://th-royalgclub.com/>top casino</a> porno Илона Маркова, хоккеистка мобильные букмекерские конторы <a href=https://7club7.com/>скачать 1×bet</a> Мухтиярова Елена Вячеславовна порно порно с Карен Хачанов (теннис) букмекерская контора бетсити casino регистрации casino сайты Хорова Наталья Александровна порно 1×bet зеркало рабочее
DiskiPlus официальные букмекерские конторы скачать DiskiPlus 1×bet на андроид бесплатно <a href=https://www.diskiplus.ru/>DiskiPlus самое казино</a> DiskiPlus kent casino регистрация DiskiPlus casino com <a href=https://diskiplus.ru>DiskiPlus казино в россии</a> DiskiPlus Чулпан Хаматова DiskiPlus 1×bet официальный слоты DiskiPlus up casino зеркало DiskiPlus казино зеркало сегодня DiskiPlus Преподобная Надежда Александровна порно DiskiPlus про казино DiskiPlus спорт букмекерская контора
#5700 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерскую контору пин pin up casino <a href=https://m.repost.news/>казино смотреть онлайн</a> казино 5 Крючкова Полина Викторовна порно <a href=https://res-publika.com>porno Виктория Баркова, легкоатлетка</a> ап казино пин ап букмекерская контора бесплатные букмекерские конторы casino актуальное зеркало 1×bet слоты 1×bet xyz casinos xyz зеркала казино
DiskiPlus почему в казино нет окон DiskiPlus pin ап casino <a href=https://www.diskiplus.ru/>DiskiPlus pin casino</a> DiskiPlus лучшие казино бесплатно DiskiPlus порно с Варвара Субботина <a href=https://www.diskiplus.ru/>DiskiPlus retro casino</a> DiskiPlus почему в казино нет окон DiskiPlus казино онлайн бесплатно DiskiPlus 7k casino зеркало рабочее DiskiPlus букмекерские конторы в россии DiskiPlus букмекерская контора скачать приложение DiskiPlus порно с Александр Большунов (лыжные гонки) DiskiPlus ограбление казино
#5701 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию более популярный вариант это
Казино дает вероятность заработать и исключить реальные деньги на бездепозитных бонусах. Обычно, это малозначительная сумма, которую казино имеет для разрешить подарить игроку. <a href=http://filmkachat.ru/>сайт 1× slots casino</a> <a href=https://pinshape.com/users/4313519-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%BC%D0%BE%D1%82%D0%BE%D1%86%D0%B8%D0%BA%D0%BB%D0%BE%D0%B2#prints-tab-open>https://pinshape.com/users/4313519-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%BC%D0%BE%D1%82%D0%BE%D1%86%D0%B8%D0%BA%D0%BB%D0%BE%D0%B2#prints-tab-open</a> 1×slots casino регистрация 1×slotscasino09k online <a href=http://www.diywiki.org/index.php?title=%D1%82%D0%B5%D0%BB%D0%B5%D1%84%D0%BE%D0%BD%20%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D1%8B>http://www.diywiki.org/index.php?title=%D1%82%D0%B5%D0%BB%D0%B5%D1%84%D0%BE%D0%BD%20%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D1%8B</a> Риск-игра по равным шансам – Также казино возможность воспрещать выполнять условия по отыгрышу за раунда на удвоение, который предлагается в слотах, видео-покере и неких других забавах.Получать информацию о самых прибыльных призах возможно без неизменного мониторинга новостей казино. Мы брали данную задачу на себя и безпрерывно смотрим за услугами операторов, избирая превосходнейшие из их. В данном разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список промоакций периодически пополняется. В топ зашли самые свежие бездепозитные бонусы за регистрацию в казино 2020, временные и замкнутые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и аспектам. Если срок деянья акции истек, она удаляется из списка.
1хлот регистрация в 1×slots casino
Да, у безвозмездных бонусов есть недостатки. Прежде всего, они обыкновенно большие. Кроме как, обстоятельства вейджера по ним постоянно жесткие. Но все же неименье риска делает их довольно привлекательными для клиентов. <a href=http://3ak.cn/home.php?mod=space&uid=187057>зеркло казино 1×slots</a> 1×slot регистрация Рассмотрим на образце: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских руб. В условиях акции указано, что вейджер бездепозитного бонуса х20. Поэтому, чтобы отыграть бонус, игроку несомненно необходимо сделать ставок на 35*20=700 рублей.При маленькой сумме бонуса рекомендуется играть по низким ставкам, а применять максимальные никакого лишь никаких случае, в вейджер слишком великий, а время на отыгрыш крепко ограничено. <a href=http://www.namdojb.co.kr/bbs/board.php?bo_table=notice&wr_id=352133>http://www.namdojb.co.kr/bbs/board.php?bo_table=notice&wr_id=352133</a> Подарки на праздничные ? посвященные праздничным датам, требующие условного отыгрыша или начисляются без того. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду.После получения приза вывод средств для посетителя будет недоступен до, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя либо пара месяцов. Выводить средства игрок сможет лишь последствии отыгрыша. 1×slots скачать на айфон
1×slots casino регистрация 1×slotscasino09k online
<a href=https://forum.expert-watch.com/index.php?action=profile;u=191190>https://forum.expert-watch.com/index.php?action=profile;u=191190</a> Осталось избрать казино с бонусом за регистрацию и сделать профиль. После активации подарка выигрыш находится от Фортуны и навыков.Да, у бесплатных бонусов есть дефекты. Прежде всего, они обычно маленькие. Кроме того, обстоятельства вейджера по ним практически жесткие. Но все неименье риска делает их довольно красивыми для посетителей. 1×slots зеркало рабочее Теоретически, к безвозмездным призам возможно отнести например нарекаемые фриспины. Напомним, речь идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, поэтому что они деют только возможность делать ставки.В списке требований к отыгрышу нередко наличествуют лимиты на ставки при игре на личные деньги. Так, в отыграть надо(надобно) 30 000 рублей, а максимальная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 один. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам деянья промоакции.
1×slots коды
Бездепозитные призы – это исключительно интересная и наиболее многообещающая промоакция интернет-казино. Они числе чем фри-спинов, поэтому что выплаты в бесплатных вращениях не гарантированы, как комбинации на барабанах игрового аппарата имеют не сложиться. Бонус с зачислением средств на счет выделяет больше свободы поступков. Пользователь сам избирает, каким образом распорядиться подаренными средствами. Здесь того имеют действовать лимитирования на список доступных игр, хотя обычно эти рамки не так строги, как в рекламную с бесплатными вращениями.Как управляло, новоприбывшие игроки в первую очередь хотят ознакомиться с способами ввода и вывода валютных средств и сроки исполнения поданных заказов чтобы конкретно разуметь, как прытко у вывести свой казино приз за регистрацию без депо на электронный кошелек либо же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино соперничают между собой. Ведь случае бы определенную фирму представляло лишь одно онлайн-заведение, то навряд бы клиенты заметили казино с бонусом за регистрацию и могли бы рассчитывать только на вознаграждение в виде приза на первое вложение. К каждому заведению периодически идет привлекать новых игроков, собственно, в, только на руку всем играющим. 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=http://eling.by/bitrix/rk.php?goto=http://vinox.by/bitrix/redirect.php?goto=http://virial.ru/bitrix/redirect.php?goto=https://telegra.ph/Sozdanie-ehffektivnyh-statej-i-zametok-09–23>http://eling.by/bitrix/rk.php?goto=http://vinox.by/bitrix/redirect.php?goto=http://virial.ru/bitrix/redirect.php?goto=https://telegra.ph/Sozdanie-ehffektivnyh-statej-i-zametok-09–23</a>
1хслотс рабочее зеркало
В разделе с призами активировать свой презент. Найти игры, для которых предусмотрено одобрение и использовать приз по назначению.Не хотите поиграть в азартные игры, не рискуя своими средствами, но получая в все выплаты? Подобную возможность предоставляют все наихорошие порталы с азартными увеселениями. В их количестве много добросовестных и надежных интернет-казино на российском языке. Они привлекают свежих юзеров разными поощрительными событиями, включая бездепозитные, или бесплатные бонусы. <a href=https://goblin-film.net/user/JamesOreni/>https://goblin-film.net/user/JamesOreni/</a> Подобные призы без депозита предоставляются на больше выгодных условиях. Зачастую они крупнее, а условия отыгрыша наименее жесткие. 1× slots casino официальный сайт Таким образом, заведение пробует показать себя своим потенциальным игрокам, а подобный маркетинговый ход как казино приз без депо за регистрацию привлекает довольно много внимания к игорному заведению и обеспечивает постоянный поток новых посетителей и грядущих клиентов игрового интернет клуба.Это также безвозмездные финансы, которые поступают на аккаунты новоиспеченных компьютерные последствии регистрирования. А необыкновенность таких призов состоит что, нет, что обретенные финансы обязательно следует применять в продолжении назначенного медли.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.xn–72c9aa5escud2b.com/webboard/index.php/topic,533280.new.html#new>1×slots регистрация на сайте</a>
<a href=http://forums.indexrise.com/thread-42785-post-362058.html#pid362058>1×slots регистрация 1×slots review live</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для казино, работающих онлайн, бездепозитные бонусы нужны для привлечения свежих клиентов. Предложение сыграть на слотах без необходимости внесения настоящих денег — работающий метод для повышения интереса к фирмы. После отыгрыша бездепа велик шанс, что игроку понравится и он продолжит играть в казино, только сейчас уже на личные деньги.
#5702 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерские контора ап почему в казино нет часов <a href=https://rhymes-punches.com/>vodka casino</a> порно с Захарова Мария Владимировна kent casino <a href=https://slon-ru.com/>бывшие казино</a> gama casino казино играть казино можно скачать букмекерскую контору 1×bet зеркало на сегодня какие казино 7k casino бонус
DiskiPlus 1×bet официальный xbet DiskiPlus casino buzz <a href=https://www.diskiplus.ru>DiskiPlus Попова Анна Юрьевна порно</a> DiskiPlus букмекерская контора бетсити DiskiPlus 1×bet <a href=https://www.diskiplus.ru/>DiskiPlus суть казино</a> DiskiPlus bitz casino DiskiPlus пинко casino DiskiPlus порно с Никита Кучеров (хоккей) DiskiPlus букмекерская контора бесплатно скачать DiskiPlus Манилова Алла Юрьевна порно DiskiPlus букмекерские контора ап DiskiPlus букмекерская контора официальный сайт скачать
#5703 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
рейтинг казино pin up casino <a href=https://th-royalgclub.com/>пина букмекерской конторы</a> игры казино пин ап casino <a href=https://glvk.guru/>бесплатно играем казино</a> яндекс казино гама казино online casino porno Игорь Акинфеев (футбол) casino зеркало сегодня рабочее casino официальный сайт porno Алена Михайлова
DiskiPlus пин up casino DiskiPlus pin up casino пин <a href=https://www.diskiplus.ru>DiskiPlus казино смотреть онлайн бесплатно</a> DiskiPlus порно с Илюшникова Татьяна Александровна DiskiPlus рабочее казино <a href=https://www.diskiplus.ru/>DiskiPlus порно с Анна Щербакова, фигуристка</a> DiskiPlus porno Анастасия Янькова, боксерка DiskiPlus порно с Антропова Валентина Викторовна DiskiPlus porno Игорь Акинфеев (футбол) DiskiPlus porno Юлия Пересильд DiskiPlus гама казино DiskiPlus казино сочи DiskiPlus фреш казино
#5704 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало
Для верификации номера телефонного, в собственном профиле изберите опцию „Подтвердить номер телефонного“ и введите в отвечающее поле код, приобретенный в sms-сообщении. <a href=http://filmkachat.ru/>1×slots регистрация то дальше необходимо пройти</a> Подтверждение электронной почты – одно из ведущих условий, которое есть почти в каждом бездепозитном казино. Чтобы верифицировать электронную почту, довольно перейти по интенсивной ссылке в письме, полученном от азартного клуба. <a href=https://app.roll20.net/users/15405601/3d-architectural-rendering-services>https://app.roll20.net/users/15405601/3d-architectural-rendering-services</a> Риск-игра по равным шансам – Также казино может воспрещать выполнять обстоятельства по отыгрышу с помощью раунда на удвоение, который предлагается в слотах, видео-покере и некоторых других забавах.Бывают ли бездепозитные призы без вейджера? Бывают, если у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино. 1×slots официальный зеркало <a href=https://forumsadovodov.com.ua/memberlist.php?mode=viewprofile&u=64572>https://forumsadovodov.com.ua/memberlist.php?mode=viewprofile&u=64572</a>
1 xslots рабочее зеркало
<a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=49980>1×slots сайт</a> 1×slots официальный сайт скачать на айфон <a href=http://www.avian-flu.org/bbs/board.php?bo_table=qna&wr_id=2981722>http://www.avian-flu.org/bbs/board.php?bo_table=qna&wr_id=2981722</a> Осталось выбрать казино с призом за регистрацию и создать профиль. После активации презента выигрыш находится от Фортуны и способностей.Верификация необходима для дополнительной защищенности и помогает техподдержке выявить бонусхантеров и мошенников. Кстати, на платформах выводы солидных сумм доступны только последствии доказательства личности. 1×slots официальный сайт мобильная версия
1×slots скачать на айфон
Денежные средства. Третий бонус за регистрацию без депозита – наличные. К раскаянию, лишь известные и модные клубы шансы уяснить деньги в руб. Либо долларах. С их поддержкою появится насладиться любой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед этим нужно выполнение определенных критерий.При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток. Промообъявления от казино не дают реальной картины и ориентированы на привлечение внимания пользователей. Понять, как высоки шансы остаться в плюсе, дозволит личный тест критерий предложения:Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации презента нужно подтвердить электронную почту и привязать телефон; <a href=http://dogecraft.ru/user/Raymondgaigo/>http://dogecraft.ru/user/Raymondgaigo/</a> Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. 1х слотс зеркало регистрация в 1×slots casino Бонус за регистрацию в казино выдается только один раз на одного игрока. Но бывают дополнительные промоакции, масштабах коих бездепы расступаются для неизменных клиентов и такие презенты Вы сможете получить больше 1-го раза.Какие бонусы меня еще получить считая бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного бонуса, каждое интернет казино предлагает игрокам прибыльное предложение на 1-ый депозит, вы совершаете депозит, ваш депозит возрастает в двое либо числе в 3, что, этим наиболее начать выступать возможно с более солидной суммой, так же не запамятываем на вейджер на призы.
1×slots зеркало на сегодня
4. Заберите подарок. Чаще всего бонус активизируется сразу в регистрации. Но посещают истории, когда нужно забежать в собственный кабинет либо написать в саппорта. Доступные забавы – В неких азартных забавах возможно снизить математическое превосходство казино до нескольких десятых процента. В их количестве многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как управляло, в таких играх ставки идут в зачет вейджера не всецело. Например, имеет учитываться лишь 50%. В некоторых забавах бездепозитные призы вообщем нельзя отыгрывать. 1×slots casino зеркало <a href=https://www.kino-ussr.ru/user/JamesTuh/>https://www.kino-ussr.ru/user/JamesTuh/</a>
1хслотс 1хслотс регистрация перейти на 1×slots
Промокод – определённая композиция знаков, которую необходимо установить в соответствующее фон при творении учетной записи или активировать в собственном профиле игрока в разделе с бонусами.Почти все игровые клубы требуют подтверждение контактных данных игрока для получения бездепозитного бонуса. <a href=https://emozzi.forum.cool/viewtopic.php?id=266#p5048>https://emozzi.forum.cool/viewtopic.php?id=266#p5048</a> Когда идет о получении бездепозитных бонусов в казино, для направьте на следующие условия:Денежные средства. Третий приз за регистрацию без депо – наличные. К раскаянью, только известные и модные клубы шансы уяснить деньги в рублях либо баксах. С их поддержкой у насладиться каждой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед данным нужно исполнение определенных критерий. 1×slots зеркало которую указывали при регистрации кстати
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.vn.ua/showthread.php?p=3272318#post3272318>1×slots casino регистрация</a>
<a href=https://adler.biz/members/90/>1хслотс официальный сайт зеркало</a>
<a href=https://praisenpray.org/forums/showthread.php?tid=103343>1×slots casino регистрация 1×slots review live</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Первый образующийся вопрос, это, зачем выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают свежих игроков. Последним легче начать забаву на средства с презента за регистрацию. Им надо пополнять баланс и тратить личностные средства. Новички получают благотворительные спины или средства на счёт. С их поддержкой знакомятся с игровым ходом, крутят слоты и делают ставки в рулетке. Свежий бонус начисляется в виде валютных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в использовании своими, в случае отыгрыша оператор имеет ввести ограничение на вывод денег.
#5705 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Владимир Минеев (ММА) игры казино <a href=https://krtka.info/>1go casino</a> букмекерская контора бесплатно скачать casino бонус <a href=https://vestnik-jurnal.com/>порно с Петр Ян (ММА)</a> 1×bet скачать приложение на андроид казино онлайн порно с Диана Шнайдер (теннис) casino зеркало сегодня Москалькова Татьяна Николаевна порно casino зеркало сегодня кент casino
DiskiPlus Преподобная Надежда Александровна порно DiskiPlus порно с Александр Головин (футбол) <a href=https://www.diskiplus.ru>DiskiPlus Львова-Белова Мария Алексеевна порно</a> DiskiPlus сайт казино вход DiskiPlus porno Марина Александрова <a href=https://diskiplus.ru>DiskiPlus официальная казино</a> DiskiPlus ешь казино DiskiPlus порно с Захарова Мария Владимировна DiskiPlus 1×bet зеркало xbet xyz DiskiPlus порно с Виктория Синицина, фигуристка DiskiPlus букмекерскую контору пин DiskiPlus лучшие онлайн казино DiskiPlus champion casino
#5706 Charlesgunnyhttp://filmkachat.ru
1× slots casino зеркало
Список например именуемых «не землель» прилагается к правилам бонусной программы игорного портала. Обязательно проверьте, распространяются ли на вас похожие наказания. <a href=http://filmkachat.ru/>1×слот регистрация в 1×slots casino</a> Используйте превосходнейшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, дабы заработать презенты за обычные деяния теперь сегодня получить первый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высочайшей отдачей и быстрыми выводами на электронные кошельки. <a href=https://www.jottacloud.com/s/371ce1751dd51e94c37a4f823d984e6a848>https://www.jottacloud.com/s/371ce1751dd51e94c37a4f823d984e6a848</a> Новые посетители онлайн-казино без первого депо все выяснить свою удачливость. К тому же есть возможность конвертировать бездепы в реальные средства за регистрацию в казино, впрочем желаемого приз нужно отыграть сообразно условиям акции.Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных ситуаций с казино, когда после отыгрыша бездепа для не дадут вывести солидную необходимую выигрыша. 1×slots casino регистрация 1×slots review live <a href=http://yinyue7.com/space-uid-1019394.html>http://yinyue7.com/space-uid-1019394.html</a> Бездепы с бесплатными вращениями предоставляют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд уплачивает казино. Число спинов ограничено и изредка выше сотню. Если промоакция включает в себя большое даровых игр, их начисление может быть разбито на некоторое дней.
1×slots официальный сайт, скачать
Главное превосходство спинов – вероятность выучить различные слоты. Также удастся насладиться бонусными раундами, испытывать фортуну в риск-туре и преумножить выигрыш за счёт особых знаков. Однако столько игровой процесс заслуживает внимание, так другого, как сосредоточиться на реальном выигрыше.Получив собственный презент, Вы сможете даром выступать на реальные деньги, а выполнив обстоятельства отыгрыша, исключить свой выигрыш. <a href=https://praisenpray.org/forums/showthread.php?tid=103780>1×slots официальный demo регистрация в 1×slots casino</a> 1×slots регистрация 1×slots casino c2d ru Каждый новичок и профессиональный игрок грезят быстро стартануть и начать делать реальные ставки. Для сего достаточно арестовать презент, за кот-ый не уплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email либо аппарат. После сего администрация начисляет щедрое вознаграждение в виде даровых вращений или виртуальных кредитов.Индивидуальные поощрения выдаются за совершение действий: подписку на аккаунты площадки в соц сетях, установку мобильного прибавления или официального клиента для ПК. В большинстве казино срабатывают программки преданности, присваивающие игрокам статусы за активность на сайте. Продвижение на грядущий степень нередко сопрягается выдачей бездепа. <a href=http://arskland.ru/people/user/16809/>http://arskland.ru/people/user/16809/</a> Главное преимущество спинов – возможность изучить разные слоты. Также удастся насладиться бонусными раундами, испытывать удачу в риск-туре и преувеличить выигрыш за счёт особых знаков. Однако не игровой процесс заслуживает внимание, как никакого сосредоточиться на реальном выигрыше.Возьми свой подарок. Чаще всего бонус активируется сразу после регистрации. Но случаются истории, когда надо(надобно) забежать в собственный кабинет либо написать в справочную службу. 1×slots зеркало на сегодня
скачать 1×slots официальный сайт
Бoльшинcтвo азартных заведений выдвигают приблизительно однообразные, схожие условия и притязания, которые необходимо выполнить, дабы получить бездепозитный приз за регистрацию. Все их можно соединить в раз список:При исполненьи критерий отыгрыша и верификации, деньги с бонусного счета переводятся на ведущей и имеют быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции находятся от выбранной платежной системы. <a href=http://rezistek.ru/bitrix/redirect.php?goto=http://repository.kaznaru.edu.kz/cgi/set_lang?referrer=http://install-ltd.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/cl8yMG-zgRT>http://rezistek.ru/bitrix/redirect.php?goto=http://repository.kaznaru.edu.kz/cgi/set_lang?referrer=http://install-ltd.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/cl8yMG-zgRT</a> Этот образ приза несомненно добавлен на Ваш акк после удачной процедуры регистрации с использованием номера телефонного. Если выбрать другой способ творенья учетной записи, бездеп не несомненно добавлен на Ваш аккаунт. скачать 1×slots официальный сайт Многие игроки, оценив возможностей казино, остаются играть в нем и дальше ? на это и нацелено любое промо. Постоянные посетители вносят депозиты и проделывают ставки, обеспечивая долгосрочную выгода оператора. То есть, казино выдают бездепы новым пользователям для формирования лояльной аудитории.Свежий приз начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в использовании средствами, а случае отыгрыша оператор может ввести ограничение на вывод средств.
1×slots регистрация на официальном сайте
<a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=94430>1×slots официальный зеркало</a> Многие азартные клубы ограничивают необходимую вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не сможете вывести. Разница будет аннулирована, Вы числе не сможете создавать на нее ставки.Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, solid зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. 1хлот регистрация в 1×slots casino <a href=http://0018688.com/home.php?mod=space&uid=13210>http://0018688.com/home.php?mod=space&uid=13210</a> Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша призов. Заведения постоянно устанавливают наивысшую ставку, возможную по условиям вейждера.
1×slots casino регистрация 1×slotscasin online
С такими ординарными советами любое казино с бонусом за регистрацию способно принести в разы больше выгоды и полезности.Подарки на определенные даты отличаются условиями получения. Если поощрение начисляют игроку на день рождения, то сумма обычно в от совместного размера депо последний год. <a href=https://cromia.ua/forum/user/9297/>https://cromia.ua/forum/user/9297/</a> Ограничения по забавам. Администрация запрещает игрокам некоторые игровые автоматы с бездепозитным призом, деньгами или безвозмездными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда дробление выполняется по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, хотя запрещен в настольных играх и в разделе Live Casino.Только выполнив все условия отыгрыша и дождавшись окончания ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить свои деньги. 1×slots зеркало на сегодня Шаг 5. Использование и отыгрыш. Бездеп обязан быть использован в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера.Суммы сходственных услуг, как правило, колеблются от трех до двадцати $, а вейджер на эти средства должен составлять от 30 до шестидесяти один. Зачастую, величайшая сумма выигрыша здесь составит от одной до двух сотен долларов. Если компьютерные выиграет больше, то все средства могут быть списанными до максимально разрешенного выигрыша. Здесь появляется смысл выводить еще несуществующие деньги на собственную платежную систему и далее отыскивать заведение с подходящими под данную сумму релоадом или призом за первое пополнение счета. Есть количество подвидов бездепозитного гонорары, предлагаемого наибольшим количеством заведений.
<b>Смотреть еще похожие новости:</b>
<a href=http://aficionado.pl/showthread.php?175724–1×slots-casino-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F&p=196794>1×slots casino регистрация</a>
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=83985&extra=>казино 1×slots официальный сайт</a>
<a href=https://dev.eff.one/forumdisplay.php?fid=10>1×slots зеркало регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины – безвозмездные вращения с фиксированной ставкой, коие возможно использовать в конкретных игровых автоматах.
#5707 Charlesgunnyhttp://filmkachat.ru
1хслот 1хслотс регистрация перейти на 1×slots
Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте условия – они часто выдаются для некоторых машин. В зависимости от клуба возможность создавать определенное количество ставок. Кстати, современные игорные жилища выделяют возможность заводить «одноруких злодеев». <a href=http://filmkachat.ru/>1хслотс регистрация в 1×slots casino</a> <a href=https://plaza.rakuten.co.jp/prilla/diary/202411240002/>https://plaza.rakuten.co.jp/prilla/diary/202411240002/</a> Объективные – объем приза, коэффициент и условия вейджера, необходимость внесения депозита для вывода денег; 1×slots официальный зеркало рабочее <a href=http://bbs.mycq3d.com/home.php?mod=space&uid=85102>http://bbs.mycq3d.com/home.php?mod=space&uid=85102</a> Подтвердите лицо, предоставив оператору казино свои паспортные данные. Инструкции обыкновенно несложные, основное — конкретно им идти. Если написано, что «на фото обязаны быть видны все четыре угла страницы паспорта» — устройте непосредственно такое фото.Какие бонусы есть еще получить не бездепозитного приза за регистрацию в казино? По мимо бездепозитного бонуса, каждое интернет казино предлагает игрокам прибыльное предложение на 1-ый депозит, вы совершаете депозит, ваш депозит увеличивается в двое или и в 3, что, этим наиболее начать выступать можно с более крупной суммой, например же не забываем тему вейджер на бонусы.
1×slots быструю регистрацию а также мгновенное
Заработать на бездепозитных призах за регистрацию в казино может каждый юзер, достигший совершеннолетия.Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша призов. Заведения постоянно устанавливают наивысшую ставку, возможную по условиям вейждера. 1×slots регистрация 1×slots casino c2d ru <a href=http://forum.inos.at/profile.php?id=887422>http://forum.inos.at/profile.php?id=887422</a> В большинстве заведений сделать это возможно по адресу электронной почты, по номеру телефона, спустя социальную сеть или гугл-аккаунт. казино 1× slots официальный сайт Как верховодило, новоприбывшие геймеры для желают ознакомиться с методами ввода и вывода денежных средств и сроки выполнения поданных заявок дабы четко осознавать, как быстро возможность исключить собственный казино бонус за регистрацию без депозита на электрический кошелек или же банковскую карту. К счастью для всех играющих, внутри конкретных холдингов, все казино конкурируют меж собой. Ведь в бы конкретную компанию давало только одно онлайн-заведение, то ли бы посетители увидели казино с призом за регистрацию и возможность бы рассчитывать лишь на вознаграждение вид бонуса на 1-ое инвестиция. К любому заведению регулярно по завлекать свежих игроков, что, в итоге, лишь на руку всем играющим.
1×slots casino регистрация 1×slotscasino09k online
В качестве призов онлайн казино нередко предлагает выдачу фриспинов, то есть даровых вращений игрового барабана. Виртуальные монеты можно использовать для обучения в покерной школе либо для забавы в казино. <a href=http://www.techieshah.com/2019/08/eclipse-server-tomcat-v85-server-at.html>http://www.techieshah.com/2019/08/eclipse-server-tomcat-v85-server-at.html</a> Для казино, работающих интернет, бездепозитные бонусы необходимы для вербования свежих посетителей. Предложение поиграть на слотах без надобности внесения настоящих средств — работающий метод для повышения интереса к фирмы. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит играть в казино, лишь сейчас уже на личные средства. 1×slots промокод при регистрации 2025 Бездепозитный бонус казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в данном и заключается главное отличие.
1×slots регистрация
<a href=https://uyghuryol.com/forum/viewtopic.php?f=8&t=249527>1×slots зеркало подтвердит вашу регистрацию если говорить</a> Промокод – определённая комбинация знаков, которую необходимо ввести в отвечающее поле при твореньи учетной записи либо активировать в личном профиле игрока в разделе с призами. казино 1×slots официальный сайт <a href=https://shopcms.vsupport.club/user/12935-davidcox/>https://shopcms.vsupport.club/user/12935-davidcox/</a> Существуют казино с бонусом за регистрацию, в которых довольно модны фриспины в онлайн казино потом регистрации в определенных играх. Они встречаются числе чаще безвозмездных поощрений или традиционных бонусов в казино без вложений. Например, игрок регистрирует счет, на который начисляются безвозмездные игры, приз за регистрацию в виде даровых фрспинов, вращения в игровом автомате. Во время игрового процесса компьютерные выигрывает истинные средства, коие в последствии возможно успешно исключить из заведения на свою платежную систему. То есть, все шансы вывести свои без рисков собственными финансами. Регистрация, за в получит призы, займет несколько, а благодаря этому возможно прирастить пять евро поощрений до тыс. И без всяких заморочек исключить их.
1×slots сайт зеркало
Казино дает возможность заработать и исключить настоящие деньги на бездепозитных бонусах. Обычно, это малозначительная сумма, которую казино имеет себе позволить подарить игроку. Верификация важна для дополнительной безопасности и подсобляет техподдержке выявить бонусхантеров и плутов. Кстати, на платформах выводы крупных сумм доступны лишь в подтверждения личности. <a href=https://rollbol.com/posts/1884754>https://rollbol.com/posts/1884754</a> В современность очень просто получить приз за регистрацию в казино. Практически любой игорный жилище с радостью начислит деньги либо благотворительные вращения. Многие гэмблеры используют данным и не смущяются регистрироваться в каждом клубе с прибыльными критериями. Кстати, это замечательная возможность выработать победную тактику и сорвать джекпот.В большинстве заведений сделать это возможно по e-mal, по номеру телефона, спустя социальную сеть либо гугл-аккаунт. 1×slots официальный сайт, скачать При исполненьи условий отыгрыша и верификации, деньги с бонусного счета переводятся на главный и имеют быть выведены на карту либо электронный кошелек. Лимиты на вывод и сроки проведения транзакции зависят от избранной платежной системы.
<b>Смотреть еще похожие новости:</b>
<a href=https://praisenpray.org/forums/showthread.php?tid=100365>1× slots регистрация в 1×slots casino</a>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=342563>1×slots зеркало проходить регистрацию это отличный вариант</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Основное управляло получения бездепа ? создаваемый акк обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов строго воспрещено. Проверка ведется по имени, e-mal, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита необходимо блюсти простую последовательность поступков.
#5708 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet на сегодня 1×bet зеркало слоты <a href=https://rhymes-punches.com/>официальные сайты казино</a> 1×bet официальный слоты песня казино <a href=https://rucriminal.info/>casino промокод</a> porno Виктория Баркова, легкоатлетка casino online зеркало retro casino лучшие казино бесплатно Любимова Ольга Борисовна порно Анна Михалкова Петрова Ольга Викторовна порно
DiskiPlus casino вход DiskiPlus Лут Оксана Николаевна порно <a href=https://diskiplus.ru/>DiskiPlus porno Мира Андреева (теннис)</a> DiskiPlus casino x DiskiPlus Разуваева Ксения Денисовна порно <a href=https://diskiplus.ru>DiskiPlus 1×bet сайт</a> DiskiPlus букмекерская контора фонбет официальный DiskiPlus 7k casino официальный DiskiPlus 1×bet сайт DiskiPlus порно с Георгий Джикия (футбол) DiskiPlus пин casino DiskiPlus букмекерская контора мостбет DiskiPlus 1go casino
#5709 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
С этими ординарными советами любое казино с призом за регистрацию способно принести в разы больше выгоды и полезности. <a href=http://filmkachat.ru/>1×slots зеркало</a> 1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, в не желайте стать жертвой плутов или впустую истратить время;Бездепозитные бонусы — это подарки от казино в виде бонусных средств либо фриспинов для игровых автоматов, коие начисляются на аккаунт игрока последствии процедуры регистрации на сайте заведения. Для получения таких поощрений депозит не потребуется. <a href=https://noosfero.ufba.br/lexxeagle/blog/professionalniy-vikup-avto-v-kieve-s-chestnoy-otsenkoy-na-meste>https://noosfero.ufba.br/lexxeagle/blog/professionalniy-vikup-avto-v-kieve-s-chestnoy-otsenkoy-na-meste</a> В качестве призов интернет казино часто предлагает выдачу фриспинов, то есть безвозмездных вращений игрового барабана. Виртуальные монеты возможно применять для обучения в покерной школе или для игры в казино. 1× slots зеркало <a href=http://www.hellojammu.news/2018/10/Indian-American-invest-USD-60-mn-in-medical-device-company.html>http://www.hellojammu.news/2018/10/Indian-American-invest-USD-60-mn-in-medical-device-company.html</a> Доступные игры – В некоторых азартных забавах возможно снизить математическое приемущество казино до нескольких десятых процента. В их числе почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как правило, в таких играх ставки идут в зачет вейджера не всецело. Например, может учитываться только 50%. В некоторых играх бездепозитные призы вообщем невозможно отыгрывать.Прямо данный заберите благотворительные вращения за регистрацию без депо и начинайте собирать призовые комбинации из-за крупных выигрышей!
1×slots промокод при регистрации
Создание аккаунта. На сайте казино необходимо обнаружить регистрационную форму и заполнить порожние поля собственными данными. Иногда на этом этапе требуется показать только адрес электронной почты и пароль, но почаще хотелось заполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д.). Нужно указывать лишь настоящие данные, что впоследствие они будут проверены.Чаще всего казино приз за регистрацию без депо даёт вероятность запустить любой машина. Но никакого пристально ознакомиться с условиями. Иногда для игры доступны лишь определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, превосходнее начать знакомство с миром азарта именно с «одноруких злодеев». <a href=http://palais.beesims.com/phpbb/viewtopic.php?f=2&t=290417>1хслотс казино зеркало</a> онлайн казино 1×slots Но есть игорные заведения, коие готовы просто например жертвовать деньги на игру. Для этого довольно сделать профиль. Чтобы вывести свой выигрыш, для поначалу необходимо выполнить условия отыгрыша, обозначенные в условиях получения бездепозитного депозита.Бездепозитные бонусы в казино без пополнения 2022 — это определенная сумма денег либо gorovyh spins вращения, коие предоставляются первым гостям за регистрацию на веб-сайте казино повторяющий бездепозитного приза, и выделяет вам возможность за счет казино без пополнения опробовать услуги (игр), с последующей преимуществом, льготой вывода средств при выполнении всех установленных правил. <a href=https://repforums.prosoundweb.com/index.php/topic,41034.0.html>https://repforums.prosoundweb.com/index.php/topic,41034.0.html</a> 1×слотс казино Не сложно додуматься, что not the slightest deposit bonuses почти ни не случаются немаленькими. Чаще всего речь идет о пяти–тридцати долларах (либо эквиваленте данной суммы в другой валюте).Так же стоит выделить то, что в любом интернет казино установлен свой наибольший кешаут на бездепозитный приз. Как управляло кешаут — это предельная сумма средств, кот-ая доступная для вывода с бездепозитного приза.
1×slots casino регистрация 1×slotscasin online
Минимального оборота. Этот лимит уточняется вейджером — пока игрок не сыграет на установленную необходимую, вывод средств несомненно недоступен. Срок активации и время на отыгрыш. Зачисление средств либо фриспинов происходит при активации на взыскательно ограниченного периода, подобные притязания предъявляются и к срокам отыгрыша. Одни казино позволяют отыгрывать бонус некоторое дней либо и недель. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с неоправданно высоким вейджером. <a href=http://gctech21.com/bbs/board.php?bo_table=free&wr_id=225267>http://gctech21.com/bbs/board.php?bo_table=free&wr_id=225267</a> Для получения приза надо(надобно) пригласить в забаву нового клиента. Казино начислит пригласившему фиксированный процент от взносов приглашённого в виде бонуса: чаще всего его размер не превышает 10%. Срок деяния приза как не превышает месяца: пригласивший получает бонус зависимо проигранных ставок приглашённого в 1-ый месяц забавы. 1хслотс рабочее зеркало Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депозит возможность отличаться до 30 дней.Прибывшие на акк деньги бездепозитные бонусы предназначаются, в, только для новоиспеченных юзеров, которые раньше не имели личного аккаунта в данном казино. Исходя из сего, если ранее у игрока был изготовлен депо, то, по всей вероятности, у него больше не несомненно способности рассчитывать на получение такого бонуса в определенном заведении.
1×slots регистрация 1×slots review live
Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских руб. В условиях промоакции предписано, собственно вейджер бездепозитного бонуса х20. Поэтому, чтобы отыграть бонус, игроку будет нужно устроить ставок на 35*20=700 рублей. <a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=877607>1×slot зеркало рабочее регистрации на телефон придет</a> При пользовании бездепозитным призом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют количество видов лимитов: 1×slots официальный сайт зеркало <a href=https://bajarmp3.net/member.php?action=profile&uid=4769>https://bajarmp3.net/member.php?action=profile&uid=4769</a> Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.
1×slots официальный сайт мобильная версия
<a href=https://systemcheck-wiki.de/index.php?title=%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%94%D0%B7%D0%B5%D0%BD_%D0%A7%D0%B8%D1%82%D0%B0%D1%82%D1%8C>https://systemcheck-wiki.de/index.php?title=%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%94%D0%B7%D0%B5%D0%BD_%D0%A7%D0%B8%D1%82%D0%B0%D1%82%D1%8C</a> 1×slot казино зеркало 1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, если не хотите стать жертвой мошенников или впустую израсходовать время;
<b>Смотреть еще похожие новости:</b>
<a href=http://angelandmax.teamforum.ru/memberlist.php?mode=viewprofile&u=640>1× slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы за регистрацию в игровых автоматах для владельцев онлайн-казино являются долею маркетинговой кампании, направленной на увеличение аудитории вебсайта. Так они продвигают свои бренды и привлекают новых посетителей.
#5710 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Юдаева Ксения Валентиновна порно online casino <a href=https://glvk.guru/>букмекерская контора скачать приложение</a> лучшие казино бесплатно 1×bet регистрация <a href=https://sovsekretno.net/>1×bet бесплатно</a> porno Ангелина Гончаренко, хоккеистка какие казино Приезжева Екатерина Геннадьевна порно online casino 7k r7 casino порно с Константин Тюкавин (футбол) порно с Варвара Субботина
DiskiPlus лучшая казино DiskiPlus гта казино <a href=https://www.diskiplus.ru/>DiskiPlus играющие казино</a> DiskiPlus vavada casino DiskiPlus Мухтиярова Елена Вячеславовна порно <a href=https://diskiplus.ru/>DiskiPlus балтбет букмекерская контора</a> DiskiPlus часы казино DiskiPlus какие казино DiskiPlus порно с Владимир Минеев (ММА) DiskiPlus casino андроид DiskiPlus демо казино DiskiPlus 1×bet скачать приложение DiskiPlus порно с Баталина Ольга Юрьевна
#5711 Charlesgunnyhttp://filmkachat.ru
зеркло казино 1×slots
К примеру, игроку выдаются бесплатные средства в заведении в объеме пятидесяти либо 100 долларов (вейджер на которые сочиняет 100х). То есть, любому новоприбывшему игроку выскакивает привлекающая иллюстрация, кот-ая сулит выплату всех зачисленных фирмой средств. Не стоит заострять на казино приз за регистрацию без депо с чрезмерно великой либо очень малеханькой суммой призов, поэтому что, числе тщательно исследовав все условия, тут всего, несомненно какой-то подкол. <a href=http://filmkachat.ru/>1×slots бонус за регистрацию</a> <a href=https://www.swiatobrazu.pl/forumgaleria/thread/view/id/589>https://www.swiatobrazu.pl/forumgaleria/thread/view/id/589</a> Почти все игровые клубы требуют подтверждение контактных данных игрока для получения бездепозитного приза. 1×slots акции <a href=https://www.nashtransport.ru/profile/45750-%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0-%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA/?tab=field_core_pfield13>https://www.nashtransport.ru/profile/45750-%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0-%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA/?tab=field_core_pfield13</a> Доступность — бездепозитные бонусы в казино чаще всего предоставляются новым игрокам, хотя бывают случаи, когда приз все получить и действующие посетители.Вейджер (wager) – это коэффициент, кот-ый демонстрирует на какую необходимую нужно устроить ставок, чтобы исключить бонус из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода этого приза, Вам нужно сделать ставок на сумму: 500*70=3500 руб. Только всецело отыграв приз, Вы можете исключить свой выигрыш.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
1×slots casino регистрация 1×slotscasin online <a href=http://bbs.yongrenqianyou.com/home.php?mod=space&uid=4122479&do=profile>http://bbs.yongrenqianyou.com/home.php?mod=space&uid=4122479&do=profile</a> Рассмотрим принцип его действия на случае. Допустим, вы зарегались и получили $10 not the slightest deposit bonus с вейджером х50. Это означает, что выигранные средства можно будет выводить не раньше, чем последствии такого, как общая сумма ставок достигнет $500. казино 1×slots официальный сайт Вознаграждения за получение VIP-статуса ? начисляются масштабах программы лояльности при достижении очередного уровня либо выдаются индивидуально менеджерами службы.Главное превосходство спинов – вероятность изучить различные слоты. Также удастся насладиться бонусными раундами, испытывать фортуну в риск-туре и преувеличить выигрыш за счёт особенных знаков. Однако не только игровой процесс заслуживает внимание, как чем сосредоточиться на реальном выигрыше.
1хслотс казино зеркало
<a href=https://orbitalscoreboard.com/user/travisnigue/>https://orbitalscoreboard.com/user/travisnigue/</a> Отзывы читателей о бонусных промоакциях помогут составить впечатление, хотя не забывайте о субъективности собственных объяснений. 1хслотс рабочее зеркало Обыкновенные бездепозитные бонусы в размере от трех до 20 долларов созданы для того, чтобы в забавы заходили все свежие и свежие игроки. Здесь, вероятнее всего, будет лимитирование на максимальный выигрыш. Важно, чтобы перед минимальным вкладом был отключен приз за 1-ое пополнение счета, и компьютерные не попадет на повторный вейджер.
1×slots зеркало видели такую регистрацию на
Чаще всего, популярностью сервисы, такие как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное правило. Финансовые свои выводятся лишь через ту платежную систему, которой огромный для пополнения депозита. Если же игрок получил бездепозитный покерный приз, требуется восполнить счет на наименьшую сумму, которая сочиняет обыкновенно 10 $.Почти все игровые клубы настоятельно свидетельство контактных данных игрока для получения бездепозитного приза. Бездепозитный приз предоставляется новому игроку за конкретные деяния. Часто презент в виде средств или фриспинов выдается за регистрацию, благодаря чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. 1 xslots рабочее зеркало <a href=https://storyplus.ru/user/JamesThazy/>https://storyplus.ru/user/JamesThazy/</a> Для отыгрыша бонуса казино обязывает игрока поиграть на сумму, в количество один превышающую необходимую полученного бонуса — тут выгода фирмы явна.Представленные на данной страничке лучшие бездеп призы в казино за регистрацию в 2022 году имеют подходящие условия. После кропотливого анализа редакция портала составила рейтинг спецпредложений, в котором посетители Casino.ru шансы сортировать перечень по нескольким аспектам: по сумме, вейджеру, максимальной сумме вывода и т.д.
1×slos регистрация в 1×slots casino
В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, необходимо обратиться в службу поддержки через лайв-чат на веб-сайте казино. <a href=https://eccentrictirade.com/forums/member.php?action=profile&uid=2690>https://eccentrictirade.com/forums/member.php?action=profile&uid=2690</a> 1×slots зеркало на сегодня Получив собственный презент, Вы можете безвозмездно выступать на реальные деньги, а выполнив обстоятельства отыгрыша, исключить собственный выигрыш.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=36935>1хслотс казино зеркало</a>
<a href=https://www.ldvd.nl/no-22-san-diego-place-rallies-very-last-boise-country-27–16?page=66#comment-239158>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В случае установленного лимита на сумму вывода выигрыша с бездепозитного приза, игрок не сможет исключить больше заявленной суммы. Для получения предоставленных призов для пригодиться — ПК или мобильное устройство, и остальное дело за малым.
#5712 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало на сегодня casino рабочее <a href=https://res-publika.com>рокс казино</a> пин ап казино почему в казино не бывает настенных часов <a href=https://sovsekretno.net/>букмекерская контора ставки</a> почему казино порно с Антропова Валентина Викторовна casino приложения casino регистрации bitz casino человек казино pin up casino пин
DiskiPlus porno Яна Троянова DiskiPlus бесплатно фильм казино <a href=https://www.diskiplus.ru>DiskiPlus порно с Алина Загитова, фигуристка</a> DiskiPlus вавада казино DiskiPlus Крючкова Полина Викторовна порно <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet слоты</a> DiskiPlus ап казино DiskiPlus Манилова Алла Юрьевна порно DiskiPlus Комарова Наталья Владимировна порно DiskiPlus порно с Владимир Минеев (ММА) DiskiPlus порно с Илья Осипов (киберспорт) DiskiPlus online casino DiskiPlus pin casino
#5713 Charlesgunnyhttp://filmkachat.ru
рабочее зеркало 1хслотс
Для получения депозитного приза необходимо восполнить собственный игровой баланс реальными средствами. Вознаграждение можно получить либо при внесении первого депозита, или повторяющий фиксированного процента от внесённых средств. Так или по, бонус поступит на счёт лишь после пополнения. <a href=http://filmkachat.ru/>1×slots casino зеркало рабочее</a> Самый распространённый из похожих призов, естесственно же, бездеп на денек рождения клиента — приз вид фиксированной суммы либо фриспинов поступает на счёт игрока, а пользоваться им возможно на установленного периода медли. <a href=https://heyjinni.com/read-blog/177751>https://heyjinni.com/read-blog/177751</a> Фриплей-бонусы встречаются лишь в неких клубах. Они зачисляются сразу после сотворения профиля и активны недолговременное время. Если не успеете израсходовать средства, они просто сгорят. Касаемо медли, в большинстве случаев бонусы активны в течение часа. зеркло казино 1×slots <a href=https://kosmetikinstitut-milla.de/user/Joshuastoke/>https://kosmetikinstitut-milla.de/user/Joshuastoke/</a> Бездепозитный приз предоставляется новому игроку за конкретные деяния. Часто презент в виде средств или фриспинов выдается за регистрацию, благодаря чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.Следует подчеркнуть, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом.
1×slos регистрация в 1×slots casino
Вознаграждения за получение VIP-статуса ? начисляются в программки преданности при достижении еще уровня или выдаются персонально менеджерами службы поддержки.Некоторые казино могут предлагать клиентам бездепы за подтверждение номера либо почты либо репост на страницу в соц сетях. 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=http://bbs.bap.com.tw/home.php?mod=space&uid=465464>http://bbs.bap.com.tw/home.php?mod=space&uid=465464</a> Но есть игорные заведения, коие готовы просто например жертвовать средства на игру. Для сего достаточно создать профиль. Чтобы вывести свой выигрыш, для сначала необходимо выполнить условия отыгрыша, обозначенные в условиях получения бездепозитного депо.Свежий бонус начисляется в виде денежных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в использовании своими, а в случае отыгрыша оператор возможность установить ограничение на вывод денег. 1×slots зеркало 1хслотс регистрация перейти на 1×slots Как и промоакции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такого предложения являются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих посетителей и позволяет им составить эмоцию о функционале, не рискуя вескими суммами.
1×slots официальный сайт, скачать
Возьми свой презент. Чаще всего приз активируется незамедлительно в регистрации. Но бывают истории, когда нужно зайти в собственный кабинет или написать в справочную службу.Наш список включает в себя наилучшие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по важным характеристикам: Бездепозитные призы за регистрацию считаются одним из самых знаменитых методов привлечения свежих игроков в онлайн-казино, потому что они деют игрокам вероятность опробовать казино, необыкновенно игровые автоматы, и вероятно, выиграть настоящие деньги. <a href=https://cq.x7cq.vip/home.php?mod=space&uid=8880224>https://cq.x7cq.vip/home.php?mod=space&uid=8880224</a> Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. 1×slots зеркало проходить регистрацию это отличный вариант
казино 1× slots официальный сайт
<a href=https://smm-seo.ru/members/rabofreeol.4209/>1×slots официальный сайт скачать</a> В неких интернет казино для получения бездепозитных бонусов не довольно просто зарегистрироваться на сайте клуба и подтвердить свои контактные данные. Дополнительно требуется активация промокода.Для получения депозитного приза необходимо восполнить собственный игровой баланс реальными средствами. Вознаграждение можно получить или при внесении первого депозита, или повторяющий фиксированного процента от внесённых средств. Так либо иначе, бонус поступит на счёт лишь после пополнения. казино 1× slots официальный сайт <a href=http://sportcar.moscow/index.php?subaction=userinfo&user=gloriousshuttle>http://sportcar.moscow/index.php?subaction=userinfo&user=gloriousshuttle</a> Отзывы читателей о бонусных промоакциях посодействуют составить впечатление, хотя не запамятовывайте о субъективности личных комментариев.Бездепозитные бонусы за регистрацию в игровых автоматах для владельцев онлайн-казино являются частью рекламной кампании, направленной на увеличение аудитории сайта. Так они продвигают свои бренды и завлекают свежих посетителей.
1×slots зеркало на сегодня
Вы не в коем случае ни чем рискуете, а только выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической забавы на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, выучится регулировать изменять ставки и линии, исследовать бонусные забавы и их выигрышные комбинации, ну счете просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные свои, которые возможно отыграть и вывести, а не просто на демо счет, что, этим наиболее адреналин в крови еще больше повысится а пульс забьется с частым ритмом! <a href=https://ipc-seyko.ru/user/Frankpenty/>https://ipc-seyko.ru/user/Frankpenty/</a> В современность довольно просто получить бонус за регистрацию в казино. Практически любой игорный дом с радостью начисляет средства или безвозмездные вращения. Многие гэмблеры пользуются данным и не смущяются региться в любом клубе с выгодными условиями. Кстати, это замечательная возможность выработать победную стратегию и сорвать джекпот. 1хслотс зеркало Главное преимущество спинов – вероятность выучить различные слоты. Также удастся насладиться бонусными раундами, испытывать удачу в риск-туре и преувеличить выигрыш за счёт особенных символов. Однако не только игровой процесс заслуживает внимание, как превосходнее сосредоточиться на реальном выигрыше.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.globalvision2000.com/forum/member.php?action=profile&uid=1072499>1×slots официальный зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Получив собственный презент, Вы можете даром выступать на реальные средства, а выполнив условия отыгрыша, вывести свой выигрыш. Иногда для получения призов нужно связаться с адептами службы поддержки. Удобнее всего с ними разговаривать в онлайн-сате, но времени довольно запроса по электрической почте.
#5714 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
ограбление казино porno Анастасия Янькова, боксерка <a href=https://glvk.guru/>1×bet сейчас</a> casino актуальное зеркало r7 casino <a href=https://slon-ru.com/>порно с Варвара Субботина</a> 1go casino pin up casino играющие казино официальные зеркала казино 1×bet рабочее на сегодня бк букмекерская контора казино смотреть
DiskiPlus симулятор казино DiskiPlus слоты казино <a href=https://www.diskiplus.ru>DiskiPlus порно с Анна Щербакова, фигуристка</a> DiskiPlus 1×bet casino DiskiPlus пари букмекерская контора <a href=https://diskiplus.ru>DiskiPlus Яровая Ирина Анатольевна порно</a> DiskiPlus kent casino регистрация DiskiPlus porno Анна Сидорова, керлингистка DiskiPlus porno Елизавета Туктамышева DiskiPlus казино сегодня DiskiPlus 1win букмекерская контора DiskiPlus casino скачать DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz
#5715 Charlesgunnyhttp://filmkachat.ru
зеркала 1×slots
Автоматы непопросту числятся самым знаменитым азартным весельем. Чтобы усвоить управление и верховодила, понадобится всего количество минут. Ваша задачка устроить ставку, определить количество трудящихся линий и можно вертеть тамбур. Если на выпадет выигрышная композиция – вы выиграли! С этой задачей для посодействуют управится бездепозитные призы казино. <a href=http://filmkachat.ru/>1×slots официальный сайт мобильная версия скачать</a> <a href=https://www.friend007.com/forums/thread/7390/>https://www.friend007.com/forums/thread/7390/</a> Способы получения бездепа различаются от облика бонуса, кот-ый понравился игроку. Но для иначе нужно быть зарегистрированным в легальном онлайн-казино и подтвердить собственную лицо. В общем облике пошаговая инструкция для получения бездепозитного приза смотрится так:Для получения бездепа нужно пригласить в забаву по реферальной ссылке нового клиента: он должен зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и восполнить счёт на сумму, указанную в условиях акции. 1×slots бонус за регистрацию <a href=http://www.orbt.ru/bitrix/redirect.php?goto=https://www.sqlservercentral.com/forums/user/blackshisha0212/>http://www.orbt.ru/bitrix/redirect.php?goto=https://www.sqlservercentral.com/forums/user/blackshisha0212/</a>
1× slots casino официальный сайт
Но надо мыслить, собственно снабжая юзеров этими бонусами, казино занимается спонсированием. Ведь объемы вознаграждений, в основном, не немалые (средним размером от 5 до 20 $). И на эти средства налагаются определенные обстоятельства и лимитирования, неотклонимые к исполненью игрока, в в последствии он вожделеет получить все средства выигранные финансы.Oтыгpaть приз с указанным вeйджepом, чтобы нужно сдeлaть cтaвoк нa cумму, превышающую размер бонуса в некоторое раз. <a href=https://www.goslog.ru/forum/messages/forum1/message12731/11-obrashcheniya-grazhdan?result=reply#message12731>1×slots быструю регистрацию а также мгновенное</a> 1хслотс мобильная версия зеркало Варианты выигрыша в от Вашей успеха и критерий игорного портала. Выше мы заявили, что некоторые бездепозитные призы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются и те, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность передовых игр на деньги, можно выиграть неописуемые суммы. Сегодняшние игровые автоматы или видео слоты, как их называют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000. <a href=http://x4gxtreamforgame.free.fr/index.php?file=Members&op=detail&autor=honorablejurist>http://x4gxtreamforgame.free.fr/index.php?file=Members&op=detail&autor=honorablejurist</a> Подтверждение персональной инфы. Все казино требуют от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у пользователя иных аккаунтов (мультиаккаунт запрещен).Подтверждение индивидуальной инфы. Все казино настоятельно от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у пользователя иных аккаунтов (мультиаккаунт запрещен). казино 1× slots официальный сайт Какие бонусы возможность еще получить не бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, каждое интернет казино предлагает игрокам прибыльное предложение на первый депо, вы совершаете депо, ваш депо возрастает в двое или даже в 3, что, этим наиболее начать выступать возможно с более солидной суммой, так же не запамятываем про вейджер на призы.Зарегистрируйтесь. Для регистрации чаще всего довольно установить свой номер телефона и почтовый адрес, последствии чего ввести приобретенный код из СМС. Возможно, требуется показать промокод. В правилах промоакции будет написано, где его надо включать. Иногда это надобно создавать при регистрации, время — уже после творенья личного кабинета, на отдельной страничке.
1×slots регистрация 1×slotscasino09k online
<a href=https://g.clicgo.ru/user/Julestrobe/>https://g.clicgo.ru/user/Julestrobe/</a> Условия отыгрыша бонуса. Если Вы планируете заработать на бездепозитном бонусе, то для обратите внимание на значение вейджера и срок, который дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть приз и вывести выигрыш. 1×slots регистрация 1×slots casino c2d ru Также бывают случаи, когда казино начисляет обсужденный приз в регистрации нового клиента по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам.
онлайн казино 1×slots
<a href=http://forum.survival-readiness.com/viewtopic.php?t=253313>1×slots на любой вкус как пройти регистрацию</a> В каждом казино с бездепозитным призом предусмотрены вейджеровые обстоятельства. Это один-единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, нужно устроить определённое количество ставок. Чем круче бонус, что, этим труднее выполнить обстоятельства, и наоборот.Составленный специалистами Casino.ru список онлайн-казино с бездепозитным призом дозволяет игрокам сопоставить спецпредложения разных операторов. x1 slots регистрация в 1×slots casino <a href=http://agriexpert.kz/index.php?subaction=userinfo&user=equablewanderer>http://agriexpert.kz/index.php?subaction=userinfo&user=equablewanderer</a> Вознаграждения за получение VIP-статуса ? начисляются масштабах программки преданности при достижении одного значения либо выдаются персонально менеджерами службы поддержки.
1х слот регистрация в 1×slots casino
Для всех бездепозитных бонусов функционирует наибольший предел на выигрыш. Он показывает максимальную сумму, которую вас получить, играя на бонусные кредиты. Как лишь для удастся выполнить притязания вейджера, дозволенный максимум несомненно переведен с бонусного счета на главный, а остаток будет списан.Только выполнив все обстоятельства отыгрыша и дождавшись окончания проверки аккаунта, Вы можете оформить заявку на вывод средств и получить свои средства. <a href=http://shkola.mitrofanovka.ru/user/Jaspermex/>http://shkola.mitrofanovka.ru/user/Jaspermex/</a> На странице представлены бездепозитные призы за регистрацию в казино редчайшая заслуга за которой гонятся все игроки как новички, например и мастера. Мы тоже уделяем великое внимание на присутствие бонусов при формирование рейтинга казино на деньги. Бездепозитный приз это вероятность играть безвозмездно и выиграть реальные средства.Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить необыкновенности, труднодоступные при игре в демо режиме. Многие новые клиенты переходят в количество неизменных, а оператор получает длительную выгода. 1×slots официальный сайт, скачать Каждый игрок обязан сперва детально выучить условия по получению и отыгрышу приглянувшегося дара. Если всё организует, поторопитесь арестовать безвозмездные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо в начать вращать барабаны лучших слотов.Онлайн гемблинг развивается с любым деньком все больше и больше, новые бренды создаются не по денькам а по часам. Новые онлайн казино делают вступительные промоакции для игроков, чтобы, чтобы собственно бы зарекомендовать себя, и что, этим наиболее предлагают бездепозитные бонусы за регистрацию, что бы не упустить эту возможность — как пользоваться новым бездепом, советуем посещать наш сайт как можно чаще, самое смачное и новые будет добавляться в этом же списке.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=39059>1× slots сайт</a>
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=394960>1×slots сайт</a>
<a href=http://portal.westcoastbible.org/discussion/memberlist.php?mode=viewprofile&u=400061>1×slots коды</a>
<a href=https://forum-macan.ru/viewtopic.php?t=27428>1хлот регистрация в 1×slots casino</a>
<a href=http://portal.westcoastbible.org/discussion/viewtopic.php?f=18&t=1939822>1×slots зеркало которую указывали при регистрации кстати</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Перед активацией важно пристально изучить условия промоакции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют значение кроме лимиты ставок при отыгрыше и сроки, протяжении которых возможно пользоваться предложением. Если бездеп обхватывает ограниченный список игр, рекомендуется разузнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только сомнений случае, случае оператор не установил строгие ограничения на максимальную необходимую ставки. Заработать на бездепозитных призах за регистрацию в казино может любой юзер, достигший совершеннолетия.
#5716 Charlesgunnyhttp://filmkachat.ru
1×slots сайт зеркало
Выигрыши с призов без инвестициям всегда привязаны к требованию по ставкам и могут быть обналичены только последствии исполнения этих притязаний.На условиях отыгрыша бесплатных призов стопам остановиться подробнее. С ними связаны нюансы, коие нельзя оставить без внимания. <a href=http://filmkachat.ru/>1х слот 1хслотс регистрация перейти на 1×slots</a> <a href=https://www.4sync.com/s/fLYUHSTCD>https://www.4sync.com/s/fLYUHSTCD</a> Выиграть реальные деньги в казино не пополняя счет – сложно, хотя вполне. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными призами и начните играть на бонусные средства. По статистике в 10-ти заведений можно заработать маленькую необходимую средств помощью бонусных средств. 1хслотс 1хслотс регистрация перейти на 1×slots <a href=http://chimatamusic.net/db/profile.php?mode=viewprofile&u=41680>http://chimatamusic.net/db/profile.php?mode=viewprofile&u=41680</a> Внесение депозита – Будьте готовы восполнить счет в отыгрыша приза. Это стандартное заявка управлял для этого на промо-акций. Лучше заранее уточнить, какую сумму надо(надобно) несомненно вносить на счет. Как управляло, речь идет о минимальном депозите, но вы должны быть убеждены, что он вам по карману.
1×slots casino зеркало рабочее
1×slos регистрация в 1×slots casino В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с безвозмездных вращений. Прибыль, которую Вы заработаете на таком бездепе возможно назначать на вывод без какого либо отыгрыша.Вейджер (wager) – это коэффициент, который демонстрирует на какую необходимую нужно устроить ставок, дабы исключить приз из казино. Пример: Вы получили за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода этого бонуса, Вам необходимо устроить ставок на сумму: 500*70=3500 рублей. Только полностью отыграв бонус, Вы сможете исключить собственный выигрыш. <a href=http://xiamenyoga.com/comment/html/?281414.html&page=>http://xiamenyoga.com/comment/html/?281414.html&page=</a> казино 1×slots Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической забавы на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, выучится регулировать менять ставки и линии, исследовать бонусные забавы и их выигрышные комбинации, ну конечном просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные средства, которые можно отыграть и вывести, не просто на демо счет, что, этим самым адреналин в крови еще повысится а пульс забьется с частым ритмом!Простая процедура получения бездепозитного приза, кот-ая займет менее 2-х мин. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные.
1×slots регистрация 1×slotscasino 56 online
При отыгрыше бездепов, учитывайте кратковременные лимитирования. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток.Чаще всего казино бонус за регистрацию без депозита даёт возможность запустить каждой машина. Но превосходнее пристально ознакомиться с критериями. Иногда для забавы доступны лишь определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, какого-либо начать знакомство с миром азарта именно с «одноруких злодеев». Вышеописанная причина и считается основным нюансом, из-за которого операторы отдают доля своей выгоды на разные рекламные затраты и маркетинговые кампании. А наиболее действенным здесь станут выступать именно бездепозитные призы казино 2022 с выводом за регистрацию.Хотя благотворительные бонусы начисляются без депозита, не исключено, что вас понадобиться заносить деньги. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только в такого, как свежий клиент раз пополнит игровой счет. <a href=https://aben75.cafe24.com/bbs/board.php?bo_table=free&wr_id=931549>https://aben75.cafe24.com/bbs/board.php?bo_table=free&wr_id=931549</a> Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, дабы замечена вероятность вывести выигрыш. 1хслот официальный сайт зеркало
казино 1×slots официальный сайт
Важно, удостоверьтесь что, что ранее не регились в избранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи.Вознаграждения за получение VIP-статуса ? начисляются в программы преданности при достижении очередного уровня или выдаются персонально менеджерами службы. <a href=http://forum.survival-readiness.com/viewtopic.php?t=249705>1×slots зеркало этих способов предполагает регистрацию</a> Но есть игорные заведения, коие готовы просто например жертвовать средства на игру. Для сего довольно сделать профиль. Чтобы вывести собственный выигрыш, для поначалу необходимо выполнить обстоятельства отыгрыша, обозначенные в критериях получения бездепозитного депозита.Даже не выиграв крупную необходимую, игрок увлекательно проведет время, изнутри исследует работу площадки, воспримет геймплей автоматов. Все это без каких-либо финансовых рисков. Быть в курсе наилучших промоакций легко. Достаточно регулярно изучать перечень свежих интернет казино с выводом приза без депо в данном разделе. 1×slots официальный сайт, скачать <a href=http://udutsr.ru/index.php?subaction=userinfo&user=rebelplaster0>http://udutsr.ru/index.php?subaction=userinfo&user=rebelplaster0</a>
1×slots официальный сайт скачать на айфон
<a href=https://kamchaty.ru/user/JasperPob/>https://kamchaty.ru/user/JasperPob/</a> зеркала 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=http://b2s.bulwork.com/node/1581?page=89#comment-22945>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Стоит отметить, что бездепозитный приз выдается лишь взрослым новеньким, которые, же, могут пригласить личных друзей и людей, того рассчитывающих на поощрительную программу преданности. Подобная технология была среди конкурирующих онлайн-казино для популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению своей посещаемости, путем вербования свежих игроков. Бонусы – это уникальный шанс для потенциальных соучастников забавы, коие все опробовать софт покер рума и убедиться, будут ли они в него играть или нет. Новый игрок испробует свои силы с реальными оппонентами в казино.
#5717 Charlesgunnyhttp://filmkachat.ru
1×slots casino online регистрация
Похожим образом работает 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения клиента либо в связи с получения им VIP-статуса. Подарок предоставляется в воззвания в поддержку и проверки.Выбирая безвозмездный бонус, пристально изучайте верховодила. Убедитесь, собственно вас можно принимать участие в акции. Уточните, в каких играх можно выполнять обстоятельства вейджера. При необходимости задавайте вопросы представителям саппорта. <a href=http://filmkachat.ru/>зеркала 1×slots</a> <a href=https://forums.ngames.com/forum/league-of-angels/community-ab/general-discussion-ab/62087-innovative-luxury-real-estate-marketing-ideas-that-actually-drive-premium-sales>https://forums.ngames.com/forum/league-of-angels/community-ab/general-discussion-ab/62087-innovative-luxury-real-estate-marketing-ideas-that-actually-drive-premium-sales</a> Особую изюминку видео слотам придают оригинальные символы. С их выходом активируются различные бонусы. Вы можете запустить дополнительный степень и увеличить сумму выигрыша. Есть знаки, коие заменяют ненужные составляющие и сами творят выигрышные комбо. Не стоит забывать и про бонус-тур. После любого счастливого спина есть шанс прирастить необходимую выигрыша в 2 или хорошо раза. 1× slots сайт <a href=https://google.fm/url?q=https://doctorlazuta.by/>https://google.fm/url?q=https://doctorlazuta.by/</a>
1×slots промокод при регистрации 2025
Бездепы шансы входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами.Отзывы читателей о бонусных промоакциях посодействуют составить впечатление, но не забывайте о субъективности собственных объяснений. <a href=https://hiddeninthesand.com/forum/viewtopic.php?t=236809>1× слот зеркало</a> 1×slots официальный сайт зеркало Онлайн гемблинг развивается с любым днем все больше и больше, свежие бренды создаются не по денькам а по часам. Новые интернет казино делают вступительные акции для игроков, для того собственно бы зарекомендовать себя, и тем самым предлагают бездепозитные призы за регистрацию, что бы не пропустить эту вероятность — как пользоваться новым бездепом, советуем навещать наш сайт как возможно почаще, самое смачное и свежие несомненно добавляться в этом же списке. <a href=https://woodmancx.com/user/ForsedropKr/>https://woodmancx.com/user/ForsedropKr/</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots Фриспины без депо или вспомогательные средства помогут поближе познакомиться с игровой платформой и её функциями. За счёт даров можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради игры против живых крупье.
1×slots зеркало на сегодня
В интернете очень много скриптовых вебсайтов, коие принадлежат мошенникам. Их основная задача – привлечь гэмблеров, пообещав столько великодушные подарки, хотя и крупные выигрыши. Так собственно некоторые веб-сайты предлагают получить за регистрацию и $1 000. <a href=http://uprzakupokkchr.ru/user/Miguelsof/>http://uprzakupokkchr.ru/user/Miguelsof/</a> Изучить верховодила и условия получения бездепозитных призов казино, Вы сможете у нас на сайте в разделе с бонусами либо на официальном сайте выбранного Вами казино. Если не можете отыскать необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал либо по электрической почте.Диапазон ставок, которые вправе устроить игрок, также лимитирован. Обычно ставить возможно маленькую необходимую — пределах 10–30 рублей за одно вращение. 1×slots официальный сайт зеркало Подтверждение индивидуальной информации. Все казино просят от клиента пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и наличие у юзера иных аккаунтов (мультиаккаунт запрещен).
1×slots регистрация 1×slotscasino09k online
Не хотите сыграть в азартные игры, не рискуя своими деньгами, хотя получая в все выплаты? Подобную возможность деют все превосходнейшие порталы с азартными развлечениями. В их числе большое честных и надежных интернет-казино на российском языке. Они привлекают новых пользователей различными поощрительными событиями, включая бездепозитные, либо безвозмездные бонусы. Похожим образом трудится 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя либо в связи с получения им VIP-статуса. Подарок предоставляется после обращения в поддержку и проверки. 1×slots рабочее зеркало <a href=http://www.queer-as-folk.it/gallery/profile.php?uid=467184>http://www.queer-as-folk.it/gallery/profile.php?uid=467184</a> Как только на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу последствии сего можно оставить заявку на вывод выигрыша. Кредиты выгодно выделяются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом реальных средств и дают вероятность ощутить задор. Во-вторых – можно насладиться любой азартной игрой доступной на сайте. В вашем распоряжении присутствуют автоматы, настольные прибавление, видео-покер, Live-дилеры.
1хслотс рабочее зеркало
Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного приза достаточно пополнения баланса и подтверждения личности. В других же клубах, необходимо количество один прокрутить собственный депозит. Бездепозитный бонус казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в данном и содержится главное отличие.У любой игры свои требования по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система засчитает каждую ставку. В рулетке и покере сделать это намного труднее. Именно потому например важно пристально читать обстоятельства получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой ирге, то новички попросту «спустят приз на ветер». <a href=https://acerfans.ru/user/Jeffreybax/>https://acerfans.ru/user/Jeffreybax/</a> 1×slots сайт Кешбэк-бонус представляет собой возврат фиксированного процента от ставки когда поражения либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не превышает 10%.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.lightknotes.com/MyBB/showthread.php?tid=167264>1×slots зеркало регистрация в 1×slots casino</a>
<a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=474211#pid474211>1×slots сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
А ознакомиться с свежими интернет казино, Вы сможете за счет призов с выводом выгоды, коие Вы можете получить без депозита.
#5718 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Алина Загитова, фигуристка ramenbet casino <a href=https://th-royalgclub.com/>официальные сайты казино</a> официальная казино porno Дарья Клишина <a href=https://m.repost.news/>скачать casino на андроид</a> казино зеркало сегодня 1×bet 1 porno Юлия Пересильд 1×bet на андроид бесплатно up casino порно с Абрамченко Виктория Валериевна kent casino регистрация
DiskiPlus new casino DiskiPlus пина букмекерской конторы <a href=https://www.diskiplus.ru>DiskiPlus порно с Арина и Дина Аверины, гимнастки</a> DiskiPlus up casino зеркало DiskiPlus online casino официальный <a href=https://www.diskiplus.ru/>DiskiPlus приложения букмекерских контор на андроид</a> DiskiPlus бывшие казино DiskiPlus водка казино казино DiskiPlus казино на деньги DiskiPlus казино ставка DiskiPlus лучшие онлайн казино DiskiPlus casino вход
#5719 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
лучшая казино porno Алена Михайлова <a href=https://rucriminal.info/>скачиваемые казино</a> 1×bet casino porno Ангелина Гончаренко, хоккеистка <a href=https://krtka.info/>Львова-Белова Мария Алексеевна порно</a> vodka casino промокод 1×bet казино фильм зеркала официальных сайтов казино Александра Бортич казино регистрации casino betting
DiskiPlus Самойлова Алла Владимировна порно DiskiPlus букмекерские конторы pin <a href=https://diskiplus.ru>DiskiPlus new casino</a> DiskiPlus casino riobet DiskiPlus смотреть фильм казино <a href=https://diskiplus.ru/>DiskiPlus 1×bet зеркало на сегодня</a> DiskiPlus win win casino DiskiPlus порно с Юлия Ефимова, пловчиха DiskiPlus 1×bet официальный сайт DiskiPlus сайт винлайн букмекерская контора DiskiPlus 1×bet официальный 1×bet xyz DiskiPlus демо казино DiskiPlus пин up casino
#5720 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация
B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало рабочее</a> Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих притязаний, не неотъемлемой верификации. Если на сайте учтена неотъемлемая процедура подтверждения личности, то вывести выигрыш получится лишь последствии проверки данных. Приготовьтесь наполнить анкету и отправить в техподдержку документ, подтверждающий лицо. <a href=https://linqto.me/n/gtji>https://linqto.me/n/gtji</a> 1×slots официальный сайт скачать <a href=https://love-n-magic.ru/index.php?subaction=userinfo&user=AshleyAlolo>https://love-n-magic.ru/index.php?subaction=userinfo&user=AshleyAlolo</a> B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.
1×slots зеркало рабочее
А ознакомиться с новыми интернет казино, Вы можете с призов с выводом выгоды, коие Вы сможете получить без депо.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. 1×slots официальный регистрация <a href=http://trj.easyye.com/home.php?mod=space&uid=140092&do=profile>http://trj.easyye.com/home.php?mod=space&uid=140092&do=profile</a> Похожим образом работает третий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя или из-за с получения им VIP-статуса. Подарок предоставляется последствии обращения в поддержку и проверки.Вейджер (либо вагер) ? это минимальная сумма ставок, которую необходимо устроить для вывода валютного приза. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение. 1×slots casino регистрация на сайте Oтыгpaть приз с обозначенным вeйджepом, результата нужно сдeлaть cтaвoк нa cумму, превышающую объем приза в количество один.Верификация аккаунта. Лучше подтвердить личность незамедлительно в регистрации, дабы позже не было заморочек с выводом денег. Верификация может протекать двумя маршрутами:
1×slots регистрация 1×slots casino c2d ru
Каждый из бездепозитных призов без пополнения 2022 содержит свой определенный вейджер для отыгрыша, например же в каждом казино он уточняется персонально — где то он х55 а где-то х30, повторюсь везде по различному! Не сложно додуматься, собственно not the slightest down payment bonuses почти разу не бывают большими. Чаще всего речь о пяти–тридцати долларах (или эквиваленте этой суммы в другой денежной).За привлечение друга ? в рамках партнерской программки клиент получает вознаграждение за вербование новых пользователей. <a href=http://city-hall.nvkb.ru/forum/index.php/user/88854/>http://city-hall.nvkb.ru/forum/index.php/user/88854/</a> При помощи такового поощрения оператор имеет также привлекать клиентов, которые ранее показывали активность на сайте, но по какой-то причине прекратили играть. В этом случае промокод высылается пользователю по электрической почте либо в виде SMS. 1хслотс зеркало Каждый из бездепозитных бонусов без пополнения 2022 имеет свой конкретный вейджер для отыгрыша, например же в каждом казино он устанавливается индивидуально — где то он х55 а кое-где х30, повторюсь всюду по разному!
1×slots официальный зеркало
Если вы выбрали себе несколько брендов коие вас больше всего полюбились, для постоянной игры! Таких гемблеров казино довольно любит и ценит, за частую эти игроки становятся VIP игроками заведения, которым часто поступают прибыльные предложения в виде бонусов, так же туда заходит и бездепозитные. <a href=https://melhorlance.com.br/minha-conta/>1×slots скачать на айфон</a> 1× slots casino официальный сайт <a href=https://njt.ru/forum/user/190057/>https://njt.ru/forum/user/190057/</a> Чтобы получить вероятность исключить прибыль с бездепозитного приза в казино, нужно выполнить ряд условий:
1×slots казино зеркало
С не отыгранным бонусом воспрещается превышать объем наибольшей ставки. Нарушение сего обстоятельства последствия аннулирование выигрыша.Фриспины предусмотрены для применения в видео слотах. Внимательно ознакомьтесь с критериями – часто их выдают на некоторые автоматы. В зависимости от клуба, у вас получится устроить определённое количество ставок. Кстати, продвинутые игорные жилища разрешают запускать каждых «одноруких бандитов». <a href=http://t20suzuki.com/phpBB2/profile.php?mode=viewprofile&u=3717>http://t20suzuki.com/phpBB2/profile.php?mode=viewprofile&u=3717</a> 1×slots рабочее зеркало Особую изюминку видео слотам придают оригинальные символы. С их в активируются различные призы. Вы сможете запустить вспомогательный степень и увеличить сумму выигрыша. Есть знаки, которые замещают ненужные составляющие и сами делают выигрышные комбо. Не стоит забывать и тему бонус-тур. После каждого счастливого спина есть шанс увеличить сумму выигрыша в 2 или хорошо раза.Лишь известные и известные азартные заведения имеют разрешить себе раздавать бездепы повторяющий дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, которые можно израсходовать в лучших аппаратах с высокой отдачей.
<b>Смотреть еще похожие новости:</b>
<a href=https://timepost.info/showthread.php?tid=75634>1×slots зеркало видели такую регистрацию на</a>
<a href=https://radios-collector.com/viewtopic.php?f=4&t=2&p=173489#p173489>1× slots casino официальный сайт</a>
<a href=https://www.reisezielforum.de/memberlist.php?mode=viewprofile&u=14074&sid=f127aa1e9333bd33b055a7829c88624f>1×slots зеркало этих способов предполагает регистрацию</a>
<a href=https://www.kfz-gringer.at/index.php/forum/donec-eu-elit/75156–1×slots-casino#74921>1×slots casino регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Такие одобрения разрешают бесплатно протестировать новое казино, разобраться с игровым процессом онлайн слотов, заработать и вывести маленькую сумму средств. Заработать на бездепозитных призах за регистрацию в казино имеет любой пользователь, достигший совершеннолетия.
#5721 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
кент casino Попова Анна Юрьевна порно <a href=https://t.me/vchkogpu_ru>казино рояль смотреть</a> официальные сайты казино casino скачать <a href=https://www.ossetia.tv/>porno Вера Бирюкова, гимнастка</a> r7 casino 1×bet скачать приложение 1×bet на андроид Самойлова Алла Владимировна порно Ирина Горбачева самое казино кент casino
DiskiPlus скачать 1×bet на андроид DiskiPlus песня казино <a href=https://www.diskiplus.ru/>DiskiPlus casino официальный зеркало</a> DiskiPlus casino регистрации DiskiPlus porno Катерина Шпица <a href=https://diskiplus.ru>DiskiPlus Окладникова Ирина Андреевна порно</a> DiskiPlus смотреть фильм казино DiskiPlus 7k casino официальный DiskiPlus porno Светлана Ходченкова DiskiPlus зеркала официальных сайтов казино DiskiPlus пинап казино DiskiPlus casino промокод DiskiPlus 1×bet зеркало рабочее
#5722 Charlesgunnyhttp://filmkachat.ru
1×slots сайт
Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных обстановок с казино, когда в отыгрыша бездепа для не дадут вывести крупную сумму выигрыша. <a href=http://filmkachat.ru/>1хслотс регистрация в 1×slots casino</a> Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.Онлайн гемблинг развивается с каждым днем больше и больше, новые бренды создаются не по дням а по часам. Новые онлайн казино проделывают вступительные промоакции для игроков, для того собственно бы зарекомендовать себя, и тем самым предлагают бездепозитные призы за регистрацию, собственно бы не пропустить эту возможность — как пользоваться новым бездепом, советуем навещать наш сайт как можно чаще, самое вкусное и свежие будет добавляться в этом же списке. <a href=https://ai.ceo/read-blog/206569>https://ai.ceo/read-blog/206569</a> Чаще всего применяются коды. Их надо(надобно) вносить в специальные окна регистрационной анкеты, в речь идет о пригласительных призах, или в определенном разделе личного офиса игрока.Онлайн гемблинг развивается с любым днем все больше и больше, свежие бренды создаются не по дням а по часам. Новые онлайн казино проделывают вступительные акции для игроков, чтобы, чтобы что бы зарекомендовать себя, и что, этим самым предлагают бездепозитные призы за регистрацию, собственно бы не пропустить такую возможность — как воспользоваться свежим бездепом, рекомендуем навещать наш сайт как можно чаще, самое аппетитное и новые несомненно добавляться в данном же перечне. casino 1×slot <a href=https://experienciafreedom.com/coaching-motivacional/>https://experienciafreedom.com/coaching-motivacional/</a> Нет. Для получения бездепозитного бонуса в казино нужна неотъемлемая регистрация на веб-сайте. Играть в слоты безвозмездно и без регистрации возможно только в демо режиме.Важно, удостоверьтесь что, что раньше не регились в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
<a href=https://forum.oursson.ru/viewtopic.php?f=2&t=8566>1хслотс 1хслотс регистрация перейти на 1×slots</a> казино 1×slots Не хотите сыграть в азартные забавы, не рискуя средствами средствами, хотя получая в все выплаты? Подобную вероятность деют все наихорошие порталы с азартными развлечениями. В их числе большое добросовестных и надежных интернет-казино на русском языке. Они привлекают новых пользователей различными поощрительными мероприятиями, включая бездепозитные, или благотворительные призы. <a href=https://turk-eli.org/user/Josephrop/>https://turk-eli.org/user/Josephrop/</a> В перечне притязаний к отыгрышу нередко присутствуют лимиты на ставки при игре на собственные средства. Так, в отыграть нужно 30 000 рублей, а максимальная сумма ограничена 30 рублями, то вертеть барабаны светит 1000 один. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам действия промоакции.Бездепозитные бонусы в казино без пополнения 2022 — это определенная сумма средств либо gift spins вращения, которые предоставляются первым постояльцам за регистрацию на веб-сайте казино вид бездепозитного бонуса, и выделяет вас возможность за счет казино без пополнения опробовать услуги (игр), с последующей преимуществом, льготой вывода средств при исполнении всех установленных управлял. 1хслотс 1хслотс регистрация перейти на 1×slots Перечисленные выше главные характеристики сочетают практически каждый бонус и являются стереотипными для бездепозитных бонусных начислений в казино.Используйте лучшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из списка ниже, дабы заработать подарки за обычные действия и уже сейчас получить первый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высочайшей отдачей и прыткими выводами на электрические кошельки.
1×slots зеркало на сегодня
Бонусы без депозита при регистрации считаются наиболее красивыми как для опытных игроков, например для и начинающих. Получив такое вознаграждение, заказчик имеет играть на настоящие средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные призы в интернет-казино Рунета, а также условия их активации и выигрыша.Даже не выиграв крупную сумму, игрок увлекательно проведет время, изнутри изучит работу площадки, оценит геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе наихороших акций с. Достаточно периодически учить перечень новых интернет казино с выводом бонуса без депо в этом разделе. Самые знаменитые методы вывода денег ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электрическим платежным системам типа Neteller и Skrill, а также пользуются криптовалютными кошельками. Вывод выигрышей может исполняться моментально либо занимать от нескольких часов до нескольких суток.Если ординарными текстами, бездепы – это определённая сумма денег или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать подарки. Но есть некоторые нюансы. Существуют игорные дома, коие перед что, этим как начислить бонусы просят привязать аппарат, предоставить копии документов. <a href=http://seoulartacademy.co.kr/bbs/board.php?bo_table=online&wr_id=1230903>http://seoulartacademy.co.kr/bbs/board.php?bo_table=online&wr_id=1230903</a> 1×slots зеркало проходить регистрацию это отличный вариант
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
В разделе с призами активировать свой презент. Найти забавы, для коих предусмотрено одобрение и применять бонус по назначению.Бездепозитный приз часто возможность замерзнуть доступным сразу последствии окончания регистрации, поскольку в большинстве случаев единственным притязанием к нему считается регистрация, а этого ревизия вашей новой учетной записи. <a href=https://demo.comuni-italiani.it/forum/viewtopic.php?f=9&t=517302>1× slots casino зеркало</a> Стоит обозначить(означить), собственно бездепозитный приз выдается лишь взрослым новичкам, которые, в свою очередь, все пригласить личных приятелей и своих, того претендующих на поощрительную программу преданности. Подобная технология была среди конкурирующих онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры способствуют увеличению собственной популярности, методом вербования свежих игроков. Бонусы – это оригинальный шанс для потенциальных участников игры, которые имеют опробовать софт покер рума и увериться, станут ли они в него выступать или нет. Новый игрок испробует свои силы с настоящими оппонентами в казино.Объективные – размер приза, коэффициент и условия вейджера, необходимость внесения депо для вывода денег; Так собственно сможете неустрашимо региться без всяких размышлений. Фортуна сегодня наверняка на вашей стороне. Не опасайтесь, ведь последствие какого или ущерба Вам абсолютно не угрожает. С этими бонусами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе.Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в обязательном порядке необходимо восполнить счет в казино. Для депозитных призов, эта процедура не необходима, например как депо уже сделан. 1×slots зеркало на сегодня <a href=http://forums.overhax.fun/member.php?action=profile&uid=4509>http://forums.overhax.fun/member.php?action=profile&uid=4509</a> Подтверждение электронной почты – одно из главных критерий, коие есть почти в каждом бездепозитном казино. Чтобы верифицировать электрическую почту, довольно перебежать по активной ссылке в послании, полученном от азартного клуба.
1×slots официальный зеркало
Большинство клубов завлекают внимание в за счёт разнообразных подарков. На 1 сайтах можно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает безвозмездные вращения для пуска лучших онлайн слотов. Несмотря на различные промоакции, стоит выделить самые главные.Не стоит незамедлительно же открещиваться от приветственных презентов в похожих казино. Администрация готова начислить деньги или фриспины, но предварительно работники обязаны убедиться, что вы не аферист. Дело в том, собственно развелось очень много охотников за призами. Они выучились дурачить систему и наваривать крупные суммы денег. <a href=http://xn–m1acg6c.xn–p1ai/index.php?subaction=userinfo&user=skinnyoration95>http://xn–m1acg6c.xn–p1ai/index.php?subaction=userinfo&user=skinnyoration95</a> 1×slots коды
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=518534#pid518534>1×slots скачать на айфон</a>
<a href=http://everestrolep.listbb.ru/viewtopic.php?f=38&t=11492>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<a href=https://forum.ltp-team.com/topic/72569–1hslots-zerkalo/>1хслотс зеркало</a>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=96190&result=reply>1×slots на любой вкус как пройти регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чтоб получить крупный выигрыш, избирайте игровые автоматы с максимальным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша.
#5723 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало
Игрокам не воспринимать приветственный приз как гарантированный способ получить большой выигрыш, хотя это замечательная вероятность без затрат оценить возможностей казино.Также, ситуации необходимо подтвердить собственный номер телефонного, чтобы код, приобретенный в смс-сообщении от клуба ввести в специальное поле в собственном офисе игрока. <a href=http://filmkachat.ru/>1 х слотс зеркало</a> Ещё одно распространённое акционное предложение – симпатичный презент с сомнительными притязаниями. К образцу, клуб сулит $100 в бездепа, хотя с вейджером х80 либо х100. Отыграть подобный вейджер практически невозможно и поэтому другого, как концентрироваться на более заманчивых акциях.Во всех законных онлайн-казино Беларуси нужно свидетельство паспортных данных для игры — это требование правительства страны. <a href=https://blog.udn.com/G_112062930339362154/181391904>https://blog.udn.com/G_112062930339362154/181391904</a> Пoдтвepдить личнocть посетителя. Для удачного вывода средств, нужно доказать лицо клиента. Нa этaпe вepификaции пpoфиля, сотрудники службы защищенности должны убедиться, собственно у игрока чем один аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не может вывести свой выигрыш, случае у него будет количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы. 1×slots на любой вкус как пройти регистрацию <a href=http://slavsbyt.ru/index.php?subaction=userinfo&user=pastoralranch54>http://slavsbyt.ru/index.php?subaction=userinfo&user=pastoralranch54</a>
1×slots официальный сайт мобильная версия скачать
1×slots официальный сайт мобильная версия <a href=https://velorout.com.ua/user/Stevenled/>https://velorout.com.ua/user/Stevenled/</a> 1×slots рабочее зеркало на сегодня Верификация важна для дополнительной безопасности и помочь техподдержке выявить бонусхантеров и мошенников. Кстати, рядах платформах выводы солидных сумм доступны только после подтверждения личности.При пользовании бездепозитным бонусом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют несколько видов лимитов:
1×slots casino зеркало рабочее
Маркетинговая политика всех игорных интернет-клубов должна носить разнородный нрав. И если вознаграждения на депо служат для того, чтобы стимулировать заносить депозиты и поощрять теснее имеющих пользователей, то бездепозитный приз в казино либо приз за регистрацию в казино, этого всего, рассчитан на расширение базы покупателей. <a href=http://www.svit-world.kiev.ua/user/DoctorLazutaEl/>http://www.svit-world.kiev.ua/user/DoctorLazutaEl/</a> 1×slots промокод при регистрации
1хслотс рабочее зеркало на сегодня
Допустим, за регистрацию вы возымели бездеп в размере 2 000 руб. С вейджером х30. В этом случае предстоит устроить ставок, на совместную сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать настоящие деньги. Однако не запамятовывайте, собственно с каждого дара получится вывести определённую сумму (почаще всего не более $200). Похожим образом работает третий способ доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения посетителя либо из-за с получения им VIP-статуса. Подарок предоставляется после обращения в поддержку и ревизии.Наиболее пользующиеся вознаграждения среди гэмблеров – бездепозитные бонусы казино. Это не изумительно, как можно получить бесплатные вращения либо виртуальные кредиты, и при этом не придётся пополнять счёт, рисковать личностными деньгами. Удастся насладиться разнообразными веселиями даже выиграть солидную необходимую, избегая серьёзного риска. Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные способы и расценить особенности, недоступные при этой в демо режиме. Многие новые клиенты переходят в количество постоянных, а оператор получает длительную прибыль. 1×slots на любой вкус как пройти регистрацию <a href=https://magadan-mebel.ru/forum/user/930/>https://magadan-mebel.ru/forum/user/930/</a> Новички не любят сразу же заносить депозит. Это обосновано неименьем навыка и сомнением. К счастью, дни возможно получить бездепозитный бонус за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В любом случае вы не рискуете своими сбережениями. Это отличная возможность запустить понравившийся видео разъем или же испытывать фортуну в настольных забавах.Также, ситуации нужно доказать собственный номер аппарата, для этого код, полученный в смс-сообщении от клуба ввести в особое фон в личном офисе игрока.
1×slots официальный зеркало
Если площадка презентует бездеп за регистрацию, то процедура его получения проста. Нужно только ввести акк на веб-сайте и активировать его, подтвердив адрес электрической почты, номер телефона либо другие данные, коие настятельно оператор. Перед данным нужно убедиться, что юзер располагается на официальном сайте казино, но на жульнической площадке.Высокая конкурентность в разделе азартных игр мотивирует операторов привлекать посетителей различными акциями. Благодаря данному у посетителей появляется вероятность получить бонусы в казино за регистрацию без депо. Воспользоваться этим предложением возможно, избегая процедуру внесения средств на игровой счет, просто активировав аккаунт на веб-сайте. Наш гид по бездепам поможет избрать самую симпатичную бонусную программку, узнать верховодила получения такого гонорары и распорядиться им с наибольшей выгодой. <a href=https://98e.fun/space-uid-7906638.html>https://98e.fun/space-uid-7906638.html</a> В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и в случае спорных ситуаций нет способности куда-то пожаловаться и доказать собственную правоту.Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депозит возможность выделяться до 30 дней. скачать 1×slots официальный сайт
<b>Смотреть еще похожие новости:</b>
<a href=http://check2go.net/my-account/>1×slots актуальное зеркало</a>
<a href=https://your-portal.at.ua/forum/48–218–16#88275>1хслотс официальный сайт зеркало</a>
<a href=https://nztw.org/forum.php?mod=viewthread&tid=534709&pid=860474&page=1&extra=#pid860474>1×slots регистрация 1×slots casino 777 online</a>
<a href=https://www.kfz-gringer.at/index.php/forum/donec-eu-elit/75222–1×slots#74986>1×slots на любой вкус как пройти регистрацию</a>
<a href=http://permitbeijing.com/forum/showthread.php?tid=2250416>1×slots акции</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подарки на конкретные даты отличаются критериями получения. Если поощрение начисляют игроку на день рождения, то сумма обычно находится от общего объема депо за прошедший год.
#5724 Charlesgunnyhttp://filmkachat.ru
1хслот скачать
Благодаря программке преданности от игорного заведения, возможно арестовать хороший старт и без дополнительных вложений запустить видеослоты. Кроме как, возможно рассчитывать на реальную удачу и получить, без инвестиции собственных финансов, немалый выигрыш.Когда идет о валютных бонусах, казино постоянно устанавливают обстоятельства вейджера, коие необходимо выполнить, дабы вывести выигрыш. <a href=http://filmkachat.ru/>1× slots официальный</a> С другой стороны, гораздо легче забрать бездепозитные фриспины за регистрацию в казино и напрямик данный начать вращать барабаны в наихороших слотах. Главная необыкновенность спинов что, нет, что они предусмотрены для топовых автоматов. Удастся не только пройти вспомогательные раунды, но и увеличить сумму выигрыша, заработать респины прочие внутриигровые презенты. <a href=https://www.hebergementweb.org/threads/mastering-the-art-of-product-lifestyle-images-from-concept-to-completion.2150185/>https://www.hebergementweb.org/threads/mastering-the-art-of-product-lifestyle-images-from-concept-to-completion.2150185/</a> Исходя из сего, просто не существует осмысленных причин махнуть рукой на получение такового приза при регистрации. И, не, на подобный бесплатной базе у вас есть шансы выиграть деньги и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные бонусы, нарекают бесплатными интернет платформами для игр. 1×slots сайт <a href=https://andyfreund.de/wiki/index.php?title=Green_Pharmacy_In_Minsk_Catalog_Of_Medicine>https://andyfreund.de/wiki/index.php?title=Green_Pharmacy_In_Minsk_Catalog_Of_Medicine</a> На бесплатные бонусы онлайн-казино практически всегда распространяется лимитирования по стране проживания посетителей. Даже случае для разрешается открывать счет и играть на деньги в заведении, это еще не значат, собственно для доступны not the slightest down payment bonuses.
1×slots casino регистрация 1×slots review live
<a href=https://10nsk.ru/user/JosephSuple/>1хслотс регистрация в 1×slots casino</a> 1хслот официальный сайт зеркало Чтобы помощи увериться в преимуществах бездепозитных бонусов, достаточно зарегистрироваться в казино и получить поощрение.Приглашаем делиться суждениями о призах. Это поможет другим юзерам выбирать более прибыльные предложения. <a href=http://t73108uj.bget.ru/member.php?action=profile&uid=115279>http://t73108uj.bget.ru/member.php?action=profile&uid=115279</a> Будьте внимательнее при ознакомлении с правилами во избежание появления конфликтных обстановок с казино, когда в отыгрыша бездепа вас не дадут вывести солидную сумму выигрыша. 1×slots сайт
1×slots актуальное зеркало
На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению сего медли, Вы не сможете активировать и получить бездепозитный бонус.В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, нужно адресоваться в службу поддержки спустя лайв-чат на сайте казино. <a href=http://shichaoliuluntan.com/home.php?mod=space&uid=331162>http://shichaoliuluntan.com/home.php?mod=space&uid=331162</a> 1×slots зеркало сайта
1×slot регистрация
Особую изюминку видео слотам присваивают оригинальные символы. С их в активируются различные бонусы. Вы сможете запустить дополнительный степень и увеличить необходимую выигрыша. Есть знаки, коие замещают негодные элементы и сами делают выигрышные комбо. Не стоит забывать и тему бонус-тур. После каждого счастливого спина есть шанс увеличить сумму выигрыша в два или хорошо раза.Как лишь получите бездеп в казино, всё одинаково не забывайте инспектировать электрическую почту. Некоторые игорные клубы постоянно радуют активных гэмблеров приятными призами. Чаще всего получить подарок можно в преддверии праздника, на день рождение, за вербование приятеля. А кроме распространённым призом является надбавка к депозиту. Нужно всего лишь пополнить счёт, и азартное заведение увеличит его на 50–100%. 1×slots официальный сайт зеркало <a href=http://www.aipingce.com/space-uid-118214.html>http://www.aipingce.com/space-uid-118214.html</a> Подтвердите регистрацию, дабы активировать Бездепозитный бонус с выводом, требуется наполнить индивидуальный профиль. Заполните порожние поля реальными данными о себя.
1х слотс зеркало регистрация в 1×slots casino
Диапазон ставок, которые вправе сделать игрок, также лимитирован. Обычно назначать возможно маленькую необходимую — пределах 10–30 руб. За одно вращение. Используйте наихорошие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из списка ниже, чтобы заработать подарки за простые деяния и уже сегодня получить 1-ый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высочайшей отдачей и прыткими выводами на электронные кошельки.Многие казино предоставляют в маркетинговых целях безвозмездные бонусы необыкновенно для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой сайт по партнерской ссылке с нашего портала. <a href=http://mirmamok.ru/forum/posts/278706?page=1#p653994>http://mirmamok.ru/forum/posts/278706?page=1#p653994</a> Онлайн-казино тщательно продумывают бонусные условия, коие необходимо изучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и ограничения.Подарки на определенные даты выделяются критериями получения. Если одобрение начисляют игроку на день рождения, то сумма обыкновенно зависимости от совместного размера депо последний год. 1×slots casino online регистрация Верификация аккаунта. Лучше подтвердить личность сразу последствии регистрации, чтобы позже не было заморочек с выводом средств. Верификация имеет проходить двумя путями:Доступность — бездепозитные бонусы в казино чаще всего предоставляются новым игрокам, но посещают случаи, когда приз все получить и действующие клиенты.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.makinamania.net/index.php?topic=251160.new#new>1×slots официальный сайт мобильная версия</a>
<a href=http://griffhunter.com/boards/viewtopic.php?p=339445#p339445>1×slots промокод при регистрации 2025</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Зарегистрируйтесь. Для регистрации чаще всего достаточно установить собственный номер телефонного и почтовый адрес, в чего установить полученный код из СМС. Возможно, требуется указать промокод. В правилах промоакции несомненно написано, где его хотелось вводить. Иногда это хотелось делать при регистрации, время — теснее последствии творенья собственного кабинета, на отдельной странице. Прибывшие на аккаунт финансы бездепозитные бонусы предназначаются, в, лишь для новоиспеченных юзеров, которые раньше не имели собственного аккаунта в данном казино. Исходя из этого, в раньше у игрока был сделан депозит, то, по всей вероятности, у него больше не несомненно способности рассчитывать на получение такого приза в определенном заведении.
#5725 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet на сегодня лучшая казино <a href=https://vestnik-jurnal.com/>казино смотреть</a> сайте букмекерской конторы фонбет реального казино <a href=https://m.repost.news/>Приезжева Екатерина Геннадьевна порно</a> скачать pin casino порно с Абрамченко Виктория Валериевна казино без porno Илья Ковальчук (хоккей) Черкесова Бэлла Мухарбиевна порно Скоробогатова Ольга Николаевна порно пин up casino
DiskiPlus вавада казино DiskiPlus porno Александр Соболев (футбол) <a href=https://diskiplus.ru>DiskiPlus porno Александра Степанова, фигуристка</a> DiskiPlus букмекерская контора мостбет DiskiPlus бесплатно фильм казино <a href=https://diskiplus.ru>DiskiPlus Яровая Ирина Анатольевна порно</a> DiskiPlus играющие казино онлайн DiskiPlus порно с Алина Загитова, фигуристка DiskiPlus 1×bet сайт 1×bet xyz DiskiPlus vavada casino DiskiPlus букмекерские конторы в россии DiskiPlus казино вулкан DiskiPlus слоты казино
#5726 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
Приглашаем делиться воззреньями о бонусах. Это поможет иным пользователям выбирать наиболее прибыльные предложения.Иногда у посетителей вебсайта могут появиться трудности, задачи, препядствия при активации приобретенного промо-кода. В этих случаях, нужно обратиться за поддержкой в саппорта «Support». Для получения ответа, непременно указывается определенная первопричина обращения и подтверждается информация дополнительными скриншотами. Если сформировалась спорная ситуация, постоянно можно обратиться к основному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ. <a href=http://filmkachat.ru/>1×slots бездепозитный бонус за регистрацию</a> Приглашаем делиться мнениями о призах. Это поможет иным юзерам выбирать наиболее прибыльные предложения. <a href=https://forum.amzgame.com/thread/detail?id=330739>https://forum.amzgame.com/thread/detail?id=330739</a> Если вы облюбовали себе несколько брендов коие вас больше всего полюбились, для неизменной игры! Таких гемблеров казино довольно любит и ценит, за частую такие игроки становятся VIP игроками заведения, коим часто поступают прибыльные предложения вид бонусов, например же туда входит и бездепозитные.Игрокам не следует воспринимать приветственный приз как гарантированный метод получить крупный выигрыш, но это замечательная вероятность без расходов расценить функционал казино. 1хслотс рабочее зеркало <a href=https://johnathanuemv64075.imblogs.net/80088560/ai-nude-app-the-future-of-content-moderation-and-privacy-protection>https://johnathanuemv64075.imblogs.net/80088560/ai-nude-app-the-future-of-content-moderation-and-privacy-protection</a> Обычно, бездепозитные призы выдаются под конкретные слоты с фиксированной ставкой, хотя их точно воспрещено применять в игровых автоматах с современным джекпотом. Список игр, каких возможно применять бездеп, Вы найдете в описании акции либо можете уточнить у саппорта заведения.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Ознакомьтесь с нашим перечнем превосходнейших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего перечня и получите бездеп незамедлительно. Хватайте наихорошие бесплатные предложения ниже и выигрывайте великие средства, не рискуя!Существуют казино с призом за регистрацию, в довольно востребованы фриспины в онлайн казино потом регистрации в определенных играх. Они встречаются числе почаще бесплатных поощрений либо традиционных призов в казино без вложений. Например, игрок регистрирует счет, на который начисляются бесплатные игры, бонус за регистрацию в виде бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса в выигрывает настоящие деньги, коие в последствии возможно удачно вывести из заведения на собственную платежную систему. То есть, есть все шансы исключить свои без рисков своими деньгами. Регистрация, за игрок получит призы, займет пару минут, а спасибо этому можно увеличить 5 евро поощрений до тыс. И без всяких заморочек вывести их. 1×slots зеркало регистрация в 1×slots casino Активация валютного вознаграждения случается механически последствии создания профиля либо применения промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на страницы казино в соц сетях или на рассылку рекламных известий, скачать и ввести дополнительный софт и т.д. <a href=https://hudejim.unoforum.pro/?1–0–0–00004366–000–0–0>https://hudejim.unoforum.pro/?1–0–0–00004366–000–0–0</a> Бывают ли бездепозитные бонусы без вейджера? Бывают, в у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино. 1×slots бонус за регистрацию
1хслот официальный сайт зеркало
При исполненьи критерий отыгрыша и верификации, средства с бонусного счета переводятся на ведущей и имеют быть выведены на карту или электронный кошелек. Лимиты на вывод и сроки проведения транзакции зависимости от выбранной платежной системы.При верном раскладе бездепы — это прекрасный способ выступать на деньги без траты собственных средств. Есть количество рекомендаций, следуя коим можно извлечь максимально полезности из подобных промоакций казино. Играть идет только на лицензированных площадках. Скриптовые веб-сайты не только дурачат с бонусными предложениями, хотя и используют пиратский софт с измененным ГСЧ. Выиграть на этих автоматах нереально. <a href=https://forex-bitcoin.com/members/351634-patricktub>https://forex-bitcoin.com/members/351634-patricktub</a> Бонус за регистрацию в казино без депозита с выводом денег нужно отыграть. Зачастую для отыгрыша может понадобиться сделать ставки на необходимую, в несколько десятков раз превышающую необходимую бонуса либо выигрыша.Наличие у игрока 2 аккаунта. Запрещено делать некоторое профилей для многократного получения бездепов. 1 х слотс зеркало Верификация важна для дополнительной безопасности и помочь техподдержке выявить бонусхантеров и мошенников. Кстати, на некоторых платформах выводы крупных сумм доступны лишь последствии доказательства личности.Бесплатные бонусы казино без депо возможно получить в виде валютных средств на бонусный счет (исключить их возможно только последствии отыгрыша), фриспинов, забавы или кешбэк-бонуса.
1× slots регистрация в 1×slots casino
Каждый геймер обязан сначала отчетливо изучить условия по получению и отыгрышу приглянувшегося подарка. Если всё устраивает, поспешите арестовать благотворительные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик сейчас начать вертеть барабаны топовых слотов. Да, у безвозмездных бонусов есть дефекты. Прежде всего, они обыкновенно небольшие. Кроме как, условия вейджера по ним постоянно жесткие. Но таки неимение риска проделывает их очень красивыми для клиентов.На условиях отыгрыша даровых призов идет тормознуть подробнее. С ними связаны аспекты, коие невозможно забыть без внимания. 1хслотс официальный сайт зеркало <a href=http://helenos.pavel-rimsky.cz/doku.php?id=%D0%A4%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B%20%D0%B0%D0%BF%D1%82%D0%B5%D0%BA%20%D0%B2%20%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8:%20%D0%A2%D1%80%D0%B5%D0%BD%D0%B4%D1%8B%20%D0%B8%20%D0%9F%D1%80%D0%BE%D0%B3%D0%BD%D0%BE%D0%B7%D1%8B%20%D0%BD%D0%B0%202024%20%D0%B3%D0%BE%D0%B4>http://helenos.pavel-rimsky.cz/doku.php?id=%D0%A4%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B%20%D0%B0%D0%BF%D1%82%D0%B5%D0%BA%20%D0%B2%20%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8:%20%D0%A2%D1%80%D0%B5%D0%BD%D0%B4%D1%8B%20%D0%B8%20%D0%9F%D1%80%D0%BE%D0%B3%D0%BD%D0%BE%D0%B7%D1%8B%20%D0%BD%D0%B0%202024%20%D0%B3%D0%BE%D0%B4</a>
1× slots зеркало
Прочитайте верховодила бонусной программки, в желайте участие. Да, мы безотступно рекомендуем сделать это до регистрации.Обычно, бездепозитные бонусы выдаются под конкретные слоты с фиксированной ставкой, но их точно воспрещено применять в игровых автоматах с современным джекпотом. Список игр, каких можно применять бездеп, Вы отыщите в описании промоакции или сможете уточнить у службы поддержки заведения. <a href=http://forum.analysisclub.ru/index.php/topic,330057.new.html#new>http://forum.analysisclub.ru/index.php/topic,330057.new.html#new</a> 1хслотс регистрация в 1×slots casino Вывод выигрыша с бездепозитных бонусов казино – щедрый презент от азартных клубов. Но чтобы вывести собственный заработок, нужно выполнить ряд критерий:
<b>Смотреть еще похожие новости:</b>
<a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=12262>1×slots актуальное зеркало</a>
<a href=https://forum.oursson.ru/viewtopic.php?f=2&t=8080>1×slots зеркало быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Oтыгpaть бонус с указанным вeйджepом, чтобы нужно сдeлaть cтaвoк нa cумму, превышающую размер бонуса в некоторое один.
#5727 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
демо казино Крючкова Полина Викторовна порно <a href=https://m.repost.news/>1×bet скачать приложение на андроид</a> пин ап casino pin букмекерские конторы бет <a href=https://rhymes-punches.com/>фильмы казино рояль</a> 1×bet официальный скачать Манилова Алла Юрьевна порно букмекерскую контору пин мобильные букмекерские конторы 1×bet зеркало рабочее на сегодня казино 1 порно с Алина Загитова
DiskiPlus 1×bet зеркало рабочее на сегодня 1×bet xyz DiskiPlus порно с Елена Никитина, скелетонистка <a href=https://www.diskiplus.ru>DiskiPlus new casino</a> DiskiPlus казино вход официальный сайт DiskiPlus порно с Анна Калинская (теннис) <a href=https://diskiplus.ru>DiskiPlus сайт казино вход</a> DiskiPlus бывшие казино DiskiPlus Окладникова Ирина Андреевна порно DiskiPlus бк букмекерская контора DiskiPlus 1×bet на андроид бесплатно DiskiPlus up casino скачать DiskiPlus kent casino DiskiPlus Разуваева Ксения Денисовна порно
#5728 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
У любой забавы средства притязания по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система зачтет любую ставку. В рулетке и покере сделать это намного сложнее. Именно потому так принципиально внимательно читать условия получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой игре, то новенькие попросту «спустят приз на ветер». <a href=http://filmkachat.ru/>1×slots официальный demo регистрация в 1×slots casino</a> <a href=https://www.trustlink.org/Ask-The-Community/Question/Business/The-Art-of-Professional-Interior-Design-Layout-Creating-Harmonious-Living-Spaces-16936>https://www.trustlink.org/Ask-The-Community/Question/Business/The-Art-of-Professional-Interior-Design-Layout-Creating-Harmonious-Living-Spaces-16936</a> Если вы новичок в этом деле и только попали в неизведанную вами район азарта — счет предложений как бездепозитные призы без пополнения.Игры, в которых можно играть на бонусные деньги. Проверьте перечень игр, в которых возможно выступать на бонусные средства, вполне они Вам не понравятся и не стоит расходовать своё время на эту акцию. 1хслот зеркало сайта <a href=http://kyeyangencplus.co.kr/bbs/board.php?bo_table=free&wr_id=2244420>http://kyeyangencplus.co.kr/bbs/board.php?bo_table=free&wr_id=2244420</a> Вейджер (wager) – это коэффициент, кот-ый демонстрирует на какую необходимую нужно сделать ставок, дабы исключить приз из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего приза, Вам необходимо устроить ставок на необходимую: 500*70=3500 рублей. Только полностью отыграв бонус, Вы можете исключить собственный выигрыш.Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в собственный офис, чтобы отобрать бесплатные вращения с вейджером х40;
1×slots casino зеркало рабочее
Не стоит сразу же отказываться от приветственных подарков в подобных казино. Администрация готова начислить средства или фриспины, но сначала сотрудники должны убедиться, что вы не мошенник. Дело никаких, собственно развелось очень большое охотников за призами. Они выучились накалывать систему и наваривать крупные суммы денег.Хотя безвозмездные бонусы начисляются без депо, не исключено, собственно для придется вносить деньги. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь последствии как, как свежий заказчик первый пополнит игровой счет. 1× slots зеркало <a href=http://www.samudranews.com/2023/01/wabub-deli-serdang-hadri-muhasabah-dan.html>http://www.samudranews.com/2023/01/wabub-deli-serdang-hadri-muhasabah-dan.html</a> Да, у даровых бонусов есть дефекты. Прежде всего, они обычно очень. Кроме как, условия вейджера по ним постоянно жесткие. Но все неименье риска делает их очень привлекательными для посетителей. 1×slots зеркало 1хслотс регистрация перейти на 1×slots
1×slots официальный сайт скачать
Ограничения по забавам. Администрация запрещает игрокам некоторые игровые автоматы с бездепозитным призом, средствами либо бесплатными вращениями. Обычно, в правилах приводится полный перечень слотов для отыгрыша. Иногда дробленье выполняется по облику игр. Например, отыгрыш возможен на всех игровых аппаратах, хотя запрещен в настольных играх и в разделе Live Casino.Только выполнив все обстоятельства отыгрыша и дождавшись завершения проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить средства деньги. Условия, на коих предоставляется бездеп, регулируются казино. Каждая промоакция содержит подробные управляла, ссылка на коие обычно находится в промообъявлении. В их указываются лимиты, вейджер, перечень дешевых игр. Если оператор прячет данные о предложении, то воспользоваться им не стоит.Частенько новенькие не знают, как активировать презенты или вывести первый выигрыш. Для подобных случаев наша команда обрисовала основные определения – что это фриспины, вейджер, как его отыграть, зачем нужно протекать верификацию. <a href=https://justpaste.it/replacing_shocks>https://justpaste.it/replacing_shocks</a> 1×slots официальный demo регистрация в 1×slots casino
сайт 1× slots casino
Способы получения бездепа различаются в зависимости от вида бонуса, который понравился игроку. Но для так надо(надобно) быть зарегистрированным в законном онлайн-казино и доказать свою личность. В общем облике пошаговая аннотация для получения бездепозитного приза смотрится так: 1 x slots casino <a href=http://girldjmcdriver.topbb.ru/viewtopic.php?id=6053#p83755>http://girldjmcdriver.topbb.ru/viewtopic.php?id=6053#p83755</a> Для казино, работающих онлайн, бездепозитные бонусы нужны для вербования новых посетителей. Предложение поиграть на слотах без необходимости внесения настоящих денег — работающий способ для увеличения интереса к компании. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит выступать в казино, только сейчас уже на собственные деньги.
1 х слотс зеркало
Индивидуальные одобрения выдаются за совершение действий: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавленья или официального посетителя для ПК. В большинстве казино действуют программы преданности, присваивающие игрокам статусы за активность на сайте. Продвижение на грядущий степень нередко сопрягается выдачей бездепа. <a href=https://fabricenetwork.mn.co/posts/61563262>https://fabricenetwork.mn.co/posts/61563262</a> Как правило, при выводе денег, от играющего потребуется только сделать минимальный вклад для того, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом индивидуальный счет.Бездепозитный приз за регистрацию в казино с выводом денег в 2022 году — Наш ресурс дает игрокам важную информацию о самых новых, щедрых и испытанных бонусах в онлайн казино, которые обновляются любой денек. 1×slots промокод при регистрации Эффективность бездепов в качестве маркетингового инструмента оценили почти операторы. Малоизвестные площадки используют эти промоакции, чтобы стремительно набрать базу. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны постоянных гостей. Не все веб-сайты, дающие подарки без депозита, рекомендованы к забаве. За симпатичным промоописанием шансы прятаться неосуществимые условия отыгрыша и другие подводные камни.Прямо сейчас отберите бесплатные вращения за регистрацию без депозита и начинайте коллекционировать призовые композиции ради солидных выигрышей!
<b>Смотреть еще похожие новости:</b>
<a href=http://moneysweet.listbb.ru/memberlist.php?mode=viewprofile&u=6851>зеркло казино 1×slots</a>
<a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=7523&TITLE_SEO=7523-preobrazovatel-interfeysov-usb-rs485&MID=471524&result=reply#message471524>1×slots зеркало рабочее</a>
<a href=http://www.ihavethepussy.com/de/threads/231803–1×slot-%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%B7%D0%A0%D1%91%D0%A0%D0%85%D0%A0%D1%95-%D0%A0%C2%B7%D0%A0%C2%B5%D0%A1%D0%82%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%BB%D0%A0%D1%95?p=250060#post250060>1×slot казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного бонуса достаточно пополнения баланса и доказательства личности. В иных же клубах, нужно некоторое один прокрутить свой депо. Например, игрок получил 500 руб. При разработке аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., понадобится устроить 875 спинов для полного отыгрыша.
#5729 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало xbet пин ап казино <a href=https://krtka.info/>приложения букмекерских контор</a> порно с Дарья Касаткина (теннис) официальное казино вход <a href=https://rumafia.news/>промокод 1×bet</a> казино пин up casino официальный рокс казино водка казино up casino букмекерские конторы pin порно с Дарья Касаткина (теннис)
DiskiPlus 1×bet зеркало на сегодня DiskiPlus casino рабочее зеркало <a href=https://diskiplus.ru/>DiskiPlus 1×bet официальный скачать</a> DiskiPlus pin up casino buzz DiskiPlus винлайн букмекерская контора официальный <a href=https://diskiplus.ru>DiskiPlus black russia казино</a> DiskiPlus казино рублях DiskiPlus 1×bet приложение DiskiPlus casino андроид DiskiPlus букмекерская контора скачать приложение DiskiPlus порно с Константин Тюкавин (футбол) DiskiPlus pin ап casino DiskiPlus Нургалиева Эльвира Рамиловна порно
#5730 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Чулпан Хаматова pin up casino top top <a href=https://repost.news/>1×slots casino</a> букмекерские контора ап скачать 1×bet <a href=https://repost.news/>1×bet 1хбет</a> леон букмекерская контора bitz casino сайты казино казино гта 5 казино играть retro casino Юдаева Ксения Валентиновна порно
DiskiPlus new casino DiskiPlus 1×bet сайт 1×bet xyz <a href=https://diskiplus.ru/>DiskiPlus фильмы казино рояль</a> DiskiPlus казино фильм DiskiPlus гама казино <a href=https://www.diskiplus.ru/>DiskiPlus Разуваева Ксения Денисовна порно</a> DiskiPlus Нургалиева Эльвира Рамиловна порно DiskiPlus яндекс казино DiskiPlus kent casino регистрация DiskiPlus casino на телефон DiskiPlus porno Илья Ковальчук (хоккей) DiskiPlus Ходнева Светлана Владимировна порно DiskiPlus казино фильм
#5731 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на официальном сайте
Как только на виртуальном счету окажутся бонусные свои, поспешите отыграть вейджер. Сразу после сего можно забыть заявку на вывод выигрыша. Кредиты выгодно выделяются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом настоящих средств и дают возможность почувствовать задор. Во-вторых – возможно насладиться каждой азартной игрой доступной на веб-сайте. В вашем постановлении находятся автоматы, настольные приложение, видео-покер, Live-дилеры.Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция имеет подробные правила, ссылка на коие обычно находится в промообъявлении. В них указываются лимиты, вейджер, список доступных игр. Если оператор скрывает данные о предложении, то воспользоваться им не стоит. <a href=http://filmkachat.ru/>casino 1×slot</a> <a href=https://scrapbox.io/shopavto/%D0%A2%D0%B5%D1%80%D0%BC%D1%96%D0%BD%D0%BE%D0%B2%D0%B8%D0%B9_%D0%B2%D0%B8%D0%BA%D1%83%D0%BF_%D0%B0%D0%B2%D1%82%D0%BE:_%D1%8F%D0%BA_%D0%B2%D0%B8%D0%B3%D1%96%D0%B4%D0%BD%D0%BE_%D1%82%D0%B0_%D1%88%D0%B2%D0%B8%D0%B4%D0%BA%D0%BE_%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D1%82%D0%B8_%D1%82%D1%80%D0%B0%D0%BD%D1%81%D0%BF%D0%BE%D1%80%D1%82%D0%BD%D0%B8%D0%B9_%D0%B7%D0%B0%D1%81%D1%96%D0%B1>https://scrapbox.io/shopavto/%D0%A2%D0%B5%D1%80%D0%BC%D1%96%D0%BD%D0%BE%D0%B2%D0%B8%D0%B9_%D0%B2%D0%B8%D0%BA%D1%83%D0%BF_%D0%B0%D0%B2%D1%82%D0%BE:_%D1%8F%D0%BA_%D0%B2%D0%B8%D0%B3%D1%96%D0%B4%D0%BD%D0%BE_%D1%82%D0%B0_%D1%88%D0%B2%D0%B8%D0%B4%D0%BA%D0%BE_%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D1%82%D0%B8_%D1%82%D1%80%D0%B0%D0%BD%D1%81%D0%BF%D0%BE%D1%80%D1%82%D0%BD%D0%B8%D0%B9_%D0%B7%D0%B0%D1%81%D1%96%D0%B1</a> При помощи такого одобрения оператор может кроме завлекать посетителей, коие ранее показывали активность на сайте, хотя по какой-то основанию перестали играть. В данном случае промокод высылается юзеру по электронной почте либо повторяющий SMS. 1×slots рабочее зеркало на сегодня <a href=http://www.shoppy.co.kr/bbs/board.php?bo_table=free&wr_id=626862>http://www.shoppy.co.kr/bbs/board.php?bo_table=free&wr_id=626862</a> Срок отыгрыша — это период, который наступает в момент активации бонуса и заканчивается с его закрытием. Пользователю нужно уложиться в данный временной зазор, иначе призовые средства аннулируются. Казино устанавливают список игр, ставки в которых засчитываются при расчете отыгранных денег. Если тайтл не заходит в данный список, то возможность быть недоступен для загрузки в действия бонусного предложения.В случае установленного лимита на сумму вывода выигрыша с бездепозитного бонуса, игрок не сможет вывести больше заявленной суммы.
1×slots официальный сайт мобильная версия
В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это самая приятная часть игры. Важно, зачастую бездепозитные призы в казино выдаются с ограничениями по максимальной выплате. В среднем возможно рассчитывать на прибыль в некоторое тыщ рублей. Как исключить выигрыш с бонуса без депо. Придётся доказать аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате либо прочитайте в правилах.В бонусную программку многих операторов входят систематические бездепы. Это бессрочные промоакции, поощряющие интенсивных постоянных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают постоянные призы без депо в обмен на скопленные баллы преданности. <a href=https://thetechmodders.com/forums/viewtopic.php?t=60585>1×slots на любой вкус как пройти регистрацию</a> 1×slots официальный зеркало рабочее Акции распространяются как на все игры казино, так и на узкий перечень. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и другие. Промо может охватывать разработки одного производителя. Бездеп не пересекается с иными акциями казино. Если на сайте учтен кэшбек, он не начисляется за ставки, сделанные бонусными деньгами. Для идентификации платежных реквизитов игрока возможность понадобиться пополнение счета на наименьшую сумму.Существует ли стратегии для отыгрыша бездепозитных бонусов? К раскаянию нет, на выигрыши либо проигрыши с бонусов, казино либо игрок повлиять имеет, отдача игр происходит от разработчиков игр. <a href=http://apa.anenii-noi.com/index.php?subaction=userinfo&user=warlikeyears38>http://apa.anenii-noi.com/index.php?subaction=userinfo&user=warlikeyears38</a> зеркло казино 1×slots
casino 1×slot
Наш список включает в себя лучшие бездепозитные бонусы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит ревизию по главным характеристикам: Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки имеют запросить вспомогательные документы либо инициировать короткое общение по Skype. <a href=https://msknovostroy.com/member.php?action=profile&uid=1487>https://msknovostroy.com/member.php?action=profile&uid=1487</a> Исходя из сего, просто не существует мудрых оснований махнуть рукою на получение такового бонуса при регистрации. И, заметить,, на подобный бесплатной основе у вас есть все шансы выиграть деньги и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные призы, называют безвозмездными онлайн платформами для игр. 1×slot регистрация
1хслотс рабочее зеркало на сегодня
Для получения бонуса нужно ознакомиться с программкой преданности казино и сделать ставки на сумму, необходимую для перехода на следующий уровень. <a href=https://10nsk.ru/user/JosephSuple/>1×slots сайт зеркало</a> Внесение депозита – Будьте готовы пополнить счет после отыгрыша бонуса. Это стандартное заявка управлял для данного типа промо-акций. Лучше заблаговременно уточнить, какую необходимую нужно будет вносить на счет. Как управляло, речь идет о минимальном депозите, хотя вы должны быть уверены, что он для по карману. 1 x slots casino <a href=https://www.ronorp.net/zurich_en/community/city-talk.66/.333700>https://www.ronorp.net/zurich_en/community/city-talk.66/.333700</a> Объективные – объем бонуса, коэффициент и условия вейджера, надобность внесения депозита для вывода средств;Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.
1×slos регистрация в 1×slots casino
Существуют казино с призом за регистрацию, каких довольно модны фриспины в интернет казино впоследствии регистрации в конкретных забавах. Они встречаются числе почаще безвозмездных поощрений или классических призов в казино без инвестициям. Например, игрок регистрирует счет, на который начисляются безвозмездные забавы, приз за регистрацию повторяющий безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса в выигрывает истинные средства, которые в последствии можно удачно исключить из заведения на собственную платежную систему. То есть, все шансы вывести средства без рисков своими деньгами. Регистрация, за которую геймер получит призы, займет несколько, а благодаря данному возможно прирастить 5 евро поощрений до тыс. И без всяких проблем вывести их. Вообще перейдя в казино — правила схожи в получении бездепозитных бонусов, в стандартные правила входит: подтвердить эл. Почту и телефонный, заполнить собственный индивидуальный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ.Наши специалисты исследуют условия акции, этого в ручном режиме проводят их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие параметры. Мы не рекламируем казино, а даем игрокам информацию о лучших из них. <a href=http://www.geze-gen.com/member.php/519726-Mycsgoger>http://www.geze-gen.com/member.php/519726-Mycsgoger</a> 1×slot рабочее зеркало В бонусную программу многих операторов входят систематические бездепы. Это пожизненные акции, поощряющие активных постоянных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают неизменные бонусы без депо в мена на скопленные баллы лояльности.Новые клиенты онлайн-казино без первого депозита могут проверить свою удачливость. К что, этому же есть вероятность конвертировать бездепы в настоящие средства за регистрацию в казино, впрочем для этого бонус необходимо отыграть сообразно условиям акции.
<b>Смотреть еще похожие новости:</b>
<a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=89184>1×slots регистрация на сайте</a>
<a href=https://www.lightknotes.com/MyBB/showthread.php?tid=261214>зеркала 1×slots</a>
<a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=146626>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Изучить правила и условия получения бездепозитных бонусов казино, Вы сможете у нас на сайте в разделе с бонусами или на официальном веб-сайте выбранного Вами казино. Если возможности отыскать необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электронной почте. Простая процедура получения бездепозитного бонуса, кот-ая займет менее 2-х минут. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные.
#5732 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Нина Пирогова, хоккеистка букмекерская контора вход <a href=https://rhymes-punches.com/>казино смотреть</a> приложения букмекерских контор 1×bet зеркало рабочее на сегодня 1×bet xyz <a href=https://glvk.guru/>пинап казино</a> порно с Юлия Ефимова, пловчиха casino зеркало сегодня порно с Захарова Мария Владимировна 1×bet зеркало рабочее xbet casino com порно с Кирьянова Дарья Борисовна лучшие бесплатные онлайн казино
DiskiPlus porno Вера Бирюкова, гимнастка DiskiPlus win win casino <a href=https://www.diskiplus.ru/>DiskiPlus порно с Алексей Миранчук (футбол)</a> DiskiPlus казино пин DiskiPlus лучшие казино бесплатно <a href=https://www.diskiplus.ru/>DiskiPlus букмекерскую контору пин</a> DiskiPlus букмекерские контора ап DiskiPlus порно с Артемий Панарин (хоккей) DiskiPlus porno Илья Ковальчук (хоккей) DiskiPlus top casino DiskiPlus пинко casino DiskiPlus up casino официальный DiskiPlus где казино
#5733 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up casino зеркало включи казино <a href=https://strelochnik.com/>официальные букмекерские конторы скачать</a> сайт казино зеркало 1×bet официальный <a href=https://repost.news/>porno Дарья Мороз</a> 7k casino официальный сайт Юдаева Ксения Валентиновна порно ап казино casino online зеркало почему в казино нет окон pin up casino официальный букмекерская контора бетсити
DiskiPlus 1×bet сайт DiskiPlus казино рублях <a href=https://www.diskiplus.ru>DiskiPlus vodka casino</a> DiskiPlus porno Алена Михайлова DiskiPlus порно с Юлия Ефимова <a href=https://diskiplus.ru/>DiskiPlus порно с Кирьянова Дарья Борисовна</a> DiskiPlus 1×bet зеркало слоты DiskiPlus мелбет букмекерская контора DiskiPlus Скоробогатова Ольга Николаевна порно DiskiPlus ограбление казино DiskiPlus Петрова Ольга Викторовна порно DiskiPlus casinos xyz DiskiPlus скачать 1×bet на андроид бесплатно
#5734 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало рабочее
Доступные игры – В некоторых азартных играх можно снизить математическое преимущество казино до нескольких десятых процента. В их числе все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как управляло, в таких играх ставки идут в зачет вейджера не полностью. Например, может предусматриваться лишь 50%. В некоторых играх бездепозитные бонусы вообщем невозможно отыгрывать.На нашем веб-сайте Вы найдете перечень актуальных свежих бездепозитных бонусов в казино 2022 года. Также, есть большое неповторимых предложений, коие доступны только гостям нашего вебсайта после регистрации по нашей ссылке или активации специального промокода. <a href=http://filmkachat.ru/>1×slots регистрация на официальном сайте</a> Однако далеко не все ресурсы предлагают своим посетителям бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено поощрение на первый депо в объеме 100–200%. Это замечательная вероятность преумножить банкролл, увеличить время, проведённое за забавой и шансы сорвать большой куш. <a href=https://www.scutify.com/articles/2024–10–25------>https://www.scutify.com/articles/2024–10–25------</a> 1×slots рабочее зеркало на сегодня <a href=http://ultfoms.ru/user/Ralphlen/>http://ultfoms.ru/user/Ralphlen/</a>
1×slots регистрация то дальше необходимо пройти
Возможность протестировать новые забавы, не рискуя личными средствами и создать собственную стратегию забавы.Для получения депозитного бонуса нужно пополнить свой игровой баланс настоящими деньгами. Вознаграждение возможно получить или при внесении первого депо, либо вид фиксированного процента от внесённых средств. Так либо другому, приз поступит на счёт только в пополнения. <a href=https://radios-collector.com/viewtopic.php?f=7&t=68892>1×slots скачать на айфон</a> 1×slots зеркало этих способов предполагает регистрацию Ну и естесственно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: подобная щедрость увеличивает уровень лояльности клиентов к компании.В некоторых интернет казино для получения бездепозитных призов не достаточно просто зарегистрироваться на сайте клуба и доказать средства контактные данные. Дополнительно требуется активация промокода. <a href=https://sklad-slabov.ru/forum/user/10377/>https://sklad-slabov.ru/forum/user/10377/</a> Высокая конкуренция в сегменте азартных игр доказывает операторов привлекать клиентов разнообразными промоакциями. Благодаря данному у посетителей замечена вероятность получить призы в казино за регистрацию без депозита. Воспользоваться таким предложением можно, минуя процедуру внесения средств на игровой счет, просто активировав аккаунт на сайте. Наш экскурсовод по бездепам поможет выбрать самую привлекательную бонусную программку, разузнать управляла получения такого вознаграждения и распорядиться им с наибольшей выгодой. 1× slots зеркало
1×slot регистрация
<a href=http://mebel-fabrik.com.ua/index.php?subaction=userinfo&user=jumpytrousers25>http://mebel-fabrik.com.ua/index.php?subaction=userinfo&user=jumpytrousers25</a> 1хслот скачать
1×slots казино зеркало
В каждом казино с бездепозитным бонусом учтены вейджеровые условия. Это единственный «подводный камень», который стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) сделать определённое количество ставок. Чем круче приз, тем труднее выполнить обстоятельства, и напротив. Выбор любого онлайн казино на нашем веб-сайте. В описании к каждому Вы можете узнать, собственно получите за создание аккаунта.Игрокам стоит воспринимать приветственный бонус как гарантированный метод получить большой выигрыш, хотя это отличная вероятность без расходов оценить возможностей казино. 1×slots актуальное зеркало <a href=https://lovewiki.faith/wiki/%D0%9E%D0%BD%D0%BB%D0%B0%D0%B9%D0%BD_%D0%A1%D0%BB%D0%BE%D1%82%D1%8B777>https://lovewiki.faith/wiki/%D0%9E%D0%BD%D0%BB%D0%B0%D0%B9%D0%BD_%D0%A1%D0%BB%D0%BE%D1%82%D1%8B777</a>
1×slots зеркало проходить регистрацию это отличный вариант
Бездепозитный бонус казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби избранного заведения, определится в выборе игр и проверить качество работы саппорта. Довольно часто, начиная игровой процесс, игрок уже не желает останавливаться и проделывает настоящий лепта. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать даром вполне как раз таки с бонусом за регистрацию без надобности заносить депо. <a href=https://beauajsb86307.blog-gold.com/37345517/nude-ai-app-transforming-image-moderation-and-privacy-in-the-digital-age>https://beauajsb86307.blog-gold.com/37345517/nude-ai-app-transforming-image-moderation-and-privacy-in-the-digital-age</a> Как верховодило, при выводе финансов, от играющего требуется только сделать наименьший лепта для того, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом личный счет. 1×slots регистрация
<b>Смотреть еще похожие новости:</b>
<a href=http://vn-info.net/user/Josephkam/>1×slots рабочее зеркало на сегодня</a>
<a href=http://check2go.net/author/jameslob/>1×slots зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подтверждение регистрации. Казино требуют привязки профиля к электрическому адресу и номеру аппарата. Для этого на e-mail отчаливает послание со ссылкой, а на телефонный ? текстовое извещение с кодом. Только выполнив все обстоятельства отыгрыша и дождавшись завершения проверки аккаунта, Вы можете оформить заявку на вывод средств и получить средства деньги.
#5735 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерские конторы pin 1×bet бесплатно <a href=https://th-royalgclub.com/>casino зеркало сегодня рабочее</a> казино пин порно с Илюшникова Татьяна Александровна <a href=https://rhymes-punches.com/>top casino</a> мелбет букмекерская контора играющие казино почему казино Комарова Наталья Владимировна порно 1×bet скачать приложение как выиграть в казино Скворцова Вероника Игоревна порно
DiskiPlus casino 7k рабочее DiskiPlus porno Юлия Канакина <a href=https://www.diskiplus.ru>DiskiPlus про казино</a> DiskiPlus порно с Александр Головин (футбол) DiskiPlus 1×bet рабочее <a href=https://diskiplus.ru>DiskiPlus 1×bet на андроид бесплатно</a> DiskiPlus Шевцова Татьяна Викторовна порно DiskiPlus казино 5 DiskiPlus казино пин DiskiPlus unlim casino DiskiPlus порно с Абрамченко Виктория Валериевна DiskiPlus пин up casino DiskiPlus скачать 1×bet
#5736 Charlesgunnyhttp://filmkachat.ru
1× slots зеркало
При отыгрыше бездепов, учитывайте временные ограничения. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток.Только выполнив все обстоятельства отыгрыша и дождавшись окончания проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить свои деньги. <a href=http://filmkachat.ru/>1хлот регистрация в 1×slots casino</a> Мы собрали и выпустили список наилучших бездепозитных казино с призами за регистрацию, коие гарантируют щедрые выигрыши и мгновенные выплаты.Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте обстоятельства – они нередко выдаются для неких машин. В зависимости от клуба продоставляется делать конкретное количество ставок. Кстати, современные игорные дома выделяют вероятность заводить «одноруких злодеев». <a href=https://www.swiatobrazu.pl/forumgaleria/thread/view/id/590>https://www.swiatobrazu.pl/forumgaleria/thread/view/id/590</a> 1×slots регистрация то дальше необходимо пройти <a href=https://rdaforum.com/user-16000.html>https://rdaforum.com/user-16000.html</a> Фриспины без депо либо дополнительные свои посодействуют поближе познакомиться с игровой платформой и её функциями. За счёт подарков можно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за забавы напротив живых крупье.
1×slot официальный сайт
<a href=http://forums.indexrise.com/thread-309-post-338072.html#pid338072>1хслотс казино зеркало</a> 1×slots регистрация на сайте 1×slots ru com Бонус в казино без депо содержит разные разновидности: это может быть приветственный бонус, акции в честь каких-то праздников или весомых дат, приз за вербование новых игроков, преданность и получение VIP-статуса.Для тех, кто лишь подумывает испытать собственную удачу, а также для профессиональных игроков, ищущих свежие площадки для выигрышей, основные лицензированные казино нередко организуют различные акции, и лучшее услуг за время – как для начинающих, например и для проф игроков – бездепозитный приз за регистрацию. <a href=http://followmedoitbbs.com/home.php?mod=space&uid=324441>http://followmedoitbbs.com/home.php?mod=space&uid=324441</a> 1×slots регистрация 1×slots casino c2d ru 2. Создать новый профиль. Для регистрации надо(надобно) наполнить маленькую анкету или зайдите в индивидуальный офис при помощи соц сеток;Для получения депозитного приза нужно пополнить свой игровой баланс реальными средствами. Вознаграждение возможно получить или при внесении первого депозита, или в виде фиксированного процента от внесённых средств. Так или другому, приз поступит на счёт только после пополнения.
1×slots промокод при регистрации 2025
Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в индивидуальный кабинет, дабы отобрать бесплатные вращения с вейджером х40; Существует ли стратегии для отыгрыша бездепозитных бонусов? К раскаянью нет, на выигрыши или проигрыши с бонусов, казино или игрок воздействовать не может, отдача игр происходит от разработчиков игр. <a href=http://www.tame.wphl.net/home.php?mod=space&uid=345029>http://www.tame.wphl.net/home.php?mod=space&uid=345029</a> Обычно бездепозитные акции от казино, приходят на эл. Почту в дни рождения либо праздничные. В неких онлайн казино можно обратиться в чат и как постоянному игроку, возможно вам предложат бездепозитное предложение.Если простыми текстами, бездепы – это определённая сумма средств либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать подарки. Но есть некоторые аспекты. Существуют игорные дома, которые перед тем как начислить призы требуют привязать телефон, дать копии документов. 1хслот официальный сайт зеркало
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Выполнив все притязания оператора, клиент возможность оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем не более суток. Если дополнительно требуется пройти процедуру верификации, то срок увеличивается до 1–2 рабочих дней. Для перевода применяются банковские приборы и электрические платежные системы. Второй метод подходит другого, как, например как большинство транзакций в этом случае исполняются моментально. В связи со специфичностью функционирования банков обработка платежей имеет занять до нескольких рабочих дней.Итак, дабы бесплатные бонусные кредиты превратились в настоящие средства, которыми вы можете распоряжаться по своему усмотрению, их нужно отыграть. Вейджер по уточнять в правилах онлайн-казино. <a href=http://b2s.bulwork.com/node/1581?page=142#comment-25629>1×slots бонус за регистрацию</a> Заработать на бездепозитных бонусах за регистрацию в казино возможность каждый пользователь, достигший совершеннолетия. Прямо момент отберите благотворительные вращения за регистрацию без депозита и начинайте коллекционировать призовые композиции ради солидных выигрышей! казино 1×slots официальный сайт <a href=https://m1bar.com/user/Zacherynes/>https://m1bar.com/user/Zacherynes/</a>
1×slots рабочее зеркало
Многие азартные клубы ограничивают необходимую вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, обозначенной в описании промоакции, суммы Вы не сможете вывести. Разница будет аннулирована, Вы числе не сможете делать на нее ставки.Такой бесплатный эквивалент средств зачисляется на профиль юзера после воплощения требований и предназначаются они только для игрового процесса. Вывод этих вознаграждений возможен лишь после воплощения вейджеровых критерий. <a href=http://www.gwmph.cn/home.php?mod=space&username=tenderdemonstra>http://www.gwmph.cn/home.php?mod=space&username=tenderdemonstra</a> Фриспины. Бесплатные вращения предназначены для применения в видео-слотах. Внимательно читайте условия – они нередко выдаются для неких машин. В зависимости от клуба продоставляется создавать определенное число ставок. Кстати, современные игорные жилища дают возможность заводить «одноруких бандитов». 1 x slots
<b>Смотреть еще похожие новости:</b>
<a href=https://talkonlinenews.com/viewtopic.php?t=5055>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<a href=https://surfaceprophets.com/members/davidelicy.5309/>1хслотс зеркало</a>
<a href=https://www.donchillin.com/space-uid-382497.html>1×slots регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Ещё одно распространённое акционное предложение – привлекательный презент с сомнительными притязаниями. К примеру, клуб сулит $100 виде бездепа, хотя с вейджером х80 либо х100. Отыграть подобный вейджер фактически невозможно и потому какого-либо концентрироваться на более интересных акциях.
#5737 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
официальные букмекерские конторы casino на телефон <a href=https://kompromat1.online/>1×bet зеркало рабочее на сегодня</a> 1×bet 1 лучшая казино <a href=https://repost.news/>часы казино</a> порно с Максим Глушенков (футбол) casino сайты балтбет букмекерская контора букмекерскую контору пин сайт казино вход porno Нина Пирогова, хоккеистка porno Анна Сидорова, керлингистка
DiskiPlus порно с Аделия Петросян (фигурное катание) DiskiPlus букмекерская контора фонбет официальный сайт <a href=https://www.diskiplus.ru/>DiskiPlus porno Мира Андреева (теннис)</a> DiskiPlus pin casino зеркало DiskiPlus retro casino <a href=https://diskiplus.ru>DiskiPlus букмекерская контора фонбет официальный</a> DiskiPlus букмекерская контора зенит DiskiPlus Набиуллина Эльвира Сахипзадовна порно DiskiPlus casino играть DiskiPlus casino бонус DiskiPlus почему в казино не бывает настенных часов DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus 7k casino официальный
#5738 Charlesgunnyhttp://filmkachat.ru
1× slots casino официальный сайт
Существует ли стратегии для отыгрыша бездепозитных бонусов? К сожалению нет, на выигрыши или проигрыши с бонусов, казино либо игрок повлиять возможности, отдача игр случается от разработчиков игр.Некоторые клубы автоматически начисляют приз на аккаунт игрока последствии исполненья условий получения, но случаются истории, когда бонус надо(надобно) активировать игроку самому. Есть несколько методов активации бонуса: <a href=http://filmkachat.ru/>1×slots мобильная версия войти казино</a> <a href=https://www.jottacloud.com/s/371d1db27e1899f43f18f1216ac5f05f9f6>https://www.jottacloud.com/s/371d1db27e1899f43f18f1216ac5f05f9f6</a> Бездепозитные призы — это подарки от казино вид бонусных средств или фриспинов для игровых автоматов, коие начисляются на аккаунт игрока в процедуры регистрации на веб-сайте заведения. Для получения этих поощрений депозит не потребуется.В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и если, тогда, неоднозначных ситуаций нет возможности куда-то пожаловаться и обосновать собственную правоту. зеркала 1×slots <a href=http://sobaeksanrock.dgweb.kr/bbs/board.php?bo_table=free&wr_id=3064689>http://sobaeksanrock.dgweb.kr/bbs/board.php?bo_table=free&wr_id=3064689</a> Мы собрали и выпустили список наилучших бездепозитных казино с призами за регистрацию, которые гарантируют великодушные выигрыши и моментальные выплаты.Одним из предлогов отдавать преимущество, льготу 1 или другому заведению содержится в привлекательности предлагаемых акций и даровых услуг. Безвозмездные фриспины, выдаваемые без дела создавать какой-либо лепта, в списке располагается далековато не в конце.
1×slots сайт зеркало
Разные казино имеют личные верховодила по выведению выигрыша. Для бездепозитных призов принимаются достаточно высочайшие требования. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до 100 раз в игровых автоматах. Например, в игрок получил даром 10 $, то необходимо несомненно отыграть их, поставив одну тыщу спинов по одному доллару каждый. Стоит обозначить(означить), что не все казино дают возможность играть на призы и не во всех увеселительных заведениях идентичные верховодила для отыгрывания. Некоторые казино запрещают играть на бонусы в блекджек либо ограничивают ставки до 5 %, что значительно увеличивает в 10-ки один число необходимых игр. <a href=https://acerfans.ru/user/JamesTed/>1×slot казино зеркало</a> 1×slots регистрация 1×slotscasino09k online Существует ли стратегии для отыгрыша бездепозитных призов? К огорчению нет, на выигрыши или проигрыши с призов, казино или игрок воздействовать имеет, отдача игр случается от создателей игр.Игры, в которых возможно выступать на бонусные деньги. Проверьте перечень игр, в которых можно выступать на бонусные свои, вероятно они Вам не понравятся и не тратить своё время на эту акцию. <a href=http://eurasiaaz.com/index.php?subaction=userinfo&user=WalterSlurl>http://eurasiaaz.com/index.php?subaction=userinfo&user=WalterSlurl</a> 1×slots сайт Главное преимущество спинов – возможность изучить различные слоты. Также удастся насладиться бонусными раундами, испытать фортуну в риск-туре и преумножить выигрыш за счёт особых знаков. Однако не только игровой процесс заслуживает внимание, ведь никакого сосредоточиться на реальном выигрыше.Бесплатные призы казино без депо можно получить в виде денежных средств на бонусный счет (исключить их можно лишь в отыгрыша), фриспинов, игры или кешбэк-бонуса.
1×slot рабочее зеркало
Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных призов принимаются довольно высокие требования. Часто онлайн-казино советуют отыграть бонусное одобрение до 100 один в игровых автоматах. Например, если игрок получил безвозмездно десять долларов, то нужно будет отыграть их, поставив одну тысячу спинов по 1 доллару каждый. Стоит обозначить(означить), собственно не все казино дают возможность выступать на бонусы и не во всех развлекательных заведениях схожие управляла для отыгрывания. Некоторые казино воспрещают выступать на призы в блекджек или ограничивают ставки до 5 %, что существенно наращивает в десятки один число нужных игр.Верификация важна для добавочной безопасности и может техподдержке выявить бонусхантеров и мошенников. Кстати, на некоторых платформах выводы солидных сумм доступны лишь после подтверждения личности. <a href=https://halqym.kz/user/DoctorLazutaMl/>https://halqym.kz/user/DoctorLazutaMl/</a> А ознакомиться с свежими онлайн казино, Вы сможете с бонусов с выводом прибыли, коие Вы сможете получить без депо.Третитй бездепозитный приз за регистрацию – валютные свои. К раскаянью, начислить рубли либо баксы готовы лишь известные и модные клубы. С их помощью у насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком. сайт 1× slots casino
1хслот зеркало
Прежде чем активировать бездеп, необходимо увериться том,, собственно страна, гражданином коей является игрок, не входит в список не. 1× слот зеркало <a href=http://arskland.ru/people/user/16809/>http://arskland.ru/people/user/16809/</a> Фриплей-бонусы встречаются только в неких клубах. Они зачисляются сразу последствии создания профиля и активны недолговременное время. Если не успеете истратить свои, они просто сгорят. Касаемо времени, в большинстве случаев призы активны в течение часа.Денежные свои. Третий бонус за регистрацию без депозита – наличные. К раскаянью, только известные и модные клубы шансы дать деньги в руб. Либо долларах. С их помощью возможность насладиться любой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед этим необходимо исполненье конкретных критерий.
казино 1×slots
<a href=http://bbs.yxsensing.net/home.php?mod=space&uid=124807>http://bbs.yxsensing.net/home.php?mod=space&uid=124807</a> Чаще всего интернет-казино предлагают бездепозитные бонусы свежим пользователям. Эта промо-акция очень эффективно завлекает новичков, подталкивая их к открытию счета. Конечно, не все они становятся послушными посетителями, хотя сам факт регистрации аккаунта играет на руку заведению. 1×slots сайт Активация случается счет промокодов, которые вводятся в собственном кабинете последствии регистрации. Среди спецпредложений в списке Casino.ru находятся эксклюзивные промокоды, коие доступны лишь гостям портала. Другие способы начисления средств ? автоматическая активация сразу после сотворения аккаунта и получение презента по запросу в службу технической помощи.Свежий бонус начисляется в виде валютных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в использовании своими, в случае отыгрыша оператор имеет ввести ограничение на вывод денег.
<b>Смотреть еще похожие новости:</b>
<a href=http://portal.westcoastbible.org/discussion/viewtopic.php?f=18&t=1965174>1×slots casino регистрация 1×slots review live</a>
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=35895>1×slots сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Сроки активации приза уточняются любым казино, но чаще всего они не превышают недели с момента получения. Игроку непременно надо(надобно) использовать бездеп протяжении обозначенного срока, в ином случае приз просто пропадет. Каждый приз можно получить лишь раз раз, потому в не применять бездеп в срок, у игрока не будет второго шанса им пользоваться.
#5739 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Алена Косторная (фигурное катание) porno Юлия Канакина, скелетонистка <a href=https://slon-ru.com/>казино рублях</a> сайт 1×bet слоты 1×bet зеркало рабочее xbet <a href=https://www.ossetia.tv/>казино фильм смотреть онлайн</a> casino зеркало сайта зеркала официальных сайтов казино лучшие бесплатные онлайн казино 1×bet сайт казино 1 яндекс игры казино официальные букмекерские конторы
DiskiPlus порно с Федор Чалов (футбол) DiskiPlus официальные букмекерские конторы <a href=https://diskiplus.ru/>DiskiPlus 1×bet сейчас</a> DiskiPlus рабочее казино DiskiPlus пин ап casino pin <a href=https://diskiplus.ru>DiskiPlus пари букмекерская контора</a> DiskiPlus скачать 1×bet на андроид DiskiPlus ставки на спорт букмекерские конторы DiskiPlus пина букмекерской конторы DiskiPlus porno Нина Пирогова, хоккеистка DiskiPlus 1×bet 1хбет DiskiPlus официальные букмекерские конторы DiskiPlus 1×bet официальный сайт 1×bet xyz
#5740 Charlesgunnyhttp://filmkachat.ru
1хслотс 1хслотс регистрация перейти на 1×slots
Подарки на праздничные ? приуроченные к парадным датам, требующие условного отыгрыша или начисляются без это. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду.Не стоит путать забаву в демо и использование бонусов. В демонстрационном режиме игрок имеет оценить механику слота, сюжет и оформление. Но игра проводится на условные кредиты, потому отсутствует основное ? чувство азарта. Активируя промокод либо фриспины, клиент по-прежнему не расходует средства деньги на игровые автоматы, хотя имеет сорвать реальный куш! <a href=http://filmkachat.ru/>1 x slots</a> <a href=https://www.scutify.com/articles/2024–11–22-understanding-3d-modeling-costs-a-comprehensive-guide-to-industry-pricing>https://www.scutify.com/articles/2024–11–22-understanding-3d-modeling-costs-a-comprehensive-guide-to-industry-pricing</a> Каждый новичок и профессиональный игрок мечтают живо стартануть и начать создавать настоящие ставки. Для этого довольно арестовать презент, за который не выплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email или телефон. После сего администрация начисляет щедрое вознаграждение повторяющий безвозмездных вращений либо виртуальных кредитов.После получения приза вывод средств для посетителя несомненно недосегаем до, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя либо пара недель. Выводить деньги игрок сможет лишь последствии отыгрыша. скачать 1×slots на андроид мобильная версия <a href=https://pbtur.com.br/users/walternep>https://pbtur.com.br/users/walternep</a> Бонус с зачислением денег на счет дает больше свободы действий. Пользователь сам выбирает, каким образом распорядиться подаренными средствами. Здесь кроме имеют действовать ограничения на перечень доступных игр, но обычно эти рамки не так строги, как в рекламную с бесплатными вращениями.
1×slots официальный регистрация
<a href=https://smm-seo.ru/members/rabofreeol.4209/>1×slots быструю регистрацию а также мгновенное</a> 1×slots сайт зеркало <a href=http://toji.kiukura.com/bbs/board.php?bo_table=free&wr_id=1091634>http://toji.kiukura.com/bbs/board.php?bo_table=free&wr_id=1091634</a> 1 х слотс зеркало
1×slots casino зеркало
Для верификации аккаунта нужно предоставить спецам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, а фотку банковской карты либо скриншот страницы электронного кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для доказательства личности.Шаг 4. Активация. Внимательно выучите обстоятельства, информацию по ограничениям и сроке действия бонусного предложения. Разобравшись с правилами, возможно активировать бонус в собственном офисе (времени ? с внедрением промокода) или по запросу в саппорт. <a href=http://rostyre.com/bitrix/redirect.php?goto=http://galencomposite.ru/bitrix/rk.php?goto=http://rusgasalliance.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/MKHpJcFHwPk>http://rostyre.com/bitrix/redirect.php?goto=http://galencomposite.ru/bitrix/rk.php?goto=http://rusgasalliance.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/MKHpJcFHwPk</a> Способы получения бездепа различаются от вида приза, кот-ый понравился игроку. Но вам в любом случае надо(надобно) быть зарегистрированным в легальном онлайн-казино и доказать свою личность. В общем облике пошаговая аннотация для получения бездепозитного бонуса смотрится так: казино 1× slots официальный сайт
1×slots casino регистрация 1×slots review live
<a href=http://www.carshowsociety.com/forum.php?action=profile;u=2398>1хслотс зеркало на сегодня</a> Для получения приза нужно пригласить в игру нового посетителя. Казино начислит пригласившему фиксированный процент от взносов приглашённого повторяющий бонуса: почаще всего его объем не превышает 10%. Срок деяния бонуса как не превышает месяца: пригласивший получает приз зависимо проигранных ставок приглашённого в первый луна забавы. 1хслотс казино зеркало <a href=http://www.tr.besatime.com/index.php?subaction=userinfo&user=RenaldoEduck>http://www.tr.besatime.com/index.php?subaction=userinfo&user=RenaldoEduck</a>
1×slots официальный сайт скачать
<a href=http://ayaz-aktau.kz/index.php?subaction=userinfo&user=cuddlydevil86>http://ayaz-aktau.kz/index.php?subaction=userinfo&user=cuddlydevil86</a> 1хслот официальный сайт зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/7302/#comment-316978>1 xslots рабочее зеркало</a>
<a href=https://www.allampolgar.hu/showthread.php?tid=2241>1×slots официальный сайт зеркало</a>
<a href=http://link.5nx.ru/viewtopic.php?f=5&t=7580>рабочее зеркало 1×slots</a>
<a href=http://loevil.com/phpBB3/viewtopic.php?t=18851>1×slots зеркало сайта</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Акции распространяются как на все забавы казино, например и на ограниченный список. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и другие. Промо может обхватывать разработки одного производителя. Бездеп не пересекается с иными промоакциями казино. Если на сайте предусмотрен кэшбек, он не начисляется за ставки, сделанные бонусными средствами. Для идентификации платежных реквизитов игрока имеет потребоваться пополнение счета на минимальную необходимую.
#5741 Звоните!https://ooorefin.ru/#rec778070975
Поможем быстро оформить микрозайм наличными на любые цели. Без справок и поручителей, с возможностью досрочного погашения Заявку оставляйте на сайте https://ooorefin.ru/#… или звоните +74956643022, мы всегда рады вас услышать!
АНТИСПАМ MAIL.RU пометило это письмо опасным!
В России спам-рассылку писем запрещает Кодекс РФ об административных правонарушениях (статья 14.3.) и Федеральный закон РФ «О рекламе» (статья 18, п. 1). Жалобы на спам подают в Управление Федеральной антимонопольной службы (УФАС) и в Роскомнадзор (https://rkn.gov.ru/…sk-question/).
#5742 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее на сегодня
Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 $. Если выдаются фриспины, их число изредка превышает нескольких десятков даровых вращений.Предложения с бездепозитными бонусами за регистрацию позволяют новым заведениям привлечь аудиторию на свой вебсайт. А игроки в свою очередь получают вероятность играть на настоящие деньги без депо в казино и заработать маленький стартовый капитал, кот-ый разрешается исключить на карту банка или электронный кошелек. <a href=http://filmkachat.ru/>1×slots сайт</a> Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. <a href=https://www.4sync.com/s/fpXRu8Czr>https://www.4sync.com/s/fpXRu8Czr</a> У любой забавы средства притязания по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система зачтет любую ставку. В рулетке и покере сделать это намного сложнее. Именно потому так принципиально внимательно читать условия получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой игре, то новенькие попросту «спустят приз на ветер».Бездепозитный приз предоставляется новому игроку за конкретные деяния. Часто презент в виде средств или фриспинов выдается за регистрацию, благодаря чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. 1×slots зеркало сайта <a href=http://admtmo.ru/bitrix/rk.php?goto=http://thetfp.com/proxy.php?link=http://velomagazin39.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/MABZTQE-1Jv>http://admtmo.ru/bitrix/rk.php?goto=http://thetfp.com/proxy.php?link=http://velomagazin39.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/MABZTQE-1Jv</a> Выигрыши с призов без инвестициям всегда привязаны к требованию по ставкам и все быть обналичены лишь после исполнения данных требований.Фриспины. Бесплатные вращения предназначены для применения в видео-слотах. Внимательно читайте условия – они часто выдаются для неких машин. В зависимости от клуба вам создавать конкретное число ставок. Кстати, современные игорные жилища выделяют возможность заводить «одноруких бандитов».
1×slots официальный зеркало
<a href=http://3ak.cn/home.php?mod=space&uid=187057>1хслотс казино зеркало</a> 1× slots регистрация в 1×slots casino Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 долларов. Если выдаются фриспины, их число редко выше нескольких десятков безвозмездных вращений.Нет. Для получения бездепозитного бонуса в казино необходима обязательная регистрация на веб-сайте. Играть в слоты даром и без регистрации возможно только в демо режиме. <a href=https://steamboatspringschat.com/forum/members/geraldgob-1466.html>https://steamboatspringschat.com/forum/members/geraldgob-1466.html</a> Для верификации номера аппарата, в личном профиле выберите опцию „Подтвердить номер телефонного“ и введите в соответствующее поле код, полученный в sms-сообщении. 1×slots casino online регистрация На бонусные начисления все быть установлены дополнительные ограничения, которые Вы не учли при отыгрыше. Пока приз полностью не отыгран — средства из казино не выводятся.Активация случается за промокодов, коие вводятся в личном офисе после регистрации. Среди спецпредложений в списке Casino.ru находятся эксклюзивные промокоды, коие доступны лишь посетителям портала. Другие способы начисления средств ? автоматическая активация незамедлительно в сотворения аккаунта и получение презента по запросу в службу технической поддержки.
1×slots официальный demo регистрация в 1×slots casino
У любого игорного заведения свои управляла и обстоятельства. Но, дабы получить бонусы, необходимо выполнить стереотипные деяния:Перед активацией принципиально внимательно изучить условия акции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют значение также лимиты ставок при отыгрыше и сроки, на коих возможно пользоваться предложением. Если бездеп охватывает ограниченный перечень игр, рекомендуется разузнать максимальные коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят лишь том, случае, случае оператор не установил взыскательные ограничения на максимальную необходимую ставки. <a href=http://www.korea-pan.com/bbs/board.php?bo_table=free&wr_id=763204>http://www.korea-pan.com/bbs/board.php?bo_table=free&wr_id=763204</a> Каждый новичок и профессиональный игрок мечтают стремительно стартануть и начать создавать настоящие ставки. Для сего достаточно арестовать подарок, за который надо уплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email или телефонный. После сего администрация начисляет щедрое вознаграждение повторяющий бесплатных вращений или виртуальных кредитов. 1×slots официальный сайт скачать Большинство клубов привлекают внимание игроков за счёт различных презентов. На одних веб-сайтах возможно получить виртуальные кредиты, которые откроют доступ ко всему софту. На иных же, администрация предлагает благотворительные вращения для запуска топовых интернет слотов. Несмотря на разные акции, стоит выделить самые основные.В разделе с призами активировать собственный подарок. Найти игры, для коих учтено одобрение и использовать приз по предназначению.
1×slots зеркало быструю регистрацию а также мгновенное
Но а если вы уже профи по интернет казино, кликаем на красноватую кнопку «Получить» и Вы автоматически перейдете в онлайн казино; 1хслотс казино зеркало <a href=http://jwc.cau.edu.cn/jsearch/viewsnap.jsp?dir=20211019&ctime=2021–10–19%2005:24:49&q=urp&url=http://fresh-prof.ru/bitrix/redirect.php?goto=http://rprofi.ru/bitrix/rk.php?goto=https://telegra.ph/Poluchenie-zakaznogo-pisma-ot-imeni-rodstvennika-09–23>http://jwc.cau.edu.cn/jsearch/viewsnap.jsp?dir=20211019&ctime=2021–10–19%2005:24:49&q=urp&url=http://fresh-prof.ru/bitrix/redirect.php?goto=http://rprofi.ru/bitrix/rk.php?goto=https://telegra.ph/Poluchenie-zakaznogo-pisma-ot-imeni-rodstvennika-09–23</a> Прежде чем активировать бездеп, нужно убедиться сомнений, что страна, гражданином коей является игрок, не заходит в перечень разрешенных.
1×slots бонус за регистрацию
Во всех легальных онлайн-казино Беларуси нужно подтверждение паспортных данных для забавы — это заявка правительства страны.Благодаря программке лояльности от игорного заведения, возможно брать превосходный старт и без добавочных инвестициям запустить видеослоты. Кроме как, можно рассчитывать на реальную фортуну и получить, без инвестиции собственных финансов, великой выигрыш. Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных обстановок с казино, когда после отыгрыша бездепа для не дадут вывести солидную сумму выигрыша.Перед активацией важно пристально выучить условия акции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, на коих возможно пользоваться предложением. Если бездеп охватывает узкий список игр, рекомендовано узнать максимальные коэффициенты, степень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь в том случае, если оператор не установил требовательные лимитирования на максимальную сумму ставки. <a href=http://www.plcolor.co.kr/bbs/board.php?bo_table=free&wr_id=938647>http://www.plcolor.co.kr/bbs/board.php?bo_table=free&wr_id=938647</a> Помимо прочего, для вывода средств по бездепу необходимо привнести на счёт свой 1-ый депозит — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально вероятную необходимую, после чего вывод средств станет доступен. 1×slots актуальное зеркало С этими ординарными советами каждое казино с призом за регистрацию способно принести в разы больше выгоды и полезности.
<b>Смотреть еще похожие новости:</b>
<a href=https://10nsk.ru/user/JosephSuple/>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<a href=https://sparta.training/faq/online-returns/#comment-66981>x1 slots регистрация в 1×slots casino</a>
<a href=https://isomedu.com/forum/profile/josephdrons/>1×slots зеркало этих способов предполагает регистрацию</a>
<a href=https://bajarmp3.net/showthread.php?tid=409810&pid=667424#pid667424>1 x slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вейджер не более х30–35 является применимым. Опытные игроки утверждают, что с этим вейджером реально остаться в плюсе, случае правильно подойти к выбору игрового аппарата. Бонус за регистрацию в казино без депо с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша имеет потребоваться устроить ставки на сумму, в количество 10-ов один превосходящую сумму приза или выигрыша.
#5743 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало подтвердит вашу регистрацию если говорить
В наше время очень просто получить приз за регистрацию в казино. Практически каждый игорный жилище с готовностью начислит деньги либо благотворительные вращения. Многие гэмблеры используют этим и не стесняются регистрироваться в каждом клубе с прибыльными критериями. Кстати, это отличная вероятность выработать победную тактику и сорвать джекпот. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и если, тогда, неоднозначных ситуаций нет способности куда-то пожаловаться и обосновать свою правоту.Допустим, за регистрацию вы получили бездеп в размере 2 000 руб. С вейджером х30. В этом случае предстоит сделать ставок, на общую необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать реальные деньги. Однако не забывайте, что с любого дара выйдет исключить определённую сумму (почаще всего менее $200). <a href=https://trumpbookusa.com/blogs/259423/Professional-3D-Animation-Services-in-the-Digital-Age>https://trumpbookusa.com/blogs/259423/Professional-3D-Animation-Services-in-the-Digital-Age</a> 1×slots официальный сайт зеркало <a href=https://carpentryforums.com/member.php?action=profile&uid=5587>https://carpentryforums.com/member.php?action=profile&uid=5587</a> Обычно для получения бонусов без депо, казино выдвигает лояльные и абсолютно выполнимые условия, но есть ряд деяний которые воспрещены и могут повлечь за собой противные последствия:Классическая разновидность бонуса за творение аккаунта. Его превосходство заключается сомнений, собственно заказчик может других выбирать аппараты и создавать ставки в их. Иногда список игровых автоматов ограничен оператором, хотя все равно это другого, чем один-единственный дешевый разъем, как в случае с внедрением фриспинов.
1×slots зеркало регистрацию более популярный вариант это
Для верификации номера аппарата, в личном профиле выберите опцию „Подтвердить номер телефонного“ и введите в соответствующее поле код, приобретенный в sms-сообщении. 1×slots официальный сайт мобильная версия Существует ли стратегии для отыгрыша бездепозитных бонусов? К раскаянью нет, на выигрыши или проигрыши с бонусов, казино или игрок воздействовать не может, отдача игр происходит от разработчиков игр. <a href=http://dns2.shadr.ru/user/Tyronelam/>http://dns2.shadr.ru/user/Tyronelam/</a> 1×slots регистрация 1×slots casino c2d ru Осталось избрать казино с бонусом за регистрацию и создать профиль. После активации дара выигрыш в от Фортуны и способностей.
рабочее зеркало 1хслотс
Бездеп с фриспинами имеет обхватывать всю коллекцию игр на веб-сайте либо разработки одного провайдера. Обычно предлагается конкретный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш может быть выведен в того, как пользователь отыграет данную сумму. Возможность расценить полный перечень слотов — главное достоинство данной разновидности. Игроку становятся доступны те функции, которые отсутствуют в демонстрационном режиме, а вероятность выиграть настоящие средства добавляет ясных азартных чувств.Баланс игрока пополняется на подобающую сумму. К ней применяется вейджер, указанный в правилах промоакции. Вывести выигрыш можно будет последствии того, как юзер сделает требуемый объем ставок из личных средств. В редких случаях бездеп работает в формате Free Play. На счет пользователя зачисляется крупная сумма, и предоставляется малый срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по окончании сего периода сумма на счету будет превосходить первоначальную, то разность можно несомненно вывести или применять для дальнейших ставок. <a href=http://www.kottinghoermanns.at/index.php?option=com_akobook>http://www.kottinghoermanns.at/index.php?option=com_akobook</a> Если речь идет об неповторимых предложениях, возможность понадобиться регистрация в казино по ссылке с партнерского вебсайта.Акции распространяются как на все игры казино, например и на ограниченный список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и. Промо может обхватывать разработки одного производителя. Бездеп не пересекается с иными акциями казино. Если на веб-сайте предусмотрен кэшбек, он не начисляется за ставки, сделанные бонусными средствами. Для идентификации платежных реквизитов игрока возможность понадобиться пополнение счета на минимальную сумму. 1×slots регистрация на сайте 1×slots ru com Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы которые возникают у начинающих.
1×slots актуальное зеркало
1хслот зеркало <a href=http://j90806hs.bget.ru/user/DoctorLazutasi/>http://j90806hs.bget.ru/user/DoctorLazutasi/</a> Вейджер в переводе с английского означает «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша полученного приза, в нашем случае бездепозитного. Число ставок роли не играет — принципиально только набрать сумму, пропорциональную сумме поощрения.Свежий бонус начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в использовании своими, ну случае отыгрыша оператор имеет установить ограничение на вывод денег.
казино 1×slots
Размер призов почаще всего чисто символический и не превышает 50 рублей. Приятно, хотя ощутимым бустом в игре ли станет. Эффективность бездепов в рекламного прибора расценили многие операторы. Малоизвестные площадки употребляют эти промоакции, дабы быстро набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны неизменных посетителей. Не все сайты, дающие подарки без депозита, рекомендованы к забаве. За привлекательным промоописанием все скрываться неосуществимые обстоятельства отыгрыша и подводные камешки.Зарегистрируйтесь. Для регистрации чаще всего достаточно ввести собственный номер телефона и почтовый адрес, последствии чего ввести полученный код из СМС. Возможно, требуется показать промокод. В правилах акции несомненно написано, где его хотелось включать. Иногда это хотелось создавать при регистрации, от — уже последствии творения личного офиса, на отдельной странице. <a href=https://cashalotblog.blogspot.com/2024/09/unlocking-power-of-undress-ai-deep-dive.html>https://cashalotblog.blogspot.com/2024/09/unlocking-power-of-undress-ai-deep-dive.html</a> 1хслот скачать Чтобы бездеп не был начислен на Ваш аккаунт, Вам не активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк механически, а Вы не планируете его применять, обратитесь в службу с пожеланием отменить бездепозитный бонус.
<b>Смотреть еще похожие новости:</b>
<a href=http://u0382101.isp.regruhosting.ru/index.php/forum/general-questions-and-how-tos/68883-otzyvy-o-tovarakh?start=2535#135988>1×slots зеркало быструю регистрацию а также мгновенное</a>
<a href=https://sadhaka.nl/forum/viewtopic.php?t=102624>1×slots casino регистрация 1×slots review live</a>
<a href=https://minifishtank.net/forum/member.php?action=profile&uid=1356>1×slots зеркало регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Мы делаем ударение на ключевых положениях верховодил, рассказываем о территориальных лимитированиях и кратко информируем о других акциях обговариваемого казино. Зачастую бездепозитные бонусы казино для игры предлагаются различными заведениями азартных игр в маркетинговых промоакций либо в целях привлечения к для новых игроков. Для бездепозитных призов в казино 2022 геймеру не нужно пополнять счет до этапа вывода желанных средств.
#5744 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия скачать
Каждая игровая перрон отличается критериями по получению и отыгрышу бездепов. В правилах отчетливо расписаны временные рамки, за которые надо(надобно) прокрутить вейджер. Также не запамятовывайте на наибольший объем ставки и максимальную сумму выплаты. С другой стороны, дабы получить бездепозитные призы казино, достаточно потратить не более 1 минутки. <a href=http://filmkachat.ru/>1хслотс регистрация в 1×slots casino</a> <a href=https://www.4yo.us/blogs/311034/From-Digital-Lines-to-Artistry-Modern-Approach-to-Sketch-Rendering>https://www.4yo.us/blogs/311034/From-Digital-Lines-to-Artistry-Modern-Approach-to-Sketch-Rendering</a> 1хлот регистрация в 1×slots casino <a href=http://hitachiprojector.co.kr/bbs/board.php?bo_table=free&wr_id=37447>http://hitachiprojector.co.kr/bbs/board.php?bo_table=free&wr_id=37447</a> Почти все игровые клубы просят свидетельство контактных данных игрока для получения бездепозитного бонуса.
1×slots регистрация на 1хслотс
Условия вывода выигрыша. В неких заведениях для удачного вывода с бездепозитного бонуса довольно пополнения баланса и доказательства личности. В иных же клубах, необходимо несколько один прокрутить собственный депозит. 1×slots регистрация 1×slots casino c2d ru <a href=https://forex-bitcoin.com/members/368192-mycsgosal>https://forex-bitcoin.com/members/368192-mycsgosal</a> Приглашаем делиться суждениями о призах. Это поможет другим пользователям избирать более выгодные предложения. 1×slots быструю регистрацию а также мгновенное Благодаря программе преданности от игорного заведения, можно арестовать превосходный старт и без дополнительных инвестициям запустить видеослоты. Кроме как, возможно рассчитывать на реальную фортуну и получить, без инвестиции собственных финансов, великий выигрыш.
1×slots регистрацию более популярный вариант это
Выбирая бесплатный бонус, пристально изучайте управляла. Убедитесь, собственно вас возможно себя роль в акции. Уточните, в каких забавах можно исполнять обстоятельства вейджера. При необходимости задавайте вопросы представителям саппорта. Рассмотрим принцип его деяния на примере. Допустим, вы зарегистрировались и получили $10 not the slightest deposit bonus с вейджером х50. Это значит, что выигранные средства можно несомненно выводить не раньше, чем после как, как общая сумма ставок достигнет $500.Помните, что в неких забавах сумма ставки идет в зачет вейджера только отчасти. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки считаются как отыгранные средства, тот как в слотах идет в зачет все 100% суммы. <a href=http://seller24.co.kr/bbs/board.php?bo_table=free&wr_id=615084>http://seller24.co.kr/bbs/board.php?bo_table=free&wr_id=615084</a> Ограничения по забавам. Администрация запрещает игрокам кое-какие игровые автоматы с бездепозитным бонусом, деньгами либо безвозмездными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда дробленье производится по виду игр. Например, отыгрыш вероятен на всех игровых аппаратах, но запрещен в настольных забавах и в разделе Live Casino. 1×slot официальный сайт
1× slots casino официальный сайт
Обычно для получения призов без депо, казино выдвигает приклнные и вполне выполнимые обстоятельства, хотя есть ряд поступков которые запрещены и шансы стать досадные последствия: Но на некоторых азартных платформах похожие вознаграждения могут получить теперь зарегистрированные пользователи. В таком случае, бонусы предоставляются в рамках оригинальных акций или же неким геймерам в виде акционного предложения, которое прибывает на почту с целью «вернуть» игрока в свое казино.Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных призов принимаются достаточно высокие притязания. Часто онлайн-казино рекомендуют отыграть бонусное поощрение до ста один в игровых автоматах. Например, в игрок получил бесплатно десять $, то нужно будет отыграть их, поставив одну тысячу спинов по одному баксу любой. Стоит отметить, что не все казино дают возможность выступать на призы и не во всех развлекательных заведениях схожие верховодила для отыгрывания. Некоторые казино воспрещают играть на бонусы в блекджек либо ограничивают ставки до пяти процентов, что существенно наращивает в 10-ки один число нужных игр. 1хлот регистрация в 1×slots casino <a href=http://stroyrem-master.ru/user/DoctorLazutaoi/>http://stroyrem-master.ru/user/DoctorLazutaoi/</a> Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, чтобы снова получить бесплатный бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ожидает неизбежное санкция.Денежные средства. Третий приз за регистрацию без депо – наличные. К огорчению, лишь знаменитые и популярные клубы все уяснить средства в руб. Или баксах. С их поддержкою появится насладиться любой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед данным нужно исполнение определенных критерий.
1×slots мобильная версия войти казино
2. Создать новый профиль. Для регистрации нужно наполнить небольшую анкету либо зайдите в индивидуальный кабинет при помощи социальных сетей;В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и в случае неоднозначных ситуаций нет способности куда-то посетовать и доказать свою правоту. Бездепозитный приз казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в этом и содержится основное различие. <a href=https://mixup.wiki/index.php/User:BobbyePatel24>https://mixup.wiki/index.php/User:BobbyePatel24</a> Бонус за регистрацию в казино без депозита с выводом денег надо(надобно) отыграть. Зачастую для отыгрыша имеет понадобиться устроить ставки на сумму, в некоторое десятков один превышающую сумму приза или выигрыша. 1×slots зеркало сайта
<b>Смотреть еще похожие новости:</b>
<a href=https://acerfans.ru/faq/796-kak-vylozhit-na-forum-informaciju-iz-zhurnala.html>1×slots зеркало проходить регистрацию это отличный вариант</a>
<a href=https://projects.sare.org/people/jamestrazy/>1×slots казино мобильная версия</a>
<a href=http://moneysweet.listbb.ru/viewtopic.php?f=2&t=5828>рабочее зеркало 1×slots</a>
<a href=http://youboy.comwww.molifan.net/space-uid-2295552.html>онлайн казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подтверждение регистрации. Казино требуют привязки профиля к электрическому адресу и номеру телефонного. Для этого на e-mail отправляется письмо ссылаясь, а на аппарат ? текстовое сообщение с кодом. Как управляло, новоприбывшие игроки в первую очередь хотят ознакомиться с методами ввода и вывода денежных средств и сроки исполнения поданных заказов дабы конкретно понимать, как стремительно они смогут исключить собственный казино бонус за регистрацию без депо на электронный кошелек либо же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино соперничают меж собой. Ведь если бы определенную компанию давало только одно онлайн-заведение, то вряд ли бы посетители заметили казино с бонусом за регистрацию и возможность бы рассчитывать только на вознаграждение вид бонуса на 1-ое вложение. К каждому заведению регулярно идет завлекать новых игроков, что, конечном, лишь на руку всем играющим.
#5745 Ремонт iPhone 15https://remont-iphone-15-frest.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт iphone 15, можете посмотреть на сайте: <a href=https://remont-iphone-15-frest.ru/>ремонт iphone 15 рядом</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#5746 Timothyirolfhttps://memphis-depay-az.org
Welcome to the fan site <a href=https://memphis-depay-az.org/>memphis depay</a> dedicated to the active Dutch footballer Memphis Depay, his career path with clubs and the Dutch national team. Tattoos, personal life and news.
#5747 WendellSethttps://jordi-alba-az.org
Biography of Spanish footballer <a href=https://jordi-alba-az.org/>jordi-alba-az org</a> Jordi Alba: Left back for Barcelona and the Spanish national team, trained at the academies of Barcelona and Valencia.
#5748 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Илюшникова Татьяна Александровна суть казино <a href=https://sovsekretno.net/>1×bet</a> порно с Баталина Ольга Юрьевна букмекерская контора ставки <a href=https://specreporter.com/>ап казино</a> 7k casino зеркало лучшая казино 1×bet скачать приложение скачать 1×bet 1×bet xyz казино бесплатно фильм казино бесплатное казино
DiskiPlus ставки на спорт букмекерские конторы DiskiPlus леон букмекерская контора <a href=https://www.diskiplus.ru>DiskiPlus Александра Бортич</a> DiskiPlus букмекерские конторы бет DiskiPlus казино можно <a href=https://diskiplus.ru>DiskiPlus казино сегодня</a> DiskiPlus почему в казино не бывает настенных часов DiskiPlus casino зеркало сегодня DiskiPlus скачать pin casino DiskiPlus казино рояль смотреть DiskiPlus порно с Аделия Петросян (фигурное катание) DiskiPlus porno Яна Троянова DiskiPlus casino приложения
#5749 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Бондаренко Анастасия Борисовна 1win casino <a href=https://krtka.info/>порно с Гатагова Ольга Анатольевна</a> bitz casino букмекерская контора официальный сайт скачать <a href=https://vestnik-jurnal.com/>букмекерская контора мостбет</a> порно с Георгий Джикия (футбол) яндекс казино порно с Александр Большунов (лыжные гонки) pin up casino buzz 1×bet официальный скачать бесплатно играем казино champion casino
DiskiPlus 1×bet xbet DiskiPlus казино рояль смотреть <a href=https://diskiplus.ru/>DiskiPlus порно с Елена Никитина, скелетонистка</a> DiskiPlus casino промокод DiskiPlus сайте букмекерской конторы фонбет <a href=https://diskiplus.ru>DiskiPlus казино гта 5</a> DiskiPlus pin up casino пин DiskiPlus bet casino DiskiPlus vodka casino DiskiPlus top casino DiskiPlus порно с Артемий Панарин (хоккей) DiskiPlus порно с Максим Глушенков (футбол) DiskiPlus porno Андрей Рублев (теннис)
#5750 RichardGephttps://buy-cannabis-prague.com
Marijuana, marijuana in Prague <a href=https://buy-cannabis-prague.com/>cannabis shop in Prague</a>
#5751 PedroTighttps://buy-weed-prague.com
Hemp delivery in Prague <a href=https://buy-weed-prague.com/>https://buy-weed-prague.com</a>
#5752 Ronaldinorohttps://taya365-casino.pro
Try your luck at <a href=https://taya365-casino.pro/>taya365 app</a>, where excitement meets reliability! Hundreds of popular games, unique promotions and instant payouts await you.
#5753 RobertApepthttps://kapitan-amerika-az.com
Изготовление подарочных <a href=https://giftbox-3.ru/>https://giftbox-3.ru</a> коробок оптом в спб и упаковочная бумага в коробку в Ставрополе.
#5754 PhilipEnribhttps://michael-jordan-az.org
Biography of American basketball legend Michael Jordan <a href=https://michael-jordan-az.org/>https://michael-jordan-az.org</a> personal life, participation in the Monaco Champions League match, film projects, marriage to Yvette Prieto, parenthood, net worth and collaboration with Michael Jackson. Latest updates in 2024.
#5755 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало рабочее
Выигрыши с призов без инвестициям всегда привязаны к притязанию по ставкам и имеют быть обналичены лишь в выполнения этих притязаний. <a href=http://filmkachat.ru/>1 xslots рабочее зеркало</a> <a href=http://www.gothicpast.com/myomeka/posters/show/78646>http://www.gothicpast.com/myomeka/posters/show/78646</a> Для доказательства электронной почты, просто перейдите по активной ссылке в письме, полученном от игрового заведения.Иногда в поощрения за регистрацию шансы выдаваться билеты для участия в турнирах. Условия их проведения довольно выделяются, поэтому мы советуем ознакомиться с любым предложением отдельно. 1хслотс 1хслотс регистрация перейти на 1×slots <a href=http://www.hpt.co.kr/bbs/board.php?bo_table=free&wr_id=47182>http://www.hpt.co.kr/bbs/board.php?bo_table=free&wr_id=47182</a> Демоказино есть практически на каждом веб-сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются веско пореже: там в случае выигрыша и соблюдения критерий акций бездеп можно превратить в реальные деньги.
1×slots зеркало на сегодня
<a href=http://kemsrr.forumex.ru/viewtopic.php?f=7&t=2142>1×slots бонус за регистрацию</a> 1×slots зеркало регистрацию более популярный вариант это B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax <a href=https://mittelrheinhandball.de/member.php?action=profile&uid=20171>https://mittelrheinhandball.de/member.php?action=profile&uid=20171</a> Бездеп с фриспинами имеет обхватывать всю коллекцию игр на веб-сайте либо разработки 1-го провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш может быть выведен в такого, как пользователь отыграет эту необходимую. Возможность оценить полный функционал слотов — главное достоинство данной разновидности. Игроку становятся доступны что, эти функции, коие отсутствуют в демонстрационном режиме, а возможность выиграть настоящие средства прибавляет ярких азартных ощущений. 1×slots зеркало проходить регистрацию это отличный вариант Фриспины предназначены для использования в видео слотах. Внимательно ознакомьтесь с условиями – часто их выдают на кое-какие автоматы. В зависимости от клуба, у вас выйдет сделать определённое количество ставок. Кстати, продвинутые игорные жилища разрешают запускать любых «одноруких злодеев».
1×slots casino регистрация 1×slots review live
Мы проделываем ударение на ключевых положениях управлял, рассказываем о территориальных ограничениях и кратко информируем о иных промоакциях обсуждаемого казино. Призовые начисления без депо шансы предоставляться для участия в турнирах интернет казино. Потратить перечисленные средства можно необыкновенно в этой акции. Условия их проведения включают в себя лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться этим предложением, лучше выучить его управляла. <a href=http://www.stavenue.com/forum/index.php?action=profile;u=58792>http://www.stavenue.com/forum/index.php?action=profile;u=58792</a> Чтобы других увериться в преимуществах бездепозитных бонусов, достаточно зарегистрироваться в казино и получить поощрение.Получить приветственный приз все лишь новые посетители онлайн-казино. Способы описаны в условиях акции каждого легального казино, почаще всего это: 1×slots актуальное зеркало Бесплатные призы казино без депо можно получить в виде денежных средств на бонусный счет (исключить их можно только после отыгрыша), фриспинов, игры или кешбэк-бонуса.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Активация денежного гонорары происходит механически в творенья профиля или применения промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на странички казино в соц сетях или на рассылку рекламных известий, скачать и ввести вспомогательный софт и т.д. Прежде чем активировать бездеп, нужно увериться никаких, собственно государство, гражданином которой является игрок, не входит в перечень разрешенных.Получив свой подарок, Вы сможете бесплатно играть на настоящие средства, а выполнив условия отыгрыша, вывести свой выигрыш. У любой игры свои требования по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система засчитает каждую ставку. В рулетке и покере сделать это намного труднее. Именно потому например важно пристально читать обстоятельства получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой ирге, то новички попросту «спустят приз на ветер».Самый распространённый из подобных бонусов, окончательно же, бездеп на денек рождения посетителя — приз вид фиксированной суммы или фриспинов поступает на счёт игрока, а воспользоваться им возможно на установленного периода времени. 1×slots официальный сайт зеркало <a href=https://rekordmeister.ru/user/TerryHom/>https://rekordmeister.ru/user/TerryHom/</a>
1×slots коды
Акции, приуроченные к календарным праздничным, посещают рассчитаны как на всех пользователей, например и на категории: к, презент на 8 марта девушкам-игрокам либо мужикам на 23 февраля. <a href=http://kuh-plus.ru/bitrix/redirect.php?goto=http://polinom.biz/bitrix/rk.php?goto=http://forum.raut.ru/bitrix/click.php?goto=https://telegra.ph/Kak-tochno-opisat-svoe-semejnoe-polozhenie-v-ankete-09–23>http://kuh-plus.ru/bitrix/redirect.php?goto=http://polinom.biz/bitrix/rk.php?goto=http://forum.raut.ru/bitrix/click.php?goto=https://telegra.ph/Kak-tochno-opisat-svoe-semejnoe-polozhenie-v-ankete-09–23</a> рабочее зеркало 1×slots Осталось избрать казино с бонусом за регистрацию и сделать профиль. После активации дара выигрыш зависимости от Фортуны и навыков.
<b>Смотреть еще похожие новости:</b>
<a href=http://sladkierecepti.5nx.ru/viewtopic.php?f=8&t=6910>1×slots официальный сайт мобильная версия</a>
<a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=53077>1хслотс казино зеркало</a>
<a href=https://creapnl.com/foros/tema/1×slots-%d1%81%d0%ba%d0%b0%d1%87%d0%b0%d1%82%d1%8c-%d0%bd%d0%b0-%d0%b0%d0%b9%d1%84%d0%be%d0%bd-40/>1×slots скачать на айфон</a>
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=274715>1×slots зеркало сайта</a>
<a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=95376>1× slots официальный</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Условия вывода выигрыша. В некоторых заведениях для успешного вывода с бездепозитного бонуса довольно пополнения баланса и подтверждения личности. В других же клубах, необходимо количество раз прокрутить свой депо.
#5756 Pedronarhttps://ppk-213.ru
программа производственного контроля цена <a href=https://ppk-213.ru/>программа производственного контроля в Москве</a>
#5757 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало порно с Зырянова Анастасия Владимировна <a href=https://rumafia.news/>Радченко Светлана Юрьевна порно</a> пин casino porno Александр Соболев (футбол) <a href=https://rhymes-punches.com/>порно с Виктория Синицина, фигуристка</a> казино зеркало сегодня up casino зеркало вавада казино порно с Илья Осипов (киберспорт) 1×bet вход Ходнева Светлана Владимировна порно зеркала официальных сайтов казино
DiskiPlus казино без DiskiPlus casino приложения <a href=https://diskiplus.ru>DiskiPlus порно с Максим Глушенков (футбол)</a> DiskiPlus casino pin официальный DiskiPlus букмекерская контора бетсити <a href=https://diskiplus.ru>DiskiPlus спорт букмекерская контора</a> DiskiPlus 1×bet зеркало xbet xyz DiskiPlus porno Анна Сидорова, керлингистка DiskiPlus new casino DiskiPlus porno Игорь Акинфеев (футбол) DiskiPlus porno Елизавета Туктамышева DiskiPlus порно с Алина Загитова DiskiPlus скачать 1×bet 1×bet xyz
#5758 Charlesgunnyhttp://filmkachat.ru
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
На безвозмездные бонусы онлайн-казино почти практически распространяется лимитирования по стране проживания посетителей. Даже случае для разрешено раскрывать счет и выступать на деньги в заведении, это еще не означают, что вас доступны not the slightest deposit bonuses. <a href=http://filmkachat.ru/>1×slot казино зеркало</a> Для верификации номера аппарата, в личном профиле выберите опцию „Подтвердить номер телефона“ и введите в отвечающее фон код, приобретенный в sms-сообщении.Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, a зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. <a href=https://output.jsbin.com/kozot>https://output.jsbin.com/kozot</a> В наше время довольно просто получить приз за регистрацию в казино. Практически каждый игорный жилище с радостью начисляет деньги либо благотворительные вращения. Многие гэмблеры пользуются данным и не стесняются регистрироваться в каждом клубе с выгодными условиями. Кстати, это отличная вероятность выработать победную тактику и сорвать джекпот. 1×slots регистрация на 1хслотс <a href=http://maglik.ru/user/DeweyGak/>http://maglik.ru/user/DeweyGak/</a> Как и другие акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такого предложения являются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает новых посетителей и дозволяет им составить впечатление о функционале, не рискуя вескими совокупностями.
1×slots casino регистрация
Благодаря программке лояльности от игорного заведения, возможно арестовать превосходный старт и без дополнительных инвестициям запустить видеослоты. Кроме такого, возможно рассчитывать на реальную удачу и получить, без вложения личных финансов, большой выигрыш. <a href=https://www.katzenforum.at/forum/media/users/jamesagema.16012/>1х слот 1хслотс регистрация перейти на 1×slots</a> 1×slots casino регистрация 1×slotscasino09k online После получения бонуса вывод средств для клиента будет недоступен до, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя или чета недель. Выводить деньги игрок может лишь после отыгрыша.Иногда виде бездепа, казино дарит минимальный приз (до 50 рублей), из-за которого надо заморачиваться. <a href=http://illustrator.odub.tomsk.ru/index.php?subaction=userinfo&user=PatrickGal>http://illustrator.odub.tomsk.ru/index.php?subaction=userinfo&user=PatrickGal</a> Не стоит незамедлительно же открещиваться от приветственных даров в похожих казино. Администрация готова начислить средства или фриспины, хотя предварительно работники обязаны увериться, собственно вы не аферист. Дело в, собственно развелось очень большое охотников за бонусами. Они выучились врать систему и наваривать крупные суммы средств.Для тех, кто лишь подумывает испытать собственную удачу, а также для профессиональных игроков, ищущих свежие площадки для выигрышей, основные лицензированные казино нередко организуют различные акции, и лучшее услуг за время – как для начинающих, например и для проф игроков – бездепозитный приз за регистрацию. 1×slots регистрация 1×slots casino c2d ru Далее требуется отыграть вагер и вывести выигрыш. Игрокам без навыка крупно подфартило, у получить десятки даров за 1 регистрацию. Если не смогли получить Бездепозитный бонус, не беспокойтесь. Обратитесь в интернет чат, оператор поможет исправить.Законодательство, регулирующее азартные забавы в разных государствах, влияние на возможности операторов. В результате пользователи из отдельных ареалов сталкиваются с лимитированиями со стороны казино. Это возможность быть как глубокий отказ в доступе, например и невозможность загружать игры отдельных изготовителей.
1×слот регистрация в 1×slots casino
Автоматическая активация на самой удобной, но ручной метод содержит перед ней достоинства. Прежде чем применять вознаграждение от казино, стоит заранее найти, сколько времени потребуется на исполнение всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деяния приза. При верном раскладе бездепы — это прекрасный способ выступать на деньги без растраты личных средств. Есть некоторое советов, следуя которым возможно извлечь максимум выгоды из подобных акций казино. Играть стопам только на лицензированных площадках. Скриптовые сайты не дурачат с бонусными предложениями, но и употребляют пиратский софт с измененным ГСЧ. Выиграть на таких автоматах невероятно. <a href=http://gkwin.net/bbs/board.php?bo_table=free&wr_id=313978>http://gkwin.net/bbs/board.php?bo_table=free&wr_id=313978</a> Бездепозитный приз – это экономическое вознаграждение, коие выдается соучастнику забавы в казино, для его вербования и появления заинтригованности. Любой гость, кот-ый соответствует условиям выдачи похожего бездепозитного бонуса, возможность претендовать на получение вышеуказанного приза. Такое одобрение является более действенным методом, дающим вероятность стартовать в игре, не вкладывая личных материальных средств. 1×slots официальный demo регистрация в 1×slots casino Некоторые сайты, прежде чем обмануть регистрацию игроков, предлагают ответить на некоторое базовых вопросов. Цель проведения похожей викторины – выявить случайных людей, коие не имеют представления о покере, и не разрешить получения ими призов. Если гость теснее играл в казино, то ответить на полтора 10 несложных вопросов несомненно нетрудно. Очень нередко, ответы можно найти на официальных сайтах данных учреждений.
1×slot казино зеркало
1×slots зеркало регистрацию более популярный вариант это <a href=https://wolvesbaneuo.com/wiki/index.php/Green_Pharmacy_Altai_Online_Store>https://wolvesbaneuo.com/wiki/index.php/Green_Pharmacy_Altai_Online_Store</a>
1× slots официальный
Верификация аккаунта. Лучше доказать личность сразу последствии регистрации, дабы потом не было заморочек с выводом средств. Верификация может проходить 2-мя маршрутами: При небольшой сумме бонуса рекомендуется играть по низким ставкам, а использовать наибольшие превосходнее лишь что, нет случае, в вейджер слишком великий, а время на отыгрыш крепко ограничено.Такой безвозмездный эквивалент средств зачисляется на профиль пользователя последствии воплощения требований и предназначаются они лишь для игрового процесса. Вывод таких вознаграждений вероятен лишь после воплощения вейджеровых условий. <a href=https://kr-osvita.gov.ua/user/Chrisstevy/>https://kr-osvita.gov.ua/user/Chrisstevy/</a> Вейджер менее х30–35 считается приемлемым. Опытные игроки заявляют, собственно с этим вейджером реально остаться в плюсе, если правильно подойти к выбору игрового аппарата.В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, нужно обратиться в службу спустя лайв-чат на веб-сайте казино. 1×slots сайт зеркало При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, коие возможно посвятить забаве в казино.Составленный знатоками Casino.ru список онлайн-казино с бездепозитным призом дозволяет игрокам сопоставить спецпредложения различных операторов.
<b>Смотреть еще похожие новости:</b>
<a href=https://melhorlance.com.br/minha-conta/>1×slots регистрация на 1хслотс</a>
<a href=https://g2clubs.com/healthy-workout/google/#comment-29390>1×slots официальный сайт зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Сразу после активации промокода возможно воспользоваться презентом. Как уже упоминалось, бонусы бывают трёх видов – фриспины, кредиты и фриплей-бонусы. При подмоги такого поощрения оператор имеет кроме привлекать клиентов, которые ранее проявляли активность на сайте, хотя по некий причине прекратили выступать. В данном случае промокод высылается юзеру по электрической почте либо в виде SMS.
#5759 FelipeLomhttps://lifeofnews1.com
Credit score requirements for FHA loans <a href=https://lifeofnews1.com/>https://lifeofnews1.com</a> minimum threshold and tips for improving. Find out how to increase your chances of getting a loan, as well as what affects approval. Detailed information for those who want to get a mortgage through FHA.
#5760 MarvinJuikehttps://sunnydays100.com
Auto loans from Community Credit Union <a href=https://sunnydays100.com/>https://sunnydays100.com</a> are simple, affordable, and great value. Low interest rates and flexible repayment options make it easy to buy a new or used car.
#5761 NelsonFloryhttps://funnydays1.com
Home Equity Loans <a href=https://funnydays1.com/>https://funnydays1.com</a> How They Work, What Are the Terms and Benefits? Get the full details on how to use your home's value for financial purposes. Find out more today!
#5762 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
В разделе с призами активировать свой презент. Найти забавы, для коих учтено одобрение и применять приз по назначению. <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> Бонус начисляется игроку сразу после регистрации и прохождения верификации в казино и не просит от клиента внесения депо. Как правило, размер приза в схожем случае довольно стыдливый, впрочем разрешает новичкам познакомиться с игрой без риска настоящими средствами.Но существуют азартные заведения, готовые просто так вручить деньги на забаву. Для этого достаточно создать профиль. Чтобы вывести выигрыш, сначала нужно выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа. <a href=https://letterboxd.com/lexxeagle/list/revolutionary-approaches-in-modern-virtual/>https://letterboxd.com/lexxeagle/list/revolutionary-approaches-in-modern-virtual/</a> Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша бонусов. Заведения постоянно устанавливают максимальную ставку, возможную по условиям вейждера. 1х слот 1хслотс регистрация перейти на 1×slots <a href=https://forum.lazarev.ru/memberlist.php?mode=viewprofile&u=158307>https://forum.lazarev.ru/memberlist.php?mode=viewprofile&u=158307</a>
1 xslots рабочее зеркало
x1 slots регистрация в 1×slots casino Это тоже благотворительные финансы, которые поступают на аккаунты новоиспеченных в после регистрирования. А особенность этих призов произведено сомнений, что обретенные деньги непременно следует использовать в продолжении назначенного медли. <a href=http://ekra.kz/index.php?subaction=userinfo&user=raspyplaza37>http://ekra.kz/index.php?subaction=userinfo&user=raspyplaza37</a> 1хслот 1хслотс регистрация перейти на 1×slots Каждый в должен сперва отчетливо выучить условия по получению и отыгрышу понравившегося подарка. Если всё организует, поторопитесь забрать безвозмездные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик данный начать вертеть барабаны топовых слотов.
1×slots регистрация 1×slots casino c2d ru
Далее требуется отыграть вагер и исключить выигрыш. Игрокам без навыка крупно подфартило, у получить 10-ки даров за 1 регистрацию. Если не сумели получить Бездепозитный приз, не тревожьтесь. Обратитесь в онлайн чат, оператор поможет ситуацию. Простая процедура получения бездепозитного приза, кот-ая займет не более 2-х мин. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные. <a href=http://www.carshowsociety.com/forum.php?action=profile;u=8880>http://www.carshowsociety.com/forum.php?action=profile;u=8880</a> 1×slots сайт зеркало
1×slots рабочее зеркало
<a href=http://b2s.bulwork.com/node/1581?page=83#comment-22642>1×slots регистрация 1×slots review live</a> Также бездепозитные призы имеют работать методом возвратить к забаве клиентов, что приостановивших своё сотрудничество с компанией: извещение о бездепе поступает на мобильный аппарат либо почту. Некоторые казино могут предлагать клиентам бездепы за подтверждение номера либо почты либо репост на страницу в соц сетях.Риск-игра по одинаковым шансам – Также казино может воспрещать скорпулезно условия по отыгрышу за раунда на удвоение, кот-ый предлагается в слотах, видео-покере и некоторых других играх. 1×slots официальный сайт скачать <a href=http://katod-tula.ru/bitrix/redirect.php?goto=http://company-dom.ru/bitrix/redirect.php?goto=http://style.kz/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/DM-joZhMyDZ>http://katod-tula.ru/bitrix/redirect.php?goto=http://company-dom.ru/bitrix/redirect.php?goto=http://style.kz/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/DM-joZhMyDZ</a> Приветственный бездеп предоставляется какому игроку только раз один. Казино дерутся с так нарекаемыми бонусхантерами (от англ. Bonus Hunter — охотник за бонусами), пытающимися заводить многочисленные аккаунты для надувательства оператора и повторного получения дара. Исключить подобные действия позволяет верификация данных. Администрация вправе востребовать у посетителя подтвердить персональные данные, обозначенные при регистрации.Итак, чтобы бесплатные бонусные кредиты превратились в настоящие средства, которыми вам распоряжаться по собственному усмотрению, их нужно отыграть. Вейджер идет уточнять в правилах онлайн-казино.
1× слот зеркало
Выше мы дали глубокий набор самых свежих и своевременных бездепозитных призов в интернет казино без пополнения на 2022 год, где продоставляется пользоваться хоть ценным бездепозитным бонусом.Мы собрали и выпустили перечень наилучших бездепозитных казино с призами за регистрацию, которые гарантируют щедрые выигрыши и моментальные выплаты. <a href=https://www.thenewtop10s.com/author/philipmak/>https://www.thenewtop10s.com/author/philipmak/</a> 1хслотс казино зеркало Наиболее известные вознаграждения между гэмблеров – бездепозитные бонусы казино. Это не изумительно, как можно получить благотворительные вращения или виртуальные кредиты, и всем не придётся пополнять счёт, рисковать собственными деньгами. Удастся насладиться разнообразными весельями и даже выиграть солидную необходимую, избегая серьёзного риска.Чтоб получить большой выигрыш, подбирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша.
<b>Смотреть еще похожие новости:</b>
<a href=https://nztw.org/home.php?mod=space&uid=43957>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a>
<a href=https://www.donchillin.com/space-uid-382497.html>1×slots сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Таким образом интернет казино получает потенциального игрока. Возможно в или истинном он захотит поиграть на свои средства. Так трудятся бездепозитные призы в интернет казино. Здесь хорошо подходит выражение, безвозмездные сыр случается только в мышеловке. Начинающие игроки могут не осознавать опасность азарта. Однако со временем осознания становится больше. Это тема для отдельного обсуждения.
#5763 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино пин зеркала казино <a href=https://kompromat1.online/>online casino</a> pin ап casino симулятор казино <a href=https://t.me/vchkogpu_ru>порно с Бондаренко Анастасия Борисовна</a> казино рояль букмекерская контора без казино проиграл 1×bet приложение порно с Елена Никитина, скелетонистка 1×bet xbet самое казино
DiskiPlus букмекерская контора мостбет DiskiPlus porno Александра Степанова, фигуристка <a href=https://diskiplus.ru/>DiskiPlus casino игровой автомат</a> DiskiPlus Радченко Светлана Юрьевна порно DiskiPlus лучшая казино <a href=https://diskiplus.ru>DiskiPlus казино фильм смотреть онлайн</a> DiskiPlus порно с Илюшникова Татьяна Александровна DiskiPlus 7k casino DiskiPlus casinos xyz DiskiPlus порно с Афонина Марина Игоревна DiskiPlus 1×bet слоты официальный сайт DiskiPlus 1×bet на андроид DiskiPlus 1×bet зеркало
#5764 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация на сайте
Чтобы играть даром на настоящие средства в казино, не всегда достаточно просто зарегистрироваться. Иногда нужно выполнить дополнительные деяния.Допустим, за регистрацию вы возымели бездеп в объеме 2 000 руб. С вейджером х30. В данном случае светит устроить ставок, на совместную сумму в 60 000 рублей (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать настоящие деньги. Однако не забывайте, собственно с любого презента получится вывести определённую сумму (почаще всего менее $200). <a href=http://filmkachat.ru/>1хслот официальный сайт зеркало</a> Бонус за регистрацию в казино без депозита с выводом средств нужно отыграть. Зачастую для отыгрыша может понадобиться сделать ставки на сумму, в несколько 10-ов один превышающую необходимую приза либо выигрыша. <a href=https://letterboxd.com/lexxeagle/list/revolutionary-approaches-in-modern-virtual/>https://letterboxd.com/lexxeagle/list/revolutionary-approaches-in-modern-virtual/</a> Внесение депо – Будьте готовы восполнить счет последствии отыгрыша приза. Это стандартное заявка управлял для данного на промо-акций. Лучше заблаговременно уточнить, какую сумму нужно несомненно вносить на счет. Как правило, речь о минимальном депозите, хотя вы обязаны быть уверены, собственно он вам по карману.Все обожают получать презенты. Согласитесь, практически каждый играющий человек будет беспредельно рад, если получит бесплатный презент для забавы в интернет казино просто за регистрацию либо же бонус за внесенный депозит, так называемые приветственные бонусы для новых игроков. Соответственно эти интернет клубы станут больше известны и преимущественны у игроков при выборе казино для забавы. Топ казино день обновляется и прибавляются новые и занимательные игровые клубы с привлекательной бонусной политикой и всеми вероятными преимуществами, льготами, к коим относятся эти бонусы как фриспины за регистрацию, денежные бездепозитные призы, еще великодушные бонусы за внесенный депо. 1×slots зеркало регистрация то дальше необходимо пройти <a href=http://matripedia.de/doku.php?id=%D1%82%D0%B5%D0%BB%D0%B5%D1%84%D0%BE%D0%BD%20%D0%B7%D0%BD%D0%B0%D0%BA%D0%BE%D0%BC%D1%81%D1%82%D0%B2%D0%B0%20%D1%84%D0%BB%D0%B8%D1%80%D1%82%20%D1%81%20%D0%B4%D0%B5%D0%B2%D1%83%D1%88%D0%BA%D0%B0%D0%BC%D0%B8>http://matripedia.de/doku.php?id=%D1%82%D0%B5%D0%BB%D0%B5%D1%84%D0%BE%D0%BD%20%D0%B7%D0%BD%D0%B0%D0%BA%D0%BE%D0%BC%D1%81%D1%82%D0%B2%D0%B0%20%D1%84%D0%BB%D0%B8%D1%80%D1%82%20%D1%81%20%D0%B4%D0%B5%D0%B2%D1%83%D1%88%D0%BA%D0%B0%D0%BC%D0%B8</a> Начнём с такого, что любое рекламную за регистрацию подразумевает некие обстоятельства. Бездепозитные бонусы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность валютного оборота, нужная для исполненья условий. Пример, получили безвозмездные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 руб., неудачных либо выигрышных, маловажно. После исполненья, бонусный баланс перейдёт на реальный и станет легкодоступным к выводу.
1×slots официальный demo регистрация в 1×slots casino
Можно. Вы постоянно сможете отказаться от получения бездепозитного приза за регистрацию в казино, же Вы не сделаете ставку.Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам воспрещено начислять призы клиентам, не имеющим денежных средств на счете. Мы предлагаем разглядеть животрепещущие бонусы онлайн-казино с лицензией, которые соблюдают законодательство РБ. <a href=https://g2clubs.com/healthy-workout/google/#comment-27695>1хслот 1хслотс регистрация перейти на 1×slots</a> 1 х слотс зеркало Бездепозитный бонус казино 2022 с выводом за регистрацию предоставляет возможность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и выяснить качество работы службы поддержки. Довольно часто, начиная игровой процесс, игрок уже отказывается останавливаться и делает настоящий лепта. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть безвозмездно возможно как раз таки с бонусом за регистрацию без надобности заносить депозит.Самый распространённый из сходственных призов, естесственно же, бездеп на денек рождения посетителя — бонус в виде фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им возможно протяжении установленного периода времени. <a href=http://moj.webservis.ru/forums/profile.php?action=show&member=11027>http://moj.webservis.ru/forums/profile.php?action=show&member=11027</a> 1хслотс казино зеркало
1×slots скачать на айфон
Нет. Казино раздают безвозмездные призы за регистрацию, для того, чтобы клиент возможность ознакомиться с игровым заведением. А чтобы вывести его, необходимо выполнить условия отыгрыша.Выше мы предоставили глубокий комплект самых новых и актуальных бездепозитных бонусов в онлайн казино без пополнения на 2022 год, где возможность пользоваться каким ценным бездепозитным призом. <a href=http://lovenomad.sakura.ne.jp/ccs/cc_jump.cgi?id=1303863951&url=http://hochu-domoi.ru/bitrix/redirect.php?goto=http://inva.ru/bitrix/rk.php?goto=https://teletype.in/@urist_free/KKr8_SDl-wz>http://lovenomad.sakura.ne.jp/ccs/cc_jump.cgi?id=1303863951&url=http://hochu-domoi.ru/bitrix/redirect.php?goto=http://inva.ru/bitrix/rk.php?goto=https://teletype.in/@urist_free/KKr8_SDl-wz</a> 1хслот скачать В игровых клубах без лицензии Вы покупаете „кота в мешке“ и в случае спорных обстановок нет способности куда-то посетовать и доказать свою правоту.
1×slot казино зеркало
Перед активацией принципиально внимательно изучить обстоятельства акции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют значение также лимиты ставок при отыгрыше и сроки, в течение коих можно пользоваться предложением. Если бездеп обхватывает узкий список игр, рекомендуется узнать наибольшие коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят лишь в случае, случае оператор не установил строгие ограничения на наивысшую необходимую ставки. Изучить верховодила и условия получения бездепозитных бонусов казино, Вы можете у нас на веб-сайте в разделе с бонусами либо на официальном веб-сайте выбранного Вами казино. Если имеет отыскать нужную информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал или по электронной почте.Получать информацию о самых выгодных призах возможно без постоянного прогноза новостей казино. Мы взяли данную задачку на себя и непрерывно следим за предложениями операторов, выбирая превосходнейшие из их. В данном разделе собраны последние бездепы, промокоды к ним и условия их активации. Список промоакций регулярно пополняется. В топ зашли самые новые бездепозитные призы за регистрацию в казино 2020, временные и закрытые рекламную. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и критериям. Если срок действия промоакции истек, она удаляется из списка. 1×slots официальный demo регистрация в 1×slots casino <a href=http://mallds.com/bbs/board.php?bo_table=free&wr_id=160327>http://mallds.com/bbs/board.php?bo_table=free&wr_id=160327</a>
1×slots зеркало рабочее на сегодня
Используйте наилучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, дабы заработать подарки за простые деяния теперь сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высокой отдачей и резвыми выводами на электронные кошельки. Если при регистрации показать промокод, можно гарантировано получить приз. Где брать ваучер? Посетите тематические блоги или форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В заключительнее время игорные дома начали рекламироваться в фильмах и сериалах. Присмотритесь и всего заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных рублей.Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают бонус по странам. Вплоть до такого, что клуб может на игроков из Вашей страны, а бездеп не давать. <a href=https://fromkorea.kr/bbs/board.php?bo_table=free&wr_id=49250>https://fromkorea.kr/bbs/board.php?bo_table=free&wr_id=49250</a> За привлечение друга ? в партнерской программки клиент получает вознаграждение за вербование новых юзеров. 1×slots официальный зеркало рабочее Допустим, за регистрацию вы возымели бездеп в размере 2 000 руб. С вейджером х30. В этом случае предстоит устроить ставок, на совместную сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать настоящие деньги. Однако не запамятовывайте, собственно с каждого дара получится вывести определённую сумму (почаще всего не более $200).При выполнении критерий отыгрыша и верификации, деньги с бонусного счета переводятся на главной и имеют быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции находятся от избранной платежной системы.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.home-visa.ru/viewtopic.php?f=69&t=807392&p=3046105#p3046105>1×slot рабочее зеркало</a>
<a href=http://romb4×4.ru/forum/threads/1×slots-klubu1×slots-1×slots-registracija-perejti-na-1×slots.22147/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если вы выбрали для себя количество брендов которые для больше всего приглянулись, для постоянной забавы! Таких гемблеров казино очень предпочитает и оценивает, за частую эти игроки становятся VIP игроками заведения, которым нередко поступают выгодные предложения повторяющий призов, так же туда заходит и бездепозитные. Фриспины начисляются по определенной ставке. После их активации игроку необходимо запустить слот и убедиться, собственно в нем показываются благотворительные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода последствии отыгрыша определяется оператором и редко превышает 5 000 рублей.
#5765 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать на айфон
Также существуют онлайн-платформы азартных игр, которые используют раздачу бездепозитных призов в специальные даты (как для казино, так и для игрока). Помимо сего, действующие игроки того имеют возможность получить похожие призы за свою деятельность (например, за увеличения уровня или за похожие достижения). <a href=http://filmkachat.ru/>1×slots регистрация</a> Получить Бездепозитный бонус в интернет казино дело двух кликов. Другой момент, отыграть промо и соблюсти правила и условия отыгрыша. Под правилами подразумевается столько вагер, но и лимитирования по наибольшей ставке. Мы разумеем, что в кинотеатр все ставят на зеро и выигрывают. Призываем не делать сходственного. Перед активацией бонуса прочитайте управляла. Узнайте следующие моменты: Условия получения презента, за регистрацию, за депо и прочее. Ограничения по максимальной ставке. Зачастую не выше 350 руб. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах можно отыгрывать вагер. Можно вращать автоматы, а вагер будет стоять на месте. Поэтому принципиально знать, в каких играх возможно осуществлять кратность валютного оборота. <a href=https://xequte.com/forum/topic.asp?TOPIC_ID=15275>https://xequte.com/forum/topic.asp?TOPIC_ID=15275</a> С не отыгранным призом воспрещается превосходить размер максимальной ставки. Нарушение этого обстоятельства в аннулирование выигрыша.Бонус за регистрацию в казино выдается лишь раз раз на одного игрока. Но бывают вспомогательные промоакции, масштабах коих бездепы расступаются для неизменных клиентов и такие презенты Вы можете получить больше 1-го раза. 1× slots casino зеркало <a href=https://pattern-wiki.win/index.php?title=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%BF%D0%B8%D1%86%D1%86%D1%8B%20%D0%B8%D0%B7%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO>https://pattern-wiki.win/index.php?title=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%BF%D0%B8%D1%86%D1%86%D1%8B%20%D0%B8%D0%B7%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO</a> Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала быстрые выводы. Фишка выплат сомнений, что достаточно выбрать платёжный инструмент и указать сумму. В большинстве случаев деньги зачисляются на электрические кошельки протяжении 15 минут, а на банковские карты – 1–3 рабочих денька.Популярность онлайн казино растёт и всё больше юзеров начинают проявлять азартными играми. Бездепозитные призы 2022 года, это уникальные подарки за регистрацию. С их помощью свежие игроки имеют получить бесплатные вращения либо деньги на баланс за одну регистрацию. С в игорных заведений в интернете, бездепозитные призы стали популярнейшим способом вербования игроков. Подобные промоакции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш сайт собрал лучшие предложения из онлайна на 2022 год. Воспользуйтесь любым даром и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша нужно выполнить условия.
1×slots официальный сайт мобильная версия
Какие бонусы возможность еще получить не бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного бонуса, любое онлайн казино предлагает игрокам выгодное предложение на первый депо, вы совершаете депо, ваш депозит возрастает в двое либо том в трое, тем самым начать играть можно с больше крупной суммой, например же не запамятываем на вейджер на бонусы. 1хслот зеркало сайта Бездепозитные призы казино это экономическая компенсация, предлагаемая юзерам на дармовой базе и возможность выступать в интернет казино безвозмездно. Если сопоставлять их с одобрениями за лепта, в свои выдаются лишь потом начального пополнения счета, то бездепозитные вознаграждения получаются безвозмездно. То есть, играющий получает вероятность создавать ставки на теснее быть финансы, которые выдаст заведение, исполняя, при этом, обыденные деянья, чтобы их извлечь (здесь речь о регистрация, удостоверении личности с внедрением номера аппарата, оформления заявки и т.д. ).В наше время довольно просто получить бонус за регистрацию в казино. Практически каждый игорный жилище с готовностью начисляет средства либо благотворительные вращения. Многие гэмблеры используют этим и не смущяются регистрироваться в любом клубе с прибыльными условиями. Кстати, это замечательная вероятность выработать победную тактику и сорвать джекпот. <a href=https://www.wow-interfaces.com/users/Chriscug>https://www.wow-interfaces.com/users/Chriscug</a> 1хслот официальный сайт зеркало
1хслотс мобильная версия зеркало
Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке представители онлайн-казино публикуют важную информацию о not the slightest deposit bonuses прочих предложениях. <a href=http://klinika-otzyvy.club/index.php?subaction=userinfo&user=energeticmold5>http://klinika-otzyvy.club/index.php?subaction=userinfo&user=energeticmold5</a> Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте обстоятельства – они часто выдаются для некоторых машин. В зависимости от клуба вы можете делать конкретное число ставок. Кстати, современные игорные дома выделяют вероятность заводить «одноруких бандитов». 1×slots зеркало регистрация то дальше необходимо пройти Как управляло, при выводе денег, от играющего потребуется только сделать наименьший лепта чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом индивидуальный счет.
1хслот официальный сайт зеркало
Бездепозитные бонусы — это презенты от казино повторяющий бонусных средств или фриспинов для игровых автоматов, которые начисляются на акк игрока в процедуры регистрации на веб-сайте заведения. Для получения этих поощрений депо не требуется. 1хслот 1хслотс регистрация перейти на 1×slots <a href=https://gamma.app/docs/Mastering-Silo-Images-Unleashing-Their-Power-in-Visual-Marketing-4jr51zld2i3k3zu>https://gamma.app/docs/Mastering-Silo-Images-Unleashing-Their-Power-in-Visual-Marketing-4jr51zld2i3k3zu</a> Создание аккаунта. На сайте казино необходимо обнаружить регистрационную форму и заполнить пустопорожние поля собственными данными. Иногда на этом шаге требуется указать только адресок электронной почты и пароль, хотя чаще надобно заполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д.). Нужно указывать только реальные данные, поскольку впоследствие они будут проверены.Чаще всего применяются коды. Их нужно вносить в особые окошки регистрационной анкеты, случае речь о пригласительных бонусах, либо в определенном разделе личного офиса игрока.
1×slots регистрация
Следует подчеркнуть, что бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом.Новые посетители онлайн-казино без первого депо имеют проверить свою удачливость. К что, этому же есть вероятность конвертировать бездепы в настоящие деньги за регистрацию в казино, впрочем для этого бонус необходимо отыграть согласно условиям промоакции. 1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, если не хотите замерзнуть жертвой жуликов либо впустую потратить время; <a href=https://www.curezone.org/blogs/fm.asp?i=2466179>https://www.curezone.org/blogs/fm.asp?i=2466179</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots Эффективность бездепов виде маркетингового инструмента оценили все операторы. Малоизвестные площадки используют такие акции, чтобы скоро набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны постоянных гостей. Не все веб-сайты, дающие презенты без депо, рекомендованы к этой. За симпатичным промоописанием могут прятаться невыполнимые условия отыгрыша прочие подводные камни.
<b>Смотреть еще похожие новости:</b>
<a href=http://miupsik.ru/forums/showthread.php?tid=249743>1×slots регистрация на сайте 1×slots ru com</a>
<a href=https://forum.spherecommunity.net/User-Jamesmew>1×slots зеркало регистрация в 1×slots casino</a>
<a href=https://test.soclanovtsy.ru/topic/57067–1×slots-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D0%BD%D0%B0-%D1%81%D0%B5%D0%B3%D0%BE%D0%B4%D0%BD%D1%8F/>1×slots рабочее зеркало на сегодня</a>
<a href=https://10nsk.ru/user/JosephSuple/>1×slots регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Нельзя разглядывать забаву на деньги, как вариант заработка. Азартные забавы воспрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не организатором азартных игр. Сайт носит информационный характер. Иногда в одобрения за регистрацию могут выдаваться билеты для участия в турнирах. Условия их проведения довольно отличаются, потому мы рекомендуем ознакомиться с каждым предложением отдельно.
#5766 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало этих способов предполагает регистрацию
Бездепозитный бонус по промо-коду будет доступен для игры, только что случае когда Вы активируете специальный бонусный код в разделе с призами либо укажите промокод при регистрации на сайте. В некоторых случаях, кроме активации кода, понадобиться доказать контактные данные игрока и наполнить анкету клиента. <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> <a href=https://www.4yo.us/blogs/315801/Transforming-Modern-Kitchen-Design-Through-Digital-Visualization>https://www.4yo.us/blogs/315801/Transforming-Modern-Kitchen-Design-Through-Digital-Visualization</a> 1×slot официальный сайт <a href=https://codescript.ru/user/Glennhup/>https://codescript.ru/user/Glennhup/</a>
1×slots casino регистрация 1×slotscasin online
Для верификации номера телефона, в личном профиле выберите опцию „Подтвердить номер аппарата“ и введите в соответствующее фон код, полученный в sms-сообщении. 1×slots бездепозитный бонус за регистрацию <a href=https://medicaidsecretsforum.com/member.php?action=profile&uid=1765>https://medicaidsecretsforum.com/member.php?action=profile&uid=1765</a> Условия отыгрыша приза. Если Вы планируете заработать на бездепозитном призе, то в первую очередь внимание на велечину вейджера и срок, который дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть приз и вывести выигрыш.Выбор каждого онлайн казино на нашем веб-сайте. В описании к любому Вы можете разузнать, что получите за творенье аккаунта. 1х слот 1хслотс регистрация перейти на 1×slots Наш перечень содержит превосходнейшие бездепозитные призы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по главным параметрам:Одним из предлогов отдавать преимущество, льготу 1 или иному заведению заключается в привлекательности предлагаемых промоакций и бесплатных услуг. Безвозмездные фриспины, выдаваемые без дела делать какой-либо вклад, в списке располагается далековато не в конце.
1 xslots рабочее зеркало
Большинство интернет-казино из нашего топ-10 готовы порадовать вас неповторимыми акциями. Читайте о них в обзорах и на форуме.Не рекомендуем опрометью голову хвататься за различные предложения получения средств без инвестициям. Вполне возможно, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем выглядит на 1-ый взор. Альтернативой является казино бонус за депо. Мы предлагаем вам пару советов, спасибо которым у любого игрока несомненно возможность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег: <a href=https://newport-beach.vraiforum.com/profile.php?mode=viewprofile&u=1420>https://newport-beach.vraiforum.com/profile.php?mode=viewprofile&u=1420</a> Будьте внимательнее при ознакомлении с правилами во избежание происхожденья конфликтных обстановок с казино, когда последствии отыгрыша бездепа для не дадут вывести солидную сумму выигрыша.Итак, чтобы благотворительные бонусные кредиты превратились в настоящие средства, которыми вам управлять по собственному усмотрению, их нужно отыграть. Вейджер по уточнять в правилах онлайн-казино. 1×slots регистрация на 1хслотс Так что главное отличие дара на депо от бездепа – обязательное пополнение счёта. Вы сможете внести депо и преувеличить стартовый капитал либо забрать бездеп и при этом не придётся рисковать своими сбережениями. Поспешите выполнить простые притязания, и администрация ресурса начисляет щедрое поощрение!Основное управляло получения бездепа ? создаваемый акк должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов взыскательно запрещено. Проверка проводится по имени, e-mal, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депо нужно блюсти несложную очередность поступков.
1×slots быструю регистрацию а также мгновенное
B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. Только выполнив все обстоятельства отыгрыша и дождавшись окончания проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить свои деньги.Процесс подтверждения личности имеет занять от одного денька до недели. Если заказчик допустил какую-либо оплошность при заполнении паспортных данных, то ему по адресоваться с проблемой в саппорта онлайн-казино. Для доказательства электронной почты, просто перейдите по активной ссылке в письме, полученном от игрового заведения.Фриплей-бонусы. Бонусы за бесплатную игру есть только в некоторых клубах. Они зачисляются незамедлительно последствии сотворения профиля и срабатывают непродолжительное время. Если у вас нет времени потратить свои, они просто завершатся. Что касается времени, как призы срабатывают в течение одного часа. 1×slots бездепозитный бонус за регистрацию <a href=http://www.chenjiagou.net/home.php?mod=space&uid=199204>http://www.chenjiagou.net/home.php?mod=space&uid=199204</a> При отыгрыше бонусных средств, необходимо учесть срок деянья бонуса и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный приз несомненно аннулирован.Условия вывода выигрыша. В некоторых заведениях для успешного вывода с бездепозитного приза достаточно пополнения баланса и подтверждения личности. В других же клубах, нужно некоторое раз прокрутить свой депо.
1хслотс казино зеркало
Законодательство, регулирующее азартные забавы в разных странах, влияние на возможности операторов. В итоге пользователи из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это возможность быть как полный отказ в доступе, например и невозможность загружать забавы отдельных изготовителей.В случае установленного лимита на необходимую вывода выигрыша с бездепозитного бонуса, игрок не может вывести больше заявленной суммы. <a href=https://miyoshi-arts.saitama.jp/event/20180528–6014/>https://miyoshi-arts.saitama.jp/event/20180528–6014/</a> казино 1× slots официальный сайт Когда речь о денежных призах, казино практически устанавливают условия вейджера, которые нужно выполнить, дабы вывести выигрыш.Получив свой презент, Вы сможете даром играть на реальные деньги, а выполнив обстоятельства отыгрыша, исключить свой выигрыш.
<b>Смотреть еще похожие новости:</b>
<a href=http://t954381g.bget.ru/user/JosephPiery/>1хслотс зеркало</a>
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1116#post-34973>1×slots официальный сайт скачать на айфон</a>
<a href=https://adminclub.org/showthread.php?tid=63109>1×слотс казино</a>
<a href=https://forum.bandariklan.com/showthread.php?tid=176825&pid=882547#pid882547>1×slot казино зеркало</a>
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=87960&extra=>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чаще всего интернет-казино предлагают бездепозитные бонусы новым пользователям. Эта промо-акция очень эффективно привлекает начинающих, подталкивая их к открытию счета. Конечно, не все они становятся послушными посетителями, но сам прецедент регистрации аккаунта играет на руку заведению.
#5767 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
Похожим образом трудится 3-ий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя или в связи с получения им VIP-статуса. Подарок предоставляется последствии воззвания в поддержку и проверки. <a href=http://filmkachat.ru/>1х слот регистрация в 1×slots casino</a> <a href=https://ai.ceo/read-blog/206569>https://ai.ceo/read-blog/206569</a> Казино выводит средства только на ту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного приза, Вам поначалу необходимо пополнить счет. В некоторых клубах узкий список методов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с данных платежных способов, которые доступны для вывода.Зарегистрироваться в казино по особой ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефонного и электронную почту). Для доказательства номера аппарата нужно в собственном профиле указать свой номер и нажать кнопку „Подтвердить номер телефона“, далее Вы получите sms-сообщение с кодом, кот-ый нужно установить в отвечающее поле. Для доказательства электрической почты, перейти по интенсивной ссылке в послании от казино. 1×slots мобильная версия войти казино <a href=http://espania.webcindario.com/modules.php?name=Forums&file=viewtopic&p=288#288>http://espania.webcindario.com/modules.php?name=Forums&file=viewtopic&p=288#288</a>
1×slots зеркало рабочее
1×slots зеркало рабочее <a href=http://injc.kr/bbs/board.php?bo_table=free&wr_id=309914>http://injc.kr/bbs/board.php?bo_table=free&wr_id=309914</a> 1хслотс рабочее зеркало Подтвердите лицо, предоставив оператору казино свои паспортные данные. Инструкции обычно несложные, главное — конкретно им идти. Если написано, что «на фото обязаны быть заметны все четыре угла страницы паспорта» — устройте именно такое фото.
1×slots зеркало регистрацию более популярный вариант это
Наши эксперты исследуют обстоятельства промоакции, затем в ручном режиме проводят их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и параметры. Мы не рекламируем казино, а даем игрокам информацию о превосходнейших из них. Многие азартные клубы ограничивают сумму вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании акции, суммы Вы не можете исключить. Разница несомненно аннулирована, Вы даже не сможете создавать на нее ставки.С иной стороны, намного проще арестовать бездепозитные фриспины за регистрацию в казино и прямо данный начать вращать барабаны в наихороших слотах. Главная особенность спинов никаких, что они предназначены для лучших автоматов. Удастся не пройти дополнительные раунды, хотя и увеличить сумму выигрыша, заработать респины прочие внутриигровые подарки. <a href=http://www.ihaomeijia.com/home.php?mod=space&uid=135733>http://www.ihaomeijia.com/home.php?mod=space&uid=135733</a> 1×slots зеркало регистрация
1× slots регистрация в 1×slots casino
Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации дара нужно подтвердить электронную почту и привязать телефонный; При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток.Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, solid только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. 1×slots зеркало регистрация <a href=http://www.god123.xyz/home.php?mod=space&uid=1042601>http://www.god123.xyz/home.php?mod=space&uid=1042601</a> Наиболее модные вознаграждения среди гэмблеров – бездепозитные бонусы казино. Это не удивительно, как можно получить бесплатные вращения или виртуальные кредиты, и при этом не придётся пополнять счёт, рисковать личными деньгами. Удастся насладиться разнородными развлечениями и даже выиграть крупную сумму, избегая серьёзного риска.Игры, в которых можно выступать на бонусные деньги. Проверьте перечень игр, в возможно выступать на бонусные свои, вполне они Вам не понравятся и надо тратить своё время на такую акцию.
1хслотс зеркало на сегодня
Шаг 4. Активация. Внимательно исследуйте обстоятельства, информацию по лимитированиям и сроке деяния бонусного предложения. Разобравшись с правилами, можно активировать приз в собственном офисе (иногда ? с внедрением промокода) либо по запросу в саппорт.Доступ к подарку имеет раскрываться автоматически последствии введения промокода или воззвания в саппорта вебсайта. В первом случае от юзера не потребуется никаких поступков. Бездеп с активацией по коду встречается чаще всего. Игроку нужно ввести совокупа знаков в графе, кот-ая может находиться в регистрационной форме в Личном офисе. Например, игрок получил 500 рублей при твореньи аккаунта и обязан отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 рублей, потребуется сделать 875 спинов для полного отыгрыша. <a href=https://www.spacepub.net/members/5046-WilliamNeeme>https://www.spacepub.net/members/5046-WilliamNeeme</a> Не стоит путать забаву в демо и использование призов. В демонстрационном режиме игрок возможность оценить механику слота, сюжет и оформление. Но игра ведется на условные кредиты, поэтому отсутствует основное ? чувство азарта. Активируя промокод либо фриспины, заказчик раньше не тратит свои средства на игровые автоматы, но возможность сорвать настоящий куш!Необходимость отыгрыша. Вейджер ситуации повыше, чем для бонусов за депо. И пока свои не отыграны, вывести их невозможно. 1 x slots Oтыгpaть приз с указанным вeйджepом, для этого необходимо сдeлaть cтaвoк нa cумму, превосходящую объем приза в некоторое один.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.carshowsociety.com/forum.php/topic,11220.new.html#new>1 хслот регистрация в 1×slots casino</a>
<a href=https://chasingadream.rpginitiative.com/showthread.php?tid=202472>1×slots регистрация 1×slots casino 777 online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Проверка занимает от нескольких минут до нескольких дней, профессионалы техподдержки шансы запросить вспомогательные документы или инициировать краткое общение по Skype.
#5768 Charlesgunnyhttp://filmkachat.ru
1хлот регистрация в 1×slots casino
Так что приготовьтесь предоставить конфиденциальную информацию (пол, возраст, государство проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев проверка данных занимает не более суток, после чего получится свободно выводить солидные выигрыши.Можно ли в одном интернет казино получить больше одного приза за регистрацию? Нет, так как в каждом интернет казино есть верховодила, к которым надо(надобно) держаться, не делать два аккаута для получения бонусов, по будет блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, бонус за регистрацию выдаеться раз один одному лицу. <a href=http://filmkachat.ru/>казино 1× slots официальный сайт</a> Создание аккаунта. На сайте казино необходимо открыть регистрационную форму и заполнить порожние поля собственными данными. Иногда на данном шаге потребуется показать лишь адрес электрической почты и пароль, но чаще хотелось наполнить анкету индивидуальной информацией (ФИО, дата рождения, место проживания и т.д.). Нужно свидетельствовать только настоящие данные, поскольку впоследствие они будут проверены. <a href=https://peertrainer.com/LoungeCommunityThread.aspx?ForumID=1&ThreadID=316721>https://peertrainer.com/LoungeCommunityThread.aspx?ForumID=1&ThreadID=316721</a> Размер ставки для забавы по бездепозитному призу (окончательно же, если, тогда,, когда он представлен в виде бонусных валютных средств) часто ниже, чем при этой на депо. Ограничение будет действовать до момента отыгрыша бонуса.Чтобы бездеп не был начислен на Ваш акк, Вам не активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт автоматически, а Вы не расчитываете его использовать, обратитесь в службу поддержки с пожеланием отменить бездепозитный бонус. 1×slot официальный сайт <a href=http://logo-def.ru/userinfo.php?uid=23699>http://logo-def.ru/userinfo.php?uid=23699</a> Бесплатный бонус – кредиты, коие онлайн-казино начислит клиенту, не заставляя его пополнять игровой счет.
скачать 1×slots официальный сайт
Этот тип бонуса будет добавлен на Ваш аккаунт в удачной процедуры регистрации с внедрением номера аппарата. Если избрать другой способ творения учетной записи, бездеп не будет добавлен на Ваш аккаунт. <a href=https://forum.bedwantsinfo.nl/thread-731970.html>1×slot рабочее зеркало</a> 1хслотс рабочее зеркало <a href=https://metalverk.ru/forum/?PAGE_NAME=profile_view&UID=76027>https://metalverk.ru/forum/?PAGE_NAME=profile_view&UID=76027</a> Размер бонуса. В качестве бездепов обычно начисляют очень суммы, а когда речь о бонусах за депо, которые начисляются в процентном соотношении от суммы пополнения, то некоторые казино шансы презентовать игроку до 2000$.Таким образом, заведение пробует показать себя своим вероятным игрокам, а такой рекламный ход как казино приз без депозита за регистрацию завлекает очень много внимания к игорному заведению и обеспечивает постоянный струю свежих посетителей и будущих посетителей игрового онлайн клуба. скачать 1×slots официальный сайт Если вы выбрали себе количество брендов которые для больше всего полюбились, для неизменной игры! Таких гемблеров казино очень любит и оценивает, за частую эти игроки становятся VIP игроками заведения, коим нередко поступают прибыльные предложения в виде призов, так же туда заходит и бездепозитные.Ограничения по играм. Администрация воспрещает игрокам кое-какие игровые автоматы с бездепозитным бонусом, деньгами или безвозмездными вращениями. Обычно, в правилах приводится полный перечень слотов для отыгрыша. Иногда разделение выполняется по облику игр. Например, отыгрыш возможен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino.
1× slots официальный
Для получения предоставленных бонусов вам понадобиться — ПК или мобильное прибор, и остальное дело за малым.Фриспины начисляются по определенной ставке. После их активации игроку необходимо запустить слот и увериться, собственно в нем показываются бесплатные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода после отыгрыша определяется оператором и изредка превышает 5 000 руб. Будьте внимательнее при ознакомлении с правилами во избежание происхожденья конфликтных ситуаций с казино, когда последствии отыгрыша бездепа вам не дадут вывести крупную необходимую выигрыша.Бездепозитные бонусы – это исключительно занимательная и наиболее многообещающая акция интернет-казино. Они том другого фри-спинов, потому собственно выплаты в даровых вращениях не гарантированы, как композиции на барабанах игрового аппарата имеют не сложиться. <a href=http://www.taijiacademy.com/newforum_down/profile.php?mode=viewprofile&u=303285>http://www.taijiacademy.com/newforum_down/profile.php?mode=viewprofile&u=303285</a> Основное различие что, что для получения бездепа не пополнять баланс в казино. Но не этого, есть ряд и отличий: 1×slots зеркало проходить регистрацию это отличный вариант Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала быстрые выводы. Фишка выплат сомнений, что достаточно выбрать платёжный инструмент и указать сумму. В большинстве случаев деньги зачисляются на электрические кошельки протяжении 15 минут, а на банковские карты – 1–3 рабочих денька.В неких онлайн казино для получения бездепозитных призов не достаточно просто зарегистрироваться на сайте клуба и доказать свои контактные данные. Дополнительно требуется активация промокода.
1×slots официальный сайт зеркало рабочее
<a href=http://naturetour.ru/communication/forum/messages/forum3/message23537/5237–1×slots-skachat-na-ayfon?sessid=c4d2b4c7fbb31048bc5264c97cd9fc51&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1×slots скачать на айфон</a> Да, у даровых бонусов есть дефекты. Прежде всего, они обычно большие. Кроме как, условия вейджера по ним постоянно жесткие. Но все неимение риска проделывает их довольно привлекательными для посетителей.Каждый новичок и профессиональный игрок мечтают быстро стартануть и начать создавать настоящие ставки. Для этого достаточно забрать презент, за кот-ый не нужно выплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email либо телефонный. После сего администрация начисляет щедрое вознаграждение повторяющий даровых вращений или виртуальных кредитов. 1хслотс зеркало <a href=http://edusegogal.edufinancierafcpc.com/index.php/forum/suggestion-box/156047>http://edusegogal.edufinancierafcpc.com/index.php/forum/suggestion-box/156047</a> Законодательство, регулирующее азартные игры в различных странах, влияние на полномочия операторов. В итоге пользователи из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это имеет быть как полный отказ в доступе, так и невозможность загружать игры отдельных производителей.
1×slots актуальное зеркало
B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.Фриплей-бонусы. Бонусы за безвозмездную забаву есть только в неких клубах. Они зачисляются незамедлительно после создания профиля и срабатывают недолговременное время. Если у вас нет медли истратить средства, они просто завершатся. Что дотрагивается медли, в большинстве случаев бонусы срабатывают на одного часа. Хотя благотворительные призы начисляются без депозита, не исключено, собственно вам придется вносить деньги. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь последствии как, как свежий клиент первый пополнит игровой счет.Прежде всего, не забывайте периодически заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом оценивают наиболее интересные предложения водящих игорных порталов. <a href=http://bbs.yunduost.com/home.php?mod=space&uid=20378>http://bbs.yunduost.com/home.php?mod=space&uid=20378</a> 1×slots рабочее зеркало Поспешите зарегистрироваться на официальном сайте Клубника, дабы моментально получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, появляется настоящий шанс победу!
<b>Смотреть еще похожие новости:</b>
<a href=https://isomedu.com/forum/profile/josephdrons/>1хслотс официальный сайт зеркало</a>
<a href=http://6000ziyuan.com/forum.php?mod=forumdisplay&fid=2>1×slots регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Итак, дабы безвозмездные бонусные кредиты превратились в настоящие средства, которыми вы можете управлять по своему усмотрению, их нужно отыграть. Вейджер стопам уточнять в правилах онлайн-казино.
#5769 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало слоты 1×bet xyz скачать 1×bet на андроид бесплатно <a href=https://kompromat1.online/>casino актуальное зеркало</a> порно с Матвей Сафонов (футбол) porno Мира Андреева (теннис) <a href=https://t.me/vchkogpu_ru>porno Александра Степанова, фигуристка</a> порно с Зырянова Анастасия Владимировна porno Светлана Ходченкова порно с Захарова Мария Владимировна Юдаева Ксения Валентиновна порно пин up casino 1×bet регистрация cat casino
DiskiPlus casino betting DiskiPlus букмекерская контора леонов <a href=https://diskiplus.ru/>DiskiPlus песня казино</a> DiskiPlus black russia казино DiskiPlus 1×bet вход <a href=https://www.diskiplus.ru/>DiskiPlus пин ап букмекерская контора</a> DiskiPlus Крючкова Полина Викторовна порно DiskiPlus casino com DiskiPlus Анна Михалкова DiskiPlus порно с Александр Большунов (лыжные гонки) DiskiPlus casino x DiskiPlus 1×bet бесплатно DiskiPlus 1×bet зеркало на сегодня 1×bet xyz
#5770 Charlesgunnyhttp://filmkachat.ru
1х слот регистрация в 1×slots casino
Выигрыши с призов без вложений постоянно привязаны к притязанию по ставкам и могут быть обналичены только последствии исполнения этих притязаний. <a href=http://filmkachat.ru/>1×slots казино мобильная версия</a> Активация по промокоду используется в разных видах бездепов. Если речь идет о приветственном призе, то набор символов можно узнать на крупнейшей странице, в регистрационной форме или письме, коие отчаливает пользователю для доказательства адреса электронной почты. Акции все проводиться совместно с партнерскими площадками. Обычно код располагается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется одноразовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем актуальный код для активации в описании любого промо.Мы проделываем ударение на ключевых положениях правил, рассказываем о территориальных ограничениях и кратко информируем о иных акциях обсуждаемого казино. <a href=https://joyrulez.com/blogs/23638/Mastering-the-Art-of-Interior-Design-Layout-From-Concept-to>https://joyrulez.com/blogs/23638/Mastering-the-Art-of-Interior-Design-Layout-From-Concept-to</a> 1×slots casino online регистрация <a href=http://www.vladmines.dn.ua/index.php?name=Account&op=info&uname=itchytundra60>http://www.vladmines.dn.ua/index.php?name=Account&op=info&uname=itchytundra60</a>
1хслотс казино зеркало
1х слотс зеркало регистрация в 1×slots casino <a href=https://chujalt.com/user-277.html>https://chujalt.com/user-277.html</a> Наши эксперты изучают условия акции, затем в ручном режиме проверяют их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и другие характеристики. Мы не рекламируем казино, а даем игрокам информацию о наихороших из них. 1хслот скачать
1×slots зеркало сайта
Ну и окончательно же, для казино бездепозитные призы выгодны с имиджевой стороны: подобная щедрость увеличивает уровень лояльности клиентов к компании.Автоматическая активация первый самой комфортной, но ручной способ содержит перед ней преимущества. Прежде чем использовать вознаграждение от казино, стоит заранее найти, сколько времени требуется на исполнение всех условий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала действия бонуса. <a href=http://l2help.lt/user/ArnoldNip/>http://l2help.lt/user/ArnoldNip/</a> Для подтверждения электрической почты, просто перейдите по интенсивной ссылке в послании, приобретенном от игрового заведения. 1×slots скачать на айфон К примеру, игроку выдаются бесплатные свои в заведении в объеме пятидесяти или 100 $ (вейджер на которые составляет 100х). То есть, каждому новоприбывшему игроку выскакивает привлекающая картинка, кот-ая обещает выплату всех зачисленных фирмой средств. Не стоит обращать внимания на казино приз за регистрацию без депо с слишком немалый либо очень махонькой суммой бонусов, поэтому что, даже кропотливо изучив все обстоятельства, тут всего, будет какой-то подкол.Выбирая бесплатный приз, пристально изучайте управляла. Убедитесь, что для возможно принимать роль в акции. Уточните, в каких играх возможно выполнять условия вейджера. При необходимости задавайте вопросы адептам саппорта.
1×slots casino регистрация
<a href=https://praisenpray.org/forums/showthread.php?tid=102831>зеркло казино 1×slots</a> Многие казино предоставляют в маркетинговых целях безвозмездные бонусы необыкновенно для наших читателей. Чтобы их получить, нужно перебежать на игровой сайт по партнерской ссылке с нашего портала. Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых новых, щедрых и испытанных бонусах в онлайн казино, коие обновляются каждый день.Бездепы обыкновенно предлагают с отыгрышем — быстро исключить выигранные свои невозможно. Перевод средств со счета несомненно возможен в того, как юзер выполнит все притязания казино, а сумма не может превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, в течение коих клиент вправе воспользоваться предложением. Обычно они не превосходят нескольких дней после активации. 1×slots казино мобильная версия <a href=http://www.yjeng2014.co.kr/gnuboard/bbs/board.php?bo_table=free&wr_id=649231>http://www.yjeng2014.co.kr/gnuboard/bbs/board.php?bo_table=free&wr_id=649231</a>
1×slots официальный сайт зеркало
Практически все онлайн казино с бездепозитным призом за регистрацию учитывает программку лояльности — систему одобрения постоянных клиентов, кот-ая состоит из большого значений. При достижении игроком еще значения на его счёт поступает приз. Чем повыше уровень — что, этим щедрее приз.Пoдтвepдить личнocть клиента. Для успешного вывода средств, нужно доказать лицо клиента. Нa этaпe вepификaции пpoфиля, работники службы защищенности обязаны увериться, собственно у игрока не один аккаунт. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не может исключить свой выигрыш, если у него несомненно несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы. <a href=http://www.neworleansbbs.com/home.php?mod=space&uid=287307>http://www.neworleansbbs.com/home.php?mod=space&uid=287307</a> 3. Подтвердить данные. В зависимости от клуба, нужно привязать аппарат или почту, показать индивидуальную информацию; 1×slots регистрация на официальном сайте
<b>Смотреть еще похожие новости:</b>
<a href=http://www.airsoft44.com/forum/index.php?action=profile;u=11896>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<a href=http://moneysweet.listbb.ru/viewtopic.php?f=2&t=7749>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=http://swissairways-va.com/phpBB3/viewtopic.php?p=1659094#p1659094>1х слот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Зарегистрироваться в казино по специальной ссылке или с бонусным кодом. Подтвердить контактные данные (номер аппарата и электрическую почту). Для подтверждения номера телефона необходимо в собственном профиле показать собственный номер и надавить кнопку „Подтвердить номер аппарата“, далее Вы получите sms-сообщение с кодом, который необходимо установить в отвечающее поле. Для подтверждения электронной почты, перейти по интенсивной ссылке в послании от казино.
#5771 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Яна Троянова up casino зеркало <a href=https://strelochnik.com/>porno Александра Степанова, фигуристка</a> porno Анна Сидорова, керлингистка почему в казино нет часов <a href=https://rucriminal.info/>porno Анастасия Янькова, боксерка</a> букмекерская контора зенит скачиваемые казино пина casino kent casino 1×bet официальный xbet винлайн букмекерская контора 7k casino зеркало на сегодня
DiskiPlus казино проиграл DiskiPlus играющие казино онлайн <a href=https://diskiplus.ru/>DiskiPlus казино вход официальный сайт</a> DiskiPlus казино 1 DiskiPlus Светлана Ходченкова <a href=https://www.diskiplus.ru/>DiskiPlus смотреть фильм казино</a> DiskiPlus 1×bet официальный слоты DiskiPlus порно с Евгения Медведева DiskiPlus retro casino DiskiPlus porno Мира Андреева (теннис) DiskiPlus винлайн букмекерская контора официальный DiskiPlus Крючкова Полина Викторовна порно DiskiPlus porno Юлия Канакина
#5772 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало рабочее
Список например именуемых «не землель» прилагается к правилам бонусной программы игорного портала. Обязательно проверьте, распространяются ли на вас похожие наказания.Обычно бездепозитные акции от казино, прибывают на эл. Почту в дни рождения либо праздники. В некоторых онлайн казино можно адресоваться в чат и как постоянному игроку, вполне для предложат бездепозитное предложение. <a href=http://filmkachat.ru/>зеркала 1×slots</a> Ну и конечно же, для казино бездепозитные бонусы прибыльны с имиджевой стороны: схожая добродушие увеличивает степень лояльности клиентов к компании.Практически все онлайн казино с бездепозитным призом за регистрацию учитывает программу преданности — систему одобрения постоянных посетителей, которая произведено из множества значений. При достижении игроком одного уровня на его счёт поступает приз. Чем выше уровень — тем щедрее приз. <a href=https://divisionmidway.org/jobs/author/archicgi-com/>https://divisionmidway.org/jobs/author/archicgi-com/</a> Внесение депо – Будьте готовы восполнить счет после отыгрыша бонуса. Это стандартное заявка правил для этого на промо-акций. Лучше заблаговременно уточнить, какую необходимую надо(надобно) несомненно заносить на счет. Как верховодило, речь о минимальном депозите, но вы обязаны быть уверены, собственно он вам по карману.Например, игрок получил 500 рублей при разработке аккаунта и обязан отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., потребуется сделать 875 спинов для полного отыгрыша. 1×slots мобильная версия войти казино <a href=http://www.orlandogamers.org/forum/member.php?action=profile&uid=3608>http://www.orlandogamers.org/forum/member.php?action=profile&uid=3608</a> А ознакомиться с новыми онлайн казино, Вы можете с призов с выводом выгоды, коие Вы можете получить без депо.Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских рублей. В условиях промоакции указано, собственно вейджер бездепозитного приза х20. Поэтому, дабы отыграть бонус, игроку несомненно нужно сделать ставок на 35*20=700 руб.
1×slots официальный сайт скачать на айфон
<a href=https://www.donchillin.com/space-uid-382497.html>1хслотс мобильная версия зеркало</a> 1×slots официальный регистрация На данном разделе портала периодически публикуются обзорные заметки, каких рассматриваются бесплатные бонусы наихороших интернет-казино. Информация структурирована по нескольким пт, включая основные:Возможность поиграть вспомогательное состязание (а иногда и количество) совершенно даром, а выигрыш, к, поступает на счёт игрока. <a href=https://w-o-n.org/member.php?action=profile&uid=2664>https://w-o-n.org/member.php?action=profile&uid=2664</a> Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы появилась возможность вывести выигрыш.Однако в условиях скрываются «подводные камешки», которые не разрешат исключить солидную необходимую либо же вы не успеете отыграть вейджер. Поэтому профессионалы рекомендуют арестовать безвозмездные вращения за регистрацию в казино без депозита, чтобы поднабраться опыта и получить настоящий шанс на победу. казино 1×slots Первый возникающий вопрос, это, для выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают новых игроков. Последним проще начать игру на деньги с дара за регистрацию. Им не пополнять баланс и расходовать собственные свои. Новички получают бесплатные спины либо свои на счёт. С их помощью знакомятся с игровым процессом, крутят слоты и проделывают ставки в рулетке.Бездеп с фриспинами имеет обхватывать всю коллекцию игр на веб-сайте либо разработки 1-го провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш может быть выведен последствии того, как пользователь отыграет данную необходимую. Возможность оценить полный перечень слотов — основное достоинство этой разновидности. Игроку становятся доступны что, эти опции, которые отсутствуют в демонстрационном режиме, а вероятность выиграть настоящие деньги добавляет ярких азартных ощущений.
1хслот зеркало сайта
3. Подтвердить данные. В зависимости от клуба, нужно привязать телефонный либо почту, указать индивидуальную информацию; Необходимость отыгрыша. Вейджер в этом случае выше, чем для призов за депо. И пока свои не отыграны, вывести их невозможно. <a href=https://oraclenana.com/MYBB3/user-4112.html>https://oraclenana.com/MYBB3/user-4112.html</a> Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам запрещено начислять призы клиентам, не имеющим валютных средств на счете. Мы предлагаем рассмотреть животрепещущие бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ.Большинство клубов завлекают внимание игроков за счёт разнородных даров. На одних сайтах можно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает бесплатные вращения для запуска лучших онлайн слотов. Несмотря на разные промоакции, стоит выделить самые главные. 1×slots официальный регистрация
1×slots рабочее зеркало на сегодня
Многие игроки, оценив функционал казино, остаются выступать в нем и дальше ? на это и нацелено любое промо. Постоянные посетители заносят депозиты и делают ставки, обеспечивая длительную прибыль оператора. То есть, казино выдают бездепы свежим юзерам для формирования лояльной аудитории.К сожалению, нет. Почти все казино, требуют внесение но бы 1-го малого депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, собственно исключить деньги разрешается лишь на ту платежную систему, с коей был сделан депо. Выше мы дали полный набор самых новых и своевременных бездепозитных бонусов в онлайн казино без пополнения на 2022 год, где возможность воспользоваться любым ценным бездепозитным бонусом.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 $. Если выдаются фриспины, их число изредка превышает нескольких десятков безвозмездных вращений. 1 хслот регистрация в 1×slots casino <a href=http://perfectsolutionlabs.com/user/StevenImife/>http://perfectsolutionlabs.com/user/StevenImife/</a> Сразу в активации промокода можно пользоваться презентом. Как теснее упоминалось, бонусы посещают трёх видов – фриспины, кредиты и фриплей-бонусы.Бонусные деньги – маленькая сумма денег для старта в новом казино. На бонусные деньги, обычно разрешено выступать во все игры, считая слотов с современным джекпотом и игр из раздела live casino.
1 x slots
Как и другие акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такого предложения являются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает новых посетителей и дозволяет им составить впечатление о функционале, не рискуя вескими совокупностями.Фриплей-бонусы. Бонусы за благотворительную забаву есть лишь в некоторых клубах. Они зачисляются незамедлительно в творенья профиля и срабатывают недолговременное время. Если у вас нет времени истратить средства, они просто закончатся. Что дотрагивается времени, правило бонусы срабатывают протяжении 1-го часа. Основное управляло получения бездепа ? творимый аккаунт должен быть у юзера первым и единственным. Наличие нескольких аккаунтов требовательно запрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депо необходимо блюсти простую очередность действий.В разделе с призами активировать собственный подарок. Найти игры, для коих учтено одобрение и использовать приз по предназначению. <a href=http://www.kbszw.com/home.php?mod=space&uid=18750>http://www.kbszw.com/home.php?mod=space&uid=18750</a> 1×slots скачать на айфон Помните, что в неких играх сумма ставки идет в зачет вейджера лишь частично. Так, в настольных и карточных забавах только от 5% до 50% суммы ставки считаются как отыгранные деньги, тот как в слотах идет в зачет все one hundred percent суммы.При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие можно посвятить ирге в казино.
<b>Смотреть еще похожие новости:</b>
<a href=https://sparta.training/faq/online-returns/#comment-66753>1× slots сайт</a>
<a href=https://clubdefansde24.com/foro/viewtopic.php?t=18358>1 x slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бонус начисляется игроку незамедлительно после регистрации и прохождения верификации в казино и не требует от клиента внесения депозита. Как управляло, объем бонуса в подобном случае довольно застенчивый, впрочем дозволяет новичкам познакомиться с забавой без риска настоящими деньгами.
#5773 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino 777 online
В реальное время получить приз за регистрацию в казино довольно просто. Почти любой игорный жилище с радостью даст деньги или безвозмездные вращения. Многие игроки пользуются данным и не стесняются региться в любом клубе с прибыльными условиями. Кстати, это замечательная вероятность придумать выигрышную тактику и сорвать куш.Иногда у гостей вебсайта имеют возникнуть трудности, задачи, препядствия при активации приобретенного промо-кода. В этих случаях, необходимо адресоваться за помощью в саппорта «Support». Для получения ответа, непременно указывается конкретная причина воззвания и подтверждается информация дополнительными скриншотами. Если сложилась неоднозначная ситуация, всегда можно обратиться к основному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ. <a href=http://filmkachat.ru/>casino 1×slot</a> Прежде всего, не запамятовывайте периодически заглядывать на страницу обзоров бездепозитных бонусов. Они шаг за шагом осматривают более занимательные предложения основных игорных порталов. <a href=https://www.4sync.com/s/fLYUHSTCD>https://www.4sync.com/s/fLYUHSTCD</a> В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это исключительно приятная часть игры. Важно, зачастую бездепозитные бонусы в казино выдаются с лимитированиями по максимальной выплате. В среднем можно рассчитывать на выгода в несколько тыщ рублей. Как вывести выигрыш с бонуса без депозита. Придётся подтвердить аккаунт документально, в неких заведениях. Процедура верификации обязательна и делается любым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате либо прочитайте в правилах. 1×slots казино зеркало <a href=http://o91668l6.beget.tech/index.php?subaction=userinfo&user=quickestabdomen>http://o91668l6.beget.tech/index.php?subaction=userinfo&user=quickestabdomen</a>
1×слотс казино
Такие одобрения дозволяют безвозмездно протестировать новое казино, разобраться с игровым процессом онлайн слотов, заработать и исключить небольшую необходимую денег.Для верификации аккаунта надо(надобно) дать профессионалам технической помощи отсканированную копию паспорта и счета за коммунальные предложения, а фотографию банковской карты или экрана странички электрического кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для доказательства личности. <a href=https://www.bf-france.com/forums/profile/30064-rabofreeor/>1×slots регистрация то дальше необходимо пройти</a> 1×слотс казино В некоторых интернет казино для получения бездепозитных призов не достаточно просто зарегистрироваться на сайте клуба и доказать свои контактные данные. Дополнительно потребуется активация промокода. <a href=http://molbiol.ru/forums/index.php?showuser=1284217>http://molbiol.ru/forums/index.php?showuser=1284217</a> Прежде чем активировать бездеп, необходимо убедиться что, нет, что государство, уроженцем которой считается игрок, не входит в список разрешенных. 1×slots бездепозитный бонус за регистрацию
1×slots регистрация то дальше необходимо пройти
Список например именуемых «разрешенных территорий» прилагается к правилам бонусной программы игорного портала. Обязательно проверьте, распространяются ли на вас подобные санкции.Классическая разновидность приза за творение аккаунта. Его превосходство содержится что, нет, что клиент возможность самостоятельно подбирать аппараты и создавать ставки в них. Иногда перечень игровых автоматов ограничен оператором, но все одинаково это другого, как, чем единственный доступный слот, как если, тогда, с внедрением фриспинов. Онлайн-казино с бездепозитными бонусами ставят посетителям условия для пользования бездепами, потому перед участием в акции чем досконально ознакомиться со всеми правилами и нюансами промоакции. Условия все прикасаться получения бонуса, его применения и последующего вывода валютных средств когда выигрыша.В основном случаев благотворительные бонусы начисляются в кредитах, коие невозможно сразу исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти требования принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д. ). О нем читайте ниже. <a href=http://mosoblzerno.ru/index.php?subaction=userinfo&user=broadneophyte56>http://mosoblzerno.ru/index.php?subaction=userinfo&user=broadneophyte56</a> 1×slots регистрация на сайте
рабочее зеркало 1×slots
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=470152>1×slots зеркало рабочее на сегодня</a> Помните, собственно в некоторых играх сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных забавах только от 5% до 50% суммы ставки числятся как отыгранные средства, на как в слотах идет в зачет все 100% суммы.Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 поболее. Когда игроку полагается большое фриспинов, администрация возможность бить3 их начисление на некоторое дней. Бесплатные вращения предоставляются для определенного слота, кот-ый указывается в правилах акции. Лишь пользующиеся и знаменитые азартные заведения все позволить себе выдавать бездепы в виде дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депо, которые возможно истратить в топовых аппаратах с высочайшей отдачей. 1×slots регистрация 1×slots review live <a href=https://www.025b.cn/space-uid-1730657.html>https://www.025b.cn/space-uid-1730657.html</a> Для того, чтобы отыграть сумму вашего бездепозитного приза нужно выполнить условия вейджера. Очень нередко фриспины даются на определенные слоты (book of ra, book of lifeless, book of sun), избирайте слот себе по душе, они все очень очень и высококачественные. Бездепозитные бонус может быть денежным например и повторяющий фриспинов на слоты
1×slots официальный зеркало рабочее
Бездепозитный приз за регистрацию в казино с выводом денег в 2022 году — Наш ресурс дает игрокам важную информацию о самых новых, щедрых и испытанных бонусах в интернет казино, коие обновляются каждый день. <a href=https://www.9tj.net/home.php?mod=space&uid=212876>https://www.9tj.net/home.php?mod=space&uid=212876</a> Новые посетители онлайн-казино без первого депозита могут проверить собственную удачливость. К что, этому же есть вероятность преобразовать бездепы в реальные средства за регистрацию в казино, впрочем чтобы приз нужно отыграть сообразно условиям акции. 1×slots быструю регистрацию а также мгновенное Бездепозитные бонусы истинными средствами, которые можно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадали.Главное превосходство спинов – вероятность выучить различные слоты. Также удастся насладиться бонусными раундами, испытывать удачу в риск-туре и преувеличить выигрыш за счёт особых знаков. Однако столько игровой процесс заслуживает внимание, ведь лучше сосредоточиться на реальном выигрыше.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.bandariklan.com/showthread.php?tid=176825&pid=934500#pid934500>1×slots casino регистрация</a>
<a href=http://palais.beesims.com/phpbb/viewtopic.php?f=2&t=290827>онлайн казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Шаг 4. Активация. Внимательно изучите условия, информацию по ограничениям и сроке действия бонусного предложения. Разобравшись с правилами, можно активировать приз в личном офисе (времени ? с внедрением промокода) или по запросу в саппорт.
#5774 Charlesgunnyhttp://filmkachat.ru
1×slots на любой вкус как пройти регистрацию
Если при регистрации показать промокод, можно гарантировано получить приз. Где арестовать ваучер? Посетите тематические блоги либо форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В заключительное время игорные жилища начали рекламироваться в фильмах и сериалах. Присмотритесь и наверняка заметите промокод, который принесёт 500 либо 1 000 бонусных рублей. <a href=http://filmkachat.ru/>зеркло казино 1×slots</a> При исполненьи критерий отыгрыша и верификации, средства с бонусного счета переводятся на ведущей и имеют быть выведены на карту или электронный кошелек. Лимиты на вывод и сроки проведения транзакции зависимости от выбранной платежной системы.Возьми собственный презент. Чаще всего приз активизируется сразу последствии регистрации. Но случаются истории, когда надо(надобно) зайти в индивидуальный офис или написать в справочную службу. <a href=https://imageevent.com/lexxeagle/3drenderedproductimages>https://imageevent.com/lexxeagle/3drenderedproductimages</a> Бездепозитные призы в казино без пополнения 2022 — это конкретная сумма денег либо gorovyh spins вращения, которые предоставляются первым постояльцам за регистрацию на сайте казино вид бездепозитного бонуса, и выделяет вам возможность за счет казино без пополнения опробовать услуги (игр), с дальнейшей прерогативой вывода средств при выполнении всех установленных верховодил. 1хслот зеркало сайта <a href=http://fitboss.ru/user/Ashleyhix/>http://fitboss.ru/user/Ashleyhix/</a>
1×slots зеркало рабочее на сегодня
Даже не выиграв солидную сумму, игрок интересно проведет время, изнутри исследует работу площадки, воспримет геймплей автоматов. Все это без каких-то финансовых рисков. Быть в курсе наихороших акций с. Достаточно периодически учить список новых интернет казино с выводом бонуса без депо в данном разделе.Приглашаем делиться воззрениями о призах. Это поможет иным юзерам избирать наиболее прибыльные предложения. 1×slots регистрация на сайте Все обожают получать подарки. Согласитесь, почти каждый играющий человек несомненно сильно рад, случае получит безвозмездный подарок для игры в онлайн казино просто за регистрацию или же приз за внесенный депозит, так именуемые приветственные бонусы для новых игроков. Соответственно эти интернет клубы будут больше востребованы и преимущественны у игроков при выборе казино для игры. Топ казино непрерывно обновляется и прибавляются свежие и увлекательные игровые клубы с привлекательной бонусной политикой и всеми возможными привилегиями, к которым относятся такие бонусы как фриспины за регистрацию, денежные бездепозитные бонусы, а щедрые призы за внесенный депозит.Такой казино бонус без депо за регистрацию выдается игроку на час и активно используется данное предложение с 2017 года. Это словно некая маскировка одобрения под бездепозитный. Суть всего сего сводится к тому, что игроку на час выдается, например, 1000 $, а реклама утверждает про, собственно любой выигрыш можно несомненно дальнейшем забыть при для. Но если играющий всерьез отнесется к данному предложению, то он попросту потеряет время. Ведь геймеру надо(надобно) будет выступать не в аккаунте, в тренировочном и с ограниченным выбором автоматов и ставок. Да и если, тогда, выигрыша (и всей тысячи) в правила вступят конкретные обстоятельства, где будет сказано, что максимальной суммой победы может быть только двести долларов и средства можно использовать только в качестве приза на 1-ый вклад с вейджером 25 от суммы вознаграждения плюс сам депозит. По итогу получится, собственно игрок выигрывал себя 200% бонус с вейджером на определенную необходимую. Короче говоря, это все надо вашего времени. <a href=https://zhshops.com/home.php?mod=space&uid=12397&do=profile>https://zhshops.com/home.php?mod=space&uid=12397&do=profile</a> Для верификации номера телефона, в собственном профиле изберите опцию „Подтвердить номер телефона“ и введите в отвечающее фон код, приобретенный в sms-сообщении.Когда речь о получении бездепозитных призов в казино, начала внимание на следующие обстоятельства: 1×slots регистрация 1×slotscasino 56 online Бездепы имеют входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами.
казино 1×slots
Это тоже бесплатные деньги, которые поступают на аккаунты свежеиспеченных игры в регистрирования. А необыкновенность этих бонусов состоит в, собственно обретенные финансы обязательно стопам применять в продолжении назначенного времени. Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и расценить необыкновенности, труднодоступные при забаве в демо режиме. Многие новые клиенты переходят в число неизменных, а оператор получает длительную выгода. <a href=https://www.0574snyw.com/space-uid-176004.html>https://www.0574snyw.com/space-uid-176004.html</a> Похожим образом трудится третий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения клиента либо в связи с получения им VIP-статуса. Подарок предоставляется последствии обращения в поддержку и проверки.Чтоб получить крупный выигрыш, выбирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша. 1×slots официальный demo регистрация в 1×slots casino Бездепы с безвозмездными вращениями предоставляют юзерам право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд выплачивает казино. Число спинов ограничено и изредка превышает сотку. Если промоакция включает в себя количество безвозмездных игр, их начисление имеет быть разбито на некоторое дней.Создание аккаунта. На сайте казино нужно открыть регистрационную форму и заполнить пустующие поля личными данными. Иногда на этом этапе требуется указать лишь адресок электрической почты и пароль, хотя чаще хотелось заполнить анкету персональной информацией (ФИО, дата рождения, пространство проживания и т.д.). Нужно свидетельствовать лишь реальные данные, поскольку впоследствие они будут испытаны.
1×slots зеркало рабочее
Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном веб-сайте и выполните вход в индивидуальный кабинет, чтобы забрать безвозмездные вращения с вейджером х40;Чтобы бездеп не был начислен на Ваш аккаунт, Вам не нужно активировать бонусный код. Если поощрение от казино было добавлено на Ваш акк автоматически, а Вы не планируете его использовать, обратитесь в саппорта с пожеланием отменить бездепозитный приз. 1хслотс рабочее зеркало на сегодня <a href=http://ventasdiversas.com/user/profile/1183169>http://ventasdiversas.com/user/profile/1183169</a> Некоторые веб-сайты, этого чем провести регистрацию игроков, предлагают ответить на количество базовых вопросов. Цель проведения похожей викторины – выявить случайных людей, коие не имеют представления о покере, и не допустить получения ими бонусов. Если гость теснее играл в казино, то ответить на полтора 10 несложных вопросов несомненно нетрудно. Очень часто, ответы можно найти на официальных сайтах данных учреждений.Условия имеют разниться друг от приятеля. Но такой приз может быть использован только для игрового процесса – приобретенные на счет финансы до того, как станут отыграны, исключить невероятно.
1×slots бонус за регистрацию
Прямо данный отберите благотворительные вращения за регистрацию без депо и начинайте коллекционировать призовые композиции ради крупных выигрышей!К образцу, игроку выдаются безвозмездные средства в заведении в размере пятидесяти либо ста $ (вейджер на которые сочиняет 100х). То есть, каждому новоприбывшему геймеру выскакивает притягивающая картинка, которая обещает выплату всех зачисленных компанией средств. Не стоит заострять на казино бонус за регистрацию без депозита с сильно великий или довольно маленькой суммой бонусов, поэтому собственно, и кропотливо выучив все условия, тут вероятнее всего, несомненно какой-то подвох. <a href=http://d3axa.com/?option=com_k2&view=itemlist&task=user&id=473074>http://d3axa.com/?option=com_k2&view=itemlist&task=user&id=473074</a> 1×slots регистрацию процедура займет всего лишь Обычно для получения бонусов без депозита, казино выдвигает приклнные и вполне выполнимые условия, но есть ряд действий которые воспрещены и шансы повлечь за собой противные последствия:
<b>Смотреть еще похожие новости:</b>
<a href=http://moneysweet.listbb.ru/memberlist.php?mode=viewprofile&u=6851&sid=343dfa18364fd630be2f0258a33c1f06>1×slots на любой вкус как пройти регистрацию</a>
<a href=http://aurorahcs.com/forum/memberlist.php?mode=viewprofile&u=168982>1×slot официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Таким образом интернет казино получает потенциального игрока. Возможно дальнейшем либо подлинном он захотит поиграть на свои средства. Так трудятся бездепозитные призы в онлайн казино. Здесь отлично подходит выражение, благотворительные сыр случается только в мышеловке. Начинающие игроки шансы не осознавать опасность азарта. Однако течением понимания делается больше. Это тема для отдельного обсуждения. Получить Бездепозитный приз в интернет казино дело двух кликов. Другой момент, отыграть рекламную и соблюсти управляла и условия отыгрыша. Под правилами предполагается не только вагер, хотя и ограничения по максимальной ставке. Мы осознаем, что в кинотеатр все ставят на зеро и выигрывают. Призываем не делать похожего. Перед активацией бонуса прочитайте правила. Узнайте последующие моменты: Условия получения подарка, за регистрацию, за депозит и многое. Ограничения по наибольшей ставке. Зачастую не повыше 350 руб. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вертеть автоматы, а вагер будет стоять на месте. Поэтому принципиально аристократия, в каких играх можно осуществлять кратность валютного оборота.
#5775 Charlesgunnyhttp://filmkachat.ru
сайт 1× slots casino
Срок отыгрыша — это период, который наступает в момент активации приза и завершается с его закрытием. Пользователю нужно уложиться в этот временной зазор, другому призовые средства аннулируются. Казино устанавливают список игр, ставки в которых засчитываются при расчете отыгранных денег. Если тайтл не входит в данный список, то ему быть недосегаем для загрузки период действия бонусного предложения.Для как, дабы отыграть необходимую вашего бездепозитного приза надо(надобно) выполнить обстоятельства вейджера. Очень нередко фриспины даются на конкретные слоты (book of ra, book of dead, book of sun), выбирайте слот для по душе, они довольно очень и высококачественные. Бездепозитные бонус может быть валютным так и повторяющий фриспинов на слоты <a href=http://filmkachat.ru/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> Превышение максимальной ставки при отыгрыше. Система механически не предуведомляет о превышении ставки, поэтому о несоблюдении правил игрок может узнать теснее в подачи запроса на вывод средств. <a href=https://www.palscity.com/forums/thread/2009/>https://www.palscity.com/forums/thread/2009/</a> Вы наверняка, как и все любите получать презенты и бездепозитные призы казино. Игорные дома взяли в привычку одаривать гэмблеров приятными бонусами. Стать обладателем приветственного подарка можно за создание профиля либо пополнение счёта. Второй вариант более занимательный, так клубы готовы удвоить депозит! Но в вы новичок и только знакомитесь с миром пыла, какого-либо воспользуйтесь бонусом за регистрацию. 1хслотс зеркало на сегодня <a href=http://n27244j0.bget.ru/index.php?subaction=userinfo&user=WalterAdelp>http://n27244j0.bget.ru/index.php?subaction=userinfo&user=WalterAdelp</a> Выбор каждого онлайн казино на нашем сайте. В описании к любому Вы можете узнать, что получите за творение аккаунта.В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с даровых вращений. Прибыль, коию Вы заработаете на этом бездепе возможно назначать на вывод без какого или отыгрыша.
1×slots регистрация 1×slotscasino 56 online
Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, чтобы снова получить бесплатный приз. Игорные заведения нетерпимы к бонус-хантерам, потому вас ждет неизбежное санкция.Для верификации аккаунта нужно дать специалистам технической помощи отсканированную копию паспорта и счета за коммунальные предложения, еще фотографию банковской карты либо экрана страницы электронного кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для доказательства личности. 1×slots регистрация на сайте 1×slots ru com Частенько новенькие не разумеют, как активировать подарки или исключить первый выигрыш. Для сходственных случаев наша команда обрисовала основные термины – собственно такое фриспины, вейджер, как его отыграть, для необходимо проходить верификацию. <a href=https://surinbest.com/classified/index.php?page=user&action=pub_profile&id=48468>https://surinbest.com/classified/index.php?page=user&action=pub_profile&id=48468</a> Бездепозитные бонусы в казино без пополнения 2022 — это конкретная сумма средств либо vacant spins вращения, коие предоставляются первым гостям за регистрацию на сайте казино повторяющий бездепозитного приза, и дает вам возможность помощью казино без пополнения опробовать предложения (игр), с последующей прерогативой вывода средств при исполненьи всех установленных верховодил.Диапазон ставок, которые вправе устроить игрок, кроме лимитирован. Обычно ставить возможно небольшую необходимую — в 10–30 рублей за одно вращение. 1×slot регистрация
1×slots сайт
Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут уточняет ограничение для клиентов. Конечно, это можно счесть неким неудобством для игрока, хотя справедливости необходимо, собственно выбор автоматов всё равно остаётся достаточно большим.Бездепозитные бонусы начисляются только один раз. Не стоит открывать свежие аккаунты, дабы получить их повторно. Служба безопасности казино обязательно выявит «левого» соучастника и перекроет. Если гость выполнит нужные притязания, отыграет собственную ставку и решит вывести собственный выигрыш, то ему нужно учесть, собственно казино обязательно востребует дать ксерокопии собственных документов, чтобы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои вывести не удастся. <a href=https://build-in.dp.ua/wr_board/tools.php?event=profile&pname=Zacheryred>https://build-in.dp.ua/wr_board/tools.php?event=profile&pname=Zacheryred</a> 1×slots зеркало которую указывали при регистрации кстати Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Бездепозитные призы отличный вариант бесплатной игры в игровые автоматы. Многие пользователи сети не знают, собственно в казино можно начать играть безусловно безвозмездно, а потом исключить выигрыш на банковскую карту либо электронный кошелек, другие не доверяют интернет казино, а третьи удачно играют и выигрывают – и тотчас достаточно великие суммы.
1х слот регистрация в 1×slots casino
Для верификации аккаунта надо(надобно) предоставить профессионалам технической помощи отсканированную копию паспорта и счета за коммунальные предложения, а также фотку банковской карты либо снимок страницы электрического кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для доказательства личности. 1× слот зеркало <a href=https://www.diekassa.at/kassenwiki/index.php?title=Shisha_Tobacco_From4_Eur>https://www.diekassa.at/kassenwiki/index.php?title=Shisha_Tobacco_From4_Eur</a> Даже не выиграв крупную необходимую, игрок увлекательно проведет время, изнутри исследует работу площадки, воспримет геймплей автоматов. Все это без каких-либо финансовых рисков. Быть в курсе наилучших промоакций легко. Достаточно регулярно изучать перечень свежих интернет казино с выводом приза без депо в данном разделе.В зависимости от интернет заведения любой из них может для предложить как бездепозитные деньги, например и бездепозитные фриспины, которые в удачной регистрации упадут вас на ваш игровой баланс.
1хслот зеркало сайта
Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша бонусов. Заведения всегда устанавливают наивысшую ставку, допустимую по условиям вейждера.3. Подтвердить данные. В зависимости от клуба, нужно привязать телефонный либо почту, показать индивидуальную информацию; Многие азартные клубы ограничивают необходимую вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании промоакции, суммы Вы не сможете вывести. Разница будет аннулирована, Вы числе не можете делать на нее ставки.Бонус с зачислением средств на счет дает больше свободы деяний. Пользователь сам избирает, каким образом воспользоваться подаренными средствами. Здесь того шансы работать ограничения на список доступных игр, хотя обычно эти рамки не например строги, как в промо с безвозмездными вращениями. <a href=https://gidro2000.com/forum-gidro/user/28696/>https://gidro2000.com/forum-gidro/user/28696/</a> Максимальный объем ставки, который нельзя превосходить пока приз не будет всецело отыгран. В случае нарушения сего управляла, бонус и выигрыш с него будут аннулированы.Большинство клубов завлекают внимание геймеров за счёт разнообразных даров. На одних веб-сайтах возможно получить виртуальные кредиты, которые откроют доступ ко всему софту. На других же, администрация предлагает безвозмездные вращения для запуска топовых онлайн слотов. Несмотря на разные промоакции, стоит выделить самые главные. 1×slots регистрация 1×slotscasino 56 online Такой казино бонус без депозита за регистрацию выдается игроку на час и активно употребляется данное предложение с 2017 года. Это как бы какая-то конспирация одобрения под бездепозитный. Суть всего этого сводится к тому, что геймеру на час выдается, к примеру, 1000 $, а реклама повторяет о том, что любой выигрыш возможно будет в забыть при себе. Но случае играющий всерьез отнесется к этому предложению, то он попросту потеряет время. Ведь геймеру надо(надобно) несомненно выступать не в основном аккаунте, а тренировочном и с ограниченным выбором автоматов и ставок. Да и если, тогда, выигрыша (числе всей тыс. ) в управляла вступят определенные условия, где будет сказано, собственно наибольшей суммой победы возможность быть только двести $ и средства возможно использовать только виде бонуса на 1-ый лепта с вейджером 25 от суммы гонорары плюс сам депо. По результату получится, что игрок выигрывал себе 200% бонус с вейджером на конкретную сумму. Короче говоря, это все не стоит вашего медли.
<b>Смотреть еще похожие новости:</b>
<a href=http://nexusroleplay.teamforum.ru/viewtopic.php?f=19&t=5987>1хслотс рабочее зеркало</a>
<a href=https://traderscrypt.com/forums/showthread.php?tid=5891&pid=8735#pid8735>1хслот 1хслотс регистрация перейти на 1×slots</a>
<a href=https://www.bf-france.com/forums/profile/30064-rabofreeor/>казино 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные призы за регистрацию считаются одним из самых модных методов вербования новых игроков в онлайн-казино, поэтому что они деют игрокам возможность опробовать казино, особенно игровые автоматы, и вероятно, выиграть настоящие средства.
#5776 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
гта казино казино рулетка <a href=https://m.repost.news/>бесплатно играем казино</a> букмекерская контора фонбет официальный сайт 1×bet регистрация <a href=https://glvk.guru/>casino зеркало сегодня рабочее</a> букмекерская контора леонов казино ставка vodka casino включи казино букмекерская контора мостбет порно с Анна Калинская (теннис) порно с Аделия Петросян (фигурное катание)
DiskiPlus демо казино DiskiPlus фильмы казино рояль <a href=https://www.diskiplus.ru>DiskiPlus pin up casino скачать</a> DiskiPlus казино ли DiskiPlus porno Анастасия Янькова, боксерка <a href=https://www.diskiplus.ru>DiskiPlus ограбление казино</a> DiskiPlus водка казино DiskiPlus порно с Евгения Медведева DiskiPlus Петрова Ольга Викторовна порно DiskiPlus скачать букмекерскую контору DiskiPlus порно с Евгения Медведева DiskiPlus смотреть фильм казино DiskiPlus 1×bet скачать приложение
#5777 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать 1×bet на андроид 1×bet вход <a href=https://th-royalgclub.com/>лучшие букмекерские конторы</a> порно с Евгений Малкин (хоккей) почему в казино не бывает настенных часов <a href=https://sovsekretno.net/>porno Виктория Баркова, легкоатлетка</a> porno Елизавета Туктамышева Ирина Горбачева porno Александр Соболев (футбол) яндекс казино casino рабочее зеркало champion casino букмекерские контора ап
DiskiPlus porno Ангелина Гончаренко, хоккеистка DiskiPlus 1×bet официальный сайт 1×bet xyz <a href=https://www.diskiplus.ru>DiskiPlus 7k casino зеркало</a> DiskiPlus ramenbet casino DiskiPlus пин ап casino pin <a href=https://www.diskiplus.ru>DiskiPlus букмекерская контора мостбет</a> DiskiPlus 1×bet вход DiskiPlus cometa casino DiskiPlus лучшая казино DiskiPlus casino сегодня DiskiPlus порно с Максим Глушенков (футбол) DiskiPlus up casino DiskiPlus порно с Евгения Медведева
#5778 Виталийhttps://hifinance.ru
Ваш микрозайм одобрен – выдача в день обращения
АНТИСПАМ MAIL.RU пометило это письмо опасным!
В России спам-рассылку писем запрещает Кодекс РФ об административных правонарушениях (статья 14.3.) и Федеральный закон РФ «О рекламе» (статья 18, п. 1). Жалобы на спам подают в Управление Федеральной антимонопольной службы (УФАС) и в Роскомнадзор (https://rkn.gov.ru/…sk-question/).
#5779 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино большая 1×bet регистрация <a href=https://7club7.com/>казино фильм смотреть онлайн</a> 1×bet слоты официальный сайт приложения букмекерских контор <a href=https://sovsekretno.net/>1×bet рабочее на сегодня</a> сайт pin up casino casino автомат pin up casino зеркало kent casino регистрация порно с Варвара Субботина лучшие букмекерские конторы порно с Виктория Синицина, фигуристка
DiskiPlus porno Юлия Пересильд DiskiPlus casino приложения <a href=https://www.diskiplus.ru/>DiskiPlus казино играть</a> DiskiPlus скачать 1×bet 1×bet xyz DiskiPlus демо казино <a href=https://diskiplus.ru/>DiskiPlus смотреть фильм казино</a> DiskiPlus мелбет букмекерская контора DiskiPlus казино на деньги DiskiPlus casino зеркало сегодня DiskiPlus porno Светлана Ходченкова DiskiPlus часы казино DiskiPlus казино на деньги DiskiPlus порно с Елена Никитина, скелетонистка
#5780 FrancisGuapshttps://body-balance.online
Federal Gov Open Enrollment <a href=https://body-balance.online/>https://body-balance.online</a> is your chance to upgrade or choose an insurance plan. Easy navigation, expert support, and a wide range of programs will help you make the right choice. Apply now!
#5781 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало
3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать аппарат или почту, указать индивидуальную информацию;Бездепозитный бонус по промо-коду несомненно доступен для забавы, только никаких случае когда Вы активируете особый бонусный код в разделе с призами либо укажите промокод при регистрации на веб-сайте. В некоторых случаях, кроме активации кода, придется подтвердить контактные данные игрока и заполнить анкету посетителя. <a href=http://filmkachat.ru/>1хслот зеркало сайта</a> <a href=https://forums.delphiforums.com/biznewsopps/messages/4670/1>https://forums.delphiforums.com/biznewsopps/messages/4670/1</a> 1×slots официальный сайт мобильная версия <a href=http://gold-sail.com.ua/bitrix/redirect.php?goto=http://metalgorstal.ru/bitrix/redirect.php?goto=http://vclis.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/-OelgdOCa4L>http://gold-sail.com.ua/bitrix/redirect.php?goto=http://metalgorstal.ru/bitrix/redirect.php?goto=http://vclis.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/-OelgdOCa4L</a>
рабочее зеркало 1хслотс
1хслот зеркало сайта Да, у бесплатных призов есть дефекты. Прежде всего, они обычно не. Кроме как, условия вейджера по ним всегда строгие. Но все же неимение риска проделывает их довольно красивыми для клиентов. <a href=http://www.cruzenews.com/wp-content/plugins/zingiri-forum/mybb/member.php?action=profile&uid=1909984>http://www.cruzenews.com/wp-content/plugins/zingiri-forum/mybb/member.php?action=profile&uid=1909984</a> Получить Бездепозитный приз в интернет казино дело двух кликов. Другой момент, отыграть промо и соблюсти верховодила и условия отыгрыша. Под правилами предполагается не вагер, но и лимитирования по максимальной ставке. Мы понимаем, что в кино все ставят на зеро и выигрывают. Призываем не делать сходственного. Перед активацией приза прочтите правила. Узнайте следующие факторы: Условия получения дара, за регистрацию, за депо и другое. Ограничения по наибольшей ставке. Зачастую не выше 350 руб. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вертеть автоматы, а вагер будет стоять на пространстве. Поэтому главно знать, в каких забавах можно осуществлять кратность денежного оборота. 1×slots регистрация на сайте При верном раскладе бездепы — это прекрасный метод выступать на деньги без траты личных средств. Есть несколько советов, следуя которым можно извлечь максимум полезности из подобных промоакций казино. Играть стопам лишь на лицензированных площадках. Скриптовые веб-сайты не только обманывают с бонусными услугами, но и используют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах нереально.
1×slots зеркало сайта
Нет. Казино выдают бесплатные призы за регистрацию, чтобы, чтобы, дабы клиент имел ознакомиться с игровым заведением. А дабы исключить его, необходимо выполнить условия отыгрыша. <a href=https://training.trainingstree.com/author/doctorlazutapl/>https://training.trainingstree.com/author/doctorlazutapl/</a> Бездепозитные призы, как теснее понятно, являются оригинальной вероятностью обратиться игровому процессу полностью бескорыстно, другими играть в интернет казино бесплатно и на быть средства незамедлительно после регистрации аккаунта. Автоматы с таким депо имеют стать великолепной возможностью поиграть для почитателей пыла с определенными лимитированиями в денег. 1×slots актуальное зеркало Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала резвые выводы. Фишка выплат что, нет, что достаточно избрать платёжный инструмент и показать необходимую. В большинстве случаев деньги зачисляются на электронные кошельки в течение 15 мин., а на банковские карты – 1–3 трудящихся дня.
1×slots зеркало видели такую регистрацию на
Бездепозитный бонус казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в данном и содержится основное отличие.Только выполнив все условия отыгрыша и дождавшись завершения ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить средства средства. Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. Также, ситуации необходимо подтвердить собственный номер телефона, для этого код, полученный в смс-сообщении от клуба ввести в особое поле в собственном офисе игрока. скачать 1×slots на андроид мобильная версия <a href=http://akva.by/forum/index.php?action=profile;u=18699>http://akva.by/forum/index.php?action=profile;u=18699</a> Фриспины без депо либо дополнительные свои посодействуют ближе познакомиться с игровой платформой и её функциями. За счёт подарков возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за игры против живых крупье.
1×slots официальный сайт зеркало
Несмотря на то, собственно этот вариант стимуляции со стороны азартных платформ довольно востребован в сфере сходственных игр, далеко многим почитателям казино ведомо, что сами бездепозитные призы казино и как непосредственно их вполне эксплуатировать. Сроки активации бонуса устанавливаются каждым казино, хотя почаще всего они не превосходят недели с этапа получения. Игроку непременно надо(надобно) использовать бездеп протяжении обозначенного срока, в ином случае приз просто исчезнет. Каждый бонус возможно получить только раз один, поэтому случае не применять бездеп в срок, у игрока не несомненно второго шанса им пользоваться.Наличие у игрока второго аккаунта. Запрещено создавать количество профилей для неоднократного получения бездепов. <a href=http://dogecraft.ru/user/Jamesantic/>http://dogecraft.ru/user/Jamesantic/</a> Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном бонусе, то в первую очередь обратите внимание на велечину вейджера и срок, кот-ый дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть приз и вывести выигрыш.Однако в критериях скрываются «подводные камни», коие не разрешат исключить солидную сумму либо же вы не успеете отыграть вейджер. Поэтому мастера советуют арестовать благотворительные вращения за регистрацию в казино без депо, чтобы поднабраться навыка и получить реальный шанс на победу. зеркло казино 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=298847>казино 1×slots</a>
<a href=https://forum.krymbezpravil.org.ua/memberlist.php?mode=viewprofile&u=10552>1×slot зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депозит может отличаться до 30 дней. Прежде чем активировать бездеп, нужно убедиться никаких, собственно государство, гражданином коей является игрок, не заходит в перечень разрешенных.
#5782 Charlesgunnyhttp://filmkachat.ru
1×slots на любой вкус как пройти регистрацию
Бездепозитные призы — это презенты от казино повторяющий бонусных денег либо фриспинов для игровых автоматов, коие начисляются на акк игрока после процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депо не требуется. <a href=http://filmkachat.ru/>1×slots сайт</a> <a href=http://prsync.com/cgifurniturecom/top-d-model-marketplaces-expert-guide-to-finding-quality-digital-assets-4446659/>http://prsync.com/cgifurniturecom/top-d-model-marketplaces-expert-guide-to-finding-quality-digital-assets-4446659/</a> В случае установленного лимита на сумму вывода выигрыша с бездепозитного приза, игрок не может вывести больше заявленной суммы. 1×slots casino регистрация 1×slotscasino09k online <a href=https://itkvariat.com/user/Miguelruike/>https://itkvariat.com/user/Miguelruike/</a>
1×slot казино зеркало
1×slots подтвердит вашу регистрацию если говорить В разделе с призами активировать свой подарок. Найти игры, для коих предусмотрено поощрение и применять бонус по предназначению. <a href=http://wiki.serialkiller.adele.im/doku.php?id=скачат_фильмы_бесплатно>http://wiki.serialkiller.adele.im/doku.php?id=скачат_фильмы_бесплатно</a> Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих притязаний, считая обязательной верификации. Если на сайте предусмотрена обязательная процедура доказательства личности, то вывести выигрыш удастся только после ревизии данных. Приготовьтесь наполнить анкету и отправить в техподдержку документ, подтверждающий лицо. 1×slots казино мобильная версия На нашем сайте Вы найдете перечень актуальных новых бездепозитных призов в казино 2022 года. Также, есть количество неповторимых предложений, коие доступны лишь гостям нашего сайта в регистрации по нашей ссылке либо активации специального промокода.
1×slots регистрация 1×slotscasino 56 online
Но никогда не забывайте внимательно разбирать верховодила роли в бонусных акциях. Если вы нарушите но бы одно условие, позднее вы не сможете уладить недоразумение с администрацией.Помимо остального, для вывода средств по бездепу нужно внести на счёт собственный первый депозит — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало возможную сумму, после чего вывод средств будет доступен. Для выбора азартного заведения Вы можете воспользоваться списком наших казино с бонусами за регистрацию. На нашем веб-сайте мы выпустили список бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, собственно часть бонусов эксклюзивные и доступны лишь для посетителей нашего вебсайта по-специальному промо-коду или по уникальной ссылке. Кроме такого, для любого приза мы подготовили подробный обозрение, в котором Вы узнаете как получить и отыграть одобрение и как исключить свой выигрыш с бездепа. <a href=https://www.elektroroller-forum.de/memberlist.php?mode=viewprofile&u=441627>https://www.elektroroller-forum.de/memberlist.php?mode=viewprofile&u=441627</a> Но есть азартные заведения, готовые просто например вручить деньги на игру. Для сего довольно создать профиль. Чтобы вывести выигрыш, сначала нужно выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа.Для казино, работающих интернет, бездепозитные призы необходимы для вербования новых посетителей. Предложение поиграть на слотах без надобности внесения реальных средств — работающий способ для увеличения энтузиазма к компании. После отыгрыша бездепа великоват шанс, собственно игроку понравится и он продолжит выступать в казино, лишь теперь теснее на собственные средства. 1хслотс рабочее зеркало Бездепозитные бонусы казино за регистрацию в 2022 году — это вероятность сыграть за счёт заведения. Казино даёт клиенту шанс пользоваться определённой суммой или количеством безвозмездных вращений без внесения депозита. Не путайте деморежим с реальной игрой без необходимости внесения депо.
1×слотс казино
Подтверждение электрической почты – одно из основных условий, которое есть почти в любом бездепозитном казино. Чтобы верифицировать электронную почту, достаточно перейти по интенсивной ссылке в послании, приобретенном от азартного клуба.Важно, убедитесь сомнений, собственно раньше не регились в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи. <a href=http://theauction.com.au/my-account/>1× slots casino зеркало</a> Чаще всего, пользующиеся сервисы, такие как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно неотъемлемое верховодило. Финансовые свои выводятся только через что, эту платежную систему, коей огромный для пополнения депозита. Если же игрок получил бездепозитный покерный приз, потребуется пополнить счет на наименьшую необходимую, кот-ая составляет обыкновенно 10 долларов.При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, коие можно посвятить ирге в казино. 1хлот регистрация в 1×slots casino <a href=http://ds2.edu.sbor.net/index.php?subaction=userinfo&user=cravenquibble71>http://ds2.edu.sbor.net/index.php?subaction=userinfo&user=cravenquibble71</a> Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.Каждый из бездепозитных призов без пополнения 2022 имеет свой определенный вейджер для отыгрыша, например же в любом казино он уточняется индивидуально — где то он х55 а где-то х30, повторюсь всюду по разному!
1хслотс казино зеркало
Теоретически, к безвозмездным призам можно отнести так нарекаемые фриспины. Напомним, речь идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, поэтому собственно они деют только вероятность создавать ставки. <a href=https://danmanba.cc/home.php?mod=space&uid=138169&do=profile&from=space>https://danmanba.cc/home.php?mod=space&uid=138169&do=profile&from=space</a> casino 1×slot
<b>Смотреть еще похожие новости:</b>
<a href=http://www.kievisp.com/forum/index.php?showuser=25142>1×slots официальный сайт скачать</a>
<a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1×slots мобильная версия войти казино</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Только выполнив все обстоятельства отыгрыша и дождавшись окончания проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить средства средства.
#5783 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
win win casino 7k casino бонус <a href=https://res-publika.com>букмекерская контора бетсити</a> сайт pin up casino казино рублях <a href=https://rhymes-punches.com/>Лут Оксана Николаевна порно</a> официальные букмекерские конторы Семёнова Татьяна Владимировна порно unlim casino casino актуальное зеркало порно с Юлия Ефимова Набиуллина Эльвира Сахипзадовна порно 1×bet зеркало рабочее xbet
DiskiPlus леон букмекерская контора DiskiPlus казино ли <a href=https://diskiplus.ru/>DiskiPlus inform@rucriminal.info</a> DiskiPlus casino играть DiskiPlus Семёнова Татьяна Владимировна порно <a href=https://diskiplus.ru>DiskiPlus казино фильм</a> DiskiPlus inform@rucriminal.info DiskiPlus top casino DiskiPlus 1×bet приложение DiskiPlus up casino официальный DiskiPlus букмекерские контора ап DiskiPlus порно с Бондаренко Анастасия Борисовна DiskiPlus порно с Кирьянова Дарья Борисовна
#5784 Michaelemusyhttps://yourmoneyblog.site
Tennis betting <a href=https://yourmoneyblog.site/>https://yourmoneyblog.site</a> best odds, predictions and analytics. Explore detailed match reviews, statistics and strategies to make successful bets. Use our tips and win!
#5785 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Семёнова Татьяна Владимировна порно 1×bet слоты 1×bet top <a href=https://th-royalgclub.com/>букмекерские конторы без депозита</a> 1×bet сейчас казино фильм <a href=https://www.ossetia.tv/>букмекерская контора скачать приложение</a> рабочее казино porno Алена Косторная (фигурное катание) online casino porno Анастасия Янькова, боксерка 1×bet официальные зеркала казино 1×bet
DiskiPlus porno Мария Шарапова DiskiPlus порно с Захарова Мария Владимировна <a href=https://www.diskiplus.ru/>DiskiPlus порно с Каролина Севастьянова</a> DiskiPlus casino приложения DiskiPlus бесплатное казино <a href=https://www.diskiplus.ru>DiskiPlus Разуваева Ксения Денисовна порно</a> DiskiPlus казино можно DiskiPlus Попова Анна Юрьевна порно DiskiPlus casino актуальное зеркало DiskiPlus бесплатное казино DiskiPlus казино можно DiskiPlus ставки на спорт букмекерские конторы DiskiPlus Скоробогатова Ольга Николаевна порно
#5786 AntonioDixhttps://blogforex.tech
Best Forex Trading Course <a href=https://blogforex.tech/>https://blogforex.tech</a> is your key to successful trading. Learn the secrets of professionals, study strategies and learn how to minimize risks. Master Forex easily and effectively!
#5787 RobertFALhttps://blogcredit.tech
Credit Union Mobile Home Loans <a href=https://blogcredit.tech/>https://blogcredit.tech</a> are the perfect solution for buying or refinancing a mobile home. Affordable rates, easy application, and reliable support every step of the way. Take the first step toward your home with us!
#5788 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
фильмы казино рояль официальная казино <a href=https://repost.news/>яндекс игры казино</a> new casino casino бездепозитный <a href=https://m.repost.news/>фреш казино</a> porno Алена Михайлова казино пину Юдаева Ксения Валентиновна порно порно с Виктория Синицина, фигуристка 1×bet xbet kometa casino букмекерская контора скачать приложение
DiskiPlus пин ап букмекерская контора DiskiPlus porno Светлана Ходченкова <a href=https://diskiplus.ru/>DiskiPlus 1×bet</a> DiskiPlus Шевцова Татьяна Викторовна порно DiskiPlus 1×bet официальный xbet <a href=https://www.diskiplus.ru/>DiskiPlus порно с Каролина Севастьянова</a> DiskiPlus казино вулкан DiskiPlus casino online зеркало DiskiPlus порно с Александр Головин (футбол) DiskiPlus порно с Кирьянова Дарья Борисовна DiskiPlus букмекерскую контору пин DiskiPlus Окладникова Ирина Андреевна порно DiskiPlus пин ап casino pin up top
#5789 Charlesgunnyhttp://filmkachat.ru
casino 1×slot
Варианты выигрыша в от Вашей удачи и критерий игорного портала. Выше мы заявили, собственно некоторые бездепозитные призы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются и, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на деньги, возможно выиграть невозможные суммы. Сегодняшние игровые автоматы или видео слоты, как их называют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые множат ставку от х100.000. <a href=http://filmkachat.ru/>casino 1×slot</a> Промокод – определённая композиция знаков, которую необходимо установить в подходящее поле при создании учетной записи или активировать в личном профиле игрока в разделе с призами.В случае установленного лимита на сумму вывода выигрыша с бездепозитного приза, игрок не может исключить больше заявленной суммы. <a href=https://divisionmidway.org/jobs/author/cgifurniture-com/>https://divisionmidway.org/jobs/author/cgifurniture-com/</a> B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. 1×slots официальный сайт зеркало <a href=http://trekliano.eu/index.php?subaction=userinfo&user=orymepoz>http://trekliano.eu/index.php?subaction=userinfo&user=orymepoz</a> Денежные свои. Третий бонус за регистрацию без депозита – наличные. К раскаянию, лишь известные и знаменитые клубы могут дать средства в руб. Или долларах. С их подмогою появится насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед данным нужно исполненье определенных условий.
1 x slots
1×slots зеркало этих способов предполагает регистрацию В лицензионных бездепозитных казино выступать в азартные игры вправду неопасно. Наличие лицензии одобряет тот факт, собственно клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP.Бездепозитные призы за регистрацию в игровых автоматах для владельцев онлайн-казино являются частью маркетинговой кампании, направленной на повышение аудитории сайта. Так они продвигают свои бренды и привлекают свежих клиентов. <a href=https://r.rumedia.top/user/Ashleynilky/>https://r.rumedia.top/user/Ashleynilky/</a> Свежий приз начисляется вид валютных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в использовании средствами, ну случае отыгрыша оператор имеет установить ограничение на вывод денег. 1×slots официальный сайт мобильная версия скачать Чтобы самостоятельно увериться в преимуществах бездепозитных призов, достаточно зарегистрироваться в казино и получить поощрение.
1×slots регистрация 1×slots casino 777 online
<a href=http://nitka.by/index.php?subaction=userinfo&user=verdantspiral39>http://nitka.by/index.php?subaction=userinfo&user=verdantspiral39</a> Таким образом онлайн казино получает потенциального игрока. Возможно в будущем либо истинном он захотит сыграть на свои деньги. Так трудятся бездепозитные призы в интернет казино. Здесь отлично подходит выражение, бесплатные сыр посещает лишь в мышеловке. Начинающие игроки все не осознавать опасность азарта. Однако течением понимания становится больше. Это тема для отдельного обсуждения. казино 1×slots Каждый из бездепозитных бонусов без пополнения 2022 содержит свой конкретный вейджер для отыгрыша, например же в любом казино он уточняется индивидуально — где то он х55 а кое-где х30, повторюсь всюду по различному!
1хслотс официальный сайт зеркало
Бонус без депо за регистрацию в казино (бездепозитный бонус) – это валютный подарок от клуба, кот-ый начисляется на аккаунт игрока в регистрации в казино. Кроме создания учетной записи, для получения бездепа, очень нередко потребуется ещё и подтвердить контактные данные игрока и/или активировать специальный промо-код.Чтоб получить крупный выигрыш, подбирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, коие доступны по условиям отыгрыша. <a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=254584>1×slots официальный регистрация</a> Если вы избираете проверенное лицензионное интернет казино и выполните все обстоятельства получения бездепозитного бонуса, проблем с получением подарка у Вас не возникнет.Большинство клубов завлекают внимание компьютерные за счёт разнородных даров. На одних сайтах возможно получить виртуальные кредиты, коие откроют доступ ко всему софту. На иных же, администрация предлагает безвозмездные вращения для пуска лучших интернет слотов. Несмотря на разные акции, стоит выделить самые главные. 1×slots официальный сайт скачать <a href=http://timeclubshop.ru/bitrix/redirect.php?goto=http://x-mox.com/bitrix/click.php?goto=http://td-gidroproekt.ru/bitrix/redirect.php?goto=https://telegra.ph/Ponimanie-znacheniya-treh-polos-na-voennyh-pogonah-09–23>http://timeclubshop.ru/bitrix/redirect.php?goto=http://x-mox.com/bitrix/click.php?goto=http://td-gidroproekt.ru/bitrix/redirect.php?goto=https://telegra.ph/Ponimanie-znacheniya-treh-polos-na-voennyh-pogonah-09–23</a> Для получения приза нужно ознакомиться с программой преданности казино и сделать ставки на сумму, необходимую для перехода на следующий уровень.Казино выделяет вероятность заработать и вывести реальные средства на бездепозитных бонусах. Обычно, это незначительная сумма, которую казино имеет себе разрешить презентовать игроку.
1×slots казино зеркало
<a href=https://prpack.ru/user/ChrisKnild/>https://prpack.ru/user/ChrisKnild/</a> x1 slots 1хслотс регистрация перейти на 1×slots Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, all зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.kfz-gringer.at/index.php/forum/suggestion-box/66576–1×slots#66341>1×slots рабочее зеркало на сегодня</a>
<a href=http://www.ihavethepussy.com/de/threads/223879–1×slots-casino-%D0%A1%D0%82%D0%A0%C2%B5%D0%A0%D1%96%D0%A0%D1%91%D0%A1%D0%83%D0%A1%E2%80%9A%D0%A1%D0%82%D0%A0%C2%B0%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A1%D0%8F?p=241853#post241853>1×slots casino регистрация</a>
<a href=https://masstr.net/showthread.php?tid=140069>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Перечисленные выше основные свойства сочетают фактически любой бонус и являются стереотипными для бездепозитных бонусных начислений в казино.
#5790 KurtisPoumbhttps://hi88bet.tech/da-ga/
Đá gà online là một hình thức giải trí mới mẻ, kết hợp giữa trò chơi truyền thống đá gà và công nghệ hiện đại. Khi công nghệ số phát triển mạnh mẽ, nhiều trò chơi dân gian đã được chuyển thể thành các phiên bản online, và đá gà không phải là ngoại lệ. Trò chơi này không chỉ giúp người chơi có thể tham gia vào bất kỳ lúc nào, bất kỳ đâu, mà còn mang lại những trải nghiệm thú vị và kịch tính. Tuy nhiên, đá gà online cũng đã gây ra nhiều tranh cãi về mặt đạo đức, pháp lý và bảo vệ quyền lợi động vật.
Đá Gà Online – Hình Thức Giải Trí Mới Mẻ
Đá gà online là một hình thức giải trí mới mẻ, kết hợp giữa trò chơi truyền thống đá gà và công nghệ hiện đại. Trong những năm gần đây, khi công nghệ số phát triển mạnh mẽ, nhiều trò chơi dân gian đã được chuyển thể thành các phiên bản online, và đá gà cũng không phải là ngoại lệ.
Chơi đá gà online mang lại cho người chơi nhiều lợi ích. Một trong những điểm nổi bật nhất là sự tiện lợi. Với việc sử dụng internet, người chơi có thể tham gia vào các trận đá gà bất cứ lúc nào và ở bất kỳ đâu. Điều này giúp cho trò chơi trở nên dễ tiếp cận hơn, đặc biệt đối với những người bận rộn với công việc và không có nhiều thời gian để tham gia các hoạt động giải trí truyền thống.
Ngoài ra, đá gà online còn mang đến những trải nghiệm thú vị và kịch tính. Người chơi không chỉ đơn thuần là xem mà còn có thể tham gia đặt cược, theo dõi những trận đấu hấp dẫn và cảm nhận được không khí hồi hộp của từng phút giây. Các nền tảng đá gà online thường cung cấp nhiều tính năng như livestream trận đấu, thống kê kết quả, và giao lưu với cộng đồng người chơi, tạo nên một không gian giải trí sống động.
Tuy nhiên, đá gà online cũng đã gây ra nhiều tranh cãi về mặt đạo đức, pháp lý và bảo vệ quyền lợi động vật. Nhiều người cho rằng việc tổ chức đá gà, dù là trực tuyến hay truyền thống, vẫn là hành vi không đáng khuyến khích, bởi nó có thể gây tổn hại cho quyền lợi của động vật. Bên cạnh đó, vấn đề pháp lý liên quan đến cá cược và những rủi ro tài chính cũng là mối quan tâm lớn đối với xã hội.
Tóm lại, đá gà online là một hình thức giải trí hiện đại và thu hút nhiều người chơi. Tuy nhiên, sự phát triển của nó cũng cần đi kèm với những giải pháp để bảo vệ quyền lợi động vật và đảm bảo tính hợp pháp của hoạt động này. Sự cân nhắc về mặt đạo đức và pháp lý trong việc tham gia trò chơi sẽ giúp tạo ra một môi trường giải trí lành mạnh và bền vững.
#5791 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Нина Пирогова, хоккеистка вавада казино <a href=https://strelochnik.com/>официальные зеркала казино</a> Лут Оксана Николаевна порно 1×bet на андроид <a href=https://vestnik-jurnal.com/>top casino</a> up casino casino зеркало сегодня букмекерская контора фонбет скачать casino на андроид casino официальный зеркало казино фильм почему в казино не бывает настенных часов
DiskiPlus букмекерская контора DiskiPlus букмекерская контора <a href=https://www.diskiplus.ru/>DiskiPlus казино 1</a> DiskiPlus casino бонус DiskiPlus порно с Виктория Синицина, фигуристка <a href=https://www.diskiplus.ru>DiskiPlus букмекерские контора ап</a> DiskiPlus Чулпан Хаматова DiskiPlus вавада казино DiskiPlus casino официальный зеркало DiskiPlus casino промокод DiskiPlus r7 casino DiskiPlus порно с Анна Калинская (теннис) DiskiPlus r7 casino
#5792 Charlesgunnyhttp://filmkachat.ru
1×slots сайт
Баланс игрока пополняется на подходящую сумму. К ней применяется вейджер, указанный в правилах промоакции. Вывести выигрыш возможно будет в того, как пользователь устроит требуемый объем ставок из личных средств. В редких случаях бездеп трудится в формате Free Play. На счет юзера зачисляется крупная сумма, и предоставляется маленький срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по завершении этого периода сумма на счету несомненно превышать первоначальную, то разность можно несомненно вывести или применять для дальнейших ставок. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало рабочее</a> Третитй бездепозитный бонус за регистрацию – валютные свои. К раскаянию, начислить рубли либо доллары готовы только знаменитые и популярностью клубы. С их подмогою у насладиться любой доступной забавой – автоматом, рулеткой, кено, блэкджеком. <a href=http://www.alexandria.gov.eg/Lists/List30/DispForm.aspx?ID=83358>http://www.alexandria.gov.eg/Lists/List30/DispForm.aspx?ID=83358</a> Фриспины предназначены для использования в видео слотах. Внимательно ознакомьтесь с условиями – частенько их выдают на некоторые автоматы. В зависимости от клуба, у вас получится сделать определённое количество ставок. Кстати, продвинутые игорные дома позволяют запускать каждых «одноруких злодеев».Вейджер (wager) – это коэффициент, кот-ый показывает на какую необходимую необходимо сделать ставок, дабы вывести приз из казино. Пример: Вы получили за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода этого бонуса, Вам необходимо сделать ставок на необходимую: 500*70=3500 руб. Только полностью отыграв приз, Вы можете вывести собственный выигрыш. 1×slots сайт <a href=http://t20suzuki.com/phpBB2/profile.php?mode=viewprofile&u=8676>http://t20suzuki.com/phpBB2/profile.php?mode=viewprofile&u=8676</a> Для получения предоставленных бонусов вас понадобиться — ПК или мобильное прибор, и остальное дело за малым.Даже не выиграв солидную сумму, игрок увлекательно проведет время, изнутри исследует работу площадки, оценит геймплей автоматов. Все это без каких-либо денежных рисков. Быть в курсе превосходнейших акций легкостью. Достаточно периодически изучать список свежих онлайн казино с выводом приза без депо в этом разделе.
1× slots официальный
Когда речь идет о получении бездепозитных бонусов в казино, в первую очередь обратите внимание на последующие обстоятельства: 1×slots казино зеркало Бонус за регистрацию в казино без депозита с выводом денег нужно отыграть. Зачастую для отыгрыша возможность понадобиться устроить ставки на необходимую, в количество 10-ов раз превосходящую сумму бонуса либо выигрыша.Существуют казино с призом за регистрацию, в очень известны фриспины в интернет казино впоследствии регистрации в конкретных забавах. Они встречаются том почаще бесплатных поощрений либо классических призов в казино без инвестициям. Например, игрок регистрирует счет, на кот-ый начисляются бесплатные забавы, бонус за регистрацию вид бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса игрок выигрывает настоящие деньги, которые в последствии можно удачно вывести из заведения на собственную платежную систему. То есть, есть все шансы исключить средства без рисков своими деньгами. Регистрация, какую компьютерные получит бонусы, займет пару минут, а спасибо данному можно увеличить 5 евро поощрений до тысячи и без всяких проблем вывести их. <a href=https://lustbb.com/member.php?action=profile&uid=2905>https://lustbb.com/member.php?action=profile&uid=2905</a> Каждый из бездепозитных призов без пополнения 2022 имеет собственный определенный вейджер для отыгрыша, так же в каждом казино он уточняется персонально — где то он х55 а где-то х30, повторюсь всюду по разному! 1×slots официальный сайт, скачать Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша бонусов. Заведения практически устанавливают наивысшую ставку, возможную по условиям вейждера.Максимальный размер ставки, кот-ый невозможно превосходить пока приз не несомненно полностью отыгран. В случае нарушения этого управляла, приз и выигрыш с него будут аннулированы.
1хслот официальный сайт зеркало
Представленные на данной страничке наилучшие бездеп бонусы в казино за регистрацию в 2022 году имеют подходящие обстоятельства. После кропотливого анализа редакция портала составила рейтинг спецпредложений, в котором посетители Casino.ru все сортировать список по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д.Чаще всего применяются коды. Их нужно вносить в специальные окошки регистрационной анкеты, если речь о пригласительных призах, или в определенном разделе собственного офиса игрока. <a href=http://quasix.ru/user/Frankjen/>http://quasix.ru/user/Frankjen/</a> Для всех бездепозитных бонусов действует наибольший лимит на выигрыш. Он указывает предельную сумму, которую возможность получить, играя на бонусные кредиты. Как лишь для удастся выполнить требования вейджера, возможный максимально будет переведен с бонусного счета на главной, а остаток несомненно списан.Бездепозитные бонусы, как теснее ясно, считаются оригинальной вероятностью обратиться игровому процессу безусловно безвозмездно, словами выступать в интернет казино безвозмездно и на существующие средства сразу последствии регистрации аккаунта. Автоматы с таким депо могут замерзнуть прекрасной вероятностью поиграть для почитателей азарта с определенными лимитированиями в финансах. 1×slots официальный сайт зеркало
1×slots официальный сайт скачать на айфон
Простая процедура получения бездепозитного бонуса, кот-ая займет менее 2-х минут. Для получения бездепов, достаточно зарегистрироваться и доказать контактные данные.Казино выделяет возможность заработать и вывести настоящие деньги на бездепозитных бонусах. Обычно, это незначительная сумма, которую казино имеет себе разрешить презентовать игроку. Почти все игровые клубы требуют свидетельство контактных данных игрока для получения бездепозитного приза. Доступ к дару возможность открываться автоматически последствии введения промокода или обращения в службу вебсайта. В первом случае от юзера не требуется практически действий. Бездеп с активацией по коду встречается чаще всего. Игроку необходимо установить совокупность знаков в графе, кот-ая возможность находиться в регистрационной форме в Личном кабинете. 1×slots зеркало сайта <a href=http://mail.ansanam.com/bbs/board.php?bo_table=report_status2&wr_id=298392>http://mail.ansanam.com/bbs/board.php?bo_table=report_status2&wr_id=298392</a>
1×slots казино зеркало
Более крупные предложения встречаются довольно редко. Зачастую они доступны только VIP-игрокам. В оставшихся случаях им всего сопутствуют довольно строгие условия отыгрыша. Также возможны вспомогательные обстоятельства и лимитирования, прописанные в условиях и положения бонусной программки казино.Приветственный приз без депо ? презент за регистрацию. Выдается деньгами, фриспинами либо баллами. В заключительном случае бонусные баллы используются для участия в турнирах либо размена на реальные деньги. К раскаянию, нет. Почти все казино, настоятельно внесение желая бы 1-го минимального депозита для вывода выигрыша с бездепозитного бонуса. Также учитывайте, что исключить средства разрешено лишь на ту платежную систему, с которой был изготовлен депо. <a href=http://shigebao.com.cn/home.php?mod=space&uid=1147331>http://shigebao.com.cn/home.php?mod=space&uid=1147331</a> 1×slots промокод при регистрации 2025 Перечисленные выше основные свойства сопровождают практически любой бонус и являются стереотипными для бездепозитных бонусных начислений в казино.
<b>Смотреть еще похожие новости:</b>
<a href=https://chasingadream.rpginitiative.com/member.php?action=profile&uid=35799>1×slots зеркало</a>
<a href=https://astraclub.ru/album.php?albumid=228073>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Игры, в можно выступать на бонусные средства. Проверьте перечень игр, в можно играть на бонусные свои, вероятно они Вам не понравятся и не стоит расходовать своё время на такую акцию.
#5793 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
Каждый в обязан сперва детально изучить обстоятельства по получению и отыгрышу приглянувшегося презента. Если всё устраивает, поспешите арестовать бесплатные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо момент начать вращать барабаны лучших слотов. <a href=http://filmkachat.ru/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> <a href=https://hanson.net/users/ShopAvto>https://hanson.net/users/ShopAvto</a> 1×slots зеркало которую указывали при регистрации кстати <a href=http://202.133.247.70/space-uid-1710863.html>http://202.133.247.70/space-uid-1710863.html</a> В бонусную программу многих операторов входят систематические бездепы. Это бессрочные акции, поощряющие интенсивных неизменных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают неизменные бонусы без депо в размен на скопленные баллы лояльности.Вейджер (wager) – это коэффициент, который демонстрирует на какую необходимую нужно сделать ставок, дабы вывести приз из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода этого бонуса, Вам необходимо сделать ставок на сумму: 500*70=3500 рублей. Только полностью отыграв приз, Вы можете исключить собственный выигрыш.
1хслотс рабочее зеркало
<a href=https://vredeenvermaak.be/forum/vrede-en-vermaak/>1×slots регистрация 1×slots casino 777 online</a> 1× slots зеркало Казино выводит средства только на ту платежную систему, с котрой был сделан депозит. То есть, для вывода бездепозитного бонуса, Вам сначала нужно восполнить счет. В некоторых клубах узкий перечень методов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет именно с этих платежных методов, коие доступны для вывода. <a href=https://trentondikl79123.blogofoto.com/61493506/deep-nude-the-ethical-dilemmas-and-technological-impacts-of-ai-driven-image-manipulation>https://trentondikl79123.blogofoto.com/61493506/deep-nude-the-ethical-dilemmas-and-technological-impacts-of-ai-driven-image-manipulation</a> 1×slots официальный сайт мобильная версия
1хслот официальный сайт зеркало
Если вы выбираете проверенное лицензионное интернет казино и выполните все условия получения бездепозитного приза, проблем с получением дара у Вас не возникнет. <a href=http://bbs.qoos.com/home.php?mod=space&uid=67951&do=profile&mycenter=1>http://bbs.qoos.com/home.php?mod=space&uid=67951&do=profile&mycenter=1</a> Игры, в которых возможно играть на бонусные деньги. Проверьте перечень игр, в которых возможно выступать на бонусные свои, вполне они Вам не понравятся и не тратить своё время на такую промоакцию.Рассмотрим на образце: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских рублей. В критериях акции указано, что вейджер бездепозитного приза х20. Поэтому, дабы отыграть приз, игроку несомненно необходимо сделать ставок на 35*20=700 руб. 1×slots официальный сайт скачать Получив собственный подарок, Вы сможете даром играть на реальные деньги, а выполнив условия отыгрыша, исключить собственный выигрыш.
1×slots casino зеркало рабочее
Чаще всего казино приз за регистрацию без депозита даёт возможность запустить каждой автомат. Но превосходнее внимательно ознакомиться с критериями. Иногда для забавы доступны лишь определённые модели. Если вы новичок и ничего не смыслите в гэмблинге, другого, как начать знакомство с миром азарта непосредственно с «одноруких бандитов». <a href=https://showboysmedia.com/real-music/#comment-60182>казино 1× slots официальный сайт</a> Практически все онлайн казино с бездепозитным призом за регистрацию предусматривает программу лояльности — систему одобрения постоянных посетителей, которая произведено из множества уровней. При достижении игроком еще уровня на его счёт поступает бонус. Чем выше уровень — тем щедрее приз.Если ординарными словами, бездепы – это определённая сумма средств или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно забирать подарки. Но есть кое-какие нюансы. Существуют игорные дома, коие перед тем как начислить бонусы просят привязать телефонный, предоставить копии документов. Раздача призов имеет быть приурочена к различным датам: календарные дни, деньки рождения игроков, годовщина открытия казино и т. Д. Подарок выдается в виде средств, фриспинов либо баллов для накопления и обмена на услуги оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода этой суммы понадобиться выполнить ряд требований. 1 x slots <a href=http://bbs.mycq3d.com/home.php?mod=space&uid=89200>http://bbs.mycq3d.com/home.php?mod=space&uid=89200</a>
1×slots казино мобильная версия
<a href=https://www.argfx.co/user/DoctorLazutaEr/>https://www.argfx.co/user/DoctorLazutaEr/</a> Бездепы шансы заходить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой или баллами. 1×slot регистрация Условия вывода выигрыша. В неких заведениях для удачного вывода с бездепозитного приза достаточно пополнения баланса и доказательства личности. В иных же клубах, нужно несколько один прокрутить собственный депозит.
<b>Смотреть еще похожие новости:</b>
<a href=https://elclasificadomx.com/author/jameslog/>1хслотс рабочее зеркало</a>
<a href=https://elclasificadomx.com/author/jameslog/>1× slots зеркало</a>
<a href=https://russiancomputerservice.ru/user/JosephCer/>1× slots зеркало</a>
<a href=https://qualityprogamer.de/forum/showthread.php?tid=395312>1×slots casino зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные призы, как уже понятно, считаются оригинальной вероятностью к игровому процессу абсолютно безвозмездно, другими играть в онлайн казино бесплатно и на место средства сразу в регистрации аккаунта. Автоматы с этим депозитом могут замерзнуть прекрасной вероятностью поиграть для почитателей азарта с определенными ограничениями в денег.
#5794 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Юдаева Ксения Валентиновна порно Анна Михалкова <a href=https://strelochnik.com/>порно с Дронова Александра Викторовна</a> промокод 1×bet букмекерская контора зенит <a href=https://vestnik-jurnal.com/>casino зеркало сегодня рабочее</a> балтбет букмекерская контора pin up casino скачать casinos winning Анна Михалкова 1go casino где казино Юдаева Ксения Валентиновна порно
DiskiPlus Анна Михалкова DiskiPlus порно с Антропова Валентина Викторовна <a href=https://www.diskiplus.ru>DiskiPlus водка казино</a> DiskiPlus 1×bet регистрация DiskiPlus 1×bet на андроид <a href=https://diskiplus.ru>DiskiPlus букмекерские конторы бет</a> DiskiPlus porno Вера Бирюкова, гимнастка DiskiPlus casino 7k сегодня DiskiPlus казино сочи DiskiPlus порно с Дарья Клишина, легкоатлетка DiskiPlus unlim casino DiskiPlus 1×bet официальный DiskiPlus порно с Дарья Касаткина (теннис)
#5795 Charlesgunnyhttp://filmkachat.ru
1×slots casino зеркало рабочее
Стоит обозначить(означить), что бездепозитный бонус выдается только взрослым новеньким, коие, тому, шансы пригласить личных друзей и знакомых, того рассчитывающих на поощрительную программу преданности. Подобная разработка была среди соперничающих онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры содействуют увеличению собственной посещаемости, путем вербования свежих игроков. Бонусы – это оригинальный шанс для потенциальных участников игры, коие все опробовать софт покер рума и увериться, станут ли они в него выступать или нет. Новый игрок испробует свои силы с реальными оппонентами в казино. <a href=http://filmkachat.ru/>1×slots регистрацию более популярный вариант это</a> При выполнении критерий отыгрыша и верификации, средства с бонусного счета переводятся на ведущей и все быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции зависимости от выбранной платежной системы.Внесение депозита – Будьте готовы пополнить счет в отыгрыша бонуса. Это обычное заявка верховодил для этого подобии промо-акций. Лучше заранее уточнить, какую сумму надо(надобно) несомненно вносить на счет. Как правило, идет о минимальном депозите, хотя вы должны быть убеждены, собственно он для по кармашку. <a href=https://www.themoviedb.org/u/%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%B0%D0%B2%D1%82%D0%BE-%D1%81%D1%80%D0%BE%D1%87%D0%BD%D0%BE>https://www.themoviedb.org/u/%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%B0%D0%B2%D1%82%D0%BE-%D1%81%D1%80%D0%BE%D1%87%D0%BD%D0%BE</a> Теоретически, к безвозмездным призам можно отнести например называемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, потому собственно они предоставляют лишь вероятность создавать ставки. 1хслотс рабочее зеркало на сегодня <a href=https://rowandmwe07419.post-blogs.com/51750878/deep-nude-understanding-the-implications-of-ai-generated-imagery>https://rowandmwe07419.post-blogs.com/51750878/deep-nude-understanding-the-implications-of-ai-generated-imagery</a> Бесплатный приз – кредиты, коие онлайн-казино начисляет посетителю, не заставляя его пополнять игровой счет.За вербование приятеля ? в рамках партнерской программки клиент получает вознаграждение за вербование свежих юзеров.
1×slots casino регистрация 1×slotscasin online
<a href=https://creapnl.com/foros/tema/1%d1%85-%d1%81%d0%bb%d0%be%d1%82–1%d1%85%d1%81%d0%bb%d0%be%d1%82%d1%81-%d1%80%d0%b5%d0%b3%d0%b8%d1%81%d1%82%d1%80%d0%b0%d1%86%d0%b8%d1%8f-%d0%bf%d0%b5%d1%80%d0%b5%d0%b9%d1%82%d0%b8-%d0%bd%d0%b0–1×sl-5/>1х слот 1хслотс регистрация перейти на 1×slots</a> 1хслот зеркало сайта Выбирайте лучшие благотворительные призы с помощью обзоров на Casinoz – и пусть вам сопутствует удача при отыгрыше бонусных кредитов! <a href=http://droid-comz.ru/user/Philipcigma/>http://droid-comz.ru/user/Philipcigma/</a> В качестве бонусов интернет казино нередко предлагает выдачу фриспинов, другими безвозмездных вращений игрового барабана. Виртуальные монеты можно применять для обучения в покерной школе либо для игры в казино.Это также безвозмездные финансы, которые поступают на аккаунты свежеиспеченных геймеров последствии регистрирования. А необыкновенность этих призов произведено что, что обретенные деньги непременно по применять в продолжении назначенного медли. 1×slots зеркало Вейджер в переводе с британского означает «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша приобретенного приза, в нашем случае бездепозитного. Число ставок значения — важно лишь набрать сумму, пропорциональную сумме одобрения.Когда речь о получении бездепозитных бонусов в казино, начала обратите внимание на следующие обстоятельства:
казино 1×slots
Так собственно приготовьтесь дать секретную информацию (пол, возраст, страна проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает не более суток, в чего удастся свободно выводить крупные выигрыши. <a href=https://rg-mechanics.club/user/JustinUnemn/>https://rg-mechanics.club/user/JustinUnemn/</a> Выбирая безвозмездный бонус, внимательно изучайте управляла. Убедитесь, что вам возможно на участие в акции. Уточните, в каких забавах можно скорпулезно условия вейджера. При надобности задавайте вопросы адептам саппорта.На нашем сайте Вы найдете перечень своевременных свежих бездепозитных бонусов в казино 2022 года. Также, есть много неповторимых услуг, коие доступны лишь гостям нашего сайта после регистрации по нашей ссылке либо активации специального промокода. 1хслот скачать
1×slots актуальное зеркало
В некоторых онлайн казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на веб-сайте клуба и доказать свои контактные данные. Дополнительно потребуется активация промокода. Во время игры в казино, выигрыши, полученные благодаря бесплатным призовым фондам, суммируются и срабатывают в совместную необходимую для отыгрывания. Однако, случае фортуна улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно разрешит вывести финансовые свои. Сумма вывода будет зависеть от лимита, одобренного именно в данном учреждении. Поэтому, внимательно надо(надобно) разбирать правила выдачи безлимитных депо. 1хслотс рабочее зеркало <a href=http://jade-crack.com/home.php?mod=space&uid=688778>http://jade-crack.com/home.php?mod=space&uid=688778</a> Для отыгрыша бонуса казино обязывает игрока поиграть на сумму, в количество один превосходящую необходимую полученного бонуса — здесь выгода фирмы очевидна.Но никогда не запамятовывайте внимательно разбирать управляла участия в бонусных акциях. Если вы нарушите но бы одно условие, позднее вы не можете устроить недоразумение с администрацией.
1хслотс рабочее зеркало
Еще одно условие дотрагивается объемов ставки. Операторы устанавливают максимальную сумму, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном офисе. При превышении лимита есть риск лишиться приза. Существующие лимитирования относятся и к конкретным обликам ставок. Например, играя в рулетку, заказчик имеет столкнуться с запретом назначать фишки на шансы. <a href=http://radshir.com/list/index.php?subaction=userinfo&user=DoctorLazutaMn>http://radshir.com/list/index.php?subaction=userinfo&user=DoctorLazutaMn</a> Даже не выиграв солидную сумму, игрок интересно проведет время, изнутри изучит работу площадки, воспримет геймплей автоматов. Все это без каких-то финансовых рисков. Быть в курсе наихороших акций легко. Достаточно периодически учить список новых интернет казино с выводом приза без депозита в данном разделе.Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном сайте и выполните вход в собственный кабинет, чтобы забрать благотворительные вращения с вейджером х40; 1×slots коды Вы не в коем случае ни же рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный бонус, по мимо практической забавы на бездепозитные бонусы, у Вас есть шанс изучить игровые автоматы, выучится регулировать изменять ставки и полосы, исследовать бонусные забавы и их выигрышные композиции, ну конечном просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные свои, коие можно отыграть и исключить, а не просто на демо счет, тем самым адреналин в крови еще больше повысится а пульс забьется с нередким ритмом!
<b>Смотреть еще похожие новости:</b>
<a href=http://www.ihavethepussy.com/de/threads/199298–1×slots-%D0%A0%D1%95%D0%A1%E2%80%9E%D0%A0%D1%91%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A0%C2%B0%D0%A0%C2%BB%D0%A1%D0%8A%D0%A0%D0%85%D0%A1%E2%80%B9%D0%A0%E2%84%96-%D0%A0%C2%B7%D0%A0%C2%B5%D0%A1%D0%82%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%BB%D0%A0%D1%95?p=216832#post216832>1×slots официальный зеркало</a>
<a href=https://bans.org.ua/index.php?topic=119225.new#new>1 xslots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Прибывшие на акк деньги бездепозитные бонусы предназначаются, в основном, только для свежеиспеченных юзеров, которые раньше не имели личного аккаунта в данном казино. Исходя из этого, если раньше у игрока был сделан депо, то, по всей вероятности, у него больше не будет возможности рассчитывать на получение такового бонуса в конкретном заведении.
#5796 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
Благодаря программке лояльности от игорного заведения, можно брать неплохой старт и без добавочных инвестициям запустить видеослоты. Кроме как, можно рассчитывать на реальную удачу и получить, без инвестиции личных финансов, великой выигрыш. <a href=http://filmkachat.ru/>1×slots casino зеркало</a> Зарегистрируйтесь. Для регистрации чаще всего довольно установить свой номер телефона и почтовый адресок, в чего ввести приобретенный код из СМС. Возможно, требуется показать промокод. В правилах промоакции несомненно написано, где его надо включать. Иногда это надобно создавать при регистрации, времени — уже последствии творенья собственного офиса, на отдельной странице.Бесплатные призы казино без депозита можно получить повторяющий валютных средств на бонусный счет (вывести их можно только после отыгрыша), фриспинов, игры или кешбэк-бонуса. <a href=https://www.tamaiaz.com/blogs/268391/Mastering-Interior-Design-Drafting>https://www.tamaiaz.com/blogs/268391/Mastering-Interior-Design-Drafting</a> Способы получения бездепа различаются в зависимости от вида бонуса, кот-ый понравился игроку. Но вам в любом случае надо(надобно) быть зарегистрированным в законном онлайн-казино и подтвердить собственную личность. В общем облике пошаговая аннотация для получения бездепозитного приза выглядит например: 1хслот зеркало <a href=http://fb7922hj.bget.ru/home.php?mod=space&uid=319652&do=profile>http://fb7922hj.bget.ru/home.php?mod=space&uid=319652&do=profile</a> Какие бонусы меня еще получить считая бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного бонуса, каждое онлайн казино предлагает игрокам прибыльное предложение на первый депо, вы совершаете депозит, ваш депо возрастает в двое или даже в 3, тем самым начать играть можно с более солидной суммой, так же не запамятываем про вейджер на призы.Казино дает вероятность заработать и исключить реальные деньги на бездепозитных бонусах. Обычно, это незначительная сумма, коию казино имеет себя позволить подарить игроку.
1×slots зеркало которую указывали при регистрации кстати
Многие казино предоставляют в маркетинговых целях благотворительные призы самая для наших читателей. Чтобы их получить, нужно перейти на игровой сайт по партнерской ссылке с нашего портала.Большинство клубов привлекают внимание в за счёт разнородных даров. На 1 веб-сайтах возможно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает безвозмездные вращения для запуска топовых онлайн слотов. Несмотря на различные промоакции, стоит выделить самые основные. 1×slots рабочее зеркало Бездепы обыкновенно предлагают с отыгрышем — мгновенно вывести выигранные свои нельзя. Перевод денег со счета несомненно вероятен после как, как пользователь выполнит все притязания казино, а сумма возможности быть выше установленного правилами лимита. Условиями акции фиксируются сроки, в течение которых заказчик вправе воспользоваться предложением. Обычно они не превышают нескольких дней в активации. <a href=https://diart.su/user/Raymondunlaf/>https://diart.su/user/Raymondunlaf/</a> Минимального оборота. Этот лимит устанавливается вейджером — пока игрок не сыграет на установленную сумму, вывод средств несомненно недоступен. 1×slots casino зеркало Важно, удостоверьтесь в том, что ранее не регистрировались в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи.Возьми собственный презент. Чаще всего бонус активируется незамедлительно последствии регистрации. Но посещают ситуации, когда надо(надобно) зайти в индивидуальный офис либо написать в справочную службу.
1хслотс рабочее зеркало
Изучить управляла и условия получения бездепозитных призов казино, Вы можете у нас на сайте в разделе с бонусами или на официальном сайте избранного Вами казино. Если имеет найти нужную информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал либо по электрической почте.Почти все игровые клубы требуют свидетельство контактных данных игрока для получения бездепозитного приза. Процесс доказательства личности имеет взятьвдолг(взятьвзаймы) от 1-го дня до недели. Если заказчик разрешил какую-либо оплошность при заполнении паспортных данных, то ему по адресоваться с проблемой в саппорта онлайн-казино.Иногда у гостей вебсайта имеют появиться трудности, задачи, препядствия при активации полученного промо-кода. В этих случаях, необходимо обратиться за поддержкою в службу «Support». Для получения ответа, непременно указывается определенная причина воззвания и подтверждается информация дополнительными экрана. Если сложилась неоднозначная ситуация, всегда возможно обратиться к основному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ. <a href=http://forum.cncprovn.com/members/176991-Miguelpoege>http://forum.cncprovn.com/members/176991-Miguelpoege</a> Высокая конкурентность в сегменте азартных игр мотивирует операторов привлекать клиентов разнородными акциями. Благодаря данному у посетителей замечена вероятность получить призы в казино за регистрацию без депозита. Воспользоваться таким предложением можно, избегая функцию внесения денег на игровой счет, просто активировав акк на сайте. Наш гид по бездепам поможет избрать самую привлекательную бонусную программку, узнать правила получения такового вознаграждения и воспользоваться им с максимальной выгодой.Прочитайте правила бонусной программки, в которой желайте участие. Да, мы настойчиво советуем устроить это до регистрации. 1×slots официальный demo регистрация в 1×slots casino Особую изюминку видео слотам присваивают уникальные знакы. С их свет активизируются разные призы. Вы можете запустить вспомогательный степень и прирастить сумму выигрыша. Есть знаки, коие сменяют ненадобные элементы и сами создают выигрышные комбо. Не стоит забывать и на бонус-тур. После любого счастливого спина есть шанс прирастить сумму выигрыша в 2 либо четыре раза.Главное превосходство спинов – возможность выучить разные слоты. Также удастся насладиться бонусными раундами, испытать фортуну в риск-туре и преумножить выигрыш за счёт особенных знаков. Однако столько игровой процесс заслуживает внимание, ведь какого-либо сосредоточиться на реальном выигрыше.
1×slots регистрация то дальше необходимо пройти
Бездепозитный приз предоставляется новенькому игроку за определенные деянья. Часто подарок вид денег либо фриспинов выдается за регистрацию, благодаря чему юзер получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. <a href=https://test.soclanovtsy.ru/topic/40318–1%D1%85-%D1%81%D0%BB%D0%BE%D1%82–1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%BF%D0%B5%D1%80%D0%B5%D0%B9%D1%82%D0%B8-%D0%BD%D0%B0–1×slots/>1х слот 1хслотс регистрация перейти на 1×slots</a> Все обожают получать подарки. Согласитесь, практически любой играющий человек будет безгранично рад, в получит даровой презент для забавы в онлайн казино просто за регистрацию либо же бонус за внесенный депозит, например нарекаемые приветственные бонусы для свежих игроков. Соответственно эти онлайн клубы станут больше популярны и предпочтительны у игроков при выборе казино для игры. Топ казино каждый обновляется и прибавляются новые и увлекательные игровые клубы с привлекательной бонусной политикой и всеми вероятными прерогативами, к коим относятся эти бонусы как фриспины за регистрацию, валютные бездепозитные призы, а также щедрые бонусы за внесенный депозит.Бывают ли бездепозитные призы без вейджера? Бывают, если у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино. Наличие у игрока второго аккаунта. Запрещено творить несколько профилей для многократного получения бездепов.Бездепозитные призы за регистрацию в игровых автоматах для владельцев онлайн-казино являются частью маркетинговой кампании, направленной на повышение аудитории сайта. Так они продвигают свои бренды и привлекают свежих клиентов. 1×slots регистрация 1×slots casino c2d ru <a href=https://m2bob.shop/forum/member.php?action=profile&uid=2757>https://m2bob.shop/forum/member.php?action=profile&uid=2757</a> Популярность интернет казино растёт и всё больше юзеров начинают интерес азартными забавами. Бездепозитные бонусы 2022 года, это оригинальные подарки за регистрацию. С их помощью свежие игроки все получить благотворительные вращения или средства на баланс за 1 регистрацию. С появлением игорных заведений в онлайне, бездепозитные бонусы стали знаменитейшим методом привлечения игроков. Подобные акции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о которых мы расскажем. Наш вебсайт собрал лучшие предложения из онлайна на 2022 год. Воспользуйтесь хоть презентом и можете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша необходимо выполнить условия.Онлайн гемблинг развивается с любым деньком все больше и больше, новые бренды создаются не по дням а по часам. Новые интернет казино проделывают вступительные промоакции для игроков, для того что бы зарекомендовать себя, и что, этим самым предлагают бездепозитные призы за регистрацию, собственно бы не упустить эту вероятность — как пользоваться свежим бездепом, советуем посещать наш сайт как возможно чаще, самое вкусное и новые будет добавляться в данном же списке.
1х слот регистрация в 1×slots casino
Подарки на конкретные даты выделяются критериями получения. Если поощрение начисляют игроку на день рождения, то сумма обыкновенно в от общего размера депо за прошедший год.Бездепозитный приз за регистрацию в казино — это стартовый подарок вид денежного начисления или бесплатных вращений для новых игроков заведения, для получения которого надо заносить депозит. Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских рублей. В критериях промоакции указано, собственно вейджер бездепозитного приза х20. Поэтому, дабы отыграть приз, игроку несомненно необходимо устроить ставок на 35*20=700 руб. <a href=http://give-sms.com/index.php?subaction=userinfo&user=abandonedspecta>http://give-sms.com/index.php?subaction=userinfo&user=abandonedspecta</a> Когда идет о валютных призах, казино постоянно устанавливают обстоятельства вейджера, которые нужно выполнить, дабы вывести выигрыш.Ещё одно распространённое акционное предложение – привлекательный подарок с сомнительными притязаниями. К примеру, клуб сулит $100 в бездепа, хотя с вейджером х80 либо х100. Отыграть такой вейджер практически нереально и потому какого-либо концентрироваться на более занимательных промоакциях. 1хлот регистрация в 1×slots casino Бездепы обыкновенно предлагают с отыгрышем — моментально вывести выигранные средства невозможно. Перевод средств со счета будет вероятен после как, как пользователь выполнит все требования казино, а сумма не может превышать установленного правилами лимита. Условиями акции фиксируются сроки, в течение коих заказчик вправе воспользоваться предложением. Обычно они не превышают нескольких дней последствии активации.
<b>Смотреть еще похожие новости:</b>
<a href=http://fin-molitor.com/forum/viewtopic.php?f=2&t=450018>скачать 1×slots на андроид мобильная версия</a>
<a href=https://australianwinerytours.com/tours/showthread.php?tid=255046>1×slos регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Высокая конкурентность в сегменте азартных игр мотивирует операторов привлекать посетителей различными промоакциями. Благодаря этому у посетителей появляется вероятность получить бонусы в казино за регистрацию без депо. Воспользоваться таким предложением можно, минуя процедуру внесения денег на игровой счет, просто активировав аккаунт на сайте. Наш экскурсовод по бездепам поможет выбрать самую симпатичную бонусную программу, разузнать верховодила получения такого гонорары и воспользоваться им с наибольшей выгодой. Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция имеет подробные верховодила, ссылка на которые обыкновенно находится в промообъявлении. В их указываются лимиты, вейджер, список доступных игр. Если оператор прячет данные о предложении, то воспользоваться им не стоит.
#5797 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Елена Лядова casino daddy <a href=https://7club7.com/>порно с Матвей Сафонов (футбол)</a> порно с Илья Осипов (киберспорт) ап казино <a href=https://7club7.com/>сайт винлайн букмекерская контора</a> pin up букмекерская контора porno Андрей Рублев (теннис) скачать сайт букмекерской конторы порно с Елена Никитина, скелетонистка казино ставка лучшие онлайн казино порно с Анна Щербакова, фигуристка
DiskiPlus online casino официальный DiskiPlus букмекерская контора на андроид <a href=https://diskiplus.ru/>DiskiPlus Ирина Горбачева</a> DiskiPlus порно с Алексей Миранчук (футбол) DiskiPlus порно с Васильева Татьяна Викторовна <a href=https://www.diskiplus.ru>DiskiPlus пин up casino</a> DiskiPlus зеркала официальных сайтов казино DiskiPlus винлайн букмекерская контора официальный DiskiPlus порно с Кирьянова Дарья Борисовна DiskiPlus kent casino регистрация DiskiPlus казино вулкан DiskiPlus порно с Анна Калинская (теннис) DiskiPlus up casino скачать
#5798 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке необходимо пополнить счет в казино. Для депозитных бонусов, эта процедура не необходима, так как депозит уже изготовлен.Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен перечень наихороших интернет казино, которые предлагают своим игрокам щедрые бонусы за регистрацию. <a href=http://filmkachat.ru/>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a> <a href=https://lyfepal.com/forums/thread/7373/Transform-Your-Kitchen-Design-with-Professional-3D-Kitchen-Rendering-Services>https://lyfepal.com/forums/thread/7373/Transform-Your-Kitchen-Design-with-Professional-3D-Kitchen-Rendering-Services</a> 1×slots быструю регистрацию а также мгновенное <a href=http://d90894u1.bget.ru/user/WalterViotO/>http://d90894u1.bget.ru/user/WalterViotO/</a>
1× slots официальный
1хслот скачать <a href=http://forum.prolifeclinics.ro/profile.php?id=1284788>http://forum.prolifeclinics.ro/profile.php?id=1284788</a> 1×slots регистрация 1×slotscasino 56 online
1×slots зеркало быструю регистрацию а также мгновенное
<a href=http://mrkarpiuk.xaa.pl/boards/shopping/member.php?action=profile&uid=45111>http://mrkarpiuk.xaa.pl/boards/shopping/member.php?action=profile&uid=45111</a> 1 xslots рабочее зеркало Акции распространяются как на все забавы казино, так и на узкий список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и другие. Промо возможность охватывать разработки одного производителя. Бездеп не пересекается с иными акциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, изготовленные бонусными деньгами. Для идентификации платежных реквизитов игрока может потребоваться пополнение счета на наименьшую сумму.
рабочее зеркало 1×slots
Бездепозитный приз часто имеет замерзнуть доступным сразу после окончания регистрации, потому правило единственным притязанием к нему является регистрация, а после ревизия вашей свежей учетной записи. <a href=http://www.arka-bahce.org/forum/showthread.php?p=776277#post776277>1×slots на любой вкус как пройти регистрацию</a> Объективные – размер приза, коэффициент и обстоятельства вейджера, необходимость внесения депо для вывода денег;Для отыгрыша приза казино обязывает игрока сыграть на необходимую, в некоторое один превосходящую сумму приобретенного бонуса — тут выгода компании очевидна. Такой бесплатный эквивалент средств зачисляется на профиль юзера последствии воплощения притязаний и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений вероятен лишь в воплощения вейджеровых критерий.Риск-игра по одинаковым шансам – Также казино имеет запрещать исполнять условия по отыгрышу за раунда на удвоение, который предлагается в слотах, видео-покере и некоторых иных забавах. 1хслотс казино зеркало <a href=http://b77706vw.bget.ru/user/Richardunarf/>http://b77706vw.bget.ru/user/Richardunarf/</a> Игрокам не воспринимать приветственный приз как гарантированный способ получить большой выигрыш, хотя это замечательная вероятность без затрат оценить возможностей казино.
1×slot казино зеркало
Воспользоваться бездепом возможно не во всех игровых автоматах: казино вдруг уточняет ограничение для клиентов. Конечно, это возможно счесть некоторым неудобством для игрока, хотя ради отметить, что выбор автоматов всё точно остаётся довольно великим. <a href=https://mcpe.ru.net/user/Richardsmary/>https://mcpe.ru.net/user/Richardsmary/</a> Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция содержит доскональные правила, гиперссылка на коие обычно находится в промообъявлении. В них указываются лимиты, вейджер, список доступных игр. Если оператор скрывает данные о предложении, то воспользоваться им надо.Также существуют онлайн-платформы азартных игр, коие используют раздачу бездепозитных бонусов в особые даты (как для казино, так и для игрока). Помимо сего, действующие игроки также имеют вероятность получить похожие призы за свою работа (к примеру, за увеличения значения либо за схожие заслуги). казино 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=http://www.emv.info/viewtopic.php?f=15&t=2524>1×slots зеркало рабочее</a>
<a href=https://uyghuryol.com/forum/memberlist.php?mode=viewprofile&u=91>1×slots скачать на айфон</a>
<a href=https://radios-collector.com/viewtopic.php?f=7&t=94085>1×slots регистрация 1×slotscasino09k online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Мы собрали и выпустили список превосходнейших бездепозитных казино с призами за регистрацию, которые гарантируют щедрые выигрыши и моментальные выплаты. С не отыгранным бонусом запрещается превышать размер максимальной ставки. Нарушение этого условия будет аннулирование выигрыша.
#5799 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало рабочее
Обычно бездепозитные промоакции от казино, прибывают на эл. Почту в деньки рождения либо праздники. В неких интернет казино можно обратиться в чат и как неизменному игроку, вполне вам предложат бездепозитное предложение. <a href=http://filmkachat.ru/>1хслотс официальный сайт зеркало</a> Вообще перейдя в казино — верховодила одинаковы в получении бездепозитных бонусов, в стандартные правила входит: доказать эл. Почту и телефонный, заполнить собственный личный профиль, активировать промо код или активировать предложения во вкладке БОНУСЫ.Фриспины предназначены для применения в видео слотах. Внимательно ознакомьтесь с условиями – часто их выдают на некоторые автоматы. В зависимости от клуба, у вас выйдет устроить определённое количество ставок. Кстати, продвинутые игорные жилища позволяют запускать любых «одноруких злодеев». <a href=https://www.friend007.com/forums/thread/7390/>https://www.friend007.com/forums/thread/7390/</a> 1хслотс регистрация в 1×slots casino <a href=http://okprint.kz/user/Michaelgeake/>http://okprint.kz/user/Michaelgeake/</a> Особую изюминку видео слотам присваивают оригинальные символы. С их появлением активируются разные призы. Вы сможете запустить дополнительный степень и прирастить сумму выигрыша. Есть знаки, коие замещают ненужные элементы и сами создают выигрышные комбо. Не стоит забывать и про бонус-тур. После каждого удачного спина есть шанс увеличить необходимую выигрыша в два либо хорошо раза.Самые модные способы вывода денег ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам на Neteller и Skrill, а пользуются криптовалютными кошельками. Вывод выигрышей возможность осуществляться быстро либо занимать от нескольких часов до нескольких суток.
1×slot зеркало
Теоретически, к бесплатным бонусам можно отнести например называемые фриспины. Напомним, речь идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, поэтому собственно они деют только возможность делать ставки.Исходя из сего, просто не существует мудрых причин махнуть рукою на получение такового приза при регистрации. И, лишним, на такой бесплатной базе у вас есть все шансы выиграть средства и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные призы, именуют безвозмездными интернет платформами для игр. <a href=https://test.soclanovtsy.ru/topic/37645–1×slots-%D0%BD%D0%B0-%D0%BB%D1%8E%D0%B1%D0%BE%D0%B9-%D0%B2%D0%BA%D1%83%D1%81-%D0%BA%D0%B0%D0%BA-%D0%BF%D1%80%D0%BE%D0%B9%D1%82%D0%B8-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8E/>1×slots на любой вкус как пройти регистрацию</a> 1×slots регистрация 1×slots casino c2d ru Для верификации аккаунта нужно предоставить спецам технической поддержки отсканированную копию паспорта и счета за коммунальные услуги, а фотку банковской карты либо экрана странички электрического кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для доказательства личности.Представьте момент, когда при ставке в 10 рублей Вы получите схожее умножение. Миллион руб. За одно вращение, собственно вполне вероятно. Поэтому вопрос, сколько возможно выиграть остаётся открытым. Предлагаем выяснить самостоятельно. Регистрируйтесь в одном или нескольких онлайн казино, получайте Бездепозитный приз и инспектируйте удачу в деле. Разумеется, вывести средства сложно. Однако шансы есть у всех. <a href=https://localtrusted.co.uk/forum/profile/EmeliaMoli>https://localtrusted.co.uk/forum/profile/EmeliaMoli</a> Когда речь о валютных бонусах, казино всегда устанавливают обстоятельства вейджера, коие необходимо выполнить, чтобы исключить выигрыш.Ещё одно распространённое акционное предложение – привлекательный подарок с сомнительными притязаниями. К образцу, клуб обещает $100 в качестве бездепа, но с вейджером х80 или х100. Отыграть подобный вейджер фактически нереально и потому другого концентрироваться на более заманчивых промоакциях. 1×slot зеркало рабочее этих способов предполагает регистрацию
1× slots регистрация в 1×slots casino
Такой безвозмездный эквивалент средств зачисляется на профиль юзера в осуществления требований и предназначаются они лишь для игрового процесса. Вывод таких вознаграждений вероятен только после воплощения вейджеровых критерий. Список так нарекаемых «запрещенных землель» прилагается к правилам бонусной программы игорного портала. Обязательно выясните, распространяются ли на вас похожие наказания.Не желаете поиграть в азартные забавы, не рискуя средствами средствами, хотя получая в все выплаты? Подобную вероятность предоставляют многие превосходнейшие порталы с азартными веселиями. В их числе много честных и надежных интернет-казино на русском языке. Они привлекают свежих пользователей различными поощрительными мероприятиями, включая бездепозитные, или бесплатные призы. <a href=https://www.scottsfasteners.com/users/julesvek>https://www.scottsfasteners.com/users/julesvek</a> Нет. Казино раздают бесплатные призы за регистрацию, чтобы, чтобы, чтобы заказчик возможность ознакомиться с игровым заведением. А дабы вывести его, нужно выполнить условия отыгрыша. 1×slots зеркало на сегодня Почти все игровые клубы требуют подтверждение контактных данных игрока для получения бездепозитного приза.Осталось выбрать казино с призом за регистрацию и создать профиль. После активации презента выигрыш зависимости от Фортуны и навыков.
1×slots регистрация 1×slots casino 777 online
Сроки активации бонуса устанавливаются любым казино, но чаще всего они не превышают недели с этапа получения. Игроку обязательно надо(надобно) применять бездеп протяжении указанного срока, в ином случае бонус просто пропадет. Каждый приз можно получить только один один, потому в не использовать бездеп в срок, у игрока не будет 2 шанса им воспользоваться. Вейджер (wager) – это коэффициент, кот-ый показывает на какую необходимую необходимо сделать ставок, чтобы исключить приз из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода этого приза, Вам необходимо сделать ставок на сумму: 500*70=3500 руб. Только всецело отыграв бонус, Вы сможете вывести свой выигрыш.Высокая конкурентность в разделе азартных игр мотивирует операторов привлекать посетителей разнородными промоакциями. Благодаря данному у гостей появляется возможность получить бонусы в казино за регистрацию без депозита. Воспользоваться этим предложением можно, минуя процедуру внесения средств на игровой счет, просто активировав акк на веб-сайте. Наш экскурсовод по бездепам поможет выбрать самую привлекательную бонусную программку, разузнать правила получения такового гонорары и распорядиться им с наибольшей выгодой. Каждый новичок и умелый игрок мечтают скоро стартануть и начать создавать настоящие ставки. Для этого довольно отобрать подарок, за который не нужно выплачивать. В зависимости от игровой платформы, нужно сделать профиль, привязать email или телефон. После этого администрация начислит щедрое вознаграждение повторяющий бесплатных вращений либо виртуальных кредитов. 1×slots официальный сайт, скачать <a href=https://escortexxx.ca/author/stevengueks/>https://escortexxx.ca/author/stevengueks/</a> В большинстве заведений устроить это можно по адресу электронной почты, по номеру телефонного, через социальную сеть либо гугл-аккаунт.Бездепозитные призы отличный вариант бесплатной игры в игровые автоматы. Многие юзеры сети не понимают, что в казино возможно начать играть абсолютно даром, а позже исключить выигрыш на банковскую карту либо электрический кошелек, иные не доверяют онлайн казино, а третьи удачно играют и выигрывают – и тотчас довольно немалые суммы.
сайт 1× slots casino
Обычно, бездепозитные призы выдаются под конкретные слоты с фиксированной ставкой, но их точно воспрещено применять в игровых автоматах с прогрессивным джекпотом. Список игр, в которых возможно применять бездеп, Вы найдете в описании промоакции либо можете уточнить у саппорта заведения. <a href=http://igroblog.j905063b.bget.ru/index.php?subaction=userinfo&user=sincereegg85>http://igroblog.j905063b.bget.ru/index.php?subaction=userinfo&user=sincereegg85</a> Частенько новички не знают, как активировать презенты или исключить 1-ый выигрыш. Для сходственных случаев наша команда обрисовала главные определения – собственно такое фриспины, вейджер, как его отыграть, зачем нужно проходить верификацию.Даже не выиграв крупную сумму, игрок интересно проведет время, изнутри исследует работу площадки, воспримет геймплей автоматов. Все это без каких-то финансовых рисков. Быть в курсе лучших промоакций легкостью. Достаточно периодически изучать список новых интернет казино с выводом бонуса без депозита в данном разделе. 1хслотс мобильная версия зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://vn-info.net/user/Josephkam/>1×slots регистрация на официальном сайте</a>
<a href=https://10nsk.ru/user/JosephSuple/>1×slots casino зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если ординарными текстами, бездепы – это определённая сумма денег или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно брать презенты. Но есть некоторые аспекты. Существуют игорные жилища, которые перед тем как начислить бонусы требуют привязать аппарат, дать копии документов.
#5800 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino рабочее up букмекерская контора <a href=https://glvk.guru/>Разуваева Ксения Денисовна порно</a> порно с Алина Загитова Валентина Матвиенко порно <a href=https://www.ossetia.tv/>1×bet официальный скачать</a> скачать 1×bet на андроид бесплатно 1×bet на андроид бесплатно букмекерская контора леонов 1×bet зеркало рабочее на сегодня casino игровой автомат букмекерская контора porno Мира Андреева (теннис)
DiskiPlus рабочие зеркала казино DiskiPlus ев казино <a href=https://diskiplus.ru/>DiskiPlus пина casino</a> DiskiPlus карты казино DiskiPlus казино без <a href=https://www.diskiplus.ru>DiskiPlus букмекерская контора фонбет</a> DiskiPlus рокс казино DiskiPlus casino приложения DiskiPlus Манилова Алла Юрьевна порно DiskiPlus 1×bet слоты 1×bet xyz DiskiPlus букмекерские конторы pin DiskiPlus porno Елизавета Туктамышева DiskiPlus яндекс игры казино
#5801 kinogohttp://q.kinogo.si/serialy/
<a href=http://q.kinogo.si/serialy/>сериалы 2024 смотреть онлайн</a>
#5802 BryanNuanthttps://bilogost.com.kg
lucky jet 1win real or fake <a href=https://bilogost.com.kg/>реферальная система 1win</a>
#5803 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Для верификации номера аппарата, в собственном профиле изберите опцию „Подтвердить номер аппарата“ и введите в соответствующее поле код, приобретенный в sms-сообщении.Выбирая безвозмездный бонус, внимательно изучайте управляла. Убедитесь, что вам возможно на участие в акции. Уточните, в каких забавах можно скорпулезно условия вейджера. При надобности задавайте вопросы адептам саппорта. <a href=http://filmkachat.ru/>1×slots зеркало сайта</a> Если вы выбрали для себя количество брендов коие вас больше всего полюбились, для неизменной забавы! Таких гемблеров казино очень предпочитает и оценивает, за частую эти игроки становятся VIP игроками заведения, которым часто поступают прибыльные предложения в виде призов, например же туда заходит и бездепозитные.Бездепозитный бонус казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в данном и заключается основное отличие. <a href=https://hanson.net/users/ShopAvto>https://hanson.net/users/ShopAvto</a> Отказ в прохождении верификации. Если заказчик не хочет либо не дать документы, подтверждающие его личность, профиль несомненно заблокирован совместно, вкупе со всеми бонусными начислениями.Следует выделить, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам либо с конкретным кодом. зеркло казино 1×slots <a href=https://ide-ai.online/member.php?action=profile&uid=2444>https://ide-ai.online/member.php?action=profile&uid=2444</a> Подтвердите лицо, предоставив оператору казино свои паспортные данные. Инструкции обыкновенно несложные, основное — конкретно им по. Если написано, собственно «на фото обязаны быть видны все четыре угла страницы паспорта» — устройте именно это фото.
1× slots зеркало
Таким образом онлайн казино получает потенциального игрока. Возможно дальнейшем либо настоящем он захотит сыграть на средства средства. Так работают бездепозитные бонусы в интернет казино. Здесь отлично подходит выражение, благотворительные сыр случается лишь в мышеловке. Начинающие игроки шансы не осознавать опасность пыла. Однако течением понимания становится больше. Это тема для отдельного обсуждения. 1хслот официальный сайт зеркало Более крупные предложения встречаются довольно редко. Зачастую они доступны лишь VIP-игрокам. В остальных случаях им всего сопутствуют довольно жесткие условия отыгрыша. Также возможны вспомогательные обстоятельства и лимитирования, прописанные в критериях и положения бонусной программки казино.Внесение депо – Будьте готовы пополнить счет последствии отыгрыша приза. Это стандартное требование правил для этого на промо-акций. Лучше заранее уточнить, какую необходимую надо(надобно) несомненно вносить на счет. Как правило, речь о минимальном депозите, но вы обязаны быть убеждены, собственно он вам по карману. <a href=https://www.grandprixforums.com/members/53792.html>https://www.grandprixforums.com/members/53792.html</a> Если вы облюбовали себе некоторое брендов коие для больше всего полюбились, для постоянной игры! Таких гемблеров казино довольно предпочитает и оценивает, за частую эти игроки становятся VIP игроками заведения, которым нередко поступают выгодные предложения в виде бонусов, так же туда заходит и бездепозитные.2. Создать свежий профиль. Для регистрации надо(надобно) наполнить маленькую анкету либо зайдите в личный офис при помощи соц сеток; 1×slots зеркало на сегодня Как лишь на виртуальном счету окажутся бонусные свои, поспешите отыграть вейджер. Сразу после этого возможно забыть заявку на вывод выигрыша. Кредиты выгодно выделяются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом настоящих средств и выделяют вероятность почувствовать азарт. Во-вторых – возможно насладиться любой азартной забавой доступной на веб-сайте. В вашем постановлении присутствуют автоматы, настольные прибавленье, видео-покер, Live-дилеры.Чтобы играть бесплатно на реальные средства в казино, не всегда довольно просто зарегистрироваться. Иногда нужно выполнить вспомогательные деянья.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Наличие у игрока второго аккаунта. Запрещено творить несколько профилей для неоднократного получения бездепов. <a href=http://bbs.ebnew.com/home.php?mod=space&uid=716185>http://bbs.ebnew.com/home.php?mod=space&uid=716185</a> 1×slots зеркало видели такую регистрацию на В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая доля игры. Важно, часто бездепозитные призы в казино выдаются с лимитированиями по максимальной выплате. В среднем можно рассчитывать на прибыль в несколько тыщ рублей. Как вывести выигрыш с приза без депо. Придётся доказать аккаунт документально, в некоторых заведениях. Процедура верификации неотклонима и делается каждым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате либо прочтите в правилах.Бездепозитный бонус казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в этом и содержится основное отличие.
1×slots casino регистрация 1×slots review live
В случае с фриспинами без вейджера, Вам не придется отыгрывать свой выигрыш с даровых вращений. Прибыль, которую Вы заработаете на таком бездепе возможно ставить на вывод без какого либо отыгрыша. <a href=https://acerfans.ru/user/JamesTed/>1х слот 1хслотс регистрация перейти на 1×slots</a> Возможность протестировать новые игры, не рискуя собственными своими и разработать личную тактику игры.Так что приготовьтесь дать конфиденциальную информацию (пол, возраст, государство проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает менее суток, в чего получится беспрепятственно выводить солидные выигрыши. зеркло казино 1×slots <a href=http://www.rrtea.cn/home.php?mod=space&uid=25125>http://www.rrtea.cn/home.php?mod=space&uid=25125</a> В настоящее время получить бонус за регистрацию в казино довольно просто. Почти каждый игорный дом с готовностью даст деньги или бесплатные вращения. Многие игроки пользуются этим и не стесняются регистрироваться в любом клубе с прибыльными критериями. Кстати, это отличная вероятность выдумать выигрышную стратегию и сорвать куш.Основное различие что, нет, собственно для получения бездепа нужно пополнять баланс в казино. Но кроме этого, есть ряд и различий:
1×slots промокод при регистрации
Представьте момент, когда при ставке в 10 руб. Вы получите подобное умножение. Миллион рублей за одно вращение, что абсолютно вполне. Поэтому вопрос, сколько можно выиграть остаётся не. Предлагаем проверить других. Регистрируйтесь в одном либо нескольких интернет казино, получайте Бездепозитный бонус и проверяйте фортуну в деле. Разумеется, исключить деньги не так просто. Однако шансы есть у всех.После получения приза вывод средств для посетителя будет недосегаем до, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя либо пара месяцов. Выводить деньги игрок может только после отыгрыша. <a href=http://www.iawbs.com/home.php?mod=space&uid=810031>http://www.iawbs.com/home.php?mod=space&uid=810031</a> B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpaxВ реальное время получить бонус за регистрацию в казино очень просто. Почти любой игорный дом с радостью предоставит средства либо безвозмездные вращения. Многие игроки пользуются данным и не стыдятся регистрироваться в любом клубе с выгодными критериями. Кстати, это отличная вероятность выдумать выигрышную тактику и сорвать куш. 1×slots casino online регистрация 1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, если не желаете замерзнуть жертвой жуликов или впустую истратить время;Так собственно приготовьтесь предоставить секретную информацию (пол, возраст, страна проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает менее суток, последствии чего получится свободно выводить крупные выигрыши.
<b>Смотреть еще похожие новости:</b>
<a href=http://u0382101.isp.regruhosting.ru/index.php/forum/general-questions-and-how-tos/68883-otzyvy-o-tovarakh>1×slots casino регистрация 1×slotscasin online</a>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/4150/#comment-232060>1×slots рабочее зеркало на сегодня</a>
<a href=https://forum.gamesims.sk/viewtopic.php?f=10&t=56775>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В большинстве заведений устроить это возможно по e-mal, по номеру телефона, спустя социальную сеть либо гугл-аккаунт. Нет. Для получения бездепозитного бонуса в казино нужна неотъемлемая регистрация на сайте. Играть в слоты даром и без регистрации можно только в демо режиме.
#5804 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Алина Загитова, фигуристка Александра Бортич <a href=https://strelochnik.com/>up букмекерская контора</a> casino online зеркало смотреть фильм казино <a href=https://strelochnik.com/>яндекс игры казино</a> играющие казино онлайн up casino скачать букмекерская контора без gama casino скачать 1×bet 1×bet xyz бывшие казино казино можно
DiskiPlus Радченко Светлана Юрьевна порно DiskiPlus 1×slots casino <a href=https://www.diskiplus.ru/>DiskiPlus казино на деньги</a> DiskiPlus казино играть DiskiPlus казино рояль смотреть <a href=https://diskiplus.ru>DiskiPlus casino com</a> DiskiPlus казино на деньги DiskiPlus Петрова Ольга Викторовна порно DiskiPlus casino buzz DiskiPlus casino ап DiskiPlus скачать букмекерскую контору на андроид DiskiPlus казино зеркало сегодня DiskiPlus бесплатное казино
#5805 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации
Поспешите зарегистрироваться на официальном сайте Клубника, чтобы моментально получить 33 безвозмездных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, появляется реальный шанс победу! <a href=http://filmkachat.ru/>1×slots казино мобильная версия</a> Диапазон ставок, коие вправе сделать игрок, кроме лимитирован. Обычно назначать можно небольшую сумму — в 10–30 руб. За одно вращение. <a href=https://jumpshare.com/v/uWsLzlmeD4r9OIw98Fgn>https://jumpshare.com/v/uWsLzlmeD4r9OIw98Fgn</a> Для получения выигрыша требуется выполнить обстоятельства казино. Чаще всего игроку нужно поставить определенную сумму, но уже из собственных средств. Она рассчитывается из совместного объема выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, если юзер выиграл 1000 руб., а множитель составляет х30, вывести средства можно будет, сделав ставки на 30 000 рублей. 1×slots casino регистрация 1×slots review live <a href=https://buketik39.ru/user/ScottRasia/>https://buketik39.ru/user/ScottRasia/</a> Мы рекомендуем не отказываться от подобных предложений известных казино. Выделите количество минут на регистрацию, получите бонус и попробуйте его отыграть. Может быть, сейчас фортуна несомненно на вашей стороне!
1×slots подтвердит вашу регистрацию если говорить
Казино выделяет вероятность заработать и вывести настоящие деньги на бездепозитных бонусах. Обычно, это малозначительная сумма, коию казино может себе позволить презентовать игроку.Благодаря программе лояльности от игорного заведения, можно брать превосходный старт и без добавочных вложений запустить видеослоты. Кроме как, возможно рассчитывать на реальную фортуну и получить, без вложения собственных денег, немалый выигрыш. <a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=389517>1х слот регистрация в 1×slots casino</a> 1×slots зеркало на сегодня <a href=http://forums.ago.ir/member.php?action=profile&uid=6121>http://forums.ago.ir/member.php?action=profile&uid=6121</a> Максимальная ставка ? устанавливается в валюте счета и ограничивает размер ставки за раз спин. В случае ее превышения бонус имеет быть аннулирован. Также в правилах может содержаться запрет на размещение ставок конкретного облика, примеру, по равным шансам в рулетке (словами, на чет либо нечет, красноватое либо черное и т.д. ). 1×slots подтвердит вашу регистрацию если говорить Мы делаем акцент на главных положениях управлял, рассказываем о территориальных лимитированиях и кратко информируем о иных акциях обговариваемого казино.
1хслот зеркало
Промокод – определённая комбинация знаков, которую необходимо ввести в отвечающее поле при твореньи учетной записи либо активировать в личном профиле игрока в разделе с призами.Представленные на данной страничке наихорошие бездеп бонусы в казино за регистрацию в 2022 году имеют подходящие условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, в котором гости Casino.ru шансы сортировать список по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д. <a href=https://forum.kainkalabs.com:443/member.php?action=profile&uid=17939>https://forum.kainkalabs.com:443/member.php?action=profile&uid=17939</a> 1×slots сайт Не желайте сыграть в азартные забавы, не рискуя средствами средствами, хотя получая в все выплаты? Подобную возможность предоставляют многие лучшие порталы с азартными увеселениями. В их количестве количество добросовестных и надежных интернет-казино на российском языке. Они завлекают новых юзеров различными поощрительными мероприятиями, включая бездепозитные, или благотворительные призы.
1хслотс официальный сайт зеркало
Бездепозитный бонус по промо-коду несомненно доступен для забавы, только никаких случае когда Вы активируете особый бонусный код в разделе с призами либо укажите промокод при регистрации на веб-сайте. В некоторых случаях, кроме активации кода, придется подтвердить контактные данные игрока и заполнить анкету посетителя.Постарайтесь отыграть вейджер, чтобы замечена возможность оставить заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные приборы. Вы сможете получить выигрыш на электрической кошелёк, карту, телефон. <a href=http://www.infoknygos.lt/smforum/index.php?topic=74791.new#new>x1 slots регистрация в 1×slots casino</a> Так собственно сможете неустрашимо регистрироваться без всяких размышлений. Фортуна сейчас наверняка на вашей стороне. Не побаивайтесь, ведь следствие какого или ущерба Вам абсолютно не угрожает. С такими бонусами как без пополнения, Вы остаетесь только в плюсе, но не как не в минусе. 1×slots промокод при регистрации <a href=https://www.winners24.pl/user-38335.html>https://www.winners24.pl/user-38335.html</a> Одним из поводов отдавать привилегию 1 или иному заведению содержится в привлекательности предлагаемых акций и бесплатных предложений. Безвозмездные фриспины, выдаваемые без дела делать какой-либо вклад, в списке располагается далеко не в конце.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Постарайтесь отыграть вейджер, чтобы появилась вероятность забыть заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электронной кошелёк, карту, телефонный.Иногда операторы настоятельно внесение минимального депозита перед выводом для верификации платежного прибора. В неких казино данный депо кроме светит отыграть. <a href=http://istinastroitelstva.xyz/index.php?subaction=userinfo&user=rattysecret53>http://istinastroitelstva.xyz/index.php?subaction=userinfo&user=rattysecret53</a> казино 1×slots официальный сайт Бесплатные призы казино без депо можно получить вид денежных средств на бонусный счет (вывести их возможно только после отыгрыша), фриспинов, игры или кешбэк-бонуса.В разделе с призами активировать свой подарок. Найти игры, для которых предусмотрено одобрение и применять приз по предназначению.
<b>Смотреть еще похожие новости:</b>
<a href=https://adminclub.org/showthread.php?tid=67065>1×slots регистрация</a>
<a href=https://forum.home-visa.ru/viewtopic.php?f=69&t=807392&p=2845633#p2845633>1×slots официальный сайт скачать</a>
<a href=https://aircompare.us/forums/memberlist.php?mode=viewprofile&u=40074>1×slot регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
У любого игорного заведения свои верховодила и обстоятельства. Но, чтобы получить бонусы, нужно выполнить стереотипные действия: Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных обстановок с казино, когда в отыгрыша бездепа для не дадут вывести крупную сумму выигрыша.
#5806 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
промокод 1×bet 1×bet зеркало рабочее <a href=https://rucriminal.info/>porno Алена Косторная (фигурное катание)</a> 1win casino как выиграть в казино <a href=https://7club7.com/>порно с Федор Чалов (футбол)</a> казино играть казино 1 1×bet зеркало xbet включи казино 7k casino скачать порно с Аделия Петросян (фигурное катание) 1×bet casino
DiskiPlus водка казино DiskiPlus скачать 1×bet на андроид бесплатно <a href=https://www.diskiplus.ru>DiskiPlus кент casino</a> DiskiPlus casino играть DiskiPlus Хорова Наталья Александровна порно <a href=https://www.diskiplus.ru>DiskiPlus порно с Аделия Петросян (фигурное катание)</a> DiskiPlus бесплатные букмекерские конторы DiskiPlus порно с Антропова Валентина Викторовна DiskiPlus порно с Никита Кучеров (хоккей) DiskiPlus 1×bet бесплатно DiskiPlus скачать 1×bet на андроид бесплатно DiskiPlus 1×bet рабочее DiskiPlus порно с Федор Чалов (футбол)
#5807 Charlesgunnyhttp://filmkachat.ru
1×slots бездепозитный бонус за регистрацию
Фриспины — бесплатные вращения, которые позволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины считаются наиболее знаменитым и желаемым обликом бонуса — благотворительные вращения порой эффективнее и веселее в отыгрыше, чем остальные облики бездепов. <a href=http://filmkachat.ru/>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a> <a href=https://www.nitrnd.com/blogs/229798/Transforming-Dream-Kitchens-Through-Professional-3D-Rendering-Solutions>https://www.nitrnd.com/blogs/229798/Transforming-Dream-Kitchens-Through-Professional-3D-Rendering-Solutions</a> Бездепы с бесплатными вращениями предоставляют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд выплачивает казино. Число спинов ограничено и изредка превышает сотку. Если промоакция включает в себя много безвозмездных игр, их начисление имеет быть разбито на количество дней. зеркала 1×slots <a href=http://maksimov.su/index.php?subaction=userinfo&user=largechamber64>http://maksimov.su/index.php?subaction=userinfo&user=largechamber64</a> Подобные бонусы без депо предоставляются на более прибыльных критериях. Зачастую они покрупнее, а обстоятельства отыгрыша менее строгие.
1х слот регистрация в 1×slots casino
1×slots официальный зеркало рабочее Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.У каждой игры средства требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система засчитает любую ставку. В рулетке и покере устроить это гораздо труднее. Именно потому например важно пристально читать условия получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой ирге, то новенькие попросту «спустят бонус на ветер». <a href=http://ekopromkonsalt.ru/index.php?subaction=userinfo&user=goodjournal37>http://ekopromkonsalt.ru/index.php?subaction=userinfo&user=goodjournal37</a> Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации подарка необходимо подтвердить электронную почту и привязать телефонный;Нет. Казино раздают безвозмездные призы за регистрацию, чтобы, чтобы, дабы заказчик имел ознакомиться с игровым заведением. А чтобы исключить его, нужно выполнить обстоятельства отыгрыша. 1×slots зеркало регистрацию более популярный вариант это Популярность онлайн казино растёт и всё больше пользователей начинают интерес азартными играми. Бездепозитные призы 2022 года, это уникальные презенты за регистрацию. С их поддержкою новые игроки могут получить бесплатные вращения либо средства на баланс за одну регистрацию. С появлением игорных заведений в онлайне, бездепозитные призы стали наимоднейшим методом привлечения игроков. Подобные акции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш сайт собрал наихорошие предложения из интернета на 2022 год. Воспользуйтесь любым даром и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить обстоятельства.
1×slots рабочее зеркало
Призовые начисления без депо шансы предоставляться для участия в турнирах интернет казино. Потратить перечисленные средства можно необыкновенно в этой акции. Условия их проведения включают в себя лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться этим предложением, лучше выучить его управляла.Как только на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу в сего можно оставить заявку на вывод выигрыша. Кредиты прибыльно выделяются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом реальных средств и выделяют вероятность почувствовать азарт. Во-вторых – можно насладиться любой азартной игрой доступной на сайте. В вашем распоряжении находятся автоматы, настольные прибавленье, видео-покер, Live-дилеры. <a href=http://masskorea.co.kr/bbs/board.php?bo_table=free&wr_id=3648352>http://masskorea.co.kr/bbs/board.php?bo_table=free&wr_id=3648352</a> 1×slots casino регистрация 1×slotscasin online
1×slot казино зеркало
Активация валютного гонорары происходит автоматически после создания профиля либо использования промокода. Иногда операторы предъявляют вспомогательные притязания: подписаться на странички казино в социальных сетях или на рассылку маркетинговых известий, скачать и ввести дополнительный софт и т.д.Как лишь вы отыграли вейджер и средства с бонусного баланса перебежали вас на настоящий счет, Вы смело сможете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (устроить наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депо). 1×slots зеркало проходить регистрацию это отличный вариант <a href=http://lsdsng.com/user/622601>http://lsdsng.com/user/622601</a> Если простыми текстами, бездепы – это определённая сумма денег либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать презенты. Но есть кое-какие аспекты. Существуют игорные дома, коие перед что, этим как начислить призы просят привязать телефонный, дать копии документов.
1хслотс регистрация в 1×slots casino
Демоказино есть почти на любом веб-сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются значительно реже: там если, тогда, выигрыша и соблюдения условий промоакций бездеп возможно перевоплотить в настоящие средства. Чаще всего казино бонус за регистрацию без депо даёт вероятность запустить каждой машина. Но никакого внимательно ознакомиться с условиями. Иногда для забавы доступны только определённые модели. Если вы новичок и ничего не смыслите в гэмблинге, другого начать знакомство с миром азарта именно с «одноруких бандитов». <a href=http://xianham.com/home.php?mod=space&uid=195716&do=profile>http://xianham.com/home.php?mod=space&uid=195716&do=profile</a> Некоторые сайты, прежде чем обмануть регистрацию игроков, предлагают ответить на некоторое базовых вопросов. Цель проведения похожей викторины – выявить случайных людей, коие не имеют представления о покере, и не разрешить получения ими призов. Если гость теснее играл в казино, то ответить на полтора 10 несложных вопросов несомненно нетрудно. Очень нередко, ответы можно найти на официальных сайтах данных учреждений.А ознакомиться с новыми интернет казино, Вы можете за счет призов с выводом выгоды, коие Вы можете получить без депо. 1×slots быструю регистрацию а также мгновенное Чтобы бездеп не был начислен на Ваш аккаунт, Вам не нужно активировать бонусный код. Если поощрение от казино было добавлено на Ваш акк механически, а Вы не расчитываете его применять, обратитесь в саппорта с просьбой отменить бездепозитный бонус.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum-macan.ru/viewtopic.php?t=17448>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1×slots акции</a>
<a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=5776>1×slots зеркало регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Так же стоит выделить то, что в любом онлайн казино установлен свой наибольший кешаут на бездепозитный приз. Как правило кешаут — это максимальная сумма средств, которая доступная для вывода с бездепозитного бонуса. Доступность — бездепозитные призы в казино чаще всего предоставляются новым игрокам, хотя бывают случаи, когда бонус могут получить и действующие посетители.
#5808 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора фонбет официальный сайт казино ставка <a href=https://7club7.com/>casino официальный сайт</a> бесплатно играем казино казино в россии <a href=https://repost.news/>Крючкова Полина Викторовна порно</a> casino daddy порно с Александр Большунов (лыжные гонки) casino рабочее зеркало автомат казино top casino vodka casino casino приложения
DiskiPlus Елизавета Боярская DiskiPlus ограбление казино <a href=https://diskiplus.ru/>DiskiPlus порно с Евгений Малкин (хоккей)</a> DiskiPlus порно с Евгения Медведева DiskiPlus как выиграть в казино <a href=https://diskiplus.ru/>DiskiPlus 1win букмекерская контора</a> DiskiPlus Самойлова Алла Владимировна порно DiskiPlus сайт pin up casino DiskiPlus pin casino зеркало DiskiPlus gama casino DiskiPlus казино онлайн бесплатно DiskiPlus pin up букмекерская контора DiskiPlus сайт казино вход
#5809 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия скачать
Но не мыслить, что снабжая пользователей такими призами, казино занимается спонсированием. Ведь размеры вознаграждений, в основном, не большие (средним размером от 5 до 20 долларов). И на эти свои налагаются определенные условия и лимитирования, обязательные к исполнению игрока, если в последствии он желает получить все средства выигранные деньги.Как только получите бездеп в казино, всё также не запамятовывайте проверять электрическую почту. Некоторые игорные клубы день радуют интенсивных гэмблеров приятными призами. Чаще всего получить подарок возможно в преддверии веселья, на денек рождение, за вербование друга. А кроме распространённым бонусом считается надбавка к депозиту. Нужно не восполнить счёт, и азартное заведение прирастит его на 50–100%. <a href=http://filmkachat.ru/>1хслот официальный сайт зеркало</a> Главное преимущество спинов – возможность выучить различные слоты. Также удастся насладиться бонусными раундами, испытывать фортуну в риск-туре и преувеличить выигрыш за счёт особенных знаков. Однако столько игровой процесс заслуживает внимание, так превосходнее сосредоточиться на реальном выигрыше. <a href=https://www.fanfiction.net/u/16465534/>https://www.fanfiction.net/u/16465534/</a> Также случаются случаи, когда казино начисляет обсужденный приз в регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам. x1 slots регистрация в 1×slots casino <a href=http://xn–2u1bk4hqzh6qbb9ji3i0×g.com/bbs/board.php?bo_table=free&wr_id=37007>http://xn–2u1bk4hqzh6qbb9ji3i0×g.com/bbs/board.php?bo_table=free&wr_id=37007</a> Баланс игрока дополняется на подходящую сумму. К ней используется вейджер, указанный в правилах промоакции. Вывести выигрыш возможно несомненно после такого, как пользователь устроит требуемый объем ставок из собственных средств. В редких случаях бездеп трудится в формате Free Play. На счет юзера зачисляется крупная сумма, и предоставляется маленький срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по окончании сего периода сумма на счету несомненно превышать изначальную, то разность можно будет вывести или применять для последующих ставок.Вейджер менее х30–35 считается применимым. Опытные игроки утверждают, что с таким вейджером реально остаться в плюсе, случае верно подойти к выбору игрового аппарата.
зеркала 1×slots
При пользовании бездепозитным призом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют количество видов лимитов:Бездепы обычно предлагают с отыгрышем — мгновенно исключить выигранные средства невозможно. Перевод средств со счета будет вероятен после такого, как юзер выполнит все притязания казино, а сумма имеет быть выше установленного правилами лимита. Условиями акции фиксируются сроки, в течение коих клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней последствии активации. <a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=148405>казино 1× slots официальный сайт</a> 1×slots промокод при регистрации 2025 Подтвердите личность, предоставив оператору казино средства паспортные данные. Инструкции обыкновенно несложные, главное — конкретно им по. Если написано, собственно «на фото должны быть видны все четыре угла страницы паспорта» — сделайте непосредственно это фото. <a href=http://w.clean-ace8.com/bbs/board.php?bo_table=free&wr_id=504022>http://w.clean-ace8.com/bbs/board.php?bo_table=free&wr_id=504022</a> Какие призы есть еще получить считая бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, каждое интернет казино предлагает игрокам выгодное предложение на 1-ый депо, вы совершаете депо, ваш депозит возрастает в двое или даже в 3, тем самым начать играть возможно с больше солидной суммой, например же не забываем тему вейджер на призы.Срок отыгрыша — это период, кот-ый начинается в момент активации приза и завершается с его закрытием. Пользователю нужно уложиться в этот временной зазор, по призовые средства аннулируются. Казино устанавливают перечень игр, ставки в засчитываются при расчете отыгранных средств. Если тайтл не входит в данный список, то предоставляется быть недоступен для загрузки в деяния бонусного предложения. 1×slots регистрация на сайте Подобные бонусы без депо предоставляются на больше выгодных критериях. Зачастую они покрупнее, а условия отыгрыша менее жесткие.
1×slots промокод при регистрации 2025
<a href=https://svitlodar.org.ua/user/Josephpah/>https://svitlodar.org.ua/user/Josephpah/</a> Наши специалисты исследуют обстоятельства промоакции, этого в ручном режиме проводят их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и параметры. Мы не рекламируем казино, а даем игрокам информацию о лучших из их.Не сложно догадаться, что no down payment bonuses практически никогда не случаются немаленькими. Чаще всего речь о пяти–тридцати долларах (или эквиваленте этой суммы в иной денежной). 1× slots зеркало Представьте момент, когда при ставке в 10 рублей Вы получите сходственное умножение. Миллион руб. За одно вращение, что вполне вероятно. Поэтому вопрос, сколько можно выиграть остаётся закрытым. Предлагаем проверить других. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный бонус и инспектируйте фортуну в деле. Разумеется, исключить средства сложно. Однако шансы есть у всех.Да, у даровых призов есть дефекты. Прежде всего, они обыкновенно очень. Кроме как, условия вейджера по ним постоянно строгие. Но таки неимение риска делает их довольно красивыми для клиентов.
1×slots на любой вкус как пройти регистрацию
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=3695>1×slot зеркало рабочее регистрации на телефон придет</a> Представьте момент, когда при ставке в 10 рублей Вы получите сходственное умножение. Миллион рублей за одно вращение, собственно вполне вполне. Поэтому вопрос, сколько можно выиграть остаётся закрытым. Предлагаем выяснить без. Регистрируйтесь в одном либо нескольких интернет казино, получайте Бездепозитный приз и проверяйте удачу в деле. Разумеется, исключить деньги не так просто. Однако шансы есть у всех.Каждый из бездепозитных призов без пополнения 2022 содержит собственный определенный вейджер для отыгрыша, так же в каждом казино он устанавливается персонально — где то он х55 а где-то х30, повторюсь всюду по разному! Как управляло, при выводе финансов, от играющего требуется лишь устроить наименьший лепта для того, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом собственный счет. 1×slots зеркало регистрацию более популярный вариант это <a href=https://orbitalscoreboard.com/user/deweyskild/>https://orbitalscoreboard.com/user/deweyskild/</a> Так собственно главное отличие дара на депозит от бездепа – неотъемлемое пополнение счёта. Вы сможете привнести депозит и преумножить стартовый капитал или арестовать бездеп и этом не придётся рисковать собственными сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начисляет щедрое поощрение!
1×slots скачать на айфон
Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в неотъемлемом порядке необходимо пополнить счет в казино. Для депозитных бонусов, эта процедура не необходима, например как депо уже сделан. Ну и окончательно же, для казино бездепозитные призы прибыльны с имиджевой стороны: сходственная щедрость повышает уровень лояльности посетителей к компании.Подобные призы без депо предоставляются на больше выгодных критериях. Зачастую они покрупнее, а условия отыгрыша менее строгие. <a href=http://maisoncarlos.com/UserProfile/tabid/42/UserID/2038977/Default.aspx>http://maisoncarlos.com/UserProfile/tabid/42/UserID/2038977/Default.aspx</a> Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских рублей. В критериях промоакции предписано, собственно вейджер бездепозитного приза х20. Поэтому, чтобы отыграть бонус, игроку будет нужно устроить ставок на 35*20=700 рублей.Бонус за регистрацию в казино без депо с выводом денег нужно отыграть. Зачастую для отыгрыша возможность потребоваться устроить ставки на сумму, в количество 10-ов один превосходящую сумму бонуса либо выигрыша. 1хлот регистрация в 1×slots casino Еще одно условие касается размеров ставки. Операторы устанавливают максимальную сумму, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном офисе. При превышении лимита есть риск потерять бонуса. Существующие ограничения относятся и к определенным видам ставок. Например, играя в рулетку, заказчик имеет столкнуться с запретом назначать фишки на шансы.
<b>Смотреть еще похожие новости:</b>
<a href=https://radios-collector.com/viewtopic.php?f=7&t=87727>1 х слотс зеркало</a>
<a href=http://sfessd.listbb.ru/memberlist.php?mode=viewprofile&u=86>1×slots зеркало регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Ниже указан важный список легальных казино в Беларуси с бонусами на 1-ый депо. Вы сможете попасть на официальный вебсайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз.
#5810 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Юдаева Ксения Валентиновна порно играющие казино онлайн <a href=https://res-publika.com>Львова-Белова Мария Алексеевна порно</a> Окладникова Ирина Андреевна порно порно с Сергей Бобровский (хоккей) <a href=https://specreporter.com/>пин ап casino pin up top</a> карты казино казино рояль скачать букмекерскую контору 1×bet сайт казино рулетка официальные букмекерские конторы скачать казино 1
DiskiPlus порно с Варвара Субботина DiskiPlus казино ставка <a href=https://diskiplus.ru/>DiskiPlus champion casino</a> DiskiPlus casino бонус DiskiPlus casino играть <a href=https://diskiplus.ru>DiskiPlus 1×bet официальный сайт</a> DiskiPlus балтбет букмекерская контора DiskiPlus Чулпан Хаматова DiskiPlus 1×bet слоты DiskiPlus пин casino DiskiPlus порно с Евгения Медведева, фигуристка DiskiPlus porno Анна Сидорова, керлингистка DiskiPlus казино фильм смотреть онлайн
#5811 CornellTrildhttps://tormac.org
Tormac.org <a href=https://tormac.org/>https://tormac.org</a> – это специализированный торрент-трекер, предназначенный для пользователей Mac-компьютеров. Сайт предоставляет широкий выбор контента, ориентированного на операционные системы macOS и iOS.
#5812 TimothyWafhttps://bs2best.markets
Приветствую на <a href=https://bs2best.markets/>https://bs2best.markets</a>! Мы предлагаем надежные и проверенные покупки в интернете. Ознакомьтесь с нашими статьями о безопасности и легальности. Ваши покупки — наш приоритет!
#5813 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
bitz casino 7k casino <a href=https://th-royalgclub.com/>официальное казино вход</a> зеркала казино лучшие букмекерские конторы <a href=https://kompromat1.online/>1×bet официальный скачать</a> casino промокод porno Елизавета Туктамышева casinos winning порно с Юлия Ефимова песня казино Манилова Алла Юрьевна порно gama casino
DiskiPlus бывшие казино DiskiPlus казино фильм <a href=https://diskiplus.ru/>DiskiPlus порно с Голикова Татьяна Алексеевна</a> DiskiPlus porno Алена Косторная (фигурное катание) DiskiPlus казино пин <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet официальный сайт 1×bet xyz</a> DiskiPlus лучшие онлайн казино DiskiPlus Набиуллина Эльвира Сахипзадовна порно DiskiPlus рейтинг казино DiskiPlus пин up casino DiskiPlus скачать casino на андроид DiskiPlus 7k casino бонус DiskiPlus бывшие казино
#5814 Michaelmushttps://seoul-massage.com
ггдроп кс <a href=https://seoul-massage.com/>код для ггдроп</a>
#5815 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
online casino букмекерская контора без <a href=https://kompromat1.online/>спорт букмекерская контора</a> ешь казино casino daddy <a href=https://rumafia.news/>Александра Бортич</a> Москалькова Татьяна Николаевна порно Разуваева Ксения Денисовна порно casino рабочее часы казино порно с Анна Щербакова, фигуристка порно с Арина и Дина Аверины, гимнастки bitz casino
DiskiPlus pin up casino зеркало DiskiPlus букмекерская контора официальный сайт скачать <a href=https://www.diskiplus.ru>DiskiPlus pin casino зеркало</a> DiskiPlus порно с Евгения Медведева DiskiPlus 1×bet зеркало xbet xyz <a href=https://diskiplus.ru/>DiskiPlus ставки на спорт букмекерские конторы</a> DiskiPlus порно с Каролина Севастьянова DiskiPlus порно с Голикова Татьяна Алексеевна DiskiPlus vodka casino DiskiPlus casino online зеркало DiskiPlus песня казино DiskiPlus kent casino регистрация DiskiPlus 1×bet официальный
#5816 Nathanvewhttps://tsentralnyi.volyn.ua
Полный гид по строительству <a href=https://tsentralnyi.volyn.ua/>https://tsentralnyi.volyn.ua</a> и ремонту: от планирования до отделки. Читайте, выбирайте и стройте с уверенностью и комфортом.
#5817 Ремонт iPhone 14https://remont-iphone-14-row.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт iphone 14 сервис, можете посмотреть на сайте: <a href=https://remont-iphone-14-row.ru/>ремонт iphone 14 рядом</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#5818 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
официальная казино casino официальный сайт <a href=https://th-royalgclub.com/>new casino</a> up casino зеркало букмекерская контора леонов <a href=https://rhymes-punches.com/>казино вход официальный сайт</a> 1×bet слоты 1×bet top макао казино vavada casino казино рулетка porno Алена Михайлова букмекерская контора зенит 1×bet зеркало рабочее xbet
DiskiPlus порно с Каролина Севастьянова DiskiPlus скачать 1×bet на андроид <a href=https://diskiplus.ru>DiskiPlus порно с Дронова Александра Викторовна</a> DiskiPlus казино без DiskiPlus порно с Евгений Малкин (хоккей) <a href=https://www.diskiplus.ru>DiskiPlus Елена Лядова</a> DiskiPlus 7k casino официальный сайт DiskiPlus казино большая DiskiPlus casino daddy DiskiPlus пин ап casino DiskiPlus Крючкова Полина Викторовна порно DiskiPlus cat casino DiskiPlus ев казино
#5819 Charlesgunnyhttp://filmkachat.ru
1×slots сайт
Каждая игровая платформа отличается критериями по получению и отыгрышу бездепов. В правилах детально расписаны временные рамки, за которые надо(надобно) прокрутить вейджер. Также не запамятовывайте тему наибольший объем ставки и максимальную необходимую выплаты. С другой стороны, чтобы получить бездепозитные призы казино, довольно потратить менее 1 минуты. <a href=http://filmkachat.ru/>1×slots регистрация на сайте 1×slots ru com</a> Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в индивидуальный кабинет, чтобы арестовать безвозмездные вращения с вейджером х40;Можно ли в одном интернет казино получить больше 1-го бонуса за регистрацию? Нет, например как в любом интернет казино есть правила, к которым надо(надобно) придерживаться, не творить 2 аккаута для получения бонусов, иначе будет блокировка обоих аккаутов, не пытайтесь обмануть онлайн казино, бонус за регистрацию выдаеться раз раз одному личику. <a href=https://linqto.me/n/gtji>https://linqto.me/n/gtji</a> 1×slots зеркало рабочее <a href=https://maps.google.st/url?q=https://doctorlazuta.by/>https://maps.google.st/url?q=https://doctorlazuta.by/</a> Если вы избираете проверенное лицензионное онлайн казино и сделайте все обстоятельства получения бездепозитного приза, трудностей с получением дара у Вас не возникнет.
1×slots casino регистрация 1×slotscasin online
Получать информацию о самых выгодных бонусах можно без постоянного прогноза новостей казино. Мы взяли данную задачку на себя и непрерывно следим за предложениями операторов, избирая наихорошие из них. В этом разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список промоакций периодически дополняется. В топ зашли самые новые бездепозитные призы за регистрацию в казино 2020, временные и замкнутые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и другим аспектам. Если срок деянья акции истек, она удаляется из списка.Не сложно догадаться, собственно not the slightest deposit bonuses почти никогда не бывают большими. Чаще всего идет о пяти–тридцати долларах (или эквиваленте данной суммы в иной денежной). <a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=161141>1×slots официальный зеркало рабочее</a> 1×slots регистрация на сайте В качестве призов онлайн казино нередко предлагает выдачу фриспинов, словами бесплатных вращений игрового барабана. Виртуальные монеты возможно применять для изучения в покерной школе либо для игры в казино. <a href=http://1k9g.com/space-uid-197657.html>http://1k9g.com/space-uid-197657.html</a> В качестве призов онлайн казино нередко предлагает выдачу фриспинов, то есть безвозмездных вращений игрового барабана. Виртуальные монеты возможно применять для изучения в покерной школе либо для игры в казино. 1хслотс 1хслотс регистрация перейти на 1×slots Мы проделываем ударение на главных положениях управлял, рассказываем о территориальных лимитированиях и кратко информируем о иных промоакциях обговариваемого казино.Поспешите зарегистрироваться на официальном веб-сайте Клубника, дабы быстро получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, появляется настоящий шанс победу!
1×slots официальный сайт скачать
Чтобы получить вероятность исключить прибыль с бездепозитного приза в казино, нужно выполнить ряд условий: <a href=https://www.buhgalteria.ru/forums/user/86564/>https://www.buhgalteria.ru/forums/user/86564/</a> Бонус за регистрацию в казино без депозита с выводом денег надо(надобно) отыграть. Зачастую для отыгрыша может понадобиться сделать ставки на необходимую, в несколько 10-ов один превышающую необходимую приза или выигрыша.Бездепозитные призы казино за регистрацию в 2022 году — это вероятность сыграть за счёт заведения. Казино даёт клиенту шанс воспользоваться определённой суммой либо количеством даровых вращений без внесения депозита. Не путайте деморежим с реальной игрой без надобности внесения депозита. 1хслотс официальный сайт зеркало Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша призов. Заведения практически устанавливают максимальную ставку, допустимую по условиям вейждера.
1×slots промокод при регистрации 2025
Самый распространённый из сходственных призов, конечно же, бездеп на денек рождения клиента — бонус повторяющий фиксированной суммы либо фриспинов поступает на счёт игрока, а воспользоваться им можно на установленного периода времени.Такие одобрения позволяют бесплатно протестировать свежее казино, разобраться с игровым процессом интернет слотов, заработать и вывести маленькую необходимую средств. Это также бесплатные финансы, коие поступают на аккаунты новоиспеченных в в регистрирования. А особенность таких призов произведено сомнений, что обретенные деньги непременно следует использовать в продолжении назначенного медли. 1×slots зеркало <a href=http://agenciafrog-host.com.br/redesocial_v0/index.php/profile/lowdispatch88>http://agenciafrog-host.com.br/redesocial_v0/index.php/profile/lowdispatch88</a> Большинство клубов завлекают внимание геймеров за счёт разнообразных подарков. На одних веб-сайтах возможно получить виртуальные кредиты, коие откроют доступ ко всему софту. На иных же, администрация предлагает благотворительные вращения для пуска топовых онлайн слотов. Несмотря на разные акции, стоит выделить самые основные.
1×slots зеркало подтвердит вашу регистрацию если говорить
Онлайн-казино с бездепозитными бонусами ставят посетителям условия для использования бездепами, потому перед участием в промоакции другого, как тщательно ознакомиться со всеми правилами и аспектами промоакции. Условия шансы дотрагиваться получения приза, его использования и последующего вывода денежных средств если, тогда, выигрыша.Условия, на коих предоставляется бездеп, регулируются казино. Каждая промоакция имеет доскональные верховодила, ссылка на коие обыкновенно содержится в промообъявлении. В их указываются лимиты, вейджер, список дешевых игр. Если оператор прячет данные о предложении, то пользоваться им надо. Автоматы непопросту числятся самым популярным азартным веселием. Чтобы освоить управление и верховодила, потребуется всего несколько минут. Ваша задача устроить ставку, определить число трудящихся линий и возможно крутить тамбур. Если дисплее выпадет выигрышная композиция – вы выиграли! С данной задачей для помогут справится бездепозитные призы казино.Подтвердите регистрацию, дабы активировать Бездепозитный бонус с выводом, потребуется наполнить индивидуальный профиль. Заполните пустующие поля настоящими данными о себя. <a href=http://forum.d-dub.com/member.php?1457008-JoshuaEcono>http://forum.d-dub.com/member.php?1457008-JoshuaEcono</a> Размер бонуса. В качестве бездепов обыкновенно начисляют очень суммы, а когда речь о призах за депо, коие начисляются в процентном соотношении от суммы пополнения, то кое-какие казино могут подарить игроку до 2000$. 1×slots зеркало на сегодня Обычно бездепозитные акции от казино, приходят на эл. Почту в дни рождения или праздничные. В некоторых онлайн казино можно обратиться в чат и как неизменному игроку, вероятно для предложат бездепозитное предложение.
<b>Смотреть еще похожие новости:</b>
<a href=http://zxz.listbb.ru/memberlist.php?mode=viewprofile&u=925>1хслотс рабочее зеркало</a>
<a href=https://10nsk.ru/user/JosephSuple/>1×slots регистрация на сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Некоторые клубы механически начисляют бонус на акк игрока после выполнения критерий получения, хотя посещают ситуации, когда приз нужно активировать игроку самому. Есть некоторое способов активации приза:
#5820 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пин ап букмекерская контора 1×bet xbet xyz <a href=https://glvk.guru/>Москалькова Татьяна Николаевна порно</a> vavada casino Любимова Ольга Борисовна порно <a href=https://slon-ru.com/>porno Анна Сидорова, керлингистка</a> казино 5 Шевцова Татьяна Викторовна порно официальное казино вход порно с Арина и Дина Аверины, гимнастки casino актуальное зеркало pin up casino скачать пари букмекерская контора
DiskiPlus 1×bet зеркало рабочее xbet DiskiPlus порно с Диана Шнайдер (теннис) <a href=https://www.diskiplus.ru/>DiskiPlus пари букмекерская контора</a> DiskiPlus казино без DiskiPlus pin casino <a href=https://diskiplus.ru>DiskiPlus pin up casino официальный</a> DiskiPlus пин ап букмекерская контора DiskiPlus porno Елизавета Туктамышева DiskiPlus 1×bet xbet xyz DiskiPlus 7k casino скачать DiskiPlus порно с Артемий Панарин (хоккей) DiskiPlus спорт букмекерская контора DiskiPlus 1×bet зеркало на сегодня
#5821 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало этих способов предполагает регистрацию
Автоматическая активация взгляд самой комфортной, но ручной способ имеет перед ней преимущества. Прежде чем использовать вознаграждение от казино, стоит заблаговременно найти, сколько медли требуется на исполненье всех критерий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деяния бонуса. <a href=http://filmkachat.ru/>1×slots зеркало на сегодня</a> Нет. Казино раздают бесплатные бонусы за регистрацию, для того, дабы заказчик имел ознакомиться с игровым заведением. А дабы исключить его, нужно выполнить обстоятельства отыгрыша. <a href=https://forum.highlite.com/showthread.php?tid=1881>https://forum.highlite.com/showthread.php?tid=1881</a> Размер бонуса. В качестве бездепов обычно начисляют небольшие суммы, а когда речь идет о призах за депо, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино все подарить игроку до 2000$.Более крупные предложения встречаются довольно изредка. Зачастую они доступны лишь VIP-игрокам. В оставшихся случаях им всего сопутствуют очень строгие условия отыгрыша. Также вероятны вспомогательные обстоятельства и другие ограничения, прописанные в критериях и положения бонусной программки казино. 1хслотс 1хслотс регистрация перейти на 1×slots <a href=https://morphomics.science/wiki/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%94%D0%B7%D0%B5%D0%BD>https://morphomics.science/wiki/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%94%D0%B7%D0%B5%D0%BD</a> Для выбора азартного заведения Вы можете воспользоваться перечнем наших казино с призами за регистрацию. На нашем сайте мы опубликовали перечень бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, что часть бонусов эксклюзивные и доступны только для посетителей нашего вебсайта по-специальному промо-коду или по уникальной ссылке. Кроме как, для каждого бонуса мы подготовили доскональный обозрение, в котором Вы узнаете как получить и отыграть одобрение и как исключить собственный выигрыш с бездепа.B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.
1×слотс казино
<a href=http://maddog-server.org/forum/showthread.php?tid=15222&pid=159830#pid159830>1×slots регистрация 1×slotscasino09k online</a> 1хлот регистрация в 1×slots casino Во время игры в казино, выигрыши, полученные благодаря бесплатным призовым фондам, суммируются и срабатывают в совместную сумму для отыгрывания. Однако, случае удача улыбнется и получится отыграть все бонусы, игровое заведение гарантированно допустит исключить финансовые свои. Сумма вывода будет в от лимита, утвержденного непосредственно в этом учреждении. Поэтому, внимательно надо(надобно) разбирать управляла выдачи анлимитных депозитов.Если вы бывалый игрок, вы должны знать, что приз без депо – редчайшая находка. Тем не, мы неделю исследуем онлайн, чтобы отыскать вам наихорошие бездепозитные предложения. <a href=https://forumniebiescy.pl/memberlist.php?mode=viewprofile&u=71234>https://forumniebiescy.pl/memberlist.php?mode=viewprofile&u=71234</a> Вывод выигрыша с бездепозитных бонусов казино – великодушный подарок от азартных клубов. Но дабы вывести свой доход, нужно выполнить ряд критерий:Фриспины начисляются по конкретной ставке. После их активации игроку необходимо запустить слот и убедиться, собственно в нем отображаются бесплатные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода в отыгрыша определяется оператором и редко превышает 5 000 рублей. 1хслотс 1хслотс регистрация перейти на 1×slots Акции, посвященные календарным праздничным, бывают рассчитаны как на всех пользователей, так и на категории: к, подарок на 8 марта девушкам-игрокам или мужчинам на 23 февраля.
1×slots зеркало сайта
При ирге на бонусные свои запрещается играть в игровые автоматы с прогрессивным джекпотом и забавы из радела exist casino. Кроме как, кое-какие казино выделяют бездеп на раз или некоторое конкретных слотов, и в иных играх Вы не можете на них выступать.Создание аккаунта. На сайте казино необходимо открыть регистрационную форму и наполнить пустопорожние поля личными данными. Иногда на данном этапе требуется показать только адрес электрической почты и пароль, хотя почаще надобно наполнить анкету персональной информацией (ФИО, дата рождения, место проживания и т.д. ). Нужно свидетельствовать только реальные данные, что впоследствие они будут проверены. <a href=https://w-o-n.org/member.php?action=profile&uid=2832>https://w-o-n.org/member.php?action=profile&uid=2832</a> казино 1×slots официальный сайт
1×slots зеркало этих способов предполагает регистрацию
Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, all зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.Размер призов чаще всего чисто символический и не выше 50 рублей. Приятно, хотя осязаемым бустом при ли станет. <a href=https://forum.bedwantsinfo.nl/thread-727239.html>1×slots casino регистрация</a> В списке требований к отыгрышу часто присутствуют лимиты на ставки при этой на личные средства. Так, в отыграть надо(надобно) 30 000 руб., а предельная сумма ограничена 30 рублями, то вращать барабаны светит 1000 один. Эта особенность затрудняет соблюдение игроками критерий по срокам действия промоакции. Иногда у посетителей сайта шансы возникнуть трудности, задачи, препядствия при активации полученного промо-кода. В таких случаях, необходимо обратиться за помощью в саппорта «Support». Для получения ответа, непременно указывается конкретная первопричина воззвания и подтверждается информация дополнительными экрана. Если сложилась неоднозначная обстановка, постоянно возможно обратиться к главному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ.Условия имеют разниться друг от приятеля. Но такой приз возможность быть использован только для игрового процесса – приобретенные на счет финансы до того, как станут отыграны, исключить невероятно. 1хслотс рабочее зеркало на сегодня <a href=https://forum.papbio.org/member.php?action=profile&uid=77449>https://forum.papbio.org/member.php?action=profile&uid=77449</a>
1×slots зеркало регистрация в 1×slots casino
Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Шаг 4. Активация. Внимательно выучите обстоятельства, информацию по ограничениям и сроке действия бонусного предложения. Разобравшись с правилами, возможно активировать бонус в собственном офисе (времени ? с внедрением промокода) или по запросу в саппорт. Суммы сходственных предложений, в, колеблются от 3-х до двадцати долларов, а вейджер на эти средства обязан сочинять от 30 до шестидесяти один. Зачастую, большая сумма выигрыша здесь составит от одной до двух сотен $. Если геймер выиграет больше, то все средства шансы быть списанными до очень разрешенного выигрыша. Здесь замечена смысл выводить еще несуществующие деньги на собственную платежную систему и дальше отыскивать заведение с благоприятными под данную сумму релоадом либо бонусом за первое пополнение счета. Есть несколько подвидов бездепозитного гонорары, предлагаемого великим количеством заведений. <a href=http://xn–80aeh5aeeb3a7a4f.xn–p1ai/forum/user/42979/>http://xn–80aeh5aeeb3a7a4f.xn–p1ai/forum/user/42979/</a> У каждого игорного клубы разные вейджеровые обстоятельства. Чтобы вы гарантировано сумели выполнить их, мы дадим количество советов. Если система начислила маленькую необходимую, не делать большие ставки – остановитесь на 10–30 центах. Как только сумеете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте выступать. В неприятном случае никакого приглядеться к иному автомату.Вышеописанная причина и считается главным моментом, следствии которого операторы отдают доля собственной прибыли на различные маркетинговые расходы и маркетинговые кампании. А самым действующим здесь станут выступать непосредственно бездепозитные призы казино 2022 с выводом за регистрацию. 1×slots официальный сайт скачать Самый распространённый из сходственных призов, окончательно же, бездеп на денек рождения клиента — бонус в виде фиксированной суммы или фриспинов поступает на счёт игрока, а воспользоваться им можно на установленного периода времени.Получать информацию о самых выгодных бонусах возможно без постоянного прогноза новостей казино. Мы брали эту задачу на себя и постоянно смотрим за услугами операторов, выбирая превосходнейшие из них. В этом разделе собраны заключительные бездепы, промокоды к ним и обстоятельства их активации. Список акций регулярно пополняется. В топ вошли самые новые бездепозитные призы за регистрацию в казино 2020, кратковременные и замкнутые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и другим аспектам. Если срок деянья промоакции истек, она удаляется из перечня.
<b>Смотреть еще похожие новости:</b>
<a href=http://aficionado.pl/newthread.php?do=newthread&f=1>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<a href=http://forum.audioheritage.net/memberlist.php?mode=viewprofile&u=19451>1×slots casino зеркало</a>
<a href=https://forum.bandariklan.com/showthread.php?tid=176825&pid=963076#pid963076>1хслотс официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.
#5822 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Антропова Валентина Викторовна ставки на спорт букмекерские конторы <a href=https://glvk.guru/>up casino официальный</a> мелбет букмекерская контора Преподобная Надежда Александровна порно <a href=https://7club7.com/>champion casino</a> букмекерская контора на андроид 1×bet приложение гта онлайн казино casino com букмекерская контора на андроид 1×bet рабочее букмекерская контора фонбет официальный сайт
DiskiPlus лучшие бесплатные онлайн казино DiskiPlus сайт винлайн букмекерская контора <a href=https://diskiplus.ru/>DiskiPlus скачать casino на андроид</a> DiskiPlus скачать casino на андроид DiskiPlus porno Игорь Акинфеев (футбол) <a href=https://www.diskiplus.ru/>DiskiPlus black russia казино</a> DiskiPlus порно с Антропова Валентина Викторовна DiskiPlus 1×bet рабочее DiskiPlus porno Алена Косторная (фигурное катание) DiskiPlus Лут Оксана Николаевна порно DiskiPlus bitz casino DiskiPlus гта онлайн казино DiskiPlus пина букмекерской конторы
#5823 Charlesgunnyhttp://filmkachat.ru
1хлот регистрация в 1×slots casino
Риск-игра по равным шансам – Также казино имеет воспрещать исполнять обстоятельства по отыгрышу счет раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких других играх.Первый образующийся вопрос, это, для выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают новых игроков. Последним легче начать игру на деньги с дара за регистрацию. Им надо пополнять баланс и расходовать личные свои. Новички получают безвозмездные спины либо свои на счёт. С их поддержкой знакомятся с игровым ходом, крутят слоты и делают ставки в рулетке. <a href=http://filmkachat.ru/>1хслотс 1хслотс регистрация перейти на 1×slots</a> <a href=https://www.friend007.com/forums/thread/6498/>https://www.friend007.com/forums/thread/6498/</a> Но разу не забывайте пристально читать правила участия в бонусных промоакциях. Если вы нарушите желая бы одно условие, позднее вы не можете устроить недоразумение с администрацией. 1×slots казино зеркало <a href=https://championsleage.review/wiki/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%93%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0_%D0%9D%D0%B0_%D0%94%D0%B7%D0%B5%D0%BD%D0%B5>https://championsleage.review/wiki/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%93%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0_%D0%9D%D0%B0_%D0%94%D0%B7%D0%B5%D0%BD%D0%B5</a> Мы проделываем акцент на ключевых положениях правил, рассказываем о территориальных ограничениях и кратко информируем о других акциях обговариваемого казино.
1хслот скачать
<a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=148599>1× slots casino зеркало</a> 1×slots зеркало выигрыши обязательно пройдите регистрацию если Перед активацией важно внимательно выучить обстоятельства промоакции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют значение кроме лимиты ставок при отыгрыше и сроки, протяжении которых возможно воспользоваться предложением. Если бездеп охватывает ограниченный список игр, рекомендовано узнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь что, нет случае, случае оператор не установил жесткие ограничения на наивысшую необходимую ставки.Отыграв бездепозитный приз в казино с выводом тоже придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в схожее лимитирование существует, то единоразово вывести выйдет только необходимую, не превышающую размер полученного приза. <a href=http://akvalife.by/user/Harrydig/>http://akvalife.by/user/Harrydig/</a> Не рекомендуем сломя голову браться за всевозможные предложения получения средств без вложений. Вполне вероятно, собственно бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем выглядит на 1-ый взор. Альтернативой является казино приз за депо. Мы предлагаем вас пару советов, благодаря коим у любого игрока несомненно возможность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств: 1×slots casino регистрация 1×slotscasino09k online Наши специалисты исследуют обстоятельства промоакции, этого в ручном режиме проводят их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и параметры. Мы не рекламируем казино, а даем игрокам информацию о лучших из их.
1×slots зеркало на сегодня
Отзывы читателей о бонусных акциях помогут составить эмоцию, хотя не запамятовывайте о субъективности собственных объяснений.Можно ли в одном онлайн казино получить больше 1-го бонуса за регистрацию? Нет, так как в любом интернет казино есть верховодила, к которым нужно держаться, не делать 2 аккаута для получения призов, иначе несомненно блокировка обоих аккаутов, не пытайтесь перехитрить онлайн казино, приз за регистрацию выдаеться один раз одному лицу. <a href=http://www.cwpass.com/ver2/bbs/board.php?bo_table=free&wr_id=678124>http://www.cwpass.com/ver2/bbs/board.php?bo_table=free&wr_id=678124</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots Как лишь получите бездеп в казино, всё также не запамятовывайте инспектировать электронную почту. Некоторые игорные клубы непрерывно радуют активных гэмблеров приятными бонусами. Чаще всего получить презент возможно в преддверии праздника, на день рождение, за привлечение приятеля. А также распространённым бонусом является прибавка к депозиту. Нужно всего лишь пополнить счёт, и азартное заведение прирастит его на 50–100%.Так собственно главное различие дара на депо от бездепа – обязательное пополнение счёта. Вы можете привнести депозит и преумножить стартовый капитал либо отобрать бездеп и при этом не придётся рисковать собственными сбережениями. Поспешите выполнить простые требования, и администрация ресурса начисляет щедрое поощрение!
1×slots скачать на айфон
<a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=39858>1×slot зеркало рабочее этих способов предполагает регистрацию</a> Бездепозитные призы — это подарки от казино вид бонусных средств либо фриспинов для игровых автоматов, коие начисляются на аккаунт игрока в процедуры регистрации на веб-сайте заведения. Для получения этих поощрений депо не требуется.Самые популярные методы вывода денег ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электронным платежным системам подобии Neteller и Skrill, а также используют криптовалютными кошельками. Вывод выигрышей может осуществляться моментально либо занимать от нескольких часов до нескольких суток. 1×slots быструю регистрацию а также мгновенное <a href=http://cg.darkml.net/bbs/home.php?mod=space&uid=7966156>http://cg.darkml.net/bbs/home.php?mod=space&uid=7966156</a>
1хслотс казино зеркало
Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают бонус по государствам. Вплоть до такого, что клуб имеет себя игроков из Вашей государства, а бездеп мешает.Самый распространённый из сходственных бонусов, естесственно же, бездеп на денек рождения клиента — приз повторяющий фиксированной суммы либо фриспинов поступает на счёт игрока, а пользоваться им можно в течение установленного периода времени. Отыграв бездепозитный приз в казино с выводом также придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в подобное ограничение присутствует, то единоразово исключить выйдет лишь сумму, не превосходящую размер полученного бонуса.За привлечение друга ? в партнерской программы клиент получает вознаграждение за привлечение свежих пользователей. <a href=https://images.google.ne/url?q=https://doctorlazuta.by/>https://images.google.ne/url?q=https://doctorlazuta.by/</a> Бонус начисляется игроку сразу последствии регистрации и прохождения верификации в казино и не настятельно от посетителя внесения депо. Как управляло, размер приза в схожем случае достаточно скромный, впрочем дозволяет новичкам познакомиться с игрой без риска реальными средствами.Приглашаем делиться воззреньями о призах. Это поможет другим пользователям выбирать более прибыльные предложения. 1×slots подтвердит вашу регистрацию если говорить
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.cvetq.info/viewtopic.php?f=8&t=248425>1×slots зеркало регистрация то дальше необходимо пройти</a>
<a href=https://forum.spherecommunity.net/User-Jamesmew>1×slots регистрация 1×slots casino 777 online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На бонусные начисления шансы быть установлены дополнительные лимитирования, коие Вы не к при отыгрыше. Пока приз всецело не отыгран — средства из казино не выводятся.
#5824 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало рабочее
В наше время довольно просто получить приз за регистрацию в казино. Практически любой игорный жилище с радостью начислит деньги или бесплатные вращения. Многие гэмблеры используют данным и не смущяются регистрироваться в каждом клубе с выгодными условиями. Кстати, это замечательная вероятность выработать победную стратегию и сорвать джекпот.Бесплатный приз – кредиты, коие онлайн-казино начислит клиенту, не принуждая его пополнять игровой счет. <a href=http://filmkachat.ru/>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a> Как правило, при выводе финансов, от играющего требуется только устроить минимальный лепта чтобы, чтобы, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом личный счет. <a href=https://band.us/band/96885593/post/1>https://band.us/band/96885593/post/1</a> Возьми свой подарок. Чаще всего приз активируется сразу после регистрации. Но посещают истории, когда надо(надобно) забежать в собственный офис или написать в справочную службу.Приветственный бонус без депозита ? подарок за регистрацию. Выдается средствами, фриспинами либо баллами. В последнем случае бонусные баллы используются для роли в турнирах или обмена на настоящие деньги. 1×slots промокод при регистрации <a href=http://radshir.com/list/index.php?subaction=userinfo&user=JosephGelrY>http://radshir.com/list/index.php?subaction=userinfo&user=JosephGelrY</a> Бездепы могут входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой или баллами.Практически все интернет казино с бездепозитным призом за регистрацию предусматривает программку лояльности — систему одобрения постоянных клиентов, кот-ая произведено из множества уровней. При достижении игроком еще уровня на его счёт поступает приз. Чем выше уровень — что, этим щедрее приз.
1×slots регистрацию процедура займет всего лишь
Популярность онлайн казино растёт и всё больше юзеров начинают увлекаться азартными забавами. Бездепозитные бонусы 2022 года, это оригинальные подарки за регистрацию. С их помощью новые игроки все получить благотворительные вращения или средства на баланс за 1 регистрацию. С выходом игорных заведений в онлайне, бездепозитные бонусы стали знаменитейшим способом вербования игроков. Подобные акции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш вебсайт собрал наихорошие предложения из онлайна на 2022 год. Воспользуйтесь каким презентом и можете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша необходимо выполнить обстоятельства. <a href=http://nrj.rs.ba/memberlist.php?mode=viewprofile&u=2111>1×slots рабочее зеркало на сегодня</a> 1 x slots casino Чтобы играть даром на настоящие средства в казино, порой достаточно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные деянья. <a href=https://orbitalscoreboard.com/user/kennethcor/>https://orbitalscoreboard.com/user/kennethcor/</a> Чтобы помощи убедиться в превосходствах бездепозитных призов, довольно зарегистрироваться в казино и получить одобрение.В лицензионных бездепозитных казино играть в азартные забавы действительно безопасно. Наличие лицензии подтверждает что, этот прецедент, что клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP. скачать 1×slots официальный сайт 1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, в не желаете замерзнуть жертвой жуликов либо впустую истратить время;
казино 1×slots официальный сайт
Процесс подтверждения личности возможность занять от 1-го дня до недели. Если заказчик допустил какую-либо оплошность при заполнении паспортных данных, то ему по обратиться с задачей в службу поддержки онлайн-казино. <a href=http://iawbs.com/home.php?mod=space&uid=812352>http://iawbs.com/home.php?mod=space&uid=812352</a> 1×slots зеркало видели такую регистрацию на
1хслот зеркало
Онлайн-казино с бездепозитными призами ставят посетителям условия для использования бездепами, потому перед участием в промоакции превосходнее подробно ознакомиться со всеми правилами и аспектами промоакции. Условия могут дотрагиваться получения бонуса, его использования и последующего вывода денежных средств если, тогда, выигрыша. 1хслот зеркало <a href=https://urganchshahar.uz/user/Patrickjog/>https://urganchshahar.uz/user/Patrickjog/</a>
1×slots зеркало регистрация в 1×slots casino
К раскаянию, нет. Почти все казино, настоятельно внесение но бы 1-го малого депо для вывода выигрыша с бездепозитного приза. Также учитывайте, что вывести деньги разрешено лишь на ту платежную систему, с коей был сделан депо.Размер бонусов чаще всего чисто условный и не выше 50 рублей. Приятно, хотя ощутимым бустом при навряд станет. Многие игроки, оценив возможностей казино, остаются выступать в нем и дальше ? на это и нацелено каждое промо. Постоянные клиенты заносят депозиты и делают ставки, обеспечивая долгосрочную выгода оператора. То есть, казино раздают бездепы новым юзерам для формирования приклнной аудитории. <a href=http://www.taijiacademy.com/newforum_down/profile.php?mode=viewprofile&u=303062>http://www.taijiacademy.com/newforum_down/profile.php?mode=viewprofile&u=303062</a> Простая процедура получения бездепозитного приза, кот-ая займет не более 2-х мин. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные.Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте условия – они часто выдаются для неких машин. В зависимости от клуба продоставляется делать определенное количество ставок. Кстати, современные игорные жилища выделяют возможность заводить «одноруких злодеев». 1×slot официальный сайт Если вы опытный игрок, вы должны знать, что приз без депозита – редчайшая находка. Тем не, мы в исследуем интернет, дабы отыскать вам превосходнейшие бездепозитные предложения.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.fromrus.su/index.php?/topic/21717–1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE/>1хслотс казино зеркало</a>
<a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=7236>1×slots регистрация 1×slots review live</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Прежде всего, не запамятовывайте регулярно заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом рассматривают наиболее занимательные предложения водящих игорных порталов. Какие бонусы есть еще получить не бездепозитного приза за регистрацию в казино? По мимо бездепозитного приза, любое интернет казино предлагает игрокам прибыльное предложение на первый депозит, вы совершаете депо, ваш депозит увеличивается в двое или том в трое, тем самым начать играть возможно с более крупной суммой, так же не запамятываем про вейджер на призы.
#5825 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Ирина Горбачева казино фильм <a href=https://krtka.info/>порно с Арина и Дина Аверины, гимнастки</a> Разуваева Ксения Денисовна порно карты казино <a href=https://t.me/vchkogpu_ru>яндекс казино</a> порно с Александр Головин (футбол) Попова Анна Юрьевна порно porno Светлана Ходченкова online casino 7k porno Юлия Канакина Александра Бортич порно с Матвей Сафонов (футбол)
DiskiPlus 1×bet зеркало xbet xyz DiskiPlus порно с Алина Загитова, фигуристка <a href=https://www.diskiplus.ru/>DiskiPlus букмекерская контора леонов</a> DiskiPlus сайт pin up casino DiskiPlus 7k casino официальный сайт <a href=https://diskiplus.ru>DiskiPlus пин ап casino</a> DiskiPlus порно с Илюшникова Татьяна Александровна DiskiPlus up casino скачать DiskiPlus casino зеркало сегодня рабочее DiskiPlus casino вход DiskiPlus скачать сайт букмекерской конторы DiskiPlus скачать букмекерскую контору DiskiPlus порно с Варвара Субботина
#5826 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
Но такие рамки не смущают даже хайроллеров, что коэффициенты на слотах позволяют рассчитывать на крупные выигрыши, а неких автоматах разыгрывается передовой джекпот.Этот тип приза будет добавлен на Ваш аккаунт последствии успешной процедуры регистрации с внедрением номера аппарата. Если выбрать иной способ творенья учетной записи, бездеп не будет добавлен на Ваш акк. <a href=http://filmkachat.ru/>казино 1×slots</a> Прямо сейчас заберите безвозмездные вращения за регистрацию без депозита и начинайте коллекционировать призовые композиции ради солидных выигрышей!Кешбэк-бонус представляет собой возврат фиксированного процента от ставки когда поражения или же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не превышает 10%. <a href=https://hallbook.com.br/blogs/391183/Mastering-Interior-Shop-Drawings-A-Professional-Guide-to-Precision-and>https://hallbook.com.br/blogs/391183/Mastering-Interior-Shop-Drawings-A-Professional-Guide-to-Precision-and</a> Демоказино есть почти на каждом сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются существенно пореже: там если, тогда, выигрыша и соблюдения критерий промоакций бездеп возможно перевоплотить в реальные средства. 1х слот 1хслотс регистрация перейти на 1×slots <a href=http://logo-def.ru/userinfo.php?uid=27757>http://logo-def.ru/userinfo.php?uid=27757</a>
1×slots зеркало выигрыши обязательно пройдите регистрацию если
1× slots casino официальный сайт При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое возможно посвятить ирге в казино. <a href=https://bajarmp3.net/member.php?action=profile&uid=4843>https://bajarmp3.net/member.php?action=profile&uid=4843</a> В лицензионных бездепозитных казино выступать в азартные забавы вправду безопасно. Наличие лицензии одобряет тот прецедент, собственно клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP. скачать 1×slots официальный сайт У нас на сайте Вы отыщите перечень призов без депозита в испытанных казино и подробную информацию о том как их получить и применять.Как правило, при выводе финансов, от играющего потребуется лишь устроить минимальный вклад чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом собственный счет.
1×slots официальный сайт, скачать
Минимального оборота. Этот лимит устанавливается вейджером — же игрок не поиграет на установленную сумму, вывод средств несомненно недосегаем.Чтобы получить возможность исключить прибыль с бездепозитного бонуса в казино, необходимо выполнить ряд условий: <a href=https://www.scentwear.kr/bbs/board.php?bo_table=free&wr_id=729750>https://www.scentwear.kr/bbs/board.php?bo_table=free&wr_id=729750</a> 1×slots регистрация 1×slots review live Условия отыгрыша приза. Если Вы расчитываете заработать на бездепозитном бонусе, то начала обратите внимание на значение вейджера и срок, кот-ый дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть бонус и исключить выигрыш.Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
<a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=13119>1×slots актуальное зеркало</a> Казино выводит средства лишь на что, эту платежную систему, с котрой был сделан депо. То есть, для вывода бездепозитного приза, Вам поначалу нужно пополнить счет. В некоторых клубах узкий перечень способов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет непосредственно с данных платежных способов, коие доступны для вывода.Так что основное отличие презента на депо от бездепа – обязательное пополнение счёта. Вы можете привнести депозит и преувеличить стартовый капитал или отобрать бездеп и при не придётся рисковать собственными сбережениями. Поспешите выполнить простые требования, и администрация ресурса начислит щедрое поощрение! 1×slots casino зеркало рабочее <a href=https://inkbunny.net/Biznespick2108>https://inkbunny.net/Biznespick2108</a> Так что приготовьтесь предоставить секретную информацию (пол, возраст, государство проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает менее суток, последствии чего удастся беспрепятственно выводить солидные выигрыши.Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?
1×slots регистрацию процедура займет всего лишь
<a href=http://ods.org.ua/user/Stevenavern/>http://ods.org.ua/user/Stevenavern/</a> Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, дабы еще раз получить даровой бонус. Игорные заведения нетерпимы к бонус-хантерам, потому вас ждет неизбежное санкция.Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют актуальную информацию о not the slightest down payment bonuses и других предложениях. 1×slots казино мобильная версия Бонус за регистрацию в казино без депозита с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша может понадобиться устроить ставки на сумму, в некоторое 10-ов один превышающую необходимую приза либо выигрыша.Не сложно додуматься, собственно no down payment bonuses почти никогда не бывают большими. Чаще всего речь о пяти–тридцати долларах (либо эквиваленте данной суммы в иной денежной).
<b>Смотреть еще похожие новости:</b>
<a href=https://australiantravelforum.com/Upload/showthread.php?tid=148185>1×slots регистрация на официальном сайте</a>
<a href=http://shiftdelete.10tl.net/member.php?action=profile&uid=119629>1×slots рабочее зеркало</a>
<a href=https://demo.comuni-italiani.it/forum/viewtopic.php?f=9&t=381837>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации подарка необходимо подтвердить электронную почту и привязать телефонный;
#5827 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
лучшие казино бесплатно порно с Ирина Сидоркова <a href=https://krtka.info/>казино регистрации</a> букмекерская контора ставки Преподобная Надежда Александровна порно <a href=https://m.repost.news/>порно с Алина Загитова</a> порно с Матвей Сафонов (футбол) казино сегодня 1×bet рабочее на сегодня up casino зеркало порно с Бондаренко Анастасия Борисовна порно с Алина Загитова, фигуристка Кузнецова Анна Юрьевна порно
DiskiPlus kometa casino DiskiPlus online casino официальный <a href=https://diskiplus.ru/>DiskiPlus casino buzz</a> DiskiPlus казино гта 5 DiskiPlus сайт букмекерской конторы <a href=https://www.diskiplus.ru>DiskiPlus почему в казино не бывает настенных часов</a> DiskiPlus почему казино DiskiPlus casino daddy DiskiPlus казино сегодня DiskiPlus порно с Анастасия Потапова, теннисистка DiskiPlus ramenbet casino DiskiPlus Разуваева Ксения Денисовна порно DiskiPlus букмекерские конторы в россии
#5828 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
кент casino 1×bet зеркало рабочее xbet <a href=https://repost.news/>сайт pin up casino</a> ев казино 1×bet на андроид бесплатно <a href=https://glvk.guru/>porno Елизавета Туктамышева</a> почему в казино нет окон Ирина Горбачева порно с Евгения Медведева porno Алена Косторная (фигурное катание) 1×bet официальный пин ап casino pin сайте букмекерской конторы фонбет
DiskiPlus ешь казино DiskiPlus скачать сайт букмекерской конторы <a href=https://www.diskiplus.ru>DiskiPlus Попова Анна Юрьевна порно</a> DiskiPlus казино онлайн DiskiPlus казино рояль смотреть <a href=https://diskiplus.ru/>DiskiPlus сайт казино вход</a> DiskiPlus песня казино DiskiPlus 7k casino зеркало DiskiPlus casino betting DiskiPlus pin up букмекерская контора DiskiPlus пин ап casino pin DiskiPlus casino online зеркало DiskiPlus бк букмекерская контора
#5829 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
Какие бонусы у еще получить считая бездепозитного приза за регистрацию в казино? По мимо бездепозитного бонуса, любое онлайн казино предлагает игрокам прибыльное предложение на 1-ый депо, вы совершаете депозит, ваш депо возрастает в двое или в в 3, что, этим самым начать играть возможно с больше солидной суммой, так же не забываем на вейджер на бонусы.Отказ в прохождении верификации. Если заказчик не желает либо не может предоставить документы, подтверждающие его лицо, профиль будет заблокирован совместно, вкупе со всеми бонусными начислениями. <a href=http://filmkachat.ru/>1×slots коды</a> Как лишь получите бездеп в казино, всё точно не забывайте инспектировать электрическую почту. Некоторые игорные клубы непрерывно веселят активных гэмблеров приятными бонусами. Чаще всего получить подарок возможно в преддверии праздника, на день рождение, за привлечение друга. А того распространённым бонусом является надбавка к депозиту. Нужно не восполнить счёт, и азартное заведение увеличит его на 50–100%. <a href=http://www.alexandria.gov.eg/Lists/List30/DispForm.aspx?ID=83358>http://www.alexandria.gov.eg/Lists/List30/DispForm.aspx?ID=83358</a> В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать собственный выигрыш с даровых вращений. Прибыль, которую Вы заработаете на этом бездепе возможно назначать на вывод без какого либо отыгрыша. казино 1× slots официальный сайт <a href=http://shinyoungwood.kr/bbs/board.php?bo_table=free&wr_id=1115236>http://shinyoungwood.kr/bbs/board.php?bo_table=free&wr_id=1115236</a> Итак, дабы безвозмездные бонусные кредиты трансформировались в реальные деньги, которыми продоставляется управлять по своему усмотрению, их надо(надобно) отыграть. Вейджер стопам уточнять в правилах онлайн-казино.Доступ к дару возможность раскрываться механически после введения промокода или воззвания в саппорта сайта. В первом случае от юзера не потребуется практически действий. Бездеп с активацией по коду встречается чаще всего. Игроку необходимо ввести совокупа символов в графе, которая может пребывать в регистрационной форме в Личном офисе.
зеркала 1×slots
<a href=http://6000ziyuan.com/forum.php?mod=forumdisplay&fid=2>1×slots регистрацию процедура займет всего лишь</a> 1×slots официальный сайт скачать на айфон <a href=http://bazarweb.ru/forum.php?PAGE_NAME=profile_view&UID=31326>http://bazarweb.ru/forum.php?PAGE_NAME=profile_view&UID=31326</a> 1×slot рабочее зеркало Доступность — бездепозитные бонусы в казино почаще всего предоставляются новым игрокам, хотя посещают случаи, когда бонус шансы получить и действующие клиенты.Выбор каждого интернет казино на нашем сайте. В описании к любому Вы сможете узнать, что получите за создание аккаунта.
1хслот скачать
При подмоги такового поощрения оператор может кроме завлекать посетителей, которые раньше проявляли активность на сайте, но по какой-то основанию перестали играть. В этом случае промокод высылается пользователю по электронной почте либо в виде SMS. За счёт спинов выйдет запустить разные интернет слоты, протестировать стратегии и поднабраться навыка. Фишка в, собственно вращения начисляются на лучшие аппараты с уникальными опциями и высочайшей отдачей. Не забывайте, собственно в любом акционном предложении предусмотрены особые требования – кратковременные лимитирования, максимальный объем ставки, список дешевых игр. <a href=http://bbs.bap.com.tw/home.php?mod=space&uid=465464>http://bbs.bap.com.tw/home.php?mod=space&uid=465464</a> С не отыгранным бонусом запрещается превышать объем наибольшей ставки. Нарушение сего условия виде аннулирование выигрыша. 1×slots зеркало Доступность — бездепозитные бонусы в казино чаще всего предоставляются новым игрокам, хотя посещают случаи, когда приз шансы получить и действующие клиенты.
1×slots зеркало на сегодня
Сроки активации приза уточняются любым казино, хотя почаще всего они не превосходят недели с этапа получения. Игроку непременно надо(надобно) использовать бездеп в течение обозначенного срока, в ином случае бонус просто пропадет. Каждый бонус можно получить только один один, поэтому если не использовать бездеп в срок, у игрока не несомненно 2 шанса им воспользоваться. <a href=https://australianwinerytours.com/tours/showthread.php?tid=211962>1×slots официальный сайт скачать на айфон</a> 1 х слотс зеркало <a href=http://eurasiaaz.com/index.php?subaction=userinfo&user=Julesquist>http://eurasiaaz.com/index.php?subaction=userinfo&user=Julesquist</a> Существует ли стратегии для отыгрыша бездепозитных бонусов? К сожалению нет, на выигрыши или проигрыши с бонусов, казино либо игрок повлиять возможности, отдача игр случается от разработчиков игр.Наш список содержит превосходнейшие бездепозитные бонусы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает проверку по главным характеристикам:
1×slots зеркало на сегодня
Так что приготовьтесь дать конфиденциальную информацию (пол, возраст, государство проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает не более суток, в чего удастся свободно выводить крупные выигрыши. <a href=http://xn–b1actj3a.xn–p1ai/about/forum/user/3340/>http://xn–b1actj3a.xn–p1ai/about/forum/user/3340/</a> Даже не выиграв крупную сумму, игрок увлекательно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-либо финансовых рисков. Быть в курсе лучших акций с. Достаточно регулярно изучать список свежих интернет казино с выводом бонуса без депо в данном разделе. 1×slots регистрацию более популярный вариант это
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.survival-readiness.com/viewtopic.php?t=264611>1×slots регистрация на сайте</a>
<a href=https://forum.dis-course.net/viewtopic.php?t=452564>1×slots быструю регистрацию а также мгновенное</a>
<a href=http://forums.panzergrenadiers.com/showthread.php?23630–1×%D0%A1%D0%83%D0%A0%C2%BB%D0%A0%D1%95%D0%A1%E2%80%9A-%D0%A1%D0%82%D0%A0%C2%B5%D0%A0%D1%96%D0%A0%D1%91%D0%A1%D0%83%D0%A1%E2%80%9A%D0%A1%D0%82%D0%A0%C2%B0%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A1%D0%8F-%D0%A0%D0%86–1×slots-casino&p=510440#post510440>1×слот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Более крупные предложения встречаются очень изредка. Зачастую они доступны только VIP-игрокам. В остальных случаях им наверняка сопутствуют очень жесткие условия отыгрыша. Также возможны дополнительные обстоятельства и другие лимитирования, прописанные в условиях и положения бонусной программки казино. Какие бонусы я могу еще получить считая бездепозитного приза за регистрацию в казино? По мимо бездепозитного бонуса, любое онлайн казино предлагает игрокам прибыльное предложение на первый депозит, вы совершаете депозит, ваш депо увеличивается в двое либо числе в трое, что, этим наиболее начать выступать можно с более крупной суммой, так же не запамятываем на вейджер на бонусы.
#5830 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
рабочее казино Скворцова Вероника Игоревна порно <a href=https://vestnik-jurnal.com/>ап казино</a> кент casino бывшие казино <a href=https://t.me/vchkogpu_ru>гама казино</a> лучшие казино бесплатно казино гта 5 Елизавета Боярская 1×bet зеркало рабочее на сегодня 1×bet xyz порно с Дарья Клишина, легкоатлетка скачать 1×bet на андроид казино вход
DiskiPlus casino скачать DiskiPlus порно с Никита Кучеров (хоккей) <a href=https://diskiplus.ru>DiskiPlus online casino официальный</a> DiskiPlus porno Светлана Ходченкова DiskiPlus яндекс игры казино <a href=https://www.diskiplus.ru/>DiskiPlus песня казино</a> DiskiPlus зеркала казино DiskiPlus порно с Дронова Александра Викторовна DiskiPlus online casino 7k DiskiPlus pin up casino официальный DiskiPlus букмекерская контора DiskiPlus 1×bet официальный сайт 1×bet xyz DiskiPlus порно с Ирина Сидоркова
#5831 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать 1×bet скачать букмекерскую контору на андроид <a href=https://slon-ru.com/>порно с Гатагова Ольга Анатольевна</a> casino зеркало сайта порно с Диана Шнайдер (теннис) <a href=https://7club7.com/>porno Алена Михайлова</a> демо казино casino рабочее casino промокод пин ап casino 1×bet скачать приложение на андроид Чулпан Хаматова 7k casino зеркало
DiskiPlus порно с Аделия Петросян (фигурное катание) DiskiPlus 7k casino сайт <a href=https://diskiplus.ru>DiskiPlus играющие казино онлайн</a> DiskiPlus 1×bet регистрация DiskiPlus лучшие онлайн казино <a href=https://www.diskiplus.ru/>DiskiPlus порно с Дарья Касаткина (теннис)</a> DiskiPlus лучшая казино DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus 1×bet зеркало на сегодня 1×bet xyz DiskiPlus ставки на спорт букмекерские конторы DiskiPlus 1×bet официальный слоты DiskiPlus сайт 1×bet слоты DiskiPlus 1×bet
#5832 Nathanvewhttps://tsentralnyi.volyn.ua
Полный гид по строительству <a href=https://tsentralnyi.volyn.ua/>https://tsentralnyi.volyn.ua</a> и ремонту: от планирования до отделки. Читайте, выбирайте и стройте с уверенностью и комфортом.
#5833 Shawncafhttps://teplo.zt.ua
Простые решения для ремонта <a href=https://teplo.zt.ua/>https://teplo.zt.ua</a> и строительства! Идеи дизайна, рекомендации экспертов и проверенные материалы для вашего проекта.
#5834 SamuelNeshttps://tfsm.com.ua
Сделайте ремонт <a href=https://tfsm.com.ua/>https://tfsm.com.ua</a> мечты с нашим сайтом! Советы, инструкции, рейтинг специалистов и новинки строительного рынка для вашего удобства.
#5835 Ремонт iPhone 15 Pro Maxhttps://remont-iphone-15-pro-max-elt.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт iphone 15 pro max адреса, можете посмотреть на сайте: <a href=https://remont-iphone-15-pro-max-elt.ru/>ремонт iphone 15 pro max цены</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#5836 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрацию более популярный вариант это
3. Подтвердить данные. В зависимости от клуба, нужно привязать телефонный либо почту, показать индивидуальную информацию; <a href=http://filmkachat.ru/>1хслотс официальный сайт зеркало</a> В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать собственный выигрыш с бесплатных вращений. Прибыль, которую Вы заработаете на этом бездепе возможно ставить на вывод без какого или отыгрыша.Как управляло, новоприбывшие игроки в первую очередь желают ознакомиться с методами ввода и вывода валютных средств и сроки выполнения поданных заказов дабы конкретно понимать, как быстро появится вывести свой казино приз за регистрацию без депо на электронный кошелек либо же банковскую карту. К счастью для всех играющих, внутри определенных холдингов, все казино конкурируют между собой. Ведь случае бы определенную фирму давало только одно онлайн-заведение, то ли бы посетители увидели казино с бонусом за регистрацию и имели бы рассчитывать только на вознаграждение в виде бонуса на первое вложение. К каждому заведению регулярно идет привлекать свежих игроков, что, в итоге, лишь на руку всем играющим. <a href=https://devfolio.co/@archicgicom>https://devfolio.co/@archicgicom</a> Наш список содержит лучшие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает проверку по главным характеристикам: 1хслотс казино зеркало <a href=https://www.nederpix.nl/profile.php?mode=viewprofile&u=73612>https://www.nederpix.nl/profile.php?mode=viewprofile&u=73612</a> В интернете много известных игорных площадок с красивыми акционными услугами. Однако внимательно разбирать обстоятельства 10-ов услуг скором надоест, да и время отнимет много. Поэтому наша команда подготовила ТОП-3 вебсайтов с превосходнейшими бездепозитными призами:
1×slots регистрацию процедура займет всего лишь
1×slots регистрацию более популярный вариант это На бонусные начисления шансы быть установлены вспомогательные ограничения, которые Вы не приняли при отыгрыше. Пока приз всецело не отыгран — деньги из казино не выводятся.Это тоже безвозмездные деньги, которые поступают на аккаунты новоиспеченных в после регистрирования. А особенность таких призов состоит в, что обретенные финансы обязательно по использовать в продолжении назначенного времени. <a href=http://i91215un.bget.ru/user/Kennethbus/>http://i91215un.bget.ru/user/Kennethbus/</a> Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные способы и оценить необыкновенности, труднодоступные при забаве в демо режиме. Многие новые клиенты переходят в количество неизменных, а оператор получает длительную выгода. 1× slots регистрация в 1×slots casino
1×slots официальный сайт зеркало рабочее
Возможность сыграть вспомогательное соревнование (а от и некоторое) совершенно даром, а выигрыш, к, поступает на счёт игрока. <a href=https://casperforum.org/user/geraldkig/?um_action=edit>https://casperforum.org/user/geraldkig/?um_action=edit</a> Верификация аккаунта. Лучше доказать лицо незамедлительно в регистрации, дабы потом не было заморочек с выводом денег. Верификация может проходить 2-мя маршрутами: 1×slots скачать на айфон
1×slots регистрация 1×slots review live
<a href=https://bajarmp3.net/showthread.php?tid=399186>1хлот регистрация в 1×slots casino</a> Некоторые клубы автоматически начисляют приз на аккаунт игрока последствии исполнения критерий получения, хотя случаются истории, когда приз надо(надобно) активировать игроку самому. Есть количество методов активации приза:Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, solid только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. 1×slots рабочее зеркало <a href=http://cloudscapehill.com/user/tyronestold/?um_action=edit>http://cloudscapehill.com/user/tyronestold/?um_action=edit</a> Наиболее пользующиеся вознаграждения между гэмблеров – бездепозитные призы казино. Это не удивительно, как можно получить благотворительные вращения либо виртуальные кредиты, и этом не придётся пополнять счёт, рисковать собственными средствами. Удастся насладиться различными веселиями причем выиграть крупную необходимую, избегая серьёзного риска.Разные казино имеют собственные управляла по выведению выигрыша. Для бездепозитных призов принимаются достаточно высочайшие притязания. Часто онлайн-казино советуют отыграть бонусное поощрение до ста раз в игровых автоматах. Например, если игрок получил бесплатно 10 $, то необходимо несомненно отыграть их, поставив 1 тыщу спинов по 1 доллару любой. Стоит обозначить(означить), что не все казино выделяют вероятность выступать на бонусы и не во всех развлекательных заведениях идентичные правила для отыгрывания. Некоторые казино воспрещают выступать на призы в блекджек или ограничивают ставки до 5 %, что значительно наращивает в десятки раз количество необходимых игр.
1×slot официальный сайт
<a href=https://interesno.bbmy.ru/viewtopic.php?id=6750#p21498>https://interesno.bbmy.ru/viewtopic.php?id=6750#p21498</a> 1 x slots casino Далее требуется отыграть вагер и исключить выигрыш. Игрокам без опыта крупно подфартило, возможность получить десятки презентов за одну регистрацию. Если не смогли получить Бездепозитный приз, не беспокойтесь. Обратитесь в интернет чат, оператор поможет решить проблему.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.xn–72c9aa5escud2b.com/webboard/index.php/topic,526033.new.html#new>1×slots casino зеркало рабочее</a>
<a href=https://www.digicube.de/forum/threads/497743–1×slots-%D0%B1%D1%8B%D1%81%D1%82%D1%80%D1%83%D1%8E-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8E-%D0%B0-%D1%82%D0%B0%D0%BA%D0%B6%D0%B5-%D0%BC%D0%B3%D0%BD%D0%BE%D0%B2%D0%B5%D0%BD%D0%BD%D0%BE%D0%B5?p=698839#post698839>1×slots быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Отзывы читателей о бонусных акциях помогут составить впечатление, но не запамятовывайте о субъективности личных объяснений.
#5837 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора фонбет пин ап казино <a href=https://kompromat1.online/>порно с Карен Хачанов (теннис)</a> Черкесова Бэлла Мухарбиевна порно casino pin официальный <a href=https://vestnik-jurnal.com/>1×bet зеркало слоты</a> porno Марина Александрова казино на деньги сайт казино зеркало casino играть 1×bet бесплатно cometa casino casino riobet
DiskiPlus porno Катерина Шпица DiskiPlus casino игровой автомат <a href=https://www.diskiplus.ru/>DiskiPlus сайт казино вход</a> DiskiPlus 1×bet 1 DiskiPlus рейтинг казино <a href=https://diskiplus.ru/>DiskiPlus Скоробогатова Ольга Николаевна порно</a> DiskiPlus casino скачать DiskiPlus casino игровой автомат DiskiPlus 1×bet официальный DiskiPlus казино смотреть онлайн DiskiPlus Скворцова Вероника Игоревна порно DiskiPlus casino зеркало сегодня рабочее DiskiPlus porno Александр Соболев (футбол)
#5838 Ремонт iPhone 15https://remont-iphone-15-frest.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали срочный ремонт iphone 15, можете посмотреть на сайте: <a href=https://remont-iphone-15-frest.ru/>срочный ремонт iphone 15</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#5839 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet вход 1×bet на андроид бесплатно <a href=https://slon-ru.com/>porno Алена Косторная (фигурное катание)</a> ев казино pin up casino скачать <a href=https://7club7.com/>порно с Юлия Ефимова, пловчиха</a> суть казино Валентина Матвиенко порно porno Андрей Рублев (теннис) казино рояль почему в казино не бывает настенных часов kometa casino porno Юлия Пересильд
DiskiPlus пина casino DiskiPlus casino сайты <a href=https://diskiplus.ru/>DiskiPlus букмекерские конторы без депозита</a> DiskiPlus casino ап DiskiPlus casino актуальное зеркало <a href=https://www.diskiplus.ru/>DiskiPlus cat casino</a> DiskiPlus казино без DiskiPlus ап казино DiskiPlus 7k casino скачать DiskiPlus порно с Карен Хачанов (теннис) DiskiPlus Попова Анна Юрьевна порно DiskiPlus винлайн букмекерская контора официальный DiskiPlus порно с Максим Глушенков (футбол)
#5840 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino автомат порно с Дронова Александра Викторовна <a href=https://vestnik-jurnal.com/>up casino официальный</a> букмекерская контора бесплатно скачать зеркала казино <a href=https://repost.news/>up casino официальный</a> 1×bet зеркало рабочее на сегодня 1×bet сайт 1×bet xyz казино фильм онлайн человек казино ramenbet casino сайте букмекерской конторы фонбет симулятор казино
DiskiPlus казино регистрации DiskiPlus Хорова Наталья Александровна порно <a href=https://www.diskiplus.ru>DiskiPlus Преподобная Надежда Александровна порно</a> DiskiPlus Хорова Наталья Александровна порно DiskiPlus 1×bet сайт 1×bet xyz <a href=https://diskiplus.ru>DiskiPlus 1×bet зеркало слоты 1×bet xyz</a> DiskiPlus какие казино DiskiPlus почему в казино не бывает настенных часов DiskiPlus Самойлова Алла Владимировна порно DiskiPlus 1×bet официальный слоты DiskiPlus porno Илона Маркова, хоккеистка DiskiPlus скачать 1×bet DiskiPlus порно с Федор Чалов (футбол)
#5841 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet сейчас porno Виктория Баркова, легкоатлетка <a href=https://rhymes-punches.com/>порно с Александр Головин (футбол)</a> 1×bet слоты официальный сайт Кузнецова Анна Юрьевна порно <a href=https://sovsekretno.net/>порно с Аделия Петросян (фигурное катание)</a> online casino букмекерская контора фонбет официальный сайт порно с Александр Головин (футбол) 1×bet 1×bet 1хбет букмекерская контора бетсити 7k casino официальный сайт
DiskiPlus ставки на спорт букмекерские конторы DiskiPlus casino вход <a href=https://diskiplus.ru/>DiskiPlus карты казино</a> DiskiPlus Крючкова Полина Викторовна порно DiskiPlus букмекерская контора фонбет <a href=https://diskiplus.ru>DiskiPlus Набиуллина Эльвира Сахипзадовна порно</a> DiskiPlus casino андроид DiskiPlus casino бездепозитный DiskiPlus 7k casino DiskiPlus 1×bet casino DiskiPlus pin casino DiskiPlus казино играть DiskiPlus пари букмекерская контора
#5842 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
gama casino casino актуальное зеркало <a href=https://m.repost.news/>1×bet официальный</a> порно с Евгения Медведева, фигуристка казино смотреть <a href=https://res-publika.com>up casino официальный</a> Кузнецова Анна Юрьевна порно casino daddy казино фильм онлайн casino актуальное зеркало рабочие зеркала казино online casino 7k порно с Анна Щербакова, фигуристка
DiskiPlus казино проиграл DiskiPlus porno Юлия Канакина <a href=https://diskiplus.ru>DiskiPlus porno Илья Ковальчук (хоккей)</a> DiskiPlus casino андроид DiskiPlus 1×bet регистрация <a href=https://diskiplus.ru>DiskiPlus Фастова Елена Владимировна порно</a> DiskiPlus букмекерская контора зенит DiskiPlus почему в казино нет часов DiskiPlus сайты казино DiskiPlus pin up casino скачать DiskiPlus как выиграть в казино DiskiPlus Ирина Горбачева DiskiPlus inform@rucriminal.info
#5843 Charlesgunnyhttp://filmkachat.ru
1×slots на любой вкус как пройти регистрацию
Вышеописанная причина и является главным моментом, следствии которого операторы отдают часть собственной выгоды на разные маркетинговые расходы и маркетинговые кампании. А наиболее действенным здесь будут играть непосредственно бездепозитные призы казино 2022 с выводом за регистрацию. <a href=http://filmkachat.ru/>1хслотс казино зеркало</a> В случае установленного лимита на необходимую вывода выигрыша с бездепозитного бонуса, игрок не сможет вывести больше заявленной суммы.Некоторые клубы автоматически начисляют приз на акк игрока последствии исполненья критерий получения, но бывают истории, когда приз нужно активировать игроку самому. Есть несколько способов активации бонуса: <a href=https://www.find-topdeals.com/blogs/188338/Revolutionizing-Product-Marketing-Through-Dynamic-3D-Presentations>https://www.find-topdeals.com/blogs/188338/Revolutionizing-Product-Marketing-Through-Dynamic-3D-Presentations</a> 1хлот регистрация в 1×slots casino <a href=https://www.catfish-assassins.org/forum/memberlist.php?mode=viewprofile&u=986>https://www.catfish-assassins.org/forum/memberlist.php?mode=viewprofile&u=986</a> Высокая конкуренция в сегменте азартных игр доказывает операторов завлекать клиентов разнородными промоакциями. Благодаря этому у гостей замечена возможность получить призы в казино за регистрацию без депозита. Воспользоваться таким предложением можно, минуя функцию внесения денег на игровой счет, просто активировав акк на сайте. Наш экскурсовод по бездепам поможет выбрать самую привлекательную бонусную программу, разузнать правила получения такового вознаграждения и воспользоваться им с максимальной выгодой.
1×slots сайт
<a href=http://shiftdelete.10tl.net/member.php?action=profile&uid=119629>1×slots официальный сайт зеркало</a> 1×slots рабочее зеркало на сегодня Зарегистрируйтесь. Для регистрации почаще всего достаточно установить свой номер телефонного и почтовый адресок, после чего установить приобретенный код из СМС. Возможно, требуется показать промокод. В правилах акции будет написано, где его надобно включать. Иногда это надобно создавать при регистрации, времени — уже в создания личного кабинета, на отдельной страничке. <a href=http://harddirectory.net/%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-kz-1×slots_294416.html>http://harddirectory.net/%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-kz-1×slots_294416.html</a> Ниже указан актуальный список законных казино в Беларуси с призами на первый депозит. Вы сможете попасть на официальный сайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз. 1×slots актуальное зеркало Иногда операторы просят внесение малого депо перед выводом для верификации платежного прибора. В неких казино этот депо кроме предстоит отыграть.Если вы новичок деле и лишь попали в неизведанную вами область азарта — за предложений как бездепозитные призы без пополнения.
рабочее зеркало 1хслотс
Некоторые казино имеют предлагать посетителям бездепы за подтверждение номера либо почты либо репост на страницу в соц сетях. <a href=http://www.jbkfxy.com/home.php?mod=space&username=disillusionedca>http://www.jbkfxy.com/home.php?mod=space&username=disillusionedca</a> Бездеп с фриспинами может охватывать всю коллекцию игр на сайте либо разработки одного провайдера. Обычно предлагается конкретный перечень автоматов. Он указывается в положениях о проведении промоакции. Выигрыш имеет быть выведен в такого, как пользователь отыграет данную сумму. Возможность оценить глубокий возможностей слотов — главное совершенство данной разновидности. Игроку становятся доступны те опции, которые отсутствуют в демонстрационном режиме, а вероятность выиграть настоящие деньги добавляет ясных азартных чувств.Но эти рамки не смущают числе хайроллеров, поскольку коэффициенты на слотах дозволяют рассчитывать на солидные выигрыши, ну некоторых автоматах разыгрывается прогрессивный джекпот. 1×slots регистрация на официальном сайте B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.Также, учите, собственно бездепозитный бонус возможно исключить лишь в том случае, когда будут выполнены все условия отыгрыша.
1×slots регистрация 1×slots review live
Если площадка дарует бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь ввести акк на сайте и активировать его, подтвердив адрес электрической почты, номер телефонного либо другие данные, которые настятельно оператор. Перед данным нужно убедиться, собственно юзер располагается на официальном веб-сайте казино, а не на мошеннической площадке.В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, необходимо обратиться в службу спустя лайв-чат на веб-сайте казино. Также учтите, собственно кое-какие игровые платформы сузивают список стран, коие способны получить предложенный бездепозитный бонус за регистрацию. К образцу, существуют онлайн-заведения, выдающие подобные бонусы лишь обитателям конкретных государств. К примеру, интернет казино 777 Оригинал дает бездепозитный приз лишь игрокам из России и стран СНГ. Или наоборот, пичкают вознаграждением всех, кроме обитателей некоторых государств (исходя из сего, по внимательно изучать перечень, чтобы потом не появилось практически вопросов и претензий). 1хслотс рабочее зеркало на сегодня <a href=https://job.epday.com/home.php?mod=space&uid=635682>https://job.epday.com/home.php?mod=space&uid=635682</a> Как только на виртуальном счету окажутся бонусные свои, поторопитесь отыграть вейджер. Сразу после этого возможно забыть заявку на вывод выигрыша. Кредиты выгодно отличаются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом настоящих средств и дают возможность ощутить азарт. Во-вторых – возможно насладиться каждой азартной забавой доступной на веб-сайте. В вашем постановлении находятся автоматы, настольные приложение, видео-покер, Live-дилеры.
1×slots рабочее зеркало на сегодня
Бесплатные бонусы казино без депозита можно получить повторяющий валютных средств на бонусный счет (исключить их возможно лишь последствии отыгрыша), фриспинов, игры либо кешбэк-бонуса.Ознакомьтесь с нашим списком превосходнейших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего списка и получите бездеп сразу. Хватайте лучшие благотворительные предложения ниже и выигрывайте великие средства, не рискуя! Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и более. Когда игроку полагается большое фриспинов, администрация может бить3 их начисление на несколько дней. Бесплатные вращения предоставляются для конкретного слота, который указывается в правилах промоакции.Возьми свой презент. Чаще всего бонус активизируется незамедлительно после регистрации. Но случаются ситуации, когда надо(надобно) забежать в личный кабинет либо написать в справочную службу. <a href=http://barboska.ru/u1439/blog/2258.html>http://barboska.ru/u1439/blog/2258.html</a> Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном призе, то начала внимание на велечину вейджера и срок, кот-ый дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, что, этим проще отыграть бонус и вывести выигрыш.В интернете очень количество скриптовых сайтов, которые принадлежат плутам. Их главная задача – заинтересовать гэмблеров, пообещав не только великодушные подарки, хотя и солидные выигрыши. Так собственно кое-какие сайты предлагают получить за регистрацию и $1 000. 1×slots зеркало подтвердит вашу регистрацию если говорить Бесплатные бонусы казино без депозита можно получить повторяющий денежных средств на бонусный счет (исключить их возможно лишь после отыгрыша), фриспинов, игры либо кешбэк-бонуса.Также есть онлайн-платформы азартных игр, коие используют раздачу бездепозитных призов в особые даты (как для казино, например и для игрока). Помимо сего, действующие геймеры также имеют возможность получить схожие призы за собственную работа (например, за повышения уровня или за схожие заслуги).
<b>Смотреть еще похожие новости:</b>
<a href=https://bbs.sinbadgroup.org/index.php?xjkh-tampa-s-poster-pup-for-new-cancer-treatment.t48661.html/page-3862#post-202296>1хслотс регистрация в 1×slots casino</a>
<a href=http://swissairways-va.com/phpBB3/viewtopic.php?p=1636151#p1636151>1×slots casino регистрация 1×slotscasin online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 $. Если выдаются фриспины, их количество изредка превышает нескольких 10-ов даровых вращений.
#5844 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
сайт 1×bet слоты порно с Георгий Джикия (футбол) <a href=https://slon-ru.com/>Ирина Горбачева</a> сайт букмекерской конторы 1×bet слоты <a href=https://res-publika.com>порно с Виктория Синицина, фигуристка</a> казино рулетка казино онлайн рабочие зеркала казино бк букмекерская контора порно с Виктория Синицина, фигуристка 1×bet зеркало на сегодня 1×bet бесплатно
DiskiPlus казино зеркало сегодня DiskiPlus casino скачать приложение <a href=https://www.diskiplus.ru>DiskiPlus сайте букмекерской конторы фонбет</a> DiskiPlus 1×bet на сегодня DiskiPlus casino рабочее <a href=https://diskiplus.ru/>DiskiPlus порно с Анастасия Потапова, теннисистка</a> DiskiPlus Юдаева Ксения Валентиновна порно DiskiPlus порно с Юлия Ефимова, пловчиха DiskiPlus казино пину DiskiPlus букмекерская контора леонов DiskiPlus слоты казино DiskiPlus 1×bet официальный скачать DiskiPlus 1×bet регистрация
#5845 Charlesgunnyhttp://filmkachat.ru
рабочее зеркало 1×slots
Бездеп с фриспинами имеет охватывать всю коллекцию игр на сайте либо разработки 1-го провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш возможность быть выведен в такого, как пользователь отыграет эту необходимую. Возможность оценить глубокий возможностей слотов — главное достоинство данной разновидности. Игроку становятся доступны что, эти опции, коие отсутствуют в демонстрационном режиме, а возможность выиграть настоящие средства добавляет ясных азартных чувств. <a href=http://filmkachat.ru/>1×slots регистрация</a> Изучить верховодила и условия получения бездепозитных призов казино, Вы можете у нас на веб-сайте в разделе с призами или на официальном сайте избранного Вами казино. Если не можете отыскать нужную информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал либо по электронной почте.Активация происходит счет промокодов, которые вводятся в личном кабинете последствии регистрации. Среди спецпредложений в списке Casino.ru содержатся эксклюзивные промокоды, коие доступны только гостям портала. Другие методы начисления средств ? автоматическая активация незамедлительно после сотворения аккаунта и получение подарка по запросу в службу технической помощи. <a href=https://forums.noria.com/topic/3d-visualization-excellence-transform-your-architectural-vision-into-reality>https://forums.noria.com/topic/3d-visualization-excellence-transform-your-architectural-vision-into-reality</a> казино 1×slots официальный сайт <a href=http://twchess.lionfree.net/discuz/home.php?mod=space&uid=24843>http://twchess.lionfree.net/discuz/home.php?mod=space&uid=24843</a> Фриспины. Бесплатные вращения предназначены для применения в видео-слотах. Внимательно читайте условия – они нередко выдаются для некоторых машин. В зависимости от клуба возможность делать конкретное число ставок. Кстати, современные игорные дома выделяют возможность заводить «одноруких злодеев».
1хслотс рабочее зеркало
Некоторые казино шансы предлагать посетителям бездепы за подтверждение номера либо почты или репост на страницу в соц сетях.Бонус без депозита за регистрацию в казино (бездепозитный приз) – это денежный подарок от клуба, который начисляется на аккаунт игрока последствии регистрации в казино. Кроме сотворения учетной записи, для получения бездепа, очень часто требуется ещё и доказать контактные данные игрока и/или активировать специальный промо-код. <a href=https://bans.org.ua/index.php?topic=117940.new#new>1хслотс регистрация в 1×slots casino</a> 1×slots актуальное зеркало Денежные свои. Третий бонус за регистрацию без депо – наличные. К сожалению, только известные и пользующиеся клубы все дать средства в руб. Либо долларах. С их поддержкою вы сможете насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед данным нужно исполненье конкретных условий. <a href=http://behzistiardabil.ir/index.php?subaction=userinfo&user=planttyrant42>http://behzistiardabil.ir/index.php?subaction=userinfo&user=planttyrant42</a> 1×slots рабочее зеркало Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Этот образ приза несомненно добавлен на Ваш акк после успешной процедуры регистрации с внедрением номера телефона. Если избрать иной способ творения учетной записи, бездеп не будет добавлен на Ваш аккаунт.
1×slots зеркало этих способов предполагает регистрацию
Список так нарекаемых «запрещенных территорий» прилагается к правилам бонусной программки игорного портала. Обязательно проверьте, распространяются ли на вас похожие наказания.Важно, убедитесь что, собственно ранее не регистрировались в выбранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи. <a href=http://ledyardmachine.com/forum/User-GlennRit>http://ledyardmachine.com/forum/User-GlennRit</a> 1×slots casino регистрация
1×slots зеркало рабочее
Бездепозитные бонусы начисляются только один раз. Не стоит раскрывать свежие аккаунты, чтобы получить их повторно. Служба защищенности казино непременно выявит «левого» участника и перекроет. Если посетитель выполнит необходимые требования, отыграет собственную ставку и решит вывести личный выигрыш, то ему нужно учесть, собственно казино обязательно востребует предоставить ксерокопии личных документов, чтобы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные свои исключить не удастся. 1×slots казино зеркало <a href=http://zghncy.cn/home.php?mod=space&uid=679107>http://zghncy.cn/home.php?mod=space&uid=679107</a> Для проверки применяются сканы паспортов, водительских удостоверений, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если юзер замечен в попытке завести вспомогательный акк, все его учетные записи подвергаются блокировке, а их владелец попадает в темный перечень. При забаве на лицензионной площадке надо бояться свидетельствовать достоверную индивидуальную информацию (шифрование ликвидирует утечку персональных данных).
1хслот зеркало
Но на азартных платформах сходственные гонорары все получить и уже зарегистрированные пользователи. В таком случае, призы предоставляются в рамках оригинальных акций либо же неким геймерам повторяющий акционного предложения, коие прибывает на почту с целью «вернуть» игрока в свое казино. <a href=http://droid-comz.ru/user/JamesSnorb/>http://droid-comz.ru/user/JamesSnorb/</a> 1×slots зеркало регистрация то дальше необходимо пройти В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с безвозмездных вращений. Прибыль, которую Вы заработаете на таком бездепе можно назначать на вывод без какого либо отыгрыша.
<b>Смотреть еще похожие новости:</b>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-4970/#comment-593289>1×slots регистрация 1×slots casino c2d ru</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В настоящее время получить приз за регистрацию в казино очень просто. Почти любой игорный жилище с готовностью предоставит средства либо благотворительные вращения. Многие игроки используют данным и не стыдятся региться в каждом клубе с выгодными критериями. Кстати, это отличная вероятность выдумать выигрышную тактику и сорвать куш. На страничке представлены бездепозитные призы за регистрацию в казино редкая заслуга за которой гонятся все игроки как новички, так и профессионалы. Мы тоже уделяем большое внимание на присутствие бонусов при формирование рейтинга казино на деньги. Бездепозитный бонус это вероятность играть безвозмездно и выиграть реальные деньги.
#5846 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Мария Шарапова бесплатно фильм казино <a href=https://7club7.com/>казино онлайн бесплатно</a> порно с Виктория Синицина, фигуристка pin up casino скачать <a href=https://sovsekretno.net/>casinos winning</a> скачиваемые казино казино смотреть 1×bet 1×bet сейчас лучшие бесплатные онлайн казино порно с Евгений Малкин (хоккей) лучшие казино бесплатно
DiskiPlus Яровая Ирина Анатольевна порно DiskiPlus букмекерские конторы бет <a href=https://www.diskiplus.ru/>DiskiPlus казино ли</a> DiskiPlus порно с Арина и Дина Аверины, гимнастки DiskiPlus porno Алена Косторная (фигурное катание) <a href=https://www.diskiplus.ru/>DiskiPlus Петрова Ольга Викторовна порно</a> DiskiPlus казино сегодня DiskiPlus лучшие бесплатные онлайн казино DiskiPlus porno Юлия Канакина, скелетонистка DiskiPlus казино фильм смотреть онлайн DiskiPlus официальные букмекерские конторы скачать DiskiPlus сайте букмекерской конторы фонбет DiskiPlus casino ru
#5847 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet рабочее на сегодня casino бонус <a href=https://rhymes-punches.com/>online casino официальный</a> casino 7k сегодня porno Игорь Акинфеев (футбол) <a href=https://specreporter.com/>букмекерская контора зенит</a> казино играть макао казино black russia казино порно с Бондаренко Анастасия Борисовна 1win casino порно с Юлия Ефимова, пловчиха Радченко Светлана Юрьевна порно
DiskiPlus 1×bet рабочее DiskiPlus демо казино <a href=https://www.diskiplus.ru/>DiskiPlus официальные букмекерские конторы скачать</a> DiskiPlus пинап казино DiskiPlus Елена Лядова <a href=https://diskiplus.ru/>DiskiPlus гта онлайн казино</a> DiskiPlus порно с Анастасия Потапова, теннисистка DiskiPlus винлайн букмекерская контора официальный DiskiPlus пина букмекерской конторы DiskiPlus порно с Аделия Петросян (фигурное катание) DiskiPlus porno Нина Пирогова, хоккеистка DiskiPlus champion casino DiskiPlus порно с Голикова Татьяна Алексеевна
#5848 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало на сегодня
Акции, приуроченные к календарным дням, бывают рассчитаны как на всех пользователей, так и на категории: например, подарок на 8 марта девушкам-игрокам или мужикам на 23 февраля. <a href=http://filmkachat.ru/>1хслотс официальный сайт зеркало</a> В количестве случаев бесплатные призы начисляются в кредитах, коие нельзя незамедлительно исключить со счета. Прежде их нужно отыграть по установленным правилам. Эти требования принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже. <a href=https://medium.com/@comcgifurniture/ultimate-guide-to-professional-weed-delivery-pickering-services-in-2024–2a76d5e699da>https://medium.com/@comcgifurniture/ultimate-guide-to-professional-weed-delivery-pickering-services-in-2024–2a76d5e699da</a> Рассмотрим принцип его деяния на случае. Допустим, вы зарегистрировались и получили $10 no down payment bonus с вейджером х50. Это значит, что выигранные деньги возможно несомненно выводить не раньше, чем после как, как общая сумма ставок достигнет $500.Благодаря программке преданности от игорного заведения, возможно взять хороший старт и без дополнительных вложений запустить видеослоты. Кроме такого, возможно рассчитывать на реальную фортуну и получить, без инвестиции собственных денег, большой выигрыш. 1×slots регистрацию более популярный вариант это <a href=http://povary.ru/forum/index.php?showuser=73757>http://povary.ru/forum/index.php?showuser=73757</a>
1 xslots рабочее зеркало
Так собственно главное различие презента на депо от бездепа – неотъемлемое пополнение счёта. Вы можете привнести депо и преумножить стартовый капитал или арестовать бездеп и всем не придётся рисковать своими сбережениями. Поспешите выполнить обычные требования, и администрация ресурса начислит щедрое одобрение! <a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=766738>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> скачать 1×slots на андроид мобильная версия <a href=http://velo-xachmas.com/index.php?subaction=userinfo&user=PatrickAbers>http://velo-xachmas.com/index.php?subaction=userinfo&user=PatrickAbers</a> Для отыгрыша приза казино обязует игрока поиграть на сумму, в несколько раз превышающую сумму приобретенного бонуса — здесь выгода компании явна. 1×slots официальный зеркало При правильном подходе бездепы — это отличный метод выступать на деньги без траты собственных средств. Есть несколько рекомендаций, следуя которым возможно извлечь максимум выгоды из похожих акций казино. Играть стопам только на лицензированных площадках. Скриптовые веб-сайты столько обманывают с бонусными предложениями, хотя и употребляют пиратский софт с измененным ГСЧ. Выиграть на таких автоматах невозможно.Обычно показатель повыше, чем для призов на депо. Не удивляйтесь, случае он будет даже х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных государств.
1×slots регистрация на 1хслотс
Похожим образом трудится третий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя или в связи с получения им VIP-статуса. Подарок предоставляется после обращения в поддержку и проверки.Важно, удостоверьтесь что, нет, что ранее не регистрировались в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи. <a href=https://bestsanswers.com/index.php?qa=69671&qa1=%D0%B1%D0%BB%D0%BE%D0%B3-%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0-%D0%B4%D0%B7%D0%B5%D0%BD>https://bestsanswers.com/index.php?qa=69671&qa1=%D0%B1%D0%BB%D0%BE%D0%B3-%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0-%D0%B4%D0%B7%D0%B5%D0%BD</a> 1×slot зеркало рабочее регистрации на телефон придет Главное превосходство спинов – возможность выучить разные слоты. Также удастся насладиться бонусными раундами, испытать удачу в риск-туре и преувеличить выигрыш за счёт особенных знаков. Однако столько игровой процесс заслуживает внимание, так превосходнее сосредоточиться на реальном выигрыше.Возьми свой презент. Чаще всего бонус активизируется незамедлительно после регистрации. Но случаются ситуации, когда надо(надобно) забежать в личный кабинет либо написать в справочную службу.
1×slots рабочее зеркало на сегодня
Для получения выигрыша потребуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить конкретную сумму, хотя теснее из личных денег. Она рассчитывается из совместного размера выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, если юзер выиграл 1000 руб., а множитель сочиняет х30, вывести деньги можно будет, сделав ставки на 30 000 руб.Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают бонус по странам. Вплоть до такого, что клуб может на игроков из Вашей страны, а бездеп не давать. <a href=http://nakupnidivadlo.cz/index.php/forum/3-pripominky/46563-pin-up-casino?start=264#235973>casino 1×slot</a> Бездепозитный приз по промо-коду будет доступен для забавы, лишь сомнений случае когда Вы активируете особый бонусный код в разделе с призами либо укажите промокод при регистрации на сайте. В некоторых случаях, кроме активации кода, придется доказать контактные данные игрока и наполнить анкету клиента.Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам важную информацию о самых свежих, щедрых и проверенных бонусах в онлайн казино, коие обновляются каждый день. Мы подготовили перечень, где есть практически животрепещущие и свежие бездепозитные призы казино, коие вы можете получить даром. Для наших юзеров есть специальные предложения неповторимые призы, которые вы у не найдете, их мы обозначили специальной красноватой плашкой «Exclusive».Многие игроки, оценив перечень казино, остаются играть в нем и далее ? на это и направлено каждое рекламную. Постоянные клиенты вносят депозиты и проделывают ставки, обеспечивая долгосрочную выгода оператора. То есть, казино раздают бездепы новым пользователям для формирования приклнной аудитории. 1×slots регистрация на сайте <a href=http://blog.kickiyangzhang.de/2015/06/newyorkerlikesyou.html>http://blog.kickiyangzhang.de/2015/06/newyorkerlikesyou.html</a> При исполнении критерий отыгрыша и верификации, средства с бонусного счета переводятся на главной и могут быть выведены на карту либо электрический кошелек. Лимиты на вывод и сроки проведения транзакции в от избранной платежной системы.Активация денежного вознаграждения случается механически после сотворения профиля либо применения промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на странички казино в социальных сетях или на рассылку рекламных сообщений, скачать и установить вспомогательный софт и т.д.
1×slots официальный сайт мобильная версия скачать
<a href=https://www.urlrate.com/www/osipovichi.com>https://www.urlrate.com/www/osipovichi.com</a> Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. 1×slots зеркало рабочее на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=http://weeklywars.de/viewtopic.php?f=12&t=10621&p=533309#p533309>1 xslots рабочее зеркало</a>
<a href=http://khodaumo.com/forum/viewtopic.php?f=2&t=75562&sid=b8960c9fc756cd51db7fd9770c15467d>1×slots официальный сайт мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выбрать казино с бездепозитным бонусом. У нас на веб-сайте представлен список лучших интернет казино, которые предлагают своим игрокам щедрые бонусы за регистрацию.
#5849 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
слоты казино рабочее казино <a href=https://rhymes-punches.com/>Нургалиева Эльвира Рамиловна порно</a> 7k casino скачать 1×bet 1×bet xyz <a href=https://th-royalgclub.com/>7k casino официальный сайт</a> Александра Бортич porno Екатерина Ефременкова, шорт-трекистка 7k casino зеркало на сегодня порно с Федор Чалов (футбол) букмекерская контора зенит порно с Абрамченко Виктория Валериевна casino сегодня
DiskiPlus 1×bet на сегодня DiskiPlus casino 7k рабочее <a href=https://www.diskiplus.ru>DiskiPlus casino зеркало сайта</a> DiskiPlus порно с Ирина Сидоркова DiskiPlus casino pin официальный <a href=https://diskiplus.ru/>DiskiPlus 1×bet зеркало</a> DiskiPlus casino online зеркало DiskiPlus порно с Никита Кучеров (хоккей) DiskiPlus pin ап casino DiskiPlus 1×bet официальный xbet DiskiPlus porno Дарья Мороз DiskiPlus гта казино DiskiPlus букмекерская контора ставки
#5850 Charlesgunnyhttp://filmkachat.ru
скачать 1×slots официальный сайт
Бездепозитный бонус часто возможность замерзнуть легкодоступным незамедлительно последствии окончания регистрации, что как единственным требованием к нему считается регистрация, а этого проверка вашей новой учетной записи. <a href=http://filmkachat.ru/>1× слот зеркало</a> B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax <a href=https://dictanote.co/n/1138185/>https://dictanote.co/n/1138185/</a> казино 1× slots официальный сайт <a href=https://mir-pozitiv.ru/forums/users/l2top0806–2/>https://mir-pozitiv.ru/forums/users/l2top0806–2/</a> Бездепозитные призы истинными деньгами, которые возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадали.Нельзя осматривать игру на деньги, как вариант заработка. Азартные забавы запрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не является организатором азартных игр. Сайт одевает информационный нрав.
1×slots зеркало сайта
Чтобы самостоятельно убедиться в преимуществах бездепозитных бонусов, довольно зарегистрироваться в казино и получить поощрение.Верификация аккаунта. Лучше доказать личность незамедлительно последствии регистрации, чтобы потом не было заморочек с выводом денег. Верификация может протекать двумя маршрутами: 1×slots официальный сайт зеркало рабочее Нет. Казино выдают безвозмездные призы за регистрацию, для того, чтобы клиент возможность ознакомиться с игровым заведением. А чтобы исключить его, нужно выполнить условия отыгрыша. <a href=https://cse.google.dk/url?q=https://doctorlazuta.by/>https://cse.google.dk/url?q=https://doctorlazuta.by/</a> казино 1×slots официальный сайт
1×slots сайт зеркало
Несмотря на то, собственно данный вариант стимуляции со стороны азартных платформ очень известен области подобных игр, далеко не всем поклонникам казино знаменито, собственно являют собой бездепозитные призы казино и как непосредственно их вполне эксплуатировать.Но никогда не забывайте внимательно разбирать верховодила роли в бонусных акциях. Если вы нарушите но бы одно условие, позднее вы не сможете уладить недоразумение с администрацией. Помните, собственно в некоторых играх сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных забавах только от 5% до 50% суммы ставки числятся как отыгранные средства, на как в слотах идет в зачет все 100% суммы. <a href=http://jkmulti.vip/bbs/board.php?bo_table=free&wr_id=5625176>http://jkmulti.vip/bbs/board.php?bo_table=free&wr_id=5625176</a> 1хлот регистрация в 1×slots casino Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, чтобы была вероятность вывести выигрыш.
1×slot официальный сайт
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=64471&result=reply>1×slots официальный зеркало</a> С другой стороны, намного проще арестовать бездепозитные фриспины за регистрацию в казино и напрямик в начать вертеть барабаны в наилучших слотах. Главная особенность спинов в, что они предусмотрены для лучших автоматов. Удастся столько пройти дополнительные раунды, но и увеличить необходимую выигрыша, заработать респины прочие внутриигровые подарки.Помните, что любые нарушения правил сведут на нет ваши усилия, и вы скорее останетесь без начисленного вам безвозмездного приза. Всегда изучайте управляла начисления и условия вейджера. По хоть вопросам, на которые вы имеет самостоятельно отыскать ответы, обращайтесь за объясненьям и саппорт. 1×слотс казино <a href=https://pyxc.ru/user/ScottKashy/>https://pyxc.ru/user/ScottKashy/</a>
1×slots бездепозитный бонус за регистрацию
Акционные предложения от казино существуют в разных форматах. Часто бонусы даются в размен на депо. Игрок вносит платеж и получает деньги, благотворительные вращения и другие одобрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — картина приза, кот-ый гарантирован за исполнение конкретных действий на сайте: <a href=https://ic-info.ru/forum/user/173358/>https://ic-info.ru/forum/user/173358/</a> Мы проделываем акцент на ключевых положениях управлял, рассказываем о территориальных лимитированиях и кратко информируем о других промоакциях обговариваемого казино. 1×slots регистрация на 1хслотс Доступ к подарку может открываться автоматически последствии введения промокода или обращения в службу поддержки сайта. В первом случае от пользователя не потребуется практически действий. Бездеп с активацией по коду встречается почаще всего. Игроку необходимо установить совокупность знаков в графе, кот-ая возможность пребывать в регистрационной форме в Личном офисе.
<b>Смотреть еще похожие новости:</b>
<a href=https://acerfans.ru/user/JamesTed/>x1 slots регистрация в 1×slots casino</a>
<a href=http://aficionado.pl/showthread.php?176054–1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82-%D1%81%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C&p=197124>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При подмоги такого одобрения оператор может кроме привлекать посетителей, коие раньше проявляли активность на сайте, но по какой-то причине перестали выступать. В данном случае промокод высылается юзеру по электронной почте или повторяющий SMS.
#5851 Charlesgunnyhttp://filmkachat.ru
1×slots casino зеркало рабочее
Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке адепты онлайн-казино публикуют актуальную информацию о not the slightest deposit bonuses и услугах. <a href=http://filmkachat.ru/>1×slots официальный сайт, скачать</a> <a href=https://telegra.ph/Legal-Cannabis-Delivery-Services-Transform-Brantfords-Marijuana-Access-11–24>https://telegra.ph/Legal-Cannabis-Delivery-Services-Transform-Brantfords-Marijuana-Access-11–24</a> Размер ставки для игры по бездепозитному призу (конечно же, если, тогда,, когда он представлен повторяющий бонусных валютных средств) зачастую ниже, чем при игре на депо. Ограничение будет работать до этапа отыгрыша приза.Прежде чем активировать бездеп, необходимо увериться в том, собственно государство, уроженцем которой считается игрок, не входит в список разрешенных. 1×slots подтвердит вашу регистрацию если говорить <a href=http://www.pigcraft.ugu.pl/member.php?action=profile&uid=235996>http://www.pigcraft.ugu.pl/member.php?action=profile&uid=235996</a> Денежные средства. Третий бонус за регистрацию без депозита – наличные. К раскаянью, только известные и популярные клубы все дать средства в рублях или баксах. С их помощью у насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед данным нужно исполнение конкретных критерий.На благотворительные бонусы онлайн-казино практически всегда распространяется ограничения по стране проживания посетителей. Даже в для разрешается открывать счет и выступать на средства в заведении, это еще не значат, что вас доступны not the slightest down payment bonuses.
1 xslots рабочее зеркало
Если вы облюбовали себе несколько брендов которые для больше всего полюбились, для неизменной игры! Таких гемблеров казино очень предпочитает и оценивает, за частую такие игроки становятся VIP игроками заведения, которым часто поступают выгодные предложения в виде бонусов, так же туда заходит и бездепозитные. <a href=https://minifishtank.net/forum/showthread.php?tid=11146>1×slots рабочее зеркало</a> 1×слотс казино Вейджер (wager) – это коэффициент, который демонстрирует на какую сумму нужно сделать ставок, дабы исключить бонус из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего бонуса, Вам необходимо сделать ставок на сумму: 500*70=3500 руб. Только полностью отыграв приз, Вы можете вывести собственный выигрыш.Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. <a href=http://opto22.ru/bitrix/rk.php?goto=https://www.ronorp.net/zurich_en/community/city-talk.66/shisha-tobacco-from-4-eur.344325>http://opto22.ru/bitrix/rk.php?goto=https://www.ronorp.net/zurich_en/community/city-talk.66/shisha-tobacco-from-4-eur.344325</a> Но никогда не запамятовывайте внимательно разбирать верховодила роли в бонусных акциях. Если вы нарушите хотя бы одно условие, позже вы не сможете уладить недоразумение с администрацией.Призовые начисления без депозита шансы предоставляться для участия в турнирах онлайн казино. Потратить перечисленные деньги можно самая в рамках данной акции. Условия их проведения включают в себя ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться таким предложением, какого-либо выучить его верховодила. 1×slots регистрация 1×slots casino c2d ru Промокод – определённая комбинация символов, которую необходимо установить в подходящее поле при разработке учетной записи либо активировать в личном профиле игрока в разделе с призами.
1×slots рабочее зеркало на сегодня
Любой выигрыш по ставке выше установленного лимита несомненно являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, в случае выигрыша его сумма не поступит на счёт клиента — результат игры будет всецело аннулирован.В основном случаев безвозмездные бонусы начисляются в кредитах, которые нельзя сразу исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже. Бездепозитный приз казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в этом и заключается главное отличие.Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации презента нужно доказать электронную почту и привязать аппарат; <a href=https://forum.storeland.ru/index.php?/user/36544-glavdorogadv3107/>https://forum.storeland.ru/index.php?/user/36544-glavdorogadv3107/</a> Индивидуальные одобрения выдаются за совершение деяний: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавления либо официального клиента для ПК. В большинстве казино действуют программки лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на грядущий степень нередко сопрягается выдачей бездепа. казино 1×slots официальный сайт Для получения приза нужно ознакомиться с программой преданности казино и сделать ставки на необходимую, нужную для перехода на следующий уровень.Бездепозитные бонусы казино за регистрацию в 2022 году — это возможность сыграть за счёт заведения. Казино даёт клиенту шанс пользоваться определённой суммой или количеством безвозмездных вращений без внесения депозита. Не путайте деморежим с реальной игрой без надобности внесения депозита.
1×slots подтвердит вашу регистрацию если говорить
Вообще перейдя в казино — управляла схожи в получении бездепозитных бонусов, в стереотипные верховодила заходит: доказать эл. Почту и аппарат, наполнить свой собственный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ.Вознаграждения за получение VIP-статуса ? начисляются в рамках программы лояльности при достижении очередного уровня или выдаются персонально менеджерами саппорта. Для выбора азартного заведения Вы можете пользоваться списком наших казино с призами за регистрацию. На нашем сайте мы выпустили список бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, что часть призов неповторимые и доступны только для гостей нашего вебсайта по-специальному промо-коду или по оригинальной ссылке. Кроме того, для любого бонуса мы подготовили подробный обзор, каком Вы узнаете как получить и отыграть одобрение и как вывести собственный выигрыш с бездепа. Также существуют онлайн-платформы азартных игр, коие применяют раздачу бездепозитных призов в специальные даты (как для казино, так и для игрока). Помимо сего, действующие геймеры кроме имеют вероятность получить похожие бонусы за собственную работа (к примеру, за увеличения значения либо за схожие достижения).Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. 1×слот регистрация в 1×slots casino <a href=http://zolotoy-vek.com/bitrix/click.php?goto=http://kuhnipark.ru/bitrix/rk.php?goto=http://cosmix.pro/bitrix/redirect.php?goto=https://teletype.in/@urist555/EJN_LVi1tjo>http://zolotoy-vek.com/bitrix/click.php?goto=http://kuhnipark.ru/bitrix/rk.php?goto=http://cosmix.pro/bitrix/redirect.php?goto=https://teletype.in/@urist555/EJN_LVi1tjo</a>
1×slots официальный зеркало
Да, у даровых бонусов есть дефекты. Прежде всего, они обычно не. Кроме того, условия вейджера по ним практически строгие. Но все же недоступность риска делает их довольно красивыми для посетителей. <a href=https://josuenpol67888.is-blog.com/36646560/nude-ai-understanding-the-intersection-of-innovation-and-ethics-in-image-manipulation>https://josuenpol67888.is-blog.com/36646560/nude-ai-understanding-the-intersection-of-innovation-and-ethics-in-image-manipulation</a> Третитй бездепозитный приз за регистрацию – денежные средства. К огорчению, начислить рубли или баксы способны лишь известные и знаменитые клубы. С их поддержкою вы сможете насладиться каждой доступной игрой – автоматом, рулеткой, кено, блэкджеком. 1хслотс рабочее зеркало За привлечение приятеля ? в партнерской программки клиент получает вознаграждение за привлечение свежих юзеров.Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации подарка необходимо подтвердить электрическую почту и привязать телефонный;
<b>Смотреть еще похожие новости:</b>
<a href=https://persiankittencat.com/grey-persian-cats-unraveling-the-charm-of-these-feline-beauties/#comment-64008>рабочее зеркало 1×slots</a>
<a href=https://forum.pmpobc.ca/index.php?topic=148008.new#new>1×slot рабочее зеркало</a>
<a href=http://rodgrodlecha.cba.pl/hidepark/?p=765155#comment-120017>1хслотс зеркало на сегодня</a>
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=11095>1×slots casino регистрация на сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном веб-сайте и выполните вход в индивидуальный кабинет, чтобы арестовать благотворительные вращения с вейджером х40; При помощи такового поощрения оператор возможность кроме завлекать клиентов, которые ранее проявляли активность на сайте, но по какой-то причине прекратили выступать. В этом случае промокод высылается юзеру по электронной почте либо вид SMS.
#5852 HaywoodUnmakhttps://stroy-portal.kyiv.ua
Полный справочник по строительству <a href=https://stroy-portal.kyiv.ua/>https://stroy-portal.kyiv.ua</a> и ремонту: советы, инструкции, дизайн-решения и помощь с выбором материалов и подрядчиков.
#5853 Robertotearihttps://stroysam.kyiv.ua
Лучшие советы по строительству <a href=https://stroysam.kyiv.ua/>https://stroysam.kyiv.ua</a> и ремонту на одном сайте! Найдите вдохновение, изучите обзоры и воплотите свои идеи с профессиональной помощью.
#5854 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
win win casino кент casino <a href=https://slon-ru.com/>1×bet сайт</a> порно с Федор Чалов (футбол) пин ап casino <a href=https://7club7.com/>champion casino</a> Нургалиева Эльвира Рамиловна порно casino актуальное зеркало 1×bet зеркало xbet new casino пин ап букмекерская контора букмекерская контора бетсити 7k casino
DiskiPlus casino официальный сайт DiskiPlus демо казино <a href=https://diskiplus.ru>DiskiPlus Скворцова Вероника Игоревна порно</a> DiskiPlus 1×bet зеркало xbet xyz DiskiPlus казино смотреть <a href=https://diskiplus.ru/>DiskiPlus порно с Зырянова Анастасия Владимировна</a> DiskiPlus пин ап casino DiskiPlus пин ап casino DiskiPlus включи казино DiskiPlus лучшие онлайн казино DiskiPlus официальная казино DiskiPlus приложения букмекерских контор DiskiPlus леон букмекерская контора
#5855 Williamdubhttps://sota-servis.com.ua
Ремонт и строительство <a href=https://sota-servis.com.ua/>https://sota-servis.com.ua</a> легко! Здесь вы найдёте инструкции, рекомендации, материалы и специалистов для успешного выполнения ваших задач.
#5856 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация
Также учтите, собственно некоторые игровые платформы сузивают перечень государств, коие готовы получить предложенный бездепозитный приз за регистрацию. К образцу, есть онлайн-заведения, выдающие подобные бонусы только обитателям конкретных стран. К примеру, интернет казино 777 Оригинал предоставляет бездепозитный бонус лишь игрокам из России и государств СНГ. Или наоборот, пичкают вознаграждением всех, не обитателей неких стран (из сего, стопам пристально изучать список, чтобы впоследствии не возникло никаких вопросов и жалоб). <a href=http://filmkachat.ru/>1×slots зеркало на сегодня</a> Все благотворительные бонусы кажутся соблазнительными. Кто же категорически от возможности поиграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далеко не все бездепозитные призы мере презентабельны для рассудительного посетителя. <a href=https://mega.nz/file/E6tG2Y6a#35AP8eRuVWDBW0vFRNmk3yz9lTf4-ohI6ETi78fc0BA>https://mega.nz/file/E6tG2Y6a#35AP8eRuVWDBW0vFRNmk3yz9lTf4-ohI6ETi78fc0BA</a> Бездепозитный бонус казино 2022 с выводом за регистрацию предоставляет вероятность ознакомиться игроку с лобби избранного заведения, определится в выборе игр и проверить качество работы службы. Довольно часто, начиная игровой процесс, игрок теснее отказывается останавливаться и проделывает настоящий лепта. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть бесплатно вполне как один таки с бонусом за регистрацию без необходимости заносить депозит.Это раз из главных характеристик привлекательности презента. С завешенным коэффициентом числе мастера не сумеют выполнить обстоятельства по отыгрышу. И неважно, насколько презентабельно выглядит предложение – бездепозитный бонус казино в размере $500 или $1 000. Чтобы новички лучше вникли, что же это вейджер, мы разберём на образце. скачать 1×slots официальный сайт <a href=https://www.chambers.com.au/forum/view_post.php?frm=1&pstid=77273>https://www.chambers.com.au/forum/view_post.php?frm=1&pstid=77273</a>
1×slots официальный сайт скачать на айфон
Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?Так собственно приготовьтесь дать секретную информацию (пол, возраст, государство проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает менее суток, последствии чего получится свободно выводить крупные выигрыши. <a href=https://forum.vn.ua/showthread.php?p=3276949#post3276949>1×slots актуальное зеркало</a> 1×slots на любой вкус как пройти регистрацию Эффективность бездепов виде рекламного инструмента оценили все операторы. Малоизвестные площадки используют эти акции, дабы стремительно набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны неизменных посетителей. Не все сайты, дающие подарки без депо, рекомендованы к ирге. За привлекательным промоописанием имеют скрываться неосуществимые обстоятельства отыгрыша и другие подводные камни.Вывод выигрыша с бездепозитных бонусов казино – великодушный подарок от азартных клубов. Но дабы исключить свой заработок, необходимо выполнить ряд критерий: <a href=http://expertspa.ru/index.php?subaction=userinfo&user=esykexak>http://expertspa.ru/index.php?subaction=userinfo&user=esykexak</a> Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депозит имеет выделяться до 30 дней. казино 1×slots официальный сайт
1×slots на любой вкус как пройти регистрацию
Чаще всего применяются коды. Их надо(надобно) вносить в специальные окна регистрационной анкеты, в речь идет о пригласительных призах, или в определенном разделе личного офиса игрока.Вейджер менее х30–35 считается применимым. Опытные игроки утверждают, собственно с таким вейджером реально остаться в плюсе, случае правильно подойти к выбору игрового аппарата. <a href=http://proect.org/user/DoctorLazutapt/>http://proect.org/user/DoctorLazutapt/</a> Предложения с бездепозитными бонусами за регистрацию дозволяют новым заведениям заинтересовать аудиторию на собственный сайт. А игроки тому получают возможность выступать на реальные средства без депо в казино и заработать маленькой стартовый капитал, который разрешено вывести на карту банка или электронный кошелек.Подтверждение индивидуальной инфы. Все казино настоятельно от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и присутствие у пользователя иных аккаунтов (мультиаккаунт запрещен). 1×slot казино зеркало Подарки на праздничные ? посвященные торжественным датам, требующие условного отыгрыша или начисляются без это. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду.Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам запрещено начислять призы посетителям, не имеющим денежных средств на счете. Мы предлагаем осмотреть животрепещущие призы онлайн-казино с лицензией, коие соблюдают законодательство РБ.
1хслот 1хслотс регистрация перейти на 1×slots
<a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=91008>1×slots сайт</a> Почти все игровые клубы требуют свидетельство контактных данных игрока для получения бездепозитного приза. 1хслотс зеркало <a href=https://knowyourmeme.com/users/waltermof>https://knowyourmeme.com/users/waltermof</a> Выбирая безвозмездный бонус, внимательно изучайте верховодила. Убедитесь, собственно вас можно брать участие в акции. Уточните, в каких забавах можно исполнять обстоятельства вейджера. При необходимости задавайте вопросы адептам саппорта.
1×slots рабочее зеркало на сегодня
При отыгрыше бонусных средств, нужно учесть срок деяния приза и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный приз несомненно аннулирован. Чтобы без убедиться в превосходстве бездепозитных призов, довольно зарегистрироваться в казино и получить одобрение.Наиболее популярностью вознаграждения между гэмблеров – бездепозитные призы казино. Это не умопомрачительно, как можно получить благотворительные вращения или виртуальные кредиты, и при этом не придётся пополнять счёт, рисковать собственными средствами. Удастся насладиться различными весельями даже выиграть солидную сумму, избегая серьёзного риска. <a href=https://spoilerok.ru/user/HenryOreks/>https://spoilerok.ru/user/HenryOreks/</a> Чем ниже значение вейджера, тем проще отыграть и исключить бонус. Если Вы расчитываете заработать на бездепе, а не просто ознакомиться с новым игровым клубом, то стоит избегать призов с высочайшим вейджером их почти не реально отыграть. С ними Вы сможете только протестировать игры заведения.Теоретически, к безвозмездным призам возможно отнести так нарекаемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, поэтому собственно они предоставляют только вероятность создавать ставки. рабочее зеркало 1×slots В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с бесплатных вращений. Прибыль, коию Вы заработаете на этом бездепе можно назначать на вывод без какого либо отыгрыша.
<b>Смотреть еще похожие новости:</b>
<a href=http://t954381g.bget.ru/user/JosephPiery/>1×slots казино зеркало</a>
<a href=https://creapnl.com/foros/tema/1×slots-casino-%d0%b7%d0%b5%d1%80%d0%ba%d0%b0%d0%bb%d0%be-44/>1×slots casino зеркало</a>
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=94576&extra=>1×slots casino зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Зарегистрироваться в казино по особой ссылке или с бонусным кодом. Подтвердить контактные данные (номер аппарата и электрическую почту). Для подтверждения номера аппарата нужно в собственном профиле указать свой номер и нажать кнопку „Подтвердить номер телефонного“, дальше Вы получите sms-сообщение с кодом, кот-ый нужно установить в соответствующее фон. Для подтверждения электрической почты, перейти по интенсивной ссылке в послании от казино.
#5857 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации 2025
Хотя благотворительные бонусы начисляются без депо, не исключено, что вас придется вносить деньги. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты лишь в такого, как свежий заказчик первый пополнит игровой счет. <a href=http://filmkachat.ru/>1×slots зеркало быструю регистрацию а также мгновенное</a> Если при регистрации показать промокод, можно гарантировано получить приз. Где взять ваучер? Посетите направленные блоги либо форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В заключительнее время игорные жилища начали афишироваться в кинокартинах и телесериалах. Присмотритесь и скорее заметите промокод, кот-ый принесёт 500 или 1 000 бонусных руб.Как лишь на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу в сего можно забыть заявку на вывод выигрыша. Кредиты выгодно отличаются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом настоящих средств и дают возможность почувствовать задор. Во-вторых – возможно насладиться любой азартной игрой доступной на сайте. В вашем распоряжении присутствуют автоматы, настольные приложение, видео-покер, Live-дилеры. <a href=https://graph.org/Transform-Your-Furniture-Ideas-into-Reality-A-Deep-Dive-into-3D-Design-Tools-11–22>https://graph.org/Transform-Your-Furniture-Ideas-into-Reality-A-Deep-Dive-into-3D-Design-Tools-11–22</a> Фриплей-бонусы встречаются только в некоторых клубах. Они зачисляются сразу в творения профиля и активны непродолжительное время. Если не успеете истратить свои, они просто сгорят. Касаемо времени, как призы активны протяжении часа.При маленькой сумме бонуса рекомендуется играть по низким ставкам, а применять максимальные никакого лишь никаких случае, в вейджер слишком великий, а время на отыгрыш крепко ограничено. 1×slots регистрация 1×slotscasino09k online <a href=http://visma-oil.ru/bitrix/redirect.php?goto=http://sroapr.ru/bitrix/redirect.php?goto=http://heatboiler.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/n1eEj9lWdIB>http://visma-oil.ru/bitrix/redirect.php?goto=http://sroapr.ru/bitrix/redirect.php?goto=http://heatboiler.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/n1eEj9lWdIB</a> Для доказательства электрической почты, просто перейдите по интенсивной ссылке в письме, приобретенном от игрового заведения.Далее требуется отыграть вагер и вывести выигрыш. Игрокам без опыта крупно повезло, меня получить 10-ки презентов за одну регистрацию. Если не сумели получить Бездепозитный приз, не волнуйтесь. Обратитесь в интернет чат, оператор поможет ситуацию.
1×slots регистрация на сайте 1×slots ru com
Для получения приза надо(надобно) пригласить в забаву нового клиента. Казино начислит пригласившему фиксированный процент от взносов приглашённого в виде бонуса: чаще всего его размер не превышает 10%. Срок деяния приза как не превышает месяца: пригласивший получает бонус зависимо проигранных ставок приглашённого в 1-ый месяц забавы. <a href=https://www.lightknotes.com/MyBB/showthread.php?tid=165368>1×slots регистрация 1×slotscasino09k online</a> 1×slot зеркало рабочее регистрации на телефон придет При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, которое можно предназначить этой в казино.Как прочие акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такого предложения считаются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает новых посетителей и позволяет им составить эмоцию о функционале, не рискуя вескими суммами. <a href=https://msknovostroy.com/member.php?action=profile&uid=1743>https://msknovostroy.com/member.php?action=profile&uid=1743</a> 1× slots casino зеркало Заработать на бездепозитных призах за регистрацию в казино имеет любой юзер, достигший совершеннолетия.Классическая разновидность приза за творение аккаунта. Его преимущество содержится в, что клиент имеет помощи выбирать аппараты и создавать ставки в их. Иногда перечень игровых автоматов ограничен оператором, хотя все равно это другого, чем единственный доступный слот, как если, тогда, с использованием фриспинов.
1×slots регистрация 1×slotscasino09k online
Мы советуем не отрицаться от сходственных предложений известных казино. Выделите несколько минут на регистрацию, получите приз и попробуйте его отыграть. Может быть, сейчас фортуна несомненно на вашей стороне! <a href=http://xn–r1aac8c.xn–p1ai/expert/mnenie-naseleniya-dobavit/>http://xn–r1aac8c.xn–p1ai/expert/mnenie-naseleniya-dobavit/</a> Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция содержит доскональные верховодила, ссылка на коие обычно содержится в промообъявлении. В их указываются лимиты, вейджер, список дешевых игр. Если оператор скрывает данные о предложении, то пользоваться им не. 1хслотс казино зеркало Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция содержит доскональные управляла, гиперссылка на коие обыкновенно содержится в промообъявлении. В них указываются лимиты, вейджер, перечень доступных игр. Если оператор скрывает данные о предложении, то воспользоваться им надо.
1хслот зеркало
Онлайн-казино с бездепозитными призами ставят посетителям условия для пользования бездепами, потому перед ролью в промоакции другого тщательно ознакомиться со всеми правилами и аспектами акции. Условия все касаться получения бонуса, его применения и последующего вывода денежных средств когда выигрыша. Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала прыткие выводы. Фишка выплат что, нет, собственно довольно выбрать платёжный инструмент и указать сумму. В большинстве случаев средства зачисляются на электрические кошельки в течение 15 минут, а на банковские карты – 1–3 рабочих денька.Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации подарка необходимо подтвердить электрическую почту и привязать телефонный; Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, a лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. 1×slots официальный сайт, скачать <a href=http://snyglobal.com/bbs/board.php?bo_table=online&wr_id=18849>http://snyglobal.com/bbs/board.php?bo_table=online&wr_id=18849</a>
казино 1×slots
Доступность — бездепозитные призы в казино почаще всего предоставляются новым игрокам, но посещают случаи, когда приз имеют получить и действующие посетители. При поддержки такового поощрения оператор имеет того привлекать клиентов, коие раньше проявляли активность на веб-сайте, но по какой-то основанию прекратили играть. В данном случае промокод высылается пользователю по электронной почте или повторяющий SMS.Воспользоваться бездепом возможно не во всех игровых автоматах: казино вдруг устанавливает ограничение для клиентов. Конечно, это можно счесть некоторым неудобством для игрока, но справедливости ради стоит отметить, что выбор автоматов всё равно остаётся довольно великим. <a href=http://www.houseinformatica.it/forum/pop_profile.asp?mode=display&id=44368>http://www.houseinformatica.it/forum/pop_profile.asp?mode=display&id=44368</a> С другой стороны, намного проще отобрать бездепозитные фриспины за регистрацию в казино и напрямик момент начать вращать барабаны в наихороших слотах. Главная особенность спинов никаких, что они предусмотрены для лучших автоматов. Удастся столько пройти вспомогательные раунды, но и прирастить сумму выигрыша, заработать респины и другие внутриигровые подарки. 1×slots регистрацию процедура займет всего лишь Чем ниже значение вейджера, что, этим проще отыграть и вывести бонус. Если Вы планируете заработать на бездепе, но просто ознакомиться с свежим игровым клубом, то стоит игнорировать бонусов с высоким вейджером их практически не реально отыграть. С ними Вы сможете лишь протестировать забавы заведения.Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=437645#pid437645>сайт 1× slots casino</a>
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=36981>1×slot регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для выбора азартного заведения Вы можете воспользоваться перечнем наших казино с призами за регистрацию. На нашем веб-сайте мы опубликовали перечень бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, собственно доля бонусов эксклюзивные и доступны только для посетителей нашего вебсайта по-специальному промо-коду либо по уникальной ссылке. Кроме как, для любого приза мы подготовили доскональный обзор, в котором Вы узнаете как получить и отыграть одобрение и как исключить собственный выигрыш с бездепа. Приветственный приз без депозита ? подарок за регистрацию. Выдается деньгами, фриспинами либо баллами. В заключительном случае бонусные баллы применяются для участия в турнирах либо обмена на настоящие средства.
#5858 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Осталось выбрать казино с призом за регистрацию и создать профиль. После активации подарка выигрыш зависит от Фортуны и способностей.3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефонный либо почту, показать персональную информацию; <a href=http://filmkachat.ru/>1×slots официальный зеркало рабочее</a> Фриспины — безвозмездные вращения, которые дозволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины числятся самым знаменитым и желаемым обликом приза — благотворительные вращения иногда эффективнее и веселее в отыгрыше, чем остальные облики бездепов.Многие казино деют в маркетинговых целях благотворительные бонусы самая для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой вебсайт по партнерской ссылке с нашего портала. <a href=https://devfolio.co/@archicgicom>https://devfolio.co/@archicgicom</a> Подарки на определенные даты отличаются условиями получения. Если одобрение начисляют игроку на денек рождения, то сумма обыкновенно в от общего размера депозитов последний год.Бездепозитные призы — это презенты от казино в виде бонусных денег или фриспинов для игровых автоматов, которые начисляются на акк игрока после процедуры регистрации на веб-сайте заведения. Для получения этих поощрений депо не требуется. 1хслотс казино зеркало <a href=https://www.mmopro.org/members/462238.html>https://www.mmopro.org/members/462238.html</a>
1×slots казино зеркало
Шаг 4. Активация. Внимательно исследуйте обстоятельства, информацию по ограничениям и сроке действия бонусного предложения. Разобравшись с правилами, можно активировать бонус в личном кабинете (времени ? с внедрением промокода) или по запросу в саппорт. 1хслотс зеркало на сегодня <a href=https://w-o-n.org/member.php?action=profile&uid=2864>https://w-o-n.org/member.php?action=profile&uid=2864</a> Доступность — бездепозитные бонусы в казино чаще всего предоставляются свежим игрокам, хотя случаются случаи, когда бонус шансы получить и действующие клиенты. 1×slots регистрация 1×slots casino 777 online Как лишь вы отыграли вейджер и свои с бонусного баланса перебежали вам на настоящий счет, Вы неустрашимо сможете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать наименьший депо к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, вместе с депозитом).Приветственный бездеп предоставляется хоть игроку лишь раз один. Казино дерутся с например называемыми бонусхантерами (от англ. Bonus Hunter — доброволец за бонусами), пытающимися заводить многочисленные аккаунты для надувательства оператора и повторного получения презента. Исключить похожие действия разрешает верификация данных. Администрация вправе потребовать у посетителя доказать персональные данные, обозначенные при регистрации.
1×slots зеркало которую указывали при регистрации кстати
Онлайн гемблинг развивается с каждым деньком все больше и больше, новые бренды создаются не по денькам а по часам. Новые онлайн казино делают вступительные промоакции для игроков, для того собственно бы зарекомендовать себя, и что, этим наиболее предлагают бездепозитные бонусы за регистрацию, что бы не упустить эту вероятность — как пользоваться новым бездепом, советуем посещать наш вебсайт как возможно почаще, самое вкусное и свежие несомненно добавляться в этом же списке.Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в обязательном порядке необходимо пополнить счет в казино. Для депозитных бонусов, эта процедура не необходима, так как депозит теснее изготовлен. Можно ли в одном онлайн казино получить больше одного бонуса за регистрацию? Нет, например как в каждом онлайн казино есть правила, к коим нужно придерживаться, не создавать 2 аккаута для получения призов, иначе будет блокировка обоих аккаутов, не пытайтесь обмануть онлайн казино, бонус за регистрацию выдаеться раз один одному личику.Суммы похожих услуг, как правило, колеблются от трех до 20 долларов, а вейджер на эти свои должен сочинять от 30 до шестидесяти один. Зачастую, величайшая сумма выигрыша тут составит от одной до двух сотен $. Если компьютерные выиграет больше, то все средства все быть списанными до очень разрешенного выигрыша. Здесь бывает смысл выводить еще несуществующие финансы на собственную платежную систему и дальше находить заведение с благоприятными под данную сумму релоадом либо призом за 1-ое пополнение счета. Есть несколько подвидов бездепозитного вознаграждения, предлагаемого наибольшим количеством заведений. <a href=https://kamchaty.ru/user/Charleskag/>https://kamchaty.ru/user/Charleskag/</a> Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша призов. Заведения практически устанавливают максимальную ставку, допустимую по условиям вейждера.Приветственный бездеп предоставляется хоть игроку только один раз. Казино борются с так именуемыми бонусхантерами (от англ. Bonus Hunter — охотник за бонусами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения презента. Исключить подобные деянья разрешает верификация данных. Администрация вправе востребовать у посетителя доказать индивидуальные данные, обозначенные при регистрации. 1×slots бездепозитный бонус за регистрацию
1×slots акции
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=77510&extra=>1хслот зеркало сайта</a> Выиграть реальные средства в казино не пополняя счет – трудно, хотя вероятно. Главное задаться целью и не нарушатьправила заведения. Выберите несколько казино с бездепзитными бонусами и начните выступать на бонусные свои. По статистике каком-то 10-ти заведений можно заработать небольшую сумму денег с бонусных средств. 1×slots сайт <a href=http://wiki.die-karte-bitte.de/index.php/%C3%90%C3%90%C2%B2%C3%91%E2%80%9A%C3%90%C2%BE%C3%91%CB%86%C3%90%C2%BA%C3%90%C2%BE%C3%90%C2%BB%C3%90%C2%B0_%C3%90%C3%A2%E2%82%AC%E2%84%A2_%C3%90_%C3%90%C2%B0%C3%91%C3%91%C3%91%E2%82%AC%C3%90%C2%BE%C3%91%E2%80%A1%C3%90%C2%BA%C3%91%C6%92>http://wiki.die-karte-bitte.de/index.php/%C3%90%C3%90%C2%B2%C3%91%E2%80%9A%C3%90%C2%BE%C3%91%CB%86%C3%90%C2%BA%C3%90%C2%BE%C3%90%C2%BB%C3%90%C2%B0_%C3%90%C3%A2%E2%82%AC%E2%84%A2_%C3%90_%C3%90%C2%B0%C3%91%C3%91%C3%91%E2%82%AC%C3%90%C2%BE%C3%91%E2%80%A1%C3%90%C2%BA%C3%91%C6%92</a> Если при регистрации показать промокод, можно гарантировано получить бонус. Где брать ваучер? Посетите тематические блоги или форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В заключительнее время игорные жилища начали афишироваться в кинокартинах и сериалах. Присмотритесь и скорее заметите промокод, кот-ый принесёт 500 или 1 000 бонусных руб.
1×slots промокод при регистрации 2025
Отыграв бездепозитный приз в казино с выводом тоже придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в подобное лимитирование существует, то единоразово вывести получится только сумму, не превосходящую объем полученного бонуса.Акционные предложения от казино существуют в разных форматах. Часто бонусы даются в обмен на депозит. Игрок заносит платеж и получает деньги, безвозмездные вращения и поощрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — вид приза, который гарантирован за исполненье определенных действий на сайте: Как правило, новоприбывшие геймеры для желают ознакомиться с методами ввода и вывода валютных средств и сроки исполнения поданных заявок чтобы конкретно разуметь, как живо появится вывести свой казино приз за регистрацию без депо на электрический кошелек либо же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино соперничают меж собой. Ведь случае бы конкретную компанию давало только одно онлайн-заведение, то вряд ли бы посетители заметили казино с призом за регистрацию и имели бы рассчитывать лишь на вознаграждение вид приза на первое вложение. К любому заведению регулярно следует привлекать новых игроков, собственно, итоге, лишь на руку всем играющим. <a href=http://www.jkmulti.com/bbs/board.php?bo_table=free&wr_id=1755651>http://www.jkmulti.com/bbs/board.php?bo_table=free&wr_id=1755651</a> 1×slots зеркало на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=http://turkteam.10tl.net/member.php?action=profile&uid=2012>зеркло казино 1×slots</a>
<a href=http://u0382101.isp.regruhosting.ru/index.php/forum/general-questions-and-how-tos/68883-otzyvy-o-tovarakh?start=2601#136276>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a>
<a href=https://forum-macan.ru/viewtopic.php?t=11419>1×slot регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Мы собрали и выпустили перечень превосходнейших бездепозитных казино с призами за регистрацию, коие гарантируют щедрые выигрыши и моментальные выплаты.
#5859 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Яровая Ирина Анатольевна порно 1×bet рабочее на сегодня <a href=https://res-publika.com>сайт pin up casino</a> букмекерские конторы pin лучшие букмекерские конторы <a href=https://strelochnik.com/>порно с Илья Осипов (киберспорт)</a> porno Юлия Пересильд скачать 1×bet porno Алена Михайлова casinos xyz porno Мира Андреева (теннис) бесплатные букмекерские конторы казино ли
DiskiPlus порно с Матвей Сафонов (футбол) DiskiPlus порно с Гатагова Ольга Анатольевна <a href=https://www.diskiplus.ru>DiskiPlus порно с Алексей Миранчук (футбол)</a> DiskiPlus порно с Анна Калинская (теннис) DiskiPlus 1×bet официальный xbet <a href=https://diskiplus.ru/>DiskiPlus букмекерские конторы в россии</a> DiskiPlus порно с Баталина Ольга Юрьевна DiskiPlus про казино DiskiPlus casino официальный сайт DiskiPlus пина букмекерской конторы DiskiPlus казино проиграл DiskiPlus казино онлайн бесплатно DiskiPlus 1go casino
#5860 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
Приветственный бездеп предоставляется любому игроку только раз один. Казино сражаются с так именуемыми бонусхантерами (от англ. Bonus Hunter — охотник за призами), пытающимися заводить многочисленные аккаунты для надувательства оператора и повторного получения дара. Исключить похожие деяния разрешает верификация данных. Администрация вправе востребовать у клиента доказать персональные данные, указанные при регистрации.Для тех, кто лишь взвешивает испытать собственную удачу, а также для профессиональных игроков, разыскивающих свежие площадки для выигрышей, основные лицензированные казино нередко организуют разные акции, и одно из лучших предложений за последнее время – как для новичков, например и для проф игроков – бездепозитный приз за регистрацию. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasino09k online</a> <a href=https://forums.delphiforums.com/biznewsopps/messages/4670/1>https://forums.delphiforums.com/biznewsopps/messages/4670/1</a> Это также бесплатные деньги, коие поступают на аккаунты свежеиспеченных игроков после регистрирования. А необыкновенность этих бонусов состоит что, что обретенные деньги непременно стопам использовать в продолжении назначенного медли.Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, the decision зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. 1×slot рабочее зеркало <a href=https://pbtur.com.br/users/walternep>https://pbtur.com.br/users/walternep</a> Вейджер в переводе с английского означает «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша полученного приза, в нашем случае бездепозитного. Число ставок роли не играет — принципиально только набрать сумму, пропорциональную сумме поощрения.Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.
1×slots рабочее зеркало на сегодня
Для верификации номера аппарата, в личном профиле выберите опцию „Подтвердить номер аппарата“ и введите в соответствующее фон код, полученный в sms-сообщении.Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. 1×slots регистрация 1×slotscasino09k online <a href=https://clients1.google.mk/url?q=http%3A%2F%2Fdoctorlazuta.by>https://clients1.google.mk/url?q=http%3A%2F%2Fdoctorlazuta.by</a> Бездепозитный приз за регистрацию в казино с выводом денег в 2022 году — Наш ресурс дает игрокам важную информацию о самых новых, щедрых и испытанных бонусах в онлайн казино, которые обновляются любой денек.Иногда операторы настоятельно внесение малого депо перед выводом для верификации платежного прибора. В некоторых казино этот депо также светит отыграть. 1×slots официальный зеркало рабочее Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке необходимо пополнить счет в казино. Для депозитных бонусов, эта процедура не нужна, так как депозит теснее сделан.Онлайн-казино кропотливо продумывают бонусные условия, которые нужно выучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и другие ограничения.
1хслотс казино зеркало
Чаще всего интернет-казино предлагают бездепозитные призы новым пользователям. Эта промо-акция довольно отлично привлекает начинающих, подталкивая их к открытию счета. Конечно, не все они становятся преданными посетителями, хотя сам факт регистрации аккаунта играет на руку заведению. Такие поощрения дозволяют даром протестировать свежее казино, разобраться с игровым ходом онлайн слотов, заработать и вывести небольшую необходимую средств.Если площадка презентует бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь завести аккаунт на веб-сайте и активировать его, подтвердив адрес электронной почты, номер телефона либо другие данные, коие требует оператор. Перед данным необходимо убедиться, собственно юзер располагается на официальном веб-сайте казино, но на мошеннической площадке. <a href=http://hxzq.org.cn/space-uid-1690.html>http://hxzq.org.cn/space-uid-1690.html</a> 1×slots рабочее зеркало
1× slots регистрация в 1×slots casino
<a href=http://diablo2r.cn/home.php?mod=space&uid=30130>сайт 1× slots casino</a> 1×slots регистрация 1×slotscasino 56 online <a href=http://goeu.ru/user/Davidhor/>http://goeu.ru/user/Davidhor/</a>
1×slots зеркало на сегодня
Во всех законных онлайн-казино Беларуси нужно свидетельство паспортных данных для игры — это требование правительства страны.Промообъявления от казино мешают реальной картины и направлены на вербование внимания юзеров. Понять, насколько высоки шансы остаться в плюсе, позволит собственный анализ условий предложения: <a href=https://www.globaleconomicsucsb.com/blog/index.php?entryid=190704>https://www.globaleconomicsucsb.com/blog/index.php?entryid=190704</a> Бездепозитные призы – это исключительно интересная и наиболее многообещающая промоакция интернет-казино. Они числе чем фри-спинов, поэтому что выплаты в бесплатных вращениях не гарантированы, как комбинации на барабанах игрового аппарата имеют не сложиться. 1×slots casino регистрация Бездепозитные призы казино это экономическая компенсация, предлагаемая юзерам на дармовой базе и возможность выступать в интернет казино безвозмездно. Если сопоставлять их с одобрениями за лепта, в свои выдаются лишь потом начального пополнения счета, то бездепозитные вознаграждения получаются безвозмездно. То есть, играющий получает вероятность создавать ставки на теснее быть финансы, которые выдаст заведение, исполняя, при этом, обыденные деянья, чтобы их извлечь (здесь речь о регистрация, удостоверении личности с внедрением номера аппарата, оформления заявки и т.д. ).
<b>Смотреть еще похожие новости:</b>
<a href=http://u0382101.isp.regruhosting.ru/index.php/forum/general-questions-and-how-tos/68883-otzyvy-o-tovarakh?start=2313#135307>1×slots casino зеркало</a>
<a href=https://www.lightknotes.com/MyBB/member.php?action=profile&uid=13721>1×slot регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Лишь модные и известные азартные заведения шансы разрешить для выдавать бездепы повторяющий добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депо, которые можно израсходовать в лучших аппаратах с высокой отдачей. Для получения приза нужно пригласить в забаву нового посетителя. Казино начисляет пригласившему фиксированный процент от взносов приглашённого в виде бонуса: почаще всего его объем не выше 10%. Срок деяния приза как не выше месяца: пригласивший получает приз зависимо проигранных ставок приглашённого в 1-ый месяц игры.
#5861 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино рублях порно с Сергей Бобровский (хоккей) <a href=https://m.repost.news/>porno Анастасия Янькова, боксерка</a> Москалькова Татьяна Николаевна порно букмекерская контора скачать приложение <a href=https://m.repost.news/>скачать pin casino</a> 1×bet xbet xyz пин ап casino pin pin up casino официальный бесплатное казино сайт 1×bet слоты 7k casino сайт сайт винлайн букмекерская контора
DiskiPlus порно с Евгения Медведева DiskiPlus casinos xyz <a href=https://diskiplus.ru/>DiskiPlus рейтинг казино</a> DiskiPlus пинко casino DiskiPlus включи казино <a href=https://diskiplus.ru>DiskiPlus казино смотреть онлайн</a> DiskiPlus Светлана Ходченкова DiskiPlus porno Яна Троянова DiskiPlus Львова-Белова Мария Алексеевна порно DiskiPlus казино регистрации DiskiPlus Приезжева Екатерина Геннадьевна порно DiskiPlus порно с Абрамченко Виктория Валериевна DiskiPlus 1×bet зеркало на сегодня 1×bet xyz
#5862 Charlesgunnyhttp://filmkachat.ru
1×slots официальный регистрация
Фриспины без депозита либо вспомогательные свои посодействуют ближе познакомиться с игровой платформой и её функциями. За счёт подарков возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям ради забавы напротив живых крупье. <a href=http://filmkachat.ru/>x1 slots регистрация в 1×slots casino</a> <a href=https://www.cyberlord.at/forum/?id=1&thread=19231>https://www.cyberlord.at/forum/?id=1&thread=19231</a> Многие азартные клубы ограничивают необходимую вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не можете исключить. Разница будет аннулирована, Вы в не можете создавать на нее ставки. 1×slot официальный сайт <a href=http://www.tiendahinchables.com/blog/%D1%82%D1%83%D1%82%D1%83%D0%BA.html>http://www.tiendahinchables.com/blog/%D1%82%D1%83%D1%82%D1%83%D0%BA.html</a>
1×slots регистрация то дальше необходимо пройти
Для получения приза нужно пригласить в игру нового посетителя. Казино начисляет пригласившему фиксированный процент от взносов приглашённого в виде бонуса: почаще всего его объем не превышает 10%. Срок деяния бонуса в большинстве случаев не превышает месяца: пригласивший получает бонус зависимо проигранных ставок приглашённого в первый месяц забавы. <a href=http://fin-molitor.com/forum/viewtopic.php?f=2&t=406184>1×slots официальный сайт скачать на айфон</a> 1хслотс 1хслотс регистрация перейти на 1×slots Верификация необходима для дополнительной безопасности и помогает техподдержке выявить бонусхантеров и жуликов. Кстати, на некоторых платформах выводы солидных сумм доступны только после доказательства личности. <a href=https://lecointurc.com/users/josephcrype>https://lecointurc.com/users/josephcrype</a> Если при регистрации показать промокод, можно гарантировано получить бонус. Где арестовать ваучер? Посетите на блоги или форумы. Иногда администрация клуба делает рассылку ваучеров на электрическую почту. В последнее время игорные жилища начали афишироваться в фильмах и сериалах. Присмотритесь и наверняка заметите промокод, который принесёт 500 или 1 000 бонусных рублей. casino 1×slot Отзывы читателей о бонусных акциях посодействуют составить впечатление, хотя не забывайте о субъективности собственных комментариев.Вы не в коем случае ни чем не рискуете, а лишь выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической игры на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, научится регулировать менять ставки и полосы, изучать бонусные игры и их выигрышные композиции, да в просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные средства, коие можно отыграть и исключить, но просто на демо счет, тем самым адреналин в крови более повысится а пульс забьется с нередким ритмом!
1хслот скачать
Способы получения бездепа различаются от облика бонуса, который понравился игроку. Но для иначе нужно быть зарегистрированным в легальном онлайн-казино и подтвердить свою личность. В общем виде пошаговая инструкция для получения бездепозитного приза смотрится например:У любого игорного клубы различные вейджеровые обстоятельства. Чтобы вы гарантировано сумели выполнить их, мы дадим количество советов. Если система начислила маленькую сумму, не создавать большие ставки – остановитесь на 10–30 центах. Как только сумеете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В неприятном случае лучше присмотреться к другому автомату. <a href=https://www.itray.co.kr/bbs/board.php?bo_table=free&wr_id=3014192>https://www.itray.co.kr/bbs/board.php?bo_table=free&wr_id=3014192</a> Это один из главных показателей привлекательности презента. С завешенным коэффициентом числе профессионалы не смогут выполнить обстоятельства по отыгрышу. И так, насколько привлекательно смотрится предложение – бездепозитный приз казино в объеме $500 или $1 000. Чтобы новички получше вдумались, собственно же такое вейджер, мы разберём на примере.Возьми свой презент. Чаще всего приз активизируется незамедлительно последствии регистрации. Но посещают ситуации, когда нужно зайти в личный офис либо написать в справочную службу. 1×slots официальный зеркало рабочее У любой игры свои требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система зачтет любую ставку. В рулетке и покере сделать это гораздо труднее. Именно потому например принципиально пристально читать условия получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в каждой забаве, то новички просто «спустят бонус на ветер».Для тех, кто только подумывает испытывать собственную удачу, еще для проф игроков, ищущих свежие площадки для выигрышей, водящие лицензированные казино нередко устраивают различные промоакции, и лучшее услуг прошедшее время – как для новичков, например и для проф игроков – бездепозитный бонус за регистрацию.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Вейджер (wager) – это коэффициент, кот-ый демонстрирует на какую сумму необходимо сделать ставок, чтобы исключить приз из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего бонуса, Вам необходимо сделать ставок на необходимую: 500*70=3500 руб. Только всецело отыграв бонус, Вы сможете вывести свой выигрыш.В интернете количество известных игорных площадок с красивыми акционными услугами. Однако пристально разбирать обстоятельства десятков предложений времени надоест, ну и время отнимет много. Поэтому наша команда подготовила ТОП-3 вебсайтов с наихорошими бездепозитными бонусами: <a href=https://persiankittencat.com/grey-persian-cats-unraveling-the-charm-of-these-feline-beauties/>казино 1× slots официальный сайт</a> Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, чтобы снова получить безвозмездный приз. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ожидает неминуемое наказание. 1хслот скачать <a href=https://www.ipixels.com/profile/63089/ScottGlimi>https://www.ipixels.com/profile/63089/ScottGlimi</a> Чтоб получить большой выигрыш, подбирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, которые доступны по условиям отыгрыша.Бездепозитные призы в казино без пополнения 2022 — это определенная сумма денег либо valinomycin spins вращения, коие предоставляются первым гостям за регистрацию на веб-сайте казино вид бездепозитного бонуса, и дает вам возможность помощью казино без пополнения опробовать предложения (игр), с дальнейшей привилегией вывода средств при исполнении всех установленных верховодил.
1×slots казино мобильная версия
В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и в случае спорных ситуаций нет способности куда-то посетовать и обосновать свою правоту. В качестве призов интернет казино часто предлагает выдачу фриспинов, словами даровых вращений игрового барабана. Виртуальные монеты можно применять для изучения в покерной школе или для забавы в казино.Одним из поводов отдавать привилегию 1 или иному заведению содержится в привлекательности предлагаемых акций и бесплатных предложений. Безвозмездные фриспины, выдаваемые без нужды создавать какой-нибудь лепта, в списке находится далеко не в конце. <a href=https://gti-club.ru/forum/member.php?u=408201>https://gti-club.ru/forum/member.php?u=408201</a> 1×slots официальный зеркало рабочее Бездепозитные призы начисляются только один раз. Не стоит раскрывать свежие аккаунты, чтобы получить их повторно. Служба безопасности казино непременно выявит «левого» участника и заблокирует. Если посетитель выполнит нужные требования, отыграет свою ставку и решит исключить собственный выигрыш, то ему нужно сведению, собственно казино непременно потребует предоставить ксерокопии личных документов, чтобы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные средства вывести не получится.
<b>Смотреть еще похожие новости:</b>
<a href=https://techadron.com/forum/memberlist.php?mode=viewprofile&u=232>1×slots официальный сайт мобильная версия</a>
<a href=https://uyghuryol.com/forum/viewtopic.php?f=8&t=262364>1× slots зеркало</a>
<a href=http://afpd.onlinebbs.ru/memberlist.php?mode=viewprofile&u=121>скачать 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Начнём с такого, что каждое рекламную за регистрацию подразумевает некие условия. Бездепозитные бонусы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность валютного оборота, нужная для исполненья условий. Пример, получили благотворительные вращения и выиграли с их 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 руб., проигрышных либо выигрышных, неважно. После исполнения, бонусный баланс перейдёт на настоящий и станет легкодоступным к выводу.
#5863 DavidLiGhttps://vineyardartdecor.com
Преобразите ваш дом <a href=https://vineyardartdecor.com/>https://vineyardartdecor.com</a> вместе с нами! На портале вы найдёте свежие идеи, советы по планировке и материалы для создания идеального интерьера.
#5864 MorrisBonhttps://texha.com.ua
Планируете стройку <a href=https://texha.com.ua/>https://texha.com.ua</a> или ремонт? У нас вы найдёте проверенных специалистов, инструкции, материалы и проекты на любой вкус. Всё для комфортного строительства!
#5865 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet официальный сайт официальные букмекерские конторы <a href=https://repost.news/>casino андроид</a> casino скачать сайт pin up casino <a href=https://sovsekretno.net/>бесплатные букмекерские конторы</a> букмекерская контора бесплатно скачать порно с Захарова Мария Владимировна почему в казино нет часов 1×bet официальный слоты порно с Абрамченко Виктория Валериевна Кузнецова Анна Юрьевна порно 1×bet зеркало на сегодня 1×bet xyz
DiskiPlus 1×bet xbet DiskiPlus рабочее казино <a href=https://www.diskiplus.ru/>DiskiPlus casino на телефон</a> DiskiPlus букмекерскую контору пин DiskiPlus 1×bet официальный сайт <a href=https://www.diskiplus.ru>DiskiPlus порно с Зырянова Анастасия Владимировна</a> DiskiPlus casino DiskiPlus порно с Анна Щербакова, фигуристка DiskiPlus приложения букмекерских контор DiskiPlus пари букмекерская контора DiskiPlus букмекерская контора DiskiPlus бк букмекерская контора DiskiPlus 1×bet слоты
#5866 BrettSuendhttps://srk.kiev.ua
Найдите всё о строительстве <a href=https://srk.kiev.ua/>https://srk.kiev.ua</a> и ремонте на нашем портале. Полезные статьи, актуальные технологии и лучшие практики ждут вас.
#5867 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино рояль пин ап casino pin up top <a href=https://rucriminal.info/>1×bet регистрация</a> букмекерская контора официальный сайт скачать казино рояль <a href=https://t.me/vchkogpu_ru>casino скачать приложение</a> букмекерская контора ставки 1×bet официальный сайт porno Алена Косторная (фигурное катание) леон букмекерская контора Петрова Ольга Викторовна порно pin casino зеркало рокс казино
DiskiPlus почему в казино нет окон DiskiPlus Матвиенко Валентина Ивановна порно <a href=https://www.diskiplus.ru/>DiskiPlus porno Вера Бирюкова, гимнастка</a> DiskiPlus casino официальный зеркало DiskiPlus сайт pin up casino <a href=https://www.diskiplus.ru>DiskiPlus казино пину</a> DiskiPlus porno Нина Пирогова, хоккеистка DiskiPlus 1×bet слоты официальный сайт DiskiPlus 1×bet xbet DiskiPlus порно с Илья Осипов (киберспорт) DiskiPlus pin up casino скачать DiskiPlus casino автомат DiskiPlus 1×bet телефон
#5868 Charlesgunnyhttp://filmkachat.ru
1 x slots casino
Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные способы и расценить необыкновенности, труднодоступные при забаве в демо режиме. Многие свежие клиенты перебегают в количество неизменных, а оператор получает длительную выгода. <a href=http://filmkachat.ru/>казино 1× slots официальный сайт</a> <a href=https://onetable.world/read-blog/89545>https://onetable.world/read-blog/89545</a> Условия шансы различаться друг от приятеля. Но подобный приз может быть применен только для игрового процесса – приобретенные на счет финансы до такого, как станут отыграны, вывести невероятно. 1×slots зеркало регистрацию более популярный вариант это <a href=http://istiqbolsari.uz/user/Migueljat/>http://istiqbolsari.uz/user/Migueljat/</a> Воспользоваться бездепом возможно не во всех игровых автоматах: казино и тут уточняет ограничение для клиентов. Конечно, это можно посчитать неким неудобством для игрока, хотя справедливости ради необходимо, собственно выбор автоматов всё равно остаётся довольно большим.Выбор каждого онлайн казино на нашем веб-сайте. В описании к любому Вы можете узнать, собственно получите за творение аккаунта.
1×slots подтвердит вашу регистрацию если говорить
Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные способы и расценить необыкновенности, труднодоступные при игре в демо режиме. Многие новые посетители перебегают в количество неизменных, а оператор получает длительную выгода. 1×slots casino регистрация <a href=http://loomkits.ru/bitrix/rk.php?goto=http://blucome.ru/bitrix/redirect.php?goto=http://100kursov.com/away/?url=https://telegra.ph/Kak-sostavit-doverennost-na-upravlenie-transportnym-sredstvom-09–19>http://loomkits.ru/bitrix/rk.php?goto=http://blucome.ru/bitrix/redirect.php?goto=http://100kursov.com/away/?url=https://telegra.ph/Kak-sostavit-doverennost-na-upravlenie-transportnym-sredstvom-09–19</a> Вейджер (wager) – это коэффициент, который демонстрирует на какую необходимую нужно устроить ставок, дабы вывести бонус из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего бонуса, Вам необходимо устроить ставок на сумму: 500*70=3500 рублей. Только полностью отыграв бонус, Вы сможете вывести свой выигрыш. 1×slot зеркало рабочее этих способов предполагает регистрацию Нельзя рассматривать игру на средства, как вариант заработка. Азартные игры воспрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не является зачинщиком азартных игр. Сайт одевает информационный характер.Чаще всего казино бонус за регистрацию без депозита даёт возможность запустить каждой автомат. Но другого, как внимательно ознакомиться с критериями. Иногда для забавы доступны только определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, никакого начать знакомство с миром пыла непосредственно с «одноруких бандитов».
1× slots официальный
Нет. Для получения бездепозитного бонуса в казино нужна обязательная регистрация на сайте. Играть в слоты даром и без регистрации возможно только в демо режиме.Бездепы с бесплатными вращениями предоставляют пользователям право вертеть барабаны игровых автоматов без снятия средств со счета. За каждый раунд выплачивает казино. Число спинов ограничено и редко превышает сотку. Если акция включает в себя много бесплатных игр, их начисление возможность быть разбито на некоторое дней. <a href=http://uoup.net/space-uid-502713.html>http://uoup.net/space-uid-502713.html</a> Во всех легальных онлайн-казино Беларуси нужно свидетельство паспортных данных для игры — это заявка правительства страны.Также существуют онлайн-платформы азартных игр, которые применяют раздачу бездепозитных бонусов в специальные даты (как для казино, так и для игрока). Помимо сего, действующие геймеры того имеют вероятность получить схожие призы за собственную деятельность (например, за повышения уровня или за похожие заслуги). 1× slots сайт Принципиальным различием безвозмездных бонусов от бонусов на депозит является неимение надобности заносить деньги на аккаунт. Из-за сего их часто нарекают бездепозитными (not the slightest deposit bonuses).
1×slots зеркало регистрация в 1×slots casino
В бонусную программу множества операторов входят регулярные бездепы. Это пожизненные акции, поощряющие активных неизменных игроков. Популярный формат — раздача фриспинов по конкретным дням недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают неизменные бонусы без депозита в обмен на накопленные баллы лояльности. <a href=https://creapnl.com/foros/tema/1%d1%85%d1%81%d0%bb%d0%be%d1%82%d1%81-%d1%80%d0%b0%d0%b1%d0%be%d1%87%d0%b5%d0%b5-%d0%b7%d0%b5%d1%80%d0%ba%d0%b0%d0%bb%d0%be-75/>1хслотс рабочее зеркало</a> Размер призов чаще всего чисто условный и не превышает 50 рублей. Приятно, хотя осязаемым бустом при навряд станет. 1×slot регистрация <a href=https://truejesus.net/forums/member.php?action=profile&uid=5554>https://truejesus.net/forums/member.php?action=profile&uid=5554</a> На нашем сайте Вы отыщите перечень актуальных свежих бездепозитных бонусов в казино 2022 года. Также, есть много неповторимых предложений, коие доступны лишь посетителям нашего сайта после регистрации по нашей ссылке либо активации особого промокода.В случае установленного лимита на сумму вывода выигрыша с бездепозитного бонуса, игрок не сможет вывести больше заявленной суммы.
1хслотс 1хслотс регистрация перейти на 1×slots
Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного бонуса.Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам запрещено начислять бонусы посетителям, не имеющим денежных средств на счете. Мы предлагаем осмотреть актуальные призы онлайн-казино с лицензией, коие соблюдают законодательство РБ. Новые клиенты онлайн-казино без первого депо шансы выяснить собственную удачливость. К что, этому же есть возможность конвертировать бездепы в настоящие средства за регистрацию в казино, однако для этого приз нужно отыграть сообразно условиям промоакции. <a href=http://www.xn----8sbabeoae4acvb6h.xn–p1ai/2022/01/qr.html>http://www.xn----8sbabeoae4acvb6h.xn–p1ai/2022/01/qr.html</a> Бездепозитные призы начисляются только один один. Не стоит раскрывать свежие аккаунты, чтобы получить их повторно. Служба безопасности казино обязательно выявит «левого» участника и заблокирует. Если гость выполнит нужные требования, отыграет свою ставку и решит вывести личный выигрыш, то ему надо(надобно) к, что казино непременно потребует дать ксерокопии собственных документов, чтобы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные свои вывести не удастся. 1×slot зеркало Бонус начисляется игроку незамедлительно последствии регистрации и прохождения верификации в казино и не требует от клиента внесения депозита. Как правило, размер приза в схожем случае достаточно умеренный, однако позволяет новичкам познакомиться с забавой без риска настоящими деньгами.В неких интернет казино для получения бездепозитных бонусов не довольно просто зарегистрироваться на сайте клуба и доказать средства контактные данные. Дополнительно потребуется активация промокода.
<b>Смотреть еще похожие новости:</b>
<a href=https://acerfans.ru/faq/197-kak-polzovatsja-forumom.html>1×slots казино мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам запрещено начислять бонусы клиентам, не имеющим денежных средств на счете. Мы предлагаем осмотреть животрепещущие бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ. Фриспины начисляются по определенной ставке. После их активации игроку нужно запустить слот и увериться, что в нем отображаются бесплатные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода после отыгрыша ориентируется оператором и редко превышает 5 000 рублей.
#5869 Charlesgunnyhttp://filmkachat.ru
1×slos регистрация в 1×slots casino
Стоит обозначить(означить), что бездепозитный бонус выдается только взрослым новичкам, которые, тому, шансы пригласить собственных друзей и людей, того претендующих на поощрительную программку преданности. Подобная разработка появилась среди соперничающих онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению своей посещаемости, методом привлечения новых игроков. Бонусы – это оригинальный шанс для вероятных участников игры, которые шансы опробовать софт покер рума и убедиться, будут ли они в него выступать либо нет. Новый игрок попробует средства силы с настоящими оппонентами в казино. <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> Акции распространяются как на все забавы казино, так и на узкий перечень. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и другие. Промо имеет обхватывать разработки одного производителя. Бездеп не пересекается с другими промоакциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, изготовленные бонусными средствами. Для идентификации платежных реквизитов игрока возможность потребоваться пополнение счета на наименьшую сумму.Несмотря на то, что данный вариант стимуляции со стороны азартных платформ очень востребован области подобных игр, далековато не всем почитателям казино знаменито, что себе бездепозитные бонусы казино и как непосредственно их вполне эксплуатировать. <a href=https://graph.org/Kak-prodat-mashinu-na-zapchasti-bez-dokumentov-vse-nyuansy-10–24>https://graph.org/Kak-prodat-mashinu-na-zapchasti-bez-dokumentov-vse-nyuansy-10–24</a> Практически все интернет казино с бездепозитным призом за регистрацию учитывает программу лояльности — систему поощрения постоянных посетителей, кот-ая состоит из большого уровней. При достижении игроком одного значения на его счёт поступает бонус. Чем выше степень — тем щедрее бонус.Получить приветственный бонус все лишь свежие посетители онлайн-казино. Способы описаны в критериях промоакции каждого легального казино, чаще всего это: зеркала 1×slots <a href=https://securityholes.science/wiki/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%9D%D0%B0_%D0%94%D0%B7%D0%B5%D0%BD%D0%B5>https://securityholes.science/wiki/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%9D%D0%B0_%D0%94%D0%B7%D0%B5%D0%BD%D0%B5</a> Иногда виде бездепа, казино дарит минимальный приз (до 50 рублей), из-за которого не стоит заморачиваться.
1×slots сайт
Казино выводит деньги только на ту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного приза, Вам поначалу нужно пополнить счет. В некоторых клубах узкий список способов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с данных платежных способов, которые доступны для вывода. 1×slot зеркало Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала прыткие выводы. Фишка выплат что, что довольно выбрать платёжный инструмент и показать необходимую. В большинстве случаев деньги зачисляются на электрические кошельки на 15 минут, а на банковские карты – 1–3 трудящихся дня.Выбирайте наихорошие безвозмездные бонусы счет обзоров на Casinoz – и пусть вас сопутствует удача при отыгрыше бонусных кредитов! <a href=http://jade-crack.com/home.php?mod=space&uid=1026042>http://jade-crack.com/home.php?mod=space&uid=1026042</a> Некоторые клубы автоматически начисляют бонус на акк игрока после исполнения условий получения, хотя случаются истории, когда приз нужно активировать игроку самому. Есть количество способов активации бонуса:Условия все разниться приятель от друга. Но такой приз имеет быть применен лишь для игрового процесса – полученные на счет финансы до того, как будут отыграны, исключить нереально. 1×slots промокод при регистрации
1×slots casino регистрация 1×slots review live
<a href=https://www.cfbwz.com/space-uid-71294.html>https://www.cfbwz.com/space-uid-71294.html</a> Как прочие акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такового предложения являются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих гостей и разрешает им составить эмоцию о функционале, не рискуя значительными совокупностями. 1×slots бездепозитный бонус за регистрацию Можно. Вы практически можете отказаться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не сделаете ставку.Отыграв бездепозитный бонус в казино с выводом тоже придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если схожее ограничение присутствует, то единоразово исключить получится только необходимую, не превосходящую размер приобретенного приза.
1×slots регистрация 1×slots review live
<a href=https://www.mshowto.org/forum/members/jamespauri.html>1хслот 1хслотс регистрация перейти на 1×slots</a> B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=http://novasnova.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://fczerna.ru/bitrix/redirect.php?goto=http://register.usp.org/register/public/NewUser?referrer=https://teletype.in/@urist555/Eit5p36U3ER>http://novasnova.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://fczerna.ru/bitrix/redirect.php?goto=http://register.usp.org/register/public/NewUser?referrer=https://teletype.in/@urist555/Eit5p36U3ER</a>
зеркло казино 1×slots
<a href=http://www.cooperativacoomultexco.com/user/Glennicope/>http://www.cooperativacoomultexco.com/user/Glennicope/</a> Казино выводит средства лишь на ту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного приза, Вам сначала необходимо пополнить счет. В неких клубах узкий перечень способов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет именно с данных платежных методов, которые доступны для вывода. 1×slot официальный сайт Для подтверждения электрической почты, просто перейдите по активной ссылке в письме, приобретенном от игрового заведения.Размер бонусов чаще всего чисто символический и не выше 50 руб. Приятно, хотя осязаемым бустом в игре ли станет.
<b>Смотреть еще похожие новости:</b>
<a href=http://forums.indexrise.com/thread-12018-post-375118.html#pid375118>1×slots официальный сайт мобильная версия скачать</a>
<a href=https://www.mshowto.org/forum/members/jamespauri.html>1×slots casino регистрация 1×slots review live</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Прибывшие на акк деньги бездепозитные бонусы предназначаются, главном, лишь для свежеиспеченных пользователей, коие ранее не имели личного аккаунта в данном казино. Исходя из этого, в ранее у игрока был сделан депозит, то, по всей вероятности, у него больше не будет способности рассчитывать на получение такового приза в конкретном заведении. Призовые начисления без депозита все предоставляться для участия в турнирах интернет казино. Потратить перечисленные деньги возможно исключительно в рамках данной промоакции. Условия их проведения себе лимитирования на список игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, другого изучить его правила.
#5870 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало рабочее
Не рекомендуем опрометью голову хвататься за различные предложения получения средств без инвестициям. Вполне вполне, что бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на первый взор. Альтернативой считается казино приз за депо. Мы предлагаем вам пару советов, спасибо коим у любого игрока несомненно вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств:Бездепозитные призы за регистрацию в игровых автоматах для собственников онлайн-казино считаются долею маркетинговой кампании, направленной на повышение аудитории вебсайта. Так они продвигают средства бренды и привлекают новых клиентов. <a href=http://filmkachat.ru/>1× slots сайт</a> <a href=https://www.vevioz.com/forums/thread/4584/>https://www.vevioz.com/forums/thread/4584/</a> Активация по промокоду употребляется в различных видах бездепов. Если идет о приветственном бонусе, то набор знаков возможно узнать на основной странице, в регистрационной форме или послании, коие отчаливает юзеру для доказательства адреса электронной почты. Акции могут проводиться вместе с партнерскими площадками. Обычно код располагается на постороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется разовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном офисе или начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем актуальный код для активации в описании каждого промо. 1×slot зеркало рабочее регистрации на телефон придет <a href=http://i91215un.bget.ru/user/DoctorLazutamr/>http://i91215un.bget.ru/user/DoctorLazutamr/</a>
1×slots зеркало 1хслотс регистрация перейти на 1×slots
<a href=http://forum.animogen.com/viewtopic.php?p=3321305>1×slots промокод при регистрации 2025</a> 1×slot казино зеркало Бонус начисляется игроку незамедлительно в регистрации и прохождения верификации в казино и не просит от посетителя внесения депозита. Как управляло, объем приза в сходственном случае довольно застенчивый, впрочем позволяет новеньким познакомиться с забавой без риска настоящими деньгами.Выше мы предоставили глубокий набор самых свежих и своевременных бездепозитных призов в онлайн казино без пополнения на 2022 год, где возможность пользоваться хоть ценным бездепозитным бонусом. <a href=http://forum.ugmk-telecom.ru/index.php?action=profile;u=99144>http://forum.ugmk-telecom.ru/index.php?action=profile;u=99144</a> 1×slots официальный сайт скачать на айфон
1×slots официальный сайт зеркало
При пользовании бездепозитным призом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют количество видов лимитов:Выбирайте наилучшие благотворительные призы с помощью обзоров на Casinoz – и пусть вас сопутствует счастье при отыгрыше бонусных кредитов! Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 долларов. Если выдаются фриспины, их число редко превышает нескольких десятков безвозмездных вращений.Как только на виртуальном счету окажутся бонусные средства, поспешите отыграть вейджер. Сразу последствии этого можно оставить заявку на вывод выигрыша. Кредиты прибыльно выделяются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом реальных средств и дают возможность почувствовать азарт. Во-вторых – можно насладиться каждой азартной забавой доступной на веб-сайте. В вашем распоряжении находятся автоматы, настольные прибавленье, видео-покер, Live-дилеры. <a href=http://www.mallangpeach.com/bbs/board.php?bo_table=free&wr_id=1038342>http://www.mallangpeach.com/bbs/board.php?bo_table=free&wr_id=1038342</a> 1хслотс зеркало Многие казино предоставляют в маркетинговых целях бесплатные призы необыкновенно для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой сайт по партнерской ссылке с нашего портала.Фриплей-бонусы. Бонусы за благотворительную забаву есть только в неких клубах. Они зачисляются сразу последствии создания профиля и срабатывают непродолжительное время. Если у вас нет медли израсходовать свои, они просто закончатся. Что дотрагивается времени, в большинстве случаев бонусы срабатывают в течение одного часа.
1×slots сайт
Перечисленные повыше основные характеристики сочетают фактически любой бонус и являются стереотипными для бездепозитных бонусных начислений в казино. 1×slots зеркало регистрацию более популярный вариант это <a href=https://caidenefeb72838.widblog.com/84480843/exploring-the-frontier-of-ai-pushed-deal-with-swap-videos-a-deep-dive-into-deepnude>https://caidenefeb72838.widblog.com/84480843/exploring-the-frontier-of-ai-pushed-deal-with-swap-videos-a-deep-dive-into-deepnude</a> Также существуют онлайн-платформы азартных игр, которые применяют раздачу бездепозитных призов в особые даты (как для казино, так и для игрока). Помимо сего, действующие геймеры того имеют вероятность получить схожие призы за собственную работа (к примеру, за увеличения уровня или за похожие достижения).Во время забавы в казино, выигрыши, приобретенные благодаря бесплатным призовым фондам, суммируются и включаются в совместную необходимую для отыгрывания. Однако, если фортуна улыбнется и получится отыграть все призы, игровое заведение гарантированно разрешит вывести финансовые свои. Сумма вывода несомненно зависеть от лимита, утвержденного непосредственно в данном учреждении. Поэтому, внимательно надо(надобно) разбирать управляла выдачи анлимитных депо.
1×slots официальный сайт зеркало
2. Создать свежий профиль. Для регистрации надо(надобно) заполнить маленькую анкету или зайдите в личный офис посредством соц сеток; Так же стоит выделить то, собственно в каждом онлайн казино установлен собственный максимальный кешаут на бездепозитный бонус. Как верховодило кешаут — это максимальная сумма денег, которая дешевая для вывода с бездепозитного бонуса.Помните, собственно в некоторых забавах сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных забавах лишь от 5% до 50% суммы ставки считаются как отыгранные средства, в то время как в слотах идет в зачет все one hundred percent суммы. <a href=http://isaevclub.ru/user/Glennsmage/>http://isaevclub.ru/user/Glennsmage/</a> Перед активацией принципиально внимательно выучить обстоятельства промоакции. Чем ниже вейджер, тем больше возможная выгода игрока. Имеют значение кроме лимиты ставок при отыгрыше и сроки, протяжении которых возможно пользоваться предложением. Если бездеп обхватывает ограниченный список игр, рекомендуется разузнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только что, нет случае, случае оператор не установил жесткие ограничения на максимальную необходимую ставки.Во всех легальных онлайн-казино Беларуси необходимо свидетельство паспортных данных для забавы — это требование правительства страны. 1×slot зеркало Также учтите, собственно некоторые игровые платформы сужают список государств, которые готовы получить предложенный бездепозитный бонус за регистрацию. К образцу, существуют онлайн-заведения, выдающие похожие призы только обитателям определенных государств. К образцу, интернет казино 777 Оригинал предоставляет бездепозитный бонус только игрокам из России и государств СНГ. Или наоборот, снабжают вознаграждением всех, кроме жителей неких государств (следует сего, следует пристально изучать список, дабы потом не появилось практически вопросов и претензий).Фриплей-бонусы встречаются только в неких клубах. Они зачисляются сразу после создания профиля и активны недолговременное время. Если не успеете истратить свои, они просто сгорят. Касаемо медли, как бонусы активны протяжении часа.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=13119>1×slots регистрация 1×slotscasino 56 online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Возьми свой подарок. Чаще всего бонус активизируется незамедлительно после регистрации. Но случаются истории, когда надо(надобно) зайти в личный офис либо написать в справочную службу. Но есть игорные заведения, коие готовы просто так жертвовать средства на забаву. Для сего достаточно создать профиль. Чтобы вывести свой выигрыш, для поначалу нужно выполнить обстоятельства отыгрыша, обозначенные в условиях получения бездепозитного депозита.
#5871 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию процедура займет всего лишь
Классическая разновидность приза за создание аккаунта. Его превосходство заключается в, собственно заказчик возможность помощи избирать аппараты и создавать ставки в их. Иногда перечень игровых автоматов ограничен оператором, но все одинаково это другого, чем один-единственный доступный слот, как если, тогда, с использованием фриспинов. <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> <a href=https://www.friend007.com/forums/thread/6498/>https://www.friend007.com/forums/thread/6498/</a> Перечисленные повыше главные свойства сочетают практически каждый приз и считаются стандартными для бездепозитных бонусных начислений в казино. 1×slots зеркало регистрацию более популярный вариант это <a href=https://repyourmaxfitness.com/user/chrisson/?um_action=edit>https://repyourmaxfitness.com/user/chrisson/?um_action=edit</a> Для вывода средств бонус надо(надобно) будет отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариациями отыгрыша бездепозитного приза до его получения, дабы избежать конфликтных обстановок.Бездепозитный приз за регистрацию в казино — это стартовый презент вид денежного начисления или даровых вращений для новых игроков заведения, для получения которого не нужно заносить депозит.
1× slots casino официальный сайт
Помимо остального, для вывода средств по бездепу нужно привнести на счёт свой первый депозит — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало вероятную сумму, в чего вывод средств будет доступен. <a href=http://aficionado.pl/showthread.php?147626–1-x-slots&p=167181>1 x slots</a> 1×slots на любой вкус как пройти регистрацию Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша призов. Заведения постоянно устанавливают наивысшую ставку, возможную по условиям вейждера. <a href=https://montreesounds.com/index.php?action=profile;u=48342>https://montreesounds.com/index.php?action=profile;u=48342</a> сайт 1× slots casino Если идет об неповторимых услугах, может понадобиться регистрация в казино по ссылке с партнерского вебсайта.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 $. Если выдаются фриспины, их количество изредка превышает нескольких 10-ов даровых вращений.
1×slots зеркало проходить регистрацию это отличный вариант
<a href=https://menwiki.men/index.php?title=cкачать_фильмы_торрент>https://menwiki.men/index.php?title=cкачать_фильмы_торрент</a> Каждый новичок и умелый игрок грезят стремительно стартануть и начать создавать реальные ставки. Для этого довольно забрать подарок, за кот-ый не нужно уплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email либо аппарат. После сего администрация начисляет щедрое вознаграждение вид даровых вращений либо виртуальных кредитов.Начнём с того, что любое промо за регистрацию предполагает некоторые условия. Бездепозитные бонусы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность валютного оборота, нужная для выполнения критерий. Пример, получили безвозмездные вращения и выиграли с них 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 рублей, проигрышных или выигрышных, так. После исполнения, бонусный баланс перейдёт на реальный и будет легкодоступным к выводу. 1хслотс официальный сайт зеркало Размер бонуса. В качестве бездепов обычно начисляют очень суммы, а когда речь о призах за депо, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино шансы подарить игроку до 2000$.
1×slots регистрация 1×slotscasino 56 online
Внесение депо – Будьте готовы восполнить счет в отыгрыша бонуса. Это обычное заявка верховодил для этого подобии промо-акций. Лучше заранее уточнить, какую сумму нужно будет заносить на счет. Как управляло, речь о минимальном депозите, но вы обязаны быть уверены, что он вас по карману. 2. Создать свежий профиль. Для регистрации надо(надобно) наполнить маленькую анкету либо зайдите в индивидуальный офис посредством социальных сеток; В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, нужно адресоваться в саппорта через лайв-чат на сайте казино. 1×slots зеркало регистрация то дальше необходимо пройти <a href=http://fr79056g.bget.ru/index.php?name=account&op=info&uname=fallaciouslawn7>http://fr79056g.bget.ru/index.php?name=account&op=info&uname=fallaciouslawn7</a> Фриспины. Бесплатные вращения предусмотрены для использования в видео-слотах. Внимательно читайте обстоятельства – они часто выдаются для некоторых машин. В зависимости от клуба возможность делать конкретное количество ставок. Кстати, современные игорные дома выделяют вероятность заводить «одноруких злодеев».
1×slots официальный сайт мобильная версия
<a href=https://ani.me/p/mpstats0509/info>https://ani.me/p/mpstats0509/info</a> 1×slots официальный регистрация Операторы гемблинга утверждают, собственно так они дерутся с бонус-хантерами. Впрочем, критики считают, что данным казино пробуют устроить из случайного гостя постоянного игрока.
<b>Смотреть еще похожие новости:</b>
<a href=https://swordmaster.org/user/JamesVok/>1х слот регистрация в 1×slots casino</a>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5111/#comment-614226>зеркло казино 1×slots</a>
<a href=https://elclasificadomx.com/author/jameslog/>1×slots зеркало сайта</a>
<a href=https://creapnl.com/foros/tema/1%d1%85%d1%81%d0%bb%d0%be%d1%82-%d1%81%d0%ba%d0%b0%d1%87%d0%b0%d1%82%d1%8c-55/>1хслот скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Перед активацией важно пристально изучить условия акции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, протяжении коих можно пользоваться предложением. Если бездеп обхватывает узкий перечень игр, рекомендуется разузнать максимальные коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только никаких случае, в оператор не установил требовательные лимитирования на максимальную сумму ставки.
#5872 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pinco casino букмекерская контора зенит <a href=https://th-royalgclub.com/>порно с Александр Головин (футбол)</a> порно с Евгения Медведева скачать 1×bet 1×bet xyz <a href=https://specreporter.com/>леон букмекерская контора</a> casinos winning vodka casino Попова Анна Юрьевна порно порно с Васильева Татьяна Викторовна казино рулетка порно с Афонина Марина Игоревна казино играть
DiskiPlus песня казино DiskiPlus up букмекерская контора <a href=https://diskiplus.ru>DiskiPlus Крючкова Полина Викторовна порно</a> DiskiPlus официальные букмекерские конторы скачать DiskiPlus скачать сайт букмекерской конторы <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet регистрация</a> DiskiPlus casinos xyz DiskiPlus kometa casino DiskiPlus пин casino DiskiPlus пинко casino DiskiPlus кент casino DiskiPlus up casino зеркало DiskiPlus казино на деньги
#5873 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasino09k online
Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша бонусов. Заведения всегда устанавливают наивысшую ставку, возможную по условиям вейждера.Мы подготовили перечень, где есть практически актуальные и свежие бездепозитные бонусы казино, которые вам получить безвозмездно. Для наших юзеров есть особые предложения неповторимые призы, коие вы ни не найдете, их мы обозначили особой красноватой плашкой «Exclusive». <a href=http://filmkachat.ru/>1хслот зеркало</a> Минимального оборота. Этот лимит устанавливается вейджером — же игрок не сыграет на установленную необходимую, вывод средств несомненно недосегаем. <a href=https://soctrip.com/post/9bb5eec0-a590–11ef-bb3e-7bacedfd239f>https://soctrip.com/post/9bb5eec0-a590–11ef-bb3e-7bacedfd239f</a> x1 slots регистрация в 1×slots casino <a href=https://www.google.ac/url?sa=i&url=https://doctorlazuta.by/>https://www.google.ac/url?sa=i&url=https://doctorlazuta.by/</a> Чтоб получить крупный выигрыш, избирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша.
1×slots рабочее зеркало на сегодня
<a href=https://vredeenvermaak.be/forum/vrede-en-vermaak/>1хслотс казино зеркало</a> 1×slot зеркало рабочее регистрации на телефон придет В интернете слишком большое скриптовых сайтов, которые принадлежат жуликам. Их основная цель – привлечь гэмблеров, пообещав не только великодушные презенты, но и крупные выигрыши. Так собственно некоторые веб-сайты предлагают получить за регистрацию числе $1 000.Приветственный приз без депозита ? презент за регистрацию. Выдается деньгами, фриспинами или баллами. В последнем случае бонусные баллы применяются для участия в турнирах или обмена на настоящие деньги. <a href=http://zvezdjuchki.ru/user/Richardsic/>http://zvezdjuchki.ru/user/Richardsic/</a> Акции, посвященные календарным праздничным, бывают рассчитаны как на всех пользователей, так и на категории: к, подарок на 8 марта девушкам-игрокам или мужчинам на 23 февраля.Для получения приза нужно ознакомиться с программкой лояльности казино и устроить ставки на сумму, необходимую для перехода на грядущий уровень. 1×slots сайт зеркало В качестве бонусов интернет казино нередко предлагает выдачу фриспинов, то есть безвозмездных вращений игрового барабана. Виртуальные монеты возможно применять для обучения в покерной школе либо для забавы в казино.
1×slots зеркало подтвердит вашу регистрацию если говорить
Исходя из сего, просто не существует разумных оснований махнуть рукою на получение такого приза при регистрации. И, не, на подобный безвозмездной базе у вас все шансы выиграть средства и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, называют безвозмездными интернет платформами для игр. Но ни не забывайте пристально читать правила роли в бонусных промоакциях. Если вы нарушите желая бы одно условие, позже вы не сможете уладить недоразумение с администрацией.Каждая игровая платформа отличается критериями по получению и отыгрышу бездепов. В правилах детально расписаны кратковременные рамки, за которые надо(надобно) прокрутить вейджер. Также не забывайте на наибольший объем ставки и наивысшую необходимую выплаты. С иной стороны, чтобы получить бездепозитные призы казино, довольно израсходовать не более 1 минуты. <a href=http://dobrknigi.ru/howto/?PAGE_NAME=profile_view&UID=22609>http://dobrknigi.ru/howto/?PAGE_NAME=profile_view&UID=22609</a> Возможность сыграть вспомогательное состязание (а время и некоторое) совершенно даром, а выигрыш, к, поступает на счёт игрока.Выиграть настоящие средства в казино не пополняя счет – сложно, но вероятно. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными призами и начните играть на бонусные средства. По статистике каком-то 10-ти заведений возможно заработать маленькую необходимую средств с бонусных средств. 1хслот зеркало Какие бонусы у еще получить считая бездепозитного приза за регистрацию в казино? По мимо бездепозитного бонуса, каждое интернет казино предлагает игрокам прибыльное предложение на 1-ый депо, вы совершаете депозит, ваш депо возрастает в двое или и в 3, что, этим самым начать играть можно с больше крупной суммой, например же не запамятываем тему вейджер на призы.Выбирая даровой приз, внимательно изучайте правила. Убедитесь, что вам можно себя участие в акции. Уточните, в каких играх можно исполнять обстоятельства вейджера. При необходимости задавайте вопросы представителям саппорта.
1×slots зеркало рабочее
Чтобы играть даром на реальные средства в казино, не всегда достаточно просто зарегистрироваться. Иногда нужно выполнить вспомогательные деяния. Теоретически, к безвозмездным бонусам возможно отнести так именуемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, потому что они деют лишь вероятность создавать ставки. Подтверждение персональной инфы. Все казино требуют от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у пользователя иных аккаунтов (мультиаккаунт запрещен). 1×slots зеркало рабочее на сегодня <a href=http://a96549hg.bget.ru/user/DoctorLazutaEl/>http://a96549hg.bget.ru/user/DoctorLazutaEl/</a> Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации подарка нужно подтвердить электрическую почту и привязать телефонный;Например, игрок получил 500 руб. При творении аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 рублей, понадобится устроить 875 спинов для полного отыгрыша.
1×slots зеркало на сегодня
Для тех, кто лишь взвешивает испытывать свою фортуну, а также для проф игроков, разыскивающих свежие площадки для выигрышей, ведущие лицензированные казино нередко организуют разные акции, и одно из лучших услуг прошедшее время – как для новичков, так и для проф игроков – бездепозитный приз за регистрацию. Бездепозитный бонус часто может стать легкодоступным сразу в завершения регистрации, потому как единственным притязанием к нему является регистрация, а после ревизия вашей свежей учетной записи. <a href=http://www.odnopolchane.net/forum/member.php?u=605681>http://www.odnopolchane.net/forum/member.php?u=605681</a> Прежде всего, не запамятовывайте регулярно заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом оценивают наиболее интересные предложения основных игорных порталов.Такие одобрения разрешают бесплатно протестировать новое казино, разобраться с игровым процессом интернет слотов, заработать и исключить маленькую сумму денег. 1×slots зеркало регистрация Бездепозитные призы — это презенты от казино в виде бонусных средств либо фриспинов для игровых автоматов, которые начисляются на аккаунт игрока в процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депозит не потребуется.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Будьте внимательнее при ознакомлении с правилами во избежание происхожденья конфликтных ситуаций с казино, когда последствии отыгрыша бездепа вам не дадут вывести крупную необходимую выигрыша. Благодаря программке лояльности от игорного заведения, возможно взять хороший старт и без дополнительных вложений запустить видеослоты. Кроме как, можно рассчитывать на реальную фортуну и получить, без вложения собственных финансов, великий выигрыш.
#5874 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Мира Андреева (теннис) лучшие казино бесплатно <a href=https://krtka.info/>гта казино</a> 1×bet 1 up casino <a href=https://t.me/vchkogpu_ru>порно с Абрамченко Виктория Валериевна</a> Матвиенко Валентина Ивановна порно pin up casino top top букмекерская контора фонбет официальный Семёнова Татьяна Владимировна порно casino зеркало сайта гама казино 7k casino сайт
DiskiPlus самое казино DiskiPlus 1×bet casino <a href=https://www.diskiplus.ru/>DiskiPlus pin up casino скачать</a> DiskiPlus up casino скачать DiskiPlus 1×bet зеркало <a href=https://www.diskiplus.ru/>DiskiPlus почему казино</a> DiskiPlus казино смотреть онлайн бесплатно DiskiPlus казино пину DiskiPlus букмекерская контора бесплатно скачать DiskiPlus бесплатные букмекерские конторы DiskiPlus порно с Карен Хачанов (теннис) DiskiPlus порно с Баталина Ольга Юрьевна DiskiPlus порно с Петр Ян (ММА)
#5875 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино смотреть онлайн пари букмекерская контора <a href=https://slon-ru.com/>порно с Александр Большунов (лыжные гонки)</a> приложения букмекерских контор на андроид сайт винлайн букмекерская контора <a href=https://kompromat1.online/>почему казино</a> pin casino зеркало порно с Антропова Валентина Викторовна порно с Сергей Бобровский (хоккей) ограбление казино casinos xyz 1×bet зеркало на сегодня Лут Оксана Николаевна порно
DiskiPlus porno Илья Ковальчук (хоккей) DiskiPlus pin up букмекерская контора <a href=https://www.diskiplus.ru/>DiskiPlus скачать букмекерскую контору на андроид</a> DiskiPlus букмекерские конторы в россии DiskiPlus порно с Каролина Севастьянова <a href=https://www.diskiplus.ru>DiskiPlus 1×bet слоты официальный сайт</a> DiskiPlus букмекерская контора на андроид DiskiPlus бесплатные букмекерские конторы DiskiPlus 1×bet зеркало xbet DiskiPlus casino бонус DiskiPlus порно с Алина Загитова DiskiPlus 1×bet слоты 1×bet xyz DiskiPlus 1×bet на сегодня
#5876 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать
Проверка занимает от нескольких мин. До нескольких дней, профессионалы техподдержки все запросить дополнительные документы либо инициировать короткое общение по Skype.Но рядах азартных платформах подобные вознаграждения могут получить теперь зарегистрированные юзеры. В этом случае, бонусы предоставляются масштабах уникальных промоакций или же некоторым игрокам вид акционного предложения, которое приходит на почту с целью «возвратить» игрока в свое казино. <a href=http://filmkachat.ru/>1×slots бонус за регистрацию</a> <a href=https://app.roll20.net/users/15345358/vykup-avariinykh-avto-p>https://app.roll20.net/users/15345358/vykup-avariinykh-avto-p</a> Бездепозитный приз за регистрацию в казино с выводом средств в 2022 году — Наш ресурс дает игрокам актуальную информацию о самых новых, великодушных и испытанных призах в интернет казино, которые обновляются любой денек. 1×slots мобильная версия войти казино <a href=https://www.buhgalteria.ru/forums/user/79097/>https://www.buhgalteria.ru/forums/user/79097/</a>
1× slots casino зеркало
Доступ к подарку может раскрываться механически после введения промокода либо воззвания в саппорта сайта. В первом случае от пользователя не требуется практически поступков. Бездеп с активацией по коду встречается чаще всего. Игроку нужно установить совокупа знаков в графе, кот-ая имеет пребывать в регистрационной форме в Личном кабинете. <a href=https://test.soclanovtsy.ru/topic/35137–1×slots-casino-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-1×slots-review-live/>1×slots casino регистрация 1×slots review live</a> 1×slots регистрация на 1хслотс <a href=http://istinastroitelstva.xyz/index.php?subaction=userinfo&user=foregoingvacanc>http://istinastroitelstva.xyz/index.php?subaction=userinfo&user=foregoingvacanc</a> Мы собрали и выпустили перечень превосходнейших бездепозитных казино с бонусами за регистрацию, которые гарантируют щедрые выигрыши и моментальные выплаты.1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, случае не желайте стать жертвой жуликов или впустую потратить время; 1хслот зеркало Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.Также, учите, что бездепозитный бонус возможно исключить лишь в том случае, когда будут выполнены все обстоятельства отыгрыша.
1×slots зеркало рабочее
<a href=https://www.catfish-assassins.org/forum/memberlist.php?mode=viewprofile&u=954>https://www.catfish-assassins.org/forum/memberlist.php?mode=viewprofile&u=954</a> Для получения бездепа нужно пригласить в игру по реферальной ссылке свежего клиента: он обязан зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на необходимую, обозначенную в критериях промоакции. 1×slot зеркало рабочее регистрации на телефон придет Но рядах азартных платформах сходственные гонорары все получить и уже зарегистрированные пользователи. В этом случае, бонусы предоставляются в оригинальных акций или же неким игрокам вид акционного предложения, которое приходит на почту с целью «возвратить» игрока в свое казино.Процесс доказательства личности возможность взятьвдолг(взятьвзаймы) от одного денька до недели. Если заказчик допустил какую-либо ошибку при заполнении паспортных данных, то ему следует обратиться с проблемой в саппорта онлайн-казино.
1хслотс официальный сайт зеркало
<a href=http://mi.minfish.com/home.php?mod=space&uid=1196847>1×slots официальный сайт скачать</a> Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного приза достаточно пополнения баланса и доказательства личности. В других же клубах, нужно некоторое один прокрутить собственный депо.Подтверждение регистрации. Казино просят привязки профиля к электрическому адресу и номеру аппарата. Для сего на e-mail отправляется послание со ссылкой, а на телефонный ? текстовое извещение с кодом. Ознакомьтесь с нашим списком наихороших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего списка и получите бездеп незамедлительно. Хватайте наихорошие бесплатные предложения ниже и выигрывайте великие деньги, не рискуя! 1×slots регистрация на сайте <a href=http://newsrbk.ru/users_profile.php?id=7928>http://newsrbk.ru/users_profile.php?id=7928</a> Прибывшие на акк деньги бездепозитные призы предназначаются, в основном, лишь для свежеиспеченных пользователей, которые раньше не имели собственного аккаунта в данном казино. Исходя из этого, случае раньше у игрока был сделан депозит, то, по всей вероятности, у него больше не будет способности рассчитывать на получение такого приза в определенном заведении.
1×slot официальный сайт
Бонус без депозита за регистрацию в казино (бездепозитный бонус) – это денежный подарок от клуба, который начисляется на аккаунт игрока в регистрации в казино. Кроме творенья учетной записи, для получения бездепа, очень нередко потребуется ещё и подтвердить контактные данные игрока и/или активировать специальный промо-код. В перечне притязаний к отыгрышу нередко наличествуют лимиты на ставки при ирге на собственные деньги. Так, случае отыграть нужно 30 000 рублей, а максимальная сумма ограничена 30 рублями, то вертеть барабаны предстоит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками условий по срокам деяния акции. <a href=http://gpp.innim.ru:81/profile/panoramichijack>http://gpp.innim.ru:81/profile/panoramichijack</a> Автоматическая активация на самой комфортной, но ручной способ имеет перед ней достоинства. Прежде чем использовать вознаграждение от казино, стоит заранее определить, сколько времени потребуется на выполнение всех критерий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деянья приза.Ограничения по играм. Администрация воспрещает игрокам кое-какие игровые автоматы с бездепозитным призом, средствами или бесплатными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда разделение выполняется по виду игр. Например, отыгрыш возможен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino. 1×slot рабочее зеркало У любой забавы свои притязания по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система зачтет любую ставку. В рулетке и покере устроить это гораздо сложнее. Именно потому например важно пристально разбирать условия получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой игре, то новенькие просто «спустят приз на ветер».Вы не в коем случае ни чем не рискуете, а только выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, выучится регулировать менять ставки и полосы, изучать бонусные забавы и их выигрышные комбинации, ну в конце концов просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные свои, которые можно отыграть и исключить, а не просто на демо счет, тем наиболее адреналин в крови еще больше повысится а пульс забьется с частым ритмом!
<b>Смотреть еще похожие новости:</b>
<a href=https://www.katzenforum.at/forum/media/users/jamesagema.16012/>1×slots официальный demo регистрация в 1×slots casino</a>
<a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=62666>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Риск-игра по равным шансам – Также казино может воспрещать выполнять условия по отыгрышу с помощью раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких других забавах. Самые свежие бездепозитные призы в казино за регистрацию 2022 года с выводом прибыли присутствуют на этой страничке. Посетитель возможность расценить условия получения и начать выступать на средства без внесения депозита. При данном игроку главно понимать, на каких условиях и какими способами него вывести полученный выигрыш. Для этого необходимо оценить перечень присоединенных платежных систем.
#5877 Charlesgunnyhttp://filmkachat.ru
1×slots казино мобильная версия
Акции, посвященные календарным праздникам, бывают рассчитаны как на всех пользователей, например и на категории: примеру, подарок на 8 марта девушкам-игрокам либо мужикам на 23 февраля.Так же стоит выделить то, собственно в каждом онлайн казино установлен собственный максимальный кешаут на бездепозитный бонус. Как управляло кешаут — это предельная сумма средств, кот-ая доступная для вывода с бездепозитного приза. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasino09k online</a> <a href=https://telegra.ph/Ultimate-Guide-to-Professional-Weed-Delivery-North-York-Your-Local-Cannabis-Companion-11–24>https://telegra.ph/Ultimate-Guide-to-Professional-Weed-Delivery-North-York-Your-Local-Cannabis-Companion-11–24</a> 1×slots регистрация 1×slots review live <a href=https://forum.trade-print.ru/showthread.php?t=5162>https://forum.trade-print.ru/showthread.php?t=5162</a>
casino 1×slot
Частенько новички не понимают, как активировать презенты либо исключить 1-ый выигрыш. Для подобных случаев наша команда описала основные определения – что это фриспины, вейджер, как его отыграть, для нужно протекать верификацию. 1хслот скачать Ограничения по играм. Администрация запрещает игрокам кое-какие игровые автоматы с бездепозитным призом, средствами или бесплатными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда разделенье производится по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, хотя запрещен в настольных забавах и в разделе Live Casino. <a href=http://iawbs.com/home.php?mod=space&uid=812255>http://iawbs.com/home.php?mod=space&uid=812255</a> Следует подчеркнуть, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом.Также, ситуации нужно доказать свой номер аппарата, для этого код, полученный в смс-сообщении от клуба установить в специальное поле в личном кабинете игрока. 1×slots официальный зеркало рабочее
1×slots казино зеркало
Проверка занимает от нескольких минут до нескольких дней, спецы техподдержки все запросить вспомогательные документы или инициировать куцее общение по Skype.Бездепозитные призы за регистрацию в игровых автоматах для хозяев онлайн-казино являются частью маркетинговой кампании, направленной на повышение аудитории вебсайта. Так они продвигают средства бренды и завлекают свежих посетителей. Кешбэк-бонус представляет собой возврат фиксированного процента от ставки если, тогда, поражения либо же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не превышает 10%.Зачастую бездепозитные призы казино для игры предлагаются различными заведениями азартных игр в качестве маркетинговых промоакций или в целях привлечения к себя новых игроков. Для бездепозитных призов в казино 2022 геймеру не нужно пополнять счет до этапа вывода хотимых средств. <a href=https://wiki.snooze-hotelsoftware.de/index.php?title=Benutzer:StormyWilbanks8>https://wiki.snooze-hotelsoftware.de/index.php?title=Benutzer:StormyWilbanks8</a> Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, a только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Особую изюминку видео слотам присваивают оригинальные символы. С их появлением активируются разные призы. Вы можете запустить вспомогательный степень и прирастить необходимую выигрыша. Есть знаки, коие замещают ненужные составляющие и сами создают выигрышные комбо. Не стоит забывать и про бонус-тур. После каждого счастливого спина есть шанс прирастить сумму выигрыша в два или хорошо раза. 1 х слотс зеркало Если вы опытный игрок, вы должны аристократия, собственно бонус без депозита – редкая находка. Тем не менее, мы еженедельно исследуем интернет, дабы отыскать для вас наихорошие бездепозитные предложения.
1 x slots
Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации дара нужно подтвердить электрическую почту и привязать телефонный;Можно. Вы всегда сможете отказаться от получения бездепозитного приза за регистрацию в казино, пока Вы не создадите ставку. 1×slots рабочее зеркало на сегодня <a href=https://speakerdeck.com/shopavto7>https://speakerdeck.com/shopavto7</a>
казино 1× slots официальный сайт
В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и когда неоднозначных ситуаций нет возможности куда-то пожаловаться и доказать собственную правоту. <a href=https://www.modernvespa.it/profile/3616-travissmuri/>https://www.modernvespa.it/profile/3616-travissmuri/</a> 1×slots casino регистрация Хотя благотворительные призы начисляются без депозита, не исключено, собственно для понадобиться вносить средства. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты лишь в такого, как новый клиент впервые пополнит игровой счет.Третитй бездепозитный приз за регистрацию – валютные средства. К раскаянию, начислить рубли или доллары способны лишь известные и модные клубы. С их поддержкою появится насладиться каждой доступной игрой – автоматом, рулеткой, кено, блэкджеком.
<b>Смотреть еще похожие новости:</b>
<a href=https://test.soclanovtsy.ru/topic/40228-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-1×-slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82/>казино 1× slots официальный сайт</a>
<a href=http://g2clubs.com/healthy-workout/google/>1 xslots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выбрать казино с бездепозитным бонусом. У нас на сайте представлен список превосходнейших онлайн казино, которые предлагают своим игрокам щедрые призы за регистрацию. Обычно для получения призов без депо, казино выдвигает приклнные и абсолютно выполнимые условия, хотя есть ряд деяний которые воспрещены и все стать неприятные последствия:
#5878 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
демо казино ramenbet casino <a href=https://specreporter.com/>1×bet официальный скачать</a> pin up букмекерская контора Лут Оксана Николаевна порно <a href=https://t.me/vchkogpu_ru>Семёнова Татьяна Владимировна порно</a> r7 casino up букмекерская контора скачать pin casino казино рублях водка казино 1×bet бесплатно винлайн букмекерская контора
DiskiPlus Яровая Ирина Анатольевна порно DiskiPlus Скворцова Вероника Игоревна порно <a href=https://www.diskiplus.ru/>DiskiPlus букмекерская контора без</a> DiskiPlus пин ап казино DiskiPlus ев казино <a href=https://www.diskiplus.ru>DiskiPlus скачать 1×bet на андроид бесплатно</a> DiskiPlus казино ставка DiskiPlus порно с Евгений Малкин (хоккей) DiskiPlus ешь казино DiskiPlus пина casino DiskiPlus букмекерская контора скачать приложение DiskiPlus казино сочи DiskiPlus казино большая
#5879 Charlesgunnyhttp://filmkachat.ru
1×slots казино мобильная версия
Бездепозитные бонусы — это подарки от казино вид бонусных средств или фриспинов для игровых автоматов, коие начисляются на аккаунт игрока в процедуры регистрации на сайте заведения. Для получения этих поощрений депозит не потребуется. <a href=http://filmkachat.ru/>1×slots casino зеркало рабочее</a> На критериях отыгрыша безвозмездных призов следует тормознуть подробнее. С ними связаны нюансы, которые невозможно оставить без внимания. <a href=https://band.us/band/96885593/post/5>https://band.us/band/96885593/post/5</a> 1×slots официальный сайт скачать <a href=http://www.qazaqpen-club.kz/en/user/GlennMes/>http://www.qazaqpen-club.kz/en/user/GlennMes/</a> Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 поболее. Когда игроку надеется количество фриспинов, администрация может бить3 их начисление на некоторое дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах акции.Допустим, за регистрацию вы возымели бездеп в размере 2 000 руб. С вейджером х30. В этом случае предстоит сделать ставок, на общую необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать настоящие средства. Однако не забывайте, собственно с каждого дара получится вывести определённую сумму (почаще всего не более $200).
1×slot зеркало рабочее регистрации на телефон придет
Для получения бонуса надо(надобно) пригласить в игру свежего клиента. Казино начислит пригласившему фиксированный процент от взносов приглашённого в виде бонуса: почаще всего его объем не превышает 10%. Срок деяния бонуса в большинстве случаев не превышает месяца: пригласивший получает бонус от проигранных ставок приглашённого в первый луна игры.Риск-игра по равным шансам – Также казино может воспрещать выполнять условия по отыгрышу за раунда на удвоение, который предлагается в слотах, видео-покере и некоторых иных играх. <a href=https://timepost.info/showthread.php?tid=85847>1хслотс зеркало</a> 1хслотс зеркало на сегодня Для ревизии применяются сканы паспортов, водительских удостоверений, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь замечен в попытке завести вспомогательный акк, все его учетные записи подвергаются блокировке, а их владелец попадает в черный перечень. При ирге на лицензионной площадке надо бояться свидетельствовать достоверную индивидуальную информацию (шифрование ликвидирует утечку персональных данных). <a href=https://hothdporn.pro/user/JustinPenny/>https://hothdporn.pro/user/JustinPenny/</a> Новые посетители онлайн-казино без первого депо имеют выяснить собственную удачливость. К тому же есть возможность преобразовать бездепы в реальные деньги за регистрацию в казино, однако результата приз нужно отыграть согласно условиям промоакции.Чаще всего казино бонус за регистрацию без депозита даёт возможность запустить любой машина. Но другого, как пристально ознакомиться с критериями. Иногда для забавы доступны лишь определённые модели. Если вы новичок и ничего не смыслите в гэмблинге, превосходнее начать знакомство с миром пыла именно с «одноруких злодеев». 1× slots официальный На бонусные начисления все быть установлены дополнительные ограничения, которые Вы не сведению при отыгрыше. Пока бонус полностью не отыгран — деньги из казино не выводятся.Если вы новичок в этом деле и лишь попали в неизведанную вами область азарта — с помощью предложений как бездепозитные бонусы без пополнения.
1×slots зеркало видели такую регистрацию на
Размер призов чаще всего чисто символический и не превышает 50 руб. Приятно, хотя ощутимым бустом деле ли станет. <a href=https://p-tweets.com/Glavdorogadv2106>https://p-tweets.com/Glavdorogadv2106</a> Высокая конкуренция в разделе азартных игр доказывает операторов завлекать посетителей разнообразными промоакциями. Благодаря этому у гостей бывает возможность получить бонусы в казино за регистрацию без депо. Воспользоваться этим предложением возможно, минуя процедуру внесения средств на игровой счет, просто активировав аккаунт на веб-сайте. Наш экскурсовод по бездепам поможет выбрать самую симпатичную бонусную программу, разузнать верховодила получения такого гонорары и распорядиться им с наибольшей выгодой.3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефон либо почту, указать индивидуальную информацию; зеркала 1×slots Бездепы с бесплатными вращениями предоставляют пользователям право вертеть барабаны игровых автоматов без снятия средств со счета. За любой раунд выплачивает казино. Число спинов ограничено и редко превышает сотку. Если акция включает в себя много даровых игр, их начисление возможность быть разбито на количество дней.Популярность интернет казино растёт и всё больше юзеров начинают интересоваться азартными забавами. Бездепозитные бонусы 2022 года, это оригинальные подарки за регистрацию. С их помощью свежие игроки имеют получить безвозмездные вращения или деньги на баланс за 1 регистрацию. С в игорных заведений в интернете, бездепозитные бонусы стали известнейшим способом вербования игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о которых мы расскажем. Наш вебсайт собрал превосходнейшие предложения из онлайна на 2022 год. Воспользуйтесь каким презентом и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить условия.
1×slots зеркало на сегодня
<a href=https://bbs.sinbadgroup.org/index.php?xjkh-tampa-s-poster-pup-for-new-cancer-treatment.t48661.html/page-3555#post-195980>x1 slots регистрация в 1×slots casino</a> Обычно показатель повыше, чем для призов на депо. Не удивляйтесь, если он будет даже х100. Иногда завышенный коэффициент вейджера устанавливается для обитателей отдельных стран. 1× slots casino официальный сайт <a href=https://www.uned-psicologia.com/index.php?action=profile;u=22665>https://www.uned-psicologia.com/index.php?action=profile;u=22665</a> Можно ли в одном онлайн казино получить больше 1-го бонуса за регистрацию? Нет, например как в любом интернет казино есть управляла, к коим нужно держаться, не творить два аккаута для получения призов, иначе будет блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, приз за регистрацию выдаеться раз раз одному лицу.
1хслот официальный сайт зеркало
Но есть игорные заведения, которые готовы просто так жертвовать средства на забаву. Для сего достаточно создать профиль. Чтобы исключить собственный выигрыш, вас поначалу нужно выполнить условия отыгрыша, указанные в критериях получения бездепозитного депо. <a href=https://justpaste.it/eia5m>https://justpaste.it/eia5m</a> Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы которые появляются у начинающих. 1×slots casino регистрация 1×slots review live Бонусы без депозита при регистрации числятся наиболее привлекательными как для опытных игроков, так для и начинающих. Получив это вознаграждение, клиент имеет выступать на настоящие средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные призы в интернет-казино Рунета, а условия их активации и выигрыша.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/8551/#comment-351129>1×slots регистрация</a>
<a href=https://smm-seo.ru/members/rabofreeol.4209/>1×slots зеркало на сегодня</a>
<a href=https://www.mshowto.org/forum/members/jamespauri.html>1×slots зеркало быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не можете активировать и получить бездепозитный приз. Бездеп с фриспинами может обхватывать всю коллекцию игр на сайте или разработки 1-го провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении акции. Выигрыш возможность быть выведен после того, как пользователь отыграет данную необходимую. Возможность расценить полный функционал слотов — главное совершенство данной разновидности. Игроку становятся доступны те опции, коие отсутствуют в демонстрационном режиме, а возможность выиграть реальные деньги добавляет ясных азартных ощущений.
#5880 Charlesgunnyhttp://filmkachat.ru
рабочее зеркало 1хслотс
Можно. Вы практически можете отказаться от получения бездепозитного приза за регистрацию в казино, же Вы не сделаете ставку. <a href=http://filmkachat.ru/>рабочее зеркало 1×slots</a> <a href=https://www.zybuluo.com/comcgifurniture/note/2570100>https://www.zybuluo.com/comcgifurniture/note/2570100</a> Для ревизии применяются сканы паспортов, водительских прав, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если юзер обнаружен в попытке завести вспомогательный акк, все его учетные записи подвергаются блокировке, а их владелец попадает в темный список. При игре на лицензионной площадке надо опасаться указывать достоверную персональную информацию (шифрование ликвидирует утечку индивидуальных данных). 1×slots казино зеркало <a href=https://www.one2bay.de/forum/member.php?action=profile&uid=28965>https://www.one2bay.de/forum/member.php?action=profile&uid=28965</a> Отыграв бездепозитный бонус в казино с выводом тоже придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в сходственное лимитирование существует, то единоразово вывести получится только необходимую, не превосходящую объем полученного приза.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Раздача призов имеет быть приурочена к разным датам: календарные праздничные, дни рождения игроков, годовщина открытия казино и т. Д. Подарок выдается вид средств, фриспинов либо баллов для накопления и размена на предложения оператора. Если юзер получает выигрыш, средства начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд требований.Такой казино приз без депозита за регистрацию выдается игроку на час и энергично используется данное предложение с 2017 года. Это как бы какая-то маскировка одобрения под бездепозитный. Суть всего этого сводится к что, этому, что игроку на час выдается, к примеру, 1000 долларов, а реклама твердит о том, что каждой выигрыш возможно будет дальнейшем забыть при для. Но случае играющий серьезно отнесется к данному предложению, то он просто потеряет время. Ведь игроку нужно несомненно выступать не в аккаунте, в тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (и всей тыс. ) в управляла вступят конкретные обстоятельства, где несомненно сказано, собственно максимальной суммой победы имеет быть лишь двести долларов и средства возможно применять только в приза на 1-ый лепта с вейджером 25 от суммы гонорары плюс сам депо. По итогу получится, собственно игрок выигрывал себе 200% приз с вейджером на определенную сумму. Короче говоря, это все не стоит вашего времени. <a href=https://10nsk.ru/user/JosephSuple/>1хслотс официальный сайт зеркало</a> 1 x slots casino Бездеп с фриспинами может обхватывать всю коллекцию игр на сайте или разработки 1-го провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш имеет быть выведен последствии такого, как пользователь отыграет эту сумму. Возможность оценить глубокий функционал слотов — основное достоинство этой разновидности. Игроку становятся доступны что, эти функции, коие отсутствуют в демонстрационном режиме, а вероятность выиграть реальные средства прибавляет ярких азартных ощущений.Прежде всего, не запамятовывайте периодически заглядывать на страницу обзоров бездепозитных бонусов. Они шаг за шагом осматривают более занимательные предложения основных игорных порталов. <a href=http://wuyuebanzou.com/home.php?mod=space&uid=533627>http://wuyuebanzou.com/home.php?mod=space&uid=533627</a> В каждом казино с бездепозитным бонусом предусмотрены вейджеровые обстоятельства. Это единственный «подводный камень», кот-ый стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, нужно сделать определённое число ставок. Чем круче приз, тем труднее выполнить обстоятельства, и наоборот. 1×slots регистрация 1×slotscasino09k online Наиболее пользующиеся вознаграждения среди гэмблеров – бездепозитные бонусы казино. Это не дивно, как можно получить бесплатные вращения или виртуальные кредиты, и при не придётся пополнять счёт, рисковать личностными средствами. Удастся насладиться различными увеселениями причем выиграть крупную необходимую, избегая серьёзного риска.
1хслотс казино зеркало
Создание аккаунта. На сайте казино необходимо обнаружить регистрационную форму и заполнить пустующие поля личностными данными. Иногда на этом этапе потребуется указать лишь адресок электронной почты и пароль, но чаще хотелось наполнить анкету индивидуальной информацией (ФИО, дата рождения, место проживания и т.д. ). Нужно свидетельствовать только настоящие данные, потому впоследствие они станут проверены. <a href=https://finbi.ru/user/TerryJar/>https://finbi.ru/user/TerryJar/</a> 1×slots регистрация 1×slotscasino09k online Главное преимущество спинов – вероятность выучить различные слоты. Также удастся насладиться бонусными раундами, испытывать удачу в риск-туре и преумножить выигрыш за счёт особых знаков. Однако не только игровой процесс заслуживает внимание, ведь чем сосредоточиться на реальном выигрыше.Но разу не забывайте пристально разбирать правила участия в бонусных акциях. Если вы нарушите желая бы одно условие, позднее вы не можете уладить недоразумение с администрацией.
1×slots зеркало на сегодня
<a href=http://nhomtruyen.com/members/jamesgaw.9280/>1 x slots</a> Также, в этом случае необходимо подтвердить собственный номер телефонного, желаемого код, приобретенный в смс-сообщении от клуба ввести в особое поле в личном кабинете игрока. 1×slots регистрацию процедура займет всего лишь <a href=https://casino993.com/bbs/board.php?bo_table=free&wr_id=147172>https://casino993.com/bbs/board.php?bo_table=free&wr_id=147172</a>
1хслот скачать
Во всех законных онлайн-казино Беларуси необходимо свидетельство паспортных данных для забавы — это заявка правительства государства.Но рядах азартных платформах подобные гонорары шансы получить теперь зарегистрированные юзеры. В таком случае, призы предоставляются в оригинальных промоакций либо же неким геймерам повторяющий акционного предложения, коие прибывает на почту с целью «возвратить» игрока в свое казино. <a href=http://www.cruzenews.com/wp-content/plugins/zingiri-forum/mybb/member.php?action=profile&uid=1901182>http://www.cruzenews.com/wp-content/plugins/zingiri-forum/mybb/member.php?action=profile&uid=1901182</a> Промокод – определённая комбинация символов, коию необходимо ввести в подходящее фон при твореньи учетной записи либо активировать в собственном профиле игрока в разделе с бонусами.Следует подчеркнуть, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам или с определенным кодом. 1×slots официальный сайт зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://amazon.rx22.ru/memberlist.php?mode=viewprofile&u=255>1×slots регистрация на официальном сайте</a>
<a href=https://www.reisezielforum.de/viewtopic.php?t=437084>1 x slots</a>
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=4594>1× slots регистрация в 1×slots casino</a>
<a href=https://ragnarok.ch/forum/viewthread.php?thread_id=134409>1×slots зеркало этих способов предполагает регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Однако в критериях исчезают «подводные камешки», коие не разрешат вывести солидную необходимую либо же вы не успеете отыграть вейджер. Поэтому мастера советуют арестовать бесплатные вращения за регистрацию в казино без депозита, дабы поднабраться опыта и получить настоящий шанс на победу.
#5881 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино можно 1×bet скачать приложение <a href=https://www.ossetia.tv/>Черкесова Бэлла Мухарбиевна порно</a> лучшие букмекерские конторы Разуваева Ксения Денисовна порно <a href=https://m.repost.news/>porno Яна Троянова</a> официальные букмекерские конторы скачать cometa casino 7k casino зеркало рабочее casino riobet казино рояль смотреть фильмы казино рояль карты казино
DiskiPlus винлайн букмекерская контора DiskiPlus порно с Евгения Медведева <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet официальный сайт 1×bet xyz</a> DiskiPlus Анна Михалкова DiskiPlus up casino официальный <a href=https://www.diskiplus.ru/>DiskiPlus porno Дарья Клишина</a> DiskiPlus лучшие казино бесплатно DiskiPlus 7k casino DiskiPlus ограбление казино DiskiPlus 7k casino бонус DiskiPlus казино вход DiskiPlus скачать сайт букмекерской конторы DiskiPlus cat casino
#5882 Charlesgunnyhttp://filmkachat.ru
1×slots акции
Однако в критериях скрываются «подводные камешки», коие не позволят вывести крупную необходимую либо же вы не успеете отыграть вейджер. Поэтому профессионалы рекомендуют отобрать безвозмездные вращения за регистрацию в казино без депо, дабы поднабраться опыта и получить реальный шанс на победу. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало рабочее</a> В истиннее время получить бонус за регистрацию в казино очень просто. Почти каждый игорный дом с готовностью предоставит средства или бесплатные вращения. Многие игроки используют данным и не стыдятся регистрироваться в любом клубе с прибыльными условиями. Кстати, это замечательная вероятность выдумать выигрышную стратегию и сорвать куш. <a href=https://webanketa.com/forms/6gtk2c9r64qk4cb5cgw66c9p/>https://webanketa.com/forms/6gtk2c9r64qk4cb5cgw66c9p/</a> 1×slots рабочее зеркало на сегодня <a href=http://eric1819.com/home.php?mod=space&uid=217573>http://eric1819.com/home.php?mod=space&uid=217573</a> Заполняя данные в собственном профиле, указывайте только достоверную информацию, так как Вам придется ее доказать в будущем при выводе средств.Призовые начисления без депо имеют предоставляться для роли в турнирах онлайн казино. Потратить перечисленные деньги возможно самая в рамках данной промоакции. Условия их проведения себе ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, другого выучить его правила.
1×slots регистрация то дальше необходимо пройти
1×slots официальный сайт, скачать <a href=http://autotek.lv/user/Joshuaesori/>http://autotek.lv/user/Joshuaesori/</a> Исходя из сего, просто не существует осмысленных причин махнуть рукой на получение такового приза при регистрации. И, не, на подобный бесплатной базе у вас есть шансы выиграть деньги и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные бонусы, нарекают бесплатными интернет платформами для игр.Такой бесплатный эквивалент средств зачисляется на профиль пользователя последствии воплощения притязаний и предназначаются они только для игрового процесса. Вывод этих вознаграждений возможен лишь в осуществления вейджеровых условий. 1хслот зеркало Бонусы без депозита при регистрации считаются наиболее красивыми как для опытных игроков, например для и начинающих. Получив такое вознаграждение, заказчик имеет играть на настоящие средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные призы в интернет-казино Рунета, а также условия их активации и выигрыша.
1× slots сайт
Начнём с такого, что любое рекламную за регистрацию предполагает некоторые обстоятельства. Бездепозитные призы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность валютного оборота, нужная для исполненья условий. Пример, возымели бесплатные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 руб., проигрышных либо выигрышных, не. После выполнения, бонусный баланс перейдёт на реальный и станет легкодоступным к выводу.Как и другие акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения считаются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих посетителей и дозволяет им составить эмоцию о функционале, не рискуя вескими совокупностями. <a href=http://www.haxorware.com/forums/member.php?action=profile&uid=282288>http://www.haxorware.com/forums/member.php?action=profile&uid=282288</a> Доступные забавы – В неких азартных забавах возможно понизить математическое превосходство казино до нескольких 10-х процента. В их числе многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как управляло, в таких забавах ставки идут в зачет вейджера не всецело. Например, может учитываться лишь 50%. В неких забавах бездепозитные призы вообще нельзя отыгрывать.Срок отыгрыша — это этап, кот-ый наступает в момент активации бонуса и кончается с его закрытием. Пользователю необходимо уложиться в данный временной зазор, по призовые свои аннулируются. Казино устанавливают перечень игр, ставки в которых засчитываются при расчете отыгранных денег. Если тайтл не заходит в данный перечень, то ему быть недосегаем для загрузки период действия бонусного предложения. 1хлот регистрация в 1×slots casino Помните, что в некоторых играх сумма ставки идет в зачет вейджера только отчасти. Так, в настольных и карточных забавах только от 5% до 50% суммы ставки числятся как отыгранные деньги, тот как в слотах идет в зачет все one hundred percent суммы.
казино 1×slots официальный сайт
Так же стоит выделить то, что в любом интернет казино установлен свой наибольший кешаут на бездепозитный приз. Как правило кешаут — это максимальная сумма денег, которая дешевая для вывода с бездепозитного бонуса.Если простыми текстами, бездепы – это определённая сумма денег либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать подарки. Но есть некоторые нюансы. Существуют игорные жилища, коие перед что, этим как начислить призы настоятельно привязать телефонный, дать копии документов. <a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=59529&result=reply>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a> Так собственно приготовьтесь предоставить секретную информацию (пол, возраст, страна проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает менее суток, в чего получится беспрепятственно выводить крупные выигрыши. 1хслотс официальный сайт зеркало <a href=https://www.autorepguide.com/member.php/7867-JamesFeark>https://www.autorepguide.com/member.php/7867-JamesFeark</a> Для получения приза надо(надобно) пригласить в игру свежего клиента. Казино начисляет пригласившему фиксированный процент от взносов приглашённого в виде бонуса: чаще всего его объем не превышает 10%. Срок действия приза в большинстве случаев не превышает месяца: пригласивший получает бонус от проигранных ставок приглашённого в первый луна игры.
1× slots официальный
<a href=http://bbs.qc0769.com/home.php?mod=space&uid=428321>http://bbs.qc0769.com/home.php?mod=space&uid=428321</a> В интернет-сети постоянно возможно отыскать перечни более известных и обещанных поощрительных программ от известных онлайн-казино.Фриспины предусмотрены для использования в видео слотах. Внимательно ознакомьтесь с критериями – часто их выдают на кое-какие автоматы. В зависимости от клуба, у вас выйдет устроить определённое количество ставок. Кстати, продвинутые игорные дома позволяют запускать любых «одноруких злодеев». 1×slots зеркало проходить регистрацию это отличный вариант Такие одобрения разрешают бесплатно протестировать свежее казино, разобраться с игровым процессом онлайн слотов, заработать и исключить маленькую необходимую средств.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=94922&p=1380030#p1380030>1хслот зеркало</a>
<a href=http://forums.indexrise.com/thread-309-post-371778.html#pid371778>1×слот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Каждый из бездепозитных призов без пополнения 2022 содержит собственный конкретный вейджер для отыгрыша, например же в любом казино он уточняется индивидуально — где то он х55 а кое-где х30, повторюсь везде по разному!
#5883 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пари букмекерская контора casino buzz <a href=https://krtka.info/>Самойлова Алла Владимировна порно</a> скачать сайт букмекерской конторы казино вход <a href=https://rhymes-punches.com/>casino</a> порно с Анна Калинская (теннис) casino online зеркало про казино 1×bet на андроид сайт букмекерской конторы лучшие онлайн казино 7k casino сайт
DiskiPlus порно с Александр Большунов (лыжные гонки) DiskiPlus pin up casino пин ап <a href=https://diskiplus.ru/>DiskiPlus букмекерская контора вход</a> DiskiPlus казино на деньги DiskiPlus порно с Варвара Субботина <a href=https://diskiplus.ru>DiskiPlus porno Игорь Акинфеев (футбол)</a> DiskiPlus мобильные букмекерские конторы DiskiPlus casino buzz DiskiPlus порно с Дарья Клишина, легкоатлетка DiskiPlus casino ru DiskiPlus casino DiskiPlus порно с Арина и Дина Аверины, гимнастки DiskiPlus 1×bet официальный слоты
#5884 StacyVuphttps://sitetime.kiev.ua
Хотите стильный интерьер <a href=https://sitetime.kiev.ua/>https://sitetime.kiev.ua</a> Наш портал предлагает уникальные идеи, профессиональные рекомендации и примеры лучших дизайн-проектов.
#5885 Raymondboomihttps://smallbusiness.dp.ua
Экспертный строительный портал <a href=https://smallbusiness.dp.ua/>https://smallbusiness.dp.ua</a> для вашего проекта! Советы, новинки и инструкции для тех, кто хочет сделать всё идеально.
#5886 Charlesgunnyhttp://filmkachat.ru
1×slots сайт зеркало
Для получения предоставленных бонусов вам пригодиться — ПК или мобильное устройство, и остальное дело за небольшим. <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> Новые клиенты онлайн-казино без первого депо шансы выяснить свою удачливость. К тому же есть вероятность преобразовать бездепы в реальные средства за регистрацию в казино, впрочем результата приз нужно отыграть сообразно условиям промоакции. <a href=https://u.pcloud.link/publink/show?code=XZNQwV5ZNtDPSsk07bJazNAm6jpRESTTmoa7>https://u.pcloud.link/publink/show?code=XZNQwV5ZNtDPSsk07bJazNAm6jpRESTTmoa7</a> Oтыгpaть бонус с указанным вeйджepом, достичь нужно сдeлaть cтaвoк нa cумму, превосходящую размер приза в некоторое раз. зеркло казино 1×slots <a href=http://helenos.pavel-rimsky.cz/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D0%BD%D0%B0%20%D0%B4%D0%B7%D0%B5%D0%BD%D0%B5>http://helenos.pavel-rimsky.cz/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D0%BD%D0%B0%20%D0%B4%D0%B7%D0%B5%D0%BD%D0%B5</a> Для получения депозитного бонуса необходимо пополнить собственный игровой баланс реальными средствами. Вознаграждение можно получить или при внесении первого депо, либо в виде фиксированного процента от внесённых средств. Так либо по, бонус поступит на счёт лишь после пополнения.Когда речь о получении бездепозитных бонусов в казино, начала обратите внимание на следующие условия:
1×slots официальный сайт скачать
Можно ли в одном интернет казино получить больше одного приза за регистрацию? Нет, так как в каждом онлайн казино есть правила, к которым надо(надобно) придерживаться, не творить 2 аккаута для получения бонусов, по несомненно блокировка обоих аккаутов, не пытайтесь обмануть онлайн казино, бонус за регистрацию выдаеться один один 1 личику.Бездепозитные призы истинными деньгами, которые возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадались. <a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=36849>1×slots сайт</a> 1×slots casino регистрация 1×slots review live Также существуют онлайн-платформы азартных игр, коие используют раздачу бездепозитных бонусов в особые даты (как для казино, например и для игрока). Помимо этого, действующие игроки кроме имеют возможность получить похожие призы за собственную работа (к примеру, за увеличения значения либо за схожие заслуги).Для тех, кто только взвешивает испытать собственную фортуну, а также для профессиональных игроков, разыскивающих новые площадки для выигрышей, водящие лицензированные казино часто организуют разные промоакции, и лучшее предложений за время – как для начинающих, например и для профессиональных игроков – бездепозитный бонус за регистрацию. <a href=https://smlabtech.com/bbs/board.php?bo_table=free&wr_id=289999>https://smlabtech.com/bbs/board.php?bo_table=free&wr_id=289999</a> Не стоит незамедлительно же открещиваться от приветственных даров в похожих казино. Администрация готова начислить средства или фриспины, хотя предварительно работники обязаны увериться, собственно вы не аферист. Дело в, собственно развелось очень большое охотников за бонусами. Они выучились врать систему и наваривать крупные суммы средств. 1×slot регистрация Более солидные предложения встречаются очень изредка. Зачастую они доступны лишь VIP-игрокам. В остальных случаях им наверняка сопутствуют довольно жесткие условия отыгрыша. Также вероятны дополнительные обстоятельства и лимитирования, прописанные в условиях и положения бонусной программы казино.
1×slots официальный сайт зеркало
Будьте внимательнее при ознакомлении с правилами во избежание происхожденья конфликтных ситуаций с казино, когда последствии отыгрыша бездепа вам не дадут исключить крупную необходимую выигрыша. Так что можете отважно регистрироваться без всяких размышлений. Фортуна сегодня наверняка на вашей стороне. Не опасайтесь, как последствие какого или убытка Вам абсолютно не угрожает. С такими бонусами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе. <a href=http://psvhome.ru/user/WalterJed/>http://psvhome.ru/user/WalterJed/</a> Ограничения по забавам. Администрация воспрещает игрокам кое-какие игровые автоматы с бездепозитным бонусом, средствами или бесплатными вращениями. Обычно, в правилах приводится глубокий список слотов для отыгрыша. Иногда деление производится по виду игр. Например, отыгрыш возможен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino.Пoдтвepдить личнocть клиента. Для удачного вывода средств, необходимо подтвердить личность посетителя. Нa этaпe вepификaции пpoфиля, сотрудники службы защищенности должны увериться, что у игрока более один аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не сможет исключить свой выигрыш, если у него будет некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы. зеркала 1×slots
x1 slots регистрация в 1×slots casino
Игры, в которых возможно играть на бонусные деньги. Проверьте список игр, каких возможно выступать на бонусные средства, возможно они Вам не понравятся и надо тратить своё время на эту промоакцию. 1×slots подтвердит вашу регистрацию если говорить <a href=http://flightgear.jpn.org/userinfo.php?uid=41574#>http://flightgear.jpn.org/userinfo.php?uid=41574#</a> Бесплатный приз – кредиты, которые онлайн-казино начислит посетителю, не принуждая его пополнять игровой счет.
1×slots зеркало видели такую регистрацию на
Главное превосходство спинов – возможность выучить разные слоты. Также получится насладиться бонусными раундами, испытать фортуну в риск-туре и преумножить выигрыш за счёт особенных символов. Однако столько игровой процесс заслуживает внимание, так другого сосредоточиться на реальном выигрыше.Мы рекомендуем не отказываться от подобных предложений известных казино. Выделите количество минут на регистрацию, получите бонус и попробуйте его отыграть. Может быть, сейчас фортуна несомненно на вашей стороне! <a href=https://www.ipixels.com/profile/64858/Tyroneopelt>https://www.ipixels.com/profile/64858/Tyroneopelt</a> онлайн казино 1×slots Чтобы получить вероятность исключить выгода с бездепозитного бонуса в казино, необходимо выполнить ряд условий:Каждая игровая перрон выделяется критериями по получению и отыгрышу бездепов. В правилах отчетливо расписаны временные рамки, за которые надо(надобно) прокрутить вейджер. Также не запамятовывайте на максимальный объем ставки и максимальную необходимую выплаты. С другой стороны, дабы получить бездепозитные бонусы казино, довольно потратить менее 1 минутки.
<b>Смотреть еще похожие новости:</b>
<a href=https://australiantravelforum.com/Upload/showthread.php?tid=174209>1×slots на любой вкус как пройти регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Одним из предлогов отдавать привилегию 1 либо другому заведению содержится в привлекательности предлагаемых промоакций и бесплатных услуг. Безвозмездные фриспины, выдаваемые без дела делать какой-нибудь лепта, в списке находится далеко не в конце. Получать информацию о самых прибыльных призах возможно без постоянного прогноза новостей казино. Мы взяли эту задачу на себя и постоянно следим за услугами операторов, выбирая лучшие из их. В данном разделе собраны последние бездепы, промокоды к ним и условия их активации. Список промоакций периодически пополняется. В топ вошли самые свежие бездепозитные бонусы за регистрацию в казино 2020, временные и закрытые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и другим аспектам. Если срок действия промоакции истек, она удаляется из списка.
#5887 FrankBaindhttps://ppk-213.ru
программа производственного контроля лаборатории <a href=https://ppk-213.ru/>новая программа производственного контроля в школе</a>
#5888 DanielLaucthttps://sculptureproject.org.ua
Всё о дизайне интерьера <a href=https://sculptureproject.org.ua/>https://sculptureproject.org.ua</a> в одном месте! Узнайте, как создать уютное, стильное и функциональное пространство, которое будет радовать каждый день.
#5889 Charlesgunnyhttp://filmkachat.ru
скачать 1×slots официальный сайт
Чаще всего интернет-казино предлагают бездепозитные призы свежим пользователям. Эта промо-акция очень эффективно привлекает новичков, подталкивая их к открытию счета. Конечно, не все становятся преданными посетителями, хотя сам факт регистрации аккаунта играет на руку заведению. <a href=http://filmkachat.ru/>1×slots регистрация на сайте</a> Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс дает игрокам актуальную информацию о самых свежих, щедрых и проверенных призах в онлайн казино, которые обновляются любой день. <a href=https://juicedmuscle.com/forum/general/general-chat/264982-creating-immersive-spaces-the-art-and-science-of-3d-walkthrough-animation>https://juicedmuscle.com/forum/general/general-chat/264982-creating-immersive-spaces-the-art-and-science-of-3d-walkthrough-animation</a> 1×slots регистрация 1×slots review live <a href=http://clasificadosdolores.com.ar/sitio/author/joshuatet>http://clasificadosdolores.com.ar/sitio/author/joshuatet</a> Этот образ бонуса несомненно добавлен на Ваш аккаунт в успешной процедуры регистрации с использованием номера телефонного. Если избрать иной метод творения учетной записи, бездеп не несомненно добавлен на Ваш акк.В качестве бонусов онлайн казино нередко предлагает выдачу фриспинов, то есть даровых вращений игрового барабана. Виртуальные монеты можно использовать для изучения в покерной школе либо для игры в казино.
casino 1×slot
1×slots зеркало этих способов предполагает регистрацию Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала резвые выводы. Фишка выплат в, что достаточно избрать платёжный инструмент и указать сумму. В большинстве случаев деньги зачисляются на электронные кошельки протяжении 15 мин., а на банковские карты – 1–3 рабочих денька.Вы не в коем случае ни чем рискуете, а только выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической игры на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, научится регулировать менять ставки и полосы, исследовать бонусные игры и их выигрышные композиции, ну счете просто зарядится кучей впечатлений! Ведь вы будите выступать на бонусные свои, коие можно отыграть и исключить, но просто на демо счет, тем наиболее адреналин в крови еще повысится а пульс забьется с частым ритмом! <a href=http://krankin.ru/bitrix/redirect.php?goto=http://kerry-kids.ru/bitrix/redirect.php?goto=http://rusgrain.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/K4PgwE_aJoG>http://krankin.ru/bitrix/redirect.php?goto=http://kerry-kids.ru/bitrix/redirect.php?goto=http://rusgrain.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/K4PgwE_aJoG</a> 1×slots бездепозитный бонус за регистрацию
рабочее зеркало 1×slots
Во время игры в казино, выигрыши, приобретенные благодаря бесплатным призовым фондам, суммируются и срабатывают в совместную сумму для отыгрывания. Однако, случае удача улыбнется и получится отыграть все призы, игровое заведение гарантированно разрешит исключить денежные средства. Сумма вывода будет зависеть от лимита, одобренного именно в этом учреждении. Поэтому, внимательно нужно разбирать управляла выдачи анлимитных депозитов.Зарегистрироваться в казино по специальной ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефонного и электрическую почту). Для подтверждения номера телефона необходимо в собственном профиле указать собственный номер и надавить кнопку „Подтвердить номер аппарата“, дальше Вы получите sms-сообщение с кодом, кот-ый необходимо установить в подходящее поле. Для подтверждения электронной почты, перейти по активной ссылке в послании от казино. Простая процедура получения бездепозитного бонуса, которая займет не более 2-х минут. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные.В лицензионных бездепозитных казино выступать в азартные забавы действительно неопасно. Наличие лицензии одобряет что, этот прецедент, что клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP. <a href=https://fofik.de/author/lindaserran/>https://fofik.de/author/lindaserran/</a> Составленный знатоками Casino.ru список онлайн-казино с бездепозитным призом дозволяет игрокам сопоставить спецпредложения разных операторов.У нас на веб-сайте Вы отыщите перечень призов без депозита в проверенных казино и доскональную информацию то как их получить и использовать. 1×slos регистрация в 1×slots casino
казино 1×slots официальный сайт
В случае установленного лимита на сумму вывода выигрыша с бездепозитного приза, игрок не сможет исключить больше заявленной суммы. Бездепозитные призы за регистрацию считаются одним из самых популярных методов привлечения новых игроков в онлайн-казино, потому что они деют игрокам возможность опробовать казино, более игровые автоматы, и вероятно, выиграть настоящие деньги. Иногда у посетителей сайта могут появиться трудности, задачи, препядствия при активации полученного промо-кода. В этих случаях, необходимо обратиться за поддержкою в службу поддержки «Support». Для получения ответа, обязательно указывается определенная причина воззвания и подтверждается информация дополнительными скриншотами. Если сложилась неоднозначная обстановка, постоянно можно обратиться к основному регулятору или контролирующему органу, выдавшему этому заведению лицензионный документ. 1х слот регистрация в 1×slots casino <a href=https://subaru-vlad.ru/forums/users/evogure/>https://subaru-vlad.ru/forums/users/evogure/</a> Мы собрали и опубликовали список превосходнейших бездепозитных казино с бонусами за регистрацию, которые гарантируют щедрые выигрыши и мгновенные выплаты.Вейджер (или вагер) ? это наименьшая сумма ставок, которую нужно устроить для вывода денежного приза. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение.
1×slots промокод при регистрации
Бездепозитные бонусы начисляются лишь один раз. Не стоит раскрывать свежие аккаунты, дабы получить их повторно. Служба безопасности казино непременно выявит «левого» участника и перекроет. Если посетитель выполнит нужные притязания, отыграет свою ставку и решит исключить собственный выигрыш, то ему нужно принять, собственно казино обязательно востребует предоставить ксерокопии собственных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные свои вывести не удастся. <a href=http://www.khretech.com/bbs/board.php?bo_table=free&wr_id=78612>http://www.khretech.com/bbs/board.php?bo_table=free&wr_id=78612</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots Бездепы с безвозмездными вращениями предоставляют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд платит казино. Число спинов ограничено и изредка выше сотню. Если акция включает в себя количество безвозмездных игр, их начисление имеет быть разбито на количество дней.Для как, чтобы отыграть необходимую вашего бездепозитного бонуса надо(надобно) выполнить условия вейджера. Очень часто фриспины даются на конкретные слоты (book of ra, book of dead, book of sun), выбирайте слот себе по, они довольно очень и высококачественные. Бездепозитные приз может быть валютным например и в виде фриспинов на слоты
<b>Смотреть еще похожие новости:</b>
<a href=https://www.digicube.de/forum/threads/507560–1×slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F?p=710007#post710007>1×slots регистрация</a>
<a href=https://forum.bedwantsinfo.nl/thread-192530-post-1259369.html#pid1259369>1×слот регистрация в 1×slots casino</a>
<a href=https://demo.comuni-italiani.it/forum/viewtopic.php?f=9&t=480587>1 x slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, solid зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.
#5890 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up casino официальный букмекерская контора скачать приложение <a href=https://m.repost.news/>автомат казино</a> букмекерская контора официальный сайт букмекерскую контору пин <a href=https://www.ossetia.tv/>1×bet</a> 1×bet бесплатно 1×bet приложение pin up casino Москалькова Татьяна Николаевна порно porno Марина Александрова pin casino зеркало casino зеркало сегодня
DiskiPlus официальное казино вход DiskiPlus 1×bet 1хбет <a href=https://diskiplus.ru/>DiskiPlus винлайн букмекерская контора официальный</a> DiskiPlus porno Алена Михайлова DiskiPlus букмекерская контора вход <a href=https://www.diskiplus.ru/>DiskiPlus pin up casino top top</a> DiskiPlus 1×bet зеркало DiskiPlus порно с Голикова Татьяна Алексеевна DiskiPlus порно с Анна Калинская (теннис) DiskiPlus porno Нина Пирогова, хоккеистка DiskiPlus порно с Анастасия Потапова, теннисистка DiskiPlus официальное казино вход DiskiPlus 1×bet официальный слоты
#5891 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало
Если ординарными словами, бездепы – это определённая сумма средств или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать презенты. Но есть кое-какие нюансы. Существуют игорные жилища, которые перед что, этим как начислить призы просят привязать телефонный, дать копии документов. <a href=http://filmkachat.ru/>рабочее зеркало 1×slots</a> Многие казино деют в маркетинговых целях безвозмездные бонусы исключительно для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой сайт по партнерской ссылке с нашего портала. <a href=https://getinkspired.com/ru/blog/519873/post/1478590/how-3d-visualization-companies-are-reshaping-global-business-landscapes/>https://getinkspired.com/ru/blog/519873/post/1478590/how-3d-visualization-companies-are-reshaping-global-business-landscapes/</a> 1х слотс зеркало регистрация в 1×slots casino <a href=https://www.rmbbk.com/space-uid-1233895.html>https://www.rmbbk.com/space-uid-1233895.html</a> У нас на веб-сайте Вы найдете список призов без депозита в проверенных казино и подробную информацию про как их получить и использовать.Подарки на дни ? посвященные торжественным датам, требующие символического отыгрыша или начисляются без это. Могут дариться игрокам сутки рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду.
1×slots casino зеркало рабочее
<a href=https://bajarmp3.net/showthread.php?tid=427464>1×slot рабочее зеркало</a> 1×slots casino регистрация 1×slotscasin online Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша призов. Заведения практически устанавливают максимальную ставку, допустимую по условиям вейждера. <a href=https://lyfepal.com/forums/thread/5395/%D0%90%D0%B2%D1%82%D0%BE%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D1%87%D1%82%D0%BE-%D1%8D%D1%82%D0%BE-%D0%B8-%D0%BA%D0%B0%D0%BA-%D0%B2%D1%8B%D0%B3%D0%BE%D0%B4%D0%BD%D0%BE-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D1%82%D1%8C-%D0%BC%D0%B0%D1%88%D0%B8%D0%BD%D1%83>https://lyfepal.com/forums/thread/5395/%D0%90%D0%B2%D1%82%D0%BE%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D1%87%D1%82%D0%BE-%D1%8D%D1%82%D0%BE-%D0%B8-%D0%BA%D0%B0%D0%BA-%D0%B2%D1%8B%D0%B3%D0%BE%D0%B4%D0%BD%D0%BE-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D1%82%D1%8C-%D0%BC%D0%B0%D1%88%D0%B8%D0%BD%D1%83</a> Как верховодило, новоприбывшие геймеры начала желают ознакомиться с способами ввода и вывода валютных средств и сроки исполнения поданных заказов чтобы конкретно разуметь, как скоро возможность вывести собственный казино приз за регистрацию без депо на электронный кошелек либо же банковскую карту. К счастью для всех играющих, внутри конкретных холдингов, все казино конкурируют меж собой. Ведь случае бы конкретную фирму представляло только одно онлайн-заведение, то вряд ли бы клиенты заметили казино с бонусом за регистрацию и имели бы рассчитывать лишь на вознаграждение в виде бонуса на 1-ое вложение. К любому заведению периодически по завлекать новых игроков, что, в, лишь на руку всем играющим. 1×слот регистрация в 1×slots casino Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке адепты онлайн-казино публикуют важную информацию о no down payment bonuses прочих услугах.
1×slots официальный зеркало рабочее
Бездепозитные бонусы за регистрацию в игровых автоматах для собственников онлайн-казино считаются долею рекламной кампании, направленной на повышение аудитории сайта. Так они продвигают свои бренды и привлекают свежих клиентов. Бонус начисляется игроку незамедлительно в регистрации и прохождения верификации в казино и не просит от посетителя внесения депозита. Как верховодило, объем бонуса в сходственном случае достаточно скромный, однако позволяет новеньким познакомиться с забавой без риска реальными деньгами. <a href=https://implementationmatters.org/index.php?title=User:JulieM32645267>https://implementationmatters.org/index.php?title=User:JulieM32645267</a> Отзывы читателей о бонусных промоакциях посодействуют составить впечатление, хотя не запамятовывайте о субъективности личных комментариев.3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать аппарат или почту, показать персональную информацию; 1×slots casino зеркало рабочее Если речь идет об неповторимых предложениях, возможность понадобиться регистрация в казино по ссылке с партнерского сайта.У любого игорного заведения средства верховодила и обстоятельства. Но, дабы получить призы, нужно выполнить стандартные деянья:
1×slots зеркало видели такую регистрацию на
<a href=http://griffhunter.com/boards/memberlist.php?mode=viewprofile&u=993>1×slots зеркало регистрация то дальше необходимо пройти</a> Каждая игровая перрон отличается условиями по получению и отыгрышу бездепов. В правилах отчетливо расписаны временные рамки, за которые нужно прокрутить вейджер. Также не забывайте про максимальный размер ставки и максимальную сумму выплаты. С другой стороны, чтобы получить бездепозитные призы казино, довольно истратить менее 1 минутки.Основное отличие том,, собственно для получения бездепа нужно пополнять баланс в казино. Но не этого, есть ряд и других отличий: 1×slots casino зеркало рабочее <a href=http://lnx.hotelresidencevillateresaischia.com/casamicciola/index.php?option=com_k2&view=itemlist&task=user&id=449117>http://lnx.hotelresidencevillateresaischia.com/casamicciola/index.php?option=com_k2&view=itemlist&task=user&id=449117</a> Рассмотрим принцип его действия на образце. Допустим, вы зарегались и возымели $10 not the slightest down payment bonus с вейджером х50. Это означает, собственно выигранные деньги можно несомненно выводить не ранее, чем после такого, как общая сумма ставок достигнет $500.Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.
1×slots рабочее зеркало
На бонусные начисления имеют быть установлены вспомогательные ограничения, коие Вы не приняли при отыгрыше. Пока бонус полностью не отыгран — средства из казино не выводятся. Такие поощрения позволяют даром протестировать новое казино, разобраться с игровым процессом онлайн слотов, заработать и исключить маленькую необходимую средств.Сразу последствии активации промокода можно воспользоваться подарком. Как уже упоминалось, бонусы случаются трёх видов – фриспины, кредиты и фриплей-бонусы. <a href=http://dokuteknoloji.com/index.php?option=com_k2&view=itemlist&task=user&id=440269>http://dokuteknoloji.com/index.php?option=com_k2&view=itemlist&task=user&id=440269</a> 1×slots официальный сайт зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://thetechmodders.com/forums/viewtopic.php?t=61233>1×slots зеркало регистрация в 1×slots casino</a>
<a href=https://radios-collector.com/viewtopic.php?f=7&t=51237>1× slots casino зеркало</a>
<a href=http://forums.indexrise.com/user-307864.html>1×slots актуальное зеркало</a>
<a href=https://bans.org.ua/index.php?topic=119691.new#new>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Во всех законных онлайн-казино Беларуси нужно свидетельство паспортных данных для забавы — это требование правительства государства.
#5892 RichardPayorhttps://rus3edin.org.ua
Ищете проверенные строительные советы <a href=https://rus3edin.org.ua/>https://rus3edin.org.ua</a> Наш портал поможет выбрать материалы, спланировать проект и сделать всё на высшем уровне.
#5893 LarryReasyhttps://samozahist.org.ua
Хотите построить дом <a href=https://samozahist.org.ua/>https://samozahist.org.ua</a> или сделать ремонт? На нашем портале вы найдёте лучшие решения и вдохновение для вашего проекта.
#5894 Kevincoitshttps://telegra.ph/Sportivnye-stavki-v-Vavada-01-15
Вавада предлагает <a href=https://telegra.ph/Sportivnye-stavki-v-Vavada-01–15>приложения для ставок</a> на любой вкус! Здесь вы найдете ставки на футбол, теннис, баскетбол, киберспорт и многое другое. Широкий выбор событий, удобный интерфейс и выгодные коэффициенты делают платформу идеальной как для новичков, так и для опытных игроков. Начните свой путь в ставках уже сегодня!
#5895 Stephenweigohttps://reklama-region.com
Всё для вашего ремонта <a href=https://reklama-region.com/>https://reklama-region.com</a> и строительства в одном месте! Практичные советы, современные решения и актуальная информация для успешного проекта.
#5896 EzekielIncafhttps://metalprotection.com.ua
Всё, что нужно знать о металлах <a href=https://metalprotection.com.ua/>https://metalprotection.com.ua</a> от их свойств до применения в различных отраслях. Обзоры, советы, новости и информация о производителях для вашего удобства.
#5897 Jerrywhemohttps://ts1231.com
九州娛樂城作為線上娛樂平台的領導品牌,不斷推出創新服務及優惠活動。近期推出的168元體驗金活動,讓新會員免費體驗平台特色。九州娛樂以玩家體驗為核心,提供多元化的遊戲選擇,包括電子遊戲、真人對戰等娛樂內容。平台以穩定、安全的系統建立口碑,加上專業的客服團隊,打造全方位的娛樂環境。現在註冊加入九州娛樂城,立即享受精彩遊戲體驗。
#5898 GilbertUninehttps://jzbet999.net
九州平台針對新會員推出168元的免費體驗金活動。這項活動的特點是無需滿足投注要求,新會員註冊 後即可使用。會員可以藉此機會體驗平台上的各種遊戲選項,包括電子遊戲、真人對戰等多樣娛樂內容。
相較於市面上其他平台,這項活動的主要優勢在於其簡單的申請流程和零門檻要求。一般平台的體驗金活動往往會設定投注金額要求,但此活動讓會員能更自由地體驗平台服務。
#5899 Hermanelackhttps://admm.ug
1win register <a href=https://admm.ug/>1win aviator predictor</a>
#5900 JamesVofhttps://mdffa.com.ng
1win bet app <a href=https://mdffa.com.ng/>how do i use my casino bonus on 1win</a>
#5901 MichaelGephttps://www.montenegro-company-registration.com/
registering a firm in montenegro <a href=https://www.montenegro-company-registration.com/>set up a company in Montenegro</a>
#5902 Charlesmakhttps://newboard-store.com.ua
Всё для успешного строительства <a href=https://newboard-store.com.ua/>https://newboard-store.com.ua</a> и ремонта на одном портале! Мы собрали актуальную информацию, идеи и инструкции для вашего удобства. Заходите и стройте с нами!
#5903 MichaelPiesshttps://okna-k.com.ua
Строительство без лишних вопросов <a href=https://okna-k.com.ua/>https://okna-k.com.ua</a> наш портал – кладезь информации о современных материалах, технологиях и лучших решениях для дома, дачи или офиса.
#5904 Jasonvoghttps://mramor.net.ua
Все секреты <a href=https://mramor.net.ua/>https://mramor.net.ua</a> строительства в одном месте! Советы экспертов, подбор материалов и готовые проекты для вдохновения.
#5905 PeterOwepehttps://msc.com.ua
Решили строить или делать ремонт <a href=https://msc.com.ua/>https://msc.com.ua</a> Мы подскажем, как выбрать лучшие материалы, спланировать бюджет и воплотить все задумки.
#5906 Glennguinshttps://mtbo.org.ua
Ваш путеводитель в мире строительства <a href=https://mtbo.org.ua/>https://mtbo.org.ua</a> полезные рекомендации, готовые проекты и современные решения для любых задач.
#5907 Kevinchicshttps://mr.org.ua
Стройте с комфортом <a href=https://mr.org.ua/>https://mr.org.ua</a> полезные советы, новейшие технологии, пошаговые инструкции и проекты – всё для вашего удобства.
#5908 Jameslibhttps://keravin.com.ua
Найдите все для ремонта <a href=https://keravin.com.ua/>https://keravin.com.ua</a> и строительства! Уникальные идеи, пошаговые инструкции и рекомендации специалистов на одном портале.
#5909 KennethWoodehttps://kinoranok.org.ua
Ландшафтный дизайн <a href=https://kinoranok.org.ua/>https://kinoranok.org.ua</a> и благоустройство для дома, офиса или парка. Профессиональные советы, подбор растений и реализация уникальных зеленых проектов.
#5910 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Александра Степанова, фигуристка casino <a href=https://www.ossetia.tv/>какие казино</a> 1×bet 1 casino онлайн <a href=https://glvk.guru/>1×bet слоты 1×bet xyz</a> зеркала казино inform@rucriminal.info 1×bet зеркало слоты porno Анна Сидорова, керлингистка pin casino Попова Анна Юрьевна порно почему в казино нет окон
DiskiPlus сайты казино DiskiPlus pin up casino buzz <a href=https://diskiplus.ru/>DiskiPlus почему в казино не бывает настенных часов</a> DiskiPlus пин ап казино DiskiPlus Разуваева Ксения Денисовна порно <a href=https://diskiplus.ru/>DiskiPlus порно с Владимир Минеев (ММА)</a> DiskiPlus порно с Ирина Сидоркова DiskiPlus casino ап DiskiPlus pinco casino DiskiPlus r7 casino DiskiPlus casino ru DiskiPlus букмекерская контора фонбет DiskiPlus мобильные букмекерские конторы
#5911 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать
Мы рекомендуем не отказываться от похожих предложений известных казино. Выделите количество мин. На регистрацию, получите приз и попробуйте его отыграть. Может быть, сегодня фортуна несомненно на вашей стороне! <a href=http://filmkachat.ru/>1×slots регистрацию процедура займет всего лишь</a> С не отыгранным призом запрещается превышать размер наибольшей ставки. Нарушение этого условия в аннулирование выигрыша. <a href=https://graph.org/Transform-Your-Furniture-Ideas-into-Reality-A-Deep-Dive-into-3D-Design-Tools-11–22>https://graph.org/Transform-Your-Furniture-Ideas-into-Reality-A-Deep-Dive-into-3D-Design-Tools-11–22</a> 1×слотс казино <a href=http://matripedia.de/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D1%8F%D0%BD%D0%B4%D0%B5%D0%BA%D1%81%20%D0%B4%D0%B7%D0%B5%D0%BD>http://matripedia.de/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D1%8F%D0%BD%D0%B4%D0%B5%D0%BA%D1%81%20%D0%B4%D0%B7%D0%B5%D0%BD</a> 1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, случае не желаете замерзнуть жертвой мошенников или впустую потратить время;
1×slots промокод при регистрации
Размер ставки для забавы по бездепозитному призу (конечно же, в случае, когда он представлен повторяющий бонусных денежных средств) зачастую ниже, чем при этой на депозит. Ограничение несомненно работать до момента отыгрыша бонуса.Выбирайте наихорошие безвозмездные призы за обзоров на Casinoz – и пусть для сопутствует счастье при отыгрыше бонусных кредитов! 1 xslots рабочее зеркало B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax <a href=http://support-groups.org/memberlist.php?mode=viewprofile&u=177012>http://support-groups.org/memberlist.php?mode=viewprofile&u=177012</a> Каждый новичок и профессиональный игрок грезят быстро стартануть и начать делать реальные ставки. Для сего достаточно арестовать презент, за кот-ый не нужно выплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email либо аппарат. После этого администрация начисляет щедрое вознаграждение вид безвозмездных вращений или виртуальных кредитов. 1×slots официальный зеркало рабочее Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают бонус по странам. Вплоть до такого, что клуб может на игроков из Вашей страны, а бездеп не давать.
1×slots сайт
<a href=https://sc-grandmaster.ru/forum/?PAGE_NAME=profile_view&UID=15680>https://sc-grandmaster.ru/forum/?PAGE_NAME=profile_view&UID=15680</a> казино 1× slots официальный сайт Отзывы читателей о бонусных промоакциях посодействуют составить эмоцию, хотя не запамятовывайте о субъективности собственных комментариев.
1×slots зеркало видели такую регистрацию на
Также бывают случаи, когда казино начислит оговоренный приз последствии регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам.Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном призе, то в первую очередь направьте на значение вейджера и срок, кот-ый дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть приз и исключить выигрыш. Мы подготовили перечень, где есть практически актуальные и новые бездепозитные бонусы казино, коие вы можете получить безвозмездно. Для наших юзеров есть специальные предложения неповторимые бонусы, коие вы ни не найдете, их мы определили специальной красноватой плашкой «Exclusive». 1×slots зеркало рабочее на сегодня <a href=http://g95887q6.beget.tech/user/MiguelPut/>http://g95887q6.beget.tech/user/MiguelPut/</a>
1×slots зеркало
Казино выделяет вероятность заработать и вывести реальные деньги на бездепозитных бонусах. Обычно, это малозначительная сумма, коию казино имеет себе разрешить презентовать игроку.Частенько новички не понимают, как активировать презенты либо вывести первый выигрыш. Для подобных случаев наша команда обрисовала основные определения – что такое фриспины, вейджер, как его отыграть, для нужно протекать верификацию. Существуют казино с бонусом за регистрацию, в которых довольно известны фриспины в онлайн казино потом регистрации в определенных играх. Они встречаются в чаще безвозмездных поощрений либо традиционных бонусов в казино без вложений. Например, игрок регистрирует счет, на кот-ый начисляются бесплатные забавы, приз за регистрацию в виде даровых фрспинов, вращения в игровом автомате. Во время игрового процесса геймер выигрывает истинные средства, которые в последствии возможно успешно вывести из заведения на свою платежную систему. То есть, есть шансы исключить свои без рисков своими деньгами. Регистрация, за которую компьютерные получит призы, займет несколько, а спасибо этому возможно прирастить пять евро поощрений до тыс. И без всяких заморочек вывести их. <a href=http://ez4×g.nehe.com.cn/home.php?mod=space&uid=504792&do=profile>http://ez4×g.nehe.com.cn/home.php?mod=space&uid=504792&do=profile</a> Выше мы дали глубокий набор самых свежих и своевременных бездепозитных бонусов в онлайн казино без пополнения на 2022 год, где вам воспользоваться каким ценным бездепозитным бонусом.При использовании бездепозитным бонусом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют несколько видов лимитов: 1хслот зеркало сайта
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.spherecommunity.net/User-JamesLop>1×slots бонус за регистрацию</a>
<a href=https://qualityprogamer.de/forum/showthread.php?tid=397710>1×slots сайт зеркало</a>
<a href=https://timepost.info/showthread.php?tid=103909>1 x slots</a>
<a href=https://adminclub.org/showthread.php?tid=72555>1×slots на любой вкус как пройти регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен перечень лучших интернет казино, коие предлагают своим игрокам щедрые бонусы за регистрацию.
#5912 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора фонбет casino сегодня <a href=https://repost.news/>скачиваемые казино</a> Семёнова Татьяна Владимировна порно казино пин <a href=https://glvk.guru/>казино ли</a> 1×bet на сегодня porno Алена Косторная (фигурное катание) cometa casino почему казино смотреть фильм казино яндекс игры казино сайт букмекерской конторы
DiskiPlus казино гта 5 DiskiPlus симулятор казино <a href=https://diskiplus.ru>DiskiPlus 1×bet на андроид бесплатно</a> DiskiPlus бывшие казино DiskiPlus porno Дарья Клишина <a href=https://www.diskiplus.ru/>DiskiPlus смотреть фильм казино</a> DiskiPlus лучшие бесплатные онлайн казино DiskiPlus top casino DiskiPlus 1×bet официальный 1×bet xyz DiskiPlus porno Нина Пирогова, хоккеистка DiskiPlus гта онлайн казино DiskiPlus casino скачать приложение DiskiPlus porno Елизавета Туктамышева
#5913 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up casino скачать 1×slots casino <a href=https://m.repost.news/>сайт винлайн букмекерская контора</a> 7k casino официальный казино рулетка <a href=https://strelochnik.com/>порно с Илюшникова Татьяна Александровна</a> casino андроид лучшая казино казино фильм онлайн r7 casino винлайн букмекерская контора официальный up casino зеркало porno Юлия Канакина
DiskiPlus сайте букмекерской конторы фонбет DiskiPlus вавада казино <a href=https://www.diskiplus.ru>DiskiPlus букмекерские конторы бет</a> DiskiPlus porno Нина Пирогова, хоккеистка DiskiPlus 1×bet официальный скачать <a href=https://www.diskiplus.ru>DiskiPlus букмекерская контора на андроид</a> DiskiPlus мобильные букмекерские конторы DiskiPlus casino скачать DiskiPlus porno Яна Троянова DiskiPlus 7k casino бонус DiskiPlus сайт pin up casino DiskiPlus букмекерская контора на андроид DiskiPlus casino pin официальный
#5914 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало проходить регистрацию это отличный вариант
Какие призы меня еще получить считая бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного бонуса, любое онлайн казино предлагает игрокам прибыльное предложение на 1-ый депозит, вы совершаете депозит, ваш депозит увеличивается в двое либо том в трое, тем самым начать играть возможно с больше крупной суммой, так же не запамятываем на вейджер на бонусы.Также бездепозитные призы имеют работать методом возвратить к забаве клиентов, что приостановивших своё сотрудничество с компанией: извещение о бездепе поступает на мобильный аппарат либо почту. <a href=http://filmkachat.ru/>1×slots бездепозитный бонус за регистрацию</a> <a href=https://peatix.com/group/16427473/activity>https://peatix.com/group/16427473/activity</a> рабочее зеркало 1×slots <a href=http://animemiru.ru/user/HenrySef/>http://animemiru.ru/user/HenrySef/</a> Бездепозитные бонусы за регистрацию в игровых автоматах для собственников онлайн-казино считаются долею рекламной кампании, направленной на повышение аудитории сайта. Так они продвигают свои бренды и привлекают свежих клиентов.Составленный знатоками Casino.ru перечень онлайн-казино с бездепозитным бонусом разрешает игрокам сравнить спецпредложения различных операторов.
1×slots сайт
1хслотс регистрация в 1×slots casino Ограничения по играм. Администрация воспрещает игрокам кое-какие игровые автоматы с бездепозитным призом, средствами или бесплатными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда разделение выполняется по виду игр. Например, отыгрыш возможен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino.Если площадка дарит бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь завести аккаунт на сайте и активировать его, подтвердив адресок электрической почты, номер телефона либо иные данные, которые настятельно оператор. Перед этим необходимо увериться, что пользователь располагается на официальном веб-сайте казино, не на мошеннической площадке. <a href=https://yjglobal.net/bbs/board.php?bo_table=free&wr_id=709257>https://yjglobal.net/bbs/board.php?bo_table=free&wr_id=709257</a> При подмоги такового поощрения оператор имеет также завлекать клиентов, коие раньше проявляли активность на веб-сайте, хотя по какой-то основанию перестали выступать. В данном случае промокод высылается юзеру по электрической почте либо вид SMS. 1× slots зеркало Объективные – размер приза, коэффициент и обстоятельства вейджера, необходимость внесения депо для вывода денег;
1×slots казино зеркало
Получить приветственный приз все лишь новые посетители онлайн-казино. Способы описаны в критериях промоакции каждого законного казино, чаще всего это: <a href=https://spoilerok.ru/user/Raymondtew/>https://spoilerok.ru/user/Raymondtew/</a> Некоторые онлайн-казино без депозита предлагают свежим клиентам избрать приз при регистрации. Будьте внимательны: выбрав один, вы в безоговорочном большинстве случаев не можете воспользоваться остальными. 1× slots casino официальный сайт
1×slots зеркало проходить регистрацию это отличный вариант
2. Создать новый профиль. Для регистрации нужно заполнить небольшую анкету или зайдите в личный кабинет при помощи соц сетей;С другой стороны, намного проще арестовать бездепозитные фриспины за регистрацию в казино и напрямик в начать вращать барабаны в превосходнейших слотах. Главная особенность спинов сомнений, собственно они предназначены для топовых автоматов. Удастся столько пройти вспомогательные раунды, но и увеличить необходимую выигрыша, заработать респины и другие внутриигровые презенты. Заполняя данные в личном профиле, указывайте только достоверную информацию, так как Вам понадобиться ее доказать дальнейшем при выводе денег. 1×slots регистрация 1×slotscasino 56 online <a href=https://amlsing.com/thread-199308–1–1.html>https://amlsing.com/thread-199308–1–1.html</a> Так собственно приготовьтесь предоставить секретную информацию (пол, возраст, страна проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев проверка данных занимает менее суток, в чего получится беспрепятственно выводить солидные выигрыши.
1×slots регистрация на сайте
Когда речь идет о получении бездепозитных призов в казино, в первую очередь направьте на последующие обстоятельства: Рассмотрим принцип его деянья на образце. Допустим, вы зарегались и возымели $10 not the slightest deposit bonus с вейджером х50. Это значит, что выигранные средства возможно несомненно выводить не раньше, чем в того, как общая сумма ставок достигнет $500. <a href=http://zakazlegko.ru/bitrix/rk.php?goto=http://info-magazin.ru/bitrix/click.php?goto=http://monolittex.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/Kvg6WSIDvv0>http://zakazlegko.ru/bitrix/rk.php?goto=http://info-magazin.ru/bitrix/click.php?goto=http://monolittex.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/Kvg6WSIDvv0</a> В интернет-сети всегда возможно найти списки более известных и обещанных поощрительных программ от известных онлайн-казино.Для верификации аккаунта нужно дать спецам технической поддержки отсканированную копию паспорта и счета за коммунальные предложения, а также фотку банковской карты или снимок странички электрического кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности. 1хслотс рабочее зеркало Если вы новичок данном и только попали в неизведанную вами область пыла — с помощью предложений как бездепозитные бонусы без пополнения.Более крупные предложения встречаются довольно редко. Зачастую они доступны лишь VIP-игрокам. В оставшихся случаях им наверняка сопутствуют довольно строгие обстоятельства отыгрыша. Также вероятны дополнительные обстоятельства и ограничения, прописанные в условиях и положения бонусной программы казино.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>сайт 1× slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Зарегистрируйтесь. Для регистрации почаще всего довольно ввести собственный номер телефона и почтовый адрес, после чего установить приобретенный код из СМС. Возможно, требуется показать промокод. В правилах промоакции будет написано, где его надо включать. Иногда это хотелось делать при регистрации, время — теснее после создания собственного офиса, на отдельной страничке.
#5915 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet официальный скачать 1×bet xbet <a href=https://www.ossetia.tv/>1×bet вход</a> порно с Александр Большунов (лыжные гонки) букмекерская контора фонбет официальный <a href=https://rumafia.news/>1×bet зеркало рабочее на сегодня 1×bet xyz</a> казино регистрации pin ап casino скачать букмекерскую контору на андроид казино 5 porno Марина Александрова сайт 1×bet слоты 1×bet официальный слоты
DiskiPlus официальные букмекерские конторы скачать DiskiPlus приложения букмекерских контор на андроид <a href=https://www.diskiplus.ru/>DiskiPlus porno Алена Косторная (фигурное катание)</a> DiskiPlus porno Ангелина Гончаренко, хоккеистка DiskiPlus Попова Анна Юрьевна порно <a href=https://diskiplus.ru>DiskiPlus pin up букмекерская контора</a> DiskiPlus казино вход официальный сайт DiskiPlus 1×bet официальный xbet DiskiPlus где казино DiskiPlus casino com DiskiPlus casino x DiskiPlus casino официальный сайт DiskiPlus casino daddy
#5916 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало которую указывали при регистрации кстати
Принципиальным различием безвозмездных бонусов от призов на депозит считается неимение необходимости вносить деньги на аккаунт. Из-за этого их часто именуют бездепозитными (no down payment bonuses).Разные казино имеют личные управляла по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высокие притязания. Часто онлайн-казино рекомендуют отыграть бонусное поощрение до ста один в игровых автоматах. Например, случае игрок получил бесплатно 10 $, то необходимо будет отыграть их, поставив одну тыщу спинов по одному баксу любой. Стоит обозначить(означить), что не все казино дают вероятность выступать на призы и не во всех развлекательных заведениях схожие управляла для отыгрывания. Некоторые казино воспрещают играть на бонусы в блекджек или ограничивают ставки до 5 процентов, собственно значительно наращивает в 10-ки один число необходимых игр. <a href=http://filmkachat.ru/>1×slots официальный demo регистрация в 1×slots casino</a> <a href=https://www.zybuluo.com/lexxeagle/note/2570093>https://www.zybuluo.com/lexxeagle/note/2570093</a> 1×slots зеркало видели такую регистрацию на <a href=https://pxhere.com/ru/photographer-me/4007552>https://pxhere.com/ru/photographer-me/4007552</a> Перечисленные выше основные свойства сочетают фактически любой приз и считаются стереотипными для бездепозитных бонусных начислений в казино.Можно ли в одном интернет казино получить больше одного приза за регистрацию? Нет, например как в каждом интернет казино есть управляла, к которым надо(надобно) держаться, не творить два аккаута для получения бонусов, другому несомненно блокировка обоих аккаутов, не пытайтесь перехитрить онлайн казино, бонус за регистрацию выдаеться один один одному личику.
1×slots зеркало регистрацию более популярный вариант это
1×slots casino регистрация 1×slots review live <a href=https://isig.ac.cd/alumni/blogs/45013/%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0-%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA-%D0%B3%D0%BB%D0%B0%D0%B2%D0%BD%D0%B0%D1%8F-%D0%B4%D0%BE%D1%80%D0%BE%D0%B3%D0%B0>https://isig.ac.cd/alumni/blogs/45013/%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0-%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA-%D0%B3%D0%BB%D0%B0%D0%B2%D0%BD%D0%B0%D1%8F-%D0%B4%D0%BE%D1%80%D0%BE%D0%B3%D0%B0</a> В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с безвозмездных вращений. Прибыль, которую Вы заработаете на таком бездепе возможно назначать на вывод без какого либо отыгрыша. 1× slots зеркало
1×slots зеркало регистрацию более популярный вариант это
Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить необыкновенности, недоступные при забаве в демо режиме. Многие свежие клиенты перебегают в число постоянных, а оператор получает долгосрочную прибыль.Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической забавы на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, научится регулировать изменять ставки и линии, исследовать бонусные игры и их выигрышные композиции, да в просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные средства, коие возможно отыграть и вывести, но просто на демо счет, что, этим самым адреналин в крови еще повысится а пульс забьется с нередким ритмом! С иной стороны, гораздо легче забрать бездепозитные фриспины за регистрацию в казино и прямо момент начать вертеть барабаны в наихороших слотах. Главная необыкновенность спинов в, что они предусмотрены для лучших автоматов. Удастся не пройти дополнительные раунды, хотя и прирастить сумму выигрыша, заработать респины прочие внутриигровые подарки.Казино выделяет возможность заработать и вывести реальные деньги на бездепозитных бонусах. Обычно, это малозначительная сумма, которую казино может для позволить презентовать игроку. <a href=https://7apk.ru/user/MiguellaH/>https://7apk.ru/user/MiguellaH/</a> Чтоб получить крупный выигрыш, выбирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша.Если ординарными текстами, бездепы – это определённая сумма денег или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно брать презенты. Но есть некоторые аспекты. Существуют игорные жилища, которые перед тем как начислить бонусы требуют привязать аппарат, дать копии документов. 1×slots рабочее зеркало на сегодня Необходимость отыгрыша. Вейджер такой выше, чем для бонусов за депо. И же свои не отыграны, вывести их нельзя.
1×slots быструю регистрацию а также мгновенное
<a href=https://www.sgomberisgombero.it/my-account-2/>1×slots рабочее зеркало</a> Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.Ограничения по играм. Администрация запрещает игрокам кое-какие игровые автоматы с бездепозитным призом, деньгами или бесплатными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда разделение производится по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, хотя запрещен в настольных забавах и в разделе Live Casino. 1×slots акции <a href=http://ohanataxi.com/shop/bbs/board.php?bo_table=free&wr_id=2529411>http://ohanataxi.com/shop/bbs/board.php?bo_table=free&wr_id=2529411</a>
1×slots зеркало регистрацию более популярный вариант это
Простая процедура получения бездепозитного бонуса, кот-ая займет не более 2-х минут. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные. <a href=https://www.google.ac/url?q=https://doctorlazuta.by/>https://www.google.ac/url?q=https://doctorlazuta.by/</a> 1×slots casino регистрация 1×slotscasin online Для подтверждения электронной почты, просто перейдите по активной ссылке в письме, приобретенном от игрового заведения.
<b>Смотреть еще похожие новости:</b>
<a href=http://evtrucksforum.com/memberlist.php?mode=viewprofile&u=28289>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Мы рекомендуем не отказываться от сходственных услуг узнаваемых казино. Выделите некоторое минут на регистрацию, получите приз и попробуйте его отыграть. Может быть, сегодня удача будет на вашей стороне!
#5917 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
бесплатное казино порно с Сергей Бобровский (хоккей) <a href=https://rucriminal.info/>скачать 1×bet</a> porno Марина Александрова porno Мария Шарапова <a href=https://specreporter.com/>porno Екатерина Ефременкова, шорт-трекистка</a> игры казино официальные букмекерские конторы скачать Лут Оксана Николаевна порно retro casino casino com порно с Арина и Дина Аверины, гимнастки 1×bet слоты официальный сайт
DiskiPlus казино вход официальный сайт DiskiPlus pin up casino <a href=https://www.diskiplus.ru>DiskiPlus casino зеркало сегодня</a> DiskiPlus Юдаева Ксения Валентиновна порно DiskiPlus gama casino <a href=https://diskiplus.ru>DiskiPlus pin up casino buzz</a> DiskiPlus казино рояль DiskiPlus бк букмекерская контора DiskiPlus про казино DiskiPlus porno Алена Михайлова DiskiPlus официальные букмекерские конторы скачать DiskiPlus Крючкова Полина Викторовна порно DiskiPlus казино рублях
#5918 Charlesgunnyhttp://filmkachat.ru
x1 slots регистрация в 1×slots casino
Акции, приуроченные к календарным дням, случаются рассчитаны как на всех пользователей, например и на категории: например, подарок на 8 марта девушкам-игрокам или мужикам на 23 февраля. <a href=http://filmkachat.ru/>1×slots зеркало которую указывали при регистрации кстати</a> <a href=https://hallbook.com.br/blogs/391183/Mastering-Interior-Shop-Drawings-A-Professional-Guide-to-Precision-and>https://hallbook.com.br/blogs/391183/Mastering-Interior-Shop-Drawings-A-Professional-Guide-to-Precision-and</a> Прибывшие на акк деньги бездепозитные призы предназначаются, главном, лишь для новоиспеченных пользователей, которые раньше не имели собственного аккаунта в данном казино. Исходя из сего, если ранее у игрока был изготовлен депозит, то, по всей вероятности, у него больше не будет возможности рассчитывать на получение такового бонуса в определенном заведении. 1×slots подтвердит вашу регистрацию если говорить <a href=https://stomping-groundz.com/index.php?action=profile;u=2969>https://stomping-groundz.com/index.php?action=profile;u=2969</a> Также, такой нужно доказать свой номер аппарата, чтобы код, полученный в смс-сообщении от клуба ввести в специальное фон в личном кабинете игрока.
казино 1×slots официальный сайт
Бездеп с фриспинами может охватывать всю коллекцию игр на сайте или разработки одного провайдера. Обычно предлагается конкретный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш может быть выведен в как, как пользователь отыграет данную необходимую. Возможность расценить глубокий возможностей слотов — основное совершенство этой разновидности. Игроку становятся доступны что, эти опции, коие отсутствуют в демонстрационном режиме, а вероятность выиграть реальные деньги добавляет ярчайших азартных ощущений. <a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=323949&pid=646162#post_646162>1×slots casino регистрация</a> 1×slots зеркало регистрация Обыкновенные бездепозитные призы в размере от 3-х до 20 $ сделаны для того, дабы в игры заходили все свежие и новые игроки. Здесь, скорее, будет ограничение на наибольший выигрыш. Важно, дабы перед наименьшим вкладом был отключен приз за 1-ое пополнение счета, и компьютерные не попадет на повторный вейджер.Также учтите, собственно кое-какие игровые платформы сужают список государств, которые способны получить предложенный бездепозитный приз за регистрацию. К образцу, существуют онлайн-заведения, выдающие сходственные призы лишь жильцам определенных государств. К образцу, интернет казино 777 Оригинал дает бездепозитный приз только игрокам из России и государств СНГ. Или напротив, пичкают вознаграждением всех, не обитателей некоторых стран (как этого, идет пристально изучать список, дабы потом не возникло практически вопросов и претензий). <a href=https://www.cfd-online.com/Forums/members/raymondlut.html>https://www.cfd-online.com/Forums/members/raymondlut.html</a> Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, дабы еще раз получить даровой приз. Игорные заведения нетерпимы к бонус-хантерам, потому вас ожидает неминуемое санкция.Как только вы отыграли вейджер и средства с бонусного баланса перешли для на реальный счет, Вы храбро сможете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать наименьший депо например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депозитом). 1×slots casino регистрация 1×slotscasino09k online За счёт спинов выйдет запустить различные онлайн слоты, протестировать стратегии и поднабраться опыта. Фишка в том, что вращения начисляются на топовые аппараты с уникальными опциями и высочайшей отдачей. Не запамятовывайте, что в каждом акционном предложении учтены особые притязания – временные ограничения, наибольший объем ставки, перечень доступных игр.
казино 1×slots
Каждая игровая платформа выделяется условиями по получению и отыгрышу бездепов. В правилах детально расписаны кратковременные рамки, за которые нужно прокрутить вейджер. Также не забывайте на максимальный размер ставки и максимальную необходимую выплаты. С другой стороны, чтобы получить бездепозитные призы казино, довольно израсходовать не более 1 минутки. После потребуется внести идентификационный платёж. Это пугает новичков больше всего. Нужно устроить минимальный депо в 100–500 руб. Таким образом служба защищенности убедиться что, нет, что платёжный метод принадлежит Вам. Данная процедура необходима для обеспечивания защищенности игровых счетов. Пример, Ваш аккаунт взломают и выведут свои на свой кошелёк. Будет крайне досадно. Поэтому верификация платёжной системы, это важный момент. <a href=https://podacha-blud.com/user/Donaldmok/>https://podacha-blud.com/user/Donaldmok/</a> Многие игроки, оценив перечень казино, остаются играть в нем и далее ? на это и направлено каждое рекламную. Постоянные клиенты вносят депозиты и делают ставки, обеспечивая долгосрочную прибыль оператора. То есть, казино раздают бездепы свежим юзерам для формирования приклнной аудитории. 1×slots акции
казино 1×slots
При регистрации никаких либо ином онлайн игральном заведении — вам дается один шанс испытать собственную удачу не внося средства монеты. Замечу собственно такую поощрительную предложение деют не все онлайн игровые площадки, а только великодушная половина из их. Которые мы подготовили для Вас в нашем списке.Главным моментом в возникновении данных вознаграждений состоит никаких, собственно пустив их в ход, компьютерные ничем не рискует и в последствии никому ничего не будет должен (не зависимо, получит ли он благодаря призам какой-нибудь выигрыш либо моментально спустит все только что прибывшие финансы). То есть, казино снабжает игрока возможностью на дармовой базе играть во различные слоты и даже спонсирует игру. <a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=62283>1×slots зеркало регистрация в 1×slots casino</a> Самые модные методы вывода средств ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электрическим платежным системам подобии Neteller и Skrill, еще используют криптовалютными кошельками. Вывод выигрышей возможность исполняться быстро или развлекать от нескольких часов до нескольких суток. Но есть игорные заведения, которые готовы просто так жертвовать средства на забаву. Для этого достаточно создать профиль. Чтобы исключить собственный выигрыш, для сначала необходимо выполнить условия отыгрыша, указанные в критериях получения бездепозитного депозита.Предложения с бездепозитными бонусами за регистрацию дозволяют новым заведениям заинтересовать аудиторию на собственный вебсайт. А игроки в свою очередь получают возможность выступать на настоящие средства без депозита в казино и заработать небольшой стартовый капитал, кот-ый разрешено вывести на карту банка или электронный кошелек. зеркло казино 1×slots <a href=http://www.nefiskokulutarifler.com/search?q=%5Burl%3Dhttps%3A%2F%2Fdoctorlazuta.by%2Fblog%5D%D0%B1%D0%BB%D0%BE%D0%B3+%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0+%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0+%D0%B4%D0%B7%D0%B5%D0%BD%5B%2Furl%5D+%D0%B1%D0%BB%D0%BE%D0%B3+%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0+%D1%87%D0%B8%D1%82%D0%B0%D1%82%D1%8C>http://www.nefiskokulutarifler.com/search?q=%5Burl%3Dhttps%3A%2F%2Fdoctorlazuta.by%2Fblog%5D%D0%B1%D0%BB%D0%BE%D0%B3+%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0+%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0+%D0%B4%D0%B7%D0%B5%D0%BD%5B%2Furl%5D+%D0%B1%D0%BB%D0%BE%D0%B3+%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0+%D1%87%D0%B8%D1%82%D0%B0%D1%82%D1%8C</a> Список так называемых «запрещенных территорий» прилагается к правилам бонусной программки игорного портала. Обязательно выясните, распространяются ли на вас подобные наказания.Такой бесплатный эквивалент средств зачисляется на профиль юзера в осуществления требований и предназначаются они только для игрового процесса. Вывод этих вознаграждений возможен лишь последствии осуществления вейджеровых условий.
1×slots рабочее зеркало на сегодня
Как верховодило, при выводе денег, от играющего требуется лишь сделать минимальный вклад для того, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом личный счет. <a href=https://zvukiknig.info/user/Jasperanomy/>https://zvukiknig.info/user/Jasperanomy/</a> При отыгрыше бонусных средств, необходимо учитывать срок действия бонуса и время, коие дается на отыгрыш. По истечению заявленного медли, не отыгранный приз несомненно аннулирован. x1 slots регистрация в 1×slots casino B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.dis-course.net/viewtopic.php?t=436201>1×slots официальный зеркало рабочее</a>
<a href=http://link.5nx.ru/viewtopic.php?f=5&t=4905>1× slots сайт</a>
<a href=http://www.easysunnysunshine.com/memberlist.php?mode=viewprofile&u=18118>1хслотс рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Как верховодило, при выводе денег, от играющего требуется только устроить наименьший вклад для того, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом личный счет.
#5919 Charlesgunnyhttp://filmkachat.ru
1×slots казино зеркало
В перечне притязаний к отыгрышу нередко присутствуют лимиты на ставки при ирге на собственные деньги. Так, случае отыграть нужно 30 000 руб., а максимальная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам деянья акции. <a href=http://filmkachat.ru/>1×slots бонус за регистрацию</a> Выше мы дали глубокий набор самых свежих и своевременных бездепозитных бонусов в онлайн казино без пополнения на 2022 год, где вам воспользоваться каким ценным бездепозитным бонусом.Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом прибыли присутствуют на этой страничке. Посетитель возможность расценить обстоятельства получения и начать играть на средства без внесения депозита. При этом игроку принципиально понимать, на каких условиях и какими способами он сможет исключить полученный выигрыш. Для сего нужно расценить перечень подключенных платежных систем. <a href=https://www.swiatobrazu.pl/forumgaleria/thread/view/id/591>https://www.swiatobrazu.pl/forumgaleria/thread/view/id/591</a> Многие новички сомневаются, что поощрительный приз не нужно несомненно отдавать, и случае они выиграли у казино. Это абсолютно безопасно и надежно. Выводя выигранные средства, игрок просто одергивает свое участие деле и теряет уникальную вероятность – бесплатно наращивать собственное материальное положение.Получив свой подарок, Вы сможете безвозмездно играть на реальные средства, а выполнив обстоятельства отыгрыша, вывести собственный выигрыш. 1×slots зеркало проходить регистрацию это отличный вариант <a href=https://www.mundoreptil.com/member.php?u=43879>https://www.mundoreptil.com/member.php?u=43879</a> Фриспины предусмотрены для применения в видео слотах. Внимательно ознакомьтесь с критериями – частенько их выдают на кое-какие автоматы. В зависимости от клуба, у вас выйдет устроить определённое количество ставок. Кстати, продвинутые игорные дома разрешают запускать любых «одноруких бандитов».Для подтверждения электронной почты, просто перейдите по активной ссылке в послании, полученном от игрового заведения.
1×slots регистрация 1×slots review live
Прежде всего, не забывайте регулярно заглядывать на страничку обзоров бездепозитных призов. Они шаг за шагом оценивают наиболее интересные предложения водящих игорных порталов. <a href=https://www.findaspermdonor.com/viewtopic.php?f=25&t=87364>1×slots зеркало этих способов предполагает регистрацию</a> рабочее зеркало 1хслотс <a href=http://mkala-koncert.ru/users/gainfulleague14>http://mkala-koncert.ru/users/gainfulleague14</a> Демоказино есть почти на каждом сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются значительно реже: там в случае выигрыша и соблюдения условий промоакций бездеп возможно превратить в настоящие деньги. 1×slots casino зеркало рабочее
1× slots casino зеркало
Бездепозитный приз предоставляется новому игроку за конкретные деяния. Часто подарок повторяющий средств или фриспинов выдается за регистрацию, благодаря чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. Акционные предложения от казино существуют в различных форматах. Часто бонусы даются в мена на депозит. Игрок заносит платеж и получает деньги, безвозмездные вращения прочие поощрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — вид приза, кот-ый гарантирован за исполнение конкретных поступков на сайте: <a href=http://x70181pe.beget.tech/index.php?subaction=userinfo&user=languidmuseum15>http://x70181pe.beget.tech/index.php?subaction=userinfo&user=languidmuseum15</a> Казино выделяет вероятность заработать и вывести настоящие деньги на бездепозитных бонусах. Обычно, это малозначительная сумма, коию казино возможность для позволить презентовать игроку.В интернете очень много скриптовых вебсайтов, коие принадлежат мошенникам. Их основная цель – привлечь гэмблеров, пообещав не щедрые презенты, но и солидные выигрыши. Так собственно некоторые сайты предлагают получить за регистрацию числе $1 000. скачать 1×slots на андроид мобильная версия Объективные – объем бонуса, коэффициент и обстоятельства вейджера, необходимость внесения депо для вывода средств;
1×slots бездепозитный бонус за регистрацию
<a href=https://nztw.org/home.php?mod=space&uid=43957>1×slot зеркало рабочее этих способов предполагает регистрацию</a> Когда речь идет о получении бездепозитных призов в казино, в первую очередь направьте на последующие условия:Бонус начисляется игроку сразу после регистрации и прохождения верификации в казино и не просит от посетителя внесения депо. Как управляло, объем бонуса в сходственном случае довольно стыдливый, впрочем разрешает новеньким познакомиться с игрой без риска реальными средствами. Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в индивидуальный офис, дабы арестовать бесплатные вращения с вейджером х40; 1хслотс регистрация в 1×slots casino <a href=http://gagetaylor.com/index.php?title=User:LulaLwm4204173>http://gagetaylor.com/index.php?title=User:LulaLwm4204173</a>
1×slots регистрацию более популярный вариант это
Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают бонус по странам. Вплоть до как, что клуб может себя игроков из Вашей государства, а бездеп не давать.Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить необыкновенности, труднодоступные при игре в демо режиме. Многие свежие посетители переходят в число постоянных, а оператор получает длительную выгода. <a href=https://masstr.net/member.php?action=profile&uid=35589>https://masstr.net/member.php?action=profile&uid=35589</a> казино 1× slots официальный сайт
<b>Смотреть еще похожие новости:</b>
<a href=http://aficionado.pl/showthread.php?151314–1%D1%85-%D1%81%D0%BB%D0%BE%D1%82–1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%BF%D0%B5%D1%80%D0%B5%D0%B9%D1%82%D0%B8-%D0%BD%D0%B0–1×slots&p=171048>1х слот 1хслотс регистрация перейти на 1×slots</a>
<a href=https://www.makinamania.net/index.php?topic=250595.new#new>1×slots бонус за регистрацию</a>
<a href=https://forum.oursson.ru/viewtopic.php?f=2&t=11435>1×slots официальный сайт скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный приз, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс изучить игровые автоматы, выучится регулировать изменять ставки и линии, изучать бонусные забавы и их выигрышные комбинации, ну в конце концов просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные средства, коие возможно отыграть и вывести, а не просто на демо счет, тем самым адреналин в крови еще больше повысится а пульс забьется с нередким ритмом! Бездепозитный приз предоставляется новому игроку за определенные действия. Часто презент в виде средств либо фриспинов выдается за регистрацию, благодаря чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.
#5920 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Марина Александрова casino daddy <a href=https://th-royalgclub.com/>порно с Антропова Валентина Викторовна</a> casino бонус пинко casino <a href=https://sovsekretno.net/>1go casino</a> казино вход официальный сайт r7 casino casino промокод казино большая porno Екатерина Ефременкова, шорт-трекистка Валентина Матвиенко порно промокод 1×bet
DiskiPlus казино смотреть онлайн DiskiPlus Кузнецова Анна Юрьевна порно <a href=https://www.diskiplus.ru/>DiskiPlus porno Юлия Пересильд</a> DiskiPlus porno Нина Пирогова, хоккеистка DiskiPlus 1×bet зеркало рабочее xbet <a href=https://www.diskiplus.ru/>DiskiPlus casino 7k рабочее</a> DiskiPlus Самойлова Алла Владимировна порно DiskiPlus букмекерская контора DiskiPlus Самойлова Алла Владимировна порно DiskiPlus почему казино DiskiPlus казино вход DiskiPlus casino сайты DiskiPlus porno Екатерина Ефременкова, шорт-трекистка
#5921 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slotscasino09k online
Получить Бездепозитный бонус в онлайн казино дело двух кликов. Другой момент, отыграть промо и соблюсти управляла и обстоятельства отыгрыша. Под правилами предполагается не вагер, хотя и ограничения по наибольшей ставке. Мы понимаем, что в кино все ставят на зеро и выигрывают. Призываем не создавать похожего. Перед активацией бонуса прочитайте управляла. Узнайте следующие факторы: Условия получения презента, за регистрацию, за депо и другое. Ограничения по максимальной ставке. Зачастую не выше 350 руб. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вертеть автоматы, а вагер будет стоять на месте. Поэтому главно аристократия, в каких забавах возможно осуществлять кратность валютного оборота. <a href=http://filmkachat.ru/>1×slots регистрация</a> Способы получения бездепа различаются зависимо вида бонуса, кот-ый понравился игроку. Но вас так нужно быть зарегистрированным в легальном онлайн-казино и доказать собственную личность. В общем облике пошаговая аннотация для получения бездепозитного приза выглядит так:Выбор любого интернет казино на нашем сайте. В описании к каждому Вы сможете узнать, собственно получите за создание аккаунта. <a href=https://www.vevioz.com/forums/thread/4584/>https://www.vevioz.com/forums/thread/4584/</a> Если при регистрации указать промокод, возможно гарантировано получить приз. Где брать ваучер? Посетите тематику блоги либо форумы. Иногда администрация клуба проделывает рассылку ваучеров на электронную почту. В последнее время игорные дома начали рекламироваться в кинокартинах и телесериалах. Присмотритесь и скорее заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных руб. казино 1×slots <a href=http://xn–80aeh5aeeb3a7a4f.xn–p1ai/forum/user/51693/>http://xn–80aeh5aeeb3a7a4f.xn–p1ai/forum/user/51693/</a> Фриспины. Бесплатные вращения предусмотрены для применения в видео-слотах. Внимательно читайте обстоятельства – они нередко выдаются для неких машин. В зависимости от клуба вам создавать конкретное количество ставок. Кстати, современные игорные жилища выделяют вероятность заводить «одноруких злодеев».
1×slots зеркало которую указывали при регистрации кстати
<a href=https://chasingadream.rpginitiative.com/showthread.php?tid=206025>1×slot зеркало</a> 1×slot зеркало рабочее этих способов предполагает регистрацию Для казино, работающих интернет, бездепозитные призы нужны для привлечения свежих посетителей. Предложение поиграть на слотах без надобности внесения реальных средств — работающий способ для повышения энтузиазма к компании. После отыгрыша бездепа велик шанс, что игроку понравится и он продолжит выступать в казино, лишь теперь уже на личные средства.Бонус за регистрацию в казино без депо с выводом средств нужно отыграть. Зачастую для отыгрыша возможность потребоваться сделать ставки на необходимую, в некоторое 10-ов раз превосходящую необходимую бонуса либо выигрыша. <a href=http://www.pawsarl.es/blog/glory-casino.html>http://www.pawsarl.es/blog/glory-casino.html</a> Нет. Для получения бездепозитного бонуса в казино необходима неотъемлемая регистрация на сайте. Играть в слоты бесплатно и без регистрации возможно лишь в демо режиме.Чаще всего применяются коды. Их надо(надобно) вносить в специальные окошки регистрационной анкеты, в речь идет о пригласительных бонусах, или в определенном разделе личного офиса игрока. 1×slots зеркало на сегодня Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 долларов. Если выдаются фриспины, их количество изредка выше нескольких 10-ов безвозмездных вращений.
1×slots зеркало
Заполняя данные в личном профиле, указывайте только достоверную информацию, так как Вам понадобиться ее подтвердить в при выводе денег.Получить приветственный бонус шансы только свежие клиенты онлайн-казино. Способы описаны в критериях промоакции любого законного казино, чаще всего это: <a href=https://www.021snyw.com/space-uid-51128.html>https://www.021snyw.com/space-uid-51128.html</a> 1×slot регистрация Для верификации номера аппарата, в личном профиле выберите опцию „Подтвердить номер аппарата“ и введите в соответствующее поле код, приобретенный в sms-сообщении.Получить Бездепозитный бонус в интернет казино дело двух кликов. Другой момент, отыграть промо и соблюсти управляла и условия отыгрыша. Под правилами подразумевается столько вагер, хотя и ограничения по максимальной ставке. Мы разумеем, собственно в кино все ставят на зеро и выигрывают. Призываем не создавать сходственного. Перед активацией бонуса прочтите управляла. Узнайте следующие факторы: Условия получения дара, за регистрацию, за депозит и многое. Ограничения по максимальной ставке. Зачастую не повыше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на месте. Поэтому главно знать, в каких забавах можно совершать кратность валютного оборота.
1×slots зеркало видели такую регистрацию на
Заработать на бездепозитных бонусах за регистрацию в казино имеет каждый юзер, достигший совершеннолетия.Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала быстрые выводы. Фишка выплат сомнений, собственно достаточно избрать платёжный инструмент и указать сумму. В большинстве случаев средства зачисляются на электронные кошельки протяжении 15 мин., а на банковские карты – 1–3 рабочих денька. 1×slots бонус за регистрацию <a href=http://www.aadd2.net/vb/member.php?s=01e29c2988d1979c24f5c69199957e13&u=36484>http://www.aadd2.net/vb/member.php?s=01e29c2988d1979c24f5c69199957e13&u=36484</a> В разделе с призами активировать свой презент. Найти игры, для которых учтено одобрение и применять бонус по предназначению.Бывают ли бездепозитные призы без вейджера? Бывают, если у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино.
1×slots зеркало быструю регистрацию а также мгновенное
Благодаря программке лояльности от игорного заведения, возможно брать превосходный старт и без дополнительных вложений запустить видеослоты. Кроме такого, возможно рассчитывать на реальную фортуну и получить, без вложения личных денег, великий выигрыш.Выше мы дали глубокий комплект самых новых и актуальных бездепозитных бонусов в онлайн казино без пополнения на 2022 год, где вы можете воспользоваться каким ценным бездепозитным бонусом. Поспешите забрать бездепозитные бонусы за регистрацию в казино из представленного списка. Все платформы не только водят законную работа, хотя и обрадуют честными результатами забавы, высокой отдачей, резвыми выплатами. <a href=http://fromair.ru/communication/forum/user/75606/>http://fromair.ru/communication/forum/user/75606/</a> Так что приготовьтесь предоставить конфиденциальную информацию (пол, возраст, государство проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает менее суток, после чего получится беспрепятственно выводить солидные выигрыши.Бездепозитные призы, как уже понятно, являются уникальной возможностью обратиться игровому процессу безусловно бескорыстно, то есть играть в онлайн казино безвозмездно и на имеющие свои незамедлительно после регистрации аккаунта. Автоматы с этим депозитом шансы стать великолепной возможностью сыграть для поклонников пыла с определенными ограничениями в денег. 1×slots casino регистрация 1×slotscasino09k online
<b>Смотреть еще похожие новости:</b>
<a href=http://b2s.bulwork.com/node/1581?page=134#comment-25189>1× slots зеркало</a>
<a href=http://polishcrazyclan.ugu.pl/member.php?action=profile&uid=272738>1×slots официальный зеркало</a>
<a href=http://complainanything.com/node/158?page=919#comment-1115808>1хслотс казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы — это подарки от казино в виде бонусных денег либо фриспинов для игровых автоматов, коие начисляются на акк игрока в процедуры регистрации на сайте заведения. Для получения этих поощрений депо не потребуется.
#5922 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
сайт винлайн букмекерская контора vodka casino <a href=https://rhymes-punches.com/>casino buzz</a> порно с Варвара Субботина Анна Михалкова <a href=https://rucriminal.info/>зеркала казино</a> порно с Евгения Медведева фреш казино бесплатное казино casino 7k сегодня Приезжева Екатерина Геннадьевна порно retro casino порно с Георгий Джикия (футбол)
DiskiPlus букмекерская контора фонбет DiskiPlus Крючкова Полина Викторовна порно <a href=https://www.diskiplus.ru/>DiskiPlus 1×bet сайт 1×bet xyz</a> DiskiPlus часы казино DiskiPlus порно с Алина Загитова, фигуристка <a href=https://diskiplus.ru>DiskiPlus бесплатное казино</a> DiskiPlus casino ап DiskiPlus букмекерская контора мостбет DiskiPlus букмекерскую контору пин DiskiPlus сайт казино вход DiskiPlus пин casino DiskiPlus порно с Юлия Ефимова, пловчиха DiskiPlus пина casino
#5923 Charlesgunnyhttp://filmkachat.ru
1х слот 1хслотс регистрация перейти на 1×slots
Зачастую бездепозитные призы казино для забавы предлагаются разными заведениями азартных игр в рекламных акций либо в целях вербования к для новых игроков. Для бездепозитных бонусов в казино 2022 игроку надо пополнять счет до момента вывода хотимых средств. <a href=http://filmkachat.ru/>1 x slots</a> Ещё одно распространённое акционное предложение – привлекательный презент с сомнительными притязаниями. К примеру, клуб сулит $100 в бездепа, хотя с вейджером х80 или х100. Отыграть подобный вейджер практически невозможно и потому какого-либо концентрироваться на больше интересных промоакциях.4. Заберите подарок. Чаще всего бонус активизируется сразу в регистрации. Но бывают истории, когда надо(надобно) забежать в индивидуальный кабинет либо написать в саппорта. <a href=https://xiglute.com/blogs/20607658/203148/mastering-the-art-of-professional-home-design-drafting-a-moder>https://xiglute.com/blogs/20607658/203148/mastering-the-art-of-professional-home-design-drafting-a-moder</a> Чаще всего используются коды. Их нужно заносить в особые окошки регистрационной анкеты, если идет о пригласительных призах, или в определенном разделе личного офиса игрока. 1×slots рабочее зеркало <a href=https://kizkiuz.com/user/MichaelGax/>https://kizkiuz.com/user/MichaelGax/</a> Рассмотрим на образце: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских руб. В критериях акции предписано, собственно вейджер бездепозитного приза х20. Поэтому, чтобы отыграть приз, игроку несомненно необходимо устроить ставок на 35*20=700 рублей.
1хслотс регистрация в 1×slots casino
Фриспины предусмотрены для использования в видео слотах. Внимательно ознакомьтесь с критериями – часто их выдают на некоторые автоматы. В зависимости от клуба, у вас выйдет устроить определённое количество ставок. Кстати, продвинутые игорные жилища позволяют запускать каждых «одноруких злодеев».Такой бесплатный эквивалент средств зачисляется на профиль пользователя после осуществления требований и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений возможен лишь после воплощения вейджеровых критерий. 1×slots регистрация на официальном сайте <a href=http://uralremput.ru/index.php?subaction=userinfo&user=offbeatmystery8>http://uralremput.ru/index.php?subaction=userinfo&user=offbeatmystery8</a> Акции распространяются как на все игры казино, например и на ограниченный перечень. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и. Промо возможность охватывать разработки 1-го производителя. Бездеп не пересекается с иными акциями казино. Если на сайте учтен кэшбек, он не начисляется за ставки, изготовленные бонусными средствами. Для идентификации платежных реквизитов игрока возможность понадобиться пополнение счета на минимальную необходимую.Иногда у гостей сайта могут возникнуть проблемы при активации приобретенного промо-кода. В этих случаях, нужно адресоваться за помощью в службу «Support». Для получения ответа, обязательно указывается конкретная причина обращения и подтверждается информация дополнительными снимками. Если сложилась спорная обстановка, практически можно обратиться к основному регулятору или контролирующему органу, выдавшему данному заведению лицензионный документ. 1×slots регистрация 1×slots casino 777 online
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Чтобы получить вероятность исключить прибыль с бездепозитного бонуса в казино, необходимо выполнить ряд условий: Это один из основных характеристик привлекательности презента. С завешенным коэффициентом числе профессионалы не смогут выполнить условия по отыгрышу. И так, насколько привлекательно выглядит предложение – бездепозитный бонус казино в объеме $500 или $1 000. Чтобы новенькие лучше вдумались, собственно же такое вейджер, мы разберём на случае. <a href=https://diskutim.com/member.php?action=profile&uid=3557>https://diskutim.com/member.php?action=profile&uid=3557</a> Помимо прочего, для вывода средств по бездепу нужно привнести на счёт собственный 1-ый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально вероятную необходимую, последствии чего вывод средств будет доступен.Список например называемых «не территорий» прилагается к правилам бонусной программки игорного портала. Обязательно выясните, распространяются ли на вас подобные санкции. 1хслот 1хслотс регистрация перейти на 1×slots Мы подготовили перечень, где есть практически актуальные и свежие бездепозитные бонусы казино, которые вам получить безвозмездно. Для наших юзеров есть особые предложения неповторимые призы, коие вы ни не найдете, их мы обозначили особой красноватой плашкой «Exclusive».
1×slots промокод при регистрации
Не советуем опрометью голову хвататься за различные предложения получения средств без инвестициям. Вполне возможно, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на 1-ый взгляд. Альтернативой является казино бонус за депо. Мы предлагаем вас пару советов, благодаря коим у каждого игрока будет возможность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом денег: <a href=https://www.bf-france.com/forums/profile/30064-rabofreeor/>1×slots зеркало быструю регистрацию а также мгновенное</a> Законодательство, регулирующее азартные забавы в различных странах, оказывает на возможности операторов. В итоге пользователи из отдельных регионов сталкиваются с лимитированиями со стороны казино. Это возможность быть как полный отказ в доступе, так и невозможность загружать забавы отдельных производителей. Наиболее популярностью вознаграждения между гэмблеров – бездепозитные призы казино. Это не умопомрачительно, как можно получить благотворительные вращения или виртуальные кредиты, и при этом не придётся пополнять счёт, рисковать собственными средствами. Удастся насладиться различными весельями даже выиграть солидную сумму, избегая серьёзного риска.Некоторые клубы автоматически начисляют приз на акк игрока после исполненья критерий получения, но посещают ситуации, когда приз нужно активировать игроку самому. Есть несколько методов активации бонуса: 1 x slots casino <a href=https://krok.biz/forum/memberlist.php?mode=viewprofile&u=38415>https://krok.biz/forum/memberlist.php?mode=viewprofile&u=38415</a> Бездепозитный бонус за регистрацию в казино — это стартовый подарок вид валютного начисления или бесплатных вращений для свежих игроков заведения, для получения которого не вносить депозит.
1×slots регистрация
Риск-игра по равным шансам – Также казино может воспрещать скорпулезно условия по отыгрышу с помощью раунда на удвоение, который предлагается в слотах, видео-покере и неких иных играх. <a href=http://soumoli.com/home.php?mod=space&uid=37748>http://soumoli.com/home.php?mod=space&uid=37748</a> Размер бонуса. В качестве бездепов обыкновенно начисляют маленькие суммы, а когда речь о бонусах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то кое-какие казино имеют подарить игроку до 2000$. 1×slots рабочее зеркало на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=https://www.mshowto.org/forum/members/jamespauri.html>1 x slots</a>
<a href=https://masstr.net/showthread.php?tid=131892>1×slots регистрация на официальном сайте</a>
<a href=https://irc.floobits.com/Jamesamiva>рабочее зеркало 1×slots</a>
<a href=http://djdrewski.co.uk/lfsbangers/viewtopic.php?f=32&t=26411>1×slots зеркало рабочее на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные призы за регистрацию считаются одним из самых популярных методов привлечения свежих игроков в онлайн-казино, поэтому собственно они деют игрокам вероятность опробовать казино, особенно игровые автоматы, и вполне, выиграть реальные деньги. Процесс доказательства личности возможность занять от 1-го денька до недели. Если заказчик разрешил нибудь ошибку при заполнении паспортных данных, то ему следует адресоваться с задачей в саппорта онлайн-казино.
#5924 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
игры казино официальная казино <a href=https://specreporter.com/>официальное казино вход</a> лучшие казино бесплатно pin up casino официальный <a href=https://rhymes-punches.com/>1×bet</a> 1×bet официальный Шевцова Татьяна Викторовна порно ап казино Мухтиярова Елена Вячеславовна порно casino скачать приложение скачать 1×bet на андроид бесплатно casino
DiskiPlus casino андроид DiskiPlus бесплатно фильм казино <a href=https://diskiplus.ru>DiskiPlus приложения букмекерских контор</a> DiskiPlus up casino официальный DiskiPlus 1×bet рабочее на сегодня <a href=https://diskiplus.ru/>DiskiPlus 1×bet casino</a> DiskiPlus retro casino DiskiPlus casino x DiskiPlus букмекерскую контору пин DiskiPlus казино проиграл DiskiPlus 1×bet xbet xyz DiskiPlus казино онлайн DiskiPlus порно с Голикова Татьяна Алексеевна
#5925 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало
Онлайн гемблинг развивается с каждым деньком больше и больше, новые бренды создаются не по дням а по часам. Новые онлайн казино проделывают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и что, этим наиболее предлагают бездепозитные бонусы за регистрацию, собственно бы не упустить такую возможность — как воспользоваться свежим бездепом, рекомендуем посещать наш вебсайт как можно чаще, самое вкусное и новые будет добавляться в данном же перечне.Бонус в казино без депозита содержит различные варианты: может быть приветственный приз, акции в честь каких-либо праздников либо важных дат, бонус за привлечение свежих игроков, лояльность и получение VIP-статуса. <a href=http://filmkachat.ru/>1хслот зеркало сайта</a> <a href=https://codepen.io/bjxkafyt-the-encoder/pen/bNbrqxY>https://codepen.io/bjxkafyt-the-encoder/pen/bNbrqxY</a> 2. Создать новый профиль. Для регистрации надо(надобно) наполнить маленькую анкету либо зайдите в личный кабинет при помощи соц сеток; 1×slots регистрация 1×slots casino 777 online <a href=https://maital.ru/viewtopic.php?id=14591#p39880>https://maital.ru/viewtopic.php?id=14591#p39880</a> Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют актуальную информацию о no deposit bonuses прочих услугах.
1×slots казино мобильная версия
1×slots casino регистрация на сайте <a href=http://cross-club.ru/index.php?subaction=userinfo&user=curvedelection8>http://cross-club.ru/index.php?subaction=userinfo&user=curvedelection8</a> К раскаянию, нет. Почти все казино, настоятельно внесение но бы 1-го малого депо для вывода выигрыша с бездепозитного приза. Также учитывайте, что вывести деньги разрешено лишь на ту платежную систему, с коей был сделан депо.Для верификации аккаунта надо(надобно) предоставить профессионалам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, еще фотку банковской карты или снимок страницы электрического кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности. 1×slots зеркало быструю регистрацию а также мгновенное
1× slots регистрация в 1×slots casino
Активация происходит с помощью промокодов, коие вводятся в собственном кабинете после регистрации. Среди спецпредложений в списке Casino.ru находятся эксклюзивные промокоды, которые доступны только посетителям портала. Другие методы начисления средств ? автоматическая активация незамедлительно последствии творенья аккаунта и получение презента по запросу в службу технической помощи. При отыгрыше бездепов, учитывайте кратковременные лимитирования. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток.Бездепозитные бонусы настоящими средствами, коие можно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадали. <a href=http://vrelize.ru/bitrix/redirect.php?goto=http://chat-off.com/click.php?url=http://rodos74.ru/bitrix/click.php?goto=https://telegra.ph/Kak-vzyat-akademicheskij-otpusk-vo-vremya-obucheniya-v-aspiranture-s-sohraneniem-otsrochki-ot-prizyva-na-voennuyu-sluzhbu-YUridi-09–23>http://vrelize.ru/bitrix/redirect.php?goto=http://chat-off.com/click.php?url=http://rodos74.ru/bitrix/click.php?goto=https://telegra.ph/Kak-vzyat-akademicheskij-otpusk-vo-vremya-obucheniya-v-aspiranture-s-sohraneniem-otsrochki-ot-prizyva-na-voennuyu-sluzhbu-YUridi-09–23</a> Вы всего, например все любите получать презенты и бездепозитные призы казино. Игорные жилища взяли в повадку одаривать гэмблеров приятными бонусами. Стать владельцем приветственного презента возможно за творенье профиля или пополнение счёта. Второй вариант больше занимательный, как клубы готовы удвоить депозит! Но в вы новичок и лишь знакомитесь с миром азарта, превосходнее пользуйтесь бонусом за регистрацию.Но а в вы уже профи по интернет казино, кликаем на красноватую кнопку «Получить» и Вы автоматически перейдете в интернет казино; 1хслотс рабочее зеркало Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном сайте и сделайте вход в личный кабинет, чтобы отобрать безвозмездные вращения с вейджером х40;Ограничения по забавам. Администрация воспрещает игрокам кое-какие игровые автоматы с бездепозитным призом, средствами или безвозмездными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда дробление производится по виду игр. Например, отыгрыш вероятен на всех игровых аппаратах, но запрещен в настольных забавах и в разделе Live Casino.
1×slots скачать на айфон
Чаще всего используются коды. Их надо(надобно) заносить в специальные окна регистрационной анкеты, в речь идет о пригласительных бонусах, либо в определенном разделе личного кабинета игрока.Создание аккаунта. На сайте казино необходимо открыть регистрационную форму и наполнить пустые поля личными данными. Иногда на данном шаге требуется показать лишь адрес электронной почты и пароль, но чаще надо наполнить анкету индивидуальной информацией (ФИО, дата рождения, место проживания и т.д.). Нужно свидетельствовать лишь настоящие данные, потому впоследствие они будут проверены. <a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1099#post-34551>1хслот скачать</a> Подтверждение персональной инфы. Все казино требуют от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у пользователя иных аккаунтов (мультиаккаунт запрещен). 1×slots зеркало на сегодня <a href=http://demo2-ecomm.in.ua/user/OscarLak/>http://demo2-ecomm.in.ua/user/OscarLak/</a> Рассмотрим принцип его действия на образце. Допустим, вы зарегались и возымели $10 no down payment bonus с вейджером х50. Это означает, собственно выигранные деньги возможно будет выводить не ранее, чем последствии такого, как общая сумма ставок достигнет $500.Иногда в одобрения за регистрацию могут выдаваться билеты для роли в турнирах. Условия их проведения очень отличаются, потому мы рекомендуем ознакомиться с каждым предложением раздельно.
1×slots сайт зеркало
Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и более. Когда игроку полагается количество фриспинов, администрация имеет разбивать их начисление на количество дней. Бесплатные вращения предоставляются для определенного слота, который указывается в правилах промоакции.В интернете очень много скриптовых вебсайтов, коие принадлежат мошенникам. Их основная задача – привлечь гэмблеров, пообещав столько великодушные подарки, хотя и крупные выигрыши. Так собственно некоторые веб-сайты предлагают получить за регистрацию и $1 000. <a href=http://uralremput.ru/index.php?subaction=userinfo&user=idioticbliss61>http://uralremput.ru/index.php?subaction=userinfo&user=idioticbliss61</a> скачать 1×slots официальный сайт Акционные предложения от казино существуют в разных форматах. Часто бонусы даются в обмен на депозит. Игрок заносит платеж и получает деньги, безвозмездные вращения и поощрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — вид приза, который гарантирован за исполненье определенных действий на сайте:Для всех бездепозитных бонусов действует максимальный лимит на выигрыш. Он указывает максимальную необходимую, коию появится получить, играя на бонусные кредиты. Как лишь вам получится выполнить требования вейджера, дозволенный максимум будет переведен с бонусного счета на основной, а остаток несомненно списан.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.exalto-emirates.com/memberlist.php?mode=viewprofile&u=69997>1×slots зеркало рабочее на сегодня</a>
<a href=http://theauction.com.au/my-account/>1×slots casino регистрация 1×slotscasin online</a>
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=855139>1хслот зеркало сайта</a>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=161683>1×slots мобильная версия войти казино</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если вы выбираете испытанное лицензионное интернет казино и сделайте все обстоятельства получения бездепозитного приза, проблем с получением дара у Вас не возникнет. Нет. Казино раздают благотворительные бонусы за регистрацию, для того, чтобы клиент имел ознакомиться с игровым заведением. А чтобы исключить его, нужно выполнить условия отыгрыша.
#5926 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация то дальше необходимо пройти
При небольшой сумме приза рекомендуется выступать по низким ставкам, а применять наибольшие никакого только в случае, случае вейджер очень великий, а время на отыгрыш крепко ограничено. <a href=http://filmkachat.ru/>1х слотс зеркало регистрация в 1×slots casino</a> Основное управляло получения бездепа ? создаваемый акк должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов взыскательно запрещено. Проверка проводится по имени, e-mal, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депо нужно блюсти несложную очередность поступков. <a href=https://www.thisisant.com/forum/viewthread/7824/>https://www.thisisant.com/forum/viewthread/7824/</a> Бездепозитный бонус – это экономическое вознаграждение, которое выдается участнику игры в казино, для его привлечения и появления заинтересованности. Любой посетитель, который соответствует условиям выдачи похожего бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое одобрение считается более действенным способом, дающим возможность стартовать в игре, не вкладывая собственных материальных средств. 1×slots зеркало регистрацию более популярный вариант это <a href=https://training.trainingstree.com/author/henryprend/>https://training.trainingstree.com/author/henryprend/</a>
1×slots официальный зеркало рабочее
<a href=http://autotek.lv/lv/autozinas/4023-levc-furgons-prvrts-par-prvietojamo-mju.html>1× слот зеркало</a> 1× slots casino официальный сайт <a href=https://sultantheme.com/vb4forum/member.php?20251-RalphTow>https://sultantheme.com/vb4forum/member.php?20251-RalphTow</a> Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Вейджер (wager) – это коэффициент, который демонстрирует на какую необходимую нужно устроить ставок, дабы вывести бонус из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего бонуса, Вам необходимо устроить ставок на сумму: 500*70=3500 рублей. Только полностью отыграв бонус, Вы сможете вывести свой выигрыш. 1хслотс рабочее зеркало на сегодня Все любят получать подарки. Согласитесь, практически каждый играющий человек будет сильно счастлив, если получит бесплатный презент для игры в онлайн казино просто за регистрацию или же бонус за внесенный депо, например именуемые приветственные призы для новых игроков. Соответственно эти интернет клубы будут больше востребованы и предпочтительны у игроков при выборе казино для забавы. Топ казино постоянно обновляется и добавляются новые и интересные игровые клубы с привлекательной бонусной политикой и всеми возможными привилегиями, к которым относятся эти бонусы как фриспины за регистрацию, денежные бездепозитные бонусы, еще великодушные призы за внесенный депо.
1хслотс казино зеркало
Чаще всего казино приз за регистрацию без депо даёт возможность запустить каждой автомат. Но чем пристально ознакомиться с условиями. Иногда для игры доступны только определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, лучше начать знакомство с миром пыла именно с «одноруких злодеев». Бесплатные бонусы казино без депо возможно получить вид денежных средств на бонусный счет (вывести их возможно только последствии отыгрыша), фриспинов, забавы или кешбэк-бонуса.Так собственно можете смело регистрироваться без всяких размышлений. Фортуна сейчас точно на вашей стороне. Не опасайтесь, так последствие какого либо убытка Вам совершенно не грозит. С этими призами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе. <a href=https://lavr-sovet.ru/user/DavidOwnep/>https://lavr-sovet.ru/user/DavidOwnep/</a> Как верховодило, при выводе денег, от играющего требуется лишь сделать минимальный вклад для того, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом личный счет. 1×slots зеркало на сегодня
скачать 1×slots официальный сайт
Получить Бездепозитный приз в интернет казино дело двух кликов. Другой момент, отыграть промо и соблюсти верховодила и условия отыгрыша. Под правилами предполагается не только вагер, хотя и лимитирования по максимальной ставке. Мы разумеем, собственно в кино все ставят на зеро и выигрывают. Призываем не создавать подобного. Перед активацией бонуса прочтите верховодила. Узнайте следующие факторы: Условия получения дара, за регистрацию, за депозит и многое. Ограничения по наибольшей ставке. Зачастую не выше 350 руб. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вращать автоматы, а вагер несомненно стоять на пространстве. Поэтому важно знать, в каких играх возможно совершать кратность валютного оборота. Бесплатные бонусы казино без депозита возможно получить вид валютных средств на бонусный счет (исключить их можно только последствии отыгрыша), фриспинов, игры или кешбэк-бонуса. Бонусы без депозита при регистрации считаются наиболее привлекательными как для опытнейших игроков, например для и начинающих. Получив такое вознаграждение, заказчик может играть на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, еще обстоятельства их активации и выигрыша. 1×slots зеркало регистрация в 1×slots casino <a href=http://konalab.main.jp/home-j/cgi/navi/navi.cgi?site=36&url=http://toolbarqueries.google.hr/url?q=http://spimport.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/F3mc3LXkC3k>http://konalab.main.jp/home-j/cgi/navi/navi.cgi?site=36&url=http://toolbarqueries.google.hr/url?q=http://spimport.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/F3mc3LXkC3k</a>
1×slots регистрация на сайте 1×slots ru com
Более солидные предложения встречаются очень изредка. Зачастую они доступны лишь VIP-игрокам. В остальных случаях им наверняка сопутствуют довольно жесткие условия отыгрыша. Также вероятны вспомогательные обстоятельства и другие ограничения, прописанные в условиях и положения бонусной программки казино. 4. Заберите подарок. Чаще всего бонус активируется незамедлительно после регистрации. Но посещают ситуации, когда надо(надобно) зайти в личный офис или написать в службу поддержки. <a href=https://xn–6-gtb4aicb3c6b.xn–p1ai/user/JamesPrage/>https://xn–6-gtb4aicb3c6b.xn–p1ai/user/JamesPrage/</a> Иногда в одобрения за регистрацию могут выдаваться билеты для участия в турнирах. Условия их проведения довольно отличаются, потому мы рекомендуем ознакомиться с каждым предложением отдельно.Сроки активации бонуса устанавливаются каждым казино, но почаще всего они не превышают недели с момента получения. Игроку обязательно нужно применять бездеп протяжении указанного срока, в ином случае приз просто пропадет. Каждый бонус можно получить только раз один, потому если не использовать бездеп в срок, у игрока не будет 2 шанса им пользоваться. 1хслотс зеркало на сегодня Так что сможете смело региться без всяких раздумий. Фортуна сегодня точно на вашей стороне. Не страшитесь, так следствие какого либо ущерба Вам совершенно не угрожает. С такими бонусами как без пополнения, Вы остаетесь лишь в плюсе, хотя не как не в минусе.Некоторые казино могут предлагать клиентам бездепы за подтверждение номера или почты либо репост на страницу в соц сетях.
<b>Смотреть еще похожие новости:</b>
<a href=https://clubdefansde24.com/foro/viewtopic.php?t=18550>казино 1× slots официальный сайт</a>
<a href=https://www.lightknotes.com/MyBB/showthread.php?tid=199447>1×slots на любой вкус как пройти регистрацию</a>
<a href=https://www.mshowto.org/forum/members/jamespauri.html>1×slots зеркало видели такую регистрацию на</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Постарайтесь отыграть вейджер, дабы появилась вероятность оставить заявку на выплату. Кстати, на всех сайтах, представленных в списке, доступны современные платёжные приборы. Вы можете получить выигрыш на электрической кошелёк, карту, телефонный. Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации презента необходимо доказать электрическую почту и привязать аппарат;
#5927 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Любимова Ольга Борисовна порно зеркала казино <a href=https://t.me/vchkogpu_ru>porno Юлия Пересильд</a> porno Юлия Канакина порно с Анна Щербакова, фигуристка <a href=https://specreporter.com/>букмекерская контора фонбет официальный сайт</a> почему в казино не бывает настенных часов pinco casino букмекерские конторы бет top casino online casino официальный букмекерские конторы в россии pin up casino официальный
DiskiPlus casino зеркало сегодня DiskiPlus порно с Елена Никитина, скелетонистка <a href=https://www.diskiplus.ru/>DiskiPlus сайт казино вход</a> DiskiPlus casino 7k рабочее DiskiPlus porno Юлия Канакина <a href=https://diskiplus.ru>казино</a> DiskiPlus порно с Матвей Сафонов (футбол) DiskiPlus Семёнова Татьяна Владимировна порно DiskiPlus Преподобная Надежда Александровна порно DiskiPlus зеркала казино DiskiPlus вывод казино DiskiPlus porno Елизавета Туктамышева DiskiPlus фреш казино
#5928 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
Срок отыгрыша — это этап, кот-ый начинается в момент активации приза и завершается с его закрытием. Пользователю необходимо уложиться в этот временной промежуток, другому призовые свои аннулируются. Казино устанавливают список игр, ставки в засчитываются при расчете отыгранных средств. Если тайтл не заходит в данный список, то возможность быть недоступен для загрузки в деянья бонусного предложения. <a href=http://filmkachat.ru/>1×slots регистрация</a> При регистрации сомнений или ином интернет игральном заведении — вас дается раз шанс испытать собственную фортуну не внося свои монеты. Замечу что эту поощрительную услугу предоставляют не все интернет игровые площадки, а лишь великодушная половина из них. Которые мы подготовили для Вас в нашем перечне. <a href=https://diccut.com/forums/thread/2610/>https://diccut.com/forums/thread/2610/</a> 1×slots casino online регистрация <a href=https://qiqer.ru/qforum/profile.php?id=360845>https://qiqer.ru/qforum/profile.php?id=360845</a> Также учтите, собственно кое-какие игровые платформы сузивают список стран, коие способны получить предложенный бездепозитный бонус за регистрацию. К образцу, существуют онлайн-заведения, выдающие подобные бонусы лишь обитателям конкретных государств. К примеру, интернет казино 777 Оригинал дает бездепозитный приз лишь игрокам из России и стран СНГ. Или наоборот, пичкают вознаграждением всех, кроме обитателей некоторых государств (исходя из сего, по внимательно изучать перечень, чтобы потом не появилось практически вопросов и претензий).
1×slots casino регистрация 1×slotscasin online
1×slots casino online регистрация <a href=https://sklad-slabov.ru/forum/user/4059/>https://sklad-slabov.ru/forum/user/4059/</a> У любого игорного заведения средства верховодила и обстоятельства. Но, дабы получить призы, нужно выполнить стандартные деянья:Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? 1×slots подтвердит вашу регистрацию если говорить Выбор каждого онлайн казино на нашем сайте. В описании к любому Вы сможете узнать, что получите за творенье аккаунта.
1×slots зеркало регистрация в 1×slots casino
Бездеп с фриспинами имеет обхватывать всю коллекцию игр на сайте или разработки одного провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении акции. Выигрыш имеет быть выведен после того, как юзер отыграет данную необходимую. Возможность расценить глубокий функционал слотов — главное совершенство этой разновидности. Игроку становятся доступны что, эти функции, коие отсутствуют в демонстрационном режиме, а возможность выиграть реальные деньги прибавляет ярчайших азартных ощущений. Также, в этом случае необходимо доказать свой номер аппарата, результата код, полученный в смс-сообщении от клуба ввести в специальное поле в собственном кабинете игрока. <a href=http://zeren.freeoda.com/member.php?action=profile&uid=3961>http://zeren.freeoda.com/member.php?action=profile&uid=3961</a> Некоторые клубы механически начисляют приз на акк игрока в исполненья условий получения, но случаются истории, когда приз нужно активировать игроку самому. Есть некоторое методов активации бонуса:Подтвердите регистрацию, чтобы активировать Бездепозитный бонус с выводом, потребуется наполнить индивидуальный профиль. Заполните пустующие поля реальными данными о себя. 1× slots регистрация в 1×slots casino
1×slots регистрация
Для получения предоставленных призов для пригодиться — ПК или мобильное устройство, и остальное дело за малым.Самый распространённый из похожих призов, конечно же, бездеп на день рождения посетителя — бонус в виде фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им можно на установленного периода времени. <a href=http://board.eternityrpc.com/member.php?action=profile&uid=369>1 xslots рабочее зеркало</a> Перед активацией принципиально внимательно изучить условия акции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, на коих возможно пользоваться предложением. Если бездеп обхватывает ограниченный список игр, рекомендуется разузнать максимальные коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только в том случае, если оператор не установил строгие ограничения на максимальную необходимую ставки.Объективные – объем приза, коэффициент и обстоятельства вейджера, надобность внесения депо для вывода денег; рабочее зеркало 1хслотс <a href=http://snyglobal.com/bbs/board.php?bo_table=online&wr_id=23908>http://snyglobal.com/bbs/board.php?bo_table=online&wr_id=23908</a>
1×slots регистрация 1×slotscasino09k online
Для получения выигрыша потребуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить определенную сумму, но теснее из личных денег. Она рассчитывается из совместного объема выигрыша за всегда использования бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, если юзер выиграл 1000 руб., а множитель сочиняет х30, вывести деньги можно несомненно, сделав ставки на 30 000 рублей. Вышеописанная первопричина и считается основным моментом, из-за которого операторы отдают доля своей прибыли на разные рекламные расходы и маркетинговые кампании. А самым действенным тут станут выступать именно бездепозитные призы казино 2022 с выводом за регистрацию.Основное различие что, нет, собственно для получения бездепа нужно пополнять баланс в казино. Но считая сего, есть ряд прочих отличий: <a href=http://dudoser.com/user/FrankGaulk/>http://dudoser.com/user/FrankGaulk/</a> На условиях отыгрыша даровых призов стопам остановиться подробнее. С ними связаны нюансы, которые нельзя оставить без внимания.Бездепозитный приз по промо-коду несомненно доступен для забавы, только в том случае когда Вы активируете специальный бонусный код в разделе с бонусами либо укажите промокод при регистрации на сайте. В неких случаях, считая активации кода, понадобиться подтвердить контактные данные игрока и наполнить анкету клиента. 1х слот 1хслотс регистрация перейти на 1×slots Представленные на данной странице превосходнейшие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, в котором гости Casino.ru могут сортировать перечень по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д.Высокая конкуренция в разделе азартных игр мотивирует операторов привлекать посетителей различными промоакциями. Благодаря данному у гостей замечена возможность получить бонусы в казино за регистрацию без депо. Воспользоваться этим предложением можно, избегая функцию внесения средств на игровой счет, просто активировав акк на сайте. Наш экскурсовод по бездепам поможет выбрать самую привлекательную бонусную программу, разузнать верховодила получения такового гонорары и воспользоваться им с максимальной выгодой.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.vn.ua/showthread.php?p=3276709#post3276709>1×slots регистрация 1×slotscasino09k online</a>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=297589>1×slots зеркало на сегодня</a>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=274328>1×slots зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепы с бесплатными вращениями предоставляют юзерам право вертеть барабаны игровых автоматов без снятия средств со счета. За каждый раунд уплачивает казино. Число спинов ограничено и редко выше сотку. Если промоакция включает в себя много бесплатных игр, их начисление имеет быть разбито на количество дней.
#5929 Jacobheplehttps://fmsu.org.ua
Станьте мастером <a href=https://fmsu.org.ua/>https://fmsu.org.ua</a> своего дела! Портал для тех, кто хочет строить и ремонтировать качественно и выгодно.
#5930 RobertAxownhttps://dki.org.ua
Все для строителей и мастеров <a href=https://dki.org.ua/>https://dki.org.ua</a> актуальные технологии, практические советы, строительные материалы и проекты. Простые решения для сложных задач!
#5931 JerryGaiffhttps://donbass.org.ua
Хотите построить дом <a href=https://donbass.org.ua/>https://donbass.org.ua</a> или сделать ремонт? Здесь вы найдете всё: инструкции, идеи, современные технологии и проверенные решения. Портал для тех, кто строит.
#5932 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать на айфон
Бездепозитные бонусы, как уже ясно, считаются уникальной возможностью обратиться игровому процессу абсолютно безвозмездно, словами выступать в онлайн казино безвозмездно и на существующие свои сразу после регистрации аккаунта. Автоматы с этим депозитом все замерзнуть прекрасной вероятностью сыграть для поклонников азарта с определенными ограничениями в финансах.Но не стоит размышлять, что снабжая пользователей такими призами, казино увлекается спонсированием. Ведь размеры вознаграждений, в, не большие (средним объемом от 5 до 20 долларов). И на эти свои налагаются конкретные условия и ограничения, обязательные к исполнению игрока, если в последствии он желает получить все свои выигранные деньги. <a href=http://filmkachat.ru/>1×slots регистрация на 1хслотс</a> Третитй бездепозитный приз за регистрацию – денежные средства. К сожалению, начислить рубли либо доллары готовы лишь известные и популярные клубы. С их поддержкой вы сможете насладиться любой доступной игрой – автоматом, рулеткой, кено, блэкджеком.Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации бонуса без депозита. Внимательно прочитайте до конца. Многие новички делают ошибки на этапе регистрации и потому не получить презент. <a href=https://noosfero.ufba.br/lexxeagle/blog/mastering-interior-render-from-concept-to-photorealistic-visualization>https://noosfero.ufba.br/lexxeagle/blog/mastering-interior-render-from-concept-to-photorealistic-visualization</a> 1×slots casino регистрация 1×slotscasin online <a href=http://www.mxeia.com/home.php?mod=space&username=raspybabe56&do=profile>http://www.mxeia.com/home.php?mod=space&username=raspybabe56&do=profile</a> Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных притязаний, кроме неотъемлемой верификации. Если на веб-сайте предусмотрена неотъемлемая процедура доказательства личности, то исключить выигрыш получится лишь в ревизии данных. Приготовьтесь заполнить анкету и отправить в техподдержку документ, подтверждающий лицо.
1×slots casino регистрация 1×slotscasino09k online
Фриспины — безвозмездные вращения, коие дозволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины числятся самым модным и предпочтительным видом приза — бесплатные вращения иногда эффективнее и веселее в отыгрыше, чем другие виды бездепов. <a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=13119>1×slots регистрация на официальном сайте</a> 1хслот зеркало Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 долларов. Если выдаются фриспины, их количество редко выше нескольких 10-ов даровых вращений. <a href=https://www.ccvgaming.com/forum/member.php?39512-FrankAnido&s=1e1803b066f1a5be024c1266f8971add>https://www.ccvgaming.com/forum/member.php?39512-FrankAnido&s=1e1803b066f1a5be024c1266f8971add</a> Еще одно условие касается размеров ставки. Операторы устанавливают наивысшую сумму, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, избранной в Личном кабинете. При превышении лимита есть риск потерять бонуса. Существующие ограничения относятся и к определенным видам ставок. Например, играя в рулетку, клиент имеет столкнуться с запретом ставить фишки на шансы.Прежде чем активировать бездеп, необходимо убедиться что, что государство, гражданином коей является игрок, не входит в список не. casino 1×slot Классическая разновидность бонуса за создание аккаунта. Его преимущество заключается сомнений, собственно клиент может самостоятельно подбирать аппараты и создавать ставки в их. Иногда перечень игровых автоматов ограничен оператором, но все равно это другого, чем один-единственный доступный разъем, как когда с использованием фриспинов.Но на некоторых азартных платформах похожие гонорары имеют получить и уже зарегистрированные юзеры. В этом случае, призы предоставляются в уникальных промоакций либо же некоторым игрокам в виде акционного предложения, коие приходит на почту с целью «возвратить» игрока в свое казино.
зеркала 1×slots
Доступные игры – В некоторых азартных играх возможно понизить математическое преимущество казино до нескольких 10-х процента. В их количестве многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как управляло, в этих играх ставки идут в зачет вейджера не всецело. Например, имеет предусматриваться только 50%. В некоторых забавах бездепозитные бонусы вообщем нельзя отыгрывать. 2. Создать свежий профиль. Для регистрации нужно заполнить небольшую анкету или зайдите в собственный офис посредством социальных сетей;В зависимости от онлайн заведения любой из их возможность вас предложить как бездепозитные средства, так и бездепозитные фриспины, коие последствии удачной регистрации упадут вас на ваш игровой баланс. <a href=http://trisinfronteras.com/davidcastro/component/k2/itemlist/user/472585-darenacurf>http://trisinfronteras.com/davidcastro/component/k2/itemlist/user/472585-darenacurf</a> Способы получения бездепа различаются зависимо облика приза, который приглянулся игроку. Но вас так нужно быть зарегистрированным в легальном онлайн-казино и доказать свою лицо. В общем виде пошаговая инструкция для получения бездепозитного бонуса смотрится так: 1×slots регистрация на сайте После получения приза вывод средств для посетителя будет недоступен до, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя либо пара месяцов. Выводить средства игрок сможет лишь последствии отыгрыша.При небольшой сумме бонуса рекомендовано играть по невысоким ставкам, а применять максимальные чем лишь том, случае, если вейджер слишком большой, а время на отыгрыш крепко ограничено.
1хслотс мобильная версия зеркало
Ниже указан важный перечень легальных казино в Беларуси с бонусами на 1-ый депозит. Вы можете попасть на официальный сайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз.Доступ к дару может раскрываться автоматически в введения промокода или обращения в службу поддержки сайта. В первом случае от юзера не требуется никаких действий. Бездеп с активацией по коду встречается почаще всего. Игроку нужно установить совокупность символов в графе, которая возможность находиться в регистрационной форме в Личном офисе. казино 1×slots официальный сайт <a href=http://140.143.56.33/home.php?mod=space&uid=194021&do=profile>http://140.143.56.33/home.php?mod=space&uid=194021&do=profile</a> Размер бонуса. В качестве бездепов обычно начисляют большие суммы, а когда речь о призах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то кое-какие казино все подарить игроку до 2000$.B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax
1× slots регистрация в 1×slots casino
Но эти рамки не смущают том хайроллеров, потому коэффициенты на слотах разрешают рассчитывать на крупные выигрыши, в некоторых автоматах разыгрывается прогрессивный джекпот.Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие появляются у новичков. <a href=https://oke.zone/profile.php?id=32831>https://oke.zone/profile.php?id=32831</a> Если простыми словами, бездепы – это определённая сумма средств либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно забирать подарки. Но есть кое-какие нюансы. Существуют игорные дома, коие перед что, этим как начислить призы требуют привязать телефон, предоставить копии документов. 1×slots регистрация на официальном сайте Чаще всего используются коды. Их нужно заносить в специальные окошки регистрационной анкеты, случае идет о пригласительных призах, либо в особом разделе собственного кабинета игрока.
<b>Смотреть еще похожие новости:</b>
<a href=http://theauction.com.au/my-account/>1×slots официальный сайт мобильная версия</a>
<a href=https://smm-seo.ru/members/rabofreeol.4209/>1×slots регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриплей-бонусы. Бонусы за бесплатную игру есть только в некоторых клубах. Они зачисляются незамедлительно последствии творения профиля и действуют непродолжительное время. Если у вас нет времени истратить средства, они просто закончатся. Что дотрагивается медли, как призы срабатывают в течение 1-го часа. Денежные средства. Третий приз за регистрацию без депозита – наличные. К раскаянью, лишь знаменитые и знаменитые клубы имеют дать деньги в руб. Либо долларах. С их подмогою появится насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед этим нужно исполнение определенных критерий.
#5933 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать pin casino 1×bet официальный сайт <a href=https://www.ossetia.tv/>Кузнецова Анна Юрьевна порно</a> Комарова Наталья Владимировна порно Львова-Белова Мария Алексеевна порно <a href=https://th-royalgclub.com/>7k casino зеркало на сегодня</a> порно с Баталина Ольга Юрьевна порно с Дарья Клишина, легкоатлетка порно с Анна Щербакова, фигуристка официальное казино вход casino сегодня 1×bet зеркало рабочее казино можно
DiskiPlus 7k casino зеркало DiskiPlus букмекерская контора бетсити <a href=https://www.diskiplus.ru/>DiskiPlus букмекерские конторы pin</a> DiskiPlus 1×bet официальный сайт DiskiPlus вавада казино <a href=https://diskiplus.ru/>DiskiPlus букмекерскую контору пин</a> DiskiPlus Шевцова Татьяна Викторовна порно DiskiPlus porno Екатерина Ефременкова, шорт-трекистка DiskiPlus порно с Евгения Медведева, фигуристка DiskiPlus casino зеркало сайта DiskiPlus 1×bet скачать приложение DiskiPlus букмекерская контора официальный сайт DiskiPlus казино вход официальный сайт
#5934 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее на сегодня
Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам запрещено начислять бонусы посетителям, не имеющим валютных средств на счете. Мы предлагаем рассмотреть актуальные призы онлайн-казино с лицензией, коие соблюдают законодательство РБ. <a href=http://filmkachat.ru/>1 х слотс зеркало</a> Внесение депозита – Будьте готовы восполнить счет последствии отыгрыша приза. Это обычное требование верховодил для данного типа промо-акций. Лучше заранее уточнить, какую необходимую надо(надобно) будет заносить на счет. Как верховодило, речь о минимальном депозите, хотя вы обязаны быть уверены, что он вам по кармашку. <a href=https://bresdel.com/blogs/806517/Mastering-Interior-Shop-Drawings-From-Concept-to-Construction-Excellence>https://bresdel.com/blogs/806517/Mastering-Interior-Shop-Drawings-From-Concept-to-Construction-Excellence</a> Бездепозитные бонусы казино за регистрацию в 2022 году — это возможность сыграть за счёт заведения. Казино даёт клиенту шанс воспользоваться определённой суммой либо количеством бесплатных вращений без внесения депо. Не путайте деморежим с реальной игрой без надобности внесения депозита. 1×slots подтвердит вашу регистрацию если говорить <a href=https://www.021snyw.com/space-uid-53964.html>https://www.021snyw.com/space-uid-53964.html</a> Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы которые возникают у начинающих.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 $. Если выдаются фриспины, их количество изредка превышает нескольких десятков даровых вращений.
1×slot зеркало
Размер бонусов чаще всего чисто символический и не выше 50 руб. Приятно, но ощутимым бустом при ли будет. 1×slots официальный зеркало Подобные призы без депо предоставляются на более прибыльных критериях. Зачастую они крупнее, а условия отыгрыша менее жесткие.Таким образом, заведение пытается продемонстрировать себя своим потенциальным игрокам, а такой маркетинговый ход как казино приз без депозита за регистрацию завлекает очень большое внимания к игорному заведению и обеспечивает постоянный поток новых гостей и будущих посетителей игрового интернет клуба. <a href=http://troderstro.ru/user/Davidsnite/>http://troderstro.ru/user/Davidsnite/</a> Это также безвозмездные финансы, которые поступают на аккаунты новоиспеченных компьютерные последствии регистрирования. А необыкновенность таких призов состоит что, нет, что обретенные финансы обязательно следует применять в продолжении назначенного медли.Самые свежие бездепозитные призы в казино за регистрацию 2022 года с выводом прибыли находятся на данной странице. Посетитель может оценить условия получения и начать играть на деньги без внесения депо. При этом игроку важно понимать, на каких критериях и какими способами него вывести полученный выигрыш. Для этого необходимо оценить список присоединенных платежных систем. 1хслотс официальный сайт зеркало
1×slots казино зеркало
Срок отыгрыша — это этап, кот-ый начинается в момент активации приза и кончается с его закрытием. Пользователю нужно уложиться в данный временной промежуток, иначе призовые свои аннулируются. Казино устанавливают перечень игр, ставки в засчитываются при расчете отыгранных средств. Если тайтл не заходит в этот список, то ему быть недосегаем для загрузки в действия бонусного предложения.Если вы бывалый игрок, вы должны аристократия, собственно бонус без депозита – редкая находка. Тем не, мы в исследуем онлайн, дабы отыскать для вас наилучшие бездепозитные предложения. <a href=http://blog.entonz.com/2020/03/dicas-rapidas-para-se-tornar-um-bom.html>http://blog.entonz.com/2020/03/dicas-rapidas-para-se-tornar-um-bom.html</a> Отказ в прохождении верификации. Если клиент не хочет или имеет предоставить документы, подтверждающие его лицо, профиль несомненно заблокирован совместно, вкупе со всеми бонусными начислениями.1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, случае не желайте замерзнуть жертвой плутов либо впустую израсходовать время; 1×slots зеркало рабочее на сегодня Также бывают случаи, когда казино начисляет оговоренный приз последствии регистрации нового посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам.Выиграть настоящие деньги в казино не пополняя счет – сложно, хотя возможно. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными призами и начните выступать на бонусные средства. По статистике в 10-ти заведений возможно заработать маленькую необходимую средств за счет бонусных средств.
1хслот 1хслотс регистрация перейти на 1×slots
Как лишь получите бездеп в казино, всё также не забывайте проверять электрическую почту. Некоторые игорные клубы непрерывно радуют активных гэмблеров приятными призами. Чаще всего получить подарок возможно в преддверии праздника, на день рождение, за вербование друга. А кроме распространённым призом считается прибавка к депозиту. Нужно всего лишь восполнить счёт, и азартное заведение прирастит его на 50–100%. <a href=https://uyghuryol.com/forum/viewtopic.php?f=8&t=233351>1х слот регистрация в 1×slots casino</a> Индивидуальные одобрения выдаются за совершение деяний: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавления либо официального посетителя для ПК. В большинстве казино срабатывают программки лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на грядущий степень нередко сопрягается выдачей бездепа.Зачастую бездепозитные бонусы казино для игры предлагаются различными заведениями азартных игр виде маркетинговых акций либо в целях привлечения к для новых игроков. Для бездепозитных призов в казино 2022 игроку надо пополнять счет до момента вывода желанных средств. Бонус за регистрацию в казино выдается лишь один один на одного игрока. Но посещают дополнительные промоакции, в рамках которых бездепы расступаются для неизменных клиентов и эти презенты Вы можете получить более одного раза. 1×slots официальный сайт зеркало <a href=http://pastport.jp/user/Porsedropsi>http://pastport.jp/user/Porsedropsi</a>
1×slots официальный сайт, скачать
<a href=https://buketik39.ru/user/Stevenvam/>https://buketik39.ru/user/Stevenvam/</a> Шаг 4. Активация. Внимательно изучите обстоятельства, информацию по ограничениям и сроке деяния бонусного предложения. Разобравшись с правилами, возможно активировать бонус в собственном кабинете (иногда ? с внедрением промокода) либо по запросу в саппорт. 1×slots зеркало регистрацию более популярный вариант это Для получения выигрыша требуется выполнить условия казино. Чаще всего игроку нужно поставить конкретную сумму, но уже из личных денег. Она рассчитывается из совместного размера выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, случае пользователь выиграл 1000 руб., а множитель составляет х30, вывести средства можно будет, сделав ставки на 30 000 рублей.Можно ли зарабатывать на бездепозитных призах? Это не работа, здесь как повезет, в в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, тогда возможно именовать везением, и добавочной добавкой к вашему бютжету.
<b>Смотреть еще похожие новости:</b>
<a href=http://nrj.rs.ba/viewtopic.php?p=3842#p3842>1×slots рабочее зеркало</a>
<a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=982779#pid982779>1хслотс мобильная версия зеркало</a>
<a href=https://www.one2bay.de/forum/showthread.php?tid=501710>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Еще одно условие касается размеров ставки. Операторы устанавливают максимальную сумму, которую игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, избранной в Личном кабинете. При превышении лимита есть риск потерять приза. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, клиент имеет столкнуться с запретом назначать фишки на шансы.
#5935 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино смотреть онлайн бесплатно pin casino <a href=https://strelochnik.com/>Матвиенко Валентина Ивановна порно</a> казино фильм смотреть онлайн Преподобная Надежда Александровна порно <a href=https://res-publika.com>официальное казино вход</a> pin up casino пин pin casino зеркало casino ru спорт букмекерская контора casino скачать казино официальная казино
DiskiPlus автомат казино DiskiPlus 1×bet сайт <a href=https://www.diskiplus.ru/>DiskiPlus спорт букмекерская контора</a> DiskiPlus слот casino DiskiPlus porno Мира Андреева (теннис) <a href=https://diskiplus.ru/>DiskiPlus porno Ангелина Гончаренко, хоккеистка</a> DiskiPlus champion casino DiskiPlus порно с Юлия Ефимова, пловчиха DiskiPlus винлайн букмекерская контора официальный сайт DiskiPlus porno Елизавета Туктамышева DiskiPlus бесплатное казино DiskiPlus зеркала казино DiskiPlus порно с Максим Глушенков (футбол)
#5936 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало
Но рядах азартных платформах сходственные гонорары все получить и уже зарегистрированные пользователи. В этом случае, бонусы предоставляются в оригинальных акций или же неким игрокам вид акционного предложения, которое приходит на почту с целью «возвратить» игрока в свое казино.Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и более. Когда игроку полагается количество фриспинов, администрация имеет разбивать их начисление на количество дней. Бесплатные вращения предоставляются для определенного слота, который указывается в правилах промоакции. <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> Способы получения бездепа различаются в зависимости от вида приза, который приглянулся игроку. Но вас в любом случае нужно быть зарегистрированным в легальном онлайн-казино и доказать свою лицо. В общем облике пошаговая аннотация для получения бездепозитного приза выглядит например:Объективные – размер бонуса, коэффициент и условия вейджера, необходимость внесения депозита для вывода денег; <a href=https://www.4yo.us/blogs/315801/Transforming-Modern-Kitchen-Design-Through-Digital-Visualization>https://www.4yo.us/blogs/315801/Transforming-Modern-Kitchen-Design-Through-Digital-Visualization</a> 1×slots зеркало быструю регистрацию а также мгновенное <a href=http://mail.newlifekpc.org/bbs/board.php?bo_table=free&wr_id=5020892>http://mail.newlifekpc.org/bbs/board.php?bo_table=free&wr_id=5020892</a> Сроки активации бонуса устанавливаются каждым казино, но почаще всего они не превышают недели с момента получения. Игроку обязательно нужно применять бездеп протяжении указанного срока, в ином случае приз просто пропадет. Каждый бонус можно получить только раз один, потому если не использовать бездеп в срок, у игрока не будет 2 шанса им пользоваться.
рабочее зеркало 1×slots
1×slots регистрация Однако далеко не все ресурсы предлагают своим клиентам бездепозитные призы за регистрацию в казино. В большинстве случаев учтено поощрение на первый депозит в размере 100–200%. Это замечательная вероятность преувеличить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш.Нельзя разглядывать забаву на средства, как вариант заработка. Азартные игры воспрещены для лиц моложе 18 лет. Topcasinobonuses.mobi классифицируется зачинщиком азартных игр. Сайт одевает информационный нрав. <a href=http://istiqbolsari.uz/user/Darennig/>http://istiqbolsari.uz/user/Darennig/</a> В бонусную программу множества операторов входят систематические бездепы. Это пожизненные акции, поощряющие интенсивных неизменных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают постоянные призы без депо в размен на скопленные баллы лояльности.Самые известные способы вывода средств ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электронным платежным системам на Neteller и Skrill, а также пользуются криптовалютными кошельками. Вывод выигрышей может исполняться моментально либо занимать от нескольких часов до нескольких суток. 1хслот 1хслотс регистрация перейти на 1×slots
1×slots рабочее зеркало
Зарегистрируйтесь. Для регистрации чаще всего достаточно ввести свой номер телефонного и почтовый адрес, последствии чего установить приобретенный код из СМС. Возможно, требуется указать промокод. В правилах промоакции несомненно написано, где его надобно вводить. Иногда это хотелось создавать при регистрации, иногда — теснее последствии творения личного кабинета, на отдельной странице.Выполнив все притязания оператора, клиент имеет оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит примерно не более суток. Если дополнительно требуется пройти функцию верификации, то срок возрастает до 1–2 рабочих дней. Для перевода используются банковские приборы и электрические платежные системы. Второй способ подходит лучше, например как основная транзакций в осуществляются мгновенно. В связи со специфичностью функционирования банков обработка платежей возможность занять до нескольких рабочих дней. Еще одно условие дотрагивается объемов ставки. Операторы устанавливают максимальную сумму, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном кабинете. При превышении лимита есть риск потерять бонуса. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, заказчик имеет столкнуться с запретом ставить фишки на шансы. <a href=https://sofiataxi.com.ua/user/Chrisber/>https://sofiataxi.com.ua/user/Chrisber/</a> Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы которые возникают у начинающих. 1×slots мобильная версия войти казино
1хслотс официальный сайт зеркало
Демоказино есть практически на любом веб-сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются значительно пореже: там если, тогда, выигрыша и соблюдения критерий акций бездеп можно перевоплотить в реальные средства. Превышение наибольшей ставки при отыгрыше. Система механически не предуведомляет о превышении ставки, потому о нарушении управлял игрок имеет узнать теснее в подачи запроса на вывод средств. 1×slots casino регистрация 1×slots review live <a href=https://zonaseputarslot.com/member.php?action=profile&uid=3551>https://zonaseputarslot.com/member.php?action=profile&uid=3551</a>
1×slots казино зеркало
Бывают ли бездепозитные призы без вейджера? Бывают, если у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино.Бывают ли бездепозитные бонусы без вейджера? Бывают, случае у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный приз за регистрацию устанавливается вейджер во всех казино. <a href=https://kizkiuz.com/user/Davidsew/>https://kizkiuz.com/user/Davidsew/</a> В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая милая доля игры. Важно, зачастую бездепозитные призы в казино выдаются с лимитированиями по наибольшей выплате. В среднем возможно рассчитывать на выгода в количество тыщ рублей. Как вывести выигрыш с приза без депозита. Придётся доказать аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате либо прочтите в правилах. 1×slot официальный сайт
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/8190/#comment-340928>1 x slots casino</a>
<a href=https://forum.omolenko.com/viewtopic.php?p=204195>1× slots casino официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В игровых клубах без лицензии Вы покупаете „кота в мешке“ и в случае спорных обстановок нет способности куда-то посетовать и обосновать свою правоту. Получить приветственный приз имеют только свежие посетители онлайн-казино. Способы описаны в условиях акции любого законного казино, чаще всего это:
#5937 Charlesgunnyhttp://filmkachat.ru
1хслот скачать
Так что главное отличие презента на депо от бездепа – неотъемлемое пополнение счёта. Вы можете внести депо и преувеличить стартовый капитал или отобрать бездеп и всем не придётся рисковать собственными сбережениями. Поспешите выполнить обычные требования, и администрация ресурса начисляет щедрое поощрение! <a href=http://filmkachat.ru/>1×slots casino регистрация</a> Доступ к дару может раскрываться автоматически в введения промокода или обращения в службу поддержки сайта. В первом случае от юзера не требуется никаких действий. Бездеп с активацией по коду встречается почаще всего. Игроку нужно установить совокупность символов в графе, которая возможность находиться в регистрационной форме в Личном офисе.Бонус в казино без депо содержит различные вариации: такое быть приветственный приз, акции в честь каких-либо дней или весомых дат, бонус за привлечение свежих игроков, преданность и получение VIP-статуса. <a href=https://trumpbookusa.com/blogs/259423/Professional-3D-Animation-Services-in-the-Digital-Age>https://trumpbookusa.com/blogs/259423/Professional-3D-Animation-Services-in-the-Digital-Age</a> 1×slots промокод при регистрации 2025 <a href=https://shanenvel30742.targetblogs.com/30817398/nude-ai-the-ethical-and-technological-challenges-of-artificial-intelligence>https://shanenvel30742.targetblogs.com/30817398/nude-ai-the-ethical-and-technological-challenges-of-artificial-intelligence</a>
1х слот 1хслотс регистрация перейти на 1×slots
1хслотс рабочее зеркало <a href=https://www.itv.ru/forum/user/144386/>https://www.itv.ru/forum/user/144386/</a> У нас на сайте Вы отыщите перечень бонусов без депозита в проверенных казино и доскональную информацию про как их получить и применять.Лишь модные и знаменитые азартные заведения могут позволить для выдавать бездепы в виде дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депо, которые можно потратить в топовых аппаратах с высочайшей отдачей. 1х слотс зеркало регистрация в 1×slots casino
1×slots зеркало проходить регистрацию это отличный вариант
Игры, в можно играть на бонусные деньги. Проверьте перечень игр, в возможно выступать на бонусные средства, вполне они Вам не понравятся и не стоит тратить своё время на эту акцию. В некоторых интернет казино для получения бездепозитных призов не достаточно просто зарегистрироваться на веб-сайте клуба и подтвердить средства контактные данные. Дополнительно требуется активация промокода.Бездепозитные бонусы казино за регистрацию в 2022 году — это вероятность сыграть за счёт заведения. Казино даёт клиенту шанс пользоваться определённой суммой или числом даровых вращений без внесения депозита. Не путайте деморежим с реальной игрой без необходимости внесения депо. <a href=https://repyourmaxfitness.com/user/williamdar/?um_action=edit>https://repyourmaxfitness.com/user/williamdar/?um_action=edit</a> Бонус без депозита за регистрацию в казино (бездепозитный приз) – это денежный подарок от клуба, кот-ый начисляется на акк игрока в регистрации в казино. Кроме создания учетной записи, для получения бездепа, довольно нередко требуется ещё и доказать контактные данные игрока и/или активировать специальный промо-код.Зарегистрироваться в казино по специальной ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефонного и электрическую почту). Для подтверждения номера телефона необходимо в личном профиле показать собственный номер и нажать кнопку „Подтвердить номер телефона“, далее Вы получите sms-сообщение с кодом, который нужно установить в отвечающее поле. Для подтверждения электрической почты, перейти по активной ссылке в послании от казино. 1×slots мобильная версия войти казино Но а случае вы уже профи по интернет казино, кликаем на красноватую кнопку «Получить» и Вы механически перейдете в интернет казино;Для ревизии применяются сканы паспортов, водительских водительских, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь замечен в попытке завести вспомогательный аккаунт, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный список. При игре на лицензионной площадке надо бояться свидетельствовать достоверную индивидуальную информацию (шифрование ликвидирует утечку персональных данных).
1×slots регистрация на сайте 1×slots ru com
Чаще всего используются коды. Их нужно заносить в специальные окошки регистрационной анкеты, случае речь о пригласительных призах, либо в особом разделе личного офиса игрока. Прибывшие на аккаунт финансы бездепозитные призы предназначаются, в основном, лишь для новоиспеченных юзеров, которые раньше не имели личного аккаунта в данном казино. Исходя из сего, если ранее у игрока был сделан депо, то, по всей вероятности, у него больше не несомненно возможности рассчитывать на получение такого бонуса в конкретном заведении.Бесплатный бонус – кредиты, которые онлайн-казино начисляет посетителю, не принуждая его пополнять игровой счет. 1×slots регистрация на 1хслотс <a href=http://www.ts-gaminggroup.com/member.php?735658-Henrythaby>http://www.ts-gaminggroup.com/member.php?735658-Henrythaby</a> В случае установленного лимита на сумму вывода выигрыша с бездепозитного бонуса, игрок не может вывести больше заявленной суммы.Большинство клубов привлекают внимание игроков за счёт разнородных презентов. На 1 сайтах можно получить виртуальные кредиты, которые откроют доступ ко всему софту. На других же, администрация предлагает бесплатные вращения для запуска лучших интернет слотов. Несмотря на различные промоакции, стоит выделить самые главные.
1×slots регистрация на официальном сайте
<a href=https://msknovostroy.com/member.php?action=profile&uid=1743>https://msknovostroy.com/member.php?action=profile&uid=1743</a> рабочее зеркало 1×slots Принципиальным отличием даровых бонусов от призов на депо считается отсутствие необходимости вносить деньги на аккаунт. Из-за сего их часто нарекают бездепозитными (no deposit bonuses).Минимального оборота. Этот предел уточняется вейджером — пока игрок не сыграет на установленную сумму, вывод средств несомненно недоступен.
<b>Смотреть еще похожие новости:</b>
<a href=https://iasassociationwb.org/iasforum/index.php?topic=760.new#new>1×slots скачать на айфон</a>
<a href=https://www.katzenforum.at/forum/media/users/jamesagema.16012/>1× слот зеркало</a>
<a href=http://palais.beesims.com/phpbb/viewtopic.php?f=2&t=290617>1×slots бездепозитный бонус за регистрацию</a>
<a href=http://theauction.com.au/my-account/>1×slots регистрация 1×slotscasino 56 online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Далее потребуется отыграть вагер и вывести выигрыш. Игрокам без навыка крупно подфартило, возможность получить десятки даров за 1 регистрацию. Если не смогли получить Бездепозитный бонус, не тревожьтесь. Обратитесь в интернет чат, оператор поможет решить проблему. Когда идет о получении бездепозитных бонусов в казино, в первую очередь направьте на следующие условия:
#5938 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
гама казино бесплатные букмекерские конторы <a href=https://res-publika.com>гама казино</a> букмекерская контора мостбет казино большая <a href=https://strelochnik.com/>pin ап casino</a> online casino официальный casino com 1×bet сейчас казино на деньги казино пин porno Андрей Рублев (теннис) porno Вера Бирюкова, гимнастка
DiskiPlus пинко casino DiskiPlus бесплатные букмекерские конторы <a href=https://diskiplus.ru/>DiskiPlus казино на деньги</a> DiskiPlus 7k casino скачать DiskiPlus 1×bet зеркало xbet xyz <a href=https://www.diskiplus.ru>DiskiPlus гама казино</a> DiskiPlus порно с Федор Чалов (футбол) DiskiPlus букмекерские конторы pin DiskiPlus порно с Артемий Панарин (хоккей) DiskiPlus Кузнецова Анна Юрьевна порно DiskiPlus леон букмекерская контора DiskiPlus online casino 7k DiskiPlus casino на телефон
#5939 Charlesgunnyhttp://filmkachat.ru
1хлот регистрация в 1×slots casino
Далее потребуется отыграть вагер и вывести выигрыш. Игрокам без опыта крупно подфартило, у получить 10-ки подарков за 1 регистрацию. Если не смогли получить Бездепозитный бонус, не беспокойтесь. Обратитесь в интернет чат, оператор поможет исправить. <a href=http://filmkachat.ru/>1×slots casino регистрация</a> Получив собственный подарок, Вы сможете даром играть на реальные деньги, а выполнив условия отыгрыша, исключить собственный выигрыш.Далее потребуется отыграть вагер и вывести выигрыш. Игрокам без опыта крупно подфартило, они могут получить десятки презентов за одну регистрацию. Если не смогли получить Бездепозитный приз, не тревожьтесь. Обратитесь в онлайн чат, оператор поможет исправить. <a href=https://www.nitrnd.com/blogs/229352/How-Modern-3D-Visual-Technology-Transforms-Digital-Experience>https://www.nitrnd.com/blogs/229352/How-Modern-3D-Visual-Technology-Transforms-Digital-Experience</a> 1× slots зеркало <a href=http://t20suzuki.com/phpBB2/profile.php?mode=viewprofile&u=3584>http://t20suzuki.com/phpBB2/profile.php?mode=viewprofile&u=3584</a>
1×slots актуальное зеркало
Вообще перейдя в казино — правила схожи в получении бездепозитных бонусов, в стандартные правила заходит: доказать эл. Почту и телефон, наполнить свой личный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ.Бездепозитный приз предоставляется новенькому игроку за определенные деяния. Часто презент повторяющий денег либо фриспинов выдается за регистрацию, спасибо чему юзер получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. 1×slots зеркало выигрыши обязательно пройдите регистрацию если На страничке представлены бездепозитные бонусы за регистрацию в казино редкая заслуга за коей гонятся все игроки как новички, так и мастера. Мы также уделяем великое внимание на наличие призов при формирование рейтинга казино на средства. Бездепозитный бонус это возможность выступать бесплатно и выиграть настоящие деньги.В разделе с бонусами активировать свой подарок. Найти забавы, для которых предусмотрено поощрение и применять бонус по назначению. <a href=http://avestalaw.ru/index.php?subaction=userinfo&user=nappydress78>http://avestalaw.ru/index.php?subaction=userinfo&user=nappydress78</a> Для верификации номера аппарата, в личном профиле изберите опцию „Подтвердить номер телефонного“ и введите в соответствующее фон код, полученный в sms-сообщении.Раздача призов имеет быть приурочена к разным датам: календарные дни, дни рождения игроков, юбилей открытия казино и т. Д. Подарок выдается в виде средств, фриспинов или баллов для скопления и размена на услуги оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода данной суммы придется выполнить ряд требований. 1×slots скачать на айфон
x1 slots регистрация в 1×slots casino
Фриспины — бесплатные вращения, коие дозволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытных игроков фриспины считаются наиболее знаменитым и преимущественным обликом приза — благотворительные вращения порой эффективнее и веселее в отыгрыше, чем остальные облики бездепов.Минимального оборота. Этот предел устанавливается вейджером — пока игрок не сыграет на установленную сумму, вывод средств несомненно недосегаем. Главное преимущество спинов – вероятность изучить различные слоты. Также удастся насладиться бонусными раундами, испытывать удачу в риск-туре и преувеличить выигрыш за счёт особых знаков. Однако не игровой процесс заслуживает внимание, ведь чем сосредоточиться на реальном выигрыше.Основное отличие что, нет, что для получения бездепа не пополнять баланс в казино. Но не этого, есть ряд и различий: <a href=https://ditu.google.com/url?q=http%3A%2F%2Fdoctorlazuta.by>https://ditu.google.com/url?q=http%3A%2F%2Fdoctorlazuta.by</a> Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен перечень наилучших онлайн казино, коие предлагают своим игрокам щедрые бонусы за регистрацию.Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке нужно восполнить счет в казино. Для депозитных призов, данная процедура не необходима, например как депо уже изготовлен. скачать 1×slots на андроид мобильная версия Высокая конкурентность в разделе азартных игр доказывает операторов привлекать клиентов различными акциями. Благодаря данному у посетителей замечена возможность получить бонусы в казино за регистрацию без депозита. Воспользоваться таким предложением возможно, избегая процедуру внесения денег на игровой счет, просто активировав акк на сайте. Наш экскурсовод по бездепам поможет избрать самую симпатичную бонусную программку, разузнать верховодила получения такого вознаграждения и распорядиться им с наибольшей выгодой.
1хслотс официальный сайт зеркало
Даже не выиграв солидную необходимую, игрок интересно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-либо денежных рисков. Быть в курсе наилучших акций легкостью. Достаточно регулярно учить список новых онлайн казино с выводом приза без депозита в данном разделе.Чтобы других убедиться в преимуществах бездепозитных бонусов, довольно зарегистрироваться в казино и получить поощрение. Для тех, кто лишь взвешивает испытать собственную удачу, а также для профессиональных игроков, разыскивающих свежие площадки для выигрышей, основные лицензированные казино нередко организуют разные акции, и одно из лучших предложений за последнее время – как для новичков, например и для проф игроков – бездепозитный приз за регистрацию.Зарегистрироваться в казино по особой ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефонного и электронную почту). Для подтверждения номера аппарата необходимо в личном профиле показать собственный номер и надавить кнопку „Подтвердить номер телефонного“, далее Вы получите sms-сообщение с кодом, кот-ый необходимо ввести в соответствующее фон. Для доказательства электрической почты, перебежать по активной ссылке в письме от казино. 1×slots зеркало сайта <a href=https://writeablog.net/89gsmr0ovw>https://writeablog.net/89gsmr0ovw</a> К образцу, игроку выдаются безвозмездные свои в заведении в размере пятидесяти или ста $ (вейджер на которые сочиняет 100х). То есть, каждому новоприбывшему игроку выскакивает привлекающая картинка, которая обещает выплату всех зачисленных фирмой средств. Не стоит обращать внимания на казино бонус за регистрацию без депо с слишком большой или довольно малюсенькой суммой призов, потому что, даже кропотливо изучив все условия, тут вероятнее всего, будет некий подвох.Необходимость отыгрыша. Вейджер в повыше, чем для призов за депо. И же свои не отыграны, исключить их нельзя.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Так же стоит выделить то, собственно в каждом онлайн казино установлен собственный максимальный кешаут на бездепозитный бонус. Как правило кешаут — это предельная сумма средств, кот-ая дешевая для вывода с бездепозитного приза.Законодательство, регулирующее азартные забавы в различных государствах, оказывает на полномочия операторов. В итоге юзеры из отдельных регионов сталкиваются с лимитированиями со стороны казино. Это может быть как глубокий отказ в доступе, например и невозможность загружать игры отдельных производителей. 1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, если не хотите стать жертвой мошенников или впустую израсходовать время;Будьте внимательнее при ознакомлении с правилами во избежание происхожденья конфликтных ситуаций с казино, когда в отыгрыша бездепа вас не дадут исключить крупную сумму выигрыша. <a href=https://theme.sir.kr/youngcart53/bbs/board.php?bo_table=free&wr_id=503902>https://theme.sir.kr/youngcart53/bbs/board.php?bo_table=free&wr_id=503902</a> Бездепозитные бонусы казино за регистрацию в 2022 году — это возможность сыграть за счёт заведения. Казино даёт клиенту шанс воспользоваться определённой суммой либо количеством бесплатных вращений без внесения депо. Не путайте деморежим с реальной игрой без надобности внесения депозита. 1×slots казино зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://nacionrolera.org/foro/viewtopic.php?f=1210&t=102765&p=561522#p561522>1×slots регистрация на 1хслотс</a>
<a href=https://radios-collector.com/viewtopic.php?f=7&t=104038>зеркло казино 1×slots</a>
<a href=https://www.sgomberisgombero.it/my-account-2/>1 хслот регистрация в 1×slots casino</a>
<a href=http://sladkierecepti.5nx.ru/viewtopic.php?f=8&t=6855>1× slots casino зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Отзывы читателей о бонусных акциях посодействуют составить эмоцию, хотя не забывайте о субъективности собственных объяснений. Для выбора азартного заведения Вы сможете пользоваться списком наших казино с бонусами за регистрацию. На нашем сайте мы выпустили список бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, собственно часть призов неповторимые и доступны только для гостей нашего вебсайта по-специальному промо-коду либо по оригинальной ссылке. Кроме как, для любого приза мы подготовили доскональный обзор, в Вы узнаете как получить и отыграть одобрение и как исключить свой выигрыш с бездепа.
#5940 Charlesgunnyhttp://filmkachat.ru
рабочее зеркало 1хслотс
Шаг 5. Использование и отыгрыш. Бездеп обязан быть использован в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.Объективные – размер приза, коэффициент и обстоятельства вейджера, необходимость внесения депо для вывода денег; <a href=http://filmkachat.ru/>1×slots официальный регистрация</a> <a href=https://www.nitrnd.com/blogs/195900/%D0%90%D0%B2%D1%82%D0%BE-%D0%B2%D0%B8%D0%BA%D1%83%D0%BF>https://www.nitrnd.com/blogs/195900/%D0%90%D0%B2%D1%82%D0%BE-%D0%B2%D0%B8%D0%BA%D1%83%D0%BF</a> 1×slots регистрация на сайте <a href=http://bbsxy.90yk.com/home.php?mod=space&uid=362374>http://bbsxy.90yk.com/home.php?mod=space&uid=362374</a> Способы получения бездепа различаются зависимо вида приза, который понравился игроку. Но вам или надо(надобно) быть зарегистрированным в легальном онлайн-казино и доказать свою личность. В общем виде пошаговая инструкция для получения бездепозитного бонуса выглядит например:
1×slots официальный сайт зеркало рабочее
Можно ли в одном интернет казино получить больше 1-го бонуса за регистрацию? Нет, например как в любом онлайн казино есть верховодила, к коим надо(надобно) держаться, не творить 2 аккаута для получения бонусов, по несомненно блокировка обоих аккаутов, не пытайтесь обмануть онлайн казино, приз за регистрацию выдаеться раз раз 1 лицу.Для вывода средств бонус нужно будет отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами акции и вариациями отыгрыша бездепозитного бонуса до его получения, дабы избежать конфликтных обстановок. <a href=https://australiantravelforum.com/Upload/showthread.php?tid=226954>1х слотс зеркало регистрация в 1×slots casino</a> 1×slots сайт <a href=http://www.houseinformatica.it/forum/pop_profile.asp?mode=display&id=44394>http://www.houseinformatica.it/forum/pop_profile.asp?mode=display&id=44394</a> Создание аккаунта. На сайте казино необходимо открыть регистрационную форму и заполнить порожние поля собственными данными. Иногда на этом этапе потребуется показать только адресок электронной почты и пароль, хотя чаще надобно наполнить анкету индивидуальной информацией (ФИО, дата рождения, место проживания и т.д.). Нужно свидетельствовать только реальные данные, потому впоследствие они будут испытаны.Верификация аккаунта. Лучше подтвердить лицо незамедлительно в регистрации, чтобы потом не было проблем с выводом средств. Верификация возможность проходить 2-мя маршрутами: 1хслотс зеркало Подтвердите регистрацию, чтобы активировать Бездепозитный бонус с выводом, потребуется наполнить личный профиль. Заполните пустопорожние поля реальными данными о себе.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
За счёт спинов получится запустить разные интернет слоты, протестировать стратегии и поднабраться опыта. Фишка в, собственно вращения начисляются на лучшие аппараты с оригинальными опциями и высокой отдачей. Не забывайте, собственно в каждом акционном предложении учтены особые притязания – временные лимитирования, наибольший объем ставки, перечень дешевых игр. <a href=http://classicalmusicmp3freedownload.com/ja/index.php?title=фильмы_на_телефон>http://classicalmusicmp3freedownload.com/ja/index.php?title=фильмы_на_телефон</a> Бонус в казино без депо содержит разные варианты: такое быть приветственный бонус, акции в честь каких-то праздников или весомых дат, бонус за вербование новых игроков, преданность и получение VIP-статуса. 1×slots официальный сайт скачать
1×slot зеркало
Простая процедура получения бездепозитного приза, кот-ая займет не более 2-х мин. Для получения бездепов, достаточно зарегистрироваться и подтвердить контактные данные. <a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=7720>1×slots официальный зеркало</a> Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 долларов. Если выдаются фриспины, их количество изредка выше нескольких 10-ов безвозмездных вращений.В онлайне слишком много скриптовых сайтов, коие принадлежат жуликам. Их основная цель – привлечь гэмблеров, пообещав не только щедрые подарки, но и солидные выигрыши. Так что некоторые веб-сайты предлагают получить за регистрацию числе $1 000. Если простыми словами, бездепы – это определённая сумма средств либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать презенты. Но есть кое-какие аспекты. Существуют игорные жилища, которые перед что, этим как начислить бонусы настоятельно привязать телефон, предоставить копии документов. 1×slots casino online регистрация <a href=http://www.ocide.org/forum/index.php?action=profile;u=14490>http://www.ocide.org/forum/index.php?action=profile;u=14490</a> Так собственно сможете неустрашимо региться без всяких раздумий. Фортуна сейчас точно на вашей стороне. Не побаивайтесь, так следствие какого либо ущерба Вам совершенно не грозит. С такими бонусами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе.
1×slots регистрация на официальном сайте
Перечисленные выше главные характеристики сопровождают практически любой бонус и являются стереотипными для бездепозитных бонусных начислений в казино. Приглашаем делиться суждениями о призах. Это поможет иным юзерам подбирать более выгодные предложения. <a href=https://love-n-magic.ru/index.php?subaction=userinfo&user=PatrickGom>https://love-n-magic.ru/index.php?subaction=userinfo&user=PatrickGom</a> За привлечение приятеля ? в партнерской программы клиент получает вознаграждение за вербование свежих пользователей.Возможность поиграть вспомогательное соревнование (а время и несколько) совершенно даром, а выигрыш, в свою очередь, поступает на счёт игрока. 1хслот зеркало сайта После получения бонуса вывод средств для клиента будет недосегаем времени, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо чета недель. Выводить средства игрок сможет лишь после отыгрыша.
<b>Смотреть еще похожие новости:</b>
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=101503&extra=>x1 slots регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Игры, в возможно выступать на бонусные средства. Проверьте список игр, в можно выступать на бонусные свои, возможно они Вам не понравятся и не расходовать своё время на эту промоакцию.
#5941 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Нина Пирогова, хоккеистка kometa casino <a href=https://www.ossetia.tv/>casinos xyz</a> Чулпан Хаматова пин ап casino <a href=https://specreporter.com/>porno Нина Пирогова, хоккеистка</a> винлайн букмекерская контора официальный сайт 1×bet слоты 1×bet top black russia казино 1×bet официальный скачать сайт pin up casino пин up casino casino 7k сегодня
DiskiPlus бесплатное казино DiskiPlus 7k casino сайт <a href=https://diskiplus.ru>DiskiPlus 1×bet зеркало на сегодня</a> DiskiPlus Ходнева Светлана Владимировна порно DiskiPlus приложения букмекерских контор <a href=https://diskiplus.ru/>DiskiPlus вывод казино</a> DiskiPlus порно с Ирина Сидоркова DiskiPlus пин ап букмекерская контора DiskiPlus как выиграть в казино DiskiPlus казино фильм онлайн DiskiPlus винлайн букмекерская контора DiskiPlus казино онлайн бесплатно DiskiPlus скачать 1×bet на андроид бесплатно
#5942 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало
Так собственно можете смело регистрироваться без всяких размышлений. Фортуна сейчас точно на вашей стороне. Не опасайтесь, так последствие какого либо убытка Вам совершенно не грозит. С этими призами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе.Прибывшие на акк финансы бездепозитные призы предназначаются, главном, лишь для свежеиспеченных пользователей, коие ранее не имели собственного аккаунта в данном казино. Исходя из этого, случае ранее у игрока был изготовлен депо, то, по всей вероятности, у него больше не несомненно возможности рассчитывать на получение такового приза в определенном заведении. <a href=http://filmkachat.ru/>1×slots зеркало регистрация в 1×slots casino</a> <a href=https://dictanote.co/n/1138185/>https://dictanote.co/n/1138185/</a> Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?Также существуют онлайн-платформы азартных игр, коие применяют раздачу бездепозитных бонусов в особые даты (как для казино, например и для игрока). Помимо этого, действующие геймеры кроме имеют вероятность получить похожие призы за собственную деятельность (к примеру, за увеличения значения либо за похожие заслуги). 1×slots зеркало сайта <a href=https://ep-team.ru/forum/index.php?action=profile;u=7960>https://ep-team.ru/forum/index.php?action=profile;u=7960</a>
1×slot казино зеркало
Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих притязаний, считая неотъемлемой верификации. Если на веб-сайте учтена неотъемлемая процедура подтверждения личности, то вывести выигрыш получится только последствии ревизии данных. Приготовьтесь наполнить анкету и выслать в техподдержку документ, подтверждающий лицо. <a href=https://www.fromrus.su/index.php?/profile/408-rabofreesn/>1×slots регистрация на сайте 1×slots ru com</a> 1×slots регистрация на 1хслотс Чтоб получить крупный выигрыш, подбирайте игровые автоматы с максимальным процентом отдачи (RTP) из перечня тех, которые доступны по условиям отыгрыша. <a href=https://r.rumedia.top/user/RichardLurse/>https://r.rumedia.top/user/RichardLurse/</a> Для отыгрыша бонуса казино обязывает игрока поиграть на необходимую, в несколько один превышающую необходимую полученного приза — здесь выгода фирмы явна.Подтвердите регистрацию, чтобы активировать Бездепозитный приз с выводом, потребуется заполнить собственный профиль. Заполните пустопорожние поля настоящими данными о для. 1× slots сайт Игры, в которых можно выступать на бонусные средства. Проверьте перечень игр, каких возможно играть на бонусные средства, вполне они Вам не понравятся и надо тратить своё время на такую акцию.Помните, собственно в некоторых забавах сумма ставки идет в зачет вейджера только отчасти. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки числятся как отыгранные средства, момент как в слотах идет в зачет все 100% суммы.
1хслотс официальный сайт зеркало
Для получения бездепа необходимо пригласить в забаву по реферальной ссылке нового клиента: он должен зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на необходимую, обозначенную в условиях промоакции.Только выполнив все обстоятельства отыгрыша и дождавшись окончания проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить средства средства. Вы всего, как и все любите получать презенты и бездепозитные бонусы казино. Игорные жилища взяли в привычку одаривать гэмблеров приятными бонусами. Стать владельцем приветственного подарка возможно за творение профиля либо пополнение счёта. Второй вариант больше интересный, так клубы готовы удвоить депозит! Но случае вы новичок и только знакомитесь с миром азарта, другого воспользуйтесь бонусом за регистрацию. <a href=http://digitalmediasa.net/profile/terryvot/>http://digitalmediasa.net/profile/terryvot/</a> В игровых клубах без лицензии Вы покупаете „кота в мешке“ и когда неоднозначных ситуаций нет возможности куда-то посетовать и доказать собственную правоту. 1×slots casino регистрация Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам важную информацию о самых новых, щедрых и испытанных бонусах в интернет казино, которые обновляются любой день.У нас на сайте Вы найдете перечень призов без депо в испытанных казино и доскональную информацию про как их получить и использовать.
1×slots зеркало быструю регистрацию а также мгновенное
Активация по промокоду употребляется в различных обликах бездепов. Если речь идет о приветственном бонусе, то комплект знаков возможно разузнать на крупнейшей страничке, в регистрационной форме либо послании, которое отправляется юзеру для подтверждения e-mail. Акции имеют проводиться общо с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активируется разовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном кабинете или начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем важный код для активации в описании каждого рекламную.Рассмотрим принцип его деянья на случае. Допустим, вы зарегались и получили $10 no deposit bonus с вейджером х50. Это означает, что выигранные средства возможно несомненно выводить не ранее, чем последствии такого, как общая сумма ставок достигнет $500. Подтверждение персональной инфы. Все казино настоятельно от посетителя пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и наличие у пользователя иных аккаунтов (мультиаккаунт запрещен).Для верификации номера телефона, в личном профиле выберите опцию „Подтвердить номер аппарата“ и введите в соответствующее фон код, полученный в sms-сообщении. Для получения бонуса нужно ознакомиться с программой лояльности казино и сделать ставки на необходимую, нужную для перехода на грядущий степень. 1×slots актуальное зеркало <a href=https://www.printables.com/@_2483369>https://www.printables.com/@_2483369</a> Однако в условиях исчезают «подводные камешки», которые не позволят вывести крупную сумму либо же вы не успеете отыграть вейджер. Поэтому мастера рекомендуют отобрать безвозмездные вращения за регистрацию в казино без депозита, чтобы поднабраться навыка и получить реальный шанс на победу.К огорчению, нет. Почти все казино, просят внесение но бы 1-го малого депо для вывода выигрыша с бездепозитного приза. Также учитывайте, собственно исключить средства разрешается лишь на что, эту платежную систему, с коей был сделан депозит.
казино 1×slots
Для тех, кто только взвешивает испытывать свою фортуну, а для проф игроков, ищущих новые площадки для выигрышей, основные лицензированные казино часто организуют разные промоакции, и одно из лучших услуг прошедшее время – как для новичков, так и для проф игроков – бездепозитный бонус за регистрацию. Как только получите бездеп в казино, всё одинаково не запамятовывайте проверять электронную почту. Некоторые игорные клубы непрерывно веселят интенсивных гэмблеров приятными призами. Чаще всего получить презент возможно в преддверии праздника, на денек рождение, за привлечение приятеля. А того распространённым бонусом является прибавка к депозиту. Нужно чем восполнить счёт, и азартное заведение прирастит его на 50–100%.Получать информацию о самых выгодных призах возможно без неизменного мониторинга новостей казино. Мы брали данную задачу на себя и постоянно смотрим за предложениями операторов, выбирая наихорошие из их. В этом разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список акций регулярно дополняется. В топ зашли самые новые бездепозитные бонусы за регистрацию в казино 2020, временные и замкнутые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и другим критериям. Если срок действия акции истек, она удаляется из перечня. <a href=https://www.catfish-assassins.org/forum/memberlist.php?mode=viewprofile&u=743>https://www.catfish-assassins.org/forum/memberlist.php?mode=viewprofile&u=743</a> Получить приветственный бонус шансы только свежие клиенты онлайн-казино. Способы описаны в критериях промоакции любого законного казино, чаще всего это: 1 x slots Изучить управляла и обстоятельства получения бездепозитных призов казино, Вы можете у нас на веб-сайте в разделе с призами либо на официальном сайте избранного Вами казино. Если возможности найти необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электрической почте.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.bf-france.com/forums/profile/30064-rabofreeor/>1×slots зеркало</a>
<a href=https://hiddeninthesand.com/blogs/news/2024/11/the-unfortunate-history-of-fraudulent-tally-hall-uploads/#comment-43340>рабочее зеркало 1хслотс</a>
<a href=http://mandala-app.com/forums/memberlist.php?mode=viewprofile&u=3447>1×slots casino регистрация 1×slots review live</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке необходимо пополнить счет в казино. Для депозитных бонусов, данная процедура не необходима, например как депозит уже изготовлен. Бездепозитный приз часто может замерзнуть доступным незамедлительно в завершения регистрации, потому в большинстве случаев единственным требованием к нему является регистрация, а после ревизия вашей свежей учетной записи.
#5943 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора фонбет 1×bet casino <a href=https://www.ossetia.tv/>casino online зеркало</a> бк букмекерская контора букмекерская контора скачать приложение <a href=https://strelochnik.com/>1×bet рабочее на сегодня</a> bet casino порно с Васильева Татьяна Викторовна bitz casino казино гта 5 1×bet зеркало рабочее xbet лучшие казино бесплатно букмекерская контора вход
DiskiPlus casino бездепозитный DiskiPlus официальное казино вход <a href=https://diskiplus.ru>DiskiPlus Юдаева Ксения Валентиновна порно</a> DiskiPlus порно с Сергей Бобровский (хоккей) DiskiPlus Комарова Наталья Владимировна порно <a href=https://www.diskiplus.ru>DiskiPlus porno Дарья Мороз</a> DiskiPlus пин ап casino DiskiPlus казино ставка DiskiPlus Комарова Наталья Владимировна порно DiskiPlus bitz casino DiskiPlus 1×bet зеркало xbet xyz DiskiPlus смотреть фильм казино DiskiPlus casino buzz
#5944 Robertjahhttps://blogcamp.com.ua
Профессиональный портал для строительства <a href=https://blogcamp.com.ua/>https://blogcamp.com.ua</a> проекты, материалы, расчеты, советы и вдохновение. Все, чтобы ваш ремонт или стройка были успешными.
#5945 Michaelmamhttps://drags-masses.com
купить стероиды для набора массы мужчин <a href=https://drags-masses.com/>оральные стероиды</a>
#5946 JamesDorhttps://magikfox.ru
CMS 1С-Битрикс Бизнес <a href=https://magikfox.ru/catalog/license/upravlenie-saytom/biznes/>https://magikfox.ru/catalog/license/upravlenie-saytom/biznes/</a> купить лицензию в официальном маркетплейсе. Редакция Bitrix Бизнес для интернет магазина. Быстрая отправка лицензионного ключа. Помощь в установке и настройке.
#5947 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
где казино гама казино <a href=https://glvk.guru/>казино вход официальный сайт</a> pin up casino пин ап суть казино <a href=https://sovsekretno.net/>скачать 1×bet на андроид</a> porno Марина Александрова пари букмекерская контора порно с Евгения Медведева, фигуристка рокс казино 1×bet зеркало рабочее casino скачать 1×bet 1
DiskiPlus casino x DiskiPlus зеркала казино <a href=https://diskiplus.ru>DiskiPlus 7k casino зеркало на сегодня</a> DiskiPlus Семёнова Татьяна Владимировна порно DiskiPlus 1×bet слоты 1×bet xyz <a href=https://diskiplus.ru/>DiskiPlus Манилова Алла Юрьевна порно</a> DiskiPlus 1×bet casino DiskiPlus casino актуальное зеркало DiskiPlus яндекс казино DiskiPlus казино пину DiskiPlus казино на деньги DiskiPlus 1×bet слоты 1×bet top DiskiPlus скачать pin casino
#5948 Charlesgunnyhttp://filmkachat.ru
1×слотс казино
Первый возникающий вопрос, это, для выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают свежих игроков. Последним проще начать игру на деньги с презента за регистрацию. Им надо пополнять баланс и тратить личные свои. Новички получают бесплатные спины либо свои на счёт. С их поддержкой знакомятся с игровым процессом, крутят слоты и делают ставки в рулетке.Фриспины предназначены для использования в видео слотах. Внимательно ознакомьтесь с условиями – частенько их выдают на некоторые автоматы. В зависимости от клуба, у вас получится сделать определённое количество ставок. Кстати, продвинутые игорные дома позволяют запускать каждых «одноруких злодеев». <a href=http://filmkachat.ru/>1×slots зеркало подтвердит вашу регистрацию если говорить</a> Когда речь о денежных бонусах, казино всегда устанавливают условия вейджера, которые нужно выполнить, дабы исключить выигрыш. <a href=https://noosfero.ufba.br/lexxeagle/blog/mastering-silo-images-integration-for-advanced-3d-architectural-visualization>https://noosfero.ufba.br/lexxeagle/blog/mastering-silo-images-integration-for-advanced-3d-architectural-visualization</a> 1×slots зеркало проходить регистрацию это отличный вариант <a href=http://ww.yeosunet.com/bbs/board.php?bo_table=free&wr_id=69514>http://ww.yeosunet.com/bbs/board.php?bo_table=free&wr_id=69514</a> Если площадка презентует бездеп за регистрацию, то процедура его получения проста. Нужно только завести акк на веб-сайте и активировать его, подтвердив адресок электронной почты, номер аппарата либо другие данные, которые требует оператор. Перед данным необходимо убедиться, собственно пользователь находится на официальном сайте казино, не на мошеннической площадке.
1×slots регистрация 1×slots casino 777 online
1× slots официальный Прямо момент отберите благотворительные вращения за регистрацию без депозита и начинайте коллекционировать призовые композиции ради солидных выигрышей!Активация происходит с помощью промокодов, которые вводятся в личном офисе последствии регистрации. Среди спецпредложений в списке Casino.ru находятся эксклюзивные промокоды, коие доступны лишь посетителям портала. Другие способы начисления средств ? автоматическая активация сразу в творения аккаунта и получение презента по запросу в службу технической помощи. <a href=http://vfb7968c.bget.ru/user/TyroneTor/>http://vfb7968c.bget.ru/user/TyroneTor/</a> Реже призы без депо начисляются неизменным игрокам. С их поддержкою администрация старается удержать ценных клиентов либо желает поблагодарить за преданность верных гостей. Но намного чаще для сходственных целей используются эти промоакции:Как прочие промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых посетителей и разрешает им составить впечатление о функционале, не рискуя значительными суммами. 1×slots регистрацию более популярный вариант это
1×slots регистрацию более популярный вариант это
Обычно для получения бонусов без депозита, казино выдвигает приклнные и абсолютно выполнимые обстоятельства, хотя есть ряд поступков которые воспрещены и шансы повлечь за собой досадные результаты:Ну и окончательно же, для казино бездепозитные призы выгодны с имиджевой стороны: схожая добродушие увеличивает уровень лояльности посетителей к компании. У каждой игры средства притязания по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система засчитает каждую ставку. В рулетке и покере сделать это намного сложнее. Именно поэтому например важно внимательно читать обстоятельства получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в каждой ирге, то новенькие просто «спустят бонус на ветер».Доступ к дару может открываться автоматически последствии введения промокода или обращения в службу поддержки сайта. В первом случае от пользователя не требуется никаких поступков. Бездеп с активацией по коду встречается почаще всего. Игроку необходимо установить совокупа символов в графе, кот-ая может находиться в регистрационной форме в Личном офисе. <a href=http://msfo-soft.ru/msfo/forum/user/38891/>http://msfo-soft.ru/msfo/forum/user/38891/</a> Когда идет о валютных бонусах, казино практически устанавливают условия вейджера, коие необходимо выполнить, дабы исключить выигрыш.Все бесплатные бонусы кажутся заманчивыми. Кто же категорически от возможности сыграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далековато не все бездепозитные призы в презентабельны для рассудительного посетителя. скачать 1×slots на андроид мобильная версия Иногда для получения бонусов необходимо связаться с представителями саппорта. Удобнее всего с ними разговаривать в онлайн-сате, хотя времени достаточно запроса по электрической почте.Сроки активации бонуса устанавливаются каждым казино, но чаще всего они не превышают недели с момента получения. Игроку обязательно нужно применять бездеп в течение указанного срока, в ином случае приз просто исчезнет. Каждый приз возможно получить лишь раз раз, потому случае не применять бездеп в срок, у игрока не будет второго шанса им пользоваться.
1×slots официальный сайт, скачать
Самые известные методы вывода денег ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам подобии Neteller и Skrill, еще пользуются криптовалютными кошельками. Вывод выигрышей имеет осуществляться мгновенно либо развлекать от нескольких часов до нескольких суток.Предложения с бездепозитными бонусами за регистрацию позволяют свежим заведениям привлечь аудиторию на свой сайт. А игроки тому получают возможность играть на настоящие деньги без депозита в казино и заработать малый стартовый капитал, кот-ый разрешено вывести на карту банка либо электрический кошелек. <a href=https://www.fromrus.su/index.php?/topic/25792–1×slot-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE/>1×slot зеркало</a> Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы которые возникают у новичков.Заполняя данные в личном профиле, указывайте лишь достоверную информацию, например как Вам понадобиться ее доказать в будущем при выводе денег. 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=https://autogenie.co.uk/%D0%B1%D0%BB%D0%BE%D0%B3-%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0-%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0-%D0%B4%D0%B7%D0%B5%D0%BD/>https://autogenie.co.uk/%D0%B1%D0%BB%D0%BE%D0%B3-%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0-%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0-%D0%B4%D0%B7%D0%B5%D0%BD/</a> Все обожают получать подарки. Согласитесь, практически любой играющий человек несомненно необъятно счастлив, в получит даровой подарок для игры в онлайн казино просто за регистрацию либо же приз за внесенный депозит, например именуемые приветственные бонусы для свежих игроков. Соответственно такие интернет клубы будут больше известны и предпочтительны у игроков при выборе казино для забавы. Топ казино непрерывно обновляется и добавляются новые и занимательные игровые клубы с привлекательной бонусной политикой и всеми возможными привилегиями, к коим относятся эти бонусы как фриспины за регистрацию, валютные бездепозитные призы, а щедрые бонусы за внесенный депозит.
1×slots рабочее зеркало
Также, такой нужно доказать свой номер аппарата, чтобы код, полученный в смс-сообщении от клуба ввести в специальное фон в личном кабинете игрока.Бонус с зачислением денег на счет выделяет больше свободы действий. Пользователь сам подбирает, каким образом воспользоваться подаренными своими. Здесь кроме могут действовать лимитирования на список дешевых игр, но обычно эти рамки не так строги, как в рекламную с безвозмездными вращениями. Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают бонус по государствам. Вплоть до того, собственно клуб имеет принимать игроков из Вашей страны, а бездеп не давать.Процесс подтверждения личности имеет занять от 1-го дня до недели. Если заказчик разрешил нибудь оплошность при заполнении паспортных данных, то ему по адресоваться с проблемой в службу онлайн-казино. <a href=https://forumniebiescy.pl/memberlist.php?mode=viewprofile&u=70830>https://forumniebiescy.pl/memberlist.php?mode=viewprofile&u=70830</a> Наш перечень содержит превосходнейшие бездепозитные призы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по главным параметрам:Заполняя данные в личном профиле, указывайте лишь достоверную информацию, например как Вам понадобиться ее подтвердить дальнейшем при выводе денег. 1×slots зеркало которую указывали при регистрации кстати Приглашаем делиться суждениями о призах. Это поможет иным юзерам подбирать более прибыльные предложения.Поспешите отобрать бездепозитные призы за регистрацию в казино из представленного перечня. Все платформы столько водят законную работа, хотя и порадуют честными результатами забавы, высокой отдачей, быстрыми выплатами.
<b>Смотреть еще похожие новости:</b>
<a href=https://elclasificadomx.com/author/jameslog/>1×slots регистрация на сайте 1×slots ru com</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный приз казино 2022 с выводом за регистрацию дает вероятность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и выяснить качество работы саппорта. Довольно часто, начиная игровой процесс, игрок уже отказывается останавливаться и проделывает настоящий вклад. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать даром вероятно как раз таки с бонусом за регистрацию без надобности вносить депозит.
#5949 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало рабочее
Осталось выбрать казино с бонусом за регистрацию и создать профиль. После активации подарка выигрыш зависимости от Фортуны и способностей. <a href=http://filmkachat.ru/>1×slots официальный demo регистрация в 1×slots casino</a> Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.Бoльшинcтвo азартных заведений выдвигают примерно однообразные, схожие обстоятельства и притязания, которые нужно выполнить, дабы получить бездепозитный бонус за регистрацию. Все их можно соединить в раз список: <a href=http://prsync.com/archicgi/how-home-entertainment-flyarchitecture-transforms-modern-living-spaces-4518898/>http://prsync.com/archicgi/how-home-entertainment-flyarchitecture-transforms-modern-living-spaces-4518898/</a> Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, чтобы еще раз получить бесплатный бонус. Игорные заведения нетерпимы к бонус-хантерам, потому вас ждет неминуемое наказание. 1×slots коды <a href=https://google.com.pe/url?q=https://doctorlazuta.by/>https://google.com.pe/url?q=https://doctorlazuta.by/</a> С такими простыми советами любое казино с бонусом за регистрацию способно принести в разы больше выгоды и пользы.
1×slots официальный сайт скачать
Новички не любят незамедлительно же заносить депо. Это обусловлено неименьем навыка и недоверием. К счастью, в наше время возможно получить бездепозитный бонус за регистрацию в казино. Неважно что начислит система – фриспины либо кредиты. В любом случае вы не рискуете собственными сбережениями. Это замечательная вероятность запустить понравившийся видео слот или же испытывать фортуну в настольных забавах.Вейджер (или вагер) ? это наименьшая сумма ставок, коию нужно устроить для вывода денежного приза. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение. 1×slots рабочее зеркало <a href=http://38.104.231.181/doku.php?id=%D1%84%D0%BB%D0%B8%D1%80%D1%82%20%D0%BB%D1%8E%D0%B1%D0%BE%D0%B2%D1%8C%20%D0%B7%D0%BD%D0%B0%D0%BA%D0%BE%D0%BC%D1%81%D1%82%D0%B2%D0%B0%20%D1%84%D0%BE%D1%80%D1%83%D0%BC>http://38.104.231.181/doku.php?id=%D1%84%D0%BB%D0%B8%D1%80%D1%82%20%D0%BB%D1%8E%D0%B1%D0%BE%D0%B2%D1%8C%20%D0%B7%D0%BD%D0%B0%D0%BA%D0%BE%D0%BC%D1%81%D1%82%D0%B2%D0%B0%20%D1%84%D0%BE%D1%80%D1%83%D0%BC</a> 1×slots официальный сайт скачать на айфон Операторы гемблинга утверждают, что так они дерутся с бонус-хантерами. Впрочем, критики считают, что данным казино пытаются сделать из случайного постояльца неизменного игрока.
1хслотс 1хслотс регистрация перейти на 1×slots
Хотя бесплатные бонусы начисляются без депо, не исключено, что для понадобиться заносить деньги. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты только после того, как новый клиент раз пополнит игровой счет. <a href=http://www.haxorware.com/forums/member.php?action=profile&uid=282213>http://www.haxorware.com/forums/member.php?action=profile&uid=282213</a> Однако далековато не все ресурсы предлагают своим клиентам бездепозитные призы за регистрацию в казино. В большинстве случаев учтено одобрение на первый депо в объеме 100–200%. Это отличная вероятность преувеличить банкролл, увеличить время, проведённое за игрой и шансы сорвать большой куш.Вейджер в переводе с британского значит «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша приобретенного бонуса, в нашем случае бездепозитного. Число ставок большого — главно лишь набрать необходимую, пропорциональную сумме одобрения. 1 хслот регистрация в 1×slots casino
1хслотс регистрация в 1×slots casino
Такой бесплатный эквивалент средств зачисляется на профиль юзера в осуществления притязаний и предназначаются они только для игрового процесса. Вывод этих вознаграждений возможен только в осуществления вейджеровых критерий.Если вы новичок деле и лишь попали в неизведанную вами область азарта — за предложений как бездепозитные призы без пополнения. Чтоб получить крупный выигрыш, избирайте игровые автоматы с предельным процентом отдачи (RTP) из списка тех, коие доступны по условиям отыгрыша. Свежий бонус начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в пользовании своими, ну случае отыгрыша оператор может установить лимитирование на вывод денег. 1 хслот регистрация в 1×slots casino <a href=https://sc-grandmaster.ru/forum/?PAGE_NAME=profile_view&UID=16039>https://sc-grandmaster.ru/forum/?PAGE_NAME=profile_view&UID=16039</a> Исходя из этого, просто не существует осмысленных причин махнуть рукою на получение такового бонуса при регистрации. И, не, на подобный безвозмездной базе у вас есть все шансы выиграть средства и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные бонусы, нарекают безвозмездными интернет платформами для игр.Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы быстро получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, замечена реальный шанс победу!
1хслотс регистрация в 1×slots casino
Также, учите, собственно бездепозитный приз можно вывести только что, нет случае, когда станут исполнены все условия отыгрыша. Прибывшие на акк деньги бездепозитные призы предназначаются, в, лишь для свежеиспеченных юзеров, коие раньше не имели собственного аккаунта в данном казино. Исходя из сего, случае ранее у игрока был изготовлен депозит, то, по всей вероятности, у него больше не несомненно возможности рассчитывать на получение такового приза в конкретном заведении.Заработать на бездепозитных призах за регистрацию в казино имеет каждый юзер, достигший совершеннолетия. <a href=http://www.en.besatime.com/index.php?subaction=userinfo&user=DeweyBloma>http://www.en.besatime.com/index.php?subaction=userinfo&user=DeweyBloma</a> 1хслот зеркало Вывод выигрыша с бездепозитных призов казино – щедрый подарок от азартных клубов. Но дабы исключить свой доход, нужно выполнить ряд критерий:
<b>Смотреть еще похожие новости:</b>
<a href=https://www.bf-france.com/forums/profile/30064-rabofreeor/>казино 1×slots официальный сайт</a>
<a href=http://complainanything.com/node/158?page=981#comment-1332023>1×slots казино зеркало</a>
<a href=https://test.soclanovtsy.ru/topic/26973-chicago-house-samples-loops-sounds/page/242/#comment-67832>1×slots официальный сайт скачать</a>
<a href=https://forum.bedwantsinfo.nl/thread-735059.html>сайт 1× slots casino</a>
<a href=https://persiankittencat.com/bathroom-tub-tile-ideas/#comment-62291>1×slots регистрация 1×slots review live</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины — бесплатные вращения, коие позволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся наиболее модным и преимущественным видом бонуса — безвозмездные вращения порой эффективнее и веселее в отыгрыше, чем другие виды бездепов. Внесение депо – Будьте готовы восполнить счет после отыгрыша бонуса. Это обычное требование верховодил для этого подобии промо-акций. Лучше заранее уточнить, какую необходимую надо(надобно) несомненно заносить на счет. Как управляло, идет о наименьшем депозите, но вы обязаны быть убеждены, что он для по карману.
#5950 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее на сегодня
Для выбора азартного заведения Вы сможете пользоваться списком наших казино с призами за регистрацию. На нашем сайте мы опубликовали перечень бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, собственно доля призов неповторимые и доступны только для посетителей нашего сайта по-специальному промо-коду или по уникальной ссылке. Кроме того, для каждого приза мы подготовили подробный обзор, в котором Вы узнаете как получить и отыграть одобрение и как исключить собственный выигрыш с бездепа.Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном сайте и сделайте вход в личный кабинет, чтобы отобрать безвозмездные вращения с вейджером х40; <a href=http://filmkachat.ru/>1× slots casino официальный сайт</a> <a href=https://blog.udn.com/G_112062930339362154/181391691>https://blog.udn.com/G_112062930339362154/181391691</a> Стоит отметить, собственно бездепозитный бонус выдается лишь взрослым новеньким, которые, в свою очередь, все пригласить собственных приятелей и знакомых, того рассчитывающих на поощрительную программку преданности. Подобная технология замечена между создающих онлайн-казино для популяризации и расширения трафика. Покер румы и спонсоры способствуют увеличению своей посещаемости, методом вербования свежих игроков. Бонусы – это уникальный шанс для вероятных соучастников забавы, которые могут опробовать софт покер рума и убедиться, будут ли они в него выступать либо нет. Новый игрок испробует свои силы с настоящими оппонентами в казино. 1×slots регистрация 1×slots review live <a href=http://mpalata.ru/forum/memberlist.php?mode=viewprofile&u=51214>http://mpalata.ru/forum/memberlist.php?mode=viewprofile&u=51214</a>
1×slots зеркало быструю регистрацию а также мгновенное
В бонусную программу множества операторов входят регулярные бездепы. Это пожизненные акции, поощряющие активных неизменных игроков. Популярный формат — раздача фриспинов по конкретным дням недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают неизменные бонусы без депозита в обмен на накопленные баллы лояльности.Прямо данный отберите бесплатные вращения за регистрацию без депозита и начинайте коллекционировать призовые композиции из-за крупных выигрышей! 1хслотс рабочее зеркало Бесплатный приз – кредиты, коие онлайн-казино начисляет посетителю, не принуждая его пополнять игровой счет.Вознаграждения за получение VIP-статуса ? начисляются в рамках программы лояльности при достижении очередного уровня или выдаются персонально менеджерами саппорта. <a href=https://vadaszapro.eu/user/profile/1268164>https://vadaszapro.eu/user/profile/1268164</a> Чтобы получить возможность вывести прибыль с бездепозитного бонуса в казино, нужно выполнить ряд критерий:Если при регистрации показать промокод, можно гарантировано получить приз. Где арестовать ваучер? Посетите направленные блоги либо форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В заключительное время игорные дома начали афишироваться в кинокартинах и телесериалах. Присмотритесь и наверняка заметите промокод, который принесёт 500 либо 1 000 бонусных рублей. 1хслотс официальный сайт зеркало Все любят получать презенты. Согласитесь, практически каждый играющий человек несомненно бесконечно рад, случае получит бесплатный подарок для игры в онлайн казино просто за регистрацию или же приз за внесенный депо, так именуемые приветственные призы для новых игроков. Соответственно такие интернет клубы станут больше известны и предпочтительны у игроков при выборе казино для забавы. Топ казино каждый обновляется и прибавляются новые и увлекательные игровые клубы с привлекательной бонусной политикой и всеми возможными привилегиями, к которым относятся такие призы как фриспины за регистрацию, денежные бездепозитные бонусы, а великодушные призы за внесенный депо.Верификация важна для дополнительной безопасности и подсобляет техподдержке выявить бонусхантеров и мошенников. Кстати, рядах платформах выводы крупных сумм доступны лишь в доказательства личности.
1×slots официальный сайт мобильная версия скачать
Обычно показатель выше, чем для бонусов на депозит. Не изумляйтесь, в он будет и х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных государств. <a href=http://www.sksmg.com/home.php?mod=space&uid=220216&do=profile>http://www.sksmg.com/home.php?mod=space&uid=220216&do=profile</a> Наиболее знаменитые гонорары среди гэмблеров – бездепозитные призы казино. Это не умопомрачительно, ведь возможно получить безвозмездные вращения или виртуальные кредиты, и при этом не придётся пополнять счёт, рисковать собственными средствами. Удастся насладиться разнородными веселиями и даже выиграть крупную сумму, избегая серьёзного риска.Для получения бонуса надо(надобно) пригласить в забаву нового посетителя. Казино начислит пригласившему фиксированный процент от взносов приглашённого вид бонуса: чаще всего его объем не превышает 10%. Срок деянья бонуса правило не выше месяца: пригласивший получает бонус от проигранных ставок приглашённого в 1-ый месяц забавы. 1×slots регистрацию более популярный вариант это Размер ставки для забавы по бездепозитному бонусу (окончательно же, в случае, когда он представлен в виде бонусных валютных средств) зачастую ниже, чем при игре на депозит. Ограничение будет работать до момента отыгрыша бонуса.
1×slots официальный зеркало
<a href=http://golf.blue-devil.eu/viewtopic.php?f=4&t=28904&p=158460&sid=ca9c88615e80ecdf6579e0a5c4882661#p158460>1×slots казино мобильная версия</a> Обыкновенные бездепозитные бонусы в объеме от 3-х до двадцати долларов сделаны чтобы, чтобы, чтобы в игры заходили все свежие и свежие игроки. Здесь, всего, несомненно ограничение на наибольший выигрыш. Важно, дабы перед наименьшим вкладом был отключен приз за 1-ое пополнение счета, и геймер не попадет на повторный вейджер. Минимального оборота. Этот предел уточняется вейджером — пока игрок не поиграет на установленную сумму, вывод средств несомненно недоступен.При этой на бонусные средства воспрещается играть в игровые автоматы с прогрессивным джекпотом и забавы из радела exist casino. Кроме такого, кое-какие казино выделяют бездеп на раз или количество конкретных слотов, и в иных забавах Вы не сможете на них выступать. 1×slots casino регистрация 1×slots review live <a href=https://valetinowiki.racing/wiki/%D0%90%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0_%D0%92_%D0%A0%D0%B0%D1%81%D1%81%D1%80%D0%BE%D1%87%D0%BA%D1%83>https://valetinowiki.racing/wiki/%D0%90%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0_%D0%92_%D0%A0%D0%B0%D1%81%D1%81%D1%80%D0%BE%D1%87%D0%BA%D1%83</a> Изучить управляла и обстоятельства получения бездепозитных призов казино, Вы можете у нас на веб-сайте в разделе с призами либо на официальном сайте избранного Вами казино. Если возможности найти необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электрической почте.
1×slots казино мобильная версия
В перечне требований к отыгрышу нередко присутствуют лимиты на ставки при забаве на собственные деньги. Так, если отыграть нужно 30 000 руб., а максимальная сумма ограничена 30 рублями, то вертеть барабаны светит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками условий по срокам действия промоакции. <a href=http://www.orlandogamers.org/forum/member.php?action=profile&uid=8141>http://www.orlandogamers.org/forum/member.php?action=profile&uid=8141</a> В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это самая милая часть забавы. Важно, часто бездепозитные бонусы в казино выдаются с лимитированиями по наибольшей выплате. В среднем можно рассчитывать на выгода в некоторое тыщ рублей. Как исключить выигрыш с приза без депо. Придётся подтвердить аккаунт документально, в некоторых заведениях. Процедура верификации обязательна и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате либо прочитайте в правилах.Активация валютного вознаграждения случается автоматически в создания профиля либо использования промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на странички казино в социальных сетях или на рассылку маркетинговых сообщений, скачать и установить дополнительный софт и т.д. 1×slot официальный сайт
<b>Смотреть еще похожие новости:</b>
<a href=https://www.formulersupport.com/Thread-recommended-site-u964wl?pid=161074#pid161074>1×slots зеркало регистрация</a>
<a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=7583>1×slots регистрацию более популярный вариант это</a>
<a href=https://test.soclanovtsy.ru/topic/35456–1×slots-%D0%B0%D0%BA%D1%86%D0%B8%D0%B8/>1×slots акции</a>
<a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/7048–1×slots-casino-registratsiya-1×slotscasino09k-online#7058>1×slots casino регистрация 1×slotscasino09k online</a>
<a href=http://powercrop.it/chi-siamo/le-persone?page=8#comment-449>1 x slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Новички не обожают сразу же вносить депо. Это обусловлено неименьем опыта и сомнением. К счастью, дни возможно получить бездепозитный бонус за регистрацию в казино. Неважно что начисляет система – фриспины или кредиты. В всяком случае вы не рискуете своими сбережениями. Это замечательная вероятность запустить понравившийся видео слот либо же испытывать удачу в настольных играх.
#5951 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet официальный xbet букмекерская контора леонов <a href=https://m.repost.news/>порно с Сергей Бобровский (хоккей)</a> vavada casino порно с Ирина Сидоркова <a href=https://kompromat1.online/>букмекерская контора бетсити</a> win win casino Любимова Ольга Борисовна порно почему в казино нет окон casino официальный зеркало букмекерская контора без порно с Васильева Татьяна Викторовна porno Илона Маркова, хоккеистка
DiskiPlus сайте букмекерской конторы фонбет DiskiPlus порно с Каролина Севастьянова <a href=https://diskiplus.ru>DiskiPlus casino 7k рабочее</a> DiskiPlus casino андроид DiskiPlus kent casino <a href=https://diskiplus.ru>DiskiPlus порно с Владимир Минеев (ММА)</a> DiskiPlus porno Дарья Клишина DiskiPlus сайты казино DiskiPlus бк букмекерская контора DiskiPlus Светлана Ходченкова DiskiPlus казино ставка DiskiPlus 1×bet зеркало слоты 1×bet xyz DiskiPlus порно с Сергей Бобровский (хоккей)
#5952 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Варвара Субботина карты казино <a href=https://strelochnik.com/>win win casino</a> casinos winning Фастова Елена Владимировна порно <a href=https://rumafia.news/>gama casino</a> скачать 1×bet 1×bet xyz up casino официальный слот casino букмекерская контора вход порно с Елена Никитина, скелетонистка Шевцова Татьяна Викторовна порно порно с Захарова Мария Владимировна
DiskiPlus гта казино DiskiPlus казино на деньги <a href=https://www.diskiplus.ru>DiskiPlus 1×bet зеркало слоты</a> DiskiPlus Яровая Ирина Анатольевна порно DiskiPlus порно с Никита Кучеров (хоккей) <a href=https://www.diskiplus.ru/>DiskiPlus фреш казино</a> DiskiPlus порно с Дарья Касаткина (теннис) DiskiPlus 1win casino DiskiPlus porno Илона Маркова, хоккеистка DiskiPlus gama casino DiskiPlus 1×bet рабочее DiskiPlus слоты казино DiskiPlus почему в казино нет окон
#5953 Roberthathttps://bathen.rv.ua
Все об озеленении и благоустройстве <a href=https://bathen.rv.ua/>https://bathen.rv.ua</a> Ландшафтный дизайн, проекты садов, террас и парков. Идеи для создания зеленых зон, подбор растений и профессиональные услуги для вашего участка.
#5954 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
online casino 1×bet зеркало рабочее на сегодня 1×bet xyz <a href=https://sovsekretno.net/>porno Мира Андреева (теннис)</a> бесплатно фильм казино промокод 1×bet <a href=https://t.me/vchkogpu_ru>букмекерская контора вход</a> порно с Афонина Марина Игоревна про казино 1×bet зеркало слоты porno Анастасия Янькова, боксерка зеркала казино вывод казино почему казино
DiskiPlus casino приложения DiskiPlus казино зеркало сегодня <a href=https://www.diskiplus.ru>DiskiPlus 7k casino зеркало</a> DiskiPlus бесплатно играем казино DiskiPlus porno Дарья Мороз <a href=https://diskiplus.ru>DiskiPlus зеркала казино</a> DiskiPlus гама казино DiskiPlus casino онлайн DiskiPlus пина букмекерской конторы DiskiPlus up casino зеркало DiskiPlus casino 7k сегодня DiskiPlus Комарова Наталья Владимировна порно DiskiPlus порно с Илья Осипов (киберспорт)
#5955 Isaacininahttps://aziatransbud.com.ua
Портал о строительстве <a href=https://aziatransbud.com.ua/>https://aziatransbud.com.ua</a> статьи, видео, инструкции, каталоги материалов и инструментов. Советы для дома и бизнеса. Легко строить, удобно ремонтировать!
#5956 Ремонт iPhone 14 Москваhttps://remont-iphone-14-row.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт iphone 14 рядом, можете посмотреть на сайте: <a href=https://remont-iphone-14-row.ru/>ремонт iphone 14 сервис</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#5957 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
демо казино казино <a href=https://slon-ru.com/>карты казино</a> бывшие казино демо казино <a href=https://7club7.com/>ев казино</a> pin up casino top top порно с Александр Головин (футбол) порно с Афонина Марина Игоревна скачать сайт букмекерской конторы porno Илья Ковальчук (хоккей) казино сегодня где казино
DiskiPlus порно с Никита Кучеров (хоккей) DiskiPlus порно с Голикова Татьяна Алексеевна <a href=https://diskiplus.ru>DiskiPlus лучшие бесплатные онлайн казино</a> DiskiPlus casino com DiskiPlus казино можно <a href=https://diskiplus.ru/>DiskiPlus сайт 1×bet слоты</a> DiskiPlus 1win casino DiskiPlus букмекерская контора DiskiPlus порно с Анастасия Потапова, теннисистка DiskiPlus casino андроид DiskiPlus retro casino DiskiPlus casinos xyz DiskiPlus porno Яна Троянова
#5958 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino скачать приложение фильмы казино рояль <a href=https://rucriminal.info/>скачать 1×bet на андроид</a> игры казино мелбет букмекерская контора <a href=https://t.me/vchkogpu_ru>porno Мира Андреева (теннис)</a> балтбет букмекерская контора porno Илона Маркова, хоккеистка казино онлайн бесплатно винлайн букмекерская контора официальный бесплатно фильм казино casino бездепозитный ramenbet casino
DiskiPlus казино пин DiskiPlus 1×bet слоты 1×bet top <a href=https://diskiplus.ru>казино</a> DiskiPlus казино ставка DiskiPlus pin up casino пин <a href=https://diskiplus.ru/>DiskiPlus casino автомат</a> DiskiPlus 1×bet сайт DiskiPlus casino на телефон DiskiPlus 1×bet официальный сайт 1×bet xyz DiskiPlus пин ап казино DiskiPlus казино большая DiskiPlus casino buzz DiskiPlus бесплатное казино
#5959 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Ирина Сидоркова casino игровой автомат <a href=https://rumafia.news/>сайт 1×bet слоты</a> ограбление казино реального казино <a href=https://th-royalgclub.com/>ставки на спорт букмекерские конторы</a> пин ап casino casino на телефон сайте букмекерской конторы фонбет pin ап casino pin up casino buzz casino промокод официальные букмекерские конторы скачать
DiskiPlus пин ап казино DiskiPlus вывод казино <a href=https://diskiplus.ru>DiskiPlus сайт винлайн букмекерская контора</a> DiskiPlus пин ап casino pin DiskiPlus casinos xyz <a href=https://www.diskiplus.ru>DiskiPlus Приезжева Екатерина Геннадьевна порно</a> DiskiPlus кент казино DiskiPlus казино сочи DiskiPlus 1×bet casino DiskiPlus сайт букмекерской конторы DiskiPlus порно с Каролина Севастьянова DiskiPlus порно с Голикова Татьяна Алексеевна DiskiPlus Хорова Наталья Александровна порно
#5960 Charlesgunnyhttp://filmkachat.ru
1 x slots casino
Сразу последствии активации промокода можно пользоваться презентом. Как теснее упоминалось, бонусы посещают трёх обликов – фриспины, кредиты и фриплей-бонусы.При верном раскладе бездепы — это отличный метод играть на средства без траты собственных средств. Есть несколько советов, следуя которым возможно извлечь максимум полезности из похожих промоакций казино. Играть идет только на лицензированных площадках. Скриптовые сайты столько дурачат с бонусными предложениями, но и используют пиратский софт с измененным ГСЧ. Выиграть на таких автоматах нереально. <a href=http://filmkachat.ru/>1×slots зеркало видели такую регистрацию на</a> Приветственный бездеп предоставляется какому игроку лишь раз раз. Казино дерутся с так нарекаемыми бонусхантерами (от англ. Bonus Hunter — охотник за призами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения дара. Исключить похожие деяния дозволяет верификация данных. Администрация вправе потребовать у клиента подтвердить персональные данные, указанные при регистрации. <a href=https://hackaday.io/rendering>https://hackaday.io/rendering</a> 1×slots зеркало быструю регистрацию а также мгновенное <a href=http://www.ppivn.vn/forum/user-28432.html>http://www.ppivn.vn/forum/user-28432.html</a> Какие бонусы у еще получить считая бездепозитного приза за регистрацию в казино? По мимо бездепозитного бонуса, каждое интернет казино предлагает игрокам прибыльное предложение на 1-ый депо, вы совершаете депозит, ваш депо возрастает в двое или и в 3, что, этим самым начать играть можно с больше крупной суммой, например же не запамятываем тему вейджер на призы.
1×slot регистрация
<a href=http://forum.survival-readiness.com/viewtopic.php?t=265113>1×slots регистрацию более популярный вариант это</a> 1×slots регистрация на 1хслотс <a href=http://vttgauriac.fr/forum/memberlist.php?mode=viewprofile&u=5425>http://vttgauriac.fr/forum/memberlist.php?mode=viewprofile&u=5425</a> 1×slots зеркало на сегодня Прежде чем активировать бездеп, необходимо убедиться в том, что страна, уроженцем которой считается игрок, не входит в перечень запрещенных.
1×slots зеркало регистрация в 1×slots casino
Разные казино имеют собственные верховодила по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высокие притязания. Часто онлайн-казино советуют отыграть бонусное одобрение до ста один в игровых автоматах. Например, в игрок получил безвозмездно 10 $, то необходимо несомненно отыграть их, поставив одну тыщу спинов по одному доллару каждый. Стоит обозначить(означить), что не все казино выделяют вероятность выступать на бонусы и не во всех развлекательных заведениях идентичные правила для отыгрывания. Некоторые казино запрещают играть на бонусы в блекджек либо ограничивают ставки до пяти процентов, собственно существенно увеличивает в десятки один количество нужных игр. Бездеп с фриспинами возможность обхватывать всю коллекцию игр на сайте или разработки одного провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш может быть выведен после такого, как юзер отыграет эту сумму. Возможность оценить глубокий возможностей слотов — главное достоинство этой разновидности. Игроку становятся доступны что, эти функции, коие отсутствуют в демонстрационном режиме, а возможность выиграть настоящие деньги добавляет ярких азартных чувств. <a href=http://web.symbol.rs/forum/member.php?action=profile&uid=655565>http://web.symbol.rs/forum/member.php?action=profile&uid=655565</a> Если вы опытный игрок, вы обязаны знать, собственно бонус без депо – редчайшая находка. Тем ниже, мы неделю исследуем онлайн, дабы найти вам превосходнейшие бездепозитные предложения.B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax сайт 1× slots casino Риск-игра по одинаковым шансам – Также казино возможность запрещать выполнять обстоятельства по отыгрышу счет раунда на удвоение, который предлагается в слотах, видео-покере и некоторых иных забавах.Приветственный бонус без депозита ? подарок за регистрацию. Выдается деньгами, фриспинами или баллами. В заключительном случае бонусные баллы используются для участия в турнирах либо обмена на настоящие деньги.
1хслотс официальный сайт зеркало
Лишь известные и известные азартные заведения все позволить себя раздавать бездепы вид добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депо, которые можно израсходовать в лучших аппаратах с высочайшей отдачей.Прочитайте правила бонусной программы, в хотите участвовать. Да, мы настойчиво советуем сделать это до регистрации. Игрокам не следует принимать приветственный бонус как гарантированный способ получить большой выигрыш, но это замечательная возможность без расходов оценить функционал казино. 1 x slots <a href=https://holisticdoggie.com/health-fitness-nutrition/%D0%BE%D0%B1%D1%83%D1%87%D0%B5%D0%BD%D0%B8%D0%B5-%D0%BD%D0%B0-%D0%BF%D1%80%D0%B0%D0%B2%D0%B0/>https://holisticdoggie.com/health-fitness-nutrition/%D0%BE%D0%B1%D1%83%D1%87%D0%B5%D0%BD%D0%B8%D0%B5-%D0%BD%D0%B0-%D0%BF%D1%80%D0%B0%D0%B2%D0%B0/</a> Даже не выиграв крупную сумму, игрок интересно проведет время, изнутри исследует работу площадки, воспримет геймплей автоматов. Все это без каких-то финансовых рисков. Быть в курсе лучших промоакций легкостью. Достаточно периодически изучать список новых интернет казино с выводом бонуса без депозита в данном разделе.Проверка занимает от нескольких мин. До нескольких дней, спецы техподдержки могут запросить дополнительные документы либо инициировать куцее общение по Skype.
1×slots официальный сайт скачать на айфон
<a href=http://iawbs.com/home.php?mod=space&uid=851805>http://iawbs.com/home.php?mod=space&uid=851805</a> Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция имеет подробные правила, ссылка на которые обыкновенно находится в промообъявлении. В их указываются лимиты, вейджер, перечень дешевых игр. Если оператор укрывает данные о предложении, то пользоваться им надо. 1×slots на любой вкус как пройти регистрацию Хотя бесплатные призы начисляются без депозита, не исключено, что для понадобиться вносить средства. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты только последствии того, как новый заказчик первый пополнит игровой счет.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=135409>1х слотс зеркало регистрация в 1×slots casino</a>
<a href=http://brilliance.ru/forum/memberlist.php?mode=viewprofile&u=21924>1×slots бонус за регистрацию</a>
<a href=http://www.deonnyn.com/PSPA/memberlist.php?mode=viewprofile&u=559>1хслотс казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подтвердите лицо, предоставив оператору казино средства паспортные данные. Инструкции обычно несложные, основное — четко им следовать. Если написано, собственно «на фото обязаны быть заметны все хорошо угла страницы паспорта» — сделайте непосредственно это фото. Выигрыши с призов без инвестициям практически привязаны к требованию по ставкам и могут быть обналичены только после исполнения данных притязаний.
#5961 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Алена Михайлова официальные зеркала казино <a href=https://rucriminal.info/>порно с Юлия Ефимова, пловчиха</a> 1×bet зеркало рабочее на сегодня 1×bet xyz казино вулкан <a href=https://rhymes-punches.com/>casinos winning</a> vodka casino casino сайты 1×bet приложение 1×bet зеркало на сегодня 1×bet xyz pin up casino порно с Захарова Мария Владимировна лучшие онлайн казино
DiskiPlus порно с Константин Тюкавин (футбол) DiskiPlus up букмекерская контора <a href=https://www.diskiplus.ru>DiskiPlus порно с Георгий Джикия (футбол)</a> DiskiPlus porno Мария Шарапова DiskiPlus 1×bet зеркало слоты <a href=https://www.diskiplus.ru/>DiskiPlus часы казино</a> DiskiPlus Львова-Белова Мария Алексеевна порно DiskiPlus Петрова Ольга Викторовна порно DiskiPlus up букмекерская контора DiskiPlus 1×bet на андроид DiskiPlus сайт казино зеркало DiskiPlus porno Юлия Канакина DiskiPlus порно с Никита Кучеров (хоккей)
#5962 Charlesgunnyhttp://filmkachat.ru
рабочее зеркало 1×slots
Сроки активации бонуса устанавливаются каждым казино, хотя почаще всего они не превосходят недели с момента получения. Игроку непременно надо(надобно) применять бездеп в течение указанного срока, в ином случае бонус просто исчезнет. Каждый бонус можно получить только раз раз, поэтому случае не применять бездеп в срок, у игрока не несомненно 2 шанса им пользоваться. <a href=http://filmkachat.ru/>зеркло казино 1×slots</a> Подтверждение электронной почты – одно из главных критерий, коие есть практически в каждом бездепозитном казино. Чтобы верифицировать электронную почту, достаточно перебежать по интенсивной ссылке в письме, приобретенном от азартного клуба.Онлайн-казино с бездепозитными призами ставят посетителям условия для пользования бездепами, потому перед ролью в промоакции другого тщательно ознакомиться со всеми правилами и аспектами акции. Условия все касаться получения бонуса, его применения и последующего вывода денежных средств когда выигрыша. <a href=https://www.scutify.com/articles/2024–12–21-transforming-visualization-through-digital-innovation>https://www.scutify.com/articles/2024–12–21-transforming-visualization-through-digital-innovation</a> Можно ли зарабатывать на бездепозитных призах? Это не работа, тут как повезет, если в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, это возможно назвать везением, и добавочной добавкой к вашему бютжету.Заработать на бездепозитных бонусах за регистрацию в казино может любой юзер, достигший совершеннолетия. 1хлот регистрация в 1×slots casino <a href=https://aiia.su/index.php?subaction=userinfo&user=HenryCus>https://aiia.su/index.php?subaction=userinfo&user=HenryCus</a> Существуют казино с призом за регистрацию, в которых очень знамениты фриспины в онлайн казино впоследствии регистрации в определенных играх. Они встречаются и почаще безвозмездных поощрений или классических бонусов в казино без вложений. Например, игрок регистрирует счет, на который начисляются безвозмездные игры, приз за регистрацию вид безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса в выигрывает настоящие средства, коие в последствии возможно успешно исключить из заведения на свою платежную систему. То есть, есть все шансы вывести свои без рисков собственными финансами. Регистрация, за которую игрок получит бонусы, займет пару минут, а благодаря данному возможно увеличить 5 евро поощрений до тыс. И без всяких заморочек исключить их.Используйте наилучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, дабы заработать подарки за простые деянья теперь сегодня получить первый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высокой отдачей и быстрыми выводами на электронные кошельки.
1×slots регистрация 1×slots casino c2d ru
1×slots зеркало рабочее на сегодня Многие казино предоставляют в рекламных целях благотворительные призы самая для наших читателей. Чтобы их получить, надо(надобно) перебежать на игровой вебсайт по партнерской ссылке с нашего портала. <a href=https://oraclenana.com/MYBB3/user-19150.html>https://oraclenana.com/MYBB3/user-19150.html</a> Игры, в которых можно играть на бонусные средства. Проверьте перечень игр, в которых можно играть на бонусные свои, вполне они Вам не понравятся и не расходовать своё время на эту промоакцию. зеркло казино 1×slots Будьте внимательнее при ознакомлении с правилами во избежание происхожденья конфликтных ситуаций с казино, когда последствии отыгрыша бездепа вам не дадут вывести солидную необходимую выигрыша.
1хслот официальный сайт зеркало
Онлайн гемблинг развивается с любым днем все больше и больше, новые бренды создаются не по денькам а по часам. Новые интернет казино делают вступительные акции для игроков, для того что бы зарекомендовать себя, и что, этим наиболее предлагают бездепозитные призы за регистрацию, собственно бы не упустить эту вероятность — как пользоваться свежим бездепом, рекомендуем навещать наш сайт как возможно почаще, самое лакомое и новые будет добавляться в этом же списке. Бездепозитные призы — это подарки от казино в виде бонусных средств либо фриспинов для игровых автоматов, которые начисляются на аккаунт игрока после процедуры регистрации на сайте заведения. Для получения этих поощрений депозит не требуется. <a href=http://www.zghncy.cn/home.php?mod=space&uid=600205>http://www.zghncy.cn/home.php?mod=space&uid=600205</a> Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. 1хслотс казино зеркало
1 xslots рабочее зеркало
В качестве призов онлайн казино нередко предлагает выдачу фриспинов, то есть даровых вращений игрового барабана. Виртуальные монеты можно использовать для обучения в покерной школе либо для забавы в казино.Так собственно главное различие дара на депозит от бездепа – неотъемлемое пополнение счёта. Вы можете привнести депозит и преувеличить стартовый капитал либо арестовать бездеп и при этом не придётся рисковать своими сбережениями. Поспешите выполнить простые притязания, и администрация ресурса начислит щедрое поощрение! <a href=http://mi.minfish.com/home.php?mod=space&uid=1196847>скачать 1×slots на андроид мобильная версия</a> За вербование приятеля ? в партнерской программы заказчик получает вознаграждение за привлечение свежих пользователей.Фриспины без депо или дополнительные средства посодействуют ближе познакомиться с игровой платформой и её функциями. За счёт даров можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради забавы против живых крупье. 1×slots зеркало регистрация то дальше необходимо пройти <a href=https://njt.ru/forum/user/186723/>https://njt.ru/forum/user/186723/</a>
1×slots регистрация 1×slots casino c2d ru
Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 $. Если выдаются фриспины, их количество редко выше нескольких десятков бесплатных вращений.Процесс подтверждения личности может занять от одного денька до недели. Если клиент допустил какую ошибку при заполнении паспортных данных, то ему идет обратиться с задачей в службу поддержки онлайн-казино. Срок активации и время на отыгрыш. Зачисление денег или фриспинов случается при активации на строго ограниченного периода, подобные притязания предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать приз некоторое дней либо числе месяцов. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высоким вейджером. <a href=https://lxgonline.mn.co/posts/the-evolution-of-face-photo-swap-tool-technology-from-fun-to-functional>https://lxgonline.mn.co/posts/the-evolution-of-face-photo-swap-tool-technology-from-fun-to-functional</a> 1×slots рабочее зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=36926>1×slots регистрация то дальше необходимо пройти</a>
<a href=http://griffhunter.com/boards/viewtopic.php?p=337418#p337418>1х слотс зеркало регистрация в 1×slots casino</a>
<a href=http://nacionrolera.org/foro/viewtopic.php?f=1210&t=99752>1×slots акции</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Первый возникающий вопрос, это, зачем выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают новых игроков. Последним легче начать забаву на средства с подарка за регистрацию. Им надо пополнять баланс и расходовать личностные средства. Новички получают безвозмездные спины или средства на счёт. С их помощью знакомятся с игровым ходом, крутят слоты и проделывают ставки в рулетке.
#5963 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Арина и Дина Аверины, гимнастки букмекерские конторы без депозита <a href=https://slon-ru.com/>casino андроид</a> пин ап casino pin up top cometa casino <a href=https://slon-ru.com/>фильмы казино рояль</a> 1×bet зеркало Манилова Алла Юрьевна порно порно с Виктория Синицина, фигуристка казино ли up casino официальный зеркала казино скачать букмекерскую контору
DiskiPlus casino скачать приложение DiskiPlus фреш казино <a href=https://www.diskiplus.ru>DiskiPlus win win casino</a> DiskiPlus porno Андрей Рублев (теннис) DiskiPlus Анна Михалкова <a href=https://diskiplus.ru>DiskiPlus casino актуальное зеркало</a> DiskiPlus casino 7k сегодня DiskiPlus букмекерская контора без DiskiPlus порно с Петр Ян (ММА) DiskiPlus букмекерская контора фонбет официальный DiskiPlus casino бонус DiskiPlus casino автомат DiskiPlus леон букмекерская контора
#5964 Charlesgunnyhttp://filmkachat.ru
1×слот регистрация в 1×slots casino
При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое возможно посвятить ирге в казино. <a href=http://filmkachat.ru/>зеркала 1×slots</a> <a href=https://www.xaphyr.com/blogs/984858/Transform-Your-Space-Professional-Secrets-of-Interior-Design-Layout-Mastery>https://www.xaphyr.com/blogs/984858/Transform-Your-Space-Professional-Secrets-of-Interior-Design-Layout-Mastery</a> Приветственный бездеп предоставляется какому игроку лишь раз раз. Казино дерутся с например называемыми бонусхантерами (от англ. Bonus Hunter — доброволец за бонусами), пытающимися заводить множественные аккаунты для надувательства оператора и повторного получения подарка. Исключить похожие деяния дозволяет верификация данных. Администрация вправе востребовать у клиента доказать персональные данные, указанные при регистрации. 1×slots casino зеркало рабочее <a href=https://prpack.ru/user/Richarddrice/>https://prpack.ru/user/Richarddrice/</a> Ознакомьтесь с нашим списком наилучших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего перечня и получите бездеп незамедлительно. Хватайте наилучшие безвозмездные предложения ниже и выигрывайте великие средства, не рискуя!
1×слот регистрация в 1×slots casino
1×slots регистрация на 1хслотс <a href=https://johnnyqajq42963.amoblog.com/nude-ai-app-transforming-image-moderation-and-privacy-in-the-digital-age-52204068>https://johnnyqajq42963.amoblog.com/nude-ai-app-transforming-image-moderation-and-privacy-in-the-digital-age-52204068</a> Верификация необходима для добавочной безопасности и помочь техподдержке выявить бонусхантеров и плутов. Кстати, на некоторых платформах выводы крупных сумм доступны только последствии подтверждения личности. 1×slots зеркало рабочее на сегодня Наши эксперты исследуют обстоятельства акции, этого в ручном режиме проверяют их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и параметры. Мы не рекламируем казино, а даем игрокам информацию о наихороших из них.
1×slots casino регистрация
<a href=http://www.fumankong2.cc/home.php?mod=space&uid=588866>http://www.fumankong2.cc/home.php?mod=space&uid=588866</a> Бездепозитные бонусы в казино без пополнения 2022 — это определенная сумма денег либо valinomycin spins вращения, коие предоставляются первым постояльцам за регистрацию на веб-сайте казино в виде бездепозитного приза, и дает вас вероятность с казино без пополнения опробовать предложения (игр), с последующей привилегией вывода средств при исполненьи всех установленных верховодил.Список например называемых «не землель» прилагается к правилам бонусной программы игорного портала. Обязательно проверьте, распространяются ли на вас сходственные санкции. 1×slots зеркало регистрация то дальше необходимо пройти
1×slots зеркало рабочее на сегодня
<a href=https://thetechmodders.com/forums/viewtopic.php?t=60893>1×slos регистрация в 1×slots casino</a> 1×slots бонус за регистрацию <a href=http://forum.moto-fan.pl/uzytkownik-patrickciche>http://forum.moto-fan.pl/uzytkownik-patrickciche</a> Объективные – объем приза, коэффициент и обстоятельства вейджера, надобность внесения депо для вывода средств;После получения бонуса вывод средств для посетителя будет недосегаем времени, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя либо чета месяцов. Выводить средства игрок может только последствии отыгрыша.
1 x slots casino
Бездепозитный бонус казино 2022 с выводом за регистрацию дает вероятность ознакомиться игроку с лобби избранного заведения, сориентироваться в выборе игр и выяснить качество работы службы. Довольно часто, начиная игровой процесс, игрок теснее не желает останавливаться и делает реальный вклад. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать даром возможно как один таки с призом за регистрацию без необходимости заносить депо.Однако в условиях исчезают «подводные камешки», которые не позволят вывести крупную необходимую или же вы не успеете отыграть вейджер. Поэтому профессионалы рекомендуют отобрать безвозмездные вращения за регистрацию в казино без депозита, дабы поднабраться опыта и получить настоящий шанс на победу. <a href=http://www.koelnmedia2.de/fastelovend/member.php?action=showprofile&user_id=14913>http://www.koelnmedia2.de/fastelovend/member.php?action=showprofile&user_id=14913</a> 1×slot регистрация В качестве призов онлайн казино нередко предлагает выдачу фриспинов, словами безвозмездных вращений игрового барабана. Виртуальные монеты можно применять для обучения в покерной школе либо для забавы в казино.Теоретически, к бесплатным призам возможно отнести например нарекаемые фриспины. Напомним, речь идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, поэтому собственно они предоставляют только возможность делать ставки.
<b>Смотреть еще похожие новости:</b>
<a href=https://10nsk.ru/user/JosephSuple/>1хслотс рабочее зеркало на сегодня</a>
<a href=http://griffhunter.com/boards/viewtopic.php?p=438066#p438066>1×slots casino регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Разные казино имеют собственные правила по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высокие притязания. Часто онлайн-казино советуют отыграть бонусное поощрение до ста один в игровых автоматах. Например, случае игрок получил бесплатно десять долларов, то нужно будет отыграть их, поставив 1 тысячу спинов по 1 баксу любой. Стоит отметить, собственно не все казино выделяют вероятность выступать на бонусы и не во всех развлекательных заведениях схожие управляла для отыгрывания. Некоторые казино воспрещают выступать на призы в блекджек или ограничивают ставки до пяти процентов, собственно существенно наращивает в десятки раз количество нужных игр.
#5965 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию процедура займет всего лишь
Бoльшинcтвo азартных заведений выдвигают приблизительно одинаковые обстоятельства и притязания, которые нужно выполнить, дабы получить бездепозитный бонус за регистрацию. Все их возможно объединить в один список: <a href=http://filmkachat.ru/>1×slots промокод при регистрации 2025</a> Промообъявления от казино не дают реальной картины и направлены на вербование внимания пользователей. Понять, как высоки шансы остаться в плюсе, позволит личный анализ условий предложения:В большинстве заведений устроить это возможно по e-mal, по номеру телефонного, спустя социальную сеть либо гугл-аккаунт. <a href=https://imageevent.com/lexxeagle/3drenderedproductimages>https://imageevent.com/lexxeagle/3drenderedproductimages</a> 1×слот регистрация в 1×slots casino <a href=http://38.104.231.181/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0>http://38.104.231.181/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0</a> Чаще всего, известные сервисы, такие как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно обязательное управляло. Финансовые средства выводятся только спустя ту платежную систему, которой огромный для пополнения депозита. Если же игрок получил бездепозитный покерный бонус, потребуется восполнить счет на наименьшую необходимую, которая составляет обычно 10 $.
1×slots скачать на айфон
<a href=http://evtrucksforum.com/memberlist.php?mode=viewprofile&u=28289>1х слот 1хслотс регистрация перейти на 1×slots</a> рабочее зеркало 1×slots У нас на веб-сайте Вы найдете список призов без депозита в испытанных казино и подробную информацию о том как их получить и применять.Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном веб-сайте и выполните вход в личный кабинет, дабы отобрать благотворительные вращения с вейджером х40; <a href=http://shichaoliuluntan.com/home.php?mod=space&uid=329151>http://shichaoliuluntan.com/home.php?mod=space&uid=329151</a> При регистрации никаких или ином интернет игральном заведении — вас дается один шанс испытывать свою фортуну не внося свои монеты. Замечу что эту поощрительную услугу предоставляют не все интернет игровые площадки, а только великодушная половина из их. Которые мы подготовили для Вас в нашем перечне.Вейджер (или вагер) ? это наименьшая сумма ставок, которую нужно устроить для вывода денежного бонуса. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение. 1хслотс рабочее зеркало на сегодня Существуют казино с бонусом за регистрацию, в которых очень известны фриспины в онлайн казино потом регистрации в конкретных играх. Они встречаются в чаще даровых поощрений или классических призов в казино без вложений. Например, игрок регистрирует счет, на который начисляются безвозмездные забавы, приз за регистрацию повторяющий бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса игрок выигрывает настоящие деньги, которые в последствии можно успешно вывести из заведения на собственную платежную систему. То есть, все шансы вывести средства без рисков своими финансами. Регистрация, за в получит бонусы, займет минут, а спасибо этому возможно увеличить 5 евро поощрений до тыс. И без всяких проблем вывести их.
1×slots регистрация на сайте
Бездепозитные бонусы казино это финансовая компенсация, предлагаемая пользователям на дармовой основе и вероятность играть в онлайн казино даром. Если ассоциировать их с поощрениями за вклад, каких средства выдаются только впоследствии первоначального пополнения счета, то бездепозитные гонорары получаются даром. То есть, играющий получает возможность делать ставки на уже имеющие деньги, коие выдаст заведение, выполняя, всем, обычные деянья, дабы их извлечь (тут речь о регистрация, удостоверении личности с использованием номера аппарата, дизайна заказы и т.д.). <a href=http://82.156.10.47/home.php?mod=space&uid=7727>http://82.156.10.47/home.php?mod=space&uid=7727</a> рабочее зеркало 1хслотс
1×slots официальный сайт, скачать
Классическая разновидность бонуса за создание аккаунта. Его превосходство заключается сомнений, собственно клиент может других избирать аппараты и делать ставки в них. Иногда список игровых автоматов ограничен оператором, но все также это никакого, чем один-единственный доступный слот, как когда с использованием фриспинов. Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 поболее. Когда игроку полагается количество фриспинов, администрация возможность бить3 их начисление на некоторое дней. Бесплатные вращения предоставляются для определенного слота, который указывается в правилах акции. 1×slots сайт <a href=http://nsejasconstruction.com/index.php/component/kunena/suggestion-box/902#902>http://nsejasconstruction.com/index.php/component/kunena/suggestion-box/902#902</a>
1×slots casino регистрация на сайте
Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке адепты онлайн-казино публикуют актуальную информацию о not the slightest deposit bonuses и предложениях. Проверка занимает от нескольких минут до нескольких дней, профессионалы техподдержки шансы запросить вспомогательные документы или инициировать короткое общение по Skype. <a href=https://sportcar.moscow/user/JeffreySpill/>https://sportcar.moscow/user/JeffreySpill/</a> 1×slots сайт Фриспины – бесплатные вращения с фиксированной ставкой, коие возможно применять в конкретных игровых автоматах.В случае установленного лимита на сумму вывода выигрыша с бездепозитного бонуса, игрок не может исключить больше заявленной суммы.
<b>Смотреть еще похожие новости:</b>
<a href=https://praisenpray.org/forums/showthread.php?tid=94756>1×slots casino регистрация 1×slots review live</a>
<a href=https://karakol.com.kg/user/Jameskef/>1×slots регистрация на сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный приз нередко может замерзнуть легкодоступным сразу после завершения регистрации, что в большинстве случаев единственным притязанием к нему считается регистрация, а затем ревизия вашей свежей учетной записи.
#5966 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet 1хбет 1×bet зеркало рабочее на сегодня 1×bet xyz <a href=https://slon-ru.com/>официальные сайты казино</a> порно с Дарья Касаткина (теннис) bitz casino <a href=https://repost.news/>официальные зеркала казино</a> new casino 1×bet официальный слоты casino вход porno Андрей Рублев (теннис) 1×bet зеркало рабочее на сегодня 1×bet xyz Юдаева Ксения Валентиновна порно казино сочи
DiskiPlus официальные букмекерские конторы скачать DiskiPlus 1×bet официальный 1×bet xyz <a href=https://www.diskiplus.ru>DiskiPlus официальные зеркала казино</a> DiskiPlus про казино DiskiPlus 7k casino зеркало на сегодня <a href=https://www.diskiplus.ru/>DiskiPlus Комарова Наталья Владимировна порно</a> DiskiPlus ев казино DiskiPlus 7k casino официальный DiskiPlus 1×bet скачать бесплатно DiskiPlus порно с Карен Хачанов (теннис) DiskiPlus online casino 7k DiskiPlus Окладникова Ирина Андреевна порно DiskiPlus приложения букмекерских контор
#5967 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet рабочее unlim casino <a href=https://glvk.guru/>автомат казино</a> сайте букмекерской конторы фонбет скачать pin casino <a href=https://th-royalgclub.com/>почему в казино нет окон</a> игры казино casino ru Набиуллина Эльвира Сахипзадовна порно букмекерская контора бесплатно скачать 1×bet зеркало xbet online casino 7k официальное казино вход
DiskiPlus ап казино DiskiPlus гта казино <a href=https://www.diskiplus.ru/>DiskiPlus casino ап</a> DiskiPlus порно с Александр Головин (футбол) DiskiPlus 1×bet слоты 1×bet top <a href=https://www.diskiplus.ru/>DiskiPlus Матвиенко Валентина Ивановна порно</a> DiskiPlus бесплатно играем казино DiskiPlus букмекерская контора без DiskiPlus букмекерская контора зенит DiskiPlus казино можно DiskiPlus 1×bet xbet DiskiPlus vavada casino DiskiPlus пина casino
#5968 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация на сайте
Существует ли стратегии для отыгрыша бездепозитных призов? К сожалению нет, на выигрыши либо проигрыши с бонусов, казино либо игрок повлиять не может, отдача игр происходит от создателей игр.У каждой игры свои требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система зачтет любую ставку. В рулетке и покере устроить это гораздо сложнее. Именно поэтому например принципиально пристально читать условия получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в любой ирге, то новенькие попросту «спустят бонус на ветер». <a href=http://filmkachat.ru/>1×slot зеркало рабочее регистрации на телефон придет</a> В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, необходимо обратиться в саппорта через лайв-чат на веб-сайте казино. <a href=https://peertrainer.com/LoungeCommunityThread.aspx?ForumID=1&ThreadID=316722>https://peertrainer.com/LoungeCommunityThread.aspx?ForumID=1&ThreadID=316722</a> 1×slots регистрация 1×slotscasino09k online <a href=https://pumping.co.kr:443/bbs/board.php?bo_table=epumping2&wr_id=369053>https://pumping.co.kr:443/bbs/board.php?bo_table=epumping2&wr_id=369053</a> Более солидные предложения встречаются очень изредка. Зачастую они доступны только VIP-игрокам. В оставшихся случаях им скорее сопутствуют очень строгие обстоятельства отыгрыша. Также вероятны дополнительные условия и другие ограничения, прописанные в условиях и положения бонусной программы казино.
1×slots casino регистрация
Бездепозитные призы казино за регистрацию в 2022 году — это вероятность сыграть за счёт заведения. Казино даёт клиенту шанс пользоваться определённой суммой или количеством даровых вращений без внесения депо. Не путайте деморежим с реальной забавой без надобности внесения депозита. <a href=https://nauc.info/forums/viewtopic.php?t=20368351>1×slots официальный зеркало рабочее</a> 1хслотс зеркало <a href=https://forum.mpgames.ir/member.php?28484-KennethKnoge>https://forum.mpgames.ir/member.php?28484-KennethKnoge</a> Баланс игрока пополняется на подобающую сумму. К ней применяется вейджер, указанный в правилах промоакции. Вывести выигрыш можно будет последствии того, как юзер сделает требуемый объем ставок из личных средств. В редких случаях бездеп работает в формате Free Play. На счет пользователя зачисляется крупная сумма, и предоставляется малый срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по окончании сего периода сумма на счету будет превосходить первоначальную, то разность можно несомненно вывести или применять для дальнейших ставок.Нет. Казино выдают благотворительные призы за регистрацию, для того, чтобы заказчик мог ознакомиться с игровым заведением. А чтобы исключить его, необходимо выполнить обстоятельства отыгрыша. 1× slots регистрация в 1×slots casino После получения бонуса вывод средств для посетителя будет недосегаем до тех пор, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или чета недель. Выводить средства игрок сможет только в отыгрыша.Активация по промокоду используется в различных обликах бездепов. Если речь идет о приветственном призе, то набор знаков возможно разузнать на основной странице, в регистрационной форме либо письме, коие отчаливает юзеру для доказательства адреса электронной почты. Акции имеют проводиться общо с партнерскими площадками. Обычно код располагается на постороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активируется разовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном кабинете или начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем важный код для активации в описании любого промо.
1хслот 1хслотс регистрация перейти на 1×slots
Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных призов принимаются довольно высокие притязания. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до ста один в игровых автоматах. Например, в игрок получил безвозмездно десять $, то нужно будет отыграть их, поставив 1 тыщу спинов по 1 баксу каждый. Стоит обозначить(означить), что не все казино дают возможность выступать на бонусы и не во всех увеселительных заведениях схожие правила для отыгрывания. Некоторые казино воспрещают играть на бонусы в блекджек или ограничивают ставки до 5 %, что значительно наращивает в 10-ки один количество нужных игр.2. Создать свежий профиль. Для регистрации нужно наполнить небольшую анкету либо зайдите в собственный кабинет при помощи социальных сеток; <a href=http://www.adbritedirectory.com/Shisha-tobacco-from-4-eur_524131.html>http://www.adbritedirectory.com/Shisha-tobacco-from-4-eur_524131.html</a> Маркетинговая деятеля всех игорных интернет-клубов обязана носить разнообразный характер. И если вознаграждения на депозит служат чтобы, чтобы, дабы стимулировать заносить депозиты и поощрять уже имеющих пользователей, то бездепозитный приз в казино либо бонус за регистрацию в казино, прежде всего, рассчитан на расширение базы потребителей. 1×slots акции
1×slots регистрация на официальном сайте
Бывают ли бездепозитные призы без вейджера? Бывают, если у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино. Изучить правила и условия получения бездепозитных бонусов казино, Вы можете у нас на сайте в разделе с бонусами или на официальном веб-сайте выбранного Вами казино. Если не можете найти необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал либо по электронной почте.Внесение депозита – Будьте готовы пополнить счет после отыгрыша бонуса. Это обычное требование правил для этого типа промо-акций. Лучше заранее уточнить, какую необходимую надо(надобно) будет заносить на счет. Как верховодило, идет о наименьшем депозите, но вы должны быть убеждены, что он для по кармашку. 1×slots официальный сайт скачать <a href=https://www.advansbum.by/component/users/?option=com_k2&view=itemlist&task=user&id=1183548>https://www.advansbum.by/component/users/?option=com_k2&view=itemlist&task=user&id=1183548</a> Срок активации и время на отыгрыш. Зачисление средств либо фриспинов происходит при активации на взыскательно ограниченного периода, подобные притязания предъявляются и к срокам отыгрыша. Одни казино позволяют отыгрывать бонус некоторое дней либо и недель. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с неоправданно высоким вейджером.Бездепозитные призы — это подарки от казино вид бонусных денег либо фриспинов для игровых автоматов, которые начисляются на акк игрока последствии процедуры регистрации на сайте заведения. Для получения этих поощрений депозит не потребуется.
1×slots зеркало рабочее
Возьми свой подарок. Чаще всего бонус активируется незамедлительно в регистрации. Но посещают ситуации, когда надо(надобно) зайти в личный кабинет или написать в справочную службу.Но на азартных платформах сходственные вознаграждения имеют получить и уже зарегистрированные пользователи. В этом случае, призы предоставляются масштабах оригинальных промоакций или же неким геймерам в виде акционного предложения, которое прибывает на почту с целью «возвратить» игрока в свое казино. Автоматы непопросту числятся самым популярным азартным веселием. Чтобы освоить управление и верховодила, потребуется всего несколько минут. Ваша задача устроить ставку, определить число трудящихся линий и возможно крутить тамбур. Если дисплее выпадет выигрышная композиция – вы выиграли! С данной задачей для помогут справится бездепозитные призы казино.На благотворительные бонусы онлайн-казино практически всегда распространяется ограничения по стране проживания посетителей. Даже в для разрешается открывать счет и выступать на средства в заведении, это еще не значат, что вас доступны not the slightest down payment bonuses. <a href=http://besstizhie.ru/user/Henrybut/>http://besstizhie.ru/user/Henrybut/</a> Большинство интернет-казино из нашего топ-10 готовы порадовать вас эксклюзивными промоакциями. Читайте о их в обзорах и на форуме. 1×slots официальный сайт зеркало Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, the decision только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Такой бесплатный эквивалент средств зачисляется на профиль юзера в осуществления притязаний и предназначаются они только для игрового процесса. Вывод таких вознаграждений возможен только после осуществления вейджеровых условий.
<b>Смотреть еще похожие новости:</b>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=283308>1× slots casino официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный приз казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби избранного заведения, определится в выборе игр и проверить качество работы саппорта. Довольно часто, начиная игровой процесс, игрок теснее отказывается останавливаться и проделывает настоящий лепта. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть бесплатно вероятно как один таки с бонусом за регистрацию без надобности заносить депозит.
#5969 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино фильм онлайн casinos winning <a href=https://krtka.info/>рейтинг казино</a> сколько казино Шевцова Татьяна Викторовна порно <a href=https://sovsekretno.net/>Москалькова Татьяна Николаевна порно</a> порно с Елена Никитина, скелетонистка pin up casino зеркало vodka casino официальные зеркала казино porno Нина Пирогова, хоккеистка пари букмекерская контора казино ставка
DiskiPlus порно с Аделия Петросян (фигурное катание) DiskiPlus r7 casino <a href=https://www.diskiplus.ru/>DiskiPlus водка казино</a> DiskiPlus порно с Ирина Сидоркова DiskiPlus Фастова Елена Владимировна порно <a href=https://diskiplus.ru>DiskiPlus букмекерская контора бетсити</a> DiskiPlus букмекерская контора бесплатно скачать DiskiPlus сайт казино зеркало DiskiPlus казино гта 5 DiskiPlus порно с Матвей Сафонов (футбол) DiskiPlus casino зеркало сегодня рабочее DiskiPlus бесплатные букмекерские конторы DiskiPlus pin up casino пин ап
#5970 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора ставки казино <a href=https://sovsekretno.net/>pin up casino buzz</a> порно с Юлия Ефимова гта казино <a href=https://glvk.guru/>порно с Алексей Миранчук (футбол)</a> порно с Ирина Сидоркова казино можно порно с Владимир Минеев (ММА) up casino официальный casino игровой автомат 1×bet телефон pin up casino
DiskiPlus скачать 1×bet 1×bet xyz DiskiPlus порно с Абрамченко Виктория Валериевна <a href=https://www.diskiplus.ru>DiskiPlus pin up casino</a> DiskiPlus кент casino DiskiPlus 1×bet зеркало рабочее <a href=https://www.diskiplus.ru>DiskiPlus скачать 1×bet</a> DiskiPlus 1×bet скачать бесплатно DiskiPlus зеркала казино DiskiPlus порно с Алина Загитова DiskiPlus порно с Антропова Валентина Викторовна DiskiPlus pin up casino пин ап DiskiPlus 7k casino бонус DiskiPlus 1go casino
#5971 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало сайта
Основное различие в том, что для получения бездепа не надо пополнять баланс в казино. Но считая этого, есть ряд и других отличий: <a href=http://filmkachat.ru/>1×slots мобильная версия войти казино</a> <a href=https://www.gift-me.net/blogs/201226/%D0%9E%D1%86%D0%B5%D0%BD%D0%BA%D0%B0-%D0%B0%D0%B2%D1%82%D0%BE-%D0%BE%D0%BD%D0%BB%D0%B0%D0%B9%D0%BD-%D0%BA%D0%B0%D0%BA-%D1%80%D0%B0%D0%B1%D0%BE%D1%82%D0%B0%D0%B5%D1%82-%D0%B8-%D0%BD%D0%B0-%D1%87%D1%82%D0%BE-%D0%BE%D0%B1%D1%80%D0%B0%D1%82%D0%B8%D1%82%D1%8C-%D0%B2%D0%BD%D0%B8%D0%BC%D0%B0%D0%BD%D0%B8%D0%B5>https://www.gift-me.net/blogs/201226/%D0%9E%D1%86%D0%B5%D0%BD%D0%BA%D0%B0-%D0%B0%D0%B2%D1%82%D0%BE-%D0%BE%D0%BD%D0%BB%D0%B0%D0%B9%D0%BD-%D0%BA%D0%B0%D0%BA-%D1%80%D0%B0%D0%B1%D0%BE%D1%82%D0%B0%D0%B5%D1%82-%D0%B8-%D0%BD%D0%B0-%D1%87%D1%82%D0%BE-%D0%BE%D0%B1%D1%80%D0%B0%D1%82%D0%B8%D1%82%D1%8C-%D0%B2%D0%BD%D0%B8%D0%BC%D0%B0%D0%BD%D0%B8%D0%B5</a> В зависимости от онлайн заведения любой из их имеет для предложить как бездепозитные средства, так и бездепозитные фриспины, которые в успешной регистрации упадут для на ваш игровой баланс. 1×slots рабочее зеркало на сегодня <a href=http://droid-comz.ru/user/JasperSew/>http://droid-comz.ru/user/JasperSew/</a>
1хслотс регистрация в 1×slots casino
Перечисленные повыше основные характеристики сочетают фактически любой бонус и являются стереотипными для бездепозитных бонусных начислений в казино.Теоретически, к безвозмездным бонусам возможно отнести так называемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, потому собственно они деют только возможность создавать ставки. <a href=http://aficionado.pl/showthread.php?105820–1×slots-%D0%BD%D0%B0-%D0%BB%D1%8E%D0%B1%D0%BE%D0%B9-%D0%B2%D0%BA%D1%83%D1%81-%D0%BA%D0%B0%D0%BA-%D0%BF%D1%80%D0%BE%D0%B9%D1%82%D0%B8-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8E&p=123397>1×slots на любой вкус как пройти регистрацию</a> 1×slots рабочее зеркало на сегодня Важно, убедитесь в, собственно раньше не регились в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи. <a href=http://ledyardmachine.com/forum/User-RandalTet>http://ledyardmachine.com/forum/User-RandalTet</a> 1×slots бонус за регистрацию Но есть игорные заведения, которые готовы просто так жертвовать средства на забаву. Для сего довольно создать профиль. Чтобы вывести свой выигрыш, вам сначала необходимо выполнить условия отыгрыша, указанные в условиях получения бездепозитного депозита.
1×slot официальный сайт
А ознакомиться с свежими онлайн казино, Вы сможете помощью призов с выводом выгоды, которые Вы сможете получить без депо. <a href=http://www.rgb-muelheim.de/buch/scarbook.php>http://www.rgb-muelheim.de/buch/scarbook.php</a> В некоторых онлайн казино для получения бездепозитных призов не довольно просто зарегистрироваться на сайте клуба и подтвердить свои контактные данные. Дополнительно требуется активация промокода. 1×slots casino регистрация 1×slotscasin online
казино 1×slots официальный сайт
Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют важную информацию о not the slightest down payment bonuses и предложениях. <a href=https://www.reisezielforum.de/viewtopic.php?t=391826>1×slot казино зеркало</a> 1×slots регистрацию процедура займет всего лишь <a href=https://www.uned-psicologia.com/index.php?action=profile;u=51352>https://www.uned-psicologia.com/index.php?action=profile;u=51352</a>
1х слот 1хслотс регистрация перейти на 1×slots
Для получения приза надо(надобно) ознакомиться с программой лояльности казино и устроить ставки на необходимую, нужную для перехода на грядущий степень. Фриспины – безвозмездные вращения с фиксированной ставкой, которые можно применять в конкретных игровых автоматах. <a href=http://y90429l8.bget.ru/user/DoctorLazutaer/>http://y90429l8.bget.ru/user/DoctorLazutaer/</a> Этот тип бонуса несомненно добавлен на Ваш аккаунт после успешной процедуры регистрации с внедрением номера телефона. Если выбрать другой метод творенья учетной записи, бездеп не несомненно добавлен на Ваш акк. 1×slots официальный demo регистрация в 1×slots casino Бездепозитный приз – это финансовое вознаграждение, коие выдается соучастнику забавы в казино, для его вербования и возникновения заинтересованности. Любой посетитель, кот-ый соответствует условиям выдачи подобного бездепозитного бонуса, имеет претендовать на получение вышеуказанного приза. Такое поощрение считается более действенным способом, дающим возможность стартовать в игре, не вкладывая собственных материальных средств.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.addonface.com/welcome>1х слот 1хслотс регистрация перейти на 1×slots</a>
<a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=7523&TITLE_SEO=7523-preobrazovatel-interfeysov-usb-rs485&MID=463729&result=reply#message463729>1× slots зеркало</a>
<a href=http://www.arka-bahce.org/forum/showthread.php?p=764161#post764161>1×slots зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Классическая разновидность приза за творение аккаунта. Его превосходство содержится никаких, что заказчик возможность помощи выбирать аппараты и делать ставки в них. Иногда список игровых автоматов ограничен оператором, хотя все одинаково это чем, чем единственный дешевый слот, как в случае с внедрением фриспинов.
#5972 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
мелбет букмекерская контора порно с Елена Никитина, скелетонистка <a href=https://res-publika.com>cat casino</a> porno Виктория Баркова, легкоатлетка суть казино <a href=https://th-royalgclub.com/>porno Катерина Шпица</a> 1×bet сайт 1×bet xyz casino приложения казино рулетка пин ап букмекерская контора casino играть cat casino казино сочи
DiskiPlus пин ап казино DiskiPlus pin ап casino <a href=https://www.diskiplus.ru>DiskiPlus porno Дарья Клишина</a> DiskiPlus сайт pin up casino DiskiPlus пина букмекерской конторы <a href=https://www.diskiplus.ru>DiskiPlus casino ап</a> DiskiPlus букмекерские конторы pin DiskiPlus порно с Евгения Медведева, фигуристка DiskiPlus лучшая казино DiskiPlus казино гта 5 DiskiPlus порно с Елена Никитина, скелетонистка DiskiPlus порно с Ирина Сидоркова DiskiPlus porno Мария Шарапова
#5973 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация
Многие азартные клубы ограничивают сумму вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании акции, суммы Вы не можете исключить. Разница несомненно аннулирована, Вы даже не можете делать на нее ставки. <a href=http://filmkachat.ru/>1 x slots</a> Наличие у игрока второго аккаунта. Запрещено делать количество профилей для многократного получения бездепов.Важно, удостоверьтесь сомнений, собственно раньше не регистрировались в выбранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи. <a href=https://www.4yo.us/blogs/315801/Transforming-Modern-Kitchen-Design-Through-Digital-Visualization>https://www.4yo.us/blogs/315801/Transforming-Modern-Kitchen-Design-Through-Digital-Visualization</a> Когда идет о получении бездепозитных бонусов в казино, для обратите внимание на следующие обстоятельства:Бездепозитные бонусы казино это экономическая компенсация, предлагаемая юзерам на дармовой базе и возможность играть в онлайн казино бесплатно. Если ассоциировать их с одобрениями за лепта, в которых средства выдаются только потом первоначального пополнения счета, то бездепозитные гонорары получаются даром. То есть, играющий получает возможность делать ставки на теснее существующие деньги, коие выдаст заведение, выполняя, всем, обычные деяния, чтобы их извлечь (здесь идет речь о регистрация, удостоверении личности с использованием номера телефона, оформления заказы и т.д.). 1×slot зеркало <a href=https://northshore.instructure.com/eportfolios/20005>https://northshore.instructure.com/eportfolios/20005</a> Любой выигрыш по ставке выше установленного лимита несомненно являться недействительным. То есть ставка не будет засчитана при отыгрыше, а случае выигрыша его сумма не поступит на счёт посетителя — итог игры будет полностью аннулирован.Если вы выбираете испытанное лицензионное онлайн казино и выполните все условия получения бездепозитного бонуса, проблем с получением подарка у Вас не возникнет.
казино 1×slots
Мы делаем ударение на главных положениях верховодил, рассказываем о территориальных лимитированиях и вкратце информируем о иных акциях обговариваемого казино.Поспешите зарегистрироваться на официальном сайте Клубника, дабы моментально получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, замечена настоящий шанс победу! 1×slots официальный сайт мобильная версия скачать Бездепозитные призы за регистрацию в игровых автоматах для владельцев онлайн-казино считаются частью маркетинговой кампании, направленной на повышение аудитории вебсайта. Так они продвигают средства бренды и привлекают свежих посетителей.Чем ниже значение вейджера, тем проще отыграть и исключить бонус. Если Вы планируете заработать на бездепе, а не просто ознакомиться с свежим игровым клубом, то стоит игнорировать призов с высоким вейджером их практически не реально отыграть. С ними Вы сможете только протестировать забавы заведения. <a href=http://2012614.com/home.php?mod=space&uid=11118&do=profile>http://2012614.com/home.php?mod=space&uid=11118&do=profile</a> 1×slots casino зеркало В игровых клубах без лицензии Вы покупаете „кота в мешке“ и в случае неоднозначных ситуаций нет способности куда-то посетовать и обосновать свою правоту.
1× слот зеркало
Выше мы предоставили полный комплект самых новых и своевременных бездепозитных бонусов в интернет казино без пополнения на 2022 год, где продоставляется воспользоваться любым ценным бездепозитным призом. <a href=http://hotelrocio.kr/bbs/board.php?bo_table=free&wr_id=231102>http://hotelrocio.kr/bbs/board.php?bo_table=free&wr_id=231102</a> Фриспины начисляются по определенной ставке. После их активации игроку необходимо запустить слот и убедиться, собственно в нем отображаются благотворительные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода в отыгрыша определяется оператором и изредка превышает 5 000 рублей. 1×slots официальный сайт скачать Так же стоит выделить то, собственно в каждом онлайн казино установлен собственный максимальный кешаут на бездепозитный бонус. Как правило кешаут — это предельная сумма средств, кот-ая дешевая для вывода с бездепозитного приза.В интернете слишком большое скриптовых сайтов, которые принадлежат жуликам. Их основная цель – привлечь гэмблеров, пообещав не только великодушные презенты, но и крупные выигрыши. Так собственно некоторые веб-сайты предлагают получить за регистрацию числе $1 000.
1хслотс казино зеркало
Фриспины без депо либо дополнительные свои помогут поближе познакомиться с игровой платформой и её функциями. За счёт подарков возможно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям из-за игры напротив живых крупье.Если вы избираете проверенное лицензионное онлайн казино и сделайте все обстоятельства получения бездепозитного приза, проблем с получением подарка у Вас не возникнет. Бесплатные призы казино без депозита возможно получить вид денежных средств на бонусный счет (исключить их возможно только после отыгрыша), фриспинов, игры или кешбэк-бонуса.Можно. Вы практически сможете отказаться от получения бездепозитного приза за регистрацию в казино, же Вы не сделаете ставку. 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=http://www.thepsa.in/4images/member.php?action=showprofile&user_id=39529>http://www.thepsa.in/4images/member.php?action=showprofile&user_id=39529</a>
1 x slots
В количестве случаев бесплатные призы начисляются в кредитах, которые невозможно незамедлительно исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти требования принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже.Бонус за регистрацию в казино выдается лишь один один на одного игрока. Но бывают дополнительные акции, в рамках которых бездепы раздаются для постоянных клиентов и эти презенты Вы можете получить более одного раза. <a href=http://www.forumdipace.org/profile.php?mode=viewprofile&u=546786>http://www.forumdipace.org/profile.php?mode=viewprofile&u=546786</a> 1×slots зеркало рабочее Размер приза. В качестве бездепов обыкновенно начисляют большие суммы, а когда идет о бонусах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино все подарить игроку до 2000$.Иногда виде одобрения за регистрацию все выдаваться билеты для роли в турнирах. Условия их проведения очень выделяются, поэтому мы рекомендуем ознакомиться с любым предложением отдельно.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1×slots регистрация 1×slots review live</a>
<a href=https://your-portal.at.ua/forum/33–367–3#88322>1 хслот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Некоторые онлайн-казино без депозита предлагают свежим посетителям избрать приз при регистрации. Будьте внимательны: выбрав раз, вы в безоговорочном большинстве случаев не можете пользоваться остальными.
#5974 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino 777 online
Процесс доказательства личности возможность занять от 1-го дня до недели. Если заказчик разрешил какую ошибку при заполнении паспортных данных, то ему стопам обратиться с проблемой в службу поддержки онлайн-казино. <a href=http://filmkachat.ru/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> <a href=https://codepen.io/bjxkafyt-the-encoder/pen/bNbrqxY>https://codepen.io/bjxkafyt-the-encoder/pen/bNbrqxY</a> Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке адепты онлайн-казино публикуют важную информацию о no deposit bonuses прочих услугах. 1×slots casino зеркало рабочее <a href=https://storyplus.ru/user/MiguelReota/>https://storyplus.ru/user/MiguelReota/</a> Не трудно додуматься, собственно no down payment bonuses почти никогда не посещают большими. Чаще всего идет о пяти–тридцати долларах (или эквиваленте данной суммы в другой валюте).
1×slots casino зеркало рабочее
<a href=https://www.orbitsound.com/forum/thread-17-post-82164.html#pid82164>1хслот зеркало</a> 1×slots регистрация 1×slots casino 777 online <a href=http://shigebao.com.cn/home.php?mod=space&uid=1142238>http://shigebao.com.cn/home.php?mod=space&uid=1142238</a> Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских руб. В условиях промоакции предписано, что вейджер бездепозитного бонуса х20. Поэтому, чтобы отыграть приз, игроку несомненно нужно сделать ставок на 35*20=700 руб.Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? 1×slots зеркало этих способов предполагает регистрацию Этот образ приза будет добавлен на Ваш аккаунт последствии успешной процедуры регистрации с внедрением номера телефонного. Если выбрать другой метод творенья учетной записи, бездеп не несомненно добавлен на Ваш акк.Размер бонуса. В качестве бездепов обычно начисляют большие суммы, а когда речь о призах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то кое-какие казино все подарить игроку до 2000$.
1×slot зеркало
Денежные средства. Третий приз за регистрацию без депозита – наличные. К раскаянью, лишь знаменитые и знаменитые клубы имеют дать деньги в руб. Либо долларах. С их подмогою появится насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед этим нужно исполнение определенных критерий. Фриплей-бонусы. Бонусы за благотворительную забаву есть лишь в неких клубах. Они зачисляются сразу после сотворения профиля и срабатывают недолговременное время. Если у вас нет медли потратить свои, они просто завершатся. Что касается медли, в большинстве случаев призы срабатывают протяжении одного часа. <a href=https://dailygram.com/blog/1253176/%D0%BF%D1%80%D0%BE%D0%B3%D1%83%D0%BB%D0%BA%D0%B0-%D0%BF%D0%BE-%D0%B3%D0%BE%D1%80%D0%BE%D0%B4%D1%83-%D0%BE%D1%81%D0%B8%D0%BF%D0%BE%D0%B2%D0%B8%D1%87%D0%B8/>https://dailygram.com/blog/1253176/%D0%BF%D1%80%D0%BE%D0%B3%D1%83%D0%BB%D0%BA%D0%B0-%D0%BF%D0%BE-%D0%B3%D0%BE%D1%80%D0%BE%D0%B4%D1%83-%D0%BE%D1%81%D0%B8%D0%BF%D0%BE%D0%B2%D0%B8%D1%87%D0%B8/</a> С не отыгранным призом воспрещается превышать размер максимальной ставки. Нарушение этого условия повлечет за собой аннулирование выигрыша. 1×slots рабочее зеркало на сегодня Срок отыгрыша — это период, который наступает в момент активации бонуса и завершается с его закрытием. Пользователю необходимо уложиться в этот временной зазор, другому призовые средства аннулируются. Казино устанавливают список игр, ставки каких засчитываются при расчете отыгранных денег. Если тайтл не входит в данный перечень, то предоставляется быть недоступен для загрузки во время деяния бонусного предложения.Превышение наибольшей ставки при отыгрыше. Система автоматически не предуведомляет о превышении ставки, потому о нарушении верховодил игрок возможность разузнать теснее в подачи запроса на вывод средств.
1×slots регистрация то дальше необходимо пройти
Диапазон ставок, коие вправе устроить игрок, кроме лимитирован. Обычно ставить возможно маленькую необходимую — пределах 10–30 рублей за одно вращение.У любой игры средства требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система засчитает каждую ставку. В рулетке и покере сделать это намного сложнее. Именно поэтому например главно внимательно читать условия получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой игре, то новенькие попросту «спустят приз на ветер». Приветственный бездеп предоставляется любому игроку лишь один раз. Казино сражаются с например именуемыми бонусхантерами (от англ. Bonus Hunter — доброволец за призами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения подарка. Исключить похожие деяния дозволяет верификация данных. Администрация вправе потребовать у клиента доказать индивидуальные данные, указанные при регистрации.Таким образом, заведение пытается продемонстрировать себя своим вероятным игрокам, а подобный маркетинговый ход как казино приз без депо за регистрацию привлекает довольно большое внимания к игорному заведению и обеспечивает постоянный поток свежих гостей и будущих клиентов игрового интернет клуба. В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, нужно адресоваться в службу через лайв-чат на веб-сайте казино.В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с бесплатных вращений. Прибыль, коию Вы заработаете на таком бездепе можно назначать на вывод без какого либо отыгрыша. 1×slots регистрация 1×slots casino 777 online <a href=http://hefeiyechang.com/home.php?mod=space&uid=87415>http://hefeiyechang.com/home.php?mod=space&uid=87415</a> Теоретически, к бесплатным призам можно отнести так нарекаемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, потому собственно они предоставляют только возможность создавать ставки.
1×slots рабочее зеркало на сегодня
Приглашаем делиться мнениями о призах. Это поможет другим юзерам подбирать более выгодные предложения. <a href=http://xsyywx.com/home.php?mod=space&uid=41484>http://xsyywx.com/home.php?mod=space&uid=41484</a> Бездепозитные бонусы начисляются лишь один один. Не стоит раскрывать свежие аккаунты, дабы получить их повторно. Служба защищенности казино непременно выявит «левого» соучастника и перекроет. Если посетитель выполнит нужные притязания, отыграет свою ставку и решит исключить личный выигрыш, то ему нужно учесть, что казино обязательно потребует дать ксерокопии личных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои вывести не удастся.Бездепозитный бонус – это экономическое вознаграждение, которое выдается соучастнику игры в казино, для его привлечения и появления заинтересованности. Любой посетитель, который подходит условиям выдачи похожего бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое поощрение является более действенным методом, дающим возможность стартовать деле, не вкладывая личных вещественных средств. казино 1×slots официальный сайт Также, в этом случае необходимо подтвердить собственный номер телефона, желаемого код, приобретенный в смс-сообщении от клуба установить в специальное фон в личном кабинете игрока.
<b>Смотреть еще похожие новости:</b>
<a href=https://peloton.com.ua/forum/memberlist.php?mode=viewprofile&u=9259>1×slots официальный сайт зеркало</a>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-4993/#comment-597442>1×slos регистрация в 1×slots casino</a>
<a href=https://praisenpray.org/forums/showthread.php?tid=97735>1×slots регистрация 1×slots casino c2d ru</a>
<a href=http://bajarmp3.net/showthread.php?tid=403099>1 xslots рабочее зеркало</a>
<a href=https://rolivka.online/forum/showthread.php?tid=33272>1×slots регистрация 1×slots casino c2d ru</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чем ниже велечину вейджера, тем легче отыграть и исключить бонус. Если Вы планируете заработать на бездепе, а не просто ознакомиться с новым игровым клубом, то стоит игнорировать призов с высоким вейджером их практически не реально отыграть. С ними Вы сможете только протестировать забавы заведения.
#5975 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino сайты букмекерская контора без <a href=https://vestnik-jurnal.com/>online casino 7k</a> порно с Каролина Севастьянова кент casino <a href=https://slon-ru.com/>casino</a> букмекерская контора бесплатно скачать Радченко Светлана Юрьевна порно Петрова Ольга Викторовна порно казино на деньги порно с Васильева Татьяна Викторовна почему в казино не бывает настенных часов порно с Васильева Татьяна Викторовна
DiskiPlus 1×bet на сегодня DiskiPlus porno Елизавета Туктамышева <a href=https://diskiplus.ru/>DiskiPlus casino зеркало сегодня</a> DiskiPlus 1win casino DiskiPlus пин ап букмекерская контора <a href=https://www.diskiplus.ru>DiskiPlus 1×bet зеркало</a> DiskiPlus бесплатные букмекерские конторы DiskiPlus лучшие онлайн казино DiskiPlus 1×bet слоты 1×bet top DiskiPlus 1×bet на андроид DiskiPlus порно с Владимир Минеев (ММА) DiskiPlus casino сайты DiskiPlus Нургалиева Эльвира Рамиловна порно
#5976 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slots review live
Перед активацией важно пристально изучить условия промоакции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют значение кроме лимиты ставок при отыгрыше и сроки, протяжении которых возможно пользоваться предложением. Если бездеп обхватывает ограниченный список игр, рекомендуется разузнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только сомнений случае, случае оператор не установил строгие ограничения на максимальную необходимую ставки.Бездепы обычно предлагают с отыгрышем — быстро исключить выигранные свои невозможно. Перевод денег со счета будет возможен последствии того, как пользователь выполнит все требования казино, а сумма имеет быть выше установленного правилами лимита. Условиями промоакции фиксируются сроки, протяжении коих заказчик вправе пользоваться предложением. Обычно они не превосходят нескольких дней в активации. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало</a> Казино выводит деньги лишь на ту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного бонуса, Вам сначала необходимо пополнить счет. В неких клубах ограниченный список методов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет именно с этих платежных способов, которые доступны для вывода. <a href=https://ilde2.upf.edu/clatmooc/v/ic2>https://ilde2.upf.edu/clatmooc/v/ic2</a> зеркала 1×slots <a href=https://tophatsec.com/forum/member.php?action=profile&uid=5312>https://tophatsec.com/forum/member.php?action=profile&uid=5312</a>
1×slots casino регистрация 1×slotscasin online
В бонусную программу множества операторов входят регулярные бездепы. Это бессрочные акции, поощряющие интенсивных постоянных игроков. Популярный формат — раздача фриспинов по конкретным денькам недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают неизменные бонусы без депозита в мена на накопленные баллы лояльности. <a href=http://www.carshowsociety.com/forum.php/topic,11220.new.html#new>1хслотс официальный сайт зеркало</a> казино 1×slots официальный сайт Для отыгрыша приза казино обязует игрока поиграть на необходимую, в количество один превышающую сумму полученного бонуса — здесь выгода компании очевидна.Бездепы могут заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами. <a href=http://biosafe.tj/user/PorsedropMn/>http://biosafe.tj/user/PorsedropMn/</a> Размер бонусов чаще всего чисто символический и не превышает 50 рублей. Приятно, но ощутимым бустом при вряд ли станет.В основном случаев бесплатные призы начисляются в кредитах, которые невозможно незамедлительно вывести со счета. Прежде их нужно отыграть по установленным правилам. Эти притязания принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д. ). О нем читайте ниже. 1×slots зеркало которую указывали при регистрации кстати
онлайн казино 1×slots
Прежде всего, не запамятовывайте периодически заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом рассматривают наиболее занимательные предложения водящих игорных порталов.Отзывы читателей о бонусных акциях помогут составить эмоцию, хотя не забывайте о субъективности личных комментариев. <a href=https://archives.megadiyhelp.com/member.php?159679-TerryMaips>https://archives.megadiyhelp.com/member.php?159679-TerryMaips</a> 1×slots быструю регистрацию а также мгновенное Еще одно условие касается размеров ставки. Операторы устанавливают максимальную сумму, коию игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, выбранной в Личном кабинете. При превышении лимита есть риск потерять приза. Существующие ограничения относятся и к конкретным видам ставок. Например, играя в рулетку, клиент возможность столкнуться с запретом назначать фишки на шансы.
сайт 1× slots casino
Если при регистрации показать промокод, можно гарантировано получить приз. Где арестовать ваучер? Посетите тематику блоги либо форумы. Иногда администрация клуба проделывает рассылку ваучеров на электронную почту. В заключительное время игорные жилища начали рекламироваться в кинокартинах и телесериалах. Присмотритесь и скорее заметите промокод, который принесёт 500 либо 1 000 бонусных рублей. <a href=https://www.rusdrama-az.com/support/51-sluzhba-tehnicheskoy-podderzhki-sayta.html>1×slot зеркало рабочее регистрации на телефон придет</a> скачать 1×slots официальный сайт <a href=https://www.empowher.com/groups/blogs-4/posts/revolutionizing-web-experiences-through-interactive-cgi-solutions>https://www.empowher.com/groups/blogs-4/posts/revolutionizing-web-experiences-through-interactive-cgi-solutions</a> За счёт спинов выйдет запустить различные интернет слоты, протестировать стратегии и поднабраться опыта. Фишка что, нет, собственно вращения начисляются на лучшие аппараты с уникальными опциями и высокой отдачей. Не забывайте, собственно в любом акционном предложении учтены особые требования – временные ограничения, наибольший объем ставки, перечень доступных игр.Игры, в которых возможно выступать на бонусные средства. Проверьте список игр, в которых можно играть на бонусные свои, вероятно они Вам не понравятся и надо расходовать своё время на такую промоакцию.
1хслот зеркало сайта
В истиннее время получить приз за регистрацию в казино довольно просто. Почти любой игорный жилище с радостью даст средства либо безвозмездные вращения. Многие игроки используют данным и не стесняются региться в каждом клубе с выгодными критериями. Кстати, это замечательная вероятность выдумать выигрышную стратегию и сорвать куш.Для тех, кто лишь подумывает испытать собственную удачу, еще для профессиональных игроков, отыскивающих свежие площадки для выигрышей, ведущие лицензированные казино нередко устраивают различные акции, и лучшее предложений за последнее время – как для новичков, например и для профессиональных игроков – бездепозитный бонус за регистрацию. <a href=http://gyeongshin.com/ksen/bbs/board.php?bo_table=free&wr_id=1182274>http://gyeongshin.com/ksen/bbs/board.php?bo_table=free&wr_id=1182274</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots Промокод – определённая композиция знаков, коию нужно ввести в соответствующее фон при создании учетной записи или активировать в собственном профиле игрока в разделе с бонусами.Активация валютного вознаграждения случается механически после творенья профиля или применения промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на страницы казино в соц сетях либо на рассылку рекламных известий, скачать и установить вспомогательный софт и т.д.
<b>Смотреть еще похожие новости:</b>
<a href=http://ledyardmachine.com/forum/User-Jameshoing>зеркала 1×slots</a>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=141797>1хслотс рабочее зеркало на сегодня</a>
<a href=http://turkteam.10tl.net/member.php?action=profile&uid=2012>1 xslots рабочее зеркало</a>
<a href=https://www.fromrus.su/index.php?/profile/408-rabofreesn/>1×slots официальный сайт зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В большинстве заведений устроить это возможно по адресу электронной почты, по номеру телефона, через социальную сеть либо гугл-аккаунт. Высокая конкуренция в сегменте азартных игр доказывает операторов привлекать посетителей различными промоакциями. Благодаря этому у посетителей появляется возможность получить бонусы в казино за регистрацию без депо. Воспользоваться этим предложением возможно, избегая процедуру внесения денег на игровой счет, просто активировав акк на веб-сайте. Наш экскурсовод по бездепам поможет избрать самую симпатичную бонусную программку, разузнать управляла получения такого гонорары и воспользоваться им с наибольшей выгодой.
#5977 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на 1хслотс
Диапазон ставок, коие вправе сделать игрок, кроме лимитирован. Обычно назначать возможно небольшую необходимую — в 10–30 рублей за одно вращение. <a href=http://filmkachat.ru/>1×slots официальный зеркало рабочее</a> Доступность — бездепозитные призы в казино почаще всего предоставляются новым игрокам, но посещают случаи, когда бонус все получить и действующие клиенты. <a href=https://www.4yo.us/blogs/315801/Transforming-Modern-Kitchen-Design-Through-Digital-Visualization>https://www.4yo.us/blogs/315801/Transforming-Modern-Kitchen-Design-Through-Digital-Visualization</a> Далее потребуется отыграть вагер и вывести выигрыш. Игрокам без опыта крупно повезло, возможность получить десятки презентов за одну регистрацию. Если не смогли получить Бездепозитный бонус, не беспокойтесь. Обратитесь в интернет чат, оператор поможет исправить. 1×slots зеркало на сегодня <a href=http://www.svit-world.kiev.ua/user/DoctorLazutaEl/>http://www.svit-world.kiev.ua/user/DoctorLazutaEl/</a> Бездепозитные бонусы отличный вариант безвозмездной забавы в игровые автоматы. Многие пользователи сети не понимают, собственно в казино можно начать выступать абсолютно безвозмездно, а позже исключить выигрыш на банковскую карту либо электрический кошелек, другие не доверяют интернет казино, а третьи успешно играют и выигрывают – и подчас довольно большие суммы.Особую изюминку видео слотам придают оригинальные знакы. С их выходом активируются разные призы. Вы можете запустить дополнительный уровень и прирастить необходимую выигрыша. Есть знаки, которые заменяют ненужные элементы и сами творят выигрышные комбо. Не стоит забывать и про бонус-тур. После любого удачного спина есть шанс прирастить сумму выигрыша в 2 или четыре раза.
1×slots регистрация на 1хслотс
Помните, собственно всевозможные нарушения управлял сведут на нет ваши усилия, и вы наверняка останетесь без начисленного вам дарового бонуса. Всегда изучайте верховодила начисления и обстоятельства вейджера. По любым вопросам, на которые вы не других отыскать ответы, обращайтесь за разъяснениям и саппорт. <a href=http://djdrewski.co.uk/lfsbangers/memberlist.php?mode=viewprofile&u=300>1×slots зеркало на сегодня</a> 1хлот регистрация в 1×slots casino <a href=https://training.trainingstree.com/author/oscardop/>https://training.trainingstree.com/author/oscardop/</a> Это один из основных показателей привлекательности презента. С завешенным коэффициентом даже мастера не сумеют выполнить обстоятельства по отыгрышу. И не, насколько привлекательно смотрится предложение – бездепозитный приз казино в объеме $500 или $1 000. Чтобы новички попревосходнее вдумались, собственно же такое вейджер, мы разберём на образце.Несмотря на то, собственно данный вариант стимуляции со стороны азартных платформ очень известен области подобных игр, далековато не всем почитателям казино знаменито, собственно сами бездепозитные призы казино и как именно их возможно эксплуатировать. скачать 1×slots на андроид мобильная версия При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое возможно предназначить этой в казино.
1×slot регистрация
Бонус за регистрацию в казино без депозита с выводом денег надо(надобно) отыграть. Зачастую для отыгрыша имеет понадобиться устроить ставки на необходимую, в некоторое 10-ов раз превышающую необходимую приза или выигрыша.Каждый новичок и профессиональный игрок мечтают прытко стартануть и начать создавать настоящие ставки. Для сего достаточно отобрать подарок, за который не нужно платить. В зависимости от игровой платформы, надо(надобно) сделать профиль, привязать email или телефонный. После этого администрация начисляет щедрое вознаграждение повторяющий бесплатных вращений либо виртуальных кредитов. <a href=http://apteka-sale.ru/bitrix/redirect.php?goto=http://cherdak-rybolova.ru/bitrix/redirect.php?goto=http://okradom.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/T3V1V6ZXztD>http://apteka-sale.ru/bitrix/redirect.php?goto=http://cherdak-rybolova.ru/bitrix/redirect.php?goto=http://okradom.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/T3V1V6ZXztD</a> Теоретически, к бесплатным бонусам можно отнести так называемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, потому что они предоставляют лишь возможность делать ставки.Этот тип приза будет добавлен на Ваш аккаунт последствии удачной процедуры регистрации с использованием номера аппарата. Если избрать другой способ сотворения учетной записи, бездеп не будет добавлен на Ваш аккаунт. 1хслот официальный сайт зеркало Получить приветственный приз могут лишь свежие клиенты онлайн-казино. Способы описаны в условиях промоакции каждого законного казино, почаще всего это:Получать информацию о самых прибыльных бонусах можно без постоянного прогноза новостей казино. Мы взяли данную задачку на себя и постоянно смотрим за предложениями операторов, выбирая превосходнейшие из них. В этом разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список акций периодически пополняется. В топ зашли самые свежие бездепозитные бонусы за регистрацию в казино 2020, кратковременные и замкнутые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и критериям. Если срок деяния промоакции истек, она удаляется из перечня.
1×slots зеркало регистрация то дальше необходимо пройти
Но ни не забывайте пристально читать верховодила участия в бонусных промоакциях. Если вы нарушите но бы одно условие, позже вы не можете устроить недоразумение с администрацией. <a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=878583>casino 1×slot</a> Когда речь о получении бездепозитных бонусов в казино, начала обратите внимание на следующие обстоятельства: 1×slots зеркало рабочее <a href=https://www.modernvespa.it/profile/3509-waltererync/>https://www.modernvespa.it/profile/3509-waltererync/</a> Бoльшинcтвo азартных заведений выдвигают приблизительно одинаковые обстоятельства и притязания, которые необходимо выполнить, чтобы получить бездепозитный приз за регистрацию. Все их возможно объединить в один перечень:
1×slots официальный сайт, скачать
Список так нарекаемых «не территорий» прилагается к правилам бонусной программы игорного портала. Обязательно выясните, распространяются ли на вас подобные наказания.Для верификации аккаунта надо(надобно) предоставить специалистам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, а фотографию банковской карты либо снимок страницы электронного кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для доказательства личности. Заполняя данные в личном профиле, указывайте лишь достоверную информацию, например как Вам придется ее доказать в будущем при выводе денег. <a href=https://forum.bandariklan.com/member.php?action=profile&uid=8387>https://forum.bandariklan.com/member.php?action=profile&uid=8387</a> Во время забавы в казино, выигрыши, приобретенные благодаря безвозмездным призовым фондам, суммируются и срабатывают в совместную необходимую для отыгрывания. Однако, в удача улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно допустит вывести финансовые средства. Сумма вывода будет зависимости от лимита, утвержденного именно в данном учреждении. Поэтому, внимательно нужно разбирать верховодила выдачи анлимитных депозитов.Составленный экспертами Casino.ru перечень онлайн-казино с бездепозитным бонусом разрешает игрокам сопоставить спецпредложения различных операторов. 1×slots официальный сайт скачать Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высокие притязания. Часто онлайн-казино советуют отыграть бонусное поощрение до 100 раз в игровых автоматах. Например, в игрок получил даром 10 долларов, то нужно несомненно отыграть их, поставив 1 тысячу спинов по 1 баксу каждый. Стоит отметить, собственно не все казино дают вероятность играть на бонусы и не во всех развлекательных заведениях схожие правила для отыгрывания. Некоторые казино запрещают играть на бонусы в блекджек либо ограничивают ставки до пяти %, что значительно увеличивает в десятки раз число нужных игр.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Кешбэк-бонус дает собой возврат фиксированного процента от ставки если, тогда, проигрыша или же от проигранной суммы за определённый период. В большинстве случаев кешбэк не превышает 10%. Способы получения бездепа различаются зависимо облика приза, который приглянулся игроку. Но вас иначе нужно быть зарегистрированным в законном онлайн-казино и подтвердить собственную лицо. В общем облике пошаговая инструкция для получения бездепозитного приза смотрится например:
#5978 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
мелбет букмекерская контора официальная казино <a href=https://glvk.guru/>казино онлайн</a> 1×bet сайт 1×bet xyz Ирина Горбачева <a href=https://t.me/vchkogpu_ru>гта онлайн казино</a> casino актуальное зеркало porno Дарья Мороз pin up casino пин casino играть букмекерские контора ап pin casino зеркало porno Игорь Акинфеев (футбол)
DiskiPlus букмекерская контора бесплатно скачать DiskiPlus unlim casino <a href=https://diskiplus.ru>DiskiPlus 1×bet слоты 1×bet xyz</a> DiskiPlus зеркала официальных сайтов казино DiskiPlus пина букмекерской конторы <a href=https://www.diskiplus.ru/>DiskiPlus почему в казино нет окон</a> DiskiPlus порно с Матвей Сафонов (футбол) DiskiPlus black russia казино DiskiPlus up casino скачать DiskiPlus порно с Виктория Синицина, фигуристка DiskiPlus порно с Антропова Валентина Викторовна DiskiPlus часы казино DiskiPlus пари букмекерская контора
#5979 Charlesgunnyhttp://filmkachat.ru
казино 1× slots официальный сайт
Если вы новичок деле и лишь попали в неизведанную вами район азарта — с помощью предложений как бездепозитные бонусы без пополнения. <a href=http://filmkachat.ru/>1×slots зеркало регистрация</a> Возможность сыграть вспомогательное состязание (а иногда и некоторое) совершенно бесплатно, а выигрыш, тому, поступает на счёт игрока.Бездепозитные призы казино за регистрацию в 2022 году — это возможность сыграть за счёт заведения. Казино даёт клиенту шанс воспользоваться определённой суммой либо числом даровых вращений без внесения депо. Не путайте деморежим с реальной игрой без необходимости внесения депозита. <a href=https://peertrainer.com/LoungeCommunityThread.aspx?ForumID=1&ThreadID=316721>https://peertrainer.com/LoungeCommunityThread.aspx?ForumID=1&ThreadID=316721</a> Во время забавы в казино, выигрыши, приобретенные спасибо безвозмездным призовым фондам, суммируются и включаются в совместную необходимую для отыгрывания. Однако, в удача улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно допустит исключить денежные свои. Сумма вывода несомненно зависеть от лимита, одобренного непосредственно в этом учреждении. Поэтому, внимательно нужно читать верховодила выдачи безлимитных депо.Бесплатные бонусы казино без депо возможно получить в виде денежных средств на бонусный счет (исключить их возможно только последствии отыгрыша), фриспинов, забавы либо кешбэк-бонуса. 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=https://www.meiyingge8.com/space-uid-568529.html>https://www.meiyingge8.com/space-uid-568529.html</a>
казино 1×slots
У любого игорного заведения свои управляла и условия. Но, чтобы получить призы, необходимо выполнить стереотипные деянья:Прибывшие на акк финансы бездепозитные призы предназначаются, в основном, только для свежеиспеченных пользователей, коие ранее не имели собственного аккаунта в данном казино. Исходя из этого, в раньше у игрока был изготовлен депозит, то, по всей вероятности, у него больше не несомненно возможности рассчитывать на получение такового приза в конкретном заведении. 1×slots зеркало быструю регистрацию а также мгновенное К сожалению, нет. Почти все казино, требуют внесение но бы одного минимального депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, что исключить средства разрешено лишь на что, эту платежную систему, с коей был изготовлен депо.На странице представлены бездепозитные призы за регистрацию в казино редкая награда за которой гонятся все игроки как новенькие, например и мастера. Мы тоже уделяем большое внимание на присутствие бонусов при формирование рейтинга казино на средства. Бездепозитный приз это возможность играть безвозмездно и выиграть настоящие деньги. <a href=http://cheapbooks.cc/memberlist.php?mode=viewprofile&u=53049>http://cheapbooks.cc/memberlist.php?mode=viewprofile&u=53049</a> Способы получения бездепа различаются в зависимости от облика приза, кот-ый приглянулся игроку. Но вас в любом случае надо(надобно) быть зарегистрированным в законном онлайн-казино и доказать свою лицо. В общем облике пошаговая инструкция для получения бездепозитного бонуса выглядит например:Перечисленные повыше главные характеристики сопровождают практически любой приз и считаются стандартными для бездепозитных бонусных начислений в казино. 1×slots промокод при регистрации
1хлот регистрация в 1×slots casino
Максимальный объем ставки, кот-ый нельзя превышать же приз не несомненно всецело отыгран. В случае нарушения этого правила, бонус и выигрыш с него будут аннулированы.На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению сего медли, Вы не сможете активировать и получить бездепозитный бонус. Так собственно приготовьтесь дать секретную информацию (пол, возраст, страна проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает не более суток, последствии чего удастся беспрепятственно выводить крупные выигрыши. <a href=http://advanced-retail.a2hosted.com/doku.php?id=Прием_платежей_для_онлайн-казино>http://advanced-retail.a2hosted.com/doku.php?id=Прием_платежей_для_онлайн-казино</a> Нет. Казино раздают безвозмездные бонусы за регистрацию, чтобы, чтобы, дабы клиент имел ознакомиться с игровым заведением. А дабы вывести его, нужно выполнить условия отыгрыша. 1х слотс зеркало регистрация в 1×slots casino
1×slots регистрация на сайте
Автоматы непопросту числятся самым знаменитым азартным развлечением. Чтобы усвоить управление и правила, потребуется всего некоторое минут. Ваша задача устроить ставку, определить количество рабочих линий и возможно крутить барабан. Если на экране выпадет выигрышная композиция – вы выиграли! С этой задачей вас посодействуют управится бездепозитные призы казино. <a href=https://nztw.org/forum.php?mod=viewthread&tid=584275&pid=921210&page=1&extra=#pid921210>1×slots casino зеркало рабочее</a> Чаще всего, популярные сервисы, такие как MoneyBookers и WebMoney, еще MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно неотъемлемое управляло. Финансовые средства выводятся лишь спустя что, эту платежную систему, коей успех для пополнения депо. Если же игрок получил бездепозитный покерный бонус, потребуется пополнить счет на наименьшую необходимую, которая составляет обычно 10 долларов. Многие новенькие колеблются, собственно поощрительный приз надо несомненно отдавать, том если они выиграли у казино. Это безусловно безопасно и накрепко. Выводя выигранные свои, игрок просто одергивает свое участие деле и утрачивает уникальную вероятность – даром увеличивать личное материальное положение.Бонус без депозита за регистрацию в казино (бездепозитный бонус) – это валютный презент от клуба, который начисляется на акк игрока после регистрации в казино. Кроме сотворения учетной записи, для получения бездепа, очень нередко требуется ещё и доказать контактные данные игрока и/или активировать специальный промо-код. 1×slot официальный сайт <a href=http://bbs.instrustar.com/home.php?mod=space&uid=106151>http://bbs.instrustar.com/home.php?mod=space&uid=106151</a>
сайт 1× slots casino
<a href=https://bridge-clip.ru/user/ZacherySnara/>https://bridge-clip.ru/user/ZacherySnara/</a> Существуют казино с бонусом за регистрацию, каких очень знамениты фриспины в интернет казино впоследствии регистрации в конкретных забавах. Они встречаются даже чаще даровых поощрений или классических бонусов в казино без инвестициям. Например, игрок регистрирует счет, на кот-ый начисляются безвозмездные забавы, приз за регистрацию повторяющий даровых фрспинов, вращения в игровом автомате. Во время игрового процесса компьютерные выигрывает истинные средства, которые в последствии можно успешно исключить из заведения на свою платежную систему. То есть, все шансы вывести средства без рисков собственными финансами. Регистрация, какую игры получит бонусы, займет минут, а благодаря данному возможно прирастить пять евро поощрений до тысячи и без всяких проблем исключить их. 1×slots казино зеркало Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке необходимо пополнить счет в казино. Для депозитных бонусов, данная процедура не необходима, например как депозит теснее сделан.
<b>Смотреть еще похожие новости:</b>
<a href=http://theauction.com.au/my-account/>1× slots сайт</a>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=136643>1хслот зеркало сайта</a>
<a href=http://mi.minfish.com/home.php?mod=space&uid=1196847>x1 slots регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, solid зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. Бездепозитные бонусы — это подарки от казино в виде бонусных средств или фриспинов для игровых автоматов, коие начисляются на аккаунт игрока последствии процедуры регистрации на сайте заведения. Для получения таких поощрений депозит не требуется.
#5980 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало подтвердит вашу регистрацию если говорить
Подтвердите лицо, предоставив оператору казино свои паспортные данные. Инструкции обыкновенно несложные, основное — конкретно им по. Если написано, собственно «на фото обязаны быть видны все четыре угла страницы паспорта» — устройте именно это фото.Вообще перейдя в казино — управляла схожи в получении бездепозитных призов, в стереотипные верховодила заходит: подтвердить эл. Почту и телефон, заполнить свой собственный профиль, активировать промо код или активировать предложения во вкладке БОНУСЫ. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots casino 777 online</a> За привлечение друга ? масштабах партнерской программы клиент получает вознаграждение за привлечение новых пользователей.Если речь идет об эксклюзивных услугах, возможность потребоваться регистрация в казино по ссылке с партнерского сайта. <a href=https://telegra.ph/Your-Ultimate-Guide-to-Licensed-Weed-Delivery-Brampton-Services-11–24>https://telegra.ph/Your-Ultimate-Guide-to-Licensed-Weed-Delivery-Brampton-Services-11–24</a> 1хслотс мобильная версия зеркало <a href=https://praisenpray.org/forums/member.php?action=profile&uid=61972>https://praisenpray.org/forums/member.php?action=profile&uid=61972</a>
казино 1×slots
Как только на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу в сего можно оставить заявку на вывод выигрыша. Кредиты прибыльно выделяются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом реальных средств и выделяют вероятность почувствовать азарт. Во-вторых – можно насладиться любой азартной игрой доступной на сайте. В вашем распоряжении находятся автоматы, настольные прибавленье, видео-покер, Live-дилеры. <a href=http://theauction.com.au/my-account/>1хслотс официальный сайт зеркало</a> 1×slots регистрация 1×slotscasino 56 online Будьте внимательнее при ознакомлении с правилами во избежание происхожденья конфликтных обстановок с казино, когда последствии отыгрыша бездепа для не дадут вывести солидную сумму выигрыша.Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают приз по государствам. Вплоть до того, собственно клуб возможность себя игроков из Вашей государства, а бездеп мешает. <a href=http://ru.monumentefunerare.md/index.php?subaction=userinfo&user=Richardalild>http://ru.monumentefunerare.md/index.php?subaction=userinfo&user=Richardalild</a> Допустим, за регистрацию вы получили бездеп в объеме 2 000 рублей с вейджером х30. В данном случае светит сделать ставок, на общую необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать реальные средства. Однако не забывайте, что с любого презента выйдет исключить определённую необходимую (чаще всего менее $200).Бездепозитные призы в казино без пополнения 2022 — это конкретная сумма средств или free spins вращения, которые предоставляются первым гостям за регистрацию на веб-сайте казино в виде бездепозитного бонуса, и дает для вероятность за счет казино без пополнения опробовать предложения (игр), с дальнейшей прерогативой вывода средств при исполнении всех установленных верховодил. 1хслотс казино зеркало
1×slots casino регистрация на сайте
Но ни не забывайте пристально разбирать верховодила участия в бонусных акциях. Если вы нарушите но бы одно условие, позже вы не можете уладить недоразумение с администрацией.Отзывы читателей о бонусных промоакциях посодействуют составить впечатление, но не запамятовывайте о субъективности собственных объяснений. Похожим образом трудится третий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя или из-за с получения им VIP-статуса. Подарок предоставляется последствии обращения в поддержку и ревизии. <a href=https://veteran-gazeta.ru/forum/user/294/>https://veteran-gazeta.ru/forum/user/294/</a> 1× slots casino официальный сайт Чем ниже значение вейджера, тем легче отыграть и вывести приз. Если Вы расчитываете заработать на бездепе, а не просто ознакомиться с свежим игровым клубом, то стоит игнорировать бонусов с высоким вейджером их почти не реально отыграть. С ними Вы можете только протестировать игры заведения.Бездепозитные бонусы прекрасный вариант бесплатной игры в игровые автоматы. Многие юзеры сети не понимают, что в казино можно начать выступать полностью даром, а потом вывести выигрыш на банковскую карту либо электронный кошелек, другие не доверяют интернет казино, а третьи успешно играют и выигрывают – и подчас довольно большие суммы.
1×slots мобильная версия войти казино
Размер ставки для забавы по бездепозитному бонусу (окончательно же, если, тогда,, когда он представлен повторяющий бонусных валютных средств) часто ниже, чем при этой на депо. Ограничение несомненно действовать до момента отыгрыша приза.Перечисленные повыше главные характеристики сопровождают практически любой бонус и являются стандартными для бездепозитных бонусных начислений в казино. <a href=http://griffhunter.com/boards/viewtopic.php?p=315061#p315061>1×slots официальный demo регистрация в 1×slots casino</a> Ниже указан важный список легальных казино в Беларуси с призами на первый депозит. Вы можете попасть на официальный сайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз.Заполняя данные в личном профиле, указывайте только достоверную информацию, например как Вам придется ее доказать в будущем при выводе денег. 1×slots сайт <a href=https://cromia.ua/forum/user/9399/>https://cromia.ua/forum/user/9399/</a>
1хлот регистрация в 1×slots casino
Для тех, кто только взвешивает испытывать свою удачу, а для проф игроков, отыскивающих свежие площадки для выигрышей, ведущие лицензированные казино нередко организуют различные акции, и лучшее услуг за время – как для начинающих, так и для проф игроков – бездепозитный бонус за регистрацию. Самые популярностью методы вывода денег ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электрическим платежным системам подобии Neteller и Skrill, еще используют криптовалютными кошельками. Вывод выигрышей возможность осуществляться мгновенно или развлекать от нескольких часов до нескольких суток.Как только вы отыграли вейджер и свои с бонусного баланса перебежали вам на реальный счет, Вы храбро сможете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать наименьший депо например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, совместно, вкупе с депо). <a href=https://szkolenia.myslepozytywnie.pl/fora/watek/%d0%b2%d1%8b%d0%ba%d1%83%d0%bf-%d0%b0%d0%b2%d1%82%d0%be-3/>https://szkolenia.myslepozytywnie.pl/fora/watek/%d0%b2%d1%8b%d0%ba%d1%83%d0%bf-%d0%b0%d0%b2%d1%82%d0%be-3/</a> Для верификации номера телефонного, в собственном профиле выберите опцию „Подтвердить номер телефона“ и введите в соответствующее фон код, полученный в sms-сообщении.Для получения предоставленных призов вас понадобиться — ПК или мобильное прибор, и остальное дело за малым. 1× slots зеркало После потребуется привнести идентификационный платёж. Это пугает начинающих больше всего. Нужно устроить наименьший депозит в 100–500 руб. Таким образом служба безопасности убедиться том,, собственно платёжный метод принадлежит Вам. Данная процедура важна для обеспечения защищенности игровых счетов. Пример, Ваш аккаунт взломают и выведут свои на собственный кошелёк. Будет крайне неприятно. Поэтому верификация платёжной системы, это необходимый момент.Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают приз по странам. Вплоть до такого, собственно клуб имеет на игроков из Вашей страны, а бездеп мешает.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.goslog.ru/forum/messages/forum1/message14147/11-obrashcheniya-grazhdan?result=reply#message14147>1×slots актуальное зеркало</a>
<a href=http://diablo2r.cn/home.php?mod=space&uid=30130>1хслотс мобильная версия зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Превышение максимальной ставки при отыгрыше. Система механически не предостерегает о превышении ставки, поэтому о несоблюдении управлял игрок возможность узнать уже после подачи запроса на вывод средств. Допустим, за регистрацию вы получили бездеп в размере 2 000 рублей с вейджером х30. В этом случае светит устроить ставок, на общую сумму в 60 000 рублей (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать настоящие средства. Однако не запамятовывайте, собственно с каждого подарка выйдет исключить определённую необходимую (чаще всего не более $200).
#5981 DavidVef
https://denemebonusuverensiteler25.com/ deneme bonusu veren siteler
#5982 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
почему казино сайты казино <a href=https://repost.news/>порно с Владимир Минеев (ММА)</a> unlim casino игры казино <a href=https://slon-ru.com/>Светлана Ходченкова</a> казино сегодня Москалькова Татьяна Николаевна порно porno Игорь Акинфеев (футбол) ев казино Мухтиярова Елена Вячеславовна порно букмекерскую контору пин порно с Баталина Ольга Юрьевна
#5983 Charlesgunnyhttp://filmkachat.ru
1 x slots
К огорчению, нет. Почти все казино, настоятельно внесение хотя бы одного малого депо для вывода выигрыша с бездепозитного приза. Также учитывайте, собственно исключить средства разрешается только на что, эту платежную систему, с которой был сделан депозит. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasin online</a> Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам запрещено начислять призы посетителям, не имеющим валютных средств на счете. Мы предлагаем рассмотреть актуальные призы онлайн-казино с лицензией, коие соблюдают законодательство РБ. <a href=https://trumpbookusa.com/blogs/259423/Professional-3D-Animation-Services-in-the-Digital-Age>https://trumpbookusa.com/blogs/259423/Professional-3D-Animation-Services-in-the-Digital-Age</a> Размер призов почаще всего чисто символический и не выше 50 рублей. Приятно, хотя осязаемым бустом в игре вряд ли будет. 1хслот скачать <a href=http://thinktoy.net/bbs/board.php?bo_table=customer2&wr_id=563209>http://thinktoy.net/bbs/board.php?bo_table=customer2&wr_id=563209</a> Какие призы есть еще получить считая бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, каждое интернет казино предлагает игрокам выгодное предложение на 1-ый депо, вы совершаете депо, ваш депозит возрастает в двое или даже в 3, тем самым начать играть возможно с больше солидной суммой, например же не забываем тему вейджер на призы.
1×slots промокод при регистрации 2025
Фриплей-бонусы встречаются лишь в неких клубах. Они зачисляются незамедлительно последствии творения профиля и активны непродолжительное время. Если не успеете израсходовать свои, они попросту сгорят. Касаемо времени, правило бонусы активны на часа. <a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=288260&pid=674631#post_674631>1×slots промокод при регистрации</a> 1×slots регистрацию процедура займет всего лишь Обычно для получения призов без депозита, казино выдвигает приклнные и вполне выполнимые условия, но есть ряд действий коие воспрещены и имеют стать досадные результаты:А ознакомиться с свежими интернет казино, Вы можете помощью призов с выводом выгоды, которые Вы сможете получить без депозита. <a href=http://sotsprof01.ru/index.php?subaction=userinfo&user=ujogupoc>http://sotsprof01.ru/index.php?subaction=userinfo&user=ujogupoc</a> Большинство клубов завлекают внимание в за счёт различных подарков. На одних сайтах возможно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает бесплатные вращения для запуска топовых онлайн слотов. Несмотря на разные акции, стоит выделить самые основные. 1×slots рабочее зеркало Для верификации аккаунта нужно дать профессионалам технической поддержки отсканированную копию паспорта и счета за коммунальные предложения, еще фотографию банковской карты либо снимок страницы электронного кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для подтверждения личности.
1×slots регистрация то дальше необходимо пройти
Такой безвозмездный эквивалент средств зачисляется на профиль юзера после воплощения требований и предназначаются они лишь для игрового процесса. Вывод таких вознаграждений вероятен лишь в воплощения вейджеровых критерий.Лишь модные и знаменитые азартные заведения могут позволить себя выдавать бездепы вид добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, которые можно израсходовать в топовых аппаратах с высокой отдачей. Минимального оборота. Этот предел уточняется вейджером — пока игрок не сыграет на установленную необходимую, вывод средств будет недоступен. <a href=https://biznes-knigi.com/user/Josephdog/>https://biznes-knigi.com/user/Josephdog/</a> Игры, в которых можно выступать на бонусные средства. Проверьте перечень игр, в возможно играть на бонусные средства, вероятно они Вам не понравятся и не стоит расходовать своё время на эту промоакцию. 1×slots зеркало сайта Условия имеют разниться друг от приятеля. Но такой бонус может быть применен лишь для игрового процесса – полученные на счет финансы до того, как будут отыграны, исключить невероятно.
1× slots сайт
Простая процедура получения бездепозитного бонуса, которая займет не более 2-х минут. Для получения бездепов, достаточно зарегистрироваться и доказать контактные данные. <a href=http://216.38.0.7/viewtopic.php?f=12&t=241686>1×slots зеркало рабочее</a> Фриплей-бонусы встречаются только в неких клубах. Они зачисляются незамедлительно после создания профиля и активны недолговременное время. Если не успеете потратить средства, они попросту сгорят. Касаемо времени, в большинстве случаев бонусы активны на часа.Как управляло, новоприбывшие игроки в первую очередь желают ознакомиться с методами ввода и вывода валютных средств и сроки выполнения поданных заказов дабы конкретно понимать, как быстро появится вывести свой казино приз за регистрацию без депо на электронный кошелек либо же банковскую карту. К счастью для всех играющих, внутри определенных холдингов, все казино конкурируют между собой. Ведь случае бы определенную фирму давало только одно онлайн-заведение, то ли бы посетители увидели казино с бонусом за регистрацию и имели бы рассчитывать только на вознаграждение в виде бонуса на первое вложение. К каждому заведению регулярно идет привлекать свежих игроков, что, в итоге, лишь на руку всем играющим. 1×slots зеркало регистрация то дальше необходимо пройти <a href=https://www.stroimvmeste.com.ua/user/GlennBew/>https://www.stroimvmeste.com.ua/user/GlennBew/</a> Зарегистрироваться в казино по особой ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефона и электрическую почту). Для подтверждения номера аппарата нужно в личном профиле показать свой номер и нажать кнопку „Подтвердить номер телефона“, далее Вы получите sms-сообщение с кодом, который нужно ввести в подходящее поле. Для подтверждения электрической почты, перейти по интенсивной ссылке в письме от казино.
1×slots на любой вкус как пройти регистрацию
Нет. Для получения бездепозитного бонуса в казино нужна неотъемлемая регистрация на сайте. Играть в слоты даром и без регистрации можно только в демо режиме. Фриспины без депо или дополнительные средства помогут поближе познакомиться с игровой платформой и её функциями. За счёт презентов возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям ради забавы против живых крупье. <a href=https://www.retroco.co/home.php?mod=space&uid=332906&do=profile>https://www.retroco.co/home.php?mod=space&uid=332906&do=profile</a> Не сложно додуматься, что no deposit bonuses практически разу не случаются великими. Чаще всего речь идет о пяти–тридцати долларах (либо эквиваленте этой суммы в другой валюте). рабочее зеркало 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://your-portal.at.ua/forum/21–2430–3#88307>1×slots зеркало проходить регистрацию это отличный вариант</a>
<a href=https://www.sgomberisgombero.it/my-account-2/>1×slots официальный сайт мобильная версия скачать</a>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=400846>1×slots рабочее зеркало</a>
<a href=http://skatefluckit.com/member.php?u=149708>казино 1× slots официальный сайт</a>
<a href=http://weeklywars.de/memberlist.php?mode=viewprofile&u=860>1×slots зеркало проходить регистрацию это отличный вариант</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
После получения приза вывод средств для посетителя будет недосегаем до, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или чета недель. Выводить средства игрок может только в отыгрыша.
#5984 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slotscasino09k online
Как только получите бездеп в казино, всё равно не запамятовывайте проверять электронную почту. Некоторые игорные клубы каждый радуют интенсивных гэмблеров приятными призами. Чаще всего получить презент можно в преддверии веселья, на денек рождение, за вербование приятеля. А того распространённым призом считается прибавка к депозиту. Нужно чем пополнить счёт, и азартное заведение прирастит его на 50–100%. <a href=http://filmkachat.ru/>1×slots зеркало видели такую регистрацию на</a> <a href=https://plaza.rakuten.co.jp/prilla/diary/202411240000/>https://plaza.rakuten.co.jp/prilla/diary/202411240000/</a> При регистрации стопам свидетельствовать только достоверную информацию. Когда учетная запись будет активна, будет доступ в Личный кабинет. В нем возможно выбрать денежную, ввести промокод и узнать подробные правила получения и отыгрыша бездепа. Краткая информация об акции нередко находится именно на регистрационной форме. 1×slots зеркало на сегодня <a href=http://www.open201.com/bbs/board.php?bo_table=free&wr_id=296624>http://www.open201.com/bbs/board.php?bo_table=free&wr_id=296624</a>
1×slot официальный сайт
<a href=http://amazon.rx22.ru/memberlist.php?mode=viewprofile&u=255>1х слот регистрация в 1×slots casino</a> 1хслотс мобильная версия зеркало <a href=http://gragal.ru/index.php?subaction=userinfo&user=splendidkeyston>http://gragal.ru/index.php?subaction=userinfo&user=splendidkeyston</a> 1×slots регистрация 1×slots review live
1×slots зеркало проходить регистрацию это отличный вариант
Заполняя данные в собственном профиле, указывайте только достоверную информацию, например как Вам придется ее доказать в при выводе средств.Прибывшие на акк деньги бездепозитные бонусы предназначаются, в основном, лишь для новоиспеченных юзеров, коие ранее не имели личного аккаунта в данном казино. Исходя из сего, если раньше у игрока был изготовлен депо, то, по всей вероятности, у него больше не несомненно способности рассчитывать на получение такого приза в определенном заведении. <a href=http://old.clientbase.ru/forum/index.php?showuser=23325>http://old.clientbase.ru/forum/index.php?showuser=23325</a> Прежде чем активировать бездеп, нужно увериться в том, что государство, уроженцем которой является игрок, не заходит в перечень не. 1 x slots Онлайн-казино с бездепозитными призами ставят клиентам условия для использования бездепами, поэтому перед участием в акции лучше тщательно ознакомиться со всеми правилами и аспектами акции. Условия имеют прикасаться получения бонуса, его применения и последующего вывода денежных средств в случае выигрыша.Чтобы без увериться в превосходствах бездепозитных бонусов, достаточно зарегистрироваться в казино и получить поощрение.
1×slots казино мобильная версия
Для подтверждения электрической почты, просто перейдите по активной ссылке в письме, полученном от игрового заведения. 1×slots зеркало на сегодня <a href=http://x4gxtreamforgame.free.fr/index.php?file=Members&op=detail&autor=jazzybanister12>http://x4gxtreamforgame.free.fr/index.php?file=Members&op=detail&autor=jazzybanister12</a>
1 x slots casino
В большинстве заведений сделать это возможно по адресу электронной почты, по номеру телефонного, через социальную сеть или гугл-аккаунт. <a href=https://qualityprogamer.de/forum/member.php?action=profile&uid=20386>https://qualityprogamer.de/forum/member.php?action=profile&uid=20386</a> Так что приготовьтесь дать конфиденциальную информацию (пол, возраст, страна проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает не более суток, в чего получится свободно выводить солидные выигрыши.Если при регистрации показать промокод, возможно гарантировано получить приз. Где арестовать ваучер? Посетите на блоги либо форумы. Иногда администрация клуба проделывает рассылку ваучеров на электронную почту. В последнее время игорные жилища начали рекламироваться в кинокартинах и сериалах. Присмотритесь и наверняка заметите промокод, который принесёт 500 либо 1 000 бонусных руб. 1×slots casino регистрация 1×slotscasin online Если вы выбрали себе некоторое брендов которые для больше всего полюбились, для неизменной игры! Таких гемблеров казино очень любит и ценит, за частую такие игроки становятся VIP игроками заведения, которым нередко поступают прибыльные предложения повторяющий призов, например же туда заходит и бездепозитные.
<b>Смотреть еще похожие новости:</b>
<a href=https://xs.xylvip.com/forum.php?mod=forumdisplay&fid=2>1хслотс регистрация в 1×slots casino</a>
<a href=https://qualityprogamer.de/forum/showthread.php?tid=360003>1×slots зеркало на сегодня</a>
<a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=1140520#pid1140520>1×slots зеркало</a>
<a href=http://board.eternityrpc.com/member.php?action=profile&uid=369>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Необходимость отыгрыша. Вейджер в повыше, чем для бонусов за депозит. И же средства не отыграны, исключить их нельзя. Бонус за регистрацию в казино без депозита с выводом денег нужно отыграть. Зачастую для отыгрыша возможность понадобиться сделать ставки на сумму, в некоторое 10-ов один превышающую необходимую бонуса либо выигрыша.
#5985 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Чулпан Хаматова casino скачать <a href=https://repost.news/>online casino официальный</a> порно с Зырянова Анастасия Владимировна casino зеркало сайта <a href=https://kompromat1.online/>1×bet зеркало рабочее на сегодня 1×bet xyz</a> порно с Кирьянова Дарья Борисовна как выиграть в казино ап казино casino сегодня 1×bet официальный сайт порно с Гатагова Ольга Анатольевна Львова-Белова Мария Алексеевна порно
#5986 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
Наши эксперты изучают обстоятельства промоакции, после в ручном режиме проверяют их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и параметры. Мы не рекламируем казино, а даем игрокам информацию о лучших из них.Способы получения бездепа различаются в зависимости от вида бонуса, кот-ый понравился игроку. Но вам в любом случае надо(надобно) быть зарегистрированным в законном онлайн-казино и подтвердить собственную личность. В общем облике пошаговая аннотация для получения бездепозитного приза выглядит например: <a href=http://filmkachat.ru/>1×slots официальный сайт, скачать</a> Риск-игра по равным шансам – Также казино может воспрещать скорпулезно условия по отыгрышу за раунда на удвоение, который предлагается в слотах, видео-покере и неких иных забавах.Демоказино есть почти на любом веб-сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются значительно пореже: там в случае выигрыша и соблюдения критерий промоакций бездеп можно перевоплотить в настоящие деньги. <a href=https://menagerie.media/index.php?link1=read-blog&id=87720>https://menagerie.media/index.php?link1=read-blog&id=87720</a> Подарки на конкретные даты выделяются критериями получения. Если поощрение начисляют игроку на день рождения, то сумма обыкновенно в от общего размера депо за прошедший год.Доступные забавы – В неких азартных забавах возможно понизить математическое превосходство казино до нескольких 10-х процента. В их количестве все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как управляло, в этих играх ставки идут в зачет вейджера не полностью. Например, имеет учитываться только 50%. В некоторых играх бездепозитные призы вообще невозможно отыгрывать. 1×slots зеркало регистрацию более популярный вариант это <a href=http://hauptmanns-gartenpflege.com/profile.php?lookup=19202>http://hauptmanns-gartenpflege.com/profile.php?lookup=19202</a> Фриспины. Бесплатные вращения предназначены для применения в видео-слотах. Внимательно читайте условия – они нередко выдаются для некоторых машин. В зависимости от клуба возможность делать конкретное число ставок. Кстати, современные игорные дома выделяют возможность заводить «одноруких злодеев».После получения приза вывод средств для клиента несомненно недосегаем времени, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или чета месяцов. Выводить деньги игрок сможет лишь в отыгрыша.
казино 1×slots официальный сайт
1×slots на любой вкус как пройти регистрацию <a href=http://1.235.32.108/doku.php?id=%D0%91%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%88%D0%B5%D1%84-%D0%BF%D0%BE%D0%B2%D0%B0%D1%80%D0%BE%D0%B2%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!>http://1.235.32.108/doku.php?id=%D0%91%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%88%D0%B5%D1%84-%D0%BF%D0%BE%D0%B2%D0%B0%D1%80%D0%BE%D0%B2%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!</a> Частенько новенькие не разумеют, как активировать презенты или исключить первый выигрыш. Для похожих случаев наша команда описала основные определения – собственно такое фриспины, вейджер, как его отыграть, чего необходимо проходить верификацию. 1×slots регистрация 1×slotscasino09k online Отыграв бездепозитный бонус в казино с выводом тоже придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в сходственное лимитирование существует, то единоразово вывести получится только необходимую, не превосходящую объем полученного приза.
1×slots зеркало быструю регистрацию а также мгновенное
<a href=http://moujmasti.com/member.php?212094-nervousbottlene>http://moujmasti.com/member.php?212094-nervousbottlene</a> Выполнив все требования оператора, заказчик возможность оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит в среднем не более суток. Если дополнительно требуется пройти функцию верификации, то срок увеличивается до 1–2 рабочих дней. Для перевода применяются банковские инструменты и электрические платежные системы. Второй способ подходит превосходнее, например как масса транзакций в осуществляются мгновенно. В связи со специфичностью функционирования банков обработка платежей имеет взятьвдолг(взятьвзаймы) до нескольких трудящихся дней. 1×slots зеркало этих способов предполагает регистрацию Любой выигрыш по ставке повыше установленного лимита несомненно считаться недействительным. То есть ставка не будет засчитана при отыгрыше, в случае выигрыша его сумма не поступит на счёт клиента — итог забавы несомненно полностью аннулирован.Промообъявления от казино не дают реальной картины и направлены на привлечение внимания юзеров. Понять, насколько высоки шансы остаться в плюсе, позволит собственный тест критерий предложения:
1×slots регистрация на сайте
Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция имеет подробные верховодила, ссылка на которые обычно находится в промообъявлении. В их указываются лимиты, вейджер, список дешевых игр. Если оператор укрывает данные о предложении, то пользоваться им не стоит. Чтобы выступать даром на настоящие деньги в казино, не всегда достаточно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные деянья. 1×slots зеркало которую указывали при регистрации кстати <a href=https://zonaseputarslot.com/member.php?action=profile&uid=2035>https://zonaseputarslot.com/member.php?action=profile&uid=2035</a> Бездепозитные призы прекрасный вариант даровой забавы в игровые автоматы. Многие пользователи сети не понимают, собственно в казино можно начать выступать абсолютно бесплатно, а позже исключить выигрыш на банковскую карту либо электронный кошелек, другие не доверяют онлайн казино, а третьи удачно играют и выигрывают – и подчас достаточно большие суммы.
1×slots регистрация на сайте 1×slots ru com
Мы делаем ударение на ключевых положениях верховодил, рассказываем о территориальных ограничениях и вкратце информируем о иных промоакциях обговариваемого казино. Подобные бонусы без депо предоставляются на больше выгодных критериях. Зачастую они покрупнее, а условия отыгрыша менее жесткие. <a href=http://forum.topgamesinc.com/member.php?1321563-zasydneshulzeo7359>http://forum.topgamesinc.com/member.php?1321563-zasydneshulzeo7359</a> На условиях отыгрыша бесплатных призов стопам остановиться подробнее. С ними связаны нюансы, коие нельзя оставить без внимания.Процесс подтверждения личности возможность взятьвдолг(взятьвзаймы) от одного денька до недели. Если заказчик допустил нибудь оплошность при заполнении паспортных данных, то ему следует адресоваться с проблемой в саппорта онлайн-казино. 1×slots зеркало на сегодня 1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, если не желайте стать жертвой мошенников или впустую потратить время;
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бонус начисляется игроку незамедлительно в регистрации и прохождения верификации в казино и не требует от посетителя внесения депозита. Как управляло, объем приза в подобном случае довольно скромный, впрочем позволяет новичкам познакомиться с игрой без риска настоящими средствами.
#5987 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Константин Тюкавин (футбол) pin up casino пин <a href=https://rucriminal.info/>porno Елизавета Туктамышева</a> казино смотреть онлайн порно с Кирьянова Дарья Борисовна <a href=https://t.me/vchkogpu_ru>скачать 1×bet на андроид бесплатно</a> пари букмекерская контора casino pin официальный porno Юлия Канакина скачать 1×bet на андроид бесплатно 7k casino зеркало рабочее bitz casino реального казино
#5988 Charlesgunnyhttp://filmkachat.ru
сайт 1× slots casino
Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен перечень наилучших интернет казино, коие предлагают своим игрокам великодушные бонусы за регистрацию.Индивидуальные поощрения выдаются за совершение деяний: подписку на аккаунты площадки в соц сетях, установку мобильного прибавления либо официального посетителя для ПК. В большинстве казино срабатывают программы лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий степень часто сопрягается выдачей бездепа. <a href=http://filmkachat.ru/>1×slots казино зеркало</a> <a href=https://peertrainer.com/LoungeCommunityThread.aspx?ForumID=1&ThreadID=316720>https://peertrainer.com/LoungeCommunityThread.aspx?ForumID=1&ThreadID=316720</a> Но есть азартные заведения, готовые просто так вручить средства на забаву. Для этого довольно создать профиль. Чтобы вывести выигрыш, сперва необходимо выполнить вейджеровые условия, прописанные в условиях получения бездепа. 1хлот регистрация в 1×slots casino <a href=http://besstizhie.ru/user/Philipvuh/>http://besstizhie.ru/user/Philipvuh/</a>
1хслотс мобильная версия зеркало
Но есть азартные заведения, готовые просто например вручить средства на игру. Для этого достаточно сделать профиль. Чтобы вывести выигрыш, сперва необходимо выполнить вейджеровые условия, прописанные в критериях получения бездепа. 1хслотс рабочее зеркало Онлайн гемблинг развивается с каждым днем больше и больше, свежие бренды создаются не по денькам а по часам. Новые онлайн казино делают вступительные акции для игроков, чтобы, чтобы собственно бы зарекомендовать себя, и тем наиболее предлагают бездепозитные бонусы за регистрацию, что бы не пропустить такую возможность — как воспользоваться новым бездепом, рекомендуем навещать наш вебсайт как можно почаще, самое смачное и свежие несомненно добавляться в этом же перечне.Помимо остального, для вывода средств по бездепу необходимо внести на счёт свой первый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало возможную сумму, после чего вывод средств станет доступен. <a href=https://hdkaraokesong.com/space-uid-281476.html>https://hdkaraokesong.com/space-uid-281476.html</a> 1×slots сайт зеркало
1хслот зеркало
Для всех бездепозитных призов действует максимальный предел на выигрыш. Он указывает предельную необходимую, коию вы сможете получить, играя на бонусные кредиты. Как лишь вам удастся выполнить требования вейджера, допустимый максимально будет переведен с бонусного счета на главный, а остаток будет списан. Прежде чем активировать бездеп, необходимо увериться в том, собственно страна, уроженцем которой считается игрок, не входит в список запрещенных.На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не можете активировать и получить бездепозитный приз. <a href=https://www.ccbm8.com/home.php?mod=space&uid=1112378>https://www.ccbm8.com/home.php?mod=space&uid=1112378</a> Если вы бывалый игрок, вы должны аристократия, собственно бонус без депо – редкая находка. Тем ниже, мы еженедельно изучаем интернет, дабы отыскать вам лучшие бездепозитные предложения. скачать 1×slots на андроид мобильная версия
1×slots официальный сайт скачать
Денежные средства. Третий приз за регистрацию без депозита – наличные. К раскаянью, лишь знаменитые и знаменитые клубы имеют дать деньги в руб. Либо долларах. С их подмогою появится насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед этим нужно исполнение определенных критерий. 1×slots зеркало быструю регистрацию а также мгновенное <a href=http://extra-oil.com/index.php?subaction=userinfo&user=odddownlink34>http://extra-oil.com/index.php?subaction=userinfo&user=odddownlink34</a> Ограничения по забавам. Администрация воспрещает игрокам некоторые игровые автоматы с бездепозитным призом, деньгами или бесплатными вращениями. Обычно, в правилах приводится полный перечень слотов для отыгрыша. Иногда разделение выполняется по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino.Иногда виде бездепа, казино дарит минимальный приз (до 50 рублей), из-за которого не стоит заморачиваться.
1×slots официальный сайт мобильная версия скачать
Даже не выиграв солидную необходимую, игрок интересно проведет время, изнутри изучит работу площадки, воспримет геймплей автоматов. Все это без каких-либо финансовых рисков. Быть в курсе превосходнейших промоакций легкостью. Достаточно регулярно учить список свежих онлайн казино с выводом бонуса без депозита в данном разделе. Для тех, кто только подумывает испытать собственную удачу, а также для проф игроков, ищущих новые площадки для выигрышей, водящие лицензированные казино нередко устраивают различные промоакции, и одно из лучших услуг прошедшее время – как для начинающих, так и для проф игроков – бездепозитный приз за регистрацию.На бонусные начисления все быть установлены вспомогательные ограничения, которые Вы не к при отыгрыше. Пока бонус всецело не отыгран — деньги из казино не выводятся. <a href=http://ceh-i.ru/user/CharlesCaw/>http://ceh-i.ru/user/CharlesCaw/</a> 1×slots casino регистрация 1×slotscasin online Какие бонусы я могу еще получить не бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного бонуса, каждое интернет казино предлагает игрокам прибыльное предложение на первый депо, вы совершаете депозит, ваш депо увеличивается в двое либо и в 3, что, этим наиболее начать выступать возможно с больше крупной суммой, так же не забываем на вейджер на бонусы.Верификация аккаунта. Лучше подтвердить лицо незамедлительно в регистрации, дабы позже не было проблем с выводом денег. Верификация имеет протекать двумя способами:
<b>Смотреть еще похожие новости:</b>
<a href=http://check2go.net/author/jameslob/>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a>
<a href=https://mcmon.ru/showthread.php?tid=126455>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<a href=https://elclasificadomx.com/author/jameslog/>1хслотс официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
4. Заберите подарок. Чаще всего бонус активируется незамедлительно последствии регистрации. Но бывают истории, когда надо(надобно) забежать в индивидуальный офис либо написать в службу поддержки.
#5989 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерские конторы в россии самое казино <a href=https://vestnik-jurnal.com/>1×bet приложение</a> букмекерская контора леонов порно с Бондаренко Анастасия Борисовна <a href=https://kompromat1.online/>пинап казино</a> симулятор казино сайт казино вход Александра Бортич порно с Голикова Татьяна Алексеевна casino x автомат казино как выиграть в казино
#5990 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на сайте
Такие одобрения разрешают бесплатно протестировать свежее казино, разобраться с игровым ходом интернет слотов, заработать и вывести небольшую необходимую средств.Так что главное различие подарка на депозит от бездепа – неотъемлемое пополнение счёта. Вы сможете внести депо и преумножить стартовый капитал либо отобрать бездеп и при не придётся рисковать своими сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начислит щедрое поощрение! <a href=http://filmkachat.ru/>1×slots сайт</a> Бездепозитный бонус по промо-коду будет доступен для игры, только в случае когда Вы активируете специальный бонусный код в разделе с призами или укажите промокод при регистрации на веб-сайте. В некоторых случаях, не активации кода, понадобиться доказать контактные данные игрока и наполнить анкету посетителя.Вы не в коем случае ни же рискуете, а лишь выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической игры на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, выучится регулировать изменять ставки и линии, исследовать бонусные игры и их выигрышные комбинации, да счете просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные свои, коие можно отыграть и вывести, но просто на демо счет, что, этим наиболее адреналин в крови еще больше повысится а пульс забьется с частым ритмом! <a href=https://forums.ngames.com/forum/league-of-angels/community-ab/general-discussion-ab/62083-%D1%8F%D0%BA-%D0%BF%D1%80%D0%B0%D1%86%D1%8E%D1%94-%D0%BF%D1%80%D0%BE%D1%84%D0%B5%D1%81%D1%96%D0%B9%D0%BD%D0%B8%D0%B9-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2%D0%B8%D0%BA%D1%83%D0%BF-%D0%BA%D0%B8%D1%97%D0%B2>https://forums.ngames.com/forum/league-of-angels/community-ab/general-discussion-ab/62083-%D1%8F%D0%BA-%D0%BF%D1%80%D0%B0%D1%86%D1%8E%D1%94-%D0%BF%D1%80%D0%BE%D1%84%D0%B5%D1%81%D1%96%D0%B9%D0%BD%D0%B8%D0%B9-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2%D0%B8%D0%BA%D1%83%D0%BF-%D0%BA%D0%B8%D1%97%D0%B2</a> 1×slots официальный сайт мобильная версия скачать <a href=http://zxos.vip/home.php?mod=space&uid=72245&do=profile>http://zxos.vip/home.php?mod=space&uid=72245&do=profile</a> Для вывода средств приз нужно несомненно отыграть законам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариантами отыгрыша бездепозитного приза до его получения, чтобы избежать конфликтных ситуаций.Выполнив все требования оператора, клиент может оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит примерно не более суток. Если дополнительно требуется пройти функцию верификации, то срок возрастает до 1–2 трудящихся дней. Для перевода используются банковские инструменты и электрические платежные системы. Второй способ подходит другого, как, так как масса транзакций в этом случае осуществляются моментально. В связи со специфичностью функционирования банков обработка платежей возможность занять до нескольких трудящихся дней.
1хслотс казино зеркало
1× slots официальный Приветственный приз без депо ? подарок за регистрацию. Выдается деньгами, фриспинами либо баллами. В заключительном случае бонусные баллы используются для роли в турнирах или обмена на реальные средства. <a href=http://image.google.tn/url?q=http://advazo.ru/bitrix/redirect.php?goto=http://ufashintorg.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/fP1_feK9hfY>http://image.google.tn/url?q=http://advazo.ru/bitrix/redirect.php?goto=http://ufashintorg.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/fP1_feK9hfY</a> Каждый геймер должен сначала детально выучить обстоятельства по получению и отыгрышу приглянувшегося подарка. Если всё организует, поспешите забрать бесплатные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо данный начать вращать барабаны топовых слотов. 1х слот регистрация в 1×slots casino Операторы гемблинга утверждают, собственно так они дерутся с бонус-хантерами. Впрочем, критики считают, что данным казино пробуют устроить из случайного гостя постоянного игрока.
1× slots официальный
<a href=http://services-sector.ru/clubpointeresam/memberlist.php?mode=viewprofile&u=174422>http://services-sector.ru/clubpointeresam/memberlist.php?mode=viewprofile&u=174422</a> Зачастую бездепозитные бонусы казино для забавы предлагаются разными заведениями азартных игр в рекламных акций либо в целях привлечения к для свежих игроков. Для бездепозитных призов в казино 2022 игроку надо пополнять счет до момента вывода хотимых средств. 1×slots бездепозитный бонус за регистрацию
1×slots официальный demo регистрация в 1×slots casino
Когда речь о получении бездепозитных бонусов в казино, начала обратите внимание на следующие обстоятельства:Этот тип бонуса несомненно добавлен на Ваш акк последствии удачной процедуры регистрации с внедрением номера телефонного. Если выбрать иной способ сотворения учетной записи, бездеп не несомненно добавлен на Ваш аккаунт. Как управляло, новоприбывшие игроки для желают ознакомиться с способами ввода и вывода денежных средств и сроки исполнения поданных заявок дабы четко понимать, как стремительно появится вывести собственный казино приз за регистрацию без депозита на электрический кошелек или же банковскую карту. К счастью для всех играющих, внутри определенных холдингов, все казино соперничают между собой. Ведь случае бы конкретную фирму давало только одно онлайн-заведение, то ли бы клиенты заметили казино с призом за регистрацию и могли бы рассчитывать лишь на вознаграждение в виде бонуса на 1-ое инвестиция. К каждому заведению регулярно по завлекать свежих игроков, собственно, конечном, лишь на руку всем играющим.При игре на бонусные средства запрещается играть в игровые автоматы с прогрессивным джекпотом и забавы из радела live casino. Кроме того, некоторые казино выделяют бездеп на один либо некоторое конкретных слотов, и в других играх Вы не сможете на них выступать. Бонус начисляется игроку незамедлительно после регистрации и прохождения верификации в казино и не просит от посетителя внесения депо. Как правило, размер бонуса в подобном случае довольно застенчивый, однако дозволяет новеньким познакомиться с забавой без риска реальными деньгами. 1×slots официальный сайт скачать <a href=https://job.epday.com/home.php?mod=space&uid=637389>https://job.epday.com/home.php?mod=space&uid=637389</a> В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, нужно обратиться в службу поддержки через лайв-чат на сайте казино.
1×slots бонус за регистрацию
Акции распространяются как на все забавы казино, так и на узкий список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino прочие. Промо может обхватывать разработки одного производителя. Бездеп не пересекается с другими промоакциями казино. Если на веб-сайте предусмотрен кэшбек, он не начисляется за ставки, сделанные бонусными деньгами. Для идентификации платежных реквизитов игрока может потребоваться пополнение счета на наименьшую сумму. На бонусные начисления шансы быть установлены дополнительные лимитирования, которые Вы не сведению при отыгрыше. Пока приз полностью не отыгран — средства из казино не выводятся.Но существуют азартные заведения, готовые просто например вручить деньги на игру. Для сего достаточно сделать профиль. Чтобы исключить выигрыш, сначала необходимо выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа. <a href=https://telegra.ph/Legal-Cannabis-Delivery-Services-Transform-Brantfords-Marijuana-Access-11–24>https://telegra.ph/Legal-Cannabis-Delivery-Services-Transform-Brantfords-Marijuana-Access-11–24</a> 1×slots зеркало рабочее Начнём с такого, что любое рекламную за регистрацию предполагает некоторые обстоятельства. Бездепозитные призы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность валютного оборота, нужная для исполненья условий. Пример, возымели бесплатные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 руб., проигрышных либо выигрышных, не. После выполнения, бонусный баланс перейдёт на реальный и станет легкодоступным к выводу.Выигрыши с призов без инвестициям постоянно привязаны к требованию по ставкам и все быть обналичены только после выполнения данных требований.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.survival-readiness.com/viewtopic.php?t=262228>1х слот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный приз за регистрацию в казино — это стартовый подарок в виде денежного начисления либо безвозмездных вращений для новых игроков заведения, для получения которого надо вносить депозит. Бесплатный бонус – кредиты, коие онлайн-казино начисляет клиенту, не заставляя его пополнять игровой счет.
#5991 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino приложения vavada casino <a href=https://sovsekretno.net/>казино фильм</a> порно с Дарья Касаткина (теннис) pin up casino buzz <a href=https://t.me/vchkogpu_ru>букмекерские конторы бет</a> букмекерская контора официальный сайт pinco casino up casino букмекерская контора рабочее казино букмекерская контора без рабочее казино
#5992 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация в 1×slots casino
Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депозит может отличаться до 30 дней.Только выполнив все обстоятельства отыгрыша и дождавшись завершения проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить средства средства. <a href=http://filmkachat.ru/>1×slots быструю регистрацию а также мгновенное</a> Если ординарными текстами, бездепы – это определённая сумма денег или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать подарки. Но есть некоторые нюансы. Существуют игорные дома, коие перед тем как начислить призы просят привязать телефонный, дать копии документов. <a href=https://www.uannounceit.com/article/1416>https://www.uannounceit.com/article/1416</a> Как только получите бездеп в казино, всё также не запамятовывайте проверять электрическую почту. Некоторые игорные клубы день радуют интенсивных гэмблеров приятными призами. Чаще всего получить подарок возможно в преддверии веселья, на денек рождение, за вербование друга. А кроме распространённым бонусом считается надбавка к депозиту. Нужно не восполнить счёт, и азартное заведение прирастит его на 50–100%.Если при регистрации указать промокод, можно гарантировано получить приз. Где арестовать ваучер? Посетите на блоги или форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В заключительное время игорные дома начали афишироваться в кинокартинах и телесериалах. Присмотритесь и наверняка заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных руб. 1×slots зеркало проходить регистрацию это отличный вариант <a href=https://urganchshahar.uz/user/CraigDit/>https://urganchshahar.uz/user/CraigDit/</a> Такие одобрения разрешают бесплатно протестировать свежее казино, разобраться с игровым процессом онлайн слотов, заработать и исключить маленькую необходимую средств.
1× slots casino зеркало
<a href=http://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=6268>1×slots рабочее зеркало на сегодня</a> 1×slots скачать на айфон <a href=http://seafishzone.com/home.php?mod=space&uid=1246404>http://seafishzone.com/home.php?mod=space&uid=1246404</a> 1×slots регистрация на 1хслотс В случае установленного лимита на необходимую вывода выигрыша с бездепозитного приза, игрок не может вывести больше заявленной суммы.
1× slots casino официальный сайт
Какие призы меня еще получить кроме бездепозитного приза за регистрацию в казино? По мимо бездепозитного приза, любое онлайн казино предлагает игрокам выгодное предложение на 1-ый депозит, вы совершаете депо, ваш депозит возрастает в двое или том в трое, тем самым начать играть можно с более солидной суммой, например же не запамятываем про вейджер на призы. Прежде чем активировать бездеп, нужно увериться что, нет, собственно государство, гражданином коей является игрок, не заходит в список не.Только выполнив все обстоятельства отыгрыша и дождавшись завершения проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить средства деньги. <a href=http://bizon15.ru/index.php?subaction=userinfo&user=meekgesture16>http://bizon15.ru/index.php?subaction=userinfo&user=meekgesture16</a> 1×slots зеркало быструю регистрацию а также мгновенное
1×slot зеркало рабочее этих способов предполагает регистрацию
Получить Бездепозитный приз в интернет казино дело двух кликов. Другой момент, отыграть рекламную и соблюсти верховодила и обстоятельства отыгрыша. Под правилами подразумевается не только вагер, но и лимитирования по максимальной ставке. Мы понимаем, собственно в кино все ставят на зеро и выигрывают. Призываем не делать сходственного. Перед активацией приза прочтите управляла. Узнайте следующие факторы: Условия получения подарка, за регистрацию, за депозит и многое. Ограничения по наибольшей ставке. Зачастую не выше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на месте. Поэтому важно аристократия, в каких играх возможно совершать кратность денежного оборота.Каждая игровая перрон выделяется критериями по получению и отыгрышу бездепов. В правилах детально расписаны временные рамки, за которые надо(надобно) прокрутить вейджер. Также не забывайте про максимальный размер ставки и наивысшую сумму выплаты. С иной стороны, чтобы получить бездепозитные бонусы казино, достаточно израсходовать менее 1 минутки. <a href=https://persiankittencat.com/grey-persian-cats-unraveling-the-charm-of-these-feline-beauties/#comment-38935>1×slots коды</a> Перечисленные выше основные свойства сочетают практически каждый приз и являются стандартными для бездепозитных бонусных начислений в казино.Некоторые казино все предлагать клиентам бездепы за подтверждение номера или почты или репост на страницу в соц сетях. 1×slots зеркало этих способов предполагает регистрацию <a href=http://www.gamer.ru/users/rabindex/vykup-avto-vladivostok>http://www.gamer.ru/users/rabindex/vykup-avto-vladivostok</a> Демоказино есть практически на любом веб-сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются веско реже: там если, тогда, выигрыша и соблюдения условий акций бездеп можно превратить в настоящие деньги.
казино 1×slots
Не стоит путать забаву в демо и использование бонусов. В демонстрационном режиме игрок имеет оценить механику слота, сюжет и оформление. Но игра проводится на условные кредиты, потому отсутствует основное ? чувство азарта. Активируя промокод либо фриспины, клиент по-прежнему не расходует средства деньги на игровые автоматы, хотя имеет сорвать реальный куш! Бесплатные призы казино без депозита возможно получить в виде денежных средств на бонусный счет (вывести их можно лишь последствии отыгрыша), фриспинов, забавы либо кешбэк-бонуса.В качестве бонусов онлайн казино нередко предлагает выдачу фриспинов, то есть даровых вращений игрового барабана. Виртуальные монеты можно использовать для изучения в покерной школе либо для игры в казино. <a href=http://dokuteknoloji.com/index.php?option=com_k2&view=itemlist&task=user&id=440515>http://dokuteknoloji.com/index.php?option=com_k2&view=itemlist&task=user&id=440515</a> Подтвердите регистрацию, дабы активировать Бездепозитный приз с выводом, потребуется заполнить индивидуальный профиль. Заполните пустующие поля настоящими данными о себя.Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. 1×slot официальный сайт Используйте превосходнейшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из списка ниже, дабы заработать подарки за обычные действия теперь сегодня получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и быстрыми выводами на электрические кошельки.Список так именуемых «не землель» прилагается к правилам бонусной программы игорного портала. Обязательно выясните, распространяются ли на вас подобные санкции.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При правильном раскладе бездепы — это прекрасный метод играть на средства без растраты собственных средств. Есть несколько советов, следуя коим можно извлечь максимум пользы из сходственных промоакций казино. Играть по только на лицензированных площадках. Скриптовые сайты не только дурачат с бонусными услугами, хотя и употребляют пиратский софт с модифицированным ГСЧ. Выиграть на этих автоматах нереально.
#5993 Charlesgunnyhttp://filmkachat.ru
x1 slots регистрация в 1×slots casino
Возможность протестировать новые игры, не рискуя личными средствами и разработать собственную стратегию игры.Доступ к подарку может открываться механически в введения промокода либо воззвания в саппорта вебсайта. В первом случае от пользователя не потребуется никаких действий. Бездеп с активацией по коду встречается чаще всего. Игроку нужно ввести совокупа символов в графе, которая имеет пребывать в регистрационной форме в Личном офисе. <a href=http://filmkachat.ru/>1×slots бездепозитный бонус за регистрацию</a> Хотя благотворительные бонусы начисляются без депо, не исключено, что вас придется вносить деньги. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только последствии как, как новый заказчик впервые пополнит игровой счет.Чтобы выступать даром на настоящие деньги в казино, порой достаточно просто зарегистрироваться. Иногда необходимо выполнить дополнительные деяния. <a href=https://www.4yo.us/blogs/171102/%D0%9A%D0%B0%D0%BA-%D1%80%D0%B0%D0%B1%D0%BE%D1%82%D0%B0%D0%B5%D1%82-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%BC%D0%BE%D1%82%D0%BE%D1%86%D0%B8%D0%BA%D0%BB%D0%BE%D0%B2>https://www.4yo.us/blogs/171102/%D0%9A%D0%B0%D0%BA-%D1%80%D0%B0%D0%B1%D0%BE%D1%82%D0%B0%D0%B5%D1%82-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%BC%D0%BE%D1%82%D0%BE%D1%86%D0%B8%D0%BA%D0%BB%D0%BE%D0%B2</a> 1×slots промокод при регистрации <a href=https://www.0574snyw.com/space-uid-176065.html>https://www.0574snyw.com/space-uid-176065.html</a> Третитй бездепозитный бонус за регистрацию – денежные средства. К сожалению, начислить рубли либо баксы способны только знаменитые и пользующиеся клубы. С их поддержкой появится насладиться любой доступной игрой – автоматом, рулеткой, кено, блэкджеком.Бездепозитный приз по промо-коду несомненно доступен для забавы, только что, нет случае когда Вы активируете особый бонусный код в разделе с бонусами либо укажите промокод при регистрации на веб-сайте. В некоторых случаях, считая активации кода, придется доказать контактные данные игрока и наполнить анкету посетителя.
скачать 1×slots официальный сайт
Если вы избираете проверенное лицензионное онлайн казино и сделайте все обстоятельства получения бездепозитного бонуса, трудностей с получением подарка у Вас не возникнет.Для получения бездепа нужно пригласить в игру по реферальной ссылке свежего посетителя: он должен зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на необходимую, указанную в условиях промоакции. 1 x slots casino Онлайн-казино кропотливо продумывают бонусные условия, которые необходимо изучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и другие лимитирования. <a href=https://marexwine.ru/forum/?PAGE_NAME=profile_view&UID=1144>https://marexwine.ru/forum/?PAGE_NAME=profile_view&UID=1144</a> 1×slots быструю регистрацию а также мгновенное
1×slots casino регистрация 1×slots review live
Срок активации и время на отыгрыш. Зачисление средств или фриспинов случается при активации протяжении требовательно ограниченного периода, схожие притязания предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать бонус некоторое дней или в недель. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с необоснованно высоким вейджером. <a href=https://lecointurc.com/users/patrickmoivy>https://lecointurc.com/users/patrickmoivy</a> 1×slots рабочее зеркало Основное правило получения бездепа ? создаваемый акк должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов взыскательно запрещено. Проверка проводится по имени, e-mal, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита необходимо блюсти простую очередность действий.
1×slos регистрация в 1×slots casino
<a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/9016–1×slots-casino-registratsiya-1×slots-review-live#9038>1×slots casino регистрация 1×slots review live</a> Бездепозитный бонус – это экономическое вознаграждение, которое выдается участнику игры в казино, для его привлечения и появления заинтересованности. Любой посетитель, который соответствует условиям выдачи похожего бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое одобрение считается более действенным способом, дающим возможность стартовать в игре, не вкладывая собственных материальных средств. 1×slots подтвердит вашу регистрацию если говорить <a href=https://premiumstoreco.com/user/koreanxr0611inbox-lv/>https://premiumstoreco.com/user/koreanxr0611inbox-lv/</a>
1×slots бонус за регистрацию
Сроки активации приза уточняются любым казино, но чаще всего они не превышают недели с момента получения. Игроку обязательно нужно применять бездеп в течение указанного срока, в ином случае бонус просто пропадет. Каждый приз можно получить лишь один раз, потому если не использовать бездеп в срок, у игрока не будет 2 шанса им воспользоваться.Фриспины. Бесплатные вращения предусмотрены для использования в видео-слотах. Внимательно читайте условия – они часто выдаются для некоторых машин. В зависимости от клуба вам делать определенное число ставок. Кстати, современные игорные дома выделяют вероятность заводить «одноруких бандитов». Но рядах азартных платформах подобные вознаграждения все получить и уже зарегистрированные юзеры. В таком случае, призы предоставляются в уникальных промоакций либо же неким игрокам повторяющий акционного предложения, коие приходит на почту с целью «вернуть» игрока в свое казино. <a href=http://admtobolsk-new.ru/bitrix/redirect.php?goto=http://astek1c.ru/bitrix/redirect.php?goto=http://essobmr.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/Uuawam-Kq6d>http://admtobolsk-new.ru/bitrix/redirect.php?goto=http://astek1c.ru/bitrix/redirect.php?goto=http://essobmr.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/Uuawam-Kq6d</a> Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие возникают у новичков. 1×slots зеркало быструю регистрацию а также мгновенное Как правило, при выводе финансов, от играющего потребуется только устроить наименьший вклад для того, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом собственный счет.
<b>Смотреть еще похожие новости:</b>
<a href=https://feederfishing.lt/en/forum/kedes-platformos-ir-ju-priedai/1304027–1×slots#1315501>1×slots официальный сайт зеркало рабочее</a>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=136611>1×slots бонус за регистрацию</a>
<a href=http://diablo2r.cn/home.php?mod=space&uid=30130>1×slots зеркало этих способов предполагает регистрацию</a>
<a href=https://www.findaspermdonor.com/viewtopic.php?f=25&t=91339>1×slots casino зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если идет об неповторимых предложениях, возможность понадобиться регистрация в казино по ссылке с партнерского вебсайта.
#5994 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
cometa casino casino вход <a href=https://7club7.com/>винлайн букмекерская контора официальный</a> порно с Дарья Клишина, легкоатлетка порно с Карен Хачанов (теннис) <a href=https://specreporter.com/>человек казино</a> самое казино 1×bet зеркало рабочее xbet casinos winning 1×bet рабочее на сегодня vodka casino Матвиенко Валентина Ивановна порно казино пин
#5995 Charlesgunnyhttp://filmkachat.ru
1хслот официальный сайт зеркало
Итак, дабы бесплатные бонусные кредиты превратились в реальные деньги, которыми вы можете управлять по своему усмотрению, их надо(надобно) отыграть. Вейджер идет уточнять в правилах онлайн-казино.Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке необходимо восполнить счет в казино. Для депозитных призов, эта процедура не необходима, так как депозит теснее изготовлен. <a href=http://filmkachat.ru/>1×slots зеркало проходить регистрацию это отличный вариант</a> Несмотря на то, собственно этот вариант стимуляции со стороны азартных платформ очень популярен в сфере сходственных игр, далеко не всем поклонникам казино известно, что себе бездепозитные бонусы казино и как непосредственно их возможно эксплуатировать.Бывают ли бездепозитные бонусы без вейджера? Бывают, если у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино. <a href=https://www.thisisant.com/forum/viewthread/7824/>https://www.thisisant.com/forum/viewthread/7824/</a> В зависимости от интернет заведения любой из них может вам предложить как бездепозитные деньги, например и бездепозитные фриспины, коие в успешной регистрации упадут вас на ваш игровой баланс. 1×slots рабочее зеркало на сегодня <a href=http://www.gtcm.info/home.php?mod=space&uid=789467>http://www.gtcm.info/home.php?mod=space&uid=789467</a> Так собственно можете отважно региться без всяких размышлений. Фортуна сегодня точно на вашей стороне. Не опасайтесь, как следствие какого либо убытка Вам совершенно не грозит. С этими бонусами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе.
1×slots акции
Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных требований, не обязательной верификации. Если на сайте предусмотрена неотъемлемая процедура доказательства личности, то исключить выигрыш удастся лишь последствии ревизии данных. Приготовьтесь наполнить анкету и выслать в техподдержку документ, подтверждающий лицо. 1хслот 1хслотс регистрация перейти на 1×slots Выбирая даровой приз, пристально изучайте верховодила. Убедитесь, что вам можно себя участие в промоакции. Уточните, в каких забавах можно исполнять условия вейджера. При надобности задавайте вопросы адептам саппорта. <a href=https://www.freebeg.com/forum/member.php?action=profile&uid=23075>https://www.freebeg.com/forum/member.php?action=profile&uid=23075</a> 1хслотс рабочее зеркало на сегодня Свежий приз начисляется вид валютных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в пользовании средствами, а в случае отыгрыша оператор имеет ввести лимитирование на вывод денег.Некоторые казино могут предлагать клиентам бездепы за подтверждение номера либо почты либо репост на страницу в соц сетях.
1×slots зеркало рабочее
Отыграв бездепозитный приз в казино с выводом также придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если сходственное лимитирование существует, то единоразово исключить выйдет лишь сумму, не превосходящую объем приобретенного приза.Теоретически, к безвозмездным призам возможно отнести так называемые фриспины. Напомним, речь идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, потому собственно они деют только вероятность создавать ставки. Например, игрок получил 500 рублей при создании аккаунта и обязан отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., понадобится устроить 875 спинов для полного отыгрыша.Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских рублей. В условиях акции указано, что вейджер бездепозитного приза х20. Поэтому, дабы отыграть приз, игроку несомненно необходимо сделать ставок на 35*20=700 рублей. <a href=http://www.italian-style.ru/Nasha_kompanija/forum/?PAGE_NAME=profile_view&UID=54980>http://www.italian-style.ru/Nasha_kompanija/forum/?PAGE_NAME=profile_view&UID=54980</a> 1×slots зеркало выигрыши обязательно пройдите регистрацию если Рассмотрим принцип его деяния на случае. Допустим, вы зарегались и возымели $10 no down payment bonus с вейджером х50. Это означает, собственно выигранные средства возможно несомненно выводить не раньше, чем в такого, как общая сумма ставок достигнет $500.При отыгрыше бонусных средств, необходимо учесть срок деянья приза и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный бонус несомненно аннулирован.
1×slots casino регистрация 1×slotscasino09k online
Превышение максимальной ставки при отыгрыше. Система механически не предостерегает о превышении ставки, потому о нарушении верховодил игрок возможность узнать уже в подачи запроса на вывод средств.Если вы избираете проверенное лицензионное онлайн казино и сделайте все обстоятельства получения бездепозитного приза, проблем с получением подарка у Вас не возникнет. Также, в необходимо доказать собственный номер телефона, достичь код, приобретенный в смс-сообщении от клуба ввести в специальное фон в собственном офисе игрока. 1хлот регистрация в 1×slots casino <a href=http://www.dsm.co.kr/bbs/board.php?bo_table=free&wr_id=260454>http://www.dsm.co.kr/bbs/board.php?bo_table=free&wr_id=260454</a> Чем ниже велечину вейджера, что, этим легче отыграть и вывести приз. Если Вы расчитываете заработать на бездепе, не просто ознакомиться с новым игровым клубом, то стоит избегать бонусов с высочайшим вейджером их почти не реально отыграть. С ними Вы можете лишь протестировать игры заведения.Риск-игра по одинаковым шансам – Также казино возможность запрещать скорпулезно условия по отыгрышу счет раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких иных играх.
1×slots казино мобильная версия
Простая процедура получения бездепозитного бонуса, которая займет менее 2-х мин. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные.Бездепозитный приз нередко может замерзнуть легкодоступным сразу в завершения регистрации, поскольку как единственным требованием к нему считается регистрация, а этого ревизия вашей новой учетной записи. <a href=https://www.jjj555.com/home.php?mod=space&uid=885195>https://www.jjj555.com/home.php?mod=space&uid=885195</a> Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.Для всех бездепозитных бонусов действует наибольший лимит на выигрыш. Он показывает предельную сумму, коию у получить, играя на бонусные кредиты. Как только вас получится выполнить требования вейджера, возможный максимум будет переведен с бонусного счета на ведущей, а остаток несомненно списан. 1хслотс официальный сайт зеркало Также бездепозитные призы все работать методом возвратить к ирге посетителей, что приостановивших своё сотрудничество с компанией: извещение о бездепе поступает на мобильный аппарат или почту.Какие бонусы возможность еще получить кроме бездепозитного приза за регистрацию в казино? По мимо бездепозитного бонуса, каждое интернет казино предлагает игрокам прибыльное предложение на 1-ый депозит, вы совершаете депозит, ваш депозит увеличивается в двое или и в трое, тем самым начать выступать можно с больше солидной суммой, так же не забываем про вейджер на бонусы.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=1140726#pid1140726>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=181560>1×slots зеркало на сегодня</a>
<a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=331563#pid331563>1×slots бездепозитный бонус за регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте условия – они часто выдаются для некоторых машин. В зависимости от клуба возможность делать определенное число ставок. Кстати, современные игорные дома дают возможность заводить «одноруких бандитов».
#5996 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало рабочее 7k casino официальный <a href=https://slon-ru.com/>часы казино</a> 1×bet casino пин ап casino pin <a href=https://rhymes-punches.com/>официальное казино вход</a> 7k casino сайт сайт казино зеркало пин ап casino pin up top рабочее казино букмекерская контора фонбет официальный сайт спорт букмекерская контора лучшая казино
#5997 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало быструю регистрацию а также мгновенное
В качестве призов интернет казино нередко предлагает выдачу фриспинов, словами даровых вращений игрового барабана. Виртуальные монеты можно использовать для обучения в покерной школе или для игры в казино.Бывают ли бездепозитные бонусы без вейджера? Бывают, случае у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasin online</a> Благодаря программке лояльности от игорного заведения, возможно взять хороший старт и без дополнительных вложений запустить видеослоты. Кроме как, можно рассчитывать на реальную фортуну и получить, без вложения собственных финансов, великий выигрыш. <a href=https://community.wongcw.com/blogs/934091/Transform-Your-Space-with-a-Professional-Interior-Design-Plan-That>https://community.wongcw.com/blogs/934091/Transform-Your-Space-with-a-Professional-Interior-Design-Plan-That</a> В некоторых онлайн казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на веб-сайте клуба и доказать свои контактные данные. Дополнительно потребуется активация промокода. 1×slots официальный зеркало <a href=http://shigebao.com.cn/home.php?mod=space&uid=1144178>http://shigebao.com.cn/home.php?mod=space&uid=1144178</a> Обычно бездепозитные промоакции от казино, прибывают на эл. Почту в деньки рождения или праздничные. В неких онлайн казино возможно обратиться в чат и как постоянному игроку, вероятно для предложат бездепозитное предложение.Демоказино есть почти на каждом веб-сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются веско реже: там когда выигрыша и соблюдения условий акций бездеп возможно перевоплотить в реальные средства.
1×slots официальный регистрация
Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депо имеет выделяться до 30 дней. <a href=http://aficionado.pl/showthread.php?170579–1×slots-%D0%B0%D0%BA%D1%82%D1%83%D0%B0%D0%BB%D1%8C%D0%BD%D0%BE%D0%B5-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE&p=191435>1×slots актуальное зеркало</a> 1×slots официальный сайт скачать <a href=http://clients1.google.td/url?q=http://wei.ltd.com/analyst/redirect?redirect=http://oil-titan.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/I_llBmk6K3k>http://clients1.google.td/url?q=http://wei.ltd.com/analyst/redirect?redirect=http://oil-titan.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/I_llBmk6K3k</a> Максимальный объем ставки, который нельзя превышать же бонус не будет всецело отыгран. В случае нарушения сего верховодила, бонус и выигрыш с него станут аннулированы. 1×slots рабочее зеркало
1× slots сайт
Наиболее знаменитые гонорары между гэмблеров – бездепозитные бонусы казино. Это не удивительно, ведь возможно получить благотворительные вращения либо виртуальные кредиты, и этом не придётся пополнять счёт, рисковать личностными деньгами. Удастся насладиться различными увеселениями причем выиграть крупную сумму, избегая серьёзного риска.Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие возникают у начинающих. Реже призы без депо начисляются постоянным игрокам. С их подмогою администрация постарается вычесть ценных клиентов либо желает поблагодарить за преданность верных посетителей. Но гораздо чаще для подобных целей используются эти акции:Как только вы отыграли вейджер и средства с бонусного баланса перешли вам на реальный счет, Вы отважно можете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (устроить минимальный депо к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депозитом). <a href=http://www.ihaomeijia.com/home.php?mod=space&uid=135403>http://www.ihaomeijia.com/home.php?mod=space&uid=135403</a> Но такие рамки не смущают том хайроллеров, поскольку коэффициенты на слотах позволяют рассчитывать на солидные выигрыши, в неких автоматах разыгрывается прогрессивный джекпот. x1 slots 1хслотс регистрация перейти на 1×slots
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, дабы замечена вероятность вывести выигрыш.Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша бонусов. Заведения практически устанавливают наивысшую ставку, возможную по условиям вейждера. Процесс доказательства личности возможность взятьвдолг(взятьвзаймы) от одного денька до недели. Если заказчик допустил какую-либо ошибку при заполнении паспортных данных, то ему следует обратиться с проблемой в саппорта онлайн-казино. При малый сумме бонуса рекомендовано выступать по невысоким ставкам, а использовать максимальные какого-либо лишь том, случае, в вейджер очень немалый, а время на отыгрыш крепко ограничено.Выиграть реальные деньги в казино не пополняя счет – трудно, но вполне. Главное задаться целью и не нарушатьправила заведения. Выберите несколько казино с бездепзитными призами и начните играть на бонусные свои. По статистике каком-то 10-ти заведений можно заработать небольшую необходимую средств с бонусных средств. 1× slots зеркало <a href=https://www.spacepub.net/members/4979-Patrickraf>https://www.spacepub.net/members/4979-Patrickraf</a> Для получения бездепа нужно пригласить в забаву по реферальной ссылке свежего клиента: он обязан зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на сумму, обозначенную в критериях промоакции.Бездепозитный бонус нередко имеет стать легкодоступным сразу после завершения регистрации, поскольку в большинстве случаев единственным требованием к нему считается регистрация, а затем проверка вашей новой учетной записи.
1 x slots casino
Необходимость отыгрыша. Вейджер ситуации повыше, чем для бонусов за депо. И пока свои не отыграны, вывести их невозможно. <a href=http://c909201u.beget.tech/user/JoshuaNobre/>http://c909201u.beget.tech/user/JoshuaNobre/</a> Многие новенькие сомневаются, что поощрительный приз надо несомненно возвращать, и случае они выиграли у казино. Это безусловно безопасно и накрепко. Выводя выигранные средства, игрок просто останавливает свое роль в игре и теряет уникальную вероятность – даром наращивать личное материальное положение. 1 x slots casino Не стоит сразу же отрицаться от приветственных подарков в подобных казино. Администрация готова начислить средства либо фриспины, хотя сначала сотрудники должны увериться, собственно вы не мошенник. Дело сомнений, что развелось слишком большое охотников за бонусами. Они научились накалывать систему и зарабатывать солидные суммы средств.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.bf-france.com/forums/profile/30064-rabofreeor/>1×slots актуальное зеркало</a>
<a href=https://melhorlance.com.br/author/jamesbom/>1×slots рабочее зеркало</a>
<a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=89021>1× слот зеркало</a>
<a href=https://www.donchillin.com/space-uid-382497.html>1×slots регистрация 1×slots casino 777 online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При регистрации что, нет или ином интернет игральном заведении — вам дается раз шанс испытать свою фортуну не внося свои монеты. Замечу собственно такую поощрительную услугу предоставляют не все онлайн игровые площадки, а только щедрая середина(средина) из них. Которые мы подготовили для Вас в нашем перечне. В бонусную программку многих операторов входят систематические бездепы. Это бессрочные промоакции, поощряющие активных неизменных игроков. Популярный формат — раздача фриспинов по определенным дням недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают постоянные бонусы без депозита в мена на накопленные баллы преданности.
#5998 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пин up casino пинко casino <a href=https://glvk.guru/>1×bet официальный сайт</a> порно с Баталина Ольга Юрьевна Юдаева Ксения Валентиновна порно <a href=https://res-publika.com>casino сайты</a> порно с Александр Головин (футбол) букмекерская контора фонбет официальный champion casino 7k casino 1×bet скачать приложение на андроид casino betting букмекерские контора ап
#5999 Charlesgunnyhttp://filmkachat.ru
1× слот зеркало
Чаще всего применяются коды. Их нужно вносить в специальные окна регистрационной анкеты, случае идет о пригласительных бонусах, либо в особом разделе собственного офиса игрока. <a href=http://filmkachat.ru/>1× slots регистрация в 1×slots casino</a> Предложения с бездепозитными призами за регистрацию позволяют свежим заведениям привлечь аудиторию на свой сайт. А игроки к получают возможность выступать на настоящие деньги без депозита в казино и заработать маленькой стартовый капитал, кот-ый разрешается исключить на карту банка или электрический кошелек.Но есть игорные заведения, которые готовы просто так жертвовать деньги на забаву. Для этого достаточно сделать профиль. Чтобы исключить свой выигрыш, вам поначалу нужно выполнить обстоятельства отыгрыша, обозначенные в критериях получения бездепозитного депо. <a href=https://letterboxd.com/lexxeagle/list/revolutionary-approaches-in-modern-virtual/>https://letterboxd.com/lexxeagle/list/revolutionary-approaches-in-modern-virtual/</a> Когда речь идет о получении бездепозитных призов в казино, в первую очередь направьте на последующие обстоятельства: 1×slots рабочее зеркало на сегодня <a href=http://images.google.com.af/url?q=http://lira-radio.ru/bitrix/redirect.php?goto=http://shinokat.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/VBvaOIl-k72>http://images.google.com.af/url?q=http://lira-radio.ru/bitrix/redirect.php?goto=http://shinokat.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/VBvaOIl-k72</a> Ну и конечно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: сходственная добродушие увеличивает степень лояльности посетителей к фирмы.
1×slots бонус за регистрацию
<a href=http://theauction.com.au/my-account/>1хслотс казино зеркало</a> 1х слот регистрация в 1×slots casino Получить приветственный бонус имеют только свежие клиенты онлайн-казино. Способы описаны в условиях акции любого легального казино, почаще всего это:Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депозит возможность отличаться до 30 дней. <a href=http://shichaoliuluntan.com/home.php?mod=space&uid=330509>http://shichaoliuluntan.com/home.php?mod=space&uid=330509</a> 1×slots рабочее зеркало на сегодня Автоматы непопросту считаются наиболее знаменитым азартным веселием. Чтобы освоить управление и управляла, понадобится всего несколько мин. Ваша задача устроить ставку, определить число трудящихся линий и можно вертеть тамбур. Если на экране выпадет выигрышная композиция – вы выиграли! С данной задачей для посодействуют управится бездепозитные призы казино.Можно ли в одном интернет казино получить больше 1-го приза за регистрацию? Нет, так как в любом интернет казино есть верховодила, к которым надо(надобно) держаться, не делать два аккаута для получения бонусов, по несомненно блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, приз за регистрацию выдаеться один раз 1 лицу.
1 x slots
Таким образом онлайн казино получает вероятного игрока. Возможно в будущем или подлинном он захотит поиграть на свои средства. Так работают бездепозитные бонусы в интернет казино. Здесь очень подходит выражение, благотворительные сыр посещает лишь в мышеловке. Начинающие игроки все не обдумывать опасность азарта. Однако течением осознания делается больше. Это тема для отдельного обсуждения.Доступ к подарку возможность раскрываться механически после введения промокода либо обращения в службу сайта. В первом случае от юзера не потребуется никаких деяний. Бездеп с активацией по коду встречается почаще всего. Игроку необходимо ввести совокупность знаков в графе, кот-ая имеет пребывать в регистрационной форме в Личном офисе. Отыграв бездепозитный приз в казино с выводом тоже придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в подобное ограничение существует, то единоразово исключить выйдет лишь необходимую, не превышающую объем приобретенного бонуса. <a href=http://ecovel.ru/bitrix/redirect.php?goto=http://belabraziv.ru/bitrix/redirect.php?goto=http://stoljar.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/n1eEj9lWdIB>http://ecovel.ru/bitrix/redirect.php?goto=http://belabraziv.ru/bitrix/redirect.php?goto=http://stoljar.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/n1eEj9lWdIB</a> Рассмотрим на образце: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских руб. В критериях промоакции предписано, что вейджер бездепозитного бонуса х20. Поэтому, дабы отыграть приз, игроку несомненно нужно устроить ставок на 35*20=700 рублей.Высокая конкурентность в разделе азартных игр доказывает операторов привлекать посетителей разнородными акциями. Благодаря этому у гостей бывает вероятность получить бонусы в казино за регистрацию без депозита. Воспользоваться этим предложением возможно, избегая процедуру внесения средств на игровой счет, просто активировав акк на сайте. Наш экскурсовод по бездепам поможет избрать самую симпатичную бонусную программку, узнать верховодила получения такого гонорары и распорядиться им с наибольшей выгодой. 1×slots зеркало видели такую регистрацию на
1×slots официальный зеркало рабочее
Активация случается за промокодов, которые вводятся в собственном офисе после регистрации. Среди спецпредложений в перечне Casino.ru содержатся эксклюзивные промокоды, коие доступны только гостям портала. Другие способы начисления средств ? автоматическая активация сразу в творения аккаунта и получение презента по запросу в службу технической помощи.Да, у бесплатных бонусов есть дефекты. Прежде всего, они обыкновенно не. Кроме такого, условия вейджера по ним постоянно жесткие. Но все отсутствие риска проделывает их очень красивыми для клиентов. <a href=https://forum.vn.ua/showthread.php?p=3277659#post3277659>1×slots на любой вкус как пройти регистрацию</a> Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.У любого игорного заведения свои правила и условия. Но, дабы получить призы, необходимо выполнить стандартные действия: Максимальная ставка ? уточняется в валюте счета и ограничивает объем ставки за раз спин. В случае ее превышения приз возможность быть аннулирован. Также в правилах возможность содержаться запрет на размещение ставок конкретного облика, примеру, по равным шансам в рулетке (то есть, на чет либо нечет, красное либо черное и т.д. ). 1×slot казино зеркало <a href=http://velo-xachmas.com/index.php?subaction=userinfo&user=Geraldbup>http://velo-xachmas.com/index.php?subaction=userinfo&user=Geraldbup</a> Подобные призы без депо предоставляются на больше выгодных критериях. Зачастую они покрупнее, а условия отыгрыша менее строгие.
1×slots casino зеркало рабочее
Начнём с как, что каждое промо за регистрацию подразумевает некоторые условия. Бездепозитные призы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность денежного оборота, нужная для исполненья критерий. Пример, получили благотворительные вращения и выиграли с них 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 рублей, неудачных либо выигрышных, маловажно. После выполнения, бонусный баланс перейдёт на реальный и станет доступным к выводу.Активация денежного гонорары случается автоматически после создания профиля или применения промокода. Иногда операторы предъявляют вспомогательные требования: подписаться на страницы казино в соц сетях либо на рассылку маркетинговых сообщений, скачать и установить вспомогательный софт и т.д. <a href=http://besstizhie.ru/user/Jaspertiemy/>http://besstizhie.ru/user/Jaspertiemy/</a> Только выполнив все обстоятельства отыгрыша и дождавшись окончания проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить свои деньги. x1 slots 1хслотс регистрация перейти на 1×slots Срок отыгрыша — это период, кот-ый начинается в момент активации бонуса и завершается с его закрытием. Пользователю необходимо уложиться в этот временной зазор, по призовые свои аннулируются. Казино устанавливают перечень игр, ставки в засчитываются при расчете отыгранных средств. Если тайтл не заходит в этот перечень, то возможность быть недосегаем для загрузки в действия бонусного предложения.Бывают ли бездепозитные бонусы без вейджера? Бывают, если у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино.
<b>Смотреть еще похожие новости:</b>
<a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/7239–1khslots-zerkalo#7249>1хслотс зеркало</a>
<a href=http://lynnniman.org/index.php?/topic/990–1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D0%B2%D1%8B%D0%B8%D0%B3%D1%80%D1%8B%D1%88%D0%B8-%D0%BE%D0%B1%D1%8F%D0%B7%D0%B0%D1%82%D0%B5%D0%BB%D1%8C%D0%BD%D0%BE-%D0%BF%D1%80%D0%BE%D0%B9%D0%B4%D0%B8%D1%82%D0%B5-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8E-%D0%B5%D1%81%D0%BB%D0%B8/>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
К примеру, игроку выдаются бесплатные свои в заведении в объеме пятидесяти либо ста $ (вейджер на коие сочиняет 100х). То есть, каждому новоприбывшему игроку выскакивает притягивающая картинка, которая сулит выплату всех зачисленных компанией средств. Не стоит внимания на казино приз за регистрацию без депо с сильно немалый или довольно махонькой суммой призов, потому что, числе кропотливо изучив все условия, здесь скорее, несомненно некий подвох.
#6000 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Алина Загитова, фигуристка 1×bet рабочее <a href=https://m.repost.news/>casino актуальное зеркало</a> up casino официальный 1×bet на андроид <a href=https://t.me/vchkogpu_ru>1×bet официальный сайт</a> бесплатное казино 1×bet зеркало слоты porno Андрей Рублев (теннис) casino buzz 1×bet вход порно с Абрамченко Виктория Валериевна pinco casino
#6001 Charlesgunnyhttp://filmkachat.ru
1 х слотс зеркало
Большинство клубов завлекают внимание геймеров за счёт различных подарков. На 1 сайтах возможно получить виртуальные кредиты, которые откроют доступ ко всему софту. На других же, администрация предлагает благотворительные вращения для пуска лучших интернет слотов. Несмотря на разные акции, стоит выделить самые главные. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasin online</a> <a href=http://www.redsea.gov.eg/deutsche/Lists/Beschwerden_List/DispForm.aspx?ID=7439>http://www.redsea.gov.eg/deutsche/Lists/Beschwerden_List/DispForm.aspx?ID=7439</a> 1×slots рабочее зеркало на сегодня <a href=http://krovlya.dp.ua/index.php?subaction=userinfo&user=ceaselessfreewa>http://krovlya.dp.ua/index.php?subaction=userinfo&user=ceaselessfreewa</a> Получить Бездепозитный приз в онлайн казино дело 2-ух кликов. Другой момент, отыграть рекламную и соблюсти правила и условия отыгрыша. Под правилами предполагается не вагер, но и лимитирования по максимальной ставке. Мы разумеем, собственно в кинотеатр все ставят на зеро и выигрывают. Призываем не делать похожего. Перед активацией бонуса прочтите верховодила. Узнайте следующие факторы: Условия получения подарка, за регистрацию, за депозит и прочее. Ограничения по наибольшей ставке. Зачастую не выше 350 руб. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на пространстве. Поэтому главно знать, в каких играх можно осуществлять кратность валютного оборота.Иногда для получения бонусов нужно спутаться с представителями саппорта. Удобнее всего с ними собеседовать в онлайн-сате, но от достаточно запроса по электронной почте.
1×slots зеркало на сегодня
Подтверждение электрической почты – одно из основных критерий, коие есть практически в любом бездепозитном казино. Чтобы верифицировать электронную почту, достаточно перейти по интенсивной ссылке в письме, полученном от азартного клуба. <a href=http://brilliance.ru/forum/memberlist.php?mode=viewprofile&u=21924>1 х слотс зеркало</a> 1×слот регистрация в 1×slots casino Шаг 5. Использование и отыгрыш. Бездеп должен быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. <a href=https://yvavilebismovla.ge/user/DavidAdern/>https://yvavilebismovla.ge/user/DavidAdern/</a> Бонусы без депо при регистрации числятся наиболее привлекательными как для опытнейших игроков, так для и начинающих. Получив это вознаграждение, заказчик возможность играть на настоящие средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, еще обстоятельства их активации и выигрыша. 1 xslots рабочее зеркало
1×слотс казино
Чаще всего, популярностью сервисы, такие как MoneyBookers и WebMoney, еще MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно неотъемлемое управляло. Финансовые средства выводятся лишь через ту платежную систему, коей огромной для пополнения депозита. Если же игрок получил бездепозитный покерный бонус, требуется пополнить счет на наименьшую необходимую, кот-ая сочиняет обычно 10 долларов. <a href=http://www.markstrongcn.com/home.php?mod=space&uid=5072&do=profile>http://www.markstrongcn.com/home.php?mod=space&uid=5072&do=profile</a> При пользовании бездепозитным бонусом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют количество обликов лимитов:Нет. Для получения бездепозитного бонуса в казино необходима неотъемлемая регистрация на веб-сайте. Играть в слоты безвозмездно и без регистрации можно лишь в демо режиме. 1×slots регистрация 1×slots review live Выполнив все требования оператора, клиент имеет оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем менее суток. Если дополнительно потребуется пройти функцию верификации, то срок увеличивается до 1–2 трудящихся дней. Для перевода используются банковские инструменты и электрические платежные системы. Второй метод подходит другого, как, так как основная транзакций такой осуществляются моментально. В связи со специфичностью функционирования банков обработка платежей может взятьвдолг(взятьвзаймы) до нескольких рабочих дней.
1×slots зеркало сайта
<a href=http://skatefluckit.com/member.php?u=149708>1×slots регистрацию более популярный вариант это</a> Мы подготовили перечень, где есть всегда животрепещущие и свежие бездепозитные бонусы казино, которые вы можете получить бесплатно. Для наших юзеров есть специальные предложения неповторимые призы, коие вы кого не найдете, их мы обозначили специальной красноватой плашкой «Exclusive».Однако далековато не все ресурсы предлагают своим клиентам бездепозитные призы за регистрацию в казино. В большинстве случаев предусмотрено одобрение на 1-ый депо в объеме 100–200%. Это замечательная возможность преумножить банкролл, увеличить время, проведённое за игрой и шансы сорвать большой куш. Размер бонусов почаще всего чисто символический и не выше 50 руб. Приятно, но ощутимым бустом деле вряд ли будет.Условия вывода выигрыша. В некоторых заведениях для успешного вывода с бездепозитного бонуса довольно пополнения баланса и подтверждения личности. В других же клубах, необходимо несколько один прокрутить собственный депозит. 1хслотс зеркало <a href=http://xn–b1acebaenad0ccc3aiee.xn–p1ai/forum/user/5207/>http://xn–b1acebaenad0ccc3aiee.xn–p1ai/forum/user/5207/</a> Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном призе, то для обратите внимание на значение вейджера и срок, кот-ый дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть бонус и исключить выигрыш.Выполнив все требования оператора, клиент имеет оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем менее суток. Если дополнительно потребуется пройти функцию верификации, то срок увеличивается до 1–2 трудящихся дней. Для перевода используются банковские инструменты и электрические платежные системы. Второй метод подходит другого, как, так как основная транзакций такой осуществляются моментально. В связи со специфичностью функционирования банков обработка платежей может взятьвдолг(взятьвзаймы) до нескольких рабочих дней.
1×slots официальный зеркало рабочее
Бездепы обычно предлагают с отыгрышем — мгновенно исключить выигранные средства невозможно. Перевод средств со счета будет вероятен после такого, как юзер выполнит все притязания казино, а сумма имеет быть выше установленного правилами лимита. Условиями акции фиксируются сроки, в течение коих клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней последствии активации.Таким образом интернет казино получает потенциального игрока. Возможно в будущем либо настоящем он захотит сыграть на средства средства. Так трудятся бездепозитные призы в интернет казино. Здесь очень подходит выражение, бесплатные сыр случается только в мышеловке. Начинающие игроки могут не осознавать опасность азарта. Однако времени осознания становится больше. Это тема для отдельного обсуждения. Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, дабы замечена возможность исключить выигрыш. <a href=https://forum.spherecommunity.net/User-DoctorLazutakl>https://forum.spherecommunity.net/User-DoctorLazutakl</a> Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются сразу последствии творения профиля и активны непродолжительное время. Если не успеете израсходовать средства, они попросту сгорят. Касаемо времени, в большинстве случаев бонусы активны на часа.Отказ в прохождении верификации. Если клиент не хочет или возможности предоставить документы, подтверждающие его лицо, профиль будет заблокирован вместе со всеми бонусными начислениями. 1 хслот регистрация в 1×slots casino Отказ в прохождении верификации. Если заказчик не хочет либо возможности дать документы, подтверждающие его лицо, профиль несомненно заблокирован вместе со всеми бонусными начислениями.
<b>Смотреть еще похожие новости:</b>
<a href=http://polishcrazyclan.ugu.pl/member.php?action=profile&uid=272738>1×slots промокод при регистрации 2025</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Также посещают случаи, когда казино начисляет оговоренный приз после регистрации нового клиента по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам. Для получения выигрыша требуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить определенную необходимую, но теснее из личных денег. Она рассчитывается из совместного размера выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, случае пользователь выиграл 1000 руб., а множитель составляет х30, исключить деньги возможно несомненно, сделав ставки на 30 000 рублей.
#6002 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино в россии казино гта 5 <a href=https://rucriminal.info/>1×bet официальный сайт 1×bet xyz</a> казино 5 лучшие казино бесплатно <a href=https://res-publika.com>букмекерская контора бетсити</a> porno Юлия Канакина, скелетонистка автомат казино промокод 1×bet сайт букмекерской конторы Преподобная Надежда Александровна порно макао казино 1×bet слоты 1×bet xyz
#6003 Charlesgunnyhttp://filmkachat.ru
1×slots бездепозитный бонус за регистрацию
Несмотря на то, собственно этот вариант стимуляции со стороны азартных платформ очень моден в похожих игр, далеко многим поклонникам казино ведомо, что являют собой бездепозитные бонусы казино и как непосредственно их вероятно эксплуатировать.Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=http://filmkachat.ru/>1×slots подтвердит вашу регистрацию если говорить</a> Наши эксперты исследуют условия акции, затем в ручном режиме проверку их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие характеристики. Мы не рекламируем казино, а даем игрокам информацию о лучших из них. <a href=https://heyjinni.com/read-blog/177751>https://heyjinni.com/read-blog/177751</a> Бонусы без депозита при регистрации считаются самыми привлекательными как для опытных игроков, так для и новичков. Получив это вознаграждение, заказчик возможность играть на настоящие средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, еще условия их активации и выигрыша.Но надо размышлять, собственно снабжая юзеров такими бонусами, казино увлекается спонсированием. Ведь размеры вознаграждений, в основном, не великие (средним объемом от 5 до 20 долларов). И на эти средства налагаются конкретные обстоятельства и ограничения, неотклонимые к исполнению игрока, случае в последствии он вожделеет получить все свои выигранные финансы. 1×slots зеркало видели такую регистрацию на <a href=http://t73108uj.bget.ru/member.php?action=profile&uid=115279>http://t73108uj.bget.ru/member.php?action=profile&uid=115279</a>
1хслотс рабочее зеркало на сегодня
Прежде всего, не забывайте периодически заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом разглядывают более интересные предложения основных игорных порталов. <a href=http://216.38.0.7/viewtopic.php?f=12&t=206821>1× slots сайт</a> 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=https://kr-osvita.gov.ua/user/DoctorLazutaPn/>https://kr-osvita.gov.ua/user/DoctorLazutaPn/</a> 1×slots регистрация на сайте 1×slots ru com Вейджер не более х30–35 считается приемлемым. Опытные игроки заявляют, что с таким вейджером реально остаться в плюсе, если верно подойти к выбору игрового аппарата.Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, так как Вам понадобиться ее доказать в при выводе средств.
1×slots регистрация 1×slots review live
Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте условия – они часто выдаются для неких машин. В зависимости от клуба вам создавать определенное число ставок. Кстати, современные игорные жилища выделяют возможность заводить «одноруких бандитов».Фриплей-бонусы. Бонусы за благотворительную забаву есть лишь в неких клубах. Они зачисляются сразу после сотворения профиля и срабатывают недолговременное время. Если у вас нет медли потратить свои, они просто завершатся. Что касается медли, в большинстве случаев призы срабатывают протяжении одного часа. <a href=https://securityholes.science/wiki/User:IvyMartinson1>https://securityholes.science/wiki/User:IvyMartinson1</a> Для получения депозитного приза нужно восполнить свой игровой баланс реальными деньгами. Вознаграждение можно получить либо при внесении первого депо, либо в виде фиксированного процента от внесённых средств. Так или по, бонус поступит на счёт только последствии пополнения. 1×slots регистрация то дальше необходимо пройти Если вы выбрали себе несколько брендов коие вас больше всего полюбились, для постоянной игры! Таких гемблеров казино довольно любит и ценит, за частую эти игроки становятся VIP игроками заведения, которым часто поступают прибыльные предложения в виде бонусов, так же туда заходит и бездепозитные.Но никогда не забывайте пристально читать управляла роли в бонусных акциях. Если вы нарушите но бы одно условие, позднее вы не можете устроить недоразумение с администрацией.
1×slots регистрация на официальном сайте
В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с безвозмездных вращений. Прибыль, коию Вы заработаете на этом бездепе можно назначать на вывод без какого или отыгрыша.Бездепы с безвозмездными вращениями деют пользователям право вертеть барабаны игровых автоматов без снятия средств со счета. За любой раунд уплачивает казино. Число спинов ограничено и изредка превышает сотню. Если промоакция включает в себя количество бесплатных игр, их начисление возможность быть разбито на некоторое дней. <a href=http://ledyardmachine.com/forum/User-Jameshoing>x1 slots 1хслотс регистрация перейти на 1×slots</a> Получив собственный презент, Вы сможете безвозмездно играть на реальные средства, а выполнив условия отыгрыша, исключить собственный выигрыш.Но существуют азартные заведения, готовые просто например вручить деньги на игру. Для сего довольно сделать профиль. Чтобы исключить выигрыш, сначала необходимо выполнить вейджеровые условия, прописанные в критериях получения бездепа. Прежде чем активировать бездеп, необходимо убедиться что, собственно страна, гражданином которой считается игрок, не заходит в список запрещенных. 1× slots зеркало <a href=http://uplmegaporn.com/user/OscarJus/>http://uplmegaporn.com/user/OscarJus/</a>
1хслот скачать
Многие казино предоставляют в маркетинговых целях бесплатные бонусы необыкновенно для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой сайт по партнерской ссылке с нашего портала. Чем ниже велечину вейджера, тем легче отыграть и исключить приз. Если Вы расчитываете заработать на бездепе, но просто ознакомиться с свежим игровым клубом, то стоит избегать бонусов с высочайшим вейджером их практически не реально отыграть. С ними Вы сможете лишь протестировать игры заведения.После получения приза вывод средств для клиента несомненно недоступен того, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя либо чета месяцов. Выводить средства игрок может только после отыгрыша. <a href=http://stomport.com/bitrix/redirect.php?goto=http://itone.ru/bitrix/redirect.php?goto=http://uriburner.openlinksw.com/describe/?url=https://telegra.ph/Maksimalnyj-razmer-alimentov-na-rebenka-razreshennyj-zakonom-09–23>http://stomport.com/bitrix/redirect.php?goto=http://itone.ru/bitrix/redirect.php?goto=http://uriburner.openlinksw.com/describe/?url=https://telegra.ph/Maksimalnyj-razmer-alimentov-na-rebenka-razreshennyj-zakonom-09–23</a> 2. Создать новый профиль. Для регистрации надо(надобно) заполнить небольшую анкету или зайдите в собственный офис посредством соц сетей;Кешбэк-бонус дает собой возврат фиксированного процента от ставки если, тогда, проигрыша или же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не выше 10%. 1×slots casino online регистрация Каждый новичок и умелый игрок мечтают скоро стартануть и начать делать настоящие ставки. Для сего довольно забрать подарок, за который не нужно платить. В зависимости от игровой платформы, нужно создать профиль, привязать email или телефонный. После этого администрация начисляет щедрое вознаграждение в виде бесплатных вращений либо виртуальных кредитов.Внесение депо – Будьте готовы пополнить счет последствии отыгрыша приза. Это стандартное требование правил для этого на промо-акций. Лучше заранее уточнить, какую необходимую надо(надобно) несомненно вносить на счет. Как правило, речь о минимальном депозите, но вы обязаны быть убеждены, собственно он вам по карману.
<b>Смотреть еще похожие новости:</b>
<a href=https://masstr.net/showthread.php?tid=83853>1×slots регистрация на сайте 1×slots ru com</a>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=328672>1×slots официальный сайт мобильная версия скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Диапазон ставок, которые вправе устроить игрок, того лимитирован. Обычно назначать возможно маленькую необходимую — около 10–30 рублей за одно вращение. Изучить верховодила и условия получения бездепозитных призов казино, Вы можете у нас на сайте в разделе с призами или на официальном сайте избранного Вами казино. Если возможности отыскать необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электронной почте.
#6004 Charlesgunnyhttp://filmkachat.ru
1хслот официальный сайт зеркало
B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. <a href=http://filmkachat.ru/>1×slos регистрация в 1×slots casino</a> <a href=https://app.degoo.com/share/hi1FahiiYBqJPnfRRsamrQ?ID=20401830865>https://app.degoo.com/share/hi1FahiiYBqJPnfRRsamrQ?ID=20401830865</a> Чаще всего казино бонус за регистрацию без депо даёт вероятность запустить любой машина. Но чем пристально ознакомиться с условиями. Иногда для игры доступны только определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, другого начать знакомство с миром пыла именно с «одноруких злодеев».Это также безвозмездные деньги, коие поступают на аккаунты новоиспеченных игроков после регистрирования. А необыкновенность таких бонусов произведено в том, собственно обретенные деньги обязательно стопам применять в продолжении назначенного времени. 1×slots официальный сайт скачать <a href=http://zhouyi68.com/home.php?mod=space&uid=793278>http://zhouyi68.com/home.php?mod=space&uid=793278</a> Практически все онлайн казино с бездепозитным призом за регистрацию учитывает программку лояльности — систему одобрения постоянных клиентов, кот-ая состоит из большого значений. При достижении игроком еще значения на его счёт поступает приз. Чем повыше уровень — что, этим щедрее приз.Для получения выигрыша потребуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить определенную сумму, хотя уже из личных средств. Она рассчитывается из совместного объема выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, случае пользователь выиграл 1000 рублей, а множитель составляет х30, вывести деньги возможно несомненно, сделав ставки на 30 000 рублей.
1×slots зеркало регистрация
Используйте наилучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из перечня ниже, дабы заработать презенты за обычные деянья теперь сейчас получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высокой отдачей и быстрыми выводами на электрические кошельки.Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, дабы замечена возможность исключить выигрыш. 1×slots официальный сайт зеркало Объективные – размер бонуса, коэффициент и обстоятельства вейджера, надобность внесения депо для вывода денег;Фриплей-бонусы. Бонусы за безвозмездную игру есть только в неких клубах. Они зачисляются сразу последствии творенья профиля и действуют недолговременное время. Если у вас нет медли потратить свои, они просто закончатся. Что касается медли, как призы действуют в течение одного часа. <a href=https://www.google.com.bo/url?q=https://doctorlazuta.by/>https://www.google.com.bo/url?q=https://doctorlazuta.by/</a> 1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, в не желайте стать жертвой плутов или впустую истратить время; 1× slots casino зеркало Бездепозитные призы за регистрацию в игровых автоматах для хозяев онлайн-казино считаются долею рекламной кампании, направленной на увеличение аудитории сайта. Так они продвигают средства бренды и привлекают новых клиентов.Бонус начисляется игроку сразу последствии регистрации и прохождения верификации в казино и не просит от клиента внесения депозита. Как правило, объем бонуса в схожем случае довольно умеренный, впрочем дозволяет новеньким познакомиться с забавой без риска настоящими деньгами.
1хлот регистрация в 1×slots casino
В интернет-сети постоянно можно найти перечни более известных и гарантированных поощрительных программ от модных онлайн-казино. <a href=https://images.google.la/url?sa=t&url=https://doctorlazuta.by/>https://images.google.la/url?sa=t&url=https://doctorlazuta.by/</a> Все благотворительные бонусы кажутся соблазнительными. Кто же откажется от возможности поиграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далековато не все бездепозитные призы одинаковой презентабельны для рассудительного посетителя. 1×slots зеркало 1хслотс регистрация перейти на 1×slots Также бездепозитные призы имеют служить методом вернуть к ирге клиентов, пока приостановивших своё сотрудничество с фирмой: уведомление о бездепе поступает на мобильный телефон или почту.Самые новые бездепозитные бонусы в казино за регистрацию 2022 года с выводом прибыли присутствуют на этой странице. Посетитель имеет расценить обстоятельства получения и начать играть на средства без внесения депо. При этом игроку принципиально разуметь, на каких критериях и какими способами у исключить приобретенный выигрыш. Для этого необходимо расценить перечень подключенных платежных систем.
1×slots зеркало на сегодня
<a href=https://adler.biz/threads/736/>1×slots официальный сайт скачать</a> Для верификации номера аппарата, в личном профиле выберите опцию „Подтвердить номер телефона“ и введите в отвечающее поле код, полученный в sms-сообщении. Получить Бездепозитный бонус в интернет казино дело 2-ух кликов. Другой момент, отыграть рекламную и соблюсти верховодила и обстоятельства отыгрыша. Под правилами предполагается не только вагер, хотя и ограничения по наибольшей ставке. Мы понимаем, собственно в кинотеатр все ставят на зеро и выигрывают. Призываем не делать сходственного. Перед активацией бонуса прочтите правила. Узнайте последующие факторы: Условия получения презента, за регистрацию, за депозит и прочее. Ограничения по максимальной ставке. Зачастую не повыше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах можно отыгрывать вагер. Можно вращать автоматы, а вагер будет стоять на пространстве. Поэтому принципиально аристократия, в каких играх можно совершать кратность денежного оборота.Обычно, бездепозитные бонусы выдаются под конкретные слоты с фиксированной ставкой, хотя их точно запрещено использовать в игровых автоматах с современным джекпотом. Список игр, в которых возможно использовать бездеп, Вы отыщите в описании промоакции либо сможете уточнить у службы поддержки заведения. 1× slots сайт <a href=http://intextv.by/forum/user/56696/>http://intextv.by/forum/user/56696/</a> Также, ситуации необходимо подтвердить собственный номер аппарата, для этого код, приобретенный в смс-сообщении от клуба установить в особое поле в собственном офисе игрока.
1×slots рабочее зеркало
Процесс подтверждения личности может взятьвдолг(взятьвзаймы) от одного дня до недели. Если заказчик допустил какую ошибку при заполнении паспортных данных, то ему идет адресоваться с задачей в службу поддержки онлайн-казино.Зарегистрируйтесь. Для регистрации почаще всего достаточно установить собственный номер телефонного и почтовый адресок, в чего установить приобретенный код из СМС. Возможно, потребуется указать промокод. В правилах промоакции будет написано, где его бы включать. Иногда это надобно делать при регистрации, иногда — уже в сотворения собственного офиса, на отдельной страничке. <a href=https://clients1.google.com.om/url?q=https://doctorlazuta.by/>https://clients1.google.com.om/url?q=https://doctorlazuta.by/</a> Несмотря на то, что этот вариант стимуляции со стороны азартных платформ очень известен в похожих игр, далеко не почитателям казино известно, собственно являют собой бездепозитные призы казино и как именно их вполне эксплуатировать.Иногда операторы настоятельно внесение малого депозита перед выводом для верификации платежного прибора. В неких казино данный депозит кроме предстоит отыграть. 1×slots casino зеркало рабочее В зависимости от онлайн заведения каждый из них может для предложить как бездепозитные деньги, так и бездепозитные фриспины, коие после успешной регистрации упадут для на ваш игровой баланс.B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.spherecommunity.net/User-Jamesmew>1× slots регистрация в 1×slots casino</a>
<a href=http://www.ihavethepussy.com/de/threads/194296–1×slots-casino-%D0%A0%C2%B7%D0%A0%C2%B5%D0%A1%D0%82%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%BB%D0%A0%D1%95?p=211830#post211830>1×slots casino зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Постарайтесь отыграть вейджер, чтобы замечена вероятность оставить заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электронной кошелёк, карту, телефон. Во время забавы в казино, выигрыши, полученные благодаря безвозмездным призовым фондам, суммируются и срабатывают в совместную необходимую для отыгрывания. Однако, случае фортуна улыбнется и получится отыграть все призы, игровое заведение гарантированно разрешит исключить денежные средства. Сумма вывода несомненно находиться от лимита, утвержденного именно в данном учреждении. Поэтому, пристально нужно разбирать верховодила выдачи анлимитных депозитов.
#6005 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet официальный 1×bet xyz букмекерская контора леонов <a href=https://rucriminal.info/>casino вход</a> online casino официальный Крючкова Полина Викторовна порно <a href=https://rucriminal.info/>ставки на спорт букмекерские конторы</a> casinos xyz 1×bet официальный слоты porno Александра Степанова, фигуристка демо казино как выиграть в казино 1×bet скачать приложение на андроид букмекерская контора фонбет официальный
#6006 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино порно с Голикова Татьяна Алексеевна <a href=https://www.ossetia.tv/>1×bet зеркало xbet</a> казино пин pin up букмекерская контора <a href=https://res-publika.com>порно с Зырянова Анастасия Владимировна</a> порно с Арина и Дина Аверины, гимнастки вывод казино казино в россии porno Алена Косторная (фигурное катание) порно с Илюшникова Татьяна Александровна винлайн букмекерская контора официальный 1×bet на сегодня
#6007 Charlesgunnyhttp://filmkachat.ru
1хслотс 1хслотс регистрация перейти на 1×slots
При забаве на бонусные средства запрещается играть в игровые автоматы с прогрессивным джекпотом и забавы из радела live casino. Кроме такого, некоторые казино дают бездеп на раз или некоторое определенных слотов, и в иных забавах Вы не можете на их выступать.Одним из поводов отдавать привилегию одному либо другому заведению содержится в привлекательности предлагаемых акций и бесплатных предложений. Безвозмездные фриспины, выдаваемые без нужды создавать какой-нибудь лепта, в перечне находится далеко не в конце. <a href=http://filmkachat.ru/>1×slots casino зеркало рабочее</a> Более солидные предложения встречаются очень редко. Зачастую они доступны только VIP-игрокам. В остальных случаях им всего сопутствуют очень строгие обстоятельства отыгрыша. Также вероятны вспомогательные условия и ограничения, прописанные в условиях и положения бонусной программы казино.Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают приз по странам. Вплоть до такого, что клуб возможность брать игроков из Вашей государства, а бездеп мешает. <a href=https://www.cyberlord.at/forum/?id=1&thread=19231>https://www.cyberlord.at/forum/?id=1&thread=19231</a> Помните, собственно в неких играх сумма ставки идет в зачет вейджера только отчасти. Так, в настольных и карточных забавах лишь от 5% до 50% суммы ставки числятся как отыгранные средства, момент как в слотах идет в зачет все 100% суммы. 1×slots зеркало регистрация <a href=https://www.hubtamil.com/talk/member.php?1639242-JosephCresk>https://www.hubtamil.com/talk/member.php?1639242-JosephCresk</a> Рассмотрим принцип его деянья на образце. Допустим, вы зарегались и получили $10 no deposit bonus с вейджером х50. Это значит, что выигранные деньги возможно несомненно выводить не ранее, чем после такого, как общая сумма ставок достигнет $500.Прежде всего, не запамятовывайте регулярно заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом рассматривают наиболее занимательные предложения водящих игорных порталов.
1×slots регистрацию более популярный вариант это
Доступность — бездепозитные бонусы в казино чаще всего предоставляются новым игрокам, хотя бывают случаи, когда приз все получить и действующие посетители. <a href=http://board.eternityrpc.com/member.php?action=profile&uid=369>1хслот зеркало сайта</a> 1×slots промокод при регистрации 2025 <a href=http://old.clientbase.ru/forum/index.php?showuser=23660>http://old.clientbase.ru/forum/index.php?showuser=23660</a> Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, the decision зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.Приветственный бездеп предоставляется хоть игроку только один раз. Казино борются с например нарекаемыми бонусхантерами (от англ. Bonus Hunter — доброволец за бонусами), пытающимися заводить многочисленные аккаунты для надувательства оператора и повторного получения дара. Исключить сходственные действия позволяет верификация данных. Администрация вправе потребовать у посетителя подтвердить персональные данные, указанные при регистрации. 1×slots регистрацию более популярный вариант это В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с даровых вращений. Прибыль, коию Вы заработаете на этом бездепе возможно назначать на вывод без какого или отыгрыша.Не стоит незамедлительно же отрицаться от приветственных подарков в похожих казино. Администрация готова начислить средства либо фриспины, но предварительно работники должны убедиться, собственно вы не аферист. Дело сомнений, собственно развелось слишком количество охотников за бонусами. Они научились накалывать систему и наваривать крупные суммы денег.
1×slots казино мобильная версия
Возможность протестировать свежие забавы, не рискуя личностными своими и создать личную тактику забавы. <a href=http://forum.americandream.de/memberlist.php?mode=viewprofile&u=10715>http://forum.americandream.de/memberlist.php?mode=viewprofile&u=10715</a> 1×slots быструю регистрацию а также мгновенное
1хслот зеркало
Акции распространяются как на все забавы казино, например и на ограниченный список. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и другие. Промо может охватывать разработки одного производителя. Бездеп не пересекается с другими промоакциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, сделанные бонусными средствами. Для идентификации платежных реквизитов игрока имеет потребоваться пополнение счета на минимальную необходимую.Срок отыгрыша — это этап, который начинается в момент активации бонуса и кончается с его закрытием. Пользователю нужно уложиться в данный временной промежуток, иначе призовые свои аннулируются. Казино устанавливают список игр, ставки каких засчитываются при расчете отыгранных денег. Если тайтл не входит в этот перечень, то он может быть недосегаем для загрузки период деянья бонусного предложения. Процесс доказательства личности имеет взятьвдолг(взятьвзаймы) от 1-го дня до недели. Если заказчик разрешил какую-либо оплошность при заполнении паспортных данных, то ему по адресоваться с проблемой в саппорта онлайн-казино.Бездепозитные бонусы в казино без пополнения 2022 — это определенная сумма средств или free spins вращения, которые предоставляются первым постояльцам за регистрацию на веб-сайте казино вид бездепозитного приза, и выделяет для возможность за счет казино без пополнения опробовать предложения (игр), с последующей прерогативой вывода средств при исполнении всех установленных верховодил. При забаве на бонусные свои запрещается выступать в игровые автоматы с современным джекпотом и игры из радела live casino. Кроме такого, кое-какие казино выделяют бездеп на один или несколько конкретных слотов, и в иных забавах Вы не сможете на их выступать.В большинстве заведений устроить это возможно по e-mal, по номеру аппарата, через социальную сеть либо гугл-аккаунт. 1×slots регистрация на официальном сайте <a href=http://www.mybaltika.info/ru/blogs/587/9775/>http://www.mybaltika.info/ru/blogs/587/9775/</a>
1×slots зеркало которую указывали при регистрации кстати
Наши эксперты изучают условия акции, этого в ручном режиме проверку их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие характеристики. Мы не рекламируем казино, а даем игрокам информацию о превосходнейших из них.Обычно, бездепозитные призы выдаются под конкретные слоты с фиксированной ставкой, хотя их точно воспрещено применять в игровых автоматах с современным джекпотом. Список игр, каких возможно применять бездеп, Вы найдете в описании акции либо можете уточнить у саппорта заведения. Чтобы получить возможность исключить выгода с бездепозитного бонуса в казино, необходимо выполнить ряд условий: <a href=http://96bbs.com/home.php?mod=space&uid=542940&do=profile&from=space>http://96bbs.com/home.php?mod=space&uid=542940&do=profile&from=space</a> 3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефон или почту, указать индивидуальную информацию;Бонус начисляется игроку сразу последствии регистрации и прохождения верификации в казино и не просит от посетителя внесения депозита. Как верховодило, размер бонуса в подобном случае довольно стыдливый, впрочем позволяет новеньким познакомиться с забавой без риска реальными деньгами. 1×slots зеркало регистрация Сразу после активации промокода можно пользоваться даром. Как уже упоминалось, призы бывают трёх обликов – фриспины, кредиты и фриплей-бонусы.
<b>Смотреть еще похожие новости:</b>
<a href=https://redfist.de/RF-Online-Testforum/viewtopic.php?f=105&t=80868>1хслот 1хслотс регистрация перейти на 1×slots</a>
<a href=https://adler.biz/threads/1213/>1×slots зеркало сайта</a>
<a href=https://forum.vn.ua/showthread.php?p=3272366#post3272366>1×slots мобильная версия войти казино</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Новички не любят сразу же вносить депо. Это обосновано неименьем навыка и сомненьем. К счастью, в наше время можно получить бездепозитный приз за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В всяком случае вы не рискуете собственными сбережениями. Это отличная вероятность запустить понравившийся видео разъем либо же испытывать удачу в настольных забавах. Вейджер (wager) – это коэффициент, который демонстрирует на какую необходимую необходимо сделать ставок, чтобы исключить бонус из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего приза, Вам нужно устроить ставок на необходимую: 500*70=3500 руб. Только полностью отыграв бонус, Вы сможете вывести свой выигрыш.
#6008 Furnitura_adSthttps://furnituradlyaplintusamsk.ru/
Широкий выбор фурнитуры для плинтуса, подберите под свой интерьер вариант. Качественная фурнитура для плинтуса, долговечные и надежные в использовании. Простота установки элементов плинтуса, сэкономьте время и силы. Тренды в дизайне фурнитуры для плинтуса, подчеркните стиль своего интерьера. Природные решения для отделки плинтуса, сделайте свой дом более безопасным для здоровья. Тренды в оттенках для декора плинтуса, создайте гармонию в доме. Оригинальные решения для отделки плинтуса, сделайте свой дом неповторимым. Советы по выбору фурнитуры для плинтуса, для долгосрочного использования. Декоративные элементы для фурнитуры плинтуса, создайте уютный и стильный дом. Изысканные решения для отделки плинтуса, сделайте свой дом роскошным и элегантным. плинтуса купить москва <a href=https://furnituradlyaplintusamsk.ru/>плинтуса купить москва</a> .
#6009 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
сайт pin up casino Любимова Ольга Борисовна порно <a href=https://repost.news/>online casino 7k</a> ограбление казино 1×bet сейчас <a href=https://7club7.com/>1×bet слоты 1×bet xyz</a> ешь казино лучшие казино бесплатно porno Юлия Канакина online casino 7k 1×bet 1 порно с Константин Тюкавин (футбол) retro casino
#6010 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало
Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? <a href=http://filmkachat.ru/>1×slots регистрация на сайте</a> Чем ниже значение вейджера, тем проще отыграть и вывести приз. Если Вы расчитываете заработать на бездепе, а не просто ознакомиться с новым игровым клубом, то стоит избегать бонусов с высочайшим вейджером их почти не реально отыграть. С ними Вы сможете только протестировать забавы заведения. <a href=https://www.palscity.com/forums/thread/2009/>https://www.palscity.com/forums/thread/2009/</a> 1×slos регистрация в 1×slots casino <a href=http://doctor54.ru/user-2573.html>http://doctor54.ru/user-2573.html</a> Прочитайте управляла бонусной программы, какой хотите принять. Да, мы настойчиво рекомендуем сделать это до регистрации.Диапазон ставок, которые вправе устроить игрок, того лимитирован. Обычно назначать возможно маленькую необходимую — около 10–30 рублей за одно вращение.
1×slots рабочее зеркало на сегодня
Шаг 5. Использование и отыгрыш. Бездеп обязан быть использован в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера.Вейджер в переводе с английского значит «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша приобретенного приза, в нашем случае бездепозитного. Число ставок роли не играет — принципиально только набрать необходимую, пропорциональную сумме поощрения. <a href=https://forum.pmpobc.ca/index.php?topic=147784.new#new>1×slots зеркало рабочее</a> 1×slot регистрация Чтоб получить большой выигрыш, выбирайте игровые автоматы с максимальным процентом отдачи (RTP) из перечня тех, которые доступны по условиям отыгрыша. <a href=http://link.ac/humor/user/Stevengauby/>http://link.ac/humor/user/Stevengauby/</a> Казино выделяет возможность заработать и исключить настоящие средства на бездепозитных бонусах. Обычно, это незначительная сумма, коию казино возможность для разрешить презентовать игроку.Фриплей-бонусы. Бонусы за благотворительную забаву есть только в неких клубах. Они зачисляются сразу последствии сотворения профиля и срабатывают недолговременное время. Если у вас нет времени израсходовать свои, они просто завершатся. Что касается медли, как бонусы действуют в течение одного часа. 1×slot зеркало рабочее этих способов предполагает регистрацию
1×slots зеркало подтвердит вашу регистрацию если говорить
Бездепы шансы заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой либо баллами. <a href=http://ask39.ru/index.php?subaction=userinfo&user=flippantinvasio>http://ask39.ru/index.php?subaction=userinfo&user=flippantinvasio</a> Прежде всего, не запамятовывайте регулярно заглядывать на страничку обзоров бездепозитных призов. Они шаг за шагом оценивают наиболее занимательные предложения ведущих игорных порталов. 1×slots зеркало регистрация то дальше необходимо пройти
1 хслот регистрация в 1×slots casino
К примеру, игроку выдаются бесплатные средства в заведении в объеме пятидесяти либо ста долларов (вейджер на которые составляет 100х). То есть, каждому новоприбывшему геймеру выскакивает привлекающая иллюстрация, кот-ая обещает выплату всех зачисленных компанией средств. Не стоит внимания на казино приз за регистрацию без депозита с слишком великой либо очень маленькой суммой бонусов, потому что, числе тщательно выучив все условия, здесь всего, несомненно некий подвох.Подобные бонусы без депо предоставляются на более выгодных критериях. Зачастую они крупнее, а обстоятельства отыгрыша наименее строгие. Бонус с зачислением денег на счет выделяет больше свободы деяний. Пользователь сам подбирает, каким образом воспользоваться подаренными своими. Здесь также шансы действовать лимитирования на перечень доступных игр, но обычно эти рамки не например строги, как в промо с бесплатными вращениями.У нас на сайте Вы отыщите перечень бонусов без депо в проверенных казино и доскональную информацию про как их получить и использовать. 1×slots на любой вкус как пройти регистрацию <a href=http://shop.ororo.co.kr/bbs/board.php?bo_table=free&wr_id=470816>http://shop.ororo.co.kr/bbs/board.php?bo_table=free&wr_id=470816</a>
1 x slots
<a href=https://play.ntop.tv/user/Ashleyamous/>https://play.ntop.tv/user/Ashleyamous/</a> 1×slot рабочее зеркало Бездепозитный бонус казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби избранного заведения, определится в выборе игр и проверить качество работы саппорта. Довольно часто, начиная игровой процесс, игрок уже не желает останавливаться и проделывает настоящий лепта. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать даром вполне как раз таки с бонусом за регистрацию без надобности заносить депо.Также, в необходимо подтвердить свой номер телефонного, желаемого код, полученный в смс-сообщении от клуба установить в особое фон в собственном кабинете игрока.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.spherecommunity.net/User-Jamesmew>1×слотс казино</a>
<a href=http://31057.ww.w.molifan.net/space-uid-2304539.html>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Максимальный объем ставки, который нельзя превышать пока бонус не несомненно полностью отыгран. В случае нарушения этого правила, приз и выигрыш с него будут аннулированы. Бездепозитные призы истинными деньгами, которые возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадались.
#6011 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casinos winning фреш казино <a href=https://res-publika.com>r7 casino</a> кент казино Фастова Елена Владимировна порно <a href=https://rumafia.news/>официальные букмекерские конторы скачать</a> Яровая Ирина Анатольевна порно pin up casino зеркало казино смотреть онлайн бесплатно 1×bet приложение 1×bet зеркало слоты Яровая Ирина Анатольевна порно казино пин
#6012 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slotscasino09k online
Риск-игра по одинаковым шансам – Также казино возможность запрещать выполнять обстоятельства по отыгрышу счет раунда на удвоение, кот-ый предлагается в слотах, видео-покере и некоторых других забавах.Если вы выбрали себе количество брендов коие вам больше всего полюбились, для неизменной забавы! Таких гемблеров казино довольно предпочитает и оценивает, за частую такие игроки становятся VIP игроками заведения, которым часто поступают выгодные предложения вид призов, так же туда заходит и бездепозитные. <a href=http://filmkachat.ru/>1×slots зеркало рабочее</a> Размер ставки для забавы по бездепозитному призу (окончательно же, в случае, когда он представлен в виде бонусных валютных средств) часто ниже, чем при забаве на депо. Ограничение несомненно действовать до этапа отыгрыша приза.У каждого игорного клубы разные вейджеровые обстоятельства. Чтобы вы гарантировано сумели выполнить их, мы дадим количество советов. Если система начислила маленькую необходимую, не стоит создавать великие ставки – остановитесь на 10–30 центах. Как только сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте играть. В противном случае другого, как приглядеться к другому автомату. <a href=https://xequte.com/forum/topic.asp?TOPIC_ID=15273>https://xequte.com/forum/topic.asp?TOPIC_ID=15273</a> 1хслотс рабочее зеркало <a href=http://tools.co.ua/wr_board/tools.php?event=profile&pname=expensivereclus>http://tools.co.ua/wr_board/tools.php?event=profile&pname=expensivereclus</a> Казино выделяет возможность заработать и исключить настоящие средства на бездепозитных призах. Обычно, это незначительная сумма, коию казино возможность себе разрешить презентовать игроку.
1×slots актуальное зеркало
1×slots зеркало регистрация При пользовании бездепозитным бонусом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют количество видов лимитов:Получив собственный подарок, Вы сможете бесплатно выступать на реальные деньги, а выполнив условия отыгрыша, исключить собственный выигрыш. <a href=http://r66227en.beget.tech/user/RalphTrasy/>http://r66227en.beget.tech/user/RalphTrasy/</a> На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не сможете активировать и получить бездепозитный приз. казино 1×slots Даже не выиграв солидную сумму, игрок интересно проведет время, изнутри изучит работу площадки, воспримет геймплей автоматов. Все это без каких-то финансовых рисков. Быть в курсе наихороших акций легко. Достаточно периодически учить список новых интернет казино с выводом приза без депозита в данном разделе.Чаще всего используются коды. Их нужно заносить в особые окна регистрационной анкеты, если идет о пригласительных бонусах, или в определенном разделе личного офиса игрока.
1× slots casino официальный сайт
<a href=http://steeldirectory.homedirectory.biz/details.php?id=302240>http://steeldirectory.homedirectory.biz/details.php?id=302240</a> Эффективность бездепов виде маркетингового инструмента оценили многие операторы. Малоизвестные площадки используют такие промоакции, дабы живо набрать базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны постоянных посетителей. Не все сайты, дающие подарки без депозита, рекомендованы к этой. За привлекательным промоописанием имеют скрываться неосуществимые обстоятельства отыгрыша и другие подводные камешки. 1×slots зеркало сайта Свежий бонус начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в использовании своими, ну случае отыгрыша оператор возможность установить ограничение на вывод средств.
1×slots регистрацию более популярный вариант это
Для всех бездепозитных бонусов функционирует наибольший предел на выигрыш. Он указывает максимальную сумму, которую у получить, играя на бонусные кредиты. Как лишь для удастся выполнить притязания вейджера, допустимый максимум несомненно переведен с бонусного счета на ведущей, а остаток несомненно списан.Вознаграждения за получение VIP-статуса ? начисляются в рамках программки преданности при достижении одного значения либо выдаются индивидуально менеджерами службы поддержки. Подтвердите личность, предоставив оператору казино средства паспортные данные. Инструкции обычно легкие, главное — конкретно им стопам. Если написано, собственно «на фото обязаны быть заметны все хорошо угла страницы паспорта» — устройте непосредственно такое фото.А ознакомиться с новыми онлайн казино, Вы можете с призов с выводом прибыли, которые Вы можете получить без депозита. 1×slots рабочее зеркало на сегодня <a href=https://historydb.date/wiki/Pharmacy_Under_Green>https://historydb.date/wiki/Pharmacy_Under_Green</a>
1×slots зеркало выигрыши обязательно пройдите регистрацию если
<a href=http://mail.unnewsusa.com/bbs/board.php?bo_table=free&wr_id=1104297>http://mail.unnewsusa.com/bbs/board.php?bo_table=free&wr_id=1104297</a> 1×slots официальный сайт скачать
<b>Смотреть еще похожие новости:</b>
<a href=https://koreanstudies.com/forum/viewtopic.php?t=119789>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1065#post-33714>1хслотс официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Этот образ приза будет добавлен на Ваш аккаунт последствии успешной процедуры регистрации с использованием номера телефонного. Если выбрать другой способ создания учетной записи, бездеп не несомненно добавлен на Ваш акк. Какие призы меня еще получить кроме бездепозитного приза за регистрацию в казино? По мимо бездепозитного приза, любое онлайн казино предлагает игрокам выгодное предложение на 1-ый депозит, вы совершаете депо, ваш депозит возрастает в двое или том в трое, тем самым начать играть можно с более солидной суммой, например же не запамятываем про вейджер на призы.
#6013 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино играть казино <a href=https://res-publika.com>букмекерская контора</a> Окладникова Ирина Андреевна порно up casino зеркало <a href=https://www.ossetia.tv/>casino betting</a> казино фильм 1×bet рабочее casino регистрации pin ап casino porno Яна Троянова casino андроид vodka casino
#6014 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало
Поспешите отобрать бездепозитные бонусы за регистрацию в казино из представленного перечня. Все платформы столько ведут легальную деятельность, но и обрадуют добросовестными результатами игры, высочайшей отдачей, быстрыми выплатами.Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные способы и расценить особенности, труднодоступные при ирге в демо режиме. Многие новые посетители переходят в количество неизменных, а оператор получает длительную выгода. <a href=http://filmkachat.ru/>1хслот зеркало</a> Прежде чем активировать бездеп, необходимо убедиться что, собственно страна, гражданином которой считается игрок, не заходит в список запрещенных.В бонусную программу множества операторов входят регулярные бездепы. Это пожизненные акции, поощряющие интенсивных постоянных игроков. Популярный формат — раздача фриспинов по конкретным денькам недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депо в обмен на скопленные баллы лояльности. <a href=https://peertrainer.com/LoungeCommunityThread.aspx?ForumID=1&ThreadID=316720>https://peertrainer.com/LoungeCommunityThread.aspx?ForumID=1&ThreadID=316720</a> 2. Создать свежий профиль. Для регистрации нужно заполнить маленькую анкету либо зайдите в личный офис посредством социальных сетей; 1×slots регистрация то дальше необходимо пройти <a href=http://seongwoneng.com/bbs/board.php?bo_table=31&wr_id=147225>http://seongwoneng.com/bbs/board.php?bo_table=31&wr_id=147225</a>
1×slots зеркало на сегодня
Для отыгрыша бонуса казино обязывает игрока сыграть на сумму, в некоторое один превосходящую необходимую приобретенного приза — тут выгода компании очевидна. 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=https://myworldgo.com/blog/116457/znachenie-referata-dlya-aspirantury>https://myworldgo.com/blog/116457/znachenie-referata-dlya-aspirantury</a> 1×slots регистрация на 1хслотс
1хслотс мобильная версия зеркало
Срок отыгрыша — это период, который наступает в момент активации бонуса и завершается с его закрытием. Пользователю нужно уложиться в данный временной промежуток, иначе призовые свои аннулируются. Казино устанавливают список игр, ставки в которых засчитываются при расчете отыгранных денег. Если тайтл не входит в данный список, то предоставляется быть недоступен для загрузки период деяния бонусного предложения. <a href=http://www.kaseisyoji.com/home.php?mod=space&uid=482283>http://www.kaseisyoji.com/home.php?mod=space&uid=482283</a> 1×slots регистрация 1×slotscasino09k online Первый образующийся вопрос, это, для выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают новых игроков. Последним проще начать забаву на средства с презента за регистрацию. Им не нужно пополнять баланс и расходовать личные средства. Новички получают бесплатные спины или свои на счёт. С их помощью знакомятся с игровым процессом, крутят слоты и проделывают ставки в рулетке.
казино 1× slots официальный сайт
Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 $. Если выдаются фриспины, их количество изредка выше нескольких 10-ов даровых вращений. Осталось избрать казино с бонусом за регистрацию и создать профиль. После активации подарка выигрыш зависит от Фортуны и способностей. Обычно, бездепозитные бонусы выдаются под определенные слоты с фиксированной ставкой, хотя их наверняка запрещено использовать в игровых автоматах с современным джекпотом. Список игр, каких можно использовать бездеп, Вы отыщите в описании акции или сможете уточнить у службы заведения. 1×slots официальный demo регистрация в 1×slots casino <a href=http://x70181pe.beget.tech/user/JaspervaK/>http://x70181pe.beget.tech/user/JaspervaK/</a> Классическая разновидность бонуса за творенье аккаунта. Его преимущество заключается что, нет, что клиент возможность без избирать аппараты и создавать ставки в их. Иногда список игровых автоматов ограничен оператором, хотя все одинаково это превосходнее, чем единственный доступный слот, как в случае с внедрением фриспинов.Бонус без депозита за регистрацию в казино (бездепозитный приз) – это валютный презент от клуба, кот-ый начисляется на аккаунт игрока после регистрации в казино. Кроме творенья учетной записи, для получения бездепа, довольно часто требуется ещё и подтвердить контактные данные игрока и/или активировать особый промо-код.
1хслотс зеркало
Бездепозитный приз за регистрацию в казино — это стартовый подарок вид денежного начисления или бесплатных вращений для новых игроков заведения, для получения которого не нужно вносить депозит. <a href=https://fakenews.win/index.php?title=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D0%B5%D0%B9%D1%88%D0%B8%D0%B5%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!>https://fakenews.win/index.php?title=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D0%B5%D0%B9%D1%88%D0%B8%D0%B5%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!</a> 1×slots зеркало выигрыши обязательно пройдите регистрацию если К раскаянью, нет. Почти все казино, просят внесение желая бы одного малого депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, собственно исключить средства разрешается лишь на что, эту платежную систему, с которой был изготовлен депозит.Отказ в прохождении верификации. Если клиент не хочет либо возможности дать документы, подтверждающие его лицо, профиль будет заблокирован вместе со всеми бонусными начислениями.
<b>Смотреть еще похожие новости:</b>
<a href=https://rf-lowrate.ru/index.php?/profile/6447-jamesmom/>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a>
<a href=http://griffhunter.com/boards/viewtopic.php?p=488880#p488880>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Некоторые казино могут предлагать клиентам бездепы за подтверждение номера или почты либо репост на страницу в соц сетях. Бонус без депозита за регистрацию в казино (бездепозитный приз) – это валютный подарок от клуба, который начисляется на аккаунт игрока последствии регистрации в казино. Кроме творенья учетной записи, для получения бездепа, довольно часто потребуется ещё и доказать контактные данные игрока и/или активировать особый промо-код.
#6015 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора официальный сайт порно с Елена Никитина, скелетонистка <a href=https://krtka.info/>online casino</a> Комарова Наталья Владимировна порно сайт казино зеркало <a href=https://www.ossetia.tv/>порно с Матвей Сафонов (футбол)</a> суть казино почему казино скачать 1×bet на андроид бесплатно сайт казино вход black russia казино как выиграть в казино porno Игорь Акинфеев (футбол)
#6016 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация
Для казино, работающих онлайн, бездепозитные призы необходимы для вербования свежих клиентов. Предложение сыграть на слотах без необходимости внесения реальных средств — работающий способ для повышения интереса к компании. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит играть в казино, только сейчас уже на личные деньги. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots casino 777 online</a> <a href=https://www.cyberlord.at/forum/?id=1&thread=19231>https://www.cyberlord.at/forum/?id=1&thread=19231</a> Нет. Казино выдают благотворительные бонусы за регистрацию, чтобы, чтобы, дабы клиент мог ознакомиться с игровым заведением. А дабы исключить его, нужно выполнить условия отыгрыша.Для верификации номера аппарата, в личном профиле выберите опцию „Подтвердить номер телефона“ и введите в отвечающее поле код, полученный в sms-сообщении. 1× слот зеркало <a href=https://bbs.zzxfsd.com/forum.php?mod=viewthread&tid=494793>https://bbs.zzxfsd.com/forum.php?mod=viewthread&tid=494793</a> Похожим образом трудится 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя либо из-за с получения им VIP-статуса. Подарок предоставляется последствии обращения в поддержку и ревизии.При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие можно посвятить забаве в казино.
1×slots бездепозитный бонус за регистрацию
<a href=https://thetechmodders.com/forums/memberlist.php?mode=viewprofile&u=945&sid=6085731f6e1715be9037371834960254>1×slots официальный зеркало рабочее</a> скачать 1×slots на андроид мобильная версия <a href=http://crtdu-kras.ru/communication/forum/user/209563/>http://crtdu-kras.ru/communication/forum/user/209563/</a> Помните, собственно любые нарушения управлял сведут на нет ваши старания, и вы всего останетесь без начисленного для дарового бонуса. Всегда изучайте верховодила начисления и условия вейджера. По хоть вопросам, на которые вы не других найти ответы, обращайтесь за объясненьям и саппорт. 1×slots официальный demo регистрация в 1×slots casino Лишь популярностью и известные азартные заведения шансы разрешить себя раздавать бездепы вид дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депо, коие возможно израсходовать в лучших аппаратах с высочайшей отдачей.Некоторые онлайн-казино без депо предлагают новым посетителям выбрать приз при регистрации. Будьте внимательны: выбрав раз, вы в абсолютном большинстве случаев не можете воспользоваться остальными.
1×slots официальный регистрация
Для всех бездепозитных призов действует наибольший предел на выигрыш. Он показывает максимальную сумму, коию появится получить, играя на бонусные кредиты. Как только вас удастся выполнить требования вейджера, возможный максимум несомненно переведен с бонусного счета на главный, а остаток несомненно списан. <a href=https://www.globalvision2000.com/forum/member.php?action=profile&uid=1059669>https://www.globalvision2000.com/forum/member.php?action=profile&uid=1059669</a> Да, у даровых призов есть дефекты. Прежде всего, они обычно небольшие. Кроме того, условия вейджера по ним всегда строгие. Но таки недоступность риска проделывает их очень красивыми для посетителей.Вы не в коем случае ни чем не рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный приз, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс изучить игровые автоматы, научится регулировать менять ставки и полосы, изучать бонусные забавы и их выигрышные композиции, ну в конце концов просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные средства, которые возможно отыграть и исключить, но просто на демо счет, что, этим самым адреналин в крови более повысится а пульс забьется с частым ритмом! 1×slots casino регистрация 1×slots review live Основное верховодило получения бездепа ? творимый аккаунт обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов взыскательно воспрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита необходимо соблюдать простую последовательность поступков.Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную процедуру активации приза без депо. Внимательно прочитайте до конца. Многие новенькие делают ошибки на этапе регистрации и поэтому не получить презент.
1×slots зеркало которую указывали при регистрации кстати
Как только вы отыграли вейджер и свои с бонусного баланса перешли вам на настоящий счет, Вы смело можете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (сделать минимальный депозит к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депо). <a href=https://www.mshowto.org/forum/members/jamespauri.html>1×slots быструю регистрацию а также мгновенное</a> Выбирая безвозмездный бонус, внимательно изучайте верховодила. Убедитесь, собственно вас можно брать участие в акции. Уточните, в каких забавах можно исполнять обстоятельства вейджера. При необходимости задавайте вопросы адептам саппорта. Казино выводит деньги только на что, эту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного приза, Вам сначала нужно пополнить счет. В некоторых клубах узкий перечень методов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет именно с данных платежных способов, коие доступны для вывода. 1хслотс рабочее зеркало <a href=http://forum.foonyew.org/home.php?mod=space&uid=155815>http://forum.foonyew.org/home.php?mod=space&uid=155815</a>
1×slots casino зеркало
Чтобы выступать даром на настоящие деньги в казино, порой довольно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные деяния.Таким образом, заведение пытается продемонстрировать себя своим потенциальным геймерам, а подобный маркетинговый ход как казино бонус без депо за регистрацию привлекает довольно количество внимания к игорному заведению и обеспечивает неизменный поток новых гостей и грядущих клиентов игрового интернет клуба. <a href=http://www.pk10zc.com/space-uid-353403.html>http://www.pk10zc.com/space-uid-353403.html</a> Теоретически, к безвозмездным бонусам возможно отнести например нарекаемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, поэтому собственно они предоставляют только возможность создавать ставки. 1×slots регистрация на официальном сайте
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.cvetq.info/viewtopic.php?f=8&t=265061>1×slots регистрацию процедура займет всего лишь</a>
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=773956>1хслот скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Внесение депо – Будьте готовы пополнить счет после отыгрыша бонуса. Это обычное заявка верховодил для данного подобии промо-акций. Лучше заранее уточнить, какую сумму надо(надобно) будет заносить на счет. Как правило, идет о минимальном депозите, хотя вы должны быть убеждены, собственно он вас по карману.
#6017 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
слоты казино Чулпан Хаматова <a href=https://strelochnik.com/>порно с Анна Щербакова, фигуристка</a> порно с Юлия Ефимова порно с Алина Загитова <a href=https://slon-ru.com/>casino 7k сегодня</a> человек казино казино вход Елизавета Боярская 1×bet официальный Любимова Ольга Борисовна порно porno Мира Андреева (теннис) бывшие казино
#6018 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasino09k online
Приветственный бездеп предоставляется хоть игроку лишь один раз. Казино дерутся с например нарекаемыми бонусхантерами (от англ. Bonus Hunter — доброволец за призами), пытающимися заводить многочисленные аккаунты для надувательства оператора и повторного получения подарка. Исключить сходственные деяния позволяет верификация данных. Администрация вправе востребовать у клиента подтвердить персональные данные, указанные при регистрации. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> <a href=http://www.pvp.iq.pl/thread-5909.html>http://www.pvp.iq.pl/thread-5909.html</a> Мы подготовили перечень, где есть постоянно животрепещущие и новые бездепозитные призы казино, которые продоставляется получить бесплатно. Для наших пользователей есть специальные предложения эксклюзивные бонусы, коие вы нигде не отыщите, их мы обозначили специальной красноватой плашкой «Exclusive». 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=http://www.nretail.co.kr/bbs/board.php?bo_table=free&wr_id=326265>http://www.nretail.co.kr/bbs/board.php?bo_table=free&wr_id=326265</a> Наш перечень содержит лучшие бездепозитные бонусы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по принципиальным параметрам:
1×slots официальный сайт зеркало рабочее
<a href=http://old.pokvesti.ru/forum/memberlist.php?mode=viewprofile&u=3543>1×slots зеркало проходить регистрацию это отличный вариант</a> 1× slots официальный <a href=https://theme.sir.kr/youngcart53/bbs/board.php?bo_table=free&wr_id=290060>https://theme.sir.kr/youngcart53/bbs/board.php?bo_table=free&wr_id=290060</a> 1×slots зеркало быструю регистрацию а также мгновенное Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, чтобы снова получить безвозмездный приз. Игорные заведения нетерпимы к бонус-хантерам, потому вас ожидает неминуемое наказание.Выбирайте наилучшие бесплатные бонусы счет обзоров на Casinoz – и пусть вас сопутствует счастье при отыгрыше бонусных кредитов!
1×slots зеркало регистрацию более популярный вариант это
Популярность онлайн казино растёт и всё больше юзеров начинают интерес азартными играми. Бездепозитные призы 2022 года, это оригинальные презенты за регистрацию. С их помощью свежие игроки шансы получить благотворительные вращения либо средства на баланс за одну регистрацию. С выходом игорных заведений в интернете, бездепозитные бонусы стали известнейшим способом привлечения игроков. Подобные акции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о которых мы расскажем. Наш сайт собрал наилучшие предложения из онлайна на 2022 год. Воспользуйтесь хоть даром и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша нужно выполнить обстоятельства.На критериях отыгрыша даровых бонусов стопам тормознуть подробнее. С ними связаны нюансы, которые невозможно забыть без внимания. <a href=https://eccentrictirade.com/forums/member.php?action=profile&uid=9041>https://eccentrictirade.com/forums/member.php?action=profile&uid=9041</a> В списке притязаний к отыгрышу нередко наличествуют лимиты на ставки при забаве на собственные деньги. Так, если отыграть надо(надобно) 30 000 руб., а предельная сумма ограничена 30 рублями, то вертеть барабаны предстоит 1000 один. Эта необыкновенность затрудняет соблюдение игроками условий по срокам деянья промоакции.Еще одно условие касается объемов ставки. Операторы устанавливают максимальную необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном офисе. При превышении лимита есть риск потерять приза. Существующие лимитирования относятся и к определенным видам ставок. Например, играя в рулетку, клиент может столкнуться с запретом назначать фишки на шансы. 1×slots casino регистрация
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Когда речь идет о получении бездепозитных призов в казино, в первую очередь направьте на последующие условия:Для верификации номера телефонного, в собственном профиле выберите опцию „Подтвердить номер телефонного“ и введите в подходящее поле код, приобретенный в sms-сообщении. Бездепозитный бонус предоставляется новому игроку за конкретные действия. Часто подарок в виде средств или фриспинов выдается за регистрацию, благодаря чему пользователь получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. 1×slots казино зеркало <a href=http://www.handgemaaktplaats.nl/user/profile/75131>http://www.handgemaaktplaats.nl/user/profile/75131</a> Бездепозитные призы начисляются лишь раз раз. Не стоит открывать свежие аккаунты, дабы получить их повторно. Служба защищенности казино непременно выявит «левого» соучастника и перекроет. Если посетитель выполнит нужные притязания, отыграет собственную ставку и решит вывести собственный выигрыш, то ему нужно принять, что казино обязательно потребует дать ксерокопии собственных документов, чтобы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные средства исключить не получится.Онлайн-казино с бездепозитными бонусами ставят клиентам условия для пользования бездепами, потому перед ролью в промоакции никакого тщательно ознакомиться со всеми правилами и аспектами акции. Условия все дотрагиваться получения бонуса, его применения и следующего вывода денежных средств в случае выигрыша.
1×slots на любой вкус как пройти регистрацию
Предложения с бездепозитными бонусами за регистрацию позволяют свежим заведениям привлечь аудиторию на свой сайт. А игроки тому получают возможность играть на настоящие деньги без депозита в казино и заработать малый стартовый капитал, кот-ый разрешено вывести на карту банка либо электрический кошелек.Во всех законных онлайн-казино Беларуси нужно свидетельство паспортных данных для игры — это требование правительства страны. <a href=http://aeawq.ww.w.molifan.net/space-uid-2365497.html>http://aeawq.ww.w.molifan.net/space-uid-2365497.html</a> Онлайн-казино с бездепозитными призами ставят посетителям обстоятельства для использования бездепами, поэтому перед участием в промоакции чем тщательно ознакомиться со всеми правилами и нюансами акции. Условия имеют прикасаться получения бонуса, его использования и последующего вывода валютных средств когда выигрыша.Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? 1×slots актуальное зеркало Бездепозитные бонусы казино это экономическая компенсация, предлагаемая пользователям на дармовой основе и вероятность выступать в онлайн казино бесплатно. Если сопоставлять их с одобрениями за вклад, в которых свои выдаются лишь потом первоначального пополнения счета, то бездепозитные вознаграждения получаются безвозмездно. То есть, играющий получает вероятность создавать ставки на теснее существующие деньги, которые выдаст заведение, исполняя, этом, обычные деяния, дабы их извлечь (здесь идет речь о регистрация, удостоверении личности с использованием номера аппарата, оформления заказы и т.д. ).Если вы новичок в этом деле и только попали в неизведанную вами район азарта — счет предложений как бездепозитные призы без пополнения.
<b>Смотреть еще похожие новости:</b>
<a href=http://complainanything.com/node/158?page=1023#comment-1455361>1×slots зеркало этих способов предполагает регистрацию</a>
<a href=https://forum.bedwantsinfo.nl/thread-685021.html>1×slots официальный сайт зеркало рабочее</a>
<a href=http://forums.indexrise.com/thread-68938-post-332804.html#pid332804>1× slots регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подарки на определенные даты отличаются критериями получения. Если одобрение начисляют игроку на день рождения, то сумма обычно зависит от общего объема депо за прошедший год.
#6019 DavidVef
https://sweetbonanza25.com/ sweet bonanza
#6020 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия скачать
У любого игорного клубы разные вейджеровые обстоятельства. Чтобы вы гарантировано смогли выполнить их, мы дадим количество советов. Если система начислила маленькую сумму, не создавать большие ставки – остановитесь на 10–30 центах. Как только сумеете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте выступать. В противном случае никакого присмотреться к иному автомату.Срок активации и время на отыгрыш. Зачисление средств или фриспинов случается при активации протяжении взыскательно ограниченного периода, подобные требования предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать бонус некоторое дней или и недель. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высоким вейджером. <a href=http://filmkachat.ru/>1хслотс 1хслотс регистрация перейти на 1×slots</a> Бездепозитные бонусы за регистрацию в игровых автоматах для собственников онлайн-казино считаются частью маркетинговой кампании, направленной на увеличение аудитории сайта. Так они продвигают свои бренды и привлекают новых клиентов. <a href=https://noosfero.ufba.br/lexxeagle/blog/professionalniy-vikup-avto-v-kieve-s-chestnoy-otsenkoy-na-meste>https://noosfero.ufba.br/lexxeagle/blog/professionalniy-vikup-avto-v-kieve-s-chestnoy-otsenkoy-na-meste</a> 1хслот 1хслотс регистрация перейти на 1×slots <a href=https://clients1.google.tm/url?q=https://doctorlazuta.by/>https://clients1.google.tm/url?q=https://doctorlazuta.by/</a> Для проверки используются сканы паспортов, водительских водительских, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если пользователь замечен в попытке ввести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный перечень. При этой на лицензионной площадке не стоит бояться свидетельствовать достоверную индивидуальную информацию (шифрование исключает утечку персональных данных).
1×slots casino регистрация 1×slotscasin online
Отказ в прохождении верификации. Если заказчик не желает или возможности дать документы, подтверждающие его личность, профиль несомненно заблокирован вместе со всеми бонусными начислениями. <a href=http://khodaumo.com/forum/memberlist.php?mode=viewprofile&u=146&sid=5b71cebebed17e3e4548e273aebd95dc>1хслот официальный сайт зеркало</a> скачать 1×slots на андроид мобильная версия Выполнив все притязания оператора, клиент возможность оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем не более суток. Если дополнительно требуется пройти процедуру верификации, то срок увеличивается до 1–2 рабочих дней. Для перевода применяются банковские приборы и электрические платежные системы. Второй метод подходит другого, как, например как большинство транзакций в этом случае исполняются моментально. В связи со специфичностью функционирования банков обработка платежей имеет занять до нескольких рабочих дней. <a href=https://sociallist.org/submit.php?url=https%3A%2F%2Fdoctorlazuta.by%2Fblog&title=%D0%B1%D0%BB%D0%BE%D0%B3+%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0&tag=uttercapture33&lang=pt&show_all=1&text=%5Burl%3Dhttps%3A%2F%2Fdoctorlazuta.by%2Fblog%5D%D0%B1%D0%BB%D0%BE%D0%B3+%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0%5B%2Furl%5D+%D0%B1%D0%BB%D0%BE%D0%B3+%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0+%D0%B4%D0%B7%D0%B5%D0%BD+%D1%87%D0%B8%D1%82%D0%B0%D1%82%D1%8C>https://sociallist.org/submit.php?url=https%3A%2F%2Fdoctorlazuta.by%2Fblog&title=%D0%B1%D0%BB%D0%BE%D0%B3+%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0&tag=uttercapture33&lang=pt&show_all=1&text=%5Burl%3Dhttps%3A%2F%2Fdoctorlazuta.by%2Fblog%5D%D0%B1%D0%BB%D0%BE%D0%B3+%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0%5B%2Furl%5D+%D0%B1%D0%BB%D0%BE%D0%B3+%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0+%D0%B4%D0%B7%D0%B5%D0%BD+%D1%87%D0%B8%D1%82%D0%B0%D1%82%D1%8C</a> Сразу в активации промокода можно воспользоваться даром. Как уже упоминалось, бонусы бывают трёх видов – фриспины, кредиты и фриплей-бонусы.Главным моментом в возникновении этих вознаграждений произведено сомнений, что пустив их в ход, игрок ничем не рискует и в последствии никому ничего не несомненно обязан (не зависимо, получит ли он благодаря призам какой-либо выигрыш или мгновенно спустит все только собственно прибывшие финансы). То есть, казино снабжает игрока вероятностью на дармовой основе выступать во различные слоты причем спонсирует забаву. 1×slots сайт С такими простыми советами любое казино с бонусом за регистрацию способно принести в разы больше выгоды и пользы.
1хслотс казино зеркало
В игровых клубах без лицензии Вы покупаете „кота в мешке“ и в случае неоднозначных обстановок нет способности куда-то посетовать и обосновать собственную правоту. Для получения бездепа необходимо пригласить в забаву по реферальной ссылке нового клиента: он обязан зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и восполнить счёт на сумму, указанную в критериях промоакции.Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные способы и расценить особенности, недоступные при этой в демо режиме. Многие новые клиенты переходят в количество постоянных, а оператор получает длительную прибыль. <a href=https://cameradb.review/wiki/User:NellBrummitt38>https://cameradb.review/wiki/User:NellBrummitt38</a> Бывают ли бездепозитные призы без вейджера? Бывают, если у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино. 1×slots рабочее зеркало на сегодня Если идет об неповторимых предложениях, возможность потребоваться регистрация в казино по ссылке с партнерского вебсайта.Бездепы с бесплатными вращениями предоставляют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд уплачивает казино. Число спинов ограничено и изредка выше сотню. Если акция включает в себя количество бесплатных игр, их начисление возможность быть разбито на некоторое дней.
1×slots официальный зеркало
<a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=138756>1×slots регистрация то дальше необходимо пройти</a> Иногда для получения бонусов нужно спутаться с адептами службы. Удобнее всего с ними разговаривать в онлайн-сате, желая времени довольно запроса по электрической почте.Можно. Вы всегда сможете отказаться от получения бездепозитного приза за регистрацию в казино, же Вы не сделаете ставку. 1×slots казино зеркало <a href=http://krovlya.dp.ua/index.php?subaction=userinfo&user=draconianoffice>http://krovlya.dp.ua/index.php?subaction=userinfo&user=draconianoffice</a> Представьте момент, когда при ставке в 10 руб. Вы получите схожее умножение. Миллион рублей за одно вращение, что абсолютно вероятно. Поэтому вопрос, сколько возможно выиграть остаётся закрытым. Предлагаем выяснить других. Регистрируйтесь в одном либо нескольких интернет казино, получайте Бездепозитный бонус и инспектируйте фортуну в деле. Разумеется, исключить деньги довольно. Однако шансы есть у всех.Это также бесплатные финансы, коие поступают на аккаунты новоиспеченных в в регистрирования. А особенность таких призов произведено сомнений, что обретенные деньги непременно следует использовать в продолжении назначенного медли.
1× slots зеркало
Такой бесплатный эквивалент средств зачисляется на профиль пользователя в осуществления притязаний и предназначаются они только для игрового процесса. Вывод этих вознаграждений возможен лишь в воплощения вейджеровых критерий. Принципиальным отличием даровых бонусов от призов на депо считается отсутствие необходимости вносить деньги на аккаунт. Из-за сего их часто нарекают бездепозитными (no deposit bonuses). <a href=http://www.aytastarim.net/user/TravisTat/>http://www.aytastarim.net/user/TravisTat/</a> Чем ниже велечину вейджера, что, этим проще отыграть и исключить бонус. Если Вы расчитываете заработать на бездепе, но просто ознакомиться с новым игровым клубом, то стоит игнорировать призов с высоким вейджером их практически не реально отыграть. С ними Вы сможете только протестировать игры заведения.Доступ к дару имеет раскрываться автоматически последствии введения промокода или воззвания в саппорта сайта. В первом случае от пользователя не потребуется никаких поступков. Бездеп с активацией по коду встречается почаще всего. Игроку нужно ввести совокупность символов в графе, которая может находиться в регистрационной форме в Личном офисе. 1×slots регистрацию процедура займет всего лишь
<b>Смотреть еще похожие новости:</b>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=218764>1×slots регистрация 1×slotscasino09k online</a>
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=43186>1×slots casino зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подтвердите личность, предоставив оператору казино средства паспортные данные. Инструкции обычно легкие, главное — четко им следовать. Если написано, что «на фото должны быть заметны все хорошо угла странички паспорта» — сделайте непосредственно такое фото.
#6021 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Илона Маркова, хоккеистка гама казино <a href=https://rumafia.news/>порно с Илья Осипов (киберспорт)</a> казино регистрации казино проиграл <a href=https://slon-ru.com/>casino скачать</a> почему в казино нет часов 7k casino зеркало рабочее porno Юлия Канакина, скелетонистка casinos winning Черкесова Бэлла Мухарбиевна порно 7k casino сайт порно с Максим Глушенков (футбол)
#6022 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерские конторы бет игры казино <a href=https://t.me/vchkogpu_ru>1×slots casino</a> официальные сайты казино pin up casino top top <a href=https://slon-ru.com/>казино онлайн</a> pin up casino ап казино Анна Михалкова порно с Алина Загитова win win casino букмекерская контора порно с Петр Ян (ММА)
#6023 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало рабочее
Во время забавы в казино, выигрыши, приобретенные спасибо безвозмездным призовым фондам, суммируются и включаются в общую необходимую для отыгрывания. Однако, если фортуна улыбнется и выйдет отыграть все призы, игровое заведение гарантированно разрешит вывести денежные средства. Сумма вывода несомненно находиться от лимита, одобренного именно в данном учреждении. Поэтому, пристально нужно читать верховодила выдачи безлимитных депо. <a href=http://filmkachat.ru/>1×slots регистрация на сайте</a> Прибывшие на акк финансы бездепозитные призы предназначаются, в, только для свежеиспеченных юзеров, коие ранее не имели собственного аккаунта в данном казино. Исходя из этого, случае раньше у игрока был сделан депозит, то, по всей вероятности, у него больше не будет способности рассчитывать на получение такового приза в определенном заведении. <a href=https://jsfiddle.net/bwzg8ysc/>https://jsfiddle.net/bwzg8ysc/</a> B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. 1× slots официальный <a href=https://pwonline.ru/forums/fredirect.php?url=tupalo.com/en/users/7937703>https://pwonline.ru/forums/fredirect.php?url=tupalo.com/en/users/7937703</a>
1×slots casino регистрация на сайте
Так собственно основное различие презента на депозит от бездепа – неотъемлемое пополнение счёта. Вы сможете внести депозит и преувеличить стартовый капитал либо арестовать бездеп и при не придётся рисковать собственными сбережениями. Поспешите выполнить простые притязания, и администрация ресурса начислит щедрое поощрение! <a href=https://australianwinerytours.com/tours/showthread.php?tid=214946>1×slots актуальное зеркало</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots Мы собрали и опубликовали перечень наихороших бездепозитных казино с бонусами за регистрацию, которые гарантируют великодушные выигрыши и моментальные выплаты. <a href=http://users.atw.hu/adf/profile.php?mode=viewprofile&u=11605>http://users.atw.hu/adf/profile.php?mode=viewprofile&u=11605</a> 1×slots зеркало выигрыши обязательно пройдите регистрацию если Начнём с как, что любое промо за регистрацию подразумевает некоторые условия. Бездепозитные бонусы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, нужная для исполнения критерий. Пример, получили безвозмездные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 руб., неудачных или выигрышных, неважно. После выполнения, бонусный баланс перейдёт на настоящий и будет легкодоступным к выводу.
1× slots зеркало
Выбрать казино с бездепозитным бонусом. У нас на сайте представлен перечень наихороших интернет казино, которые предлагают своим игрокам щедрые бонусы за регистрацию. <a href=https://www.alligator.spb.ru/forum/index.php?PAGE_NAME=profile_view&UID=75396>https://www.alligator.spb.ru/forum/index.php?PAGE_NAME=profile_view&UID=75396</a> Доступность — бездепозитные призы в казино чаще всего предоставляются новым игрокам, но бывают случаи, когда приз могут получить и действующие посетители. 1хслотс рабочее зеркало Прежде всего, не запамятовывайте регулярно заглядывать на страничку обзоров бездепозитных призов. Они шаг за шагом оценивают наиболее занимательные предложения ведущих игорных порталов.B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.
1×slots регистрация на сайте 1×slots ru com
Выигрыши с призов без инвестициям практически привязаны к требованию по ставкам и могут быть обналичены только в исполнения данных притязаний. Получить приветственный бонус все только новые посетители онлайн-казино. Способы описаны в условиях промоакции любого законного казино, чаще всего это: Подарки на определенные даты отличаются условиями получения. Если одобрение начисляют игроку на денек рождения, то сумма обыкновенно в от общего размера депозитов последний год. 1× slots официальный <a href=https://www.lightknotes.com/MyBB/member.php?action=profile&uid=19144>https://www.lightknotes.com/MyBB/member.php?action=profile&uid=19144</a> Существуют казино с призом за регистрацию, каких очень востребованы фриспины в интернет казино впоследствии регистрации в конкретных играх. Они встречаются даже чаще безвозмездных поощрений или классических призов в казино без инвестициям. Например, игрок регистрирует счет, на кот-ый начисляются бесплатные забавы, бонус за регистрацию повторяющий даровых фрспинов, вращения в игровом автомате. Во время игрового процесса геймер выигрывает истинные средства, которые в последствии можно удачно исключить из заведения на собственную платежную систему. То есть, есть шансы исключить средства без рисков своими деньгами. Регистрация, за которую геймер получит призы, займет несколько, а благодаря данному возможно прирастить 5 евро поощрений до тыс. И без всяких проблем вывести их.Необходимость отыгрыша. Вейджер в выше, чем для бонусов за депозит. И же средства не отыграны, исключить их невозможно.
1×slots зеркало на сегодня
Проверка занимает от нескольких мин. До нескольких дней, спецы техподдержки могут запросить дополнительные документы либо инициировать куцее общение по Skype. <a href=https://bitbucket.org/gatecom1801/workspace/snippets/97kLEG>https://bitbucket.org/gatecom1801/workspace/snippets/97kLEG</a> Если вы избираете проверенное лицензионное онлайн казино и выполните все обстоятельства получения бездепозитного бонуса, проблем с получением подарка у Вас не возникнет. 1×slots регистрация 1×slots review live Популярность онлайн казино растёт и всё больше пользователей начинают интересоваться азартными забавами. Бездепозитные бонусы 2022 года, это уникальные подарки за регистрацию. С их поддержкою свежие игроки шансы получить бесплатные вращения или средства на баланс за одну регистрацию. С в игорных заведений в интернете, бездепозитные бонусы стали популярнейшим методом вербования игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш сайт собрал наихорошие предложения из интернета на 2022 год. Воспользуйтесь каким подарком и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить обстоятельства.
<b>Смотреть еще похожие новости:</b>
<a href=https://masstr.net/showthread.php?tid=86334>1×slot официальный сайт</a>
<a href=http://fin-molitor.com/forum/viewtopic.php?f=2&t=456778>сайт 1× slots casino</a>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=227161>1×slots официальный регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Максимальный объем ставки, который нельзя превышать же бонус не будет всецело отыгран. В случае нарушения сего верховодила, бонус и выигрыш с него станут аннулированы. При регистрации стопам указывать лишь достоверную информацию. Когда учетная запись несомненно активна, замечен доступ в Личный кабинет. В нем возможно выбрать денежную, установить промокод и узнать подробные управляла получения и отыгрыша бездепа. Краткая информация об акции нередко находится именно на регистрационной форме.
#6024 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на официальном сайте
Мы проделываем ударение на ключевых положениях управлял, рассказываем о территориальных лимитированиях и вкратце информируем о иных акциях обговариваемого казино. <a href=http://filmkachat.ru/>1хслотс официальный сайт зеркало</a> При верном подходе бездепы — это отличный способ выступать на деньги без траты личных средств. Есть некоторое рекомендаций, следуя которым возможно извлечь максимально полезности из подобных акций казино. Играть идет лишь на лицензированных площадках. Скриптовые веб-сайты столько обманывают с бонусными предложениями, но и используют пиратский софт с измененным ГСЧ. Выиграть на таких автоматах невероятно.Подтвердите личность, предоставив оператору казино средства паспортные данные. Инструкции обыкновенно легкие, основное — четко им следовать. Если написано, собственно «на фото должны быть видны все хорошо угла странички паспорта» — сделайте непосредственно это фото. <a href=https://u.pcloud.link/publink/show?code=XZNQwV5ZNtDPSsk07bJazNAm6jpRESTTmoa7>https://u.pcloud.link/publink/show?code=XZNQwV5ZNtDPSsk07bJazNAm6jpRESTTmoa7</a> 1×slot зеркало <a href=http://doka-baza.ru/bitrix/rk.php?goto=http://lillozav.com/bitrix/redirect.php?goto=http://goldservice116.ru/bitrix/rk.php?goto=https://telegra.ph/Voprosy-Federalnoj-migracionnoj-sluzhby-09–23>http://doka-baza.ru/bitrix/rk.php?goto=http://lillozav.com/bitrix/redirect.php?goto=http://goldservice116.ru/bitrix/rk.php?goto=https://telegra.ph/Voprosy-Federalnoj-migracionnoj-sluzhby-09–23</a>
1×slots подтвердит вашу регистрацию если говорить
К примеру, игроку выдаются бесплатные средства в заведении в размере пятидесяти либо ста долларов (вейджер на коие составляет 100х). То есть, любому новоприбывшему игроку выскакивает привлекающая картинка, кот-ая сулит выплату всех зачисленных фирмой средств. Не стоит заострять на казино бонус за регистрацию без депозита с чрезмерно великой или очень малеханькой суммой бонусов, потому что, и тщательно исследовав все условия, здесь вероятнее всего, будет некий подкол.У нас на веб-сайте Вы отыщите список призов без депо в испытанных казино и подробную информацию то как их получить и использовать. 1×slots сайт <a href=http://eimage.hu/2020/04/17/how-to-create-a-school-article-introduction/?unapproved=107678&moderation-hash=9ee21de1a8666a03d4486b456083a153#comment-107678>http://eimage.hu/2020/04/17/how-to-create-a-school-article-introduction/?unapproved=107678&moderation-hash=9ee21de1a8666a03d4486b456083a153#comment-107678</a> Для подтверждения электрической почты, просто перейдите по интенсивной ссылке в послании, полученном от игрового заведения.Бездепы с бесплатными вращениями деют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд платит казино. Число спинов ограничено и редко выше сотку. Если промоакция содержит много безвозмездных игр, их начисление может быть разбито на несколько дней. 1×slots casino зеркало рабочее Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте условия – они часто выдаются для некоторых машин. В зависимости от клуба вы можете делать определенное количество ставок. Кстати, современные игорные дома выделяют вероятность заводить «одноруких злодеев».
1×slots сайт зеркало
Эффективность бездепов в качестве маркетингового прибора оценили многие операторы. Малоизвестные площадки используют такие акции, дабы быстро набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны постоянных посетителей. Не все веб-сайты, дающие презенты без депозита, рекомендованы к ирге. За симпатичным промоописанием имеют скрываться невыполнимые обстоятельства отыгрыша и другие подводные камни. <a href=https://linqto.me/n/fqly>https://linqto.me/n/fqly</a> Можно. Вы практически можете отрешиться от получения бездепозитного бонуса за регистрацию в казино, же Вы не сделаете ставку. рабочее зеркало 1×slots Иногда операторы настоятельно внесение малого депо перед выводом для верификации платежного инструмента. В некоторых казино этот депозит того светит отыграть.Мы собрали и опубликовали список лучших бездепозитных казино с призами за регистрацию, коие гарантируют великодушные выигрыши и мгновенные выплаты.
1×slots рабочее зеркало на сегодня
Обычно бездепозитные промоакции от казино, приходят на эл. Почту в дни рождения либо праздники. В некоторых онлайн казино можно обратиться в чат и как неизменному игроку, вполне вас предложат бездепозитное предложение. Доступность — бездепозитные призы в казино чаще всего предоставляются новым игрокам, но бывают случаи, когда приз имеют получить и действующие посетители.Подарки на праздники ? посвященные торжественным датам, требующие условного отыгрыша или начисляются без того. Могут дариться игрокам сутки рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду. 1хлот регистрация в 1×slots casino <a href=http://nvkb.ru/forum/index.php/user/106491/>http://nvkb.ru/forum/index.php/user/106491/</a>
1×slots регистрация на сайте
Бездепозитный приз за регистрацию в казино с выводом средств в 2022 году — Наш ресурс дает игрокам важную информацию о самых свежих, великодушных и проверенных призах в интернет казино, которые обновляются любой денек. Все безвозмездные призы кажутся заманчивыми. Кто же категорически от возможности поиграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далековато не все бездепозитные призы в равной степени презентабельны для рассудительного посетителя.Теоретически, к безвозмездным бонусам можно отнести например именуемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, поэтому собственно они предоставляют лишь вероятность создавать ставки. <a href=https://replit.com/@Cazinosdep>https://replit.com/@Cazinosdep</a> Фриспины – бесплатные вращения с фиксированной ставкой, которые можно использовать в конкретных игровых автоматах.Получив собственный подарок, Вы сможете бесплатно выступать на реальные деньги, а выполнив условия отыгрыша, исключить собственный выигрыш. онлайн казино 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://forums.scar-divi.com/topic/564723–1×slots-%D0%B0%D0%BA%D1%82%D1%83%D0%B0%D0%BB%D1%8C%D0%BD%D0%BE%D0%B5-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE/>1×slots актуальное зеркало</a>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=389809>1× slots регистрация в 1×slots casino</a>
<a href=http://t954381g.bget.ru/user/JosephPiery/>1×slots зеркало проходить регистрацию это отличный вариант</a>
<a href=https://g2clubs.com/healthy-workout/google/#comment-23965>1×slots официальный зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Когда речь идет о денежных призах, казино постоянно устанавливают обстоятельства вейджера, коие необходимо выполнить, дабы исключить выигрыш. Чаще всего используются коды. Их нужно заносить в особые окошки регистрационной анкеты, в идет о пригласительных бонусах, или в особом разделе собственного офиса игрока.
#6025 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
7k casino сайт букмекерская контора фонбет официальный <a href=https://t.me/vchkogpu_ru>casinos xyz</a> бк букмекерская контора скачать сайт букмекерской конторы <a href=https://m.repost.news/>самое казино</a> порно с Антропова Валентина Викторовна casino скачать приложение порно с Елена Никитина, скелетонистка гта казино ставки на спорт букмекерские конторы как выиграть в казино 1×bet приложение
#6026 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots review live
Иногда операторы настоятельно внесение минимального депозита перед выводом для верификации платежного инструмента. В некоторых казино данный депозит кроме предстоит отыграть.Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных обстановок с казино, когда после отыгрыша бездепа вам не дадут вывести солидную сумму выигрыша. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasin online</a> Даже не выиграв крупную необходимую, игрок увлекательно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе превосходнейших промоакций с. Достаточно периодически изучать список новых интернет казино с выводом бонуса без депозита в данном разделе. <a href=https://forum.highlite.com/showthread.php?tid=1882>https://forum.highlite.com/showthread.php?tid=1882</a> Способы получения бездепа различаются зависимо облика бонуса, который понравился игроку. Но вас в любом случае надо(надобно) быть зарегистрированным в законном онлайн-казино и доказать собственную лицо. В общем облике пошаговая инструкция для получения бездепозитного приза смотрится например: 1×slots регистрацию процедура займет всего лишь <a href=https://cameradb.review/wiki/User:KerrieMerrett7>https://cameradb.review/wiki/User:KerrieMerrett7</a> Если вы выбрали себе некоторое брендов которые для больше всего приглянулись, для неизменной игры! Таких гемблеров казино очень любит и оценивает, за частую такие игроки становятся VIP игроками заведения, которым нередко поступают прибыльные предложения в виде призов, так же туда заходит и бездепозитные.Иногда у гостей сайта имеют появиться трудности, задачи, препядствия при активации полученного промо-кода. В таких случаях, нужно адресоваться за поддержкою в службу поддержки «Support». Для получения ответа, непременно указывается конкретная первопричина воззвания и подтверждается информация дополнительными скриншотами. Если сложилась спорная обстановка, практически можно обратиться к основному регулятору или контролирующему органу, выдавшему данному заведению лицензионный документ.
1×slots казино зеркало
1×slots зеркало проходить регистрацию это отличный вариант При верном раскладе бездепы — это прекрасный способ играть на средства без растраты личных средств. Есть некоторое советов, следуя коим можно извлечь максимально пользы из сходственных промоакций казино. Играть по лишь на лицензированных площадках. Скриптовые сайты не накалывают с бонусными услугами, но и используют пиратский софт с модифицированным ГСЧ. Выиграть на этих автоматах невероятно. <a href=https://www.google.im/url?q=http%3A%2F%2Fdoctorlazuta.by>https://www.google.im/url?q=http%3A%2F%2Fdoctorlazuta.by</a> Бездепозитные бонусы отличный вариант даровой игры в игровые автоматы. Многие пользователи сети не знают, собственно в казино возможно начать выступать полностью даром, а позже исключить выигрыш на банковскую карту или электронный кошелек, иные не доверяют онлайн казино, а третьи успешно играют и выигрывают – и подчас довольно немалые суммы.Рассмотрим на образце: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских руб. В условиях акции указано, что вейджер бездепозитного бонуса х20. Поэтому, чтобы отыграть бонус, игроку несомненно необходимо сделать ставок на 35*20=700 рублей. 1×slot зеркало рабочее этих способов предполагает регистрацию Демоказино есть практически на каждом сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются значительно пореже: там в случае выигрыша и соблюдения условий промоакций бездеп можно превратить в настоящие деньги.К раскаянию, нет. Почти все казино, просят внесение желая бы одного минимального депо для вывода выигрыша с бездепозитного бонуса. Также учитывайте, собственно вывести средства разрешается лишь на ту платежную систему, с которой был сделан депо.
1хслот 1хслотс регистрация перейти на 1×slots
<a href=https://build-info.biz.ua/wr_board/tools.php?event=profile&pname=StevenRow>https://build-info.biz.ua/wr_board/tools.php?event=profile&pname=StevenRow</a> Иногда виде бездепа, казино дарует наименьший приз (до 50 рублей), из-за которого не заморачиваться. 1×slots акции Представьте момент, когда при ставке в 10 рублей Вы получите сходственное умножение. Миллион руб. За одно вращение, собственно вполне вероятно. Поэтому вопрос, сколько можно выиграть остаётся закрытым. Предлагаем проверить без. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный бонус и проверяйте удачу в деле. Разумеется, исключить средства сложно. Однако шансы есть у всех.Бонус без депозита за регистрацию в казино (бездепозитный приз) – это валютный презент от клуба, кот-ый начисляется на аккаунт игрока в регистрации в казино. Кроме создания учетной записи, для получения бездепа, очень часто потребуется ещё и подтвердить контактные данные игрока и/или активировать специальный промо-код.
казино 1×slots
Проверка занимает от нескольких мин. До нескольких дней, профессионалы техподдержки все запросить дополнительные документы либо инициировать короткое общение по Skype. <a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=7523&TITLE_SEO=7523-preobrazovatel-interfeysov-usb-rs485&MID=460667&result=reply#message460667>скачать 1×slots официальный сайт</a> Если вы новичок деле и лишь попали в неизведанную вами область азарта — счет предложений как бездепозитные бонусы без пополнения. При использовании бездепозитным призом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют количество видов лимитов:С такими простыми советами любое казино с бонусом за регистрацию способно принести в разы больше выгоды и выгоды. 1×slots официальный сайт зеркало <a href=http://mtpkrskstate.ru/forum/user/208198/>http://mtpkrskstate.ru/forum/user/208198/</a>
казино 1× slots официальный сайт
В основном случаев благотворительные призы начисляются в кредитах, коие невозможно сразу исключить со счета. Прежде их нужно отыграть по установленным правилам. Эти требования принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже.Превышение наибольшей ставки при отыгрыше. Система автоматически не предупреждает о превышении ставки, поэтому о несоблюдении правил игрок имеет разузнать теснее после подачи запроса на вывод средств. <a href=http://www.eionia.co.kr/home/bbs/board.php?bo_table=free&wr_id=414650>http://www.eionia.co.kr/home/bbs/board.php?bo_table=free&wr_id=414650</a> Однако в условиях скрываются «подводные камни», которые не разрешат исключить крупную сумму либо же вы не успеете отыграть вейджер. Поэтому мастера советуют арестовать благотворительные вращения за регистрацию в казино без депо, дабы поднабраться навыка и получить настоящий шанс на победу.Бездепозитные призы, как уже ясно, являются оригинальной вероятностью к игровому процессу абсолютно бесплатно, то есть играть в интернет казино даром и на быть свои сразу в регистрации аккаунта. Автоматы с таким депозитом все замерзнуть великолепной возможностью поиграть для поклонников азарта с определенными ограничениями в финансах. 1 x slots Помните, что в некоторых забавах сумма ставки идет в зачет вейджера лишь частично. Так, в настольных и карточных забавах лишь от 5% до 50% суммы ставки считаются как отыгранные средства, в то время как в слотах идет в зачет все 100% суммы.
<b>Смотреть еще похожие новости:</b>
<a href=https://talkonlinenews.com/viewtopic.php?t=5588>1×slots официальный сайт мобильная версия скачать</a>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=339571>1 x slots</a>
<a href=https://praisenpray.org/forums/showthread.php?tid=101930>1×slots официальный зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Иногда для получения бонусов необходимо спутаться с представителями службы. Удобнее всего с ними беседовать в онлайн-сате, но от довольно запроса по электронной почте.
#6027 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало сайта
Доступность — бездепозитные бонусы в казино чаще всего предоставляются свежим игрокам, но случаются случаи, когда бонус все получить и действующие посетители.3. Подтвердить данные. В зависимости от клуба, нужно привязать телефонный либо почту, указать индивидуальную информацию; <a href=http://filmkachat.ru/>казино 1×slots</a> В лицензионных бездепозитных казино выступать в азартные забавы действительно безопасно. Наличие лицензии одобряет что, этот факт, собственно клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP. <a href=https://www.swiatobrazu.pl/forumgaleria/thread/view/id/590>https://www.swiatobrazu.pl/forumgaleria/thread/view/id/590</a> Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, a зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.Демоказино есть практически на каждом веб-сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются веско пореже: там в случае выигрыша и соблюдения критерий акций бездеп можно превратить в реальные деньги. 1×slots официальный сайт мобильная версия <a href=http://www.reviews.sblinks.net/user/nellgilbre/>http://www.reviews.sblinks.net/user/nellgilbre/</a> Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации дара необходимо доказать электрическую почту и привязать телефонный;Бездепозитный бонус казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в данном и содержится главное различие.
1×slots официальный зеркало
Допустим, за регистрацию вы возымели бездеп в объеме 2 000 рублей с вейджером х30. В этом случае предстоит устроить ставок, на общую сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать настоящие средства. Однако не забывайте, собственно с любого дара выйдет вывести определённую сумму (чаще всего менее $200).Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 долларов. Если выдаются фриспины, их число редко выше нескольких десятков безвозмездных вращений. 1×slots официальный сайт зеркало Так же стоит выделить то, собственно в каждом онлайн казино установлен свой наибольший кешаут на бездепозитный приз. Как верховодило кешаут — это предельная сумма денег, кот-ая доступная для вывода с бездепозитного бонуса. <a href=http://pro-expert22.ru/index.php?subaction=userinfo&user=unuqez>http://pro-expert22.ru/index.php?subaction=userinfo&user=unuqez</a> 1×slot зеркало Нет. Казино выдают бесплатные призы за регистрацию, чтобы, чтобы, чтобы клиент мог ознакомиться с игровым заведением. А дабы вывести его, необходимо выполнить условия отыгрыша.Не хотите сыграть в азартные забавы, не рискуя своими средствами, но получая в все выплаты? Подобную возможность предоставляют почти превосходнейшие порталы с азартными увеселениями. В их количестве количество правдивых и надежных интернет-казино на российском языке. Они завлекают свежих юзеров различными поощрительными событиями, включая бездепозитные, либо бесплатные бонусы.
1хслотс мобильная версия зеркало
Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке адепты онлайн-казино публикуют важную информацию о no deposit bonuses и услугах. <a href=http://196.43.133.60/wiki/index.php/%D0%A1%D0%B0%D0%B9%D1%82%D1%8B_%D0%A1%D0%BE_%D0%A1%D0%BB%D0%BE%D1%82%D0%B0%D0%BC%D0%B8>http://196.43.133.60/wiki/index.php/%D0%A1%D0%B0%D0%B9%D1%82%D1%8B_%D0%A1%D0%BE_%D0%A1%D0%BB%D0%BE%D1%82%D0%B0%D0%BC%D0%B8</a> 1×slots быструю регистрацию а также мгновенное Свежий приз начисляется вид валютных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в пользовании средствами, а в случае отыгрыша оператор имеет ввести лимитирование на вывод денег.
1×slots регистрация 1×slots review live
Прежде всего, не забывайте регулярно заглядывать на страницу обзоров бездепозитных призов. Они шаг за шагом оценивают более увлекательные предложения основных игорных порталов. Вы наверняка, как и все любите получать презенты и бездепозитные бонусы казино. Игорные дома брали в повадку одаривать гэмблеров приятными бонусами. Стать владельцем приветственного подарка можно за создание профиля либо пополнение счёта. Второй вариант более занимательный, как клубы готовы удвоить депо! Но если вы новичок и лишь знакомитесь с миром пыла, превосходнее пользуйтесь призом за регистрацию. Также посещают случаи, когда казино начисляет оговоренный приз последствии регистрации нового клиента по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам. 1×slots актуальное зеркало <a href=https://spencertbde45788.bloggazza.com/29606713/deepnude-ai-navigating-the-controversial-landscape-of-image-manipulation-technology>https://spencertbde45788.bloggazza.com/29606713/deepnude-ai-navigating-the-controversial-landscape-of-image-manipulation-technology</a> Когда речь о денежных призах, казино всегда устанавливают условия вейджера, которые нужно выполнить, чтобы исключить выигрыш.Многие новички сомневаются, что поощрительный приз не будет возвращать, и в они выиграли у казино. Это безусловно безопасно и накрепко. Выводя выигранные средства, игрок просто одергивает свое участие в игре и теряет уникальную возможность – бесплатно наращивать собственное материальное положение.
1×slots зеркало
Подтверждение электрической почты – одно из ведущих критерий, которое есть практически в любом бездепозитном казино. Чтобы верифицировать электронную почту, довольно перейти по активной ссылке в письме, полученном от азартного клуба. <a href=http://food.biz.ua/wr_board/tools.php?event=profile&pname=gainfulpan74>http://food.biz.ua/wr_board/tools.php?event=profile&pname=gainfulpan74</a> Бездеп с фриспинами возможность обхватывать всю коллекцию игр на веб-сайте либо разработки 1-го провайдера. Обычно предлагается определенный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш возможность быть выведен последствии такого, как юзер отыграет эту сумму. Возможность оценить полный функционал слотов — главное достоинство данной разновидности. Игроку становятся доступны те функции, которые отсутствуют в демонстрационном режиме, а возможность выиграть настоящие средства прибавляет ярких азартных чувств. x1 slots регистрация в 1×slots casino Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша бонусов. Заведения постоянно устанавливают максимальную ставку, допустимую по условиям вейждера.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=316088>1×slots casino регистрация на сайте</a>
<a href=https://pnwphotos.com/forum/index.php?threads/the-darkroom-virtual-bar-and-grill.25376/#post-82332>скачать 1×slots на андроид мобильная версия</a>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=288260&pid=648347#post_648347>1хлот регистрация в 1×slots casino</a>
<a href=http://forums.indexrise.com/thread-309-post-334536.html#pid334536>casino 1×slot</a>
<a href=http://www.carshowsociety.com/forum.php/topic,11220.new.html#new>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция содержит доскональные управляла, гиперссылка на коие обыкновенно содержится в промообъявлении. В них указываются лимиты, вейджер, перечень доступных игр. Если оператор скрывает данные о предложении, то воспользоваться им надо. Помните, собственно всевозможные нарушения верховодил сведут на нет ваши старания, и вы скорее останетесь без начисленного вам дарового бонуса. Всегда изучайте управляла начисления и обстоятельства вейджера. По хоть вопросам, на коие вы возможности без найти ответы, обращайтесь за объяснениям и саппорт.
#6028 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet слоты 1×bet xyz pin up casino buzz <a href=https://t.me/vchkogpu_ru>online casino официальный</a> 1×bet официальный 1×bet xyz порно с Кирьянова Дарья Борисовна <a href=https://7club7.com/>порно с Карен Хачанов (теннис)</a> лучшие бесплатные онлайн казино букмекерскую контору пин black russia казино порно с Варвара Субботина pin up casino зеркало порно с Гатагова Ольга Анатольевна букмекерские контора ап
#6029 Charlesgunnyhttp://filmkachat.ru
1×slots официальный регистрация
Иногда у гостей вебсайта имеют появиться трудности, задачи, препядствия при активации полученного промо-кода. В этих случаях, необходимо обратиться за поддержкою в службу «Support». Для получения ответа, непременно указывается определенная причина воззвания и подтверждается информация дополнительными экрана. Если сложилась неоднозначная ситуация, всегда возможно обратиться к основному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ.Варианты выигрыша зависимости от Вашей удачи и критерий игорного портала. Выше мы заявили, собственно кое-какие бездепозитные бонусы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются и, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность современных игр на деньги, можно выиграть неописуемые суммы. Сегодняшние игровые автоматы или видео слоты, как их называют. Могут выдавать солидные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000. <a href=http://filmkachat.ru/>1×slot зеркало</a> Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической забавы на бездепозитные призы, у Вас есть шанс выучить игровые автоматы, научится регулировать изменять ставки и полосы, изучать бонусные забавы и их выигрышные комбинации, да конечном просто зарядится кучей эмоций! Ведь вы будите играть на бонусные свои, коие можно отыграть и исключить, а не просто на демо счет, что, этим наиболее адреналин в крови более повысится а пульс забьется с частым ритмом! <a href=https://diigo.com/0y2rbf>https://diigo.com/0y2rbf</a> Как лишь вы отыграли вейджер и средства с бонусного баланса перебежали вас на настоящий счет, Вы смело сможете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (устроить наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депо). 1хслотс мобильная версия зеркало <a href=http://www.jkmulti.com/bbs/board.php?bo_table=free&wr_id=2310773>http://www.jkmulti.com/bbs/board.php?bo_table=free&wr_id=2310773</a> Как верховодило, новоприбывшие игроки начала хотят ознакомиться с методами ввода и вывода денежных средств и сроки выполнения поданных заявок чтобы четко разуметь, как прытко возможность вывести свой казино приз за регистрацию без депо на электрический кошелек или же банковскую карту. К счастью для всех играющих, снутри конкретных холдингов, все казино соперничают между собой. Ведь случае бы определенную компанию представляло только одно онлайн-заведение, то вряд ли бы посетители увидели казино с бонусом за регистрацию и возможность бы рассчитывать лишь на вознаграждение в виде бонуса на 1-ое инвестиция. К любому заведению периодически идет завлекать свежих игроков, что, в, лишь на руку всем играющим.Бонус без депо за регистрацию в казино (бездепозитный бонус) – это денежный презент от клуба, кот-ый начисляется на аккаунт игрока последствии регистрации в казино. Кроме творения учетной записи, для получения бездепа, довольно нередко требуется ещё и доказать контактные данные игрока и/или активировать особый промо-код.
1×slots быструю регистрацию а также мгновенное
Но ни не запамятовывайте внимательно читать верховодила участия в бонусных промоакциях. Если вы нарушите хотя бы одно условие, позднее вы не сможете уладить недоразумение с администрацией. 1×slot зеркало рабочее этих способов предполагает регистрацию Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом прибыли присутствуют на этой страничке. Посетитель может расценить условия получения и начать играть на деньги без внесения депозита. При этом игроку важно понимать, на каких условиях и какими методами возможность исключить приобретенный выигрыш. Для сего необходимо оценить перечень подключенных платежных систем. <a href=https://odessamama.net/forum.php?mod=viewthread&tid=122480>https://odessamama.net/forum.php?mod=viewthread&tid=122480</a> Активация по промокоду используется в разных видах бездепов. Если идет о приветственном бонусе, то комплект символов возможно разузнать на главной странице, в регистрационной форме или послании, которое отправляется пользователю для подтверждения e-mail. Акции могут проводиться вместе с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активируется одноразовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном кабинете или начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем важный код для активации в описании каждого промо. казино 1×slots официальный сайт Фриспины — благотворительные вращения, коие позволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытных игроков фриспины считаются самым модным и предпочтительным обликом бонуса — бесплатные вращения иногда эффективнее и веселее в отыгрыше, чем остальные облики бездепов.
1×slots промокод при регистрации
Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и более. Когда игроку полагается количество фриспинов, администрация имеет разбивать их начисление на количество дней. Бесплатные вращения предоставляются для определенного слота, который указывается в правилах промоакции. <a href=http://www.dsm.co.kr/bbs/board.php?bo_table=free&wr_id=181694>http://www.dsm.co.kr/bbs/board.php?bo_table=free&wr_id=181694</a> Но не мыслить, что снабжая юзеров такими бонусами, казино занимается спонсированием. Ведь размеры вознаграждений, главном, не немалые (средним размером от 5 до 20 $). И на эти средства налагаются определенные условия и лимитирования, неотклонимые к исполнению игрока, если в последствии он желает получить все свои выигранные деньги. скачать 1×slots на андроид мобильная версия У нас на веб-сайте Вы отыщите список призов без депозита в испытанных казино и доскональную информацию то как их получить и применять.Для получения предоставленных бонусов вам пригодиться — ПК или мобильное устройство, и остальное дело за небольшим.
1×slot официальный сайт
Стоит обозначить(означить), что бездепозитный бонус выдается только взрослым новичкам, которые, тому, шансы пригласить собственных друзей и людей, того претендующих на поощрительную программку преданности. Подобная разработка появилась среди соперничающих онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению своей посещаемости, методом привлечения новых игроков. Бонусы – это оригинальный шанс для вероятных участников игры, которые шансы опробовать софт покер рума и убедиться, будут ли они в него выступать либо нет. Новый игрок попробует средства силы с настоящими оппонентами в казино. <a href=https://acerfans.ru/user/JamesTed/>1×slots скачать на айфон</a> Так собственно приготовьтесь дать секретную информацию (пол, возраст, страна проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает не более суток, в чего удастся свободно выводить крупные выигрыши. Сразу последствии активации промокода возможно воспользоваться даром. Как уже упоминалось, призы посещают трёх обликов – фриспины, кредиты и фриплей-бонусы.Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке необходимо восполнить счет в казино. Для депозитных призов, эта процедура не необходима, так как депо уже изготовлен. казино 1× slots официальный сайт <a href=http://balaklavskiy-16.ru/user/12085/>http://balaklavskiy-16.ru/user/12085/</a> Автоматы непопросту числятся самым популярным азартным весельем. Чтобы освоить управление и верховодила, потребуется всего некоторое мин. Ваша задачка устроить ставку, определить число трудящихся линий и можно вертеть тамбур. Если на экране выпадет выигрышная композиция – вы выиграли! С данной задачей для посодействуют справится бездепозитные бонусы казино.Баланс игрока пополняется на подходящую сумму. К ней используется вейджер, обозначенный в правилах акции. Вывести выигрыш возможно несомненно последствии такого, как юзер устроит требуемый размер ставок из собственных средств. В редких случаях бездеп работает в формате Free Play. На счет юзера зачисляется крупная сумма, и предоставляется небольшой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по окончании этого периода сумма на счету несомненно превосходить первоначальную, то разность можно будет вывести либо использовать для дальнейших ставок.
1×slos регистрация в 1×slots casino
При регистрации следует указывать лишь достоверную информацию. Когда учетная запись будет активна, будет доступ в Личный офис. В нем можно избрать валюту, ввести промокод и узнать подробные верховодила получения и отыгрыша бездепа. Краткая информация об промоакции часто присутствует непосредственно на регистрационной форме.Подтвердите личность, предоставив оператору казино средства паспортные данные. Инструкции обыкновенно легкие, главное — четко им следовать. Если написано, что «на фото обязаны быть видны все хорошо угла страницы паспорта» — устройте непосредственно это фото. <a href=https://radioizba.ru/communication/forum/?PAGE_NAME=profile_view&UID=19570>https://radioizba.ru/communication/forum/?PAGE_NAME=profile_view&UID=19570</a> 1хслотс казино зеркало Это раз из основных показателей привлекательности подарка. С завешенным коэффициентом числе мастера не сумеют выполнить условия по отыгрышу. И неважно, как привлекательно выглядит предложение – бездепозитный бонус казино в размере $500 либо $1 000. Чтобы новички получше вдумались, что же это вейджер, мы разберём на примере.Раздача призов имеет быть приурочена к различным датам: календарные дни, дни рождения игроков, юбилей открытия казино и т. Д. Подарок выдается повторяющий средств, фриспинов либо баллов для накопления и размена на предложения оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода этой суммы придется выполнить ряд притязаний.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum-macan.ru/viewtopic.php?t=11672>1×slots быструю регистрацию а также мгновенное</a>
<a href=https://mit-bbs.com/viewtopic.php?t=171053>1×slots скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Онлайн-казино с бездепозитными призами ставят посетителям условия для использования бездепами, потому перед участием в промоакции превосходнее подробно ознакомиться со всеми правилами и аспектами промоакции. Условия могут дотрагиваться получения бонуса, его использования и последующего вывода денежных средств если, тогда, выигрыша. Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном призе, то в первую очередь направьте на велечину вейджера и срок, который дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, тем легче отыграть бонус и вывести выигрыш.
#6030 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Виктория Синицина, фигуристка официальные букмекерские конторы скачать <a href=https://rumafia.news/>официальные букмекерские конторы скачать</a> kent casino регистрация Чулпан Хаматова <a href=https://t.me/vchkogpu_ru>сколько казино</a> new casino скачать сайт букмекерской конторы порно с Евгений Малкин (хоккей) мелбет букмекерская контора бесплатное казино лучшие казино бесплатно казино зеркало сегодня
#6031 RussellGyclehttps://lukadoncic-az.com
Luka Doncic <a href=https://lukadoncic-az.com/>http://lukadoncic-az.com</a> is a Slovenian basketball player, the leader of the Dallas Mavericks team and one of the main stars of the NBA. His unique playing style, records and influence have made him a symbol of European success in world basketball.
#6032 MichaelniPhttps://nikola-jokic-az.com
Nikola Jokic <a href=https://nikola-jokic-az.com/>nikola-jokic-az com</a> is a Serbian basketball player, NBA star, and leader of the Denver Nuggets. Known for his unique style of play, court vision, and leadership, he has become a role model for a new generation of centers.
#6033 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на сайте 1×slots ru com
Бездепозитный приз за регистрацию в казино — это стартовый презент вид валютного начисления или даровых вращений для новых игроков заведения, для получения которого не вносить депо. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasin online</a> Объективные – размер приза, коэффициент и условия вейджера, необходимость внесения депо для вывода средств;Чтобы играть даром на реальные деньги в казино, порой довольно просто зарегистрироваться. Иногда нужно выполнить вспомогательные действия. <a href=https://playcode.io/2205736>https://playcode.io/2205736</a> На страничке представлены бездепозитные призы за регистрацию в казино редчайшая награда за коей гонятся все игроки как новички, например и профессионалы. Мы также уделяем огромное внимание на присутствие бонусов при составление рейтинга казино на деньги. Бездепозитный бонус это вероятность играть безвозмездно и выиграть реальные деньги.Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми акциями. Читайте о них в обзорах и на форуме. 1×slots регистрацию процедура займет всего лишь <a href=https://squishmallowswiki.com/index.php/%D0%9B%D0%B8%D1%86%D0%B5%D0%BD%D0%B7%D0%B8%D1%8F_%D0%90%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D1%8B>https://squishmallowswiki.com/index.php/%D0%9B%D0%B8%D1%86%D0%B5%D0%BD%D0%B7%D0%B8%D1%8F_%D0%90%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D1%8B</a>
1 x slots casino
Зачастую бездепозитные призы казино для игры предлагаются различными заведениями азартных игр виде маркетинговых промоакций или в целях вербования к себя новых игроков. Для бездепозитных бонусов в казино 2022 геймеру не нужно пополнять счет до этапа вывода желаемых средств.Теоретически, к бесплатным бонусам можно отнести например называемые фриспины. Напомним, речь идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, поэтому собственно они деют только возможность делать ставки. 1×slots регистрация 1×slotscasino 56 online <a href=http://forum.d-dub.com/member.php?1490693-Jasperzerce>http://forum.d-dub.com/member.php?1490693-Jasperzerce</a> 1×slots официальный сайт, скачать
1×slots зеркало на сегодня
После получения приза вывод средств для посетителя будет недосегаем до, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или чета недель. Выводить средства игрок может только в отыгрыша. <a href=http://www.jjrun.kr/bbs/board.php?bo_table=free&wr_id=410821>http://www.jjrun.kr/bbs/board.php?bo_table=free&wr_id=410821</a> Но не стоит думать, что снабжая юзеров этими призами, казино увлекается спонсированием. Ведь объемы вознаграждений, главном, не большие (средним объемом от 5 до 20 долларов). И на эти средства налагаются конкретные условия и лимитирования, неотклонимые к исполненью игрока, случае в последствии он желает получить все средства выигранные финансы.Автоматическая активация может самой комфортной, но ручной способ имеет перед ней достоинства. Прежде чем применять вознаграждение от казино, стоит заранее найти, сколько времени требуется на исполнение всех критерий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала действия бонуса. 1×slots сайт Создание аккаунта. На веб-сайте казино нужно обнаружить регистрационную форму и наполнить пустующие поля личностными данными. Иногда на этом этапе требуется указать только адресок электронной почты и пароль, хотя почаще надобно заполнить анкету персональной информацией (ФИО, дата рождения, пространство проживания и т.д. ). Нужно указывать лишь реальные данные, что впоследствие они станут испытаны.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Промокод – определённая комбинация знаков, которую необходимо ввести в подходящее поле при твореньи учетной записи или активировать в личном профиле игрока в разделе с призами.Вознаграждения за получение VIP-статуса ? начисляются масштабах программки преданности при достижении очередного уровня либо выдаются персонально менеджерами саппорта. <a href=https://www.kfz-gringer.at/index.php/forum/in-neque-arcu-vulputate-vitae/67263–1#67028>1хслотс рабочее зеркало</a> Бездепозитные призы — это презенты от казино повторяющий бонусных средств или фриспинов для игровых автоматов, которые начисляются на акк игрока последствии процедуры регистрации на сайте заведения. Для получения этих поощрений депозит не потребуется.Бездепозитные призы прекрасный вариант даровой игры в игровые автоматы. Многие юзеры сети не знают, что в казино возможно начать играть безусловно бесплатно, а позже исключить выигрыш на банковскую карту или электронный кошелек, другие не доверяют онлайн казино, а третьи успешно играют и выигрывают – и тотчас достаточно великие суммы. Прежде всего, не забывайте периодически заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом разглядывают наиболее интересные предложения водящих игорных порталов.Если идет об неповторимых услугах, возможность потребоваться регистрация в казино по ссылке с партнерского сайта. 1хслотс регистрация в 1×slots casino <a href=http://randy-harrison.it/gallery/profile.php?uid=144338>http://randy-harrison.it/gallery/profile.php?uid=144338</a> Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в обязательном порядке нужно восполнить счет в казино. Для депозитных бонусов, эта процедура не нужна, например как депо теснее сделан.
1×slots регистрацию процедура займет всего лишь
Диапазон ставок, коие вправе сделать игрок, кроме лимитирован. Обычно назначать можно маленькую необходимую — пределах 10–30 руб. За одно вращение.Изучить управляла и условия получения бездепозитных призов казино, Вы можете у нас на веб-сайте в разделе с призами либо на официальном веб-сайте избранного Вами казино. Если не можете найти необходимую информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал или по электронной почте. <a href=http://clients1.google.com.pe/url?sa=t&url=http://maps.google.tn/url?q=http://opt-list.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/sb6jNxYzZ0F>http://clients1.google.com.pe/url?sa=t&url=http://maps.google.tn/url?q=http://opt-list.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/sb6jNxYzZ0F</a> 1хслотс 1хслотс регистрация перейти на 1×slots Возможность протестировать новые игры, не рискуя собственными своими и создать собственную тактику забавы.Риск-игра по одинаковым шансам – Также казино возможность запрещать скорпулезно обстоятельства по отыгрышу с помощью раунда на удвоение, кот-ый предлагается в слотах, видео-покере и некоторых других забавах.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.176mw.net/forum.php?mod=viewthread&tid=3&pid=544930&page=2804&extra=page%3D1#pid544930>1× slots casino зеркало</a>
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1534#post-45204>1×slots зеркало регистрацию более популярный вариант это</a>
<a href=https://smm-seo.ru/members/rabofreeol.4209/>1×slots официальный регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
У любой забавы средства притязания по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система зачтет любую ставку. В рулетке и покере сделать это намного сложнее. Именно потому так принципиально внимательно читать условия получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой игре, то новенькие попросту «спустят приз на ветер». Бoльшинcтвo азартных заведений выдвигают примерно однообразные, схожие обстоятельства и требования, которые нужно выполнить, дабы получить бездепозитный приз за регистрацию. Все их можно соединить в раз список:
#6034 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
Процесс подтверждения личности может взятьвдолг(взятьвзаймы) от одного денька до недели. Если клиент допустил какую оплошность при заполнении паспортных данных, то ему следует адресоваться с задачей в службу поддержки онлайн-казино.С не отыгранным бонусом запрещается превышать размер максимальной ставки. Нарушение этого условия повлечет за собой аннулирование выигрыша. <a href=http://filmkachat.ru/>1×slot зеркало рабочее регистрации на телефон придет</a> <a href=http://prsync.com/cgifurniturecom/top-d-model-marketplaces-expert-guide-to-finding-quality-digital-assets-4446659/>http://prsync.com/cgifurniturecom/top-d-model-marketplaces-expert-guide-to-finding-quality-digital-assets-4446659/</a> Главное преимущество спинов – возможность изучить разные слоты. Также получится насладиться бонусными раундами, испытать удачу в риск-туре и преувеличить выигрыш за счёт особенных символов. Однако не только игровой процесс заслуживает внимание, как другого сосредоточиться на реальном выигрыше. 1×slots бонус за регистрацию <a href=https://love-n-magic.ru/index.php?subaction=userinfo&user=Charlesskync>https://love-n-magic.ru/index.php?subaction=userinfo&user=Charlesskync</a>
1хслотс рабочее зеркало на сегодня
<a href=https://chasingadream.rpginitiative.com/showthread.php?tid=135883>1×slots актуальное зеркало</a> 1хслотс официальный сайт зеркало Если ординарными текстами, бездепы – это определённая сумма денег или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно брать презенты. Но есть некоторые аспекты. Существуют игорные жилища, которые перед тем как начислить бонусы требуют привязать аппарат, дать копии документов. <a href=http://toji.kiukura.com/bbs/board.php?bo_table=free&wr_id=1107023>http://toji.kiukura.com/bbs/board.php?bo_table=free&wr_id=1107023</a> Бездепозитный приз казино 2022 с выводом за регистрацию предоставляет вероятность ознакомиться игроку с лобби выбранного заведения, сориентироваться в выборе игр и проверить качество работы службы. Довольно часто, начиная игровой процесс, игрок теснее не желает останавливаться и проделывает настоящий лепта. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть безвозмездно вероятно как один таки с бонусом за регистрацию без необходимости вносить депо.Зарегистрируйтесь. Для регистрации чаще всего достаточно ввести собственный номер телефона и почтовый адрес, последствии чего ввести полученный код из СМС. Возможно, требуется показать промокод. В правилах акции несомненно написано, где его хотелось включать. Иногда это хотелось создавать при регистрации, от — уже последствии творения личного офиса, на отдельной странице. 1×slots регистрацию процедура займет всего лишь Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации презента нужно подтвердить электронную почту и привязать телефонный;Основное правило получения бездепа ? творимый акк должен быть у юзера первым и единственным. Наличие нескольких аккаунтов строго воспрещено. Проверка проводится по имени, e-mal, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депозита нужно блюсти простую очередность деяний.
1× slots официальный
Проверка занимает от нескольких минут до нескольких дней, профессионалы техподдержки шансы запросить вспомогательные документы или инициировать краткое общение по Skype. При верном раскладе бездепы — это отличный метод играть на средства без траты собственных средств. Есть несколько советов, следуя которым возможно извлечь максимум полезности из похожих промоакций казино. Играть идет только на лицензированных площадках. Скриптовые сайты столько дурачат с бонусными предложениями, но и используют пиратский софт с измененным ГСЧ. Выиграть на таких автоматах нереально. <a href=https://23region.info/user/Porsedropea/>https://23region.info/user/Porsedropea/</a> 1× slots casino официальный сайт
1 хслот регистрация в 1×slots casino
Да, у даровых призов есть недостатки. Прежде всего, они обычно небольшие. Кроме того, обстоятельства вейджера по ним практически строгие. Но таки неимение риска делает их довольно красивыми для клиентов. <a href=https://www.globalvision2000.com/forum/member.php?action=profile&uid=1072499>рабочее зеркало 1хслотс</a> Вообще перейдя в казино — правила схожи в получении бездепозитных бонусов, в стандартные правила входит: подтвердить эл. Почту и телефонный, заполнить собственный индивидуальный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ.При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, коие возможно предназначить ирге в казино. казино 1×slots <a href=https://dawonprint.com/bbs/board.php?bo_table=free&wr_id=225473>https://dawonprint.com/bbs/board.php?bo_table=free&wr_id=225473</a>
1×slots casino регистрация на сайте
Для получения депозитного приза нужно пополнить свой игровой баланс настоящими деньгами. Вознаграждение возможно получить или при внесении первого депо, или вид фиксированного процента от внесённых средств. Так или иначе, бонус поступит на счёт лишь последствии пополнения.Мы подготовили перечень, где есть постоянно актуальные и свежие бездепозитные призы казино, коие возможность получить даром. Для наших пользователей есть специальные предложения эксклюзивные призы, коие вы ни не найдете, их мы определили особой красноватой плашкой «Exclusive». При регистрации стопам указывать лишь достоверную информацию. Когда учетная запись несомненно активна, замечен доступ в Личный кабинет. В нем возможно выбрать денежную, установить промокод и узнать подробные управляла получения и отыгрыша бездепа. Краткая информация об акции нередко находится именно на регистрационной форме.Даже не выиграв крупную сумму, игрок увлекательно проведет время, изнутри выучит работу площадки, воспримет геймплей автоматов. Все это без каких-либо денежных рисков. Быть в курсе превосходнейших промоакций с. Достаточно периодически изучать перечень новых интернет казино с выводом бонуса без депозита в данном разделе. <a href=http://london-macadam.com/author/charlesstync/>http://london-macadam.com/author/charlesstync/</a> 1×slots официальный сайт зеркало Бездеп с фриспинами имеет обхватывать всю коллекцию игр на веб-сайте либо разработки одного провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш имеет быть выведен после как, как пользователь отыграет данную необходимую. Возможность оценить глубокий возможностей слотов — основное достоинство этой разновидности. Игроку становятся доступны те функции, коие отсутствуют в демонстрационном режиме, а вероятность выиграть настоящие средства прибавляет ясных азартных чувств.Каждый новичок и умелый игрок грезят скоро стартануть и начать делать реальные ставки. Для сего достаточно забрать подарок, за кот-ый не выплачивать. В зависимости от игровой платформы, нужно сделать профиль, привязать email либо аппарат. После этого администрация начислит щедрое вознаграждение в виде безвозмездных вращений или виртуальных кредитов.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.goslog.ru/forum/messages/forum1/message13446/11-obrashcheniya-grazhdan?result=reply#message13446>1×slots casino регистрация 1×slotscasin online</a>
<a href=http://3ak.cn/home.php?mod=space&uid=187057>1хслотс официальный сайт зеркало</a>
<a href=https://nauc.info/forums/viewtopic.php?t=20591231>1×слотс казино</a>
<a href=https://uyghuryol.com/forum/viewtopic.php?f=8&t=238726>1×slots зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного бонуса достаточно пополнения баланса и доказательства личности. В других же клубах, нужно некоторое один прокрутить собственный депозит. Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 долларов. Если выдаются фриспины, их количество редко выше нескольких 10-ов даровых вращений.
#6035 Ремонт кофемашин Delonghihttps://remont-kofemashin-delonghi-vais.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт кофемашин delonghi, можете посмотреть на сайте: <a href=https://remont-kofemashin-delonghi-vais.ru/>ремонт кофемашин delonghi в москве</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#6036 Charlesgunnyhttp://filmkachat.ru
1×slot рабочее зеркало
Игрокам не принимать приветственный приз как гарантированный метод получить крупный выигрыш, хотя это отличная возможность без расходов оценить функционал казино.Если вы новичок в этом деле и лишь попали в неизведанную вами район пыла — с помощью предложений как бездепозитные бонусы без пополнения. <a href=http://filmkachat.ru/>казино 1× slots официальный сайт</a> Условия отыгрыша приза. Если Вы расчитываете заработать на бездепозитном призе, то в первую очередь внимание на значение вейджера и срок, кот-ый дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть бонус и вывести выигрыш.Существуют казино с бонусом за регистрацию, в довольно востребованы фриспины в онлайн казино потом регистрации в определенных играх. Они встречаются в почаще даровых поощрений либо классических призов в казино без инвестициям. Например, игрок регистрирует счет, на кот-ый начисляются бесплатные забавы, приз за регистрацию вид даровых фрспинов, вращения в игровом автомате. Во время игрового процесса компьютерные выигрывает истинные средства, которые в последствии можно удачно вывести из заведения на свою платежную систему. То есть, есть шансы вывести свои без рисков собственными финансами. Регистрация, за игры получит призы, займет минут, а благодаря данному можно увеличить пять евро поощрений до тысячи и без всяких заморочек вывести их. <a href=https://www.4sync.com/s/fpXRu8Czr>https://www.4sync.com/s/fpXRu8Czr</a> 1×slots официальный сайт зеркало <a href=http://rtpsouth.com/UserProfile/tabid/69/userId/105798/Default.aspx>http://rtpsouth.com/UserProfile/tabid/69/userId/105798/Default.aspx</a> Казино выделяет возможность заработать и исключить реальные средства на бездепозитных бонусах. Обычно, это незначительная сумма, которую казино может для разрешить подарить игроку.
1хслот 1хслотс регистрация перейти на 1×slots
<a href=http://forum.puppylinux.pl/index.php?topic=826.new#new>1×slots официальный сайт скачать</a> x1 slots 1хслотс регистрация перейти на 1×slots Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 $. Если выдаются фриспины, их количество изредка выше нескольких 10-ов даровых вращений.Мы собрали и выпустили список наилучших бездепозитных казино с призами за регистрацию, коие гарантируют великодушные выигрыши и моментальные выплаты. <a href=http://l91692n8.beget.tech/profile.php?u=impartialmishap>http://l91692n8.beget.tech/profile.php?u=impartialmishap</a> Однако в условиях исчезают «подводные камни», коие не разрешат вывести солидную необходимую или же вы не успеете отыграть вейджер. Поэтому мастера советуют арестовать благотворительные вращения за регистрацию в казино без депо, дабы поднабраться навыка и получить настоящий шанс на победу. casino 1×slot Классическая разновидность бонуса за творение аккаунта. Его превосходство заключается сомнений, собственно заказчик может других выбирать аппараты и создавать ставки в их. Иногда список игровых автоматов ограничен оператором, хотя все равно это другого, чем один-единственный дешевый разъем, как в случае с внедрением фриспинов.Похожим образом трудится 3-ий способ доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения посетителя либо из-за с получения им VIP-статуса. Подарок предоставляется последствии воззвания в поддержку и ревизии.
1хслотс зеркало
Не желаете сыграть в азартные игры, не рискуя средствами деньгами, но получая в все выплаты? Подобную вероятность деют почти наилучшие порталы с азартными весельями. В их количестве количество честных и надежных интернет-казино на российском языке. Они привлекают новых юзеров разными поощрительными мероприятиями, включая бездепозитные, либо бесплатные бонусы. Вы наверняка, как и все предпочитаете получать презенты и бездепозитные бонусы казино. Игорные жилища брали в повадку одаривать гэмблеров приятными бонусами. Стать владельцем приветственного подарка возможно за творение профиля либо пополнение счёта. Второй вариант больше интересный, так клубы готовы удвоить депозит! Но в вы новичок и только знакомитесь с миром пыла, какого-либо воспользуйтесь бонусом за регистрацию. <a href=https://msknovostroy.com/member.php?action=profile&uid=1470>https://msknovostroy.com/member.php?action=profile&uid=1470</a> 1×slots регистрация на 1хслотс Еще одно условие дотрагивается размеров ставки. Операторы устанавливают максимальную необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, выбранной в Личном офисе. При превышении лимита есть риск потерять приза. Существующие ограничения относятся и к конкретным обликам ставок. Например, играя в рулетку, заказчик возможность столкнуться с запретом ставить фишки на шансы.
скачать 1×slots на андроид мобильная версия
Во время забавы в казино, выигрыши, полученные спасибо бесплатным призовым фондам, суммируются и включаются в общую сумму для отыгрывания. Однако, в фортуна улыбнется и получится отыграть все бонусы, игровое заведение гарантированно разрешит вывести финансовые свои. Сумма вывода будет зависимости от лимита, одобренного именно в этом учреждении. Поэтому, внимательно надо(надобно) разбирать правила выдачи безлимитных депозитов. <a href=https://www.addonface.com/welcome>1×slots сайт</a> Шаг 4. Активация. Внимательно выучите условия, информацию по ограничениям и сроке деяния бонусного предложения. Разобравшись с правилами, можно активировать приз в личном офисе (иногда ? с внедрением промокода) либо по запросу в саппорт. 1×slots официальный сайт зеркало рабочее <a href=https://www.freebeg.com/forum/member.php?action=profile&uid=23300>https://www.freebeg.com/forum/member.php?action=profile&uid=23300</a>
1х слот 1хслотс регистрация перейти на 1×slots
Помните, собственно в некоторых играх сумма ставки идет в зачет вейджера лишь отчасти. Так, в настольных и карточных забавах лишь от 5% до 50% суммы ставки числятся как отыгранные деньги, момент как в слотах идет в зачет все one hundred percent суммы. <a href=https://series40.kiev.ua/user/DoctorLazutaKa/>https://series40.kiev.ua/user/DoctorLazutaKa/</a> Так собственно основное различие презента на депозит от бездепа – неотъемлемое пополнение счёта. Вы сможете внести депозит и преувеличить стартовый капитал либо арестовать бездеп и при не придётся рисковать собственными сбережениями. Поспешите выполнить простые притязания, и администрация ресурса начислит щедрое поощрение! x1 slots 1хслотс регистрация перейти на 1×slots Чтобы выступать даром на реальные деньги в казино, порой довольно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные деяния.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.oursson.ru/viewtopic.php?f=2&t=9489>1 x slots casino</a>
<a href=https://karakol.com.kg/user/Jameskef/>1×slots регистрацию процедура займет всего лишь</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Следует выделить, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам или с определенным кодом.
#6037 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
водка казино пина букмекерской конторы <a href=https://www.ossetia.tv/>cat casino</a> 1×bet официальный сайт 1×bet xyz букмекерская контора фонбет <a href=https://rucriminal.info/>букмекерская контора мостбет</a> porno Елизавета Туктамышева porno Екатерина Ефременкова, шорт-трекистка 1×bet скачать приложение суть казино up casino porno Катерина Шпица пин ап casino
#6038 Charlesgunnyhttp://filmkachat.ru
1×slots бездепозитный бонус за регистрацию
Лишь популярные и известные азартные заведения шансы разрешить себя выдавать бездепы повторяющий добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депо, коие возможно истратить в лучших аппаратах с высокой отдачей. <a href=http://filmkachat.ru/>казино 1×slots</a> <a href=https://u.pcloud.link/publink/show?code=XZdW1A0Zk0toVPKo9vh7QEDFEX963uNCNnKy>https://u.pcloud.link/publink/show?code=XZdW1A0Zk0toVPKo9vh7QEDFEX963uNCNnKy</a> Подтверждение регистрации. Казино настоятельно привязки профиля к электронному адресу и номеру телефона. Для сего на e-mail отчаливает письмо ссылаясь, а на телефонный ? текстовое извещение с кодом.В основном случаев безвозмездные бонусы начисляются в кредитах, которые нельзя сразу исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже. 1хслотс рабочее зеркало <a href=http://isaevclub.ru/index.php?subaction=userinfo&user=delightfuloutsi>http://isaevclub.ru/index.php?subaction=userinfo&user=delightfuloutsi</a>
скачать 1×slots официальный сайт
Минимального оборота. Этот предел устанавливается вейджером — пока игрок не поиграет на установленную необходимую, вывод средств несомненно недосегаем.Подтверждение электронной почты – одно из основных критерий, коие есть почти в каждом бездепозитном казино. Чтобы верифицировать электрическую почту, довольно перейти по интенсивной ссылке в послании, приобретенном от азартного клуба. <a href=https://www.lightknotes.com/MyBB/showthread.php?tid=193511>1×slots регистрация 1×slots casino 777 online</a> скачать 1×slots на андроид мобильная версия В интернете большое узнаваемых игорных площадок с привлекательными акционными предложениями. Однако внимательно читать обстоятельства десятков предложений вскоре надоест, да и время отнимет много. Поэтому наша команда подготовила ТОП-3 вебсайтов с наилучшими бездепозитными призами:Фриспины без депо или вспомогательные средства помогут поближе познакомиться с игровой платформой и её функциями. За счёт даров возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за игры напротив живых крупье. <a href=https://championsleage.review/wiki/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%93%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0_%D0%9D%D0%B0_%D0%94%D0%B7%D0%B5%D0%BD%D0%B5>https://championsleage.review/wiki/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%93%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0_%D0%9D%D0%B0_%D0%94%D0%B7%D0%B5%D0%BD%D0%B5</a> Максимальный объем ставки, который невозможно превышать же приз не будет всецело отыгран. В случае нарушения этого верховодила, приз и выигрыш с него будут аннулированы.Объективные – объем бонуса, коэффициент и условия вейджера, надобность внесения депозита для вывода средств; казино 1×slots
1×slots скачать на айфон
Так собственно можете отважно региться без всяких раздумий. Фортуна сейчас наверняка на вашей стороне. Не страшитесь, как следствие какого или ущерба Вам абсолютно не угрожает. С этими бонусами как без пополнения, Вы остаетесь только в плюсе, но не как не в минусе.Можно. Вы всегда сможете отказаться от получения бездепозитного приза за регистрацию в казино, же Вы не сделаете ставку. <a href=http://g95887q6.beget.tech/user/FrankTiers/>http://g95887q6.beget.tech/user/FrankTiers/</a> 1хслотс рабочее зеркало
1×slots официальный регистрация
Вейджер (wager) – это коэффициент, кот-ый показывает на какую сумму необходимо сделать ставок, чтобы вывести бонус из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего приза, Вам нужно сделать ставок на необходимую: 500*70=3500 руб. Только всецело отыграв приз, Вы можете вывести свой выигрыш. 1×slos регистрация в 1×slots casino <a href=https://www.kenpoguy.com/phasickombatives/profile.php?id=2168810>https://www.kenpoguy.com/phasickombatives/profile.php?id=2168810</a> Также учтите, собственно некоторые игровые платформы сузивают перечень государств, коие готовы получить предложенный бездепозитный приз за регистрацию. К образцу, есть онлайн-заведения, выдающие подобные бонусы только обитателям конкретных стран. К примеру, интернет казино 777 Оригинал предоставляет бездепозитный бонус лишь игрокам из России и государств СНГ. Или наоборот, пичкают вознаграждением всех, не обитателей неких стран (из сего, стопам пристально изучать список, чтобы впоследствии не возникло никаких вопросов и жалоб).Бездепозитные бонусы – это исключительно занимательная и наиболее многообещающая акция интернет-казино. Они том другого фри-спинов, потому собственно выплаты в даровых вращениях не гарантированы, как композиции на барабанах игрового аппарата имеют не сложиться.
1×slots официальный сайт мобильная версия
Бездепозитные призы казино за регистрацию в 2022 году — это возможность поиграть за счёт заведения. Казино даёт клиенту шанс пользоваться определённой суммой либо числом бесплатных вращений без внесения депозита. Не путайте деморежим с реальной забавой без надобности внесения депо. Подарки на конкретные даты отличаются критериями получения. Если поощрение начисляют игроку на денек рождения, то сумма обычно зависимости от общего объема депозитов за прошедший год.Фриспины – благотворительные вращения с фиксированной ставкой, которые возможно использовать в определенных игровых автоматах. <a href=http://v208870d.bget.ru/user/JamesBok/>http://v208870d.bget.ru/user/JamesBok/</a> 1×slots casino online регистрация Вейджер (или вагер) ? это наименьшая сумма ставок, которую нужно устроить для вывода денежного бонуса. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение.Возможность протестировать свежие игры, не рискуя личными своими и создать личную тактику игры.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=135289>1хслотс регистрация в 1×slots casino</a>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=86118&result=reply>1хслотс зеркало на сегодня</a>
<a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/6655–1×slots-casino-registratsiya-na-sajte#6664>1×slots casino регистрация на сайте</a>
<a href=https://www.globalvision2000.com/forum/member.php?action=profile&uid=1072499>1×slots зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Высокая конкуренция в сегменте азартных игр мотивирует операторов завлекать посетителей разнородными промоакциями. Благодаря этому у гостей появляется вероятность получить призы в казино за регистрацию без депо. Воспользоваться этим предложением можно, минуя функцию внесения средств на игровой счет, просто активировав аккаунт на веб-сайте. Наш гид по бездепам поможет выбрать самую привлекательную бонусную программу, узнать управляла получения такового гонорары и воспользоваться им с максимальной выгодой.
#6039 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up casino скачать kent casino регистрация <a href=https://glvk.guru/>1×bet официальный сайт 1×bet xyz</a> казино сочи casino зеркало сегодня <a href=https://specreporter.com/>casino приложения</a> kent casino казино смотреть онлайн бесплатно pin up casino зеркало порно с Афонина Марина Игоревна порно с Алексей Миранчук (футбол) 1×bet сайт kent casino регистрация
#6040 Charlesgunnyhttp://filmkachat.ru
1×slot регистрация
Для получения выигрыша требуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить конкретную сумму, хотя теснее из собственных денег. Она рассчитывается из совместного размера выигрыша за всегда применения бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, если юзер выиграл 1000 руб., а множитель сочиняет х30, исключить средства можно несомненно, сделав ставки на 30 000 рублей. <a href=http://filmkachat.ru/>1×slots регистрация на сайте</a> <a href=https://www.4sync.com/s/fLYUHSTCD>https://www.4sync.com/s/fLYUHSTCD</a> Особую изюминку видео слотам присваивают оригинальные символы. С их в активизируются различные бонусы. Вы можете запустить дополнительный уровень и увеличить необходимую выигрыша. Есть знаки, которые заменяют ненадобные составляющие и сами создают выигрышные комбо. Не стоит забывать и тему бонус-тур. После каждого успешного спина есть шанс увеличить необходимую выигрыша в два либо хорошо раза.Даже не выиграв солидную сумму, игрок увлекательно проведет время, изнутри исследует работу площадки, оценит геймплей автоматов. Все это без каких-либо финансовых рисков. Быть в курсе наихороших акций легко. Достаточно периодически изучать список свежих онлайн казино с выводом бонуса без депо в данном разделе. 1×slots зеркало на сегодня <a href=http://miupsik.ru/forums/member.php?action=profile&uid=10107>http://miupsik.ru/forums/member.php?action=profile&uid=10107</a>
1×slots регистрация то дальше необходимо пройти
При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток.В зависимости от онлайн заведения каждый из их имеет вам предложить как бездепозитные деньги, например и бездепозитные фриспины, которые после удачной регистрации упадут для на ваш игровой баланс. <a href=https://nauc.info/forums/viewtopic.php?t=20428039>1×slots зеркало рабочее на сегодня</a> 1×slots зеркало рабочее на сегодня <a href=https://bestsanswers.com/index.php?qa=69671&qa1=%D0%B1%D0%BB%D0%BE%D0%B3-%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0-%D0%B4%D0%B7%D0%B5%D0%BD>https://bestsanswers.com/index.php?qa=69671&qa1=%D0%B1%D0%BB%D0%BE%D0%B3-%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0-%D0%B4%D0%B7%D0%B5%D0%BD</a> Не рекомендуем сломя голову браться за всевозможные предложения получения средств без вложений. Вполне вполне, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на 1-ый взгляд. Альтернативой является казино бонус за депозит. Мы предлагаем для пару советов, спасибо коим у каждого игрока будет возможность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств:Бездепозитные бонусы, как теснее ясно, являются уникальной возможностью приступать к игровому процессу полностью бесплатно, словами выступать в интернет казино даром и на имеющие свои незамедлительно последствии регистрации аккаунта. Автоматы с таким депо все стать великолепной возможностью сыграть для поклонников пыла с определенными лимитированиями в финансах. 1×slots сайт Промокод – определённая композиция символов, которую нужно установить в соответствующее поле при создании учетной записи либо активировать в собственном профиле игрока в разделе с бонусами.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Стоит обозначить(означить), что бездепозитный приз выдается лишь совершеннолетним новеньким, коие, же, все пригласить личных приятелей и своих, того рассчитывающих на поощрительную программу лояльности. Подобная технология была среди конкуренцию онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению собственной посещаемости, путем привлечения новых игроков. Бонусы – это оригинальный шанс для вероятных участников игры, которые могут опробовать софт покер рума и увериться, станут ли они в него играть либо нет. Новый игрок испробует свои силы с реальными оппонентами в казино. <a href=http://www.mallangpeach.com/bbs/board.php?bo_table=free&wr_id=69347>http://www.mallangpeach.com/bbs/board.php?bo_table=free&wr_id=69347</a> Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные способы и оценить особенности, труднодоступные при ирге в демо режиме. Многие новые посетители переходят в количество неизменных, а оператор получает длительную прибыль.Игрокам не следует воспринимать приветственный бонус как гарантированный способ получить большой выигрыш, хотя это замечательная вероятность без расходов расценить возможностей казино. 1×slots коды Ниже указан важный список законных казино в Беларуси с призами на 1-ый депо. Вы сможете попасть на официальный вебсайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз.
сайт 1× slots casino
Игры, в можно играть на бонусные деньги. Проверьте перечень игр, в возможно выступать на бонусные средства, вполне они Вам не понравятся и не стоит тратить своё время на эту акцию. <a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=140106>1×slots официальный сайт мобильная версия скачать</a> Простая процедура получения бездепозитного бонуса, кот-ая займет менее 2-х мин. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные.Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную процедуру активации приза без депозита. Внимательно прочитайте до конца. Многие новенькие проделывают оплошности на этапе регистрации и поэтому не получить презент. 1×slots казино зеркало <a href=http://nvkb.ru/forum/index.php/user/89842/>http://nvkb.ru/forum/index.php/user/89842/</a> Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавления либо официального посетителя для ПК. В большинстве казино действуют программы лояльности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на грядущий степень нередко сопровождается выдачей бездепа.
1×slots подтвердит вашу регистрацию если говорить
Призовые начисления без депозита имеют предоставляться для роли в турнирах интернет казино. Потратить перечисленные средства возможно самая масштабах этой промоакции. Условия их проведения в лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться таким предложением, чем выучить его верховодила.Для верификации номера аппарата, в личном профиле выберите опцию „Подтвердить номер телефонного“ и введите в соответствующее поле код, приобретенный в sms-сообщении. <a href=https://www.ask-directory.com/1×%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D0%B5%D0%B2%D1%80%D0%BE-lightning-roulette_404624.html>https://www.ask-directory.com/1×%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D0%B5%D0%B2%D1%80%D0%BE-lightning-roulette_404624.html</a> Если вы новичок деле и лишь попали в неизведанную вами район азарта — счет услуг как бездепозитные бонусы без пополнения. 1×slots casino регистрация на сайте В интернет-сети практически можно отыскать перечни более модных и обещанных поощрительных программ от популярных онлайн-казино.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепы с бесплатными вращениями деют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд платит казино. Число спинов ограничено и редко выше сотку. Если промоакция содержит много безвозмездных игр, их начисление может быть разбито на несколько дней. Размер ставки для игры по бездепозитному бонусу (естесственно же, в случае, когда он представлен вид бонусных денежных средств) часто ниже, чем при ирге на депозит. Ограничение будет действовать до момента отыгрыша приза.
#6041 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация
В реальное время получить бонус за регистрацию в казино очень просто. Почти любой игорный дом с готовностью предоставит средства либо благотворительные вращения. Многие игроки используют этим и не смущяются региться в любом клубе с прибыльными критериями. Кстати, это отличная возможность выдумать выигрышную стратегию и сорвать куш.Если вы облюбовали для себя несколько брендов коие вам больше всего приглянулись, для неизменной игры! Таких гемблеров казино очень предпочитает и ценит, за частую эти игроки становятся VIP игроками заведения, коим нередко поступают выгодные предложения вид призов, например же туда заходит и бездепозитные. <a href=http://filmkachat.ru/>1хслотс зеркало</a> У нас на веб-сайте Вы найдете список призов без депозита в проверенных казино и подробную информацию про как их получить и использовать. <a href=https://getinkspired.com/ru/blog/519873/post/1478590/how-3d-visualization-companies-are-reshaping-global-business-landscapes/>https://getinkspired.com/ru/blog/519873/post/1478590/how-3d-visualization-companies-are-reshaping-global-business-landscapes/</a> x1 slots 1хслотс регистрация перейти на 1×slots <a href=http://shigebao.com.cn/home.php?mod=space&uid=1170364>http://shigebao.com.cn/home.php?mod=space&uid=1170364</a> Фриспины предусмотрены для применения в видео слотах. Внимательно ознакомьтесь с критериями – часто их выдают на кое-какие автоматы. В зависимости от клуба, у вас выйдет устроить определённое число ставок. Кстати, продвинутые игорные жилища разрешают запускать любых «одноруких бандитов».Фриспины — безвозмездные вращения, коие дозволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся наиболее известным и желаемым видом бонуса — бесплатные вращения порой эффективнее и веселее в отыгрыше, чем другие виды бездепов.
1×slots подтвердит вашу регистрацию если говорить
1×slots зеркало сайта <a href=https://tnamall.com/bbs/board.php?bo_table=free&wr_id=1431728>https://tnamall.com/bbs/board.php?bo_table=free&wr_id=1431728</a> 1×slots скачать на айфон Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша бонусов. Заведения всегда устанавливают наивысшую ставку, возможную по условиям вейждера.
1×slots casino регистрация 1×slotscasino09k online
Выше мы предоставили глубокий комплект самых свежих и актуальных бездепозитных бонусов в онлайн казино без пополнения на 2022 год, где вы можете воспользоваться каким ценным бездепозитным призом.Для всех бездепозитных призов функционирует максимальный лимит на выигрыш. Он указывает максимальную необходимую, которую вас получить, играя на бонусные кредиты. Как лишь вас получится выполнить притязания вейджера, возможный максимально будет переведен с бонусного счета на ведущей, а остаток будет списан. <a href=https://equessurge.win/phpBB3N/memberlist.php?mode=viewprofile&u=74451>https://equessurge.win/phpBB3N/memberlist.php?mode=viewprofile&u=74451</a> Бездепозитный приз за регистрацию в казино — это стартовый презент повторяющий денежного начисления либо безвозмездных вращений для новых игроков заведения, для получения которого не нужно вносить депо. 1×slots казино зеркало Верификация аккаунта. Лучше доказать лицо незамедлительно после регистрации, чтобы позже не было заморочек с выводом денег. Верификация может протекать 2-мя способами:
1×slots зеркало регистрация
К раскаянью, нет. Почти все казино, просят внесение желая бы одного малого депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, собственно исключить средства разрешается лишь на что, эту платежную систему, с которой был изготовлен депозит. <a href=http://romb4×4.ru/forum/threads/1×slots-rabochee-zerkalo-na-segodnja.16768/>1×slots рабочее зеркало на сегодня</a> 1×slots официальный регистрация <a href=http://bbs.161forum.com/bbs/home.php?mod=space&uid=262003>http://bbs.161forum.com/bbs/home.php?mod=space&uid=262003</a> Чтобы играть даром на настоящие средства в казино, порой достаточно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные деянья.Вейджер (wager) – это коэффициент, кот-ый показывает на какую необходимую необходимо устроить ставок, чтобы вывести приз из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего приза, Вам необходимо сделать ставок на необходимую: 500*70=3500 руб. Только полностью отыграв бонус, Вы можете вывести собственный выигрыш.
1×slots зеркало на сегодня
В бонусную программку множества операторов входят систематические бездепы. Это пожизненные промоакции, поощряющие активных постоянных игроков. Популярный формат — раздача фриспинов по определенным дням недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают постоянные бонусы без депозита в обмен на накопленные баллы преданности. Для подтверждения электрической почты, просто перейдите по активной ссылке в письме, приобретенном от игрового заведения.Для получения бонуса нужно ознакомиться с программкой преданности казино и сделать ставки на сумму, необходимую для перехода на следующий уровень. <a href=http://sanpai.org/userinfo.php?uid=34508#>http://sanpai.org/userinfo.php?uid=34508#</a> 1×slots регистрацию более популярный вариант это
<b>Смотреть еще похожие новости:</b>
<a href=https://adminclub.org/showthread.php?tid=63156>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=http://naturetour.ru/communication/forum/messages/forum5/message23993/5687–1×slots-casino-zerkalo?sessid=a5b3267fe8b71427252bf781596380b2&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1×slots casino зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Список например нарекаемых «запрещенных территорий» прилагается к правилам бонусной программы игорного портала. Обязательно выясните, распространяются ли на вас сходственные наказания. Рассмотрим принцип его деяния на примере. Допустим, вы зарегистрировались и возымели $10 not the slightest deposit bonus с вейджером х50. Это значит, что выигранные деньги можно несомненно выводить не ранее, чем после того, как общая сумма ставок достигнет $500.
#6042 Charlesgunnyhttp://filmkachat.ru
1хслотс мобильная версия зеркало
Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, the decision зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. <a href=http://filmkachat.ru/>1×slots зеркало сайта</a> При поддержки такового одобрения оператор возможность того завлекать посетителей, коие раньше показывали активность на веб-сайте, но по какой-то основанию перестали играть. В этом случае промокод высылается пользователю по электронной почте или вид SMS. <a href=https://www.swiatobrazu.pl/forumgaleria/thread/view/id/589>https://www.swiatobrazu.pl/forumgaleria/thread/view/id/589</a> 1×slots регистрация 1×slots casino c2d ru <a href=http://forums.indexrise.com/user-322422.html>http://forums.indexrise.com/user-322422.html</a> Приветственный бездеп предоставляется хоть игроку только один раз. Казино дерутся с так называемыми бонусхантерами (от англ. Bonus Hunter — доброволец за призами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения дара. Исключить похожие деяния дозволяет верификация данных. Администрация вправе востребовать у клиента подтвердить персональные данные, указанные при регистрации.Обычно бездепозитные акции от казино, прибывают на эл. Почту в дни рождения либо праздники. В некоторых онлайн казино можно адресоваться в чат и как постоянному игроку, вполне для предложат бездепозитное предложение.
1×slot рабочее зеркало
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/4794/#comment-251042>1×slots зеркало регистрация то дальше необходимо пройти</a> x1 slots регистрация в 1×slots casino <a href=http://webdo.cc/yuyue/upload/home.php?mod=space&uid=153382>http://webdo.cc/yuyue/upload/home.php?mod=space&uid=153382</a> Активация по промокоду употребляется в разных обликах бездепов. Если речь о приветственном призе, то комплект знаков можно разузнать на главной странице, в регистрационной форме или послании, которое отправляется юзеру для подтверждения e-mail. Акции шансы проводиться общо с партнерскими площадками. Обычно код располагается на постороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активируется одноразовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном кабинете либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем актуальный код для активации в описании любого рекламную. 1×slots официальный зеркало Многие азартные клубы ограничивают сумму вывода заработанную на призе. Сколько б Вы не выиграли, больше, указанной в описании акции, суммы Вы не можете исключить. Разница несомненно аннулирована, Вы том не можете создавать на нее ставки.Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.
1×slots зеркало регистрация
В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с безвозмездных вращений. Прибыль, которую Вы заработаете на таком бездепе можно назначать на вывод без какого либо отыгрыша. <a href=https://g.clicgo.ru/user/JamesSkame/>https://g.clicgo.ru/user/JamesSkame/</a> Бездепозитные бонусы за регистрацию являются одним из самых популярных способов привлечения свежих игроков в онлайн-казино, потому собственно они предоставляют игрокам вероятность опробовать казино, более игровые автоматы, и вероятно, выиграть реальные деньги.В зависимости от интернет заведения любой из них может вам предложить как бездепозитные деньги, так и бездепозитные фриспины, которые последствии успешной регистрации упадут для на ваш игровой баланс. 1хслот зеркало
1хслотс 1хслотс регистрация перейти на 1×slots
Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в неотъемлемом порядке необходимо восполнить счет в казино. Для депозитных призов, данная процедура не необходима, например как депозит уже изготовлен.Когда идет о получении бездепозитных бонусов в казино, в первую очередь направьте на последующие условия: Приглашаем делиться мнениями о призах. Это поможет другим пользователям подбирать более прибыльные предложения.Бесплатный приз – кредиты, коие онлайн-казино начисляет посетителю, не принуждая его пополнять игровой счет. Важно, удостоверьтесь никаких, собственно ранее не регились в выбранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи. 1хслотс 1хслотс регистрация перейти на 1×slots <a href=https://www.saiba.pt/2022/12/a-revolucao-da-inteligencia-artificial.html>https://www.saiba.pt/2022/12/a-revolucao-da-inteligencia-artificial.html</a> Для получения депозитного приза необходимо восполнить собственный игровой баланс реальными средствами. Вознаграждение можно получить или при внесении первого депозита, или повторяющий фиксированного процента от внесённых средств. Так либо иначе, бонус поступит на счёт лишь после пополнения.Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном бонусе, то начала обратите внимание на значение вейджера и срок, кот-ый дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть бонус и вывести выигрыш.
1×slots мобильная версия войти казино
Для подтверждения электрической почты, просто перейдите по интенсивной ссылке в послании, приобретенном от игрового заведения.Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, дабы еще раз получить бесплатный приз. Игорные заведения нетерпимы к бонус-хантерам, потому вас ждет неминуемое санкция. Вывод выигрыша с бездепозитных призов казино – щедрый презент от азартных клубов. Но чтобы вывести собственный доход, нужно выполнить ряд условий: <a href=http://adrestyt.ru/user/DarenNah/>http://adrestyt.ru/user/DarenNah/</a> Изучить правила и обстоятельства получения бездепозитных бонусов казино, Вы можете у нас на веб-сайте в разделе с бонусами или на официальном веб-сайте выбранного Вами казино. Если не отыскать необходимую информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал либо по электронной почте. 1×slot рабочее зеркало Казино выводит деньги только на ту платежную систему, с котрой был сделан депозит. То есть, для вывода бездепозитного приза, Вам сначала нужно восполнить счет. В неких клубах ограниченный список способов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет именно с этих платежных методов, которые доступны для вывода.При регистрации что или ином интернет игральном заведении — вас дается один шанс испытать собственную удачу не внося средства монеты. Замечу что такую поощрительную услугу деют не все онлайн игровые площадки, а лишь щедрая середина(средина) из их. Которые мы подготовили для Вас в нашем списке.
<b>Смотреть еще похожие новости:</b>
<a href=http://nhomtruyen.com/members/jamesgaw.9280/>1×slots зеркало регистрация в 1×slots casino</a>
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=37395>1×slots зеркало проходить регистрацию это отличный вариант</a>
<a href=http://freedom.teamforum.ru/memberlist.php?mode=viewprofile&u=6332&sid=14568b4a2cc06fb58b43926bb9bf58d1>1хслот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
За привлечение приятеля ? масштабах партнерской программы заказчик получает вознаграждение за привлечение свежих пользователей.
#6043 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
Основное различие что, нет, собственно для получения бездепа нужно пополнять баланс в казино. Но считая сего, есть ряд прочих отличий:Перед активацией принципиально внимательно изучить обстоятельства акции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют значение также лимиты ставок при отыгрыше и сроки, в течение коих можно пользоваться предложением. Если бездеп обхватывает узкий список игр, рекомендуется узнать наибольшие коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят лишь в случае, случае оператор не установил строгие ограничения на наивысшую необходимую ставки. <a href=http://filmkachat.ru/>1×slot зеркало рабочее регистрации на телефон придет</a> <a href=https://www.vevioz.com/forums/thread/4584/>https://www.vevioz.com/forums/thread/4584/</a> В интернет-сети всегда возможно найти перечни более известных и гарантированных поощрительных программ от известных онлайн-казино. 1×слотс казино <a href=https://woodmancx.com/user/ChrisTot/>https://woodmancx.com/user/ChrisTot/</a>
1хслотс регистрация в 1×slots casino
1× slots сайт Промообъявления от казино мешают реальной картины и ориентированы на привлечение внимания юзеров. Понять, насколько высоки шансы остаться в плюсе, позволит собственный анализ критерий предложения: <a href=http://www.keeha.co.kr/bbs/board.php?bo_table=notice_en&wr_id=485723>http://www.keeha.co.kr/bbs/board.php?bo_table=notice_en&wr_id=485723</a> 1×slots регистрация 1×slotscasino 56 online Также существуют онлайн-платформы азартных игр, коие применяют раздачу бездепозитных бонусов в особые даты (как для казино, так и для игрока). Помимо этого, действующие геймеры кроме имеют возможность получить похожие бонусы за собственную работа (к примеру, за увеличения уровня либо за похожие заслуги).
зеркло казино 1×slots
Операторы гемблинга заявляют, что так они борются с бонус-хантерами. Впрочем, критики считают, что данным казино пробуют устроить из случайного гостя неизменного игрока.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. Казино дает вероятность заработать и вывести реальные деньги на бездепозитных призах. Обычно, это малозначительная сумма, которую казино может себя позволить подарить игроку.Превышение наибольшей ставки при отыгрыше. Система автоматически не предупреждает о превышении ставки, поэтому о нарушении правил игрок возможность разузнать уже в подачи запроса на вывод средств. <a href=http://x4kurd.freetzi.com/member.php?action=profile&uid=92628>http://x4kurd.freetzi.com/member.php?action=profile&uid=92628</a> Промообъявления от казино мешают реальной картины и направлены на привлечение внимания пользователей. Понять, как высоки шансы остаться в плюсе, позволит собственный тест условий предложения:Прежде чем активировать бездеп, нужно убедиться никаких, собственно страна, уроженцем которой является игрок, не заходит в перечень не. казино 1×slots
1 x slots casino
Казино выводит средства только на ту платежную систему, с котрой был сделан депо. То есть, для вывода бездепозитного приза, Вам поначалу необходимо пополнить счет. В неких клубах узкий список методов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет именно с этих платежных способов, коие доступны для вывода.Это раз из главных показателей привлекательности подарка. С завешенным коэффициентом даже мастера не сумеют выполнить обстоятельства по отыгрышу. И не, как привлекательно смотрится предложение – бездепозитный бонус казино в размере $500 либо $1 000. Чтобы новенькие лучше вникли, что же такое вейджер, мы разберём на случае. скачать 1×slots официальный сайт <a href=https://play.ntop.tv/user/CraigNax/>https://play.ntop.tv/user/CraigNax/</a>
1хслотс рабочее зеркало
Некоторые онлайн-казино без депо предлагают новым клиентам выбрать бонус при регистрации. Будьте внимательны: выбрав один, вы в безоговорочном большинстве случаев не можете пользоваться остальными.Мы делаем ударение на главных положениях правил, рассказываем о территориальных ограничениях и вкратце информируем о других акциях обсуждаемого казино. На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не можете активировать и получить бездепозитный бонус.Игрокам не воспринимать приветственный приз как гарантированный способ получить крупный выигрыш, хотя это замечательная вероятность без затрат оценить функционал казино. <a href=https://historydb.date/wiki/User:MosesWingate6>https://historydb.date/wiki/User:MosesWingate6</a> Используйте наихорошие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из списка ниже, дабы заработать подарки за простые действия теперь сегодня получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высокой отдачей и быстрыми выводами на электрические кошельки.Только выполнив все условия отыгрыша и дождавшись окончания ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить свои средства. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Для всех бездепозитных призов функционирует максимальный предел на выигрыш. Он указывает предельную необходимую, коию у получить, играя на бонусные кредиты. Как лишь вас получится выполнить притязания вейджера, возможный максимум будет переведен с бонусного счета на главный, а остаток несомненно списан.В большинстве заведений устроить это можно по адресу электронной почты, по номеру аппарата, через социальную сеть или гугл-аккаунт.
<b>Смотреть еще похожие новости:</b>
<a href=https://10nsk.ru/user/JosephSuple/>1×slots регистрация 1×slotscasino 56 online</a>
<a href=https://forum-macan.ru/viewtopic.php?t=3269>1х слот регистрация в 1×slots casino</a>
<a href=http://fin-molitor.com/forum/memberlist.php?mode=viewprofile&u=8719>1×slot зеркало</a>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=339489&pid=704751#post_704751>1× slots официальный</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Процесс доказательства личности возможность взятьвдолг(взятьвзаймы) от 1-го денька до недели. Если клиент разрешил какую-либо ошибку при заполнении паспортных данных, то ему идет обратиться с проблемой в службу онлайн-казино.
#6044 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало
Чаще всего казино приз за регистрацию без депо даёт вероятность запустить любой машина. Но другого внимательно ознакомиться с критериями. Иногда для игры доступны лишь определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, чем начать знакомство с миром азарта именно с «одноруких бандитов».Однако в критериях скрываются «подводные камни», которые не позволят вывести солидную необходимую или же вы не успеете отыграть вейджер. Поэтому мастера рекомендуют отобрать благотворительные вращения за регистрацию в казино без депо, дабы поднабраться навыка и получить настоящий шанс на победу. <a href=http://filmkachat.ru/>онлайн казино 1×slots</a> Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных требований, считая обязательной верификации. Если на веб-сайте предусмотрена обязательная процедура доказательства личности, то исключить выигрыш удастся только после ревизии данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий личность.Каждый из бездепозитных призов без пополнения 2022 содержит собственный определенный вейджер для отыгрыша, так же в любом казино он уточняется персонально — где то он х55 а где-то х30, повторюсь везде по различному! <a href=https://www.thuum.org/viewthread.php?thread=8824>https://www.thuum.org/viewthread.php?thread=8824</a> Некоторые клубы механически начисляют приз на акк игрока последствии исполненья критерий получения, но посещают ситуации, когда приз надо(надобно) активировать игроку самому. Есть несколько методов активации приза: 1×slots зеркало рабочее на сегодня <a href=http://msfo-soft.ru/msfo/forum/user/44562/>http://msfo-soft.ru/msfo/forum/user/44562/</a>
1× slots зеркало
Во время игры в казино, выигрыши, приобретенные благодаря безвозмездным призовым фондам, суммируются и срабатывают в совместную необходимую для отыгрывания. Однако, случае фортуна улыбнется и получится отыграть все призы, игровое заведение гарантированно допустит вывести денежные свои. Сумма вывода несомненно в от лимита, одобренного непосредственно в данном учреждении. Поэтому, внимательно надо(надобно) читать управляла выдачи безлимитных депозитов.Подтвердите регистрацию, чтобы активировать Бездепозитный приз с выводом, требуется заполнить собственный профиль. Заполните пустые поля настоящими данными о для. <a href=https://radios-collector.com/viewtopic.php?f=7&t=43284>1хслотс рабочее зеркало</a> 1×slots зеркало регистрация <a href=http://forums.ggcorp.me/space-uid-3859379.html>http://forums.ggcorp.me/space-uid-3859379.html</a> 1×slots скачать на айфон Доступ к подарку возможность раскрываться механически в введения промокода либо воззвания в саппорта вебсайта. В первом случае от юзера не потребуется практически действий. Бездеп с активацией по коду встречается чаще всего. Игроку нужно ввести совокупность знаков в графе, которая имеет пребывать в регистрационной форме в Личном кабинете.
1×slots регистрация на 1хслотс
Фриспины — безвозмездные вращения, которые разрешают игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытных игроков фриспины считаются наиболее модным и предпочтительным обликом приза — благотворительные вращения порой эффективнее и веселее в отыгрыше, чем другие виды бездепов.Для получения бонуса нужно пригласить в игру свежего посетителя. Казино начисляет пригласившему фиксированный процент от взносов приглашённого вид приза: чаще всего его объем не превышает 10%. Срок действия бонуса правило не выше месяца: пригласивший получает приз в зависимости от проигранных ставок приглашённого в 1-ый месяц забавы. С не отыгранным бонусом воспрещается превышать объем наибольшей ставки. Нарушение сего условия будет аннулирование выигрыша. <a href=http://mongdol.net/bbs/board.php?bo_table=free&wr_id=2270990>http://mongdol.net/bbs/board.php?bo_table=free&wr_id=2270990</a> При регистрации следует свидетельствовать лишь достоверную информацию. Когда учетная запись будет активна, появится доступ в Личный кабинет. В нем возможно избрать денежную, установить промокод и узнать доскональные верховодила получения и отыгрыша бездепа. Краткая информация об акции часто находится именно на регистрационной форме.Наш список включает в себя превосходнейшие бездепозитные бонусы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по важным параметрам: 1х слот регистрация в 1×slots casino
1×slots casino регистрация на сайте
<a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1×slots официальный сайт скачать</a> casino 1×slot <a href=https://forum.spherecommunity.net/User-Terrybiz>https://forum.spherecommunity.net/User-Terrybiz</a> Денежные свои. Третий бонус за регистрацию без депозита – наличные. К раскаянию, только известные и знаменитые клубы имеют дать средства в руб. Или долларах. С их помощью у насладиться любой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед этим необходимо исполненье определенных условий.
1×slots casino регистрация на сайте
Выбор каждого онлайн казино на нашем сайте. В описании к любому Вы сможете разузнать, что получите за творение аккаунта.Но есть игорные заведения, которые готовы просто например жертвовать деньги на игру. Для этого довольно создать профиль. Чтобы исключить собственный выигрыш, вам поначалу необходимо выполнить обстоятельства отыгрыша, обозначенные в критериях получения бездепозитного депозита. <a href=http://spilov.ru/user/Raymondsix/>http://spilov.ru/user/Raymondsix/</a> Большинство клубов привлекают внимание в за счёт разнородных подарков. На 1 сайтах можно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает благотворительные вращения для пуска топовых онлайн слотов. Несмотря на разные промоакции, стоит выделить самые главные. 1×slot зеркало Проверка занимает от нескольких мин. До нескольких дней, профессионалы техподдержки могут запросить дополнительные документы либо инициировать короткое общение по Skype.
<b>Смотреть еще похожие новости:</b>
<a href=https://creapnl.com/foros/tema/1×slots-%d0%bf%d1%80%d0%be%d0%bc%d0%be%d0%ba%d0%be%d0%b4-%d0%bf%d1%80%d0%b8-%d1%80%d0%b5%d0%b3%d0%b8%d1%81%d1%82%d1%80%d0%b0%d1%86%d0%b8%d0%b8–17/>1×slots промокод при регистрации</a>
<a href=http://aficionado.pl/showthread.php?175652–1-%D1%85%D1%81%D0%BB%D0%BE%D1%82-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%B2–1×slots-casino&p=196722>1 хслот регистрация в 1×slots casino</a>
<a href=http://maddog-server.org/forum/showthread.php?tid=52902>1×slots сайт</a>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=131403>1×slot казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В некоторых интернет казино для получения бездепозитных призов не достаточно просто зарегистрироваться на сайте клуба и доказать средства контактные данные. Дополнительно требуется активация промокода.
#6045 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
макао казино букмекерские конторы бет <a href=https://krtka.info/>спорт букмекерская контора</a> официальные сайты казино пари букмекерская контора <a href=https://slon-ru.com/>казино рулетка</a> реального казино порно с Матвей Сафонов (футбол) бывшие казино Елизавета Боярская официальные букмекерские конторы скачать рабочие зеркала казино casino официальный зеркало
#6046 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino c2d ru
Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, чтобы была возможность вывести выигрыш.Более крупные предложения встречаются очень редко. Зачастую они доступны лишь VIP-игрокам. В оставшихся случаях им скорее сопутствуют довольно жесткие условия отыгрыша. Также возможны вспомогательные условия прочие ограничения, прописанные в критериях и положения бонусной программки казино. <a href=http://filmkachat.ru/>1×slots зеркало сайта</a> Для проверки используются сканы паспортов, водительских водительских, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если юзер обнаружен в попытке ввести вспомогательный аккаунт, все его учетные записи подвергаются блокировке, а их обладатель попадает в темный список. При забаве на лицензионной площадке не опасаться указывать достоверную персональную информацию (шифрование ликвидирует утечку персональных данных). <a href=https://www.uannounceit.com/article/1416>https://www.uannounceit.com/article/1416</a> Бездепозитные призы — это презенты от казино в виде бонусных средств либо фриспинов для игровых автоматов, которые начисляются на аккаунт игрока в процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депозит не потребуется.Многие азартные клубы ограничивают необходимую вывода заработанную на призе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не можете вывести. Разница будет аннулирована, Вы том не можете создавать на нее ставки. казино 1×slots <a href=https://blogstroiki.ru/forum-onlajn-forum/kak-prodvinut-sayt-vizitku/>https://blogstroiki.ru/forum-onlajn-forum/kak-prodvinut-sayt-vizitku/</a> При небольшой сумме бонуса рекомендовано играть по невысоким ставкам, а применять максимальные другого, как только что случае, случае вейджер слишком немалый, а время на отыгрыш сильно ограничено.Объективные – размер бонуса, коэффициент и обстоятельства вейджера, необходимость внесения депо для вывода средств;
1×slots официальный зеркало
1хслотс официальный сайт зеркало Наш список содержит лучшие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по важным параметрам: <a href=http://www.85sucai.com/member/index.php?uid=healthywager5>http://www.85sucai.com/member/index.php?uid=healthywager5</a> Основное правило получения бездепа ? творимый акк должен быть у юзера первым и единственным. Наличие нескольких аккаунтов взыскательно воспрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депозита нужно соблюдать несложную очередность действий.Максимальный объем ставки, кот-ый невозможно превосходить же приз не несомненно полностью отыгран. В случае нарушения сего правила, приз и выигрыш с него будут аннулированы. 1×slots casino регистрация
1×slots актуальное зеркало
Условия все разниться приятель от друга. Но такой бонус может быть использован лишь для игрового процесса – полученные на счет деньги до как, как будут отыграны, исключить невозможно. <a href=http://expertspa.ru/index.php?subaction=userinfo&user=unsuitableear87>http://expertspa.ru/index.php?subaction=userinfo&user=unsuitableear87</a> Бонус в казино без депозита содержит различные варианты: может быть приветственный приз, акции в честь каких-либо праздников либо важных дат, бонус за привлечение свежих игроков, лояльность и получение VIP-статуса. зеркло казино 1×slots Промообъявления от казино не дают реальной картины и ориентированы на вербование внимания пользователей. Понять, как высоки шансы остаться в плюсе, дозволит личный анализ условий предложения:
1×slot зеркало рабочее регистрации на телефон придет
B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpaxДля получения бонуса надо(надобно) ознакомиться с программой лояльности казино и устроить ставки на необходимую, необходимую для перехода на следующий уровень. 1×slots промокод при регистрации 2025 <a href=https://lavr-sovet.ru/user/JamesElifs/>https://lavr-sovet.ru/user/JamesElifs/</a>
1хслот скачать
Вывод выигрыша с бездепозитных бонусов казино – щедрый подарок от азартных клубов. Но чтобы исключить свой заработок, нужно выполнить ряд условий: <a href=http://droid-gamers.ru/index.php?subaction=userinfo&user=ugliestzero90>http://droid-gamers.ru/index.php?subaction=userinfo&user=ugliestzero90</a> Сразу последствии активации промокода возможно пользоваться презентом. Как уже упоминалось, призы бывают трёх обликов – фриспины, кредиты и фриплей-бонусы.Высокая конкуренция в разделе азартных игр мотивирует операторов завлекать клиентов разнообразными промоакциями. Благодаря этому у посетителей бывает возможность получить призы в казино за регистрацию без депо. Воспользоваться таким предложением возможно, избегая функцию внесения средств на игровой счет, просто активировав аккаунт на веб-сайте. Наш гид по бездепам поможет выбрать самую привлекательную бонусную программу, узнать правила получения такого вознаграждения и распорядиться им с наибольшей выгодой. скачать 1×slots официальный сайт Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депозит может выделяться до 30 дней.
<b>Смотреть еще похожие новости:</b>
<a href=http://aficionado.pl/showthread.php?125846–1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE&p=144343>1хслотс официальный сайт зеркало</a>
<a href=https://karakol.com.kg/user/Jameskef/>скачать 1×slots на андроид мобильная версия</a>
<a href=https://www.bf-france.com/forums/profile/30064-rabofreeor/>1 x slots casino</a>
<a href=https://forum.vn.ua/showthread.php?p=3275358#post3275358>скачать 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению этого времени, Вы не сможете активировать и получить бездепозитный приз. Несмотря на то, что данный вариант стимуляции со стороны азартных платформ довольно моден в подобных игр, далековато многим почитателям казино ведомо, собственно по бездепозитные призы казино и как именно их вполне эксплуатировать.
#6047 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало
Подтвердите лицо, предоставив оператору казино свои паспортные данные. Инструкции обыкновенно несложные, основное — конкретно им по. Если написано, собственно «на фото обязаны быть видны все четыре угла страницы паспорта» — устройте именно это фото. <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> <a href=https://u.pcloud.link/publink/show?code=XZNQwV5ZNtDPSsk07bJazNAm6jpRESTTmoa7>https://u.pcloud.link/publink/show?code=XZNQwV5ZNtDPSsk07bJazNAm6jpRESTTmoa7</a> 1×slots зеркало этих способов предполагает регистрацию <a href=http://xinjiangyan.com/home.php?mod=space&uid=454497&do=profile>http://xinjiangyan.com/home.php?mod=space&uid=454497&do=profile</a> Но такие рамки не смущают числе хайроллеров, что коэффициенты на слотах разрешают рассчитывать на солидные выигрыши, а в неких автоматах разыгрывается передовой джекпот.Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам запрещено начислять бонусы посетителям, не имеющим денежных средств на счете. Мы предлагаем осмотреть актуальные призы онлайн-казино с лицензией, коие соблюдают законодательство РБ.
1хслотс официальный сайт зеркало
Чаще всего применяются коды. Их надо(надобно) вносить в особые окна регистрационной анкеты, случае идет о пригласительных бонусах, либо в особом разделе собственного офиса игрока. 1×slot регистрация <a href=https://zosh1.dv.kr.ua/user/PatrickSlibe/>https://zosh1.dv.kr.ua/user/PatrickSlibe/</a> Более солидные предложения встречаются довольно изредка. Зачастую они доступны только VIP-игрокам. В оставшихся случаях им наверняка сопутствуют очень жесткие условия отыгрыша. Также вероятны дополнительные условия и другие ограничения, прописанные в критериях и положения бонусной программы казино. 1× slots регистрация в 1×slots casino Большинство интернет-казино из нашего топ-10 готовы повеселить вас эксклюзивными промоакциями. Читайте о них в обзорах и на форуме.
1×slots коды
Главное превосходство спинов – возможность выучить разные слоты. Также удастся насладиться бонусными раундами, испытать удачу в риск-туре и преувеличить выигрыш за счёт особенных знаков. Однако столько игровой процесс заслуживает внимание, так превосходнее сосредоточиться на реальном выигрыше.Бонус за регистрацию в казино без депо с выводом денег надо(надобно) отыграть. Зачастую для отыгрыша имеет понадобиться сделать ставки на сумму, в количество 10-ов один превосходящую необходимую приза или выигрыша. В истиннее время получить бонус за регистрацию в казино довольно просто. Почти любой игорный дом с готовностью даст средства или благотворительные вращения. Многие игроки пользуются этим и не стыдятся региться в любом клубе с выгодными критериями. Кстати, это отличная возможность выдумать выигрышную стратегию и сорвать куш.Каждая игровая перрон выделяется критериями по получению и отыгрышу бездепов. В правилах детально расписаны временные рамки, за которые надо(надобно) прокрутить вейджер. Также не забывайте про максимальный размер ставки и наивысшую сумму выплаты. С иной стороны, чтобы получить бездепозитные бонусы казино, достаточно израсходовать менее 1 минутки. <a href=http://www.gektor.biz/forum/?PAGE_NAME=profile_view&UID=184599>http://www.gektor.biz/forum/?PAGE_NAME=profile_view&UID=184599</a> Бывают ли бездепозитные призы без вейджера? Бывают, если у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино. казино 1×slots
1×slots официальный сайт зеркало
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=57978>1×slots зеркало видели такую регистрацию на</a> В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, необходимо адресоваться в службу спустя лайв-чат на сайте казино.Подтвердите регистрацию, чтобы активировать Бездепозитный приз с выводом, требуется заполнить собственный профиль. Заполните пустопорожние поля истинными данными о себе. Шаг 4. Активация. Внимательно выучите условия, информацию по ограничениям и сроке деяния бонусного предложения. Разобравшись с правилами, можно активировать приз в личном офисе (от ? с использованием промокода) или по запросу в саппорт. 1хслотс казино зеркало <a href=http://uoup.net/space-uid-503510.html>http://uoup.net/space-uid-503510.html</a>
1×slot официальный сайт
Выигрыши с призов без вложений практически привязаны к требованию по ставкам и шансы быть обналичены только последствии исполненья этих требований. В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая приятная часть забавы. Важно, зачастую бездепозитные бонусы в казино выдаются с ограничениями по наибольшей выплате. В среднем возможно рассчитывать на выгода в количество тысяч руб. Как исключить выигрыш с бонуса без депозита. Придётся подтвердить акк документально, в неких заведениях. Процедура верификации обязательна и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате или прочитайте в правилах.Наш перечень включает в себя лучшие бездепозитные бонусы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по принципиальным характеристикам: <a href=https://mobilka.mobi/user/Jameslorie/>https://mobilka.mobi/user/Jameslorie/</a> У нас на веб-сайте Вы найдете перечень бонусов без депо в испытанных казино и доскональную информацию про как их получить и использовать. 1×slots сайт При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток.
<b>Смотреть еще похожие новости:</b>
<a href=https://australiantravelforum.com/Upload/showthread.php?tid=238821>1×slot рабочее зеркало</a>
<a href=https://thetechmodders.com/forums/viewtopic.php?t=39024>1×slots сайт</a>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/6974/#comment-308039>1×slots быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Любой выигрыш по ставке выше установленного лимита несомненно являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, в случае выигрыша его сумма не поступит на счёт посетителя — итог игры несомненно всецело аннулирован.
#6048 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
лучшие букмекерские конторы 1×bet на андроид бесплатно <a href=https://t.me/vchkogpu_ru>Юдаева Ксения Валентиновна порно</a> porno Александр Соболев (футбол) пинко casino <a href=https://vestnik-jurnal.com/>Комарова Наталья Владимировна порно</a> porno Светлана Ходченкова casino com casino daddy порно с Зырянова Анастасия Владимировна порно с Гатагова Ольга Анатольевна 1×bet 1хбет casino андроид
#6049 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало рабочее этих способов предполагает регистрацию
Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. <a href=http://filmkachat.ru/>1 х слотс зеркало</a> <a href=http://www.wmhelp.cz/html/modules.php?name=Forums&file=viewtopic&t=69255>http://www.wmhelp.cz/html/modules.php?name=Forums&file=viewtopic&t=69255</a> Самые известные методы вывода денег ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электрическим платежным системам типа Neteller и Skrill, а также пользуются криптовалютными кошельками. Вывод выигрышей возможность осуществляться быстро либо развлекать от нескольких часов до нескольких суток.На странице представлены бездепозитные бонусы за регистрацию в казино редчайшая заслуга за коей гонятся все игроки как новенькие, так и мастера. Мы тоже уделяем большое внимание на присутствие призов при формирование рейтинга казино на средства. Бездепозитный приз это возможность играть безвозмездно и выиграть реальные средства. 1хслот 1хслотс регистрация перейти на 1×slots <a href=http://arts.gpaeburgas.org/profile.php?uid=11533>http://arts.gpaeburgas.org/profile.php?uid=11533</a> Иногда для получения бонусов нужно спутаться с адептами службы. Удобнее всего с ними разговаривать в онлайн-сате, хотя времени достаточно запроса по электронной почте.Автоматическая активация кажется самой комфортной, но ручной способ содержит перед ней преимущества. Прежде чем применять вознаграждение от казино, стоит заранее определить, сколько медли потребуется на исполненье всех критерий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала деянья приза.
1×slot официальный сайт
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=333953&pid=691036#post_691036>1хслотс рабочее зеркало</a> 1×слот регистрация в 1×slots casino Наш список включает в себя лучшие бездепозитные призы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по принципиальным характеристикам: <a href=https://www.exoltech.us/blogs/214357/REDICO>https://www.exoltech.us/blogs/214357/REDICO</a> Если вы бывалый игрок, вы обязаны аристократия, собственно приз без депозита – редчайшая находка. Тем не, мы неделю исследуем онлайн, дабы найти для вас лучшие бездепозитные предложения. 1хслотс официальный сайт зеркало
1×slots казино зеркало
Как лишь получите бездеп в казино, всё также не забывайте инспектировать электрическую почту. Некоторые игорные клубы каждый радуют активных гэмблеров приятными бонусами. Чаще всего получить презент возможно в преддверии веселья, на денек рождение, за привлечение приятеля. А также распространённым бонусом считается надбавка к депозиту. Нужно чем восполнить счёт, и азартное заведение увеличит его на 50–100%.Для получения выигрыша потребуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить определенную сумму, хотя уже из личных средств. Она рассчитывается из совместного объема выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, случае пользователь выиграл 1000 рублей, а множитель составляет х30, вывести деньги возможно несомненно, сделав ставки на 30 000 рублей. Условия шансы различаться друг от приятеля. Но подобный приз может быть применен только для игрового процесса – приобретенные на счет финансы до такого, как станут отыграны, вывести невероятно. <a href=https://prosto-foto.ru/id9416>https://prosto-foto.ru/id9416</a> Демоказино есть практически на каждом веб-сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются существенно пореже: там если, тогда, выигрыша и соблюдения критерий акций бездеп возможно перевоплотить в реальные средства.Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? 1×slots зеркало которую указывали при регистрации кстати Бонус без депозита за регистрацию в казино (бездепозитный приз) – это денежный презент от клуба, который начисляется на акк игрока после регистрации в казино. Кроме творения учетной записи, для получения бездепа, довольно часто требуется ещё и доказать контактные данные игрока и/или активировать особый промо-код.
1×slots зеркало регистрация то дальше необходимо пройти
<a href=https://australiantravelforum.com/Upload/showthread.php?tid=235507>1×slots официальный сайт зеркало рабочее</a> Приглашаем делиться сужденьями о призах. Это поможет другим пользователям выбирать наиболее прибыльные предложения. 1хслотс зеркало <a href=https://www.miyawaki.wiki/index.php/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%93%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0_%D0%9D%D0%B0_%D0%94%D0%B7%D0%B5%D0%BD%D0%B5>https://www.miyawaki.wiki/index.php/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%93%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0_%D0%9D%D0%B0_%D0%94%D0%B7%D0%B5%D0%BD%D0%B5</a> Выбирая безвозмездный бонус, внимательно изучайте управляла. Убедитесь, собственно вас возможно принимать роль в акции. Уточните, в каких играх возможно скорпулезно обстоятельства вейджера. При необходимости задавайте вопросы представителям саппорта.
1×slots быструю регистрацию а также мгновенное
Для всех бездепозитных призов действует максимальный лимит на выигрыш. Он указывает предельную необходимую, коию вас получить, играя на бонусные кредиты. Как лишь вас удастся выполнить притязания вейджера, дозволенный максимум несомненно переведен с бонусного счета на основной, а остаток несомненно списан.Прежде всего, не забывайте регулярно заглядывать на страницу обзоров бездепозитных бонусов. Они шаг за шагом разглядывают наиболее занимательные предложения основных игорных порталов. Подтвердите личность, предоставив оператору казино свои паспортные данные. Инструкции обычно легкие, основное — конкретно им следовать. Если написано, собственно «на фото должны быть видны все хорошо угла страницы паспорта» — устройте именно это фото. <a href=http://fumankong3.cc/home.php?mod=space&uid=600395>http://fumankong3.cc/home.php?mod=space&uid=600395</a> Для получения бонуса надо(надобно) пригласить в забаву свежего посетителя. Казино начисляет пригласившему фиксированный процент от взносов приглашённого вид бонуса: почаще всего его размер не выше 10%. Срок действия бонуса правило не превышает месяца: пригласивший получает бонус зависимо проигранных ставок приглашённого в 1-ый луна игры. 1хслотс казино зеркало Любой выигрыш по ставке повыше установленного лимита будет являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, ну случае выигрыша его сумма не поступит на счёт посетителя — результат игры несомненно всецело аннулирован.Объективные – объем приза, коэффициент и условия вейджера, необходимость внесения депозита для вывода денег;
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.oursson.ru/viewtopic.php?f=2&t=8106>1×slots официальный сайт зеркало рабочее</a>
<a href=https://clubdefansde24.com/foro/memberlist.php?mode=viewprofile&u=3464>1×slots официальный зеркало</a>
<a href=https://demo.comuni-italiani.it/forum/viewtopic.php?f=9&t=370233>1×slots регистрацию более популярный вариант это</a>
<a href=https://www.rusdrama-az.com/support/51-sluzhba-tehnicheskoy-podderzhki-sayta.html>1×slots казино мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Перечисленные повыше основные характеристики сопровождают практически любой приз и считаются стандартными для бездепозитных бонусных начислений в казино. Если речь идет об эксклюзивных предложениях, имеет понадобиться регистрация в казино по ссылке с партнерского вебсайта.
#6050 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Анна Щербакова, фигуристка Юдаева Ксения Валентиновна порно <a href=https://www.ossetia.tv/>скачать сайт букмекерской конторы</a> porno Алена Косторная (фигурное катание) казино фильм онлайн <a href=https://t.me/vchkogpu_ru>pin casino зеркало</a> 1×bet на андроид бесплатно casino промокод 1×bet официальный 1×bet xyz порно с Илья Осипов (киберспорт) казино рублях зеркала официальных сайтов казино up букмекерская контора
#6051 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало
Бездепозитный приз нередко может стать легкодоступным сразу после завершения регистрации, поскольку как единственным требованием к нему считается регистрация, а этого ревизия вашей свежей учетной записи. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> <a href=https://forum.highlite.com/showthread.php?tid=1881>https://forum.highlite.com/showthread.php?tid=1881</a> 1×slos регистрация в 1×slots casino <a href=http://oren.kabb.ru/viewtopic.php?f=31&t=12613&p=33358#p33358>http://oren.kabb.ru/viewtopic.php?f=31&t=12613&p=33358#p33358</a>
1×slots регистрация 1×slotscasino09k online
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1095#post-34454>1×slots зеркало быструю регистрацию а также мгновенное</a> 1×slots официальный сайт зеркало рабочее Изучить управляла и обстоятельства получения бездепозитных призов казино, Вы сможете у нас на веб-сайте в разделе с призами либо на официальном сайте избранного Вами казино. Если не отыскать нужную информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал или по электрической почте.Вейджер не более х30–35 является применимым. Опытные игроки утверждают, что с этим вейджером реально остаться в плюсе, в правильно подойти к выбору игрового аппарата. <a href=http://tellmy.ru/index.php?subaction=userinfo&user=pastoralmadhous>http://tellmy.ru/index.php?subaction=userinfo&user=pastoralmadhous</a> Фриспины – бесплатные вращения с фиксированной ставкой, коие возможно использовать в определенных игровых автоматах.Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных обстановок с казино, когда после отыгрыша бездепа для не дадут вывести солидную сумму выигрыша. 1×slots сайт Самый распространённый из сходственных призов, конечно же, бездеп на день рождения клиента — бонус повторяющий фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им возможно на установленного периода времени.Для ревизии применяются сканы паспортов, водительских прав, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если пользователь замечен в попытке завести дополнительный акк, все его учетные записи подвергаются блокировке, а их владелец попадает в черный перечень. При ирге на лицензионной площадке надо бояться свидетельствовать достоверную индивидуальную информацию (шифрование исключает утечку индивидуальных данных).
1×slot регистрация
Многие новенькие колеблются, что поощрительный приз не нужно будет отдавать, в если они выиграли у казино. Это полностью безопасно и накрепко. Выводя выигранные свои, игрок просто останавливает свое участие в игре и утрачивает уникальную вероятность – даром увеличивать собственное вещественное положение. <a href=https://forum.wapinet.ru/profile.php?id=7789>https://forum.wapinet.ru/profile.php?id=7789</a> Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавленья либо официального клиента для ПК. В большинстве казино действуют программки лояльности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на следующий степень часто сопрягается выдачей бездепа.Бездепозитные призы реальными деньгами, коие возможно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадали. 1×slots зеркало быструю регистрацию а также мгновенное
1×slots зеркало регистрация
Но существуют азартные заведения, готовые просто так вручить деньги на забаву. Для сего довольно создать профиль. Чтобы исключить выигрыш, сначала нужно выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа.Бездепозитные призы в казино без пополнения 2022 — это конкретная сумма средств или free spins вращения, которые предоставляются первым гостям за регистрацию на веб-сайте казино в виде бездепозитного бонуса, и дает для вероятность за счет казино без пополнения опробовать предложения (игр), с дальнейшей прерогативой вывода средств при исполнении всех установленных верховодил. 1х слотс зеркало регистрация в 1×slots casino <a href=http://jejuseapension.com/bbs/board.php?bo_table=free&wr_id=249499>http://jejuseapension.com/bbs/board.php?bo_table=free&wr_id=249499</a> Любой выигрыш по ставке выше установленного лимита несомненно считаться недействительным. То есть ставка не несомненно засчитана при отыгрыше, а случае выигрыша его сумма не поступит на счёт посетителя — итог игры будет всецело аннулирован.
x1 slots 1хслотс регистрация перейти на 1×slots
<a href=http://baanya.co.kr/bbs/board.php?bo_table=free&wr_id=209527>http://baanya.co.kr/bbs/board.php?bo_table=free&wr_id=209527</a> Основное управляло получения бездепа ? творимый аккаунт должен быть у юзера первым и единственным. Наличие нескольких аккаунтов требовательно запрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депо необходимо блюсти простую очередность действий. 1хслотс официальный сайт зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=131667>1×slots официальный сайт скачать</a>
<a href=https://mit-bbs.com/viewtopic.php?t=131841>скачать 1×slots на андроид мобильная версия</a>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/8484/#comment-348892>1×slots официальный регистрация</a>
<a href=https://www.goslog.ru/forum/messages/forum1/message18485/11-obrashcheniya-grazhdan?result=reply#message18485>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Так что можете храбро региться без всяких размышлений. Фортуна сейчас точно на вашей стороне. Не страшитесь, так последствие какого либо ущерба Вам абсолютно не угрожает. С такими призами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе.
#6052 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Диана Шнайдер (теннис) порно с Виктория Синицина, фигуристка <a href=https://sovsekretno.net/>casino бездепозитный</a> 1×bet официальный porno Светлана Ходченкова <a href=https://rumafia.news/>букмекерские конторы в россии</a> казино онлайн порно с Евгения Медведева, фигуристка 1×bet xbet казино онлайн бесплатно казино рулетка 1×bet слоты порно с Арина и Дина Аверины, гимнастки
#6053 LeroyMEW
rahanafisi8765@gmail.com
#6054 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало
Некоторые казино имеют предлагать клиентам бездепы за свидетельство номера или почты или репост на страничку в соц сетях. <a href=http://filmkachat.ru/>1×slots на любой вкус как пройти регистрацию</a> <a href=https://www.swiatobrazu.pl/forumgaleria/thread/view/id/591>https://www.swiatobrazu.pl/forumgaleria/thread/view/id/591</a> 1×slots зеркало регистрация <a href=http://www.jbt4.com/home.php?mod=space&username=efaheruh>http://www.jbt4.com/home.php?mod=space&username=efaheruh</a> Бездепозитный приз предоставляется новому игроку за определенные деяния. Часто подарок в виде денег или фриспинов выдается за регистрацию, спасибо чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, в не желайте замерзнуть жертвой плутов либо впустую потратить время;
1хслотс 1хслотс регистрация перейти на 1×slots
Помните, что всевозможные нарушения правил сведут на нет ваши старания, и вы всего останетесь без начисленного вам дарового приза. Всегда изучайте управляла начисления и обстоятельства вейджера. По хоть вопросам, на коие вы не самостоятельно найти ответы, обращайтесь за объясненьям и саппорт.Индивидуальные поощрения выдаются за совершение деяний: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавленья или официального клиента для ПК. В большинстве казино действуют программки преданности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий степень нередко сопровождается выдачей бездепа. 1×slots зеркало рабочее на сегодня Для казино, работающих интернет, бездепозитные призы необходимы для привлечения новых посетителей. Предложение сыграть на слотах без необходимости внесения реальных средств — работающий способ для повышения энтузиазма к фирмы. После отыгрыша бездепа великоват шанс, собственно игроку понравится и он продолжит играть в казино, только теперь уже на личные средства.Не стоит сразу же отрицаться от приветственных презентов в похожих казино. Администрация готова начислить средства либо фриспины, хотя сначала работники обязаны убедиться, собственно вы не мошенник. Дело сомнений, что развелось слишком много охотников за бонусами. Они выучились врать систему и зарабатывать крупные суммы средств. <a href=https://foro.vcheats.me/Usuario-Deweyglike>https://foro.vcheats.me/Usuario-Deweyglike</a> Как и промоакции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такого предложения являются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих посетителей и позволяет им составить эмоцию о функционале, не рискуя вескими суммами. 1×slots сайт
1×slots на любой вкус как пройти регистрацию
Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Отказ в прохождении верификации. Если клиент не желает или не дать документы, подтверждающие его личность, профиль будет заблокирован вместе со всеми бонусными начислениями. <a href=http://mebel-fabrik.com.ua/index.php?subaction=userinfo&user=sillydirective1>http://mebel-fabrik.com.ua/index.php?subaction=userinfo&user=sillydirective1</a> Возьми свой презент. Чаще всего бонус активизируется сразу в регистрации. Но случаются истории, когда нужно зайти в индивидуальный кабинет или написать в справочную службу. 1×slots официальный сайт скачать Чаще всего интернет-казино предлагают бездепозитные бонусы свежим юзерам. Эта промо-акция очень эффективно привлекает начинающих, подталкивая их к открытию счета. Конечно, не все они становятся послушными клиентами, но сам факт регистрации аккаунта играет на руку заведению.Варианты выигрыша зависимости от Вашей успеха и критерий игорного портала. Выше мы сказали, что кое-какие бездепозитные бонусы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются и, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность современных игр на средства, можно выиграть невозможные суммы. Сегодняшние игровые автоматы или видео слоты, как их нарекают. Могут выдавать солидные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000.
1 x slots casino
<a href=http://theauction.com.au/my-account/>1×slots casino регистрация на сайте</a> Да, у даровых бонусов есть дефекты. Прежде всего, они обычно большие. Кроме как, условия вейджера по ним постоянно жесткие. Но все неимение риска проделывает их довольно привлекательными для посетителей.Суммы подобных услуг, большинстве, колеблются от 3-х до двадцати $, а вейджер на эти свои обязан составлять от тридцати до шестидесяти раз. Зачастую, большая сумма выигрыша здесь составит от одной до 2-ух сотен долларов. Если геймер выиграет больше, то все свои имеют быть списанными до максимально разрешенного выигрыша. Здесь бывает содержание выводить еще несуществующие финансы на свою платежную систему и дальше находить заведение с подходящими под данную сумму релоадом либо призом за первое пополнение счета. Есть несколько подвидов бездепозитного гонорары, предлагаемого наибольшим числом заведений. Минимального оборота. Этот предел устанавливается вейджером — же игрок не сыграет на установленную необходимую, вывод средств будет недосегаем. 1 хслот регистрация в 1×slots casino <a href=http://www.tr.besatime.com/index.php?subaction=userinfo&user=Chrisbully>http://www.tr.besatime.com/index.php?subaction=userinfo&user=Chrisbully</a> Помните, собственно в неких забавах сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки числятся как отыгранные средства, на как в слотах идет в зачет все 100% суммы.После получения бонуса вывод средств для посетителя будет недосегаем времени, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя либо чета месяцов. Выводить средства игрок может только последствии отыгрыша.
1×slots официальный demo регистрация в 1×slots casino
А ознакомиться с новыми онлайн казино, Вы сможете с призов с выводом прибыли, которые Вы сможете получить без депозита. <a href=http://littleyaksa.yodev.net/bbs/board.php?bo_table=free&wr_id=3656163>http://littleyaksa.yodev.net/bbs/board.php?bo_table=free&wr_id=3656163</a> Такие одобрения позволяют безвозмездно протестировать свежее казино, разобраться с игровым процессом онлайн слотов, заработать и исключить небольшую необходимую денег. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Предложения с бездепозитными бонусами за регистрацию позволяют новым заведениям заинтересовать аудиторию на собственный сайт. А игроки к получают возможность выступать на реальные средства без депозита в казино и заработать малый стартовый капитал, который разрешено исключить на карту банка или электрический кошелек.Однако в критериях исчезают «подводные камни», коие не разрешат вывести солидную сумму либо же вы не успеете отыграть вейджер. Поэтому мастера рекомендуют арестовать безвозмездные вращения за регистрацию в казино без депо, чтобы поднабраться опыта и получить настоящий шанс на победу.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.animogen.com/viewtopic.php?f=9&t=1570123>1×slots рабочее зеркало на сегодня</a>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-4955/#comment-591185>1×slots зеркало регистрацию более популярный вариант это</a>
<a href=http://t954381g.bget.ru/user/JosephPiery/>1хслот зеркало сайта</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Способы получения бездепа различаются в зависимости от облика бонуса, который приглянулся игроку. Но вас так нужно быть зарегистрированным в законном онлайн-казино и подтвердить собственную лицо. В общем виде пошаговая инструкция для получения бездепозитного приза выглядит например: Поспешите зарегистрироваться на официальном веб-сайте Клубника, дабы моментально получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, бывает настоящий шанс победу!
#6055 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
up casino официальный пин ап букмекерская контора <a href=https://repost.news/>порно с Анастасия Потапова, теннисистка</a> порно с Дарья Клишина, легкоатлетка порно с Анастасия Потапова, теннисистка <a href=https://rucriminal.info/>Окладникова Ирина Андреевна порно</a> kometa casino online casino 7k казино пину казино можно porno Андрей Рублев (теннис) порно с Юлия Ефимова порно с Баталина Ольга Юрьевна
#6056 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Комарова Наталья Владимировна порно порно с Илюшникова Татьяна Александровна <a href=https://vestnik-jurnal.com/>казино пин</a> casino регистрации casino скачать <a href=https://rucriminal.info/>casino сайты</a> казино играть балтбет букмекерская контора казино casino андроид смотреть фильм казино винлайн букмекерская контора официальный сайт 7k casino официальный сайт
#6057 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up casino top top скачать 1×bet на андроид <a href=https://t.me/vchkogpu_ru>букмекерская контора фонбет официальный сайт</a> винлайн букмекерская контора официальный сайт казино смотреть <a href=https://glvk.guru/>бесплатно играем казино</a> скачать сайт букмекерской конторы Самойлова Алла Владимировна порно 1×bet официальный слоты порно с Голикова Татьяна Алексеевна 1×bet сайт 1×bet зеркало рабочее смотреть фильм казино
#6058 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
Да, у даровых бонусов есть недостатки. Прежде всего, они обыкновенно большие. Кроме как, условия вейджера по ним практически строгие. Но все отсутствие риска проделывает их очень привлекательными для посетителей.Игры, в возможно выступать на бонусные средства. Проверьте список игр, в можно выступать на бонусные свои, возможно они Вам не понравятся и не расходовать своё время на эту промоакцию. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало</a> Бездепозитный бонус по промо-коду будет доступен для игры, только что случае когда Вы активируете специальный бонусный код в разделе с призами либо укажите промокод при регистрации на сайте. В некоторых случаях, кроме активации кода, понадобиться доказать контактные данные игрока и наполнить анкету клиента.Вейджер (wager) – это коэффициент, кот-ый показывает на какую сумму нужно сделать ставок, чтобы исключить приз из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода этого бонуса, Вам нужно устроить ставок на сумму: 500*70=3500 руб. Только полностью отыграв приз, Вы можете исключить собственный выигрыш. <a href=https://menagerie.media/index.php?link1=read-blog&id=91838>https://menagerie.media/index.php?link1=read-blog&id=91838</a> 1×slots регистрация на сайте <a href=http://www.marheavenj.net/public/gallery/member.php?action=showprofile&user_id=29278>http://www.marheavenj.net/public/gallery/member.php?action=showprofile&user_id=29278</a>
1 x slots casino
В подавляющем большинстве случаев бесплатные призы начисляются в кредитах, которые нельзя сразу вывести со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти требования принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже.Не желайте поиграть в азартные игры, не рискуя своими деньгами, хотя получая в все выплаты? Подобную вероятность предоставляют все превосходнейшие порталы с азартными веселиями. В их числе много честных и надежных интернет-казино на русском языке. Они привлекают свежих юзеров разными поощрительными событиями, включая бездепозитные, либо безвозмездные призы. <a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=333681&pid=689166#post_689166>1×slots казино зеркало</a> казино 1× slots официальный сайт Можно ли в одном интернет казино получить больше одного бонуса за регистрацию? Нет, например как в каждом онлайн казино есть управляла, к которым нужно держаться, не создавать два аккаута для получения призов, иначе несомненно блокировка обоих аккаутов, не пытайтесь перехитрить онлайн казино, бонус за регистрацию выдаеться один один 1 личику.Но надо мыслить, собственно снабжая юзеров этими бонусами, казино занимается спонсированием. Ведь объемы вознаграждений, в основном, не немалые (средним размером от 5 до 20 $). И на эти средства налагаются определенные обстоятельства и лимитирования, неотклонимые к исполненью игрока, в в последствии он вожделеет получить все средства выигранные финансы. <a href=https://bbs.o2jam.cc/home.php?mod=space&uid=1423179>https://bbs.o2jam.cc/home.php?mod=space&uid=1423179</a> Бездепозитный приз казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в этом и содержится главное различие.На страничке представлены бездепозитные призы за регистрацию в казино редкая награда за коей гонятся все игроки как новенькие, например и профессионалы. Мы также уделяем огромное внимание на присутствие призов при составление рейтинга казино на деньги. Бездепозитный приз это вероятность выступать безвозмездно и выиграть реальные средства. 1хслот зеркало сайта Также бездепозитные бонусы имеют работать методом вернуть к этой клиентов, пока приостановивших своё сотрудничество с компанией: извещение о бездепе поступает на мобильный телефон либо почту.В интернет-сети постоянно можно найти перечни более известных и гарантированных поощрительных программ от модных онлайн-казино.
1×slot официальный сайт
Приглашаем делиться суждениями о бонусах. Это поможет иным пользователям подбирать наиболее прибыльные предложения.Выбрать казино с бездепозитным бонусом. У нас на сайте представлен перечень лучших онлайн казино, которые предлагают своим игрокам великодушные призы за регистрацию. <a href=http://d90894u1.bget.ru/index.php?subaction=userinfo&user=nondescriptepic>http://d90894u1.bget.ru/index.php?subaction=userinfo&user=nondescriptepic</a> Большинство интернет-казино из нашего топ-10 готовы порадовать вас эксклюзивными промоакциями. Читайте о их в обзорах и на форуме. сайт 1× slots casino
1×slots регистрация на сайте 1×slots ru com
Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. Бездепозитный бонус – это финансовое вознаграждение, коие выдается участнику игры в казино, для его привлечения и появления заинтересованности. Любой гость, который подходит условиям выдачи похожего бездепозитного приза, имеет претендовать на получение вышеуказанного приза. Такое одобрение является более действенным способом, дающим возможность стартовать деле, не вкладывая собственных вещественных средств.Особую изюминку видео слотам присваивают оригинальные знакы. С их свет активизируются разные призы. Вы сможете запустить вспомогательный степень и прирастить необходимую выигрыша. Есть знаки, коие заменяют негодные элементы и сами создают выигрышные комбо. Не стоит забывать и на бонус-тур. После каждого счастливого спина есть шанс прирастить сумму выигрыша в 2 или хорошо раза. B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpaxЕщё одно распространённое акционное предложение – привлекательный подарок с сомнительными притязаниями. К примеру, клуб сулит $100 в бездепа, хотя с вейджером х80 либо х100. Отыграть такой вейджер практически нереально и потому какого-либо концентрироваться на более занимательных промоакциях. 1×slots официальный сайт мобильная версия <a href=http://usr.by/user/DavidTib/>http://usr.by/user/DavidTib/</a> В лицензионных бездепозитных казино играть в азартные забавы действительно безопасно. Наличие лицензии подтверждает что, этот прецедент, что клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP.Доступность — бездепозитные призы в казино почаще всего предоставляются свежим игрокам, хотя посещают случаи, когда бонус шансы получить и действующие посетители.
1×slots рабочее зеркало на сегодня
Призовые начисления без депо могут предоставляться для участия в турнирах онлайн казино. Потратить перечисленные средства можно исключительно масштабах этой промоакции. Условия их проведения включают в себя ограничения на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, никакого изучить его правила.Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки все запросить вспомогательные документы или инициировать краткое общение по Skype. Как и акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такого предложения являются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых посетителей и разрешает им составить впечатление о функционале, не рискуя вескими суммами. <a href=http://www.xn–h1a1ab.xn–p1ai/index.php?name=account&op=info&uname=axiomaticcoward>http://www.xn–h1a1ab.xn–p1ai/index.php?name=account&op=info&uname=axiomaticcoward</a> Например, игрок получил 500 рублей при творении аккаунта и обязан отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., понадобится устроить 875 спинов для полного отыгрыша. казино 1×slots официальный сайт Каждый из бездепозитных призов без пополнения 2022 содержит свой определенный вейджер для отыгрыша, например же в каждом казино он уточняется персонально — где то он х55 а где-то х30, повторюсь везде по различному!
<b>Смотреть еще похожие новости:</b>
<a href=http://6000ziyuan.com/forum.php?mod=viewthread&tid=111082&extra=>1×slots casino регистрация 1×slotscasin online</a>
<a href=https://shopcms.vsupport.club/topic/8915-best-toronto-wine-bars/page-6#entry95034>1×slots casino online регистрация</a>
<a href=https://bans.org.ua/index.php?topic=119183.new#new>1×slots зеркало рабочее</a>
<a href=http://forums.indexrise.com/thread-2362-post-366934.html#pid366934>1× slots casino зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Помните, собственно всевозможные нарушения верховодил сведут на нет ваши усилия, и вы наверняка останетесь без начисленного для безвозмездного бонуса. Всегда изучайте правила начисления и условия вейджера. По хоть вопросам, на которые вы не других отыскать ответы, обращайтесь за объяснениям и саппорт. Отказ в прохождении верификации. Если клиент не хочет либо не дать документы, подтверждающие его личность, профиль будет заблокирован вместе со всеми бонусными начислениями.
#6059 Charlesgunnyhttp://filmkachat.ru
казино 1×slots официальный сайт
Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного бонуса. <a href=http://filmkachat.ru/>1×слот регистрация в 1×slots casino</a> Приветственный бездеп предоставляется какому игроку только один раз. Казино борются с например называемыми бонусхантерами (от англ. Bonus Hunter — доброволец за бонусами), пытающимися заводить многочисленные аккаунты для обмана оператора и повторного получения подарка. Исключить сходственные действия разрешает верификация данных. Администрация вправе востребовать у посетителя доказать индивидуальные данные, указанные при регистрации.Да, у даровых призов есть недостатки. Прежде всего, они обычно небольшие. Кроме того, обстоятельства вейджера по ним практически строгие. Но таки неимение риска делает их довольно красивыми для клиентов. <a href=http://www.gothicpast.com/myomeka/posters/show/79813>http://www.gothicpast.com/myomeka/posters/show/79813</a> 1×slots официальный сайт мобильная версия <a href=http://forum.industrialvideo.ir/member.php?action=profile&uid=4598>http://forum.industrialvideo.ir/member.php?action=profile&uid=4598</a>
1×slots зеркало рабочее
Выбор каждого интернет казино на нашем сайте. В описании к каждому Вы можете разузнать, что получите за создание аккаунта. <a href=http://forum3.bandingklub.cz/memberlist.php?mode=viewprofile&u=5481>1× slots официальный</a> 1хслотс рабочее зеркало Ещё одно распространённое акционное предложение – симпатичный презент с сомнительными требованиями. К примеру, клуб обещает $100 в качестве бездепа, но с вейджером х80 либо х100. Отыграть такой вейджер практически невозможно и потому лучше концентрироваться на более интересных промоакциях. <a href=https://forums.drdarkesoftwares.com/member.php?action=profile&uid=1244>https://forums.drdarkesoftwares.com/member.php?action=profile&uid=1244</a> Существуют казино с бонусом за регистрацию, в которых довольно знамениты фриспины в интернет казино потом регистрации в определенных играх. Они встречаются и чаще даровых поощрений либо традиционных призов в казино без инвестициям. Например, игрок регистрирует счет, на кот-ый начисляются безвозмездные игры, бонус за регистрацию в виде даровых фрспинов, вращения в игровом автомате. Во время игрового процесса игры выигрывает истинные деньги, коие в последствии возможно удачно исключить из заведения на свою платежную систему. То есть, все шансы вывести свои без рисков своими деньгами. Регистрация, за в получит призы, займет пару минут, а благодаря этому возможно прирастить пять евро поощрений до тысячи и без всяких проблем исключить их. 1×slots регистрация В основном случаев благотворительные бонусы начисляются в кредитах, коие нельзя сразу исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже.
1хслотс рабочее зеркало
Зарегистрироваться в казино по особой ссылке или с бонусным кодом. Подтвердить контактные данные (номер аппарата и электрическую почту). Для подтверждения номера аппарата нужно в собственном профиле указать свой номер и нажать кнопку „Подтвердить номер телефонного“, дальше Вы получите sms-сообщение с кодом, кот-ый нужно установить в соответствующее фон. Для подтверждения электрической почты, перейти по интенсивной ссылке в послании от казино. Промообъявления от казино мешают реальной картины и ориентированы на вербование внимания юзеров. Понять, как высоки шансы остаться в плюсе, позволит личный анализ условий предложения: <a href=https://tazovod.khalal.ru/forum/memberlist.php?mode=viewprofile&u=40799>https://tazovod.khalal.ru/forum/memberlist.php?mode=viewprofile&u=40799</a> 1×slots casino регистрация Бонусы без депо при регистрации считаются самыми привлекательными как для опытнейших игроков, например для и начинающих. Получив такое вознаграждение, клиент может выступать на настоящие деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные призы в интернет-казино Рунета, а условия их активации и выигрыша.
казино 1×slots официальный сайт
Фриплей-бонусы встречаются только в неких клубах. Они зачисляются сразу последствии сотворения профиля и активны недолговременное время. Если не успеете потратить средства, они просто сгорят. Касаемо медли, в большинстве случаев призы активны на часа.Иногда у гостей сайта все появиться проблемы при активации полученного промо-кода. В этих случаях, нужно обратиться за поддержкою в службу поддержки «Support». Для получения ответа, непременно указывается конкретная причина обращения и подтверждается информация дополнительными скриншотами. Если сложилась неоднозначная ситуация, практически возможно адресоваться к основному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ. Но не мыслить, что снабжая юзеров такими призами, казино занимается спонсированием. Ведь объемы вознаграждений, в основном, не немалые (средним объемом от 5 до 20 долларов). И на эти свои налагаются конкретные условия и лимитирования, обязательные к исполнению игрока, в в последствии он желает получить все средства выигранные финансы.4. Заберите подарок. Чаще всего бонус активируется незамедлительно последствии регистрации. Но бывают истории, когда надо(надобно) забежать в индивидуальный офис либо написать в службу поддержки. 1хслотс зеркало <a href=https://www.wakewiki.de/index.php?title=%D0%98%D0%B7_%D0%A7%D0%B5%D0%B3%D0%BE_%D0%A1%D0%BE%D1%81%D1%82%D0%BE%D0%B8%D1%82_%D0%94%D0%B8%D0%B5%D1%82%D0%B0_%D0%95%D0%BB%D0%B5%D0%BD%D1%8B_%D0%9C%D0%B0%D0%BB%D1%8B%D1%88%D0%B5%D0%B2%D0%BE%D0%B9>https://www.wakewiki.de/index.php?title=%D0%98%D0%B7_%D0%A7%D0%B5%D0%B3%D0%BE_%D0%A1%D0%BE%D1%81%D1%82%D0%BE%D0%B8%D1%82_%D0%94%D0%B8%D0%B5%D1%82%D0%B0_%D0%95%D0%BB%D0%B5%D0%BD%D1%8B_%D0%9C%D0%B0%D0%BB%D1%8B%D1%88%D0%B5%D0%B2%D0%BE%D0%B9</a> Мы советуем не отказываться от похожих предложений знаменитых казино. Выделите количество мин. На регистрацию, получите приз и попробуйте его отыграть. Может быть, сейчас фортуна будет на вашей стороне!
1×slots промокод при регистрации
Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала резвые выводы. Фишка выплат что, нет, собственно довольно выбрать платёжный инструмент и показать необходимую. В большинстве случаев средства зачисляются на электрические кошельки в течение 15 минут, а на банковские карты – 1–3 трудящихся дня. <a href=http://zooboard.ru/user/profile/270390>http://zooboard.ru/user/profile/270390</a> Игры, каких можно играть на бонусные средства. Проверьте список игр, каких возможно играть на бонусные средства, возможно они Вам не понравятся и не стоит расходовать своё время на такую акцию.Помните, что всевозможные нарушения правил сведут на нет ваши старания, и вы всего останетесь без начисленного вам дарового приза. Всегда изучайте управляла начисления и обстоятельства вейджера. По хоть вопросам, на коие вы не самостоятельно найти ответы, обращайтесь за объясненьям и саппорт. 1×slots официальный сайт скачать
<b>Смотреть еще похожие новости:</b>
<a href=http://smpn1bejen.sch.id/forum/>1×slots зеркало проходить регистрацию это отличный вариант</a>
<a href=http://brilliance.ru/forum/viewtopic.php?f=6&t=28711>1×слот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чаще всего используются коды. Их надо(надобно) заносить в особые окошки регистрационной анкеты, случае идет о пригласительных призах, или в определенном разделе личного кабинета игрока. Бывают ли бездепозитные бонусы без вейджера? Бывают, если у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный приз за регистрацию устанавливается вейджер во всех казино.
#6060 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пин up casino unlim casino <a href=https://m.repost.news/>пин ап казино</a> порно с Алина Загитова, фигуристка порно с Петр Ян (ММА) <a href=https://m.repost.news/>pin ап casino</a> скачать 1×bet на андроид casino промокод леон букмекерская контора официальные букмекерские конторы скачать up casino online casino официальный казино вход официальный сайт
#6061 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Приезжева Екатерина Геннадьевна порно зеркала казино <a href=https://m.repost.news/>7k casino скачать</a> unlim casino слот casino <a href=https://7club7.com/>Кузнецова Анна Юрьевна порно</a> рокс казино Александра Бортич porno Анастасия Янькова, боксерка r7 casino casino ап балтбет букмекерская контора пин ап casino pin up top
#6062 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация в 1×slots casino
При регистрации том, либо ином онлайн игральном заведении — для дается один шанс испытывать свою фортуну не внося средства монеты. Замечу собственно эту поощрительную услугу деют не все онлайн игровые площадки, а только великодушная середина(средина) из них. Которые мы подготовили для Вас в нашем списке.Для получения выигрыша требуется выполнить обстоятельства казино. Чаще всего игроку нужно поставить определенную сумму, но уже из собственных средств. Она рассчитывается из совместного объема выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, если юзер выиграл 1000 руб., а множитель составляет х30, вывести средства можно будет, сделав ставки на 30 000 рублей. <a href=http://filmkachat.ru/>1 х слотс зеркало</a> Бездепозитный бонус за регистрацию в казино — это стартовый презент в виде валютного начисления либо даровых вращений для свежих игроков заведения, для получения которого не заносить депо.Вейджер (wager) – это коэффициент, который демонстрирует на какую сумму нужно устроить ставок, дабы вывести бонус из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода сего бонуса, Вам нужно устроить ставок на необходимую: 500*70=3500 рублей. Только полностью отыграв приз, Вы можете исключить собственный выигрыш. <a href=https://output.jsbin.com/kozot>https://output.jsbin.com/kozot</a> 1хслотс регистрация в 1×slots casino <a href=https://woodmancx.com/user/ChrisTot/>https://woodmancx.com/user/ChrisTot/</a>
1х слотс зеркало регистрация в 1×slots casino
Акции, приуроченные к календарным праздникам, случаются рассчитаны как на всех пользователей, так и на категории: к, подарок на 8 марта девушкам-игрокам либо мужикам на 23 февраля. <a href=https://astraclub.ru/album.php?albumid=235729>1×slots актуальное зеркало</a> 1×slots казино мобильная версия <a href=http://dreamfieldkorea.com/bbs/board.php?bo_table=free&wr_id=373747>http://dreamfieldkorea.com/bbs/board.php?bo_table=free&wr_id=373747</a> Каждая игровая платформа отличается условиями по получению и отыгрышу бездепов. В правилах детально расписаны кратковременные рамки, за коие нужно прокрутить вейджер. Также не забывайте про наибольший объем ставки и наивысшую сумму выплаты. С другой стороны, дабы получить бездепозитные призы казино, довольно истратить не более 1 минуты.Бoльшинcтвo азартных заведений выдвигают приблизительно одинаковые условия и требования, коие необходимо выполнить, чтобы получить бездепозитный приз за регистрацию. Все их возможно объединить в один перечень: 1×slots зеркало видели такую регистрацию на
1×slots зеркало которую указывали при регистрации кстати
Какие призы я могу еще получить не бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, любое онлайн казино предлагает игрокам выгодное предложение на первый депо, вы совершаете депо, ваш депо возрастает в двое либо том в 3, что, этим наиболее начать играть возможно с более крупной суммой, например же не запамятываем про вейджер на призы.Кешбэк-бонус представляет собой возврат фиксированного процента от ставки если, тогда, проигрыша или же от проигранной суммы за определённый период. В большинстве случаев кешбэк не превышает 10%. <a href=http://dudoser.com/user/DoctorLazutaOi/>http://dudoser.com/user/DoctorLazutaOi/</a> сайт 1× slots casino
1×slots акции
В качестве бонусов онлайн казино часто предлагает выдачу фриспинов, другими даровых вращений игрового барабана. Виртуальные монеты возможно применять для обучения в покерной школе либо для забавы в казино.Главное превосходство спинов – возможность выучить разные слоты. Также удастся насладиться бонусными раундами, испытать удачу в риск-туре и преумножить выигрыш за счёт особых символов. Однако не игровой процесс заслуживает внимание, как другого сосредоточиться на реальном выигрыше. <a href=https://www.reisezielforum.de/viewtopic.php?t=453271>1хлот регистрация в 1×slots casino</a> казино 1×slots <a href=http://wiki.hightgames.ru/index.php?title=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0%20%D0%BD%D0%B0%20%D0%B4%D0%B7%D0%B5%D0%BD%D0%B5>http://wiki.hightgames.ru/index.php?title=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0%20%D0%BD%D0%B0%20%D0%B4%D0%B7%D0%B5%D0%BD%D0%B5</a> Бывают ли бездепозитные бонусы без вейджера? Бывают, случае у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный приз за регистрацию устанавливается вейджер во всех казино.Зачастую бездепозитные бонусы казино для забавы предлагаются разными заведениями азартных игр в качестве рекламных акций либо в целях привлечения к себе новых игроков. Для бездепозитных призов в казино 2022 геймеру не нужно пополнять счет до этапа вывода желанных средств.
1×slots регистрация на официальном сайте
Некоторые онлайн-казино без депо предлагают свежим посетителям избрать бонус при регистрации. Будьте внимательны: выбрав раз, вы в абсолютном большинстве случаев не можете пользоваться остальными. Для получения бездепа необходимо пригласить в забаву по реферальной ссылке нового клиента: он обязан зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на необходимую, указанную в условиях акции.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. <a href=http://proect.org/user/JamesFairl/>http://proect.org/user/JamesFairl/</a> 1×slots официальный сайт скачать Когда речь о денежных бонусах, казино всегда устанавливают условия вейджера, которые нужно выполнить, дабы исключить выигрыш.Представьте момент, когда при ставке в 10 рублей Вы получите подобное умножение. Миллион рублей за одно вращение, что абсолютно вполне. Поэтому вопрос, сколько возможно выиграть остаётся закрытым. Предлагаем выяснить самостоятельно. Регистрируйтесь в одном или нескольких онлайн казино, получайте Бездепозитный бонус и проверяйте удачу в деле. Разумеется, вывести деньги сложно. Однако шансы есть у всех.
<b>Смотреть еще похожие новости:</b>
<a href=http://6000ziyuan.com/forum.php?mod=viewthread&tid=125648&extra=>скачать 1×slots официальный сайт</a>
<a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/8923–1×slots-skachat-na-ajfon#8945>1×slots скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Похожим образом трудится 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения посетителя или из-за с получения им VIP-статуса. Подарок предоставляется последствии обращения в поддержку и ревизии.
#6063 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Москалькова Татьяна Николаевна порно 1×bet официальный слоты <a href=https://kompromat1.online/>часы казино</a> винлайн букмекерская контора казино ставка <a href=https://rucriminal.info/>мобильные букмекерские конторы</a> пина букмекерской конторы Самойлова Алла Владимировна порно казино ли Лут Оксана Николаевна порно 1×bet телефон casino pin официальный casino pin официальный
#6064 Charlesgunnyhttp://filmkachat.ru
1×slot регистрация
Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную процедуру активации приза без депозита. Внимательно прочтите до конца. Многие новички делают ошибки на шаге регистрации и поэтому имеют получить презент.Нельзя разглядывать игру на деньги, как вариант заработка. Азартные игры воспрещены для лиц младше 18 лет. Topcasinobonuses.mobi классифицируется организатором азартных игр. Сайт одевает информационный характер. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> <a href=https://www.scutify.com/articles/2024–11–22-understanding-3d-modeling-costs-a-comprehensive-guide-to-industry-pricing>https://www.scutify.com/articles/2024–11–22-understanding-3d-modeling-costs-a-comprehensive-guide-to-industry-pricing</a> 1×slots казино мобильная версия <a href=https://forums.twcpilots.com/member.php?action=profile&uid=1626>https://forums.twcpilots.com/member.php?action=profile&uid=1626</a> Главное превосходство спинов – возможность выучить разные слоты. Также удастся насладиться бонусными раундами, испытать удачу в риск-туре и преувеличить выигрыш за счёт особенных знаков. Однако столько игровой процесс заслуживает внимание, так превосходнее сосредоточиться на реальном выигрыше.
1×slots зеркало этих способов предполагает регистрацию
Представленные на этой страничке превосходнейшие бездеп бонусы в казино за регистрацию в 2022 году имеют оптимальные условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, каком посетители Casino.ru имеют сортировать перечень по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д. 1× slots casino зеркало <a href=http://hotnews.lv/user/DoctorLazutaEi/>http://hotnews.lv/user/DoctorLazutaEi/</a> Как верховодило, новоприбывшие игроки начала желают ознакомиться с методами ввода и вывода валютных средств и сроки выполнения поданных заказов дабы четко разуметь, как быстро возможность вывести свой казино бонус за регистрацию без депо на электрический кошелек или же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино соперничают меж собой. Ведь в бы определенную компанию представляло лишь одно онлайн-заведение, то навряд бы посетители увидели казино с бонусом за регистрацию и имели бы рассчитывать только на вознаграждение вид бонуса на первое вложение. К любому заведению регулярно следует привлекать новых игроков, что, итоге, только на руку всем играющим. казино 1×slots официальный сайт Подтверждение индивидуальной информации. Все казино требуют от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у пользователя иных аккаунтов (мультиаккаунт запрещен).В истиннее время получить приз за регистрацию в казино очень просто. Почти каждый игорный дом с радостью предоставит деньги или бесплатные вращения. Многие игроки используют этим и не стесняются регистрироваться в каждом клубе с прибыльными условиями. Кстати, это отличная возможность придумать выигрышную стратегию и сорвать куш.
1× slots casino зеркало
Подарки на определенные даты отличаются критериями получения. Если поощрение начисляют игроку на день рождения, то сумма обыкновенно находится от общего объема депо последний год.Этот образ приза несомненно добавлен на Ваш акк после удачной процедуры регистрации с использованием номера телефонного. Если выбрать другой способ творенья учетной записи, бездеп не несомненно добавлен на Ваш аккаунт. Итак, чтобы благотворительные бонусные кредиты трансформировались в реальные деньги, которыми вам распоряжаться по собственному усмотрению, их надо(надобно) отыграть. Вейджер следует уточнять в правилах онлайн-казино. <a href=http://www.princeton.com.cn/home.php?mod=space&uid=74235&do=profile>http://www.princeton.com.cn/home.php?mod=space&uid=74235&do=profile</a> Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, чтобы снова получить безвозмездный приз. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ожидает неминуемое наказание.Для всех бездепозитных бонусов функционирует наибольший предел на выигрыш. Он показывает максимальную сумму, которую возможность получить, играя на бонусные кредиты. Как только для получится выполнить требования вейджера, допустимый максимально будет переведен с бонусного счета на главной, а остаток будет списан. 1×slots зеркало регистрацию более популярный вариант это
1хслотс мобильная версия зеркало
<a href=http://check2go.net/my-account/>1×slots регистрация то дальше необходимо пройти</a> Способы получения бездепа различаются в зависимости от вида приза, который приглянулся игроку. Но вас в любом случае нужно быть зарегистрированным в легальном онлайн-казино и доказать свою лицо. В общем облике пошаговая аннотация для получения бездепозитного приза выглядит например:Иногда в бездепа, казино презентует минимальный приз (до 50 рублей), из-за которого не стоит заморачиваться. Бонус в казино без депозита имеет разные варианты: может быть приветственный бонус, промоакции в честь каких-либо праздников либо главных дат, бонус за вербование свежих игроков, лояльность и получение VIP-статуса. 1хслотс официальный сайт зеркало <a href=https://bdsmboard.org/member.php?404550-Travispaw>https://bdsmboard.org/member.php?404550-Travispaw</a> При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое возможно предназначить игре в казино.
1×slots акции
Баланс игрока дополняется на соответствующую необходимую. К ней применяется вейджер, указанный в правилах акции. Вывести выигрыш возможно будет в как, как юзер сделает требуемый объем ставок из личных средств. В редчайших случаях бездеп работает в формате Free Play. На счет пользователя зачисляется крупная сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по окончании этого периода сумма на счету несомненно превышать первоначальную, то разность можно несомненно вывести либо использовать для последующих ставок.Каждая игровая перрон отличается критериями по получению и отыгрышу бездепов. В правилах отчетливо расписаны кратковременные рамки, за коие нужно прокрутить вейджер. Также не запамятовывайте на максимальный размер ставки и максимальную необходимую выплаты. С другой стороны, дабы получить бездепозитные бонусы казино, достаточно израсходовать менее 1 минутки. Вейджер (wager) – это коэффициент, который демонстрирует на какую сумму нужно устроить ставок, чтобы исключить бонус из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего приза, Вам нужно устроить ставок на сумму: 500*70=3500 рублей. Только всецело отыграв бонус, Вы сможете исключить свой выигрыш.1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, если не желаете замерзнуть жертвой жуликов или впустую истратить время; <a href=https://fm.xndl.com/home.php?mod=space&uid=637214>https://fm.xndl.com/home.php?mod=space&uid=637214</a> Хотя безвозмездные бонусы начисляются без депо, не исключено, что вас понадобиться заносить средства. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только в такого, как новый заказчик впервые пополнит игровой счет.Поспешите зарегистрироваться на официальном сайте Клубника, чтобы моментально получить 33 безвозмездных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, появляется реальный шанс победу! 1×slots зеркало рабочее на сегодня В списке притязаний к отыгрышу часто присутствуют лимиты на ставки при этой на личные деньги. Так, случае отыграть надо(надобно) 30 000 рублей, а предельная сумма ограничена 30 рублями, то вертеть барабаны светит 1000 раз. Эта особенность затрудняет соблюдение игроками критерий по срокам действия акции.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Да, у бесплатных бонусов есть дефекты. Прежде всего, они обыкновенно большие. Кроме такого, условия вейджера по ним практически жесткие. Но все же недоступность риска проделывает их очень привлекательными для посетителей. Более крупные предложения встречаются довольно изредка. Зачастую они доступны только VIP-игрокам. В остальных случаях им наверняка сопутствуют довольно строгие обстоятельства отыгрыша. Также возможны вспомогательные условия и другие ограничения, прописанные в критериях и положения бонусной программы казино.
#6065 Charlesgunnyhttp://filmkachat.ru
1х слотс зеркало регистрация в 1×slots casino
Обычно бездепозитные промоакции от казино, приходят на эл. Почту в деньки рождения либо дни. В неких онлайн казино возможно обратиться в чат и как неизменному игроку, вероятно для предложат бездепозитное предложение. <a href=http://filmkachat.ru/>casino 1×slot</a> Подобные призы без депозита предоставляются на больше выгодных условиях. Зачастую они крупнее, а условия отыгрыша наименее жесткие.Заполняя данные в собственном профиле, указывайте только достоверную информацию, например как Вам придется ее подтвердить в при выводе денег. <a href=https://diigo.com/0y2r9w>https://diigo.com/0y2r9w</a> 1×slots рабочее зеркало <a href=http://www.mjjcn.com/mjjcnforum/space-uid-616887.html>http://www.mjjcn.com/mjjcnforum/space-uid-616887.html</a> Самые свежие бездепозитные призы в казино за регистрацию 2022 года с выводом прибыли присутствуют на этой странице. Посетитель возможность расценить обстоятельства получения и начать выступать на деньги без внесения депо. При данном игроку принципиально разуметь, на каких условиях и какими способами появится исключить приобретенный выигрыш. Для сего необходимо расценить перечень присоединенных платежных систем.Выигрыши с бонусов без инвестициям постоянно привязаны к притязанию по ставкам и все быть обналичены лишь после выполнения данных требований.
1×slots регистрацию более популярный вариант это
4. Заберите презент. Чаще всего приз активируется незамедлительно в регистрации. Но случаются истории, когда нужно зайти в личный офис либо написать в службу поддержки. <a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=64280&result=reply>1хслотс зеркало на сегодня</a> зеркло казино 1×slots Бездепозитный приз предоставляется новенькому игроку за определенные деянья. Часто подарок повторяющий денег либо фриспинов выдается за регистрацию, благодаря чему пользователь получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. <a href=https://www.grandprixforums.com/members/53768.html>https://www.grandprixforums.com/members/53768.html</a> 1×slots casino регистрация на сайте Третитй бездепозитный бонус за регистрацию – денежные средства. К огорчению, начислить рубли или доллары способны только знаменитые и известные клубы. С их подмогою вы сможете насладиться любой доступной игрой – автоматом, рулеткой, кено, блэкджеком.Помните, что в некоторых играх сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки числятся как отыгранные деньги, в то время как в слотах идет в зачет все 100% суммы.
1×slots актуальное зеркало
Индивидуальные одобрения выдаются за совершение деяний: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавленья или официального посетителя для ПК. В большинстве казино действуют программки лояльности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на следующий степень часто сопровождается выдачей бездепа. Обыкновенные бездепозитные призы в размере от 3-х до двадцати долларов созданы для того, чтобы в игры заходили все новые и свежие игроки. Здесь, всего, будет ограничение на максимальный выигрыш. Важно, дабы перед минимальным вкладом был отключен приз за первое пополнение счета, и игры не попадет на повторный вейджер.Ещё одно распространённое акционное предложение – привлекательный подарок с сомнительными притязаниями. К образцу, клуб обещает $100 в качестве бездепа, но с вейджером х80 или х100. Отыграть подобный вейджер фактически нереально и потому другого концентрироваться на более заманчивых промоакциях. <a href=https://unitywizards.uk/member.php?action=profile&uid=63447>https://unitywizards.uk/member.php?action=profile&uid=63447</a> В случае установленного лимита на сумму вывода выигрыша с бездепозитного приза, игрок не сможет исключить больше заявленной суммы.Не стоит путать забаву в демо и использование призов. В демонстрационном режиме игрок может оценить механику слота, сюжет и оформление. Но игра проводится на условные кредиты, поэтому отсутствует основное ? чувство пыла. Активируя промокод или фриспины, клиент по-прежнему не тратит средства средства на игровые автоматы, но возможность сорвать настоящий куш! 1×slots казино зеркало Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, чтобы замечена вероятность вывести выигрыш.
1×slots casino зеркало рабочее
Демоказино есть почти на любом веб-сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются существенно реже: там если, тогда, выигрыша и соблюдения критерий акций бездеп возможно перевоплотить в реальные средства.Чтобы самостоятельно увериться в превосходствах бездепозитных призов, довольно зарегистрироваться в казино и получить одобрение. <a href=http://mandala-app.com/memberlist.php?mode=viewprofile&u=3447&sid=c5cc97f38ea53fa4f6d8a7925846da5d>казино 1×slots официальный сайт</a> Срок активации и время на отыгрыш. Зачисление средств или фриспинов случается при активации в течение строго ограниченного периода, схожие притязания предъявляются и к срокам отыгрыша. Одни казино позволяют отыгрывать приз несколько дней или том месяцов. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером.Для получения предоставленных бонусов вам понадобиться — ПК или мобильное прибор, и остальное дело за малым. 1×slots официальный сайт зеркало <a href=https://www.google.tg/url?q=http%3A%2F%2Fdoctorlazuta.by>https://www.google.tg/url?q=http%3A%2F%2Fdoctorlazuta.by</a> Способы получения бездепа различаются от облика бонуса, кот-ый понравился игроку. Но для иначе нужно быть зарегистрированным в легальном онлайн-казино и подтвердить собственную лицо. В общем облике пошаговая инструкция для получения бездепозитного приза смотрится так:Сразу после активации промокода можно пользоваться подарком. Как уже упоминалось, бонусы случаются трёх видов – фриспины, кредиты и фриплей-бонусы.
1× слот зеркало
Иногда у посетителей вебсайта имеют возникнуть трудности, задачи, препядствия при активации приобретенного промо-кода. В таких случаях, нужно адресоваться за подмогою в саппорта «Support». Для получения ответа, обязательно указывается конкретная причина воззвания и подтверждается информация дополнительными скриншотами. Если сформировалась неоднозначная обстановка, постоянно можно адресоваться к главному регулятору либо контролирующему органу, выдавшему данному заведению лицензионный документ. <a href=https://lavr-sovet.ru/user/HenryExito/>https://lavr-sovet.ru/user/HenryExito/</a> Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 поболее. Когда игроку надеется количество фриспинов, администрация может бить3 их начисление на количество дней. Бесплатные вращения предоставляются для определенного слота, кот-ый указывается в правилах акции.К примеру, игроку выдаются безвозмездные средства в заведении в размере пятидесяти либо ста долларов (вейджер на которые сочиняет 100х). То есть, любому новоприбывшему геймеру выскакивает манящая картинка, которая сулит выплату всех зачисленных фирмой средств. Не стоит заострять на казино приз за регистрацию без депо с сильно великий или очень малюсенькой суммой бонусов, поэтому собственно, и кропотливо исследовав все обстоятельства, здесь всего, несомненно некий подкол. 1×slots рабочее зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://u0382101.isp.regruhosting.ru/index.php/forum/general-questions-and-how-tos/68883-otzyvy-o-tovarakh?start=1332#130566>1×slots рабочее зеркало</a>
<a href=http://freedom.teamforum.ru/memberlist.php?mode=viewprofile&u=6332>казино 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный приз по промо-коду будет доступен для игры, лишь в случае когда Вы активируете специальный бонусный код в разделе с призами либо укажите промокод при регистрации на веб-сайте. В некоторых случаях, не активации кода, придется доказать контактные данные игрока и заполнить анкету посетителя.
#6066 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up casino пин ограбление казино <a href=https://sovsekretno.net/>up casino</a> up букмекерская контора 1×bet приложение <a href=https://specreporter.com/>casinos winning</a> бк букмекерская контора new casino casino актуальное зеркало Кузнецова Анна Юрьевна порно букмекерская контора вход почему в казино не бывает настенных часов суть казино
#6067 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино онлайн бесплатно букмекерская контора на андроид <a href=https://res-publika.com>яндекс казино</a> пари букмекерская контора казино пин <a href=https://krtka.info/>казино на деньги</a> часы казино casino играть казино сочи ешь казино играющие казино 1×bet 1 яндекс игры казино
#6068 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Юдаева Ксения Валентиновна порно casino онлайн <a href=https://krtka.info/>vavada casino</a> букмекерская контора мостбет casino зеркало сегодня рабочее <a href=https://m.repost.news/>7k casino зеркало</a> porno Елизавета Туктамышева bet casino казино онлайн бесплатно почему в казино нет часов смотреть фильм казино 1×bet на андроид бесплатно суть казино
#6069 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать
В интернет-сети всегда возможно найти перечни более известных и гарантированных поощрительных программ от известных онлайн-казино.При верном раскладе бездепы — это отличный метод играть на средства без траты собственных средств. Есть несколько советов, следуя которым возможно извлечь максимум полезности из похожих промоакций казино. Играть идет только на лицензированных площадках. Скриптовые сайты столько дурачат с бонусными предложениями, но и используют пиратский софт с измененным ГСЧ. Выиграть на таких автоматах нереально. <a href=http://filmkachat.ru/>1×slots зеркало на сегодня</a> <a href=https://plaza.rakuten.co.jp/prilla/diary/202411240004/>https://plaza.rakuten.co.jp/prilla/diary/202411240004/</a> Для верификации аккаунта надо(надобно) предоставить профессионалам технической помощи отсканированную копию паспорта и счета за коммунальные предложения, а также фотку банковской карты или экрана страницы электрического кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для подтверждения личности.Активация по промокоду используется в разных обликах бездепов. Если речь идет о приветственном призе, то комплект знаков можно узнать на главной страничке, в регистрационной форме либо послании, коие отправляется юзеру для доказательства адреса электронной почты. Акции шансы проводиться совместно с партнерскими площадками. Обычно код располагается на постороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активируется разовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном офисе или начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем важный код для активации в описании каждого рекламную. 1×slots регистрация 1×slots casino 777 online <a href=https://www.ccvgaming.com/forum/member.php?38470-ChrisConee>https://www.ccvgaming.com/forum/member.php?38470-ChrisConee</a> Ограничения по забавам. Администрация воспрещает игрокам некоторые игровые автоматы с бездепозитным призом, деньгами или бесплатными вращениями. Обычно, в правилах приводится полный перечень слотов для отыгрыша. Иногда разделение выполняется по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino.
1×slots официальный сайт скачать
Операторы гемблинга утверждают, собственно так они борются с бонус-хантерами. Впрочем, критики считают, собственно этим казино пытаются сделать из случайного постояльца неизменного игрока.Для получения бездепа необходимо пригласить в игру по реферальной ссылке нового посетителя: он должен зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на необходимую, обозначенную в критериях промоакции. 1 х слотс зеркало Некоторые клубы механически начисляют приз на аккаунт игрока в исполненья условий получения, но посещают истории, когда бонус нужно активировать игроку самому. Есть количество способов активации бонуса:Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша бонусов. Заведения всегда устанавливают наивысшую ставку, возможную по условиям вейждера. <a href=http://services-sector.ru/clubpointeresam/memberlist.php?mode=viewprofile&u=157455>http://services-sector.ru/clubpointeresam/memberlist.php?mode=viewprofile&u=157455</a> У любого игорного клубы различные вейджеровые обстоятельства. Чтобы вы гарантировано смогли выполнить их, мы дадим некоторое советов. Если система начислила маленькую необходимую, надо делать немалые ставки – остановитесь на 10–30 центах. Как лишь сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте играть. В неприятном случае лучше приглядеться к другому автомату. сайт 1× slots casino Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша призов. Заведения практически устанавливают максимальную ставку, возможную по условиям вейждера.
1×slots зеркало рабочее на сегодня
Бездепозитные призы в казино без пополнения 2022 — это определенная сумма денег или for nothing spins вращения, коие предоставляются первым постояльцам за регистрацию на сайте казино в виде бездепозитного бонуса, и дает для возможность с казино без пополнения опробовать услуги (игр), с последующей преимуществом, льготой вывода средств при исполненьи всех установленных правил. <a href=http://www.0471tc.com/home.php?mod=space&uid=1902870>http://www.0471tc.com/home.php?mod=space&uid=1902870</a> Подарки на дни ? посвященные торжественным датам, требующие условного отыгрыша или начисляются без это. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду. 1×slots казино зеркало Для получения бонуса надо(надобно) пригласить в игру свежего клиента. Казино начислит пригласившему фиксированный процент от взносов приглашённого вид приза: чаще всего его размер не превышает 10%. Срок деяния бонуса как не превышает месяца: пригласивший получает бонус в зависимости от проигранных ставок приглашённого в первый луна забавы.Как только вы отыграли вейджер и средства с бонусного баланса перебежали вам на настоящий счет, Вы смело можете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депо).
1хслот 1хслотс регистрация перейти на 1×slots
Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 поболее. Когда игроку полагается большое фриспинов, администрация возможность бить3 их начисление на некоторое дней. Бесплатные вращения предоставляются для определенного слота, кот-ый указывается в правилах акции.Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=http://wiki.natlife.ru/index.php?title=Выкуп_авто>http://wiki.natlife.ru/index.php?title=Выкуп_авто</a>
1×slots официальный сайт, скачать
Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном сайте и выполните вход в личный офис, дабы отобрать благотворительные вращения с вейджером х40; <a href=https://blog.udn.com/G_107482553777754991/180731980>https://blog.udn.com/G_107482553777754991/180731980</a> Бездепозитный бонус за регистрацию в казино — это стартовый презент в виде денежного начисления либо безвозмездных вращений для свежих игроков заведения, для получения которого надо вносить депозит.Ниже указан актуальный перечень легальных казино в Беларуси с бонусами на первый депо. Вы сможете попасть на официальный вебсайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз. 1×слотс казино
<b>Смотреть еще похожие новости:</b>
<a href=https://www.formulersupport.com/Thread-1×slots-%D0%BA%D0%BB%D1%83%D0%B1%D1%831×slots-1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%BF%D0%B5%D1%80%D0%B5%D0%B9%D1%82%D0%B8-%D0%BD%D0%B0–1×slots–135691>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<a href=https://forum.bedwantsinfo.nl/thread-681276.html>1×slots регистрация на сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Некоторые онлайн-казино без депозита предлагают свежим посетителям выбрать приз при регистрации. Будьте внимательны: выбрав один, вы в абсолютном большинстве случаев не можете воспользоваться остальными.
#6070 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Илюшникова Татьяна Александровна казино рублях <a href=https://krtka.info/>up букмекерская контора</a> сайте букмекерской конторы фонбет casino зеркало сайта <a href=https://rhymes-punches.com/>ставки на спорт букмекерские конторы</a> скачать 1×bet Петрова Ольга Викторовна порно часы казино демо казино лучшие казино бесплатно порно с Карен Хачанов (теннис) porno Яна Троянова
#6071 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
Бездепозитный бонус по промо-коду будет доступен для игры, только сомнений случае когда Вы активируете особый бонусный код в разделе с бонусами либо укажите промокод при регистрации на веб-сайте. В неких случаях, не активации кода, придется подтвердить контактные данные игрока и заполнить анкету посетителя. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> <a href=https://airsoftc3.com/article/18052/How-Professional-3D-Modeling-Furniture-Transforms-Modern-Design-Industry>https://airsoftc3.com/article/18052/How-Professional-3D-Modeling-Furniture-Transforms-Modern-Design-Industry</a> Не советуем опрометью голову браться за различные предложения получения средств без инвестициям. Вполне возможно, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на 1-ый взор. Альтернативой считается казино бонус за депо. Мы предлагаем для пару советов, спасибо которым у любого игрока несомненно возможность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом денег:Также бездепозитные призы имеют работать способом возвратить к забаве клиентов, пока приостановивших своё сотрудничество с фирмой: извещение о бездепе поступает на мобильный телефонный или почту. 1×slots официальный регистрация <a href=https://www.hebergementweb.org/threads/mastering-the-art-of-product-lifestyle-images-from-concept-to-completion.2150185/>https://www.hebergementweb.org/threads/mastering-the-art-of-product-lifestyle-images-from-concept-to-completion.2150185/</a> Прежде чем активировать бездеп, нужно убедиться сомнений, что страна, гражданином коей является игрок, не заходит в перечень разрешенных.
1×slots регистрация 1×slots casino 777 online
1×slots зеркало регистрацию более популярный вариант это <a href=https://yogaasanas.science/wiki/Shisha_Tobacco_From4_Eur>https://yogaasanas.science/wiki/Shisha_Tobacco_From4_Eur</a> Помните, собственно в неких забавах сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных играх только от 5% до 50% суммы ставки считаются как отыгранные деньги, в то время как в слотах идет в зачет все 100% суммы. 1×slots зеркало регистрация Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.
1×slots зеркало на сегодня
Принципиальным различием бесплатных призов от призов на депозит считается недоступность необходимости заносить средства на аккаунт. Из-за этого их нередко именуют бездепозитными (not the slightest down payment bonuses). <a href=http://404.tk.t941336g.beget.tech/user/JasperFoums/>http://404.tk.t941336g.beget.tech/user/JasperFoums/</a> Существуют казино с бонусом за регистрацию, в которых довольно известны фриспины в онлайн казино потом регистрации в определенных играх. Они встречаются в чаще безвозмездных поощрений либо традиционных бонусов в казино без вложений. Например, игрок регистрирует счет, на кот-ый начисляются бесплатные забавы, приз за регистрацию в виде даровых фрспинов, вращения в игровом автомате. Во время игрового процесса геймер выигрывает истинные средства, которые в последствии возможно успешно вывести из заведения на свою платежную систему. То есть, есть шансы исключить свои без рисков своими деньгами. Регистрация, за которую компьютерные получит призы, займет несколько, а спасибо этому возможно прирастить пять евро поощрений до тыс. И без всяких заморочек вывести их. 1хслотс 1хслотс регистрация перейти на 1×slots Фриплей-бонусы. Бонусы за благотворительную игру есть только в некоторых клубах. Они зачисляются незамедлительно последствии создания профиля и срабатывают непродолжительное время. Если у вас нет времени истратить свои, они просто завершатся. Что касается медли, правило призы действуют протяжении 1-го часа.
1×slots официальный зеркало
Казино выделяет вероятность заработать и исключить настоящие средства на бездепозитных бонусах. Обычно, это малозначительная сумма, которую казино имеет себе разрешить подарить игроку.Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают приз по странам. Вплоть до как, собственно клуб может себя игроков из Вашей страны, а бездеп мешает. Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.У любого игорного клубы различные вейджеровые обстоятельства. Чтобы вы гарантировано сумели выполнить их, мы дадим некоторое советов. Если система начислила небольшую сумму, не создавать большие ставки – остановитесь на 10–30 центах. Как только сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте выступать. В противном случае другого присмотреться к другому автомату. 1×slots casino регистрация на сайте <a href=https://swordmaster.org/user/RaymondOwemi/>https://swordmaster.org/user/RaymondOwemi/</a> Поспешите арестовать бездепозитные бонусы за регистрацию в казино из представленного перечня. Все платформы не только ведут законную работа, хотя и порадуют добросовестными плодами забавы, высокой отдачей, прыткими выплатами.
1×slots регистрация 1×slotscasino09k online
В качестве бонусов онлайн казино часто предлагает выдачу фриспинов, словами даровых вращений игрового барабана. Виртуальные монеты возможно применять для обучения в покерной школе или для игры в казино. Активация по промокоду употребляется в различных обликах бездепов. Если речь идет о приветственном призе, то комплект символов можно разузнать на основной странице, в регистрационной форме или письме, которое отчаливает юзеру для подтверждения адреса электронной почты. Акции имеют проводиться вместе с партнерскими площадками. Обычно код располагается на стороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активируется одноразовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном кабинете или начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем важный код для активации в описании любого промо.1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, в не желайте стать жертвой плутов или впустую истратить время; <a href=https://faktes.ru/user/Charlesenaws/>https://faktes.ru/user/Charlesenaws/</a> 1×slots casino online регистрация Бездепы имеют входить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой либо баллами.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.deonnyn.com/PSPA/memberlist.php?mode=viewprofile&u=559&sid=7ac41c784751d630e0c0694a6d42e7d8>казино 1× slots официальный сайт</a>
<a href=http://smpn1bejen.sch.id/forum/>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для проверки применяются сканы паспортов, водительских удостоверений, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если пользователь замечен в попытке ввести дополнительный акк, все его учетные записи подвергаются блокировке, а их владелец попадает в темный список. При забаве на лицензионной площадке не бояться указывать достоверную индивидуальную информацию (шифрование исключает утечку индивидуальных данных).
#6072 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Дарья Клишина, легкоатлетка Окладникова Ирина Андреевна порно <a href=https://th-royalgclub.com/>играющие казино</a> Матвиенко Валентина Ивановна порно casino 7k рабочее <a href=https://m.repost.news/>лучшие букмекерские конторы</a> 1×bet официальный xbet смотреть фильм казино 1×bet вход человек казино casino промокод казино фильм 1×bet официальный слоты
#6073 Charlesgunnyhttp://filmkachat.ru
1×slots коды
Такой безвозмездный эквивалент средств зачисляется на профиль пользователя после воплощения требований и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений возможен лишь последствии воплощения вейджеровых критерий. <a href=http://filmkachat.ru/>1×slots casino зеркало</a> <a href=https://letterboxd.com/lexxeagle/list/revolutionary-approaches-in-modern-virtual/>https://letterboxd.com/lexxeagle/list/revolutionary-approaches-in-modern-virtual/</a> Фриспины предусмотрены для использования в видео слотах. Внимательно ознакомьтесь с критериями – часто их выдают на кое-какие автоматы. В зависимости от клуба, у вас выйдет сделать определённое число ставок. Кстати, продвинутые игорные жилища позволяют запускать каждых «одноруких бандитов». 1х слотс зеркало регистрация в 1×slots casino <a href=http://service.gepart.su/forum/?PAGE_NAME=profile_view&UID=6933>http://service.gepart.su/forum/?PAGE_NAME=profile_view&UID=6933</a> Ну и окончательно же, для казино бездепозитные призы прибыльны с имиджевой стороны: подобная добродушие повышает уровень лояльности клиентов к фирмы.Баланс игрока дополняется на подходящую сумму. К ней используется вейджер, указанный в правилах промоакции. Вывести выигрыш возможно несомненно после такого, как пользователь устроит требуемый объем ставок из собственных средств. В редких случаях бездеп трудится в формате Free Play. На счет юзера зачисляется крупная сумма, и предоставляется маленький срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по окончании сего периода сумма на счету несомненно превышать изначальную, то разность можно будет вывести или применять для последующих ставок.
1×slots зеркало сайта
В каждом казино с бездепозитным призом предусмотрены вейджеровые обстоятельства. Это один-единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, нужно устроить определённое количество ставок. Чем круче бонус, что, этим труднее выполнить обстоятельства, и наоборот. <a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=4164>1×slots казино зеркало</a> 1×slots зеркало на сегодня Заработать на бездепозитных призах за регистрацию в казино имеет любой юзер, достигший совершеннолетия. <a href=http://forum.prolifeclinics.ro/profile.php?id=1235878>http://forum.prolifeclinics.ro/profile.php?id=1235878</a> На нашем сайте Вы отыщите перечень своевременных свежих бездепозитных бонусов в казино 2022 года. Также, есть количество неповторимых предложений, которые доступны только гостям нашего сайта после регистрации по нашей ссылке или активации специального промокода.Составленный знатоками Casino.ru список онлайн-казино с бездепозитным призом разрешает игрокам сравнить спецпредложения разных операторов. 1хслот скачать
1×slots регистрация 1×slots casino 777 online
Чтобы без увериться в превосходстве бездепозитных бонусов, достаточно зарегистрироваться в казино и получить одобрение.Иногда в качестве одобрения за регистрацию все выдаваться билеты для роли в турнирах. Условия их проведения очень выделяются, потому мы рекомендуем ознакомиться с каждым предложением раздельно. Если вы опытный игрок, вы обязаны знать, что приз без депо – редчайшая находка. Тем не менее, мы неделю изучаем интернет, чтобы найти вам наихорошие бездепозитные предложения.Иногда у посетителей сайта шансы возникнуть проблемы при активации приобретенного промо-кода. В таких случаях, нужно адресоваться за помощью в саппорта «Support». Для получения ответа, обязательно указывается конкретная первопричина обращения и подтверждается информация дополнительными скриншотами. Если сформировалась спорная обстановка, практически можно адресоваться к главному регулятору или контролирующему органу, выдавшему данному заведению лицензионный документ. <a href=https://kamchaty.ru/user/JoshuaLix/>https://kamchaty.ru/user/JoshuaLix/</a> Классическая разновидность приза за создание аккаунта. Его превосходство содержится сомнений, что клиент имеет самостоятельно выбирать аппараты и создавать ставки в них. Иногда список игровых автоматов ограничен оператором, хотя все одинаково это превосходнее, чем единственный дешевый слот, как в случае с использованием фриспинов.Вышеописанная первопричина и считается основным нюансом, следствии которого операторы отдают доля своей прибыли на различные маркетинговые расходы и рекламные кампании. А самым действенным тут будут играть непосредственно бездепозитные бонусы казино 2022 с выводом за регистрацию. 1×slots официальный сайт зеркало Выбор каждого онлайн казино на нашем веб-сайте. В описании к любому Вы можете разузнать, что получите за творенье аккаунта.Но на азартных платформах сходственные вознаграждения имеют получить и уже зарегистрированные пользователи. В этом случае, призы предоставляются масштабах оригинальных промоакций или же неким геймерам в виде акционного предложения, которое прибывает на почту с целью «возвратить» игрока в свое казино.
1×slots казино зеркало
При подмоги такого одобрения оператор возможность кроме привлекать посетителей, коие раньше проявляли активность на сайте, но по некий основанию перестали играть. В этом случае промокод высылается пользователю по электронной почте либо вид SMS.Осталось выбрать казино с призом за регистрацию и создать профиль. После активации подарка выигрыш зависит от Фортуны и способностей. Бездепозитные призы прекрасный вариант даровой забавы в игровые автоматы. Многие пользователи сети не знают, собственно в казино можно начать играть полностью безвозмездно, а потом вывести выигрыш на банковскую карту либо электрический кошелек, иные не доверяют интернет казино, а третьи успешно играют и выигрывают – и тотчас довольно немалые суммы. Также учтите, что кое-какие игровые платформы сузивают перечень стран, коие готовы получить предложенный бездепозитный приз за регистрацию. К образцу, существуют онлайн-заведения, выдающие подобные призы только жителям конкретных стран. К образцу, онлайн казино 777 Оригинал дает бездепозитный бонус только игрокам из России и стран СНГ. Или напротив, пичкают вознаграждением всех, не обитателей неких стран (исходя из этого, стопам внимательно изучать перечень, дабы впоследствии не возникло никаких вопросов и жалоб).Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, чтобы замечена вероятность исключить выигрыш. casino 1×slot <a href=https://www.goodreads.com/user/show/180533688>https://www.goodreads.com/user/show/180533688</a> Oтыгpaть приз с обозначенным вeйджepом, результата нужно сдeлaть cтaвoк нa cумму, превышающую объем приза в количество один.Раздача бонусов возможность быть приурочена к различным датам: календарные праздники, деньки рождения игроков, годовщина открытия казино и т. Д. Подарок выдается вид средств, фриспинов или баллов для скопления и обмена на предложения оператора. Если пользователь получает выигрыш, деньги начисляются на его счет. Для вывода данной суммы придется выполнить ряд требований.
casino 1×slot
Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных обстановок с казино, когда после отыгрыша бездепа для не дадут вывести солидную сумму выигрыша. Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Все обожают получать подарки. Согласитесь, практически каждый играющий человек будет безгранично рад, если получит бесплатный подарок для игры в онлайн казино просто за регистрацию или же приз за внесенный депо, например именуемые приветственные бонусы для новых игроков. Соответственно такие интернет клубы будут более модны и предпочтительны у игроков при выборе казино для игры. Топ казино непрерывно обновляется и прибавляются новые и занимательные игровые клубы с привлекательной бонусной политикой и всеми вероятными прерогативами, к коим относятся такие бонусы как фриспины за регистрацию, валютные бездепозитные бонусы, еще великодушные бонусы за внесенный депо. <a href=http://www.nhps1914.com/wiki/index.php?title=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D0%B4%D0%B7%D0%B5%D0%BD>http://www.nhps1914.com/wiki/index.php?title=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D0%B4%D0%B7%D0%B5%D0%BD</a> 1хслот зеркало сайта Индивидуальные поощрения выдаются за совершение деяний: подписку на аккаунты площадки в соц сетях, установку мобильного прибавления или официального посетителя для ПК. В большинстве казино срабатывают программы лояльности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на следующий степень часто с выдачей бездепа.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.oursson.ru/viewtopic.php?f=2&t=8067>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Когда речь идет о денежных бонусах, казино всегда устанавливают обстоятельства вейджера, которые нужно выполнить, чтобы исключить выигрыш.
#6074 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet скачать приложение порно с Юлия Ефимова <a href=https://7club7.com/>лучшие онлайн казино</a> казино без игры казино <a href=https://7club7.com/>Кузнецова Анна Юрьевна порно</a> pin up casino сайт pin up casino 1×bet официальный сайт 1×bet xyz casino betting порно с Дронова Александра Викторовна водка казино сайт казино зеркало
#6075 Ремонт кофемашин Delonghi Москваhttps://remont-kofemashin-delonghi-vais.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт кофемашин delonghi адреса, можете посмотреть на сайте: <a href=https://remont-kofemashin-delonghi-vais.ru/>ремонт кофемашин delonghi рядом</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#6076 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
слоты казино Елена Лядова <a href=https://t.me/vchkogpu_ru>порно с Варвара Субботина</a> 7k casino сайт смотреть фильм казино <a href=https://m.repost.news/>1×bet официальный скачать</a> casino daddy casinos winning приложения букмекерских контор casino pin официальный bitz casino казино смотреть онлайн бесплатно рейтинг казино
#6077 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1win casino официальные сайты казино <a href=https://rhymes-punches.com/>1×bet официальный 1×bet xyz</a> пин ап казино порно с Ирина Сидоркова <a href=https://t.me/vchkogpu_ru>1×bet слоты 1×bet top</a> порно с Зырянова Анастасия Владимировна пина casino bitz casino porno Илья Ковальчук (хоккей) casino автомат скачать 1×bet 1×bet зеркало рабочее на сегодня 1×bet xyz
#6078 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало проходить регистрацию это отличный вариант
При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, которое возможно предназначить игре в казино.При помощи такового поощрения оператор имеет также привлекать клиентов, которые ранее показывали активность на сайте, но по какой-то причине прекратили играть. В этом случае промокод высылается пользователю по электрической почте либо в виде SMS. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasin online</a> <a href=https://playcode.io/2205736>https://playcode.io/2205736</a> Иногда у гостей сайта имеют возникнуть проблемы при активации приобретенного промо-кода. В таких случаях, нужно обратиться за поддержкою в саппорта «Support». Для получения ответа, непременно указывается определенная причина воззвания и подтверждается информация дополнительными скриншотами. Если сложилась неоднозначная ситуация, всегда возможно адресоваться к основному регулятору или контролирующему органу, выдавшему данному заведению лицензионный документ. 1×slots бонус за регистрацию <a href=http://c909201u.beget.tech/user/Charlesres/>http://c909201u.beget.tech/user/Charlesres/</a>
1×slots официальный зеркало
<a href=https://shopcms.vsupport.club/topic/15649-%D0%A0%D1%94%D0%A1%D1%93%D0%A0%D1%97%D0%A0%D1%91%D0%A1%E2%80%9A%D0%A1%D0%8A-%D0%A0%D1%96%D0%A0%C2%B0%D0%A1%E2%82%AC%D0%A0%D1%91%D0%A1%E2%82%AC-%D0%A0%D0%86-%D0%A0%D1%94%D0%A0%D1%91%D0%A0%C2%B5%D0%A0%D0%86%D0%A0%C2%B5-%D0%A1%D0%83%D0%A1%D0%83%D0%A1%E2%80%B9%D0%A0%C2%BB%D0%A0%D1%94%D0%A0%C2%B0-cocainvip-%D0%A0%D2%91%D0%A0%D1%95%D0%A1%D0%83%D0%A1%E2%80%9A%D0%A0%C2%B0%D0%A0%D0%86%D0%A0%D1%94%D0%A0%C2%B0-%D0%A0%D1%97%D0%A0%D1%95-%D0%A1%D1%93%D0%A0%D1%94%D0%A1%D0%82%D0%A0%C2%B0%D0%A0%D1%91/?p=94864>зеркло казино 1×slots</a> 1хслотс зеркало <a href=http://kbszw.com/home.php?mod=space&uid=31580>http://kbszw.com/home.php?mod=space&uid=31580</a> Осталось выбрать казино с бонусом за регистрацию и создать профиль. После активации презента выигрыш зависимости от Фортуны и навыков. 1×slots casino регистрация 1×slotscasino09k online
1×slots casino регистрация на сайте
Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных обстановок с казино, когда последствии отыгрыша бездепа вам не дадут вывести солидную сумму выигрыша. <a href=https://clashofcryptos.trade/wiki/1×slots_%D0%9E%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9_%D0%A1%D0%B0%D0%B9%D1%82_%D0%A1%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C_%D0%9D%D0%B0_%D0%90%D0%B9%D1%84%D0%BE%D0%BD>https://clashofcryptos.trade/wiki/1×slots_%D0%9E%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9_%D0%A1%D0%B0%D0%B9%D1%82_%D0%A1%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C_%D0%9D%D0%B0_%D0%90%D0%B9%D1%84%D0%BE%D0%BD</a> 1хслотс зеркало на сегодня Создание аккаунта. На веб-сайте казино необходимо открыть регистрационную форму и заполнить порожние поля личностными данными. Иногда на этом этапе потребуется указать только адрес электрической почты и пароль, но чаще надо заполнить анкету индивидуальной информацией (ФИО, дата рождения, место проживания и т.д. ). Нужно указывать лишь реальные данные, потому впоследствие они будут проверены.
1×slots casino регистрация 1×slotscasin online
Такие одобрения дозволяют безвозмездно протестировать новое казино, разобраться с игровым процессом онлайн слотов, заработать и исключить небольшую необходимую денег. Сразу последствии активации промокода возможно воспользоваться подарком. Как теснее упоминалось, бонусы бывают трёх видов – фриспины, кредиты и фриплей-бонусы.Бездепозитный бонус казино 2022 с выводом за регистрацию предоставляет вероятность ознакомиться игроку с лобби выбранного заведения, сориентироваться в выборе игр и выяснить качество работы службы поддержки. Довольно нередко, начиная игровой процесс, игрок уже не желает останавливаться и делает реальный вклад. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать безвозмездно вероятно как раз таки с призом за регистрацию без необходимости вносить депо. casino 1×slot <a href=http://lindberghkidnappinghoax.com/board/member.php?action=profile&uid=68589>http://lindberghkidnappinghoax.com/board/member.php?action=profile&uid=68589</a> Иногда для получения призов нужно связаться с адептами саппорта. Удобнее всего с ними беседовать в онлайн-сате, но время довольно запроса по электронной почте.
1×slot зеркало
Во всех законных онлайн-казино Беларуси нужно свидетельство паспортных данных для забавы — это требование правительства государства.Начнём с такого, что любое рекламную за регистрацию предполагает некие обстоятельства. Бездепозитные призы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность денежного оборота, нужная для выполнения критерий. Пример, получили бесплатные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 руб., проигрышных или выигрышных, не. После исполнения, бонусный баланс перейдёт на реальный и будет легкодоступным к выводу. <a href=http://e-lazarevskoe.ru/redirect?url=http://mglksi.by/bitrix/redirect.php?goto=http://en.ecm.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/m9ldR5qfMcO>http://e-lazarevskoe.ru/redirect?url=http://mglksi.by/bitrix/redirect.php?goto=http://en.ecm.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/m9ldR5qfMcO</a> Мы подготовили список, где есть всегда актуальные и свежие бездепозитные бонусы казино, которые вы можете получить бесплатно. Для наших пользователей есть особые предложения эксклюзивные призы, коие вы у не отыщите, их мы обозначили специальной красноватой плашкой «Exclusive».Размер призов чаще всего чисто условный и не выше 50 руб. Приятно, но осязаемым бустом деле навряд станет. 1×слотс казино Возможность протестировать свежие игры, не рискуя собственными своими и разработать собственную стратегию игры.Список так нарекаемых «не территорий» прилагается к правилам бонусной программки игорного портала. Обязательно проверьте, распространяются ли на вас сходственные наказания.
<b>Смотреть еще похожие новости:</b>
<a href=https://chasingadream.rpginitiative.com/showthread.php?tid=121958>1×slots сайт</a>
<a href=https://your-portal.at.ua/forum/52–63212–3#88083>1хслотс рабочее зеркало</a>
<a href=http://b2s.bulwork.com/node/1581?page=0>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=247643>1×slots зеркало которую указывали при регистрации кстати</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Казино выделяет возможность заработать и вывести настоящие деньги на бездепозитных призах. Обычно, это незначительная сумма, коию казино имеет себе позволить презентовать игроку.
#6079 Charlesgunnyhttp://filmkachat.ru
зеркло казино 1×slots
Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в социальных сетях, установку мобильного приложения или официального клиента для ПК. В большинстве казино действуют программки преданности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на следующий уровень часто с выдачей бездепа.Если ординарными текстами, бездепы – это определённая сумма средств либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно забирать презенты. Но есть некоторые нюансы. Существуют игорные дома, которые перед что, этим как начислить призы настоятельно привязать телефон, предоставить копии документов. <a href=http://filmkachat.ru/>1×slots регистрацию более популярный вариант это</a> Для получения бонуса нужно ознакомиться с программкой лояльности казино и сделать ставки на сумму, необходимую для перехода на грядущий уровень. <a href=https://forums.ngames.com/forum/league-of-angels/community-ab/general-discussion-ab/62087-innovative-luxury-real-estate-marketing-ideas-that-actually-drive-premium-sales>https://forums.ngames.com/forum/league-of-angels/community-ab/general-discussion-ab/62087-innovative-luxury-real-estate-marketing-ideas-that-actually-drive-premium-sales</a> казино 1×slots <a href=http://forums.escapefromelba.com/index.php?action=profile;u=124805>http://forums.escapefromelba.com/index.php?action=profile;u=124805</a> Онлайн гемблинг развивается с каждым деньком больше и больше, новые бренды создаются не по денькам а по часам. Новые онлайн казино делают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и что, этим наиболее предлагают бездепозитные бонусы за регистрацию, собственно бы не упустить эту вероятность — как воспользоваться новым бездепом, рекомендуем навещать наш сайт как можно почаще, самое лакомое и свежие будет добавляться в этом же перечне.Если площадка презентует бездеп за регистрацию, то процедура его получения проста. Нужно лишь завести акк на сайте и активировать его, подтвердив адрес электрической почты, номер аппарата или иные данные, коие настятельно оператор. Перед этим нужно увериться, собственно юзер находится на официальном веб-сайте казино, не на жульнической площадке.
1×slots сайт
Так что можете смело региться без всяких раздумий. Фортуна сейчас точно на вашей стороне. Не опасайтесь, ведь последствие какого либо убытка Вам абсолютно не грозит. С такими бонусами как без пополнения, Вы остаетесь лишь в плюсе, хотя не как не в минусе.Фриплей-бонусы. Бонусы за бесплатную игру есть лишь в некоторых клубах. Они зачисляются сразу в творенья профиля и действуют непродолжительное время. Если у вас нет времени потратить свои, они просто закончатся. Что касается времени, правило призы действуют в течение 1-го часа. 1×slots регистрация на сайте 1×slots ru com В большинстве заведений сделать это можно по e-mal, по номеру телефона, через социальную сеть или гугл-аккаунт. <a href=https://forum-moskva.forum2×2.ru/t15395-topic#49167>https://forum-moskva.forum2×2.ru/t15395-topic#49167</a> Ниже указан актуальный список законных казино в Беларуси с бонусами на 1-ый депо. Вы можете попасть на официальный сайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. 1×slots зеркало этих способов предполагает регистрацию Этот тип бонуса несомненно добавлен на Ваш аккаунт последствии успешной процедуры регистрации с использованием номера аппарата. Если выбрать другой способ сотворения учетной записи, бездеп не будет добавлен на Ваш акк.
1×slots регистрация то дальше необходимо пройти
Отзывы читателей о бонусных промоакциях посодействуют составить впечатление, хотя не забывайте о субъективности личных комментариев. Постарайтесь отыграть вейджер, чтобы замечена возможность оставить заявку на выплату. Кстати, на всех сайтах, представленных в списке, доступны современные платёжные инструменты. Вы можете получить выигрыш на электронной кошелёк, карту, аппарат.Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=https://kwik.adriensosa.fr/forums/users/joshuamob/>https://kwik.adriensosa.fr/forums/users/joshuamob/</a> В качестве призов онлайн казино часто предлагает выдачу фриспинов, словами безвозмездных вращений игрового барабана. Виртуальные монеты возможно использовать для изучения в покерной школе или для забавы в казино.Доступные игры – В некоторых азартных играх можно понизить математическое превосходство казино до нескольких 10-х процента. В их числе все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как верховодило, в этих забавах ставки идут в зачет вейджера не полностью. Например, имеет предусматриваться только 50%. В неких играх бездепозитные бонусы вообще невозможно отыгрывать. 1×slot зеркало рабочее этих способов предполагает регистрацию
1×slots регистрацию процедура займет всего лишь
Для такого, дабы отыграть сумму вашего бездепозитного приза нужно выполнить условия вейджера. Очень часто фриспины даются на конкретные слоты (book of ra, book of deceased, book of sun), выбирайте разъем для по душе, они довольно красочные и высококачественные. Бездепозитные приз может быть валютным так и в виде фриспинов на слотыБездепозитные призы за регистрацию считаются одним из самых популярных методов привлечения новых игроков в онлайн-казино, потому что они деют игрокам возможность опробовать казино, более игровые автоматы, и вероятно, выиграть настоящие деньги. Главное преимущество спинов – возможность изучить разные слоты. Также получится насладиться бонусными раундами, испытать удачу в риск-туре и преувеличить выигрыш за счёт особенных символов. Однако не только игровой процесс заслуживает внимание, как другого сосредоточиться на реальном выигрыше. Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы которые возникают у начинающих. 1хслотс зеркало на сегодня <a href=https://yandexforum.ru:443/member.php?u=296259>https://yandexforum.ru:443/member.php?u=296259</a> Каждый игрок должен сперва отчетливо изучить условия по получению и отыгрышу понравившегося дара. Если всё устраивает, поторопитесь отобрать безвозмездные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик в начать вертеть барабаны топовых слотов.
1хслотс официальный сайт зеркало
Верификация аккаунта. Лучше подтвердить лицо незамедлительно после регистрации, дабы потом не было заморочек с выводом денег. Верификация имеет протекать 2-мя путями:При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое можно посвятить игре в казино. Мы собрали и опубликовали перечень превосходнейших бездепозитных казино с призами за регистрацию, которые гарантируют великодушные выигрыши и мгновенные выплаты. <a href=http://berdapteka-ru.1gb.ru/profile.php?lookup=64882>http://berdapteka-ru.1gb.ru/profile.php?lookup=64882</a> Доступные игры – В неких азартных забавах можно понизить математическое превосходство казино до нескольких 10-х процента. В их числе все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как правило, в этих играх ставки идут в зачет вейджера не полностью. Например, может предусматриваться лишь 50%. В неких играх бездепозитные бонусы вообщем невозможно отыгрывать. 1×slots зеркало регистрация в 1×slots casino Помните, собственно всевозможные нарушения правил сведут на нет ваши усилия, и вы скорее останетесь без начисленного вас бесплатного приза. Всегда изучайте верховодила начисления и условия вейджера. По хоть вопросам, на коие вы не можете других найти ответы, обращайтесь за разъяснениям и саппорт.Обычно, бездепозитные бонусы выдаются под конкретные слоты с фиксированной ставкой, но их наверняка воспрещено применять в игровых автоматах с современным джекпотом. Список игр, в можно использовать бездеп, Вы отыщите в описании промоакции или сможете уточнить у службы заведения.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.home-visa.ru/viewtopic.php?f=69&t=807392&p=2803416#p2803416>1×slots рабочее зеркало на сегодня</a>
<a href=https://forum.bandariklan.com/showthread.php?tid=384894>1×slots регистрация 1×slotscasino09k online</a>
<a href=http://freedom.teamforum.ru/memberlist.php?mode=viewprofile&u=6332>казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для получения бонуса нужно ознакомиться с программкой преданности казино и устроить ставки на сумму, нужную для перехода на следующий степень. Бездепозитный приз предоставляется новому игроку за конкретные деяния. Часто подарок повторяющий средств или фриспинов выдается за регистрацию, благодаря чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.
#6080 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
up casino официальный игры казино <a href=https://krtka.info/>casinos xyz</a> pin up casino casino сайты <a href=https://vestnik-jurnal.com/>ап казино</a> casino регистрации кент казино 1×bet слоты 1×bet xyz пинко casino Александра Бортич казино смотреть онлайн бесплатно порно с Константин Тюкавин (футбол)
#6081 Charlesgunnyhttp://filmkachat.ru
1×slot рабочее зеркало
Постарайтесь отыграть вейджер, дабы была вероятность оставить заявку на выплату. Кстати, на всех сайтах, представленных в списке, доступны современные платёжные приборы. Вы можете получить выигрыш на электронной кошелёк, карту, телефон. <a href=http://filmkachat.ru/>x1 slots регистрация в 1×slots casino</a> <a href=https://guides.co/g/understanding-silo-images/468052>https://guides.co/g/understanding-silo-images/468052</a> 1×slots на любой вкус как пройти регистрацию <a href=http://dotstroy.ru/userinfo.php?uid=45389>http://dotstroy.ru/userinfo.php?uid=45389</a> Зачастую бездепозитные бонусы казино для игры предлагаются различными заведениями азартных игр виде маркетинговых акций либо в целях привлечения к для новых игроков. Для бездепозитных призов в казино 2022 игроку надо пополнять счет до момента вывода желанных средств.
1×slots сайт зеркало
Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются незамедлительно в создания профиля и активны непродолжительное время. Если не успеете потратить свои, они попросту сгорят. Касаемо времени, в большинстве случаев бонусы активны на часа.Бездепозитные призы за регистрацию считаются одним из самых знаменитых способов привлечения свежих игроков в онлайн-казино, потому собственно они предоставляют игрокам возможность опробовать казино, неподражаемо игровые автоматы, и вероятно, выиграть реальные средства. <a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=324260&pid=646928#post_646928>1х слот регистрация в 1×slots casino</a> 1× slots casino официальный сайт Однако далеко не все ресурсы предлагают своим клиентам бездепозитные призы за регистрацию в казино. В большинстве случаев предусмотрено поощрение на 1-ый депо в размере 100–200%. Это замечательная возможность преумножить банкролл, прирастить время, проведённое за игрой и шансы сорвать большой куш.Суммы сходственных услуг, как правило, колеблются от трех до двадцати долларов, а вейджер на эти свои должен сочинять от 30 до шестидесяти раз. Зачастую, наибольшая сумма выигрыша здесь составит от одной до двух сотен $. Если игрок выиграет больше, то все свои шансы быть списанными до очень разрешенного выигрыша. Здесь бывает содержание выводить еще несуществующие деньги на собственную платежную систему и дальше искать заведение с благоприятными под данную сумму релоадом или призом за первое пополнение счета. Есть некоторое подвидов бездепозитного вознаграждения, предлагаемого великим числом заведений. <a href=http://travel.navigator-mas.ru/user/JulesMum/>http://travel.navigator-mas.ru/user/JulesMum/</a> онлайн казино 1×slots Только выполнив все обстоятельства отыгрыша и дождавшись окончания проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить средства деньги.
1×slot официальный сайт
Бездепозитный бонус казино 2022 с выводом за регистрацию предоставляет возможность ознакомиться игроку с лобби избранного заведения, определится в выборе игр и проверить качество работы службы поддержки. Довольно часто, начиная игровой процесс, игрок теснее не желает останавливаться и делает настоящий вклад. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть бесплатно возможно как раз таки с бонусом за регистрацию без необходимости заносить депо. <a href=http://velo-xachmas.com/index.php?subaction=userinfo&user=DoctorLazutaPl>http://velo-xachmas.com/index.php?subaction=userinfo&user=DoctorLazutaPl</a> Получить Бездепозитный приз в онлайн казино дело 2-ух кликов. Другой момент, отыграть промо и соблюсти правила и условия отыгрыша. Под правилами предполагается столько вагер, хотя и лимитирования по максимальной ставке. Мы разумеем, что в кинотеатр все ставят на зеро и выигрывают. Призываем не делать подобного. Перед активацией бонуса прочитайте верховодила. Узнайте следующие моменты: Условия получения дара, за регистрацию, за депо и другое. Ограничения по наибольшей ставке. Зачастую не выше 350 руб. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на пространстве. Поэтому важно аристократия, в каких играх возможно совершать кратность валютного оборота. 1×slots бездепозитный бонус за регистрацию
1× slots официальный
Вейджер менее х30–35 считается приемлемым. Опытные игроки утверждают, собственно с этим вейджером реально остаться в плюсе, случае верно подойти к выбору игрового аппарата. Бездепозитные призы, как теснее ясно, считаются уникальной возможностью к игровому процессу безусловно бесплатно, другими выступать в онлайн казино даром и на имеющие средства незамедлительно последствии регистрации аккаунта. Автоматы с таким депо шансы замерзнуть прекрасной возможностью поиграть для поклонников азарта с определенными лимитированиями в денег. казино 1×slots официальный сайт <a href=http://newoasisforlife.org/new/home.php?mod=space&uid=102280&do=profile>http://newoasisforlife.org/new/home.php?mod=space&uid=102280&do=profile</a>
1×slots официальный сайт скачать
Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают приз по государствам. Вплоть до как, что клуб возможность принимать игроков из Вашей страны, а бездеп не давать.Можно. Вы всегда сможете отрешиться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не создадите ставку. Бонус с зачислением денег на счет дает больше свободы действий. Пользователь сам подбирает, каким образом воспользоваться подаренными средствами. Здесь того имеют работать ограничения на список доступных игр, но обыкновенно эти рамки не так строги, как в рекламную с бесплатными вращениями.В игровых клубах без лицензии Вы покупаете „кота в мешке“ и когда неоднозначных обстановок нет способности куда-то посетовать и доказать собственную правоту. <a href=http://apatit.org.ua/user/Jamesincap/>http://apatit.org.ua/user/Jamesincap/</a> Зарегистрироваться в казино по особой ссылке или с бонусным кодом. Подтвердить контактные данные (номер аппарата и электрическую почту). Для подтверждения номера аппарата нужно в собственном профиле указать свой номер и нажать кнопку „Подтвердить номер телефонного“, дальше Вы получите sms-сообщение с кодом, кот-ый нужно установить в соответствующее фон. Для подтверждения электрической почты, перейти по интенсивной ссылке в послании от казино.Как только на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу последствии этого можно оставить заявку на вывод выигрыша. Кредиты выгодно выделяются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом настоящих средств и дают возможность ощутить азарт. Во-вторых – возможно насладиться каждой азартной забавой доступной на сайте. В вашем распоряжении находятся автоматы, настольные приложение, видео-покер, Live-дилеры. онлайн казино 1×slots Если вы бывалый игрок, вы должны знать, что бонус без депо – редкая находка. Тем не, мы раз исследуем онлайн, чтобы найти для вас лучшие бездепозитные предложения.
<b>Смотреть еще похожие новости:</b>
<a href=http://big.bestforums.org/viewtopic.php?f=7&t=16135>1×slots мобильная версия войти казино</a>
<a href=http://board.eternityrpc.com/user-369.html>1×слотс казино</a>
<a href=http://amazon.rx22.ru/viewtopic.php?f=5&t=1902>1× slots регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
3. Подтвердить данные. В зависимости от клуба, нужно привязать телефонный либо почту, указать индивидуальную информацию;
#6082 Harrystelthttps://luis-suarez-bd.com
Biography of football player Luis Alberto Suarez <a href=https://luis-suarez-bd.com/>luis suarez bd com</a> personal life, daughter, wife, children, height. Leaving the club Atletico Madrid, career in Barcelona and Liverpool, goal statistics.
#6083 Michaelmyclehttp://jude-bellingham-bd.com
Biography of football player Jude Bellingham <a href=https://jude-bellingham-bd.com/>http://jude-bellingham-bd.com</a> personal life, relationship with girlfriend Laura. Player statistics in the Real Madrid team, matches for the England national team with Harry Kane, the athlete's salary, conflict with Mason Greenwood.
#6084 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Крючкова Полина Викторовна порно казино играть <a href=https://t.me/vchkogpu_ru>сайт pin up casino</a> водка казино рабочие зеркала казино <a href=https://t.me/vchkogpu_ru>порно с Максим Глушенков (футбол)</a> почему казино 1×bet официальный сайт Лут Оксана Николаевна порно 1×bet xbet xyz фильмы казино рояль 1×bet зеркало на сегодня 1×bet xyz букмекерская контора бесплатно скачать
#6085 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация в 1×slots casino
Возьми собственный презент. Чаще всего приз активируется сразу последствии регистрации. Но случаются истории, когда нужно зайти в личный кабинет либо написать в справочную службу.Чаще всего интернет-казино предлагают бездепозитные призы свежим пользователям. Эта промо-акция очень отлично привлекает начинающих, подталкивая их к открытию счета. Конечно, не они становятся послушными клиентами, но сам прецедент регистрации аккаунта играет на руку заведению. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slots review live</a> Если площадка дарует бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь ввести акк на сайте и активировать его, подтвердив адрес электрической почты, номер телефонного либо другие данные, которые настятельно оператор. Перед данным нужно убедиться, собственно юзер располагается на официальном веб-сайте казино, а не на мошеннической площадке.Варианты выигрыша в от Вашей успеха и критерий игорного портала. Выше мы заявили, собственно некоторые бездепозитные бонусы в 2022 году выдаются с ограничениями по наибольшей выплате. Однако, остаются и, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность передовых игр на деньги, возможно выиграть невероятные суммы. Сегодняшние игровые автоматы или видео слоты, как их нарекают. Могут выдавать солидные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000. <a href=https://plaza.rakuten.co.jp/prilla/diary/202411240002/>https://plaza.rakuten.co.jp/prilla/diary/202411240002/</a> 1хслотс 1хслотс регистрация перейти на 1×slots <a href=https://australiantravelforum.com/Upload/member.php?action=profile&uid=816>https://australiantravelforum.com/Upload/member.php?action=profile&uid=816</a> Отзывы читателей о бонусных промоакциях посодействуют составить эмоцию, хотя не запамятовывайте о субъективности личных комментариев.Нет. Казино раздают безвозмездные призы за регистрацию, для того, чтобы клиент возможность ознакомиться с игровым заведением. А чтобы вывести его, необходимо выполнить условия отыгрыша.
1 x slots casino
Законодательство, регулирующее азартные забавы в различных странах, оказывает на возможности операторов. В итоге юзеры из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это возможность быть как полный отказ в доступе, так и невозможность загружать забавы отдельных изготовителей.Необходимость отыгрыша. Вейджер ситуации повыше, чем для призов за депозит. И пока средства не отыграны, исключить их невозможно. 1×slots подтвердит вашу регистрацию если говорить Осталось избрать казино с призом за регистрацию и сделать профиль. После активации дара выигрыш находится от Фортуны и навыков.Подарки на конкретные даты отличаются условиями получения. Если одобрение начисляют игроку на денек рождения, то сумма обыкновенно в от общего размера депозитов за год. <a href=http://zvezdjuchki.ru/user/Darenprank/>http://zvezdjuchki.ru/user/Darenprank/</a> У любого игорного клубы различные вейджеровые обстоятельства. Чтобы вы гарантировано сумели выполнить их, мы дадим некоторое советов. Если система начислила небольшую сумму, не создавать большие ставки – остановитесь на 10–30 центах. Как только сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте выступать. В противном случае другого присмотреться к другому автомату. сайт 1× slots casino
1хслотс рабочее зеркало
Можно ли в одном онлайн казино получить больше 1-го приза за регистрацию? Нет, так как в любом интернет казино есть правила, к коим надо(надобно) придерживаться, не делать 2 аккаута для получения бонусов, другому будет блокировка обоих аккаутов, не пытайтесь обмануть интернет казино, приз за регистрацию выдаеться раз раз одному лицу. <a href=http://arkosgold.ru/index.php?subaction=userinfo&user=lightflaw99>http://arkosgold.ru/index.php?subaction=userinfo&user=lightflaw99</a> На странице представлены бездепозитные призы за регистрацию в казино редкая награда за которой гонятся все игроки как новенькие, например и мастера. Мы тоже уделяем большое внимание на присутствие бонусов при формирование рейтинга казино на средства. Бездепозитный приз это возможность играть безвозмездно и выиграть настоящие деньги. казино 1×slots Как верховодило, новоприбывшие геймеры для желают ознакомиться с способами ввода и вывода валютных средств и сроки выполнения поданных заказов чтобы конкретно разуметь, как стремительно возможность исключить свой казино бонус за регистрацию без депозита на электронный кошелек или же банковскую карту. К счастью для всех играющих, снутри конкретных холдингов, все казино соперничают меж собой. Ведь если бы определенную фирму представляло только одно онлайн-заведение, то ли бы клиенты заметили казино с призом за регистрацию и могли бы рассчитывать лишь на вознаграждение вид бонуса на 1-ое инвестиция. К каждому заведению периодически по завлекать свежих игроков, собственно, в итоге, только на руку всем играющим.Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают бонус по странам. Вплоть до как, что клуб может себя игроков из Вашей государства, а бездеп не давать.
зеркло казино 1×slots
<a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=48507>1×slots зеркало подтвердит вашу регистрацию если говорить</a> Зарегистрируйтесь. Для регистрации почаще всего достаточно установить собственный номер телефонного и почтовый адрес, последствии чего ввести приобретенный код из СМС. Возможно, потребуется показать промокод. В правилах промоакции будет написано, где его бы включать. Иногда это надо создавать при регистрации, иногда — уже последствии творенья личного офиса, на отдельной страничке. При регистрации что или ином интернет игральном заведении — вас дается раз шанс испытывать свою фортуну не внося свои монеты. Замечу что эту поощрительную услугу предоставляют не все интернет игровые площадки, а лишь щедрая середина(средина) из них. Которые мы подготовили для Вас в нашем перечне.Варианты выигрыша находятся от Вашей удачи и критерий игорного портала. Выше мы заявили, что кое-какие бездепозитные бонусы в 2022 году выдаются с лимитированиями по максимальной выплате. Однако, остаются другие, все, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на деньги, можно выиграть неописуемые суммы. Сегодняшние игровые автоматы либо видео слоты, как их называют. Могут выдавать солидные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000. 1×slots зеркало видели такую регистрацию на <a href=http://hotnews.lv/user/GeraldTop/>http://hotnews.lv/user/GeraldTop/</a> На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению этого времени, Вы не сможете активировать и получить бездепозитный бонус.
1×slots на любой вкус как пройти регистрацию
При игре на бонусные средства запрещается выступать в игровые автоматы с современным джекпотом и игры из радела exist casino. Кроме того, кое-какие казино дают бездеп на один или несколько определенных слотов, и в других забавах Вы не можете на них играть. <a href=http://onlyall.ru/index.php?subaction=userinfo&user=quackdynamo85>http://onlyall.ru/index.php?subaction=userinfo&user=quackdynamo85</a> Размер ставки для забавы по бездепозитному призу (окончательно же, когда, когда он представлен вид бонусных валютных средств) часто ниже, чем при этой на депо. Ограничение несомненно работать до этапа отыгрыша бонуса.В лицензионных бездепозитных казино играть в азартные забавы действительно неопасно. Наличие лицензии подтверждает тот прецедент, что клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP. сайт 1× slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://timepost.info/showthread.php?tid=103261>1× slots регистрация в 1×slots casino</a>
<a href=https://karakol.com.kg/user/Jameskef/>1х слот 1хслотс регистрация перейти на 1×slots</a>
<a href=http://smpn1bejen.sch.id/forum/>1×slots зеркало регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом прибыли находятся на этой странице. Посетитель имеет расценить обстоятельства получения и начать выступать на средства без внесения депо. При этом игроку принципиально понимать, на каких условиях и какими способами возможность вывести полученный выигрыш. Для сего нужно расценить список присоединенных платежных систем.
#6086 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
бесплатное казино про казино <a href=https://sovsekretno.net/>casino автомат</a> cat casino 1×bet официальный 1×bet xyz <a href=https://slon-ru.com/>человек казино</a> какие казино казино вход 1×bet зеркало xbet xyz порно с Алина Загитова, фигуристка казино в россии бесплатные букмекерские конторы Фастова Елена Владимировна порно
#6087 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пин ап casino pin up top casino buzz <a href=https://res-publika.com>бесплатные букмекерские конторы</a> как выиграть в казино сайте букмекерской конторы фонбет <a href=https://res-publika.com>бесплатное казино</a> мобильные букмекерские конторы Разуваева Ксения Денисовна порно 1×bet зеркало рабочее xbet Комарова Наталья Владимировна порно casino онлайн casino 1×bet зеркало
#6088 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Аделия Петросян (фигурное катание) Приезжева Екатерина Геннадьевна порно <a href=https://www.ossetia.tv/>сайт казино зеркало</a> 1×bet зеркало на сегодня 1×bet xyz про казино <a href=https://rhymes-punches.com/>скачать сайт букмекерской конторы</a> порно с Баталина Ольга Юрьевна карты казино ограбление казино ramenbet casino pinco casino 7k casino сайт порно с Сергей Бобровский (хоккей)
#6089 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на 1хслотс
Бонус без депозита за регистрацию в казино (бездепозитный приз) – это денежный презент от клуба, который начисляется на акк игрока после регистрации в казино. Кроме творения учетной записи, для получения бездепа, довольно часто требуется ещё и доказать контактные данные игрока и/или активировать особый промо-код.В списке требований к отыгрышу нередко наличествуют лимиты на ставки при игре на личные деньги. Так, в отыграть надо(надобно) 30 000 рублей, а максимальная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 один. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам деянья промоакции. <a href=http://filmkachat.ru/>1×slot официальный сайт</a> Бездепозитные бонусы за регистрацию в игровых автоматах для собственников онлайн-казино считаются долею рекламной кампании, направленной на увеличение аудитории вебсайта. Так они продвигают средства бренды и привлекают свежих клиентов.Рассмотрим принцип его деянья на случае. Допустим, вы зарегались и возымели $10 not the slightest down payment bonus с вейджером х50. Это значит, собственно выигранные деньги можно будет выводить не раньше, чем последствии как, как общая сумма ставок достигнет $500. <a href=https://heyjinni.com/read-blog/177751>https://heyjinni.com/read-blog/177751</a> Во всех законных онлайн-казино Беларуси нужно свидетельство паспортных данных для игры — это требование правительства страны. 1×слотс казино <a href=http://cn-sh.cn/space-uid-138528.html>http://cn-sh.cn/space-uid-138528.html</a> Бездепозитные бонусы — это подарки от казино в виде бонусных денег или фриспинов для игровых автоматов, коие начисляются на акк игрока последствии процедуры регистрации на сайте заведения. Для получения этих поощрений депозит не потребуется.
1×slots зеркало на сегодня
1хслот зеркало <a href=https://istinastroitelstva.xyz/user/HenryFrago/>https://istinastroitelstva.xyz/user/HenryFrago/</a> Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации подарка нужно подтвердить электрическую почту и привязать телефонный; 1×slots рабочее зеркало При забаве на бонусные средства воспрещается выступать в игровые автоматы с современным джекпотом и забавы из радела exist casino. Кроме как, кое-какие казино выделяют бездеп на один либо несколько конкретных слотов, и в иных играх Вы не можете на них играть.Если вы выбрали себе некоторое брендов которые вам больше всего полюбились, для неизменной игры! Таких гемблеров казино довольно предпочитает и ценит, за частую эти игроки становятся VIP игроками заведения, которым часто поступают прибыльные предложения вид бонусов, так же туда заходит и бездепозитные.
зеркло казино 1×slots
Как только на виртуальном счету окажутся бонусные свои, поспешите отыграть вейджер. Сразу последствии сего можно забыть заявку на вывод выигрыша. Кредиты выгодно отличаются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом реальных средств и дают возможность почувствовать задор. Во-вторых – можно насладиться каждой азартной забавой доступной на сайте. В вашем распоряжении присутствуют автоматы, настольные прибавление, видео-покер, Live-дилеры. Возможность сыграть вспомогательное соревнование (а от и несколько) совершенно безвозмездно, а выигрыш, же, поступает на счёт игрока. <a href=http://istartw.lineageinc.com/home.php?mod=space&uid=3675116&do=profile&from=space>http://istartw.lineageinc.com/home.php?mod=space&uid=3675116&do=profile&from=space</a> Так же стоит выделить то, что в любом интернет казино установлен свой наибольший кешаут на бездепозитный приз. Как правило кешаут — это максимальная сумма денег, которая дешевая для вывода с бездепозитного бонуса.У нас на веб-сайте Вы отыщите список призов без депозита в испытанных казино и доскональную информацию то как их получить и применять. 1×slots коды Для получения приза нужно пригласить в забаву нового посетителя. Казино начисляет пригласившему фиксированный процент от взносов приглашённого повторяющий приза: чаще всего его размер не выше 10%. Срок деянья приза как не выше месяца: пригласивший получает приз в зависимости от проигранных ставок приглашённого в 1-ый месяц забавы.
1×slots казино зеркало
Поспешите арестовать бездепозитные призы за регистрацию в казино из представленного списка. Все платформы столько ведут легальную работа, но и порадуют правдивыми плодами игры, высочайшей отдачей, резвыми выплатами. <a href=http://mi.minfish.com/home.php?mod=space&uid=1196847>1× слот зеркало</a> 1×slots casino регистрация 1×slotscasin online <a href=https://artistecard.com/Lebanditslot0608#!/news/2024/83103>https://artistecard.com/Lebanditslot0608#!/news/2024/83103</a>
1× slots регистрация в 1×slots casino
<a href=https://keydirectories.co.uk/forum/profile/LesleeAmun>https://keydirectories.co.uk/forum/profile/LesleeAmun</a> 1×slots регистрация 1×slotscasino09k online Можно ли в одном онлайн казино получить больше 1-го приза за регистрацию? Нет, например как в любом онлайн казино есть верховодила, к коим надо(надобно) придерживаться, не создавать 2 аккаута для получения бонусов, другому будет блокировка обоих аккаутов, не пытайтесь обмануть интернет казино, приз за регистрацию выдаеться один один 1 личику.Новички не обожают незамедлительно же вносить депо. Это обосновано неименьем навыка и сомненьем. К счастью, в наше время можно получить бездепозитный бонус за регистрацию в казино. Неважно что начисляет система – фриспины или кредиты. В всяком случае вы не рискуете собственными сбережениями. Это замечательная вероятность запустить приглянувшийся видео разъем либо же испытывать удачу в настольных играх.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подобные призы без депо предоставляются на больше прибыльных критериях. Зачастую они покрупнее, а условия отыгрыша наименее строгие.
#6090 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
леон букмекерская контора 1×bet xbet xyz <a href=https://vestnik-jurnal.com/>1win casino</a> online casino 1×bet зеркало рабочее на сегодня 1×bet xyz <a href=https://slon-ru.com/>bitz casino</a> спорт букмекерская контора порно с Илюшникова Татьяна Александровна рабочие зеркала казино kometa casino 1×bet официальный сайт porno Марина Александрова суть казино
#6091 Charlesgunnyhttp://filmkachat.ru
1× slots официальный
Стоит отметить, что бездепозитный приз выдается лишь взрослым новеньким, которые, же, могут пригласить личных друзей и людей, того рассчитывающих на поощрительную программу преданности. Подобная технология была среди конкурирующих онлайн-казино для популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению своей посещаемости, путем вербования свежих игроков. Бонусы – это уникальный шанс для потенциальных соучастников забавы, коие все опробовать софт покер рума и убедиться, будут ли они в него играть или нет. Новый игрок испробует свои силы с реальными оппонентами в казино. <a href=http://filmkachat.ru/>сайт 1× slots casino</a> В интернете большое известных игорных площадок с красивыми акционными предложениями. Однако внимательно читать условия десятков предложений в надоест, ну и время отнимет количество. Поэтому наша команда подготовила ТОП-3 сайтов с лучшими бездепозитными бонусами:Подтверждение регистрации. Казино настоятельно привязки профиля к электрическому адресу и номеру аппарата. Для сего на e-mail отправляется послание ссылаясь, а на телефон ? текстовое извещение с кодом. <a href=https://imageevent.com/lexxeagle/3drenderedproductimages>https://imageevent.com/lexxeagle/3drenderedproductimages</a> Как лишь получите бездеп в казино, всё также не забывайте инспектировать электрическую почту. Некоторые игорные клубы день радуют интенсивных гэмблеров приятными бонусами. Чаще всего получить подарок возможно в преддверии веселья, на денек рождение, за вербование друга. А также распространённым бонусом является прибавка к депозиту. Нужно не пополнить счёт, и азартное заведение прирастит его на 50–100%. 1×slots на любой вкус как пройти регистрацию <a href=http://www.saerimtech.co.kr/bbs/board.php?bo_table=free&wr_id=773597>http://www.saerimtech.co.kr/bbs/board.php?bo_table=free&wr_id=773597</a> Когда речь о денежных бонусах, казино постоянно устанавливают условия вейджера, которые необходимо выполнить, чтобы исключить выигрыш.
1×slots регистрация 1×slots casino 777 online
Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных обстановок с казино, когда после отыгрыша бездепа вас не дадут вывести солидную сумму выигрыша.Верификация необходима для добавочной защищенности и может техподдержке выявить бонусхантеров и жуликов. Кстати, на платформах выводы крупных сумм доступны лишь последствии доказательства личности. <a href=http://permitbeijing.com/forum/showthread.php?tid=2230285>1×slots казино зеркало</a> 1×slots зеркало которую указывали при регистрации кстати Такой казино приз без депо за регистрацию выдается игроку на час и активно используется данное предложение с 2017 года. Это как бы некая маскировка одобрения под бездепозитный. Суть всего сего сводится к что, этому, собственно геймеру на час выдается, например, 1000 $, а реклама повторяет то, собственно каждой выигрыш возможно будет в оставить при себе. Но случае играющий всерьез отнесется к данному предложению, то он попросту растеряет время. Ведь геймеру надо(надобно) будет выступать не в основном аккаунте, а в тренировочном и с ограниченным выбором автоматов и ставок. Да и если, тогда, выигрыша (в всей тыс. ) в управляла вступят определенные обстоятельства, где несомненно сказано, что максимальной суммой победы имеет быть лишь двести $ и деньги возможно применять лишь в качестве бонуса на 1-ый вклад с вейджером 25 от суммы гонорары плюс сам депо. По итогу получится, что игрок выигрывал для 200% бонус с вейджером на конкретную необходимую. Короче разговаривая, это все не вашего времени. <a href=http://naydisebe.ru/user/profile/136863>http://naydisebe.ru/user/profile/136863</a> Да, у безвозмездных бонусов есть недостатки. Прежде всего, они обыкновенно маленькие. Кроме такого, условия вейджера по ним всегда жесткие. Но все же отсутствие риска делает их довольно красивыми для клиентов. 1×slots регистрация на сайте 1×slots ru com
1×slots casino зеркало
Автоматическая активация взгляд самой комфортной, хотя ручной способ имеет перед ней преимущества. Прежде чем использовать вознаграждение от казино, стоит заблаговременно определить, сколько медли требуется на выполнение всех критерий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала деянья бонуса.Наш список содержит лучшие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по важным параметрам: <a href=https://bajarmp3.net/member.php?action=profile&uid=4389>https://bajarmp3.net/member.php?action=profile&uid=4389</a> Но есть азартные заведения, готовые просто например вручить средства на игру. Для сего достаточно сделать профиль. Чтобы исключить выигрыш, сперва нужно выполнить вейджеровые обстоятельства, прописанные в критериях получения бездепа.В игровых клубах без лицензии Вы покупаете „кота в мешке“ и если, тогда, спорных обстановок нет возможности куда-то пожаловаться и доказать собственную правоту. 1×slots подтвердит вашу регистрацию если говорить Пoдтвepдить личнocть посетителя. Для удачного вывода средств, нужно подтвердить личность посетителя. Нa этaпe вepификaции пpoфиля, работники службы безопасности обязаны увериться, что у игрока чем один аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не может вывести свой выигрыш, случае у него будет несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы.Когда речь идет о получении бездепозитных призов в казино, для внимание на следующие обстоятельства:
казино 1×slots
<a href=https://uyghuryol.com/forum/viewtopic.php?f=8&t=234143>1×slots мобильная версия войти казино</a> 1хслотс зеркало на сегодня <a href=http://www.diarivitamin.com/2015/09/diet-seimbang-elak-batu-hempedu.html>http://www.diarivitamin.com/2015/09/diet-seimbang-elak-batu-hempedu.html</a> Необходимость отыгрыша. Вейджер в выше, чем для бонусов за депо. И же свои не отыграны, вывести их нельзя.
1×slots промокод при регистрации
Выигрыши с бонусов без инвестициям практически привязаны к притязанию по ставкам и могут быть обналичены только после исполненья этих притязаний.Вознаграждения за получение VIP-статуса ? начисляются в рамках программки лояльности при достижении очередного значения или выдаются индивидуально менеджерами саппорта. <a href=http://sound-systems.ru/bitrix/click.php?goto=http://kit-engineering.ru/bitrix/redirect.php?goto=http://jonyit.ru/bitrix/click.php?goto=https://teletype.in/@urist555/KjL7fVuq3V->http://sound-systems.ru/bitrix/click.php?goto=http://kit-engineering.ru/bitrix/redirect.php?goto=http://jonyit.ru/bitrix/click.php?goto=https://teletype.in/@urist555/KjL7fVuq3V-</a> Зарегистрироваться в казино по специальной ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефонного и электрическую почту). Для подтверждения номера телефона необходимо в личном профиле показать собственный номер и нажать кнопку „Подтвердить номер телефона“, далее Вы получите sms-сообщение с кодом, который нужно установить в отвечающее поле. Для подтверждения электрической почты, перейти по активной ссылке в послании от казино. 1 x slots casino Обыкновенные бездепозитные призы в размере от трех до двадцати $ сделаны чтобы, чтобы, дабы в забавы заходили все новые и свежие игроки. Здесь, всего, несомненно лимитирование на максимальный выигрыш. Важно, дабы перед минимальным вкладом был отключен бонус за первое пополнение счета, и геймер не попадет на повторный вейджер.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.formulersupport.com/Thread-1%D1%85%D1%81%D0%BB%D0%BE%D1%82-%D1%81%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C–163547>1хслот скачать</a>
<a href=https://portugal-campings.com/pt/account/>1×слот регистрация в 1×slots casino</a>
<a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=48033>скачать 1×slots на андроид мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для верификации аккаунта нужно предоставить спецам технической помощи отсканированную копию паспорта и счета за коммунальные предложения, еще фотографию банковской карты или экрана странички электронного кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности.
#6092 Charlesgunnyhttp://filmkachat.ru
1×slots сайт зеркало
Несмотря на то, собственно этот вариант стимуляции со стороны азартных платформ очень популярен в сфере сходственных игр, далеко не всем поклонникам казино известно, что себе бездепозитные бонусы казино и как непосредственно их возможно эксплуатировать. <a href=http://filmkachat.ru/>1×slots официальный зеркало</a> Классическая разновидность бонуса за творение аккаунта. Его преимущество содержится что, нет, что клиент возможность без выбирать аппараты и создавать ставки в их. Иногда список игровых автоматов ограничен оператором, хотя все также это другого, как, чем единственный доступный разъем, как в случае с внедрением фриспинов.Автоматы непопросту считаются самым известным азартным весельем. Чтобы освоить управление и верховодила, потребуется всего некоторое минут. Ваша задача устроить ставку, найти число рабочих линий и возможно вертеть тамбур. Если на выпадет выигрышная композиция – вы выиграли! С данной задачей вас посодействуют управится бездепозитные бонусы казино. <a href=https://divisionmidway.org/jobs/author/cgifurniture-com/>https://divisionmidway.org/jobs/author/cgifurniture-com/</a> После получения бонуса вывод средств для клиента несомненно недоступен до тех пор, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо пара месяцов. Выводить деньги игрок сможет лишь последствии отыгрыша. 1×slots casino регистрация 1×slotscasin online <a href=https://forum.bandariklan.com/member.php?action=profile&uid=8897>https://forum.bandariklan.com/member.php?action=profile&uid=8897</a> Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам воспрещено начислять призы клиентам, не имеющим денежных средств на счете. Мы предлагаем разглядеть животрепещущие бонусы онлайн-казино с лицензией, которые соблюдают законодательство РБ.
1хслот скачать
В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая приятная доля игры. Важно, зачастую бездепозитные призы в казино выдаются с лимитированиями по наибольшей выплате. В среднем возможно рассчитывать на выгода в несколько тысяч руб. Как исключить выигрыш с приза без депо. Придётся подтвердить акк документально, в неких заведениях. Процедура верификации неотклонима и делается каждым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате или прочитайте в правилах. 1х слот 1хслотс регистрация перейти на 1×slots Помните, что любые нарушения управлял сведут на нет ваши усилия, и вы наверняка останетесь без начисленного для бесплатного приза. Всегда изучайте верховодила начисления и условия вейджера. По любым вопросам, на которые вы не можете самостоятельно отыскать ответы, обращайтесь за объяснениям и саппорт. <a href=http://www.daongil.com/bbs/board.php?bo_table=free&wr_id=354528>http://www.daongil.com/bbs/board.php?bo_table=free&wr_id=354528</a> Вообще перейдя в казино — верховодила схожи в получении бездепозитных бонусов, в стандартные правила входит: доказать эл. Почту и телефонный, заполнить свой личный профиль, активировать рекламную код либо активировать предложения во вкладке БОНУСЫ. 1×slots официальный сайт зеркало Прибывшие на акк финансы бездепозитные бонусы предназначаются, главном, лишь для новоиспеченных пользователей, которые раньше не имели личного аккаунта в данном казино. Исходя из этого, если ранее у игрока был изготовлен депозит, то, по всей вероятности, у него больше не несомненно возможности рассчитывать на получение такого бонуса в конкретном заведении.
1×slots официальный зеркало рабочее
Основное отличие никаких, что для получения бездепа не пополнять баланс в казино. Но не сего, есть ряд и различий:Иногда виде бездепа, казино презентует минимальный приз (до 50 руб. ), ради которого не стоит заморачиваться. <a href=https://cameradb.review/index.php?title=новинки_кино_торрент>https://cameradb.review/index.php?title=новинки_кино_торрент</a> Раздача призов имеет быть приурочена к разным датам: календарные дни, дни рождения игроков, юбилей открытия казино и т. Д. Подарок выдается в виде средств, фриспинов или баллов для скопления и размена на услуги оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода данной суммы придется выполнить ряд требований.Можно. Вы всегда можете отрешиться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не создадите ставку. 1×slots сайт Будьте внимательнее при ознакомлении с правилами во избежание появления конфликтных ситуаций с казино, когда в отыгрыша бездепа вас не дадут исключить крупную необходимую выигрыша.Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам запрещено начислять бонусы посетителям, не имеющим валютных средств на счете. Мы предлагаем рассмотреть актуальные призы онлайн-казино с лицензией, коие соблюдают законодательство РБ.
1х слот регистрация в 1×slots casino
Наш список включает в себя лучшие бездепозитные призы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по важным параметрам:Вейджер (или вагер) ? это наименьшая сумма ставок, коию необходимо устроить для вывода денежного приза. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение. Выше мы дали полный комплект самых новых и своевременных бездепозитных призов в онлайн казино без пополнения на 2022 год, где возможность пользоваться каким ценным бездепозитным призом.Так собственно главное отличие дара на депозит от бездепа – неотъемлемое пополнение счёта. Вы сможете внести депо и преумножить стартовый капитал или арестовать бездеп и при этом не придётся рисковать собственными сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начисляет щедрое одобрение! 1×slos регистрация в 1×slots casino <a href=http://asculap.ru/bitrix/redirect.php?goto=http://alt1.toolbarqueries.google.com.au/url?q=http://sibintcom.ru/bitrix/redirect.php?goto=https://telegra.ph/Ponimanie-prichin-pozharov-posledstvij-i-mer-bezopasnosti-09–24>http://asculap.ru/bitrix/redirect.php?goto=http://alt1.toolbarqueries.google.com.au/url?q=http://sibintcom.ru/bitrix/redirect.php?goto=https://telegra.ph/Ponimanie-prichin-pozharov-posledstvij-i-mer-bezopasnosti-09–24</a> Если простыми текстами, бездепы – это определённая сумма средств или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать подарки. Но есть кое-какие нюансы. Существуют игорные дома, коие перед тем как начислить бонусы настоятельно привязать телефон, предоставить копии документов.Чтобы помощи убедиться в превосходстве бездепозитных бонусов, довольно зарегистрироваться в казино и получить одобрение.
1×slots casino регистрация 1×slots review live
Подарки на определенные даты отличаются критериями получения. Если одобрение начисляют игроку на денек рождения, то сумма обычно зависит от совместного объема депозитов за год. <a href=http://klotzlube.ru/forum/user/266928/>http://klotzlube.ru/forum/user/266928/</a> 1 xslots рабочее зеркало Бездепозитный приз казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в этом и заключается основное отличие.Мы проделываем ударение на ключевых положениях правил, рассказываем о территориальных ограничениях и кратко информируем о иных акциях обговариваемого казино.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1хслот 1хслотс регистрация перейти на 1×slots</a>
<a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=7523&TITLE_SEO=7523-preobrazovatel-interfeysov-usb-rs485&MID=475887&result=reply#message475887>1×slots зеркало рабочее</a>
<a href=http://moneysweet.listbb.ru/memberlist.php?mode=viewprofile&u=6851>1×slots зеркало сайта</a>
<a href=http://vn-info.net/user/Josephkam/>1×slots регистрация 1×slotscasino09k online</a>
<a href=https://www.ldvd.nl/no-22-san-diego-place-rallies-very-last-boise-country-27–16?page=32#comment-237438>зеркло казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выиграть настоящие средства в казино не пополняя счет – трудно, но возможно. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными призами и начните играть на бонусные средства. По статистике каком-то 10-ти заведений можно заработать небольшую необходимую денег за счет бонусных средств.
#6093 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее на сегодня
Этот тип бонуса несомненно добавлен на Ваш акк последствии удачной процедуры регистрации с внедрением номера телефонного. Если выбрать иной способ сотворения учетной записи, бездеп не несомненно добавлен на Ваш аккаунт. <a href=http://filmkachat.ru/>1×slots зеркало регистрацию более популярный вариант это</a> Бездепозитный приз нередко может замерзнуть легкодоступным сразу в завершения регистрации, поскольку как единственным требованием к нему считается регистрация, а этого ревизия вашей новой учетной записи.Бездепозитный приз по промо-коду несомненно доступен для игры, только никаких случае когда Вы активируете особый бонусный код в разделе с призами либо укажите промокод при регистрации на веб-сайте. В неких случаях, считая активации кода, придется подтвердить контактные данные игрока и заполнить анкету клиента. <a href=https://band.us/band/96885593/post/5>https://band.us/band/96885593/post/5</a> 1×slots casino регистрация 1×slotscasin online <a href=https://www.almanacar.com/profile/HelenBrisb>https://www.almanacar.com/profile/HelenBrisb</a>
1×slots регистрацию процедура займет всего лишь
Бездепы с бесплатными вращениями деют юзерам право вертеть барабаны игровых автоматов без снятия средств со счета. За каждый раунд выплачивает казино. Число спинов ограничено и редко превышает сотку. Если промоакция содержит много бесплатных игр, их начисление возможность быть разбито на некоторое дней. <a href=http://sfessd.listbb.ru/memberlist.php?mode=viewprofile&u=86>1×slots зеркало подтвердит вашу регистрацию если говорить</a> 1×slots зеркало этих способов предполагает регистрацию Казино выделяет вероятность заработать и вывести настоящие деньги на бездепозитных бонусах. Обычно, это малозначительная сумма, коию казино возможность для позволить презентовать игроку.Чтоб получить крупный выигрыш, избирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша. <a href=http://collieforum.ru/viewtopic.php?f=34&t=7153&p=232721#p232721>http://collieforum.ru/viewtopic.php?f=34&t=7153&p=232721#p232721</a> Кешбэк-бонус представляет собой возврат фиксированного процента от ставки если, тогда, поражения или же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%. зеркло казино 1×slots При игре на бонусные свои воспрещается выступать в игровые автоматы с современным джекпотом и игры из радела live casino. Кроме такого, кое-какие казино дают бездеп на раз или некоторое определенных слотов, и в иных забавах Вы не можете на них выступать.Акционные предложения от казино существуют в разных форматах. Часто призы даются в мена на депо. Игрок заносит платеж и получает деньги, бесплатные вращения и другие одобрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — вид приза, который гарантирован за исполнение конкретных деяний на веб-сайте:
1хслотс мобильная версия зеркало
Ну и естесственно же, для казино бездепозитные призы прибыльны с имиджевой стороны: подобная добродушие увеличивает уровень преданности посетителей к фирмы.Бездепы обычно предлагают с отыгрышем — моментально исключить выигранные средства невозможно. Перевод средств со счета будет возможен последствии такого, как юзер выполнит все требования казино, а сумма имеет превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, протяжении коих клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней после активации. Чтобы бездеп не был начислен на Ваш акк, Вам не нужно активировать бонусный код. Если одобрение от казино было добавлено на Ваш аккаунт автоматически, а Вы не планируете его использовать, обратитесь в службу поддержки с пожеланием отменить бездепозитный приз. <a href=http://intentionalpress.com/author/scottmag/>http://intentionalpress.com/author/scottmag/</a> 1хслот скачать У любого игорного заведения средства правила и обстоятельства. Но, дабы получить бонусы, необходимо выполнить стереотипные деянья:Чаще всего казино приз за регистрацию без депозита даёт вероятность запустить любой автомат. Но лучше внимательно ознакомиться с условиями. Иногда для игры доступны лишь определённые модели. Если вы новичок и ничего не смыслите в гэмблинге, чем начать знакомство с миром пыла именно с «одноруких злодеев».
1хслотс рабочее зеркало
Проверка занимает от нескольких мин. До нескольких дней, профессионалы техподдержки могут запросить вспомогательные документы либо инициировать краткое общение по Skype.Разные казино имеют личные верховодила по выведению выигрыша. Для бездепозитных призов принимаются довольно высокие притязания. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до ста раз в игровых автоматах. Например, если игрок получил бесплатно 10 долларов, то необходимо несомненно отыграть их, поставив 1 тыщу спинов по одному доллару любой. Стоит обозначить(означить), собственно не все казино выделяют вероятность играть на бонусы и не во всех развлекательных заведениях схожие управляла для отыгрывания. Некоторые казино запрещают выступать на бонусы в блекджек либо ограничивают ставки до пяти процентов, что значительно увеличивает в десятки один количество нужных игр. <a href=http://www.arka-bahce.org/forum/showthread.php?p=764383#post764383>1×slots казино мобильная версия</a> Список так называемых «разрешенных территорий» прилагается к правилам бонусной программки игорного портала. Обязательно выясните, распространяются ли на вас похожие наказания. 1×slots casino регистрация на сайте <a href=http://worldpoetry.cn/home.php?mod=space&uid=328770>http://worldpoetry.cn/home.php?mod=space&uid=328770</a> Некоторые клубы механически начисляют приз на аккаунт игрока после исполнения критерий получения, но посещают ситуации, когда бонус надо(надобно) активировать игроку самому. Есть количество способов активации бонуса:Кешбэк-бонус дает собой возврат фиксированного процента от ставки когда проигрыша или же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не выше 10%.
1 xslots рабочее зеркало
Бездепозитные бонусы настоящими средствами, коие можно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадались.Вы наверняка, скажем, как все любите получать презенты и бездепозитные призы казино. Игорные жилища брали в повадку одаривать гэмблеров приятными призами. Стать владельцем приветственного подарка возможно за творение профиля или пополнение счёта. Второй вариант больше занимательный, так клубы готовы удвоить депо! Но если вы новичок и лишь знакомитесь с миром азарта, никакого воспользуйтесь бонусом за регистрацию. <a href=https://bleachrpg.com.br/wiki/index.php/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%AF%D0%BD%D0%B4%D0%B5%D0%BA%D1%81_%D0%94%D0%B7%D0%B5%D0%BD>https://bleachrpg.com.br/wiki/index.php/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%AF%D0%BD%D0%B4%D0%B5%D0%BA%D1%81_%D0%94%D0%B7%D0%B5%D0%BD</a> 1хслотс официальный сайт зеркало Каждая игровая платформа выделяется условиями по получению и отыгрышу бездепов. В правилах детально расписаны кратковременные рамки, за которые нужно прокрутить вейджер. Также не забывайте на максимальный размер ставки и максимальную необходимую выплаты. С другой стороны, чтобы получить бездепозитные призы казино, довольно израсходовать не более 1 минутки.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/2594/#comment-189248>1×slots casino регистрация на сайте</a>
<a href=https://g2clubs.com/healthy-workout/google/#comment-24432>1×slots на любой вкус как пройти регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Какие бонусы я могу еще получить считая бездепозитного приза за регистрацию в казино? По мимо бездепозитного бонуса, любое онлайн казино предлагает игрокам прибыльное предложение на первый депозит, вы совершаете депозит, ваш депо увеличивается в двое либо числе в трое, что, этим наиболее начать выступать можно с более крупной суммой, так же не запамятываем на вейджер на бонусы. Бездепозитный бонус казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в данном и содержится главное различие.
#6094 Charlesgunnyhttp://filmkachat.ru
рабочее зеркало 1×slots
Если простыми текстами, бездепы – это определённая сумма денег либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать подарки. Но есть некоторые аспекты. Существуют игорные дома, коие перед тем как начислить бонусы требуют привязать аппарат, предоставить копии документов.Таким образом онлайн казино получает вероятного игрока. Возможно дальнейшем или настоящем он захочет сыграть на средства средства. Так работают бездепозитные призы в интернет казино. Здесь отлично подходит выражение, благотворительные сыр бывает только в мышеловке. Начинающие игроки могут не осознавать опасность азарта. Однако течением понимания становится больше. Это тема для отдельного обсуждения. <a href=http://filmkachat.ru/>1×slots бонус за регистрацию</a> За счёт спинов получится запустить разные интернет слоты, протестировать стратегии и поднабраться опыта. Фишка сомнений, что вращения начисляются на лучшие аппараты с уникальными опциями и высочайшей отдачей. Не запамятовывайте, собственно в любом акционном предложении предусмотрены особые требования – временные ограничения, наибольший объем ставки, перечень дешевых игр.Прежде чем активировать бездеп, необходимо убедиться что, собственно страна, гражданином которой считается игрок, не заходит в список запрещенных. <a href=https://hanson.net/users/archicgicom>https://hanson.net/users/archicgicom</a> 1 хслот регистрация в 1×slots casino <a href=http://krast-studio.ru/user/DoctorLazutaEn/>http://krast-studio.ru/user/DoctorLazutaEn/</a>
1хслотс официальный сайт зеркало
Бездепы обыкновенно предлагают с отыгрышем — быстро вывести выигранные средства невозможно. Перевод денег со счета несомненно возможен после того, как юзер выполнит все притязания казино, а сумма имеет быть выше установленного правилами лимита. Условиями акции фиксируются сроки, протяжении которых заказчик вправе воспользоваться предложением. Обычно они не превосходят нескольких дней в активации. 1×slots регистрация 1×slots casino 777 online Самый распространённый из сходственных бонусов, окончательно же, бездеп на денек рождения клиента — приз вид фиксированной суммы либо фриспинов поступает на счёт игрока, а воспользоваться им возможно в течение установленного периода медли. <a href=https://carecepthealth.com/community/profile/jasperfrign/>https://carecepthealth.com/community/profile/jasperfrign/</a> Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного бонуса. 1×slots подтвердит вашу регистрацию если говорить После получения приза вывод средств для посетителя несомненно недоступен до тех пор, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо пара недель. Выводить деньги игрок может лишь в отыгрыша.Для доказательства электронной почты, просто перейдите по интенсивной ссылке в письме, полученном от игрового заведения.
1×slots коды
Бездепозитные призы за регистрацию в игровых автоматах для владельцев онлайн-казино считаются частью маркетинговой кампании, направленной на увеличение аудитории сайта. Так они продвигают свои бренды и завлекают новых посетителей. Можно ли в одном интернет казино получить больше 1-го бонуса за регистрацию? Нет, например как в любом интернет казино есть правила, к которым надо(надобно) придерживаться, не творить 2 аккаута для получения бонусов, иначе будет блокировка обоих аккаутов, не пытайтесь обмануть онлайн казино, бонус за регистрацию выдаеться раз раз одному личику. <a href=http://nbrkv.ru/user/WalterScefe/>http://nbrkv.ru/user/WalterScefe/</a> Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. 1×slots регистрация 1×slots casino c2d ru Если площадка презентует бездеп за регистрацию, то процедура его получения проста. Нужно лишь ввести аккаунт на веб-сайте и активировать его, подтвердив адресок электронной почты, номер телефонного или другие данные, коие настятельно оператор. Перед данным необходимо увериться, что юзер находится на официальном сайте казино, не на жульнической площадке.
1×slots зеркало регистрация то дальше необходимо пройти
Все бесплатные призы кажутся соблазнительными. Кто же откажется от возможности поиграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далековато не все бездепозитные призы в привлекательны для рассудительного клиента.Вейджер менее х30–35 считается применимым. Опытные игроки утверждают, что с таким вейджером реально остаться в плюсе, случае верно подойти к выбору игрового аппарата. <a href=http://www.carshowsociety.com/forum.php/topic,11220.new.html#new>1×slots официальный сайт скачать на айфон</a> В разделе с бонусами активировать собственный подарок. Найти игры, для коих предусмотрено поощрение и использовать бонус по предназначению.Каждый игры обязан сперва детально выучить обстоятельства по получению и отыгрышу приглянувшегося дара. Если всё устраивает, поспешите арестовать бесплатные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик сейчас начать вертеть барабаны топовых слотов. Суммы подобных предложений, в, колеблются от 3-х до двадцати долларов, а вейджер на эти свои должен составлять от тридцати до шестидесяти раз. Зачастую, наибольшая сумма выигрыша здесь составит от одной до 2-ух сотен $. Если геймер выиграет больше, то все средства могут быть списанными до очень разрешенного выигрыша. Здесь замечена содержание выводить еще несуществующие деньги на собственную платежную систему и далее искать заведение с подходящими под данную необходимую релоадом либо призом за первое пополнение счета. Есть некоторое подвидов бездепозитного гонорары, предлагаемого великим числом заведений. 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=https://gamesdrive.net/User-RobertMow>https://gamesdrive.net/User-RobertMow</a> Как лишь получите бездеп в казино, всё точно не забывайте инспектировать электрическую почту. Некоторые игорные клубы непрерывно веселят активных гэмблеров приятными бонусами. Чаще всего получить подарок возможно в преддверии праздника, на день рождение, за привлечение друга. А того распространённым бонусом является надбавка к депозиту. Нужно не восполнить счёт, и азартное заведение увеличит его на 50–100%.
рабочее зеркало 1×slots
<a href=https://doodleordie.com/profile/nodressio1>https://doodleordie.com/profile/nodressio1</a> Онлайн гемблинг развивается с каждым днем больше и больше, свежие бренды создаются не по дням а по часам. Новые онлайн казино проделывают вступительные акции для игроков, для того собственно бы зарекомендовать себя, и что, этим наиболее предлагают бездепозитные призы за регистрацию, что бы не пропустить эту возможность — как воспользоваться новым бездепом, рекомендуем посещать наш вебсайт как возможно чаще, самое смачное и свежие несомненно добавляться в этом же списке.При использовании бездепозитным призом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют количество обликов лимитов: 1хслотс рабочее зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://www.kfz-gringer.at/index.php/forum/in-neque-arcu-vulputate-vitae/74569–1×slots#74334>казино 1×slots официальный сайт</a>
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=446798>1×slot регистрация</a>
<a href=https://forum.home-visa.ru/viewtopic.php?f=69&t=807392&p=2850031#p2850031>1×slots зеркало которую указывали при регистрации кстати</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы моментально получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, появляется настоящий шанс победу!
#6095 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на сайте 1×slots ru com
В разделе с призами активировать собственный подарок. Найти забавы, для которых предусмотрено поощрение и использовать приз по предназначению. <a href=http://filmkachat.ru/>1×slots мобильная версия войти казино</a> Если площадка дарит бездеп за регистрацию, то процедура его получения проста. Нужно только ввести акк на веб-сайте и активировать его, подтвердив адрес электронной почты, номер аппарата или другие данные, коие настятельно оператор. Перед данным нужно убедиться, собственно юзер находится на официальном сайте казино, не на жульнической площадке. <a href=https://peertrainer.com/LoungeCommunityThread.aspx?ForumID=1&ThreadID=316721>https://peertrainer.com/LoungeCommunityThread.aspx?ForumID=1&ThreadID=316721</a> 1×slots казино зеркало <a href=https://www.google.li/url?q=http%3A%2F%2Fdoctorlazuta.by>https://www.google.li/url?q=http%3A%2F%2Fdoctorlazuta.by</a>
1×slots официальный сайт мобильная версия скачать
<a href=http://board.eternityrpc.com/member.php?action=profile&uid=369>казино 1×slots</a> 1хслотс рабочее зеркало Бонус в казино без депо содержит разные вариации: это может быть приветственный приз, акции в честь каких-то праздников либо весомых дат, приз за привлечение свежих игроков, лояльность и получение VIP-статуса.Воспользоваться бездепом возможно не во всех игровых автоматах: казино вдруг уточняет ограничение для посетителей. Конечно, это можно посчитать некоторым неудобством для игрока, хотя справедливости стоит отметить, что выбор автоматов всё равно остаётся довольно великим. <a href=https://aryba.kg/user/GeraldMem/>https://aryba.kg/user/GeraldMem/</a> 1×slots регистрация 1×slotscasino09k online Для вывода средств бонус нужно будет отыграть законам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариациями отыгрыша бездепозитного бонуса до его получения, дабы избежать конфликтных обстановок.
1×slots скачать на айфон
<a href=https://btpars.com/home.php?mod=space&username=knowingfascist6>https://btpars.com/home.php?mod=space&username=knowingfascist6</a> 1× slots официальный
зеркала 1×slots
Лишь модные и известные азартные заведения все разрешить себя выдавать бездепы вид добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депо, которые можно истратить в лучших аппаратах с высокой отдачей. 1×slots промокод при регистрации 2025 <a href=http://rvolchansk.ru/user/Jaspersef/>http://rvolchansk.ru/user/Jaspersef/</a>
1×slots официальный регистрация
Даже не выиграв крупную необходимую, игрок интересно проведет время, изнутри выучит работу площадки, воспримет геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе лучших акций с. Достаточно периодически учить список новых интернет казино с выводом бонуса без депо в данном разделе. <a href=https://coderwall.com/%D0%90%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0%20%D0%92%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA>https://coderwall.com/%D0%90%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0%20%D0%92%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA</a> 1хслот официальный сайт зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://radios-collector.com/viewtopic.php?f=7&t=71986>1×slot зеркало рабочее регистрации на телефон придет</a>
<a href=http://diablo2r.cn/home.php?mod=space&uid=30130>1×slots коды</a>
<a href=http://moneysweet.listbb.ru/viewtopic.php?f=2&t=5853>1×slots регистрация 1×slots casino c2d ru</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Будьте внимательнее при ознакомлении с правилами во избежание появления конфликтных ситуаций с казино, когда в отыгрыша бездепа для не дадут исключить солидную сумму выигрыша. Этот тип приза несомненно добавлен на Ваш акк в удачной процедуры регистрации с внедрением номера аппарата. Если выбрать иной способ создания учетной записи, бездеп не несомненно добавлен на Ваш аккаунт.
#6096 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Крючкова Полина Викторовна порно порно с Бондаренко Анастасия Борисовна <a href=https://th-royalgclub.com/>online casino</a> casino riobet porno Юлия Пересильд <a href=https://t.me/vchkogpu_ru>porno Яна Троянова</a> рейтинг казино Крючкова Полина Викторовна порно 1×bet официальный слоты порно с Алина Загитова, фигуристка online casino официальная казино часы казино
#6097 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало сайта
Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала прыткие выводы. Фишка выплат что, что довольно выбрать платёжный инструмент и показать сумму. В большинстве случаев средства зачисляются на электронные кошельки в течение 15 мин., а на банковские карты – 1–3 трудящихся денька.Еще одно условие дотрагивается размеров ставки. Операторы устанавливают наивысшую необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, избранной в Личном офисе. При превышении лимита есть риск потерять приза. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, клиент возможность столкнуться с запретом назначать фишки на шансы. <a href=http://filmkachat.ru/>1хслотс зеркало на сегодня</a> <a href=https://diigo.com/0y2r7c>https://diigo.com/0y2r7c</a> При верном раскладе бездепы — это прекрасный метод выступать на средства без траты собственных средств. Есть количество рекомендаций, следуя коим возможно извлечь максимум выгоды из сходственных акций казино. Играть по лишь на лицензированных площадках. Скриптовые веб-сайты не только врут с бонусными предложениями, хотя и используют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах невероятно. 1×slots официальный сайт, скачать <a href=https://policjaforum.pl/user-2034.html>https://policjaforum.pl/user-2034.html</a> Чаще всего казино бонус за регистрацию без депо даёт вероятность запустить любой машина. Но чем пристально ознакомиться с условиями. Иногда для игры доступны только определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, другого начать знакомство с миром пыла именно с «одноруких злодеев».В онлайне большое знаменитых игорных площадок с привлекательными акционными услугами. Однако внимательно разбирать условия десятков услуг вскоре надоест, да и время отнимет много. Поэтому наша команда подготовила ТОП-3 вебсайтов с наихорошими бездепозитными бонусами:
1×slots официальный сайт мобильная версия скачать
Вейджер менее х30–35 считается приемлемым. Опытные игроки заявляют, собственно с этим вейджером реально остаться в плюсе, в правильно подойти к выбору игрового аппарата. 1хслотс зеркало В современность очень просто получить бонус за регистрацию в казино. Практически каждый игорный жилище с радостью начислит средства или бесплатные вращения. Многие гэмблеры пользуются данным и не смущяются регистрироваться в каждом клубе с прибыльными условиями. Кстати, это отличная вероятность выработать победную стратегию и сорвать джекпот.Для получения предоставленных призов вам пригодиться — ПК либо мобильное устройство, и остальное дело за небольшим. <a href=https://images.google.de/url?sa=t&url=https://doctorlazuta.by/>https://images.google.de/url?sa=t&url=https://doctorlazuta.by/</a> Новички не любят сразу же заносить депозит. Это обусловлено неимением опыта и сомнением. К счастью, дни возможно получить бездепозитный приз за регистрацию в казино. Неважно собственно начислит система – фриспины либо кредиты. В любом случае вы не рискуете своими сбережениями. Это отличная возможность запустить понравившийся видео слот или же испытать фортуну в настольных забавах. казино 1×slots официальный сайт Фриплей-бонусы. Бонусы за благотворительную забаву есть лишь в неких клубах. Они зачисляются сразу после сотворения профиля и срабатывают недолговременное время. Если у вас нет медли потратить свои, они просто завершатся. Что касается медли, в большинстве случаев призы срабатывают протяжении одного часа.
1×slots на любой вкус как пройти регистрацию
В зависимости от интернет заведения каждый из них имеет вас предложить как бездепозитные деньги, например и бездепозитные фриспины, коие последствии успешной регистрации рухнут вам на ваш игровой баланс. <a href=https://www.gamers-forum.com/member.php?104675-PhilipAmbiz>https://www.gamers-forum.com/member.php?104675-PhilipAmbiz</a> Наши специалисты исследуют условия акции, после в ручном режиме проверяют их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие характеристики. Мы не рекламируем казино, а даем игрокам информацию о наилучших из их.Фриспины без депо или дополнительные свои посодействуют поближе познакомиться с игровой платформой и её функциями. За счёт даров возможно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради забавы против живых крупье. 1×slot официальный сайт Заработать на бездепозитных бонусах за регистрацию в казино возможность каждый пользователь, достигший совершеннолетия.
1×slots промокод при регистрации
Прежде чем активировать бездеп, необходимо увериться что, нет, что страна, уроженцем коей является игрок, не заходит в список запрещенных.Бездепозитные призы казино это экономическая компенсация, предлагаемая юзерам на дармовой основе и возможность выступать в онлайн казино безвозмездно. Если сравнивать их с поощрениями за лепта, каких средства выдаются только впоследствии начального пополнения счета, то бездепозитные гонорары получаются безвозмездно. То есть, играющий получает возможность делать ставки на теснее быть финансы, которые выдаст заведение, исполняя, этом, обычные деяния, чтобы их извлечь (тут идет о регистрация, удостоверении личности с внедрением номера телефона, оформления заявки и т.д.). онлайн казино 1×slots <a href=https://tophatsec.com/forum/member.php?action=profile&uid=6542>https://tophatsec.com/forum/member.php?action=profile&uid=6542</a> Некоторые веб-сайты, прежде чем обмануть регистрацию игроков, предлагают ответить на несколько базовых вопросов. Цель проведения подобной викторины – выявить случайных людей, коие не имеют представления о покере, и не разрешить получения ими призов. Если гость уже играл в казино, то ответить на полтора десятка несложных вопросов несомненно нетрудно. Очень нередко, ответы возможно отыскать на официальных сайтах этих учреждений.
1×slots бездепозитный бонус за регистрацию
Акции, посвященные календарным праздникам, случаются рассчитаны как на всех юзеров, так и на категории: например, презент на 8 марта девушкам-игрокам либо мужикам на 23 февраля.Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, a лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. Приветственный приз без депозита ? подарок за регистрацию. Выдается средствами, фриспинами либо баллами. В заключительном случае бонусные баллы применяются для роли в турнирах либо размена на настоящие деньги. <a href=https://flaxeco.com/user/Walterwhins/>https://flaxeco.com/user/Walterwhins/</a> casino 1×slot Максимальный размер ставки, который невозможно превосходить пока приз не несомненно полностью отыгран. В случае нарушения сего верховодила, приз и выигрыш с него станут аннулированы.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/8505/#comment-349605>1×slots казино зеркало</a>
<a href=http://www.arka-bahce.org/forum/showthread.php?p=772151#post772151>1×slots casino регистрация 1×slots review live</a>
<a href=https://forum.home-visa.ru/viewtopic.php?f=69&t=807392&p=3077171#p3077171>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для тех, кто только взвешивает испытать свою удачу, а для профессиональных игроков, разыскивающих свежие площадки для выигрышей, водящие лицензированные казино нередко организуют различные акции, и лучшее услуг за последнее время – как для начинающих, так и для проф игроков – бездепозитный приз за регистрацию. Активация случается счет промокодов, коие вводятся в собственном офисе в регистрации. Среди спецпредложений в списке Casino.ru находятся неповторимые промокоды, коие доступны лишь посетителям портала. Другие методы начисления средств ? автоматическая активация незамедлительно последствии создания аккаунта и получение дара по запросу в службу технической помощи.
#6098 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet сейчас порно с Евгений Малкин (хоккей) <a href=https://glvk.guru/>порно с Антропова Валентина Викторовна</a> 1×bet на сегодня kent casino <a href=https://m.repost.news/>про казино</a> порно с Аделия Петросян (фигурное катание) порно с Зырянова Анастасия Владимировна casino официальный сайт игры казино лучшие казино бесплатно pin ап casino porno Мария Шарапова
#6099 Charlesgunnyhttp://filmkachat.ru
онлайн казино 1×slots
Чтобы бездеп не был начислен на Ваш акк, Вам не активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт автоматически, а Вы не расчитываете его использовать, обратитесь в службу поддержки с пожеланием отменить бездепозитный бонус.Если простыми словами, бездепы – это определённая сумма денег либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать презенты. Но есть кое-какие нюансы. Существуют игорные жилища, коие перед что, этим как начислить призы настоятельно привязать телефон, дать копии документов. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало рабочее</a> <a href=https://peertrainer.com/LoungeCommunityThread.aspx?ForumID=1&ThreadID=316722>https://peertrainer.com/LoungeCommunityThread.aspx?ForumID=1&ThreadID=316722</a> 1 x slots casino <a href=http://eicg.kz/index.php?subaction=userinfo&user=lightcurator71>http://eicg.kz/index.php?subaction=userinfo&user=lightcurator71</a> Начнём с такого, собственно каждое рекламную за регистрацию подразумевает некие обстоятельства. Бездепозитные призы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность денежного оборота, необходимая для исполнения условий. Пример, возымели бесплатные вращения и выиграли с их 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 руб., неудачных либо выигрышных, неважно. После исполненья, бонусный баланс перейдёт на настоящий и станет доступным к выводу.Прибывшие на акк деньги бездепозитные бонусы предназначаются, в, лишь для свежеиспеченных пользователей, которые раньше не имели личного аккаунта в данном казино. Исходя из сего, в ранее у игрока был сделан депо, то, по всей вероятности, у него больше не будет способности рассчитывать на получение такого приза в определенном заведении.
1×slots скачать на айфон
Любой выигрыш по ставке повыше установленного лимита будет являться недействительным. То есть ставка не будет засчитана при отыгрыше, а в случае выигрыша его сумма не поступит на счёт посетителя — результат забавы несомненно полностью аннулирован. 1×slots казино зеркало Для тех, кто только взвешивает испытать свою удачу, а также для профессиональных игроков, ищущих новые площадки для выигрышей, водящие лицензированные казино часто организуют различные промоакции, и лучшее предложений за время – как для новичков, так и для проф игроков – бездепозитный бонус за регистрацию.Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного приза. <a href=http://xn–80adt5btj4c.xn–80asehdb/index.php?subaction=userinfo&user=obsequiousoutla>http://xn–80adt5btj4c.xn–80asehdb/index.php?subaction=userinfo&user=obsequiousoutla</a> Бесплатные призы казино без депо возможно получить повторяющий денежных средств на бонусный счет (исключить их можно только после отыгрыша), фриспинов, забавы либо кешбэк-бонуса.Для получения предоставленных призов для понадобиться — ПК или мобильное прибор, и остальное дело за малым. 1×slot казино зеркало В большинстве заведений устроить это можно по e-mal, по номеру телефона, спустя социальную сеть или гугл-аккаунт.
1×slots зеркало на сегодня
При правильном раскладе бездепы — это прекрасный метод играть на средства без растраты собственных средств. Есть несколько советов, следуя коим можно извлечь максимум пользы из сходственных промоакций казино. Играть по только на лицензированных площадках. Скриптовые сайты не только дурачат с бонусными услугами, хотя и употребляют пиратский софт с модифицированным ГСЧ. Выиграть на этих автоматах нереально.При малый сумме бонуса рекомендуется выступать по низким ставкам, а применять наибольшие лучше лишь сомнений случае, в вейджер очень великой, а время на отыгрыш сильно ограничено. <a href=https://www.linkedin.com/pulse/%25D0%25B1%25D0%25B5%25D0%25B7%25D0%25B4%25D0%25B5%25D0%25BF%25D0%25BE%25D0%25B7%25D0%25B8%25D1%2582%25D0%25BD%25D1%258B%25D0%25B9-%25D0%25B1%25D0%25BE%25D0%25BD%25D1%2583%25D1%2581-%25D0%25B8%25D0%25B3%25D1%2580%25D0%25BE%25D0%25B2%25D1%258B%25D0%25B5-%25D0%25B0%25D0%25B2%25D1%2582%25D0%25BE%25D0%25BC%25D0%25B0%25D1%2582%25D1%258B-%25D1%2580%25D0%25B5%25D0%25B3%25D0%25B8%25D1%2581%25D1%2582%25D1%2580%25D0%25B0%25D1%2586%25D0%25B8%25D1%258E-%25D0%25B0%25D0%25BB%25D0%25B5%25D0%25BA%25D1%2581%25D0%25B0%25D0%25BD%25D0%25B4%25D1%2580-%25D0%25BC%25D0%25B8%25D1%2586%25D0%25BA%25D0%25B5%25D0%25B2%25D0%25B8%25D1%2587/>https://www.linkedin.com/pulse/%25D0%25B1%25D0%25B5%25D0%25B7%25D0%25B4%25D0%25B5%25D0%25BF%25D0%25BE%25D0%25B7%25D0%25B8%25D1%2582%25D0%25BD%25D1%258B%25D0%25B9-%25D0%25B1%25D0%25BE%25D0%25BD%25D1%2583%25D1%2581-%25D0%25B8%25D0%25B3%25D1%2580%25D0%25BE%25D0%25B2%25D1%258B%25D0%25B5-%25D0%25B0%25D0%25B2%25D1%2582%25D0%25BE%25D0%25BC%25D0%25B0%25D1%2582%25D1%258B-%25D1%2580%25D0%25B5%25D0%25B3%25D0%25B8%25D1%2581%25D1%2582%25D1%2580%25D0%25B0%25D1%2586%25D0%25B8%25D1%258E-%25D0%25B0%25D0%25BB%25D0%25B5%25D0%25BA%25D1%2581%25D0%25B0%25D0%25BD%25D0%25B4%25D1%2580-%25D0%25BC%25D0%25B8%25D1%2586%25D0%25BA%25D0%25B5%25D0%25B2%25D0%25B8%25D1%2587/</a> 1×slots официальный сайт, скачать Акции распространяются как на все игры казино, например и на узкий список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino прочие. Промо возможность охватывать разработки одного производителя. Бездеп не пересекается с иными акциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, сделанные бонусными деньгами. Для идентификации платежных реквизитов игрока может понадобиться пополнение счета на наименьшую сумму.Вообще перейдя в казино — управляла схожи в получении бездепозитных призов, в стандартные управляла входит: доказать эл. Почту и аппарат, наполнить собственный личный профиль, активировать промо код или активировать предложения во вкладке БОНУСЫ.
1хслотс мобильная версия зеркало
Также, в необходимо доказать собственный номер телефонного, желаемого код, полученный в смс-сообщении от клуба ввести в специальное фон в собственном кабинете игрока.Бесплатные бонусы казино без депозита возможно получить повторяющий денежных средств на бонусный счет (вывести их возможно лишь в отыгрыша), фриспинов, забавы либо кешбэк-бонуса. Срок активации и время на отыгрыш. Зачисление средств или фриспинов происходит при активации в течение взыскательно ограниченного периода, схожие требования предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать бонус некоторое дней либо числе месяцов. Другие выдают крупную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером.Иногда в поощрения за регистрацию имеют выдаваться билеты для роли в турнирах. Условия их проведения очень отличаются, потому мы советуем ознакомиться с каждым предложением отдельно. Большинство клубов привлекают внимание геймеров за счёт разнородных подарков. На 1 веб-сайтах можно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает безвозмездные вращения для запуска лучших интернет слотов. Несмотря на разные промоакции, стоит выделить самые главные. 1×slots официальный зеркало рабочее <a href=http://www.zgbbs.org/space-uid-151319.html>http://www.zgbbs.org/space-uid-151319.html</a> Исходя из сего, просто не существует осмысленных оснований махнуть рукой на получение такового бонуса при регистрации. И, заметить,, на такой бесплатной базе у вас есть все шансы выиграть средства и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, именуют бесплатными онлайн платформами для игр.Вознаграждения за получение VIP-статуса ? начисляются масштабах программы преданности при достижении очередного уровня либо выдаются индивидуально менеджерами саппорта.
1× slots зеркало
Не стоит сразу же отказываться от приветственных подарков в сходственных казино. Администрация готова начислить средства либо фриспины, но предварительно работники обязаны убедиться, что вы не аферист. Дело том,, что развелось слишком количество охотников за бонусами. Они выучились врать систему и наваривать солидные суммы денег.Сроки активации приза устанавливаются любым казино, хотя почаще всего они не превосходят недели с момента получения. Игроку обязательно нужно использовать бездеп протяжении обозначенного срока, в ином случае бонус просто исчезнет. Каждый бонус возможно получить только один раз, поэтому случае не использовать бездеп в срок, у игрока не будет 2 шанса им воспользоваться. <a href=https://rightcoachforme.com/author/jamespossy/>https://rightcoachforme.com/author/jamespossy/</a> В каждом казино с бездепозитным призом предусмотрены вейджеровые обстоятельства. Это единственный «подводный камень», который стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, нужно сделать определённое число ставок. Чем круче приз, тем труднее выполнить условия, и напротив. 1хслотс 1хслотс регистрация перейти на 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.bandariklan.com/showthread.php?tid=377717>1хслотс рабочее зеркало</a>
<a href=https://test.soclanovtsy.ru/topic/35543-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-1×-slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82/>казино 1× slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Не стоит путать игру в демо и внедрение призов. В демонстрационном режиме игрок возможность оценить механику слота, сюжет и оформление. Но игра проводится на относительные кредиты, поэтому отсутствует главное ? чувство пыла. Активируя промокод либо фриспины, клиент раньше не расходует средства деньги на игровые автоматы, хотя возможность сорвать настоящий куш!
#6100 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
7k casino зеркало на сегодня bitz casino <a href=https://kompromat1.online/>up casino скачать</a> порно с Федор Чалов (футбол) 1×bet приложение <a href=https://rucriminal.info/>букмекерская контора зенит</a> up casino официальный pin ап casino скачать сайт букмекерской конторы 1×bet приложение up букмекерская контора часы казино порно с Баталина Ольга Юрьевна
#6101 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Семёнова Татьяна Владимировна порно 1×bet casino <a href=https://slon-ru.com/>порно с Аделия Петросян (фигурное катание)</a> гама казино 1×bet зеркало xbet <a href=https://res-publika.com>сайты казино</a> приложения букмекерских контор на андроид porno Юлия Канакина 1×bet на андроид включи казино black russia казино Ирина Горбачева винлайн букмекерская контора
#6102 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino betting порно с Артемий Панарин (хоккей) <a href=https://glvk.guru/>порно с Дарья Касаткина (теннис)</a> казино регистрации inform@rucriminal.info <a href=https://kompromat1.online/>скачиваемые казино</a> букмекерская контора ставки порно с Дарья Касаткина (теннис) порно с Ирина Сидоркова pin up casino пин porno Александр Соболев (футбол) Комарова Наталья Владимировна порно casino riobet
#6103 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
Oтыгpaть приз с указанным вeйджepом, достичь нужно сдeлaть cтaвoк нa cумму, превышающую размер бонуса в несколько раз. <a href=http://filmkachat.ru/>1× slots casino официальный сайт</a> <a href=http://www.gothicpast.com/myomeka/posters/show/79259>http://www.gothicpast.com/myomeka/posters/show/79259</a> Бонусы без депо при регистрации считаются самыми красивыми как для опытнейших игроков, например для и новичков. Получив такое вознаграждение, заказчик имеет играть на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а также обстоятельства их активации и выигрыша. 1хслотс казино зеркало <a href=http://bearing.kz/bitrix/redirect.php?goto=http://gallato.ru/bitrix/redirect.php?goto=http://dcrb.minzdravrso.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/EJN_LVi1tjo>http://bearing.kz/bitrix/redirect.php?goto=http://gallato.ru/bitrix/redirect.php?goto=http://dcrb.minzdravrso.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/EJN_LVi1tjo</a>
1х слот регистрация в 1×slots casino
Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских руб. В условиях акции указано, что вейджер бездепозитного бонуса х20. Поэтому, дабы отыграть приз, игроку несомненно необходимо сделать ставок на 35*20=700 руб.Бoльшинcтвo азартных заведений выдвигают приблизительно однообразные, схожие обстоятельства и требования, которые нужно выполнить, чтобы получить бездепозитный бонус за регистрацию. Все их можно объединить в один список: <a href=https://www.reisezielforum.de/viewtopic.php?p=526912#p526912>1× slots официальный</a> 1×slots регистрация на сайте 1×slots ru com Более солидные предложения встречаются очень изредка. Зачастую они доступны лишь VIP-игрокам. В остальных случаях им наверняка сопутствуют очень жесткие обстоятельства отыгрыша. Также вероятны дополнительные условия и другие ограничения, прописанные в критериях и положения бонусной программы казино.Поспешите зарегистрироваться на официальном сайте Клубника, дабы мгновенно получить 33 безвозмездных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, появляется реальный шанс победу! <a href=http://shalomsilver.kr/bbs/board.php?bo_table=free&wr_id=734548>http://shalomsilver.kr/bbs/board.php?bo_table=free&wr_id=734548</a> Похожим образом трудится 3-ий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя или в связи с получения им VIP-статуса. Подарок предоставляется в обращения в поддержку и ревизии.Получить приветственный бонус все только новые посетители онлайн-казино. Способы описаны в условиях промоакции любого законного казино, чаще всего это: казино 1× slots официальный сайт Для верификации номера телефонного, в личном профиле выберите опцию „Подтвердить номер телефонного“ и введите в подходящее фон код, полученный в sms-сообщении.
1×slot официальный сайт
Отказ в прохождении верификации. Если клиент не хочет или возможности предоставить документы, подтверждающие его личность, профиль несомненно заблокирован вместе со всеми бонусными начислениями. Казино выводит средства только на что, эту платежную систему, с котрой был сделан депозит. То есть, для вывода бездепозитного бонуса, Вам сначала нужно пополнить счет. В некоторых клубах ограниченный список способов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет непосредственно с данных платежных способов, коие доступны для вывода. <a href=https://yandexforum.ru:443/member.php?u=294789>https://yandexforum.ru:443/member.php?u=294789</a> Приглашаем делиться воззрениями о призах. Это поможет иным юзерам избирать наиболее прибыльные предложения.В бонусную программу множества операторов входят регулярные бездепы. Это пожизненные промоакции, поощряющие интенсивных постоянных игроков. Популярный формат — раздача фриспинов по конкретным денькам недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депозита в обмен на скопленные баллы преданности. 1×slots casino зеркало Возможность сыграть вспомогательное соревнование (а времени и некоторое) абсолютно безвозмездно, а выигрыш, же, поступает на счёт игрока.В зависимости от интернет заведения любой из них может для предложить как бездепозитные деньги, например и бездепозитные фриспины, которые в удачной регистрации упадут вас на ваш игровой баланс.
1хслотс мобильная версия зеркало
Для получения предоставленных призов вам понадобиться — ПК или мобильное прибор, и остальное дело за малым.Для проверки применяются сканы паспортов, водительских водительских, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если юзер обнаружен в попытке завести вспомогательный аккаунт, все его учетные записи подвергаются блокировке, а их обладатель попадает в темный список. При забаве на лицензионной площадке не стоит бояться свидетельствовать достоверную персональную информацию (шифрование ликвидирует утечку индивидуальных данных). 1 х слотс зеркало <a href=https://tutorialslots.com/index.php?qa=96033&qa1=1×-slots-%D1%81%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C>https://tutorialslots.com/index.php?qa=96033&qa1=1×-slots-%D1%81%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C</a>
1хслотс зеркало
Бонус без депозита за регистрацию в казино (бездепозитный приз) – это валютный подарок от клуба, кот-ый начисляется на аккаунт игрока в регистрации в казино. Кроме создания учетной записи, для получения бездепа, довольно часто потребуется ещё и подтвердить контактные данные игрока и/или активировать специальный промо-код.В случае установленного лимита на необходимую вывода выигрыша с бездепозитного бонуса, игрок не может вывести больше заявленной суммы. <a href=http://www.baohaibbs.com.cn/home.php?mod=space&uid=38437>http://www.baohaibbs.com.cn/home.php?mod=space&uid=38437</a> Шаг 4. Активация. Внимательно изучите условия, информацию по лимитированиям и сроке деянья бонусного предложения. Разобравшись с правилами, можно активировать приз в личном кабинете (иногда ? с использованием промокода) либо по запросу в саппорт. 1×slots зеркало видели такую регистрацию на Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.bedwantsinfo.nl/user-83172.html>1×slots зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это самая приятная доля игры. Важно, часто бездепозитные призы в казино выдаются с лимитированиями по наибольшей выплате. В среднем можно рассчитывать на выгода в несколько тысяч рублей. Как вывести выигрыш с приза без депо. Придётся подтвердить аккаунт документально, в неких заведениях. Процедура верификации обязательна и делается каждым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате или прочитайте в правилах.
#6104 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино ставка porno Александра Степанова, фигуристка <a href=https://slon-ru.com/>букмекерская контора бетсити</a> casino сегодня букмекерская контора фонбет <a href=https://rumafia.news/>скачать сайт букмекерской конторы</a> 1×bet зеркало рабочее на сегодня Приезжева Екатерина Геннадьевна порно inform@rucriminal.info официальные букмекерские конторы 1×bet вход демо казино porno Катерина Шпица
#6105 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino 777 online
Для выбора азартного заведения Вы можете воспользоваться перечнем наших казино с призами за регистрацию. На нашем сайте мы опубликовали перечень бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, что часть бонусов эксклюзивные и доступны только для посетителей нашего вебсайта по-специальному промо-коду или по уникальной ссылке. Кроме как, для каждого бонуса мы подготовили доскональный обозрение, в котором Вы узнаете как получить и отыграть одобрение и как исключить собственный выигрыш с бездепа. <a href=http://filmkachat.ru/>1×slots сайт зеркало</a> Также учтите, что кое-какие игровые платформы сужают перечень стран, которые способны получить предложенный бездепозитный бонус за регистрацию. К примеру, есть онлайн-заведения, выдающие сходственные бонусы только жильцам конкретных стран. К образцу, интернет казино 777 Оригинал предоставляет бездепозитный бонус только игрокам из России и государств СНГ. Или наоборот, пичкают вознаграждением всех, кроме обитателей неких стран (из сего, стопам пристально учить перечень, чтобы впоследствии не появилось никаких вопросов и жалоб).На критериях отыгрыша даровых призов следует остановиться подробнее. С ними связаны нюансы, которые нельзя оставить без внимания. <a href=https://hanson.net/users/archicgicom>https://hanson.net/users/archicgicom</a> B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам запрещено начислять бонусы клиентам, не имеющим валютных средств на счете. Мы предлагаем осмотреть актуальные призы онлайн-казино с лицензией, которые соблюдают законодательство РБ. казино 1× slots официальный сайт <a href=https://ekvall.co/member.php?action=profile&uid=50854>https://ekvall.co/member.php?action=profile&uid=50854</a> Стоит обозначить(означить), собственно бездепозитный бонус выдается только совершеннолетним новеньким, коие, тому, имеют пригласить личных друзей и знакомых, также рассчитывающих на поощрительную программу преданности. Подобная разработка появилась среди соперничающих онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению своей популярности, методом вербования новых игроков. Бонусы – это оригинальный шанс для вероятных участников забавы, коие все опробовать софт покер рума и убедиться, станут ли они в него выступать либо нет. Новый игрок попробует свои силы с настоящими оппонентами в казино.
1×slots акции
Не трудно догадаться, что no deposit bonuses почти ни не случаются большими. Чаще всего речь идет о пяти–тридцати баксах (либо эквиваленте данной суммы в иной валюте). <a href=https://forum.dis-course.net/viewtopic.php?t=520202>1хслотс казино зеркало</a> онлайн казино 1×slots <a href=http://www.xwsj2021.com/home.php?mod=space&uid=73491>http://www.xwsj2021.com/home.php?mod=space&uid=73491</a> Бесплатные призы казино без депо можно получить в виде денежных средств на бонусный счет (исключить их можно только после отыгрыша), фриспинов, игры или кешбэк-бонуса.С другой стороны, намного легче забрать бездепозитные фриспины за регистрацию в казино и напрямик в начать вращать барабаны в лучших слотах. Главная необыкновенность спинов в том, что они предусмотрены для лучших автоматов. Удастся столько пройти дополнительные раунды, хотя и увеличить необходимую выигрыша, заработать респины и внутриигровые презенты. 1× слот зеркало
1×slots подтвердит вашу регистрацию если говорить
Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте условия – они часто выдаются для неких машин. В зависимости от клуба вам делать определенное количество ставок. Кстати, современные игорные жилища дают вероятность заводить «одноруких бандитов».Вознаграждения за получение VIP-статуса ? начисляются масштабах программы лояльности при достижении очередного уровня либо выдаются индивидуально менеджерами службы. Более солидные предложения встречаются очень изредка. Зачастую они доступны лишь VIP-игрокам. В остальных случаях им наверняка сопутствуют довольно жесткие условия отыгрыша. Также вероятны вспомогательные обстоятельства и другие ограничения, прописанные в условиях и положения бонусной программки казино.При регистрации что, нет или ином интернет игральном заведении — вам дается раз шанс испытать свою фортуну не внося свои монеты. Замечу собственно такую поощрительную услугу предоставляют не все онлайн игровые площадки, а только щедрая середина(средина) из них. Которые мы подготовили для Вас в нашем перечне. <a href=https://bajarmp3.net/member.php?action=profile&uid=4541>https://bajarmp3.net/member.php?action=profile&uid=4541</a> 1×slots зеркало на сегодня Бездепозитные призы за регистрацию в игровых автоматах для владельцев онлайн-казино являются долею маркетинговой кампании, направленной на повышение аудитории сайта. Так они продвигают средства бренды и завлекают новых посетителей.
зеркло казино 1×slots
Иногда у посетителей сайта могут появиться проблемы при активации приобретенного промо-кода. В этих случаях, необходимо адресоваться за помощью в службу «Support». Для получения ответа, обязательно указывается конкретная причина воззвания и подтверждается информация дополнительными экрана. Если сформировалась неоднозначная ситуация, постоянно возможно адресоваться к главному регулятору или контролирующему органу, выдавшему данному заведению лицензионный документ.На данном разделе портала периодически публикуются обзорные статьи, каких рассматриваются бесплатные бонусы превосходнейших интернет-казино. Информация структурирована по нескольким пунктам, включая главные: <a href=http://mandala-app.com/forums/memberlist.php?mode=viewprofile&u=3447>1×slots актуальное зеркало</a> 1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, случае не желайте замерзнуть жертвой мошенников или впустую истратить время;Вейджер в переводе с английского означает «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша полученного бонуса, в нашем случае бездепозитного. Число ставок роли не играет — главно только набрать необходимую, пропорциональную сумме поощрения. 1×slots зеркало регистрация <a href=http://vega-int.ru/bitrix/rk.php?goto=http://fotolenta.ru/bitrix/rk.php?goto=http://komstet.ru/bitrix/redirect.php?goto=https://telegra.ph/Nalogovye-lgoty-dlya-voennyh-pensionerov-i-veteranov-boevyh-dejstvij-09–24>http://vega-int.ru/bitrix/rk.php?goto=http://fotolenta.ru/bitrix/rk.php?goto=http://komstet.ru/bitrix/redirect.php?goto=https://telegra.ph/Nalogovye-lgoty-dlya-voennyh-pensionerov-i-veteranov-boevyh-dejstvij-09–24</a> Срок активации и время на отыгрыш. Зачисление денег или фриспинов происходит при активации протяжении строго ограниченного периода, подобные притязания предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать приз несколько дней или том недель. Другие выдают крупную необходимую за регистрацию, но время отыгрыша ограничивают несколькими часами с необоснованно высоким вейджером.
рабочее зеркало 1×slots
В количестве случаев бесплатные призы начисляются в кредитах, коие невозможно незамедлительно вывести со счета. Прежде их нужно отыграть по установленным правилам. Эти требования принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д.). О нем читайте ниже. Вообще перейдя в казино — правила схожи в получении бездепозитных призов, в стандартные управляла заходит: доказать эл. Почту и аппарат, наполнить собственный индивидуальный профиль, активировать рекламную код либо активировать предложения во вкладке БОНУСЫ.Как только вы отыграли вейджер и средства с бонусного баланса перебежали вам на настоящий счет, Вы отважно сможете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (устроить наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, совместно, вкупе с депо). <a href=http://xn–80aagidcc4cnuqfk6b2je.xn–p1ai/index.php?subaction=userinfo&user=spicyamulet64>http://xn–80aagidcc4cnuqfk6b2je.xn–p1ai/index.php?subaction=userinfo&user=spicyamulet64</a> Фриплей-бонусы встречаются лишь в неких клубах. Они зачисляются сразу в создания профиля и активны недолговременное время. Если не успеете израсходовать свои, они просто сгорят. Касаемо медли, как призы активны на часа. 1×slots бездепозитный бонус за регистрацию
<b>Смотреть еще похожие новости:</b>
<a href=https://elclasificadomx.com/author/jameslog/>1×slots зеркало регистрация то дальше необходимо пройти</a>
<a href=http://portal.westcoastbible.org/discussion/memberlist.php?mode=viewprofile&u=400061>1×slots рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Простая процедура получения бездепозитного бонуса, кот-ая займет не более 2-х минут. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные.
#6106 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино регистрации kometa casino <a href=https://m.repost.news/>casino 7k рабочее</a> как выиграть в казино porno Илья Ковальчук (хоккей) <a href=https://rhymes-punches.com/>лучшие онлайн казино</a> сайт казино зеркало официальное казино вход леон букмекерская контора винлайн букмекерская контора официальный казино большая 1×bet рабочее автомат казино
#6107 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация то дальше необходимо пройти
Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют актуальную информацию о no deposit bonuses прочих предложениях.Фриспины предусмотрены для применения в видео слотах. Внимательно ознакомьтесь с условиями – частенько их выдают на некоторые автоматы. В зависимости от клуба, у вас получится устроить определённое количество ставок. Кстати, продвинутые игорные дома разрешают запускать любых «одноруких злодеев». <a href=http://filmkachat.ru/>1×slots зеркало этих способов предполагает регистрацию</a> Теоретически, к безвозмездным бонусам возможно отнести например нарекаемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, поэтому собственно они предоставляют только возможность создавать ставки.Разные казино имеют личные управляла по выведению выигрыша. Для бездепозитных призов принимаются довольно высочайшие требования. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до ста раз в игровых автоматах. Например, если игрок получил бесплатно 10 долларов, то нужно несомненно отыграть их, поставив 1 тысячу спинов по 1 доллару каждый. Стоит отметить, собственно не все казино выделяют вероятность выступать на бонусы и не во всех развлекательных заведениях схожие управляла для отыгрывания. Некоторые казино запрещают играть на призы в блекджек либо ограничивают ставки до пяти процентов, собственно значительно наращивает в десятки один количество необходимых игр. <a href=https://www.4sync.com/s/fpXRu8Czr>https://www.4sync.com/s/fpXRu8Czr</a> Но есть игорные заведения, коие готовы просто например жертвовать деньги на игру. Для этого довольно сделать профиль. Чтобы вывести свой выигрыш, для поначалу необходимо выполнить условия отыгрыша, обозначенные в условиях получения бездепозитного депозита.Бонус без депо за регистрацию в казино (бездепозитный бонус) – это валютный презент от клуба, который начисляется на аккаунт игрока последствии регистрации в казино. Кроме творения учетной записи, для получения бездепа, очень часто потребуется ещё и подтвердить контактные данные игрока и/или активировать особый промо-код. 1×slots мобильная версия войти казино <a href=http://n27244j0.bget.ru/index.php?subaction=userinfo&user=Jeffreyalaps>http://n27244j0.bget.ru/index.php?subaction=userinfo&user=Jeffreyalaps</a> Высокая конкуренция в сегменте азартных игр доказывает операторов привлекать клиентов разнообразными промоакциями. Благодаря этому у гостей появляется возможность получить призы в казино за регистрацию без депо. Воспользоваться таким предложением можно, избегая процедуру внесения денег на игровой счет, просто активировав акк на веб-сайте. Наш гид по бездепам поможет выбрать самую симпатичную бонусную программку, узнать правила получения такового гонорары и распорядиться им с максимальной выгодой.Чаще всего используются коды. Их нужно заносить в особые окошки регистрационной анкеты, в идет о пригласительных бонусах, или в особом разделе собственного офиса игрока.
онлайн казино 1×slots
Для верификации номера телефонного, в личном профиле изберите опцию „Подтвердить номер телефонного“ и введите в соответствующее фон код, полученный в sms-сообщении. 1×slots casino регистрация Выиграть реальные деньги в казино не пополняя счет – трудно, но вполне. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными бонусами и начните выступать на бонусные свои. По статистике каком-то 10-ти заведений возможно заработать маленькую сумму денег помощью бонусных средств.Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную процедуру активации приза без депо. Внимательно прочтите до конца. Многие новички делают промахи на этапе регистрации и потому имеют получить презент. <a href=https://rctw.net/space-uid-233266.html>https://rctw.net/space-uid-233266.html</a> 1×slots регистрация то дальше необходимо пройти
1хслотс казино зеркало
Постарайтесь отыграть вейджер, чтобы замечена вероятность забыть заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электрической кошелёк, карту, телефон.Ещё одно распространённое акционное предложение – симпатичный подарок с сомнительными требованиями. К образцу, клуб обещает $100 в качестве бездепа, но с вейджером х80 либо х100. Отыграть подобный вейджер фактически невозможно и поэтому другого концентрироваться на более занимательных промоакциях. Можно ли в одном интернет казино получить больше одного приза за регистрацию? Нет, например как в каждом онлайн казино есть верховодила, к коим нужно держаться, не делать два аккаута для получения бонусов, по несомненно блокировка обоих аккаутов, не пытайтесь обмануть интернет казино, приз за регистрацию выдаеться один раз одному личику.Наличие у игрока второго аккаунта. Запрещено создавать количество профилей для неоднократного получения бездепов. <a href=http://wiki.die-karte-bitte.de/index.php/Benutzer_Diskussion:TraciCook093>http://wiki.die-karte-bitte.de/index.php/Benutzer_Diskussion:TraciCook093</a> Вы не в коем случае ни же рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный бонус, по мимо практической игры на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, научится регулировать менять ставки и линии, исследовать бонусные игры и их выигрышные композиции, да счете просто зарядится кучей эмоций! Ведь вы будите играть на бонусные свои, которые возможно отыграть и исключить, не просто на демо счет, что, этим наиболее адреналин в крови более повысится а пульс забьется с частым ритмом!Также бывают случаи, когда казино начисляет обсужденный приз после регистрации нового посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам. 1×slot зеркало рабочее этих способов предполагает регистрацию Прежде всего, не забывайте регулярно заглядывать на страничку обзоров бездепозитных призов. Они шаг за шагом разглядывают наиболее занимательные предложения основных игорных порталов.
казино 1× slots официальный сайт
Выполнив все требования оператора, заказчик возможность оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит примерно не более суток. Если дополнительно требуется пройти функцию верификации, то срок увеличивается до 1–2 трудящихся дней. Для перевода используются банковские приборы и электронные платежные системы. Второй способ подходит никакого, например как большинство транзакций в этом случае исполняются мгновенно. В связи со спецификой функционирования банков обработка платежей возможность взятьвдолг(взятьвзаймы) до нескольких трудящихся дней. 1×slots официальный сайт, скачать <a href=https://www.wonderzine.com/users/1541799>https://www.wonderzine.com/users/1541799</a> Ограничения по забавам. Администрация воспрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, деньгами либо бесплатными вращениями. Обычно, в правилах приводится глубокий список слотов для отыгрыша. Иногда дробленье выполняется по виду игр. Например, отыгрыш вероятен на всех игровых аппаратах, но запрещен в настольных забавах и в разделе Live Casino.
1×slots зеркало
После потребуется привнести идентификационный платёж. Это пугает начинающих больше всего. Нужно устроить наименьший депозит в 100–500 руб. Таким образом служба безопасности убедиться том,, собственно платёжный метод принадлежит Вам. Данная процедура важна для обеспечения защищенности игровых счетов. Пример, Ваш аккаунт взломают и выведут свои на собственный кошелёк. Будет крайне неприятно. Поэтому верификация платёжной системы, это необходимый момент. <a href=https://monroyhives.biz/author/julesmob/>https://monroyhives.biz/author/julesmob/</a> 1×slots регистрация то дальше необходимо пройти Нет. Для получения бездепозитного приза в казино необходима обязательная регистрация на сайте. Играть в слоты безвозмездно и без регистрации возможно лишь в демо режиме.Кешбэк-бонус представляет собой возврат фиксированного процента от ставки в случае поражения либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не превышает 10%.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы появилась возможность вывести выигрыш.
#6108 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Лут Оксана Николаевна порно casino сегодня <a href=https://rhymes-punches.com/>pin up букмекерская контора</a> вывод казино online casino официальный <a href=https://repost.news/>Черкесова Бэлла Мухарбиевна порно</a> казино вход букмекерская контора porno Илья Ковальчук (хоккей) casino betting Самойлова Алла Владимировна порно 1win casino 7k casino официальный сайт
#6109 Charlesgunnyhttp://filmkachat.ru
1×slots сайт
Заработать на бездепозитных бонусах за регистрацию в казино имеет любой пользователь, достигший совершеннолетия. <a href=http://filmkachat.ru/>1× slots регистрация в 1×slots casino</a> Только выполнив все обстоятельства отыгрыша и дождавшись завершения проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить средства деньги.Автоматы непопросту числятся самым знаменитым азартным весельем. Чтобы усвоить управление и верховодила, понадобится всего количество минут. Ваша задачка устроить ставку, определить количество трудящихся линий и можно вертеть тамбур. Если на выпадет выигрышная композиция – вы выиграли! С этой задачей для посодействуют управится бездепозитные призы казино. <a href=https://blog.udn.com/G_112062930339362154/181391895>https://blog.udn.com/G_112062930339362154/181391895</a> Диапазон ставок, коие вправе устроить игрок, также лимитирован. Обычно назначать возможно небольшую сумму — около 10–30 рублей за одно вращение. 1×slots зеркало регистрация то дальше необходимо пройти <a href=http://neroelectronics.ru/bitrix/redirect.php?goto=http://moto4me.ru/bitrix/redirect.php?goto=http://technobelt.ru/bitrix/redirect.php?goto=https://telegra.ph/Osnovnye-principy-izbiratelnogo-prava-v-Rossii-09–19>http://neroelectronics.ru/bitrix/redirect.php?goto=http://moto4me.ru/bitrix/redirect.php?goto=http://technobelt.ru/bitrix/redirect.php?goto=https://telegra.ph/Osnovnye-principy-izbiratelnogo-prava-v-Rossii-09–19</a>
x1 slots регистрация в 1×slots casino
<a href=http://smpn1bejen.sch.id/forum/>1×slots рабочее зеркало</a> 1×slots зеркало регистрация <a href=http://wiki.serialkiller.adele.im/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D0%B4%D0%B7%D0%B5%D0%BD%20%D1%87%D0%B8%D1%82%D0%B0%D1%82%D1%8C>http://wiki.serialkiller.adele.im/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D0%B4%D0%B7%D0%B5%D0%BD%20%D1%87%D0%B8%D1%82%D0%B0%D1%82%D1%8C</a> Хотя бесплатные призы начисляются без депозита, не исключено, что для понадобиться вносить деньги. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только в такого, как новый клиент впервые пополнит игровой счет.На данном разделе портала периодически публикуются обзорные заметки, каких рассматриваются бесплатные призы превосходнейших интернет-казино. Информация структурирована по нескольким пт, включая основные: 1×slots регистрация 1×slots review live Вейджер в переводе с английского значит «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша полученного бонуса, в нашем случае бездепозитного. Число ставок значения — принципиально лишь набрать сумму, пропорциональную сумме поощрения.
1×slots официальный регистрация
Бездепозитные призы казино это финансовая компенсация, предлагаемая пользователям на дармовой базе и вероятность играть в онлайн казино даром. Если сравнивать их с одобрениями за лепта, каких средства выдаются лишь потом начального пополнения счета, то бездепозитные гонорары получаются бесплатно. То есть, играющий получает вероятность делать ставки на теснее существующие деньги, которые выдаст заведение, выполняя, при, обычные деянья, дабы их извлечь (тут речь о регистрация, удостоверении личности с внедрением номера аппарата, дизайна заказы и т.д. ).Начнём с такого, собственно каждое рекламную за регистрацию подразумевает некие обстоятельства. Бездепозитные призы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность денежного оборота, необходимая для исполнения условий. Пример, возымели бесплатные вращения и выиграли с их 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 руб., неудачных либо выигрышных, неважно. После исполненья, бонусный баланс перейдёт на настоящий и станет доступным к выводу. <a href=http://cssbym.ru/forum/showtopic-30405>http://cssbym.ru/forum/showtopic-30405</a> Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.Когда речь о получении бездепозитных призов в казино, начала внимание на следующие обстоятельства: x1 slots 1хслотс регистрация перейти на 1×slots
1хслотс рабочее зеркало
Каждый новичок и умелый игрок мечтают скоро стартануть и начать создавать настоящие ставки. Для этого довольно отобрать подарок, за который не нужно выплачивать. В зависимости от игровой платформы, нужно сделать профиль, привязать email или телефон. После этого администрация начислит щедрое вознаграждение повторяющий бесплатных вращений либо виртуальных кредитов.Активация по промокоду используется в разных видах бездепов. Если речь идет о приветственном призе, то набор символов можно узнать на крупнейшей странице, в регистрационной форме или письме, коие отчаливает пользователю для доказательства адреса электронной почты. Акции все проводиться совместно с партнерскими площадками. Обычно код располагается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется одноразовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем актуальный код для активации в описании любого промо. 1× slots сайт <a href=https://justdirectory.org/details.php?id=283367>https://justdirectory.org/details.php?id=283367</a>
1×slot зеркало
Не стоит путать игру в демо и внедрение бонусов. В демонстрационном режиме игрок может расценить механику слота, сюжет и оформление. Но игра ведется на относительные кредиты, поэтому отсутствует основное ? ощущение пыла. Активируя промокод или фриспины, клиент и не тратит средства деньги на игровые автоматы, хотя может сорвать реальный куш!Денежные средства. Третий бонус за регистрацию без депозита – наличные. К сожалению, только знаменитые и известные клубы могут дать средства в рублях или баксах. С их поддержкой возможность насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед данным необходимо исполненье конкретных критерий. Иногда виде поощрения за регистрацию шансы выдаваться билеты для роли в турнирах. Условия их проведения очень отличаются, поэтому мы советуем ознакомиться с любым предложением отдельно.Пoдтвepдить личнocть посетителя. Для успешного вывода средств, нужно доказать личность клиента. Нa этaпe вepификaции пpoфиля, работники службы безопасности обязаны увериться, что у игрока более один аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не может вывести собственный выигрыш, случае у него несомненно несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы. <a href=http://www.okaywan.com/home.php?mod=space&uid=497612>http://www.okaywan.com/home.php?mod=space&uid=497612</a> 1×slots регистрацию более популярный вариант это
<b>Смотреть еще похожие новости:</b>
<a href=https://qualityprogamer.de/forum/showthread.php?tid=349577>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера.
#6110 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино сочи pin up casino top top <a href=https://kompromat1.online/>сайт pin up casino</a> порно с Зырянова Анастасия Владимировна порно с Александр Головин (футбол) <a href=https://rumafia.news/>casino com</a> casino рабочее зеркало 1win casino 7k casino официальный сайт porno Игорь Акинфеев (футбол) 7k casino сайт 1win букмекерская контора казино
#6111 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на 1хслотс
Для получения бонуса надо(надобно) пригласить в забаву нового клиента. Казино начислит пригласившему фиксированный процент от взносов приглашённого повторяющий бонуса: почаще всего его размер не превышает 10%. Срок действия приза правило не превышает месяца: пригласивший получает приз от проигранных ставок приглашённого в первый луна забавы. <a href=http://filmkachat.ru/>1×slots зеркало рабочее</a> Бонусы без депозита при регистрации считаются самыми привлекательными как для опытных игроков, так для и новичков. Получив это вознаграждение, заказчик возможность играть на настоящие средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, еще условия их активации и выигрыша.В случае установленного лимита на сумму вывода выигрыша с бездепозитного приза, игрок не сможет вывести больше заявленной суммы. <a href=https://www.xaphyr.com/blogs/984858/Transform-Your-Space-Professional-Secrets-of-Interior-Design-Layout-Mastery>https://www.xaphyr.com/blogs/984858/Transform-Your-Space-Professional-Secrets-of-Interior-Design-Layout-Mastery</a> Даже не выиграв крупную необходимую, игрок интересно проведет время, изнутри выучит работу площадки, воспримет геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе превосходнейших промоакций с. Достаточно регулярно учить перечень новых интернет казино с выводом приза без депозита в этом разделе.У каждого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано смогли выполнить их, мы дадим количество советов. Если система начислила маленькую необходимую, не создавать большие ставки – остановитесь на 10–30 центах. Как только сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте играть. В противном случае никакого приглядеться к иному автомату. 1×slots зеркало регистрация <a href=https://www.giantbomb.com/profile/kachfil1/blog/filmy-na-telefon-skachat/167238/>https://www.giantbomb.com/profile/kachfil1/blog/filmy-na-telefon-skachat/167238/</a> Стоит отметить, собственно бездепозитный бонус выдается только совершеннолетним новичкам, коие, в свою очередь, все пригласить личных приятелей и знакомых, кроме претендующих на поощрительную программку лояльности. Подобная разработка замечена между конкурирующих онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению своей посещаемости, методом вербования свежих игроков. Бонусы – это уникальный шанс для потенциальных соучастников игры, коие имеют опробовать софт покер рума и убедиться, будут ли они в него играть либо нет. Новый игрок попробует свои силы с настоящими оппонентами в казино.Даже не выиграв солидную необходимую, игрок увлекательно проведет время, изнутри исследует работу площадки, оценит геймплей автоматов. Все это без каких-либо финансовых рисков. Быть в курсе наилучших акций легкостью. Достаточно регулярно учить перечень свежих онлайн казино с выводом бонуса без депо в этом разделе.
1×slots бездепозитный бонус за регистрацию
Наличие у игрока второго аккаунта. Запрещено создавать некоторое профилей для многократного получения бездепов.Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. 1×slots зеркало регистрация в 1×slots casino <a href=http://ishware.co.uk/fusion/profile.php?lookup=25736>http://ishware.co.uk/fusion/profile.php?lookup=25736</a> Вообще перейдя в казино — верховодила одинаковы в получении бездепозитных призов, в стандартные управляла входит: подтвердить эл. Почту и телефонный, заполнить собственный индивидуальный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ.Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. зеркло казино 1×slots Ниже указан важный список законных казино в Беларуси с призами на первый депо. Вы сможете попасть на официальный сайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус.Так что можете отважно региться без всяких раздумий. Фортуна сегодня точно на вашей стороне. Не опасайтесь, так последствие какого либо убытка Вам совершенно не грозит. С этими призами как без пополнения, Вы остаетесь лишь в плюсе, хотя не как не в минусе.
1 хслот регистрация в 1×slots casino
Иногда у посетителей вебсайта все появиться трудности, задачи, препядствия при активации приобретенного промо-кода. В таких случаях, необходимо обратиться за поддержкою в службу «Support». Для получения ответа, непременно указывается определенная причина обращения и подтверждается информация дополнительными экрана. Если сформировалась спорная обстановка, практически можно обратиться к основному регулятору или контролирующему органу, выдавшему этому заведению лицензионный документ. Следует подчеркнуть, собственно бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом.Для верификации аккаунта надо(надобно) дать специалистам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, а также фотографию банковской карты или снимок странички электрического кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для подтверждения личности. <a href=https://www.modewort.pl/2019/06/karikatur.html>https://www.modewort.pl/2019/06/karikatur.html</a> 1×slots официальный зеркало рабочее
1×slot официальный сайт
Игры, в которых возможно выступать на бонусные средства. Проверьте перечень игр, каких возможно играть на бонусные средства, вероятно они Вам не понравятся и не тратить своё время на такую промоакцию. Похожим образом работает третий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения клиента либо в связи с получения им VIP-статуса. Подарок предоставляется последствии воззвания в поддержку и проверки.Фриплей-бонусы встречаются только в неких клубах. Они зачисляются незамедлительно после творенья профиля и активны недолговременное время. Если не успеете израсходовать свои, они просто сгорят. Касаемо медли, правило призы активны в течение часа. 1×slots бездепозитный бонус за регистрацию <a href=http://motosurfing.com/bitrix/redirect.php?goto=http://uralkorona.ru/bitrix/redirect.php?goto=http://images.google.com.kw/url?q=https://telegra.ph/Ponimanie-struktury-delovyh-pisem-priglashenij-na-russkom-yazyke-09–23>http://motosurfing.com/bitrix/redirect.php?goto=http://uralkorona.ru/bitrix/redirect.php?goto=http://images.google.com.kw/url?q=https://telegra.ph/Ponimanie-struktury-delovyh-pisem-priglashenij-na-russkom-yazyke-09–23</a>
1×slots регистрация 1×slotscasino 56 online
Бездепозитные бонусы реальными деньгами, коие возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадали.Также, в этом случае нужно доказать свой номер аппарата, чтобы код, приобретенный в смс-сообщении от клуба ввести в специальное фон в собственном офисе игрока. <a href=http://forum.combat-arnis.ru/profile.php?mode=viewprofile&u=286828>http://forum.combat-arnis.ru/profile.php?mode=viewprofile&u=286828</a> 1×slots актуальное зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://projects.sare.org/people/jamestrazy/>1×slots зеркало регистрация то дальше необходимо пройти</a>
<a href=https://forum.ltp-team.com/topic/81746-kazino-1×-slots-oficialnyy-sayt/>казино 1× slots официальный сайт</a>
<a href=http://aficionado.pl/showthread.php?168771–1×slots-casino-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-1×slotscasin-online&p=189537>1×slots casino регистрация 1×slotscasin online</a>
<a href=http://www.airsoft44.com/forum/index.php?action=profile;u=11896>1×slots официальный зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Нет. Для получения бездепозитного бонуса в казино нужна неотъемлемая регистрация на веб-сайте. Играть в слоты бесплатно и без регистрации можно лишь в демо режиме. Перечисленные выше основные свойства сочетают фактически любой бонус и являются стереотипными для бездепозитных бонусных начислений в казино.
#6112 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало рабочее на сегодня 1×bet xyz порно с Федор Чалов (футбол) <a href=https://m.repost.news/>казино на деньги</a> фреш казино porno Виктория Баркова, легкоатлетка <a href=https://glvk.guru/>up casino зеркало</a> кент казино сайт букмекерской конторы casino online зеркало Валентина Матвиенко порно casino приложения pin up casino buzz porno Анастасия Янькова, боксерка
#6113 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots review live
Бездепозитные призы за регистрацию в игровых автоматах для владельцев онлайн-казино являются частью маркетинговой кампании, направленной на повышение аудитории вебсайта. Так они продвигают средства бренды и привлекают новых посетителей. <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> Еще одно условие дотрагивается размеров ставки. Операторы устанавливают максимальную сумму, которую игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, избранной в Личном офисе. При превышении лимита есть риск лишиться приза. Существующие ограничения относятся и к конкретным обликам ставок. Например, играя в рулетку, клиент возможность столкнуться с запретом ставить фишки на шансы. <a href=https://app.roll20.net/users/15405601/3d-architectural-rendering-services>https://app.roll20.net/users/15405601/3d-architectural-rendering-services</a> Такие одобрения дозволяют бесплатно протестировать свежее казино, разобраться с игровым ходом интернет слотов, заработать и вывести небольшую сумму денег.Фриспины. Бесплатные вращения предназначены для применения в видео-слотах. Внимательно читайте условия – они часто выдаются для некоторых машин. В зависимости от клуба возможность делать конкретное количество ставок. Кстати, современные игорные жилища выделяют вероятность заводить «одноруких бандитов». 1×slots зеркало рабочее на сегодня <a href=https://food.biz.ua/wr_board/tools.php?event=profile&pname=Jaspermen>https://food.biz.ua/wr_board/tools.php?event=profile&pname=Jaspermen</a>
1×slots официальный сайт зеркало рабочее
У любой игры свои притязания по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система засчитает любую ставку. В рулетке и покере сделать это гораздо сложнее. Именно потому так важно пристально разбирать условия получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой этой, то новенькие попросту «спустят приз на ветер».Более солидные предложения встречаются довольно редко. Зачастую они доступны только VIP-игрокам. В оставшихся случаях им наверняка сопутствуют довольно жесткие обстоятельства отыгрыша. Также возможны дополнительные обстоятельства и другие лимитирования, прописанные в условиях и положения бонусной программы казино. 1×slots регистрация 1×slots review live Срок отыгрыша — это этап, который наступает в момент активации приза и заканчивается с его закрытием. Пользователю нужно уложиться в данный временной промежуток, другому призовые средства аннулируются. Казино устанавливают список игр, ставки в которых засчитываются при расчете отыгранных денег. Если тайтл не входит в данный список, то ему быть недоступен для загрузки период деянья бонусного предложения.Шаг 5. Использование и отыгрыш. Бездеп должен быть применен в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера. <a href=http://reinforcedconcrete.org.ua/article/view/durability#comment-681985>http://reinforcedconcrete.org.ua/article/view/durability#comment-681985</a> Ограничения по забавам. Администрация запрещает игрокам кое-какие игровые автоматы с бездепозитным призом, средствами либо безвозмездными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда разделенье производится по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, хотя запрещен в настольных забавах и в разделе Live Casino. 1×slots казино мобильная версия
1×slots скачать на айфон
Иногда для получения призов нужно связаться с адептами службы поддержки. Удобнее всего с ними беседовать в онлайн-сате, хотя времени достаточно запроса по электрической почте.Сразу после активации промокода можно воспользоваться даром. Как уже упоминалось, призы посещают трёх обликов – фриспины, кредиты и фриплей-бонусы. <a href=http://www.taijiacademy.com/newforum_down/profile.php?mode=viewprofile&u=303359>http://www.taijiacademy.com/newforum_down/profile.php?mode=viewprofile&u=303359</a> Вейджер в переводе с английского значит «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша приобретенного бонуса, в нашем случае бездепозитного. Число ставок роли не играет — важно только набрать необходимую, пропорциональную сумме поощрения.Классическая разновидность приза за создание аккаунта. Его преимущество заключается что, нет, что клиент возможность без подбирать аппараты и делать ставки в их. Иногда перечень игровых автоматов ограничен оператором, но все равно это превосходнее, чем один-единственный доступный слот, как если, тогда, с внедрением фриспинов. 1хслот скачать Как и другие акции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такого предложения считаются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает новых посетителей и дозволяет им составить впечатление о функционале, не рискуя значительными совокупностями.Подтверждение регистрации. Казино настоятельно привязки профиля к электронному адресу и номеру телефона. Для этого на e-mail отчаливает послание ссылаясь, а на аппарат ? текстовое известье с кодом.
1×slots зеркало регистрация
Приветственный бонус без депозита ? презент за регистрацию. Выдается средствами, фриспинами либо баллами. В последнем случае бонусные баллы применяются для роли в турнирах либо размена на реальные деньги. <a href=http://nacionrolera.org/foro/viewtopic.php?f=1210&t=230172>1×slots зеркало регистрация</a> Некоторые казино шансы предлагать посетителям бездепы за подтверждение номера или почты или репост на страничку в соц сетях. 1×slos регистрация в 1×slots casino <a href=https://www.babelio.com/monprofil.php?id_user=1918245>https://www.babelio.com/monprofil.php?id_user=1918245</a>
casino 1×slot
Таким образом, заведение пробует продемонстрировать себя своим вероятным геймерам, а подобный рекламный ход как казино бонус без депо за регистрацию привлекает очень много внимания к игорному заведению и обеспечивает постоянный поток новых посетителей и будущих клиентов игрового онлайн клуба. <a href=https://payhip.com/b/16J8K>https://payhip.com/b/16J8K</a> Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и. Когда игроку надеется много фриспинов, администрация возможность бить3 их начисление на несколько дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах акции. 1×slots casino регистрация
<b>Смотреть еще похожие новости:</b>
<a href=https://vredeenvermaak.be/forum/vrede-en-vermaak/>зеркло казино 1×slots</a>
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=4227>1×slots зеркало этих способов предполагает регистрацию</a>
<a href=http://vn-info.net/user/Josephkam/>1х слотс зеркало регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Самый распространённый из похожих бонусов, конечно же, бездеп на денек рождения клиента — бонус вид фиксированной суммы либо фриспинов поступает на счёт игрока, а пользоваться им можно в течение установленного периода времени.
#6114 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерские конторы в россии букмекерская контора на андроид <a href=https://strelochnik.com/>casino бонус</a> casinos xyz unlim casino <a href=https://kompromat1.online/>казино пин</a> сайт казино вход porno Вера Бирюкова, гимнастка casino рабочее зеркало 1×bet зеркало xbet Черкесова Бэлла Мухарбиевна порно new casino ешь казино
#6115 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация в 1×slots casino
Такие одобрения дозволяют даром протестировать свежее казино, разобраться с игровым ходом интернет слотов, заработать и вывести маленькую необходимую денег. <a href=http://filmkachat.ru/>1×slots зеркало регистрация</a> Чтоб получить большой выигрыш, избирайте игровые автоматы с предельным процентом отдачи (RTP) из списка тех, коие доступны по условиям отыгрыша. <a href=https://band.us/band/96885593/post/1>https://band.us/band/96885593/post/1</a> Прямо данный арестуйте благотворительные вращения за регистрацию без депозита и начинайте собирать призовые комбинации ради крупных выигрышей! 1×slots регистрация 1×slotscasino09k online <a href=http://www.bisound.com/forum/showthread.php?t=55261>http://www.bisound.com/forum/showthread.php?t=55261</a> Промокод – определённая композиция знаков, коию нужно ввести в соответствующее фон при создании учетной записи или активировать в собственном профиле игрока в разделе с бонусами.Для такого, чтобы отыграть необходимую вашего бездепозитного приза надо(надобно) выполнить обстоятельства вейджера. Очень часто фриспины даются на определенные слоты (book of ra, book of lifeless, book of sun), выбирайте слот себя нраву, они очень красивые и качественные. Бездепозитные бонус имеет быть денежным так и вид фриспинов на слоты
1×slots казино зеркало
Для верификации номера телефонного, в собственном профиле выберите опцию „Подтвердить номер телефона“ и введите в подходящее поле код, полученный в sms-сообщении.Бездепозитный бонус – это финансовое вознаграждение, коие выдается участнику игры в казино, для его привлечения и появления заинтересованности. Любой гость, который подходит условиям выдачи похожего бездепозитного приза, имеет претендовать на получение вышеуказанного приза. Такое одобрение является более действенным способом, дающим возможность стартовать деле, не вкладывая собственных вещественных средств. 1×slots рабочее зеркало Обычно для получения бонусов без депо, казино выдвигает лояльные и вполне выполнимые обстоятельства, но есть ряд поступков коие воспрещены и шансы стать противные последствия: <a href=http://boss.why3s.cc/boss/home.php?mod=space&uid=140317>http://boss.why3s.cc/boss/home.php?mod=space&uid=140317</a> 1 х слотс зеркало
1хслотс официальный сайт зеркало
Бездепозитные призы — это презенты от казино повторяющий бонусных денег либо фриспинов для игровых автоматов, коие начисляются на акк игрока после процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депо не требуется. Одним из предлогов отдавать привилегию одному либо другому заведению заключается в привлекательности предлагаемых акций и безвозмездных услуг. Безвозмездные фриспины, выдаваемые без нужды делать какой-нибудь лепта, в списке находится далековато не в конце.Бездеп с фриспинами может обхватывать всю коллекцию игр на сайте или разработки 1-го провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении акции. Выигрыш возможность быть выведен после того, как пользователь отыграет данную необходимую. Возможность расценить полный функционал слотов — главное совершенство данной разновидности. Игроку становятся доступны те опции, коие отсутствуют в демонстрационном режиме, а возможность выиграть реальные деньги добавляет ясных азартных ощущений. <a href=http://www.ajuede.com/2019/09/taylor-swift-white-supremacy-is.html>http://www.ajuede.com/2019/09/taylor-swift-white-supremacy-is.html</a> Выполнив все притязания оператора, клиент имеет оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит примерно менее суток. Если дополнительно потребуется пройти процедуру верификации, то срок возрастает до 1–2 рабочих дней. Для перевода применяются банковские приборы и электрические платежные системы. Второй способ подходит никакого, например как масса транзакций такой осуществляются мгновенно. В связи со специфичностью функционирования банков обработка платежей может взятьвдолг(взятьвзаймы) до нескольких трудящихся дней. 1×slots зеркало выигрыши обязательно пройдите регистрацию если Бoльшинcтвo азартных заведений выдвигают приблизительно одинаковые обстоятельства и требования, коие необходимо выполнить, чтобы получить бездепозитный приз за регистрацию. Все их возможно объединить в раз перечень:
1×slot зеркало рабочее этих способов предполагает регистрацию
Некоторые казино могут предлагать клиентам бездепы за подтверждение номера или почты или репост на страницу в соц сетях.Наши эксперты исследуют условия акции, после в ручном режиме проверку их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и параметры. Мы не рекламируем казино, а даем игрокам информацию о превосходнейших из их. <a href=https://dev.eff.one/forumdisplay.php?fid=10>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a> Ознакомьтесь с нашим списком наилучших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего списка и получите бездеп сразу. Хватайте превосходнейшие безвозмездные предложения ниже и выигрывайте великие средства, не рискуя! Внесение депозита – Будьте готовы пополнить счет в отыгрыша бонуса. Это обычное заявка верховодил для этого подобии промо-акций. Лучше заранее уточнить, какую сумму надо(надобно) несомненно вносить на счет. Как правило, идет о минимальном депозите, хотя вы должны быть убеждены, собственно он для по кармашку. 1х слот регистрация в 1×slots casino <a href=http://krast-studio.ru/user/PhilipGuals/>http://krast-studio.ru/user/PhilipGuals/</a> Несмотря на то, собственно этот вариант стимуляции со стороны азартных платформ очень популярен в сфере сходственных игр, далеко не всем поклонникам казино известно, что себе бездепозитные бонусы казино и как непосредственно их возможно эксплуатировать.
скачать 1×slots на андроид мобильная версия
Некоторые клубы автоматически начисляют приз на аккаунт игрока в исполнения условий получения, хотя случаются истории, когда приз нужно активировать игроку самому. Есть некоторое способов активации приза:Помимо остального, для вывода средств по бездепу нужно внести на счёт собственный первый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на мало возможную необходимую, последствии чего вывод средств будет доступен. Иногда в качестве бездепа, казино презентует наименьший приз (до 50 руб. ), из-за которого не стоит заморачиваться. <a href=http://maglik.ru/user/Richardviepe/>http://maglik.ru/user/Richardviepe/</a> 1×slots скачать на айфон Все любят получать подарки. Согласитесь, практически любой играющий человек будет беспредельно счастлив, в получит безвозмездный подарок для игры в интернет казино просто за регистрацию или же приз за внесенный депо, так именуемые приветственные призы для новых игроков. Соответственно такие онлайн клубы станут более модны и преимущественны у игроков при выборе казино для забавы. Топ казино непрерывно обновляется и добавляются свежие и занимательные игровые клубы с привлекательной бонусной политикой и всеми вероятными привилегиями, к которым относятся эти бонусы как фриспины за регистрацию, валютные бездепозитные призы, а великодушные бонусы за внесенный депозит.Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских руб. В условиях промоакции указано, собственно вейджер бездепозитного приза х20. Поэтому, чтобы отыграть бонус, игроку будет нужно устроить ставок на 35*20=700 рублей.
<b>Смотреть еще похожие новости:</b>
<a href=http://ledyardmachine.com/forum/User-Jameshoing>1хлот регистрация в 1×slots casino</a>
<a href=https://koreanstudies.com/forum/viewtopic.php?t=169347>1×slots подтвердит вашу регистрацию если говорить</a>
<a href=https://www.katzenforum.at/forum/threads/1×slots-oficialnyj-sajt-mobilnaja-versija-skachat.43488/>1×slots официальный сайт мобильная версия скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для получения бонуса надо(надобно) ознакомиться с программкой преданности казино и устроить ставки на сумму, необходимую для перехода на грядущий уровень.
#6116 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
играющие казино порно с Баталина Ольга Юрьевна <a href=https://repost.news/>casino игровой автомат</a> Матвиенко Валентина Ивановна порно porno Нина Пирогова, хоккеистка <a href=https://t.me/vchkogpu_ru>Мухтиярова Елена Вячеславовна порно</a> казино регистрации 1×bet скачать приложение 1×bet бесплатно Юдаева Ксения Валентиновна порно 1×bet слоты казино вход официальный сайт win win casino
#6117 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasino09k online
Раздача бонусов может быть приурочена к различным датам: календарные дни, деньки рождения игроков, юбилей открытия казино и т. Д. Подарок выдается в виде средств, фриспинов либо баллов для скопления и размена на услуги оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд требований.Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша бонусов. Заведения всегда устанавливают наивысшую ставку, допустимую по условиям вейждера. <a href=http://filmkachat.ru/>1×slots официальный регистрация</a> Самые популярные методы вывода денег ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электрическим платежным системам типа Neteller и Skrill, а пользуются криптовалютными кошельками. Вывод выигрышей возможность осуществляться быстро или развлекать от нескольких часов до нескольких суток. <a href=https://forums.ngames.com/forum/league-of-angels/community-ab/general-discussion-ab/62089-revolutionizing-e-commerce-the-power-of-3d-rendered-product-images>https://forums.ngames.com/forum/league-of-angels/community-ab/general-discussion-ab/62089-revolutionizing-e-commerce-the-power-of-3d-rendered-product-images</a> Выполнив все притязания оператора, заказчик возможность оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит в среднем менее суток. Если дополнительно потребуется пройти процедуру верификации, то срок увеличивается до 1–2 рабочих дней. Для перевода применяются банковские приборы и электронные платежные системы. Второй метод подходит другого, например как большинство транзакций такой исполняются мгновенно. В связи со спецификой функционирования банков обработка платежей может взятьвдолг(взятьвзаймы) до нескольких рабочих дней. 1хслот зеркало <a href=https://aiia.su/index.php?subaction=userinfo&user=KeithSorse>https://aiia.su/index.php?subaction=userinfo&user=KeithSorse</a> Верификация важна для добавочной безопасности и подсобляет техподдержке выявить бонусхантеров и плутов. Кстати, рядах платформах выводы крупных сумм доступны лишь последствии подтверждения личности.
1х слот регистрация в 1×slots casino
Обычно для получения призов без депо, казино выдвигает лояльные и вполне выполнимые условия, но есть ряд действий которые запрещены и все причиной неприятные последствия:Казино выводит средства только на ту платежную систему, с котрой был сделан депозит. То есть, для вывода бездепозитного бонуса, Вам сначала нужно восполнить счет. В некоторых клубах узкий перечень методов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет именно с этих платежных методов, коие доступны для вывода. 1×slots подтвердит вашу регистрацию если говорить Но есть игорные заведения, которые готовы просто например жертвовать средства на забаву. Для этого достаточно создать профиль. Чтобы вывести свой выигрыш, для сначала необходимо выполнить условия отыгрыша, обозначенные в критериях получения бездепозитного депозита. <a href=http://moregasmsplease.com/component/kunena/user/561203-terryhag>http://moregasmsplease.com/component/kunena/user/561203-terryhag</a> Так собственно главное отличие дара на депозит от бездепа – неотъемлемое пополнение счёта. Вы сможете внести депо и преумножить стартовый капитал или арестовать бездеп и при этом не придётся рисковать собственными сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начисляет щедрое одобрение!На бонусные начисления имеют быть установлены вспомогательные ограничения, коие Вы не приняли при отыгрыше. Пока бонус полностью не отыгран — средства из казино не выводятся. 1хслот зеркало Для казино, работающих онлайн, бездепозитные бонусы необходимы для вербования свежих посетителей. Предложение сыграть на слотах без надобности внесения реальных средств — работающий метод для увеличения интереса к компании. После отыгрыша бездепа великоват шанс, собственно игроку понравится и он продолжит играть в казино, лишь теперь теснее на собственные средства.
1×slots официальный сайт зеркало
2. Создать свежий профиль. Для регистрации нужно заполнить небольшую анкету или зайдите в индивидуальный офис посредством социальных сетей;Реже бонусы без депо начисляются постоянным игрокам. С их поддержкой администрация старается вычесть ценных посетителей либо вожделеет поблагодарить за преданность правильных гостей. Но намного почаще для сходственных целей применяются эти промоакции: <a href=https://ic-info.ru/forum/user/168072/>https://ic-info.ru/forum/user/168072/</a> 1×slots промокод при регистрации 2025 Эффективность бездепов в рекламного прибора оценили все операторы. Малоизвестные площадки используют такие промоакции, дабы скоро набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны неизменных посетителей. Не все веб-сайты, дающие подарки без депозита, рекомендованы к забаве. За симпатичным промоописанием имеют прятаться неосуществимые условия отыгрыша прочие подводные камни.
1×slots актуальное зеркало
2. Создать новый профиль. Для регистрации нужно наполнить небольшую анкету либо зайдите в индивидуальный кабинет при помощи социальных сетей;Доступные забавы – В неких азартных играх можно снизить математическое преимущество казино до нескольких 10-х процента. В их количестве многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как управляло, в этих играх ставки идут в зачет вейджера не полностью. Например, возможность учитываться лишь 50%. В неких забавах бездепозитные призы вообщем нельзя отыгрывать. Не стоит путать игру в демо и внедрение бонусов. В демонстрационном режиме игрок возможность расценить механику слота, сюжет и оформление. Но игра проводится на условные кредиты, потому отсутствует главное ? чувство азарта. Активируя промокод либо фриспины, заказчик как не расходует свои деньги на игровые автоматы, хотя имеет сорвать реальный куш!Превышение максимальной ставки при отыгрыше. Система механически не предупреждает о превышении ставки, потому о нарушении правил игрок имеет узнать уже после подачи запроса на вывод средств. 1×slots регистрация то дальше необходимо пройти <a href=https://www.modernvespa.it/profile/3590-williamrit/>https://www.modernvespa.it/profile/3590-williamrit/</a>
1×slots казино мобильная версия
Для вывода средств приз надо(надобно) несомненно отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариантами отыгрыша бездепозитного бонуса до его получения, дабы избежать конфликтных ситуаций. Каждый новичок и профессиональный игрок мечтают быстро стартануть и начать создавать настоящие ставки. Для этого достаточно забрать презент, за кот-ый не нужно выплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email либо телефонный. После сего администрация начисляет щедрое вознаграждение повторяющий даровых вращений или виртуальных кредитов.Подтверждение персональной инфы. Все казино просят от посетителя пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и присутствие у юзера иных аккаунтов (мультиаккаунт запрещен). <a href=http://alex-zarya.ru/user/DeweyRAX/>http://alex-zarya.ru/user/DeweyRAX/</a> Даже не выиграв крупную необходимую, игрок интересно проведет время, изнутри исследует работу площадки, оценит геймплей автоматов. Все это без каких-то финансовых рисков. Быть в курсе превосходнейших промоакций легко. Достаточно периодически учить список новых онлайн казино с выводом приза без депозита в данном разделе. 1хслотс мобильная версия зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://xn–80akbkalsbeeafq6a6b2f.xn–p1ai/forum/messages/forum1/topic39256/message207939/?result=new>1×slots официальный зеркало</a>
<a href=https://test.soclanovtsy.ru/topic/26973-chicago-house-samples-loops-sounds/page/372/#comment-77758>1×slots официальный сайт мобильная версия</a>
<a href=https://sadhaka.nl/forum/viewtopic.php?t=102484>1×slot зеркало рабочее регистрации на телефон придет</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в обязательном порядке необходимо пополнить счет в казино. Для депозитных бонусов, эта процедура не необходима, так как депозит теснее изготовлен.
#6118 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
зеркала официальных сайтов казино порно с Варвара Субботина <a href=https://t.me/vchkogpu_ru>porno Александр Соболев (футбол)</a> порно с Алексей Миранчук (футбол) porno Анна Сидорова, керлингистка <a href=https://www.ossetia.tv/>new casino</a> порно с Елена Никитина, скелетонистка пин ап casino скачать сайт букмекерской конторы казино пин porno Александра Степанова, фигуристка букмекерская контора вход Юдаева Ксения Валентиновна порно
#6119 Charlesgunnyhttp://filmkachat.ru
1×slots официальный demo регистрация в 1×slots casino
Условия вывода выигрыша. В некоторых заведениях для успешного вывода с бездепозитного приза довольно пополнения баланса и доказательства личности. В иных же клубах, нужно несколько раз прокрутить собственный депо.Фриспины — бесплатные вращения, коие дозволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся самым известным и преимущественным обликом бонуса — безвозмездные вращения иногда эффективнее и веселее в отыгрыше, чем другие облики бездепов. <a href=http://filmkachat.ru/>1×slots промокод при регистрации</a> Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. <a href=https://www.4sync.com/s/fpXRu8Czr>https://www.4sync.com/s/fpXRu8Czr</a> 1хслотс казино зеркало <a href=https://dc-kd.ru/user/HenryUnify/>https://dc-kd.ru/user/HenryUnify/</a>
1хслотс официальный сайт зеркало
<a href=http://forums.indexrise.com/thread-2362-post-374083.html#pid374083>1×slot регистрация</a> 1×slos регистрация в 1×slots casino Нет. Для получения бездепозитного бонуса в казино необходима неотъемлемая регистрация на веб-сайте. Играть в слоты безвозмездно и без регистрации возможно лишь в демо режиме.Срок активации и время на отыгрыш. Зачисление средств или фриспинов происходит при активации на строго ограниченного периода, подобные требования предъявляются и к срокам отыгрыша. Одни казино позволяют отыгрывать приз количество дней или том месяцов. Другие выдают крупную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с неоправданно высоким вейджером. <a href=http://cosmostech.eu/technologyadvances/index.php?option=com_k2&view=itemlist&task=user&id=637193>http://cosmostech.eu/technologyadvances/index.php?option=com_k2&view=itemlist&task=user&id=637193</a> 1×slots быструю регистрацию а также мгновенное
1×slots официальный зеркало
Для верификации аккаунта надо(надобно) дать профессионалам технической помощи отсканированную копию паспорта и счета за коммунальные предложения, еще фотку банковской карты или экрана странички электрического кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для подтверждения личности.Бездепозитные призы, как уже ясно, являются оригинальной вероятностью к игровому процессу абсолютно бесплатно, то есть играть в интернет казино даром и на быть свои сразу в регистрации аккаунта. Автоматы с таким депозитом все замерзнуть великолепной возможностью поиграть для поклонников азарта с определенными ограничениями в финансах. Условия, на которых предоставляется бездеп, регулируются казино. Каждая акция имеет подробные правила, гиперссылка на коие обычно содержится в промообъявлении. В них указываются лимиты, вейджер, перечень доступных игр. Если оператор прячет данные о предложении, то пользоваться им не. <a href=http://nedv-revda.ru/index.php?subaction=userinfo&user=sulkyboss46>http://nedv-revda.ru/index.php?subaction=userinfo&user=sulkyboss46</a> 1×slots официальный demo регистрация в 1×slots casino Воспользоваться бездепом возможно не во всех игровых автоматах: казино и тут устанавливает лимитирование для клиентов. Конечно, это можно счесть неким неудобством для игрока, но ради отметить, что выбор автоматов всё точно остаётся довольно наибольшим.Внесение депо – Будьте готовы восполнить счет в отыгрыша приза. Это обычное заявка верховодил для этого подобии промо-акций. Лучше заранее уточнить, какую необходимую надо(надобно) несомненно заносить на счет. Как управляло, речь идет о наименьшем депозите, хотя вы обязаны быть уверены, собственно он вас по карману.
1хслотс 1хслотс регистрация перейти на 1×slots
После получения бонуса вывод средств для клиента несомненно недоступен до тех пор, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо пара месяцов. Выводить деньги игрок сможет лишь последствии отыгрыша. Чаще всего казино бонус за регистрацию без депо даёт вероятность запустить любой машина. Но какого-либо внимательно ознакомиться с критериями. Иногда для забавы доступны только определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, другого, как начать знакомство с миром азарта именно с «одноруких бандитов». 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=http://zeren.freeoda.com/member.php?action=profile&uid=4315>http://zeren.freeoda.com/member.php?action=profile&uid=4315</a> Максимальный размер ставки, кот-ый невозможно превосходить пока приз не несомненно полностью отыгран. В случае нарушения сего правила, бонус и выигрыш с него станут аннулированы.
1× слот зеркало
Для верификации номера аппарата, в собственном профиле изберите опцию „Подтвердить номер аппарата“ и введите в соответствующее поле код, приобретенный в sms-сообщении. Возможность протестировать свежие игры, не рискуя собственными средствами и создать личную стратегию забавы.При пользовании бездепозитным бонусом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют количество видов лимитов: <a href=http://xn–80aakbafh6ca3c.xn–p1ai/index.php?subaction=userinfo&user=glamorousklutz9>http://xn–80aakbafh6ca3c.xn–p1ai/index.php?subaction=userinfo&user=glamorousklutz9</a> 1×slot регистрация Фриспины – безвозмездные вращения с фиксированной ставкой, которые возможно применять в определенных игровых автоматах.
<b>Смотреть еще похожие новости:</b>
<a href=https://bbs.sinbadgroup.org/index.php?xjkh-tampa-s-poster-pup-for-new-cancer-treatment.t48661.html/page-3343#post-191509>1×slot казино зеркало</a>
<a href=https://thetechmodders.com/forums/viewtopic.php?t=62223>1×slots зеркало на сегодня</a>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=358979>1×slot официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подтвердите регистрацию, чтобы активировать Бездепозитный приз с выводом, требуется наполнить личный профиль. Заполните пустые поля реальными данными о себя. Получить приветственный приз шансы только новые посетители онлайн-казино. Способы описаны в условиях акции каждого законного казино, почаще всего это:
#6120 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино сегодня casino на телефон <a href=https://t.me/vchkogpu_ru>леон букмекерская контора</a> online casino 7k пин ап букмекерская контора <a href=https://7club7.com/>порно с Анастасия Потапова, теннисистка</a> лучшие букмекерские конторы 1×bet скачать приложение на андроид лучшие бесплатные онлайн казино рабочие зеркала казино casino регистрации порно с Петр Ян (ММА) casino онлайн
#6121 Charlesgunnyhttp://filmkachat.ru
1×slots быструю регистрацию а также мгновенное
Для отыгрыша бонуса казино обязывает игрока поиграть на сумму, в количество один превышающую необходимую полученного бонуса — тут выгода фирмы явна. <a href=http://filmkachat.ru/>1×slots сайт зеркало</a> <a href=https://telegra.ph/Your-Ultimate-Guide-to-Licensed-Weed-Delivery-Brampton-Services-11–24>https://telegra.ph/Your-Ultimate-Guide-to-Licensed-Weed-Delivery-Brampton-Services-11–24</a> 1×slots скачать на айфон <a href=http://x70181pe.beget.tech/index.php?subaction=userinfo&user=egosuz>http://x70181pe.beget.tech/index.php?subaction=userinfo&user=egosuz</a> Существуют казино с призом за регистрацию, в очень востребованы фриспины в онлайн казино впоследствии регистрации в конкретных забавах. Они встречаются том почаще бесплатных поощрений или классических бонусов в казино без вложений. Например, игрок регистрирует счет, на который начисляются бесплатные забавы, приз за регистрацию повторяющий бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса геймер выигрывает настоящие средства, которые в последствии можно успешно вывести из заведения на собственную платежную систему. То есть, есть шансы исключить средства без рисков собственными финансами. Регистрация, за которую игры получит бонусы, займет минут, а спасибо данному можно увеличить 5 евро поощрений до тыс. И без всяких заморочек вывести их.
1×slots актуальное зеркало
Многие новенькие колеблются, что поощрительный приз не нужно будет отдавать, в если они выиграли у казино. Это полностью безопасно и накрепко. Выводя выигранные свои, игрок просто останавливает свое участие в игре и утрачивает уникальную вероятность – даром увеличивать собственное вещественное положение. <a href=http://g2clubs.com/healthy-workout/google/>1×slots регистрация 1×slots casino 777 online</a> 1×slots актуальное зеркало Каждый игрок должен сперва отчетливо изучить условия по получению и отыгрышу понравившегося дара. Если всё устраивает, поторопитесь отобрать безвозмездные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик в начать вертеть барабаны топовых слотов.В истинное время получить приз за регистрацию в казино очень просто. Почти любой игорный дом с радостью предоставит деньги либо безвозмездные вращения. Многие игроки используют данным и не стесняются регистрироваться в любом клубе с прибыльными условиями. Кстати, это замечательная возможность придумать выигрышную стратегию и сорвать куш. <a href=https://www.realrocks.ru/id247179/>https://www.realrocks.ru/id247179/</a> Все обожают получать подарки. Согласитесь, практически любой играющий человек будет безгранично рад, в получит даровой презент для забавы в онлайн казино просто за регистрацию либо же бонус за внесенный депозит, например нарекаемые приветственные бонусы для свежих игроков. Соответственно эти онлайн клубы станут больше популярны и предпочтительны у игроков при выборе казино для игры. Топ казино каждый обновляется и прибавляются новые и увлекательные игровые клубы с привлекательной бонусной политикой и всеми вероятными прерогативами, к коим относятся эти бонусы как фриспины за регистрацию, валютные бездепозитные призы, а также щедрые бонусы за внесенный депозит. 1×slots рабочее зеркало на сегодня Если простыми словами, бездепы – это определённая сумма денег или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно брать подарки. Но есть кое-какие аспекты. Существуют игорные жилища, коие перед тем как начислить бонусы просят привязать телефонный, дать копии документов.Наиболее модные гонорары между гэмблеров – бездепозитные призы казино. Это не удивительно, ведь можно получить бесплатные вращения либо виртуальные кредиты, и при не придётся пополнять счёт, рисковать собственными средствами. Удастся насладиться различными весельями и даже выиграть крупную сумму, избегая серьёзного риска.
1×slots скачать на айфон
Условия вывода выигрыша. В некоторых заведениях для успешного вывода с бездепозитного приза довольно пополнения баланса и доказательства личности. В иных же клубах, необходимо несколько один прокрутить свой депозит.Получать информацию о самых прибыльных бонусах можно без неизменного мониторинга новостей казино. Мы брали эту задачу на себя и безпрерывно смотрим за услугами операторов, избирая лучшие из них. В этом разделе собраны заключительные бездепы, промокоды к ним и обстоятельства их активации. Список акций периодически дополняется. В топ вошли самые свежие бездепозитные бонусы за регистрацию в казино 2020, кратковременные и замкнутые промо. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и другим аспектам. Если срок деянья акции истек, она удаляется из перечня. <a href=https://andresdoyh18530.dsiblogger.com/63159078/deep-nude-the-ethical-dilemmas-and-technological-impacts-of-ai-driven-image-manipulation>https://andresdoyh18530.dsiblogger.com/63159078/deep-nude-the-ethical-dilemmas-and-technological-impacts-of-ai-driven-image-manipulation</a> 1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, случае не желаете замерзнуть жертвой мошенников или впустую потратить время; 1×slots официальный сайт, скачать Условия, на коих предоставляется бездеп, регулируются казино. Каждая промоакция содержит подробные управляла, ссылка на коие обычно находится в промообъявлении. В их указываются лимиты, вейджер, перечень дешевых игр. Если оператор прячет данные о предложении, то воспользоваться им не стоит.Итак, чтобы благотворительные бонусные кредиты превратились в реальные деньги, которыми вы можете управлять по собственному усмотрению, их нужно отыграть. Вейджер по уточнять в правилах онлайн-казино.
1 хслот регистрация в 1×slots casino
2. Создать новый профиль. Для регистрации надо(надобно) наполнить маленькую анкету или зайдите в индивидуальный офис при помощи соц сеток; Бездепозитные призы отличный вариант бесплатной забавы в игровые автоматы. Многие юзеры сети не знают, что в казино можно начать играть полностью бесплатно, а позже исключить выигрыш на банковскую карту либо электрический кошелек, другие не доверяют интернет казино, а третьи успешно играют и выигрывают – и подчас довольно большие суммы. 1×slots регистрация 1×slotscasino 56 online <a href=http://naszaswietlica.dwr.pl/profile.php?lookup=16838>http://naszaswietlica.dwr.pl/profile.php?lookup=16838</a>
1×slots официальный сайт скачать на айфон
Бездепозитные бонусы за регистрацию в игровых автоматах для собственников онлайн-казино считаются частью рекламной кампании, направленной на увеличение аудитории вебсайта. Так они продвигают свои бренды и привлекают свежих клиентов.На бонусные начисления шансы быть установлены вспомогательные лимитирования, коие Вы не учли при отыгрыше. Пока приз всецело не отыгран — средства из казино не выводятся. <a href=https://istinastroitelstva.xyz/user/Richardquary/>https://istinastroitelstva.xyz/user/Richardquary/</a> Существуют казино с призом за регистрацию, в довольно популярны фриспины в интернет казино впоследствии регистрации в определенных забавах. Они встречаются числе почаще безвозмездных поощрений либо традиционных бонусов в казино без инвестициям. Например, игрок регистрирует счет, на кот-ый начисляются бесплатные игры, бонус за регистрацию в виде даровых фрспинов, вращения в игровом автомате. Во время игрового процесса геймер выигрывает истинные средства, коие в последствии возможно удачно исключить из заведения на свою платежную систему. То есть, есть шансы исключить свои без рисков собственными деньгами. Регистрация, какую геймер получит призы, займет несколько, а благодаря данному можно прирастить пять евро поощрений до тысячи и без всяких заморочек исключить их.Поспешите отобрать бездепозитные бонусы за регистрацию в казино из представленного перечня. Все платформы не только ведут легальную деятельность, но и порадуют правдивыми результатами забавы, высокой отдачей, прыткими выплатами. казино 1×slots официальный сайт Для проверки используются сканы паспортов, водительских водительских, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если пользователь замечен в попытке ввести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный перечень. При этой на лицензионной площадке не стоит бояться свидетельствовать достоверную индивидуальную информацию (шифрование исключает утечку персональных данных).Бонусные средства – маленькая сумма денег для старта в новом казино. На бонусные средства, обыкновенно разрешается играть во все забавы, кроме слотов с современным джекпотом и игр из раздела live casino.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.airsoft44.com/forum/index.php?action=profile;u=11896>1×slots официальный сайт зеркало рабочее</a>
<a href=https://koreanstudies.com/forum/viewtopic.php?t=151012>1×slots рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Частенько новенькие не разумеют, как активировать подарки или вывести первый выигрыш. Для подобных случаев наша команда описала главные определения – что это фриспины, вейджер, как его отыграть, для нужно протекать верификацию. Выше мы предоставили глубокий набор самых свежих и своевременных бездепозитных бонусов в онлайн казино без пополнения на 2022 год, где продоставляется пользоваться каким ценным бездепозитным призом.
#6122 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора бетсити Львова-Белова Мария Алексеевна порно <a href=https://www.ossetia.tv/>порно с Елена Никитина, скелетонистка</a> букмекерская контора фонбет официальный casino приложения <a href=https://sovsekretno.net/>casino зеркало сегодня</a> сайт казино вход casino x black russia казино официальные букмекерские конторы скачать скачать 1×bet на андроид casino riobet 7k casino бонус
#6123 Charlesgunnyhttp://filmkachat.ru
1×slots казино зеркало
Прямо в арестуйте безвозмездные вращения за регистрацию без депозита и начинайте коллекционировать призовые комбинации ради солидных выигрышей! <a href=http://filmkachat.ru/>1×slots регистрация 1×slots casino c2d ru</a> Будьте внимательнее при ознакомлении с правилами во избежание происхожденья конфликтных обстановок с казино, когда в отыгрыша бездепа вам не дадут исключить крупную необходимую выигрыша.К примеру, игроку выдаются бесплатные средства в заведении в объеме пятидесяти либо 100 долларов (вейджер на которые сочиняет 100х). То есть, любому новоприбывшему игроку выскакивает привлекающая иллюстрация, кот-ая сулит выплату всех зачисленных фирмой средств. Не стоит заострять на казино приз за регистрацию без депо с чрезмерно великой либо очень малеханькой суммой призов, поэтому что, числе тщательно исследовав все условия, тут всего, несомненно какой-то подкол. <a href=https://telegra.ph/Ultimate-Guide-to-Professional-Weed-Delivery-North-York-Your-Local-Cannabis-Companion-11–24>https://telegra.ph/Ultimate-Guide-to-Professional-Weed-Delivery-North-York-Your-Local-Cannabis-Companion-11–24</a> онлайн казино 1×slots <a href=http://www.edid.co.kr/bbs/board.php?bo_table=free&wr_id=565050>http://www.edid.co.kr/bbs/board.php?bo_table=free&wr_id=565050</a> Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша бонусов. Заведения практически устанавливают наивысшую ставку, возможную по условиям вейждера.Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в личный офис, дабы забрать благотворительные вращения с вейджером х40;
1×slots бездепозитный бонус за регистрацию
В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с безвозмездных вращений. Прибыль, которую Вы заработаете на таком бездепе можно назначать на вывод без какого либо отыгрыша. <a href=https://nauc.info/forums/viewtopic.php?t=20378566>1×slots casino online регистрация</a> 1×slots рабочее зеркало Для получения бездепа нужно пригласить в забаву по реферальной ссылке свежего посетителя: он обязан зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на необходимую, обозначенную в критериях акции.Для получения выигрыша потребуется выполнить условия казино. Чаще всего игроку нужно поставить конкретную сумму, хотя уже из собственных средств. Она рассчитывается из общего объема выигрыша за всегда использования бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, в юзер выиграл 1000 рублей, а множитель сочиняет х30, вывести средства можно будет, сделав ставки на 30 000 руб. <a href=http://bbs.xinhaolian.com/home.php?mod=space&uid=4019765>http://bbs.xinhaolian.com/home.php?mod=space&uid=4019765</a> Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных притязаний, кроме обязательной верификации. Если на сайте учтена неотъемлемая процедура подтверждения личности, то вывести выигрыш удастся лишь последствии проверки данных. Приготовьтесь наполнить анкету и отправить в техподдержку документ, подтверждающий личность. x1 slots 1хслотс регистрация перейти на 1×slots
1хслотс казино зеркало
Каждая игровая перрон выделяется условиями по получению и отыгрышу бездепов. В правилах детально расписаны временные рамки, за которые надо(надобно) прокрутить вейджер. Также не запамятовывайте на наибольший размер ставки и максимальную сумму выплаты. С иной стороны, дабы получить бездепозитные призы казино, довольно потратить менее 1 минуты.Игры, в которых можно выступать на бонусные средства. Проверьте перечень игр, в возможно играть на бонусные средства, вероятно они Вам не понравятся и не стоит расходовать своё время на эту промоакцию. Казино выделяет вероятность заработать и вывести настоящие деньги на бездепозитных бонусах. Обычно, это малозначительная сумма, коию казино возможность для позволить презентовать игроку. <a href=http://l6046402.bget.ru/member.php?action=profile&uid=40266>http://l6046402.bget.ru/member.php?action=profile&uid=40266</a> 1хслотс казино зеркало
1×slots скачать на айфон
Но а в вы теснее профи по онлайн казино, кликаем на красноватую кнопку «Получить» и Вы автоматически перейдете в интернет казино;Вывод выигрыша с бездепозитных призов казино – щедрый подарок от азартных клубов. Но дабы исключить свой доход, нужно выполнить ряд критерий: <a href=https://test.soclanovtsy.ru/topic/54265–1×slots-%D0%B1%D0%BE%D0%BD%D1%83%D1%81-%D0%B7%D0%B0-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8E/>1×slots бонус за регистрацию</a> Для получения депозитного приза необходимо восполнить свой игровой баланс настоящими средствами. Вознаграждение возможно получить или при внесении первого депозита, либо вид фиксированного процента от внесённых средств. Так или по, приз поступит на счёт только в пополнения. У каждого игорного заведения средства правила и условия. Но, дабы получить призы, нужно выполнить стереотипные деяния: 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=https://sciencewiki.science/wiki/Shisha_Tobacco_From4_Eur>https://sciencewiki.science/wiki/Shisha_Tobacco_From4_Eur</a>
казино 1×slots
Но ни не запамятовывайте внимательно читать управляла участия в бонусных промоакциях. Если вы нарушите хотя бы одно условие, позже вы не сможете устроить недоразумение с администрацией.Прибывшие на акк финансы бездепозитные призы предназначаются, в основном, только для свежеиспеченных пользователей, коие ранее не имели собственного аккаунта в данном казино. Исходя из этого, в раньше у игрока был изготовлен депозит, то, по всей вероятности, у него больше не несомненно возможности рассчитывать на получение такового приза в конкретном заведении. <a href=https://riverqyho41752.wizzardsblog.com/30290337/ai-nude-revolutionizing-content-moderation-and-privacy-protection>https://riverqyho41752.wizzardsblog.com/30290337/ai-nude-revolutionizing-content-moderation-and-privacy-protection</a> казино 1×slots К примеру, игроку выдаются бесплатные свои в заведении в объеме пятидесяти либо 100 $ (вейджер на которые сочиняет 100х). То есть, любому новоприбывшему игроку выскакивает притягивающая картинка, которая сулит выплату всех зачисленных компанией средств. Не стоит внимания на казино бонус за регистрацию без депо с чрезмерно великой либо довольно малеханькой суммой бонусов, потому что, том кропотливо выучив все условия, здесь скорее, несомненно некий подкол.Рассмотрим принцип его деяния на примере. Допустим, вы зарегистрировались и получили $10 not the slightest deposit bonus с вейджером х50. Это значит, что выигранные деньги можно будет выводить не раньше, чем последствии такого, как общая сумма ставок достигнет $500.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.exalto-emirates.com/memberlist.php?mode=viewprofile&u=69997&sid=e9604da83b11693c70d6a1a67a5262fb>1×slots регистрация то дальше необходимо пройти</a>
<a href=https://elclasificadomx.com/author/jameslog/>1×slots официальный сайт мобильная версия скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Допустим, за регистрацию вы возымели бездеп в объеме 2 000 рублей с вейджером х30. В данном случае предстоит сделать ставок, на общую сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда сделайте условия по отыгрышу, придёт время заработать настоящие деньги. Однако не запамятовывайте, собственно с любого подарка выйдет вывести определённую сумму (почаще всего менее $200). Вознаграждения за получение VIP-статуса ? начисляются в программы преданности при достижении очередного уровня либо выдаются персонально менеджерами службы.
#6124 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать на айфон
Фриспины без депозита или дополнительные свои посодействуют ближе познакомиться с игровой платформой и её функциями. За счёт подарков можно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за игры напротив живых крупье. <a href=http://filmkachat.ru/>1×slots зеркало проходить регистрацию это отличный вариант</a> Для получения бездепа нужно пригласить в игру по реферальной ссылке свежего посетителя: он обязан зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на сумму, указанную в критериях акции.Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают приз по странам. Вплоть до как, собственно клуб может на игроков из Вашей страны, а бездеп не давать. <a href=https://jumpshare.com/v/6DEzisT7cRjyebCJQLAM>https://jumpshare.com/v/6DEzisT7cRjyebCJQLAM</a> Промокод – определённая комбинация символов, коию нужно ввести в отвечающее фон при твореньи учетной записи либо активировать в собственном профиле игрока в разделе с бонусами.Далее потребуется отыграть вагер и исключить выигрыш. Игрокам без навыка крупно подфартило, есть получить десятки даров за одну регистрацию. Если не смогли получить Бездепозитный бонус, не волнуйтесь. Обратитесь в интернет чат, оператор поможет ситуацию. скачать 1×slots на андроид мобильная версия <a href=https://caidenlucl29630.alltdesign.com/deep-nude-the-ethical-dilemmas-and-technological-impacts-of-ai-driven-image-manipulation-50007784>https://caidenlucl29630.alltdesign.com/deep-nude-the-ethical-dilemmas-and-technological-impacts-of-ai-driven-image-manipulation-50007784</a> Максимальный объем ставки, кот-ый невозможно превышать же приз не будет полностью отыгран. В случае нарушения сего управляла, приз и выигрыш с него будут аннулированы.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
<a href=https://www.makinamania.net/index.php?topic=252110.new#new>1×slots casino регистрация 1×slotscasin online</a> 1×slots регистрацию более популярный вариант это <a href=http://1k9g.com/space-uid-197598.html>http://1k9g.com/space-uid-197598.html</a> Список так называемых «не землель» прилагается к правилам бонусной программы игорного портала. Обязательно проверьте, распространяются ли на вас сходственные наказания.Постарайтесь отыграть вейджер, чтобы была вероятность оставить заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные приборы. Вы можете получить выигрыш на электрической кошелёк, карту, телефонный. 1×slots casino регистрация Автоматическая активация показаться самой удобной, но ручной метод имеет перед ней преимущества. Прежде чем использовать вознаграждение от казино, стоит заблаговременно определить, сколько медли требуется на исполнение всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деянья приза.
1×slots casino зеркало рабочее
Индивидуальные одобрения выдаются за совершение действий: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавленья или официального посетителя для ПК. В большинстве казино действуют программы преданности, присваивающие игрокам статусы за активность на сайте. Продвижение на грядущий степень нередко сопрягается выдачей бездепа.Так что приготовьтесь предоставить конфиденциальную информацию (пол, возраст, страна проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает не более суток, последствии чего удастся свободно выводить крупные выигрыши. <a href=http://www.xuandouwan.com/home.php?mod=space&uid=44648&do=profile>http://www.xuandouwan.com/home.php?mod=space&uid=44648&do=profile</a> Начнём с такого, собственно каждое рекламную за регистрацию предполагает некие обстоятельства. Бездепозитные бонусы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, нужная для исполненья условий. Пример, возымели бесплатные вращения и выиграли с их 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 руб., проигрышных либо выигрышных, маловажно. После исполненья, бонусный баланс перейдёт на настоящий и станет доступным к выводу.Подобные бонусы без депозита предоставляются на больше прибыльных критериях. Зачастую они крупнее, а условия отыгрыша наименее строгие. 1× slots официальный Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депо возможность выделяться до 30 дней.Денежные средства. Третий приз за регистрацию без депозита – наличные. К раскаянью, лишь знаменитые и модные клубы могут уяснить деньги в рублях или баксах. С их поддержкой вы сможете насладиться любой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед этим необходимо исполнение определенных критерий.
1×slots мобильная версия войти казино
Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Иногда операторы требуют внесение малого депо перед выводом для верификации платежного прибора. В неких казино этот депо того светит отыграть. Получив свой презент, Вы можете даром играть на настоящие средства, а выполнив обстоятельства отыгрыша, вывести свой выигрыш. 1×slots официальный сайт зеркало <a href=https://www.94zq.com/space-uid-722473.html>https://www.94zq.com/space-uid-722473.html</a> Можно ли в одном онлайн казино получить больше 1-го бонуса за регистрацию? Нет, так как в любом онлайн казино есть верховодила, к коим нужно держаться, не творить 2 аккаута для получения бонусов, иначе несомненно блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, бонус за регистрацию выдаеться один раз 1 лицу.Самые известные методы вывода денег ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электрическим платежным системам типа Neteller и Skrill, а также пользуются криптовалютными кошельками. Вывод выигрышей возможность осуществляться быстро либо развлекать от нескольких часов до нескольких суток.
1× slots casino официальный сайт
Также, такой необходимо доказать свой номер аппарата, достичь код, приобретенный в смс-сообщении от клуба ввести в особое поле в личном офисе игрока. Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, или проигрываете предложенный бонус, по мимо практической игры на бездепозитные призы, у Вас есть шанс выучить игровые автоматы, выучится регулировать менять ставки и линии, исследовать бонусные забавы и их выигрышные композиции, ну в просто зарядится кучей впечатлений! Ведь вы будите выступать на бонусные средства, которые можно отыграть и вывести, не просто на демо счет, тем наиболее адреналин в крови еще больше повысится а пульс забьется с частым ритмом! <a href=https://cityyellowpages.net/author/arnoldhab/?custom_post=listing>https://cityyellowpages.net/author/arnoldhab/?custom_post=listing</a> Важно, удостоверьтесь что, нет, что раньше не регились в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи.Промообъявления от казино мешают реальной картины и направлены на вербование внимания юзеров. Понять, насколько высоки шансы остаться в плюсе, позволит собственный анализ условий предложения: 1×slots регистрация 1×slotscasino 56 online Но ни не забывайте пристально читать верховодила участия в бонусных промоакциях. Если вы нарушите но бы одно условие, позже вы не можете устроить недоразумение с администрацией.
<b>Смотреть еще похожие новости:</b>
<a href=https://your-portal.at.ua/forum/57–724–6#88423>скачать 1×slots официальный сайт</a>
<a href=https://www.formulersupport.com/Thread-1×slos-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%B2–1×slots-casino>1×slos регистрация в 1×slots casino</a>
<a href=http://forum.l2endless.com/showthread.php?tid=376018>1×slot зеркало</a>
<a href=https://acerfans.ru/faq/796-kak-vylozhit-na-forum-informaciju-iz-zhurnala.html>1×slot регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Как и другие акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такового предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых посетителей и дозволяет им составить впечатление о функционале, не рискуя вескими совокупностями.
#6125 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация то дальше необходимо пройти
Максимальная ставка ? устанавливается в еденице счета и ограничивает объем ставки за один спин. В случае ее превышения приз может быть аннулирован. Также в правилах имеет находиться запрет на размещение ставок конкретного вида, к, по равным шансам в рулетке (словами, на чет либо нечет, красное либо темное и т.д. ).Каждый новичок и умелый игрок грезят прытко стартануть и начать создавать настоящие ставки. Для сего достаточно отобрать презент, за который не нужно платить. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email либо телефонный. После этого администрация начислит щедрое вознаграждение вид даровых вращений или виртуальных кредитов. <a href=http://filmkachat.ru/>1×slots быструю регистрацию а также мгновенное</a> <a href=https://www.friend007.com/forums/thread/6498/>https://www.friend007.com/forums/thread/6498/</a> Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. рабочее зеркало 1хслотс <a href=https://sunyudang.com/bbs/board.php?bo_table=free&wr_id=188126>https://sunyudang.com/bbs/board.php?bo_table=free&wr_id=188126</a> Условия вывода выигрыша. В неких заведениях для удачного вывода с бездепозитного приза достаточно пополнения баланса и доказательства личности. В иных же клубах, нужно несколько раз прокрутить свой депо.
1×slots подтвердит вашу регистрацию если говорить
Подтверждение регистрации. Казино просят привязки профиля к электрическому адресу и номеру аппарата. Для сего на e-mail отчаливает письмо со ссылкой, а на телефон ? текстовое извещение с кодом.Не советуем опрометью голову браться за всевозможные предложения получения средств без инвестициям. Вполне возможно, собственно бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на первый взгляд. Альтернативой считается казино бонус за депозит. Мы предлагаем для пару советов, благодаря которым у каждого игрока будет вероятность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом средств: 1×slots бездепозитный бонус за регистрацию Фриспины начисляются по определенной ставке. После их активации игроку нужно запустить разъем и увериться, что в нем показываются безвозмездные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода в отыгрыша определяется оператором и изредка выше 5 000 рублей.Отыграв бездепозитный приз в казино с выводом также придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в подобное ограничение присутствует, то единоразово исключить выйдет лишь сумму, не превышающую размер приобретенного бонуса. <a href=https://www.faribowl.com/author/katiezambra/>https://www.faribowl.com/author/katiezambra/</a> Бонус за регистрацию в казино выдается только один раз на одного игрока. Но бывают вспомогательные акции, в которых бездепы раздаются для неизменных клиентов и такие подарки Вы сможете получить больше 1-го раза. рабочее зеркало 1хслотс
1×slots официальный зеркало рабочее
Выполнив все требования оператора, клиент возможность оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит примерно менее суток. Если дополнительно требуется пройти процедуру верификации, то срок увеличивается до 1–2 рабочих дней. Для перевода используются банковские инструменты и электронные платежные системы. Второй метод подходит превосходнее, например как большинство транзакций в этом случае исполняются мгновенно. В связи со специфичностью функционирования банков обработка платежей возможность взятьвдолг(взятьвзаймы) до нескольких трудящихся дней.В качестве призов интернет казино часто предлагает выдачу фриспинов, словами даровых вращений игрового барабана. Виртуальные монеты можно применять для изучения в покерной школе или для игры в казино. Прежде всего, не запамятовывайте регулярно заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом рассматривают более интересные предложения водящих игорных порталов.Популярность онлайн казино растёт и всё больше пользователей начинают интересоваться азартными играми. Бездепозитные призы 2022 года, это уникальные презенты за регистрацию. С их помощью новые игроки могут получить благотворительные вращения либо деньги на баланс за 1 регистрацию. С свет игорных заведений в онлайне, бездепозитные бонусы стали моднейшим способом привлечения игроков. Подобные акции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о которых мы поведаем. Наш вебсайт собрал лучшие предложения из онлайна на 2022 год. Воспользуйтесь любым подарком и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить обстоятельства. <a href=https://cse.google.ac/url?q=https://doctorlazuta.by/>https://cse.google.ac/url?q=https://doctorlazuta.by/</a> 1×slots зеркало рабочее Постарайтесь отыграть вейджер, дабы была возможность оставить заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электрической кошелёк, карту, телефонный.
1×slots регистрация
Основное отличие что, собственно для получения бездепа не пополнять баланс в казино. Но кроме сего, есть ряд и различий:Чаще всего казино приз за регистрацию без депо даёт возможность запустить каждой автомат. Но никакого внимательно ознакомиться с условиями. Иногда для забавы доступны только определённые модели. Если вы новичок и ничего не смыслите в гэмблинге, другого начать знакомство с миром азарта непосредственно с «одноруких бандитов». Простая процедура получения бездепозитного приза, которая займет не более 2-х мин. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные.При этой на бонусные средства запрещается играть в игровые автоматы с прогрессивным джекпотом и игры из радела live casino. Кроме того, некоторые казино выделяют бездеп на раз или некоторое конкретных слотов, и в иных забавах Вы не сможете на их выступать. 1×slots официальный зеркало <a href=https://tsonlinevn.4it.top/User-Walternexaw>https://tsonlinevn.4it.top/User-Walternexaw</a> Важно, удостоверьтесь что, нет, собственно ранее не регистрировались в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи.
сайт 1× slots casino
<a href=http://bbs.py27.com/home.php?mod=space&uid=394786>http://bbs.py27.com/home.php?mod=space&uid=394786</a> 1×slots регистрация на официальном сайте Срок активации и время на отыгрыш. Зачисление денег либо фриспинов происходит при активации на взыскательно ограниченного периода, похожие требования предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать приз некоторое дней либо числе месяцов. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с неоправданно высоким вейджером.
<b>Смотреть еще похожие новости:</b>
<a href=http://nacionrolera.org/foro/viewtopic.php?f=1210&t=143499>1 xslots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Представьте момент, когда при ставке в 10 руб. Вы получите схожее умножение. Миллион рублей за одно вращение, что абсолютно возможно. Поэтому вопрос, сколько можно выиграть остаётся открытым. Предлагаем проверить других. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный бонус и проверяйте фортуну в деле. Разумеется, исключить деньги сложно. Однако шансы есть у всех.
#6126 Charlesgunnyhttp://filmkachat.ru
1× slots сайт
Самый распространённый из похожих призов, конечно же, бездеп на день рождения клиента — приз вид фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им возможно в течение установленного периода медли.Для выбора азартного заведения Вы можете воспользоваться перечнем наших казино с призами за регистрацию. На нашем веб-сайте мы опубликовали перечень бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, что доля бонусов эксклюзивные и доступны лишь для посетителей нашего сайта по-специальному промо-коду или по уникальной ссылке. Кроме того, для каждого бонуса мы подготовили подробный обозрение, в котором Вы узнаете как получить и отыграть поощрение и как вывести собственный выигрыш с бездепа. <a href=http://filmkachat.ru/>зеркло казино 1×slots</a> Любой выигрыш по ставке повыше установленного лимита будет считаться недействительным. То есть ставка не несомненно засчитана при отыгрыше, а в случае выигрыша его сумма не поступит на счёт клиента — результат игры несомненно всецело аннулирован. <a href=https://soctrip.com/post/9bb5eec0-a590–11ef-bb3e-7bacedfd239f>https://soctrip.com/post/9bb5eec0-a590–11ef-bb3e-7bacedfd239f</a> 1×slots официальный зеркало <a href=http://brilliance.ru/forum/memberlist.php?mode=viewprofile&u=21924>http://brilliance.ru/forum/memberlist.php?mode=viewprofile&u=21924</a> Способы получения бездепа различаются зависимо вида бонуса, кот-ый приглянулся игроку. Но вам иначе нужно быть зарегистрированным в законном онлайн-казино и доказать собственную лицо. В общем облике пошаговая аннотация для получения бездепозитного бонуса выглядит так:Вы не в коем случае ни же рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, научится регулировать изменять ставки и полосы, исследовать бонусные забавы и их выигрышные комбинации, ну конечном просто зарядится кучей впечатлений! Ведь вы будите выступать на бонусные средства, коие можно отыграть и исключить, не просто на демо счет, что, этим наиболее адреналин в крови более повысится а пульс забьется с частым ритмом!
1×slots официальный регистрация
<a href=http://diablo2r.cn/home.php?mod=space&uid=30130>1×slots casino регистрация 1×slots review live</a> 1×slots регистрация 1×slotscasino09k online <a href=https://policjaforum.pl/user-2235.html>https://policjaforum.pl/user-2235.html</a> 1×slots регистрация Обычно для получения бонусов без депо, казино выдвигает приклнные и вполне выполнимые условия, но есть ряд деяний коие воспрещены и шансы повлечь за собой досадные последствия:Онлайн гемблинг развивается с каждым днем больше и больше, свежие бренды создаются не по дням а по часам. Новые интернет казино делают вступительные акции для игроков, чтобы, чтобы что бы зарекомендовать себя, и что, этим самым предлагают бездепозитные бонусы за регистрацию, собственно бы не пропустить эту возможность — как воспользоваться новым бездепом, советуем посещать наш вебсайт как можно почаще, самое вкусное и свежие будет добавляться в этом же списке.
1хслотс мобильная версия зеркало
Классическая разновидность бонуса за творенье аккаунта. Его превосходство заключается что, нет, что клиент имеет без выбирать аппараты и создавать ставки в них. Иногда перечень игровых автоматов ограничен оператором, хотя все также это другого, как, чем единственный дешевый разъем, как в случае с внедрением фриспинов. <a href=https://alphacs.ro/member.php?80002-Porsedropkn>https://alphacs.ro/member.php?80002-Porsedropkn</a> Начнём с такого, собственно любое промо за регистрацию предполагает некоторые обстоятельства. Бездепозитные призы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность денежного оборота, нужная для исполнения условий. Пример, возымели благотворительные вращения и выиграли с их 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 руб., неудачных либо выигрышных, важно. После исполненья, бонусный баланс перейдёт на настоящий и будет доступным к выводу.Лишь популярностью и знаменитые азартные заведения шансы позволить себе раздавать бездепы вид дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, которые можно израсходовать в лучших аппаратах с высочайшей отдачей. 1хлот регистрация в 1×slots casino Составленный специалистами Casino.ru список онлайн-казино с бездепозитным призом дозволяет игрокам сопоставить спецпредложения разных операторов.
1×slots официальный demo регистрация в 1×slots casino
Допустим, за регистрацию вы получили бездеп в размере 2 000 рублей с вейджером х30. В данном случае светит устроить ставок, на общую сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать реальные деньги. Однако не забывайте, собственно с каждого дара получится исключить определённую сумму (чаще всего менее $200).Если вы избираете проверенное лицензионное онлайн казино и сделайте все обстоятельства получения бездепозитного приза, проблем с получением подарка у Вас не возникнет. x1 slots регистрация в 1×slots casino <a href=https://goblin-film.net/user/CraigWoort/>https://goblin-film.net/user/CraigWoort/</a> Для всех бездепозитных призов функционирует максимальный предел на выигрыш. Он указывает предельную необходимую, коию у получить, играя на бонусные кредиты. Как лишь вас получится выполнить притязания вейджера, возможный максимум будет переведен с бонусного счета на главный, а остаток несомненно списан.На нашем веб-сайте Вы найдете перечень своевременных свежих бездепозитных призов в казино 2022 года. Также, есть большое эксклюзивных услуг, коие доступны лишь гостям нашего вебсайта после регистрации по нашей ссылке либо активации особого промокода.
1×slots регистрация то дальше необходимо пройти
Прямо в арестуйте безвозмездные вращения за регистрацию без депозита и начинайте коллекционировать призовые комбинации из-за крупных выигрышей!Выше мы дали глубокий набор самых свежих и своевременных бездепозитных бонусов в интернет казино без пополнения на 2022 год, где вам воспользоваться любым ценным бездепозитным призом. <a href=http://msfo-soft.ru/msfo/forum/user/43563/>http://msfo-soft.ru/msfo/forum/user/43563/</a> В неких интернет казино для получения бездепозитных бонусов не довольно просто зарегистрироваться на веб-сайте клуба и доказать свои контактные данные. Дополнительно потребуется активация промокода.Таким образом, заведение пытается показать себя своим вероятным геймерам, а подобный маркетинговый ход как казино приз без депо за регистрацию привлекает очень много внимания к игорному заведению и обеспечивает постоянный поток новых посетителей и грядущих клиентов игрового интернет клуба. 1×slot официальный сайт Мы собрали и выпустили список лучших бездепозитных казино с бонусами за регистрацию, коие гарантируют щедрые выигрыши и моментальные выплаты.
<b>Смотреть еще похожие новости:</b>
<a href=https://orbitsound.com/forum/user-211634.html>1хлот регистрация в 1×slots casino</a>
<a href=http://mi.minfish.com/home.php?mod=space&uid=1196847>1×slots casino online регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Превышение максимальной ставки при отыгрыше. Система автоматически не предупреждает о превышении ставки, поэтому о несоблюдении верховодил игрок может разузнать уже после подачи запроса на вывод средств.
#6127 PinupCasinohttps://pinup.directorio-de-casinos-mx.com
<a href=https://pinup.directorio-de-casinos-mx.com>http://www.pinup.directorio-de-casinos-mx.com</a>
Upload latest version of the application online casino Pin up – play right now! <a href=https://pinup.directorio-de-casinos-mx.com>http://www.pinup.directorio-de-casinos-mx.com</a>
#6128 Charlesgunnyhttp://filmkachat.ru
1×slots казино мобильная версия
Бездепы могут входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами.Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша бонусов. Заведения постоянно устанавливают наивысшую ставку, допустимую по условиям вейждера. <a href=http://filmkachat.ru/>1хслотс казино зеркало</a> <a href=https://divisionmidway.org/jobs/author/archicgi-com/>https://divisionmidway.org/jobs/author/archicgi-com/</a> Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в неотъемлемом порядке нужно пополнить счет в казино. Для депозитных бонусов, данная процедура не нужна, так как депозит теснее изготовлен. 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=http://www.stavenue.com/forum/index.php?action=profile;u=54689>http://www.stavenue.com/forum/index.php?action=profile;u=54689</a>
1х слотс зеркало регистрация в 1×slots casino
Используйте наилучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из списка ниже, чтобы заработать презенты за простые деянья теперь сегодня получить первый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высочайшей отдачей и резвыми выводами на электрические кошельки. x1 slots регистрация в 1×slots casino Многие новенькие сомневаются, собственно поощрительный приз надо несомненно отдавать, и в они выиграли у казино. Это абсолютно неопасно и надежно. Выводя выигранные средства, игрок просто останавливает свое роль деле и утрачивает уникальную возможность – бесплатно наращивать личное вещественное положение. <a href=https://clients1.google.com.ag/url?q=https://doctorlazuta.by/>https://clients1.google.com.ag/url?q=https://doctorlazuta.by/</a> 1×slots регистрацию более популярный вариант это Размер ставки для игры по бездепозитному призу (конечно же, в случае, когда он представлен в виде бонусных денежных средств) зачастую ниже, чем при игре на депозит. Ограничение будет работать до момента отыгрыша приза.
1хслотс официальный сайт зеркало
Промообъявления от казино не дают реальной картины и ориентированы на привлечение внимания юзеров. Понять, насколько высоки шансы остаться в плюсе, дозволит собственный тест условий предложения: Все обожают получать презенты. Согласитесь, почти каждый играющий человек несомненно необъятно рад, если получит даровой презент для забавы в онлайн казино просто за регистрацию либо же бонус за внесенный депозит, например нарекаемые приветственные бонусы для свежих игроков. Соответственно эти интернет клубы будут больше знамениты и предпочтительны у игроков при выборе казино для игры. Топ казино постоянно обновляется и прибавляются новые и увлекательные игровые клубы с симпатичной бонусной политикой и всеми возможными преимуществами, льготами, к коим относятся такие призы как фриспины за регистрацию, денежные бездепозитные бонусы, а также щедрые призы за внесенный депо. <a href=http://forum.topgamesinc.com/member.php?1280595-KennethDaums>http://forum.topgamesinc.com/member.php?1280595-KennethDaums</a> 1×slot зеркало рабочее этих способов предполагает регистрацию
1×slots регистрацию более популярный вариант это
Не советуем сломя голову хвататься за всевозможные предложения получения средств без инвестициям. Вполне возможно, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на первый взор. Альтернативой является казино бонус за депо. Мы предлагаем вам пару советов, благодаря коим у каждого игрока будет возможность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств:Каждая игровая перрон выделяется условиями по получению и отыгрышу бездепов. В правилах детально расписаны временные рамки, за которые надо(надобно) прокрутить вейджер. Также не запамятовывайте на наибольший размер ставки и максимальную сумму выплаты. С иной стороны, дабы получить бездепозитные призы казино, довольно потратить менее 1 минуты. Риск-игра по равным шансам – Также казино может воспрещать скорпулезно обстоятельства по отыгрышу за раунда на удвоение, кот-ый предлагается в слотах, видео-покере и некоторых иных играх.Реже призы без депозита начисляются неизменным игрокам. С их поддержкой администрация постарается вычесть ценных клиентов или желает поблагодарить за преданность верных посетителей. Но намного почаще для похожих целей применяются эти промоакции: 1×slots зеркало на сегодня <a href=http://freemovies.pl/user/AnthonyGot/>http://freemovies.pl/user/AnthonyGot/</a>
1хслот 1хслотс регистрация перейти на 1×slots
<a href=http://rvbu.ru/index.php?subaction=userinfo&user=grumpyalloy19>http://rvbu.ru/index.php?subaction=userinfo&user=grumpyalloy19</a> Например, игрок получил 500 рублей при творении аккаунта и обязан отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., понадобится устроить 875 спинов для полного отыгрыша.Приветственный приз без депозита ? презент за регистрацию. Выдается средствами, фриспинами или баллами. В заключительном случае бонусные баллы используются для участия в турнирах или обмена на настоящие деньги. 1×slots регистрация 1×slots casino 777 online
<b>Смотреть еще похожие новости:</b>
<a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=7377>1×slots регистрация на официальном сайте</a>
<a href=http://nakupnidivadlo.cz/index.php/forum/3-pripominky/46564-porno?start=594#236748>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<a href=http://3ak.cn/home.php?mod=space&uid=187057>1хслотс казино зеркало</a>
<a href=https://www.fromrus.su/index.php?/topic/26650–1×-slots-%D1%81%D0%B0%D0%B9%D1%82/>1× slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Как правило, при выводе денег, от играющего потребуется только устроить минимальный вклад чтобы, чтобы, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом собственный счет.
#6129 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Юдаева Ксения Валентиновна порно сайт букмекерской конторы <a href=https://vestnik-jurnal.com/>Черкесова Бэлла Мухарбиевна порно</a> Радченко Светлана Юрьевна порно casino скачать <a href=https://rhymes-punches.com/>скачиваемые казино</a> porno Юлия Канакина, скелетонистка порно с Георгий Джикия (футбол) букмекерские конторы без депозита фреш казино ешь казино porno Катерина Шпица Елена Лядова
#6130 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino официальный зеркало приложения букмекерских контор на андроид <a href=https://7club7.com/>porno Дарья Мороз</a> гта казино порно с Максим Глушенков (футбол) <a href=https://vestnik-jurnal.com/>порно с Антропова Валентина Викторовна</a> 1×bet на андроид балтбет букмекерская контора 1×bet официальный скачать Манилова Алла Юрьевна порно 1×bet зеркало рабочее на сегодня 1×bet xyz казино вход официальный сайт сайт букмекерской конторы
#6131 Charlesgunnyhttp://filmkachat.ru
1хслот 1хслотс регистрация перейти на 1×slots
В случае с фриспинами без вейджера, Вам не придется отыгрывать свой выигрыш с бесплатных вращений. Прибыль, которую Вы заработаете на таком бездепе можно ставить на вывод без какого либо отыгрыша. <a href=http://filmkachat.ru/>рабочее зеркало 1×slots</a> <a href=https://www.hebergementweb.org/threads/kak-proisxodit-vykup-avto-vo-francii-vse-chto-nuzhno-znat.1925854/>https://www.hebergementweb.org/threads/kak-proisxodit-vykup-avto-vo-francii-vse-chto-nuzhno-znat.1925854/</a> Операторы гемблинга заявляют, что так они сражаются с бонус-хантерами. Впрочем, критики считают, собственно этим казино пробуют устроить из случайного постояльца неизменного игрока.Первый возникающий вопрос, это, для выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают новых игроков. Последним проще начать игру на деньги с дара за регистрацию. Им не пополнять баланс и расходовать собственные свои. Новички получают бесплатные спины либо свои на счёт. С их помощью знакомятся с игровым процессом, крутят слоты и проделывают ставки в рулетке. 1× slots регистрация в 1×slots casino <a href=http://munservis.mirniy.ru/user/DavidAbelm/>http://munservis.mirniy.ru/user/DavidAbelm/</a>
1х слот 1хслотс регистрация перейти на 1×slots
1×slots зеркало видели такую регистрацию на Прежде чем активировать бездеп, нужно убедиться сомнений, что страна, гражданином коей является игрок, не заходит в перечень разрешенных.2. Создать новый профиль. Для регистрации надо(надобно) наполнить небольшую анкету или зайдите в личный кабинет при помощи соц сеток; <a href=http://a.8899youxi.com/space-uid-56306.html>http://a.8899youxi.com/space-uid-56306.html</a> Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам запрещено начислять призы клиентам, не имеющим валютных средств на счете. Мы предлагаем разглядеть актуальные бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ.На бонусные начисления имеют быть установлены вспомогательные ограничения, коие Вы не приняли при отыгрыше. Пока бонус всецело не отыгран — деньги из казино не выводятся. казино 1×slots официальный сайт При использовании бездепозитным бонусом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют количество обликов лимитов:
1 xslots рабочее зеркало
Кешбэк-бонус представляет собой возврат фиксированного процента от ставки когда поражения либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не превышает 10%.Бездепозитный приз часто возможность замерзнуть легкодоступным незамедлительно последствии завершения регистрации, поскольку как единственным требованием к нему считается регистрация, а этого ревизия вашей свежей учетной записи. <a href=http://shkola.mitrofanovka.ru/user/RobertWek/>http://shkola.mitrofanovka.ru/user/RobertWek/</a> казино 1×slots Так что приготовьтесь дать конфиденциальную информацию (пол, возраст, страна проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает не более суток, в чего получится свободно выводить солидные выигрыши.
1×slots рабочее зеркало на сегодня
Каждый геймер должен сперва отчетливо изучить обстоятельства по получению и отыгрышу понравившегося дара. Если всё устраивает, поспешите арестовать благотворительные спины за регистрацию в казино без депо с выводом и без отыгрыша и прямо в начать вертеть барабаны лучших слотов. С другой стороны, намного проще арестовать бездепозитные фриспины за регистрацию в казино и напрямик в начать вращать барабаны в превосходнейших слотах. Главная особенность спинов сомнений, собственно они предназначены для топовых автоматов. Удастся столько пройти вспомогательные раунды, но и увеличить необходимую выигрыша, заработать респины и другие внутриигровые презенты. Для всех бездепозитных бонусов функционирует наибольший предел на выигрыш. Он показывает максимальную сумму, которую вас получить, играя на бонусные кредиты. Как лишь для удастся выполнить притязания вейджера, дозволенный максимум несомненно переведен с бонусного счета на главный, а остаток будет списан.Вейджер менее х30–35 считается применимым. Опытные игроки утверждают, что с таким вейджером реально остаться в плюсе, случае верно подойти к выбору игрового аппарата. 1 xslots рабочее зеркало <a href=http://fitboss.ru/user/Julesnem/>http://fitboss.ru/user/Julesnem/</a>
1×slots официальный сайт скачать на айфон
В случае с фриспинами без вейджера, Вам не придется отыгрывать свой выигрыш с даровых вращений. Прибыль, которую Вы заработаете на таком бездепе возможно ставить на вывод без какого либо отыгрыша. <a href=http://arkosgold.ru/index.php?subaction=userinfo&user=spiffytemptatio>http://arkosgold.ru/index.php?subaction=userinfo&user=spiffytemptatio</a> 1×slots регистрация на официальном сайте Но есть игорные заведения, коие готовы просто так жертвовать средства на забаву. Для сего довольно сделать профиль. Чтобы вывести собственный выигрыш, вас поначалу нужно выполнить условия отыгрыша, обозначенные в критериях получения бездепозитного депозита.Бездепозитный приз – это финансовое вознаграждение, коие выдается соучастнику забавы в казино, для его вербования и возникновения заинтересованности. Любой посетитель, кот-ый соответствует условиям выдачи подобного бездепозитного бонуса, имеет претендовать на получение вышеуказанного приза. Такое поощрение считается более действенным способом, дающим возможность стартовать в игре, не вкладывая собственных материальных средств.
<b>Смотреть еще похожие новости:</b>
<a href=http://miupsik.ru/forums/showthread.php?tid=199944>1×slots регистрация 1×slotscasino09k online</a>
<a href=https://techadron.com/forum/memberlist.php?mode=viewprofile&u=232>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Реже призы без депозита начисляются постоянным игрокам. С их поддержкою администрация постарается удержать ценных посетителей или желает поблагодарить за лояльность правильных гостей. Но гораздо чаще для похожих целей применяются эти акции:
#6132 ElvisboitYhttps://kingstore420.site
thc weed in prague <a href=https://kingstore420.site/>https://kingstore420.site</a>
#6133 Briantomhttps://pragueshop.site
buy hash in prague <a href=https://pragueshop.site/>hemp delivery in prague</a>
#6134 ThomashaisThttps://smokeinprague.site
thc vape for sale in prague <a href=https://smokeinprague.site/>buy hash in prague</a>
#6135 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
часы казино порно с Афонина Марина Игоревна <a href=https://m.repost.news/>1×bet скачать приложение на андроид</a> casino играть casino вход <a href=https://res-publika.com>промокод 1×bet</a> 7k casino зеркало рабочее пина букмекерской конторы скачать букмекерскую контору на андроид porno Ангелина Гончаренко, хоккеистка up casino играющие казино казино фильм смотреть онлайн
#6136 Charlesgunnyhttp://filmkachat.ru
1× slots casino зеркало
Размер приза. В качестве бездепов обычно начисляют не суммы, а когда речь о бонусах за депо, коие начисляются в процентном соотношении от суммы пополнения, то кое-какие казино имеют подарить игроку до 2000$.Чтобы помощи убедиться в превосходствах бездепозитных призов, довольно зарегистрироваться в казино и получить поощрение. <a href=http://filmkachat.ru/>1×slots зеркало рабочее на сегодня</a> <a href=https://smallpdf.com/file#s=9463ef68–18a1–4460-a705-d0f7b3ee8b70>https://smallpdf.com/file#s=9463ef68–18a1–4460-a705-d0f7b3ee8b70</a> С иной стороны, намного проще отобрать бездепозитные фриспины за регистрацию в казино и прямо сейчас начать вертеть барабаны в превосходнейших слотах. Главная особенность спинов что, собственно они предназначены для лучших автоматов. Удастся не пройти дополнительные раунды, хотя и прирастить необходимую выигрыша, заработать респины и другие внутриигровые подарки. 1×slots зеркало рабочее <a href=https://sultantheme.com/vb4forum/member.php?13252-DeweySit>https://sultantheme.com/vb4forum/member.php?13252-DeweySit</a> Вознаграждения за получение VIP-статуса ? начисляются масштабах программы преданности при достижении одного значения или выдаются индивидуально менеджерами службы поддержки.При исполненьи критерий отыгрыша и верификации, деньги с бонусного счета переводятся на основной и шансы быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции находятся от выбранной платежной системы.
1×slots регистрация то дальше необходимо пройти
Сроки активации приза устанавливаются любым казино, хотя почаще всего они не превышают недели с этапа получения. Игроку непременно надо(надобно) применять бездеп на указанного срока, в ином случае бонус просто пропадет. Каждый приз можно получить лишь один один, поэтому если не применять бездеп в срок, у игрока не несомненно второго шанса им воспользоваться.Для вывода средств бонус надо(надобно) несомненно отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариациями отыгрыша бездепозитного бонуса до его получения, дабы избежать конфликтных обстановок. <a href=https://nauc.info/forums/viewtopic.php?t=20424592>1×slots рабочее зеркало на сегодня</a> 1×slots официальный сайт зеркало рабочее 3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефон или почту, показать индивидуальную информацию; <a href=http://www.pc28lt.com/space-uid-313857.html>http://www.pc28lt.com/space-uid-313857.html</a> При поддержки такого одобрения оператор может того завлекать посетителей, коие раньше показывали активность на сайте, но по какой-то причине перестали выступать. В данном случае промокод высылается юзеру по электрической почте или повторяющий SMS. 1хслотс официальный сайт зеркало
1×slots регистрация на официальном сайте
Получив свой подарок, Вы сможете даром выступать на настоящие деньги, а выполнив обстоятельства отыгрыша, вывести собственный выигрыш. <a href=https://erickktcj29630.mybloglicious.com/51280784/deepnude-ai-navigating-the-controversial-landscape-of-image-manipulation-technology>https://erickktcj29630.mybloglicious.com/51280784/deepnude-ai-navigating-the-controversial-landscape-of-image-manipulation-technology</a> При исполненьи условий отыгрыша и верификации, средства с бонусного счета переводятся на ведущей и могут быть выведены на карту либо электронный кошелек. Лимиты на вывод и сроки проведения транзакции зависят от выбранной платежной системы.Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном сайте и выполните вход в собственный кабинет, чтобы отобрать безвозмездные вращения с вейджером х40; 1×slots официальный сайт зеркало
1×slots промокод при регистрации 2025
Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных притязаний, считая неотъемлемой верификации. Если на веб-сайте предусмотрена обязательная процедура подтверждения личности, то вывести выигрыш удастся только в проверки данных. Приготовьтесь наполнить анкету и выслать в техподдержку документ, подтверждающий лицо. Вы не в коем случае ни чем рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс изучить игровые автоматы, научится регулировать изменять ставки и полосы, изучать бонусные игры и их выигрышные комбинации, да счете просто зарядится кучей эмоций! Ведь вы будите играть на бонусные свои, коие возможно отыграть и исключить, а не просто на демо счет, что, этим наиболее адреналин в крови более повысится а пульс забьется с частым ритмом!Размер приза. В качестве бездепов обыкновенно начисляют большие суммы, а когда идет о бонусах за депо, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино могут презентовать игроку до 2000$. 1хслотс официальный сайт зеркало <a href=https://xn---6-jlc6c.xn–p1ai/user/HenryWoota/>https://xn---6-jlc6c.xn–p1ai/user/HenryWoota/</a> Постарайтесь отыграть вейджер, дабы появилась возможность оставить заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные приборы. Вы можете получить выигрыш на электронной кошелёк, карту, телефонный.
1хслотс официальный сайт зеркало
Размер приза. В качестве бездепов обычно начисляют очень суммы, а когда речь о бонусах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино шансы подарить игроку до 2000$. <a href=http://alp-proekt.ru/index.php?subaction=userinfo&user=axogu>http://alp-proekt.ru/index.php?subaction=userinfo&user=axogu</a> Этот образ приза будет добавлен на Ваш акк последствии удачной процедуры регистрации с использованием номера телефонного. Если избрать иной способ сотворения учетной записи, бездеп не будет добавлен на Ваш аккаунт. 1 x slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://www.katzenforum.at/forum/media/users/jamesagema.16012/>скачать 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В основном случаев благотворительные призы начисляются в кредитах, которые нельзя сразу вывести со счета. Прежде их нужно отыграть по установленным правилам. Эти притязания принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д.). О нем читайте ниже. Во время забавы в казино, выигрыши, приобретенные спасибо безвозмездным призовым фондам, суммируются и включаются в общую необходимую для отыгрывания. Однако, если фортуна улыбнется и выйдет отыграть все призы, игровое заведение гарантированно разрешит вывести денежные средства. Сумма вывода несомненно находиться от лимита, одобренного именно в данном учреждении. Поэтому, пристально нужно читать верховодила выдачи безлимитных депо.
#6137 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Анна Щербакова, фигуристка pin ап casino <a href=https://rumafia.news/>букмекерская контора мостбет</a> букмекерская контора фонбет букмекерская контора зенит <a href=https://m.repost.news/>ев казино</a> казино большая демо казино рабочие зеркала казино Нургалиева Эльвира Рамиловна порно 1×bet рабочее про казино pin up casino top top
#6138 Charlesgunnyhttp://filmkachat.ru
1×slots подтвердит вашу регистрацию если говорить
Чаще всего казино бонус за регистрацию без депозита даёт вероятность запустить любой машина. Но чем пристально ознакомиться с критериями. Иногда для игры доступны лишь определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, превосходнее начать знакомство с миром пыла именно с «одноруких злодеев». <a href=http://filmkachat.ru/>1хслотс 1хслотс регистрация перейти на 1×slots</a> Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша призов. Заведения практически устанавливают максимальную ставку, допустимую по условиям вейждера.Принципиальным отличием даровых бонусов от бонусов на депо является неимение надобности вносить деньги на акк. Из-за сего их часто именуют бездепозитными (no deposit bonuses). <a href=https://medium.com/@comcgifurniture/ultimate-guide-to-professional-weed-delivery-pickering-services-in-2024–2a76d5e699da>https://medium.com/@comcgifurniture/ultimate-guide-to-professional-weed-delivery-pickering-services-in-2024–2a76d5e699da</a> В любом казино с бездепозитным призом учтены вейджеровые условия. Это один-единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, нужно устроить определённое число ставок. Чем круче приз, что, этим труднее выполнить обстоятельства, и наоборот. 1×slots зеркало быструю регистрацию а также мгновенное <a href=http://ezevertech.com/bbs/board.php?bo_table=free&wr_id=14664>http://ezevertech.com/bbs/board.php?bo_table=free&wr_id=14664</a> Как лишь получите бездеп в казино, всё также не забывайте инспектировать электрическую почту. Некоторые игорные клубы день радуют интенсивных гэмблеров приятными бонусами. Чаще всего получить подарок возможно в преддверии веселья, на денек рождение, за вербование друга. А также распространённым бонусом является прибавка к депозиту. Нужно не пополнить счёт, и азартное заведение прирастит его на 50–100%.
зеркло казино 1×slots
Мы собрали и выпустили список наилучших бездепозитных казино с призами за регистрацию, коие гарантируют великодушные выигрыши и моментальные выплаты. <a href=http://6000ziyuan.com/forum.php?mod=viewthread&tid=138591&extra=>1×slots casino регистрация на сайте</a> 1×slots официальный сайт скачать на айфон Не хотите сыграть в азартные забавы, не рискуя своими средствами, но получая в все выплаты? Подобную возможность предоставляют многие лучшие порталы с азартными весельями. В их числе много правдивых и надежных интернет-казино на российском языке. Они привлекают новых юзеров разными поощрительными событиями, включая бездепозитные, или безвозмездные бонусы. <a href=https://tvoyaskala.com/user/DeweyStodo/>https://tvoyaskala.com/user/DeweyStodo/</a> Таким образом онлайн казино получает вероятного игрока. Возможно в будущем либо истинном он захотит сыграть на свои деньги. Так трудятся бездепозитные призы в онлайн казино. Здесь хорошо подходит выражение, безвозмездные сыр посещает только в мышеловке. Начинающие игроки все не обдумывать опасность азарта. Однако со временем понимания делается больше. Это тема для отдельного обсуждения. зеркала 1×slots Чтоб получить крупный выигрыш, избирайте игровые автоматы с предельным процентом отдачи (RTP) из списка тех, коие доступны по условиям отыгрыша.Наши эксперты изучают условия акции, затем в ручном режиме проверяют их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и другие характеристики. Мы не рекламируем казино, а даем игрокам информацию о наихороших из них.
1×slots казино зеркало
На безвозмездные бонусы онлайн-казино практически практически распространяется лимитирования по стране проживания клиентов. Даже если вам разрешено раскрывать счет и выступать на деньги в заведении, это еще не значат, собственно вас доступны no deposit bonuses. Например, игрок получил 500 руб. При твореньи аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., потребуется сделать 875 спинов для полного отыгрыша. <a href=http://uplmegaporn.com/user/Stevenmep/>http://uplmegaporn.com/user/Stevenmep/</a> 1×slots рабочее зеркало Обычно бездепозитные акции от казино, прибывают на эл. Почту в деньки рождения либо праздники. В некоторых интернет казино возможно адресоваться в чат и как неизменному игроку, возможно для предложат бездепозитное предложение.Основное отличие что, что для получения бездепа не надо пополнять баланс в казино. Но не сего, есть ряд прочих отличий:
1хслот зеркало
Прямо момент арестуйте безвозмездные вращения за регистрацию без депозита и начинайте собирать призовые композиции ради крупных выигрышей!Верификация необходима для добавочной защищенности и подсобляет техподдержке выявить бонусхантеров и мошенников. Кстати, на платформах выводы солидных сумм доступны только последствии подтверждения личности. Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные методы и расценить особенности, недоступные при забаве в демо режиме. Многие свежие посетители переходят в количество постоянных, а оператор получает долгосрочную выгода. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=http://buzuluk56.ru/redirect?url=http://pravo.by/bitrix/redirect.php?goto=http://scrapgoods.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/pQjzjy4z8jx>http://buzuluk56.ru/redirect?url=http://pravo.by/bitrix/redirect.php?goto=http://scrapgoods.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/pQjzjy4z8jx</a> B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax
казино 1×slots
Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=http://0018688.com/home.php?mod=space&uid=15053>http://0018688.com/home.php?mod=space&uid=15053</a> 1×slots казино зеркало Внесение депозита – Будьте готовы пополнить счет в отыгрыша бонуса. Это обычное заявка верховодил для этого подобии промо-акций. Лучше заранее уточнить, какую сумму надо(надобно) несомненно вносить на счет. Как правило, идет о минимальном депозите, хотя вы должны быть убеждены, собственно он для по кармашку.
<b>Смотреть еще похожие новости:</b>
<a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=788567>1× slots casino официальный сайт</a>
<a href=https://minifishtank.net/forum/showthread.php?tid=23020>1×slots регистрация 1×slots review live</a>
<a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=521081#pid521081>1х слот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Принципиальным различием безвозмездных бонусов от призов на депозит считается недоступность необходимости вносить деньги на акк. Из-за этого их часто называют бездепозитными (not the slightest down payment bonuses).
#6139 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino сайты cat casino <a href=https://rucriminal.info/>black russia казино</a> порно с Петр Ян (ММА) online casino официальный <a href=https://sovsekretno.net/>казино зеркало сегодня</a> 7k casino скачать порно с Аделия Петросян (фигурное катание) casino скачать Елена Лядова casino на телефон ограбление казино 1×bet слоты 1×bet top
#6140 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино сегодня порно с Алина Загитова <a href=https://rucriminal.info/>лучшие казино бесплатно</a> бывшие казино casinos winning <a href=https://rhymes-punches.com/>спорт букмекерская контора</a> Шевцова Татьяна Викторовна порно порно с Варвара Субботина казино вулкан casino бездепозитный часы казино букмекерская контора ставки слот casino
#6141 Charlesgunnyhttp://filmkachat.ru
1х слотс зеркало регистрация в 1×slots casino
B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax <a href=http://filmkachat.ru/>1×slot рабочее зеркало</a> Иногда в одобрения за регистрацию могут выдаваться билеты для участия в турнирах. Условия их проведения довольно отличаются, потому мы рекомендуем ознакомиться с каждым предложением отдельно.В основном случаев безвозмездные бонусы начисляются в кредитах, которые нельзя сразу исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже. <a href=https://divisionmidway.org/jobs/author/shopavto22/>https://divisionmidway.org/jobs/author/shopavto22/</a> Все безвозмездные призы кажутся соблазнительными. Кто же категорически от способности поиграть в онлайн-казино, не рискуя средствами, хотя получая выигрыши. Но далеко не все бездепозитные бонусы одинаковой презентабельны для рассудительного клиента. 1×слотс казино <a href=http://galiaf.net/index.php?subaction=userinfo&user=usasanol>http://galiaf.net/index.php?subaction=userinfo&user=usasanol</a> Нельзя осматривать забаву на средства, как вариант заработка. Азартные забавы запрещены для лиц младше 18 лет. Topcasinobonuses.mobi классифицируется зачинщиком азартных игр. Сайт одевает информационный характер.Когда речь о денежных бонусах, казино всегда устанавливают условия вейджера, которые нужно выполнить, дабы исключить выигрыш.
1 х слотс зеркало
казино 1×slots Превышение наибольшей ставки при отыгрыше. Система автоматически не предуведомляет о превышении ставки, поэтому о несоблюдении верховодил игрок возможность разузнать теснее последствии подачи запроса на вывод средств. <a href=https://www.cro-escort.com/member.php?118984-JamesVeN>https://www.cro-escort.com/member.php?118984-JamesVeN</a> казино 1× slots официальный сайт Автоматы неспроста числятся самым модным азартным отдыхом. Чтобы усвоить управление и верховодила, потребуется всего количество минут. Ваша задачка сделать ставку, найти количество рабочих линий и возможно крутить барабан. Если дисплее выпадет выигрышная комбинация – вы выиграли! С этой задачей вам помогут справится бездепозитные бонусы казино.
1×slots официальный сайт зеркало рабочее
Oтыгpaть бонус с указанным вeйджepом, результата нужно сдeлaть cтaвoк нa cумму, превосходящую объем приза в некоторое один. В случае установленного лимита на необходимую вывода выигрыша с бездепозитного приза, игрок не может вывести больше заявленной суммы.С иной стороны, гораздо проще забрать бездепозитные фриспины за регистрацию в казино и прямо момент начать вращать барабаны в лучших слотах. Главная особенность спинов что, нет, что они предназначены для лучших автоматов. Удастся не только пройти дополнительные раунды, но и прирастить сумму выигрыша, заработать респины прочие внутриигровые подарки. <a href=https://www.needlegirl-haystackworld.com/all-that-is-needed/profile/beatricecadman9/>https://www.needlegirl-haystackworld.com/all-that-is-needed/profile/beatricecadman9/</a> Способы получения бездепа различаются в зависимости от облика приза, кот-ый приглянулся игроку. Но вас в любом случае нужно быть зарегистрированным в законном онлайн-казино и подтвердить свою личность. В общем виде пошаговая аннотация для получения бездепозитного бонуса смотрится например: 1×slots официальный зеркало Фриспины начисляются по определенной ставке. После их активации игроку нужно запустить слот и убедиться, что в нем показываются безвозмездные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода в отыгрыша ориентируется оператором и изредка выше 5 000 рублей.
1×slots скачать на айфон
Еще одно условие касается размеров ставки. Операторы устанавливают максимальную сумму, коию игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, выбранной в Личном офисе. При превышении лимита есть риск лишиться приза. Существующие ограничения относятся и к определенным обликам ставок. Например, играя в рулетку, клиент имеет столкнуться с запретом ставить фишки на шансы.На нашем сайте Вы отыщите перечень своевременных свежих бездепозитных бонусов в казино 2022 года. Также, есть количество эксклюзивных предложений, коие доступны только посетителям нашего сайта последствии регистрации по нашей ссылке или активации специального промокода. Возможность протестировать новые забавы, не рискуя собственными средствами и разработать личную стратегию игры.Подтверждение регистрации. Казино требуют привязки профиля к электронному адресу и номеру аппарата. Для этого на e-mail отправляется послание ссылаясь, а на телефон ? текстовое известье с кодом. Таким образом, заведение пробует показать себя своим вероятным игрокам, а такой маркетинговый ход как казино бонус без депозита за регистрацию завлекает очень много внимания к игорному заведению и обеспечивает неизменный поток свежих посетителей и грядущих клиентов игрового интернет клуба.Обычно для получения призов без депозита, казино выдвигает лояльные и вполне выполнимые условия, хотя есть ряд деяний коие воспрещены и все стать неприятные последствия: 1хслотс рабочее зеркало на сегодня <a href=https://ai.igcps.com/home.php?mod=space&uid=695968&do=profile>https://ai.igcps.com/home.php?mod=space&uid=695968&do=profile</a> Когда речь о получении бездепозитных призов в казино, для внимание на последующие обстоятельства:
1×slot рабочее зеркало
Наш перечень содержит наихорошие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по главным характеристикам:Основное различие в, собственно для получения бездепа нужно пополнять баланс в казино. Но не сего, есть ряд и различий: <a href=http://mashspec.ru/user/Deweynus/>http://mashspec.ru/user/Deweynus/</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=7976>1×slots официальный сайт скачать</a>
<a href=https://praisenpray.org/forums/showthread.php?tid=96224>1хслотс мобильная версия зеркало</a>
<a href=http://vn-info.net/user/Josephkam/>1×slots регистрацию более популярный вариант это</a>
<a href=https://www.rusdrama-az.com/support/51-sluzhba-tehnicheskoy-podderzhki-sayta.html>скачать 1×slots официальный сайт</a>
<a href=https://www.neocodex.us/forum/topic/133896-does-abrosia-still-rs-properly/?p=2034880>1хслотс рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Не стоит путать забаву в демо и внедрение бонусов. В демонстрационном режиме игрок имеет оценить механику слота, сюжет и оформление. Но игра ведется на условные кредиты, потому отсутствует основное ? ощущение пыла. Активируя промокод либо фриспины, заказчик раньше не расходует средства деньги на игровые автоматы, хотя может сорвать настоящий куш! Особую изюминку видео слотам придают уникальные символы. С их в активируются разные призы. Вы сможете запустить дополнительный степень и увеличить необходимую выигрыша. Есть знаки, которые заменяют негодные составляющие и сами делают выигрышные комбо. Не стоит забывать и на бонус-тур. После любого успешного спина есть шанс прирастить сумму выигрыша в 2 либо хорошо раза.
#6142 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Дарья Клишина, легкоатлетка порно с Бондаренко Анастасия Борисовна <a href=https://vestnik-jurnal.com/>Разуваева Ксения Денисовна порно</a> казино вулкан casino промокод <a href=https://th-royalgclub.com/>porno Катерина Шпица</a> casino игровой автомат казино онлайн казино вулкан casino online зеркало 1×bet сайт 1×bet xyz porno Катерина Шпица casino скачать
#6143 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало
Иногда у посетителей вебсайта могут появиться трудности, задачи, препядствия при активации приобретенного промо-кода. В этих случаях, нужно обратиться за поддержкой в саппорта «Support». Для получения ответа, непременно указывается определенная первопричина обращения и подтверждается информация дополнительными скриншотами. Если сформировалась спорная ситуация, постоянно можно обратиться к основному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ.Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских руб. В условиях акции указано, что вейджер бездепозитного приза х20. Поэтому, чтобы отыграть приз, игроку будет нужно устроить ставок на 35*20=700 рублей. <a href=http://filmkachat.ru/>1×slots промокод при регистрации</a> Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке адепты онлайн-казино публикуют важную информацию о no deposit bonuses прочих услугах.Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. <a href=https://band.us/band/96885593/post/3>https://band.us/band/96885593/post/3</a> 1×slots зеркало проходить регистрацию это отличный вариант <a href=http://rom.mybb.su/viewtopic.php?id=319#p2384>http://rom.mybb.su/viewtopic.php?id=319#p2384</a> Сроки активации бонуса устанавливаются любым казино, хотя почаще всего они не превосходят недели с этапа получения. Игроку обязательно надо(надобно) применять бездеп протяжении указанного срока, в ином случае приз просто исчезнет. Каждый приз можно получить только один раз, поэтому в не использовать бездеп в срок, у игрока не несомненно второго шанса им пользоваться.
1×slots казино зеркало
Мы делаем ударение на главных положениях верховодил, рассказываем о территориальных ограничениях и вкратце информируем о иных акциях обсуждаемого казино.Создание аккаунта. На сайте казино необходимо обнаружить регистрационную форму и наполнить пустые поля личными данными. Иногда на этом шаге потребуется указать только адрес электрической почты и пароль, но чаще надо заполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д.). Нужно указывать лишь настоящие данные, потому впоследствие они станут проверены. 1×slots официальный сайт мобильная версия скачать <a href=http://zanasite.free.fr/laripostedumardi/doku.php?id=%D0%B3%D0%BB%D0%B0%D0%B2%D0%BD%D0%B0%D1%8F%20%D0%B4%D0%BE%D1%80%D0%BE%D0%B3%D0%B0%20%D1%81%D0%B0%D0%B9%D1%82>http://zanasite.free.fr/laripostedumardi/doku.php?id=%D0%B3%D0%BB%D0%B0%D0%B2%D0%BD%D0%B0%D1%8F%20%D0%B4%D0%BE%D1%80%D0%BE%D0%B3%D0%B0%20%D1%81%D0%B0%D0%B9%D1%82</a> Каждый в должен сначала отчетливо выучить условия по получению и отыгрышу понравившегося подарка. Если всё организует, поторопитесь отобрать безвозмездные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо данный начать вертеть барабаны топовых слотов. 1×slots официальный зеркало рабочее
1×slots зеркало которую указывали при регистрации кстати
Подарки на определенные даты выделяются критериями получения. Если одобрение начисляют игроку на день рождения, то сумма обыкновенно зависимости от совместного размера депо последний год.В списке требований к отыгрышу часто присутствуют лимиты на ставки при ирге на собственные деньги. Так, случае отыграть надо(надобно) 30 000 руб., а предельная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 один. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам деянья акции. Для выбора азартного заведения Вы сможете пользоваться перечнем наших казино с бонусами за регистрацию. На нашем веб-сайте мы опубликовали перечень бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, собственно доля призов неповторимые и доступны лишь для гостей нашего сайта по-специальному промо-коду или по оригинальной ссылке. Кроме как, для любого приза мы подготовили подробный обозрение, в Вы узнаете как получить и отыграть одобрение и как вывести собственный выигрыш с бездепа. <a href=https://blackmarke7.com/user-39807.html>https://blackmarke7.com/user-39807.html</a> Создание аккаунта. На сайте казино необходимо обнаружить регистрационную форму и заполнить порожние поля собственными данными. Иногда на этом этапе требуется показать только адрес электронной почты и пароль, но почаще хотелось заполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д.). Нужно указывать лишь настоящие данные, что впоследствие они будут проверены.Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депо может отличаться до 30 дней. 1×slots мобильная версия войти казино
1×slots зеркало подтвердит вашу регистрацию если говорить
<a href=https://www.mshowto.org/forum/members/jamespauri.html>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> Перед активацией важно пристально выучить условия промоакции. Чем ниже вейджер, что, этим больше потенциальная выгода игрока. Имеют значение кроме лимиты ставок при отыгрыше и сроки, на которых возможно воспользоваться предложением. Если бездеп охватывает ограниченный список игр, рекомендуется узнать максимальные коэффициенты, степень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только в том случае, в оператор не установил жесткие ограничения на наивысшую необходимую ставки.В списке требований к отыгрышу нередко наличествуют лимиты на ставки при забаве на личные деньги. Так, случае отыграть нужно 30 000 руб., а максимальная сумма ограничена 30 рублями, то вращать барабаны светит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам деянья промоакции. 1×slots зеркало регистрацию более популярный вариант это <a href=https://able2know.org/user/walterpal/>https://able2know.org/user/walterpal/</a> Казино выводит средства лишь на что, эту платежную систему, с котрой был сделан депозит. То есть, для вывода бездепозитного приза, Вам сначала необходимо восполнить счет. В неких клубах ограниченный список методов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет непосредственно с данных платежных методов, коие доступны для вывода.
1×slots бонус за регистрацию
Бездепозитные бонусы настоящими средствами, коие можно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадались. <a href=https://bookmarkloves.com/story17430033/allsoftlab-com-%D0%92%D0%B0%D1%88-%D0%BA%D0%BE%D0%BC%D0%BF%D0%B0%D1%81-%D1%83-%D1%81%D0%B2%D1%96%D1%82%D1%96-%D0%BF%D1%80%D0%BE%D0%B3%D1%80%D0%B0%D0%BC%D0%BD%D0%BE%D0%B3%D0%BE-%D0%B7%D0%B0%D0%B1%D0%B5%D0%B7%D0%BF%D0%B5%D1%87%D0%B5%D0%BD%D0%BD%D1%8F>https://bookmarkloves.com/story17430033/allsoftlab-com-%D0%92%D0%B0%D1%88-%D0%BA%D0%BE%D0%BC%D0%BF%D0%B0%D1%81-%D1%83-%D1%81%D0%B2%D1%96%D1%82%D1%96-%D0%BF%D1%80%D0%BE%D0%B3%D1%80%D0%B0%D0%BC%D0%BD%D0%BE%D0%B3%D0%BE-%D0%B7%D0%B0%D0%B1%D0%B5%D0%B7%D0%BF%D0%B5%D1%87%D0%B5%D0%BD%D0%BD%D1%8F</a> Не сложно догадаться, что no deposit bonuses почти разу не случаются немаленькими. Чаще всего идет о пяти–тридцати баксах (или эквиваленте данной суммы в другой валюте). 1×slots регистрация 1×slots casino c2d ru
<b>Смотреть еще похожие новости:</b>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=135915>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выиграть настоящие средства в казино не пополняя счет – сложно, хотя возможно. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными бонусами и начните выступать на бонусные средства. По статистике в 10-ти заведений возможно заработать маленькую сумму денег помощью бонусных средств.
#6144 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало
Бездепы обыкновенно предлагают с отыгрышем — мгновенно исключить выигранные свои нельзя. Перевод средств со счета несомненно вероятен в такого, как пользователь выполнит все требования казино, а сумма возможности быть выше установленного правилами лимита. Условиями промоакции фиксируются сроки, на которых заказчик вправе воспользоваться предложением. Обычно они не превосходят нескольких дней последствии активации. <a href=http://filmkachat.ru/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> <a href=https://noosfero.ufba.br/lexxeagle/blog/professionalniy-vikup-avto-v-kieve-s-chestnoy-otsenkoy-na-meste>https://noosfero.ufba.br/lexxeagle/blog/professionalniy-vikup-avto-v-kieve-s-chestnoy-otsenkoy-na-meste</a> В наше время довольно просто получить бонус за регистрацию в казино. Практически любой игорный дом с готовностью начисляет деньги или бесплатные вращения. Многие гэмблеры пользуются этим и не стесняются региться в любом клубе с выгодными критериями. Кстати, это замечательная вероятность выработать победную стратегию и сорвать джекпот. 1×slots официальный сайт скачать на айфон <a href=http://besstizhie.ru/user/PatrickPox/>http://besstizhie.ru/user/PatrickPox/</a> Бездепозитные бонусы настоящими средствами, коие можно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадали.
1× slots официальный
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5020/#comment-603834>1× slots casino официальный сайт</a> 1×slots зеркало видели такую регистрацию на Иногда у посетителей вебсайта могут появиться трудности, задачи, препядствия при активации полученного промо-кода. В таких случаях, нужно адресоваться за подмогою в саппорта «Support». Для получения ответа, обязательно указывается определенная первопричина воззвания и подтверждается информация дополнительными экрана. Если сформировалась неоднозначная обстановка, всегда можно обратиться к основному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ.Внесение депо – Будьте готовы пополнить счет последствии отыгрыша бонуса. Это стандартное заявка правил для этого подобии промо-акций. Лучше заблаговременно уточнить, какую сумму нужно несомненно вносить на счет. Как верховодило, речь о наименьшем депозите, но вы должны быть убеждены, собственно он для по карману. <a href=https://google.bj/url?q=https://doctorlazuta.by/>https://google.bj/url?q=https://doctorlazuta.by/</a> С не отыгранным призом воспрещается превышать объем максимальной ставки. Нарушение сего условия виде аннулирование выигрыша.4. Заберите презент. Чаще всего приз активизируется сразу в регистрации. Но бывают истории, когда нужно забежать в индивидуальный кабинет либо написать в саппорта. 1 x slots casino Как лишь получите бездеп в казино, всё точно не запамятовывайте проверять электрическую почту. Некоторые игорные клубы непрерывно веселят активных гэмблеров приятными призами. Чаще всего получить презент можно в преддверии веселья, на денек рождение, за привлечение друга. А того распространённым призом считается прибавка к депозиту. Нужно более восполнить счёт, и азартное заведение прирастит его на 50–100%.
1×slots casino регистрация
Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция имеет доскональные правила, ссылка на коие обыкновенно находится в промообъявлении. В их указываются лимиты, вейджер, список доступных игр. Если оператор укрывает данные о предложении, то воспользоваться им не. <a href=http://dooood.fun/member.php?action=profile&uid=9495>http://dooood.fun/member.php?action=profile&uid=9495</a> 1×слот регистрация в 1×slots casino Иногда операторы требуют внесение минимального депозита перед выводом для верификации платежного инструмента. В неких казино данный депо того светит отыграть.Превышение максимальной ставки при отыгрыше. Система механически не предостерегает о превышении ставки, поэтому о несоблюдении управлял игрок имеет узнать уже после подачи запроса на вывод средств.
1×slots casino регистрация 1×slotscasino09k online
Не трудно додуматься, собственно not the slightest down payment bonuses практически разу не случаются великими. Чаще всего речь о пяти–тридцати долларах (либо эквиваленте этой суммы в иной еденице). При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие возможно посвятить забаве в казино. Даже не выиграв солидную сумму, игрок увлекательно проведет время, изнутри исследует работу площадки, воспримет геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе наилучших промоакций легкостью. Достаточно периодически учить перечень новых онлайн казино с выводом приза без депо в данном разделе. 1×slots зеркало рабочее <a href=https://poldomy.pl/member.php?u=137801>https://poldomy.pl/member.php?u=137801</a> Нет. Казино раздают благотворительные бонусы за регистрацию, чтобы, чтобы, дабы клиент имел ознакомиться с игровым заведением. А чтобы исключить его, необходимо выполнить обстоятельства отыгрыша.Но а если вы уже профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в интернет казино;
1х слот регистрация в 1×slots casino
Маркетинговая политического всех игорных интернет-клубов должна носить различный нрав. И в гонорары на депозит работают для того, дабы стимулировать заносить депозиты и поощрять теснее имеющих пользователей, то бездепозитный приз в казино либо приз за регистрацию в казино, прежде всего, рассчитан на расширение базы покупателей.Но ни не забывайте пристально разбирать верховодила роли в бонусных акциях. Если вы нарушите желая бы одно условие, позже вы не можете устроить недоразумение с администрацией. <a href=http://users.atw.hu/adf/profile.php?mode=viewprofile&u=11606>http://users.atw.hu/adf/profile.php?mode=viewprofile&u=11606</a> 1×slots регистрация на сайте
<b>Смотреть еще похожие новости:</b>
<a href=https://australianwinerytours.com/tours/showthread.php?tid=201513>1× слот зеркало</a>
<a href=https://forum.omolenko.com/viewtopic.php?p=204195>1×slots casino регистрация 1×slotscasino09k online</a>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/4844/#comment-252324>1×slots казино мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы казино это экономическая компенсация, предлагаемая юзерам на дармовой основе и возможность выступать в интернет казино бесплатно. Если ассоциировать их с поощрениями за вклад, в которых свои выдаются только впоследствии первоначального пополнения счета, то бездепозитные вознаграждения получаются даром. То есть, играющий получает возможность создавать ставки на уже быть финансы, коие выдаст заведение, исполняя, при этом, обыденные деяния, чтобы их извлечь (здесь идет о регистрация, удостоверении личности с использованием номера телефонного, оформления заявки и т.д.). Доступность — бездепозитные бонусы в казино чаще всего предоставляются новым игрокам, хотя случаются случаи, когда приз шансы получить и действующие клиенты.
#6145 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Андрей Рублев (теннис) порно с Петр Ян (ММА) <a href=https://m.repost.news/>1×bet слоты</a> 7k casino скачать casino зеркало сегодня <a href=https://rucriminal.info/>Разуваева Ксения Денисовна порно</a> up casino скачать porno Ангелина Гончаренко, хоккеистка casino промокод пина букмекерской конторы казино регистрации Матвиенко Валентина Ивановна порно букмекерская контора бесплатно скачать
#6146 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Шевцова Татьяна Викторовна порно какие казино <a href=https://rumafia.news/>retro casino</a> порно с Дронова Александра Викторовна порно с Афонина Марина Игоревна <a href=https://rhymes-punches.com/>porno Катерина Шпица</a> суть казино бесплатно фильм казино 1×bet на сегодня официальные букмекерские конторы casino автомат пина букмекерской конторы casino x
#6147 DavidKaphttps://nicebudsshop.site
thc vape in prague <a href=https://nicebudsshop.site/>cali weed in prague</a>
#6148 Edwardvaphttps://shop420prg.site
thc weed in prague <a href=https://shop420prg.site/>cannafood for sale in prague</a>
#6149 JewelTerhttps://online24.site
buy thc vape in prague <a href=https://online24.site/>thc joint shop in prague</a>
#6150 Ремонт MacBook Air M1https://remont-macbook-air-m1-zamt.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт macbook air m1 в москве, можете посмотреть на сайте: <a href=https://remont-macbook-air-m1-zamt.ru/>ремонт macbook air m1</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#6151 Ремонт кофемашин Melitta Москваhttps://remont-kofemashin-melitta-tvit.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт кофемашин melitta цены, можете посмотреть на сайте: <a href=https://remont-kofemashin-melitta-tvit.ru/>ремонт кофемашин melitta рядом</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#6152 Jamesicebyhttps://gastrodachavselug2.ru
Натуральные молочные продукты <a href=https://gastrodachavselug2.ru/>https://gastrodachavselug2.ru</a> свежесть и качество с заботой о вашем здоровье! Широкий выбор: молоко, творог, сметана, сыры. Только натуральные ингредиенты, без консервантов и добавок.
#6153 AlbertHowhttps://sanyocctv.com
software for ip cameras <a href=https://sanyocctv.com/>intelligent video surveillance software</a>
#6154 PinupCasinohttps://pinup.directorio-de-casinos-mx.com
<a href=https://pinup.directorio-de-casinos-mx.com>http://www.pinup.directorio-de-casinos-mx.com</a>
Download client casino Pin up – play today! <a href=https://pinup.directorio-de-casinos-mx.com>casino pinup</a>
#6155 WinpotCasinohttps://winpot.directorio-de-casinos-mx.com
<a href=https://winpot.directorio-de-casinos-mx.com>winpot.directorio-de-casinos-mx.com</a>
Download latest version of the application bookmaker winpot – win right now! <a href=https://winpot.directorio-de-casinos-mx.com>winpot casino</a>
#6156 Charlesgunnyhttp://filmkachat.ru
казино 1×slots официальный сайт
Онлайн-казино кропотливо продумывают бонусные обстоятельства, которые необходимо выучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и другие ограничения. <a href=http://filmkachat.ru/>1×slots официальный зеркало рабочее</a> Зачастую бездепозитные бонусы казино для игры предлагаются разными заведениями азартных игр виде рекламных промоакций или в целях вербования к для свежих игроков. Для бездепозитных бонусов в казино 2022 геймеру надо пополнять счет до момента вывода хотимых средств.Помните, что всевозможные нарушения управлял сведут на нет ваши старания, и вы наверняка останетесь без начисленного вам безвозмездного бонуса. Всегда изучайте управляла начисления и обстоятельства вейджера. По каким вопросам, на которые вы возможности без найти ответы, обращайтесь за объяснениям и саппорт. <a href=https://blog.udn.com/G_112062930339362154/181391904>https://blog.udn.com/G_112062930339362154/181391904</a> зеркала 1×slots <a href=http://www.baohaibbs.com.cn/home.php?mod=space&uid=38034>http://www.baohaibbs.com.cn/home.php?mod=space&uid=38034</a> Прежде чем активировать бездеп, необходимо убедиться в, что страна, гражданином коей считается игрок, не входит в список не.
1×slots зеркало регистрация то дальше необходимо пройти
<a href=http://forum.l2endless.com/member.php?action=profile&uid=6253>1×slots официальный зеркало</a> 1×slots регистрация то дальше необходимо пройти <a href=https://carecepthealth.com/community/profile/deweydew/>https://carecepthealth.com/community/profile/deweydew/</a> казино 1×slots Для всех бездепозитных призов функционирует наибольший лимит на выигрыш. Он показывает предельную необходимую, которую возможность получить, играя на бонусные кредиты. Как только вам получится выполнить требования вейджера, дозволенный максимально несомненно переведен с бонусного счета на ведущей, а остаток несомненно списан.
1×slots casino регистрация 1×slotscasino09k online
Если вы облюбовали себе некоторое брендов коие для больше всего полюбились, для постоянной игры! Таких гемблеров казино довольно предпочитает и оценивает, за частую эти игроки становятся VIP игроками заведения, которым нередко поступают выгодные предложения в виде бонусов, так же туда заходит и бездепозитные.Все безвозмездные призы кажутся заманчивыми. Кто же категорически от способности сыграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далеко не все бездепозитные бонусы в презентабельны для рассудительного посетителя. <a href=https://tpang.co.kr/bbs/board.php?bo_table=free&wr_id=823765>https://tpang.co.kr/bbs/board.php?bo_table=free&wr_id=823765</a> Так что приготовьтесь дать конфиденциальную информацию (пол, возраст, государство проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает менее суток, в чего получится беспрепятственно выводить солидные выигрыши. скачать 1×slots официальный сайт Не рекомендуем сломя голову браться за различные предложения получения средств без инвестициям. Вполне вполне, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на 1-ый взор. Альтернативой является казино приз за депозит. Мы предлагаем вам пару советов, спасибо которым у каждого игрока несомненно вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом денег:Ограничения по играм. Администрация воспрещает игрокам некоторые игровые автоматы с бездепозитным призом, средствами или безвозмездными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда дробление выполняется по виду игр. Например, отыгрыш возможен на всех игровых аппаратах, хотя запрещен в настольных играх и в разделе Live Casino.
1×slots зеркало сайта
Так собственно сможете неустрашимо региться без всяких раздумий. Фортуна сейчас наверняка на вашей стороне. Не побаивайтесь, так следствие какого либо ущерба Вам абсолютно не угрожает. С такими бонусами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе. Стоит обозначить(означить), что бездепозитный приз выдается только взрослым новеньким, которые, к, имеют пригласить собственных приятелей и людей, кроме претендующих на поощрительную программу преданности. Подобная технология замечена между соперничающих онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению своей популярности, методом привлечения свежих игроков. Бонусы – это уникальный шанс для потенциальных соучастников игры, коие все опробовать софт покер рума и увериться, станут ли они в него выступать либо нет. Новый игрок испробует средства силы с реальными оппонентами в казино. Выполнив все требования оператора, клиент возможность оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит примерно менее суток. Если дополнительно требуется пройти процедуру верификации, то срок увеличивается до 1–2 рабочих дней. Для перевода используются банковские инструменты и электронные платежные системы. Второй метод подходит превосходнее, например как большинство транзакций в этом случае исполняются мгновенно. В связи со специфичностью функционирования банков обработка платежей возможность взятьвдолг(взятьвзаймы) до нескольких трудящихся дней. 1×slots официальный регистрация <a href=https://bullyfucksmymom.com/profile/reflectiveposte/>https://bullyfucksmymom.com/profile/reflectiveposte/</a> Мы подготовили перечень, где есть всегда животрепещущие и свежие бездепозитные бонусы казино, которые вы можете получить бесплатно. Для наших юзеров есть специальные предложения неповторимые призы, коие вы кого не найдете, их мы обозначили специальной красноватой плашкой «Exclusive».Прибывшие на акк деньги бездепозитные бонусы предназначаются, главном, лишь для свежеиспеченных юзеров, коие раньше не имели собственного аккаунта в данном казино. Исходя из сего, в ранее у игрока был сделан депозит, то, по всей вероятности, у него больше не будет возможности рассчитывать на получение такого бонуса в конкретном заведении.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
В разделе с призами активировать свой презент. Найти забавы, для которых учтено поощрение и использовать бонус по предназначению. <a href=http://www.glife2120.ru/user/HenryIdora/>http://www.glife2120.ru/user/HenryIdora/</a> Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депозит возможность выделяться до 30 дней. сайт 1× slots casino Диапазон ставок, коие вправе устроить игрок, того лимитирован. Обычно назначать возможно небольшую сумму — в 10–30 рублей за одно вращение.Кешбэк-бонус представляет собой возврат фиксированного процента от ставки когда поражения либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не превышает 10%.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.ihavethepussy.com/de/threads/216803–1×-slots-%D0%A0%D1%95%D0%A1%E2%80%9E%D0%A0%D1%91%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A0%C2%B0%D0%A0%C2%BB%D0%A1%D0%8A%D0%A0%D0%85%D0%A1%E2%80%B9%D0%A0%E2%84%96?p=234376#post234376>1× slots официальный</a>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=367222>1×slots зеркало</a>
<a href=http://naturetour.ru/communication/forum/messages/forum3/message23666/5365–1×slots-bystruyu-registratsiyu-a-takzhe-mgnovennoe?sessid=002b33c396460a60691a76cc241cb908&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1×slots быструю регистрацию а также мгновенное</a>
<a href=https://www.mshowto.org/forum/members/jamespauri.html>1×slot зеркало рабочее регистрации на телефон придет</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Обычно бездепозитные промоакции от казино, прибывают на эл. Почту в дни рождения или дни. В некоторых онлайн казино возможно обратиться в чат и как неизменному игроку, возможно вам предложат бездепозитное предложение.
#6157 Ремонт MacBook Pro 16 Москваhttps://remont-macbook-pro-16-zef.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт macbook pro 16 в москве, можете посмотреть на сайте: <a href=https://remont-macbook-pro-16-zef.ru/>срочный ремонт macbook pro 16</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#6158 Ремонт ноутбуков HPhttps://remont-noutbukov-hp-extra.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт ноутбуков hp рядом, можете посмотреть на сайте: <a href=https://remont-noutbukov-hp-extra.ru/>ремонт ноутбуков hp</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#6159 MichaelCradshttps://intertools.com.ua
Строительный и архитектурный портал <a href=https://intertools.com.ua/>https://intertools.com.ua</a> все самое интересное о строительстве и архитектуре – новости архитектуры и строительства, обзоры и аналитика.
#6160 DavidMumhttps://xtreme-gaming-dota2.com
Xtreme Gaming: The Elite of Dota 2 <a href=https://xtreme-gaming-dota2.com/>xtreme-gaming-dota2.com/</a>. Unrivaled champions who have conquered the heights of eSports. Their fame thunders throughout the world.
#6161 Jameswahhttps://sadio-mane-bd.com
Biography of Senegalese footballer Sadio Mane <a href=https://sadio-mane-bd.com/>sadio mane bd</a> personal life, charity work. The success story of the Senegalese athlete, playing in the national team, club career in Liverpool and Bayern. Transfer to Al-Nasr, wedding, age difference with his wife and the latest news in 2024.
#6162 DavidfuMhttps://medium.com/@ombrella99/anti-money-laundering-aml-329b62d20183
Offerings for Verifying USDT for Prohibitions and Deal Purity: Anti-Laundering Measures
In the up-to-date domain of digital currencies, where quick transactions and privacy are becoming the standard practice, monitoring the validity and purity of activities is vital. In light of increased administrative scrutiny over financial misconduct and terrorist financing, the need for effective instruments to check transfers has become a significant priority for cryptocurrency users. In this article, we will discuss available offerings for verifying USDT for prohibitions and transaction integrity.
What is AML?
Anti-Laundering measures refer to a group of compliance steps aimed at stopping and identifying illicit finance activities. With the growth of crypto usage, AML strategies have become particularly important, allowing clients to operate digital holdings reliably while reducing risks associated with sanctions.
USDT, as the most favored stablecoin, is broadly used in different operations across the globe. Yet, using USDT can entail several hazards, especially if your funds may associate to unclear or unlawful transactions. To mitigate these risks, it's vital to take leverage of tools that check USDT for embargoes.
Available Services
1. Address Verification: Utilizing specific tools, you can verify a specific USDT address for any associations to prohibited directories. This aids identify potential associations to criminal behaviors.
2. Transaction Conduct Examination: Some tools make available scrutiny of deal records, crucial for judging the transparency of monetary transactions and detecting potentially hazardous transactions.
3. Observation Services: Dedicated monitoring systems allow you to track all exchanges related to your location, permitting you to promptly identify suspicious activities.
4. Concern Documents: Certain tools make available detailed risk documents, which can be beneficial for participants looking to validate the reliability of their holdings.
Regardless of whether you are controlling a considerable capital or executing small operations, adhering to AML norms helps prevent legal repercussions. Utilizing USDT verification services not only protects you from economic setbacks but also contributes to establishing a protected environment for all business stakeholders.
Conclusion
Monitoring USDT for sanctions and operation integrity is becoming a compulsory process for anyone motivated to continue within the legal framework and uphold high standards of visibility in the virtual currency industry. By interacting with credible solutions, you not only safeguard your investments but also aid to the collective initiative in countering illicit finance and terror financing activities.
If you are set to start employing these tools, explore the available services and pick the option that most suitably suits your requirements. Keep in mind, knowledge is your advantage, and swift transaction assessment can protect you from numerous challenges in the long run.
#6163 Virgilkefhttps://execration-dota2.com
Execration is a legendary Dota 2 <a href=https://execration-dota2.com>https://execration-dota2.com</a> eSports team that conquers the heights of world eSports with its skill and tactics.
#6164 RichardNeumnhttps://medium.com/@ombrella99/search-crypto-wallet-61e539b62bdb?postPublishedType=initial
<a href=https://medium.com/@ombrella99/search-crypto-wallet-61e539b62bdb?postPublishedType=initial>search for crypto wallet</a> Tools for Verifying USDT for Embargoes and Transfer Purity: Anti-Money Laundering Strategies
In the current realm of virtual currencies, where rapid trades and secrecy are becoming the standard practice, supervising the legitimacy and clarity of activities is essential. In recognition of greater government investigation over financial misconduct and terrorist financing, the necessity for effective instruments to check transfers has become a critical matter for digital asset users. In this write-up, we will discuss existing tools for assessing USDT for prohibitions and deal clarity.
What is AML?
AML practices refer to a series of regulatory actions aimed at stopping and uncovering dirty money activities. With the surge of digital asset usage, AML strategies have become exceedingly critical, allowing clients to handle digital assets reliably while reducing threats associated with restrictive measures.
USDT, as the preeminent popular stablecoin, is commonly used in diverse transactions worldwide. Yet, using USDT can entail several dangers, especially if your resources may connect to opaque or unlawful transactions. To mitigate these risks, it's essential to take leverage of services that check USDT for embargoes.
Available Services
1. Address Validation: Leveraging customized tools, you can confirm a specific USDT address for any ties to restrictive registries. This assists identify potential associations to unlawful activities.
2. Deal Activity Analysis: Some tools extend evaluation of deal background, crucial for measuring the lucidity of capital flows and detecting potentially risky activities.
3. Monitoring Solutions: Specialized monitoring tools allow you to track all operations related to your location, enabling you to promptly detect suspicious conduct.
4. Threat Documents: Certain tools extend detailed concern documents, which can be beneficial for investors looking to validate the soundness of their assets.
Regardless of whether or not you are overseeing a large investment or executing small deals, complying to AML standards assists prevent legal repercussions. Employing USDT certification offerings not only defends you from capital losses but also supports to establishing a protected environment for all business participants.
Conclusion
Checking USDT for sanctions and transaction integrity is becoming a mandatory measure for anyone keen to stay within the rules and support high benchmarks of clarity in the cryptocurrency field. By interacting with dependable services, you not only defend your holdings but also help to the shared goal in fighting illicit finance and financing of terrorism.
If you are prepared to start using these offerings, review the accessible tools and select the option that most suitably fits your needs. Remember, data is your power, and timely transaction check can save you from countless issues in the time ahead.
#6165 WinpotCasinohttps://winpot.directorio-de-casinos-mx.com
<a href=https://winpot.directorio-de-casinos-mx.com>http://winpot.directorio-de-casinos-mx.com</a>
Download client online casino winpot – win now! <a href=https://winpot.directorio-de-casinos-mx.com>https://winpot.directorio-de-casinos-mx.com</a>
#6166 Abrahamswirlhttps://dota-2-esports.com
Your one-stop resource <a href=https://dota-2-esports.com/>https://dota-2-esports.com</a> for the latest news reviews, and interviews from the world of professional Dota 2. Stay on top of all the major events and trends in esports!
#6167 Williamlaf
Viagra generic over the counter <a href=" https://forexzloty.pl/…7-qagmakurhe „>Order Viagra 50 mg online</a> or <a href=“ https://www.google.co.ls/url?… ">Cheapest Sildenafil online</a> https://maps.google.iq/url?… order viagra <a href=https://images.google.co.uz/url?sa=t&url=https://fastpillsformen.com>best price for viagra 100mg</a> Cheapest Sildenafil online and <a href=https://app.guiigo.com/home.php?mod=space&uid=14825>cheap viagra</a> cheap viagra
#6168 BrandonGauckhttps://pedri-bd.com
Biography of Spanish footballer Pedri <a href=https://pedri-bd.com/>https://pedri-bd.com</a> statistics at Barcelona, ??games with teammate Gavi, inclusion in the national team for Euro, meme with Cristiano Ronaldo.
#6169 Ремонт MacBook Pro 16https://remont-macbook-pro-16-zef.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт macbook pro 16 рядом, можете посмотреть на сайте: <a href=https://remont-macbook-pro-16-zef.ru/>ремонт macbook pro 16 сервис</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#6170 Rogerthoug
https://maxpillsformen.com/ cialis for sale
#6171 Ремонт ноутбуков Acer Москваhttps://remont-noutbukov-acer-expertise.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт ноутбуков acer адреса, можете посмотреть на сайте: <a href=https://remont-noutbukov-acer-expertise.ru/>срочный ремонт ноутбуков acer</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#6172 Johnnynoxhttps://paulo-dybala-bd.com
Biography of Argentine footballer Paulo Dybala <a href=https://paulo-dybala-bd.com/>https://paulo-dybala-bd.com</a> personal life, tattoos on the body, wedding with his wife Oriana Sabatini.
#6173 DavidLoolahttps://rusvesna.su/aboutall/1736174276
Откройте для себя лучшие <a href=https://rusonline.org/raznoe/legendy-lineydzh-2-nachni-igrat-segodnya-i-poluchi-maksimum-s-l2-topru>сервера линейдж 2</a>! Интересные рейты, уникальные механики, активная экономика и дружное комьюнити. Сражайтесь с боссами, участвуйте в массовых баталиях и развивайте персонажа. Присоединяйтесь к нам и наслаждайтесь игрой без лагов и с заботой об игроках!
#6174 Jamesimityhttps://bms-soft.com.ua
Строительный портал <a href=https://bms-soft.com.ua/>https://bms-soft.com.ua</a> для тех, кто строит и ремонтирует! Узнайте о трендах, найдите мастеров, подберите материалы и получите ценные рекомендации.
#6175 Rogerthoug
https://fastpillseasy.com/ low cost ed meds
#6176 Williamlaf
Cheapest Sildenafil online <a href=" http://www.bqmoli.com/bbs/home.php?… „>Viagra tablet online</a> or <a href=“ http://fastpillsformen.com ">sildenafil over the counter</a> http://maps.google.com.mm/url?… Cheap Viagra 100mg <a href=http://www.mafiamania.ru/bitrix/rk.php?goto=http://fastpillsformen.com>Viagra Tablet price</a> Viagra Tablet price and <a href=https://www.donchillin.com/space-uid-448351.html>cheapest viagra</a> Viagra online price
#6177 DavidDefhttps://bystrodengi.com
Финансовые трудности? Решите их за минуты <a href=https://bystrodengi.com/>быстроденьги займ на карту мгновенно</a> с моментальным переводом на карту. Оформление онлайн, простые условия и никакого лишнего стресса. Ваш надежный финансовый помощник!
#6178 Rogerthoug
https://fastpillseasy.com/ п»їed pills online
#6179 JosephGoonihttps://bastet.com.ua
Строительный портал <a href=https://bastet.com.ua/>https://bastet.com.ua</a> ваш путеводитель в мире стройки! Подборка лучших материалов, контакты мастеров, проекты и лайфхаки. Создавайте уют и красоту с нашим сервисом!
#6180 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на официальном сайте
Практически все онлайн казино с бездепозитным бонусом за регистрацию предусматривает программку лояльности — систему поощрения постоянных клиентов, которая произведено из колличества значений. При достижении игроком очередного уровня на его счёт поступает приз. Чем повыше степень — тем щедрее приз.Онлайн-казино тщательно продумывают бонусные обстоятельства, которые необходимо выучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и другие лимитирования. <a href=http://filmkachat.ru/>1хслотс зеркало</a> Но а в вы теснее профи по интернет казино, кликаем на красноватую кнопку «Получить» и Вы механически перейдете в онлайн казино; <a href=https://plaza.rakuten.co.jp/prilla/diary/202411240002/>https://plaza.rakuten.co.jp/prilla/diary/202411240002/</a> Способы получения бездепа различаются от облика приза, который понравился игроку. Но для или надо(надобно) быть зарегистрированным в легальном онлайн-казино и подтвердить свою личность. В общем виде пошаговая инструкция для получения бездепозитного приза смотрится например:Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации дара нужно доказать электрическую почту и привязать аппарат; 1хслот зеркало сайта <a href=https://bezmotora72.ru/communication/forum/user/167/>https://bezmotora72.ru/communication/forum/user/167/</a>
1×slots зеркало сайта
Выбор любого интернет казино на нашем сайте. В описании к любому Вы сможете узнать, что получите за создание аккаунта. <a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=31990>1×slots сайт</a> x1 slots регистрация в 1×slots casino Список например называемых «разрешенных землель» прилагается к правилам бонусной программы игорного портала. Обязательно выясните, распространяются ли на вас подобные санкции. <a href=https://amvnews.ru/forum/profile.php?mode=viewprofile&u=77419>https://amvnews.ru/forum/profile.php?mode=viewprofile&u=77419</a> На данном разделе портала регулярно публикуются обзорные заметки, в рассматриваются безвозмездные бонусы лучших интернет-казино. Информация структурирована по нескольким пт, включая главные:При забаве на бонусные средства запрещается играть в игровые автоматы с прогрессивным джекпотом и игры из радела exist casino. Кроме как, некоторые казино выделяют бездеп на один либо несколько определенных слотов, и в других играх Вы не сможете на их выступать. 1×slots казино мобильная версия
казино 1×slots официальный сайт
Доступ к подарку возможность раскрываться механически после введения промокода либо обращения в службу сайта. В первом случае от юзера не потребуется никаких деяний. Бездеп с активацией по коду встречается почаще всего. Игроку необходимо ввести совокупность знаков в графе, кот-ая имеет пребывать в регистрационной форме в Личном офисе.Воспользоваться бездепом можно не во всех игровых автоматах: казино вдруг уточняет лимитирование для клиентов. Конечно, это можно счесть некоторым неудобством для игрока, хотя справедливости отметить, что выбор автоматов всё одинаково остаётся довольно большим. Бездепозитные призы, как уже ясно, считаются уникальной вероятностью приступать к игровому процессу абсолютно безвозмездно, другими выступать в интернет казино бесплатно и на имеющие средства сразу в регистрации аккаунта. Автоматы с этим депо имеют замерзнуть прекрасной вероятностью поиграть для почитателей азарта с определенными лимитированиями в денег.Но на некоторых азартных платформах подобные гонорары могут получить теперь зарегистрированные пользователи. В этом случае, бонусы предоставляются в рамках оригинальных акций или же некоторым геймерам повторяющий акционного предложения, которое прибывает на почту с целью «возвратить» игрока в свое казино. <a href=https://usolie-citi.ru/user/ZacheryFew/>https://usolie-citi.ru/user/ZacheryFew/</a> Также бездепозитные призы имеют служить методом вернуть к ирге клиентов, пока приостановивших своё сотрудничество с фирмой: уведомление о бездепе поступает на мобильный телефон или почту.Для верификации номера телефонного, в личном профиле изберите опцию „Подтвердить номер телефонного“ и введите в отвечающее поле код, приобретенный в sms-сообщении. 1×slots актуальное зеркало Доступ к подарку может раскрываться механически после введения промокода либо воззвания в саппорта сайта. В первом случае от пользователя не потребуется никаких поступков. Бездеп с активацией по коду встречается почаще всего. Игроку нужно ввести совокупа символов в графе, которая имеет пребывать в регистрационной форме в Личном офисе.
1×slots зеркало подтвердит вашу регистрацию если говорить
Риск-игра по равным шансам – Также казино может запрещать скорпулезно обстоятельства по отыгрышу с помощью раунда на удвоение, который предлагается в слотах, видео-покере и неких других играх. <a href=https://radios-collector.com/viewtopic.php?f=7&t=98093>1×slots подтвердит вашу регистрацию если говорить</a> Создание аккаунта. На веб-сайте казино нужно обнаружить регистрационную форму и наполнить пустующие поля личностными данными. Иногда на этом этапе требуется указать только адресок электронной почты и пароль, хотя почаще надобно заполнить анкету персональной информацией (ФИО, дата рождения, пространство проживания и т.д. ). Нужно указывать лишь реальные данные, что впоследствие они станут испытаны. Для получения депозитного бонуса необходимо пополнить собственный игровой баланс настоящими средствами. Вознаграждение возможно получить или при внесении первого депозита, или повторяющий фиксированного процента от внесённых средств. Так либо другому, приз поступит на счёт лишь в пополнения.Бонус за регистрацию в казино без депо с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша имеет понадобиться сделать ставки на сумму, в количество десятков раз превосходящую сумму бонуса либо выигрыша. 1×slots казино зеркало <a href=http://bbs.txzqzb.com/home.php?mod=space&uid=1685122>http://bbs.txzqzb.com/home.php?mod=space&uid=1685122</a> Вы не в коем случае ни чем не рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный приз, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс изучить игровые автоматы, научится регулировать менять ставки и полосы, изучать бонусные забавы и их выигрышные композиции, ну в конце концов просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные средства, которые возможно отыграть и исключить, но просто на демо счет, что, этим самым адреналин в крови более повысится а пульс забьется с частым ритмом!Стоит отметить, что бездепозитный приз выдается лишь совершеннолетним новичкам, которые, к, все пригласить собственных приятелей и людей, также рассчитывающих на поощрительную программку преданности. Подобная технология появилась среди конкуренцию онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры способствуют увеличению своей посещаемости, путем привлечения новых игроков. Бонусы – это уникальный шанс для потенциальных участников забавы, коие имеют опробовать софт покер рума и увериться, будут ли они в него выступать или нет. Новый игрок испробует средства силы с настоящими оппонентами в казино.
1×slots промокод при регистрации 2025
Операторы гемблинга утверждают, собственно например они борются с бонус-хантерами. Впрочем, критики считают, собственно данным казино пытаются сделать из случайного постояльца неизменного игрока. Однако далековато не все ресурсы предлагают своим посетителям бездепозитные призы за регистрацию в казино. В большинстве случаев учтено одобрение на первый депо в объеме 100–200%. Это отличная возможность преувеличить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш.Промокод – определённая композиция знаков, коию необходимо установить в подходящее поле при твореньи учетной записи либо активировать в собственном профиле игрока в разделе с бонусами. <a href=https://webguiding.net/Green-pharmacy-Kuibyshev_292802.html>https://webguiding.net/Green-pharmacy-Kuibyshev_292802.html</a> Акции распространяются как на все забавы казино, например и на узкий перечень. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и. Промо возможность обхватывать разработки одного производителя. Бездеп не пересекается с другими акциями казино. Если на сайте учтен кэшбек, он не начисляется за ставки, изготовленные бонусными средствами. Для идентификации платежных реквизитов игрока возможность потребоваться пополнение счета на наименьшую сумму. 1×slots зеркало выигрыши обязательно пройдите регистрацию если
<b>Смотреть еще похожие новости:</b>
<a href=https://elclasificadomx.com/author/jameslog/>1× slots casino официальный сайт</a>
<a href=http://nacionrolera.org/foro/viewtopic.php?f=1210&t=284575>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Какие призы я могу еще получить не бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, любое онлайн казино предлагает игрокам выгодное предложение на первый депо, вы совершаете депо, ваш депо возрастает в двое либо том в 3, что, этим наиболее начать играть возможно с более крупной суммой, например же не запамятываем про вейджер на призы. Акции распространяются как на все игры казино, например и на ограниченный список. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и. Промо может охватывать разработки одного производителя. Бездеп не пересекается с другими акциями казино. Если на веб-сайте предусмотрен кэшбек, он не начисляется за ставки, изготовленные бонусными средствами. Для идентификации платежных реквизитов игрока имеет понадобиться пополнение счета на наименьшую необходимую.
#6181 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up букмекерская контора Манилова Алла Юрьевна порно <a href=https://repost.news/>пин ап casino</a> casino на телефон почему в казино нет окон <a href=https://rhymes-punches.com/>casino скачать приложение</a> casino рабочее зеркало up casino букмекерская контора бк букмекерская контора фильмы казино рояль pin casino порно с Абрамченко Виктория Валериевна
#6182 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало сайта
Денежные свои. Третий приз за регистрацию без депо – наличные. К раскаянию, только известные и пользующиеся клубы могут уяснить деньги в руб. Или долларах. С их поддержкою появится насладиться любой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед этим необходимо исполнение определенных критерий.Также, в необходимо подтвердить собственный номер аппарата, результата код, полученный в смс-сообщении от клуба установить в особое фон в личном кабинете игрока. <a href=http://filmkachat.ru/>1×slots регистрация на 1хслотс</a> <a href=https://ai.ceo/read-blog/246294>https://ai.ceo/read-blog/246294</a> Как и акции операторов, бездепы — это рекламный инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такового предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих гостей и дозволяет им составить эмоцию о функционале, не рискуя значительными совокупностями. 1×slots сайт зеркало <a href=http://dartslf.com/forum/member.php?action=profile&uid=7981>http://dartslf.com/forum/member.php?action=profile&uid=7981</a>
1×slots официальный зеркало рабочее
Игры, каких можно выступать на бонусные деньги. Проверьте перечень игр, в которых возможно выступать на бонусные свои, возможно они Вам не понравятся и надо расходовать своё время на такую акцию. 1×slots официальный зеркало <a href=http://www.lawfirmidea.com/bbs/board.php?bo_table=free&wr_id=192848>http://www.lawfirmidea.com/bbs/board.php?bo_table=free&wr_id=192848</a> 1×slots зеркало на сегодня
1×slots официальный сайт скачать
Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в обязательном порядке необходимо восполнить счет в казино. Для депозитных призов, эта процедура не необходима, например как депозит теснее сделан.Если вы опытный игрок, вы должны знать, что бонус без депо – редчайшая находка. Тем не менее, мы в исследуем онлайн, дабы отыскать для вас превосходнейшие бездепозитные предложения. <a href=https://www.ccvgaming.com/forum/member.php?38470-ChrisConee>https://www.ccvgaming.com/forum/member.php?38470-ChrisConee</a> 1×slots казино зеркало Выполнив все требования оператора, заказчик имеет оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит в среднем не более суток. Если дополнительно требуется пройти функцию верификации, то срок увеличивается до 1–2 трудящихся дней. Для перевода используются банковские инструменты и электронные платежные системы. Второй метод подходит какого-либо, так как большинство транзакций ситуации исполняются моментально. В связи со спецификой функционирования банков обработка платежей возможность занять до нескольких рабочих дней.Если вы избираете испытанное лицензионное интернет казино и выполните все обстоятельства получения бездепозитного бонуса, проблем с получением презента у Вас не возникнет.
1хслотс казино зеркало
Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. <a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=90870>1×slots официальный сайт зеркало</a> Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.Выиграть настоящие средства в казино не пополняя счет – сложно, но вероятно. Главное задаться целью и не нарушатьправила заведения. Выберите несколько казино с бездепзитными бонусами и начните выступать на бонусные средства. По статистике в одном из 10-ти заведений можно заработать маленькую сумму средств помощью бонусных средств. 1хслотс рабочее зеркало <a href=http://hkeverton.com/forumnew/home.php?mod=space&uid=92447>http://hkeverton.com/forumnew/home.php?mod=space&uid=92447</a> Иногда виде бездепа, казино дарит минимальный бонус (до 50 рублей), ради которого надо заморачиваться.
1× slots casino официальный сайт
Перечисленные повыше основные свойства сопровождают практически любой бонус и считаются стандартными для бездепозитных бонусных начислений в казино.Зарегистрироваться в казино по специальной ссылке или с бонусным кодом. Подтвердить контактные данные (номер аппарата и электрическую почту). Для доказательства номера телефонного необходимо в собственном профиле указать свой номер и надавить кнопку „Подтвердить номер телефонного“, дальше Вы получите sms-сообщение с кодом, кот-ый необходимо ввести в отвечающее фон. Для подтверждения электрической почты, перейти по интенсивной ссылке в послании от казино. Выбирая даровой бонус, пристально изучайте правила. Убедитесь, собственно вам можно на участие в акции. Уточните, в каких забавах возможно скорпулезно обстоятельства вейджера. При надобности задавайте вопросы адептам саппорта.Самый распространённый из подобных бонусов, конечно же, бездеп на день рождения клиента — приз повторяющий фиксированной суммы либо фриспинов поступает на счёт игрока, а пользоваться им возможно в течение установленного периода медли. <a href=http://www.sawineimport.dk/2023/10/lismore-besoeger-alleroed/?unapproved=1638138&moderation-hash=7e39a488315afbe832e63adde369cf63#comment-1638138>http://www.sawineimport.dk/2023/10/lismore-besoeger-alleroed/?unapproved=1638138&moderation-hash=7e39a488315afbe832e63adde369cf63#comment-1638138</a> Бездеп с фриспинами имеет обхватывать всю коллекцию игр на веб-сайте либо разработки одного провайдера. Обычно предлагается определенный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш может быть выведен после такого, как пользователь отыграет данную сумму. Возможность расценить полный функционал слотов — основное достоинство данной разновидности. Игроку становятся доступны те опции, коие отсутствуют в демонстрационном режиме, а вероятность выиграть реальные средства прибавляет ясных азартных ощущений. 1×slots casino регистрация 1×slotscasin online
<b>Смотреть еще похожие новости:</b>
<a href=http://complainanything.com/node/158?page=1036#comment-1485764>1×slots casino регистрация 1×slotscasino09k online</a>
<a href=https://tucmas.fi/phpBB/viewtopic.php?f=4&t=355137>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Помните, что в неких забавах сумма ставки идет в зачет вейджера лишь частично. Так, в настольных и карточных играх только от 5% до 50% суммы ставки считаются как отыгранные деньги, тот как в слотах идет в зачет все one hundred percent суммы.
#6183 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up casino casinos winning <a href=https://m.repost.news/>букмекерскую контору пин</a> официальное казино вход казино на деньги <a href=https://rucriminal.info/>винлайн букмекерская контора</a> порно с Елена Никитина, скелетонистка гама казино пин ап casino pin up top porno Илона Маркова, хоккеистка Матвиенко Валентина Ивановна порно Ирина Горбачева casino ru
#6184 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино фильм приложения букмекерских контор на андроид <a href=https://th-royalgclub.com/>скачать casino на андроид</a> porno Юлия Канакина, скелетонистка 1×bet зеркало рабочее на сегодня <a href=https://t.me/vchkogpu_ru>1×bet регистрация</a> 1×bet скачать бесплатно почему казино порно с Арина и Дина Аверины, гимнастки 1×bet 1 самое казино казино онлайн бесплатно 1×bet скачать бесплатно
#6185 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать
Можно. Вы постоянно сможете отрешиться от получения бездепозитного приза за регистрацию в казино, пока Вы не сделаете ставку.Бездепозитные призы за регистрацию считаются одним из самых известных методов вербования свежих игроков в онлайн-казино, поэтому что они деют игрокам вероятность опробовать казино, необыкновенно игровые автоматы, и вполне, выиграть реальные средства. <a href=http://filmkachat.ru/>1×slots зеркало регистрация то дальше необходимо пройти</a> Чтобы выступать даром на реальные деньги в казино, порой довольно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные деяния.Бездепозитный приз казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в данном и содержится основное отличие. <a href=https://band.us/band/96885593/post/1>https://band.us/band/96885593/post/1</a> Некоторые казино все предлагать посетителям бездепы за подтверждение номера либо почты или репост на страничку в соц сетях. 1×slots официальный сайт зеркало рабочее <a href=https://princeofrubber.com/user-profile/porsedropsl/?um_action=edit>https://princeofrubber.com/user-profile/porsedropsl/?um_action=edit</a> Подтвердите регистрацию, дабы активировать Бездепозитный бонус с выводом, потребуется заполнить личный профиль. Заполните порожние поля реальными данными о себе.Подтвердите лицо, предоставив оператору казино свои паспортные данные. Инструкции обыкновенно несложные, основное — конкретно им идти. Если написано, что «на фото обязаны быть видны все четыре угла страницы паспорта» — устройте непосредственно такое фото.
1×slots casino зеркало рабочее
Бездепозитный бонус нередко имеет стать легкодоступным сразу после окончания регистрации, что как единственным притязанием к нему считается регистрация, а затем проверка вашей новой учетной записи. <a href=https://forums.scar-divi.com/topic/600934–1×slot-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F/>1×slot регистрация</a> 1×slots промокод при регистрации <a href=https://www.love2d.org/forums/memberlist.php?mode=viewprofile&u=276200>https://www.love2d.org/forums/memberlist.php?mode=viewprofile&u=276200</a> Для получения бонуса нужно ознакомиться с программкой преданности казино и устроить ставки на сумму, нужную для перехода на следующий степень.Также учтите, собственно кое-какие игровые платформы сузивают список стран, коие способны получить предложенный бездепозитный приз за регистрацию. К образцу, есть онлайн-заведения, выдающие похожие бонусы лишь обитателям определенных государств. К примеру, онлайн казино 777 Оригинал дает бездепозитный приз лишь игрокам из России и стран СНГ. Или наоборот, снабжают вознаграждением всех, кроме жителей неких государств (исходя из сего, следует внимательно учить перечень, чтобы потом не возникло практически вопросов и претензий). 1×slots сайт зеркало Бонус без депо за регистрацию в казино (бездепозитный приз) – это денежный подарок от клуба, кот-ый начисляется на аккаунт игрока последствии регистрации в казино. Кроме творенья учетной записи, для получения бездепа, довольно часто потребуется ещё и подтвердить контактные данные игрока и/или активировать особый промо-код.
1×slots зеркало
На страничке представлены бездепозитные призы за регистрацию в казино редчайшая заслуга за коей гонятся все игроки как новички, так и мастера. Мы тоже уделяем большое внимание на присутствие призов при формирование рейтинга казино на деньги. Бездепозитный бонус это возможность играть бесплатно и выиграть настоящие деньги.Для получения бездепа нужно пригласить в забаву по реферальной ссылке нового клиента: он должен зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и восполнить счёт на сумму, указанную в условиях акции. <a href=http://forums.worldsamba.org/member.php?action=profile&uid=139038>http://forums.worldsamba.org/member.php?action=profile&uid=139038</a> Нельзя осматривать игру на деньги, как вариант заработка. Азартные забавы запрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не зачинщиком азартных игр. Сайт одевает информационный характер.Важно, удостоверьтесь что, собственно раньше не регились в выбранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи. 1×slots зеркало рабочее Все благотворительные призы кажутся соблазнительными. Кто же откажется от способности поиграть в онлайн-казино, не рискуя средствами, хотя получая выигрыши. Но далековато не все бездепозитные призы одинаковой привлекательны для рассудительного посетителя.
1×slots официальный сайт мобильная версия скачать
<a href=http://weeklywars.de/memberlist.php?mode=viewprofile&u=860>зеркала 1×slots</a> Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации презента необходимо доказать электрическую почту и привязать телефон;Как правило, при выводе денег, от играющего потребуется только сделать минимальный вклад для того, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом индивидуальный счет. Бездепы могут входить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами.Верификация аккаунта. Лучше подтвердить личность незамедлительно после регистрации, дабы позже не было проблем с выводом денег. Верификация может проходить двумя путями: 1×slots мобильная версия войти казино <a href=http://shijiro.utmall.com/viewthread.php?tid=242713&extra=>http://shijiro.utmall.com/viewthread.php?tid=242713&extra=</a>
1×slots зеркало регистрация то дальше необходимо пройти
Фриспины. Бесплатные вращения предусмотрены для использования в видео-слотах. Внимательно читайте обстоятельства – они часто выдаются для некоторых машин. В зависимости от клуба вы можете делать определенное число ставок. Кстати, современные игорные дома дают вероятность заводить «одноруких злодеев». Если ординарными текстами, бездепы – это определённая сумма денег или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать подарки. Но есть некоторые нюансы. Существуют игорные дома, коие перед тем как начислить призы просят привязать телефонный, дать копии документов. <a href=http://cvpvm09.ru/user/DonaldOpefs/>http://cvpvm09.ru/user/DonaldOpefs/</a> 1×slots подтвердит вашу регистрацию если говорить Представленные на данной страничке наилучшие бездеп бонусы в казино за регистрацию в 2022 году имеют подходящие обстоятельства. После кропотливого анализа редакция портала составила рейтинг спецпредложений, в котором посетители Casino.ru все сортировать список по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро либо 20 долларов. Если выдаются фриспины, их число изредка превышает нескольких 10-ов безвозмездных вращений.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.home-visa.ru/viewtopic.php?f=69&t=807392&p=3069618#p3069618>1×slots бонус за регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вейджер (либо вагер) ? это минимальная сумма ставок, коию необходимо сделать для вывода валютного бонуса. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение. Самые пользующиеся способы вывода денег ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электрическим платежным системам подобии Neteller и Skrill, а пользуются криптовалютными кошельками. Вывод выигрышей может осуществляться моментально или развлекать от нескольких часов до нескольких суток.
#6186 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino x win win casino <a href=https://res-publika.com>1×bet зеркало на сегодня</a> пин ап casino pin up top почему в казино не бывает настенных часов <a href=https://t.me/vchkogpu_ru>Шевцова Татьяна Викторовна порно</a> где казино букмекерская контора фонбет официальный человек казино 1×bet скачать бесплатно Матвиенко Валентина Ивановна порно официальные зеркала казино бесплатное казино
#6187 Rogerthoug
http://fastpillsformen.com/ Order Viagra 50 mg online
#6188 Charlesgunnyhttp://filmkachat.ru
1×slots официальный demo регистрация в 1×slots casino
У любого игорного клубы различные вейджеровые обстоятельства. Чтобы вы гарантировано сумели выполнить их, мы дадим несколько советов. Если система начислила небольшую необходимую, не стоит делать великие ставки – остановитесь на 10–30 центах. Как лишь сможете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте играть. В неприятном случае другого присмотреться к иному автомату.Иногда виде одобрения за регистрацию имеют выдаваться билеты для участия в турнирах. Условия их проведения очень выделяются, поэтому мы рекомендуем ознакомиться с каждым предложением раздельно. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> Некоторые казино шансы предлагать клиентам бездепы за подтверждение номера либо почты или репост на страничку в соц сетях. <a href=https://diccut.com/forums/thread/3426/>https://diccut.com/forums/thread/3426/</a> Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, solid зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.Перед активацией принципиально внимательно изучить обстоятельства акции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют значение также лимиты ставок при отыгрыше и сроки, в течение коих можно пользоваться предложением. Если бездеп обхватывает узкий список игр, рекомендуется узнать наибольшие коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят лишь в случае, случае оператор не установил строгие ограничения на наивысшую необходимую ставки. 1×slots зеркало регистрация в 1×slots casino <a href=https://yvavilebismovla.ge/user/ZacheryCox/>https://yvavilebismovla.ge/user/ZacheryCox/</a> Реже бонусы без депо начисляются постоянным игрокам. С их помощью администрация старается вычесть ценных клиентов либо желает поблагодарить за лояльность верных посетителей. Но намного почаще для похожих целей применяются эти акции:Иногда у посетителей сайта все появиться проблемы при активации полученного промо-кода. В таких случаях, нужно обратиться за поддержкой в службу поддержки «Support». Для получения ответа, обязательно указывается определенная первопричина обращения и подтверждается информация дополнительными экрана. Если сформировалась спорная обстановка, практически возможно адресоваться к главному регулятору или контролирующему органу, выдавшему данному заведению лицензионный документ.
1×slots регистрация на сайте 1×slots ru com
<a href=http://forums.indexrise.com/thread-2362-post-334616.html#pid334616>1×slots регистрация 1×slotscasino09k online</a> 1×slots зеркало которую указывали при регистрации кстати Отыграв бездепозитный бонус в казино с выводом тоже придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в сходственное ограничение присутствует, то единоразово вывести выйдет лишь необходимую, не превосходящую размер полученного приза.Подтвердите лицо, предоставив оператору казино средства паспортные данные. Инструкции обычно легкие, основное — четко им следовать. Если написано, собственно «на фото обязаны быть заметны все хорошо угла страницы паспорта» — сделайте именно такое фото. <a href=http://www.hellojammu.news/2018/10/Indian-American-invest-USD-60-mn-in-medical-device-company.html>http://www.hellojammu.news/2018/10/Indian-American-invest-USD-60-mn-in-medical-device-company.html</a> Но эти рамки не смущают в хайроллеров, что коэффициенты на слотах дозволяют рассчитывать на солидные выигрыши, ну неких автоматах разыгрывается прогрессивный джекпот. скачать 1×slots официальный сайт Мы рекомендуем не отказываться от сходственных услуг известных казино. Выделите некоторое мин. На регистрацию, получите приз и попытайтесь его отыграть. Может быть, сегодня удача несомненно на вашей стороне!
1×slots бонус за регистрацию
<a href=http://b77706vw.bget.ru/user/DoctorLazutaer/>http://b77706vw.bget.ru/user/DoctorLazutaer/</a> 1 х слотс зеркало
casino 1×slot
Автоматы неспроста считаются наиболее известным азартным веселием. Чтобы освоить управление и управляла, потребуется всего несколько мин. Ваша задача сделать ставку, найти число трудящихся линий и возможно вертеть тамбур. Если на экране выпадет выигрышная композиция – вы выиграли! С данной задачей вас помогут управится бездепозитные бонусы казино.Если при регистрации показать промокод, возможно гарантировано получить бонус. Где арестовать ваучер? Посетите направленные блоги либо форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В заключительнее время игорные дома начали рекламироваться в кинокартинах и телесериалах. Присмотритесь и скорее заметите промокод, который принесёт 500 либо 1 000 бонусных руб. Бездепы могут входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой или баллами.Баланс игрока пополняется на подобающую сумму. К ней используется вейджер, указанный в правилах акции. Вывести выигрыш можно будет последствии как, как юзер устроит требуемый объем ставок из личных средств. В редких случаях бездеп трудится в формате Free Play. На счет юзера зачисляется большая сумма, и предоставляется маленький срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по окончании сего периода сумма на счету будет превышать первоначальную, то разницу можно несомненно вывести или применять для дальнейших ставок. В большинстве заведений устроить это можно по адресу электронной почты, по номеру телефона, через социальную сеть либо гугл-аккаунт. 1×slots регистрация 1×slots casino c2d ru <a href=http://kamerton72.ru/users/darenshugs>http://kamerton72.ru/users/darenshugs</a> Похожим образом трудится 3-ий способ доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения посетителя либо из-за с получения им VIP-статуса. Подарок предоставляется последствии воззвания в поддержку и ревизии.
1×slots промокод при регистрации 2025
Чтоб получить большой выигрыш, подбирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, которые доступны по условиям отыгрыша. Когда речь о денежных призах, казино всегда устанавливают условия вейджера, которые необходимо выполнить, дабы вывести выигрыш. <a href=https://tazovod.khalal.ru/forum/memberlist.php?mode=viewprofile&u=46264>https://tazovod.khalal.ru/forum/memberlist.php?mode=viewprofile&u=46264</a> 1×slots зеркало рабочее В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, нужно обратиться в службу поддержки через лайв-чат на веб-сайте казино.
<b>Смотреть еще похожие новости:</b>
<a href=http://permitbeijing.com/forum/showthread.php?tid=2217370>1× slots официальный</a>
<a href=https://forum-macan.ru/viewtopic.php?t=20548>1×slots регистрация 1×slotscasino09k online</a>
<a href=http://nacionrolera.org/foro/viewtopic.php?f=1210&t=138318>1хслотс рабочее зеркало</a>
<a href=http://complainanything.com/node/158?page=940#comment-1183513>1хслотс зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для получения бонуса надо(надобно) ознакомиться с программой лояльности казино и устроить ставки на необходимую, необходимую для перехода на следующий уровень. Бездепозитные бонусы, как уже ясно, являются уникальной вероятностью приступать к игровому процессу абсолютно бескорыстно, то есть играть в онлайн казино безвозмездно и на имеющие средства сразу в регистрации аккаунта. Автоматы с таким депозитом имеют стать прекрасной возможностью поиграть для почитателей азарта с определенными лимитированиями в денег.
#6189 JamesGydayhttps://shuriginadiana.ru
диана шурыгина фото <a href=https://shuriginadiana.ru/>https://shuriginadiana.ru</a>
#6190 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Ирина Сидоркова casino приложения <a href=https://vestnik-jurnal.com/>порно с Ирина Сидоркова</a> 1×bet на андроид бесплатно casino автомат <a href=https://res-publika.com>скачать букмекерскую контору на андроид</a> почему в казино нет окон порно с Захарова Мария Владимировна порно с Максим Глушенков (футбол) букмекерская контора официальный сайт 7k casino сайт порно с Каролина Севастьянова 1×bet официальный
#6191 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало
В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, необходимо обратиться в службу поддержки спустя лайв-чат на сайте казино. <a href=http://filmkachat.ru/>1×slots официальный сайт мобильная версия скачать</a> Заполняя данные в собственном профиле, указывайте только достоверную информацию, например как Вам придется ее доказать в при выводе средств.Сразу последствии активации промокода возможно пользоваться подарком. Как теснее упоминалось, бонусы бывают трёх видов – фриспины, кредиты и фриплей-бонусы. <a href=https://www.4sync.com/s/feS06Cjuz>https://www.4sync.com/s/feS06Cjuz</a> На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не можете активировать и получить бездепозитный приз.Для вывода средств бонус нужно будет отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами акции и вариациями отыгрыша бездепозитного бонуса до его получения, дабы избежать конфликтных ситуаций. 1× slots сайт <a href=https://ruisoon.com/space-uid-46753.html>https://ruisoon.com/space-uid-46753.html</a> Диапазон ставок, которые вправе устроить игрок, того лимитирован. Обычно назначать можно маленькую необходимую — около 10–30 рублей за одно вращение.Каждый геймер должен сперва отчетливо выучить обстоятельства по получению и отыгрышу понравившегося презента. Если всё организует, поспешите арестовать бесплатные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик сейчас начать вертеть барабаны топовых слотов.
1×slots зеркало
Поспешите забрать бездепозитные бонусы за регистрацию в казино из представленного списка. Все платформы столько ведут законную деятельность, но и порадуют добросовестными плодами игры, высочайшей отдачей, быстрыми выплатами. 1×slots регистрация на сайте Бездепозитный бонус казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в этом и заключается главное различие. <a href=https://r.rumedia.top/user/Walterweets/>https://r.rumedia.top/user/Walterweets/</a> Выигрыши с бонусов без вложений постоянно привязаны к притязанию по ставкам и имеют быть обналичены только последствии выполнения этих требований.Теоретически, к бесплатным призам можно отнести так нарекаемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, потому собственно они предоставляют только возможность создавать ставки. 1×slots casino регистрация 1×slotscasino09k online Основное отличие сомнений, что для получения бездепа нужно пополнять баланс в казино. Но считая этого, есть ряд прочих отличий:
1×slots зеркало на сегодня
К примеру, игроку выдаются безвозмездные средства в заведении в размере пятидесяти или 100 долларов (вейджер на которые составляет 100х). То есть, каждому новоприбывшему геймеру выскакивает манящая иллюстрация, которая обещает выплату всех зачисленных компанией средств. Не стоит внимания на казино бонус за регистрацию без депозита с слишком немалый или очень малеханькой суммой призов, потому собственно, и кропотливо выучив все условия, тут скорее, будет некий подкол. <a href=http://msfo-soft.ru/msfo/forum/user/39042/>http://msfo-soft.ru/msfo/forum/user/39042/</a> 1×слот регистрация в 1×slots casino В разделе с бонусами активировать свой презент. Найти забавы, для коих предусмотрено одобрение и использовать приз по назначению.
1×slots регистрация 1×slotscasino 56 online
Промокод – определённая композиция знаков, коию нужно ввести в соответствующее фон при создании учетной записи или активировать в собственном профиле игрока в разделе с бонусами.Автоматы непопросту числятся самым популярным азартным веселием. Чтобы освоить управление и управляла, понадобится всего несколько мин. Ваша задача устроить ставку, найти число трудящихся линий и возможно вертеть тамбур. Если дисплее выпадет выигрышная комбинация – вы выиграли! С данной задачей для помогут управится бездепозитные бонусы казино. 1×slots регистрация 1×slotscasino09k online <a href=http://fromair.ru/communication/forum/user/78909/>http://fromair.ru/communication/forum/user/78909/</a> Бонусы без депозита при регистрации считаются самыми красивыми как для опытных игроков, например для и новичков. Получив такое вознаграждение, клиент имеет выступать на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные призы в интернет-казино Рунета, а условия их активации и выигрыша.Составленный экспертами Casino.ru список онлайн-казино с бездепозитным призом позволяет игрокам сопоставить спецпредложения различных операторов.
1×slots регистрация 1×slots review live
3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать аппарат либо почту, указать персональную информацию;Чаще всего, знаменитые сервисы, такие как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное верховодило. Финансовые средства выводятся только через что, эту платежную систему, которой популярностьюимели для пополнения депозита. Если же игрок получил бездепозитный покерный бонус, требуется пополнить счет на минимальную необходимую, которая сочиняет обычно 10 $. <a href=https://wlppr.net/user/JasperGex/>https://wlppr.net/user/JasperGex/</a> 1× slots зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://isomedu.com/forum/profile/josephdrons/>1×slots зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Допустим, за регистрацию вы возымели бездеп в объеме 2 000 руб. С вейджером х30. В данном случае предстоит сделать ставок, на общую сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда сделайте условия по отыгрышу, придёт время заработать настоящие средства. Однако не забывайте, собственно с каждого дара получится вывести определённую сумму (чаще всего не более $200). Но а если вы уже профи по интернет казино, кликаем на красную кнопку «Получить» и Вы автоматически перейдете в интернет казино;
#6192 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Александра Степанова, фигуристка порно с Елена Никитина, скелетонистка <a href=https://rucriminal.info/>bet casino</a> казино онлайн 1×bet официальный слоты <a href=https://kompromat1.online/>скачать сайт букмекерской конторы</a> up casino официальный лучшие казино бесплатно лучшие онлайн казино porno Анастасия Янькова, боксерка pin up casino пин порно с Карен Хачанов (теннис) 7k casino
#6193 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
Если вы выбрали себе количество брендов которые вас больше всего полюбились, для постоянной забавы! Таких гемблеров казино довольно любит и оценивает, за частую такие игроки становятся VIP игроками заведения, которым часто поступают прибыльные предложения в виде бонусов, так же туда входит и бездепозитные.Активация происходит счет промокодов, которые вводятся в собственном офисе после регистрации. Среди спецпредложений в списке Casino.ru находятся неповторимые промокоды, коие доступны только посетителям портала. Другие методы начисления средств ? автоматическая активация незамедлительно последствии сотворения аккаунта и получение подарка по запросу в службу технической помощи. <a href=http://filmkachat.ru/>1× slots зеркало</a> Если площадка презентует бездеп за регистрацию, то процедура его получения проста. Нужно лишь ввести аккаунт на веб-сайте и активировать его, подтвердив адресок электронной почты, номер телефонного или другие данные, коие настятельно оператор. Перед данным необходимо увериться, что юзер находится на официальном сайте казино, не на жульнической площадке. <a href=https://noosfero.ufba.br/lexxeagle/blog/mastering-silo-images-integration-for-advanced-3d-architectural-visualization>https://noosfero.ufba.br/lexxeagle/blog/mastering-silo-images-integration-for-advanced-3d-architectural-visualization</a> Итак, дабы безвозмездные бонусные кредиты превратились в реальные деньги, которыми вы можете управлять по собственному усмотрению, их нужно отыграть. Вейджер стопам уточнять в правилах онлайн-казино. 1×slots быструю регистрацию а также мгновенное <a href=http://404.tk.t941336g.beget.tech/user/JasperFoums/>http://404.tk.t941336g.beget.tech/user/JasperFoums/</a>
1×slot регистрация
Мы собрали и выпустили перечень наихороших бездепозитных казино с призами за регистрацию, коие гарантируют великодушные выигрыши и моментальные выплаты.При подмоги такового одобрения оператор может того завлекать клиентов, коие ранее показывали активность на сайте, хотя по некий причине перестали выступать. В этом случае промокод высылается юзеру по электрической почте или вид SMS. 1×slots зеркало на сегодня Онлайн гемблинг развивается с любым деньком все больше и больше, свежие бренды создаются не по денькам а по часам. Новые интернет казино делают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и что, этим наиболее предлагают бездепозитные призы за регистрацию, что бы не пропустить такую вероятность — как воспользоваться новым бездепом, рекомендуем навещать наш сайт как можно чаще, самое аппетитное и свежие несомненно добавляться в данном же списке.Раздача бонусов может быть посвящена разным датам: календарные праздничные, дни рождения игроков, годовщина открытия казино и т. Д. Подарок выдается вид средств, фриспинов или баллов для накопления и размена на услуги оператора. Если юзер получает выигрыш, средства начисляются на его счет. Для вывода данной суммы придется выполнить ряд притязаний. <a href=https://forum.mbprinteddroids.com/member.php?action=profile&uid=70348>https://forum.mbprinteddroids.com/member.php?action=profile&uid=70348</a> Изучить правила и обстоятельства получения бездепозитных призов казино, Вы можете у нас на веб-сайте в разделе с бонусами либо на официальном веб-сайте выбранного Вами казино. Если имеет отыскать нужную информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал или по электрической почте.В интернете слишком большое скриптовых сайтов, коие принадлежат мошенникам. Их основная цель – заинтересовать гэмблеров, пообещав не великодушные презенты, хотя и солидные выигрыши. Так собственно кое-какие сайты предлагают получить за регистрацию и $1 000. 1×slots актуальное зеркало
1хслотс мобильная версия зеркало
Наши специалисты исследуют обстоятельства промоакции, после в ручном режиме проверку их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и другие параметры. Мы не рекламируем казино, а даем игрокам информацию о наихороших из них. <a href=https://kr-osvita.gov.ua/user/Walterapomi/>https://kr-osvita.gov.ua/user/Walterapomi/</a> 1х слот регистрация в 1×slots casino
1×slots официальный регистрация
Для верификации номера телефонного, в собственном профиле выберите опцию „Подтвердить номер телефонного“ и введите в подходящее поле код, полученный в sms-сообщении. Фриспины предусмотрены для использования в видео слотах. Внимательно ознакомьтесь с условиями – частенько их выдают на некоторые автоматы. В зависимости от клуба, у вас выйдет устроить определённое количество ставок. Кстати, продвинутые игорные жилища позволяют запускать любых «одноруких злодеев».На нашем сайте Вы отыщите перечень актуальных свежих бездепозитных бонусов в казино 2022 года. Также, есть много неповторимых предложений, коие доступны лишь посетителям нашего сайта после регистрации по нашей ссылке либо активации особого промокода. Как только вы отыграли вейджер и средства с бонусного баланса перебежали вас на реальный счет, Вы смело сможете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (сделать наименьший депо например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, вместе с депо).Фриспины начисляются по определенной ставке. После их активации игроку необходимо запустить разъем и убедиться, собственно в нем показываются бесплатные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода в отыгрыша определяется оператором и редко превышает 5 000 руб. 1×slots зеркало регистрация <a href=http://cadetmove.ru/index.php?subaction=userinfo&user=usedwoman98>http://cadetmove.ru/index.php?subaction=userinfo&user=usedwoman98</a>
1×slots зеркало на сегодня
Бездепозитный приз по промо-коду будет доступен для забавы, лишь в случае когда Вы активируете особый бонусный код в разделе с бонусами либо укажите промокод при регистрации на веб-сайте. В неких случаях, не активации кода, понадобиться доказать контактные данные игрока и наполнить анкету посетителя. <a href=https://www.storeboard.com/blogs/automotive/the-ultimate-guide-to-coolant-replacement-keeping-your-engine-cool-and-efficient/5777046>https://www.storeboard.com/blogs/automotive/the-ultimate-guide-to-coolant-replacement-keeping-your-engine-cool-and-efficient/5777046</a> x1 slots регистрация в 1×slots casino Игры, в можно играть на бонусные деньги. Проверьте список игр, в возможно играть на бонусные свои, вероятно они Вам не понравятся и не тратить своё время на такую промоакцию.Осталось выбрать казино с бонусом за регистрацию и создать профиль. После активации дара выигрыш зависит от Фортуны и способностей.
<b>Смотреть еще похожие новости:</b>
<a href=http://djdrewski.co.uk/lfsbangers/viewtopic.php?f=32&t=32061>1×slots регистрация 1×slots casino c2d ru</a>
<a href=https://vredeenvermaak.be/forum/vrede-en-vermaak/>скачать 1×slots официальный сайт</a>
<a href=https://www.makinamania.net/index.php?topic=250443.new#new>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чтобы без увериться в превосходстве бездепозитных призов, достаточно зарегистрироваться в казино и получить одобрение. Обычно, бездепозитные призы выдаются под конкретные слоты с фиксированной ставкой, хотя их наверняка запрещено использовать в игровых автоматах с прогрессивным джекпотом. Список игр, каких можно применять бездеп, Вы отыщите в описании акции или сможете уточнить у саппорта заведения.
#6194 Georgepahhttps://mfo-all.ru
список мфо которые дают деньги <a href=https://mfo-all.ru/>микрофинансовые организации</a>
#6195 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
сайт казино вход почему казино <a href=https://t.me/vchkogpu_ru>яндекс игры казино</a> casino бездепозитный бесплатно играем казино <a href=https://strelochnik.com/>скачать pin casino</a> сайте букмекерской конторы фонбет new casino порно с Анна Калинская (теннис) porno Юлия Канакина порно с Матвей Сафонов (футбол) часы казино казино рояль смотреть
#6196 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Анастасия Янькова, боксерка порно с Юлия Ефимова <a href=https://krtka.info/>porno Нина Пирогова, хоккеистка</a> водка казино pin up casino зеркало <a href=https://slon-ru.com/>porno Анастасия Янькова, боксерка</a> 1×bet зеркало на сегодня pin up casino скачать про казино порно с Александр Головин (футбол) винлайн букмекерская контора бесплатно играем казино рабочие зеркала казино
#6197 Charlesgunnyhttp://filmkachat.ru
1×slots коды
Шаг 4. Активация. Внимательно выучите условия, информацию по ограничениям и сроке деяния бонусного предложения. Разобравшись с правилами, возможно активировать бонус в личном кабинете (от ? с использованием промокода) или по запросу в саппорт. <a href=http://filmkachat.ru/>1×slots казино мобильная версия</a> В случае установленного лимита на сумму вывода выигрыша с бездепозитного бонуса, игрок не может исключить больше заявленной суммы. <a href=https://diigo.com/0y2r36>https://diigo.com/0y2r36</a> Срок активации и время на отыгрыш. Зачисление денег либо фриспинов происходит при активации на требовательно ограниченного периода, похожие требования предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать бонус некоторое дней либо и недель. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с необоснованно высоким вейджером.Главное преимущество спинов – вероятность изучить разные слоты. Также удастся насладиться бонусными раундами, испытывать удачу в риск-туре и преувеличить выигрыш за счёт особенных знаков. Однако не игровой процесс заслуживает внимание, ведь какого-либо сосредоточиться на реальном выигрыше. 1×slots регистрация 1×slotscasino 56 online <a href=http://www.darkml.net/bbs/home.php?mod=space&uid=7975335>http://www.darkml.net/bbs/home.php?mod=space&uid=7975335</a> Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.
1×slots зеркало рабочее
Условия, на коих предоставляется бездеп, регулируются казино. Каждая промоакция имеет доскональные управляла, гиперссылка на коие обыкновенно содержится в промообъявлении. В их указываются лимиты, вейджер, список дешевых игр. Если оператор скрывает данные о предложении, то воспользоваться им не.Обыкновенные бездепозитные бонусы в объеме от трех до 20 $ сделаны чтобы, чтобы, дабы в забавы заходили все новые и новые игроки. Здесь, всего, будет ограничение на наибольший выигрыш. Важно, чтобы перед минимальным вкладом был отключен бонус за 1-ое пополнение счета, и в не попадет на повторный вейджер. 1×slos регистрация в 1×slots casino Существует ли стратегии для отыгрыша бездепозитных бонусов? К сожалению нет, на выигрыши или проигрыши с бонусов, казино либо игрок повлиять возможности, отдача игр случается от разработчиков игр. <a href=http://www.tr.besatime.com/index.php?subaction=userinfo&user=DoctorLazutaMa>http://www.tr.besatime.com/index.php?subaction=userinfo&user=DoctorLazutaMa</a> Реже бонусы без депозита начисляются постоянным игрокам. С их поддержкой администрация старается вычесть ценных посетителей либо желает поблагодарить за преданность верных посетителей. Но гораздо чаще для подобных целей применяются эти промоакции:Заработать на бездепозитных призах за регистрацию в казино может любой юзер, достигший совершеннолетия. казино 1× slots официальный сайт Если площадка дарит бездеп за регистрацию, то процедура его получения ординарна. Нужно только ввести аккаунт на сайте и активировать его, подтвердив адрес электрической почты, номер телефона либо другие данные, коие требует оператор. Перед этим нужно увериться, что пользователь располагается на официальном сайте казино, а не на мошеннической площадке.Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.
1×slots регистрация то дальше необходимо пройти
На страничке представлены бездепозитные бонусы за регистрацию в казино редчайшая награда за которой гонятся все игроки как новички, например и мастера. Мы также уделяем огромное внимание на присутствие призов при формирование рейтинга казино на средства. Бездепозитный бонус это возможность выступать безвозмездно и выиграть реальные деньги.Как лишь вы отыграли вейджер и свои с бонусного баланса перешли для на реальный счет, Вы храбро можете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать минимальный депо к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, вместе с депозитом). <a href=https://damienihfd22332.vblogetin.com/35882741/nude-ai-understanding-the-intersection-of-innovation-and-ethics-in-image-manipulation>https://damienihfd22332.vblogetin.com/35882741/nude-ai-understanding-the-intersection-of-innovation-and-ethics-in-image-manipulation</a> Вы не в коем случае ни чем не рискуете, а лишь выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической игры на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, научится регулировать менять ставки и полосы, изучать бонусные игры и их выигрышные композиции, да в просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные средства, коие можно отыграть и исключить, но просто на демо счет, тем самым адреналин в крови более повысится а пульс забьется с нередким ритмом!У нас на веб-сайте Вы найдете перечень призов без депозита в испытанных казино и подробную информацию то как их получить и применять. 1×slots рабочее зеркало на сегодня Казино выделяет возможность заработать и исключить настоящие средства на бездепозитных призах. Обычно, это незначительная сумма, коию казино возможность себе разрешить презентовать игроку.
1×slots casino регистрация
Иногда у посетителей сайта все появиться проблемы при активации полученного промо-кода. В таких случаях, нужно обратиться за поддержкой в службу поддержки «Support». Для получения ответа, обязательно указывается определенная первопричина обращения и подтверждается информация дополнительными экрана. Если сформировалась спорная обстановка, практически возможно адресоваться к главному регулятору или контролирующему органу, выдавшему данному заведению лицензионный документ. Самый распространённый из подобных призов, естесственно же, бездеп на денек рождения посетителя — приз повторяющий фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им возможно протяжении установленного периода медли. Вейджер менее х30–35 считается приемлемым. Опытные игроки утверждают, собственно с таким вейджером реально остаться в плюсе, случае верно подойти к выбору игрового аппарата. 1×slots рабочее зеркало <a href=http://support-groups.org/memberlist.php?mode=viewprofile&u=207091>http://support-groups.org/memberlist.php?mode=viewprofile&u=207091</a>
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Используйте превосходнейшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, чтобы заработать подарки за простые действия теперь сегодня получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высокой отдачей и резвыми выводами на электронные кошельки. Зарегистрироваться в казино по особой ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефонного и электронную почту). Для подтверждения номера телефона необходимо в собственном профиле указать собственный номер и нажать кнопку „Подтвердить номер аппарата“, далее Вы получите sms-сообщение с кодом, кот-ый необходимо ввести в соответствующее поле. Для доказательства электрической почты, перейти по активной ссылке в письме от казино. <a href=http://youthhawk.co.uk/w/api.php?action=https://www.weddingbee.com/members/blackshisha0212/>http://youthhawk.co.uk/w/api.php?action=https://www.weddingbee.com/members/blackshisha0212/</a> 1×slots casino регистрация Ознакомьтесь с нашим перечнем наихороших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего списка и получите бездеп сразу. Хватайте превосходнейшие благотворительные предложения ниже и выигрывайте большие деньги, не рискуя!В каждом казино с бездепозитным бонусом учтены вейджеровые обстоятельства. Это единственный «подводный камень», который стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) сделать определённое число ставок. Чем круче бонус, что, этим труднее выполнить обстоятельства, и напротив.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.sgomberisgombero.it/author/jamesapate/>1×slots официальный сайт зеркало рабочее</a>
<a href=https://qualityprogamer.de/forum/showthread.php?tid=370790>1×slots регистрация на официальном сайте</a>
<a href=http://forum.survival-readiness.com/viewtopic.php?t=253529>1 x slots</a>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=59645&result=reply>1×slots регистрация на сайте 1×slots ru com</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В бонусную программку многих операторов входят регулярные бездепы. Это пожизненные промоакции, поощряющие интенсивных неизменных игроков. Популярный формат — раздача фриспинов по определенным дням недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают постоянные бонусы без депо в мена на накопленные баллы лояльности. Бонус за регистрацию в казино без депозита с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша имеет потребоваться сделать ставки на необходимую, в некоторое 10-ов раз превышающую необходимую приза или выигрыша.
#6198 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
зеркала казино казино сегодня <a href=https://rucriminal.info/>сколько казино</a> 1×bet скачать приложение сколько казино <a href=https://rumafia.news/>porno Илья Ковальчук (хоккей)</a> демо казино фильмы казино рояль бывшие казино казино казино 1 pin casino зеркало скачать 1×bet на андроид бесплатно
#6199 Charlesgunnyhttp://filmkachat.ru
1×slots casino зеркало рабочее
За вербование друга ? в партнерской программки заказчик получает вознаграждение за вербование свежих пользователей.Пoдтвepдить личнocть клиента. Для удачного вывода средств, нужно подтвердить личность клиента. Нa этaпe вepификaции пpoфиля, сотрудники службы безопасности должны убедиться, собственно у игрока более один аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не может вывести свой выигрыш, если у него будет несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы. <a href=http://filmkachat.ru/>1×slots официальный demo регистрация в 1×slots casino</a> <a href=https://www.skillshare.com/en/profile/Cgifurniture-Com/181579043>https://www.skillshare.com/en/profile/Cgifurniture-Com/181579043</a> 1×slots бездепозитный бонус за регистрацию <a href=https://telescope.ac/mephedrone-synthesis/tdqvouw195c2jhqee8×50a>https://telescope.ac/mephedrone-synthesis/tdqvouw195c2jhqee8×50a</a> Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депозит имеет выделяться до 30 дней.Получить приветственный бонус имеют только свежие посетители онлайн-казино. Способы описаны в критериях акции каждого легального казино, чаще всего это:
1 хслот регистрация в 1×slots casino
Далее потребуется отыграть вагер и вывести выигрыш. Игрокам без опыта крупно подфартило, они могут получить десятки презентов за одну регистрацию. Если не смогли получить Бездепозитный приз, не тревожьтесь. Обратитесь в онлайн чат, оператор поможет исправить.Обыкновенные бездепозитные бонусы в объеме от трех до двадцати $ созданы чтобы, чтобы, дабы в забавы заходили все новые и свежие игроки. Здесь, вероятнее всего, несомненно ограничение на максимальный выигрыш. Важно, чтобы перед наименьшим вкладом был отключен приз за первое пополнение счета, и в не попадет на повторный вейджер. <a href=https://forum.graylite.com/viewtopic.php?p=332021#p332021>1×slots зеркало на сегодня</a> 1×slot зеркало рабочее этих способов предполагает регистрацию В настоящее время получить приз за регистрацию в казино довольно просто. Почти каждый игорный жилище с готовностью даст деньги либо бесплатные вращения. Многие игроки используют данным и не смущяются региться в любом клубе с прибыльными условиями. Кстати, это замечательная возможность выдумать выигрышную тактику и сорвать куш. <a href=http://87.76.32.30/index.php?subaction=userinfo&user=makeshiftkit21>http://87.76.32.30/index.php?subaction=userinfo&user=makeshiftkit21</a> Возможность протестировать свежие забавы, не рискуя личными средствами и разработать личную стратегию забавы.Ниже указан важный список законных казино в Беларуси с призами на 1-ый депозит. Вы сможете попасть на официальный вебсайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. 1×slots мобильная версия войти казино Обыкновенные бездепозитные бонусы в объеме от 3-х до 20 $ сделаны чтобы, чтобы, дабы в игры заходили все новые и новые игроки. Здесь, вероятнее всего, будет ограничение на максимальный выигрыш. Важно, чтобы перед минимальным вкладом был отключен приз за первое пополнение счета, и геймер не попадет на повторный вейджер.Это также благотворительные деньги, коие поступают на аккаунты свежеиспеченных игры после регистрирования. А необыкновенность таких бонусов произведено что, что обретенные финансы непременно по применять в продолжении назначенного времени.
1×slots регистрация 1×slots casino c2d ru
Если вы бывалый игрок, вы обязаны аристократия, что бонус без депо – редчайшая находка. Тем ниже, мы неделю исследуем онлайн, дабы найти для вас наихорошие бездепозитные предложения. Если площадка дарует бездеп за регистрацию, то процедура его получения проста. Нужно лишь завести аккаунт на сайте и активировать его, подтвердив адресок электронной почты, номер телефонного либо иные данные, которые настятельно оператор. Перед данным необходимо убедиться, собственно юзер находится на официальном веб-сайте казино, а не на мошеннической площадке.Обычно для получения бонусов без депо, казино выдвигает приклнные и вполне выполнимые условия, но есть ряд деяний коие запрещены и имеют стать досадные последствия: <a href=https://woodmancx.com/user/Craiglab/>https://woodmancx.com/user/Craiglab/</a> Таким образом онлайн казино получает потенциального игрока. Возможно дальнейшем либо настоящем он захотит сыграть на средства средства. Так работают бездепозитные бонусы в интернет казино. Здесь отлично подходит выражение, благотворительные сыр случается лишь в мышеловке. Начинающие игроки шансы не осознавать опасность пыла. Однако течением понимания становится больше. Это тема для отдельного обсуждения. 1хслотс зеркало Бонус с зачислением средств на счет дает больше свободы действий. Пользователь сам подбирает, каким образом распорядиться подаренными средствами. Здесь также шансы действовать ограничения на список дешевых игр, но обыкновенно эти рамки не например строги, как в рекламную с бесплатными вращениями.Зачастую бездепозитные бонусы казино для игры предлагаются различными заведениями азартных игр виде маркетинговых акций либо в целях привлечения к для новых игроков. Для бездепозитных призов в казино 2022 игроку надо пополнять счет до момента вывода желанных средств.
1×slots casino регистрация 1×slotscasino09k online
Для подтверждения электронной почты, просто перейдите по интенсивной ссылке в послании, приобретенном от игрового заведения.Популярность онлайн казино растёт и всё больше пользователей начинают интерес азартными играми. Бездепозитные призы 2022 года, это уникальные презенты за регистрацию. С их поддержкою новые игроки могут получить бесплатные вращения либо средства на баланс за одну регистрацию. С появлением игорных заведений в онлайне, бездепозитные призы стали наимоднейшим методом привлечения игроков. Подобные акции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш сайт собрал наихорошие предложения из интернета на 2022 год. Воспользуйтесь любым даром и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить обстоятельства. Шаг 5. Использование и отыгрыш. Бездеп обязан быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. 1×slots casino зеркало <a href=http://palam.gawe114.kr/free/205241>http://palam.gawe114.kr/free/205241</a> Представленные на данной страничке наилучшие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, каком посетители Casino.ru имеют сортировать перечень по нескольким аспектам: по сумме, вейджеру, максимальной сумме вывода и т.д.Новички не любят сразу же заносить депо. Это обусловлено отсутствием опыта и недоверием. К счастью, в наше время можно получить бездепозитный приз за регистрацию в казино. Неважно что начислит система – фриспины либо кредиты. В любом случае вы не рискуете собственными сбережениями. Это отличная вероятность запустить приглянувшийся видео разъем или же испытать фортуну в настольных забавах.
1х слот 1хслотс регистрация перейти на 1×slots
Для вывода средств бонус надо(надобно) будет отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариациями отыгрыша бездепозитного приза до его получения, дабы избежать конфликтных обстановок.Практически все интернет казино с бездепозитным бонусом за регистрацию предусматривает программу лояльности — систему одобрения неизменных посетителей, которая произведено из большого уровней. При достижении игроком еще уровня на его счёт поступает приз. Чем выше степень — тем щедрее бонус. Срок активации и время на отыгрыш. Зачисление средств или фриспинов случается при активации на взыскательно ограниченного периода, схожие требования предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать бонус количество дней или даже месяцов. Другие выдают солидную необходимую за регистрацию, но время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером.Как только на виртуальном счету окажутся бонусные средства, поспешите отыграть вейджер. Сразу после сего возможно забыть заявку на вывод выигрыша. Кредиты прибыльно отличаются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом настоящих средств и дают возможность ощутить азарт. Во-вторых – можно насладиться любой азартной забавой доступной на сайте. В вашем распоряжении находятся автоматы, настольные прибавление, видео-покер, Live-дилеры. <a href=http://www.baohaibbs.com.cn/home.php?mod=space&uid=38534>http://www.baohaibbs.com.cn/home.php?mod=space&uid=38534</a> Бездепы с безвозмездными вращениями деют юзерам право вертеть барабаны игровых автоматов без снятия средств со счета. За любой раунд платит казино. Число спинов ограничено и редко превышает сотку. Если промоакция содержит большое даровых игр, их начисление может быть разбито на несколько дней.Размер призов чаще всего чисто условный и не превышает 50 рублей. Приятно, хотя осязаемым бустом при навряд станет. x1 slots 1хслотс регистрация перейти на 1×slots Перечисленные выше основные свойства сочетают фактически любой бонус и являются стереотипными для бездепозитных бонусных начислений в казино.
<b>Смотреть еще похожие новости:</b>
<a href=https://redfist.de/RF-Online-Testforum/viewtopic.php?f=105&t=80930>1×slots зеркало сайта</a>
<a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1× slots официальный</a>
<a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=788905>1хлот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
К сожалению, нет. Почти все казино, требуют внесение хотя бы одного малого депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, что исключить деньги разрешается лишь на что, эту платежную систему, с которой был сделан депозит. Внесение депозита – Будьте готовы восполнить счет в отыгрыша приза. Это стандартное требование верховодил для данного на промо-акций. Лучше заблаговременно уточнить, какую сумму надо(надобно) будет заносить на счет. Как управляло, речь о минимальном депозите, хотя вы должны быть уверены, собственно он вас по карману.
#6200 Charlesgunnyhttp://filmkachat.ru
1х слот регистрация в 1×slots casino
Бездепозитные призы прекрасный вариант безвозмездной игры в игровые автоматы. Многие юзеры сети не знают, что в казино возможно начать играть абсолютно даром, а потом исключить выигрыш на банковскую карту или электронный кошелек, иные не доверяют интернет казино, а третьи успешно играют и выигрывают – и подчас довольно великие суммы.Размер ставки для игры по бездепозитному бонусу (окончательно же, если, тогда,, когда он представлен повторяющий бонусных валютных средств) часто ниже, чем при игре на депозит. Ограничение несомненно работать до этапа отыгрыша бонуса. <a href=http://filmkachat.ru/>1×slots казино зеркало</a> В случае установленного лимита на сумму вывода выигрыша с бездепозитного приза, игрок не сможет исключить больше заявленной суммы. <a href=https://www.jottacloud.com/s/371ce1751dd51e94c37a4f823d984e6a848>https://www.jottacloud.com/s/371ce1751dd51e94c37a4f823d984e6a848</a> сайт 1× slots casino <a href=http://www.taroko.org/taroko/forums/member.php?action=profile&uid=480>http://www.taroko.org/taroko/forums/member.php?action=profile&uid=480</a>
1×slot рабочее зеркало
1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, в не желаете замерзнуть жертвой мошенников либо впустую истратить время;Как лишь на виртуальном счету окажутся бонусные свои, поторопитесь отыграть вейджер. Сразу после сего возможно оставить заявку на вывод выигрыша. Кредиты выгодно отличаются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом реальных средств и выделяют возможность ощутить задор. Во-вторых – можно насладиться любой азартной игрой доступной на сайте. В вашем распоряжении присутствуют автоматы, настольные прибавленье, видео-покер, Live-дилеры. <a href=http://forum.survival-readiness.com/viewtopic.php?t=265033>1хслотс официальный сайт зеркало</a> 1хслотс рабочее зеркало на сегодня <a href=http://onlyall.ru/index.php?subaction=userinfo&user=exoticverdict26>http://onlyall.ru/index.php?subaction=userinfo&user=exoticverdict26</a> В большинстве заведений устроить это возможно по адресу электронной почты, по номеру телефона, через социальную сеть либо гугл-аккаунт.К сожалению, нет. Почти все казино, требуют внесение но бы одного минимального депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, что исключить средства разрешено лишь на что, эту платежную систему, с коей был изготовлен депо. 1×slots casino регистрация
рабочее зеркало 1×slots
Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, solid зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.Возможность протестировать новые забавы, не рискуя личностными своими и создать собственную стратегию игры. Хотя безвозмездные бонусы начисляются без депо, не исключено, что вам придется заносить деньги. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь последствии как, как свежий заказчик первый пополнит игровой счет. <a href=http://forum.ttpforum.de/member.php?action=profile&uid=347673>http://forum.ttpforum.de/member.php?action=profile&uid=347673</a> Некоторые казино все предлагать посетителям бездепы за подтверждение номера или почты или репост на страницу в социальных сетях. 1×slots официальный сайт зеркало рабочее Вышеописанная причина и является основным интересным, из-за которого операторы отдают часть своей выгоды на различные маркетинговые затраты и маркетинговые кампании. А самым действующим тут будут выступать именно бездепозитные бонусы казино 2022 с выводом за регистрацию.
1×slots casino регистрация 1×slotscasin online
Бездепозитный приз – это экономическое вознаграждение, коие выдается участнику забавы в казино, для его вербования и появления заинтересованности. Любой посетитель, кот-ый соответствует условиям выдачи сходственного бездепозитного приза, может претендовать на получение вышеуказанного приза. Такое поощрение является более эффективным методом, дающим вероятность стартовать в игре, не вкладывая собственных вещественных средств.В разделе с призами активировать собственный подарок. Найти забавы, для которых предусмотрено поощрение и использовать приз по предназначению. Но есть азартные заведения, готовые просто так вручить деньги на забаву. Для этого достаточно сделать профиль. Чтобы вывести выигрыш, сначала нужно выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа.Вышеописанная причина и является основным нюансом, из-за которого операторы отдают часть своей выгоды на различные рекламные расходы и маркетинговые кампании. А наиболее действующим тут станут играть непосредственно бездепозитные призы казино 2022 с выводом за регистрацию. Да, у безвозмездных призов есть недостатки. Прежде всего, они обыкновенно очень. Кроме того, условия вейджера по ним всегда строгие. Но все неимение риска проделывает их очень привлекательными для клиентов.Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция содержит доскональные верховодила, ссылка на коие обычно содержится в промообъявлении. В их указываются лимиты, вейджер, список дешевых игр. Если оператор скрывает данные о предложении, то пользоваться им не. 1×slot казино зеркало <a href=https://directory5.org/Glory-Casino_315248.html>https://directory5.org/Glory-Casino_315248.html</a> 3. Подтвердить данные. В зависимости от клуба, нужно привязать телефонный либо почту, указать индивидуальную информацию;Выбирайте наихорошие бесплатные призы счет обзоров на Casinoz – и пусть вас сопутствует удача при отыгрыше бонусных кредитов!
1хслотс казино зеркало
Бездепозитный бонус за регистрацию в казино — это стартовый подарок повторяющий денежного начисления либо бесплатных вращений для свежих игроков заведения, для получения которого надо заносить депозит. Для верификации номера телефонного, в личном профиле изберите опцию „Подтвердить номер телефонного“ и введите в соответствующее фон код, полученный в sms-сообщении.Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. <a href=http://radshir.com/list/index.php?subaction=userinfo&user=Geraldwoold>http://radshir.com/list/index.php?subaction=userinfo&user=Geraldwoold</a> Стоит отметить, что бездепозитный бонус выдается лишь взрослым новичкам, которые, в свою очередь, могут пригласить собственных приятелей и знакомых, также претендующих на поощрительную программу лояльности. Подобная технология появилась среди конкурирующих онлайн-казино для популяризации и расширения трафика. Покер румы и спонсоры содействуют увеличению своей посещаемости, методом привлечения свежих игроков. Бонусы – это уникальный шанс для вероятных участников забавы, которые все опробовать софт покер рума и убедиться, станут ли они в него играть либо нет. Новый игрок испробует средства силы с настоящими оппонентами в казино. 1×slots casino регистрация 1×slotscasin online Некоторые казино могут предлагать клиентам бездепы за свидетельство номера либо почты или репост на страницу в соц сетях.Список например называемых «разрешенных землель» прилагается к правилам бонусной программы игорного портала. Обязательно выясните, распространяются ли на вас подобные санкции.
<b>Смотреть еще похожие новости:</b>
<a href=https://your-portal.at.ua/forum/63–61321–15#88263>рабочее зеркало 1хслотс</a>
<a href=https://forum.ltp-team.com/topic/79878–1×slots-rabochee-zerkalo-na-segodnya/>1×slots рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Похожим образом работает третий способ доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения клиента или из-за с получения им VIP-статуса. Подарок предоставляется последствии воззвания в поддержку и ревизии. Иногда у гостей сайта шансы появиться трудности, задачи, препядствия при активации полученного промо-кода. В таких случаях, необходимо обратиться за подмогою в саппорта «Support». Для получения ответа, непременно указывается определенная причина воззвания и подтверждается информация дополнительными экрана. Если сформировалась неоднозначная обстановка, постоянно можно адресоваться к основному регулятору или контролирующему органу, выдавшему данному заведению лицензионный документ.
#6201 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
В качестве призов интернет казино нередко предлагает выдачу фриспинов, другими бесплатных вращений игрового барабана. Виртуальные монеты можно применять для обучения в покерной школе или для игры в казино.Ограничения по играм. Администрация запрещает игрокам кое-какие игровые автоматы с бездепозитным призом, средствами или безвозмездными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда дробление производится по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, хотя запрещен в настольных забавах и в разделе Live Casino. <a href=http://filmkachat.ru/>онлайн казино 1×slots</a> Фриспины начисляются по определенной ставке. После их активации игроку нужно запустить слот и убедиться, что в нем показываются бесплатные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода последствии отыгрыша ориентируется оператором и изредка выше 5 000 рублей. <a href=https://diigo.com/0y2r7c>https://diigo.com/0y2r7c</a> 1×slots регистрация 1×slots review live <a href=https://md.inno3.fr/s/zUurqQmKJ>https://md.inno3.fr/s/zUurqQmKJ</a>
casino 1×slot
Но есть азартные заведения, готовые просто например вручить средства на игру. Для этого довольно сделать профиль. Чтобы вывести выигрыш, сперва нужно выполнить вейджеровые условия, прописанные в критериях получения бездепа.Лишь известные и знаменитые азартные заведения шансы разрешить себе раздавать бездепы в виде дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депо, которые можно потратить в топовых аппаратах с высокой отдачей. <a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=345906>казино 1×slots</a> 1×slot казино зеркало Максимальный объем ставки, который нельзя превышать же бонус не будет всецело отыгран. В случае нарушения этого управляла, приз и выигрыш с него будут аннулированы. <a href=http://www.so0912.com/home.php?mod=space&uid=2348895&do=profile&from=space>http://www.so0912.com/home.php?mod=space&uid=2348895&do=profile&from=space</a> 1×slots casino регистрация на сайте
1×slots официальный зеркало рабочее
Бонусы без депо при регистрации числятся самыми красивыми как для опытнейших игроков, так для и начинающих. Получив такое вознаграждение, заказчик может выступать на реальные средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а обстоятельства их активации и выигрыша. <a href=http://liuwenzheng.com.cn/home.php?mod=space&uid=860514&do=profile>http://liuwenzheng.com.cn/home.php?mod=space&uid=860514&do=profile</a> 1×slots зеркало сайта Новички не любят незамедлительно же вносить депо. Это обосновано неименьем навыка и сомнением. К счастью, в наше время можно получить бездепозитный приз за регистрацию в казино. Неважно собственно начислит система – фриспины либо кредиты. В любом случае вы не рискуете собственными сбережениями. Это отличная вероятность запустить понравившийся видео слот или же испытывать фортуну в настольных играх.Так собственно сможете неустрашимо региться без всяких раздумий. Фортуна сейчас наверняка на вашей стороне. Не побаивайтесь, так следствие какого либо ущерба Вам абсолютно не угрожает. С такими бонусами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе.
x1 slots 1хслотс регистрация перейти на 1×slots
Фриспины предназначены для использования в видео слотах. Внимательно ознакомьтесь с условиями – часто их выдают на кое-какие автоматы. В зависимости от клуба, у вас получится устроить определённое количество ставок. Кстати, продвинутые игорные жилища позволяют запускать каждых «одноруких злодеев». Условия, на коих предоставляется бездеп, регулируются казино. Каждая промоакция имеет подробные верховодила, ссылка на коие обычно содержится в промообъявлении. В них указываются лимиты, вейджер, список дешевых игр. Если оператор укрывает данные о предложении, то воспользоваться им не.Диапазон ставок, коие вправе устроить игрок, того лимитирован. Обычно назначать возможно небольшую сумму — в 10–30 рублей за одно вращение. Максимальный объем ставки, кот-ый нельзя превосходить пока приз не будет всецело отыгран. В случае нарушения этого управляла, приз и выигрыш с него будут аннулированы. 1×slots акции <a href=http://tegos.su/index.php?subaction=userinfo&user=wideseries88>http://tegos.su/index.php?subaction=userinfo&user=wideseries88</a> Oтыгpaть бонус с указанным вeйджepом, чтобы необходимо сдeлaть cтaвoк нa cумму, превышающую объем бонуса в несколько раз.Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, the decision только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.
1×slots casino регистрация
Акции, приуроченные к календарным праздничным, бывают рассчитаны как на всех пользователей, например и на категории: к, подарок на 8 марта девушкам-игрокам либо мужчинам на 23 февраля. <a href=https://rg-mechanics.club/user/PhilipOxign/>https://rg-mechanics.club/user/PhilipOxign/</a> Игры, каких возможно выступать на бонусные деньги. Проверьте список игр, в которых можно выступать на бонусные свои, вероятно они Вам не понравятся и не тратить своё время на эту промоакцию.Условия отыгрыша бонуса. Если Вы планируете заработать на бездепозитном призе, то для обратите внимание на велечину вейджера и срок, кот-ый дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, тем легче отыграть приз и вывести выигрыш. 1×slots промокод при регистрации 2025 Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала быстрые выводы. Фишка выплат том,, что довольно избрать платёжный инструмент и указать необходимую. В большинстве случаев средства зачисляются на электрические кошельки в течение 15 минут, а на банковские карты – 1–3 рабочих дня.Бездеп с фриспинами может охватывать всю коллекцию игр на сайте либо разработки одного провайдера. Обычно предлагается конкретный перечень автоматов. Он указывается в положениях о проведении промоакции. Выигрыш имеет быть выведен в такого, как пользователь отыграет данную сумму. Возможность оценить глубокий возможностей слотов — главное совершенство данной разновидности. Игроку становятся доступны те опции, которые отсутствуют в демонстрационном режиме, а вероятность выиграть настоящие деньги добавляет ясных азартных чувств.
<b>Смотреть еще похожие новости:</b>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=282455>1хслотс рабочее зеркало</a>
<a href=https://elclasificadomx.com/author/jameslog/>1хслотс зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Игрокам не следует воспринимать приветственный бонус как гарантированный метод получить большой выигрыш, хотя это отличная возможность без расходов оценить перечень казино. Так же стоит выделить то, что в каждом интернет казино установлен собственный наибольший кешаут на бездепозитный бонус. Как правило кешаут — это предельная сумма средств, кот-ая доступная для вывода с бездепозитного приза.
#6202 Charlesgunnyhttp://filmkachat.ru
1х слотс зеркало регистрация в 1×slots casino
В бонусную программку многих операторов входят систематические бездепы. Это бессрочные акции, поощряющие активных постоянных игроков. Популярный формат — раздача фриспинов по конкретным дням недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают постоянные бонусы без депозита в размен на накопленные баллы преданности. <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino09k online</a> <a href=https://peertrainer.com/LoungeCommunityThread.aspx?ForumID=1&ThreadID=316722>https://peertrainer.com/LoungeCommunityThread.aspx?ForumID=1&ThreadID=316722</a> Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 долларов. Если выдаются фриспины, их число изредка превышает нескольких 10-ов бесплатных вращений.Бездепозитные бонусы казино за регистрацию в 2022 году — это вероятность поиграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой либо числом даровых вращений без внесения депозита. Не путайте деморежим с реальной игрой без надобности внесения депо. 1×slots рабочее зеркало <a href=https://hastui.com/home.php?mod=space&uid=10477>https://hastui.com/home.php?mod=space&uid=10477</a> Объективные – объем бонуса, коэффициент и обстоятельства вейджера, надобность внесения депозита для вывода средств;С этими ординарными советами любое казино с бонусом за регистрацию способно принести в разы больше выгоды и полезности.
1×slots зеркало регистрацию более популярный вариант это
<a href=http://weeklywars.de/viewtopic.php?f=12&t=10253&p=532299#p532299>x1 slots регистрация в 1×slots casino</a> 1×slots регистрация на сайте 1×slots ru com <a href=http://www.ceraunavoltapavullo.it/index.php?option=com_k2&view=itemlist&task=user&id=1080035>http://www.ceraunavoltapavullo.it/index.php?option=com_k2&view=itemlist&task=user&id=1080035</a> Индивидуальные одобрения выдаются за совершение деяний: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавления либо официального клиента для ПК. В большинстве казино действуют программки лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на грядущий степень нередко сопрягается выдачей бездепа.Первый образующийся вопрос, это, зачем выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают свежих игроков. Последним проще начать забаву на средства с подарка за регистрацию. Им надо пополнять баланс и тратить собственные средства. Новички получают благотворительные спины или свои на счёт. С их поддержкою знакомятся с игровым процессом, крутят слоты и проделывают ставки в рулетке. 1хслотс мобильная версия зеркало Во время игры в казино, выигрыши, полученные благодаря бесплатным призовым фондам, суммируются и срабатывают в совместную необходимую для отыгрывания. Однако, случае фортуна улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно разрешит вывести финансовые свои. Сумма вывода будет зависеть от лимита, одобренного именно в данном учреждении. Поэтому, внимательно надо(надобно) разбирать правила выдачи безлимитных депо.
1×slots зеркало которую указывали при регистрации кстати
Для доказательства электронной почты, просто перейдите по интенсивной ссылке в письме, полученном от игрового заведения.При ирге на бонусные свои воспрещается выступать в игровые автоматы с современным джекпотом и игры из радела exist casino. Кроме того, некоторые казино выделяют бездеп на раз либо несколько конкретных слотов, и в других забавах Вы не можете на них играть. <a href=https://love-n-magic.ru/index.php?subaction=userinfo&user=JasperGag>https://love-n-magic.ru/index.php?subaction=userinfo&user=JasperGag</a> Чтобы играть бесплатно на реальные средства в казино, не всегда достаточно просто зарегистрироваться. Иногда нужно выполнить дополнительные действия.Эффективность бездепов в качестве маркетингового инструмента оценили почти операторы. Малоизвестные площадки употребляют эти промоакции, чтобы скоро набрать базу. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны неизменных гостей. Не все веб-сайты, дающие презенты без депозита, рекомендованы к ирге. За привлекательным промоописанием все скрываться невыполнимые обстоятельства отыгрыша и подводные камни. 1хслотс официальный сайт зеркало Почти все игровые клубы требуют подтверждение контактных данных игрока для получения бездепозитного приза.
1×slots рабочее зеркало
Выбрать казино с бездепозитным бонусом. У нас на сайте представлен перечень наилучших интернет казино, коие предлагают своим игрокам щедрые призы за регистрацию.В наше время довольно просто получить приз за регистрацию в казино. Практически любой игорный жилище с радостью начисляет средства или бесплатные вращения. Многие гэмблеры пользуются этим и не стесняются регистрироваться в каждом клубе с прибыльными условиями. Кстати, это замечательная вероятность выработать победную стратегию и сорвать джекпот. 1×slots регистрацию более популярный вариант это <a href=https://www.medicinacinesenews.it/forum/memberlist.php?mode=viewprofile&u=3653402>https://www.medicinacinesenews.it/forum/memberlist.php?mode=viewprofile&u=3653402</a> Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и более. Когда игроку полагается большое фриспинов, администрация возможность разбивать их начисление на количество дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах промоакции.
1×slots зеркало на сегодня
Онлайн-казино кропотливо продумывают бонусные условия, коие необходимо изучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша прочие ограничения.Зачастую бездепозитные бонусы казино для игры предлагаются разными заведениями азартных игр в маркетинговых промоакций или в целях привлечения к себе новых игроков. Для бездепозитных бонусов в казино 2022 геймеру надо пополнять счет до этапа вывода хотимых средств. <a href=https://www.wattpad.com/user/Onpravau2706>https://www.wattpad.com/user/Onpravau2706</a> 1×slots официальный сайт мобильная версия скачать
<b>Смотреть еще похожие новости:</b>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=127816>казино 1× slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Получить Бездепозитный бонус в интернет казино дело 2-ух кликов. Другой момент, отыграть рекламную и соблюсти верховодила и условия отыгрыша. Под правилами предполагается столько вагер, но и ограничения по максимальной ставке. Мы осознаем, собственно в кино все ставят на зеро и выигрывают. Призываем не делать похожего. Перед активацией приза прочтите правила. Узнайте последующие моменты: Условия получения дара, за регистрацию, за депо и многое. Ограничения по максимальной ставке. Зачастую не выше 350 руб. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах можно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на месте. Поэтому важно знать, в каких играх можно совершать кратность валютного оборота. Все бесплатные бонусы кажутся заманчивыми. Кто же категорически от способности поиграть в онлайн-казино, не рискуя деньгами, хотя получая выигрыши. Но далековато не все бездепозитные призы в равной степени презентабельны для рассудительного клиента.
#6203 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
бесплатно фильм казино букмекерская контора фонбет официальный <a href=https://rucriminal.info/>Окладникова Ирина Андреевна порно</a> Матвиенко Валентина Ивановна порно порно с Алина Загитова <a href=https://rucriminal.info/>букмекерские конторы pin</a> казино 1win букмекерская контора kent casino регистрация казино смотреть онлайн бесплатно casino betting слоты казино карты казино
#6204 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Антропова Валентина Викторовна порно с Владимир Минеев (ММА) <a href=https://res-publika.com>сайт казино вход</a> casino бонус porno Анна Сидорова, керлингистка <a href=https://www.ossetia.tv/>букмекерская контора бетсити</a> казино вход яндекс казино 1×bet на сегодня casino рабочее зеркало казино на деньги 1×bet 1хбет пин ап casino pin up top
#6205 Charlesgunnyhttp://filmkachat.ru
1×slots сайт
Вейджер (либо вагер) ? это наименьшая сумма ставок, которую необходимо сделать для вывода денежного приза. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение.С иной стороны, гораздо легче арестовать бездепозитные фриспины за регистрацию в казино и прямо сейчас начать вращать барабаны в лучших слотах. Главная необыкновенность спинов сомнений, собственно они предназначены для топовых автоматов. Удастся не пройти вспомогательные раунды, хотя и прирастить сумму выигрыша, заработать респины и другие внутриигровые презенты. <a href=http://filmkachat.ru/>1×slots официальный сайт мобильная версия скачать</a> <a href=https://www.scutify.com/articles/2024–12–21-transforming-visualization-through-digital-innovation>https://www.scutify.com/articles/2024–12–21-transforming-visualization-through-digital-innovation</a> Следует подчеркнуть, собственно бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом. 1×slots официальный сайт скачать <a href=http://flowers-armavir.ru/bitrix/redirect.php?goto=http://tolerancecenter.ru/bitrix/click.php?goto=http://teaway.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/3lStapSe1uJ>http://flowers-armavir.ru/bitrix/redirect.php?goto=http://tolerancecenter.ru/bitrix/click.php?goto=http://teaway.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/3lStapSe1uJ</a> Стоит отметить, что бездепозитный бонус выдается лишь совершеннолетним новеньким, которые, тому, имеют пригласить собственных друзей и людей, того претендующих на поощрительную программу лояльности. Подобная технология была между соперничающих онлайн-казино для популяризации и расширения трафика. Покер румы и спонсоры содействуют увеличению своей посещаемости, путем вербования новых игроков. Бонусы – это уникальный шанс для вероятных участников забавы, которые имеют опробовать софт покер рума и убедиться, будут ли они в него играть либо нет. Новый игрок попробует средства силы с настоящими оппонентами в казино.
1× слот зеркало
Также бывают случаи, когда казино начислит оговоренный бонус последствии регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам. 1×slos регистрация в 1×slots casino На бонусные начисления имеют быть установлены дополнительные ограничения, которые Вы не приняли при отыгрыше. Пока бонус полностью не отыгран — средства из казино не выводятся. <a href=http://tube.tunanno.com/profile.php?u=ruddyhijacker34>http://tube.tunanno.com/profile.php?u=ruddyhijacker34</a> Подобные призы без депо предоставляются на более прибыльных критериях. Зачастую они покрупнее, а условия отыгрыша наименее жесткие. 1× slots зеркало
1×slots зеркало на сегодня
Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы была возможность исключить выигрыш. <a href=http://out4.ru/index.php?subaction=userinfo&user=abjectnecessity>http://out4.ru/index.php?subaction=userinfo&user=abjectnecessity</a> Бездепозитные бонусы за регистрацию являются одним из самых известных способов вербования новых игроков в онлайн-казино, потому что они предоставляют игрокам возможность опробовать казино, необыкновенно игровые автоматы, и возможно, выиграть настоящие средства. 1×slots зеркало 1хслотс регистрация перейти на 1×slots Как лишь на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу в этого возможно оставить заявку на вывод выигрыша. Кредиты прибыльно отличаются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом реальных средств и выделяют вероятность ощутить азарт. Во-вторых – можно насладиться любой азартной забавой доступной на сайте. В вашем распоряжении присутствуют автоматы, настольные прибавление, видео-покер, Live-дилеры.
1×slots регистрация на сайте 1×slots ru com
Законодательство, регулирующее азартные забавы в разных государствах, оказывает на возможности операторов. В результате пользователи из отдельных регионов сталкиваются с ограничениями со стороны казино. Это имеет быть как глубокий отказ в доступе, так и невозможность загружать игры отдельных производителей. Риск-игра по одинаковым шансам – Также казино возможность запрещать исполнять условия по отыгрышу с помощью раунда на удвоение, который предлагается в слотах, видео-покере и некоторых иных забавах.Вейджер (либо вагер) ? это минимальная сумма ставок, которую нужно устроить для вывода денежного приза. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение. 1 хслот регистрация в 1×slots casino <a href=https://wiki.dulovic.tech/index.php/%D0%9F%D0%BE%D0%BF%D1%83%D0%BB%D1%8F%D1%80%D0%BD%D1%8B%D0%B5_%D0%98%D0%B3%D1%80%D0%BE%D0%B2%D1%8B%D0%B5_%D0%90%D0%B2%D1%82%D0%BE%D0%BC%D0%B0%D1%82%D1%8B>https://wiki.dulovic.tech/index.php/%D0%9F%D0%BE%D0%BF%D1%83%D0%BB%D1%8F%D1%80%D0%BD%D1%8B%D0%B5_%D0%98%D0%B3%D1%80%D0%BE%D0%B2%D1%8B%D0%B5_%D0%90%D0%B2%D1%82%D0%BE%D0%BC%D0%B0%D1%82%D1%8B</a>
1×slots рабочее зеркало
При регистрации в либо ином интернет игральном заведении — для дается раз шанс испытывать свою фортуну не внося свои монеты. Замечу собственно эту поощрительную предложение предоставляют не все онлайн игровые площадки, а лишь щедрая половина из них. Которые мы подготовили для Вас в нашем списке.Предложения с бездепозитными призами за регистрацию разрешают новым заведениям привлечь аудиторию на собственный вебсайт. А игроки же получают возможность играть на настоящие средства без депо в казино и заработать маленький стартовый капитал, который разрешается вывести на карту банка либо электронный кошелек. Мы подготовили перечень, где есть практически актуальные и новые бездепозитные бонусы казино, коие вы можете получить безвозмездно. Для наших юзеров есть специальные предложения неповторимые бонусы, коие вы ни не найдете, их мы определили специальной красноватой плашкой «Exclusive».Выигрыши с призов без вложений постоянно привязаны к требованию по ставкам и имеют быть обналичены только в исполнения этих притязаний. <a href=http://lsdsng.com/user/506713>http://lsdsng.com/user/506713</a> 1хслотс рабочее зеркало Верификация аккаунта. Лучше доказать лицо незамедлительно в регистрации, дабы потом не было заморочек с выводом денег. Верификация может проходить 2-мя маршрутами:Однако в условиях исчезают «подводные камешки», коие не разрешат вывести крупную сумму или же вы не успеете отыграть вейджер. Поэтому профессионалы советуют отобрать благотворительные вращения за регистрацию в казино без депо, чтобы поднабраться навыка и получить настоящий шанс на победу.
<b>Смотреть еще похожие новости:</b>
<a href=http://xn–80akbkalsbeeafq6a6b2f.xn–p1ai/forum/messages/forum1/topic39826/message212490/?result=new>1×slots регистрация 1×slots casino c2d ru</a>
<a href=http://6000ziyuan.com/forum.php?mod=forumdisplay&fid=2>сайт 1× slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины начисляются по конкретной ставке. После их активации игроку необходимо запустить слот и увериться, собственно в нем отображаются бесплатные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода после отыгрыша ориентируется оператором и изредка выше 5 000 руб. Пoдтвepдить личнocть посетителя. Для удачного вывода средств, необходимо подтвердить личность посетителя. Нa этaпe вepификaции пpoфиля, работники службы защищенности должны убедиться, что у игрока чем один акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не может вывести свой выигрыш, в у него несомненно некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы.
#6206 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
про казино 1×bet зеркало рабочее на сегодня <a href=https://krtka.info/>1×bet слоты</a> порно с Арина и Дина Аверины, гимнастки Скоробогатова Ольга Николаевна порно <a href=https://specreporter.com/>порно с Артемий Панарин (хоккей)</a> 7k casino бонус рокс казино 1×bet официальный 1×bet xyz Нургалиева Эльвира Рамиловна порно 1×bet телефон 7k casino официальный сайт порно с Евгения Медведева
#6207 Charlesgunnyhttp://filmkachat.ru
1 x slots casino
Можно ли наваривать на бездепозитных бонусах? Это не работа, тут как повезет, в в любом предложенном безедепе, вы будете откручивать вейджер и выводить, это можно именовать везением, и дополнительной добавкой к вашему бюджету. <a href=http://filmkachat.ru/>1×slots официальный зеркало рабочее</a> <a href=https://elearn.ellak.gr/mod/forum/discuss.php?d=31646>https://elearn.ellak.gr/mod/forum/discuss.php?d=31646</a> Еще одно условие дотрагивается размеров ставки. Операторы устанавливают наивысшую необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном офисе. При превышении лимита есть риск потерять бонуса. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, заказчик возможность столкнуться с запретом назначать фишки на шансы.Самый распространённый из сходственных призов, окончательно же, бездеп на денек рождения клиента — бонус в виде фиксированной суммы или фриспинов поступает на счёт игрока, а воспользоваться им можно на установленного периода времени. 1×slots зеркало регистрация <a href=http://bbs.ep360.cn/home.php?mod=space&uid=90417>http://bbs.ep360.cn/home.php?mod=space&uid=90417</a> Объективные – объем бонуса, коэффициент и условия вейджера, необходимость внесения депозита для вывода средств;Можно ли наваривать на бездепозитных призах? Это не работа, здесь как повезет, если в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, за можно назвать везением, и дополнительной добавкой к вашему бютжету.
casino 1×slot
скачать 1×slots официальный сайт <a href=https://graddata.ru/user/TravisMaymn/>https://graddata.ru/user/TravisMaymn/</a> Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, solid зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. 1×slots официальный зеркало рабочее Денежные средства. Третий приз за регистрацию без депо – наличные. К сожалению, только известные и известные клубы имеют уяснить средства в рублях либо баксах. С их помощью у насладиться любой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед данным нужно выполнение конкретных критерий.
1×slots зеркало регистрация в 1×slots casino
Чаще всего, пользующиеся сервисы, эти как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно неотъемлемое управляло. Финансовые свои выводятся лишь через ту платежную систему, коей огромной для пополнения депо. Если же игрок получил бездепозитный покерный приз, потребуется восполнить счет на минимальную сумму, которая сочиняет обычно десять $. <a href=https://www.mshowto.org/forum/members/glennhap.html>https://www.mshowto.org/forum/members/glennhap.html</a> 1×slots зеркало сайта
1×слотс казино
казино 1×slots <a href=https://backpacker-footsteps.com/backpacker-footsteps-forum/profile/justinwem/>https://backpacker-footsteps.com/backpacker-footsteps-forum/profile/justinwem/</a> Многие игроки, оценив возможностей казино, остаются выступать в нем и дальше ? на это и направлено любое промо. Постоянные посетители заносят депозиты и проделывают ставки, обеспечивая длительную прибыль оператора. То есть, казино выдают бездепы свежим пользователям для формирования приклнной аудитории.
скачать 1×slots на андроид мобильная версия
Бездепы с бесплатными вращениями предоставляют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд платит казино. Число спинов ограничено и изредка выше сотню. Если акция включает в себя количество бесплатных игр, их начисление имеет быть разбито на количество дней. Выбор любого интернет казино на нашем сайте. В описании к любому Вы можете узнать, что получите за творенье аккаунта.При исполненьи критерий отыгрыша и верификации, средства с бонусного счета переводятся на главной и шансы быть выведены на карту либо электрический кошелек. Лимиты на вывод и сроки проведения транзакции зависимости от избранной платежной системы. <a href=http://www2.bio.ulaval.ca/landrylab/bioinfo/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D1%8F%D0%BD%D0%B4%D0%B5%D0%BA%D1%81%20%D0%B4%D0%B7%D0%B5%D0%BD%20%D1%87%D0%B8%D1%82%D0%B0%D1%82%D1%8C>http://www2.bio.ulaval.ca/landrylab/bioinfo/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D1%8F%D0%BD%D0%B4%D0%B5%D0%BA%D1%81%20%D0%B4%D0%B7%D0%B5%D0%BD%20%D1%87%D0%B8%D1%82%D0%B0%D1%82%D1%8C</a> Самый распространённый из сходственных призов, окончательно же, бездеп на денек рождения клиента — бонус в виде фиксированной суммы или фриспинов поступает на счёт игрока, а воспользоваться им можно на установленного периода времени. 1хслотс рабочее зеркало на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=https://adminclub.org/member.php?action=profile&uid=90427>1×slots актуальное зеркало</a>
<a href=http://www.forum.kalor.ru/1×slots-registraciya-na-sayte-t5429.html>1×slots регистрация на сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В интернете слишком большое скриптовых вебсайтов, которые принадлежат плутам. Их главная задача – привлечь гэмблеров, пообещав не только щедрые подарки, но и крупные выигрыши. Так что кое-какие сайты предлагают получить за регистрацию и $1 000. Законодательство, регулирующее азартные забавы в различных государствах, оказывает на возможности операторов. В результате юзеры из отдельных регионов сталкиваются с лимитированиями со стороны казино. Это имеет быть как полный отказ в доступе, так и невозможность загружать забавы отдельных производителей.
#6208 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
new casino букмекерская контора фонбет <a href=https://strelochnik.com/>где казино</a> porno Дарья Мороз porno Игорь Акинфеев (футбол) <a href=https://rumafia.news/>порно с Петр Ян (ММА)</a> гта онлайн казино casino online зеркало pin ап casino casino онлайн 1×bet зеркало xbet Шевцова Татьяна Викторовна порно 1×bet скачать бесплатно
#6209 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasino09k online
Активация по промокоду используется в различных обликах бездепов. Если речь о приветственном призе, то комплект символов можно узнать на главной странице, в регистрационной форме либо послании, коие отправляется пользователю для доказательства адреса электронной почты. Акции имеют проводиться общо с партнерскими площадками. Обычно код располагается на постороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется одноразовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном офисе или начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем важный код для активации в описании каждого промо.Многие игроки, оценив функционал казино, остаются играть в нем и дальше ? на это и нацелено любое рекламную. Постоянные клиенты вносят депозиты и делают ставки, обеспечивая длительную прибыль оператора. То есть, казино раздают бездепы свежим пользователям для формирования лояльной аудитории. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> <a href=https://graph.org/Transform-Your-Space-Professional-3D-Bedroom-Design-Secrets-Revealed-12–21>https://graph.org/Transform-Your-Space-Professional-3D-Bedroom-Design-Secrets-Revealed-12–21</a> 1хслотс официальный сайт зеркало <a href=http://ceh-i.ru/user/Henryflumn/>http://ceh-i.ru/user/Henryflumn/</a> А ознакомиться с свежими онлайн казино, Вы сможете за счет бонусов с выводом прибыли, коие Вы сможете получить без депозита.Не стоит сразу же открещиваться от приветственных презентов в сходственных казино. Администрация готова начислить средства либо фриспины, хотя сначала работники должны увериться, что вы не аферист. Дело том,, собственно развелось слишком количество охотников за призами. Они научились дурачить систему и зарабатывать крупные суммы средств.
1×slots зеркало проходить регистрацию это отличный вариант
При маленькой сумме бонуса рекомендуется выступать по низким ставкам, а применять наибольшие какого-либо лишь том, случае, если вейджер очень великий, а время на отыгрыш сильно ограничено.Чаще всего интернет-казино предлагают бездепозитные бонусы свежим юзерам. Эта промо-акция очень эффективно завлекает новичков, подталкивая их к открытию счета. Конечно, не все они становятся послушными клиентами, но сам прецедент регистрации аккаунта играет на руку заведению. <a href=https://www.findaspermdonor.com/viewtopic.php?f=25&t=89201>1×slots регистрация на сайте 1×slots ru com</a> 1×slots официальный сайт скачать Для всех бездепозитных бонусов функционирует наибольший предел на выигрыш. Он указывает максимальную сумму, которую у получить, играя на бонусные кредиты. Как лишь для удастся выполнить притязания вейджера, допустимый максимум несомненно переведен с бонусного счета на ведущей, а остаток несомненно списан.Прямо сейчас арестуйте безвозмездные вращения за регистрацию без депозита и начинайте коллекционировать призовые композиции из-за солидных выигрышей! <a href=https://www.google.co.nz/url?sa=i&source=imgres&cd=&cad=rja&uact=8&ved=2ahUKEwjYhoLNkMvcAhWRzmEKHXiZBycQjRx6BAgBEAU&url=https://doctorlazuta.by/>https://www.google.co.nz/url?sa=i&source=imgres&cd=&cad=rja&uact=8&ved=2ahUKEwjYhoLNkMvcAhWRzmEKHXiZBycQjRx6BAgBEAU&url=https://doctorlazuta.by/</a> 1×slots официальный сайт, скачать Подтверждение регистрации. Казино просят привязки профиля к электрическому адресу и номеру аппарата. Для сего на e-mail отчаливает письмо ссылаясь, а на телефонный ? текстовое извещение с кодом.Помните, что любые нарушения правил сведут на нет ваши усилия, и вы наверняка останетесь без начисленного для бесплатного бонуса. Всегда изучайте верховодила начисления и обстоятельства вейджера. По хоть вопросам, на которые вы имеет других найти ответы, обращайтесь за объяснениям и саппорт.
1×слот регистрация в 1×slots casino
Но эти рамки не смущают том хайроллеров, что коэффициенты на слотах дозволяют рассчитывать на солидные выигрыши, в некоторых автоматах разыгрывается прогрессивный джекпот.Все безвозмездные бонусы кажутся заманчивыми. Кто же категорически от возможности сыграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далеко не все бездепозитные бонусы мере презентабельны для рассудительного клиента. Не стоит путать забаву в демо и использование призов. В демонстрационном режиме игрок имеет расценить механику слота, сюжет и оформление. Но игра проводится на относительные кредиты, поэтому отсутствует главное ? ощущение пыла. Активируя промокод либо фриспины, клиент по-прежнему не тратит средства средства на игровые автоматы, хотя возможность сорвать реальный куш! <a href=http://telemarket24.ru/bitrix/click.php?goto=http://cse.google.cl/url?q=http://teoriya.ru/en/https://teletype.in/@urid_pomosh/lf6Kbz_9J21>http://telemarket24.ru/bitrix/click.php?goto=http://cse.google.cl/url?q=http://teoriya.ru/en/https://teletype.in/@urid_pomosh/lf6Kbz_9J21</a> Сразу после активации промокода можно воспользоваться подарком. Как теснее упоминалось, бонусы случаются трёх обликов – фриспины, кредиты и фриплей-бонусы.Объективные – размер бонуса, коэффициент и обстоятельства вейджера, надобность внесения депозита для вывода средств; 1×slots сайт зеркало Приветственный бонус без депо ? презент за регистрацию. Выдается средствами, фриспинами или баллами. В последнем случае бонусные баллы используются для роли в турнирах или размена на реальные деньги.
1хслотс казино зеркало
<a href=https://test.soclanovtsy.ru/topic/32483-x1-slots-1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%BF%D0%B5%D1%80%D0%B5%D0%B9%D1%82%D0%B8-%D0%BD%D0%B0–1×slots/>x1 slots 1хслотс регистрация перейти на 1×slots</a> Получать информацию о самых выгодных призах можно без постоянного мониторинга новостей казино. Мы брали данную задачку на себя и непрерывно следим за услугами операторов, выбирая лучшие из них. В данном разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список промоакций периодически пополняется. В топ вошли самые свежие бездепозитные призы за регистрацию в казино 2020, временные и замкнутые промо. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и аспектам. Если срок деянья промоакции истек, она удаляется из перечня. 1×slots быструю регистрацию а также мгновенное <a href=https://www.exibart.com/community/sladkovby1709/profile/>https://www.exibart.com/community/sladkovby1709/profile/</a>
1×slots официальный сайт, скачать
Однако в критериях исчезают «подводные камешки», коие не разрешат вывести солидную необходимую либо же вы не успеете отыграть вейджер. Поэтому мастера советуют арестовать бесплатные вращения за регистрацию в казино без депозита, дабы поднабраться опыта и получить настоящий шанс на победу. <a href=https://civilpatrol.info/?q=petition/80911/kupit-razmeshchenie-ssylok>https://civilpatrol.info/?q=petition/80911/kupit-razmeshchenie-ssylok</a> В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, нужно адресоваться в саппорта через лайв-чат на сайте казино.Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном сайте и выполните вход в собственный кабинет, чтобы забрать безвозмездные вращения с вейджером х40; 1хслотс официальный сайт зеркало
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Возможность сыграть вспомогательное соревнование (а время и количество) абсолютно безвозмездно, а выигрыш, в свою очередь, поступает на счёт игрока. Наличие у игрока второго аккаунта. Запрещено творить количество профилей для многократного получения бездепов.
#6210 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasino09k online
Воспользоваться бездепом возможно не во всех игровых автоматах: казино и тут уточняет ограничение для посетителей. Конечно, это можно счесть неким неудобством для игрока, хотя ради стоит отметить, что выбор автоматов всё равно остаётся достаточно наибольшим. <a href=http://filmkachat.ru/>скачать 1×slots официальный сайт</a> <a href=https://www.fanfiction.net/u/16457165/>https://www.fanfiction.net/u/16457165/</a> Вышеописанная причина и считается главным нюансом, из-за которого операторы отдают доля собственной выгоды на различные рекламные расходы и маркетинговые кампании. А самым действенным тут будут выступать именно бездепозитные призы казино 2022 с выводом за регистрацию. 1хслот скачать <a href=http://www.clean-ace8.com/bbs/board.php?bo_table=free&wr_id=138647>http://www.clean-ace8.com/bbs/board.php?bo_table=free&wr_id=138647</a> Баланс игрока дополняется на подходящую необходимую. К ней применяется вейджер, указанный в правилах промоакции. Вывести выигрыш возможно будет после как, как пользователь устроит требуемый размер ставок из личных средств. В редких случаях бездеп трудится в формате Free Play. На счет юзера зачисляется крупная сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по окончании сего периода сумма на счету несомненно превышать первоначальную, то разницу можно будет вывести или применять для последующих ставок.Подтверждение персональной инфы. Все казино требуют от посетителя пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и присутствие у пользователя других аккаунтов (мультиаккаунт запрещен).
1×slot зеркало рабочее регистрации на телефон придет
Бездепы могут входить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами.Ниже указан важный перечень законных казино в Беларуси с бонусами на первый депозит. Вы можете попасть на официальный сайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. <a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/6167–1×slots-ofitsialnyj-sajt-mobilnaya-versiya-skachat#6176>1×slots официальный сайт мобильная версия скачать</a> 1×slots casino зеркало Автоматическая активация взгляд самой удобной, но ручной способ имеет перед ней превосходства. Прежде чем применять вознаграждение от казино, стоит заранее найти, сколько медли потребуется на исполнение всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деяния бонуса.Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, the decision лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. <a href=https://gshost.ru/user/DoctorLazutaEt/>https://gshost.ru/user/DoctorLazutaEt/</a> Верификация важна для дополнительной безопасности и помочь техподдержке выявить бонусхантеров и мошенников. Кстати, на платформах выводы крупных сумм доступны лишь в доказательства личности. 1×slots зеркало на сегодня Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция имеет подробные правила, ссылка на которые обыкновенно содержится в промообъявлении. В них указываются лимиты, вейджер, список доступных игр. Если оператор прячет данные о предложении, то пользоваться им надо.Бездеп с фриспинами возможность охватывать всю коллекцию игр на сайте либо разработки одного провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш имеет быть выведен после того, как пользователь отыграет данную сумму. Возможность расценить полный перечень слотов — основное совершенство данной разновидности. Игроку становятся доступны те опции, коие отсутствуют в демонстрационном режиме, а вероятность выиграть настоящие средства добавляет ярких азартных чувств.
1×slots регистрация 1×slotscasino 56 online
1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, в не желаете стать жертвой мошенников или впустую истратить время;Это раз из главных характеристик привлекательности презента. С завешенным коэффициентом числе профессионалы не смогут выполнить обстоятельства по отыгрышу. И неважно, как привлекательно смотрится предложение – бездепозитный бонус казино в объеме $500 либо $1 000. Чтобы новички попревосходнее вникли, собственно же такое вейджер, мы разберём на образце. <a href=http://demo.qkseo.in/profile.php?id=634158>http://demo.qkseo.in/profile.php?id=634158</a> Как лишь на виртуальном счету окажутся бонусные свои, поторопитесь отыграть вейджер. Сразу после сего возможно оставить заявку на вывод выигрыша. Кредиты выгодно отличаются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом реальных средств и выделяют возможность ощутить задор. Во-вторых – можно насладиться любой азартной игрой доступной на сайте. В вашем распоряжении присутствуют автоматы, настольные прибавленье, видео-покер, Live-дилеры.В истиннее время получить бонус за регистрацию в казино довольно просто. Почти любой игорный дом с радостью даст средства или бесплатные вращения. Многие игроки пользуются этим и не смущяются регистрироваться в любом клубе с прибыльными критериями. Кстати, это замечательная возможность придумать выигрышную стратегию и сорвать куш. 1×slots официальный зеркало рабочее
1×slots casino регистрация 1×slots review live
Превышение наибольшей ставки при отыгрыше. Система механически не предуведомляет о превышении ставки, потому о нарушении управлял игрок имеет узнать теснее в подачи запроса на вывод средств.Oтыгpaть приз с обозначенным вeйджepом, результата нужно сдeлaть cтaвoк нa cумму, превышающую размер приза в несколько один. Автоматы неспроста считаются самым популярным азартным веселием. Чтобы освоить управление и управляла, потребуется всего некоторое минут. Ваша задачка сделать ставку, определить количество рабочих линий и возможно вертеть тамбур. Если на экране выпадет выигрышная композиция – вы выиграли! С данной задачей для посодействуют справится бездепозитные бонусы казино.Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы которые возникают у начинающих. Фриплей-бонусы встречаются лишь в неких клубах. Они зачисляются незамедлительно последствии творения профиля и активны недолговременное время. Если не успеете потратить средства, они попросту сгорят. Касаемо медли, правило призы активны на часа.Как управляло, при выводе финансов, от играющего потребуется лишь сделать наименьший вклад чтобы, чтобы, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом индивидуальный счет. 1×slots зеркало этих способов предполагает регистрацию <a href=https://www.globalvision2000.com/forum/member.php?action=profile&uid=1053087>https://www.globalvision2000.com/forum/member.php?action=profile&uid=1053087</a> В большинстве заведений сделать это возможно по адресу электронной почты, по номеру телефонного, через социальную сеть или гугл-аккаунт.При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, коие можно предназначить игре в казино.
1×slots casino регистрация 1×slots review live
В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать собственный выигрыш с даровых вращений. Прибыль, коию Вы заработаете на таком бездепе возможно ставить на вывод без какого либо отыгрыша.Похожим образом трудится третий способ доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения клиента или в связи с получения им VIP-статуса. Подарок предоставляется в воззвания в поддержку и проверки. <a href=http://alt1.toolbarqueries.google.com.jm/url?q=http://velokron.ru/go?http://images.google.to/url?q=https://teletype.in/@urist555/m9ldR5qfMcO>http://alt1.toolbarqueries.google.com.jm/url?q=http://velokron.ru/go?http://images.google.to/url?q=https://teletype.in/@urist555/m9ldR5qfMcO</a> 1×slots зеркало регистрация Фриспины начисляются по конкретной ставке. После их активации игроку необходимо запустить разъем и увериться, собственно в нем показываются бесплатные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода после отыгрыша определяется оператором и редко выше 5 000 рублей.Иногда операторы настоятельно внесение малого депо перед выводом для верификации платежного инструмента. В некоторых казино этот депозит того предстоит отыграть.
<b>Смотреть еще похожие новости:</b>
<a href=https://nztw.org/home.php?mod=space&uid=43957>1хслот зеркало сайта</a>
<a href=http://mi.minfish.com/home.php?mod=space&uid=1196847>1×slots официальный сайт зеркало рабочее</a>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/6971/#comment-307977>1×slots регистрация 1×slotscasino 56 online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Ограничения по играм. Администрация воспрещает игрокам кое-какие игровые автоматы с бездепозитным бонусом, деньгами или безвозмездными вращениями. Обычно, в правилах приводится полный перечень слотов для отыгрыша. Иногда разделение выполняется по облику игр. Например, отыгрыш возможен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino.
#6211 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino рабочее сайт букмекерской конторы <a href=https://rucriminal.info/>casino скачать</a> порно с Виктория Синицина, фигуристка порно с Александр Головин (футбол) <a href=https://res-publika.com>порно с Юлия Ефимова, пловчиха</a> скачать casino на андроид казино играть 1×bet casino 7k casino порно с Зырянова Анастасия Владимировна up casino официальный Львова-Белова Мария Алексеевна порно
#6212 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino c2d ru
Отыграв бездепозитный бонус в казино с выводом также придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, случае сходственное лимитирование существует, то единоразово исключить выйдет лишь необходимую, не превосходящую объем приобретенного приза.Активация денежного гонорары случается механически после творения профиля либо использования промокода. Иногда операторы предъявляют вспомогательные притязания: подписаться на странички казино в социальных сетях либо на рассылку маркетинговых извещений, скачать и установить дополнительный софт и т.д. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> На странице представлены бездепозитные бонусы за регистрацию в казино редчайшая заслуга за которой гонятся все игроки как новички, так и мастера. Мы тоже уделяем великое внимание на наличие бонусов при формирование рейтинга казино на средства. Бездепозитный бонус это возможность играть бесплатно и выиграть настоящие деньги. <a href=https://ai.ceo/read-blog/246294>https://ai.ceo/read-blog/246294</a> 1×slots рабочее зеркало <a href=http://bizbi.ru/bitrix/rk.php?goto=http://tpsearchtool.com/out-link?website=http://ntsr.info/bitrix/redirect.php?goto=https://telegra.ph/Otmena-domovoj-knigi–chto-ehto-znachit-dlya-sobstvennikov-zhilya-09–19>http://bizbi.ru/bitrix/rk.php?goto=http://tpsearchtool.com/out-link?website=http://ntsr.info/bitrix/redirect.php?goto=https://telegra.ph/Otmena-domovoj-knigi–chto-ehto-znachit-dlya-sobstvennikov-zhilya-09–19</a>
1×slots акции
Сроки активации приза устанавливаются каждым казино, но чаще всего они не превышают недели с момента получения. Игроку непременно надо(надобно) использовать бездеп в течение обозначенного срока, в ином случае бонус просто исчезнет. Каждый бонус возможно получить только один раз, потому случае не использовать бездеп в срок, у игрока не будет второго шанса им воспользоваться. 1×slots официальный сайт мобильная версия скачать <a href=http://yinyue7.com/space-uid-1017577.html>http://yinyue7.com/space-uid-1017577.html</a> Игры, в которых возможно выступать на бонусные деньги. Проверьте список игр, в которых возможно выступать на бонусные средства, вероятно они Вам не понравятся и не стоит тратить своё время на такую акцию.Наш список включает в себя наихорошие бездепозитные бонусы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по главным характеристикам: 1×slot рабочее зеркало Даже не выиграв солидную сумму, игрок увлекательно проведет время, изнутри исследует работу площадки, оценит геймплей автоматов. Все это без каких-либо финансовых рисков. Быть в курсе наихороших акций легко. Достаточно периодически изучать список свежих онлайн казино с выводом бонуса без депо в данном разделе.Стоит отметить, что бездепозитный приз выдается лишь взрослым новичкам, коие, тому, имеют пригласить личных друзей и своих, также рассчитывающих на поощрительную программу преданности. Подобная технология появилась среди соперничающих онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению собственной популярности, методом привлечения новых игроков. Бонусы – это уникальный шанс для вероятных участников забавы, коие все опробовать софт покер рума и увериться, станут ли они в него играть или нет. Новый игрок испробует свои силы с реальными оппонентами в казино.
1×slots casino регистрация на сайте
Операторы гемблинга заявляют, что например они сражаются с бонус-хантерами. Впрочем, критики считают, собственно этим казино пытаются сделать из случайного постояльца неизменного игрока.Некоторые сайты, прежде чем провести регистрацию игроков, предлагают ответить на количество базисных вопросов. Цель проведения похожей викторины – выявить случайных людей, которые не имеют представления о покере, и не допустить получения ими бонусов. Если гость уже играл в казино, то ответить на полтора десятка несложных вопросов несомненно несложно. Очень нередко, ответы возможно отыскать на официальных веб-сайтах данных учреждений. Таким образом, заведение пытается показать себя своим вероятным игрокам, а такой рекламный ход как казино бонус без депозита за регистрацию завлекает очень много внимания к игорному заведению и обеспечивает неизменный поток новых посетителей и грядущих посетителей игрового онлайн клуба.Некоторые веб-сайты, до чем обмануть регистрацию игроков, предлагают ответить на некоторое базовых вопросов. Цель проведения подобной викторины – выявить случайных людей, коие не имеют представления о покере, и не разрешить получения ими призов. Если посетитель теснее играл в казино, то ответить на полтора 10 простых вопросов будет нетрудно. Очень часто, ответы можно найти на официальных сайтах этих учреждений. <a href=http://bbs.py27.com/home.php?mod=space&uid=395077>http://bbs.py27.com/home.php?mod=space&uid=395077</a> Вы не в коем случае ни чем не рискуете, а только выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической забавы на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, научится регулировать менять ставки и полосы, изучать бонусные забавы и их выигрышные композиции, ну конечном просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные средства, которые возможно отыграть и исключить, а не просто на демо счет, тем самым адреналин в крови более повысится а пульс забьется с нередким ритмом! рабочее зеркало 1хслотс
казино 1× slots официальный сайт
Условия имеют разниться приятель от друга. Но такой приз имеет быть применен лишь для игрового процесса – полученные на счет деньги до того, как станут отыграны, исключить невозможно.Для казино, работающих интернет, бездепозитные бонусы нужны для привлечения новых посетителей. Предложение поиграть на слотах без надобности внесения настоящих денег — работающий метод для увеличения энтузиазма к фирмы. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит выступать в казино, лишь теперь теснее на собственные средства. Подарки на определенные даты выделяются условиями получения. Если поощрение начисляют игроку на денек рождения, то сумма обыкновенно зависит от совместного объема депо за год. 1×slots промокод при регистрации 2025 <a href=http://www.rhl-mod.ru/members/97172-arnoldarrip/>http://www.rhl-mod.ru/members/97172-arnoldarrip/</a> Акции, посвященные календарным праздникам, бывают рассчитаны как на всех юзеров, так и на категории: например, подарок на 8 марта девушкам-игрокам или мужчинам на 23 февраля.
1×слотс казино
Прочитайте правила бонусной программки, в которой желаете участие. Да, мы безотступно советуем сделать это до регистрации. После требуется привнести идентификационный платёж. Это пугает новичков больше всего. Нужно устроить наименьший депозит в 100–500 руб. Таким образом служба защищенности убедиться что, нет, что платёжный метод принадлежит Вам. Данная процедура важна для обеспечения защищенности игровых счетов. Пример, Ваш аккаунт взломают и выведут свои на собственный кошелёк. Будет крайне досадно. Поэтому верификация платёжной системы, это важный момент.Верификация аккаунта. Лучше подтвердить лицо незамедлительно в регистрации, чтобы потом не было проблем с выводом средств. Верификация возможность проходить 2-мя маршрутами: <a href=http://mutons.ru/club/user/7249/>http://mutons.ru/club/user/7249/</a> Бонус с зачислением средств на счет дает больше свободы действий. Пользователь сам подбирает, каким образом распорядиться подаренными средствами. Здесь также шансы действовать ограничения на список дешевых игр, но обыкновенно эти рамки не например строги, как в рекламную с бесплатными вращениями.Фриспины. Бесплатные вращения предусмотрены для применения в видео-слотах. Внимательно читайте обстоятельства – они часто выдаются для неких машин. В зависимости от клуба продоставляется создавать определенное количество ставок. Кстати, современные игорные дома дают вероятность заводить «одноруких бандитов». 1× слот зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://polishcrazyclan.ugu.pl/member.php?action=profile&uid=272738>1×slots зеркало рабочее на сегодня</a>
<a href=https://smm-seo.ru/members/rabofreeol.4209/>1хслотс зеркало</a>
<a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=882223#pid882223>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы за регистрацию являются одним из самых знаменитых методов привлечения свежих игроков в онлайн-казино, поэтому что они деют игрокам вероятность опробовать казино, неподражаемо игровые автоматы, и возможно, выиграть реальные деньги. Так же стоит выделить то, что в любом интернет казино установлен собственный максимальный кешаут на бездепозитный бонус. Как верховодило кешаут — это предельная сумма денег, которая дешевая для вывода с бездепозитного приза.
#6213 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
бесплатные букмекерские конторы порно с Дронова Александра Викторовна <a href=https://www.ossetia.tv/>1×bet регистрация</a> казино гта 5 casino вход <a href=https://specreporter.com/>1×slots casino</a> Петрова Ольга Викторовна порно retro casino porno Алена Косторная (фигурное катание) online casino официальный букмекерская контора вход 1×bet слоты официальный сайт porno Андрей Рублев (теннис)
#6214 Charlesgunnyhttp://filmkachat.ru
1х слот регистрация в 1×slots casino
При подмоги такого поощрения оператор имеет кроме привлекать клиентов, которые ранее проявляли активность на сайте, хотя по некий причине прекратили выступать. В данном случае промокод высылается юзеру по электрической почте либо в виде SMS. <a href=http://filmkachat.ru/>1×slots официальный demo регистрация в 1×slots casino</a> <a href=https://www.thuum.org/viewthread.php?thread=8824>https://www.thuum.org/viewthread.php?thread=8824</a> Стоит обозначить(означить), собственно бездепозитный бонус выдается лишь взрослым новичкам, коие, к, имеют пригласить собственных друзей и знакомых, также претендующих на поощрительную программку лояльности. Подобная разработка была среди конкурирующих онлайн-казино для популяризации и расширения трафика. Покер румы и спонсоры содействуют повышению собственной популярности, методом вербования свежих игроков. Бонусы – это оригинальный шанс для потенциальных соучастников игры, которые могут опробовать софт покер рума и убедиться, будут ли они в него играть или нет. Новый игрок испробует средства силы с реальными оппонентами в казино.Получать информацию о самых выгодных бонусах возможно без неизменного прогноза новостей казино. Мы брали эту задачку на себя и постоянно смотрим за предложениями операторов, выбирая наихорошие из них. В этом разделе собраны последние бездепы, промокоды к ним и условия их активации. Список акций периодически пополняется. В топ вошли самые новые бездепозитные бонусы за регистрацию в казино 2020, кратковременные и закрытые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и критериям. Если срок деяния промоакции истек, она удаляется из списка. 1×slots казино зеркало <a href=http://www.01.com.hk/member.php?Action=viewprofile&username=DavidRiZ>http://www.01.com.hk/member.php?Action=viewprofile&username=DavidRiZ</a>
1×slots casino регистрация 1×slotscasino09k online
Бонусные средства – маленькая сумма средств для старта в новеньком казино. На бонусные средства, обычно разрешается выступать во все игры, не слотов с прогрессивным джекпотом и игр из раздела exist casino. <a href=https://www.donchillin.com/space-uid-382497.html>1хлот регистрация в 1×slots casino</a> 1×слотс казино Большинство интернет-казино из нашего топ-10 готовы порадовать вас эксклюзивными промоакциями. Читайте о их в обзорах и на форуме.Бездепозитный приз – это финансовое вознаграждение, коие выдается участнику игры в казино, для его вербования и появления заинтересованности. Любой гость, который подходит условиям выдачи подобного бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое одобрение считается наиболее действенным способом, дающим возможность стартовать при, не вкладывая личных вещественных средств. <a href=https://www.ls1.com/forums/member.php?u=118575>https://www.ls1.com/forums/member.php?u=118575</a> Каждый компьютерные обязан сначала детально выучить обстоятельства по получению и отыгрышу приглянувшегося дара. Если всё организует, поторопитесь забрать благотворительные спины за регистрацию в казино без депозита с выводом и без отыгрыша и напрямик момент начать вращать барабаны лучших слотов.Если вы выбрали себе количество брендов которые для больше всего полюбились, для неизменной игры! Таких гемблеров казино очень любит и оценивает, за частую эти игроки становятся VIP игроками заведения, коим нередко поступают прибыльные предложения в виде призов, так же туда заходит и бездепозитные. 1хслотс казино зеркало Некоторые сайты, этого чем обмануть регистрацию игроков, предлагают ответить на несколько базовых вопросов. Цель проведения сходственной викторины – выявить случайных людей, коие не имеют представления о покере, и не допустить получения ими бонусов. Если гость теснее играл в казино, то ответить на полтора десятка простых вопросов несомненно несложно. Очень часто, ответы возможно найти на официальных сайтах этих учреждений.4. Заберите презент. Чаще всего приз активируется сразу последствии регистрации. Но случаются ситуации, когда нужно забежать в индивидуальный офис или написать в службу поддержки.
1×slots зеркало которую указывали при регистрации кстати
Допустим, за регистрацию вы возымели бездеп в объеме 2 000 руб. С вейджером х30. В данном случае светит устроить ставок, на общую необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда выполните обстоятельства по отыгрышу, придёт время заработать реальные деньги. Однако не забывайте, что с любого подарка выйдет вывести определённую необходимую (почаще всего менее $200). Чаще всего интернет-казино предлагают бездепозитные призы новым пользователям. Эта промо-акция довольно отлично завлекает начинающих, подталкивая их к открытию счета. Конечно, не все становятся преданными посетителями, хотя сам факт регистрации аккаунта играет на руку заведению.Например, игрок получил 500 рублей при разработке аккаунта и должен отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., потребуется сделать 875 спинов для полного отыгрыша. <a href=http://milkovoadm.ru/bitrix/redirect.php?goto=http://globalcio.ru/bitrix/redirect.php?goto=http://mash-hold.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/AbLNHcExmdg>http://milkovoadm.ru/bitrix/redirect.php?goto=http://globalcio.ru/bitrix/redirect.php?goto=http://mash-hold.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/AbLNHcExmdg</a> Даже не выиграв крупную сумму, игрок увлекательно проведет время, изнутри исследует работу площадки, оценит геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе наихороших акций легко. Достаточно периодически изучать перечень новых интернет казино с выводом приза без депо в этом разделе. 1×slots зеркало на сегодня Благодаря программке преданности от игорного заведения, возможно арестовать хороший старт и без дополнительных инвестициям запустить видеослоты. Кроме такого, можно рассчитывать на реальную удачу и получить, без вложения собственных финансов, большой выигрыш.Ну и конечно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: схожая добродушие повышает степень преданности клиентов к компании.
1×slots регистрация
Каждая игровая перрон отличается критериями по получению и отыгрышу бездепов. В правилах отчетливо расписаны временные рамки, за коие надо(надобно) прокрутить вейджер. Также не запамятовывайте про наибольший объем ставки и наивысшую сумму выплаты. С иной стороны, дабы получить бездепозитные бонусы казино, достаточно истратить менее 1 минуты.Основное различие что, нет, собственно для получения бездепа не пополнять баланс в казино. Но кроме сего, есть ряд и отличий: Третитй бездепозитный бонус за регистрацию – валютные свои. К сожалению, начислить рубли либо баксы готовы лишь знаменитые и пользующиеся клубы. С их поддержкою у насладиться любой доступной игрой – автоматом, рулеткой, кено, блэкджеком.Простая процедура получения бездепозитного бонуса, кот-ая займет не более 2-х минут. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные. Классическая разновидность приза за творенье аккаунта. Его преимущество содержится в, что заказчик имеет помощи подбирать аппараты и делать ставки в них. Иногда перечень игровых автоматов ограничен оператором, но все точно это какого-либо, чем один-единственный доступный слот, как если, тогда, с использованием фриспинов.Постарайтесь отыграть вейджер, чтобы появилась вероятность оставить заявку на выплату. Кстати, на всех веб-сайтах, представленных в перечне, доступны современные платёжные приборы. Вы сможете получить выигрыш на электрической кошелёк, карту, аппарат. 1хслот зеркало сайта <a href=http://skaah59.free.fr/index.php?file=Members&op=detail&autor=chunkycanopy9>http://skaah59.free.fr/index.php?file=Members&op=detail&autor=chunkycanopy9</a> Прибывшие на акк финансы бездепозитные призы предназначаются, в, только для свежеиспеченных юзеров, коие ранее не имели собственного аккаунта в данном казино. Исходя из этого, случае раньше у игрока был сделан депозит, то, по всей вероятности, у него больше не будет способности рассчитывать на получение такового приза в определенном заведении.В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и в случае неоднозначных обстановок нет способности куда-то посетовать и доказать свою правоту.
1хслот 1хслотс регистрация перейти на 1×slots
Например, игрок получил 500 руб. При твореньи аккаунта и обязан отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., понадобится сделать 875 спинов для полного отыгрыша.Операторы гемблинга утверждают, что так они дерутся с бонус-хантерами. Впрочем, критики считают, что данным казино пытаются сделать из случайного постояльца неизменного игрока. При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие возможно предназначить игре в казино. <a href=http://codaip.com/bbs/board.php?bo_table=free&wr_id=45872>http://codaip.com/bbs/board.php?bo_table=free&wr_id=45872</a> 1×slots промокод при регистрации 2025 Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, дабы снова получить безвозмездный бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ожидает неминуемое санкция.Зарегистрироваться в казино по особой ссылке или с бонусным кодом. Подтвердить контактные данные (номер аппарата и электрическую почту). Для подтверждения номера телефонного необходимо в личном профиле показать свой номер и нажать кнопку „Подтвердить номер аппарата“, далее Вы получите sms-сообщение с кодом, кот-ый нужно ввести в подходящее поле. Для подтверждения электрической почты, перебежать по интенсивной ссылке в письме от казино.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.mshowto.org/forum/members/jamespauri.html>1×slots регистрация то дальше необходимо пройти</a>
<a href=https://acerfans.ru/faq/796-kak-vylozhit-na-forum-informaciju-iz-zhurnala.html>1х слот регистрация в 1×slots casino</a>
<a href=https://talkonlinenews.com/viewtopic.php?t=5195>1×slots рабочее зеркало на сегодня</a>
<a href=http://nacionrolera.org/foro/viewtopic.php?f=1210&t=152374>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные призы, как уже понятно, считаются оригинальной вероятностью к игровому процессу абсолютно безвозмездно, другими играть в онлайн казино бесплатно и на место средства сразу в регистрации аккаунта. Автоматы с этим депозитом могут замерзнуть прекрасной вероятностью поиграть для почитателей азарта с определенными ограничениями в денег. На бесплатные призы онлайн-казино почти практически распространяется лимитирования по стране проживания клиентов. Даже если вам разрешено раскрывать счет и играть на деньги в заведении, это еще не означают, собственно вам доступны no deposit bonuses.
#6215 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора зенит casino андроид <a href=https://glvk.guru/>скачать 1×bet</a> casino бонус песня казино <a href=https://krtka.info/>бесплатные букмекерские конторы</a> симулятор казино up casino casino online зеркало 1×bet бесплатно cometa casino up casino скачать porno Илья Ковальчук (хоккей)
#6216 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino c2d ru
Основное различие что, нет, собственно для получения бездепа не пополнять баланс в казино. Но кроме сего, есть ряд и отличий:Если вы выбрали для себя некоторое брендов коие вас больше всего приглянулись, для постоянной забавы! Таких гемблеров казино довольно любит и ценит, за частую эти игроки становятся VIP игроками заведения, коим нередко поступают прибыльные предложения вид призов, например же туда входит и бездепозитные. <a href=http://filmkachat.ru/>1хслотс зеркало</a> <a href=https://owntweet.com/thread/214646>https://owntweet.com/thread/214646</a> 1×slots регистрацию более популярный вариант это <a href=https://www.escort-liege.eu/user/profile/467975>https://www.escort-liege.eu/user/profile/467975</a>
1×slots регистрация 1×slots casino 777 online
Автоматы неспроста считаются самым знаменитым азартным развлечением. Чтобы усвоить управление и управляла, потребуется всего несколько минут. Ваша задачка сделать ставку, найти число рабочих линий и возможно крутить барабан. Если дисплее выпадет выигрышная композиция – вы выиграли! С этой задачей вас посодействуют управится бездепозитные призы казино. 1×slots сайт Для тех, кто лишь подумывает испытать собственную фортуну, еще для профессиональных игроков, разыскивающих новые площадки для выигрышей, ведущие лицензированные казино часто устраивают разные промоакции, и одно из лучших предложений за время – как для новичков, например и для профессиональных игроков – бездепозитный приз за регистрацию. <a href=https://sims-game.com/user/TyroneTed/>https://sims-game.com/user/TyroneTed/</a> Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских руб. В критериях промоакции предписано, что вейджер бездепозитного приза х20. Поэтому, чтобы отыграть бонус, игроку будет нужно сделать ставок на 35*20=700 руб.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро либо 20 долларов. Если выдаются фриспины, их число редко выше нескольких 10-ов бесплатных вращений. 1×slots скачать на айфон Можно ли наваривать на бездепозитных бонусах? Это не работа, тут как повезет, в в любом предложенном безедепе, вы будете откручивать вейджер и выводить, это можно именовать везением, и дополнительной добавкой к вашему бюджету.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Иногда для получения призов нужно связаться с адептами саппорта. Удобнее всего с ними беседовать в онлайн-сате, но время довольно запроса по электронной почте. <a href=http://fumankong4.cc/home.php?mod=space&uid=572893>http://fumankong4.cc/home.php?mod=space&uid=572893</a> Для ревизии используются сканы паспортов, водительских прав, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если пользователь обнаружен в попытке завести вспомогательный акк, все его учетные записи подвергаются блокировке, а их владелец попадает в черный перечень. При игре на лицензионной площадке надо бояться указывать достоверную персональную информацию (шифрование исключает утечку персональных данных).Мы собрали и выпустили перечень превосходнейших бездепозитных казино с призами за регистрацию, коие гарантируют щедрые выигрыши и моментальные выплаты. 1х слот 1хслотс регистрация перейти на 1×slots Получать информацию о самых выгодных призах можно без неизменного прогноза новостей казино. Мы взяли данную задачу на себя и безпрерывно смотрим за предложениями операторов, избирая наилучшие из них. В данном разделе собраны заключительные бездепы, промокоды к ним и обстоятельства их активации. Список промоакций периодически дополняется. В топ вошли самые новые бездепозитные бонусы за регистрацию в казино 2020, кратковременные и закрытые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру прочим критериям. Если срок действия промоакции истек, она удаляется из перечня.Не трудно догадаться, собственно no down payment bonuses практически ни не посещают великими. Чаще всего идет о пяти–тридцати долларах (или эквиваленте данной суммы в другой валюте).
1×slots регистрацию более популярный вариант это
Фриспины начисляются по определенной ставке. После их активации игроку необходимо запустить слот и убедиться, собственно в нем показываются благотворительные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода последствии отыгрыша определяется оператором и редко превышает 5 000 рублей.Поспешите арестовать бездепозитные бонусы за регистрацию в казино из представленного перечня. Все платформы не только ведут законную работа, хотя и порадуют правдивыми плодами забавы, высочайшей отдачей, быстрыми выплатами. <a href=http://www.arka-bahce.org/forum/showthread.php?p=761264#post761264>1 х слотс зеркало</a> Если простыми словами, бездепы – это определённая сумма средств либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать презенты. Но есть кое-какие аспекты. Существуют игорные жилища, которые перед тем как начислить призы настоятельно привязать телефонный, дать копии документов.На критериях отыгрыша даровых бонусов идет остановиться подробнее. С ними связаны нюансы, которые нельзя забыть без внимания. Не советуем опрометью голову хвататься за различные предложения получения средств без инвестициям. Вполне возможно, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на 1-ый взгляд. Альтернативой является казино бонус за депо. Мы предлагаем вас пару советов, благодаря коим у каждого игрока будет возможность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом денег:Для получения выигрыша потребуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить конкретную необходимую, хотя теснее из личных средств. Она рассчитывается из общего объема выигрыша за всегда использования бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, если пользователь выиграл 1000 руб., а множитель составляет х30, исключить деньги можно будет, сделав ставки на 30 000 руб. 1×slot зеркало рабочее регистрации на телефон придет <a href=https://wiki.streampy.at/index.php?title=User:GuyRather495964>https://wiki.streampy.at/index.php?title=User:GuyRather495964</a> Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте условия – они часто выдаются для неких машин. В зависимости от клуба вам создавать определенное число ставок. Кстати, современные игорные жилища выделяют возможность заводить «одноруких бандитов».Маркетинговая политика всех игорных интернет-клубов должна одевать разнородный нрав. И случае гонорары на депозит работают для того, дабы стимулировать заносить депозиты и поощрять уже существующих пользователей, то бездепозитный приз в казино либо приз за регистрацию в казино, этого всего, рассчитан на расширение базы покупателей.
1×slots регистрация на 1хслотс
Когда речь идет о денежных призах, казино постоянно устанавливают обстоятельства вейджера, коие необходимо выполнить, дабы исключить выигрыш. <a href=https://www.merchantcircle.com/blogs/-1-boise-id/2024/8/-/2786739>https://www.merchantcircle.com/blogs/-1-boise-id/2024/8/-/2786739</a> Принципиальным различием даровых призов от бонусов на депозит является неимение необходимости заносить средства на аккаунт. Из-за этого их часто нарекают бездепозитными (no down payment bonuses).Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, solid зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. 1×slots регистрация на сайте 1×slots ru com
<b>Смотреть еще похожие новости:</b>
<a href=https://koreanstudies.com/forum/viewtopic.php?t=127876>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вознаграждения за получение VIP-статуса ? начисляются масштабах программки преданности при достижении одного значения либо выдаются персонально менеджерами службы поддержки. Фриплей-бонусы. Бонусы за благотворительную игру есть только в некоторых клубах. Они зачисляются незамедлительно последствии создания профиля и срабатывают непродолжительное время. Если у вас нет времени истратить свои, они просто завершатся. Что касается медли, правило призы действуют протяжении 1-го часа.
#6217 Charlesgunnyhttp://filmkachat.ru
1×slots сайт
Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и. Когда игроку полагается большое фриспинов, администрация возможность разбивать их начисление на количество дней. Бесплатные вращения предоставляются для конкретного слота, который указывается в правилах промоакции. <a href=http://filmkachat.ru/>1×slots промокод при регистрации 2025</a> Вейджер (или вагер) ? это наименьшая сумма ставок, коию необходимо сделать для вывода валютного бонуса. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение.Бездепозитный приз – это финансовое вознаграждение, коие выдается соучастнику забавы в казино, для его привлечения и возникновения заинтригованности. Любой гость, кот-ый подходит условиям выдачи сходственного бездепозитного бонуса, может претендовать на получение вышеуказанного приза. Такое поощрение является наиболее действенным методом, дающим вероятность стартовать в игре, не вкладывая личных материальных средств. <a href=https://www.palscity.com/forums/thread/2078/>https://www.palscity.com/forums/thread/2078/</a> Мы подготовили список, где есть постоянно животрепещущие и свежие бездепозитные бонусы казино, коие вы можете получить бесплатно. Для наших юзеров есть особые предложения неповторимые призы, коие вы ни не найдете, их мы обозначили специальной красноватой плашкой «Exclusive».Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, чтобы замечена вероятность исключить выигрыш. 1х слот 1хслотс регистрация перейти на 1×slots <a href=http://brain-smart.ru/bitrix/redirect.php?goto=http://mkmedia.ru/bitrix/redirect.php?goto=http://matadoro.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/WujDOsDDn3j>http://brain-smart.ru/bitrix/redirect.php?goto=http://mkmedia.ru/bitrix/redirect.php?goto=http://matadoro.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/WujDOsDDn3j</a> Бывают ли бездепозитные бонусы без вейджера? Бывают, случае у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный приз за регистрацию устанавливается вейджер во всех казино.Доступ к подарку может открываться механически в введения промокода либо воззвания в саппорта вебсайта. В первом случае от пользователя не потребуется никаких действий. Бездеп с активацией по коду встречается чаще всего. Игроку нужно ввести совокупа символов в графе, которая имеет пребывать в регистрационной форме в Личном офисе.
1×slots бонус за регистрацию
При регистрации следует свидетельствовать только достоверную информацию. Когда учетная запись несомненно активна, замечен доступ в Личный кабинет. В нем возможно выбрать денежную, ввести промокод и разузнать подробные управляла получения и отыгрыша бездепа. Краткая информация об акции часто находится именно на регистрационной форме. 1 х слотс зеркало Доступность — бездепозитные призы в казино почаще всего предоставляются новым игрокам, но случаются случаи, когда приз могут получить и действующие посетители.Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, например как Вам придется ее подтвердить в будущем при выводе средств. <a href=https://bajarmp3.net/member.php?action=profile&uid=4052>https://bajarmp3.net/member.php?action=profile&uid=4052</a> Как правило, при выводе финансов, от играющего требуется лишь устроить наименьший лепта чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом индивидуальный счет.Принципиальным различием безвозмездных бонусов от бонусов на депо является отсутствие необходимости вносить деньги на акк. Из-за сего их нередко нарекают бездепозитными (no deposit bonuses). 1×slots официальный сайт зеркало Одним из поводов отдавать преимущество, льготу одному или иному заведению содержится в привлекательности предлагаемых акций и безвозмездных предложений. Безвозмездные фриспины, выдаваемые без дела создавать какой-нибудь вклад, в списке находится далековато не в конце.
1×slots рабочее зеркало
Бонус в казино без депо содержит различные вариации: может быть приветственный приз, акции в честь каких-то праздников либо главных дат, бонус за вербование свежих игроков, лояльность и получение VIP-статуса.В случае установленного лимита на сумму вывода выигрыша с бездепозитного бонуса, игрок не может исключить больше заявленной суммы. Хотя безвозмездные призы начисляются без депозита, не исключено, собственно вас придется вносить средства. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты лишь последствии как, как свежий заказчик раз пополнит игровой счет.Бонусные средства – небольшая сумма средств для старта в новеньком казино. На бонусные средства, обычно разрешается играть во все игры, не слотов с прогрессивным джекпотом и игр из раздела exist casino. <a href=http://www.radiogrijalva.com/2022/06/grandes-autores-y-compositores56.html>http://www.radiogrijalva.com/2022/06/grandes-autores-y-compositores56.html</a> После получения приза вывод средств для посетителя будет недоступен до, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо чета недель. Выводить деньги игрок может только в отыгрыша.Особую изюминку видео слотам придают оригинальные знакы. С их в активизируются разные призы. Вы можете запустить дополнительный уровень и прирастить сумму выигрыша. Есть знаки, коие заменяют ненадобные составляющие и сами творят выигрышные комбо. Не стоит забывать и тему бонус-тур. После каждого успешного спина есть шанс прирастить необходимую выигрыша в 2 или хорошо раза. 1×slots casino регистрация 1×slots review live Бездепы все заходить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой или баллами.Для получения выигрыша потребуется выполнить условия казино. Чаще всего игроку нужно поставить конкретную сумму, хотя уже из личных денег. Она рассчитывается из общего объема выигрыша за всегда применения бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, если юзер выиграл 1000 руб., а множитель сочиняет х30, исключить деньги можно будет, сделав ставки на 30 000 руб.
казино 1× slots официальный сайт
Таким образом, заведение пытается продемонстрировать себя своим потенциальным геймерам, а подобный рекламный ход как казино приз без депо за регистрацию завлекает довольно большое внимания к игорному заведению и обеспечивает постоянный струю свежих посетителей и грядущих посетителей игрового интернет клуба. Как лишь получите бездеп в казино, всё точно не запамятовывайте проверять электрическую почту. Некоторые игорные клубы постоянно радуют активных гэмблеров приятными призами. Чаще всего получить презент возможно в преддверии веселья, на денек рождение, за привлечение приятеля. А кроме распространённым бонусом является прибавка к депозиту. Нужно чем пополнить счёт, и азартное заведение прирастит его на 50–100%. 1×slots скачать на айфон <a href=https://viewcinema.ru/user/Davidknire/>https://viewcinema.ru/user/Davidknire/</a>
1×slots официальный сайт скачать
Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. Выбирая бесплатный бонус, пристально изучайте верховодила. Убедитесь, что для можно на роль в промоакции. Уточните, в каких забавах можно выполнять обстоятельства вейджера. При надобности задавайте вопросы адептам саппорта.Прямо момент арестуйте благотворительные вращения за регистрацию без депозита и начинайте собирать призовые композиции ради крупных выигрышей! <a href=https://myelimu.com/User-renaldoboazy>https://myelimu.com/User-renaldoboazy</a> 1×slots зеркало сайта При пользовании бездепозитным бонусом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют количество обликов лимитов:Шаг 4. Активация. Внимательно изучите условия, информацию по ограничениям и сроке действия бонусного предложения. Разобравшись с правилами, возможно активировать приз в собственном офисе (время ? с использованием промокода) либо по запросу в саппорт.
<b>Смотреть еще похожие новости:</b>
<a href=https://sadhaka.nl/forum/viewtopic.php?t=102640>1× slots регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выигрыши с бонусов без вложений постоянно привязаны к притязанию по ставкам и могут быть обналичены лишь после исполнения данных требований.
#6218 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на официальном сайте
Создание аккаунта. На сайте казино необходимо обнаружить регистрационную форму и заполнить пустующие поля личными данными. Иногда на этом шаге требуется указать только адресок электрической почты и пароль, но почаще надобно заполнить анкету индивидуальной информацией (ФИО, дата рождения, место проживания и т.д.). Нужно свидетельствовать лишь реальные данные, поскольку впоследствие они будут проверены. <a href=http://filmkachat.ru/>1х слот регистрация в 1×slots casino</a> <a href=https://letterboxd.com/lexxeagle/list/revolutionary-approaches-in-modern-virtual/>https://letterboxd.com/lexxeagle/list/revolutionary-approaches-in-modern-virtual/</a> казино 1×slots официальный сайт <a href=https://viewcinema.ru/user/Davidknire/>https://viewcinema.ru/user/Davidknire/</a> Так же стоит выделить то, что в каждом онлайн казино установлен собственный максимальный кешаут на бездепозитный бонус. Как управляло кешаут — это предельная сумма денег, которая дешевая для вывода с бездепозитного приза.Многие новички сомневаются, что поощрительный приз не будет возвращать, числе в они выиграли у казино. Это абсолютно неопасно и надежно. Выводя выигранные средства, игрок просто останавливает свое роль в игре и теряет уникальную возможность – безвозмездно наращивать собственное вещественное положение.
1×slots актуальное зеркало
При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток. <a href=http://theauction.com.au/my-account/>1×slots подтвердит вашу регистрацию если говорить</a> 1хслот официальный сайт зеркало <a href=http://forum.americandream.de/memberlist.php?mode=viewprofile&u=6849>http://forum.americandream.de/memberlist.php?mode=viewprofile&u=6849</a> 1×slots регистрация то дальше необходимо пройти Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, дабы снова получить даровой приз. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ожидает неизбежное санкция.При использовании бездепозитным призом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют некоторое видов лимитов:
1×slots регистрация 1×slots review live
При регистрации по свидетельствовать только достоверную информацию. Когда учетная запись будет активна, появится доступ в Личный офис. В нем можно избрать валюту, ввести промокод и разузнать доскональные правила получения и отыгрыша бездепа. Краткая информация об промоакции часто присутствует непосредственно на регистрационной форме.Любой выигрыш по ставке повыше установленного лимита несомненно считаться недействительным. То есть ставка не будет засчитана при отыгрыше, в случае выигрыша его сумма не поступит на счёт посетителя — результат забавы несомненно полностью аннулирован. Далее требуется отыграть вагер и вывести выигрыш. Игрокам без опыта крупно повезло, меня получить десятки презентов за одну регистрацию. Если не сумели получить Бездепозитный бонус, не беспокойтесь. Обратитесь в интернет чат, оператор поможет решить проблему. <a href=http://hairdesign482.com/userinfo.php?uid=13165#>http://hairdesign482.com/userinfo.php?uid=13165#</a> В качестве призов онлайн казино нередко предлагает выдачу фриспинов, другими бесплатных вращений игрового барабана. Виртуальные монеты можно использовать для обучения в покерной школе либо для забавы в казино.Также, ситуации необходимо подтвердить собственный номер телефона, достичь код, полученный в смс-сообщении от клуба ввести в специальное фон в собственном кабинете игрока. 1×slots официальный сайт скачать Пoдтвepдить личнocть клиента. Для удачного вывода средств, нужно доказать личность клиента. Нa этaпe вepификaции пpoфиля, сотрудники службы защищенности должны увериться, собственно у игрока более раз аккаунт. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не сможет вывести собственный выигрыш, в у него будет количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы.
1 х слотс зеркало
Иногда в поощрения за регистрацию шансы выдаваться билеты для участия в турнирах. Условия их проведения довольно выделяются, поэтому мы советуем ознакомиться с любым предложением отдельно. <a href=https://redfist.de/RF-Online-Testforum/viewtopic.php?f=60&t=77871>1×slots официальный сайт зеркало</a> Иногда для получения призов нужно спутаться с представителями службы. Удобнее всего с ними собеседовать в онлайн-сате, хотя время довольно запроса по электрической почте.С другой стороны, намного проще забрать бездепозитные фриспины за регистрацию в казино и напрямик сейчас начать вертеть барабаны в превосходнейших слотах. Главная необыкновенность спинов в том, собственно они предназначены для топовых автоматов. Удастся не пройти вспомогательные раунды, хотя и увеличить необходимую выигрыша, заработать респины и другие внутриигровые подарки. 1×slots регистрацию более популярный вариант это <a href=https://www.megaindex.org/u1675488>https://www.megaindex.org/u1675488</a>
1хслотс рабочее зеркало
Нельзя рассматривать забаву на средства, как вариант заработка. Азартные забавы запрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не является зачинщиком азартных игр. Сайт носит информационный характер.Еще одно условие дотрагивается объемов ставки. Операторы устанавливают наивысшую сумму, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном офисе. При превышении лимита есть риск лишиться приза. Существующие ограничения относятся и к определенным обликам ставок. Например, играя в рулетку, клиент может столкнуться с запретом назначать фишки на шансы. Вейджер в переводе с британского значит «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша полученного приза, в нашем случае бездепозитного. Число ставок значения — главно только набрать необходимую, пропорциональную сумме одобрения.Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, чтобы снова получить бесплатный приз. Игорные заведения нетерпимы к бонус-хантерам, потому вас ожидает неизбежное наказание. <a href=http://deviajesbaratos.com/blog/flyright-comenta-vuelo.html/comment-page-1?unapproved=2804409&moderation-hash=88197a284b28720ba61b3d5c0f063136#comment-2804409>http://deviajesbaratos.com/blog/flyright-comenta-vuelo.html/comment-page-1?unapproved=2804409&moderation-hash=88197a284b28720ba61b3d5c0f063136#comment-2804409</a> 1×slots зеркало которую указывали при регистрации кстати
<b>Смотреть еще похожие новости:</b>
<a href=http://griffhunter.com/boards/memberlist.php?mode=viewprofile&u=993>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.
#6219 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Анна Сидорова, керлингистка Крючкова Полина Викторовна порно <a href=https://vestnik-jurnal.com/>Фастова Елена Владимировна порно</a> Шевцова Татьяна Викторовна порно винлайн букмекерская контора официальный <a href=https://repost.news/>казино рояль смотреть</a> 1×bet сейчас 1×bet зеркало слоты приложения букмекерских контор Манилова Алла Юрьевна порно порно с Елена Никитина, скелетонистка гта казино казино сочи
#6220 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Светлана Ходченкова бывшие казино <a href=https://repost.news/>1×bet зеркало xbet</a> казино рояль смотреть 1×bet зеркало xbet xyz <a href=https://sovsekretno.net/>рабочие зеркала казино</a> порно с Евгения Медведева, фигуристка 7k casino бонус лучшие букмекерские конторы приложения букмекерских контор на андроид 1×bet слоты официальный сайт Разуваева Ксения Денисовна порно песня казино
#6221 Charlesgunnyhttp://filmkachat.ru
1×slots сайт
Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, a лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. <a href=http://filmkachat.ru/>x1 slots 1хслотс регистрация перейти на 1×slots</a> <a href=https://www.palscity.com/forums/thread/2083/>https://www.palscity.com/forums/thread/2083/</a> Итак, дабы благотворительные бонусные кредиты превратились в настоящие средства, которыми вы можете управлять по своему усмотрению, их надо(надобно) отыграть. Вейджер по уточнять в правилах онлайн-казино.Во время игры в казино, выигрыши, полученные спасибо бесплатным призовым фондам, суммируются и включаются в общую сумму для отыгрывания. Однако, в фортуна улыбнется и получится отыграть все призы, игровое заведение гарантированно разрешит исключить денежные свои. Сумма вывода несомненно находиться от лимита, одобренного непосредственно в этом учреждении. Поэтому, пристально надо(надобно) читать верховодила выдачи безлимитных депо. рабочее зеркало 1хслотс <a href=http://bbs.xinhaolian.com/home.php?mod=space&uid=4004169>http://bbs.xinhaolian.com/home.php?mod=space&uid=4004169</a> Вознаграждения за получение VIP-статуса ? начисляются в рамках программы преданности при достижении еще значения либо выдаются персонально менеджерами службы.Каждая игровая перрон отличается критериями по получению и отыгрышу бездепов. В правилах отчетливо расписаны кратковременные рамки, за коие нужно прокрутить вейджер. Также не запамятовывайте на максимальный размер ставки и максимальную необходимую выплаты. С другой стороны, дабы получить бездепозитные бонусы казино, достаточно израсходовать менее 1 минутки.
1×slots официальный сайт мобильная версия
<a href=https://ragnarok.ch/forum/viewthread.php?thread_id=130659>1хслот официальный сайт зеркало</a> 1×slots зеркало регистрация в 1×slots casino <a href=http://muhaylovakoliba.1gb.ua/user/JustinBlarm/>http://muhaylovakoliba.1gb.ua/user/JustinBlarm/</a> Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. 1 xslots рабочее зеркало Любой выигрыш по ставке повыше установленного лимита несомненно считаться недействительным. То есть ставка не будет засчитана при отыгрыше, в случае выигрыша его сумма не поступит на счёт клиента — итог забавы несомненно полностью аннулирован.На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению этого времени, Вы не сможете активировать и получить бездепозитный бонус.
1×slots официальный сайт скачать на айфон
Минимального оборота. Этот предел устанавливается вейджером — пока игрок не сыграет на установленную сумму, вывод средств несомненно недосегаем. <a href=http://cc.koreaapp.kr/bbs/board.php?bo_table=free&wr_id=2772660>http://cc.koreaapp.kr/bbs/board.php?bo_table=free&wr_id=2772660</a> казино 1×slots официальный сайт Чаще всего казино приз за регистрацию без депо даёт возможность запустить каждой автомат. Но никакого внимательно ознакомиться с условиями. Иногда для забавы доступны только определённые модели. Если вы новичок и ничего не смыслите в гэмблинге, другого начать знакомство с миром азарта непосредственно с «одноруких бандитов».Список например именуемых «разрешенных землель» прилагается к правилам бонусной программы игорного портала. Обязательно выясните, распространяются ли на вас подобные санкции.
1×slots актуальное зеркало
<a href=http://policeacademy.teamforum.ru/memberlist.php?mode=viewprofile&u=410>1×slots регистрация 1×slots casino 777 online</a> На бесплатные бонусы онлайн-казино практически постоянно распространяется лимитирования по стране проживания клиентов. Даже в для разрешается раскрывать счет и выступать на средства в заведении, это еще не значат, что вас доступны not the slightest down payment bonuses. 1хслот зеркало сайта <a href=https://podacha-blud.com/user/Justincat/>https://podacha-blud.com/user/Justincat/</a>
1 x slots
Основное отличие что, собственно для получения бездепа не пополнять баланс в казино. Но кроме сего, есть ряд и различий: Да, у безвозмездных призов есть дефекты. Прежде всего, они обыкновенно очень. Кроме как, обстоятельства вейджера по ним постоянно строгие. Но все же недоступность риска делает их очень привлекательными для клиентов.Когда идет о валютных бонусах, казино постоянно устанавливают условия вейджера, которые необходимо выполнить, дабы вывести выигрыш. <a href=http://skiindustry.org:/forum/member.php?action=profile&uid=1170740>http://skiindustry.org:/forum/member.php?action=profile&uid=1170740</a> Свежий приз начисляется повторяющий валютных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в пользовании средствами, а случае отыгрыша оператор может ввести лимитирование на вывод средств.Постарайтесь отыграть вейджер, дабы была возможность оставить заявку на выплату. Кстати, на всех сайтах, представленных в списке, доступны современные платёжные приборы. Вы сможете получить выигрыш на электрической кошелёк, карту, аппарат. 1× slots регистрация в 1×slots casino Как верховодило, новоприбывшие геймеры начала хотят ознакомиться с методами ввода и вывода валютных средств и сроки исполнения поданных заявок чтобы четко осознавать, как живо меня исключить собственный казино приз за регистрацию без депозита на электрический кошелек либо же банковскую карту. К счастью для всех играющих, внутри конкретных холдингов, все казино соперничают меж собой. Ведь в бы конкретную компанию давало только одно онлайн-заведение, то вряд ли бы клиенты заметили казино с призом за регистрацию и могли бы рассчитывать только на вознаграждение вид бонуса на первое вложение. К любому заведению периодически по завлекать свежих игроков, что, в, только на руку всем играющим.
<b>Смотреть еще похожие новости:</b>
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=379552>1×slots casino регистрация 1×slotscasino09k online</a>
<a href=https://www.rusdrama-az.com/support/51-sluzhba-tehnicheskoy-podderzhki-sayta.html>1×slot казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Теоретически, к безвозмездным бонусам можно отнести так называемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, потому собственно они деют только возможность делать ставки. Получив свой презент, Вы сможете безвозмездно играть на реальные деньги, а выполнив обстоятельства отыгрыша, исключить собственный выигрыш.
#6222 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
приложения букмекерских контор на андроид pin up casino скачать <a href=https://t.me/vchkogpu_ru>порно с Георгий Джикия (футбол)</a> 1×bet слоты официальный сайт порно с Илюшникова Татьяна Александровна <a href=https://glvk.guru/>1×bet</a> 7k casino официальный сайт 1×bet на андроид casino регистрации гта онлайн казино карты казино официальные сайты казино букмекерскую контору пин
#6223 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия
Каждый новичок и умелый игрок мечтают живо стартануть и начать создавать настоящие ставки. Для сего достаточно отобрать презент, за кот-ый не нужно платить. В зависимости от игровой платформы, нужно создать профиль, привязать email либо аппарат. После этого администрация начислит щедрое вознаграждение вид бесплатных вращений или виртуальных кредитов.Помните, собственно всевозможные нарушения управлял сведут на нет ваши усилия, и вы скорее останетесь без начисленного вас бесплатного приза. Всегда изучайте верховодила начисления и условия вейджера. По каким вопросам, на коие вы не самостоятельно найти ответы, обращайтесь за разъяснениям и саппорт. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> Получить Бездепозитный приз в онлайн казино дело двух кликов. Другой момент, отыграть рекламную и соблюсти управляла и условия отыгрыша. Под правилами предполагается столько вагер, но и ограничения по наибольшей ставке. Мы осознаем, собственно в кино все ставят на зеро и выигрывают. Призываем не делать сходственного. Перед активацией бонуса прочтите управляла. Узнайте последующие факторы: Условия получения дара, за регистрацию, за депозит и другое. Ограничения по максимальной ставке. Зачастую не повыше 350 руб. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на пространстве. Поэтому принципиально знать, в каких играх возможно совершать кратность денежного оборота.Чтобы получить возможность вывести прибыль с бездепозитного приза в казино, нужно выполнить ряд критерий: <a href=https://wakelet.com/wake/-bCB6R6Fc7F319ngWQ1YF>https://wakelet.com/wake/-bCB6R6Fc7F319ngWQ1YF</a> Чаще всего используются коды. Их надо(надобно) заносить в специальные окна регистрационной анкеты, если речь о пригласительных призах, или в особом разделе собственного кабинета игрока.Прибывшие на аккаунт финансы бездепозитные призы предназначаются, в основном, только для новоиспеченных пользователей, коие ранее не имели собственного аккаунта в данном казино. Исходя из этого, случае раньше у игрока был изготовлен депо, то, по всей вероятности, у него больше не несомненно возможности рассчитывать на получение такого бонуса в конкретном заведении. 1×slots регистрация 1×slotscasino 56 online <a href=http://taiwanzhenglun5.com/home.php?mod=space&uid=18782>http://taiwanzhenglun5.com/home.php?mod=space&uid=18782</a> Но есть игорные заведения, коие готовы просто так жертвовать средства на забаву. Для сего достаточно сделать профиль. Чтобы вывести свой выигрыш, вам сначала нужно выполнить условия отыгрыша, указанные в условиях получения бездепозитного депо.Размер приза. В качестве бездепов обычно начисляют маленькие суммы, а когда речь идет о бонусах за депо, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино могут презентовать игроку до 2000$.
1× slots casino официальный сайт
На нашем веб-сайте Вы найдете перечень актуальных свежих бездепозитных бонусов в казино 2022 года. Также, есть большое неповторимых предложений, коие доступны только гостям нашего вебсайта после регистрации по нашей ссылке или активации специального промокода. 1×slots зеркало подтвердит вашу регистрацию если говорить В разделе с призами активировать свой презент. Найти забавы, для коих учтено одобрение и применять приз по назначению.Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. <a href=http://msfo-soft.ru/msfo/forum/user/38592/>http://msfo-soft.ru/msfo/forum/user/38592/</a> 1×слот регистрация в 1×slots casino Отзывы читателей о бонусных промоакциях посодействуют составить эмоцию, хотя не запамятовывайте о субъективности собственных объяснений.
1×slot зеркало
Ограничения по играм. Администрация воспрещает игрокам некоторые игровые автоматы с бездепозитным призом, средствами или бесплатными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда дробление выполняется по облику игр. Например, отыгрыш возможен на всех игровых аппаратах, хотя запрещен в настольных играх и в разделе Live Casino. Этот тип бонуса несомненно добавлен на Ваш аккаунт после успешной процедуры регистрации с внедрением номера телефона. Если выбрать другой метод творенья учетной записи, бездеп не несомненно добавлен на Ваш акк.За счёт спинов получится запустить разные интернет слоты, протестировать стратегии и поднабраться навыка. Фишка что, нет, собственно вращения начисляются на лучшие аппараты с оригинальными опциями и высокой отдачей. Не забывайте, собственно в любом акционном предложении предусмотрены специальные требования – кратковременные лимитирования, максимальный размер ставки, список дешевых игр. <a href=http://www.support.ipron.com/communication/forum/index.php?PAGE_NAME=profile_view&UID=15416>http://www.support.ipron.com/communication/forum/index.php?PAGE_NAME=profile_view&UID=15416</a> 1хслотс зеркало на сегодня
1×slots промокод при регистрации
Получать информацию о самых выгодных призах возможно без постоянного прогноза новостей казино. Мы взяли данную задачку на себя и непрерывно следим за предложениями операторов, выбирая превосходнейшие из их. В данном разделе собраны последние бездепы, промокоды к ним и условия их активации. Список промоакций регулярно пополняется. В топ зашли самые новые бездепозитные призы за регистрацию в казино 2020, временные и закрытые рекламную. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и критериям. Если срок действия промоакции истек, она удаляется из списка.Разные казино имеют личные верховодила по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высокие требования. Часто онлайн-казино советуют отыграть бонусное одобрение до 100 раз в игровых автоматах. Например, в игрок получил безвозмездно десять $, то нужно будет отыграть их, поставив 1 тыщу спинов по 1 доллару любой. Стоит отметить, собственно не все казино дают возможность играть на призы и не во всех развлекательных заведениях схожие верховодила для отыгрывания. Некоторые казино запрещают выступать на бонусы в блекджек или ограничивают ставки до 5 процентов, собственно существенно наращивает в десятки один число нужных игр. Фриспины — благотворительные вращения, коие разрешают игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытных игроков фриспины считаются наиболее модным и преимущественным видом бонуса — безвозмездные вращения порой эффективнее и веселее в отыгрыше, чем другие виды бездепов. 1×slots акции <a href=http://ru.monumentefunerare.md/index.php?subaction=userinfo&user=secretiveengine>http://ru.monumentefunerare.md/index.php?subaction=userinfo&user=secretiveengine</a> Маркетинговая политика всех игорных интернет-клубов должна одевать разнородный характер. И если вознаграждения на депозит работают для того, чтобы провоцировать вносить депозиты и поощрять уже существующих пользователей, то бездепозитный бонус в казино или бонус за регистрацию в казино, прежде всего, рассчитан на расширение базы покупателей.Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в обязательном порядке нужно пополнить счет в казино. Для депозитных бонусов, данная процедура не нужна, например как депо теснее изготовлен.
1×slots промокод при регистрации
Активация валютного вознаграждения случается автоматически в творения профиля либо применения промокода. Иногда операторы предъявляют вспомогательные требования: подписаться на странички казино в социальных сетях либо на рассылку маркетинговых сообщений, скачать и ввести дополнительный софт и т.д. <a href=https://webyourself.eu/blogs/511295/%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0-%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA>https://webyourself.eu/blogs/511295/%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0-%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA</a> Все безвозмездные призы кажутся заманчивыми. Кто же категорически от способности сыграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далеко не все бездепозитные бонусы в презентабельны для рассудительного посетителя.Кешбэк-бонус представляет собой возврат фиксированного процента от ставки в случае проигрыша либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не превышает 10%. x1 slots регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.animogen.com/memberlist.php?mode=viewprofile&u=15333>рабочее зеркало 1хслотс</a>
<a href=https://bajarmp3.net/showthread.php?tid=403720>1×slots рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Активация по промокоду используется в разных видах бездепов. Если речь о приветственном призе, то набор знаков можно разузнать на основной страничке, в регистрационной форме либо послании, коие отправляется юзеру для подтверждения адреса электронной почты. Акции могут проводиться совместно с партнерскими площадками. Обычно код располагается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активируется одноразовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем актуальный код для активации в описании каждого промо.
#6224 CharlesGafhttps://rezka-ua.com
фільми онлайн безкоштовно трилери <a href=https://rezka-ua.com/>фільми онлайн безкоштовно історичні</a>
#6225 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
up casino скачать букмекерские конторы pin <a href=https://th-royalgclub.com/>casino 7k сегодня</a> 1×bet слоты официальный сайт включи казино <a href=https://rhymes-punches.com/>casino скачать приложение</a> 1×bet официальный сайт 1×bet xyz человек казино где казино casino бонус kent casino регистрация букмекерские конторы бет игры казино
#6226 Charlesgunnyhttp://filmkachat.ru
1 хслот регистрация в 1×slots casino
В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и в случае спорных ситуаций нет способности куда-то посетовать и доказать собственную правоту.У каждого игорного клубы различные вейджеровые условия. Чтобы вы гарантировано сумели выполнить их, мы дадим несколько советов. Если система начислила маленькую необходимую, не делать немалые ставки – остановитесь на 10–30 центах. Как только сможете заработать примерно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте играть. В неприятном случае другого, как приглядеться к иному автомату. <a href=http://filmkachat.ru/>1 x slots</a> <a href=https://www.empowher.com/groups/blogs-4/posts/modern-trends-professional-3d-architectural-visualisation-agency-servi>https://www.empowher.com/groups/blogs-4/posts/modern-trends-professional-3d-architectural-visualisation-agency-servi</a> 1хслотс 1хслотс регистрация перейти на 1×slots <a href=https://www.amateur-girls-posts.com/forums/profile.php?mode=viewprofile&u=2950518>https://www.amateur-girls-posts.com/forums/profile.php?mode=viewprofile&u=2950518</a> Во всех законных онлайн-казино Беларуси нужно свидетельство паспортных данных для забавы — это требование правительства государства.Наш перечень включает в себя наилучшие бездепозитные бонусы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит ревизию по важным характеристикам:
1×slots официальный сайт скачать на айфон
Получить Бездепозитный бонус в онлайн казино дело 2-ух кликов. Другой момент, отыграть рекламную и соблюсти управляла и обстоятельства отыгрыша. Под правилами подразумевается не только вагер, хотя и ограничения по наибольшей ставке. Мы осознаем, собственно в кинотеатр все ставят на зеро и выигрывают. Призываем не создавать похожего. Перед активацией бонуса прочитайте управляла. Узнайте последующие моменты: Условия получения подарка, за регистрацию, за депозит и многое. Ограничения по максимальной ставке. Зачастую не повыше 350 рублей. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вращать автоматы, а вагер несомненно стоять на месте. Поэтому принципиально аристократия, в каких играх возможно совершать кратность валютного оборота. <a href=https://www.sgomberisgombero.it/my-account-2/>1×slots коды</a> 1×slots официальный сайт мобильная версия скачать Какие бонусы есть еще получить кроме бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного бонуса, каждое онлайн казино предлагает игрокам прибыльное предложение на 1-ый депо, вы совершаете депозит, ваш депозит возрастает в двое или и в 3, что, этим наиболее начать выступать можно с больше солидной суммой, так же не запамятываем на вейджер на призы. <a href=http://cn-sh.cn/space-uid-147276.html>http://cn-sh.cn/space-uid-147276.html</a> Самый распространённый из похожих призов, конечно же, бездеп на день рождения клиента — приз вид фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им возможно в течение установленного периода медли.Выиграть настоящие средства в казино не пополняя счет – трудно, но вполне. Главное задаться целью и не нарушатьправила заведения. Выберите несколько казино с бездепзитными бонусами и начните выступать на бонусные свои. По статистике в одном из 10-ти заведений возможно заработать маленькую сумму средств с бонусных средств. 1хслотс мобильная версия зеркало Похожим образом трудится третий способ доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения посетителя либо в связи с получения им VIP-статуса. Подарок предоставляется в обращения в поддержку и проверки.Максимальный объем ставки, который нельзя превосходить пока приз не несомненно полностью отыгран. В случае нарушения этого управляла, приз и выигрыш с него станут аннулированы.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Как управляло, новоприбывшие геймеры для желают ознакомиться с способами ввода и вывода денежных средств и сроки исполнения поданных заявок дабы конкретно разуметь, как быстро возможность вывести свой казино бонус за регистрацию без депозита на электронный кошелек либо же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино соперничают меж собой. Ведь в бы конкретную фирму представляло только одно онлайн-заведение, то навряд бы посетители заметили казино с призом за регистрацию и имели бы рассчитывать лишь на вознаграждение в виде приза на первое инвестиция. К любому заведению регулярно идет привлекать новых игроков, что, в итоге, лишь на руку всем играющим. <a href=https://cursos.fixtech.com.br/forum/member.php?action=profile&uid=13613>https://cursos.fixtech.com.br/forum/member.php?action=profile&uid=13613</a> 1×slots casino регистрация 1×slots review live
1хслотс казино зеркало
Внесение депо – Будьте готовы восполнить счет после отыгрыша приза. Это стандартное требование правил для данного на промо-акций. Лучше заблаговременно уточнить, какую необходимую нужно будет заносить на счет. Как управляло, речь о наименьшем депозите, но вы обязаны быть уверены, что он вам по карману. 1хслотс официальный сайт зеркало <a href=http://fb7707ng.bget.ru/user/CharlesKiz/>http://fb7707ng.bget.ru/user/CharlesKiz/</a> Необходимость отыгрыша. Вейджер ситуации выше, чем для призов за депозит. И же свои не отыграны, исключить их нельзя.Бездепозитные призы истинными деньгами, которые можно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадались.
зеркло казино 1×slots
Итак, чтобы безвозмездные бонусные кредиты трансформировались в настоящие деньги, которыми возможность распоряжаться по своему усмотрению, их надо(надобно) отыграть. Вейджер следует уточнять в правилах онлайн-казино.Онлайн гемблинг развивается с каждым днем больше и больше, свежие бренды создаются не по дням а по часам. Новые интернет казино делают вступительные акции для игроков, чтобы, чтобы что бы зарекомендовать себя, и что, этим самым предлагают бездепозитные бонусы за регистрацию, собственно бы не пропустить эту возможность — как воспользоваться новым бездепом, советуем посещать наш вебсайт как можно почаще, самое вкусное и свежие будет добавляться в этом же списке. <a href=http://www.russtars.tv/user/MiguelGrins/>http://www.russtars.tv/user/MiguelGrins/</a> Бездепозитные призы казино это финансовая компенсация, предлагаемая юзерам на дармовой базе и возможность играть в интернет казино безвозмездно. Если сравнивать их с поощрениями за лепта, в средства выдаются только впоследствии первоначального пополнения счета, то бездепозитные гонорары получаются безвозмездно. То есть, играющий получает вероятность делать ставки на уже место деньги, коие выдаст заведение, выполняя, при, обычные действия, дабы их извлечь (тут идет о регистрация, удостоверении личности с использованием номера телефона, дизайна заказы и т.д. ).Законодательство, регулирующее азартные игры в различных странах, влияет на возможности операторов. В результате пользователи из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это имеет быть как полный отказ в доступе, например и невозможность загружать игры отдельных изготовителей. 1×slots зеркало выигрыши обязательно пройдите регистрацию если
<b>Смотреть еще похожие новости:</b>
<a href=http://fin-molitor.com/forum/viewtopic.php?f=2&t=395660>1хслот официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При отыгрыше бонусных средств, необходимо учитывать срок деяния бонуса и время, которое дается на отыгрыш. По истечению заявленного медли, не отыгранный приз будет аннулирован. Мы собрали и выпустили перечень наихороших бездепозитных казино с бонусами за регистрацию, коие гарантируют великодушные выигрыши и мгновенные выплаты.
#6227 Matthewaxosyhttps://rezka-ua.com
кращі фільми онлайн у високій якості <a href=https://rezka-ua.com/>дивитися фільм безкоштовно детективи</a>
#6228 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино 1 cometa casino <a href=https://krtka.info/>porno Юлия Пересильд</a> up casino скачать 1×bet официальный xbet <a href=https://th-royalgclub.com/>букмекерская контора леонов</a> букмекерскую контору пин казино в россии Разуваева Ксения Денисовна порно порно с Илья Осипов (киберспорт) porno Нина Пирогова, хоккеистка inform@rucriminal.info 1×slots casino
#6229 Williamlaf
Generic Viagra for sale <a href=" http://www.bqmoli.com/bbs/home.php?… „>viagra without prescription</a> or <a href=“ https://sheltieforums.com/proxy.php?… ">Generic Viagra online</a> https://maps.google.ch/url?… Viagra tablet online <a href=http://maps.google.com.qa/url?q=https://fastpillsformen.com>Viagra online price</a> Cheapest Sildenafil online and <a href=http://lzdsxxb.com/home.php?mod=space&uid=3813524>Sildenafil 100mg price</a> Order Viagra 50 mg online
#6230 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора скачать приложение casino com <a href=https://7club7.com/>1×bet зеркало</a> 1×bet скачать приложение на андроид скачать букмекерскую контору на андроид <a href=https://www.ossetia.tv/>казино рояль</a> casino официальный зеркало казино 1 кент казино порно с Юлия Ефимова официальные сайты казино сайте букмекерской конторы фонбет официальные букмекерские конторы
#6231 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Многие азартные клубы ограничивают сумму вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании промоакции, суммы Вы не можете исключить. Разница несомненно аннулирована, Вы и не сможете делать на нее ставки.Призовые начисления без депозита шансы предоставляться для участия в турнирах интернет казино. Потратить перечисленные деньги возможно самая в рамках данной акции. Условия их проведения содержат лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, какого-либо изучить его правила. <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> Более солидные предложения встречаются довольно изредка. Зачастую они доступны только VIP-игрокам. В оставшихся случаях им всего сопутствуют довольно строгие обстоятельства отыгрыша. Также вероятны вспомогательные обстоятельства и ограничения, прописанные в условиях и положения бонусной программки казино.4. Заберите презент. Чаще всего бонус активируется незамедлительно в регистрации. Но посещают ситуации, когда нужно забежать в индивидуальный офис или написать в службу поддержки. <a href=https://rant.li/9fsnh6hu13>https://rant.li/9fsnh6hu13</a> Одним из предлогов отдавать преимущество, льготу 1 или другому заведению содержится в привлекательности предлагаемых акций и даровых услуг. Безвозмездные фриспины, выдаваемые без дела создавать какой-либо лепта, в списке располагается далековато не в конце. 1×slots бездепозитный бонус за регистрацию <a href=http://libpalatka.ru/index.php?subaction=userinfo&user=zonkedjug65>http://libpalatka.ru/index.php?subaction=userinfo&user=zonkedjug65</a>
1×slots регистрацию более популярный вариант это
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=324010&pid=646304#post_646304>1×slots регистрация 1×slots casino 777 online</a> 1×slots регистрация на сайте А ознакомиться с новыми онлайн казино, Вы сможете за счет призов с выводом выгоды, коие Вы можете получить без депо.Основное правило получения бездепа ? создаваемый аккаунт обязан быть у пользователя первым и единственным. Наличие нескольких аккаунтов взыскательно запрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депо необходимо соблюдать несложную последовательность действий. <a href=https://google.co.th/url?q=https://doctorlazuta.by/>https://google.co.th/url?q=https://doctorlazuta.by/</a> казино 1×slots официальный сайт Составленный экспертами Casino.ru список онлайн-казино с бездепозитным бонусом разрешает игрокам сравнить спецпредложения разных операторов.
1хслотс регистрация в 1×slots casino
На критериях отыгрыша даровых бонусов идет остановиться подробнее. С ними связаны нюансы, которые нельзя забыть без внимания.Не стоит незамедлительно же отрицаться от приветственных даров в похожих казино. Администрация готова начислить деньги или фриспины, хотя сначала сотрудники должны увериться, собственно вы не мошенник. Дело в том, собственно развелось очень большое охотников за призами. Они научились накалывать систему и зарабатывать крупные суммы средств. <a href=https://ai-db.science/index.php?title=%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0%20%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA>https://ai-db.science/index.php?title=%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0%20%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA</a> 1× slots сайт Законодательство, регулирующее азартные игры в разных странах, влияет на полномочия операторов. В результате юзеры из отдельных ареалов сталкиваются с лимитированиями со стороны казино. Это может быть как полный отказ в доступе, так и невозможность загружать забавы отдельных изготовителей.Процесс подтверждения личности может занять от одного дня до недели. Если заказчик допустил какую оплошность при заполнении паспортных данных, то ему стопам адресоваться с задачей в службу поддержки онлайн-казино.
1×slots официальный сайт скачать
На нашем веб-сайте Вы найдете список актуальных новых бездепозитных призов в казино 2022 года. Также, есть много неповторимых услуг, которые доступны лишь гостям нашего вебсайта после регистрации по нашей ссылке либо активации особого промокода. Итак, чтобы безвозмездные бонусные кредиты превратились в реальные деньги, которыми возможность распоряжаться по своему усмотрению, их нужно отыграть. Вейджер следует уточнять в правилах онлайн-казино.Вы наверняка, например все любите получать подарки и бездепозитные призы казино. Игорные дома брали в повадку одаривать гэмблеров приятными бонусами. Стать владельцем приветственного презента можно за создание профиля либо пополнение счёта. Второй вариант больше занимательный, так клубы готовы удвоить депо! Но в вы новичок и только знакомитесь с миром азарта, превосходнее воспользуйтесь призом за регистрацию. 1×slots регистрация <a href=http://stroimdacha.ru/index.php?subaction=userinfo&user=fatverdict18>http://stroimdacha.ru/index.php?subaction=userinfo&user=fatverdict18</a> Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.
казино 1×slots официальный сайт
Бонус начисляется игроку сразу последствии регистрации и прохождения верификации в казино и не требует от клиента внесения депо. Как управляло, размер приза в сходственном случае довольно скромный, однако разрешает новеньким познакомиться с забавой без риска реальными деньгами.Некоторые онлайн-казино без депо предлагают новым посетителям избрать приз при регистрации. Будьте внимательны: выбрав раз, вы в безоговорочном большинстве случаев не сможете воспользоваться остальными. Также, в этом случае необходимо подтвердить собственный номер телефонного, чтобы код, приобретенный в смс-сообщении от клуба установить в особое фон в собственном офисе игрока. <a href=https://forum.curvyeditor.com/user-5054.html>https://forum.curvyeditor.com/user-5054.html</a> Для верификации номера телефона, в собственном профиле выберите опцию „Подтвердить номер телефона“ и введите в отвечающее фон код, полученный в sms-сообщении.При регистрации никаких либо ином онлайн игральном заведении — для дается один шанс испытывать свою удачу не внося средства монеты. Замечу собственно такую поощрительную предложение деют не все онлайн игровые площадки, а только щедрая середина(средина) из их. Которые мы подготовили для Вас в нашем списке. казино 1×slots Основное верховодило получения бездепа ? творимый аккаунт должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов взыскательно воспрещено. Проверка проводится по имени, e-mal, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депо нужно соблюдать простую последовательность действий.У любой игры средства притязания по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система засчитает каждую ставку. В рулетке и покере сделать это намного сложнее. Именно поэтому например принципиально внимательно разбирать обстоятельства получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой этой, то новички попросту «спустят приз на ветер».
<b>Смотреть еще похожие новости:</b>
<a href=https://www.globalvision2000.com/forum/member.php?action=profile&uid=1072499>1×slots регистрация на 1хслотс</a>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=164602>1хслотс рабочее зеркало</a>
<a href=https://forum.ltp-team.com/topic/63227–1hslots-zerkalo-na-segodnya/>1хслотс зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Шаг 4. Активация. Внимательно выучите условия, информацию по лимитированиям и сроке действия бонусного предложения. Разобравшись с правилами, можно активировать бонус в собственном кабинете (иногда ? с внедрением промокода) либо по запросу в саппорт. Бoльшинcтвo азартных заведений выдвигают примерно однообразные, схожие обстоятельства и притязания, коие необходимо выполнить, чтобы получить бездепозитный бонус за регистрацию. Все их можно объединить в раз список:
#6232 Charlesgunnyhttp://filmkachat.ru
1×slots бонус за регистрацию
Высокая конкурентность в сегменте азартных игр мотивирует операторов привлекать клиентов разнородными акциями. Благодаря данному у посетителей замечена вероятность получить призы в казино за регистрацию без депозита. Воспользоваться таким предложением можно, избегая функцию внесения денег на игровой счет, просто активировав акк на сайте. Наш гид по бездепам поможет избрать самую привлекательную бонусную программку, узнать правила получения такового вознаграждения и воспользоваться им с максимальной выгодой.Самые пользующиеся методы вывода средств ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электрическим платежным системам типа Neteller и Skrill, а пользуются криптовалютными кошельками. Вывод выигрышей возможность осуществляться мгновенно либо занимать от нескольких часов до нескольких суток. <a href=http://filmkachat.ru/>сайт 1× slots casino</a> <a href=https://guides.co/g/how-3d-property-tours-are-revolutionizing-real-estate-mark/474208>https://guides.co/g/how-3d-property-tours-are-revolutionizing-real-estate-mark/474208</a> Простая процедура получения бездепозитного приза, кот-ая займет не более 2-х минут. Для получения бездепов, достаточно зарегистрироваться и подтвердить контактные данные.Для получения бездепа необходимо пригласить в игру по реферальной ссылке нового клиента: он обязан зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на необходимую, обозначенную в критериях акции. 1×slots casino регистрация 1×slots review live <a href=https://www.cfbwz.com/space-uid-71794.html>https://www.cfbwz.com/space-uid-71794.html</a> Бездепы с безвозмездными вращениями предоставляют юзерам право вертеть барабаны игровых автоматов без снятия средств со счета. За каждый раунд уплачивает казино. Число спинов ограничено и изредка превышает сотку. Если акция включает в себя большое безвозмездных игр, их начисление имеет быть разбито на несколько дней.
1×slots регистрация 1×slots casino 777 online
Размер ставки для забавы по бездепозитному призу (окончательно же, если, тогда,, когда он представлен в виде бонусных валютных средств) часто ниже, чем при этой на депо. Ограничение будет действовать до момента отыгрыша бонуса. <a href=https://www.reisezielforum.de/viewtopic.php?t=451636>1×slots рабочее зеркало на сегодня</a> 1×slots промокод при регистрации 2025 Для вывода средств бонус нужно будет отыграть законам, установленным казино. Внимательно ознакомьтесь с правилами акции и вариациями отыгрыша бездепозитного приза до его получения, чтобы избежать конфликтных обстановок.Бездепозитные призы, как уже ясно, являются оригинальной возможностью к игровому процессу абсолютно бескорыстно, словами играть в онлайн казино безвозмездно и на быть свои незамедлительно в регистрации аккаунта. Автоматы с этим депо все стать прекрасной возможностью сыграть для почитателей пыла с определенными ограничениями в финансах. <a href=http://bbs.worldsu.org/home.php?mod=space&uid=201976>http://bbs.worldsu.org/home.php?mod=space&uid=201976</a> Многие игроки, оценив возможностей казино, остаются играть в нем и дальше ? на это и направлено любое промо. Постоянные посетители заносят депозиты и делают ставки, обеспечивая долгосрочную выгода оператора. То есть, казино выдают бездепы свежим юзерам для формирования лояльной аудитории.Доступ к подарку возможность открываться автоматически последствии введения промокода или воззвания в службу сайта. В первом случае от пользователя не требуется практически деяний. Бездеп с активацией по коду встречается чаще всего. Игроку нужно установить совокупность символов в графе, которая возможность находиться в регистрационной форме в Личном офисе. 1×slots зеркало на сегодня Принципиальным отличием безвозмездных призов от бонусов на депо является неименье необходимости вносить деньги на акк. Из-за сего их часто называют бездепозитными (no down payment bonuses).
1×slots casino регистрация 1×slotscasin online
Каждый геймер должен сперва отчетливо изучить условия по получению и отыгрышу приглянувшегося презента. Если всё устраивает, поторопитесь арестовать бесплатные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик сейчас начать вертеть барабаны лучших слотов. Представьте момент, когда при ставке в 10 руб. Вы получите сходственное умножение. Миллион руб. За одно вращение, что вполне возможно. Поэтому вопрос, сколько возможно выиграть остаётся закрытым. Предлагаем выяснить без. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный приз и проверяйте удачу в деле. Разумеется, вывести средства довольно. Однако шансы есть у всех. <a href=http://pram.elmercurio.com/Logout.aspx?ApplicationName=EMOL&l=yes&SSOTargetUrl=http://kerranova.ru/bitrix/redirect.php?goto=http://fish4fish.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/kd4Aa96-znB>http://pram.elmercurio.com/Logout.aspx?ApplicationName=EMOL&l=yes&SSOTargetUrl=http://kerranova.ru/bitrix/redirect.php?goto=http://fish4fish.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/kd4Aa96-znB</a> 1×slots официальный сайт зеркало
1×slots мобильная версия войти казино
Более крупные предложения встречаются довольно изредка. Зачастую они доступны только VIP-игрокам. В оставшихся случаях им наверняка сопутствуют очень жесткие обстоятельства отыгрыша. Также вероятны вспомогательные условия прочие ограничения, прописанные в критериях и положения бонусной программки казино.Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном сайте и выполните вход в личный офис, чтобы отобрать бесплатные вращения с вейджером х40; <a href=http://86395.ww.w.molifan.net./space-uid-2275092.html>1хслотс рабочее зеркало на сегодня</a> 1×slots скачать на айфон <a href=https://arjaniki.ru/memberlist.php?mode=viewprofile&u=37606>https://arjaniki.ru/memberlist.php?mode=viewprofile&u=37606</a>
1×slots рабочее зеркало
Иногда операторы просят внесение малого депозита перед выводом для верификации платежного прибора. В неких казино этот депозит того светит отыграть.Список так называемых «запрещенных территорий» прилагается к правилам бонусной программки игорного портала. Обязательно выясните, распространяются ли на вас подобные наказания. <a href=https://pushtokindle.fivefilters.org/send.php?url=http%3A%2F%2Fcasino.filmkachat.ru>https://pushtokindle.fivefilters.org/send.php?url=http%3A%2F%2Fcasino.filmkachat.ru</a> При регистрации стопам свидетельствовать лишь достоверную информацию. Когда учетная запись несомненно активна, появится доступ в Личный офис. В нем можно выбрать денежную, установить промокод и узнать подробные управляла получения и отыгрыша бездепа. Краткая информация об промоакции часто присутствует непосредственно на регистрационной форме. 1× слот зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://bans.org.ua/index.php?topic=119819.new#new>1×slots регистрация 1×slots casino c2d ru</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы настоящими деньгами, которые возможно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадали. Каждый новичок и умелый игрок грезят скоро стартануть и начать делать реальные ставки. Для сего достаточно забрать подарок, за кот-ый не выплачивать. В зависимости от игровой платформы, нужно сделать профиль, привязать email либо аппарат. После этого администрация начислит щедрое вознаграждение в виде безвозмездных вращений или виртуальных кредитов.
#6233 Rogerthoug
http://maxpillsformen.com/ Generic Cialis price
#6234 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация
Чаще всего применяются коды. Их нужно заносить в специальные окна регистрационной анкеты, в идет о пригласительных бонусах, либо в особом разделе собственного кабинета игрока. <a href=http://filmkachat.ru/>1хслот 1хслотс регистрация перейти на 1×slots</a> <a href=https://ai.ceo/read-blog/206569>https://ai.ceo/read-blog/206569</a> 1×slots casino регистрация 1×slots review live <a href=http://www.podzemie.6f.sk/profile.php?lookup=18943>http://www.podzemie.6f.sk/profile.php?lookup=18943</a> Частенько новички не разумеют, как активировать презенты либо исключить первый выигрыш. Для сходственных случаев наша команда обрисовала основные определения – что это фриспины, вейджер, как его отыграть, зачем необходимо протекать верификацию.Бездепы с безвозмездными вращениями предоставляют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд платит казино. Число спинов ограничено и редко превышает сотню. Если промоакция включает в себя большое безвозмездных игр, их начисление имеет быть разбито на несколько дней.
1×slots зеркало рабочее
1×slots сайт В списке требований к отыгрышу часто присутствуют лимиты на ставки при этой на личные средства. Так, в отыграть надо(надобно) 30 000 руб., а предельная сумма ограничена 30 рублями, то вращать барабаны светит 1000 один. Эта особенность затрудняет соблюдение игроками критерий по срокам действия промоакции.Стоит отметить, собственно бездепозитный приз выдается лишь совершеннолетним новичкам, которые, же, могут пригласить собственных приятелей и людей, кроме претендующих на поощрительную программку лояльности. Подобная технология появилась между конкуренцию онлайн-казино для популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению своей популярности, методом привлечения новых игроков. Бонусы – это уникальный шанс для вероятных соучастников забавы, которые шансы опробовать софт покер рума и убедиться, будут ли они в него играть либо нет. Новый игрок попробует средства силы с настоящими оппонентами в казино. <a href=https://blackmarke7.com/user-41621.html>https://blackmarke7.com/user-41621.html</a> В онлайне очень много скриптовых сайтов, которые принадлежат жуликам. Их основная задача – заинтересовать гэмблеров, пообещав не только великодушные презенты, но и крупные выигрыши. Так собственно кое-какие сайты предлагают получить за регистрацию в $1 000.Призовые начисления без депозита имеют предоставляться для роли в турнирах интернет казино. Потратить перечисленные средства возможно необыкновенно в данной акции. Условия их проведения содержат ограничения на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться таким предложением, чем изучить его управляла. 1х слотс зеркало регистрация в 1×slots casino Денежные свои. Третий приз за регистрацию без депо – наличные. К сожалению, лишь знаменитые и пользующиеся клубы шансы уяснить средства в рублях или долларах. С их помощью появится насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед данным нужно исполнение конкретных условий.Не стоит сразу же отрицаться от приветственных презентов в похожих казино. Администрация готова начислить средства либо фриспины, хотя сначала работники обязаны убедиться, собственно вы не мошенник. Дело сомнений, что развелось слишком много охотников за бонусами. Они выучились врать систему и зарабатывать крупные суммы средств.
1×slots рабочее зеркало на сегодня
Способы получения бездепа различаются от вида приза, кот-ый приглянулся игроку. Но для или нужно быть зарегистрированным в легальном онлайн-казино и подтвердить свою личность. В общем виде пошаговая аннотация для получения бездепозитного бонуса выглядит так:Верификация необходима для дополнительной защищенности и может техподдержке выявить бонусхантеров и жуликов. Кстати, на некоторых платформах выводы солидных сумм доступны только в доказательства личности. <a href=http://bonanza.com/home/redirect_warning?url=taxref.i3s.unice.fr/describe/?url=http://fsin-marketplace.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/EuQR7R65lUv>http://bonanza.com/home/redirect_warning?url=taxref.i3s.unice.fr/describe/?url=http://fsin-marketplace.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/EuQR7R65lUv</a> 1 x slots casino Не советуем сломя голову хвататься за различные предложения получения средств без инвестициям. Вполне вероятно, что бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем смотрится на 1-ый взгляд. Альтернативой является казино приз за депозит. Мы предлагаем вам пару советов, спасибо которым у каждого игрока будет вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом денег:Диапазон ставок, которые вправе сделать игрок, кроме лимитирован. Обычно назначать возможно маленькую сумму — около 10–30 рублей за одно вращение.
1× слот зеркало
<a href=https://www.katzenforum.at/forum/media/users/jamesagema.16012/>1× slots зеркало</a> Промообъявления от казино не дают реальной картины и направлены на вербование внимания юзеров. Понять, насколько высоки шансы остаться в плюсе, дозволит собственный анализ условий предложения:Классическая разновидность бонуса за творение аккаунта. Его преимущество содержится в, собственно клиент возможность без выбирать аппараты и создавать ставки в них. Иногда список игровых автоматов ограничен оператором, хотя все одинаково это лучше, чем единственный дешевый слот, как когда с внедрением фриспинов. 1× слот зеркало <a href=http://zzwind.is-programmer.com/guestbook/>http://zzwind.is-programmer.com/guestbook/</a> Такой безвозмездный эквивалент средств зачисляется на профиль юзера в воплощения притязаний и предназначаются они только для игрового процесса. Вывод таких вознаграждений вероятен только последствии осуществления вейджеровых условий.Основное различие никаких, что для получения бездепа не надо пополнять баланс в казино. Но считая этого, есть ряд прочих различий:
1х слотс зеркало регистрация в 1×slots casino
Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в обязательном порядке необходимо пополнить счет в казино. Для депозитных бонусов, эта процедура не необходима, так как депозит теснее изготовлен. Призовые начисления без депозита все предоставляться для участия в турнирах онлайн казино. Потратить перечисленные деньги возможно необыкновенно в рамках этой акции. Условия их проведения включают в себя лимитирования на список игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться таким предложением, лучше изучить его верховодила.Лишь известные и известные азартные заведения имеют разрешить себе раздавать бездепы повторяющий дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, которые можно израсходовать в лучших аппаратах с высокой отдачей. <a href=http://bbs.yunduost.com/home.php?mod=space&uid=20602>http://bbs.yunduost.com/home.php?mod=space&uid=20602</a> 1×slots регистрацию более популярный вариант это
<b>Смотреть еще похожие новости:</b>
<a href=https://10nsk.ru/user/JosephSuple/>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=https://qualityprogamer.de/forum/showthread.php?tid=280715>1×slots официальный сайт мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чаще всего интернет-казино предлагают бездепозитные бонусы свежим юзерам. Эта промо-акция очень эффективно привлекает новичков, подталкивая их к открытию счета. Конечно, не они становятся послушными клиентами, но сам прецедент регистрации аккаунта играет на руку заведению.
#6235 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Дарья Касаткина (теннис) 1×bet бесплатно <a href=https://rhymes-punches.com/>7k casino</a> сайте букмекерской конторы фонбет casino бонус <a href=https://strelochnik.com/>сайт винлайн букмекерская контора</a> porno Виктория Баркова, легкоатлетка bitz casino букмекерская контора бесплатно скачать porno Юлия Канакина самое казино рабочее казино 1×slots casino
#6236 SidneySlotahttps://steroids-price.ru
Ищете качественные <a href=https://steroids-price.ru/>стероиды для набора массы</a>? У нас вы найдете широкий выбор сертифицированной продукции для набора массы, сушки и улучшения спортивных результатов. Только проверенные бренды, доступные цены и быстрая доставка. Ваше здоровье и успех в спорте – наш приоритет! Заказывайте прямо сейчас!"
#6237 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино рояль смотреть 1×bet приложение <a href=https://strelochnik.com/>vodka casino</a> 1×bet официальный слоты скачать 1×bet на андроид <a href=https://th-royalgclub.com/>сколько казино</a> порно с Юлия Ефимова, пловчиха включи казино промокод 1×bet 1×bet на андроид бесплатно casino pin официальный casino riobet порно с Владимир Минеев (ММА)
#6238 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию более популярный вариант это
Главное превосходство спинов – возможность изучить разные слоты. Также получится насладиться бонусными раундами, испытать фортуну в риск-туре и преувеличить выигрыш за счёт особенных символов. Однако не игровой процесс заслуживает внимание, так превосходнее сосредоточиться на реальном выигрыше. <a href=http://filmkachat.ru/>1хслотс казино зеркало</a> Рассмотрим на образце: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских рублей. В условиях промоакции указано, собственно вейджер бездепозитного бонуса х20. Поэтому, чтобы отыграть бонус, игроку несомненно нужно сделать ставок на 35*20=700 рублей. <a href=https://graph.org/Transform-Your-Furniture-Ideas-into-Reality-A-Deep-Dive-into-3D-Design-Tools-11–22>https://graph.org/Transform-Your-Furniture-Ideas-into-Reality-A-Deep-Dive-into-3D-Design-Tools-11–22</a> 1×slot зеркало рабочее регистрации на телефон придет <a href=http://zvezdjuchki.ru/user/RalphHow/>http://zvezdjuchki.ru/user/RalphHow/</a> При верном раскладе бездепы — это прекрасный способ выступать на средства без растраты собственных средств. Есть количество советов, следуя которым можно извлечь максимально выгоды из похожих акций казино. Играть по лишь на лицензированных площадках. Скриптовые сайты не только обманывают с бонусными предложениями, хотя и употребляют пиратский софт с измененным ГСЧ. Выиграть на этих автоматах невозможно.
1×slots регистрация то дальше необходимо пройти
Пoдтвepдить личнocть посетителя. Для удачного вывода средств, нужно доказать лицо посетителя. Нa этaпe вepификaции пpoфиля, работники службы безопасности обязаны убедиться, что у игрока не раз аккаунт. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не может исключить собственный выигрыш, если у него будет количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы.На нашем веб-сайте Вы найдете перечень своевременных новых бездепозитных призов в казино 2022 года. Также, есть много эксклюзивных предложений, которые доступны лишь гостям нашего сайта в регистрации по нашей ссылке или активации специального промокода. <a href=https://forum.home-visa.ru/memberlist.php?mode=viewprofile&u=3536>1×slots регистрацию процедура займет всего лишь</a> 1× slots casino официальный сайт <a href=http://bbs.yongrenqianyou.com/home.php?mod=space&uid=4141039&do=profile>http://bbs.yongrenqianyou.com/home.php?mod=space&uid=4141039&do=profile</a> Итак, дабы безвозмездные бонусные кредиты трансформировались в реальные деньги, которыми возможность распоряжаться по своему усмотрению, их надо(надобно) отыграть. Вейджер следует уточнять в правилах онлайн-казино.Ниже указан важный список законных казино в Беларуси с призами на 1-ый депозит. Вы можете попасть на официальный вебсайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз. 1×slots зеркало которую указывали при регистрации кстати Бездепозитные бонусы начисляются лишь один один. Не стоит раскрывать свежие аккаунты, дабы получить их повторно. Служба защищенности казино обязательно выявит «левого» соучастника и перекроет. Если посетитель выполнит необходимые притязания, отыграет собственную ставку и решит вывести личный выигрыш, то ему нужно сведению, собственно казино непременно востребует дать ксерокопии собственных документов, дабы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои исключить не удастся.
1×slots официальный регистрация
Размер бонуса. В качестве бездепов обычно начисляют большие суммы, а когда речь идет о призах за депо, которые начисляются в процентном соотношении от суммы пополнения, то некоторые казино все презентовать игроку до 2000$.Доступные забавы – В неких азартных играх возможно снизить математическое приемущество казино до нескольких 10-х процента. В их количестве все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как верховодило, в таких забавах ставки идут в зачет вейджера не всецело. Например, имеет учитываться только 50%. В некоторых играх бездепозитные призы вообще невозможно отыгрывать. <a href=https://lit-book.ru/user/Jaspergurdy/>https://lit-book.ru/user/Jaspergurdy/</a> Максимальный объем ставки, кот-ый нельзя превышать же приз не будет полностью отыгран. В случае нарушения этого верховодила, бонус и выигрыш с него будут аннулированы.Практически все интернет казино с бездепозитным бонусом за регистрацию учитывает программку преданности — систему поощрения неизменных клиентов, кот-ая состоит из колличества значений. При достижении игроком одного значения на его счёт поступает приз. Чем повыше степень — что, этим щедрее бонус. 1х слот регистрация в 1×slots casino Заработать на бездепозитных бонусах за регистрацию в казино возможность любой пользователь, достигший совершеннолетия.
1×slots casino регистрация 1×slotscasin online
Выбирая безвозмездный бонус, пристально изучайте верховодила. Убедитесь, собственно вас можно принимать участие в акции. Уточните, в каких играх можно выполнять обстоятельства вейджера. При необходимости задавайте вопросы представителям саппорта.Зарегистрируйтесь. Для регистрации почаще всего достаточно установить собственный номер телефонного и почтовый адрес, последствии чего ввести приобретенный код из СМС. Возможно, потребуется показать промокод. В правилах промоакции будет написано, где его бы включать. Иногда это надо создавать при регистрации, иногда — уже последствии творенья личного офиса, на отдельной страничке. Бездепозитные бонусы начисляются только раз один. Не стоит открывать новые аккаунты, чтобы получить их повторно. Служба безопасности казино обязательно выявит «левого» участника и перекроет. Если гость выполнит необходимые требования, отыграет свою ставку и решит исключить личный выигрыш, то ему надо(надобно) принять, собственно казино обязательно потребует дать ксерокопии личных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные средства исключить не удастся.Превышение наибольшей ставки при отыгрыше. Система механически не предуведомляет о превышении ставки, потому о нарушении управлял игрок имеет узнать теснее в подачи запроса на вывод средств. Многие азартные клубы ограничивают необходимую вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не можете исключить. Разница будет аннулирована, Вы в не можете создавать на нее ставки. 1×слотс казино <a href=http://yiseeyou.com/free/17>http://yiseeyou.com/free/17</a> Изучить верховодила и условия получения бездепозитных бонусов казино, Вы сможете у нас на сайте в разделе с бонусами или на официальном веб-сайте выбранного Вами казино. Если имеет отыскать нужную информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал либо по электронной почте.
1х слот регистрация в 1×slots casino
Как управляло, при выводе финансов, от играющего требуется лишь устроить минимальный вклад чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом собственный счет.Верификация важна для дополнительной безопасности и помочь техподдержке выявить бонусхантеров и плутов. Кстати, на некоторых платформах выводы солидных сумм доступны лишь после подтверждения личности. В интернет-сети всегда можно отыскать перечни наиболее известных и обещанных поощрительных программ от популярных онлайн-казино. <a href=https://love-n-magic.ru/index.php?subaction=userinfo&user=PatrickGom>https://love-n-magic.ru/index.php?subaction=userinfo&user=PatrickGom</a> 1×slots официальный сайт зеркало рабочее Особую изюминку видео слотам придают оригинальные символы. С их выходом активируются различные бонусы. Вы можете запустить дополнительный степень и увеличить сумму выигрыша. Есть знаки, коие заменяют ненужные составляющие и сами творят выигрышные комбо. Не стоит забывать и про бонус-тур. После любого счастливого спина есть шанс прирастить необходимую выигрыша в 2 или хорошо раза.Да, у безвозмездных призов есть недостатки. Прежде всего, они обычно очень. Кроме такого, обстоятельства вейджера по ним практически строгие. Но все же отсутствие риска делает их довольно привлекательными для посетителей.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.home-visa.ru/memberlist.php?mode=viewprofile&u=3536>казино 1×slots официальный сайт</a>
<a href=https://www.fromrus.su/index.php?/topic/33083–1×slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D1%82%D0%BE-%D0%B4%D0%B0%D0%BB%D1%8C%D1%88%D0%B5-%D0%BD%D0%B5%D0%BE%D0%B1%D1%85%D0%BE%D0%B4%D0%B8%D0%BC%D0%BE-%D0%BF%D1%80%D0%BE%D0%B9%D1%82%D0%B8/>1×slots регистрация то дальше необходимо пройти</a>
<a href=http://forum.azartweb2.com/threads/1×slots-zerkalo-na-segodnja.228526/>1хслотс зеркало на сегодня</a>
<a href=http://aficionado.pl/showthread.php?126984–1%D1%85-%D1%81%D0%BB%D0%BE%D1%82-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%B2–1×slots-casino&p=145511>1х слот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Помимо прочего, для вывода средств по бездепу необходимо привнести на счёт свой 1-ый депо — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально вероятную необходимую, в чего вывод средств станет доступен.
#6239 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
up casino скачать казино без <a href=https://kompromat1.online/>букмекерская контора вход</a> Фастова Елена Владимировна порно casino betting <a href=https://th-royalgclub.com/>casino pin официальный</a> пин ап букмекерская контора казино онлайн порно с Захарова Мария Владимировна casino онлайн black russia казино яндекс казино Яровая Ирина Анатольевна порно
#6240 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Владимир Минеев (ММА) казино вулкан <a href=https://specreporter.com/>porno Елизавета Туктамышева</a> букмекерская контора ставки лучшие бесплатные онлайн казино <a href=https://slon-ru.com/>casino рабочее</a> 1×bet xbet xyz Комарова Наталья Владимировна порно балтбет букмекерская контора порно с Кирьянова Дарья Борисовна официальное казино вход промокод 1×bet порно с Георгий Джикия (футбол)
#6241 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию более популярный вариант это
Составленный специалистами Casino.ru список онлайн-казино с бездепозитным бонусом дозволяет игрокам сравнить спецпредложения различных операторов. <a href=http://filmkachat.ru/>1× slots casino зеркало</a> У нас на веб-сайте Вы найдете список бонусов без депо в проверенных казино и доскональную информацию про как их получить и использовать. <a href=https://www.friend007.com/forums/thread/6498/>https://www.friend007.com/forums/thread/6498/</a> Бездепозитные бонусы начисляются только раз один. Не стоит открывать новые аккаунты, чтобы получить их повторно. Служба безопасности казино обязательно выявит «левого» участника и перекроет. Если гость выполнит необходимые требования, отыграет свою ставку и решит исключить личный выигрыш, то ему надо(надобно) принять, собственно казино обязательно потребует дать ксерокопии личных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные средства исключить не удастся. 1×slots регистрация на сайте <a href=https://disgaeawiki.info/index.php/User:BetsyPaton0>https://disgaeawiki.info/index.php/User:BetsyPaton0</a> Онлайн гемблинг развивается с любым деньком все больше и больше, новые бренды создаются не по денькам а по часам. Новые онлайн казино проделывают вступительные промоакции для игроков, для того собственно бы зарекомендовать себя, и тем наиболее предлагают бездепозитные призы за регистрацию, что бы не упустить такую вероятность — как пользоваться свежим бездепом, рекомендуем навещать наш сайт как возможно чаще, самое лакомое и новые несомненно добавляться в данном же перечне.Начнём с такого, что каждое рекламную за регистрацию предполагает некие условия. Бездепозитные призы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, необходимая для исполненья критерий. Пример, возымели безвозмездные вращения и выиграли с них 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 руб., неудачных или выигрышных, неважно. После выполнения, бонусный баланс перейдёт на настоящий и будет легкодоступным к выводу.
1×slos регистрация в 1×slots casino
Бонусные деньги – небольшая сумма средств для старта в новеньком казино. На бонусные средства, обыкновенно разрешается играть во все забавы, кроме слотов с современным джекпотом и игр из раздела exist casino. <a href=http://djdrewski.co.uk/lfsbangers/viewtopic.php?f=32&t=29623>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a> 1 xslots рабочее зеркало В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая милая доля игры. Важно, зачастую бездепозитные призы в казино выдаются с лимитированиями по наибольшей выплате. В среднем возможно рассчитывать на выгода в количество тыщ рублей. Как вывести выигрыш с приза без депозита. Придётся доказать аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате либо прочтите в правилах.Ну и конечно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: схожая добродушие повышает степень преданности клиентов к компании. <a href=http://y90429l8.bget.ru/user/PatrickMal/>http://y90429l8.bget.ru/user/PatrickMal/</a> Для проверки используются сканы паспортов, водительских водительских, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь обнаружен в попытке ввести вспомогательный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный перечень. При забаве на лицензионной площадке не опасаться указывать достоверную индивидуальную информацию (шифрование исключает утечку персональных данных). 1 хслот регистрация в 1×slots casino Варианты выигрыша находятся от Вашей успеха и условий игорного портала. Выше мы заявили, что некоторые бездепозитные призы в 2022 году выдаются с лимитированиями по максимальной выплате. Однако, остаются другие, все, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на деньги, возможно выиграть невозможные суммы. Сегодняшние игровые автоматы либо видео слоты, как их именуют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000.
1×slots официальный сайт мобильная версия скачать
<a href=https://forum.vn.ua/showthread.php?t=76792>https://forum.vn.ua/showthread.php?t=76792</a> В интернет-сети постоянно можно найти списки наиболее модных и гарантированных поощрительных программ от популярных онлайн-казино.Автоматы неспроста считаются наиболее известным азартным развлечением. Чтобы освоить управление и управляла, потребуется всего количество мин. Ваша задача сделать ставку, найти число рабочих линий и возможно крутить барабан. Если дисплее выпадет выигрышная комбинация – вы выиграли! С данной задачей для помогут справится бездепозитные бонусы казино. 1х слот 1хслотс регистрация перейти на 1×slots При правильном подходе бездепы — это отличный метод играть на средства без траты собственных средств. Есть количество рекомендаций, следуя коим можно извлечь максимально полезности из похожих промоакций казино. Играть следует лишь на лицензированных площадках. Скриптовые веб-сайты столько накалывают с бонусными услугами, хотя и используют пиратский софт с модифицированным ГСЧ. Выиграть на этих автоматах нереально.
1×slots рабочее зеркало на сегодня
Чаще всего казино приз за регистрацию без депозита даёт вероятность запустить каждой автомат. Но какого-либо внимательно ознакомиться с условиями. Иногда для забавы доступны только определённые модели. Если вы новичок и ничего не смыслите в гэмблинге, другого начать знакомство с миром пыла непосредственно с «одноруких бандитов». <a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=61788>1×slots рабочее зеркало на сегодня</a> Размер приза. В качестве бездепов обычно начисляют маленькие суммы, а когда речь о призах за депо, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино имеют подарить игроку до 2000$.В случае установленного лимита на сумму вывода выигрыша с бездепозитного бонуса, игрок не может вывести больше заявленной суммы. Одним из поводов отдавать преимущество, льготу одному либо иному заведению содержится в привлекательности предлагаемых акций и даровых предложений. Безвозмездные фриспины, выдаваемые без нужды создавать какой-либо вклад, в списке располагается далеко не в конце. 1хслот скачать <a href=https://polonistyka.com/user-2/charlesunofs/>https://polonistyka.com/user-2/charlesunofs/</a>
1×slots официальный сайт, скачать
Только выполнив все условия отыгрыша и дождавшись окончания ревизии аккаунта, Вы сможете оформить заявку на вывод средств и получить свои деньги.Заработать на бездепозитных призах за регистрацию в казино возможность любой юзер, достигший совершеннолетия. Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных притязаний, не обязательной верификации. Если на веб-сайте учтена обязательная процедура подтверждения личности, то исключить выигрыш удастся только последствии ревизии данных. Приготовьтесь заполнить анкету и отправить в техподдержку документ, подтверждающий лицо.Для получения бездепа необходимо пригласить в забаву по реферальной ссылке свежего посетителя: он обязан зарегистрироваться, пройти верификацию на сайте онлайн-казино и пополнить счёт на сумму, обозначенную в условиях промоакции. <a href=https://forex-bitcoin.com/members/388027-davidirova>https://forex-bitcoin.com/members/388027-davidirova</a> 1×slots рабочее зеркало на сегодня На нашем веб-сайте Вы отыщите список актуальных новых бездепозитных бонусов в казино 2022 года. Также, есть много неповторимых предложений, которые доступны лишь гостям нашего вебсайта после регистрации по нашей ссылке либо активации особого промокода.К раскаянью, нет. Почти все казино, требуют внесение хотя бы 1-го малого депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, что исключить деньги разрешено только на что, эту платежную систему, с коей был изготовлен депозит.
<b>Смотреть еще похожие новости:</b>
<a href=https://smm-seo.ru/members/rabofreeol.4209/>1х слотс зеркало регистрация в 1×slots casino</a>
<a href=http://miupsik.ru/forums/showthread.php?tid=249259>рабочее зеркало 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Как лишь вы отыграли вейджер и свои с бонусного баланса перешли вам на реальный счет, Вы отважно сможете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (устроить минимальный депо к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депозитом).
#6242 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало на сегодня
Одним из поводов отдавать преимущество, льготу 1 или другому заведению заключается в привлекательности предлагаемых промоакций и безвозмездных предложений. Безвозмездные фриспины, выдаваемые без дела создавать какой-нибудь вклад, в перечне находится далековато не в конце. <a href=http://filmkachat.ru/>1×slots скачать на айфон</a> <a href=https://owntweet.com/thread/214649>https://owntweet.com/thread/214649</a> Бонус в казино без депозита имеет различные вариации: может быть приветственный бонус, промоакции в честь каких-либо праздничных или главных дат, приз за вербование новых игроков, лояльность и получение VIP-статуса. 1хслотс рабочее зеркало <a href=https://ark.arkadak.sarmo.ru/communication/forum/messages/forum5/message698/651-_-_?result=new#message698>https://ark.arkadak.sarmo.ru/communication/forum/messages/forum5/message698/651-_-_?result=new#message698</a>
1×slots мобильная версия войти казино
Суммы сходственных услуг, как правило, колеблются от трех до двадцати долларов, а вейджер на эти свои должен сочинять от 30 до шестидесяти раз. Зачастую, наибольшая сумма выигрыша здесь составит от одной до двух сотен $. Если игрок выиграет больше, то все свои шансы быть списанными до очень разрешенного выигрыша. Здесь бывает содержание выводить еще несуществующие деньги на собственную платежную систему и дальше искать заведение с благоприятными под данную сумму релоадом или призом за первое пополнение счета. Есть некоторое подвидов бездепозитного вознаграждения, предлагаемого великим числом заведений. 1×slots зеркало быструю регистрацию а также мгновенное Ознакомьтесь с нашим списком наихороших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего списка и получите бездеп сразу. Хватайте лучшие безвозмездные предложения ниже и выигрывайте большие деньги, не рискуя! <a href=https://wood.biz.ua/wr_board/tools.php?event=profile&pname=WalterLop>https://wood.biz.ua/wr_board/tools.php?event=profile&pname=WalterLop</a> Однако далеко не все ресурсы предлагают своим посетителям бездепозитные призы за регистрацию в казино. В большинстве случаев учтено поощрение на первый депозит в размере 100–200%. Это отличная вероятность преувеличить банкролл, прирастить время, проведённое за игрой и шансы сорвать большой куш.На благотворительные бонусы онлайн-казино почти постоянно распространяется лимитирования по стране проживания клиентов. Даже случае для разрешено раскрывать счет и выступать на средства в заведении, это еще не означают, что вам доступны no deposit bonuses. казино 1×slots официальный сайт
1×slots зеркало сайта
<a href=https://acerfans.ru/user/Jaspercah/>https://acerfans.ru/user/Jaspercah/</a> Практически все онлайн казино с бездепозитным призом за регистрацию учитывает программку преданности — систему поощрения постоянных клиентов, кот-ая состоит из колличества значений. При достижении игроком очередного значения на его счёт поступает бонус. Чем повыше уровень — что, этим щедрее приз. 1хслот зеркало сайта
1×slots подтвердит вашу регистрацию если говорить
Бонусные деньги – небольшая сумма средств для старта в новеньком казино. На бонусные деньги, обычно разрешено выступать во все игры, не слотов с прогрессивным джекпотом и игр из раздела exist casino. Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми промоакциями. Читайте о них в обзорах и на форуме.Наиболее популярные вознаграждения среди гэмблеров – бездепозитные бонусы казино. Это не изумительно, как возможно получить благотворительные вращения или виртуальные кредиты, и при этом не придётся пополнять счёт, рисковать личными деньгами. Удастся насладиться разнородными развлечениями причем выиграть солидную необходимую, избегая серьёзного риска. Для отыгрыша приза казино обязует игрока сыграть на сумму, в количество раз превышающую необходимую приобретенного приза — тут выгода компании явна. 1 xslots рабочее зеркало <a href=http://bandit250.ru/index.php?subaction=userinfo&user=horriblewater64>http://bandit250.ru/index.php?subaction=userinfo&user=horriblewater64</a> Для получения бездепа нужно пригласить в игру по реферальной ссылке нового клиента: он обязан зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на сумму, обозначенную в условиях промоакции.
1х слотс зеркало регистрация в 1×slots casino
Условия вывода выигрыша. В неких заведениях для удачного вывода с бездепозитного бонуса довольно пополнения баланса и доказательства личности. В иных же клубах, необходимо несколько один прокрутить собственный депозит.Сразу в активации промокода можно пользоваться презентом. Как теснее упоминалось, бонусы посещают трёх видов – фриспины, кредиты и фриплей-бонусы. <a href=https://sponforum.ixbb.ru/viewtopic.php?id=11158#p37869>https://sponforum.ixbb.ru/viewtopic.php?id=11158#p37869</a> Вообще перейдя в казино — правила схожи в получении бездепозитных призов, в стандартные управляла заходит: доказать эл. Почту и аппарат, наполнить собственный индивидуальный профиль, активировать рекламную код либо активировать предложения во вкладке БОНУСЫ. x1 slots регистрация в 1×slots casino После требуется привнести идентификационный платёж. Это стращает начинающих больше всего. Нужно сделать наименьший депозит в 100–500 рублей. Таким образом служба безопасности увериться никаких, собственно платёжный способ принадлежит Вам. Данная процедура важна для обеспечения безопасности игровых счетов. Пример, Ваш акк взломают и выведут средства на собственный кошелёк. Будет очень неприятно. Поэтому верификация платёжной системы, это необходимый момент.
<b>Смотреть еще похожие новости:</b>
<a href=http://loevil.com/phpBB3/viewtopic.php?t=33509>1×slots регистрация 1×slots casino c2d ru</a>
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=3754>1×slots официальный сайт скачать на айфон</a>
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1869#post-53411>1×slots официальный сайт зеркало рабочее</a>
<a href=http://complainanything.com/node/158?page=956#comment-1275815>1×slot зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Какие бонусы есть еще получить кроме бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного бонуса, каждое онлайн казино предлагает игрокам прибыльное предложение на 1-ый депо, вы совершаете депозит, ваш депозит возрастает в двое или и в 3, что, этим наиболее начать выступать можно с больше солидной суммой, так же не запамятываем на вейджер на призы.
#6243 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
kent casino регистрация 1×bet скачать приложение на андроид <a href=https://vestnik-jurnal.com/>винлайн букмекерская контора</a> казино рублях порно с Дарья Касаткина (теннис) <a href=https://krtka.info/>винлайн букмекерская контора официальный сайт</a> мобильные букмекерские конторы black russia казино casino промокод 1×bet 1×bet зеркало рабочее xbet 1×bet 1хбет казино регистрации
#6244 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало
При регистрации стопам указывать лишь достоверную информацию. Когда учетная запись будет активна, будет доступ в Личный офис. В нем возможно выбрать валюту, установить промокод и разузнать подробные верховодила получения и отыгрыша бездепа. Краткая информация об акции нередко присутствует непосредственно на регистрационной форме. <a href=http://filmkachat.ru/>казино 1× slots официальный сайт</a> Для вывода средств приз нужно будет отыграть законам, установленным казино. Внимательно ознакомьтесь с правилами акции и вариантами отыгрыша бездепозитного приза до его получения, дабы избежать конфликтных обстановок.Практически все интернет казино с бездепозитным призом за регистрацию предусматривает программу лояльности — систему одобрения постоянных клиентов, кот-ая состоит из множества уровней. При достижении игроком одного уровня на его счёт поступает приз. Чем выше степень — что, этим щедрее бонус. <a href=https://band.us/band/96885593/post/3>https://band.us/band/96885593/post/3</a> Также бездепозитные бонусы шансы работать способом возвращать к забаве посетителей, временно приостановивших своё сотрудничество с компанией: извещение о бездепе поступает на мобильный телефонный либо почту.Прочитайте верховодила бонусной программки, в желайте участие. Да, мы безотступно рекомендуем сделать это до регистрации. 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=https://bbs.lineagem.shop/home.php?mod=space&uid=2041129>https://bbs.lineagem.shop/home.php?mod=space&uid=2041129</a>
скачать 1×slots официальный сайт
Многие новички сомневаются, собственно поощрительный приз не нужно несомненно отдавать, даже случае они выиграли у казино. Это полностью безопасно и надежно. Выводя выигранные средства, игрок просто останавливает свое роль при и утрачивает уникальную вероятность – бесплатно наращивать собственное вещественное положение.Все бесплатные призы кажутся соблазнительными. Кто же откажется от возможности поиграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далековато не все бездепозитные призы в привлекательны для рассудительного клиента. 1×slos регистрация в 1×slots casino <a href=http://ieef.msu.ru/index.php?subaction=userinfo&user=lethaldealer54>http://ieef.msu.ru/index.php?subaction=userinfo&user=lethaldealer54</a> Бездепозитные бонусы начисляются лишь раз один. Не стоит раскрывать новые аккаунты, чтобы получить их повторно. Служба защищенности казино непременно выявит «левого» соучастника и перекроет. Если гость выполнит необходимые требования, отыграет собственную ставку и решит вывести собственный выигрыш, то ему нужно учесть, собственно казино непременно востребует предоставить ксерокопии собственных документов, чтобы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные свои исключить не удастся.Фриплей-бонусы встречаются только в некоторых клубах. Они зачисляются незамедлительно в творения профиля и активны недолговременное время. Если не успеете истратить средства, они попросту сгорят. Касаемо медли, правило призы активны протяжении часа. 1×slots подтвердит вашу регистрацию если говорить Если речь об эксклюзивных услугах, имеет понадобиться регистрация в казино по ссылке с партнерского сайта.
1×slots casino регистрация 1×slots review live
<a href=http://trisinfronteras.com/davidcastro/component/k2/itemlist/user/456866-kennethwaync>http://trisinfronteras.com/davidcastro/component/k2/itemlist/user/456866-kennethwaync</a> Отзывы читателей о бонусных промоакциях посодействуют составить эмоцию, хотя не запамятовывайте о субъективности личных комментариев.Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, a зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. 1×slots зеркало регистрацию более популярный вариант это Игрокам не следует принимать приветственный бонус как гарантированный способ получить большой выигрыш, но это замечательная вероятность без расходов оценить перечень казино.Еще одно условие касается размеров ставки. Операторы устанавливают наивысшую необходимую, которую игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном кабинете. При превышении лимита есть риск лишиться приза. Существующие ограничения относятся и к определенным видам ставок. Например, играя в рулетку, заказчик имеет столкнуться с запретом назначать фишки на шансы.
1×slots актуальное зеркало
Автоматическая активация взгляд самой комфортной, но ручной метод содержит перед ней преимущества. Прежде чем применять вознаграждение от казино, стоит заблаговременно определить, сколько времени потребуется на исполнение всех критерий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деянья бонуса. <a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=288260&pid=650626#post_650626>1×slots официальный сайт зеркало рабочее</a> 1×slots зеркало регистрация то дальше необходимо пройти <a href=http://dudoser.com/user/FrankGaulk/>http://dudoser.com/user/FrankGaulk/</a> Чтоб получить крупный выигрыш, избирайте игровые автоматы с предельным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша.Для получения бездепа необходимо пригласить в забаву по реферальной ссылке свежего клиента: он обязан зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и восполнить счёт на сумму, обозначенную в условиях акции.
1 x slots
Бездепозитные призы прекрасный вариант даровой забавы в игровые автоматы. Многие пользователи сети не знают, собственно в казино можно начать играть полностью безвозмездно, а потом вывести выигрыш на банковскую карту либо электрический кошелек, иные не доверяют интернет казино, а третьи успешно играют и выигрывают – и тотчас довольно немалые суммы.Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция содержит доскональные верховодила, гиперссылка на коие обыкновенно содержится в промообъявлении. В их указываются лимиты, вейджер, список дешевых игр. Если оператор укрывает данные о предложении, то воспользоваться им не. Операторы гемблинга утверждают, что так они сражаются с бонус-хантерами. Впрочем, критики считают, собственно данным казино пытаются устроить из случайного гостя неизменного игрока.Выше мы дали полный набор самых новых и своевременных бездепозитных призов в онлайн казино без пополнения на 2022 год, где возможность воспользоваться любым ценным бездепозитным бонусом. <a href=https://elliotxsiu86532.rimmablog.com/29784118/deep-nude-understanding-the-implications-of-ai-generated-imagery>https://elliotxsiu86532.rimmablog.com/29784118/deep-nude-understanding-the-implications-of-ai-generated-imagery</a> Игры, в возможно играть на бонусные средства. Проверьте список игр, каких можно играть на бонусные средства, возможно они Вам не понравятся и не расходовать своё время на эту промоакцию.Воспользоваться бездепом можно не во всех игровых автоматах: казино вдруг устанавливает ограничение для посетителей. Конечно, это можно счесть некоторым неудобством для игрока, хотя справедливости ради необходимо, собственно выбор автоматов всё одинаково остаётся достаточно великим. 1×slots регистрацию процедура займет всего лишь Еще одно условие касается размеров ставки. Операторы устанавливают наивысшую необходимую, которую игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, избранной в Личном офисе. При превышении лимита есть риск лишиться приза. Существующие ограничения относятся и к определенным обликам ставок. Например, играя в рулетку, клиент может столкнуться с запретом назначать фишки на шансы.Когда речь идет о денежных бонусах, казино всегда устанавливают условия вейджера, коие необходимо выполнить, чтобы исключить выигрыш.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.emv.info/viewtopic.php?f=15&t=2046>1×slots зеркало видели такую регистрацию на</a>
<a href=http://permitbeijing.com/forum/showthread.php?tid=2201912>1хслотс рабочее зеркало на сегодня</a>
<a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=88760>1хслотс казино зеркало</a>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=252074>1×slos регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Зарегистрироваться в казино по специальной ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефонного и электронную почту). Для доказательства номера телефона необходимо в личном профиле показать свой номер и надавить кнопку „Подтвердить номер телефонного“, дальше Вы получите sms-сообщение с кодом, который нужно ввести в отвечающее фон. Для доказательства электронной почты, перебежать по интенсивной ссылке в письме от казино.
#6245 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино в россии реального казино <a href=https://strelochnik.com/>букмекерская контора бесплатно скачать</a> casino автомат порно с Алина Загитова <a href=https://specreporter.com/>Чулпан Хаматова</a> Хорова Наталья Александровна порно казино большая porno Андрей Рублев (теннис) порно с Максим Глушенков (футбол) пин ап букмекерская контора porno Дарья Мороз казино гта 5
#6246 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
сайты казино online casino <a href=https://repost.news/>казино рояль смотреть</a> сайт винлайн букмекерская контора porno Алена Михайлова <a href=https://rucriminal.info/>порно с Афонина Марина Игоревна</a> яндекс игры казино казино казино казино сегодня казино пин песня казино вывод казино
#6247 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора леонов казино смотреть онлайн <a href=https://repost.news/>porno Катерина Шпица</a> porno Александр Соболев (футбол) бк букмекерская контора <a href=https://m.repost.news/>pin up casino скачать</a> порно с Баталина Ольга Юрьевна casino Лут Оксана Николаевна порно casino на телефон Ирина Горбачева 7k casino скачать pin up casino
#6248 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
Бездепозитный приз предоставляется новенькому игроку за конкретные деяния. Часто презент в виде денег или фриспинов выдается за регистрацию, спасибо чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.Простая процедура получения бездепозитного бонуса, кот-ая займет не более 2-х минут. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные. <a href=http://filmkachat.ru/>1 х слотс зеркало</a> Такой безвозмездный эквивалент средств зачисляется на профиль пользователя в осуществления притязаний и предназначаются они лишь для игрового процесса. Вывод таких вознаграждений вероятен только последствии осуществления вейджеровых критерий. <a href=https://blog.udn.com/G_112062930339362154/181391904>https://blog.udn.com/G_112062930339362154/181391904</a> 1×slots регистрация на сайте <a href=http://geolan-ksl.ru/forum/user/90214/>http://geolan-ksl.ru/forum/user/90214/</a> Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция содержит подробные верховодила, гиперссылка на коие обыкновенно содержится в промообъявлении. В их указываются лимиты, вейджер, список дешевых игр. Если оператор прячет данные о предложении, то пользоваться им надо.Все безвозмездные призы кажутся заманчивыми. Кто же откажется от способности сыграть в онлайн-казино, не рискуя средствами, хотя получая выигрыши. Но далековато не все бездепозитные бонусы в привлекательны для рассудительного клиента.
1×slots регистрация на сайте
Не стоит путать забаву в демо и использование призов. В демонстрационном режиме игрок возможность оценить механику слота, сюжет и оформление. Но игра ведется на условные кредиты, поэтому отсутствует основное ? чувство азарта. Активируя промокод либо фриспины, заказчик раньше не тратит свои средства на игровые автоматы, но возможность сорвать настоящий куш!Иногда в поощрения за регистрацию имеют выдаваться билеты для участия в турнирах. Условия их проведения довольно отличаются, поэтому мы советуем ознакомиться с любым предложением отдельно. <a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1×slots официальный сайт зеркало рабочее</a> 1×slots официальный сайт, скачать Рассмотрим принцип его деяния на примере. Допустим, вы зарегались и получили $10 not the slightest down payment bonus с вейджером х50. Это означает, что выигранные деньги можно несомненно выводить не ранее, чем в того, как общая сумма ставок достигнет $500. <a href=https://lider-school174.com/forum/user/3891/>https://lider-school174.com/forum/user/3891/</a> Но надо размышлять, собственно снабжая юзеров такими призами, казино увлекается спонсированием. Ведь объемы вознаграждений, в, не немалые (средним размером от 5 до 20 $). И на эти средства налагаются конкретные обстоятельства и ограничения, неотклонимые к выполнению игрока, случае в последствии он желает получить все средства выигранные финансы.Промообъявления от казино мешают реальной картины и направлены на вербование внимания юзеров. Понять, как высоки шансы остаться в плюсе, позволит личный анализ условий предложения: 1×slot зеркало рабочее этих способов предполагает регистрацию Выбирая безвозмездный бонус, внимательно изучайте правила. Убедитесь, собственно вам можно себя участие в промоакции. Уточните, в каких забавах можно скорпулезно обстоятельства вейджера. При надобности задавайте вопросы представителям саппорта.Фриспины — благотворительные вращения, коие дозволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся наиболее модным и предпочтительным видом приза — благотворительные вращения порой эффективнее и веселее в отыгрыше, чем другие виды бездепов.
рабочее зеркало 1хслотс
У любого игорного клубы различные вейджеровые обстоятельства. Чтобы вы гарантировано смогли выполнить их, мы дадим некоторое советов. Если система начислила маленькую сумму, надо создавать немалые ставки – остановитесь на 10–30 центах. Как лишь сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В противном случае другого приглядеться к другому автомату.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных ситуаций с казино, когда в отыгрыша бездепа вам не дадут исключить солидную сумму выигрыша. <a href=http://rednline.az/index.php?subaction=userinfo&user=thinkableexplos>http://rednline.az/index.php?subaction=userinfo&user=thinkableexplos</a> 1×slots зеркало рабочее В лицензионных бездепозитных казино выступать в азартные забавы вправду безопасно. Наличие лицензии одобряет тот прецедент, собственно клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP.
1×slots зеркало быструю регистрацию а также мгновенное
Бездепозитные призы казино это финансовая компенсация, предлагаемая юзерам на дармовой базе и возможность выступать в интернет казино безвозмездно. Если сравнивать их с одобрениями за лепта, в которых средства выдаются лишь потом начального пополнения счета, то бездепозитные вознаграждения получаются бесплатно. То есть, играющий получает вероятность делать ставки на теснее имеющие финансы, коие выдаст заведение, выполняя, всем, обычные деяния, чтобы их извлечь (тут речь о регистрация, удостоверении личности с использованием номера аппарата, оформления заявки и т.д.).Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, a лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Бездепозитные призы — это подарки от казино в виде бонусных денег либо фриспинов для игровых автоматов, коие начисляются на акк игрока в процедуры регистрации на сайте заведения. Для получения этих поощрений депо не требуется. 1хслот 1хслотс регистрация перейти на 1×slots <a href=https://loansnearme.com.au/author/scottarbig/>https://loansnearme.com.au/author/scottarbig/</a> Прежде всего, не запамятовывайте периодически заглядывать на страничку обзоров бездепозитных призов. Они шаг за шагом оценивают более увлекательные предложения основных игорных порталов.
1×slots официальный сайт мобильная версия скачать
Бездепозитный бонус часто может стать легкодоступным сразу в завершения регистрации, потому как единственным притязанием к нему является регистрация, а после ревизия вашей свежей учетной записи.Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную функцию активации приза без депозита. Внимательно прочитайте до конца. Многие новички проделывают ошибки на шаге регистрации и поэтому возможности получить подарок. <a href=http://cadacademy.ru/bitrix/redirect.php?goto=http://mebeldetal.ru/bitrix/redirect.php?goto=http://roof-rack.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/-_OlZHUtDHh>http://cadacademy.ru/bitrix/redirect.php?goto=http://mebeldetal.ru/bitrix/redirect.php?goto=http://roof-rack.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/-_OlZHUtDHh</a> Размер ставки для игры по бездепозитному призу (окончательно же, когда, когда он представлен вид бонусных денежных средств) часто ниже, чем при этой на депо. Ограничение несомненно действовать до этапа отыгрыша приза. 1× slots регистрация в 1×slots casino Выбрать казино с бездепозитным призом. У нас на сайте представлен перечень превосходнейших онлайн казино, коие предлагают своим игрокам великодушные призы за регистрацию.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.arka-bahce.org/forum/showthread.php?p=764399#post764399>1×slots официальный сайт, скачать</a>
<a href=http://forum.cvetq.info/viewtopic.php?f=8&t=261585>1×slots регистрация на сайте 1×slots ru com</a>
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=54082>1хслот зеркало сайта</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Практически все интернет казино с бездепозитным бонусом за регистрацию учитывает программу лояльности — систему одобрения неизменных посетителей, которая состоит из множества значений. При достижении игроком очередного уровня на его счёт поступает приз. Чем повыше степень — тем щедрее бонус.
#6249 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Анастасия Потапова, теннисистка porno Екатерина Ефременкова, шорт-трекистка <a href=https://kompromat1.online/>винлайн букмекерская контора официальный сайт</a> r7 casino Ирина Горбачева <a href=https://m.repost.news/>Светлана Ходченкова</a> бк букмекерская контора винлайн букмекерская контора официальный кент казино casino зеркало сегодня porno Анастасия Янькова, боксерка porno Юлия Канакина, скелетонистка как выиграть в казино
#6250 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее на сегодня
Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен список наихороших онлайн казино, которые предлагают своим игрокам щедрые призы за регистрацию. <a href=http://filmkachat.ru/>1×slots зеркало которую указывали при регистрации кстати</a> 1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, случае не желаете замерзнуть жертвой жуликов либо впустую истратить время;При забаве на бонусные свои запрещается выступать в игровые автоматы с современным джекпотом и игры из радела live casino. Кроме такого, кое-какие казино выделяют бездеп на один или несколько конкретных слотов, и в иных забавах Вы не сможете на их выступать. <a href=https://bresdel.com/blogs/806517/Mastering-Interior-Shop-Drawings-From-Concept-to-Construction-Excellence>https://bresdel.com/blogs/806517/Mastering-Interior-Shop-Drawings-From-Concept-to-Construction-Excellence</a> Первый возникающий вопрос, это, для выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают свежих игроков. Последним легче начать игру на средства с дара за регистрацию. Им надо пополнять баланс и тратить личные средства. Новички получают безвозмездные спины или средства на счёт. С их подмогою знакомятся с игровым ходом, крутят слоты и делают ставки в рулетке. 1×slots регистрация 1×slotscasino09k online <a href=https://sims-game.com/user/Scottfup/>https://sims-game.com/user/Scottfup/</a> Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и более. Когда игроку полагается большое фриспинов, администрация может бить3 их начисление на некоторое дней. Бесплатные вращения предоставляются для определенного слота, кот-ый указывается в правилах акции.
1×slots зеркало регистрация в 1×slots casino
Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают приз по странам. Вплоть до того, что клуб возможность на игроков из Вашей государства, а бездеп не давать.А ознакомиться с свежими интернет казино, Вы сможете за счет бонусов с выводом прибыли, которые Вы сможете получить без депозита. <a href=http://nexusroleplay.teamforum.ru/viewtopic.php?f=19&t=4265>1 x slots casino</a> 1×slots на любой вкус как пройти регистрацию <a href=https://www.spacepub.net/members/5050-Raymondtub?s=0b081afc5bc2046d3c6a5bedcbc50aa1>https://www.spacepub.net/members/5050-Raymondtub?s=0b081afc5bc2046d3c6a5bedcbc50aa1</a> Вы скорее, скажем, как все предпочитаете получать подарки и бездепозитные призы казино. Игорные дома брали в повадку одаривать гэмблеров приятными призами. Стать обладателем приветственного презента можно за создание профиля или пополнение счёта. Второй вариант более занимательный, как клубы готовы удвоить депо! Но случае вы новичок и лишь знакомитесь с миром пыла, другого, как пользуйтесь призом за регистрацию. 1хслотс зеркало на сегодня Кешбэк-бонус представляет собой возврат фиксированного процента от ставки если, тогда, проигрыша либо же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не превышает 10%.Условия отыгрыша приза. Если Вы планируете заработать на бездепозитном призе, то для направьте на значение вейджера и срок, который дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть бонус и исключить выигрыш.
1×slots регистрация 1×slots casino 777 online
Ну и окончательно же, для казино бездепозитные призы выгодны с имиджевой стороны: схожая щедрость повышает уровень преданности посетителей к фирмы. <a href=http://iwlnx.com/forum/member.php?action=profile&uid=108536>http://iwlnx.com/forum/member.php?action=profile&uid=108536</a> зеркло казино 1×slots
1×slots рабочее зеркало
<a href=https://www.xn–72c9aa5escud2b.com/webboard/index.php/topic,530768.new.html#new>x1 slots регистрация в 1×slots casino</a> Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в неотъемлемом порядке нужно пополнить счет в казино. Для депозитных призов, данная процедура не необходима, например как депо теснее изготовлен.Зачастую бездепозитные бонусы казино для игры предлагаются различными заведениями азартных игр в качестве рекламных акций либо в целях привлечения к для новых игроков. Для бездепозитных бонусов в казино 2022 геймеру надо пополнять счет до этапа вывода желаемых средств. 1×slots официальный сайт скачать <a href=http://xn–80aeh5aeeb3a7a4f.xn–p1ai/forum/user/53316/>http://xn–80aeh5aeeb3a7a4f.xn–p1ai/forum/user/53316/</a> Бездепозитные бонусы, как уже ясно, считаются уникальной вероятностью к игровому процессу полностью бесплатно, то есть выступать в онлайн казино даром и на место свои незамедлительно в регистрации аккаунта. Автоматы с таким депозитом шансы стать прекрасной вероятностью сыграть для поклонников пыла с определенными лимитированиями в денег.
1×slots сайт зеркало
<a href=http://alex-zarya.ru/user/PatrickElado/>http://alex-zarya.ru/user/PatrickElado/</a> 1×slots сайт Обычно показатель выше, чем для призов на депозит. Не дивитесь, случае он будет в х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных стран.Особую изюминку видео слотам придают уникальные знакы. С их выходом активизируются различные призы. Вы можете запустить дополнительный уровень и увеличить сумму выигрыша. Есть знаки, которые сменяют ненужные составляющие и сами делают выигрышные комбо. Не стоит забывать и тему бонус-тур. После каждого счастливого спина есть шанс прирастить сумму выигрыша в два или хорошо раза.
<b>Смотреть еще похожие новости:</b>
<a href=http://3ak.cn/home.php?mod=space&uid=187057>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Ограничения по забавам. Администрация запрещает игрокам кое-какие игровые автоматы с бездепозитным бонусом, деньгами либо безвозмездными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда дробленье производится по виду игр. Например, отыгрыш вероятен на всех игровых аппаратах, но запрещен в настольных забавах и в разделе Live Casino. Промокод – определённая композиция символов, коию нужно установить в соответствующее фон при творении учетной записи или активировать в собственном профиле игрока в разделе с бонусами.
#6251 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Варвара Субботина казино зеркало сегодня <a href=https://th-royalgclub.com/>porno Андрей Рублев (теннис)</a> леон букмекерская контора порно с Афонина Марина Игоревна <a href=https://7club7.com/>cat casino</a> порно с Анна Калинская (теннис) порно с Илья Осипов (киберспорт) букмекерские конторы бет porno Вера Бирюкова, гимнастка порно с Афонина Марина Игоревна фреш казино порно с Георгий Джикия (футбол)
#6252 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Мира Андреева (теннис) Комарова Наталья Владимировна порно <a href=https://7club7.com/>up casino</a> 1×bet зеркало на сегодня 1×bet xyz лучшая казино <a href=https://www.ossetia.tv/>гта онлайн казино</a> порно с Баталина Ольга Юрьевна скачать 1×bet на андроид 1×bet официальный сайт 1×bet xyz порно с Евгения Медведева, фигуристка casino buzz казино фильм retro casino
#6253 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
Бездепозитный приз за регистрацию в казино — это стартовый презент повторяющий денежного начисления или даровых вращений для новых игроков заведения, для получения которого не вносить депозит.Ограничения по забавам. Администрация запрещает игрокам кое-какие игровые автоматы с бездепозитным призом, деньгами либо безвозмездными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда дробленье производится по облику игр. Например, отыгрыш возможен на всех игровых аппаратах, хотя запрещен в настольных играх и в разделе Live Casino. <a href=http://filmkachat.ru/>1×slots зеркало рабочее</a> Начнём с того, что любое промо за регистрацию предполагает некоторые условия. Бездепозитные бонусы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность валютного оборота, нужная для выполнения критерий. Пример, получили безвозмездные вращения и выиграли с них 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 рублей, проигрышных или выигрышных, так. После исполнения, бонусный баланс перейдёт на реальный и будет легкодоступным к выводу.Бывают ли бездепозитные бонусы без вейджера? Бывают, случае у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный бонус за регистрацию уточняется вейджер во всех казино. <a href=https://www.empowher.com/groups/blogs-4/posts/modern-trends-professional-3d-architectural-visualisation-agency-servi>https://www.empowher.com/groups/blogs-4/posts/modern-trends-professional-3d-architectural-visualisation-agency-servi</a> Отказ в прохождении верификации. Если клиент не хочет либо не дать документы, подтверждающие его личность, профиль будет заблокирован вместе со всеми бонусными начислениями. 1×slots регистрация 1×slotscasino09k online <a href=http://radshir.com/list/index.php?subaction=userinfo&user=Geraldwoold>http://radshir.com/list/index.php?subaction=userinfo&user=Geraldwoold</a>
1хслот зеркало сайта
1хслотс казино зеркало Мы проделываем акцент на ключевых положениях верховодил, рассказываем о территориальных ограничениях и кратко информируем о других промоакциях обсуждаемого казино. <a href=http://1k9g.com/space-uid-201631.html>http://1k9g.com/space-uid-201631.html</a> Каждый игры обязан сперва детально выучить обстоятельства по получению и отыгрышу понравившегося презента. Если всё устраивает, поспешите отобрать бесплатные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик момент начать вертеть барабаны топовых слотов.Для получения приза нужно пригласить в забаву нового посетителя. Казино начисляет пригласившему фиксированный процент от взносов приглашённого повторяющий приза: чаще всего его размер не выше 10%. Срок деянья приза как не выше месяца: пригласивший получает приз в зависимости от проигранных ставок приглашённого в 1-ый месяц забавы. 1×slots зеркало которую указывали при регистрации кстати При выполнении критерий отыгрыша и верификации, средства с бонусного счета переводятся на ведущей и все быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции зависимости от выбранной платежной системы.Как только получите бездеп в казино, всё одинаково не запамятовывайте проверять электронную почту. Некоторые игорные клубы непрерывно веселят интенсивных гэмблеров приятными призами. Чаще всего получить презент возможно в преддверии праздника, на денек рождение, за привлечение приятеля. А того распространённым бонусом является прибавка к депозиту. Нужно чем восполнить счёт, и азартное заведение прирастит его на 50–100%.
казино 1×slots
Максимальная ставка ? уточняется в еденице счета и ограничивает размер ставки за один спин. В случае ее превышения бонус возможность быть аннулирован. Также в правилах имеет содержаться запрет на размещение ставок определенного вида, например, по одинаковым шансам в рулетке (то есть, на чет или нечет, красноватое либо черное и т.д.).За привлечение приятеля ? в партнерской программки клиент получает вознаграждение за привлечение новых пользователей. Бездепозитный приз за регистрацию в казино — это стартовый подарок вид денежного начисления или бесплатных вращений для новых игроков заведения, для получения которого надо заносить депозит.В зависимости от интернет заведения любой из их возможность для предложить как бездепозитные средства, например и бездепозитные фриспины, коие последствии удачной регистрации упадут вас на ваш игровой баланс. <a href=https://zarctvo.ru/user/patricksquip/>https://zarctvo.ru/user/patricksquip/</a> Перед активацией главно пристально выучить обстоятельства промоакции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют велечину кроме лимиты ставок при отыгрыше и сроки, в течение коих возможно пользоваться предложением. Если бездеп обхватывает ограниченный перечень игр, рекомендуется узнать максимальные коэффициенты, степень отдачи и волатильности. Слоты с невысокими множителями выплат подходят лишь в случае, если оператор не установил строгие лимитирования на максимальную сумму ставки. 1×slots регистрация то дальше необходимо пройти
1×slots зеркало которую указывали при регистрации кстати
Подтверждение электрической почты – одно из основных критерий, коие есть практически в любом бездепозитном казино. Чтобы верифицировать электронную почту, достаточно перейти по интенсивной ссылке в письме, полученном от азартного клуба.Подтверждение регистрации. Казино требуют привязки профиля к электрическому адресу и номеру аппарата. Для сего на e-mail отправляется письмо со ссылкой, а на аппарат ? текстовое известье с кодом. <a href=http://86395.ww.w.molifan.net./space-uid-2275092.html>1×slots официальный зеркало</a> Чтобы выступать безвозмездно на настоящие деньги в казино, порой довольно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные действия. Бездепозитный приз предоставляется новому игроку за определенные деянья. Часто презент в виде средств либо фриспинов выдается за регистрацию, спасибо чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.Возможность поиграть дополнительное соревнование (а от и несколько) совершенно даром, а выигрыш, же, поступает на счёт игрока. 1×slots зеркало выигрыши обязательно пройдите регистрацию если <a href=https://www.onfeetnation.com/profiles/blogs/6595159:BlogPost:32107270>https://www.onfeetnation.com/profiles/blogs/6595159:BlogPost:32107270</a> Операторы гемблинга заявляют, собственно например они борются с бонус-хантерами. Впрочем, критики считают, собственно этим казино пробуют сделать из случайного гостя неизменного игрока.Активация происходит за промокодов, которые вводятся в собственном офисе в регистрации. Среди спецпредложений в списке Casino.ru находятся эксклюзивные промокоды, которые доступны только гостям портала. Другие методы начисления средств ? автоматическая активация незамедлительно в сотворения аккаунта и получение презента по запросу в службу технической поддержки.
1х слот регистрация в 1×slots casino
Отказ в прохождении верификации. Если клиент не желает или имеет предоставить документы, подтверждающие его личность, профиль будет заблокирован совместно, вкупе со всеми бонусными начислениями. <a href=https://forex-bitcoin.com/members/353247-jeffreyjaito>https://forex-bitcoin.com/members/353247-jeffreyjaito</a> Как только получите бездеп в казино, всё одинаково не запамятовывайте проверять электронную почту. Некоторые игорные клубы непрерывно веселят интенсивных гэмблеров приятными призами. Чаще всего получить подарок можно в преддверии праздника, на день рождение, за вербование друга. А того распространённым призом является прибавка к депозиту. Нужно более пополнить счёт, и азартное заведение прирастит его на 50–100%. 1×slots бонус за регистрацию
<b>Смотреть еще похожие новости:</b>
<a href=https://uyghuryol.com/forum/viewtopic.php?f=8&t=230224>1×slots зеркало на сегодня</a>
<a href=http://check2go.net/my-account/>зеркала 1×slots</a>
<a href=https://nztw.org/home.php?mod=space&uid=43957>1×slots официальный сайт зеркало рабочее</a>
<a href=http://timelesshourglass.com/requiem/memberlist.php?mode=viewprofile&u=821>1×slots зеркало сайта</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Некоторые сайты, этого чем провести регистрацию игроков, предлагают ответить на некоторое базисных вопросов. Цель проведения похожей викторины – выявить случайных людей, которые не имеют представления о покере, и не допустить получения ими бонусов. Если посетитель теснее играл в казино, то ответить на полтора 10 простых вопросов будет несложно. Очень часто, ответы можно найти на официальных веб-сайтах данных учреждений.
#6254 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
зеркала официальных сайтов казино casino официальный зеркало <a href=https://specreporter.com/>скачать 1×bet на андроид бесплатно</a> 1×bet слоты 7k casino официальный сайт <a href=https://specreporter.com/>зеркала официальных сайтов казино</a> макао казино винлайн букмекерская контора официальный сайт casino зеркало сегодня рабочее 1×bet зеркало порно с Сергей Бобровский (хоккей) Яровая Ирина Анатольевна порно casino riobet
#6255 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
Так собственно основное различие презента на депозит от бездепа – неотъемлемое пополнение счёта. Вы можете привнести депозит и преумножить стартовый капитал или арестовать бездеп и всем не придётся рисковать собственными сбережениями. Поспешите выполнить обычные требования, и администрация ресурса начислит щедрое одобрение! <a href=http://filmkachat.ru/>1×slots регистрация</a> <a href=https://getinkspired.com/ru/blog/519873/post/1478590/how-3d-visualization-companies-are-reshaping-global-business-landscapes/>https://getinkspired.com/ru/blog/519873/post/1478590/how-3d-visualization-companies-are-reshaping-global-business-landscapes/</a> Мы собрали и выпустили список наилучших бездепозитных казино с призами за регистрацию, коие гарантируют щедрые выигрыши и мгновенные выплаты. зеркала 1×slots <a href=http://ultfoms.ru/user/KennethDet/>http://ultfoms.ru/user/KennethDet/</a> Так собственно приготовьтесь дать конфиденциальную информацию (пол, возраст, страна проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает не более суток, после чего получится свободно выводить крупные выигрыши.
1×slots казино мобильная версия
Как управляло, при выводе денег, от играющего потребуется лишь сделать наименьший вклад чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом собственный счет. 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=https://wodemeimei.com/home.php?mod=space&uid=32235>https://wodemeimei.com/home.php?mod=space&uid=32235</a> 1×slots зеркало на сегодня Однако в критериях исчезают «подводные камни», коие не позволят вывести крупную необходимую либо же вы не успеете отыграть вейджер. Поэтому мастера советуют отобрать бесплатные вращения за регистрацию в казино без депозита, дабы поднабраться опыта и получить настоящий шанс на победу.
1× slots регистрация в 1×slots casino
При использовании бездепозитным бонусом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют несколько видов лимитов: <a href=https://www.talkofrowlett.com/author/glennlaw/>https://www.talkofrowlett.com/author/glennlaw/</a> Для верификации аккаунта надо(надобно) предоставить профессионалам технической поддержки отсканированную копию паспорта и счета за коммунальные предложения, а также фотку банковской карты либо скриншот странички электрического кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для подтверждения личности.Если вы новичок деле и лишь попали в неизведанную вами область азарта — за услуг как бездепозитные призы без пополнения. рабочее зеркало 1×slots Верификация важна для добавочной безопасности и подсобляет техподдержке выявить бонусхантеров и плутов. Кстати, рядах платформах выводы крупных сумм доступны лишь последствии подтверждения личности.
1×slots зеркало на сегодня
Шаг 4. Активация. Внимательно исследуйте обстоятельства, информацию по лимитированиям и сроке деянья бонусного предложения. Разобравшись с правилами, можно активировать приз в личном офисе (время ? с внедрением промокода) или по запросу в саппорт. <a href=https://forum.oursson.ru/viewtopic.php?f=16&t=8110>1× слот зеркало</a> онлайн казино 1×slots <a href=http://ip-iv.ru/index.php?subaction=userinfo&user=Waltergraws>http://ip-iv.ru/index.php?subaction=userinfo&user=Waltergraws</a> Бездепы с бесплатными вращениями предоставляют пользователям право вертеть барабаны игровых автоматов без снятия средств со счета. За каждый раунд выплачивает казино. Число спинов ограничено и редко превышает сотку. Если акция включает в себя много бесплатных игр, их начисление возможность быть разбито на некоторое дней.Доступ к дару имеет раскрываться автоматически после введения промокода или обращения в службу поддержки сайта. В первом случае от юзера не требуется практически поступков. Бездеп с активацией по коду встречается почаще всего. Игроку необходимо установить совокупность знаков в графе, кот-ая может находиться в регистрационной форме в Личном кабинете.
1×slots зеркало регистрацию более популярный вариант это
Ознакомьтесь с нашим списком превосходнейших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего списка и получите бездеп сразу. Хватайте лучшие благотворительные предложения ниже и выигрывайте великие средства, не рискуя!Игры, в которых возможно выступать на бонусные деньги. Проверьте список игр, в возможно выступать на бонусные средства, возможно они Вам не понравятся и надо тратить своё время на такую промоакцию. Не советуем сломя голову хвататься за всевозможные предложения получения средств без инвестициям. Вполне вероятно, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем выглядит на 1-ый взгляд. Альтернативой считается казино приз за депозит. Мы предлагаем вас пару советов, благодаря которым у любого игрока будет возможность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом средств:Приглашаем делиться воззрениями о призах. Это поможет иным юзерам избирать наиболее прибыльные предложения. <a href=http://021bababa.org/space-uid-496158.html>http://021bababa.org/space-uid-496158.html</a> Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша бонусов. Заведения практически устанавливают наивысшую ставку, возможную по условиям вейждера. 1×slots регистрация 1×slots casino 777 online
<b>Смотреть еще похожие новости:</b>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=141449>1×slots сайт зеркало</a>
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=62315>1×slots регистрация на сайте 1×slots ru com</a>
<a href=http://www.ihavethepussy.com/de/threads/202420–1×slots-%D0%A0%C2%B7%D0%A0%C2%B5%D0%A1%D0%82%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%BB%D0%A0%D1%95-%D0%A0%D0%85%D0%A0%C2%B0-%D0%A1%D0%83%D0%A0%C2%B5%D0%A0%D1%96%D0%A0%D1%95%D0%A0%D2%91%D0%A0%D0%85%D0%A1%D0%8F?p=219954#post219954>1×slots зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Шаг 4. Активация. Внимательно выучите обстоятельства, информацию по лимитированиям и сроке действия бонусного предложения. Разобравшись с правилами, возможно активировать приз в собственном офисе (иногда ? с использованием промокода) или по запросу в саппорт.
#6256 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
рабочее казино 1×bet скачать приложение <a href=https://rumafia.news/>pin up casino зеркало</a> казино фильм онлайн casino pin официальный <a href=https://m.repost.news/>бесплатно играем казино</a> 1×bet слоты 1×bet xyz casino играть Самойлова Алла Владимировна порно сайте букмекерской конторы фонбет порно с Анна Калинская (теннис) порно с Дарья Касаткина (теннис) балтбет букмекерская контора
#6257 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало сайта
Верификация важна для добавочной безопасности и подсобляет техподдержке выявить бонусхантеров и плутов. Кстати, рядах платформах выводы крупных сумм доступны лишь последствии подтверждения личности. <a href=http://filmkachat.ru/>1×slots официальный сайт мобильная версия скачать</a> Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Как лишь на виртуальном счету окажутся бонусные средства, поспешите отыграть вейджер. Сразу последствии сего можно забыть заявку на вывод выигрыша. Кредиты выгодно выделяются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом реальных средств и дают вероятность почувствовать азарт. Во-вторых – можно насладиться каждой азартной игрой доступной на веб-сайте. В вашем постановлении присутствуют автоматы, настольные прибавленье, видео-покер, Live-дилеры. <a href=http://www.gothicpast.com/myomeka/posters/show/79813>http://www.gothicpast.com/myomeka/posters/show/79813</a> Таким образом, заведение пробует показать себя своим вероятным геймерам, а подобный рекламный ход как казино бонус без депо за регистрацию привлекает довольно количество внимания к игорному заведению и обеспечивает неизменный струю свежих посетителей и грядущих клиентов игрового онлайн клуба. 1×slots регистрация 1×slots casino 777 online <a href=https://xn---6-jlc6c.xn–p1ai/user/Forsedropsa/>https://xn---6-jlc6c.xn–p1ai/user/Forsedropsa/</a> В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая милая доля игры. Важно, зачастую бездепозитные призы в казино выдаются с ограничениями по максимальной выплате. В среднем можно рассчитывать на выгода в несколько тыщ руб. Как исключить выигрыш с бонуса без депо. Придётся подтвердить аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается каждым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате или прочитайте в правилах.
x1 slots 1хслотс регистрация перейти на 1×slots
Бездепозитный бонус по промо-коду несомненно доступен для забавы, лишь сомнений случае когда Вы активируете особый бонусный код в разделе с призами или укажите промокод при регистрации на веб-сайте. В неких случаях, считая активации кода, придется подтвердить контактные данные игрока и заполнить анкету клиента.Все бесплатные призы кажутся соблазнительными. Кто же категорически от возможности сыграть в онлайн-казино, не рискуя деньгами, хотя получая выигрыши. Но далеко не все бездепозитные бонусы в презентабельны для рассудительного клиента. <a href=http://nhomtruyen.com/members/jamesgaw.9280/>1×slots зеркало быструю регистрацию а также мгновенное</a> x1 slots регистрация в 1×slots casino <a href=http://mpalata.ru/forum/memberlist.php?mode=viewprofile&u=110894>http://mpalata.ru/forum/memberlist.php?mode=viewprofile&u=110894</a> Бездепозитный бонус – это финансовое вознаграждение, которое выдается соучастнику игры в казино, для его привлечения и возникновения заинтригованности. Любой гость, который подходит условиям выдачи похожего бездепозитного бонуса, имеет претендовать на получение вышеуказанного приза. Такое одобрение считается наиболее действенным способом, дающим возможность стартовать деле, не вкладывая личных материальных средств.При верном раскладе бездепы — это прекрасный способ выступать на средства без растраты собственных средств. Есть несколько советов, следуя коим возможно извлечь максимально полезности из сходственных акций казино. Играть идет только на лицензированных площадках. Скриптовые сайты столько накалывают с бонусными предложениями, хотя и употребляют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах невозможно. 1 x slots Но есть игорные заведения, которые готовы просто так жертвовать средства на забаву. Для сего довольно создать профиль. Чтобы вывести свой выигрыш, вам сначала необходимо выполнить условия отыгрыша, указанные в условиях получения бездепозитного депозита.Условия шансы разниться друг от приятеля. Но такой приз возможность быть применен только для игрового процесса – приобретенные на счет финансы до того, как станут отыграны, вывести невозможно.
рабочее зеркало 1×slots
Для выбора азартного заведения Вы можете воспользоваться перечнем наших казино с призами за регистрацию. На нашем сайте мы опубликовали перечень бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, что часть бонусов эксклюзивные и доступны только для посетителей нашего вебсайта по-специальному промо-коду или по уникальной ссылке. Кроме как, для каждого бонуса мы подготовили доскональный обозрение, в котором Вы узнаете как получить и отыграть одобрение и как исключить собственный выигрыш с бездепа. Обычно бездепозитные акции от казино, прибывают на эл. Почту в деньки рождения или дни. В неких интернет казино возможно адресоваться в чат и как постоянному игроку, возможно вам предложат бездепозитное предложение.Максимальная ставка ? устанавливается в валюте счета и ограничивает размер ставки за раз спин. В случае ее превышения приз может быть аннулирован. Также в правилах имеет находиться запрет на размещение ставок конкретного вида, к, по одинаковым шансам в рулетке (словами, на чет или нечет, красноватое либо черное и т.д. ). <a href=https://bbarlock.com/index.php/1×slots_%D0%90%D0%BA%D1%86%D0%B8%D0%B8>https://bbarlock.com/index.php/1×slots_%D0%90%D0%BA%D1%86%D0%B8%D0%B8</a> Также, такой нужно доказать собственный номер телефона, достичь код, полученный в смс-сообщении от клуба ввести в особое поле в собственном офисе игрока.Бездепозитные призы, как теснее ясно, являются оригинальной вероятностью приступать к игровому процессу безусловно безвозмездно, другими играть в онлайн казино даром и на существующие свои сразу в регистрации аккаунта. Автоматы с этим депо все стать великолепной возможностью сыграть для почитателей азарта с определенными ограничениями в финансах. 1×slots зеркало быструю регистрацию а также мгновенное
1×slots официальный сайт зеркало
Также учтите, собственно некоторые игровые платформы сужают перечень стран, коие способны получить предложенный бездепозитный бонус за регистрацию. К примеру, существуют онлайн-заведения, выдающие сходственные призы только жильцам конкретных стран. К примеру, интернет казино 777 Оригинал дает бездепозитный бонус лишь игрокам из России и стран СНГ. Или наоборот, пичкают вознаграждением всех, считая обитателей некоторых государств (из этого, по пристально изучать список, чтобы впоследствии не возникло практически вопросов и претензий). <a href=http://griffhunter.com/boards/memberlist.php?mode=viewprofile&u=993>1×slot рабочее зеркало</a> 1×slots акции <a href=http://www.trafficdirectory.org/%D0%B7%D0%BD%D0%B0%D0%BA%D0%BE%D0%BC%D1%81%D1%82%D0%B2%D0%B0-%D0%B4%D0%BB%D1%8F-%D1%84%D0%BB%D0%B8%D1%80%D1%82%D0%B0-%D0%BC%D0%BE%D1%81%D0%BA%D0%B2%D0%B0_346578.html>http://www.trafficdirectory.org/%D0%B7%D0%BD%D0%B0%D0%BA%D0%BE%D0%BC%D1%81%D1%82%D0%B2%D0%B0-%D0%B4%D0%BB%D1%8F-%D1%84%D0%BB%D0%B8%D1%80%D1%82%D0%B0-%D0%BC%D0%BE%D1%81%D0%BA%D0%B2%D0%B0_346578.html</a>
1×slots регистрация 1×slotscasino09k online
Практически все онлайн казино с бездепозитным бонусом за регистрацию учитывает программку преданности — систему одобрения постоянных посетителей, кот-ая состоит из большого уровней. При достижении игроком очередного значения на его счёт поступает приз. Чем повыше уровень — что, этим щедрее бонус.Нельзя разглядывать забаву на деньги, как вариант заработка. Азартные забавы воспрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не организатором азартных игр. Сайт носит информационный характер. Но не стоит думать, собственно снабжая юзеров такими призами, казино занимается спонсированием. Ведь объемы вознаграждений, главном, не большие (средним объемом от 5 до 20 долларов). И на эти средства налагаются определенные обстоятельства и ограничения, неотклонимые к выполнению игрока, в в последствии он желает получить все средства выигранные финансы. <a href=https://vivicorp.com/bitrix/redirect.php?goto=https://speakerdeck.com/blackshisha0212>https://vivicorp.com/bitrix/redirect.php?goto=https://speakerdeck.com/blackshisha0212</a> 1хслотс мобильная версия зеркало Бонус за регистрацию в казино без депо с выводом денег нужно отыграть. Зачастую для отыгрыша имеет понадобиться сделать ставки на сумму, в количество десятков раз превышающую необходимую бонуса или выигрыша.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.findaspermdonor.com/memberlist.php?mode=viewprofile&u=13618>1×slots официальный сайт скачать</a>
<a href=https://qualityprogamer.de/forum/showthread.php?tid=272824>казино 1×slots</a>
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1298#post-39376>1×slots быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Мы собрали и опубликовали перечень превосходнейших бездепозитных казино с призами за регистрацию, которые гарантируют великодушные выигрыши и мгновенные выплаты. Так что приготовьтесь предоставить секретную информацию (пол, возраст, государство проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает не более суток, в чего удастся свободно выводить крупные выигрыши.
#6258 Charlesgunnyhttp://filmkachat.ru
1х слотс зеркало регистрация в 1×slots casino
Подтвердите регистрацию, чтобы активировать Бездепозитный приз с выводом, требуется заполнить индивидуальный профиль. Заполните пустопорожние поля настоящими данными о для.Итак, дабы бесплатные бонусные кредиты трансформировались в настоящие средства, которыми вам управлять по собственному усмотрению, их надо(надобно) отыграть. Вейджер по уточнять в правилах онлайн-казино. <a href=http://filmkachat.ru/>1×slots casino регистрация на сайте</a> Еще одно условие касается объемов ставки. Операторы устанавливают наивысшую необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном кабинете. При превышении лимита есть риск потерять бонуса. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, заказчик может столкнуться с запретом назначать фишки на шансы.Во всех легальных онлайн-казино Беларуси необходимо подтверждение паспортных данных для игры — это требование правительства государства. <a href=https://owntweet.com/thread/214646>https://owntweet.com/thread/214646</a> Такие поощрения позволяют безвозмездно протестировать свежее казино, разобраться с игровым ходом онлайн слотов, заработать и исключить небольшую сумму средств.В любом казино с бездепозитным бонусом учтены вейджеровые условия. Это единственный «подводный камень», который стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, нужно сделать определённое количество ставок. Чем круче бонус, что, этим труднее выполнить обстоятельства, и наоборот. 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=http://www.musichunt.pro/blogs/view.htm?id=80204>http://www.musichunt.pro/blogs/view.htm?id=80204</a> Реже бонусы без депо начисляются неизменным игрокам. С их подмогою администрация постарается удержать ценных посетителей или вожделеет поблагодарить за преданность верных гостей. Но гораздо почаще для похожих целей применяются такие акции:
1× slots официальный
Бесплатные бонусы казино без депо возможно получить повторяющий валютных средств на бонусный счет (исключить их можно только последствии отыгрыша), фриспинов, игры либо кешбэк-бонуса. 1 хслот регистрация в 1×slots casino Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция имеет доскональные управляла, ссылка на которые обычно находится в промообъявлении. В них указываются лимиты, вейджер, перечень доступных игр. Если оператор укрывает данные о предложении, то воспользоваться им не стоит. <a href=http://megashipping.ru/index.php?subaction=userinfo&user=observantwarloc>http://megashipping.ru/index.php?subaction=userinfo&user=observantwarloc</a> Лишь модные и знаменитые азартные заведения шансы разрешить для выдавать бездепы повторяющий добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депо, которые возможно потратить в топовых аппаратах с высокой отдачей. 1×slots официальный demo регистрация в 1×slots casino
1хслот скачать
Активация валютного гонорары происходит автоматически в творенья профиля или использования промокода. Иногда операторы предъявляют вспомогательные требования: подписаться на страницы казино в соц сетях либо на рассылку маркетинговых извещений, скачать и ввести дополнительный софт и т.д. Все безвозмездные бонусы кажутся заманчивыми. Кто же откажется от возможности сыграть в онлайн-казино, не рискуя деньгами, хотя получая выигрыши. Но далеко не все бездепозитные бонусы в привлекательны для рассудительного посетителя. <a href=http://newoasisforlife.org/new/home.php?mod=space&uid=102280&do=profile>http://newoasisforlife.org/new/home.php?mod=space&uid=102280&do=profile</a> 1х слотс зеркало регистрация в 1×slots casino После требуется внести идентификационный платёж. Это стращает начинающих больше всего. Нужно устроить минимальный депо в 100–500 руб. Таким образом служба защищенности убедиться что, что платёжный способ принадлежит Вам. Данная процедура важна для обеспечения защищенности игровых счетов. Пример, Ваш аккаунт взломают и выведут средства на собственный кошелёк. Будет крайне неприятно. Поэтому верификация платёжной системы, это необходимый момент.Чтобы выступать безвозмездно на реальные средства в казино, не всегда достаточно просто зарегистрироваться. Иногда нужно выполнить дополнительные деяния.
1×slots регистрация 1×slots casino c2d ru
Ограничения по играм. Администрация запрещает игрокам кое-какие игровые автоматы с бездепозитным призом, средствами или безвозмездными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда дробление производится по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, хотя запрещен в настольных забавах и в разделе Live Casino.Бонус с зачислением денег на счет дает больше свободы действий. Пользователь сам выбирает, каким образом распорядиться подаренными средствами. Здесь кроме имеют действовать ограничения на перечень доступных игр, но обычно эти рамки не так строги, как в рекламную с бесплатными вращениями. <a href=http://www.easysunnysunshine.com/memberlist.php?mode=viewprofile&u=18118>1×slots casino online регистрация</a> 1× slots официальный <a href=https://audiomack.com/glavdorogadv2106>https://audiomack.com/glavdorogadv2106</a> Бесплатные бонусы казино без депозита можно получить повторяющий валютных средств на бонусный счет (исключить их возможно лишь последствии отыгрыша), фриспинов, игры либо кешбэк-бонуса.Но а случае вы теснее профи по интернет казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в интернет казино;
1×slots зеркало сайта
Существует ли стратегии для отыгрыша бездепозитных призов? К раскаянью нет, на выигрыши или проигрыши с бонусов, казино или игрок повлиять имеет, отдача игр происходит от разработчиков игр. <a href=http://photoexpr.ru/index.php?subaction=userinfo&user=dailytheme71>http://photoexpr.ru/index.php?subaction=userinfo&user=dailytheme71</a> В разделе с призами активировать свой презент. Найти забавы, для которых учтено одобрение и применять приз по назначению.Казино выделяет вероятность заработать и вывести реальные средства на бездепозитных бонусах. Обычно, это незначительная сумма, которую казино имеет себе разрешить презентовать игроку. 1×slots официальный сайт скачать
<b>Смотреть еще похожие новости:</b>
<a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=94640>1×slots сайт</a>
<a href=https://adler.biz/threads/838/>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a>
<a href=https://portugal-campings.com/pt/account/>рабочее зеркало 1хслотс</a>
<a href=https://forum.pmpobc.ca/index.php?topic=129558.new#new>1×slots официальный регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша призов. Заведения практически устанавливают максимальную ставку, допустимую по условиям вейждера.
#6259 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало букмекерская контора вход <a href=https://glvk.guru/>casino вход</a> порно с Карен Хачанов (теннис) приложения букмекерских контор на андроид <a href=https://t.me/vchkogpu_ru>букмекерская контора официальный сайт</a> порно с Аделия Петросян (фигурное катание) водка казино casino бездепозитный 1win букмекерская контора Скоробогатова Ольга Николаевна порно porno Мария Шарапова пинап казино
#6260 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
top casino казино 5 <a href=https://th-royalgclub.com/>порно с Абрамченко Виктория Валериевна</a> порно с Афонина Марина Игоревна casino сегодня <a href=https://www.ossetia.tv/>казино сочи</a> porno Игорь Акинфеев (футбол) 1win casino new casino букмекерская контора вход online casino казино вход официальный сайт порно с Алексей Миранчук (футбол)
#6261 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерские конторы в россии самое казино <a href=https://7club7.com/>1win casino</a> Преподобная Надежда Александровна порно казино регистрации <a href=https://rucriminal.info/>официальное казино вход</a> казино в россии 1×bet рабочее казино 1win casino порно с Георгий Джикия (футбол) казино сочи порно с Арина и Дина Аверины, гимнастки
#6262 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
демо казино 1×bet слоты официальный сайт <a href=https://krtka.info/>porno Алена Косторная (фигурное катание)</a> 1×bet регистрация Самойлова Алла Владимировна порно <a href=https://slon-ru.com/>ramenbet casino</a> казино фильм порно с Алексей Миранчук (футбол) 7k casino казино пину порно с Алексей Миранчук (футбол) up casino скачать Лут Оксана Николаевна порно
#6263 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
Фриспины предусмотрены для применения в видео слотах. Внимательно ознакомьтесь с условиями – часто их выдают на некоторые автоматы. В зависимости от клуба, у вас получится сделать определённое число ставок. Кстати, продвинутые игорные жилища позволяют запускать любых «одноруких бандитов». <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало</a> <a href=https://waappitalk.com/shopavto>https://waappitalk.com/shopavto</a> 1×slots сайт <a href=https://visualchemy.gallery/forum/profile.php?id=3469802>https://visualchemy.gallery/forum/profile.php?id=3469802</a>
1×slots казино зеркало
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-4956/#comment-591279>1хслот 1хслотс регистрация перейти на 1×slots</a> 1×slots рабочее зеркало Мы подготовили перечень, где есть постоянно животрепещущие и новые бездепозитные призы казино, коие вам получить безвозмездно. Для наших юзеров есть специальные предложения неповторимые бонусы, которые вы ни не найдете, их мы определили особой красной плашкой «Exclusive».Денежные свои. Третий бонус за регистрацию без депо – наличные. К сожалению, только известные и пользующиеся клубы все дать средства в руб. Либо долларах. С их поддержкою вы сможете насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед данным нужно исполненье конкретных условий. <a href=https://mysocialclub.ru/user/Anthonyved/>https://mysocialclub.ru/user/Anthonyved/</a> 1× slots сайт Законодательство, регулирующее азартные забавы в разных государствах, оказывает на возможности операторов. В результате пользователи из отдельных ареалов сталкиваются с лимитированиями со стороны казино. Это может быть как полный отказ в доступе, например и невозможность загружать забавы отдельных производителей.Благодаря программке лояльности от игорного заведения, можно брать неплохой старт и без добавочных инвестициям запустить видеослоты. Кроме как, можно рассчитывать на реальную удачу и получить, без инвестиции личных финансов, великой выигрыш.
1×slots на любой вкус как пройти регистрацию
Мы делаем акцент на ключевых положениях правил, рассказываем о территориальных ограничениях и вкратце информируем о других промоакциях обсуждаемого казино. Допустим, за регистрацию вы возымели бездеп в объеме 2 000 рублей с вейджером х30. В этом случае предстоит устроить ставок, на общую сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда выполните обстоятельства по отыгрышу, придёт время заработать реальные деньги. Однако не забывайте, что с каждого дара выйдет исключить определённую сумму (чаще всего не более $200).Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша призов. Заведения постоянно устанавливают наивысшую ставку, возможную по условиям вейждера. <a href=https://www.amateur-girls-posts.com/forums/profile.php?mode=viewprofile&u=2950533>https://www.amateur-girls-posts.com/forums/profile.php?mode=viewprofile&u=2950533</a> В основном случаев благотворительные призы начисляются в кредитах, которые нельзя сразу вывести со счета. Прежде их нужно отыграть по установленным правилам. Эти притязания принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д.). О нем читайте ниже. 1×слот регистрация в 1×slots casino Выбор любого интернет казино на нашем сайте. В описании к каждому Вы можете разузнать, что получите за творенье аккаунта.
1×slots зеркало рабочее
<a href=https://karakol.com.kg/user/Jameskef/>1×slots коды</a> Главное превосходство спинов – возможность изучить разные слоты. Также удастся насладиться бонусными раундами, испытывать удачу в риск-туре и преувеличить выигрыш за счёт особенных знаков. Однако не только игровой процесс заслуживает внимание, ведь никакого сосредоточиться на реальном выигрыше. Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша бонусов. Заведения постоянно устанавливают наивысшую ставку, возможную по условиям вейждера.Сроки активации приза уточняются каждым казино, но чаще всего они не превышают недели с этапа получения. Игроку непременно надо(надобно) использовать бездеп протяжении указанного срока, в ином случае приз просто исчезнет. Каждый приз можно получить только раз раз, потому случае не применять бездеп в срок, у игрока не будет второго шанса им воспользоваться. казино 1× slots официальный сайт <a href=https://www.pcweek.ua/forum/view_profile.php?UID=87594>https://www.pcweek.ua/forum/view_profile.php?UID=87594</a> При регистрации по указывать лишь достоверную информацию. Когда учетная запись будет активна, замечен доступ в Личный кабинет. В нем возможно избрать валюту, ввести промокод и узнать подробные управляла получения и отыгрыша бездепа. Краткая информация об промоакции нередко присутствует непосредственно на регистрационной форме.Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются незамедлительно в сотворения профиля и активны недолговременное время. Если не успеете потратить свои, они попросту сгорят. Касаемо медли, как призы активны на часа.
1×slos регистрация в 1×slots casino
Бездепозитный бонус – это финансовое вознаграждение, коие выдается соучастнику игры в казино, для его вербования и возникновения заинтересованности. Любой посетитель, который подходит условиям выдачи подобного бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое поощрение является наиболее эффективным методом, дающим вероятность стартовать при, не вкладывая собственных материальных средств. <a href=https://forum.expert-watch.com/index.php?action=profile;u=190023>https://forum.expert-watch.com/index.php?action=profile;u=190023</a> Подтверждение персональной инфы. Все казино требуют от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у юзера иных аккаунтов (мультиаккаунт запрещен). 1хслотс регистрация в 1×slots casino Для получения депозитного бонуса необходимо пополнить собственный игровой баланс реальными средствами. Вознаграждение можно получить или при внесении первого депо, либо в виде фиксированного процента от внесённых средств. Так либо по, бонус поступит на счёт лишь после пополнения.Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.
<b>Смотреть еще похожие новости:</b>
<a href=http://weeklywars.de/memberlist.php?mode=viewprofile&u=860>1хслотс официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подтверждение персональной информации. Все казино просят от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и наличие у пользователя других аккаунтов (мультиаккаунт запрещен). Онлайн гемблинг развивается с каждым деньком все больше и больше, свежие бренды создаются не по дням а по часам. Новые онлайн казино делают вступительные акции для игроков, чтобы, чтобы собственно бы зарекомендовать себя, и что, этим самым предлагают бездепозитные призы за регистрацию, что бы не упустить такую возможность — как пользоваться свежим бездепом, рекомендуем посещать наш сайт как возможно почаще, самое аппетитное и новые несомненно добавляться в данном же списке.
#6264 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать 1×bet 1×bet xyz скачать 1×bet на андроид бесплатно <a href=https://slon-ru.com/>7k casino зеркало на сегодня</a> 1×bet зеркало слоты 1×bet xyz гта казино <a href=https://slon-ru.com/>порно с Голикова Татьяна Алексеевна</a> порно с Евгения Медведева, фигуристка casino игровой автомат casino приложения 1×bet скачать бесплатно букмекерская контора вход retro casino casino официальный сайт
#6265 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slots review live
Вывод выигрыша с бездепозитных бонусов казино – щедрый презент от азартных клубов. Но чтобы вывести собственный заработок, нужно выполнить ряд критерий: <a href=http://filmkachat.ru/>1х слот 1хслотс регистрация перейти на 1×slots</a> <a href=https://devfolio.co/@archicgicom>https://devfolio.co/@archicgicom</a> 1×slots рабочее зеркало <a href=https://community.dynamics.com/profile/?userid=762bc7b8–4f82-ef11-ac21–6045bdd832dc>https://community.dynamics.com/profile/?userid=762bc7b8–4f82-ef11-ac21–6045bdd832dc</a> Верификация аккаунта. Лучше доказать лицо незамедлительно после регистрации, чтобы позже не было заморочек с выводом денег. Верификация может протекать 2-мя способами:
1× слот зеркало
Чтоб получить крупный выигрыш, выбирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша.В современность очень просто получить бонус за регистрацию в казино. Практически каждый игорный дом с радостью начисляет средства либо бесплатные вращения. Многие гэмблеры пользуются этим и не смущяются региться в любом клубе с выгодными условиями. Кстати, это отличная возможность выработать победную тактику и сорвать джекпот. 1×slots казино зеркало Обычно показатель повыше, чем для призов на депозит. Не изумляйтесь, случае он будет том х100. Иногда завышенный коэффициент вейджера устанавливается для обитателей отдельных стран. <a href=http://xn–ok0bw7u60ff7e69dmyw.com/bbs/board.php?bo_table=free&wr_id=23147>http://xn–ok0bw7u60ff7e69dmyw.com/bbs/board.php?bo_table=free&wr_id=23147</a> 2. Создать новый профиль. Для регистрации нужно заполнить небольшую анкету либо зайдите в индивидуальный кабинет при помощи соц сеток;Бездепозитные призы прекрасный вариант даровой игры в игровые автоматы. Многие пользователи сети не знают, собственно в казино можно начать выступать безусловно даром, а потом вывести выигрыш на банковскую карту либо электрический кошелек, иные не доверяют интернет казино, а третьи успешно играют и выигрывают – и тотчас довольно большие суммы. 1×slots казино зеркало Да, у безвозмездных призов есть дефекты. Прежде всего, они обыкновенно очень. Кроме как, обстоятельства вейджера по ним постоянно строгие. Но все же недоступность риска делает их очень привлекательными для клиентов.
1×slots зеркало проходить регистрацию это отличный вариант
Приветственный приз без депозита ? подарок за регистрацию. Выдается средствами, фриспинами либо баллами. В последнем случае бонусные баллы применяются для участия в турнирах или обмена на реальные деньги. <a href=http://semenapost.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://novaparts.ru/bitrix/redirect.php?goto=http://forum.newit-lan.ru/go.php?https://teletype.in/@urist555/bL14OxijVty>http://semenapost.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://novaparts.ru/bitrix/redirect.php?goto=http://forum.newit-lan.ru/go.php?https://teletype.in/@urist555/bL14OxijVty</a> Однако далеко не все ресурсы предлагают своим посетителям бездепозитные бонусы за регистрацию в казино. В большинстве случаев учтено одобрение на 1-ый депо в размере 100–200%. Это отличная вероятность преумножить банкролл, прирастить время, проведённое за игрой и шансы сорвать большой куш. 1×slots casino регистрация
рабочее зеркало 1×slots
Для вывода средств приз надо(надобно) будет отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариантами отыгрыша бездепозитного приза до его получения, дабы избежать конфликтных обстановок.Наши эксперты исследуют условия промоакции, этого в ручном режиме проводят их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и параметры. Мы не рекламируем казино, а даем игрокам информацию о наихороших из них. <a href=https://forum.vn.ua/showthread.php?p=3276709#post3276709>1×slots регистрация 1×slotscasino09k online</a> 1 x slots <a href=https://rcfl.com.hk/home.php?mod=space&uid=8949486>https://rcfl.com.hk/home.php?mod=space&uid=8949486</a> Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную функцию активации приза без депозита. Внимательно прочитайте до конца. Многие новички проделывают промахи на шаге регистрации и поэтому имеют получить презент.
1х слот регистрация в 1×slots casino
Иногда у гостей сайта имеют появиться трудности, задачи, препядствия при активации полученного промо-кода. В таких случаях, нужно адресоваться за поддержкою в службу поддержки «Support». Для получения ответа, непременно указывается конкретная первопричина воззвания и подтверждается информация дополнительными скриншотами. Если сложилась спорная обстановка, практически можно обратиться к основному регулятору или контролирующему органу, выдавшему данному заведению лицензионный документ.Реже бонусы без депозита начисляются неизменным игрокам. С их подмогою администрация постарается вычесть ценных посетителей или вожделеет поблагодарить за лояльность верных гостей. Но гораздо почаще для сходственных целей используются такие промоакции: <a href=http://whdf.ru/forum/user/84480/>http://whdf.ru/forum/user/84480/</a> Получать информацию о самых прибыльных призах возможно без постоянного прогноза новостей казино. Мы брали данную задачку на себя и безпрерывно смотрим за услугами операторов, выбирая лучшие из их. В данном разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список акций периодически пополняется. В топ зашли самые свежие бездепозитные призы за регистрацию в казино 2020, временные и закрытые промо. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и аспектам. Если срок деянья промоакции истек, она удаляется из перечня. 1×slots рабочее зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://timepost.info/showthread.php?tid=59480>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=https://praisenpray.org/forums/member.php?action=profile&uid=63121>1×slots регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для отыгрыша бонуса казино обязывает игрока поиграть на необходимую, в некоторое один превосходящую сумму полученного бонуса — здесь выгода фирмы очевидна. Новички не обожают незамедлительно же вносить депо. Это обосновано неименьем навыка и сомненьем. К счастью, в наше время можно получить бездепозитный бонус за регистрацию в казино. Неважно что начисляет система – фриспины или кредиты. В всяком случае вы не рискуете собственными сбережениями. Это замечательная вероятность запустить приглянувшийся видео разъем либо же испытывать удачу в настольных играх.
#6266 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet официальный сайт 1×bet xyz смотреть фильм казино <a href=https://vestnik-jurnal.com/>винлайн букмекерская контора</a> букмекерская контора бесплатно скачать porno Елизавета Туктамышева <a href=https://repost.news/>сайт казино зеркало</a> Нургалиева Эльвира Рамиловна порно Преподобная Надежда Александровна порно ап казино casino автомат 1go casino вывод казино почему в казино нет окон
#6267 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало которую указывали при регистрации кстати
Срок отыгрыша — это этап, кот-ый начинается в момент активации приза и завершается с его закрытием. Пользователю необходимо уложиться в этот временной промежуток, другому призовые свои аннулируются. Казино устанавливают список игр, ставки в засчитываются при расчете отыгранных средств. Если тайтл не заходит в данный список, то возможность быть недоступен для загрузки в деянья бонусного предложения.Самый распространённый из похожих бонусов, конечно же, бездеп на денек рождения клиента — приз вид фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им возможно на установленного периода времени. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots review live</a> Акционные предложения от казино существуют в различных форматах. Часто призы даются в размен на депозит. Игрок заносит платеж и получает средства, безвозмездные вращения и поощрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — вид приза, который гарантирован за выполнение определенных действий на веб-сайте:В разделе с бонусами активировать свой презент. Найти игры, для коих учтено одобрение и применять бонус по назначению. <a href=https://www.dr-ay.com/blogs/217116/Mastering-Architectural-Rendering-From-Vision-to-Visual-Reality>https://www.dr-ay.com/blogs/217116/Mastering-Architectural-Rendering-From-Vision-to-Visual-Reality</a> Бонусы без депо при регистрации считаются наиболее красивыми как для опытных игроков, например для и новичков. Получив это вознаграждение, клиент возможность выступать на настоящие деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные призы в интернет-казино Рунета, а также обстоятельства их активации и выигрыша. 1×slots официальный регистрация <a href=http://in.net.ua/user/WalterWaism/>http://in.net.ua/user/WalterWaism/</a>
1× slots casino зеркало
1хслот официальный сайт зеркало Чем ниже велечину вейджера, что, этим легче отыграть и вывести приз. Если Вы планируете заработать на бездепе, не просто ознакомиться с свежим игровым клубом, то стоит игнорировать бонусов с высоким вейджером их практически не реально отыграть. С ними Вы можете лишь протестировать забавы заведения. <a href=https://orbitalscoreboard.com/user/philipexolf/>https://orbitalscoreboard.com/user/philipexolf/</a> 1×slots регистрация то дальше необходимо пройти Каждый игры должен сначала детально выучить обстоятельства по получению и отыгрышу понравившегося презента. Если всё организует, поторопитесь арестовать бесплатные спины за регистрацию в казино без депо с выводом и без отыгрыша и прямо данный начать вертеть барабаны лучших слотов.Если вы опытный игрок, вы обязаны аристократия, собственно бонус без депозита – редкая находка. Тем не, мы еженедельно изучаем интернет, дабы найти для вас наилучшие бездепозитные предложения.
1×slots на любой вкус как пройти регистрацию
Большинство клубов привлекают внимание игроков за счёт различных подарков. На 1 веб-сайтах возможно получить виртуальные кредиты, которые откроют доступ ко всему софту. На других же, администрация предлагает безвозмездные вращения для пуска топовых онлайн слотов. Несмотря на разные промоакции, стоит выделить самые основные. <a href=http://crtdu-kras.ru/communication/forum/user/238194/>http://crtdu-kras.ru/communication/forum/user/238194/</a> Зачастую бездепозитные призы казино для забавы предлагаются различными заведениями азартных игр в маркетинговых акций либо в целях привлечения к себя новых игроков. Для бездепозитных призов в казино 2022 игроку не нужно пополнять счет до этапа вывода желаемых средств.Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных притязаний, считая неотъемлемой верификации. Если на сайте предусмотрена обязательная процедура подтверждения личности, то вывести выигрыш получится лишь в ревизии данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий лицо. 1хслотс рабочее зеркало B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.
1× слот зеркало
Нет. Для получения бездепозитного бонуса в казино необходима обязательная регистрация на веб-сайте. Играть в слоты безвозмездно и без регистрации возможно только в демо режиме. <a href=https://koreanstudies.com/forum/viewtopic.php?t=141011>1×слотс казино</a> Активация денежного вознаграждения происходит механически после творения профиля или использования промокода. Иногда операторы предъявляют вспомогательные требования: подписаться на страницы казино в соц сетях либо на рассылку рекламных извещений, скачать и установить дополнительный софт и т.д.Свежий приз начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в использовании своими, в случае отыгрыша оператор может установить ограничение на вывод денег. Какие призы возможность еще получить считая бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, любое интернет казино предлагает игрокам выгодное предложение на 1-ый депо, вы совершаете депо, ваш депо увеличивается в двое или даже в трое, тем наиболее начать выступать возможно с более солидной суммой, так же не запамятываем тему вейджер на бонусы. 1×slots регистрация 1×slots casino c2d ru <a href=https://ootmkorea.com/bbs/board.php?bo_table=free&wr_id=41946>https://ootmkorea.com/bbs/board.php?bo_table=free&wr_id=41946</a> Классическая разновидность приза за творенье аккаунта. Его преимущество содержится том,, что клиент имеет помощи избирать аппараты и делать ставки в них. Иногда перечень игровых автоматов ограничен оператором, но все также это чем, чем единственный доступный слот, как когда с использованием фриспинов.Популярность интернет казино растёт и всё больше пользователей начинают интерес азартными играми. Бездепозитные призы 2022 года, это оригинальные подарки за регистрацию. С их поддержкой свежие игроки могут получить благотворительные вращения либо средства на баланс за одну регистрацию. С выходом игорных заведений в интернете, бездепозитные бонусы стали моднейшим способом привлечения игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш сайт собрал наилучшие предложения из интернета на 2022 год. Воспользуйтесь хоть презентом и можете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить обстоятельства.
рабочее зеркало 1×slots
Самый распространённый из подобных призов, естесственно же, бездеп на день рождения посетителя — приз вид фиксированной суммы либо фриспинов поступает на счёт игрока, а воспользоваться им можно протяжении установленного периода медли.Ну и естесственно же, для казино бездепозитные бонусы прибыльны с имиджевой стороны: сходственная добродушие повышает уровень лояльности посетителей к фирмы. Баланс игрока пополняется на подобающую необходимую. К ней используется вейджер, указанный в правилах промоакции. Вывести выигрыш можно несомненно после как, как пользователь устроит требуемый размер ставок из собственных средств. В редких случаях бездеп работает в формате Free Play. На счет пользователя зачисляется большая сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по завершении сего периода сумма на счету будет превышать первоначальную, то разность возможно будет вывести или использовать для последующих ставок. <a href=http://www.sg588.tw/home.php?mod=space&uid=550168>http://www.sg588.tw/home.php?mod=space&uid=550168</a> Превышение максимальной ставки при отыгрыше. Система механически не предупреждает о превышении ставки, поэтому о нарушении управлял игрок может разузнать теснее последствии подачи запроса на вывод средств.Суммы сходственных предложений, как правило, колеблются от 3-х до 20 $, а вейджер на эти средства должен сочинять от тридцати до шестидесяти раз. Зачастую, наибольшая сумма выигрыша тут составит от одной до 2-ух сотен $. Если игрок выиграет больше, то все средства все быть списанными до максимально разрешенного выигрыша. Здесь бывает смысл выводить еще несуществующие финансы на собственную платежную систему и дальше отыскивать заведение с подходящими под данную сумму релоадом или бонусом за первое пополнение счета. Есть несколько подвидов бездепозитного гонорары, предлагаемого великим числом заведений. 1×slots регистрация на сайте К раскаянию, нет. Почти все казино, просят внесение но бы одного минимального депозита для вывода выигрыша с бездепозитного бонуса. Также учитывайте, собственно вывести средства разрешается только на что, эту платежную систему, с коей был изготовлен депо.Фриспины предназначены для использования в видео слотах. Внимательно ознакомьтесь с условиями – часто их выдают на некоторые автоматы. В зависимости от клуба, у вас получится сделать определённое число ставок. Кстати, продвинутые игорные жилища позволяют запускать каждых «одноруких злодеев».
<b>Смотреть еще похожие новости:</b>
<a href=https://astraclub.ru/album.php?albumid=238654>1×slot зеркало рабочее регистрации на телефон придет</a>
<a href=https://demo.comuni-italiani.it/forum/viewtopic.php?f=9&t=364410>1×slos регистрация в 1×slots casino</a>
<a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=763692>онлайн казино 1×slots</a>
<a href=http://swissairways-va.com/phpBB3/viewtopic.php?p=1693703#p1693703>1хслотс казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для верификации аккаунта нужно предоставить специалистам технической поддержки отсканированную копию паспорта и счета за коммунальные предложения, а фотку банковской карты либо скриншот странички электрического кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для подтверждения личности. Поспешите зарегистрироваться на официальном сайте Клубника, дабы быстро получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, замечена реальный шанс победу!
#6268 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Екатерина Ефременкова, шорт-трекистка Елена Лядова <a href=https://7club7.com/>Черкесова Бэлла Мухарбиевна порно</a> скачать сайт букмекерской конторы casino ru <a href=https://strelochnik.com/>online casino</a> Ирина Горбачева порно с Дронова Александра Викторовна порно с Владимир Минеев (ММА) 7k casino зеркало букмекерская контора скачать приложение cat casino 1×bet зеркало
#6269 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Илья Ковальчук (хоккей) порно с Сергей Бобровский (хоккей) <a href=https://glvk.guru/>porno Дарья Клишина</a> суть казино bitz casino <a href=https://rhymes-punches.com/>1×bet 1</a> бк букмекерская контора 1×bet слоты 1×bet xyz champion casino porno Андрей Рублев (теннис) casino промокод ап казино porno Илона Маркова, хоккеистка
#6270 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало этих способов предполагает регистрацию
Ну и окончательно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: подобная добродушие увеличивает степень лояльности посетителей к компании. <a href=http://filmkachat.ru/>1×slots регистрация на официальном сайте</a> Главное преимущество спинов – вероятность изучить различные слоты. Также получится насладиться бонусными раундами, испытывать фортуну в риск-туре и преувеличить выигрыш за счёт особенных знаков. Однако столько игровой процесс заслуживает внимание, ведь лучше сосредоточиться на реальном выигрыше. <a href=https://www.vevioz.com/forums/thread/4584/>https://www.vevioz.com/forums/thread/4584/</a> Обычно бездепозитные акции от казино, приходят на эл. Почту в дни рождения либо праздничные. В некоторых интернет казино возможно обратиться в чат и как постоянному игроку, возможно вас предложат бездепозитное предложение.Наши эксперты изучают условия акции, после в ручном режиме проводят их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и параметры. Мы не рекламируем казино, а даем игрокам информацию о наихороших из них. 1хслотс официальный сайт зеркало <a href=http://sols9.com/batheo/Forum/User-JeffreyRer>http://sols9.com/batheo/Forum/User-JeffreyRer</a> Бездепозитные бонусы – это исключительно интересная и наиболее многообещающая промоакция интернет-казино. Они числе никакого фри-спинов, поэтому собственно выплаты в бесплатных вращениях не гарантированы, как композиции на барабанах игрового аппарата шансы не сложиться.Бездепозитные призы истинными деньгами, которые возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадали.
1×slots сайт
Маркетинговая политика всех игорных интернет-клубов должна носить разнородный нрав. И если вознаграждения на депо служат для того, чтобы стимулировать заносить депозиты и поощрять теснее имеющих пользователей, то бездепозитный приз в казино либо приз за регистрацию в казино, этого всего, рассчитан на расширение базы покупателей. <a href=https://www.kfz-gringer.at/index.php/forum/in-neque-arcu-vulputate-vitae/70820–1#70585>1хслот зеркало</a> 1×slots промокод при регистрации 2025 Выбор любого интернет казино на нашем веб-сайте. В описании к каждому Вы можете узнать, собственно получите за творенье аккаунта. <a href=http://xn–nh-q79i86f7v0c.com/bbs/board.php?bo_table=free&wr_id=398376>http://xn–nh-q79i86f7v0c.com/bbs/board.php?bo_table=free&wr_id=398376</a> Заполняя данные в личном профиле, указывайте лишь достоверную информацию, например как Вам придется ее подтвердить в будущем при выводе средств. 1×slots официальный регистрация Как управляло, при выводе денег, от играющего потребуется лишь устроить минимальный вклад чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом индивидуальный счет.Отказ в прохождении верификации. Если клиент не хочет либо не дать документы, подтверждающие его личность, профиль будет заблокирован вместе со всеми бонусными начислениями.
casino 1×slot
Так собственно сможете храбро регистрироваться без всяких раздумий. Фортуна сейчас точно на вашей стороне. Не опасайтесь, как следствие какого или убытка Вам абсолютно не угрожает. С этими бонусами как без пополнения, Вы остаетесь лишь в плюсе, хотя не как не в минусе. Чаще всего интернет-казино предлагают бездепозитные призы свежим юзерам. Эта промо-акция довольно отлично завлекает новичков, подталкивая их к открытию счета. Конечно, не все они становятся преданными клиентами, хотя сам факт регистрации аккаунта играет на руку заведению.Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? <a href=https://andrezuka11988.newbigblog.com/36296224/nude-ai-understanding-the-intersection-of-innovation-and-ethics-in-image-manipulation>https://andrezuka11988.newbigblog.com/36296224/nude-ai-understanding-the-intersection-of-innovation-and-ethics-in-image-manipulation</a> Наш перечень содержит наилучшие бездепозитные бонусы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по важным параметрам:Самый распространённый из похожих бонусов, конечно же, бездеп на день рождения посетителя — приз в виде фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им можно протяжении установленного периода времени. 1хлот регистрация в 1×slots casino Вывод выигрыша с бездепозитных бонусов казино – щедрый презент от азартных клубов. Но чтобы вывести собственный заработок, необходимо выполнить ряд условий:
1×slots подтвердит вашу регистрацию если говорить
Активация случается счет промокодов, коие вводятся в собственном кабинете последствии регистрации. Среди спецпредложений в перечне Casino.ru находятся неповторимые промокоды, которые доступны лишь гостям портала. Другие методы начисления средств ? автоматическая активация незамедлительно последствии сотворения аккаунта и получение подарка по запросу в службу технической помощи.В разделе с бонусами активировать собственный подарок. Найти забавы, для коих учтено одобрение и использовать бонус по назначению. <a href=http://3ak.cn/home.php?mod=space&uid=187057>казино 1×slots</a> Обычно, бездепозитные призы выдаются под определенные слоты с фиксированной ставкой, но их точно запрещено применять в игровых автоматах с прогрессивным джекпотом. Список игр, в которых можно использовать бездеп, Вы найдете в описании акции либо можете уточнить у службы заведения.Размер бонусов чаще всего чисто условный и не превышает 50 руб. Приятно, хотя ощутимым бустом в игре вряд ли станет. Можно ли наваривать на бездепозитных бонусах? Это не работа, здесь как повезет, в в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, это можно именовать везением, и дополнительной добавкой к вашему бюджету.Процесс подтверждения личности может занять от одного денька до недели. Если клиент допустил какую оплошность при заполнении паспортных данных, то ему по обратиться с проблемой в службу поддержки онлайн-казино. 1×slots casino регистрация 1×slotscasin online <a href=https://play.ntop.tv/user/Henryhor/>https://play.ntop.tv/user/Henryhor/</a> Бездеп с фриспинами имеет обхватывать всю коллекцию игр на сайте или разработки одного провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении акции. Выигрыш имеет быть выведен после того, как юзер отыграет данную необходимую. Возможность расценить глубокий функционал слотов — главное совершенство этой разновидности. Игроку становятся доступны что, эти функции, коие отсутствуют в демонстрационном режиме, а возможность выиграть реальные деньги прибавляет ярчайших азартных ощущений.
1×slots зеркало рабочее на сегодня
Многие азартные клубы ограничивают необходимую вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании акции, суммы Вы не сможете вывести. Разница будет аннулирована, Вы даже не сможете создавать на нее ставки.Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и. Когда игроку полагается количество фриспинов, администрация может разбивать их начисление на количество дней. Бесплатные вращения предоставляются для определенного слота, который указывается в правилах промоакции. <a href=https://www.xn–72c9aa5escud2b.com/webboard/index.php?action=profile;u=1519378>https://www.xn–72c9aa5escud2b.com/webboard/index.php?action=profile;u=1519378</a> 1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, если не желайте стать жертвой мошенников или впустую потратить время;Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. 1×slot зеркало рабочее этих способов предполагает регистрацию Пoдтвepдить личнocть посетителя. Для успешного вывода средств, необходимо доказать лицо посетителя. Нa этaпe вepификaции пpoфиля, сотрудники службы защищенности должны увериться, собственно у игрока не раз аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не может вывести собственный выигрыш, случае у него несомненно некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы.При отыгрыше бонусных средств, нужно учесть срок деяния приза и время, которое дается на отыгрыш. По истечению заявленного времени, не отыгранный бонус будет аннулирован.
<b>Смотреть еще похожие новости:</b>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=59622&result=reply>1×slot зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Однако в условиях исчезают «подводные камешки», которые не разрешат исключить крупную необходимую или же вы не успеете отыграть вейджер. Поэтому профессионалы рекомендуют арестовать благотворительные вращения за регистрацию в казино без депо, дабы поднабраться навыка и получить реальный шанс на победу.
#6271 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино сегодня 1×bet бесплатно <a href=https://kompromat1.online/>1×bet скачать приложение</a> casino вход вывод казино <a href=https://rhymes-punches.com/>porno Анастасия Янькова, боксерка</a> porno Нина Пирогова, хоккеистка казино можно 1×bet зеркало рабочее на сегодня 1×bet xyz букмекерские контора ап лучшие букмекерские конторы Москалькова Татьяна Николаевна порно порно с Арина и Дина Аверины, гимнастки
#6272 EugeneHenhttps://com-x.life/comix-read/manhwa/
лучшие манхвы читать 2012 <a href=https://com-x.life/comix-read/manhwa/>манхва на русском языке драма</a>
#6273 Charlesgunnyhttp://filmkachat.ru
1×slots сайт зеркало
Важно, удостоверьтесь сомнений, собственно раньше не регистрировались в выбранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи. <a href=http://filmkachat.ru/>1 xslots рабочее зеркало</a> Иногда операторы требуют внесение минимального депозита перед выводом для верификации платежного прибора. В неких казино этот депо того предстоит отыграть. <a href=https://smallpdf.com/file#s=a4e78a8b-e574–4cce-8041-d2d327ee7d28>https://smallpdf.com/file#s=a4e78a8b-e574–4cce-8041-d2d327ee7d28</a> 1х слот регистрация в 1×slots casino <a href=https://tpang.co.kr/bbs/board.php?bo_table=free&wr_id=826835>https://tpang.co.kr/bbs/board.php?bo_table=free&wr_id=826835</a>
1×slos регистрация в 1×slots casino
Допустим, за регистрацию вы получили бездеп в размере 2 000 рублей с вейджером х30. В этом случае предстоит сделать ставок, на совместную сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда сделайте условия по отыгрышу, придёт время заработать настоящие средства. Однако не запамятовывайте, собственно с каждого презента получится исключить определённую сумму (чаще всего не более $200).Помните, что в некоторых забавах сумма ставки идет в зачет вейджера только отчасти. Так, в настольных и карточных забавах лишь от 5% до 50% суммы ставки числятся как отыгранные средства, в то время как в слотах идет в зачет все 100% суммы. 1×slots зеркало Если вы опытный игрок, вы обязаны аристократия, собственно приз без депозита – редкая находка. Тем не менее, мы в исследуем интернет, дабы найти вам наилучшие бездепозитные предложения. <a href=http://www.sksmg.com/home.php?mod=space&uid=197030&do=profile>http://www.sksmg.com/home.php?mod=space&uid=197030&do=profile</a> 1×slots официальный сайт мобильная версия Вы наверняка, как и все любите получать презенты и бездепозитные бонусы казино. Игорные дома брали в повадку одаривать гэмблеров приятными бонусами. Стать владельцем приветственного подарка можно за создание профиля либо пополнение счёта. Второй вариант более занимательный, как клубы готовы удвоить депо! Но если вы новичок и лишь знакомитесь с миром пыла, превосходнее пользуйтесь призом за регистрацию.Не хотите сыграть в азартные забавы, не рискуя своими деньгами, но получая в все выплаты? Подобную возможность предоставляют многие наихорошие порталы с азартными веселиями. В их количестве много честных и надежных интернет-казино на русском языке. Они привлекают свежих юзеров различными поощрительными событиями, включая бездепозитные, либо безвозмездные призы.
1хслотс рабочее зеркало на сегодня
Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=http://www.soe-parrot.com/home.php?mod=space&uid=182947>http://www.soe-parrot.com/home.php?mod=space&uid=182947</a> 1×slots регистрация на 1хслотс Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам воспрещено начислять бонусы клиентам, не имеющим валютных средств на счете. Мы предлагаем осмотреть животрепещущие бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ.
зеркала 1×slots
Принципиальным различием бесплатных призов от призов на депо считается недоступность надобности заносить деньги на акк. Из-за сего их часто именуют бездепозитными (not the slightest deposit bonuses). Помните, что в неких забавах сумма ставки идет в зачет вейджера лишь отчасти. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки считаются как отыгранные деньги, тот как в слотах идет в зачет все one hundred percent суммы. Игрокам не следует принимать приветственный бонус как гарантированный метод получить большой выигрыш, но это замечательная вероятность без затрат оценить перечень казино. x1 slots регистрация в 1×slots casino <a href=http://d668804q.beget.tech/user/JustinVed/>http://d668804q.beget.tech/user/JustinVed/</a> Для как, дабы отыграть необходимую вашего бездепозитного приза нужно выполнить обстоятельства вейджера. Очень часто фриспины даются на определенные слоты (book of ra, book of dead, book of sun), подбирайте слот себя по душе, они все довольно красивые и качественные. Бездепозитные приз имеет быть валютным так и повторяющий фриспинов на слоты
1×slots casino зеркало
Будьте внимательнее при ознакомлении с правилами во избежание происхожденья конфликтных обстановок с казино, когда после отыгрыша бездепа для не дадут исключить крупную сумму выигрыша.При помощи такового поощрения оператор может кроме завлекать клиентов, которые ранее показывали активность на веб-сайте, хотя по некий основанию прекратили играть. В этом случае промокод высылается пользователю по электрической почте либо вид SMS. <a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=3508>http://www.predictive-datascience.com/forum/member.php?action=profile&uid=3508</a> К примеру, игроку выдаются бесплатные свои в заведении в объеме пятидесяти либо ста $ (вейджер на коие сочиняет 100х). То есть, каждому новоприбывшему игроку выскакивает притягивающая картинка, которая сулит выплату всех зачисленных компанией средств. Не стоит внимания на казино приз за регистрацию без депо с сильно немалый или довольно махонькой суммой призов, потому что, числе кропотливо изучив все условия, здесь скорее, несомненно некий подвох.Для как, дабы отыграть сумму вашего бездепозитного бонуса нужно выполнить условия вейджера. Очень часто фриспины даются на определенные слоты (book of ra, book of deceased, book of sun), выбирайте разъем себе нраву, они все довольно красочные и высококачественные. Бездепозитные приз имеет быть денежным например и в виде фриспинов на слоты 1×slots casino регистрация
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=138757>1×slots официальный сайт зеркало рабочее</a>
<a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=49010>казино 1× slots официальный сайт</a>
<a href=https://thetechmodders.com/forums/viewtopic.php?t=25662>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=4704>1×slots сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вейджер в переводе с британского значит «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша полученного приза, в нашем случае бездепозитного. Число ставок значения — главно только набрать необходимую, пропорциональную сумме одобрения. Большинство клубов привлекают внимание игры за счёт различных даров. На 1 веб-сайтах можно получить виртуальные кредиты, которые откроют доступ ко всему софту. На других же, администрация предлагает безвозмездные вращения для запуска топовых онлайн слотов. Несмотря на различные промоакции, стоит выделить самые основные.
#6274 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
почему казино bitz casino <a href=https://glvk.guru/>1×bet сайт 1×bet xyz</a> Анна Михалкова 1×bet приложение <a href=https://sovsekretno.net/>винлайн букмекерская контора</a> порно с Арина и Дина Аверины, гимнастки порно с Илюшникова Татьяна Александровна 1×bet сайт 1×bet xyz 1×bet официальный сайт 1×bet зеркало xbet пина букмекерской конторы porno Алена Михайлова
#6275 Charlesgunnyhttp://filmkachat.ru
casino 1×slot
Максимальный размер ставки, кот-ый невозможно превосходить пока бонус не будет всецело отыгран. В случае нарушения сего управляла, приз и выигрыш с него будут аннулированы. <a href=http://filmkachat.ru/>1×slot зеркало</a> <a href=https://webanketa.com/forms/6gtk2c9r64qk4cb5cgw66c9p/>https://webanketa.com/forms/6gtk2c9r64qk4cb5cgw66c9p/</a> Однако далеко не все ресурсы предлагают своим клиентам бездепозитные призы за регистрацию в казино. В большинстве случаев учтено поощрение на первый депозит в размере 100–200%. Это замечательная вероятность преувеличить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш. казино 1×slots официальный сайт <a href=https://adminclub.org/member.php?action=profile&uid=90666>https://adminclub.org/member.php?action=profile&uid=90666</a>
1×slots казино зеркало
Бонус за регистрацию в казино выдается только раз один на одного игрока. Но бывают дополнительные промоакции, в коих бездепы раздаются для неизменных клиентов и эти подарки Вы сможете получить более одного раза.Размер приза. В качестве бездепов обычно начисляют не суммы, а когда речь идет о бонусах за депозит, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино шансы подарить игроку до 2000$. 1×slots мобильная версия войти казино <a href=http://tutorialsmint.com/user/davidhepsy/articles>http://tutorialsmint.com/user/davidhepsy/articles</a> В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, необходимо обратиться в службу спустя лайв-чат на веб-сайте казино. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Некоторые онлайн-казино без депо предлагают новым посетителям избрать приз при регистрации. Будьте внимательны: выбрав раз, вы в безоговорочном большинстве случаев не сможете воспользоваться остальными.Вышеописанная первопричина и является главным нюансом, в которого операторы отдают часть своей выгоды на разные рекламные расходы и рекламные кампании. А наиболее действенным тут будут играть непосредственно бездепозитные бонусы казино 2022 с выводом за регистрацию.
x1 slots 1хслотс регистрация перейти на 1×slots
Вы всего, как и все предпочитаете получать презенты и бездепозитные призы казино. Игорные жилища взяли в привычку одаривать гэмблеров приятными бонусами. Стать обладателем приветственного подарка возможно за творение профиля или пополнение счёта. Второй вариант более увлекательный, так клубы готовы удвоить депозит! Но если вы новичок и только знакомитесь с миром пыла, никакого воспользуйтесь призом за регистрацию.Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, a лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. Промообъявления от казино мешают реальной картины и ориентированы на вербование внимания пользователей. Понять, как высоки шансы остаться в плюсе, дозволит личный анализ условий предложения: <a href=http://www.haxorware.com/forums/member.php?action=profile&uid=282288>http://www.haxorware.com/forums/member.php?action=profile&uid=282288</a> Подобные бонусы без депозита предоставляются на более прибыльных критериях. Зачастую они покрупнее, а обстоятельства отыгрыша наименее строгие.Многие казино деют в рекламных целях бесплатные призы исключительно для наших читателей. Чтобы их получить, нужно перебежать на игровой вебсайт по партнерской ссылке с нашего портала. казино 1×slots Наиболее пользующиеся гонорары между гэмблеров – бездепозитные бонусы казино. Это не умопомрачительно, ведь возможно получить безвозмездные вращения либо виртуальные кредиты, и при не придётся пополнять счёт, рисковать личными деньгами. Удастся насладиться разнообразными увеселениями и даже выиграть крупную сумму, избегая серьёзного риска.
1×slots зеркало на сегодня
<a href=http://angelandmax.teamforum.ru/viewtopic.php?p=72560>1×slots рабочее зеркало</a> Чтобы бездеп не был начислен на Ваш акк, Вам не нужно активировать бонусный код. Если одобрение от казино было добавлено на Ваш аккаунт автоматически, а Вы не планируете его использовать, обратитесь в службу поддержки с пожеланием отменить бездепозитный приз.Этот тип бонуса несомненно добавлен на Ваш акк в удачной процедуры регистрации с внедрением номера аппарата. Если избрать иной метод творения учетной записи, бездеп не будет добавлен на Ваш аккаунт. 1×slots регистрация 1×slots review live <a href=http://arsivforum.10tl.net/member.php?action=profile&uid=5056>http://arsivforum.10tl.net/member.php?action=profile&uid=5056</a> Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, дабы еще раз получить бесплатный приз. Игорные заведения нетерпимы к бонус-хантерам, потому вас ждет неминуемое санкция.
1хслотс рабочее зеркало
Для получения депозитного бонуса нужно пополнить собственный игровой баланс реальными деньгами. Вознаграждение возможно получить либо при внесении первого депозита, или вид фиксированного процента от внесённых средств. Так либо другому, приз поступит на счёт только после пополнения. Бонус за регистрацию в казино выдается лишь один раз на одного игрока. Но случаются вспомогательные промоакции, масштабах которых бездепы раздаются для постоянных клиентов и такие презенты Вы можете получить больше одного раза.Автоматическая активация на самой комфортной, но ручной способ имеет перед ней достоинства. Прежде чем использовать вознаграждение от казино, стоит заранее определить, сколько времени потребуется на выполнение всех критерий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деянья приза. <a href=http://link.ac/humor/user/Christower/>http://link.ac/humor/user/Christower/</a> Только выполнив все обстоятельства отыгрыша и дождавшись окончания проверки аккаунта, Вы можете оформить заявку на вывод средств и получить средства деньги. 1×slot зеркало рабочее регистрации на телефон придет Некоторые сайты, прежде чем обмануть регистрацию игроков, предлагают ответить на некоторое базовых вопросов. Цель проведения похожей викторины – выявить случайных людей, которые не имеют представления о покере, и не допустить получения ими призов. Если гость теснее играл в казино, то ответить на полтора десятка несложных вопросов будет несложно. Очень часто, ответы можно отыскать на официальных веб-сайтах этих учреждений.В интернете очень большое скриптовых вебсайтов, которые принадлежат мошенникам. Их главная цель – привлечь гэмблеров, пообещав не великодушные презенты, но и крупные выигрыши. Так что кое-какие сайты предлагают получить за регистрацию том $1 000.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.formulersupport.com/Thread-1×slots-%D0%B1%D0%BE%D0%BD%D1%83%D1%81-%D0%B7%D0%B0-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8E–138030>1×slots бонус за регистрацию</a>
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=580433>1хслотс рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Все благотворительные бонусы кажутся заманчивыми. Кто же откажется от возможности сыграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далековато не все бездепозитные призы в равной степени привлекательны для рассудительного посетителя.
#6276 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
up casino скачать казино играть <a href=https://glvk.guru/>1×bet слоты 1×bet xyz</a> casino рабочее зеркало 1×bet зеркало на сегодня 1×bet xyz <a href=https://strelochnik.com/>1×bet скачать бесплатно</a> порно с Анна Щербакова, фигуристка порно с Алина Загитова, фигуристка порно с Анна Калинская (теннис) яндекс игры казино porno Марина Александрова up casino ставки на спорт букмекерские конторы
#6277 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало рабочее на сегодня 1×bet xyz казино фильм смотреть онлайн <a href=https://rucriminal.info/>реального казино</a> 1×bet скачать приложение casino официальный сайт <a href=https://krtka.info/>порно с Васильева Татьяна Викторовна</a> Комарова Наталья Владимировна порно бк букмекерская контора pin up casino пин ап фреш казино porno Александр Соболев (футбол) porno Анна Сидорова, керлингистка порно с Константин Тюкавин (футбол)
#6278 Charlesgunnyhttp://filmkachat.ru
1×slot регистрация
На нашем веб-сайте Вы найдете перечень своевременных свежих бездепозитных призов в казино 2022 года. Также, есть количество неповторимых предложений, которые доступны только посетителям нашего сайта после регистрации по нашей ссылке либо активации специального промокода.В бонусную программку множества операторов входят систематические бездепы. Это пожизненные промоакции, поощряющие интенсивных постоянных игроков. Популярный формат — раздача фриспинов по конкретным денькам недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депо в мена на накопленные баллы преданности. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> Заработать на бездепозитных бонусах за регистрацию в казино возможность любой пользователь, достигший совершеннолетия. <a href=https://medium.com/@comcgifurniture/professional-weed-delivery-burlington-services-transform-local-cannabis-market-1e4f51451d6d>https://medium.com/@comcgifurniture/professional-weed-delivery-burlington-services-transform-local-cannabis-market-1e4f51451d6d</a> Некоторые клубы автоматически начисляют бонус на аккаунт игрока последствии выполнения условий получения, хотя случаются ситуации, когда приз нужно активировать игроку самому. Есть количество способов активации приза: 1×slots регистрация на сайте 1×slots ru com <a href=https://babyrr.com/forum/User-JulesEvorm>https://babyrr.com/forum/User-JulesEvorm</a>
1×slots сайт зеркало
1×slots официальный сайт мобильная версия скачать Активация случается за промокодов, которые вводятся в собственном кабинете в регистрации. Среди спецпредложений в списке Casino.ru находятся эксклюзивные промокоды, коие доступны лишь гостям портала. Другие способы начисления средств ? автоматическая активация сразу последствии сотворения аккаунта и получение подарка по запросу в службу технической помощи. <a href=http://www.clicksordirectory.com/details.php?id=428849>http://www.clicksordirectory.com/details.php?id=428849</a> Свежий бонус начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в использовании своими, ну случае отыгрыша оператор возможность установить ограничение на вывод средств.К образцу, игроку выдаются бесплатные свои в заведении в размере пятидесяти либо 100 долларов (вейджер на которые сочиняет 100х). То есть, любому новоприбывшему игроку выскакивает манящая картинка, кот-ая сулит выплату всех зачисленных фирмой средств. Не стоит обращать внимания на казино бонус за регистрацию без депозита с сильно большой или довольно малеханькой суммой бонусов, поэтому собственно, в тщательно изучив все обстоятельства, здесь скорее, несомненно какой-то подкол. 1×slots официальный зеркало Бездепы с бесплатными вращениями предоставляют юзерам право вертеть барабаны игровых автоматов без снятия средств со счета. За любой раунд выплачивает казино. Число спинов ограничено и изредка превышает сотку. Если акция содержит большое безвозмездных игр, их начисление имеет быть разбито на некоторое дней.
1×slots сайт
Для казино, работающих онлайн, бездепозитные бонусы необходимы для вербования новых клиентов. Предложение сыграть на слотах без необходимости внесения настоящих денег — работающий метод для увеличения интереса к фирмы. После отыгрыша бездепа великоват шанс, собственно игроку понравится и он продолжит играть в казино, только сейчас теснее на собственные деньги.Чем ниже значение вейджера, тем легче отыграть и вывести бонус. Если Вы планируете заработать на бездепе, а не просто ознакомиться с свежим игровым клубом, то стоит игнорировать призов с высоким вейджером их практически не реально отыграть. С ними Вы сможете лишь протестировать забавы заведения. Так же стоит выделить то, собственно в каждом интернет казино установлен свой наибольший кешаут на бездепозитный бонус. Как управляло кешаут — это предельная сумма средств, кот-ая дешевая для вывода с бездепозитного приза. <a href=http://www.apeka.nl/member.php?action=profile&uid=3854>http://www.apeka.nl/member.php?action=profile&uid=3854</a> Приветственный бонус без депо ? подарок за регистрацию. Выдается средствами, фриспинами либо баллами. В последнем случае бонусные баллы применяются для роли в турнирах или обмена на настоящие средства. 1×слот регистрация в 1×slots casino Не желайте сыграть в азартные забавы, не рискуя средствами средствами, но получая в все выплаты? Подобную возможность предоставляют все наихорошие порталы с азартными увеселениями. В их числе большое честных и надежных интернет-казино на русском языке. Они завлекают свежих юзеров различными поощрительными событиями, включая бездепозитные, или благотворительные призы.В некоторых онлайн казино для получения бездепозитных призов не довольно просто зарегистрироваться на сайте клуба и подтвердить средства контактные данные. Дополнительно потребуется активация промокода.
1×slos регистрация в 1×slots casino
Главное превосходство спинов – вероятность изучить различные слоты. Также удастся насладиться бонусными раундами, испытывать фортуну в риск-туре и преувеличить выигрыш за счёт особенных знаков. Однако не только игровой процесс заслуживает внимание, как чем сосредоточиться на реальном выигрыше. <a href=http://romb4×4.ru/forum/threads/1×slots-oficialnyj-sajt-skachat.21366/>1×slots официальный сайт скачать</a> 1× slots casino официальный сайт <a href=http://users.atw.hu/vasutasadam/profile.php?lookup=184273>http://users.atw.hu/vasutasadam/profile.php?lookup=184273</a>
1 x slots casino
Иногда для получения призов необходимо спутаться с представителями службы поддержки. Удобнее всего с ними разговаривать в онлайн-сате, но иногда довольно запроса по электрической почте. <a href=https://play.ntop.tv/user/Jasperscant/>https://play.ntop.tv/user/Jasperscant/</a> 1хлот регистрация в 1×slots casino В случае установленного лимита на необходимую вывода выигрыша с бездепозитного бонуса, игрок не сможет вывести больше заявленной суммы.Бесплатный приз – кредиты, которые онлайн-казино начислит посетителю, не принуждая его пополнять игровой счет.
<b>Смотреть еще похожие новости:</b>
<a href=https://rolivka.online/forum/showthread.php?tid=28288>1×slots официальный сайт скачать на айфон</a>
<a href=https://mcmon.ru/showthread.php?tid=111331>скачать 1×slots на андроид мобильная версия</a>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=158085>1×slot зеркало рабочее регистрации на телефон придет</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Мы советуем не открещиваться от сходственных предложений известных казино. Выделите несколько мин. На регистрацию, получите бонус и попробуйте его отыграть. Может быть, сейчас удача будет на вашей стороне!
#6279 Rogerthoug
http://fastpillseasy.com/ cheap erectile dysfunction pills
#6280 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
Но а если вы уже профи по интернет казино, кликаем на красноватую кнопку «Получить» и Вы механически перейдете в онлайн казино; <a href=http://filmkachat.ru/>1×slot зеркало рабочее регистрации на телефон придет</a> С такими ординарными советами любое казино с бонусом за регистрацию способно принести в разы больше выгоды и полезности.При правильном подходе бездепы — это отличный способ играть на средства без растраты собственных средств. Есть количество рекомендаций, следуя коим возможно извлечь максимально пользы из похожих акций казино. Играть идет только на лицензированных площадках. Скриптовые сайты не дурачат с бонусными предложениями, хотя и употребляют пиратский софт с измененным ГСЧ. Выиграть на этих автоматах невероятно. <a href=https://www.find-topdeals.com/blogs/164113/%D0%A1%D1%80%D0%BE%D1%87%D0%BD%D1%8B%D0%B9-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%BE%D0%B1%D0%B8%D0%BB%D0%B5%D0%B9>https://www.find-topdeals.com/blogs/164113/%D0%A1%D1%80%D0%BE%D1%87%D0%BD%D1%8B%D0%B9-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%BE%D0%B1%D0%B8%D0%BB%D0%B5%D0%B9</a> Используйте превосходнейшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, чтобы заработать презенты за обычные деянья теперь сегодня получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высокой отдачей и прыткими выводами на электрические кошельки.Многие азартные клубы ограничивают сумму вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании акции, суммы Вы не можете исключить. Разница несомненно аннулирована, Вы даже не сможете создавать на нее ставки. 1×slots официальный сайт зеркало рабочее <a href=https://bbs.zzxfsd.com/forum.php?mod=viewthread&tid=42900>https://bbs.zzxfsd.com/forum.php?mod=viewthread&tid=42900</a>
1×slots регистрацию процедура займет всего лишь
<a href=http://theauction.com.au/my-account/>1×slots зеркало на сегодня</a> 1хслот зеркало B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax <a href=https://calibreapp.com/tools/core-web-vitals-checker/ua-car.com?scheme=https&path=%2F&context=origin>https://calibreapp.com/tools/core-web-vitals-checker/ua-car.com?scheme=https&path=%2F&context=origin</a> Срок отыгрыша — это этап, который наступает в момент активации приза и заканчивается с его закрытием. Пользователю нужно уложиться в данный временной промежуток, другому призовые средства аннулируются. Казино устанавливают список игр, ставки в которых засчитываются при расчете отыгранных денег. Если тайтл не входит в данный список, то ему быть недоступен для загрузки период деянья бонусного предложения.У каждого игорного заведения свои управляла и условия. Но, дабы получить бонусы, необходимо выполнить стандартные действия: 1×slots казино зеркало Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, solid зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.Несмотря на то, что данный вариант стимуляции со стороны азартных платформ довольно известен области подобных игр, далековато многим почитателям казино знаменито, что являют собой бездепозитные бонусы казино и как непосредственно их вероятно эксплуатировать.
1×slots регистрация то дальше необходимо пройти
Бездеп с фриспинами имеет охватывать всю коллекцию игр на веб-сайте либо разработки одного провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш может быть выведен после как, как юзер отыграет данную необходимую. Возможность расценить полный возможностей слотов — главное совершенство данной разновидности. Игроку становятся доступны те опции, которые отсутствуют в демонстрационном режиме, а возможность выиграть настоящие деньги добавляет ясных азартных чувств.У каждой игры средства требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система засчитает каждую ставку. В рулетке и покере сделать это намного труднее. Именно поэтому так главно внимательно читать обстоятельства получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой этой, то новички попросту «спустят бонус на ветер». Так что сможете отважно региться без всяких размышлений. Фортуна сегодня точно на вашей стороне. Не страшитесь, как последствие какого либо ущерба Вам совершенно не грозит. С такими бонусами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе.Обычно, бездепозитные бонусы выдаются под конкретные слоты с фиксированной ставкой, хотя их точно воспрещено использовать в игровых автоматах с прогрессивным джекпотом. Список игр, каких можно использовать бездеп, Вы отыщите в описании акции или можете уточнить у службы заведения. <a href=http://www.mmecaw.com/home.php?mod=space&uid=466401>http://www.mmecaw.com/home.php?mod=space&uid=466401</a> 1хслотс рабочее зеркало Промообъявления от казино мешают реальной картины и ориентированы на привлечение внимания юзеров. Понять, насколько высоки шансы остаться в плюсе, дозволит собственный тест критерий предложения:
1×slot зеркало рабочее этих способов предполагает регистрацию
Даже не выиграв крупную необходимую, игрок увлекательно проведет время, изнутри исследует работу площадки, воспримет геймплей автоматов. Все это без каких-либо финансовых рисков. Быть в курсе наилучших промоакций легко. Достаточно регулярно изучать перечень свежих интернет казино с выводом приза без депо в данном разделе. <a href=https://forums.scar-divi.com/topic/745362–1×slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D1%82%D0%BE-%D0%B4%D0%B0%D0%BB%D1%8C%D1%88%D0%B5-%D0%BD%D0%B5%D0%BE%D0%B1%D1%85%D0%BE%D0%B4%D0%B8%D0%BC%D0%BE-%D0%BF%D1%80%D0%BE%D0%B9%D1%82%D0%B8/>1×slots регистрация то дальше необходимо пройти</a> Ознакомьтесь с нашим списком лучших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего перечня и получите бездеп сразу. Хватайте наихорошие благотворительные предложения ниже и выигрывайте большие средства, не рискуя!Фриплей-бонусы. Бонусы за бесплатную забаву есть только в неких клубах. Они зачисляются незамедлительно в творенья профиля и срабатывают непродолжительное время. Если у вас нет медли истратить средства, они просто закончатся. Что касается времени, правило бонусы действуют протяжении 1-го часа. Но есть игорные заведения, коие готовы просто например жертвовать средства на игру. Для этого достаточно создать профиль. Чтобы исключить собственный выигрыш, вам сначала необходимо выполнить условия отыгрыша, обозначенные в критериях получения бездепозитного депо.Используйте лучшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из списка ниже, чтобы заработать подарки за простые действия и уже сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высокой отдачей и резвыми выводами на электрические кошельки. 1хслот 1хслотс регистрация перейти на 1×slots <a href=http://devitabel.ru/bitrix/redirect.php?goto=http://picnic-club.ru/bitrix/redirect.php?goto=http://iberis-group.ru/bitrix/redirect.php?goto=https://telegra.ph/Molochnaya-kuhnya-v-Moskve–novyj-vzglyad-na-obespechenie-semej-pitaniem-09–23>http://devitabel.ru/bitrix/redirect.php?goto=http://picnic-club.ru/bitrix/redirect.php?goto=http://iberis-group.ru/bitrix/redirect.php?goto=https://telegra.ph/Molochnaya-kuhnya-v-Moskve–novyj-vzglyad-na-obespechenie-semej-pitaniem-09–23</a> Чаще всего интернет-казино предлагают бездепозитные призы новым юзерам. Эта промо-акция довольно эффективно привлекает новичков, подталкивая их к открытию счета. Конечно, не все они становятся послушными клиентами, хотя сам прецедент регистрации аккаунта играет на руку заведению.Вывод выигрыша с бездепозитных бонусов казино – великодушный подарок от азартных клубов. Но дабы вывести свой доход, нужно выполнить ряд критерий:
1×slots зеркало подтвердит вашу регистрацию если говорить
Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном веб-сайте и выполните вход в индивидуальный офис, чтобы арестовать безвозмездные вращения с вейджером х40; <a href=https://forum.musicalpraxis.gr/forum/profile/margaretawilbur/>https://forum.musicalpraxis.gr/forum/profile/margaretawilbur/</a> Самый распространённый из похожих призов, естесственно же, бездеп на денек рождения клиента — приз вид фиксированной суммы либо фриспинов поступает на счёт игрока, а пользоваться им возможно на установленного периода медли. 1×slots регистрация 1×slots review live Бездепозитные бонусы реальными деньгами, коие возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадали.
<b>Смотреть еще похожие новости:</b>
<a href=https://021snyw.com/space-uid-53919.html>1×slots регистрация на официальном сайте</a>
<a href=https://www.donchillin.com/space-uid-382497.html>зеркала 1×slots</a>
<a href=http://polishcrazyclan.ugu.pl/member.php?action=profile&uid=272738>1×slots официальный сайт мобильная версия скачать</a>
<a href=http://forum.survival-readiness.com/viewtopic.php?p=436996>1×slots зеркало этих способов предполагает регистрацию</a>
<a href=http://forum.puppylinux.pl/index.php?topic=907.new#new>1×slots официальный регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вообще перейдя в казино — правила схожи в получении бездепозитных призов, в стереотипные управляла входит: подтвердить эл. Почту и аппарат, наполнить собственный индивидуальный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ. Шаг 5. Использование и отыгрыш. Бездеп должен быть применен в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера.
#6281 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet рабочее реального казино <a href=https://www.ossetia.tv/>porno Яна Троянова</a> Елена Лядова реального казино <a href=https://th-royalgclub.com/>казино рублях</a> порно с Юлия Ефимова скачать 1×bet на андроид бесплатно где казино порно с Виктория Синицина, фигуристка casino online зеркало 7k casino бонус casino автомат
#6282 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino 777 online
Отзывы читателей о бонусных акциях помогут составить эмоцию, хотя не запамятовывайте о субъективности личных комментариев. <a href=http://filmkachat.ru/>1×slots регистрация на 1хслотс</a> <a href=https://divisionmidway.org/jobs/author/cgifurniture-com/>https://divisionmidway.org/jobs/author/cgifurniture-com/</a> Бонус с зачислением денег на счет дает больше свободы действий. Пользователь сам подбирает, каким образом воспользоваться подаренными своими. Здесь также все работать ограничения на перечень дешевых игр, но обыкновенно эти рамки не например строги, как в промо с безвозмездными вращениями.На критериях отыгрыша бесплатных бонусов следует остановиться подробнее. С ними связаны нюансы, которые нельзя оставить без внимания. 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=https://sportavesti.ru/forums/users/xrusseo0306–2/>https://sportavesti.ru/forums/users/xrusseo0306–2/</a> Мы делаем акцент на ключевых положениях правил, рассказываем о территориальных ограничениях и вкратце информируем о других промоакциях обговариваемого казино.
1хслотс зеркало
<a href=https://timepost.info/showthread.php?tid=57505>x1 slots 1хслотс регистрация перейти на 1×slots</a> 1 x slots casino При использовании бездепозитным призом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют количество видов лимитов:Используйте наихорошие бездепозитные призы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из перечня ниже, чтобы заработать презенты за простые деяния и уже сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высокой отдачей и быстрыми выводами на электронные кошельки. <a href=http://www.pk10zc.com/space-uid-344246.html>http://www.pk10zc.com/space-uid-344246.html</a> Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных обстановок с казино, когда после отыгрыша бездепа вас не дадут вывести солидную сумму выигрыша. 1×slots casino online регистрация Фриспины — бесплатные вращения, коие дозволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся самым известным и преимущественным обликом бонуса — безвозмездные вращения иногда эффективнее и веселее в отыгрыше, чем другие облики бездепов.Принципиальным различием бесплатных призов от призов на депо считается недоступность надобности заносить деньги на акк. Из-за сего их часто именуют бездепозитными (not the slightest deposit bonuses).
1×slots подтвердит вашу регистрацию если говорить
Бонус начисляется игроку незамедлительно последствии регистрации и прохождения верификации в казино и не настятельно от клиента внесения депозита. Как правило, объем бонуса в подобном случае довольно застенчивый, впрочем позволяет новеньким познакомиться с игрой без риска настоящими средствами.Чаще всего, популярностью сервисы, эти как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное управляло. Финансовые средства выводятся лишь спустя что, эту платежную систему, которой огромный для пополнения депо. Если же игрок получил бездепозитный покерный приз, потребуется восполнить счет на минимальную сумму, которая сочиняет обычно 10 $. Во всех законных онлайн-казино Беларуси необходимо свидетельство паспортных данных для забавы — это заявка правительства государства.Каждая игровая платформа выделяется условиями по получению и отыгрышу бездепов. В правилах детально расписаны временные рамки, за которые надо(надобно) прокрутить вейджер. Также не забывайте тему наибольший объем ставки и наивысшую сумму выплаты. С иной стороны, чтобы получить бездепозитные призы казино, довольно истратить не более 1 минуты. <a href=https://forum.wapinet.ru/profile.php?id=8188>https://forum.wapinet.ru/profile.php?id=8188</a> Для верификации аккаунта надо(надобно) предоставить спецам технической помощи отсканированную копию паспорта и счета за коммунальные предложения, а также фотку банковской карты или экрана страницы электронного кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для доказательства личности.Чем ниже велечину вейджера, тем проще отыграть и вывести бонус. Если Вы планируете заработать на бездепе, не просто ознакомиться с новым игровым клубом, то стоит избегать бонусов с высоким вейджером их почти не реально отыграть. С ними Вы можете только протестировать игры заведения. 1×slots зеркало регистрация то дальше необходимо пройти Бездепы с бесплатными вращениями деют юзерам право вертеть барабаны игровых автоматов без снятия средств со счета. За любой раунд выплачивает казино. Число спинов ограничено и редко превышает сотню. Если акция включает в себя большое бесплатных игр, их начисление имеет быть разбито на некоторое дней.Для доказательства электрической почты, просто перейдите по интенсивной ссылке в письме, приобретенном от игрового заведения.
1×slots официальный зеркало
Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.Но а в вы теснее профи по интернет казино, кликаем на красную кнопку «Получить» и Вы автоматически перейдете в интернет казино; <a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=135860>1×slots зеркало видели такую регистрацию на</a> Будьте внимательнее при ознакомлении с правилами во избежание происхожденья конфликтных обстановок с казино, когда в отыгрыша бездепа вам не дадут исключить солидную сумму выигрыша. В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая доля игры. Важно, часто бездепозитные призы в казино выдаются с лимитированиями по максимальной выплате. В среднем можно рассчитывать на прибыль в несколько тыщ рублей. Как вывести выигрыш с приза без депо. Придётся доказать аккаунт документально, в некоторых заведениях. Процедура верификации неотклонима и делается каждым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате либо прочтите в правилах.В перечне требований к отыгрышу часто наличествуют лимиты на ставки при этой на личные деньги. Так, если отыграть надо(надобно) 30 000 рублей, а предельная сумма ограничена 30 рублями, то вращать барабаны светит 1000 раз. Эта особенность затрудняет соблюдение игроками условий по срокам деяния промоакции. 1×slots зеркало проходить регистрацию это отличный вариант <a href=https://amvnews.ru/forum/profile.php?mode=viewprofile&u=78353>https://amvnews.ru/forum/profile.php?mode=viewprofile&u=78353</a>
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Для казино, работающих онлайн, бездепозитные призы необходимы для привлечения свежих посетителей. Предложение сыграть на слотах без необходимости внесения настоящих средств — работающий метод для увеличения энтузиазма к компании. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит выступать в казино, лишь сейчас теснее на личные средства.Акционные предложения от казино есть в различных форматах. Часто призы даются в размен на депо. Игрок заносит платеж и получает средства, безвозмездные вращения прочие одобрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — картина бонуса, который гарантирован за выполнение конкретных поступков на сайте: <a href=http://www.italian-style.ru/Nasha_kompanija/forum/?PAGE_NAME=profile_view&UID=48905>http://www.italian-style.ru/Nasha_kompanija/forum/?PAGE_NAME=profile_view&UID=48905</a> 1хслотс официальный сайт зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=152175>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<a href=https://forum.spherecommunity.net/User-JamesLop>1×slots зеркало рабочее</a>
<a href=https://feederfishing.lt/en/forum/subkategorija-1–3/1237742–1×slots#1249216>1×slots зеркало проходить регистрацию это отличный вариант</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В любом казино с бездепозитным бонусом предусмотрены вейджеровые обстоятельства. Это один-единственный «подводный камень», который стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) устроить определённое число ставок. Чем круче бонус, тем сложнее выполнить обстоятельства, и напротив. Лишь популярностью и известные азартные заведения имеют позволить себе раздавать бездепы в виде добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депо, коие можно израсходовать в лучших аппаратах с высочайшей отдачей.
#6283 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрацию более популярный вариант это
Когда идет о денежных призах, казино постоянно устанавливают обстоятельства вейджера, коие нужно выполнить, чтобы исключить выигрыш.Простая процедура получения бездепозитного приза, кот-ая займет не более 2-х мин. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные. <a href=http://filmkachat.ru/>1хслотс рабочее зеркало на сегодня</a> Бездепозитные бонусы, как уже ясно, являются уникальной вероятностью приступать к игровому процессу абсолютно бескорыстно, то есть играть в онлайн казино безвозмездно и на имеющие средства сразу в регистрации аккаунта. Автоматы с таким депозитом имеют стать прекрасной возможностью поиграть для почитателей азарта с определенными лимитированиями в денег.Денежные средства. Третий приз за регистрацию без депозита – наличные. К раскаянью, лишь знаменитые и знаменитые клубы имеют дать деньги в руб. Либо долларах. С их подмогою появится насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед этим нужно исполнение определенных критерий. <a href=https://forum.prusa3d.com/forum/profile/3d-product-rendering/>https://forum.prusa3d.com/forum/profile/3d-product-rendering/</a> 1×slots бонус за регистрацию <a href=https://job.epday.com/home.php?mod=space&uid=634402>https://job.epday.com/home.php?mod=space&uid=634402</a> Хотя бесплатные бонусы начисляются без депо, не исключено, что для понадобиться заносить деньги. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты только после того, как новый клиент раз пополнит игровой счет.
скачать 1×slots на андроид мобильная версия
Зачастую бездепозитные призы казино для забавы предлагаются разными заведениями азартных игр в маркетинговых промоакций или в целях вербования к себя свежих игроков. Для бездепозитных призов в казино 2022 игроку не нужно пополнять счет до момента вывода желанных средств. <a href=https://irc.floobits.com/Jamesamiva>1×slots официальный сайт скачать</a> 1×slots рабочее зеркало В лицензионных бездепозитных казино выступать в азартные игры вправду неопасно. Наличие лицензии одобряет тот факт, собственно клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP.Подтверждение персональной инфы. Все казино требуют от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у пользователя иных аккаунтов (мультиаккаунт запрещен). <a href=http://youyanggse.co.kr/board/bbs/board.php?bo_table=free&wr_id=231577>http://youyanggse.co.kr/board/bbs/board.php?bo_table=free&wr_id=231577</a> 1 х слотс зеркало
1× slots зеркало
А ознакомиться с свежими онлайн казино, Вы сможете помощью бонусов с выводом прибыли, которые Вы сможете получить без депозита.Ещё одно распространённое акционное предложение – привлекательный подарок с неблаговидными требованиями. К примеру, клуб обещает $100 в бездепа, но с вейджером х80 или х100. Отыграть такой вейджер фактически невозможно и потому другого концентрироваться на больше занимательных промоакциях. Зарегистрируйтесь. Для регистрации почаще всего достаточно установить собственный номер телефона и почтовый адрес, в чего ввести приобретенный код из СМС. Возможно, требуется показать промокод. В правилах промоакции несомненно написано, где его надобно вводить. Иногда это надо делать при регистрации, от — уже после сотворения личного кабинета, на отдельной странице. <a href=http://www.igmph.com/bbs/board.php?bo_table=free&wr_id=190738>http://www.igmph.com/bbs/board.php?bo_table=free&wr_id=190738</a> При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, коие можно предназначить игре в казино. 1×slots зеркало видели такую регистрацию на Фриспины – благотворительные вращения с фиксированной ставкой, которые возможно использовать в конкретных игровых автоматах.
1хслотс официальный сайт зеркало
Некоторые клубы механически начисляют приз на аккаунт игрока последствии выполнения условий получения, хотя случаются истории, когда бонус надо(надобно) активировать игроку самому. Есть некоторое методов активации бонуса: Бесплатный приз – кредиты, которые онлайн-казино начислит посетителю, не принуждая его пополнять игровой счет. 1 x slots casino <a href=http://drugs.ie/?URL=perevodvsem.ru/proxy.php?link=http://letstab.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/3HsEht3uvYr>http://drugs.ie/?URL=perevodvsem.ru/proxy.php?link=http://letstab.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/3HsEht3uvYr</a> Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные способы и расценить особенности, труднодоступные при ирге в демо режиме. Многие новые клиенты переходят в количество неизменных, а оператор получает долгосрочную прибыль.
1х слотс зеркало регистрация в 1×slots casino
Онлайн гемблинг развивается с любым деньком все больше и больше, новые бренды создаются не по дням а по часам. Новые интернет казино проделывают вступительные промоакции для игроков, для того собственно бы зарекомендовать себя, и что, этим самым предлагают бездепозитные бонусы за регистрацию, собственно бы не пропустить такую вероятность — как пользоваться новым бездепом, советуем навещать наш вебсайт как возможно чаще, самое смачное и свежие несомненно добавляться в этом же списке.Варианты выигрыша зависят от Вашей успеха и условий игорного портала. Выше мы сказали, что кое-какие бездепозитные бонусы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются другие, все, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность передовых игр на деньги, возможно выиграть невероятные суммы. Сегодняшние игровые автоматы либо видео слоты, как их именуют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000. <a href=https://warezlover.xyz/user/StevenFab/>https://warezlover.xyz/user/StevenFab/</a> В основном случаев благотворительные призы начисляются в кредитах, которые невозможно незамедлительно вывести со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д. ). О нем читайте ниже.Шаг 5. Использование и отыгрыш. Бездеп обязан быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. 1× slots зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://xn–80akbkalsbeeafq6a6b2f.xn–p1ai/forum/messages/forum1/topic31887/message186144/?result=new>1×slots бонус за регистрацию</a>
<a href=http://theauction.com.au/my-account/>1× слот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины начисляются по определенной ставке. После их активации игроку нужно запустить разъем и увериться, что в нем показываются безвозмездные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода в отыгрыша определяется оператором и изредка выше 5 000 рублей.
#6284 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
часы казино порно с Владимир Минеев (ММА) <a href=https://m.repost.news/>пин up casino</a> Светлана Ходченкова лучшие букмекерские конторы <a href=https://slon-ru.com/>1×bet зеркало рабочее</a> casino x пари букмекерская контора porno Мария Шарапова макао казино как выиграть в казино casino андроид порно с Матвей Сафонов (футбол)
#6285 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия скачать
Все любят получать подарки. Согласитесь, почти каждый играющий человек несомненно сильно рад, в получит безвозмездный презент для игры в интернет казино просто за регистрацию или же бонус за внесенный депозит, так нарекаемые приветственные бонусы для свежих игроков. Соответственно эти интернет клубы будут больше модны и преимущественны у игроков при выборе казино для игры. Топ казино непрерывно обновляется и прибавляются новые и интересные игровые клубы с симпатичной бонусной политикой и всеми возможными прерогативами, к коим относятся такие бонусы как фриспины за регистрацию, валютные бездепозитные призы, еще великодушные призы за внесенный депозит.Не стоит незамедлительно же отрицаться от приветственных подарков в похожих казино. Администрация готова начислить деньги либо фриспины, хотя предварительно работники обязаны увериться, собственно вы не аферист. Дело никаких, что развелось очень большое охотников за призами. Они выучились дурачить систему и зарабатывать солидные суммы денег. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало рабочее</a> Чаще всего казино бонус за регистрацию без депозита даёт вероятность запустить любой машина. Но лучше внимательно ознакомиться с критериями. Иногда для игры доступны лишь определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, лучше начать знакомство с миром пыла непосредственно с «одноруких бандитов».За вербование друга ? масштабах партнерской программы заказчик получает вознаграждение за вербование новых пользователей. <a href=https://www.friend007.com/forums/thread/7390/>https://www.friend007.com/forums/thread/7390/</a> Третитй бездепозитный бонус за регистрацию – валютные свои. К раскаянью, начислить рубли или баксы способны только знаменитые и популярностью клубы. С их помощью возможность насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком. 1хслот зеркало сайта <a href=http://021bababa.org/space-uid-503394.html>http://021bababa.org/space-uid-503394.html</a>
1 x slots casino
Прямо в арестуйте безвозмездные вращения за регистрацию без депозита и начинайте коллекционировать призовые комбинации из-за крупных выигрышей!Чаще всего, известные сервисы, такие как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное управляло. Финансовые свои выводятся лишь через ту платежную систему, коей популярностьюимели для пополнения депо. Если же игрок получил бездепозитный покерный бонус, потребуется пополнить счет на наименьшую сумму, которая составляет обычно десять $. 1×slots официальный сайт скачать С этими ординарными советами каждое казино с призом за регистрацию способно принести в разы больше выгоды и полезности.Онлайн гемблинг развивается с любым днем все больше и больше, свежие бренды создаются не по дням а по часам. Новые интернет казино проделывают вступительные акции для игроков, для того собственно бы зарекомендовать себя, и тем самым предлагают бездепозитные призы за регистрацию, что бы не пропустить такую возможность — как пользоваться свежим бездепом, советуем посещать наш вебсайт как возможно чаще, самое смачное и новые несомненно добавляться в данном же списке. <a href=https://23region.info/user/Darenrek/>https://23region.info/user/Darenrek/</a> Бездепы шансы заходить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой или баллами. 1×slots на любой вкус как пройти регистрацию Во время забавы в казино, выигрыши, приобретенные благодаря бесплатным призовым фондам, суммируются и включаются в совместную необходимую для отыгрывания. Однако, если фортуна улыбнется и получится отыграть все призы, игровое заведение гарантированно разрешит вывести финансовые свои. Сумма вывода несомненно зависеть от лимита, утвержденного непосредственно в данном учреждении. Поэтому, внимательно надо(надобно) разбирать управляла выдачи анлимитных депо.
1×slots зеркало которую указывали при регистрации кстати
Бездепозитные бонусы — это презенты от казино вид бонусных денег или фриспинов для игровых автоматов, которые начисляются на аккаунт игрока после процедуры регистрации на веб-сайте заведения. Для получения этих поощрений депо не требуется.Но не думать, собственно снабжая пользователей такими бонусами, казино занимается спонсированием. Ведь размеры вознаграждений, в, не великие (средним размером от 5 до 20 долларов). И на эти средства налагаются определенные обстоятельства и ограничения, обязательные к исполнению игрока, случае в последствии он вожделеет получить все свои выигранные финансы. Если вы новичок в этом деле и только попали в неизведанную вами область пыла — счет предложений как бездепозитные призы без пополнения.Чтобы помощи увериться в превосходстве бездепозитных бонусов, достаточно зарегистрироваться в казино и получить поощрение. <a href=https://computer.ju.edu.jo/Lists/Alumni%20Feedback%20Survey/DispForm.aspx?ID=93150>https://computer.ju.edu.jo/Lists/Alumni%20Feedback%20Survey/DispForm.aspx?ID=93150</a> Для тех, кто лишь подумывает испытать свою фортуну, еще для профессиональных игроков, ищущих новые площадки для выигрышей, основные лицензированные казино часто организуют разные промоакции, и лучшее услуг за время – как для новичков, например и для профессиональных игроков – бездепозитный бонус за регистрацию.Чтобы выступать даром на реальные деньги в казино, порой довольно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные деяния. 1х слотс зеркало регистрация в 1×slots casino Существует ли стратегии для отыгрыша бездепозитных бонусов? К огорчению нет, на выигрыши либо проигрыши с бонусов, казино или игрок повлиять не, отдача игр случается от создателей игр.
1 хслот регистрация в 1×slots casino
<a href=http://www.skmecca.com/2011/04/14/leave-the-world-better-than-you-found-it/comment-page-11/#comment-124404>1×slots официальный зеркало рабочее</a> Но на некоторых азартных платформах подобные гонорары все получить и уже зарегистрированные пользователи. В этом случае, призы предоставляются в рамках уникальных промоакций либо же неким игрокам повторяющий акционного предложения, которое прибывает на почту с целью «вернуть» игрока в свое казино.При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, коие можно посвятить ирге в казино. Ещё одно распространённое акционное предложение – симпатичный подарок с сомнительными притязаниями. К примеру, клуб сулит $100 в качестве бездепа, но с вейджером х80 либо х100. Отыграть подобный вейджер фактически невероятно и поэтому чем концентрироваться на больше интересных акциях.Если при регистрации указать промокод, можно гарантировано получить приз. Где арестовать ваучер? Посетите на блоги или форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В заключительное время игорные дома начали афишироваться в кинокартинах и телесериалах. Присмотритесь и наверняка заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных руб. 1хслотс рабочее зеркало <a href=http://art-fresh.org/bitrix/click.php?goto=http://toolbarqueries.google.vu/url?q=http://sztkom.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/8VwmBQzqNP7>http://art-fresh.org/bitrix/click.php?goto=http://toolbarqueries.google.vu/url?q=http://sztkom.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/8VwmBQzqNP7</a>
1×slots регистрация на официальном сайте
Можно ли наваривать на бездепозитных призах? Это не работа, тут как повезет, случае в любом предложенном безедепе, вы будете откручивать вейджер и выводить, за возможно именовать везением, и дополнительной добавкой к вашему бюджету.А ознакомиться с новыми онлайн казино, Вы можете с призов с выводом выгоды, коие Вы можете получить без депо. Но на азартных платформах похожие гонорары шансы получить теперь зарегистрированные юзеры. В таком случае, бонусы предоставляются масштабах уникальных акций либо же неким игрокам в виде акционного предложения, коие приходит на почту с целью «возвратить» игрока в свое казино. <a href=https://ai.igcps.com/home.php?mod=space&uid=687476&do=profile>https://ai.igcps.com/home.php?mod=space&uid=687476&do=profile</a> 1×slots казино зеркало Автоматическая активация на самой удобной, хотя ручной метод содержит перед ней достоинства. Прежде чем применять вознаграждение от казино, стоит заранее определить, сколько времени потребуется на исполнение всех условий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала действия приза.
<b>Смотреть еще похожие новости:</b>
<a href=https://karakol.com.kg/user/Jameskef/>1×slots промокод при регистрации 2025</a>
<a href=http://aficionado.pl/showthread.php?146627–1×slots-casino-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-1×slots-review-live&p=166118>1×slots casino регистрация 1×slots review live</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных требований, не обязательной верификации. Если на сайте учтена обязательная процедура подтверждения личности, то исключить выигрыш удастся лишь последствии ревизии данных. Приготовьтесь заполнить анкету и отправить в техподдержку документ, подтверждающий личность.
#6286 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино большая 1×bet 1хбет <a href=https://sovsekretno.net/>казино смотреть</a> скачать сайт букмекерской конторы Львова-Белова Мария Алексеевна порно <a href=https://repost.news/>пин ап букмекерская контора</a> карты казино porno Илона Маркова, хоккеистка фреш казино online casino 1×bet рабочее на сегодня Мухтиярова Елена Вячеславовна порно казино вход
#6287 Charlesgunnyhttp://filmkachat.ru
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Исходя из этого, просто не присутствует мудрых оснований махнуть рукой на получение такого бонуса при регистрации. И, что, на подобный безвозмездной основе у вас есть все шансы выиграть деньги и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, называют бесплатными онлайн платформами для игр.Подарки на праздники ? приуроченные к праздничным датам, требующие символического отыгрыша либо начисляются без это. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду. <a href=http://filmkachat.ru/>1×slots сайт</a> Отыграв бездепозитный приз в казино с выводом также придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если подобное ограничение присутствует, то единоразово исключить получится лишь необходимую, не превышающую размер приобретенного бонуса. <a href=https://wowgilden.net/forum-topic_475313.html>https://wowgilden.net/forum-topic_475313.html</a> 1×slots зеркало на сегодня <a href=https://sex18babes.com/user/RichardRap/>https://sex18babes.com/user/RichardRap/</a> Обыкновенные бездепозитные призы в размере от 3-х до 20 $ созданы чтобы, чтобы, дабы в игры заходили все свежие и свежие игроки. Здесь, скорее, будет лимитирование на максимальный выигрыш. Важно, дабы перед минимальным вкладом был отключен приз за 1-ое пополнение счета, и геймер не попадет на повторный вейджер.
1×slot рабочее зеркало
Мы собрали и выпустили перечень лучших бездепозитных казино с бонусами за регистрацию, коие гарантируют щедрые выигрыши и моментальные выплаты. 1×slots зеркало на сегодня <a href=http://buzuluk56.ru/redirect?url=http://pravo.by/bitrix/redirect.php?goto=http://scrapgoods.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/pQjzjy4z8jx>http://buzuluk56.ru/redirect?url=http://pravo.by/bitrix/redirect.php?goto=http://scrapgoods.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/pQjzjy4z8jx</a> Какие призы возможность еще получить не бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, любое онлайн казино предлагает игрокам выгодное предложение на 1-ый депозит, вы совершаете депо, ваш депо увеличивается в двое либо том в трое, тем наиболее начать выступать возможно с больше солидной суммой, так же не забываем про вейджер на призы.При отыгрыше бездепов, учитывайте временные ограничения. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток. 1×slots казино зеркало Активация происходит с помощью промокодов, которые вводятся в личном офисе последствии регистрации. Среди спецпредложений в списке Casino.ru находятся эксклюзивные промокоды, коие доступны лишь посетителям портала. Другие способы начисления средств ? автоматическая активация сразу в творения аккаунта и получение презента по запросу в службу технической помощи.Риск-игра по равным шансам – Также казино может воспрещать выполнять обстоятельства по отыгрышу с помощью раунда на удвоение, который предлагается в слотах, видео-покере и некоторых других забавах.
1×slots casino online регистрация
Бонус начисляется игроку незамедлительно после регистрации и прохождения верификации в казино и не требует от посетителя внесения депозита. Как правило, объем бонуса в схожем случае достаточно стыдливый, впрочем разрешает новичкам познакомиться с игрой без риска настоящими средствами.На странице представлены бездепозитные бонусы за регистрацию в казино редкая награда за которой гонятся все игроки как новенькие, так и мастера. Мы также уделяем огромное внимание на присутствие призов при формирование рейтинга казино на средства. Бездепозитный приз это вероятность играть бесплатно и выиграть реальные средства. <a href=https://elliottkwgn41852.bleepblogs.com/30804823/deepnude-the-dark-side-of-ai-technology-and-its-ethical-implications>https://elliottkwgn41852.bleepblogs.com/30804823/deepnude-the-dark-side-of-ai-technology-and-its-ethical-implications</a> Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша призов. Заведения всегда устанавливают наивысшую ставку, допустимую по условиям вейждера. 1×slots официальный зеркало
1×slots casino online регистрация
Также учтите, собственно некоторые игровые платформы сужают список государств, коие готовы получить предложенный бездепозитный приз за регистрацию. К примеру, существуют онлайн-заведения, выдающие похожие бонусы лишь жильцам конкретных стран. К примеру, онлайн казино 777 Оригинал дает бездепозитный приз только игрокам из России и государств СНГ. Или напротив, пичкают вознаграждением всех, кроме жителей неких государств (из этого, по внимательно изучать перечень, дабы потом не возникло практически вопросов и претензий). <a href=https://test.soclanovtsy.ru/topic/40293–1×-slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%B2–1×slots-casino/>1× slots регистрация в 1×slots casino</a> casino 1×slot <a href=https://australianweddingforum.com/weddings/member.php?action=profile&uid=22201>https://australianweddingforum.com/weddings/member.php?action=profile&uid=22201</a> Нет. Для получения бездепозитного приза в казино нужна обязательная регистрация на сайте. Играть в слоты бесплатно и без регистрации возможно только в демо режиме.Возьми свой подарок. Чаще всего бонус активируется незамедлительно в регистрации. Но бывают ситуации, когда нужно забежать в личный кабинет либо написать в справочную службу.
1хслотс казино зеркало
Выбирая бесплатный приз, внимательно изучайте управляла. Убедитесь, что для возможно брать роль в промоакции. Уточните, в каких забавах возможно скорпулезно условия вейджера. При надобности задавайте вопросы адептам саппорта. Но есть азартные заведения, готовые просто например вручить средства на игру. Для этого довольно создать профиль. Чтобы вывести выигрыш, сперва нужно выполнить вейджеровые условия, прописанные в критериях получения бездепа. <a href=https://prpack.ru/user/HenryFlext/>https://prpack.ru/user/HenryFlext/</a> Какие призы я могу еще получить считая бездепозитного приза за регистрацию в казино? По мимо бездепозитного бонуса, любое онлайн казино предлагает игрокам выгодное предложение на 1-ый депозит, вы совершаете депозит, ваш депозит увеличивается в двое либо в в трое, тем самым начать играть можно с больше крупной суммой, например же не забываем на вейджер на бонусы. рабочее зеркало 1×slots Необходимость отыгрыша. Вейджер ситуации повыше, чем для призов за депо. И пока свои не отыграны, исключить их невозможно.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Представьте момент, когда при ставке в 10 рублей Вы получите сходственное умножение. Миллион руб. За одно вращение, собственно абсолютно вполне. Поэтому вопрос, сколько можно выиграть остаётся не. Предлагаем проверить без. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный приз и проверяйте фортуну в деле. Разумеется, вывести деньги не так просто. Однако шансы есть у всех. В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая доля забавы. Важно, зачастую бездепозитные призы в казино выдаются с лимитированиями по наибольшей выплате. В среднем возможно рассчитывать на выгода в количество тысяч рублей. Как исключить выигрыш с бонуса без депо. Придётся подтвердить аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном доказательстве учетной записи спрашивайте в интернет чате либо прочтите в правилах.
#6288 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
Максимальная ставка ? устанавливается в валюте счета и ограничивает размер ставки за один спин. В случае ее превышения бонус может быть аннулирован. Также в правилах может находиться запрет на размещение ставок определенного вида, к, по одинаковым шансам в рулетке (другими, на чет или нечет, красноватое или темное и т.д.). <a href=http://filmkachat.ru/>1×slots казино мобильная версия</a> Классическая разновидность бонуса за создание аккаунта. Его преимущество заключается сомнений, собственно клиент может самостоятельно подбирать аппараты и создавать ставки в их. Иногда перечень игровых автоматов ограничен оператором, но все равно это другого, чем один-единственный доступный разъем, как когда с использованием фриспинов.Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и. Когда игроку надеется много фриспинов, администрация возможность разбивать их начисление на количество дней. Бесплатные вращения предоставляются для конкретного слота, который указывается в правилах промоакции. <a href=http://www.gothicpast.com/myomeka/posters/show/79259>http://www.gothicpast.com/myomeka/posters/show/79259</a> рабочее зеркало 1хслотс <a href=https://testebi.mixgeo.ge/user/JosephGed/>https://testebi.mixgeo.ge/user/JosephGed/</a> Используйте превосходнейшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из списка ниже, чтобы заработать презенты за обычные действия и уже сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и прыткими выводами на электрические кошельки.Чаще всего применяются коды. Их надо(надобно) вносить в особые окошки регистрационной анкеты, в речь о пригласительных призах, или в особом разделе собственного кабинета игрока.
1×слот регистрация в 1×slots casino
Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются незамедлительно последствии творенья профиля и активны недолговременное время. Если не успеете израсходовать средства, они просто сгорят. Касаемо времени, как призы активны на часа. рабочее зеркало 1хслотс Бесплатный бонус – кредиты, коие онлайн-казино начисляет клиенту, не заставляя его пополнять игровой счет.Для выбора азартного заведения Вы можете пользоваться списком наших казино с призами за регистрацию. На нашем сайте мы выпустили список бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, что часть призов неповторимые и доступны только для гостей нашего вебсайта по-специальному промо-коду или по оригинальной ссылке. Кроме того, для любого бонуса мы подготовили подробный обзор, каком Вы узнаете как получить и отыграть одобрение и как вывести собственный выигрыш с бездепа. <a href=https://able2know.org/user/charlesmealm/>https://able2know.org/user/charlesmealm/</a> 1х слот регистрация в 1×slots casino
1×slots регистрация
<a href=https://forumsadovodov.com.ua/memberlist.php?mode=viewprofile&u=64570>https://forumsadovodov.com.ua/memberlist.php?mode=viewprofile&u=64570</a> Для отыгрыша бонуса казино обязует игрока поиграть на необходимую, в некоторое один превышающую необходимую полученного бонуса — здесь выгода фирмы очевидна.Все бесплатные бонусы кажутся заманчивыми. Кто же откажется от возможности сыграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далеко не все бездепозитные бонусы в равной степени привлекательны для рассудительного посетителя. 1×slots регистрация на официальном сайте Выбирая безвозмездный приз, пристально изучайте управляла. Убедитесь, что для возможно брать участие в промоакции. Уточните, в каких забавах возможно выполнять обстоятельства вейджера. При необходимости задавайте вопросы адептам саппорта.Oтыгpaть бонус с обозначенным вeйджepом, достичь нужно сдeлaть cтaвoк нa cумму, превышающую размер бонуса в количество раз.
1хслотс казино зеркало
Однако в критериях скрываются «подводные камни», которые не позволят исключить солидную необходимую либо же вы не успеете отыграть вейджер. Поэтому профессионалы рекомендуют отобрать безвозмездные вращения за регистрацию в казино без депозита, дабы поднабраться навыка и получить реальный шанс на победу.Если при регистрации указать промокод, можно гарантировано получить приз. Где брать ваучер? Посетите на блоги либо форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В последнее время игорные дома начали афишироваться в кинокартинах и телесериалах. Присмотритесь и скорее заметите промокод, который принесёт 500 либо 1 000 бонусных рублей. <a href=https://your-portal.at.ua/forum/18–63360–2#88641>1× slots casino зеркало</a> Создание аккаунта. На сайте казино необходимо обнаружить регистрационную форму и наполнить пустые поля личными данными. Иногда на этом шаге потребуется указать только адрес электрической почты и пароль, но чаще надо заполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д.). Нужно указывать лишь настоящие данные, потому впоследствие они станут проверены. 1хслот официальный сайт зеркало <a href=http://intentionalpress.com/author/porsedroppa/>http://intentionalpress.com/author/porsedroppa/</a> Выбирайте лучшие благотворительные призы с помощью обзоров на Casinoz – и пусть вам сопутствует удача при отыгрыше бонусных кредитов!На условиях отыгрыша безвозмездных бонусов идет остановиться подробнее. С ними связаны аспекты, коие нельзя забыть без внимания.
1×slots бездепозитный бонус за регистрацию
Как лишь получите бездеп в казино, всё равно не запамятовывайте инспектировать электронную почту. Некоторые игорные клубы каждый веселят интенсивных гэмблеров приятными призами. Чаще всего получить презент можно в преддверии веселья, на денек рождение, за привлечение друга. А того распространённым призом является надбавка к депозиту. Нужно чем пополнить счёт, и азартное заведение прирастит его на 50–100%.Для казино, работающих интернет, бездепозитные призы необходимы для вербования свежих посетителей. Предложение сыграть на слотах без надобности внесения реальных денег — работающий метод для повышения интереса к фирмы. После отыгрыша бездепа великоват шанс, собственно игроку понравится и он продолжит играть в казино, только теперь теснее на собственные деньги. Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в обязательном порядке необходимо восполнить счет в казино. Для депозитных бонусов, эта процедура не нужна, так как депозит уже сделан. <a href=http://hefeiyechang.com/home.php?mod=space&uid=409970>http://hefeiyechang.com/home.php?mod=space&uid=409970</a> Выбирая безвозмездный бонус, внимательно изучайте верховодила. Убедитесь, собственно вас можно брать участие в акции. Уточните, в каких забавах можно исполнять обстоятельства вейджера. При необходимости задавайте вопросы адептам саппорта.Бездепозитные бонусы казино это экономическая компенсация, предлагаемая юзерам на дармовой основе и возможность выступать в интернет казино бесплатно. Если ассоциировать их с поощрениями за вклад, в которых свои выдаются только впоследствии первоначального пополнения счета, то бездепозитные вознаграждения получаются даром. То есть, играющий получает возможность создавать ставки на уже быть финансы, коие выдаст заведение, исполняя, при этом, обыденные деяния, чтобы их извлечь (здесь идет о регистрация, удостоверении личности с использованием номера телефонного, оформления заявки и т.д.). 1×slots регистрация на сайте 1×slots ru com Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную процедуру активации бонуса без депо. Внимательно прочтите до конца. Многие новенькие проделывают ошибки на этапе регистрации и поэтому имеют получить презент.Таким образом онлайн казино получает потенциального игрока. Возможно в или настоящем он захотит поиграть на средства деньги. Так трудятся бездепозитные призы в интернет казино. Здесь очень подходит выражение, безвозмездные сыр посещает лишь в мышеловке. Начинающие игроки шансы не осознавать опасность пыла. Однако со временем понимания делается больше. Это тема для отдельного обсуждения.
<b>Смотреть еще похожие новости:</b>
<a href=https://elclasificadomx.com/author/jameslog/>1×slots подтвердит вашу регистрацию если говорить</a>
<a href=http://big.bestforums.org/viewtopic.php?f=7&t=10214>1х слот 1хслотс регистрация перейти на 1×slots</a>
<a href=https://10nsk.ru/user/JosephSuple/>1хлот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Ещё одно распространённое акционное предложение – симпатичный презент с сомнительными требованиями. К образцу, клуб сулит $100 виде бездепа, но с вейджером х80 или х100. Отыграть такой вейджер фактически невозможно и поэтому другого, как концентрироваться на больше занимательных акциях.
#6289 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
какие казино pin up casino пин ап <a href=https://krtka.info/>пин ап casino</a> porno Дарья Мороз казино без <a href=https://rucriminal.info/>казино зеркало сегодня</a> 1×bet зеркало рабочее xbet пинап казино 1win casino porno Анна Сидорова, керлингистка сайт винлайн букмекерская контора порно с Ирина Сидоркова порно с Анна Калинская (теннис)
#6290 Charlesgunnyhttp://filmkachat.ru
1 xslots рабочее зеркало
Основное правило получения бездепа ? творимый акк должен быть у юзера первым и единственным. Наличие нескольких аккаунтов строго воспрещено. Проверка проводится по имени, e-mal, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депозита нужно блюсти простую очередность деяний. <a href=http://filmkachat.ru/>1× slots официальный</a> Представьте момент, когда при ставке в 10 рублей Вы получите сходственное умножение. Миллион руб. За одно вращение, что вполне вероятно. Поэтому вопрос, сколько можно выиграть остаётся закрытым. Предлагаем проверить других. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный бонус и инспектируйте фортуну в деле. Разумеется, исключить средства сложно. Однако шансы есть у всех. <a href=https://waappitalk.com/shopavto>https://waappitalk.com/shopavto</a> 1× slots регистрация в 1×slots casino <a href=http://bocauvietnam.com/member.php?1465809-Zacherystype>http://bocauvietnam.com/member.php?1465809-Zacherystype</a> Наиболее знаменитые вознаграждения между гэмблеров – бездепозитные призы казино. Это не удивительно, так можно получить бесплатные вращения либо виртуальные кредиты, и этом не придётся пополнять счёт, рисковать личностными средствами. Удастся насладиться разнородными развлечениями причем выиграть крупную сумму, избегая серьёзного риска.Бездепозитные призы, как теснее понятно, являются оригинальной возможностью обратиться игровому процессу абсолютно бескорыстно, словами играть в интернет казино бесплатно и на существующие средства сразу после регистрации аккаунта. Автоматы с этим депо все замерзнуть великолепной возможностью поиграть для почитателей азарта с определенными ограничениями в финансах.
1×slots актуальное зеркало
Возможность протестировать новые игры, не рискуя собственными средствами и разработать собственную стратегию забавы.За счёт спинов получится запустить разные интернет слоты, протестировать стратегии и поднабраться опыта. Фишка сомнений, что вращения начисляются на лучшие аппараты с уникальными опциями и высочайшей отдачей. Не запамятовывайте, собственно в любом акционном предложении предусмотрены особые требования – временные ограничения, максимальный объем ставки, список дешевых игр. <a href=https://feederfishing.lt/forum/profile/117121-rabofreesi>1 хслот регистрация в 1×slots casino</a> 1х слот 1хслотс регистрация перейти на 1×slots Это также бесплатные деньги, коие поступают на аккаунты новоиспеченных игры последствии регистрирования. А необыкновенность таких призов состоит в том, что обретенные деньги обязательно следует применять в продолжении назначенного времени.Используйте наилучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из перечня ниже, дабы заработать презенты за обычные деянья теперь сейчас получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высокой отдачей и быстрыми выводами на электрические кошельки. <a href=http://nvkb.ru/forum/index.php/user/106491/>http://nvkb.ru/forum/index.php/user/106491/</a> При ирге на бонусные средства запрещается играть в игровые автоматы с прогрессивным джекпотом и игры из радела live casino. Кроме как, кое-какие казино дают бездеп на один либо количество определенных слотов, и в других играх Вы не сможете на их выступать.Осталось выбрать казино с призом за регистрацию и сделать профиль. После активации подарка выигрыш зависит от Фортуны и способностей. 1× slots сайт С иной стороны, намного легче отобрать бездепозитные фриспины за регистрацию в казино и прямо в начать вращать барабаны в наилучших слотах. Главная особенность спинов что, нет, собственно они предусмотрены для лучших автоматов. Удастся столько пройти дополнительные раунды, но и увеличить сумму выигрыша, заработать респины и другие внутриигровые презенты.
1 x slots casino
Но рядах азартных платформах похожие вознаграждения шансы получить теперь зарегистрированные юзеры. В таком случае, бонусы предоставляются в оригинальных акций или же некоторым геймерам вид акционного предложения, коие приходит на почту с целью «возвратить» игрока в свое казино. Призовые начисления без депо имеют предоставляться для роли в турнирах интернет казино. Потратить перечисленные деньги возможно самая в данной акции. Условия их проведения включают в себя ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться этим предложением, другого, как выучить его управляла. <a href=http://lineyka.org/user/Franktek/>http://lineyka.org/user/Franktek/</a> В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с бесплатных вращений. Прибыль, коию Вы заработаете на этом бездепе можно назначать на вывод без какого либо отыгрыша. 1×slots сайт Классическая разновидность приза за творение аккаунта. Его превосходство содержится никаких, что заказчик возможность помощи выбирать аппараты и делать ставки в них. Иногда список игровых автоматов ограничен оператором, хотя все одинаково это чем, чем единственный дешевый слот, как в случае с внедрением фриспинов.Онлайн-казино тщательно продумывают бонусные обстоятельства, коие необходимо изучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша прочие лимитирования.
рабочее зеркало 1хслотс
Если площадка дарует бездеп за регистрацию, то процедура его получения проста. Нужно только завести аккаунт на сайте и активировать его, подтвердив адрес электрической почты, номер аппарата либо иные данные, коие требует оператор. Перед этим нужно увериться, что пользователь располагается на официальном сайте казино, а не на мошеннической площадке. Для получения предоставленных призов вам пригодиться — ПК либо мобильное устройство, и остальное дело за небольшим.Вышеописанная первопричина и является основным интересным, в которого операторы отдают доля своей выгоды на различные маркетинговые расходы и рекламные кампании. А наиболее действенным здесь станут выступать именно бездепозитные бонусы казино 2022 с выводом за регистрацию. 1×slots зеркало рабочее на сегодня <a href=http://d90894u1.bget.ru/user/GeraldThits/>http://d90894u1.bget.ru/user/GeraldThits/</a> Зарегистрироваться в казино по специальной ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефонного и электронную почту). Для доказательства номера телефона необходимо в личном профиле показать свой номер и надавить кнопку „Подтвердить номер телефонного“, дальше Вы получите sms-сообщение с кодом, который нужно ввести в отвечающее фон. Для доказательства электронной почты, перебежать по интенсивной ссылке в письме от казино.
casino 1×slot
<a href=http://www.igmph.com/bbs/board.php?bo_table=free&wr_id=279994>http://www.igmph.com/bbs/board.php?bo_table=free&wr_id=279994</a> 1×slots официальный demo регистрация в 1×slots casino Доступность — бездепозитные призы в казино чаще всего предоставляются свежим игрокам, но случаются случаи, когда приз могут получить и действующие посетители.
<b>Смотреть еще похожие новости:</b>
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1827#post-52408>1× slots регистрация в 1×slots casino</a>
<a href=https://www.formulersupport.com/Thread-1×slots-%D0%BA%D0%BB%D1%83%D0%B1%D1%831×slots-1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%BF%D0%B5%D1%80%D0%B5%D0%B9%D1%82%D0%B8-%D0%BD%D0%B0–1×slots–151685>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Oтыгpaть приз с обозначенным вeйджepом, желаемого нужно сдeлaть cтaвoк нa cумму, превышающую размер бонуса в количество раз. Вывод выигрыша с бездепозитных бонусов казино – щедрый подарок от азартных клубов. Но дабы исключить собственный заработок, нужно выполнить ряд условий:
#6291 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
винлайн букмекерская контора официальный 7k casino зеркало <a href=https://strelochnik.com/>casino betting</a> официальное казино вход промокод 1×bet <a href=https://sovsekretno.net/>1×bet скачать бесплатно</a> kometa casino про казино cometa casino зеркала официальных сайтов казино официальные букмекерские конторы gama casino промокод 1×bet
#6292 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
Онлайн гемблинг развивается с каждым деньком все больше и больше, свежие бренды создаются не по дням а по часам. Новые интернет казино проделывают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и что, этим наиболее предлагают бездепозитные бонусы за регистрацию, что бы не пропустить такую возможность — как пользоваться свежим бездепом, советуем навещать наш вебсайт как можно чаще, самое аппетитное и свежие будет добавляться в данном же списке. <a href=http://filmkachat.ru/>1×slots казино зеркало</a> Этот тип бонуса будет добавлен на Ваш аккаунт в удачной процедуры регистрации с внедрением номера аппарата. Если избрать другой способ творения учетной записи, бездеп не будет добавлен на Ваш аккаунт. <a href=https://www.empowher.com/groups/blogs-4/posts-33>https://www.empowher.com/groups/blogs-4/posts-33</a> 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=http://stomport.com/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://toolbarqueries.google.gg/url?q=http://stroykanasha.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/D4YvGKlX9Vs>http://stomport.com/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://toolbarqueries.google.gg/url?q=http://stroykanasha.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/D4YvGKlX9Vs</a>
скачать 1×slots официальный сайт
Прибывшие на аккаунт финансы бездепозитные призы предназначаются, главном, только для новоиспеченных юзеров, которые раньше не имели собственного аккаунта в данном казино. Исходя из сего, если раньше у игрока был изготовлен депо, то, по всей вероятности, у него больше не несомненно возможности рассчитывать на получение такого бонуса в определенном заведении. <a href=https://www.donchillin.com/space-uid-382497.html>1×slots бездепозитный бонус за регистрацию</a> 1хслотс рабочее зеркало С этими ординарными советами любое казино с призом за регистрацию способно принести в разы больше выгоды и полезности. <a href=http://ru.monumentefunerare.md/index.php?subaction=userinfo&user=GlennJourf>http://ru.monumentefunerare.md/index.php?subaction=userinfo&user=GlennJourf</a> 1×slot регистрация Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, чтобы была возможность исключить выигрыш.
1×slots рабочее зеркало на сегодня
Обычно, бездепозитные призы выдаются под конкретные слоты с фиксированной ставкой, но их точно воспрещено применять в игровых автоматах с прогрессивным джекпотом. Список игр, в которых возможно применять бездеп, Вы найдете в описании промоакции либо можете уточнить у саппорта заведения.Бездепозитный бонус за регистрацию в казино — это стартовый подарок в виде денежного начисления или безвозмездных вращений для свежих игроков заведения, для получения которого надо заносить депо. <a href=http://x70181pe.beget.tech/user/StevenHum/>http://x70181pe.beget.tech/user/StevenHum/</a> Следует подчеркнуть, собственно бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом.В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с даровых вращений. Прибыль, которую Вы заработаете на таком бездепе возможно ставить на вывод без какого или отыгрыша. 1хслотс казино зеркало
1×slots casino регистрация 1×slotscasino09k online
Законодательство, регулирующее азартные игры в различных государствах, влияет на возможности операторов. В результате юзеры из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это возможность быть как глубокий отказ в доступе, например и невозможность загружать игры отдельных изготовителей.Реже призы без депозита начисляются постоянным игрокам. С их поддержкой администрация постарается вычесть ценных клиентов либо вожделеет поблагодарить за преданность верных посетителей. Но гораздо чаще для сходственных целей используются такие акции: <a href=http://sharecovid19story.com/memberlist.php?mode=viewprofile&u=5122>1×slots официальный сайт зеркало</a> Многие азартные клубы ограничивают необходимую вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании промоакции, суммы Вы не можете вывести. Разница несомненно аннулирована, Вы в не сможете делать на нее ставки. Однако в условиях исчезают «подводные камешки», коие не разрешат вывести крупную сумму или же вы не успеете отыграть вейджер. Поэтому мастера советуют арестовать бесплатные вращения за регистрацию в казино без депо, чтобы поднабраться опыта и получить настоящий шанс на победу. 1×slots регистрацию процедура займет всего лишь <a href=https://bahchisaray.org.ua/index.php?showtopic=6223&st=0&gopid=84613&#entry84613>https://bahchisaray.org.ua/index.php?showtopic=6223&st=0&gopid=84613&#entry84613</a>
1×slots официальный зеркало
Важно, удостоверьтесь в том, что ранее не регились в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи.С не отыгранным бонусом запрещается превосходить объем максимальной ставки. Нарушение сего обстоятельства в аннулирование выигрыша. Бонусы без депозита при регистрации считаются наиболее красивыми как для опытных игроков, так для и начинающих. Получив это вознаграждение, клиент возможность выступать на настоящие деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные призы в интернет-казино Рунета, еще условия их активации и выигрыша.Обыкновенные бездепозитные бонусы в размере от трех до двадцати долларов созданы для того, дабы в забавы заходили все новые и свежие игроки. Здесь, всего, несомненно лимитирование на максимальный выигрыш. Важно, дабы перед минимальным вкладом был отключен приз за первое пополнение счета, и игры не попадет на повторный вейджер. <a href=http://iminthai.com/home.php?mod=space&uid=224090>http://iminthai.com/home.php?mod=space&uid=224090</a> Свежий бонус начисляется в виде валютных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в пользовании своими, а в случае отыгрыша оператор возможность установить лимитирование на вывод денег. 1хслотс официальный сайт зеркало Выбирайте наилучшие благотворительные бонусы за обзоров на Casinoz – и пусть вам сопутствует удача при отыгрыше бонусных кредитов!Главным нюансом в появлении данных вознаграждений состоит сомнений, собственно пустив их в ход, компьютерные ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он благодаря призам какой-нибудь выигрыш или моментально спустит все только собственно прибывшие финансы). То есть, казино снабжает игрока возможностью на дармовой основе выступать во всевозможные слоты и даже спонсирует забаву.
<b>Смотреть еще похожие новости:</b>
<a href=https://dev.eff.one/forumdisplay.php?fid=10>1×slots актуальное зеркало</a>
<a href=http://vn-info.net/user/Josephkam/>рабочее зеркало 1×slots</a>
<a href=https://masstr.net/showthread.php?tid=72603>казино 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Да, у даровых бонусов есть дефекты. Прежде всего, они обычно большие. Кроме как, условия вейджера по ним постоянно жесткие. Но все неимение риска проделывает их довольно привлекательными для посетителей. Мы подготовили список, где есть практически актуальные и свежие бездепозитные призы казино, коие вам получить безвозмездно. Для наших юзеров есть особые предложения неповторимые бонусы, которые вы ни не отыщите, их мы обозначили особой красной плашкой «Exclusive».
#6293 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Диана Шнайдер (теннис) казино ставка <a href=https://specreporter.com/>леон букмекерская контора</a> сколько казино винлайн букмекерская контора официальный <a href=https://strelochnik.com/>где казино</a> рабочие зеркала казино casino рабочее зеркало почему казино рокс казино приложения букмекерских контор casino скачать кент казино
#6294 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
Если вы облюбовали для себя некоторое брендов которые вас больше всего приглянулись, для постоянной забавы! Таких гемблеров казино довольно предпочитает и оценивает, за частую эти игроки становятся VIP игроками заведения, которым часто поступают прибыльные предложения в виде призов, так же туда входит и бездепозитные.Иногда виде одобрения за регистрацию имеют выдаваться билеты для участия в турнирах. Условия их проведения очень выделяются, поэтому мы советуем ознакомиться с каждым предложением раздельно. <a href=http://filmkachat.ru/>1×slots регистрация на 1хслотс</a> <a href=https://www.fanfiction.net/u/16465534/>https://www.fanfiction.net/u/16465534/</a> 1×slots casino регистрация на сайте <a href=http://darksside.com/index.php?subaction=userinfo&user=assortedpet39>http://darksside.com/index.php?subaction=userinfo&user=assortedpet39</a>
1×slots зеркало
<a href=https://forum.bandariklan.com/showthread.php?tid=365326>скачать 1×slots официальный сайт</a> 1× slots casino зеркало Не трудно додуматься, собственно not the slightest down payment bonuses практически ни не посещают большими. Чаще всего речь о пяти–тридцати долларах (либо эквиваленте этой суммы в иной денежной). <a href=http://ariangallery.com/bbs/board.php?bo_table=free&wr_id=58544>http://ariangallery.com/bbs/board.php?bo_table=free&wr_id=58544</a> 1×slots casino регистрация 1×slots review live Бездепозитные бонусы истинными деньгами, которые возможно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадались.Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам воспрещено начислять бонусы посетителям, не имеющим денежных средств на счете. Мы предлагаем рассмотреть актуальные призы онлайн-казино с лицензией, которые соблюдают законодательство РБ.
1хслотс зеркало на сегодня
Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы быстро получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, появляется настоящий шанс победу!Самые свежие бездепозитные бонусы в казино за регистрацию 2022 года с выводом выгоды находятся на данной странице. Посетитель имеет оценить условия получения и начать выступать на деньги без внесения депо. При данном игроку важно разуметь, на каких критериях и какими методами у вывести приобретенный выигрыш. Для этого необходимо оценить список присоединенных платежных систем. <a href=https://www.google.fm/url?sa=t&url=https://doctorlazuta.by/>https://www.google.fm/url?sa=t&url=https://doctorlazuta.by/</a> При регистрации по свидетельствовать лишь достоверную информацию. Когда учетная запись несомненно активна, появится доступ в Личный кабинет. В нем возможно избрать денежную, установить промокод и разузнать подробные правила получения и отыгрыша бездепа. Краткая информация об акции часто присутствует именно на регистрационной форме. 1×slots промокод при регистрации 2025 Мы собрали и опубликовали список превосходнейших бездепозитных казино с призами за регистрацию, коие гарантируют великодушные выигрыши и мгновенные выплаты.Основное различие что, нет, собственно для получения бездепа нужно пополнять баланс в казино. Но считая сего, есть ряд прочих отличий:
1×slots зеркало регистрация в 1×slots casino
Вознаграждения за получение VIP-статуса ? начисляются масштабах программки лояльности при достижении еще значения либо выдаются индивидуально менеджерами службы поддержки. <a href=http://griffhunter.com/boards/memberlist.php?mode=viewprofile&u=993>казино 1×slots</a> В качестве призов онлайн казино часто предлагает выдачу фриспинов, то есть безвозмездных вращений игрового барабана. Виртуальные монеты возможно применять для обучения в покерной школе или для игры в казино.Приветственный бонус без депозита ? подарок за регистрацию. Выдается средствами, фриспинами либо баллами. В последнем случае бонусные баллы используются для роли в турнирах или обмена на настоящие деньги. сайт 1× slots casino <a href=http://elka54.ru/forum/?PAGE_NAME=profile_view&UID=102476>http://elka54.ru/forum/?PAGE_NAME=profile_view&UID=102476</a> Популярность интернет казино растёт и всё больше пользователей начинают интерес азартными забавами. Бездепозитные бонусы 2022 года, это оригинальные презенты за регистрацию. С их поддержкою свежие игроки все получить безвозмездные вращения либо деньги на баланс за 1 регистрацию. С в игорных заведений в онлайне, бездепозитные бонусы стали знаменитейшим способом привлечения игроков. Подобные промоакции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш вебсайт собрал наилучшие предложения из онлайна на 2022 год. Воспользуйтесь каким даром и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша необходимо выполнить обстоятельства.Отказ в прохождении верификации. Если заказчик не хочет либо не дать документы, подтверждающие его личность, профиль несомненно заблокирован совместно, вкупе со всеми бонусными начислениями.
1×slots официальный сайт скачать
Промокод – определённая композиция символов, коию нужно установить в соответствующее фон при творении учетной записи или активировать в собственном профиле игрока в разделе с бонусами. <a href=https://love-n-magic.ru/index.php?subaction=userinfo&user=Arnoldarbit>https://love-n-magic.ru/index.php?subaction=userinfo&user=Arnoldarbit</a> 1хслотс официальный сайт зеркало Одним из предлогов отдавать преимущество, льготу одному либо другому заведению заключается в привлекательности предлагаемых промоакций и безвозмездных услуг. Безвозмездные фриспины, выдаваемые без нужды создавать какой-нибудь лепта, в перечне находится далековато не в конце.Для выбора азартного заведения Вы можете пользоваться перечнем наших казино с бонусами за регистрацию. На нашем веб-сайте мы опубликовали список бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, собственно часть бонусов неповторимые и доступны только для гостей нашего вебсайта по-специальному промо-коду либо по оригинальной ссылке. Кроме такого, для любого бонуса мы подготовили доскональный обозрение, каком Вы узнаете как получить и отыграть одобрение и как вывести свой выигрыш с бездепа.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/8613/#comment-354348>рабочее зеркало 1хслотс</a>
<a href=https://praisenpray.org/forums/showthread.php?tid=96470>1×slots casino регистрация на сайте</a>
<a href=http://forum.animogen.com/viewtopic.php?f=9&t=1569935>скачать 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Раздача бонусов может быть посвящена различным датам: календарные праздники, деньки рождения игроков, годовщина открытия казино и т. Д. Подарок выдается вид денег, фриспинов либо баллов для накопления и обмена на предложения оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода этой суммы понадобиться выполнить ряд притязаний. Таким образом, заведение пробует показать себя своим потенциальным игрокам, а такой маркетинговый ход как казино бонус без депо за регистрацию привлекает очень большое внимания к игорному заведению и обеспечивает постоянный поток новых гостей и грядущих посетителей игрового онлайн клуба.
#6295 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать сайт букмекерской конторы казино рулетка <a href=https://t.me/vchkogpu_ru>1×bet официальный</a> почему казино казино можно <a href=https://rucriminal.info/>casino online зеркало</a> пинко casino пина букмекерской конторы casino daddy pin ап casino букмекерская контора мостбет 1×bet зеркало букмекерская контора леонов
#6296 Charlesgunnyhttp://filmkachat.ru
1×slots бонус за регистрацию
Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих притязаний, считая неотъемлемой верификации. Если на веб-сайте учтена неотъемлемая процедура подтверждения личности, то вывести выигрыш получится только последствии ревизии данных. Приготовьтесь наполнить анкету и выслать в техподдержку документ, подтверждающий лицо. <a href=http://filmkachat.ru/>x1 slots 1хслотс регистрация перейти на 1×slots</a> За привлечение друга ? масштабах партнерской программы клиент получает вознаграждение за привлечение новых юзеров.Для получения бездепа необходимо пригласить в игру по реферальной ссылке нового посетителя: он должен зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на необходимую, обозначенную в критериях промоакции. <a href=https://forms.yandex.com/cloud/6716307302848f0c3b0dc022/>https://forms.yandex.com/cloud/6716307302848f0c3b0dc022/</a> Так что основное отличие подарка на депозит от бездепа – неотъемлемое пополнение счёта. Вы сможете внести депозит и преумножить стартовый капитал либо арестовать бездеп и этом не придётся рисковать своими сбережениями. Поспешите выполнить простые требования, и администрация ресурса начислит щедрое поощрение! онлайн казино 1×slots <a href=https://kivy.club/home.php?mod=space&uid=19864>https://kivy.club/home.php?mod=space&uid=19864</a> Многие казино деют в маркетинговых целях благотворительные призы самая для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой вебсайт по партнерской ссылке с нашего портала.
1×slots регистрация на официальном сайте
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=90444&result=reply>1×slots регистрация на 1хслотс</a> 1× slots сайт Осталось избрать казино с бонусом за регистрацию и сделать профиль. После активации презента выигрыш находится от Фортуны и способностей.В бонусную программу многих операторов входят регулярные бездепы. Это бессрочные акции, поощряющие активных неизменных игроков. Популярный формат — раздача фриспинов по определенным дням недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депо в мена на накопленные баллы преданности. <a href=http://sp-fun.ru/bitrix/redirect.php?goto=http://portuguese.myoresearch.com/?URL=racurs.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/rnV-SAvAyra>http://sp-fun.ru/bitrix/redirect.php?goto=http://portuguese.myoresearch.com/?URL=racurs.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/rnV-SAvAyra</a> Для всех бездепозитных бонусов действует наибольший лимит на выигрыш. Он указывает максимальную необходимую, коию возможность получить, играя на бонусные кредиты. Как лишь вам получится выполнить притязания вейджера, допустимый максимум будет переведен с бонусного счета на основной, а остаток будет списан. скачать 1×slots на андроид мобильная версия
1×slots рабочее зеркало
<a href=https://nc750.ru/member.php?u=3607>https://nc750.ru/member.php?u=3607</a> Приглашаем делиться мнениями о призах. Это поможет иным юзерам выбирать наиболее прибыльные предложения. 1×slots зеркало подтвердит вашу регистрацию если говорить Подтвердите лицо, предоставив оператору казино средства паспортные данные. Инструкции обыкновенно несложные, основное — конкретно им идти. Если написано, собственно «на фото обязаны быть видны все хорошо угла страницы паспорта» — сделайте именно такое фото.Постарайтесь отыграть вейджер, чтобы замечена вероятность забыть заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электрической кошелёк, карту, телефон.
1×slots зеркало регистрация то дальше необходимо пройти
Основное отличие сомнений, собственно для получения бездепа не пополнять баланс в казино. Но не сего, есть ряд прочих различий: <a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=93702>1×слот регистрация в 1×slots casino</a> Практически все интернет казино с бездепозитным призом за регистрацию учитывает программу преданности — систему поощрения постоянных посетителей, кот-ая состоит из большого уровней. При достижении игроком одного уровня на его счёт поступает бонус. Чем выше уровень — что, этим щедрее приз. 1 х слотс зеркало <a href=https://gowwwlist.com/%D0%BA%D0%B0%D1%87%D0%B5%D1%81%D1%82%D0%B2%D0%B5%D0%BD%D0%BD%D1%8B%D0%B5-%D0%B2%D0%B5%D1%87%D0%BD%D1%8B%D0%B5-%D1%81%D1%81%D1%8B%D0%BB%D0%BA%D0%B8_250271.html>https://gowwwlist.com/%D0%BA%D0%B0%D1%87%D0%B5%D1%81%D1%82%D0%B2%D0%B5%D0%BD%D0%BD%D1%8B%D0%B5-%D0%B2%D0%B5%D1%87%D0%BD%D1%8B%D0%B5-%D1%81%D1%81%D1%8B%D0%BB%D0%BA%D0%B8_250271.html</a> Если вы облюбовали себе несколько брендов коие вас больше всего полюбились, для неизменной игры! Таких гемблеров казино довольно любит и ценит, за частую такие игроки становятся VIP игроками заведения, коим часто поступают прибыльные предложения вид бонусов, например же туда входит и бездепозитные.
1×слот регистрация в 1×slots casino
Фриспины начисляются по конкретной ставке. После их активации игроку нужно запустить разъем и увериться, собственно в нем показываются бесплатные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода в отыгрыша ориентируется оператором и редко превышает 5 000 руб. <a href=http://d90894u1.bget.ru/index.php?subaction=userinfo&user=ocihybu>http://d90894u1.bget.ru/index.php?subaction=userinfo&user=ocihybu</a> Используйте наихорошие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, дабы заработать подарки за простые деянья и уже сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и прыткими выводами на электронные кошельки.За вербование приятеля ? в партнерской программки клиент получает вознаграждение за вербование свежих пользователей. 1×slots casino зеркало 3. Подтвердить данные. В зависимости от клуба, нужно привязать телефон или почту, показать персональную информацию;
<b>Смотреть еще похожие новости:</b>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=337336>1×слот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток. Наш перечень включает в себя превосходнейшие бездепозитные призы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по главным характеристикам:
#6297 WinnerCasinohttps://winner.directorio-de-casinos-mx.com
<a href=https://winner.directorio-de-casinos-mx.com/>winner casino</a>
Download client online casino winner – win today! <a href=https://winner.directorio-de-casinos-mx.com/>www.winner.directorio-de-casinos-mx.com</a>
#6298 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Каждый игрок обязан сперва отчетливо изучить условия по получению и отыгрышу приглянувшегося подарка. Если всё устраивает, поспешите отобрать безвозмездные спины за регистрацию в казино без депозита с выводом и без отыгрыша и напрямик в начать вращать барабаны топовых слотов. <a href=http://filmkachat.ru/>1 x slots</a> Так собственно главное различие подарка на депозит от бездепа – обязательное пополнение счёта. Вы можете внести депозит и преувеличить стартовый капитал или забрать бездеп и при не придётся рисковать собственными сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начисляет щедрое поощрение!Вейджер (или вагер) ? это минимальная сумма ставок, которую необходимо устроить для вывода валютного бонуса. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение. <a href=https://www.exoltech.us/blogs/246291/Mastering-the-Art-of-Home-Design-Drafting-A-Professional-s>https://www.exoltech.us/blogs/246291/Mastering-the-Art-of-Home-Design-Drafting-A-Professional-s</a> Фриспины — благотворительные вращения, коие разрешают игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины числятся наиболее популярным и преимущественным видом бонуса — безвозмездные вращения порой эффективнее и веселее в отыгрыше, чем другие облики бездепов. 1 x slots casino <a href=http://www.foryoudrive.com/bbs/board.php?bo_table=free&wr_id=243968>http://www.foryoudrive.com/bbs/board.php?bo_table=free&wr_id=243968</a> Получить приветственный бонус имеют только свежие посетители онлайн-казино. Способы описаны в условиях акции любого законного казино, почаще всего это:
1×slots официальный сайт зеркало
На бесплатные призы онлайн-казино практически практически распространяется ограничения по стране проживания посетителей. Даже в вас разрешается открывать счет и играть на деньги в заведении, это еще не значат, собственно для доступны not the slightest down payment bonuses.Бездепозитные бонусы реальными деньгами, коие возможно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадали. <a href=http://www.carshowsociety.com/forum.php/topic,11220.new.html#new>1хслотс 1хслотс регистрация перейти на 1×slots</a> сайт 1× slots casino При помощи такового поощрения оператор может также привлекать клиентов, которые ранее проявляли активность на веб-сайте, хотя по некий основанию прекратили играть. В этом случае промокод высылается пользователю по электронной почте либо в виде SMS. <a href=http://www.mxeia.com/home.php?mod=space&username=spookyimbecile9&do=profile>http://www.mxeia.com/home.php?mod=space&username=spookyimbecile9&do=profile</a> 1×slots регистрация 1×slotscasino 56 online Также случаются случаи, когда казино начислит оговоренный бонус в регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам.
1×slots регистрация на сайте
В лицензионных бездепозитных казино выступать в азартные игры вправду неопасно. Наличие лицензии подтверждает что, этот факт, что клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP. Как прочие акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такового предложения являются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих гостей и разрешает им составить эмоцию о функционале, не рискуя значительными совокупностями. <a href=https://www.nederpix.nl/profile.php?mode=viewprofile&u=73617>https://www.nederpix.nl/profile.php?mode=viewprofile&u=73617</a> 1×slots актуальное зеркало Ещё одно распространённое акционное предложение – симпатичный презент с сомнительными притязаниями. К образцу, клуб сулит $100 виде бездепа, хотя с вейджером х80 или х100. Отыграть подобный вейджер фактически нереально и поэтому чем концентрироваться на более занимательных промоакциях.
1×slots зеркало сайта
Бездепозитные бонусы, как уже понятно, являются уникальной возможностью приступать к игровому процессу абсолютно безвозмездно, то есть играть в интернет казино бесплатно и на существующие средства незамедлительно последствии регистрации аккаунта. Автоматы с этим депозитом могут стать прекрасной возможностью сыграть для почитателей пыла с определенными ограничениями в финансах.Представьте момент, когда при ставке в 10 руб. Вы получите подобное умножение. Миллион рублей за одно вращение, что вполне вероятно. Поэтому вопрос, сколько можно выиграть остаётся закрытым. Предлагаем выяснить помощи. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный бонус и инспектируйте удачу в деле. Разумеется, вывести деньги сложно. Однако шансы есть у всех. Операторы гемблинга утверждают, что так они сражаются с бонус-хантерами. Впрочем, критики считают, что этим казино пытаются устроить из случайного постояльца неизменного игрока.Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие появляются у новичков. Свежий бонус начисляется в виде валютных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в пользовании своими, а в случае отыгрыша оператор возможность установить лимитирование на вывод денег. 1× slots зеркало <a href=http://www.aadd2.net/vb/member.php?u=33921>http://www.aadd2.net/vb/member.php?u=33921</a>
1хслотс официальный сайт зеркало
Такие поощрения дозволяют даром протестировать свежее казино, разобраться с игровым ходом онлайн слотов, заработать и вывести небольшую необходимую средств. Как правило, новоприбывшие игроки начала хотят ознакомиться с методами ввода и вывода денежных средств и сроки исполнения поданных заявок дабы конкретно понимать, как стремительно появится исключить свой казино приз за регистрацию без депо на электронный кошелек или же банковскую карту. К счастью для всех играющих, внутри определенных холдингов, все казино соперничают меж собой. Ведь если бы определенную компанию давало лишь одно онлайн-заведение, то ли бы клиенты заметили казино с бонусом за регистрацию и могли бы рассчитывать только на вознаграждение вид приза на первое инвестиция. К любому заведению периодически следует привлекать свежих игроков, что, конечном, лишь на руку всем играющим.Новые клиенты онлайн-казино без первого депозита имеют выяснить собственную удачливость. К что, этому же есть возможность преобразовать бездепы в реальные средства за регистрацию в казино, однако желаемого приз нужно отыграть согласно условиям промоакции. <a href=http://www.audipiter.ru/user/Chrisrix/>http://www.audipiter.ru/user/Chrisrix/</a> Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша призов. Заведения практически устанавливают максимальную ставку, допустимую по условиям вейждера. 1×slots казино мобильная версия Активация по промокоду употребляется в различных видах бездепов. Если идет о приветственном бонусе, то набор символов возможно разузнать на крупнейшей странице, в регистрационной форме или письме, которое отчаливает пользователю для подтверждения e-mail. Акции имеют проводиться вместе с партнерскими площадками. Обычно код размещается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется одноразовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном кабинете либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем актуальный код для активации в описании любого промо.3. Подтвердить данные. В зависимости от клуба, нужно привязать телефонный либо почту, указать индивидуальную информацию;
<b>Смотреть еще похожие новости:</b>
<a href=http://board.eternityrpc.com/user-369.html>casino 1×slot</a>
<a href=http://fin-molitor.com/forum/viewtopic.php?f=2&t=405860>казино 1×slots официальный сайт</a>
<a href=https://adminclub.org/showthread.php?tid=59811>1×slots зеркало рабочее на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Даже не выиграв солидную необходимую, игрок увлекательно проведет время, изнутри исследует работу площадки, оценит геймплей автоматов. Все это без каких-либо финансовых рисков. Быть в курсе наилучших акций легкостью. Достаточно регулярно учить перечень свежих онлайн казино с выводом бонуса без депо в этом разделе. Иногда для получения бонусов необходимо связаться с представителями службы. Удобнее всего с ними беседовать в онлайн-сате, но время достаточно запроса по электронной почте.
#6299 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Захарова Мария Владимировна порно с Васильева Татьяна Викторовна <a href=https://7club7.com/>porno Елизавета Туктамышева</a> порно с Дарья Касаткина (теннис) 1×bet зеркало на сегодня 1×bet xyz <a href=https://sovsekretno.net/>casino вход</a> скачать pin casino скачиваемые казино официальные зеркала казино casino онлайн зеркала казино лучшие казино бесплатно 1win букмекерская контора
#6300 Charlesgunnyhttp://filmkachat.ru
x1 slots 1хслотс регистрация перейти на 1×slots
Особую изюминку видео слотам присваивают оригинальные знакы. С их свет активизируются разные призы. Вы сможете запустить дополнительный степень и увеличить необходимую выигрыша. Есть знаки, которые замещают негодные элементы и сами создают выигрышные комбо. Не стоит забывать и на бонус-тур. После любого удачного спина есть шанс прирастить сумму выигрыша в два либо четыре раза.Онлайн-казино с бездепозитными призами ставят посетителям условия для пользования бездепами, поэтому перед ролью в промоакции никакого досконально ознакомиться со всеми правилами и аспектами промоакции. Условия имеют дотрагиваться получения приза, его использования и следующего вывода денежных средств если, тогда, выигрыша. <a href=http://filmkachat.ru/>1×slots зеркало регистрация то дальше необходимо пройти</a> Однако в условиях скрываются «подводные камешки», которые не разрешат вывести солидную необходимую или же вы не успеете отыграть вейджер. Поэтому профессионалы советуют отобрать безвозмездные вращения за регистрацию в казино без депозита, чтобы поднабраться опыта и получить настоящий шанс на победу.Вы наверняка, как и все любите получать презенты и бездепозитные призы казино. Игорные дома брали в привычку одаривать гэмблеров приятными призами. Стать владельцем приветственного презента возможно за творение профиля или пополнение счёта. Второй вариант более увлекательный, так клубы готовы удвоить депо! Но если вы новичок и лишь знакомитесь с миром пыла, превосходнее воспользуйтесь призом за регистрацию. <a href=https://www.swiatobrazu.pl/forumgaleria/thread/view/id/589>https://www.swiatobrazu.pl/forumgaleria/thread/view/id/589</a> Стоит отметить, собственно бездепозитный бонус выдается лишь взрослым новеньким, которые, в свою очередь, все пригласить собственных приятелей и знакомых, того рассчитывающих на поощрительную программку преданности. Подобная технология замечена между создающих онлайн-казино для популяризации и расширения трафика. Покер румы и спонсоры способствуют увеличению своей посещаемости, методом вербования свежих игроков. Бонусы – это уникальный шанс для вероятных соучастников забавы, которые могут опробовать софт покер рума и убедиться, будут ли они в него выступать либо нет. Новый игрок испробует свои силы с настоящими оппонентами в казино.Индивидуальные поощрения выдаются за совершение действий: подписку на аккаунты площадки в соц сетях, установку мобильного прибавленья или официального посетителя для ПК. В большинстве казино срабатывают программы преданности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на следующий уровень часто сопровождается выдачей бездепа. 1×slot казино зеркало <a href=http://www.scoreit.org/p/tyronetum>http://www.scoreit.org/p/tyronetum</a> У нас на сайте Вы найдете перечень бонусов без депо в испытанных казино и доскональную информацию о том как их получить и применять.
1×slots зеркало регистрация то дальше необходимо пройти
Срок отыгрыша — это этап, который начинается в момент активации приза и завершается с его закрытием. Пользователю необходимо уложиться в данный временной зазор, по призовые средства аннулируются. Казино устанавливают перечень игр, ставки в которых засчитываются при расчете отыгранных средств. Если тайтл не входит в данный перечень, то возможность быть недосегаем для загрузки в действия бонусного предложения. <a href=https://www.findaspermdonor.com/viewtopic.php?f=25&t=88784>1×slots на любой вкус как пройти регистрацию</a> 1×slot официальный сайт Лишь известные и известные азартные заведения все позволить себе раздавать бездепы вид дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, коие можно истратить в лучших аппаратах с высочайшей отдачей.Каждая игровая платформа отличается критериями по получению и отыгрышу бездепов. В правилах детально расписаны кратковременные рамки, за которые надо(надобно) прокрутить вейджер. Также не забывайте на наибольший объем ставки и наивысшую необходимую выплаты. С иной стороны, чтобы получить бездепозитные призы казино, довольно израсходовать не более 1 минуты. <a href=https://king-wifi.win/wiki/User:AngeliaLaughlin>https://king-wifi.win/wiki/User:AngeliaLaughlin</a> Если ординарными текстами, бездепы – это определённая сумма средств либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно забирать презенты. Но есть некоторые нюансы. Существуют игорные дома, которые перед что, этим как начислить призы настоятельно привязать телефон, предоставить копии документов. 1×slots промокод при регистрации 2025 Бездепозитные призы, как уже понятно, являются уникальной вероятностью приступать к игровому процессу полностью бескорыстно, другими выступать в онлайн казино безвозмездно и на место свои сразу в регистрации аккаунта. Автоматы с этим депозитом могут стать прекрасной вероятностью поиграть для поклонников пыла с определенными лимитированиями в финансах.Иногда виде бездепа, казино дарит минимальный приз (до 50 рублей), из-за которого надо заморачиваться.
1 xslots рабочее зеркало
Некоторые клубы механически начисляют бонус на акк игрока после исполнения критерий получения, но случаются ситуации, когда бонус надо(надобно) активировать игроку самому. Есть количество методов активации бонуса:Мы собрали и опубликовали перечень наихороших бездепозитных казино с бонусами за регистрацию, которые гарантируют великодушные выигрыши и моментальные выплаты. Верификация важна для добавочной безопасности и подсобляет техподдержке выявить бонусхантеров и плутов. Кстати, рядах платформах выводы крупных сумм доступны лишь последствии подтверждения личности.В лицензионных бездепозитных казино играть в азартные забавы вправду неопасно. Наличие лицензии одобряет тот факт, что клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP. <a href=http://forum.changeducation.cn/home.php?mod=space&uid=500284&do=profile&from=space>http://forum.changeducation.cn/home.php?mod=space&uid=500284&do=profile&from=space</a> 1×slots казино мобильная версия Автоматическая активация может самой комфортной, хотя ручной способ имеет перед ней достоинства. Прежде чем использовать вознаграждение от казино, стоит заблаговременно определить, сколько медли требуется на исполненье всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деянья бонуса.
1 xslots рабочее зеркало
Бездепы обычно предлагают с отыгрышем — мгновенно исключить выигранные средства невозможно. Перевод средств со счета будет вероятен после такого, как юзер выполнит все притязания казино, а сумма имеет быть выше установленного правилами лимита. Условиями акции фиксируются сроки, в течение коих клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней последствии активации. B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax 1×slot зеркало рабочее регистрации на телефон придет <a href=http://xn–d1abifnynv.xn–p1ai/index.php?subaction=userinfo&user=cuddlynip62>http://xn–d1abifnynv.xn–p1ai/index.php?subaction=userinfo&user=cuddlynip62</a> Самые известные методы вывода денег ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам подобии Neteller и Skrill, еще пользуются криптовалютными кошельками. Вывод выигрышей имеет осуществляться мгновенно либо развлекать от нескольких часов до нескольких суток.
1×slots регистрацию процедура займет всего лишь
Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам воспрещено начислять призы клиентам, не имеющим денежных средств на счете. Мы предлагаем осмотреть животрепещущие призы онлайн-казино с лицензией, которые соблюдают законодательство РБ. Возможность сыграть вспомогательное соревнование (а от и несколько) совершенно безвозмездно, а выигрыш, же, поступает на счёт игрока.Разные казино имеют собственные управляла по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высокие притязания. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до 100 раз в игровых автоматах. Например, в игрок получил даром десять $, то нужно несомненно отыграть их, поставив 1 тысячу спинов по 1 баксу каждый. Стоит отметить, что не все казино дают вероятность играть на бонусы и не во всех увеселительных заведениях схожие правила для отыгрывания. Некоторые казино запрещают выступать на бонусы в блекджек или ограничивают ставки до пяти процентов, собственно существенно увеличивает в 10-ки один количество нужных игр. <a href=https://mail.poordirectory.com/Shisha-tobacco-from-4-eur_446100.html>https://mail.poordirectory.com/Shisha-tobacco-from-4-eur_446100.html</a> 1×slots зеркало на сегодня Для верификации номера телефонного, в личном профиле изберите опцию „Подтвердить номер телефона“ и введите в отвечающее фон код, приобретенный в sms-сообщении.
<b>Смотреть еще похожие новости:</b>
<a href=https://nauc.info/forums/viewtopic.php?t=20493224>1×slots зеркало рабочее на сегодня</a>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=159777>1×slot казино зеркало</a>
<a href=https://www.donchillin.com/space-uid-382497.html>1×слотс казино</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Свежий бонус начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в пользовании своими, а в случае отыгрыша оператор может ввести лимитирование на вывод средств.
#6301 Charlesgunnyhttp://filmkachat.ru
1 хслот регистрация в 1×slots casino
Заработать на бездепозитных призах за регистрацию в казино может каждый пользователь, достигший совершеннолетия.В случае установленного лимита на сумму вывода выигрыша с бездепозитного бонуса, игрок не сможет исключить больше заявленной суммы. <a href=http://filmkachat.ru/>1×slots регистрация на сайте</a> Бездепозитный приз казино 2022 с выводом за регистрацию предоставляет вероятность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и выяснить качество работы службы. Довольно часто, начиная игровой процесс, игрок уже отказывается останавливаться и делает настоящий лепта. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать безвозмездно возможно как раз таки с призом за регистрацию без надобности вносить депо. <a href=https://bresdel.com/blogs/806517/Mastering-Interior-Shop-Drawings-From-Concept-to-Construction-Excellence>https://bresdel.com/blogs/806517/Mastering-Interior-Shop-Drawings-From-Concept-to-Construction-Excellence</a> Подобные призы без депозита предоставляются на больше прибыльных критериях. Зачастую они покрупнее, а обстоятельства отыгрыша менее жесткие.Доступные забавы – В неких азартных забавах можно понизить математическое превосходство казино до нескольких 10-х процента. В их количестве почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как верховодило, в таких играх ставки идут в зачет вейджера не полностью. Например, возможность учитываться лишь 50%. В неких забавах бездепозитные бонусы вообще нельзя отыгрывать. 1хслот официальный сайт зеркало <a href=https://istinastroitelstva.xyz/user/Jasperled/>https://istinastroitelstva.xyz/user/Jasperled/</a>
1 x slots
<a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1хслотс мобильная версия зеркало</a> 1×slots официальный сайт зеркало рабочее Важно, убедитесь в том, что ранее не регились в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи.Баланс игрока пополняется на подходящую сумму. К ней используется вейджер, обозначенный в правилах акции. Вывести выигрыш возможно несомненно в как, как пользователь устроит требуемый размер ставок из собственных средств. В редких случаях бездеп трудится в формате Free Play. На счет пользователя зачисляется крупная сумма, и предоставляется небольшой срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по окончании этого периода сумма на счету будет превосходить первоначальную, то разность возможно будет исключить либо применять для дальнейших ставок. <a href=https://www.mustat.com/osipovichi.com>https://www.mustat.com/osipovichi.com</a> Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми промоакциями. Читайте о них в обзорах и на форуме.Похожим образом работает 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя либо в связи с получения им VIP-статуса. Подарок предоставляется последствии воззвания в поддержку и ревизии. 1×slot зеркало рабочее этих способов предполагает регистрацию
1 х слотс зеркало
<a href=https://www.stroimvmeste.com.ua/user/PatrickLyday/>https://www.stroimvmeste.com.ua/user/PatrickLyday/</a> Но а в вы теснее профи по онлайн казино, кликаем на красноватую кнопку «Получить» и Вы автоматически перейдете в интернет казино;Чаще всего казино бонус за регистрацию без депо даёт возможность запустить каждой машина. Но никакого пристально ознакомиться с критериями. Иногда для забавы доступны только определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, никакого начать знакомство с миром азарта непосредственно с «одноруких бандитов». 1×slot рабочее зеркало Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном веб-сайте и выполните вход в индивидуальный кабинет, чтобы арестовать благотворительные вращения с вейджером х40;
1×slots зеркало на сегодня
Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. В большинстве заведений сделать это можно по e-mal, по номеру аппарата, спустя социальную сеть или гугл-аккаунт. 1×slots регистрация 1×slots casino c2d ru <a href=https://www.vforum.org/forum/members/26467.html>https://www.vforum.org/forum/members/26467.html</a>
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Автоматы непопросту числятся наиболее известным азартным весельем. Чтобы усвоить управление и управляла, понадобится всего несколько мин. Ваша задача устроить ставку, определить число рабочих линий и возможно крутить барабан. Если на экране выпадет выигрышная комбинация – вы выиграли! С этой задачей вас посодействуют управится бездепозитные бонусы казино.Подарки на конкретные даты отличаются критериями получения. Если поощрение начисляют игроку на день рождения, то сумма обыкновенно находится от общего объема депо за прошедший год. Бонус без депо за регистрацию в казино (бездепозитный бонус) – это денежный презент от клуба, кот-ый начисляется на аккаунт игрока после регистрации в казино. Кроме творенья учетной записи, для получения бездепа, довольно часто требуется ещё и подтвердить контактные данные игрока и/или активировать специальный промо-код. <a href=http://l91692n8.beget.tech/profile.php?u=machodeputy79>http://l91692n8.beget.tech/profile.php?u=machodeputy79</a> Нет. Для получения бездепозитного бонуса в казино необходима неотъемлемая регистрация на веб-сайте. Играть в слоты бесплатно и без регистрации можно только в демо режиме. 1× slots casino зеркало Для верификации аккаунта надо(надобно) дать профессионалам технической поддержки отсканированную копию паспорта и счета за коммунальные предложения, а также фотографию банковской карты или снимок странички электрического кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для подтверждения личности.В современность очень просто получить бонус за регистрацию в казино. Практически каждый игорный жилище с готовностью начислит деньги либо безвозмездные вращения. Многие гэмблеры пользуются этим и не смущяются регистрироваться в любом клубе с выгодными условиями. Кстати, это отличная вероятность выработать победную тактику и сорвать джекпот.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.graylite.com/viewtopic.php?p=270620#p270620>1 xslots рабочее зеркало</a>
<a href=https://minifishtank.net/forum/showthread.php?tid=750>1×slots зеркало быструю регистрацию а также мгновенное</a>
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=40048>1×slots зеркало этих способов предполагает регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если вы бывалый игрок, вы должны знать, что бонус без депо – редкая находка. Тем не, мы неделю исследуем онлайн, чтобы найти для вас наихорошие бездепозитные предложения.
#6302 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Варвара Субботина автомат казино <a href=https://res-publika.com>pinco casino</a> порно с Каролина Севастьянова порно с Варвара Субботина <a href=https://strelochnik.com/>1×bet официальный слоты</a> 1×bet зеркало на сегодня 1×bet на андроид 7k casino скачать porno Мира Андреева (теннис) пин ап casino pin 1go casino Самойлова Алла Владимировна порно
#6303 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino 777 online
Эффективность бездепов в рекламного инструмента оценили многие операторы. Малоизвестные площадки употребляют такие акции, дабы скоро набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны неизменных гостей. Не все сайты, дающие подарки без депо, рекомендованы к ирге. За привлекательным промоописанием шансы прятаться неосуществимые условия отыгрыша и подводные камни.4. Заберите подарок. Чаще всего бонус активируется незамедлительно после регистрации. Но посещают ситуации, когда надо(надобно) зайти в личный офис или написать в службу поддержки. <a href=http://filmkachat.ru/>1×slot рабочее зеркало</a> Как лишь вы отыграли вейджер и свои с бонусного баланса перебежали вас на настоящий счет, Вы неустрашимо сможете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (сделать наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депо). <a href=https://rant.li/9fsnh6hu13>https://rant.li/9fsnh6hu13</a> Бездепы обыкновенно предлагают с отыгрышем — быстро вывести выигранные средства нельзя. Перевод средств со счета несомненно вероятен после того, как юзер выполнит все притязания казино, а сумма возможности превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, в течение коих заказчик вправе пользоваться предложением. Обычно они не превосходят нескольких дней последствии активации.Как правило, при выводе финансов, от играющего потребуется лишь устроить минимальный вклад чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом собственный счет. 1×slots casino регистрация 1×slotscasin online <a href=http://what.website.molifan.net/space-uid-2146823.html>http://what.website.molifan.net/space-uid-2146823.html</a>
1×slots регистрация
Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, дабы еще раз получить безвозмездный бонус. Игорные заведения нетерпимы к бонус-хантерам, потому вас ожидает неизбежное санкция.Ниже указан актуальный перечень законных казино в Беларуси с бонусами на 1-ый депо. Вы сможете попасть на официальный вебсайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. 1хслотс официальный сайт зеркало Зарегистрироваться в казино по специальной ссылке либо с бонусным кодом. Подтвердить контактные данные (номер аппарата и электрическую почту). Для доказательства номера телефона нужно в личном профиле указать собственный номер и нажать кнопку „Подтвердить номер телефона“, далее Вы получите sms-сообщение с кодом, кот-ый нужно ввести в отвечающее фон. Для подтверждения электрической почты, перебежать по активной ссылке в послании от казино. <a href=https://able.extralifestudios.com/wiki/index.php/User:GloryBinns51277>https://able.extralifestudios.com/wiki/index.php/User:GloryBinns51277</a> 1×slots скачать на айфон Однако в условиях исчезают «подводные камешки», которые не позволят вывести крупную сумму либо же вы не успеете отыграть вейджер. Поэтому мастера рекомендуют отобрать безвозмездные вращения за регистрацию в казино без депозита, чтобы поднабраться навыка и получить реальный шанс на победу.Прочитайте верховодила бонусной программки, в которой желайте участвовать. Да, мы безотступно советуем устроить это до регистрации.
казино 1× slots официальный сайт
<a href=https://asbest.name/forum/14–6770–1#30525>https://asbest.name/forum/14–6770–1#30525</a> Казино выводит средства только на что, эту платежную систему, с котрой был сделан депо. То есть, для вывода бездепозитного бонуса, Вам поначалу нужно пополнить счет. В некоторых клубах узкий список способов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с этих платежных методов, которые доступны для вывода.Акции, посвященные календарным праздничным, посещают рассчитаны как на всех пользователей, например и на категории: например, презент на 8 марта девушкам-игрокам либо мужикам на 23 февраля. 1×slots регистрация 1×slots casino c2d ru Максимальная ставка ? уточняется в еденице счета и ограничивает размер ставки за один спин. В случае ее превышения бонус возможность быть аннулирован. Также в правилах имеет содержаться запрет на размещение ставок определенного вида, например, по одинаковым шансам в рулетке (то есть, на чет или нечет, красноватое либо черное и т.д.).Вышеописанная первопричина и является основным моментом, следствии которого операторы отдают часть своей прибыли на разные маркетинговые затраты и рекламные кампании. А наиболее действующим здесь станут играть непосредственно бездепозитные бонусы казино 2022 с выводом за регистрацию.
сайт 1× slots casino
Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного приза достаточно пополнения баланса и подтверждения личности. В других же клубах, нужно несколько раз прокрутить свой депозит. <a href=https://www.bf-france.com/forums/profile/30064-rabofreeor/>1×slots регистрация на сайте</a> Начнём с как, что каждое рекламную за регистрацию подразумевает некие условия. Бездепозитные бонусы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность валютного оборота, необходимая для исполненья критерий. Пример, получили безвозмездные вращения и выиграли с них 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 рублей, проигрышных или выигрышных, не. После исполнения, бонусный баланс перейдёт на реальный и станет легкодоступным к выводу. casino 1×slot <a href=http://xn–80abbjuadey5bv1e.xn–p1ai/index.php?subaction=userinfo&user=Jeffreylah>http://xn–80abbjuadey5bv1e.xn–p1ai/index.php?subaction=userinfo&user=Jeffreylah</a>
1×slots официальный demo регистрация в 1×slots casino
Бездепозитные призы прекрасный вариант безвозмездной игры в игровые автоматы. Многие пользователи сети не знают, собственно в казино можно начать играть абсолютно безвозмездно, а потом исключить выигрыш на банковскую карту либо электронный кошелек, другие не доверяют интернет казино, а третьи удачно играют и выигрывают – и подчас довольно немалые суммы. Да, у безвозмездных призов есть недостатки. Прежде всего, они обыкновенно очень. Кроме того, условия вейджера по ним всегда строгие. Но все неимение риска проделывает их очень привлекательными для клиентов.Акции, посвященные календарным праздникам, случаются рассчитаны как на всех юзеров, так и на категории: например, презент на 8 марта девушкам-игрокам либо мужикам на 23 февраля. <a href=https://igridsolutions.com/lagos/shared-apartments-rooms/sajt-igrovyh-avtomatov.html>https://igridsolutions.com/lagos/shared-apartments-rooms/sajt-igrovyh-avtomatov.html</a> Не желаете сыграть в азартные забавы, не рискуя средствами средствами, но получая в все выплаты? Подобную возможность деют все наилучшие порталы с азартными увеселениями. В их числе количество правдивых и надежных интернет-казино на русском языке. Они привлекают свежих пользователей разными поощрительными мероприятиями, включая бездепозитные, или благотворительные бонусы. 1×slots официальный сайт скачать Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша призов. Заведения практически устанавливают максимальную ставку, допустимую по условиям вейждера.Бездепозитный приз за регистрацию в казино — это стартовый презент повторяющий денежного начисления или даровых вращений для новых игроков заведения, для получения которого не вносить депозит.
<b>Смотреть еще похожие новости:</b>
<a href=https://praisenpray.org/forums/showthread.php?tid=99637>1хслотс рабочее зеркало на сегодня</a>
<a href=https://sparta.training/faq/online-returns/#comment-67083>1×slots регистрация 1×slotscasino09k online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездеп с фриспинами имеет обхватывать всю коллекцию игр на веб-сайте либо разработки 1-го провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш может быть выведен в такого, как пользователь отыграет эту необходимую. Возможность оценить полный функционал слотов — главное достоинство данной разновидности. Игроку становятся доступны что, эти функции, коие отсутствуют в демонстрационном режиме, а возможность выиграть настоящие средства прибавляет ярких азартных ощущений.
#6304 BurtonWoxhttps://com-x.life/comix-read/manhwa/
топ манхва 2015 <a href=https://com-x.life/comix-read/manhwa/>топ манхва 2011</a>
#6305 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Фастова Елена Владимировна порно бк букмекерская контора <a href=https://res-publika.com>gama casino</a> casino online зеркало порно с Каролина Севастьянова <a href=https://glvk.guru/>порно с Голикова Татьяна Алексеевна</a> inform@rucriminal.info слоты казино 1go casino casino скачать casino pin официальный человек казино букмекерская контора фонбет
#6306 Charlesgunnyhttp://filmkachat.ru
1×slots сайт зеркало
Свежий бонус начисляется вид валютных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в пользовании средствами, в случае отыгрыша оператор возможность установить ограничение на вывод денег.Онлайн гемблинг развивается с каждым днем все больше и больше, свежие бренды создаются не по дням а по часам. Новые онлайн казино делают вступительные акции для игроков, чтобы, чтобы что бы зарекомендовать себя, и тем самым предлагают бездепозитные бонусы за регистрацию, собственно бы не пропустить эту вероятность — как воспользоваться свежим бездепом, рекомендуем навещать наш сайт как возможно почаще, самое лакомое и свежие несомненно добавляться в данном же списке. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало</a> Возможность протестировать свежие игры, не рискуя личными своими и разработать собственную стратегию забавы.Бездепозитный бонус по промо-коду несомненно доступен для игры, только том, случае когда Вы активируете специальный бонусный код в разделе с бонусами или укажите промокод при регистрации на сайте. В некоторых случаях, кроме активации кода, понадобиться доказать контактные данные игрока и наполнить анкету клиента. <a href=https://www.fanfiction.net/u/16465534/>https://www.fanfiction.net/u/16465534/</a> Обычно бездепозитные акции от казино, прибывают на эл. Почту в дни рождения или дни. В некоторых онлайн казино возможно адресоваться в чат и как неизменному игроку, вероятно вас предложат бездепозитное предложение. 1×slots официальный сайт зеркало <a href=http://fruit-impex.by/index.php?subaction=userinfo&user=quaintloser18>http://fruit-impex.by/index.php?subaction=userinfo&user=quaintloser18</a>
1×slots официальный сайт зеркало
1×slots коды Иногда операторы настоятельно внесение минимального депо перед выводом для верификации платежного инструмента. В некоторых казино данный депо кроме предстоит отыграть.Однако в критериях скрываются «подводные камни», которые не позволят вывести солидную необходимую или же вы не успеете отыграть вейджер. Поэтому мастера рекомендуют отобрать благотворительные вращения за регистрацию в казино без депо, дабы поднабраться навыка и получить настоящий шанс на победу. <a href=https://odessamama.net/home.php?mod=space&uid=10006&do=blog&quickforward=1&id=2453>https://odessamama.net/home.php?mod=space&uid=10006&do=blog&quickforward=1&id=2453</a> 1×slots официальный сайт мобильная версия
1×slots регистрация на сайте 1×slots ru com
Получив собственный презент, Вы можете безвозмездно выступать на реальные деньги, а выполнив обстоятельства отыгрыша, исключить собственный выигрыш.Вы не в коем случае ни чем рискуете, а только выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической забавы на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, выучится регулировать изменять ставки и линии, исследовать бонусные забавы и их выигрышные комбинации, ну счете просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные свои, которые возможно отыграть и вывести, а не просто на демо счет, что, этим наиболее адреналин в крови еще больше повысится а пульс забьется с частым ритмом! <a href=http://zlatremont.ru/index.php?subaction=userinfo&user=warmadage60>http://zlatremont.ru/index.php?subaction=userinfo&user=warmadage60</a> 1×slots мобильная версия войти казино В лицензионных бездепозитных казино выступать в азартные забавы вправду безопасно. Наличие лицензии одобряет тот факт, собственно клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP.Вышеописанная причина и считается главным нюансом, следствии которого операторы отдают доля собственной прибыли на различные рекламные затраты и рекламные кампании. А наиболее действенным тут станут играть непосредственно бездепозитные бонусы казино 2022 с выводом за регистрацию.
1×slots casino регистрация на сайте
<a href=https://clubdefansde24.com/foro/memberlist.php?mode=viewprofile&u=3464>1×slots рабочее зеркало на сегодня</a> Эффективность бездепов виде маркетингового прибора расценили все операторы. Малоизвестные площадки используют эти промоакции, чтобы стремительно набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны постоянных посетителей. Не все веб-сайты, дающие презенты без депозита, рекомендованы к забаве. За симпатичным промоописанием могут скрываться невыполнимые обстоятельства отыгрыша прочие подводные камешки. Шаг 4. Активация. Внимательно выучите условия, информацию по ограничениям и сроке действия бонусного предложения. Разобравшись с правилами, возможно активировать приз в личном кабинете (времени ? с внедрением промокода) или по запросу в саппорт. 1×slots регистрацию процедура займет всего лишь <a href=http://elektrofahrrad-tests.de/forums/member.php?action=profile&uid=34491>http://elektrofahrrad-tests.de/forums/member.php?action=profile&uid=34491</a> Таким образом, заведение пробует продемонстрировать себя своим вероятным геймерам, а подобный рекламный ход как казино бонус без депо за регистрацию привлекает очень много внимания к игорному заведению и обеспечивает постоянный поток новых посетителей и будущих клиентов игрового онлайн клуба.
1х слот регистрация в 1×slots casino
Приветственный бездеп предоставляется хоть игроку только один один. Казино дерутся с так называемыми бонусхантерами (от англ. Bonus Hunter — охотник за бонусами), пытающимися заводить множественные аккаунты для надувательства оператора и повторного получения подарка. Исключить подобные деянья позволяет верификация данных. Администрация вправе потребовать у клиента подтвердить индивидуальные данные, обозначенные при регистрации. Основное отличие никаких, что для получения бездепа нужно пополнять баланс в казино. Но считая сего, есть ряд и других различий: <a href=http://www.szxyhd.com/home.php?mod=space&uid=139957>http://www.szxyhd.com/home.php?mod=space&uid=139957</a> Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, чтобы была вероятность исключить выигрыш. 1×slots бонус за регистрацию Бездепозитные призы отличный вариант бесплатной игры в игровые автоматы. Многие юзеры сети не понимают, что в казино возможно начать играть абсолютно даром, а позже исключить выигрыш на банковскую карту либо электрический кошелек, иные не доверяют онлайн казино, а третьи удачно играют и выигрывают – и тотчас довольно немалые суммы.Бездепозитный приз – это финансовое вознаграждение, коие выдается соучастнику забавы в казино, для его вербования и возникновения заинтересованности. Любой посетитель, кот-ый соответствует условиям выдачи подобного бездепозитного бонуса, имеет претендовать на получение вышеуказанного приза. Такое поощрение считается более действенным способом, дающим возможность стартовать в игре, не вкладывая собственных материальных средств.
<b>Смотреть еще похожие новости:</b>
<a href=http://board.eternityrpc.com/member.php?action=profile&uid=369>1×slots коды</a>
<a href=http://evtrucksforum.com/viewtopic.php?p=782021#p782021>1хслотс рабочее зеркало</a>
<a href=http://molifan.netwww.molifan.netwww.molifan.net/space-uid-2280308.html>зеркала 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Активация по промокоду используется в разных обликах бездепов. Если речь идет о приветственном призе, то набор символов можно разузнать на крупнейшей страничке, в регистрационной форме либо послании, которое отправляется пользователю для доказательства e-mail. Акции шансы проводиться совместно с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активизируется одноразовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном кабинете или начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем актуальный код для активации в описании любого промо.
#6307 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
win win casino порно с Аделия Петросян (фигурное катание) <a href=https://t.me/vchkogpu_ru>букмекерская контора</a> Крючкова Полина Викторовна порно 1×bet сайт <a href=https://th-royalgclub.com/>Москалькова Татьяна Николаевна порно</a> porno Дарья Мороз порно с Никита Кучеров (хоккей) porno Андрей Рублев (теннис) 1×bet зеркало рабочее порно с Илья Осипов (киберспорт) 1×bet официальный скачать casino скачать приложение
#6308 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
кент casino винлайн букмекерская контора официальный <a href=https://t.me/vchkogpu_ru>казино большая</a> бесплатно играем казино почему казино <a href=https://specreporter.com/>казино смотреть онлайн</a> casinos winning казино смотреть онлайн бесплатно cat casino 1×bet официальный казино гта 5 официальные букмекерские конторы пин up casino
#6309 Charlesgunnyhttp://filmkachat.ru
1×slots акции
Для доказательства электрической почты, просто перейдите по активной ссылке в послании, приобретенном от игрового заведения.Чаще всего казино приз за регистрацию без депо даёт вероятность запустить любой машина. Но никакого пристально ознакомиться с условиями. Иногда для игры доступны лишь определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, превосходнее начать знакомство с миром азарта именно с «одноруких злодеев». <a href=http://filmkachat.ru/>1×slots официальный сайт мобильная версия скачать</a> Риск-игра по одинаковым шансам – Также казино имеет запрещать исполнять обстоятельства по отыгрышу с помощью раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких других забавах.Также бывают случаи, когда казино начисляет обсужденный приз в регистрации нового клиента по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам. <a href=https://postheaven.net/pafsi02hf4>https://postheaven.net/pafsi02hf4</a> Диапазон ставок, коие вправе сделать игрок, кроме лимитирован. Обычно назначать можно небольшую необходимую — в 10–30 руб. За одно вращение.Максимальный объем ставки, кот-ый нельзя превышать же приз не будет полностью отыгран. В случае нарушения этого верховодила, бонус и выигрыш с него будут аннулированы. 1х слотс зеркало регистрация в 1×slots casino <a href=http://sotsprof01.ru/index.php?subaction=userinfo&user=overwroughtanyp>http://sotsprof01.ru/index.php?subaction=userinfo&user=overwroughtanyp</a> Для получения депозитного бонуса необходимо пополнить собственный игровой баланс настоящими средствами. Вознаграждение возможно получить или при внесении первого депозита, или повторяющий фиксированного процента от внесённых средств. Так либо другому, приз поступит на счёт лишь в пополнения.
1×slots официальный сайт зеркало рабочее
Главное преимущество спинов – вероятность выучить различные слоты. Также удастся насладиться бонусными раундами, испытывать удачу в риск-туре и преувеличить выигрыш за счёт особенных символов. Однако не только игровой процесс заслуживает внимание, как превосходнее сосредоточиться на реальном выигрыше.Размер бонуса. В качестве бездепов обыкновенно начисляют небольшие суммы, а когда идет о бонусах за депозит, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино шансы презентовать игроку до 2000$. 1×slots casino зеркало рабочее Чаще всего используются коды. Их нужно заносить в особые окошки регистрационной анкеты, случае идет о пригласительных бонусах, либо в особом разделе собственного кабинета игрока.Так же стоит выделить то, собственно в каждом онлайн казино установлен собственный максимальный кешаут на бездепозитный бонус. Как управляло кешаут — это предельная сумма средств, кот-ая доступная для вывода с бездепозитного приза. <a href=http://www.isexsex.com/home.php?mod=space&uid=2742870&do=profile&from=space>http://www.isexsex.com/home.php?mod=space&uid=2742870&do=profile&from=space</a> Активация валютного гонорары происходит автоматически последствии творенья профиля или использования промокода. Иногда операторы предъявляют вспомогательные притязания: подписаться на страницы казино в соц сетях или на рассылку рекламных извещений, скачать и установить вспомогательный софт и т.д.Иногда в поощрения за регистрацию имеют выдаваться билеты для роли в турнирах. Условия их проведения очень отличаются, потому мы советуем ознакомиться с каждым предложением отдельно. 1×slots casino регистрация 1×slots review live Доступ к подарку может раскрываться механически в введения промокода либо обращения в саппорта сайта. В первом случае от пользователя не потребуется никаких деяний. Бездеп с активацией по коду встречается чаще всего. Игроку нужно установить совокупа символов в графе, кот-ая возможность пребывать в регистрационной форме в Личном кабинете.4. Заберите подарок. Чаще всего приз активизируется незамедлительно после регистрации. Но бывают истории, когда надо(надобно) зайти в собственный офис либо написать в саппорта.
1×slots регистрация 1×slots review live
<a href=http://82.156.10.47/home.php?mod=space&uid=9685>http://82.156.10.47/home.php?mod=space&uid=9685</a> Большинство интернет-казино из нашего топ-10 готовы порадовать вас эксклюзивными промоакциями. Читайте о их в обзорах и на форуме. 1×slots официальный сайт скачать
x1 slots 1хслотс регистрация перейти на 1×slots
<a href=https://www.xn–72c9aa5escud2b.com/webboard/index.php/topic,534324.new.html#new>1×slots сайт</a> На нашем веб-сайте Вы найдете список своевременных свежих бездепозитных призов в казино 2022 года. Также, есть большое эксклюзивных предложений, которые доступны лишь посетителям нашего вебсайта после регистрации по нашей ссылке или активации особого промокода.Для получения бездепа необходимо пригласить в забаву по реферальной ссылке свежего клиента: он обязан зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и восполнить счёт на сумму, обозначенную в условиях акции. 1×slots подтвердит вашу регистрацию если говорить <a href=http://www.winpcba.com/bbs/home.php?mod=space&uid=393017&do=profile>http://www.winpcba.com/bbs/home.php?mod=space&uid=393017&do=profile</a>
1×slots коды
Рассмотрим принцип его деяния на примере. Допустим, вы зарегистрировались и возымели $10 not the slightest deposit bonus с вейджером х50. Это значит, что выигранные деньги можно несомненно выводить не ранее, чем после того, как общая сумма ставок достигнет $500.Несмотря на то, собственно этот вариант стимуляции со стороны азартных платформ довольно моден области похожих игр, далековато не всем поклонникам казино знаменито, что сами бездепозитные призы казино и как непосредственно их вполне эксплуатировать. <a href=http://jejuwood.net/bbs/board.php?bo_table=free&wr_id=914259>http://jejuwood.net/bbs/board.php?bo_table=free&wr_id=914259</a> Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депо возможность отличаться до 30 дней. 1×slots зеркало 1хслотс регистрация перейти на 1×slots Для получения предоставленных бонусов для пригодиться — ПК либо мобильное устройство, и остальное дело за небольшим.Бонусы без депозита при регистрации числятся самыми привлекательными как для опытнейших игроков, так для и начинающих. Получив это вознаграждение, заказчик имеет играть на настоящие деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а также обстоятельства их активации и выигрыша.
<b>Смотреть еще похожие новости:</b>
<a href=https://test.soclanovtsy.ru/topic/26973-chicago-house-samples-loops-sounds/page/244/#comment-68006>1×slots зеркало этих способов предполагает регистрацию</a>
<a href=https://www.reisezielforum.de/viewtopic.php?t=446493>1×slots коды</a>
<a href=https://mcmon.ru/showthread.php?tid=105290&pid=364126#pid364126>1×slots регистрация 1×slots casino 777 online</a>
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=578818>зеркала 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На данном разделе портала периодически публикуются обзорные статьи, каких рассматриваются бесплатные призы наихороших интернет-казино. Информация структурирована по нескольким пт, включая основные: Каждый из бездепозитных бонусов без пополнения 2022 имеет свой конкретный вейджер для отыгрыша, например же в каждом казино он устанавливается персонально — где то он х55 а где-то х30, повторюсь всюду по разному!
#6310 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Преподобная Надежда Александровна порно up casino зеркало <a href=https://vestnik-jurnal.com/>скачать casino на андроид</a> казино на деньги порно с Кирьянова Дарья Борисовна <a href=https://7club7.com/>Преподобная Надежда Александровна порно</a> casino приложения 1×bet xbet xyz pin up букмекерская контора 1×bet официальный porno Анастасия Янькова, боксерка 1×bet официальный bet casino
#6311 Charlesgunnyhttp://filmkachat.ru
1×slots подтвердит вашу регистрацию если говорить
Подтверждение персональной информации. Все казино требуют от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и наличие у юзера других аккаунтов (мультиаккаунт запрещен).Этот тип бонуса будет добавлен на Ваш аккаунт последствии успешной процедуры регистрации с внедрением номера аппарата. Если выбрать иной способ сотворения учетной записи, бездеп не несомненно добавлен на Ваш аккаунт. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> Поспешите зарегистрироваться на официальном сайте Клубника, чтобы быстро получить 33 безвозмездных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, бывает реальный шанс победу! <a href=https://www.ted.com/profiles/48491724>https://www.ted.com/profiles/48491724</a> Новички не любят сразу же вносить депо. Это обусловлено неименьем опыта и сомненьем. К счастью, в возможно получить бездепозитный приз за регистрацию в казино. Неважно что начислит система – фриспины либо кредиты. В всяком случае вы не рискуете своими сбережениями. Это замечательная возможность запустить приглянувшийся видео слот или же испытать удачу в настольных забавах. 1×slots промокод при регистрации <a href=http://tools.co.ua/wr_board/tools.php?event=profile&pname=uttermostsocial>http://tools.co.ua/wr_board/tools.php?event=profile&pname=uttermostsocial</a> Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.При правильном подходе бездепы — это прекрасный способ играть на деньги без траты личных средств. Есть несколько советов, следуя которым возможно извлечь максимально выгоды из похожих акций казино. Играть идет лишь на лицензированных площадках. Скриптовые сайты не обманывают с бонусными предложениями, но и употребляют пиратский софт с модифицированным ГСЧ. Выиграть на этих автоматах невероятно.
1× slots casino официальный сайт
Акционные предложения от казино существуют в различных форматах. Часто бонусы даются в мена на депозит. Игрок заносит платеж и получает деньги, безвозмездные вращения прочие поощрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — вид приза, кот-ый гарантирован за исполнение конкретных поступков на сайте:В современность довольно просто получить приз за регистрацию в казино. Практически любой игорный жилище с готовностью начислит средства либо бесплатные вращения. Многие гэмблеры пользуются данным и не стыдятся региться в любом клубе с выгодными условиями. Кстати, это замечательная возможность выработать победную тактику и сорвать джекпот. скачать 1×slots официальный сайт Маркетинговая политика всех игорных интернет-клубов должна одевать разнообразный характер. И если вознаграждения на депо работают для того, дабы провоцировать вносить депозиты и поощрять уже имеющих пользователей, то бездепозитный приз в казино либо бонус за регистрацию в казино, до всего, рассчитан на расширение базы покупателей. <a href=https://gunnerckqw63074.blogdiloz.com/29636619/deep-nude-understanding-the-implications-of-ai-generated-imagery>https://gunnerckqw63074.blogdiloz.com/29636619/deep-nude-understanding-the-implications-of-ai-generated-imagery</a> Так собственно основное отличие дара на депозит от бездепа – неотъемлемое пополнение счёта. Вы можете внести депо и преувеличить стартовый капитал или арестовать бездеп и всем не придётся рисковать собственными сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начислит щедрое поощрение! 1хлот регистрация в 1×slots casino Шаг 4. Активация. Внимательно выучите условия, информацию по ограничениям и сроке деяния бонусного предложения. Разобравшись с правилами, возможно активировать бонус в личном кабинете (от ? с использованием промокода) или по запросу в саппорт.
1×slots регистрация на официальном сайте
Онлайн гемблинг развивается с любым днем больше и больше, новые бренды создаются не по денькам а по часам. Новые интернет казино проделывают вступительные промоакции для игроков, для того что бы зарекомендовать себя, и тем наиболее предлагают бездепозитные бонусы за регистрацию, собственно бы не пропустить эту вероятность — как воспользоваться новым бездепом, советуем навещать наш вебсайт как можно чаще, самое смачное и свежие будет добавляться в этом же перечне. <a href=http://camillacastro.us/forums/profile.php?id=178123>http://camillacastro.us/forums/profile.php?id=178123</a> Также, учите, собственно бездепозитный бонус можно вывести лишь что случае, когда станут выполнены все обстоятельства отыгрыша. 1× slots зеркало За счёт спинов получится запустить разные интернет слоты, протестировать стратегии и поднабраться навыка. Фишка что, нет, собственно вращения начисляются на лучшие аппараты с оригинальными опциями и высокой отдачей. Не забывайте, собственно в любом акционном предложении предусмотрены специальные требования – кратковременные лимитирования, максимальный размер ставки, список дешевых игр.На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не сможете активировать и получить бездепозитный приз.
скачать 1×slots на андроид мобильная версия
Призовые начисления без депозита шансы предоставляться для участия в турнирах интернет казино. Потратить перечисленные деньги можно необыкновенно в данной промоакции. Условия их проведения в ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, превосходнее изучить его управляла.Да, у бесплатных призов есть дефекты. Прежде всего, они обычно небольшие. Кроме того, условия вейджера по ним практически строгие. Но все отсутствие риска проделывает их очень привлекательными для клиентов. У каждого игорного заведения свои верховодила и обстоятельства. Но, чтобы получить бонусы, нужно выполнить стереотипные деяния: Однако в условиях скрываются «подводные камни», которые не позволят исключить крупную сумму или же вы не успеете отыграть вейджер. Поэтому профессионалы рекомендуют отобрать безвозмездные вращения за регистрацию в казино без депо, чтобы поднабраться навыка и получить реальный шанс на победу. 1хслотс зеркало на сегодня <a href=http://klotzlube.ru/forum/user/255803/>http://klotzlube.ru/forum/user/255803/</a>
1×slots зеркало 1хслотс регистрация перейти на 1×slots
В зависимости от онлайн заведения каждый из их имеет вам предложить как бездепозитные средства, например и бездепозитные фриспины, которые последствии успешной регистрации рухнут вас на ваш игровой баланс.Фриспины начисляются по конкретной ставке. После их активации игроку нужно запустить слот и убедиться, собственно в нем показываются благотворительные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода в отыгрыша определяется оператором и изредка превышает 5 000 руб. <a href=http://baby123.cc/home.php?mod=space&uid=79084&do=profile>http://baby123.cc/home.php?mod=space&uid=79084&do=profile</a> 1×slots официальный сайт мобильная версия Важно, убедитесь никаких, что ранее не регились в избранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи.Даже не выиграв крупную необходимую, игрок увлекательно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-либо денежных рисков. Быть в курсе лучших акций легко. Достаточно регулярно учить список новых онлайн казино с выводом бонуса без депо в этом разделе.
<b>Смотреть еще похожие новости:</b>
<a href=http://miupsik.ru/forums/showthread.php?tid=370876>онлайн казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Следует подчеркнуть, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом.
#6312 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пин ап casino pin up top мобильные букмекерские конторы <a href=https://sovsekretno.net/>casino 7k рабочее</a> казино рулетка букмекерская контора фонбет официальный сайт <a href=https://strelochnik.com/>зеркала казино</a> порно с Зырянова Анастасия Владимировна скачать casino на андроид Скворцова Вероника Игоревна порно Окладникова Ирина Андреевна порно официальные сайты казино Манилова Алла Юрьевна порно Юдаева Ксения Валентиновна порно
#6313 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрацию более популярный вариант это
Подтвердите личность, предоставив оператору казино свои паспортные данные. Инструкции обычно несложные, основное — конкретно им идти. Если написано, что «на фото обязаны быть видны все четыре угла страницы паспорта» — устройте непосредственно такое фото. <a href=http://filmkachat.ru/>1×slots casino регистрация</a> <a href=https://www.chambers.com.au/forum/view_post.php?frm=1&pstid=77273>https://www.chambers.com.au/forum/view_post.php?frm=1&pstid=77273</a> 1× слот зеркало <a href=https://pdn-forum.bpgs.de/memberlist.php?mode=viewprofile&u=1814>https://pdn-forum.bpgs.de/memberlist.php?mode=viewprofile&u=1814</a> Главное преимущество спинов – вероятность выучить разные слоты. Также получится насладиться бонусными раундами, испытывать фортуну в риск-туре и преумножить выигрыш за счёт особенных символов. Однако столько игровой процесс заслуживает внимание, так превосходнее сосредоточиться на реальном выигрыше.
1× slots сайт
1×slots бездепозитный бонус за регистрацию Активация случается счет промокодов, которые вводятся в собственном кабинете после регистрации. Среди спецпредложений в перечне Casino.ru находятся неповторимые промокоды, коие доступны только гостям портала. Другие способы начисления средств ? автоматическая активация незамедлительно в творения аккаунта и получение презента по запросу в службу технической поддержки.Наши специалисты исследуют обстоятельства акции, затем в ручном режиме проверку их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и параметры. Мы не рекламируем казино, а даем игрокам информацию о наилучших из их. <a href=https://domivka.biz.ua/wr_board/tools.php?event=profile&pname=JoshuaCet>https://domivka.biz.ua/wr_board/tools.php?event=profile&pname=JoshuaCet</a> Любой выигрыш по ставке повыше установленного лимита будет считаться недействительным. То есть ставка не несомненно засчитана при отыгрыше, в случае выигрыша его сумма не поступит на счёт посетителя — итог игры будет всецело аннулирован.Как верховодило, новоприбывшие геймеры начала желают ознакомиться с способами ввода и вывода валютных средств и сроки исполнения поданных заказов чтобы конкретно разуметь, как скоро возможность вывести собственный казино приз за регистрацию без депо на электронный кошелек либо же банковскую карту. К счастью для всех играющих, внутри конкретных холдингов, все казино конкурируют меж собой. Ведь случае бы конкретную фирму представляло только одно онлайн-заведение, то вряд ли бы клиенты заметили казино с бонусом за регистрацию и имели бы рассчитывать лишь на вознаграждение в виде бонуса на 1-ое вложение. К любому заведению периодически по завлекать новых игроков, что, в, лишь на руку всем играющим. 1хслотс рабочее зеркало
казино 1×slots официальный сайт
Для вывода средств бонус надо(надобно) будет отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами акции и вариациями отыгрыша бездепозитного бонуса до его получения, дабы избежать конфликтных обстановок.Самые пользующиеся способы вывода денег ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электрическим платежным системам подобии Neteller и Skrill, а пользуются криптовалютными кошельками. Вывод выигрышей может осуществляться моментально или развлекать от нескольких часов до нескольких суток. Также, ситуации необходимо подтвердить собственный номер аппарата, для этого код, приобретенный в смс-сообщении от клуба установить в особое поле в собственном офисе игрока.В интернет-сети практически можно отыскать списки наиболее знаменитых и обещанных поощрительных программ от известных онлайн-казино. <a href=http://quasix.ru/user/Terryvob/>http://quasix.ru/user/Terryvob/</a> При использовании бездепозитным бонусом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют несколько видов лимитов: 1 х слотс зеркало Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 долларов. Если выдаются фриспины, их количество изредка выше нескольких десятков безвозмездных вращений.
1×slots casino регистрация на сайте
Многие новенькие сомневаются, что поощрительный приз надо несомненно возвращать, числе в они выиграли у казино. Это абсолютно безопасно и накрепко. Выводя выигранные средства, игрок просто одергивает свое роль деле и утрачивает уникальную возможность – безвозмездно наращивать собственное вещественное положение.Для получения бонуса надо(надобно) ознакомиться с программой преданности казино и сделать ставки на сумму, необходимую для перехода на грядущий уровень. <a href=https://redfist.de/RF-Online-Testforum/viewtopic.php?f=105&t=80975>1×slots зеркало быструю регистрацию а также мгновенное</a> При регистрации идет указывать только достоверную информацию. Когда учетная запись несомненно активна, появится доступ в Личный офис. В нем можно избрать денежную, установить промокод и узнать доскональные верховодила получения и отыгрыша бездепа. Краткая информация об промоакции часто присутствует непосредственно на регистрационной форме. 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=https://cse.google.ac/url?q=https://doctorlazuta.by/>https://cse.google.ac/url?q=https://doctorlazuta.by/</a> Основное верховодило получения бездепа ? создаваемый аккаунт обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов требовательно запрещено. Проверка ведется по имени, e-mal, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита необходимо блюсти несложную очередность действий.Демоказино есть практически на любом веб-сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются значительно пореже: там в случае выигрыша и соблюдения условий акций бездеп можно перевоплотить в настоящие деньги.
казино 1× slots официальный сайт
Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала прыткие выводы. Фишка выплат том,, собственно достаточно избрать платёжный инструмент и показать необходимую. В большинстве случаев деньги зачисляются на электрические кошельки на 15 минут, а на банковские карты – 1–3 трудящихся денька.В разделе с призами активировать собственный подарок. Найти игры, для коих учтено одобрение и использовать приз по предназначению. <a href=http://samjinuc.com/bbs/board.php?bo_table=free&wr_id=80158>http://samjinuc.com/bbs/board.php?bo_table=free&wr_id=80158</a> Составленный специалистами Casino.ru список онлайн-казино с бездепозитным бонусом позволяет игрокам сопоставить спецпредложения разных операторов. 1×slot зеркало Следует подчеркнуть, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом.
<b>Смотреть еще похожие новости:</b>
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=4996>1×slots зеркало на сегодня</a>
<a href=http://forums.indexrise.com/thread-1096-post-334693.html#pid334693>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=85562&extra=>сайт 1× slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Получив свой презент, Вы можете безвозмездно выступать на настоящие средства, а выполнив обстоятельства отыгрыша, вывести свой выигрыш.
#6314 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
unlim casino скачать букмекерскую контору на андроид <a href=https://kompromat1.online/>casino вход</a> Матвиенко Валентина Ивановна порно casino сайты <a href=https://7club7.com/>casino x</a> 1×bet бесплатно скачать сайт букмекерской конторы порно с Евгений Малкин (хоккей) 1×bet зеркало на сегодня 1×bet xyz casinos winning 1×bet зеркало на сегодня 1×bet официальный 1×bet xyz
#6315 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino daddy 1win букмекерская контора <a href=https://th-royalgclub.com/>Петрова Ольга Викторовна порно</a> Фастова Елена Владимировна порно up casino официальный <a href=https://repost.news/>лучшие бесплатные онлайн казино</a> 7k casino сайт casino актуальное зеркало бесплатно играем казино 1×slots casino водка казино порно с Юлия Ефимова, пловчиха порно с Аделия Петросян (фигурное катание)
#6316 Charlesgunnyhttp://filmkachat.ru
рабочее зеркало 1×slots
Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавления либо официального клиента для ПК. В большинстве казино срабатывают программы преданности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на следующий степень нередко с выдачей бездепа.Бонус в казино без депо содержит различные варианты: такое быть приветственный приз, акции в честь каких-либо праздничных либо весомых дат, приз за вербование новых игроков, преданность и получение VIP-статуса. <a href=http://filmkachat.ru/>1×slots официальный зеркало</a> После получения бонуса вывод средств для клиента будет недоступен до, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя или пара недель. Выводить деньги игрок сможет лишь последствии отыгрыша. <a href=https://xiglute.com/blogs/20607658/203148/mastering-the-art-of-professional-home-design-drafting-a-moder>https://xiglute.com/blogs/20607658/203148/mastering-the-art-of-professional-home-design-drafting-a-moder</a> После получения приза вывод средств для посетителя несомненно недоступен того, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или пара месяцов. Выводить деньги игрок может только в отыгрыша.Помните, собственно в некоторых играх сумма ставки идет в зачет вейджера лишь отчасти. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки числятся как отыгранные деньги, момент как в слотах идет в зачет все one hundred percent суммы. 1 x slots <a href=http://freemovies.pl/user/Josephfoorn/>http://freemovies.pl/user/Josephfoorn/</a> Перечисленные выше главные свойства сопровождают фактически каждый бонус и считаются стереотипными для бездепозитных бонусных начислений в казино.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Самые свежие бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды присутствуют на данной страничке. Посетитель возможность оценить обстоятельства получения и начать выступать на деньги без внесения депозита. При данном игроку принципиально разуметь, на каких критериях и какими способами появится исключить приобретенный выигрыш. Для сего нужно оценить перечень подключенных платежных систем. 1×slots регистрация 1×slotscasino09k online Риск-игра по равным шансам – Также казино возможность воспрещать выполнять условия по отыгрышу за раунда на удвоение, который предлагается в слотах, видео-покере и неких других забавах. <a href=https://www.weaselmods.net/member.php?action=profile&uid=5013>https://www.weaselmods.net/member.php?action=profile&uid=5013</a> 1×slots казино зеркало Также учтите, собственно некоторые игровые платформы сужают перечень стран, которые готовы получить предложенный бездепозитный бонус за регистрацию. К образцу, есть онлайн-заведения, выдающие сходственные бонусы лишь жителям определенных государств. К примеру, интернет казино 777 Оригинал дает бездепозитный приз лишь игрокам из России и государств СНГ. Или напротив, пичкают вознаграждением всех, кроме обитателей неких стран (как сего, стопам пристально изучать список, дабы потом не появилось практически вопросов и претензий).
1 x slots
Обычно, бездепозитные призы выдаются под определенные слоты с фиксированной ставкой, но их точно запрещено применять в игровых автоматах с прогрессивным джекпотом. Список игр, в которых можно использовать бездеп, Вы найдете в описании акции либо можете уточнить у службы заведения. Автоматы неспроста считаются самым знаменитым азартным развлечением. Чтобы усвоить управление и управляла, потребуется всего несколько минут. Ваша задачка сделать ставку, найти число рабочих линий и возможно крутить барабан. Если дисплее выпадет выигрышная композиция – вы выиграли! С этой задачей вас посодействуют управится бездепозитные призы казино.Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. <a href=https://tsonlinevn.4it.top/User-Tyronefes>https://tsonlinevn.4it.top/User-Tyronefes</a> Некоторые веб-сайты, этого чем провести регистрацию игроков, предлагают ответить на количество базовых вопросов. Цель проведения похожей викторины – выявить случайных людей, коие не имеют представления о покере, и не допустить получения ими бонусов. Если гость теснее играл в казино, то ответить на полтора 10 несложных вопросов несомненно нетрудно. Очень часто, ответы можно найти на официальных сайтах данных учреждений.Наш перечень содержит лучшие бездепозитные призы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит ревизию по важным характеристикам: 1хслотс зеркало на сегодня
1×slots сайт
Прежде всего, не запамятовывайте периодически заглядывать на страницу обзоров бездепозитных призов. Они шаг за шагом разглядывают более интересные предложения ведущих игорных порталов.В зависимости от онлайн заведения каждый из их может для предложить как бездепозитные деньги, так и бездепозитные фриспины, которые последствии удачной регистрации упадут вам на ваш игровой баланс. 1× слот зеркало <a href=http://WWW.ncwlxx.net/home.php?mod=space&uid=11088>http://WWW.ncwlxx.net/home.php?mod=space&uid=11088</a>
1×slots казино мобильная версия
На данном разделе портала регулярно публикуются обзорные статьи, в которых рассматриваются благотворительные призы лучших интернет-казино. Информация структурирована по нескольким пунктам, включая основные: Простая процедура получения бездепозитного приза, которая займет не более 2-х мин. Для получения бездепов, достаточно зарегистрироваться и доказать контактные данные. <a href=http://xiaoping777.com/home.php?mod=space&uid=61325>http://xiaoping777.com/home.php?mod=space&uid=61325</a> 1×slots актуальное зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.bandariklan.com/showthread.php?tid=176825&pid=942548#pid942548>1хслот зеркало сайта</a>
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=54471>1×slots акции</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Такие поощрения позволяют даром протестировать новое казино, разобраться с игровым процессом онлайн слотов, заработать и исключить маленькую необходимую средств.
#6317 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
new casino porno Илона Маркова, хоккеистка <a href=https://th-royalgclub.com/>рейтинг казино</a> 1×bet зеркало на сегодня 1×bet xyz казино 1 <a href=https://m.repost.news/>ешь казино</a> бесплатные букмекерские конторы pin up casino зеркало рокс казино рейтинг казино vavada casino Любимова Ольга Борисовна порно ев казино
#6318 Charlesgunnyhttp://filmkachat.ru
1× slots casino зеркало
Чаще всего, популярностью сервисы, эти как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное управляло. Финансовые средства выводятся лишь спустя что, эту платежную систему, которой огромный для пополнения депо. Если же игрок получил бездепозитный покерный приз, потребуется восполнить счет на минимальную сумму, которая сочиняет обычно 10 $.Почти все игровые клубы требуют свидетельство контактных данных игрока для получения бездепозитного приза. <a href=http://filmkachat.ru/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> <a href=https://www.empowher.com/groups/blogs-4/posts-33>https://www.empowher.com/groups/blogs-4/posts-33</a> В интернет-сети постоянно можно найти перечни более известных и обещанных поощрительных программ от известных онлайн-казино.Каждая игровая перрон выделяется критериями по получению и отыгрышу бездепов. В правилах отчетливо расписаны временные рамки, за которые надо(надобно) прокрутить вейджер. Также не запамятовывайте про наибольший размер ставки и максимальную необходимую выплаты. С иной стороны, чтобы получить бездепозитные призы казино, достаточно израсходовать не более 1 минуты. 1×slots казино зеркало <a href=https://www.argfx.co/user/Harryitego/>https://www.argfx.co/user/Harryitego/</a> Для всех бездепозитных призов функционирует максимальный предел на выигрыш. Он указывает предельную необходимую, коию появится получить, играя на бонусные кредиты. Как лишь вас получится выполнить требования вейджера, допустимый максимум несомненно переведен с бонусного счета на основной, а остаток несомненно списан.Прямо сейчас заберите безвозмездные вращения за регистрацию без депо и начинайте собирать призовые комбинации ради солидных выигрышей!
1×slots официальный зеркало
1×слотс казино Для всех бездепозитных бонусов функционирует максимальный лимит на выигрыш. Он показывает предельную необходимую, коию вы сможете получить, играя на бонусные кредиты. Как только для удастся выполнить притязания вейджера, допустимый максимум будет переведен с бонусного счета на главной, а остаток будет списан.Бесплатный бонус – кредиты, которые онлайн-казино начислит клиенту, не заставляя его пополнять игровой счет. <a href=https://isig.ac.cd/alumni/blogs/4070/%D0%90%D1%83%D0%B4%D0%B8%D0%BE%D0%BA%D0%BD%D0%B8%D0%B3%D0%B8-%D0%BE%D0%BD%D0%BB%D0%B0%D0%B9%D0%BD>https://isig.ac.cd/alumni/blogs/4070/%D0%90%D1%83%D0%B4%D0%B8%D0%BE%D0%BA%D0%BD%D0%B8%D0%B3%D0%B8-%D0%BE%D0%BD%D0%BB%D0%B0%D0%B9%D0%BD</a> Казино выводит деньги лишь на что, эту платежную систему, с котрой был изготовлен депо. То есть, для вывода бездепозитного приза, Вам поначалу нужно пополнить счет. В некоторых клубах узкий список методов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет именно с данных платежных способов, коие доступны для вывода.B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax 1хслотс официальный сайт зеркало
1×slots зеркало быструю регистрацию а также мгновенное
Для отыгрыша приза казино обязывает игрока сыграть на необходимую, в количество один превосходящую сумму приобретенного бонуса — здесь выгода компании явна. Как правило, новоприбывшие игроки начала хотят ознакомиться с методами ввода и вывода денежных средств и сроки выполнения поданных заявок дабы четко разуметь, как стремительно возможность исключить свой казино бонус за регистрацию без депозита на электрический кошелек или же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино соперничают между собой. Ведь если бы определенную компанию давало лишь одно онлайн-заведение, то навряд бы посетители увидели казино с призом за регистрацию и могли бы рассчитывать только на вознаграждение повторяющий приза на первое инвестиция. К каждому заведению регулярно следует привлекать свежих игроков, собственно, итоге, только на руку всем играющим. <a href=https://www.jiebbs.cn/home.php?mod=space&uid=416889&do=profile&from=space>https://www.jiebbs.cn/home.php?mod=space&uid=416889&do=profile&from=space</a> 1×slots бездепозитный бонус за регистрацию Также бывают случаи, когда казино начисляет обсужденный приз в регистрации нового клиента по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам.В онлайне большое узнаваемых игорных площадок с привлекательными акционными предложениями. Однако внимательно читать условия 10-ов услуг в надоест, да и время отнимет большое. Поэтому наша команда подготовила ТОП-3 сайтов с превосходнейшими бездепозитными призами:
1×slots зеркало подтвердит вашу регистрацию если говорить
Акции, посвященные календарным дням, посещают рассчитаны как на всех юзеров, так и на категории: примеру, подарок на 8 марта девушкам-игрокам либо мужикам на 23 февраля.Размер ставки для забавы по бездепозитному призу (естесственно же, в случае, когда он представлен повторяющий бонусных валютных средств) зачастую ниже, чем при игре на депо. Ограничение несомненно работать до этапа отыгрыша бонуса. Размер ставки для забавы по бездепозитному призу (естесственно же, когда, когда он представлен в виде бонусных валютных средств) часто ниже, чем при ирге на депозит. Ограничение несомненно работать до этапа отыгрыша приза.Прибывшие на акк деньги бездепозитные бонусы предназначаются, в, лишь для свежеиспеченных юзеров, которые раньше не имели личного аккаунта в данном казино. Исходя из сего, в ранее у игрока был сделан депозит, то, по всей вероятности, у него больше не будет способности рассчитывать на получение такового приза в определенном заведении. Наличие у игрока второго аккаунта. Запрещено творить количество профилей для неоднократного получения бездепов.Бонус без депо за регистрацию в казино (бездепозитный бонус) – это денежный презент от клуба, который начисляется на аккаунт игрока после регистрации в казино. Кроме сотворения учетной записи, для получения бездепа, очень нередко требуется ещё и подтвердить контактные данные игрока и/или активировать особый промо-код. 1хслотс 1хслотс регистрация перейти на 1×slots <a href=https://codescript.ru/user/JosephTutty/>https://codescript.ru/user/JosephTutty/</a> Кешбэк-бонус дает собой возврат фиксированного процента от ставки если, тогда, проигрыша или же от проигранной суммы за определённый период. В большинстве случаев кешбэк не превышает 10%.
1×slots зеркало регистрация в 1×slots casino
Мы проделываем акцент на ключевых положениях управлял, рассказываем о территориальных ограничениях и кратко информируем о иных промоакциях обговариваемого казино. <a href=https://lyfepal.com/posts/348646>https://lyfepal.com/posts/348646</a> В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с безвозмездных вращений. Прибыль, коию Вы заработаете на таком бездепе возможно назначать на вывод без какого либо отыгрыша. 1×slots регистрация на официальном сайте Бездепы шансы входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами.
<b>Смотреть еще похожие новости:</b>
<a href=https://adler.biz/threads/2672/>1×slots официальный сайт зеркало рабочее</a>
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=104300&extra=>1×slots зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Как и другие промоакции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такого предложения являются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает новых посетителей и разрешает им составить эмоцию о функционале, не рискуя вескими суммами. Прямо в арестуйте безвозмездные вращения за регистрацию без депозита и начинайте коллекционировать призовые комбинации ради солидных выигрышей!
#6319 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало рабочее на сегодня букмекерская контора фонбет официальный <a href=https://specreporter.com/>1×bet сейчас</a> online casino официальный porno Елизавета Туктамышева <a href=https://th-royalgclub.com/>pinco casino</a> кент casino 1×bet зеркало слоты леон букмекерская контора 1×bet зеркало xbet букмекерская контора скачать приложение casino ru сайты казино
#6320 Charlesgunnyhttp://filmkachat.ru
1 x slots casino
Каждый новичок и профессиональный игрок мечтают прытко стартануть и начать создавать реальные ставки. Для сего достаточно арестовать подарок, за кот-ый надо уплачивать. В зависимости от игровой платформы, нужно сделать профиль, привязать email или телефон. После сего администрация начисляет щедрое вознаграждение повторяющий безвозмездных вращений либо виртуальных кредитов. <a href=http://filmkachat.ru/>1×slot казино зеркало</a> Бонусы без депо при регистрации числятся наиболее красивыми как для опытных игроков, так для и начинающих. Получив это вознаграждение, заказчик имеет играть на настоящие средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а обстоятельства их активации и выигрыша.Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. <a href=http://www.redsea.gov.eg/deutsche/Lists/Beschwerden_List/DispForm.aspx?ID=7439>http://www.redsea.gov.eg/deutsche/Lists/Beschwerden_List/DispForm.aspx?ID=7439</a> Отзывы читателей о бонусных акциях помогут составить эмоцию, хотя не запамятовывайте о субъективности личных комментариев.Например, игрок получил 500 рублей при разработке аккаунта и обязан отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 руб., потребуется сделать 875 спинов для полного отыгрыша. 1×slos регистрация в 1×slots casino <a href=http://i-pusk.ru/bitrix/redirect.php?goto=http://uchebnikvsluh.ru/bitrix/redirect.php?goto=http://esklad59.ru/bitrix/redirect.php?goto=https://telegra.ph/Edinyj-nalogovyj-platezh-dlya-biznesa-budet-vveden-FNS-Rossii-tolko-k-koncu-2022-goda-09–19>http://i-pusk.ru/bitrix/redirect.php?goto=http://uchebnikvsluh.ru/bitrix/redirect.php?goto=http://esklad59.ru/bitrix/redirect.php?goto=https://telegra.ph/Edinyj-nalogovyj-platezh-dlya-biznesa-budet-vveden-FNS-Rossii-tolko-k-koncu-2022-goda-09–19</a> Новички не обожают сразу же заносить депозит. Это обусловлено неимением опыта и сомненьем. К счастью, в возможно получить бездепозитный бонус за регистрацию в казино. Неважно собственно начисляет система – фриспины либо кредиты. В всяком случае вы не рискуете собственными сбережениями. Это замечательная вероятность запустить приглянувшийся видео слот либо же испытывать удачу в настольных играх.
1х слотс зеркало регистрация в 1×slots casino
Существует ли стратегии для отыгрыша бездепозитных призов? К раскаянию нет, на выигрыши либо проигрыши с призов, казино или игрок повлиять возможности, отдача игр происходит от создателей игр.Частенько новенькие не понимают, как активировать подарки либо вывести 1-ый выигрыш. Для сходственных случаев наша команда обрисовала главные термины – собственно такое фриспины, вейджер, как его отыграть, зачем необходимо протекать верификацию. 1×slots официальный регистрация <a href=http://ksem.ru/bitrix/rk.php?goto=http://glax.org/bitrix/click.php?goto=http://medvisor.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/rK_0qwtN1as>http://ksem.ru/bitrix/rk.php?goto=http://glax.org/bitrix/click.php?goto=http://medvisor.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/rK_0qwtN1as</a> В качестве призов интернет казино часто предлагает выдачу фриспинов, то есть безвозмездных вращений игрового барабана. Виртуальные монеты возможно применять для обучения в покерной школе или для игры в казино.Условия могут различаться приятель от друга. Но подобный бонус может быть применен лишь для игрового процесса – полученные на счет деньги до как, как будут отыграны, вывести нереально. 1×slots зеркало регистрация 2. Создать свежий профиль. Для регистрации нужно заполнить небольшую анкету или зайдите в собственный офис посредством социальных сетей;
1×slot зеркало рабочее регистрации на телефон придет
Игрокам стоит принимать приветственный приз как гарантированный метод получить большой выигрыш, но это отличная возможность без расходов расценить перечень казино.Наш список включает в себя наихорошие бездепозитные бонусы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает проверку по принципиальным параметрам: Нет. Для получения бездепозитного бонуса в казино нужна обязательная регистрация на сайте. Играть в слоты бесплатно и без регистрации можно только в демо режиме. <a href=http://lawshare.tw/home.php?mod=space&username=egipeget>http://lawshare.tw/home.php?mod=space&username=egipeget</a> При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие возможно посвятить этой в казино.Пoдтвepдить личнocть клиента. Для удачного вывода средств, необходимо подтвердить личность посетителя. Нa этaпe вepификaции пpoфиля, сотрудники службы защищенности должны увериться, что у игрока более один аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не сможет исключить свой выигрыш, если у него будет некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы. 1×slot казино зеркало
рабочее зеркало 1×slots
Бoльшинcтвo азартных заведений выдвигают приблизительно одинаковые обстоятельства и требования, коие необходимо выполнить, чтобы получить бездепозитный приз за регистрацию. Все их возможно объединить в раз перечень:Простая процедура получения бездепозитного бонуса, кот-ая займет не более 2-х мин. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные. 1×слотс казино <a href=http://forum.drustvogil-galad.si/index.php?action=profile;u=45841>http://forum.drustvogil-galad.si/index.php?action=profile;u=45841</a> На критериях отыгрыша даровых бонусов по тормознуть подробнее. С ними связаны аспекты, коие невозможно забыть без внимания.Для тех, кто лишь подумывает испытать собственную удачу, еще для профессиональных игроков, отыскивающих свежие площадки для выигрышей, ведущие лицензированные казино нередко устраивают различные акции, и лучшее предложений за последнее время – как для новичков, например и для профессиональных игроков – бездепозитный бонус за регистрацию.
рабочее зеркало 1хслотс
В разделе с бонусами активировать собственный презент. Найти забавы, для которых учтено одобрение и использовать приз по назначению.Многие новички сомневаются, собственно поощрительный приз не несомненно отдавать, даже в они выиграли у казино. Это полностью неопасно и накрепко. Выводя выигранные средства, игрок просто одергивает свое участие при и утрачивает уникальную вероятность – безвозмездно увеличивать собственное материальное положение. Как только получите бездеп в казино, всё одинаково не забывайте проверять электрическую почту. Некоторые игорные клубы каждый радуют активных гэмблеров приятными бонусами. Чаще всего получить подарок можно в преддверии веселья, на день рождение, за вербование друга. А того распространённым призом считается надбавка к депозиту. Нужно более пополнить счёт, и азартное заведение увеличит его на 50–100%. <a href=http://suprememasterchinghai.net/bbs/board.php?bo_table=free&wr_id=3823528>http://suprememasterchinghai.net/bbs/board.php?bo_table=free&wr_id=3823528</a> Для получения бонуса нужно ознакомиться с программкой преданности казино и устроить ставки на сумму, нужную для перехода на грядущий уровень.Каждый новичок и профессиональный игрок грезят быстро стартануть и начать делать реальные ставки. Для сего достаточно арестовать презент, за кот-ый не уплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email либо аппарат. После сего администрация начисляет щедрое вознаграждение в виде даровых вращений или виртуальных кредитов. 1× slots casino официальный сайт Зарегистрируйтесь. Для регистрации почаще всего довольно установить свой номер аппарата и почтовый адресок, после чего установить приобретенный код из СМС. Возможно, потребуется указать промокод. В правилах промоакции будет написано, где его бы вводить. Иногда это надо делать при регистрации, иногда — теснее в сотворения собственного кабинета, на отдельной страничке.
<b>Смотреть еще похожие новости:</b>
<a href=https://mit-bbs.com/viewtopic.php?t=129242>1× slots зеркало</a>
<a href=http://board.eternityrpc.com/member.php?action=profile&uid=369>зеркло казино 1×slots</a>
<a href=http://polishcrazyclan.ugu.pl/member.php?action=profile&uid=272738>1×slots актуальное зеркало</a>
<a href=https://forum.bandariklan.com/showthread.php?tid=176825&pid=930232#pid930232>1×slots промокод при регистрации</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша бонусов. Заведения всегда устанавливают максимальную ставку, допустимую по условиям вейждера.
#6321 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
ограбление казино порно с Баталина Ольга Юрьевна <a href=https://www.ossetia.tv/>сайт винлайн букмекерская контора</a> Семёнова Татьяна Владимировна порно 1×bet на андроид бесплатно <a href=https://rucriminal.info/>casino на телефон</a> порно с Евгения Медведева пинко casino 1×bet рабочее на сегодня букмекерская контора фонбет официальный сайт porno Вера Бирюкова, гимнастка Фастова Елена Владимировна порно casino com
#6322 CasinoCalientehttps://caliente.directorio-de-casinos-mx.com
<a href=https://office-expert.kz/bitrix/redirect.php?goto=https://caliente.directorio-de-casinos-mx.com/>https://caliente.directorio-de-casinos-mx.com/</a> <a href=http://stroymet-shop.ru/bitrix/rk.php?goto=https://caliente.directorio-de-casinos-mx.com/>https://caliente.directorio-de-casinos-mx.com/</a> <a href=http://rd.wishlistmemberplugins.net/index.php?lnk=aHR0cDovL3dhc2VhcmNoLmxvYy5nb3YvZTJrLyovaHR0cDovL2t1cnN5LXNlby1tb3NrdmEyLnJ1&dst=aHR0cHM6Ly9jdXRlcGl4LmluZm8vc2V4L3JpbGV5LXJleWVzLnBocA==https://caliente.directorio-de-casinos-mx.com/>https://caliente.directorio-de-casinos-mx.com/</a> <a href=https://bystron.blog.idnes.cz/redir.aspx?url=https://caliente.directorio-de-casinos-mx.com/>https://caliente.directorio-de-casinos-mx.com/</a> <a href=http://annyaurora19.com/wp-content/plugins/AND-AntiBounce/redirector.php?url=https://caliente.directorio-de-casinos-mx.com/>https://caliente.directorio-de-casinos-mx.com/</a> <a href=https://nordast.ru/bitrix/rk.php?goto=https://caliente.directorio-de-casinos-mx.com/>https://caliente.directorio-de-casinos-mx.com/</a> <a href=http://ezproxy.uzh.ch.xx3.kz/go.php?url=https://caliente.directorio-de-casinos-mx.com/>https://caliente.directorio-de-casinos-mx.com/</a> <a href=http://fujinokuni-cojp.check-sixcore.jp/rank.php?mode=link&id=180&url=https://caliente.directorio-de-casinos-mx.com/>https://caliente.directorio-de-casinos-mx.com/</a> <a href=http://rental-ranking.com/o.cgi?r=0054&c=3&id=cybozu1&u=https://caliente.directorio-de-casinos-mx.com/>https://caliente.directorio-de-casinos-mx.com/</a> <a href=http://alavir.by/bitrix/redirect.php?event1=&event2=&event3=&goto=https://caliente.directorio-de-casinos-mx.com/>https://caliente.directorio-de-casinos-mx.com/</a> <a href=http://btsmebel.ru/bitrix/rk.php?goto=https://caliente.directorio-de-casinos-mx.com/>https://caliente.directorio-de-casinos-mx.com/</a> <a href=https://jeanneau.shipsnetwork.com/en/service/?adreforw=&aiid=&mdid=295https://caliente.directorio-de-casinos-mx.com/>https://caliente.directorio-de-casinos-mx.com/</a> <a href=http://placetobet.net/pointyerna?a=2&c=49&r=https://caliente.directorio-de-casinos-mx.com/>https://caliente.directorio-de-casinos-mx.com/</a> <a href=https://maps.google.kg/url?q=https://caliente.directorio-de-casinos-mx.com/-news-az.com/>https://caliente.directorio-de-casinos-mx.com/</a> <a href=https://pharmap-congress.com/bitrix/redirect.php?goto=https://caliente.directorio-de-casinos-mx.com/>https://caliente.directorio-de-casinos-mx.com/</a>
Upload latest version of the application casino caliente – win today! <a href=http://www.abladvisor.com/redirect.aspx?CType=7&nlid=326067642&email=USER_EMAIL&uhash=USER_HASH&ET=3&id=64&url=https://caliente.directorio-de-casinos-mx.com/>https://caliente.directorio-de-casinos-mx.com/</a> <a href=http://www.renren.com/?url=https://caliente.directorio-de-casinos-mx.com/>https://caliente.directorio-de-casinos-mx.com/</a> <a href=http://www.global-flat.com/mobile/mobile_switch.php?dir=tofull&url=http%3A%2F%2Fdownload-caliente.directorio-de-casinos-mx.com/-fr.com >https://caliente.directorio-de-casinos-mx.com/</a> <a href=http://www.xijucn.com/kaixin/link.php?url=https://caliente.directorio-de-casinos-mx.com/>https://caliente.directorio-de-casinos-mx.com/</a> <a href=https://skinguru.ru/php/apps/shop/comments.php?for=shop&i=197&all=1&url=https://caliente.directorio-de-casinos-mx.com/>https://caliente.directorio-de-casinos-mx.com/</a> <a href=http://www.heidelbergsecatechismus.nl/verwerk_taal.php?publicatie_id=1340&redir=https://caliente.directorio-de-casinos-mx.com/>https://caliente.directorio-de-casinos-mx.com/</a> <a href=http://www.week.co.jp/skion/cljump.php?clid=129&url=https://caliente.directorio-de-casinos-mx.com/>https://caliente.directorio-de-casinos-mx.com/</a> <a href=https://www.google.at/url?q=http%3A%2F%2Fdownload-caliente.directorio-de-casinos-mx.com/-fr.com >https://caliente.directorio-de-casinos-mx.com/</a> <a href=https://torcaliente.directorio-de-casinos-mx.com/h.ru/redirect/?go=https://caliente.directorio-de-casinos-mx.com/>https://caliente.directorio-de-casinos-mx.com/</a> <a href=http://www.plank.cc/gallery/main.php?g2_view=core.UserAdmin&g2_subView=core.UserRecoverPassword&g2_return=https://caliente.directorio-de-casinos-mx.com/>https://caliente.directorio-de-casinos-mx.com/</a> <a href=https://bricks.ua/bitrix/rk.php?goto=https://caliente.directorio-de-casinos-mx.com/>https://caliente.directorio-de-casinos-mx.com/</a> <a href=http://www.mundolapalma.com/inicio/enlacexterno/index.php?enl=https://caliente.directorio-de-casinos-mx.com/>https://caliente.directorio-de-casinos-mx.com/</a> <a href=https://diazcastro.blog.idnes.cz/redir.aspx?url=https://caliente.directorio-de-casinos-mx.com/>https://caliente.directorio-de-casinos-mx.com/</a> <a href=http://haohaibags.com/cn/productshow.asp?id=9&mnid=36974&mc=HL-J45&url=http%3A%2F%2Fdownload-caliente.directorio-de-casinos-mx.com/-fr.com >https://caliente.directorio-de-casinos-mx.com/</a> <a href=http://adserver.millemedia.de/live/www/delivery/ck.php?ct=1&oaparams=2__bannerid=90__zoneid=2__cb=37899684ea__oadest=http%3A%2F%2Fdownload-caliente.directorio-de-casinos-mx.com/-fr.com >https://caliente.directorio-de-casinos-mx.com/</a>
#6323 Charlesgunnyhttp://filmkachat.ru
1×slot регистрация
Главным интересным в появлении этих вознаграждений состоит том,, собственно пустив их в ход, в ничем не рискует и в последствии никому ничего не будет должен (не зависимо, получит ли он благодаря бонусам какой-нибудь выигрыш или мгновенно спустит все лишь собственно прибывшие финансы). То есть, казино снабжает игрока вероятностью на дармовой основе играть во всевозможные слоты даже спонсирует игру.Для казино, работающих онлайн, бездепозитные бонусы необходимы для вербования свежих посетителей. Предложение сыграть на слотах без надобности внесения реальных средств — работающий метод для увеличения интереса к компании. После отыгрыша бездепа великоват шанс, собственно игроку понравится и он продолжит играть в казино, лишь теперь теснее на собственные средства. <a href=http://filmkachat.ru/>1×slots зеркало рабочее на сегодня</a> <a href=http://www.wmhelp.cz/html/modules.php?name=Forums&file=viewtopic&t=69255>http://www.wmhelp.cz/html/modules.php?name=Forums&file=viewtopic&t=69255</a> Фриспины без депо либо дополнительные средства посодействуют ближе познакомиться с игровой платформой и её функциями. За счёт презентов можно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за забавы напротив живых крупье.Подобные призы без депо предоставляются на больше прибыльных условиях. Зачастую они покрупнее, а условия отыгрыша менее строгие. казино 1×slots официальный сайт <a href=http://www.shoppy.co.kr/bbs/board.php?bo_table=free&wr_id=588564>http://www.shoppy.co.kr/bbs/board.php?bo_table=free&wr_id=588564</a> Для получения депозитного бонуса нужно пополнить свой игровой баланс настоящими средствами. Вознаграждение возможно получить либо при внесении первого депо, либо повторяющий фиксированного процента от внесённых средств. Так либо по, приз поступит на счёт лишь последствии пополнения.
1хслотс зеркало на сегодня
<a href=https://persiankittencat.com/grey-persian-cats-unraveling-the-charm-of-these-feline-beauties/#comment-54575>1×slots зеркало сайта</a> 1×slots регистрация на сайте 1×slots ru com <a href=http://www.realitybyrach.com/2011/09/we-bought-zoo-trailer.html>http://www.realitybyrach.com/2011/09/we-bought-zoo-trailer.html</a> Теоретически, к бесплатным бонусам можно отнести например именуемые фриспины. Напомним, речь идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, поэтому что они предоставляют лишь возможность делать ставки. 1×slos регистрация в 1×slots casino На данном разделе портала регулярно публикуются обзорные заметки, в рассматриваются благотворительные призы превосходнейших интернет-казино. Информация структурирована по нескольким пунктам, включая главные:
1 x slots casino
Иногда у гостей вебсайта имеют возникнуть трудности, задачи, препядствия при активации приобретенного промо-кода. В этих случаях, необходимо адресоваться за помощью в саппорта «Support». Для получения ответа, непременно указывается конкретная причина воззвания и подтверждается информация дополнительными скриншотами. Если сложилась неоднозначная ситуация, всегда можно обратиться к основному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ. <a href=http://www.directoryanalytic.com/details.php?id=315602>http://www.directoryanalytic.com/details.php?id=315602</a> Представьте момент, когда при ставке в 10 руб. Вы получите схожее умножение. Миллион рублей за одно вращение, что абсолютно вполне. Поэтому вопрос, сколько можно выиграть остаётся не. Предлагаем проверить без. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный бонус и проверяйте фортуну в деле. Разумеется, вывести деньги не так просто. Однако шансы есть у всех.Бесплатные бонусы казино без депо возможно получить повторяющий денежных средств на бонусный счет (исключить их можно лишь в отыгрыша), фриспинов, забавы либо кешбэк-бонуса. 1×slots регистрация то дальше необходимо пройти Чтобы выступать бесплатно на реальные средства в казино, не всегда довольно просто зарегистрироваться. Иногда нужно выполнить вспомогательные деянья.
1×slots рабочее зеркало на сегодня
Как правило, при выводе финансов, от играющего потребуется только сделать минимальный вклад для того, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом личный счет.Одним из предлогов отдавать привилегию 1 либо другому заведению заключается в привлекательности предлагаемых акций и бесплатных предложений. Безвозмездные фриспины, выдаваемые без нужды создавать какой-нибудь лепта, в списке находится далеко не в конце. Список так нарекаемых «запрещенных землель» прилагается к правилам бонусной программы игорного портала. Обязательно выясните, распространяются ли на вас подобные санкции. 1×slots рабочее зеркало на сегодня <a href=http://www.taijiacademy.com/newforum_down/profile.php?mode=viewprofile&u=303330>http://www.taijiacademy.com/newforum_down/profile.php?mode=viewprofile&u=303330</a>
1хслотс рабочее зеркало
Фриспины — бесплатные вращения, которые позволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины считаются наиболее знаменитым и желаемым обликом бонуса — благотворительные вращения порой эффективнее и веселее в отыгрыше, чем остальные облики бездепов.Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депозит имеет выделяться до 30 дней. <a href=http://goodjobdongguan.com/home.php?mod=space&uid=4395024>http://goodjobdongguan.com/home.php?mod=space&uid=4395024</a> рабочее зеркало 1хслотс Но существуют азартные заведения, готовые просто так вручить деньги на забаву. Для этого довольно создать профиль. Чтобы вывести выигрыш, сначала нужно выполнить вейджеровые условия, прописанные в условиях получения бездепа.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.survival-readiness.com/viewtopic.php?t=250480>1×slots акции</a>
<a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1хлот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездеп с фриспинами может обхватывать всю коллекцию игр на веб-сайте или разработки 1-го провайдера. Обычно предлагается конкретный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш может быть выведен после того, как пользователь отыграет данную необходимую. Возможность оценить глубокий функционал слотов — главное достоинство данной разновидности. Игроку становятся доступны что, эти опции, которые отсутствуют в демонстрационном режиме, а возможность выиграть реальные средства добавляет ярких азартных чувств.
#6324 Rogerthoug
http://fastpillseasy.com/ ed medication online
#6325 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
Бонус начисляется игроку незамедлительно в регистрации и прохождения верификации в казино и не требует от посетителя внесения депо. Как верховодило, размер приза в сходственном случае достаточно стыдливый, впрочем разрешает новеньким познакомиться с забавой без риска реальными деньгами. <a href=http://filmkachat.ru/>казино 1×slots</a> При отыгрыше бонусных средств, необходимо учесть срок действия бонуса и время, которое дается на отыгрыш. По истечению заявленного времени, не отыгранный приз несомненно аннулирован. <a href=https://www.tamaiaz.com/blogs/268391/Mastering-Interior-Design-Drafting>https://www.tamaiaz.com/blogs/268391/Mastering-Interior-Design-Drafting</a> Риск-игра по одинаковым шансам – Также казино возможность запрещать исполнять условия по отыгрышу с помощью раунда на удвоение, который предлагается в слотах, видео-покере и некоторых иных забавах.Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих притязаний, считая обязательной верификации. Если на сайте предусмотрена обязательная процедура доказательства личности, то вывести выигрыш удастся только после ревизии данных. Приготовьтесь наполнить анкету и отправить в техподдержку документ, подтверждающий лицо. 1×slots бездепозитный бонус за регистрацию <a href=http://soundpoolradio.de/profile.php?lookup=17831>http://soundpoolradio.de/profile.php?lookup=17831</a> У каждого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано сумели выполнить их, мы дадим несколько советов. Если система начислила небольшую сумму, не создавать великие ставки – остановитесь на 10–30 центах. Как только сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В противном случае другого, как присмотреться к иному автомату.Доступность — бездепозитные призы в казино почаще всего предоставляются свежим игрокам, хотя случаются случаи, когда приз могут получить и действующие посетители.
1×slots официальный сайт скачать на айфон
B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpaxПрактически все интернет казино с бездепозитным призом за регистрацию предусматривает программку лояльности — систему поощрения неизменных посетителей, которая состоит из большого уровней. При достижении игроком очередного значения на его счёт поступает приз. Чем повыше степень — тем щедрее бонус. 1хслотс зеркало Мы рекомендуем не открещиваться от похожих предложений знаменитых казино. Выделите несколько минут на регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сегодня удача будет на вашей стороне!Для верификации аккаунта надо(надобно) дать специалистам технической поддержки отсканированную копию паспорта и счета за коммунальные услуги, а также фотку банковской карты либо экрана странички электрического кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для доказательства личности. <a href=http://dfch.ru/bitrix/click.php?goto=http://kirabrand.ru/bitrix/redirect.php?goto=http://marblelab.com/bitrix/redirect.php?goto=https://teletype.in/@urist555/ER19Z7cpmDg>http://dfch.ru/bitrix/click.php?goto=http://kirabrand.ru/bitrix/redirect.php?goto=http://marblelab.com/bitrix/redirect.php?goto=https://teletype.in/@urist555/ER19Z7cpmDg</a> Некоторые клубы механически начисляют приз на акк игрока в исполненья условий получения, хотя бывают ситуации, когда бонус нужно активировать игроку самому. Есть несколько методов активации приза:Новые клиенты онлайн-казино без первого депозита могут выяснить собственную удачливость. К что, этому же есть возможность преобразовать бездепы в настоящие деньги за регистрацию в казино, впрочем чтобы бонус нужно отыграть сообразно условиям промоакции. 1×slots зеркало
1хслотс официальный сайт зеркало
В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с бесплатных вращений. Прибыль, коию Вы заработаете на этом бездепе возможно ставить на вывод без какого или отыгрыша.Выполнив все требования оператора, клиент может оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит примерно не более суток. Если дополнительно требуется пройти функцию верификации, то срок возрастает до 1–2 трудящихся дней. Для перевода используются банковские инструменты и электрические платежные системы. Второй способ подходит другого, как, так как масса транзакций в этом случае осуществляются моментально. В связи со специфичностью функционирования банков обработка платежей возможность занять до нескольких трудящихся дней. <a href=http://bbs.yunduost.com/home.php?mod=space&uid=97798>http://bbs.yunduost.com/home.php?mod=space&uid=97798</a> Как прочие промоакции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения считаются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых посетителей и разрешает им составить эмоцию о функционале, не рискуя вескими суммами. 1×слот регистрация в 1×slots casino Заполняя данные в личном профиле, указывайте только достоверную информацию, например как Вам придется ее подтвердить в будущем при выводе денег.4. Заберите презент. Чаще всего бонус активизируется незамедлительно последствии регистрации. Но случаются ситуации, когда надо(надобно) забежать в собственный офис или написать в саппорта.
скачать 1×slots официальный сайт
Разные казино имеют собственные верховодила по выведению выигрыша. Для бездепозитных бонусов принимаются достаточно высокие притязания. Часто онлайн-казино советуют отыграть бонусное поощрение до 100 один в игровых автоматах. Например, в игрок получил бесплатно десять $, то необходимо будет отыграть их, поставив одну тыщу спинов по одному баксу любой. Стоит обозначить(означить), что не все казино дают возможность играть на призы и не во всех увеселительных заведениях идентичные верховодила для отыгрывания. Некоторые казино воспрещают выступать на бонусы в блекджек или ограничивают ставки до 5 %, что существенно увеличивает в 10-ки раз число нужных игр. <a href=https://masstr.net/showthread.php?tid=138943>1хлот регистрация в 1×slots casino</a> В некоторых интернет казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на сайте клуба и подтвердить свои контактные данные. Дополнительно требуется активация промокода.Нет. Для получения бездепозитного бонуса в казино необходима неотъемлемая регистрация на веб-сайте. Играть в слоты бесплатно и без регистрации можно только в демо режиме. казино 1×slots официальный сайт <a href=http://www.sinoright.net/member/index.php?uid=plantovertone22&action=viewarchives&aid=5208>http://www.sinoright.net/member/index.php?uid=plantovertone22&action=viewarchives&aid=5208</a>
1×slots зеркало на сегодня
Наличие у игрока второго аккаунта. Запрещено делать несколько профилей для многократного получения бездепов.Также случаются случаи, когда казино начислит оговоренный приз после регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам. Игрокам стоит воспринимать приветственный бонус как гарантированный способ получить большой выигрыш, хотя это замечательная возможность без затрат расценить возможностей казино.Бездепозитный приз нередко может стать доступным сразу в завершения регистрации, поскольку в большинстве случаев единственным притязанием к нему является регистрация, а затем ревизия вашей свежей учетной записи. <a href=http://www.g3rmaica.de/elfredo/member.php?action=showprofile&user_id=21480>http://www.g3rmaica.de/elfredo/member.php?action=showprofile&user_id=21480</a> Эффективность бездепов в рекламного инструмента оценили многие операторы. Малоизвестные площадки употребляют такие акции, дабы скоро набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны неизменных гостей. Не все сайты, дающие подарки без депо, рекомендованы к ирге. За привлекательным промоописанием шансы прятаться неосуществимые условия отыгрыша и подводные камни. 1×slots зеркало регистрация Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала резвые выводы. Фишка выплат в, что достаточно избрать платёжный инструмент и указать сумму. В большинстве случаев деньги зачисляются на электронные кошельки протяжении 15 мин., а на банковские карты – 1–3 рабочих денька.
<b>Смотреть еще похожие новости:</b>
<a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=7935>1×slots зеркало которую указывали при регистрации кстати</a>
<a href=https://www.xn–72c9aa5escud2b.com/webboard/index.php/topic,537193.new.html#new>1хслотс официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На безвозмездные призы онлайн-казино практически постоянно распространяется лимитирования по стране проживания посетителей. Даже случае для разрешается открывать счет и играть на деньги в заведении, это еще не значат, что вас доступны not the slightest deposit bonuses.
#6326 RonaldApornhttps://chromewebstore.google.com/detail/teleprompter-online/jdimgadkmdedidklfhimhgcbpkkhohbp?hl=en
teleprompter for phone app <a href=https://chromewebstore.google.com/detail/teleprompter-online/jdimgadkmdedidklfhimhgcbpkkhohbp?hl=en>teleprompter online</a>
#6327 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
самое казино Преподобная Надежда Александровна порно <a href=https://rucriminal.info/>Семёнова Татьяна Владимировна порно</a> промокод 1×bet Лут Оксана Николаевна порно <a href=https://slon-ru.com/>porno Илона Маркова, хоккеистка</a> почему в казино не бывает настенных часов казино вулкан порно с Дронова Александра Викторовна порно с Диана Шнайдер (теннис) 1×bet на сегодня ап казино Попова Анна Юрьевна порно
#6328 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало
Стоит отметить, что бездепозитный приз выдается лишь взрослым новеньким, которые, же, шансы пригласить собственных друзей и своих, также рассчитывающих на поощрительную программу преданности. Подобная технология была среди создающих онлайн-казино для популяризации и расширения трафика. Покер румы и спонсоры содействуют повышению своей посещаемости, путем вербования новых игроков. Бонусы – это уникальный шанс для вероятных участников игры, которые шансы опробовать софт покер рума и увериться, станут ли они в него выступать либо нет. Новый игрок испробует средства силы с настоящими оппонентами в казино. <a href=http://filmkachat.ru/>1×slots зеркало подтвердит вашу регистрацию если говорить</a> <a href=https://divisionmidway.org/jobs/author/shopavto22/>https://divisionmidway.org/jobs/author/shopavto22/</a> Но а если вы теснее профи по интернет казино, кликаем на красноватую кнопку «Получить» и Вы автоматически перейдете в онлайн казино; 1×slots бонус за регистрацию <a href=http://anima-rpg.com:/member.php?action=profile&uid=347426>http://anima-rpg.com:/member.php?action=profile&uid=347426</a> Доступ к дару может раскрываться механически последствии введения промокода или воззвания в саппорта сайта. В первом случае от юзера не требуется практически действий. Бездеп с активацией по коду встречается чаще всего. Игроку нужно ввести совокупность знаков в графе, которая возможность находиться в регистрационной форме в Личном офисе.Бонус начисляется игроку сразу в регистрации и прохождения верификации в казино и не настятельно от клиента внесения депозита. Как верховодило, объем бонуса в сходственном случае довольно скромный, однако разрешает новичкам познакомиться с игрой без риска настоящими средствами.
1× slots casino зеркало
<a href=http://nacionrolera.org/foro/viewtopic.php?f=1210&t=106934>1×slots зеркало на сегодня</a> казино 1×slots официальный сайт Таким образом интернет казино получает вероятного игрока. Возможно в или подлинном он захочет поиграть на свои деньги. Так трудятся бездепозитные призы в онлайн казино. Здесь очень подходит выражение, бесплатные сыр бывает только в мышеловке. Начинающие игроки имеют не обдумывать опасность азарта. Однако времени осознания делается больше. Это тема для отдельного обсуждения. <a href=http://www.delishis.ru/forum/?Subdiv_ID=11&Topic_ID=467>http://www.delishis.ru/forum/?Subdiv_ID=11&Topic_ID=467</a> B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. 1×slots регистрация 1×slots review live Чем ниже значение вейджера, тем легче отыграть и вывести приз. Если Вы планируете заработать на бездепе, не просто ознакомиться с новым игровым клубом, то стоит игнорировать призов с высоким вейджером их практически не реально отыграть. С ними Вы сможете лишь протестировать забавы заведения.Так собственно сможете неустрашимо региться без всяких раздумий. Фортуна сейчас точно на вашей стороне. Не побаивайтесь, ведь следствие какого либо ущерба Вам абсолютно не угрожает. С такими бонусами как без пополнения, Вы остаетесь только в плюсе, но не как не в минусе.
casino 1×slot
<a href=https://pornodrochka.club/user/Charlescal/>https://pornodrochka.club/user/Charlescal/</a> Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, научится регулировать менять ставки и линии, изучать бонусные забавы и их выигрышные композиции, да в просто зарядится кучей впечатлений! Ведь вы будите выступать на бонусные средства, которые возможно отыграть и вывести, а не просто на демо счет, что, этим самым адреналин в крови еще повысится а пульс забьется с частым ритмом!Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном сайте и выполните вход в личный офис, дабы отобрать благотворительные вращения с вейджером х40; 1×slots официальный зеркало
1× slots регистрация в 1×slots casino
Акционные предложения от казино есть в разных форматах. Часто призы даются в мена на депо. Игрок вносит платеж и получает средства, безвозмездные вращения и одобрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — картина приза, который гарантирован за исполнение определенных действий на веб-сайте: Например, игрок получил 500 руб. При разработке аккаунта и должен отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 рублей, потребуется сделать 875 спинов для полного отыгрыша.Бонусы без депозита при регистрации считаются самыми красивыми как для опытных игроков, например для и новичков. Получив такое вознаграждение, клиент имеет выступать на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные призы в интернет-казино Рунета, а условия их активации и выигрыша. При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, коие можно посвятить забаве в казино. зеркло казино 1×slots <a href=http://gdz-fizika.ru/index.php?subaction=userinfo&user=erectwriter84>http://gdz-fizika.ru/index.php?subaction=userinfo&user=erectwriter84</a>
1хслот официальный сайт зеркало
Демоказино есть почти на любом веб-сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются существенно пореже: там когда выигрыша и соблюдения условий промоакций бездеп возможно превратить в реальные средства. Выбирайте лучшие безвозмездные бонусы с помощью обзоров на Casinoz – и пусть вас сопутствует удача при отыгрыше бонусных кредитов!Бездепозитные призы реальными средствами, которые можно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадались. <a href=http://autotek.lv/user/PorsedropMr/>http://autotek.lv/user/PorsedropMr/</a> казино 1× slots официальный сайт Бесплатные призы казино без депозита возможно получить в виде денежных средств на бонусный счет (вывести их можно лишь последствии отыгрыша), фриспинов, забавы либо кешбэк-бонуса.
<b>Смотреть еще похожие новости:</b>
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1526#post-44996>1×slots официальный сайт зеркало рабочее</a>
<a href=http://swissairways-va.com/phpBB3/viewtopic.php?p=1674803#p1674803>1×slots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Большинство клубов привлекают внимание в за счёт разнородных подарков. На 1 сайтах можно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает благотворительные вращения для пуска топовых онлайн слотов. Несмотря на разные промоакции, стоит выделить самые главные.
#6329 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
7k casino зеркало рабочее казино большая <a href=https://specreporter.com/>порно с Александр Большунов (лыжные гонки)</a> 1×bet официальный скачать 1×bet телефон <a href=https://kompromat1.online/>почему в казино нет часов</a> porno Вера Бирюкова, гимнастка 1×bet на сегодня ап казино сайт винлайн букмекерская контора лучшие бесплатные онлайн казино casino 7k рабочее где казино
#6330 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало
В наше время очень просто получить бонус за регистрацию в казино. Практически любой игорный дом с готовностью начислит деньги или благотворительные вращения. Многие гэмблеры пользуются этим и не смущяются регистрироваться в любом клубе с выгодными критериями. Кстати, это замечательная вероятность выработать победную стратегию и сорвать джекпот. <a href=http://filmkachat.ru/>казино 1×slots</a> Наши эксперты изучают условия промоакции, затем в ручном режиме проверку их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие характеристики. Мы не рекламируем казино, а даем игрокам информацию о лучших из них. <a href=https://jumpshare.com/v/6DEzisT7cRjyebCJQLAM>https://jumpshare.com/v/6DEzisT7cRjyebCJQLAM</a> 1×slots сайт <a href=https://steamboatspringschat.com/forum/members/justinodofs-1555.html>https://steamboatspringschat.com/forum/members/justinodofs-1555.html</a> Бездепозитный бонус казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в данном и содержится основное различие.Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном сайте и выполните вход в индивидуальный офис, чтобы отобрать безвозмездные вращения с вейджером х40;
1×slots рабочее зеркало на сегодня
<a href=http://griffhunter.com/boards/viewtopic.php?p=486727#p486727>1 х слотс зеркало</a> 1хслотс рабочее зеркало <a href=https://policjaforum.pl/user-2054.html>https://policjaforum.pl/user-2054.html</a> Вышеописанная первопричина и является основным интересным, в которого операторы отдают часть своей выгоды на разные рекламные затраты и рекламные кампании. А наиболее действенным тут будут играть именно бездепозитные бонусы казино 2022 с выводом за регистрацию. 1×slot регистрация Свежий бонус начисляется в виде валютных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в использовании своими, в случае отыгрыша оператор имеет ввести ограничение на вывод денег.
1×slots коды
Наши эксперты исследуют условия промоакции, этого в ручном режиме проверяют их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и параметры. Мы не рекламируем казино, а даем игрокам информацию о наихороших из них.Постарайтесь отыграть вейджер, чтобы появилась возможность забыть заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электронной кошелёк, карту, телефон. <a href=https://rus-crafting.ru/index.php?subaction=userinfo&user=Raymondjep>https://rus-crafting.ru/index.php?subaction=userinfo&user=Raymondjep</a> Если вы новичок деле и лишь попали в неизведанную вами область азарта — счет услуг как бездепозитные призы без пополнения. 1 хслот регистрация в 1×slots casino Допустим, за регистрацию вы возымели бездеп в размере 2 000 руб. С вейджером х30. В этом случае предстоит сделать ставок, на общую необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать настоящие средства. Однако не забывайте, собственно с каждого дара получится вывести определённую сумму (почаще всего не более $200).Однако в условиях скрываются «подводные камни», которые не разрешат исключить крупную сумму либо же вы не успеете отыграть вейджер. Поэтому мастера советуют арестовать благотворительные вращения за регистрацию в казино без депо, дабы поднабраться навыка и получить настоящий шанс на победу.
1×slots зеркало на сегодня
В интернет-сети всегда можно отыскать перечни наиболее известных и обещанных поощрительных программ от знаменитых онлайн-казино.Вознаграждения за получение VIP-статуса ? начисляются в программы преданности при достижении очередного значения либо выдаются персонально менеджерами службы поддержки. <a href=https://persiankittencat.com/grey-persian-cats-unraveling-the-charm-of-these-feline-beauties/#comment-64227>1×slots рабочее зеркало</a> Популярность интернет казино растёт и всё больше юзеров начинают интересоваться азартными забавами. Бездепозитные призы 2022 года, это оригинальные презенты за регистрацию. С их подмогою свежие игроки все получить благотворительные вращения либо деньги на баланс за 1 регистрацию. С свет игорных заведений в интернете, бездепозитные бонусы стали наимоднейшим способом привлечения игроков. Подобные промоакции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш сайт собрал наихорошие предложения из онлайна на 2022 год. Воспользуйтесь каким подарком и сможете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша нужно выполнить условия.Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. Отзывы читателей о бонусных акциях посодействуют составить эмоцию, хотя не забывайте о субъективности собственных объяснений.Подтверждение индивидуальной инфы. Все казино настоятельно от посетителя пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и присутствие у пользователя других аккаунтов (мультиаккаунт запрещен). 1 x slots casino <a href=http://mymodelpages.com/RaymondHok>http://mymodelpages.com/RaymondHok</a> Бездепозитные призы – это самая занимательная и более многообещающая акция интернет-казино. Они том превосходнее фри-спинов, потому собственно выплаты в даровых вращениях не гарантированы, ведь композиции на барабанах игрового аппарата имеют не сложиться.Для казино, работающих интернет, бездепозитные призы необходимы для привлечения новых клиентов. Предложение поиграть на слотах без надобности внесения настоящих денег — работающий способ для повышения интереса к фирмы. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит играть в казино, только сейчас теснее на собственные средства.
1хслот 1хслотс регистрация перейти на 1×slots
Одним из поводов отдавать привилегию 1 или иному заведению заключается в привлекательности предлагаемых промоакций и даровых предложений. Безвозмездные фриспины, выдаваемые без дела делать какой-либо вклад, в списке располагается далековато не в конце. Максимальная ставка ? устанавливается в еденице счета и ограничивает объем ставки за раз спин. В случае ее превышения бонус имеет быть аннулирован. Также в правилах имеет содержаться запрет на размещение ставок конкретного вида, к, по одинаковым шансам в рулетке (другими, на чет или нечет, красноватое или черное и т.д.).Чаще всего интернет-казино предлагают бездепозитные бонусы новым пользователям. Эта промо-акция очень отлично завлекает начинающих, подталкивая их к открытию счета. Конечно, не все они становятся послушными посетителями, хотя сам прецедент регистрации аккаунта играет на руку заведению. <a href=http://mirmagnitov.ru/bitrix/redirect.php?goto=http://sketchpark.ru/bitrix/redirect.php?goto=http://pony-visa.com/bitrix/rk.php?goto=https://teletype.in/@urist555/RnDfBxAcM6q>http://mirmagnitov.ru/bitrix/redirect.php?goto=http://sketchpark.ru/bitrix/redirect.php?goto=http://pony-visa.com/bitrix/rk.php?goto=https://teletype.in/@urist555/RnDfBxAcM6q</a> Бездепы с безвозмездными вращениями деют пользователям право вертеть барабаны игровых автоматов без снятия средств со счета. За любой раунд уплачивает казино. Число спинов ограничено и изредка превышает сотню. Если промоакция включает в себя количество бесплатных игр, их начисление возможность быть разбито на некоторое дней. 1хслот 1хслотс регистрация перейти на 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://australianwinerytours.com/tours/showthread.php?tid=201590>1×slots зеркало видели такую регистрацию на</a>
<a href=https://test.soclanovtsy.ru/profile/2098-rabofreesn/>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a>
<a href=https://timepost.info/showthread.php?tid=102731>1хслот официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая часть забавы. Важно, часто бездепозитные бонусы в казино выдаются с ограничениями по максимальной выплате. В среднем можно рассчитывать на прибыль в количество тыщ рублей. Как вывести выигрыш с бонуса без депозита. Придётся доказать аккаунт документально, в некоторых заведениях. Процедура верификации обязательна и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате либо прочтите в правилах.
#6331 Charlesgunnyhttp://filmkachat.ru
1×slots на любой вкус как пройти регистрацию
Бездепозитные призы — это презенты от казино вид бонусных денег или фриспинов для игровых автоматов, коие начисляются на аккаунт игрока последствии процедуры регистрации на сайте заведения. Для получения этих поощрений депозит не потребуется. <a href=http://filmkachat.ru/>1×slot казино зеркало</a> Не рекомендуем опрометью голову хвататься за различные предложения получения средств без инвестициям. Вполне вполне, собственно бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на 1-ый взор. Альтернативой является казино приз за депо. Мы предлагаем вам пару советов, благодаря коим у любого игрока несомненно вероятность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег:Существует ли стратегии для отыгрыша бездепозитных призов? К раскаянью нет, на выигрыши или проигрыши с бонусов, казино или игрок воздействовать не может, отдача игр происходит от создателей игр. <a href=https://lyfepal.com/forums/thread/7349/Mastering-the-Art-of-CGI-Design-From-Concept-to-Revolutionary>https://lyfepal.com/forums/thread/7349/Mastering-the-Art-of-CGI-Design-From-Concept-to-Revolutionary</a> 1×slots регистрация 1×slots casino c2d ru <a href=https://bz510.com/home.php?mod=space&uid=8942&do=profile>https://bz510.com/home.php?mod=space&uid=8942&do=profile</a>
1×slots официальный demo регистрация в 1×slots casino
<a href=https://thetechmodders.com/forums/viewtopic.php?t=61081>1хслотс рабочее зеркало на сегодня</a> 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Подарки на конкретные даты отличаются критериями получения. Если одобрение начисляют игроку на день рождения, то сумма обычно зависимости от общего размера депозитов за год.1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, в не хотите стать жертвой мошенников или впустую потратить время; <a href=http://food.biz.ua/wr_board/tools.php?event=profile&pname=functionalpaint>http://food.biz.ua/wr_board/tools.php?event=profile&pname=functionalpaint</a> В лицензионных бездепозитных казино играть в азартные игры действительно неопасно. Наличие лицензии одобряет что, этот факт, что клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP.Бонус за регистрацию в казино без депозита с выводом денег надо(надобно) отыграть. Зачастую для отыгрыша может понадобиться сделать ставки на необходимую, в несколько 10-ов один превышающую необходимую приза или выигрыша. 1×slots на любой вкус как пройти регистрацию Получить приветственный приз могут только новые посетители онлайн-казино. Способы описаны в критериях акции каждого легального казино, почаще всего это:Онлайн гемблинг развивается с любым днем больше и больше, свежие бренды создаются не по дням а по часам. Новые интернет казино проделывают вступительные акции для игроков, чтобы, чтобы что бы зарекомендовать себя, и тем самым предлагают бездепозитные призы за регистрацию, собственно бы не пропустить такую возможность — как воспользоваться свежим бездепом, рекомендуем навещать наш сайт как можно чаще, самое аппетитное и новые будет добавляться в данном же перечне.
1×slot казино зеркало
Также, ситуации необходимо подтвердить собственный номер телефонного, чтобы код, приобретенный в смс-сообщении от клуба ввести в специальное поле в собственном офисе игрока.Стоит обозначить(означить), собственно бездепозитный бонус выдается только совершеннолетним новичкам, коие, к, все пригласить личных приятелей и людей, того претендующих на поощрительную программку лояльности. Подобная разработка появилась между соперничающих онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры способствуют увеличению собственной популярности, методом привлечения свежих игроков. Бонусы – это оригинальный шанс для потенциальных соучастников забавы, коие могут опробовать софт покер рума и убедиться, будут ли они в него играть или нет. Новый игрок попробует свои силы с реальными оппонентами в казино. Так же стоит выделить то, собственно в каждом интернет казино установлен свой максимальный кешаут на бездепозитный приз. Как управляло кешаут — это максимальная сумма средств, кот-ая доступная для вывода с бездепозитного бонуса.Иногда операторы требуют внесение малого депо перед выводом для верификации платежного прибора. В некоторых казино этот депо также предстоит отыграть. <a href=http://fruit-impex.by/index.php?subaction=userinfo&user=quaintloser18>http://fruit-impex.by/index.php?subaction=userinfo&user=quaintloser18</a> Фриспины начисляются по конкретной ставке. После их активации игроку необходимо запустить разъем и увериться, собственно в нем показываются бесплатные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода после отыгрыша определяется оператором и редко выше 5 000 рублей.Бездепы обыкновенно предлагают с отыгрышем — быстро вывести выигранные средства невозможно. Перевод средств со счета несомненно возможен после как, как юзер выполнит все притязания казино, а сумма имеет превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, в течение коих клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней последствии активации. 1 х слотс зеркало
1×slots официальный сайт, скачать
Некоторые казино могут предлагать посетителям бездепы за подтверждение номера или почты или репост на страничку в соц сетях.Осталось выбрать казино с бонусом за регистрацию и сделать профиль. После активации презента выигрыш в от Фортуны и навыков. Изучить правила и обстоятельства получения бездепозитных призов казино, Вы сможете у нас на веб-сайте в разделе с бонусами или на официальном веб-сайте выбранного Вами казино. Если не можете найти нужную информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал либо по электрической почте. Приглашаем делиться сужденьями о бонусах. Это поможет иным юзерам выбирать наиболее прибыльные предложения.Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. 1×slot регистрация <a href=http://cheapbooks.cc/memberlist.php?mode=viewprofile&u=44881>http://cheapbooks.cc/memberlist.php?mode=viewprofile&u=44881</a>
1×slots зеркало быструю регистрацию а также мгновенное
Вейджер (wager) – это коэффициент, который демонстрирует на какую необходимую необходимо сделать ставок, чтобы исключить бонус из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего приза, Вам нужно устроить ставок на необходимую: 500*70=3500 руб. Только полностью отыграв бонус, Вы сможете вывести свой выигрыш. <a href=http://qanunxeber.com/index.php?subaction=userinfo&user=curlyrash88>http://qanunxeber.com/index.php?subaction=userinfo&user=curlyrash88</a> 1×slots коды
<b>Смотреть еще похожие новости:</b>
<a href=http://sladkierecepti.5nx.ru/viewtopic.php?f=8&t=3874>1× slots официальный</a>
<a href=https://www.lightknotes.com/MyBB/showthread.php?tid=274405>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<a href=https://www.addonface.com/welcome>1хслотс рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подтвердите регистрацию, чтобы активировать Бездепозитный приз с выводом, требуется заполнить собственный профиль. Заполните пустые поля настоящими данными о для. Похожим образом работает 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя или в связи с получения им VIP-статуса. Подарок предоставляется в обращения в поддержку и проверки.
#6332 Charlesgunnyhttp://filmkachat.ru
1×slots мобильная версия войти казино
Бездепозитные бонусы — это презенты от казино в виде бонусных денег либо фриспинов для игровых автоматов, которые начисляются на аккаунт игрока в процедуры регистрации на сайте заведения. Для получения таких поощрений депозит не требуется. <a href=http://filmkachat.ru/>1×slots сайт зеркало</a> За привлечение приятеля ? в партнерской программы клиент получает вознаграждение за вербование свежих пользователей.Главное превосходство спинов – вероятность выучить различные слоты. Также удастся насладиться бонусными раундами, испытывать удачу в риск-туре и преувеличить выигрыш за счёт особых знаков. Однако столько игровой процесс заслуживает внимание, ведь лучше сосредоточиться на реальном выигрыше. <a href=https://www.4yo.us/blogs/315801/Transforming-Modern-Kitchen-Design-Through-Digital-Visualization>https://www.4yo.us/blogs/315801/Transforming-Modern-Kitchen-Design-Through-Digital-Visualization</a> Для выбора азартного заведения Вы сможете пользоваться перечнем наших казино с призами за регистрацию. На нашем сайте мы опубликовали перечень бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, что доля призов неповторимые и доступны только для гостей нашего сайта по-специальному промо-коду либо по оригинальной ссылке. Кроме того, для каждого бонуса мы подготовили доскональный обзор, в Вы узнаете как получить и отыграть поощрение и как вывести собственный выигрыш с бездепа. 1×slots регистрация 1×slotscasino09k online <a href=http://space.scmlife.com/home.php?mod=space&uid=414064>http://space.scmlife.com/home.php?mod=space&uid=414064</a>
1 хслот регистрация в 1×slots casino
К раскаянию, нет. Почти все казино, просят внесение желая бы одного малого депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, что исключить деньги разрешено лишь на что, эту платежную систему, с коей был сделан депо.Прежде всего, не забывайте периодически заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом разглядывают наиболее интересные предложения водящих игорных порталов. рабочее зеркало 1хслотс Свежий бонус начисляется повторяющий валютных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в использовании своими, в случае отыгрыша оператор возможность ввести ограничение на вывод денег.Также есть онлайн-платформы азартных игр, коие используют раздачу бездепозитных бонусов в специальные даты (как для казино, например и для игрока). Помимо этого, действующие игроки также имеют возможность получить похожие бонусы за свою деятельность (например, за повышения значения либо за схожие заслуги). <a href=http://forumqservice.co.uk/member.php?action=profile&uid=5137>http://forumqservice.co.uk/member.php?action=profile&uid=5137</a> Ну и конечно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: сходственная добродушие увеличивает степень лояльности посетителей к фирмы. 1×slots мобильная версия войти казино
1×slots casino online регистрация
На нашем веб-сайте Вы отыщите список актуальных новых бездепозитных бонусов в казино 2022 года. Также, есть много неповторимых предложений, которые доступны лишь гостям нашего вебсайта после регистрации по нашей ссылке либо активации особого промокода.Также, учите, что бездепозитный приз возможно исключить только сомнений случае, когда станут выполнены все условия отыгрыша. Но а если вы уже профи по онлайн казино, кликаем на красноватую кнопку «Получить» и Вы автоматически перейдете в онлайн казино; <a href=https://www.buhgalteria.ru/forums/user/69235/>https://www.buhgalteria.ru/forums/user/69235/</a> Классическая разновидность приза за творение аккаунта. Его преимущество содержится в том, собственно заказчик возможность других подбирать аппараты и делать ставки в их. Иногда список игровых автоматов ограничен оператором, но все точно это другого, чем один-единственный доступный слот, как если, тогда, с использованием фриспинов. 1×slot зеркало рабочее регистрации на телефон придет Некоторые клубы автоматически начисляют бонус на акк игрока после исполнения условий получения, но бывают ситуации, когда бонус надо(надобно) активировать игроку самому. Есть количество методов активации бонуса:В интернете слишком количество скриптовых сайтов, коие принадлежат жуликам. Их главная цель – привлечь гэмблеров, пообещав не щедрые презенты, но и солидные выигрыши. Так собственно кое-какие сайты предлагают получить за регистрацию даже $1 000.
1×slots регистрация на 1хслотс
В качестве призов интернет казино часто предлагает выдачу фриспинов, словами даровых вращений игрового барабана. Виртуальные монеты можно применять для изучения в покерной школе или для забавы в казино. Для выбора азартного заведения Вы сможете пользоваться перечнем наших казино с бонусами за регистрацию. На нашем веб-сайте мы выпустили перечень бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, что часть бонусов эксклюзивные и доступны лишь для гостей нашего сайта по-специальному промо-коду либо по оригинальной ссылке. Кроме такого, для каждого бонуса мы подготовили доскональный обзор, каком Вы узнаете как получить и отыграть поощрение и как вывести свой выигрыш с бездепа.Бездепы обычно предлагают с отыгрышем — моментально исключить выигранные средства невозможно. Перевод средств со счета будет возможен последствии такого, как юзер выполнит все требования казино, а сумма имеет превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, протяжении коих клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней после активации. 1×slots регистрацию процедура займет всего лишь <a href=https://forum.expert-watch.com/index.php?action=profile;u=190100>https://forum.expert-watch.com/index.php?action=profile;u=190100</a> А ознакомиться с новыми онлайн казино, Вы сможете помощью призов с выводом выгоды, коие Вы сможете получить без депозита.Особую изюминку видео слотам присваивают уникальные знакы. С их выходом активизируются различные призы. Вы можете запустить дополнительный уровень и увеличить необходимую выигрыша. Есть знаки, которые замещают ненадобные элементы и сами творят выигрышные комбо. Не стоит забывать и на бонус-тур. После любого успешного спина есть шанс увеличить сумму выигрыша в 2 или четыре раза.
рабочее зеркало 1×slots
Большинство интернет-казино из нашего топ-10 готовы порадовать вас эксклюзивными акциями. Читайте о них в обзорах и на форуме. <a href=http://www.tr.besatime.com/index.php?subaction=userinfo&user=ForsedropPr>http://www.tr.besatime.com/index.php?subaction=userinfo&user=ForsedropPr</a> Разные казино имеют собственные управляла по выведению выигрыша. Для бездепозитных призов принимаются достаточно высочайшие требования. Часто онлайн-казино советуют отыграть бонусное одобрение до 100 один в игровых автоматах. Например, если игрок получил даром десять $, то нужно несомненно отыграть их, поставив одну тысячу спинов по 1 баксу каждый. Стоит обозначить(означить), что не все казино выделяют вероятность выступать на бонусы и не во всех развлекательных заведениях идентичные правила для отыгрывания. Некоторые казино воспрещают выступать на бонусы в блекджек или ограничивают ставки до пяти процентов, что существенно наращивает в 10-ки один число нужных игр.Бонус за регистрацию в казино без депозита с выводом денег надо(надобно) отыграть. Зачастую для отыгрыша может понадобиться сделать ставки на необходимую, в несколько 10-ов один превышающую необходимую приза или выигрыша. 1× slots casino официальный сайт Во всех законных онлайн-казино Беларуси необходимо подтверждение паспортных данных для забавы — это заявка правительства страны.Когда речь идет о денежных бонусах, казино практически устанавливают условия вейджера, которые необходимо выполнить, чтобы вывести выигрыш.
<b>Смотреть еще похожие новости:</b>
<a href=http://lider1c.ru/communication/forum/messages/forum5/message18506/14526–1khslot-zerkalo?sessid=1ac9fe26905ca111cfd5b6eeb6873118&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1хслот зеркало</a>
<a href=https://nauc.info/forums/viewtopic.php?t=20401470>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=990814#pid990814>казино 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Таким образом интернет казино получает потенциального игрока. Возможно в либо подлинном он захочет сыграть на свои средства. Так работают бездепозитные бонусы в онлайн казино. Здесь хорошо подходит выражение, бесплатные сыр случается только в мышеловке. Начинающие игроки имеют не осознавать опасность азарта. Однако течением осознания делается больше. Это тема для отдельного обсуждения. Пoдтвepдить личнocть клиента. Для удачного вывода средств, необходимо подтвердить личность посетителя. Нa этaпe вepификaции пpoфиля, сотрудники службы защищенности должны увериться, что у игрока более один аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не сможет исключить свой выигрыш, если у него будет некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы.
#6333 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet официальный слоты букмекерская контора вход <a href=https://specreporter.com/>casino вход</a> казино без приложения букмекерских контор на андроид <a href=https://m.repost.news/>porno Илона Маркова, хоккеистка</a> porno Юлия Пересильд casino 7k сегодня Москалькова Татьяна Николаевна порно фреш казино порно с Георгий Джикия (футбол) казино смотреть онлайн бесплатно Москалькова Татьяна Николаевна порно
#6334 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
new casino porno Яна Троянова <a href=https://rhymes-punches.com/>рокс казино</a> 1×bet сейчас 1×bet 1хбет <a href=https://krtka.info/>спорт букмекерская контора</a> 1×bet зеркало xbet 1×bet new casino r7 casino 1win букмекерская контора игры казино порно с Матвей Сафонов (футбол)
#6335 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Юлия Ефимова, пловчиха казино смотреть онлайн бесплатно <a href=https://sovsekretno.net/>пин casino</a> Скворцова Вероника Игоревна порно Окладникова Ирина Андреевна порно <a href=https://rucriminal.info/>играющие казино</a> казино пину casinos winning 1×bet зеркало рабочее на сегодня 1win букмекерская контора porno Дарья Клишина vavada casino casino ru
#6336 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino 7k сегодня casino бонус <a href=https://www.ossetia.tv/>балтбет букмекерская контора</a> играющие казино рокс казино <a href=https://rucriminal.info/>казино смотреть</a> порно с Константин Тюкавин (футбол) 1×bet слоты официальный сайт рокс казино порно с Матвей Сафонов (футбол) букмекерская контора мостбет порно с Константин Тюкавин (футбол) казино играть
#6337 Charlesgunnyhttp://filmkachat.ru
1×slots казино мобильная версия
Законодательство, регулирующее азартные игры в разных странах, влияние на возможности операторов. В результате пользователи из отдельных регионов сталкиваются с лимитированиями со стороны казино. Это может быть как глубокий отказ в доступе, например и невозможность загружать забавы отдельных производителей. <a href=http://filmkachat.ru/>1×slots зеркало сайта</a> Каждый новичок и умелый игрок мечтают стремительно стартануть и начать создавать настоящие ставки. Для этого довольно забрать подарок, за который надо уплачивать. В зависимости от игровой платформы, нужно создать профиль, привязать email или аппарат. После сего администрация начисляет щедрое вознаграждение вид даровых вращений или виртуальных кредитов. <a href=https://www.swiatobrazu.pl/forumgaleria/thread/view/id/589>https://www.swiatobrazu.pl/forumgaleria/thread/view/id/589</a> Бездепозитный приз казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в данном и содержится основное отличие. 1хслот зеркало <a href=https://maps.google.dz/url?q=https://doctorlazuta.by/>https://maps.google.dz/url?q=https://doctorlazuta.by/</a> Приветственный бездеп предоставляется какому игроку только один один. Казино сражаются с например называемыми бонусхантерами (от англ. Bonus Hunter — доброволец за призами), пытающимися заводить многочисленные аккаунты для обмана оператора и повторного получения подарка. Исключить сходственные действия дозволяет верификация данных. Администрация вправе потребовать у посетителя подтвердить персональные данные, обозначенные при регистрации.Возьми собственный презент. Чаще всего бонус активизируется сразу в регистрации. Но посещают истории, когда нужно зайти в индивидуальный офис или написать в справочную службу.
1×slots промокод при регистрации 2025
1×slots рабочее зеркало на сегодня <a href=http://dotmetal.com.ua/wr_board/tools.php?event=profile&pname=bashfulpyramid1>http://dotmetal.com.ua/wr_board/tools.php?event=profile&pname=bashfulpyramid1</a> Основное отличие что, нет, собственно для получения бездепа не надо пополнять баланс в казино. Но кроме этого, есть ряд и других отличий: 1×slots официальный сайт мобильная версия скачать Постарайтесь отыграть вейджер, чтобы замечена вероятность забыть заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электрической кошелёк, карту, телефон.Будьте внимательнее при ознакомлении с правилами во избежание происхожденья конфликтных ситуаций с казино, когда последствии отыгрыша бездепа вам не дадут вывести солидную сумму выигрыша.
1×slots официальный сайт зеркало
Объективные – объем бонуса, коэффициент и обстоятельства вейджера, надобность внесения депозита для вывода средств;Чтоб получить крупный выигрыш, подбирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша. Oтыгpaть бонус с указанным вeйджepом, достичь нужно сдeлaть cтaвoк нa cумму, превосходящую объем приза в некоторое один. <a href=https://xn–80apeih4a.xn–p1ai/communication/forum/messages/forum2/message4300/2873-vykup-avto?result=new#message4300>https://xn–80apeih4a.xn–p1ai/communication/forum/messages/forum2/message4300/2873-vykup-avto?result=new#message4300</a> Если площадка презентует бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь завести аккаунт на веб-сайте и активировать его, подтвердив адрес электронной почты, номер телефона либо другие данные, коие требует оператор. Перед данным необходимо убедиться, собственно юзер располагается на официальном веб-сайте казино, но на мошеннической площадке.Это один из основных характеристик привлекательности презента. С завешенным коэффициентом том мастера не сумеют выполнить условия по отыгрышу. И важно, насколько презентабельно выглядит предложение – бездепозитный бонус казино в размере $500 либо $1 000. Чтобы новенькие лучше вдумались, собственно же такое вейджер, мы разберём на случае. 1×slots коды Для такого, чтобы отыграть необходимую вашего бездепозитного приза надо(надобно) выполнить обстоятельства вейджера. Очень часто фриспины даются на определенные слоты (book of ra, book of lifeless, book of sun), выбирайте слот себя нраву, они очень красивые и качественные. Бездепозитные бонус имеет быть денежным так и вид фриспинов на слотыВы скорее, например все предпочитаете получать презенты и бездепозитные бонусы казино. Игорные дома взяли в повадку одаривать гэмблеров приятными призами. Стать владельцем приветственного подарка можно за создание профиля либо пополнение счёта. Второй вариант больше интересный, ведь клубы готовы удвоить депозит! Но в вы новичок и только знакомитесь с миром азарта, другого, как пользуйтесь бонусом за регистрацию.
1 x slots
Вейджер (либо вагер) ? это минимальная сумма ставок, которую нужно сделать для вывода валютного бонуса. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение. Вознаграждения за получение VIP-статуса ? начисляются масштабах программы лояльности при достижении одного уровня либо выдаются персонально менеджерами службы поддержки.В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это самая приятная часть игры. Важно, зачастую бездепозитные призы в казино выдаются с ограничениями по максимальной выплате. В среднем возможно рассчитывать на прибыль в некоторое тыщ рублей. Как исключить выигрыш с бонуса без депо. Придётся доказать аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате либо прочитайте в правилах. 1×slots рабочее зеркало <a href=https://www.mikocon.com/home.php?mod=space&uid=212409>https://www.mikocon.com/home.php?mod=space&uid=212409</a> Эффективность бездепов виде маркетингового инструмента расценили почти операторы. Малоизвестные площадки используют такие промоакции, чтобы скоро набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны неизменных гостей. Не все сайты, дающие презенты без депо, рекомендованы к игре. За симпатичным промоописанием могут скрываться неосуществимые условия отыгрыша и подводные камешки.
1×slots бонус за регистрацию
Вейджер (wager) – это коэффициент, который показывает на какую необходимую нужно устроить ставок, дабы вывести бонус из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода этого приза, Вам нужно устроить ставок на сумму: 500*70=3500 рублей. Только полностью отыграв приз, Вы можете исключить собственный выигрыш. Однако в критериях исчезают «подводные камни», коие не разрешат исключить солидную сумму либо же вы не успеете отыграть вейджер. Поэтому мастера советуют забрать благотворительные вращения за регистрацию в казино без депозита, чтобы поднабраться опыта и получить реальный шанс на победу. <a href=https://forum.gamefa.com/User-Jamesjer>https://forum.gamefa.com/User-Jamesjer</a> Активация по промокоду используется в разных видах бездепов. Если речь о приветственном призе, то набор знаков можно разузнать на основной страничке, в регистрационной форме либо послании, коие отправляется юзеру для подтверждения адреса электронной почты. Акции могут проводиться совместно с партнерскими площадками. Обычно код располагается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активируется одноразовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем актуальный код для активации в описании каждого промо. 1×slots зеркало на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=http://evtrucksforum.com/memberlist.php?mode=viewprofile&u=28289>1×slots официальный регистрация</a>
<a href=http://big.bestforums.org/viewtopic.php?f=7&t=10415>1 xslots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Обычно для получения бонусов без депозита, казино выдвигает лояльные и абсолютно выполнимые условия, но есть ряд действий которые запрещены и могут повлечь за собой противные последствия: Для казино, работающих онлайн, бездепозитные призы необходимы для вербования свежих клиентов. Предложение сыграть на слотах без необходимости внесения реальных средств — работающий способ для повышения интереса к компании. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит играть в казино, только сейчас уже на личные деньги.
#6338 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
ев казино casino промокод <a href=https://kompromat1.online/>pin up casino официальный</a> порно с Елена Никитина, скелетонистка casino андроид <a href=https://specreporter.com/>r7 casino</a> Нургалиева Эльвира Рамиловна порно мобильные букмекерские конторы Ирина Горбачева porno Илона Маркова, хоккеистка casino online зеркало 1×bet зеркало рабочее на сегодня up букмекерская контора
#6339 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало этих способов предполагает регистрацию
Не трудно додуматься, собственно no deposit bonuses практически разу не посещают большими. Чаще всего речь о пяти–тридцати баксах (или эквиваленте данной суммы в другой валюте).Вообще перейдя в казино — правила одинаковы в получении бездепозитных бонусов, в стереотипные верховодила заходит: подтвердить эл. Почту и телефонный, заполнить свой собственный профиль, активировать рекламную код либо активировать предложения во вкладке БОНУСЫ. <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток.Размер ставки для забавы по бездепозитному бонусу (окончательно же, если, тогда,, когда он представлен в виде бонусных валютных средств) часто ниже, чем при этой на депо. Ограничение будет работать до момента отыгрыша приза. <a href=https://lyfepal.com/forums/thread/7349/Mastering-the-Art-of-CGI-Design-From-Concept-to-Revolutionary>https://lyfepal.com/forums/thread/7349/Mastering-the-Art-of-CGI-Design-From-Concept-to-Revolutionary</a> 1×slots регистрацию более популярный вариант это <a href=http://rental7942.co.kr/bbs/board.php?bo_table=free&wr_id=13492>http://rental7942.co.kr/bbs/board.php?bo_table=free&wr_id=13492</a> Одним из поводов отдавать преимущество, льготу одному или иному заведению содержится в привлекательности предлагаемых акций и безвозмездных предложений. Безвозмездные фриспины, выдаваемые без дела создавать какой-нибудь вклад, в списке находится далековато не в конце.
1хслотс казино зеркало
Будьте внимательнее при ознакомлении с правилами во избежание появления конфликтных обстановок с казино, когда после отыгрыша бездепа вас не дадут исключить солидную сумму выигрыша.Многие азартные клубы ограничивают необходимую вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, обозначенной в описании акции, суммы Вы не сможете вывести. Разница будет аннулирована, Вы том не сможете создавать на нее ставки. рабочее зеркало 1хслотс Наш перечень содержит наилучшие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по важным параметрам: <a href=http://kpforma.ru/bitrix/rk.php?goto=http://avt-1c.ru/bitrix/redirect.php?goto=http://flegl.blog.idnes.cz/redir.aspx?url=https://telegra.ph/Kak-najti-mestonahozhdenie-zaklyuchennogo-po-ego-familii-09–23>http://kpforma.ru/bitrix/rk.php?goto=http://avt-1c.ru/bitrix/redirect.php?goto=http://flegl.blog.idnes.cz/redir.aspx?url=https://telegra.ph/Kak-najti-mestonahozhdenie-zaklyuchennogo-po-ego-familii-09–23</a> 1хлот регистрация в 1×slots casino
1×слотс казино
Промообъявления от казино мешают реальной картины и направлены на вербование внимания пользователей. Понять, как высоки шансы остаться в плюсе, позволит личный анализ критерий предложения:Существует ли стратегии для отыгрыша бездепозитных призов? К раскаянью нет, на выигрыши или проигрыши с призов, казино или игрок воздействовать возможности, отдача игр происходит от создателей игр. Обычно показатель выше, чем для призов на депозит. Не изумляйтесь, случае он будет числе х100. Иногда завышенный коэффициент вейджера уточняется для обитателей отдельных государств. <a href=http://mail.canadalondonchinese.com/home.php?mod=space&uid=197666>http://mail.canadalondonchinese.com/home.php?mod=space&uid=197666</a> 1×slots регистрация то дальше необходимо пройти
1×slots сайт
Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в неотъемлемом порядке необходимо восполнить счет в казино. Для депозитных призов, эта процедура не необходима, так как депозит уже сделан.Помните, собственно любые нарушения управлял сведут на нет ваши усилия, и вы всего останетесь без начисленного для дарового бонуса. Всегда изучайте управляла начисления и обстоятельства вейджера. По любым вопросам, на коие вы возможности без найти ответы, обращайтесь за объясненьям и саппорт. Онлайн гемблинг развивается с каждым днем больше и больше, свежие бренды создаются не по дням а по часам. Новые интернет казино проделывают вступительные акции для игроков, для того что бы зарекомендовать себя, и тем самым предлагают бездепозитные призы за регистрацию, собственно бы не пропустить такую вероятность — как воспользоваться свежим бездепом, рекомендуем навещать наш вебсайт как возможно почаще, самое лакомое и свежие несомненно добавляться в данном же перечне. 1×slot казино зеркало <a href=https://pediascape.science/wiki/Glory_Casino>https://pediascape.science/wiki/Glory_Casino</a> Мы делаем акцент на ключевых положениях управлял, рассказываем о территориальных ограничениях и кратко информируем о других акциях обсуждаемого казино.
1хлот регистрация в 1×slots casino
Чтобы выступать даром на настоящие деньги в казино, порой довольно просто зарегистрироваться. Иногда нужно выполнить дополнительные действия.Приветственный бездеп предоставляется любому игроку лишь один раз. Казино борются с так нарекаемыми бонусхантерами (от англ. Bonus Hunter — охотник за призами), пытающимися заводить многочисленные аккаунты для обмана оператора и повторного получения подарка. Исключить подобные деяния позволяет верификация данных. Администрация вправе потребовать у клиента доказать персональные данные, указанные при регистрации. После получения бонуса вывод средств для посетителя будет недоступен до тех пор, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо пара недель. Выводить средства игрок может только последствии отыгрыша. <a href=http://permitbeijing.com/forum/member.php?action=profile&uid=195944>http://permitbeijing.com/forum/member.php?action=profile&uid=195944</a> Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам воспрещено начислять бонусы клиентам, не имеющим денежных средств на счете. Мы предлагаем разглядеть актуальные бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ.Зарегистрируйтесь. Для регистрации чаще всего довольно ввести свой номер аппарата и почтовый адресок, в чего установить полученный код из СМС. Возможно, требуется указать промокод. В правилах акции несомненно написано, где его надо вводить. Иногда это хотелось делать при регистрации, от — теснее в творения собственного кабинета, на отдельной странице. 1× slots сайт
<b>Смотреть еще похожие новости:</b>
<a href=http://link.5nx.ru/viewtopic.php?f=5&t=4880>1хслот зеркало</a>
<a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=92683>1×slots регистрация 1×slots casino 777 online</a>
<a href=http://diplomka.jakubfiser.com/wolf/plugins/comment/image.php>1×slots регистрация 1×slotscasino 56 online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Наличие у игрока 2 аккаунта. Запрещено создавать несколько профилей для неоднократного получения бездепов. Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.
#6340 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasino09k online
Не стоит незамедлительно же отказываться от приветственных подарков в похожих казино. Администрация готова начислить средства либо фриспины, но предварительно сотрудники обязаны убедиться, собственно вы не аферист. Дело что, нет, что развелось слишком большое охотников за призами. Они научились дурачить систему и зарабатывать солидные суммы денег. <a href=http://filmkachat.ru/>1× slots регистрация в 1×slots casino</a> Призовые начисления без депозита имеют предоставляться для роли в турнирах интернет казино. Потратить перечисленные средства возможно необыкновенно в данной акции. Условия их проведения содержат ограничения на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться таким предложением, чем изучить его управляла. <a href=https://elearn.ellak.gr/mod/forum/discuss.php?d=31646>https://elearn.ellak.gr/mod/forum/discuss.php?d=31646</a> Бонус за регистрацию в казино выдается лишь один раз на одного игрока. Но случаются вспомогательные промоакции, масштабах которых бездепы раздаются для постоянных клиентов и такие презенты Вы можете получить больше одного раза. 1×slots рабочее зеркало <a href=http://arskland.ru/people/user/14304/>http://arskland.ru/people/user/14304/</a> На условиях отыгрыша бесплатных призов идет тормознуть подробнее. С ними связаны нюансы, которые нельзя оставить без внимания.
1×slots casino регистрация
Исходя из сего, просто не существует разумных оснований махнуть рукою на получение такового бонуса при регистрации. И, будет, на подобный безвозмездной основе у вас есть шансы выиграть деньги и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные бонусы, называют безвозмездными интернет платформами для игр. 1×slots бездепозитный бонус за регистрацию Простая процедура получения бездепозитного приза, которая займет не более 2-х мин. Для получения бездепов, достаточно зарегистрироваться и доказать контактные данные. <a href=http://t95283ld.bget.ru/user/GeraldDoony/>http://t95283ld.bget.ru/user/GeraldDoony/</a> зеркло казино 1×slots Чтобы выступать безвозмездно на реальные деньги в казино, порой довольно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные действия.
1×slots casino зеркало
Онлайн-казино кропотливо продумывают бонусные условия, коие нужно изучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и другие ограничения.Чтобы выступать даром на настоящие деньги в казино, порой довольно просто зарегистрироваться. Иногда нужно выполнить дополнительные действия. Перед активацией важно внимательно изучить обстоятельства промоакции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют значение кроме лимиты ставок при отыгрыше и сроки, в течение которых можно пользоваться предложением. Если бездеп охватывает узкий список игр, рекомендуется узнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только никаких случае, в оператор не установил жесткие лимитирования на наивысшую необходимую ставки. <a href=http://yunduost.com/home.php?mod=space&uid=20058>http://yunduost.com/home.php?mod=space&uid=20058</a> Возможность сыграть дополнительное соревнование (а от и некоторое) абсолютно даром, а выигрыш, в свою очередь, поступает на счёт игрока.В истиннее время получить бонус за регистрацию в казино очень просто. Почти каждый игорный дом с готовностью предоставит средства или бесплатные вращения. Многие игроки используют данным и не стыдятся регистрироваться в любом клубе с прибыльными условиями. Кстати, это замечательная вероятность выдумать выигрышную стратегию и сорвать куш. casino 1×slot Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.Риск-игра по равным шансам – Также казино имеет воспрещать выполнять условия по отыгрышу за раунда на удвоение, который предлагается в слотах, видео-покере и неких иных играх.
1×slots регистрация 1×slotscasino 56 online
<a href=https://chasingadream.rpginitiative.com/showthread.php?tid=139566>1× slots регистрация в 1×slots casino</a> Бездепозитный приз за регистрацию в казино — это стартовый подарок вид денежного начисления или даровых вращений для новых игроков заведения, для получения которого надо вносить депозит.Верификация важна для добавочной безопасности и может техподдержке выявить бонусхантеров и мошенников. Кстати, на некоторых платформах выводы солидных сумм доступны лишь после подтверждения личности. 1×slots casino регистрация 1×slots review live <a href=https://rovworld.com/members/raymondner/profile/>https://rovworld.com/members/raymondner/profile/</a>
1хслот скачать
Если вы новичок в и лишь попали в неизведанную вами район азарта — за услуг как бездепозитные бонусы без пополнения. <a href=http://itstula.com/index.php?subaction=userinfo&user=yummyfreeway52>http://itstula.com/index.php?subaction=userinfo&user=yummyfreeway52</a> В онлайне большое знаменитых игорных площадок с привлекательными акционными услугами. Однако внимательно разбирать условия десятков услуг вскоре надоест, да и время отнимет много. Поэтому наша команда подготовила ТОП-3 вебсайтов с наихорошими бездепозитными бонусами:Иногда для получения призов необходимо связаться с адептами службы. Удобнее всего с ними разговаривать в онлайн-сате, хотя от достаточно запроса по электронной почте. 1хслотс официальный сайт зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=2798>1х слот регистрация в 1×slots casino</a>
<a href=http://griffhunter.com/boards/viewtopic.php?p=338143#p338143>1×slot зеркало рабочее регистрации на телефон придет</a>
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=674109>1×slots официальный регистрация</a>
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1942#post-55335>1×slot рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Отказ в прохождении верификации. Если клиент не хочет либо возможности дать документы, подтверждающие его личность, профиль несомненно заблокирован вместе со всеми бонусными начислениями.
#6341 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Лут Оксана Николаевна порно unlim casino <a href=https://7club7.com/>казино фильм онлайн</a> 1×bet сайт porno Юлия Пересильд <a href=https://vestnik-jurnal.com/>песня казино</a> 1×bet зеркало казино ли porno Илона Маркова, хоккеистка unlim casino казино фильм смотреть онлайн casino зеркало сегодня 1×bet вход
#6342 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Каролина Севастьянова букмекерская контора фонбет официальный сайт <a href=https://sovsekretno.net/>пина букмекерской конторы</a> porno Илона Маркова, хоккеистка ешь казино <a href=https://slon-ru.com/>рейтинг казино</a> porno Дарья Мороз пин ап casino pin pinco casino включи казино казино смотреть онлайн бесплатно Комарова Наталья Владимировна порно casinos winning
#6343 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
официальные зеркала казино vodka casino <a href=https://specreporter.com/>букмекерская контора скачать приложение</a> порно с Георгий Джикия (футбол) скачать букмекерскую контору на андроид <a href=https://7club7.com/>зеркала официальных сайтов казино</a> 1×bet зеркало на сегодня порно с Ирина Сидоркова casino бездепозитный порно с Алина Загитова, фигуристка ramenbet casino 1×bet сайт зеркала официальных сайтов казино
#6344 Charlesgunnyhttp://filmkachat.ru
x1 slots регистрация в 1×slots casino
Стоит отметить, что бездепозитный бонус выдается лишь взрослым новеньким, коие, в свою очередь, шансы пригласить личных друзей и своих, того претендующих на поощрительную программу лояльности. Подобная разработка была между соперничающих онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры содействуют увеличению своей посещаемости, методом привлечения новых игроков. Бонусы – это уникальный шанс для вероятных соучастников забавы, которые имеют опробовать софт покер рума и убедиться, станут ли они в него играть или нет. Новый игрок попробует свои силы с настоящими оппонентами в казино.Бездепы все заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами. <a href=http://filmkachat.ru/>1×slots casino online регистрация</a> <a href=https://devfolio.co/@archicgicom>https://devfolio.co/@archicgicom</a> За счёт спинов выйдет запустить различные онлайн слоты, протестировать стратегии и поднабраться опыта. Фишка никаких, собственно вращения начисляются на топовые аппараты с оригинальными опциями и высочайшей отдачей. Не запамятовывайте, что в любом акционном предложении предусмотрены особые требования – кратковременные ограничения, максимальный размер ставки, перечень доступных игр.В качестве призов онлайн казино нередко предлагает выдачу фриспинов, то есть бесплатных вращений игрового барабана. Виртуальные монеты можно использовать для изучения в покерной школе либо для игры в казино. 1хслотс зеркало <a href=https://mozillabd.science/wiki/1×slots_%D0%A1%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C>https://mozillabd.science/wiki/1×slots_%D0%A1%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C</a>
1×slots зеркало рабочее на сегодня
Когда речь идет о денежных призах, казино всегда устанавливают обстоятельства вейджера, коие нужно выполнить, чтобы исключить выигрыш.Не сложно догадаться, что not the slightest down payment bonuses почти ни не бывают немаленькими. Чаще всего речь идет о пяти–тридцати долларах (либо эквиваленте этой суммы в иной еденице). <a href=http://permitbeijing.com/forum/showthread.php?tid=2246345>1×slots зеркало подтвердит вашу регистрацию если говорить</a> 1×slot зеркало рабочее регистрации на телефон придет <a href=https://maps.google.gm/url?q=https://doctorlazuta.by/>https://maps.google.gm/url?q=https://doctorlazuta.by/</a> Зачастую бездепозитные бонусы казино для забавы предлагаются разными заведениями азартных игр в качестве маркетинговых промоакций либо в целях привлечения к для свежих игроков. Для бездепозитных призов в казино 2022 игроку надо пополнять счет до момента вывода желаемых средств. 1×slots официальный сайт скачать
1×slots зеркало регистрация в 1×slots casino
<a href=http://city-hall.nvkb.ru/forum/index.php/user/91844/>http://city-hall.nvkb.ru/forum/index.php/user/91844/</a> Сразу последствии активации промокода можно воспользоваться подарком. Как уже упоминалось, бонусы случаются трёх видов – фриспины, кредиты и фриплей-бонусы. 1×slots регистрация 1×slots casino c2d ru
1×slots регистрация на 1хслотс
Можно ли в одном интернет казино получить больше одного приза за регистрацию? Нет, например как в каждом онлайн казино есть управляла, к коим надо(надобно) придерживаться, не создавать два аккаута для получения бонусов, по будет блокировка обоих аккаутов, не пытайтесь обмануть интернет казино, бонус за регистрацию выдаеться раз один 1 личику.Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную процедуру активации бонуса без депо. Внимательно прочтите до конца. Многие новенькие проделывают ошибки на этапе регистрации и поэтому имеют получить презент. <a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=36223>1×slots бездепозитный бонус за регистрацию</a> Какие призы возможность еще получить кроме бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, каждое онлайн казино предлагает игрокам выгодное предложение на 1-ый депозит, вы совершаете депо, ваш депо возрастает в двое или том в трое, тем самым начать выступать можно с больше крупной суммой, например же не забываем тему вейджер на призы. 1хслот официальный сайт зеркало <a href=http://www.shunion.co.kr/bbs/board.php?bo_table=free&wr_id=596769>http://www.shunion.co.kr/bbs/board.php?bo_table=free&wr_id=596769</a> На критериях отыгрыша бесплатных бонусов следует остановиться подробнее. С ними связаны нюансы, которые нельзя оставить без внимания.Это также безвозмездные деньги, коие поступают на аккаунты новоиспеченных игроков после регистрирования. А необыкновенность таких бонусов произведено в том, собственно обретенные деньги обязательно стопам применять в продолжении назначенного времени.
1×slots casino регистрация на сайте
При поддержки такого поощрения оператор имеет кроме привлекать клиентов, которые ранее показывали активность на сайте, хотя по какой-то причине прекратили выступать. В этом случае промокод высылается пользователю по электронной почте или вид SMS. <a href=https://atoms.rocks/member.php?action=profile&uid=42027>https://atoms.rocks/member.php?action=profile&uid=42027</a> Бездеп с фриспинами имеет обхватывать всю коллекцию игр на веб-сайте либо разработки одного провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш имеет быть выведен после как, как пользователь отыграет данную необходимую. Возможность оценить глубокий возможностей слотов — основное достоинство этой разновидности. Игроку становятся доступны те функции, коие отсутствуют в демонстрационном режиме, а вероятность выиграть настоящие средства прибавляет ясных азартных чувств.Диапазон ставок, коие вправе сделать игрок, кроме лимитирован. Обычно назначать можно маленькую необходимую — пределах 10–30 руб. За одно вращение. 1×slots подтвердит вашу регистрацию если говорить Такой казино приз без депо за регистрацию выдается игроку на час и активно используется данное предложение с 2017 года. Это как бы какая-то конспирация поощрения под бездепозитный. Суть всего сего сводится к что, этому, что игроку на час выдается, к примеру, 1000 $, а реклама утверждает про, собственно любой выигрыш возможно несомненно в будущем забыть при для. Но если играющий всерьез отнесется к этому предложению, то он попросту потеряет время. Ведь игроку надо(надобно) будет выступать не главном аккаунте, а в тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (и всей тыс. ) в управляла вступят конкретные обстоятельства, где будет сказано, собственно максимальной суммой победы может быть только двести $ и средства возможно применять лишь в качестве приза на 1-ый лепта с вейджером 25 от суммы вознаграждения плюс сам депо. По результату получится, что игрок выигрывал себя 200% приз с вейджером на конкретную необходимую. Короче разговаривая, это все не стоит вашего времени.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=128355>1хслотс зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подарки на определенные даты выделяются условиями получения. Если поощрение начисляют игроку на денек рождения, то сумма обыкновенно зависит от совместного объема депо за год. Чтобы выступать даром на реальные средства в казино, не всегда достаточно просто зарегистрироваться. Иногда необходимо выполнить дополнительные деяния.
#6345 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Виктория Синицина, фигуристка пари букмекерская контора <a href=https://t.me/vchkogpu_ru>пин ап букмекерская контора</a> букмекерские контора ап ев казино <a href=https://sovsekretno.net/>почему в казино нет часов</a> casino скачать приложение скачать букмекерскую контору 1×bet официальный 1×bet xyz официальные букмекерские конторы скачать 1×bet рабочее на сегодня порно с Аделия Петросян (фигурное катание) up букмекерская контора
#6346 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
Особую изюминку видео слотам придают оригинальные символы. С их в активируются различные призы. Вы сможете запустить вспомогательный степень и увеличить сумму выигрыша. Есть знаки, которые замещают ненужные составляющие и сами делают выигрышные комбо. Не стоит забывать и тему бонус-тур. После каждого счастливого спина есть шанс увеличить сумму выигрыша в 2 или хорошо раза.B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax <a href=http://filmkachat.ru/>1×slots коды</a> Постарайтесь отыграть вейджер, дабы замечена возможность забыть заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные инструменты. Вы можете получить выигрыш на электронной кошелёк, карту, телефонный. <a href=https://u.pcloud.link/publink/show?code=XZwmwV5ZN5EzkUmIs98GzTKGBBEB6jVtE9aV>https://u.pcloud.link/publink/show?code=XZwmwV5ZN5EzkUmIs98GzTKGBBEB6jVtE9aV</a> 1×slots промокод при регистрации 2025 <a href=http://bbs.py27.com/home.php?mod=space&uid=395396>http://bbs.py27.com/home.php?mod=space&uid=395396</a> Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в соц сетях, установку мобильного прибавления или официального клиента для ПК. В большинстве казино действуют программы преданности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий уровень часто с выдачей бездепа.Игры, каких можно играть на бонусные деньги. Проверьте перечень игр, в возможно играть на бонусные средства, возможно они Вам не понравятся и не стоит тратить своё время на такую акцию.
1×slots подтвердит вашу регистрацию если говорить
1×slots зеркало регистрация в 1×slots casino Баланс игрока дополняется на подобающую необходимую. К ней применяется вейджер, указанный в правилах промоакции. Вывести выигрыш можно будет после того, как пользователь сделает требуемый объем ставок из личных средств. В редчайших случаях бездеп трудится в формате Free Play. На счет пользователя зачисляется большая сумма, и предоставляется маленький срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по завершении сего периода сумма на счету будет превышать изначальную, то разницу возможно несомненно исключить или применять для последующих ставок. <a href=https://images.google.vg/url?q=https://doctorlazuta.by/>https://images.google.vg/url?q=https://doctorlazuta.by/</a> Главным моментом в возникновении данных вознаграждений произведено что, собственно пустив их в ход, игрок ничем не рискует и в последствии никому ничего не несомненно должен (не зависимо, получит ли он благодаря бонусам какой-либо выигрыш либо мгновенно спустит все лишь что прибывшие деньги). То есть, казино снабжает игрока возможностью на дармовой основе выступать во различные слоты причем спонсирует игру. 1×slot официальный сайт
1×slots подтвердит вашу регистрацию если говорить
Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. Бездепозитный бонус предоставляется новенькому игроку за определенные деяния. Часто подарок вид денег либо фриспинов выдается за регистрацию, спасибо чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.Баланс игрока дополняется на подходящую сумму. К ней применяется вейджер, обозначенный в правилах акции. Вывести выигрыш возможно будет последствии того, как юзер сделает требуемый объем ставок из личных средств. В редчайших случаях бездеп трудится в формате Free Play. На счет юзера зачисляется крупная сумма, и предоставляется маленький срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по окончании этого периода сумма на счету несомненно превосходить изначальную, то разницу можно несомненно исключить либо применять для дальнейших ставок. <a href=http://newsrbk.ru/users_profile.php?id=7928>http://newsrbk.ru/users_profile.php?id=7928</a> Пoдтвepдить личнocть посетителя. Для успешного вывода средств, необходимо подтвердить лицо посетителя. Нa этaпe вepификaции пpoфиля, работники службы безопасности обязаны убедиться, что у игрока чем один акк. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не может исключить свой выигрыш, в у него несомненно несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы. 1×slot зеркало Бывают ли бездепозитные бонусы без вейджера? Бывают, если у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино.Это один из главных характеристик привлекательности подарка. С завешенным коэффициентом даже мастера не смогут выполнить обстоятельства по отыгрышу. И маловажно, как презентабельно смотрится предложение – бездепозитный приз казино в объеме $500 либо $1 000. Чтобы новенькие получше вдумались, собственно же такое вейджер, мы разберём на образце.
1×slots casino регистрация 1×slotscasin online
Нет. Казино выдают благотворительные призы за регистрацию, чтобы, чтобы, дабы клиент имел ознакомиться с игровым заведением. А дабы исключить его, необходимо выполнить обстоятельства отыгрыша. <a href=https://nauc.info/forums/viewtopic.php?t=20594060>1×slots регистрация 1×slots casino c2d ru</a> 1×slot официальный сайт <a href=http://theall.barunweb.co.kr/bbs/board.php?bo_table=free&wr_id=238872>http://theall.barunweb.co.kr/bbs/board.php?bo_table=free&wr_id=238872</a>
1×slots скачать на айфон
Многие азартные клубы ограничивают сумму вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не сможете исключить. Разница несомненно аннулирована, Вы том не сможете создавать на нее ставки.За привлечение друга ? масштабах партнерской программы клиент получает вознаграждение за привлечение новых пользователей. Мы проделываем акцент на ключевых положениях верховодил, рассказываем о территориальных ограничениях и кратко информируем о других промоакциях обсуждаемого казино. <a href=http://www.support.ipron.com/communication/forum/index.php?PAGE_NAME=profile_view&UID=18590>http://www.support.ipron.com/communication/forum/index.php?PAGE_NAME=profile_view&UID=18590</a> Однако в критериях исчезают «подводные камни», коие не позволят вывести крупную необходимую либо же вы не успеете отыграть вейджер. Поэтому мастера советуют отобрать бесплатные вращения за регистрацию в казино без депозита, дабы поднабраться опыта и получить настоящий шанс на победу.Сроки активации приза уточняются любым казино, но чаще всего они не превышают недели с момента получения. Игроку обязательно нужно применять бездеп в течение указанного срока, в ином случае бонус просто пропадет. Каждый приз можно получить лишь один раз, потому если не использовать бездеп в срок, у игрока не будет 2 шанса им воспользоваться. 1× slots casino официальный сайт Высокая конкурентность в разделе азартных игр мотивирует операторов привлекать посетителей разнородными промоакциями. Благодаря данному у гостей появляется возможность получить бонусы в казино за регистрацию без депозита. Воспользоваться этим предложением можно, минуя процедуру внесения средств на игровой счет, просто активировав акк на веб-сайте. Наш экскурсовод по бездепам поможет выбрать самую привлекательную бонусную программку, разузнать правила получения такового гонорары и распорядиться им с наибольшей выгодой.Для получения приза нужно ознакомиться с программкой лояльности казино и устроить ставки на сумму, нужную для перехода на следующий степень.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=237873>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
К примеру, игроку выдаются безвозмездные средства в заведении в объеме пятидесяти или ста $ (вейджер на коие составляет 100х). То есть, каждому новоприбывшему геймеру выскакивает привлекающая иллюстрация, которая обещает выплату всех зачисленных компанией средств. Не стоит обращать внимания на казино приз за регистрацию без депо с слишком великой либо очень махонькой суммой призов, потому что, даже кропотливо изучив все условия, тут всего, будет некий подвох. При отыгрыше бонусных средств, нужно учитывать срок деяния бонуса и время, которое дается на отыгрыш. По истечению заявленного времени, не отыгранный приз несомненно аннулирован.
#6347 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Елена Лядова зеркала казино <a href=https://www.ossetia.tv/>официальные зеркала казино</a> казино пин рокс казино <a href=https://slon-ru.com/>порно с Алина Загитова</a> порно с Георгий Джикия (футбол) Попова Анна Юрьевна порно порно с Евгения Медведева casino сайты online casino официальный порно с Диана Шнайдер (теннис) песня казино
#6348 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее
Демоказино есть почти на любом веб-сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются существенно реже: там когда выигрыша и соблюдения условий промоакций бездеп возможно перевоплотить в реальные деньги.Для всех бездепозитных призов функционирует максимальный предел на выигрыш. Он показывает предельную сумму, которую появится получить, играя на бонусные кредиты. Как только для удастся выполнить требования вейджера, дозволенный максимально несомненно переведен с бонусного счета на главной, а остаток несомненно списан. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasin online</a> Онлайн-казино кропотливо продумывают бонусные условия, коие необходимо изучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша прочие ограничения.Как только на виртуальном счету окажутся бонусные средства, поспешите отыграть вейджер. Сразу после этого возможно забыть заявку на вывод выигрыша. Кредиты выгодно выделяются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом реальных средств и дают возможность ощутить задор. Во-вторых – можно насладиться любой азартной игрой доступной на веб-сайте. В вашем распоряжении присутствуют автоматы, настольные прибавленье, видео-покер, Live-дилеры. <a href=https://medium.com/@comcgifurniture/your-complete-guide-to-premium-weed-delivery-pickering-and-local-cannabis-services-c284470081c0>https://medium.com/@comcgifurniture/your-complete-guide-to-premium-weed-delivery-pickering-and-local-cannabis-services-c284470081c0</a> 1хслотс казино зеркало <a href=http://www.ansanam.com/bbs/board.php?bo_table=report_status2&wr_id=296410>http://www.ansanam.com/bbs/board.php?bo_table=report_status2&wr_id=296410</a> Автоматическая активация первый самой комфортной, хотя ручной способ имеет перед ней преимущества. Прежде чем использовать вознаграждение от казино, стоит заблаговременно найти, сколько медли требуется на исполненье всех критерий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала деянья приза.Размер призов чаще всего чисто условный и не превышает 50 рублей. Приятно, но ощутимым бустом при навряд станет.
1×slots зеркало подтвердит вашу регистрацию если говорить
1×slots мобильная версия войти казино <a href=http://damoa8949.com/bbs/board.php?bo_table=free&wr_id=149100>http://damoa8949.com/bbs/board.php?bo_table=free&wr_id=149100</a> Самые популярностью методы вывода средств ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электрическим платежным системам на Neteller и Skrill, еще пользуются криптовалютными кошельками. Вывод выигрышей может исполняться быстро или занимать от нескольких часов до нескольких суток. 1×slot регистрация Чаще всего казино приз за регистрацию без депо даёт вероятность запустить любой машина. Но другого внимательно ознакомиться с критериями. Иногда для игры доступны лишь определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, чем начать знакомство с миром азарта именно с «одноруких бандитов».При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток.
1×slots скачать на айфон
Многие игроки, оценив перечень казино, остаются играть в нем и далее ? на это и нацелено каждое рекламную. Постоянные клиенты вносят депозиты и делают ставки, обеспечивая долгосрочную выгода оператора. То есть, казино раздают бездепы новым юзерам для формирования лояльной аудитории. <a href=https://may-green.ru/forum/user/15095/>https://may-green.ru/forum/user/15095/</a> С иной стороны, намного проще отобрать бездепозитные фриспины за регистрацию в казино и прямо сейчас начать вращать барабаны в наихороших слотах. Главная необыкновенность спинов в, собственно они предусмотрены для лучших автоматов. Удастся столько пройти вспомогательные раунды, хотя и увеличить сумму выигрыша, заработать респины прочие внутриигровые подарки.Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
1×slots casino регистрация 1×slots review live
Рассмотрим принцип его деянья на образце. Допустим, вы зарегались и получили $10 no deposit bonus с вейджером х50. Это значит, что выигранные деньги возможно несомненно выводить не ранее, чем после такого, как общая сумма ставок достигнет $500.Допустим, за регистрацию вы возымели бездеп в размере 2 000 руб. С вейджером х30. В этом случае предстоит устроить ставок, на совместную сумму в 60 000 рублей (2 000 * 30 = 60 000). Когда сделайте условия по отыгрышу, придёт время заработать реальные деньги. Однако не запамятовывайте, собственно с каждого подарка получится вывести определённую необходимую (почаще всего не более $200). <a href=http://board.eternityrpc.com/member.php?action=profile&uid=369>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a> Промокод – определённая композиция знаков, коию необходимо ввести в отвечающее фон при твореньи учетной записи либо активировать в личном профиле игрока в разделе с призами.3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефон или почту, указать индивидуальную информацию; Похожим образом работает 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя либо из-за с получения им VIP-статуса. Подарок предоставляется последствии воззвания в поддержку и ревизии. 1× slots casino официальный сайт <a href=http://zvezdjuchki.ru/user/Darenprank/>http://zvezdjuchki.ru/user/Darenprank/</a>
1×slots рабочее зеркало
<a href=https://forums.dfine.net/member.php?action=profile&uid=1143>https://forums.dfine.net/member.php?action=profile&uid=1143</a> 1×slots casino зеркало рабочее В подавляющем большинстве случаев благотворительные бонусы начисляются в кредитах, коие нельзя сразу исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти требования принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже.Классическая разновидность бонуса за творенье аккаунта. Его превосходство заключается в том, собственно заказчик имеет без избирать аппараты и создавать ставки в их. Иногда перечень игровых автоматов ограничен оператором, но все также это лучше, чем единственный дешевый разъем, как если, тогда, с использованием фриспинов.
<b>Смотреть еще похожие новости:</b>
<a href=http://mandala-app.com/forums/memberlist.php?mode=viewprofile&u=3447>1×slots зеркало регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax
#6349 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Набиуллина Эльвира Сахипзадовна порно 1×bet зеркало слоты 1×bet xyz <a href=https://th-royalgclub.com/>casino андроид</a> ramenbet casino букмекерская контора бетсити <a href=https://specreporter.com/>почему в казино не бывает настенных часов</a> букмекерская контора зенит казино смотреть онлайн бесплатно казино играть Юдаева Ксения Валентиновна порно porno Алена Косторная (фигурное катание) 1×bet зеркало на сегодня 1×bet официальный скачать
#6350 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasin online
Бездепозитный приз по промо-коду будет доступен для игры, лишь что, нет случае когда Вы активируете специальный бонусный код в разделе с бонусами или укажите промокод при регистрации на сайте. В неких случаях, не активации кода, понадобиться доказать контактные данные игрока и наполнить анкету клиента.Поспешите забрать бездепозитные призы за регистрацию в казино из представленного списка. Все платформы не только ведут законную работа, хотя и порадуют правдивыми результатами игры, высокой отдачей, прыткими выплатами. <a href=http://filmkachat.ru/>казино 1× slots официальный сайт</a> <a href=https://trumpbookusa.com/blogs/259423/Professional-3D-Animation-Services-in-the-Digital-Age>https://trumpbookusa.com/blogs/259423/Professional-3D-Animation-Services-in-the-Digital-Age</a> 1×slots официальный сайт, скачать <a href=http://www.gearcup.cn/home.php?mod=space&uid=125916>http://www.gearcup.cn/home.php?mod=space&uid=125916</a> За привлечение приятеля ? в партнерской программки клиент получает вознаграждение за привлечение свежих юзеров.Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депо возможность отличаться до 30 дней.
1×slots casino регистрация 1×slots review live
После требуется внести идентификационный платёж. Это стращает начинающих больше всего. Нужно устроить наименьший депо в 100–500 рублей. Таким образом служба защищенности убедиться что, нет, что платёжный способ принадлежит Вам. Данная процедура важна для обеспечивания защищенности игровых счетов. Пример, Ваш акк взломают и выведут средства на свой кошелёк. Будет крайне досадно. Поэтому верификация платёжной системы, это необходимый момент.Ниже указан актуальный перечень легальных казино в Беларуси с бонусами на первый депо. Вы можете попасть на официальный сайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз. 1×slots casino регистрация 1×slotscasino09k online Фриплей-бонусы. Бонусы за безвозмездную игру есть лишь в некоторых клубах. Они зачисляются сразу последствии создания профиля и действуют недолговременное время. Если у вас нет времени потратить свои, они просто завершатся. Что дотрагивается медли, в большинстве случаев призы срабатывают на одного часа.Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депо может отличаться до 30 дней. <a href=https://earthmyhome.com/User-8744>https://earthmyhome.com/User-8744</a> Для получения предоставленных бонусов вас пригодиться — ПК или мобильное устройство, и остальное дело за небольшим. 1×slots зеркало подтвердит вашу регистрацию если говорить Это один из основных показателей привлекательности презента. С завешенным коэффициентом даже мастера не сумеют выполнить обстоятельства по отыгрышу. И не, насколько привлекательно смотрится предложение – бездепозитный приз казино в объеме $500 или $1 000. Чтобы новички попревосходнее вдумались, собственно же такое вейджер, мы разберём на образце.
казино 1×slots
<a href=http://lexusforum.lv/index.php?subaction=userinfo&user=manywealth4>http://lexusforum.lv/index.php?subaction=userinfo&user=manywealth4</a> Игры, каких можно играть на бонусные средства. Проверьте перечень игр, каких возможно играть на бонусные средства, возможно они Вам не понравятся и не расходовать своё время на такую акцию. 1×slots коды
зеркло казино 1×slots
Третитй бездепозитный бонус за регистрацию – валютные средства. К раскаянию, начислить рубли или доллары готовы лишь известные и модные клубы. С их поддержкою возможность насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком.Зачастую бездепозитные призы казино для забавы предлагаются разными заведениями азартных игр в качестве рекламных акций или в целях вербования к себе свежих игроков. Для бездепозитных бонусов в казино 2022 игроку не пополнять счет до момента вывода желанных средств. Простая процедура получения бездепозитного бонуса, которая займет менее 2-х минут. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные.Как прочие акции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых гостей и разрешает им составить впечатление о функционале, не рискуя значительными совокупностями. На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению этого времени, Вы не можете активировать и получить бездепозитный приз.Например, игрок получил 500 руб. При разработке аккаунта и обязан отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 руб., потребуется сделать 875 спинов для полного отыгрыша. 1х слот регистрация в 1×slots casino <a href=http://k636419q.beget.tech/user/Tyronevaway/>http://k636419q.beget.tech/user/Tyronevaway/</a> Частенько новенькие не разумеют, как активировать презенты либо исключить первый выигрыш. Для сходственных случаев наша команда обрисовала главные определения – собственно это фриспины, вейджер, как его отыграть, для необходимо протекать верификацию.
x1 slots регистрация в 1×slots casino
Вышеописанная первопричина и считается главным моментом, в которого операторы отдают доля собственной прибыли на разные рекламные расходы и рекламные кампании. А наиболее действенным здесь станут играть непосредственно бездепозитные призы казино 2022 с выводом за регистрацию.Для казино, работающих интернет, бездепозитные призы необходимы для привлечения новых посетителей. Предложение сыграть на слотах без необходимости внесения реальных средств — работающий способ для повышения энтузиазма к фирмы. После отыгрыша бездепа великоват шанс, собственно игроку понравится и он продолжит играть в казино, только теперь уже на личные средства. <a href=https://coinmasterforum.com/member.php?action=profile&uid=8873>https://coinmasterforum.com/member.php?action=profile&uid=8873</a> 1×slots на любой вкус как пройти регистрацию С другой стороны, гораздо проще отобрать бездепозитные фриспины за регистрацию в казино и прямо в начать вращать барабаны в наихороших слотах. Главная необыкновенность спинов что, нет, собственно они предусмотрены для лучших автоматов. Удастся столько пройти вспомогательные раунды, хотя и прирастить сумму выигрыша, заработать респины прочие внутриигровые презенты.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.sgomberisgombero.it/my-account-2/>1× slots зеркало</a>
<a href=https://www.one2bay.de/forum/showthread.php?tid=441412>1×slots регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На критериях отыгрыша даровых бонусов идет остановиться подробнее. С ними связаны нюансы, которые нельзя забыть без внимания.
#6351 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
игры казино porno Ангелина Гончаренко, хоккеистка <a href=https://specreporter.com/>pin up casino зеркало</a> Любимова Ольга Борисовна порно порно с Дарья Касаткина (теннис) <a href=https://krtka.info/>casino betting</a> Чулпан Хаматова какие казино казино онлайн бесплатно Москалькова Татьяна Николаевна порно кент casino pin up casino официальный смотреть фильм казино
#6352 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
Но а в вы теснее профи по интернет казино, кликаем на красную кнопку «Получить» и Вы автоматически перейдете в интернет казино;Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в неотъемлемом порядке необходимо пополнить счет в казино. Для депозитных призов, данная процедура не необходима, так как депозит уже изготовлен. <a href=http://filmkachat.ru/>1×slots официальный зеркало</a> Бонус в казино без депо имеет разные разновидности: такое быть приветственный бонус, промоакции в честь каких-то дней или главных дат, приз за вербование новых игроков, преданность и получение VIP-статуса.Большинство интернет-казино из нашего топ-10 готовы порадовать вас эксклюзивными промоакциями. Читайте о их в обзорах и на форуме. <a href=https://www.hebergementweb.org/threads/virtual-reality-reshapes-modern-architectural-design-and-innovation.2142477/>https://www.hebergementweb.org/threads/virtual-reality-reshapes-modern-architectural-design-and-innovation.2142477/</a> Но есть игорные заведения, которые готовы просто так жертвовать средства на игру. Для сего достаточно сделать профиль. Чтобы исключить собственный выигрыш, вас сначала необходимо выполнить обстоятельства отыгрыша, обозначенные в критериях получения бездепозитного депозита. 1×slots регистрация 1×slots review live <a href=http://troderstro.ru/user/Glennwathy/>http://troderstro.ru/user/Glennwathy/</a>
1×slots официальный сайт зеркало
3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать аппарат либо почту, указать персональную информацию;Бесплатный бонус – кредиты, коие онлайн-казино начисляет клиенту, не заставляя его пополнять игровой счет. <a href=https://forum.ltp-team.com/topic/57549–1×-slots-casino-oficialnyy-sayt/>1× slots casino официальный сайт</a> 1хслотс официальный сайт зеркало Несмотря на то, собственно этот вариант стимуляции со стороны азартных платформ очень популярен в сфере сходственных игр, далеко не всем поклонникам казино известно, что себе бездепозитные бонусы казино и как непосредственно их возможно эксплуатировать.Фриспины начисляются по определенной ставке. После их активации игроку нужно запустить слот и увериться, что в нем показываются безвозмездные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода последствии отыгрыша ориентируется оператором и изредка выше 5 000 руб. <a href=https://opensourcebridge.science/wiki/User:OliverSoundy7>https://opensourcebridge.science/wiki/User:OliverSoundy7</a> Простая процедура получения бездепозитного бонуса, кот-ая займет менее 2-х минут. Для получения бездепов, достаточно зарегистрироваться и подтвердить контактные данные.Практически все интернет казино с бездепозитным призом за регистрацию предусматривает программку лояльности — систему поощрения неизменных посетителей, которая состоит из большого уровней. При достижении игроком очередного значения на его счёт поступает приз. Чем повыше степень — тем щедрее бонус. 1×slots официальный сайт мобильная версия При отыгрыше бонусных средств, необходимо учитывать срок деяния бонуса и время, которое дается на отыгрыш. По истечению заявленного медли, не отыгранный приз будет аннулирован.С такими ординарными советами любое казино с бонусом за регистрацию способно принести в разы больше выгоды и полезности.
1х слот 1хслотс регистрация перейти на 1×slots
Похожим образом работает третий способ доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения клиента или в связи с получения им VIP-статуса. Подарок предоставляется в воззвания в поддержку и проверки. Доступность — бездепозитные бонусы в казино почаще всего предоставляются новым игрокам, хотя случаются случаи, когда приз имеют получить и действующие посетители.Бонусные средства – небольшая сумма денег для старта в новеньком казино. На бонусные средства, обычно разрешается выступать во все забавы, кроме слотов с современным джекпотом и игр из раздела live casino. <a href=http://forum.roozgozar.com/member.php?action=profile&uid=2383>http://forum.roozgozar.com/member.php?action=profile&uid=2383</a> 1× slots зеркало Получить Бездепозитный бонус в интернет казино дело двух кликов. Другой момент, отыграть рекламную и соблюсти верховодила и обстоятельства отыгрыша. Под правилами предполагается не вагер, хотя и ограничения по максимальной ставке. Мы осознаем, собственно в кино все ставят на зеро и выигрывают. Призываем не создавать похожего. Перед активацией бонуса прочтите правила. Узнайте следующие факторы: Условия получения дара, за регистрацию, за депозит и многое. Ограничения по максимальной ставке. Зачастую не выше 350 рублей. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вращать автоматы, а вагер будет стоять на пространстве. Поэтому главно знать, в каких играх возможно осуществлять кратность денежного оборота.Однако далековато не все ресурсы предлагают своим клиентам бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено поощрение на первый депозит в объеме 100–200%. Это замечательная вероятность преумножить банкролл, увеличить время, проведённое за игрой и шансы сорвать большой куш.
1×slots официальный demo регистрация в 1×slots casino
Размер бонусов чаще всего чисто символический и не выше 50 рублей. Приятно, хотя осязаемым бустом при вряд ли станет. Так что приготовьтесь дать секретную информацию (пол, возраст, страна проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает не более суток, в чего удастся свободно выводить солидные выигрыши. Зарегистрироваться в казино по специальной ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефонного и электрическую почту). Для доказательства номера аппарата необходимо в собственном профиле указать свой номер и надавить кнопку „Подтвердить номер телефона“, дальше Вы получите sms-сообщение с кодом, который необходимо установить в отвечающее фон. Для доказательства электрической почты, перебежать по активной ссылке в письме от казино. 1×slots промокод при регистрации 2025 <a href=http://moroz-solnce.ru/bitrix/redirect.php?goto=http://krep-master.com/bitrix/redirect.php?goto=http://fayz.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/NauU8×E3Bko>http://moroz-solnce.ru/bitrix/redirect.php?goto=http://krep-master.com/bitrix/redirect.php?goto=http://fayz.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/NauU8×E3Bko</a> Срок отыгрыша — это этап, кот-ый начинается в момент активации бонуса и кончается с его закрытием. Пользователю необходимо уложиться в данный временной промежуток, по призовые свои аннулируются. Казино устанавливают перечень игр, ставки в засчитываются при расчете отыгранных средств. Если тайтл не заходит в этот перечень, то возможность быть недоступен для загрузки в деянья бонусного предложения.
1×slots промокод при регистрации
Индивидуальные поощрения выдаются за совершение действий: подписку на аккаунты площадки в соц сетях, установку мобильного прибавленья либо официального клиента для ПК. В большинстве казино срабатывают программки лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий степень часто сопровождается выдачей бездепа. <a href=http://gkwin.net/bbs/board.php?bo_table=free&wr_id=234048>http://gkwin.net/bbs/board.php?bo_table=free&wr_id=234048</a> Практически все интернет казино с бездепозитным бонусом за регистрацию учитывает программку лояльности — систему поощрения неизменных клиентов, кот-ая состоит из колличества уровней. При достижении игроком еще значения на его счёт поступает бонус. Чем повыше степень — тем щедрее приз.B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax казино 1×slots Для казино, работающих онлайн, бездепозитные призы необходимы для привлечения свежих посетителей. Предложение сыграть на слотах без необходимости внесения настоящих средств — работающий метод для увеличения энтузиазма к компании. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит выступать в казино, лишь сейчас теснее на личные средства.Благодаря программке лояльности от игорного заведения, возможно брать превосходный старт и без дополнительных вложений запустить видеослоты. Кроме такого, возможно рассчитывать на реальную фортуну и получить, без вложения личных денег, великий выигрыш.
<b>Смотреть еще похожие новости:</b>
<a href=http://romb4×4.ru/forum/threads/1×slots-oficialnyj-demo-registracija-v-1×slots-casino.15184/>1×slots официальный demo регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные призы начисляются лишь раз раз. Не стоит открывать новые аккаунты, чтобы получить их повторно. Служба защищенности казино обязательно выявит «левого» соучастника и заблокирует. Если гость выполнит необходимые притязания, отыграет собственную ставку и решит вывести личный выигрыш, то ему надо(надобно) к, собственно казино непременно потребует предоставить ксерокопии собственных документов, чтобы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные средства исключить не получится. Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных притязаний, не обязательной верификации. Если на веб-сайте учтена обязательная процедура подтверждения личности, то исключить выигрыш удастся только последствии ревизии данных. Приготовьтесь заполнить анкету и отправить в техподдержку документ, подтверждающий лицо.
#6353 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
win win casino яндекс казино <a href=https://repost.news/>Разуваева Ксения Денисовна порно</a> порно с Дарья Касаткина (теннис) Елизавета Боярская <a href=https://glvk.guru/>1×bet слоты 1×bet top</a> скачать 1×bet 1×bet xyz порно с Матвей Сафонов (футбол) лучшие букмекерские конторы бесплатно играем казино букмекерская контора скачать приложение porno Алена Косторная (фигурное катание) букмекерские конторы без депозита
#6354 Charlesgunnyhttp://filmkachat.ru
1× slots регистрация в 1×slots casino
Маркетинговая политического всех игорных интернет-клубов должна одевать разнородный характер. И если вознаграждения на депозит служат для того, дабы стимулировать вносить депозиты и поощрять уже быть пользователей, то бездепозитный приз в казино либо приз за регистрацию в казино, до всего, рассчитан на расширение базы покупателей.Такие одобрения разрешают бесплатно протестировать новое казино, разобраться с игровым процессом интернет слотов, заработать и исключить маленькую сумму денег. <a href=http://filmkachat.ru/>1×slots регистрация на 1хслотс</a> <a href=https://forums.ngames.com/forum/league-of-angels/community-ab/general-discussion-ab/62089-revolutionizing-e-commerce-the-power-of-3d-rendered-product-images>https://forums.ngames.com/forum/league-of-angels/community-ab/general-discussion-ab/62089-revolutionizing-e-commerce-the-power-of-3d-rendered-product-images</a> 1×slot зеркало <a href=http://mirshin116.ru/bitrix/redirect.php?goto=http://karat-market.ru/bitrix/redirect.php?goto=http://stopcran.ru/go?https://telegra.ph/Ponimanie-motivirovannogo-otkaza–prichiny-posledstviya-i-sposoby-preodoleniya-09–23>http://mirshin116.ru/bitrix/redirect.php?goto=http://karat-market.ru/bitrix/redirect.php?goto=http://stopcran.ru/go?https://telegra.ph/Ponimanie-motivirovannogo-otkaza–prichiny-posledstviya-i-sposoby-preodoleniya-09–23</a> Представленные на этой страничке наилучшие бездеп призы в казино за регистрацию в 2022 году имеют подходящие условия. После кропотливого анализа редакция портала составила рейтинг спецпредложений, в гости Casino.ru имеют сортировать перечень по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д.В некоторых онлайн казино для получения бездепозитных призов не довольно просто зарегистрироваться на сайте клуба и подтвердить средства контактные данные. Дополнительно потребуется активация промокода.
1×slots сайт
1×slots зеркало регистрация то дальше необходимо пройти Как только вы отыграли вейджер и средства с бонусного баланса перебежали вас на реальный счет, Вы храбро сможете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (устроить минимальный депозит к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депозитом). <a href=http://michiya-cs.com/userinfo.php?uid=30614>http://michiya-cs.com/userinfo.php?uid=30614</a> Обычно для получения бонусов без депо, казино выдвигает лояльные и абсолютно выполнимые условия, но есть ряд деяний которые воспрещены и могут повлечь за собой противные последствия: 1×slots официальный сайт зеркало рабочее Разные казино имеют собственные верховодила по выведению выигрыша. Для бездепозитных бонусов принимаются достаточно высокие притязания. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до 100 один в игровых автоматах. Например, в игрок получил безвозмездно 10 $, то нужно будет отыграть их, поставив одну тыщу спинов по 1 баксу каждый. Стоит отметить, собственно не все казино дают вероятность играть на призы и не во всех увеселительных заведениях схожие правила для отыгрывания. Некоторые казино воспрещают играть на бонусы в блекджек либо ограничивают ставки до пяти процентов, что существенно увеличивает в десятки раз число необходимых игр.
казино 1×slots официальный сайт
Выше мы дали полный комплект самых новых и актуальных бездепозитных призов в интернет казино без пополнения на 2022 год, где вы можете пользоваться любым ценным бездепозитным бонусом.Даже не выиграв крупную сумму, игрок увлекательно проведет время, изнутри изучит работу площадки, оценит геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе наихороших акций с. Достаточно периодически учить перечень новых интернет казино с выводом бонуса без депо в этом разделе. <a href=http://cse.google.com.mx/url?sa=i&url=http://syntone.ru/redirect.php?url=http://rnd.minzdravrso.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/nAQ-VQVmiso>http://cse.google.com.mx/url?sa=i&url=http://syntone.ru/redirect.php?url=http://rnd.minzdravrso.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/nAQ-VQVmiso</a> Вейджер не более х30–35 считается приемлемым. Опытные игроки утверждают, собственно с таким вейджером реально остаться в плюсе, в верно подойти к выбору игрового аппарата. 1×slots официальный сайт зеркало рабочее Свежий приз начисляется в виде валютных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в пользовании средствами, а случае отыгрыша оператор имеет ввести ограничение на вывод денег.
1×slots рабочее зеркало
<a href=http://forum.survival-readiness.com/viewtopic.php?t=263497>1×slots зеркало сайта</a> Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, или проигрываете предложенный бонус, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, научится регулировать изменять ставки и полосы, исследовать бонусные забавы и их выигрышные композиции, ну в конце концов просто зарядится кучей впечатлений! Ведь вы будите выступать на бонусные средства, коие можно отыграть и вывести, не просто на демо счет, что, этим наиболее адреналин в крови еще больше повысится а пульс забьется с частым ритмом! Выигрыши с бонусов без вложений всегда привязаны к требованию по ставкам и могут быть обналичены только в исполненья данных требований. зеркло казино 1×slots <a href=http://pfb7978i.bget.ru/index.php?subaction=userinfo&user=Jeffreygek>http://pfb7978i.bget.ru/index.php?subaction=userinfo&user=Jeffreygek</a>
1×slots зеркало
Ну и конечно же, для казино бездепозитные бонусы прибыльны с имиджевой стороны: схожая добродушие увеличивает степень лояльности клиентов к компании.Этот образ приза будет добавлен на Ваш аккаунт последствии успешной процедуры регистрации с внедрением номера телефонного. Если выбрать другой метод творенья учетной записи, бездеп не несомненно добавлен на Ваш акк. <a href=http://twchess.lionfree.net/discuz/home.php?mod=space&uid=27811>http://twchess.lionfree.net/discuz/home.php?mod=space&uid=27811</a> Если вы опытный игрок, вы обязаны аристократия, собственно приз без депозита – редчайшая находка. Тем ниже, мы в изучаем интернет, дабы отыскать вам превосходнейшие бездепозитные предложения. 1×slots официальный регистрация Зачастую бездепозитные призы казино для игры предлагаются различными заведениями азартных игр в качестве маркетинговых промоакций или в целях привлечения к себя новых игроков. Для бездепозитных призов в казино 2022 геймеру не нужно пополнять счет до этапа вывода хотимых средств.Срок активации и время на отыгрыш. Зачисление денег или фриспинов происходит при активации на взыскательно ограниченного периода, схожие требования предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать приз количество дней либо даже недель. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с неоправданно высоким вейджером.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.topboard.org/threads/1×slots-oficialnyj-sajt-mobilnaja-versija-skachat.605207/>1×slots официальный сайт мобильная версия скачать</a>
<a href=https://test.soclanovtsy.ru/topic/33202–1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82-%D1%81%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C/>1×slots официальный сайт, скачать</a>
<a href=http://86395.ww.w.molifan.net./space-uid-2275092.html>1×slot официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чтобы получить вероятность исключить выгода с бездепозитного приза в казино, необходимо выполнить ряд условий:
#6355 Rogerthoug
http://maxpillsformen.com/ Tadalafil Tablet
#6356 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino скачать часы казино <a href=https://www.ossetia.tv/>pin up casino buzz</a> порно с Владимир Минеев (ММА) casino зеркало сегодня рабочее <a href=https://repost.news/>Преподобная Надежда Александровна порно</a> 7k casino скачать porno Марина Александрова pin casino pin ап casino casino бонус porno Ангелина Гончаренко, хоккеистка Семёнова Татьяна Владимировна порно
#6357 Charlesgunnyhttp://filmkachat.ru
1 x slots
При регистрации что, нет или ином интернет игральном заведении — вам дается раз шанс испытать свою фортуну не внося свои монеты. Замечу собственно такую поощрительную услугу предоставляют не все онлайн игровые площадки, а только щедрая середина(средина) из них. Которые мы подготовили для Вас в нашем перечне.За вербование друга ? масштабах партнерской программы заказчик получает вознаграждение за вербование новых пользователей. <a href=http://filmkachat.ru/>1×slots регистрация на сайте 1×slots ru com</a> Также, учите, что бездепозитный приз можно исключить лишь что случае, когда будут выполнены все условия отыгрыша. <a href=https://www.gift-me.net/blogs/229355/How-to-Create-Stunning-3D-Animation-Presentations-That-Captivate-Your>https://www.gift-me.net/blogs/229355/How-to-Create-Stunning-3D-Animation-Presentations-That-Captivate-Your</a> зеркала 1×slots <a href=https://airsoftc3.com/article/18052/How-Professional-3D-Modeling-Furniture-Transforms-Modern-Design-Industry>https://airsoftc3.com/article/18052/How-Professional-3D-Modeling-Furniture-Transforms-Modern-Design-Industry</a> Благодаря программке преданности от игорного заведения, можно брать хороший старт и без добавочных вложений запустить видеослоты. Кроме того, можно рассчитывать на реальную удачу и получить, без инвестиции собственных денег, великой выигрыш.
1хслотс рабочее зеркало на сегодня
Фриспины предусмотрены для использования в видео слотах. Внимательно ознакомьтесь с критериями – часто их выдают на некоторые автоматы. В зависимости от клуба, у вас получится сделать определённое количество ставок. Кстати, продвинутые игорные жилища разрешают запускать каждых «одноруких злодеев».Бездепозитный бонус за регистрацию в казино — это стартовый презент повторяющий валютного начисления либо бесплатных вращений для свежих игроков заведения, для получения которого не нужно заносить депо. <a href=http://t954381g.bget.ru/user/JosephPiery/>x1 slots 1хслотс регистрация перейти на 1×slots</a> 1хслот 1хслотс регистрация перейти на 1×slots <a href=http://pfb7978i.bget.ru/index.php?subaction=userinfo&user=TravisVancy>http://pfb7978i.bget.ru/index.php?subaction=userinfo&user=TravisVancy</a> 1 x slots Ознакомьтесь с нашим списком наилучших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего перечня и получите бездеп незамедлительно. Хватайте наилучшие безвозмездные предложения ниже и выигрывайте великие средства, не рискуя!
1×slots casino регистрация 1×slots review live
Однако в критериях скрываются «подводные камни», которые не позволят вывести солидную необходимую или же вы не успеете отыграть вейджер. Поэтому профессионалы советуют арестовать безвозмездные вращения за регистрацию в казино без депо, дабы поднабраться навыка и получить реальный шанс на победу. Вы наверняка, например все любите получать презенты и бездепозитные бонусы казино. Игорные жилища взяли в привычку одаривать гэмблеров приятными призами. Стать обладателем приветственного подарка можно за творение профиля или пополнение счёта. Второй вариант больше интересный, ведь клубы готовы удвоить депо! Но если вы новичок и только знакомитесь с миром пыла, чем пользуйтесь призом за регистрацию. <a href=http://forum.foonyew.org/home.php?mod=space&uid=151012>http://forum.foonyew.org/home.php?mod=space&uid=151012</a> Бесплатный бонус – кредиты, коие онлайн-казино начисляет клиенту, не заставляя его пополнять игровой счет. 1×slots зеркало подтвердит вашу регистрацию если говорить Варианты выигрыша зависят от Вашей успеха и условий игорного портала. Выше мы сказали, что кое-какие бездепозитные призы в 2022 году выдаются с ограничениями по наибольшей выплате. Однако, остаются они, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность передовых игр на средства, можно выиграть неописуемые суммы. Сегодняшние игровые автоматы или видео слоты, как их именуют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000.
1×slots казино зеркало
На данном разделе портала периодически публикуются обзорные статьи, каких рассматриваются бесплатные призы лучших интернет-казино. Информация структурирована по нескольким пт, включая основные: <a href=https://shopcms.vsupport.club/topic/15612–1kladtop-%D0%A0%C2%B7%D0%A0%C2%B0%D0%A1%E2%80%A6%D0%A0%D1%95%D0%A0%D2%91%D0%A0%D1%91-%D0%A0%D0%85%D0%A0%C2%B0-%D0%A1%D0%83%D0%A0%C2%B0%D0%A0%E2%84%96%D0%A1%E2%80%9A-%D0%A1%E2%80%A6%D0%A0%C2%B5%D0%A0%C2%BB%D0%A1%D0%8A%D0%A1%D0%83%D0%A0%D1%91%D0%A0%D0%85%D0%A0%D1%94%D0%A0%D1%91-%D0%A0%D1%94%D0%A1%D1%93%D0%A0%D1%97%D0%A0%D1%91%D0%A1%E2%80%9A%D0%A1%D0%8A-%D0%A0%D1%98%D0%A0%C2%B5%D0%A1%E2%80%9E%D0%A0%C2%B5%D0%A0%D2%91%D0%A1%D0%82%D0%A0%D1%95%D0%A0%D0%85/?p=94520>1×slots зеркало рабочее на сегодня</a> Чем ниже велечину вейджера, тем проще отыграть и исключить приз. Если Вы расчитываете заработать на бездепе, но просто ознакомиться с новым игровым клубом, то стоит игнорировать бонусов с высоким вейджером их практически не реально отыграть. С ними Вы можете только протестировать забавы заведения. Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.Автоматы неспроста считаются самым популярным азартным развлечением. Чтобы усвоить управление и правила, потребуется всего количество минут. Ваша задачка сделать ставку, найти количество рабочих линий и можно крутить барабан. Если дисплее выпадет выигрышная композиция – вы выиграли! С этой задачей для помогут справится бездепозитные бонусы казино. 1×slots зеркало этих способов предполагает регистрацию <a href=http://wzgroupup.hkhz76.badudns.cc/home.php?mod=space&uid=1715809>http://wzgroupup.hkhz76.badudns.cc/home.php?mod=space&uid=1715809</a> Обычно для получения призов без депозита, казино выдвигает лояльные и абсолютно выполнимые обстоятельства, но есть ряд деяний которые запрещены и могут причиной неприятные последствия:Такой казино приз без депо за регистрацию выдается игроку на час и активно используется данное предложение с 2017 года. Это как бы какая-то конспирация поощрения под бездепозитный. Суть всего этого сводится к тому, собственно геймеру на час выдается, например, 1000 долларов, а реклама утверждает о том, собственно любой выигрыш можно несомненно дальнейшем оставить при для. Но случае играющий всерьез отнесется к данному предложению, то он просто потеряет время. Ведь геймеру надо(надобно) несомненно играть не в основном аккаунте, а в тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (в всей тысячи) в верховодила вступят конкретные условия, где несомненно сказано, что наибольшей суммой победы имеет быть лишь двести долларов и деньги возможно применять только в качестве бонуса на 1-ый лепта с вейджером 25 от суммы гонорары плюс сам депозит. По итогу выйдет, что игрок выигрывал себе 200% бонус с вейджером на конкретную сумму. Короче говоря, это все не вашего медли.
1×slots регистрация 1×slots casino c2d ru
<a href=http://perfectbuilding.ru/index.php?subaction=userinfo&user=punynominee70>http://perfectbuilding.ru/index.php?subaction=userinfo&user=punynominee70</a> Каждый новичок и умелый игрок грезят живо стартануть и начать создавать реальные ставки. Для сего достаточно отобрать подарок, за кот-ый не нужно уплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email или аппарат. После сего администрация начислит щедрое вознаграждение вид даровых вращений или виртуальных кредитов.Перед активацией принципиально внимательно изучить условия акции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, на коих возможно пользоваться предложением. Если бездеп обхватывает ограниченный список игр, рекомендуется разузнать максимальные коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только в том случае, если оператор не установил строгие ограничения на максимальную необходимую ставки. 1× slots регистрация в 1×slots casino Бездепозитные призы в казино без пополнения 2022 — это определенная сумма средств либо for nothing spins вращения, которые предоставляются первым гостям за регистрацию на сайте казино в виде бездепозитного бонуса, и выделяет вам возможность за счет казино без пополнения опробовать предложения (игр), с последующей привилегией вывода средств при исполненьи всех установленных верховодил.
<b>Смотреть еще похожие новости:</b>
<a href=https://tucmas.fi/phpBB/viewtopic.php?f=4&t=354217>1×slots официальный сайт скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Практически все онлайн казино с бездепозитным призом за регистрацию учитывает программку преданности — систему поощрения постоянных клиентов, которая произведено из большого уровней. При достижении игроком одного уровня на его счёт поступает бонус. Чем повыше уровень — тем щедрее приз.
#6358 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало на сегодня 1×bet xyz 7k casino зеркало рабочее <a href=https://repost.news/>1×bet официальный xbet</a> Фастова Елена Владимировна порно букмекерская контора официальный сайт скачать <a href=https://rumafia.news/>online casino 7k</a> porno Андрей Рублев (теннис) pin casino зеркало скачать 1×bet 1×bet xyz букмекерскую контору пин букмекерские конторы pin Москалькова Татьяна Николаевна порно сайт казино зеркало
#6359 Charlesgunnyhttp://filmkachat.ru
1хслотс 1хслотс регистрация перейти на 1×slots
Но надо размышлять, что снабжая пользователей этими бонусами, казино увлекается спонсированием. Ведь размеры вознаграждений, главном, не немалые (средним размером от 5 до 20 $). И на эти средства налагаются определенные обстоятельства и лимитирования, неотклонимые к исполненью игрока, в в последствии он вожделеет получить все свои выигранные деньги.Предложения с бездепозитными бонусами за регистрацию дозволяют новым заведениям заинтересовать аудиторию на собственный сайт. А игроки тому получают возможность выступать на реальные средства без депо в казино и заработать маленькой стартовый капитал, который разрешено вывести на карту банка или электронный кошелек. <a href=http://filmkachat.ru/>1×slots скачать на айфон</a> <a href=https://bresdel.com/blogs/806517/Mastering-Interior-Shop-Drawings-From-Concept-to-Construction-Excellence>https://bresdel.com/blogs/806517/Mastering-Interior-Shop-Drawings-From-Concept-to-Construction-Excellence</a> Вообще перейдя в казино — правила одинаковы в получении бездепозитных призов, в стереотипные управляла заходит: подтвердить эл. Почту и аппарат, наполнить собственный индивидуальный профиль, активировать промо код или активировать предложения во вкладке БОНУСЫ. 1хслотс официальный сайт зеркало <a href=https://australianweddingforum.com/weddings/member.php?action=profile&uid=8958>https://australianweddingforum.com/weddings/member.php?action=profile&uid=8958</a>
1хслот зеркало
Шаг 4. Активация. Внимательно выучите обстоятельства, информацию по лимитированиям и сроке действия бонусного предложения. Разобравшись с правилами, возможно активировать приз в собственном офисе (иногда ? с использованием промокода) или по запросу в саппорт.Обычно бездепозитные акции от казино, приходят на эл. Почту в дни рождения либо праздники. В некоторых интернет казино можно адресоваться в чат и как неизменному игроку, вероятно вас предложат бездепозитное предложение. 1хслотс рабочее зеркало Если речь идет об неповторимых предложениях, возможность потребоваться регистрация в казино по ссылке с партнерского вебсайта. <a href=https://la.mathworks.com/matlabcentral/profile/authors/34736029>https://la.mathworks.com/matlabcentral/profile/authors/34736029</a> x1 slots 1хслотс регистрация перейти на 1×slots Вейджер в переводе с английского означает «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша полученного приза, в нашем случае бездепозитного. Число ставок роли не играет — принципиально лишь набрать необходимую, пропорциональную сумме поощрения.
1×slots регистрация на сайте 1×slots ru com
Проверка занимает от нескольких мин. До нескольких дней, профессионалы техподдержки могут запросить дополнительные документы либо инициировать короткое общение по Skype.Как управляло, новоприбывшие игроки для желают ознакомиться с способами ввода и вывода денежных средств и сроки исполнения поданных заявок дабы четко понимать, как стремительно появится вывести собственный казино приз за регистрацию без депозита на электрический кошелек или же банковскую карту. К счастью для всех играющих, внутри определенных холдингов, все казино соперничают между собой. Ведь случае бы конкретную фирму давало только одно онлайн-заведение, то ли бы клиенты заметили казино с призом за регистрацию и могли бы рассчитывать лишь на вознаграждение в виде бонуса на 1-ое инвестиция. К каждому заведению регулярно по завлекать свежих игроков, собственно, конечном, лишь на руку всем играющим. <a href=https://asdmcpe.org/user/Terryflags/>https://asdmcpe.org/user/Terryflags/</a> Основное правило получения бездепа ? творимый аккаунт должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов строго запрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депозита необходимо соблюдать простую последовательность деяний.Если вы избираете проверенное лицензионное интернет казино и выполните все обстоятельства получения бездепозитного бонуса, проблем с получением подарка у Вас не возникнет. 1× slots регистрация в 1×slots casino
1×slots скачать на айфон
Активация по промокоду употребляется в разных обликах бездепов. Если речь идет о приветственном призе, то комплект знаков возможно разузнать на основной странице, в регистрационной форме или послании, которое отчаливает пользователю для подтверждения e-mail. Акции все проводиться совместно с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активируется одноразовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном кабинете либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем актуальный код для активации в описании любого рекламную. <a href=https://www.globalvision2000.com/forum/member.php?action=profile&uid=1072499>1×slot казино зеркало</a> Не желаете сыграть в азартные игры, не рискуя средствами деньгами, но получая в все выплаты? Подобную вероятность деют почти наилучшие порталы с азартными весельями. В их количестве количество честных и надежных интернет-казино на российском языке. Они привлекают новых юзеров разными поощрительными мероприятиями, включая бездепозитные, либо бесплатные бонусы.Да, у бесплатных бонусов есть дефекты. Прежде всего, они обычно маленькие. Кроме как, условия вейджера по ним постоянно строгие. Но все же неименье риска проделывает их довольно привлекательными для клиентов. 1×slots официальный сайт зеркало рабочее <a href=http://sols9.com/batheo/Forum/User-Justinevelt>http://sols9.com/batheo/Forum/User-Justinevelt</a> Можно. Вы всегда можете отрешиться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не создадите ставку.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 долларов. Если выдаются фриспины, их число редко выше нескольких 10-ов бесплатных вращений.
1× slots официальный
Внесение депо – Будьте готовы пополнить счет после отыгрыша бонуса. Это обычное требование верховодил для данного типа промо-акций. Лучше заблаговременно уточнить, какую необходимую нужно будет заносить на счет. Как правило, идет о наименьшем депозите, хотя вы обязаны быть уверены, собственно он вас по кармашку. <a href=https://baskino.zone/user/ScottWRISM/>https://baskino.zone/user/ScottWRISM/</a> Бесплатные призы казино без депо возможно получить вид денежных средств на бонусный счет (вывести их можно только в отыгрыша), фриспинов, забавы или кешбэк-бонуса. 1×slots зеркало регистрация в 1×slots casino Похожим образом трудится 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя либо из-за с получения им VIP-статуса. Подарок предоставляется последствии обращения в поддержку и ревизии.
<b>Смотреть еще похожие новости:</b>
<a href=https://mit-bbs.com/viewtopic.php?t=154283>1×slots зеркало регистрация то дальше необходимо пройти</a>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=145184>казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бонус начисляется игроку незамедлительно последствии регистрации и прохождения верификации в казино и не настятельно от клиента внесения депо. Как управляло, объем приза в сходственном случае достаточно стыдливый, однако дозволяет новеньким познакомиться с игрой без риска настоящими деньгами.
#6360 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
почему в казино нет окон порно с Юлия Ефимова, пловчиха <a href=https://m.repost.news/>казино вход официальный сайт</a> автомат казино pin up casino <a href=https://vestnik-jurnal.com/>Радченко Светлана Юрьевна порно</a> почему в казино нет часов ставки на спорт букмекерские конторы порно с Матвей Сафонов (футбол) 1win букмекерская контора пина букмекерской конторы 1×bet телефон букмекерская контора фонбет официальный
#6361 Charlesgunnyhttp://filmkachat.ru
казино 1× slots официальный сайт
Размер приза. В качестве бездепов обыкновенно начисляют не суммы, а когда речь идет о бонусах за депо, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино шансы презентовать игроку до 2000$.Получив собственный подарок, Вы можете безвозмездно выступать на настоящие средства, а выполнив условия отыгрыша, вывести собственный выигрыш. <a href=http://filmkachat.ru/>онлайн казино 1×slots</a> Чаще всего казино приз за регистрацию без депо даёт возможность запустить каждой автомат. Но никакого пристально ознакомиться с условиями. Иногда для забавы доступны только определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, другого, как начать знакомство с миром азарта именно с «одноруких злодеев».Так что основное отличие подарка на депозит от бездепа – неотъемлемое пополнение счёта. Вы сможете внести депозит и преумножить стартовый капитал либо арестовать бездеп и этом не придётся рисковать своими сбережениями. Поспешите выполнить простые требования, и администрация ресурса начислит щедрое поощрение! <a href=https://www.as7abe.com/wall/blogs/post/60173>https://www.as7abe.com/wall/blogs/post/60173</a> Кешбэк-бонус дает собой возврат фиксированного процента от ставки если, тогда, поражения либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%.В наше время довольно просто получить бонус за регистрацию в казино. Практически любой игорный жилище с радостью начислит деньги либо бесплатные вращения. Многие гэмблеры пользуются этим и не стесняются региться в любом клубе с выгодными критериями. Кстати, это отличная возможность выработать победную тактику и сорвать джекпот. 1×slots официальный сайт зеркало рабочее <a href=https://rubcrumb.ru/user/JeffreyFar/>https://rubcrumb.ru/user/JeffreyFar/</a>
1× slots casino зеркало
Возьми собственный презент. Чаще всего приз активизируется сразу после регистрации. Но бывают ситуации, когда нужно забежать в собственный офис либо написать в справочную службу. <a href=https://timepost.info/showthread.php?tid=70026>1× слот зеркало</a> 1×slots зеркало регистрация в 1×slots casino Даже не выиграв крупную необходимую, игрок интересно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе превосходнейших промоакций легкостью. Достаточно регулярно изучать перечень свежих онлайн казино с выводом приза без депозита в данном разделе.Для ревизии применяются сканы паспортов, водительских прав, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь замечен в попытке завести дополнительный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный список. При ирге на лицензионной площадке не бояться указывать достоверную персональную информацию (шифрование исключает утечку персональных данных). <a href=http://inetpartners.ru/forum/member.php?u=207341>http://inetpartners.ru/forum/member.php?u=207341</a> 4. Заберите подарок. Чаще всего приз активируется сразу в регистрации. Но случаются истории, когда надо(надобно) зайти в личный офис либо написать в службу.Выбирайте превосходнейшие бесплатные бонусы счет обзоров на Casinoz – и пусть для сопутствует удача при отыгрыше бонусных кредитов! 1×slots сайт
1хслотс официальный сайт зеркало
<a href=https://igia.cv.ua/index.php/forum/laskavo-prosimo/497-skachat-uzhas-besplatno#324957>https://igia.cv.ua/index.php/forum/laskavo-prosimo/497-skachat-uzhas-besplatno#324957</a> 1хслотс казино зеркало Вывод выигрыша с бездепозитных призов казино – великодушный презент от азартных клубов. Но дабы вывести свой заработок, нужно выполнить ряд критерий:
1хслотс зеркало на сегодня
<a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1×slot регистрация</a> Получить Бездепозитный бонус в онлайн казино дело двух кликов. Другой момент, отыграть промо и соблюсти правила и условия отыгрыша. Под правилами подразумевается не только вагер, но и ограничения по максимальной ставке. Мы разумеем, собственно в кино все ставят на зеро и выигрывают. Призываем не создавать подобного. Перед активацией приза прочтите верховодила. Узнайте следующие моменты: Условия получения подарка, за регистрацию, за депозит и прочее. Ограничения по наибольшей ставке. Зачастую не повыше 350 рублей. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на пространстве. Поэтому главно аристократия, в каких забавах возможно совершать кратность денежного оборота.Фриспины предусмотрены для применения в видео слотах. Внимательно ознакомьтесь с условиями – частенько их выдают на некоторые автоматы. В зависимости от клуба, у вас получится устроить определённое количество ставок. Кстати, продвинутые игорные дома разрешают запускать любых «одноруких злодеев». онлайн казино 1×slots <a href=http://www.maurighcolori.it/node/162>http://www.maurighcolori.it/node/162</a> Для получения приза нужно ознакомиться с программкой лояльности казино и сделать ставки на сумму, нужную для перехода на следующий степень.
1×slots официальный сайт скачать на айфон
Но рядах азартных платформах сходственные гонорары все получить и уже зарегистрированные юзеры. В этом случае, бонусы предоставляются масштабах оригинальных акций или же неким геймерам повторяющий акционного предложения, которое прибывает на почту с целью «вернуть» игрока в свое казино.Бонус за регистрацию в казино без депозита с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша может потребоваться устроить ставки на необходимую, в количество 10-ов один превосходящую сумму приза либо выигрыша. <a href=http://ceh-i.ru/user/Jeffreygor/>http://ceh-i.ru/user/Jeffreygor/</a> 1×slots зеркало сайта Нет. Казино раздают благотворительные бонусы за регистрацию, для того, чтобы клиент имел ознакомиться с игровым заведением. А чтобы исключить его, нужно выполнить условия отыгрыша.
<b>Смотреть еще похожие новости:</b>
<a href=https://mycs.ge/index.php?subaction=userinfo&user=JamesDop>1хслотс казино зеркало</a>
<a href=http://mi.minfish.com/home.php?mod=space&uid=1196847>1×slots зеркало проходить регистрацию это отличный вариант</a>
<a href=http://brilliance.ru/forum/viewtopic.php?f=6&t=39917>1хслотс официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вы не в коем случае ни чем рискуете, а только выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической забавы на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, выучится регулировать изменять ставки и полосы, исследовать бонусные игры и их выигрышные комбинации, ну в конце концов просто зарядится кучей эмоций! Ведь вы будите играть на бонусные свои, коие можно отыграть и исключить, не просто на демо счет, тем наиболее адреналин в крови более повысится а пульс забьется с нередким ритмом! Чтобы получить возможность исключить прибыль с бездепозитного бонуса в казино, необходимо выполнить ряд условий:
#6362 WilliamUnambhttps://potwater.kg
1win app login <a href=https://potwater.kg/>ваучер 1win</a>
#6363 Charlesgunnyhttp://filmkachat.ru
1×slots официальный регистрация
На безвозмездные призы онлайн-казино практически всегда распространяется ограничения по стране проживания посетителей. Даже случае вас разрешено открывать счет и играть на средства в заведении, это еще не означают, собственно вам доступны no down payment bonuses.Такой безвозмездный эквивалент средств зачисляется на профиль пользователя после осуществления требований и предназначаются они только для игрового процесса. Вывод таких вознаграждений возможен только последствии осуществления вейджеровых условий. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать на айфон</a> <a href=https://plaza.rakuten.co.jp/prilla/diary/202411240000/>https://plaza.rakuten.co.jp/prilla/diary/202411240000/</a> 1×slots мобильная версия войти казино <a href=https://codescript.ru/user/Tyroneunuck/>https://codescript.ru/user/Tyroneunuck/</a>
1×slots официальный demo регистрация в 1×slots casino
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=104047&extra=>1×slots casino регистрация</a> 1×slots casino зеркало рабочее Фриспины – бесплатные вращения с фиксированной ставкой, коие возможно использовать в конкретных игровых автоматах.Бонус в казино без депозита имеет различные вариации: может быть приветственный бонус, промоакции в честь каких-либо праздничных или главных дат, приз за вербование новых игроков, лояльность и получение VIP-статуса. <a href=http://predictorllc.ru/bitrix/redirect.php?goto=http://lk.broen.ru/bitrix/redirect.php?goto=http://clients1.google.gy/url?q=https://teletype.in/@urid_pomosh/oloIV3Wgnrk>http://predictorllc.ru/bitrix/redirect.php?goto=http://lk.broen.ru/bitrix/redirect.php?goto=http://clients1.google.gy/url?q=https://teletype.in/@urid_pomosh/oloIV3Wgnrk</a> 1хслотс казино зеркало Бездепозитные призы начисляются только один раз. Не стоит раскрывать свежие аккаунты, чтобы получить их повторно. Служба безопасности казино непременно выявит «левого» участника и заблокирует. Если посетитель выполнит нужные требования, отыграет свою ставку и решит исключить собственный выигрыш, то ему нужно сведению, собственно казино непременно потребует предоставить ксерокопии личных документов, чтобы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные средства вывести не получится.
1×slots регистрация 1×slotscasino09k online
В зависимости от онлайн заведения каждый из их может для предложить как бездепозитные средства, так и бездепозитные фриспины, которые после удачной регистрации рухнут вас на ваш игровой баланс. Нет. Казино выдают бесплатные бонусы за регистрацию, для того, чтобы клиент имел ознакомиться с игровым заведением. А дабы вывести его, необходимо выполнить условия отыгрыша.Операторы гемблинга утверждают, что так они борются с бонус-хантерами. Впрочем, критики считают, собственно данным казино пытаются устроить из случайного постояльца неизменного игрока. <a href=http://wiki.diamonds-crew.net/index.php?title=%D0%9B%D1%83%D1%87%D1%88%D0%B8%D0%B5%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO>http://wiki.diamonds-crew.net/index.php?title=%D0%9B%D1%83%D1%87%D1%88%D0%B8%D0%B5%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO</a> 1хслот 1хслотс регистрация перейти на 1×slots
1×slots зеркало этих способов предполагает регистрацию
Некоторые клубы автоматически начисляют бонус на акк игрока после исполнения условий получения, но бывают ситуации, когда бонус надо(надобно) активировать игроку самому. Есть количество методов активации бонуса: <a href=https://feederfishing.lt/en/forum/kotai/1287198–1×slots#1298672>1×slots бонус за регистрацию</a> Перед активацией главно внимательно выучить условия акции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют значение также лимиты ставок при отыгрыше и сроки, протяжении которых можно воспользоваться предложением. Если бездеп обхватывает узкий список игр, рекомендуется узнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с низкими множителями выплат подходят только никаких случае, в оператор не установил взыскательные лимитирования на максимальную сумму ставки.Для отыгрыша бонуса казино обязывает игрока сыграть на необходимую, в некоторое один превосходящую необходимую полученного приза — тут выгода фирмы очевидна. 1× slots casino официальный сайт <a href=http://www.soe-parrot.com/home.php?mod=space&uid=168510>http://www.soe-parrot.com/home.php?mod=space&uid=168510</a> Онлайн-казино тщательно продумывают бонусные условия, которые необходимо изучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша прочие ограничения.
1хлот регистрация в 1×slots casino
<a href=https://nedvigimost.bbok.ru/viewtopic.php?id=11142#p31608>https://nedvigimost.bbok.ru/viewtopic.php?id=11142#p31608</a> Минимального оборота. Этот лимит устанавливается вейджером — же игрок не поиграет на установленную сумму, вывод средств несомненно недосегаем. casino 1×slot
<b>Смотреть еще похожие новости:</b>
<a href=http://complainanything.com/node/158?page=915#comment-1098158>1×slots регистрацию более популярный вариант это</a>
<a href=https://smm-seo.ru/members/rabofreeol.4209/>1×slots сайт</a>
<a href=https://creapnl.com/foros/tema/1×slots-%d0%ba%d0%b0%d0%b7%d0%b8%d0%bd%d0%be-%d0%bc%d0%be%d0%b1%d0%b8%d0%bb%d1%8c%d0%bd%d0%b0%d1%8f-%d0%b2%d0%b5%d1%80%d1%81%d0%b8%d1%8f-39/>1×slots казино мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Отзывы читателей о бонусных промоакциях посодействуют составить впечатление, хотя не забывайте о субъективности собственных объяснений.
#6364 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерские конторы бет букмекерские конторы бет <a href=https://vestnik-jurnal.com/>гта казино</a> Преподобная Надежда Александровна порно казино ставка <a href=https://specreporter.com/>1×bet приложение</a> Ирина Горбачева casino игровой автомат лучшие букмекерские конторы кент casino casino регистрации up casino букмекерская контора зенит
#6365 Charlesgunnyhttp://filmkachat.ru
1×slot регистрация
Частенько новички не понимают, как активировать презенты либо вывести первый выигрыш. Для подобных случаев наша команда обрисовала основные определения – что такое фриспины, вейджер, как его отыграть, для нужно протекать верификацию.Акции, посвященные календарным праздничным, случаются рассчитаны как на всех пользователей, например и на категории: например, подарок на 8 марта девушкам-игрокам либо мужчинам на 23 февраля. <a href=http://filmkachat.ru/>1×slots зеркало рабочее на сегодня</a> <a href=https://plaza.rakuten.co.jp/prilla/diary/202411240004/>https://plaza.rakuten.co.jp/prilla/diary/202411240004/</a> Начнём с такого, что каждое рекламную за регистрацию предполагает некие условия. Бездепозитные призы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, необходимая для исполненья критерий. Пример, возымели безвозмездные вращения и выиграли с них 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 руб., неудачных или выигрышных, неважно. После выполнения, бонусный баланс перейдёт на настоящий и будет легкодоступным к выводу. 1×slots casino зеркало <a href=http://ru.monumentefunerare.md/index.php?subaction=userinfo&user=needlessunderwo>http://ru.monumentefunerare.md/index.php?subaction=userinfo&user=needlessunderwo</a>
1×slots мобильная версия войти казино
<a href=https://melhorlance.com.br/minha-conta/>1×slot зеркало</a> 1хслот зеркало <a href=http://forum.roozgozar.com/member.php?action=profile&uid=4849>http://forum.roozgozar.com/member.php?action=profile&uid=4849</a> В современность довольно просто получить бонус за регистрацию в казино. Практически каждый игорный дом с радостью начислит деньги либо безвозмездные вращения. Многие гэмблеры пользуются этим и не стыдятся регистрироваться в каждом клубе с прибыльными условиями. Кстати, это отличная возможность выработать победную стратегию и сорвать джекпот. 1×slot регистрация Бездепозитные призы за регистрацию в игровых автоматах для владельцев онлайн-казино являются долею маркетинговой кампании, направленной на повышение аудитории сайта. Так они продвигают свои бренды и завлекают свежих посетителей.Похожим образом работает третий метод доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения клиента либо из-за с получения им VIP-статуса. Подарок предоставляется в обращения в поддержку и ревизии.
1хслотс зеркало
Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают приз по государствам. Вплоть до такого, собственно клуб может на игроков из Вашей государства, а бездеп мешает. <a href=http://metabolichealthdigest.com/user/franktuh/?um_action=edit>http://metabolichealthdigest.com/user/franktuh/?um_action=edit</a> 1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, если не желайте стать жертвой жуликов либо впустую истратить время; 1×slots зеркало которую указывали при регистрации кстати Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке адепты онлайн-казино публикуют важную информацию о no down payment bonuses прочих услугах.Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых свежих, великодушных и проверенных бонусах в онлайн казино, которые обновляются каждый денек.
1×slots зеркало на сегодня
Приветственный бездеп предоставляется хоть игроку лишь раз один. Казино дерутся с например нарекаемыми бонусхантерами (от англ. Bonus Hunter — доброволец за призами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения презента. Исключить подобные деяния дозволяет верификация данных. Администрация вправе потребовать у клиента подтвердить персональные данные, обозначенные при регистрации.Иногда в качестве поощрения за регистрацию шансы выдаваться билеты для роли в турнирах. Условия их проведения очень отличаются, поэтому мы советуем ознакомиться с каждым предложением отдельно. Практически все интернет казино с бездепозитным призом за регистрацию учитывает программку преданности — систему одобрения постоянных клиентов, которая состоит из множества уровней. При достижении игроком одного значения на его счёт поступает бонус. Чем повыше уровень — тем щедрее бонус.Не советуем сломя голову браться за различные предложения получения средств без вложений. Вполне возможно, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на первый взор. Альтернативой считается казино приз за депо. Мы предлагаем вас пару советов, спасибо которым у любого игрока несомненно вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом денег: Но есть игорные заведения, коие готовы просто так жертвовать средства на забаву. Для сего довольно сделать профиль. Чтобы вывести собственный выигрыш, вас поначалу нужно выполнить условия отыгрыша, обозначенные в критериях получения бездепозитного депозита. 1×slots официальный сайт зеркало <a href=https://wechurch.tw/home.php?mod=space&uid=188914>https://wechurch.tw/home.php?mod=space&uid=188914</a> Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке представители онлайн-казино публикуют актуальную информацию о no deposit bonuses и предложениях.
1хслотс мобильная версия зеркало
Практически все интернет казино с бездепозитным бонусом за регистрацию предусматривает программу лояльности — систему одобрения неизменных посетителей, кот-ая состоит из множества значений. При достижении игроком еще значения на его счёт поступает приз. Чем выше степень — что, этим щедрее бонус. Как и другие промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения считаются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых гостей и разрешает им составить эмоцию о функционале, не рискуя значительными суммами. <a href=http://www.dmgec.com/bbs/board.php?bo_table=free&wr_id=209587>http://www.dmgec.com/bbs/board.php?bo_table=free&wr_id=209587</a> Самый распространённый из похожих призов, окончательно же, бездеп на день рождения посетителя — приз вид фиксированной суммы либо фриспинов поступает на счёт игрока, а пользоваться им возможно протяжении установленного периода медли.Обычно, бездепозитные бонусы выдаются под определенные слоты с фиксированной ставкой, но их наверняка запрещено применять в игровых автоматах с прогрессивным джекпотом. Список игр, в которых можно применять бездеп, Вы найдете в описании промоакции либо можете уточнить у саппорта заведения. 1×slots официальный сайт мобильная версия скачать
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.puppylinux.pl/index.php?topic=793.new#new>1 x slots</a>
<a href=https://masstr.net/showthread.php?tid=140101>1×slots зеркало регистрация в 1×slots casino</a>
<a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=294252#pid294252>рабочее зеркало 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для получения предоставленных призов вам пригодиться — ПК либо мобильное устройство, и остальное дело за небольшим. Условия, на коих предоставляется бездеп, регулируются казино. Каждая промоакция содержит подробные управляла, ссылка на которые обычно содержится в промообъявлении. В них указываются лимиты, вейджер, перечень дешевых игр. Если оператор укрывает данные о предложении, то пользоваться им не стоит.
#6366 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Аделия Петросян (фигурное катание) Валентина Матвиенко порно <a href=https://strelochnik.com/>casino зеркало сегодня рабочее</a> porno Анна Сидорова, керлингистка 1×bet зеркало рабочее xbet <a href=https://vestnik-jurnal.com/>букмекерскую контору пин</a> скачать pin casino casino бездепозитный Разуваева Ксения Денисовна порно pin up casino пин ап играющие казино Манилова Алла Юрьевна порно champion casino
#6367 Charlesgunnyhttp://filmkachat.ru
1×slots мобильная версия войти казино
Акции распространяются как на все забавы казино, например и на узкий перечень. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino прочие. Промо возможность охватывать разработки одного производителя. Бездеп не пересекается с другими акциями казино. Если на сайте учтен кэшбек, он не начисляется за ставки, изготовленные бонусными средствами. Для идентификации платежных реквизитов игрока имеет понадобиться пополнение счета на наименьшую сумму. <a href=http://filmkachat.ru/>1×slots официальный сайт мобильная версия</a> Реже бонусы без депозита начисляются постоянным игрокам. С их подмогою администрация постарается вычесть ценных клиентов либо вожделеет поблагодарить за преданность верных гостей. Но намного почаще для сходственных целей используются эти промоакции: <a href=https://forum.amzgame.com/thread/detail?id=330739>https://forum.amzgame.com/thread/detail?id=330739</a> Многие новички сомневаются, собственно поощрительный приз не несомненно возвращать, даже в они выиграли у казино. Это полностью безопасно и надежно. Выводя выигранные средства, игрок просто останавливает свое роль в игре и теряет уникальную вероятность – безвозмездно наращивать личное вещественное положение.Вышеописанная первопричина и является главным интересным, следствии которого операторы отдают часть собственной выгоды на разные рекламные расходы и маркетинговые кампании. А самым действующим здесь будут играть непосредственно бездепозитные бонусы казино 2022 с выводом за регистрацию. 1×slots рабочее зеркало на сегодня <a href=http://91075425.k216.opensrs.cn/home.php?mod=space&username=uxyse>http://91075425.k216.opensrs.cn/home.php?mod=space&username=uxyse</a> Несмотря на то, собственно этот вариант стимуляции со стороны азартных платформ довольно востребован в сфере похожих игр, далековато многим поклонникам казино ведомо, собственно являют собой бездепозитные бонусы казино и как непосредственно их вполне эксплуатировать.Акции распространяются как на все забавы казино, так и на узкий список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и. Промо возможность охватывать разработки 1-го производителя. Бездеп не пересекается с другими акциями казино. Если на сайте предусмотрен кэшбек, он не начисляется за ставки, изготовленные бонусными средствами. Для идентификации платежных реквизитов игрока может потребоваться пополнение счета на минимальную необходимую.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам запрещено начислять бонусы посетителям, не имеющим валютных средств на счете. Мы предлагаем разглядеть актуальные бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ.После потребуется внести идентификационный платёж. Это стращает начинающих больше всего. Нужно устроить наименьший депозит в 100–500 руб. Таким образом служба защищенности увериться в, что платёжный метод принадлежит Вам. Данная процедура необходима для обеспечивания безопасности игровых счетов. Пример, Ваш акк взломают и выведут средства на свой кошелёк. Будет крайне неприятно. Поэтому верификация платёжной системы, это необходимый момент. 1×slots подтвердит вашу регистрацию если говорить <a href=http://stroyrem-master.ru/user/Davidexcic/>http://stroyrem-master.ru/user/Davidexcic/</a> Бездепозитные призы за регистрацию считаются одним из самых известных методов привлечения свежих игроков в онлайн-казино, поэтому что они предоставляют игрокам вероятность опробовать казино, особенно игровые автоматы, и вполне, выиграть реальные средства.При регистрации том, или ином онлайн игральном заведении — вам дается один шанс испытать собственную фортуну не внося свои монеты. Замечу собственно эту поощрительную предложение предоставляют не все онлайн игровые площадки, а лишь великодушная половина из их. Которые мы подготовили для Вас в нашем перечне. 1×slots регистрация 1×slotscasino 56 online Отыграв бездепозитный приз в казино с выводом также придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если схожее лимитирование присутствует, то единоразово вывести выйдет лишь необходимую, не превосходящую размер приобретенного бонуса.
1×slots casino регистрация
Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие возникают у новичков.Каждый из бездепозитных бонусов без пополнения 2022 содержит собственный определенный вейджер для отыгрыша, например же в каждом казино он уточняется индивидуально — где то он х55 а где-то х30, повторюсь всюду по различному! Мы собрали и опубликовали перечень лучших бездепозитных казино с бонусами за регистрацию, коие гарантируют щедрые выигрыши и мгновенные выплаты.Обычно бездепозитные промоакции от казино, приходят на эл. Почту в дни рождения либо праздники. В некоторых онлайн казино можно обратиться в чат и как неизменному игроку, вполне вас предложат бездепозитное предложение. <a href=https://39504.org/member.php?action=profile&uid=25312>https://39504.org/member.php?action=profile&uid=25312</a> Индивидуальные поощрения выдаются за совершение поступков: подписку на аккаунты площадки в соц сетях, установку мобильного приложения либо официального клиента для ПК. В большинстве казино срабатывают программы преданности, присваивающие игрокам статусы за активность на сайте. Продвижение на грядущий уровень нередко с выдачей бездепа. 1×slots casino зеркало рабочее
1×slots зеркало регистрация то дальше необходимо пройти
Бездепы с безвозмездными вращениями деют юзерам право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд уплачивает казино. Число спинов ограничено и изредка выше сотню. Если промоакция содержит количество безвозмездных игр, их начисление имеет быть разбито на несколько дней. Диапазон ставок, коие вправе устроить игрок, кроме лимитирован. Обычно ставить возможно маленькую необходимую — пределах 10–30 рублей за одно вращение. казино 1× slots официальный сайт <a href=http://jejuseapension.com/bbs/board.php?bo_table=free&wr_id=217077&&#c_246782>http://jejuseapension.com/bbs/board.php?bo_table=free&wr_id=217077&&#c_246782</a>
1×slos регистрация в 1×slots casino
Свежий приз начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в использовании средствами, а случае отыгрыша оператор может ввести ограничение на вывод средств. <a href=https://magadan-mebel.ru/forum/user/1117/>https://magadan-mebel.ru/forum/user/1117/</a> Рассмотрим принцип его действия на образце. Допустим, вы зарегистрировались и получили $10 no deposit bonus с вейджером х50. Это означает, что выигранные средства возможно несомненно выводить не ранее, чем последствии такого, как общая сумма ставок достигнет $500. 1×slots на любой вкус как пройти регистрацию Большинство клубов привлекают внимание в за счёт различных подарков. На одних веб-сайтах можно получить виртуальные кредиты, коие откроют доступ ко всему софту. На иных же, администрация предлагает благотворительные вращения для пуска лучших онлайн слотов. Несмотря на разные промоакции, стоит выделить самые основные.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.vn.ua/showthread.php?p=3276949#post3276949>1×slots актуальное зеркало</a>
<a href=https://your-portal.at.ua/forum/16–63253–2#87916>1×slots сайт</a>
<a href=http://link.5nx.ru/memberlist.php?mode=viewprofile&u=600>1×slots регистрация на 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.
#6368 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Кузнецова Анна Юрьевна порно букмекерская контора бетсити <a href=https://specreporter.com/>Кузнецова Анна Юрьевна порно</a> пин up casino casino официальный зеркало <a href=https://th-royalgclub.com/>букмекерские конторы без депозита</a> porno Екатерина Ефременкова, шорт-трекистка Матвиенко Валентина Ивановна порно 1×bet слоты 1×bet top пин ап casino pin porno Вера Бирюкова, гимнастка casino betting смотреть фильм казино
#6369 Charlesgunnyhttp://filmkachat.ru
1×slot рабочее зеркало
Бездепозитные бонусы — это презенты от казино повторяющий бонусных средств или фриспинов для игровых автоматов, которые начисляются на аккаунт игрока после процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депозит не потребуется.Обычно показатель выше, чем для бонусов на депозит. Не изумляйтесь, в он будет и х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных государств. <a href=http://filmkachat.ru/>1 х слотс зеркало</a> <a href=https://telegra.ph/Navigating-Cannabis-Delivery-Services-in-Whitby-11–24>https://telegra.ph/Navigating-Cannabis-Delivery-Services-in-Whitby-11–24</a> Во всех легальных онлайн-казино Беларуси необходимо подтверждение паспортных данных для забавы — это заявка правительства государства. 1×slots официальный сайт, скачать <a href=http://forum.inos.at/profile.php?id=893664>http://forum.inos.at/profile.php?id=893664</a>
1×slots casino online регистрация
<a href=https://forum.spherecommunity.net/User-Jamesmew>1 x slots casino</a> x1 slots 1хслотс регистрация перейти на 1×slots Такие одобрения позволяют даром протестировать свежее казино, разобраться с игровым процессом интернет слотов, заработать и вывести маленькую необходимую средств. <a href=https://www.vennews.net/home.php?mod=space&uid=156444&do=profile&from=space>https://www.vennews.net/home.php?mod=space&uid=156444&do=profile&from=space</a> Следует подчеркнуть, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам либо с конкретным кодом.Приглашаем делиться мнениями о бонусах. Это поможет иным юзерам выбирать наиболее прибыльные предложения. казино 1×slots официальный сайт
1×slots регистрация 1×slots casino 777 online
При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток. Кешбэк-бонус дает собой возврат фиксированного процента от ставки в случае проигрыша или же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не выше 10%.Внесение депо – Будьте готовы восполнить счет в отыгрыша приза. Это обычное заявка верховодил для данного типа промо-акций. Лучше заблаговременно уточнить, какую необходимую нужно будет заносить на счет. Как управляло, идет о минимальном депозите, но вы обязаны быть уверены, что он вам по карману. <a href=https://www.x-fta.com/foro/member.php?1253506-OscarChame>https://www.x-fta.com/foro/member.php?1253506-OscarChame</a> Не стоит незамедлительно же отказываться от приветственных презентов в похожих казино. Администрация готова начислить средства либо фриспины, хотя предварительно работники должны увериться, что вы не аферист. Дело в, собственно развелось слишком много охотников за призами. Они выучились врать систему и наваривать солидные суммы денег. 1хслот зеркало Индивидуальные поощрения выдаются за совершение поступков: подписку на аккаунты площадки в соц сетях, установку мобильного приложения или официального посетителя для ПК. В большинстве казино действуют программы лояльности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на следующий уровень нередко с выдачей бездепа.Подтвердите лицо, предоставив оператору казино средства паспортные данные. Инструкции обыкновенно легкие, главное — четко им стопам. Если написано, собственно «на фото должны быть заметны все хорошо угла странички паспорта» — сделайте именно это фото.
1×slots промокод при регистрации
Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих требований, кроме обязательной верификации. Если на веб-сайте предусмотрена обязательная процедура подтверждения личности, то вывести выигрыш удастся лишь в проверки данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий лицо. 1×слотс казино <a href=https://zarctvo.ru/user/jamesalorp/>https://zarctvo.ru/user/jamesalorp/</a> За вербование друга ? в партнерской программки клиент получает вознаграждение за привлечение новых юзеров.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.
1×slots зеркало рабочее на сегодня
Онлайн гемблинг развивается с каждым днем больше и больше, свежие бренды создаются не по дням а по часам. Новые интернет казино делают вступительные акции для игроков, чтобы, чтобы что бы зарекомендовать себя, и что, этим самым предлагают бездепозитные бонусы за регистрацию, собственно бы не пропустить эту возможность — как воспользоваться новым бездепом, советуем посещать наш вебсайт как можно почаще, самое вкусное и свежие будет добавляться в этом же списке.Но не стоит размышлять, что снабжая пользователей такими призами, казино увлекается спонсированием. Ведь размеры вознаграждений, в, не большие (средним объемом от 5 до 20 долларов). И на эти свои налагаются конкретные условия и ограничения, обязательные к исполнению игрока, если в последствии он желает получить все свои выигранные деньги. <a href=http://biosafe.tj/user/Tyronetof/>http://biosafe.tj/user/Tyronetof/</a> 1 x slots casino Хотя бесплатные бонусы начисляются без депо, не исключено, что для понадобиться заносить деньги. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты только после того, как новый клиент раз пополнит игровой счет.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.oursson.ru/viewtopic.php?f=26&t=9739>1×slot рабочее зеркало</a>
<a href=https://australianwinerytours.com/tours/showthread.php?tid=238379>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В лицензионных бездепозитных казино выступать в азартные игры вправду безопасно. Наличие лицензии одобряет что, этот прецедент, что клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP. Сроки активации бонуса устанавливаются каждым казино, хотя почаще всего они не превосходят недели с этапа получения. Игроку обязательно нужно применять бездеп в течение указанного срока, в ином случае бонус просто исчезнет. Каждый бонус возможно получить только один один, поэтому в не использовать бездеп в срок, у игрока не несомненно 2 шанса им воспользоваться.
#6370 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Алина Загитова ешь казино <a href=https://res-publika.com>1×bet официальный</a> казино сочи porno Юлия Канакина <a href=https://vestnik-jurnal.com/>порно с Гатагова Ольга Анатольевна</a> лучшие бесплатные онлайн казино 1×bet 1 Нургалиева Эльвира Рамиловна порно Мухтиярова Елена Вячеславовна порно казино ставка букмекерская контора без 1×bet слоты 1×bet top
#6371 Charlesgunnyhttp://filmkachat.ru
1×slot официальный сайт
В настоящее время получить приз за регистрацию в казино очень просто. Почти любой игорный жилище с готовностью предоставит средства либо благотворительные вращения. Многие игроки используют данным и не стыдятся региться в каждом клубе с выгодными критериями. Кстати, это отличная вероятность выдумать выигрышную тактику и сорвать куш.Для казино, работающих онлайн, бездепозитные бонусы необходимы для привлечения свежих посетителей. Предложение сыграть на слотах без необходимости внесения реальных денег — работающий метод для повышения интереса к компании. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит играть в казино, лишь теперь уже на собственные деньги. <a href=http://filmkachat.ru/>1хслотс рабочее зеркало на сегодня</a> Выше мы предоставили полный комплект самых новых и актуальных бездепозитных бонусов в онлайн казино без пополнения на 2022 год, где вы можете воспользоваться любым ценным бездепозитным призом.Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную процедуру активации приза без депо. Внимательно прочитайте до конца. Многие новички делают промахи на этапе регистрации и потому не получить презент. <a href=https://www.skillshare.com/en/profile/Cgifurniture-Com/181579043>https://www.skillshare.com/en/profile/Cgifurniture-Com/181579043</a> Отыграв бездепозитный приз в казино с выводом также придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, случае сходственное лимитирование существует, то единоразово вывести выйдет лишь сумму, не превышающую объем полученного бонуса.Возможность сыграть дополнительное соревнование (а от и количество) совершенно бесплатно, а выигрыш, тому, поступает на счёт игрока. 1×slots сайт зеркало <a href=http://www.pengstys.com/home.php?mod=space&uid=110069>http://www.pengstys.com/home.php?mod=space&uid=110069</a> Выполнив все требования оператора, заказчик имеет оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит в среднем менее суток. Если дополнительно потребуется пройти процедуру верификации, то срок увеличивается до 1–2 трудящихся дней. Для перевода применяются банковские инструменты и электронные платежные системы. Второй метод подходит превосходнее, так как основная транзакций ситуации исполняются моментально. В связи со спецификой функционирования банков обработка платежей имеет взятьвдолг(взятьвзаймы) до нескольких трудящихся дней.Сразу в активации промокода возможно воспользоваться даром. Как теснее упоминалось, призы случаются трёх обликов – фриспины, кредиты и фриплей-бонусы.
1×слот регистрация в 1×slots casino
Наш перечень включает в себя наилучшие бездепозитные бонусы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит ревизию по важным характеристикам: 1×slots регистрация на официальном сайте Объективные – объем бонуса, коэффициент и обстоятельства вейджера, надобность внесения депозита для вывода денег; <a href=https://foxsheets.statfoxsports.com/UserProfile/tabid/57/userId/191841/Default.aspx>https://foxsheets.statfoxsports.com/UserProfile/tabid/57/userId/191841/Default.aspx</a> Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. 1×slots регистрацию более популярный вариант это Размер ставки для забавы по бездепозитному призу (конечно же, в случае, когда он представлен повторяющий бонусных денежных средств) зачастую ниже, чем при этой на депозит. Ограничение несомненно работать до момента отыгрыша бонуса.Как и акции операторов, бездепы — это рекламный инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такового предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает свежих гостей и позволяет им составить впечатление о функционале, не рискуя значительными совокупностями.
1× slots сайт
Однако далеко не все ресурсы предлагают своим клиентам бездепозитные призы за регистрацию в казино. В большинстве случаев учтено одобрение на 1-ый депозит в объеме 100–200%. Это замечательная возможность преувеличить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш.Способы получения бездепа различаются зависимо вида приза, кот-ый приглянулся игроку. Но для или надо(надобно) быть зарегистрированным в законном онлайн-казино и доказать собственную лицо. В общем облике пошаговая аннотация для получения бездепозитного бонуса выглядит так: <a href=https://mcpe.ru.net/user/JamesAwact/>https://mcpe.ru.net/user/JamesAwact/</a> Способы получения бездепа различаются от облика бонуса, который приглянулся игроку. Но вас так надо(надобно) быть зарегистрированным в легальном онлайн-казино и доказать собственную личность. В общем виде пошаговая инструкция для получения бездепозитного приза выглядит так: казино 1× slots официальный сайт
1×slots официальный сайт скачать
B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax 1× slots регистрация в 1×slots casino <a href=http://usr.by/index.php?subaction=userinfo&user=picayunequalm63>http://usr.by/index.php?subaction=userinfo&user=picayunequalm63</a>
1×slots зеркало на сегодня
Также учтите, собственно некоторые игровые платформы сужают перечень государств, которые готовы получить предложенный бездепозитный приз за регистрацию. К примеру, существуют онлайн-заведения, выдающие подобные бонусы только обитателям конкретных стран. К примеру, онлайн казино 777 Оригинал предоставляет бездепозитный бонус только игрокам из России и стран СНГ. Или наоборот, пичкают вознаграждением всех, считая обитателей некоторых государств (как сего, следует пристально учить список, дабы потом не появилось практически вопросов и претензий).Прямо сейчас заберите бесплатные вращения за регистрацию без депо и начинайте собирать призовые композиции из-за солидных выигрышей! <a href=http://forum.ugmk-telecom.ru/index.php?action=profile;u=99024>http://forum.ugmk-telecom.ru/index.php?action=profile;u=99024</a> Разные казино имеют собственные управляла по выведению выигрыша. Для бездепозитных бонусов принимаются достаточно высочайшие притязания. Часто онлайн-казино рекомендуют отыграть бонусное поощрение до ста раз в игровых автоматах. Например, случае игрок получил даром 10 $, то необходимо несомненно отыграть их, поставив 1 тыщу спинов по одному баксу любой. Стоит отметить, что не все казино выделяют вероятность играть на призы и не во всех увеселительных заведениях идентичные правила для отыгрывания. Некоторые казино запрещают играть на бонусы в блекджек либо ограничивают ставки до пяти процентов, собственно значительно увеличивает в 10-ки раз количество необходимых игр.Для верификации номера телефонного, в личном профиле выберите опцию „Подтвердить номер телефонного“ и введите в подходящее фон код, полученный в sms-сообщении. 1×slots официальный сайт мобильная версия Сроки активации бонуса устанавливаются любым казино, хотя почаще всего они не превосходят недели с момента получения. Игроку обязательно нужно применять бездеп в течение обозначенного срока, в ином случае бонус просто пропадет. Каждый бонус возможно получить лишь один один, поэтому в не использовать бездеп в срок, у игрока не несомненно 2 шанса им пользоваться.Как верховодило, при выводе финансов, от играющего требуется лишь устроить минимальный вклад для того, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом личный счет.
<b>Смотреть еще похожие новости:</b>
<a href=http://mi.minfish.com/home.php?mod=space&uid=1196847>1×slots регистрация</a>
<a href=https://smm-seo.ru/members/rabofreeol.4209/>1×slots зеркало сайта</a>
<a href=http://rodgrodlecha.cba.pl/hidepark/?p=765794#comment-121009>казино 1×slots</a>
<a href=http://theauction.com.au/my-account/>1×slots регистрация 1×slots casino c2d ru</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это исключительно милая часть забавы. Важно, зачастую бездепозитные бонусы в казино выдаются с ограничениями по максимальной выплате. В среднем возможно рассчитывать на прибыль в некоторое тыщ руб. Как исключить выигрыш с бонуса без депозита. Придётся доказать акк документально, в некоторых заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате либо прочтите в правилах.
#6372 CalienteCasinohttps://caliente.directorio-de-casinos-mx.com
<a href=https://caliente.directorio-de-casinos-mx.com>https://www.caliente.directorio-de-casinos-mx.com</a>
Install apk file online casino caliente – play today! <a href=https://caliente.directorio-de-casinos-mx.com>caliente casino</a>
#6373 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Захарова Мария Владимировна pin up casino скачать <a href=https://th-royalgclub.com/>игры казино</a> почему в казино нет окон порно с Голикова Татьяна Алексеевна <a href=https://rhymes-punches.com/>почему в казино нет часов</a> kent casino регистрация сайт казино зеркало Ходнева Светлана Владимировна порно гта онлайн казино букмекерские конторы без депозита казино смотреть онлайн приложения букмекерских контор
#6374 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
up casino официальный porno Нина Пирогова, хоккеистка <a href=https://glvk.guru/>1×bet официальный</a> 1×bet зеркало xbet xyz Ходнева Светлана Владимировна порно <a href=https://th-royalgclub.com/>Валентина Матвиенко порно</a> 1×bet слоты официальный сайт Радченко Светлана Юрьевна порно kent casino 1×bet приложение 1×bet 1×bet официальный сайт retro casino
#6375 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slotscasino 56 online
Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных притязаний, кроме неотъемлемой верификации. Если на сайте предусмотрена неотъемлемая процедура доказательства личности, то вывести выигрыш удастся только последствии ревизии данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий личность. <a href=http://filmkachat.ru/>1×slot зеркало</a> <a href=https://diigo.com/0y2r9w>https://diigo.com/0y2r9w</a> Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. 1×slots казино зеркало <a href=http://printpoligraf.kiev.ua/index.php?subaction=userinfo&user=greatebb62>http://printpoligraf.kiev.ua/index.php?subaction=userinfo&user=greatebb62</a> Акционные предложения от казино существуют в различных форматах. Часто бонусы даются в размен на депо. Игрок заносит платеж и получает средства, безвозмездные вращения прочие одобрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — вид приза, кот-ый гарантирован за исполненье конкретных действий на сайте:
1 x slots casino
Представленные на данной страничке наилучшие бездеп призы в казино за регистрацию в 2022 году имеют подходящие обстоятельства. После тщательного анализа редакция портала составила рейтинг спецпредложений, в котором гости Casino.ru все сортировать список по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д. <a href=https://adler.biz/threads/803/>1×slots зеркало регистрацию более популярный вариант это</a> 1хслотс рабочее зеркало Чем ниже значение вейджера, тем проще отыграть и исключить бонус. Если Вы планируете заработать на бездепе, а не просто ознакомиться с свежим игровым клубом, то стоит игнорировать призов с высоким вейджером их практически не реально отыграть. С ними Вы сможете только протестировать забавы заведения.Иногда операторы настоятельно внесение малого депо перед выводом для верификации платежного инструмента. В некоторых казино этот депозит того предстоит отыграть. <a href=https://www.winners24.pl/user-46319.html>https://www.winners24.pl/user-46319.html</a> зеркло казино 1×slots Обычно, бездепозитные призы выдаются под определенные слоты с фиксированной ставкой, хотя их точно запрещено использовать в игровых автоматах с современным джекпотом. Список игр, в возможно использовать бездеп, Вы отыщите в описании акции либо можете уточнить у службы заведения.На условиях отыгрыша бесплатных призов стопам остановиться подробнее. С ними связаны нюансы, коие нельзя оставить без внимания.
1×slots сайт
<a href=https://qiqer.ru/qforum/profile.php?id=360421>https://qiqer.ru/qforum/profile.php?id=360421</a> Предложения с бездепозитными бонусами за регистрацию разрешают свежим заведениям привлечь аудиторию на свой вебсайт. А игроки тому получают возможность выступать на настоящие деньги без депо в казино и заработать небольшой стартовый капитал, кот-ый разрешается исключить на карту банка либо электронный кошелек. 1×slots зеркало регистрация Только выполнив все обстоятельства отыгрыша и дождавшись завершения проверки аккаунта, Вы можете оформить заявку на вывод средств и получить средства средства.Выбор любого онлайн казино на нашем веб-сайте. В описании к каждому Вы сможете разузнать, что получите за создание аккаунта.
1×slot казино зеркало
Как верховодило, при выводе финансов, от играющего требуется только сделать наименьший лепта для того, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом личный счет.Верификация аккаунта. Лучше подтвердить лицо незамедлительно в регистрации, чтобы потом не было проблем с выводом средств. Верификация может протекать 2-мя способами: 1 хслот регистрация в 1×slots casino <a href=http://forum.d-dub.com/member.php?1451574-Harryevame>http://forum.d-dub.com/member.php?1451574-Harryevame</a> Отзывы читателей о бонусных акциях посодействуют составить эмоцию, хотя не забывайте о субъективности собственных объяснений.
1хслотс зеркало
Прочитайте управляла бонусной программы, в желаете участие. Да, мы настоятельно советуем сделать это до регистрации.Бывают ли бездепозитные бонусы без вейджера? Бывают, случае у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино. <a href=https://ai.igcps.com/home.php?mod=space&uid=738101&do=profile>https://ai.igcps.com/home.php?mod=space&uid=738101&do=profile</a> Как прочие акции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такого предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих посетителей и позволяет им составить впечатление о функционале, не рискуя вескими суммами. 1×slots зеркало этих способов предполагает регистрацию Автоматы непопросту числятся самым знаменитым азартным развлечением. Чтобы усвоить управление и правила, потребуется всего некоторое минут. Ваша задача устроить ставку, определить количество рабочих линий и возможно крутить барабан. Если на экране выпадет выигрышная композиция – вы выиграли! С этой задачей вас посодействуют управится бездепозитные призы казино.
<b>Смотреть еще похожие новости:</b>
<a href=http://complainanything.com/node/158?page=1037#comment-1486261>онлайн казино 1×slots</a>
<a href=https://forum.spherecommunity.net/User-Jamesmew>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Главное превосходство спинов – возможность изучить разные слоты. Также получится насладиться бонусными раундами, испытать фортуну в риск-туре и преумножить выигрыш за счёт особых знаков. Однако не только игровой процесс заслуживает внимание, так другого, как сосредоточиться на реальном выигрыше.
#6376 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
сайты казино макао казино <a href=https://res-publika.com>казино рояль</a> букмекерские контора ап 1×bet рабочее на сегодня <a href=https://th-royalgclub.com/>porno Юлия Канакина</a> gama casino казино смотреть онлайн vavada casino порно с Антропова Валентина Викторовна casino приложения casino официальный сайт casino официальный зеркало
#6377 Charlesgunnyhttp://filmkachat.ru
1× slots официальный
Для всех бездепозитных бонусов функционирует наибольший предел на выигрыш. Он показывает максимальную сумму, которую возможность получить, играя на бонусные кредиты. Как только для получится выполнить требования вейджера, допустимый максимально будет переведен с бонусного счета на главной, а остаток будет списан.С не отыгранным бонусом запрещается превышать размер наибольшей ставки. Нарушение сего условия в аннулирование выигрыша. <a href=http://filmkachat.ru/>1×slots промокод при регистрации 2025</a> Для получения бездепа нужно пригласить в игру по реферальной ссылке свежего клиента: он обязан зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на необходимую, обозначенную в критериях промоакции. <a href=https://webanketa.com/forms/6gtk2c9q6mqk8d34c8v32db6/>https://webanketa.com/forms/6gtk2c9q6mqk8d34c8v32db6/</a> Бoльшинcтвo азартных заведений выдвигают примерно однообразные, схожие условия и притязания, которые нужно выполнить, дабы получить бездепозитный приз за регистрацию. Все их возможно объединить в раз перечень:Популярность интернет казино растёт и всё больше пользователей начинают проявлять азартными забавами. Бездепозитные бонусы 2022 года, это уникальные презенты за регистрацию. С их поддержкой новые игроки шансы получить благотворительные вращения либо средства на баланс за 1 регистрацию. С в игорных заведений в интернете, бездепозитные бонусы стали известнейшим способом вербования игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о которых мы расскажем. Наш сайт собрал наихорошие предложения из интернета на 2022 год. Воспользуйтесь хоть даром и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить обстоятельства. 1×slots коды <a href=http://pfb7978i.bget.ru/index.php?subaction=userinfo&user=Jeffreygek>http://pfb7978i.bget.ru/index.php?subaction=userinfo&user=Jeffreygek</a> На бонусные начисления все быть установлены дополнительные лимитирования, которые Вы не приняли при отыгрыше. Пока бонус полностью не отыгран — деньги из казино не выводятся.Воспользоваться бездепом возможно не во всех игровых автоматах: казино вдруг устанавливает лимитирование для посетителей. Конечно, это возможно счесть некоторым неудобством для игрока, хотя справедливости ради стоит отметить, собственно выбор автоматов всё точно остаётся достаточно наибольшим.
1×slots рабочее зеркало
казино 1×slots официальный сайт Вы наверняка, например все любите получать презенты и бездепозитные призы казино. Игорные жилища брали в повадку одаривать гэмблеров приятными бонусами. Стать владельцем приветственного презента возможно за творенье профиля либо пополнение счёта. Второй вариант больше увлекательный, как клубы готовы удвоить депозит! Но в вы новичок и лишь знакомитесь с миром пыла, другого, как воспользуйтесь бонусом за регистрацию. <a href=https://bajarmp3.net/member.php?action=profile&uid=4721>https://bajarmp3.net/member.php?action=profile&uid=4721</a> Третитй бездепозитный бонус за регистрацию – денежные свои. К огорчению, начислить рубли либо баксы готовы только знаменитые и известные клубы. С их подмогою у насладиться любой доступной забавой – автоматом, рулеткой, кено, блэкджеком. 1×slots сайт
1хслотс зеркало
Каждый новичок и умелый игрок мечтают живо стартануть и начать делать настоящие ставки. Для этого довольно отобрать подарок, за который не нужно уплачивать. В зависимости от игровой платформы, надо(надобно) сделать профиль, привязать email или аппарат. После сего администрация начислит щедрое вознаграждение вид даровых вращений либо виртуальных кредитов. <a href=http://b98415ql.bget.ru/user/Glennwoums/>http://b98415ql.bget.ru/user/Glennwoums/</a> 1×slot рабочее зеркало Теоретически, к безвозмездным бонусам возможно отнести так нарекаемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, потому что они деют лишь вероятность делать ставки.
1× слот зеркало
Фриспины – безвозмездные вращения с фиксированной ставкой, которые возможно использовать в конкретных игровых автоматах. При правильном раскладе бездепы — это отличный метод играть на деньги без растраты личных средств. Есть количество советов, следуя коим возможно извлечь максимально выгоды из подобных акций казино. Играть стопам только на лицензированных площадках. Скриптовые веб-сайты не только врут с бонусными предложениями, но и употребляют пиратский софт с измененным ГСЧ. Выиграть на таких автоматах невероятно. 1×slots casino зеркало рабочее <a href=https://k2s.club/user/JasperZoone/>https://k2s.club/user/JasperZoone/</a> Как лишь на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу в сего возможно забыть заявку на вывод выигрыша. Кредиты выгодно отличаются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом реальных средств и выделяют возможность почувствовать задор. Во-вторых – возможно насладиться любой азартной игрой доступной на веб-сайте. В вашем распоряжении находятся автоматы, настольные приложение, видео-покер, Live-дилеры.В разделе с бонусами активировать свой презент. Найти забавы, для коих предусмотрено одобрение и использовать приз по назначению.
1×slots регистрацию процедура займет всего лишь
Маркетинговая политического всех игорных интернет-клубов должна одевать разнородный нрав. И случае гонорары на депо служат для того, чтобы провоцировать заносить депозиты и поощрять теснее имеющих юзеров, то бездепозитный приз в казино либо бонус за регистрацию в казино, до всего, рассчитан на расширение базы покупателей.Первый образующийся вопрос, это, чего выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают свежих игроков. Последним проще начать забаву на средства с презента за регистрацию. Им не нужно пополнять баланс и тратить собственные свои. Новички получают безвозмездные спины либо свои на счёт. С их подмогою знакомятся с игровым ходом, крутят слоты и делают ставки в рулетке. <a href=http://www.glaschat.ru/glas-f/member.php?498105-FrankGuefe>http://www.glaschat.ru/glas-f/member.php?498105-FrankGuefe</a> Прямо сейчас отберите благотворительные вращения за регистрацию без депо и начинайте собирать призовые композиции из-за крупных выигрышей! 1хслотс казино зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=799723>1×slots официальный сайт зеркало</a>
<a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=13119>1хслотс рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Благодаря программе преданности от игорного заведения, можно взять неплохой старт и без дополнительных вложений запустить видеослоты. Кроме того, возможно рассчитывать на реальную удачу и получить, без вложения личных денег, великий выигрыш. Нельзя осматривать игру на деньги, как вариант заработка. Азартные забавы запрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не зачинщиком азартных игр. Сайт одевает информационный характер.
#6378 Charlesgunnyhttp://filmkachat.ru
рабочее зеркало 1×slots
Бездепозитные бонусы начисляются лишь один раз. Не стоит раскрывать свежие аккаунты, дабы получить их повторно. Служба безопасности казино непременно выявит «левого» участника и перекроет. Если посетитель выполнит нужные притязания, отыграет свою ставку и решит исключить собственный выигрыш, то ему нужно принять, собственно казино обязательно востребует предоставить ксерокопии собственных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные свои вывести не удастся.Условия отыгрыша приза. Если Вы расчитываете заработать на бездепозитном призе, то начала направьте на значение вейджера и срок, который дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть бонус и исключить выигрыш. <a href=http://filmkachat.ru/>скачать 1×slots на андроид мобильная версия</a> <a href=https://forum.highlite.com/showthread.php?tid=1882>https://forum.highlite.com/showthread.php?tid=1882</a> 1×slots мобильная версия войти казино <a href=http://c909201u.beget.tech/user/JamesDroky/>http://c909201u.beget.tech/user/JamesDroky/</a> Третитй бездепозитный бонус за регистрацию – валютные средства. К раскаянью, начислить рубли или баксы готовы лишь знаменитые и популярные клубы. С их поддержкой у насладиться любой доступной забавой – автоматом, рулеткой, кено, блэкджеком.
1×slot зеркало рабочее этих способов предполагает регистрацию
<a href=https://forum.bandariklan.com/showthread.php?tid=176825&pid=890168#pid890168>1хслотс рабочее зеркало</a> зеркала 1×slots Самый распространённый из подобных призов, естесственно же, бездеп на день рождения посетителя — приз в виде фиксированной суммы или фриспинов поступает на счёт игрока, а воспользоваться им возможно протяжении установленного периода медли. <a href=http://clients1.google.cf/url?q=http://molkom-penza.ru/bitrix/rk.php?goto=http://idea-ufa.ru/bitrix/redirect.php?goto=https://telegra.ph/Bolnichnyj-list-po-osnovnoj-rabote-i-vnutrennemu-sovmestitelstvu-09–24>http://clients1.google.cf/url?q=http://molkom-penza.ru/bitrix/rk.php?goto=http://idea-ufa.ru/bitrix/redirect.php?goto=https://telegra.ph/Bolnichnyj-list-po-osnovnoj-rabote-i-vnutrennemu-sovmestitelstvu-09–24</a> 1хслот зеркало
1×slots зеркало рабочее
Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации подарка необходимо подтвердить электронную почту и привязать телефон;Поспешите арестовать бездепозитные бонусы за регистрацию в казино из представленного перечня. Все платформы не только ведут законную работа, хотя и порадуют добросовестными плодами забавы, высокой отдачей, прыткими выплатами. <a href=http://a96549hg.bget.ru/user/Darenrurne/>http://a96549hg.bget.ru/user/Darenrurne/</a> Пoдтвepдить личнocть посетителя. Для успешного вывода средств, необходимо доказать личность клиента. Нa этaпe вepификaции пpoфиля, сотрудники службы защищенности должны увериться, собственно у игрока чем раз аккаунт. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не сможет вывести собственный выигрыш, в у него несомненно некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы.Чаще всего интернет-казино предлагают бездепозитные призы свежим юзерам. Эта промо-акция довольно отлично завлекает начинающих, подталкивая их к открытию счета. Конечно, не все становятся преданными клиентами, хотя сам прецедент регистрации аккаунта играет на руку заведению. 1×slots casino зеркало рабочее Как верховодило, новоприбывшие геймеры для желают ознакомиться с методами ввода и вывода денежных средств и сроки выполнения поданных заявок дабы четко осознавать, как быстро возможность исключить собственный казино бонус за регистрацию без депозита на электрический кошелек или же банковскую карту. К счастью для всех играющих, внутри конкретных холдингов, все казино конкурируют меж собой. Ведь в бы конкретную компанию давало только одно онлайн-заведение, то ли бы посетители увидели казино с призом за регистрацию и возможность бы рассчитывать лишь на вознаграждение вид бонуса на 1-ое инвестиция. К любому заведению регулярно по завлекать свежих игроков, что, в итоге, лишь на руку всем играющим.
1×slots казино мобильная версия
Бездепы обыкновенно предлагают с отыгрышем — моментально исключить выигранные свои невозможно. Перевод средств со счета несомненно возможен в того, как юзер выполнит все притязания казино, а сумма не быть выше установленного правилами лимита. Условиями акции фиксируются сроки, в течение коих клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней в активации. 1×slots регистрация на официальном сайте <a href=http://lat-puzz.com/phpbb/memberlist.php?mode=viewprofile&u=96082>http://lat-puzz.com/phpbb/memberlist.php?mode=viewprofile&u=96082</a> Таким образом, заведение пробует показать себя своим потенциальным геймерам, а такой маркетинговый ход как казино приз без депозита за регистрацию привлекает очень количество внимания к игорному заведению и обеспечивает неизменный струю новых гостей и грядущих посетителей игрового интернет клуба.
1×slots регистрацию процедура займет всего лишь
Создание аккаунта. На сайте казино нужно открыть регистрационную форму и заполнить порожние поля личными данными. Иногда на данном шаге требуется указать только адресок электронной почты и пароль, хотя почаще хотелось заполнить анкету персональной информацией (ФИО, дата рождения, пространство проживания и т.д.). Нужно указывать лишь настоящие данные, что впоследствие они будут испытаны.Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера. Игры, каких возможно выступать на бонусные средства. Проверьте список игр, каких можно играть на бонусные свои, вероятно они Вам не понравятся и не тратить своё время на такую промоакцию.Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша призов. Заведения практически устанавливают максимальную ставку, допустимую по условиям вейждера. <a href=http://besstizhie.ru/user/Joshuasef/>http://besstizhie.ru/user/Joshuasef/</a> Этот образ бонуса несомненно добавлен на Ваш акк после удачной процедуры регистрации с использованием номера телефона. Если избрать другой метод сотворения учетной записи, бездеп не несомненно добавлен на Ваш аккаунт.Бездепы с безвозмездными вращениями предоставляют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд платит казино. Число спинов ограничено и редко выше сотку. Если промоакция включает в себя много даровых игр, их начисление имеет быть разбито на количество дней. 1×slots casino зеркало рабочее Основное верховодило получения бездепа ? создаваемый аккаунт обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов строго запрещено. Проверка проводится по имени, адресу электронной почты, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита нужно соблюдать несложную очередность деяний.Представьте момент, когда при ставке в 10 рублей Вы получите сходственное умножение. Миллион руб. За одно вращение, собственно абсолютно возможно. Поэтому вопрос, сколько возможно выиграть остаётся закрытым. Предлагаем проверить без. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный приз и проверяйте фортуну в деле. Разумеется, исключить средства довольно. Однако шансы есть у всех.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.arka-bahce.org/forum/showthread.php?p=773124#post773124>1×slots рабочее зеркало на сегодня</a>
<a href=https://www.lightknotes.com/MyBB/showthread.php?tid=160993>1×slots зеркало регистрация в 1×slots casino</a>
<a href=https://forums.scar-divi.com/topic/778495–1×slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%BD%D0%B0-%D1%81%D0%B0%D0%B9%D1%82%D0%B5/>1×slots регистрация на сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В некоторых интернет казино для получения бездепозитных призов не достаточно просто зарегистрироваться на сайте клуба и доказать средства контактные данные. Дополнительно требуется активация промокода.
#6379 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino зеркало сайта 1×bet рабочее на сегодня <a href=https://rhymes-punches.com/>порно с Никита Кучеров (хоккей)</a> 1×bet слоты официальный сайт 1×bet зеркало слоты 1×bet xyz <a href=https://www.ossetia.tv/>1×bet слоты</a> пин ап casino pin up top почему в казино нет окон porno Юлия Канакина, скелетонистка Радченко Светлана Юрьевна порно песня казино мобильные букмекерские конторы Хорова Наталья Александровна порно
#6380 Charlesgunnyhttp://filmkachat.ru
1хслотс регистрация в 1×slots casino
При маленькой сумме бонуса рекомендовано играть по невысоким ставкам, а применять максимальные другого, как только никаких случае, если вейджер слишком великий, а время на отыгрыш сильно ограничено.Осталось избрать казино с бонусом за регистрацию и создать профиль. После активации дара выигрыш в от Фортуны и способностей. <a href=http://filmkachat.ru/>1×slots зеркало</a> Иногда виде бездепа, казино презентует наименьший приз (до 50 рублей), из-за которого надо заморачиваться.Прежде всего, не запамятовывайте периодически заглядывать на страницу обзоров бездепозитных призов. Они шаг за шагом рассматривают более занимательные предложения водящих игорных порталов. <a href=https://wowgilden.net/forum-topic_475313.html>https://wowgilden.net/forum-topic_475313.html</a> Какие призы возможность еще получить не бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, любое онлайн казино предлагает игрокам выгодное предложение на 1-ый депозит, вы совершаете депо, ваш депо увеличивается в двое либо том в трое, тем наиболее начать выступать возможно с больше солидной суммой, так же не забываем про вейджер на призы. 1×slots рабочее зеркало <a href=http://fottontuxedo.co.kr/bbs/board.php?bo_table=free&wr_id=1704194>http://fottontuxedo.co.kr/bbs/board.php?bo_table=free&wr_id=1704194</a> Бездепы с бесплатными вращениями деют пользователям право вертеть барабаны игровых автоматов без снятия средств со счета. За каждый раунд платит казино. Число спинов ограничено и редко выше сотню. Если акция содержит большое даровых игр, их начисление возможность быть разбито на несколько дней.При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток.
x1 slots 1хслотс регистрация перейти на 1×slots
Приветственный бонус без депозита ? подарок за регистрацию. Выдается средствами, фриспинами или баллами. В заключительном случае бонусные баллы используются для участия в турнирах или обмена на настоящие деньги. <a href=https://radios-collector.com/viewtopic.php?f=7&t=84495>1×slots зеркало</a> 1хслотс рабочее зеркало При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток. <a href=https://clicgo.ru/user/RenaldoDiure/>https://clicgo.ru/user/RenaldoDiure/</a> Бонус с зачислением денег на счет дает больше свободы действий. Пользователь сам подбирает, каким образом воспользоваться подаренными средствами. Здесь того имеют работать ограничения на список доступных игр, но обыкновенно эти рамки не так строги, как в рекламную с бесплатными вращениями.Так собственно приготовьтесь дать конфиденциальную информацию (пол, возраст, государство проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает не более суток, в чего удастся беспрепятственно выводить крупные выигрыши. 1×slots официальный сайт мобильная версия Получить приветственный приз шансы только свежие клиенты онлайн-казино. Способы описаны в критериях промоакции любого легального казино, чаще всего это:
1хслотс рабочее зеркало на сегодня
Казино выводит деньги только на что, эту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного приза, Вам сначала нужно пополнить счет. В некоторых клубах узкий перечень методов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет именно с данных платежных способов, коие доступны для вывода.Мы советуем не отрицаться от сходственных услуг узнаваемых казино. Выделите количество мин. На регистрацию, получите приз и попробуйте его отыграть. Может быть, сегодня удача несомненно на вашей стороне! <a href=https://forum.m2.hk/home.php?mod=space&uid=110246>https://forum.m2.hk/home.php?mod=space&uid=110246</a> 1× slots casino зеркало
1×слотс казино
Можно ли в одном интернет казино получить больше одного приза за регистрацию? Нет, так как в каждом интернет казино есть верховодила, к которым надо(надобно) держаться, не делать два аккаута для получения бонусов, по будет блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, бонус за регистрацию выдаеться раз один одному лицу.Обычно бездепозитные промоакции от казино, приходят на эл. Почту в деньки рождения либо праздники. В некоторых онлайн казино возможно обратиться в чат и как неизменному игроку, вероятно вам предложат бездепозитное предложение. Получать информацию о самых прибыльных призах возможно без неизменного мониторинга новостей казино. Мы брали данную задачу на себя и безпрерывно смотрим за услугами операторов, избирая превосходнейшие из их. В данном разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список промоакций периодически пополняется. В топ зашли самые свежие бездепозитные бонусы за регистрацию в казино 2020, временные и замкнутые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и аспектам. Если срок деянья акции истек, она удаляется из списка. Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 поболее. Когда игроку надеется количество фриспинов, администрация может бить3 их начисление на количество дней. Бесплатные вращения предоставляются для определенного слота, кот-ый указывается в правилах акции. 1хслотс официальный сайт зеркало <a href=https://www.mybbaddons.com/board/user-79937.html>https://www.mybbaddons.com/board/user-79937.html</a> Получить приветственный приз шансы лишь свежие посетители онлайн-казино. Способы описаны в условиях акции любого легального казино, чаще всего это:
1×slots официальный сайт зеркало
Заработать на бездепозитных призах за регистрацию в казино возможность каждый пользователь, достигший совершеннолетия.Нет. Казино выдают безвозмездные призы за регистрацию, чтобы, чтобы, чтобы клиент имел ознакомиться с игровым заведением. А чтобы исключить его, нужно выполнить условия отыгрыша. <a href=https://forum.green.ir/member.php?action=profile&uid=4489>https://forum.green.ir/member.php?action=profile&uid=4489</a> Приветственный бонус без депо ? подарок за регистрацию. Выдается средствами, фриспинами либо баллами. В последнем случае бонусные баллы применяются для роли в турнирах или обмена на настоящие средства. 1×slots актуальное зеркало В зависимости от интернет заведения каждый из них имеет вас предложить как бездепозитные деньги, например и бездепозитные фриспины, коие последствии успешной регистрации рухнут вам на ваш игровой баланс.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=14&t=231972&p=628439#p628439>1хлот регистрация в 1×slots casino</a>
<a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=120505>1×slots регистрация 1×slotscasino09k online</a>
<a href=https://www.donchillin.com/space-uid-382497.html>1× slots зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но есть игорные заведения, коие готовы просто например жертвовать деньги на игру. Для этого довольно сделать профиль. Чтобы вывести свой выигрыш, вам сначала необходимо выполнить обстоятельства отыгрыша, обозначенные в условиях получения бездепозитного депозита.
#6381 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino com песня казино <a href=https://sovsekretno.net/>1×bet вход</a> как выиграть в казино retro casino <a href=https://strelochnik.com/>Набиуллина Эльвира Сахипзадовна порно</a> мобильные букмекерские конторы порно с Александр Большунов (лыжные гонки) почему в казино нет окон 7k casino официальный букмекерская контора мостбет casino скачать приложение 1×bet слоты 1×bet xyz
#6382 Charlesgunnyhttp://filmkachat.ru
онлайн казино 1×slots
Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, solid зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.В современность очень просто получить бонус за регистрацию в казино. Практически каждый игорный жилище с готовностью начислит деньги либо безвозмездные вращения. Многие гэмблеры пользуются этим и не смущяются регистрироваться в любом клубе с выгодными условиями. Кстати, это отличная вероятность выработать победную тактику и сорвать джекпот. <a href=http://filmkachat.ru/>1хслотс 1хслотс регистрация перейти на 1×slots</a> Вы не в коем случае ни же рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической забавы на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, научится регулировать изменять ставки и линии, исследовать бонусные игры и их выигрышные композиции, да в просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные свои, которые можно отыграть и вывести, не просто на демо счет, тем самым адреналин в крови еще больше повысится а пульс забьется с частым ритмом!Онлайн-казино кропотливо продумывают бонусные условия, которые необходимо изучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и другие лимитирования. <a href=https://myanimelist.net/profile/shopavto>https://myanimelist.net/profile/shopavto</a> 1×slots регистрация 1×slots casino 777 online <a href=http://forum.centrum-hvac.pl/User-Williamnoumb>http://forum.centrum-hvac.pl/User-Williamnoumb</a> Для выбора азартного заведения Вы сможете пользоваться списком наших казино с призами за регистрацию. На нашем сайте мы опубликовали перечень бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, собственно доля призов неповторимые и доступны только для посетителей нашего сайта по-специальному промо-коду или по уникальной ссылке. Кроме того, для каждого приза мы подготовили подробный обзор, в котором Вы узнаете как получить и отыграть одобрение и как исключить собственный выигрыш с бездепа.Как верховодило, при выводе денег, от играющего требуется только устроить минимальный лепта чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом собственный счет.
1×slots на любой вкус как пройти регистрацию
При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие возможно посвятить забаве в казино.Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации дара нужно подтвердить электронную почту и привязать телефонный; <a href=http://aficionado.pl/showthread.php?151052–1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D0%BD%D0%B0-%D1%81%D0%B5%D0%B3%D0%BE%D0%B4%D0%BD%D1%8F&p=170775>1хслотс рабочее зеркало на сегодня</a> 1хслот 1хслотс регистрация перейти на 1×slots <a href=https://slides.com/lexxeagle/deck-3254df>https://slides.com/lexxeagle/deck-3254df</a> 1×slots зеркало видели такую регистрацию на Чаще всего интернет-казино предлагают бездепозитные призы новым юзерам. Эта промо-акция очень эффективно завлекает новичков, подталкивая их к открытию счета. Конечно, не они становятся послушными посетителями, хотя сам факт регистрации аккаунта играет на руку заведению.
1×slots казино зеркало
Почти все игровые клубы настоятельно подтверждение контактных данных игрока для получения бездепозитного бонуса. <a href=https://www.weaselmods.net/member.php?action=profile&uid=2921>https://www.weaselmods.net/member.php?action=profile&uid=2921</a> Однако в условиях скрываются «подводные камни», которые не позволят исключить крупную сумму или же вы не успеете отыграть вейджер. Поэтому профессионалы рекомендуют отобрать безвозмездные вращения за регистрацию в казино без депо, чтобы поднабраться навыка и получить реальный шанс на победу. 1×slots регистрация Маркетинговая политического всех игорных интернет-клубов должна одевать разнородный нрав. И случае гонорары на депо служат для того, чтобы провоцировать заносить депозиты и поощрять теснее имеющих юзеров, то бездепозитный приз в казино либо бонус за регистрацию в казино, до всего, рассчитан на расширение базы покупателей.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
При подмоги такового поощрения оператор имеет также завлекать клиентов, коие раньше проявляли активность на веб-сайте, хотя по какой-то основанию перестали выступать. В данном случае промокод высылается юзеру по электрической почте либо вид SMS.Существует ли стратегии для отыгрыша бездепозитных призов? К раскаянью нет, на выигрыши или проигрыши с бонусов, казино либо игрок воздействовать имеет, отдача игр случается от разработчиков игр. <a href=http://www.webdesignforum.com.au/member.php?action=profile&uid=31660>1× slots сайт</a> 1× slots официальный <a href=http://sgs-penza.ru/index.php?subaction=userinfo&user=knowledgeablewa>http://sgs-penza.ru/index.php?subaction=userinfo&user=knowledgeablewa</a> Разные казино имеют собственные управляла по выведению выигрыша. Для бездепозитных бонусов принимаются достаточно высочайшие требования. Часто онлайн-казино советуют отыграть бонусное поощрение до 100 раз в игровых автоматах. Например, если игрок получил бесплатно 10 долларов, то необходимо несомненно отыграть их, поставив одну тысячу спинов по одному доллару любой. Стоит отметить, собственно не все казино выделяют вероятность играть на призы и не во всех развлекательных заведениях идентичные верховодила для отыгрывания. Некоторые казино запрещают выступать на призы в блекджек либо ограничивают ставки до пяти процентов, собственно существенно увеличивает в десятки раз число необходимых игр.
1×slots зеркало подтвердит вашу регистрацию если говорить
Каждый из бездепозитных бонусов без пополнения 2022 содержит собственный конкретный вейджер для отыгрыша, например же в любом казино он уточняется персонально — где то он х55 а где-то х30, повторюсь везде по различному!Во всех законных онлайн-казино Беларуси необходимо свидетельство паспортных данных для забавы — это требование правительства страны. Бездепозитный приз – это экономическое вознаграждение, коие выдается соучастнику забавы в казино, для его вербования и появления заинтригованности. Любой гость, кот-ый соответствует условиям выдачи похожего бездепозитного бонуса, возможность претендовать на получение вышеуказанного приза. Такое одобрение является более действенным методом, дающим вероятность стартовать в игре, не вкладывая личных материальных средств. <a href=http://rosttour.com/user/JasperNaria/>http://rosttour.com/user/JasperNaria/</a> Почти все игровые клубы требуют подтверждение контактных данных игрока для получения бездепозитного бонуса.Поспешите отобрать бездепозитные бонусы за регистрацию в казино из представленного списка. Все платформы не водят законную работа, но и порадуют добросовестными результатами игры, высокой отдачей, прыткими выплатами. 1×slots рабочее зеркало на сегодня Бездепозитные бонусы за регистрацию являются одним из самых модных способов вербования новых игроков в онлайн-казино, поэтому собственно они предоставляют игрокам возможность опробовать казино, особенно игровые автоматы, и возможно, выиграть реальные средства.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины без депо или дополнительные средства посодействуют ближе познакомиться с игровой платформой и её функциями. За счёт презентов возможно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям из-за игры напротив живых крупье. Условия отыгрыша приза. Если Вы планируете заработать на бездепозитном призе, то для направьте на значение вейджера и срок, который дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть бонус и исключить выигрыш.
#6383 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Илья Осипов (киберспорт) казино фильм <a href=https://krtka.info/>казино пин</a> pin ап casino казино пину <a href=https://kompromat1.online/>порно с Дарья Касаткина (теннис)</a> как выиграть в казино casino рабочее зеркало Любимова Ольга Борисовна порно официальная казино online casino 7k вавада казино 7k casino
#6384 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Например, игрок получил 500 рублей при разработке аккаунта и должен отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 руб., понадобится сделать 875 спинов для полного отыгрыша.Таким образом интернет казино получает потенциального игрока. Возможно в будущем либо истинном он захочет сыграть на свои деньги. Так трудятся бездепозитные бонусы в интернет казино. Здесь хорошо подходит выражение, безвозмездные сыр бывает только в мышеловке. Начинающие игроки все не обдумывать опасность азарта. Однако со временем понимания становится больше. Это тема для отдельного обсуждения. <a href=http://filmkachat.ru/>1× slots casino зеркало</a> Бездепы с безвозмездными вращениями предоставляют пользователям право вертеть барабаны игровых автоматов без снятия средств со счета. За каждый раунд выплачивает казино. Число спинов ограничено и редко выше сотку. Если акция содержит много безвозмездных игр, их начисление может быть разбито на некоторое дней.В современность очень просто получить бонус за регистрацию в казино. Практически каждый игорный жилище с радостью начислит средства или бесплатные вращения. Многие гэмблеры пользуются данным и не смущяются регистрироваться в каждом клубе с прибыльными условиями. Кстати, это отличная вероятность выработать победную стратегию и сорвать джекпот. <a href=https://www.facer.io/user/CA95QUBa2X>https://www.facer.io/user/CA95QUBa2X</a> Обычно, бездепозитные бонусы выдаются под конкретные слоты с фиксированной ставкой, но их точно воспрещено использовать в игровых автоматах с прогрессивным джекпотом. Список игр, в которых возможно использовать бездеп, Вы найдете в описании акции или можете уточнить у службы поддержки заведения. 1×slots регистрация 1×slots casino c2d ru <a href=http://airmax.ge/index.php?subaction=userinfo&user=thinkableradica>http://airmax.ge/index.php?subaction=userinfo&user=thinkableradica</a> Теоретически, к бесплатным бонусам можно отнести например именуемые фриспины. Напомним, речь идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, поэтому что они предоставляют лишь возможность делать ставки.
1×slots casino регистрация 1×slots review live
1×slots зеркало проходить регистрацию это отличный вариант <a href=https://ai-db.science/wiki/User:DonetteTellez45>https://ai-db.science/wiki/User:DonetteTellez45</a> При верном раскладе бездепы — это прекрасный метод выступать на деньги без траты собственных средств. Есть количество рекомендаций, следуя которым можно извлечь максимально выгоды из сходственных акций казино. Играть по лишь на лицензированных площадках. Скриптовые веб-сайты не накалывают с бонусными предложениями, хотя и употребляют пиратский софт с модифицированным ГСЧ. Выиграть на этих автоматах нереально.Получать информацию о самых выгодных призах можно без постоянного мониторинга новостей казино. Мы брали данную задачку на себя и непрерывно следим за услугами операторов, выбирая лучшие из них. В данном разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список промоакций периодически пополняется. В топ вошли самые свежие бездепозитные призы за регистрацию в казино 2020, временные и замкнутые промо. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и аспектам. Если срок деянья промоакции истек, она удаляется из перечня. зеркала 1×slots Казино дает возможность заработать и вывести реальные деньги на бездепозитных призах. Обычно, это незначительная сумма, коию казино может для позволить презентовать игроку.Вейджер в переводе с английского означает «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша приобретенного бонуса, в нашем случае бездепозитного. Число ставок имеет — принципиально лишь набрать необходимую, пропорциональную сумме поощрения.
1×slots бездепозитный бонус за регистрацию
Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. <a href=http://52gmsy.com/home.php?mod=space&uid=49777>http://52gmsy.com/home.php?mod=space&uid=49777</a> К раскаянию, нет. Почти все казино, требуют внесение но бы 1-го малого депозита для вывода выигрыша с бездепозитного бонуса. Также учитывайте, что исключить средства разрешается лишь на что, эту платежную систему, с которой был изготовлен депозит. 1×slots официальный сайт зеркало Для получения бездепа необходимо пригласить в забаву по реферальной ссылке нового клиента: он должен зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на необходимую, обозначенную в условиях промоакции.Иногда виде бездепа, казино дарит минимальный бонус (до 50 руб. ), ради которого не стоит заморачиваться.
1×slots официальный demo регистрация в 1×slots casino
Например, игрок получил 500 рублей при творении аккаунта и должен отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., понадобится сделать 875 спинов для полного отыгрыша. 1×slots зеркало быструю регистрацию а также мгновенное <a href=http://wto.ru/bitrix/redirect.php?goto=http://kvokkakids.ru/bitrix/redirect.php?goto=http://buzulukinform.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/IpAQ5W46wYY>http://wto.ru/bitrix/redirect.php?goto=http://kvokkakids.ru/bitrix/redirect.php?goto=http://buzulukinform.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/IpAQ5W46wYY</a> Вейджер (или вагер) ? это минимальная сумма ставок, которую необходимо устроить для вывода валютного бонуса. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение.Когда идет о валютных бонусах, казино практически устанавливают условия вейджера, которые необходимо выполнить, чтобы вывести выигрыш.
1×slots casino online регистрация
<a href=http://wx.abcvote.cn/home.php?mod=space&uid=1748494>http://wx.abcvote.cn/home.php?mod=space&uid=1748494</a> Некоторые клубы автоматически начисляют бонус на акк игрока после исполнения условий получения, хотя случаются истории, когда приз нужно активировать игроку самому. Есть количество способов активации бонуса: 1×slots казино зеркало Для получения предоставленных бонусов для понадобиться — ПК либо мобильное прибор, и остальное дело за небольшим.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. После требуется привнести идентификационный платёж. Это пугает новичков больше всего. Нужно сделать минимальный депо в 100–500 рублей. Таким образом служба безопасности убедиться том,, собственно платёжный способ принадлежит Вам. Данная процедура важна для обеспечения защищенности игровых счетов. Пример, Ваш аккаунт взломают и выведут свои на собственный кошелёк. Будет очень досадно. Поэтому верификация платёжной системы, это важный момент.
#6385 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet слоты официальный сайт Яровая Ирина Анатольевна порно <a href=https://res-publika.com>промокод 1×bet</a> зеркала официальных сайтов казино pin casino <a href=https://glvk.guru/>порно с Дарья Касаткина (теннис)</a> казино на деньги пин ап casino pin up top 1×bet зеркало porno Андрей Рублев (теннис) Попова Анна Юрьевна порно 1×bet на андроид Разуваева Ксения Денисовна порно
#6386 Charlesgunnyhttp://filmkachat.ru
1×slots сайт
Каждый новичок и умелый игрок мечтают прытко стартануть и начать делать реальные ставки. Для этого достаточно забрать презент, за кот-ый не платить. В зависимости от игровой платформы, нужно сделать профиль, привязать email или телефонный. После сего администрация начислит щедрое вознаграждение в виде даровых вращений либо виртуальных кредитов. <a href=http://filmkachat.ru/>1хслотс мобильная версия зеркало</a> Эффективность бездепов в качестве рекламного прибора оценили все операторы. Малоизвестные площадки используют эти промоакции, чтобы живо набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны неизменных посетителей. Не все сайты, дающие презенты без депо, рекомендованы к забаве. За симпатичным промоописанием шансы скрываться неосуществимые обстоятельства отыгрыша прочие подводные камни.В неких онлайн казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на сайте клуба и подтвердить средства контактные данные. Дополнительно потребуется активация промокода. <a href=https://webanketa.com/forms/6gtk2c9r64qk4cb5cgw66c9p/>https://webanketa.com/forms/6gtk2c9r64qk4cb5cgw66c9p/</a> Сразу после активации промокода возможно воспользоваться подарком. Как теснее упоминалось, призы посещают трёх обликов – фриспины, кредиты и фриплей-бонусы. 1×slots актуальное зеркало <a href=https://www.amateur-girls-posts.com/forums/profile.php?mode=viewprofile&u=2950636>https://www.amateur-girls-posts.com/forums/profile.php?mode=viewprofile&u=2950636</a> Мы советуем не отказываться от похожих услуг узнаваемых казино. Выделите некоторое минут на регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сейчас удача будет на вашей стороне!При отыгрыше бонусных средств, нужно учесть срок действия приза и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный приз несомненно аннулирован.
1×слотс казино
казино 1× slots официальный сайт На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не сможете активировать и получить бездепозитный приз. <a href=http://berdapteka.ru/profile.php?lookup=63131>http://berdapteka.ru/profile.php?lookup=63131</a> Основное правило получения бездепа ? создаваемый акк обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов требовательно запрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита необходимо блюсти несложную очередность деяний. 1хслотс регистрация в 1×slots casino
1хслотс мобильная версия зеркало
При этой на бонусные свои запрещается играть в игровые автоматы с прогрессивным джекпотом и забавы из радела exist casino. Кроме того, некоторые казино выделяют бездеп на один или некоторое определенных слотов, и в других играх Вы не можете на их выступать. <a href=http://www.andoniscars.com/2020/09/cute-girl-drifting-in-rally-car.html>http://www.andoniscars.com/2020/09/cute-girl-drifting-in-rally-car.html</a> Стоит отметить, что бездепозитный приз выдается только совершеннолетним новичкам, которые, же, шансы пригласить собственных друзей и знакомых, также претендующих на поощрительную программку преданности. Подобная технология появилась среди конкуренцию онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры содействуют увеличению своей посещаемости, методом вербования свежих игроков. Бонусы – это оригинальный шанс для потенциальных соучастников забавы, которые имеют опробовать софт покер рума и увериться, станут ли они в него выступать или нет. Новый игрок испробует свои силы с реальными оппонентами в казино. скачать 1×slots официальный сайт
казино 1×slots
Частенько новенькие не понимают, как активировать подарки либо вывести 1-ый выигрыш. Для сходственных случаев наша команда обрисовала главные термины – собственно такое фриспины, вейджер, как его отыграть, зачем необходимо протекать верификацию.Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, чтобы была вероятность вывести выигрыш.Бездепозитный бонус часто имеет стать легкодоступным незамедлительно после окончания регистрации, потому в большинстве случаев единственным требованием к нему считается регистрация, а этого проверка вашей новой учетной записи. 1×slots зеркало рабочее на сегодня <a href=https://diigo.com/0y2rbf>https://diigo.com/0y2rbf</a>
рабочее зеркало 1хслотс
Приветственный бонус без депозита ? подарок за регистрацию. Выдается деньгами, фриспинами или баллами. В последнем случае бонусные баллы применяются для участия в турнирах либо размена на реальные деньги. <a href=http://bbs.yongrenqianyou.com/home.php?mod=space&uid=4140969&do=profile&from=space>http://bbs.yongrenqianyou.com/home.php?mod=space&uid=4140969&do=profile&from=space</a> Также учтите, собственно некоторые игровые платформы сужают перечень государств, которые готовы получить предложенный бездепозитный приз за регистрацию. К примеру, существуют онлайн-заведения, выдающие подобные бонусы только обитателям конкретных стран. К примеру, онлайн казино 777 Оригинал предоставляет бездепозитный бонус только игрокам из России и стран СНГ. Или наоборот, пичкают вознаграждением всех, считая обитателей некоторых государств (как сего, следует пристально учить список, дабы потом не появилось практически вопросов и претензий). 1×slots рабочее зеркало на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=http://big.bestforums.org/viewtopic.php?f=7&t=15888>казино 1×slots</a>
<a href=https://australianwinerytours.com/tours/showthread.php?tid=199329>1×slots скачать на айфон</a>
<a href=http://nacionrolera.org/foro/viewtopic.php?f=1210&t=210094>1×slots регистрация на сайте 1×slots ru com</a>
<a href=https://nauc.info/forums/viewtopic.php?t=20590969>1×slots зеркало регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные призы за регистрацию в игровых автоматах для собственников онлайн-казино считаются долею маркетинговой кампании, направленной на повышение аудитории вебсайта. Так они продвигают средства бренды и привлекают новых клиентов.
#6387 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Приезжева Екатерина Геннадьевна порно porno Елизавета Туктамышева <a href=https://rucriminal.info/>pinco casino</a> Попова Анна Юрьевна порно casino 7k сегодня <a href=https://strelochnik.com/>7k casino зеркало рабочее</a> pin up casino пин 7k casino официальный балтбет букмекерская контора Яровая Ирина Анатольевна порно 7k casino Елена Лядова champion casino
#6388 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало
Иногда для получения призов нужно связаться с адептами службы поддержки. Удобнее всего с ними беседовать в онлайн-сате, хотя времени достаточно запроса по электрической почте. <a href=http://filmkachat.ru/>1хслотс мобильная версия зеркало</a> При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, которое можно предназначить забаве в казино. <a href=https://www.themoviedb.org/u/%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%B0%D0%B2%D1%82%D0%BE-%D1%81%D1%80%D0%BE%D1%87%D0%BD%D0%BE>https://www.themoviedb.org/u/%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%B0%D0%B2%D1%82%D0%BE-%D1%81%D1%80%D0%BE%D1%87%D0%BD%D0%BE</a> 1×slots на любой вкус как пройти регистрацию <a href=http://www.princeton.com.cn/home.php?mod=space&uid=73974&do=profile>http://www.princeton.com.cn/home.php?mod=space&uid=73974&do=profile</a> Отыграв бездепозитный бонус в казино с выводом тоже придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в сходственное ограничение присутствует, то единоразово вывести выйдет лишь необходимую, не превосходящую размер полученного приза.
1×slots регистрация 1×slotscasino09k online
Онлайн гемблинг развивается с любым деньком все больше и больше, свежие бренды создаются не по денькам а по часам. Новые интернет казино делают вступительные акции для игроков, чтобы, чтобы что бы зарекомендовать себя, и что, этим наиболее предлагают бездепозитные бонусы за регистрацию, что бы не упустить такую вероятность — как воспользоваться свежим бездепом, рекомендуем посещать наш вебсайт как возможно почаще, самое лакомое и новые несомненно добавляться в данном же перечне.Свежий бонус начисляется вид валютных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в пользовании средствами, ну случае отыгрыша оператор имеет установить ограничение на вывод средств. <a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=3621>1×slots регистрация то дальше необходимо пройти</a> 1×slots промокод при регистрации <a href=http://kx2.net/space-uid-173719.html>http://kx2.net/space-uid-173719.html</a> Теоретически, к бесплатным призам можно отнести например именуемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, поэтому собственно они предоставляют только возможность создавать ставки.Представьте момент, когда при ставке в 10 руб. Вы получите сходственное умножение. Миллион руб. За одно вращение, что вполне возможно. Поэтому вопрос, сколько возможно выиграть остаётся закрытым. Предлагаем выяснить без. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный приз и проверяйте удачу в деле. Разумеется, вывести средства довольно. Однако шансы есть у всех. 1хслот 1хслотс регистрация перейти на 1×slots Чтоб получить крупный выигрыш, избирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша.
1× slots официальный
Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. Прибывшие на аккаунт деньги бездепозитные призы предназначаются, в, только для свежеиспеченных пользователей, которые ранее не имели собственного аккаунта в данном казино. Исходя из этого, если ранее у игрока был изготовлен депо, то, по всей вероятности, у него больше не будет возможности рассчитывать на получение такового приза в конкретном заведении. <a href=http://b98415ql.bget.ru/index.php?subaction=userinfo&user=determinedkit67>http://b98415ql.bget.ru/index.php?subaction=userinfo&user=determinedkit67</a> Для того, чтобы отыграть необходимую вашего бездепозитного бонуса нужно выполнить обстоятельства вейджера. Очень нередко фриспины даются на конкретные слоты (book of ra, book of dead, book of sun), подбирайте разъем себя по, они очень красочные и качественные. Бездепозитные приз имеет быть валютным так и повторяющий фриспинов на слоты 1хслотс официальный сайт зеркало Ну и естесственно же, для казино бездепозитные призы прибыльны с имиджевой стороны: сходственная щедрость повышает уровень лояльности клиентов к фирмы.Ниже указан важный перечень легальных казино в Беларуси с призами на первый депозит. Вы сможете попасть на официальный сайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз.
1×slots казино мобильная версия
<a href=https://www.bf-france.com/forums/profile/30064-rabofreeor/>1×slots регистрация на сайте</a> Допустим, за регистрацию вы получили бездеп в размере 2 000 руб. С вейджером х30. В данном случае светит сделать ставок, на общую необходимую в 60 000 руб. (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать настоящие средства. Однако не запамятовывайте, что с каждого подарка получится исключить определённую сумму (почаще всего не более $200). Вейджер (или вагер) ? это наименьшая сумма ставок, которую нужно устроить для вывода денежного бонуса. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение.Ознакомьтесь с нашим списком лучших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего перечня и получите бездеп сразу. Хватайте наихорошие бесплатные предложения ниже и выигрывайте великие средства, не рискуя! 1×slot зеркало <a href=http://forum.notionmusic.com/memberlist.php?mode=viewprofile&u=28433>http://forum.notionmusic.com/memberlist.php?mode=viewprofile&u=28433</a> Условия все различаться приятель от приятеля. Но подобный бонус имеет быть использован лишь для игрового процесса – полученные на счет деньги до такого, как станут отыграны, вывести нереально.
casino 1×slot
Получить приветственный приз шансы только новые посетители онлайн-казино. Способы описаны в условиях акции каждого законного казино, почаще всего это:Необходимость отыгрыша. Вейджер такой выше, чем для бонусов за депо. И же свои не отыграны, вывести их нельзя. Чтоб получить крупный выигрыш, избирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, коие доступны по условиям отыгрыша. <a href=http://ppm.co.jp/userinfo.php?uid=16957#>http://ppm.co.jp/userinfo.php?uid=16957#</a> 1×slots коды Шаг 4. Активация. Внимательно выучите обстоятельства, информацию по лимитированиям и сроке деянья бонусного предложения. Разобравшись с правилами, возможно активировать приз в личном офисе (от ? с внедрением промокода) либо по запросу в саппорт.Но на азартных платформах сходственные вознаграждения имеют получить и уже зарегистрированные пользователи. В этом случае, призы предоставляются масштабах оригинальных промоакций или же неким геймерам в виде акционного предложения, которое прибывает на почту с целью «возвратить» игрока в свое казино.
<b>Смотреть еще похожие новости:</b>
<a href=https://sadhaka.nl/forum/viewtopic.php?t=102432>1×slots официальный сайт, скачать</a>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=239611>скачать 1×slots на андроид мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные призы истинными деньгами, которые возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадали. Минимального оборота. Этот лимит уточняется вейджером — пока игрок не поиграет на установленную сумму, вывод средств несомненно недоступен.
#6389 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
top casino казино можно <a href=https://kompromat1.online/>порно с Илья Осипов (киберспорт)</a> pin up casino официальный букмекерскую контору пин <a href=https://m.repost.news/>реального казино</a> букмекерская контора без 1×bet регистрация казино можно пин ап casino pin up top 7k casino официальный букмекерская контора фонбет официальный сайт ешь казино
#6390 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало видели такую регистрацию на
Многие казино деют в рекламных целях безвозмездные призы необыкновенно для наших читателей. Чтобы их получить, надо(надобно) перебежать на игровой сайт по партнерской ссылке с нашего портала.Бездепозитные бонусы за регистрацию являются одним из самых знаменитых способов привлечения свежих игроков в онлайн-казино, поэтому что они деют игрокам возможность опробовать казино, тем игровые автоматы, и возможно, выиграть реальные деньги. <a href=http://filmkachat.ru/>1×slots зеркало проходить регистрацию это отличный вариант</a> Иногда для получения бонусов необходимо спутаться с адептами саппорта. Удобнее всего с ними собеседовать в онлайн-сате, желая от довольно запроса по электрической почте. <a href=https://www.jottacloud.com/s/371d1db27e1899f43f18f1216ac5f05f9f6>https://www.jottacloud.com/s/371d1db27e1899f43f18f1216ac5f05f9f6</a> Если вы новичок данном и только попали в неизведанную вами район азарта — с помощью услуг как бездепозитные призы без пополнения.Активация случается счет промокодов, коие вводятся в личном кабинете после регистрации. Среди спецпредложений в перечне Casino.ru содержатся эксклюзивные промокоды, которые доступны лишь гостям портала. Другие способы начисления средств ? автоматическая активация сразу последствии создания аккаунта и получение презента по запросу в службу технической поддержки. 1хслот официальный сайт зеркало <a href=https://qna.habr.com/user/Glavdorogadv2708>https://qna.habr.com/user/Glavdorogadv2708</a>
1×slot рабочее зеркало
Не сложно додуматься, что no deposit bonuses практически разу не случаются великими. Чаще всего речь идет о пяти–тридцати долларах (либо эквиваленте этой суммы в другой валюте). 1×slots официальный зеркало Осталось избрать казино с бонусом за регистрацию и создать профиль. После активации подарка выигрыш зависит от Фортуны и способностей.Для получения бонуса надо(надобно) ознакомиться с программой преданности казино и устроить ставки на сумму, нужную для перехода на следующий степень. <a href=http://www.sazkar.info/member5750.html>http://www.sazkar.info/member5750.html</a> Как верховодило, новоприбывшие геймеры начала хотят ознакомиться с методами ввода и вывода валютных средств и сроки выполнения поданных заявок дабы четко осознавать, как скоро возможность исключить собственный казино приз за регистрацию без депо на электрический кошелек или же банковскую карту. К счастью для всех играющих, внутри определенных холдингов, все казино соперничают меж собой. Ведь случае бы определенную компанию давало лишь одно онлайн-заведение, то ли бы посетители заметили казино с бонусом за регистрацию и возможность бы рассчитывать лишь на вознаграждение повторяющий приза на 1-ое вложение. К любому заведению регулярно стопам завлекать свежих игроков, собственно, конечном, только на руку всем играющим. 1 х слотс зеркало Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы появилась возможность исключить выигрыш.
1×slots актуальное зеркало
Прибывшие на акк деньги бездепозитные бонусы предназначаются, в, лишь для свежеиспеченных юзеров, которые раньше не имели личного аккаунта в данном казино. Исходя из сего, в ранее у игрока был сделан депозит, то, по всей вероятности, у него больше не будет способности рассчитывать на получение такового приза в определенном заведении.Как и другие акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения считаются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих посетителей и дозволяет им составить эмоцию о функционале, не рискуя вескими совокупностями. <a href=http://borderforum.ru/viewtopic.php?f=7&t=2170&p=176796#p176796>http://borderforum.ru/viewtopic.php?f=7&t=2170&p=176796#p176796</a> Бездепы имеют входить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой либо баллами. 1×slots на любой вкус как пройти регистрацию Для казино, работающих онлайн, бездепозитные призы нужны для вербования новых клиентов. Предложение сыграть на слотах без необходимости внесения реальных средств — работающий метод для увеличения энтузиазма к фирмы. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит выступать в казино, лишь теперь уже на личные средства.Для верификации номера телефонного, в личном профиле изберите опцию „Подтвердить номер телефона“ и введите в отвечающее фон код, приобретенный в sms-сообщении.
1×slots официальный сайт скачать на айфон
<a href=https://traderscrypt.com/forums/showthread.php?tid=5891&pid=8770#pid8770>1×slots casino зеркало рабочее</a> Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают приз по странам. Вплоть до того, собственно клуб возможность брать игроков из Вашей страны, а бездеп не давать. 1×slots casino регистрация 1×slotscasin online <a href=https://www.ls1.com/forums/member.php?u=118981>https://www.ls1.com/forums/member.php?u=118981</a> Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, чтобы была возможность исключить выигрыш.
рабочее зеркало 1×slots
Как правило, при выводе финансов, от играющего требуется только устроить минимальный лепта чтобы, чтобы, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом личный счет.Некоторые клубы автоматически начисляют бонус на аккаунт игрока после выполнения критерий получения, хотя посещают ситуации, когда бонус надо(надобно) активировать игроку самому. Есть несколько способов активации приза: <a href=https://vadaszapro.eu/user/profile/1271687>https://vadaszapro.eu/user/profile/1271687</a> Однако далеко не все ресурсы предлагают своим посетителям бездепозитные призы за регистрацию в казино. В большинстве случаев учтено поощрение на первый депо в объеме 100–200%. Это замечательная возможность преувеличить банкролл, увеличить время, проведённое за игрой и шансы сорвать крупный куш. 1хслотс рабочее зеркало на сегодня Простая процедура получения бездепозитного приза, которая займет менее 2-х мин. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные.Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную функцию активации приза без депо. Внимательно прочитайте до конца. Многие новенькие проделывают ошибки на этапе регистрации и поэтому не могут получить презент.
<b>Смотреть еще похожие новости:</b>
<a href=https://smm-seo.ru/members/rabofreeol.4209/>казино 1× slots официальный сайт</a>
<a href=https://forum.bandariklan.com/showthread.php?tid=389035>1×slots рабочее зеркало на сегодня</a>
<a href=https://forum.pmpobc.ca/index.php?topic=128777.new#new>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Активация валютного гонорары происходит автоматически после творения профиля или применения промокода. Иногда операторы предъявляют вспомогательные притязания: подписаться на странички казино в социальных сетях либо на рассылку маркетинговых сообщений, скачать и ввести вспомогательный софт и т.д. Нельзя рассматривать игру на деньги, как вариант заработка. Азартные забавы воспрещены для лиц младше 18 лет. Topcasinobonuses.mobi не является зачинщиком азартных игр. Сайт носит информационный характер.
#6391 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало 1хслотс регистрация перейти на 1×slots
В современность очень просто получить приз за регистрацию в казино. Практически любой игорный жилище с радостью начислит деньги либо благотворительные вращения. Многие гэмблеры используют данным и не смущяются регистрироваться в каждом клубе с прибыльными критериями. Кстати, это замечательная возможность выработать победную тактику и сорвать джекпот. <a href=http://filmkachat.ru/>1×slots официальный demo регистрация в 1×slots casino</a> <a href=https://forum.highlite.com/showthread.php?tid=1882>https://forum.highlite.com/showthread.php?tid=1882</a> 1×slots рабочее зеркало <a href=http://silkhunter.com/index.php?title=Выкуп_авто>http://silkhunter.com/index.php?title=Выкуп_авто</a> Условия отыгрыша приза. Если Вы планируете заработать на бездепозитном призе, то в первую очередь обратите внимание на велечину вейджера и срок, который дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть бонус и вывести выигрыш.Свежий бонус начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в использовании своими, ну случае отыгрыша оператор возможность установить ограничение на вывод средств.
1хслотс рабочее зеркало на сегодня
<a href=http://fin-molitor.com/forum/viewtopic.php?f=2&t=427043>1 xslots рабочее зеркало</a> 1×slots сайт зеркало Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам воспрещено начислять призы посетителям, не имеющим валютных средств на счете. Мы предлагаем разглядеть актуальные призы онлайн-казино с лицензией, которые соблюдают законодательство РБ. <a href=http://iawbs.com/home.php?mod=space&uid=810684>http://iawbs.com/home.php?mod=space&uid=810684</a> 1×slot зеркало Чаще всего интернет-казино предлагают бездепозитные бонусы новым юзерам. Эта промо-акция очень отлично завлекает новичков, подталкивая их к открытию счета. Конечно, не они становятся послушными клиентами, но сам факт регистрации аккаунта играет на руку заведению.Исходя из сего, просто не существует осмысленных оснований махнуть рукою на получение такого бонуса при регистрации. И, кстати, на подобный бесплатной основе у вас есть шансы выиграть средства и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные бонусы, именуют безвозмездными интернет платформами для игр.
1×slots официальный сайт, скачать
Срок активации и время на отыгрыш. Зачисление средств или фриспинов происходит при активации протяжении строго ограниченного периода, подобные требования предъявляются и к срокам отыгрыша. Одни казино позволяют отыгрывать бонус несколько дней или в недель. Другие выдают солидную сумму за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высоким вейджером. Бездепозитный бонус часто имеет стать легкодоступным незамедлительно после окончания регистрации, потому в большинстве случаев единственным требованием к нему считается регистрация, а этого проверка вашей новой учетной записи. <a href=https://e-participationyouth.eu/forum/profile/robertesosy/>https://e-participationyouth.eu/forum/profile/robertesosy/</a> 1× slots зеркало
1хслот зеркало сайта
<a href=https://adminclub.org/showthread.php?tid=63964>1×slot зеркало рабочее регистрации на телефон придет</a> Фриплей-бонусы. Бонусы за безвозмездную игру есть только в неких клубах. Они зачисляются сразу последствии творенья профиля и действуют недолговременное время. Если у вас нет медли потратить свои, они просто закончатся. Что касается медли, как призы действуют в течение одного часа.Возьми свой презент. Чаще всего бонус активизируется незамедлительно после регистрации. Но случаются ситуации, когда надо(надобно) забежать в личный кабинет либо написать в справочную службу. Максимальная ставка ? устанавливается в валюте счета и ограничивает размер ставки за один спин. В случае ее превышения бонус может быть аннулирован. Также в правилах может находиться запрет на размещение ставок определенного вида, к, по одинаковым шансам в рулетке (другими, на чет или нечет, красноватое или темное и т.д.).У любого игорного клубы различные вейджеровые условия. Чтобы вы гарантировано сумели выполнить их, мы дадим некоторое советов. Если система начислила маленькую необходимую, не стоит делать немалые ставки – остановитесь на 10–30 центах. Как только сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте выступать. В неприятном случае лучше присмотреться к иному автомату. рабочее зеркало 1хслотс <a href=http://randy-harrison.it/gallery/profile.php?uid=142943>http://randy-harrison.it/gallery/profile.php?uid=142943</a>
1×slots зеркало рабочее на сегодня
Классическая разновидность приза за создание аккаунта. Его преимущество содержится том,, что заказчик возможность без подбирать аппараты и создавать ставки в их. Иногда перечень игровых автоматов ограничен оператором, хотя все точно это чем, чем единственный дешевый разъем, как в случае с внедрением фриспинов. Практически все интернет казино с бездепозитным бонусом за регистрацию предусматривает программку лояльности — систему одобрения постоянных клиентов, кот-ая произведено из большого уровней. При достижении игроком одного значения на его счёт поступает бонус. Чем повыше степень — тем щедрее бонус.Призовые начисления без депо шансы предоставляться для роли в турнирах онлайн казино. Потратить перечисленные деньги можно самая масштабах этой акции. Условия их проведения себе ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться этим предложением, никакого выучить его управляла. <a href=http://www.andoniscars.com/2020/09/cute-girl-drifting-in-rally-car.html>http://www.andoniscars.com/2020/09/cute-girl-drifting-in-rally-car.html</a> Любой выигрыш по ставке выше установленного лимита несомненно являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, в случае выигрыша его сумма не поступит на счёт клиента — результат игры будет всецело аннулирован.Получать информацию о самых прибыльных бонусах можно без постоянного мониторинга новостей казино. Мы взяли эту задачу на себя и непрерывно смотрим за предложениями операторов, выбирая наилучшие из их. В данном разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список промоакций периодически пополняется. В топ вошли самые новые бездепозитные бонусы за регистрацию в казино 2020, кратковременные и замкнутые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру прочим аспектам. Если срок деяния промоакции истек, она удаляется из перечня. 1×slot официальный сайт Бонус с зачислением средств на счет выделяет больше свободы поступков. Пользователь сам выбирает, каким образом распорядиться подаренными средствами. Здесь того все работать лимитирования на перечень дешевых игр, хотя обыкновенно эти рамки не например строги, как в рекламную с бесплатными вращениями.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.one2bay.de/forum/showthread.php?tid=430909>1×slots регистрация на сайте 1×slots ru com</a>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=139254>1×slots быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
У любого игорного заведения средства правила и обстоятельства. Но, дабы получить бонусы, необходимо выполнить стереотипные деянья: Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную процедуру активации приза без депо. Внимательно прочтите до конца. Многие новенькие делают оплошности на шаге регистрации и потому не могут получить презент.
#6392 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Дарья Клишина казино вход <a href=https://7club7.com/>porno Игорь Акинфеев (футбол)</a> ешь казино porno Екатерина Ефременкова, шорт-трекистка <a href=https://strelochnik.com/>porno Яна Троянова</a> порно с Юлия Ефимова самое казино porno Марина Александрова Нургалиева Эльвира Рамиловна порно порно с Ирина Сидоркова как выиграть в казино порно с Максим Глушенков (футбол)
#6393 Charlesgunnyhttp://filmkachat.ru
1 х слотс зеркало
Иногда в бездепа, казино дарует минимальный бонус (до 50 руб. ), из-за которого не заморачиваться. <a href=http://filmkachat.ru/>1× slots зеркало</a> <a href=https://lyfepal.com/forums/thread/7349/Mastering-the-Art-of-CGI-Design-From-Concept-to-Revolutionary>https://lyfepal.com/forums/thread/7349/Mastering-the-Art-of-CGI-Design-From-Concept-to-Revolutionary</a> Получать информацию о самых прибыльных бонусах можно без постоянного мониторинга новостей казино. Мы взяли эту задачу на себя и непрерывно смотрим за предложениями операторов, выбирая наилучшие из их. В данном разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список промоакций периодически пополняется. В топ вошли самые новые бездепозитные бонусы за регистрацию в казино 2020, кратковременные и замкнутые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру прочим аспектам. Если срок деяния промоакции истек, она удаляется из перечня.Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера. 1×slots регистрация на официальном сайте <a href=http://apatit.org.ua/user/DavidSit/>http://apatit.org.ua/user/DavidSit/</a> Нет. Для получения бездепозитного приза в казино нужна неотъемлемая регистрация на веб-сайте. Играть в слоты безвозмездно и без регистрации можно только в демо режиме.Не стоит сразу же открещиваться от приветственных презентов в подобных казино. Администрация готова начислить средства или фриспины, хотя сначала сотрудники обязаны увериться, собственно вы не мошенник. Дело никаких, что развелось очень много охотников за бонусами. Они научились накалывать систему и зарабатывать солидные суммы средств.
casino 1×slot
Активация валютного вознаграждения происходит автоматически последствии творения профиля либо использования промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на странички казино в социальных сетях либо на рассылку маркетинговых извещений, скачать и ввести дополнительный софт и т.д.Отзывы читателей о бонусных промоакциях помогут составить эмоцию, хотя не забывайте о субъективности личных комментариев. <a href=https://projects.sare.org/people/jamestrazy/>1×slots сайт</a> рабочее зеркало 1хслотс Представленные на данной страничке лучшие бездеп бонусы в казино за регистрацию в 2022 году имеют подходящие обстоятельства. После кропотливого анализа редакция портала составила рейтинг спецпредложений, каком посетители Casino.ru шансы сортировать список по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д.Изучить правила и условия получения бездепозитных бонусов казино, Вы сможете у нас на сайте в разделе с бонусами или на официальном веб-сайте выбранного Вами казино. Если возможности отыскать необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электронной почте. <a href=http://forums.overhax.fun/member.php?action=profile&uid=4225>http://forums.overhax.fun/member.php?action=profile&uid=4225</a> 1×slots регистрация 1×slotscasino09k online
1×slots актуальное зеркало
Доступность — бездепозитные призы в казино почаще всего предоставляются свежим игрокам, хотя случаются случаи, когда приз могут получить и действующие посетители.Итак, чтобы благотворительные бонусные кредиты превратились в настоящие средства, которыми вам распоряжаться по своему усмотрению, их нужно отыграть. Вейджер следует уточнять в правилах онлайн-казино. Приветственный бездеп предоставляется какому игроку только один один. Казино сражаются с например называемыми бонусхантерами (от англ. Bonus Hunter — доброволец за призами), пытающимися заводить многочисленные аккаунты для обмана оператора и повторного получения подарка. Исключить сходственные действия дозволяет верификация данных. Администрация вправе потребовать у посетителя подтвердить персональные данные, обозначенные при регистрации. <a href=http://tvtower.ru/bitrix/redirect.php?goto=http://admkazym.ru/bitrix/redirect.php?goto=http://gofro-karton.com/bitrix/redirect.php?goto=https://telegra.ph/Uznajte-zhiv-li-chelovek–tochnoe-onlajn-gadanie-09–23>http://tvtower.ru/bitrix/redirect.php?goto=http://admkazym.ru/bitrix/redirect.php?goto=http://gofro-karton.com/bitrix/redirect.php?goto=https://telegra.ph/Uznajte-zhiv-li-chelovek–tochnoe-onlajn-gadanie-09–23</a> 1 хслот регистрация в 1×slots casino Казино выводит деньги только на ту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного бонуса, Вам сначала необходимо пополнить счет. В некоторых клубах ограниченный перечень способов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет именно с данных платежных методов, которые доступны для вывода.
скачать 1×slots официальный сайт
Бездепозитные бонусы в казино без пополнения 2022 — это конкретная сумма денег либо free spins вращения, которые предоставляются первым гостям за регистрацию на веб-сайте казино вид бездепозитного бонуса, и выделяет вам вероятность помощью казино без пополнения опробовать предложения (игр), с дальнейшей прерогативой вывода средств при исполненьи всех установленных управлял.У каждой игры средства требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система засчитает каждую ставку. В рулетке и покере сделать это намного труднее. Именно поэтому так главно внимательно читать обстоятельства получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой этой, то новички попросту «спустят бонус на ветер». <a href=http://forums.panzergrenadiers.com/showthread.php?23701–1×slots-%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%B7%D0%A0%D1%91%D0%A0%D0%85%D0%A0%D1%95-%D0%A0%C2%B7%D0%A0%C2%B5%D0%A1%D0%82%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%BB%D0%A0%D1%95&p=510537#post510537>1×slots казино зеркало</a> Ну и естесственно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: подобная добродушие увеличивает уровень лояльности посетителей к компании. Максимальная ставка ? устанавливается в денежной счета и ограничивает объем ставки за раз спин. В случае ее превышения бонус возможность быть аннулирован. Также в правилах может содержаться запрет на размещение ставок конкретного облика, примеру, по одинаковым шансам в рулетке (то есть, на чет либо нечет, красноватое либо черное и т.д. ). 1×slots мобильная версия войти казино <a href=http://campus.ecrin.org/topic/181595/>http://campus.ecrin.org/topic/181595/</a> Максимальная ставка ? устанавливается в валюте счета и ограничивает размер ставки за раз спин. В случае ее превышения приз возможность быть аннулирован. Также в правилах имеет находиться запрет на размещение ставок конкретного облика, например, по равным шансам в рулетке (словами, на чет или нечет, красноватое или черное и т.д. ).Изучить управляла и обстоятельства получения бездепозитных бонусов казино, Вы сможете у нас на сайте в разделе с призами либо на официальном сайте избранного Вами казино. Если возможности найти необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электрической почте.
1хслот официальный сайт зеркало
Простая процедура получения бездепозитного приза, которая займет менее 2-х мин. Для получения бездепов, достаточно зарегистрироваться и доказать контактные данные.Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить необыкновенности, недоступные при забаве в демо режиме. Многие свежие клиенты перебегают в число постоянных, а оператор получает долгосрочную прибыль. <a href=https://nrns-games.com/index.php?action=profile;u=40966>https://nrns-games.com/index.php?action=profile;u=40966</a> Сроки активации приза уточняются любым казино, хотя почаще всего они не превосходят недели с этапа получения. Игроку непременно надо(надобно) использовать бездеп в течение обозначенного срока, в ином случае бонус просто пропадет. Каждый бонус можно получить только один один, поэтому если не использовать бездеп в срок, у игрока не несомненно 2 шанса им воспользоваться. 1хслотс 1хслотс регистрация перейти на 1×slots Риск-игра по равным шансам – Также казино может воспрещать исполнять условия по отыгрышу с помощью раунда на удвоение, который предлагается в слотах, видео-покере и некоторых иных забавах.
<b>Смотреть еще похожие новости:</b>
<a href=https://021snyw.com/space-uid-53919.html>1×слот регистрация в 1×slots casino</a>
<a href=https://forum.eliteshost.com/showthread.php?tid=15032>1×slots рабочее зеркало</a>
<a href=https://www.fromrus.su/index.php?/topic/33391-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82/>казино 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бывают ли бездепозитные бонусы без вейджера? Бывают, случае у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино. Для верификации номера аппарата, в личном профиле выберите опцию „Подтвердить номер телефонного“ и введите в подходящее поле код, приобретенный в sms-сообщении.
#6394 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
kent casino Москалькова Татьяна Николаевна порно <a href=https://sovsekretno.net/>casino 7k сегодня</a> кент казино porno Анастасия Янькова, боксерка <a href=https://res-publika.com>сайт 1×bet слоты</a> букмекерская контора ставки casino зеркало сайта Нургалиева Эльвира Рамиловна порно порно с Дронова Александра Викторовна vodka casino 1×bet зеркало слоты 1×bet xyz казино фильм онлайн
#6395 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet casino 1×bet зеркало рабочее на сегодня <a href=https://res-publika.com>Преподобная Надежда Александровна порно</a> casino актуальное зеркало Нургалиева Эльвира Рамиловна порно <a href=https://7club7.com/>casino 7k рабочее</a> официальные зеркала казино up букмекерская контора рейтинг казино Елизавета Боярская casino играть 1×bet слоты 1×bet top сайт pin up casino
#6396 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация
Обычно показатель повыше, чем для призов на депозит. Не дивитесь, в он несомненно и х100. Иногда завышенный коэффициент вейджера устанавливается для обитателей отдельных стран. <a href=http://filmkachat.ru/>1×slots сайт</a> Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? <a href=https://www.thuum.org/viewthread.php?thread=8824>https://www.thuum.org/viewthread.php?thread=8824</a> Чаще всего, популярностью сервисы, такие как MoneyBookers и WebMoney, еще MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно обязательное правило. Финансовые средства выводятся только спустя ту платежную систему, которой пользовались для пополнения депо. Если же игрок получил бездепозитный покерный приз, требуется пополнить счет на наименьшую сумму, кот-ая составляет обычно 10 $. 1×slots официальный сайт скачать на айфон <a href=http://zvezdjuchki.ru/user/Joshuajeomo/>http://zvezdjuchki.ru/user/Joshuajeomo/</a> Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки все запросить дополнительные документы либо инициировать краткое общение по Skype.Для проверки применяются сканы паспортов, водительских удостоверений, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь замечен в попытке ввести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их владелец попадает в темный список. При игре на лицензионной площадке надо опасаться свидетельствовать достоверную индивидуальную информацию (шифрование ликвидирует утечку персональных данных).
1×slots рабочее зеркало
скачать 1×slots на андроид мобильная версия Заработать на бездепозитных призах за регистрацию в казино возможность любой пользователь, достигший совершеннолетия.Бездепозитные призы, как теснее понятно, являются оригинальной вероятностью к игровому процессу полностью бесплатно, то есть играть в онлайн казино даром и на место средства сразу после регистрации аккаунта. Автоматы с этим депо могут замерзнуть великолепной возможностью сыграть для поклонников азарта с определенными лимитированиями в финансах. <a href=http://0lwow.com/home.php?mod=space&uid=20572>http://0lwow.com/home.php?mod=space&uid=20572</a> Получив свой подарок, Вы сможете безвозмездно играть на реальные средства, а выполнив обстоятельства отыгрыша, вывести собственный выигрыш.Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации подарка нужно доказать электрическую почту и привязать телефонный; 1×slots регистрация на 1хслотс Как только вы отыграли вейджер и средства с бонусного баланса перебежали вам на настоящий счет, Вы смело можете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депо).Высокая конкурентность в разделе азартных игр мотивирует операторов привлекать посетителей разнородными промоакциями. Благодаря данному у гостей появляется возможность получить бонусы в казино за регистрацию без депозита. Воспользоваться этим предложением можно, минуя процедуру внесения средств на игровой счет, просто активировав акк на веб-сайте. Наш экскурсовод по бездепам поможет выбрать самую привлекательную бонусную программку, разузнать правила получения такового гонорары и распорядиться им с наибольшей выгодой.
1×slots промокод при регистрации
В перечне притязаний к отыгрышу нередко присутствуют лимиты на ставки при ирге на собственные деньги. Так, случае отыграть нужно 30 000 руб., а максимальная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам деянья акции. <a href=http://rytmika-gdansk.pl/profile.php?lookup=31057>http://rytmika-gdansk.pl/profile.php?lookup=31057</a> казино 1×slots официальный сайт В наше время довольно просто получить бонус за регистрацию в казино. Практически любой игорный жилище с радостью начислит средства или бесплатные вращения. Многие гэмблеры пользуются данным и не смущяются регистрироваться в любом клубе с прибыльными критериями. Кстати, это отличная вероятность выработать победную стратегию и сорвать джекпот.
1×slot зеркало рабочее этих способов предполагает регистрацию
Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.Получить Бездепозитный бонус в онлайн казино дело 2-ух кликов. Другой момент, отыграть рекламную и соблюсти управляла и обстоятельства отыгрыша. Под правилами подразумевается не только вагер, хотя и ограничения по наибольшей ставке. Мы осознаем, собственно в кинотеатр все ставят на зеро и выигрывают. Призываем не создавать похожего. Перед активацией бонуса прочитайте управляла. Узнайте последующие моменты: Условия получения подарка, за регистрацию, за депозит и многое. Ограничения по максимальной ставке. Зачастую не повыше 350 рублей. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вращать автоматы, а вагер несомненно стоять на месте. Поэтому принципиально аристократия, в каких играх возможно совершать кратность валютного оборота. <a href=https://talkonlinenews.com/memberlist.php?mode=viewprofile&u=778>1×slots рабочее зеркало на сегодня</a> Можно ли в одном онлайн казино получить больше одного бонуса за регистрацию? Нет, например как в каждом онлайн казино есть правила, к коим нужно придерживаться, не создавать 2 аккаута для получения призов, иначе будет блокировка обоих аккаутов, не пытайтесь обмануть онлайн казино, бонус за регистрацию выдаеться раз один одному личику. Некоторые веб-сайты, этого чем обмануть регистрацию игроков, предлагают ответить на количество базисных вопросов. Цель проведения похожей викторины – выявить случайных людей, коие не имеют представления о покере, и не допустить получения ими бонусов. Если гость теснее играл в казино, то ответить на полтора десятка несложных вопросов несомненно несложно. Очень часто, ответы можно найти на официальных веб-сайтах этих учреждений.Также бывают случаи, когда казино начислит оговоренный бонус последствии регистрации нового клиента по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам. 1×slots официальный сайт зеркало рабочее <a href=https://forums.twcpilots.com/member.php?action=profile&uid=853>https://forums.twcpilots.com/member.php?action=profile&uid=853</a> Бездепы шансы входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами.Бездепозитный приз казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в этом и заключается основное отличие.
1×slots официальный зеркало рабочее
<a href=http://google.com.gt/url?q=http://schottnyc.ru/bitrix/redirect.php?goto=http://sakura-nsk.com/bitrix/click.php?goto=https://telegra.ph/Nasledstvennye-prava-padcheric-i-sovershennoletnih-detej-v-brake-bez-zaveshchaniya-09–24>http://google.com.gt/url?q=http://schottnyc.ru/bitrix/redirect.php?goto=http://sakura-nsk.com/bitrix/click.php?goto=https://telegra.ph/Nasledstvennye-prava-padcheric-i-sovershennoletnih-detej-v-brake-bez-zaveshchaniya-09–24</a> Такой безвозмездный эквивалент средств зачисляется на профиль юзера в осуществления требований и предназначаются они только для игрового процесса. Вывод этих вознаграждений возможен лишь в осуществления вейджеровых условий. 1×slots зеркало регистрацию более популярный вариант это Размер ставки для забавы по бездепозитному бонусу (окончательно же, если, тогда,, когда он представлен в виде бонусных валютных средств) часто ниже, чем при этой на депо. Ограничение будет работать до момента отыгрыша приза.
<b>Смотреть еще похожие новости:</b>
<a href=https://portugal-campings.com/pt/account/>x1 slots регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выигрыши с призов без вложений всегда привязаны к требованию по ставкам и имеют быть обналичены лишь в выполнения данных требований. Стоит обозначить(означить), собственно бездепозитный бонус выдается лишь взрослым новичкам, которые, же, могут пригласить собственных приятелей и знакомых, также претендующих на поощрительную программку преданности. Подобная разработка замечена между конкуренцию онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры содействуют повышению собственной посещаемости, путем привлечения свежих игроков. Бонусы – это уникальный шанс для потенциальных участников игры, коие могут опробовать софт покер рума и увериться, станут ли они в него выступать либо нет. Новый игрок попробует средства силы с реальными оппонентами в казино.
#6397 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало рабочее
У каждого игорного клубы разные вейджеровые обстоятельства. Чтобы вы гарантировано сумели выполнить их, мы дадим количество советов. Если система начислила маленькую необходимую, не стоит создавать великие ставки – остановитесь на 10–30 центах. Как только сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте играть. В противном случае другого, как приглядеться к другому автомату.Для отыгрыша бонуса казино обязует игрока поиграть на сумму, в количество один превышающую необходимую приобретенного бонуса — здесь выгода фирмы явна. <a href=http://filmkachat.ru/>1×slots зеркало рабочее</a> <a href=https://wowgilden.net/forum-topic_475313.html>https://wowgilden.net/forum-topic_475313.html</a> Демоказино есть практически на каждом сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются веско пореже: там в случае выигрыша и соблюдения условий акций бездеп возможно перевоплотить в настоящие средства.Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам воспрещено начислять бонусы клиентам, не имеющим денежных средств на счете. Мы предлагаем разглядеть животрепещущие бонусы онлайн-казино с лицензией, которые соблюдают законодательство РБ. 1×slots зеркало этих способов предполагает регистрацию <a href=http://remont-okon.od.ua/index.php?subaction=userinfo&user=nutritiousrunt8>http://remont-okon.od.ua/index.php?subaction=userinfo&user=nutritiousrunt8</a> В лицензионных бездепозитных казино играть в азартные забавы действительно неопасно. Наличие лицензии подтверждает тот прецедент, что клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP.Онлайн-казино с бездепозитными призами ставят посетителям условия для пользования бездепами, потому перед ролью в промоакции никакого тщательно ознакомиться со всеми правилами и аспектами акции. Условия шансы прикасаться получения приза, его применения и следующего вывода денежных средств когда выигрыша.
1хслотс регистрация в 1×slots casino
Новые клиенты онлайн-казино без первого депозита шансы выяснить собственную удачливость. К тому же есть возможность преобразовать бездепы в реальные средства за регистрацию в казино, однако желаемого приз нужно отыграть сообразно условиям акции. <a href=https://www.kfz-gringer.at/index.php/forum/donec-eu-elit/65818–1×#65583>1× слот зеркало</a> 1×slots бонус за регистрацию Выбрать казино с бездепозитным призом. У нас на сайте представлен перечень наилучших интернет казино, коие предлагают своим игрокам щедрые бонусы за регистрацию.Чаще всего казино бонус за регистрацию без депозита даёт вероятность запустить каждой автомат. Но чем внимательно ознакомиться с условиями. Иногда для забавы доступны только определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, лучше начать знакомство с миром пыла непосредственно с «одноруких бандитов». <a href=http://o91668l6.beget.tech/user/OscarKix/>http://o91668l6.beget.tech/user/OscarKix/</a> Популярность онлайн казино растёт и всё больше пользователей начинают интересоваться азартными играми. Бездепозитные призы 2022 года, это уникальные презенты за регистрацию. С их поддержкою новые игроки шансы получить безвозмездные вращения либо деньги на баланс за одну регистрацию. С свет игорных заведений в интернете, бездепозитные призы стали известнейшим способом вербования игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш сайт собрал наихорошие предложения из интернета на 2022 год. Воспользуйтесь каким даром и сможете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша нужно выполнить обстоятельства. 1× slots регистрация в 1×slots casino
казино 1× slots официальный сайт
Активация денежного гонорары случается автоматически после создания профиля или применения промокода. Иногда операторы предъявляют вспомогательные требования: подписаться на страницы казино в соц сетях либо на рассылку маркетинговых сообщений, скачать и установить вспомогательный софт и т.д.Максимальный размер ставки, который невозможно превышать же приз не будет полностью отыгран. В случае нарушения сего управляла, бонус и выигрыш с него станут аннулированы. <a href=https://cursos.fixtech.com.br/forum/member.php?action=profile&uid=16311>https://cursos.fixtech.com.br/forum/member.php?action=profile&uid=16311</a> 1×slot зеркало рабочее регистрации на телефон придет
1×slots официальный зеркало
Чтобы получить возможность вывести прибыль с бездепозитного приза в казино, нужно выполнить ряд условий:Каждый из бездепозитных призов без пополнения 2022 содержит свой конкретный вейджер для отыгрыша, так же в любом казино он устанавливается индивидуально — где то он х55 а кое-где х30, повторюсь везде по разному! <a href=http://vn-info.net/user/Josephkam/>1× slots официальный</a> Также учтите, собственно некоторые игровые платформы сузивают список государств, коие готовы получить предложенный бездепозитный приз за регистрацию. К образцу, существуют онлайн-заведения, выдающие подобные призы лишь обитателям определенных государств. К примеру, онлайн казино 777 Оригинал дает бездепозитный приз лишь игрокам из России и стран СНГ. Или напротив, снабжают вознаграждением всех, не жителей некоторых государств (следует этого, идет внимательно изучать список, дабы потом не возникло практически вопросов и претензий). Для ревизии применяются сканы паспортов, водительских прав, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если юзер замечен в попытке завести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их владелец попадает в темный список. При забаве на лицензионной площадке не стоит бояться указывать достоверную персональную информацию (шифрование ликвидирует утечку персональных данных). 1хслотс казино зеркало <a href=http://www.rohitab.com/discuss/user/2317426-sharonharg/>http://www.rohitab.com/discuss/user/2317426-sharonharg/</a>
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Прямо в арестуйте бесплатные вращения за регистрацию без депозита и начинайте коллекционировать призовые композиции из-за крупных выигрышей!Но есть игорные заведения, коие готовы просто например жертвовать средства на забаву. Для сего довольно создать профиль. Чтобы исключить собственный выигрыш, для поначалу нужно выполнить условия отыгрыша, указанные в критериях получения бездепозитного депозита. Все любят получать подарки. Согласитесь, практически любой играющий человек будет беспредельно счастлив, в получит безвозмездный подарок для игры в интернет казино просто за регистрацию или же приз за внесенный депо, так именуемые приветственные призы для новых игроков. Соответственно такие онлайн клубы станут более модны и преимущественны у игроков при выборе казино для забавы. Топ казино непрерывно обновляется и добавляются свежие и занимательные игровые клубы с привлекательной бонусной политикой и всеми вероятными привилегиями, к которым относятся эти бонусы как фриспины за регистрацию, валютные бездепозитные призы, а великодушные бонусы за внесенный депозит.Демоказино есть почти на каждом сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются существенно пореже: там если, тогда, выигрыша и соблюдения критерий промоакций бездеп возможно перевоплотить в реальные средства. <a href=http://jade-crack.com/home.php?mod=space&uid=1237210>http://jade-crack.com/home.php?mod=space&uid=1237210</a> Бездепы обычно предлагают с отыгрышем — быстро вывести выигранные средства невозможно. Перевод денег со счета будет возможен в такого, как юзер выполнит все притязания казино, а сумма не может превышать установленного правилами лимита. Условиями акции фиксируются сроки, на коих клиент вправе пользоваться предложением. Обычно они не превышают нескольких дней после активации.Раздача призов имеет быть посвящена разным датам: календарные праздничные, деньки рождения игроков, годовщина открытия казино и т. Д. Подарок выдается вид денег, фриспинов либо баллов для накопления и размена на предложения оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода этой суммы понадобиться выполнить ряд притязаний. 1×slots зеркало выигрыши обязательно пройдите регистрацию если Например, игрок получил 500 руб. При создании аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 рублей, понадобится устроить 875 спинов для полного отыгрыша.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.formulersupport.com/Thread-1×slot-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE–123105>1×slot зеркало</a>
<a href=http://www.airsoft44.com/forum/index.php?action=profile;u=11896>1×slots официальный сайт зеркало</a>
<a href=https://forumauthority.com/thread-6652-post-39268.html#pid39268>1×slots зеркало регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция имеет подробные правила, ссылка на коие обычно находится в промообъявлении. В них указываются лимиты, вейджер, список доступных игр. Если оператор скрывает данные о предложении, то воспользоваться им не стоит. Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых новых, щедрых и проверенных бонусах в интернет казино, коие обновляются любой день.
#6398 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Александр Большунов (лыжные гонки) казино вход официальный сайт <a href=https://www.ossetia.tv/>1×bet сайт 1×bet xyz</a> слот casino porno Игорь Акинфеев (футбол) <a href=https://repost.news/>скачать 1×bet на андроид</a> porno Ангелина Гончаренко, хоккеистка порно с Антропова Валентина Викторовна порно с Сергей Бобровский (хоккей) скачать сайт букмекерской конторы порно с Анна Калинская (теннис) Семёнова Татьяна Владимировна порно пинко casino
#6399 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
Для тех, кто лишь подумывает испытывать собственную фортуну, еще для профессиональных игроков, отыскивающих свежие площадки для выигрышей, основные лицензированные казино нередко устраивают разные акции, и одно из лучших услуг прошедшее время – как для новичков, например и для проф игроков – бездепозитный приз за регистрацию.Призовые начисления без депо все предоставляться для роли в турнирах интернет казино. Потратить перечисленные деньги можно исключительно масштабах этой акции. Условия их проведения себе ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться этим предложением, чем изучить его управляла. <a href=http://filmkachat.ru/>1хслот официальный сайт зеркало</a> Получив собственный презент, Вы можете безвозмездно играть на реальные средства, а выполнив условия отыгрыша, исключить свой выигрыш.Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. <a href=https://app.roll20.net/users/15345358/vykup-avariinykh-avto-p>https://app.roll20.net/users/15345358/vykup-avariinykh-avto-p</a> 1×slots сайт <a href=https://clicgo.ru/user/HenryCASTY/>https://clicgo.ru/user/HenryCASTY/</a>
1×slots регистрация 1×slotscasino09k online
1×slots регистрация 1×slotscasino09k online Шаг 5. Использование и отыгрыш. Бездеп должен быть применен в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера.Мы собрали и опубликовали перечень наихороших бездепозитных казино с бонусами за регистрацию, которые гарантируют щедрые выигрыши и мгновенные выплаты. <a href=https://kr-osvita.gov.ua/user/Patricktog/>https://kr-osvita.gov.ua/user/Patricktog/</a> онлайн казино 1×slots При отыгрыше бонусных средств, необходимо учесть срок действия бонуса и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный приз несомненно аннулирован.Многие казино предоставляют в маркетинговых целях безвозмездные бонусы необыкновенно для наших читателей. Чтобы их получить, нужно перейти на игровой сайт по партнерской ссылке с нашего портала.
1хслотс регистрация в 1×slots casino
<a href=https://lit-book.ru/user/DoctorLazutaol/>https://lit-book.ru/user/DoctorLazutaol/</a> В онлайне слишком количество скриптовых сайтов, которые принадлежат плутам. Их главная цель – заинтересовать гэмблеров, пообещав не щедрые презенты, но и солидные выигрыши. Так что кое-какие сайты предлагают получить за регистрацию том $1 000.Если вы бывалый игрок, вы должны знать, что приз без депозита – редчайшая находка. Тем не, мы в изучаем онлайн, чтобы отыскать вам наихорошие бездепозитные предложения. 1× slots casino зеркало
1хслот скачать
Иногда у гостей вебсайта все появиться трудности, задачи, препядствия при активации приобретенного промо-кода. В таких случаях, нужно обратиться за подмогою в саппорта «Support». Для получения ответа, непременно указывается определенная первопричина воззвания и подтверждается информация дополнительными снимками. Если сложилась неоднозначная обстановка, всегда можно адресоваться к главному регулятору либо контролирующему органу, выдавшему данному заведению лицензионный документ. В лицензионных бездепозитных казино выступать в азартные забавы действительно безопасно. Наличие лицензии одобряет что, этот факт, собственно клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP.Во всех законных онлайн-казино Беларуси необходимо свидетельство паспортных данных для забавы — это требование правительства страны. 1×slots зеркало видели такую регистрацию на <a href=https://otpusk.ru/forum/index.php?PAGE_NAME=profile_view&UID=2239>https://otpusk.ru/forum/index.php?PAGE_NAME=profile_view&UID=2239</a>
1хслот скачать
Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных призов принимаются довольно высокие требования. Часто онлайн-казино советуют отыграть бонусное одобрение до 100 один в игровых автоматах. Например, если игрок получил безвозмездно десять долларов, то нужно будет отыграть их, поставив одну тысячу спинов по 1 доллару каждый. Стоит обозначить(означить), собственно не все казино дают возможность выступать на бонусы и не во всех развлекательных заведениях схожие управляла для отыгрывания. Некоторые казино воспрещают выступать на призы в блекджек или ограничивают ставки до 5 %, что существенно наращивает в десятки один число нужных игр.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 $. Если выдаются фриспины, их количество редко выше нескольких десятков бесплатных вращений. Каждый игрок обязан сперва детально выучить условия по получению и отыгрышу приглянувшегося дара. Если всё организует, поторопитесь арестовать безвозмездные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо в начать вращать барабаны лучших слотов. <a href=http://eng-jw.com/bbs/board.php?bo_table=free&wr_id=49543>http://eng-jw.com/bbs/board.php?bo_table=free&wr_id=49543</a> Прибывшие на аккаунт финансы бездепозитные бонусы предназначаются, в основном, только для новоиспеченных юзеров, коие ранее не имели личного аккаунта в данном казино. Исходя из сего, случае ранее у игрока был изготовлен депо, то, по всей вероятности, у него больше не несомненно возможности рассчитывать на получение такового бонуса в конкретном заведении. 1×slots сайт
<b>Смотреть еще похожие новости:</b>
<a href=http://theauction.com.au/author/jamesflake/>сайт 1× slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Отыграв бездепозитный бонус в казино с выводом также придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в сходственное ограничение существует, то единоразово исключить получится лишь необходимую, не превышающую размер полученного приза. B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.
#6400 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино сегодня рабочие зеркала казино <a href=https://rhymes-punches.com/>kent casino</a> casino вход porno Юлия Пересильд <a href=https://repost.news/>porno Нина Пирогова, хоккеистка</a> казино 5 porno Виктория Баркова, легкоатлетка казино можно porno Анна Сидорова, керлингистка казино сегодня Попова Анна Юрьевна порно лучшая казино
#6401 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на 1хслотс
Каждый из бездепозитных бонусов без пополнения 2022 содержит свой конкретный вейджер для отыгрыша, например же в любом казино он устанавливается персонально — где то он х55 а где-то х30, повторюсь всюду по различному! <a href=http://filmkachat.ru/>1×slots акции</a> <a href=https://www.find-topdeals.com/blogs/187723/Unlocking-the-Magic-of-Professional-Architectural-Render-Creation>https://www.find-topdeals.com/blogs/187723/Unlocking-the-Magic-of-Professional-Architectural-Render-Creation</a> 1хслотс 1хслотс регистрация перейти на 1×slots <a href=https://forums.dfine.net/member.php?action=profile&uid=1179>https://forums.dfine.net/member.php?action=profile&uid=1179</a>
1×slot рабочее зеркало
Составленный знатоками Casino.ru список онлайн-казино с бездепозитным призом разрешает игрокам сравнить спецпредложения разных операторов. <a href=https://bans.org.ua/index.php?topic=128468.new#new>1×slot официальный сайт</a> 1×slots официальный demo регистрация в 1×slots casino Все бесплатные бонусы кажутся заманчивыми. Кто же категорически от возможности сыграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далековато не все бездепозитные призы в презентабельны для рассудительного посетителя.Ознакомьтесь с нашим перечнем превосходнейших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего перечня и получите бездеп незамедлительно. Хватайте наихорошие бесплатные предложения ниже и выигрывайте великие средства, не рискуя! <a href=https://clashofcryptos.trade/wiki/User:SherrylOrdell47>https://clashofcryptos.trade/wiki/User:SherrylOrdell47</a> 1хслот 1хслотс регистрация перейти на 1×slots
1×slots официальный demo регистрация в 1×slots casino
Чем ниже значение вейджера, тем проще отыграть и исключить бонус. Если Вы расчитываете заработать на бездепе, а не просто ознакомиться с новым игровым клубом, то стоит избегать призов с высочайшим вейджером их почти не реально отыграть. С ними Вы сможете только протестировать игры заведения.Приглашаем делиться воззрениями о бонусах. Это поможет иным юзерам выбирать наиболее выгодные предложения. Хотя благотворительные призы начисляются без депозита, не исключено, собственно вам понадобиться вносить деньги. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь в того, как свежий заказчик раз пополнит игровой счет. <a href=http://terramic.ru/bitrix/click.php?goto=http://s03.megalodon.jp/?url=http://zid.by/bitrix/redirect.php?goto=https://telegra.ph/Konstituciya-kak-osnovnoj-zakon-i-ee-rol-v-zhizni-grazhdan-Rossii-09–23>http://terramic.ru/bitrix/click.php?goto=http://s03.megalodon.jp/?url=http://zid.by/bitrix/redirect.php?goto=https://telegra.ph/Konstituciya-kak-osnovnoj-zakon-i-ee-rol-v-zhizni-grazhdan-Rossii-09–23</a> 1×slot зеркало
1×slots casino зеркало
Прямо в арестуйте бесплатные вращения за регистрацию без депозита и начинайте коллекционировать призовые композиции из-за крупных выигрышей!Так собственно можете отважно регистрироваться без всяких размышлений. Фортуна сегодня наверняка на вашей стороне. Не бойтесь, так следствие какого или убытка Вам совершенно не грозит. С этими призами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе. Бесплатный бонус – кредиты, коие онлайн-казино начислит клиенту, не заставляя его пополнять игровой счет. Демоказино есть почти на каждом сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются существенно пореже: там если, тогда, выигрыша и соблюдения критерий промоакций бездеп возможно перевоплотить в реальные средства.Основное правило получения бездепа ? творимый аккаунт должен быть у юзера первым и единственным. Наличие нескольких аккаунтов требовательно воспрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депо необходимо соблюдать простую последовательность деяний. 1×slots промокод при регистрации <a href=https://viewcinema.ru/user/CharlesBam/>https://viewcinema.ru/user/CharlesBam/</a>
1хслотс рабочее зеркало
Возможность протестировать свежие игры, не рискуя собственными своими и разработать собственную стратегию игры.Также учтите, что кое-какие игровые платформы сузивают список стран, коие способны получить предложенный бездепозитный бонус за регистрацию. К образцу, есть онлайн-заведения, выдающие сходственные бонусы лишь обитателям конкретных стран. К образцу, онлайн казино 777 Оригинал дает бездепозитный приз только игрокам из России и стран СНГ. Или напротив, пичкают вознаграждением всех, кроме жителей некоторых государств (следует этого, следует внимательно учить список, дабы потом не появилось практически вопросов и жалоб). <a href=http://seneka-vl.ru/index.php?subaction=userinfo&user=largenetwork24>http://seneka-vl.ru/index.php?subaction=userinfo&user=largenetwork24</a> Подтверждение электрической почты – одно из ведущих критерий, коие есть практически в любом бездепозитном казино. Чтобы верифицировать электрическую почту, достаточно перебежать по активной ссылке в послании, приобретенном от азартного клуба.Вообще перейдя в казино — управляла одинаковы в получении бездепозитных призов, в стереотипные правила входит: доказать эл. Почту и телефонный, заполнить свой личный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ. x1 slots регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://rolivka.online/forum/showthread.php?tid=29252>1×slots сайт</a>
<a href=https://portugal-campings.com/pt/account/>казино 1× slots официальный сайт</a>
<a href=https://timepost.info/showthread.php?tid=46029>1×slots регистрация на официальном сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Похожим образом трудится 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения клиента или в связи с получения им VIP-статуса. Подарок предоставляется в воззвания в поддержку и проверки.
#6402 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
black russia казино пари букмекерская контора <a href=https://m.repost.news/>казино на деньги</a> фреш казино 1×bet вход <a href=https://kompromat1.online/>лучшие онлайн казино</a> Петрова Ольга Викторовна порно сайт 1×bet слоты Любимова Ольга Борисовна порно букмекерская контора зенит 1×bet официальный слоты 1×bet зеркало пинап казино
#6403 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало online casino <a href=https://rhymes-punches.com/>ев казино</a> kent casino регистрация 1×bet приложение <a href=https://slon-ru.com/>какие казино</a> casino на телефон 7k casino официальный сайт спорт букмекерская контора казино рублях пин ап casino pin up top Разуваева Ксения Денисовна порно мобильные букмекерские конторы
#6404 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало подтвердит вашу регистрацию если говорить
Если вы облюбовали себе количество брендов коие вам больше всего приглянулись, для постоянной игры! Таких гемблеров казино довольно предпочитает и оценивает, за частую такие игроки становятся VIP игроками заведения, коим нередко поступают прибыльные предложения повторяющий призов, например же туда входит и бездепозитные. <a href=http://filmkachat.ru/>1×slots зеркало которую указывали при регистрации кстати</a> Поспешите арестовать бездепозитные бонусы за регистрацию в казино из представленного перечня. Все платформы не только ведут законную работа, хотя и порадуют правдивыми плодами забавы, высочайшей отдачей, быстрыми выплатами. <a href=https://telegra.ph/Ultimate-Guide-to-Professional-Weed-Delivery-North-York-Your-Local-Cannabis-Companion-11–24>https://telegra.ph/Ultimate-Guide-to-Professional-Weed-Delivery-North-York-Your-Local-Cannabis-Companion-11–24</a> Некоторые клубы автоматически начисляют бонус на акк игрока после исполнения условий получения, хотя случаются истории, когда приз нужно активировать игроку самому. Есть количество способов активации бонуса:Акционные предложения от казино есть в разных форматах. Часто бонусы даются в мена на депо. Игрок заносит платеж и получает деньги, безвозмездные вращения и одобрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — картина бонуса, кот-ый гарантирован за выполнение определенных действий на веб-сайте: 1× slots зеркало <a href=http://filmsgood.ru/index.php?subaction=userinfo&user=feignedshoe73>http://filmsgood.ru/index.php?subaction=userinfo&user=feignedshoe73</a>
1×slots зеркало которую указывали при регистрации кстати
1×slots официальный сайт скачать на айфон Внесение депо – Будьте готовы пополнить счет в отыгрыша бонуса. Это стандартное требование правил для этого подобии промо-акций. Лучше заранее уточнить, какую сумму нужно несомненно вносить на счет. Как правило, речь идет о наименьшем депозите, но вы обязаны быть уверены, собственно он вас по кармашку.Такой казино приз без депозита за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это словно какая-то конспирация одобрения под бездепозитный. Суть всего этого сводится к что, этому, что игроку на час выдается, к примеру, 1000 долларов, а реклама повторяет о том, что каждой выигрыш можно несомненно в забыть при себя. Но случае играющий всерьез отнесется к данному предложению, то он просто растеряет время. Ведь геймеру надо(надобно) будет выступать не в основном аккаунте, ну тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (даже всей тысячи) в управляла вступят конкретные обстоятельства, где несомненно сказано, собственно максимальной суммой победы возможность быть лишь двести $ и деньги возможно применять только в бонуса на 1-ый вклад с вейджером 25 от суммы гонорары плюс сам депозит. По итогу получится, что игрок выигрывал для 200% приз с вейджером на конкретную необходимую. Короче разговаривая, это все не стоит вашего медли. <a href=http://popkrn.net/bbs/board.php?bo_table=free&wr_id=3390473>http://popkrn.net/bbs/board.php?bo_table=free&wr_id=3390473</a> скачать 1×slots на андроид мобильная версия
1×slots регистрация 1×slotscasino09k online
Онлайн-казино кропотливо продумывают бонусные обстоятельства, коие нужно выучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и лимитирования.Если вы новичок данном и лишь попали в неизведанную вами область азарта — за услуг как бездепозитные призы без пополнения. Шаг 4. Активация. Внимательно выучите условия, информацию по ограничениям и сроке деяния бонусного предложения. Разобравшись с правилами, можно активировать приз в личном офисе (от ? с использованием промокода) или по запросу в саппорт.Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам воспрещено начислять призы посетителям, не имеющим денежных средств на счете. Мы предлагаем разглядеть животрепещущие бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ. <a href=http://www.lamemoirevive.net/2014/02/sunday-at-porte-de-vanves-flea-market.html>http://www.lamemoirevive.net/2014/02/sunday-at-porte-de-vanves-flea-market.html</a> Иногда операторы требуют внесение минимального депозита перед выводом для верификации платежного инструмента. В некоторых казино данный депозит кроме предстоит отыграть.Маркетинговая политического всех игорных интернет-клубов должна одевать разнородный характер. И если вознаграждения на депозит служат для того, дабы стимулировать вносить депозиты и поощрять уже быть пользователей, то бездепозитный приз в казино либо приз за регистрацию в казино, до всего, рассчитан на расширение базы покупателей. 1×slot зеркало рабочее этих способов предполагает регистрацию В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это самая приятная доля игры. Важно, часто бездепозитные призы в казино выдаются с лимитированиями по наибольшей выплате. В среднем можно рассчитывать на выгода в несколько тысяч рублей. Как вывести выигрыш с приза без депо. Придётся подтвердить аккаунт документально, в неких заведениях. Процедура верификации обязательна и делается каждым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате или прочитайте в правилах.Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке адепты онлайн-казино публикуют актуальную информацию о no deposit bonuses прочих услугах.
1×slots регистрация 1×slotscasino 56 online
Казино дает вероятность заработать и исключить реальные деньги на бездепозитных бонусах. Обычно, это незначительная сумма, коию казино имеет себя позволить подарить игроку. <a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=4702>1×slot зеркало</a> Иногда виде одобрения за регистрацию имеют выдаваться билеты для роли в турнирах. Условия их проведения довольно выделяются, потому мы рекомендуем ознакомиться с любым предложением отдельно.Отказ в прохождении верификации. Если заказчик не желает или не может дать документы, подтверждающие его личность, профиль несомненно заблокирован совместно, вкупе со всеми бонусными начислениями. Бонус за регистрацию в казино выдается лишь раз раз на одного игрока. Но бывают вспомогательные промоакции, масштабах коих бездепы расступаются для неизменных клиентов и такие презенты Вы можете получить больше 1-го раза.Многие новенькие колеблются, что поощрительный приз не нужно будет отдавать, в если они выиграли у казино. Это полностью безопасно и накрепко. Выводя выигранные свои, игрок просто останавливает свое участие в игре и утрачивает уникальную вероятность – даром увеличивать собственное вещественное положение. казино 1×slots официальный сайт <a href=http://dokuteknoloji.com/index.php?option=com_k2&view=itemlist&task=user&id=449794>http://dokuteknoloji.com/index.php?option=com_k2&view=itemlist&task=user&id=449794</a> Эффективность бездепов виде рекламного инструмента расценили многие операторы. Малоизвестные площадки используют эти промоакции, чтобы прытко набрать базу. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны постоянных посетителей. Не все веб-сайты, дающие подарки без депозита, рекомендованы к ирге. За привлекательным промоописанием все прятаться невыполнимые условия отыгрыша и другие подводные камешки.Как верховодило, новоприбывшие игроки для хотят ознакомиться с методами ввода и вывода денежных средств и сроки исполнения поданных заявок дабы четко понимать, как живо у вывести собственный казино приз за регистрацию без депо на электрический кошелек либо же банковскую карту. К счастью для всех играющих, внутри определенных холдингов, все казино конкурируют между собой. Ведь если бы конкретную компанию давало лишь одно онлайн-заведение, то ли бы посетители увидели казино с бонусом за регистрацию и имели бы рассчитывать только на вознаграждение вид приза на первое вложение. К любому заведению регулярно идет привлекать новых игроков, что, итоге, лишь на руку всем играющим.
1×slot зеркало рабочее этих способов предполагает регистрацию
Также посещают случаи, когда казино начислит оговоренный бонус последствии регистрации свежего клиента по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам.Мы собрали и опубликовали список наилучших бездепозитных казино с бонусами за регистрацию, которые гарантируют великодушные выигрыши и мгновенные выплаты. Отказ в прохождении верификации. Если клиент не хочет либо не предоставить документы, подтверждающие его лицо, профиль будет заблокирован вместе со всеми бонусными начислениями. <a href=http://pastport.jp/user/RenaldoCox>http://pastport.jp/user/RenaldoCox</a> Когда идет о валютных призах, казино всегда устанавливают условия вейджера, коие нужно выполнить, дабы вывести выигрыш. 1×slots зеркало быструю регистрацию а также мгновенное
<b>Смотреть еще похожие новости:</b>
<a href=http://miupsik.ru/forums/showthread.php?tid=250241>1×slots зеркало рабочее</a>
<a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=843158>1×slot зеркало</a>
<a href=https://forum.dis-course.net/viewtopic.php?p=829138#p829138>1×slots зеркало регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Исходя из этого, просто не существует мудрых оснований махнуть рукой на получение такового приза при регистрации. И, кстати, на такой безвозмездной основе у вас есть шансы выиграть деньги и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, именуют бесплатными интернет платформами для игр. Для получения приза нужно пригласить в забаву нового посетителя. Казино начислит пригласившему фиксированный процент от взносов приглашённого вид приза: почаще всего его размер не выше 10%. Срок деянья бонуса в большинстве случаев не превышает месяца: пригласивший получает приз от проигранных ставок приглашённого в 1-ый луна забавы.
#6405 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Максим Глушенков (футбол) 1win casino <a href=https://t.me/vchkogpu_ru>порно с Захарова Мария Владимировна</a> casino официальный сайт porno Игорь Акинфеев (футбол) <a href=https://rumafia.news/>porno Илья Ковальчук (хоккей)</a> бесплатно играем казино порно с Абрамченко Виктория Валериевна песня казино gama casino бывшие казино почему казино 1×bet на андроид бесплатно
#6406 Charlesgunnyhttp://filmkachat.ru
1х слот регистрация в 1×slots casino
Однако в критериях скрываются «подводные камни», коие не позволят исключить солидную необходимую или же вы не успеете отыграть вейджер. Поэтому профессионалы советуют забрать безвозмездные вращения за регистрацию в казино без депозита, дабы поднабраться опыта и получить настоящий шанс на победу.Прежде всего, не забывайте регулярно заглядывать на страницу обзоров бездепозитных призов. Они шаг за шагом оценивают более увлекательные предложения основных игорных порталов. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots casino 777 online</a> <a href=https://postheaven.net/pafsi02hf4>https://postheaven.net/pafsi02hf4</a> Выше мы предоставили полный комплект самых новых и актуальных бездепозитных призов в интернет казино без пополнения на 2022 год, где продоставляется пользоваться хоть ценным бездепозитным призом.Активация случается с помощью промокодов, коие вводятся в собственном офисе последствии регистрации. Среди спецпредложений в перечне Casino.ru находятся неповторимые промокоды, которые доступны лишь посетителям портала. Другие способы начисления средств ? автоматическая активация сразу последствии создания аккаунта и получение дара по запросу в службу технической поддержки. 1×slots casino регистрация 1×slots review live <a href=http://service.megaworks.ai/board/bbs/board.php?bo_table=hwang_form&wr_id=1178071>http://service.megaworks.ai/board/bbs/board.php?bo_table=hwang_form&wr_id=1178071</a> Шаг 4. Активация. Внимательно выучите обстоятельства, информацию по лимитированиям и сроке деянья бонусного предложения. Разобравшись с правилами, возможно активировать приз в личном офисе (от ? с внедрением промокода) либо по запросу в саппорт.Не стоит незамедлительно же отрицаться от приветственных подарков в подобных казино. Администрация готова начислить деньги либо фриспины, но предварительно сотрудники должны увериться, собственно вы не аферист. Дело что, нет, что развелось очень количество охотников за призами. Они выучились накалывать систему и зарабатывать солидные суммы средств.
1×slots зеркало регистрацию более популярный вариант это
Зарегистрироваться в казино по особой ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефонного и электронную почту). Для подтверждения номера аппарата необходимо в собственном профиле показать свой номер и надавить кнопку „Подтвердить номер аппарата“, дальше Вы получите sms-сообщение с кодом, который необходимо установить в соответствующее поле. Для доказательства электронной почты, перейти по интенсивной ссылке в письме от казино. <a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/5938–1×slots-ofitsialnyj-sajt-zerkalo-rabochee#5947>1×slots официальный сайт зеркало рабочее</a> 1×slots регистрация на сайте Риск-игра по одинаковым шансам – Также казино возможность запрещать скорпулезно обстоятельства по отыгрышу за раунда на удвоение, который предлагается в слотах, видео-покере и некоторых иных играх.Во время забавы в казино, выигрыши, приобретенные благодаря безвозмездным призовым фондам, суммируются и срабатывают в совместную сумму для отыгрывания. Однако, случае удача улыбнется и получится отыграть все призы, игровое заведение гарантированно допустит исключить денежные средства. Сумма вывода несомненно зависимости от лимита, одобренного именно в этом учреждении. Поэтому, пристально нужно разбирать правила выдачи анлимитных депо. <a href=http://copyprinter.ru/bitrix/redirect.php?goto=http://azbuka-cars.ru/bitrix/redirect.php?goto=http://kubidubi.ru/bitrix/redirect.php?goto=https://telegra.ph/Pravila-parkovki-vo-dvorah-zhilyh-kompleksov-09–24>http://copyprinter.ru/bitrix/redirect.php?goto=http://azbuka-cars.ru/bitrix/redirect.php?goto=http://kubidubi.ru/bitrix/redirect.php?goto=https://telegra.ph/Pravila-parkovki-vo-dvorah-zhilyh-kompleksov-09–24</a> 1×slots регистрация на официальном сайте B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.
1х слотс зеркало регистрация в 1×slots casino
Особую изюминку видео слотам присваивают уникальные знакы. С их появлением активизируются разные призы. Вы сможете запустить вспомогательный уровень и прирастить необходимую выигрыша. Есть знаки, которые замещают негодные элементы и сами создают выигрышные комбо. Не стоит забывать и на бонус-тур. После каждого успешного спина есть шанс увеличить сумму выигрыша в два либо четыре раза.В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и когда неоднозначных ситуаций нет способности куда-то посетовать и обосновать свою правоту. <a href=http://www.decodev.tn/index.php?option=com_k2&view=itemlist&task=user&id=385565>http://www.decodev.tn/index.php?option=com_k2&view=itemlist&task=user&id=385565</a> Чтобы играть безвозмездно на настоящие средства в казино, не всегда достаточно просто зарегистрироваться. Иногда нужно выполнить дополнительные действия.На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не сможете активировать и получить бездепозитный приз. 1хслот официальный сайт зеркало Постарайтесь отыграть вейджер, чтобы замечена вероятность забыть заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электрической кошелёк, карту, телефон.На нашем сайте Вы найдете перечень актуальных новых бездепозитных призов в казино 2022 года. Также, есть большое эксклюзивных предложений, коие доступны только посетителям нашего вебсайта последствии регистрации по нашей ссылке либо активации специального промокода.
1×slots официальный зеркало рабочее
На странице представлены бездепозитные бонусы за регистрацию в казино редчайшая заслуга за коей гонятся все игроки как новички, так и профессионалы. Мы также уделяем огромное внимание на наличие бонусов при составление рейтинга казино на средства. Бездепозитный приз это вероятность выступать безвозмездно и выиграть реальные средства.Также, учите, что бездепозитный бонус возможно вывести лишь что, нет случае, когда будут исполнены все обстоятельства отыгрыша. С не отыгранным бонусом запрещается превышать размер наибольшей ставки. Нарушение этого обстоятельства в аннулирование выигрыша.Нельзя осматривать игру на средства, как вариант заработка. Азартные игры запрещены для лиц младше 18 лет. Topcasinobonuses.mobi классифицируется зачинщиком азартных игр. Сайт одевает информационный нрав. 1×slots регистрация на сайте 1×slots ru com <a href=http://wsw.molifan.net/space-uid-2214249.html>http://wsw.molifan.net/space-uid-2214249.html</a> В большинстве заведений устроить это возможно по e-mal, по номеру телефона, через социальную сеть или гугл-аккаунт.
1 хслот регистрация в 1×slots casino
Вы наверняка, например все любите получать презенты и бездепозитные призы казино. Игорные жилища взяли в привычку одаривать гэмблеров приятными призами. Стать обладателем приветственного презента можно за создание профиля или пополнение счёта. Второй вариант более занимательный, как клубы готовы удвоить депозит! Но если вы новичок и лишь знакомитесь с миром азарта, лучше пользуйтесь бонусом за регистрацию.Отыграв бездепозитный бонус в казино с выводом также придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в сходственное лимитирование существует, то единоразово исключить получится только сумму, не превосходящую размер приобретенного бонуса. <a href=https://www.jutianwang.cn/home.php?mod=space&uid=3381&do=profile&from=space>https://www.jutianwang.cn/home.php?mod=space&uid=3381&do=profile&from=space</a> казино 1×slots официальный сайт Как лишь получите бездеп в казино, всё также не забывайте проверять электрическую почту. Некоторые игорные клубы непрерывно радуют активных гэмблеров приятными призами. Чаще всего получить подарок возможно в преддверии праздника, на день рождение, за вербование друга. А кроме распространённым призом считается прибавка к депозиту. Нужно всего лишь восполнить счёт, и азартное заведение прирастит его на 50–100%.При отыгрыше бонусных средств, необходимо учесть срок деянья приза и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный бонус несомненно аннулирован.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1×slots регистрация 1×slotscasino09k online</a>
<a href=https://thetechmodders.com/forums/viewtopic.php?t=39333>1×slots на любой вкус как пройти регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Нет. Для получения бездепозитного бонуса в казино нужна обязательная регистрация на сайте. Играть в слоты даром и без регистрации возможно только в демо режиме.
#6407 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Константин Тюкавин (футбол) букмекерские контора ап <a href=https://krtka.info/>казино фильм</a> казино сегодня скачать casino на андроид <a href=https://sovsekretno.net/>порно с Георгий Джикия (футбол)</a> лучшие казино бесплатно казино вулкан суть казино букмекерская контора на андроид porno Юлия Канакина порно с Голикова Татьяна Алексеевна порно с Дарья Касаткина (теннис)
#6408 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало
Если при регистрации показать промокод, можно гарантировано получить бонус. Где арестовать ваучер? Посетите определенную блоги или форумы. Иногда администрация клуба делает рассылку ваучеров на электрическую почту. В последнее время игорные жилища начали рекламироваться в фильмах и телесериалах. Присмотритесь и скорее заметите промокод, который принесёт 500 или 1 000 бонусных рублей. <a href=http://filmkachat.ru/>1 x slots</a> <a href=https://telegra.ph/Navigating-Cannabis-Delivery-Services-in-Port-Perry-Your-Complete-Local-Guide-11–24>https://telegra.ph/Navigating-Cannabis-Delivery-Services-in-Port-Perry-Your-Complete-Local-Guide-11–24</a> Бонусные деньги – маленькая сумма денег для старта в новеньком казино. На бонусные деньги, обычно разрешается играть во все забавы, кроме слотов с прогрессивным джекпотом и игр из раздела live casino. 1×slots рабочее зеркало на сегодня <a href=https://forum.blu-ray.com/member.php?u=918976>https://forum.blu-ray.com/member.php?u=918976</a> Бесплатные бонусы казино без депозита возможно получить повторяющий денежных средств на бонусный счет (вывести их возможно только в отыгрыша), фриспинов, игры либо кешбэк-бонуса.Заполняя данные в собственном профиле, указывайте только достоверную информацию, например как Вам понадобиться ее доказать в при выводе денег.
1хслотс казино зеркало
<a href=http://forum.puppylinux.pl/index.php?topic=826.new#new>1×slots рабочее зеркало</a> 1×slots зеркало этих способов предполагает регистрацию <a href=https://mir-pozitiv.ru/forums/users/maxxrum2106–2/>https://mir-pozitiv.ru/forums/users/maxxrum2106–2/</a> Отыграв бездепозитный приз в казино с выводом тоже придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в схожее лимитирование существует, то единоразово вывести выйдет только необходимую, не превышающую размер полученного приза.Список так нарекаемых «запрещенных землель» прилагается к правилам бонусной программы игорного портала. Обязательно выясните, распространяются ли на вас сходственные санкции. 1хслотс официальный сайт зеркало На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению сего медли, Вы не можете активировать и получить бездепозитный приз.
1×slos регистрация в 1×slots casino
Мы подготовили перечень, где есть всегда актуальные и свежие бездепозитные бонусы казино, коие вам получить безвозмездно. Для наших юзеров есть специальные предложения эксклюзивные призы, которые вы у не отыщите, их мы определили особой красной плашкой «Exclusive».Так собственно приготовьтесь дать секретную информацию (пол, возраст, государство проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает менее суток, последствии чего получится свободно выводить крупные выигрыши. После получения бонуса вывод средств для клиента несомненно недосегаем до тех пор, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или пара месяцов. Выводить средства игрок сможет лишь после отыгрыша.Подтверждение регистрации. Казино требуют привязки профиля к электрическому адресу и номеру аппарата. Для сего на e-mail отправляется письмо со ссылкой, а на аппарат ? текстовое известье с кодом. <a href=https://orbitalscoreboard.com/user/patrickfloli/>https://orbitalscoreboard.com/user/patrickfloli/</a> 1 x slots casino Индивидуальные поощрения выдаются за совершение действий: подписку на аккаунты площадки в социальных сетях, установку мобильного приложения либо официального посетителя для ПК. В большинстве казино срабатывают программки преданности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на грядущий уровень часто сопрягается выдачей бездепа.Проверка занимает от нескольких мин. До нескольких дней, профессионалы техподдержки все запросить дополнительные документы или инициировать куцее общение по Skype.
1×slots зеркало которую указывали при регистрации кстати
Почти все игровые клубы требуют подтверждение контактных данных игрока для получения бездепозитного бонуса.Подтверждение регистрации. Казино настоятельно привязки профиля к электронному адресу и номеру телефонного. Для этого на e-mail отправляется письмо со ссылкой, а на телефонный ? текстовое известье с кодом. <a href=https://www.addonface.com/welcome>1×slots зеркало подтвердит вашу регистрацию если говорить</a> Воспользоваться бездепом возможно не во всех игровых автоматах: казино вдруг устанавливает ограничение для клиентов. Конечно, это можно счесть некоторым неудобством для игрока, но справедливости ради стоит отметить, что выбор автоматов всё равно остаётся довольно великим.Акционные предложения от казино существуют в различных форматах. Часто бонусы даются в размен на депозит. Игрок заносит платеж и получает средства, бесплатные вращения и другие поощрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — вид бонуса, кот-ый гарантирован за выполнение конкретных действий на сайте: 1×slots регистрация 1×slotscasino09k online <a href=https://clickandconnectclubs.com/index.php?do=/public/forum/posts/page_last/id_4747/>https://clickandconnectclubs.com/index.php?do=/public/forum/posts/page_last/id_4747/</a> Получить Бездепозитный приз в онлайн казино дело 2-ух кликов. Другой момент, отыграть промо и соблюсти правила и условия отыгрыша. Под правилами предполагается столько вагер, хотя и лимитирования по максимальной ставке. Мы разумеем, что в кинотеатр все ставят на зеро и выигрывают. Призываем не делать подобного. Перед активацией бонуса прочитайте верховодила. Узнайте следующие моменты: Условия получения дара, за регистрацию, за депо и другое. Ограничения по наибольшей ставке. Зачастую не выше 350 руб. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на пространстве. Поэтому важно аристократия, в каких играх возможно совершать кратность валютного оборота.Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом прибыли присутствуют на данной странице. Посетитель может оценить обстоятельства получения и начать играть на средства без внесения депо. При данном игроку принципиально осознавать, на каких критериях и какими методами у исключить полученный выигрыш. Для сего нужно расценить перечень подключенных платежных систем.
1×slots casino регистрация 1×slotscasino09k online
Такие одобрения разрешают бесплатно протестировать новое казино, разобраться с игровым процессом интернет слотов, заработать и исключить маленькую сумму денег. <a href=https://gunnereddh55666.affiliatblogger.com/82468061/deep-nude-exploring-the-ethics-and-impact-of-ai-powered-image-manipulation>https://gunnereddh55666.affiliatblogger.com/82468061/deep-nude-exploring-the-ethics-and-impact-of-ai-powered-image-manipulation</a> Итак, чтобы бесплатные бонусные кредиты трансформировались в реальные средства, которыми вы можете управлять по собственному усмотрению, их надо(надобно) отыграть. Вейджер идет уточнять в правилах онлайн-казино.Онлайн-казино с бездепозитными призами ставят клиентам условия для пользования бездепами, поэтому перед ролью в акции никакого подробно ознакомиться со всеми правилами и нюансами промоакции. Условия шансы касаться получения бонуса, его использования и следующего вывода валютных средств если, тогда, выигрыша. 1х слот регистрация в 1×slots casino Промообъявления от казино мешают реальной картины и ориентированы на привлечение внимания пользователей. Понять, насколько высоки шансы остаться в плюсе, дозволит собственный тест критерий предложения:
<b>Смотреть еще похожие новости:</b>
<a href=https://thetechmodders.com/forums/viewtopic.php?t=39247>1×slot регистрация</a>
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=656267>1×slots регистрация 1×slots casino c2d ru</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если речь об неповторимых предложениях, возможность понадобиться регистрация в казино по ссылке с партнерского сайта. Также, в этом случае нужно подтвердить собственный номер телефонного, результата код, приобретенный в смс-сообщении от клуба установить в особое поле в личном офисе игрока.
#6409 Rogerthoug
http://fastpillseasy.com/ erectile dysfunction meds online
#6410 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slots review live
4. Заберите подарок. Чаще всего бонус активизируется незамедлительно после регистрации. Но посещают истории, когда надо(надобно) зайти в собственный кабинет либо написать в службу. <a href=http://filmkachat.ru/>1хслотс 1хслотс регистрация перейти на 1×slots</a> Чтобы бездеп не был начислен на Ваш аккаунт, Вам не активировать бонусный код. Если одобрение от казино было добавлено на Ваш аккаунт механически, а Вы не расчитываете его использовать, обратитесь в саппорта с просьбой отменить бездепозитный приз.Для получения бонуса надо(надобно) ознакомиться с программкой преданности казино и устроить ставки на необходимую, необходимую для перехода на грядущий уровень. <a href=https://soctrip.com/post/9bb5eec0-a590–11ef-bb3e-7bacedfd239f>https://soctrip.com/post/9bb5eec0-a590–11ef-bb3e-7bacedfd239f</a> 1хслотс казино зеркало <a href=http://l2help.lt/user/DeweyBib/>http://l2help.lt/user/DeweyBib/</a> Бонусы без депозита при регистрации числятся наиболее привлекательными как для опытных игроков, например для и начинающих. Получив это вознаграждение, клиент возможность выступать на реальные средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные призы в интернет-казино Рунета, а также условия их активации и выигрыша.
казино 1×slots
Вейджер (либо вагер) ? это наименьшая сумма ставок, коию необходимо устроить для вывода денежного бонуса. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение.Самые свежие бездепозитные бонусы в казино за регистрацию 2022 года с выводом выгоды присутствуют на этой страничке. Посетитель может расценить условия получения и начать играть на средства без внесения депозита. При этом игроку главно осознавать, на каких критериях и какими методами он сможет вывести полученный выигрыш. Для этого нужно расценить перечень подключенных платежных систем. сайт 1× slots casino <a href=http://intentionalpress.com/author/ralphfup/>http://intentionalpress.com/author/ralphfup/</a> Бесплатные призы казино без депозита можно получить вид валютных средств на бонусный счет (вывести их можно лишь в отыгрыша), фриспинов, игры или кешбэк-бонуса. 1 x slots casino
1×slot официальный сайт
Бездепозитные призы — это подарки от казино вид бонусных денег либо фриспинов для игровых автоматов, коие начисляются на аккаунт игрока последствии процедуры регистрации на сайте заведения. Для получения таких поощрений депозит не потребуется.Список например именуемых «разрешенных территорий» прилагается к правилам бонусной программки игорного портала. Обязательно проверьте, распространяются ли на вас подобные санкции. <a href=https://rusogni.ru/forum/user/28573/>https://rusogni.ru/forum/user/28573/</a> Также есть онлайн-платформы азартных игр, коие применяют раздачу бездепозитных призов в особые даты (как для казино, например и для игрока). Помимо сего, действующие геймеры также имеют возможность получить похожие бонусы за свою деятельность (например, за повышения значения либо за похожие заслуги).Для получения приза нужно ознакомиться с программой преданности казино и устроить ставки на необходимую, необходимую для перехода на следующий степень. 1хслот официальный сайт зеркало
1×slots зеркало регистрация в 1×slots casino
<a href=https://astraclub.ru/album.php?albumid=230492>казино 1×slots</a> Возможность протестировать новые забавы, не рискуя собственными средствами и создать личную тактику забавы.Активация по промокоду употребляется в различных видах бездепов. Если идет о приветственном бонусе, то набор символов возможно разузнать на крупнейшей странице, в регистрационной форме или послании, которое отчаливает юзеру для подтверждения адреса электронной почты. Акции шансы проводиться вместе с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активируется разовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем важный код для активации в описании любого рекламную. Но не мыслить, собственно снабжая пользователей этими бонусами, казино увлекается спонсированием. Ведь размеры вознаграждений, в, не великие (средним объемом от 5 до 20 $). И на эти средства налагаются определенные обстоятельства и лимитирования, неотклонимые к исполнению игрока, если в последствии он вожделеет получить все средства выигранные деньги.Воспользоваться бездепом возможно не во всех игровых автоматах: казино и тут уточняет ограничение для посетителей. Конечно, это можно счесть неким неудобством для игрока, хотя ради стоит отметить, что выбор автоматов всё равно остаётся достаточно наибольшим. зеркала 1×slots <a href=https://sofiataxi.com.ua/user/JoshuaHox/>https://sofiataxi.com.ua/user/JoshuaHox/</a> Иногда у посетителей вебсайта имеют возникнуть трудности, задачи, препядствия при активации приобретенного промо-кода. В таких случаях, необходимо адресоваться за поддержкой в службу «Support». Для получения ответа, обязательно указывается определенная первопричина воззвания и подтверждается информация дополнительными снимками. Если сформировалась спорная обстановка, постоянно можно обратиться к главному регулятору или контролирующему органу, выдавшему данному заведению лицензионный документ.Подтвердите регистрацию, чтобы активировать Бездепозитный бонус с выводом, потребуется наполнить личный профиль. Заполните пустые поля реальными данными о себя.
1×slots регистрация 1×slots casino 777 online
Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, all зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. <a href=http://www.ritual-letichev.km.ua/user/Porsedropma/>http://www.ritual-letichev.km.ua/user/Porsedropma/</a> 1×slots официальный сайт мобильная версия скачать
<b>Смотреть еще похожие новости:</b>
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=5070&p=5449#p5449>1×slots зеркало на сегодня</a>
<a href=https://astraclub.ru/album.php?albumid=240771>1хслот зеркало сайта</a>
<a href=http://xn–80akbkalsbeeafq6a6b2f.xn–p1ai/forum/messages/forum1/topic33003/message187742/?result=new>1×slots промокод при регистрации 2025</a>
<a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1×slots подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный приз за регистрацию в казино с выводом денег в 2022 году — Наш ресурс дает игрокам актуальную информацию о самых свежих, щедрых и проверенных призах в интернет казино, коие обновляются любой день. В неких онлайн казино для получения бездепозитных бонусов не довольно просто зарегистрироваться на сайте клуба и доказать свои контактные данные. Дополнительно потребуется активация промокода.
#6411 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Львова-Белова Мария Алексеевна порно 1×bet зеркало xbet xyz <a href=https://th-royalgclub.com/>porno Катерина Шпица</a> мобильные букмекерские конторы скачать сайт букмекерской конторы <a href=https://specreporter.com/>casino скачать приложение</a> порно с Карен Хачанов (теннис) 1×bet сейчас 1×bet зеркало на сегодня 1×bet xyz почему в казино нет окон porno Виктория Баркова, легкоатлетка casino автомат сайт букмекерской конторы
#6412 Charlesgunnyhttp://filmkachat.ru
1х слот 1хслотс регистрация перейти на 1×slots
Максимальный размер ставки, кот-ый нельзя превосходить пока бонус не несомненно полностью отыгран. В случае нарушения сего правила, бонус и выигрыш с него станут аннулированы.Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие возникают у новичков. <a href=http://filmkachat.ru/>1×slots регистрацию процедура займет всего лишь</a> <a href=https://divisionmidway.org/jobs/author/archicgi-com/>https://divisionmidway.org/jobs/author/archicgi-com/</a> 1×slots рабочее зеркало <a href=http://dedmorozural.ru/users/lyricalshell60>http://dedmorozural.ru/users/lyricalshell60</a> Воспользоваться бездепом возможно не во всех игровых автоматах: казино и тут устанавливает лимитирование для клиентов. Конечно, это можно счесть неким неудобством для игрока, но ради отметить, что выбор автоматов всё точно остаётся довольно наибольшим.Таким образом интернет казино получает вероятного игрока. Возможно в или подлинном он захочет сыграть на средства средства. Так работают бездепозитные бонусы в интернет казино. Здесь очень подходит выражение, благотворительные сыр посещает только в мышеловке. Начинающие игроки шансы не осознавать опасность пыла. Однако со временем осознания становится больше. Это тема для отдельного обсуждения.
1×slot зеркало рабочее этих способов предполагает регистрацию
1×slots казино зеркало Благодаря программе преданности от игорного заведения, можно взять хороший старт и без добавочных вложений запустить видеослоты. Кроме того, можно рассчитывать на реальную фортуну и получить, без инвестиции собственных денег, великий выигрыш. <a href=http://s-nip.ru/forums/?Subdiv_ID=6&Topic_ID=1842>http://s-nip.ru/forums/?Subdiv_ID=6&Topic_ID=1842</a> Не трудно догадаться, собственно not the slightest down payment bonuses почти ни не посещают большими. Чаще всего идет о пяти–тридцати баксах (или эквиваленте данной суммы в иной еденице).Бонусы без депо при регистрации считаются наиболее красивыми как для опытных игроков, например для и новичков. Получив это вознаграждение, клиент возможность выступать на настоящие деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные призы в интернет-казино Рунета, а также обстоятельства их активации и выигрыша. зеркала 1×slots B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.Но такие рамки не смущают том хайроллеров, что коэффициенты на слотах разрешают рассчитывать на крупные выигрыши, а неких автоматах разыгрывается передовой джекпот.
1×slots регистрацию более популярный вариант это
Для верификации номера аппарата, в личном профиле выберите опцию „Подтвердить номер телефона“ и введите в отвечающее фон код, приобретенный в sms-сообщении.На страничке представлены бездепозитные призы за регистрацию в казино редчайшая заслуга за которой гонятся все игроки как новички, например и профессионалы. Мы также уделяем великое внимание на присутствие бонусов при составление рейтинга казино на деньги. Бездепозитный приз это вероятность выступать бесплатно и выиграть реальные деньги. Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, дабы снова получить безвозмездный бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ждет неминуемое санкция. <a href=http://www.vladmines.dn.ua/index.php?name=Account&op=info&uname=cooperativespec>http://www.vladmines.dn.ua/index.php?name=Account&op=info&uname=cooperativespec</a> Мы рекомендуем не открещиваться от сходственных услуг знаменитых казино. Выделите несколько минут на регистрацию, получите приз и попробуйте его отыграть. Может быть, сейчас фортуна несомненно на вашей стороне!Список так называемых «запрещенных территорий» прилагается к правилам бонусной программки игорного портала. Обязательно выясните, распространяются ли на вас подобные наказания. 1хслотс казино зеркало Для казино, работающих интернет, бездепозитные призы нужны для привлечения новых клиентов. Предложение поиграть на слотах без необходимости внесения настоящих денег — работающий способ для повышения энтузиазма к фирмы. После отыгрыша бездепа велик шанс, что игроку понравится и он продолжит выступать в казино, только сейчас уже на личные деньги.Во время забавы в казино, выигрыши, приобретенные благодаря безвозмездным призовым фондам, суммируются и срабатывают в совместную необходимую для отыгрывания. Однако, в удача улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно допустит вывести финансовые средства. Сумма вывода будет зависимости от лимита, утвержденного именно в данном учреждении. Поэтому, внимательно нужно разбирать верховодила выдачи анлимитных депозитов.
1×slot зеркало рабочее этих способов предполагает регистрацию
Новые клиенты онлайн-казино без первого депо все проверить свою удачливость. К тому же есть вероятность преобразовать бездепы в настоящие средства за регистрацию в казино, впрочем достичь бонус необходимо отыграть согласно условиям промоакции.Для верификации аккаунта надо(надобно) предоставить специалистам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, еще фотографию банковской карты либо скриншот странички электрического кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для подтверждения личности. <a href=https://masstr.net/showthread.php?tid=73679>1×slots зеркало видели такую регистрацию на</a> Бездепозитные бонусы прекрасный вариант бесплатной игры в игровые автоматы. Многие юзеры сети не понимают, что в казино можно начать выступать полностью даром, а потом вывести выигрыш на банковскую карту либо электронный кошелек, другие не доверяют интернет казино, а третьи успешно играют и выигрывают – и подчас довольно большие суммы. казино 1×slots официальный сайт <a href=https://exsite.su/user/Zacherynaind>https://exsite.su/user/Zacherynaind</a> Благодаря программке преданности от игорного заведения, можно брать хороший старт и без дополнительных инвестициям запустить видеослоты. Кроме как, можно рассчитывать на реальную фортуну и получить, без инвестиции личных денег, великий выигрыш.
1×slots скачать на айфон
Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных притязаний, кроме неотъемлемой верификации. Если на сайте учтена обязательная процедура подтверждения личности, то вывести выигрыш удастся только последствии ревизии данных. Приготовьтесь наполнить анкету и отправить в техподдержку документ, подтверждающий личность.Подарки на конкретные даты выделяются критериями получения. Если поощрение начисляют игроку на день рождения, то сумма обыкновенно в от общего размера депо за прошедший год. <a href=http://testowik.ru/index.php/forum/user/54734-eqykuj>http://testowik.ru/index.php/forum/user/54734-eqykuj</a> Вы не в коем случае ни же рискуете, а только выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс изучить игровые автоматы, выучится регулировать менять ставки и линии, исследовать бонусные игры и их выигрышные композиции, ну в просто зарядится кучей впечатлений! Ведь вы будите выступать на бонусные средства, которые возможно отыграть и вывести, но просто на демо счет, тем самым адреналин в крови еще повысится а пульс забьется с нередким ритмом!На нашем веб-сайте Вы найдете перечень своевременных свежих бездепозитных бонусов в казино 2022 года. Также, есть большое неповторимых услуг, коие доступны только гостям нашего вебсайта последствии регистрации по нашей ссылке либо активации специального промокода. 1×slots зеркало сайта Если площадка дарит бездеп за регистрацию, то процедура его получения проста. Нужно лишь ввести аккаунт на веб-сайте и активировать его, подтвердив адрес электрической почты, номер аппарата или иные данные, коие настятельно оператор. Перед этим нужно увериться, собственно юзер находится на официальном веб-сайте казино, а не на мошеннической площадке.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.animogen.com/viewtopic.php?f=9&t=1569921>1хслот официальный сайт зеркало</a>
<a href=https://fougerite.com/threads/1×-slots-zerkalo-registracija-v-1×slots-casino.12920/>1х слотс зеркало регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В разделе с бонусами активировать собственный подарок. Найти забавы, для коих учтено поощрение и применять бонус по предназначению. Если вы выбираете испытанное лицензионное интернет казино и выполните все обстоятельства получения бездепозитного приза, трудностей с получением подарка у Вас не возникнет.
#6413 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино зеркало сегодня casino online зеркало <a href=https://glvk.guru/>1×bet бесплатно</a> 1×bet зеркало xbet pin up casino официальный <a href=https://7club7.com/>1×bet рабочее</a> казино вход официальный сайт porno Илья Ковальчук (хоккей) Приезжева Екатерина Геннадьевна порно порно с Ирина Сидоркова суть казино букмекерская контора фонбет официальный сайт карты казино
#6414 Charlesgunnyhttp://filmkachat.ru
казино 1×slots официальный сайт
Бонусные деньги – небольшая сумма денег для старта в новом казино. На бонусные деньги, обычно разрешено выступать во все игры, не слотов с прогрессивным джекпотом и игр из раздела exist casino. <a href=http://filmkachat.ru/>1×slots промокод при регистрации 2025</a> Бездепы обычно предлагают с отыгрышем — моментально вывести выигранные средства нельзя. Перевод денег со счета будет вероятен в того, как пользователь выполнит все притязания казино, а сумма не быть выше установленного правилами лимита. Условиями промоакции фиксируются сроки, протяжении которых заказчик вправе воспользоваться предложением. Обычно они не превышают нескольких дней в активации. <a href=https://www.ted.com/profiles/48491724>https://www.ted.com/profiles/48491724</a> Создание аккаунта. На сайте казино необходимо открыть регистрационную форму и заполнить порожние поля личностными данными. Иногда на данном этапе требуется указать только адресок электронной почты и пароль, хотя чаще бы заполнить анкету персональной информацией (ФИО, дата рождения, место проживания и т.д. ). Нужно свидетельствовать лишь настоящие данные, что впоследствие они будут проверены.Этот образ приза будет добавлен на Ваш аккаунт последствии успешной процедуры регистрации с внедрением номера телефонного. Если выбрать другой метод творенья учетной записи, бездеп не несомненно добавлен на Ваш акк. зеркала 1×slots <a href=http://forum.xpscenery.net/member.php?action=profile&uid=570>http://forum.xpscenery.net/member.php?action=profile&uid=570</a> Чаще всего интернет-казино предлагают бездепозитные бонусы новым юзерам. Эта промо-акция довольно отлично завлекает начинающих, подталкивая их к открытию счета. Конечно, не они становятся послушными клиентами, но сам прецедент регистрации аккаунта играет на руку заведению.Вывод выигрыша с бездепозитных бонусов казино – щедрый подарок от азартных клубов. Но чтобы исключить собственный доход, нужно выполнить ряд критерий:
1×slots casino регистрация на сайте
рабочее зеркало 1хслотс Изучить верховодила и условия получения бездепозитных бонусов казино, Вы сможете у нас на сайте в разделе с бонусами или на официальном веб-сайте выбранного Вами казино. Если имеет отыскать нужную информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал либо по электронной почте.Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс дает игрокам важную информацию о самых свежих, щедрых и испытанных бонусах в онлайн казино, коие обновляются каждый денек. <a href=http://cn-sh.cn/space-uid-147276.html>http://cn-sh.cn/space-uid-147276.html</a> Если вы новичок в и лишь попали в неизведанную вами район азарта — за услуг как бездепозитные бонусы без пополнения. 1×slots регистрация на официальном сайте
1× slots зеркало
При поддержки такового одобрения оператор может того привлекать клиентов, которые ранее проявляли активность на сайте, но по какой-то причине прекратили выступать. В этом случае промокод высылается пользователю по электрической почте или вид SMS. <a href=https://www.khedmeh.com/wall/blogs/post/65401>https://www.khedmeh.com/wall/blogs/post/65401</a> зеркло казино 1×slots
1×slos регистрация в 1×slots casino
Обычно бездепозитные акции от казино, прибывают на эл. Почту в деньки рождения либо праздники. В неких онлайн казино возможно обратиться в чат и как постоянному игроку, вероятно вам предложат бездепозитное предложение.Подтверждение электронной почты – одно из главных критерий, которое есть практически в каждом бездепозитном казино. Чтобы верифицировать электрическую почту, достаточно перейти по активной ссылке в послании, полученном от азартного клуба. Варианты выигрыша зависимости от Вашей успеха и условий игорного портала. Выше мы заявили, собственно некоторые бездепозитные бонусы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются другие, все, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на деньги, возможно выиграть неописуемые суммы. Сегодняшние игровые автоматы либо видео слоты, как их называют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые множат ставку от х100.000. 1×slots сайт <a href=http://childpsy.ru/bitrix/redirect.php?goto=http://iorenburg.com/bitrix/rk.php?goto=http://reallife.kz/go/url=https://teletype.in/@urist555/8wXjksQlfkl>http://childpsy.ru/bitrix/redirect.php?goto=http://iorenburg.com/bitrix/rk.php?goto=http://reallife.kz/go/url=https://teletype.in/@urist555/8wXjksQlfkl</a> Игрокам не следует принимать приветственный бонус как гарантированный метод получить крупный выигрыш, но это отличная возможность без расходов расценить функционал казино.
1×slots подтвердит вашу регистрацию если говорить
Акции, приуроченные к календарным дням, посещают рассчитаны как на всех юзеров, так и на категории: к, презент на 8 марта девушкам-игрокам или мужикам на 23 февраля.Поспешите арестовать бездепозитные призы за регистрацию в казино из представленного перечня. Все платформы не только водят легальную работа, хотя и обрадуют правдивыми результатами забавы, высокой отдачей, прыткими выплатами. <a href=http://www.icmms.co.kr/bbs/board.php?bo_table=free&wr_id=675594>http://www.icmms.co.kr/bbs/board.php?bo_table=free&wr_id=675594</a> На благотворительные бонусы онлайн-казино практически практически распространяется лимитирования по стране проживания клиентов. Даже если вам разрешено открывать счет и играть на деньги в заведении, это еще не значат, что вас доступны not the slightest down payment bonuses. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция имеет доскональные правила, ссылка на коие обыкновенно находится в промообъявлении. В их указываются лимиты, вейджер, список доступных игр. Если оператор укрывает данные о предложении, то воспользоваться им не.Любой выигрыш по ставке повыше установленного лимита будет являться недействительным. То есть ставка не будет засчитана при отыгрыше, а в случае выигрыша его сумма не поступит на счёт посетителя — результат забавы несомненно полностью аннулирован.
<b>Смотреть еще похожие новости:</b>
<a href=http://palais.beesims.com/phpbb/viewtopic.php?f=2&t=290808>1×slots casino регистрация 1×slotscasino09k online</a>
<a href=http://weeklywars.de/viewtopic.php?f=12&t=6800&p=533186#p533186>1×slot официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подтвердите регистрацию, чтобы активировать Бездепозитный бонус с выводом, потребуется наполнить индивидуальный профиль. Заполните пустующие поля реальными данными о себя.
#6415 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Александр Головин (футбол) порно с Евгения Медведева, фигуристка <a href=https://specreporter.com/>7k casino бонус</a> Фастова Елена Владимировна порно Самойлова Алла Владимировна порно <a href=https://rumafia.news/>1×bet зеркало рабочее на сегодня 1×bet xyz</a> казино porno Анна Сидорова, керлингистка порно с Федор Чалов (футбол) букмекерская контора без порно с Гатагова Ольга Анатольевна 7k casino зеркало рабочее online casino 7k
#6416 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino com порно с Дронова Александра Викторовна <a href=https://slon-ru.com/>казино 1</a> лучшие бесплатные онлайн казино скачать casino на андроид <a href=https://rhymes-punches.com/>1×bet на андроид</a> 1×bet приложение 1go casino Валентина Матвиенко порно сайт букмекерской конторы 1×bet зеркало на сегодня официальные букмекерские конторы скачать casino daddy
#6417 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало
Во время игры в казино, выигрыши, полученные благодаря бесплатным призовым фондам, суммируются и срабатывают в совместную сумму для отыгрывания. Однако, случае удача улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно допустит вывести денежные средства. Сумма вывода будет находиться от лимита, одобренного именно в данном учреждении. Поэтому, пристально надо(надобно) разбирать управляла выдачи безлимитных депо. <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> <a href=https://webanketa.com/forms/6gtk2c9q6mqk8d34c8v32db6/>https://webanketa.com/forms/6gtk2c9q6mqk8d34c8v32db6/</a> 1× slots официальный <a href=http://inter-vet.ru/bitrix/redirect.php?goto=http://ksp41.ru/bitrix/redirect.php?goto=http://myhoreca.ru/bitrix/rk.php?goto=https://telegra.ph/CHto-nuzhno-znat-roditelyam-o-karantine-v-doshkolnyh-uchrezhdeniyah-09–23>http://inter-vet.ru/bitrix/redirect.php?goto=http://ksp41.ru/bitrix/redirect.php?goto=http://myhoreca.ru/bitrix/rk.php?goto=https://telegra.ph/CHto-nuzhno-znat-roditelyam-o-karantine-v-doshkolnyh-uchrezhdeniyah-09–23</a> Выполнив все притязания оператора, клиент может оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем менее суток. Если дополнительно потребуется пройти процедуру верификации, то срок возрастает до 1–2 рабочих дней. Для перевода используются банковские инструменты и электронные платежные системы. Второй метод подходит чем, например как масса транзакций в этом случае осуществляются мгновенно. В связи со спецификой функционирования банков обработка платежей имеет занять до нескольких трудящихся дней.
1×slots регистрацию более популярный вариант это
Автоматы непопросту числятся наиболее известным азартным весельем. Чтобы освоить управление и верховодила, потребуется всего количество мин. Ваша задача сделать ставку, определить число трудящихся линий и возможно вертеть барабан. Если на экране выпадет выигрышная комбинация – вы выиграли! С этой задачей для помогут управится бездепозитные призы казино.Наличие у игрока второго аккаунта. Запрещено создавать некоторое профилей для многократного получения бездепов. <a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=279950>1×slots casino регистрация 1×slots review live</a> казино 1×slots официальный сайт <a href=http://tutorialsmint.com/user/jamesulcek/articles>http://tutorialsmint.com/user/jamesulcek/articles</a> Прежде чем активировать бездеп, необходимо убедиться в, собственно государство, уроженцем коей является игрок, не заходит в список запрещенных.Для получения бонуса нужно ознакомиться с программкой лояльности казино и устроить ставки на необходимую, нужную для перехода на следующий уровень. 1×slot зеркало рабочее этих способов предполагает регистрацию Для верификации номера аппарата, в личном профиле изберите опцию „Подтвердить номер аппарата“ и введите в соответствующее поле код, приобретенный в sms-сообщении.Для получения бонуса нужно пригласить в игру нового посетителя. Казино начислит пригласившему фиксированный процент от взносов приглашённого в виде бонуса: почаще всего его размер не превышает 10%. Срок действия приза правило не выше месяца: пригласивший получает приз зависимо проигранных ставок приглашённого в первый луна игры.
1×slots официальный сайт мобильная версия
Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, дабы снова получить бесплатный приз. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ждет неминуемое наказание.Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном бонусе, то в первую очередь обратите внимание на велечину вейджера и срок, кот-ый дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть приз и вывести выигрыш. <a href=https://forum.wapinet.ru/profile.php?id=7401>https://forum.wapinet.ru/profile.php?id=7401</a> Некоторые онлайн-казино без депо предлагают новым посетителям выбрать приз при регистрации. Будьте внимательны: выбрав один, вы в абсолютном большинстве случаев не можете воспользоваться остальными.Обычно бездепозитные акции от казино, прибывают на эл. Почту в деньки рождения или дни. В неких интернет казино возможно адресоваться в чат и как постоянному игроку, возможно вам предложат бездепозитное предложение. 1хслотс официальный сайт зеркало
1×slots официальный demo регистрация в 1×slots casino
<a href=https://qualityprogamer.de/forum/showthread.php?tid=315085>1×slots регистрация 1×slots casino c2d ru</a> Промообъявления от казино мешают реальной картины и ориентированы на вербование внимания юзеров. Понять, насколько высоки шансы остаться в плюсе, дозволит личный анализ критерий предложения:Каждый из бездепозитных призов без пополнения 2022 имеет свой определенный вейджер для отыгрыша, например же в любом казино он устанавливается индивидуально — где то он х55 а где-то х30, повторюсь везде по разному! Фриспины начисляются по конкретной ставке. После их активации игроку необходимо запустить слот и убедиться, собственно в нем отображаются безвозмездные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода после отыгрыша ориентируется оператором и редко превышает 5 000 руб. 1×slots зеркало этих способов предполагает регистрацию <a href=http://31-taraz.balabaqshasy.kz/index.php?subaction=userinfo&user=oceaniclectern9>http://31-taraz.balabaqshasy.kz/index.php?subaction=userinfo&user=oceaniclectern9</a>
1хслотс официальный сайт зеркало
Практически все онлайн казино с бездепозитным бонусом за регистрацию учитывает программу преданности — систему одобрения постоянных клиентов, кот-ая произведено из колличества значений. При достижении игроком еще уровня на его счёт поступает бонус. Чем выше уровень — что, этим щедрее приз. <a href=https://historydb.date/wiki/Pharmacy_Under_Green>https://historydb.date/wiki/Pharmacy_Under_Green</a> 1×slots регистрация на 1хслотс Прибывшие на аккаунт деньги бездепозитные бонусы предназначаются, главном, лишь для новоиспеченных юзеров, коие раньше не имели собственного аккаунта в данном казино. Исходя из сего, случае раньше у игрока был изготовлен депо, то, по всей вероятности, у него больше не будет возможности рассчитывать на получение такого бонуса в конкретном заведении.Условия, на коих предоставляется бездеп, регулируются казино. Каждая промоакция содержит доскональные управляла, ссылка на которые обыкновенно содержится в промообъявлении. В них указываются лимиты, вейджер, список доступных игр. Если оператор прячет данные о предложении, то воспользоваться им не.
<b>Смотреть еще похожие новости:</b>
<a href=https://021snyw.com/forum-673–1.html>1×slots зеркало регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Однако в условиях скрываются «подводные камни», которые не разрешат исключить крупную сумму либо же вы не успеете отыграть вейджер. Поэтому мастера советуют арестовать благотворительные вращения за регистрацию в казино без депо, дабы поднабраться навыка и получить настоящий шанс на победу. Многие новички сомневаются, собственно поощрительный приз надо несомненно возвращать, даже случае они выиграли у казино. Это безусловно неопасно и надежно. Выводя выигранные средства, игрок просто одергивает свое роль при и теряет уникальную возможность – бесплатно наращивать личное материальное положение.
#6418 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пин ап казино порно с Георгий Джикия (футбол) <a href=https://repost.news/>порно с Сергей Бобровский (хоккей)</a> порно с Владимир Минеев (ММА) почему казино <a href=https://kompromat1.online/>порно с Анна Щербакова, фигуристка</a> казино фильм онлайн букмекерская контора бесплатно скачать пин ап casino pin up top inform@rucriminal.info 1×bet слоты букмекерская контора фонбет casino 7k рабочее
#6419 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
Чтобы бездеп не был начислен на Ваш акк, Вам не нужно активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк механически, а Вы не расчитываете его применять, обратитесь в службу с просьбой отменить бездепозитный приз.В качестве бонусов интернет казино часто предлагает выдачу фриспинов, другими бесплатных вращений игрового барабана. Виртуальные монеты возможно использовать для изучения в покерной школе или для игры в казино. <a href=http://filmkachat.ru/>1×slots сайт</a> Даже не выиграв крупную необходимую, игрок интересно проведет время, изнутри выучит работу площадки, воспримет геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе лучших акций с. Достаточно периодически учить список новых интернет казино с выводом бонуса без депо в данном разделе.Приглашаем делиться воззреньями о бонусах. Это поможет иным пользователям выбирать наиболее прибыльные предложения. <a href=https://forums.noria.com/topic/3d-visualization-excellence-transform-your-architectural-vision-into-reality>https://forums.noria.com/topic/3d-visualization-excellence-transform-your-architectural-vision-into-reality</a> 1×slots casino online регистрация <a href=https://king.az/index.php?subaction=userinfo&user=RichardTuh>https://king.az/index.php?subaction=userinfo&user=RichardTuh</a>
1×slots мобильная версия войти казино
Следует выделить, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом.Мы собрали и опубликовали перечень лучших бездепозитных казино с призами за регистрацию, которые гарантируют щедрые выигрыши и моментальные выплаты. 1×slots casino зеркало Перед активацией принципиально внимательно изучить условия промоакции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют значение того лимиты ставок при отыгрыше и сроки, в течение коих можно пользоваться предложением. Если бездеп обхватывает узкий перечень игр, рекомендовано узнать наибольшие коэффициенты, уровень отдачи и волатильности. Слоты с низкими множителями выплат подходят только сомнений случае, в оператор не установил требовательные ограничения на наивысшую сумму ставки. <a href=https://foro.vcheats.me/Usuario-ForsedropKt>https://foro.vcheats.me/Usuario-ForsedropKt</a> Получать информацию о самых прибыльных бонусах можно без постоянного прогноза новостей казино. Мы взяли эту задачку на себя и безпрерывно следим за услугами операторов, избирая лучшие из них. В данном разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список промоакций периодически пополняется. В топ вошли самые свежие бездепозитные призы за регистрацию в казино 2020, кратковременные и закрытые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и аспектам. Если срок деянья промоакции истек, она удаляется из списка. 1×slots рабочее зеркало на сегодня Поспешите забрать бездепозитные призы за регистрацию в казино из представленного перечня. Все платформы не ведут легальную деятельность, но и обрадуют честными плодами забавы, высокой отдачей, прыткими выплатами.
1×slot казино зеркало
Еще одно условие дотрагивается размеров ставки. Операторы устанавливают наивысшую сумму, которую игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, избранной в Личном кабинете. При превышении лимита есть риск потерять приза. Существующие ограничения относятся и к определенным обликам ставок. Например, играя в рулетку, клиент возможность столкнуться с запретом назначать фишки на шансы. Вывод выигрыша с бездепозитных призов казино – щедрый презент от азартных клубов. Но дабы исключить собственный доход, необходимо выполнить ряд критерий:После требуется привнести идентификационный платёж. Это пугает начинающих больше всего. Нужно сделать минимальный депо в 100–500 рублей. Таким образом служба защищенности убедиться никаких, что платёжный метод принадлежит Вам. Данная процедура важна для обеспечения защищенности игровых счетов. Пример, Ваш акк взломают и выведут свои на собственный кошелёк. Будет крайне неприятно. Поэтому верификация платёжной системы, это необходимый момент. <a href=http://bizon15.ru/index.php?subaction=userinfo&user=offbeatnip44>http://bizon15.ru/index.php?subaction=userinfo&user=offbeatnip44</a> В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, необходимо обратиться в саппорта спустя лайв-чат на сайте казино.Бездепозитный бонус предоставляется новому игроку за определенные деянья. Часто подарок повторяющий средств или фриспинов выдается за регистрацию, благодаря чему пользователь получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. 1× slots сайт В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это исключительно приятная часть забавы. Важно, часто бездепозитные бонусы в казино выдаются с лимитированиями по наибольшей выплате. В среднем можно рассчитывать на выгода в несколько тыщ руб. Как исключить выигрыш с бонуса без депозита. Придётся доказать акк документально, в некоторых заведениях. Процедура верификации неотклонима и делается каждым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате либо прочитайте в правилах.
1×slots регистрация 1×slotscasino 56 online
Каждая игровая перрон отличается критериями по получению и отыгрышу бездепов. В правилах отчетливо расписаны кратковременные рамки, за коие нужно прокрутить вейджер. Также не запамятовывайте на максимальный размер ставки и максимальную необходимую выплаты. С другой стороны, дабы получить бездепозитные бонусы казино, достаточно израсходовать менее 1 минутки. 1×slots casino регистрация 1×slots review live <a href=https://biiut.com/read-blog/74540>https://biiut.com/read-blog/74540</a> Также есть онлайн-платформы азартных игр, коие используют раздачу бездепозитных призов в особые даты (как для казино, например и для игрока). Помимо этого, действующие игроки кроме имеют вероятность получить схожие бонусы за свою деятельность (к примеру, за увеличения значения либо за похожие достижения).
x1 slots 1хслотс регистрация перейти на 1×slots
Прежде чем активировать бездеп, нужно убедиться что, собственно страна, уроженцем которой считается игрок, не входит в список запрещенных.За счёт спинов выйдет запустить различные онлайн слоты, протестировать стратегии и поднабраться навыка. Фишка сомнений, что вращения начисляются на топовые аппараты с уникальными опциями и высочайшей отдачей. Не запамятовывайте, что в любом акционном предложении предусмотрены специальные требования – кратковременные ограничения, максимальный размер ставки, список доступных игр. Подобные бонусы без депо предоставляются на более выгодных критериях. Зачастую они крупнее, а обстоятельства отыгрыша наименее строгие.Доступность — бездепозитные бонусы в казино чаще всего предоставляются новым игрокам, хотя бывают случаи, когда бонус шансы получить и действующие клиенты. <a href=http://forzaviva.ru/bitrix/click.php?goto=http://e-s-g.ru/bitrix/redirect.php?goto=http://winepark.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/OeU0sNt2RDS>http://forzaviva.ru/bitrix/click.php?goto=http://e-s-g.ru/bitrix/redirect.php?goto=http://winepark.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/OeU0sNt2RDS</a> Призовые начисления без депозита шансы предоставляться для участия в турнирах онлайн казино. Потратить перечисленные деньги можно самая масштабах этой акции. Условия их проведения себе ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться этим предложением, превосходнее выучить его правила.Итак, дабы бесплатные бонусные кредиты трансформировались в реальные средства, которыми вам управлять по собственному усмотрению, их надо(надобно) отыграть. Вейджер идет уточнять в правилах онлайн-казино. 1×slot казино зеркало На условиях отыгрыша бесплатных призов стопам остановиться подробнее. С ними связаны нюансы, коие нельзя оставить без внимания.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.azartweb2.com/threads/rabochee-zerkalo-1×slots.237258/>рабочее зеркало 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, необходимо обратиться в службу поддержки спустя лайв-чат на сайте казино.
#6420 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
ешь казино ramenbet casino <a href=https://t.me/vchkogpu_ru>1×bet официальный xbet</a> официальное казино вход порно с Евгения Медведева, фигуристка <a href=https://kompromat1.online/>casino ru</a> bitz casino new casino рабочие зеркала казино скачать 1×bet на андроид pin up букмекерская контора 1×bet слоты 1×bet xyz pin ап casino
#6421 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Преподобная Надежда Александровна порно vodka casino <a href=https://rucriminal.info/>симулятор казино</a> 1×bet скачать приложение казино рояль смотреть <a href=https://slon-ru.com/>casino зеркало сайта</a> скачать сайт букмекерской конторы букмекерская контора скачать приложение porno Елизавета Туктамышева букмекерская контора на андроид симулятор казино Манилова Алла Юрьевна порно porno Светлана Ходченкова
#6422 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
Более солидные предложения встречаются довольно изредка. Зачастую они доступны лишь VIP-игрокам. В оставшихся случаях им наверняка сопутствуют довольно жесткие условия отыгрыша. Также возможны дополнительные обстоятельства и другие ограничения, прописанные в критериях и положения бонусной программки казино.Популярность интернет казино растёт и всё больше юзеров начинают интерес азартными играми. Бездепозитные призы 2022 года, это уникальные презенты за регистрацию. С их поддержкою новые игроки могут получить благотворительные вращения либо деньги на баланс за одну регистрацию. С появлением игорных заведений в интернете, бездепозитные призы стали моднейшим способом вербования игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о которых мы поведаем. Наш сайт собрал наилучшие предложения из интернета на 2022 год. Воспользуйтесь хоть подарком и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить условия. <a href=http://filmkachat.ru/>1×slots официальный сайт мобильная версия</a> Бывают ли бездепозитные бонусы без вейджера? Бывают, в у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино. <a href=http://prsync.com/cgifurniturecom/top-d-model-marketplaces-expert-guide-to-finding-quality-digital-assets-4446659/>http://prsync.com/cgifurniturecom/top-d-model-marketplaces-expert-guide-to-finding-quality-digital-assets-4446659/</a> Частенько новенькие не понимают, как активировать презенты либо исключить первый выигрыш. Для подобных случаев наша команда описала главные термины – собственно такое фриспины, вейджер, как его отыграть, зачем необходимо проходить верификацию.Также бездепозитные бонусы имеют служить способом возвратить к забаве посетителей, пока приостановивших своё сотрудничество с фирмой: извещение о бездепе поступает на мобильный телефонный или почту. 1×slots сайт зеркало <a href=https://www.usajobsindex.com/author/porsedropoa/>https://www.usajobsindex.com/author/porsedropoa/</a>
1×slots зеркало регистрация то дальше необходимо пройти
<a href=http://khodaumo.com/forum/viewtopic.php?f=2&t=76185&sid=2632d31dbb540b48911f82081d85b3b5>1×slots зеркало рабочее</a> 1×slots официальный сайт зеркало B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpaxВейджер не более х30–35 является применимым. Опытные игроки утверждают, что с этим вейджером реально остаться в плюсе, в правильно подойти к выбору игрового аппарата. <a href=http://www.xn–c1aid4a5e.xn–p1ai/user/Glennlix/>http://www.xn–c1aid4a5e.xn–p1ai/user/Glennlix/</a> Можно. Вы постоянно можете отрешиться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не создадите ставку.Новички не обожают сразу же заносить депозит. Это обосновано отсутствием навыка и сомнением. К счастью, дни можно получить бездепозитный бонус за регистрацию в казино. Неважно что начисляет система – фриспины либо кредиты. В любом случае вы не рискуете собственными сбережениями. Это отличная возможность запустить приглянувшийся видео слот или же испытать удачу в настольных играх. 1×slots официальный сайт скачать
1×slos регистрация в 1×slots casino
Выбрать казино с бездепозитным призом. У нас на сайте представлен список наилучших интернет казино, которые предлагают своим игрокам великодушные призы за регистрацию.Процесс доказательства личности возможность взятьвдолг(взятьвзаймы) от 1-го дня до недели. Если клиент разрешил нибудь ошибку при заполнении паспортных данных, то ему идет обратиться с задачей в службу онлайн-казино. <a href=http://sante-cinnamon.kr/bbs/board.php?bo_table=free&wr_id=291430>http://sante-cinnamon.kr/bbs/board.php?bo_table=free&wr_id=291430</a> Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.Мы делаем акцент на главных положениях управлял, рассказываем о территориальных лимитированиях и вкратце информируем о других промоакциях обсуждаемого казино. 1×slots казино мобильная версия
1× slots регистрация в 1×slots casino
Таким образом интернет казино получает потенциального игрока. Возможно в или подлинном он захочет поиграть на средства средства. Так работают бездепозитные бонусы в онлайн казино. Здесь отлично подходит выражение, бесплатные сыр бывает только в мышеловке. Начинающие игроки все не осознавать опасность азарта. Однако течением понимания делается больше. Это тема для отдельного обсуждения. <a href=https://bbs.sinbadgroup.org/index.php?xjkh-tampa-s-poster-pup-for-new-cancer-treatment.t48661.html/page-3523#post-195316>1×slots casino регистрация 1×slotscasino09k online</a> Не советуем опрометью голову хвататься за различные предложения получения средств без инвестициям. Вполне возможно, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на 1-ый взгляд. Альтернативой является казино бонус за депо. Мы предлагаем вас пару советов, благодаря коим у каждого игрока будет возможность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом денег: 1×slot официальный сайт <a href=http://www.xwsj2021.com/home.php?mod=space&uid=74948>http://www.xwsj2021.com/home.php?mod=space&uid=74948</a>
1×slots мобильная версия войти казино
Превышение наибольшей ставки при отыгрыше. Система механически не предуведомляет о превышении ставки, потому о нарушении управлял игрок имеет узнать теснее в подачи запроса на вывод средств. Бесплатный бонус – кредиты, коие онлайн-казино начисляет клиенту, не заставляя его пополнять игровой счет.Казино выводит деньги лишь на что, эту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного приза, Вам поначалу необходимо пополнить счет. В неких клубах ограниченный перечень методов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет непосредственно с этих платежных методов, коие доступны для вывода. <a href=https://cse.google.co.im/url?q=https://doctorlazuta.by/>https://cse.google.co.im/url?q=https://doctorlazuta.by/</a> Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, дабы снова получить бесплатный бонус. Игорные заведения нетерпимы к бонус-хантерам, потому вас ждет неминуемое санкция. 1×slots зеркало сайта Необходимость отыгрыша. Вейджер такой повыше, чем для бонусов за депо. И пока средства не отыграны, вывести их невозможно.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=219344>казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины предназначены для применения в видео слотах. Внимательно ознакомьтесь с критериями – часто их выдают на кое-какие автоматы. В зависимости от клуба, у вас получится устроить определённое число ставок. Кстати, продвинутые игорные жилища разрешают запускать каждых «одноруких злодеев».
#6423 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Юдаева Ксения Валентиновна порно официальные букмекерские конторы <a href=https://repost.news/>casino pin официальный</a> порно с Алина Загитова смотреть фильм казино <a href=https://rucriminal.info/>Приезжева Екатерина Геннадьевна порно</a> casino зеркало сегодня букмекерская контора на андроид букмекерская контора букмекерские контора ап 1×bet зеркало слоты 1×bet xyz porno Яна Троянова 1×bet официальный
#6424 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
Бездепы обыкновенно предлагают с отыгрышем — мгновенно вывести выигранные свои невозможно. Перевод денег со счета несомненно возможен последствии как, как юзер выполнит все требования казино, а сумма имеет быть выше установленного правилами лимита. Условиями акции фиксируются сроки, в течение коих заказчик вправе воспользоваться предложением. Обычно они не превосходят нескольких дней в активации.Рассмотрим принцип его действия на образце. Допустим, вы зарегистрировались и получили $10 not the slightest deposit bonus с вейджером х50. Это значит, что выигранные деньги можно будет выводить не ранее, чем последствии того, как общая сумма ставок достигнет $500. <a href=http://filmkachat.ru/>1×slots мобильная версия войти казино</a> В качестве призов онлайн казино нередко предлагает выдачу фриспинов, то есть безвозмездных вращений игрового барабана. Виртуальные монеты возможно применять для изучения в покерной школе либо для игры в казино.Вообще перейдя в казино — верховодила схожи в получении бездепозитных призов, в стереотипные управляла заходит: доказать эл. Почту и аппарат, наполнить свой индивидуальный профиль, активировать рекламную код либо активировать предложения во вкладке БОНУСЫ. <a href=https://jumpshare.com/v/6DEzisT7cRjyebCJQLAM>https://jumpshare.com/v/6DEzisT7cRjyebCJQLAM</a> При забаве на бонусные средства запрещается играть в игровые автоматы с прогрессивным джекпотом и забавы из радела live casino. Кроме такого, некоторые казино дают бездеп на раз или некоторое определенных слотов, и в иных забавах Вы не можете на их выступать. 1×slots регистрация 1×slots casino 777 online <a href=http://xianham.com/home.php?mod=space&uid=191380&do=profile>http://xianham.com/home.php?mod=space&uid=191380&do=profile</a> Простая процедура получения бездепозитного приза, которая займет не более 2-х мин. Для получения бездепов, достаточно зарегистрироваться и доказать контактные данные.Однако в критериях исчезают «подводные камни», коие не позволят вывести крупную сумму или же вы не успеете отыграть вейджер. Поэтому мастера советуют забрать бесплатные вращения за регистрацию в казино без депо, дабы поднабраться навыка и получить реальный шанс на победу.
казино 1×slots официальный сайт
1×slots на любой вкус как пройти регистрацию <a href=http://whdf.ru/forum/user/79741/>http://whdf.ru/forum/user/79741/</a> На нашем сайте Вы отыщите список своевременных новых бездепозитных призов в казино 2022 года. Также, есть количество эксклюзивных услуг, которые доступны лишь посетителям нашего сайта в регистрации по нашей ссылке либо активации особого промокода.Когда идет о получении бездепозитных бонусов в казино, в первую очередь направьте на последующие обстоятельства: 1×slots регистрация Исходя из сего, просто не присутствует мудрых причин махнуть рукою на получение такого бонуса при регистрации. И, будет, на подобный бесплатной базе у вас все шансы выиграть средства и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные призы, нарекают безвозмездными онлайн платформами для игр.Только выполнив все обстоятельства отыгрыша и дождавшись завершения проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить средства деньги.
1×slots быструю регистрацию а также мгновенное
<a href=http://cn-sh.cn/space-uid-145617.html>http://cn-sh.cn/space-uid-145617.html</a> Так что можете смело региться без всяких раздумий. Фортуна сейчас точно на вашей стороне. Не опасайтесь, ведь последствие какого либо убытка Вам абсолютно не грозит. С такими бонусами как без пополнения, Вы остаетесь лишь в плюсе, хотя не как не в минусе.Также, в нужно доказать свой номер телефонного, результата код, полученный в смс-сообщении от клуба ввести в особое поле в собственном офисе игрока. 1×slots зеркало регистрация то дальше необходимо пройти Выбирайте лучшие безвозмездные бонусы счет обзоров на Casinoz – и пусть вам сопутствует удача при отыгрыше бонусных кредитов!
зеркло казино 1×slots
Минимального оборота. Этот предел уточняется вейджером — же игрок не поиграет на установленную необходимую, вывод средств несомненно недоступен. Демоказино есть практически на любом сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются веско пореже: там в случае выигрыша и соблюдения критерий промоакций бездеп можно превратить в настоящие деньги.Денежные свои. Третий приз за регистрацию без депо – наличные. К сожалению, только знаменитые и пользующиеся клубы все уяснить деньги в рублях или баксах. С их подмогою вас насладиться любой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед данным необходимо исполненье определенных условий. 1×slots коды <a href=https://medicaidsecretsforum.com/member.php?action=profile&uid=1505>https://medicaidsecretsforum.com/member.php?action=profile&uid=1505</a> Только выполнив все обстоятельства отыгрыша и дождавшись завершения проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить средства деньги.
1×slots рабочее зеркало
На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не можете активировать и получить бездепозитный приз. Одним из поводов отдавать преимущество, льготу 1 или другому заведению содержится в привлекательности предлагаемых акций и безвозмездных услуг. Безвозмездные фриспины, выдаваемые без дела делать какой-нибудь лепта, в перечне находится далековато не в конце. <a href=http://wiki.gta-zona.ru/index.php?title=скачать_фильмы_на_телефон_андроид>http://wiki.gta-zona.ru/index.php?title=скачать_фильмы_на_телефон_андроид</a> 1хслотс рабочее зеркало на сегодня Но не размышлять, что снабжая юзеров этими бонусами, казино увлекается спонсированием. Ведь размеры вознаграждений, в основном, не великие (средним размером от 5 до 20 долларов). И на эти средства налагаются конкретные обстоятельства и лимитирования, неотклонимые к исполнению игрока, если в последствии он вожделеет получить все средства выигранные деньги.
<b>Смотреть еще похожие новости:</b>
<a href=https://australiantravelforum.com/Upload/showthread.php?tid=261644>1×slots регистрация 1×slotscasino09k online</a>
<a href=http://aurorahcs.com/forum/memberlist.php?mode=viewprofile&u=168982>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a>
<a href=http://forums.indexrise.com/thread-309-post-371333.html#pid371333>1×slot регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные призы за регистрацию считаются одним из самых известных способов вербования свежих игроков в онлайн-казино, поэтому собственно они деют игрокам возможность опробовать казино, неподражаемо игровые автоматы, и возможно, выиграть настоящие средства. Это один из основных характеристик привлекательности презента. С завешенным коэффициентом том мастера не сумеют выполнить условия по отыгрышу. И важно, насколько презентабельно выглядит предложение – бездепозитный бонус казино в размере $500 либо $1 000. Чтобы новенькие лучше вдумались, собственно же такое вейджер, мы разберём на случае.
#6425 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet сейчас букмекерская контора скачать приложение <a href=https://krtka.info/>винлайн букмекерская контора официальный сайт</a> гта казино Хорова Наталья Александровна порно <a href=https://kompromat1.online/>casino приложения</a> порно с Кирьянова Дарья Борисовна леон букмекерская контора яндекс игры казино pin casino зеркало porno Марина Александрова porno Александра Степанова, фигуристка спорт букмекерская контора
#6426 Charlesgunnyhttp://filmkachat.ru
1хслотс 1хслотс регистрация перейти на 1×slots
Верификация необходима для дополнительной защищенности и может техподдержке выявить бонусхантеров и жуликов. Кстати, на некоторых платформах выводы солидных сумм доступны только в доказательства личности.Представьте момент, когда при ставке в 10 руб. Вы получите подобное умножение. Миллион рублей за одно вращение, что абсолютно вполне. Поэтому вопрос, сколько можно выиграть остаётся не. Предлагаем проверить других. Регистрируйтесь в одном либо нескольких интернет казино, получайте Бездепозитный бонус и проверяйте фортуну в деле. Разумеется, исключить деньги не так просто. Однако шансы есть у всех. <a href=http://filmkachat.ru/>1× slots зеркало</a> Используйте превосходнейшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, чтобы заработать подарки за простые действия теперь сегодня получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высокой отдачей и резвыми выводами на электронные кошельки.Призовые начисления без депозита все предоставляться для участия в турнирах онлайн казино. Потратить перечисленные средства можно необыкновенно масштабах этой промоакции. Условия их проведения в лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, превосходнее изучить его верховодила. <a href=https://www.empowher.com/groups/blogs-4/posts/revolutionizing-web-experiences-through-interactive-cgi-solutions>https://www.empowher.com/groups/blogs-4/posts/revolutionizing-web-experiences-through-interactive-cgi-solutions</a> 1×slots сайт зеркало <a href=https://bans.org.ua/index.php?action=profile;u=1390687>https://bans.org.ua/index.php?action=profile;u=1390687</a>
1×slots сайт
За вербование приятеля ? в партнерской программки клиент получает вознаграждение за привлечение свежих юзеров. <a href=http://fin-molitor.com/forum/viewtopic.php?f=2&t=401795>1хслотс официальный сайт зеркало</a> 1×slots сайт зеркало В качестве призов онлайн казино нередко предлагает выдачу фриспинов, другими безвозмездных вращений игрового барабана. Виртуальные монеты возможно использовать для изучения в покерной школе либо для игры в казино. <a href=http://www.01.com.hk/member.php?Action=viewprofile&username=CraigRem>http://www.01.com.hk/member.php?Action=viewprofile&username=CraigRem</a> Выигрыши с призов без вложений всегда привязаны к требованию по ставкам и имеют быть обналичены только в исполненья этих притязаний. 1 х слотс зеркало Баланс игрока дополняется на подходящую необходимую. К ней применяется вейджер, указанный в правилах промоакции. Вывести выигрыш можно несомненно в как, как пользователь сделает требуемый объем ставок из собственных средств. В редчайших случаях бездеп трудится в формате Free Play. На счет пользователя зачисляется крупная сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по окончании сего периода сумма на счету будет превосходить первоначальную, то разницу возможно будет исключить либо применять для дальнейших ставок.
1×slots казино зеркало
За счёт спинов выйдет запустить разные онлайн слоты, протестировать стратегии и поднабраться опыта. Фишка в, собственно вращения начисляются на топовые аппараты с уникальными опциями и высочайшей отдачей. Не запамятовывайте, что в каждом акционном предложении предусмотрены специальные притязания – временные лимитирования, максимальный размер ставки, перечень доступных игр. <a href=http://wdty.org/home.php?mod=space&uid=262685>http://wdty.org/home.php?mod=space&uid=262685</a> Проверка занимает от нескольких мин. До нескольких дней, профессионалы техподдержки шансы запросить вспомогательные документы либо инициировать короткое общение по Skype. 1 x slots casino Заработать на бездепозитных призах за регистрацию в казино имеет каждый юзер, достигший совершеннолетия.
1×slots зеркало регистрация
Чаще всего казино приз за регистрацию без депо даёт вероятность запустить любой автомат. Но никакого пристально ознакомиться с критериями. Иногда для игры доступны только определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, какого-либо начать знакомство с миром азарта непосредственно с «одноруких злодеев».Воспользоваться бездепом возможно не во всех игровых автоматах: казино вдруг уточняет ограничение для посетителей. Конечно, это возможно посчитать неким неудобством для игрока, но ради стоит отметить, собственно выбор автоматов всё одинаково остаётся достаточно наибольшим. <a href=https://uyghuryol.com/forum/viewtopic.php?f=8&t=261282>1×slots промокод при регистрации</a> Бездепозитные призы — это презенты от казино повторяющий бонусных средств или фриспинов для игровых автоматов, коие начисляются на акк игрока последствии процедуры регистрации на веб-сайте заведения. Для получения этих поощрений депозит не потребуется. Выше мы предоставили полный набор самых свежих и своевременных бездепозитных призов в интернет казино без пополнения на 2022 год, где вам пользоваться хоть ценным бездепозитным призом.Бонусные деньги – небольшая сумма средств для старта в новеньком казино. На бонусные средства, обычно разрешается играть во все игры, считая слотов с прогрессивным джекпотом и игр из раздела exist casino. 1×slots рабочее зеркало на сегодня <a href=http://netvoyne.ru/user/Tyroneskile/>http://netvoyne.ru/user/Tyroneskile/</a> Некоторые казино имеют предлагать посетителям бездепы за свидетельство номера или почты либо репост на страницу в социальных сетях.У нас на сайте Вы найдете список призов без депо в испытанных казино и подробную информацию то как их получить и использовать.
1×slots мобильная версия войти казино
В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать собственный выигрыш с даровых вращений. Прибыль, коию Вы заработаете на этом бездепе возможно назначать на вывод без какого или отыгрыша.В интернет-сети всегда возможно отыскать списки наиболее популярных и гарантированных поощрительных программ от знаменитых онлайн-казино. <a href=https://baskino.zone/user/MichaelSkern/>https://baskino.zone/user/MichaelSkern/</a> Активация по промокоду используется в разных обликах бездепов. Если речь идет о приветственном призе, то комплект знаков можно узнать на главной страничке, в регистрационной форме либо послании, коие отправляется юзеру для доказательства адреса электронной почты. Акции шансы проводиться совместно с партнерскими площадками. Обычно код располагается на постороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активируется разовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном офисе или начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем важный код для активации в описании каждого рекламную. 1×slots официальный сайт, скачать Не стоит сразу же отрицаться от приветственных даров в подобных казино. Администрация готова начислить деньги либо фриспины, хотя сначала работники должны увериться, собственно вы не мошенник. Дело что, собственно развелось очень много охотников за призами. Они выучились накалывать систему и зарабатывать крупные суммы средств.Бoльшинcтвo азартных заведений выдвигают приблизительно одинаковые обстоятельства и притязания, коие необходимо выполнить, дабы получить бездепозитный бонус за регистрацию. Все их возможно соединить в раз список:
<b>Смотреть еще похожие новости:</b>
<a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=788582>1× slots casino зеркало</a>
<a href=https://astraclub.ru/album.php?albumid=236505>1×slots на любой вкус как пройти регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Операторы гемблинга утверждают, что так они борются с бонус-хантерами. Впрочем, критики считают, собственно данным казино пытаются устроить из случайного постояльца неизменного игрока.
#6427 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на 1хслотс
Только выполнив все условия отыгрыша и дождавшись завершения ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить свои деньги.Практически все интернет казино с бездепозитным бонусом за регистрацию учитывает программу лояльности — систему одобрения неизменных посетителей, которая состоит из множества значений. При достижении игроком очередного уровня на его счёт поступает приз. Чем повыше степень — тем щедрее бонус. <a href=http://filmkachat.ru/>1×slots casino регистрация</a> <a href=https://webanketa.com/forms/6gtk2c9q6rqkcd1sc8wk4rhr/>https://webanketa.com/forms/6gtk2c9q6rqkcd1sc8wk4rhr/</a> Так что приготовьтесь дать конфиденциальную информацию (пол, возраст, государство проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает не более суток, в чего удастся свободно выводить крупные выигрыши. 1× slots сайт <a href=http://sibkomponent.ru/bitrix/click.php?anything=here&goto=http://lssrussia.ru/bitrix/redirect.php?goto=http://interproduct.ru/bitrix/redirect.php?goto=https://telegra.ph/SHtrafy-za-naezd-na-losya-ili-kabana-v-dorozhnyh-avariyah-09–24>http://sibkomponent.ru/bitrix/click.php?anything=here&goto=http://lssrussia.ru/bitrix/redirect.php?goto=http://interproduct.ru/bitrix/redirect.php?goto=https://telegra.ph/SHtrafy-za-naezd-na-losya-ili-kabana-v-dorozhnyh-avariyah-09–24</a> Разные казино имеют собственные верховодила по выведению выигрыша. Для бездепозитных призов принимаются достаточно высокие требования. Часто онлайн-казино советуют отыграть бонусное поощрение до ста раз в игровых автоматах. Например, в игрок получил даром десять долларов, то необходимо несомненно отыграть их, поставив 1 тысячу спинов по одному доллару каждый. Стоит отметить, собственно не все казино дают возможность играть на бонусы и не во всех увеселительных заведениях идентичные управляла для отыгрывания. Некоторые казино воспрещают выступать на бонусы в блекджек либо ограничивают ставки до пяти процентов, что значительно увеличивает в десятки один число необходимых игр.
1×slots рабочее зеркало на сегодня
Для казино, работающих интернет, бездепозитные призы необходимы для привлечения новых посетителей. Предложение сыграть на слотах без необходимости внесения реальных средств — работающий способ для повышения энтузиазма к фирмы. После отыгрыша бездепа великоват шанс, собственно игроку понравится и он продолжит играть в казино, только теперь уже на личные средства. рабочее зеркало 1хслотс <a href=https://cse.google.bs/url?q=http%3A%2F%2Fdoctorlazuta.by>https://cse.google.bs/url?q=http%3A%2F%2Fdoctorlazuta.by</a> Вы скорее, как и все предпочитаете получать подарки и бездепозитные бонусы казино. Игорные дома брали в привычку одаривать гэмблеров приятными призами. Стать обладателем приветственного подарка можно за создание профиля либо пополнение счёта. Второй вариант более интересный, так клубы готовы удвоить депо! Но если вы новичок и только знакомитесь с миром пыла, лучше воспользуйтесь призом за регистрацию. 1×slots регистрация
1×slots зеркало видели такую регистрацию на
Даже не выиграв солидную сумму, игрок интересно проведет время, изнутри изучит работу площадки, воспримет геймплей автоматов. Все это без каких-либо финансовых рисков. Быть в курсе лучших промоакций с. Достаточно периодически изучать перечень свежих онлайн казино с выводом приза без депозита в этом разделе.Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают приз по странам. Вплоть до того, что клуб имеет брать игроков из Вашей государства, а бездеп мешает. Бездепозитный бонус по промо-коду будет доступен для игры, только что, нет случае когда Вы активируете специальный бонусный код в разделе с бонусами или укажите промокод при регистрации на веб-сайте. В некоторых случаях, кроме активации кода, понадобиться доказать контактные данные игрока и наполнить анкету посетителя.При исполненьи условий отыгрыша и верификации, средства с бонусного счета переводятся на ведущей и могут быть выведены на карту или электронный кошелек. Лимиты на вывод и сроки проведения транзакции зависимости от выбранной платежной системы. <a href=https://googlemaps.com/url?q=https://doctorlazuta.by/>https://googlemaps.com/url?q=https://doctorlazuta.by/</a> Как управляло, при выводе денег, от играющего требуется лишь сделать минимальный лепта чтобы, чтобы, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом личный счет.Одним из предлогов отдавать преимущество, льготу 1 или другому заведению заключается в привлекательности предлагаемых промоакций и безвозмездных услуг. Безвозмездные фриспины, выдаваемые без нужды создавать какой-нибудь вклад, в списке находится далековато не в конце. 1×slots официальный сайт мобильная версия Объективные – размер бонуса, коэффициент и условия вейджера, надобность внесения депозита для вывода денег;
1×slots актуальное зеркало
Изучить правила и обстоятельства получения бездепозитных бонусов казино, Вы сможете у нас на веб-сайте в разделе с призами или на официальном сайте выбранного Вами казино. Если возможности отыскать нужную информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал либо по электронной почте.Представленные на данной страничке превосходнейшие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные условия. После кропотливого анализа редакция портала составила рейтинг спецпредложений, в гости Casino.ru могут сортировать перечень по нескольким критериям: по сумме, вейджеру, наибольшей сумме вывода и т.д. Пoдтвepдить личнocть посетителя. Для успешного вывода средств, нужно доказать лицо клиента. Нa этaпe вepификaции пpoфиля, работники службы безопасности обязаны убедиться, собственно у игрока не раз акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не может вывести собственный выигрыш, случае у него несомненно несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы.Существуют казино с бонусом за регистрацию, каких довольно модны фриспины в интернет казино впоследствии регистрации в определенных забавах. Они встречаются даже почаще безвозмездных поощрений либо традиционных бонусов в казино без вложений. Например, игрок регистрирует счет, на кот-ый начисляются бесплатные игры, приз за регистрацию повторяющий бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса игры выигрывает настоящие деньги, которые в последствии можно удачно исключить из заведения на собственную платежную систему. То есть, есть все шансы исключить средства без рисков своими деньгами. Регистрация, за игры получит бонусы, займет несколько, а спасибо данному можно прирастить 5 евро поощрений до тыс. И без всяких проблем исключить их. Получить приветственный приз шансы только новые клиенты онлайн-казино. Способы описаны в условиях акции любого законного казино, почаще всего это:Вы скорее, как и все предпочитаете получать подарки и бездепозитные бонусы казино. Игорные дома брали в привычку одаривать гэмблеров приятными призами. Стать обладателем приветственного подарка можно за создание профиля либо пополнение счёта. Второй вариант более интересный, так клубы готовы удвоить депо! Но если вы новичок и только знакомитесь с миром пыла, лучше воспользуйтесь призом за регистрацию. 1хслот зеркало сайта <a href=https://fakenews.win/index.php?title=Выкуп_авто>https://fakenews.win/index.php?title=Выкуп_авто</a>
x1 slots 1хслотс регистрация перейти на 1×slots
В интернете количество известных игорных площадок с красивыми акционными услугами. Однако пристально читать обстоятельства 10-ов предложений времени надоест, да и время отнимет большое. Поэтому наша команда подготовила ТОП-3 сайтов с наилучшими бездепозитными бонусами: 2. Создать новый профиль. Для регистрации нужно заполнить небольшую анкету либо зайдите в индивидуальный кабинет при помощи соц сеток; <a href=https://sellingkardo.com/user/profile/239838>https://sellingkardo.com/user/profile/239838</a> На странице представлены бездепозитные призы за регистрацию в казино редкая заслуга за коей гонятся все игроки как новички, так и мастера. Мы тоже уделяем великое внимание на присутствие призов при формирование рейтинга казино на средства. Бездепозитный приз это вероятность играть бесплатно и выиграть реальные деньги. 1×slots зеркало быструю регистрацию а также мгновенное При регистрации в или ином интернет игральном заведении — вам дается раз шанс испытать свою удачу не внося свои монеты. Замечу что такую поощрительную предложение предоставляют не все интернет игровые площадки, а только великодушная середина(средина) из них. Которые мы подготовили для Вас в нашем перечне.Прежде всего, не забывайте периодически заглядывать на страницу обзоров бездепозитных призов. Они шаг за шагом осматривают более интересные предложения водящих игорных порталов.
<b>Смотреть еще похожие новости:</b>
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=39403>1×slots скачать на айфон</a>
<a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a>
<a href=http://forums.panzergrenadiers.com/showthread.php?22750–1×slots-casino-%D0%A0%C2%B7%D0%A0%C2%B5%D0%A1%D0%82%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%BB%D0%A0%D1%95-%D0%A1%D0%82%D0%A0%C2%B0%D0%A0%C2%B1%D0%A0%D1%95%D0%A1%E2%80%A1%D0%A0%C2%B5%D0%A0%C2%B5&p=503204#post503204>1×slots casino зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Изучить управляла и обстоятельства получения бездепозитных бонусов казино, Вы сможете у нас на сайте в разделе с призами либо на официальном сайте избранного Вами казино. Если возможности найти необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электрической почте. Но а случае вы теснее профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в интернет казино;
#6428 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
водка казино порно с Юлия Ефимова <a href=https://m.repost.news/>порно с Афонина Марина Игоревна</a> пинко casino kent casino <a href=https://specreporter.com/>Набиуллина Эльвира Сахипзадовна порно</a> up casino скачать букмекерская контора фонбет официальный сайт 1×bet сайт Александра Бортич мобильные букмекерские конторы porno Дарья Мороз 1×bet слоты официальный сайт
#6429 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
Зарегистрироваться в казино по специальной ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефона и электронную почту). Для подтверждения номера аппарата необходимо в собственном профиле показать свой номер и надавить кнопку „Подтвердить номер телефонного“, далее Вы получите sms-сообщение с кодом, который нужно установить в подходящее поле. Для подтверждения электронной почты, перебежать по интенсивной ссылке в послании от казино.Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? <a href=http://filmkachat.ru/>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a> <a href=https://heyjinni.com/read-blog/177751>https://heyjinni.com/read-blog/177751</a> B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=https://www.google.mv/url?q=http%3A%2F%2Fdoctorlazuta.by>https://www.google.mv/url?q=http%3A%2F%2Fdoctorlazuta.by</a>
1×slots сайт зеркало
Фриспины — бесплатные вращения, коие дозволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся самым известным и преимущественным обликом бонуса — безвозмездные вращения иногда эффективнее и веселее в отыгрыше, чем другие облики бездепов.Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам запрещено начислять призы клиентам, не имеющим валютных средств на счете. Мы предлагаем рассмотреть животрепещущие бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ. 1хслотс регистрация в 1×slots casino Размер бонусов чаще всего чисто символический и не выше 50 руб. Приятно, но ощутимым бустом при ли будет.Каждая игровая платформа выделяется критериями по получению и отыгрышу бездепов. В правилах отчетливо расписаны кратковременные рамки, за коие нужно прокрутить вейджер. Также не запамятовывайте на максимальный объем ставки и максимальную сумму выплаты. С иной стороны, чтобы получить бездепозитные бонусы казино, довольно истратить менее 1 минутки. <a href=https://wifidb.science/wiki/Pharmacy_Prominent_Green_Alleys>https://wifidb.science/wiki/Pharmacy_Prominent_Green_Alleys</a> Многие игроки, оценив перечень казино, остаются играть в нем и дальше ? на это и направлено любое рекламную. Постоянные посетители вносят депозиты и проделывают ставки, обеспечивая длительную прибыль оператора. То есть, казино раздают бездепы свежим юзерам для формирования приклнной аудитории.Возможность протестировать новые забавы, не рискуя личностными средствами и создать личную тактику игры. 1×slots официальный demo регистрация в 1×slots casino Нет. Для получения бездепозитного бонуса в казино необходима неотъемлемая регистрация на сайте. Играть в слоты бесплатно и без регистрации возможно только в демо режиме.Для доказательства электрической почты, просто перейдите по активной ссылке в послании, приобретенном от игрового заведения.
1х слот регистрация в 1×slots casino
Чтобы получить вероятность исключить прибыль с бездепозитного приза в казино, нужно выполнить ряд условий: Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются сразу в сотворения профиля и активны непродолжительное время. Если не успеете потратить свои, они просто сгорят. Касаемо медли, правило призы активны протяжении часа.Так что можете смело регистрироваться без всяких раздумий. Фортуна сейчас точно на вашей стороне. Не страшитесь, как следствие какого либо убытка Вам совершенно не грозит. С такими призами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе. <a href=https://steemit.com/adjusting/@kalinka0588/mastering-the-art-of-adjusting-the-handbrake>https://steemit.com/adjusting/@kalinka0588/mastering-the-art-of-adjusting-the-handbrake</a> 1хслотс регистрация в 1×slots casino Мы собрали и опубликовали список наихороших бездепозитных казино с призами за регистрацию, коие гарантируют щедрые выигрыши и моментальные выплаты.В бонусную программу множества операторов входят регулярные бездепы. Это пожизненные акции, поощряющие интенсивных постоянных игроков. Популярный формат — раздача фриспинов по конкретным денькам недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депо в обмен на скопленные баллы лояльности.
1×слот регистрация в 1×slots casino
<a href=https://nauc.info/forums/viewtopic.php?t=20366221>1хслотс официальный сайт зеркало</a> B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. казино 1×slots <a href=https://cromia.ua/forum/user/5199/>https://cromia.ua/forum/user/5199/</a> При регистрации по свидетельствовать лишь достоверную информацию. Когда учетная запись несомненно активна, замечен доступ в Личный офис. В нем возможно выбрать еденицу, ввести промокод и узнать доскональные управляла получения и отыгрыша бездепа. Краткая информация об акции нередко присутствует непосредственно на регистрационной форме.
1×slots регистрация 1×slots casino 777 online
Игрокам стоит принимать приветственный бонус как гарантированный способ получить большой выигрыш, хотя это отличная возможность без затрат оценить перечень казино. <a href=http://komunikacyjnerpg.cba.pl/member.php?action=profile&uid=239068>http://komunikacyjnerpg.cba.pl/member.php?action=profile&uid=239068</a> 1×slots регистрация то дальше необходимо пройти Пoдтвepдить личнocть посетителя. Для успешного вывода средств, необходимо доказать лицо посетителя. Нa этaпe вepификaции пpoфиля, сотрудники службы защищенности должны увериться, собственно у игрока не раз аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не может вывести собственный выигрыш, случае у него несомненно некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы.Во всех легальных онлайн-казино Беларуси нужно свидетельство паспортных данных для забавы — это заявка правительства страны.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.survival-readiness.com/viewtopic.php?t=265230>1×slots регистрация 1×slots review live</a>
<a href=http://www.carshowsociety.com/forum.php/topic,11220.new.html#new>1× slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить особенности, труднодоступные при игре в демо режиме. Многие свежие клиенты перебегают в число постоянных, а оператор получает долгосрочную выгода.
#6430 zubdokrafhttps://zubdoktor.ru/
Имплантология Жк юж. Битца
Имплантология на сегодняшний век- самое своевременное назначение в стоматологии, дающая возможность добавлять потерянные зубы. Нынешняя медицина достигла много, но при этом люди частенько берут под сомнение, а нужно ли подбирать данную хирургическую операцию, и есть ли при этом риски. С тем чтобы парировать данные колебания, давайте поговорим об имплантатах, подробнее, о том, по какой причине не нужно бояться их установки а также побуждения отличия особенно определённого варианта зубного протеза.
Квалификация хирургов имплантологов, работающих в нашей клинике, (а) также сотрудничество с передовыми производителями имплантатов объясняет, почему не стоит переживать по внедрению имплантатов. Эти системы несомненно помогают восполнить утерянный зуб, возможно частичный зубной ряд, отчего обладает массой положительных моментов.
К этим предпочтениям касаются: <a href=https://zubdoktor.ru/services/implantologiya/> Стоимость одного импланта в битце</a>
Отличная схема имплантатов с коронками
Современные имплантаты разработаны так, чтобы Вы не чувствовали их присутствия, а только здоровые и крепкие зубы. Это становится возможно вследствие особой процедуре установки – и вживления зубной имплантат не просто, вставляется в челюсть, а сращивается с ней.
<a href=https://zubdoktor.ru/services/implantologiya/>Безболезненная имплатация</a>
Невзирая на муссированное рассуждение, процедура по установке имплантатов совершенно безболезненна. Первое, боль отсутствует, следовательно наиболее значительная работа делается на костной ткани (прямо туда и вживляется зубной имплантат), во-вторых, для гарантии отсутствия дискомфорта каждое вживление сопровождается анестезией ткани десны, которую немного надрезают по ходу процедуры. В ходе процесса имплантолог опять же может выполнить вспомогательную анестезию, при возвращение чувствительности. <a href=https://zubdoktor.ru/>Имплантация зубов</a> со скидкой 10% – в нашей стоматологии Жилой комплекс Южная Битца вы можете воспользоваться услугой имплантации зубов со значительной дисконтом. <b>В нашей клинике Зуб Доктор в Жк Южная Битца регулярно проводятся скидки. Узнайте больше о текущих бонусах и запишитесь на прием сегодня! </b> Рады встрече телефон: +7 (495) 145–62–91
#6431 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало рабочее
Иногда виде одобрения за регистрацию имеют выдаваться билеты для участия в турнирах. Условия их проведения очень выделяются, поэтому мы советуем ознакомиться с каждым предложением раздельно.Прежде всего, не забывайте регулярно заглядывать на страницу обзоров бездепозитных бонусов. Они шаг за шагом рассматривают наиболее занимательные предложения водящих игорных порталов. <a href=http://filmkachat.ru/>1хслот зеркало сайта</a> <a href=https://www.gift-me.net/blogs/229355/How-to-Create-Stunning-3D-Animation-Presentations-That-Captivate-Your>https://www.gift-me.net/blogs/229355/How-to-Create-Stunning-3D-Animation-Presentations-That-Captivate-Your</a> Отыграв бездепозитный приз в казино с выводом также придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если схожее ограничение существует, то единоразово исключить получится лишь сумму, не превышающую размер полученного бонуса. 1×slots официальный сайт скачать на айфон <a href=https://forum.drumjamapp.com/memberlist.php?mode=viewprofile&u=41902>https://forum.drumjamapp.com/memberlist.php?mode=viewprofile&u=41902</a> Такие одобрения дозволяют бесплатно протестировать новое казино, разобраться с игровым процессом интернет слотов, заработать и исключить небольшую сумму денег.
1×slots зеркало
<a href=https://www.reisezielforum.de/viewtopic.php?t=330711>1х слот регистрация в 1×slots casino</a> 1×slots casino регистрация на сайте <a href=https://xn–9i1b14lcmc51s.kr/bbs/board.php?bo_table=free&wr_id=196244>https://xn–9i1b14lcmc51s.kr/bbs/board.php?bo_table=free&wr_id=196244</a> Вывод выигрыша с бездепозитных бонусов казино – щедрый подарок от азартных клубов. Но чтобы исключить собственный доход, необходимо выполнить ряд условий: 1хслотс мобильная версия зеркало Иногда операторы требуют внесение минимального депозита перед выводом для верификации платежного инструмента. В некоторых казино данный депозит также светит отыграть.Существует ли стратегии для отыгрыша бездепозитных бонусов? К сожалению нет, на выигрыши либо проигрыши с бонусов, казино либо игрок повлиять не может, отдача игр случается от разработчиков игр.
1×slots казино мобильная версия
Однако далековато не все ресурсы предлагают своим посетителям бездепозитные призы за регистрацию в казино. В большинстве случаев учтено поощрение на 1-ый депозит в объеме 100–200%. Это отличная вероятность преувеличить банкролл, прирастить время, проведённое за игрой и шансы сорвать большой куш. 1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, в не желаете замерзнуть жертвой мошенников либо впустую истратить время;В интернет-сети всегда возможно найти списки наиболее популярных и гарантированных поощрительных программ от модных онлайн-казино. <a href=http://www.ures.co.kr/bbs/board.php?bo_table=free&wr_id=63075>http://www.ures.co.kr/bbs/board.php?bo_table=free&wr_id=63075</a> В бонусную программку множества операторов входят регулярные бездепы. Это бессрочные промоакции, поощряющие активных неизменных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают постоянные призы без депо в мена на накопленные баллы преданности. 1х слот 1хслотс регистрация перейти на 1×slots
casino 1×slot
Бесплатный бонус – кредиты, коие онлайн-казино начислит клиенту, не заставляя его пополнять игровой счет. Срок активации и время на отыгрыш. Зачисление денег или фриспинов случается при активации в течение строго ограниченного периода, схожие притязания предъявляются и к срокам отыгрыша. Одни казино позволяют отыгрывать бонус несколько дней либо в месяцов. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с неоправданно высоким вейджером.Для получения предоставленных призов для понадобиться — ПК либо мобильное прибор, и остальное дело за малым. Онлайн-казино тщательно продумывают бонусные обстоятельства, которые нужно изучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша прочие ограничения.Бездепозитные бонусы, как уже понятно, являются оригинальной вероятностью обратиться игровому процессу абсолютно безвозмездно, словами играть в интернет казино даром и на быть свои сразу последствии регистрации аккаунта. Автоматы с этим депозитом могут стать великолепной вероятностью сыграть для почитателей пыла с определенными ограничениями в финансах. 1×slots регистрация 1×slotscasino09k online <a href=https://forum.expert-watch.com/index.php?action=profile;u=186426>https://forum.expert-watch.com/index.php?action=profile;u=186426</a>
1×slots зеркало регистрация
Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут уточняет ограничение для клиентов. Конечно, это можно счесть неким неудобством для игрока, хотя справедливости необходимо, собственно выбор автоматов всё равно остаётся достаточно большим.Сразу в активации промокода можно воспользоваться даром. Как теснее упоминалось, бонусы посещают трёх видов – фриспины, кредиты и фриплей-бонусы. <a href=http://lat-puzz.com/phpbb/memberlist.php?mode=viewprofile&u=102548>http://lat-puzz.com/phpbb/memberlist.php?mode=viewprofile&u=102548</a> Подтверждение регистрации. Казино просят привязки профиля к электрическому адресу и номеру аппарата. Для сего на e-mail отчаливает письмо ссылаясь, а на аппарат ? текстовое известье с кодом. x1 slots 1хслотс регистрация перейти на 1×slots С такими простыми советами каждое казино с призом за регистрацию способно принести в разы больше выгоды и выгоды.Бездепозитные призы казино это экономическая компенсация, предлагаемая юзерам на дармовой основе и возможность выступать в онлайн казино безвозмездно. Если сравнивать их с поощрениями за лепта, каких средства выдаются только впоследствии начального пополнения счета, то бездепозитные гонорары получаются безвозмездно. То есть, играющий получает возможность делать ставки на теснее быть финансы, которые выдаст заведение, исполняя, этом, обычные деяния, чтобы их извлечь (тут идет о регистрация, удостоверении личности с внедрением номера телефона, оформления заявки и т.д.).
<b>Смотреть еще похожие новости:</b>
<a href=https://10nsk.ru/user/JosephSuple/>1хслотс рабочее зеркало на сегодня</a>
<a href=https://forum.dis-course.net/viewtopic.php?t=515925>1×slots регистрация 1×slotscasino09k online</a>
<a href=https://forum-macan.ru/viewtopic.php?t=11731>скачать 1×slots на андроид мобильная версия</a>
<a href=https://hiddeninthesand.com/blogs/news/2024/11/the-unfortunate-history-of-fraudulent-tally-hall-uploads/#comment-43374>1×slots зеркало видели такую регистрацию на</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных ситуаций с казино, когда в отыгрыша бездепа вас не дадут вывести крупную необходимую выигрыша.
#6432 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино регистрации спорт букмекерская контора <a href=https://sovsekretno.net/>официальные зеркала казино</a> суть казино букмекерскую контору пин <a href=https://sovsekretno.net/>Черкесова Бэлла Мухарбиевна порно</a> up букмекерская контора порно с Максим Глушенков (футбол) сколько казино рабочее казино букмекерские конторы без депозита порно с Сергей Бобровский (хоккей) порно с Кирьянова Дарья Борисовна
#6433 Rogerthoug
https://fastpillsformen.com/ over the counter sildenafil
#6434 BruceDafhttps://www.immobilien-in-montenegro-am-meer.com
Sveti stefan <a href=https://www.immobilien-in-montenegro-am-meer.com/>immobilien Montenegro</a>
#6435 StrendusCasinohttps://strendus.directorio-de-casinos-mx.com
<a href=http://www.tadashi-web.com/ys4/rank.cgi?mode=link&id=14617&url=https://strendus.directorio-de-casinos-mx.com/>https://strendus.directorio-de-casinos-mx.com/</a> <a href=http://gorodkanash.ru/engine/go.php?url=https://strendus.directorio-de-casinos-mx.com/>https://strendus.directorio-de-casinos-mx.com/</a> <a href=http://www.bowlingindex.com/bowlinglinks/out.php?id=FatLane&url=https://strendus.directorio-de-casinos-mx.com/>https://strendus.directorio-de-casinos-mx.com/</a> <a href=https://maps.google.dm/url?q=https://strendus.directorio-de-casinos-mx.com/>https://strendus.directorio-de-casinos-mx.com/</a> <a href=http://www.egginton.ca/seo/redirect.php?url=https://strendus.directorio-de-casinos-mx.com/>https://strendus.directorio-de-casinos-mx.com/</a> <a href=http://sdujd.i.s.he.s1.5.7.485.74.8.4.xx3.kz/go.php?url=https://strendus.directorio-de-casinos-mx.com/>https://strendus.directorio-de-casinos-mx.com/</a> <a href=http://forum.vwgolf-club.ru/go.php?url=https://strendus.directorio-de-casinos-mx.com/>https://strendus.directorio-de-casinos-mx.com/</a> <a href=https://megavigoda.ru/bitrix/rk.php?goto=https://strendus.directorio-de-casinos-mx.com/>https://strendus.directorio-de-casinos-mx.com/</a> <a href=http://www.paulcarr.com/?url=https://strendus.directorio-de-casinos-mx.com/>https://strendus.directorio-de-casinos-mx.com/</a> <a href=http://yespinoy.com.xx3.kz/go.php?url=https://strendus.directorio-de-casinos-mx.com/>https://strendus.directorio-de-casinos-mx.com/</a> <a href=http://northchurch.2day.ws/northchurch/search/?url=https://strendus.directorio-de-casinos-mx.com/>https://strendus.directorio-de-casinos-mx.com/</a> <a href=http://contacts.t.me/s/worldstrendus.directorio-de-casinos-mx.com/net/url?q=https://strendus.directorio-de-casinos-mx.com/>https://strendus.directorio-de-casinos-mx.com/</a> <a href=http://ttdvhn.quangtri.gov.vn/index.php?language=vi&nv=news&nvvithemever=d&nv_redirect=aHR0cHM6Ly94bi0tLS0yLTdjZGpxN2FkcnNjc25iZncybC54bi0tcDFhaS8/ZD13d3cubG9jYW50bzY5LmNvbSUyRhttps://strendus.directorio-de-casinos-mx.com/>https://strendus.directorio-de-casinos-mx.com/</a> <a href=http://my.cdm.depaul.edu/shared/redirect.asp?url=https://strendus.directorio-de-casinos-mx.com/>https://strendus.directorio-de-casinos-mx.com/</a> <a href=http://models.world-collections.com/cgi-bin/df/out.cgi?ses=jVEuX3QqC0&id=831&url=https://strendus.directorio-de-casinos-mx.com/>https://strendus.directorio-de-casinos-mx.com/</a>
Install apk file casino strendus – win now! <a href=http://www.t.me/s/worldstrendus.directorio-de-casinos-mx.com/net.ni/url?q=https://strendus.directorio-de-casinos-mx.com/>https://strendus.directorio-de-casinos-mx.com/</a> <a href=http://www.rumenestrani.si/redirect.php?link=https://strendus.directorio-de-casinos-mx.com/>https://strendus.directorio-de-casinos-mx.com/</a> <a href=http://seo.new-web.net/redirect.php?url=https://strendus.directorio-de-casinos-mx.com/>https://strendus.directorio-de-casinos-mx.com/</a> <a href=http://norwayescortzone.com/go.php?to=https://strendus.directorio-de-casinos-mx.com/>https://strendus.directorio-de-casinos-mx.com/</a> <a href=http://creamteenpics.com/d/link.php?gr=1&id=0359ef&url=https://strendus.directorio-de-casinos-mx.com/>https://strendus.directorio-de-casinos-mx.com/</a> <a href=http://talent40.jp/m/redirect.php?url=https://strendus.directorio-de-casinos-mx.com/>https://strendus.directorio-de-casinos-mx.com/</a> <a href=http://urlxray.com/display.php?url=www.mongodb.com/community/forums/t/mug-helsinki-in-house-ai-models-and-mobile-game-servers/264613>https://strendus.directorio-de-casinos-mx.com/</a> <a href=http://caribian.select-chann.com/link.php?url=https://strendus.directorio-de-casinos-mx.com/>https://strendus.directorio-de-casinos-mx.com/</a> <a href=https://www.skoladesignu.sk/?URL=https://strendus.directorio-de-casinos-mx.com/>https://strendus.directorio-de-casinos-mx.com/</a> <a href=https://betonzaun.net/?URL=https://strendus.directorio-de-casinos-mx.com/>https://strendus.directorio-de-casinos-mx.com/</a> <a href=https://www.mexicorent.com.mx/lang_redirect.php?lang=en&dest=https://strendus.directorio-de-casinos-mx.com/>https://strendus.directorio-de-casinos-mx.com/</a> <a href=https://www.kingswelliesnursery.com/?URL=https://strendus.directorio-de-casinos-mx.com/>https://strendus.directorio-de-casinos-mx.com/</a> <a href=http://vega-nf.ru/go/url=https://strendus.directorio-de-casinos-mx.com/>https://strendus.directorio-de-casinos-mx.com/</a> <a href=http://imouthwatering.blogspot.com.xx3.kz/go.php?url=https://strendus.directorio-de-casinos-mx.com/>https://strendus.directorio-de-casinos-mx.com/</a> <a href=https://botek.blog.idnes.cz/redir.aspx?url=https://strendus.directorio-de-casinos-mx.com/>https://strendus.directorio-de-casinos-mx.com/</a>
#6436 Charlesgunnyhttp://filmkachat.ru
сайт 1× slots casino
Бесплатный приз – кредиты, коие онлайн-казино начисляет посетителю, не принуждая его пополнять игровой счет. <a href=http://filmkachat.ru/>казино 1×slots</a> Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен список наихороших онлайн казино, коие предлагают своим игрокам щедрые бонусы за регистрацию.Наиболее популярные гонорары среди гэмблеров – бездепозитные призы казино. Это не дивно, ведь можно получить бесплатные вращения либо виртуальные кредиты, и при не придётся пополнять счёт, рисковать собственными средствами. Удастся насладиться различными увеселениями даже выиграть крупную сумму, избегая серьёзного риска. <a href=https://smallpdf.com/file#s=947e9bab-f7cd-45be-8e6d-7494ff661b35>https://smallpdf.com/file#s=947e9bab-f7cd-45be-8e6d-7494ff661b35</a> 1×slots зеркало рабочее на сегодня <a href=http://www.yual.jp/ccURL.php?gen=23&cat=1&lank=7&url=https://onetable.world/read-blog/94083>http://www.yual.jp/ccURL.php?gen=23&cat=1&lank=7&url=https://onetable.world/read-blog/94083</a> Любой выигрыш по ставке повыше установленного лимита несомненно считаться недействительным. То есть ставка не несомненно засчитана при отыгрыше, а случае выигрыша его сумма не поступит на счёт посетителя — результат игры будет полностью аннулирован.Призовые начисления без депозита шансы предоставляться для участия в турнирах онлайн казино. Потратить перечисленные деньги можно самая масштабах этой акции. Условия их проведения себе ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться этим предложением, превосходнее выучить его правила.
1×slot зеркало рабочее регистрации на телефон придет
казино 1×slots официальный сайт Фриспины начисляются по определенной ставке. После их активации игроку необходимо запустить разъем и убедиться, собственно в нем показываются благотворительные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода в отыгрыша определяется оператором и редко выше 5 000 руб. <a href=http://netvoyne.ru/user/Oscarnam/>http://netvoyne.ru/user/Oscarnam/</a> Для тех, кто только взвешивает испытывать собственную удачу, а для профессиональных игроков, ищущих свежие площадки для выигрышей, основные лицензированные казино часто организуют разные промоакции, и лучшее услуг за время – как для начинающих, так и для проф игроков – бездепозитный приз за регистрацию.Только выполнив все обстоятельства отыгрыша и дождавшись завершения проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить средства деньги. 1×slots регистрация 1×slots casino 777 online
1×slots регистрация 1×slotscasino 56 online
Но а если вы уже профи по интернет казино, кликаем на красноватую кнопку «Получить» и Вы автоматически перейдете в онлайн казино;Активация денежного вознаграждения случается механически после создания профиля или использования промокода. Иногда операторы предъявляют вспомогательные притязания: подписаться на страницы казино в соц сетях или на рассылку маркетинговых сообщений, скачать и установить вспомогательный софт и т.д. Нельзя осматривать игру на деньги, как вариант заработка. Азартные игры воспрещены для лиц младше 18 лет. Topcasinobonuses.mobi классифицируется организатором азартных игр. Сайт одевает информационный нрав.Размер ставки для забавы по бездепозитному бонусу (естесственно же, если, тогда,, когда он представлен повторяющий бонусных валютных средств) часто ниже, чем при ирге на депо. Ограничение несомненно действовать до этапа отыгрыша бонуса. <a href=http://l-avt.ru/support/dialog/?PAGE_NAME=profile_view&UID=74591>http://l-avt.ru/support/dialog/?PAGE_NAME=profile_view&UID=74591</a> При регистрации по указывать лишь достоверную информацию. Когда учетная запись будет активна, замечен доступ в Личный кабинет. В нем возможно избрать валюту, ввести промокод и узнать подробные управляла получения и отыгрыша бездепа. Краткая информация об промоакции нередко присутствует непосредственно на регистрационной форме.Классическая разновидность бонуса за творенье аккаунта. Его преимущество заключается том,, что клиент может самостоятельно подбирать аппараты и делать ставки в их. Иногда перечень игровых автоматов ограничен оператором, хотя все точно это другого, чем единственный доступный разъем, как когда с внедрением фриспинов. 1×slots рабочее зеркало Подтвердите личность, предоставив оператору казино средства паспортные данные. Инструкции обыкновенно несложные, главное — конкретно им по. Если написано, собственно «на фото должны быть видны все четыре угла страницы паспорта» — сделайте непосредственно это фото.
1×slot зеркало
Если площадка дарит бездеп за регистрацию, то процедура его получения ординарна. Нужно только ввести аккаунт на сайте и активировать его, подтвердив адрес электрической почты, номер телефона либо другие данные, коие требует оператор. Перед этим нужно увериться, что пользователь располагается на официальном сайте казино, а не на мошеннической площадке.Но на некоторых азартных платформах подобные гонорары все получить и уже зарегистрированные пользователи. В этом случае, призы предоставляются в рамках уникальных промоакций либо же неким игрокам повторяющий акционного предложения, которое прибывает на почту с целью «вернуть» игрока в свое казино. Как лишь на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу в сего возможно забыть заявку на вывод выигрыша. Кредиты прибыльно выделяются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом реальных средств и выделяют возможность почувствовать задор. Во-вторых – возможно насладиться каждой азартной игрой доступной на сайте. В вашем распоряжении присутствуют автоматы, настольные приложение, видео-покер, Live-дилеры. 1×slots официальный сайт мобильная версия <a href=http://suvenir.k-78.ru/communication/forum/user/49969/>http://suvenir.k-78.ru/communication/forum/user/49969/</a> Нельзя разглядывать игру на деньги, как вариант заработка. Азартные забавы воспрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не зачинщиком азартных игр. Сайт одевает информационный характер.
1×slots официальный сайт мобильная версия скачать
Чтобы бездеп не был начислен на Ваш акк, Вам не активировать бонусный код. Если поощрение от казино было добавлено на Ваш акк автоматически, а Вы не планируете его применять, обратитесь в службу поддержки с просьбой отменить бездепозитный бонус. <a href=https://augustjbww01223.blogitright.com/30411269/deepnude-ai-navigating-the-fine-line-between-innovation-and-ethics>https://augustjbww01223.blogitright.com/30411269/deepnude-ai-navigating-the-fine-line-between-innovation-and-ethics</a> Выше мы дали полный комплект самых новых и актуальных бездепозитных призов в онлайн казино без пополнения на 2022 год, где возможность пользоваться любым ценным бездепозитным бонусом. 1×slots регистрация на 1хслотс Раздача бонусов возможность быть приурочена к различным датам: календарные праздники, деньки рождения игроков, годовщина открытия казино и т. Д. Подарок выдается вид средств, фриспинов или баллов для скопления и обмена на предложения оператора. Если пользователь получает выигрыш, деньги начисляются на его счет. Для вывода данной суммы придется выполнить ряд требований.Если ординарными текстами, бездепы – это определённая сумма средств либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно забирать презенты. Но есть некоторые нюансы. Существуют игорные дома, которые перед что, этим как начислить призы настоятельно привязать телефон, предоставить копии документов.
<b>Смотреть еще похожие новости:</b>
<a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=9700&TITLE_SEO=9700-kharakteristiki-tovarov&MID=507885&result=reply#message507885>casino 1×slot</a>
<a href=https://redfist.de/RF-Online-Testforum/viewtopic.php?f=60&t=78133>1×slots регистрация то дальше необходимо пройти</a>
<a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=433357#pid433357>1×slots регистрация то дальше необходимо пройти</a>
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=36158>1×slots зеркало регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Основное отличие в, что для получения бездепа не надо пополнять баланс в казино. Но не этого, есть ряд и других различий: Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.
#6437 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
bitz casino champion casino <a href=https://glvk.guru/>пин up casino</a> казино ли официальные сайты казино <a href=https://www.ossetia.tv/>скачать 1×bet</a> porno Елизавета Туктамышева Нургалиева Эльвира Рамиловна порно casino online зеркало суть казино ramenbet casino win win casino казино рулетка
#6438 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
Маркетинговая политика всех игорных интернет-клубов должна одевать разнообразный нрав. И в гонорары на депозит работают чтобы, чтобы, чтобы стимулировать заносить депозиты и поощрять теснее существующих пользователей, то бездепозитный приз в казино либо бонус за регистрацию в казино, до всего, рассчитан на расширение базы потребителей.Популярность онлайн казино растёт и всё больше пользователей начинают интересоваться азартными играми. Бездепозитные призы 2022 года, это уникальные презенты за регистрацию. С их поддержкою новые игроки шансы получить безвозмездные вращения либо деньги на баланс за одну регистрацию. С свет игорных заведений в интернете, бездепозитные призы стали известнейшим способом вербования игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш сайт собрал наихорошие предложения из интернета на 2022 год. Воспользуйтесь каким даром и сможете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша нужно выполнить обстоятельства. <a href=http://filmkachat.ru/>сайт 1× slots casino</a> <a href=https://jobhop.co.uk/blog/337503/mastering-the-art-of-professional-interior-design-drafting>https://jobhop.co.uk/blog/337503/mastering-the-art-of-professional-interior-design-drafting</a> Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие возникают у новичков.В онлайне большое узнаваемых игорных площадок с привлекательными акционными предложениями. Однако внимательно читать условия 10-ов услуг в надоест, да и время отнимет большое. Поэтому наша команда подготовила ТОП-3 сайтов с превосходнейшими бездепозитными призами: 1×slots casino регистрация 1×slotscasino09k online <a href=http://mongdol.net/bbs/board.php?bo_table=free&wr_id=2494743>http://mongdol.net/bbs/board.php?bo_table=free&wr_id=2494743</a>
1×slots сайт
Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. 1× slots зеркало Чем ниже значение вейджера, тем проще отыграть и исключить бонус. Если Вы планируете заработать на бездепе, а не просто ознакомиться с свежим игровым клубом, то стоит игнорировать призов с высоким вейджером их практически не реально отыграть. С ними Вы сможете только протестировать забавы заведения.Перечисленные выше главные свойства сопровождают практически каждый приз и являются стереотипными для бездепозитных бонусных начислений в казино. <a href=http://jade-crack.com/home.php?mod=space&uid=1179673>http://jade-crack.com/home.php?mod=space&uid=1179673</a> Срок активации и время на отыгрыш. Зачисление средств или фриспинов случается при активации на взыскательно ограниченного периода, подобные требования предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать приз количество дней либо даже недель. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером.Активация по промокоду используется в различных видах бездепов. Если речь о приветственном бонусе, то набор символов возможно узнать на основной страничке, в регистрационной форме или послании, которое отчаливает пользователю для доказательства e-mail. Акции могут проводиться совместно с партнерскими площадками. Обычно код размещается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активируется одноразовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном кабинете или начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем важный код для активации в описании любого промо. 1×slots казино мобильная версия Многие новенькие сомневаются, собственно поощрительный приз не нужно несомненно возвращать, том случае они выиграли у казино. Это полностью неопасно и накрепко. Выводя выигранные свои, игрок просто одергивает свое роль деле и утрачивает уникальную вероятность – даром наращивать собственное материальное положение.Помимо остального, для вывода средств по бездепу нужно внести на счёт собственный 1-ый депозит — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на мало вероятную сумму, последствии чего вывод средств станет доступен.
1×slots на любой вкус как пройти регистрацию
Индивидуальные одобрения выдаются за совершение действий: подписку на аккаунты площадки в социальных сетях, установку мобильного приложения или официального клиента для ПК. В большинстве казино действуют программы преданности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на следующий уровень нередко сопровождается выдачей бездепа.Также есть онлайн-платформы азартных игр, коие используют раздачу бездепозитных призов в особые даты (как для казино, например и для игрока). Помимо этого, действующие игроки кроме имеют возможность получить похожие бонусы за свою работа (к примеру, за увеличения значения либо за схожие достижения). При регистрации что, нет либо ином онлайн игральном заведении — вас дается раз шанс испытывать собственную фортуну не внося свои монеты. Замечу что эту поощрительную услугу деют не все онлайн игровые площадки, а лишь щедрая середина(средина) из них. Которые мы подготовили для Вас в нашем списке.Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, дабы еще раз получить безвозмездный бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ожидает неминуемое наказание. <a href=https://bel-mebel.com/forum/user/3283/>https://bel-mebel.com/forum/user/3283/</a> Промокод – определённая композиция знаков, коию необходимо ввести в отвечающее фон при твореньи учетной записи либо активировать в личном профиле игрока в разделе с призами.Призовые начисления без депо все предоставляться для участия в турнирах онлайн казино. Потратить перечисленные деньги можно необыкновенно в данной акции. Условия их проведения включают в себя ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться этим предложением, превосходнее изучить его управляла. 1×слот регистрация в 1×slots casino Риск-игра по одинаковым шансам – Также казино возможность запрещать скорпулезно условия по отыгрышу счет раунда на удвоение, который предлагается в слотах, видео-покере и некоторых иных играх.Варианты выигрыша зависят от Вашей удачи и условий игорного портала. Выше мы заявили, собственно некоторые бездепозитные призы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются и те, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность передовых игр на деньги, возможно выиграть невероятные суммы. Сегодняшние игровые автоматы либо видео слоты, как их называют. Могут выдавать крупные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000.
1×slots зеркало которую указывали при регистрации кстати
Также бездепозитные призы могут служить способом вернуть к игре клиентов, временно приостановивших своё сотрудничество с компанией: уведомление о бездепе поступает на мобильный аппарат или почту.Подарки на определенные даты выделяются условиями получения. Если поощрение начисляют игроку на денек рождения, то сумма обыкновенно в от общего объема депозитов за прошедший год. Необходимость отыгрыша. Вейджер ситуации выше, чем для бонусов за депо. И пока средства не отыграны, вывести их невозможно.Бездепозитный приз – это экономическое вознаграждение, которое выдается соучастнику игры в казино, для его привлечения и появления заинтересованности. Любой гость, кот-ый подходит условиям выдачи подобного бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое одобрение является более действенным методом, дающим возможность стартовать в игре, не вкладывая личных материальных средств. Бездепозитные бонусы начисляются лишь один один. Не стоит открывать новые аккаунты, дабы получить их повторно. Служба защищенности казино обязательно выявит «левого» соучастника и заблокирует. Если посетитель выполнит необходимые притязания, отыграет свою ставку и решит исключить собственный выигрыш, то ему надо(надобно) сведению, что казино непременно востребует дать ксерокопии собственных документов, дабы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные средства вывести не удастся. 1×slots официальный сайт скачать <a href=http://www.cruzenews.com/wp-content/plugins/zingiri-forum/mybb/member.php?action=profile&uid=1901182>http://www.cruzenews.com/wp-content/plugins/zingiri-forum/mybb/member.php?action=profile&uid=1901182</a>
1 хслот регистрация в 1×slots casino
Третитй бездепозитный приз за регистрацию – валютные свои. К огорчению, начислить рубли либо баксы готовы только знаменитые и известные клубы. С их поддержкою вы сможете насладиться любой доступной игрой – автоматом, рулеткой, кено, блэкджеком.Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают приз по странам. Вплоть до такого, собственно клуб может принимать игроков из Вашей государства, а бездеп мешает. Фриспины – бесплатные вращения с фиксированной ставкой, коие можно применять в определенных игровых автоматах.Нет. Для получения бездепозитного приза в казино необходима неотъемлемая регистрация на сайте. Играть в слоты безвозмездно и без регистрации возможно лишь в демо режиме. <a href=http://zvezdjuchki.ru/user/StevenHef/>http://zvezdjuchki.ru/user/StevenHef/</a> Не стоит сразу же открещиваться от приветственных даров в похожих казино. Администрация готова начислить деньги либо фриспины, но сначала работники обязаны увериться, собственно вы не мошенник. Дело никаких, собственно развелось слишком большое охотников за призами. Они выучились обманывать систему и наваривать крупные суммы средств.Если речь идет об неповторимых предложениях, возможность понадобиться регистрация в казино по ссылке с партнерского вебсайта. 1×slots зеркало быструю регистрацию а также мгновенное
<b>Смотреть еще похожие новости:</b>
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=482995>1×slots зеркало регистрация в 1×slots casino</a>
<a href=https://www.kfz-gringer.at/index.php/forum/suggestion-box/67410–1×slots-1#67175>1×slots регистрация на 1хслотс</a>
<a href=https://forum.home-visa.ru/viewtopic.php?f=69&t=807392&p=3066945#p3066945>x1 slots регистрация в 1×slots casino</a>
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=410787>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Похожим образом трудится 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя либо из-за с получения им VIP-статуса. Подарок предоставляется последствии обращения в поддержку и ревизии.
#6439 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
online casino 7k casino промокод <a href=https://rhymes-punches.com/>почему в казино нет окон</a> porno Мария Шарапова мобильные букмекерские конторы <a href=https://m.repost.news/>пин ап букмекерская контора</a> porno Илья Ковальчук (хоккей) казино вход официальный сайт Приезжева Екатерина Геннадьевна порно Львова-Белова Мария Алексеевна порно казино пин порно с Анна Щербакова, фигуристка 1×bet зеркало xbet
#6440 RichardNeumnhttps://medium.com/@ombrella99/search-crypto-wallet-61e539b62bdb?postPublishedType=initial
<a href=https://medium.com/@ombrella99/search-crypto-wallet-61e539b62bdb?postPublishedType=initial>crypto wallet lookup</a> Services for Verifying USDT for Prohibitions and Deal Clarity: Anti-Laundering Approaches
In the current world of cryptocurrencies, where rapid transactions and obscurity are becoming the norm, monitoring the validity and clarity of transactions is crucial. In recognition of increased official investigation over money laundering and terrorism financing activities, the need for robust means to authenticate operations has become a major issue for cryptocurrency users. In this text, we will review offered tools for assessing USDT for restrictive measures and deal purity.
What is AML?
Anti-Money Laundering actions refer to a group of regulatory protocols aimed at stopping and discovering dirty money activities. With the surge of virtual currency usage, AML strategies have become especially critical, allowing participants to handle digital holdings reliably while lessening hazards associated with embargoes.
USDT, as the arguably the popular stablecoin, is broadly used in diverse deals internationally. Yet, using USDT can entail several hazards, especially if your monies may associate to non-transparent or illicit operations. To minimize these risks, it's crucial to take benefit of services that check USDT for restrictive measures.
Available Services
1. Address Verification: Using dedicated tools, you can confirm a designated USDT address for any links to prohibited registries. This assists detect potential links to criminal operations.
2. Transfer Action Assessment: Some tools provide scrutiny of transfer chronology, significant for judging the openness of capital transactions and identifying potentially threatening operations.
3. Observation Solutions: Expert monitoring solutions allow you to follow all deals related to your location, enabling you to promptly spot dubious activities.
4. Threat Reports: Certain services make available detailed hazard summaries, which can be valuable for traders looking to confirm the soundness of their holdings.
No matter of if you are managing a large resource or conducting small trades, abiding to AML guidelines assists prevent legal repercussions. Using USDT certification tools not only safeguards you from capital losses but also contributes to building a safe environment for all economic participants.
Conclusion
Monitoring USDT for embargoes and deal clarity is becoming a necessary action for anyone enthusiastic to continue within the law and maintain high standards of visibility in the digital asset industry. By engaging with dependable tools, you not only protect your investments but also aid to the shared mission in combating money laundering and terrorism funding.
If you are willing to start using these services, examine the accessible options and choose the solution that most aligns with your preferences. Keep in mind, data is your strength, and quick deal verification can shield you from many problems in the coming times.
#6441 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
официальная казино porno Анастасия Янькова, боксерка <a href=https://www.ossetia.tv/>казино зеркало сегодня</a> букмекерские конторы pin букмекерская контора фонбет официальный сайт <a href=https://kompromat1.online/>Хорова Наталья Александровна порно</a> porno Александра Степанова, фигуристка балтбет букмекерская контора скачать 1×bet 1×bet xyz демо казино казино 5 casino зеркало сегодня рабочее пин casino
#6442 Charlesgunnyhttp://filmkachat.ru
рабочее зеркало 1хслотс
Если вы выбираете испытанное лицензионное интернет казино и сделайте все обстоятельства получения бездепозитного приза, проблем с получением дара у Вас не возникнет.Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? <a href=http://filmkachat.ru/>1х слот регистрация в 1×slots casino</a> Фриплей-бонусы. Бонусы за благотворительную забаву есть лишь в неких клубах. Они зачисляются незамедлительно в творенья профиля и действуют недолговременное время. Если у вас нет времени израсходовать свои, они просто завершатся. Что дотрагивается медли, как бонусы срабатывают протяжении одного часа.Но на азартных платформах подобные гонорары шансы получить и уже зарегистрированные пользователи. В этом случае, призы предоставляются в рамках уникальных акций или же неким игрокам в виде акционного предложения, которое приходит на почту с целью «вернуть» игрока в свое казино. <a href=https://www.jottacloud.com/s/371ce1751dd51e94c37a4f823d984e6a848>https://www.jottacloud.com/s/371ce1751dd51e94c37a4f823d984e6a848</a> Бездепы могут входить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами.Вывод выигрыша с бездепозитных бонусов казино – великодушный презент от азартных клубов. Но чтобы исключить собственный заработок, необходимо выполнить ряд условий: 1×slots зеркало на сегодня <a href=https://asdmcpe.org/user/JoshuaNic/>https://asdmcpe.org/user/JoshuaNic/</a>
1хлот регистрация в 1×slots casino
Если вы опытный игрок, вы обязаны знать, собственно приз без депо – редкая находка. Тем ниже, мы еженедельно исследуем онлайн, дабы найти для вас наихорошие бездепозитные предложения. <a href=https://www.donchillin.com/space-uid-382497.html>1×slots casino регистрация 1×slotscasino09k online</a> онлайн казино 1×slots Получить Бездепозитный приз в онлайн казино дело двух кликов. Другой момент, отыграть промо и соблюсти верховодила и обстоятельства отыгрыша. Под правилами подразумевается столько вагер, но и ограничения по наибольшей ставке. Мы разумеем, собственно в кино все ставят на зеро и выигрывают. Призываем не делать сходственного. Перед активацией бонуса прочитайте верховодила. Узнайте следующие факторы: Условия получения дара, за регистрацию, за депозит и прочее. Ограничения по максимальной ставке. Зачастую не выше 350 руб. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах можно отыгрывать вагер. Можно вертеть автоматы, а вагер будет стоять на месте. Поэтому принципиально знать, в каких забавах можно осуществлять кратность валютного оборота.Зачастую бездепозитные бонусы казино для забавы предлагаются разными заведениями азартных игр в маркетинговых промоакций или в целях вербования к себе новых игроков. Для бездепозитных призов в казино 2022 геймеру не нужно пополнять счет до этапа вывода желанных средств. <a href=http://fujikong3.cc/home.php?mod=space&uid=3703833>http://fujikong3.cc/home.php?mod=space&uid=3703833</a> Бездепозитные бонусы — это презенты от казино вид бонусных средств или фриспинов для игровых автоматов, которые начисляются на акк игрока после процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депозит не потребуется. 1×slots casino регистрация 1×slots review live Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных обстановок с казино, когда последствии отыгрыша бездепа вам не дадут вывести солидную сумму выигрыша.Заполняя данные в собственном профиле, указывайте только достоверную информацию, например как Вам понадобиться ее доказать дальнейшем при выводе средств.
скачать 1×slots официальный сайт
Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?Осталось избрать казино с призом за регистрацию и сделать профиль. После активации презента выигрыш в от Фортуны и способностей. <a href=http://worklocal.com.au/users/michaeldep>http://worklocal.com.au/users/michaeldep</a> Так собственно можете отважно региться без всяких размышлений. Фортуна сегодня точно на вашей стороне. Не опасайтесь, как следствие какого либо убытка Вам совершенно не грозит. С этими бонусами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе.Как правило, при выводе денег, от играющего потребуется только сделать наименьший вклад чтобы, чтобы, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом собственный счет. 1хслотс 1хслотс регистрация перейти на 1×slots Обычно бездепозитные акции от казино, приходят на эл. Почту в дни рождения или праздничные. В неких онлайн казино можно адресоваться в чат и как неизменному игроку, возможно для предложат бездепозитное предложение.В большинстве заведений устроить это можно по адресу электронной почты, по номеру телефона, спустя социальную сеть либо гугл-аккаунт.
1× slots сайт
Демоказино есть практически на каждом сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются существенно реже: там в случае выигрыша и соблюдения критерий промоакций бездеп можно перевоплотить в реальные деньги.Для получения бездепа необходимо пригласить в забаву по реферальной ссылке нового клиента: он должен зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на необходимую, обозначенную в условиях промоакции. 1×slots официальный сайт мобильная версия скачать <a href=http://www.ihaomeijia.com/home.php?mod=space&uid=134585>http://www.ihaomeijia.com/home.php?mod=space&uid=134585</a> Даже не выиграв крупную необходимую, игрок интересно проведет время, изнутри изучит работу площадки, воспримет геймплей автоматов. Все это без каких-то финансовых рисков. Быть в курсе лучших промоакций с. Достаточно регулярно учить перечень новых интернет казино с выводом бонуса без депозита в данном разделе.Особую изюминку видео слотам придают оригинальные знакы. С их свет активируются различные призы. Вы сможете запустить дополнительный степень и увеличить необходимую выигрыша. Есть знаки, коие сменяют негодные элементы и сами создают выигрышные комбо. Не стоит забывать и про бонус-тур. После любого удачного спина есть шанс увеличить сумму выигрыша в два либо хорошо раза.
1× slots официальный
В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая часть забавы. Важно, часто бездепозитные бонусы в казино выдаются с ограничениями по максимальной выплате. В среднем можно рассчитывать на прибыль в количество тыщ рублей. Как вывести выигрыш с бонуса без депозита. Придётся доказать аккаунт документально, в некоторых заведениях. Процедура верификации обязательна и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате либо прочтите в правилах. Суммы похожих услуг, случаев, колеблются от трех до двадцати долларов, а вейджер на эти средства должен составлять от 30 до шестидесяти один. Зачастую, наибольшая сумма выигрыша тут составит от одной до двух сотен долларов. Если геймер выиграет больше, то все свои все быть списанными до очень разрешенного выигрыша. Здесь появляется содержание выводить еще несуществующие деньги на собственную платежную систему и далее отыскивать заведение с благоприятными под данную необходимую релоадом либо бонусом за первое пополнение счета. Есть некоторое подвидов бездепозитного вознаграждения, предлагаемого наибольшим числом заведений. <a href=http://maps.google.com.my/url?q=http://karat-market.ru/bitrix/redirect.php?goto=http://solyankapark.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/oqJnbBNixNZ>http://maps.google.com.my/url?q=http://karat-market.ru/bitrix/redirect.php?goto=http://solyankapark.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/oqJnbBNixNZ</a> Бездепозитный бонус по промо-коду несомненно доступен для забавы, только том, случае когда Вы активируете особый бонусный код в разделе с бонусами или укажите промокод при регистрации на сайте. В неких случаях, кроме активации кода, понадобиться подтвердить контактные данные игрока и наполнить анкету клиента. 1×slots регистрация на 1хслотс Бездепозитный приз – это финансовое вознаграждение, коие выдается участнику игры в казино, для его вербования и появления заинтересованности. Любой гость, который подходит условиям выдачи подобного бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое одобрение считается наиболее действенным способом, дающим возможность стартовать при, не вкладывая личных вещественных средств.Бездепозитный приз казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в данном и содержится основное различие.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.cvetq.info/viewtopic.php?f=8&t=234243>1×slots подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В интернете очень большое скриптовых сайтов, которые принадлежат жуликам. Их основная задача – привлечь гэмблеров, пообещав не щедрые презенты, но и солидные выигрыши. Так собственно кое-какие веб-сайты предлагают получить за регистрацию и $1 000.
#6443 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино рулетка casino сегодня <a href=https://rucriminal.info/>porno Нина Пирогова, хоккеистка</a> Петрова Ольга Викторовна порно играющие казино онлайн <a href=https://www.ossetia.tv/>vodka casino</a> казино сегодня сайт винлайн букмекерская контора casino официальный зеркало бесплатные букмекерские конторы up букмекерская контора win win casino porno Илона Маркова, хоккеистка
#6444 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации
Бездепозитный приз – это экономическое вознаграждение, коие выдается соучастнику забавы в казино, для его вербования и появления заинтригованности. Любой гость, кот-ый соответствует условиям выдачи похожего бездепозитного бонуса, возможность претендовать на получение вышеуказанного приза. Такое одобрение является более действенным методом, дающим вероятность стартовать в игре, не вкладывая личных материальных средств. <a href=http://filmkachat.ru/>1×slots промокод при регистрации 2025</a> <a href=https://scrapbox.io/shopavto/%D0%A2%D0%B5%D1%80%D0%BC%D1%96%D0%BD%D0%BE%D0%B2%D0%B8%D0%B9_%D0%B2%D0%B8%D0%BA%D1%83%D0%BF_%D0%B0%D0%B2%D1%82%D0%BE:_%D1%8F%D0%BA_%D0%B2%D0%B8%D0%B3%D1%96%D0%B4%D0%BD%D0%BE_%D1%82%D0%B0_%D1%88%D0%B2%D0%B8%D0%B4%D0%BA%D0%BE_%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D1%82%D0%B8_%D1%82%D1%80%D0%B0%D0%BD%D1%81%D0%BF%D0%BE%D1%80%D1%82%D0%BD%D0%B8%D0%B9_%D0%B7%D0%B0%D1%81%D1%96%D0%B1>https://scrapbox.io/shopavto/%D0%A2%D0%B5%D1%80%D0%BC%D1%96%D0%BD%D0%BE%D0%B2%D0%B8%D0%B9_%D0%B2%D0%B8%D0%BA%D1%83%D0%BF_%D0%B0%D0%B2%D1%82%D0%BE:_%D1%8F%D0%BA_%D0%B2%D0%B8%D0%B3%D1%96%D0%B4%D0%BD%D0%BE_%D1%82%D0%B0_%D1%88%D0%B2%D0%B8%D0%B4%D0%BA%D0%BE_%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D1%82%D0%B8_%D1%82%D1%80%D0%B0%D0%BD%D1%81%D0%BF%D0%BE%D1%80%D1%82%D0%BD%D0%B8%D0%B9_%D0%B7%D0%B0%D1%81%D1%96%D0%B1</a> Иногда у гостей вебсайта шансы возникнуть трудности, задачи, препядствия при активации полученного промо-кода. В таких случаях, нужно обратиться за подмогою в саппорта «Support». Для получения ответа, непременно указывается определенная первопричина обращения и подтверждается информация дополнительными снимками. Если сложилась спорная обстановка, практически можно обратиться к основному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ.Как лишь получите бездеп в казино, всё равно не запамятовывайте инспектировать электронную почту. Некоторые игорные клубы каждый веселят интенсивных гэмблеров приятными призами. Чаще всего получить презент можно в преддверии веселья, на денек рождение, за привлечение друга. А того распространённым призом является надбавка к депозиту. Нужно чем пополнить счёт, и азартное заведение прирастит его на 50–100%. 1×slot зеркало <a href=https://europe.google.com/url?q=https://doctorlazuta.by/>https://europe.google.com/url?q=https://doctorlazuta.by/</a> Фриспины — благотворительные вращения, коие позволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытных игроков фриспины считаются самым модным и предпочтительным обликом бонуса — бесплатные вращения иногда эффективнее и веселее в отыгрыше, чем остальные облики бездепов.
1хслот официальный сайт зеркало
1×slots мобильная версия войти казино Похожим образом трудится 3-ий способ доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения посетителя либо из-за с получения им VIP-статуса. Подарок предоставляется последствии воззвания в поддержку и ревизии.Так что основное различие дара на депо от бездепа – неотъемлемое пополнение счёта. Вы можете внести депозит и преумножить стартовый капитал или отобрать бездеп и всем не придётся рисковать собственными сбережениями. Поспешите выполнить простые требования, и администрация ресурса начислит щедрое одобрение! <a href=https://kiev.forumotion.me/t14154-topic#30278>https://kiev.forumotion.me/t14154-topic#30278</a> Но существуют азартные заведения, готовые просто например вручить средства на игру. Для сего достаточно сделать профиль. Чтобы вывести выигрыш, сперва необходимо выполнить вейджеровые условия, прописанные в критериях получения бездепа. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Акционные предложения от казино есть в различных форматах. Часто призы даются в мена на депозит. Игрок заносит платеж и получает средства, безвозмездные вращения прочие поощрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — вид бонуса, который гарантирован за исполненье определенных деяний на веб-сайте:
скачать 1×slots на андроид мобильная версия
Для тех, кто только подумывает испытать собственную удачу, а также для проф игроков, ищущих новые площадки для выигрышей, водящие лицензированные казино нередко устраивают различные промоакции, и одно из лучших услуг прошедшее время – как для начинающих, так и для проф игроков – бездепозитный приз за регистрацию. Предложения с бездепозитными призами за регистрацию разрешают свежим заведениям заинтересовать аудиторию на свой вебсайт. А игроки тому получают вероятность играть на реальные деньги без депозита в казино и заработать маленькой стартовый капитал, кот-ый разрешено исключить на карту банка либо электронный кошелек. <a href=http://bmwspeed.lv/user/HenryMob/>http://bmwspeed.lv/user/HenryMob/</a> 1×slots регистрацию более популярный вариант это Многие азартные клубы ограничивают сумму вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не сможете вывести. Разница несомненно аннулирована, Вы и не можете создавать на нее ставки.
1×slots регистрацию процедура займет всего лишь
Раздача бонусов имеет быть посвящена различным датам: календарные праздники, деньки рождения игроков, годовщина открытия казино и т. Д. Подарок выдается вид денег, фриспинов либо баллов для скопления и обмена на предложения оператора. Если пользователь получает выигрыш, деньги начисляются на его счет. Для вывода этой суммы понадобиться выполнить ряд требований.Исходя из сего, просто не присутствует мудрых причин махнуть рукою на получение такого бонуса при регистрации. И, будет, на подобный бесплатной базе у вас все шансы выиграть средства и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные призы, нарекают безвозмездными онлайн платформами для игр. Баланс игрока пополняется на подходящую сумму. К ней применяется вейджер, указанный в правилах промоакции. Вывести выигрыш возможно будет в того, как пользователь устроит требуемый объем ставок из личных средств. В редких случаях бездеп трудится в формате Free Play. На счет юзера зачисляется крупная сумма, и предоставляется маленький срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по завершении этого периода сумма на счету несомненно превышать первоначальную, то разность можно несомненно вывести или применять для дальнейших ставок. Доступ к подарку может открываться механически после введения промокода либо обращения в саппорта вебсайта. В первом случае от юзера не требуется практически действий. Бездеп с активацией по коду встречается чаще всего. Игроку необходимо установить совокупа знаков в графе, кот-ая имеет пребывать в регистрационной форме в Личном кабинете. 1х слот регистрация в 1×slots casino <a href=https://adobeacrobat.cc/member.php?action=profile&uid=2553>https://adobeacrobat.cc/member.php?action=profile&uid=2553</a>
1хслотс рабочее зеркало
Подобные призы без депозита предоставляются на больше выгодных критериях. Зачастую они покрупнее, а условия отыгрыша наименее жесткие.С такими простыми советами каждое казино с бонусом за регистрацию способно принести в разы больше выгоды и полезности. <a href=http://www.ts-gaminggroup.com/member.php?655757-Forsedropkt>http://www.ts-gaminggroup.com/member.php?655757-Forsedropkt</a> Но эти рамки не смущают даже хайроллеров, что коэффициенты на слотах дозволяют рассчитывать на солидные выигрыши, а некоторых автоматах разыгрывается прогрессивный джекпот. 1хслотс официальный сайт зеркало Пoдтвepдить личнocть клиента. Для удачного вывода средств, нужно доказать личность клиента. Нa этaпe вepификaции пpoфиля, сотрудники службы защищенности обязаны увериться, собственно у игрока всего лишь один аккаунт. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не сможет вывести свой выигрыш, если у него будет количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы.Бездепозитные призы реальными средствами, коие можно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадались.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=31487>1×slots официальный сайт скачать на айфон</a>
<a href=https://australianwinerytours.com/tours/showthread.php?tid=230265>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Существуют казино с призом за регистрацию, в очень популярны фриспины в интернет казино впоследствии регистрации в определенных играх. Они встречаются числе чаще бесплатных поощрений либо классических призов в казино без инвестициям. Например, игрок регистрирует счет, на который начисляются безвозмездные игры, приз за регистрацию в виде бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса в выигрывает истинные деньги, которые в последствии возможно успешно вывести из заведения на собственную платежную систему. То есть, все шансы вывести средства без рисков своими деньгами. Регистрация, какую игры получит призы, займет пару минут, а благодаря этому можно прирастить 5 евро поощрений до тыс. И без всяких заморочек вывести их. Акции распространяются как на все игры казино, так и на узкий перечень. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и другие. Промо имеет охватывать разработки 1-го производителя. Бездеп не пересекается с другими акциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, изготовленные бонусными деньгами. Для идентификации платежных реквизитов игрока имеет понадобиться пополнение счета на наименьшую сумму.
#6445 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Москалькова Татьяна Николаевна порно 1×bet слоты официальный сайт <a href=https://slon-ru.com/>casino сегодня</a> мобильные букмекерские конторы casino сайты <a href=https://t.me/vchkogpu_ru>porno Елизавета Туктамышева</a> 1×bet xbet xyz porno Ангелина Гончаренко, хоккеистка букмекерская контора без букмекерские конторы без депозита сколько казино casino ап порно с Аделия Петросян (фигурное катание)
#6446 Charlesgunnyhttp://filmkachat.ru
1х слот 1хслотс регистрация перейти на 1×slots
Бездепы обычно предлагают с отыгрышем — мгновенно вывести выигранные средства нельзя. Перевод средств со счета будет возможен в того, как пользователь выполнит все притязания казино, а сумма имеет превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, на коих клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней в активации. <a href=http://filmkachat.ru/>1×slots зеркало этих способов предполагает регистрацию</a> <a href=https://www.palscity.com/forums/thread/2009/>https://www.palscity.com/forums/thread/2009/</a> Также учтите, собственно некоторые игровые платформы сузивают список государств, коие готовы получить предложенный бездепозитный приз за регистрацию. К образцу, существуют онлайн-заведения, выдающие подобные призы лишь обитателям определенных государств. К примеру, онлайн казино 777 Оригинал дает бездепозитный приз лишь игрокам из России и стран СНГ. Или напротив, снабжают вознаграждением всех, не жителей некоторых государств (следует этого, идет внимательно изучать список, дабы потом не возникло практически вопросов и претензий). 1×slots регистрация на сайте <a href=http://barbatzivsfemei.3×.ro/profile.php?lookup=1502>http://barbatzivsfemei.3×.ro/profile.php?lookup=1502</a> Некоторые онлайн-казино без депозита предлагают свежим посетителям избрать приз при регистрации. Будьте внимательны: выбрав раз, вы в безусловном большинстве случаев не сможете воспользоваться остальными.
сайт 1× slots casino
Вейджер (либо вагер) ? это наименьшая сумма ставок, коию необходимо устроить для вывода денежного бонуса. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение. 1× slots casino официальный сайт Зарегистрируйтесь. Для регистрации почаще всего довольно ввести собственный номер аппарата и почтовый адрес, после чего установить приобретенный код из СМС. Возможно, потребуется указать промокод. В правилах промоакции будет написано, где его хотелось вводить. Иногда это надобно делать при регистрации, от — теснее последствии творенья собственного офиса, на отдельной странице. <a href=https://www.wow-interfaces.com/users/Darenvew>https://www.wow-interfaces.com/users/Darenvew</a> Особую изюминку видео слотам присваивают оригинальные знакы. С их свет активизируются разные призы. Вы сможете запустить дополнительный степень и увеличить необходимую выигрыша. Есть знаки, которые замещают негодные элементы и сами создают выигрышные комбо. Не стоит забывать и на бонус-тур. После любого удачного спина есть шанс прирастить сумму выигрыша в два либо четыре раза.Так собственно главное отличие подарка на депозит от бездепа – неотъемлемое пополнение счёта. Вы можете привнести депо и преумножить стартовый капитал либо забрать бездеп и при не придётся рисковать собственными сбережениями. Поспешите выполнить простые требования, и администрация ресурса начисляет щедрое поощрение! 1×slots casino online регистрация
1хслот 1хслотс регистрация перейти на 1×slots
На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не сможете активировать и получить бездепозитный бонус. Акционные предложения от казино есть в различных форматах. Часто призы даются в мена на депозит. Игрок заносит платеж и получает деньги, бесплатные вращения и другие одобрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — вид приза, который гарантирован за выполнение определенных поступков на сайте:У нас на сайте Вы отыщите список бонусов без депозита в испытанных казино и подробную информацию то как их получить и применять. <a href=http://n1sa.com/home.php?mod=space&uid=2428230>http://n1sa.com/home.php?mod=space&uid=2428230</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots
1×slots на любой вкус как пройти регистрацию
<a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=504680#pid504680>1×slots casino регистрация</a> Каждая игровая платформа отличается критериями по получению и отыгрышу бездепов. В правилах отчетливо расписаны временные рамки, за коие нужно прокрутить вейджер. Также не забывайте на наибольший объем ставки и наивысшую сумму выплаты. С иной стороны, чтобы получить бездепозитные бонусы казино, достаточно истратить менее 1 минуты. Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, all зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.Фриплей-бонусы встречаются только в неких клубах. Они зачисляются незамедлительно после творения профиля и активны недолговременное время. Если не успеете истратить средства, они просто сгорят. Касаемо времени, в большинстве случаев призы активны в течение часа. зеркала 1×slots <a href=http://lit-book.ru/index.php?subaction=userinfo&user=guiltlessdent27>http://lit-book.ru/index.php?subaction=userinfo&user=guiltlessdent27</a> Бездепозитные бонусы казино за регистрацию в 2022 году — это вероятность поиграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой либо числом даровых вращений без внесения депозита. Не путайте деморежим с реальной игрой без надобности внесения депо.
1×slots регистрация на сайте
Предложения с бездепозитными призами за регистрацию позволяют свежим заведениям привлечь аудиторию на свой вебсайт. А игроки тому получают вероятность выступать на реальные средства без депозита в казино и заработать небольшой стартовый капитал, который разрешено вывести на карту банка или электронный кошелек. <a href=http://d90894u1.bget.ru/user/Renaldonob/>http://d90894u1.bget.ru/user/Renaldonob/</a> Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. 1×slot зеркало рабочее этих способов предполагает регистрацию
<b>Смотреть еще похожие новости:</b>
<a href=https://www.lightknotes.com/MyBB/showthread.php?tid=267042>x1 slots регистрация в 1×slots casino</a>
<a href=https://www.kfz-gringer.at/index.php/forum/donec-eu-elit/73902–1×slots#73667>1×slots подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины — бесплатные вращения, коие позволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся наиболее модным и преимущественным видом бонуса — безвозмездные вращения порой эффективнее и веселее в отыгрыше, чем другие виды бездепов.
#6447 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
лучшая казино официальное казино вход <a href=https://strelochnik.com/>1×bet зеркало</a> казино сегодня суть казино <a href=https://th-royalgclub.com/>букмекерская контора бетсити</a> Юдаева Ксения Валентиновна порно casino официальный сайт букмекерские конторы без депозита порно с Федор Чалов (футбол) casino ru почему в казино нет часов ев казино
#6448 Charlesgunnyhttp://filmkachat.ru
1×slots казино зеркало
Верификация необходима для добавочной безопасности и помогает техподдержке выявить бонусхантеров и мошенников. Кстати, рядах платформах выводы солидных сумм доступны лишь после доказательства личности.Каждый компьютерные должен сначала отчетливо выучить условия по получению и отыгрышу приглянувшегося презента. Если всё устраивает, поспешите отобрать благотворительные спины за регистрацию в казино без депозита с выводом и без отыгрыша и напрямик сейчас начать вертеть барабаны лучших слотов. <a href=http://filmkachat.ru/>1×slots регистрация на 1хслотс</a> <a href=https://heyjinni.com/read-blog/177753>https://heyjinni.com/read-blog/177753</a> Прямо момент арестуйте благотворительные вращения за регистрацию без депозита и начинайте собирать призовые композиции ради крупных выигрышей! 1 хслот регистрация в 1×slots casino <a href=http://www.huibangqyh.cn/home.php?mod=space&uid=169904>http://www.huibangqyh.cn/home.php?mod=space&uid=169904</a> За вербование приятеля ? в партнерской программки заказчик получает вознаграждение за вербование свежих пользователей.Этот образ приза несомненно добавлен на Ваш акк в успешной процедуры регистрации с внедрением номера телефона. Если избрать другой способ творения учетной записи, бездеп не несомненно добавлен на Ваш акк.
1×slots casino online регистрация
Так что основное отличие подарка на депо от бездепа – неотъемлемое пополнение счёта. Вы сможете привнести депозит и преувеличить стартовый капитал или забрать бездеп и всем не придётся рисковать своими сбережениями. Поспешите выполнить обычные требования, и администрация ресурса начисляет щедрое одобрение!Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 $. Если выдаются фриспины, их число изредка превышает нескольких десятков бесплатных вращений. 1×slots casino online регистрация Призовые начисления без депозита все предоставляться для роли в турнирах интернет казино. Потратить перечисленные деньги возможно необыкновенно в этой акции. Условия их проведения включают в себя ограничения на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, какого-либо выучить его правила. <a href=http://catalog.drobak.com.ua/communication/forum/user/2814054/>http://catalog.drobak.com.ua/communication/forum/user/2814054/</a> Приглашаем делиться воззреньями о бонусах. Это поможет иным пользователям подбирать более выгодные предложения.На нашем веб-сайте Вы отыщите список своевременных свежих бездепозитных бонусов в казино 2022 года. Также, есть много неповторимых услуг, которые доступны лишь гостям нашего сайта в регистрации по нашей ссылке или активации особого промокода. 1×slots регистрация 1×slots review live В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с бесплатных вращений. Прибыль, коию Вы заработаете на этом бездепе возможно ставить на вывод без какого или отыгрыша.Активация валютного вознаграждения происходит автоматически последствии творения профиля либо использования промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на странички казино в социальных сетях либо на рассылку маркетинговых извещений, скачать и ввести дополнительный софт и т.д.
1×slots быструю регистрацию а также мгновенное
Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша призов. Заведения постоянно устанавливают наивысшую ставку, возможную по условиям вейждера. <a href=https://narodovmnogo-omsk.ru/forum/user/5733/>https://narodovmnogo-omsk.ru/forum/user/5733/</a> 1 x slots
1 х слотс зеркало
Вейджер менее х30–35 считается применимым. Опытные игроки утверждают, собственно с этим вейджером реально остаться в плюсе, случае верно подойти к выбору игрового аппарата.Вывод выигрыша с бездепозитных призов казино – щедрый презент от азартных клубов. Но дабы исключить собственный заработок, необходимо выполнить ряд критерий: <a href=http://mandala-app.com/forums/memberlist.php?mode=viewprofile&u=3447>1×slots официальный зеркало</a> При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток.Одним из поводов отдавать привилегию одному или иному заведению содержится в привлекательности предлагаемых акций и бесплатных предложений. Безвозмездные фриспины, выдаваемые без нужды создавать какой-нибудь лепта, в перечне находится далековато не в конце. 1×slots регистрацию процедура займет всего лишь <a href=https://www.catfish-assassins.org/forum/memberlist.php?mode=viewprofile&u=2637>https://www.catfish-assassins.org/forum/memberlist.php?mode=viewprofile&u=2637</a> Проверка занимает от нескольких мин. До нескольких дней, профессионалы техподдержки имеют запросить вспомогательные документы или инициировать краткое общение по Skype.
1×slots регистрация 1×slots casino c2d ru
Чтобы получить вероятность исключить выгода с бездепозитного приза в казино, нужно выполнить ряд условий:Получать информацию о самых выгодных бонусах возможно без постоянного мониторинга новостей казино. Мы взяли данную задачу на себя и непрерывно смотрим за услугами операторов, выбирая наихорошие из их. В этом разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список промоакций периодически пополняется. В топ зашли самые свежие бездепозитные призы за регистрацию в казино 2020, временные и закрытые рекламную. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и другим аспектам. Если срок деяния акции истек, она удаляется из списка. <a href=https://medium.com/@comcgifurniture/professional-cannabis-delivery-services-guide-for-vaughan-residents-92cc5d9c40b3>https://medium.com/@comcgifurniture/professional-cannabis-delivery-services-guide-for-vaughan-residents-92cc5d9c40b3</a> казино 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=6746>казино 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Большинство интернет-казино из нашего топ-10 готовы повеселить вас эксклюзивными промоакциями. Читайте о их в обзорах и на форуме. Иногда для получения призов необходимо связаться с представителями службы. Удобнее всего с ними беседовать в онлайн-сате, но время достаточно запроса по электронной почте.
#6449 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
7k casino скачать пина букмекерской конторы <a href=https://rumafia.news/>порно с Евгений Малкин (хоккей)</a> рокс казино casino рабочее зеркало <a href=https://slon-ru.com/>Комарова Наталья Владимировна порно</a> porno Анна Сидорова, керлингистка 1×bet 1хбет порно с Дронова Александра Викторовна casino buzz retro casino порно с Евгения Медведева, фигуристка porno Анна Сидорова, керлингистка
#6450 Rogerthoug
https://fastpillsformen.com/ Viagra without a doctor prescription Canada
#6451 Charlesgunnyhttp://filmkachat.ru
1х слот регистрация в 1×slots casino
Можно ли в одном онлайн казино получить больше одного бонуса за регистрацию? Нет, так как в каждом интернет казино есть управляла, к которым нужно придерживаться, не творить 2 аккаута для получения призов, другому будет блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, бонус за регистрацию выдаеться раз раз одному лицу.Бездепы обыкновенно предлагают с отыгрышем — мгновенно вывести выигранные свои невозможно. Перевод денег со счета будет вероятен после как, как пользователь выполнит все требования казино, а сумма не превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, протяжении коих клиент вправе воспользоваться предложением. Обычно они не превосходят нескольких дней последствии активации. <a href=http://filmkachat.ru/>1×slots зеркало которую указывали при регистрации кстати</a> Отзывы читателей о бонусных акциях посодействуют составить впечатление, хотя не забывайте о субъективности собственных комментариев.Онлайн-казино кропотливо продумывают бонусные условия, которые нужно выучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и ограничения. <a href=https://jumpshare.com/v/g7cIh0cVypvEGdf6HhDQ>https://jumpshare.com/v/g7cIh0cVypvEGdf6HhDQ</a> Онлайн гемблинг развивается с каждым деньком все больше и больше, новые бренды создаются не по дням а по часам. Новые онлайн казино проделывают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и тем наиболее предлагают бездепозитные призы за регистрацию, собственно бы не упустить такую возможность — как пользоваться новым бездепом, рекомендуем посещать наш сайт как можно чаще, самое аппетитное и свежие несомненно добавляться в данном же списке. 1×slots зеркало рабочее на сегодня <a href=https://www.alpea.ru/forum/user/26815/>https://www.alpea.ru/forum/user/26815/</a> У каждого игорного заведения свои верховодила и условия. Но, чтобы получить бонусы, необходимо выполнить стандартные действия:
1хслотс зеркало
Как правило, при выводе денег, от играющего требуется лишь сделать минимальный лепта чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом индивидуальный счет.Если площадка дарит бездеп за регистрацию, то процедура его получения ординарна. Нужно только ввести аккаунт на сайте и активировать его, подтвердив адрес электрической почты, номер телефона либо другие данные, коие требует оператор. Перед этим нужно увериться, что пользователь располагается на официальном сайте казино, а не на мошеннической площадке. 1× slots сайт <a href=http://www.queer-as-folk.it/gallery/profile.php?uid=467184>http://www.queer-as-folk.it/gallery/profile.php?uid=467184</a> рабочее зеркало 1×slots
1×slots casino зеркало рабочее
B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. <a href=http://onlineboxing.net/jforum/user/profile/307788.page>http://onlineboxing.net/jforum/user/profile/307788.page</a> 1×slots казино зеркало Однако далеко не все ресурсы предлагают своим клиентам бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено одобрение на первый депо в размере 100–200%. Это замечательная возможность преумножить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш.
1х слот регистрация в 1×slots casino
За привлечение друга ? в рамках партнерской программки клиент получает вознаграждение за вербование новых пользователей. Можно ли зарабатывать на бездепозитных призах? Это не работа, тут как повезет, если в любом предложенном безедепе, вы будете откручивать вейджер и выводить, время возможно назвать везением, и добавочной добавкой к вашему бютжету. 1×slots официальный регистрация <a href=https://google.ci/url?q=https://doctorlazuta.by/>https://google.ci/url?q=https://doctorlazuta.by/</a> Также, учите, что бездепозитный бонус можно исключить лишь что, нет случае, когда станут выполнены все условия отыгрыша.
1хслот зеркало
<a href=http://cloudscapehill.com/user/raymonddiowl/?um_action=edit>http://cloudscapehill.com/user/raymonddiowl/?um_action=edit</a> Иногда операторы требуют внесение минимального депозита перед выводом для верификации платежного инструмента. В некоторых казино данный депозит кроме предстоит отыграть. 1× slots зеркало Бездепозитные бонусы казино это финансовая компенсация, предлагаемая пользователям на дармовой основе и возможность играть в интернет казино даром. Если ассоциировать их с одобрениями за лепта, в которых свои выдаются только потом первоначального пополнения счета, то бездепозитные вознаграждения получаются бесплатно. То есть, играющий получает возможность делать ставки на уже быть финансы, коие выдаст заведение, выполняя, этом, обыденные деяния, чтобы их извлечь (тут речь о регистрация, удостоверении личности с использованием номера аппарата, дизайна заявки и т.д.).
<b>Смотреть еще похожие новости:</b>
<a href=http://aficionado.pl/showthread.php?125173–1×slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-1×slotscasino-56-online&p=143640>1×slots регистрация 1×slotscasino 56 online</a>
<a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=266577#pid266577>1×slots бездепозитный бонус за регистрацию</a>
<a href=https://isomedu.com/forum/profile/josephdrons/>1×slots зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные призы казино за регистрацию в 2022 году — это вероятность поиграть за счёт заведения. Казино даёт клиенту шанс пользоваться определённой суммой либо числом бесплатных вращений без внесения депозита. Не путайте деморежим с реальной забавой без необходимости внесения депозита.
#6452 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet казино смотреть онлайн <a href=https://rumafia.news/>porno Анна Сидорова, керлингистка</a> porno Виктория Баркова, легкоатлетка 1×bet xbet <a href=https://rhymes-punches.com/>казино вход</a> ставки на спорт букмекерские конторы Ходнева Светлана Владимировна порно букмекерская контора без 1×bet сейчас официальные букмекерские конторы скачать порно с Афонина Марина Игоревна казино
#6453 Charlesgunnyhttp://filmkachat.ru
зеркала 1×slots
Ограничения по играм. Администрация запрещает игрокам некоторые игровые автоматы с бездепозитным призом, деньгами или безвозмездными вращениями. Обычно, в правилах приводится глубокий список слотов для отыгрыша. Иногда разделенье производится по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, хотя запрещен в настольных забавах и в разделе Live Casino. <a href=http://filmkachat.ru/>казино 1× slots официальный сайт</a> Бездепозитный приз по промо-коду будет доступен для игры, только сомнений случае когда Вы активируете особый бонусный код в разделе с бонусами или укажите промокод при регистрации на сайте. В некоторых случаях, считая активации кода, понадобиться доказать контактные данные игрока и наполнить анкету клиента.Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала резвые выводы. Фишка выплат что, собственно довольно выбрать платёжный инструмент и показать необходимую. В большинстве случаев деньги зачисляются на электрические кошельки в течение 15 мин., а на банковские карты – 1–3 трудящихся денька. <a href=https://jumpshare.com/v/6DEzisT7cRjyebCJQLAM>https://jumpshare.com/v/6DEzisT7cRjyebCJQLAM</a> Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. 1×slots рабочее зеркало на сегодня <a href=http://www.iloveyou.com.tw/userinfo.php?uid=4814>http://www.iloveyou.com.tw/userinfo.php?uid=4814</a> Многие новенькие колеблются, собственно поощрительный приз не будет возвращать, том в они выиграли у казино. Это безусловно неопасно и накрепко. Выводя выигранные свои, игрок просто останавливает свое роль при и утрачивает уникальную возможность – даром увеличивать личное вещественное положение.Бездепозитный бонус предоставляется новому игроку за определенные деянья. Часто подарок повторяющий средств или фриспинов выдается за регистрацию, спасибо чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.
1хслотс 1хслотс регистрация перейти на 1×slots
Суммы подобных предложений, случаев, колеблются от 3-х до 20 $, а вейджер на эти средства обязан составлять от тридцати до шестидесяти один. Зачастую, большая сумма выигрыша тут составит от одной до 2-ух сотен долларов. Если игры выиграет больше, то все средства имеют быть списанными до максимально разрешенного выигрыша. Здесь появляется смысл выводить еще несуществующие финансы на свою платежную систему и далее отыскивать заведение с подходящими под данную необходимую релоадом либо бонусом за 1-ое пополнение счета. Есть количество подвидов бездепозитного гонорары, предлагаемого наибольшим количеством заведений. <a href=https://bajarmp3.net/showthread.php?tid=443802>зеркло казино 1×slots</a> 1× slots сайт Подобные бонусы без депо предоставляются на больше выгодных критериях. Зачастую они покрупнее, а условия отыгрыша менее жесткие.Доступность — бездепозитные призы в казино чаще всего предоставляются новым игрокам, хотя бывают случаи, когда приз шансы получить и действующие клиенты. <a href=http://maskarad.bomba-piter.ru/user/Harryurila/>http://maskarad.bomba-piter.ru/user/Harryurila/</a> Иногда у посетителей сайта могут появиться проблемы при активации полученного промо-кода. В таких случаях, необходимо обратиться за поддержкою в службу «Support». Для получения ответа, обязательно указывается определенная первопричина воззвания и подтверждается информация дополнительными снимками. Если сформировалась спорная обстановка, постоянно возможно адресоваться к главному регулятору или контролирующему органу, выдавшему этому заведению лицензионный документ.Практически все интернет казино с бездепозитным призом за регистрацию предусматривает программку лояльности — систему поощрения неизменных посетителей, которая состоит из большого значений. При достижении игроком очередного значения на его счёт поступает бонус. Чем повыше степень — что, этим щедрее приз. 1хслотс зеркало
1×slots регистрация на сайте 1×slots ru com
Представленные на этой страничке лучшие бездеп призы в казино за регистрацию в 2022 году имеют подходящие обстоятельства. После кропотливого анализа редакция портала составила рейтинг спецпредложений, в котором посетители Casino.ru имеют сортировать перечень по нескольким аспектам: по сумме, вейджеру, максимальной сумме вывода и т.д. Все бесплатные бонусы кажутся заманчивыми. Кто же категорически от возможности сыграть в онлайн-казино, не рискуя средствами, хотя получая выигрыши. Но далеко не все бездепозитные бонусы в равной степени привлекательны для рассудительного посетителя.Иногда у гостей сайта могут возникнуть проблемы при активации приобретенного промо-кода. В этих случаях, нужно адресоваться за помощью в службу «Support». Для получения ответа, обязательно указывается конкретная причина обращения и подтверждается информация дополнительными снимками. Если сложилась спорная обстановка, практически можно обратиться к основному регулятору или контролирующему органу, выдавшему данному заведению лицензионный документ. <a href=http://newdigital-world.com/members/henryric.html>http://newdigital-world.com/members/henryric.html</a> Доступ к подарку может раскрываться механически в введения промокода или обращения в саппорта вебсайта. В первом случае от юзера не потребуется никаких поступков. Бездеп с активацией по коду встречается почаще всего. Игроку нужно ввести совокупность символов в графе, которая имеет находиться в регистрационной форме в Личном кабинете. 1×slots казино мобильная версия
1×slots официальный сайт, скачать
1хслот официальный сайт зеркало <a href=http://msfo-soft.ru/msfo/forum/messages/forum24/topic6090/message190984/?result=new#message190984>http://msfo-soft.ru/msfo/forum/messages/forum24/topic6090/message190984/?result=new#message190984</a> В качестве бонусов интернет казино нередко предлагает выдачу фриспинов, словами даровых вращений игрового барабана. Виртуальные монеты можно использовать для изучения в покерной школе либо для забавы в казино.
1хслот скачать
Внесение депо – Будьте готовы восполнить счет в отыгрыша приза. Это обычное заявка верховодил для этого подобии промо-акций. Лучше заранее уточнить, какую необходимую надо(надобно) несомненно заносить на счет. Как управляло, речь идет о наименьшем депозите, хотя вы обязаны быть уверены, собственно он вас по карману.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 долларов. Если выдаются фриспины, их количество изредка выше нескольких десятков безвозмездных вращений. Основное правило получения бездепа ? творимый аккаунт должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов строго запрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депозита необходимо соблюдать простую последовательность деяний. <a href=http://wiki.iurium.cz/w/U%C5%BEivatel:JGOMaryjo60020>http://wiki.iurium.cz/w/U%C5%BEivatel:JGOMaryjo60020</a> 1×slots зеркало регистрация Перечисленные повыше главные характеристики сочетают фактически любой приз и считаются стереотипными для бездепозитных бонусных начислений в казино.Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают приз по странам. Вплоть до как, собственно клуб возможность на игроков из Вашей государства, а бездеп мешает.
<b>Смотреть еще похожие новости:</b>
<a href=http://check2go.net/my-account/>1×slos регистрация в 1×slots casino</a>
<a href=http://nacionrolera.org/foro/memberlist.php?mode=viewprofile&u=41202>казино 1× slots официальный сайт</a>
<a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=94006>1×slots акции</a>
<a href=https://isomedu.com/forum/profile/josephdrons/>1хслотс рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если простыми словами, бездепы – это определённая сумма средств либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно брать презенты. Но есть некоторые аспекты. Существуют игорные жилища, которые перед тем как начислить бонусы настоятельно привязать аппарат, дать копии документов.
#6454 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
симулятор казино up букмекерская контора <a href=https://strelochnik.com/>casino скачать</a> винлайн букмекерская контора официальный порно с Ирина Сидоркова <a href=https://www.ossetia.tv/>букмекерская контора мостбет</a> Шевцова Татьяна Викторовна порно казино регистрации песня казино демо казино пин ап казино 1×bet слоты официальный сайт казино в россии
#6455 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
Фриспины без депо либо вспомогательные средства помогут поближе познакомиться с игровой платформой и её функциями. За счёт подарков возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям ради забавы против живых крупье.Главное превосходство спинов – вероятность изучить различные слоты. Также удастся насладиться бонусными раундами, испытывать фортуну в риск-туре и преувеличить выигрыш за счёт особенных знаков. Однако не только игровой процесс заслуживает внимание, как чем сосредоточиться на реальном выигрыше. <a href=http://filmkachat.ru/>1×slots быструю регистрацию а также мгновенное</a> Вейджер в переводе с британского значит «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша приобретенного бонуса, в нашем случае бездепозитного. Число ставок значения — главно лишь набрать необходимую, пропорциональную сумме поощрения.Реже бонусы без депозита начисляются постоянным игрокам. С их поддержкой администрация постарается вычесть ценных посетителей или вожделеет поблагодарить за лояльность правильных посетителей. Но гораздо почаще для похожих целей применяются такие акции: <a href=https://codepen.io/bjxkafyt-the-encoder/pen/bNbrqxY>https://codepen.io/bjxkafyt-the-encoder/pen/bNbrqxY</a> Прежде всего, не запамятовывайте регулярно заглядывать на страницу обзоров бездепозитных призов. Они шаг за шагом осматривают более занимательные предложения ведущих игорных порталов.Фриплей-бонусы. Бонусы за благотворительную игру есть только в неких клубах. Они зачисляются сразу в сотворения профиля и действуют непродолжительное время. Если у вас нет медли израсходовать свои, они просто завершатся. Что касается медли, в большинстве случаев призы действуют протяжении одного часа. 1× slots официальный <a href=https://moscow.naydemvam.ru/viewtopic.php?id=22204#p35570>https://moscow.naydemvam.ru/viewtopic.php?id=22204#p35570</a> Способы получения бездепа различаются в зависимости от вида приза, который приглянулся игроку. Но вас в любом случае нужно быть зарегистрированным в легальном онлайн-казино и доказать свою лицо. В общем облике пошаговая аннотация для получения бездепозитного приза выглядит например:
1×slots сайт зеркало
Максимальная ставка ? уточняется в валюте счета и ограничивает объем ставки за один спин. В случае ее превышения приз имеет быть аннулирован. Также в правилах может находиться запрет на размещение ставок конкретного облика, например, по одинаковым шансам в рулетке (другими, на чет или нечет, красноватое или черное и т.д.).Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы которые возникают у новичков. x1 slots регистрация в 1×slots casino <a href=https://maps.google.fr/url?q=https://doctorlazuta.by/>https://maps.google.fr/url?q=https://doctorlazuta.by/</a> 1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, случае не желаете замерзнуть жертвой жуликов либо впустую истратить время;Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? 1хслотс рабочее зеркало Ну и окончательно же, для казино бездепозитные призы выгодны с имиджевой стороны: сходственная щедрость повышает степень преданности клиентов к фирмы.Чтобы играть безвозмездно на реальные средства в казино, порой довольно просто зарегистрироваться. Иногда нужно выполнить дополнительные деянья.
1 хслот регистрация в 1×slots casino
Вы всего, скажем, как все любите получать подарки и бездепозитные призы казино. Игорные дома взяли в повадку одаривать гэмблеров приятными призами. Стать владельцем приветственного презента можно за создание профиля или пополнение счёта. Второй вариант больше занимательный, ведь клубы готовы удвоить депо! Но в вы новичок и только знакомитесь с миром азарта, чем воспользуйтесь призом за регистрацию. <a href=http://www.cmpedu.co.kr/bbs/board.php?bo_table=free&wr_id=673128>http://www.cmpedu.co.kr/bbs/board.php?bo_table=free&wr_id=673128</a> Но а если вы уже профи по онлайн казино, кликаем на красноватую кнопку «Получить» и Вы автоматически перейдете в онлайн казино; 1×slots казино зеркало Необходимость отыгрыша. Вейджер в повыше, чем для бонусов за депо. И же свои не отыграны, вывести их нельзя.
1×slots регистрация на сайте 1×slots ru com
В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и если, тогда, неоднозначных ситуаций нет способности куда-то пожаловаться и обосновать свою правоту. Необходимость отыгрыша. Вейджер в этом случае повыше, чем для призов за депозит. И пока средства не отыграны, исключить их невозможно.При правильном раскладе бездепы — это прекрасный способ выступать на деньги без траты собственных средств. Есть некоторое советов, следуя коим можно извлечь максимально выгоды из похожих промоакций казино. Играть стопам только на лицензированных площадках. Скриптовые сайты столько накалывают с бонусными предложениями, но и употребляют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах невозможно. Бесплатные призы казино без депо можно получить вид валютных средств на бонусный счет (исключить их можно только после отыгрыша), фриспинов, игры или кешбэк-бонуса.Автоматы непопросту считаются самым знаменитым азартным развлечением. Чтобы усвоить управление и управляла, понадобится всего некоторое мин. Ваша задачка устроить ставку, найти количество рабочих линий и можно крутить барабан. Если дисплее выпадет выигрышная комбинация – вы выиграли! С этой задачей вам посодействуют управится бездепозитные бонусы казино. 1× slots сайт <a href=http://corp-eeek.ru/index.php?subaction=userinfo&user=grotesqueteam85>http://corp-eeek.ru/index.php?subaction=userinfo&user=grotesqueteam85</a>
1×slots casino регистрация
Основное управляло получения бездепа ? создаваемый акк должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов требовательно воспрещено. Проверка ведется по имени, e-mal, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депо нужно соблюдать простую последовательность поступков. <a href=http://classicalmusicmp3freedownload.com/ja/index.php?title=%E5%88%A9%E7%94%A8%E8%80%85:EvaImlay64>http://classicalmusicmp3freedownload.com/ja/index.php?title=%E5%88%A9%E7%94%A8%E8%80%85:EvaImlay64</a> 1хслотс регистрация в 1×slots casino Бездепозитные бонусы начисляются лишь раз один. Не стоит раскрывать свежие аккаунты, дабы получить их повторно. Служба безопасности казино непременно выявит «левого» участника и перекроет. Если посетитель выполнит необходимые требования, отыграет собственную ставку и решит исключить собственный выигрыш, то ему надо(надобно) учесть, что казино обязательно потребует предоставить ксерокопии личных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои вывести не удастся.Перед активацией главно пристально изучить условия акции. Чем ниже вейджер, что, этим больше потенциальная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, на которых можно пользоваться предложением. Если бездеп обхватывает ограниченный список игр, рекомендуется разузнать максимальные коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только что, нет случае, случае оператор не установил взыскательные лимитирования на максимальную необходимую ставки.
<b>Смотреть еще похожие новости:</b>
<a href=https://g2clubs.com/healthy-workout/google/#comment-24305>1×slots casino регистрация на сайте</a>
<a href=http://griffhunter.com/boards/viewtopic.php?p=470424#p470424>1×slots скачать на айфон</a>
<a href=https://forum.bedwantsinfo.nl/thread-719236.html>1×slots casino регистрация на сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Разные казино имеют собственные правила по выведению выигрыша. Для бездепозитных призов принимаются довольно высокие требования. Часто онлайн-казино советуют отыграть бонусное поощрение до 100 один в игровых автоматах. Например, случае игрок получил безвозмездно десять $, то нужно будет отыграть их, поставив 1 тыщу спинов по 1 баксу каждый. Стоит отметить, собственно не все казино дают вероятность играть на призы и не во всех увеселительных заведениях схожие правила для отыгрывания. Некоторые казино воспрещают играть на бонусы в блекджек или ограничивают ставки до пяти процентов, собственно существенно увеличивает в 10-ки один количество нужных игр. В лицензионных бездепозитных казино играть в азартные забавы вправду неопасно. Наличие лицензии одобряет тот факт, что клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP.
#6456 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать 1×bet 1×bet xyz 7k casino зеркало на сегодня <a href=https://rumafia.news/>1×bet слоты</a> игры казино пин ап букмекерская контора <a href=https://kompromat1.online/>retro casino</a> демо казино порно с Кирьянова Дарья Борисовна up casino казино смотреть онлайн бесплатно казино регистрации спорт букмекерская контора скачать букмекерскую контору на андроид
#6457 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерские контора ап 1×bet сайт 1×bet xyz <a href=https://m.repost.news/>порно с Антропова Валентина Викторовна</a> Радченко Светлана Юрьевна порно казино смотреть онлайн <a href=https://7club7.com/>порно с Юлия Ефимова</a> порно с Илья Осипов (киберспорт) Попова Анна Юрьевна порно бесплатно фильм казино casinos xyz скачать casino на андроид порно с Анна Калинская (теннис) 1×bet зеркало слоты
#6458 Charlesgunnyhttp://filmkachat.ru
1×slos регистрация в 1×slots casino
Самые популярностью методы вывода денег ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электрическим платежным системам подобии Neteller и Skrill, еще используют криптовалютными кошельками. Вывод выигрышей возможность осуществляться мгновенно или развлекать от нескольких часов до нескольких суток. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало рабочее</a> Для казино, работающих интернет, бездепозитные призы нужны для вербования новых посетителей. Предложение поиграть на слотах без необходимости внесения реальных средств — работающий способ для увеличения интереса к компании. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит играть в казино, лишь сейчас уже на собственные деньги.Изучить правила и обстоятельства получения бездепозитных бонусов казино, Вы сможете у нас на сайте в разделе с бонусами либо на официальном веб-сайте выбранного Вами казино. Если имеет найти необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электрической почте. <a href=https://telegra.ph/Legal-Cannabis-Delivery-Services-Transform-Brantfords-Marijuana-Access-11–24>https://telegra.ph/Legal-Cannabis-Delivery-Services-Transform-Brantfords-Marijuana-Access-11–24</a> К образцу, игроку выдаются бесплатные свои в заведении в объеме пятидесяти или 100 $ (вейджер на коие составляет 100х). То есть, каждому новоприбывшему игроку выскакивает манящая иллюстрация, кот-ая обещает выплату всех зачисленных компанией средств. Не стоит внимания на казино бонус за регистрацию без депозита с слишком большой либо довольно махонькой суммой призов, потому что, и тщательно исследовав все условия, тут вероятнее всего, будет какой-то подвох.Бонус начисляется игроку незамедлительно после регистрации и прохождения верификации в казино и не просит от посетителя внесения депо. Как правило, размер бонуса в подобном случае довольно застенчивый, однако дозволяет новеньким познакомиться с забавой без риска реальными деньгами. 1×slots регистрация 1×slots casino c2d ru <a href=https://earthmyhome.com/User-8779>https://earthmyhome.com/User-8779</a> Наш список содержит лучшие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает проверку по главным характеристикам:B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax
1×slots рабочее зеркало на сегодня
Изучить управляла и обстоятельства получения бездепозитных призов казино, Вы сможете у нас на веб-сайте в разделе с призами либо на официальном сайте избранного Вами казино. Если не отыскать нужную информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал или по электрической почте.Поспешите забрать бездепозитные призы за регистрацию в казино из представленного перечня. Все платформы не ведут законную деятельность, хотя и порадуют добросовестными результатами забавы, высочайшей отдачей, прыткими выплатами. <a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1хлот регистрация в 1×slots casino</a> 1×slots официальный сайт скачать Чаще всего используются коды. Их надо(надобно) заносить в специальные окошки регистрационной анкеты, если идет о пригласительных призах, либо в определенном разделе личного офиса игрока. <a href=http://zemli.com/index.php?subaction=userinfo&user=gentlesite64>http://zemli.com/index.php?subaction=userinfo&user=gentlesite64</a> Акционные предложения от казино существуют в разных форматах. Часто призы даются в обмен на депо. Игрок заносит платеж и получает деньги, бесплатные вращения и другие одобрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — картина приза, который гарантирован за выполнение конкретных поступков на сайте:Срок активации и время на отыгрыш. Зачисление денег либо фриспинов происходит при активации на требовательно ограниченного периода, похожие притязания предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать приз количество дней либо даже месяцов. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером. казино 1×slots официальный сайт Все обожают получать подарки. Согласитесь, практически каждый играющий человек будет безгранично счастлив, в получит безвозмездный презент для игры в онлайн казино просто за регистрацию или же приз за внесенный депозит, например именуемые приветственные призы для новых игроков. Соответственно эти онлайн клубы станут больше известны и преимущественны у игроков при выборе казино для игры. Топ казино каждый обновляется и прибавляются свежие и занимательные игровые клубы с привлекательной бонусной политикой и всеми возможными привилегиями, к коим относятся такие бонусы как фриспины за регистрацию, денежные бездепозитные призы, а также великодушные бонусы за внесенный депозит.Но ни не запамятовывайте внимательно читать управляла роли в бонусных промоакциях. Если вы нарушите желая бы одно условие, позже вы не сможете устроить недоразумение с администрацией.
1×slots регистрация 1×slots casino 777 online
Верификация важна для добавочной безопасности и помогает техподдержке выявить бонусхантеров и жуликов. Кстати, на платформах выводы крупных сумм доступны только в доказательства личности. <a href=https://www.feeder.mobi/members/jamesvon/profile/>https://www.feeder.mobi/members/jamesvon/profile/</a> 1хслотс рабочее зеркало Демоказино есть практически на каждом сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются значительно реже: там в случае выигрыша и соблюдения условий акций бездеп можно перевоплотить в реальные средства.При правильном подходе бездепы — это отличный способ играть на средства без растраты собственных средств. Есть количество рекомендаций, следуя коим возможно извлечь максимально пользы из похожих акций казино. Играть идет только на лицензированных площадках. Скриптовые сайты не дурачат с бонусными предложениями, хотя и употребляют пиратский софт с измененным ГСЧ. Выиграть на этих автоматах невероятно.
1×slots акции
Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных ситуаций с казино, когда последствии отыгрыша бездепа для не дадут вывести солидную сумму выигрыша.Как только вы отыграли вейджер и средства с бонусного баланса перешли вас на реальный счет, Вы смело можете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (устроить минимальный депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, совместно, вкупе с депо). 1× slots регистрация в 1×slots casino <a href=http://www.volgogradru.com/users/Vykupavto/>http://www.volgogradru.com/users/Vykupavto/</a> Список так нарекаемых «разрешенных землель» прилагается к правилам бонусной программки игорного портала. Обязательно выясните, распространяются ли на вас сходственные наказания.
1хслотс зеркало
<a href=http://armrus.org/extranet/forum/user/147988/>http://armrus.org/extranet/forum/user/147988/</a> Для верификации номера телефонного, в личном профиле изберите опцию „Подтвердить номер телефонного“ и введите в соответствующее фон код, полученный в sms-сообщении. 1×slots казино мобильная версия
<b>Смотреть еще похожие новости:</b>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=181370>1×slots официальный demo регистрация в 1×slots casino</a>
<a href=https://projects.sare.org/people/jamestrazy/>1×slots регистрация на сайте 1×slots ru com</a>
<a href=https://thetechmodders.com/forums/viewtopic.php?t=24683>1×slot зеркало</a>
<a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=118312>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Не сложно догадаться, что no deposit bonuses почти разу не случаются немаленькими. Чаще всего идет о пяти–тридцати баксах (или эквиваленте данной суммы в другой валюте). Некоторые клубы автоматически начисляют приз на акк игрока последствии исполнения критерий получения, но бывают истории, когда приз надо(надобно) активировать игроку самому. Есть несколько методов активации бонуса:
#6459 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на 1хслотс
Вознаграждения за получение VIP-статуса ? начисляются масштабах программы лояльности при достижении очередного значения или выдаются индивидуально менеджерами службы поддержки.Если вы опытный игрок, вы обязаны знать, что приз без депо – редчайшая находка. Тем не, мы еженедельно изучаем интернет, дабы отыскать вам наилучшие бездепозитные предложения. <a href=http://filmkachat.ru/>1хслотс казино зеркало</a> Также бездепозитные бонусы имеют работать способом вернуть к забаве клиентов, временно приостановивших своё сотрудничество с компанией: уведомление о бездепе поступает на мобильный аппарат или почту.В интернет-сети практически можно найти перечни более популярных и обещанных поощрительных программ от знаменитых онлайн-казино. <a href=https://www.fundable.com/user-1002820>https://www.fundable.com/user-1002820</a> Бонусы без депо при регистрации числятся самыми привлекательными как для опытнейших игроков, так для и новичков. Получив такое вознаграждение, клиент может выступать на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а обстоятельства их активации и выигрыша.Автоматическая активация кажется самой комфортной, но ручной метод имеет перед ней преимущества. Прежде чем применять вознаграждение от казино, стоит заблаговременно найти, сколько медли требуется на исполненье всех критерий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала действия приза. x1 slots 1хслотс регистрация перейти на 1×slots <a href=http://elka54.ru/forum/?PAGE_NAME=profile_view&UID=102551>http://elka54.ru/forum/?PAGE_NAME=profile_view&UID=102551</a>
1×slots зеркало видели такую регистрацию на
<a href=https://g2clubs.com/healthy-workout/google/#comment-26192>1×slots мобильная версия войти казино</a> 1хслотс 1хслотс регистрация перейти на 1×slots Фриспины. Бесплатные вращения предусмотрены для применения в видео-слотах. Внимательно читайте условия – они нередко выдаются для некоторых машин. В зависимости от клуба продоставляется делать конкретное количество ставок. Кстати, современные игорные дома выделяют возможность заводить «одноруких бандитов».Игры, каких возможно выступать на бонусные средства. Проверьте перечень игр, в которых можно выступать на бонусные средства, возможно они Вам не понравятся и надо расходовать своё время на эту акцию. <a href=http://www.ashleykelly.net/2012/06/cassie-collin-rehearsal-dinner.html>http://www.ashleykelly.net/2012/06/cassie-collin-rehearsal-dinner.html</a> 1×slots зеркало регистрация
1×slots регистрация на 1хслотс
Фриспины — бесплатные вращения, которые позволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины считаются наиболее знаменитым и желаемым обликом бонуса — благотворительные вращения порой эффективнее и веселее в отыгрыше, чем остальные облики бездепов.Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских рублей. В критериях промоакции указано, что вейджер бездепозитного приза х20. Поэтому, дабы отыграть приз, игроку несомненно необходимо устроить ставок на 35*20=700 руб. <a href=https://zionnwer88787.newsbloger.com/30847175/deep-nude-ethical-concerns-and-the-impact-of-ai-on-privacy>https://zionnwer88787.newsbloger.com/30847175/deep-nude-ethical-concerns-and-the-impact-of-ai-on-privacy</a> 1×slots регистрация на 1хслотс
1×slots на любой вкус как пройти регистрацию
Бoльшинcтвo азартных заведений выдвигают приблизительно одинаковые обстоятельства и требования, которые необходимо выполнить, чтобы получить бездепозитный бонус за регистрацию. Все их можно объединить в один перечень: <a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=396104>1×slots регистрация</a> 1×slots официальный сайт мобильная версия <a href=http://xn–80aeh5aeeb3a7a4f.xn–p1ai/forum/user/53318/>http://xn–80aeh5aeeb3a7a4f.xn–p1ai/forum/user/53318/</a> Максимальный размер ставки, кот-ый невозможно превосходить пока бонус не будет полностью отыгран. В случае нарушения этого верховодила, приз и выигрыш с него будут аннулированы.Бездепозитные бонусы казино это финансовая компенсация, предлагаемая пользователям на дармовой основе и возможность играть в интернет казино даром. Если ассоциировать их с одобрениями за лепта, в которых свои выдаются только потом первоначального пополнения счета, то бездепозитные вознаграждения получаются бесплатно. То есть, играющий получает возможность делать ставки на уже быть финансы, коие выдаст заведение, выполняя, этом, обыденные деяния, чтобы их извлечь (тут речь о регистрация, удостоверении личности с использованием номера аппарата, дизайна заявки и т.д.).
1×slots сайт
Зарегистрируйтесь. Для регистрации чаще всего довольно установить собственный номер телефонного и почтовый адресок, последствии чего установить полученный код из СМС. Возможно, потребуется указать промокод. В правилах промоакции будет написано, где его надобно включать. Иногда это бы делать при регистрации, время — уже после создания собственного кабинета, на отдельной страничке. Для получения бонуса надо(надобно) пригласить в игру свежего посетителя. Казино начислит пригласившему фиксированный процент от взносов приглашённого повторяющий бонуса: почаще всего его объем не превышает 10%. Срок деянья приза как не превышает месяца: пригласивший получает приз от проигранных ставок приглашённого в 1-ый луна забавы. <a href=https://zrz26.ru/user/Arnoldhab/>https://zrz26.ru/user/Arnoldhab/</a> 1хслот зеркало Отказ в прохождении верификации. Если заказчик не желает либо имеет дать документы, подтверждающие его лицо, профиль будет заблокирован совместно, вкупе со всеми бонусными начислениями.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=13119>казино 1×slots официальный сайт</a>
<a href=http://vn-info.net/user/Josephkam/>1×slots сайт</a>
<a href=http://forums.panzergrenadiers.com/showthread.php?23517–1×slots-casino-%D0%A1%D0%82%D0%A0%C2%B5%D0%A0%D1%96%D0%A0%D1%91%D0%A1%D0%83%D0%A1%E2%80%9A%D0%A1%D0%82%D0%A0%C2%B0%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A1%D0%8F-1×slotscasin-online&p=510327#post510327>1×slots casino регистрация 1×slotscasin online</a>
<a href=https://uyghuryol.com/forum/viewtopic.php?f=8&t=245226>1×slots casino регистрация 1×slotscasino09k online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, например как Вам понадобиться ее подтвердить дальнейшем при выводе средств.
#6460 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино сегодня unlim casino <a href=https://rumafia.news/>казино большая</a> порно с Сергей Бобровский (хоккей) 1×bet 1 <a href=https://th-royalgclub.com/>1×bet зеркало xbet</a> Юдаева Ксения Валентиновна порно ешь казино porno Мира Андреева (теннис) порно с Евгения Медведева, фигуристка порно с Александр Головин (футбол) казино 1 казино рояль
#6461 Charlesgunnyhttp://filmkachat.ru
1×слотс казино
Новые посетители онлайн-казино без первого депозита шансы проверить свою удачливость. К тому же есть возможность преобразовать бездепы в настоящие деньги за регистрацию в казино, однако желаемого бонус необходимо отыграть согласно условиям промоакции. <a href=http://filmkachat.ru/>1×slots зеркало которую указывали при регистрации кстати</a> Не рекомендуем сломя голову хвататься за различные предложения получения средств без вложений. Вполне возможно, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на первый взгляд. Альтернативой считается казино бонус за депозит. Мы предлагаем для пару советов, спасибо которым у каждого игрока несомненно возможность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом средств: <a href=https://myanimelist.net/profile/shopavto>https://myanimelist.net/profile/shopavto</a> Доступ к дару имеет раскрываться автоматически после введения промокода или обращения в службу поддержки сайта. В первом случае от юзера не требуется практически поступков. Бездеп с активацией по коду встречается почаще всего. Игроку необходимо установить совокупность знаков в графе, кот-ая может находиться в регистрационной форме в Личном кабинете. 1×slots зеркало выигрыши обязательно пройдите регистрацию если <a href=http://www.wy881688.com/home.php?mod=space&uid=689506&do=profile>http://www.wy881688.com/home.php?mod=space&uid=689506&do=profile</a> Например, игрок получил 500 руб. При разработке аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., понадобится устроить 875 спинов для полного отыгрыша.
1×слот регистрация в 1×slots casino
Фриспины без депозита либо дополнительные средства помогут поближе познакомиться с игровой платформой и её функциями. За счёт презентов можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради игры напротив живых крупье. <a href=http://forums.indexrise.com/thread-1096-post-362401.html#pid362401>1 x slots</a> 1хслотс 1хслотс регистрация перейти на 1×slots Отыграв бездепозитный приз в казино с выводом также придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если сходственное лимитирование присутствует, то единоразово исключить выйдет лишь сумму, не превосходящую объем полученного бонуса.Некоторые клубы автоматически начисляют бонус на аккаунт игрока после исполненья критерий получения, хотя посещают истории, когда приз нужно активировать игроку самому. Есть количество методов активации бонуса: <a href=https://uniteckorea.net/bbs/board.php?bo_table=free&wr_id=65334>https://uniteckorea.net/bbs/board.php?bo_table=free&wr_id=65334</a> Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, например как Вам понадобиться ее подтвердить дальнейшем при выводе средств. 1× slots casino зеркало
1× slots сайт
Ну и естесственно же, для казино бездепозитные призы прибыльны с имиджевой стороны: сходственная щедрость увеличивает уровень лояльности посетителей к фирмы. <a href=https://itproduce.ru/club/user/323/>https://itproduce.ru/club/user/323/</a> Размер ставки для забавы по бездепозитному призу (окончательно же, если, тогда,, когда он представлен повторяющий бонусных денежных средств) часто ниже, чем при забаве на депо. Ограничение будет действовать до этапа отыгрыша приза.Не стоит путать игру в демо и внедрение бонусов. В демонстрационном режиме игрок имеет оценить механику слота, сюжет и оформление. Но забава ведется на условные кредиты, потому отсутствует главное ? ощущение пыла. Активируя промокод или фриспины, заказчик как не расходует средства деньги на игровые автоматы, но имеет сорвать реальный куш! 1×slots регистрация
1хслотс официальный сайт зеркало
<a href=http://soumoli.com/home.php?mod=space&uid=24916>1× slots регистрация в 1×slots casino</a> Подарки на праздничные ? посвященные торжественным датам, требующие условного отыгрыша или начисляются без это. Могут дариться игрокам сутки рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду. 1×slots рабочее зеркало <a href=https://forum.kainkalabs.com:443/member.php?action=profile&uid=19159>https://forum.kainkalabs.com:443/member.php?action=profile&uid=19159</a> Если речь об эксклюзивных услугах, имеет понадобиться регистрация в казино по ссылке с партнерского сайта.
1×slots официальный сайт скачать на айфон
Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. Доступные забавы – В неких азартных играх можно снизить математическое преимущество казино до нескольких 10-х процента. В их количестве многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как управляло, в этих играх ставки идут в зачет вейджера не полностью. Например, возможность учитываться лишь 50%. В неких забавах бездепозитные призы вообщем нельзя отыгрывать. <a href=http://arsivforum.10tl.net/member.php?action=profile&uid=6058>http://arsivforum.10tl.net/member.php?action=profile&uid=6058</a> 1×slots акции Только выполнив все обстоятельства отыгрыша и дождавшись завершения проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить средства деньги.Игры, в которых возможно играть на бонусные деньги. Проверьте список игр, каких возможно выступать на бонусные средства, вполне они Вам не понравятся и не стоит расходовать своё время на такую акцию.
<b>Смотреть еще похожие новости:</b>
<a href=http://aficionado.pl/newthread.php?do=newthread&f=41>1×slots зеркало этих способов предполагает регистрацию</a>
<a href=https://bans.org.ua/index.php?topic=127949.new#new>1хслот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
С не отыгранным призом запрещается превышать размер максимальной ставки. Нарушение этого условия иметь аннулирование выигрыша. Для казино, работающих интернет, бездепозитные призы нужны для привлечения новых клиентов. Предложение поиграть на слотах без необходимости внесения настоящих денег — работающий способ для повышения энтузиазма к фирмы. После отыгрыша бездепа велик шанс, что игроку понравится и он продолжит выступать в казино, только сейчас уже на личные деньги.
#6462 JeffreyDughttps://arc.com.kg
mostbet скачать на андроид бесплатно <a href=https://arc.com.kg/>mostbet indir android</a>
#6463 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия
При малый сумме приза рекомендуется выступать по низким ставкам, а использовать наибольшие превосходнее лишь сомнений случае, в вейджер очень большой, а время на отыгрыш крепко ограничено. <a href=http://filmkachat.ru/>1×slots скачать на айфон</a> Каждый новичок и профессиональный игрок грезят живо стартануть и начать делать настоящие ставки. Для этого достаточно отобрать подарок, за кот-ый не выплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email или телефон. После этого администрация начисляет щедрое вознаграждение повторяющий безвозмездных вращений либо виртуальных кредитов.Для верификации номера аппарата, в личном профиле выберите опцию „Подтвердить номер телефона“ и введите в отвечающее поле код, полученный в sms-сообщении. <a href=https://www.nitrnd.com/blogs/229798/Transforming-Dream-Kitchens-Through-Professional-3D-Rendering-Solutions>https://www.nitrnd.com/blogs/229798/Transforming-Dream-Kitchens-Through-Professional-3D-Rendering-Solutions</a> 1хслотс официальный сайт зеркало <a href=http://www.glife2120.ru/user/CraigPlono/>http://www.glife2120.ru/user/CraigPlono/</a>
1хслотс официальный сайт зеркало
Обычно, бездепозитные призы выдаются под конкретные слоты с фиксированной ставкой, хотя их наверняка запрещено использовать в игровых автоматах с прогрессивным джекпотом. Список игр, каких можно применять бездеп, Вы отыщите в описании акции или сможете уточнить у саппорта заведения. 1 х слотс зеркало Прежде всего, не запамятовывайте регулярно заглядывать на страничку обзоров бездепозитных призов. Они шаг за шагом осматривают более увлекательные предложения ведущих игорных порталов.Но а если вы уже профи по интернет казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в онлайн казино; <a href=https://lit-book.ru/user/RalphAging/>https://lit-book.ru/user/RalphAging/</a> Все благотворительные призы кажутся соблазнительными. Кто же откажется от способности поиграть в онлайн-казино, не рискуя средствами, хотя получая выигрыши. Но далеко не все бездепозитные бонусы в равной степени привлекательны для рассудительного клиента. 1×slots регистрация на официальном сайте Например, игрок получил 500 рублей при творении аккаунта и должен отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 рублей, потребуется сделать 875 спинов для полного отыгрыша.Баланс игрока дополняется на соответствующую необходимую. К ней применяется вейджер, указанный в правилах промоакции. Вывести выигрыш можно будет после такого, как юзер устроит требуемый объем ставок из личных средств. В редчайших случаях бездеп трудится в формате Free Play. На счет юзера зачисляется крупная сумма, и предоставляется малый срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по окончании этого периода сумма на счету несомненно превосходить первоначальную, то разницу можно несомненно исключить или использовать для дальнейших ставок.
1×slots сайт
К раскаянию, нет. Почти все казино, просят внесение желая бы одного минимального депо для вывода выигрыша с бездепозитного бонуса. Также учитывайте, собственно вывести средства разрешается лишь на ту платежную систему, с которой был сделан депо.При отыгрыше бонусных средств, необходимо учесть срок деяния приза и время, которое дается на отыгрыш. По истечению заявленного медли, не отыгранный приз несомненно аннулирован. <a href=https://qashvqt.uz/index.php?subaction=userinfo&user=KeithDREND>https://qashvqt.uz/index.php?subaction=userinfo&user=KeithDREND</a> Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте условия – они нередко выдаются для некоторых машин. В зависимости от клуба возможность создавать конкретное число ставок. Кстати, современные игорные дома выделяют вероятность заводить «одноруких бандитов». 1×slots зеркало на сегодня Для тех, кто лишь взвешивает испытать свою фортуну, а для профессиональных игроков, отыскивающих новые площадки для выигрышей, ведущие лицензированные казино часто организуют разные акции, и одно из лучших предложений за время – как для начинающих, так и для профессиональных игроков – бездепозитный приз за регистрацию.
1×slots казино зеркало
Вышеописанная причина и является главным интересным, в которого операторы отдают часть собственной выгоды на разные рекламные затраты и маркетинговые кампании. А наиболее действующим здесь станут выступать именно бездепозитные призы казино 2022 с выводом за регистрацию.Как управляло, при выводе финансов, от играющего потребуется лишь сделать наименьший вклад для того, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом личный счет. Классическая разновидность приза за создание аккаунта. Его превосходство заключается в том, что заказчик имеет других подбирать аппараты и делать ставки в их. Иногда перечень игровых автоматов ограничен оператором, но все равно это никакого, чем один-единственный доступный разъем, как когда с использованием фриспинов.Итак, дабы бесплатные бонусные кредиты превратились в настоящие средства, которыми вы можете распоряжаться по своему усмотрению, их нужно отыграть. Вейджер по уточнять в правилах онлайн-казино. 1×slot зеркало рабочее регистрации на телефон придет <a href=https://gidro2000.com/forum-gidro/user/26855/>https://gidro2000.com/forum-gidro/user/26855/</a> Ознакомьтесь с нашим перечнем наилучших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего списка и получите бездеп незамедлительно. Хватайте превосходнейшие благотворительные предложения ниже и выигрывайте большие деньги, не рискуя!
1×slots регистрацию более популярный вариант это
Помните, собственно в некоторых играх сумма ставки идет в зачет вейджера только отчасти. Так, в настольных и карточных забавах лишь от 5% до 50% суммы ставки числятся как отыгранные средства, момент как в слотах идет в зачет все 100% суммы.Отзывы читателей о бонусных акциях помогут составить впечатление, но не забывайте о субъективности личных комментариев. <a href=https://online-learning-initiative.org/wiki/index.php/User:FEDLuciana>https://online-learning-initiative.org/wiki/index.php/User:FEDLuciana</a> Но есть игорные заведения, коие готовы просто так жертвовать деньги на игру. Для сего довольно сделать профиль. Чтобы исключить собственный выигрыш, вас поначалу нужно выполнить обстоятельства отыгрыша, указанные в условиях получения бездепозитного депо. 1хслотс рабочее зеркало на сегодня Вообще перейдя в казино — управляла одинаковы в получении бездепозитных бонусов, в стандартные верховодила входит: подтвердить эл. Почту и телефонный, заполнить собственный личный профиль, активировать промо код или активировать предложения во вкладке БОНУСЫ.
<b>Смотреть еще похожие новости:</b>
<a href=http://mi.minfish.com/home.php?mod=space&uid=1196847>1×slots сайт</a>
<a href=https://www.bf-france.com/forums/profile/30064-rabofreeor/>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Минимального оборота. Этот предел уточняется вейджером — пока игрок не поиграет на установленную сумму, вывод средств несомненно недоступен.
#6464 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
3. Подтвердить данные. В зависимости от клуба, нужно привязать аппарат или почту, показать индивидуальную информацию; <a href=http://filmkachat.ru/>1×slots подтвердит вашу регистрацию если говорить</a> После получения приза вывод средств для клиента несомненно недосегаем времени, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя или пара месяцов. Выводить деньги игрок сможет только последствии отыгрыша. <a href=https://groups.google.com/u/1/g/3d-rendering-services>https://groups.google.com/u/1/g/3d-rendering-services</a> К примеру, игроку выдаются бесплатные средства в заведении в размере пятидесяти либо ста долларов (вейджер на которые сочиняет 100х). То есть, любому новоприбывшему игроку выскакивает привлекающая картинка, кот-ая обещает выплату всех зачисленных фирмой средств. Не стоит внимания на казино бонус за регистрацию без депо с слишком великой или очень малеханькой суммой призов, потому что, том кропотливо изучив все обстоятельства, тут вероятнее всего, будет некий подкол. казино 1× slots официальный сайт <a href=http://skiindustry.org:/forum/member.php?action=profile&uid=1170056>http://skiindustry.org:/forum/member.php?action=profile&uid=1170056</a> У каждого игорного клубы различные вейджеровые обстоятельства. Чтобы вы гарантировано смогли выполнить их, мы дадим количество советов. Если система начислила маленькую сумму, не стоит создавать большие ставки – остановитесь на 10–30 центах. Как только сумеете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте играть. В неприятном случае какого-либо присмотреться к другому автомату.
1хслот 1хслотс регистрация перейти на 1×slots
Фриспины начисляются по определенной ставке. После их активации игроку необходимо запустить разъем и увериться, что в нем показываются безвозмездные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода после отыгрыша ориентируется оператором и изредка превышает 5 000 рублей.Кешбэк-бонус дает собой возврат фиксированного процента от ставки в случае проигрыша либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%. 1×slots casino регистрация 1×slotscasin online Особую изюминку видео слотам придают уникальные знакы. С их выходом активизируются различные призы. Вы можете запустить дополнительный уровень и увеличить сумму выигрыша. Есть знаки, которые сменяют ненужные составляющие и сами делают выигрышные комбо. Не стоит забывать и тему бонус-тур. После каждого счастливого спина есть шанс прирастить сумму выигрыша в два или хорошо раза. <a href=https://gtafarai.lt/index.php?/profile/12599-walterdaync/>https://gtafarai.lt/index.php?/profile/12599-walterdaync/</a> 1×slots зеркало проходить регистрацию это отличный вариант
1×slots регистрация 1×slotscasino 56 online
У любой игры свои притязания по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система засчитает каждую ставку. В рулетке и покере сделать это намного труднее. Именно потому например важно внимательно разбирать обстоятельства получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой забаве, то новички просто «спустят бонус на ветер».Кешбэк-бонус дает собой возврат фиксированного процента от ставки в случае поражения или же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%. Чаще всего, известные сервисы, такие как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно обязательное управляло. Финансовые средства выводятся только спустя ту платежную систему, которой огромный для пополнения депозита. Если же игрок получил бездепозитный покерный бонус, потребуется восполнить счет на наименьшую необходимую, которая составляет обычно 10 $.Шаг 4. Активация. Внимательно исследуйте обстоятельства, информацию по ограничениям и сроке деянья бонусного предложения. Разобравшись с правилами, можно активировать бонус в собственном офисе (иногда ? с использованием промокода) либо по запросу в саппорт. <a href=https://sparkitupforums.net/User-Jamescit>https://sparkitupforums.net/User-Jamescit</a> 1×slots casino регистрация 1×slots review live
1×slots казино зеркало
<a href=https://www.formulersupport.com/Thread-%D0%B7%D0%B5%D1%80%D0%BA%D0%BB%D0%BE-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-1×slots–127183>зеркло казино 1×slots</a> Для верификации номера телефонного, в собственном профиле выберите опцию „Подтвердить номер телефона“ и введите в соответствующее фон код, полученный в sms-сообщении. казино 1× slots официальный сайт <a href=https://medicaidsecretsforum.com/member.php?action=profile&uid=2051>https://medicaidsecretsforum.com/member.php?action=profile&uid=2051</a> Бонус в казино без депо содержит различные вариации: такое быть приветственный приз, акции в честь каких-либо дней или важных дат, приз за привлечение новых игроков, преданность и получение VIP-статуса.Онлайн гемблинг развивается с каждым деньком все больше и больше, свежие бренды создаются не по дням а по часам. Новые онлайн казино делают вступительные акции для игроков, чтобы, чтобы собственно бы зарекомендовать себя, и что, этим самым предлагают бездепозитные призы за регистрацию, что бы не упустить такую возможность — как пользоваться свежим бездепом, рекомендуем посещать наш сайт как возможно почаще, самое аппетитное и новые несомненно добавляться в данном же списке.
рабочее зеркало 1×slots
Для тех, кто лишь подумывает испытывать свою удачу, а для проф игроков, разыскивающих свежие площадки для выигрышей, ведущие лицензированные казино часто устраивают различные акции, и одно из лучших услуг за последнее время – как для начинающих, например и для профессиональных игроков – бездепозитный приз за регистрацию.Акционные предложения от казино существуют в разных форматах. Часто бонусы даются в обмен на депозит. Игрок вносит платеж и получает деньги, бесплатные вращения и другие поощрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — вид приза, кот-ый гарантирован за исполненье определенных действий на веб-сайте: <a href=https://rdaforum.com/user-15948.html>https://rdaforum.com/user-15948.html</a> Ознакомьтесь с нашим списком лучших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего списка и получите бездеп сразу. Хватайте наихорошие безвозмездные предложения ниже и выигрывайте немалые средства, не рискуя!Бесплатные бонусы казино без депо можно получить вид валютных средств на бонусный счет (вывести их возможно лишь в отыгрыша), фриспинов, игры либо кешбэк-бонуса. 1х слот регистрация в 1×slots casino Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Получать информацию о самых прибыльных бонусах можно без постоянного мониторинга новостей казино. Мы взяли данную задачку на себя и непрерывно следим за услугами операторов, выбирая наилучшие из них. В этом разделе собраны последние бездепы, промокоды к ним и условия их активации. Список акций регулярно пополняется. В топ зашли самые новые бездепозитные бонусы за регистрацию в казино 2020, временные и закрытые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и аспектам. Если срок действия промоакции истек, она удаляется из перечня.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.findaspermdonor.com/viewtopic.php?f=25&t=88788>1×slots казино мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Прочитайте управляла бонусной программы, в которой желаете участвовать. Да, мы безотступно советуем устроить это до регистрации. Выбирайте наихорошие благотворительные призы за обзоров на Casinoz – и пусть вам сопутствует счастье при отыгрыше бонусных кредитов!
#6465 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
gama casino up casino скачать <a href=https://7club7.com/>porno Марина Александрова</a> Крючкова Полина Викторовна порно casino зеркало сегодня рабочее <a href=https://res-publika.com>1×bet слоты 1×bet xyz</a> казино играть champion casino inform@rucriminal.info Фастова Елена Владимировна порно casino рабочее 1×bet официальный сайт porno Юлия Канакина
#6466 Charlesgunnyhttp://filmkachat.ru
1×slots подтвердит вашу регистрацию если говорить
У любого игорного клубы различные вейджеровые обстоятельства. Чтобы вы гарантировано смогли выполнить их, мы дадим несколько советов. Если система начислила небольшую необходимую, надо делать великие ставки – остановитесь на 10–30 центах. Как лишь сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В противном случае чем приглядеться к другому автомату. <a href=http://filmkachat.ru/>1×slot зеркало рабочее этих способов предполагает регистрацию</a> <a href=https://www.emaze.com/@ALIWWWIIQ/looking-to-give-yourhome-a-stunning-makeover-house>https://www.emaze.com/@ALIWWWIIQ/looking-to-give-yourhome-a-stunning-makeover-house</a> В большинстве заведений сделать это можно по адресу электронной почты, по номеру аппарата, спустя социальную сеть либо гугл-аккаунт.Это один из главных показателей привлекательности подарка. С завешенным коэффициентом и мастера не смогут выполнить условия по отыгрышу. И неважно, насколько презентабельно смотрится предложение – бездепозитный бонус казино в объеме $500 или $1 000. Чтобы новички попревосходнее вдумались, что же такое вейджер, мы разберём на примере. 1×slot регистрация <a href=https://www.evangelie.eu/forum/members/85354.html>https://www.evangelie.eu/forum/members/85354.html</a> Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные способы и оценить необыкновенности, труднодоступные при забаве в демо режиме. Многие новые клиенты переходят в количество неизменных, а оператор получает длительную выгода.
1×slots официальный сайт мобильная версия
<a href=http://www.carshowsociety.com/forum.php/topic,11220.new.html#new>1×slots подтвердит вашу регистрацию если говорить</a> 1 х слотс зеркало Постарайтесь отыграть вейджер, чтобы появилась возможность забыть заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы можете получить выигрыш на электронной кошелёк, карту, аппарат.Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды находятся на этой странице. Посетитель возможность оценить условия получения и начать выступать на средства без внесения депо. При этом игроку главно понимать, на каких условиях и какими способами появится исключить полученный выигрыш. Для этого нужно расценить список присоединенных платежных систем. <a href=http://armovision.ru/bitrix/redirect.php?goto=http://clients1.google.com.pr/url?q=http://xn---1-mlc3bjlr.xn–p1ai/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/EuQR7R65lUv>http://armovision.ru/bitrix/redirect.php?goto=http://clients1.google.com.pr/url?q=http://xn---1-mlc3bjlr.xn–p1ai/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/EuQR7R65lUv</a> Объективные – объем бонуса, коэффициент и условия вейджера, необходимость внесения депозита для вывода средств;Если вы выбрали для себя несколько брендов коие для больше всего приглянулись, для неизменной забавы! Таких гемблеров казино довольно любит и ценит, за частую такие игроки становятся VIP игроками заведения, коим часто поступают выгодные предложения вид бонусов, так же туда заходит и бездепозитные. 1×slots зеркало быструю регистрацию а также мгновенное В некоторых интернет казино для получения бездепозитных призов не достаточно просто зарегистрироваться на сайте клуба и доказать средства контактные данные. Дополнительно требуется активация промокода.
казино 1×slots официальный сайт
<a href=https://sex18babes.com/user/StevenMeady/>https://sex18babes.com/user/StevenMeady/</a> Главное преимущество спинов – вероятность изучить различные слоты. Также получится насладиться бонусными раундами, испытывать фортуну в риск-туре и преумножить выигрыш за счёт особых символов. Однако не игровой процесс заслуживает внимание, так другого, как сосредоточиться на реальном выигрыше.Почти все игровые клубы требуют подтверждение контактных данных игрока для получения бездепозитного приза. 1хслотс официальный сайт зеркало Таким образом интернет казино получает потенциального игрока. Возможно дальнейшем либо подлинном он захотит поиграть на свои средства. Так трудятся бездепозитные призы в онлайн казино. Здесь отлично подходит выражение, благотворительные сыр случается только в мышеловке. Начинающие игроки шансы не осознавать опасность азарта. Однако течением понимания делается больше. Это тема для отдельного обсуждения.Некоторые клубы механически начисляют приз на аккаунт игрока в исполненья условий получения, но посещают истории, когда бонус нужно активировать игроку самому. Есть количество способов активации бонуса:
1×slots сайт
Как управляло, новоприбывшие геймеры для желают ознакомиться с способами ввода и вывода денежных средств и сроки исполнения поданных заявок дабы конкретно разуметь, как быстро возможность вывести свой казино бонус за регистрацию без депозита на электронный кошелек либо же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино соперничают меж собой. Ведь в бы конкретную фирму представляло только одно онлайн-заведение, то навряд бы посетители заметили казино с призом за регистрацию и имели бы рассчитывать лишь на вознаграждение в виде приза на первое инвестиция. К любому заведению регулярно идет привлекать новых игроков, что, в итоге, лишь на руку всем играющим. Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 $. Если выдаются фриспины, их число изредка превышает нескольких десятков даровых вращений. 1×slots промокод при регистрации <a href=https://lustbb.com/member.php?action=profile&uid=2121>https://lustbb.com/member.php?action=profile&uid=2121</a> Операторы гемблинга утверждают, собственно так они борются с бонус-хантерами. Впрочем, критики считают, что данным казино пробуют сделать из случайного гостя постоянного игрока.
1×slots сайт зеркало
Все обожают получать подарки. Согласитесь, практически любой играющий человек несомненно необъятно счастлив, в получит даровой подарок для игры в онлайн казино просто за регистрацию либо же приз за внесенный депозит, например именуемые приветственные бонусы для свежих игроков. Соответственно такие интернет клубы будут больше известны и предпочтительны у игроков при выборе казино для забавы. Топ казино непрерывно обновляется и добавляются новые и занимательные игровые клубы с привлекательной бонусной политикой и всеми возможными привилегиями, к коим относятся эти бонусы как фриспины за регистрацию, валютные бездепозитные призы, а щедрые бонусы за внесенный депозит. <a href=https://earthmyhome.com/User-8615>https://earthmyhome.com/User-8615</a> В большинстве заведений устроить это возможно по адресу электронной почты, по номеру телефона, через социальную сеть либо гугл-аккаунт.Размер ставки для игры по бездепозитному бонусу (конечно же, когда, когда он представлен вид бонусных денежных средств) зачастую ниже, чем при ирге на депозит. Ограничение несомненно работать до этапа отыгрыша приза. 1×slots официальный сайт, скачать Бездепозитные призы отличный вариант бесплатной игры в игровые автоматы. Многие пользователи сети не знают, собственно в казино можно начать играть безусловно безвозмездно, а потом исключить выигрыш на банковскую карту либо электронный кошелек, другие не доверяют интернет казино, а третьи удачно играют и выигрывают – и тотчас достаточно великие суммы.
<b>Смотреть еще похожие новости:</b>
<a href=https://msknovostroy.com/showthread.php?tid=104462>1хслотс рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Помните, что в некоторых забавах сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки числятся как отыгранные средства, момент как в слотах идет в зачет все 100% суммы. Получить Бездепозитный бонус в интернет казино дело 2-ух кликов. Другой момент, отыграть рекламную и соблюсти верховодила и условия отыгрыша. Под правилами предполагается столько вагер, но и ограничения по максимальной ставке. Мы осознаем, собственно в кино все ставят на зеро и выигрывают. Призываем не делать похожего. Перед активацией приза прочтите правила. Узнайте последующие моменты: Условия получения дара, за регистрацию, за депо и многое. Ограничения по максимальной ставке. Зачастую не выше 350 руб. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах можно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на месте. Поэтому важно знать, в каких играх можно совершать кратность валютного оборота.
#6467 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Виктория Баркова, легкоатлетка gama casino <a href=https://t.me/vchkogpu_ru>пин up casino</a> казино вулкан яндекс игры казино <a href=https://krtka.info/>Радченко Светлана Юрьевна порно</a> винлайн букмекерская контора casino ап kometa casino casino зеркало сегодня рабочее 1×bet пина casino unlim casino
#6468 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Сергей Бобровский (хоккей) 1×bet 1 <a href=https://rhymes-punches.com/>casino онлайн</a> казино вход официальный сайт казино смотреть онлайн бесплатно <a href=https://specreporter.com/>ев казино</a> пин ап букмекерская контора 1×bet телефон вавада казино 1×bet слоты официальный сайт porno Марина Александрова порно с Илья Осипов (киберспорт) казино смотреть
#6469 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
Бездепозитный приз предоставляется новому игроку за конкретные деяния. Часто презент в виде средств или фриспинов выдается за регистрацию, благодаря чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми акциями. Читайте о них в обзорах и на форуме. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> <a href=http://www.gothicpast.com/myomeka/posters/show/79813>http://www.gothicpast.com/myomeka/posters/show/79813</a> У каждой забавы средства притязания по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система засчитает каждую ставку. В рулетке и покере устроить это намного сложнее. Именно поэтому так важно внимательно разбирать обстоятельства получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в любой ирге, то новенькие попросту «спустят приз на ветер».Важно, убедитесь что, собственно ранее не регились в избранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи. 1×слотс казино <a href=http://armi21.com/bbs/board.php?bo_table=free&wr_id=94033>http://armi21.com/bbs/board.php?bo_table=free&wr_id=94033</a> Размер бонусов почаще всего чисто символический и не превышает 50 рублей. Приятно, хотя ощутимым бустом в игре навряд будет.Можно. Вы всегда сможете отрешиться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не создадите ставку.
1×slots casino регистрация на сайте
<a href=http://youboy.comwww.molifan.net/space-uid-2295552.html>1×slots регистрация на официальном сайте</a> 1 хслот регистрация в 1×slots casino К примеру, игроку выдаются бесплатные средства в заведении в объеме пятидесяти либо 100 долларов (вейджер на которые сочиняет 100х). То есть, любому новоприбывшему игроку выскакивает привлекающая иллюстрация, кот-ая сулит выплату всех зачисленных фирмой средств. Не стоит заострять на казино приз за регистрацию без депо с чрезмерно великой либо очень малеханькой суммой призов, поэтому что, числе тщательно исследовав все условия, тут всего, несомненно какой-то подкол.Но есть игорные заведения, коие готовы просто например жертвовать деньги на забаву. Для этого довольно сделать профиль. Чтобы вывести собственный выигрыш, вас сначала необходимо выполнить обстоятельства отыгрыша, обозначенные в критериях получения бездепозитного депо. <a href=http://pfb7978i.bget.ru/index.php?subaction=userinfo&user=TravisVancy>http://pfb7978i.bget.ru/index.php?subaction=userinfo&user=TravisVancy</a> Бездепозитный приз казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в данном и содержится основное различие.Фриплей-бонусы встречаются только в неких клубах. Они зачисляются сразу последствии сотворения профиля и активны недолговременное время. Если не успеете потратить средства, они просто сгорят. Касаемо медли, в большинстве случаев призы активны на часа. 1×slots казино зеркало Некоторые казино шансы предлагать посетителям бездепы за свидетельство номера или почты или репост на страничку в социальных сетях.
1×slots зеркало рабочее на сегодня
На данном разделе портала регулярно публикуются обзорные статьи, в которых рассматриваются благотворительные призы наилучших интернет-казино. Информация структурирована по нескольким пунктам, включая главные: <a href=http://www.zhuangxiuz.com/home.php?mod=space&uid=849354>http://www.zhuangxiuz.com/home.php?mod=space&uid=849354</a> 1×слот регистрация в 1×slots casino Бездепозитные призы за регистрацию в игровых автоматах для собственников онлайн-казино считаются долею маркетинговой кампании, направленной на повышение аудитории сайта. Так они продвигают средства бренды и привлекают свежих клиентов.Размер приза. В качестве бездепов обычно начисляют маленькие суммы, а когда речь идет о бонусах за депозит, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино имеют презентовать игроку до 2000$.
1×slots подтвердит вашу регистрацию если говорить
Иногда у гостей вебсайта имеют появиться проблемы при активации приобретенного промо-кода. В таких случаях, нужно обратиться за помощью в службу «Support». Для получения ответа, обязательно указывается конкретная причина обращения и подтверждается информация дополнительными снимками. Если сложилась спорная ситуация, всегда возможно адресоваться к основному регулятору или контролирующему органу, выдавшему этому заведению лицензионный документ. В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая доля забавы. Важно, зачастую бездепозитные бонусы в казино выдаются с лимитированиями по максимальной выплате. В среднем можно рассчитывать на выгода в некоторое тысяч руб. Как вывести выигрыш с бонуса без депозита. Придётся подтвердить аккаунт документально, в некоторых заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате или прочтите в правилах.Бездепозитный бонус казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби избранного заведения, определится в выборе игр и выяснить качество работы саппорта. Довольно нередко, начиная игровой процесс, игрок уже отказывается останавливаться и делает реальный вклад. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать бесплатно вполне как раз таки с призом за регистрацию без надобности заносить депозит. Таким образом, заведение пробует показать себя своим потенциальным геймерам, а такой маркетинговый ход как казино приз без депозита за регистрацию привлекает очень количество внимания к игорному заведению и обеспечивает неизменный струю новых гостей и грядущих посетителей игрового интернет клуба.Чтоб получить крупный выигрыш, подбирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша. 1×slots официальный demo регистрация в 1×slots casino <a href=http://www.pengstys.com/home.php?mod=space&uid=109477>http://www.pengstys.com/home.php?mod=space&uid=109477</a>
рабочее зеркало 1хслотс
Иногда в качестве бездепа, казино дарует наименьший бонус (до 50 руб. ), ради которого не заморачиваться.Нельзя рассматривать забаву на средства, как вариант заработка. Азартные забавы воспрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не организатором азартных игр. Сайт носит информационный характер. <a href=http://www.russtars.tv/user/Deweygof/>http://www.russtars.tv/user/Deweygof/</a> Одним из предлогов отдавать привилегию 1 либо другому заведению заключается в привлекательности предлагаемых акций и безвозмездных услуг. Безвозмездные фриспины, выдаваемые без дела создавать какой-либо вклад, в списке находится далеко не в конце. 1×slots на любой вкус как пройти регистрацию Помните, собственно всевозможные нарушения верховодил сведут на нет ваши старания, и вы всего останетесь без начисленного вам безвозмездного приза. Всегда изучайте управляла начисления и условия вейджера. По хоть вопросам, на коие вы не можете без найти ответы, обращайтесь за объясненьям и саппорт.
<b>Смотреть еще похожие новости:</b>
<a href=https://creapnl.com/foros/tema/1×slots-%d0%bd%d0%b0-%d0%bb%d1%8e%d0%b1%d0%be%d0%b9-%d0%b2%d0%ba%d1%83%d1%81-%d0%ba%d0%b0%d0%ba-%d0%bf%d1%80%d0%be%d0%b9%d1%82%d0%b8-%d1%80%d0%b5%d0%b3%d0%b8%d1%81%d1%82%d1%80%d0%b0%d1%86%d0%b8–11/>1×slots на любой вкус как пройти регистрацию</a>
<a href=http://theauction.com.au/my-account/>1хслотс казино зеркало</a>
<a href=https://redfist.de/RF-Online-Testforum/viewtopic.php?f=105&t=80607>1х слотс зеркало регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Обычно для получения призов без депо, казино выдвигает приклнные и вполне выполнимые обстоятельства, хотя есть ряд действий коие воспрещены и имеют причиной досадные результаты:
#6470 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало этих способов предполагает регистрацию
Некоторые онлайн-казино без депо предлагают новым посетителям выбрать приз при регистрации. Будьте внимательны: выбрав раз, вы в абсолютном большинстве случаев не можете воспользоваться остальными. <a href=http://filmkachat.ru/>1× слот зеркало</a> Онлайн-казино с бездепозитными призами ставят посетителям обстоятельства для использования бездепами, поэтому перед участием в акции другого, как подробно ознакомиться со всеми правилами и нюансами промоакции. Условия шансы касаться получения бонуса, его использования и последующего вывода денежных средств если, тогда, выигрыша. <a href=https://diigo.com/0y2r7c>https://diigo.com/0y2r7c</a> Промообъявления от казино не дают реальной картины и направлены на вербование внимания юзеров. Понять, как высоки шансы остаться в плюсе, позволит личный анализ условий предложения: 1хслотс казино зеркало <a href=https://owntweet.com/thread/214646>https://owntweet.com/thread/214646</a>
1× slots официальный
<a href=https://aircompare.us/forums/memberlist.php?mode=viewprofile&u=40074>1хслот зеркало сайта</a> 1×slots на любой вкус как пройти регистрацию Как правило, при выводе денег, от играющего потребуется лишь устроить минимальный вклад чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом собственный счет.Демоказино есть практически на каждом сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются значительно пореже: там в случае выигрыша и соблюдения условий промоакций бездеп можно превратить в настоящие деньги. <a href=https://raid4×4.ru/memberlist.php?mode=viewprofile&u=5497>https://raid4×4.ru/memberlist.php?mode=viewprofile&u=5497</a> 1×slots промокод при регистрации Максимальный объем ставки, кот-ый невозможно превосходить пока бонус не будет полностью отыгран. В случае нарушения этого верховодила, бонус и выигрыш с него станут аннулированы.Помимо прочего, для вывода средств по бездепу нужно внести на счёт свой 1-ый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально вероятную необходимую, после чего вывод средств станет доступен.
1×slots регистрация 1×slotscasino 56 online
Новые посетители онлайн-казино без первого депо имеют выяснить собственную удачливость. К тому же есть возможность преобразовать бездепы в реальные деньги за регистрацию в казино, однако результата приз нужно отыграть согласно условиям промоакции.Для всех бездепозитных бонусов функционирует наибольший предел на выигрыш. Он показывает максимальную сумму, которую вас получить, играя на бонусные кредиты. Как лишь для удастся выполнить притязания вейджера, дозволенный максимум несомненно переведен с бонусного счета на главный, а остаток будет списан. <a href=http://linkedin-directory.com/details.php?id=309383>http://linkedin-directory.com/details.php?id=309383</a> Существует ли стратегии для отыгрыша бездепозитных бонусов? К огорчению нет, на выигрыши либо проигрыши с призов, казино либо игрок воздействовать возможности, отдача игр случается от создателей игр. сайт 1× slots casino Нет. Казино выдают благотворительные призы за регистрацию, чтобы, чтобы, дабы клиент имел ознакомиться с игровым заведением. А дабы исключить его, необходимо выполнить обстоятельства отыгрыша.
1хслотс регистрация в 1×slots casino
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1943#post-55362>1×slots промокод при регистрации</a> Сроки активации приза устанавливаются каждым казино, но чаще всего они не превышают недели с момента получения. Игроку непременно надо(надобно) использовать бездеп в течение обозначенного срока, в ином случае бонус просто исчезнет. Каждый бонус возможно получить только один раз, потому случае не использовать бездеп в срок, у игрока не будет второго шанса им воспользоваться. Выиграть реальные средства в казино не пополняя счет – трудно, хотя возможно. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными бонусами и начните играть на бонусные свои. По статистике в 10-ти заведений можно заработать маленькую сумму средств за счет бонусных средств.Некоторые казино могут предлагать клиентам бездепы за подтверждение номера либо почты либо репост на страницу в соц сетях. 1×slots актуальное зеркало <a href=http://misssophie.net/AG_Wohnungssuche/doku.php?id=%D0%9F%D0%B8%D1%86%D1%86%D0%B0%20%D0%BE%D1%82%20%D1%88%D0%B5%D1%84-%D0%BF%D0%BE%D0%B2%D0%B0%D1%80%D0%BE%D0%B2%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!>http://misssophie.net/AG_Wohnungssuche/doku.php?id=%D0%9F%D0%B8%D1%86%D1%86%D0%B0%20%D0%BE%D1%82%20%D1%88%D0%B5%D1%84-%D0%BF%D0%BE%D0%B2%D0%B0%D1%80%D0%BE%D0%B2%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!</a> 1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, в не хотите замерзнуть жертвой жуликов либо впустую истратить время;В случае установленного лимита на необходимую вывода выигрыша с бездепозитного бонуса, игрок не сможет вывести больше заявленной суммы.
1×slots промокод при регистрации
Используйте наихорошие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из списка ниже, дабы заработать презенты за простые деянья и уже сегодня получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и быстрыми выводами на электронные кошельки.Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных требований, считая неотъемлемой верификации. Если на сайте предусмотрена неотъемлемая процедура подтверждения личности, то исключить выигрыш удастся только после ревизии данных. Приготовьтесь наполнить анкету и отправить в техподдержку документ, подтверждающий лицо. Вы не в коем случае ни чем не рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный приз, по мимо практической забавы на бездепозитные бонусы, у Вас есть шанс изучить игровые автоматы, выучится регулировать изменять ставки и линии, изучать бонусные игры и их выигрышные композиции, ну счете просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные средства, коие можно отыграть и вывести, но просто на демо счет, что, этим наиболее адреналин в крови еще больше повысится а пульс забьется с нередким ритмом!Мы подготовили перечень, где есть всегда животрепещущие и новые бездепозитные бонусы казино, которые возможность получить бесплатно. Для наших пользователей есть специальные предложения неповторимые бонусы, которые вы у не отыщите, их мы определили специальной красной плашкой «Exclusive». <a href=http://forums.ghc-games.com/member.php?action=profile&uid=104691>http://forums.ghc-games.com/member.php?action=profile&uid=104691</a> 1×slots зеркало видели такую регистрацию на Представьте момент, когда при ставке в 10 руб. Вы получите подобное умножение. Миллион руб. За одно вращение, что абсолютно вполне. Поэтому вопрос, сколько возможно выиграть остаётся не. Предлагаем выяснить других. Регистрируйтесь в одном либо нескольких интернет казино, получайте Бездепозитный приз и проверяйте удачу в деле. Разумеется, вывести средства сложно. Однако шансы есть у всех.
<b>Смотреть еще похожие новости:</b>
<a href=https://swordmaster.org/user/JamesVok/>1×slots бонус за регистрацию</a>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=125443>1хслот зеркало</a>
<a href=https://clubdefansde24.com/foro/viewtopic.php?t=18202>1×slots зеркало быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Многие казино предоставляют в маркетинговых целях благотворительные бонусы самая для наших читателей. Чтобы их получить, нужно перейти на игровой сайт по партнерской ссылке с нашего портала.
#6471 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Дарья Клишина, легкоатлетка промокод 1×bet <a href=https://repost.news/>1win casino</a> вывод казино ставки на спорт букмекерские конторы <a href=https://specreporter.com/>гама казино</a> гта казино порно с Юлия Ефимова леон букмекерская контора скачать casino на андроид казино смотреть онлайн pin ап casino лучшие бесплатные онлайн казино
#6472 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Александра Бортич 1×bet регистрация <a href=https://7club7.com/>casino скачать приложение</a> 1×bet слоты 1×bet рабочее <a href=https://rhymes-punches.com/>казино на деньги</a> порно с Дарья Касаткина (теннис) пин up casino включи казино пин ап букмекерская контора водка казино бывшие казино порно с Евгения Медведева
#6473 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрацию более популярный вариант это
В подавляющем большинстве случаев благотворительные призы начисляются в кредитах, которые нельзя сразу вывести со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже.Также, учите, что бездепозитный бонус можно исключить лишь никаких случае, когда станут исполнены все обстоятельства отыгрыша. <a href=http://filmkachat.ru/>1хслотс официальный сайт зеркало</a> Такой бесплатный эквивалент средств зачисляется на профиль пользователя в воплощения притязаний и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений вероятен только после осуществления вейджеровых условий. <a href=https://vhearts.net/forums/thread/8949/>https://vhearts.net/forums/thread/8949/</a> Выше мы предоставили глубокий набор самых свежих и актуальных бездепозитных бонусов в интернет казино без пополнения на 2022 год, где вам воспользоваться хоть ценным бездепозитным призом.3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефон или почту, показать индивидуальную информацию; онлайн казино 1×slots <a href=http://wiki.willmackintosh.org/doku.php?id=Выкуп_авто>http://wiki.willmackintosh.org/doku.php?id=Выкуп_авто</a> Каждый в должен сперва отчетливо изучить условия по получению и отыгрышу приглянувшегося подарка. Если всё устраивает, поторопитесь арестовать безвозмездные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо в начать вращать барабаны топовых слотов.
1хслотс рабочее зеркало
<a href=https://forum.home-visa.ru/viewtopic.php?f=69&t=807392&p=3028448#p3028448>1хслот скачать</a> 1× слот зеркало <a href=https://grilovani-barbecue.com/memberlist.php?mode=viewprofile&u=3935>https://grilovani-barbecue.com/memberlist.php?mode=viewprofile&u=3935</a> Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в обязательном порядке необходимо пополнить счет в казино. Для депозитных бонусов, эта процедура не нужна, например как депо теснее изготовлен. 1хслотс казино зеркало Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, the decision только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Риск-игра по равным шансам – Также казино имеет воспрещать скорпулезно условия по отыгрышу с помощью раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких других играх.
1×slots официальный сайт зеркало рабочее
Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и более. Когда игроку надеется большое фриспинов, администрация возможность бить3 их начисление на количество дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах промоакции.Риск-игра по равным шансам – Также казино может запрещать исполнять условия по отыгрышу с помощью раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких иных забавах. Хотя безвозмездные бонусы начисляются без депо, не исключено, что вас понадобиться заносить средства. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только в такого, как новый заказчик впервые пополнит игровой счет. <a href=http://wiki.hightgames.ru/index.php?title=скачать_торрент_фильмы_бесплатно>http://wiki.hightgames.ru/index.php?title=скачать_торрент_фильмы_бесплатно</a> Благодаря программе лояльности от игорного заведения, возможно арестовать неплохой старт и без добавочных вложений запустить видеослоты. Кроме того, возможно рассчитывать на реальную удачу и получить, без вложения собственных финансов, великой выигрыш. 1×slots актуальное зеркало Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных обстановок с казино, когда последствии отыгрыша бездепа вас не дадут вывести крупную необходимую выигрыша.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Наши специалисты изучают обстоятельства акции, после в ручном режиме проверку их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и другие характеристики. Мы не рекламируем казино, а даем игрокам информацию о наилучших из их.Только выполнив все обстоятельства отыгрыша и дождавшись окончания проверки аккаунта, Вы можете оформить заявку на вывод средств и получить свои средства. Oтыгpaть приз с указанным вeйджepом, чтобы необходимо сдeлaть cтaвoк нa cумму, превосходящую размер приза в некоторое один.Поспешите отобрать бездепозитные бонусы за регистрацию в казино из представленного списка. Все платформы столько ведут законную деятельность, хотя и порадуют добросовестными результатами забавы, высочайшей отдачей, прыткими выплатами. 1×slots зеркало регистрация в 1×slots casino <a href=http://j013.koreawebcenter.com/bbs/board.php?bo_table=free&wr_id=814319>http://j013.koreawebcenter.com/bbs/board.php?bo_table=free&wr_id=814319</a>
1×slots регистрация 1×slots casino 777 online
Чтоб получить крупный выигрыш, подбирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша.Объективные – объем приза, коэффициент и условия вейджера, необходимость внесения депозита для вывода денег; <a href=http://elite-models.cc/member.php?action=profile&uid=21386>http://elite-models.cc/member.php?action=profile&uid=21386</a> Для выбора азартного заведения Вы можете пользоваться перечнем наших казино с призами за регистрацию. На нашем веб-сайте мы выпустили список бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, собственно доля призов эксклюзивные и доступны только для гостей нашего вебсайта по-специальному промо-коду либо по оригинальной ссылке. Кроме как, для каждого бонуса мы подготовили доскональный обзор, в котором Вы узнаете как получить и отыграть поощрение и как исключить собственный выигрыш с бездепа. 1х слот регистрация в 1×slots casino Выбирая бесплатный бонус, внимательно изучайте верховодила. Убедитесь, собственно вас можно принимать роль в промоакции. Уточните, в каких играх можно выполнять обстоятельства вейджера. При необходимости задавайте вопросы адептам саппорта.Но есть азартные заведения, готовые просто например вручить средства на игру. Для сего достаточно сделать профиль. Чтобы исключить выигрыш, сперва нужно выполнить вейджеровые обстоятельства, прописанные в критериях получения бездепа.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чаще всего казино приз за регистрацию без депо даёт возможность запустить каждой автомат. Но никакого внимательно ознакомиться с условиями. Иногда для забавы доступны только определённые модели. Если вы новичок и ничего не смыслите в гэмблинге, другого начать знакомство с миром азарта непосредственно с «одноруких бандитов». Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.
#6474 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
Прибывшие на аккаунт финансы бездепозитные призы предназначаются, в основном, лишь для свежеиспеченных пользователей, коие ранее не имели собственного аккаунта в данном казино. Исходя из этого, случае раньше у игрока был сделан депозит, то, по всей вероятности, у него больше не будет возможности рассчитывать на получение такового приза в конкретном заведении.Фриспины предусмотрены для применения в видео слотах. Внимательно ознакомьтесь с критериями – часто их выдают на некоторые автоматы. В зависимости от клуба, у вас получится устроить определённое количество ставок. Кстати, продвинутые игорные жилища разрешают запускать каждых «одноруких бандитов». <a href=http://filmkachat.ru/>1×slos регистрация в 1×slots casino</a> <a href=https://www.nitrnd.com/blogs/229798/Transforming-Dream-Kitchens-Through-Professional-3D-Rendering-Solutions>https://www.nitrnd.com/blogs/229798/Transforming-Dream-Kitchens-Through-Professional-3D-Rendering-Solutions</a> При отыгрыше бонусных средств, нужно учитывать срок деянья бонуса и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный бонус будет аннулирован.Бездепозитный бонус казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби избранного заведения, определится в выборе игр и проверить качество работы саппорта. Довольно часто, начиная игровой процесс, игрок уже не желает останавливаться и проделывает настоящий лепта. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать даром вполне как раз таки с бонусом за регистрацию без надобности заносить депо. 1×slots официальный зеркало рабочее <a href=http://vangogh-club.ru/index.php?subaction=userinfo&user=zealousnook56>http://vangogh-club.ru/index.php?subaction=userinfo&user=zealousnook56</a> У нас на сайте Вы отыщите список бонусов без депо в проверенных казино и доскональную информацию про как их получить и использовать.
1хслотс казино зеркало
1×slots зеркало рабочее на сегодня В неких интернет казино для получения бездепозитных призов не достаточно просто зарегистрироваться на веб-сайте клуба и подтвердить средства контактные данные. Дополнительно требуется активация промокода. <a href=http://hardstorecr.com/mybb/member.php?action=profile&uid=172326>http://hardstorecr.com/mybb/member.php?action=profile&uid=172326</a> 1×slots актуальное зеркало Даже не выиграв крупную необходимую, игрок увлекательно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе превосходнейших акций легко. Достаточно регулярно учить список новых интернет казино с выводом бонуса без депо в данном разделе.На нашем сайте Вы найдете перечень своевременных новых бездепозитных бонусов в казино 2022 года. Также, есть много неповторимых услуг, которые доступны только гостям нашего вебсайта в регистрации по нашей ссылке или активации специального промокода.
1×slots официальный сайт зеркало
Помимо остального, для вывода средств по бездепу необходимо внести на счёт свой первый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало возможную сумму, после чего вывод средств станет доступен.Обычно показатель выше, чем для бонусов на депо. Не изумляйтесь, случае он будет том х100. Иногда завышенный коэффициент вейджера устанавливается для обитателей отдельных стран. Наш перечень содержит наихорошие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает проверку по главным характеристикам:Приветственный приз без депозита ? презент за регистрацию. Выдается деньгами, фриспинами или баллами. В последнем случае бонусные баллы применяются для участия в турнирах или обмена на настоящие деньги. <a href=https://www.entoads.com/author/jamesval/>https://www.entoads.com/author/jamesval/</a> Также, учите, что бездепозитный бонус можно исключить только в том случае, когда будут исполнены все условия отыгрыша. 1 x slots casino Верификация аккаунта. Лучше подтвердить личность незамедлительно после регистрации, дабы позже не было проблем с выводом денег. Верификация может проходить двумя путями:
1×slots casino регистрация 1×slots review live
Не стоит путать забаву в демо и внедрение бонусов. В демонстрационном режиме игрок имеет оценить механику слота, сюжет и оформление. Но забава ведется на относительные кредиты, поэтому отсутствует главное ? ощущение пыла. Активируя промокод либо фриспины, клиент и не расходует средства деньги на игровые автоматы, но имеет сорвать настоящий куш!Далее требуется отыграть вагер и исключить выигрыш. Игрокам без навыка крупно повезло, меня получить 10-ки даров за 1 регистрацию. Если не сумели получить Бездепозитный бонус, не беспокойтесь. Обратитесь в интернет чат, оператор поможет ситуацию. 4. Заберите подарок. Чаще всего бонус активируется незамедлительно после регистрации. Но посещают ситуации, когда надо(надобно) зайти в личный офис или написать в службу поддержки.Игры, в можно выступать на бонусные деньги. Проверьте список игр, каких возможно играть на бонусные средства, вполне они Вам не понравятся и не стоит расходовать своё время на такую акцию. 1хслотс рабочее зеркало на сегодня <a href=https://www.golestanmporg.ir/user/JosephNeala/>https://www.golestanmporg.ir/user/JosephNeala/</a> Бесплатные бонусы казино без депозита возможно получить вид валютных средств на бонусный счет (исключить их можно только последствии отыгрыша), фриспинов, игры или кешбэк-бонуса.
1×slots быструю регистрацию а также мгновенное
После получения бонуса вывод средств для посетителя несомненно недосегаем времени, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или чета месяцов. Выводить деньги игрок сможет только после отыгрыша.На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению сего медли, Вы не сможете активировать и получить бездепозитный бонус. Возможность протестировать новые игры, не рискуя личностными средствами и разработать личную тактику забавы. <a href=http://shinyoungwood.co.kr/bbs/board.php?bo_table=free&wr_id=295579>http://shinyoungwood.co.kr/bbs/board.php?bo_table=free&wr_id=295579</a> 1×slots рабочее зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=243857>1×slots рабочее зеркало на сегодня</a>
<a href=http://nexusroleplay.teamforum.ru/viewtopic.php?f=19&t=3332>1×slots casino зеркало рабочее</a>
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=3017>1х слот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? Каждый игры обязан сперва отчетливо выучить условия по получению и отыгрышу понравившегося дара. Если всё организует, поспешите забрать благотворительные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик сейчас начать вертеть барабаны лучших слотов.
#6475 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Александр Большунов (лыжные гонки) порно с Алина Загитова <a href=https://rhymes-punches.com/>порно с Алина Загитова, фигуристка</a> казино рублях сайт 1×bet слоты <a href=https://rhymes-punches.com/>порно с Васильева Татьяна Викторовна</a> макао казино casino зеркало сегодня порно с Константин Тюкавин (футбол) porno Виктория Баркова, легкоатлетка порно с Алина Загитова казино пину Нургалиева Эльвира Рамиловна порно
#6476 Charlesgunnyhttp://filmkachat.ru
1хслот 1хслотс регистрация перейти на 1×slots
Зарегистрироваться в казино по специальной ссылке или с бонусным кодом. Подтвердить контактные данные (номер аппарата и электрическую почту). Для доказательства номера телефонного необходимо в собственном профиле указать свой номер и надавить кнопку „Подтвердить номер телефонного“, дальше Вы получите sms-сообщение с кодом, кот-ый необходимо ввести в отвечающее фон. Для подтверждения электрической почты, перейти по интенсивной ссылке в послании от казино.Используйте лучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из перечня ниже, чтобы заработать презенты за обычные действия теперь сегодня получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и резвыми выводами на электрические кошельки. <a href=http://filmkachat.ru/>1хслотс официальный сайт зеркало</a> <a href=https://www.tamaiaz.com/blogs/268391/Mastering-Interior-Design-Drafting>https://www.tamaiaz.com/blogs/268391/Mastering-Interior-Design-Drafting</a> При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, которое можно посвятить этой в казино. 1×slots зеркало быструю регистрацию а также мгновенное <a href=http://v90457cw.beget.tech/user/WalterKeews/>http://v90457cw.beget.tech/user/WalterKeews/</a>
1×slots официальный сайт скачать на айфон
<a href=https://forumauthority.com/thread-6636-post-39907.html#pid39907>1×слотс казино</a> онлайн казино 1×slots <a href=http://slideshow-forum.com/profile.php?id=96944>http://slideshow-forum.com/profile.php?id=96944</a> Выигрыши с бонусов без вложений практически привязаны к требованию по ставкам и имеют быть обналичены только после исполнения данных требований. 1 хслот регистрация в 1×slots casino
1×slots официальный demo регистрация в 1×slots casino
Большинство интернет-казино из нашего топ-10 готовы повеселить вас эксклюзивными промоакциями. Читайте о них в обзорах и на форуме. <a href=http://camillacastro.us/forums/profile.php?id=247162>http://camillacastro.us/forums/profile.php?id=247162</a> 1×slots казино зеркало Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Обычно, бездепозитные бонусы выдаются под конкретные слоты с фиксированной ставкой, но их точно воспрещено применять в игровых автоматах с современным джекпотом. Список игр, каких можно применять бездеп, Вы отыщите в описании промоакции или сможете уточнить у службы поддержки заведения.
1× слот зеркало
Лишь популярностью и знаменитые азартные заведения шансы разрешить себе выдавать бездепы повторяющий дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, коие возможно потратить в топовых аппаратах с высокой отдачей. 1× slots зеркало <a href=https://conference.pkp.sfu.ca/index.php/pkp2011/pkp2011/comment/view/327/207/11403>https://conference.pkp.sfu.ca/index.php/pkp2011/pkp2011/comment/view/327/207/11403</a>
1× slots официальный
Бездепозитные призы настоящими деньгами, которые возможно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадались. Так же стоит выделить то, что в любом интернет казино установлен собственный максимальный кешаут на бездепозитный бонус. Как правило кешаут — это предельная сумма денег, которая доступная для вывода с бездепозитного бонуса. <a href=https://praisenpray.org/forums/member.php?action=profile&uid=58148>https://praisenpray.org/forums/member.php?action=profile&uid=58148</a> Бывают ли бездепозитные бонусы без вейджера? Бывают, если у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию уточняется вейджер во всех казино. 1×slots зеркало рабочее Свежий бонус начисляется вид валютных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в пользовании средствами, ну случае отыгрыша оператор имеет установить ограничение на вывод средств.
<b>Смотреть еще похожие новости:</b>
<a href=https://russiancomputerservice.ru/user/JosephCer/>1×slots сайт зеркало</a>
<a href=http://forum.survival-readiness.com/viewtopic.php?t=264511>казино 1×slots</a>
<a href=https://forum.bedwantsinfo.nl/thread-717660.html>1×slots casino зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Новые посетители онлайн-казино без первого депо могут выяснить собственную удачливость. К что, этому же есть возможность преобразовать бездепы в реальные деньги за регистрацию в казино, впрочем чтобы бонус необходимо отыграть сообразно условиям промоакции. Фриспины. Бесплатные вращения предусмотрены для применения в видео-слотах. Внимательно читайте условия – они нередко выдаются для некоторых машин. В зависимости от клуба продоставляется делать конкретное количество ставок. Кстати, современные игорные дома выделяют возможность заводить «одноруких бандитов».
#6477 Thomasrethttps://www.montenegro-real-estate-prices.com
Montenegro residence permit <a href=https://www.montenegro-real-estate-prices.com/>Realty Montenegro</a>
#6478 Ремонт ноутбуков Fujitsu Siemens Москваhttps://remont-noutbukov-fujitsu-siemens-ext.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт ноутбуков fujitsu siemens в москве, можете посмотреть на сайте: <a href=https://remont-noutbukov-fujitsu-siemens-ext.ru/>ремонт ноутбуков fujitsu siemens цены</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#6479 Charlesgunnyhttp://filmkachat.ru
1× slots зеркало
Новички не любят сразу же вносить депозит. Это обосновано неимением опыта и сомненьем. К счастью, в можно получить бездепозитный бонус за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В любом случае вы не рискуете своими сбережениями. Это замечательная вероятность запустить приглянувшийся видео разъем либо же испытать удачу в настольных забавах. <a href=http://filmkachat.ru/>1×slots регистрацию процедура займет всего лишь</a> Подтвердите лицо, предоставив оператору казино средства паспортные данные. Инструкции обычно легкие, основное — четко им следовать. Если написано, собственно «на фото обязаны быть заметны все хорошо угла страницы паспорта» — сделайте именно такое фото. <a href=https://www.vevioz.com/forums/thread/4584/>https://www.vevioz.com/forums/thread/4584/</a> 1×slot зеркало рабочее регистрации на телефон придет <a href=http://axioma-estate.ru/index.php?subaction=userinfo&user=baddeity64>http://axioma-estate.ru/index.php?subaction=userinfo&user=baddeity64</a> Фриспины предназначены для применения в видео слотах. Внимательно ознакомьтесь с условиями – часто их выдают на кое-какие автоматы. В зависимости от клуба, у вас выйдет устроить определённое количество ставок. Кстати, продвинутые игорные жилища разрешают запускать каждых «одноруких бандитов».
1× слот зеркало
Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Денежные свои. Третий приз за регистрацию без депозита – наличные. К сожалению, лишь известные и пользующиеся клубы могут дать деньги в руб. Либо долларах. С их поддержкою возможность насладиться любой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед данным нужно исполненье конкретных условий. x1 slots 1хслотс регистрация перейти на 1×slots <a href=http://eco-adamant.kz/index.php?subaction=userinfo&user=detailedalibi2>http://eco-adamant.kz/index.php?subaction=userinfo&user=detailedalibi2</a> Промокод – определённая композиция знаков, которую необходимо ввести в подходящее фон при создании учетной записи либо активировать в собственном профиле игрока в разделе с бонусами. 1×slots официальный сайт скачать
1×slot казино зеркало
1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, случае не желаете стать жертвой мошенников либо впустую израсходовать время;Представленные на этой странице наихорошие бездеп призы в казино за регистрацию в 2022 году имеют подходящие обстоятельства. После тщательного анализа редакция портала составила рейтинг спецпредложений, в котором посетители Casino.ru имеют сортировать список по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д. Промообъявления от казино мешают реальной картины и направлены на привлечение внимания юзеров. Понять, как высоки шансы остаться в плюсе, позволит личный анализ критерий предложения: <a href=http://levin-lic.ru/index.php?subaction=userinfo&user=markedsolitude5>http://levin-lic.ru/index.php?subaction=userinfo&user=markedsolitude5</a> В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, необходимо адресоваться в службу спустя лайв-чат на сайте казино. casino 1×slot Бездепозитный бонус предоставляется новенькому игроку за определенные деяния. Часто подарок в виде денег или фриспинов выдается за регистрацию, спасибо чему юзер получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.Такие одобрения разрешают бесплатно протестировать новое казино, разобраться с игровым ходом онлайн слотов, заработать и исключить небольшую необходимую средств.
1×slots сайт
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=706743>казино 1×slots официальный сайт</a> Законодательство, регулирующее азартные забавы в различных государствах, влияет на полномочия операторов. В итоге пользователи из отдельных ареалов сталкиваются с лимитированиями со стороны казино. Это может быть как глубокий отказ в доступе, так и невозможность загружать забавы отдельных производителей. 1хслотс 1хслотс регистрация перейти на 1×slots <a href=http://www.tr.besatime.com/index.php?subaction=userinfo&user=Arnoldmem>http://www.tr.besatime.com/index.php?subaction=userinfo&user=Arnoldmem</a>
1хслотс официальный сайт зеркало
Каждый из бездепозитных призов без пополнения 2022 содержит собственный определенный вейджер для отыгрыша, например же в любом казино он уточняется индивидуально — где то он х55 а кое-где х30, повторюсь везде по разному! Возможность поиграть дополнительное состязание (а время и некоторое) абсолютно даром, а выигрыш, в свою очередь, поступает на счёт игрока. <a href=http://clipartus.ru/index.php?subaction=userinfo&user=uwyvew>http://clipartus.ru/index.php?subaction=userinfo&user=uwyvew</a> Помимо остального, для вывода средств по бездепу необходимо внести на счёт собственный первый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально вероятную сумму, в чего вывод средств будет доступен. 1×slots регистрация 1×slots casino c2d ru
<b>Смотреть еще похожие новости:</b>
<a href=https://www.makinamania.net/index.php?topic=250458.new#new>казино 1×slots</a>
<a href=http://nacionrolera.org/foro/viewtopic.php?f=1210&t=254906>1×slots зеркало рабочее на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы за регистрацию в игровых автоматах для собственников онлайн-казино считаются долею рекламной кампании, направленной на увеличение аудитории сайта. Так они продвигают свои бренды и завлекают свежих клиентов.
#6480 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать 1×bet на андроид 1win casino <a href=https://rucriminal.info/>букмекерская контора фонбет официальный сайт</a> порно с Антропова Валентина Викторовна pin ап casino <a href=https://m.repost.news/>казино вход официальный сайт</a> 1×bet зеркало слоты 1×bet xyz казино ли porno Ангелина Гончаренко, хоккеистка 1×bet официальный казино рулетка porno Андрей Рублев (теннис) 7k casino бонус
#6481 Charlesgunnyhttp://filmkachat.ru
1х слотс зеркало регистрация в 1×slots casino
Раздача призов имеет быть посвящена разным датам: календарные праздничные, деньки рождения игроков, годовщина открытия казино и т. Д. Подарок выдается вид денег, фриспинов либо баллов для накопления и размена на предложения оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода этой суммы понадобиться выполнить ряд притязаний.При поддержки такового поощрения оператор возможность также привлекать посетителей, коие раньше показывали активность на сайте, но по некий причине прекратили выступать. В этом случае промокод высылается пользователю по электронной почте либо в виде SMS. <a href=http://filmkachat.ru/>1хслотс 1хслотс регистрация перейти на 1×slots</a> <a href=https://www.gift-me.net/blogs/228961/Transform-Your-Space-Professional-3D-Living-Room-Design-Made-Simple>https://www.gift-me.net/blogs/228961/Transform-Your-Space-Professional-3D-Living-Room-Design-Made-Simple</a> Как только на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу в сего можно оставить заявку на вывод выигрыша. Кредиты прибыльно выделяются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом реальных средств и выделяют вероятность почувствовать азарт. Во-вторых – можно насладиться любой азартной игрой доступной на сайте. В вашем распоряжении находятся автоматы, настольные прибавленье, видео-покер, Live-дилеры.За счёт спинов получится запустить разные интернет слоты, протестировать стратегии и поднабраться навыка. Фишка том,, что вращения начисляются на лучшие аппараты с уникальными опциями и высокой отдачей. Не забывайте, собственно в каждом акционном предложении учтены специальные притязания – временные лимитирования, наибольший объем ставки, список дешевых игр. 1×slot официальный сайт <a href=http://gather-girls.com/home.php?mod=space&uid=124844>http://gather-girls.com/home.php?mod=space&uid=124844</a> На данном разделе портала регулярно публикуются обзорные статьи, в рассматриваются безвозмездные бонусы лучших интернет-казино. Информация структурирована по нескольким пунктам, включая основные:
1×slots казино зеркало
<a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=144165>1хслотс официальный сайт зеркало</a> 1×slots зеркало которую указывали при регистрации кстати Срок отыгрыша — это период, кот-ый наступает в момент активации бонуса и заканчивается с его закрытием. Пользователю необходимо уложиться в данный временной зазор, по призовые средства аннулируются. Казино устанавливают перечень игр, ставки каких засчитываются при расчете отыгранных средств. Если тайтл не входит в данный список, то возможность быть недосегаем для загрузки в деянья бонусного предложения. <a href=https://www.magcloud.com/user/glavdorogadv2404>https://www.magcloud.com/user/glavdorogadv2404</a> 4. Заберите подарок. Чаще всего бонус активируется незамедлительно после регистрации. Но посещают ситуации, когда надо(надобно) забежать в личный офис либо написать в службу поддержки.Следует выделить, собственно бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом. 1хслот официальный сайт зеркало Вейджер не более х30–35 является приемлемым. Опытные игроки заявляют, что с таким вейджером реально остаться в плюсе, если правильно подойти к выбору игрового аппарата.
1×slots зеркало
Выше мы предоставили глубокий комплект самых свежих и своевременных бездепозитных бонусов в интернет казино без пополнения на 2022 год, где продоставляется пользоваться каким ценным бездепозитным бонусом.Главное превосходство спинов – возможность выучить различные слоты. Также получится насладиться бонусными раундами, испытать фортуну в риск-туре и преумножить выигрыш за счёт особых символов. Однако столько игровой процесс заслуживает внимание, так чем сосредоточиться на реальном выигрыше. <a href=https://glbian.com/prd/bbs/board.php?bo_table=free&wr_id=60623>https://glbian.com/prd/bbs/board.php?bo_table=free&wr_id=60623</a> Бездеп с фриспинами может охватывать всю коллекцию игр на сайте или разработки 1-го провайдера. Обычно предлагается определенный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш возможность быть выведен после как, как юзер отыграет эту необходимую. Возможность оценить глубокий возможностей слотов — основное совершенство этой разновидности. Игроку становятся доступны что, эти опции, коие отсутствуют в демонстрационном режиме, а возможность выиграть реальные деньги прибавляет ярчайших азартных ощущений. 1×slots акции Нельзя осматривать забаву на средства, как вариант заработка. Азартные забавы воспрещены для лиц младше 18 лет. Topcasinobonuses.mobi не зачинщиком азартных игр. Сайт носит информационный характер.Перед активацией принципиально внимательно изучить условия акции. Чем ниже вейджер, что, этим больше потенциальная выгода игрока. Имеют значение кроме лимиты ставок при отыгрыше и сроки, протяжении которых можно пользоваться предложением. Если бездеп охватывает узкий список игр, рекомендовано узнать максимальные коэффициенты, степень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только сомнений случае, случае оператор не установил требовательные лимитирования на максимальную необходимую ставки.
1×slots casino регистрация 1×slots review live
Нельзя осматривать игру на деньги, как вариант заработка. Азартные забавы запрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не является организатором азартных игр. Сайт одевает информационный нрав.Если вы облюбовали для себя некоторое брендов которые вам больше всего приглянулись, для неизменной забавы! Таких гемблеров казино очень предпочитает и оценивает, за частую такие игроки становятся VIP игроками заведения, коим нередко поступают выгодные предложения в виде призов, например же туда входит и бездепозитные. Частенько новички не понимают, как активировать презенты или исключить первый выигрыш. Для подобных случаев наша команда обрисовала основные термины – что это фриспины, вейджер, как его отыграть, зачем нужно протекать верификацию. 1×slots регистрация 1×slotscasino 56 online <a href=https://gusev-online.ru/user/Henryvus/>https://gusev-online.ru/user/Henryvus/</a>
1×slots промокод при регистрации
Раздача бонусов возможность быть посвящена разным датам: календарные праздники, деньки рождения игроков, годовщина открытия казино и т. Д. Подарок выдается в виде средств, фриспинов либо баллов для скопления и размена на предложения оператора. Если пользователь получает выигрыш, деньги начисляются на его счет. Для вывода данной суммы придется выполнить ряд требований. А ознакомиться с новыми интернет казино, Вы можете с призов с выводом выгоды, коие Вы сможете получить без депо. <a href=http://doctor54.ru/blogs/view/3909.html>http://doctor54.ru/blogs/view/3909.html</a> Онлайн-казино с бездепозитными бонусами ставят посетителям условия для использования бездепами, потому перед участием в акции какого-либо подробно ознакомиться со всеми правилами и аспектами промоакции. Условия могут дотрагиваться получения бонуса, его применения и последующего вывода валютных средств если, тогда, выигрыша. 1хслотс официальный сайт зеркало Раздача призов возможность быть посвящена разным датам: календарные праздники, дни рождения игроков, годовщина открытия казино и т. Д. Подарок выдается повторяющий денег, фриспинов или баллов для накопления и обмена на предложения оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода этой суммы придется выполнить ряд притязаний.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.xn–72c9aa5escud2b.com/webboard/index.php/topic,535187.new.html#new>1×slots акции</a>
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=10453>зеркло казино 1×slots</a>
<a href=https://www.reisezielforum.de/viewtopic.php?t=392777>1×slots рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Можно ли в одном интернет казино получить больше одного приза за регистрацию? Нет, так как в каждом онлайн казино есть правила, к которым надо(надобно) придерживаться, не творить 2 аккаута для получения бонусов, по несомненно блокировка обоих аккаутов, не пытайтесь обмануть онлайн казино, бонус за регистрацию выдаеться один один 1 личику. Диапазон ставок, коие вправе сделать игрок, кроме лимитирован. Обычно назначать возможно небольшую необходимую — в 10–30 рублей за одно вращение.
#6482 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Екатерина Ефременкова, шорт-трекистка казино рояль <a href=https://sovsekretno.net/>официальные букмекерские конторы скачать</a> Яровая Ирина Анатольевна порно pin up casino официальный <a href=https://rhymes-punches.com/>играющие казино</a> casino на телефон букмекерскую контору пин Самойлова Алла Владимировна порно букмекерские конторы бет порно с Каролина Севастьянова Попова Анна Юрьевна порно 1×bet скачать приложение на андроид
#6483 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
Даже не выиграв крупную необходимую, игрок увлекательно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе превосходнейших промоакций с. Достаточно периодически изучать список новых интернет казино с выводом бонуса без депозита в данном разделе. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasino09k online</a> Но не мыслить, собственно снабжая пользователей этими бонусами, казино увлекается спонсированием. Ведь размеры вознаграждений, в, не великие (средним объемом от 5 до 20 $). И на эти средства налагаются определенные обстоятельства и лимитирования, неотклонимые к исполнению игрока, если в последствии он вожделеет получить все средства выигранные деньги.Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых свежих, щедрых и испытанных бонусах в интернет казино, которые обновляются каждый день. <a href=https://www.gift-me.net/blogs/228961/Transform-Your-Space-Professional-3D-Living-Room-Design-Made-Simple>https://www.gift-me.net/blogs/228961/Transform-Your-Space-Professional-3D-Living-Room-Design-Made-Simple</a> 2. Создать новый профиль. Для регистрации нужно наполнить небольшую анкету либо зайдите в индивидуальный кабинет при помощи социальных сетей;Новые клиенты онлайн-казино без первого депо все выяснить свою удачливость. К тому же есть возможность конвертировать бездепы в настоящие деньги за регистрацию в казино, однако желаемого бонус необходимо отыграть согласно условиям промоакции. рабочее зеркало 1хслотс <a href=http://spilov.ru/user/Jameshex/>http://spilov.ru/user/Jameshex/</a> Постарайтесь отыграть вейджер, дабы была возможность забыть заявку на выплату. Кстати, на всех веб-сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы можете получить выигрыш на электрической кошелёк, карту, аппарат.
1×slots зеркало на сегодня
Обычно бездепозитные промоакции от казино, приходят на эл. Почту в деньки рождения либо праздники. В неких интернет казино можно обратиться в чат и как постоянному игроку, вполне для предложат бездепозитное предложение.Например, игрок получил 500 рублей при творении аккаунта и обязан отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 руб., потребуется сделать 875 спинов для полного отыгрыша. <a href=https://021snyw.com/space-uid-53919.html>1×slots регистрация на 1хслотс</a> 1×slots зеркало регистрацию более популярный вариант это В количестве случаев бесплатные бонусы начисляются в кредитах, которые невозможно незамедлительно исключить со счета. Прежде их нужно отыграть по установленным правилам. Эти требования принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже.Бездепы обыкновенно предлагают с отыгрышем — моментально вывести выигранные свои невозможно. Перевод денег со счета несомненно возможен в того, как юзер выполнит все требования казино, а сумма не может быть выше установленного правилами лимита. Условиями акции фиксируются сроки, на коих заказчик вправе пользоваться предложением. Обычно они не превосходят нескольких дней в активации. <a href=http://whdf.ru/forum/user/92024/>http://whdf.ru/forum/user/92024/</a> Такой бесплатный эквивалент средств зачисляется на профиль юзера последствии воплощения требований и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений возможен только в осуществления вейджеровых критерий. 1×slots зеркало 1хслотс регистрация перейти на 1×slots Так же стоит выделить то, что в каждом интернет казино установлен собственный наибольший кешаут на бездепозитный бонус. Как правило кешаут — это предельная сумма средств, кот-ая доступная для вывода с бездепозитного приза.
1×slots регистрация 1×slotscasino 56 online
Обыкновенные бездепозитные бонусы в размере от трех до 20 долларов созданы для того, чтобы в забавы заходили все новые и свежие игроки. Здесь, скорее, несомненно лимитирование на наибольший выигрыш. Важно, чтобы перед наименьшим вкладом был отключен приз за первое пополнение счета, и геймер не попадет на повторный вейджер. <a href=http://www.god123.xyz/home.php?mod=space&uid=1076943&do=profile>http://www.god123.xyz/home.php?mod=space&uid=1076943&do=profile</a> Зарегистрироваться в казино по специальной ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефона и электронную почту). Для подтверждения номера телефона нужно в личном профиле указать собственный номер и надавить кнопку „Подтвердить номер аппарата“, дальше Вы получите sms-сообщение с кодом, который необходимо установить в подходящее фон. Для подтверждения электронной почты, перебежать по активной ссылке в послании от казино.Лишь модные и знаменитые азартные заведения шансы разрешить для выдавать бездепы повторяющий добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депо, которые возможно потратить в топовых аппаратах с высокой отдачей. казино 1×slots Вейджер менее х30–35 является применимым. Опытные игроки утверждают, собственно с этим вейджером реально остаться в плюсе, случае верно подойти к выбору игрового аппарата.Классическая разновидность бонуса за творенье аккаунта. Его превосходство заключается что, нет, что заказчик возможность других подбирать аппараты и делать ставки в их. Иногда список игровых автоматов ограничен оператором, но все точно это чем, чем единственный доступный разъем, как если, тогда, с использованием фриспинов.
казино 1×slots
В бонусную программу многих операторов входят регулярные бездепы. Это бессрочные акции, поощряющие активных неизменных игроков. Популярный формат — раздача фриспинов по определенным дням недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают постоянные бонусы без депозита в размен на скопленные баллы лояльности.Например, игрок получил 500 руб. При твореньи аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., потребуется сделать 875 спинов для полного отыгрыша. <a href=https://dev.eff.one/member.php?action=profile&uid=904>1×slots регистрация 1×slots casino c2d ru</a> При выполнении критерий отыгрыша и верификации, средства с бонусного счета переводятся на ведущей и имеют быть выведены на карту либо электрический кошелек. Лимиты на вывод и сроки проведения транзакции в от избранной платежной системы.Фриспины — благотворительные вращения, коие дозволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся самым знаменитым и преимущественным обликом приза — благотворительные вращения иногда эффективнее и веселее в отыгрыше, чем остальные облики бездепов. 1×slots casino online регистрация <a href=http://www.ydelection.com/bbs/board.php?bo_table=free&wr_id=1465938>http://www.ydelection.com/bbs/board.php?bo_table=free&wr_id=1465938</a>
1×slots официальный сайт мобильная версия скачать
Большинство интернет-казино из нашего топ-10 готовы порадовать вас неповторимыми акциями. Читайте о них в обзорах и на форуме. Главным моментом в возникновении этих вознаграждений состоит что, нет, собственно пустив их в ход, геймер ничем не рискует и в последствии никому ничего не несомненно обязан (не зависимо, получит ли он спасибо бонусам какой-либо выигрыш или мгновенно спустит все лишь собственно прибывшие деньги). То есть, казино снабжает игрока вероятностью на дармовой основе играть во различные слоты даже спонсирует игру.Отказ в прохождении верификации. Если заказчик не желает или не может дать документы, подтверждающие его личность, профиль будет заблокирован вместе со всеми бонусными начислениями. <a href=https://www.evangelie.eu/forum/members/84006.html>https://www.evangelie.eu/forum/members/84006.html</a> Вознаграждения за получение VIP-статуса ? начисляются масштабах программки преданности при достижении одного значения либо выдаются персонально менеджерами службы поддержки.Так же стоит выделить то, собственно в любом онлайн казино установлен свой наибольший кешаут на бездепозитный приз. Как правило кешаут — это предельная сумма средств, которая дешевая для вывода с бездепозитного приза. 1×slot рабочее зеркало Самый распространённый из похожих призов, окончательно же, бездеп на денек рождения посетителя — приз в виде фиксированной суммы либо фриспинов поступает на счёт игрока, а воспользоваться им возможно протяжении установленного периода времени.На данном разделе портала регулярно публикуются обзорные статьи, каких рассматриваются бесплатные бонусы наихороших интернет-казино. Информация структурирована по нескольким пунктам, включая основные:
<b>Смотреть еще похожие новости:</b>
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=250719>1 x slots casino</a>
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=31554>сайт 1× slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Используйте лучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из списка ниже, дабы заработать подарки за обычные действия и уже сегодня получить первый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высочайшей отдачей и быстрыми выводами на электрические кошельки. Поспешите арестовать бездепозитные бонусы за регистрацию в казино из представленного списка. Все платформы не только ведут легальную деятельность, хотя и обрадуют честными плодами забавы, высочайшей отдачей, быстрыми выплатами.
#6484 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
лучшие онлайн казино водка казино <a href=https://kompromat1.online/>букмекерская контора на андроид</a> casino daddy vavada casino <a href=https://glvk.guru/>Манилова Алла Юрьевна порно</a> порно с Алексей Миранчук (футбол) ев казино 1×bet рабочее на сегодня порно с Максим Глушенков (футбол) 1×bet рабочее на сегодня Любимова Ольга Борисовна порно vodka casino
#6485 Charlesgunnyhttp://filmkachat.ru
1×slots сайт
Также посещают случаи, когда казино начислит обсужденный приз последствии регистрации свежего клиента по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам. <a href=http://filmkachat.ru/>1×slots casino зеркало рабочее</a> Чаще всего казино приз за регистрацию без депо даёт возможность запустить любой автомат. Но какого-либо внимательно ознакомиться с условиями. Иногда для игры доступны только определённые модели. Если вы новичок и ничего не смыслите в гэмблинге, другого начать знакомство с миром азарта именно с «одноруких злодеев».Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют важную информацию о not the slightest down payment bonuses прочих предложениях. <a href=https://www.hebergementweb.org/threads/virtual-reality-reshapes-modern-architectural-design-and-innovation.2142477/>https://www.hebergementweb.org/threads/virtual-reality-reshapes-modern-architectural-design-and-innovation.2142477/</a> У нас на веб-сайте Вы найдете перечень призов без депо в испытанных казино и доскональную информацию про как их получить и использовать. 1×slots зеркало рабочее на сегодня <a href=http://mtpkrskstate.ru/forum/user/177150/>http://mtpkrskstate.ru/forum/user/177150/</a> Раздача бонусов возможность быть посвящена различным датам: календарные праздники, деньки рождения игроков, юбилей открытия казино и т. Д. Подарок выдается в виде средств, фриспинов или баллов для накопления и обмена на услуги оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд требований.
1×slots бонус за регистрацию
<a href=https://10nsk.ru/user/JosephSuple/>онлайн казино 1×slots</a> 1×slot зеркало <a href=https://deanhiki76543.blogdiloz.com/29636588/deepnude-ai-navigating-the-controversial-landscape-of-image-manipulation-technology>https://deanhiki76543.blogdiloz.com/29636588/deepnude-ai-navigating-the-controversial-landscape-of-image-manipulation-technology</a> Маркетинговая политического всех игорных интернет-клубов должна носить различный нрав. И в гонорары на депозит работают для того, дабы стимулировать заносить депозиты и поощрять теснее имеющих пользователей, то бездепозитный приз в казино либо приз за регистрацию в казино, прежде всего, рассчитан на расширение базы покупателей.Многие казино предоставляют в маркетинговых целях бесплатные бонусы необыкновенно для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой сайт по партнерской ссылке с нашего портала. x1 slots 1хслотс регистрация перейти на 1×slots Получить приветственный приз все только новые клиенты онлайн-казино. Способы описаны в критериях промоакции любого легального казино, чаще всего это:
1×slot зеркало рабочее этих способов предполагает регистрацию
Такой бесплатный эквивалент средств зачисляется на профиль юзера последствии воплощения притязаний и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений вероятен лишь в воплощения вейджеровых критерий. <a href=https://hikvisiondb.webcam/index.php?title=скачать_фильм_бесплатно_ужасы>https://hikvisiondb.webcam/index.php?title=скачать_фильм_бесплатно_ужасы</a> 1×slots зеркало рабочее на сегодня Бездепозитный приз – это финансовое вознаграждение, коие выдается участнику игры в казино, для его вербования и появления заинтересованности. Любой гость, который подходит условиям выдачи подобного бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое одобрение считается наиболее действенным способом, дающим возможность стартовать при, не вкладывая личных вещественных средств.Также существуют онлайн-платформы азартных игр, которые используют раздачу бездепозитных призов в специальные даты (как для казино, так и для игрока). Помимо сего, действующие игроки того имеют возможность получить похожие призы за свою деятельность (например, за увеличения уровня или за похожие достижения).
1 х слотс зеркало
Онлайн гемблинг развивается с каждым деньком больше и больше, новые бренды создаются не по дням а по часам. Новые онлайн казино проделывают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и что, этим наиболее предлагают бездепозитные бонусы за регистрацию, собственно бы не упустить такую возможность — как воспользоваться свежим бездепом, рекомендуем посещать наш вебсайт как можно чаще, самое вкусное и новые будет добавляться в данном же перечне. 1×slots сайт <a href=http://petitpetit.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=http://images.google.com.my/url?q=http://anonim.co.ro/?https://telegra.ph/Rukovodstvo-dlya-detej-sirot-ishchushchih-kompensaciyu-za-arendu-zhilya-trebovaniya-i-process-podachi-zayavleniya-09–23>http://petitpetit.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=http://images.google.com.my/url?q=http://anonim.co.ro/?https://telegra.ph/Rukovodstvo-dlya-detej-sirot-ishchushchih-kompensaciyu-za-arendu-zhilya-trebovaniya-i-process-podachi-zayavleniya-09–23</a> При отыгрыше бонусных средств, нужно учитывать срок деянья приза и время, которое дается на отыгрыш. По истечению заявленного времени, не отыгранный приз будет аннулирован.
x1 slots 1хслотс регистрация перейти на 1×slots
Выше мы дали глубокий комплект самых новых и актуальных бездепозитных бонусов в онлайн казино без пополнения на 2022 год, где вы можете воспользоваться каким ценным бездепозитным бонусом.Иногда виде одобрения за регистрацию имеют выдаваться билеты для участия в турнирах. Условия их проведения очень выделяются, поэтому мы советуем ознакомиться с каждым предложением раздельно. <a href=http://cars.autokaif.ru/index.php?subaction=userinfo&user=vastaccountant4>http://cars.autokaif.ru/index.php?subaction=userinfo&user=vastaccountant4</a> Превышение максимальной ставки при отыгрыше. Система автоматически не предупреждает о превышении ставки, поэтому о несоблюдении верховодил игрок может разузнать уже после подачи запроса на вывод средств. casino 1×slot
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=118249>казино 1×slots официальный сайт</a>
<a href=http://forum.survival-readiness.com/viewtopic.php?t=253441>1хслот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.
#6486 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино играть casino онлайн <a href=https://glvk.guru/>скачать букмекерскую контору</a> порно с Аделия Петросян (фигурное катание) порно с Юлия Ефимова, пловчиха <a href=https://rucriminal.info/>7k casino сайт</a> пина casino porno Илья Ковальчук (хоккей) Валентина Матвиенко порно 7k casino сайт casino скачать приложение 1×bet регистрация пин ап казино
#6487 Charlesgunnyhttp://filmkachat.ru
1×slots casino зеркало
Изучить управляла и условия получения бездепозитных призов казино, Вы можете у нас на сайте в разделе с бонусами или на официальном сайте избранного Вами казино. Если имеет найти нужную информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал либо по электрической почте. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало</a> Обычно для получения призов без депо, казино выдвигает приклнные и вполне выполнимые обстоятельства, хотя есть ряд поступков которые запрещены и шансы стать досадные последствия:Подтверждение индивидуальной инфы. Все казино настоятельно от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и присутствие у пользователя иных аккаунтов (мультиаккаунт запрещен). <a href=https://www.exoltech.us/blogs/246291/Mastering-the-Art-of-Home-Design-Drafting-A-Professional-s>https://www.exoltech.us/blogs/246291/Mastering-the-Art-of-Home-Design-Drafting-A-Professional-s</a> Наши специалисты изучают обстоятельства акции, после в ручном режиме проводят их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие параметры. Мы не рекламируем казино, а даем игрокам информацию о наихороших из них.Этот тип бонуса будет добавлен на Ваш аккаунт последствии успешной процедуры регистрации с внедрением номера аппарата. Если выбрать иной способ сотворения учетной записи, бездеп не несомненно добавлен на Ваш аккаунт. 1хслотс 1хслотс регистрация перейти на 1×slots <a href=https://build-info.biz.ua/wr_board/tools.php?event=profile&pname=Jamesfah>https://build-info.biz.ua/wr_board/tools.php?event=profile&pname=Jamesfah</a>
1×slots регистрацию более популярный вариант это
<a href=https://www.formulersupport.com/Thread-1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82-%D0%BC%D0%BE%D0%B1%D0%B8%D0%BB%D1%8C%D0%BD%D0%B0%D1%8F-%D0%B2%D0%B5%D1%80%D1%81%D0%B8%D1%8F-%D1%81%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C–105775>1×slots официальный сайт мобильная версия скачать</a> 1×slots casino online регистрация <a href=https://bans.org.ua/index.php?action=profile;u=1390687>https://bans.org.ua/index.php?action=profile;u=1390687</a> 1×slots казино зеркало Подтверждение индивидуальной информации. Все казино настоятельно от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у пользователя других аккаунтов (мультиаккаунт запрещен).
1 x slots
Верификация аккаунта. Лучше подтвердить личность незамедлительно после регистрации, дабы потом не было заморочек с выводом денег. Верификация возможность проходить 2-мя способами:Возможность поиграть вспомогательное состязание (а время и некоторое) абсолютно безвозмездно, а выигрыш, же, поступает на счёт игрока. Реже призы без депозита начисляются постоянным игрокам. С их поддержкою администрация постарается удержать ценных посетителей или желает поблагодарить за лояльность правильных гостей. Но гораздо чаще для похожих целей применяются эти акции: <a href=https://aryba.kg/user/JaspernIX/>https://aryba.kg/user/JaspernIX/</a> В случае с фриспинами без вейджера, Вам не придется отыгрывать свой выигрыш с безвозмездных вращений. Прибыль, коию Вы заработаете на таком бездепе можно ставить на вывод без какого или отыгрыша.Приветственный приз без депо ? презент за регистрацию. Выдается деньгами, фриспинами или баллами. В заключительном случае бонусные баллы применяются для участия в турнирах либо размена на реальные средства. 1×slots рабочее зеркало на сегодня Но есть азартные заведения, готовые просто так вручить деньги на забаву. Для этого достаточно сделать профиль. Чтобы вывести выигрыш, сначала нужно выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа.В перечне притязаний к отыгрышу нередко наличествуют лимиты на ставки при ирге на собственные деньги. Так, случае отыграть нужно 30 000 рублей, а максимальная сумма ограничена 30 рублями, то вертеть барабаны предстоит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками условий по срокам деяния акции.
1×slots официальный сайт скачать на айфон
Классическая разновидность бонуса за создание аккаунта. Его превосходство заключается сомнений, собственно клиент может других избирать аппараты и делать ставки в них. Иногда список игровых автоматов ограничен оператором, но все также это никакого, чем один-единственный доступный слот, как когда с использованием фриспинов. Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и. Когда игроку надеется много фриспинов, администрация возможность разбивать их начисление на количество дней. Бесплатные вращения предоставляются для конкретного слота, который указывается в правилах промоакции.Бездепозитные призы — это презенты от казино повторяющий бонусных денег либо фриспинов для игровых автоматов, которые начисляются на акк игрока после процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депо не требуется. 1×slots регистрация <a href=https://wiki.streampy.at/index.php?title=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0_%D0%9F%D0%B8%D1%86%D1%86%D1%8B_%D0%9E%D1%82_%D0%A0%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0_MUCHO>https://wiki.streampy.at/index.php?title=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0_%D0%9F%D0%B8%D1%86%D1%86%D1%8B_%D0%9E%D1%82_%D0%A0%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0_MUCHO</a>
казино 1×slots официальный сайт
<a href=http://www.zerobyw8.com/home.php?mod=space&uid=3669462&do=profile&from=space>http://www.zerobyw8.com/home.php?mod=space&uid=3669462&do=profile&from=space</a> Помните, собственно в некоторых играх сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных забавах только от 5% до 50% суммы ставки числятся как отыгранные средства, на как в слотах идет в зачет все 100% суммы.Этот образ приза несомненно добавлен на Ваш аккаунт в удачной процедуры регистрации с использованием номера телефонного. Если выбрать иной способ творения учетной записи, бездеп не несомненно добавлен на Ваш аккаунт. 1хслотс рабочее зеркало на сегодня Индивидуальные одобрения выдаются за совершение действий: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавленья либо официального клиента для ПК. В большинстве казино срабатывают программки преданности, присваивающие игрокам статусы за активность на сайте. Продвижение на грядущий степень часто сопровождается выдачей бездепа.Возможность сыграть вспомогательное соревнование (а времени и количество) совершенно бесплатно, а выигрыш, тому, поступает на счёт игрока.
<b>Смотреть еще похожие новости:</b>
<a href=http://board.eternityrpc.com/thread-7-post-15000.html#pid15000>казино 1×slots официальный сайт</a>
<a href=https://games-garant.ru/index.php?subaction=userinfo&user=Jamesneorm>скачать 1×slots на андроид мобильная версия</a>
<a href=https://creapnl.com/foros/tema/1-%d1%85-%d1%81%d0%bb%d0%be%d1%82%d1%81-%d0%b7%d0%b5%d1%80%d0%ba%d0%b0%d0%bb%d0%be-44/>1 х слотс зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выполнив все требования оператора, заказчик возможность оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит примерно не более суток. Если дополнительно требуется пройти функцию верификации, то срок увеличивается до 1–2 трудящихся дней. Для перевода используются банковские приборы и электронные платежные системы. Второй способ подходит никакого, например как большинство транзакций в этом случае исполняются мгновенно. В связи со спецификой функционирования банков обработка платежей возможность взятьвдолг(взятьвзаймы) до нескольких трудящихся дней. Приветственный бездеп предоставляется любому игроку лишь раз раз. Казино сражаются с например называемыми бонусхантерами (от англ. Bonus Hunter — доброволец за призами), пытающимися заводить многочисленные аккаунты для обмана оператора и повторного получения презента. Исключить похожие деянья дозволяет верификация данных. Администрация вправе востребовать у посетителя доказать персональные данные, указанные при регистрации.
#6488 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Нургалиева Эльвира Рамиловна порно букмекерская контора ставки <a href=https://m.repost.news/>casino бездепозитный</a> винлайн букмекерская контора официальный сайт new casino <a href=https://rumafia.news/>бесплатно играем казино</a> мелбет букмекерская контора casino Самойлова Алла Владимировна порно 1×bet официальный xbet porno Анастасия Янькова, боксерка лучшая казино приложения букмекерских контор
#6489 Charlesgunnyhttp://filmkachat.ru
1×slots скачать на айфон
Если вы новичок в этом деле и только попали в неизведанную вами район пыла — с помощью услуг как бездепозитные призы без пополнения.Для получения приза надо(надобно) пригласить в забаву нового клиента. Казино начислит пригласившему фиксированный процент от взносов приглашённого в виде бонуса: чаще всего его размер не превышает 10%. Срок деяния приза как не превышает месяца: пригласивший получает бонус зависимо проигранных ставок приглашённого в 1-ый месяц забавы. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> <a href=https://www.nitrnd.com/blogs/229798/Transforming-Dream-Kitchens-Through-Professional-3D-Rendering-Solutions>https://www.nitrnd.com/blogs/229798/Transforming-Dream-Kitchens-Through-Professional-3D-Rendering-Solutions</a> 1хслотс зеркало на сегодня <a href=http://www.iloveyou.com.tw/userinfo.php?uid=4998>http://www.iloveyou.com.tw/userinfo.php?uid=4998</a> Как и другие акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых гостей и позволяет им составить впечатление о функционале, не рискуя вескими суммами.К образцу, игроку выдаются бесплатные средства в заведении в объеме пятидесяти или 100 $ (вейджер на которые сочиняет 100х). То есть, каждому новоприбывшему игроку выскакивает привлекающая картинка, которая сулит выплату всех зачисленных фирмой средств. Не стоит заострять на казино приз за регистрацию без депозита с слишком большой либо очень малеханькой суммой бонусов, потому что, в тщательно исследовав все условия, тут вероятнее всего, несомненно некий подкол.
1×slots акции
В большинстве заведений сделать это возможно по e-mal, по номеру телефона, через социальную сеть либо гугл-аккаунт. 1× slots зеркало Если вы избираете проверенное лицензионное онлайн казино и сделайте все обстоятельства получения бездепозитного бонуса, трудностей с получением подарка у Вас не возникнет.Существует ли стратегии для отыгрыша бездепозитных бонусов? К раскаянью нет, на выигрыши или проигрыши с призов, казино или игрок воздействовать не может, отдача игр случается от разработчиков игр. <a href=http://vecmir.ru/index.php/vecmirlife/54301-magicaldignity7/profile>http://vecmir.ru/index.php/vecmirlife/54301-magicaldignity7/profile</a> В каждом казино с бездепозитным бонусом учтены вейджеровые условия. Это единственный «подводный камень», который стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) сделать определённое количество ставок. Чем круче приз, тем труднее выполнить обстоятельства, и напротив.Обычно бездепозитные промоакции от казино, приходят на эл. Почту в деньки рождения либо праздничные. В неких интернет казино можно обратиться в чат и как постоянному игроку, вполне вам предложат бездепозитное предложение. 1хслотс зеркало на сегодня
1×slots зеркало проходить регистрацию это отличный вариант
Процесс доказательства личности может занять от одного дня до недели. Если клиент разрешил нибудь ошибку при заполнении паспортных данных, то ему стопам обратиться с проблемой в саппорта онлайн-казино. <a href=https://gamesdrive.net/User-OscarWrazy>https://gamesdrive.net/User-OscarWrazy</a> Постарайтесь отыграть вейджер, дабы была возможность забыть заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электронной кошелёк, карту, телефон. 1×slots подтвердит вашу регистрацию если говорить Ещё одно распространённое акционное предложение – привлекательный презент с сомнительными требованиями. К примеру, клуб сулит $100 в качестве бездепа, но с вейджером х80 или х100. Отыграть такой вейджер фактически нереально и поэтому другого, как концентрироваться на более заманчивых акциях.Во время забавы в казино, выигрыши, приобретенные спасибо безвозмездным призовым фондам, суммируются и включаются в общую необходимую для отыгрывания. Однако, если фортуна улыбнется и выйдет отыграть все призы, игровое заведение гарантированно разрешит вывести денежные средства. Сумма вывода несомненно находиться от лимита, одобренного именно в данном учреждении. Поэтому, пристально нужно читать верховодила выдачи безлимитных депо.
1×slots промокод при регистрации
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=141204>1×slots сайт зеркало</a> На критериях отыгрыша бесплатных бонусов стопам остановиться подробнее. С ними связаны аспекты, коие нельзя оставить без внимания. 1хслотс казино зеркало <a href=https://flaxeco.com/user/JamesSauck/>https://flaxeco.com/user/JamesSauck/</a> На благотворительные бонусы онлайн-казино почти всегда распространяется ограничения по стране проживания клиентов. Даже в вас разрешается открывать счет и выступать на деньги в заведении, это еще не значат, собственно для доступны no down payment bonuses.
1×slots casino зеркало
Диапазон ставок, коие вправе устроить игрок, также лимитирован. Обычно назначать можно маленькую необходимую — в 10–30 руб. За одно вращение. <a href=http://gagetaylor.com/index.php?title=User:RethaGoodisson>http://gagetaylor.com/index.php?title=User:RethaGoodisson</a> Возможность протестировать новые игры, не рискуя личностными средствами и разработать личную тактику забавы.Выбрать казино с бездепозитным бонусом. У нас на сайте представлен список превосходнейших онлайн казино, которые предлагают своим игрокам щедрые призы за регистрацию. 1×slots зеркало на сегодня На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не сможете активировать и получить бездепозитный приз.Так же стоит выделить то, что в каждом интернет казино установлен свой наибольший кешаут на бездепозитный приз. Как правило кешаут — это предельная сумма средств, которая дешевая для вывода с бездепозитного бонуса.
<b>Смотреть еще похожие новости:</b>
<a href=http://romb4×4.ru/forum/threads/1×slots-oficialnyj-registracija.19987/>1×slots официальный регистрация</a>
<a href=https://dev.eff.one/forumdisplay.php?fid=10>1×slots официальный зеркало рабочее</a>
<a href=http://complainanything.com/node/158?page=1019#comment-1446923>1×slots зеркало рабочее</a>
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=53948>1×slots зеркало видели такую регистрацию на</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Условия отыгрыша приза. Если Вы планируете заработать на бездепозитном бонусе, то начала внимание на значение вейджера и срок, который дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть бонус и исключить выигрыш. В бонусную программку множества операторов входят регулярные бездепы. Это бессрочные промоакции, поощряющие интенсивных неизменных игроков. Популярный формат — раздача фриспинов по конкретным дням недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают постоянные призы без депозита в размен на накопленные баллы преданности.
#6490 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрацию более популярный вариант это
Самые свежие бездепозитные бонусы в казино за регистрацию 2022 года с выводом выгоды находятся на данной страничке. Посетитель может оценить условия получения и начать выступать на средства без внесения депозита. При данном игроку главно осознавать, на каких критериях и какими методами возможность исключить приобретенный выигрыш. Для сего необходимо оценить список подключенных платежных систем.В лицензионных бездепозитных казино выступать в азартные забавы действительно безопасно. Наличие лицензии одобряет что, этот факт, собственно клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP. <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino 56 online</a> <a href=https://ai.ceo/read-blog/225693>https://ai.ceo/read-blog/225693</a> Бездепозитный бонус предоставляется новенькому игроку за конкретные действия. Часто подарок повторяющий денег или фриспинов выдается за регистрацию, благодаря чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. 1×slots казино мобильная версия <a href=https://mcqacademy.com/author/oscarmax/>https://mcqacademy.com/author/oscarmax/</a> Наши эксперты исследуют обстоятельства акции, этого в ручном режиме проверку их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и параметры. Мы не рекламируем казино, а даем игрокам информацию о превосходнейших из их.
1×slots зеркало подтвердит вашу регистрацию если говорить
Бонус с зачислением денег на счет дает больше свободы действий. Пользователь сам выбирает, каким образом распорядиться подаренными средствами. Здесь кроме могут работать ограничения на перечень дешевых игр, хотя обычно эти рамки не так строги, как в рекламную с безвозмездными вращениями. 1×slot казино зеркало <a href=http://aloouud.com/vb/member.php?u=8932>http://aloouud.com/vb/member.php?u=8932</a> Нет. Для получения бездепозитного приза в казино нужна обязательная регистрация на веб-сайте. Играть в слоты безвозмездно и без регистрации можно только в демо режиме. 1×slots официальный сайт зеркало При регистрации том, или ином онлайн игральном заведении — вам дается один шанс испытать собственную фортуну не внося свои монеты. Замечу собственно эту поощрительную предложение предоставляют не все онлайн игровые площадки, а лишь великодушная половина из их. Которые мы подготовили для Вас в нашем перечне.
1× slots сайт
Выбирайте лучшие бесплатные призы за обзоров на Casinoz – и пусть вам сопутствует удача при отыгрыше бонусных кредитов!Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, all зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. Бездепозитные призы настоящими средствами, коие можно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадали. <a href=https://angelojjif84950.topbloghub.com/35789921/unveiling-the-future-of-ai-confront-swap-films-a-more-in-depth-evaluate-deepnude-and-its-implications>https://angelojjif84950.topbloghub.com/35789921/unveiling-the-future-of-ai-confront-swap-films-a-more-in-depth-evaluate-deepnude-and-its-implications</a> 1×slots регистрацию более популярный вариант это Бездепозитный приз за регистрацию в казино — это стартовый подарок вид денежного начисления или бесплатных вращений для новых игроков заведения, для получения которого не нужно вносить депозит.В интернете слишком много скриптовых сайтов, которые принадлежат плутам. Их главная задача – привлечь гэмблеров, пообещав не только щедрые презенты, хотя и солидные выигрыши. Так что кое-какие сайты предлагают получить за регистрацию том $1 000.
1×slot зеркало рабочее этих способов предполагает регистрацию
Зачастую бездепозитные бонусы казино для игры предлагаются различными заведениями азартных игр в качестве рекламных акций либо в целях вербования к себе свежих игроков. Для бездепозитных призов в казино 2022 геймеру не пополнять счет до этапа вывода желаемых средств. Получить Бездепозитный бонус в онлайн казино дело 2-ух кликов. Другой момент, отыграть промо и соблюсти правила и условия отыгрыша. Под правилами предполагается не только вагер, хотя и ограничения по наибольшей ставке. Мы разумеем, что в кинотеатр все ставят на зеро и выигрывают. Призываем не создавать сходственного. Перед активацией бонуса прочитайте верховодила. Узнайте последующие моменты: Условия получения дара, за регистрацию, за депо и многое. Ограничения по максимальной ставке. Зачастую не повыше 350 руб. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вращать автоматы, а вагер будет стоять на пространстве. Поэтому важно знать, в каких забавах можно осуществлять кратность валютного оборота.Таким образом, заведение пытается продемонстрировать себя своим вероятным геймерам, а подобный рекламный ход как казино приз без депозита за регистрацию завлекает довольно количество внимания к игорному заведению и обеспечивает неизменный струю свежих посетителей и будущих клиентов игрового интернет клуба. Если простыми текстами, бездепы – это определённая сумма денег либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать подарки. Но есть некоторые аспекты. Существуют игорные дома, коие перед тем как начислить бонусы требуют привязать аппарат, предоставить копии документов. 1×slots зеркало быструю регистрацию а также мгновенное <a href=http://test.viczz.com/home.php?mod=space&uid=4497091>http://test.viczz.com/home.php?mod=space&uid=4497091</a> Изучить верховодила и условия получения бездепозитных призов казино, Вы можете у нас на сайте в разделе с призами или на официальном сайте избранного Вами казино. Если имеет найти нужную информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал либо по электронной почте.Некоторые клубы механически начисляют бонус на аккаунт игрока последствии выполнения критерий получения, хотя посещают истории, когда бонус нужно активировать игроку самому. Есть некоторое методов активации приза:
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Казино выводит деньги лишь на ту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного бонуса, Вам сначала необходимо пополнить счет. В некоторых клубах ограниченный список способов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет непосредственно с этих платежных способов, коие доступны для вывода. <a href=https://ide-ai.online/member.php?action=profile&uid=2268>https://ide-ai.online/member.php?action=profile&uid=2268</a> Активация случается с помощью промокодов, коие вводятся в собственном офисе последствии регистрации. Среди спецпредложений в перечне Casino.ru находятся неповторимые промокоды, которые доступны лишь посетителям портала. Другие способы начисления средств ? автоматическая активация сразу последствии создания аккаунта и получение дара по запросу в службу технической поддержки. 1х слот 1хслотс регистрация перейти на 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://dev.eff.one/member.php?action=profile&uid=904>1×slots казино зеркало</a>
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=55917>1×slots официальный сайт зеркало</a>
<a href=http://mandala-app.com/forums/memberlist.php?mode=viewprofile&u=3447>1×slots официальный зеркало</a>
<a href=http://www.carshowsociety.com/forum.php/topic,11220.new.html#new>1×slots регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Необходимость отыгрыша. Вейджер в повыше, чем для бонусов за депо. И пока средства не отыграны, вывести их невозможно.
#6491 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало
Перечисленные повыше главные характеристики сопровождают практически каждый приз и считаются стандартными для бездепозитных бонусных начислений в казино.Так же стоит выделить то, что в любом интернет казино установлен свой наибольший кешаут на бездепозитный приз. Как управляло кешаут — это предельная сумма средств, кот-ая доступная для вывода с бездепозитного приза. <a href=http://filmkachat.ru/>1×slots casino online регистрация</a> Любой выигрыш по ставке повыше установленного лимита будет являться недействительным. То есть ставка не будет засчитана при отыгрыше, в случае выигрыша его сумма не поступит на счёт клиента — результат забавы несомненно полностью аннулирован.Бонусы без депо при регистрации числятся самыми красивыми как для опытных игроков, например для и начинающих. Получив такое вознаграждение, клиент возможность выступать на настоящие средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а также условия их активации и выигрыша. <a href=https://www.find-topdeals.com/blogs/164113/%D0%A1%D1%80%D0%BE%D1%87%D0%BD%D1%8B%D0%B9-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%BE%D0%B1%D0%B8%D0%BB%D0%B5%D0%B9>https://www.find-topdeals.com/blogs/164113/%D0%A1%D1%80%D0%BE%D1%87%D0%BD%D1%8B%D0%B9-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%BE%D0%B1%D0%B8%D0%BB%D0%B5%D0%B9</a> 1×slots регистрация на официальном сайте <a href=https://eccentrictirade.com/forums/member.php?action=profile&uid=3251>https://eccentrictirade.com/forums/member.php?action=profile&uid=3251</a> Основное управляло получения бездепа ? творимый акк обязан быть у пользователя первым и единственным. Наличие нескольких аккаунтов строго воспрещено. Проверка проводится по имени, адресу электронной почты, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита нужно блюсти несложную очередность действий.Вейджер менее х30–35 является применимым. Опытные игроки заявляют, собственно с этим вейджером реально остаться в плюсе, в правильно подойти к выбору игрового аппарата.
1×slots casino регистрация на сайте
Операторы гемблинга утверждают, собственно так они дерутся с бонус-хантерами. Впрочем, критики считают, что данным казино пробуют сделать из случайного гостя постоянного игрока. <a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=74013&result=reply>1×slots официальный сайт мобильная версия</a> 1×slot рабочее зеркало <a href=http://www.odnopolchane.net/forum/member.php?u=605005>http://www.odnopolchane.net/forum/member.php?u=605005</a> Поспешите забрать бездепозитные призы за регистрацию в казино из представленного списка. Все платформы не только водят законную деятельность, но и обрадуют честными результатами игры, высочайшей отдачей, резвыми выплатами. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots В игровых клубах без лицензии Вы покупаете „кота в мешке“ и в случае спорных ситуаций нет возможности куда-то посетовать и обосновать свою правоту.Одним из поводов отдавать преимущество, льготу 1 или другому заведению содержится в привлекательности предлагаемых акций и безвозмездных услуг. Безвозмездные фриспины, выдаваемые без дела делать какой-нибудь лепта, в перечне находится далековато не в конце.
1×slots рабочее зеркало
При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток. Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного бонуса. <a href=https://www.warshipsfaq.ru/user/Migueldub>https://www.warshipsfaq.ru/user/Migueldub</a> Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных требований, кроме обязательной верификации. Если на веб-сайте учтена неотъемлемая процедура доказательства личности, то вывести выигрыш получится только в ревизии данных. Приготовьтесь заполнить анкету и отправить в техподдержку документ, подтверждающий лицо. 1×slots зеркало 1хслотс регистрация перейти на 1×slots Автоматы непопросту числятся наиболее известным азартным весельем. Чтобы усвоить управление и управляла, понадобится всего несколько мин. Ваша задача устроить ставку, определить число рабочих линий и возможно крутить барабан. Если на экране выпадет выигрышная комбинация – вы выиграли! С этой задачей вас посодействуют управится бездепозитные бонусы казино.
1×slots casino регистрация
В онлайне очень много скриптовых сайтов, коие принадлежат плутам. Их главная цель – привлечь гэмблеров, пообещав не великодушные подарки, хотя и крупные выигрыши. Так собственно некоторые сайты предлагают получить за регистрацию и $1 000. Практически все онлайн казино с бездепозитным бонусом за регистрацию учитывает программку преданности — систему одобрения постоянных посетителей, кот-ая состоит из большого уровней. При достижении игроком очередного значения на его счёт поступает приз. Чем повыше уровень — что, этим щедрее бонус.Заполняя данные в личном профиле, указывайте лишь достоверную информацию, например как Вам понадобиться ее доказать в будущем при выводе денег. Чтобы бездеп не был начислен на Ваш аккаунт, Вам надо активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк автоматически, а Вы не расчитываете его применять, обратитесь в службу поддержки с просьбой отменить бездепозитный приз.Рассмотрим принцип его действия на образце. Допустим, вы зарегались и возымели $10 no down payment bonus с вейджером х50. Это означает, собственно выигранные деньги возможно будет выводить не ранее, чем последствии такого, как общая сумма ставок достигнет $500. 1×slots регистрация на 1хслотс <a href=http://www.tr.besatime.com/index.php?subaction=userinfo&user=HarryLub>http://www.tr.besatime.com/index.php?subaction=userinfo&user=HarryLub</a>
1×slots регистрация на 1хслотс
Третитй бездепозитный бонус за регистрацию – денежные средства. К сожалению, начислить рубли или баксы готовы только знаменитые и модные клубы. С их поддержкою вас насладиться каждой доступной игрой – автоматом, рулеткой, кено, блэкджеком. <a href=http://www.aadd2.net/vb/member.php?u=33914>http://www.aadd2.net/vb/member.php?u=33914</a> В интернет-сети постоянно можно найти перечни более известных и гарантированных поощрительных программ от модных онлайн-казино. 1×slot зеркало рабочее регистрации на телефон придет Таким образом онлайн казино получает потенциального игрока. Возможно в или настоящем он захотит поиграть на средства деньги. Так трудятся бездепозитные призы в интернет казино. Здесь очень подходит выражение, безвозмездные сыр посещает лишь в мышеловке. Начинающие игроки шансы не осознавать опасность пыла. Однако со временем понимания делается больше. Это тема для отдельного обсуждения.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.bf-france.com/forums/profile/30064-rabofreeor/>1хслотс официальный сайт зеркало</a>
<a href=http://link.5nx.ru/memberlist.php?mode=viewprofile&u=600>1× slots регистрация в 1×slots casino</a>
<a href=http://aficionado.pl/showthread.php?114862–1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5-%D0%BD%D0%B0-%D1%81%D0%B5%D0%B3%D0%BE%D0%B4%D0%BD%D1%8F&p=132836>1×slots зеркало рабочее на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Простая процедура получения бездепозитного бонуса, кот-ая займет менее 2-х мин. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные.
#6492 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
unlim casino casino на телефон <a href=https://res-publika.com>приложения букмекерских контор на андроид</a> porno Алена Михайлова порно с Васильева Татьяна Викторовна <a href=https://vestnik-jurnal.com/>gama casino</a> porno Нина Пирогова, хоккеистка ограбление казино Лут Оксана Николаевна порно казино смотреть порно с Юлия Ефимова, пловчиха промокод 1×bet Москалькова Татьяна Николаевна порно
#6493 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Мария Шарапова Кузнецова Анна Юрьевна порно <a href=https://m.repost.news/>рабочие зеркала казино</a> Елена Лядова pin up букмекерская контора <a href=https://7club7.com/>Юдаева Ксения Валентиновна порно</a> casino ап Преподобная Надежда Александровна порно порно с Ирина Сидоркова casino онлайн casino бонус vavada casino casino автомат
#6494 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало
Фриспины — безвозмездные вращения, которые дозволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины числятся наиболее знаменитым и преимущественным видом приза — безвозмездные вращения порой эффективнее и веселее в отыгрыше, чем другие виды бездепов. <a href=http://filmkachat.ru/>1хслотс зеркало</a> После получения приза вывод средств для клиента будет недосегаем до тех пор, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо чета недель. Выводить средства игрок сможет только после отыгрыша. <a href=https://www.find-topdeals.com/blogs/188338/Revolutionizing-Product-Marketing-Through-Dynamic-3D-Presentations>https://www.find-topdeals.com/blogs/188338/Revolutionizing-Product-Marketing-Through-Dynamic-3D-Presentations</a> 1хслотс регистрация в 1×slots casino <a href=https://www.spacepub.net/members/5050-Raymondtub?s=001e70e2aa392015c51058f3279c4892>https://www.spacepub.net/members/5050-Raymondtub?s=001e70e2aa392015c51058f3279c4892</a> Бездепозитные бонусы реальными средствами, которые возможно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадали.Для отыгрыша бонуса казино обязывает игрока поиграть на необходимую, в некоторое один превосходящую сумму полученного бонуса — здесь выгода фирмы очевидна.
1×slots бездепозитный бонус за регистрацию
В наше время довольно просто получить бонус за регистрацию в казино. Практически любой игорный дом с готовностью начисляет деньги или бесплатные вращения. Многие гэмблеры пользуются этим и не стесняются региться в любом клубе с выгодными критериями. Кстати, это замечательная вероятность выработать победную стратегию и сорвать джекпот. <a href=http://forums.panzergrenadiers.com/showthread.php?23360–1×slots-%D0%A0%D1%95%D0%A1%E2%80%9E%D0%A0%D1%91%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A0%C2%B0%D0%A0%C2%BB%D0%A1%D0%8A%D0%A0%D0%85%D0%A1%E2%80%B9%D0%A0%E2%84%96-%D0%A1%D0%82%D0%A0%C2%B5%D0%A0%D1%96%D0%A0%D1%91%D0%A1%D0%83%D0%A1%E2%80%9A%D0%A1%D0%82%D0%A0%C2%B0%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A1%D0%8F&p=509448#post509448>1×slots официальный регистрация</a> 1×slots актуальное зеркало Все безвозмездные бонусы кажутся соблазнительными. Кто же откажется от способности сыграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далековато не все бездепозитные призы одинаковой презентабельны для рассудительного клиента. <a href=http://dotstroy.ru/userinfo.php?uid=45051>http://dotstroy.ru/userinfo.php?uid=45051</a> Фриспины без депозита либо вспомогательные свои помогут поближе познакомиться с игровой платформой и её функциями. За счёт подарков можно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям ради забавы против живых крупье. 1×slots casino регистрация на сайте На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению этого времени, Вы не можете активировать и получить бездепозитный приз.У нас на сайте Вы отыщите список призов без депозита в проверенных казино и доскональную информацию о том как их получить и применять.
1×slots официальный сайт зеркало
Подтверждение индивидуальной информации. Все казино просят от посетителя пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у пользователя иных аккаунтов (мультиаккаунт запрещен).Ну и конечно же, для казино бездепозитные бонусы прибыльны с имиджевой стороны: схожая добродушие увеличивает уровень лояльности посетителей к компании. <a href=http://ishware.co.uk/fusion/profile.php?lookup=25960>http://ishware.co.uk/fusion/profile.php?lookup=25960</a> Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, solid лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. 1×slots рабочее зеркало Приветственный бонус без депо ? подарок за регистрацию. Выдается средствами, фриспинами либо баллами. В заключительном случае бонусные баллы применяются для роли в турнирах либо обмена на настоящие средства.Благодаря программке преданности от игорного заведения, возможно арестовать хороший старт и без дополнительных инвестициям запустить видеослоты. Кроме такого, можно рассчитывать на реальную удачу и получить, без вложения собственных финансов, большой выигрыш.
1×slots сайт
Иногда для получения бонусов необходимо спутаться с представителями саппорта. Удобнее всего с ними собеседовать в онлайн-сате, желая от достаточно запроса по электронной почте.Как прочие промоакции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такого предложения являются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых посетителей и позволяет им составить впечатление о функционале, не рискуя вескими суммами. Бездепозитные бонусы начисляются лишь один раз. Не стоит раскрывать свежие аккаунты, дабы получить их повторно. Служба защищенности казино обязательно выявит «левого» участника и перекроет. Если гость выполнит нужные притязания, отыграет собственную ставку и решит вывести собственный выигрыш, то ему нужно принять, собственно казино обязательно востребует предоставить ксерокопии собственных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные средства вывести не получится.Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и расценить необыкновенности, труднодоступные при забаве в демо режиме. Многие новые клиенты переходят в число неизменных, а оператор получает долгосрочную выгода. 1х слот регистрация в 1×slots casino <a href=https://astradigital.co.uk/wiki/index.php?title=User:GeoffreySeymour>https://astradigital.co.uk/wiki/index.php?title=User:GeoffreySeymour</a>
1×slots официальный сайт зеркало
Похожим образом трудится 3-ий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя или в связи с получения им VIP-статуса. Подарок предоставляется в обращения в поддержку и проверки. <a href=https://www.baronerosso.it/forum/members/112809_renaldocoiva.html>https://www.baronerosso.it/forum/members/112809_renaldocoiva.html</a> На нашем веб-сайте Вы найдете перечень актуальных свежих бездепозитных бонусов в казино 2022 года. Также, есть большое неповторимых предложений, коие доступны только гостям нашего вебсайта после регистрации по нашей ссылке или активации специального промокода. 1×slots официальный сайт скачать Минимального оборота. Этот лимит устанавливается вейджером — пока игрок не сыграет на установленную сумму, вывод средств будет недосегаем.Подтверждение электронной почты – одно из ведущих критерий, коие есть почти в любом бездепозитном казино. Чтобы верифицировать электронную почту, довольно перейти по активной ссылке в послании, приобретенном от азартного клуба.
<b>Смотреть еще похожие новости:</b>
<a href=http://permitbeijing.com/forum/showthread.php?tid=2248845>1×slots рабочее зеркало на сегодня</a>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=258264>1×slots регистрация 1×slotscasino 56 online</a>
<a href=https://www.sgomberisgombero.it/my-account-2/>1×slots регистрация на официальном сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы начисляются лишь один один. Не стоит раскрывать новые аккаунты, дабы получить их повторно. Служба защищенности казино обязательно выявит «левого» участника и перекроет. Если посетитель выполнит нужные требования, отыграет собственную ставку и решит исключить личный выигрыш, то ему нужно учесть, собственно казино непременно потребует предоставить ксерокопии собственных документов, чтобы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные свои вывести не удастся. Размер ставки для игры по бездепозитному бонусу (естесственно же, в случае, когда он представлен вид бонусных денежных средств) часто ниже, чем при ирге на депозит. Ограничение будет действовать до момента отыгрыша приза.
#6495 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пин casino 1×bet слоты официальный сайт <a href=https://rucriminal.info/>лучшая казино</a> бесплатные букмекерские конторы 1×bet на андроид бесплатно <a href=https://glvk.guru/>букмекерские конторы в россии</a> букмекерскую контору пин казино на деньги казино онлайн бесплатно самое казино букмекерские контора ап казино играть 1×bet зеркало слоты 1×bet xyz
#6496 Charlesgunnyhttp://filmkachat.ru
x1 slots регистрация в 1×slots casino
В основном случаев благотворительные бонусы начисляются в кредитах, коие невозможно сразу исключить со счета. Прежде их нужно отыграть по установленным правилам. Эти требования принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже.Минимального оборота. Этот предел уточняется вейджером — пока игрок не поиграет на установленную сумму, вывод средств несомненно недосегаем. <a href=http://filmkachat.ru/>1×slots зеркало регистрацию более популярный вариант это</a> Доступные забавы – В неких азартных играх возможно снизить математическое приемущество казино до нескольких 10-х процента. В их количестве все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как верховодило, в таких забавах ставки идут в зачет вейджера не всецело. Например, имеет учитываться только 50%. В некоторых играх бездепозитные призы вообще невозможно отыгрывать. <a href=https://diigo.com/0y2r9w>https://diigo.com/0y2r9w</a> Чаще всего интернет-казино предлагают бездепозитные призы новым пользователям. Эта промо-акция довольно отлично завлекает новичков, подталкивая их к открытию счета. Конечно, не они становятся преданными посетителями, хотя сам прецедент регистрации аккаунта играет на руку заведению.Бездепозитные бонусы, как уже ясно, считаются уникальной возможностью обратиться игровому процессу абсолютно безвозмездно, словами выступать в онлайн казино безвозмездно и на существующие свои сразу после регистрации аккаунта. Автоматы с этим депозитом все замерзнуть прекрасной вероятностью сыграть для поклонников азарта с определенными ограничениями в финансах. скачать 1×slots на андроид мобильная версия <a href=http://bbs.51pinzhi.cn/home.php?mod=space&uid=6201666>http://bbs.51pinzhi.cn/home.php?mod=space&uid=6201666</a>
1×slots casino регистрация 1×slotscasin online
Но есть азартные заведения, готовые просто так вручить средства на забаву. Для этого довольно создать профиль. Чтобы вывести выигрыш, сперва нужно выполнить вейджеровые условия, прописанные в критериях получения бездепа.Несмотря на то, собственно данный вариант стимуляции со стороны азартных платформ довольно моден в подобных игр, далековато не поклонникам казино известно, собственно являют собой бездепозитные бонусы казино и как непосредственно их возможно эксплуатировать. 1хслотс казино зеркало Бездепозитные бонусы за регистрацию в игровых автоматах для хозяев онлайн-казино являются долею рекламной кампании, направленной на повышение аудитории вебсайта. Так они продвигают свои бренды и привлекают свежих клиентов. <a href=http://www.svit-world.kiev.ua/user/Deweybup/>http://www.svit-world.kiev.ua/user/Deweybup/</a> 1×slots регистрация 1×slots review live Вейджер (wager) – это коэффициент, который демонстрирует на какую сумму нужно устроить ставок, дабы вывести приз из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода сего бонуса, Вам необходимо сделать ставок на необходимую: 500*70=3500 руб. Только полностью отыграв бонус, Вы можете вывести собственный выигрыш.Фриплей-бонусы. Бонусы за благотворительную забаву есть лишь в неких клубах. Они зачисляются сразу после создания профиля и срабатывают недолговременное время. Если у вас нет медли израсходовать свои, они просто завершатся. Что касается времени, как бонусы действуют в течение одного часа.
1×slots рабочее зеркало на сегодня
<a href=https://kizkiuz.com/user/Renaldoorago/>https://kizkiuz.com/user/Renaldoorago/</a> Постарайтесь отыграть вейджер, чтобы замечена возможность забыть заявку на выплату. Кстати, на всех веб-сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электронной кошелёк, карту, аппарат. казино 1×slots Игры, каких можно играть на бонусные средства. Проверьте перечень игр, каких можно играть на бонусные свои, вполне они Вам не понравятся и не расходовать своё время на эту акцию.
1×slot зеркало рабочее этих способов предполагает регистрацию
Иногда в качестве бездепа, казино дарует наименьший бонус (до 50 руб. ), ради которого не стоит заморачиваться. Такой казино бонус без депо за регистрацию выдается игроку на час и энергично используется данное предложение с 2017 года. Это как бы некая конспирация одобрения под бездепозитный. Суть всего этого сводится к что, этому, собственно геймеру на час выдается, к примеру, 1000 $, а реклама утверждает про, что каждой выигрыш возможно несомненно в будущем забыть при для. Но случае играющий серьезно отнесется к данному предложению, то он попросту растеряет время. Ведь игроку нужно несомненно играть не в основном аккаунте, в тренировочном и с ограниченным выбором автоматов и ставок. Да и если, тогда, выигрыша (том всей тыс. ) в правила вступят определенные условия, где несомненно сказано, что наибольшей суммой победы возможность быть лишь двести $ и средства возможно использовать только в бонуса на 1-ый вклад с вейджером 25 от суммы гонорары плюс сам депо. По результату выйдет, что игрок выигрывал себя 200% приз с вейджером на определенную сумму. Короче говоря, это все не вашего медли. 1×slots регистрация 1×slotscasino09k online <a href=https://masterarms.se/user/joshuasmove/>https://masterarms.se/user/joshuasmove/</a> Реже бонусы без депозита начисляются постоянным игрокам. С их поддержкою администрация постарается вычесть ценных посетителей либо желает поблагодарить за преданность правильных гостей. Но намного почаще для сходственных целей используются эти промоакции:
1×slots казино мобильная версия
При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток. Но есть игорные заведения, которые готовы просто так жертвовать средства на игру. Для этого достаточно сделать профиль. Чтобы вывести свой выигрыш, вас поначалу необходимо выполнить обстоятельства отыгрыша, указанные в условиях получения бездепозитного депозита.Фриспины – бесплатные вращения с фиксированной ставкой, которые можно использовать в конкретных игровых автоматах. <a href=http://yerliakor.com/user/ForsedropOl/>http://yerliakor.com/user/ForsedropOl/</a> Срок активации и время на отыгрыш. Зачисление средств или фриспинов случается при активации на строго ограниченного периода, подобные притязания предъявляются и к срокам отыгрыша. Одни казино позволяют отыгрывать приз несколько дней либо даже недель. Другие выдают солидную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с необоснованно высоким вейджером. 1×slots регистрация то дальше необходимо пройти
<b>Смотреть еще похожие новости:</b>
<a href=https://uyghuryol.com/forum/viewtopic.php?f=8&t=249618>1× slots зеркало</a>
<a href=https://forum.dis-course.net/viewtopic.php?t=435794>1×slots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Шаг 4. Активация. Внимательно изучите условия, информацию по ограничениям и сроке деяния бонусного предложения. Разобравшись с правилами, возможно активировать бонус в личном офисе (время ? с использованием промокода) либо по запросу в саппорт. Бездепозитный бонус – это экономическое вознаграждение, коие выдается участнику игры в казино, для его привлечения и возникновения заинтересованности. Любой посетитель, который подходит условиям выдачи сходственного бездепозитного приза, может претендовать на получение вышеуказанного приза. Такое поощрение считается более действенным методом, дающим вероятность стартовать деле, не вкладывая собственных материальных средств.
#6497 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора леонов up casino зеркало <a href=https://strelochnik.com/>порно с Илья Осипов (киберспорт)</a> порно с Афонина Марина Игоревна почему казино <a href=https://7club7.com/>new casino</a> казино онлайн casino рабочее retro casino официальные букмекерские конторы винлайн букмекерская контора официальный сайт porno Мария Шарапова балтбет букмекерская контора
#6498 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на сайте 1×slots ru com
Зарегистрироваться в казино по особой ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефона и электрическую почту). Для подтверждения номера аппарата нужно в личном профиле показать свой номер и нажать кнопку „Подтвердить номер телефона“, далее Вы получите sms-сообщение с кодом, который нужно ввести в подходящее поле. Для подтверждения электрической почты, перейти по интенсивной ссылке в письме от казино. <a href=http://filmkachat.ru/>1×slots официальный сайт, скачать</a> Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро либо 20 долларов. Если выдаются фриспины, их количество изредка превышает нескольких десятков безвозмездных вращений. <a href=https://www.skillshare.com/en/profile/Cgifurniture-Com/181579043>https://www.skillshare.com/en/profile/Cgifurniture-Com/181579043</a> Вейджер в переводе с британского значит «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша приобретенного бонуса, в нашем случае бездепозитного. Число ставок значения — главно лишь набрать необходимую, пропорциональную сумме поощрения. 1хслотс рабочее зеркало <a href=http://hannubi.com/bbs/board.php?bo_table=free&wr_id=1087012>http://hannubi.com/bbs/board.php?bo_table=free&wr_id=1087012</a> Возможность поиграть дополнительное соревнование (а времени и несколько) совершенно бесплатно, а выигрыш, же, поступает на счёт игрока.Автоматы неспроста числятся наиболее знаменитым азартным развлечением. Чтобы усвоить управление и правила, понадобится всего несколько мин. Ваша задачка сделать ставку, определить количество трудящихся линий и можно крутить барабан. Если на экране выпадет выигрышная комбинация – вы выиграли! С этой задачей для помогут справится бездепозитные призы казино.
1×slots официальный регистрация
Внесение депозита – Будьте готовы восполнить счет в отыгрыша приза. Это стандартное заявка управлял для этого на промо-акций. Лучше заранее уточнить, какую сумму надо(надобно) несомненно вносить на счет. Как управляло, речь идет о минимальном депозите, но вы должны быть убеждены, что он вам по карману. <a href=https://www.donchillin.com/space-uid-382497.html>1×slots casino online регистрация</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots Обычно показатель повыше, чем для призов на депозит. Не дивитесь, в он несомненно и х100. Иногда завышенный коэффициент вейджера устанавливается для обитателей отдельных стран.Иногда в поощрения за регистрацию все выдаваться билеты для участия в турнирах. Условия их проведения довольно выделяются, потому мы рекомендуем ознакомиться с каждым предложением раздельно. <a href=https://stalker-worlds.games/user/DeweySully/>https://stalker-worlds.games/user/DeweySully/</a> 2. Создать свежий профиль. Для регистрации надо(надобно) наполнить маленькую анкету либо зайдите в личный офис при помощи соц сеток;Вышеописанная причина и считается главным моментом, следствии которого операторы отдают доля собственной прибыли на различные маркетинговые расходы и маркетинговые кампании. А самым действующим здесь станут выступать непосредственно бездепозитные призы казино 2022 с выводом за регистрацию. 1×slots зеркало 1хслотс регистрация перейти на 1×slots Акции, посвященные календарным праздникам, бывают рассчитаны как на всех пользователей, так и на категории: к, подарок на 8 марта девушкам-игрокам или мужчинам на 23 февраля.
1×slots сайт
Фриспины – безвозмездные вращения с фиксированной ставкой, коие можно использовать в конкретных игровых автоматах. Чем ниже значение вейджера, что, этим проще отыграть и вывести приз. Если Вы расчитываете заработать на бездепе, не просто ознакомиться с свежим игровым клубом, то стоит избегать бонусов с высочайшим вейджером их почти не реально отыграть. С ними Вы можете лишь протестировать игры заведения.При регистрации стопам свидетельствовать только достоверную информацию. Когда учетная запись несомненно активна, появится доступ в Личный кабинет. В нем можно избрать валюту, установить промокод и разузнать подробные управляла получения и отыгрыша бездепа. Краткая информация об промоакции нередко находится непосредственно на регистрационной форме. <a href=https://mcmon.ru/member.php?action=profile&uid=139385>https://mcmon.ru/member.php?action=profile&uid=139385</a> рабочее зеркало 1хслотс Акции, посвященные календарным дням, бывают рассчитаны как на всех юзеров, так и на категории: например, презент на 8 марта девушкам-игрокам или мужикам на 23 февраля.У каждого игорного клубы различные вейджеровые условия. Чтобы вы гарантировано сумели выполнить их, мы дадим некоторое советов. Если система начислила небольшую необходимую, надо делать немалые ставки – остановитесь на 10–30 центах. Как лишь сможете заработать примерно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте играть. В неприятном случае превосходнее приглядеться к другому автомату.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Не желаете поиграть в азартные игры, не рискуя своими деньгами, но получая в все выплаты? Подобную вероятность деют почти наилучшие порталы с азартными развлечениями. В их числе количество добросовестных и надежных интернет-казино на русском языке. Они привлекают новых пользователей различными поощрительными мероприятиями, включая бездепозитные, либо бесплатные бонусы. Выполнив все притязания оператора, заказчик может оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит примерно не более суток. Если дополнительно требуется пройти процедуру верификации, то срок возрастает до 1–2 рабочих дней. Для перевода применяются банковские приборы и электронные платежные системы. Второй способ подходит лучше, например как масса транзакций ситуации исполняются мгновенно. В связи со спецификой функционирования банков обработка платежей может занять до нескольких трудящихся дней.Возьми свой подарок. Чаще всего бонус активируется незамедлительно в регистрации. Но бывают ситуации, когда нужно забежать в личный кабинет либо написать в справочную службу. 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=http://ultfoms.ru/user/Jeffreymip/>http://ultfoms.ru/user/Jeffreymip/</a> Размер бонуса. В качестве бездепов обыкновенно начисляют маленькие суммы, а когда идет о призах за депо, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино все презентовать игроку до 2000$.Условия могут различаться приятель от друга. Но подобный бонус может быть применен лишь для игрового процесса – полученные на счет деньги до как, как будут отыграны, вывести нереально.
1×slots зеркало регистрация в 1×slots casino
Бонус с зачислением денег на счет дает больше свободы действий. Пользователь сам подбирает, каким образом воспользоваться подаренными средствами. Здесь того шансы действовать лимитирования на перечень дешевых игр, хотя обычно эти рамки не так строги, как в рекламную с безвозмездными вращениями. <a href=http://flowerwheel.synology.me/dokuwiki/doku.php?id=фильмы_в_формате_3gp>http://flowerwheel.synology.me/dokuwiki/doku.php?id=фильмы_в_формате_3gp</a> Так же стоит выделить то, собственно в любом онлайн казино установлен свой максимальный кешаут на бездепозитный приз. Как верховодило кешаут — это максимальная сумма денег, которая дешевая для вывода с бездепозитного бонуса. 1хслотс казино зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://freedom.teamforum.ru/memberlist.php?mode=viewprofile&u=6332>1×slots рабочее зеркало</a>
<a href=https://forum.ltp-team.com/topic/48382–1×slots-oficialnyy-zerkalo-rabochee/>1×slots официальный зеркало рабочее</a>
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=40902>1×слот регистрация в 1×slots casino</a>
<a href=https://hiddeninthesand.com/blogs/news/2024/11/the-unfortunate-history-of-fraudulent-tally-hall-uploads/#comment-51089>1×slots регистрация 1×slots review live</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, нужно адресоваться в службу через лайв-чат на веб-сайте казино.
#6499 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора вход online casino официальный <a href=https://res-publika.com>porno Вера Бирюкова, гимнастка</a> casino riobet casino официальный зеркало <a href=https://vestnik-jurnal.com/>порно с Константин Тюкавин (футбол)</a> человек казино casino вход пинко casino casino 7k рабочее балтбет букмекерская контора bet casino 1×bet слоты 1×bet top
#6500 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало
Иногда операторы просят внесение минимального депозита перед выводом для верификации платежного инструмента. В неких казино данный депозит также предстоит отыграть.Бездепозитные призы — это презенты от казино вид бонусных средств либо фриспинов для игровых автоматов, которые начисляются на аккаунт игрока в процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депо не требуется. <a href=http://filmkachat.ru/>1×slots промокод при регистрации 2025</a> <a href=https://blog.udn.com/G_112062930339362154/181391895>https://blog.udn.com/G_112062930339362154/181391895</a> Отзывы читателей о бонусных акциях помогут составить впечатление, но не запамятовывайте о субъективности личных объяснений. 1×slots рабочее зеркало <a href=http://ooo-esk.ru/index.php?subaction=userinfo&user=lazyfable65>http://ooo-esk.ru/index.php?subaction=userinfo&user=lazyfable65</a> Но есть игорные заведения, которые готовы просто например жертвовать деньги на игру. Для сего довольно сделать профиль. Чтобы исключить свой выигрыш, для поначалу нужно выполнить обстоятельства отыгрыша, обозначенные в условиях получения бездепозитного депозита.
1×slots рабочее зеркало на сегодня
Верификация аккаунта. Лучше подтвердить личность незамедлительно после регистрации, дабы позже не было проблем с выводом денег. Верификация может проходить двумя путями:Таким образом, заведение пытается продемонстрировать себя своим потенциальным геймерам, а подобный рекламный ход как казино приз без депо за регистрацию завлекает довольно большое внимания к игорному заведению и обеспечивает постоянный струю свежих посетителей и грядущих посетителей игрового интернет клуба. <a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1×slots казино зеркало</a> 1×slots официальный demo регистрация в 1×slots casino <a href=https://cameradb.review/index.php?title=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D0%B5%D0%B9%D1%88%D0%B8%D0%B5%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BF%D1%80%D1%8F%D0%BC%D0%BE%20%D1%83%20%D1%81%D0%B5%D0%B1%D1%8F%20%D0%B4%D0%BE%D0%BC%D0%B0%20-%20%D0%B4%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D0%BE%D0%B2%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO>https://cameradb.review/index.php?title=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D0%B5%D0%B9%D1%88%D0%B8%D0%B5%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BF%D1%80%D1%8F%D0%BC%D0%BE%20%D1%83%20%D1%81%D0%B5%D0%B1%D1%8F%20%D0%B4%D0%BE%D0%BC%D0%B0%20-%20%D0%B4%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D0%BE%D0%B2%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO</a> Особую изюминку видео слотам придают оригинальные символы. С их выходом активируются различные бонусы. Вы можете запустить дополнительный степень и увеличить сумму выигрыша. Есть знаки, коие заменяют ненужные составляющие и сами творят выигрышные комбо. Не стоит забывать и про бонус-тур. После любого счастливого спина есть шанс прирастить необходимую выигрыша в 2 или хорошо раза.Превышение максимальной ставки при отыгрыше. Система автоматически не предуведомляет о превышении ставки, поэтому о нарушении правил игрок возможность разузнать теснее после подачи запроса на вывод средств. 1×slots casino online регистрация Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?
1хслотс зеркало
Для подтверждения электронной почты, просто перейдите по интенсивной ссылке в послании, приобретенном от игрового заведения. <a href=http://gtamotors.ru/user/Forsedropma/>http://gtamotors.ru/user/Forsedropma/</a> 1×slots подтвердит вашу регистрацию если говорить Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в социальных сетях, установку мобильного приложения или официального клиента для ПК. В большинстве казино действуют программки преданности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на грядущий уровень нередко с выдачей бездепа.На нашем веб-сайте Вы найдете список своевременных новых бездепозитных бонусов в казино 2022 года. Также, есть количество эксклюзивных предложений, коие доступны лишь посетителям нашего вебсайта последствии регистрации по нашей ссылке либо активации специального промокода.
1×slots официальный зеркало
1×slot рабочее зеркало <a href=https://dc-kd.ru/user/Justinrix/>https://dc-kd.ru/user/Justinrix/</a>
казино 1× slots официальный сайт
Казино выводит деньги лишь на ту платежную систему, с котрой был изготовлен депо. То есть, для вывода бездепозитного бонуса, Вам сначала нужно пополнить счет. В неких клубах узкий перечень способов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с данных платежных способов, которые доступны для вывода. <a href=http://silkhunter.com/index.php?title=Выкуп_авто>http://silkhunter.com/index.php?title=Выкуп_авто</a> Получить Бездепозитный приз в онлайн казино дело двух кликов. Другой момент, отыграть рекламную и соблюсти верховодила и условия отыгрыша. Под правилами подразумевается не вагер, хотя и ограничения по максимальной ставке. Мы понимаем, собственно в кино все ставят на зеро и выигрывают. Призываем не делать сходственного. Перед активацией приза прочитайте верховодила. Узнайте следующие моменты: Условия получения дара, за регистрацию, за депо и другое. Ограничения по наибольшей ставке. Зачастую не повыше 350 рублей. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на месте. Поэтому главно знать, в каких играх можно осуществлять кратность валютного оборота.Новые клиенты онлайн-казино без первого депозита шансы выяснить собственную удачливость. К тому же есть возможность конвертировать бездепы в реальные деньги за регистрацию в казино, впрочем чтобы бонус необходимо отыграть согласно условиям промоакции. зеркала 1×slots Бесплатные призы казино без депо можно получить в виде денежных средств на бонусный счет (исключить их можно лишь в отыгрыша), фриспинов, игры или кешбэк-бонуса.
<b>Смотреть еще похожие новости:</b>
<a href=http://nacionrolera.org/foro/viewtopic.php?f=1210&t=102056>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Срок отыгрыша — это период, который начинается в момент активации приза и завершается с его закрытием. Пользователю нужно уложиться в этот временной промежуток, по призовые средства аннулируются. Казино устанавливают список игр, ставки в которых засчитываются при расчете отыгранных средств. Если тайтл не входит в этот список, то предоставляется быть недоступен для загрузки во время деяния бонусного предложения. Минимального оборота. Этот предел уточняется вейджером — пока игрок не сыграет на установленную необходимую, вывод средств будет недоступен.
#6501 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
почему в казино нет часов букмекерская контора мостбет <a href=https://m.repost.news/>песня казино</a> играющие казино онлайн 1×bet официальный слоты <a href=https://vestnik-jurnal.com/>букмекерская контора леонов</a> пинап казино Валентина Матвиенко порно up букмекерская контора винлайн букмекерская контора официальный casino зеркало сайта 1×bet официальный скачать pin up casino top top
#6502 Charlesgunnyhttp://filmkachat.ru
1× slots casino официальный сайт
Диапазон ставок, коие вправе устроить игрок, того лимитирован. Обычно ставить можно небольшую необходимую — пределах 10–30 руб. За одно вращение.Фриплей-бонусы. Бонусы за бесплатную игру есть лишь в некоторых клубах. Они зачисляются незамедлительно последствии сотворения профиля и срабатывают недолговременное время. Если у вас нет медли потратить средства, они просто завершатся. Что дотрагивается медли, в большинстве случаев призы действуют на одного часа. <a href=http://filmkachat.ru/>1×slots регистрацию более популярный вариант это</a> Приглашаем делиться сужденьями о бонусах. Это поможет иным пользователям избирать более выгодные предложения. <a href=https://ilde2.upf.edu/clatmooc/v/ibs>https://ilde2.upf.edu/clatmooc/v/ibs</a> 1×slots официальный demo регистрация в 1×slots casino <a href=http://forums.ggcorp.me/space-uid-3859685.html>http://forums.ggcorp.me/space-uid-3859685.html</a>
1×slots бездепозитный бонус за регистрацию
Практически все интернет казино с бездепозитным бонусом за регистрацию предусматривает программу преданности — систему поощрения неизменных посетителей, которая произведено из множества уровней. При достижении игроком еще уровня на его счёт поступает бонус. Чем выше степень — тем щедрее бонус.Для тех, кто лишь подумывает испытать свою фортуну, еще для профессиональных игроков, ищущих новые площадки для выигрышей, основные лицензированные казино часто организуют разные промоакции, и лучшее услуг за время – как для новичков, например и для профессиональных игроков – бездепозитный бонус за регистрацию. <a href=https://showboysmedia.com/real-music/#comment-74887>1×slots сайт зеркало</a> 1 x slots casino Не хотите сыграть в азартные забавы, не рискуя своими средствами, но получая в все выплаты? Подобную возможность предоставляют почти превосходнейшие порталы с азартными увеселениями. В их количестве количество правдивых и надежных интернет-казино на российском языке. Они завлекают свежих юзеров различными поощрительными событиями, включая бездепозитные, либо бесплатные бонусы. <a href=http://doremichildcarecentre.com/index.php/forum/user/209785-nebulousitinera>http://doremichildcarecentre.com/index.php/forum/user/209785-nebulousitinera</a> 1×slots зеркало выигрыши обязательно пройдите регистрацию если
1×slots промокод при регистрации
Помимо прочего, для вывода средств по бездепу необходимо привнести на счёт свой 1-ый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на минимально вероятную сумму, последствии чего вывод средств станет доступен.Для получения депозитного бонуса необходимо пополнить собственный игровой баланс настоящими средствами. Вознаграждение возможно получить либо при внесении первого депо, либо повторяющий фиксированного процента от внесённых средств. Так или другому, приз поступит на счёт лишь в пополнения. <a href=https://www.fortressrisk.com/user/philipnefphilipnef/>https://www.fortressrisk.com/user/philipnefphilipnef/</a> Условия шансы разниться друг от друга. Но такой бонус возможность быть применен только для игрового процесса – полученные на счет финансы до такого, как будут отыграны, исключить невероятно.Все обожают получать подарки. Согласитесь, почти каждый играющий человек несомненно необъятно счастлив, случае получит безвозмездный подарок для игры в онлайн казино просто за регистрацию или же приз за внесенный депозит, например именуемые приветственные бонусы для свежих игроков. Соответственно эти онлайн клубы станут более популярны и преимущественны у игроков при выборе казино для забавы. Топ казино день обновляется и прибавляются новые и занимательные игровые клубы с привлекательной бонусной политикой и всеми вероятными прерогативами, к коим относятся эти бонусы как фриспины за регистрацию, валютные бездепозитные призы, а великодушные призы за внесенный депо. 1×slots рабочее зеркало
1×slots регистрация 1×slots casino 777 online
Фриспины предусмотрены для использования в видео слотах. Внимательно ознакомьтесь с условиями – частенько их выдают на некоторые автоматы. В зависимости от клуба, у вас выйдет сделать определённое количество ставок. Кстати, продвинутые игорные дома позволяют запускать любых «одноруких бандитов».Необходимость отыгрыша. Вейджер в выше, чем для призов за депозит. И пока свои не отыграны, исключить их нельзя. <a href=http://big.bestforums.org/viewtopic.php?f=7&t=9669>1× slots сайт</a> 1×slots регистрация 1×slots casino c2d ru <a href=https://escortexxx.ca/author/patrickbeesy/>https://escortexxx.ca/author/patrickbeesy/</a> Возможность сыграть дополнительное состязание (а времени и некоторое) абсолютно безвозмездно, а выигрыш, к, поступает на счёт игрока.
казино 1×slots
Хотя безвозмездные призы начисляются без депо, не исключено, собственно для придется вносить средства. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь после того, как новый заказчик первый пополнит игровой счет. Ограничения по играм. Администрация запрещает игрокам некоторые игровые автоматы с бездепозитным призом, деньгами либо безвозмездными вращениями. Обычно, в правилах приводится полный перечень слотов для отыгрыша. Иногда дробленье выполняется по виду игр. Например, отыгрыш возможен на всех игровых аппаратах, но запрещен в настольных забавах и в разделе Live Casino.Ну и естесственно же, для казино бездепозитные призы прибыльны с имиджевой стороны: сходственная щедрость повышает уровень лояльности клиентов к фирмы. <a href=http://m2motors.com.ua/index.php?subaction=userinfo&user=vulgarmogul16>http://m2motors.com.ua/index.php?subaction=userinfo&user=vulgarmogul16</a> Каждый из бездепозитных бонусов без пополнения 2022 имеет свой конкретный вейджер для отыгрыша, так же в каждом казино он уточняется персонально — где то он х55 а кое-где х30, повторюсь везде по различному!Не сложно догадаться, что no deposit bonuses почти ни не бывают немаленькими. Чаще всего речь идет о пяти–тридцати баксах (или эквиваленте данной суммы в другой денежной). x1 slots 1хслотс регистрация перейти на 1×slots Чаще всего, известные сервисы, такие как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное управляло. Финансовые свои выводятся лишь через ту платежную систему, коей популярностьюимели для пополнения депо. Если же игрок получил бездепозитный покерный бонус, потребуется пополнить счет на наименьшую сумму, которая составляет обычно десять $.
<b>Смотреть еще похожие новости:</b>
<a href=https://redfist.de/RF-Online-Testforum/viewtopic.php?f=60&t=77929>1хслотс казино зеркало</a>
<a href=http://vn-info.net/user/Josephkam/>1×slots регистрация на сайте 1×slots ru com</a>
<a href=http://maddog-server.org/forum/showthread.php?tid=52896>1×slots casino зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бонус за регистрацию в казино выдается лишь раз один на 1-го игрока. Но посещают дополнительные промоакции, в рамках коих бездепы расступаются для постоянных посетителей и эти презенты Вы можете получить более одного раза. Бездепозитные бонусы настоящими средствами, коие можно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадались.
#6503 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up casino top top скачать 1×bet <a href=https://rumafia.news/>бесплатно играем казино</a> почему казино букмекерская контора леонов <a href=https://rhymes-punches.com/>1×bet телефон</a> Скворцова Вероника Игоревна порно Преподобная Надежда Александровна порно букмекерская контора вход casino зеркало сегодня порно с Максим Глушенков (футбол) слот casino Елизавета Боярская
#6504 Charlesgunnyhttp://filmkachat.ru
казино 1×slots официальный сайт
Исходя из сего, просто не существует осмысленных оснований махнуть рукой на получение такового бонуса при регистрации. И, заметить,, на такой бесплатной базе у вас есть все шансы выиграть средства и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, именуют бесплатными онлайн платформами для игр.Доступность — бездепозитные бонусы в казино почаще всего предоставляются свежим игрокам, хотя случаются случаи, когда приз могут получить и действующие посетители. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских рублей. В критериях акции предписано, что вейджер бездепозитного бонуса х20. Поэтому, дабы отыграть приз, игроку несомненно необходимо сделать ставок на 35*20=700 руб. <a href=https://dictanote.co/n/1138185/>https://dictanote.co/n/1138185/</a> Для получения депозитного бонуса необходимо восполнить собственный игровой баланс настоящими деньгами. Вознаграждение можно получить либо при внесении первого депо, либо повторяющий фиксированного процента от внесённых средств. Так либо по, бонус поступит на счёт лишь в пополнения.Третитй бездепозитный приз за регистрацию – валютные средства. К огорчению, начислить рубли либо доллары готовы только знаменитые и популярные клубы. С их поддержкой появится насладиться любой доступной игрой – автоматом, рулеткой, кено, блэкджеком. 1×slot рабочее зеркало <a href=https://www.npf-atom.ru/support/forum/view_profile.php?UID=16737>https://www.npf-atom.ru/support/forum/view_profile.php?UID=16737</a> Бездепозитный бонус казино 2022 с выводом за регистрацию предоставляет вероятность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и проверить качество работы саппорта. Довольно нередко, начиная игровой процесс, игрок теснее не желает останавливаться и проделывает реальный лепта. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать безвозмездно вероятно как раз таки с призом за регистрацию без надобности заносить депо.
1×slots регистрация на сайте
Но надо мыслить, собственно снабжая юзеров этими бонусами, казино занимается спонсированием. Ведь объемы вознаграждений, в основном, не немалые (средним размером от 5 до 20 $). И на эти средства налагаются определенные обстоятельства и лимитирования, неотклонимые к исполненью игрока, в в последствии он вожделеет получить все средства выигранные финансы. <a href=https://www.xn–72c9aa5escud2b.com/webboard/index.php/topic,524711.new.html#new>1×slots официальный сайт зеркало рабочее</a> 1×slots регистрация на сайте 1×slots ru com У нас на веб-сайте Вы найдете список призов без депо в испытанных казино и подробную информацию о том как их получить и использовать.Некоторые казино имеют предлагать клиентам бездепы за свидетельство номера или почты либо репост на страницу в социальных сетях. <a href=https://www.warshipsfaq.ru/user/DoctorLazutakl>https://www.warshipsfaq.ru/user/DoctorLazutakl</a> Бездепозитный приз нередко может замерзнуть легкодоступным сразу после завершения регистрации, что как единственным притязанием к нему является регистрация, а затем ревизия вашей новой учетной записи.Срок активации и время на отыгрыш. Зачисление средств либо фриспинов происходит при активации в течение требовательно ограниченного периода, схожие притязания предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать приз несколько дней либо в месяцов. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с необоснованно высоким вейджером. 1хслотс рабочее зеркало
1× слот зеркало
Обычно бездепозитные акции от казино, приходят на эл. Почту в дни рождения либо дни. В неких интернет казино возможно адресоваться в чат и как постоянному игроку, вполне вам предложат бездепозитное предложение. Для верификации аккаунта нужно дать профессионалам технической поддержки отсканированную копию паспорта и счета за коммунальные услуги, еще фотографию банковской карты или снимок странички электрического кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности.С другой стороны, намного легче забрать бездепозитные фриспины за регистрацию в казино и напрямик в начать вращать барабаны в лучших слотах. Главная необыкновенность спинов в том, что они предусмотрены для лучших автоматов. Удастся столько пройти дополнительные раунды, хотя и увеличить необходимую выигрыша, заработать респины и внутриигровые презенты. <a href=https://cookeji.com/home.php?mod=space&uid=291994>https://cookeji.com/home.php?mod=space&uid=291994</a> Бездепозитные призы истинными деньгами, которые возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадались. 1×slot зеркало рабочее этих способов предполагает регистрацию
1×slots зеркало рабочее
<a href=http://forum.cvetq.info/viewtopic.php?f=3&t=250362>1хслот официальный сайт зеркало</a> 1×slots зеркало выигрыши обязательно пройдите регистрацию если <a href=https://diakov.net/user/ForsedropSr/>https://diakov.net/user/ForsedropSr/</a> Несмотря на то, что этот вариант стимуляции со стороны азартных платформ довольно популярен в сфере похожих игр, далеко многим поклонникам казино известно, что являют собой бездепозитные бонусы казино и как непосредственно их вероятно эксплуатировать.Бездепы обыкновенно предлагают с отыгрышем — быстро вывести выигранные средства нельзя. Перевод средств со счета несомненно вероятен после того, как юзер выполнит все притязания казино, а сумма не превышать установленного правилами лимита. Условиями акции фиксируются сроки, протяжении которых клиент вправе воспользоваться предложением. Обычно они не превышают нескольких дней после активации.
1х слотс зеркало регистрация в 1×slots casino
В зависимости от интернет заведения каждый из их возможность вам предложить как бездепозитные деньги, так и бездепозитные фриспины, коие после успешной регистрации упадут вас на ваш игровой баланс.Отзывы читателей о бонусных промоакциях посодействуют составить эмоцию, хотя не забывайте о субъективности личных объяснений. В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с даровых вращений. Прибыль, коию Вы заработаете на этом бездепе возможно назначать на вывод без какого или отыгрыша. <a href=http://j013.koreawebcenter.com/bbs/board.php?bo_table=free&wr_id=478101>http://j013.koreawebcenter.com/bbs/board.php?bo_table=free&wr_id=478101</a> скачать 1×slots официальный сайт
<b>Смотреть еще похожие новости:</b>
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=37339>1×slots официальный сайт мобильная версия скачать</a>
<a href=https://g2clubs.com/healthy-workout/google/#comment-26107>1×slots регистрацию более популярный вариант это</a>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=159&pid=646461#post_646461>1×slots зеркало видели такую регистрацию на</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для получения депозитного приза нужно восполнить свой игровой баланс настоящими деньгами. Вознаграждение возможно получить либо при внесении первого депозита, или вид фиксированного процента от внесённых средств. Так или другому, приз поступит на счёт только в пополнения.
#6505 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up casino top top 1×bet бесплатно <a href=https://rhymes-punches.com/>порно с Абрамченко Виктория Валериевна</a> букмекерскую контору пин pin up casino зеркало <a href=https://specreporter.com/>лучшие онлайн казино</a> как выиграть в казино порно с Елена Никитина, скелетонистка 7k casino как выиграть в казино сайт казино вход Анна Михалкова vavada casino
#6506 Charlesgunnyhttp://filmkachat.ru
1х слот 1хслотс регистрация перейти на 1×slots
Для всех бездепозитных бонусов функционирует максимальный предел на выигрыш. Он указывает предельную сумму, которую вас получить, играя на бонусные кредиты. Как лишь вам удастся выполнить требования вейджера, допустимый максимум будет переведен с бонусного счета на основной, а остаток несомненно списан. <a href=http://filmkachat.ru/>1× slots официальный</a> Необходимость отыгрыша. Вейджер в выше, чем для бонусов за депозит. И же средства не отыграны, вывести их невозможно.Доступ к дару имеет открываться механически последствии введения промокода или воззвания в саппорта вебсайта. В первом случае от пользователя не требуется никаких поступков. Бездеп с активацией по коду встречается почаще всего. Игроку необходимо ввести совокупность знаков в графе, которая имеет находиться в регистрационной форме в Личном офисе. <a href=https://letterboxd.com/lexxeagle/list/revolutionary-approaches-in-modern-virtual/>https://letterboxd.com/lexxeagle/list/revolutionary-approaches-in-modern-virtual/</a> Как правило, при выводе финансов, от играющего требуется лишь устроить минимальный лепта для того, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом собственный счет. 1×slots официальный сайт зеркало <a href=https://aryba.kg/user/KennethEmafe/>https://aryba.kg/user/KennethEmafe/</a>
1хслот зеркало
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=192497>1×slots casino зеркало рабочее</a> рабочее зеркало 1хслотс <a href=http://wooriatoz.com/atozhk/bbs/board.php?bo_table=free&wr_id=179310>http://wooriatoz.com/atozhk/bbs/board.php?bo_table=free&wr_id=179310</a> 1×slots зеркало на сегодня
1×slots регистрация на официальном сайте
Денежные средства. Третий бонус за регистрацию без депо – наличные. К огорчению, лишь известные и пользующиеся клубы все дать средства в рублях либо долларах. С их помощью вас насладиться любой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед данным необходимо выполнение конкретных критерий.Благодаря программе лояльности от игорного заведения, возможно арестовать неплохой старт и без добавочных вложений запустить видеослоты. Кроме того, возможно рассчитывать на реальную удачу и получить, без вложения собственных финансов, великой выигрыш. <a href=http://clasificadosdolores.com.ar/sitio/author/chrisset>http://clasificadosdolores.com.ar/sitio/author/chrisset</a> Доступные забавы – В некоторых азартных забавах возможно понизить математическое преимущество казино до нескольких 10-х процента. В их количестве все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как верховодило, в таких играх ставки идут в зачет вейджера не всецело. Например, имеет предусматриваться только 50%. В неких играх бездепозитные призы вообще нельзя отыгрывать.Зачастую бездепозитные бонусы казино для забавы предлагаются различными заведениями азартных игр виде маркетинговых акций или в целях вербования к себя новых игроков. Для бездепозитных призов в казино 2022 геймеру не нужно пополнять счет до этапа вывода желанных средств. 1×slots официальный сайт мобильная версия Для казино, работающих интернет, бездепозитные призы необходимы для привлечения новых посетителей. Предложение сыграть на слотах без надобности внесения настоящих денег — работающий метод для повышения интереса к компании. После отыгрыша бездепа великоват шанс, собственно игроку понравится и он продолжит выступать в казино, только сейчас уже на личные деньги.Бездепозитные бонусы отличный вариант даровой игры в игровые автоматы. Многие пользователи сети не понимают, что в казино возможно начать играть абсолютно безвозмездно, а позже исключить выигрыш на банковскую карту либо электрический кошелек, иные не доверяют онлайн казино, а третьи успешно играют и выигрывают – и подчас достаточно великие суммы.
1×slots зеркало которую указывали при регистрации кстати
<a href=http://fin-molitor.com/forum/viewtopic.php?f=2&t=442602>1× slots официальный</a> В случае установленного лимита на необходимую вывода выигрыша с бездепозитного приза, игрок не сможет исключить больше заявленной суммы. 1×slots регистрация на сайте <a href=http://filmsgood.ru/user/Henryunsow/>http://filmsgood.ru/user/Henryunsow/</a> Бонус без депо за регистрацию в казино (бездепозитный бонус) – это валютный презент от клуба, кот-ый начисляется на акк игрока в регистрации в казино. Кроме творения учетной записи, для получения бездепа, довольно нередко потребуется ещё и подтвердить контактные данные игрока и/или активировать особый промо-код.
1хслот скачать
Как правило, при выводе финансов, от играющего потребуется лишь устроить наименьший лепта чтобы, чтобы, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом индивидуальный счет.Основное правило получения бездепа ? творимый аккаунт должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов строго запрещено. Проверка ведется по имени, e-mal, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депо необходимо блюсти простую очередность поступков. Создание аккаунта. На сайте казино необходимо обнаружить регистрационную форму и заполнить порожние поля собственными данными. Иногда на этом этапе требуется показать только адрес электронной почты и пароль, но почаще хотелось заполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д.). Нужно указывать лишь настоящие данные, что впоследствие они будут проверены. <a href=http://forums.indexrise.com/user-319768.html>http://forums.indexrise.com/user-319768.html</a> Свежий бонус начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в пользовании своими, а в случае отыгрыша оператор возможность ввести ограничение на вывод средств. 1×slots регистрация на 1хслотс Прибывшие на аккаунт деньги бездепозитные призы предназначаются, главном, лишь для новоиспеченных пользователей, коие ранее не имели собственного аккаунта в данном казино. Исходя из этого, случае раньше у игрока был сделан депозит, то, по всей вероятности, у него больше не будет возможности рассчитывать на получение такого бонуса в конкретном заведении.Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских руб. В критериях промоакции предписано, что вейджер бездепозитного приза х20. Поэтому, чтобы отыграть бонус, игроку будет нужно сделать ставок на 35*20=700 руб.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.findaspermdonor.com/memberlist.php?mode=viewprofile&u=13618>1×slots casino регистрация на сайте</a>
<a href=https://forum.dis-course.net/viewtopic.php?t=419779>1хслотс рабочее зеркало на сегодня</a>
<a href=https://10nsk.ru/user/JosephSuple/>1хслот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Зарегистрируйтесь. Для регистрации почаще всего довольно ввести свой номер телефонного и почтовый адресок, в чего ввести приобретенный код из СМС. Возможно, требуется указать промокод. В правилах акции будет написано, где его надобно вводить. Иногда это бы создавать при регистрации, времени — теснее после творения собственного кабинета, на отдельной странице. Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную процедуру активации бонуса без депо. Внимательно прочтите до конца. Многие новенькие проделывают промахи на этапе регистрации и поэтому имеют получить презент.
#6507 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet официальный сайт бк букмекерская контора <a href=https://7club7.com/>приложения букмекерских контор на андроид</a> casino зеркало сегодня рабочее букмекерскую контору пин <a href=https://slon-ru.com/>1×bet зеркало слоты 1×bet xyz</a> Преподобная Надежда Александровна порно Елизавета Боярская играющие казино сколько казино лучшие казино бесплатно казино ставка 1×bet xbet
#6508 Charlesgunnyhttp://filmkachat.ru
1хслотс 1хслотс регистрация перейти на 1×slots
При регистрации что, нет либо ином онлайн игральном заведении — для дается раз шанс испытывать свою фортуну не внося свои монеты. Замечу собственно эту поощрительную предложение предоставляют не все интернет игровые площадки, а только великодушная половина из них. Которые мы подготовили для Вас в нашем перечне. <a href=http://filmkachat.ru/>1×slots официальный зеркало рабочее</a> Подтвердите регистрацию, дабы активировать Бездепозитный бонус с выводом, требуется заполнить индивидуальный профиль. Заполните пустопорожние поля реальными данными о для. <a href=https://www.4sync.com/s/feS06Cjuz>https://www.4sync.com/s/feS06Cjuz</a> 1хслот скачать <a href=https://australianwinerytours.com/tours/member.php?action=profile&uid=1934>https://australianwinerytours.com/tours/member.php?action=profile&uid=1934</a> Активация происходит с помощью промокодов, которые вводятся в личном офисе последствии регистрации. Среди спецпредложений в списке Casino.ru находятся эксклюзивные промокоды, коие доступны лишь посетителям портала. Другие способы начисления средств ? автоматическая активация сразу в творения аккаунта и получение презента по запросу в службу технической помощи.Вообще перейдя в казино — правила одинаковы в получении бездепозитных призов, в стереотипные управляла входит: доказать эл. Почту и аппарат, заполнить собственный личный профиль, активировать рекламную код либо активировать предложения во вкладке БОНУСЫ.
1×slots регистрация то дальше необходимо пройти
Во время забавы в казино, выигрыши, приобретенные благодаря безвозмездным призовым фондам, суммируются и включаются в общую сумму для отыгрывания. Однако, если фортуна улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно допустит вывести финансовые свои. Сумма вывода несомненно находиться от лимита, утвержденного непосредственно в данном учреждении. Поэтому, внимательно надо(надобно) читать управляла выдачи анлимитных депо.Можно ли наваривать на бездепозитных призах? Это не работа, здесь как повезет, случае в любом предложенном безедепе, вы будете откручивать вейджер и выводить, тогда можно назвать везением, и добавочной добавкой к вашему бютжету. 1×slots casino регистрация на сайте Некоторые сайты, прежде чем обмануть регистрацию игроков, предлагают ответить на некоторое базовых вопросов. Цель проведения похожей викторины – выявить случайных людей, которые не имеют представления о покере, и не допустить получения ими призов. Если гость теснее играл в казино, то ответить на полтора десятка несложных вопросов будет несложно. Очень часто, ответы можно отыскать на официальных веб-сайтах этих учреждений. <a href=https://profiteplo.com/user/Porsedropel/>https://profiteplo.com/user/Porsedropel/</a> Бездепозитные призы — это презенты от казино в виде бонусных средств либо фриспинов для игровых автоматов, которые начисляются на аккаунт игрока в процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депозит не потребуется.Условия шансы различаться приятель от друга. Но подобный приз имеет быть использован только для игрового процесса – приобретенные на счет деньги до такого, как станут отыграны, вывести нереально. 1×slot зеркало рабочее регистрации на телефон придет Как лишь вы отыграли вейджер и средства с бонусного баланса перебежали вас на настоящий счет, Вы смело сможете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (устроить наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депо).
1×slots зеркало видели такую регистрацию на
Выполнив все требования оператора, заказчик возможность оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем не более суток. Если дополнительно потребуется пройти функцию верификации, то срок возрастает до 1–2 рабочих дней. Для перевода применяются банковские приборы и электрические платежные системы. Второй метод подходит превосходнее, так как большинство транзакций такой осуществляются моментально. В связи со специфичностью функционирования банков обработка платежей возможность взятьвдолг(взятьвзаймы) до нескольких трудящихся дней.Ниже указан важный список легальных казино в Беларуси с бонусами на 1-ый депо. Вы сможете попасть на официальный вебсайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз. <a href=http://link.ac/humor/user/Christower/>http://link.ac/humor/user/Christower/</a> В интернете много знаменитых игорных площадок с привлекательными акционными предложениями. Однако внимательно разбирать условия десятков предложений времени надоест, ну и время отнимет количество. Поэтому наша команда подготовила ТОП-3 сайтов с наилучшими бездепозитными призами:С не отыгранным бонусом воспрещается превосходить размер максимальной ставки. Нарушение этого обстоятельства виде аннулирование выигрыша. 1хслотс рабочее зеркало на сегодня Суммы похожих услуг, случаев, колеблются от трех до двадцати долларов, а вейджер на эти средства должен составлять от 30 до шестидесяти один. Зачастую, наибольшая сумма выигрыша тут составит от одной до двух сотен долларов. Если геймер выиграет больше, то все свои все быть списанными до очень разрешенного выигрыша. Здесь появляется содержание выводить еще несуществующие деньги на собственную платежную систему и далее отыскивать заведение с благоприятными под данную необходимую релоадом либо бонусом за первое пополнение счета. Есть некоторое подвидов бездепозитного вознаграждения, предлагаемого наибольшим числом заведений.Бездепозитный приз предоставляется новому игроку за определенные деяния. Часто подарок в виде денег или фриспинов выдается за регистрацию, спасибо чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.
1 хслот регистрация в 1×slots casino
Бонусные средства – небольшая сумма денег для старта в новом казино. На бонусные деньги, обычно разрешено играть во все игры, считая слотов с современным джекпотом и игр из раздела live casino. Промообъявления от казино мешают реальной картины и направлены на привлечение внимания пользователей. Понять, как высоки шансы остаться в плюсе, позволит личный анализ условий предложения:Необходимость отыгрыша. Вейджер ситуации выше, чем для бонусов за депо. И пока средства не отыграны, вывести их невозможно. 1 xslots рабочее зеркало <a href=https://rolivka.online/forum/member.php?action=profile&uid=56847>https://rolivka.online/forum/member.php?action=profile&uid=56847</a> Подтверждение электронной почты – одно из основных условий, которое есть почти в любом бездепозитном казино. Чтобы верифицировать электронную почту, достаточно перебежать по активной ссылке в послании, приобретенном от азартного клуба.
1х слот 1хслотс регистрация перейти на 1×slots
Выполнив все притязания оператора, клиент может оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем менее суток. Если дополнительно потребуется пройти процедуру верификации, то срок возрастает до 1–2 рабочих дней. Для перевода используются банковские инструменты и электронные платежные системы. Второй метод подходит чем, например как масса транзакций в этом случае осуществляются мгновенно. В связи со спецификой функционирования банков обработка платежей имеет занять до нескольких трудящихся дней.Доступ к подарку может раскрываться механически в введения промокода или обращения в саппорта вебсайта. В первом случае от юзера не потребуется никаких поступков. Бездеп с активацией по коду встречается почаще всего. Игроку нужно ввести совокупность символов в графе, которая имеет находиться в регистрационной форме в Личном кабинете. <a href=https://malaysia-forex.com/members/132494-CharlesNus>https://malaysia-forex.com/members/132494-CharlesNus</a> зеркло казино 1×slots Вейджер менее х30–35 считается применимым. Опытные игроки утверждают, собственно с этим вейджером реально остаться в плюсе, случае верно подойти к выбору игрового аппарата.В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая приятная доля забавы. Важно, часто бездепозитные бонусы в казино выдаются с ограничениями по максимальной выплате. В среднем возможно рассчитывать на прибыль в некоторое тысяч руб. Как исключить выигрыш с приза без депо. Придётся доказать аккаунт документально, в неких заведениях. Процедура верификации обязательна и делается каждым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате или прочитайте в правилах.
<b>Смотреть еще похожие новости:</b>
<a href=http://mandala-app.com/forums/memberlist.php?mode=viewprofile&u=3447>1× слот зеркало</a>
<a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Прямо сейчас отберите бесплатные вращения за регистрацию без депозита и начинайте коллекционировать призовые композиции ради солидных выигрышей! Перечисленные повыше основные свойства сочетают практически каждый приз и считаются стандартными для бездепозитных бонусных начислений в казино.
#6509 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Елизавета Туктамышева casino бездепозитный <a href=https://www.ossetia.tv/>порно с Голикова Татьяна Алексеевна</a> Попова Анна Юрьевна порно порно с Александр Головин (футбол) <a href=https://sovsekretno.net/>porno Катерина Шпица</a> porno Игорь Акинфеев (футбол) порно с Елена Никитина, скелетонистка сайт винлайн букмекерская контора 1×bet сайт porno Мира Андреева (теннис) online casino 7k casino на телефон
#6510 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация то дальше необходимо пройти
Свежий приз начисляется в виде валютных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в пользовании средствами, а случае отыгрыша оператор имеет ввести ограничение на вывод денег.В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и когда неоднозначных ситуаций нет способности куда-то посетовать и обосновать свою правоту. <a href=http://filmkachat.ru/>1×slots промокод при регистрации</a> Возьми свой презент. Чаще всего приз активизируется незамедлительно последствии регистрации. Но бывают ситуации, когда нужно забежать в собственный кабинет либо написать в справочную службу.Следует подчеркнуть, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с определенным кодом. <a href=https://mega.nz/file/d28RQCBS#2i_xAXDQfj-rVkVhMWNDPYPXRKJ71NaLOz_MKYAVxxQ>https://mega.nz/file/d28RQCBS#2i_xAXDQfj-rVkVhMWNDPYPXRKJ71NaLOz_MKYAVxxQ</a> 1×slot зеркало рабочее регистрации на телефон придет <a href=http://itstula.com/user/Jaspermet/>http://itstula.com/user/Jaspermet/</a>
1×slots зеркало сайта
Вейджер менее х30–35 считается приемлемым. Опытные игроки заявляют, собственно с таким вейджером реально остаться в плюсе, случае верно подойти к выбору игрового аппарата. 1×slots регистрацию процедура займет всего лишь Сразу последствии активации промокода можно пользоваться презентом. Как теснее упоминалось, призы посещают трёх обликов – фриспины, кредиты и фриплей-бонусы. <a href=http://usr.by/index.php?subaction=userinfo&user=drunkshoe77>http://usr.by/index.php?subaction=userinfo&user=drunkshoe77</a> Также, учите, собственно бездепозитный приз возможно вывести только том, случае, когда будут исполнены все обстоятельства отыгрыша.Это тоже безвозмездные финансы, которые поступают на аккаунты новоиспеченных компьютерные последствии регистрирования. А особенность этих призов состоит что, нет, собственно обретенные деньги обязательно идет использовать в продолжении назначенного медли. 1хслот 1хслотс регистрация перейти на 1×slots
1×slot зеркало рабочее регистрации на телефон придет
В основном случаев безвозмездные бонусы начисляются в кредитах, коие невозможно незамедлительно вывести со счета. Прежде их нужно отыграть по установленным правилам. Эти притязания принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже.B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. Превышение максимальной ставки при отыгрыше. Система механически не предуведомляет о превышении ставки, поэтому о несоблюдении правил игрок возможность узнать теснее последствии подачи запроса на вывод средств. <a href=http://www.jingsuanwu.com/home.php?mod=space&username=Glennsarry>http://www.jingsuanwu.com/home.php?mod=space&username=Glennsarry</a> Поспешите зарегистрироваться на официальном сайте Клубника, дабы мгновенно получить 33 безвозмездных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, бывает настоящий шанс победу! 1×slots официальный сайт зеркало рабочее Список так именуемых «не землель» прилагается к правилам бонусной программы игорного портала. Обязательно выясните, распространяются ли на вас подобные санкции.
1×slots регистрация 1×slots review live
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=59617&extra=>1×slots casino регистрация 1×slots review live</a> Можно ли зарабатывать на бездепозитных бонусах? Это не работа, тут как повезет, в в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, за можно назвать везением, и добавочной добавкой к вашему бюджету. Важно, удостоверьтесь том,, что раньше не регились в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи. 1×slots регистрация 1×slots casino 777 online <a href=http://megatv.kiev.ua/user/PatrickEvate/>http://megatv.kiev.ua/user/PatrickEvate/</a> Приветственный бездеп предоставляется хоть игроку лишь раз раз. Казино сражаются с так называемыми бонусхантерами (от англ. Bonus Hunter — охотник за бонусами), пытающимися заводить множественные аккаунты для надувательства оператора и повторного получения презента. Исключить похожие деянья позволяет верификация данных. Администрация вправе востребовать у клиента доказать индивидуальные данные, указанные при регистрации.Список так нарекаемых «не территорий» прилагается к правилам бонусной программки игорного портала. Обязательно проверьте, распространяются ли на вас сходственные наказания.
1×slots бонус за регистрацию
Так собственно приготовьтесь дать конфиденциальную информацию (пол, возраст, государство проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает не более суток, в чего удастся беспрепятственно выводить крупные выигрыши.Так же стоит выделить то, собственно в каждом интернет казино установлен свой максимальный кешаут на бездепозитный приз. Как верховодило кешаут — это предельная сумма денег, которая дешевая для вывода с бездепозитного бонуса. <a href=https://www.femina.cz/forums/topic/%d0%b3%d0%bb%d0%b0%d0%b2%d0%bd%d0%b0%d1%8f-%d0%b4%d0%be%d1%80%d0%be%d0%b3%d0%b0-%d0%b0%d0%b2%d1%82%d0%be%d1%88%d0%ba%d0%be%d0%bb%d0%b0-%d0%b2%d0%bb%d0%b0%d0%b4%d0%b8%d0%b2%d0%be%d1%81%d1%82%d0%be/>https://www.femina.cz/forums/topic/%d0%b3%d0%bb%d0%b0%d0%b2%d0%bd%d0%b0%d1%8f-%d0%b4%d0%be%d1%80%d0%be%d0%b3%d0%b0-%d0%b0%d0%b2%d1%82%d0%be%d1%88%d0%ba%d0%be%d0%bb%d0%b0-%d0%b2%d0%bb%d0%b0%d0%b4%d0%b8%d0%b2%d0%be%d1%81%d1%82%d0%be/</a> 1×slots официальный сайт мобильная версия скачать
<b>Смотреть еще похожие новости:</b>
<a href=https://www.ldvd.nl/no-22-san-diego-place-rallies-very-last-boise-country-27–16?page=27#comment-237194>x1 slots регистрация в 1×slots casino</a>
<a href=http://aficionado.pl/showthread.php?166848–1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82-%D1%81%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C&p=187508>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
У каждой игры свои требования по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система засчитает любую ставку. В рулетке и покере устроить это намного труднее. Именно потому так главно пристально разбирать условия получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой забаве, то новенькие просто «спустят бонус на ветер».
#6511 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало рабочее этих способов предполагает регистрацию
Акции распространяются как на все забавы казино, например и на ограниченный перечень. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и. Промо может обхватывать разработки одного производителя. Бездеп не пересекается с иными промоакциями казино. Если на сайте предусмотрен кэшбек, он не начисляется за ставки, сделанные бонусными деньгами. Для идентификации платежных реквизитов игрока возможность потребоваться пополнение счета на наименьшую сумму. <a href=http://filmkachat.ru/>1×slots акции</a> <a href=https://mega.nz/file/E6tG2Y6a#35AP8eRuVWDBW0vFRNmk3yz9lTf4-ohI6ETi78fc0BA>https://mega.nz/file/E6tG2Y6a#35AP8eRuVWDBW0vFRNmk3yz9lTf4-ohI6ETi78fc0BA</a> Одним из поводов отдавать преимущество, льготу одному или другому заведению содержится в привлекательности предлагаемых промоакций и безвозмездных предложений. Безвозмездные фриспины, выдаваемые без нужды создавать какой-либо вклад, в перечне находится далеко не в конце. 1×slots рабочее зеркало на сегодня <a href=https://cryptosafeguard.net/forum/member.php?action=profile&uid=487>https://cryptosafeguard.net/forum/member.php?action=profile&uid=487</a> Также, учите, что бездепозитный приз возможно исключить лишь в случае, когда станут выполнены все условия отыгрыша.Внесение депозита – Будьте готовы пополнить счет последствии отыгрыша приза. Это стандартное требование управлял для данного типа промо-акций. Лучше заблаговременно уточнить, какую необходимую надо(надобно) несомненно вносить на счет. Как правило, речь идет о наименьшем депозите, хотя вы должны быть убеждены, собственно он для по кармашку.
x1 slots регистрация в 1×slots casino
Благодаря программе преданности от игорного заведения, можно взять неплохой старт и без добавочных вложений запустить видеослоты. Кроме как, можно рассчитывать на реальную фортуну и получить, без вложения собственных денег, великий выигрыш.Да, у даровых призов есть дефекты. Прежде всего, они обыкновенно очень. Кроме как, условия вейджера по ним постоянно строгие. Но таки неимение риска делает их довольно красивыми для клиентов. <a href=https://talkonlinenews.com/viewtopic.php?t=3481>1×slots актуальное зеркало</a> 1хслотс зеркало <a href=https://pattern-wiki.win/wiki/User:JennyCollocott3>https://pattern-wiki.win/wiki/User:JennyCollocott3</a> Если вы избираете испытанное лицензионное интернет казино и сделайте все условия получения бездепозитного приза, проблем с получением презента у Вас не возникнет.Подобные призы без депозита предоставляются на больше прибыльных условиях. Зачастую они крупнее, а условия отыгрыша менее строгие. 1×slots официальный сайт скачать на айфон При регистрации идет свидетельствовать только достоверную информацию. Когда учетная запись несомненно активна, замечен доступ в Личный кабинет. В нем возможно выбрать еденицу, ввести промокод и узнать подробные верховодила получения и отыгрыша бездепа. Краткая информация об промоакции нередко находится непосредственно на регистрационной форме.Составленный экспертами Casino.ru перечень онлайн-казино с бездепозитным призом позволяет игрокам сравнить спецпредложения разных операторов.
1×slots регистрацию более популярный вариант это
При отыгрыше бездепов, учитывайте временные ограничения. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток. <a href=http://kidsnighttonight.com:/forums/member.php?action=profile&uid=346829>http://kidsnighttonight.com:/forums/member.php?action=profile&uid=346829</a> Наиболее модные вознаграждения среди гэмблеров – бездепозитные бонусы казино. Это не удивительно, так можно получить безвозмездные вращения или виртуальные кредиты, и при не придётся пополнять счёт, рисковать личными деньгами. Удастся насладиться различными веселиями и даже выиграть крупную необходимую, избегая серьёзного риска. 1хслотс казино зеркало Игрокам стоит принимать приветственный приз как гарантированный метод получить крупный выигрыш, но это отличная возможность без затрат оценить перечень казино.
1×slot зеркало
<a href=https://dev.eff.one/forumdisplay.php?fid=10>казино 1× slots официальный сайт</a> Вообще перейдя в казино — верховодила одинаковы в получении бездепозитных бонусов, в стандартные правила входит: доказать эл. Почту и телефонный, заполнить собственный личный профиль, активировать промо код или активировать предложения во вкладке БОНУСЫ.При ирге на бонусные свои воспрещается выступать в игровые автоматы с современным джекпотом и игры из радела exist casino. Кроме того, некоторые казино выделяют бездеп на раз либо несколько конкретных слотов, и в других забавах Вы не можете на них играть. 1×slots зеркало рабочее на сегодня <a href=https://www.gamers-forum.com/member.php?104675-PhilipAmbiz>https://www.gamers-forum.com/member.php?104675-PhilipAmbiz</a> Возможность протестировать свежие забавы, не рискуя собственными своими и разработать собственную стратегию забавы.Сроки активации приза уточняются каждым казино, но почаще всего они не превышают недели с этапа получения. Игроку непременно надо(надобно) использовать бездеп на обозначенного срока, в ином случае бонус просто исчезнет. Каждый приз возможно получить лишь один раз, поэтому случае не использовать бездеп в срок, у игрока не будет второго шанса им воспользоваться.
1×slots рабочее зеркало
Вышеописанная причина и считается главным моментом, следствии которого операторы отдают часть собственной прибыли на разные рекламные затраты и маркетинговые кампании. А самым действующим тут будут играть непосредственно бездепозитные призы казино 2022 с выводом за регистрацию. Превышение максимальной ставки при отыгрыше. Система механически не предупреждает о превышении ставки, потому о нарушении правил игрок имеет узнать уже после подачи запроса на вывод средств. <a href=http://alp-proekt.ru/index.php?subaction=userinfo&user=goofytwilight23>http://alp-proekt.ru/index.php?subaction=userinfo&user=goofytwilight23</a> Верификация аккаунта. Лучше доказать лицо незамедлительно после регистрации, дабы потом не было заморочек с выводом средств. Верификация возможность проходить 2-мя маршрутами: 1×slot рабочее зеркало Стоит отметить, собственно бездепозитный бонус выдается лишь совершеннолетним новичкам, коие, в свою очередь, шансы пригласить личных друзей и людей, того рассчитывающих на поощрительную программку лояльности. Подобная разработка была среди конкурирующих онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры содействуют увеличению собственной посещаемости, путем вербования новых игроков. Бонусы – это оригинальный шанс для вероятных участников забавы, которые шансы опробовать софт покер рума и убедиться, будут ли они в него играть или нет. Новый игрок попробует свои силы с настоящими оппонентами в казино.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=37288>1×slots подтвердит вашу регистрацию если говорить</a>
<a href=http://khodaumo.com/forum/viewtopic.php?f=2&t=75236&sid=7e71f5edd7d45fc892ec4854821dbece>1×slots официальный сайт зеркало</a>
<a href=https://thetechmodders.com/forums/viewtopic.php?t=62034>1×slot официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бонус за регистрацию в казино выдается лишь раз один на 1-го игрока. Но посещают дополнительные промоакции, в рамках коих бездепы расступаются для постоянных посетителей и эти презенты Вы можете получить более одного раза. Чтоб получить большой выигрыш, подбирайте игровые автоматы с максимальным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша.
#6512 Charlesgunnyhttp://filmkachat.ru
1× slots официальный
Выбор каждого онлайн казино на нашем веб-сайте. В описании к каждому Вы можете разузнать, собственно получите за творение аккаунта.Реже призы без депозита начисляются неизменным игрокам. С их поддержкою администрация постарается удержать ценных посетителей или вожделеет поблагодарить за преданность правильных гостей. Но гораздо чаще для подобных целей используются такие промоакции: <a href=http://filmkachat.ru/>1×slots зеркало</a> Основное отличие в, что для получения бездепа не надо пополнять баланс в казино. Но не этого, есть ряд и других различий:С не отыгранным бонусом воспрещается превосходить объем максимальной ставки. Нарушение сего обстоятельства повлечет за собой аннулирование выигрыша. <a href=https://forums.delphiforums.com/biznewsopps/messages/4670/1>https://forums.delphiforums.com/biznewsopps/messages/4670/1</a> 1×slot регистрация <a href=http://www.cwpass.com/ver2/bbs/board.php?bo_table=free&wr_id=676017>http://www.cwpass.com/ver2/bbs/board.php?bo_table=free&wr_id=676017</a> Бонусные средства – маленькая сумма средств для старта в новеньком казино. На бонусные деньги, обычно разрешено выступать во все игры, кроме слотов с современным джекпотом и игр из раздела live casino.
1хслотс казино зеркало
При регистрации сомнений или ином интернет игральном заведении — вас дается раз шанс испытывать собственную фортуну не внося средства монеты. Замечу что эту поощрительную предложение деют не все онлайн игровые площадки, а лишь щедрая середина(средина) из их. Которые мы подготовили для Вас в нашем перечне. 1×slots зеркало выигрыши обязательно пройдите регистрацию если При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток.В реальное время получить приз за регистрацию в казино очень просто. Почти каждый игорный дом с радостью даст средства либо безвозмездные вращения. Многие игроки используют данным и не смущяются региться в каждом клубе с выгодными условиями. Кстати, это отличная вероятность выдумать выигрышную стратегию и сорвать куш. <a href=http://injc.kr/bbs/board.php?bo_table=free&wr_id=309914>http://injc.kr/bbs/board.php?bo_table=free&wr_id=309914</a> Главным моментом в возникновении этих вознаграждений произведено в, собственно пустив их в ход, игры ничем не рискует и в последствии никому ничего не несомненно обязан (не зависимо, получит ли он спасибо бонусам какой-нибудь выигрыш либо моментально спустит все только что прибывшие финансы). То есть, казино снабжает игрока вероятностью на дармовой основе играть во различные слоты и даже спонсирует игру.Когда идет о получении бездепозитных бонусов в казино, для внимание на следующие обстоятельства: 1×слотс казино Только выполнив все обстоятельства отыгрыша и дождавшись окончания проверки аккаунта, Вы можете оформить заявку на вывод средств и получить свои средства.Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом прибыли присутствуют на данной странице. Посетитель может оценить обстоятельства получения и начать играть на средства без внесения депо. При данном игроку принципиально осознавать, на каких критериях и какими методами у исключить полученный выигрыш. Для сего нужно расценить перечень подключенных платежных систем.
зеркала 1×slots
<a href=https://www.kzntreasury.gov.za/Lists/FRAUD%20RISK%20ASSESSMENT%20QUESTIONNAIRE/DispForm.aspx?ID=92171>https://www.kzntreasury.gov.za/Lists/FRAUD%20RISK%20ASSESSMENT%20QUESTIONNAIRE/DispForm.aspx?ID=92171</a> 1хслотс казино зеркало Помните, что любые нарушения правил сведут на нет ваши старания, и вы всего останетесь без начисленного вас бесплатного приза. Всегда изучайте правила начисления и обстоятельства вейджера. По любым вопросам, на коие вы имеет помощи найти ответы, обращайтесь за разъяснениям и саппорт.
1×slots зеркало регистрацию более популярный вариант это
Вейджер в переводе с британского значит «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша полученного приза, в нашем случае бездепозитного. Число ставок значения — главно только набрать необходимую, пропорциональную сумме одобрения.Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают приз по государствам. Вплоть до того, собственно клуб возможность себя игроков из Вашей государства, а бездеп мешает. <a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=4499>1× slots регистрация в 1×slots casino</a> Стоит отметить, собственно бездепозитный приз выдается лишь совершеннолетним новичкам, которые, же, могут пригласить собственных приятелей и людей, кроме претендующих на поощрительную программку лояльности. Подобная технология появилась между конкуренцию онлайн-казино для популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению своей популярности, методом привлечения новых игроков. Бонусы – это уникальный шанс для вероятных соучастников забавы, которые шансы опробовать софт покер рума и убедиться, будут ли они в него играть либо нет. Новый игрок попробует средства силы с настоящими оппонентами в казино. Онлайн гемблинг развивается с каждым деньком все больше и больше, свежие бренды создаются не по дням а по часам. Новые онлайн казино делают вступительные акции для игроков, для того собственно бы зарекомендовать себя, и что, этим самым предлагают бездепозитные бонусы за регистрацию, собственно бы не упустить такую вероятность — как воспользоваться новым бездепом, советуем посещать наш вебсайт как возможно чаще, самое аппетитное и новые несомненно добавляться в этом же списке.Подтверждение персональной инфы. Все казино требуют от посетителя пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и присутствие у пользователя других аккаунтов (мультиаккаунт запрещен). 1хслот скачать <a href=http://ip-iv.ru/index.php?subaction=userinfo&user=Deweyrot>http://ip-iv.ru/index.php?subaction=userinfo&user=Deweyrot</a> Если площадка дарит бездеп за регистрацию, то процедура его получения проста. Нужно лишь завести акк на сайте и активировать его, подтвердив адрес электрической почты, номер телефонного или иные данные, которые требует оператор. Перед данным нужно увериться, собственно юзер находится на официальном веб-сайте казино, а не на жульнической площадке.Высокая конкуренция в разделе азартных игр мотивирует операторов завлекать клиентов разнообразными промоакциями. Благодаря этому у посетителей бывает возможность получить призы в казино за регистрацию без депо. Воспользоваться таким предложением возможно, избегая функцию внесения средств на игровой счет, просто активировав аккаунт на веб-сайте. Наш гид по бездепам поможет выбрать самую привлекательную бонусную программу, узнать правила получения такого вознаграждения и распорядиться им с наибольшей выгодой.
1× слот зеркало
Для вывода средств бонус нужно несомненно отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариантами отыгрыша бездепозитного бонуса до его получения, чтобы избежать конфликтных ситуаций. <a href=https://beaunex.net/bbs/board.php?bo_table=free&wr_id=287978>https://beaunex.net/bbs/board.php?bo_table=free&wr_id=287978</a> Бонус без депозита за регистрацию в казино (бездепозитный приз) – это валютный презент от клуба, кот-ый начисляется на акк игрока после регистрации в казино. Кроме сотворения учетной записи, для получения бездепа, довольно часто потребуется ещё и подтвердить контактные данные игрока и/или активировать особый промо-код. 1×slots регистрация 1×slots casino c2d ru Третитй бездепозитный бонус за регистрацию – денежные средства. К сожалению, начислить рубли либо баксы способны только знаменитые и пользующиеся клубы. С их поддержкой появится насладиться любой доступной игрой – автоматом, рулеткой, кено, блэкджеком.
<b>Смотреть еще похожие новости:</b>
<a href=http://khodaumo.com/forum/memberlist.php?mode=viewprofile&u=146&sid=c92daac6b6d87f78494873d6a189580c>1хслотс официальный сайт зеркало</a>
<a href=https://mcmon.ru/member.php?action=profile&uid=134611>1× slots сайт</a>
<a href=http://nexusroleplay.teamforum.ru/viewtopic.php?f=19&t=5873>1×slots зеркало видели такую регистрацию на</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чем ниже велечину вейджера, что, этим легче отыграть и исключить бонус. Если Вы планируете заработать на бездепе, но просто ознакомиться с свежим игровым клубом, то стоит игнорировать призов с высоким вейджером их практически не реально отыграть. С ними Вы можете лишь протестировать игры заведения.
#6513 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
слот casino ограбление казино <a href=https://glvk.guru/>порно с Анна Щербакова, фигуристка</a> человек казино inform@rucriminal.info <a href=https://7club7.com/>1×bet 1</a> inform@rucriminal.info как выиграть в казино Львова-Белова Мария Алексеевна порно порно с Дарья Клишина, легкоатлетка casino зеркало сайта casino com букмекерская контора скачать приложение
#6514 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slotscasino 56 online
Во время игры в казино, выигрыши, приобретенные благодаря бесплатным призовым фондам, суммируются и срабатывают в общую необходимую для отыгрывания. Однако, если фортуна улыбнется и получится отыграть все бонусы, игровое заведение гарантированно допустит вывести финансовые средства. Сумма вывода несомненно зависимости от лимита, утвержденного именно в данном учреждении. Поэтому, внимательно нужно читать правила выдачи анлимитных депозитов.Прибывшие на аккаунт деньги бездепозитные призы предназначаются, в, только для свежеиспеченных юзеров, коие ранее не имели собственного аккаунта в данном казино. Исходя из сего, случае раньше у игрока был сделан депо, то, по всей вероятности, у него больше не будет способности рассчитывать на получение такового приза в определенном заведении. <a href=http://filmkachat.ru/>1×slots зеркало регистрация то дальше необходимо пройти</a> В большинстве заведений устроить это можно по e-mal, по номеру телефонного, через социальную сеть либо гугл-аккаунт. <a href=https://blog.udn.com/G_112062930339362154/181391691>https://blog.udn.com/G_112062930339362154/181391691</a> Такой безвозмездный эквивалент средств зачисляется на профиль пользователя в осуществления притязаний и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений возможен лишь в воплощения вейджеровых критерий.Срок активации и время на отыгрыш. Зачисление денег либо фриспинов происходит при активации на строго ограниченного периода, подобные требования предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать приз количество дней либо том месяцов. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером. 1×slots casino регистрация 1×slotscasino09k online <a href=https://daltonjjif84051.get-blogging.com/30012678/the-chopping-fringe-of-nsfw-ai-exploring-the-options-of-undress-ai>https://daltonjjif84051.get-blogging.com/30012678/the-chopping-fringe-of-nsfw-ai-exploring-the-options-of-undress-ai</a>
1×slots официальный сайт зеркало
1хслотс казино зеркало <a href=http://xn–2s2b1p822a.net/bbs/board.php?bo_table=free&wr_id=627694>http://xn–2s2b1p822a.net/bbs/board.php?bo_table=free&wr_id=627694</a> Если вы выбираете проверенное лицензионное онлайн казино и выполните все обстоятельства получения бездепозитного бонуса, проблем с получением презента у Вас не возникнет. 1×slots casino регистрация 1×slots review live
рабочее зеркало 1хслотс
Отыграв бездепозитный приз в казино с выводом также придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если подобное ограничение существует, то единоразово исключить получится лишь сумму, не превышающую объем приобретенного бонуса. Кешбэк-бонус представляет собой возврат фиксированного процента от ставки если, тогда, проигрыша либо же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не выше 10%. <a href=https://isig.ac.cd/alumni/blogs/4073/%D0%96%D1%96%D0%BD%D0%BE%D1%87%D1%96-%D0%B0%D0%BA%D1%81%D0%B5%D1%81%D1%83%D0%B0%D1%80%D0%B8>https://isig.ac.cd/alumni/blogs/4073/%D0%96%D1%96%D0%BD%D0%BE%D1%87%D1%96-%D0%B0%D0%BA%D1%81%D0%B5%D1%81%D1%83%D0%B0%D1%80%D0%B8</a> Однако в критериях скрываются «подводные камешки», коие не разрешат исключить солидную сумму или же вы не успеете отыграть вейджер. Поэтому профессионалы рекомендуют забрать безвозмездные вращения за регистрацию в казино без депозита, дабы поднабраться навыка и получить реальный шанс на победу. зеркала 1×slots Вейджер в переводе с английского означает «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша полученного приза, в нашем случае бездепозитного. Число ставок роли не играет — принципиально только набрать необходимую, пропорциональную сумме одобрения.
1×слотс казино
<a href=https://10nsk.ru/user/JosephSuple/>1× слот зеркало</a> Для казино, работающих интернет, бездепозитные призы нужны для привлечения новых клиентов. Предложение поиграть на слотах без необходимости внесения настоящих денег — работающий способ для повышения энтузиазма к фирмы. После отыгрыша бездепа велик шанс, что игроку понравится и он продолжит выступать в казино, только сейчас уже на личные деньги.В некоторых интернет казино для получения бездепозитных призов не довольно просто зарегистрироваться на веб-сайте клуба и доказать свои контактные данные. Дополнительно требуется активация промокода. Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в обязательном порядке необходимо пополнить счет в казино. Для депозитных бонусов, эта процедура не нужна, например как депо теснее изготовлен. 1хслот зеркало сайта <a href=https://strokedb.lighthouseapp.com/users/1937911>https://strokedb.lighthouseapp.com/users/1937911</a> В неких онлайн казино для получения бездепозитных бонусов не довольно просто зарегистрироваться на сайте клуба и доказать свои контактные данные. Дополнительно потребуется активация промокода.Первый возникающий вопрос, это, чего выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают свежих игроков. Последним проще начать забаву на средства с дара за регистрацию. Им не пополнять баланс и тратить личностные свои. Новички получают благотворительные спины либо средства на счёт. С их поддержкой знакомятся с игровым ходом, крутят слоты и проделывают ставки в рулетке.
1хслот зеркало сайта
Приветственный бонус без депозита ? презент за регистрацию. Выдается средствами, фриспинами или баллами. В заключительном случае бонусные баллы используются для роли в турнирах или размена на реальные деньги.Минимального оборота. Этот предел уточняется вейджером — пока игрок не поиграет на установленную сумму, вывод средств несомненно недоступен. У нас на сайте Вы отыщите список бонусов без депо в проверенных казино и доскональную информацию про как их получить и использовать. <a href=http://www.invest74.ru/index.php?action=profile;u=1829354>http://www.invest74.ru/index.php?action=profile;u=1829354</a> Бездепы шансы входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами.Например, игрок получил 500 рублей при творении аккаунта и должен отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., понадобится сделать 875 спинов для полного отыгрыша. 1×slots зеркало регистрацию более популярный вариант это Такой бесплатный эквивалент средств зачисляется на профиль пользователя после осуществления требований и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений возможен лишь после воплощения вейджеровых критерий.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.bandariklan.com/showthread.php?tid=176825&pid=943620#pid943620>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=118136>1×slots официальный сайт мобильная версия скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный приз казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби избранного заведения, сориентироваться в выборе игр и выяснить качество работы службы. Довольно часто, начиная игровой процесс, игрок уже отказывается останавливаться и делает настоящий вклад. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть бесплатно вполне как один таки с бонусом за регистрацию без необходимости вносить депозит. При отыгрыше бонусных средств, необходимо учесть срок деянья бонуса и время, которое дается на отыгрыш. По истечению заявленного времени, не отыгранный приз несомненно аннулирован.
#6515 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало этих способов предполагает регистрацию
Подтверждение индивидуальной информации. Все казино просят от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у юзера других аккаунтов (мультиаккаунт запрещен). <a href=http://filmkachat.ru/>1хслотс зеркало</a> <a href=https://www.swiatobrazu.pl/forumgaleria/thread/view/id/524>https://www.swiatobrazu.pl/forumgaleria/thread/view/id/524</a> Прямо данный арестуйте благотворительные вращения за регистрацию без депозита и начинайте собирать призовые комбинации ради крупных выигрышей! 1×slots регистрация <a href=http://donggoudi.com/home.php?mod=space&uid=1204875>http://donggoudi.com/home.php?mod=space&uid=1204875</a> Зарегистрироваться в казино по специальной ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефона и электронную почту). Для доказательства номера телефонного нужно в собственном профиле указать собственный номер и нажать кнопку „Подтвердить номер телефонного“, далее Вы получите sms-сообщение с кодом, который нужно ввести в подходящее поле. Для подтверждения электрической почты, перейти по активной ссылке в послании от казино.Бездепозитный приз по промо-коду несомненно доступен для игры, лишь в том случае когда Вы активируете особый бонусный код в разделе с бонусами либо укажите промокод при регистрации на веб-сайте. В неких случаях, считая активации кода, понадобиться подтвердить контактные данные игрока и наполнить анкету клиента.
1×slots зеркало быструю регистрацию а также мгновенное
<a href=https://forum.vn.ua/showthread.php?p=3274694#post3274694>1×slots промокод при регистрации</a> 1хслотс 1хслотс регистрация перейти на 1×slots <a href=http://classicalmusicmp3freedownload.com/ja/index.php?title=скачать_фильм_бесплатно_и_без_регистрации>http://classicalmusicmp3freedownload.com/ja/index.php?title=скачать_фильм_бесплатно_и_без_регистрации</a> Обычно бездепозитные акции от казино, прибывают на эл. Почту в деньки рождения либо праздники. В неких онлайн казино возможно обратиться в чат и как постоянному игроку, вероятно вам предложат бездепозитное предложение. 1×slots казино мобильная версия Еще одно условие дотрагивается объемов ставки. Операторы устанавливают наивысшую сумму, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном офисе. При превышении лимита есть риск лишиться приза. Существующие ограничения относятся и к определенным обликам ставок. Например, играя в рулетку, клиент может столкнуться с запретом назначать фишки на шансы.Выполнив все притязания оператора, заказчик возможность оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит в среднем менее суток. Если дополнительно потребуется пройти процедуру верификации, то срок увеличивается до 1–2 рабочих дней. Для перевода применяются банковские приборы и электронные платежные системы. Второй метод подходит другого, например как большинство транзакций такой исполняются мгновенно. В связи со спецификой функционирования банков обработка платежей может взятьвдолг(взятьвзаймы) до нескольких рабочих дней.
1×slots casino online регистрация
Подарки на определенные даты выделяются условиями получения. Если поощрение начисляют игроку на денек рождения, то сумма обыкновенно в от общего объема депозитов за прошедший год.Игрокам не следует принимать приветственный бонус как гарантированный способ получить большой выигрыш, но это замечательная вероятность без расходов оценить перечень казино. Также, учите, собственно бездепозитный бонус возможно вывести только что, нет случае, когда будут выполнены все обстоятельства отыгрыша.Чтобы выступать даром на настоящие деньги в казино, порой довольно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные деяния. <a href=https://getcomixxx.com/index.php?subaction=userinfo&user=DoctorLazutama>https://getcomixxx.com/index.php?subaction=userinfo&user=DoctorLazutama</a> Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные способы и расценить необыкновенности, недоступные при ирге в демо режиме. Многие новые посетители переходят в количество неизменных, а оператор получает длительную прибыль. онлайн казино 1×slots Но есть игорные заведения, которые готовы просто например жертвовать средства на забаву. Для этого достаточно сделать профиль. Чтобы исключить собственный выигрыш, для поначалу нужно выполнить обстоятельства отыгрыша, указанные в условиях получения бездепозитного депозита.
1× слот зеркало
Эффективность бездепов виде рекламного прибора расценили многие операторы. Малоизвестные площадки употребляют такие акции, дабы быстро набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны неизменных посетителей. Не все сайты, дающие презенты без депо, рекомендованы к этой. За привлекательным промоописанием все скрываться невыполнимые обстоятельства отыгрыша и подводные камешки. Например, игрок получил 500 руб. При разработке аккаунта и обязан отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., понадобится устроить 875 спинов для полного отыгрыша. Промокод – определённая композиция знаков, коию необходимо установить в подходящее поле при твореньи учетной записи или активировать в собственном профиле игрока в разделе с бонусами. x1 slots 1хслотс регистрация перейти на 1×slots <a href=https://qiqer.ru/qforum/profile.php?id=369288>https://qiqer.ru/qforum/profile.php?id=369288</a> Бонус в казино без депозита имеет различные варианты: может быть приветственный приз, промоакции в честь каких-либо дней либо важных дат, бонус за привлечение свежих игроков, лояльность и получение VIP-статуса.
1х слотс зеркало регистрация в 1×slots casino
Такие поощрения дозволяют даром протестировать свежее казино, разобраться с игровым процессом интернет слотов, заработать и вывести маленькую сумму денег. <a href=https://motogpdb.racing/index.php?title=смотреть_онлайн_полный_фильм>https://motogpdb.racing/index.php?title=смотреть_онлайн_полный_фильм</a> В качестве бонусов интернет казино часто предлагает выдачу фриспинов, словами даровых вращений игрового барабана. Виртуальные монеты можно использовать для обучения в покерной школе или для забавы в казино.Бонус с зачислением средств на счет дает больше свободы деяний. Пользователь сам выбирает, каким образом распорядиться подаренными своими. Здесь кроме шансы работать лимитирования на перечень дешевых игр, хотя обычно эти рамки не например строги, как в промо с бесплатными вращениями. 1×slots зеркало рабочее Самые новые бездепозитные бонусы в казино за регистрацию 2022 года с выводом выгоды находятся на данной странице. Посетитель имеет оценить обстоятельства получения и начать играть на деньги без внесения депо. При этом игроку важно разуметь, на каких критериях и какими методами у исключить приобретенный выигрыш. Для сего нужно расценить список подключенных платежных систем.Выбрать казино с бездепозитным призом. У нас на сайте представлен список наихороших интернет казино, коие предлагают своим игрокам щедрые призы за регистрацию.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.sgomberisgombero.it/my-account-2/>1×slots официальный сайт, скачать</a>
<a href=https://www.donchillin.com/space-uid-382497.html>1×slots регистрацию процедура займет всего лишь</a>
<a href=http://theauction.com.au/my-account/>1×slots зеркало сайта</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На условиях отыгрыша безвозмездных бонусов идет остановиться подробнее. С ними связаны аспекты, коие нельзя забыть без внимания.
#6516 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet на андроид бесплатно 1×bet 1 <a href=https://res-publika.com>официальные букмекерские конторы скачать</a> балтбет букмекерская контора casino рабочее зеркало <a href=https://rhymes-punches.com/>pin up casino пин ап</a> Комарова Наталья Владимировна порно порно с Абрамченко Виктория Валериевна самое казино ставки на спорт букмекерские конторы сайт pin up casino Набиуллина Эльвира Сахипзадовна порно вавада казино
#6517 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Юлия Канакина, скелетонистка лучшие букмекерские конторы <a href=https://vestnik-jurnal.com/>скачать 1×bet</a> карты казино официальные зеркала казино <a href=https://rucriminal.info/>Анна Михалкова</a> карты казино леон букмекерская контора казино гта 5 1×bet зеркало xbet xyz pin up casino скачать Любимова Ольга Борисовна порно яндекс казино
#6518 Charlesgunnyhttp://filmkachat.ru
1×slot рабочее зеркало
Верификация аккаунта. Лучше доказать лицо незамедлительно в регистрации, дабы потом не было заморочек с выводом денег. Верификация может проходить 2-мя маршрутами:Высокая конкуренция в разделе азартных игр доказывает операторов завлекать посетителей разнообразными акциями. Благодаря этому у посетителей бывает возможность получить бонусы в казино за регистрацию без депозита. Воспользоваться этим предложением можно, избегая функцию внесения средств на игровой счет, просто активировав аккаунт на веб-сайте. Наш экскурсовод по бездепам поможет избрать самую симпатичную бонусную программу, узнать правила получения такового вознаграждения и распорядиться им с максимальной выгодой. <a href=http://filmkachat.ru/>1×slots зеркало регистрация в 1×slots casino</a> Если простыми словами, бездепы – это определённая сумма денег либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать презенты. Но есть кое-какие нюансы. Существуют игорные жилища, коие перед что, этим как начислить призы настоятельно привязать телефон, дать копии документов. <a href=http://www.gothicpast.com/myomeka/posters/show/79813>http://www.gothicpast.com/myomeka/posters/show/79813</a> 1×slots официальный сайт скачать <a href=http://goodjobdongguan.com/home.php?mod=space&uid=3355124>http://goodjobdongguan.com/home.php?mod=space&uid=3355124</a> Демоказино есть практически на любом сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются веско реже: там если, тогда, выигрыша и соблюдения критерий промоакций бездеп возможно превратить в реальные средства.Пoдтвepдить личнocть посетителя. Для успешного вывода средств, нужно доказать личность клиента. Нa этaпe вepификaции пpoфиля, работники службы безопасности обязаны увериться, что у игрока более один аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не может вывести собственный выигрыш, случае у него несомненно несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы.
1×slots зеркало
Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. <a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=129990>1хслотс 1хслотс регистрация перейти на 1×slots</a> 1× slots регистрация в 1×slots casino <a href=http://mlmoli.net/space-uid-2244395.html>http://mlmoli.net/space-uid-2244395.html</a> 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
1×slots сайт зеркало
Каждый игры обязан сперва отчетливо выучить условия по получению и отыгрышу приглянувшегося подарка. Если всё организует, поторопитесь арестовать бесплатные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик данный начать вертеть барабаны топовых слотов.Доступность — бездепозитные призы в казино почаще всего предоставляются свежим игрокам, хотя случаются случаи, когда приз могут получить и действующие посетители. <a href=http://vttgauriac.fr/forum/memberlist.php?mode=viewprofile&u=5459>http://vttgauriac.fr/forum/memberlist.php?mode=viewprofile&u=5459</a> Многие азартные клубы ограничивают сумму вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, обозначенной в описании акции, суммы Вы не сможете исключить. Разница несомненно аннулирована, Вы и не сможете делать на нее ставки. 1×slots зеркало подтвердит вашу регистрацию если говорить С не отыгранным бонусом запрещается превосходить объем максимальной ставки. Нарушение сего обстоятельства в аннулирование выигрыша.
зеркала 1×slots
1×слот регистрация в 1×slots casino <a href=http://zvezdjuchki.ru/index.php?subaction=userinfo&user=mushybreeze40>http://zvezdjuchki.ru/index.php?subaction=userinfo&user=mushybreeze40</a> Промообъявления от казино мешают реальной картины и направлены на вербование внимания юзеров. Понять, насколько высоки шансы остаться в плюсе, позволит собственный анализ условий предложения:Кешбэк-бонус представляет собой возврат фиксированного процента от ставки если, тогда, проигрыша или же от проигранной суммы за определённый период. В большинстве случаев кешбэк не превышает 10%.
онлайн казино 1×slots
Это тоже благотворительные деньги, коие поступают на аккаунты свежеиспеченных в последствии регистрирования. А особенность этих призов состоит никаких, собственно обретенные деньги обязательно идет применять в продолжении назначенного времени. Верификация важна для дополнительной безопасности и помогает техподдержке выявить бонусхантеров и жуликов. Кстати, рядах платформах выводы крупных сумм доступны лишь после доказательства личности. <a href=http://nfb3806w.bget.ru/user/DavidErozy/>http://nfb3806w.bget.ru/user/DavidErozy/</a> 1×slots официальный сайт скачать на айфон Нельзя рассматривать игру на деньги, как вариант заработка. Азартные забавы запрещены для лиц младше 18 лет. Topcasinobonuses.mobi не является организатором азартных игр. Сайт носит информационный характер.Некоторые онлайн-казино без депо предлагают новым клиентам выбрать бонус при регистрации. Будьте внимательны: выбрав один, вы в безусловном большинстве случаев не можете пользоваться остальными.
<b>Смотреть еще похожие новости:</b>
<a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=3331>1×slots мобильная версия войти казино</a>
<a href=http://mandala-app.com/forums/memberlist.php?mode=viewprofile&u=3447>1хслотс казино зеркало</a>
<a href=http://www.emv.info/viewtopic.php?f=15&t=2193>1×slots регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Даже не выиграв солидную сумму, игрок увлекательно проведет время, изнутри исследует работу площадки, воспримет геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе наилучших промоакций легкостью. Достаточно периодически учить перечень новых онлайн казино с выводом приза без депо в данном разделе. Бездепозитный приз за регистрацию в казино с выводом денег в 2022 году — Наш ресурс дает игрокам актуальную информацию о самых свежих, великодушных и проверенных бонусах в онлайн казино, коие обновляются каждый денек.
#6519 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
автомат казино Скворцова Вероника Игоревна порно <a href=https://res-publika.com>казино играть</a> r7 casino порно с Алексей Миранчук (футбол) <a href=https://specreporter.com/>порно с Анна Калинская (теннис)</a> почему казино Набиуллина Эльвира Сахипзадовна порно букмекерская контора вход 1×bet зеркало рабочее на сегодня 1×bet xyz casinos xyz Москалькова Татьяна Николаевна порно ставки на спорт букмекерские конторы
#6520 Charlesgunnyhttp://filmkachat.ru
казино 1× slots официальный сайт
В разделе с призами активировать свой презент. Найти игры, для которых учтено одобрение и применять бонус по предназначению.Любой выигрыш по ставке выше установленного лимита будет являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, ну случае выигрыша его сумма не поступит на счёт посетителя — результат игры несомненно полностью аннулирован. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> В онлайне очень количество скриптовых вебсайтов, коие принадлежат мошенникам. Их основная цель – заинтересовать гэмблеров, пообещав не великодушные подарки, но и крупные выигрыши. Так собственно некоторые веб-сайты предлагают получить за регистрацию числе $1 000. <a href=https://www.palscity.com/forums/thread/2083/>https://www.palscity.com/forums/thread/2083/</a> 1×slots сайт зеркало <a href=https://helheim5k.ru/users/renaldosotly>https://helheim5k.ru/users/renaldosotly</a>
1×slots рабочее зеркало на сегодня
Когда речь о получении бездепозитных призов в казино, начала обратите внимание на последующие условия: <a href=https://rolivka.online/forum/showthread.php?tid=28403>1×slots бездепозитный бонус за регистрацию</a> 1×slots зеркало на сегодня Популярность интернет казино растёт и всё больше юзеров начинают проявлять азартными играми. Бездепозитные бонусы 2022 года, это уникальные презенты за регистрацию. С их поддержкой свежие игроки могут получить бесплатные вращения или деньги на баланс за 1 регистрацию. С в игорных заведений в онлайне, бездепозитные бонусы стали знаменитейшим способом привлечения игроков. Подобные акции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы расскажем. Наш сайт собрал наилучшие предложения из интернета на 2022 год. Воспользуйтесь хоть презентом и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить обстоятельства.Представьте момент, когда при ставке в 10 руб. Вы получите схожее умножение. Миллион руб. За одно вращение, что абсолютно вероятно. Поэтому вопрос, сколько можно выиграть остаётся не. Предлагаем проверить самостоятельно. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный бонус и инспектируйте фортуну в деле. Разумеется, вывести деньги сложно. Однако шансы есть у всех. <a href=http://moujmasti.com/member.php?13104-Glennten>http://moujmasti.com/member.php?13104-Glennten</a> Отзывы читателей о бонусных промоакциях посодействуют составить впечатление, но не запамятовывайте о субъективности собственных объяснений.Так что можете смело региться без всяких раздумий. Фортуна сейчас точно на вашей стороне. Не опасайтесь, ведь последствие какого либо убытка Вам абсолютно не грозит. С такими бонусами как без пополнения, Вы остаетесь лишь в плюсе, хотя не как не в минусе. 1×slots casino регистрация 1×slotscasino09k online
1×slots официальный сайт скачать на айфон
Похожим образом трудится третий способ доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения посетителя либо в связи с получения им VIP-статуса. Подарок предоставляется в обращения в поддержку и проверки. Чаще всего казино бонус за регистрацию без депозита даёт возможность запустить каждой автомат. Но чем внимательно ознакомиться с условиями. Иногда для забавы доступны только определённые модели. Если вы новичок и ничего не смыслите в гэмблинге, лучше начать знакомство с миром азарта именно с «одноруких бандитов». <a href=https://wiki.eqoarevival.com/index.php/User:CorneliusStallcu>https://wiki.eqoarevival.com/index.php/User:CorneliusStallcu</a> казино 1×slots официальный сайт Активация по промокоду употребляется в разных обликах бездепов. Если речь о приветственном призе, то комплект знаков можно разузнать на главной странице, в регистрационной форме или послании, которое отправляется юзеру для подтверждения e-mail. Акции шансы проводиться общо с партнерскими площадками. Обычно код располагается на постороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активируется одноразовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном кабинете либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем актуальный код для активации в описании любого рекламную.Фриплей-бонусы встречаются только в неких клубах. Они зачисляются сразу после создания профиля и активны недолговременное время. Если не успеете истратить средства, они просто сгорят. Касаемо времени, в большинстве случаев бонусы активны на часа.
1×slots официальный сайт зеркало рабочее
Только выполнив все обстоятельства отыгрыша и дождавшись окончания ревизии аккаунта, Вы сможете оформить заявку на вывод средств и получить средства средства. Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются незамедлительно в сотворения профиля и активны недолговременное время. Если не успеете потратить свои, они попросту сгорят. Касаемо медли, как призы активны на часа.1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, случае не желаете замерзнуть жертвой жуликов либо впустую истратить время; Необходимость отыгрыша. Вейджер в этом случае повыше, чем для призов за депозит. И пока свои не отыграны, исключить их невозможно. 1×slots casino регистрация 1×slotscasino09k online <a href=https://www.ccbm8.com/home.php?mod=space&uid=959972>https://www.ccbm8.com/home.php?mod=space&uid=959972</a> Активация случается счет промокодов, которые вводятся в собственном кабинете в регистрации. Среди спецпредложений в списке Casino.ru находятся неповторимые промокоды, которые доступны лишь гостям портала. Другие способы начисления средств ? автоматическая активация незамедлительно последствии творения аккаунта и получение подарка по запросу в службу технической помощи.
1хслотс рабочее зеркало на сегодня
Практически все интернет казино с бездепозитным бонусом за регистрацию предусматривает программку преданности — систему одобрения постоянных клиентов, которая состоит из колличества значений. При достижении игроком очередного значения на его счёт поступает приз. Чем повыше степень — тем щедрее бонус.Чем ниже значение вейджера, что, этим проще отыграть и вывести бонус. Если Вы планируете заработать на бездепе, но просто ознакомиться с свежим игровым клубом, то стоит игнорировать бонусов с высоким вейджером их практически не реально отыграть. С ними Вы сможете лишь протестировать забавы заведения. Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают бонус по странам. Вплоть до того, собственно клуб имеет на игроков из Вашей страны, а бездеп мешает. <a href=http://www.jindoushiqi.com/bbs/home.php?mod=space&uid=128148>http://www.jindoushiqi.com/bbs/home.php?mod=space&uid=128148</a> 1× слот зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://angelandmax.teamforum.ru/memberlist.php?mode=viewprofile&u=640>1×slots зеркало регистрация</a>
<a href=https://your-portal.at.ua/forum/63–61321–15#88263>1×slots регистрация 1×slots review live</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Онлайн гемблинг развивается с любым днем все больше и больше, свежие бренды создаются не по дням а по часам. Новые онлайн казино проделывают вступительные акции для игроков, чтобы, чтобы что бы зарекомендовать себя, и что, этим самым предлагают бездепозитные призы за регистрацию, собственно бы не пропустить такую возможность — как воспользоваться свежим бездепом, рекомендуем навещать наш сайт как можно чаще, самое аппетитное и новые несомненно добавляться в данном же перечне. Составленный экспертами Casino.ru перечень онлайн-казино с бездепозитным призом позволяет игрокам сравнить спецпредложения различных операторов.
#6521 ThomasGok
„Как маркетплейс Kraken помогает потребителям и продавцам находить и обменивать товары“
В наше время онлайн-торговля стала неотъемлемой частью повседневной жизни. Множество людей предпочитают покупать и продавать товары через интернет, ведь это удобно, быстро и позволяет сэкономить массу времени. Одним из самых популярных
<a href=https://kraken23tor.com>кракен ссылка</a>
#6522 Charlesgunnyhttp://filmkachat.ru
1×slots casino online регистрация
Бездепозитные призы — это презенты от казино в виде бонусных денег или фриспинов для игровых автоматов, которые начисляются на акк игрока после процедуры регистрации на веб-сайте заведения. Для получения этих поощрений депо не требуется. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> Бoльшинcтвo азартных заведений выдвигают приблизительно одинаковые условия и требования, коие необходимо выполнить, чтобы получить бездепозитный приз за регистрацию. Все их возможно объединить в один перечень:Промокод – определённая комбинация символов, коию необходимо ввести в соответствующее фон при твореньи учетной записи либо активировать в собственном профиле игрока в разделе с призами. <a href=https://rant.li/9fsnh6hu13>https://rant.li/9fsnh6hu13</a> Вейджер в переводе с британского значит «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша приобретенного бонуса, в нашем случае бездепозитного. Число ставок имеет — принципиально лишь набрать необходимую, пропорциональную сумме поощрения. 1×slot зеркало рабочее регистрации на телефон придет <a href=http://www.01.com.hk/member.php?Action=viewprofile&username=CharlesAtmor>http://www.01.com.hk/member.php?Action=viewprofile&username=CharlesAtmor</a> Также, ситуации нужно доказать собственный номер аппарата, результата код, полученный в смс-сообщении от клуба установить в особое фон в собственном кабинете игрока.
1×slots casino зеркало рабочее
Самые модные методы вывода денег ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электронным платежным системам типа Neteller и Skrill, а пользуются криптовалютными кошельками. Вывод выигрышей возможность осуществляться мгновенно либо занимать от нескольких часов до нескольких суток.В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, необходимо адресоваться в службу поддержки через лайв-чат на веб-сайте казино. 1×slots зеркало регистрация в 1×slots casino Бонус за регистрацию в казино выдается только один один на 1-го игрока. Но случаются дополнительные акции, в рамках которых бездепы раздаются для постоянных клиентов и такие подарки Вы сможете получить более одного раза.У нас на сайте Вы найдете список призов без депо в испытанных казино и подробную информацию то как их получить и использовать. <a href=http://stroyrem-master.ru/user/Jameschash/>http://stroyrem-master.ru/user/Jameschash/</a> Бездепозитный приз – это финансовое вознаграждение, коие выдается соучастнику забавы в казино, для его привлечения и появления заинтересованности. Любой посетитель, кот-ый подходит условиям выдачи похожего бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое поощрение является наиболее действенным методом, дающим вероятность стартовать деле, не вкладывая собственных вещественных средств.Главным моментом в возникновении данных вознаграждений произведено в том, что пустив их в ход, игры ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он спасибо бонусам какой-либо выигрыш либо моментально спустит все только собственно прибывшие деньги). То есть, казино снабжает игрока вероятностью на дармовой базе играть во всевозможные слоты даже спонсирует игру. 1×slots казино зеркало У любого игорного заведения средства верховодила и обстоятельства. Но, чтобы получить бонусы, необходимо выполнить стандартные действия:Пoдтвepдить личнocть клиента. Для удачного вывода средств, необходимо подтвердить лицо посетителя. Нa этaпe вepификaции пpoфиля, сотрудники службы защищенности должны убедиться, собственно у игрока всего лишь раз акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не сможет исключить свой выигрыш, в у него будет некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы.
1×slots регистрация 1×slots casino 777 online
Многие казино предоставляют в рекламных целях благотворительные призы исключительно для наших читателей. Чтобы их получить, нужно перебежать на игровой сайт по партнерской ссылке с нашего портала.При регистрации что, нет либо ином онлайн игральном заведении — для дается раз шанс испытывать свою фортуну не внося свои монеты. Замечу собственно эту поощрительную предложение предоставляют не все интернет игровые площадки, а только великодушная половина из них. Которые мы подготовили для Вас в нашем перечне. Подарки на определенные даты выделяются условиями получения. Если поощрение начисляют игроку на денек рождения, то сумма обыкновенно в от общего объема депозитов за прошедший год. <a href=https://bikeindex.org/users/glavdorogadv1606>https://bikeindex.org/users/glavdorogadv1606</a> Автоматическая активация первый самой удобной, хотя ручной способ содержит перед ней достоинства. Прежде чем использовать вознаграждение от казино, стоит заранее определить, сколько медли потребуется на исполненье всех условий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала деянья бонуса.Новички не любят сразу же вносить депо. Это обосновано неименьем опыта и сомненьем. К счастью, наши возможно получить бездепозитный приз за регистрацию в казино. Неважно собственно начислит система – фриспины или кредиты. В любом случае вы не рискуете своими сбережениями. Это отличная возможность запустить понравившийся видео слот или же испытать удачу в настольных играх. казино 1×slots
1×slots рабочее зеркало на сегодня
Выбирайте наихорошие безвозмездные призы за обзоров на Casinoz – и пусть для сопутствует счастье при отыгрыше бонусных кредитов!Игры, в можно выступать на бонусные средства. Проверьте список игр, в можно играть на бонусные средства, вероятно они Вам не понравятся и надо расходовать своё время на эту акцию. Бездепозитный приз часто имеет замерзнуть легкодоступным сразу последствии окончания регистрации, поскольку правило единственным притязанием к нему считается регистрация, а после ревизия вашей свежей учетной записи.У нас на сайте Вы отыщите список призов без депо в испытанных казино и подробную информацию про как их получить и использовать. B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.Можно. Вы практически можете отказаться от получения бездепозитного приза за регистрацию в казино, пока Вы не создадите ставку. 1×slots регистрация 1×slots review live <a href=http://orbitasmd.ru/index.php?subaction=userinfo&user=hilariousdisast>http://orbitasmd.ru/index.php?subaction=userinfo&user=hilariousdisast</a> Все обожают получать подарки. Согласитесь, практически любой играющий человек будет необъятно рад, случае получит даровой презент для забавы в онлайн казино просто за регистрацию либо же приз за внесенный депозит, так называемые приветственные бонусы для новых игроков. Соответственно такие интернет клубы будут более популярны и предпочтительны у игроков при выборе казино для забавы. Топ казино день обновляется и прибавляются свежие и увлекательные игровые клубы с симпатичной бонусной политикой и всеми вероятными преимуществами, льготами, к которым относятся эти бонусы как фриспины за регистрацию, денежные бездепозитные бонусы, еще щедрые призы за внесенный депозит.
скачать 1×slots на андроид мобильная версия
Составленный экспертами Casino.ru перечень онлайн-казино с бездепозитным призом позволяет игрокам сравнить спецпредложения различных операторов. <a href=https://www.alligator.spb.ru/forum/index.php?PAGE_NAME=profile_view&UID=78619>https://www.alligator.spb.ru/forum/index.php?PAGE_NAME=profile_view&UID=78619</a> 1×slots регистрация 1×slotscasino 56 online Бездепозитный приз казино 2022 с выводом за регистрацию предоставляет вероятность ознакомиться игроку с лобби выбранного заведения, сориентироваться в выборе игр и проверить качество работы службы. Довольно часто, начиная игровой процесс, игрок теснее не желает останавливаться и проделывает настоящий лепта. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть безвозмездно вероятно как один таки с бонусом за регистрацию без необходимости вносить депо.
<b>Смотреть еще похожие новости:</b>
<a href=https://tabsgame.ru/user/Jamesbes/>1×slots зеркало видели такую регистрацию на</a>
<a href=http://www.emv.info/viewtopic.php?f=15&t=2333>1×slots бездепозитный бонус за регистрацию</a>
<a href=https://10nsk.ru/user/JosephSuple/>казино 1×slots официальный сайт</a>
<a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=52216>x1 slots регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
У каждой забавы свои требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система зачтет любую ставку. В рулетке и покере устроить это гораздо труднее. Именно потому так главно пристально читать условия получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой игре, то новенькие просто «спустят бонус на ветер». Первый возникающий вопрос, это, зачем выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают свежих игроков. Последним проще начать забаву на деньги с дара за регистрацию. Им не нужно пополнять баланс и тратить собственные свои. Новички получают бесплатные спины либо средства на счёт. С их поддержкою знакомятся с игровым ходом, крутят слоты и проделывают ставки в рулетке.
#6523 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачиваемые казино порно с Гатагова Ольга Анатольевна <a href=https://m.repost.news/>порно с Федор Чалов (футбол)</a> казино смотреть онлайн бесплатно гта онлайн казино <a href=https://res-publika.com>гта онлайн казино</a> букмекерская контора мостбет champion casino Скворцова Вероника Игоревна порно 1win букмекерская контора cometa casino up casino зеркало порно с Федор Чалов (футбол)
#6524 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots review live
Выбирайте лучшие безвозмездные призы за обзоров на Casinoz – и пусть вам сопутствует счастье при отыгрыше бонусных кредитов! <a href=http://filmkachat.ru/>1×slots регистрация 1×slots casino 777 online</a> Это раз из основных характеристик привлекательности презента. С завешенным коэффициентом том профессионалы не смогут выполнить условия по отыгрышу. И важно, как презентабельно выглядит предложение – бездепозитный бонус казино в объеме $500 или $1 000. Чтобы новенькие попревосходнее вникли, что же такое вейджер, мы разберём на образце. <a href=https://onetable.world/read-blog/89545>https://onetable.world/read-blog/89545</a> Условия все различаться приятель от приятеля. Но подобный бонус имеет быть использован лишь для игрового процесса – полученные на счет деньги до такого, как станут отыграны, вывести нереально.Бездепозитные призы за регистрацию в игровых автоматах для владельцев онлайн-казино считаются частью маркетинговой кампании, направленной на увеличение аудитории сайта. Так они продвигают средства бренды и завлекают новых посетителей. 1х слотс зеркало регистрация в 1×slots casino <a href=https://rightcoachforme.com/author/stevenscaps/>https://rightcoachforme.com/author/stevenscaps/</a> При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток.
1×slots на любой вкус как пройти регистрацию
1×slots регистрация 1×slots casino 777 online <a href=https://ekvall.co/member.php?action=profile&uid=40204>https://ekvall.co/member.php?action=profile&uid=40204</a> Вообще перейдя в казино — верховодила одинаковы в получении бездепозитных призов, в стереотипные управляла входит: подтвердить эл. Почту и телефонный, заполнить собственный собственный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ. 1×slots casino регистрация на сайте Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, чтобы еще раз получить даровой приз. Игорные заведения нетерпимы к бонус-хантерам, потому вас ожидает неизбежное наказание.
1×slots зеркало быструю регистрацию а также мгновенное
Ознакомьтесь с нашим перечнем наихороших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего списка и получите бездеп незамедлительно. Хватайте лучшие бесплатные предложения ниже и выигрывайте великие деньги, не рискуя!Шаг 5. Использование и отыгрыш. Бездеп обязан быть использован в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера. 1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, в не желайте замерзнуть жертвой плутов либо впустую потратить время;Активация происходит за промокодов, которые вводятся в собственном офисе после регистрации. Среди спецпредложений в списке Casino.ru содержатся эксклюзивные промокоды, коие доступны лишь гостям портала. Другие способы начисления средств ? автоматическая активация незамедлительно последствии создания аккаунта и получение презента по запросу в службу технической поддержки. <a href=http://seafishzone.com/home.php?mod=space&uid=1247301>http://seafishzone.com/home.php?mod=space&uid=1247301</a> Высокая конкурентность в разделе азартных игр мотивирует операторов привлекать посетителей различными акциями. Благодаря данному у посетителей появляется вероятность получить бонусы в казино за регистрацию без депо. Воспользоваться этим предложением возможно, избегая процедуру внесения средств на игровой счет, просто активировав аккаунт на веб-сайте. Наш гид по бездепам поможет избрать самую симпатичную бонусную программку, узнать верховодила получения такого гонорары и распорядиться им с наибольшей выгодой. 1×slots бездепозитный бонус за регистрацию Это также благотворительные деньги, которые поступают на аккаунты свежеиспеченных в в регистрирования. А необыкновенность этих призов произведено в, что обретенные финансы непременно идет применять в продолжении назначенного времени.Мы подготовили список, где есть постоянно актуальные и свежие бездепозитные призы казино, коие вы можете получить даром. Для наших юзеров есть особые предложения эксклюзивные призы, коие вы кого не найдете, их мы обозначили особой красноватой плашкой «Exclusive».
1×slots зеркало
Для казино, работающих онлайн, бездепозитные бонусы нужны для привлечения свежих клиентов. Предложение сыграть на слотах без необходимости внесения настоящих денег — работающий метод для повышения интереса к фирмы. После отыгрыша бездепа велик шанс, что игроку понравится и он продолжит играть в казино, только сейчас уже на личные деньги. <a href=https://qualityprogamer.de/forum/showthread.php?tid=332346>1 x slots casino</a> Каждая игровая платформа отличается условиями по получению и отыгрышу бездепов. В правилах отчетливо расписаны кратковременные рамки, за коие нужно прокрутить вейджер. Также не запамятовывайте на наибольший объем ставки и максимальную необходимую выплаты. С другой стороны, дабы получить бездепозитные призы казино, довольно истратить не более 1 минуты. 1х слотс зеркало регистрация в 1×slots casino <a href=https://forum.21up.co.uk/member.php?action=profile&uid=8812>https://forum.21up.co.uk/member.php?action=profile&uid=8812</a> Однако в условиях скрываются «подводные камешки», которые не разрешат исключить солидную необходимую либо же вы не успеете отыграть вейджер. Поэтому профессионалы рекомендуют арестовать безвозмездные вращения за регистрацию в казино без депозита, чтобы поднабраться опыта и получить настоящий шанс на победу.
1×slots регистрация 1×slotscasino09k online
Несмотря на то, собственно данный вариант стимуляции со стороны азартных платформ довольно популярен в сфере сходственных игр, далековато многим почитателям казино ведомо, что сами бездепозитные бонусы казино и как непосредственно их возможно эксплуатировать. Получить приветственный бонус могут лишь свежие посетители онлайн-казино. Способы описаны в условиях акции каждого законного казино, почаще всего это:Выигрыши с бонусов без инвестициям всегда привязаны к притязанию по ставкам и все быть обналичены лишь последствии исполненья данных требований. <a href=http://ivangandola.com/index.php/forum/user/2856-unadviseddome63>http://ivangandola.com/index.php/forum/user/2856-unadviseddome63</a> Какие бонусы у еще получить не бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, каждое онлайн казино предлагает игрокам выгодное предложение на 1-ый депозит, вы совершаете депо, ваш депо увеличивается в двое либо в в трое, тем наиболее начать выступать можно с больше крупной суммой, так же не запамятываем про вейджер на бонусы. 1хслотс 1хслотс регистрация перейти на 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1×slots регистрация на сайте 1×slots ru com</a>
<a href=http://ledyardmachine.com/forum/User-Jameshoing>1хслотс официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Похожим образом работает 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения посетителя или из-за с получения им VIP-статуса. Подарок предоставляется последствии обращения в поддержку и проверки.
#6525 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Баталина Ольга Юрьевна леон букмекерская контора <a href=https://rumafia.news/>casinos winning</a> водка казино casinos xyz <a href=https://t.me/vchkogpu_ru>официальные букмекерские конторы</a> букмекерская контора без new casino бесплатно фильм казино casino промокод ев казино vodka casino porno Алена Михайлова
#6526 Charlesgunnyhttp://filmkachat.ru
1× слот зеркало
Классическая разновидность приза за создание аккаунта. Его превосходство заключается в, что заказчик может самостоятельно избирать аппараты и делать ставки в них. Иногда список игровых автоматов ограничен оператором, хотя все также это какого-либо, чем один-единственный доступный разъем, как в случае с внедрением фриспинов. <a href=http://filmkachat.ru/>1×slots зеркало рабочее</a> Некоторые казино могут предлагать клиентам бездепы за свидетельство номера либо почты либо репост на страничку в соц сетях. <a href=https://www.palscity.com/forums/thread/2009/>https://www.palscity.com/forums/thread/2009/</a> рабочее зеркало 1×slots <a href=https://www.efunda.com/members/people/show_people.cfm?Usr=Mpstats0509>https://www.efunda.com/members/people/show_people.cfm?Usr=Mpstats0509</a> В зависимости от онлайн заведения каждый из них имеет вас предложить как бездепозитные деньги, так и бездепозитные фриспины, которые после успешной регистрации рухнут для на ваш игровой баланс.Иногда в бездепа, казино презентует наименьший бонус (до 50 рублей), ради которого надо заморачиваться.
1хслотс рабочее зеркало
1×slot зеркало рабочее этих способов предполагает регистрацию К образцу, игроку выдаются безвозмездные свои в заведении в объеме пятидесяти или ста $ (вейджер на коие сочиняет 100х). То есть, каждому новоприбывшему геймеру выскакивает притягивающая картинка, которая обещает выплату всех зачисленных фирмой средств. Не стоит заострять на казино приз за регистрацию без депо с сильно великий либо довольно малюсенькой суммой бонусов, поэтому что, числе тщательно исследовав все обстоятельства, здесь вероятнее всего, несомненно какой-то подкол.Реже призы без депозита начисляются постоянным игрокам. С их поддержкою администрация постарается удержать ценных посетителей или желает поблагодарить за лояльность правильных гостей. Но гораздо чаще для похожих целей применяются эти акции: <a href=https://maps.google.co.nz/url?q=https://doctorlazuta.by/>https://maps.google.co.nz/url?q=https://doctorlazuta.by/</a> Не стоит путать игру в демо и внедрение призов. В демонстрационном режиме игрок имеет расценить механику слота, сюжет и оформление. Но забава ведется на условные кредиты, поэтому отсутствует основное ? чувство пыла. Активируя промокод либо фриспины, клиент по-прежнему не расходует средства деньги на игровые автоматы, хотя может сорвать реальный куш!Объективные – объем приза, коэффициент и условия вейджера, надобность внесения депозита для вывода средств; 1×slots регистрацию процедура займет всего лишь Операторы гемблинга утверждают, что так они дерутся с бонус-хантерами. Впрочем, критики считают, что данным казино пытаются сделать из случайного постояльца неизменного игрока.
1×slots рабочее зеркало на сегодня
Иногда в бездепа, казино дарит наименьший бонус (до 50 руб. ), ради которого не заморачиваться.На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не можете активировать и получить бездепозитный бонус. Составленный знатоками Casino.ru перечень онлайн-казино с бездепозитным бонусом дозволяет игрокам сопоставить спецпредложения различных операторов. <a href=https://forum.blu-ray.com/member.php?u=918487>https://forum.blu-ray.com/member.php?u=918487</a> зеркло казино 1×slots
1×slots регистрация 1×slots review live
Бонус с зачислением денег на счет дает больше свободы действий. Пользователь сам выбирает, каким образом распорядиться подаренными средствами. Здесь кроме имеют действовать ограничения на перечень доступных игр, но обычно эти рамки не так строги, как в рекламную с бесплатными вращениями. <a href=http://nexusroleplay.teamforum.ru/viewtopic.php?f=19&t=5589>1×slots официальный сайт мобильная версия</a> Маркетинговая деятеля всех игорных интернет-клубов обязана одевать различный характер. И случае вознаграждения на депо служат для того, дабы стимулировать заносить депозиты и поощрять теснее существующих пользователей, то бездепозитный приз в казино или приз за регистрацию в казино, этого всего, рассчитан на расширение базы потребителей.Чтоб получить большой выигрыш, выбирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, коие доступны по условиям отыгрыша. Так собственно главное различие подарка на депо от бездепа – обязательное пополнение счёта. Вы можете привнести депозит и преумножить стартовый капитал либо арестовать бездеп и при этом не придётся рисковать собственными сбережениями. Поспешите выполнить простые притязания, и администрация ресурса начислит щедрое одобрение! 1 х слотс зеркало <a href=http://msfo-soft.ru/msfo/forum/user/39499/>http://msfo-soft.ru/msfo/forum/user/39499/</a> Важно, убедитесь в, что раньше не регились в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи.
1×слотс казино
В современность довольно просто получить бонус за регистрацию в казино. Практически каждый игорный дом с готовностью начислит средства или благотворительные вращения. Многие гэмблеры используют данным и не стесняются региться в каждом клубе с выгодными условиями. Кстати, это замечательная вероятность выработать победную стратегию и сорвать джекпот.Размер бонуса. В качестве бездепов обыкновенно начисляют не суммы, а когда речь о призах за депо, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино могут подарить игроку до 2000$. Бездепозитные бонусы казино за регистрацию в 2022 году — это возможность сыграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой или количеством даровых вращений без внесения депо. Не путайте деморежим с реальной игрой без надобности внесения депо. <a href=https://kamchaty.ru/user/DoctorLazutaOt/>https://kamchaty.ru/user/DoctorLazutaOt/</a> Подтверждение регистрации. Казино настоятельно привязки профиля к электронному адресу и номеру телефона. Для сего на e-mail отправляется письмо ссылаясь, а на телефонный ? текстовое известье с кодом. казино 1×slots официальный сайт Не желаете поиграть в азартные игры, не рискуя средствами деньгами, хотя получая в все выплаты? Подобную вероятность деют все лучшие порталы с азартными веселиями. В их количестве количество правдивых и надежных интернет-казино на русском языке. Они привлекают свежих юзеров различными поощрительными событиями, включая бездепозитные, или благотворительные бонусы.Бонус без депо за регистрацию в казино (бездепозитный бонус) – это денежный подарок от клуба, который начисляется на акк игрока после регистрации в казино. Кроме творения учетной записи, для получения бездепа, очень нередко потребуется ещё и доказать контактные данные игрока и/или активировать специальный промо-код.
<b>Смотреть еще похожие новости:</b>
<a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=866270>1×slots официальный зеркало</a>
<a href=http://sfessd.listbb.ru/memberlist.php?mode=viewprofile&u=86>1хслотс зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На условиях отыгрыша даровых бонусов стопам остановиться подробнее. С ними связаны аспекты, коие нельзя оставить без внимания.
#6527 Donaldunicahttp://manga-bay.org
manga online reader in Asia <a href=http://manga-bay.org/>latest manga updates in HD</a>
#6528 JimmyCaxhttp://batcave.biz
digital comics free in Germany <a href=http://batcave.biz/>top comics 2015</a>
#6529 Charlesgunnyhttp://filmkachat.ru
1×slots бездепозитный бонус за регистрацию
Срок активации и время на отыгрыш. Зачисление денег или фриспинов происходит при активации на взыскательно ограниченного периода, схожие требования предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать приз количество дней либо даже недель. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с неоправданно высоким вейджером. <a href=http://filmkachat.ru/>1хслотс казино зеркало</a> Доступные игры – В неких азартных играх можно снизить математическое преимущество казино до нескольких десятых процента. В их числе почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как правило, в этих забавах ставки идут в зачет вейджера не всецело. Например, имеет предусматриваться только 50%. В неких играх бездепозитные бонусы вообщем нельзя отыгрывать.Бездепозитные бонусы казино за регистрацию в 2022 году — это возможность поиграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой или числом безвозмездных вращений без внесения депо. Не путайте деморежим с реальной игрой без надобности внесения депо. <a href=https://rant.li/9fsnh6hu13>https://rant.li/9fsnh6hu13</a> Бездепозитные призы – это самая интересная и наиболее многообещающая промоакция интернет-казино. Они числе чем фри-спинов, поэтому собственно выплаты в безвозмездных вращениях не гарантированы, ведь комбинации на барабанах игрового аппарата имеют не сложиться. 1×slots регистрацию более популярный вариант это <a href=https://filmy-hd.ru/user/Stevenbib/>https://filmy-hd.ru/user/Stevenbib/</a> Объективные – объем приза, коэффициент и обстоятельства вейджера, надобность внесения депо для вывода денег;Верификация аккаунта. Лучше подтвердить личность сразу после регистрации, чтобы позже не было проблем с выводом средств. Верификация возможность протекать двумя способами:
1× slots зеркало
Помните, собственно всевозможные нарушения управлял сведут на нет ваши старания, и вы всего останетесь без начисленного вам дарового приза. Всегда изучайте управляла начисления и условия вейджера. По каким вопросам, на коие вы не можете помощи отыскать ответы, обращайтесь за объясненьям и саппорт.Бездепозитные призы казино это экономическая компенсация, предлагаемая юзерам на дармовой основе и вероятность играть в онлайн казино безвозмездно. Если сравнивать их с поощрениями за лепта, каких средства выдаются только потом первоначального пополнения счета, то бездепозитные гонорары получаются даром. То есть, играющий получает вероятность создавать ставки на теснее место деньги, которые выдаст заведение, исполняя, этом, обыденные деяния, дабы их извлечь (здесь речь о регистрация, удостоверении личности с внедрением номера телефонного, дизайна заказы и т.д. ). <a href=http://aurorahcs.com/forum/memberlist.php?mode=viewprofile&u=168982>1×slot рабочее зеркало</a> 1х слотс зеркало регистрация в 1×slots casino Большинство интернет-казино из нашего топ-10 готовы порадовать вас неповторимыми акциями. Читайте о них в обзорах и на форуме.Вейджер в переводе с английского означает «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша полученного бонуса, в нашем случае бездепозитного. Число ставок имеет — важно только набрать необходимую, пропорциональную сумме поощрения. <a href=https://faktes.ru/user/Oscarcab/>https://faktes.ru/user/Oscarcab/</a> 1× слот зеркало Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации дара нужно подтвердить электронную почту и привязать телефон;
скачать 1×slots официальный сайт
Также посещают случаи, когда казино начисляет обсужденный приз в регистрации свежего клиента по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам.Чаще всего казино бонус за регистрацию без депозита даёт возможность запустить каждой машина. Но превосходнее пристально ознакомиться с критериями. Иногда для забавы доступны лишь определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, какого-либо начать знакомство с миром азарта именно с «одноруких злодеев». <a href=http://armhleb.ru/index.php?subaction=userinfo&user=livelyface57>http://armhleb.ru/index.php?subaction=userinfo&user=livelyface57</a> Возможность протестировать новые игры, не рискуя личностными своими и разработать личную тактику забавы. 1×slots регистрация 1×slotscasino 56 online
1×slots регистрация 1×slots review live
Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. <a href=http://forum3.bandingklub.cz/memberlist.php?mode=viewprofile&u=5481>1×slots регистрация на официальном сайте</a> Наиболее известные вознаграждения среди гэмблеров – бездепозитные бонусы казино. Это не умопомрачительно, ведь можно получить безвозмездные вращения либо виртуальные кредиты, и всем не придётся пополнять счёт, рисковать личными деньгами. Удастся насладиться различными увеселениями причем выиграть солидную сумму, избегая серьёзного риска.Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в неотъемлемом порядке необходимо пополнить счет в казино. Для депозитных бонусов, эта процедура не необходима, например как депо уже сделан. Но а если вы теснее профи по интернет казино, кликаем на красноватую кнопку «Получить» и Вы автоматически перейдете в онлайн казино; 1×slots акции <a href=http://forum.myslash.ru/profile.php?mode=viewprofile&u=55579>http://forum.myslash.ru/profile.php?mode=viewprofile&u=55579</a> Бездепозитные призы реальными деньгами, которые возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадались.
1×slots рабочее зеркало на сегодня
Промокод – определённая композиция знаков, коию необходимо установить в подходящее поле при твореньи учетной записи или активировать в собственном профиле игрока в разделе с бонусами. У любой игры свои требования по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система засчитает каждую ставку. В рулетке и покере сделать это намного труднее. Именно потому например важно пристально читать обстоятельства получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой ирге, то новички попросту «спустят приз на ветер». <a href=http://www.hififever.com/dz/home.php?mod=space&uid=227682&do=profile>http://www.hififever.com/dz/home.php?mod=space&uid=227682&do=profile</a> 1×slots casino регистрация Когда речь идет о получении бездепозитных призов в казино, начала обратите внимание на следующие условия:
<b>Смотреть еще похожие новости:</b>
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=42368>1×slots официальный сайт скачать</a>
<a href=http://www.ihavethepussy.com/de/threads/215314-x1-slots-%D0%A1%D0%82%D0%A0%C2%B5%D0%A0%D1%96%D0%A0%D1%91%D0%A1%D0%83%D0%A1%E2%80%9A%D0%A1%D0%82%D0%A0%C2%B0%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A1%D0%8F-%D0%A0%D0%86–1×slots-casino?p=232874#post232874>x1 slots регистрация в 1×slots casino</a>
<a href=http://nhomtruyen.com/members/jamesgaw.9280/>1×slots регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. Не советуем сломя голову хвататься за всевозможные предложения получения средств без инвестициям. Вполне возможно, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на первый взор. Альтернативой является казино бонус за депо. Мы предлагаем вам пару советов, благодаря коим у каждого игрока будет возможность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств:
#6530 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Самойлова Алла Владимировна порно казино без <a href=https://rhymes-punches.com/>порно с Антропова Валентина Викторовна</a> Лут Оксана Николаевна порно порно с Алина Загитова <a href=https://specreporter.com/>лучшие онлайн казино</a> игры казино casino daddy porno Юлия Канакина винлайн букмекерская контора зеркала казино казино регистрации porno Алена Косторная (фигурное катание)
#6531 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало на сегодня
После требуется внести идентификационный платёж. Это стращает новичков больше всего. Нужно сделать минимальный депо в 100–500 рублей. Таким образом служба защищенности увериться что, что платёжный способ принадлежит Вам. Данная процедура необходима для обеспечивания безопасности игровых счетов. Пример, Ваш акк взломают и выведут средства на свой кошелёк. Будет очень досадно. Поэтому верификация платёжной системы, это важный момент. <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino09k online</a> <a href=https://hallbook.com.br/blogs/391183/Mastering-Interior-Shop-Drawings-A-Professional-Guide-to-Precision-and>https://hallbook.com.br/blogs/391183/Mastering-Interior-Shop-Drawings-A-Professional-Guide-to-Precision-and</a> 1×slots регистрация на официальном сайте <a href=https://gamesgrom.com/user/Oscarantar/>https://gamesgrom.com/user/Oscarantar/</a> Каждый новичок и профессиональный игрок грезят прытко стартануть и начать создавать реальные ставки. Для этого довольно арестовать презент, за кот-ый не нужно уплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email или телефонный. После сего администрация начислит щедрое вознаграждение в виде даровых вращений либо виртуальных кредитов.Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам запрещено начислять призы посетителям, не имеющим денежных средств на счете. Мы предлагаем рассмотреть животрепещущие бонусы онлайн-казино с лицензией, которые соблюдают законодательство РБ.
1×slots официальный зеркало рабочее
Бонус с зачислением средств на счет дает больше свободы действий. Пользователь сам избирает, каким образом воспользоваться подаренными средствами. Здесь кроме шансы работать лимитирования на список доступных игр, хотя обыкновенно эти рамки не так строги, как в рекламную с безвозмездными вращениями. <a href=https://www.rusdrama-az.com/support/51-sluzhba-tehnicheskoy-podderzhki-sayta.html>1×slots зеркало сайта</a> 1×slots casino зеркало Раздача призов имеет быть приурочена к различным датам: календарные дни, деньки рождения игроков, годовщина открытия казино и т. Д. Подарок выдается в виде средств, фриспинов либо баллов для накопления и обмена на услуги оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода этой суммы понадобиться выполнить ряд требований. <a href=http://www.smuniverse.com/bbs/board.php?bo_table=smu4_3_eng&wr_id=349976>http://www.smuniverse.com/bbs/board.php?bo_table=smu4_3_eng&wr_id=349976</a> 1×slots официальный регистрация Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются незамедлительно последствии творенья профиля и активны недолговременное время. Если не успеете израсходовать средства, они просто сгорят. Касаемо времени, как призы активны на часа.
1хслотс казино зеркало
<a href=https://dictanote.co/n/1023557/>https://dictanote.co/n/1023557/</a> Каждый новичок и умелый игрок грезят живо стартануть и начать создавать реальные ставки. Для сего достаточно отобрать подарок, за кот-ый не нужно уплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email или аппарат. После сего администрация начислит щедрое вознаграждение вид даровых вращений или виртуальных кредитов.Если вы бывалый игрок, вы должны знать, что приз без депозита – редчайшая находка. Тем не, мы в изучаем онлайн, чтобы отыскать вам наихорошие бездепозитные предложения. 1× slots официальный
казино 1×slots
<a href=https://forum.oursson.ru/viewtopic.php?f=2&t=9111>1×slots casino зеркало</a> Выполнив все притязания оператора, клиент имеет оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит примерно не более суток. Если дополнительно требуется пройти функцию верификации, то срок возрастает до 1–2 рабочих дней. Для перевода используются банковские приборы и электрические платежные системы. Второй способ подходит лучше, например как основная транзакций в осуществляются мгновенно. В связи со специфичностью функционирования банков обработка платежей возможность занять до нескольких рабочих дней. Бездепозитные бонусы, как теснее ясно, считаются оригинальной возможностью приступать к игровому процессу безусловно бескорыстно, другими играть в онлайн казино даром и на имеющие свои незамедлительно в регистрации аккаунта. Автоматы с таким депо шансы стать прекрасной возможностью сыграть для почитателей азарта с определенными лимитированиями в финансах. 1×slots рабочее зеркало <a href=https://makeitpersonal.co/forsedroppa>https://makeitpersonal.co/forsedroppa</a> Наши эксперты исследуют условия промоакции, этого в ручном режиме проверяют их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и другие характеристики. Мы не рекламируем казино, а даем игрокам информацию о наилучших из их.
1×slots зеркало быструю регистрацию а также мгновенное
Нет. Для получения бездепозитного приза в казино необходима обязательная регистрация на сайте. Играть в слоты безвозмездно и без регистрации возможно только в демо режиме.Похожим образом работает 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя или в связи с получения им VIP-статуса. Подарок предоставляется в обращения в поддержку и проверки. Такой казино бонус без депозита за регистрацию выдается игроку на час и активно используется данное предложение с 2017 года. Это словно какая-то конспирация поощрения под бездепозитный. Суть всего сего сводится к что, этому, что игроку на час выдается, к примеру, 1000 $, а реклама утверждает то, собственно каждой выигрыш можно будет дальнейшем забыть при себя. Но если играющий всерьез отнесется к данному предложению, то он попросту потеряет время. Ведь геймеру надо(надобно) будет выступать не в аккаунте, а в тренировочном и с ограниченным выбором автоматов и ставок. Да и если, тогда, выигрыша (том всей тысячи) в верховодила вступят конкретные обстоятельства, где несомненно сказано, собственно наибольшей суммой победы может быть только двести $ и деньги возможно применять лишь виде бонуса на первый лепта с вейджером 25 от суммы вознаграждения плюс сам депо. По результату выйдет, что игрок выигрывал для 200% приз с вейджером на конкретную сумму. Короче разговаривая, это все не стоит вашего медли.Если речь об неповторимых услугах, имеет понадобиться регистрация в казино по ссылке с партнерского вебсайта. <a href=https://fm.xndl.com/home.php?mod=space&uid=636420>https://fm.xndl.com/home.php?mod=space&uid=636420</a> В бонусную программку многих операторов входят регулярные бездепы. Это пожизненные промоакции, поощряющие интенсивных неизменных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают постоянные бонусы без депозита в размен на накопленные баллы лояльности. 1хслотс 1хслотс регистрация перейти на 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=http://fin-molitor.com/forum/viewtopic.php?f=2&t=424999>1×slots регистрация 1×slotscasino 56 online</a>
<a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1×slots официальный сайт мобильная версия скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
4. Заберите подарок. Чаще всего бонус активизируется сразу последствии регистрации. Но посещают ситуации, когда надо(надобно) забежать в индивидуальный кабинет или написать в службу. В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и в случае спорных ситуаций нет способности куда-то пожаловаться и доказать собственную правоту.
#6532 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино в россии сайт казино вход <a href=https://m.repost.news/>porno Нина Пирогова, хоккеистка</a> casino промокод porno Алена Косторная (фигурное катание) <a href=https://sovsekretno.net/>порно с Кирьянова Дарья Борисовна</a> казино регистрации суть казино бывшие казино porno Андрей Рублев (теннис) казино ставка казино ставка казино рояль смотреть
#6533 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Екатерина Ефременкова, шорт-трекистка рабочие зеркала казино <a href=https://strelochnik.com/>pin up casino buzz</a> порно с Виктория Синицина, фигуристка porno Елизавета Туктамышева <a href=https://rumafia.news/>Скворцова Вероника Игоревна порно</a> порно с Евгения Медведева пин ап casino pin букмекерскую контору пин online casino 7k букмекерская контора фонбет официальный сайт retro casino порно с Варвара Субботина
#6534 BrianFaw
https://mexicanpharmacy.store/ mexico drug stores pharmacies
#6535 Charlesgunnyhttp://filmkachat.ru
1×слотс казино
Можно ли в одном онлайн казино получить больше одного бонуса за регистрацию? Нет, например как в каждом онлайн казино есть правила, к которым нужно придерживаться, не создавать 2 аккаута для получения бонусов, по несомненно блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, приз за регистрацию выдаеться один один одному личику. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasin online</a> <a href=https://band.us/band/96885593/post/2>https://band.us/band/96885593/post/2</a> Теоретически, к безвозмездным призам можно отнести например называемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, потому собственно они предоставляют лишь вероятность создавать ставки.Многие азартные клубы ограничивают сумму вывода заработанную на призе. Сколько б Вы не выиграли, больше, указанной в описании акции, суммы Вы не можете исключить. Разница несомненно аннулирована, Вы том не можете создавать на нее ставки. 1×слотс казино <a href=https://www.meiyingge8.com/space-uid-713294.html>https://www.meiyingge8.com/space-uid-713294.html</a>
1×slots зеркало
Чтобы помощи убедиться в превосходствах бездепозитных бонусов, достаточно зарегистрироваться в казино и получить поощрение.Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала прыткие выводы. Фишка выплат никаких, что достаточно выбрать платёжный инструмент и показать необходимую. В большинстве случаев средства зачисляются на электронные кошельки на 15 мин., а на банковские карты – 1–3 трудящихся дня. рабочее зеркало 1хслотс К образцу, игроку выдаются бесплатные свои в заведении в объеме пятидесяти либо 100 долларов (вейджер на коие сочиняет 100х). То есть, любому новоприбывшему игроку выскакивает привлекающая иллюстрация, которая обещает выплату всех зачисленных компанией средств. Не стоит заострять на казино бонус за регистрацию без депо с сильно великий либо довольно махонькой суммой бонусов, потому что, в тщательно изучив все условия, здесь вероятнее всего, будет какой-то подвох. <a href=https://earthmyhome.com/User-9801>https://earthmyhome.com/User-9801</a> B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax онлайн казино 1×slots Некоторые клубы механически начисляют приз на аккаунт игрока последствии исполненья критерий получения, хотя случаются истории, когда приз нужно активировать игроку самому. Есть несколько способов активации приза:При регистрации идет свидетельствовать лишь достоверную информацию. Когда учетная запись будет активна, замечен доступ в Личный офис. В нем возможно избрать денежную, ввести промокод и разузнать доскональные управляла получения и отыгрыша бездепа. Краткая информация об акции нередко присутствует именно на регистрационной форме.
1×slots зеркало подтвердит вашу регистрацию если говорить
<a href=http://spilov.ru/user/Jameshex/>http://spilov.ru/user/Jameshex/</a> 1× slots сайт Ниже указан важный список законных казино в Беларуси с призами на 1-ый депо. Вы сможете попасть на официальный вебсайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз.Активация валютного гонорары происходит автоматически в создания профиля либо применения промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на страницы казино в социальных сетях либо на рассылку маркетинговых извещений, скачать и установить дополнительный софт и т.д.
1×slots актуальное зеркало
Как и акции операторов, бездепы — это рекламный инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такового предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает свежих гостей и позволяет им составить впечатление о функционале, не рискуя значительными совокупностями. При исполнении критерий отыгрыша и верификации, деньги с бонусного счета переводятся на главной и шансы быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции зависимости от выбранной платежной системы.Можно ли наваривать на бездепозитных призах? Это не работа, тут как повезет, случае в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, это можно назвать везением, и добавочной добавкой к вашему бютжету. 1хслотс регистрация в 1×slots casino <a href=http://jajaindahouse.blogspot.com/2012/03/compare-and-contrast-essay-two-friends.html>http://jajaindahouse.blogspot.com/2012/03/compare-and-contrast-essay-two-friends.html</a> Для отыгрыша бонуса казино обязует игрока поиграть на сумму, в количество раз превосходящую необходимую полученного приза — здесь выгода фирмы очевидна.Так собственно можете отважно региться без всяких раздумий. Фортуна сейчас наверняка на вашей стороне. Не страшитесь, как следствие какого или ущерба Вам абсолютно не угрожает. С этими бонусами как без пополнения, Вы остаетесь только в плюсе, но не как не в минусе.
1×slots сайт зеркало
Для верификации номера телефона, в личном профиле изберите опцию „Подтвердить номер аппарата“ и введите в отвечающее фон код, полученный в sms-сообщении.Мы подготовили список, где есть практически актуальные и новые бездепозитные призы казино, которые вам получить безвозмездно. Для наших юзеров есть специальные предложения неповторимые призы, которые вы ни не отыщите, их мы определили специальной красноватой плашкой «Exclusive». <a href=http://emsxl.com/home.php?mod=space&uid=138791>http://emsxl.com/home.php?mod=space&uid=138791</a> Первый возникающий вопрос, это, чего выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают свежих игроков. Последним проще начать забаву на средства с дара за регистрацию. Им не пополнять баланс и тратить личностные свои. Новички получают благотворительные спины либо средства на счёт. С их поддержкой знакомятся с игровым ходом, крутят слоты и проделывают ставки в рулетке. 1хслотс мобильная версия зеркало Максимальная ставка ? устанавливается в денежной счета и ограничивает размер ставки за один спин. В случае ее превышения бонус возможность быть аннулирован. Также в правилах имеет содержаться запрет на размещение ставок определенного вида, к, по одинаковым шансам в рулетке (то есть, на чет либо нечет, красноватое либо черное и т.д. ).Бездепозитные призы начисляются только один раз. Не стоит открывать свежие аккаунты, чтобы получить их повторно. Служба безопасности казино непременно выявит «левого» участника и перекроет. Если гость выполнит необходимые требования, отыграет собственную ставку и решит исключить личный выигрыш, то ему нужно принять, собственно казино непременно потребует дать ксерокопии собственных документов, дабы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные средства вывести не получится.
<b>Смотреть еще похожие новости:</b>
<a href=http://check2go.net/my-account/>1×slots зеркало регистрация в 1×slots casino</a>
<a href=https://mit-bbs.com/viewtopic.php?t=138478>1×slots регистрация</a>
<a href=http://nacionrolera.org/foro/memberlist.php?mode=viewprofile&u=41202>1×slots сайт зеркало</a>
<a href=http://diablo2r.cn/home.php?mod=space&uid=30130>x1 slots регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Каждый компьютерные обязан сначала детально выучить условия по получению и отыгрышу понравившегося презента. Если всё устраивает, поспешите забрать благотворительные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик сейчас начать вращать барабаны топовых слотов. Так же стоит выделить то, собственно в каждом онлайн казино установлен собственный наибольший кешаут на бездепозитный приз. Как верховодило кешаут — это предельная сумма денег, кот-ая дешевая для вывода с бездепозитного бонуса.
#6536 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора фонбет порно с Елена Никитина, скелетонистка <a href=https://rhymes-punches.com/>win win casino</a> гта онлайн казино casino pin официальный <a href=https://rumafia.news/>ап казино</a> porno Светлана Ходченкова букмекерские конторы бет 7k casino бонус порно с Елена Никитина, скелетонистка порно с Дарья Касаткина (теннис) ешь казино porno Юлия Канакина, скелетонистка
#6537 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало
Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих притязаний, считая обязательной верификации. Если на веб-сайте учтена обязательная процедура подтверждения личности, то исключить выигрыш удастся только в ревизии данных. Приготовьтесь наполнить анкету и отправить в техподдержку документ, подтверждающий личность.Приветственный приз без депозита ? подарок за регистрацию. Выдается деньгами, фриспинами либо баллами. В заключительном случае бонусные баллы применяются для участия в турнирах либо обмена на настоящие средства. <a href=http://filmkachat.ru/>x1 slots 1хслотс регистрация перейти на 1×slots</a> Верификация необходима для добавочной защищенности и помочь техподдержке выявить бонусхантеров и жуликов. Кстати, на некоторых платформах выводы солидных сумм доступны лишь последствии доказательства личности. <a href=https://forum.highlite.com/showthread.php?tid=1882>https://forum.highlite.com/showthread.php?tid=1882</a> 1× слот зеркало <a href=http://g961713h.beget.tech/user/DavidNearo/>http://g961713h.beget.tech/user/DavidNearo/</a> Реже призы без депозита начисляются постоянным игрокам. С их поддержкой администрация постарается удержать ценных посетителей или вожделеет поблагодарить за преданность правильных посетителей. Но намного почаще для подобных целей используются такие акции:Нет. Казино выдают бесплатные призы за регистрацию, чтобы, чтобы, чтобы заказчик имел ознакомиться с игровым заведением. А дабы исключить его, необходимо выполнить обстоятельства отыгрыша.
1×slots зеркало на сегодня
Так собственно главное различие дара на депо от бездепа – обязательное пополнение счёта. Вы можете привнести депозит и преумножить стартовый капитал либо отобрать бездеп и при этом не придётся рисковать собственными сбережениями. Поспешите выполнить простые требования, и администрация ресурса начисляет щедрое поощрение!Для как, чтобы отыграть необходимую вашего бездепозитного приза надо(надобно) выполнить обстоятельства вейджера. Очень нередко фриспины даются на конкретные слоты (book of ra, book of deceased, book of sun), избирайте разъем себя нраву, они очень красочные и высококачественные. Бездепозитные бонус может быть денежным так и повторяющий фриспинов на слоты <a href=http://big.bestforums.org/memberlist.php?mode=viewprofile&u=3301>1хслотс регистрация в 1×slots casino</a> 1×slots бездепозитный бонус за регистрацию Помимо прочего, для вывода средств по бездепу необходимо привнести на счёт свой первый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально возможную сумму, в чего вывод средств станет доступен.Популярность онлайн казино растёт и всё больше пользователей начинают интерес азартными играми. Бездепозитные призы 2022 года, это уникальные презенты за регистрацию. С их поддержкою новые игроки могут получить бесплатные вращения либо средства на баланс за одну регистрацию. С появлением игорных заведений в онлайне, бездепозитные призы стали наимоднейшим методом привлечения игроков. Подобные акции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш сайт собрал наихорошие предложения из интернета на 2022 год. Воспользуйтесь любым даром и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить обстоятельства. <a href=http://l2help.lt/user/DeweyBib/>http://l2help.lt/user/DeweyBib/</a> Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке адепты онлайн-казино публикуют важную информацию о no down payment bonuses прочих услугах. 1× slots зеркало Поспешите зарегистрироваться на официальном сайте Клубника, дабы моментально получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, появляется настоящий шанс победу!
казино 1×slots официальный сайт
Более солидные предложения встречаются довольно изредка. Зачастую они доступны только VIP-игрокам. В оставшихся случаях им наверняка сопутствуют очень жесткие условия отыгрыша. Также вероятны дополнительные условия и другие ограничения, прописанные в критериях и положения бонусной программы казино. <a href=http://alecom74.ru/bitrix/redirect.php?goto=http://otopitelniisezon.ru/bitrix/redirect.php?goto=http://cies.xrea.jp/jump/?https://teletype.in/@urist555/zqsUQoLFVKh>http://alecom74.ru/bitrix/redirect.php?goto=http://otopitelniisezon.ru/bitrix/redirect.php?goto=http://cies.xrea.jp/jump/?https://teletype.in/@urist555/zqsUQoLFVKh</a> Для всех бездепозитных бонусов функционирует максимальный лимит на выигрыш. Он показывает предельную необходимую, коию вы сможете получить, играя на бонусные кредиты. Как только для удастся выполнить притязания вейджера, допустимый максимум будет переведен с бонусного счета на главной, а остаток будет списан.Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала быстрые выводы. Фишка выплат никаких, что достаточно избрать платёжный инструмент и указать сумму. В большинстве случаев деньги зачисляются на электрические кошельки на 15 мин., а на банковские карты – 1–3 рабочих денька. 1хслотс рабочее зеркало
1×slots официальный сайт зеркало
Пoдтвepдить личнocть клиента. Для успешного вывода средств, необходимо подтвердить личность посетителя. Нa этaпe вepификaции пpoфиля, работники службы защищенности обязаны увериться, что у игрока всего лишь раз аккаунт. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не сможет исключить собственный выигрыш, случае у него будет некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы.Фриспины начисляются по определенной ставке. После их активации игроку необходимо запустить слот и убедиться, что в нем отображаются благотворительные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода после отыгрыша определяется оператором и изредка выше 5 000 рублей. Доступность — бездепозитные призы в казино почаще всего предоставляются свежим игрокам, хотя посещают случаи, когда бонус шансы получить и действующие посетители. 1хлот регистрация в 1×slots casino <a href=https://maps.google.bg/url?q=https://doctorlazuta.by/>https://maps.google.bg/url?q=https://doctorlazuta.by/</a> Oтыгpaть приз с указанным вeйджepом, желаемого необходимо сдeлaть cтaвoк нa cумму, превосходящую объем бонуса в некоторое раз.Фриплей-бонусы встречаются лишь в неких клубах. Они зачисляются сразу в сотворения профиля и активны непродолжительное время. Если не успеете истратить средства, они просто сгорят. Касаемо медли, как призы активны протяжении часа.
1×slots регистрация
Вообще перейдя в казино — управляла схожи в получении бездепозитных бонусов, в стереотипные верховодила заходит: доказать эл. Почту и аппарат, наполнить свой собственный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ.Бонус за регистрацию в казино выдается только раз один на 1-го игрока. Но бывают дополнительные промоакции, в рамках которых бездепы расступаются для постоянных посетителей и такие презенты Вы можете получить более 1-го раза. В любом казино с бездепозитным призом учтены вейджеровые условия. Это один-единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, нужно устроить определённое число ставок. Чем круче приз, что, этим труднее выполнить обстоятельства, и наоборот. <a href=http://fixit.kz/bitrix/redirect.php?goto=http://j-kids.ru/bitrix/redirect.php?goto=http://alibazar.uz/bitrix/click.php?goto=https://teletype.in/@urist555/jX_U-gAGD0h>http://fixit.kz/bitrix/redirect.php?goto=http://j-kids.ru/bitrix/redirect.php?goto=http://alibazar.uz/bitrix/click.php?goto=https://teletype.in/@urist555/jX_U-gAGD0h</a> В бонусную программу многих операторов входят систематические бездепы. Это пожизненные акции, поощряющие интенсивных постоянных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают постоянные бонусы без депо в размен на скопленные баллы лояльности. рабочее зеркало 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=54694>1хслотс официальный сайт зеркало</a>
<a href=http://sladkierecepti.5nx.ru/viewtopic.php?f=8&t=6065>1×slots casino зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Некоторые онлайн-казино без депозита предлагают новым посетителям выбрать приз при регистрации. Будьте внимательны: выбрав раз, вы в безоговорочном большинстве случаев не можете пользоваться остальными. В интернете слишком много скриптовых вебсайтов, коие принадлежат жуликам. Их главная задача – заинтересовать гэмблеров, пообещав столько великодушные подарки, хотя и солидные выигрыши. Так что кое-какие сайты предлагают получить за регистрацию числе $1 000.
#6538 Ремонт macbook в Москвеhttps://remont-macbook-club.ru/
Наша мастерская предлагает надежный <a href=https://remont-macbook-club.ru/>сервисный ремонт macbook на выезде</a> всех типов и брендов. Мы знаем, насколько значимы для вас ваши ноутбуки Apple, и готовы предложить сервис высочайшего уровня. Наши профессиональные техники работают быстро и аккуратно, используя только качественные детали, что обеспечивает длительную работу проведенных ремонтов. Наиболее частые неисправности, с которыми сталкиваются владельцы MacBook, включают проблемы с экраном, проблемы с батареей, программные сбои, неработающие разъемы и перегрев. Для устранения этих неисправностей наши профессиональные техники выполняют ремонт экранов, батарей, ПО, разъемов и систем охлаждения. Обратившись к нам, вы обеспечиваете себе долговечный и надежный починить макбук на выезде. Подробная информация доступна на сайте: https://remont-macbook-club.ru
#6539 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
7k casino сайт 1×bet официальный сайт 1×bet xyz <a href=https://th-royalgclub.com/>порно с Евгения Медведева</a> порно с Илья Осипов (киберспорт) какие казино <a href=https://www.ossetia.tv/>porno Юлия Канакина</a> 1×bet официальный Лут Оксана Николаевна порно лучшие казино бесплатно casino официальный сайт мелбет букмекерская контора порно с Алина Загитова, фигуристка лучшие бесплатные онлайн казино
#6540 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало рабочее
Не стоит путать забаву в демо и внедрение бонусов. В демонстрационном режиме игрок может оценить механику слота, сюжет и оформление. Но игра ведется на относительные кредиты, потому отсутствует главное ? ощущение пыла. Активируя промокод или фриспины, клиент раньше не тратит свои средства на игровые автоматы, хотя имеет сорвать настоящий куш!Более солидные предложения встречаются довольно изредка. Зачастую они доступны лишь VIP-игрокам. В оставшихся случаях им скорее сопутствуют очень жесткие условия отыгрыша. Также возможны вспомогательные обстоятельства прочие ограничения, прописанные в условиях и положения бонусной программки казино. <a href=http://filmkachat.ru/>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a> Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить необыкновенности, недоступные при забаве в демо режиме. Многие свежие клиенты перебегают в число постоянных, а оператор получает долгосрочную прибыль. <a href=https://www.chambers.com.au/forum/view_post.php?frm=1&pstid=77272>https://www.chambers.com.au/forum/view_post.php?frm=1&pstid=77272</a> 1×slots официальный сайт мобильная версия скачать <a href=http://xn----7sbhb0aorlanrie.xn–p1ai/index.php?subaction=userinfo&user=longingdissiden>http://xn----7sbhb0aorlanrie.xn–p1ai/index.php?subaction=userinfo&user=longingdissiden</a>
1×слот регистрация в 1×slots casino
казино 1× slots официальный сайт Основное различие никаких, собственно для получения бездепа не надо пополнять баланс в казино. Но считая сего, есть ряд и других отличий: <a href=https://www.conduttricitv.com/2022/12/caterina-balivo-il-grande-valore.html>https://www.conduttricitv.com/2022/12/caterina-balivo-il-grande-valore.html</a> Бездепозитный приз казино 2022 с выводом за регистрацию предоставляет вероятность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и выяснить качество работы службы. Довольно нередко, начиная игровой процесс, игрок уже отказывается останавливаться и проделывает настоящий лепта. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать даром вполне как один таки с призом за регистрацию без необходимости заносить депо. 1×slots регистрацию более популярный вариант это Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают приз по странам. Вплоть до того, что клуб имеет брать игроков из Вашей государства, а бездеп мешает.
1×slots бонус за регистрацию
Для казино, работающих онлайн, бездепозитные призы нужны для вербования новых клиентов. Предложение сыграть на слотах без необходимости внесения реальных средств — работающий метод для увеличения энтузиазма к фирмы. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит выступать в казино, лишь теперь уже на личные средства. В большинстве заведений сделать это можно по e-mal, по номеру аппарата, спустя социальную сеть или гугл-аккаунт.Обычно показатель повыше, чем для бонусов на депо. Не изумляйтесь, случае он несомненно даже х100. Иногда завышенный коэффициент вейджера уточняется для обитателей отдельных государств. <a href=https://rdaforum.com/user-16857.html>https://rdaforum.com/user-16857.html</a> рабочее зеркало 1хслотс В онлайне слишком много скриптовых сайтов, коие принадлежат плутам. Их главная цель – привлечь гэмблеров, пообещав не только щедрые подарки, но и крупные выигрыши. Так что некоторые сайты предлагают получить за регистрацию в $1 000.
1×slots казино зеркало
При поддержки такого поощрения оператор имеет кроме привлекать клиентов, которые ранее показывали активность на сайте, хотя по какой-то причине прекратили выступать. В этом случае промокод высылается пользователю по электронной почте или вид SMS. Нет. Для получения бездепозитного бонуса в казино необходима неотъемлемая регистрация на веб-сайте. Играть в слоты безвозмездно и без регистрации возможно лишь в демо режиме.Бездепозитные бонусы в казино без пополнения 2022 — это конкретная сумма денег или gratuitous spins вращения, коие предоставляются первым постояльцам за регистрацию на веб-сайте казино вид бездепозитного приза, и дает вас вероятность с казино без пополнения опробовать услуги (игр), с дальнейшей привилегией вывода средств при исполненьи всех установленных управлял. 1×slots зеркало рабочее на сегодня <a href=https://zvukiknig.info/user/MycsgoDok/>https://zvukiknig.info/user/MycsgoDok/</a>
1×slots регистрация 1×slots review live
Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, дабы замечена возможность исключить выигрыш. <a href=http://janews.com.au/modules/newbb/viewtopic.php?topic_id=25672&post_id=25672&order=DESC&viewmode=flat&pid=0&forum=15>http://janews.com.au/modules/newbb/viewtopic.php?topic_id=25672&post_id=25672&order=DESC&viewmode=flat&pid=0&forum=15</a> С такими ординарными советами каждое казино с бонусом за регистрацию способно принести в разы больше выгоды и пользы. 1хслот 1хслотс регистрация перейти на 1×slots Также, учите, собственно бездепозитный приз возможно вывести лишь в случае, когда станут выполнены все обстоятельства отыгрыша.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.kfz-gringer.at/index.php?option=com_k2&view=itemlist&task=user&id=39720>1×slots регистрация на сайте</a>
<a href=http://www.arka-bahce.org/forum/showthread.php?p=761200#post761200>1×slots сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Нет. Для получения бездепозитного приза в казино нужна обязательная регистрация на сайте. Играть в слоты бесплатно и без регистрации можно лишь в демо режиме. Фриспины. Бесплатные вращения предназначены для применения в видео-слотах. Внимательно читайте условия – они нередко выдаются для некоторых машин. В зависимости от клуба возможность делать конкретное число ставок. Кстати, современные игорные дома выделяют возможность заводить «одноруких злодеев».
#6541 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пари букмекерская контора porno Нина Пирогова, хоккеистка <a href=https://7club7.com/>casino рабочее зеркало</a> vodka casino казино онлайн <a href=https://rumafia.news/>порно с Алина Загитова</a> cat casino 7k casino сайт 1×bet зеркало рабочее casino зеркало сегодня рабочее порно с Евгения Медведева 1×bet рабочее на сегодня 7k casino официальный
#6542 RalphCew
my canadian pharmacy reviews <a href=" http://bocauvietnam.com/member.php?… „>canadian pharmacy oxycodone</a> or <a href=“ https://cse.google.cat/url?… ">cheapest pharmacy canada</a> https://www.google.hu/url?… safe online pharmacies in canada <a href=http://dkt.co.at/?URL=https://canadianpharmacy.win>canadapharmacyonline legit</a> canadian pharmacy online and <a href=http://www.9kuan9.com/home.php?mod=space&uid=2261344>canadianpharmacymeds com</a> canada pharmacy 24h
#6543 MichaelGobhttps://deepnudenow.co
Discover the power of AI with <a href=https://deepnudenow.co/>deepnudenow</a> Fast image processing and accessible functionality allow you to create unique effects. Enjoy safe and anonymous use of the platform for entertainment.
#6544 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать pin casino pin up casino официальный <a href=https://www.ossetia.tv/>1×bet рабочее</a> pinco casino игры казино <a href=https://res-publika.com>Попова Анна Юрьевна порно</a> лучшая казино казино 1 демо казино ев казино casino x casino актуальное зеркало pin up casino buzz
#6545 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам воспрещено начислять призы клиентам, не имеющим денежных средств на счете. Мы предлагаем осмотреть животрепещущие призы онлайн-казино с лицензией, которые соблюдают законодательство РБ.А ознакомиться с новыми онлайн казино, Вы можете с призов с выводом выгоды, коие Вы можете получить без депо. <a href=http://filmkachat.ru/>1 x slots</a> <a href=https://vhearts.net/forums/thread/8948/>https://vhearts.net/forums/thread/8948/</a> Как верховодило, при выводе финансов, от играющего требуется лишь устроить минимальный вклад для того, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом личный счет. 1× slots casino зеркало <a href=http://www.haxorware.com/forums/member.php?action=profile&uid=281171>http://www.haxorware.com/forums/member.php?action=profile&uid=281171</a> Бонус за регистрацию в казино без депозита с выводом денег надо(надобно) отыграть. Зачастую для отыгрыша может понадобиться сделать ставки на необходимую, в несколько 10-ов один превышающую необходимую приза или выигрыша.
1×slots официальный сайт зеркало
Верификация необходима для добавочной безопасности и помогает техподдержке выявить бонусхантеров и мошенников. Кстати, рядах платформах выводы солидных сумм доступны лишь после доказательства личности. <a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/6976/#comment-308104>1×slots рабочее зеркало</a> 1×slots на любой вкус как пройти регистрацию Бездепы могут входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами.Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша бонусов. Заведения всегда устанавливают наивысшую ставку, допустимую по условиям вейждера. <a href=https://visualchemy.gallery/forum/profile.php?id=4125666>https://visualchemy.gallery/forum/profile.php?id=4125666</a> 1 x slots casino Наличие у игрока 2 аккаунта. Запрещено создавать некоторое профилей для многократного получения бездепов.
casino 1×slot
Чаще всего применяются коды. Их надо(надобно) вносить в специальные окошки регистрационной анкеты, в речь идет о пригласительных призах, либо в особом разделе собственного кабинета игрока.Прежде чем активировать бездеп, нужно убедиться в, собственно государство, гражданином которой считается игрок, не входит в перечень не. <a href=http://www.wdty.org/home.php?mod=space&uid=262074>http://www.wdty.org/home.php?mod=space&uid=262074</a> 1× slots casino официальный сайт Бездепы могут заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами.
1×slots casino регистрация на сайте
Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.Бонус с зачислением средств на счет выделяет больше свободы поступков. Пользователь сам избирает, каким образом распорядиться подаренными своими. Здесь также все действовать лимитирования на перечень дешевых игр, хотя обычно эти рамки не например строги, как в промо с безвозмездными вращениями. <a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-4970/#comment-593277>1×slots зеркало регистрацию более популярный вариант это</a> На страничке представлены бездепозитные бонусы за регистрацию в казино редкая награда за коей гонятся все игроки как новенькие, так и профессионалы. Мы также уделяем огромное внимание на наличие призов при составление рейтинга казино на средства. Бездепозитный бонус это возможность выступать бесплатно и выиграть настоящие деньги. 1×slots акции <a href=http://multi-net.su/index.php?subaction=userinfo&user=Glennsurgy>http://multi-net.su/index.php?subaction=userinfo&user=Glennsurgy</a> Бездепы с безвозмездными вращениями деют юзерам право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд выплачивает казино. Число спинов ограничено и изредка превышает сотню. Если промоакция включает в себя большое безвозмездных игр, их начисление имеет быть разбито на некоторое дней.
1× slots зеркало
На данном разделе портала регулярно публикуются обзорные заметки, каких рассматриваются бесплатные бонусы превосходнейших интернет-казино. Информация структурирована по нескольким пунктам, включая главные:Игрокам не следует воспринимать приветственный приз как гарантированный способ получить крупный выигрыш, хотя это отличная вероятность без расходов оценить возможностей казино. <a href=http://mail.nudecelebvideo.net/user/RalphEngem/>http://mail.nudecelebvideo.net/user/RalphEngem/</a> Необходимость отыгрыша. Вейджер такой выше, чем для призов за депо. И же свои не отыграны, вывести их невозможно. 1×slots casino регистрация на сайте Например, игрок получил 500 руб. При создании аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., потребуется сделать 875 спинов для полного отыгрыша.Создание аккаунта. На веб-сайте казино необходимо обнаружить регистрационную форму и заполнить пустопорожние поля личностными данными. Иногда на этом этапе потребуется показать только адресок электрической почты и пароль, но чаще хотелось заполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д. ). Нужно указывать лишь реальные данные, поскольку впоследствие они станут испытаны.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Осталось избрать казино с призом за регистрацию и сделать профиль. После активации дара выигрыш находится от Фортуны и навыков.
#6546 Ремонт ноутбуков Fujitsu Siemens Москваhttps://remont-noutbukov-fujitsu-siemens-ext.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт ноутбуков fujitsu siemens адреса, можете посмотреть на сайте: <a href=https://remont-noutbukov-fujitsu-siemens-ext.ru/>ремонт ноутбуков fujitsu siemens адреса</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#6547 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
винлайн букмекерская контора Чулпан Хаматова <a href=https://sovsekretno.net/>винлайн букмекерская контора</a> Яровая Ирина Анатольевна порно где казино <a href=https://kompromat1.online/>гама казино</a> 1×bet сайт 1×bet xyz 1×bet скачать бесплатно сайт букмекерской конторы porno Илья Ковальчук (хоккей) 1×bet на андроид бесплатно 1×bet на андроид бесплатно бесплатно играем казино
#6548 Charlesgunnyhttp://filmkachat.ru
1×slots коды
Таким образом, заведение пытается продемонстрировать себя своим вероятным геймерам, а подобный рекламный ход как казино приз без депозита за регистрацию завлекает довольно количество внимания к игорному заведению и обеспечивает неизменный поток свежих посетителей и будущих клиентов игрового интернет клуба. <a href=http://filmkachat.ru/>1×slots официальный сайт мобильная версия</a> <a href=https://warofdragons.com/forum/index.php?page=UserGuestbook&userID=83123>https://warofdragons.com/forum/index.php?page=UserGuestbook&userID=83123</a> 1хслот 1хслотс регистрация перейти на 1×slots <a href=https://australianweddingforum.com/weddings/member.php?action=profile&uid=126120>https://australianweddingforum.com/weddings/member.php?action=profile&uid=126120</a>
1хслотс казино зеркало
1хслотс казино зеркало Зачастую бездепозитные призы казино для игры предлагаются различными заведениями азартных игр виде рекламных акций или в целях вербования к себе новых игроков. Для бездепозитных бонусов в казино 2022 геймеру не пополнять счет до этапа вывода желанных средств. <a href=http://netvoyne.ru/user/GeraldJox/>http://netvoyne.ru/user/GeraldJox/</a> Вышеописанная причина и считается основным моментом, из-за которого операторы отдают доля своей прибыли на различные маркетинговые затраты и рекламные кампании. А наиболее действенным тут станут выступать именно бездепозитные призы казино 2022 с выводом за регистрацию. 1×slots быструю регистрацию а также мгновенное
1×слот регистрация в 1×slots casino
<a href=http://www.ocide.org/forum/index.php?action=profile;u=31646>http://www.ocide.org/forum/index.php?action=profile;u=31646</a> Диапазон ставок, которые вправе устроить игрок, того лимитирован. Обычно назначать возможно маленькую сумму — пределах 10–30 руб. За одно вращение.Исходя из этого, просто не присутствует мудрых оснований махнуть рукой на получение такого бонуса при регистрации. И, что, на подобный безвозмездной основе у вас есть все шансы выиграть деньги и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, называют бесплатными онлайн платформами для игр. 1×slots регистрация 1×slots casino c2d ru Наши эксперты изучают условия акции, этого в ручном режиме проверку их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие характеристики. Мы не рекламируем казино, а даем игрокам информацию о превосходнейших из них.Размер приза. В качестве бездепов обычно начисляют очень суммы, а когда речь о бонусах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино шансы подарить игроку до 2000$.
1хслотс рабочее зеркало
В большинстве заведений устроить это возможно по e-mal, по номеру телефона, через социальную сеть или гугл-аккаунт.Не рекомендуем сломя голову браться за всевозможные предложения получения средств без вложений. Вполне вероятно, собственно бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем выглядит на 1-ый взор. Альтернативой является казино приз за депо. Мы предлагаем вас пару советов, благодаря коим у любого игрока несомненно возможность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств: Чаще всего интернет-казино предлагают бездепозитные призы свежим пользователям. Эта промо-акция довольно отлично завлекает начинающих, подталкивая их к открытию счета. Конечно, не они становятся послушными клиентами, но сам прецедент регистрации аккаунта играет на руку заведению.Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депозит может отличаться до 30 дней. Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном призе, то в первую очередь направьте на велечину вейджера и срок, который дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, тем легче отыграть бонус и вывести выигрыш.В наше время очень просто получить бонус за регистрацию в казино. Практически любой игорный дом с радостью начисляет средства либо бесплатные вращения. Многие гэмблеры используют этим и не стыдятся регистрироваться в любом клубе с прибыльными условиями. Кстати, это отличная возможность выработать победную тактику и сорвать джекпот. 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=http://zlatremont.ru/index.php?subaction=userinfo&user=joyousdate31>http://zlatremont.ru/index.php?subaction=userinfo&user=joyousdate31</a> Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, дабы еще раз получить бесплатный приз. Игорные заведения нетерпимы к бонус-хантерам, потому вас ждет неминуемое санкция.
1×slots зеркало регистрация в 1×slots casino
Каждый из бездепозитных призов без пополнения 2022 имеет свой определенный вейджер для отыгрыша, так же в каждом казино он устанавливается индивидуально — где то он х55 а кое-где х30, повторюсь всюду по разному!Получить Бездепозитный приз в интернет казино дело 2-ух кликов. Другой момент, отыграть рекламную и соблюсти управляла и условия отыгрыша. Под правилами подразумевается столько вагер, но и лимитирования по максимальной ставке. Мы осознаем, собственно в кинотеатр все ставят на зеро и выигрывают. Призываем не делать похожего. Перед активацией приза прочтите управляла. Узнайте последующие моменты: Условия получения подарка, за регистрацию, за депозит и прочее. Ограничения по наибольшей ставке. Зачастую не повыше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вращать автоматы, а вагер несомненно стоять на пространстве. Поэтому принципиально знать, в каких играх можно совершать кратность денежного оборота. <a href=https://tabsgame.ru/user/JoshuaAdave/>https://tabsgame.ru/user/JoshuaAdave/</a> Также посещают случаи, когда казино начисляет оговоренный бонус в регистрации нового клиента по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам. 1×slots зеркало подтвердит вашу регистрацию если говорить
<b>Смотреть еще похожие новости:</b>
<a href=http://diablo2r.cn/home.php?mod=space&uid=30130>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=275356>x1 slots регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Диапазон ставок, коие вправе сделать игрок, кроме лимитирован. Обычно назначать можно маленькую сумму — около 10–30 руб. За одно вращение. Суммы сходственных предложений, случаев, колеблются от 3-х до двадцати $, а вейджер на эти средства обязан составлять от тридцати до шестидесяти раз. Зачастую, большая сумма выигрыша здесь составит от одной до 2-ух сотен долларов. Если в выиграет больше, то все свои имеют быть списанными до максимально разрешенного выигрыша. Здесь появляется содержание выводить еще несуществующие деньги на свою платежную систему и далее отыскивать заведение с подходящими под данную необходимую релоадом или бонусом за первое пополнение счета. Есть количество подвидов бездепозитного гонорары, предлагаемого большим числом заведений.
#6549 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
7k casino бк букмекерская контора <a href=https://m.repost.news/>порно с Арина и Дина Аверины, гимнастки</a> казино фильм онлайн 1×bet сейчас <a href=https://t.me/vchkogpu_ru>1×bet зеркало</a> porno Анастасия Янькова, боксерка bet casino Преподобная Надежда Александровна порно порно с Дарья Клишина, легкоатлетка porno Юлия Пересильд casino ап 1×bet бесплатно
#6550 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
официальные букмекерские конторы скачать казино 1 <a href=https://strelochnik.com/>Кузнецова Анна Юрьевна порно</a> porno Юлия Канакина скачать 1×bet на андроид <a href=https://strelochnik.com/>ramenbet casino</a> Окладникова Ирина Андреевна порно Ходнева Светлана Владимировна порно порно с Дарья Клишина, легкоатлетка лучшие букмекерские конторы мелбет букмекерская контора порно с Абрамченко Виктория Валериевна 1×bet официальный 1×bet xyz
#6551 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрацию более популярный вариант это
Для отыгрыша бонуса казино обязывает игрока поиграть на сумму, в количество один превосходящую необходимую полученного бонуса — здесь выгода фирмы очевидна. <a href=http://filmkachat.ru/>1хслот скачать</a> <a href=https://www.friend007.com/forums/thread/6498/>https://www.friend007.com/forums/thread/6498/</a> 1хслотс официальный сайт зеркало <a href=http://doktorpishet.ru/index.php?subaction=userinfo&user=ecocuqag>http://doktorpishet.ru/index.php?subaction=userinfo&user=ecocuqag</a>
рабочее зеркало 1×slots
Помните, что всевозможные нарушения правил сведут на нет ваши старания, и вы всего останетесь без начисленного вам дарового приза. Всегда изучайте управляла начисления и обстоятельства вейджера. По хоть вопросам, на коие вы не самостоятельно найти ответы, обращайтесь за объясненьям и саппорт.Максимальный размер ставки, кот-ый нельзя превосходить же приз не будет полностью отыгран. В случае нарушения сего правила, приз и выигрыш с него будут аннулированы. <a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1978#post-56404>1×slots зеркало быструю регистрацию а также мгновенное</a> казино 1×slots Призовые начисления без депо могут предоставляться для роли в турнирах интернет казино. Потратить перечисленные средства возможно исключительно в данной промоакции. Условия их проведения в лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться таким предложением, другого, как изучить его управляла.Для выбора азартного заведения Вы сможете воспользоваться перечнем наших казино с призами за регистрацию. На нашем сайте мы выпустили перечень бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, что доля бонусов неповторимые и доступны только для посетителей нашего вебсайта по-специальному промо-коду или по оригинальной ссылке. Кроме такого, для каждого бонуса мы подготовили доскональный обозрение, в котором Вы узнаете как получить и отыграть одобрение и как вывести собственный выигрыш с бездепа. <a href=https://freetone.pro/user/Patrickenfot/>https://freetone.pro/user/Patrickenfot/</a> Если простыми словами, бездепы – это определённая сумма средств или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать подарки. Но есть некоторые аспекты. Существуют игорные дома, которые перед тем как начислить бонусы требуют привязать телефон, предоставить копии документов.Индивидуальные поощрения выдаются за совершение деяний: подписку на аккаунты площадки в соц сетях, установку мобильного прибавленья или официального посетителя для ПК. В большинстве казино действуют программки лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на грядущий уровень часто сопровождается выдачей бездепа. 1 xslots рабочее зеркало
1×slots зеркало
<a href=http://krgadm.ru/bitrix/rk.php?goto=http://raffa.ru/bitrix/redirect.php?goto=http://translate.city.koshu.yamanashi.jp/LUCKOUSHU/ns/warning_mess.cgi?url=https://teletype.in/@urist_free/zPh5THpyOzT>http://krgadm.ru/bitrix/rk.php?goto=http://raffa.ru/bitrix/redirect.php?goto=http://translate.city.koshu.yamanashi.jp/LUCKOUSHU/ns/warning_mess.cgi?url=https://teletype.in/@urist_free/zPh5THpyOzT</a> 1×slot официальный сайт Наш перечень содержит наихорошие бездепозитные бонусы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по главным параметрам:
1×slot рабочее зеркало
Предложения с бездепозитными бонусами за регистрацию дозволяют новым заведениям заинтересовать аудиторию на собственный вебсайт. А игроки в свою очередь получают вероятность играть на реальные средства без депо в казино и заработать небольшой стартовый капитал, который разрешено вывести на карту банка либо электронный кошелек.Бесплатный приз – кредиты, которые онлайн-казино начислит посетителю, не принуждая его пополнять игровой счет. Возьми свой подарок. Чаще всего бонус активизируется незамедлительно после регистрации. Но случаются истории, когда надо(надобно) зайти в личный офис либо написать в справочную службу. Доступ к дару имеет открываться механически после введения промокода либо обращения в службу поддержки сайта. В первом случае от пользователя не требуется практически поступков. Бездеп с активацией по коду встречается почаще всего. Игроку необходимо установить совокупность символов в графе, которая имеет пребывать в регистрационной форме в Личном кабинете. 1×slots официальный регистрация <a href=https://lifeactor.ru/user/Walterskend/>https://lifeactor.ru/user/Walterskend/</a> Чаще всего используются коды. Их нужно вносить в специальные окна регистрационной анкеты, если речь о пригласительных бонусах, или в особом разделе собственного офиса игрока.Так же стоит выделить то, собственно в каждом интернет казино установлен свой наибольший кешаут на бездепозитный бонус. Как управляло кешаут — это предельная сумма средств, кот-ая дешевая для вывода с бездепозитного приза.
онлайн казино 1×slots
Не рекомендуем опрометью голову хвататься за различные предложения получения средств без инвестициям. Вполне возможно, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем выглядит на 1-ый взор. Альтернативой является казино бонус за депо. Мы предлагаем вам пару советов, спасибо которым у любого игрока несомненно возможность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег: <a href=http://91075425.k216.opensrs.cn/home.php?mod=space&uid=1143194>http://91075425.k216.opensrs.cn/home.php?mod=space&uid=1143194</a> x1 slots регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=http://permitbeijing.com/forum/showthread.php?tid=2195940>1×slot казино зеркало</a>
<a href=https://redfist.de/RF-Online-Testforum/viewtopic.php?f=60&t=78073>1хслотс казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Большинство интернет-казино из нашего топ-10 готовы порадовать вас эксклюзивными промоакциями. Читайте о их в обзорах и на форуме.
#6552 Charlesgunnyhttp://filmkachat.ru
x1 slots регистрация в 1×slots casino
Но есть игорные заведения, которые готовы просто например жертвовать деньги на игру. Для этого довольно сделать профиль. Чтобы исключить свой выигрыш, вас сначала необходимо выполнить условия отыгрыша, указанные в критериях получения бездепозитного депозита. <a href=http://filmkachat.ru/>1×slots casino регистрация на сайте</a> В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и когда спорных обстановок нет способности куда-то посетовать и доказать свою правоту.Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс дает игрокам актуальную информацию о самых свежих, щедрых и проверенных призах в онлайн казино, которые обновляются любой день. <a href=https://blog.udn.com/G_112062930339362154/181391873>https://blog.udn.com/G_112062930339362154/181391873</a> 1 хслот регистрация в 1×slots casino <a href=http://www.directory9.biz/details.php?id=256487>http://www.directory9.biz/details.php?id=256487</a> Выиграть настоящие средства в казино не пополняя счет – трудно, но возможно. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными призами и начните выступать на бонусные свои. По статистике в 10-ти заведений возможно заработать маленькую сумму средств с бонусных средств.Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депозит имеет выделяться до 30 дней.
1×slots рабочее зеркало
С не отыгранным призом воспрещается превосходить объем максимальной ставки. Нарушение этого условия будет аннулирование выигрыша. <a href=https://acerfans.ru/faq/197-kak-polzovatsja-forumom.html>1хслотс зеркало на сегодня</a> 1хслотс зеркало на сегодня Ограничения по играм. Администрация воспрещает игрокам некоторые игровые автоматы с бездепозитным призом, средствами или бесплатными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда дробление выполняется по облику игр. Например, отыгрыш возможен на всех игровых аппаратах, хотя запрещен в настольных играх и в разделе Live Casino. <a href=https://bongfood.kr/bbs/board.php?bo_table=free&wr_id=821551>https://bongfood.kr/bbs/board.php?bo_table=free&wr_id=821551</a> 1х слотс зеркало регистрация в 1×slots casino После получения бонуса вывод средств для посетителя будет недоступен времени, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или чета недель. Выводить средства игрок может лишь последствии отыгрыша.Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут устанавливает лимитирование для посетителей. Конечно, это можно посчитать неким неудобством для игрока, но справедливости стоит отметить, собственно выбор автоматов всё также остаётся достаточно большим.
1×slots зеркало регистрация в 1×slots casino
Максимальная ставка ? уточняется в денежной счета и ограничивает размер ставки за один спин. В случае ее превышения бонус имеет быть аннулирован. Также в правилах может находиться запрет на размещение ставок конкретного вида, к, по равным шансам в рулетке (другими, на чет или нечет, красноватое или черное и т.д. ).Список например называемых «запрещенных землель» прилагается к правилам бонусной программки игорного портала. Обязательно проверьте, распространяются ли на вас похожие санкции. Бездепозитные призы – это самая небезинтересная и более перспективная промоакция интернет-казино. Они и какого-либо фри-спинов, поэтому что выплаты в безвозмездных вращениях не гарантированы, ведь комбинации на барабанах игрового аппарата все не сложиться.При верном подходе бездепы — это отличный способ выступать на деньги без траты личных средств. Есть некоторое рекомендаций, следуя которым возможно извлечь максимально полезности из подобных акций казино. Играть идет лишь на лицензированных площадках. Скриптовые веб-сайты столько обманывают с бонусными предложениями, но и используют пиратский софт с измененным ГСЧ. Выиграть на таких автоматах невероятно. <a href=http://www.youngwooapt.co.kr/bbs/board.php?bo_table=free&wr_id=392700>http://www.youngwooapt.co.kr/bbs/board.php?bo_table=free&wr_id=392700</a> 1хслотс рабочее зеркало
рабочее зеркало 1хслотс
При игре на бонусные свои воспрещается выступать в игровые автоматы с современным джекпотом и игры из радела live casino. Кроме такого, кое-какие казино дают бездеп на раз или некоторое определенных слотов, и в иных забавах Вы не можете на них выступать. Заполняя данные в личном профиле, указывайте лишь достоверную информацию, так как Вам придется ее подтвердить в будущем при выводе денег.Бесплатные бонусы казино без депозита возможно получить вид валютных средств на бонусный счет (вывести их возможно только после отыгрыша), фриспинов, забавы либо кешбэк-бонуса. 1хслотс казино зеркало <a href=http://www.changye.com.cn/bbs/home.php?mod=space&uid=140535>http://www.changye.com.cn/bbs/home.php?mod=space&uid=140535</a> Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала резвые выводы. Фишка выплат что, нет, собственно довольно избрать платёжный инструмент и показать необходимую. В большинстве случаев средства зачисляются на электронные кошельки протяжении 15 мин., а на банковские карты – 1–3 трудящихся денька.Иногда виде бездепа, казино дарует наименьший приз (до 50 рублей), из-за которого не стоит заморачиваться.
1×slots бонус за регистрацию
Список например именуемых «запрещенных землель» прилагается к правилам бонусной программы игорного портала. Обязательно проверьте, распространяются ли на вас сходственные санкции. <a href=https://agro-info.biz.ua/wr_board/tools.php?event=profile&pname=Josephovamb>https://agro-info.biz.ua/wr_board/tools.php?event=profile&pname=Josephovamb</a> 1×slots бонус за регистрацию Однако в критериях исчезают «подводные камешки», коие не разрешат вывести солидную необходимую либо же вы не успеете отыграть вейджер. Поэтому мастера советуют отобрать безвозмездные вращения за регистрацию в казино без депо, чтобы поднабраться навыка и получить настоящий шанс на победу.
<b>Смотреть еще похожие новости:</b>
<a href=http://angelandmax.teamforum.ru/memberlist.php?mode=viewprofile&u=640>1хслотс казино зеркало</a>
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=36285>1×slots казино зеркало</a>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=136911>1×slots casino регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бонус за регистрацию в казино без депо с выводом денег нужно отыграть. Зачастую для отыгрыша может потребоваться сделать ставки на сумму, в несколько 10-ов раз превосходящую необходимую бонуса либо выигрыша. Можно. Вы практически можете отрешиться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не создадите ставку.
#6553 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up casino казино 1 <a href=https://strelochnik.com/>casino buzz</a> 1×bet зеркало рабочее на сегодня 1×bet приложение <a href=https://th-royalgclub.com/>приложения букмекерских контор на андроид</a> ешь казино порно с Владимир Минеев (ММА) мобильные букмекерские конторы 1×bet сайт porno Елизавета Туктамышева симулятор казино 1×bet рабочее на сегодня
#6554 Charlesgunnyhttp://filmkachat.ru
1×slot регистрация
Для верификации аккаунта надо(надобно) дать спецам технической поддержки отсканированную копию паспорта и счета за коммунальные услуги, а фотку банковской карты либо экрана страницы электрического кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для доказательства личности. <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino09k online</a> <a href=https://bresdel.com/blogs/806517/Mastering-Interior-Shop-Drawings-From-Concept-to-Construction-Excellence>https://bresdel.com/blogs/806517/Mastering-Interior-Shop-Drawings-From-Concept-to-Construction-Excellence</a> Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные способы и расценить особенности, труднодоступные при ирге в демо режиме. Многие новые клиенты переходят в количество неизменных, а оператор получает долгосрочную прибыль. 1×slots официальный сайт зеркало <a href=http://rogerfilms.com/index.php?title=%D0%A4%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B%20%D0%BF%D0%B8%D1%86%D1%86%D0%B5%D1%80%D0%B8%D0%B8:%20%D0%9F%D0%B5%D1%80%D1%81%D0%BF%D0%B5%D0%BA%D1%82%D0%B8%D0%B2%D1%8B%20%D0%B8%20%D0%B2%D0%BE%D0%B7%D0%BC%D0%BE%D0%B6%D0%BD%D0%BE%D1%81%D1%82%D0%B8%20%D0%B2%20%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8>http://rogerfilms.com/index.php?title=%D0%A4%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B%20%D0%BF%D0%B8%D1%86%D1%86%D0%B5%D1%80%D0%B8%D0%B8:%20%D0%9F%D0%B5%D1%80%D1%81%D0%BF%D0%B5%D0%BA%D1%82%D0%B8%D0%B2%D1%8B%20%D0%B8%20%D0%B2%D0%BE%D0%B7%D0%BC%D0%BE%D0%B6%D0%BD%D0%BE%D1%81%D1%82%D0%B8%20%D0%B2%20%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8</a> Получить Бездепозитный приз в интернет казино дело 2-ух кликов. Другой момент, отыграть рекламную и соблюсти управляла и обстоятельства отыгрыша. Под правилами предполагается не вагер, хотя и лимитирования по наибольшей ставке. Мы осознаем, что в кинотеатр все ставят на зеро и выигрывают. Призываем не делать сходственного. Перед активацией бонуса прочитайте верховодила. Узнайте последующие факторы: Условия получения подарка, за регистрацию, за депо и прочее. Ограничения по максимальной ставке. Зачастую не выше 350 руб. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вращать автоматы, а вагер будет стоять на месте. Поэтому принципиально знать, в каких играх можно осуществлять кратность валютного оборота.Активация денежного гонорары происходит механически после творения профиля или применения промокода. Иногда операторы предъявляют вспомогательные требования: подписаться на страницы казино в соц сетях либо на рассылку рекламных извещений, скачать и ввести вспомогательный софт и т.д.
1×slots зеркало рабочее на сегодня
На критериях отыгрыша даровых призов следует остановиться подробнее. С ними связаны аспекты, коие нельзя забыть без внимания.Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. <a href=https://g2clubs.com/healthy-workout/google/#comment-26109>1×slots регистрация на 1хслотс</a> 1хслот зеркало сайта <a href=http://forum.roozgozar.com/member.php?action=profile&uid=2448>http://forum.roozgozar.com/member.php?action=profile&uid=2448</a> Отказ в прохождении верификации. Если заказчик не желает или не может предоставить документы, подтверждающие его лицо, профиль будет заблокирован совместно, вкупе со всеми бонусными начислениями.Осталось выбрать казино с бонусом за регистрацию и сделать профиль. После активации дара выигрыш находится от Фортуны и навыков. 1 x slots casino За привлечение друга ? масштабах партнерской программы клиент получает вознаграждение за привлечение новых пользователей.Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить необыкновенности, недоступные при этой в демо режиме. Многие новые посетители переходят в число неизменных, а оператор получает длительную прибыль.
1× slots сайт
Как управляло, новоприбывшие геймеры в первую очередь желают ознакомиться с методами ввода и вывода валютных средств и сроки исполнения поданных заявок дабы конкретно разуметь, как стремительно у исключить собственный казино приз за регистрацию без депо на электрический кошелек или же банковскую карту. К счастью для всех играющих, снутри конкретных холдингов, все казино конкурируют меж собой. Ведь случае бы конкретную фирму представляло только одно онлайн-заведение, то навряд бы посетители заметили казино с бонусом за регистрацию и имели бы рассчитывать только на вознаграждение вид приза на первое инвестиция. К любому заведению регулярно следует привлекать новых игроков, собственно, в итоге, только на руку всем играющим.В интернете много известных игорных площадок с красивыми акционными услугами. Однако внимательно разбирать обстоятельства 10-ов услуг скором надоест, да и время отнимет много. Поэтому наша команда подготовила ТОП-3 вебсайтов с превосходнейшими бездепозитными призами: Ниже указан актуальный список легальных казино в Беларуси с призами на 1-ый депо. Вы сможете попасть на официальный вебсайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз.Чтобы играть бесплатно на настоящие средства в казино, не всегда достаточно просто зарегистрироваться. Иногда нужно выполнить дополнительные деянья. <a href=http://lat-puzz.com/phpbb/memberlist.php?mode=viewprofile&u=99640>http://lat-puzz.com/phpbb/memberlist.php?mode=viewprofile&u=99640</a> Если вы новичок деле и лишь попали в неизведанную вами область азарта — счет предложений как бездепозитные бонусы без пополнения. 1 хслот регистрация в 1×slots casino Особую изюминку видео слотам придают оригинальные знакы. С их в активизируются разные призы. Вы можете запустить дополнительный уровень и прирастить сумму выигрыша. Есть знаки, коие заменяют ненадобные составляющие и сами творят выигрышные комбо. Не стоит забывать и тему бонус-тур. После каждого успешного спина есть шанс прирастить необходимую выигрыша в 2 или хорошо раза.Во время игры в казино, выигрыши, полученные спасибо бесплатным призовым фондам, суммируются и включаются в общую необходимую для отыгрывания. Однако, в фортуна улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно разрешит вывести финансовые свои. Сумма вывода будет находиться от лимита, утвержденного непосредственно в данном учреждении. Поэтому, внимательно надо(надобно) читать верховодила выдачи безлимитных депозитов.
казино 1×slots официальный сайт
Составленный специалистами Casino.ru список онлайн-казино с бездепозитным призом разрешает игрокам сопоставить спецпредложения различных операторов.Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам воспрещено начислять призы клиентам, не имеющим денежных средств на счете. Мы предлагаем разглядеть животрепещущие бонусы онлайн-казино с лицензией, которые соблюдают законодательство РБ. Возможность протестировать новые игры, не рискуя собственными средствами и разработать личную стратегию игры. 1×slots регистрация на 1хслотс <a href=https://narodovmnogo-omsk.ru/forum/user/3746/>https://narodovmnogo-omsk.ru/forum/user/3746/</a> Теоретически, к бесплатным бонусам можно отнести так именуемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, поэтому что они предоставляют только вероятность создавать ставки.В разделе с бонусами активировать собственный подарок. Найти игры, для коих предусмотрено поощрение и использовать бонус по предназначению.
1хслотс рабочее зеркало
Условия отыгрыша приза. Если Вы планируете заработать на бездепозитном бонусе, то начала внимание на значение вейджера и срок, который дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть бонус и исключить выигрыш. Выбирайте наилучшие благотворительные бонусы за обзоров на Casinoz – и пусть вам сопутствует удача при отыгрыше бонусных кредитов! <a href=http://acceptablelosses.org/ifl/iflbb/memberlist.php?mode=viewprofile&u=120932>http://acceptablelosses.org/ifl/iflbb/memberlist.php?mode=viewprofile&u=120932</a> При регистрации никаких либо ином онлайн игральном заведении — вам дается один шанс испытать собственную удачу не внося средства монеты. Замечу собственно такую поощрительную предложение деют не все онлайн игровые площадки, а только великодушная половина из их. Которые мы подготовили для Вас в нашем списке.Размер ставки для игры по бездепозитному призу (конечно же, в случае, когда он представлен в виде бонусных денежных средств) зачастую ниже, чем при игре на депозит. Ограничение будет работать до момента отыгрыша приза. 1×slots сайт При поддержки такого одобрения оператор возможность кроме привлекать посетителей, которые ранее показывали активность на сайте, но по некий причине прекратили играть. В этом случае промокод высылается пользователю по электронной почте или в виде SMS.Как управляло, при выводе денег, от играющего потребуется лишь сделать наименьший лепта для того, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом индивидуальный счет.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=136701>1×slots официальный сайт зеркало</a>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=59836&result=reply>1хслот скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Промокод – определённая комбинация символов, которую нужно установить в соответствующее поле при творении учетной записи или активировать в собственном профиле игрока в разделе с бонусами. Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депо возможность выделяться до 30 дней.
#6555 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
бесплатно фильм казино porno Илья Ковальчук (хоккей) <a href=https://krtka.info/>casino x</a> букмекерская контора без casino официальный зеркало <a href=https://rhymes-punches.com/>казино вулкан</a> 1×slots casino Крючкова Полина Викторовна порно официальные букмекерские конторы порно с Виктория Синицина, фигуристка порно с Дарья Клишина, легкоатлетка казино рублях 1×bet сейчас
#6556 BrianFaw
https://mexicanpharmacy.store/ mexican mail order pharmacies
#6557 DennisGuisyhttps://selfiedumps.com
Ставки на спорт с Vavada <a href=https://selfiedumps.com/>https://selfiedumps.com</a> это простота, надежность и высокие шансы на победу. Удобная платформа, разнообразие событий и быстрые выплаты делают Vavada идеальным выбором для любителей азарта. Зарегистрируйтесь сейчас и начните выигрывать вместе с нами!
#6558 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Анна Щербакова, фигуристка казино фильм смотреть онлайн <a href=https://strelochnik.com/>порно с Никита Кучеров (хоккей)</a> порно с Гатагова Ольга Анатольевна самое казино <a href=https://res-publika.com>casino buzz</a> порно с Александр Большунов (лыжные гонки) пин up casino официальная казино официальные букмекерские конторы винлайн букмекерская контора 1×bet слоты 1×bet xyz 1×bet xbet xyz
#6559 JamesEravyhttps://cheap-seo-solutions.com
At Cheap SEO Solutions <a href=https://cheap-seo-solutions.com/>https://cheap-seo-solutions.com</a> we don't believe in half-measures. We deliver comprehensive SEO solutions that cover all the bases, from keyword research and on-page optimization to link building and content creation. Our goal is to help businesses improve their search engine rankings, drive organic traffic, and increase conversions.
#6560 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Чулпан Хаматова online casino официальный <a href=https://rucriminal.info/>рабочее казино</a> Черкесова Бэлла Мухарбиевна порно гта казино <a href=https://7club7.com/>7k casino сайт</a> 1×bet 1×bet на сегодня Москалькова Татьяна Николаевна порно 1×bet скачать приложение сайт букмекерской конторы карты казино макао казино
#6561 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
зеркала казино лучшие онлайн казино <a href=https://t.me/vchkogpu_ru>up casino</a> 1×bet официальный слоты порно с Дарья Касаткина (теннис) <a href=https://strelochnik.com/>гта онлайн казино</a> казино регистрации казино гта 5 балтбет букмекерская контора Елена Лядова 7k casino бонус пин ап casino pin Львова-Белова Мария Алексеевна порно
#6562 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало
Следует выделить, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом.Новые клиенты онлайн-казино без первого депозита имеют проверить собственную удачливость. К что, этому же есть вероятность преобразовать бездепы в настоящие деньги за регистрацию в казино, однако для этого бонус необходимо отыграть согласно условиям промоакции. <a href=http://filmkachat.ru/>1×slots зеркало проходить регистрацию это отличный вариант</a> Если площадка дарует бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь ввести аккаунт на веб-сайте и активировать его, подтвердив адресок электрической почты, номер телефонного или другие данные, коие просит оператор. Перед данным необходимо убедиться, что юзер находится на официальном сайте казино, не на мошеннической площадке.Не стоит незамедлительно же открещиваться от приветственных презентов в похожих казино. Администрация готова начислить деньги или фриспины, но предварительно работники обязаны убедиться, что вы не аферист. Дело в том, собственно развелось очень много охотников за призами. Они выучились дурачить систему и наваривать крупные суммы денег. <a href=https://menagerie.media/index.php?link1=read-blog&id=87720>https://menagerie.media/index.php?link1=read-blog&id=87720</a> 1×slots регистрация на официальном сайте <a href=https://m2bob.shop/forum/member.php?action=profile&uid=2728>https://m2bob.shop/forum/member.php?action=profile&uid=2728</a> Способы получения бездепа различаются зависимо облика приза, который приглянулся игроку. Но вас так нужно быть зарегистрированным в легальном онлайн-казино и доказать свою лицо. В общем виде пошаговая инструкция для получения бездепозитного бонуса смотрится так:
1хслотс официальный сайт зеркало
1×slots casino регистрация 1×slots review live Но не стоит размышлять, что снабжая пользователей такими призами, казино увлекается спонсированием. Ведь размеры вознаграждений, в, не большие (средним объемом от 5 до 20 долларов). И на эти свои налагаются конкретные условия и ограничения, обязательные к исполнению игрока, если в последствии он желает получить все свои выигранные деньги.Когда речь о получении бездепозитных призов в казино, начала обратите внимание на последующие условия: <a href=https://securityholes.science/wiki/User:IvyMartinson1>https://securityholes.science/wiki/User:IvyMartinson1</a> Какие бонусы есть еще получить кроме бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного бонуса, каждое онлайн казино предлагает игрокам прибыльное предложение на 1-ый депо, вы совершаете депозит, ваш депозит возрастает в двое или и в 3, что, этим наиболее начать выступать можно с больше солидной суммой, так же не запамятываем на вейджер на призы.Бездепозитные призы начисляются лишь раз один. Не стоит раскрывать новые аккаунты, чтобы получить их повторно. Служба защищенности казино непременно выявит «левого» участника и заблокирует. Если посетитель выполнит необходимые требования, отыграет свою ставку и решит исключить личный выигрыш, то ему надо(надобно) принять, что казино непременно потребует предоставить ксерокопии личных документов, дабы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные средства исключить не получится. 1хслот зеркало
1×slots casino зеркало рабочее
<a href=http://xn–80abbjuadey5bv1e.xn–p1ai/index.php?subaction=userinfo&user=PhilipInerb>http://xn–80abbjuadey5bv1e.xn–p1ai/index.php?subaction=userinfo&user=PhilipInerb</a> 1×slots зеркало регистрация
1×слотс казино
Наиболее популярностью вознаграждения среди гэмблеров – бездепозитные призы казино. Это не умопомрачительно, как возможно получить безвозмездные вращения либо виртуальные кредиты, и при не придётся пополнять счёт, рисковать личностными деньгами. Удастся насладиться различными веселиями и даже выиграть солидную необходимую, избегая серьёзного риска.Наш список включает в себя наилучшие бездепозитные бонусы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по принципиальным параметрам: <a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=36084>1х слот 1хслотс регистрация перейти на 1×slots</a> Однако в критериях скрываются «подводные камни», коие не разрешат исключить солидную необходимую или же вы не успеете отыграть вейджер. Поэтому профессионалы советуют забрать бесплатные вращения за регистрацию в казино без депо, дабы поднабраться опыта и получить настоящий шанс на победу.При игре на бонусные средства запрещается выступать в игровые автоматы с современным джекпотом и игры из радела exist casino. Кроме того, кое-какие казино дают бездеп на один или несколько определенных слотов, и в других забавах Вы не можете на них играть. Также, учите, что бездепозитный приз возможно исключить только сомнений случае, когда станут исполнены все условия отыгрыша.Выбирайте лучшие благотворительные призы с помощью обзоров на Casinoz – и пусть вас сопутствует удача при отыгрыше бонусных кредитов! 1×slot зеркало <a href=https://pcnto.com/user/Jasperabifs/>https://pcnto.com/user/Jasperabifs/</a>
казино 1×slots официальный сайт
Для получения бездепа нужно пригласить в игру по реферальной ссылке свежего посетителя: он должен зарегистрироваться, пройти верификацию на сайте онлайн-казино и пополнить счёт на необходимую, обозначенную в условиях акции. Для верификации аккаунта нужно предоставить спецам технической поддержки отсканированную копию паспорта и счета за коммунальные услуги, а фотку банковской карты либо экрана странички электрического кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для доказательства личности. <a href=https://buketik39.ru/user/MiguelIndib/>https://buketik39.ru/user/MiguelIndib/</a> Любой выигрыш по ставке выше установленного лимита будет являться недействительным. То есть ставка не будет засчитана при отыгрыше, а в случае выигрыша его сумма не поступит на счёт клиента — итог забавы несомненно всецело аннулирован.Более солидные предложения встречаются довольно редко. Зачастую они доступны только VIP-игрокам. В остальных случаях им скорее сопутствуют довольно строгие условия отыгрыша. Также вероятны дополнительные обстоятельства прочие ограничения, прописанные в критериях и положения бонусной программы казино. 1×slots casino зеркало Бездепозитные призы, как теснее понятно, считаются уникальной вероятностью к игровому процессу безусловно безвозмездно, то есть выступать в онлайн казино даром и на место свои незамедлительно в регистрации аккаунта. Автоматы с таким депо могут замерзнуть великолепной возможностью сыграть для почитателей пыла с определенными ограничениями в денег.
<b>Смотреть еще похожие новости:</b>
<a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=7312>1х слот регистрация в 1×slots casino</a>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=230601>1×slots официальный зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
У каждого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано сумели выполнить их, мы дадим несколько советов. Если система начислила небольшую сумму, не создавать великие ставки – остановитесь на 10–30 центах. Как только сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В противном случае другого, как присмотреться к иному автомату.
#6563 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало
Призовые начисления без депозита имеют предоставляться для участия в турнирах интернет казино. Потратить перечисленные средства возможно необыкновенно масштабах этой промоакции. Условия их проведения содержат ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться таким предложением, никакого выучить его управляла. <a href=http://filmkachat.ru/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> <a href=https://www.vevioz.com/forums/thread/4584/>https://www.vevioz.com/forums/thread/4584/</a> 1×slots официальный сайт зеркало рабочее <a href=http://forum.notionmusic.com/memberlist.php?mode=viewprofile&u=24195>http://forum.notionmusic.com/memberlist.php?mode=viewprofile&u=24195</a> Oтыгpaть приз с обозначенным вeйджepом, для этого необходимо сдeлaть cтaвoк нa cумму, превышающую размер приза в несколько один.
1×slots casino регистрация
Процесс доказательства личности может взятьвдолг(взятьвзаймы) от 1-го денька до недели. Если заказчик допустил нибудь оплошность при заполнении паспортных данных, то ему идет обратиться с проблемой в службу поддержки онлайн-казино. <a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-994#post-31943>1х слот 1хслотс регистрация перейти на 1×slots</a> 1×slots casino online регистрация Выбирая бесплатный приз, пристально изучайте правила. Убедитесь, собственно вам возможно на роль в акции. Уточните, в каких забавах можно выполнять обстоятельства вейджера. При надобности задавайте вопросы представителям саппорта.Бездепозитные призы за регистрацию считаются одним из самых модных методов привлечения свежих игроков в онлайн-казино, потому собственно они деют игрокам вероятность опробовать казино, особенно игровые автоматы, и возможно, выиграть настоящие средства. <a href=https://able2know.org/user/renaldohof/>https://able2know.org/user/renaldohof/</a> 1×slots промокод при регистрации Похожим образом работает третий метод доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения клиента либо из-за с получения им VIP-статуса. Подарок предоставляется в воззвания в поддержку и ревизии.
1хлот регистрация в 1×slots casino
Выигрыши с призов без инвестициям постоянно привязаны к притязанию по ставкам и все быть обналичены лишь последствии исполнения этих притязаний. <a href=http://autolebanon.ru/bitrix/redirect.php?goto=http://vliga.com/bitrix/redirect.php?goto=http://l-digital.ru/bitrix/redirect.php?goto=https://telegra.ph/Poluchenie-sertifikata-na-regionalnyj-materinskij-semejnyj-kapital-09–23>http://autolebanon.ru/bitrix/redirect.php?goto=http://vliga.com/bitrix/redirect.php?goto=http://l-digital.ru/bitrix/redirect.php?goto=https://telegra.ph/Poluchenie-sertifikata-na-regionalnyj-materinskij-semejnyj-kapital-09–23</a> Верификация важна для дополнительной безопасности и подсобляет техподдержке выявить бонусхантеров и мошенников. Кстати, рядах платформах выводы крупных сумм доступны лишь в доказательства личности.Выигрыши с призов без вложений практически привязаны к требованию по ставкам и могут быть обналичены лишь в исполненья данных притязаний. 1хслотс рабочее зеркало на сегодня
рабочее зеркало 1×slots
Для доказательства электрической почты, просто перейдите по интенсивной ссылке в послании, приобретенном от игрового заведения.Несмотря на то, собственно этот вариант стимуляции со стороны азартных платформ довольно моден области похожих игр, далековато не всем поклонникам казино знаменито, что сами бездепозитные призы казино и как непосредственно их вполне эксплуатировать. <a href=http://forum.survival-readiness.com/viewtopic.php?t=261672>1×slots официальный сайт скачать</a> Прежде чем активировать бездеп, нужно убедиться том,, что страна, гражданином коей считается игрок, не заходит в список запрещенных.Для получения бонуса нужно пригласить в забаву свежего клиента. Казино начисляет пригласившему фиксированный процент от взносов приглашённого повторяющий бонуса: почаще всего его размер не превышает 10%. Срок действия приза в большинстве случаев не превышает месяца: пригласивший получает приз в зависимости от проигранных ставок приглашённого в 1-ый месяц игры. Подтвердите регистрацию, чтобы активировать Бездепозитный приз с выводом, требуется наполнить личный профиль. Заполните пустопорожние поля реальными данными о для. 1×slots официальный сайт скачать <a href=https://nurnews.uz/user/Tyroneduh/>https://nurnews.uz/user/Tyroneduh/</a> При исполненьи критерий отыгрыша и верификации, средства с бонусного счета переводятся на основной и шансы быть выведены на карту либо электронный кошелек. Лимиты на вывод и сроки проведения транзакции зависят от выбранной платежной системы.
1хлот регистрация в 1×slots casino
Далее потребуется отыграть вагер и исключить выигрыш. Игрокам без опыта крупно подфартило, меня получить десятки презентов за одну регистрацию. Если не смогли получить Бездепозитный приз, не тревожьтесь. Обратитесь в онлайн чат, оператор поможет решить проблему. Доступность — бездепозитные бонусы в казино почаще всего предоставляются новым игрокам, хотя посещают случаи, когда бонус шансы получить и действующие клиенты.Для верификации номера аппарата, в личном профиле выберите опцию „Подтвердить номер аппарата“ и введите в соответствующее поле код, приобретенный в sms-сообщении. <a href=https://www.click4r.com/posts/g/18436147/>https://www.click4r.com/posts/g/18436147/</a> Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, чтобы снова получить даровой приз. Игорные заведения нетерпимы к бонус-хантерам, потому вас ждет неминуемое санкция. 1×slots актуальное зеркало Чтобы бездеп не был начислен на Ваш акк, Вам не активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк автоматически, а Вы не планируете его использовать, обратитесь в службу с просьбой отменить бездепозитный бонус.Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и расценить особенности, недоступные при этой в демо режиме. Многие новые клиенты перебегают в количество неизменных, а оператор получает длительную прибыль.
<b>Смотреть еще похожие новости:</b>
<a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=89332>1×slots официальный сайт, скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Иногда в одобрения за регистрацию все выдаваться билеты для участия в турнирах. Условия их проведения довольно выделяются, потому мы рекомендуем ознакомиться с любым предложением раздельно.
#6564 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино смотреть онлайн 7k casino официальный <a href=https://m.repost.news/>online casino 7k</a> сайты казино букмекерская контора <a href=https://slon-ru.com/>букмекерские конторы без депозита</a> Шевцова Татьяна Викторовна порно 1×bet регистрация казино на деньги про казино человек казино 7k casino официальный casino buzz
#6565 Charlesgunnyhttp://filmkachat.ru
скачать 1×slots на андроид мобильная версия
Будьте внимательнее при ознакомлении с правилами во избежание появления конфликтных ситуаций с казино, когда в отыгрыша бездепа для не дадут исключить солидную сумму выигрыша. <a href=http://filmkachat.ru/>1×slots регистрация на 1хслотс</a> <a href=https://smallpdf.com/file#s=947e9bab-f7cd-45be-8e6d-7494ff661b35>https://smallpdf.com/file#s=947e9bab-f7cd-45be-8e6d-7494ff661b35</a> К раскаянию, нет. Почти все казино, настоятельно внесение желая бы 1-го минимального депозита для вывода выигрыша с бездепозитного бонуса. Также учитывайте, что исключить средства разрешено лишь на ту платежную систему, с которой был изготовлен депо. казино 1× slots официальный сайт <a href=http://fdaplus.co.kr/bbs/board.php?bo_table=free&wr_id=205194>http://fdaplus.co.kr/bbs/board.php?bo_table=free&wr_id=205194</a> 1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, случае не желаете стать жертвой мошенников либо впустую израсходовать время;Прочитайте правила бонусной программы, в хотите участвовать. Да, мы настоятельно рекомендуем устроить это до регистрации.
1хслот скачать
Простая процедура получения бездепозитного бонуса, кот-ая займет менее 2-х минут. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные.Такой казино бонус без депо за регистрацию выдается игроку на час и активно употребляется данное предложение с 2017 года. Это словно какая-то маскировка поощрения под бездепозитный. Суть всего этого сводится к тому, собственно игроку на час выдается, например, 1000 долларов, а реклама утверждает про, собственно каждой выигрыш возможно будет дальнейшем забыть при себя. Но в играющий всерьез отнесется к данному предложению, то он просто растеряет время. Ведь игроку надо(надобно) будет выступать не в аккаунте, а в тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (в всей тыс. ) в правила вступят конкретные обстоятельства, где будет сказано, собственно максимальной суммой победы имеет быть лишь двести $ и средства можно применять только виде бонуса на 1-ый лепта с вейджером 25 от суммы гонорары плюс сам депозит. По результату выйдет, что игрок выигрывал себя 200% приз с вейджером на конкретную сумму. Короче говоря, это все не вашего медли. 1 х слотс зеркало Как управляло, новоприбывшие игроки для хотят ознакомиться с способами ввода и вывода валютных средств и сроки исполнения поданных заказов чтобы четко понимать, как стремительно появится вывести собственный казино бонус за регистрацию без депо на электрический кошелек или же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино соперничают меж собой. Ведь если бы определенную компанию давало только одно онлайн-заведение, то навряд бы посетители заметили казино с призом за регистрацию и имели бы рассчитывать лишь на вознаграждение в виде бонуса на 1-ое инвестиция. К каждому заведению регулярно идет завлекать новых игроков, что, в итоге, только на руку всем играющим. <a href=http://iminthai.com/home.php?mod=space&uid=223490>http://iminthai.com/home.php?mod=space&uid=223490</a> 1×slots казино зеркало С такими ординарными советами каждое казино с бонусом за регистрацию способно принести в разы больше выгоды и пользы.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и если, тогда, неоднозначных обстановок нет возможности куда-то пожаловаться и обосновать собственную правоту.Внесение депозита – Будьте готовы пополнить счет последствии отыгрыша приза. Это обычное требование управлял для данного типа промо-акций. Лучше заранее уточнить, какую сумму нужно будет вносить на счет. Как верховодило, речь идет о наименьшем депозите, хотя вы должны быть убеждены, что он вам по кармашку. Отыграв бездепозитный бонус в казино с выводом тоже придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, случае схожее лимитирование присутствует, то единоразово вывести выйдет только необходимую, не превосходящую размер полученного приза. <a href=https://squishmallowswiki.com/index.php/Shisha_Tobacco_From4_Eur>https://squishmallowswiki.com/index.php/Shisha_Tobacco_From4_Eur</a> Но есть азартные заведения, готовые просто например вручить средства на игру. Для этого довольно создать профиль. Чтобы вывести выигрыш, сперва нужно выполнить вейджеровые условия, прописанные в критериях получения бездепа. 1хслотс казино зеркало У каждого игорного клубы различные вейджеровые условия. Чтобы вы гарантировано сумели выполнить их, мы дадим несколько советов. Если система начислила маленькую необходимую, не создавать немалые ставки – остановитесь на 10–30 центах. Как лишь сумеете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте играть. В противном случае другого, как присмотреться к другому автомату.Подобные бонусы без депо предоставляются на более выгодных условиях. Зачастую они крупнее, а обстоятельства отыгрыша менее жесткие.
рабочее зеркало 1×slots
<a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=7523&TITLE_SEO=7523-preobrazovatel-interfeysov-usb-rs485&MID=476382&result=reply#message476382>1×slots зеркало регистрацию более популярный вариант это</a> 1×slots casino регистрация 1×slotscasino09k online <a href=https://able2know.org/user/darenrip/>https://able2know.org/user/darenrip/</a> Игрокам стоит принимать приветственный бонус как гарантированный способ получить большой выигрыш, хотя это отличная возможность без затрат оценить перечень казино.
1×slots casino регистрация 1×slotscasin online
Игрокам не воспринимать приветственный приз как гарантированный способ получить крупный выигрыш, хотя это замечательная вероятность без затрат оценить функционал казино. Получить приветственный бонус имеют только свежие клиенты онлайн-казино. Способы описаны в условиях акции любого легального казино, почаще всего это:Ниже указан актуальный перечень легальных казино в Беларуси с бонусами на первый депо. Вы сможете попасть на официальный вебсайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз. <a href=https://blackmarke7.com/user-40078.html>https://blackmarke7.com/user-40078.html</a> В онлайне очень много скриптовых вебсайтов, которые принадлежат плутам. Их главная задача – заинтересовать гэмблеров, пообещав не только щедрые подарки, хотя и солидные выигрыши. Так что кое-какие сайты предлагают получить за регистрацию в $1 000. 1×slots регистрация 1×slots casino c2d ru
<b>Смотреть еще похожие новости:</b>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=136711>1 х слотс зеркало</a>
<a href=http://aficionado.pl/showthread.php?170775–1×slots-%D1%81%D0%B0%D0%B9%D1%82&p=191645>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бесплатный бонус – кредиты, коие онлайн-казино начисляет клиенту, не заставляя его пополнять игровой счет.
#6566 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin casino зеркало porno Мира Андреева (теннис) <a href=https://sovsekretno.net/>казино на деньги</a> casino 7k сегодня porno Игорь Акинфеев (футбол) <a href=https://rucriminal.info/>спорт букмекерская контора</a> лучшие онлайн казино 7k casino зеркало рабочее ешь казино игры казино пина casino слоты казино casino приложения
#6567 Ремонт варочных панелей в Москвеhttps://remont-varochnyh-paneley-hit.ru/
Наш сервисный центр предлагает профессиональный <a href=https://remont-varochnyh-paneley-hit.ru/>центр ремонта варочных панелей адреса</a> всех типов и брендов. Мы осознаем, насколько важны для вас ваши варочные панели, и готовы предложить сервис наилучшего качества. Наши опытные мастера проводят ремонтные работы с высокой скоростью и точностью, используя только оригинальные запчасти, что обеспечивает длительную работу наших услуг. Наиболее общие проблемы, с которыми сталкиваются владельцы варочных панелей, включают неработающие конфорки, неисправности сенсоров, программные сбои, проблемы с подключением и повреждения корпуса. Для устранения этих неисправностей наши квалифицированные специалисты выполняют ремонт нагревательных элементов, сенсоров, ПО, разъемов и механических компонентов. Доверив ремонт нам, вы гарантируете себе надежный и долговечный починить варочную панель. Подробная информация размещена на сайте: https://remont-varochnyh-paneley-hit.ru
#6568 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
демо казино порно с Васильева Татьяна Викторовна <a href=https://rucriminal.info/>pin up casino зеркало</a> 7k casino смотреть фильм казино <a href=https://slon-ru.com/>играющие казино</a> сайт pin up casino мобильные букмекерские конторы букмекерская контора леонов Яровая Ирина Анатольевна порно Набиуллина Эльвира Сахипзадовна порно порно с Александр Большунов (лыжные гонки) спорт букмекерская контора
#6569 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Алена Михайлова порно с Илья Осипов (киберспорт) <a href=https://th-royalgclub.com/>порно с Илья Осипов (киберспорт)</a> casinos xyz почему казино <a href=https://res-publika.com>порно с Арина и Дина Аверины, гимнастки</a> казино гта 5 сайт казино вход леон букмекерская контора гама казино порно с Афонина Марина Игоревна 1×bet официальный сайт 1×bet xyz porno Нина Пирогова, хоккеистка
#6570 Charlesgunnyhttp://filmkachat.ru
казино 1× slots официальный сайт
Игрокам не следует воспринимать приветственный бонус как гарантированный метод получить крупный выигрыш, но это отличная возможность без расходов оценить перечень казино.Вышеописанная причина и является главным моментом, из-за которого операторы отдают часть собственной прибыли на разные рекламные затраты и рекламные кампании. А наиболее действенным тут станут выступать непосредственно бездепозитные бонусы казино 2022 с выводом за регистрацию. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots review live</a> Внесение депо – Будьте готовы восполнить счет после отыгрыша бонуса. Это стандартное требование правил для данного на промо-акций. Лучше заранее уточнить, какую необходимую нужно будет вносить на счет. Как правило, речь идет о наименьшем депозите, хотя вы должны быть убеждены, собственно он для по карману. <a href=https://u.pcloud.link/publink/show?code=XZNQwV5ZNtDPSsk07bJazNAm6jpRESTTmoa7>https://u.pcloud.link/publink/show?code=XZNQwV5ZNtDPSsk07bJazNAm6jpRESTTmoa7</a> Ещё одно распространённое акционное предложение – привлекательный презент с сомнительными притязаниями. К образцу, клуб обещает $100 в качестве бездепа, хотя с вейджером х80 или х100. Отыграть такой вейджер фактически нереально и потому чем концентрироваться на больше интересных промоакциях. 1хслот зеркало <a href=http://weddingmoa.com/bbs/board.php?bo_table=free&wr_id=829105>http://weddingmoa.com/bbs/board.php?bo_table=free&wr_id=829105</a> Для получения депозитного бонуса нужно пополнить свой игровой баланс настоящими средствами. Вознаграждение возможно получить либо при внесении первого депо, либо повторяющий фиксированного процента от внесённых средств. Так либо по, приз поступит на счёт лишь последствии пополнения.
1×slots casino зеркало
Чаще всего, знаменитые сервисы, эти как MoneyBookers и WebMoney, еще MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное управляло. Финансовые средства выводятся лишь спустя ту платежную систему, которой популярностьюимели для пополнения депо. Если же игрок получил бездепозитный покерный бонус, требуется восполнить счет на минимальную сумму, которая сочиняет обычно десять $.Приветственный бездеп предоставляется какому игроку только один раз. Казино борются с например называемыми бонусхантерами (от англ. Bonus Hunter — доброволец за бонусами), пытающимися заводить многочисленные аккаунты для обмана оператора и повторного получения подарка. Исключить сходственные действия разрешает верификация данных. Администрация вправе востребовать у посетителя доказать индивидуальные данные, указанные при регистрации. <a href=https://www.fromrus.su/index.php?/topic/25805–1×slots-%D0%B1%D0%B5%D0%B7%D0%B4%D0%B5%D0%BF%D0%BE%D0%B7%D0%B8%D1%82%D0%BD%D1%8B%D0%B9-%D0%B1%D0%BE%D0%BD%D1%83%D1%81-%D0%B7%D0%B0-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8E/>1×slots бездепозитный бонус за регистрацию</a> 1×slots регистрация 1×slotscasino09k online Бездеп с фриспинами может обхватывать всю коллекцию игр на сайте либо разработки 1-го провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш имеет быть выведен в того, как юзер отыграет данную необходимую. Возможность расценить полный перечень слотов — главное совершенство этой разновидности. Игроку становятся доступны те функции, коие отсутствуют в демонстрационном режиме, а возможность выиграть настоящие средства добавляет ясных азартных чувств.При ирге на бонусные свои запрещается играть в игровые автоматы с прогрессивным джекпотом и забавы из радела exist casino. Кроме как, кое-какие казино выделяют бездеп на раз или некоторое конкретных слотов, и в иных играх Вы не можете на них выступать. <a href=https://mega-games.pl/user/HenrykeK/>https://mega-games.pl/user/HenrykeK/</a> Проверка занимает от нескольких минут до нескольких дней, спецы техподдержки имеют запросить вспомогательные документы либо инициировать краткое общение по Skype.Oтыгpaть бонус с указанным вeйджepом, для этого необходимо сдeлaть cтaвoк нa cумму, превосходящую объем приза в несколько один. 1хслотс рабочее зеркало
1×slots зеркало выигрыши обязательно пройдите регистрацию если
<a href=http://b77706vw.bget.ru/user/CharlesDyesk/>http://b77706vw.bget.ru/user/CharlesDyesk/</a> 1×slots зеркало рабочее Выше мы дали полный набор самых свежих и своевременных бездепозитных призов в интернет казино без пополнения на 2022 год, где вам воспользоваться хоть ценным бездепозитным бонусом.
казино 1×slots официальный сайт
Для отыгрыша приза казино обязывает игрока поиграть на сумму, в несколько один превышающую сумму полученного бонуса — тут выгода фирмы очевидна. <a href=https://www.bf-france.com/forums/profile/30064-rabofreeor/>1×slots зеркало регистрация</a> Для казино, работающих интернет, бездепозитные призы нужны для привлечения новых клиентов. Предложение поиграть на слотах без необходимости внесения настоящих денег — работающий способ для повышения энтузиазма к фирмы. После отыгрыша бездепа велик шанс, что игроку понравится и он продолжит выступать в казино, только сейчас уже на личные деньги. 1×slots бездепозитный бонус за регистрацию <a href=http://hxwltw.com/home.php?mod=space&uid=355049&do=profile>http://hxwltw.com/home.php?mod=space&uid=355049&do=profile</a>
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Иногда у гостей вебсайта имеют появиться проблемы при активации приобретенного промо-кода. В этих случаях, нужно адресоваться за поддержкою в службу поддержки «Support». Для получения ответа, обязательно указывается определенная причина обращения и подтверждается информация дополнительными экрана. Если сформировалась спорная ситуация, практически можно адресоваться к основному регулятору или контролирующему органу, выдавшему данному заведению лицензионный документ.Казино дает вероятность заработать и исключить реальные деньги на бездепозитных бонусах. Обычно, это малозначительная сумма, которую казино имеет для разрешить подарить игроку. <a href=http://parigimebel-ru.1gb.ru/index.php?subaction=userinfo&user=murkymalady12>http://parigimebel-ru.1gb.ru/index.php?subaction=userinfo&user=murkymalady12</a> Для казино, работающих интернет, бездепозитные бонусы необходимы для привлечения свежих клиентов. Предложение сыграть на слотах без надобности внесения реальных средств — работающий метод для повышения интереса к компании. После отыгрыша бездепа великоват шанс, собственно игроку понравится и он продолжит выступать в казино, только сейчас теснее на собственные средства.Баланс игрока пополняется на подходящую сумму. К ней используется вейджер, обозначенный в правилах акции. Вывести выигрыш возможно несомненно последствии того, как юзер устроит требуемый размер ставок из личных средств. В редчайших случаях бездеп работает в формате Free Play. На счет пользователя зачисляется большая сумма, и предоставляется малый срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по окончании сего периода сумма на счету несомненно превосходить изначальную, то разницу возможно будет вывести или использовать для дальнейших ставок. 1×slots регистрацию процедура займет всего лишь Прибывшие на аккаунт финансы бездепозитные призы предназначаются, в, лишь для новоиспеченных пользователей, коие ранее не имели собственного аккаунта в данном казино. Исходя из сего, случае ранее у игрока был изготовлен депозит, то, по всей вероятности, у него больше не несомненно способности рассчитывать на получение такого приза в определенном заведении.Почти все игровые клубы просят свидетельство контактных данных игрока для получения бездепозитного бонуса.
<b>Смотреть еще похожие новости:</b>
<a href=https://chasingadream.rpginitiative.com/member.php?action=profile&uid=35799>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, чтобы снова получить бесплатный приз. Игорные заведения нетерпимы к бонус-хантерам, потому вас ждет неизбежное санкция.
#6571 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
bitz casino casino играть <a href=https://specreporter.com/>скачать 1×bet на андроид бесплатно</a> Набиуллина Эльвира Сахипзадовна порно casino зеркало сегодня <a href=https://7club7.com/>яндекс казино</a> Ирина Горбачева казино фильм онлайн включи казино kent casino регистрация букмекерские конторы pin ставки на спорт букмекерские конторы casino на телефон
#6572 Charlesgunnyhttp://filmkachat.ru
казино 1×slots официальный сайт
При исполненьи условий отыгрыша и верификации, деньги с бонусного счета переводятся на основной и все быть выведены на карту либо электронный кошелек. Лимиты на вывод и сроки проведения транзакции в от избранной платежной системы. <a href=http://filmkachat.ru/>1×slots зеркало этих способов предполагает регистрацию</a> Суммы похожих услуг, большинстве, колеблются от трех до двадцати долларов, а вейджер на эти свои должен сочинять от тридцати до шестидесяти один. Зачастую, наивеличайшая сумма выигрыша тут составит от одной до 2-ух сотен долларов. Если компьютерные выиграет больше, то все средства могут быть списанными до очень разрешенного выигрыша. Здесь бывает содержание выводить еще несуществующие деньги на собственную платежную систему и дальше искать заведение с подходящими под данную необходимую релоадом или бонусом за 1-ое пополнение счета. Есть несколько подвидов бездепозитного вознаграждения, предлагаемого наибольшим числом заведений. <a href=https://trumpbookusa.com/blogs/259423/Professional-3D-Animation-Services-in-the-Digital-Age>https://trumpbookusa.com/blogs/259423/Professional-3D-Animation-Services-in-the-Digital-Age</a> 1×slots зеркало видели такую регистрацию на <a href=http://msk-ru.ru/index.php?subaction=userinfo&user=murkycontainer2>http://msk-ru.ru/index.php?subaction=userinfo&user=murkycontainer2</a> С этими простыми советами любое казино с призом за регистрацию способно принести в разы больше выгоды и пользы.Таким образом интернет казино получает потенциального игрока. Возможно дальнейшем или подлинном он захотит сыграть на свои средства. Так трудятся бездепозитные бонусы в интернет казино. Здесь отлично подходит выражение, благотворительные сыр посещает только в мышеловке. Начинающие игроки имеют не осознавать опасность пыла. Однако течением понимания делается больше. Это тема для отдельного обсуждения.
1хслот 1хслотс регистрация перейти на 1×slots
Бездепозитные бонусы казино за регистрацию в 2022 году — это вероятность сыграть за счёт заведения. Казино даёт посетителю шанс пользоваться определённой суммой либо количеством бесплатных вращений без внесения депо. Не путайте деморежим с реальной забавой без надобности внесения депозита.Главным нюансом в возникновении этих вознаграждений состоит в, что пустив их в ход, в ничем не рискует и в последствии никому ничего не несомненно должен (не зависимо, получит ли он благодаря призам какой-нибудь выигрыш либо моментально спустит все только собственно прибывшие финансы). То есть, казино снабжает игрока вероятностью на дармовой базе играть во различные слоты даже спонсирует забаву. 1×slot зеркало рабочее регистрации на телефон придет Онлайн-казино с бездепозитными бонусами ставят клиентам условия для пользования бездепами, потому перед ролью в промоакции никакого тщательно ознакомиться со всеми правилами и аспектами акции. Условия все дотрагиваться получения бонуса, его применения и следующего вывода денежных средств в случае выигрыша.Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, чтобы еще раз получить даровой бонус. Игорные заведения нетерпимы к бонус-хантерам, потому вас ожидает неминуемое санкция. <a href=http://k636419q.beget.tech/user/Jaspertox/>http://k636419q.beget.tech/user/Jaspertox/</a> 1×slots рабочее зеркало на сегодня Бездепозитные бонусы казино за регистрацию в 2022 году — это возможность сыграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой или числом бесплатных вращений без внесения депо. Не путайте деморежим с реальной забавой без необходимости внесения депозита.
1×slots зеркало рабочее на сегодня
Выиграть реальные деньги в казино не пополняя счет – сложно, но вероятно. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными призами и начните выступать на бонусные свои. По статистике каком-то 10-ти заведений можно заработать небольшую необходимую денег с бонусных средств.В истиннее время получить бонус за регистрацию в казино очень просто. Почти каждый игорный дом с готовностью предоставит средства либо благотворительные вращения. Многие игроки используют этим и не смущяются регистрироваться в каждом клубе с выгодными критериями. Кстати, это отличная возможность выдумать выигрышную стратегию и сорвать куш. <a href=http://fumankong1.cc/home.php?mod=space&uid=580626>http://fumankong1.cc/home.php?mod=space&uid=580626</a> Также есть онлайн-платформы азартных игр, коие используют раздачу бездепозитных бонусов в специальные даты (как для казино, например и для игрока). Помимо этого, действующие игроки также имеют возможность получить похожие бонусы за свою деятельность (например, за повышения значения либо за схожие заслуги).Также учтите, собственно кое-какие игровые платформы сужают список государств, которые способны получить предложенный бездепозитный приз за регистрацию. К образцу, существуют онлайн-заведения, выдающие сходственные призы лишь жильцам определенных государств. К образцу, интернет казино 777 Оригинал дает бездепозитный приз только игрокам из России и государств СНГ. Или напротив, пичкают вознаграждением всех, не обитателей некоторых стран (как этого, идет пристально изучать список, дабы потом не возникло практически вопросов и претензий). 1×slots регистрация 1×slots casino 777 online
рабочее зеркало 1×slots
В каждом казино с бездепозитным призом предусмотрены вейджеровые условия. Это единственный «подводный камень», который стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) устроить определённое число ставок. Чем круче бонус, тем труднее выполнить обстоятельства, и напротив. Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Внесение депо – Будьте готовы восполнить счет после отыгрыша приза. Это стандартное заявка управлял для этого подобии промо-акций. Лучше заблаговременно уточнить, какую сумму надо(надобно) будет заносить на счет. Как верховодило, речь идет о наименьшем депозите, но вы должны быть уверены, собственно он для по кармашку. 1хслотс официальный сайт зеркало <a href=https://arenafighter.adult/mybb/member.php?action=profile&uid=262970>https://arenafighter.adult/mybb/member.php?action=profile&uid=262970</a> Даже не выиграв крупную необходимую, игрок увлекательно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе превосходнейших промоакций с. Достаточно периодически изучать список новых интернет казино с выводом бонуса без депозита в данном разделе.Ниже указан важный список легальных казино в Беларуси с призами на 1-ый депо. Вы сможете попасть на официальный вебсайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус.
зеркала 1×slots
Каждый игры обязан сперва отчетливо выучить условия по получению и отыгрышу приглянувшегося подарка. Если всё организует, поторопитесь арестовать бесплатные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик данный начать вертеть барабаны топовых слотов.Если площадка дарит бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь ввести аккаунт на сайте и активировать его, подтвердив адрес электрической почты, номер телефона либо другие данные, коие настятельно оператор. Перед данным необходимо увериться, что юзер находится на официальном сайте казино, не на мошеннической площадке. Все бесплатные бонусы кажутся заманчивыми. Кто же откажется от возможности сыграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далеко не все бездепозитные бонусы в равной степени привлекательны для рассудительного посетителя. <a href=http://www.ritual-letichev.km.ua/user/Donaldpak/>http://www.ritual-letichev.km.ua/user/Donaldpak/</a> 1×slots регистрация то дальше необходимо пройти Новички не обожают сразу же заносить депозит. Это обусловлено неимением опыта и сомненьем. К счастью, в возможно получить бездепозитный бонус за регистрацию в казино. Неважно собственно начисляет система – фриспины либо кредиты. В всяком случае вы не рискуете собственными сбережениями. Это замечательная вероятность запустить приглянувшийся видео слот либо же испытывать удачу в настольных играх.Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в неотъемлемом порядке необходимо восполнить счет в казино. Для депозитных призов, данная процедура не необходима, например как депозит уже изготовлен.
<b>Смотреть еще похожие новости:</b>
<a href=https://masstr.net/showthread.php?tid=122892>1хслотс зеркало</a>
<a href=https://www.neocodex.us/forum/topic/134459-%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%B7%D0%A0%D1%91%D0%A0%D0%85%D0%A0%D1%95–1×-slots-%D0%A0%D1%95%D0%A1%E2%80%9E%D0%A0%D1%91%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A0%C2%B0%D0%A0%C2%BB%D0%A1%D0%8A%D0%A0%D0%85%D0%A1%E2%80%B9%D0%A0%E2%84%96-%D0%A1%D0%83%D0%A0%C2%B0%D0%A0%E2%84%96%D0%A1%E2%80%9A/>казино 1× slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Условия все различаться друг от приятеля. Но подобный бонус возможность быть применен только для игрового процесса – полученные на счет деньги до такого, как станут отыграны, вывести невероятно. Если вы бывалый игрок, вы должны аристократия, что приз без депо – редчайшая находка. Тем ниже, мы в изучаем интернет, чтобы отыскать для вас превосходнейшие бездепозитные предложения.
#6573 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино ли порно с Анна Щербакова, фигуристка <a href=https://krtka.info/>pin ап casino</a> слот casino фильмы казино рояль <a href=https://kompromat1.online/>1win букмекерская контора</a> pin up casino официальный включи казино порно с Зырянова Анастасия Владимировна 1×bet бесплатно 1×bet 1хбет казино смотреть 1×bet рабочее на сегодня
#6574 Charlesgunnyhttp://filmkachat.ru
x1 slots регистрация в 1×slots casino
Выбирайте наихорошие безвозмездные призы за обзоров на Casinoz – и пусть для сопутствует счастье при отыгрыше бонусных кредитов!Как лишь получите бездеп в казино, всё точно не запамятовывайте проверять электрическую почту. Некоторые игорные клубы постоянно веселят активных гэмблеров приятными призами. Чаще всего получить презент можно в преддверии веселья, на денек рождение, за вербование приятеля. А также распространённым призом является прибавка к депозиту. Нужно чем пополнить счёт, и азартное заведение увеличит его на 50–100%. <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> <a href=https://elearn.ellak.gr/mod/forum/discuss.php?d=31646>https://elearn.ellak.gr/mod/forum/discuss.php?d=31646</a> Допустим, за регистрацию вы возымели бездеп в размере 2 000 рублей с вейджером х30. В данном случае предстоит сделать ставок, на совместную необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать настоящие деньги. Однако не запамятовывайте, что с каждого презента выйдет исключить определённую сумму (почаще всего менее $200).Для проверки применяются сканы паспортов, водительских удостоверений, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если юзер замечен в попытке завести вспомогательный акк, все его учетные записи подвергаются блокировке, а их владелец попадает в темный перечень. При забаве на лицензионной площадке надо бояться свидетельствовать достоверную индивидуальную информацию (шифрование ликвидирует утечку персональных данных). 1×slots на любой вкус как пройти регистрацию <a href=https://paladinscounter.com/users/Deweycib>https://paladinscounter.com/users/Deweycib</a>
1×slos регистрация в 1×slots casino
Игрокам не следует принимать приветственный бонус как гарантированный метод получить большой выигрыш, хотя это замечательная вероятность без затрат оценить перечень казино. <a href=https://www.bf-france.com/forums/profile/30064-rabofreeor/>1хслот зеркало</a> 1х слотс зеркало регистрация в 1×slots casino Активация происходит с помощью промокодов, коие вводятся в личном кабинете после регистрации. Среди спецпредложений в списке Casino.ru содержатся неповторимые промокоды, которые доступны только гостям портала. Другие методы начисления средств ? автоматическая активация сразу в творенья аккаунта и получение презента по запросу в службу технической поддержки. <a href=https://bongatoken.com/user/Jamesnox/>https://bongatoken.com/user/Jamesnox/</a> 1×slots промокод при регистрации
1х слот регистрация в 1×slots casino
Нет. Для получения бездепозитного бонуса в казино нужна обязательная регистрация на веб-сайте. Играть в слоты бесплатно и без регистрации можно лишь в демо режиме.Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных призов принимаются достаточно высокие требования. Часто онлайн-казино советуют отыграть бонусное поощрение до 100 раз в игровых автоматах. Например, случае игрок получил бесплатно 10 долларов, то необходимо несомненно отыграть их, поставив одну тысячу спинов по одному баксу каждый. Стоит отметить, что не все казино выделяют возможность играть на бонусы и не во всех развлекательных заведениях идентичные верховодила для отыгрывания. Некоторые казино запрещают выступать на призы в блекджек либо ограничивают ставки до пяти %, что существенно наращивает в десятки раз количество нужных игр. За счёт спинов выйдет запустить разные интернет слоты, протестировать стратегии и поднабраться опыта. Фишка что, что вращения начисляются на лучшие аппараты с уникальными опциями и высокой отдачей. Не запамятовывайте, что в любом акционном предложении учтены особые требования – временные ограничения, наибольший объем ставки, список доступных игр. <a href=https://xn–80abdzaxbkfak2ai0bzf4ce.xn–p1ai/communication/forum/user/42809/>https://xn–80abdzaxbkfak2ai0bzf4ce.xn–p1ai/communication/forum/user/42809/</a> Автоматы неспроста считаются самым знаменитым азартным развлечением. Чтобы усвоить управление и управляла, потребуется всего несколько минут. Ваша задачка сделать ставку, найти число рабочих линий и возможно крутить барабан. Если дисплее выпадет выигрышная композиция – вы выиграли! С этой задачей вас посодействуют управится бездепозитные призы казино. 1×slots регистрацию процедура займет всего лишь Зарегистрироваться в казино по специальной ссылке либо с бонусным кодом. Подтвердить контактные данные (номер аппарата и электрическую почту). Для подтверждения номера телефона необходимо в личном профиле показать собственный номер и надавить кнопку „Подтвердить номер телефонного“, дальше Вы получите sms-сообщение с кодом, который необходимо ввести в подходящее фон. Для подтверждения электронной почты, перебежать по активной ссылке в письме от казино.Как только получите бездеп в казино, всё одинаково не запамятовывайте инспектировать электронную почту. Некоторые игорные клубы постоянно радуют активных гэмблеров приятными призами. Чаще всего получить подарок можно в преддверии веселья, на денек рождение, за привлечение друга. А кроме распространённым призом является прибавка к депозиту. Нужно чем пополнить счёт, и азартное заведение увеличит его на 50–100%.
1×slots зеркало которую указывали при регистрации кстати
Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, the decision лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. Демоказино есть практически на каждом веб-сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются существенно пореже: там если, тогда, выигрыша и соблюдения критерий акций бездеп возможно перевоплотить в реальные средства.Далее требуется отыграть вагер и исключить выигрыш. Игрокам без опыта крупно подфартило, есть получить десятки даров за одну регистрацию. Если не сумели получить Бездепозитный бонус, не тревожьтесь. Обратитесь в интернет чат, оператор поможет исправить. 1×slots актуальное зеркало <a href=http://www.jcdqzdh.com/home.php?mod=space&uid=244662>http://www.jcdqzdh.com/home.php?mod=space&uid=244662</a> Создать новый профиль. Для регистрации нужно заполнить небольшую анкету или зайдите в индивидуальный кабинет посредством социальных сетей;Так что основное отличие подарка на депо от бездепа – обязательное пополнение счёта. Вы сможете внести депо и преувеличить стартовый капитал или арестовать бездеп и при не придётся рисковать своими сбережениями. Поспешите выполнить обычные требования, и администрация ресурса начисляет щедрое одобрение!
1хслот скачать
<a href=http://www.jingsuanwu.com/home.php?mod=space&username=StevenTriaM>http://www.jingsuanwu.com/home.php?mod=space&username=StevenTriaM</a> Поспешите зарегистрироваться на официальном сайте Клубника, дабы мгновенно получить 33 безвозмездных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, появляется реальный шанс победу! 1×slots официальный сайт зеркало рабочее Каждая игровая перрон отличается критериями по получению и отыгрышу бездепов. В правилах детально расписаны кратковременные рамки, за которые надо(надобно) прокрутить вейджер. Также не забывайте на наибольший размер ставки и максимальную сумму выплаты. С другой стороны, чтобы получить бездепозитные призы казино, достаточно потратить не более 1 минутки.Не стоит путать игру в демо и внедрение бонусов. В демонстрационном режиме игрок может расценить механику слота, сюжет и оформление. Но забава проводится на относительные кредиты, потому отсутствует главное ? ощущение пыла. Активируя промокод или фриспины, клиент как не расходует средства деньги на игровые автоматы, хотя может сорвать реальный куш!
<b>Смотреть еще похожие новости:</b>
<a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=94227>1× slots casino зеркало</a>
<a href=http://aurorahcs.com/forum/memberlist.php?mode=viewprofile&u=168982>1хслотс рабочее зеркало на сегодня</a>
<a href=https://vredeenvermaak.be/forum/vrede-en-vermaak/>1×slots бонус за регистрацию</a>
<a href=https://acerfans.ru/user/JamesTed/>1×slots зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В случае установленного лимита на необходимую вывода выигрыша с бездепозитного приза, игрок не может вывести больше заявленной суммы. Несмотря на то, что этот вариант стимуляции со стороны азартных платформ довольно востребован в подобных игр, далековато многим почитателям казино ведомо, собственно по бездепозитные призы казино и как непосредственно их возможно эксплуатировать.
#6575 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
kent casino регистрация самое казино <a href=https://specreporter.com/>casino 7k сегодня</a> спорт букмекерская контора cat casino <a href=https://strelochnik.com/>casino автомат</a> гта казино приложения букмекерских контор на андроид casino бездепозитный яндекс игры казино Лут Оксана Николаевна порно песня казино порно с Максим Глушенков (футбол)
#6576 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots review live
Если при регистрации указать промокод, возможно гарантировано получить приз. Где брать ваучер? Посетите тематику блоги либо форумы. Иногда администрация клуба проделывает рассылку ваучеров на электронную почту. В последнее время игорные дома начали рекламироваться в кинокартинах и телесериалах. Присмотритесь и скорее заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных руб. <a href=http://filmkachat.ru/>1×slots коды</a> Третитй бездепозитный приз за регистрацию – валютные свои. К огорчению, начислить рубли либо доллары способны лишь известные и известные клубы. С их подмогою у насладиться любой доступной забавой – автоматом, рулеткой, кено, блэкджеком.Если речь идет об эксклюзивных услугах, возможность потребоваться регистрация в казино по ссылке с партнерского сайта. <a href=https://divisionmidway.org/jobs/author/cgifurniture-com/>https://divisionmidway.org/jobs/author/cgifurniture-com/</a> 1×слотс казино <a href=http://www.qaclubkiev.com/2014/09/goit-2–4.html>http://www.qaclubkiev.com/2014/09/goit-2–4.html</a> Прямо в арестуйте бесплатные вращения за регистрацию без депозита и начинайте коллекционировать призовые композиции ради солидных выигрышей!Не трудно додуматься, собственно not the slightest deposit bonuses почти разу не бывают большими. Чаще всего речь идет о пяти–тридцати баксах (либо эквиваленте данной суммы в другой еденице).
1хслотс рабочее зеркало на сегодня
Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, solid только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. <a href=https://www.bf-france.com/forums/profile/30064-rabofreeor/>1×slots casino online регистрация</a> 1×slots зеркало этих способов предполагает регистрацию Для получения выигрыша потребуется выполнить обстоятельства казино. Чаще всего игроку нужно поставить конкретную необходимую, хотя теснее из личных средств. Она рассчитывается из совместного объема выигрыша за всегда использования бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, в юзер выиграл 1000 рублей, а множитель составляет х30, исключить деньги можно несомненно, сделав ставки на 30 000 руб.Выбор каждого онлайн казино на нашем веб-сайте. В описании к каждому Вы сможете разузнать, собственно получите за творение аккаунта. <a href=http://toolbarqueries.google.com.my/url?q=http://stinger-russia.ru/bitrix/redirect.php?goto=http://sechenov.ru/bitrix/redirect.php?goto=https://telegra.ph/Obrazec-akta-peredachi-oborudovaniya-09–24>http://toolbarqueries.google.com.my/url?q=http://stinger-russia.ru/bitrix/redirect.php?goto=http://sechenov.ru/bitrix/redirect.php?goto=https://telegra.ph/Obrazec-akta-peredachi-oborudovaniya-09–24</a> 1х слотс зеркало регистрация в 1×slots casino
казино 1×slots
Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.Бездепозитные бонусы настоящими средствами, коие можно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадали. <a href=http://www.designdarum.co.kr/bbs/board.php?bo_table=free&wr_id=1121885>http://www.designdarum.co.kr/bbs/board.php?bo_table=free&wr_id=1121885</a> Чтобы без увериться в превосходстве бездепозитных бонусов, достаточно зарегистрироваться в казино и получить одобрение. казино 1×slots официальный сайт Автоматическая активация показаться самой удобной, хотя ручной метод имеет перед ней превосходства. Прежде чем использовать вознаграждение от казино, стоит заблаговременно найти, сколько времени требуется на выполнение всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деяния бонуса.Каждый компьютерные обязан сперва отчетливо изучить обстоятельства по получению и отыгрышу понравившегося подарка. Если всё устраивает, поспешите отобрать благотворительные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо сейчас начать вращать барабаны топовых слотов.
казино 1× slots официальный сайт
<a href=https://uyghuryol.com/forum/viewtopic.php?f=8&t=258875>рабочее зеркало 1×slots</a> Для получения депозитного приза нужно пополнить свой игровой баланс реальными средствами. Вознаграждение можно получить либо при внесении первого депо, либо повторяющий фиксированного процента от внесённых средств. Так либо иначе, приз поступит на счёт лишь в пополнения.В бонусную программку многих операторов входят систематические бездепы. Это бессрочные акции, поощряющие активных неизменных игроков. Популярный формат — раздача фриспинов по определенным дням недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают постоянные бонусы без депо в обмен на накопленные баллы лояльности. Можно ли наваривать на бездепозитных призах? Это не работа, здесь как повезет, если в любом предложенном безедепе, вы будете откручивать вейджер и выводить, это возможно именовать везением, и дополнительной добавкой к вашему бютжету.Существует ли стратегии для отыгрыша бездепозитных бонусов? К сожалению нет, на выигрыши или проигрыши с бонусов, казино либо игрок воздействовать не может, отдача игр случается от разработчиков игр. 1хслот зеркало <a href=http://jade-crack.com/home.php?mod=space&uid=1107447>http://jade-crack.com/home.php?mod=space&uid=1107447</a>
1×slots casino online регистрация
Иногда в бездепа, казино презентует минимальный бонус (до 50 руб. ), из-за которого не стоит заморачиваться.В наше время довольно просто получить бонус за регистрацию в казино. Практически любой игорный жилище с радостью начислит деньги либо бесплатные вращения. Многие гэмблеры пользуются этим и не стесняются региться в любом клубе с выгодными критериями. Кстати, это отличная возможность выработать победную тактику и сорвать джекпот. Главным нюансом в возникновении этих вознаграждений состоит в, что пустив их в ход, в ничем не рискует и в последствии никому ничего не несомненно должен (не зависимо, получит ли он благодаря призам какой-нибудь выигрыш либо моментально спустит все только собственно прибывшие финансы). То есть, казино снабжает игрока вероятностью на дармовой базе играть во различные слоты даже спонсирует забаву. <a href=https://tony-sheryl.com/bbs/board.php?bo_table=free&wr_id=196210>https://tony-sheryl.com/bbs/board.php?bo_table=free&wr_id=196210</a> На бесплатные бонусы онлайн-казино практически всегда распространяется лимитирования по стране проживания посетителей. Даже случае для разрешено раскрывать счет и выступать на средства в заведении, это еще не значат, что для доступны not the slightest down payment bonuses. 1×slots рабочее зеркало на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.puppylinux.pl/index.php?topic=793.new#new>1×slots подтвердит вашу регистрацию если говорить</a>
<a href=http://naturetour.ru/personal/profile/index.php?PAGE_NAME=profile_view&UID=2416>1×slots casino регистрация</a>
<a href=https://www.formulersupport.com/Thread-1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82-%D0%BC%D0%BE%D0%B1%D0%B8%D0%BB%D1%8C%D0%BD%D0%B0%D1%8F-%D0%B2%D0%B5%D1%80%D1%81%D0%B8%D1%8F-%D1%81%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C–100269>1×slots официальный сайт мобильная версия скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для получения предоставленных призов вам понадобиться — ПК или мобильное прибор, и остальное дело за малым. Чаще всего казино бонус за регистрацию без депозита даёт вероятность запустить каждой машина. Но чем пристально ознакомиться с критериями. Иногда для забавы доступны лишь определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, никакого начать знакомство с миром пыла непосредственно с «одноруких бандитов».
#6577 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
r7 casino скачать pin casino <a href=https://res-publika.com>porno Александр Соболев (футбол)</a> сайте букмекерской конторы фонбет 1×bet зеркало рабочее <a href=https://specreporter.com/>какие казино</a> ешь казино включи казино песня казино фильмы казино рояль порно с Юлия Ефимова порно с Юлия Ефимова ешь казино
#6578 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
up casino официальный сайт pin up casino <a href=https://m.repost.news/>сайт казино вход</a> казино фильм онлайн сайт 1×bet слоты <a href=https://repost.news/>пин up casino</a> Черкесова Бэлла Мухарбиевна порно бесплатное казино kent casino porno Анастасия Янькова, боксерка porno Нина Пирогова, хоккеистка балтбет букмекерская контора букмекерская контора официальный сайт
#6579 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пин ап casino pin up top 1×bet вход <a href=https://rumafia.news/>порно с Никита Кучеров (хоккей)</a> порно с Илья Осипов (киберспорт) 1×bet слоты 1×bet top <a href=https://kompromat1.online/>казино смотреть</a> рабочие зеркала казино 7k casino бонус bitz casino скачать 1×bet рокс казино casino ап Елена Лядова
#6580 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino мелбет букмекерская контора <a href=https://strelochnik.com/>пин ап casino</a> porno Елизавета Туктамышева casino com <a href=https://rumafia.news/>казино рояль смотреть</a> casino вход 1×bet на андроид рейтинг казино фильмы казино рояль Манилова Алла Юрьевна порно букмекерская контора мостбет 1×bet слоты официальный сайт
#6581 Charlesgunnyhttp://filmkachat.ru
1×slots сайт зеркало
Можно ли зарабатывать на бездепозитных бонусах? Это не работа, здесь как повезет, случае в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, тогда можно именовать везением, и добавочной добавкой к вашему бюджету. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало</a> Отыграв бездепозитный бонус в казино с выводом тоже придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если схожее ограничение присутствует, то единоразово исключить получится только необходимую, не превосходящую размер приобретенного приза. <a href=https://webanketa.com/forms/6gtk2c9q74qpaeb368vked9s/>https://webanketa.com/forms/6gtk2c9q74qpaeb368vked9s/</a> 1×slots сайт зеркало <a href=https://velorout.com.ua/user/Glennexcut/>https://velorout.com.ua/user/Glennexcut/</a> Вейджер (wager) – это коэффициент, кот-ый демонстрирует на какую сумму нужно устроить ставок, чтобы вывести бонус из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего бонуса, Вам необходимо устроить ставок на необходимую: 500*70=3500 руб. Только всецело отыграв бонус, Вы сможете вывести свой выигрыш.
1 х слотс зеркало
<a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1×slots зеркало рабочее</a> 1×slots регистрация на официальном сайте <a href=http://www.cooperativacoomultexco.com/user/Davidaxope/>http://www.cooperativacoomultexco.com/user/Davidaxope/</a> Игрокам стоит воспринимать приветственный приз как гарантированный метод получить большой выигрыш, хотя это замечательная вероятность без затрат оценить возможностей казино.В интернете слишком большое скриптовых сайтов, которые принадлежат жуликам. Их основная цель – привлечь гэмблеров, пообещав не только великодушные презенты, но и крупные выигрыши. Так собственно некоторые веб-сайты предлагают получить за регистрацию числе $1 000. сайт 1× slots casino
1хслотс казино зеркало
Поспешите зарегистрироваться на официальном сайте Клубника, дабы моментально получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, появляется реальный шанс победу!У каждой забавы свои требования по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система засчитает любую ставку. В рулетке и покере устроить это гораздо труднее. Именно поэтому например главно внимательно читать обстоятельства получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в каждой игре, то новенькие попросту «спустят бонус на ветер». <a href=http://forums.overhax.fun/member.php?action=profile&uid=4509>http://forums.overhax.fun/member.php?action=profile&uid=4509</a> Обыкновенные бездепозитные бонусы в размере от трех до двадцати $ сделаны для того, чтобы в игры заходили все свежие и свежие игроки. Здесь, вероятнее всего, будет лимитирование на наибольший выигрыш. Важно, дабы перед минимальным вкладом был отключен приз за 1-ое пополнение счета, и в не попадет на повторный вейджер.Бездепозитный бонус предоставляется новенькому игроку за определенные действия. Часто подарок повторяющий денег либо фриспинов выдается за регистрацию, спасибо чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. 1×slots зеркало которую указывали при регистрации кстати Фриплей-бонусы встречаются лишь в неких клубах. Они зачисляются незамедлительно после творенья профиля и активны непродолжительное время. Если не успеете израсходовать свои, они попросту сгорят. Касаемо времени, как призы активны протяжении часа.Если площадка дарует бездеп за регистрацию, то процедура его получения проста. Нужно только завести аккаунт на сайте и активировать его, подтвердив адрес электронной почты, номер телефона или иные данные, которые настятельно оператор. Перед данным нужно убедиться, собственно юзер располагается на официальном веб-сайте казино, а не на мошеннической площадке.
1хслотс 1хслотс регистрация перейти на 1×slots
На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не можете активировать и получить бездепозитный бонус. 1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, случае не желайте стать жертвой плутов или впустую израсходовать время; Обычно, бездепозитные призы выдаются под конкретные слоты с фиксированной ставкой, хотя их точно воспрещено использовать в игровых автоматах с современным джекпотом. Список игр, каких возможно использовать бездеп, Вы отыщите в описании акции или сможете уточнить у саппорта заведения. 1хслот скачать <a href=http://msfo-soft.ru/msfo/forum/messages/forum29/topic12134/message322899/?result=new#message322899>http://msfo-soft.ru/msfo/forum/messages/forum29/topic12134/message322899/?result=new#message322899</a>
1× slots casino зеркало
Некоторые сайты, этого чем обмануть регистрацию игроков, предлагают ответить на количество базисных вопросов. Цель проведения подобной викторины – выявить случайных людей, которые не имеют представления о покере, и не допустить получения ими бонусов. Если гость теснее играл в казино, то ответить на полтора десятка простых вопросов будет нетрудно. Очень часто, ответы возможно найти на официальных сайтах данных учреждений. <a href=https://krok.biz/forum/memberlist.php?mode=viewprofile&u=38265>https://krok.biz/forum/memberlist.php?mode=viewprofile&u=38265</a> Особую изюминку видео слотам придают оригинальные знакы. С их в активируются разные призы. Вы можете запустить вспомогательный уровень и увеличить сумму выигрыша. Есть знаки, которые заменяют ненадобные составляющие и сами делают выигрышные комбо. Не стоит забывать и тему бонус-тур. После любого успешного спина есть шанс прирастить сумму выигрыша в 2 либо хорошо раза. 1×slots зеркало регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=http://fin-molitor.com/forum/viewtopic.php?f=2&t=419827>1хлот регистрация в 1×slots casino</a>
<a href=https://www.goslog.ru/forum/messages/forum1/message14934/11-obrashcheniya-grazhdan?result=reply#message14934>1×slots регистрация</a>
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=3764>1 х слотс зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Маркетинговая деятеля всех игорных интернет-клубов должна носить разнородный характер. И в вознаграждения на депозит работают чтобы, чтобы, чтобы стимулировать вносить депозиты и поощрять теснее имеющих пользователей, то бездепозитный приз в казино либо приз за регистрацию в казино, до всего, рассчитан на расширение базы покупателей. Для всех бездепозитных бонусов действует максимальный лимит на выигрыш. Он указывает максимальную необходимую, коию появится получить, играя на бонусные кредиты. Как лишь вам получится выполнить требования вейджера, дозволенный максимум будет переведен с бонусного счета на основной, а остаток несомненно списан.
#6582 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало xbet xyz up casino <a href=https://rumafia.news/>1×bet официальный 1×bet xyz</a> 7k casino зеркало на сегодня kometa casino <a href=https://rucriminal.info/>1×bet сайт 1×bet xyz</a> пин ап казино casino скачать casino бездепозитный демо казино сайт 1×bet слоты реального казино Окладникова Ирина Андреевна порно
#6583 Charlesgunnyhttp://filmkachat.ru
1хслот официальный сайт зеркало
Разные казино имеют собственные управляла по выведению выигрыша. Для бездепозитных призов принимаются достаточно высочайшие притязания. Часто онлайн-казино советуют отыграть бонусное поощрение до ста раз в игровых автоматах. Например, если игрок получил бесплатно 10 $, то необходимо несомненно отыграть их, поставив 1 тыщу спинов по 1 доллару любой. Стоит обозначить(означить), что не все казино выделяют вероятность выступать на бонусы и не во всех развлекательных заведениях идентичные правила для отыгрывания. Некоторые казино воспрещают выступать на призы в блекджек или ограничивают ставки до 5 %, что значительно наращивает в десятки раз количество необходимых игр.3. Подтвердить данные. В зависимости от клуба, нужно привязать телефонный или почту, показать индивидуальную информацию; <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> Для отыгрыша бонуса казино обязует игрока сыграть на сумму, в некоторое раз превышающую сумму полученного приза — здесь выгода фирмы явна.Свежий приз начисляется в виде денежных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в пользовании средствами, ну случае отыгрыша оператор может установить лимитирование на вывод средств. <a href=http://prsync.com/archicgi/how-home-entertainment-flyarchitecture-transforms-modern-living-spaces-4518898/>http://prsync.com/archicgi/how-home-entertainment-flyarchitecture-transforms-modern-living-spaces-4518898/</a> Бездепозитные бонусы — это презенты от казино повторяющий бонусных средств или фриспинов для игровых автоматов, которые начисляются на акк игрока в процедуры регистрации на веб-сайте заведения. Для получения этих поощрений депо не требуется.Если простыми текстами, бездепы – это определённая сумма денег либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно забирать подарки. Но есть некоторые нюансы. Существуют игорные жилища, которые перед что, этим как начислить бонусы настоятельно привязать телефон, предоставить копии документов. 1×slots зеркало регистрация в 1×slots casino <a href=https://www.globalvision2000.com/forum/member.php?action=profile&uid=1060608>https://www.globalvision2000.com/forum/member.php?action=profile&uid=1060608</a> В некоторых интернет казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на сайте клуба и подтвердить свои контактные данные. Дополнительно требуется активация промокода.Для получения выигрыша требуется выполнить обстоятельства казино. Чаще всего игроку нужно поставить определенную сумму, но уже из собственных средств. Она рассчитывается из совместного объема выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, если юзер выиграл 1000 руб., а множитель составляет х30, вывести средства можно будет, сделав ставки на 30 000 рублей.
1×slots официальный сайт скачать
Выполнив все требования оператора, заказчик может оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит примерно менее суток. Если дополнительно требуется пройти функцию верификации, то срок увеличивается до 1–2 рабочих дней. Для перевода используются банковские инструменты и электрические платежные системы. Второй способ подходит другого, так как масса транзакций в этом случае исполняются мгновенно. В связи со специфичностью функционирования банков обработка платежей имеет взятьвдолг(взятьвзаймы) до нескольких рабочих дней. <a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=39035>казино 1× slots официальный сайт</a> 1хслотс регистрация в 1×slots casino Большинство интернет-казино из нашего топ-10 готовы повеселить вас эксклюзивными акциями. Читайте о их в обзорах и на форуме. <a href=https://fishtrade3000.ru/forum/user/1386/>https://fishtrade3000.ru/forum/user/1386/</a> 1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, случае не хотите стать жертвой плутов или впустую потратить время;Для отыгрыша приза казино обязывает игрока поиграть на сумму, в некоторое раз превосходящую сумму полученного бонуса — здесь выгода компании явна. скачать 1×slots официальный сайт С этими ординарными советами любое казино с бонусом за регистрацию способно принести в разы больше выгоды и пользы.Для верификации аккаунта надо(надобно) предоставить профессионалам технической помощи отсканированную копию паспорта и счета за коммунальные предложения, а также фотку банковской карты или экрана страницы электрического кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для подтверждения личности.
1×slots casino регистрация 1×slotscasin online
Призовые начисления без депозита имеют предоставляться для роли в турнирах интернет казино. Потратить перечисленные средства возможно самая масштабах этой промоакции. Условия их проведения в лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться таким предложением, чем выучить его верховодила. <a href=https://images.google.co.ve/url?q=https://doctorlazuta.by/>https://images.google.co.ve/url?q=https://doctorlazuta.by/</a> 1×slots промокод при регистрации Если простыми словами, бездепы – это определённая сумма средств либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать презенты. Но есть кое-какие аспекты. Существуют игорные жилища, которые перед тем как начислить призы настоятельно привязать телефонный, дать копии документов.
зеркала 1×slots
Выполнив все требования оператора, клиент может оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем менее суток. Если дополнительно требуется пройти функцию верификации, то срок возрастает до 1–2 рабочих дней. Для перевода применяются банковские приборы и электронные платежные системы. Второй способ подходит лучше, например как большинство транзакций в этом случае осуществляются моментально. В связи со спецификой функционирования банков обработка платежей имеет взятьвдолг(взятьвзаймы) до нескольких рабочих дней. Самый распространённый из подобных бонусов, конечно же, бездеп на день рождения клиента — приз повторяющий фиксированной суммы либо фриспинов поступает на счёт игрока, а пользоваться им возможно в течение установленного периода медли.Объективные – объем бонуса, коэффициент и условия вейджера, надобность внесения депозита для вывода средств; 1х слотс зеркало регистрация в 1×slots casino <a href=http://obruchalka-vrn.ru/index.php?subaction=userinfo&user=dashingvictim0>http://obruchalka-vrn.ru/index.php?subaction=userinfo&user=dashingvictim0</a> Бездепозитные бонусы за регистрацию в игровых автоматах для собственников онлайн-казино считаются частью маркетинговой кампании, направленной на увеличение аудитории сайта. Так они продвигают свои бренды и привлекают новых клиентов.Не стоит сразу же открещиваться от приветственных презентов в сходственных казино. Администрация готова начислить средства или фриспины, хотя сначала работники обязаны убедиться, что вы не мошенник. Дело том,, собственно развелось слишком много охотников за бонусами. Они научились дурачить систему и наваривать крупные суммы денег.
1×slots сайт
Фриплей-бонусы. Бонусы за благотворительную забаву есть лишь в некоторых клубах. Они зачисляются незамедлительно в творенья профиля и срабатывают недолговременное время. Если у вас нет времени истратить средства, они просто закончатся. Что дотрагивается времени, правило бонусы срабатывают протяжении 1-го часа. <a href=http://forums.ghc-games.com/member.php?action=profile&uid=105198>http://forums.ghc-games.com/member.php?action=profile&uid=105198</a> 1×slots актуальное зеркало Чтоб получить крупный выигрыш, избирайте игровые автоматы с предельным процентом отдачи (RTP) из списка тех, коие доступны по условиям отыгрыша.Несмотря на то, что этот вариант стимуляции со стороны азартных платформ очень известен области сходственных игр, далеко не всем поклонникам казино известно, что являют собой бездепозитные бонусы казино и как именно их вполне эксплуатировать.
<b>Смотреть еще похожие новости:</b>
<a href=https://demo.comuni-italiani.it/forum/viewtopic.php?f=9&t=425306>1×slots регистрация 1×slots casino 777 online</a>
<a href=https://forum.bandariklan.com/showthread.php?tid=176825&pid=914136#pid914136>x1 slots регистрация в 1×slots casino</a>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5033/#comment-605634>1×slots рабочее зеркало на сегодня</a>
<a href=http://complainanything.com/node/158?page=912#comment-1087217>1×slots подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Срок активации и время на отыгрыш. Зачисление средств либо фриспинов происходит при активации на взыскательно ограниченного периода, подобные притязания предъявляются и к срокам отыгрыша. Одни казино позволяют отыгрывать бонус некоторое дней либо и недель. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с неоправданно высоким вейджером. Шаг 5. Использование и отыгрыш. Бездеп обязан быть использован в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера.
#6584 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet xbet xyz порно с Гатагова Ольга Анатольевна <a href=https://vestnik-jurnal.com/>inform@rucriminal.info</a> 1×bet зеркало рабочее xbet порно с Сергей Бобровский (хоккей) <a href=https://m.repost.news/>casino игровой автомат</a> букмекерские конторы pin зеркала казино casino скачать приложение балтбет букмекерская контора casino официальный сайт казино ставка casino 7k рабочее
#6585 Charlesgunnyhttp://filmkachat.ru
1×slot казино зеркало
Отзывы читателей о бонусных акциях посодействуют составить впечатление, но не запамятовывайте о субъективности личных объяснений.Бездепозитные бонусы в казино без пополнения 2022 — это определенная сумма средств или valinomycin spins вращения, коие предоставляются первым гостям за регистрацию на веб-сайте казино повторяющий бездепозитного приза, и дает вас вероятность с казино без пополнения опробовать предложения (игр), с последующей преимуществом, льготой вывода средств при исполненьи всех установленных правил. <a href=http://filmkachat.ru/>1хслотс зеркало на сегодня</a> <a href=https://heyjinni.com/read-blog/177752>https://heyjinni.com/read-blog/177752</a> Создание аккаунта. На веб-сайте казино нужно обнаружить регистрационную форму и заполнить пустопорожние поля личными данными. Иногда на этом шаге потребуется показать лишь адрес электрической почты и пароль, хотя почаще хотелось наполнить анкету персональной информацией (ФИО, дата рождения, место проживания и т.д. ). Нужно указывать лишь реальные данные, что впоследствие они будут проверены. казино 1×slots <a href=http://forum.l2endless.com/member.php?action=profile&uid=12487>http://forum.l2endless.com/member.php?action=profile&uid=12487</a>
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Выбирая даровой приз, внимательно изучайте правила. Убедитесь, что вам можно себя участие в акции. Уточните, в каких играх можно исполнять обстоятельства вейджера. При необходимости задавайте вопросы представителям саппорта. <a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/8082/#comment-337924>1хлот регистрация в 1×slots casino</a> 1×slots зеркало регистрация то дальше необходимо пройти <a href=http://ad-vance.ru/communication/forum/user/34857/>http://ad-vance.ru/communication/forum/user/34857/</a> казино 1×slots Для получения бонуса надо(надобно) пригласить в игру свежего клиента. Казино начислит пригласившему фиксированный процент от взносов приглашённого вид приза: чаще всего его размер не превышает 10%. Срок деяния бонуса как не превышает месяца: пригласивший получает бонус в зависимости от проигранных ставок приглашённого в первый луна забавы.
1×slots зеркало рабочее на сегодня
1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, если не хотите замерзнуть жертвой жуликов или впустую израсходовать время;При регистрации следует свидетельствовать только достоверную информацию. Когда учетная запись несомненно активна, замечен доступ в Личный кабинет. В нем возможно выбрать денежную, ввести промокод и разузнать подробные управляла получения и отыгрыша бездепа. Краткая информация об акции часто находится именно на регистрационной форме. <a href=https://asdmcpe.org/user/StevenFep/>https://asdmcpe.org/user/StevenFep/</a> Возможность сыграть дополнительное состязание (а времени и некоторое) абсолютно бесплатно, а выигрыш, тому, поступает на счёт игрока.Вы наверняка, например все любите получать подарки и бездепозитные бонусы казино. Игорные дома брали в повадку одаривать гэмблеров приятными призами. Стать владельцем приветственного презента можно за творенье профиля либо пополнение счёта. Второй вариант больше интересный, ведь клубы готовы удвоить депо! Но в вы новичок и лишь знакомитесь с миром азарта, другого пользуйтесь бонусом за регистрацию. x1 slots регистрация в 1×slots casino Многие новички колеблются, собственно поощрительный приз не нужно будет отдавать, числе если они выиграли у казино. Это абсолютно неопасно и надежно. Выводя выигранные свои, игрок просто одергивает свое участие деле и утрачивает уникальную возможность – бесплатно увеличивать собственное вещественное положение.У любого игорного заведения средства управляла и обстоятельства. Но, чтобы получить призы, необходимо выполнить стандартные деяния:
1×slots официальный сайт скачать
Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном бонусе, то в первую очередь обратите внимание на велечину вейджера и срок, кот-ый дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть приз и вывести выигрыш. <a href=https://mycs.ge/index.php?subaction=userinfo&user=JamesDop>1×slots регистрация на сайте</a> Когда речь идет о валютных призах, казино всегда устанавливают обстоятельства вейджера, коие нужно выполнить, дабы вывести выигрыш.Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных притязаний, считая обязательной верификации. Если на веб-сайте учтена неотъемлемая процедура подтверждения личности, то исключить выигрыш получится лишь после проверки данных. Приготовьтесь заполнить анкету и отправить в техподдержку документ, подтверждающий лицо. казино 1×slots <a href=https://lit-book.ru/user/RichardFainy/>https://lit-book.ru/user/RichardFainy/</a> Доступность — бездепозитные призы в казино чаще всего предоставляются новым игрокам, хотя бывают случаи, когда бонус могут получить и действующие посетители.
казино 1×slots
Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен перечень лучших интернет казино, коие предлагают своим игрокам щедрые бонусы за регистрацию. <a href=https://rogdenie-kerch.ru/user/AnthonyAgomi/>https://rogdenie-kerch.ru/user/AnthonyAgomi/</a> В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это исключительно приятная часть забавы. Важно, часто бездепозитные бонусы в казино выдаются с лимитированиями по наибольшей выплате. В среднем можно рассчитывать на выгода в несколько тыщ руб. Как исключить выигрыш с бонуса без депозита. Придётся доказать акк документально, в некоторых заведениях. Процедура верификации неотклонима и делается каждым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате либо прочитайте в правилах. 1×slot зеркало рабочее регистрации на телефон придет Получать информацию о самых выгодных бонусах можно без неизменного прогноза новостей казино. Мы брали данную задачку на себя и непрерывно следим за предложениями операторов, избирая наихорошие из них. В этом разделе собраны последние бездепы, промокоды к ним и условия их активации. Список промоакций регулярно пополняется. В топ вошли самые свежие бездепозитные бонусы за регистрацию в казино 2020, кратковременные и замкнутые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру прочим критериям. Если срок деянья промоакции истек, она удаляется из перечня.
<b>Смотреть еще похожие новости:</b>
<a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=7523&TITLE_SEO=7523-preobrazovatel-interfeysov-usb-rs485&MID=471369&result=reply#message471369>1×slots рабочее зеркало</a>
<a href=https://021snyw.com/space-uid-53919.html>скачать 1×slots на андроид мобильная версия</a>
<a href=http://forum.cvetq.info/memberlist.php?mode=viewprofile&u=17326&sid=07d2729afeeebba02f573b6970251345>1×slots зеркало регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Процесс доказательства личности возможность взятьвдолг(взятьвзаймы) от одного денька до недели. Если заказчик допустил какую-либо ошибку при заполнении паспортных данных, то ему следует обратиться с проблемой в саппорта онлайн-казино.
#6586 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Сергей Бобровский (хоккей) Мухтиярова Елена Вячеславовна порно <a href=https://rucriminal.info/>букмекерская контора леонов</a> casino ап сколько казино <a href=https://vestnik-jurnal.com/>скачать сайт букмекерской конторы</a> 1×bet на андроид pin casino букмекерскую контору пин сайт казино зеркало Хорова Наталья Александровна порно unlim casino порно с Александр Головин (футбол)
#6587 BrianFaw
http://mexicanpharmacy.store/ buying from online mexican pharmacy
#6588 RalphCew
canadian pharmacy phone number <a href=" http://www.9kuan9.com/home.php?… „>pharmacy rx world canada</a> or <a href=“ http://cse.google.com.ai/url?… ">vipps approved canadian online pharmacy</a> http://underground.co.za/redirect/?… canadian pharmacy 365 <a href=http://www.arndt-am-abend.de/url?q=https://canadianpharmacy.win>canadian pharmacy king</a> canadian drug and <a href=https://www.donchillin.com/space-uid-447997.html>canada pharmacy</a> canada pharmacy online
#6589 BrianFaw
https://mexicanpharmacy.store/ purple pharmacy mexico price list
#6590 MaynardJawhttp://gid-ua.li
кращі фільми 2000 онлайн <a href=http://gid-ua.li/>кращі фільми онлайн в Канаді</a>
#6591 DavidIrockhttp://hd-rezk.com
фильмы 2024 смотреть онлайн с субтитрами <a href=http://hd-rezk.com/>лучшие фильмы 2004 смотреть онлайн</a>
#6592 RalphCew
buying from canadian pharmacies <a href=" https://www.gztongcheng.top/home.php?… „>canadianpharmacyworld com</a> or <a href=“ http://vm-01.magneticgrid.com/info.php?a<>=<a+href=http://canadianpharmacy.win>where+can+i+buy+viagra+online+cheap</a ">canadian pharmacy prices</a> https://images.google.com.ph/url?… medication canadian pharmacy <a href=https://www.google.com.tr/url?sa=t&url=http://canadianpharmacy.win>vipps approved canadian online pharmacy</a> canadian pharmacy victoza and <a href=http://xn–0lq70ey8yz1b.com/home.php?mod=space&uid=1088648>pharmacy in canada</a> canadian pharmacies online
#6593 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up casino официальный казино можно <a href=https://sovsekretno.net/>суть казино</a> Лут Оксана Николаевна порно casino 7k рабочее <a href=https://rhymes-punches.com/>porno Екатерина Ефременкова, шорт-трекистка</a> бесплатно фильм казино слоты казино казино фильм онлайн скачать букмекерскую контору на андроид pin up casino официальный porno Катерина Шпица Москалькова Татьяна Николаевна порно
#6594 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Екатерина Ефременкова, шорт-трекистка porno Нина Пирогова, хоккеистка <a href=https://strelochnik.com/>porno Юлия Канакина</a> bitz casino порно с Евгений Малкин (хоккей) <a href=https://glvk.guru/>порно с Елена Никитина, скелетонистка</a> мобильные букмекерские конторы лучшие бесплатные онлайн казино казино большая бывшие казино сколько казино 1×bet зеркало слоты porno Анастасия Янькова, боксерка
#6595 Charlesgunnyhttp://filmkachat.ru
казино 1× slots официальный сайт
Только выполнив все условия отыгрыша и дождавшись завершения ревизии аккаунта, Вы сможете оформить заявку на вывод средств и получить средства деньги.Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала быстрые выводы. Фишка выплат в том, собственно довольно избрать платёжный инструмент и показать сумму. В большинстве случаев средства зачисляются на электрические кошельки протяжении 15 мин., а на банковские карты – 1–3 рабочих дня. <a href=http://filmkachat.ru/>1×slots зеркало регистрация</a> Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке нужно восполнить счет в казино. Для депозитных призов, эта процедура не нужна, так как депо теснее сделан.Некоторые казино шансы предлагать посетителям бездепы за свидетельство номера либо почты или репост на страницу в социальных сетях. <a href=https://elearn.ellak.gr/mod/forum/discuss.php?d=31646>https://elearn.ellak.gr/mod/forum/discuss.php?d=31646</a> В списке притязаний к отыгрышу нередко наличествуют лимиты на ставки при забаве на собственные средства. Так, в отыграть надо(надобно) 30 000 руб., а предельная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 один. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам действия акции.Как управляло, при выводе денег, от играющего потребуется только устроить минимальный лепта чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом личный счет. 1×slots casino регистрация 1×slotscasino09k online <a href=https://velorout.com.ua/user/Justingrear/>https://velorout.com.ua/user/Justingrear/</a>
казино 1×slots официальный сайт
1хслотс 1хслотс регистрация перейти на 1×slots Бездепозитный бонус казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби избранного заведения, сориентироваться в выборе игр и выяснить качество работы саппорта. Довольно нередко, начиная игровой процесс, игрок уже отказывается останавливаться и делает настоящий вклад. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть безвозмездно вероятно как один таки с бонусом за регистрацию без необходимости вносить депозит.Чаще всего казино бонус за регистрацию без депозита даёт вероятность запустить каждой машина. Но другого внимательно ознакомиться с условиями. Иногда для забавы доступны лишь определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, никакого начать знакомство с миром азарта непосредственно с «одноруких бандитов». <a href=https://lecointurc.com/users/justinbex>https://lecointurc.com/users/justinbex</a> У нас на сайте Вы отыщите список призов без депо в испытанных казино и подробную информацию про как их получить и использовать.Прежде чем активировать бездеп, нужно убедиться том,, что страна, гражданином коей считается игрок, не заходит в список запрещенных. 1×slots официальный зеркало рабочее Во время забавы в казино, выигрыши, приобретенные спасибо безвозмездным призовым фондам, суммируются и включаются в общую необходимую для отыгрывания. Однако, если фортуна улыбнется и выйдет отыграть все призы, игровое заведение гарантированно разрешит вывести денежные средства. Сумма вывода несомненно находиться от лимита, одобренного именно в данном учреждении. Поэтому, пристально нужно читать верховодила выдачи безлимитных депо.
зеркло казино 1×slots
Обыкновенные бездепозитные бонусы в размере от трех до двадцати долларов созданы для того, дабы в забавы заходили все новые и свежие игроки. Здесь, всего, несомненно лимитирование на максимальный выигрыш. Важно, дабы перед минимальным вкладом был отключен приз за первое пополнение счета, и игры не попадет на повторный вейджер. Выполнив все притязания оператора, клиент может оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем менее суток. Если дополнительно потребуется пройти процедуру верификации, то срок возрастает до 1–2 рабочих дней. Для перевода используются банковские инструменты и электронные платежные системы. Второй метод подходит чем, например как масса транзакций в этом случае осуществляются мгновенно. В связи со спецификой функционирования банков обработка платежей имеет занять до нескольких трудящихся дней. <a href=http://www.neworleansbbs.com/home.php?mod=space&uid=181603>http://www.neworleansbbs.com/home.php?mod=space&uid=181603</a> Ниже указан актуальный список законных казино в Беларуси с призами на первый депозит. Вы сможете попасть на официальный сайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз.Риск-игра по одинаковым шансам – Также казино имеет запрещать исполнять обстоятельства по отыгрышу с помощью раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких других забавах. 1×slots регистрация на 1хслотс Превышение наибольшей ставки при отыгрыше. Система автоматически не предуведомляет о превышении ставки, поэтому о несоблюдении верховодил игрок возможность разузнать теснее последствии подачи запроса на вывод средств.Любой выигрыш по ставке повыше установленного лимита будет считаться недействительным. То есть ставка не несомненно засчитана при отыгрыше, а в случае выигрыша его сумма не поступит на счёт клиента — результат игры несомненно всецело аннулирован.
1×slots рабочее зеркало на сегодня
1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, случае не желаете замерзнуть жертвой жуликов либо впустую истратить время; 1×slots подтвердит вашу регистрацию если говорить <a href=https://atoms.rocks/member.php?action=profile&uid=42028>https://atoms.rocks/member.php?action=profile&uid=42028</a> Мы собрали и опубликовали список лучших бездепозитных казино с призами за регистрацию, коие гарантируют великодушные выигрыши и мгновенные выплаты.
1× slots официальный
<a href=http://yigilcalilar.com/forum/member.php?action=profile&uid=53936>http://yigilcalilar.com/forum/member.php?action=profile&uid=53936</a> Исходя из сего, просто не существует мудрых оснований махнуть рукой на получение такового бонуса при регистрации. И, не, на такой бесплатной основе у вас есть все шансы выиграть средства и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные призы, нарекают бесплатными интернет платформами для игр. 1×slots сайт зеркало Получать информацию о самых прибыльных призах возможно без неизменного мониторинга новостей казино. Мы брали данную задачу на себя и постоянно следим за предложениями операторов, выбирая наилучшие из них. В этом разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список промоакций регулярно дополняется. В топ зашли самые новые бездепозитные призы за регистрацию в казино 2020, временные и замкнутые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и критериям. Если срок действия акции истек, она удаляется из перечня.Подобные бонусы без депозита предоставляются на больше прибыльных критериях. Зачастую они крупнее, а условия отыгрыша наименее строгие.
<b>Смотреть еще похожие новости:</b>
<a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=7523&TITLE_SEO=7523-preobrazovatel-interfeysov-usb-rs485&MID=461111&result=reply#message461111>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=http://fin-molitor.com/forum/viewtopic.php?f=2&t=425135>1х слот 1хслотс регистрация перейти на 1×slots</a>
<a href=http://www.carshowsociety.com/forum.php/topic,11220.new.html#new>1×slots регистрация 1×slots review live</a>
<a href=https://forum-macan.ru/viewtopic.php?t=3994>1×slots casino регистрация 1×slotscasino09k online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В зависимости от онлайн заведения любой из них может для предложить как бездепозитные средства, например и бездепозитные фриспины, которые в удачной регистрации рухнут для на ваш игровой баланс. Когда идет о денежных призах, казино постоянно устанавливают обстоятельства вейджера, коие нужно выполнить, чтобы исключить выигрыш.
#6596 Charlesgunnyhttp://filmkachat.ru
1хслотс мобильная версия зеркало
Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных притязаний, считая обязательной верификации. Если на веб-сайте учтена обязательная процедура подтверждения личности, то исключить выигрыш получится только после ревизии данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий лицо. <a href=http://filmkachat.ru/>1×slots официальный зеркало рабочее</a> <a href=https://guides.co/g/understanding-silo-images/468052>https://guides.co/g/understanding-silo-images/468052</a> Доступ к подарку может открываться автоматически последствии введения промокода либо обращения в саппорта вебсайта. В первом случае от пользователя не требуется никаких деяний. Бездеп с активацией по коду встречается почаще всего. Игроку нужно установить совокупность знаков в графе, кот-ая имеет находиться в регистрационной форме в Личном кабинете.Риск-игра по равным шансам – Также казино возможность запрещать выполнять обстоятельства по отыгрышу с помощью раунда на удвоение, который предлагается в слотах, видео-покере и неких иных забавах. 1× slots сайт <a href=https://www.varranger.com/vforum/index.php?action=profile;u=37260>https://www.varranger.com/vforum/index.php?action=profile;u=37260</a> Бездепозитные бонусы отличный вариант безвозмездной забавы в игровые автоматы. Многие пользователи сети не понимают, собственно в казино можно начать выступать абсолютно безвозмездно, а позже исключить выигрыш на банковскую карту либо электрический кошелек, другие не доверяют интернет казино, а третьи успешно играют и выигрывают – и подчас довольно большие суммы.
1 x slots
Благодаря программе преданности от игорного заведения, можно взять неплохой старт и без добавочных вложений запустить видеослоты. Кроме как, можно рассчитывать на реальную фортуну и получить, без вложения собственных денег, великий выигрыш.Казино дает вероятность заработать и исключить реальные средства на бездепозитных призах. Обычно, это малозначительная сумма, коию казино возможность для позволить подарить игроку. <a href=https://uyghuryol.com/forum/viewtopic.php?f=8&t=247812>1×слот регистрация в 1×slots casino</a> онлайн казино 1×slots Рассмотрим принцип его деяния на случае. Допустим, вы зарегались и получили $10 not the slightest down payment bonus с вейджером х50. Это значит, собственно выигранные деньги можно несомненно выводить не ранее, чем в такого, как общая сумма ставок достигнет $500.В перечне притязаний к отыгрышу нередко наличествуют лимиты на ставки при этой на личные средства. Так, в отыграть нужно 30 000 рублей, а максимальная сумма ограничена 30 рублями, то вертеть барабаны светит 1000 раз. Эта особенность затрудняет соблюдение игроками условий по срокам деяния промоакции. <a href=http://infozillon.com/index.php?subaction=userinfo&user=guardedstyle24>http://infozillon.com/index.php?subaction=userinfo&user=guardedstyle24</a> Шаг 5. Использование и отыгрыш. Бездеп обязан быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.Доступ к подарку имеет раскрываться автоматически последствии введения промокода или воззвания в саппорта вебсайта. В первом случае от юзера не потребуется никаких поступков. Бездеп с активацией по коду встречается чаще всего. Игроку нужно ввести совокупа знаков в графе, кот-ая может находиться в регистрационной форме в Личном офисе. 1×slots зеркало этих способов предполагает регистрацию При регистрации следует свидетельствовать только достоверную информацию. Когда учетная запись несомненно активна, замечен доступ в Личный кабинет. В нем возможно выбрать денежную, ввести промокод и разузнать подробные управляла получения и отыгрыша бездепа. Краткая информация об акции часто находится именно на регистрационной форме.В случае установленного лимита на необходимую вывода выигрыша с бездепозитного бонуса, игрок не может исключить больше заявленной суммы.
1х слот регистрация в 1×slots casino
Бездепозитные призы истинными средствами, которые можно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадались.Бездепозитные призы в казино без пополнения 2022 — это конкретная сумма денег либо gorovyh spins вращения, коие предоставляются первым гостям за регистрацию на сайте казино повторяющий бездепозитного бонуса, и дает вас вероятность помощью казино без пополнения опробовать услуги (игр), с дальнейшей преимуществом, льготой вывода средств при выполнении всех установленных правил. <a href=http://www.vintageampeg.com/forum/member.php?action=profile&uid=7143>http://www.vintageampeg.com/forum/member.php?action=profile&uid=7143</a> 1 x slots casino Как лишь вы отыграли вейджер и средства с бонусного баланса перешли вам на настоящий счет, Вы неустрашимо можете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать минимальный депо к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депозитом).Мы подготовили список, где есть постоянно актуальные и новые бездепозитные бонусы казино, которые вам получить безвозмездно. Для наших пользователей есть особые предложения эксклюзивные бонусы, коие вы кого не отыщите, их мы определили особой красной плашкой «Exclusive».
1×slot казино зеркало
Основное отличие в, что для получения бездепа не надо пополнять баланс в казино. Но не этого, есть ряд и других различий: Сразу после активации промокода можно пользоваться подарком. Как уже упоминалось, бонусы случаются трёх видов – фриспины, кредиты и фриплей-бонусы. 1хлот регистрация в 1×slots casino <a href=https://forum.amzgame.com/thread/detail?id=330739>https://forum.amzgame.com/thread/detail?id=330739</a>
1×slots рабочее зеркало на сегодня
<a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=4777>http://www.predictive-datascience.com/forum/member.php?action=profile&uid=4777</a> 1×slots официальный сайт скачать
<b>Смотреть еще похожие новости:</b>
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=9792>1×slots зеркало быструю регистрацию а также мгновенное</a>
<a href=http://www.deonnyn.com/PSPA/memberlist.php?mode=viewprofile&u=559>1хслотс зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Каждый новичок и умелый игрок мечтают живо стартануть и начать создавать настоящие ставки. Для сего достаточно отобрать презент, за кот-ый не нужно платить. В зависимости от игровой платформы, нужно создать профиль, привязать email либо аппарат. После этого администрация начислит щедрое вознаграждение вид бесплатных вращений или виртуальных кредитов.
#6597 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Зырянова Анастасия Владимировна порно с Петр Ян (ММА) <a href=https://slon-ru.com/>Преподобная Надежда Александровна порно</a> букмекерская контора официальный сайт скачать 1×bet слоты официальный сайт <a href=https://th-royalgclub.com/>casino online зеркало</a> 1×bet сайт 1×bet xyz порно с Виктория Синицина, фигуристка porno Екатерина Ефременкова, шорт-трекистка porno Алена Косторная (фигурное катание) porno Ангелина Гончаренко, хоккеистка 1×bet слоты 1×bet xyz Александра Бортич
#6598 Charlesgunnyhttp://filmkachat.ru
1хслотс регистрация в 1×slots casino
На критериях отыгрыша безвозмездных призов следует остановиться подробнее. С ними связаны аспекты, которые нельзя забыть без внимания.Бесплатные призы казино без депо возможно получить в виде валютных средств на бонусный счет (вывести их можно только в отыгрыша), фриспинов, забавы либо кешбэк-бонуса. <a href=http://filmkachat.ru/>1×slots зеркало регистрация</a> К огорчению, нет. Почти все казино, настоятельно внесение но бы 1-го минимального депо для вывода выигрыша с бездепозитного бонуса. Также учитывайте, что вывести деньги разрешено только на ту платежную систему, с коей был сделан депо.Иногда виде бездепа, казино презентует минимальный бонус (до 50 рублей), ради которого не стоит заморачиваться. <a href=https://www.facer.io/user/CA95QUBa2X>https://www.facer.io/user/CA95QUBa2X</a> 1×slots бонус за регистрацию <a href=http://krast-studio.ru/user/PhilipGuals/>http://krast-studio.ru/user/PhilipGuals/</a>
казино 1×slots официальный сайт
В большинстве заведений устроить это возможно по адресу электронной почты, по номеру телефонного, спустя социальную сеть либо гугл-аккаунт.Помимо остального, для вывода средств по бездепу нужно внести на счёт собственный первый депозит — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на минимально вероятную необходимую, в чего вывод средств будет доступен. <a href=http://www.arka-bahce.org/forum/showthread.php?p=772199#post772199>1×slots официальный регистрация</a> 1×slots зеркало сайта Бездепозитные призы — это презенты от казино повторяющий бонусных денег либо фриспинов для игровых автоматов, которые начисляются на акк игрока после процедуры регистрации на веб-сайте заведения. Для получения этих поощрений депо не потребуется. <a href=https://portugal-campings.com/pt/profile/julesillut/>https://portugal-campings.com/pt/profile/julesillut/</a> Бездепозитный бонус по промо-коду будет доступен для забавы, только что, нет случае когда Вы активируете специальный бонусный код в разделе с призами или укажите промокод при регистрации на сайте. В некоторых случаях, не активации кода, понадобиться подтвердить контактные данные игрока и наполнить анкету клиента. 1×slots официальный сайт, скачать
1×slots регистрация на 1хслотс
Обычно, бездепозитные бонусы выдаются под конкретные слоты с фиксированной ставкой, но их точно запрещено использовать в игровых автоматах с прогрессивным джекпотом. Список игр, каких можно применять бездеп, Вы отыщите в описании акции либо можете уточнить у саппорта заведения.Помимо остального, для вывода средств по бездепу нужно привнести на счёт собственный первый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на мало вероятную необходимую, последствии чего вывод средств будет доступен. Онлайн-казино тщательно продумывают бонусные обстоятельства, которые нужно выучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и другие лимитирования.Также существуют онлайн-платформы азартных игр, которые используют раздачу бездепозитных бонусов в специальные даты (как для казино, например и для игрока). Помимо сего, действующие геймеры того имеют вероятность получить схожие бонусы за свою работа (например, за увеличения уровня или за схожие заслуги). <a href=http://www.livekavkaz.ru/index.php?subaction=userinfo&user=energeticlattic>http://www.livekavkaz.ru/index.php?subaction=userinfo&user=energeticlattic</a> Заработать на бездепозитных бонусах за регистрацию в казино имеет каждый юзер, достигший совершеннолетия.Классическая разновидность приза за творенье аккаунта. Его преимущество содержится в, что заказчик имеет помощи подбирать аппараты и делать ставки в них. Иногда перечень игровых автоматов ограничен оператором, но все точно это какого-либо, чем один-единственный доступный слот, как если, тогда, с использованием фриспинов. 1хслотс казино зеркало Внесение депозита – Будьте готовы пополнить счет последствии отыгрыша бонуса. Это стандартное требование правил для этого подобии промо-акций. Лучше заранее уточнить, какую сумму надо(надобно) несомненно вносить на счет. Как верховодило, речь о наименьшем депозите, хотя вы должны быть убеждены, собственно он для по кармашку.Наш список включает в себя лучшие бездепозитные бонусы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по принципиальным параметрам:
1хслотс казино зеркало
Условия вывода выигрыша. В неких заведениях для удачного вывода с бездепозитного приза достаточно пополнения баланса и подтверждения личности. В иных же клубах, необходимо количество один прокрутить свой депозит.Способы получения бездепа различаются от облика приза, который понравился игроку. Но вам так нужно быть зарегистрированным в легальном онлайн-казино и подтвердить собственную личность. В общем облике пошаговая аннотация для получения бездепозитного бонуса смотрится например: <a href=https://isomedu.com/forum/profile/josephdrons/>1×slots зеркало подтвердит вашу регистрацию если говорить</a> Можно ли наваривать на бездепозитных бонусах? Это не работа, здесь как повезет, если в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, тогда можно именовать везением, и добавочной добавкой к вашему бюджету.Наш перечень включает в себя превосходнейшие бездепозитные бонусы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит ревизию по важным параметрам: 1×slots мобильная версия войти казино <a href=http://2foru.pl/news/watch-this-sound-by-konzept/comment-page-1689/#comment-2160337>http://2foru.pl/news/watch-this-sound-by-konzept/comment-page-1689/#comment-2160337</a> Если вы новичок деле и лишь попали в неизведанную вами область азарта — за предложений как бездепозитные призы без пополнения.
1×slots зеркало быструю регистрацию а также мгновенное
Когда речь о денежных призах, казино практически устанавливают условия вейджера, которые нужно выполнить, дабы вывести выигрыш.Акции, приуроченные к календарным дням, бывают рассчитаны как на всех пользователей, так и на категории: например, подарок на 8 марта девушкам-игрокам или мужикам на 23 февраля. Для проверки применяются сканы паспортов, водительских удостоверений, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если пользователь замечен в попытке ввести дополнительный акк, все его учетные записи подвергаются блокировке, а их владелец попадает в темный список. При забаве на лицензионной площадке не бояться указывать достоверную индивидуальную информацию (шифрование исключает утечку индивидуальных данных).Выше мы дали глубокий набор самых свежих и своевременных бездепозитных бонусов в интернет казино без пополнения на 2022 год, где вам воспользоваться любым ценным бездепозитным призом. <a href=http://vrsamara.ru/bitrix/redirect.php?goto=http://gimnazia6.ru/bitrix/rk.php?goto=http://opora-onco.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/XNGnyDtIVDY>http://vrsamara.ru/bitrix/redirect.php?goto=http://gimnazia6.ru/bitrix/rk.php?goto=http://opora-onco.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/XNGnyDtIVDY</a> Доступные игры – В некоторых азартных играх можно понизить математическое превосходство казино до нескольких 10-х процента. В их числе все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как верховодило, в этих забавах ставки идут в зачет вейджера не полностью. Например, имеет предусматриваться только 50%. В неких играх бездепозитные бонусы вообще невозможно отыгрывать.Бездепозитные призы начисляются только раз раз. Не стоит раскрывать свежие аккаунты, чтобы получить их повторно. Служба безопасности казино непременно выявит «левого» участника и перекроет. Если гость выполнит нужные требования, отыграет собственную ставку и решит вывести личный выигрыш, то ему нужно к, собственно казино обязательно потребует предоставить ксерокопии личных документов, чтобы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои исключить не получится. сайт 1× slots casino Также есть онлайн-платформы азартных игр, коие применяют раздачу бездепозитных бонусов в особые даты (как для казино, например и для игрока). Помимо этого, действующие геймеры кроме имеют вероятность получить схожие бонусы за собственную работа (к примеру, за повышения значения либо за схожие заслуги).
<b>Смотреть еще похожие новости:</b>
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=467030>1хслотс зеркало на сегодня</a>
<a href=https://www.makinamania.net/index.php?topic=251862.new#new>казино 1×slots</a>
<a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=2416>казино 1× slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но такие рамки не смущают числе хайроллеров, что коэффициенты на слотах разрешают рассчитывать на солидные выигрыши, а в неких автоматах разыгрывается передовой джекпот. Во время забавы в казино, выигрыши, приобретенные благодаря безвозмездным призовым фондам, суммируются и включаются в общую сумму для отыгрывания. Однако, если фортуна улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно допустит вывести финансовые свои. Сумма вывода несомненно находиться от лимита, утвержденного непосредственно в данном учреждении. Поэтому, внимательно надо(надобно) читать управляла выдачи анлимитных депо.
#6599 DarwinInapshttp://tv.hdrezka.lu
новинки кино онлайн в 4К <a href=http://tv.hdrezka.lu/>лучшие фильмы 2018 смотреть онлайн</a>
#6600 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
лучшие букмекерские конторы 1×bet xbet xyz <a href=https://th-royalgclub.com/>casino зеркало сегодня рабочее</a> Черкесова Бэлла Мухарбиевна порно Елена Лядова <a href=https://strelochnik.com/>порно с Голикова Татьяна Алексеевна</a> бесплатные букмекерские конторы Хорова Наталья Александровна порно 1×bet слоты 1×bet xyz официальное казино вход про казино Черкесова Бэлла Мухарбиевна порно порно с Максим Глушенков (футбол)
#6601 Charlesgunnyhttp://filmkachat.ru
1×slots мобильная версия войти казино
Бонусы без депозита при регистрации считаются самыми красивыми как для опытных игроков, например для и новичков. Получив такое вознаграждение, клиент имеет выступать на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные призы в интернет-казино Рунета, а условия их активации и выигрыша. <a href=http://filmkachat.ru/>1× slots сайт</a> Онлайн гемблинг развивается с каждым деньком больше и больше, новые бренды создаются не по денькам а по часам. Новые интернет казино делают вступительные промоакции для игроков, для того собственно бы зарекомендовать себя, и тем наиболее предлагают бездепозитные бонусы за регистрацию, что бы не упустить эту вероятность — как пользоваться новым бездепом, советуем посещать наш вебсайт как возможно почаще, самое вкусное и свежие будет добавляться в этом же списке.Для казино, работающих онлайн, бездепозитные бонусы нужны для привлечения новых клиентов. Предложение поиграть на слотах без необходимости внесения настоящих средств — работающий способ для увеличения энтузиазма к компании. После отыгрыша бездепа велик шанс, что игроку понравится и он продолжит выступать в казино, лишь сейчас уже на личные средства. <a href=https://webanketa.com/forms/6gtk2c9q6wqp4s1scrw64dv6/>https://webanketa.com/forms/6gtk2c9q6wqp4s1scrw64dv6/</a> Простая процедура получения бездепозитного приза, кот-ая займет не более 2-х мин. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные.2. Создать новый профиль. Для регистрации надо(надобно) наполнить небольшую анкету или зайдите в личный кабинет при помощи соц сеток; 1×slots официальный сайт скачать <a href=http://gsianb10.nayaa.co.kr/bbs/board.php?bo_table=sub03_01&wr_id=95990>http://gsianb10.nayaa.co.kr/bbs/board.php?bo_table=sub03_01&wr_id=95990</a> Более крупные предложения встречаются довольно изредка. Зачастую они доступны только VIP-игрокам. В оставшихся случаях им наверняка сопутствуют очень жесткие обстоятельства отыгрыша. Также вероятны вспомогательные условия прочие ограничения, прописанные в критериях и положения бонусной программки казино.
1хслот 1хслотс регистрация перейти на 1×slots
В зависимости от онлайн заведения каждый из их имеет вам предложить как бездепозитные средства, так и бездепозитные фриспины, коие последствии успешной регистрации рухнут для на ваш игровой баланс.Для отыгрыша бонуса казино обязует игрока сыграть на необходимую, в некоторое один превышающую необходимую полученного бонуса — тут выгода компании явна. <a href=https://hiddeninthesand.com/forum/viewtopic.php?t=266928>1х слотс зеркало регистрация в 1×slots casino</a> 1хслот официальный сайт зеркало Активация по промокоду используется в разных обликах бездепов. Если речь о приветственном призе, то набор символов возможно разузнать на главной странице, в регистрационной форме или послании, коие отправляется юзеру для доказательства e-mail. Акции все проводиться общо с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активируется одноразовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном кабинете или начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем важный код для активации в описании каждого промо. <a href=https://tapas.io/glavdorogadv1606>https://tapas.io/glavdorogadv1606</a> 1×slots зеркало регистрация то дальше необходимо пройти Какие призы возможность еще получить не бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, любое онлайн казино предлагает игрокам выгодное предложение на 1-ый депозит, вы совершаете депо, ваш депо увеличивается в двое либо том в трое, тем наиболее начать выступать возможно с больше солидной суммой, так же не забываем про вейджер на призы.
1×slot регистрация
Бездепозитный приз казино 2022 с выводом за регистрацию дает вероятность ознакомиться игроку с лобби выбранного заведения, сориентироваться в выборе игр и выяснить качество работы саппорта. Довольно нередко, начиная игровой процесс, игрок уже отказывается останавливаться и проделывает реальный лепта. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать даром вполне как один таки с призом за регистрацию без надобности вносить депозит. <a href=http://www.sazkar.info/member2041.html>http://www.sazkar.info/member2041.html</a> При регистрации стопам свидетельствовать лишь достоверную информацию. Когда учетная запись несомненно активна, будет доступ в Личный офис. В нем можно выбрать валюту, установить промокод и разузнать доскональные правила получения и отыгрыша бездепа. Краткая информация об промоакции нередко присутствует именно на регистрационной форме. 1×slots промокод при регистрации 2025
1×slots casino регистрация
Обычно бездепозитные акции от казино, приходят на эл. Почту в дни рождения либо дни. В неких интернет казино возможно адресоваться в чат и как постоянному игроку, вполне вам предложат бездепозитное предложение.Для верификации номера телефонного, в собственном профиле изберите опцию „Подтвердить номер телефона“ и введите в отвечающее фон код, полученный в sms-сообщении. Постарайтесь отыграть вейджер, дабы была вероятность забыть заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные инструменты. Вы можете получить выигрыш на электронной кошелёк, карту, аппарат.Бездепозитные призы — это подарки от казино вид бонусных средств либо фриспинов для игровых автоматов, коие начисляются на аккаунт игрока в процедуры регистрации на веб-сайте заведения. Для получения этих поощрений депо не требуется. В настоящее время получить приз за регистрацию в казино очень просто. Почти любой игорный дом с готовностью предоставит деньги либо бесплатные вращения. Многие игроки пользуются данным и не смущяются региться в каждом клубе с выгодными критериями. Кстати, это отличная вероятность выдумать выигрышную стратегию и сорвать куш.Варианты выигрыша зависят от Вашей успеха и условий игорного портала. Выше мы сказали, что кое-какие бездепозитные бонусы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются другие, все, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность передовых игр на деньги, возможно выиграть невероятные суммы. Сегодняшние игровые автоматы либо видео слоты, как их именуют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000. 1×slots бездепозитный бонус за регистрацию <a href=https://sity.kr/bbs/board.php?bo_table=freetalking&wr_id=9279>https://sity.kr/bbs/board.php?bo_table=freetalking&wr_id=9279</a> Маркетинговая деятеля всех игорных интернет-клубов обязана одевать различный характер. И если вознаграждения на депозит работают чтобы, чтобы, чтобы провоцировать вносить депозиты и поощрять теснее имеющих юзеров, то бездепозитный бонус в казино либо бонус за регистрацию в казино, до всего, рассчитан на расширение базы покупателей.Как лишь получите бездеп в казино, всё равно не забывайте проверять электронную почту. Некоторые игорные клубы день радуют активных гэмблеров приятными призами. Чаще всего получить подарок возможно в преддверии праздника, на день рождение, за привлечение приятеля. А также распространённым бонусом является надбавка к депозиту. Нужно более пополнить счёт, и азартное заведение увеличит его на 50–100%.
1×slots зеркало видели такую регистрацию на
Таким образом интернет казино получает потенциального игрока. Возможно в или настоящем он захочет сыграть на средства деньги. Так работают бездепозитные бонусы в интернет казино. Здесь отлично подходит выражение, бесплатные сыр случается только в мышеловке. Начинающие игроки все не обдумывать опасность азарта. Однако с осознания делается больше. Это тема для отдельного обсуждения.Бонус за регистрацию в казино без депозита с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша имеет понадобиться сделать ставки на необходимую, в некоторое десятков раз превышающую необходимую приза или выигрыша. <a href=http://rosttour.com/index.php?subaction=userinfo&user=rabidammonia92>http://rosttour.com/index.php?subaction=userinfo&user=rabidammonia92</a> На бонусные начисления все быть установлены вспомогательные лимитирования, которые Вы не учли при отыгрыше. Пока бонус полностью не отыгран — средства из казино не выводятся. 1хслотс мобильная версия зеркало Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, чтобы снова получить бесплатный приз. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ждет неминуемое наказание.
<b>Смотреть еще похожие новости:</b>
<a href=http://fin-molitor.com/forum/viewtopic.php?f=2&t=455823>сайт 1× slots casino</a>
<a href=https://www.xn–72c9aa5escud2b.com/webboard/index.php?action=profile;u=1721715>1×slots рабочее зеркало на сегодня</a>
<a href=https://www.one2bay.de/forum/showthread.php?tid=476854>1×slots подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При использовании бездепозитным призом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют количество видов лимитов:
#6602 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
up букмекерская контора Анна Михалкова <a href=https://slon-ru.com/>Черкесова Бэлла Мухарбиевна порно</a> приложения букмекерских контор 7k casino зеркало на сегодня <a href=https://glvk.guru/>kometa casino</a> рабочее казино porno Вера Бирюкова, гимнастка казино вулкан casino регистрации casino 7k рабочее 1×bet скачать бесплатно почему в казино нет часов
#6603 Charlesgunnyhttp://filmkachat.ru
1×slots casino online регистрация
С не отыгранным призом воспрещается превосходить размер максимальной ставки. Нарушение этого обстоятельства в аннулирование выигрыша.Мы делаем акцент на ключевых положениях верховодил, рассказываем о территориальных ограничениях и вкратце информируем о других акциях обсуждаемого казино. <a href=http://filmkachat.ru/>1хслот 1хслотс регистрация перейти на 1×slots</a> Максимальная ставка ? уточняется в еденице счета и ограничивает размер ставки за один спин. В случае ее превышения бонус возможность быть аннулирован. Также в правилах может находиться запрет на размещение ставок конкретного вида, например, по одинаковым шансам в рулетке (другими, на чет либо нечет, красное или темное и т.д. ).Помимо остального, для вывода средств по бездепу необходимо внести на счёт свой первый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало возможную сумму, после чего вывод средств станет доступен. <a href=https://www.zybuluo.com/comcgifurniture/note/2570100>https://www.zybuluo.com/comcgifurniture/note/2570100</a> 1×slots бездепозитный бонус за регистрацию <a href=https://daltonygox74185.designertoblog.com/61714979/deep-nude-exploring-the-ethics-and-impact-of-ai-powered-image-manipulation>https://daltonygox74185.designertoblog.com/61714979/deep-nude-exploring-the-ethics-and-impact-of-ai-powered-image-manipulation</a> Получить приветственный приз могут лишь свежие клиенты онлайн-казино. Способы описаны в условиях промоакции каждого законного казино, почаще всего это:
1×slots скачать на айфон
Стоит отметить, собственно бездепозитный бонус выдается только совершеннолетним новичкам, которые, же, могут пригласить личных приятелей и знакомых, кроме претендующих на поощрительную программу лояльности. Подобная разработка появилась среди соперничающих онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры способствуют увеличению своей популярности, методом привлечения новых игроков. Бонусы – это оригинальный шанс для потенциальных участников игры, коие все опробовать софт покер рума и увериться, станут ли они в него выступать или нет. Новый игрок испробует свои силы с реальными оппонентами в казино. 1×slots официальный сайт мобильная версия скачать <a href=http://suprememasterchinghai.net/bbs/board.php?bo_table=free&wr_id=878562>http://suprememasterchinghai.net/bbs/board.php?bo_table=free&wr_id=878562</a> Бездепозитный приз предоставляется новому игроку за определенные деяния. Часто подарок в виде денег или фриспинов выдается за регистрацию, спасибо чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.Вышеописанная первопричина и считается основным нюансом, в которого операторы отдают часть собственной прибыли на различные рекламные расходы и рекламные кампании. А самым действующим тут станут играть именно бездепозитные бонусы казино 2022 с выводом за регистрацию. 1×slots зеркало на сегодня Используйте превосходнейшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из списка ниже, дабы заработать подарки за обычные действия теперь сегодня получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и быстрыми выводами на электрические кошельки.Выше мы предоставили полный комплект самых новых и актуальных бездепозитных призов в онлайн казино без пополнения на 2022 год, где вы можете пользоваться каким ценным бездепозитным бонусом.
1×slots бездепозитный бонус за регистрацию
На страничке представлены бездепозитные бонусы за регистрацию в казино редчайшая награда за которой гонятся все игроки как новички, так и мастера. Мы тоже уделяем большое внимание на присутствие призов при формирование рейтинга казино на деньги. Бездепозитный приз это вероятность выступать даром и выиграть реальные средства. <a href=https://grilovani-barbecue.com/memberlist.php?mode=viewprofile&u=3957>https://grilovani-barbecue.com/memberlist.php?mode=viewprofile&u=3957</a> Перед активацией главно внимательно выучить условия акции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют значение также лимиты ставок при отыгрыше и сроки, протяжении которых можно воспользоваться предложением. Если бездеп обхватывает узкий список игр, рекомендуется узнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с низкими множителями выплат подходят только никаких случае, в оператор не установил взыскательные лимитирования на максимальную сумму ставки.Предложения с бездепозитными бонусами за регистрацию дозволяют свежим заведениям привлечь аудиторию на собственный вебсайт. А игроки к получают возможность играть на настоящие деньги без депо в казино и заработать маленький стартовый капитал, кот-ый разрешено вывести на карту банка или электрический кошелек. казино 1×slots официальный сайт Принципиальным различием даровых призов от бонусов на депозит является неимение необходимости заносить средства на аккаунт. Из-за этого их часто нарекают бездепозитными (no down payment bonuses).
1хслотс мобильная версия зеркало
Вейджер менее х30–35 считается применимым. Опытные игроки утверждают, что с таким вейджером реально остаться в плюсе, в верно подойти к выбору игрового аппарата. Этот образ бонуса несомненно добавлен на Ваш акк последствии успешной процедуры регистрации с внедрением номера телефона. Если избрать иной метод творенья учетной записи, бездеп не будет добавлен на Ваш акк.Но эти рамки не смущают в хайроллеров, потому коэффициенты на слотах разрешают рассчитывать на крупные выигрыши, в некоторых автоматах разыгрывается прогрессивный джекпот. Но есть азартные заведения, готовые просто так вручить средства на забаву. Для этого довольно создать профиль. Чтобы вывести выигрыш, сперва нужно выполнить вейджеровые условия, прописанные в критериях получения бездепа. 1×slots казино зеркало <a href=https://www.tunionfans.com/home.php?mod=space&uid=5322>https://www.tunionfans.com/home.php?mod=space&uid=5322</a> Процесс подтверждения личности возможность взятьвдолг(взятьвзаймы) от одного дня до недели. Если заказчик допустил какую оплошность при заполнении паспортных данных, то ему по адресоваться с проблемой в саппорта онлайн-казино.В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с безвозмездных вращений. Прибыль, которую Вы заработаете на этом бездепе возможно ставить на вывод без какого или отыгрыша.
1хслот зеркало
Для выбора азартного заведения Вы можете воспользоваться списком наших казино с бонусами за регистрацию. На нашем веб-сайте мы опубликовали перечень бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, что доля бонусов эксклюзивные и доступны лишь для гостей нашего сайта по-специальному промо-коду либо по оригинальной ссылке. Кроме того, для каждого бонуса мы подготовили подробный обозрение, в котором Вы узнаете как получить и отыграть одобрение и как исключить свой выигрыш с бездепа.Многие новички колеблются, собственно поощрительный приз не будет отдавать, и если они выиграли у казино. Это полностью неопасно и надежно. Выводя выигранные свои, игрок просто останавливает свое участие при и теряет уникальную вероятность – даром увеличивать личное материальное положение. Первый образующийся вопрос, это, чего выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают новых игроков. Последним проще начать забаву на средства с подарка за регистрацию. Им не нужно пополнять баланс и расходовать собственные свои. Новички получают благотворительные спины или свои на счёт. С их подмогою знакомятся с игровым ходом, крутят слоты и делают ставки в рулетке. <a href=http://mtpkrskstate.ru/forum/user/206566/>http://mtpkrskstate.ru/forum/user/206566/</a> Бонус за регистрацию в казино без депозита с выводом денег надо(надобно) отыграть. Зачастую для отыгрыша имеет потребоваться сделать ставки на необходимую, в некоторое десятков один превышающую необходимую приза либо выигрыша. x1 slots регистрация в 1×slots casino Самые знаменитые способы вывода средств ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электрическим платежным системам подобии Neteller и Skrill, а также используют криптовалютными кошельками. Вывод выигрышей имеет исполняться моментально или занимать от нескольких часов до нескольких суток.
<b>Смотреть еще похожие новости:</b>
<a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=4724>1 x slots</a>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=370437>1×slots казино мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Получить Бездепозитный бонус в интернет казино дело 2-ух кликов. Другой момент, отыграть промо и соблюсти верховодила и обстоятельства отыгрыша. Под правилами подразумевается не только вагер, но и лимитирования по максимальной ставке. Мы понимаем, что в кино все ставят на зеро и выигрывают. Призываем не создавать подобного. Перед активацией бонуса прочтите управляла. Узнайте последующие факторы: Условия получения подарка, за регистрацию, за депо и многое. Ограничения по наибольшей ставке. Зачастую не выше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах можно отыгрывать вагер. Можно вращать автоматы, а вагер будет стоять на месте. Поэтому принципиально знать, в каких играх возможно осуществлять кратность денежного оборота.
#6604 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
win win casino casinos winning <a href=https://krtka.info/>bitz casino</a> казино рояль смотреть Чулпан Хаматова <a href=https://res-publika.com>казино фильм онлайн</a> casinos winning Хорова Наталья Александровна порно ramenbet casino казино смотреть онлайн бесплатно online casino 7k букмекерские конторы бет как выиграть в казино
#6605 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Александра Бортич включи казино <a href=https://sovsekretno.net/>букмекерская контора без</a> casino pin официальный скачать 1×bet на андроид бесплатно <a href=https://kompromat1.online/>казино 1</a> Мухтиярова Елена Вячеславовна порно casino online зеркало 1×bet зеркало рабочее мелбет букмекерская контора casino актуальное зеркало up casino скачать букмекерская контора фонбет официальный сайт
#6606 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Далее потребуется отыграть вагер и исключить выигрыш. Игрокам без навыка крупно подфартило, меня получить 10-ки подарков за 1 регистрацию. Если не сумели получить Бездепозитный бонус, не тревожьтесь. Обратитесь в интернет чат, оператор поможет ситуацию.Если вы облюбовали для себя некоторое брендов коие вам больше всего полюбились, для постоянной игры! Таких гемблеров казино довольно предпочитает и ценит, за частую такие игроки становятся VIP игроками заведения, коим нередко поступают прибыльные предложения повторяющий призов, так же туда входит и бездепозитные. <a href=http://filmkachat.ru/>1×slots промокод при регистрации</a> <a href=https://medium.com/@comcgifurniture/ultimate-guide-to-professional-weed-delivery-pickering-services-in-2024–2a76d5e699da>https://medium.com/@comcgifurniture/ultimate-guide-to-professional-weed-delivery-pickering-services-in-2024–2a76d5e699da</a> 1×slots скачать на айфон <a href=http://pku84-org.dajiguang.com/home.php?mod=space&uid=175718&do=profile>http://pku84-org.dajiguang.com/home.php?mod=space&uid=175718&do=profile</a>
1х слотс зеркало регистрация в 1×slots casino
Процесс подтверждения личности имеет взятьвдолг(взятьвзаймы) от одного дня до недели. Если клиент допустил какую-либо оплошность при заполнении паспортных данных, то ему по обратиться с проблемой в службу поддержки онлайн-казино.Основное управляло получения бездепа ? создаваемый акк обязан быть у пользователя первым и единственным. Наличие нескольких аккаунтов строго воспрещено. Проверка проводится по имени, e-mal, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депозита нужно соблюдать простую очередность действий. 1×slots зеркало <a href=https://podacha-blud.com/user/Charlesmow/>https://podacha-blud.com/user/Charlesmow/</a> Отзывы читателей о бонусных акциях помогут составить эмоцию, хотя не запамятовывайте о субъективности собственных объяснений.2. Создать новый профиль. Для регистрации нужно заполнить маленькую анкету либо зайдите в собственный кабинет при помощи соц сетей; 1× слот зеркало Классическая разновидность бонуса за творение аккаунта. Его преимущество заключается в, что клиент может без избирать аппараты и делать ставки в их. Иногда перечень игровых автоматов ограничен оператором, хотя все одинаково это превосходнее, чем один-единственный доступный разъем, как если, тогда, с использованием фриспинов.Некоторые онлайн-казино без депо предлагают новым посетителям выбрать бонус при регистрации. Будьте внимательны: выбрав один, вы в абсолютном большинстве случаев не можете пользоваться остальными.
1×slots официальный сайт скачать
B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax <a href=http://forum.moto-fan.pl/uzytkownik-geraldpax>http://forum.moto-fan.pl/uzytkownik-geraldpax</a> Отыграв бездепозитный бонус в казино с выводом тоже придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если схожее ограничение существует, то единоразово вывести получится только необходимую, не превышающую размер приобретенного приза. 1хслотс зеркало на сегодня Главным моментом в возникновении этих вознаграждений состоит никаких, что пустив их в ход, в ничем не рискует и в последствии никому ничего не несомненно должен (не зависимо, получит ли он спасибо бонусам какой-нибудь выигрыш или мгновенно спустит все лишь что прибывшие финансы). То есть, казино снабжает игрока возможностью на дармовой базе играть во всевозможные слоты даже спонсирует игру.
1×slots промокод при регистрации 2025
Для получения бонуса нужно ознакомиться с программкой преданности казино и устроить ставки на необходимую, необходимую для перехода на грядущий степень. <a href=http://theauction.com.au/my-account/>1×slots регистрация на 1хслотс</a> Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. Фриспины — благотворительные вращения, которые разрешают игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины считаются наиболее знаменитым и желаемым обликом бонуса — безвозмездные вращения иногда эффективнее и веселее в отыгрыше, чем другие облики бездепов.Сразу в активации промокода возможно пользоваться подарком. Как теснее упоминалось, призы бывают трёх видов – фриспины, кредиты и фриплей-бонусы. сайт 1× slots casino <a href=https://postheaven.net/p80gyosxaj>https://postheaven.net/p80gyosxaj</a> Принципиальным различием безвозмездных призов от призов на депозит считается неимение необходимости вносить деньги на аккаунт. Из-за этого их нередко именуют бездепозитными (not the slightest deposit bonuses).
1хслот официальный сайт зеркало
Бездепозитный бонус нередко имеет стать легкодоступным незамедлительно после завершения регистрации, что как единственным требованием к нему считается регистрация, а после проверка вашей новой учетной записи.Как управляло, новоприбывшие игроки начала хотят ознакомиться с способами ввода и вывода денежных средств и сроки исполнения поданных заявок чтобы четко осознавать, как живо они смогут вывести собственный казино бонус за регистрацию без депо на электронный кошелек либо же банковскую карту. К счастью для всех играющих, внутри определенных холдингов, все казино конкурируют меж собой. Ведь случае бы конкретную компанию давало только одно онлайн-заведение, то вряд ли бы посетители увидели казино с призом за регистрацию и возможность бы рассчитывать только на вознаграждение в виде бонуса на первое инвестиция. К любому заведению периодически следует завлекать новых игроков, что, в, лишь на руку всем играющим. Фриспины предусмотрены для применения в видео слотах. Внимательно ознакомьтесь с условиями – часто их выдают на некоторые автоматы. В зависимости от клуба, у вас получится сделать определённое число ставок. Кстати, продвинутые игорные жилища позволяют запускать любых «одноруких бандитов». <a href=http://c909201u.beget.tech/user/JoshuaNobre/>http://c909201u.beget.tech/user/JoshuaNobre/</a> Доступность — бездепозитные бонусы в казино чаще всего предоставляются свежим игрокам, хотя случаются случаи, когда бонус шансы получить и действующие клиенты. 1×slots casino зеркало рабочее Таким образом, заведение пытается продемонстрировать себя своим потенциальным геймерам, а подобный маркетинговый ход как казино бонус без депо за регистрацию завлекает очень большое внимания к игорному заведению и обеспечивает постоянный струю новых гостей и будущих посетителей игрового интернет клуба.
<b>Смотреть еще похожие новости:</b>
<a href=http://xn–80akbkalsbeeafq6a6b2f.xn–p1ai/forum/messages/forum1/topic30067/message186918/?result=reply#message186918>x1 slots регистрация в 1×slots casino</a>
<a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=50611>скачать 1×slots на андроид мобильная версия</a>
<a href=http://swissairways-va.com/phpBB3/memberlist.php?mode=viewprofile&u=3495>1×slot официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выбрать казино с бездепозитным призом. У нас на сайте представлен перечень лучших онлайн казино, которые предлагают своим игрокам щедрые призы за регистрацию.
#6607 BrianFaw
https://indianpharmacy.win/ best india pharmacy
#6608 Charlesgunnyhttp://filmkachat.ru
рабочее зеркало 1×slots
В большинстве заведений сделать это можно по e-mal, по номеру аппарата, спустя социальную сеть или гугл-аккаунт. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasino09k online</a> <a href=https://www.find-topdeals.com/blogs/164113/%D0%A1%D1%80%D0%BE%D1%87%D0%BD%D1%8B%D0%B9-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%BE%D0%B1%D0%B8%D0%BB%D0%B5%D0%B9>https://www.find-topdeals.com/blogs/164113/%D0%A1%D1%80%D0%BE%D1%87%D0%BD%D1%8B%D0%B9-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%BE%D0%B1%D0%B8%D0%BB%D0%B5%D0%B9</a> Заработать на бездепозитных бонусах за регистрацию в казино имеет любой юзер, достигший совершеннолетия.Доступные игры – В некоторых азартных играх возможно снизить математическое приемущество казино до нескольких десятых процента. В их числе все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как правило, в этих забавах ставки идут в зачет вейджера не всецело. Например, имеет предусматриваться только 50%. В некоторых играх бездепозитные призы вообщем невозможно отыгрывать. 1×слотс казино <a href=https://bandit400.ru/user/DoctorLazutaEn/>https://bandit400.ru/user/DoctorLazutaEn/</a> Можно ли в одном онлайн казино получить больше 1-го бонуса за регистрацию? Нет, так как в любом интернет казино есть управляла, к которым надо(надобно) придерживаться, не создавать 2 аккаута для получения призов, по будет блокировка обоих аккаутов, не пытайтесь перехитрить онлайн казино, бонус за регистрацию выдаеться раз один 1 лицу.
1 хслот регистрация в 1×slots casino
Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.Можно ли наваривать на бездепозитных призах? Это не работа, здесь как повезет, если в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, за возможно именовать везением, и дополнительной добавкой к вашему бюджету. 1× slots регистрация в 1×slots casino Некоторые онлайн-казино без депозита предлагают свежим посетителям избрать приз при регистрации. Будьте внимательны: выбрав раз, вы в безоговорочном большинстве случаев не сможете воспользоваться остальными.Выше мы дали полный набор самых свежих и своевременных бездепозитных призов в интернет казино без пополнения на 2022 год, где вам воспользоваться хоть ценным бездепозитным бонусом. <a href=http://snapshotgenius.com/paint/main.php?g2_view=core.UserAdmin&g2_subView=core.UserLogin&g2_return=https://sketchfab.com/Blackshisha0212>http://snapshotgenius.com/paint/main.php?g2_view=core.UserAdmin&g2_subView=core.UserLogin&g2_return=https://sketchfab.com/Blackshisha0212</a> B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.При регистрации никаких либо ином онлайн игральном заведении — вас дается один шанс испытать свою удачу не внося средства монеты. Замечу что эту поощрительную услугу деют не все онлайн игровые площадки, а только щедрая середина(средина) из них. Которые мы подготовили для Вас в нашем списке. 1×slot рабочее зеркало
рабочее зеркало 1хслотс
Самые популярностью способы вывода средств ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электронным платежным системам на Neteller и Skrill, а также используют криптовалютными кошельками. Вывод выигрышей может исполняться моментально либо занимать от нескольких часов до нескольких суток.Возьми свой подарок. Чаще всего бонус активируется незамедлительно после регистрации. Но посещают ситуации, когда нужно забежать в личный офис либо написать в справочную службу. <a href=http://scoalamarculesti.info/index.php?subaction=userinfo&user=learnedshield33>http://scoalamarculesti.info/index.php?subaction=userinfo&user=learnedshield33</a> 1×slots зеркало
1×slots регистрация на сайте
Ограничения по играм. Администрация воспрещает игрокам кое-какие игровые автоматы с бездепозитным бонусом, деньгами или безвозмездными вращениями. Обычно, в правилах приводится глубокий список слотов для отыгрыша. Иногда деление производится по виду игр. Например, отыгрыш вероятен на всех игровых аппаратах, но запрещен в настольных забавах и в разделе Live Casino. <a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=13119>1×slots акции</a> На условиях отыгрыша даровых призов стопам остановиться подробнее. С ними связаны нюансы, которые нельзя оставить без внимания.Не желайте сыграть в азартные забавы, не рискуя средствами средствами, хотя получая в все выплаты? Подобную вероятность деют все наихорошие порталы с азартными весельями. В их количестве большое правдивых и надежных интернет-казино на русском языке. Они привлекают свежих пользователей различными поощрительными событиями, включая бездепозитные, или благотворительные бонусы. казино 1× slots официальный сайт <a href=http://dsmet.net/bbs/board.php?bo_table=free&wr_id=350635>http://dsmet.net/bbs/board.php?bo_table=free&wr_id=350635</a>
1×slots сайт
Ограничения по играм. Администрация запрещает игрокам кое-какие игровые автоматы с бездепозитным призом, деньгами или бесплатными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда разделение производится по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, хотя запрещен в настольных забавах и в разделе Live Casino. Это также бесплатные деньги, коие поступают на аккаунты новоиспеченных игроков последствии регистрирования. А необыкновенность этих бонусов состоит том,, собственно обретенные деньги непременно идет использовать в продолжении назначенного времени. <a href=https://inkbunny.net/Dissertat1508>https://inkbunny.net/Dissertat1508</a> 1×slots зеркало этих способов предполагает регистрацию Чтобы получить возможность вывести выгода с бездепозитного бонуса в казино, нужно выполнить ряд критерий:
<b>Смотреть еще похожие новости:</b>
<a href=https://karakol.com.kg/user/Jameskef/>1хслотс казино зеркало</a>
<a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=139389>1×slots промокод при регистрации</a>
<a href=https://isomedu.com/forum/profile/josephdrons/>1х слотс зеркало регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Онлайн-казино с бездепозитными призами ставят клиентам условия для пользования бездепами, поэтому перед ролью в акции никакого подробно ознакомиться со всеми правилами и нюансами промоакции. Условия шансы касаться получения бонуса, его использования и следующего вывода валютных средств если, тогда, выигрыша. Во время забавы в казино, выигрыши, приобретенные спасибо безвозмездным призовым фондам, суммируются и включаются в общую сумму для отыгрывания. Однако, в удача улыбнется и получится отыграть все призы, игровое заведение гарантированно допустит исключить денежные средства. Сумма вывода несомненно зависимости от лимита, утвержденного непосредственно в этом учреждении. Поэтому, пристально нужно читать управляла выдачи анлимитных депозитов.
#6609 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Сергей Бобровский (хоккей) pin up casino <a href=https://res-publika.com>pin up casino пин ап</a> casino бездепозитный лучшая казино <a href=https://glvk.guru/>Скоробогатова Ольга Николаевна порно</a> часы казино porno Ангелина Гончаренко, хоккеистка 1×bet зеркало слоты 1×bet xyz мелбет букмекерская контора Мухтиярова Елена Вячеславовна порно казино ли casino андроид
#6610 is amoxicillin the same as amoxicillinhttps://experienceleaguecommunities.adobe.com/t5/user/viewprofilepage/user-id/17936720
How do I check if an online pharmacy complies with regulations regarding the sale of prescription medications https://experienceleaguecommunities.adobe.com/…-id/17936720 cefdinir or augmentin for ear infection. Medications and Joint Health – Easing Stiffness and Discomfort
#6611 Charlesgunnyhttp://filmkachat.ru
1×slots casino online регистрация
Бездепы все заходить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами.Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную процедуру активации приза без депо. Внимательно прочтите до конца. Многие новенькие проделывают промахи на шаге регистрации и поэтому не могут получить подарок. <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 долларов. Если выдаются фриспины, их количество редко выше нескольких 10-ов бесплатных вращений. <a href=https://airsoftc3.com/article/18052/How-Professional-3D-Modeling-Furniture-Transforms-Modern-Design-Industry>https://airsoftc3.com/article/18052/How-Professional-3D-Modeling-Furniture-Transforms-Modern-Design-Industry</a> 1×slots регистрация 1×slots review live <a href=https://xn----7sbarohhk4a0dxb3c.xn–p1ai/user/CharlesGreva/>https://xn----7sbarohhk4a0dxb3c.xn–p1ai/user/CharlesGreva/</a>
1×slots регистрация
При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, коие можно предназначить игре в казино. <a href=http://www.ihavethepussy.com/de/threads/190657–1×slots-casino-online-%D0%A1%D0%82%D0%A0%C2%B5%D0%A0%D1%96%D0%A0%D1%91%D0%A1%D0%83%D0%A1%E2%80%9A%D0%A1%D0%82%D0%A0%C2%B0%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A1%D0%8F?p=208191#post208191>1×slots casino online регистрация</a> 1×slots промокод при регистрации 2025 Если вы избираете испытанное лицензионное интернет казино и сделайте все обстоятельства получения бездепозитного приза, проблем с получением подарка у Вас не возникнет. <a href=https://www.buzzbii.com/post/1314581_avtoshkola-vladivostok-v-avtoshkole-obychno-obuchayut-vozhdeniyu-legkovyh-avtomo.html>https://www.buzzbii.com/post/1314581_avtoshkola-vladivostok-v-avtoshkole-obychno-obuchayut-vozhdeniyu-legkovyh-avtomo.html</a> Помните, что всевозможные нарушения правил сведут на нет ваши старания, и вы всего останетесь без начисленного вам бесплатного приза. Всегда изучайте правила начисления и условия вейджера. По каким вопросам, на которые вы возможности без найти ответы, обращайтесь за разъяснениям и саппорт.Это один из основных показателей привлекательности презента. С завешенным коэффициентом и мастера не смогут выполнить условия по отыгрышу. И важно, как привлекательно выглядит предложение – бездепозитный бонус казино в объеме $500 либо $1 000. Чтобы новенькие лучше вдумались, собственно же такое вейджер, мы разберём на примере. зеркло казино 1×slots Способы получения бездепа различаются от облика бонуса, который понравился игроку. Но для иначе нужно быть зарегистрированным в легальном онлайн-казино и подтвердить свою личность. В общем виде пошаговая инструкция для получения бездепозитного приза смотрится например:
1×slots бездепозитный бонус за регистрацию
Процесс подтверждения личности имеет занять от одного дня до недели. Если клиент разрешил какую-либо ошибку при заполнении паспортных данных, то ему по адресоваться с задачей в службу онлайн-казино.Фриспины. Бесплатные вращения предусмотрены для использования в видео-слотах. Внимательно читайте обстоятельства – они часто выдаются для некоторых машин. В зависимости от клуба возможность делать конкретное количество ставок. Кстати, современные игорные дома выделяют вероятность заводить «одноруких злодеев». Отзывы читателей о бонусных промоакциях помогут составить эмоцию, но не запамятовывайте о субъективности собственных комментариев. <a href=http://xn---54–6cdxn7akip.xn–p1ai/forum/memberlist.php?mode=viewprofile&u=42437>http://xn---54–6cdxn7akip.xn–p1ai/forum/memberlist.php?mode=viewprofile&u=42437</a> Доступность — бездепозитные призы в казино чаще всего предоставляются новым игрокам, но бывают случаи, когда бонус все получить и действующие клиенты. 1 хслот регистрация в 1×slots casino
1×slots casino регистрация 1×slotscasin online
<a href=https://creapnl.com/foros/tema/1×slots-%d1%80%d0%b5%d0%b3%d0%b8%d1%81%d1%82%d1%80%d0%b0%d1%86%d0%b8%d1%8e-%d0%b1%d0%be%d0%bb%d0%b5%d0%b5-%d0%bf%d0%be%d0%bf%d1%83%d0%bb%d1%8f%d1%80%d0%bd%d1%8b%d0%b9-%d0%b2%d0%b0%d1%80%d0%b8%d0%b0–11/>1×slots регистрацию более популярный вариант это</a> На бонусные начисления имеют быть установлены дополнительные лимитирования, коие Вы не к при отыгрыше. Пока бонус полностью не отыгран — средства из казино не выводятся. Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.Во время игры в казино, выигрыши, полученные спасибо бесплатным призовым фондам, суммируются и включаются в общую необходимую для отыгрывания. Однако, в фортуна улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно разрешит вывести финансовые свои. Сумма вывода будет находиться от лимита, утвержденного непосредственно в данном учреждении. Поэтому, внимательно надо(надобно) читать верховодила выдачи безлимитных депозитов. 1×slots регистрация на 1хслотс <a href=https://xn–80abdzaxbkfak2ai0bzf4ce.xn–p1ai/communication/forum/messages/forum4/message14592/14285-vykup-avto?result=new#message14592>https://xn–80abdzaxbkfak2ai0bzf4ce.xn–p1ai/communication/forum/messages/forum4/message14592/14285-vykup-avto?result=new#message14592</a> Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные способы и расценить особенности, труднодоступные при ирге в демо режиме. Многие новые клиенты переходят в количество неизменных, а оператор получает долгосрочную прибыль.
1хслотс зеркало
Третитй бездепозитный приз за регистрацию – денежные средства. К сожалению, начислить рубли либо доллары готовы лишь известные и популярные клубы. С их поддержкой вы сможете насладиться любой доступной игрой – автоматом, рулеткой, кено, блэкджеком.Если вы облюбовали себе количество брендов коие вам больше всего приглянулись, для постоянной игры! Таких гемблеров казино довольно предпочитает и оценивает, за частую такие игроки становятся VIP игроками заведения, коим нередко поступают прибыльные предложения повторяющий призов, например же туда входит и бездепозитные. <a href=http://e-audit.gefest.me/index.php?subaction=userinfo&user=cageytenant69>http://e-audit.gefest.me/index.php?subaction=userinfo&user=cageytenant69</a> Стоит обозначить(означить), что бездепозитный бонус выдается только взрослым новеньким, коие, тому, шансы пригласить личных друзей и знакомых, того рассчитывающих на поощрительную программу преданности. Подобная разработка была среди соперничающих онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры содействуют увеличению собственной посещаемости, путем вербования свежих игроков. Бонусы – это оригинальный шанс для потенциальных участников игры, коие все опробовать софт покер рума и увериться, станут ли они в него выступать или нет. Новый игрок испробует свои силы с реальными оппонентами в казино.Активация случается за промокодов, коие вводятся в личном офисе последствии регистрации. Среди спецпредложений в перечне Casino.ru находятся неповторимые промокоды, коие доступны лишь посетителям портала. Другие способы начисления средств ? автоматическая активация сразу последствии творения аккаунта и получение подарка по запросу в службу технической помощи. 1 х слотс зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://www.fiat130.it/phpbb3/viewtopic.php?f=14&t=331911>1×slots быструю регистрацию а также мгновенное</a>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=154243>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Минимального оборота. Этот лимит уточняется вейджером — пока игрок не поиграет на установленную сумму, вывод средств несомненно недоступен. Заработать на бездепозитных бонусах за регистрацию в казино имеет любой пользователь, достигший совершеннолетия.
#6612 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Дарья Клишина, легкоатлетка пина букмекерской конторы <a href=https://rucriminal.info/>Скворцова Вероника Игоревна порно</a> бк букмекерская контора порно с Гатагова Ольга Анатольевна <a href=https://sovsekretno.net/>up casino</a> 1×bet официальный сайт 1×bet xyz porno Светлана Ходченкова казино сегодня Хорова Наталья Александровна порно porno Светлана Ходченкова скачать pin casino 1×bet зеркало xbet xyz
#6613 Charlesgunnyhttp://filmkachat.ru
1×slots казино зеркало
Доступные забавы – В неких азартных забавах возможно снизить математическое превосходство казино до нескольких десятых процента. В их количестве многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как управляло, в таких играх ставки идут в зачет вейджера не всецело. Например, имеет учитываться лишь 50%. В некоторых забавах бездепозитные призы вообщем нельзя отыгрывать.Для получения выигрыша потребуется выполнить обстоятельства казино. Чаще всего игроку нужно поставить определенную необходимую, но уже из личных денег. Она рассчитывается из общего размера выигрыша за всегда применения бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, случае юзер выиграл 1000 руб., а множитель сочиняет х30, вывести средства можно будет, сделав ставки на 30 000 руб. <a href=http://filmkachat.ru/>1×slots казино зеркало</a> Как и другие промоакции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такого предложения считаются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых посетителей и дозволяет им составить эмоцию о функционале, не рискуя значительными совокупностями. <a href=https://ai.ceo/read-blog/246294>https://ai.ceo/read-blog/246294</a> 1хслотс казино зеркало <a href=http://klaus-autopark.ru/bitrix/rk.php?goto=http://sdvv.ru/bitrix/redirect.php?goto=http://alternativa-za-vas.com/?URL=https://teletype.in/@urist555/z8Dmk5vfYKH>http://klaus-autopark.ru/bitrix/rk.php?goto=http://sdvv.ru/bitrix/redirect.php?goto=http://alternativa-za-vas.com/?URL=https://teletype.in/@urist555/z8Dmk5vfYKH</a> Заработать на бездепозитных призах за регистрацию в казино может любой юзер, достигший совершеннолетия.Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и. Когда игроку надеется много фриспинов, администрация возможность разбивать их начисление на количество дней. Бесплатные вращения предоставляются для конкретного слота, который указывается в правилах промоакции.
1×slots зеркало регистрация
<a href=http://nacionrolera.org/foro/memberlist.php?mode=viewprofile&u=41202>скачать 1×slots на андроид мобильная версия</a> 1×slots зеркало этих способов предполагает регистрацию С не отыгранным бонусом запрещается превышать размер наибольшей ставки. Нарушение сего условия в аннулирование выигрыша. <a href=https://forums.dfine.net/member.php?action=profile&uid=1160>https://forums.dfine.net/member.php?action=profile&uid=1160</a> Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам запрещено начислять бонусы посетителям, не имеющим валютных средств на счете. Мы предлагаем разглядеть актуальные бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ.Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам воспрещено начислять бонусы клиентам, не имеющим валютных средств на счете. Мы предлагаем осмотреть животрепещущие бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ. 1× slots casino зеркало Внесение депозита – Будьте готовы пополнить счет последствии отыгрыша бонуса. Это обычное требование верховодил для данного подобии промо-акций. Лучше заблаговременно уточнить, какую сумму надо(надобно) несомненно вносить на счет. Как управляло, речь идет о наименьшем депозите, но вы должны быть уверены, собственно он вас по карману.Иногда в бездепа, казино дарует минимальный приз (до 50 руб. ), из-за которого не заморачиваться.
1хслотс регистрация в 1×slots casino
Индивидуальные одобрения выдаются за совершение действий: подписку на аккаунты площадки в соц сетях, установку мобильного прибавления либо официального посетителя для ПК. В большинстве казино срабатывают программы лояльности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на грядущий уровень часто с выдачей бездепа.Эффективность бездепов в рекламного прибора оценили все операторы. Малоизвестные площадки употребляют такие промоакции, чтобы живо набрать базу. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны неизменных гостей. Не все сайты, дающие подарки без депозита, рекомендованы к ирге. За привлекательным промоописанием могут прятаться неосуществимые обстоятельства отыгрыша прочие подводные камни. Также существуют онлайн-платформы азартных игр, коие используют раздачу бездепозитных бонусов в особые даты (как для казино, например и для игрока). Помимо этого, действующие игроки кроме имеют возможность получить похожие призы за собственную работа (к примеру, за увеличения значения либо за схожие заслуги). <a href=https://www.google.pt/url?q=https://doctorlazuta.by/>https://www.google.pt/url?q=https://doctorlazuta.by/</a> 1× slots casino зеркало На бесплатные бонусы онлайн-казино практически всегда распространяется лимитирования по стране проживания посетителей. Даже случае для разрешается открывать счет и играть на деньги в заведении, это еще не значат, собственно для доступны not the slightest down payment bonuses.Подтвердите лицо, предоставив оператору казино свои паспортные данные. Инструкции обычно несложные, основное — конкретно им по. Если написано, собственно «на фото должны быть заметны все четыре угла странички паспорта» — сделайте именно такое фото.
скачать 1×slots официальный сайт
Для получения приза надо(надобно) ознакомиться с программой преданности казино и сделать ставки на сумму, необходимую для перехода на грядущий степень. <a href=http://griffhunter.com/boards/memberlist.php?mode=viewprofile&u=993>1×slots casino регистрация</a> Реже бонусы без депо начисляются постоянным игрокам. С их подмогою администрация старается вычесть ценных клиентов или желает поблагодарить за лояльность верных посетителей. Но намного чаще для похожих целей используются такие акции: 1×slots официальный сайт скачать <a href=http://trisinfronteras.com/davidcastro/component/k2/itemlist/user/455596-henryevext>http://trisinfronteras.com/davidcastro/component/k2/itemlist/user/455596-henryevext</a>
1×slots промокод при регистрации
Возьми свой презент. Чаще всего приз активизируется незамедлительно последствии регистрации. Но посещают ситуации, когда нужно зайти в личный офис либо написать в справочную службу.Операторы гемблинга заявляют, собственно так они сражаются с бонус-хантерами. Впрочем, критики считают, собственно данным казино пробуют сделать из случайного гостя неизменного игрока. <a href=https://mcpe.ru.net/user/CharlesRep/>https://mcpe.ru.net/user/CharlesRep/</a> Игрокам стоит воспринимать приветственный приз как гарантированный метод получить крупный выигрыш, хотя это отличная вероятность без затрат расценить возможностей казино.Иногда у посетителей сайта могут появиться трудности, задачи, препядствия при активации полученного промо-кода. В этих случаях, необходимо обратиться за поддержкою в службу поддержки «Support». Для получения ответа, обязательно указывается определенная причина воззвания и подтверждается информация дополнительными скриншотами. Если сложилась неоднозначная обстановка, постоянно можно обратиться к основному регулятору или контролирующему органу, выдавшему этому заведению лицензионный документ. 1×slots casino зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://rolivka.online/forum/showthread.php?tid=31506>1×slots бездепозитный бонус за регистрацию</a>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=62861&result=reply>1×slots официальный сайт зеркало</a>
<a href=https://www.makinamania.net/index.php?action=profile;u=260122>1×slots акции</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бонус без депо за регистрацию в казино (бездепозитный бонус) – это денежный презент от клуба, который начисляется на аккаунт игрока последствии регистрации в казино. Кроме сотворения учетной записи, для получения бездепа, довольно часто требуется ещё и подтвердить контактные данные игрока и/или активировать специальный промо-код.
#6614 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Игорь Акинфеев (футбол) casinos winning <a href=https://t.me/vchkogpu_ru>порно с Елена Никитина, скелетонистка</a> porno Дарья Мороз pin ап casino <a href=https://rhymes-punches.com/>Петрова Ольга Викторовна порно</a> 1×bet сейчас скачать 1×bet 1×bet xyz порно с Юлия Ефимова Елена Лядова букмекерская контора без casino игровой автомат 1×bet на сегодня
#6615 Charlesgunnyhttp://filmkachat.ru
1×слотс казино
Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша бонусов. Заведения практически устанавливают максимальную ставку, возможную по условиям вейждера. <a href=http://filmkachat.ru/>1×slots регистрация на официальном сайте</a> Ограничения по играм. Администрация запрещает игрокам некоторые игровые автоматы с бездепозитным призом, деньгами либо безвозмездными вращениями. Обычно, в правилах приводится полный перечень слотов для отыгрыша. Иногда дробление выполняется по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, хотя запрещен в настольных забавах и в разделе Live Casino.Вы не в коем случае ни же рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической игры на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, выучится регулировать менять ставки и полосы, исследовать бонусные игры и их выигрышные композиции, ну конечном просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные свои, которые возможно отыграть и исключить, но просто на демо счет, что, этим наиболее адреналин в крови еще повысится а пульс забьется с частым ритмом! <a href=https://band.us/band/96885593/post/5>https://band.us/band/96885593/post/5</a> С иной стороны, намного проще отобрать бездепозитные фриспины за регистрацию в казино и прямо сейчас начать вертеть барабаны в превосходнейших слотах. Главная особенность спинов что, собственно они предназначены для лучших автоматов. Удастся не пройти дополнительные раунды, хотя и прирастить необходимую выигрыша, заработать респины и другие внутриигровые подарки.Также учтите, собственно некоторые игровые платформы сужают перечень государств, которые готовы получить предложенный бездепозитный приз за регистрацию. К примеру, существуют онлайн-заведения, выдающие похожие призы только жильцам определенных государств. К примеру, интернет казино 777 Оригинал предоставляет бездепозитный бонус лишь игрокам из России и государств СНГ. Или наоборот, снабжают вознаграждением всех, считая обитателей неких стран (из сего, по пристально изучать перечень, чтобы впоследствии не возникло никаких вопросов и претензий). 1×slots официальный сайт скачать на айфон <a href=http://at-work.pro/bitrix/redirect.php?goto=http://casaespanola.ru/bitrix/rk.php?goto=http://lekarstva.ru/bitrix/click.php?goto=https://telegra.ph/Kak-proverit-status-zayavleniya-i-ugolovnogo-dela-podrobnoe-rukovodstvo-i-kontaktnye-telefony-dlya-bystroj-proverki-09–23>http://at-work.pro/bitrix/redirect.php?goto=http://casaespanola.ru/bitrix/rk.php?goto=http://lekarstva.ru/bitrix/click.php?goto=https://telegra.ph/Kak-proverit-status-zayavleniya-i-ugolovnogo-dela-podrobnoe-rukovodstvo-i-kontaktnye-telefony-dlya-bystroj-proverki-09–23</a> Реже призы без депо начисляются постоянным игрокам. С их подмогою администрация постарается вычесть ценных клиентов либо желает поблагодарить за преданность верных посетителей. Но гораздо чаще для подобных целей используются эти акции:
1×слот регистрация в 1×slots casino
Бездепозитный бонус за регистрацию в казино — это стартовый презент в виде валютного начисления либо даровых вращений для свежих игроков заведения, для получения которого надо заносить депо. <a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=802806>1×slots зеркало регистрация в 1×slots casino</a> 1×slots мобильная версия войти казино Не трудно додуматься, что no down payment bonuses практически разу не случаются немаленькими. Чаще всего речь о пяти–тридцати баксах (либо эквиваленте этой суммы в другой валюте).Ознакомьтесь с нашим перечнем наилучших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего перечня и получите бездеп сразу. Хватайте наилучшие бесплатные предложения ниже и выигрывайте немалые средства, не рискуя! <a href=https://cameradb.review/wiki/Shisha_Tobacco_From4_Eur>https://cameradb.review/wiki/Shisha_Tobacco_From4_Eur</a> Бездепы могут входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами. 1×slots casino регистрация 1×slots review live Большинство клубов завлекают внимание игры за счёт разнородных презентов. На одних сайтах возможно получить виртуальные кредиты, коие откроют доступ ко всему софту. На иных же, администрация предлагает безвозмездные вращения для запуска топовых онлайн слотов. Несмотря на различные акции, стоит выделить самые основные.
1×slots казино зеркало
<a href=http://clubwings.ru/bitrix/click.php?goto=http://tekstil-pro.ru/bitrix/redirect.php?goto=http://deltabank.by/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/HLopMW09u2z>http://clubwings.ru/bitrix/click.php?goto=http://tekstil-pro.ru/bitrix/redirect.php?goto=http://deltabank.by/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/HLopMW09u2z</a> 1×slot регистрация Еще одно условие касается размеров ставки. Операторы устанавливают наивысшую сумму, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, избранной в Личном офисе. При превышении лимита есть риск потерять приза. Существующие ограничения относятся и к конкретным обликам ставок. Например, играя в рулетку, заказчик имеет столкнуться с запретом ставить фишки на шансы.Реже бонусы без депо начисляются постоянным игрокам. С их поддержкою администрация постарается вычесть ценных клиентов либо желает поблагодарить за преданность верных посетителей. Но намного почаще для подобных целей применяются такие промоакции:
1×slots официальный demo регистрация в 1×slots casino
Для получения выигрыша потребуется выполнить условия казино. Чаще всего игроку необходимо поставить конкретную необходимую, но теснее из собственных средств. Она рассчитывается из общего размера выигрыша за всегда применения бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, если пользователь выиграл 1000 руб., а множитель сочиняет х30, вывести средства возможно будет, сделав ставки на 30 000 рублей.Несмотря на то, что данный вариант стимуляции со стороны азартных платформ довольно популярен в сфере сходственных игр, далековато не почитателям казино ведомо, собственно сами бездепозитные призы казино и как именно их вероятно эксплуатировать. <a href=https://acerfans.ru/faq/796-kak-vylozhit-na-forum-informaciju-iz-zhurnala.html>1хслотс официальный сайт зеркало</a> Похожим образом трудится третий способ доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения клиента или в связи с получения им VIP-статуса. Подарок предоставляется после обращения в поддержку и проверки. 1×slots коды <a href=https://floobits.com/DeweyBEP>https://floobits.com/DeweyBEP</a>
1хслотс регистрация в 1×slots casino
Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы которые появляются у новичков. Законодательство, регулирующее азартные игры в различных странах, влияет на возможности операторов. В результате пользователи из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это имеет быть как полный отказ в доступе, например и невозможность загружать игры отдельных изготовителей.Для отыгрыша приза казино обязует игрока сыграть на сумму, в количество раз превышающую необходимую полученного бонуса — тут выгода компании явна. <a href=https://www.blurb.com/user/Glavdorogadv>https://www.blurb.com/user/Glavdorogadv</a> Некоторые онлайн-казино без депозита предлагают новым посетителям выбрать приз при регистрации. Будьте внимательны: выбрав один, вы в абсолютном большинстве случаев не сможете пользоваться остальными. 1×slots зеркало рабочее
<b>Смотреть еще похожие новости:</b>
<a href=https://021snyw.com/space-uid-53919.html>казино 1× slots официальный сайт</a>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/8131/#comment-339300>1×slots регистрация 1×slots casino c2d ru</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Как лишь на виртуальном счету окажутся бонусные свои, поспешите отыграть вейджер. Сразу последствии этого возможно забыть заявку на вывод выигрыша. Кредиты выгодно отличаются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом настоящих средств и дают возможность ощутить задор. Во-вторых – возможно насладиться каждой азартной забавой доступной на веб-сайте. В вашем постановлении присутствуют автоматы, настольные приложение, видео-покер, Live-дилеры.
#6616 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up casino buzz казино регистрации <a href=https://www.ossetia.tv/>винлайн букмекерская контора официальный</a> почему казино casino автомат <a href=https://th-royalgclub.com/>скачать 1×bet</a> порно с Дарья Клишина, легкоатлетка 1×bet официальный сайт зеркала казино казино большая online casino 7k букмекерская контора бесплатно скачать казино смотреть онлайн
#6617 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало
Бездепозитные призы прекрасный вариант безвозмездной игры в игровые автоматы. Многие юзеры сети не знают, что в казино возможно начать играть полностью безвозмездно, а потом вывести выигрыш на банковскую карту или электронный кошелек, иные не доверяют онлайн казино, а третьи удачно играют и выигрывают – и тотчас достаточно немалые суммы. <a href=http://filmkachat.ru/>1хслотс регистрация в 1×slots casino</a> Постарайтесь отыграть вейджер, чтобы замечена вероятность забыть заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные приборы. Вы можете получить выигрыш на электрической кошелёк, карту, телефонный.Игры, в которых можно играть на бонусные деньги. Проверьте перечень игр, в которых возможно выступать на бонусные средства, вполне они Вам не понравятся и не стоит расходовать своё время на эту акцию. <a href=https://forum.amzgame.com/thread/detail?id=330739>https://forum.amzgame.com/thread/detail?id=330739</a> 1×slots официальный сайт скачать <a href=https://gtorr.net/index.php?subaction=userinfo&user=Arnoldmoipt>https://gtorr.net/index.php?subaction=userinfo&user=Arnoldmoipt</a> Приглашаем делиться мнениями о призах. Это поможет иным юзерам выбирать наиболее прибыльные предложения.Существует ли стратегии для отыгрыша бездепозитных бонусов? К сожалению нет, на выигрыши или проигрыши с бонусов, казино либо игрок повлиять возможности, отдача игр случается от разработчиков игр.
1×slots бонус за регистрацию
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=90300&result=reply>1×slots казино зеркало</a> 1×slots регистрацию более популярный вариант это Ещё одно распространённое акционное предложение – симпатичный подарок с сомнительными притязаниями. К примеру, клуб сулит $100 в качестве бездепа, но с вейджером х80 либо х100. Отыграть подобный вейджер фактически невероятно и поэтому чем концентрироваться на больше интересных акциях. <a href=https://e-participationyouth.eu/forum/profile/jamesesoth/>https://e-participationyouth.eu/forum/profile/jamesesoth/</a> Вейджер менее х30–35 является приемлемым. Опытные игроки утверждают, что с таким вейджером реально остаться в плюсе, в правильно подойти к выбору игрового аппарата. 1×slots casino регистрация 1×slotscasino09k online Варианты выигрыша в от Вашей удачи и критерий игорного портала. Выше мы заявили, собственно некоторые бездепозитные призы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются и, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность современных игр на средства, можно выиграть неописуемые суммы. Сегодняшние игровые автоматы или видео слоты, как их называют. Могут выдавать солидные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000.
1×slots актуальное зеркало
Почти все игровые клубы просят свидетельство контактных данных игрока для получения бездепозитного бонуса. Акции распространяются как на все забавы казино, так и на ограниченный перечень. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и. Промо возможность охватывать разработки 1-го производителя. Бездеп не пересекается с иными акциями казино. Если на сайте предусмотрен кэшбек, он не начисляется за ставки, изготовленные бонусными деньгами. Для идентификации платежных реквизитов игрока имеет потребоваться пополнение счета на минимальную сумму. <a href=https://webguiding.net/Glory-Casino_267629.html>https://webguiding.net/Glory-Casino_267629.html</a> На нашем веб-сайте Вы отыщите список актуальных новых бездепозитных бонусов в казино 2022 года. Также, есть много эксклюзивных услуг, коие доступны только гостям нашего сайта в регистрации по нашей ссылке или активации специального промокода.Ознакомьтесь с нашим перечнем превосходнейших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего списка и получите бездеп сразу. Хватайте превосходнейшие безвозмездные предложения ниже и выигрывайте немалые деньги, не рискуя! 1×slots casino регистрация Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных обстановок с казино, когда последствии отыгрыша бездепа вам не дадут вывести крупную необходимую выигрыша.С другой стороны, гораздо проще арестовать бездепозитные фриспины за регистрацию в казино и прямо данный начать вертеть барабаны в наилучших слотах. Главная особенность спинов никаких, собственно они предназначены для топовых автоматов. Удастся не только пройти вспомогательные раунды, но и прирастить сумму выигрыша, заработать респины прочие внутриигровые подарки.
1×slots зеркало рабочее на сегодня
Бездепы с безвозмездными вращениями деют юзерам право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд уплачивает казино. Число спинов ограничено и редко превышает сотку. Если промоакция включает в себя много бесплатных игр, их начисление возможность быть разбито на несколько дней.Также, учите, собственно бездепозитный бонус возможно вывести лишь что, нет случае, когда станут выполнены все обстоятельства отыгрыша. <a href=https://surfaceprophets.com/members/davidelicy.5309/>1×slots официальный регистрация</a> При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, которое возможно предназначить забаве в казино. Для получения бездепа нужно пригласить в игру по реферальной ссылке свежего посетителя: он должен зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на необходимую, указанную в условиях промоакции. 1×slots casino регистрация <a href=http://www.nhps1914.com/wiki/index.php?title=скачать_фильм_mp3>http://www.nhps1914.com/wiki/index.php?title=скачать_фильм_mp3</a> Срок отыгрыша — это период, кот-ый наступает в момент активации бонуса и кончается с его закрытием. Пользователю нужно уложиться в этот временной промежуток, иначе призовые свои аннулируются. Казино устанавливают список игр, ставки в засчитываются при расчете отыгранных денег. Если тайтл не заходит в этот список, то предоставляется быть недоступен для загрузки во время деяния бонусного предложения.Иногда операторы настоятельно внесение малого депо перед выводом для верификации платежного инструмента. В неких казино этот депозит также светит отыграть.
1×slots сайт
Баланс игрока дополняется на соответствующую сумму. К ней используется вейджер, указанный в правилах акции. Вывести выигрыш можно несомненно в того, как пользователь устроит требуемый размер ставок из собственных средств. В редких случаях бездеп трудится в формате Free Play. На счет пользователя зачисляется крупная сумма, и предоставляется маленький срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по завершении этого периода сумма на счету будет превосходить первоначальную, то разницу возможно несомненно вывести или использовать для последующих ставок. Бездепы обычно предлагают с отыгрышем — моментально исключить выигранные средства нельзя. Перевод средств со счета будет вероятен после того, как пользователь выполнит все притязания казино, а сумма возможности превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, протяжении которых клиент вправе пользоваться предложением. Обычно они не превышают нескольких дней последствии активации. <a href=https://www.rosewood.edu.na/profile/prostoysoft0105/profile>https://www.rosewood.edu.na/profile/prostoysoft0105/profile</a> casino 1×slot Как верховодило, новоприбывшие игроки начала хотят ознакомиться с методами ввода и вывода денежных средств и сроки выполнения поданных заявок чтобы четко разуметь, как прытко возможность вывести свой казино приз за регистрацию без депо на электрический кошелек или же банковскую карту. К счастью для всех играющих, снутри конкретных холдингов, все казино соперничают между собой. Ведь случае бы определенную компанию представляло только одно онлайн-заведение, то вряд ли бы посетители увидели казино с бонусом за регистрацию и возможность бы рассчитывать лишь на вознаграждение в виде бонуса на 1-ое инвестиция. К любому заведению периодически идет завлекать свежих игроков, что, в, лишь на руку всем играющим.
<b>Смотреть еще похожие новости:</b>
<a href=https://timepost.info/showthread.php?tid=98803>1 xslots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На нашем веб-сайте Вы отыщите список актуальных новых бездепозитных призов в казино 2022 года. Также, есть большое эксклюзивных предложений, которые доступны только посетителям нашего вебсайта в регистрации по нашей ссылке или активации особого промокода.
#6618 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Илья Осипов (киберспорт) порно с Антропова Валентина Викторовна <a href=https://rhymes-punches.com/>суть казино</a> кент казино порно с Артемий Панарин (хоккей) <a href=https://repost.news/>1×bet регистрация</a> реального казино 7k casino скачать мелбет букмекерская контора скачать букмекерскую контору на андроид casino зеркало сегодня porno Катерина Шпица Окладникова Ирина Андреевна порно
#6619 Charlesgunnyhttp://filmkachat.ru
1 хслот регистрация в 1×slots casino
Бонусные средства – небольшая сумма средств для старта в новеньком казино. На бонусные средства, обыкновенно разрешается играть во все забавы, кроме слотов с прогрессивным джекпотом и игр из раздела exist casino.Для получения депозитного бонуса необходимо пополнить свой игровой баланс настоящими деньгами. Вознаграждение возможно получить либо при внесении первого депозита, либо вид фиксированного процента от внесённых средств. Так или по, бонус поступит на счёт лишь последствии пополнения. <a href=http://filmkachat.ru/>1×slots быструю регистрацию а также мгновенное</a> Онлайн гемблинг развивается с каждым деньком больше и больше, свежие бренды создаются не по дням а по часам. Новые онлайн казино делают вступительные промоакции для игроков, для того собственно бы зарекомендовать себя, и что, этим самым предлагают бездепозитные бонусы за регистрацию, собственно бы не упустить такую вероятность — как воспользоваться свежим бездепом, рекомендуем навещать наш сайт как можно чаще, самое вкусное и новые будет добавляться в данном же перечне.Минимального оборота. Этот предел уточняется вейджером — пока игрок не поиграет на установленную сумму, вывод средств несомненно недосегаем. <a href=https://divisionmidway.org/jobs/author/shopavto22/>https://divisionmidway.org/jobs/author/shopavto22/</a> Для ревизии применяются сканы паспортов, водительских водительских, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если юзер обнаружен в попытке ввести вспомогательный аккаунт, все его учетные записи подвергаются блокировке, а их владелец попадает в темный перечень. При этой на лицензионной площадке надо опасаться свидетельствовать достоверную персональную информацию (шифрование исключает утечку индивидуальных данных). 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=http://houses.ru/bitrix/click.php?goto=http://miraton.ua/bitrix/rk.php?goto=http://randi.fashion/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/4BbitnfpVyU>http://houses.ru/bitrix/click.php?goto=http://miraton.ua/bitrix/rk.php?goto=http://randi.fashion/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/4BbitnfpVyU</a> Можно ли в одном интернет казино получить больше 1-го приза за регистрацию? Нет, например как в каждом интернет казино есть верховодила, к которым надо(надобно) держаться, не делать 2 аккаута для получения бонусов, иначе будет блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, бонус за регистрацию выдаеться раз один одному лицу.3. Подтвердить данные. В зависимости от клуба, нужно привязать аппарат или почту, показать индивидуальную информацию;
скачать 1×slots на андроид мобильная версия
Бездепозитные бонусы за регистрацию являются одним из самых модных способов вербования новых игроков в онлайн-казино, поэтому собственно они предоставляют игрокам возможность опробовать казино, особенно игровые автоматы, и возможно, выиграть реальные средства.Бездепозитные призы начисляются только один раз. Не стоит открывать новые аккаунты, чтобы получить их повторно. Служба защищенности казино обязательно выявит «левого» соучастника и заблокирует. Если гость выполнит нужные притязания, отыграет свою ставку и решит вывести личный выигрыш, то ему нужно к, собственно казино непременно востребует дать ксерокопии собственных документов, чтобы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные средства исключить не получится. зеркала 1×slots Не рекомендуем опрометью голову хвататься за всевозможные предложения получения средств без вложений. Вполне вероятно, что бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на 1-ый взгляд. Альтернативой считается казино приз за депозит. Мы предлагаем для пару советов, спасибо коим у каждого игрока несомненно возможность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег:При использовании бездепозитным бонусом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют несколько видов лимитов: <a href=http://pr.lgubiz.net/bbs/board.php?bo_table=free&wr_id=1169309>http://pr.lgubiz.net/bbs/board.php?bo_table=free&wr_id=1169309</a> казино 1×slots официальный сайт Некоторые онлайн-казино без депо предлагают новым посетителям выбрать приз при регистрации. Будьте внимательны: выбрав один, вы в безоговорочном большинстве случаев не можете воспользоваться остальными.Размер бонусов чаще всего чисто символический и не выше 50 рублей. Приятно, хотя осязаемым бустом при вряд ли станет.
1× slots регистрация в 1×slots casino
Осталось выбрать казино с призом за регистрацию и сделать профиль. После активации презента выигрыш в от Фортуны и способностей. Отказ в прохождении верификации. Если клиент не хочет либо возможности дать документы, подтверждающие его лицо, профиль будет заблокирован вместе со всеми бонусными начислениями.У каждого игорного заведения средства управляла и обстоятельства. Но, дабы получить призы, нужно выполнить стереотипные деянья: <a href=http://fitboss.ru/user/HenryWAx/>http://fitboss.ru/user/HenryWAx/</a> Принципиальным различием безвозмездных призов от призов на депозит считается неимение необходимости вносить деньги на аккаунт. Из-за этого их нередко именуют бездепозитными (not the slightest deposit bonuses).Заполняя данные в личном профиле, указывайте только достоверную информацию, так как Вам придется ее доказать в при выводе денег. 1×slots коды Вывод выигрыша с бездепозитных призов казино – великодушный подарок от азартных клубов. Но дабы вывести свой доход, нужно выполнить ряд условий:Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в обязательном порядке необходимо пополнить счет в казино. Для депозитных бонусов, эта процедура не нужна, например как депо теснее изготовлен.
зеркала 1×slots
Ограничения по играм. Администрация запрещает игрокам кое-какие игровые автоматы с бездепозитным призом, средствами или безвозмездными вращениями. Обычно, в правилах приводится полный перечень слотов для отыгрыша. Иногда деление производится по облику игр. Например, отыгрыш возможен на всех игровых аппаратах, хотя запрещен в настольных играх и в разделе Live Casino.Высокая конкурентность в разделе азартных игр мотивирует операторов привлекать посетителей разнородными промоакциями. Благодаря данному у гостей появляется возможность получить бонусы в казино за регистрацию без депозита. Воспользоваться этим предложением можно, минуя процедуру внесения средств на игровой счет, просто активировав акк на веб-сайте. Наш экскурсовод по бездепам поможет выбрать самую привлекательную бонусную программку, разузнать правила получения такового гонорары и распорядиться им с наибольшей выгодой. <a href=http://www.skmecca.com/2011/04/14/leave-the-world-better-than-you-found-it/comment-page-5/#comment-122932>1×slots официальный сайт зеркало рабочее</a> Ограничения по играм. Администрация запрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, средствами или безвозмездными вращениями. Обычно, в правилах приводится полный перечень слотов для отыгрыша. Иногда разделение производится по виду игр. Например, отыгрыш вероятен на всех игровых аппаратах, но запрещен в настольных забавах и в разделе Live Casino.Также случаются случаи, когда казино начисляет обсужденный приз в регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам. Любой выигрыш по ставке повыше установленного лимита будет являться недействительным. То есть ставка не будет засчитана при отыгрыше, а случае выигрыша его сумма не поступит на счёт посетителя — итог забавы будет всецело аннулирован. 1×slots сайт <a href=http://bmwspeed.lv/user/Raymondwothe/>http://bmwspeed.lv/user/Raymondwothe/</a>
1×slots зеркало выигрыши обязательно пройдите регистрацию если
В случае установленного лимита на необходимую вывода выигрыша с бездепозитного бонуса, игрок не может вывести больше заявленной суммы. <a href=https://library.kemu.ac.ke/kemuwiki/index.php/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0>https://library.kemu.ac.ke/kemuwiki/index.php/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0</a> 1×slots зеркало подтвердит вашу регистрацию если говорить Мы рекомендуем не отказываться от подобных предложений узнаваемых казино. Выделите некоторое мин. На регистрацию, получите бонус и попробуйте его отыграть. Может быть, сегодня удача несомненно на вашей стороне!
<b>Смотреть еще похожие новости:</b>
<a href=http://theauction.com.au/author/jamesflake/>1×slots коды</a>
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=801399>1×slots промокод при регистрации</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Раздача призов может быть приурочена к разным датам: календарные дни, дни рождения игроков, юбилей открытия казино и т. Д. Подарок выдается в виде средств, фриспинов или баллов для накопления и обмена на услуги оператора. Если юзер получает выигрыш, средства начисляются на его счет. Для вывода этой суммы придется выполнить ряд притязаний.
#6620 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Самойлова Алла Владимировна порно букмекерская контора фонбет официальный <a href=https://rumafia.news/>какие казино</a> порно с Алина Загитова, фигуристка скачать букмекерскую контору на андроид <a href=https://7club7.com/>порно с Захарова Мария Владимировна</a> вавада казино porno Юлия Канакина, скелетонистка online casino 7k 1×bet зеркало рабочее на сегодня Приезжева Екатерина Геннадьевна порно скачать 1×bet на андроид Манилова Алла Юрьевна порно
#6621 Charlesgunnyhttp://filmkachat.ru
сайт 1× slots casino
Бездепозитные бонусы казино за регистрацию в 2022 году — это вероятность поиграть за счёт заведения. Казино даёт посетителю шанс пользоваться определённой суммой или количеством даровых вращений без внесения депозита. Не путайте деморежим с реальной игрой без необходимости внесения депо.Важно, убедитесь сомнений, собственно ранее не регились в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи. <a href=http://filmkachat.ru/>1×slots официальный зеркало</a> В бонусную программку множества операторов входят систематические бездепы. Это пожизненные промоакции, поощряющие активных постоянных игроков. Популярный формат — раздача фриспинов по определенным дням недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают постоянные бонусы без депозита в обмен на накопленные баллы преданности. <a href=https://noosfero.ufba.br/lexxeagle/blog/professionalniy-vikup-avto-v-kieve-s-chestnoy-otsenkoy-na-meste>https://noosfero.ufba.br/lexxeagle/blog/professionalniy-vikup-avto-v-kieve-s-chestnoy-otsenkoy-na-meste</a> Список например именуемых «не землель» прилагается к правилам бонусной программы игорного портала. Обязательно проверьте, распространяются ли на вас похожие наказания. 1 x slots <a href=http://ruzland.ru/communication/forum/user/1954/>http://ruzland.ru/communication/forum/user/1954/</a> Постарайтесь отыграть вейджер, дабы была вероятность забыть заявку на выплату. Кстати, на всех веб-сайтах, представленных в перечне, доступны современные платёжные приборы. Вы сможете получить выигрыш на электрической кошелёк, карту, телефонный.Похожим образом работает третий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя либо из-за с получения им VIP-статуса. Подарок предоставляется после обращения в поддержку и проверки.
1×slot казино зеркало
Бездепозитный приз за регистрацию в казино с выводом денег в 2022 году — Наш ресурс дает игрокам актуальную информацию о самых новых, щедрых и испытанных бонусах в интернет казино, которые обновляются любой день. 1×slots скачать на айфон <a href=http://mtpkrskstate.ru/forum/user/200423/>http://mtpkrskstate.ru/forum/user/200423/</a> 1×slots официальный зеркало
1×slots casino зеркало рабочее
Принципиальным различием даровых призов от бонусов на депозит является недоступность необходимости вносить деньги на аккаунт. Из-за сего их часто именуют бездепозитными (no down payment bonuses).Почти все игровые клубы настоятельно свидетельство контактных данных игрока для получения бездепозитного приза. Размер бонуса. В качестве бездепов обыкновенно начисляют очень суммы, а когда речь о призах за депо, коие начисляются в процентном соотношении от суммы пополнения, то кое-какие казино могут подарить игроку до 2000$. <a href=http://www.webdesignforum.com.au/member.php?action=profile&uid=31065>http://www.webdesignforum.com.au/member.php?action=profile&uid=31065</a> Акции, приуроченные к календарным праздникам, случаются рассчитаны как на всех пользователей, например и на категории: к, презент на 8 марта девушкам-игрокам или мужикам на 23 февраля.Бездепы могут входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами. 1×slots сайт
1×slots актуальное зеркало
<a href=https://tucmas.fi/phpBB/viewtopic.php?f=4&t=351563>рабочее зеркало 1×slots</a> казино 1× slots официальный сайт <a href=http://t1mro.ru/index.php?subaction=userinfo&user=agonizingspray5>http://t1mro.ru/index.php?subaction=userinfo&user=agonizingspray5</a>
1×slots рабочее зеркало на сегодня
Бонусы без депозита при регистрации считаются наиболее красивыми как для опытных игроков, например для и начинающих. Получив это вознаграждение, заказчик может выступать на реальные средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, еще условия их активации и выигрыша. Подтвердите лицо, предоставив оператору казино свои паспортные данные. Инструкции обычно несложные, основное — конкретно им по. Если написано, собственно «на фото должны быть заметны все четыре угла странички паспорта» — сделайте именно такое фото. <a href=https://www.twoandahalfminer.de/unser-forum/member.php?action=profile&uid=6533>https://www.twoandahalfminer.de/unser-forum/member.php?action=profile&uid=6533</a> С не отыгранным призом воспрещается превосходить размер максимальной ставки. Нарушение этого условия в аннулирование выигрыша.Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. 1×slots зеркало быструю регистрацию а также мгновенное Иногда в качестве одобрения за регистрацию имеют выдаваться билеты для роли в турнирах. Условия их проведения очень отличаются, потому мы советуем ознакомиться с каждым предложением отдельно.Итак, чтобы безвозмездные бонусные кредиты превратились в реальные деньги, которыми возможность распоряжаться по своему усмотрению, их нужно отыграть. Вейджер следует уточнять в правилах онлайн-казино.
<b>Смотреть еще похожие новости:</b>
<a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=829792>1×slot рабочее зеркало</a>
<a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=146810>1×slots официальный сайт мобильная версия скачать</a>
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=6729>1×slots зеркало которую указывали при регистрации кстати</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Высокая конкурентность в разделе азартных игр доказывает операторов привлекать клиентов разнообразными акциями. Благодаря этому у посетителей бывает вероятность получить бонусы в казино за регистрацию без депозита. Воспользоваться таким предложением можно, минуя процедуру внесения средств на игровой счет, просто активировав аккаунт на сайте. Наш экскурсовод по бездепам поможет избрать самую симпатичную бонусную программку, узнать верховодила получения такого гонорары и распорядиться им с максимальной выгодой. Некоторые онлайн-казино без депозита предлагают свежим клиентам выбрать приз при регистрации. Будьте внимательны: выбрав один, вы в абсолютном большинстве случаев не сможете пользоваться остальными.
#6622 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Москалькова Татьяна Николаевна порно мелбет букмекерская контора <a href=https://repost.news/>букмекерская контора вход</a> букмекерская контора бесплатно скачать скачиваемые казино <a href=https://7club7.com/>спорт букмекерская контора</a> казино сочи casino андроид Лут Оксана Николаевна порно casino промокод сайте букмекерской конторы фонбет порно с Диана Шнайдер (теннис) 1×bet слоты
#6623 Charlesgunnyhttp://filmkachat.ru
1×слот регистрация в 1×slots casino
При отыгрыше бонусных средств, необходимо учитывать срок деянья приза и время, которое дается на отыгрыш. По истечению заявленного времени, не отыгранный бонус будет аннулирован. <a href=http://filmkachat.ru/>1×slot казино зеркало</a> <a href=https://vhearts.net/forums/thread/8948/>https://vhearts.net/forums/thread/8948/</a> В разделе с бонусами активировать собственный подарок. Найти забавы, для коих учтено одобрение и использовать бонус по назначению.Также бездепозитные призы шансы служить методом вернуть к этой посетителей, что приостановивших своё сотрудничество с фирмой: уведомление о бездепе поступает на мобильный телефон либо почту. 1× slots casino официальный сайт <a href=https://blogs.rufox.ru/~lexxeagle/45726.htm>https://blogs.rufox.ru/~lexxeagle/45726.htm</a> Отыграв бездепозитный бонус в казино с выводом тоже придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, случае схожее лимитирование присутствует, то единоразово вывести выйдет лишь сумму, не превышающую размер полученного приза.
1×slots официальный сайт зеркало рабочее
Бездепозитный бонус за регистрацию в казино с выводом средств в 2022 году — Наш ресурс предоставляет игрокам важную информацию о самых свежих, великодушных и испытанных бонусах в интернет казино, которые обновляются каждый денек.Для вывода средств приз нужно несомненно отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами акции и вариантами отыгрыша бездепозитного бонуса до его получения, чтобы избежать конфликтных ситуаций. 1×slots зеркало регистрация то дальше необходимо пройти Подтверждение электронной почты – одно из главных критерий, которое есть практически в каждом бездепозитном казино. Чтобы верифицировать электрическую почту, достаточно перейти по активной ссылке в послании, полученном от азартного клуба.Ну и окончательно же, для казино бездепозитные призы выгодны с имиджевой стороны: подобная щедрость увеличивает уровень лояльности клиентов к компании. <a href=http://100druzei.info/gds/item/126834/>http://100druzei.info/gds/item/126834/</a> 1хслот официальный сайт зеркало При пользовании бездепозитным призом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют количество видов лимитов:Вы не в коем случае ни чем рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный бонус, по мимо практической забавы на бездепозитные призы, у Вас есть шанс выучить игровые автоматы, выучится регулировать изменять ставки и линии, исследовать бонусные игры и их выигрышные комбинации, да счете просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные свои, коие можно отыграть и вывести, но просто на демо счет, тем наиболее адреналин в крови более повысится а пульс забьется с нередким ритмом!
1×slots casino регистрация 1×slotscasino09k online
<a href=https://tradersreview.co.uk/forum/profile/HueyLoewen>https://tradersreview.co.uk/forum/profile/HueyLoewen</a> Итак, дабы безвозмездные бонусные кредиты трансформировались в реальные средства, которыми продоставляется управлять по собственному усмотрению, их нужно отыграть. Вейджер стопам уточнять в правилах онлайн-казино.Одним из поводов отдавать привилегию 1 или иному заведению заключается в привлекательности предлагаемых акций и даровых предложений. Безвозмездные фриспины, выдаваемые без дела создавать какой-нибудь вклад, в списке находится далеко не в конце. скачать 1×slots на андроид мобильная версия Акции распространяются как на все игры казино, так и на ограниченный список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и. Промо имеет обхватывать разработки одного производителя. Бездеп не пересекается с иными промоакциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, сделанные бонусными средствами. Для идентификации платежных реквизитов игрока имеет понадобиться пополнение счета на наименьшую сумму.Акционные предложения от казино есть в разных форматах. Часто бонусы даются в размен на депо. Игрок заносит платеж и получает деньги, безвозмездные вращения и другие одобрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — вид приза, который гарантирован за исполненье определенных действий на веб-сайте:
1×slots промокод при регистрации 2025
В современность очень просто получить бонус за регистрацию в казино. Практически каждый игорный жилище с готовностью начислит деньги либо безвозмездные вращения. Многие гэмблеры пользуются этим и не смущяются регистрироваться в любом клубе с выгодными условиями. Кстати, это отличная вероятность выработать победную тактику и сорвать джекпот. Таким образом, заведение пытается продемонстрировать себя своим потенциальным геймерам, а подобный рекламный ход как казино приз без депо за регистрацию привлекает довольно большое внимания к игорному заведению и обеспечивает постоянный струю новых гостей и будущих посетителей игрового онлайн клуба.Помните, собственно любые нарушения верховодил сведут на нет ваши усилия, и вы скорее останетесь без начисленного вам безвозмездного бонуса. Всегда изучайте правила начисления и условия вейджера. По хоть вопросам, на которые вы не можете помощи отыскать ответы, обращайтесь за разъяснениям и саппорт. Многие новички колеблются, что поощрительный приз не будет возвращать, том если они выиграли у казино. Это безусловно безопасно и накрепко. Выводя выигранные свои, игрок просто одергивает свое участие при и теряет уникальную вероятность – безвозмездно увеличивать собственное материальное положение. 1хслотс 1хслотс регистрация перейти на 1×slots <a href=http://proect.org/user/Kennethagose/>http://proect.org/user/Kennethagose/</a> Большинство клубов привлекают внимание игры за счёт различных презентов. На 1 сайтах возможно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает благотворительные вращения для запуска топовых интернет слотов. Несмотря на различные акции, стоит выделить самые главные.
1×slots официальный сайт, скачать
Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских руб. В условиях промоакции предписано, собственно вейджер бездепозитного бонуса х20. Поэтому, чтобы отыграть бонус, игроку будет нужно устроить ставок на 35*20=700 рублей. Как и другие промоакции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такого предложения считаются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых посетителей и разрешает им составить эмоцию о функционале, не рискуя значительными совокупностями.Чтобы выступать даром на реальные деньги в казино, порой довольно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные деяния. <a href=https://cse.google.com.bz/url?q=https://doctorlazuta.by/>https://cse.google.com.bz/url?q=https://doctorlazuta.by/</a> 1хслотс 1хслотс регистрация перейти на 1×slots Вывод выигрыша с бездепозитных бонусов казино – великодушный подарок от азартных клубов. Но чтобы исключить собственный заработок, нужно выполнить ряд критерий:Акции, приуроченные к календарным дням, случаются рассчитаны как на всех юзеров, так и на категории: примеру, подарок на 8 марта девушкам-игрокам или мужчинам на 23 февраля.
<b>Смотреть еще похожие новости:</b>
<a href=https://timepost.info/showthread.php?tid=93854>1×slots коды</a>
<a href=http://board.eternityrpc.com/member.php?action=profile&uid=369>1×слот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Частенько новички не разумеют, как активировать презенты либо вывести 1-ый выигрыш. Для сходственных случаев наша команда описала главные определения – что это фриспины, вейджер, как его отыграть, зачем нужно протекать верификацию. Исходя из этого, просто не присутствует разумных оснований махнуть рукою на получение такового приза при регистрации. И, не, на подобный безвозмездной основе у вас есть все шансы выиграть деньги и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, нарекают бесплатными онлайн платформами для игр.
#6624 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet casino porno Алена Косторная (фигурное катание) <a href=https://specreporter.com/>casino приложения</a> казино рублях 1×bet приложение <a href=https://slon-ru.com/>Львова-Белова Мария Алексеевна порно</a> Петрова Ольга Викторовна порно 7k casino скачать человек казино porno Нина Пирогова, хоккеистка скачать 1×bet на андроид 1×bet бесплатно casino рабочее зеркало
#6625 Charlesgunnyhttp://filmkachat.ru
1×slots казино мобильная версия
Фриспины. Бесплатные вращения предусмотрены для применения в видео-слотах. Внимательно читайте обстоятельства – они нередко выдаются для неких машин. В зависимости от клуба продоставляется создавать конкретное число ставок. Кстати, современные игорные жилища дают возможность заводить «одноруких бандитов». <a href=http://filmkachat.ru/>1×slots мобильная версия войти казино</a> Наши эксперты изучают условия акции, затем в ручном режиме проверяют их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие характеристики. Мы не рекламируем казино, а даем игрокам информацию о превосходнейших из них.Бездепозитный приз за регистрацию в казино — это стартовый презент вид денежного начисления или даровых вращений для новых игроков заведения, для получения которого не нужно заносить депозит. <a href=https://social.urgclub.com/read-blog/214040>https://social.urgclub.com/read-blog/214040</a> Однако далеко не все ресурсы предлагают своим посетителям бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено одобрение на первый депо в объеме 100–200%. Это замечательная вероятность преувеличить банкролл, прирастить время, проведённое за игрой и шансы сорвать большой куш. 1×slots casino регистрация 1×slotscasin online <a href=https://bizboostformula.com/question/%d0%ba%d0%be%d0%bd%d1%82%d0%b0%d0%ba%d1%82%d0%bd%d1%8b%d0%b5-%d0%bb%d0%b8%d0%bd%d0%b7%d1%8b-%d0%ba%d0%bb%d0%b0%d1%80%d0%b8%d1%82%d0%b8-%d1%8d%d0%bb%d0%b8%d1%82-%d0%ba%d0%b0%d1%87%d0%b5%d1%81%d1%82/>https://bizboostformula.com/question/%d0%ba%d0%be%d0%bd%d1%82%d0%b0%d0%ba%d1%82%d0%bd%d1%8b%d0%b5-%d0%bb%d0%b8%d0%bd%d0%b7%d1%8b-%d0%ba%d0%bb%d0%b0%d1%80%d0%b8%d1%82%d0%b8-%d1%8d%d0%bb%d0%b8%d1%82-%d0%ba%d0%b0%d1%87%d0%b5%d1%81%d1%82/</a> Условия отыгрыша приза. Если Вы планируете заработать на бездепозитном призе, то для внимание на велечину вейджера и срок, кот-ый дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть приз и вывести выигрыш.
1хслотс официальный сайт зеркало
1хслотс официальный сайт зеркало <a href=https://yvavilebismovla.ge/user/PatrickLet/>https://yvavilebismovla.ge/user/PatrickLet/</a> Для получения предоставленных бонусов вас пригодиться — ПК либо мобильное устройство, и остальное дело за небольшим.Чтоб получить крупный выигрыш, избирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша. 1×slots регистрация 1×slotscasino09k online К образцу, игроку выдаются безвозмездные средства в заведении в размере пятидесяти либо ста $ (вейджер на которые сочиняет 100х). То есть, каждому новоприбывшему геймеру выскакивает притягивающая картинка, которая обещает выплату всех зачисленных компанией средств. Не стоит заострять на казино бонус за регистрацию без депозита с сильно великий или довольно маленькой суммой бонусов, поэтому собственно, и кропотливо выучив все условия, тут вероятнее всего, несомненно какой-то подвох.
1×slots официальный сайт скачать
Операторы гемблинга утверждают, собственно так они борются с бонус-хантерами. Впрочем, критики считают, собственно этим казино пытаются сделать из случайного постояльца неизменного игрока.При регистрации сомнений либо ином интернет игральном заведении — вам дается один шанс испытывать собственную фортуну не внося средства монеты. Замечу что эту поощрительную предложение деют не все онлайн игровые площадки, а лишь щедрая середина(средина) из них. Которые мы подготовили для Вас в нашем списке. <a href=http://matera-mebel.ru/bitrix/redirect.php?goto=http://kmsperm.ru/bitrix/redirect.php?goto=http://posudacenter.ru/bitrix/redirect.php?goto=https://telegra.ph/Zakon-o-shumovom-regulirovanii-v-Orle-2024-goda-09–23>http://matera-mebel.ru/bitrix/redirect.php?goto=http://kmsperm.ru/bitrix/redirect.php?goto=http://posudacenter.ru/bitrix/redirect.php?goto=https://telegra.ph/Zakon-o-shumovom-regulirovanii-v-Orle-2024-goda-09–23</a> Только выполнив все условия отыгрыша и дождавшись завершения проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить свои средства.Риск-игра по одинаковым шансам – Также казино имеет запрещать скорпулезно обстоятельства по отыгрышу счет раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких других играх. 1×slots casino зеркало
1×slots регистрация 1×slotscasino 56 online
<a href=http://www.carshowsociety.com/forum.php/topic,11220.new.html#new>1×slots бездепозитный бонус за регистрацию</a> Бездепы с безвозмездными вращениями деют юзерам право вертеть барабаны игровых автоматов без снятия средств со счета. За любой раунд платит казино. Число спинов ограничено и редко выше сотню. Если акция содержит много бесплатных игр, их начисление возможность быть разбито на количество дней. Так что основное отличие презента на депозит от бездепа – неотъемлемое пополнение счёта. Вы сможете внести депозит и преувеличить стартовый капитал или отобрать бездеп и при этом не придётся рисковать своими сбережениями. Поспешите выполнить простые требования, и администрация ресурса начисляет щедрое одобрение! 1×slots сайт зеркало <a href=http://mc-pe.net/index.php?subaction=userinfo&user=cageypodium25>http://mc-pe.net/index.php?subaction=userinfo&user=cageypodium25</a> В бонусную программку множества операторов входят регулярные бездепы. Это бессрочные акции, поощряющие активных неизменных игроков. Популярный формат — раздача фриспинов по конкретным денькам недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают неизменные бонусы без депо в мена на скопленные баллы лояльности.Некоторые казино шансы предлагать клиентам бездепы за свидетельство номера либо почты либо репост на страницу в социальных сетях.
1× slots casino зеркало
Подтвердите лицо, предоставив оператору казино свои паспортные данные. Инструкции обычно легкие, основное — конкретно им стопам. Если написано, что «на фото должны быть заметны все хорошо угла страницы паспорта» — устройте именно такое фото. Похожим образом трудится 3-ий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя или в связи с получения им VIP-статуса. Подарок предоставляется в обращения в поддержку и ревизии.Так же стоит выделить то, собственно в каждом онлайн казино установлен собственный максимальный кешаут на бездепозитный бонус. Как управляло кешаут — это максимальная сумма денег, кот-ая дешевая для вывода с бездепозитного приза. <a href=https://truejesus.net/forums/member.php?action=profile&uid=4493>https://truejesus.net/forums/member.php?action=profile&uid=4493</a> 1×slots зеркало рабочее
<b>Смотреть еще похожие новости:</b>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-4974/#comment-593922>1×slots регистрация на официальном сайте</a>
<a href=https://thetechmodders.com/forums/viewtopic.php?t=59456>1×slots зеркало сайта</a>
<a href=https://radios-collector.com/viewtopic.php?f=7&t=52042>1×slots зеркало регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если вы избираете проверенное лицензионное интернет казино и выполните все обстоятельства получения бездепозитного приза, трудностей с получением презента у Вас не возникнет.
#6626 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino com casino регистрации <a href=https://th-royalgclub.com/>unlim casino</a> 1×bet зеркало на сегодня порно с Максим Глушенков (футбол) <a href=https://res-publika.com>вывод казино</a> букмекерские конторы без депозита букмекерские конторы в россии порно с Константин Тюкавин (футбол) гама казино 1×bet зеркало xbet xyz casino играть порно с Артемий Панарин (хоккей)
#6627 Charlesgunnyhttp://filmkachat.ru
1хслот скачать
Приветственный приз без депо ? презент за регистрацию. Выдается деньгами, фриспинами либо баллами. В последнем случае бонусные баллы применяются для роли в турнирах либо размена на реальные средства.Помните, что всевозможные нарушения управлял сведут на нет ваши старания, и вы всего останетесь без начисленного вам безвозмездного приза. Всегда изучайте правила начисления и условия вейджера. По хоть вопросам, на которые вы возможности других найти ответы, обращайтесь за разъяснениям и саппорт. <a href=http://filmkachat.ru/>1×slots зеркало регистрация в 1×slots casino</a> У нас на сайте Вы отыщите перечень бонусов без депозита в проверенных казино и подробную информацию про как их получить и применять.У каждого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано сумели выполнить их, мы дадим несколько советов. Если система начислила маленькую необходимую, надо делать великие ставки – остановитесь на 10–30 центах. Как лишь сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В противном случае никакого присмотреться к иному автомату. <a href=https://www.fundable.com/user-1002820>https://www.fundable.com/user-1002820</a> 1×slots зеркало на сегодня <a href=http://xn–80aeh5aeeb3a7a4f.xn–p1ai/forum/user/51197/>http://xn–80aeh5aeeb3a7a4f.xn–p1ai/forum/user/51197/</a> Объективные – размер бонуса, коэффициент и обстоятельства вейджера, надобность внесения депо для вывода денег;Варианты выигрыша находятся от Вашей успеха и условий игорного портала. Выше мы заявили, что некоторые бездепозитные призы в 2022 году выдаются с лимитированиями по максимальной выплате. Однако, остаются другие, все, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на деньги, возможно выиграть невозможные суммы. Сегодняшние игровые автоматы либо видео слоты, как их именуют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000.
казино 1×slots официальный сайт
Для получения бездепа необходимо пригласить в игру по реферальной ссылке нового клиента: он обязан зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на необходимую, обозначенную в критериях акции. <a href=http://ledyardmachine.com/forum/User-Jameshoing>1×slots промокод при регистрации 2025</a> x1 slots регистрация в 1×slots casino Новички не любят сразу же вносить депо. Это обусловлено неименьем опыта и сомненьем. К счастью, в возможно получить бездепозитный приз за регистрацию в казино. Неважно что начислит система – фриспины либо кредиты. В всяком случае вы не рискуете своими сбережениями. Это замечательная возможность запустить приглянувшийся видео слот или же испытать удачу в настольных забавах.Если вы опытный игрок, вы должны знать, собственно приз без депозита – редкая находка. Тем не менее, мы еженедельно изучаем интернет, чтобы отыскать вам превосходнейшие бездепозитные предложения. <a href=https://forum.bakililar.az/profile/86829-glavdorogadv3107/?tab=field_core_pfield23>https://forum.bakililar.az/profile/86829-glavdorogadv3107/?tab=field_core_pfield23</a> Каждый новичок и профессиональный игрок грезят прытко стартануть и начать создавать реальные ставки. Для этого достаточно арестовать презент, за кот-ый не уплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email или аппарат. После сего администрация начислит щедрое вознаграждение в виде безвозмездных вращений либо виртуальных кредитов. 1×slot зеркало рабочее регистрации на телефон придет
1×slots регистрация на сайте 1×slots ru com
Чтобы играть даром на настоящие деньги в казино, порой достаточно просто зарегистрироваться. Иногда необходимо выполнить дополнительные деяния. <a href=https://uadplugins.club/memberlist.php?mode=viewprofile&u=188655>https://uadplugins.club/memberlist.php?mode=viewprofile&u=188655</a> У нас на сайте Вы найдете список призов без депозита в проверенных казино и доскональную информацию о том как их получить и использовать. казино 1×slots официальный сайт Если речь об эксклюзивных предложениях, может потребоваться регистрация в казино по ссылке с партнерского сайта.Этот тип бонуса будет добавлен на Ваш акк после успешной процедуры регистрации с внедрением номера телефона. Если избрать другой метод творенья учетной записи, бездеп не будет добавлен на Ваш акк.
1хслотс рабочее зеркало
Заполняя данные в собственном профиле, указывайте только достоверную информацию, например как Вам понадобиться ее доказать дальнейшем при выводе средств. Если при регистрации показать промокод, можно гарантировано получить бонус. Где взять ваучер? Посетите определенную блоги или форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В заключительнее время игорные дома начали афишироваться в кинокартинах и сериалах. Присмотритесь и наверняка заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных руб. 1×slots официальный зеркало <a href=https://ww1.toonanime.site/user/Henrykab/>https://ww1.toonanime.site/user/Henrykab/</a>
1×slots промокод при регистрации
Операторы гемблинга утверждают, что так они сражаются с бонус-хантерами. Впрочем, критики считают, собственно данным казино пытаются устроить из случайного гостя неизменного игрока.Как и акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такого предложения являются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих посетителей и дозволяет им составить впечатление о функционале, не рискуя вескими совокупностями. <a href=http://stroyrem-master.ru/user/WalterChuby/>http://stroyrem-master.ru/user/WalterChuby/</a> 1×slots регистрацию более популярный вариант это
<b>Смотреть еще похожие новости:</b>
<a href=http://molifan.netwww.molifan.netwww.molifan.net/space-uid-2280308.html>1×slots регистрация на сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В списке требований к отыгрышу нередко наличествуют лимиты на ставки при забаве на личные деньги. Так, случае отыграть нужно 30 000 руб., а максимальная сумма ограничена 30 рублями, то вращать барабаны светит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам деянья промоакции.
#6628 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
cat casino gama casino <a href=https://strelochnik.com/>букмекерские конторы pin</a> casino андроид порно с Юлия Ефимова <a href=https://kompromat1.online/>porno Виктория Баркова, легкоатлетка</a> официальные букмекерские конторы пин ап казино 1×bet телефон сайт винлайн букмекерская контора бесплатно играем казино порно с Максим Глушенков (футбол) 7k casino зеркало рабочее
#6629 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet бесплатно скачиваемые казино <a href=https://rhymes-punches.com/>casino бездепозитный</a> bet casino скачать букмекерскую контору <a href=https://glvk.guru/>фильмы казино рояль</a> up casino зеркало 1×bet телефон казино фильм casino официальный сайт казино онлайн Светлана Ходченкова пинап казино
#6630 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало быструю регистрацию а также мгновенное
Для того, дабы отыграть сумму вашего бездепозитного приза нужно выполнить условия вейджера. Очень часто фриспины даются на конкретные слоты (book of ra, book of lifeless, book of sun), избирайте разъем себя по, все очень красивые и высококачественные. Бездепозитные приз возможность быть валютным так и в виде фриспинов на слоты <a href=http://filmkachat.ru/>1×slots официальный demo регистрация в 1×slots casino</a> Заработать на бездепозитных бонусах за регистрацию в казино имеет любой пользователь, достигший совершеннолетия.Но ни не запамятовывайте внимательно разбирать управляла участия в бонусных промоакциях. Если вы нарушите но бы одно условие, позднее вы не сможете устроить недоразумение с администрацией. <a href=https://trumpbookusa.com/blogs/259423/Professional-3D-Animation-Services-in-the-Digital-Age>https://trumpbookusa.com/blogs/259423/Professional-3D-Animation-Services-in-the-Digital-Age</a> Если вы бывалый игрок, вы должны аристократия, собственно бонус без депо – редкая находка. Тем ниже, мы еженедельно изучаем интернет, дабы отыскать вам лучшие бездепозитные предложения. 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=http://forum.moto-fan.pl/uzytkownik-unaccountableha>http://forum.moto-fan.pl/uzytkownik-unaccountableha</a>
1×slots зеркало рабочее на сегодня
<a href=https://forum.home-visa.ru/memberlist.php?mode=viewprofile&u=3536>1хслотс зеркало на сегодня</a> 1×slots промокод при регистрации 2025 <a href=https://funsilo.date/wiki/User:ErmelindaOsorio>https://funsilo.date/wiki/User:ErmelindaOsorio</a> 1хслот зеркало Как управляло, при выводе финансов, от играющего потребуется только сделать наименьший вклад чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом личный счет.В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с даровых вращений. Прибыль, коию Вы заработаете на таком бездепе возможно назначать на вывод без какого или отыгрыша.
1×slots зеркало на сегодня
Лишь знаменитые и знаменитые азартные заведения могут позволить себя выдавать бездепы в виде дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депо, коие возможно израсходовать в лучших аппаратах с высокой отдачей.Для верификации номера аппарата, в собственном профиле изберите опцию „Подтвердить номер аппарата“ и введите в соответствующее поле код, приобретенный в sms-сообщении. Если вы выбираете проверенное лицензионное интернет казино и выполните все условия получения бездепозитного приза, проблем с получением дара у Вас не возникнет. <a href=https://forums.twcpilots.com/member.php?action=profile&uid=749>https://forums.twcpilots.com/member.php?action=profile&uid=749</a> Ознакомьтесь с нашим перечнем наилучших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего списка и получите бездеп незамедлительно. Хватайте лучшие безвозмездные предложения ниже и выигрывайте немалые средства, не рискуя!Подтвердите лицо, предоставив оператору казино средства паспортные данные. Инструкции обычно несложные, основное — четко им идти. Если написано, что «на фото обязаны быть заметны все четыре угла страницы паспорта» — сделайте именно такое фото. 1 хслот регистрация в 1×slots casino
скачать 1×slots на андроид мобильная версия
Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют важную информацию о not the slightest down payment bonuses и других услугах.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро либо 20 $. Если выдаются фриспины, их число изредка выше нескольких десятков бесплатных вращений. <a href=https://swordmaster.org/user/JamesVok/>1хслотс 1хслотс регистрация перейти на 1×slots</a> Бездепозитный бонус предоставляется новенькому игроку за конкретные действия. Часто презент повторяющий средств либо фриспинов выдается за регистрацию, благодаря чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. Кешбэк-бонус дает собой возврат фиксированного процента от ставки когда проигрыша или же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%. сайт 1× slots casino <a href=https://martinifcx10087.blogtov.com/10771266/nude-ai-the-ethical-and-technological-challenges-of-artificial-intelligence>https://martinifcx10087.blogtov.com/10771266/nude-ai-the-ethical-and-technological-challenges-of-artificial-intelligence</a>
1×slots мобильная версия войти казино
Так же стоит выделить то, что в любом интернет казино установлен собственный максимальный кешаут на бездепозитный бонус. Как верховодило кешаут — это предельная сумма денег, которая дешевая для вывода с бездепозитного приза. Эффективность бездепов в качестве маркетингового прибора оценили почти операторы. Малоизвестные площадки употребляют такие акции, дабы живо набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны неизменных гостей. Не все сайты, дающие презенты без депо, рекомендованы к забаве. За симпатичным промоописанием имеют скрываться неосуществимые обстоятельства отыгрыша и подводные камни. <a href=http://hannubi.com/bbs/board.php?bo_table=free&wr_id=1087012>http://hannubi.com/bbs/board.php?bo_table=free&wr_id=1087012</a> Чем ниже значение вейджера, тем легче отыграть и вывести приз. Если Вы планируете заработать на бездепе, но просто ознакомиться с новым игровым клубом, то стоит избегать бонусов с высочайшим вейджером их практически не реально отыграть. С ними Вы сможете только протестировать забавы заведения. 1 х слотс зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://www.mshowto.org/forum/members/jamespauri.html>1× slots зеркало</a>
<a href=http://loevil.com/phpBB3/viewtopic.php?t=30753>1×slots промокод при регистрации 2025</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подтвердите личность, предоставив оператору казино свои паспортные данные. Инструкции обычно несложные, основное — конкретно им идти. Если написано, что «на фото обязаны быть видны все четыре угла страницы паспорта» — устройте непосредственно такое фото.
#6631 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
new casino win win casino <a href=https://res-publika.com>балтбет букмекерская контора</a> 1×bet xbet xyz как выиграть в казино <a href=https://rucriminal.info/>порно с Васильева Татьяна Викторовна</a> kometa casino букмекерские конторы без депозита ап казино 1×bet зеркало слоты 1×bet xyz casino рабочее зеркало скачать сайт букмекерской конторы bet casino
#6632 Charlesgunnyhttp://filmkachat.ru
1×slot официальный сайт
Начнём с того, что каждое промо за регистрацию подразумевает некоторые обстоятельства. Бездепозитные бонусы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, нужная для исполнения критерий. Пример, возымели благотворительные вращения и выиграли с них 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 рублей, проигрышных или выигрышных, так. После исполненья, бонусный баланс перейдёт на настоящий и станет легкодоступным к выводу. <a href=http://filmkachat.ru/>1хслотс мобильная версия зеркало</a> <a href=https://www.facer.io/user/CA95QUBa2X>https://www.facer.io/user/CA95QUBa2X</a> 1×slots коды <a href=http://london-macadam.com/author/darenreorm/>http://london-macadam.com/author/darenreorm/</a> Бездепозитный приз – это экономическое вознаграждение, которое выдается соучастнику игры в казино, для его привлечения и появления заинтересованности. Любой гость, кот-ый подходит условиям выдачи подобного бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое одобрение является более действенным методом, дающим возможность стартовать в игре, не вкладывая личных материальных средств.За счёт спинов получится запустить разные интернет слоты, протестировать стратегии и поднабраться опыта. Фишка в, собственно вращения начисляются на лучшие аппараты с оригинальными опциями и высокой отдачей. Не забывайте, собственно в каждом акционном предложении учтены особые притязания – временные лимитирования, наибольший объем ставки, перечень дешевых игр.
1×slots быструю регистрацию а также мгновенное
Подтверждение персональной инфы. Все казино просят от посетителя пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и присутствие у пользователя иных аккаунтов (мультиаккаунт запрещен).Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном сайте и выполните вход в собственный кабинет, дабы арестовать благотворительные вращения с вейджером х40; 1×slot зеркало Так же стоит выделить то, что в любом онлайн казино установлен собственный наибольший кешаут на бездепозитный бонус. Как правило кешаут — это максимальная сумма средств, кот-ая доступная для вывода с бездепозитного приза. <a href=https://urganchshahar.uz/user/JamesGam/>https://urganchshahar.uz/user/JamesGam/</a> Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Во всех законных онлайн-казино Беларуси необходимо подтверждение паспортных данных для забавы — это заявка правительства государства. 1×slots casino регистрация С иной стороны, гораздо проще отобрать бездепозитные фриспины за регистрацию в казино и прямо момент начать вертеть барабаны в наилучших слотах. Главная особенность спинов никаких, собственно они предназначены для топовых автоматов. Удастся не только пройти вспомогательные раунды, но и прирастить сумму выигрыша, заработать респины и другие внутриигровые подарки.В онлайне слишком большое скриптовых вебсайтов, которые принадлежат мошенникам. Их главная цель – заинтересовать гэмблеров, пообещав не только щедрые подарки, хотя и крупные выигрыши. Так собственно кое-какие сайты предлагают получить за регистрацию даже $1 000.
1×slots официальный регистрация
Можно. Вы всегда можете отрешиться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не создадите ставку. Бездепозитный приз казино 2022 с выводом за регистрацию предоставляет вероятность ознакомиться игроку с лобби избранного заведения, сориентироваться в выборе игр и проверить качество работы саппорта. Довольно нередко, начиная игровой процесс, игрок уже отказывается останавливаться и проделывает настоящий лепта. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать даром возможно как один таки с бонусом за регистрацию без надобности заносить депо.Зарегистрируйтесь. Для регистрации почаще всего достаточно ввести собственный номер телефонного и почтовый адрес, после чего установить полученный код из СМС. Возможно, потребуется указать промокод. В правилах акции будет написано, где его надобно вводить. Иногда это бы делать при регистрации, время — теснее в создания личного кабинета, на отдельной страничке. <a href=http://zqykj.com/bbs/home.php?mod=space&uid=266873>http://zqykj.com/bbs/home.php?mod=space&uid=266873</a> Прибывшие на акк деньги бездепозитные призы предназначаются, в основном, лишь для свежеиспеченных пользователей, которые раньше не имели собственного аккаунта в данном казино. Исходя из этого, случае раньше у игрока был сделан депозит, то, по всей вероятности, у него больше не будет способности рассчитывать на получение такого приза в определенном заведении.У любого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано сумели выполнить их, мы дадим несколько советов. Если система начислила небольшую необходимую, надо делать большие ставки – остановитесь на 10–30 центах. Как лишь сможете заработать примерно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В противном случае никакого приглядеться к иному автомату. 1×slots официальный сайт скачать Доступ к дару возможность открываться механически после введения промокода либо воззвания в службу сайта. В первом случае от пользователя не потребуется практически действий. Бездеп с активацией по коду встречается чаще всего. Игроку необходимо установить совокупа знаков в графе, кот-ая возможность находиться в регистрационной форме в Личном кабинете.
казино 1× slots официальный сайт
В перечне притязаний к отыгрышу нередко наличествуют лимиты на ставки при этой на личные деньги. Так, если отыграть нужно 30 000 рублей, а максимальная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам действия промоакции. казино 1×slots официальный сайт <a href=https://onlylove.kr/bbs/board.php?bo_table=free&wr_id=162485>https://onlylove.kr/bbs/board.php?bo_table=free&wr_id=162485</a>
1×slots регистрация 1×slotscasino09k online
Бонусы без депозита при регистрации числятся наиболее привлекательными как для опытных игроков, так для и начинающих. Получив это вознаграждение, клиент имеет выступать на настоящие средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные призы в интернет-казино Рунета, а условия их активации и выигрыша. Отказ в прохождении верификации. Если заказчик не желает либо имеет дать документы, подтверждающие его лицо, профиль несомненно заблокирован совместно, вкупе со всеми бонусными начислениями.Заполняя данные в личном профиле, указывайте лишь достоверную информацию, например как Вам придется ее доказать в будущем при выводе денег. <a href=https://bbs.yhmoli.net/space-uid-710200.html?do=profile>https://bbs.yhmoli.net/space-uid-710200.html?do=profile</a> 1хслотс регистрация в 1×slots casino Лишь известные и известные азартные заведения все позволить себя раздавать бездепы вид добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депо, которые можно израсходовать в лучших аппаратах с высочайшей отдачей.
<b>Смотреть еще похожие новости:</b>
<a href=https://australiantravelforum.com/Upload/showthread.php?tid=180585>1 х слотс зеркало</a>
<a href=http://theauction.com.au/my-account/>1×slots зеркало видели такую регистрацию на</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для получения выигрыша требуется выполнить условия казино. Чаще всего игроку необходимо поставить конкретную необходимую, но теснее из собственных денег. Она рассчитывается из совместного размера выигрыша за все время использования бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, в пользователь выиграл 1000 рублей, а множитель сочиняет х30, исключить средства возможно будет, сделав ставки на 30 000 руб. Первый образующийся вопрос, это, зачем выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают свежих игроков. Последним легче начать игру на деньги с дара за регистрацию. Им надо пополнять баланс и расходовать собственные средства. Новички получают благотворительные спины или свои на счёт. С их поддержкой знакомятся с игровым ходом, крутят слоты и делают ставки в рулетке.
#6633 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало
Акционные предложения от казино существуют в различных форматах. Часто бонусы даются в обмен на депо. Игрок заносит платеж и получает деньги, бесплатные вращения и другие одобрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — картина приза, кот-ый гарантирован за исполненье конкретных деяний на сайте: <a href=http://filmkachat.ru/>1 x slots casino</a> <a href=https://forums.delphiforums.com/biznewsopps/messages/4670/1>https://forums.delphiforums.com/biznewsopps/messages/4670/1</a> Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации дара нужно доказать электрическую почту и привязать аппарат; 1×slots регистрация на официальном сайте <a href=http://p-r.by/bitrix/redirect.php?goto=http://disfo.ru/redirect.php?url=http://listweb.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/eYNEtKdvTWv>http://p-r.by/bitrix/redirect.php?goto=http://disfo.ru/redirect.php?url=http://listweb.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/eYNEtKdvTWv</a>
1×slots регистрация
Иногда в качестве бездепа, казино дарует минимальный приз (до 50 рублей), ради которого не стоит заморачиваться. казино 1×slots Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.Важно, удостоверьтесь что, нет, что ранее не регистрировались в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи. <a href=http://cvpvm09.ru/user/TyroneAcigh/>http://cvpvm09.ru/user/TyroneAcigh/</a> Иногда у гостей сайта имеют появиться трудности, задачи, препядствия при активации полученного промо-кода. В таких случаях, нужно адресоваться за поддержкою в службу поддержки «Support». Для получения ответа, непременно указывается конкретная первопричина воззвания и подтверждается информация дополнительными скриншотами. Если сложилась спорная обстановка, практически можно обратиться к основному регулятору или контролирующему органу, выдавшему данному заведению лицензионный документ. 1×slot рабочее зеркало Третитй бездепозитный бонус за регистрацию – валютные свои. К раскаянью, начислить рубли либо доллары готовы лишь известные и пользующиеся клубы. С их поддержкой вы сможете насладиться каждой доступной игрой – автоматом, рулеткой, кено, блэкджеком.
1× slots официальный
Наличие у игрока второго аккаунта. Запрещено создавать количество профилей для многократного получения бездепов.Подтверждение регистрации. Казино просят привязки профиля к электронному адресу и номеру телефона. Для сего на e-mail отчаливает послание со ссылкой, а на аппарат ? текстовое извещенье с кодом. <a href=http://maglik.ru/user/ChrisAmedo/>http://maglik.ru/user/ChrisAmedo/</a> Выбирайте наихорошие благотворительные призы счет обзоров на Casinoz – и пусть вам сопутствует удача при отыгрыше бонусных кредитов!Многие новички сомневаются, собственно поощрительный приз надо несомненно возвращать, даже случае они выиграли у казино. Это безусловно неопасно и надежно. Выводя выигранные средства, игрок просто одергивает свое роль при и теряет уникальную возможность – бесплатно наращивать личное материальное положение. 1× slots регистрация в 1×slots casino Выше мы предоставили полный набор самых новых и своевременных бездепозитных призов в интернет казино без пополнения на 2022 год, где продоставляется пользоваться хоть ценным бездепозитным призом.
1×slots зеркало регистрацию более популярный вариант это
Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в обязательном порядке необходимо восполнить счет в казино. Для депозитных бонусов, эта процедура не нужна, так как депозит уже сделан.Отказ в прохождении верификации. Если клиент не хочет или возможности предоставить документы, подтверждающие его личность, профиль несомненно заблокирован вместе со всеми бонусными начислениями. <a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=212053>1×slots официальный сайт мобильная версия</a> 1×slots casino регистрация 1×slotscasino09k online <a href=http://www.italian-style.ru/Nasha_kompanija/forum/?PAGE_NAME=profile_view&UID=47991>http://www.italian-style.ru/Nasha_kompanija/forum/?PAGE_NAME=profile_view&UID=47991</a>
1×slots официальный сайт скачать на айфон
<a href=http://goeu.ru/user/Arnoldrot/>http://goeu.ru/user/Arnoldrot/</a> скачать 1×slots на андроид мобильная версия Выполнив все требования оператора, заказчик возможность оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит примерно не более суток. Если дополнительно требуется пройти функцию верификации, то срок увеличивается до 1–2 трудящихся дней. Для перевода используются банковские приборы и электронные платежные системы. Второй способ подходит никакого, например как большинство транзакций в этом случае исполняются мгновенно. В связи со спецификой функционирования банков обработка платежей возможность взятьвдолг(взятьвзаймы) до нескольких трудящихся дней.
<b>Смотреть еще похожие новости:</b>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=212989>1×slots регистрация на официальном сайте</a>
<a href=https://forum.krymbezpravil.org.ua/memberlist.php?mode=viewprofile&u=10552>1х слот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Перед активацией принципиально внимательно изучить обстоятельства акции. Чем ниже вейджер, тем больше возможная выгода игрока. Имеют велечину также лимиты ставок при отыгрыше и сроки, протяжении коих можно пользоваться предложением. Если бездеп обхватывает узкий перечень игр, рекомендовано разузнать наибольшие коэффициенты, уровень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь что, нет случае, если оператор не установил строгие лимитирования на максимальную сумму ставки. Вейджер в переводе с британского означает «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша полученного приза, в нашем случае бездепозитного. Число ставок имеет — принципиально лишь набрать сумму, пропорциональную сумме одобрения.
#6634 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
игры казино pin up casino <a href=https://t.me/vchkogpu_ru>porno Анастасия Янькова, боксерка</a> casinos winning 1×bet рабочее на сегодня <a href=https://kompromat1.online/>порно с Анастасия Потапова, теннисистка</a> casino сайты официальное казино вход яндекс игры казино казино смотреть онлайн макао казино casino человек казино
#6635 StanleyFUELPhttps://medium.com/@ombrella99/search-crypto-wallet-61e539b62bdb?postPublishedType=initial
<a href=https://medium.com/@ombrella99/search-crypto-wallet-61e539b62bdb?postPublishedType=initial>search crypto wallet</a> Offerings for Assessing USDT for Restrictive Measures and Transfer Purity: Anti-Laundering Approaches
In the contemporary realm of crypto assets, where rapid deals and anonymity are becoming the norm, supervising the lawfulness and integrity of operations is necessary. In recognition of heightened government investigation over illicit finance and terrorism financing activities, the requirement for efficient resources to verify transfers has become a key concern for crypto users. In this write-up, we will analyze offered solutions for assessing USDT for prohibitions and deal purity.
What is AML?
Anti-Laundering strategies refer to a set of supervisory measures aimed at stopping and identifying dirty money activities. With the growth of crypto usage, AML strategies have become particularly crucial, allowing individuals to handle digital holdings securely while lessening perils associated with restrictive measures.
USDT, as the widely regarded as the well-known stablecoin, is commonly used in different operations worldwide. Nonetheless, using USDT can carry several dangers, especially if your monies may relate to opaque or criminal operations. To minimize these threats, it's imperative to take benefit of offerings that assess USDT for embargoes.
Available Services
1. Address Validation: Utilizing dedicated tools, you can confirm a certain USDT address for any associations to restrictive catalogs. This facilitates identify potential connections to illicit activities.
2. Operation Activity Assessment: Some tools extend scrutiny of transfer background, essential for assessing the openness of monetary transactions and detecting potentially threatening conduct.
3. Surveillance Tools: Professional monitoring services allow you to observe all exchanges related to your address, facilitating you to rapidly spot questionable actions.
4. Hazard Documents: Certain solutions offer detailed concern reports, which can be crucial for stakeholders looking to confirm the integrity of their resources.
No matter of whether you are controlling a significant investment or making small deals, abiding to AML norms assists prevent legal repercussions. Using USDT validation offerings not only defends you from capital damages but also supports to establishing a stable environment for all market actors.
Conclusion
Assessing USDT for restrictive measures and transaction cleanliness is becoming a required process for anyone keen to stay compliant within the regulations and preserve high criteria of transparency in the virtual currency field. By working with credible solutions, you not only safeguard your assets but also support to the collective initiative in fighting financial misconduct and financing of terrorism.
If you are set to start leveraging these services, investigate the offered tools and select the solution that most adequately meets your needs. Be aware, insight is your strength, and prompt transfer verification can save you from a variety of challenges in the long run.
#6636 Charlesgunnyhttp://filmkachat.ru
1× слот зеркало
Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную процедуру активации приза без депо. Внимательно прочтите до конца. Многие новенькие делают оплошности на шаге регистрации и потому не могут получить презент.Обычно для получения бонусов без депозита, казино выдвигает приклнные и абсолютно выполнимые обстоятельства, хотя есть ряд поступков которые воспрещены и шансы повлечь за собой досадные результаты: <a href=http://filmkachat.ru/>сайт 1× slots casino</a> <a href=https://plaza.rakuten.co.jp/prilla/diary/202411240003/>https://plaza.rakuten.co.jp/prilla/diary/202411240003/</a> 1×slots зеркало регистрация то дальше необходимо пройти <a href=http://www.zgqsz.com/home.php?mod=space&uid=302281>http://www.zgqsz.com/home.php?mod=space&uid=302281</a> В разделе с призами активировать собственный презент. Найти забавы, для коих учтено поощрение и применять бонус по назначению.Несмотря на то, что данный вариант стимуляции со стороны азартных платформ очень известен области похожих игр, далеко не всем поклонникам казино ведомо, что себе бездепозитные бонусы казино и как именно их вероятно эксплуатировать.
1×slots мобильная версия войти казино
Это один из главных показателей привлекательности подарка. С завешенным коэффициентом и мастера не смогут выполнить условия по отыгрышу. И неважно, насколько презентабельно смотрится предложение – бездепозитный бонус казино в объеме $500 или $1 000. Чтобы новички попревосходнее вдумались, что же такое вейджер, мы разберём на примере.Так же стоит выделить то, что в каждом онлайн казино установлен собственный максимальный кешаут на бездепозитный бонус. Как управляло кешаут — это предельная сумма денег, которая дешевая для вывода с бездепозитного приза. <a href=https://koreanstudies.com/forum/viewtopic.php?t=116811>1×slots сайт</a> 1хслотс зеркало на сегодня Одним из предлогов отдавать привилегию 1 либо другому заведению заключается в привлекательности предлагаемых акций и бесплатных предложений. Безвозмездные фриспины, выдаваемые без нужды создавать какой-нибудь лепта, в списке находится далеко не в конце. <a href=https://forum.gekko.wizb.it/user-21899.html>https://forum.gekko.wizb.it/user-21899.html</a> 1×slots рабочее зеркало
1× slots официальный
Если вы новичок в этом деле и только попали в неизведанную вами район азарта — счет предложений как бездепозитные призы без пополнения. <a href=http://catalog2.drobak.com.ua/communication/forum/user/2727160/>http://catalog2.drobak.com.ua/communication/forum/user/2727160/</a> 1×slots официальный сайт зеркало Шаг 5. Использование и отыгрыш. Бездеп обязан быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.
1×slots официальный сайт скачать на айфон
Составленный знатоками Casino.ru перечень онлайн-казино с бездепозитным призом дозволяет игрокам сопоставить спецпредложения разных операторов. В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая приятная часть забавы. Важно, часто бездепозитные призы в казино выдаются с ограничениями по максимальной выплате. В среднем можно рассчитывать на прибыль в несколько тыщ рублей. Как исключить выигрыш с приза без депо. Придётся подтвердить акк документально, в некоторых заведениях. Процедура верификации обязательна и делается каждым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате либо прочитайте в правилах.В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это исключительно приятная доля игры. Важно, зачастую бездепозитные призы в казино выдаются с ограничениями по максимальной выплате. В среднем возможно рассчитывать на прибыль в некоторое тысяч руб. Как вывести выигрыш с бонуса без депозита. Придётся доказать акк документально, в неких заведениях. Процедура верификации неотклонима и делается каждым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате или прочтите в правилах. Обыкновенные бездепозитные бонусы в объеме от трех до двадцати $ сделаны для того, дабы в забавы заходили все свежие и новые игроки. Здесь, вероятнее всего, несомненно лимитирование на максимальный выигрыш. Важно, чтобы перед наименьшим вкладом был отключен приз за первое пополнение счета, и в не попадет на повторный вейджер. 1×slots официальный сайт скачать <a href=http://lombards55.ru/index.php?subaction=userinfo&user=economicmisfit3>http://lombards55.ru/index.php?subaction=userinfo&user=economicmisfit3</a>
1× slots casino зеркало
Только выполнив все условия отыгрыша и дождавшись завершения проверки аккаунта, Вы можете оформить заявку на вывод средств и получить свои деньги.Во всех законных онлайн-казино Беларуси необходимо подтверждение паспортных данных для игры — это требование правительства государства. <a href=https://www.gamers-forum.com/member.php?106059-DoctorLazutaSl>https://www.gamers-forum.com/member.php?106059-DoctorLazutaSl</a> Некоторые казино шансы предлагать посетителям бездепы за подтверждение номера либо почты или репост на страницу в соц сетях. 1×slots регистрация 1×slotscasino09k online Ещё одно распространённое акционное предложение – привлекательный презент с неблаговидными требованиями. К образцу, клуб обещает $100 в бездепа, хотя с вейджером х80 или х100. Отыграть такой вейджер практически нереально и потому какого-либо концентрироваться на более заманчивых промоакциях.
<b>Смотреть еще похожие новости:</b>
<a href=https://australiantravelforum.com/Upload/showthread.php?tid=226074>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=http://www.arka-bahce.org/forum/showthread.php?p=759381#post759381>казино 1×slots</a>
<a href=https://portugal-campings.com/pt/profile/jamescip/>1×slots рабочее зеркало</a>
<a href=http://forum.survival-readiness.com/memberlist.php?mode=viewprofile&u=30498&sid=dbd5ca31d0674505a667e2ab5a54f568>1×slots зеркало рабочее на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Например, игрок получил 500 руб. При создании аккаунта и обязан отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 рублей, потребуется устроить 875 спинов для полного отыгрыша. Приветственный бонус без депо ? подарок за регистрацию. Выдается средствами, фриспинами либо баллами. В заключительном случае бонусные баллы используются для роли в турнирах либо размена на реальные средства.
#6637 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino андроид kometa casino <a href=https://repost.news/>porno Илья Ковальчук (хоккей)</a> 7k casino зеркало рабочее casino андроид <a href=https://repost.news/>1×bet официальный сайт 1×bet xyz</a> casino официальный зеркало Валентина Матвиенко порно лучшие бесплатные онлайн казино pin up casino top top гта онлайн казино casino daddy porno Александра Степанова, фигуристка
#6638 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало рабочее этих способов предполагает регистрацию
Этот тип бонуса будет добавлен на Ваш акк после удачной процедуры регистрации с внедрением номера телефона. Если выбрать иной метод сотворения учетной записи, бездеп не несомненно добавлен на Ваш акк. <a href=http://filmkachat.ru/>зеркала 1×slots</a> <a href=https://graph.org/Kak-prodat-mashinu-na-zapchasti-bez-dokumentov-vse-nyuansy-10–24>https://graph.org/Kak-prodat-mashinu-na-zapchasti-bez-dokumentov-vse-nyuansy-10–24</a> Получить приветственный приз шансы только свежие клиенты онлайн-казино. Способы описаны в критериях промоакции любого легального казино, чаще всего это: 1×slots мобильная версия войти казино <a href=http://academy-i-t.com/index.php?subaction=userinfo&user=burlydynasty1>http://academy-i-t.com/index.php?subaction=userinfo&user=burlydynasty1</a> Иногда у гостей сайта все появиться проблемы при активации приобретенного промо-кода. В этих случаях, нужно обратиться за поддержкой в службу «Support». Для получения ответа, непременно указывается определенная первопричина воззвания и подтверждается информация дополнительными экрана. Если сформировалась неоднозначная ситуация, постоянно возможно адресоваться к главному регулятору или контролирующему органу, выдавшему этому заведению лицензионный документ.Объективные – объем приза, коэффициент и условия вейджера, надобность внесения депозита для вывода средств;
1× slots зеркало
1хслотс зеркало <a href=http://drivebelt.ru/bitrix/redirect.php?goto=http://stopcran.ru/go?http://forumsad.ru/proxy.php?link=https://telegra.ph/Tri-unikalnyh-primera-doklada-o-Kazahstane-09–23>http://drivebelt.ru/bitrix/redirect.php?goto=http://stopcran.ru/go?http://forumsad.ru/proxy.php?link=https://telegra.ph/Tri-unikalnyh-primera-doklada-o-Kazahstane-09–23</a> Кешбэк-бонус дает собой возврат фиксированного процента от ставки когда поражения или же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не превышает 10%. 1хслотс регистрация в 1×slots casino
1×slots casino регистрация 1×slotscasin online
Бездепозитные бонусы за регистрацию являются одним из самых популярных способов вербования новых игроков в онлайн-казино, потому что они предоставляют игрокам вероятность опробовать казино, особенно игровые автоматы, и вероятно, выиграть реальные средства.Свежий приз начисляется вид валютных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в пользовании средствами, в случае отыгрыша оператор может ввести лимитирование на вывод денег. <a href=http://ip-sosnevo.ru/user/HarryEtelp/>http://ip-sosnevo.ru/user/HarryEtelp/</a> онлайн казино 1×slots Составленный знатоками Casino.ru список онлайн-казино с бездепозитным призом дозволяет игрокам сопоставить спецпредложения различных операторов.
1×slots официальный сайт зеркало
Бонусные деньги – маленькая сумма денег для старта в новеньком казино. На бонусные деньги, обычно разрешается играть во все забавы, кроме слотов с прогрессивным джекпотом и игр из раздела live casino.Для верификации аккаунта нужно предоставить специалистам технической поддержки отсканированную копию паспорта и счета за коммунальные предложения, а фотку банковской карты либо скриншот странички электрического кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для подтверждения личности. 1×slots бонус за регистрацию <a href=https://www.google.as/url?q=http%3A%2F%2Fdoctorlazuta.by>https://www.google.as/url?q=http%3A%2F%2Fdoctorlazuta.by</a>
1×slots зеркало регистрацию более популярный вариант это
Такой казино приз без депозита за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это как бы некая маскировка поощрения под бездепозитный. Суть всего этого сводится к что, этому, что игроку на час выдается, например, 1000 долларов, а реклама твердит то, собственно любой выигрыш можно будет в забыть при для. Но в играющий серьезно отнесется к этому предложению, то он просто растеряет время. Ведь игроку надо(надобно) несомненно играть не главном аккаунте, а в тренировочном и с ограниченным выбором автоматов и ставок. Да и если, тогда, выигрыша (том всей тысячи) в правила вступят определенные условия, где будет сказано, что максимальной суммой победы возможность быть только двести $ и средства возможно использовать только в качестве бонуса на первый лепта с вейджером 25 от суммы гонорары плюс сам депозит. По результату выйдет, что игрок выигрывал для 200% бонус с вейджером на определенную необходимую. Короче говоря, это все надо вашего времени.При отыгрыше бонусных средств, необходимо учитывать срок действия приза и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный бонус несомненно аннулирован. <a href=http://d992387h.bget.ru/user/WalterFen/>http://d992387h.bget.ru/user/WalterFen/</a> Самые популярные способы вывода средств ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электрическим платежным системам типа Neteller и Skrill, а используют криптовалютными кошельками. Вывод выигрышей может исполняться мгновенно или развлекать от нескольких часов до нескольких суток.Сроки активации приза уточняются любым казино, хотя чаще всего они не превышают недели с момента получения. Игроку непременно надо(надобно) использовать бездеп на указанного срока, в ином случае бонус просто исчезнет. Каждый бонус можно получить лишь один раз, потому случае не использовать бездеп в срок, у игрока не будет второго шанса им пользоваться. 1×slots мобильная версия войти казино Бездепозитные бонусы казино это финансовая компенсация, предлагаемая юзерам на дармовой базе и вероятность выступать в интернет казино даром. Если ассоциировать их с одобрениями за вклад, в средства выдаются только потом начального пополнения счета, то бездепозитные вознаграждения получаются даром. То есть, играющий получает вероятность делать ставки на теснее место деньги, коие выдаст заведение, исполняя, при, обычные деянья, дабы их извлечь (здесь идет речь о регистрация, удостоверении личности с использованием номера телефонного, дизайна заказы и т.д.).Иногда у посетителей вебсайта все возникнуть проблемы при активации приобретенного промо-кода. В этих случаях, необходимо обратиться за поддержкой в саппорта «Support». Для получения ответа, обязательно указывается определенная причина обращения и подтверждается информация дополнительными скриншотами. Если сформировалась неоднозначная ситуация, практически возможно адресоваться к главному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ.
<b>Смотреть еще похожие новости:</b>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=205351>1×slots коды</a>
<a href=http://www.arka-bahce.org/forum/showthread.php?p=766377#post766377>1×slots официальный сайт мобильная версия скачать</a>
<a href=http://lynnniman.org/index.php?/topic/1570–1×slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%BD%D0%B0-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D0%BE%D0%BC-%D1%81%D0%B0%D0%B9%D1%82%D0%B5/>1×slots регистрация на официальном сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вообще перейдя в казино — верховодила схожи в получении бездепозитных бонусов, в стандартные верховодила заходит: подтвердить эл. Почту и телефонный, наполнить собственный собственный профиль, активировать промо код или активировать предложения во вкладке БОНУСЫ. Вообще перейдя в казино — управляла схожи в получении бездепозитных бонусов, в стереотипные верховодила заходит: доказать эл. Почту и аппарат, заполнить свой личный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ.
#6639 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Радченко Светлана Юрьевна порно порно с Евгений Малкин (хоккей) <a href=https://rhymes-punches.com/>букмекерская контора</a> букмекерская контора вход casino промокод <a href=https://specreporter.com/>порно с Гатагова Ольга Анатольевна</a> скачать букмекерскую контору казино смотреть онлайн порно с Петр Ян (ММА) скачать pin casino Кузнецова Анна Юрьевна порно рабочее казино casino daddy
#6640 BrianFaw
https://indianpharmacy.win/ indian pharmacies safe
#6641 Jamescox
http://canadianpharmacy.win/ canadian pharmacy sarasota
#6642 RalphCew
global pharmacy canada <a href=" http://lzdsxxb.com/home.php?… „>canadian pharmacies that deliver to the us</a> or <a href=“ https://maps.google.sc/url?… ">canada drugs reviews</a> https://www.google.hn/url?… canadian pharmacy reviews <a href=https://images.google.com.gt/url?q=https://canadianpharmacy.win>canadian pharmacy 1 internet online drugstore</a> legit canadian pharmacy online and <a href=http://www.bbmlbb.com/bbs/home.php?mod=space&uid=14915>canadian pharmacy online ship to usa</a> online pharmacy canada
#6643 Charlesgunnyhttp://filmkachat.ru
1×slots официальный demo регистрация в 1×slots casino
Прежде всего, не забывайте регулярно заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом осматривают более занимательные предложения ведущих игорных порталов. <a href=http://filmkachat.ru/>рабочее зеркало 1хслотс</a> У каждой игры средства требования по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система зачтет любую ставку. В рулетке и покере сделать это гораздо сложнее. Именно потому например принципиально внимательно читать условия получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой забаве, то новенькие просто «спустят приз на ветер». <a href=https://lyfepal.com/forums/thread/7373/Transform-Your-Kitchen-Design-with-Professional-3D-Kitchen-Rendering-Services>https://lyfepal.com/forums/thread/7373/Transform-Your-Kitchen-Design-with-Professional-3D-Kitchen-Rendering-Services</a> казино 1×slots официальный сайт <a href=https://robotech.com/forums/viewthread/2226901>https://robotech.com/forums/viewthread/2226901</a> Выбирая безвозмездный приз, внимательно изучайте управляла. Убедитесь, собственно вас возможно брать участие в акции. Уточните, в каких играх возможно исполнять условия вейджера. При необходимости задавайте вопросы представителям саппорта.
1×slot официальный сайт
<a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=48615>1 xslots рабочее зеркало</a> 1×slot зеркало рабочее регистрации на телефон придет <a href=http://43.240.15.40/home.php?mod=space&uid=580841>http://43.240.15.40/home.php?mod=space&uid=580841</a> 1×slots официальный зеркало рабочее На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не сможете активировать и получить бездепозитный приз.Так что приготовьтесь дать конфиденциальную информацию (пол, возраст, государство проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает менее суток, в чего получится беспрепятственно выводить солидные выигрыши.
1хслотс рабочее зеркало
Главное превосходство спинов – вероятность выучить разные слоты. Также получится насладиться бонусными раундами, испытывать удачу в риск-туре и преувеличить выигрыш за счёт особенных символов. Однако не игровой процесс заслуживает внимание, так какого-либо сосредоточиться на реальном выигрыше.Шаг 5. Использование и отыгрыш. Бездеп должен быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. Но а в вы уже профи по онлайн казино, кликаем на красноватую кнопку «Получить» и Вы автоматически перейдете в онлайн казино;Также существуют онлайн-платформы азартных игр, коие используют раздачу бездепозитных бонусов в особые даты (как для казино, например и для игрока). Помимо этого, действующие игроки кроме имеют возможность получить похожие призы за собственную работа (к примеру, за увеличения значения либо за схожие заслуги). <a href=https://usolie-citi.ru/user/JulesClope/>https://usolie-citi.ru/user/JulesClope/</a> 1хслотс рабочее зеркало Подобные призы без депозита предоставляются на больше выгодных критериях. Зачастую они покрупнее, а условия отыгрыша наименее жесткие.
1×slots регистрация на 1хслотс
Бонус за регистрацию в казино выдается лишь раз один на одного игрока. Но случаются вспомогательные акции, в рамках которых бездепы расступаются для постоянных клиентов и эти презенты Вы сможете получить более 1-го раза. <a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=850947#pid850947>1×slots казино зеркало</a> Бездепозитный приз часто может стать доступным сразу в завершения регистрации, поскольку правило единственным требованием к нему является регистрация, а этого проверка вашей свежей учетной записи.Для всех бездепозитных призов функционирует максимальный предел на выигрыш. Он указывает предельную необходимую, коию у получить, играя на бонусные кредиты. Как лишь вас получится выполнить притязания вейджера, возможный максимум будет переведен с бонусного счета на главный, а остаток несомненно списан. Для всех бездепозитных бонусов действует наибольший лимит на выигрыш. Он указывает предельную сумму, которую возможность получить, играя на бонусные кредиты. Как лишь для удастся выполнить требования вейджера, возможный максимально будет переведен с бонусного счета на главной, а остаток несомненно списан.Итак, дабы безвозмездные бонусные кредиты трансформировались в реальные деньги, которыми вам распоряжаться по собственному усмотрению, их надо(надобно) отыграть. Вейджер следует уточнять в правилах онлайн-казино. 1×slots зеркало <a href=https://www.walkaholic.me/user/26482-walterrax>https://www.walkaholic.me/user/26482-walterrax</a> Каждый новичок и профессиональный игрок грезят быстро стартануть и начать создавать настоящие ставки. Для этого довольно арестовать презент, за кот-ый надо платить. В зависимости от игровой платформы, нужно сделать профиль, привязать email либо телефонный. После сего администрация начисляет щедрое вознаграждение повторяющий даровых вращений либо виртуальных кредитов.Приветственный бонус без депозита ? презент за регистрацию. Выдается средствами, фриспинами или баллами. В заключительном случае бонусные баллы используются для роли в турнирах или размена на реальные деньги.
1х слот регистрация в 1×slots casino
B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. <a href=https://www.birdpix.nl/profile.php?mode=viewprofile&u=126851>https://www.birdpix.nl/profile.php?mode=viewprofile&u=126851</a> Суммы похожих услуг, случаев, колеблются от трех до двадцати долларов, а вейджер на эти свои должен составлять от 30 до шестидесяти раз. Зачастую, наивеличайшая сумма выигрыша тут составит от одной до 2-ух сотен $. Если компьютерные выиграет больше, то все свои могут быть списанными до очень разрешенного выигрыша. Здесь появляется содержание выводить еще несуществующие деньги на собственную платежную систему и дальше искать заведение с благоприятными под данную необходимую релоадом либо бонусом за первое пополнение счета. Есть количество подвидов бездепозитного гонорары, предлагаемого большим числом заведений.В зависимости от интернет заведения каждый из их возможность вам предложить как бездепозитные средства, так и бездепозитные фриспины, которые после удачной регистрации рухнут вам на ваш игровой баланс. 1×slots официальный сайт зеркало рабочее Бездепозитные призы за регистрацию считаются одним из самых известных методов привлечения свежих игроков в онлайн-казино, поэтому что они предоставляют игрокам вероятность опробовать казино, особенно игровые автоматы, и вполне, выиграть реальные средства.Большинство клубов привлекают внимание в за счёт разнородных подарков. На 1 сайтах можно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает благотворительные вращения для пуска топовых онлайн слотов. Несмотря на разные промоакции, стоит выделить самые главные.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.katzenforum.at/forum/media/users/jamesagema.16012/>1хслотс зеркало</a>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=125537>1хслотс казино зеркало</a>
<a href=https://pbtur.com.br/users/jameshex>1×слотс казино</a>
<a href=https://australiantravelforum.com/Upload/showthread.php?tid=236378>1×slots официальный demo регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На благотворительные бонусы онлайн-казино почти практически распространяется лимитирования по стране проживания клиентов. Даже в для разрешается раскрывать счет и выступать на деньги в заведении, это еще не значат, что для доступны not the slightest deposit bonuses.
#6644 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало рабочее
Вейджер (wager) – это коэффициент, который демонстрирует на какую сумму нужно сделать ставок, дабы исключить бонус из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего бонуса, Вам необходимо сделать ставок на сумму: 500*70=3500 руб. Только полностью отыграв приз, Вы можете вывести собственный выигрыш.Отыграв бездепозитный приз в казино с выводом также придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, случае схожее лимитирование существует, то единоразово исключить получится только сумму, не превышающую объем приобретенного бонуса. <a href=http://filmkachat.ru/>1хслот скачать</a> Также бывают случаи, когда казино начисляет обсужденный приз после регистрации нового посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам.Раздача призов может быть посвящена различным датам: календарные дни, дни рождения игроков, годовщина открытия казино и т. Д. Подарок выдается повторяющий средств, фриспинов либо баллов для накопления и размена на предложения оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд требований. <a href=https://www.hebergementweb.org/threads/virtual-reality-reshapes-modern-architectural-design-and-innovation.2142477/>https://www.hebergementweb.org/threads/virtual-reality-reshapes-modern-architectural-design-and-innovation.2142477/</a> 1×slots акции <a href=http://wookpink.com/bbs/board.php?bo_table=free&wr_id=420164>http://wookpink.com/bbs/board.php?bo_table=free&wr_id=420164</a>
1× slots зеркало
1×slots промокод при регистрации Чем ниже велечину вейджера, что, этим легче отыграть и вывести бонус. Если Вы расчитываете заработать на бездепе, а не просто ознакомиться с новым игровым клубом, то стоит игнорировать бонусов с высочайшим вейджером их почти не реально отыграть. С ними Вы можете лишь протестировать игры заведения.Призовые начисления без депозита могут предоставляться для участия в турнирах интернет казино. Потратить перечисленные деньги возможно самая в данной промоакции. Условия их проведения включают в себя лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться этим предложением, лучше изучить его верховодила. <a href=https://forum.m2.hk/home.php?mod=space&uid=75959>https://forum.m2.hk/home.php?mod=space&uid=75959</a> 1×slots зеркало регистрация то дальше необходимо пройти При правильном подходе бездепы — это отличный способ играть на средства без растраты собственных средств. Есть количество рекомендаций, следуя коим возможно извлечь максимально пользы из похожих акций казино. Играть идет только на лицензированных площадках. Скриптовые сайты не дурачат с бонусными предложениями, хотя и употребляют пиратский софт с измененным ГСЧ. Выиграть на этих автоматах невероятно.
1хслотс казино зеркало
<a href=https://sportcar.moscow/user/Raymondmix/>https://sportcar.moscow/user/Raymondmix/</a> Если простыми текстами, бездепы – это определённая сумма денег либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать подарки. Но есть некоторые аспекты. Существуют игорные дома, коие перед тем как начислить бонусы требуют привязать аппарат, предоставить копии документов. 1×slots сайт зеркало Для как, дабы отыграть сумму вашего бездепозитного приза нужно выполнить обстоятельства вейджера. Очень нередко фриспины даются на определенные слоты (book of ra, book of dead, book of sun), избирайте разъем себе по душе, они все очень красочные и качественные. Бездепозитные бонус возможность быть денежным так и повторяющий фриспинов на слотыИногда для получения призов нужно спутаться с представителями службы. Удобнее всего с ними собеседовать в онлайн-сате, желая иногда довольно запроса по электронной почте.
1×slots рабочее зеркало
Отзывы читателей о бонусных промоакциях помогут составить эмоцию, но не запамятовывайте о субъективности собственных комментариев. Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. 1×slots зеркало <a href=http://1ctv.cn/home.php?mod=space&uid=2952353>http://1ctv.cn/home.php?mod=space&uid=2952353</a> Риск-игра по одинаковым шансам – Также казино возможность запрещать исполнять условия по отыгрышу за раунда на удвоение, который предлагается в слотах, видео-покере и неких других играх.Обычно бездепозитные акции от казино, приходят на эл. Почту в деньки рождения или праздничные. В некоторых интернет казино можно адресоваться в чат и как постоянному игроку, возможно для предложат бездепозитное предложение.
1× slots регистрация в 1×slots casino
Новички не обожают сразу же вносить депозит. Это обосновано отсутствием опыта и недоверием. К счастью, в наше время можно получить бездепозитный бонус за регистрацию в казино. Неважно собственно начисляет система – фриспины или кредиты. В всяком случае вы не рискуете собственными сбережениями. Это замечательная вероятность запустить приглянувшийся видео слот либо же испытывать удачу в настольных забавах.Если вы избираете испытанное лицензионное интернет казино и сделайте все условия получения бездепозитного приза, трудностей с получением дара у Вас не возникнет. Мы советуем не отрицаться от подобных услуг знаменитых казино. Выделите количество мин. На регистрацию, получите приз и попытайтесь его отыграть. Может быть, сегодня удача будет на вашей стороне!Чтобы получить вероятность исключить прибыль с бездепозитного приза в казино, нужно выполнить ряд условий: <a href=https://www.underking.net/bbs/board.php?bo_table=free&wr_id=958277>https://www.underking.net/bbs/board.php?bo_table=free&wr_id=958277</a> зеркло казино 1×slots Изучить правила и обстоятельства получения бездепозитных бонусов казино, Вы можете у нас на веб-сайте в разделе с бонусами или на официальном веб-сайте выбранного Вами казино. Если не отыскать необходимую информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал либо по электронной почте.Такой казино бонус без депо за регистрацию выдается игроку на час и активно употребляется данное предложение с 2017 года. Это словно какая-то маскировка поощрения под бездепозитный. Суть всего этого сводится к тому, собственно игроку на час выдается, например, 1000 долларов, а реклама утверждает про, собственно каждой выигрыш возможно будет дальнейшем забыть при себя. Но в играющий всерьез отнесется к данному предложению, то он просто растеряет время. Ведь игроку надо(надобно) будет выступать не в аккаунте, а в тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (в всей тыс. ) в правила вступят конкретные обстоятельства, где будет сказано, собственно максимальной суммой победы имеет быть лишь двести $ и средства можно применять только виде бонуса на 1-ый лепта с вейджером 25 от суммы гонорары плюс сам депозит. По результату выйдет, что игрок выигрывал себя 200% приз с вейджером на конкретную сумму. Короче говоря, это все не вашего медли.
<b>Смотреть еще похожие новости:</b>
<a href=https://bans.org.ua/index.php?topic=118002.new#new>1х слот регистрация в 1×slots casino</a>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=197771>казино 1×slots официальный сайт</a>
<a href=https://www.goslog.ru/forum/messages/forum1/message10005/11-obrashcheniya-grazhdan?result=reply#message10005>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Шаг 5. Использование и отыгрыш. Бездеп обязан быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.
#6645 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Крючкова Полина Викторовна порно порно с Алина Загитова, фигуристка <a href=https://specreporter.com/>винлайн букмекерская контора</a> зеркала казино porno Мира Андреева (теннис) <a href=https://t.me/vchkogpu_ru>порно с Александр Большунов (лыжные гонки)</a> рабочие зеркала казино ешь казино казино рояль смотреть casino зеркало сегодня bitz casino porno Виктория Баркова, легкоатлетка casino ru
#6646 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию более популярный вариант это
При малый сумме бонуса рекомендовано выступать по невысоким ставкам, а использовать максимальные какого-либо лишь том, случае, в вейджер очень немалый, а время на отыгрыш крепко ограничено.С такими простыми советами каждое казино с бонусом за регистрацию способно принести в разы больше выгоды и полезности. <a href=http://filmkachat.ru/>1хслотс зеркало</a> <a href=https://www.hebergementweb.org/threads/kak-proisxodit-vykup-avto-vo-francii-vse-chto-nuzhno-znat.1925854/>https://www.hebergementweb.org/threads/kak-proisxodit-vykup-avto-vo-francii-vse-chto-nuzhno-znat.1925854/</a> Постарайтесь отыграть вейджер, чтобы появилась возможность забыть заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы можете получить выигрыш на электронной кошелёк, карту, аппарат.Все обожают получать подарки. Согласитесь, почти каждый играющий человек несомненно необъятно счастлив, случае получит безвозмездный подарок для игры в онлайн казино просто за регистрацию или же приз за внесенный депозит, например именуемые приветственные бонусы для свежих игроков. Соответственно эти онлайн клубы станут более популярны и преимущественны у игроков при выборе казино для забавы. Топ казино день обновляется и прибавляются новые и занимательные игровые клубы с привлекательной бонусной политикой и всеми вероятными прерогативами, к коим относятся эти бонусы как фриспины за регистрацию, валютные бездепозитные призы, а великодушные призы за внесенный депо. казино 1×slots официальный сайт <a href=https://chujalt.com/user-278.html>https://chujalt.com/user-278.html</a> Основное отличие никаких, что для получения бездепа не пополнять баланс в казино. Но не сего, есть ряд и различий:Наши специалисты исследуют условия акции, после в ручном режиме проверяют их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие характеристики. Мы не рекламируем казино, а даем игрокам информацию о наилучших из их.
1хслот 1хслотс регистрация перейти на 1×slots
В основном случаев благотворительные бонусы начисляются в кредитах, коие нельзя сразу исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже.В современность довольно просто получить бонус за регистрацию в казино. Практически каждый игорный дом с готовностью начисляет средства или благотворительные вращения. Многие гэмблеры используют данным и не стыдятся регистрироваться в каждом клубе с выгодными критериями. Кстати, это отличная возможность выработать победную стратегию и сорвать джекпот. <a href=https://australianwinerytours.com/tours/showthread.php?tid=241745>1×slots регистрация</a> 1×slots официальный зеркало рабочее Каждая игровая платформа отличается условиями по получению и отыгрышу бездепов. В правилах детально расписаны кратковременные рамки, за коие нужно прокрутить вейджер. Также не забывайте на максимальный объем ставки и наивысшую сумму выплаты. С другой стороны, дабы получить бездепозитные бонусы казино, довольно истратить менее 1 минутки. <a href=http://fabrika-eko.ru/bitrix/redirect.php?goto=http://i-ola.ru/bitrix/click.php?goto=http://astrodesign.net/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/v-fcyGoVmqE>http://fabrika-eko.ru/bitrix/redirect.php?goto=http://i-ola.ru/bitrix/click.php?goto=http://astrodesign.net/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/v-fcyGoVmqE</a> 1×slots коды Бездепозитный бонус нередко имеет замерзнуть доступным сразу в окончания регистрации, потому в большинстве случаев единственным требованием к нему является регистрация, а этого ревизия вашей новой учетной записи.Для верификации аккаунта нужно предоставить специалистам технической помощи отсканированную копию паспорта и счета за коммунальные предложения, а фотографию банковской карты или скриншот страницы электронного кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для подтверждения личности.
1×slots регистрация на сайте
Ограничения по играм. Администрация воспрещает игрокам некоторые игровые автоматы с бездепозитным призом, средствами или бесплатными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда дробление выполняется по облику игр. Например, отыгрыш возможен на всех игровых аппаратах, хотя запрещен в настольных играх и в разделе Live Casino.Подарки на праздники ? приуроченные к парадным датам, требующие условного отыгрыша или начисляются без такового. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду. <a href=https://menwiki.men/index.php?title=%D0%A4%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B%20%D0%BA%D0%BE%D0%BD%D0%B4%D0%B8%D1%82%D0%B5%D1%80%D1%81%D0%BA%D0%BE%D0%B9:%20%D0%BF%D1%83%D1%82%D1%8C%20%D0%BA%20%D1%81%D0%BB%D0%B0%D0%B4%D0%BA%D0%BE%D0%BC%D1%83%20%D0%B1%D0%B8%D0%B7%D0%BD%D0%B5%D1%81%D1%83%20%D0%B2%20%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8>https://menwiki.men/index.php?title=%D0%A4%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B%20%D0%BA%D0%BE%D0%BD%D0%B4%D0%B8%D1%82%D0%B5%D1%80%D1%81%D0%BA%D0%BE%D0%B9:%20%D0%BF%D1%83%D1%82%D1%8C%20%D0%BA%20%D1%81%D0%BB%D0%B0%D0%B4%D0%BA%D0%BE%D0%BC%D1%83%20%D0%B1%D0%B8%D0%B7%D0%BD%D0%B5%D1%81%D1%83%20%D0%B2%20%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8</a> Бонус в казино без депозита содержит различные варианты: может быть приветственный приз, промоакции в честь каких-либо праздников или важных дат, приз за привлечение свежих игроков, преданность и получение VIP-статуса. 1×slots официальный зеркало рабочее Предложения с бездепозитными бонусами за регистрацию позволяют новым заведениям привлечь аудиторию на собственный вебсайт. А игроки же получают вероятность выступать на реальные деньги без депо в казино и заработать небольшой стартовый капитал, который разрешено вывести на карту банка или электронный кошелек.Фриплей-бонусы. Бонусы за благотворительную игру есть лишь в некоторых клубах. Они зачисляются сразу в создания профиля и срабатывают непродолжительное время. Если у вас нет времени потратить средства, они просто закончатся. Что касается медли, как бонусы срабатывают на одного часа.
1× slots сайт
Получить приветственный приз шансы только новые посетители онлайн-казино. Способы описаны в условиях промоакции каждого законного казино, почаще всего это: Чаще всего, знаменитые сервисы, такие как MoneyBookers и WebMoney, еще MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно обязательное верховодило. Финансовые свои выводятся лишь спустя что, эту платежную систему, которой огромной для пополнения депозита. Если же игрок получил бездепозитный покерный бонус, потребуется восполнить счет на минимальную сумму, кот-ая составляет обыкновенно десять $.Бонусные деньги – небольшая сумма средств для старта в новеньком казино. На бонусные деньги, обыкновенно разрешается играть во все забавы, считая слотов с прогрессивным джекпотом и игр из раздела live casino. Законодательство, регулирующее азартные забавы в различных странах, влияние на полномочия операторов. В результате пользователи из отдельных регионов сталкиваются с ограничениями со стороны казино. Это имеет быть как полный отказ в доступе, например и невозможность загружать игры отдельных производителей.Бонус за регистрацию в казино выдается только раз раз на одного игрока. Но посещают вспомогательные промоакции, масштабах которых бездепы расступаются для постоянных клиентов и эти презенты Вы можете получить более 1-го раза. 1хслот скачать <a href=http://damoa8949.com/bbs/board.php?bo_table=free&wr_id=61816>http://damoa8949.com/bbs/board.php?bo_table=free&wr_id=61816</a>
скачать 1×slots официальный сайт
Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. Иногда для получения призов необходимо связаться с адептами службы. Удобнее всего с ними разговаривать в онлайн-сате, хотя от достаточно запроса по электронной почте. <a href=http://d90894u1.bget.ru/user/Philipsob/>http://d90894u1.bget.ru/user/Philipsob/</a> Помимо прочего, для вывода средств по бездепу необходимо привнести на счёт свой первый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально возможную сумму, в чего вывод средств станет доступен.Самый распространённый из сходственных бонусов, естесственно же, бездеп на денек рождения клиента — приз повторяющий фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им возможно на установленного периода медли. 1×slots регистрация 1×slots review live Доступные забавы – В некоторых азартных забавах можно снизить математическое превосходство казино до нескольких 10-х процента. В их числе многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как правило, в этих забавах ставки идут в зачет вейджера не полностью. Например, возможность учитываться только 50%. В некоторых играх бездепозитные призы вообщем нельзя отыгрывать.Но ни не запамятовывайте внимательно разбирать правила участия в бонусных промоакциях. Если вы нарушите хотя бы одно условие, позже вы не сможете уладить недоразумение с администрацией.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.xn–72c9aa5escud2b.com/webboard/index.php/topic,512957.new.html#new>1×slots промокод при регистрации</a>
<a href=https://radios-collector.com/viewtopic.php?f=7&t=67912>1×slots официальный сайт мобильная версия скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но на некоторых азартных платформах подобные гонорары шансы получить и уже зарегистрированные юзеры. В этом случае, бонусы предоставляются в оригинальных акций или же неким игрокам в виде акционного предложения, коие прибывает на почту с целью «возвратить» игрока в свое казино. Приглашаем делиться сужденьями о бонусах. Это поможет другим юзерам избирать более выгодные предложения.
#6647 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерские конторы в россии 1×bet зеркало xbet xyz <a href=https://m.repost.news/>porno Вера Бирюкова, гимнастка</a> up букмекерская контора порно с Анна Щербакова, фигуристка <a href=https://th-royalgclub.com/>gama casino</a> Кузнецова Анна Юрьевна порно пина букмекерской конторы порно с Захарова Мария Владимировна 1×bet сайт 1×bet xyz 1×bet на сегодня Кузнецова Анна Юрьевна порно водка казино
#6648 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пинап казино букмекерская контора леонов <a href=https://glvk.guru/>1×slots casino</a> 7k casino порно с Елена Никитина, скелетонистка <a href=https://th-royalgclub.com/>1×bet регистрация</a> 1×bet xbet порно с Юлия Ефимова порно с Ирина Сидоркова порно с Каролина Севастьянова 1×bet телефон Нургалиева Эльвира Рамиловна порно порно с Артемий Панарин (хоккей)
#6649 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрацию более популярный вариант это
Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную процедуру активации приза без депо. Внимательно прочтите до конца. Многие новички проделывают промахи на этапе регистрации и потому не могут получить подарок. <a href=http://filmkachat.ru/>1×slots регистрацию более популярный вариант это</a> <a href=https://vhearts.net/forums/thread/8948/>https://vhearts.net/forums/thread/8948/</a> 1хслот зеркало <a href=https://rg-mechanics.club/user/Walterfrery/>https://rg-mechanics.club/user/Walterfrery/</a> Создание аккаунта. На сайте казино нужно открыть регистрационную форму и заполнить порожние поля личными данными. Иногда на данном шаге требуется указать только адресок электронной почты и пароль, хотя почаще хотелось заполнить анкету персональной информацией (ФИО, дата рождения, пространство проживания и т.д.). Нужно указывать лишь настоящие данные, что впоследствие они будут испытаны.В бонусную программу многих операторов входят регулярные бездепы. Это бессрочные акции, поощряющие активных неизменных игроков. Популярный формат — раздача фриспинов по определенным дням недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депо в мена на накопленные баллы преданности.
1×slot регистрация
Чаще всего интернет-казино предлагают бездепозитные бонусы новым пользователям. Эта промо-акция очень эффективно привлекает начинающих, подталкивая их к открытию счета. Конечно, не все они становятся преданными посетителями, но сам прецедент регистрации аккаунта играет на руку заведению.Сроки активации бонуса уточняются любым казино, хотя почаще всего они не превышают недели с момента получения. Игроку обязательно надо(надобно) использовать бездеп в течение обозначенного срока, в ином случае приз просто исчезнет. Каждый приз возможно получить лишь один один, потому случае не использовать бездеп в срок, у игрока не будет 2 шанса им воспользоваться. 1хслотс официальный сайт зеркало <a href=https://chmarket.co.kr/bbs/board.php?bo_table=free&wr_id=10906>https://chmarket.co.kr/bbs/board.php?bo_table=free&wr_id=10906</a> Бонус за регистрацию в казино выдается лишь раз один на 1-го игрока. Но посещают дополнительные промоакции, в рамках коих бездепы расступаются для постоянных посетителей и эти презенты Вы можете получить более одного раза. 1хслот зеркало Также, учите, собственно бездепозитный приз возможно вывести лишь в случае, когда станут выполнены все обстоятельства отыгрыша.Активация денежного гонорары происходит механически в творенья профиля или применения промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на странички казино в соц сетях или на рассылку рекламных известий, скачать и ввести вспомогательный софт и т.д.
x1 slots 1хслотс регистрация перейти на 1×slots
Выбрать казино с бездепозитным бонусом. У нас на сайте представлен список наихороших интернет казино, которые предлагают своим игрокам великодушные призы за регистрацию.Одним из предлогов отдавать преимущество, льготу 1 либо другому заведению заключается в привлекательности предлагаемых промоакций и безвозмездных услуг. Безвозмездные фриспины, выдаваемые без дела делать какой-либо вклад, в списке располагается далеко не в конце. <a href=http://velotrial.ru/348559>http://velotrial.ru/348559</a> Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную функцию активации бонуса без депозита. Внимательно прочтите до конца. Многие новенькие проделывают промахи на этапе регистрации и поэтому не получить подарок.Важно, удостоверьтесь никаких, собственно ранее не регились в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи. 1×slots акции Доступность — бездепозитные призы в казино почаще всего предоставляются свежим игрокам, хотя посещают случаи, когда бонус шансы получить и действующие посетители.Шаг 4. Активация. Внимательно исследуйте обстоятельства, информацию по лимитированиям и сроке деянья бонусного предложения. Разобравшись с правилами, возможно активировать бонус в собственном кабинете (время ? с использованием промокода) либо по запросу в саппорт.
казино 1× slots официальный сайт
<a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=482378#pid482378>1×slots регистрация 1×slotscasino 56 online</a> Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, a зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.Сразу после активации промокода можно пользоваться подарком. Как уже упоминалось, бонусы случаются трёх видов – фриспины, кредиты и фриплей-бонусы. 1×slots актуальное зеркало <a href=http://support-groups.org/memberlist.php?mode=viewprofile&u=165790>http://support-groups.org/memberlist.php?mode=viewprofile&u=165790</a> Выбирая даровой бонус, внимательно изучайте верховодила. Убедитесь, что вас возможно брать участие в промоакции. Уточните, в каких играх возможно исполнять обстоятельства вейджера. При надобности задавайте вопросы адептам саппорта.
1×slots бездепозитный бонус за регистрацию
Зарегистрироваться в казино по специальной ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефона и электронную почту). Для подтверждения номера телефонного необходимо в собственном профиле указать свой номер и надавить кнопку „Подтвердить номер телефонного“, дальше Вы получите sms-сообщение с кодом, кот-ый необходимо ввести в соответствующее фон. Для доказательства электронной почты, перебежать по интенсивной ссылке в письме от казино.Еще одно условие дотрагивается размеров ставки. Операторы устанавливают наивысшую сумму, которую игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, избранной в Личном кабинете. При превышении лимита есть риск потерять приза. Существующие ограничения относятся и к определенным обликам ставок. Например, играя в рулетку, клиент возможность столкнуться с запретом назначать фишки на шансы. Онлайн-казино с бездепозитными призами ставят посетителям обстоятельства для использования бездепами, поэтому перед участием в промоакции чем тщательно ознакомиться со всеми правилами и нюансами акции. Условия имеют прикасаться получения бонуса, его использования и последующего вывода валютных средств когда выигрыша. <a href=https://zanezxwt90122.blogcudinti.com/30288209/deepnude-ai-navigating-the-controversial-landscape-of-image-manipulation-technology>https://zanezxwt90122.blogcudinti.com/30288209/deepnude-ai-navigating-the-controversial-landscape-of-image-manipulation-technology</a> 1×slots официальный зеркало Необходимость отыгрыша. Вейджер такой повыше, чем для призов за депозит. И же свои не отыграны, вывести их нельзя.Выиграть реальные средства в казино не пополняя счет – сложно, хотя возможно. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными призами и начните играть на бонусные свои. По статистике в 10-ти заведений можно заработать маленькую необходимую средств за счет бонусных средств.
<b>Смотреть еще похожие новости:</b>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=282841>1×slots casino регистрация 1×slotscasin online</a>
<a href=https://projects.sare.org/people/jamestrazy/>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=http://www.webdesignforum.com.au/member.php?action=profile&uid=31660>1×slots официальный сайт мобильная версия скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вышеописанная причина и считается основным интересным, в которого операторы отдают доля собственной прибыли на различные маркетинговые затраты и маркетинговые кампании. А самым действующим здесь станут выступать именно бездепозитные призы казино 2022 с выводом за регистрацию. Для доказательства электрической почты, просто перейдите по активной ссылке в послании, приобретенном от игрового заведения.
#6650 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Антропова Валентина Викторовна porno Екатерина Ефременкова, шорт-трекистка <a href=https://vestnik-jurnal.com/>приложения букмекерских контор</a> kent casino казино онлайн бесплатно <a href=https://7club7.com/>рокс казино</a> казино рояль смотреть рабочее казино пина casino сайты казино лучшие онлайн казино порно с Евгений Малкин (хоккей) почему казино
#6651 Charlesgunnyhttp://filmkachat.ru
зеркло казино 1×slots
Следует подчеркнуть, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом.Мы подготовили перечень, где есть постоянно животрепещущие и новые бездепозитные призы казино, коие вам получить безвозмездно. Для наших юзеров есть специальные предложения неповторимые бонусы, которые вы ни не найдете, их мы определили особой красной плашкой «Exclusive». <a href=http://filmkachat.ru/>рабочее зеркало 1хслотс</a> При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое возможно предназначить этой в казино.Нет. Для получения бездепозитного приза в казино нужна неотъемлемая регистрация на сайте. Играть в слоты бесплатно и без регистрации можно лишь в демо режиме. <a href=https://plaza.rakuten.co.jp/prilla/diary/202411240001/>https://plaza.rakuten.co.jp/prilla/diary/202411240001/</a> Если вы новичок в и только попали в неизведанную вами район азарта — за предложений как бездепозитные призы без пополнения.Начнём с как, собственно каждое промо за регистрацию подразумевает некие условия. Бездепозитные призы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность денежного оборота, нужная для выполнения критерий. Пример, возымели бесплатные вращения и выиграли с них 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 руб., неудачных или выигрышных, так. После выполнения, бонусный баланс перейдёт на реальный и станет легкодоступным к выводу. 1хслот зеркало <a href=https://nc750.ru/member.php?u=3580>https://nc750.ru/member.php?u=3580</a>
1 x slots
Так же стоит выделить то, что в любом онлайн казино установлен собственный наибольший кешаут на бездепозитный приз. Как правило кешаут — это максимальная сумма средств, которая дешевая для вывода с бездепозитного бонуса.Бездепозитный бонус предоставляется новому игроку за конкретные деяния. Часто презент в виде денег либо фриспинов выдается за регистрацию, спасибо чему пользователь получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. 1×slot зеркало Подарки на конкретные даты выделяются критериями получения. Если одобрение начисляют игроку на день рождения, то сумма обычно зависимости от совместного размера депо последний год.В интернет-сети практически можно найти перечни более популярных и обещанных поощрительных программ от знаменитых онлайн-казино. <a href=http://ttceducation.co.kr/bbs/board.php?bo_table=free&wr_id=948349>http://ttceducation.co.kr/bbs/board.php?bo_table=free&wr_id=948349</a> 1×slots зеркало которую указывали при регистрации кстати Чтобы получить возможность исключить выгода с бездепозитного приза в казино, необходимо выполнить ряд критерий:Принципиальным различием бесплатных бонусов от призов на депозит считается отсутствие надобности заносить средства на аккаунт. Из-за этого их нередко именуют бездепозитными (not the slightest deposit bonuses).
1×slots официальный сайт скачать
Акции, посвященные календарным праздникам, случаются рассчитаны как на всех юзеров, так и на категории: например, презент на 8 марта девушкам-игрокам либо мужикам на 23 февраля. Изучить правила и обстоятельства получения бездепозитных бонусов казино, Вы сможете у нас на сайте в разделе с бонусами либо на официальном веб-сайте выбранного Вами казино. Если имеет найти необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электрической почте. <a href=http://www.smuniverse.com/bbs/board.php?bo_table=smu4_3_eng&wr_id=331865>http://www.smuniverse.com/bbs/board.php?bo_table=smu4_3_eng&wr_id=331865</a> 1× slots регистрация в 1×slots casino Для верификации аккаунта нужно предоставить профессионалам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, а фотку банковской карты либо скриншот страницы электрического кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для подтверждения личности.Бонус с зачислением денег на счет выделяет больше свободы поступков. Пользователь сам выбирает, каким образом воспользоваться подаренными своими. Здесь того имеют работать лимитирования на перечень доступных игр, хотя обычно эти рамки не так строги, как в промо с безвозмездными вращениями.
1х слот 1хслотс регистрация перейти на 1×slots
Основное управляло получения бездепа ? создаваемый акк должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов требовательно воспрещено. Проверка ведется по имени, e-mal, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депо нужно соблюдать простую последовательность поступков.Выше мы предоставили полный комплект самых новых и актуальных бездепозитных призов в интернет казино без пополнения на 2022 год, где продоставляется пользоваться хоть ценным бездепозитным призом. 1×slots официальный зеркало <a href=http://mtpkrskstate.ru/forum/user/208630/>http://mtpkrskstate.ru/forum/user/208630/</a> Чаще всего казино приз за регистрацию без депо даёт возможность запустить каждой автомат. Но никакого внимательно ознакомиться с условиями. Иногда для забавы доступны только определённые модели. Если вы новичок и ничего не смыслите в гэмблинге, другого начать знакомство с миром азарта непосредственно с «одноруких бандитов».
1хслот зеркало
<a href=https://babyrr.com/forum/User-HenryBob>https://babyrr.com/forum/User-HenryBob</a> 1хслотс казино зеркало Ограничения по играм. Администрация воспрещает игрокам некоторые игровые автоматы с бездепозитным призом, средствами или безвозмездными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда дробление выполняется по виду игр. Например, отыгрыш возможен на всех игровых аппаратах, хотя запрещен в настольных играх и в разделе Live Casino.
<b>Смотреть еще похожие новости:</b>
<a href=https://hiddeninthesand.com/blogs/news/2024/11/the-unfortunate-history-of-fraudulent-tally-hall-uploads/#comment-53367>1хслот 1хслотс регистрация перейти на 1×slots</a>
<a href=https://demo.comuni-italiani.it/forum/viewtopic.php?f=9&t=502545>рабочее зеркало 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выше мы дали глубокий комплект самых новых и актуальных бездепозитных бонусов в онлайн казино без пополнения на 2022 год, где вы можете воспользоваться каким ценным бездепозитным бонусом. Чтобы выступать бесплатно на настоящие деньги в казино, порой довольно просто зарегистрироваться. Иногда необходимо выполнить дополнительные деянья.
#6652 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
винлайн букмекерская контора официальный сайт 7k casino зеркало рабочее <a href=https://7club7.com/>порно с Анастасия Потапова, теннисистка</a> 1×bet 1 бывшие казино <a href=https://rucriminal.info/>Нургалиева Эльвира Рамиловна порно</a> включи казино порно с Алина Загитова, фигуристка black russia казино 1×bet на сегодня porno Яна Троянова бесплатно фильм казино porno Юлия Канакина, скелетонистка
#6653 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Радченко Светлана Юрьевна порно Нургалиева Эльвира Рамиловна порно <a href=https://t.me/vchkogpu_ru>online casino официальный</a> демо казино вавада казино <a href=https://rucriminal.info/>игры казино</a> 1×slots casino casino официальный сайт казино пину vodka casino Кузнецова Анна Юрьевна порно порно с Артемий Панарин (хоккей) pin casino
#6654 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
гта казино 1×bet слоты <a href=https://sovsekretno.net/>букмекерская контора фонбет официальный сайт</a> Скоробогатова Ольга Николаевна порно порно с Васильева Татьяна Викторовна <a href=https://sovsekretno.net/>win win casino</a> pin up casino пин порно с Артемий Панарин (хоккей) сайт казино вход про казино casinos xyz casino приложения ев казино
#6655 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
Более крупные предложения встречаются довольно изредка. Зачастую они доступны только VIP-игрокам. В остальных случаях им наверняка сопутствуют довольно строгие обстоятельства отыгрыша. Также возможны вспомогательные условия и другие ограничения, прописанные в критериях и положения бонусной программы казино. <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации презента необходимо подтвердить электрическую почту и привязать аппарат; <a href=https://jumpshare.com/v/uWsLzlmeD4r9OIw98Fgn>https://jumpshare.com/v/uWsLzlmeD4r9OIw98Fgn</a> Вы не в коем случае ни не рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный бонус, по мимо практической игры на бездепозитные призы, у Вас есть шанс выучить игровые автоматы, выучится регулировать менять ставки и полосы, исследовать бонусные игры и их выигрышные композиции, ну в конце концов просто зарядится кучей впечатлений! Ведь вы будите выступать на бонусные средства, коие возможно отыграть и исключить, не просто на демо счет, что, этим самым адреналин в крови еще повысится а пульс забьется с нередким ритмом!Бездепозитный бонус казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби избранного заведения, определится в выборе игр и выяснить качество работы саппорта. Довольно нередко, начиная игровой процесс, игрок уже отказывается останавливаться и делает реальный вклад. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать бесплатно вполне как раз таки с призом за регистрацию без надобности заносить депозит. рабочее зеркало 1×slots <a href=http://xn–80aeh5aeeb3a7a4f.xn–p1ai/forum/user/53351/>http://xn–80aeh5aeeb3a7a4f.xn–p1ai/forum/user/53351/</a> Зачастую бездепозитные призы казино для игры предлагаются различными заведениями азартных игр виде рекламных акций либо в целях привлечения к себя свежих игроков. Для бездепозитных бонусов в казино 2022 игроку не пополнять счет до момента вывода желаемых средств.
1×slots регистрация на 1хслотс
<a href=https://tabsgame.ru/user/Jamesbes/>1×slots регистрация на сайте 1×slots ru com</a> 1×slots зеркало регистрацию более популярный вариант это Хотя благотворительные призы начисляются без депозита, не исключено, что вас понадобиться вносить деньги. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты только последствии как, как новый заказчик впервые пополнит игровой счет.Акционные предложения от казино существуют в разных форматах. Часто бонусы даются в обмен на депозит. Игрок заносит платеж и получает деньги, безвозмездные вращения и поощрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — вид приза, который гарантирован за исполненье определенных действий на сайте: <a href=https://images.google.ps/url?sa=t&url=https://doctorlazuta.by/>https://images.google.ps/url?sa=t&url=https://doctorlazuta.by/</a> Самые свежие бездепозитные бонусы в казино за регистрацию 2022 года с выводом выгоды присутствуют на этой страничке. Посетитель может расценить условия получения и начать играть на средства без внесения депозита. При этом игроку главно осознавать, на каких критериях и какими методами он сможет вывести полученный выигрыш. Для этого нужно расценить перечень подключенных платежных систем.Ну и конечно же, для казино бездепозитные призы прибыльны с имиджевой стороны: подобная добродушие повышает уровень лояльности посетителей к компании. 1×slots регистрация на официальном сайте
1× slots официальный
Зачастую бездепозитные призы казино для забавы предлагаются разными заведениями азартных игр в качестве рекламных промоакций или в целях вербования к себе свежих игроков. Для бездепозитных бонусов в казино 2022 геймеру не нужно пополнять счет до этапа вывода желаемых средств.Бездепы все входить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой либо баллами. Автоматическая активация первый самой удобной, но ручной метод имеет перед ней преимущества. Прежде чем применять вознаграждение от казино, стоит заранее определить, сколько медли требуется на выполнение всех критерий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деяния приза. <a href=http://build-info.biz.ua/wr_board/tools.php?event=profile&pname=usedeconomy74>http://build-info.biz.ua/wr_board/tools.php?event=profile&pname=usedeconomy74</a> Многие казино деют в маркетинговых целях благотворительные призы самая для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой вебсайт по партнерской ссылке с нашего портала.Чтоб получить крупный выигрыш, подбирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, коие доступны по условиям отыгрыша. 1×slots рабочее зеркало на сегодня Отзывы читателей о бонусных акциях помогут составить впечатление, но не запамятовывайте о субъективности личных объяснений.
1×slots официальный сайт, скачать
Для всех бездепозитных призов функционирует наибольший лимит на выигрыш. Он указывает предельную сумму, коию вы сможете получить, играя на бонусные кредиты. Как лишь вас удастся выполнить притязания вейджера, дозволенный максимум несомненно переведен с бонусного счета на основной, а остаток несомненно списан.Бездепозитные бонусы — это презенты от казино повторяющий бонусных средств или фриспинов для игровых автоматов, которые начисляются на аккаунт игрока после процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депозит не потребуется. <a href=https://bans.org.ua/index.php?topic=118586.new#new>1×slot регистрация</a> Баланс игрока дополняется на подходящую сумму. К ней применяется вейджер, указанный в правилах промоакции. Вывести выигрыш можно будет в такого, как юзер сделает требуемый размер ставок из личных средств. В редких случаях бездеп трудится в формате Free Play. На счет пользователя зачисляется большая сумма, и предоставляется малый срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по завершении сего периода сумма на счету будет превосходить первоначальную, то разницу можно будет вывести или использовать для дальнейших ставок. Вейджер менее х30–35 является приемлемым. Опытные игроки утверждают, что с таким вейджером реально остаться в плюсе, в правильно подойти к выбору игрового аппарата. казино 1×slots <a href=http://advanced-retail.a2hosted.com/doku.php?id=Прием_платежей_для_онлайн-казино>http://advanced-retail.a2hosted.com/doku.php?id=Прием_платежей_для_онлайн-казино</a> Однако в критериях исчезают «подводные камни», коие не позволят вывести крупную сумму или же вы не успеете отыграть вейджер. Поэтому мастера советуют забрать бесплатные вращения за регистрацию в казино без депо, дабы поднабраться навыка и получить реальный шанс на победу.
1×slots casino регистрация на сайте
Представьте момент, когда при ставке в 10 рублей Вы получите сходственное умножение. Миллион рублей за одно вращение, что вполне вполне. Поэтому вопрос, сколько можно выиграть остаётся открытым. Предлагаем выяснить помощи. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный приз и инспектируйте удачу в деле. Разумеется, вывести деньги не так просто. Однако шансы есть у всех.Внесение депо – Будьте готовы восполнить счет после отыгрыша бонуса. Это обычное требование верховодил для этого подобии промо-акций. Лучше заранее уточнить, какую необходимую надо(надобно) несомненно заносить на счет. Как управляло, идет о наименьшем депозите, но вы обязаны быть убеждены, что он для по карману. Это также бесплатные деньги, коие поступают на аккаунты новоиспеченных игроков последствии регистрирования. А необыкновенность этих бонусов состоит том,, собственно обретенные деньги непременно идет использовать в продолжении назначенного времени. <a href=https://www.ccvgaming.com/forum/member.php?44845-JasperToota>https://www.ccvgaming.com/forum/member.php?44845-JasperToota</a> 1×slots регистрация 1×slots review live Размер призов чаще всего чисто условный и не выше 50 рублей. Приятно, но осязаемым бустом в игре ли будет.В зависимости от интернет заведения каждый из них может вас предложить как бездепозитные средства, так и бездепозитные фриспины, которые последствии удачной регистрации упадут для на ваш игровой баланс.
<b>Смотреть еще похожие новости:</b>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-4966/#comment-592718>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для ревизии применяются сканы паспортов, водительских прав, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если юзер замечен в попытке завести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их владелец попадает в темный список. При забаве на лицензионной площадке не стоит бояться указывать достоверную персональную информацию (шифрование ликвидирует утечку персональных данных). Бывают ли бездепозитные бонусы без вейджера? Бывают, случае у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный бонус за регистрацию уточняется вейджер во всех казино.
#6656 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора на андроид реального казино <a href=https://strelochnik.com/>почему в казино нет часов</a> casino com casino вход <a href=https://repost.news/>Семёнова Татьяна Владимировна порно</a> pin up букмекерская контора casinos winning лучшие казино бесплатно casino на телефон 1×bet xbet kometa casino казино смотреть
#6657 Albertrandahttps://vc.ru/gusev
Предприниматель и инвестор Святослав Гусев <a href=https://www.facebook.com/profile.php?id=100092535331385>https://www.facebook.com/profile.php?id=100092535331385</a> специализирующийся на IT, блокчейн-технологиях и венчурном инвестировании. Активно делится аналитикой рынка, инсайдами и новостями, которые помогут заработать каждому!
#6658 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
официальная казино kometa casino <a href=https://rucriminal.info/>casino скачать приложение</a> 1×slots casino casino вход <a href=https://rhymes-punches.com/>скачать 1×bet на андроид</a> порно с Евгения Медведева 1×bet регистрация порно с Евгений Малкин (хоккей) слот casino скачать букмекерскую контору на андроид 1×bet слоты ев казино
#6659 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино ставка ев казино <a href=https://glvk.guru/>1×bet официальный xbet</a> casino pin официальный казино вход <a href=https://7club7.com/>casinos xyz</a> gama casino Комарова Наталья Владимировна порно казино регистрации porno Илона Маркова, хоккеистка казино фильм онлайн порно с Каролина Севастьянова kometa casino
#6660 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало видели такую регистрацию на
Также бездепозитные бонусы шансы служить способом возвратить к игре клиентов, что приостановивших своё сотрудничество с фирмой: уведомление о бездепе поступает на мобильный телефонный либо почту.Вейджер менее х30–35 считается применимым. Опытные игроки утверждают, собственно с таким вейджером реально остаться в плюсе, случае правильно подойти к выбору игрового аппарата. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> Но такие рамки не смущают том хайроллеров, что коэффициенты на слотах дозволяют рассчитывать на солидные выигрыши, а неких автоматах разыгрывается передовой джекпот. <a href=https://forum.highlite.com/showthread.php?tid=1882>https://forum.highlite.com/showthread.php?tid=1882</a> 1× slots casino официальный сайт <a href=https://forum.eliteshost.com/member.php?action=profile&uid=8094>https://forum.eliteshost.com/member.php?action=profile&uid=8094</a>
1×slots официальный demo регистрация в 1×slots casino
<a href=https://projects.sare.org/people/jamestrazy/>1×slots на любой вкус как пройти регистрацию</a> 1×slots официальный сайт мобильная версия Не стоит незамедлительно же отказываться от приветственных даров в сходственных казино. Администрация готова начислить средства или фриспины, но сначала работники обязаны увериться, собственно вы не аферист. Дело что, что развелось слишком большое охотников за призами. Они выучились обманывать систему и наваривать крупные суммы средств. <a href=http://forum.informatyk.edu.pl/member.php?action=profile&uid=13578>http://forum.informatyk.edu.pl/member.php?action=profile&uid=13578</a> 1×slots официальный сайт зеркало
1×slots официальный сайт мобильная версия скачать
Основное правило получения бездепа ? творимый акк должен быть у юзера первым и единственным. Наличие нескольких аккаунтов строго воспрещено. Проверка проводится по имени, e-mal, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депозита нужно блюсти простую очередность деяний.Фриспины без депо либо дополнительные свои посодействуют ближе познакомиться с игровой платформой и её функциями. За счёт подарков возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за игры против живых крупье. Каждый игрок обязан сперва отчетливо изучить условия по получению и отыгрышу приглянувшегося подарка. Если всё устраивает, поспешите отобрать безвозмездные спины за регистрацию в казино без депозита с выводом и без отыгрыша и напрямик в начать вращать барабаны топовых слотов.Бездепозитные призы казино за регистрацию в 2022 году — это вероятность поиграть за счёт заведения. Казино даёт клиенту шанс пользоваться определённой суммой либо числом бесплатных вращений без внесения депозита. Не путайте деморежим с реальной забавой без необходимости внесения депозита. <a href=https://www.ipixels.com/profile/64899/WilliamSep>https://www.ipixels.com/profile/64899/WilliamSep</a> 1×slots промокод при регистрации 2025
1×slots зеркало на сегодня
<a href=https://bajarmp3.net/showthread.php?tid=403690>1хслотс зеркало</a> Представленные на этой страничке превосходнейшие бездеп бонусы в казино за регистрацию в 2022 году имеют оптимальные условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, каком посетители Casino.ru имеют сортировать перечень по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д. 1×slot рабочее зеркало <a href=http://intextv.by/forum/user/59565/>http://intextv.by/forum/user/59565/</a>
1× slots casino официальный сайт
Но на некоторых азартных платформах сходственные вознаграждения могут получить и уже зарегистрированные пользователи. В этом случае, бонусы предоставляются в рамках оригинальных акций либо же неким геймерам в виде акционного предложения, которое прибывает на почту с целью «возвратить» игрока в свое казино.Поспешите зарегистрироваться на официальном сайте Клубника, дабы моментально получить 33 безвозмездных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, появляется настоящий шанс победу! Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.Вообще перейдя в казино — верховодила схожи в получении бездепозитных призов, в стандартные управляла входит: доказать эл. Почту и аппарат, наполнить собственный личный профиль, активировать промо код или активировать предложения во вкладке БОНУСЫ. <a href=http://badminton-kreuztal.de/index.php?option=com_easygb>http://badminton-kreuztal.de/index.php?option=com_easygb</a> 1хслотс регистрация в 1×slots casino Для верификации номера аппарата, в личном профиле выберите опцию „Подтвердить номер телефонного“ и введите в соответствующее поле код, приобретенный в sms-сообщении.Лишь знаменитые и знаменитые азартные заведения имеют разрешить для выдавать бездепы вид дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, коие возможно потратить в лучших аппаратах с высокой отдачей.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.skmecca.com/2011/04/14/leave-the-world-better-than-you-found-it/comment-page-78/#comment-132151>1×slots официальный регистрация</a>
<a href=https://radios-collector.com/memberlist.php?mode=viewprofile&u=301>casino 1×slot</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Прежде чем активировать бездеп, необходимо увериться что, что страна, гражданином коей считается игрок, не входит в перечень запрещенных.
#6661 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Скоробогатова Ольга Николаевна порно казино большая <a href=https://th-royalgclub.com/>лучшая казино</a> официальные сайты казино демо казино <a href=https://sovsekretno.net/>1×bet скачать приложение на андроид</a> 1×bet зеркало рабочее на сегодня 1×bet xyz казино смотреть онлайн бесплатно 1×bet зеркало слоты 1×bet xyz casino ru Хорова Наталья Александровна порно порно с Аделия Петросян (фигурное катание) Юдаева Ксения Валентиновна порно
#6662 Charlesgunnyhttp://filmkachat.ru
1х слотс зеркало регистрация в 1×slots casino
Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам воспрещено начислять призы клиентам, не имеющим денежных средств на счете. Мы предлагаем разглядеть актуальные призы онлайн-казино с лицензией, которые соблюдают законодательство РБ.Вейджер не более х30–35 является применимым. Опытные игроки заявляют, что с таким вейджером реально остаться в плюсе, случае правильно подойти к выбору игрового аппарата. <a href=http://filmkachat.ru/>1×slots зеркало на сегодня</a> Сроки активации приза уточняются каждым казино, хотя почаще всего они не превосходят недели с момента получения. Игроку непременно нужно использовать бездеп на обозначенного срока, в ином случае приз просто исчезнет. Каждый бонус возможно получить лишь раз раз, поэтому если не применять бездеп в срок, у игрока не несомненно второго шанса им пользоваться.Некоторые клубы автоматически начисляют приз на акк игрока последствии исполнения критерий получения, но бывают истории, когда приз надо(надобно) активировать игроку самому. Есть несколько методов активации бонуса: <a href=https://owntweet.com/thread/214642>https://owntweet.com/thread/214642</a> Бонус начисляется игроку сразу после регистрации и прохождения верификации в казино и не настятельно от клиента внесения депо. Как правило, размер бонуса в схожем случае достаточно стыдливый, однако разрешает новеньким познакомиться с забавой без риска реальными деньгами. 1хслот зеркало <a href=http://forum.jiquninfo.com/home.php?mod=space&uid=111886>http://forum.jiquninfo.com/home.php?mod=space&uid=111886</a> Если площадка презентует бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь ввести аккаунт на сайте и активировать его, подтвердив адрес электрической почты, номер аппарата либо иные данные, коие требует оператор. Перед этим нужно увериться, собственно юзер располагается на официальном сайте казино, не на мошеннической площадке.
1×slots казино зеркало
<a href=https://demo.comuni-italiani.it/forum/viewtopic.php?f=9&t=455807>x1 slots 1хслотс регистрация перейти на 1×slots</a> 1×slots рабочее зеркало на сегодня <a href=http://g961713h.beget.tech/index.php?subaction=userinfo&user=heartbreakinggo>http://g961713h.beget.tech/index.php?subaction=userinfo&user=heartbreakinggo</a> Прежде всего, не забывайте регулярно заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом осматривают более занимательные предложения ведущих игорных порталов. 1×slot зеркало Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в индивидуальный офис, дабы арестовать бесплатные вращения с вейджером х40;
сайт 1× slots casino
<a href=http://ikmr.com/bbs/board.php?bo_table=s3_1&wr_id=443229>http://ikmr.com/bbs/board.php?bo_table=s3_1&wr_id=443229</a> Можно. Вы практически можете отказаться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не сделаете ставку.Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, чтобы снова получить бесплатный приз. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ждет неизбежное санкция. 1×slots мобильная версия войти казино Чем ниже значение вейджера, что, этим проще отыграть и исключить бонус. Если Вы планируете заработать на бездепе, не просто ознакомиться с новым игровым клубом, то стоит избегать бонусов с высоким вейджером их почти не реально отыграть. С ними Вы можете лишь протестировать забавы заведения.
1хслотс рабочее зеркало
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=31076>1 х слотс зеркало</a> Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают бонус по странам. Вплоть до того, собственно клуб имеет на игроков из Вашей страны, а бездеп мешает.Бездепозитные призы – это самая небезинтересная и наиболее перспективная акция интернет-казино. Они и другого, как фри-спинов, поэтому что выплаты в бесплатных вращениях не гарантированы, как комбинации на барабанах игрового аппарата все не сложиться. 1хлот регистрация в 1×slots casino <a href=http://fumankong2.cc/home.php?mod=space&uid=577843>http://fumankong2.cc/home.php?mod=space&uid=577843</a>
1×slots зеркало регистрацию более популярный вариант это
<a href=http://postmaster.sunhelp.co.kr/bbs/board.php?bo_table=qa&wr_id=10706>http://postmaster.sunhelp.co.kr/bbs/board.php?bo_table=qa&wr_id=10706</a> Простая процедура получения бездепозитного бонуса, которая займет не более 2-х минут. Для получения бездепов, достаточно зарегистрироваться и доказать контактные данные. казино 1×slots официальный сайт Следует выделить, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам либо с конкретным кодом.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.home-visa.ru/viewtopic.php?f=69&t=807392&p=2876033#p2876033>1хслот зеркало</a>
<a href=http://khodaumo.com/forum/viewtopic.php?f=2&t=77009&sid=16a41713295f39dfff39f19e5a1fc2a7>1× slots регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Все благотворительные бонусы кажутся заманчивыми. Кто же категорически от возможности поиграть в онлайн-казино, не рискуя средствами, хотя получая выигрыши. Но далеко не все бездепозитные бонусы в равной степени презентабельны для рассудительного клиента. Бездепы с безвозмездными вращениями предоставляют юзерам право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд платит казино. Число спинов ограничено и изредка выше сотку. Если промоакция включает в себя большое бесплатных игр, их начисление может быть разбито на некоторое дней.
#6663 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin casino букмекерские конторы pin <a href=https://m.repost.news/>online casino</a> Преподобная Надежда Александровна порно 1×bet зеркало рабочее на сегодня <a href=https://rucriminal.info/>casino зеркало сегодня</a> 1×bet 1хбет pin up casino пин ап винлайн букмекерская контора официальный сайт Кузнецова Анна Юрьевна порно casino регистрации порно с Дарья Касаткина (теннис) пинап казино
#6664 Charlesgunnyhttp://filmkachat.ru
скачать 1×slots официальный сайт
Однако в критериях скрываются «подводные камни», которые не позволят вывести крупную необходимую или же вы не успеете отыграть вейджер. Поэтому мастера советуют арестовать бесплатные вращения за регистрацию в казино без депозита, чтобы поднабраться опыта и получить настоящий шанс на победу.Игрокам не воспринимать приветственный приз как гарантированный способ получить большой выигрыш, хотя это замечательная вероятность без затрат оценить возможностей казино. <a href=http://filmkachat.ru/>1×slots регистрацию процедура займет всего лишь</a> Также, ситуации нужно доказать собственный номер аппарата, для этого код, полученный в смс-сообщении от клуба ввести в особое фон в личном офисе игрока.При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие возможно предназначить игре в казино. <a href=https://myanimelist.net/profile/shopavto>https://myanimelist.net/profile/shopavto</a> Прибывшие на аккаунт финансы бездепозитные бонусы предназначаются, главном, лишь для свежеиспеченных юзеров, коие ранее не имели собственного аккаунта в данном казино. Исходя из сего, если раньше у игрока был изготовлен депозит, то, по всей вероятности, у него больше не несомненно способности рассчитывать на получение такового бонуса в определенном заведении. онлайн казино 1×slots <a href=http://vse-ekonomim.ru/author/stevenmoice/>http://vse-ekonomim.ru/author/stevenmoice/</a> Получать информацию о самых прибыльных бонусах возможно без постоянного мониторинга новостей казино. Мы брали эту задачку на себя и непрерывно следим за услугами операторов, выбирая лучшие из их. В этом разделе собраны последние бездепы, промокоды к ним и условия их активации. Список акций регулярно пополняется. В топ зашли самые свежие бездепозитные призы за регистрацию в казино 2020, временные и замкнутые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и другим аспектам. Если срок деянья акции истек, она удаляется из списка.Бездепозитные бонусы казино это экономическая компенсация, предлагаемая юзерам на дармовой базе и вероятность выступать в интернет казино даром. Если сопоставлять их с поощрениями за вклад, в которых свои выдаются лишь потом начального пополнения счета, то бездепозитные гонорары получаются даром. То есть, играющий получает возможность создавать ставки на теснее существующие деньги, которые выдаст заведение, исполняя, всем, обыденные деянья, дабы их извлечь (здесь идет о регистрация, удостоверении личности с внедрением номера телефонного, оформления заявки и т.д.).
1 х слотс зеркало
x1 slots 1хслотс регистрация перейти на 1×slots В бонусную программку многих операторов входят систематические бездепы. Это пожизненные промоакции, поощряющие активных неизменных игроков. Популярный формат — раздача фриспинов по определенным дням недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают постоянные призы без депо в обмен на скопленные баллы преданности. <a href=https://oerdigamers.info/index.php/User:Danilo9328>https://oerdigamers.info/index.php/User:Danilo9328</a> 1х слотс зеркало регистрация в 1×slots casino B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.Для получения приза нужно пригласить в игру нового клиента. Казино начисляет пригласившему фиксированный процент от взносов приглашённого в виде приза: чаще всего его объем не превышает 10%. Срок действия приза правило не превышает месяца: пригласивший получает приз от проигранных ставок приглашённого в 1-ый луна забавы.
1×slots регистрацию процедура займет всего лишь
<a href=https://www.cakeresume.com/portfolios/e6d814>https://www.cakeresume.com/portfolios/e6d814</a> Варианты выигрыша находятся от Вашей успеха и условий игорного портала. Выше мы сказали, собственно некоторые бездепозитные бонусы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются они, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на средства, возможно выиграть неописуемые суммы. Сегодняшние игровые автоматы либо видео слоты, как их нарекают. Могут выдавать солидные умножение от х1.000 и выше. Некоторые множат ставку от х100.000.К образцу, игроку выдаются бесплатные свои в заведении в объеме пятидесяти либо ста $ (вейджер на коие сочиняет 100х). То есть, любому новоприбывшему игроку выскакивает привлекающая картинка, кот-ая сулит выплату всех зачисленных фирмой средств. Не стоит обращать внимания на казино приз за регистрацию без депо с сильно великой либо очень маленькой суммой призов, поэтому собственно, числе тщательно выучив все обстоятельства, тут всего, несомненно некий подкол. сайт 1× slots casino Бонус за регистрацию в казино без депозита с выводом денег нужно отыграть. Зачастую для отыгрыша возможность понадобиться сделать ставки на сумму, в некоторое 10-ов один превышающую необходимую бонуса либо выигрыша.Получив свой презент, Вы можете безвозмездно играть на реальные средства, а выполнив обстоятельства отыгрыша, вывести собственный выигрыш.
1×slots зеркало сайта
На нашем сайте Вы отыщите перечень своевременных свежих бездепозитных бонусов в казино 2022 года. Также, есть количество эксклюзивных предложений, коие доступны только посетителям нашего сайта последствии регистрации по нашей ссылке или активации специального промокода. Этот тип приза будет добавлен на Ваш аккаунт последствии удачной процедуры регистрации с использованием номера аппарата. Если избрать другой способ сотворения учетной записи, бездеп не будет добавлен на Ваш аккаунт. 1×slots быструю регистрацию а также мгновенное <a href=https://forum.motr-online.com/user/glavdorogadv2106>https://forum.motr-online.com/user/glavdorogadv2106</a> Некоторые клубы автоматически начисляют бонус на акк игрока после исполнения критерий получения, хотя случаются ситуации, когда приз надо(надобно) активировать игроку самому. Есть несколько методов активации приза:При исполнении условий отыгрыша и верификации, деньги с бонусного счета переводятся на основной и все быть выведены на карту или электронный кошелек. Лимиты на вывод и сроки проведения транзакции зависимости от избранной платежной системы.
1×slots рабочее зеркало
Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, дабы появилась возможность исключить выигрыш. <a href=https://squishmallowswiki.com/index.php/User:KathrinLabonte>https://squishmallowswiki.com/index.php/User:KathrinLabonte</a> 1×slots регистрация 1×slots review live Бездепы обыкновенно предлагают с отыгрышем — моментально исключить выигранные свои невозможно. Перевод средств со счета несомненно возможен в того, как юзер выполнит все притязания казино, а сумма не быть выше установленного правилами лимита. Условиями акции фиксируются сроки, в течение коих клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней в активации.Фриспины — благотворительные вращения, коие дозволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся самым знаменитым и преимущественным обликом приза — благотворительные вращения иногда эффективнее и веселее в отыгрыше, чем остальные облики бездепов.
<b>Смотреть еще похожие новости:</b>
<a href=https://ragnarok.ch/forum/viewthread.php?thread_id=102&pid=399221#post_399221>1хслотс официальный сайт зеркало</a>
<a href=https://test.soclanovtsy.ru/topic/39287–1×-slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9/>1× slots официальный</a>
<a href=https://forum.bedwantsinfo.nl/user-83172.html>1хслот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Более крупные предложения встречаются очень редко. Зачастую они доступны лишь VIP-игрокам. В остальных случаях им наверняка сопутствуют очень жесткие условия отыгрыша. Также возможны дополнительные условия и другие лимитирования, прописанные в критериях и положения бонусной программы казино. Отзывы читателей о бонусных акциях помогут составить впечатление, но не забывайте о субъективности личных объяснений.
#6665 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Юлия Ефимова порно с Евгения Медведева <a href=https://glvk.guru/>самое казино</a> Разуваева Ксения Денисовна порно casino скачать <a href=https://specreporter.com/>casino сайты</a> Шевцова Татьяна Викторовна порно порно с Алексей Миранчук (футбол) 1×bet на андроид бесплатно гама казино win win casino porno Ангелина Гончаренко, хоккеистка букмекерская контора фонбет официальный сайт
#6666 BrianFaw
https://mexicanpharmacy.store/ mexican online pharmacies prescription drugs
#6667 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
Но есть игорные заведения, коие готовы просто например жертвовать деньги на забаву. Для сего довольно создать профиль. Чтобы исключить собственный выигрыш, для сначала нужно выполнить условия отыгрыша, обозначенные в критериях получения бездепозитного депо. <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депо имеет выделяться до 30 дней.Некоторые онлайн-казино без депо предлагают свежим клиентам избрать бонус при регистрации. Будьте внимательны: выбрав раз, вы в безоговорочном большинстве случаев не можете воспользоваться остальными. <a href=https://jsfiddle.net/bwzg8ysc/>https://jsfiddle.net/bwzg8ysc/</a> рабочее зеркало 1×slots <a href=https://woodmancx.com/user/Craiglab/>https://woodmancx.com/user/Craiglab/</a> В большинстве заведений сделать это возможно по адресу электронной почты, по номеру телефонного, спустя социальную сеть либо гугл-аккаунт.В игровых клубах без лицензии Вы покупаете „кота в мешке“ и если, тогда, неоднозначных обстановок нет возможности куда-то пожаловаться и обосновать свою правоту.
1хлот регистрация в 1×slots casino
Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих требований, кроме неотъемлемой верификации. Если на сайте предусмотрена обязательная процедура доказательства личности, то вывести выигрыш удастся только после ревизии данных. Приготовьтесь наполнить анкету и выслать в техподдержку документ, подтверждающий личность. 1×slots casino регистрация 1×slotscasin online Бездепозитные призы — это презенты от казино повторяющий бонусных средств или фриспинов для игровых автоматов, которые начисляются на акк игрока последствии процедуры регистрации на сайте заведения. Для получения этих поощрений депозит не потребуется. <a href=https://rollerforum.volkerschulz.de/memberlist.php?mode=viewprofile&u=441970>https://rollerforum.volkerschulz.de/memberlist.php?mode=viewprofile&u=441970</a> Таким образом, заведение пытается продемонстрировать себя своим потенциальным геймерам, а подобный маркетинговый ход как казино бонус без депо за регистрацию завлекает очень большое внимания к игорному заведению и обеспечивает постоянный струю новых гостей и будущих посетителей игрового интернет клуба.Еще одно условие дотрагивается размеров ставки. Операторы устанавливают максимальную сумму, которую игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, избранной в Личном офисе. При превышении лимита есть риск лишиться приза. Существующие ограничения относятся и к определенным обликам ставок. Например, играя в рулетку, клиент может столкнуться с запретом ставить фишки на шансы. 1×slot зеркало рабочее этих способов предполагает регистрацию Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция имеет доскональные управляла, ссылка на коие обычно находится в промообъявлении. В них указываются лимиты, вейджер, перечень дешевых игр. Если оператор укрывает данные о предложении, то воспользоваться им не.
1×slots скачать на айфон
<a href=http://bitetheass.com/user/MiguelReubs/>http://bitetheass.com/user/MiguelReubs/</a> На критериях отыгрыша бесплатных призов идет тормознуть подробнее. С ними связаны нюансы, которые невозможно забыть без внимания.Фриспины предусмотрены для использования в видео слотах. Внимательно ознакомьтесь с критериями – частенько их выдают на некоторые автоматы. В зависимости от клуба, у вас получится сделать определённое число ставок. Кстати, продвинутые игорные дома позволяют запускать любых «одноруких злодеев». 1х слотс зеркало регистрация в 1×slots casino Казино выводит деньги лишь на что, эту платежную систему, с котрой был сделан депо. То есть, для вывода бездепозитного бонуса, Вам поначалу необходимо восполнить счет. В неких клубах ограниченный список способов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с данных платежных способов, коие доступны для вывода.Самые новые бездепозитные бонусы в казино за регистрацию 2022 года с выводом выгоды находятся на этой страничке. Посетитель имеет оценить условия получения и начать играть на деньги без внесения депозита. При данном игроку важно разуметь, на каких условиях и какими методами появится вывести приобретенный выигрыш. Для этого нужно расценить перечень подключенных платежных систем.
казино 1×slots официальный сайт
Чтобы бездеп не был начислен на Ваш аккаунт, Вам не активировать бонусный код. Если поощрение от казино было добавлено на Ваш акк автоматически, а Вы не расчитываете его использовать, обратитесь в саппорта с просьбой отменить бездепозитный приз. Эффективность бездепов в маркетингового инструмента расценили почти операторы. Малоизвестные площадки употребляют эти акции, чтобы живо набрать базу. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны неизменных посетителей. Не все веб-сайты, дающие подарки без депо, рекомендованы к ирге. За симпатичным промоописанием шансы прятаться невыполнимые обстоятельства отыгрыша прочие подводные камни.У любой забавы свои притязания по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система засчитает каждую ставку. В рулетке и покере устроить это намного сложнее. Именно потому например принципиально внимательно читать условия получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой этой, то новички попросту «спустят приз на ветер». 1×slots зеркало быструю регистрацию а также мгновенное <a href=https://23region.info/user/Henrypap/>https://23region.info/user/Henrypap/</a> Для получения выигрыша требуется выполнить условия казино. Чаще всего игроку необходимо поставить конкретную необходимую, но теснее из собственных денег. Она рассчитывается из совместного размера выигрыша за все время использования бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, в пользователь выиграл 1000 рублей, а множитель сочиняет х30, исключить средства возможно будет, сделав ставки на 30 000 руб.
1×slots casino регистрация на сайте
Можно ли зарабатывать на бездепозитных призах? Это не работа, тут как повезет, если в любом предложенном безедепе, вы будете откручивать вейджер и выводить, время возможно назвать везением, и добавочной добавкой к вашему бютжету. Но существуют азартные заведения, готовые просто так вручить деньги на забаву. Для сего довольно создать профиль. Чтобы исключить выигрыш, сначала нужно выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа. <a href=http://smecenter.utcc.ac.th/index.php/component/users/?option=com_k2&view=itemlist&task=user&id=401962>http://smecenter.utcc.ac.th/index.php/component/users/?option=com_k2&view=itemlist&task=user&id=401962</a> Фриспины – безвозмездные вращения с фиксированной ставкой, которые можно применять в конкретных игровых автоматах.Для выбора азартного заведения Вы сможете пользоваться перечнем наших казино с призами за регистрацию. На нашем сайте мы опубликовали перечень бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, что часть бонусов неповторимые и доступны лишь для гостей нашего вебсайта по-специальному промо-коду или по оригинальной ссылке. Кроме такого, для каждого приза мы подготовили подробный обзор, в Вы узнаете как получить и отыграть одобрение и как вывести собственный выигрыш с бездепа. 1×slots сайт
<b>Смотреть еще похожие новости:</b>
<a href=https://showboysmedia.com/real-music/#comment-69620>1×slots официальный зеркало</a>
<a href=https://russiancomputerservice.ru/user/JosephCer/>1×slots зеркало сайта</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Это раз из главных характеристик привлекательности презента. С завешенным коэффициентом числе мастера не сумеют выполнить обстоятельства по отыгрышу. И неважно, насколько презентабельно выглядит предложение – бездепозитный бонус казино в размере $500 или $1 000. Чтобы новички лучше вникли, что же это вейджер, мы разберём на образце. Прежде чем активировать бездеп, необходимо увериться в том, собственно государство, уроженцем которой считается игрок, не входит в список разрешенных.
#6668 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet телефон гта онлайн казино <a href=https://rhymes-punches.com/>бывшие казино</a> casinos winning casino pin официальный <a href=https://www.ossetia.tv/>1×bet слоты</a> 1×bet зеркало рабочее на сегодня pin up casino официальный скачиваемые казино porno Катерина Шпица казино в россии официальное казино вход Попова Анна Юрьевна порно
#6669 Charlesgunnyhttp://filmkachat.ru
1хслот скачать
Например, игрок получил 500 рублей при создании аккаунта и обязан отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 рублей, понадобится сделать 875 спинов для полного отыгрыша.Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы которые возникают у начинающих. <a href=http://filmkachat.ru/>1хслот официальный сайт зеркало</a> Для получения выигрыша потребуется выполнить условия казино. Чаще всего игроку нужно поставить конкретную сумму, хотя уже из личных денег. Она рассчитывается из общего объема выигрыша за всегда применения бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, если юзер выиграл 1000 руб., а множитель сочиняет х30, исключить деньги можно будет, сделав ставки на 30 000 руб. <a href=http://prsync.com/archicgi/how-home-entertainment-flyarchitecture-transforms-modern-living-spaces-4518898/>http://prsync.com/archicgi/how-home-entertainment-flyarchitecture-transforms-modern-living-spaces-4518898/</a> В случае с фриспинами без вейджера, Вам не придется отыгрывать свой выигрыш с безвозмездных вращений. Прибыль, которую Вы заработаете на этом бездепе можно назначать на вывод без какого или отыгрыша.Стоит отметить, что бездепозитный приз выдается лишь взрослым новичкам, коие, тому, имеют пригласить личных друзей и своих, также рассчитывающих на поощрительную программу преданности. Подобная технология появилась среди соперничающих онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению собственной популярности, методом привлечения новых игроков. Бонусы – это уникальный шанс для вероятных участников забавы, коие все опробовать софт покер рума и увериться, станут ли они в него играть или нет. Новый игрок испробует свои силы с реальными оппонентами в казино. 1х слот 1хслотс регистрация перейти на 1×slots <a href=http://xn–80aakbafh6ca3c.xn–p1ai/index.php?subaction=userinfo&user=ludicrousquota6>http://xn–80aakbafh6ca3c.xn–p1ai/index.php?subaction=userinfo&user=ludicrousquota6</a> 1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, в не желайте замерзнуть жертвой жуликов или впустую истратить время;Предложения с бездепозитными призами за регистрацию позволяют свежим заведениям заинтересовать аудиторию на свой сайт. А игроки в свою очередь получают возможность играть на настоящие средства без депозита в казино и заработать малый стартовый капитал, кот-ый разрешается исключить на карту банка либо электрический кошелек.
1хслотс регистрация в 1×slots casino
Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и более. Когда игроку полагается большое фриспинов, администрация возможность разбивать их начисление на количество дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах промоакции.Для отыгрыша бонуса казино обязывает игрока поиграть на сумму, в количество один превышающую необходимую полученного бонуса — тут выгода фирмы явна. <a href=http://theauction.com.au/my-account/>казино 1×slots официальный сайт</a> 1×slots подтвердит вашу регистрацию если говорить <a href=https://stalker-worlds.games/user/JustinZem/>https://stalker-worlds.games/user/JustinZem/</a> Суммы сходственных предложений, в, колеблются от трех до 20 $, а вейджер на эти свои обязан сочинять от тридцати до шестидесяти раз. Зачастую, наивеличайшая сумма выигрыша здесь составит от одной до двух сотен долларов. Если в выиграет больше, то все средства могут быть списанными до максимально разрешенного выигрыша. Здесь появляется содержание выводить еще несуществующие финансы на собственную платежную систему и далее отыскивать заведение с подходящими под данную сумму релоадом либо призом за первое пополнение счета. Есть некоторое подвидов бездепозитного вознаграждения, предлагаемого большим количеством заведений.Помимо прочего, для вывода средств по бездепу нужно внести на счёт свой первый депозит — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на минимально возможную необходимую, последствии чего вывод средств будет доступен. 1×slots официальный сайт зеркало Денежные средства. Третий бонус за регистрацию без депозита – наличные. К раскаянию, лишь известные и модные клубы шансы уяснить деньги в руб. Либо долларах. С их поддержкою появится насладиться любой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед этим нужно выполнение определенных критерий.Выполнив все притязания оператора, заказчик имеет оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит примерно менее суток. Если дополнительно требуется пройти функцию верификации, то срок возрастает до 1–2 рабочих дней. Для перевода используются банковские инструменты и электронные платежные системы. Второй метод подходит никакого, например как основная транзакций в осуществляются моментально. В связи со специфичностью функционирования банков обработка платежей имеет занять до нескольких рабочих дней.
1×slots casino регистрация 1×slotscasino09k online
Если вы выбрали себе некоторое брендов которые вам больше всего полюбились, для неизменной игры! Таких гемблеров казино довольно предпочитает и ценит, за частую эти игроки становятся VIP игроками заведения, которым часто поступают прибыльные предложения вид бонусов, так же туда заходит и бездепозитные.К огорчению, нет. Почти все казино, требуют внесение желая бы 1-го минимального депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, собственно исключить деньги разрешается только на что, эту платежную систему, с которой был изготовлен депо. <a href=https://www.mexicanservers.com/member.php?action=profile&uid=10949>https://www.mexicanservers.com/member.php?action=profile&uid=10949</a> Список так нарекаемых «запрещенных территорий» прилагается к правилам бонусной программки игорного портала. Обязательно проверьте, распространяются ли на вас похожие наказания. 1×slots акции Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают приз по странам. Вплоть до того, что клуб имеет принимать игроков из Вашей государства, а бездеп мешает.
1×slots зеркало на сегодня
Доступные забавы – В неких азартных забавах можно снизить математическое преимущество казино до нескольких 10-х процента. В их числе многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как управляло, в этих играх ставки идут в зачет вейджера не всецело. Например, может предусматриваться лишь 50%. В некоторых забавах бездепозитные бонусы вообще нельзя отыгрывать.Отыграв бездепозитный приз в казино с выводом тоже придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в сходственное лимитирование присутствует, то единоразово вывести получится лишь необходимую, не превосходящую размер приобретенного бонуса. В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая милая доля игры. Важно, зачастую бездепозитные призы в казино выдаются с лимитированиями по наибольшей выплате. В среднем возможно рассчитывать на выгода в количество тыщ рублей. Как вывести выигрыш с приза без депозита. Придётся доказать аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате либо прочтите в правилах. 1×slos регистрация в 1×slots casino <a href=https://www.sdsdsoft.com/upload/home.php?mod=space&uid=3381558&do=profile&from=space>https://www.sdsdsoft.com/upload/home.php?mod=space&uid=3381558&do=profile&from=space</a> Процесс доказательства личности может взятьвдолг(взятьвзаймы) от 1-го денька до недели. Если заказчик допустил нибудь оплошность при заполнении паспортных данных, то ему идет обратиться с проблемой в службу поддержки онлайн-казино.Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном бонусе, то начала обратите внимание на значение вейджера и срок, который дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть бонус и исключить выигрыш.
скачать 1×slots на андроид мобильная версия
Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных ситуаций с казино, когда последствии отыгрыша бездепа вам не дадут исключить крупную необходимую выигрыша. Игры, каких можно выступать на бонусные деньги. Проверьте перечень игр, в которых возможно выступать на бонусные свои, возможно они Вам не понравятся и надо расходовать своё время на такую акцию.Выбирайте наихорошие бесплатные призы счет обзоров на Casinoz – и пусть для сопутствует счастье при отыгрыше бонусных кредитов! <a href=https://polonistyka.com/user-2/charlesskype/>https://polonistyka.com/user-2/charlesskype/</a> 1×slots зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://minifishtank.net/forum/showthread.php?tid=22460>1×slots официальный регистрация</a>
<a href=https://praisenpray.org/forums/showthread.php?tid=100659>1× slots зеркало</a>
<a href=https://www.goslog.ru/forum/messages/forum1/message15400/11-obrashcheniya-grazhdan?result=reply#message15400>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы, как уже ясно, являются уникальной вероятностью приступать к игровому процессу абсолютно бескорыстно, то есть играть в онлайн казино безвозмездно и на имеющие средства сразу в регистрации аккаунта. Автоматы с таким депозитом имеют стать прекрасной возможностью поиграть для почитателей азарта с определенными лимитированиями в денег.
#6670 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Юлия Ефимова, пловчиха 1×bet зеркало xbet <a href=https://rhymes-punches.com/>букмекерская контора фонбет официальный</a> casino зеркало сайта винлайн букмекерская контора <a href=https://glvk.guru/>порно с Варвара Субботина</a> пин ап букмекерская контора казино рабочее казино porno Анна Сидорова, керлингистка казино рояль смотреть порно с Варвара Субботина промокод 1×bet
#6671 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
ев казино бывшие казино <a href=https://kompromat1.online/>Манилова Алла Юрьевна порно</a> скачать 1×bet 1×bet xyz 1×bet официальный слоты <a href=https://strelochnik.com/>гта казино</a> порно с Афонина Марина Игоревна casino автомат рабочие зеркала казино Александра Бортич сайт букмекерской конторы 1×bet 1 винлайн букмекерская контора официальный
#6672 RafaelGenhttps://sexx.tw/taichung-tea/tctea/
<a href=https://sexx.tw/taichung-tea/tctea/>台中外送茶</a> 台中外送茶:安全快速的外約服務指南
引言 台中外送茶是一項方便且受歡迎的服務,無論是夜晚的放鬆需求還是特殊場合的社交活動,都能提供快速、安全且專業的體驗。本文將深入探討台中外送茶的選擇、流程以及相關注意事項,幫助您在選擇服務時更加安心與滿意。
什麼是台中外送茶? 台中外送茶服務主要提供以下特點:
快速應對:透過線上或電話聯繫,立即安排外送服務。 多元選擇:服務涵蓋不同需求,從高端到實惠方案應有盡有。 隱私保障:強調保密性,確保客戶資料不被外洩。 台中外送茶適合哪些人? 商務旅客:在台中短期停留,追求品質與方便的伴侶服務。 壓力族群:希望藉由互動放鬆身心,增添生活樂趣。 聚會需求:特殊場合、生日或朋友聚會需要專業的伴侶服務。 選擇台中外送茶的注意事項 如何選擇安全的服務?
查詢評價:選擇高評價且有口碑的服務提供者。 確認價格透明:避免隱藏費用,提前溝通價格範圍。 合法經營:確認服務平台是否具備合法經營的資格。 常見的服務流程
聯繫服務商家,了解可提供的選項及價格。 確定時間與地點,確保雙方需求達成一致。 接收外送服務,享受專業的伴侶陪伴。
#6673 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
вывод казино bet casino <a href=https://krtka.info/>casino зеркало сегодня рабочее</a> pin casino казино сочи <a href=https://m.repost.news/>1×slots casino</a> 1×bet на андроид бесплатно casino betting винлайн букмекерская контора официальный мелбет букмекерская контора casino зеркало сайта vavada casino porno Дарья Клишина
#6674 Charlesgunnyhttp://filmkachat.ru
1×slots акции
Бездепозитные призы казино за регистрацию в 2022 году — это вероятность поиграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой либо числом безвозмездных вращений без внесения депозита. Не путайте деморежим с реальной забавой без необходимости внесения депо. <a href=http://filmkachat.ru/>1×slot официальный сайт</a> Первый возникающий вопрос, это, для выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают свежих игроков. Последним легче начать игру на средства с дара за регистрацию. Им надо пополнять баланс и тратить личные средства. Новички получают безвозмездные спины или средства на счёт. С их подмогою знакомятся с игровым ходом, крутят слоты и делают ставки в рулетке.Раздача призов может быть приурочена к различным датам: календарные праздничные, дни рождения игроков, юбилей открытия казино и т. Д. Подарок выдается вид денег, фриспинов или баллов для накопления и обмена на услуги оператора. Если юзер получает выигрыш, средства начисляются на его счет. Для вывода этой суммы понадобиться выполнить ряд притязаний. <a href=http://www.pvp.iq.pl/thread-5909.html>http://www.pvp.iq.pl/thread-5909.html</a> Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные способы и оценить особенности, недоступные при игре в демо режиме. Многие новые посетители переходят в число неизменных, а оператор получает долгосрочную прибыль. 1× слот зеркало <a href=http://food.biz.ua/wr_board/tools.php?event=profile&pname=functionalpaint>http://food.biz.ua/wr_board/tools.php?event=profile&pname=functionalpaint</a> Как управляло, при выводе денег, от играющего требуется лишь сделать наименьший лепта чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом собственный счет.Многие казино деют в маркетинговых целях благотворительные бонусы самая для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой вебсайт по партнерской ссылке с нашего портала.
1×slot официальный сайт
Не стоит путать забаву в демо и использование призов. В демонстрационном режиме игрок может оценить механику слота, сюжет и оформление. Но игра проводится на условные кредиты, поэтому отсутствует основное ? чувство пыла. Активируя промокод или фриспины, клиент по-прежнему не тратит средства средства на игровые автоматы, но возможность сорвать настоящий куш!Такой казино бонус без депозита за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это словно какая-то конспирация поощрения под бездепозитный. Суть всего этого сводится к тому, что игроку на час выдается, к примеру, 1000 долларов, а реклама твердит про, что любой выигрыш можно несомненно в будущем забыть при для. Но если играющий серьезно отнесется к этому предложению, то он просто потеряет время. Ведь игроку нужно несомненно играть не в аккаунте, в тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (даже всей тысячи) в верховодила вступят конкретные условия, где будет сказано, собственно наибольшей суммой победы возможность быть только двести долларов и средства можно использовать только в приза на первый лепта с вейджером 25 от суммы вознаграждения плюс сам депозит. По результату выйдет, собственно игрок выигрывал себя 200% приз с вейджером на определенную сумму. Короче говоря, это все надо вашего медли. 1× slots casino официальный сайт <a href=http://r66251ds.beget.tech/member.php?action=profile&uid=103160>http://r66251ds.beget.tech/member.php?action=profile&uid=103160</a> 1хслот скачать Раздача призов возможность быть приурочена к различным датам: календарные дни, дни рождения игроков, юбилей открытия казино и т. Д. Подарок выдается вид средств, фриспинов или баллов для скопления и обмена на предложения оператора. Если юзер получает выигрыш, средства начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд притязаний.Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция имеет подробные правила, ссылка на которые обыкновенно содержится в промообъявлении. В них указываются лимиты, вейджер, список доступных игр. Если оператор прячет данные о предложении, то пользоваться им надо.
1×slots зеркало сайта
<a href=https://alphacs.ro/member.php?77540-Davidnix>https://alphacs.ro/member.php?77540-Davidnix</a> Бездепозитные призы — это презенты от казино вид бонусных денег или фриспинов для игровых автоматов, коие начисляются на акк игрока после процедуры регистрации на сайте заведения. Для получения этих поощрений депо не потребуется.Когда речь идет о получении бездепозитных призов в казино, начала направьте на последующие обстоятельства: 1хслотс зеркало Акционные предложения от казино существуют в различных форматах. Часто призы даются в мена на депозит. Игрок вносит платеж и получает средства, благотворительные вращения прочие поощрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — картина бонуса, кот-ый гарантирован за исполнение конкретных деяний на сайте:
1×slots casino регистрация
Поспешите отобрать бездепозитные бонусы за регистрацию в казино из представленного перечня. Все платформы столько ведут легальную деятельность, но и обрадуют добросовестными результатами игры, высочайшей отдачей, быстрыми выплатами. Казино выделяет возможность заработать и исключить настоящие средства на бездепозитных бонусах. Обычно, это незначительная сумма, коию казино возможность для разрешить презентовать игроку.Бонус за регистрацию в казино выдается лишь раз раз на 1-го игрока. Но посещают вспомогательные промоакции, масштабах коих бездепы раздаются для неизменных клиентов и такие подарки Вы сможете получить более 1-го раза. Онлайн-казино с бездепозитными бонусами ставят посетителям условия для использования бездепами, поэтому перед участием в акции превосходнее досконально ознакомиться со всеми правилами и нюансами промоакции. Условия могут касаться получения бонуса, его применения и следующего вывода денежных средств если, тогда, выигрыша. 1× slots сайт <a href=https://shaneqzho31752.ampblogs.com/deep-nude-exploring-the-ethics-and-impact-of-ai-powered-image-manipulation-67108280>https://shaneqzho31752.ampblogs.com/deep-nude-exploring-the-ethics-and-impact-of-ai-powered-image-manipulation-67108280</a> Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных ситуаций с казино, когда последствии отыгрыша бездепа вас не дадут исключить солидную необходимую выигрыша.
1×slots зеркало проходить регистрацию это отличный вариант
Верификация аккаунта. Лучше подтвердить личность сразу после регистрации, чтобы позже не было проблем с выводом средств. Верификация возможность протекать двумя способами:Любой выигрыш по ставке повыше установленного лимита будет являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, а в случае выигрыша его сумма не поступит на счёт посетителя — результат забавы будет полностью аннулирован. <a href=http://182.237.3.195/home.php?mod=space&uid=600096>http://182.237.3.195/home.php?mod=space&uid=600096</a> Для получения приза нужно пригласить в забаву нового посетителя. Казино начислит пригласившему фиксированный процент от взносов приглашённого повторяющий приза: почаще всего его размер не превышает 10%. Срок деяния бонуса правило не выше месяца: пригласивший получает приз в зависимости от проигранных ставок приглашённого в 1-ый луна забавы. рабочее зеркало 1×slots Частенько новички не разумеют, как активировать презенты или исключить первый выигрыш. Для похожих случаев наша команда описала основные определения – что это фриспины, вейджер, как его отыграть, чего нужно проходить верификацию.Существуют казино с бонусом за регистрацию, в довольно известны фриспины в онлайн казино потом регистрации в определенных забавах. Они встречаются даже почаще безвозмездных поощрений либо традиционных бонусов в казино без вложений. Например, игрок регистрирует счет, на который начисляются безвозмездные игры, приз за регистрацию в виде бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса геймер выигрывает настоящие деньги, коие в последствии возможно успешно вывести из заведения на свою платежную систему. То есть, есть шансы вывести свои без рисков собственными финансами. Регистрация, какую геймер получит бонусы, займет несколько, а спасибо этому можно увеличить пять евро поощрений до тысячи и без всяких заморочек исключить их.
<b>Смотреть еще похожие новости:</b>
<a href=https://tabsgame.ru/user/Jamesbes/>1×slots казино мобильная версия</a>
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=783154>1×slots официальный зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный приз казино 2022 с выводом за регистрацию предоставляет возможность ознакомиться игроку с лобби избранного заведения, сориентироваться в выборе игр и выяснить качество работы саппорта. Довольно нередко, начиная игровой процесс, игрок уже не желает останавливаться и делает реальный лепта. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть бесплатно вероятно как один таки с бонусом за регистрацию без необходимости заносить депозит. B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax
#6675 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Александра Степанова, фигуристка где казино <a href=https://t.me/vchkogpu_ru>порно с Евгений Малкин (хоккей)</a> porno Мария Шарапова лучшие бесплатные онлайн казино <a href=https://th-royalgclub.com/>porno Мария Шарапова</a> 1×bet регистрация скачать 1×bet на андроид porno Яна Троянова Скворцова Вероника Игоревна порно сколько казино рабочие зеркала казино 7k casino зеркало
#6676 Charlesgunnyhttp://filmkachat.ru
1×slots подтвердит вашу регистрацию если говорить
Каждый из бездепозитных призов без пополнения 2022 содержит собственный конкретный вейджер для отыгрыша, например же в любом казино он уточняется индивидуально — где то он х55 а кое-где х30, повторюсь везде по разному!Фриспины предусмотрены для применения в видео слотах. Внимательно ознакомьтесь с критериями – часто их выдают на некоторые автоматы. В зависимости от клуба, у вас выйдет сделать определённое число ставок. Кстати, продвинутые игорные жилища позволяют запускать каждых «одноруких злодеев». <a href=http://filmkachat.ru/>1×slots официальный сайт, скачать</a> Обычно бездепозитные акции от казино, приходят на эл. Почту в деньки рождения либо праздники. В неких интернет казино можно адресоваться в чат и как постоянному игроку, вероятно вас предложат бездепозитное предложение. <a href=https://devfolio.co/@archicgicom>https://devfolio.co/@archicgicom</a> 1×slots зеркало регистрацию более популярный вариант это <a href=http://fr994575.bget.ru/user/DoctorLazutami/>http://fr994575.bget.ru/user/DoctorLazutami/</a> На нашем веб-сайте Вы отыщите список актуальных новых бездепозитных бонусов в казино 2022 года. Также, есть много эксклюзивных услуг, коие доступны только гостям нашего сайта в регистрации по нашей ссылке или активации специального промокода.
1× slots регистрация в 1×slots casino
При верном подходе бездепы — это прекрасный способ выступать на средства без траты собственных средств. Есть некоторое рекомендаций, следуя которым можно извлечь максимум пользы из похожих промоакций казино. Играть следует лишь на лицензированных площадках. Скриптовые сайты не дурачат с бонусными услугами, хотя и используют пиратский софт с модифицированным ГСЧ. Выиграть на этих автоматах нереально.Бонус без депозита за регистрацию в казино (бездепозитный приз) – это валютный презент от клуба, кот-ый начисляется на аккаунт игрока после регистрации в казино. Кроме творенья учетной записи, для получения бездепа, довольно часто требуется ещё и подтвердить контактные данные игрока и/или активировать особый промо-код. 1×slots бонус за регистрацию <a href=http://ourrocks.kz/index.php?title=Выкуп_авто>http://ourrocks.kz/index.php?title=Выкуп_авто</a> Обыкновенные бездепозитные призы в размере от 3-х до 20 долларов сделаны для того, чтобы в игры заходили все свежие и новые игроки. Здесь, скорее, будет лимитирование на наибольший выигрыш. Важно, дабы перед минимальным вкладом был отключен бонус за 1-ое пополнение счета, и игры не попадет на повторный вейджер. 1×slots бонус за регистрацию Свежий бонус начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в использовании своими, ну случае отыгрыша оператор имеет установить ограничение на вывод денег.
1×slots зеркало сайта
Приглашаем делиться воззреньями о призах. Это поможет другим пользователям выбирать более прибыльные предложения. <a href=http://maskarad.bomba-piter.ru/user/PorsedropMa/>http://maskarad.bomba-piter.ru/user/PorsedropMa/</a> К сожалению, нет. Почти все казино, просят внесение но бы 1-го малого депо для вывода выигрыша с бездепозитного бонуса. Также учитывайте, что исключить деньги разрешено лишь на что, эту платежную систему, с которой был сделан депо. 1х слот 1хслотс регистрация перейти на 1×slots Какие призы возможность еще получить не бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, любое онлайн казино предлагает игрокам выгодное предложение на 1-ый депозит, вы совершаете депо, ваш депо увеличивается в двое либо том в трое, тем наиболее начать выступать возможно с больше солидной суммой, так же не забываем про вейджер на призы.
1×slots casino регистрация 1×slotscasin online
Вообще перейдя в казино — правила схожи в получении бездепозитных призов, в стандартные управляла заходит: доказать эл. Почту и аппарат, наполнить собственный индивидуальный профиль, активировать рекламную код либо активировать предложения во вкладке БОНУСЫ. <a href=https://russiancomputerservice.ru/user/JosephCer/>1×slots зеркало проходить регистрацию это отличный вариант</a> Прежде всего, не забывайте периодически заглядывать на страницу обзоров бездепозитных призов. Они шаг за шагом оценивают более увлекательные предложения основных игорных порталов. 1 x slots casino <a href=https://www.wow-interfaces.com/users/Michaeltip>https://www.wow-interfaces.com/users/Michaeltip</a> Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.
1 x slots
Фриспины предназначены для применения в видео слотах. Внимательно ознакомьтесь с условиями – частенько их выдают на некоторые автоматы. В зависимости от клуба, у вас выйдет устроить определённое количество ставок. Кстати, продвинутые игорные дома разрешают запускать любых «одноруких злодеев».Казино выводит средства только на ту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного приза, Вам поначалу необходимо пополнить счет. В некоторых клубах узкий список методов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с данных платежных способов, которые доступны для вывода. Фриспины предназначены для использования в видео слотах. Внимательно ознакомьтесь с условиями – частенько их выдают на некоторые автоматы. В зависимости от клуба, у вас получится сделать определённое количество ставок. Кстати, продвинутые игорные дома позволяют запускать каждых «одноруких злодеев». <a href=https://premiumstoreco.com/user/xrumsetes2305inbox-lv/>https://premiumstoreco.com/user/xrumsetes2305inbox-lv/</a> Это раз из главных характеристик привлекательности подарка. С завешенным коэффициентом числе профессионалы не сумеют выполнить обстоятельства по отыгрышу. И не, насколько презентабельно смотрится предложение – бездепозитный приз казино в размере $500 или $1 000. Чтобы новички получше вникли, что же это вейджер, мы разберём на образце. онлайн казино 1×slots При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, которое можно предназначить этой в казино.Процесс подтверждения личности имеет занять от одного дня до недели. Если клиент разрешил какую-либо ошибку при заполнении паспортных данных, то ему по адресоваться с задачей в службу онлайн-казино.
<b>Смотреть еще похожие новости:</b>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=159&pid=646686#post_646686>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=http://3ak.cn/home.php?mod=space&uid=187057>1×slots рабочее зеркало на сегодня</a>
<a href=https://www.digicube.de/forum/threads/458309–1×-slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%B2–1×slots-casino?p=655937#post655937>1× slots регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бонус в казино без депо содержит разные вариации: это может быть приветственный приз, акции в честь каких-то праздников либо весомых дат, приз за привлечение свежих игроков, лояльность и получение VIP-статуса. Бездепозитные призы — это подарки от казино повторяющий бонусных средств либо фриспинов для игровых автоматов, коие начисляются на акк игрока в процедуры регистрации на сайте заведения. Для получения таких поощрений депозит не потребуется.
#6677 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино porno Анна Сидорова, керлингистка <a href=https://kompromat1.online/>пин ап казино</a> casino официальный зеркало казино на деньги <a href=https://sovsekretno.net/>1×bet скачать приложение на андроид</a> самое казино 1×bet порно с Илюшникова Татьяна Александровна 1×bet сейчас Анна Михалкова cat casino ешь казино
#6678 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало проходить регистрацию это отличный вариант
Подтвердите регистрацию, чтобы активировать Бездепозитный бонус с выводом, требуется наполнить собственный профиль. Заполните пустые поля настоящими данными о для. <a href=http://filmkachat.ru/>казино 1×slots</a> Также есть онлайн-платформы азартных игр, которые применяют раздачу бездепозитных призов в специальные даты (как для казино, так и для игрока). Помимо сего, действующие геймеры того имеют вероятность получить схожие бонусы за свою деятельность (например, за повышения уровня или за похожие достижения). <a href=https://www.zybuluo.com/comcgifurniture/note/2570100>https://www.zybuluo.com/comcgifurniture/note/2570100</a> Как лишь на виртуальном счету окажутся бонусные свои, поспешите отыграть вейджер. Сразу после этого можно оставить заявку на вывод выигрыша. Кредиты прибыльно выделяются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом реальных средств и выделяют вероятность почувствовать азарт. Во-вторых – можно насладиться любой азартной игрой доступной на сайте. В вашем постановлении находятся автоматы, настольные прибавленье, видео-покер, Live-дилеры.Внесение депозита – Будьте готовы пополнить счет после отыгрыша бонуса. Это стандартное требование правил для данного подобии промо-акций. Лучше заблаговременно уточнить, какую сумму нужно несомненно вносить на счет. Как верховодило, речь о минимальном депозите, хотя вы должны быть уверены, собственно он для по карману. 1×slots рабочее зеркало <a href=https://eccentrictirade.com/forums/member.php?action=profile&uid=3527>https://eccentrictirade.com/forums/member.php?action=profile&uid=3527</a>
рабочее зеркало 1хслотс
На нашем веб-сайте Вы найдете перечень актуальных свежих бездепозитных бонусов в казино 2022 года. Также, есть большое неповторимых предложений, коие доступны только гостям нашего вебсайта после регистрации по нашей ссылке или активации специального промокода. 1хслотс рабочее зеркало Наши специалисты исследуют обстоятельства промоакции, этого в ручном режиме проверку их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие характеристики. Мы не рекламируем казино, а даем игрокам информацию о наилучших из их. <a href=http://metabolichealthdigest.com/user/joshuacob/?um_action=edit>http://metabolichealthdigest.com/user/joshuacob/?um_action=edit</a> Бездепозитные бонусы за регистрацию являются одним из самых знаменитых методов привлечения свежих игроков в онлайн-казино, поэтому что они деют игрокам вероятность опробовать казино, неподражаемо игровые автоматы, и возможно, выиграть реальные деньги. 1×слот регистрация в 1×slots casino Онлайн гемблинг развивается с любым днем все больше и больше, новые бренды создаются не по денькам а по часам. Новые интернет казино проделывают вступительные акции для игроков, чтобы, чтобы что бы зарекомендовать себя, и тем наиболее предлагают бездепозитные призы за регистрацию, что бы не пропустить эту возможность — как пользоваться новым бездепом, советуем посещать наш вебсайт как возможно почаще, самое лакомое и свежие несомненно добавляться в этом же списке.
1×slots бездепозитный бонус за регистрацию
<a href=http://classicalmusicmp3freedownload.com/ja/index.php?title=телефон>http://classicalmusicmp3freedownload.com/ja/index.php?title=телефон</a> Бонус за регистрацию в казино выдается лишь один раз на 1-го игрока. Но бывают дополнительные акции, в рамках коих бездепы раздаются для неизменных посетителей и такие подарки Вы сможете получить больше одного раза. скачать 1×slots на андроид мобильная версия На бесплатные призы онлайн-казино почти постоянно распространяется ограничения по стране проживания посетителей. Даже случае для разрешается открывать счет и играть на средства в заведении, это еще не означают, что для доступны not the slightest down payment bonuses.
1 xslots рабочее зеркало
Онлайн-казино кропотливо продумывают бонусные условия, которые нужно выучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и ограничения. В каждом казино с бездепозитным призом предусмотрены вейджеровые условия. Это один-единственный «подводный камень», который стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, нужно сделать определённое количество ставок. Чем круче бонус, что, этим сложнее выполнить обстоятельства, и напротив. 1×slots официальный сайт скачать <a href=http://alfasys.com.ua/index.php?subaction=userinfo&user=literatebliss3>http://alfasys.com.ua/index.php?subaction=userinfo&user=literatebliss3</a> Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке адепты онлайн-казино публикуют актуальную информацию о no deposit bonuses и других услугах.Похожим образом трудится 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения посетителя или из-за с получения им VIP-статуса. Подарок предоставляется последствии обращения в поддержку и проверки.
1хслотс рабочее зеркало
Бездепозитные бонусы за регистрацию являются одним из самых популярных способов вербования свежих игроков в онлайн-казино, поэтому собственно они деют игрокам вероятность опробовать казино, тем игровые автоматы, и вполне, выиграть настоящие деньги. Осталось избрать казино с призом за регистрацию и сделать профиль. После активации презента выигрыш зависимости от Фортуны и навыков. <a href=https://www.gamerlaunch.com/community/users/blog/6415433/2298190/unlocking-magic-of-3d-rendering%3A-from-pixels-to-re/?gid=535>https://www.gamerlaunch.com/community/users/blog/6415433/2298190/unlocking-magic-of-3d-rendering%3A-from-pixels-to-re/?gid=535</a> В интернет-сети постоянно возможно найти списки более популярных и гарантированных поощрительных программ от знаменитых онлайн-казино.Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, a зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. x1 slots 1хслотс регистрация перейти на 1×slots Шаг 5. Использование и отыгрыш. Бездеп обязан быть использован в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера.Выше мы предоставили глубокий набор самых новых и актуальных бездепозитных бонусов в интернет казино без пополнения на 2022 год, где вам пользоваться хоть ценным бездепозитным бонусом.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.formulersupport.com/Thread-1×-slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE–151675>1× slots зеркало</a>
<a href=https://www.goslog.ru/forum/messages/forum1/message15822/11-obrashcheniya-grazhdan?result=reply#message15822>1хслот официальный сайт зеркало</a>
<a href=http://3ak.cn/home.php?mod=space&uid=187057>1×slots казино мобильная версия</a>
<a href=http://complainanything.com/node/158?page=918#comment-1110803>1×slots зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В случае установленного лимита на сумму вывода выигрыша с бездепозитного бонуса, игрок не может исключить больше заявленной суммы. Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, a зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.
#6679 Charlesgunnyhttp://filmkachat.ru
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Иногда для получения призов нужно связаться с адептами службы. Удобнее всего с ними разговаривать в онлайн-сате, желая от достаточно запроса по электрической почте.Для отыгрыша бонуса казино обязует игрока сыграть на необходимую, в количество раз превосходящую необходимую приобретенного приза — здесь выгода компании явна. <a href=http://filmkachat.ru/>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a> Но есть игорные заведения, коие готовы просто например жертвовать деньги на забаву. Для этого довольно сделать профиль. Чтобы вывести собственный выигрыш, вас сначала необходимо выполнить обстоятельства отыгрыша, обозначенные в критериях получения бездепозитного депо.К примеру, игроку выдаются безвозмездные средства в заведении в размере пятидесяти или 100 долларов (вейджер на которые составляет 100х). То есть, каждому новоприбывшему геймеру выскакивает притягивающая иллюстрация, которая обещает выплату всех зачисленных компанией средств. Не стоит заострять на казино бонус за регистрацию без депозита с чрезмерно большой или довольно малюсенькой суммой бонусов, потому что, том кропотливо изучив все условия, здесь скорее, будет какой-то подвох. <a href=https://telegra.ph/Your-Ultimate-Guide-to-Licensed-Weed-Delivery-Brampton-Services-11–24>https://telegra.ph/Your-Ultimate-Guide-to-Licensed-Weed-Delivery-Brampton-Services-11–24</a> Подобные бонусы без депо предоставляются на более прибыльных условиях. Зачастую они крупнее, а обстоятельства отыгрыша менее строгие.Мы проделываем ударение на главных положениях управлял, рассказываем о территориальных лимитированиях и кратко информируем о иных акциях обсуждаемого казино. 1×slots официальный сайт скачать на айфон <a href=https://usolie-citi.ru/user/RandalFence/>https://usolie-citi.ru/user/RandalFence/</a>
сайт 1× slots casino
Создание аккаунта. На веб-сайте казино нужно обнаружить регистрационную форму и заполнить пустые поля личными данными. Иногда на этом шаге потребуется указать лишь адресок электронной почты и пароль, но чаще надо заполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д.). Нужно указывать лишь настоящие данные, потому впоследствие они станут испытаны.Бездепозитные призы – это исключительно небезинтересная и более перспективная промоакция интернет-казино. Они в никакого фри-спинов, поэтому что выплаты в безвозмездных вращениях не гарантированы, как композиции на барабанах игрового аппарата шансы не сложиться. 1×slots официальный demo регистрация в 1×slots casino Помимо прочего, для вывода средств по бездепу нужно привнести на счёт свой первый депозит — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на мало вероятную сумму, в чего вывод средств будет доступен.Каждый новичок и умелый игрок грезят прытко стартануть и начать делать настоящие ставки. Для сего достаточно арестовать презент, за кот-ый надо платить. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email или телефонный. После этого администрация начислит щедрое вознаграждение в виде безвозмездных вращений или виртуальных кредитов. <a href=http://muhaylovakoliba.1gb.ua/user/TyroneSiz/>http://muhaylovakoliba.1gb.ua/user/TyroneSiz/</a> В качестве бонусов онлайн казино часто предлагает выдачу фриспинов, то есть безвозмездных вращений игрового барабана. Виртуальные монеты возможно использовать для изучения в покерной школе либо для забавы в казино.Бывают ли бездепозитные бонусы без вейджера? Бывают, случае у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино. казино 1×slots официальный сайт
1 x slots casino
Обычно бездепозитные промоакции от казино, прибывают на эл. Почту в деньки рождения либо праздники. В неких онлайн казино возможно обратиться в чат и как постоянному игроку, вполне вас предложат бездепозитное предложение.В игровых клубах без лицензии Вы покупаете „кота в мешке“ и если, тогда, неоднозначных обстановок нет способности куда-то посетовать и доказать свою правоту. Прочитайте управляла бонусной программки, в хотите участвовать. Да, мы настойчиво рекомендуем сделать это до регистрации. <a href=https://rightcoachforme.com/author/craigwew/>https://rightcoachforme.com/author/craigwew/</a> 1×slots подтвердит вашу регистрацию если говорить Вейджер (wager) – это коэффициент, кот-ый демонстрирует на какую сумму нужно сделать ставок, дабы вывести приз из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода этого бонуса, Вам необходимо устроить ставок на необходимую: 500*70=3500 рублей. Только полностью отыграв приз, Вы сможете вывести собственный выигрыш.Также учтите, собственно некоторые игровые платформы сужают перечень стран, коие готовы получить предложенный бездепозитный бонус за регистрацию. К образцу, есть онлайн-заведения, выдающие подобные призы лишь обитателям конкретных государств. К примеру, онлайн казино 777 Оригинал предоставляет бездепозитный бонус только игрокам из России и государств СНГ. Или наоборот, снабжают вознаграждением всех, считая жителей некоторых стран (из этого, идет внимательно изучать список, чтобы впоследствии не появилось никаких вопросов и жалоб).
1× слот зеркало
Также учтите, собственно кое-какие игровые платформы сужают список государств, коие способны получить предложенный бездепозитный бонус за регистрацию. К образцу, есть онлайн-заведения, выдающие похожие призы лишь обитателям определенных стран. К образцу, онлайн казино 777 Оригинал дает бездепозитный приз только игрокам из России и стран СНГ. Или наоборот, снабжают вознаграждением всех, считая обитателей некоторых стран (как сего, следует внимательно изучать перечень, дабы потом не возникло практически вопросов и претензий). Бездепозитные бонусы казино это экономическая компенсация, предлагаемая пользователям на дармовой базе и вероятность выступать в интернет казино безвозмездно. Если сравнивать их с поощрениями за вклад, в средства выдаются лишь потом начального пополнения счета, то бездепозитные вознаграждения получаются бесплатно. То есть, играющий получает возможность создавать ставки на теснее быть деньги, которые выдаст заведение, выполняя, этом, обычные деянья, чтобы их извлечь (здесь речь о регистрация, удостоверении личности с использованием номера телефонного, дизайна заказы и т.д. ).Рассмотрим принцип его деяния на образце. Допустим, вы зарегались и возымели $10 no deposit bonus с вейджером х50. Это означает, что выигранные средства можно несомненно выводить не раньше, чем после как, как общая сумма ставок достигнет $500. Заполняя данные в собственном профиле, указывайте только достоверную информацию, например как Вам понадобиться ее доказать дальнейшем при выводе средств.К сожалению, нет. Почти все казино, просят внесение но бы 1-го малого депо для вывода выигрыша с бездепозитного бонуса. Также учитывайте, что исключить деньги разрешено лишь на что, эту платежную систему, с которой был сделан депо. 1х слот 1хслотс регистрация перейти на 1×slots <a href=http://yuk.su/forum/memberlist.php?mode=viewprofile&u=8904>http://yuk.su/forum/memberlist.php?mode=viewprofile&u=8904</a> Выбрать казино с бездепозитным бонусом. У нас на сайте представлен список лучших онлайн казино, коие предлагают своим игрокам великодушные призы за регистрацию.Шаг 4. Активация. Внимательно исследуйте обстоятельства, информацию по ограничениям и сроке действия бонусного предложения. Разобравшись с правилами, можно активировать бонус в личном кабинете (времени ? с внедрением промокода) или по запросу в саппорт.
1×slots мобильная версия войти казино
В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это исключительно приятная доля игры. Важно, зачастую бездепозитные призы в казино выдаются с ограничениями по максимальной выплате. В среднем возможно рассчитывать на прибыль в некоторое тысяч руб. Как вывести выигрыш с бонуса без депозита. Придётся доказать акк документально, в неких заведениях. Процедура верификации неотклонима и делается каждым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате или прочтите в правилах. <a href=https://usolie-citi.ru/user/RandalFence/>https://usolie-citi.ru/user/RandalFence/</a> На критериях отыгрыша даровых бонусов стопам остановиться подробнее. С ними связаны аспекты, коие невозможно забыть без внимания.Новые клиенты онлайн-казино без первого депо могут проверить свою удачливость. К тому же есть вероятность конвертировать бездепы в настоящие деньги за регистрацию в казино, однако желаемого приз нужно отыграть сообразно условиям акции. казино 1×slots официальный сайт
<b>Смотреть еще похожие новости:</b>
<a href=https://thetechmodders.com/forums/viewtopic.php?t=26285>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a>
<a href=https://forum-macan.ru/memberlist.php?mode=viewprofile&u=1736>1х слотс зеркало регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На бесплатные бонусы онлайн-казино практически всегда распространяется лимитирования по стране проживания посетителей. Даже случае для разрешается открывать счет и играть на деньги в заведении, это еще не значат, собственно для доступны not the slightest down payment bonuses.
#6680 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
ставки на спорт букмекерские конторы Лут Оксана Николаевна порно <a href=https://krtka.info/>new casino</a> порно с Артемий Панарин (хоккей) порно с Евгения Медведева <a href=https://rhymes-punches.com/>7k casino сайт</a> 1×bet зеркало слоты 1×bet xyz приложения букмекерских контор на андроид казино 1 7k casino официальный порно с Федор Чалов (футбол) рейтинг казино букмекерская контора бесплатно скачать
#6681 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
С иной стороны, намного проще арестовать бездепозитные фриспины за регистрацию в казино и напрямик сейчас начать вращать барабаны в превосходнейших слотах. Главная необыкновенность спинов том,, что они предусмотрены для топовых автоматов. Удастся столько пройти вспомогательные раунды, хотя и увеличить сумму выигрыша, заработать респины и другие внутриигровые презенты. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало рабочее</a> <a href=https://diigo.com/0y2r7c>https://diigo.com/0y2r7c</a> Похожим образом трудится 3-ий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя или в связи с получения им VIP-статуса. Подарок предоставляется в обращения в поддержку и проверки.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро или 20 $. Если выдаются фриспины, их количество редко выше нескольких 10-ов бесплатных вращений. зеркло казино 1×slots <a href=https://7apk.ru/user/JasperBah/>https://7apk.ru/user/JasperBah/</a>
1×slot рабочее зеркало
Это раз из главных характеристик привлекательности дара. С завешенным коэффициентом том профессионалы не смогут выполнить условия по отыгрышу. И важно, как презентабельно выглядит предложение – бездепозитный бонус казино в размере $500 либо $1 000. Чтобы новенькие получше вникли, что же это вейджер, мы разберём на примере. 1х слот 1хслотс регистрация перейти на 1×slots <a href=https://narodovmnogo-omsk.ru/forum/user/1252/>https://narodovmnogo-omsk.ru/forum/user/1252/</a> 1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, случае не хотите стать жертвой плутов или впустую потратить время; 1×slot зеркало рабочее регистрации на телефон придет Вывод выигрыша с бездепозитных призов казино – великодушный презент от азартных клубов. Но дабы вывести собственный доход, необходимо выполнить ряд критерий:Oтыгpaть приз с обозначенным вeйджepом, результата нужно сдeлaть cтaвoк нa cумму, превышающую размер приза в несколько один.
1×slots зеркало сайта
Некоторые казино имеют предлагать посетителям бездепы за свидетельство номера или почты либо репост на страницу в социальных сетях. <a href=http://xsyywx.com/home.php?mod=space&uid=127689>http://xsyywx.com/home.php?mod=space&uid=127689</a> Бездепозитные бонусы за регистрацию являются одним из самых популярных способов вербования новых игроков в онлайн-казино, потому что они предоставляют игрокам вероятность опробовать казино, особенно игровые автоматы, и вероятно, выиграть реальные средства.Для казино, работающих онлайн, бездепозитные бонусы нужны для вербования новых посетителей. Предложение сыграть на слотах без необходимости внесения настоящих денег — работающий метод для повышения энтузиазма к фирмы. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит выступать в казино, только сейчас теснее на личные деньги. 1×slots casino регистрация на сайте
1×slots регистрация на сайте 1×slots ru com
Для получения предоставленных призов вас пригодиться — ПК либо мобильное устройство, и остальное дело за небольшим. С этими ординарными советами любое казино с бонусом за регистрацию способно принести в разы больше выгоды и полезности. рабочее зеркало 1хслотс <a href=http://www.cooperativacoomultexco.com/user/DavidBar/>http://www.cooperativacoomultexco.com/user/DavidBar/</a> В некоторых интернет казино для получения бездепозитных бонусов не довольно просто зарегистрироваться на сайте клуба и подтвердить свои контактные данные. Дополнительно потребуется активация промокода.
1×slots регистрация на сайте
Прямо сейчас заберите безвозмездные вращения за регистрацию без депозита и начинайте коллекционировать призовые композиции ради солидных выигрышей!Для ревизии используются сканы паспортов, водительских удостоверений, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если юзер обнаружен в попытке завести вспомогательный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный перечень. При ирге на лицензионной площадке надо бояться указывать достоверную персональную информацию (шифрование исключает утечку индивидуальных данных). <a href=https://www.dr-ay.com/blogs/201936/%D0%9A%D0%B0%D0%BA-%D0%B1%D1%8B%D1%81%D1%82%D1%80%D0%BE-%D0%B8-%D0%B2%D1%8B%D0%B3%D0%BE%D0%B4%D0%BD%D0%BE-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D1%82%D1%8C-%D0%B0%D0%B2%D1%82%D0%BE-%D0%BF%D0%BE%D0%B4-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%B2-%D0%94%D0%BD%D0%B5%D0%BF%D1%80%D0%B5>https://www.dr-ay.com/blogs/201936/%D0%9A%D0%B0%D0%BA-%D0%B1%D1%8B%D1%81%D1%82%D1%80%D0%BE-%D0%B8-%D0%B2%D1%8B%D0%B3%D0%BE%D0%B4%D0%BD%D0%BE-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D1%82%D1%8C-%D0%B0%D0%B2%D1%82%D0%BE-%D0%BF%D0%BE%D0%B4-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%B2-%D0%94%D0%BD%D0%B5%D0%BF%D1%80%D0%B5</a> 1×slots мобильная версия войти казино
<b>Смотреть еще похожие новости:</b>
<a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=872662#pid872662>1 хслот регистрация в 1×slots casino</a>
<a href=https://vredeenvermaak.be/forum/vrede-en-vermaak/>1×slots регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Отыграв бездепозитный приз в казино с выводом также придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если схожее ограничение присутствует, то единоразово исключить получится лишь сумму, не превосходящую объем приобретенного бонуса.
#6682 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
bitz casino пин ап casino pin <a href=https://krtka.info/>порно с Афонина Марина Игоревна</a> официальные букмекерские конторы скачать лучшие бесплатные онлайн казино <a href=https://www.ossetia.tv/>казино</a> Разуваева Ксения Денисовна порно casino зеркало сайта casino актуальное зеркало 1×bet зеркало xbet xyz официальные сайты казино pin up casino пин ап cat casino
#6683 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Лут Оксана Николаевна порно винлайн букмекерская контора <a href=https://vestnik-jurnal.com/>1×bet на андроид бесплатно</a> симулятор казино Черкесова Бэлла Мухарбиевна порно <a href=https://rumafia.news/>porno Анна Сидорова, керлингистка</a> porno Виктория Баркова, легкоатлетка 1×bet 1хбет pin up букмекерская контора почему в казино нет окон пинко casino букмекерские конторы без депозита фреш казино
#6684 Freddiereozyhttps://shuriginadiana.org
видео диана шурыгиной <a href=https://shuriginadiana.org/>диана шурыгина</a>
#6685 Charlesgunnyhttp://filmkachat.ru
1×slots скачать на айфон
Бездепозитные призы казино это финансовая компенсация, предлагаемая пользователям на дармовой основе и возможность выступать в онлайн казино даром. Если сопоставлять их с поощрениями за вклад, в которых средства выдаются лишь потом начального пополнения счета, то бездепозитные гонорары получаются даром. То есть, играющий получает возможность делать ставки на теснее быть финансы, которые выдаст заведение, исполняя, при этом, обычные деянья, чтобы их извлечь (тут речь о регистрация, удостоверении личности с внедрением номера телефонного, дизайна заказы и т.д. ).Для проверки используются сканы паспортов, водительских водительских, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если пользователь замечен в попытке ввести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный перечень. При этой на лицензионной площадке не стоит бояться свидетельствовать достоверную индивидуальную информацию (шифрование исключает утечку персональных данных). <a href=http://filmkachat.ru/>1×слотс казино</a> Бездепозитный приз казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в этом и заключается главное отличие. <a href=https://www.fanfiction.net/u/16457165/>https://www.fanfiction.net/u/16457165/</a> Выбор любого интернет казино на нашем сайте. В описании к любому Вы можете узнать, что получите за творенье аккаунта. 1×slots регистрация на официальном сайте <a href=http://autobrands.lv/user/Kennethjaf/>http://autobrands.lv/user/Kennethjaf/</a> Бесплатный приз – кредиты, которые онлайн-казино начисляет посетителю, не принуждая его пополнять игровой счет.Основное отличие никаких, что для получения бездепа нужно пополнять баланс в казино. Но считая сего, есть ряд и других различий:
1×slots бонус за регистрацию
Обыкновенные бездепозитные призы в размере от 3-х до 20 долларов сделаны для того, чтобы в игры заходили все свежие и новые игроки. Здесь, скорее, будет лимитирование на наибольший выигрыш. Важно, дабы перед минимальным вкладом был отключен бонус за 1-ое пополнение счета, и игры не попадет на повторный вейджер.Похожим образом работает 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя либо в связи с получения им VIP-статуса. Подарок предоставляется последствии воззвания в поддержку и ревизии. 1×slots зеркало этих способов предполагает регистрацию Некоторые клубы механически начисляют бонус на аккаунт игрока после исполнения условий получения, хотя случаются ситуации, когда бонус надо(надобно) активировать игроку самому. Есть количество методов активации приза: <a href=http://www.beretta-modelle.ch/forum/v_profile.php?user[userid>=48936&s=b9021a110de3397b60db5025a06018b6]http://www.beretta-modelle.ch/forum/v_profile.php?user<userid>=48936&s=b9021a110de3397b60db5025a06018b6</a> Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие появляются у новичков. 1×slots официальный сайт мобильная версия скачать Фриспины без депо либо дополнительные свои помогут ближе познакомиться с игровой платформой и её функциями. За счёт презентов возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за игры напротив живых крупье.Постарайтесь отыграть вейджер, дабы появилась возможность оставить заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные приборы. Вы можете получить выигрыш на электронной кошелёк, карту, телефонный.
казино 1× slots официальный сайт
Срок отыгрыша — это период, кот-ый наступает в момент активации приза и заканчивается с его закрытием. Пользователю необходимо уложиться в этот временной зазор, по призовые средства аннулируются. Казино устанавливают перечень игр, ставки в которых засчитываются при расчете отыгранных средств. Если тайтл не заходит в данный список, то возможность быть недоступен для загрузки в действия бонусного предложения. Представленные на этой странице превосходнейшие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные обстоятельства. После кропотливого анализа редакция портала составила рейтинг спецпредложений, каком гости Casino.ru все сортировать список по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д. <a href=http://forum.l2endless.com/member.php?action=profile&uid=5807>http://forum.l2endless.com/member.php?action=profile&uid=5807</a> 1хслот зеркало
1×slots casino регистрация на сайте
Для получения депозитного приза необходимо пополнить собственный игровой баланс настоящими средствами. Вознаграждение можно получить или при внесении первого депозита, или в виде фиксированного процента от внесённых средств. Так либо иначе, приз поступит на счёт только последствии пополнения.При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие можно посвятить забаве в казино. <a href=https://seniordance.ru/forum/showthread.php/75700–1×slot-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82?p=105459#post105459>1×slot официальный сайт</a> 1×slots актуальное зеркало <a href=https://ai-db.science/wiki/User:FFGBettye4>https://ai-db.science/wiki/User:FFGBettye4</a> Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают бонус по государствам. Вплоть до того, собственно клуб имеет принимать игроков из Вашей страны, а бездеп не давать.
1хслотс 1хслотс регистрация перейти на 1×slots
В онлайне очень много скриптовых сайтов, которые принадлежат жуликам. Их основная задача – заинтересовать гэмблеров, пообещав не только великодушные презенты, но и крупные выигрыши. Так собственно кое-какие сайты предлагают получить за регистрацию в $1 000.Рассмотрим принцип его деянья на примере. Допустим, вы зарегистрировались и возымели $10 not the slightest down payment bonus с вейджером х50. Это значит, собственно выигранные средства возможно будет выводить не раньше, чем последствии такого, как общая сумма ставок достигнет $500. <a href=http://wikimapia.org/forum/memberlist.php?mode=viewprofile&u=1316034>http://wikimapia.org/forum/memberlist.php?mode=viewprofile&u=1316034</a> 1×slots зеркало на сегодня Все безвозмездные бонусы кажутся соблазнительными. Кто же категорически от возможности поиграть в онлайн-казино, не рискуя средствами, но получая выигрыши. Но далековато не все бездепозитные призы в привлекательны для рассудительного посетителя.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=309798#pid309798>1×slots быструю регистрацию а также мгновенное</a>
<a href=http://check2go.net/author/jameslob/>1хслотс зеркало на сегодня</a>
<a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1×slots зеркало сайта</a>
<a href=http://griffhunter.com/boards/viewtopic.php?p=481115#p481115>1×слотс казино</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Так собственно основное различие презента на депозит от бездепа – неотъемлемое пополнение счёта. Вы сможете внести депозит и преувеличить стартовый капитал либо арестовать бездеп и при не придётся рисковать собственными сбережениями. Поспешите выполнить простые притязания, и администрация ресурса начислит щедрое поощрение! Чтобы бездеп не был начислен на Ваш акк, Вам не активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт автоматически, а Вы не планируете его применять, обратитесь в саппорта с пожеланием отменить бездепозитный бонус.
#6686 JerryTothttps://t.me/DianaBrilliantBot
Официальная страница Дианы Шурыгиной <a href=https://www.instagram.com/diana_shlianina.s/>https://www.instagram.com/diana_shlianina.s/</a> свежие новости, уникальные фото и видео, личные откровения и новые проекты. Погружайтесь в мир Дианы, узнавайте её историю и вдохновение. Будьте в центре её жизни и не пропустите ни одного яркого момента!
#6687 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
win win casino porno Мира Андреева (теннис) <a href=https://glvk.guru/>pinco casino</a> casino betting 1×bet бесплатно <a href=https://rucriminal.info/>казино</a> вывод казино porno Нина Пирогова, хоккеистка porno Александра Степанова, фигуристка порно с Зырянова Анастасия Владимировна ramenbet casino win win casino 1×bet зеркало рабочее на сегодня 1×bet xyz
#6688 Charlesgunnyhttp://filmkachat.ru
1×slots casino зеркало
Игры, каких можно играть на бонусные деньги. Проверьте перечень игр, в возможно играть на бонусные средства, возможно они Вам не понравятся и не стоит тратить своё время на такую акцию.Используйте лучшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из списка ниже, дабы заработать подарки за обычные действия и уже сейчас получить первый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высочайшей отдачей и прыткими выводами на электрические кошельки. <a href=http://filmkachat.ru/>зеркала 1×slots</a> Если при регистрации указать промокод, возможно гарантировано получить приз. Где брать ваучер? Посетите тематику блоги либо форумы. Иногда администрация клуба проделывает рассылку ваучеров на электронную почту. В последнее время игорные дома начали рекламироваться в кинокартинах и телесериалах. Присмотритесь и скорее заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных руб. <a href=https://forums.ngames.com/forum/league-of-angels/community-ab/general-discussion-ab/62083-%D1%8F%D0%BA-%D0%BF%D1%80%D0%B0%D1%86%D1%8E%D1%94-%D0%BF%D1%80%D0%BE%D1%84%D0%B5%D1%81%D1%96%D0%B9%D0%BD%D0%B8%D0%B9-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2%D0%B8%D0%BA%D1%83%D0%BF-%D0%BA%D0%B8%D1%97%D0%B2>https://forums.ngames.com/forum/league-of-angels/community-ab/general-discussion-ab/62083-%D1%8F%D0%BA-%D0%BF%D1%80%D0%B0%D1%86%D1%8E%D1%94-%D0%BF%D1%80%D0%BE%D1%84%D0%B5%D1%81%D1%96%D0%B9%D0%BD%D0%B8%D0%B9-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2%D0%B8%D0%BA%D1%83%D0%BF-%D0%BA%D0%B8%D1%97%D0%B2</a> В любом казино с бездепозитным бонусом учтены вейджеровые условия. Это один-единственный «подводный камень», который стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) сделать определённое количество ставок. Чем круче бонус, что, этим труднее выполнить условия, и наоборот.Бонус без депо за регистрацию в казино (бездепозитный бонус) – это валютный презент от клуба, который начисляется на аккаунт игрока последствии регистрации в казино. Кроме творения учетной записи, для получения бездепа, очень часто потребуется ещё и подтвердить контактные данные игрока и/или активировать особый промо-код. 1×slots регистрация 1×slotscasino09k online <a href=https://www.stroimvmeste.com.ua/user/Darenboolo/>https://www.stroimvmeste.com.ua/user/Darenboolo/</a>
1×slots регистрация 1×slots casino c2d ru
Вейджер не более х30–35 является применимым. Опытные игроки утверждают, что с таким вейджером реально остаться в плюсе, в верно подойти к выбору игрового аппарата.Бесплатные бонусы казино без депозита можно получить в виде валютных средств на бонусный счет (исключить их возможно только последствии отыгрыша), фриспинов, забавы либо кешбэк-бонуса. 1×slots актуальное зеркало Нет. Казино раздают безвозмездные призы за регистрацию, чтобы, чтобы, чтобы заказчик возможность ознакомиться с игровым заведением. А чтобы вывести его, нужно выполнить условия отыгрыша.Как только вы отыграли вейджер и свои с бонусного баланса перебежали вам на настоящий счет, Вы храбро можете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать минимальный депо к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депо). <a href=http://ternovka4school.org.ua/user/Geraldtus/>http://ternovka4school.org.ua/user/Geraldtus/</a> Нет. Казино выдают бесплатные бонусы за регистрацию, чтобы, чтобы, чтобы клиент имел ознакомиться с игровым заведением. А дабы вывести его, необходимо выполнить обстоятельства отыгрыша. 1 x slots Простая процедура получения бездепозитного бонуса, кот-ая займет не более 2-х минут. Для получения бездепов, достаточно зарегистрироваться и доказать контактные данные.
1х слот 1хслотс регистрация перейти на 1×slots
Демоказино есть практически на любом веб-сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются веско реже: там если, тогда, выигрыша и соблюдения условий акций бездеп можно превратить в настоящие деньги. <a href=https://www.softairmania.it/members/57313-Davidbup>https://www.softairmania.it/members/57313-Davidbup</a> Изучить верховодила и условия получения бездепозитных бонусов казино, Вы сможете у нас на веб-сайте в разделе с бонусами или на официальном веб-сайте выбранного Вами казино. Если не отыскать необходимую информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал либо по электронной почте. 1×slots казино зеркало В некоторых онлайн казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на веб-сайте клуба и доказать средства контактные данные. Дополнительно потребуется активация промокода.На бонусные начисления все быть установлены дополнительные ограничения, которые Вы не учли при отыгрыше. Пока бонус всецело не отыгран — деньги из казино не выводятся.
1×slots официальный сайт скачать
Представленные на этой странице наихорошие бездеп бонусы в казино за регистрацию в 2022 году имеют оптимальные обстоятельства. После тщательного анализа редакция портала составила рейтинг спецпредложений, в гости Casino.ru имеют сортировать список по нескольким критериям: по сумме, вейджеру, наибольшей сумме вывода и т.д.Бoльшинcтвo азартных заведений выдвигают приблизительно одинаковые обстоятельства и притязания, которые необходимо выполнить, чтобы получить бездепозитный приз за регистрацию. Все их возможно объединить в один перечень: <a href=http://diablo2r.cn/home.php?mod=space&uid=30130>1хлот регистрация в 1×slots casino</a> Так что сможете храбро региться без всяких раздумий. Фортуна сегодня точно на вашей стороне. Не бойтесь, ведь следствие какого либо ущерба Вам совершенно не грозит. С такими бонусами как без пополнения, Вы остаетесь только в плюсе, но не как не в минусе. 1×slots зеркало выигрыши обязательно пройдите регистрацию если <a href=http://lebbook.kz/user/DoctorLazutaKr/>http://lebbook.kz/user/DoctorLazutaKr/</a> В лицензионных бездепозитных казино играть в азартные забавы действительно безопасно. Наличие лицензии подтверждает что, этот прецедент, что клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP.
1×slots официальный сайт зеркало
Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, solid зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. <a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=3629>http://www.predictive-datascience.com/forum/member.php?action=profile&uid=3629</a> Существует ли стратегии для отыгрыша бездепозитных бонусов? К раскаянию нет, на выигрыши либо проигрыши с призов, казино либо игрок повлиять возможности, отдача игр случается от создателей игр.Можно ли в одном интернет казино получить больше одного приза за регистрацию? Нет, так как в каждом интернет казино есть верховодила, к которым надо(надобно) держаться, не делать два аккаута для получения бонусов, по будет блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, бонус за регистрацию выдаеться раз один одному лицу. 1хслот скачать Каждый геймер должен сначала детально выучить обстоятельства по получению и отыгрышу приглянувшегося подарка. Если всё организует, поспешите забрать бесплатные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо данный начать вращать барабаны топовых слотов.
<b>Смотреть еще похожие новости:</b>
<a href=https://test.soclanovtsy.ru/topic/40731–1×slots-casino-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%BD%D0%B0-%D1%81%D0%B0%D0%B9%D1%82%D0%B5/>1×slots casino регистрация на сайте</a>
<a href=https://clubdefansde24.com/foro/viewtopic.php?t=19057>1× slots регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Варианты выигрыша в от Вашей удачи и критерий игорного портала. Выше мы заявили, собственно некоторые бездепозитные призы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются и, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на деньги, возможно выиграть невозможные суммы. Сегодняшние игровые автоматы или видео слоты, как их называют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые множат ставку от х100.000. Основное правило получения бездепа ? создаваемый аккаунт обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов взыскательно запрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депозита нужно блюсти простую последовательность действий.
#6689 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Юдаева Ксения Валентиновна порно porno Мария Шарапова <a href=https://slon-ru.com/>casino андроид</a> букмекерскую контору пин ramenbet casino <a href=https://www.ossetia.tv/>pin casino</a> зеркала официальных сайтов казино букмекерская контора официальный сайт скачать приложения букмекерских контор порно с Максим Глушенков (футбол) 1×bet xbet сайт казино вход винлайн букмекерская контора
#6690 RalphCew
is canadian pharmacy legit <a href=" https://app.guiigo.com/home.php?… „>canadian pharmacy</a> or <a href=“ https://toolbarqueries.google.com.pa/url?… ">canada cloud pharmacy</a> https://cse.google.gg/url?… buy drugs from canada <a href=http://clients1.google.co.th/url?q=https://canadianpharmacy.win>canadian pharmacy scam</a> canadian pharmacies that deliver to the us and <a href=http://www.1moli.top/home.php?mod=space&uid=875198>best canadian online pharmacy</a> canada drug pharmacy
#6691 Daniellubhttps://figurnoe-katanie-piter.ru
тренировки по фигурному катанию для детей <a href=https://figurnoe-katanie-piter.ru/>стоимость занятий в клубе по фигурному катанию</a>
#6692 Pierrenerhttps://studiobanda.net
Смотрите аниме онлайн <a href=https://studiobanda.net/>https://studiobanda.net</a> бесплатно и без рекламы. Удобный каталог с популярными тайтлами, новинками и свежими сериями. Высокое качество видео и быстрый плеер обеспечат комфортный просмотр. Подборки по жанрам, рекомендации и регулярные обновления сделают ваш опыт максимально приятным.
#6693 BrianFaw
http://mexicanpharmacy.store/ buying prescription drugs in mexico
#6694 Charlesgunnyhttp://filmkachat.ru
1 x slots casino
А ознакомиться с новыми интернет казино, Вы сможете помощью бонусов с выводом выгоды, коие Вы можете получить без депо.Вышеописанная причина и является главным нюансом, из-за которого операторы отдают часть своей выгоды на разные рекламные затраты и маркетинговые кампании. А наиболее действенным здесь станут играть непосредственно бездепозитные бонусы казино 2022 с выводом за регистрацию. <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> Но есть игорные заведения, коие готовы просто так жертвовать средства на забаву. Для сего достаточно сделать профиль. Чтобы вывести свой выигрыш, вам сначала нужно выполнить условия отыгрыша, указанные в условиях получения бездепозитного депо.Бездепозитный бонус казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби избранного заведения, сориентироваться в выборе игр и проверить качество работы саппорта. Довольно нередко, начиная игровой процесс, игрок теснее не желает останавливаться и проделывает реальный вклад. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть бесплатно вероятно как один таки с бонусом за регистрацию без необходимости заносить депозит. <a href=https://forums.ngames.com/forum/league-of-angels/community-ab/general-discussion-ab/62089-revolutionizing-e-commerce-the-power-of-3d-rendered-product-images>https://forums.ngames.com/forum/league-of-angels/community-ab/general-discussion-ab/62089-revolutionizing-e-commerce-the-power-of-3d-rendered-product-images</a> 1хлот регистрация в 1×slots casino <a href=https://uniquethis.com/profile/Glavdorogadv2509/>https://uniquethis.com/profile/Glavdorogadv2509/</a> Вознаграждения за получение VIP-статуса ? начисляются в программки преданности при достижении одного значения либо выдаются индивидуально менеджерами службы.
1×slots регистрацию процедура займет всего лишь
Бездепозитные призы, как теснее понятно, являются оригинальной вероятностью обратиться игровому процессу полностью бескорыстно, другими играть в интернет казино бесплатно и на быть средства незамедлительно после регистрации аккаунта. Автоматы с таким депо имеют стать великолепной возможностью поиграть для почитателей пыла с определенными лимитированиями в денег. 1×slot зеркало Все обожают получать презенты. Согласитесь, практически каждый играющий человек будет беспредельно рад, если получит бесплатный презент для забавы в интернет казино просто за регистрацию либо же бонус за внесенный депозит, так называемые приветственные бонусы для новых игроков. Соответственно эти интернет клубы станут больше известны и преимущественны у игроков при выборе казино для забавы. Топ казино день обновляется и прибавляются новые и занимательные игровые клубы с привлекательной бонусной политикой и всеми вероятными преимуществами, льготами, к коим относятся эти бонусы как фриспины за регистрацию, денежные бездепозитные призы, еще великодушные бонусы за внесенный депо. <a href=http://www.shadowville.com/board/general-discussions/topic-226117#p608199>http://www.shadowville.com/board/general-discussions/topic-226117#p608199</a> Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала резвые выводы. Фишка выплат в том, собственно достаточно выбрать платёжный инструмент и показать сумму. В большинстве случаев деньги зачисляются на электронные кошельки протяжении 15 мин., а на банковские карты – 1–3 трудящихся денька. казино 1×slots официальный сайт Многие игроки, оценив перечень казино, остаются выступать в нем и дальше ? на это и нацелено каждое рекламную. Постоянные посетители вносят депозиты и проделывают ставки, обеспечивая долгосрочную выгода оператора. То есть, казино раздают бездепы свежим пользователям для формирования приклнной аудитории.
1хслотс регистрация в 1×slots casino
За счёт спинов выйдет запустить разные онлайн слоты, протестировать стратегии и поднабраться опыта. Фишка в, собственно вращения начисляются на топовые аппараты с уникальными опциями и высочайшей отдачей. Не запамятовывайте, что в каждом акционном предложении предусмотрены специальные притязания – временные лимитирования, максимальный размер ставки, перечень доступных игр.Фриспины без депозита либо дополнительные свои посодействуют ближе познакомиться с игровой платформой и её функциями. За счёт презентов возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за забавы напротив живых крупье. Но такие рамки не смущают том хайроллеров, потому коэффициенты на слотах позволяют рассчитывать на крупные выигрыши, в неких автоматах разыгрывается передовой джекпот. <a href=https://blendedlearning.bharatskills.gov.in/mod/forum/discuss.php?d=7114>https://blendedlearning.bharatskills.gov.in/mod/forum/discuss.php?d=7114</a> 1хслот скачать Можно ли зарабатывать на бездепозитных бонусах? Это не работа, здесь как повезет, случае в любом предложенном безедепе, вы будете откручивать вейджер и выводить, за возможно именовать везением, и дополнительной добавкой к вашему бюджету.Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских руб. В критериях акции предписано, что вейджер бездепозитного приза х20. Поэтому, дабы отыграть приз, игроку будет необходимо устроить ставок на 35*20=700 руб.
1×slots зеркало регистрация
Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить необыкновенности, труднодоступные при игре в демо режиме. Многие новые клиенты переходят в число неизменных, а оператор получает долгосрочную выгода. Если вы новичок деле и лишь попали в неизведанную вами область пыла — с помощью услуг как бездепозитные призы без пополнения. 1×slots регистрация 1×slotscasino 56 online <a href=https://tophatsec.com/forum/member.php?action=profile&uid=5331>https://tophatsec.com/forum/member.php?action=profile&uid=5331</a> Ниже указан актуальный список законных казино в Беларуси с бонусами на первый депозит. Вы можете попасть на официальный вебсайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус.
зеркала 1×slots
У любой забавы средства притязания по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система засчитает любую ставку. В рулетке и покере устроить это намного сложнее. Именно поэтому так принципиально пристально разбирать условия получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в любой игре, то новенькие просто «спустят бонус на ветер».Далее требуется отыграть вагер и вывести выигрыш. Игрокам без навыка крупно повезло, возможность получить 10-ки презентов за 1 регистрацию. Если не сумели получить Бездепозитный приз, не тревожьтесь. Обратитесь в интернет чат, оператор поможет исправить. При исполненьи критерий отыгрыша и верификации, средства с бонусного счета переводятся на главный и все быть выведены на карту либо электрический кошелек. Лимиты на вывод и сроки проведения транзакции зависимости от выбранной платежной системы. <a href=https://imoodle.win/wiki/User:CliffordRemer>https://imoodle.win/wiki/User:CliffordRemer</a> Однако в условиях исчезают «подводные камешки», которые не позволят исключить крупную сумму либо же вы не успеете отыграть вейджер. Поэтому профессионалы советуют арестовать благотворительные вращения за регистрацию в казино без депо, дабы поднабраться опыта и получить реальный шанс на победу.При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие можно посвятить ирге в казино. 1×slot зеркало рабочее этих способов предполагает регистрацию Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы замечена возможность вывести выигрыш.
<b>Смотреть еще похожие новости:</b>
<a href=http://polishcrazyclan.ugu.pl/member.php?action=profile&uid=272738>1хслотс рабочее зеркало на сегодня</a>
<a href=https://www.donchillin.com/space-uid-382497.html>1хслотс официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Самые знаменитые методы вывода денег ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электрическим платежным системам типа Neteller и Skrill, а также пользуются криптовалютными кошельками. Вывод выигрышей может исполняться моментально либо занимать от нескольких часов до нескольких суток. Лишь популярностью и известные азартные заведения имеют позволить себе раздавать бездепы в виде добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депо, коие можно израсходовать в лучших аппаратах с высочайшей отдачей.
#6695 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино онлайн бесплатно букмекерские конторы без депозита <a href=https://7club7.com/>Комарова Наталья Владимировна порно</a> пина casino балтбет букмекерская контора <a href=https://kompromat1.online/>casino зеркало сайта</a> сайт букмекерской конторы почему в казино нет часов слоты казино kent casino 1×bet сайт 1×bet xyz казино пин 1×bet на сегодня
#6696 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Игорь Акинфеев (футбол) рокс казино <a href=https://m.repost.news/>porno Светлана Ходченкова</a> казино ли букмекерская контора <a href=https://m.repost.news/>официальные сайты казино</a> бесплатно фильм казино porno Нина Пирогова, хоккеистка сайты казино pin ап casino pin ап casino самое казино порно с Дарья Клишина, легкоатлетка
#6697 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino онлайн Анна Михалкова <a href=https://www.ossetia.tv/>Нургалиева Эльвира Рамиловна порно</a> 1×bet слоты 1×bet top 1×bet xbet <a href=https://specreporter.com/>pin ап casino</a> Разуваева Ксения Денисовна порно казино фильм смотреть онлайн 1×bet рабочее сайт 1×bet слоты 1×bet на андроид бесплатно пин ап casino Александра Бортич
#6698 Charlesgunnyhttp://filmkachat.ru
1× slots сайт
Но рядах азартных платформах подобные вознаграждения все получить и уже зарегистрированные юзеры. В таком случае, призы предоставляются в уникальных промоакций либо же неким игрокам повторяющий акционного предложения, коие приходит на почту с целью «вернуть» игрока в свое казино. <a href=http://filmkachat.ru/>скачать 1×slots на андроид мобильная версия</a> Нет. Для получения бездепозитного приза в казино необходима обязательная регистрация на веб-сайте. Играть в слоты даром и без регистрации можно лишь в демо режиме.Размер ставки для забавы по бездепозитному призу (окончательно же, если, тогда,, когда он представлен повторяющий бонусных денежных средств) часто ниже, чем при забаве на депо. Ограничение будет действовать до этапа отыгрыша приза. <a href=https://www.fanfiction.net/u/16457165/>https://www.fanfiction.net/u/16457165/</a> Начнём с того, что каждое промо за регистрацию подразумевает некоторые обстоятельства. Бездепозитные бонусы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, нужная для исполнения критерий. Пример, возымели благотворительные вращения и выиграли с них 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 рублей, проигрышных или выигрышных, так. После исполненья, бонусный баланс перейдёт на настоящий и станет легкодоступным к выводу.Чаще всего казино бонус за регистрацию без депозита даёт вероятность запустить каждой автомат. Но чем внимательно ознакомиться с условиями. Иногда для забавы доступны только определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, лучше начать знакомство с миром пыла непосредственно с «одноруких бандитов». 1×slots рабочее зеркало <a href=http://osvita.ch.ua/index.php?subaction=userinfo&user=amuckbandanna43>http://osvita.ch.ua/index.php?subaction=userinfo&user=amuckbandanna43</a> Фриспины — благотворительные вращения, коие дозволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся наиболее модным и предпочтительным видом приза — благотворительные вращения порой эффективнее и веселее в отыгрыше, чем другие виды бездепов.Если вы новичок деле и только попали в неизведанную вами район пыла — счет предложений как бездепозитные призы без пополнения.
казино 1×slots официальный сайт
<a href=https://10nsk.ru/user/JosephSuple/>1хслот 1хслотс регистрация перейти на 1×slots</a> 1×slots регистрация 1×slotscasino09k online <a href=http://uprotec.co.kr/yc/bbs/board.php?bo_table=free&wr_id=86922>http://uprotec.co.kr/yc/bbs/board.php?bo_table=free&wr_id=86922</a> 1×slots промокод при регистрации Существуют казино с призом за регистрацию, в очень востребованы фриспины в интернет казино впоследствии регистрации в определенных забавах. Они встречаются даже чаще даровых поощрений или классических призов в казино без вложений. Например, игрок регистрирует счет, на который начисляются безвозмездные игры, бонус за регистрацию повторяющий бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса компьютерные выигрывает истинные средства, которые в последствии можно успешно вывести из заведения на собственную платежную систему. То есть, все шансы вывести свои без рисков собственными финансами. Регистрация, какую игрок получит бонусы, займет пару минут, а благодаря данному можно увеличить 5 евро поощрений до тыс. И без всяких заморочек исключить их.
1×slots зеркало видели такую регистрацию на
Чаще всего казино бонус за регистрацию без депозита даёт вероятность запустить любой машина. Но другого внимательно ознакомиться с критериями. Иногда для забавы доступны лишь определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, другого, как начать знакомство с миром азарта непосредственно с «одноруких бандитов».Бездепозитные призы начисляются лишь раз один. Не стоит раскрывать новые аккаунты, чтобы получить их повторно. Служба защищенности казино непременно выявит «левого» участника и заблокирует. Если посетитель выполнит необходимые требования, отыграет свою ставку и решит исключить личный выигрыш, то ему надо(надобно) принять, что казино непременно потребует предоставить ксерокопии личных документов, дабы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные средства исключить не получится. Так что приготовьтесь предоставить секретную информацию (пол, возраст, государство проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает менее суток, последствии чего удастся беспрепятственно выводить солидные выигрыши.Лишь известные и знаменитые азартные заведения имеют позволить себе выдавать бездепы в виде добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депо, которые возможно истратить в лучших аппаратах с высокой отдачей. <a href=https://wood.co.ua/wr_board/tools.php?event=profile&pname=Zacheryfug>https://wood.co.ua/wr_board/tools.php?event=profile&pname=Zacheryfug</a> Третитй бездепозитный приз за регистрацию – валютные свои. К раскаянию, начислить рубли или доллары способны лишь известные и пользующиеся клубы. С их подмогою вас насладиться любой доступной игрой – автоматом, рулеткой, кено, блэкджеком.Диапазон ставок, коие вправе сделать игрок, также лимитирован. Обычно ставить возможно небольшую сумму — пределах 10–30 рублей за одно вращение. 1 x slots casino Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном веб-сайте и выполните вход в собственный офис, дабы забрать бесплатные вращения с вейджером х40;Не хотите сыграть в азартные игры, не рискуя своими средствами, но получая в все выплаты? Подобную возможность деют многие наихорошие порталы с азартными веселиями. В их числе количество добросовестных и надежных интернет-казино на российском языке. Они привлекают новых пользователей разными поощрительными событиями, включая бездепозитные, либо безвозмездные бонусы.
1×slots casino регистрация 1×slots review live
Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, например как Вам понадобиться ее подтвердить в при выводе денег.В интернете много знаменитых игорных площадок с привлекательными акционными предложениями. Однако внимательно разбирать условия десятков предложений времени надоест, ну и время отнимет количество. Поэтому наша команда подготовила ТОП-3 сайтов с наилучшими бездепозитными призами: <a href=https://adminclub.org/showthread.php?tid=59771>1 x slots casino</a> Мы советуем не отрицаться от подобных предложений узнаваемых казино. Выделите некоторое минут на регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сегодня фортуна несомненно на вашей стороне!При этой на бонусные свои запрещается играть в игровые автоматы с прогрессивным джекпотом и игры из радела live casino. Кроме того, некоторые казино дают бездеп на раз или количество определенных слотов, и в других забавах Вы не сможете на их выступать. Для ревизии используются сканы паспортов, водительских удостоверений, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если юзер обнаружен в попытке завести вспомогательный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный перечень. При ирге на лицензионной площадке надо бояться указывать достоверную персональную информацию (шифрование исключает утечку индивидуальных данных). 1×slot регистрация <a href=http://serverknowledgebase.co.uk/index.php?title=%D0%B1%D0%BB%D0%BE%D0%B3%D0%B8%20%D0%BE%20%D0%B6%D0%B5%D0%BD%D1%81%D0%BA%D0%BE%D0%BC%20%D0%B7%D0%B4%D0%BE%D1%80%D0%BE%D0%B2%D1%8C%D0%B5>http://serverknowledgebase.co.uk/index.php?title=%D0%B1%D0%BB%D0%BE%D0%B3%D0%B8%20%D0%BE%20%D0%B6%D0%B5%D0%BD%D1%81%D0%BA%D0%BE%D0%BC%20%D0%B7%D0%B4%D0%BE%D1%80%D0%BE%D0%B2%D1%8C%D0%B5</a> Каждый новичок и профессиональный игрок грезят быстро стартануть и начать делать реальные ставки. Для сего достаточно арестовать презент, за кот-ый не уплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email либо аппарат. После сего администрация начисляет щедрое вознаграждение в виде даровых вращений или виртуальных кредитов.
1×slots зеркало на сегодня
Все благотворительные призы кажутся заманчивыми. Кто же категорически от возможности поиграть в онлайн-казино, не рискуя средствами, хотя получая выигрыши. Но далеко не все бездепозитные бонусы мере привлекательны для рассудительного посетителя.Внесение депозита – Будьте готовы пополнить счет последствии отыгрыша бонуса. Это обычное заявка верховодил для данного типа промо-акций. Лучше заранее уточнить, какую необходимую нужно несомненно заносить на счет. Как правило, речь идет о минимальном депозите, но вы обязаны быть убеждены, собственно он для по кармашку. <a href=http://elymbmx.com/mybb/member.php?action=profile&uid=9648>http://elymbmx.com/mybb/member.php?action=profile&uid=9648</a> Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации бонуса без депо. Внимательно прочитайте до конца. Многие новенькие делают оплошности на шаге регистрации и потому возможности получить подарок. 1×slots акции
<b>Смотреть еще похожие новости:</b>
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=3&t=286518&p=301279#p301279>1 x slots casino</a>
<a href=https://radios-collector.com/viewtopic.php?f=7&t=97368>1× slots casino официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В игровых клубах без лицензии Вы покупаете „кота в мешке“ и если, тогда, неоднозначных обстановок нет возможности куда-то пожаловаться и доказать собственную правоту.
#6699 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
7k casino сайт порно с Артемий Панарин (хоккей) <a href=https://sovsekretno.net/>1×bet бесплатно</a> казино играть официальные букмекерские конторы <a href=https://res-publika.com>букмекерская контора скачать приложение</a> казино рояль смотреть бесплатно играем казино Приезжева Екатерина Геннадьевна порно 1×bet зеркало на сегодня порно с Диана Шнайдер (теннис) букмекерская контора скачать приложение бк букмекерская контора
#6700 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать
Приветственный бездеп предоставляется какому игроку лишь раз раз. Казино дерутся с так нарекаемыми бонусхантерами (от англ. Bonus Hunter — охотник за призами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения дара. Исключить похожие деяния дозволяет верификация данных. Администрация вправе потребовать у клиента подтвердить персональные данные, указанные при регистрации.Бездепозитный приз предоставляется новому игроку за определенные деянья. Часто презент в виде средств либо фриспинов выдается за регистрацию, спасибо чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. <a href=http://filmkachat.ru/>1× slots casino зеркало</a> Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают бонус по странам. Вплоть до того, собственно клуб возможность себя игроков из Вашей государства, а бездеп мешает. <a href=https://vhearts.net/forums/thread/8949/>https://vhearts.net/forums/thread/8949/</a> Прежде всего, не забывайте периодически заглядывать на страницу обзоров бездепозитных бонусов. Они шаг за шагом осматривают наиболее увлекательные предложения ведущих игорных порталов. 1хслотс рабочее зеркало <a href=https://simracing.su/user/StevenEquab/>https://simracing.su/user/StevenEquab/</a> Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и более. Когда игроку полагается большое фриспинов, администрация может бить3 их начисление на несколько дней. Бесплатные вращения предоставляются для конкретного слота, который указывается в правилах промоакции.
1×slots официальный зеркало рабочее
1×slots регистрация 1×slotscasino09k online Каждый игры обязан сперва детально изучить обстоятельства по получению и отыгрышу понравившегося дара. Если всё организует, поторопитесь забрать бесплатные спины за регистрацию в казино без депо с выводом и без отыгрыша и прямо данный начать вращать барабаны топовых слотов.Составленный специалистами Casino.ru список онлайн-казино с бездепозитным бонусом разрешает игрокам сравнить спецпредложения различных операторов. <a href=http://www.zgbbs.org/space-uid-153141.html>http://www.zgbbs.org/space-uid-153141.html</a> В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, нужно адресоваться в службу спустя лайв-чат на сайте казино.Бонус с зачислением денег на счет выделяет больше свободы деяний. Пользователь сам избирает, каким образом воспользоваться подаренными средствами. Здесь того все действовать ограничения на список дешевых игр, хотя обычно эти рамки не например строги, как в рекламную с безвозмездными вращениями. 1×slots casino регистрация 1×slots review live
1хслотс 1хслотс регистрация перейти на 1×slots
Используйте наихорошие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, чтобы заработать презенты за обычные действия и уже сегодня получить 1-ый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высокой отдачей и прыткими выводами на электрические кошельки. <a href=http://www.dongdotech.co.kr/bbs/board.php?bo_table=free&wr_id=170000>http://www.dongdotech.co.kr/bbs/board.php?bo_table=free&wr_id=170000</a> 1×slots регистрация 1×slotscasino 56 online При выполнении критерий отыгрыша и верификации, деньги с бонусного счета переводятся на главный и могут быть выведены на карту либо электронный кошелек. Лимиты на вывод и сроки проведения транзакции зависят от выбранной платежной системы.
1×slots зеркало проходить регистрацию это отличный вариант
Зарегистрироваться в казино по специальной ссылке либо с бонусным кодом. Подтвердить контактные данные (номер аппарата и электрическую почту). Для доказательства номера телефонного нужно в личном профиле показать свой номер и надавить кнопку „Подтвердить номер телефонного“, дальше Вы получите sms-сообщение с кодом, который нужно установить в отвечающее фон. Для подтверждения электронной почты, перебежать по интенсивной ссылке в послании от казино. Обычно, бездепозитные призы выдаются под конкретные слоты с фиксированной ставкой, хотя их точно запрещено применять в игровых автоматах с прогрессивным джекпотом. Список игр, в возможно применять бездеп, Вы найдете в описании промоакции либо сможете уточнить у службы заведения.Еще одно условие касается объемов ставки. Операторы устанавливают наивысшую сумму, которую игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, избранной в Личном кабинете. При превышении лимита есть риск лишиться бонуса. Существующие лимитирования относятся и к определенным видам ставок. Например, играя в рулетку, клиент может столкнуться с запретом назначать фишки на шансы. 1× слот зеркало <a href=https://coffeepeople.ru/memberlist.php?mode=viewprofile&u=31488>https://coffeepeople.ru/memberlist.php?mode=viewprofile&u=31488</a> Вывод выигрыша с бездепозитных призов казино – великодушный презент от азартных клубов. Но дабы вывести свой заработок, необходимо выполнить ряд условий:
1×slots рабочее зеркало
<a href=http://xn–80aeh5aeeb3a7a4f.xn–p1ai/forum/user/51148/>http://xn–80aeh5aeeb3a7a4f.xn–p1ai/forum/user/51148/</a> 1×slots регистрацию процедура займет всего лишь Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном сайте и выполните вход в собственный офис, чтобы отобрать благотворительные вращения с вейджером х40;
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Верификация аккаунта. Лучше подтвердить личность сразу последствии регистрации, чтобы позже не было проблем с выводом денег. Верификация имеет протекать двумя путями:
#6701 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet рабочее бесплатно играем казино <a href=https://vestnik-jurnal.com/>online casino</a> казино сочи 1×bet xbet <a href=https://glvk.guru/>Комарова Наталья Владимировна порно</a> порно с Голикова Татьяна Алексеевна казино рояль online casino 7k casino рабочее зеркало порно с Анна Калинская (теннис) 1×bet скачать приложение на андроид казино в россии
#6702 Charlesgunnyhttp://filmkachat.ru
1х слот 1хслотс регистрация перейти на 1×slots
Баланс игрока дополняется на подобающую необходимую. К ней используется вейджер, указанный в правилах промоакции. Вывести выигрыш возможно будет после как, как пользователь устроит требуемый размер ставок из собственных средств. В редких случаях бездеп трудится в формате Free Play. На счет юзера зачисляется большая сумма, и предоставляется небольшой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по окончании этого периода сумма на счету несомненно превосходить изначальную, то разницу возможно несомненно исключить или применять для последующих ставок.Зарегистрироваться в казино по специальной ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефонного и электронную почту). Для доказательства номера телефонного необходимо в личном профиле показать собственный номер и надавить кнопку „Подтвердить номер телефона“, далее Вы получите sms-сообщение с кодом, который необходимо ввести в отвечающее поле. Для доказательства электронной почты, перебежать по активной ссылке в письме от казино. <a href=http://filmkachat.ru/>1×slots зеркало регистрация в 1×slots casino</a> <a href=https://heyjinni.com/read-blog/177753>https://heyjinni.com/read-blog/177753</a> 1×slots регистрацию процедура займет всего лишь <a href=http://muhaylovakoliba.1gb.ua/user/PorsedropPl/>http://muhaylovakoliba.1gb.ua/user/PorsedropPl/</a> Создание аккаунта. На веб-сайте казино необходимо обнаружить регистрационную форму и наполнить пустые поля личными данными. Иногда на данном шаге потребуется показать только адрес электронной почты и пароль, но почаще бы наполнить анкету индивидуальной информацией (ФИО, дата рождения, место проживания и т.д. ). Нужно указывать только настоящие данные, что впоследствие они станут проверены.Многие новички колеблются, собственно поощрительный приз не нужно будет отдавать, числе если они выиграли у казино. Это абсолютно неопасно и надежно. Выводя выигранные свои, игрок просто одергивает свое участие деле и утрачивает уникальную возможность – бесплатно увеличивать собственное вещественное положение.
1×slots регистрация 1×slots casino 777 online
Также, в этом случае необходимо подтвердить свой номер телефонного, желаемого код, приобретенный в смс-сообщении от клуба установить в специальное поле в собственном кабинете игрока.Чтобы получить вероятность исключить выгода с бездепозитного приза в казино, нужно выполнить ряд условий: <a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=131270>1×slots сайт</a> казино 1×slots <a href=https://itkvariat.com/user/RenaldoQuica/>https://itkvariat.com/user/RenaldoQuica/</a> 1хслот 1хслотс регистрация перейти на 1×slots Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша бонусов. Заведения практически устанавливают наивысшую ставку, возможную по условиям вейждера.
1×slots регистрация то дальше необходимо пройти
Некоторые сайты, до чем провести регистрацию игроков, предлагают ответить на некоторое базовых вопросов. Цель проведения подобной викторины – выявить случайных людей, коие не имеют представления о покере, и не допустить получения ими призов. Если гость уже играл в казино, то ответить на полтора десятка несложных вопросов будет нетрудно. Очень часто, ответы можно отыскать на официальных сайтах этих учреждений. Возьми свой подарок. Чаще всего бонус активируется незамедлительно в регистрации. Но посещают ситуации, когда надо(надобно) зайти в личный кабинет или написать в справочную службу. <a href=https://www.harnessracingforum.com/member.php?113682-Travisjer>https://www.harnessracingforum.com/member.php?113682-Travisjer</a> Вейджер в переводе с английского значит «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша полученного бонуса, в нашем случае бездепозитного. Число ставок значения — принципиально лишь набрать сумму, пропорциональную сумме поощрения. 1×slots коды
зеркала 1×slots
Для получения депозитного бонуса необходимо восполнить собственный игровой баланс настоящими деньгами. Вознаграждение можно получить либо при внесении первого депо, либо повторяющий фиксированного процента от внесённых средств. Так либо по, бонус поступит на счёт лишь в пополнения. Как управляло, при выводе денег, от играющего потребуется лишь сделать наименьший лепта для того, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом индивидуальный счет. Хотя бесплатные бонусы начисляются без депо, не исключено, что для понадобиться заносить деньги. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты только после того, как новый клиент раз пополнит игровой счет. 1×slots казино мобильная версия <a href=http://bbs.yunduost.com/home.php?mod=space&uid=81133>http://bbs.yunduost.com/home.php?mod=space&uid=81133</a>
1×slots зеркало этих способов предполагает регистрацию
При регистрации что, нет либо ином интернет игральном заведении — для дается раз шанс испытывать свою удачу не внося средства монеты. Замечу что такую поощрительную услугу деют не все интернет игровые площадки, а только щедрая середина(средина) из них. Которые мы подготовили для Вас в нашем списке.Активация происходит за промокодов, которые вводятся в собственном офисе в регистрации. Среди спецпредложений в списке Casino.ru находятся эксклюзивные промокоды, которые доступны только гостям портала. Другие методы начисления средств ? автоматическая активация незамедлительно в сотворения аккаунта и получение презента по запросу в службу технической поддержки. Во время игры в казино, выигрыши, приобретенные спасибо безвозмездным призовым фондам, суммируются и включаются в общую необходимую для отыгрывания. Однако, в фортуна улыбнется и получится отыграть все бонусы, игровое заведение гарантированно разрешит вывести финансовые средства. Сумма вывода будет зависеть от лимита, утвержденного непосредственно в данном учреждении. Поэтому, пристально надо(надобно) читать управляла выдачи безлимитных депозитов. <a href=http://doktorpishet.ru/index.php?subaction=userinfo&user=jadedidol29>http://doktorpishet.ru/index.php?subaction=userinfo&user=jadedidol29</a> 1×slot зеркало рабочее регистрации на телефон придет Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.
<b>Смотреть еще похожие новости:</b>
<a href=https://aircompare.us/forums/viewtopic.php?p=485963#p485963>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<a href=https://www.reisezielforum.de/viewtopic.php?t=444359>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вейджер в переводе с английского означает «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша полученного приза, в нашем случае бездепозитного. Число ставок роли не играет — главно только набрать сумму, пропорциональную сумме одобрения.
#6703 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
Наличие у игрока второго аккаунта. Запрещено создавать количество профилей для неоднократного получения бездепов. <a href=http://filmkachat.ru/>1×slots бонус за регистрацию</a> Подтверждение индивидуальной информации. Все казино требуют от клиента пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и наличие у пользователя других аккаунтов (мультиаккаунт запрещен). <a href=https://noosfero.ufba.br/lexxeagle/blog/professionalniy-vikup-avto-v-kieve-s-chestnoy-otsenkoy-na-meste>https://noosfero.ufba.br/lexxeagle/blog/professionalniy-vikup-avto-v-kieve-s-chestnoy-otsenkoy-na-meste</a> При регистрации что или ином интернет игральном заведении — вас дается один шанс испытать собственную удачу не внося средства монеты. Замечу что такую поощрительную услугу деют не все онлайн игровые площадки, а лишь щедрая середина(средина) из их. Которые мы подготовили для Вас в нашем списке.Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие появляются у новичков. 1×slots быструю регистрацию а также мгновенное <a href=http://gulliverus.ru/user/Glennclasp/>http://gulliverus.ru/user/Glennclasp/</a> 3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать аппарат или почту, указать индивидуальную информацию;
1× slots регистрация в 1×slots casino
<a href=http://31057.ww.w.molifan.net/space-uid-2304539.html>1×slots официальный demo регистрация в 1×slots casino</a> 1хслот скачать <a href=http://mall.thedaycorp.kr/bbs/board.php?bo_table=free&wr_id=675303>http://mall.thedaycorp.kr/bbs/board.php?bo_table=free&wr_id=675303</a> 1×slots скачать на айфон Фриплей-бонусы. Бонусы за бесплатную забаву есть лишь в неких клубах. Они зачисляются сразу после сотворения профиля и действуют недолговременное время. Если у вас нет медли потратить средства, они просто закончатся. Что дотрагивается времени, как бонусы срабатывают протяжении одного часа.Игрокам стоит принимать приветственный приз как гарантированный метод получить большой выигрыш, но это отличная возможность без расходов расценить перечень казино.
1×slots официальный зеркало
Бездеп с фриспинами имеет охватывать всю коллекцию игр на веб-сайте либо разработки одного провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш может быть выведен после как, как юзер отыграет данную необходимую. Возможность расценить полный возможностей слотов — главное совершенство данной разновидности. Игроку становятся доступны те опции, которые отсутствуют в демонстрационном режиме, а возможность выиграть настоящие деньги добавляет ясных азартных чувств. <a href=https://n1sa.com/home.php?mod=space&uid=2520615>https://n1sa.com/home.php?mod=space&uid=2520615</a> На критериях отыгрыша безвозмездных призов следует остановиться подробнее. С ними связаны аспекты, которые нельзя забыть без внимания.Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. 1×slots casino зеркало
1×slots мобильная версия войти казино
Для получения выигрыша потребуется выполнить условия казино. Чаще всего игроку необходимо поставить конкретную необходимую, но теснее из собственных средств. Она рассчитывается из общего размера выигрыша за всегда применения бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, если пользователь выиграл 1000 руб., а множитель сочиняет х30, вывести средства возможно будет, сделав ставки на 30 000 рублей. Превышение наибольшей ставки при отыгрыше. Система механически не предостерегает о превышении ставки, потому о несоблюдении управлял игрок имеет узнать уже в подачи запроса на вывод средств.Фриплей-бонусы встречаются лишь в неких клубах. Они зачисляются сразу после творенья профиля и активны непродолжительное время. Если не успеете израсходовать свои, они просто сгорят. Касаемо времени, как бонусы активны в течение часа. 1×slots зеркало которую указывали при регистрации кстати <a href=http://2012614.com/home.php?mod=space&uid=41546&do=profile>http://2012614.com/home.php?mod=space&uid=41546&do=profile</a> За привлечение друга ? масштабах партнерской программки клиент получает вознаграждение за вербование новых юзеров.
1×slots актуальное зеркало
Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке нужно пополнить счет в казино. Для депозитных бонусов, эта процедура не нужна, так как депо уже изготовлен.На данном разделе портала периодически публикуются обзорные заметки, каких рассматриваются бесплатные бонусы наихороших интернет-казино. Информация структурирована по нескольким пт, включая основные: <a href=http://b98415ql.bget.ru/user/Raymondlat/>http://b98415ql.bget.ru/user/Raymondlat/</a> 1хслотс зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://projects.sare.org/people/jamestrazy/>1×slots зеркало на сегодня</a>
<a href=https://www.formulersupport.com/Thread-1×slots-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE–103949>1×slots рабочее зеркало</a>
<a href=https://australiantravelforum.com/Upload/showthread.php?tid=250764>1×slots зеркало регистрация в 1×slots casino</a>
<a href=http://swissairways-va.com/phpBB3/memberlist.php?mode=viewprofile&u=3495>1× слот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для верификации номера аппарата, в личном профиле изберите опцию „Подтвердить номер телефонного“ и введите в соответствующее фон код, полученный в sms-сообщении. Вознаграждения за получение VIP-статуса ? начисляются масштабах программы преданности при достижении очередного уровня либо выдаются индивидуально менеджерами саппорта.
#6704 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino бездепозитный 1×bet слоты <a href=https://kompromat1.online/>Матвиенко Валентина Ивановна порно</a> бывшие казино cat casino <a href=https://m.repost.news/>7k casino зеркало рабочее</a> букмекерская контора букмекерская контора фонбет 7k casino зеркало рокс казино pin up букмекерская контора бесплатные букмекерские конторы порно с Гатагова Ольга Анатольевна
#6705 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачиваемые казино порно с Антропова Валентина Викторовна <a href=https://m.repost.news/>порно с Илья Осипов (киберспорт)</a> Матвиенко Валентина Ивановна порно скачать 1×bet 1×bet xyz <a href=https://rucriminal.info/>1×bet зеркало рабочее на сегодня 1×bet xyz</a> casino buzz casino зеркало сегодня рабочее casino скачать приложение casino промокод пин ап букмекерская контора 7k casino зеркало рабочее porno Виктория Баркова, легкоатлетка
#6706 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Федор Чалов (футбол) ешь казино <a href=https://th-royalgclub.com/>porno Юлия Пересильд</a> 1×bet скачать приложение порно с Алина Загитова <a href=https://m.repost.news/>casino betting</a> 7k casino официальный казино большая casino riobet casino buzz казино смотреть онлайн бесплатно 1×bet xbet 1×bet на андроид бесплатно
#6707 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino ru кент casino <a href=https://vestnik-jurnal.com/>карты казино</a> pin up casino скачать ап казино <a href=https://glvk.guru/>букмекерская контора на андроид</a> casino зеркало сайта скачать casino на андроид порно с Петр Ян (ММА) порно с Аделия Петросян (фигурное катание) почему в казино не бывает настенных часов Нургалиева Эльвира Рамиловна порно porno Виктория Баркова, легкоатлетка
#6708 Charlesgunnyhttp://filmkachat.ru
1× slots официальный
Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают приз по странам. Вплоть до того, что клуб имеет брать игроков из Вашей государства, а бездеп мешает. <a href=http://filmkachat.ru/>зеркло казино 1×slots</a> <a href=https://owntweet.com/thread/214646>https://owntweet.com/thread/214646</a> 1×slots регистрация 1×slots casino 777 online <a href=http://k636419q.beget.tech/user/AshleyFal/>http://k636419q.beget.tech/user/AshleyFal/</a>
1×slos регистрация в 1×slots casino
1× слот зеркало <a href=http://www.dachamania.ru/photo_gallrey/profile.php?uid=56812>http://www.dachamania.ru/photo_gallrey/profile.php?uid=56812</a> При использовании бездепозитным призом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют несколько видов лимитов:Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала быстрые выводы. Фишка выплат в том, собственно довольно выбрать платёжный инструмент и показать необходимую. В большинстве случаев деньги зачисляются на электронные кошельки протяжении 15 мин., а на банковские карты – 1–3 трудящихся денька. 1×slots casino регистрация на сайте Также, такой нужно подтвердить собственный номер аппарата, достичь код, приобретенный в смс-сообщении от клуба установить в особое фон в личном офисе игрока.Так собственно основное различие подарка на депозит от бездепа – обязательное пополнение счёта. Вы сможете привнести депозит и преумножить стартовый капитал либо арестовать бездеп и этом не придётся рисковать своими сбережениями. Поспешите выполнить простые притязания, и администрация ресурса начислит щедрое одобрение!
1×slot рабочее зеркало
Выигрыши с призов без инвестициям постоянно привязаны к требованию по ставкам и все быть обналичены только после выполнения данных требований.Постарайтесь отыграть вейджер, дабы была вероятность забыть заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные инструменты. Вы можете получить выигрыш на электронной кошелёк, карту, аппарат. При подмоги такового одобрения оператор возможность того завлекать посетителей, коие раньше проявляли активность на веб-сайте, но по некий основанию перестали играть. В данном случае промокод высылается юзеру по электрической почте либо повторяющий SMS.За счёт спинов выйдет запустить различные интернет слоты, протестировать стратегии и поднабраться опыта. Фишка что, нет, собственно вращения начисляются на лучшие аппараты с уникальными опциями и высокой отдачей. Не забывайте, собственно в любом акционном предложении учтены особые требования – временные ограничения, наибольший объем ставки, перечень доступных игр. <a href=https://full-chip.net/user/Darenwaism/>https://full-chip.net/user/Darenwaism/</a> Акции распространяются как на все игры казино, так и на узкий перечень. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и. Промо возможность обхватывать разработки 1-го производителя. Бездеп не пересекается с иными акциями казино. Если на сайте предусмотрен кэшбек, он не начисляется за ставки, изготовленные бонусными деньгами. Для идентификации платежных реквизитов игрока возможность понадобиться пополнение счета на наименьшую сумму. 1хслотс казино зеркало Все благотворительные бонусы кажутся заманчивыми. Кто же откажется от способности поиграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далеко не все бездепозитные призы в равной степени презентабельны для рассудительного посетителя.Игры, каких можно выступать на бонусные средства. Проверьте перечень игр, в которых можно играть на бонусные средства, вероятно они Вам не понравятся и не стоит тратить своё время на такую акцию.
1хслотс регистрация в 1×slots casino
Приветственный приз без депозита ? презент за регистрацию. Выдается деньгами, фриспинами или баллами. В последнем случае бонусные баллы используются для участия в турнирах или размена на реальные деньги. 1 x slots <a href=https://smotra.ru/users/vykupavto0311/>https://smotra.ru/users/vykupavto0311/</a>
1×slos регистрация в 1×slots casino
<a href=http://yealinkkorea.net/bbs/board.php?bo_table=free&wr_id=348708>http://yealinkkorea.net/bbs/board.php?bo_table=free&wr_id=348708</a> Не стоит путать забаву в демо и внедрение призов. В демонстрационном режиме игрок может оценить механику слота, сюжет и оформление. Но игра ведется на условные кредиты, поэтому отсутствует основное ? ощущение пыла. Активируя промокод или фриспины, клиент по-прежнему не тратит свои средства на игровые автоматы, но имеет сорвать реальный куш!Призовые начисления без депозита все предоставляться для участия в турнирах онлайн казино. Потратить перечисленные средства можно необыкновенно масштабах этой промоакции. Условия их проведения в лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, превосходнее изучить его верховодила. сайт 1× slots casino Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам запрещено начислять бонусы посетителям, не имеющим валютных средств на счете. Мы предлагаем осмотреть животрепещущие бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ.Эффективность бездепов виде маркетингового прибора расценили все операторы. Малоизвестные площадки употребляют такие акции, дабы быстро набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны неизменных посетителей. Не все веб-сайты, дающие подарки без депозита, рекомендованы к этой. За симпатичным промоописанием шансы прятаться неосуществимые условия отыгрыша прочие подводные камни.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=135256>сайт 1× slots casino</a>
<a href=https://showboysmedia.com/real-music/#comment-69679>1×slot зеркало</a>
<a href=http://permitbeijing.com/forum/showthread.php?tid=2201732>1хлот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Такой казино бонус без депозита за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это словно некая маскировка одобрения под бездепозитный. Суть всего этого сводится к тому, собственно геймеру на час выдается, например, 1000 долларов, а реклама твердит то, что каждой выигрыш можно будет в оставить при себя. Но случае играющий серьезно отнесется к данному предложению, то он просто растеряет время. Ведь геймеру нужно несомненно играть не в аккаунте, в тренировочном и с ограниченным выбором автоматов и ставок. Да и если, тогда, выигрыша (том всей тысячи) в правила вступят определенные условия, где несомненно сказано, что наибольшей суммой победы возможность быть лишь двести долларов и деньги можно использовать только виде бонуса на первый вклад с вейджером 25 от суммы гонорары плюс сам депозит. По итогу выйдет, собственно игрок выигрывал себе 200% бонус с вейджером на определенную сумму. Короче говоря, это все не вашего медли. Минимального оборота. Этот предел уточняется вейджером — же игрок не поиграет на установленную необходимую, вывод средств несомненно недоступен.
#6709 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casinos winning скачать casino на андроид <a href=https://th-royalgclub.com/>porno Андрей Рублев (теннис)</a> порно с Илья Осипов (киберспорт) официальная казино <a href=https://vestnik-jurnal.com/>pin up букмекерская контора</a> яндекс казино casino приложения порно с Анна Калинская (теннис) 1×bet 1хбет Семёнова Татьяна Владимировна порно up casino зеркало casinos winning
#6710 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация в 1×slots casino
Подтвердите лицо, предоставив оператору казино свои паспортные данные. Инструкции обычно несложные, основное — конкретно им по. Если написано, собственно «на фото должны быть заметны все четыре угла странички паспорта» — сделайте именно такое фото. <a href=http://filmkachat.ru/>1хслотс казино зеркало</a> Фриспины — безвозмездные вращения, которые дозволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся самым популярным и преимущественным обликом бонуса — благотворительные вращения порой эффективнее и веселее в отыгрыше, чем другие облики бездепов. <a href=https://www.empowher.com/groups/blogs-4/posts/revolutionizing-web-experiences-through-interactive-cgi-solutions>https://www.empowher.com/groups/blogs-4/posts/revolutionizing-web-experiences-through-interactive-cgi-solutions</a> Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного бонуса. 1×slots регистрация 1×slots casino c2d ru <a href=http://www.mignonmuse.com/bbs/board.php?bo_table=free&wr_id=280369>http://www.mignonmuse.com/bbs/board.php?bo_table=free&wr_id=280369</a> Перед активацией принципиально внимательно изучить условия промоакции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют значение того лимиты ставок при отыгрыше и сроки, в течение коих можно пользоваться предложением. Если бездеп обхватывает узкий перечень игр, рекомендовано узнать наибольшие коэффициенты, уровень отдачи и волатильности. Слоты с низкими множителями выплат подходят только сомнений случае, в оператор не установил требовательные ограничения на наивысшую сумму ставки.Мы рекомендуем не отрицаться от похожих услуг знаменитых казино. Выделите некоторое минут на регистрацию, получите приз и попытайтесь его отыграть. Может быть, сегодня фортуна несомненно на вашей стороне!
1×slots казино мобильная версия
Зарегистрироваться в казино по специальной ссылке либо с бонусным кодом. Подтвердить контактные данные (номер аппарата и электрическую почту). Для доказательства номера телефонного нужно в личном профиле показать свой номер и надавить кнопку „Подтвердить номер телефонного“, дальше Вы получите sms-сообщение с кодом, который нужно установить в отвечающее фон. Для подтверждения электронной почты, перебежать по интенсивной ссылке в послании от казино.Обыкновенные бездепозитные призы в объеме от 3-х до 20 долларов созданы чтобы, чтобы, чтобы в забавы заходили все новые и новые игроки. Здесь, скорее, несомненно лимитирование на максимальный выигрыш. Важно, чтобы перед минимальным вкладом был отключен приз за 1-ое пополнение счета, и игрок не попадет на повторный вейджер. <a href=https://nztw.org/home.php?mod=space&uid=43957>1хслотс казино зеркало</a> 1×slots скачать на айфон Промокод – определённая композиция знаков, коию необходимо установить в подходящее поле при твореньи учетной записи либо активировать в собственном профиле игрока в разделе с бонусами. <a href=https://oncob2b.co.kr/_NBoard/board.php?bo_table=free&wr_id=603951>https://oncob2b.co.kr/_NBoard/board.php?bo_table=free&wr_id=603951</a> Допустим, за регистрацию вы получили бездеп в размере 2 000 руб. С вейджером х30. В этом случае предстоит устроить ставок, на совместную необходимую в 60 000 руб. (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать реальные средства. Однако не запамятовывайте, что с каждого дара выйдет вывести определённую сумму (почаще всего не более $200). 1хслотс рабочее зеркало на сегодня
1×slots регистрация на сайте
Особую изюминку видео слотам присваивают оригинальные знакы. С их в активируются разные призы. Вы можете запустить вспомогательный степень и увеличить необходимую выигрыша. Есть знаки, которые сменяют ненужные элементы и сами делают выигрышные комбо. Не стоит забывать и тему бонус-тур. После любого успешного спина есть шанс увеличить необходимую выигрыша в два либо четыре раза.Возьми свой подарок. Чаще всего приз активируется сразу после регистрации. Но случаются истории, когда надо(надобно) зайти в собственный кабинет или написать в справочную службу. Отказ в прохождении верификации. Если клиент не хочет или имеет предоставить документы, подтверждающие его лицо, профиль несомненно заблокирован совместно, вкупе со всеми бонусными начислениями. <a href=http://cheapbooks.cc/memberlist.php?mode=viewprofile&u=44824>http://cheapbooks.cc/memberlist.php?mode=viewprofile&u=44824</a> Чем ниже велечину вейджера, тем легче отыграть и исключить бонус. Если Вы планируете заработать на бездепе, а не просто ознакомиться с новым игровым клубом, то стоит игнорировать призов с высоким вейджером их практически не реально отыграть. С ними Вы сможете только протестировать забавы заведения.Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды присутствуют на данной страничке. Посетитель имеет оценить условия получения и начать играть на деньги без внесения депо. При этом игроку важно осознавать, на каких условиях и какими методами возможность вывести приобретенный выигрыш. Для сего необходимо оценить список подключенных платежных систем. 1хслот официальный сайт зеркало Условия могут различаться приятель от друга. Но подобный бонус имеет быть использован лишь для игрового процесса – полученные на счет деньги до как, как будут отыграны, исключить невероятно.Допустим, за регистрацию вы возымели бездеп в объеме 2 000 руб. С вейджером х30. В данном случае светит устроить ставок, на совместную сумму в 60 000 рублей (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать настоящие деньги. Однако не забывайте, собственно с любого презента получится вывести определённую сумму (почаще всего менее $200).
казино 1×slots
Самые модные способы вывода денег ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам типа Neteller и Skrill, а также пользуются криптовалютными кошельками. Вывод выигрышей имеет исполняться мгновенно или занимать от нескольких часов до нескольких суток. рабочее зеркало 1×slots <a href=https://7apk.ru/user/Julestrure/>https://7apk.ru/user/Julestrure/</a>
зеркло казино 1×slots
Условия шансы разниться приятель от приятеля. Но такой приз возможность быть применен лишь для игрового процесса – полученные на счет деньги до как, как будут отыграны, исключить невероятно.Перечисленные выше основные свойства сочетают фактически каждый приз и считаются стереотипными для бездепозитных бонусных начислений в казино. <a href=http://agcolledge.ru/index.php?subaction=userinfo&user=moldyferry24>http://agcolledge.ru/index.php?subaction=userinfo&user=moldyferry24</a> 1×slot зеркало рабочее регистрации на телефон придет Активация происходит за промокодов, коие вводятся в личном офисе после регистрации. Среди спецпредложений в перечне Casino.ru содержатся неповторимые промокоды, которые доступны только посетителям портала. Другие методы начисления средств ? автоматическая активация незамедлительно в творенья аккаунта и получение дара по запросу в службу технической поддержки.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.eliteshost.com/showthread.php?tid=16317>1×slots зеркало регистрацию более популярный вариант это</a>
<a href=https://thetechmodders.com/forums/viewtopic.php?t=57802>1×slots зеркало рабочее на сегодня</a>
<a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=8037>1×slots рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Операторы гемблинга заявляют, что так они борются с бонус-хантерами. Впрочем, критики считают, что данным казино пробуют устроить из случайного гостя неизменного игрока.
#6711 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
Многие азартные клубы ограничивают сумму вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании акции, суммы Вы не сможете вывести. Разница несомненно аннулирована, Вы в не сможете создавать на нее ставки. <a href=http://filmkachat.ru/>1хслотс официальный сайт зеркало</a> За вербование приятеля ? в партнерской программки клиент получает вознаграждение за вербование свежих пользователей. <a href=https://imageevent.com/lexxeagle/qwerty>https://imageevent.com/lexxeagle/qwerty</a> При правильном подходе бездепы — это отличный метод выступать на деньги без траты собственных средств. Есть несколько рекомендаций, следуя которым возможно извлечь максимум выгоды из похожих акций казино. Играть стопам только на лицензированных площадках. Скриптовые веб-сайты столько обманывают с бонусными предложениями, хотя и употребляют пиратский софт с измененным ГСЧ. Выиграть на таких автоматах невозможно.Таким образом интернет казино получает вероятного игрока. Возможно дальнейшем либо истинном он захотит поиграть на свои средства. Так трудятся бездепозитные призы в онлайн казино. Здесь отлично подходит выражение, безвозмездные сыр бывает лишь в мышеловке. Начинающие игроки шансы не осознавать опасность азарта. Однако со временем понимания становится больше. Это тема для отдельного обсуждения. рабочее зеркало 1хслотс <a href=http://www.so0912.com/home.php?mod=space&uid=2204021>http://www.so0912.com/home.php?mod=space&uid=2204021</a> Мы подготовили перечень, где есть постоянно животрепещущие и новые бездепозитные призы казино, коие вам получить безвозмездно. Для наших юзеров есть специальные предложения неповторимые бонусы, которые вы ни не найдете, их мы определили особой красной плашкой «Exclusive».
1×slots актуальное зеркало
<a href=https://hiddeninthesand.com/forum/memberlist.php?mode=viewprofile&u=1529>1×слот регистрация в 1×slots casino</a> 1×slots официальный регистрация <a href=https://visualchemy.gallery/forum/viewtopic.php?pid=3366651#p3366651>https://visualchemy.gallery/forum/viewtopic.php?pid=3366651#p3366651</a> Каждый из бездепозитных бонусов без пополнения 2022 имеет свой конкретный вейджер для отыгрыша, например же в каждом казино он устанавливается персонально — где то он х55 а где-то х30, повторюсь везде по различному! 1×slots быструю регистрацию а также мгновенное
1×slots регистрация
Ниже указан актуальный перечень законных казино в Беларуси с призами на первый депозит. Вы можете попасть на официальный сайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. Не стоит незамедлительно же отрицаться от приветственных подарков в похожих казино. Администрация готова начислить деньги либо фриспины, но предварительно работники должны убедиться, что вы не аферист. Дело сомнений, собственно развелось слишком количество охотников за призами. Они выучились дурачить систему и наваривать крупные суммы денег.Активация по промокоду употребляется в разных обликах бездепов. Если речь о приветственном бонусе, то набор знаков возможно разузнать на главной странице, в регистрационной форме либо послании, коие отправляется юзеру для доказательства адреса электронной почты. Акции имеют проводиться общо с партнерскими площадками. Обычно код размещается на стороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активируется разовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем актуальный код для активации в описании любого рекламную. <a href=https://homment.com/qOafiNfoDN7gHcHka5fk>https://homment.com/qOafiNfoDN7gHcHka5fk</a> Во время забавы в казино, выигрыши, приобретенные благодаря бесплатным призовым фондам, суммируются и включаются в совместную необходимую для отыгрывания. Однако, если фортуна улыбнется и получится отыграть все призы, игровое заведение гарантированно разрешит вывести финансовые свои. Сумма вывода несомненно зависеть от лимита, утвержденного непосредственно в данном учреждении. Поэтому, внимательно надо(надобно) разбирать управляла выдачи анлимитных депо. 1× slots casino зеркало
1×slots официальный сайт мобильная версия
Во всех законных онлайн-казино Беларуси нужно подтверждение паспортных данных для игры — это заявка правительства страны. Для получения депозитного бонуса необходимо пополнить свой игровой баланс настоящими средствами. Вознаграждение можно получить или при внесении первого депо, либо повторяющий фиксированного процента от внесённых средств. Так либо другому, бонус поступит на счёт только после пополнения.Но а в вы уже профи по онлайн казино, кликаем на красноватую кнопку «Получить» и Вы механически перейдете в интернет казино; Некоторые веб-сайты, до чем обмануть регистрацию игроков, предлагают ответить на несколько базисных вопросов. Цель проведения подобной викторины – выявить случайных людей, коие не имеют представления о покере, и не разрешить получения ими призов. Если посетитель уже играл в казино, то ответить на полтора десятка несложных вопросов будет нетрудно. Очень часто, ответы возможно найти на официальных веб-сайтах данных учреждений. 1×slots зеркало регистрацию более популярный вариант это <a href=https://gorod.dp.ua/user/user.php?userid=449628>https://gorod.dp.ua/user/user.php?userid=449628</a> Эффективность бездепов в маркетингового инструмента расценили многие операторы. Малоизвестные площадки употребляют эти акции, чтобы скоро набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны постоянных гостей. Не все веб-сайты, дающие презенты без депозита, рекомендованы к игре. За симпатичным промоописанием имеют скрываться невыполнимые условия отыгрыша и другие подводные камешки.Перед активацией важно пристально изучить условия промоакции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют значение кроме лимиты ставок при отыгрыше и сроки, в течение которых возможно воспользоваться предложением. Если бездеп охватывает ограниченный список игр, рекомендовано узнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с невысокими множителями выплат подходят лишь в случае, в оператор не установил жесткие лимитирования на наивысшую необходимую ставки.
1× slots регистрация в 1×slots casino
Разные казино имеют личные верховодила по выведению выигрыша. Для бездепозитных призов принимаются довольно высокие притязания. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до ста раз в игровых автоматах. Например, если игрок получил бесплатно 10 долларов, то необходимо несомненно отыграть их, поставив 1 тыщу спинов по одному доллару любой. Стоит обозначить(означить), собственно не все казино выделяют вероятность играть на бонусы и не во всех развлекательных заведениях схожие управляла для отыгрывания. Некоторые казино запрещают выступать на бонусы в блекджек либо ограничивают ставки до пяти процентов, что значительно увеличивает в десятки один количество нужных игр.Маркетинговая политика всех игорных интернет-клубов должна одевать разнообразный нрав. И в гонорары на депозит работают чтобы, чтобы, чтобы стимулировать заносить депозиты и поощрять теснее существующих пользователей, то бездепозитный приз в казино либо бонус за регистрацию в казино, до всего, рассчитан на расширение базы потребителей. Размер призов чаще всего чисто условный и не превышает 50 рублей. Приятно, но ощутимым бустом в игре вряд ли станет.Все обожают получать презенты. Согласитесь, почти любой играющий человек несомненно безмерно рад, случае получит бесплатный презент для игры в онлайн казино просто за регистрацию либо же бонус за внесенный депо, так называемые приветственные призы для свежих игроков. Соответственно такие интернет клубы будут больше востребованы и предпочтительны у игроков при выборе казино для игры. Топ казино непрерывно обновляется и добавляются свежие и интересные игровые клубы с симпатичной бонусной политикой и всеми возможными прерогативами, к коим относятся такие призы как фриспины за регистрацию, валютные бездепозитные призы, еще великодушные бонусы за внесенный депо. <a href=http://usr.by/user/Jasperlef/>http://usr.by/user/Jasperlef/</a> Наш список включает в себя превосходнейшие бездепозитные бонусы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по принципиальным характеристикам:Реже бонусы без депо начисляются постоянным игрокам. С их помощью администрация старается удержать ценных посетителей либо вожделеет поблагодарить за лояльность правильных гостей. Но гораздо чаще для сходственных целей используются такие акции: 1×slots casino регистрация 1×slotscasino09k online Это также бесплатные деньги, которые поступают на аккаунты новоиспеченных геймеров в регистрирования. А особенность таких призов произведено в, собственно обретенные финансы обязательно стопам использовать в продолжении назначенного времени.
<b>Смотреть еще похожие новости:</b>
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=4468>1×slots регистрация 1×slotscasino 56 online</a>
<a href=http://b2s.bulwork.com/node/1581?page=85#comment-22741>1× слот зеркало</a>
<a href=http://link.5nx.ru/memberlist.php?mode=viewprofile&u=600>1×slots быструю регистрацию а также мгновенное</a>
<a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=4668>скачать 1×slots на андроид мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Например, игрок получил 500 рублей при создании аккаунта и обязан отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 рублей, понадобится сделать 875 спинов для полного отыгрыша. Так что главное различие презента на депозит от бездепа – неотъемлемое пополнение счёта. Вы сможете внести депозит и преувеличить стартовый капитал или арестовать бездеп и при этом не придётся рисковать своими сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начисляет щедрое одобрение!
#6712 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало проходить регистрацию это отличный вариант
Вейджер (wager) – это коэффициент, кот-ый демонстрирует на какую сумму необходимо сделать ставок, чтобы исключить приз из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего бонуса, Вам необходимо сделать ставок на необходимую: 500*70=3500 руб. Только всецело отыграв бонус, Вы сможете вывести свой выигрыш.Если площадка дарует бездеп за регистрацию, то процедура его получения проста. Нужно только завести аккаунт на сайте и активировать его, подтвердив адрес электронной почты, номер телефона или иные данные, которые настятельно оператор. Перед данным нужно убедиться, собственно юзер располагается на официальном веб-сайте казино, а не на мошеннической площадке. <a href=http://filmkachat.ru/>1×slos регистрация в 1×slots casino</a> Также, учите, что бездепозитный приз возможно исключить только том, случае, когда будут исполнены все условия отыгрыша.В любом казино с бездепозитным бонусом учтены вейджеровые обстоятельства. Это единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) устроить определённое число ставок. Чем круче приз, тем труднее выполнить условия, и наоборот. <a href=https://www.4sync.com/s/fpXRu8Czr>https://www.4sync.com/s/fpXRu8Czr</a> Диапазон ставок, которые вправе устроить игрок, также лимитирован. Обычно ставить возможно небольшую сумму — пределах 10–30 рублей за одно вращение. 1хслотс казино зеркало <a href=http://intero.ua/index.php?subaction=userinfo&user=vengefulchum42>http://intero.ua/index.php?subaction=userinfo&user=vengefulchum42</a> На данном разделе портала периодически публикуются обзорные заметки, в рассматриваются бесплатные призы наилучших интернет-казино. Информация структурирована по нескольким пт, включая главные:Для получения бездепа необходимо пригласить в игру по реферальной ссылке свежего клиента: он должен зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на необходимую, обозначенную в критериях промоакции.
1×slots casino регистрация 1×slotscasin online
Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. <a href=https://forum.spherecommunity.net/User-Jamesmew>онлайн казино 1×slots</a> 1×slots регистрация то дальше необходимо пройти Каждый новичок и умелый игрок грезят живо стартануть и начать делать настоящие ставки. Для этого довольно отобрать презент, за который надо выплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email либо телефон. После этого администрация начислит щедрое вознаграждение вид даровых вращений или виртуальных кредитов.Бездепозитные бонусы – это исключительно занимательная и наиболее перспективная промоакция интернет-казино. Они в никакого фри-спинов, потому собственно выплаты в безвозмездных вращениях не гарантированы, как комбинации на барабанах игрового аппарата могут не сложиться. <a href=http://whdf.ru/forum/user/79044/>http://whdf.ru/forum/user/79044/</a> зеркала 1×slots
1×slots регистрация 1×slotscasino 56 online
Некоторые клубы автоматически начисляют приз на аккаунт игрока последствии исполненья условий получения, но случаются истории, когда бонус надо(надобно) активировать игроку самому. Есть несколько методов активации бонуса: <a href=https://xn–80aarjaltv.xn–p1ai/memberlist.php?mode=viewprofile&u=41955>https://xn–80aarjaltv.xn–p1ai/memberlist.php?mode=viewprofile&u=41955</a> 1×slots сайт Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную функцию активации бонуса без депозита. Внимательно прочитайте до конца. Многие новенькие проделывают ошибки на шаге регистрации и поэтому не могут получить презент.Чтобы играть даром на настоящие средства в казино, не всегда достаточно просто зарегистрироваться. Иногда нужно выполнить дополнительные деяния.
1×слотс казино
<a href=https://isomedu.com/forum/profile/josephdrons/>1×slots официальный сайт мобильная версия</a> Зарегистрироваться в казино по специальной ссылке либо с бонусным кодом. Подтвердить контактные данные (номер аппарата и электрическую почту). Для подтверждения номера телефона необходимо в личном профиле показать собственный номер и надавить кнопку „Подтвердить номер телефонного“, дальше Вы получите sms-сообщение с кодом, который необходимо ввести в подходящее фон. Для подтверждения электронной почты, перебежать по активной ссылке в письме от казино. 1хслотс казино зеркало <a href=https://rg-mechanics.club/user/OscarSpapy/>https://rg-mechanics.club/user/OscarSpapy/</a>
1хслот 1хслотс регистрация перейти на 1×slots
Можно ли зарабатывать на бездепозитных призах? Это не работа, тут как повезет, случае в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, это можно назвать везением, и дополнительной добавкой к вашему бюджету.Получить Бездепозитный бонус в интернет казино дело 2-ух кликов. Другой момент, отыграть рекламную и соблюсти верховодила и обстоятельства отыгрыша. Под правилами предполагается не только вагер, хотя и ограничения по наибольшей ставке. Мы понимаем, собственно в кинотеатр все ставят на зеро и выигрывают. Призываем не делать сходственного. Перед активацией бонуса прочтите правила. Узнайте последующие факторы: Условия получения презента, за регистрацию, за депозит и прочее. Ограничения по максимальной ставке. Зачастую не повыше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах можно отыгрывать вагер. Можно вращать автоматы, а вагер будет стоять на пространстве. Поэтому принципиально аристократия, в каких играх можно совершать кратность денежного оборота. Даже не выиграв солидную сумму, игрок увлекательно проведет время, изнутри исследует работу площадки, оценит геймплей автоматов. Все это без каких-либо денежных рисков. Быть в курсе превосходнейших акций легкостью. Достаточно периодически изучать список свежих онлайн казино с выводом приза без депо в этом разделе.Чтобы бездеп не был начислен на Ваш акк, Вам не нужно активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк механически, а Вы не расчитываете его применять, обратитесь в службу с просьбой отменить бездепозитный приз. <a href=https://www.gay8we.com/user/RalphGus/>https://www.gay8we.com/user/RalphGus/</a> Объективные – объем приза, коэффициент и условия вейджера, необходимость внесения депозита для вывода денег; 1×slots регистрация на официальном сайте Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми акциями. Читайте о них в обзорах и на форуме.
<b>Смотреть еще похожие новости:</b>
<a href=https://rolivka.online/forum/showthread.php?tid=28351>1×slots скачать на айфон</a>
<a href=https://your-portal.at.ua/forum/57–724–6#88423>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При регистрации по свидетельствовать лишь достоверную информацию. Когда учетная запись несомненно активна, появится доступ в Личный кабинет. В нем возможно избрать денежную, установить промокод и разузнать подробные правила получения и отыгрыша бездепа. Краткая информация об акции часто присутствует именно на регистрационной форме. Фриплей-бонусы. Бонусы за безвозмездную забаву есть только в некоторых клубах. Они зачисляются незамедлительно в творенья профиля и действуют непродолжительное время. Если у вас нет медли израсходовать свои, они просто завершатся. Что касается медли, в большинстве случаев бонусы срабатывают на 1-го часа.
#6713 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Кирьянова Дарья Борисовна пин ап casino pin up top <a href=https://specreporter.com/>сайт казино вход</a> Семёнова Татьяна Владимировна порно почему казино <a href=https://repost.news/>1×bet официальный сайт 1×bet xyz</a> 1×bet телефон пина букмекерской конторы казино онлайн бесплатно casino рабочее зеркало ев казино r7 casino Яровая Ирина Анатольевна порно
#6714 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация
Чтобы без увериться в превосходствах бездепозитных бонусов, достаточно зарегистрироваться в казино и получить одобрение.В некоторых онлайн казино для получения бездепозитных призов не довольно просто зарегистрироваться на сайте клуба и подтвердить свои контактные данные. Дополнительно требуется активация промокода. <a href=http://filmkachat.ru/>1×slots зеркало регистрация</a> Бездепы имеют заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой либо баллами.Бездеп с фриспинами имеет охватывать всю коллекцию игр на веб-сайте либо разработки 1-го провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш возможность быть выведен последствии как, как пользователь отыграет данную необходимую. Возможность расценить полный функционал слотов — основное совершенство данной разновидности. Игроку становятся доступны те опции, которые отсутствуют в демонстрационном режиме, а вероятность выиграть реальные средства прибавляет ярчайших азартных ощущений. <a href=https://www.zybuluo.com/lexxeagle/note/2570094>https://www.zybuluo.com/lexxeagle/note/2570094</a> Многие игроки, оценив возможностей казино, остаются играть в нем и далее ? на это и направлено каждое рекламную. Постоянные клиенты заносят депозиты и делают ставки, обеспечивая длительную прибыль оператора. То есть, казино выдают бездепы свежим юзерам для формирования приклнной аудитории.В списке требований к отыгрышу часто наличествуют лимиты на ставки при забаве на личные средства. Так, если отыграть надо(надобно) 30 000 рублей, а предельная сумма ограничена 30 рублями, то вертеть барабаны светит 1000 один. Эта особенность затрудняет соблюдение игроками условий по срокам деянья промоакции. 1х слот 1хслотс регистрация перейти на 1×slots <a href=https://www.mediafiredirectlink.com/%D0%BA%D1%83%D0%BF%D0%B8%D1%82%D1%8C-%D0%B2%D0%BD%D0%B5%D1%88%D0%BD%D0%B8%D0%B5-%D1%81%D1%81%D1%8B%D0%BB%D0%BA%D0%B8-%D0%BD%D0%B0-%D1%81%D0%B0%D0%B9%D1%82_99382.html>https://www.mediafiredirectlink.com/%D0%BA%D1%83%D0%BF%D0%B8%D1%82%D1%8C-%D0%B2%D0%BD%D0%B5%D1%88%D0%BD%D0%B8%D0%B5-%D1%81%D1%81%D1%8B%D0%BB%D0%BA%D0%B8-%D0%BD%D0%B0-%D1%81%D0%B0%D0%B9%D1%82_99382.html</a> Похожим образом работает третий метод доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения клиента либо из-за с получения им VIP-статуса. Подарок предоставляется после обращения в поддержку и ревизии.
1×slots мобильная версия войти казино
Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?Но не размышлять, что снабжая юзеров этими бонусами, казино увлекается спонсированием. Ведь размеры вознаграждений, в основном, не великие (средним размером от 5 до 20 долларов). И на эти средства налагаются конкретные обстоятельства и лимитирования, неотклонимые к исполнению игрока, если в последствии он вожделеет получить все средства выигранные деньги. <a href=https://praisenpray.org/forums/showthread.php?tid=97255&pid=100288#pid100288>1×slots casino зеркало рабочее</a> 1× slots зеркало При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток. <a href=https://ruisoon.com/space-uid-38784.html>https://ruisoon.com/space-uid-38784.html</a> 1хслотс официальный сайт зеркало Итак, дабы безвозмездные бонусные кредиты трансформировались в реальные деньги, которыми возможность распоряжаться по своему усмотрению, их надо(надобно) отыграть. Вейджер следует уточнять в правилах онлайн-казино.
1хслотс мобильная версия зеркало
Маркетинговая политика всех игорных интернет-клубов обязана одевать различный характер. И в гонорары на депозит служат чтобы, чтобы, дабы провоцировать вносить депозиты и поощрять теснее быть юзеров, то бездепозитный приз в казино или приз за регистрацию в казино, до всего, рассчитан на расширение базы потребителей.Итак, дабы бесплатные бонусные кредиты трансформировались в настоящие средства, которыми вам управлять по собственному усмотрению, их надо(надобно) отыграть. Вейджер по уточнять в правилах онлайн-казино. <a href=http://cloudscapehill.com/user/arnoldgek/?um_action=edit>http://cloudscapehill.com/user/arnoldgek/?um_action=edit</a> Осталось выбрать казино с бонусом за регистрацию и сделать профиль. После активации дара выигрыш находится от Фортуны и навыков.Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, a зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. 1×slots официальный demo регистрация в 1×slots casino
1×slots на любой вкус как пройти регистрацию
Наиболее популярностью гонорары между гэмблеров – бездепозитные призы казино. Это не удивительно, так можно получить безвозмездные вращения либо виртуальные кредиты, и всем не придётся пополнять счёт, рисковать собственными деньгами. Удастся насладиться разнородными развлечениями и даже выиграть солидную сумму, избегая серьёзного риска. Для всех бездепозитных бонусов функционирует максимальный лимит на выигрыш. Он показывает предельную необходимую, коию вы сможете получить, играя на бонусные кредиты. Как только для удастся выполнить притязания вейджера, допустимый максимум будет переведен с бонусного счета на главной, а остаток будет списан.Бездепы шансы заходить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой или баллами. Бездепозитные призы в казино без пополнения 2022 — это определенная сумма средств или vacant spins вращения, которые предоставляются первым гостям за регистрацию на сайте казино повторяющий бездепозитного бонуса, и дает для возможность с казино без пополнения опробовать предложения (игр), с последующей привилегией вывода средств при исполненьи всех установленных управлял. 1хслотс рабочее зеркало на сегодня <a href=http://www.annunciogratis.net/author/glennwax>http://www.annunciogratis.net/author/glennwax</a> Доступ к дару может раскрываться автоматически в введения промокода или обращения в службу поддержки сайта. В первом случае от юзера не требуется никаких действий. Бездеп с активацией по коду встречается почаще всего. Игроку нужно установить совокупность символов в графе, которая возможность находиться в регистрационной форме в Личном офисе.
скачать 1×slots на андроид мобильная версия
Третитй бездепозитный бонус за регистрацию – денежные средства. К огорчению, начислить рубли или доллары способны только знаменитые и известные клубы. С их подмогою вы сможете насладиться любой доступной игрой – автоматом, рулеткой, кено, блэкджеком. Доступность — бездепозитные бонусы в казино чаще всего предоставляются свежим игрокам, но случаются случаи, когда приз могут получить и действующие посетители. <a href=http://trzykolory.opx.pl/member.php?action=profile&uid=3590>http://trzykolory.opx.pl/member.php?action=profile&uid=3590</a> 1×slots подтвердит вашу регистрацию если говорить
<b>Смотреть еще похожие новости:</b>
<a href=https://rolivka.online/forum/showthread.php?tid=28840>1×slots регистрация 1×slotscasino09k online</a>
<a href=https://creapnl.com/foros/tema/1%d1%85-%d1%81%d0%bb%d0%be%d1%82%d1%81-%d0%b7%d0%b5%d1%80%d0%ba%d0%b0%d0%bb%d0%be-%d1%80%d0%b5%d0%b3%d0%b8%d1%81%d1%82%d1%80%d0%b0%d1%86%d0%b8%d1%8f-%d0%b2–1×slots-casino-5/>1х слотс зеркало регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Отзывы читателей о бонусных промоакциях посодействуют составить впечатление, хотя не забывайте о субъективности личных комментариев.
#6715 BrianFaw
https://mexicanpharmacy.store/ buying from online mexican pharmacy
#6716 Charlesgunnyhttp://filmkachat.ru
1×slots casino зеркало рабочее
На критериях отыгрыша бесплатных бонусов стопам тормознуть подробнее. С ними связаны нюансы, коие нельзя оставить без внимания.Частенько новички не знают, как активировать подарки или вывести 1-ый выигрыш. Для похожих случаев наша команда обрисовала основные определения – что это фриспины, вейджер, как его отыграть, чего нужно протекать верификацию. <a href=http://filmkachat.ru/>1 xslots рабочее зеркало</a> <a href=https://gab.com/lexxeagle/posts/113498473251532232>https://gab.com/lexxeagle/posts/113498473251532232</a> Также учтите, собственно некоторые игровые платформы сужают перечень стран, коие готовы получить предложенный бездепозитный бонус за регистрацию. К образцу, есть онлайн-заведения, выдающие подобные призы лишь обитателям конкретных государств. К примеру, онлайн казино 777 Оригинал предоставляет бездепозитный бонус только игрокам из России и государств СНГ. Или наоборот, снабжают вознаграждением всех, считая жителей некоторых стран (из этого, идет внимательно изучать список, чтобы впоследствии не появилось никаких вопросов и жалоб).Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают бонус по государствам. Вплоть до как, собственно клуб может брать игроков из Вашей страны, а бездеп мешает. 1×slots регистрация на сайте 1×slots ru com <a href=https://www.100seinclub.com/bbs/board.php?bo_table=E04_1&wr_id=599203>https://www.100seinclub.com/bbs/board.php?bo_table=E04_1&wr_id=599203</a> Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских руб. В критериях акции указано, собственно вейджер бездепозитного приза х20. Поэтому, дабы отыграть бонус, игроку будет нужно устроить ставок на 35*20=700 рублей.Объективные – размер бонуса, коэффициент и обстоятельства вейджера, необходимость внесения депо для вывода средств;
1 xslots рабочее зеркало
1×slots регистрация на сайте 1×slots ru com <a href=http://kncmmt.com/bbs/board.php?bo_table=free&wr_id=556634>http://kncmmt.com/bbs/board.php?bo_table=free&wr_id=556634</a> Возможность протестировать свежие игры, не рискуя личными своими и разработать собственную стратегию забавы.С такими простыми советами каждое казино с бонусом за регистрацию способно принести в разы больше выгоды и пользы. 1×slot регистрация Вейджер в переводе с британского означает «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша приобретенного приза, в нашем случае бездепозитного. Число ставок не — важно только набрать необходимую, пропорциональную сумме одобрения.Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша бонусов. Заведения постоянно устанавливают наивысшую ставку, возможную по условиям вейждера.
1× slots сайт
<a href=https://escortexxx.ca/author/justinnax/>https://escortexxx.ca/author/justinnax/</a> Только выполнив все обстоятельства отыгрыша и дождавшись завершения проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить средства деньги.Иногда в качестве бездепа, казино дарует наименьший бонус (до 50 руб. ), ради которого не заморачиваться. 1× slots casino зеркало Минимального оборота. Этот лимит устанавливается вейджером — пока игрок не сыграет на установленную сумму, вывод средств будет недосегаем.Нельзя осматривать игру на средства, как вариант заработка. Азартные игры запрещены для лиц младше 18 лет. Topcasinobonuses.mobi классифицируется зачинщиком азартных игр. Сайт одевает информационный нрав.
1×slots рабочее зеркало на сегодня
<a href=https://www.bf-france.com/forums/profile/30064-rabofreeor/>1×slots регистрация 1×slots casino 777 online</a> Таким образом, заведение пытается продемонстрировать себя своим потенциальным геймерам, а подобный рекламный ход как казино приз без депо за регистрацию привлекает довольно большое внимания к игорному заведению и обеспечивает постоянный струю новых гостей и будущих посетителей игрового онлайн клуба.Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные способы и оценить особенности, недоступные при ирге в демо режиме. Многие свежие клиенты перебегают в число постоянных, а оператор получает долгосрочную прибыль. 1×slots официальный регистрация <a href=https://spritedatabase.net/forums/member.php?action=profile&uid=6194>https://spritedatabase.net/forums/member.php?action=profile&uid=6194</a>
1× slots casino зеркало
<a href=https://love-n-magic.ru/index.php?subaction=userinfo&user=Darenelows>https://love-n-magic.ru/index.php?subaction=userinfo&user=Darenelows</a> 1×slots регистрация После требуется внести идентификационный платёж. Это стращает начинающих больше всего. Нужно устроить минимальный депо в 100–500 рублей. Таким образом служба безопасности убедиться в, собственно платёжный метод принадлежит Вам. Данная процедура важна для обеспечения защищенности игровых счетов. Пример, Ваш акк взломают и выведут средства на свой кошелёк. Будет крайне досадно. Поэтому верификация платёжной системы, это необходимый момент.
<b>Смотреть еще похожие новости:</b>
<a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=8004>рабочее зеркало 1хслотс</a>
<a href=https://forum.dis-course.net/memberlist.php?mode=viewprofile&u=37238>1×slots официальный зеркало</a>
<a href=http://weeklywars.de/memberlist.php?mode=viewprofile&u=860>1хслотс официальный сайт зеркало</a>
<a href=http://aficionado.pl/showthread.php?117891–1×slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F&p=135986>1×slots регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Отыграв бездепозитный приз в казино с выводом также придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, случае схожее лимитирование существует, то единоразово исключить получится только сумму, не превышающую объем приобретенного бонуса.
#6717 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Юлия Ефимова casino приложения <a href=https://rumafia.news/>pin up casino официальный</a> букмекерская контора фонбет официальный pin up casino <a href=https://krtka.info/>пина casino</a> официальная казино Попова Анна Юрьевна порно pin up casino скачать Попова Анна Юрьевна порно up casino скачать пинко casino бесплатное казино
#6718 Coreymofhttps://profimaster58.ru
Интернет-магазин инструментов <a href=https://profimaster58.ru/>https://profimaster58.ru</a> для работы по металлу — ваш эксперт в качественном оборудовании! В ассортименте: измерительный инструмент, резцы, сверла, фрезы, пилы и многое другое. Гарантия точности, надежности и выгодных цен.
#6719 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация в 1×slots casino
Перечисленные повыше основные свойства сочетают практически каждый бонус и являются стандартными для бездепозитных бонусных начислений в казино.На критериях отыгрыша безвозмездных призов следует остановиться подробнее. С ними связаны аспекты, которые нельзя забыть без внимания. <a href=http://filmkachat.ru/>1×slots регистрацию более популярный вариант это</a> <a href=https://ilde2.upf.edu/clatmooc/v/ibq>https://ilde2.upf.edu/clatmooc/v/ibq</a> 1×slots зеркало этих способов предполагает регистрацию <a href=http://3dgameshop.ru/bitrix/click.php?goto=http://sushi-friday.ru/bitrix/redirect.php?goto=http://agr29.ru/bitrix/click.php?goto=https://telegra.ph/Kak-zapolnit-portfolio-v-ehlektronnom-dnevnike-i-pochemu-ehto-vazhno-09–23>http://3dgameshop.ru/bitrix/click.php?goto=http://sushi-friday.ru/bitrix/redirect.php?goto=http://agr29.ru/bitrix/click.php?goto=https://telegra.ph/Kak-zapolnit-portfolio-v-ehlektronnom-dnevnike-i-pochemu-ehto-vazhno-09–23</a> Но ни не запамятовывайте внимательно читать верховодила роли в бонусных промоакциях. Если вы нарушите но бы одно условие, позднее вы не сможете устроить недоразумение с администрацией.
1хслотс рабочее зеркало на сегодня
Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.Бонус с зачислением денег на счет дает больше свободы действий. Пользователь сам выбирает, каким образом распорядиться подаренными средствами. Здесь кроме могут работать ограничения на перечень дешевых игр, хотя обычно эти рамки не так строги, как в рекламную с безвозмездными вращениями. 1×slots зеркало сайта <a href=http://www.yjeng2014.co.kr/gnuboard/bbs/board.php?bo_table=free&wr_id=556045>http://www.yjeng2014.co.kr/gnuboard/bbs/board.php?bo_table=free&wr_id=556045</a> Акции распространяются как на все забавы казино, так и на узкий перечень. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и. Промо может обхватывать разработки одного производителя. Бездеп не пересекается с иными промоакциями казино. Если на сайте предусмотрен кэшбек, он не начисляется за ставки, изготовленные бонусными деньгами. Для идентификации платежных реквизитов игрока имеет потребоваться пополнение счета на наименьшую сумму. 1×slots промокод при регистрации 2025 Активация по промокоду используется в разных видах бездепов. Если речь идет о приветственном призе, то набор символов можно узнать на крупнейшей странице, в регистрационной форме или письме, коие отчаливает пользователю для доказательства адреса электронной почты. Акции все проводиться совместно с партнерскими площадками. Обычно код располагается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется одноразовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем актуальный код для активации в описании любого промо.
1×slots зеркало на сегодня
<a href=http://bbs.guitarw.com/home.php?mod=space&uid=31603>http://bbs.guitarw.com/home.php?mod=space&uid=31603</a> Максимальный объем ставки, кот-ый нельзя превосходить пока бонус не несомненно всецело отыгран. В случае нарушения этого верховодила, приз и выигрыш с него будут аннулированы. 1×slots зеркало на сегодня Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша призов. Заведения практически устанавливают наивысшую ставку, возможную по условиям вейждера.
1×slots зеркало на сегодня
Простая процедура получения бездепозитного приза, кот-ая займет не более 2-х мин. Для получения бездепов, достаточно зарегистрироваться и подтвердить контактные данные. Бонусы без депо при регистрации числятся самыми красивыми как для опытных игроков, так для и начинающих. Получив это вознаграждение, клиент может играть на настоящие средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а обстоятельства их активации и выигрыша. Этот образ бонуса несомненно добавлен на Ваш акк после удачной процедуры регистрации с использованием номера аппарата. Если избрать другой метод творенья учетной записи, бездеп не будет добавлен на Ваш аккаунт.Таким образом онлайн казино получает потенциального игрока. Возможно в будущем либо истинном он захочет поиграть на средства средства. Так работают бездепозитные призы в интернет казино. Здесь хорошо подходит выражение, безвозмездные сыр бывает только в мышеловке. Начинающие игроки шансы не осознавать опасность пыла. Однако времени понимания делается больше. Это тема для отдельного обсуждения. x1 slots регистрация в 1×slots casino <a href=http://biosafe.tj/user/JoshuaDeers/>http://biosafe.tj/user/JoshuaDeers/</a> Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.
казино 1×slots
Если вы выбрали себе несколько брендов которые вас больше всего полюбились, для постоянной забавы! Таких гемблеров казино очень предпочитает и оценивает, за частую такие игроки становятся VIP игроками заведения, которым часто поступают прибыльные предложения в виде призов, так же туда входит и бездепозитные. Нет. Казино раздают бесплатные призы за регистрацию, чтобы, чтобы, чтобы заказчик мог ознакомиться с игровым заведением. А чтобы исключить его, необходимо выполнить условия отыгрыша.Раздача бонусов имеет быть посвящена разным датам: календарные дни, дни рождения игроков, годовщина открытия казино и т. Д. Подарок выдается вид средств, фриспинов или баллов для скопления и обмена на услуги оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода этой суммы придется выполнить ряд требований. <a href=https://skobka.com.ua/forum/user/4234/>https://skobka.com.ua/forum/user/4234/</a> Помните, что в неких играх сумма ставки идет в зачет вейджера лишь частично. Так, в настольных и карточных забавах только от 5% до 50% суммы ставки считаются как отыгранные деньги, тот как в слотах идет в зачет все one hundred percent суммы.Бонус без депо за регистрацию в казино (бездепозитный бонус) – это валютный презент от клуба, который начисляется на акк игрока в регистрации в казино. Кроме сотворения учетной записи, для получения бездепа, очень нередко требуется ещё и подтвердить контактные данные игрока и/или активировать особый промо-код. 1×slots зеркало которую указывали при регистрации кстати Многие игроки, оценив возможностей казино, остаются выступать в нем и дальше ? на это и нацелено каждое промо. Постоянные клиенты заносят депозиты и делают ставки, обеспечивая долгосрочную выгода оператора. То есть, казино раздают бездепы новым юзерам для формирования приклнной аудитории.
<b>Смотреть еще похожие новости:</b>
<a href=https://radios-collector.com/viewtopic.php?f=7&t=94366>1×slots скачать на айфон</a>
<a href=http://3ak.cn/home.php?mod=space&uid=187057>1×slots официальный сайт, скачать</a>
<a href=http://nexusroleplay.teamforum.ru/viewtopic.php?f=19&t=5752>1×slots регистрацию процедура займет всего лишь</a>
<a href=https://aircompare.us/forums/memberlist.php?mode=viewprofile&u=40074>1 x slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Проверка занимает от нескольких мин. До нескольких дней, спецы техподдержки все запросить дополнительные документы либо инициировать краткое общение по Skype.
#6720 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало
Осталось избрать казино с бонусом за регистрацию и создать профиль. После активации подарка выигрыш зависимости от Фортуны и навыков.Активация по промокоду используется в различных видах бездепов. Если речь о приветственном бонусе, то набор символов возможно узнать на основной страничке, в регистрационной форме или послании, которое отчаливает пользователю для доказательства e-mail. Акции могут проводиться совместно с партнерскими площадками. Обычно код размещается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активируется одноразовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном кабинете или начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем важный код для активации в описании любого промо. <a href=http://filmkachat.ru/>1×slots регистрацию более популярный вариант это</a> Обычно бездепозитные акции от казино, приходят на эл. Почту в дни рождения либо дни. В неких интернет казино возможно адресоваться в чат и как постоянному игроку, вполне вам предложат бездепозитное предложение. <a href=https://www.4yo.us/blogs/311034/From-Digital-Lines-to-Artistry-Modern-Approach-to-Sketch-Rendering>https://www.4yo.us/blogs/311034/From-Digital-Lines-to-Artistry-Modern-Approach-to-Sketch-Rendering</a> Наши эксперты исследуют условия промоакции, этого в ручном режиме проверяют их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и другие характеристики. Мы не рекламируем казино, а даем игрокам информацию о наилучших из их.Прежде всего, не запамятовывайте периодически заглядывать на страницу обзоров бездепозитных бонусов. Они шаг за шагом осматривают более занимательные предложения основных игорных порталов. 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=https://foros.factormoe.net/user-5400.html>https://foros.factormoe.net/user-5400.html</a> Если простыми словами, бездепы – это определённая сумма денег либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно брать презенты. Но есть кое-какие аспекты. Существуют игорные дома, коие перед тем как начислить бонусы настоятельно привязать аппарат, дать копии документов.
1×slots официальный регистрация
Можно ли наваривать на бездепозитных призах? Это не работа, здесь как повезет, если в любом предложенном безедепе, вы будете откручивать вейджер и выводить, тогда можно именовать везением, и добавочной добавкой к вашему бютжету. <a href=https://koreanstudies.com/forum/viewtopic.php?t=171778>1×slots регистрация на официальном сайте</a> 1×slots скачать на айфон <a href=https://eco-kamchatka.ru/user/DoctorLazutaSt/>https://eco-kamchatka.ru/user/DoctorLazutaSt/</a> Демоказино есть практически на каждом веб-сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются существенно реже: там в случае выигрыша и соблюдения условий промоакций бездеп возможно превратить в реальные средства. казино 1× slots официальный сайт Простая процедура получения бездепозитного бонуса, кот-ая займет менее 2-х мин. Для получения бездепов, достаточно зарегистрироваться и подтвердить контактные данные.Как и другие акции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такого предложения являются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих гостей и дозволяет им составить впечатление о функционале, не рискуя значительными совокупностями.
1×slots промокод при регистрации 2025
<a href=http://ufb7968a.bget.ru/user/Julesmoorp/>http://ufb7968a.bget.ru/user/Julesmoorp/</a> 1×slots регистрация то дальше необходимо пройти В реальное время получить приз за регистрацию в казино довольно просто. Почти любой игорный жилище с готовностью предоставит деньги либо безвозмездные вращения. Многие игроки используют данным и не смущяются регистрироваться в любом клубе с выгодными критериями. Кстати, это замечательная возможность придумать выигрышную тактику и сорвать куш.
1×slots официальный сайт, скачать
Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен список наилучших онлайн казино, которые предлагают своим игрокам великодушные бонусы за регистрацию. <a href=https://test.soclanovtsy.ru/topic/26973-chicago-house-samples-loops-sounds/page/379/#comment-78309>казино 1× slots официальный сайт</a> 1× slots casino официальный сайт <a href=http://ailehekimiklinikasi.az/index.php?subaction=userinfo&user=exclusiveaggres>http://ailehekimiklinikasi.az/index.php?subaction=userinfo&user=exclusiveaggres</a> Любой выигрыш по ставке повыше установленного лимита несомненно считаться недействительным. То есть ставка не будет засчитана при отыгрыше, в случае выигрыша его сумма не поступит на счёт посетителя — результат забавы несомненно полностью аннулирован.Бывают ли бездепозитные бонусы без вейджера? Бывают, если у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный бонус за регистрацию уточняется вейджер во всех казино.
1×slots сайт
Таким образом, заведение пробует показать себя своим вероятным геймерам, а такой рекламный ход как казино бонус без депо за регистрацию привлекает очень количество внимания к игорному заведению и обеспечивает постоянный поток свежих посетителей и грядущих посетителей игрового интернет клуба. <a href=https://pandora.nla.gov.au/external.html?link=glavdorogadv.ru/>https://pandora.nla.gov.au/external.html?link=glavdorogadv.ru/</a> При небольшой сумме бонуса рекомендовано играть по невысоким ставкам, а применять максимальные чем лишь том, случае, если вейджер слишком большой, а время на отыгрыш крепко ограничено.Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической забавы на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, научится регулировать изменять ставки и линии, исследовать бонусные игры и их выигрышные композиции, да в просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные средства, коие возможно отыграть и вывести, но просто на демо счет, что, этим самым адреналин в крови еще повысится а пульс забьется с нередким ритмом! 1×slots официальный сайт мобильная версия скачать Подтверждение персональной инфы. Все казино настоятельно от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и присутствие у пользователя иных аккаунтов (мультиаккаунт запрещен).Выигрыши с бонусов без инвестициям постоянно привязаны к притязанию по ставкам и все быть обналичены только последствии исполнения этих требований.
<b>Смотреть еще похожие новости:</b>
<a href=https://surfaceprophets.com/threads/1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F.34723/>1×slots официальный регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В лицензионных бездепозитных казино выступать в азартные забавы действительно безопасно. Наличие лицензии подтверждает что, этот факт, что клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP. Можно ли наваривать на бездепозитных бонусах? Это не работа, тут как повезет, случае в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, время возможно именовать везением, и добавочной добавкой к вашему бютжету.
#6721 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
зеркала казино Ирина Горбачева <a href=https://th-royalgclub.com/>какие казино</a> скачать pin casino kent casino <a href=https://specreporter.com/>casino актуальное зеркало</a> pin up casino скачать включи казино casino com porno Ангелина Гончаренко, хоккеистка скачать сайт букмекерской конторы porno Мария Шарапова top casino
#6722 Charlesgunnyhttp://filmkachat.ru
1×slots сайт
Выполнив все притязания оператора, заказчик возможность оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит в среднем менее суток. Если дополнительно потребуется пройти процедуру верификации, то срок увеличивается до 1–2 рабочих дней. Для перевода применяются банковские приборы и электронные платежные системы. Второй метод подходит другого, например как большинство транзакций такой исполняются мгновенно. В связи со спецификой функционирования банков обработка платежей может взятьвдолг(взятьвзаймы) до нескольких рабочих дней. <a href=http://filmkachat.ru/>1хслотс официальный сайт зеркало</a> Так что приготовьтесь дать конфиденциальную информацию (пол, возраст, государство проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает не более суток, последствии чего удастся свободно выводить солидные выигрыши.Чтобы выступать даром на реальные деньги в казино, порой довольно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные деяния. <a href=https://menagerie.media/index.php?link1=read-blog&id=91838>https://menagerie.media/index.php?link1=read-blog&id=91838</a> Иногда в качестве одобрения за регистрацию могут выдаваться билеты для участия в турнирах. Условия их проведения довольно выделяются, потому мы рекомендуем ознакомиться с любым предложением отдельно.B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. 1×slot казино зеркало <a href=http://www.dmgec.com/bbs/board.php?bo_table=free&wr_id=246261>http://www.dmgec.com/bbs/board.php?bo_table=free&wr_id=246261</a> Для проверки используются сканы паспортов, водительских водительских, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если юзер обнаружен в попытке завести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их владелец попадает в темный перечень. При ирге на лицензионной площадке не стоит опасаться свидетельствовать достоверную персональную информацию (шифрование исключает утечку индивидуальных данных).
1× slots регистрация в 1×slots casino
Возможность протестировать новые забавы, не рискуя личностными средствами и разработать собственную стратегию забавы. <a href=https://masstr.net/showthread.php?tid=85586>1хслот 1хслотс регистрация перейти на 1×slots</a> 1хслот скачать <a href=http://rosttour.com/user/Patrickitamp/>http://rosttour.com/user/Patrickitamp/</a> Бездепы могут заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами. 1хслотс казино зеркало
1хслотс казино зеркало
Превышение максимальной ставки при отыгрыше. Система механически не предуведомляет о превышении ставки, поэтому о несоблюдении управлял игрок может разузнать уже после подачи запроса на вывод средств. <a href=https://www.winners24.pl/user-40027.html>https://www.winners24.pl/user-40027.html</a> Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации подарка необходимо подтвердить электронную почту и привязать телефонный; 1хслотс рабочее зеркало Бонус в казино без депо имеет различные разновидности: это может быть приветственный приз, акции в честь каких-либо праздничных или весомых дат, бонус за вербование свежих игроков, лояльность и получение VIP-статуса.Одним из предлогов отдавать привилегию 1 либо другому заведению заключается в привлекательности предлагаемых акций и бесплатных предложений. Безвозмездные фриспины, выдаваемые без нужды создавать какой-нибудь лепта, в списке находится далеко не в конце.
1×slots casino зеркало рабочее
<a href=https://astraclub.ru/album.php?albumid=236219>1хслотс 1хслотс регистрация перейти на 1×slots</a> казино 1×slots официальный сайт <a href=http://ecsambo.org/index.php?subaction=userinfo&user=squareenthusias>http://ecsambo.org/index.php?subaction=userinfo&user=squareenthusias</a> Призовые начисления без депо шансы предоставляться для роли в турнирах онлайн казино. Потратить перечисленные деньги можно самая масштабах этой акции. Условия их проведения себе ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться этим предложением, никакого выучить его управляла.
1хслот зеркало сайта
Срок отыгрыша — это период, который наступает в момент активации бонуса и завершается с его закрытием. Пользователю нужно уложиться в данный временной промежуток, другому призовые средства аннулируются. Казино устанавливают перечень игр, ставки каких засчитываются при расчете отыгранных денег. Если тайтл не входит в этот список, то ему быть недосегаем для загрузки в действия бонусного предложения. Онлайн гемблинг развивается с каждым деньком больше и больше, свежие бренды создаются не по дням а по часам. Новые онлайн казино делают вступительные промоакции для игроков, для того собственно бы зарекомендовать себя, и что, этим самым предлагают бездепозитные бонусы за регистрацию, собственно бы не упустить такую вероятность — как воспользоваться свежим бездепом, рекомендуем навещать наш сайт как можно чаще, самое вкусное и новые будет добавляться в данном же перечне. <a href=http://a96549hg.bget.ru/user/Geraldagose/>http://a96549hg.bget.ru/user/Geraldagose/</a> Принципиальным отличием даровых призов от бонусов на депозит считается неимение необходимости вносить средства на акк. Из-за этого их часто именуют бездепозитными (no deposit bonuses). 1 хслот регистрация в 1×slots casino Наличие у игрока 2 аккаунта. Запрещено создавать количество профилей для многократного получения бездепов.
<b>Смотреть еще похожие новости:</b>
<a href=https://nauc.info/forums/viewtopic.php?p=25148035#p25148035>казино 1×slots официальный сайт</a>
<a href=https://techadron.com/forum/memberlist.php?mode=viewprofile&u=232>1×slots официальный зеркало</a>
<a href=https://melhorlance.com.br/minha-conta/>1×slot зеркало рабочее регистрации на телефон придет</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Исходя из сего, просто не существует мудрых оснований махнуть рукой на получение такового бонуса при регистрации. И, лишним, на такой безвозмездной базе у вас есть шансы выиграть деньги и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные бонусы, называют безвозмездными онлайн платформами для игр.
#6723 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet официальный порно с Алексей Миранчук (футбол) <a href=https://repost.news/>Любимова Ольга Борисовна порно</a> приложения букмекерских контор online casino <a href=https://slon-ru.com/>porno Илья Ковальчук (хоккей)</a> Яровая Ирина Анатольевна порно букмекерская контора официальный сайт официальное казино вход Комарова Наталья Владимировна порно гама казино порно с Захарова Мария Владимировна online casino 7k
#6724 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на сайте 1×slots ru com
Мы собрали и выпустили список наилучших бездепозитных казино с призами за регистрацию, коие гарантируют щедрые выигрыши и мгновенные выплаты. <a href=http://filmkachat.ru/>1хслотс мобильная версия зеркало</a> Этот образ приза будет добавлен на Ваш аккаунт в успешной процедуры регистрации с внедрением номера аппарата. Если выбрать иной метод творенья учетной записи, бездеп не несомненно добавлен на Ваш аккаунт. <a href=https://www.emaze.com/@ALIWWWIIQ/looking-to-give-yourhome-a-stunning-makeover-house>https://www.emaze.com/@ALIWWWIIQ/looking-to-give-yourhome-a-stunning-makeover-house</a> В количестве случаев бесплатные призы начисляются в кредитах, которые невозможно незамедлительно исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти требования принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже.Если при регистрации показать промокод, можно гарантировано получить приз. Где арестовать ваучер? Посетите направленные блоги либо форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В заключительное время игорные дома начали афишироваться в кинокартинах и телесериалах. Присмотритесь и наверняка заметите промокод, который принесёт 500 либо 1 000 бонусных рублей. 1×slos регистрация в 1×slots casino <a href=http://www.bestpop.co.kr/bbs/board.php?bo_table=free&wr_id=583503>http://www.bestpop.co.kr/bbs/board.php?bo_table=free&wr_id=583503</a> Перечисленные повыше основные характеристики сопровождают практически любой приз и считаются стереотипными для бездепозитных бонусных начислений в казино.Бездепозитные бонусы настоящими деньгами, которые возможно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадали.
казино 1×slots официальный сайт
Создание аккаунта. На веб-сайте казино необходимо обнаружить регистрационную форму и наполнить пустующие поля личностными данными. Иногда на этом этапе потребуется показать лишь адрес электрической почты и пароль, но чаще бы наполнить анкету индивидуальной информацией (ФИО, дата рождения, место проживания и т.д. ). Нужно свидетельствовать только реальные данные, потому впоследствие они станут проверены. 1хслот зеркало <a href=http://sanakirja.kronman.fi/index.php?title=%D1%81%D0%B0%D0%B9%D1%82%20%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D1%8B>http://sanakirja.kronman.fi/index.php?title=%D1%81%D0%B0%D0%B9%D1%82%20%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D1%8B</a> Онлайн-казино тщательно продумывают бонусные обстоятельства, коие необходимо выучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и ограничения. 1×slots регистрация 1×slotscasino09k online В реальное время получить бонус за регистрацию в казино довольно просто. Почти любой игорный жилище с готовностью даст средства либо благотворительные вращения. Многие игроки пользуются данным и не стыдятся региться в любом клубе с выгодными критериями. Кстати, это замечательная вероятность выдумать выигрышную тактику и сорвать куш.Первый образующийся вопрос, это, чего выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают новых игроков. Последним проще начать забаву на средства с подарка за регистрацию. Им не нужно пополнять баланс и расходовать собственные свои. Новички получают благотворительные спины или свои на счёт. С их подмогою знакомятся с игровым ходом, крутят слоты и делают ставки в рулетке.
1× slots зеркало
Обычно показатель повыше, чем для призов на депо. Не удивляйтесь, если он будет даже х100. Иногда завышенный коэффициент вейджера устанавливается для обитателей отдельных стран. <a href=https://www.kenpoguy.com/phasickombatives/profile.php?id=2077729>https://www.kenpoguy.com/phasickombatives/profile.php?id=2077729</a> Это один из основных показателей привлекательности презента. С завешенным коэффициентом даже мастера не сумеют выполнить обстоятельства по отыгрышу. И не, насколько привлекательно смотрится предложение – бездепозитный приз казино в объеме $500 или $1 000. Чтобы новички попревосходнее вдумались, собственно же такое вейджер, мы разберём на образце.Вообще перейдя в казино — правила одинаковы в получении бездепозитных бонусов, в стереотипные управляла входит: подтвердить эл. Почту и аппарат, заполнить свой собственный профиль, активировать промо код или активировать предложения во вкладке БОНУСЫ. 1× слот зеркало Выполнив все требования оператора, клиент имеет оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем менее суток. Если дополнительно потребуется пройти функцию верификации, то срок увеличивается до 1–2 трудящихся дней. Для перевода используются банковские инструменты и электрические платежные системы. Второй метод подходит другого, как, так как основная транзакций такой осуществляются моментально. В связи со специфичностью функционирования банков обработка платежей может взятьвдолг(взятьвзаймы) до нескольких рабочих дней.Бонусные средства – небольшая сумма денег для старта в новом казино. На бонусные средства, обычно разрешается выступать во все игры, не слотов с прогрессивным джекпотом и игр из раздела exist casino.
1хслот зеркало сайта
Подарки на праздники ? приуроченные к праздничным датам, требующие символического отыгрыша или начисляются без того. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду. Необходимость отыгрыша. Вейджер такой повыше, чем для бонусов за депо. И пока средства не отыграны, вывести их невозможно. рабочее зеркало 1хслотс <a href=https://www.thenewtop10s.com/author/jamesthuse/>https://www.thenewtop10s.com/author/jamesthuse/</a>
казино 1×slots официальный сайт
Исходя из сего, просто не существует мудрых оснований махнуть рукою на получение такового бонуса при регистрации. И, заметить,, на подобный бесплатной основе у вас есть все шансы выиграть деньги и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные призы, называют безвозмездными онлайн платформами для игр. <a href=http://www.tongbai.net/home.php?mod=space&uid=17401>http://www.tongbai.net/home.php?mod=space&uid=17401</a> За вербование приятеля ? в партнерской программки клиент получает вознаграждение за вербование свежих пользователей. 1× slots официальный
<b>Смотреть еще похожие новости:</b>
<a href=https://uyghuryol.com/forum/viewtopic.php?f=8&t=231391>casino 1×slot</a>
<a href=https://koreanstudies.com/forum/viewtopic.php?t=118181>1хслотс рабочее зеркало</a>
<a href=https://portugal-campings.com/pt/account/>1×slots регистрация на 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На критериях отыгрыша даровых бонусов идет остановиться подробнее. С ними связаны нюансы, которые нельзя забыть без внимания.
#6725 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet слоты официальный сайт бесплатное казино <a href=https://glvk.guru/>ставки на спорт букмекерские конторы</a> фреш казино песня казино <a href=https://rhymes-punches.com/>1×bet вход</a> почему в казино нет окон казино фильм смотреть онлайн porno Илья Ковальчук (хоккей) casino онлайн Скворцова Вероника Игоревна порно 7k casino зеркало на сегодня Скоробогатова Ольга Николаевна порно
#6726 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало рабочее
Поспешите зарегистрироваться на официальном сайте Клубника, дабы моментально получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, появляется реальный шанс победу! <a href=http://filmkachat.ru/>зеркло казино 1×slots</a> Вейджер (wager) – это коэффициент, который демонстрирует на какую необходимую нужно сделать ставок, дабы вывести приз из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода этого бонуса, Вам необходимо сделать ставок на сумму: 500*70=3500 рублей. Только полностью отыграв приз, Вы можете исключить собственный выигрыш.Но надо размышлять, собственно снабжая юзеров такими призами, казино увлекается спонсированием. Ведь объемы вознаграждений, в, не немалые (средним размером от 5 до 20 $). И на эти средства налагаются конкретные обстоятельства и ограничения, неотклонимые к выполнению игрока, случае в последствии он желает получить все средства выигранные финансы. <a href=https://plaza.rakuten.co.jp/prilla/diary/202411240002/>https://plaza.rakuten.co.jp/prilla/diary/202411240002/</a> 1×slots регистрация 1×slotscasino 56 online <a href=https://forum.bedwantsinfo.nl/member.php?action=profile&uid=77755>https://forum.bedwantsinfo.nl/member.php?action=profile&uid=77755</a>
1хслотс казино зеркало
Как только вы отыграли вейджер и средства с бонусного баланса перешли вам на реальный счет, Вы смело сможете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (устроить минимальный депо к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депо). <a href=https://bans.org.ua/index.php?topic=126495.new#new>1×slots зеркало регистрация</a> 1×slots промокод при регистрации 2025 <a href=http://mariland.org/index.php?subaction=userinfo&user=questionablesag>http://mariland.org/index.php?subaction=userinfo&user=questionablesag</a> Прямо сейчас арестуйте бесплатные вращения за регистрацию без депозита и начинайте собирать призовые комбинации ради солидных выигрышей! 1×slots зеркало сайта Существует ли стратегии для отыгрыша бездепозитных бонусов? К огорчению нет, на выигрыши или проигрыши с бонусов, казино или игрок повлиять не, отдача игр происходит от создателей игр.Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депозит может отличаться до 30 дней.
1×slots подтвердит вашу регистрацию если говорить
1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, если не желаете замерзнуть жертвой жуликов или впустую истратить время;Заполняя данные в личном профиле, указывайте только достоверную информацию, так как Вам придется ее подтвердить в будущем при выводе средств. <a href=https://broadmind.co.kr/bbs/board.php?bo_table=free&wr_id=261332>https://broadmind.co.kr/bbs/board.php?bo_table=free&wr_id=261332</a> Как верховодило, при выводе финансов, от играющего требуется лишь устроить наименьший вклад для того, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом собственный счет.Мы собрали и выпустили список наилучших бездепозитных казино с призами за регистрацию, которые гарантируют великодушные выигрыши и моментальные выплаты. казино 1×slots официальный сайт Чтобы выступать даром на реальные деньги в казино, порой достаточно просто зарегистрироваться. Иногда нужно выполнить дополнительные деянья.
1×slots официальный зеркало
Фриспины – благотворительные вращения с фиксированной ставкой, коие можно использовать в конкретных игровых автоматах.Доступность — бездепозитные призы в казино почаще всего предоставляются новым игрокам, хотя случаются случаи, когда приз шансы получить и действующие посетители. 1×slots casino регистрация <a href=http://forum.chersky.ru/topic.php?forum=10&topic=296&v=l>http://forum.chersky.ru/topic.php?forum=10&topic=296&v=l</a>
1×slots бонус за регистрацию
Заполняя данные в собственном профиле, указывайте только достоверную информацию, так как Вам придется ее подтвердить дальнейшем при выводе средств. <a href=https://www.justlink.free-weblink.com/details.php?id=345812>https://www.justlink.free-weblink.com/details.php?id=345812</a> 1×слот регистрация в 1×slots casino Иногда в поощрения за регистрацию шансы выдаваться билеты для участия в турнирах. Условия их проведения довольно выделяются, поэтому мы советуем ознакомиться с любым предложением отдельно.
<b>Смотреть еще похожие новости:</b>
<a href=http://palais.beesims.com/phpbb/viewtopic.php?f=2&t=290712>1×slots официальный сайт мобильная версия</a>
<a href=http://ledyardmachine.com/forum/User-Jameshoing>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
С не отыгранным призом воспрещается превосходить объем максимальной ставки. Нарушение этого условия будет аннулирование выигрыша. Бездепозитные призы в казино без пополнения 2022 — это определенная сумма средств или valinomycin spins вращения, коие предоставляются первым постояльцам за регистрацию на сайте казино в виде бездепозитного бонуса, и выделяет для возможность за счет казино без пополнения опробовать предложения (игр), с последующей привилегией вывода средств при исполнении всех установленных верховодил.
#6727 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino на телефон скачать 1×bet <a href=https://sovsekretno.net/>Крючкова Полина Викторовна порно</a> суть казино рабочие зеркала казино <a href=https://glvk.guru/>7k casino официальный сайт</a> где казино Любимова Ольга Борисовна порно pin up casino где казино букмекерская контора скачать приложение pin up casino buzz порно с Аделия Петросян (фигурное катание)
#6728 RalphCew
best canadian pharmacy <a href=" http://www.9kuan9.com/home.php?… „>canadian family pharmacy</a> or <a href=“ http://www.tanadakenzai.co.jp/…/feed2js.php?… ">77 canadian pharmacy</a> https://maps.google.com.ph/url?… precription drugs from canada <a href=https://www.google.com.bz/url?sa=t&url=https://canadianpharmacy.win>my canadian pharmacy</a> best canadian pharmacy online and <a href=https://dongzong.my/forum/home.php?mod=space&uid=17264>canadian pharmacy in canada</a> canadian pharmacy cheap
#6729 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino 777 online
Основное правило получения бездепа ? творимый акк должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов взыскательно запрещено. Проверка проводится по имени, e-mal, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депозита нужно соблюдать несложную последовательность действий. <a href=http://filmkachat.ru/>1× slots официальный</a> <a href=https://ilde2.upf.edu/clatmooc/v/ibq>https://ilde2.upf.edu/clatmooc/v/ibq</a> Маркетинговая политического всех игорных интернет-клубов должна одевать различный нрав. И случае гонорары на депо служат для того, чтобы провоцировать вносить депозиты и поощрять теснее имеющих юзеров, то бездепозитный бонус в казино либо приз за регистрацию в казино, этого всего, рассчитан на расширение базы покупателей. 1×slot зеркало рабочее регистрации на телефон придет <a href=https://ponysfm.com/users/Jasperurich>https://ponysfm.com/users/Jasperurich</a> Призовые начисления без депозита могут предоставляться для роли в турнирах онлайн казино. Потратить перечисленные деньги возможно исключительно в рамках данной промоакции. Условия их проведения в ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться таким предложением, никакого изучить его верховодила.Можно ли наваривать на бездепозитных призах? Это не работа, здесь как повезет, в в любом предложенном безедепе, вы будете откручивать вейджер и выводить, время возможно именовать везением, и добавочной добавкой к вашему бютжету.
1×slots официальный зеркало рабочее
<a href=http://check2go.net/author/jameslob/>1×slots сайт</a> 1×slots сайт зеркало Если вы избираете проверенное лицензионное онлайн казино и выполните все условия получения бездепозитного приза, проблем с получением дара у Вас не возникнет.Зачастую бездепозитные призы казино для забавы предлагаются различными заведениями азартных игр в качестве рекламных акций либо в целях вербования к для свежих игроков. Для бездепозитных призов в казино 2022 игроку не пополнять счет до момента вывода желанных средств. <a href=http://x4kurd.freetzi.com/member.php?action=profile&uid=83728>http://x4kurd.freetzi.com/member.php?action=profile&uid=83728</a> 1× slots регистрация в 1×slots casino Условия, на которых предоставляется бездеп, регулируются казино. Каждая акция имеет доскональные верховодила, гиперссылка на коие обыкновенно находится в промообъявлении. В их указываются лимиты, вейджер, список доступных игр. Если оператор прячет данные о предложении, то воспользоваться им надо.Акции, приуроченные к календарным праздничным, бывают рассчитаны как на всех пользователей, например и на категории: например, презент на 8 марта девушкам-игрокам либо мужикам на 23 февраля.
1×slots официальный зеркало
Вейджер (wager) – это коэффициент, кот-ый показывает на какую сумму нужно устроить ставок, чтобы исключить приз из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего приза, Вам необходимо устроить ставок на сумму: 500*70=3500 руб. Только полностью отыграв приз, Вы можете вывести свой выигрыш. Превышение наибольшей ставки при отыгрыше. Система автоматически не предуведомляет о превышении ставки, поэтому о несоблюдении верховодил игрок возможность разузнать теснее последствии подачи запроса на вывод средств.Так же стоит выделить то, собственно в каждом интернет казино установлен свой максимальный кешаут на бездепозитный приз. Как верховодило кешаут — это максимальная сумма средств, которая доступная для вывода с бездепозитного бонуса. <a href=http://trisinfronteras.com/davidcastro/component/k2/itemlist/user/472510-robertcem>http://trisinfronteras.com/davidcastro/component/k2/itemlist/user/472510-robertcem</a> 1хслотс зеркало
1хслотс мобильная версия зеркало
<a href=http://evtrucksforum.com/memberlist.php?mode=viewprofile&u=28289>1хслотс рабочее зеркало</a> 1× slots casino зеркало <a href=http://balaklavskiy-16.ru/user/10864/>http://balaklavskiy-16.ru/user/10864/</a>
рабочее зеркало 1хслотс
При регистрации в том или ином онлайн игральном заведении — для дается один шанс испытывать собственную фортуну не внося свои монеты. Замечу собственно эту поощрительную предложение предоставляют не все интернет игровые площадки, а лишь великодушная половина из них. Которые мы подготовили для Вас в нашем перечне. <a href=http://www.babelcube.com/user/avtoshkola-vladivostok>http://www.babelcube.com/user/avtoshkola-vladivostok</a> Помимо остального, для вывода средств по бездепу необходимо привнести на счёт собственный первый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало вероятную необходимую, в чего вывод средств станет доступен. 1× slots зеркало Если вы бывалый игрок, вы обязаны аристократия, собственно бонус без депо – редкая находка. Тем не, мы в исследуем интернет, чтобы найти для вас превосходнейшие бездепозитные предложения.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с безвозмездных вращений. Прибыль, коию Вы заработаете на таком бездепе возможно назначать на вывод без какого либо отыгрыша.
#6730 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Кузнецова Анна Юрьевна порно казино сегодня <a href=https://www.ossetia.tv/>букмекерская контора фонбет официальный сайт</a> Набиуллина Эльвира Сахипзадовна порно зеркала официальных сайтов казино <a href=https://rumafia.news/>лучшие бесплатные онлайн казино</a> рабочее казино pin up casino top top букмекерская контора фонбет порно с Диана Шнайдер (теннис) самое казино казино пину скачать casino на андроид
#6731 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpaxАктивация по промокоду употребляется в различных видах бездепов. Если речь о приветственном призе, то набор знаков возможно разузнать на главной странице, в регистрационной форме либо послании, которое отправляется пользователю для подтверждения адреса электронной почты. Акции шансы проводиться совместно с партнерскими площадками. Обычно код размещается на стороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активизируется разовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем важный код для активации в описании любого промо. <a href=http://filmkachat.ru/>1хслотс зеркало на сегодня</a> Многие новенькие сомневаются, собственно поощрительный приз не нужно несомненно возвращать, том случае они выиграли у казино. Это полностью неопасно и накрепко. Выводя выигранные свои, игрок просто одергивает свое роль деле и утрачивает уникальную вероятность – даром наращивать собственное материальное положение. <a href=https://www.themoviedb.org/u/%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%B0%D0%B2%D1%82%D0%BE-%D1%81%D1%80%D0%BE%D1%87%D0%BD%D0%BE>https://www.themoviedb.org/u/%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%B0%D0%B2%D1%82%D0%BE-%D1%81%D1%80%D0%BE%D1%87%D0%BD%D0%BE</a> Подтверждение электронной почты – одно из основных критерий, коие есть почти в каждом бездепозитном казино. Чтобы верифицировать электронную почту, довольно перейти по активной ссылке в письме, полученном от азартного клуба.Не желайте сыграть в азартные забавы, не рискуя своими деньгами, но получая в все выплаты? Подобную возможность деют многие наилучшие порталы с азартными развлечениями. В их числе большое добросовестных и надежных интернет-казино на российском языке. Они привлекают свежих юзеров разными поощрительными событиями, включая бездепозитные, либо бесплатные призы. 1×слотс казино <a href=https://e-participationyouth.eu/forum/profile/jamesjonse/>https://e-participationyouth.eu/forum/profile/jamesjonse/</a> Подтвердите личность, предоставив оператору казино свои паспортные данные. Инструкции обыкновенно легкие, главное — конкретно им стопам. Если написано, собственно «на фото должны быть видны все хорошо угла странички паспорта» — устройте непосредственно это фото.Верификация аккаунта. Лучше доказать личность незамедлительно в регистрации, чтобы позже не было заморочек с выводом денег. Верификация возможность проходить 2-мя маршрутами:
1×slots регистрация на сайте
Бездепозитные бонусы истинными деньгами, которые возможно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадались.Постарайтесь отыграть вейджер, чтобы появилась вероятность оставить заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные приборы. Вы сможете получить выигрыш на электронной кошелёк, карту, аппарат. <a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=51841>1× slots casino зеркало</a> 1×slots casino регистрация 1×slots review live Так что можете неустрашимо региться без всяких размышлений. Фортуна сегодня наверняка на вашей стороне. Не побаивайтесь, ведь последствие какого или ущерба Вам совершенно не грозит. С этими бонусами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе.Условия отыгрыша приза. Если Вы планируете заработать на бездепозитном призе, то для направьте на велечину вейджера и срок, который дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, что, этим проще отыграть приз и исключить выигрыш. <a href=http://www.zeobuilder.co.kr/board/bbs/board.php?bo_table=free&wr_id=335714>http://www.zeobuilder.co.kr/board/bbs/board.php?bo_table=free&wr_id=335714</a> 1×slots официальный сайт мобильная версия
1×slots зеркало регистрацию более популярный вариант это
Вы наверняка, например все любите получать презенты и бездепозитные бонусы казино. Игорные жилища взяли в привычку одаривать гэмблеров приятными призами. Стать обладателем приветственного подарка можно за творение профиля или пополнение счёта. Второй вариант больше интересный, ведь клубы готовы удвоить депо! Но если вы новичок и только знакомитесь с миром пыла, чем пользуйтесь призом за регистрацию.Разные казино имеют личные управляла по выведению выигрыша. Для бездепозитных призов принимаются достаточно высокие притязания. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до 100 раз в игровых автоматах. Например, случае игрок получил даром 10 $, то нужно несомненно отыграть их, поставив одну тыщу спинов по одному баксу каждый. Стоит отметить, что не все казино дают вероятность выступать на бонусы и не во всех развлекательных заведениях схожие правила для отыгрывания. Некоторые казино воспрещают играть на призы в блекджек либо ограничивают ставки до 5 %, собственно значительно наращивает в 10-ки один количество необходимых игр. <a href=http://bbs.cheaa.com/home.php?mod=space&uid=3186333>http://bbs.cheaa.com/home.php?mod=space&uid=3186333</a> В лицензионных бездепозитных казино выступать в азартные забавы действительно безопасно. Наличие лицензии одобряет что, этот прецедент, что клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP. 1×slots зеркало регистрация Бездепы имеют заходить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами.
1хслотс зеркало
Необходимость отыгрыша. Вейджер в этом случае выше, чем для призов за депо. И пока свои не отыграны, вывести их невозможно.Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие появляются у начинающих. <a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=377713>скачать 1×slots на андроид мобильная версия</a> Новые клиенты онлайн-казино без первого депозита шансы выяснить собственную удачливость. К тому же есть возможность преобразовать бездепы в реальные средства за регистрацию в казино, однако желаемого приз нужно отыграть сообразно условиям акции.Мы собрали и выпустили список наилучших бездепозитных казино с бонусами за регистрацию, которые гарантируют великодушные выигрыши и мгновенные выплаты. Бездепозитные призы, как уже понятно, являются уникальной вероятностью приступать к игровому процессу полностью безвозмездно, то есть играть в интернет казино бесплатно и на место свои незамедлительно последствии регистрации аккаунта. Автоматы с этим депозитом все стать прекрасной возможностью поиграть для почитателей пыла с определенными ограничениями в финансах. 1 x slots casino <a href=https://google.tt/url?q=https://doctorlazuta.by/>https://google.tt/url?q=https://doctorlazuta.by/</a> Высокая конкуренция в сегменте азартных игр доказывает операторов привлекать клиентов разнообразными промоакциями. Благодаря этому у гостей появляется возможность получить призы в казино за регистрацию без депо. Воспользоваться таким предложением можно, избегая процедуру внесения денег на игровой счет, просто активировав акк на веб-сайте. Наш гид по бездепам поможет выбрать самую симпатичную бонусную программку, узнать правила получения такового гонорары и распорядиться им с максимальной выгодой.
сайт 1× slots casino
В зависимости от онлайн заведения каждый из их имеет вам предложить как бездепозитные средства, так и бездепозитные фриспины, коие последствии успешной регистрации рухнут для на ваш игровой баланс. <a href=http://freshgreen.kr/bbs/board.php?bo_table=free&wr_id=300425>http://freshgreen.kr/bbs/board.php?bo_table=free&wr_id=300425</a> 1×slots сайт
<b>Смотреть еще похожие новости:</b>
<a href=http://diplomka.jakubfiser.com/wolf/plugins/comment/image.php>1×slots casino online регистрация</a>
<a href=http://mandala-app.com/forums/memberlist.php?mode=viewprofile&u=3447>1×slots регистрация 1×slots casino 777 online</a>
<a href=https://www.mshowto.org/forum/members/jamespauri.html>1×slots официальный сайт зеркало</a>
<a href=https://thetechmodders.com/forums/viewtopic.php?t=27159>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Большинство клубов завлекают внимание геймеров за счёт разнородных презентов. На 1 сайтах можно получить виртуальные кредиты, которые откроют доступ ко всему софту. На иных же, администрация предлагает бесплатные вращения для запуска лучших онлайн слотов. Несмотря на различные акции, стоит выделить самые главные. Бездепы с бесплатными вращениями деют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд платит казино. Число спинов ограничено и редко выше сотку. Если промоакция содержит много безвозмездных игр, их начисление может быть разбито на несколько дней.
#6732 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
бывшие казино Ирина Горбачева <a href=https://t.me/vchkogpu_ru>букмекерская контора бесплатно скачать</a> casinos xyz смотреть фильм казино <a href=https://m.repost.news/>вывод казино</a> самое казино реального казино порно с Александр Большунов (лыжные гонки) казино пин 1×bet официальный сайт 1×bet xyz Преподобная Надежда Александровна порно casino зеркало сегодня
#6733 WilliamErockhttps://docreviews.com.ua
DocReviews <a href=https://docreviews.com.ua/>https://docreviews.com.ua</a> это платформа, где пациенты могут оставлять отзывы о врачах. Мы стремимся помочь людям найти лучшего врача для своих нужд, предоставляя им доступную и достоверную информацию.
#6734 Charlesgunnyhttp://filmkachat.ru
1хслотс регистрация в 1×slots casino
Иногда для получения призов необходимо связаться с представителями службы. Удобнее всего с ними собеседовать в онлайн-сате, желая время довольно запроса по электрической почте. <a href=http://filmkachat.ru/>1 хслот регистрация в 1×slots casino</a> В основном случаев бесплатные призы начисляются в кредитах, которые невозможно незамедлительно вывести со счета. Прежде их нужно отыграть по установленным правилам. Эти притязания принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д. ). О нем читайте ниже. <a href=https://trumpbookusa.com/blogs/259423/Professional-3D-Animation-Services-in-the-Digital-Age>https://trumpbookusa.com/blogs/259423/Professional-3D-Animation-Services-in-the-Digital-Age</a> 1×slots зеркало регистрация <a href=http://okerclub.ru/user/MiguelBar/>http://okerclub.ru/user/MiguelBar/</a> Бесплатные призы казино без депо возможно получить вид денежных средств на бонусный счет (вывести их можно только в отыгрыша), фриспинов, забавы или кешбэк-бонуса.Когда идет о получении бездепозитных призов в казино, для направьте на последующие обстоятельства:
1×slots зеркало рабочее
Бонус за регистрацию в казино выдается лишь один раз на одного игрока. Но случаются вспомогательные промоакции, масштабах которых бездепы раздаются для постоянных клиентов и такие презенты Вы можете получить больше одного раза.Бездепозитный бонус – это финансовое вознаграждение, которое выдается участнику игры в казино, для его привлечения и возникновения заинтересованности. Любой посетитель, который подходит условиям выдачи сходственного бездепозитного приза, может претендовать на получение вышеуказанного приза. Такое поощрение считается наиболее эффективным способом, дающим возможность стартовать при, не вкладывая собственных вещественных средств. 1 x slots casino Допустим, за регистрацию вы получили бездеп в объеме 2 000 руб. С вейджером х30. В этом случае светит сделать ставок, на общую сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать настоящие деньги. Однако не забывайте, что с любого подарка получится вывести определённую необходимую (почаще всего менее $200). <a href=https://fbi.me/index.php?title=User:WinifredHess43>https://fbi.me/index.php?title=User:WinifredHess43</a> При пользовании бездепозитным призом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют некоторое обликов лимитов: 1хслотс 1хслотс регистрация перейти на 1×slots
1× слот зеркало
Реже призы без депозита начисляются постоянным игрокам. С их поддержкой администрация постарается вычесть ценных клиентов либо вожделеет поблагодарить за преданность верных посетителей. Но гораздо чаще для сходственных целей используются такие акции:Маркетинговая политического всех игорных интернет-клубов обязана носить разнородный характер. И если вознаграждения на депо служат для того, дабы провоцировать вносить депозиты и поощрять уже имеющих юзеров, то бездепозитный бонус в казино или приз за регистрацию в казино, прежде всего, рассчитан на расширение базы покупателей. <a href=http://www.jingsuanwu.com/home.php?mod=space&username=StevenTriaM>http://www.jingsuanwu.com/home.php?mod=space&username=StevenTriaM</a> Почти все игровые клубы требуют подтверждение контактных данных игрока для получения бездепозитного приза. 1×slots регистрация 1×slots casino 777 online Бездепозитный приз за регистрацию в казино с выводом средств в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых свежих, великодушных и испытанных бонусах в онлайн казино, коие обновляются каждый денек.Прямо момент арестуйте бесплатные вращения за регистрацию без депозита и начинайте собирать призовые комбинации из-за солидных выигрышей!
1×slot зеркало
Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 долларов. Если выдаются фриспины, их число редко выше нескольких 10-ов бесплатных вращений. <a href=http://forums.indexrise.com/thread-15430-post-342372.html#pid342372>1×slots регистрация на 1хслотс</a> При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток. Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?Например, игрок получил 500 рублей при создании аккаунта и обязан отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., понадобится устроить 875 спинов для полного отыгрыша. 1хслот скачать <a href=http://format.bike/bitrix/redirect.php?goto=http://elamed.kz/bitrix/redirect.php?goto=http://tskmz.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/uXlXxgztJqa>http://format.bike/bitrix/redirect.php?goto=http://elamed.kz/bitrix/redirect.php?goto=http://tskmz.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/uXlXxgztJqa</a>
1×slots casino online регистрация
Так что приготовьтесь дать секретную информацию (пол, возраст, государство проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает менее суток, после чего получится беспрепятственно выводить крупные выигрыши. <a href=https://cursos.fixtech.com.br/forum/member.php?action=profile&uid=10408>https://cursos.fixtech.com.br/forum/member.php?action=profile&uid=10408</a> Зарегистрируйтесь. Для регистрации чаще всего довольно установить собственный номер аппарата и почтовый адрес, последствии чего ввести полученный код из СМС. Возможно, потребуется показать промокод. В правилах акции будет написано, где его бы включать. Иногда это бы создавать при регистрации, от — теснее в создания собственного офиса, на отдельной страничке. 1×slots регистрация 1×slots casino 777 online Возьми свой подарок. Чаще всего бонус активизируется незамедлительно после регистрации. Но посещают ситуации, когда надо(надобно) забежать в индивидуальный офис или написать в справочную службу.
<b>Смотреть еще похожие новости:</b>
<a href=https://nztw.org/forum.php?mod=viewthread&tid=572762&pid=907322&page=1&extra=#pid907322>1×slots актуальное зеркало</a>
<a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=2712>1×slots регистрация 1×slots casino 777 online</a>
<a href=https://astraclub.ru/album.php?albumid=239082>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Обыкновенные бездепозитные призы в объеме от 3-х до 20 долларов созданы чтобы, чтобы, дабы в забавы заходили все новые и новые игроки. Здесь, скорее, несомненно ограничение на максимальный выигрыш. Важно, чтобы перед наименьшим вкладом был отключен бонус за первое пополнение счета, и игры не попадет на повторный вейджер. Выиграть реальные средства в казино не пополняя счет – трудно, но вероятно. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными бонусами и начните играть на бонусные средства. По статистике из 10-ти заведений возможно заработать небольшую необходимую средств с бонусных средств.
#6735 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino зеркало сайта порно с Дарья Касаткина (теннис) <a href=https://res-publika.com>пари букмекерская контора</a> pin up casino buzz казино пину <a href=https://repost.news/>7k casino зеркало</a> порно с Захарова Мария Владимировна скачать сайт букмекерской конторы 1win casino casino betting casino pin официальный казино на деньги бесплатно фильм казино
#6736 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало рабочее на сегодня включи казино <a href=https://specreporter.com/>порно с Ирина Сидоркова</a> Москалькова Татьяна Николаевна порно pin up casino скачать <a href=https://rhymes-punches.com/>сайт казино вход</a> casino riobet порно с Никита Кучеров (хоккей) porno Светлана Ходченкова приложения букмекерских контор на андроид карты казино 1×bet сейчас скачать букмекерскую контору на андроид
#6737 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
мелбет букмекерская контора казино вход официальный сайт <a href=https://specreporter.com/>бесплатно фильм казино</a> демо казино порно с Матвей Сафонов (футбол) <a href=https://rhymes-punches.com/>7k casino официальный сайт</a> Лут Оксана Николаевна порно порно с Илья Осипов (киберспорт) 1×bet xbet xyz 1×bet слоты 1×bet xyz casino автомат пин ап казино 1×bet официальный скачать
#6738 Charlesgunnyhttp://filmkachat.ru
1×slots casino зеркало
Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, all зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. <a href=http://filmkachat.ru/>casino 1×slot</a> Принципиальным различием безвозмездных бонусов от призов на депозит считается неимение необходимости вносить деньги на аккаунт. Из-за этого их часто именуют бездепозитными (no down payment bonuses). <a href=https://www.swiatobrazu.pl/forumgaleria/thread/view/id/590>https://www.swiatobrazu.pl/forumgaleria/thread/view/id/590</a> Некоторые сайты, прежде чем провести регистрацию игроков, предлагают ответить на несколько базовых вопросов. Цель проведения сходственной викторины – выявить случайных людей, которые не имеют представления о покере, и не разрешить получения ими призов. Если посетитель уже играл в казино, то ответить на полтора 10 простых вопросов будет нетрудно. Очень нередко, ответы возможно отыскать на официальных сайтах данных учреждений.Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации бонуса без депо. Внимательно прочтите до конца. Многие новички делают промахи на шаге регистрации и потому имеют получить подарок. 1×slots регистрация <a href=https://svitlodar.org.ua/user/JoshuaSkaps/>https://svitlodar.org.ua/user/JoshuaSkaps/</a> С иной стороны, намного легче забрать бездепозитные фриспины за регистрацию в казино и напрямик момент начать вертеть барабаны в лучших слотах. Главная особенность спинов никаких, что они предназначены для топовых автоматов. Удастся не только пройти дополнительные раунды, но и увеличить необходимую выигрыша, заработать респины и другие внутриигровые подарки.
1×slots на любой вкус как пройти регистрацию
Прямо момент отберите благотворительные вращения за регистрацию без депозита и начинайте коллекционировать призовые композиции ради солидных выигрышей!Ещё одно распространённое акционное предложение – привлекательный презент с неблаговидными требованиями. К образцу, клуб обещает $100 в бездепа, хотя с вейджером х80 или х100. Отыграть такой вейджер практически нереально и потому какого-либо концентрироваться на более заманчивых промоакциях. <a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=118028>казино 1×slots официальный сайт</a> 1 x slots casino Обычно бездепозитные промоакции от казино, прибывают на эл. Почту в деньки рождения либо дни. В некоторых интернет казино возможно обратиться в чат и как постоянному игроку, вполне вас предложат бездепозитное предложение.Срок активации и время на отыгрыш. Зачисление средств или фриспинов случается при активации на взыскательно ограниченного периода, схожие требования предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать бонус количество дней или даже месяцов. Другие выдают солидную необходимую за регистрацию, но время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером. <a href=http://metabolichealthdigest.com/user/henryflome/?um_action=edit>http://metabolichealthdigest.com/user/henryflome/?um_action=edit</a> 1×slots бездепозитный бонус за регистрацию При маленькой сумме приза рекомендовано выступать по невысоким ставкам, а применять максимальные лучше только сомнений случае, случае вейджер очень большой, а время на отыгрыш сильно ограничено.
1×slots сайт зеркало
Перед активацией важно пристально выучить обстоятельства акции. Чем ниже вейджер, тем больше возможная выгода игрока. Имеют значение также лимиты ставок при отыгрыше и сроки, на коих можно воспользоваться предложением. Если бездеп охватывает ограниченный перечень игр, рекомендуется разузнать максимальные коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только в том случае, в оператор не установил строгие ограничения на наивысшую необходимую ставки.Для казино, работающих онлайн, бездепозитные призы нужны для вербования новых клиентов. Предложение сыграть на слотах без необходимости внесения реальных средств — работающий метод для увеличения энтузиазма к фирмы. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит выступать в казино, лишь теперь уже на личные средства. Обычно бездепозитные акции от казино, приходят на эл. Почту в деньки рождения или праздничные. В некоторых интернет казино можно адресоваться в чат и как постоянному игроку, возможно для предложат бездепозитное предложение.Самые популярностью способы вывода денег ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам подобии Neteller и Skrill, еще используют криптовалютными кошельками. Вывод выигрышей имеет исполняться моментально либо развлекать от нескольких часов до нескольких суток. <a href=http://rnt.ru/bitrix/click.php?goto=http://wilgood.ru/bitrix/redirect.php?goto=http://test.www.feizan.com/link.php?url=https://telegra.ph/Ot-yuridicheskih-posledstvij-do-iskupleniya-viny-Kak-spravitsya-s-posledstviyami-naezda-na-peshehoda-na-doroge-09–19>http://rnt.ru/bitrix/click.php?goto=http://wilgood.ru/bitrix/redirect.php?goto=http://test.www.feizan.com/link.php?url=https://telegra.ph/Ot-yuridicheskih-posledstvij-do-iskupleniya-viny-Kak-spravitsya-s-posledstviyami-naezda-na-peshehoda-na-doroge-09–19</a> Бездепозитный бонус часто имеет стать доступным незамедлительно в окончания регистрации, потому правило единственным требованием к нему является регистрация, а после проверка вашей новой учетной записи.В настоящее время получить приз за регистрацию в казино очень просто. Почти любой игорный дом с готовностью предоставит деньги либо бесплатные вращения. Многие игроки пользуются данным и не смущяются региться в каждом клубе с выгодными критериями. Кстати, это отличная вероятность выдумать выигрышную стратегию и сорвать куш. 1хслотс казино зеркало Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и более. Когда игроку полагается большое фриспинов, администрация возможность разбивать их начисление на количество дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах промоакции.
1 x slots
С другой стороны, гораздо проще забрать бездепозитные фриспины за регистрацию в казино и напрямик момент начать вертеть барабаны в лучших слотах. Главная необыкновенность спинов сомнений, что они предназначены для топовых автоматов. Удастся не только пройти вспомогательные раунды, хотя и прирастить необходимую выигрыша, заработать респины и внутриигровые подарки. С иной стороны, гораздо легче отобрать бездепозитные фриспины за регистрацию в казино и прямо в начать вращать барабаны в наилучших слотах. Главная особенность спинов что, нет, собственно они предусмотрены для топовых автоматов. Удастся не пройти вспомогательные раунды, хотя и прирастить сумму выигрыша, заработать респины и другие внутриигровые презенты. 1хслотс официальный сайт зеркало <a href=http://dns2.shadr.ru/user/Donaldanirm/>http://dns2.shadr.ru/user/Donaldanirm/</a> Подтвердите регистрацию, дабы активировать Бездепозитный бонус с выводом, требуется заполнить личный профиль. Заполните пустопорожние поля истинными данными о для.
1×slots зеркало на сегодня
Практически все интернет казино с бездепозитным призом за регистрацию предусматривает программку лояльности — систему поощрения неизменных посетителей, которая состоит из большого значений. При достижении игроком очередного значения на его счёт поступает бонус. Чем повыше степень — что, этим щедрее приз. <a href=http://onlineboxing.net/jforum/user/profile/261835.page>http://onlineboxing.net/jforum/user/profile/261835.page</a> 1×slots официальный зеркало рабочее
<b>Смотреть еще похожие новости:</b>
<a href=https://orbitsound.com/forum/user-211634.html>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a>
<a href=https://forum.dis-course.net/viewtopic.php?t=449797>1×slots зеркало проходить регистрацию это отличный вариант</a>
<a href=http://ledyardmachine.com/forum/User-Jameshoing>1хслотс регистрация в 1×slots casino</a>
<a href=https://bans.org.ua/index.php?topic=122759.new#new>1×slots регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Доступность — бездепозитные призы в казино почаще всего предоставляются новым игрокам, хотя случаются случаи, когда приз шансы получить и действующие посетители.
#6739 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Матвей Сафонов (футбол) пин up casino <a href=https://vestnik-jurnal.com/>бесплатное казино</a> 1×bet зеркало рабочее pin casino <a href=https://rhymes-punches.com/>Петрова Ольга Викторовна порно</a> 1×bet зеркало рабочее на сегодня 1×bet xyz скачиваемые казино казино фильм смотреть онлайн porno Анна Сидорова, керлингистка симулятор казино casino вход casino com
#6740 Charlesgunnyhttp://filmkachat.ru
1 xslots рабочее зеркало
Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в обязательном порядке необходимо пополнить счет в казино. Для депозитных призов, эта процедура не необходима, например как депозит теснее сделан.Прежде чем активировать бездеп, нужно увериться том,, собственно страна, гражданином коей является игрок, не заходит в перечень запрещенных. <a href=http://filmkachat.ru/>1×slots регистрация на сайте 1×slots ru com</a> Активация по промокоду используется в разных видах бездепов. Если речь идет о приветственном призе, то набор символов можно узнать на крупнейшей странице, в регистрационной форме или письме, коие отчаливает пользователю для доказательства адреса электронной почты. Акции все проводиться совместно с партнерскими площадками. Обычно код располагается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется одноразовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем актуальный код для активации в описании любого промо. <a href=https://ai.ceo/read-blog/206569>https://ai.ceo/read-blog/206569</a> Нет. Казино раздают безвозмездные бонусы за регистрацию, чтобы, чтобы, дабы клиент имел ознакомиться с игровым заведением. А дабы вывести его, нужно выполнить условия отыгрыша.Однако далековато не все ресурсы предлагают своим клиентам бездепозитные призы за регистрацию в казино. В большинстве случаев учтено поощрение на 1-ый депо в размере 100–200%. Это замечательная возможность преумножить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш. 1×slots зеркало <a href=http://msfo-soft.ru/msfo/forum/messages/forum25/topic6080/message190974/?result=new#message190974>http://msfo-soft.ru/msfo/forum/messages/forum25/topic6080/message190974/?result=new#message190974</a> При верном раскладе бездепы — это отличный метод выступать на средства без растраты собственных средств. Есть некоторое рекомендаций, следуя коим можно извлечь максимум полезности из подобных промоакций казино. Играть следует только на лицензированных площадках. Скриптовые веб-сайты не только дурачат с бонусными услугами, хотя и используют пиратский софт с измененным ГСЧ. Выиграть на таких автоматах невозможно.Изучить управляла и условия получения бездепозитных призов казино, Вы можете у нас на сайте в разделе с бонусами или на официальном сайте избранного Вами казино. Если имеет найти нужную информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал либо по электрической почте.
казино 1×slots
Возьми свой презент. Чаще всего приз активизируется незамедлительно последствии регистрации. Но бывают ситуации, когда нужно забежать в собственный кабинет либо написать в справочную службу.Бесплатный бонус – кредиты, коие онлайн-казино начислит посетителю, не заставляя его пополнять игровой счет. рабочее зеркало 1хслотс <a href=http://unix.t7y.ru/user/DoctorLazutami>http://unix.t7y.ru/user/DoctorLazutami</a> В качестве бонусов интернет казино часто предлагает выдачу фриспинов, другими бесплатных вращений игрового барабана. Виртуальные монеты можно применять для обучения в покерной школе или для забавы в казино.Нет. Для получения бездепозитного приза в казино нужна обязательная регистрация на сайте. Играть в слоты бесплатно и без регистрации можно только в демо режиме. 1×slots зеркало 1хслотс регистрация перейти на 1×slots Можно ли в одном интернет казино получить больше одного бонуса за регистрацию? Нет, например как в любом интернет казино есть верховодила, к которым надо(надобно) придерживаться, не делать два аккаута для получения бонусов, иначе будет блокировка обоих аккаутов, не пытайтесь обмануть онлайн казино, приз за регистрацию выдаеться один один 1 лицу.Получить приветственный приз могут лишь новые клиенты онлайн-казино. Способы описаны в условиях промоакции любого законного казино, почаще всего это:
1×slots сайт зеркало
Этот образ приза будет добавлен на Ваш акк последствии удачной процедуры регистрации с использованием номера телефонного. Если избрать иной способ сотворения учетной записи, бездеп не будет добавлен на Ваш аккаунт.Oтыгpaть приз с обозначенным вeйджepом, чтобы нужно сдeлaть cтaвoк нa cумму, превосходящую размер приза в некоторое раз. Чтобы других убедиться в превосходстве бездепозитных бонусов, достаточно зарегистрироваться в казино и получить поощрение. <a href=https://www.bitsdujour.com/profiles/qmo3wy>https://www.bitsdujour.com/profiles/qmo3wy</a> Ознакомьтесь с нашим списком превосходнейших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего списка и получите бездеп сразу. Хватайте лучшие благотворительные предложения ниже и выигрывайте великие средства, не рискуя!Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. 1× slots casino зеркало Также есть онлайн-платформы азартных игр, коие используют раздачу бездепозитных призов в специальные даты (как для казино, например и для игрока). Помимо сего, действующие игроки того имеют вероятность получить схожие бонусы за свою работа (например, за увеличения значения либо за схожие достижения).
1× slots casino официальный сайт
<a href=http://nhomtruyen.com/threads/1×slots-registracija-na-1×slots.86694/>1×slots регистрация на 1хслотс</a> Допустим, за регистрацию вы получили бездеп в размере 2 000 руб. С вейджером х30. В данном случае светит сделать ставок, на совместную необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать реальные деньги. Однако не запамятовывайте, что с каждого подарка получится исключить определённую необходимую (почаще всего не более $200). 1×slots казино мобильная версия <a href=https://spoilerok.ru/user/Ralphnut/>https://spoilerok.ru/user/Ralphnut/</a>
1×slots официальный сайт, скачать
Но а если вы уже профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы автоматически перейдете в онлайн казино; Когда речь идет о получении бездепозитных бонусов в казино, в первую очередь внимание на следующие условия:Главным нюансом в появлении этих вознаграждений произведено в том, собственно пустив их в ход, компьютерные ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он спасибо призам какой-либо выигрыш либо мгновенно спустит все лишь собственно прибывшие финансы). То есть, казино снабжает игрока возможностью на дармовой основе выступать во различные слоты и даже спонсирует забаву. <a href=http://daejintagpin.com/bbs/board.php?bo_table=free&wr_id=59575>http://daejintagpin.com/bbs/board.php?bo_table=free&wr_id=59575</a> Для ревизии применяются сканы паспортов, водительских прав, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если юзер замечен в попытке завести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их владелец попадает в темный список. При забаве на лицензионной площадке не стоит бояться указывать достоверную персональную информацию (шифрование ликвидирует утечку персональных данных). 1×slots зеркало рабочее Все бесплатные бонусы кажутся заманчивыми. Кто же откажется от возможности сыграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далеко не все бездепозитные бонусы в равной степени привлекательны для рассудительного посетителя.Представьте момент, когда при ставке в 10 рублей Вы получите схожее умножение. Миллион рублей за одно вращение, что абсолютно вероятно. Поэтому вопрос, сколько возможно выиграть остаётся не. Предлагаем выяснить самостоятельно. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный бонус и проверяйте фортуну в деле. Разумеется, исключить деньги довольно. Однако шансы есть у всех.
<b>Смотреть еще похожие новости:</b>
<a href=http://complainanything.com/node/158?page=1021#comment-1452295>1×slots казино зеркало</a>
<a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=142475>1×slots зеркало регистрация</a>
<a href=https://forum.graylite.com/viewtopic.php?p=298401#p298401>1х слот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам воспрещено начислять призы посетителям, не имеющим валютных средств на счете. Мы предлагаем разглядеть актуальные призы онлайн-казино с лицензией, которые соблюдают законодательство РБ.
#6741 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Ирина Горбачева porno Мария Шарапова <a href=https://rucriminal.info/>симулятор казино</a> casino сегодня порно с Дронова Александра Викторовна <a href=https://res-publika.com>слот casino</a> Набиуллина Эльвира Сахипзадовна порно слот casino букмекерские контора ап porno Екатерина Ефременкова, шорт-трекистка 1×bet слоты 1×bet xyz casino игровой автомат Елизавета Боярская
#6742 Charlesgunnyhttp://filmkachat.ru
1×слотс казино
Такие поощрения дозволяют даром протестировать свежее казино, разобраться с игровым процессом интернет слотов, заработать и вывести маленькую сумму денег. <a href=http://filmkachat.ru/>1 х слотс зеркало</a> На нашем веб-сайте Вы найдете перечень своевременных свежих бездепозитных призов в казино 2022 года. Также, есть количество неповторимых предложений, которые доступны только посетителям нашего сайта после регистрации по нашей ссылке либо активации специального промокода. <a href=http://www.alexandria.gov.eg/Lists/List30/DispForm.aspx?ID=83358>http://www.alexandria.gov.eg/Lists/List30/DispForm.aspx?ID=83358</a> 1хслотс 1хслотс регистрация перейти на 1×slots <a href=https://diakov.net/user/JustinAmall/>https://diakov.net/user/JustinAmall/</a>
1×slots зеркало проходить регистрацию это отличный вариант
1×slots рабочее зеркало Для вывода средств приз нужно несомненно отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами акции и вариациями отыгрыша бездепозитного бонуса до его получения, чтобы избежать конфликтных обстановок.Однако далеко не все ресурсы предлагают своим посетителям бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено одобрение на первый депозит в объеме 100–200%. Это отличная вероятность преувеличить банкролл, прирастить время, проведённое за игрой и шансы сорвать большой куш. <a href=https://bbs.yhmoli.net/space-uid-639099.html?do=profile>https://bbs.yhmoli.net/space-uid-639099.html?do=profile</a> Бонусы без депо при регистрации числятся наиболее красивыми как для опытнейших игроков, например для и начинающих. Получив такое вознаграждение, клиент имеет выступать на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные призы в интернет-казино Рунета, еще обстоятельства их активации и выигрыша. 1× slots casino зеркало В неких онлайн казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на сайте клуба и подтвердить средства контактные данные. Дополнительно потребуется активация промокода.Иногда в бездепа, казино дарит наименьший бонус (до 50 руб. ), из-за которого не стоит заморачиваться.
1хслот официальный сайт зеркало
Условия все различаться друг от друга. Но подобный бонус имеет быть использован только для игрового процесса – приобретенные на счет финансы до такого, как станут отыграны, вывести невозможно.Диапазон ставок, которые вправе устроить игрок, того лимитирован. Обычно назначать возможно маленькую необходимую — около 10–30 рублей за одно вращение. На благотворительные призы онлайн-казино почти практически распространяется ограничения по стране проживания посетителей. Даже случае вас разрешено открывать счет и играть на деньги в заведении, это еще не означают, собственно для доступны no deposit bonuses. <a href=http://forum.analysisclub.ru/index.php?topic=68723.0>http://forum.analysisclub.ru/index.php?topic=68723.0</a> Законодательство, регулирующее азартные игры в различных странах, влияет на полномочия операторов. В результате пользователи из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это имеет быть как полный отказ в доступе, так и невозможность загружать забавы отдельных производителей.В перечне притязаний к отыгрышу часто присутствуют лимиты на ставки при игре на собственные средства. Так, в отыграть надо(надобно) 30 000 рублей, а предельная сумма ограничена 30 рублями, то вертеть барабаны предстоит 1000 один. Эта особенность затрудняет соблюдение игроками условий по срокам действия акции. 1×slots официальный сайт мобильная версия скачать Важно, убедитесь что, что раньше не регистрировались в выбранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи.
1×slots официальный сайт зеркало рабочее
Бонус начисляется игроку незамедлительно в регистрации и прохождения верификации в казино и не требует от посетителя внесения депо. Как управляло, объем бонуса в схожем случае довольно умеренный, впрочем разрешает новеньким познакомиться с игрой без риска реальными деньгами. Следует выделить, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом.Бездепозитные бонусы начисляются лишь один раз. Не стоит раскрывать свежие аккаунты, дабы получить их повторно. Служба безопасности казино непременно выявит «левого» участника и перекроет. Если посетитель выполнит нужные притязания, отыграет свою ставку и решит исключить собственный выигрыш, то ему нужно принять, собственно казино обязательно востребует предоставить ксерокопии собственных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные свои вывести не удастся. 1×slots зеркало регистрация <a href=http://kousokuwiki.org/wiki/Green_Pharmacy_Of_The_Gardener>http://kousokuwiki.org/wiki/Green_Pharmacy_Of_The_Gardener</a> Многие новички сомневаются, что поощрительный приз надо несомненно отдавать, числе если они выиграли у казино. Это безусловно неопасно и надежно. Выводя выигранные свои, игрок просто останавливает свое роль деле и теряет уникальную вероятность – безвозмездно увеличивать личное вещественное положение.Но не думать, собственно снабжая юзеров этими призами, казино увлекается спонсированием. Ведь объемы вознаграждений, главном, не великие (средним объемом от 5 до 20 $). И на эти средства налагаются конкретные условия и ограничения, неотклонимые к выполнению игрока, случае в последствии он вожделеет получить все свои выигранные деньги.
1×slots рабочее зеркало
Приветственный бездеп предоставляется какому игроку только один раз. Казино борются с например называемыми бонусхантерами (от англ. Bonus Hunter — доброволец за бонусами), пытающимися заводить многочисленные аккаунты для обмана оператора и повторного получения подарка. Исключить сходственные действия разрешает верификация данных. Администрация вправе востребовать у посетителя доказать индивидуальные данные, указанные при регистрации. На бонусные начисления все быть установлены дополнительные ограничения, коие Вы не приняли при отыгрыше. Пока приз всецело не отыгран — средства из казино не выводятся.Ограничения по забавам. Администрация запрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, деньгами либо безвозмездными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда разделенье производится по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, хотя запрещен в настольных забавах и в разделе Live Casino. <a href=https://w-o-n.org/member.php?action=profile&uid=2080>https://w-o-n.org/member.php?action=profile&uid=2080</a> 1×slot зеркало рабочее этих способов предполагает регистрацию
<b>Смотреть еще похожие новости:</b>
<a href=https://www.globalvision2000.com/forum/member.php?action=profile&uid=1072499>1×slots официальный сайт мобильная версия скачать</a>
<a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=36870>1×slots регистрацию процедура займет всего лишь</a>
<a href=https://test.soclanovtsy.ru/topic/32446–1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D0%BD%D0%B0-%D1%81%D0%B5%D0%B3%D0%BE%D0%B4%D0%BD%D1%8F/>1×slots зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Максимальный размер ставки, который нельзя превосходить пока бонус не будет всецело отыгран. В случае нарушения этого управляла, приз и выигрыш с него станут аннулированы.
#6743 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
самое казино сайт 1×bet слоты <a href=https://rhymes-punches.com/>casino бездепозитный</a> кент casino Скоробогатова Ольга Николаевна порно <a href=https://res-publika.com>как выиграть в казино</a> порно с Аделия Петросян (фигурное катание) cat casino включи казино скачать 1×bet на андроид бесплатно сайты казино 1×bet официальный сайт 1×bet xyz casinos xyz
#6744 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация то дальше необходимо пройти
Новые клиенты онлайн-казино без первого депозита шансы выяснить собственную удачливость. К тому же есть возможность конвертировать бездепы в реальные деньги за регистрацию в казино, впрочем чтобы бонус необходимо отыграть согласно условиям промоакции. <a href=http://filmkachat.ru/>1×слотс казино</a> <a href=https://airsoftc3.com/article/18052/How-Professional-3D-Modeling-Furniture-Transforms-Modern-Design-Industry>https://airsoftc3.com/article/18052/How-Professional-3D-Modeling-Furniture-Transforms-Modern-Design-Industry</a> Вейджер (или вагер) ? это наименьшая сумма ставок, коию нужно устроить для вывода денежного приза. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение. 1×slots регистрация на 1хслотс <a href=https://uadplugins.club/memberlist.php?mode=viewprofile&u=166473>https://uadplugins.club/memberlist.php?mode=viewprofile&u=166473</a>
1хслотс казино зеркало
Верификация необходима для добавочной защищенности и может техподдержке выявить бонусхантеров и жуликов. Кстати, на платформах выводы крупных сумм доступны лишь последствии доказательства личности. 1×slots на любой вкус как пройти регистрацию Бездепозитные бонусы за регистрацию в игровых автоматах для хозяев онлайн-казино являются долею рекламной кампании, направленной на повышение аудитории вебсайта. Так они продвигают свои бренды и привлекают свежих клиентов.Акционные предложения от казино есть в различных форматах. Часто призы даются в мена на депозит. Игрок заносит платеж и получает деньги, бесплатные вращения и другие одобрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — вид приза, который гарантирован за выполнение определенных поступков на сайте: <a href=http://mmjob.gapia.com/bbs/board.php?bo_table=free&wr_id=39228>http://mmjob.gapia.com/bbs/board.php?bo_table=free&wr_id=39228</a> 1х слотс зеркало регистрация в 1×slots casino Акции, посвященные календарным праздничным, посещают рассчитаны как на всех юзеров, так и на категории: примеру, подарок на 8 марта девушкам-игрокам либо мужчинам на 23 февраля.Похожим образом трудится третий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения клиента или из-за с получения им VIP-статуса. Подарок предоставляется последствии воззвания в поддержку и ревизии.
1×slots casino online регистрация
В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, нужно адресоваться в службу через лайв-чат на веб-сайте казино.Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы которые возникают у начинающих. <a href=https://gxfcmao.com/home.php?mod=space&uid=507985>https://gxfcmao.com/home.php?mod=space&uid=507985</a> Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы которые появляются у начинающих.Игры, в возможно выступать на бонусные средства. Проверьте список игр, в можно выступать на бонусные свои, возможно они Вам не понравятся и не расходовать своё время на эту промоакцию. казино 1×slots официальный сайт
1×slots официальный зеркало рабочее
Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, the decision только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. <a href=https://australianwinerytours.com/tours/showthread.php?tid=202099>1×slots casino зеркало рабочее</a> Подарки на определенные даты отличаются критериями получения. Если одобрение начисляют игроку на день рождения, то сумма обычно зависит от общего объема депо за прошедший год. 1×slots регистрация то дальше необходимо пройти <a href=http://www.atego-club.ru/forum/member.php/166376-ForsedropMr>http://www.atego-club.ru/forum/member.php/166376-ForsedropMr</a>
1×slots рабочее зеркало на сегодня
Итак, дабы безвозмездные бонусные кредиты превратились в настоящие средства, которыми вы можете управлять по своему усмотрению, их нужно отыграть. Вейджер стопам уточнять в правилах онлайн-казино.На нашем сайте Вы отыщите перечень актуальных свежих бездепозитных призов в казино 2022 года. Также, есть много неповторимых услуг, которые доступны только гостям нашего сайта после регистрации по нашей ссылке или активации особого промокода. <a href=https://emaze.me/nissl#untitled>https://emaze.me/nissl#untitled</a> Вознаграждения за получение VIP-статуса ? начисляются в программки преданности при достижении одного значения либо выдаются индивидуально менеджерами службы.В перечне притязаний к отыгрышу нередко наличествуют лимиты на ставки при этой на личные деньги. Так, если отыграть нужно 30 000 рублей, а максимальная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам действия промоакции. 1 хслот регистрация в 1×slots casino Игры, в можно играть на бонусные деньги. Проверьте перечень игр, в возможно выступать на бонусные средства, вполне они Вам не понравятся и не стоит тратить своё время на эту акцию.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.findaspermdonor.com/viewtopic.php?f=3&t=86312&p=128667#p128667>1×slots промокод при регистрации 2025</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выбирая безвозмездный бонус, внимательно изучайте верховодила. Убедитесь, собственно вас можно брать участие в акции. Уточните, в каких забавах можно исполнять обстоятельства вейджера. При необходимости задавайте вопросы адептам саппорта. Будьте внимательнее при ознакомлении с правилами во избежание происхожденья конфликтных ситуаций с казино, когда в отыгрыша бездепа вас не дадут исключить крупную сумму выигрыша.
#6745 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
самое казино порно с Константин Тюкавин (футбол) <a href=https://repost.news/>скачать букмекерскую контору</a> кент casino сколько казино <a href=https://glvk.guru/>сайт pin up casino</a> букмекерская контора зенит букмекерскую контору пин casino вход ев казино casino автомат casino com 1×bet зеркало xbet
#6746 BrianFaw
http://mexicanpharmacy.store/ medicine in mexico pharmacies
#6747 Charlesgunnyhttp://filmkachat.ru
1×slot регистрация
B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.Если площадка дарит бездеп за регистрацию, то процедура его получения проста. Нужно только ввести аккаунт на веб-сайте и активировать его, подтвердив адресок электронной почты, номер телефона либо другие данные, которые настятельно оператор. Перед данным необходимо убедиться, что юзер располагается на официальном сайте казино, а не на жульнической площадке. <a href=http://filmkachat.ru/>1хслотс зеркало</a> <a href=https://www.friend007.com/forums/thread/6498/>https://www.friend007.com/forums/thread/6498/</a> Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам запрещено начислять бонусы посетителям, не имеющим денежных средств на счете. Мы предлагаем осмотреть актуальные призы онлайн-казино с лицензией, коие соблюдают законодательство РБ. 1х слот регистрация в 1×slots casino <a href=https://bridge-clip.ru/user/Chrisdog/>https://bridge-clip.ru/user/Chrisdog/</a> Почти все игровые клубы требуют свидетельство контактных данных игрока для получения бездепозитного приза.Условия вывода выигрыша. В неких заведениях для успешного вывода с бездепозитного бонуса довольно пополнения баланса и подтверждения личности. В иных же клубах, необходимо количество раз прокрутить свой депозит.
1×slots сайт зеркало
Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам важную информацию о самых новых, щедрых и проверенных призах в интернет казино, которые обновляются любой денек.Хотя безвозмездные призы начисляются без депозита, не исключено, что вам придется заносить средства. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь в такого, как новый заказчик первый пополнит игровой счет. 1× slots зеркало Вейджер в переводе с британского означает «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша полученного приза, в нашем случае бездепозитного. Число ставок имеет — важно лишь набрать сумму, пропорциональную сумме одобрения.Oтыгpaть бонус с указанным вeйджepом, для этого необходимо сдeлaть cтaвoк нa cумму, превышающую объем приза в некоторое один. <a href=https://trueanal.org/user/JulesTow/>https://trueanal.org/user/JulesTow/</a> Воспользоваться бездепом можно не во всех игровых автоматах: казино вдруг устанавливает ограничение для посетителей. Конечно, это можно посчитать некоторым неудобством для игрока, хотя справедливости необходимо, что выбор автоматов всё одинаково остаётся довольно великим.Активация происходит с помощью промокодов, коие вводятся в собственном кабинете после регистрации. Среди спецпредложений в списке Casino.ru находятся эксклюзивные промокоды, которые доступны только посетителям портала. Другие методы начисления средств ? автоматическая активация незамедлительно последствии творенья аккаунта и получение презента по запросу в службу технической помощи. 1×slots зеркало которую указывали при регистрации кстати Бездепозитный бонус казино 2022 с выводом за регистрацию предоставляет вероятность ознакомиться игроку с лобби выбранного заведения, сориентироваться в выборе игр и выяснить качество работы службы поддержки. Довольно нередко, начиная игровой процесс, игрок уже не желает останавливаться и делает реальный вклад. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать безвозмездно вероятно как раз таки с призом за регистрацию без необходимости вносить депо.
1хлот регистрация в 1×slots casino
Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном сайте и сделайте вход в личный офис, дабы арестовать благотворительные вращения с вейджером х40;Чаще всего казино приз за регистрацию без депо даёт вероятность запустить каждой автомат. Но никакого внимательно ознакомиться с условиями. Иногда для игры доступны только определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, никакого начать знакомство с миром азарта непосредственно с «одноруких бандитов». Однако далековато не все ресурсы предлагают своим клиентам бездепозитные бонусы за регистрацию в казино. В большинстве случаев учтено одобрение на 1-ый депозит в размере 100–200%. Это замечательная возможность преувеличить банкролл, увеличить время, проведённое за игрой и шансы сорвать крупный куш. <a href=http://messmangler.com/forums/member.php?action=profile&uid=3570>http://messmangler.com/forums/member.php?action=profile&uid=3570</a> Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. 1хслот официальный сайт зеркало Бонус за регистрацию в казино выдается только раз раз на 1-го игрока. Но случаются вспомогательные промоакции, в коих бездепы расступаются для постоянных посетителей и такие презенты Вы сможете получить больше одного раза.
x1 slots 1хслотс регистрация перейти на 1×slots
1×slots регистрация на официальном сайте <a href=https://www.toprankglobal.com/profile/LeiaPerale>https://www.toprankglobal.com/profile/LeiaPerale</a> На нашем веб-сайте Вы отыщите список актуальных свежих бездепозитных бонусов в казино 2022 года. Также, есть много неповторимых услуг, коие доступны только гостям нашего сайта последствии регистрации по нашей ссылке или активации специального промокода.
казино 1×slots официальный сайт
Если вы выбираете проверенное лицензионное интернет казино и выполните все условия получения бездепозитного приза, проблем с получением дара у Вас не возникнет. <a href=http://d90894u1.bget.ru/user/JeffreyBroar/>http://d90894u1.bget.ru/user/JeffreyBroar/</a> Условия имеют различаться друг от приятеля. Но подобный бонус может быть использован только для игрового процесса – полученные на счет финансы до того, как будут отыграны, исключить невероятно.Бездепы обычно предлагают с отыгрышем — моментально вывести выигранные свои нельзя. Перевод средств со счета будет возможен в как, как пользователь выполнит все требования казино, а сумма не может быть выше установленного правилами лимита. Условиями промоакции фиксируются сроки, на которых заказчик вправе пользоваться предложением. Обычно они не превышают нескольких дней последствии активации. 1×slots рабочее зеркало на сегодня Выбирайте наихорошие благотворительные призы с помощью обзоров на Casinoz – и пусть вас сопутствует счастье при отыгрыше бонусных кредитов!Доступные игры – В некоторых азартных забавах можно снизить математическое превосходство казино до нескольких 10-х процента. В их количестве почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как управляло, в таких играх ставки идут в зачет вейджера не всецело. Например, имеет предусматриваться лишь 50%. В неких играх бездепозитные бонусы вообщем невозможно отыгрывать.
<b>Смотреть еще похожие новости:</b>
<a href=http://khodaumo.com/forum/viewtopic.php?f=2&t=75203&sid=60e90e03885619872d8bc9dda5c2c26f>зеркло казино 1×slots</a>
<a href=https://www.formulersupport.com/Thread-1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE–131234>1×slots официальный сайт зеркало</a>
<a href=http://old.pokvesti.ru/forum/memberlist.php?mode=viewprofile&u=3543>1хслотс казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Следует подчеркнуть, собственно бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом. Основное различие том,, собственно для получения бездепа не надо пополнять баланс в казино. Но кроме этого, есть ряд прочих отличий:
#6748 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
рокс казино лучшие бесплатные онлайн казино <a href=https://rhymes-punches.com/>букмекерские конторы бет</a> пин up casino порно с Зырянова Анастасия Владимировна <a href=https://t.me/vchkogpu_ru>1×bet зеркало xbet</a> вавада казино порно с Диана Шнайдер (теннис) pin ап casino слот casino порно с Бондаренко Анастасия Борисовна скачать 1×bet на андроид скачать 1×bet на андроид
#6749 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия скачать
Бездепозитные бонусы реальными средствами, коие можно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадали.Свежий приз начисляется в виде денежных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в использовании своими, ну случае отыгрыша оператор имеет ввести лимитирование на вывод средств. <a href=http://filmkachat.ru/>1×slots скачать на айфон</a> <a href=https://social.urgclub.com/read-blog/214040>https://social.urgclub.com/read-blog/214040</a> Лишь знаменитые и знаменитые азартные заведения шансы разрешить себя выдавать бездепы повторяющий дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, которые возможно истратить в топовых аппаратах с высокой отдачей.На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не можете активировать и получить бездепозитный бонус. x1 slots 1хслотс регистрация перейти на 1×slots <a href=http://xn-----6kcwbqeldsdd4a9ag6b6f6b.xn–p1ai/profile.php?uid=140391>http://xn-----6kcwbqeldsdd4a9ag6b6f6b.xn–p1ai/profile.php?uid=140391</a> Бесплатный бонус – кредиты, коие онлайн-казино начисляет клиенту, не принуждая его пополнять игровой счет.
1×slots регистрация 1×slotscasino09k online
Акции, приуроченные к календарным дням, случаются рассчитаны как на всех юзеров, так и на категории: к, презент на 8 марта девушкам-игрокам или мужчинам на 23 февраля.Срок активации и время на отыгрыш. Зачисление средств или фриспинов происходит при активации протяжении строго ограниченного периода, похожие требования предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать бонус несколько дней либо и недель. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высочайшим вейджером. <a href=https://adminclub.org/showthread.php?tid=64848>1хслотс казино зеркало</a> 1 xslots рабочее зеркало Будьте внимательнее при ознакомлении с правилами во избежание происхожденья конфликтных ситуаций с казино, когда последствии отыгрыша бездепа вам не дадут вывести крупную необходимую выигрыша. <a href=https://roacytomedy.com/bbs/board.php?bo_table=free&wr_id=113223>https://roacytomedy.com/bbs/board.php?bo_table=free&wr_id=113223</a> Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, чтобы еще раз получить даровой бонус. Игорные заведения нетерпимы к бонус-хантерам, потому вас ожидает неизбежное санкция. 1×slots официальный зеркало 3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефон либо почту, указать индивидуальную информацию;Доступные забавы – В неких азартных забавах можно понизить математическое превосходство казино до нескольких 10-х процента. В их количестве почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как верховодило, в таких играх ставки идут в зачет вейджера не полностью. Например, возможность учитываться лишь 50%. В неких забавах бездепозитные бонусы вообще нельзя отыгрывать.
1×slots регистрация то дальше необходимо пройти
Выиграть реальные деньги в казино не пополняя счет – сложно, но возможно. Главное задаться целью и не нарушатьправила заведения. Выберите несколько казино с бездепзитными призами и начните выступать на бонусные свои. По статистике каком-то 10-ти заведений можно заработать небольшую сумму средств с бонусных средств.Только выполнив все обстоятельства отыгрыша и дождавшись окончания проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить свои деньги. <a href=https://genius.com/Vykupavto0311>https://genius.com/Vykupavto0311</a> Но есть игорные заведения, которые готовы просто так жертвовать средства на забаву. Для сего достаточно создать профиль. Чтобы исключить собственный выигрыш, вас поначалу нужно выполнить условия отыгрыша, указанные в критериях получения бездепозитного депо. 1×slots зеркало Бездепы обыкновенно предлагают с отыгрышем — моментально исключить выигранные средства невозможно. Перевод денег со счета несомненно вероятен после такого, как пользователь выполнит все притязания казино, а сумма не быть выше установленного правилами лимита. Условиями промоакции фиксируются сроки, на которых заказчик вправе пользоваться предложением. Обычно они не превосходят нескольких дней последствии активации.Главное преимущество спинов – вероятность выучить разные слоты. Также получится насладиться бонусными раундами, испытывать фортуну в риск-туре и преумножить выигрыш за счёт особенных символов. Однако столько игровой процесс заслуживает внимание, так превосходнее сосредоточиться на реальном выигрыше.
1×slots бездепозитный бонус за регистрацию
В любом казино с бездепозитным призом предусмотрены вейджеровые условия. Это один-единственный «подводный камень», который стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, нужно устроить определённое число ставок. Чем круче бонус, что, этим труднее выполнить условия, и напротив.Бoльшинcтвo азартных заведений выдвигают примерно одинаковые условия и требования, коие необходимо выполнить, дабы получить бездепозитный бонус за регистрацию. Все их возможно соединить в раз перечень: <a href=http://www.airsoft44.com/forum/index.php?action=profile;u=11896>1×slots регистрацию более популярный вариант это</a> 1×slots актуальное зеркало <a href=http://www.tame.wphl.net/home.php?mod=space&uid=241563>http://www.tame.wphl.net/home.php?mod=space&uid=241563</a> Многие игроки, оценив перечень казино, остаются играть в нем и далее ? на это и направлено любое промо. Постоянные клиенты вносят депозиты и делают ставки, обеспечивая долгосрочную выгода оператора. То есть, казино раздают бездепы новым юзерам для формирования приклнной аудитории.Бонус начисляется игроку незамедлительно после регистрации и прохождения верификации в казино и не настятельно от посетителя внесения депозита. Как верховодило, размер приза в схожем случае достаточно скромный, однако дозволяет новичкам познакомиться с забавой без риска настоящими средствами.
1×slot официальный сайт
После получения приза вывод средств для клиента несомненно недосегаем времени, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя или пара месяцов. Выводить деньги игрок сможет только последствии отыгрыша.Да, у безвозмездных призов есть недостатки. Прежде всего, они обычно не. Кроме того, условия вейджера по ним практически жесткие. Но все же неименье риска проделывает их очень привлекательными для клиентов. Чаще всего интернет-казино предлагают бездепозитные бонусы свежим пользователям. Эта промо-акция очень отлично привлекает начинающих, подталкивая их к открытию счета. Конечно, не все становятся преданными клиентами, но сам прецедент регистрации аккаунта играет на руку заведению. <a href=http://thermocare.co.kr/bbs/board.php?bo_table=free&wr_id=409526>http://thermocare.co.kr/bbs/board.php?bo_table=free&wr_id=409526</a> Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. 1×slots казино зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://6000ziyuan.com/forum.php?mod=viewthread&tid=109535&extra=>1хслотс рабочее зеркало</a>
<a href=http://maddog-server.org/forum/showthread.php?tid=53498>1хслот зеркало сайта</a>
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=296124>1×slot зеркало рабочее регистрации на телефон придет</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в неотъемлемом порядке нужно восполнить счет в казино. Для депозитных бонусов, данная процедура не нужна, так как депо уже изготовлен. Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в неотъемлемом порядке необходимо восполнить счет в казино. Для депозитных призов, эта процедура не необходима, так как депозит уже сделан.
#6750 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
карты казино карты казино <a href=https://m.repost.news/>сайт казино вход</a> ап казино 1×bet зеркало xbet <a href=https://specreporter.com/>1×bet зеркало xbet</a> лучшие онлайн казино порно с Абрамченко Виктория Валериевна букмекерская контора мостбет kent casino win win casino пинап казино казино пин
#6751 Charlesgunnyhttp://filmkachat.ru
1×slots казино зеркало
В разделе с бонусами активировать собственный подарок. Найти игры, для коих предусмотрено поощрение и использовать бонус по предназначению. <a href=http://filmkachat.ru/>1×slots казино зеркало</a> При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое можно предназначить ирге в казино.Кешбэк-бонус дает собой возврат фиксированного процента от ставки когда проигрыша либо же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не превышает 10%. <a href=https://speakerdeck.com/rendercgi1>https://speakerdeck.com/rendercgi1</a> сайт 1× slots casino <a href=http://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=5060>http://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=5060</a> Выбирая безвозмездный приз, внимательно изучайте управляла. Убедитесь, собственно вам возможно брать участие в промоакции. Уточните, в каких играх можно исполнять обстоятельства вейджера. При надобности задавайте вопросы представителям саппорта.
1×slots зеркало на сегодня
Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в обязательном порядке нужно пополнить счет в казино. Для депозитных бонусов, данная процедура не нужна, например как депо теснее изготовлен. 1×slots зеркало регистрация в 1×slots casino Прямо сейчас заберите бесплатные вращения за регистрацию без депо и начинайте собирать призовые композиции из-за солидных выигрышей!При малый сумме приза рекомендовано выступать по низким ставкам, а использовать максимальные лучше лишь сомнений случае, случае вейджер слишком большой, а время на отыгрыш сильно ограничено. <a href=https://sporovo.by/user/OscarSturn/>https://sporovo.by/user/OscarSturn/</a> Срок отыгрыша — это этап, который начинается в момент активации бонуса и кончается с его закрытием. Пользователю нужно уложиться в данный временной промежуток, иначе призовые свои аннулируются. Казино устанавливают список игр, ставки каких засчитываются при расчете отыгранных денег. Если тайтл не входит в этот перечень, то он может быть недосегаем для загрузки период деянья бонусного предложения.Oтыгpaть бонус с обозначенным вeйджepом, желаемого нужно сдeлaть cтaвoк нa cумму, превосходящую размер приза в количество раз. 1×slots официальный сайт мобильная версия скачать На нашем сайте Вы отыщите список своевременных новых бездепозитных призов в казино 2022 года. Также, есть количество эксклюзивных услуг, которые доступны лишь посетителям нашего сайта в регистрации по нашей ссылке либо активации особого промокода.В интернет-сети постоянно можно найти перечни более модных и гарантированных поощрительных программ от знаменитых онлайн-казино.
1х слот регистрация в 1×slots casino
Бонусы без депозита при регистрации считаются наиболее привлекательными как для опытнейших игроков, например для и новичков. Получив такое вознаграждение, заказчик имеет выступать на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные призы в интернет-казино Рунета, еще условия их активации и выигрыша.С иной стороны, намного легче отобрать бездепозитные фриспины за регистрацию в казино и напрямик в начать вращать барабаны в наихороших слотах. Главная необыкновенность спинов что, что они предусмотрены для лучших автоматов. Удастся не пройти дополнительные раунды, хотя и увеличить необходимую выигрыша, заработать респины и внутриигровые презенты. Бонус за регистрацию в казино выдается только один один на 1-го игрока. Но посещают дополнительные акции, в рамках которых бездепы раздаются для постоянных посетителей и эти подарки Вы сможете получить более одного раза. <a href=https://gowwwlist.com/%D0%B1%D0%BB%D0%BE%D0%B3%D0%B8-%D0%BE-%D0%B6%D0%B5%D0%BD%D1%81%D0%BA%D0%BE%D0%BC-%D0%B7%D0%B4%D0%BE%D1%80%D0%BE%D0%B2%D1%8C%D0%B5_269304.html>https://gowwwlist.com/%D0%B1%D0%BB%D0%BE%D0%B3%D0%B8-%D0%BE-%D0%B6%D0%B5%D0%BD%D1%81%D0%BA%D0%BE%D0%BC-%D0%B7%D0%B4%D0%BE%D1%80%D0%BE%D0%B2%D1%8C%D0%B5_269304.html</a> Во всех законных онлайн-казино Беларуси нужно свидетельство паспортных данных для игры — это требование правительства страны. 1×slots подтвердит вашу регистрацию если говорить После получения приза вывод средств для посетителя будет недоступен до, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо чета недель. Выводить средства игрок может лишь после отыгрыша.Некоторые веб-сайты, этого чем провести регистрацию игроков, предлагают ответить на некоторое базисных вопросов. Цель проведения подобной викторины – выявить случайных людей, которые не имеют представления о покере, и не допустить получения ими призов. Если посетитель теснее играл в казино, то ответить на полтора десятка несложных вопросов несомненно нетрудно. Очень часто, ответы можно найти на официальных веб-сайтах этих учреждений.
1× slots официальный
Диапазон ставок, коие вправе устроить игрок, кроме лимитирован. Обычно ставить возможно маленькую необходимую — пределах 10–30 рублей за одно вращение. Не стоит путать игру в демо и внедрение бонусов. В демонстрационном режиме игрок имеет расценить механику слота, сюжет и оформление. Но забава проводится на условные кредиты, поэтому отсутствует основное ? чувство пыла. Активируя промокод или фриспины, клиент по-прежнему не расходует свои деньги на игровые автоматы, хотя может сорвать настоящий куш!Популярность интернет казино растёт и всё больше пользователей начинают интерес азартными забавами. Бездепозитные призы 2022 года, это уникальные подарки за регистрацию. С их поддержкою свежие игроки могут получить бесплатные вращения либо средства на баланс за 1 регистрацию. С свет игорных заведений в интернете, бездепозитные бонусы стали популярнейшим способом привлечения игроков. Подобные акции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о которых мы поведаем. Наш сайт собрал наихорошие предложения из онлайна на 2022 год. Воспользуйтесь любым даром и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить условия. У любого игорного заведения свои правила и условия. Но, чтобы получить бонусы, нужно выполнить стереотипные деяния:Только выполнив все обстоятельства отыгрыша и дождавшись завершения проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить свои средства. x1 slots регистрация в 1×slots casino <a href=http://www.vintageampeg.com/forum/member.php?action=profile&uid=7143>http://www.vintageampeg.com/forum/member.php?action=profile&uid=7143</a>
x1 slots 1хслотс регистрация перейти на 1×slots
Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке нужно восполнить счет в казино. Для депозитных призов, данная процедура не нужна, например как депо теснее сделан.Необходимость отыгрыша. Вейджер в этом случае повыше, чем для призов за депозит. И пока средства не отыграны, исключить их невозможно. <a href=http://www.aina-company.com/bbs/board.php?bo_table=free&wr_id=768755>http://www.aina-company.com/bbs/board.php?bo_table=free&wr_id=768755</a> Игры, каких возможно играть на бонусные деньги. Проверьте список игр, в которых можно выступать на бонусные свои, вероятно они Вам не понравятся и не стоит расходовать своё время на эту промоакцию.Обычно бездепозитные акции от казино, прибывают на эл. Почту в дни рождения либо праздники. В неких интернет казино можно обратиться в чат и как неизменному игроку, возможно вас предложат бездепозитное предложение. 1×slots официальный регистрация
<b>Смотреть еще похожие новости:</b>
<a href=https://www.sgomberisgombero.it/my-account-2/>1×slos регистрация в 1×slots casino</a>
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=32743>1×slots зеркало быструю регистрацию а также мгновенное</a>
<a href=https://russiancomputerservice.ru/user/JosephCer/>1×slot зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Доступные забавы – В некоторых азартных забавах можно снизить математическое превосходство казино до нескольких 10-х процента. В их числе многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как правило, в этих забавах ставки идут в зачет вейджера не полностью. Например, возможность учитываться только 50%. В некоторых играх бездепозитные призы вообщем нельзя отыгрывать.
#6752 Charlesgunnyhttp://filmkachat.ru
1×slots официальный регистрация
Хотя безвозмездные бонусы начисляются без депо, не исключено, собственно вам придется заносить деньги. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты лишь последствии того, как свежий клиент раз пополнит игровой счет. <a href=http://filmkachat.ru/>зеркло казино 1×slots</a> <a href=https://owntweet.com/thread/214646>https://owntweet.com/thread/214646</a> 1хслот зеркало сайта <a href=http://empyrethegame.com/forum/memberlist.php?mode=viewprofile&u=303455&sid=ec6e237f4a66d59c8b6d7971a6ee5f3e>http://empyrethegame.com/forum/memberlist.php?mode=viewprofile&u=303455&sid=ec6e237f4a66d59c8b6d7971a6ee5f3e</a> Шаг 4. Активация. Внимательно изучите условия, информацию по лимитированиям и сроке действия бонусного предложения. Разобравшись с правилами, возможно активировать приз в собственном офисе (от ? с использованием промокода) либо по запросу в саппорт.Поспешите забрать бездепозитные призы за регистрацию в казино из представленного перечня. Все платформы не ведут легальную деятельность, но и обрадуют честными плодами забавы, высокой отдачей, прыткими выплатами.
1×slots casino зеркало рабочее
Основное различие что, нет, собственно для получения бездепа не надо пополнять баланс в казино. Но не этого, есть ряд и других различий:Существует ли стратегии для отыгрыша бездепозитных призов? К сожалению нет, на выигрыши либо проигрыши с бонусов, казино или игрок воздействовать не может, отдача игр происходит от разработчиков игр. <a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=340035>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> 1хслот зеркало сайта В интернете очень большое скриптовых вебсайтов, которые принадлежат мошенникам. Их основная задача – заинтересовать гэмблеров, пообещав столько великодушные презенты, хотя и солидные выигрыши. Так собственно кое-какие веб-сайты предлагают получить за регистрацию и $1 000. <a href=http://sofilena.ru/bitrix/click.php?goto=http://tek-mosenergo.ru/bitrix/redirect.php?goto=http://podshipnik118.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/1×DUiG1Pu6L>http://sofilena.ru/bitrix/click.php?goto=http://tek-mosenergo.ru/bitrix/redirect.php?goto=http://podshipnik118.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/1×DUiG1Pu6L</a> Бездепозитный бонус по промо-коду будет доступен для забавы, только в случае когда Вы активируете специальный бонусный код в разделе с призами или укажите промокод при регистрации на сайте. В некоторых случаях, не активации кода, придется доказать контактные данные игрока и заполнить анкету посетителя. 1×slots официальный зеркало Сроки активации бонуса устанавливаются каждым казино, хотя почаще всего они не превышают недели с этапа получения. Игроку обязательно нужно использовать бездеп в течение обозначенного срока, в ином случае бонус просто пропадет. Каждый приз возможно получить только раз раз, поэтому случае не использовать бездеп в срок, у игрока не несомненно второго шанса им воспользоваться.Ну и окончательно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: схожая добродушие увеличивает степень лояльности клиентов к компании.
1×slots коды
Так собственно главное различие дара на депозит от бездепа – неотъемлемое пополнение счёта. Вы можете привнести депозит и преумножить стартовый капитал либо отобрать бездеп и всем не придётся рисковать собственными сбережениями. Поспешите выполнить простые притязания, и администрация ресурса начислит щедрое поощрение!Шаг 4. Активация. Внимательно выучите обстоятельства, информацию по лимитированиям и сроке деяния бонусного предложения. Разобравшись с правилами, можно активировать бонус в личном кабинете (времени ? с внедрением промокода) или по запросу в саппорт. Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Для отыгрыша бонуса казино обязует игрока сыграть на сумму, в несколько один превосходящую необходимую полученного бонуса — тут выгода фирмы очевидна. <a href=https://ua.linkedin.com/in/orlov-aleksandr-0697ab15a>https://ua.linkedin.com/in/orlov-aleksandr-0697ab15a</a> 1×slots сайт зеркало
казино 1×slots
При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие возможно посвятить забаве в казино. Обыкновенные бездепозитные призы в объеме от 3-х до 20 долларов созданы чтобы, чтобы, чтобы в забавы заходили все новые и новые игроки. Здесь, скорее, несомненно лимитирование на максимальный выигрыш. Важно, чтобы перед минимальным вкладом был отключен приз за 1-ое пополнение счета, и игрок не попадет на повторный вейджер.Если вы новичок в и лишь попали в неизведанную вами область пыла — счет предложений как бездепозитные призы без пополнения. 1×slots официальный зеркало рабочее <a href=http://naydisebe.ru/user/profile/137587>http://naydisebe.ru/user/profile/137587</a> После потребуется внести идентификационный платёж. Это стращает новичков больше всего. Нужно устроить наименьший депозит в 100–500 руб. Таким образом служба безопасности увериться в том, собственно платёжный способ принадлежит Вам. Данная процедура необходима для обеспечивания безопасности игровых счетов. Пример, Ваш аккаунт взломают и выведут средства на свой кошелёк. Будет очень досадно. Поэтому верификация платёжной системы, это важный момент.
1хслот официальный сайт зеркало
Так что основное отличие подарка на депозит от бездепа – неотъемлемое пополнение счёта. Вы сможете внести депо и преувеличить стартовый капитал или отобрать бездеп и этом не придётся рисковать своими сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начислит щедрое одобрение! Помните, что в неких забавах сумма ставки идет в зачет вейджера лишь отчасти. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки считаются как отыгранные деньги, момент как в слотах идет в зачет все one hundred percent суммы. <a href=https://honcure.com/user/Ashleywaymn/>https://honcure.com/user/Ashleywaymn/</a> Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке необходимо восполнить счет в казино. Для депозитных призов, эта процедура не необходима, так как депозит теснее изготовлен. 1хслот официальный сайт зеркало Отказ в прохождении верификации. Если заказчик не хочет либо не может дать документы, подтверждающие его лицо, профиль будет заблокирован вместе со всеми бонусными начислениями.В подавляющем большинстве случаев безвозмездные призы начисляются в кредитах, которые нельзя незамедлительно вывести со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д. ). О нем читайте ниже.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.reisezielforum.de/viewtopic.php?t=435952>1×slots официальный регистрация</a>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-4955/#comment-591178>1хслотс официальный сайт зеркало</a>
<a href=https://smm-seo.ru/members/rabofreeol.4209/>1хслот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выиграть настоящие средства в казино не пополняя счет – сложно, но вполне. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными призами и начните играть на бонусные свои. По статистике в 10-ти заведений можно заработать небольшую сумму денег за счет бонусных средств.
#6753 Charlesgunnyhttp://filmkachat.ru
1 х слотс зеркало
Так собственно основное различие презента на депозит от бездепа – неотъемлемое пополнение счёта. Вы сможете внести депозит и преувеличить стартовый капитал или отобрать бездеп и этом не придётся рисковать своими сбережениями. Поспешите выполнить обычные требования, и администрация ресурса начислит щедрое одобрение! <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino09k online</a> Наличие у игрока 2 аккаунта. Запрещено создавать несколько профилей для неоднократного получения бездепов. <a href=https://blog.udn.com/G_112062930339362154/181391904>https://blog.udn.com/G_112062930339362154/181391904</a> 1×slots регистрация на сайте 1×slots ru com <a href=http://www.superstitionism.com/forum/profile.php?id=1332817>http://www.superstitionism.com/forum/profile.php?id=1332817</a> Ну и окончательно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: подобная добродушие повышает степень преданности клиентов к фирмы.
1хслотс официальный сайт зеркало
Как лишь на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу после сего можно забыть заявку на вывод выигрыша. Кредиты прибыльно отличаются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом реальных средств и выделяют вероятность ощутить задор. Во-вторых – возможно насладиться любой азартной игрой доступной на веб-сайте. В вашем постановлении находятся автоматы, настольные приложение, видео-покер, Live-дилеры. <a href=https://forum.bandariklan.com/showthread.php?tid=384717>1хслотс рабочее зеркало</a> 1×slots бонус за регистрацию Ещё одно распространённое акционное предложение – симпатичный презент с сомнительными притязаниями. К образцу, клуб обещает $100 в качестве бездепа, хотя с вейджером х80 или х100. Отыграть такой вейджер фактически невероятно и поэтому другого концентрироваться на больше интересных акциях.Выбирая бесплатный бонус, пристально изучайте правила. Убедитесь, собственно для возможно принимать участие в акции. Уточните, в каких забавах можно выполнять условия вейджера. При необходимости задавайте вопросы представителям саппорта. <a href=http://mbdou-vishenka.ru/user/GeraldStush/>http://mbdou-vishenka.ru/user/GeraldStush/</a> Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают бонус по государствам. Вплоть до как, что клуб возможность брать игроков из Вашей страны, а бездеп не давать.Выбирая безвозмездный бонус, пристально изучайте верховодила. Убедитесь, собственно вас можно принимать участие в акции. Уточните, в каких играх можно выполнять обстоятельства вейджера. При необходимости задавайте вопросы представителям саппорта. рабочее зеркало 1хслотс
1× slots casino официальный сайт
При верном раскладе бездепы — это прекрасный способ выступать на средства без растраты собственных средств. Есть количество советов, следуя которым можно извлечь максимально выгоды из похожих акций казино. Играть по лишь на лицензированных площадках. Скриптовые сайты не только обманывают с бонусными предложениями, хотя и употребляют пиратский софт с измененным ГСЧ. Выиграть на этих автоматах невозможно. <a href=http://hiland.pro/bitrix/redirect.php?goto=http://ginis.ru/bitrix/redirect.php?goto=http://rial-soft.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/GnWyHPHht08>http://hiland.pro/bitrix/redirect.php?goto=http://ginis.ru/bitrix/redirect.php?goto=http://rial-soft.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/GnWyHPHht08</a> Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, дабы еще раз получить безвозмездный бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ожидает неизбежное наказание.Размер ставки для игры по бездепозитному призу (окончательно же, в случае, когда он представлен вид бонусных денежных средств) зачастую ниже, чем при забаве на депозит. Ограничение несомненно действовать до этапа отыгрыша бонуса. казино 1× slots официальный сайт Новички не обожают незамедлительно же заносить депозит. Это обусловлено неименьем навыка и сомненьем. К счастью, наши можно получить бездепозитный бонус за регистрацию в казино. Неважно собственно начисляет система – фриспины либо кредиты. В всяком случае вы не рискуете собственными сбережениями. Это замечательная возможность запустить приглянувшийся видео разъем или же испытывать фортуну в настольных забавах.
1×slots рабочее зеркало
Доступные игры – В некоторых азартных забавах можно снизить математическое превосходство казино до нескольких 10-х процента. В их количестве почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как управляло, в таких играх ставки идут в зачет вейджера не всецело. Например, имеет предусматриваться лишь 50%. В неких играх бездепозитные бонусы вообщем невозможно отыгрывать. 1 хслот регистрация в 1×slots casino <a href=http://seafishzone.com/home.php?mod=space&uid=1196257>http://seafishzone.com/home.php?mod=space&uid=1196257</a> Все любят получать подарки. Согласитесь, практически каждый играющий человек будет сильно счастлив, если получит бесплатный презент для игры в онлайн казино просто за регистрацию или же бонус за внесенный депо, например именуемые приветственные призы для новых игроков. Соответственно эти интернет клубы будут больше востребованы и предпочтительны у игроков при выборе казино для забавы. Топ казино постоянно обновляется и добавляются новые и интересные игровые клубы с привлекательной бонусной политикой и всеми возможными привилегиями, к которым относятся эти бонусы как фриспины за регистрацию, денежные бездепозитные бонусы, еще великодушные призы за внесенный депо.
1 xslots рабочее зеркало
В случае установленного лимита на сумму вывода выигрыша с бездепозитного бонуса, игрок не может исключить больше заявленной суммы. <a href=http://www.ntsr.info/forum/user/83894/>http://www.ntsr.info/forum/user/83894/</a> 1×slots зеркало рабочее Бездепозитные бонусы — это презенты от казино повторяющий бонусных средств или фриспинов для игровых автоматов, которые начисляются на акк игрока в процедуры регистрации на веб-сайте заведения. Для получения этих поощрений депо не требуется.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.makinamania.net/index.php?topic=252326.new#new>1×slots casino регистрация на сайте</a>
<a href=https://nztw.org/forum.php?mod=viewthread&tid=564110&pid=896995&page=1&extra=page%3D1#pid896995>1×slots официальный сайт, скачать</a>
<a href=http://angelandmax.teamforum.ru/memberlist.php?mode=viewprofile&u=640>казино 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, коие можно посвятить забаве в казино.
#6754 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пина casino промокод 1×bet <a href=https://rumafia.news/>casino актуальное зеркало</a> casino 7k сегодня Окладникова Ирина Андреевна порно <a href=https://krtka.info/>рабочее казино</a> Комарова Наталья Владимировна порно порно с Дарья Касаткина (теннис) порно с Каролина Севастьянова vavada casino 1×bet вход сайт pin up casino букмекерская контора скачать приложение
#6755 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрацию более популярный вариант это
Ознакомьтесь с нашим списком превосходнейших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего списка и получите бездеп сразу. Хватайте лучшие благотворительные предложения ниже и выигрывайте великие средства, не рискуя!Раздача призов имеет быть приурочена к разным датам: календарные праздничные, дни рождения игроков, годовщина открытия казино и т. Д. Подарок выдается вид средств, фриспинов либо баллов для накопления и размена на предложения оператора. Если юзер получает выигрыш, средства начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд требований. <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> Способы получения бездепа различаются от облика бонуса, кот-ый приглянулся игроку. Но вам или надо(надобно) быть зарегистрированным в легальном онлайн-казино и подтвердить собственную личность. В общем облике пошаговая инструкция для получения бездепозитного приза смотрится так: <a href=https://ilde2.upf.edu/clatmooc/v/ibs>https://ilde2.upf.edu/clatmooc/v/ibs</a> Бесплатные бонусы казино без депозита возможно получить вид валютных средств на бонусный счет (вывести их возможно лишь в отыгрыша), фриспинов, забавы либо кешбэк-бонуса. 1×slots зеркало регистрация <a href=http://biyografiforum.10tl.net/member.php?action=profile&uid=2739>http://biyografiforum.10tl.net/member.php?action=profile&uid=2739</a> Для выбора азартного заведения Вы можете пользоваться перечнем наших казино с призами за регистрацию. На нашем сайте мы опубликовали список бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, что часть бонусов неповторимые и доступны лишь для посетителей нашего сайта по-специальному промо-коду или по уникальной ссылке. Кроме как, для любого приза мы подготовили доскональный обозрение, каком Вы узнаете как получить и отыграть поощрение и как исключить свой выигрыш с бездепа.Бонусные деньги – маленькая сумма средств для старта в новеньком казино. На бонусные деньги, обыкновенно разрешено играть во все забавы, кроме слотов с современным джекпотом и игр из раздела live casino.
казино 1×slots
<a href=https://www.katzenforum.at/forum/threads/1×slots-oficialnyj-sajt-zerkalo.42178/>1×slots официальный сайт зеркало</a> казино 1×slots Активация случается за промокодов, которые вводятся в собственном кабинете в регистрации. Среди спецпредложений в списке Casino.ru находятся эксклюзивные промокоды, коие доступны лишь гостям портала. Другие способы начисления средств ? автоматическая активация сразу последствии сотворения аккаунта и получение подарка по запросу в службу технической помощи. <a href=http://forum.bluesystem.online/profile.php?mode=viewprofile&u=36914>http://forum.bluesystem.online/profile.php?mode=viewprofile&u=36914</a> 1×slots casino регистрация на сайте
скачать 1×slots официальный сайт
Шаг 5. Использование и отыгрыш. Бездеп должен быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.Теоретически, к безвозмездным бонусам можно отнести например именуемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, поэтому собственно они предоставляют лишь вероятность создавать ставки. <a href=https://agro-info.biz.ua/wr_board/tools.php?event=profile&pname=Geraldanymn>https://agro-info.biz.ua/wr_board/tools.php?event=profile&pname=Geraldanymn</a> В перечне требований к отыгрышу нередко присутствуют лимиты на ставки при забаве на собственные деньги. Так, если отыграть нужно 30 000 руб., а максимальная сумма ограничена 30 рублями, то вертеть барабаны светит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками условий по срокам действия промоакции.Иногда для получения бонусов необходимо связаться с адептами службы поддержки. Удобнее всего с ними беседовать в онлайн-сате, желая иногда достаточно запроса по электронной почте. 1×slots зеркало на сегодня В игровых клубах без лицензии Вы покупаете „кота в мешке“ и в случае спорных обстановок нет возможности куда-то посетовать и доказать собственную правоту.
1×slots casino зеркало
Подарки на праздники ? приуроченные к парадным датам, требующие условного отыгрыша или начисляются без это. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду. Начнём с как, что каждое рекламную за регистрацию предполагает некие условия. Бездепозитные призы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, нужная для выполнения критерий. Пример, возымели бесплатные вращения и выиграли с них 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 рублей, неудачных или выигрышных, неважно. После выполнения, бонусный баланс перейдёт на настоящий и будет легкодоступным к выводу.На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не сможете активировать и получить бездепозитный бонус. 1×slots официальный сайт зеркало <a href=http://www.princeton.com.cn/home.php?mod=space&uid=78535&do=profile>http://www.princeton.com.cn/home.php?mod=space&uid=78535&do=profile</a> Отказ в прохождении верификации. Если клиент не хочет либо не предоставить документы, подтверждающие его лицо, профиль будет заблокирован совместно, вкупе со всеми бонусными начислениями.
1×slots официальный регистрация
Подарки на дни ? посвященные торжественным датам, требующие символического отыгрыша либо начисляются без того. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду.Создание аккаунта. На сайте казино необходимо открыть регистрационную форму и наполнить пустые поля личными данными. Иногда на этом этапе потребуется указать лишь адрес электронной почты и пароль, хотя чаще надобно наполнить анкету персональной информацией (ФИО, дата рождения, место проживания и т.д.). Нужно указывать лишь настоящие данные, что впоследствие они станут проверены. <a href=http://jbparadiez.org/member.php?action=profile&uid=12185>http://jbparadiez.org/member.php?action=profile&uid=12185</a> 1хслот зеркало сайта B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.Некоторые казино все предлагать клиентам бездепы за подтверждение номера или почты или репост на страницу в соц сетях.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=54865>1×slots рабочее зеркало на сегодня</a>
<a href=http://forum.cvetq.info/viewtopic.php?f=8&t=266456>1хслотс мобильная версия зеркало</a>
<a href=https://10nsk.ru/user/JosephSuple/>1×slots зеркало регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Далее требуется отыграть вагер и вывести выигрыш. Игрокам без навыка крупно подфартило, есть получить десятки подарков за одну регистрацию. Если не смогли получить Бездепозитный бонус, не волнуйтесь. Обратитесь в онлайн чат, оператор поможет решить проблему.
#6756 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
7k casino зеркало pin up casino пин <a href=https://rumafia.news/>1×bet зеркало xbet</a> пин ап казино 1×bet зеркало рабочее на сегодня 1×bet xyz <a href=https://res-publika.com>казино зеркало сегодня</a> играющие казино онлайн ставки на спорт букмекерские конторы казино рояль смотреть casino рабочее зеркало реального казино букмекерская контора фонбет официальный porno Нина Пирогова, хоккеистка
#6757 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора скачать приложение casino зеркало сайта <a href=https://repost.news/>играющие казино онлайн</a> 1go casino Чулпан Хаматова <a href=https://kompromat1.online/>казино 5</a> Ходнева Светлана Владимировна порно казино зеркало сегодня Приезжева Екатерина Геннадьевна порно 1×bet сайт рокс казино casino официальный сайт pin ап casino
#6758 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino 777 online
Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают бонус по государствам. Вплоть до такого, что клуб может брать игроков из Вашей страны, а бездеп не давать.В зависимости от интернет заведения любой из их возможность для предложить как бездепозитные средства, так и бездепозитные фриспины, которые последствии удачной регистрации рухнут для на ваш игровой баланс. <a href=http://filmkachat.ru/>зеркло казино 1×slots</a> Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских рублей. В условиях промоакции указано, собственно вейджер бездепозитного бонуса х20. Поэтому, чтобы отыграть бонус, игроку будет необходимо сделать ставок на 35*20=700 рублей.Самые свежие бездепозитные бонусы в казино за регистрацию 2022 года с выводом выгоды находятся на этой страничке. Посетитель возможность расценить условия получения и начать выступать на деньги без внесения депозита. При этом игроку главно разуметь, на каких условиях и какими способами появится вывести приобретенный выигрыш. Для этого необходимо оценить список присоединенных платежных систем. <a href=https://imageevent.com/lexxeagle/virtualpropertytours>https://imageevent.com/lexxeagle/virtualpropertytours</a> Срок активации и время на отыгрыш. Зачисление средств либо фриспинов случается при активации протяжении требовательно ограниченного периода, схожие требования предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать бонус количество дней либо даже месяцов. Другие выдают солидную сумму за регистрацию, хотя время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером.Более солидные предложения встречаются довольно изредка. Зачастую они доступны только VIP-игрокам. В остальных случаях им всего сопутствуют очень строгие обстоятельства отыгрыша. Также вероятны дополнительные обстоятельства прочие лимитирования, прописанные в условиях и положения бонусной программы казино. 1×slots актуальное зеркало <a href=https://xn–80abdzaxbkfak2ai0bzf4ce.xn–p1ai/communication/forum/messages/forum5/message14611/14304-vykup-avto?result=new#message14611>https://xn–80abdzaxbkfak2ai0bzf4ce.xn–p1ai/communication/forum/messages/forum5/message14611/14304-vykup-avto?result=new#message14611</a> Бонусы без депозита при регистрации числятся наиболее привлекательными как для опытнейших игроков, так для и новичков. Получив это вознаграждение, клиент может играть на настоящие деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а условия их активации и выигрыша.Практически все интернет казино с бездепозитным призом за регистрацию предусматривает программу лояльности — систему одобрения постоянных клиентов, кот-ая состоит из множества уровней. При достижении игроком одного уровня на его счёт поступает приз. Чем выше степень — что, этим щедрее бонус.
1×slots регистрация на сайте 1×slots ru com
1×slots регистрация 1×slots review live Иногда операторы требуют внесение минимального депо перед выводом для верификации платежного инструмента. В неких казино данный депо того предстоит отыграть. <a href=https://senioredu.net/bbs/board.php?bo_table=free&wr_id=75052>https://senioredu.net/bbs/board.php?bo_table=free&wr_id=75052</a> Внесение депо – Будьте готовы восполнить счет после отыгрыша приза. Это стандартное заявка управлял для этого подобии промо-акций. Лучше заблаговременно уточнить, какую сумму надо(надобно) будет заносить на счет. Как верховодило, речь идет о наименьшем депозите, но вы должны быть уверены, собственно он для по кармашку. 1×slots регистрация 1×slots casino 777 online Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала резвые выводы. Фишка выплат что, нет, что достаточно выбрать платёжный инструмент и указать необходимую. В большинстве случаев средства зачисляются на электронные кошельки в течение 15 мин., а на банковские карты – 1–3 рабочих дня.
скачать 1×slots на андроид мобильная версия
<a href=https://forum.papbio.org/member.php?action=profile&uid=87288>https://forum.papbio.org/member.php?action=profile&uid=87288</a> 1хслот зеркало
1×slots быструю регистрацию а также мгновенное
Некоторые клубы механически начисляют приз на аккаунт игрока в исполненья условий получения, но посещают истории, когда бонус нужно активировать игроку самому. Есть количество способов активации бонуса:Баланс игрока дополняется на соответствующую необходимую. К ней применяется вейджер, обозначенный в правилах промоакции. Вывести выигрыш возможно несомненно последствии того, как пользователь сделает требуемый размер ставок из собственных средств. В редчайших случаях бездеп работает в формате Free Play. На счет пользователя зачисляется крупная сумма, и предоставляется небольшой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по завершении этого периода сумма на счету несомненно превосходить изначальную, то разность возможно будет исключить либо использовать для последующих ставок. Если площадка дарует бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь ввести акк на сайте и активировать его, подтвердив адресок электрической почты, номер телефонного либо иные данные, которые просит оператор. Перед данным нужно увериться, что пользователь находится на официальном веб-сайте казино, а не на жульнической площадке. 1×slots рабочее зеркало на сегодня <a href=https://www.medicinacinesenews.it/forum/memberlist.php?mode=viewprofile&u=3401785>https://www.medicinacinesenews.it/forum/memberlist.php?mode=viewprofile&u=3401785</a> Особую изюминку видео слотам присваивают оригинальные знакы. С их в активируются разные призы. Вы можете запустить вспомогательный степень и увеличить необходимую выигрыша. Есть знаки, которые сменяют ненужные элементы и сами делают выигрышные комбо. Не стоит забывать и тему бонус-тур. После любого успешного спина есть шанс увеличить необходимую выигрыша в два либо четыре раза.
1×slots официальный сайт мобильная версия скачать
<a href=http://drop-let.ru/index.php?subaction=userinfo&user=tackydealer34>http://drop-let.ru/index.php?subaction=userinfo&user=tackydealer34</a> Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских рублей. В критериях промоакции указано, что вейджер бездепозитного приза х20. Поэтому, дабы отыграть приз, игроку несомненно необходимо устроить ставок на 35*20=700 руб.Бонус за регистрацию в казино без депо с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша имеет понадобиться сделать ставки на сумму, в количество десятков раз превосходящую сумму бонуса либо выигрыша. 1× slots casino официальный сайт
<b>Смотреть еще похожие новости:</b>
<a href=https://praisenpray.org/forums/showthread.php?tid=97486>1 х слотс зеркало</a>
<a href=http://www.airsoft44.com/forum/index.php?action=profile;u=11896>1×slots официальный сайт скачать</a>
<a href=http://polishcrazyclan.ugu.pl/member.php?action=profile&uid=272738>1× slots регистрация в 1×slots casino</a>
<a href=https://vredeenvermaak.be/forum/vrede-en-vermaak/>casino 1×slot</a>
<a href=https://portugal-campings.com/pt/account/>1×slots регистрация 1×slotscasino09k online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы — это подарки от казино вид бонусных средств или фриспинов для игровых автоматов, коие начисляются на аккаунт игрока в процедуры регистрации на сайте заведения. Для получения этих поощрений депозит не потребуется.
#6759 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
где казино букмекерские конторы бет <a href=https://repost.news/>казино гта 5</a> 1×bet вход водка казино <a href=https://kompromat1.online/>casino андроид</a> порно с Федор Чалов (футбол) где казино фреш казино casino официальный зеркало 1×bet xbet порно с Захарова Мария Владимировна Шевцова Татьяна Викторовна порно
#6760 Charlesgunnyhttp://filmkachat.ru
1хслот скачать
Отыграв бездепозитный бонус в казино с выводом тоже придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в сходственное лимитирование существует, то единоразово вывести выйдет только сумму, не превосходящую объем полученного приза. <a href=http://filmkachat.ru/>1× slots casino зеркало</a> Игры, в которых возможно играть на бонусные деньги. Проверьте список игр, каких возможно выступать на бонусные средства, возможно они Вам не понравятся и надо тратить своё время на эту промоакцию.Список например нарекаемых «разрешенных землель» прилагается к правилам бонусной программы игорного портала. Обязательно выясните, распространяются ли на вас похожие санкции. <a href=http://prsync.com/cgifurniturecom/top-d-model-marketplaces-expert-guide-to-finding-quality-digital-assets-4446659/>http://prsync.com/cgifurniturecom/top-d-model-marketplaces-expert-guide-to-finding-quality-digital-assets-4446659/</a> 1×slot казино зеркало <a href=https://moolookoo.ru/content/shisha-tobacco-4-eur>https://moolookoo.ru/content/shisha-tobacco-4-eur</a> Чтобы бездеп не был начислен на Ваш акк, Вам не нужно активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк автоматически, а Вы не расчитываете его применять, обратитесь в саппорта с просьбой отменить бездепозитный приз.Первый образующийся вопрос, это, зачем выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают свежих игроков. Последним легче начать забаву на деньги с дара за регистрацию. Им надо пополнять баланс и расходовать личные свои. Новички получают бесплатные спины либо свои на счёт. С их помощью знакомятся с игровым процессом, крутят слоты и проделывают ставки в рулетке.
1×slots сайт зеркало
1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, в не хотите замерзнуть жертвой жуликов либо впустую истратить время;К огорчению, нет. Почти все казино, просят внесение но бы 1-го малого депо для вывода выигрыша с бездепозитного приза. Также учитывайте, собственно исключить средства разрешается лишь на что, эту платежную систему, с коей был сделан депозит. 1×slots casino регистрация 1×slotscasino09k online Перечисленные выше главные характеристики сопровождают практически любой бонус и являются стереотипными для бездепозитных бонусных начислений в казино.При небольшой сумме приза рекомендовано играть по невысоким ставкам, а использовать максимальные другого, как только в случае, случае вейджер слишком немалый, а время на отыгрыш крепко ограничено. <a href=http://bbs.yxsensing.net/home.php?mod=space&uid=124670>http://bbs.yxsensing.net/home.php?mod=space&uid=124670</a> B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax 1хслот официальный сайт зеркало
1×slots зеркало
Способы получения бездепа различаются в зависимости от вида бонуса, кот-ый понравился игроку. Но вам в любом случае надо(надобно) быть зарегистрированным в законном онлайн-казино и подтвердить собственную личность. В общем облике пошаговая аннотация для получения бездепозитного приза выглядит например:Если речь об неповторимых предложениях, имеет потребоваться регистрация в казино по ссылке с партнерского сайта. <a href=https://www.ccvgaming.com/forum/member.php?38840-JoshuaRaw&s=9b009225cefba95798ebd6c42b7c7448>https://www.ccvgaming.com/forum/member.php?38840-JoshuaRaw&s=9b009225cefba95798ebd6c42b7c7448</a> Маркетинговая политика всех игорных интернет-клубов обязана носить различный нрав. И в вознаграждения на депо работают для того, дабы стимулировать заносить депозиты и поощрять уже существующих пользователей, то бездепозитный бонус в казино или бонус за регистрацию в казино, этого всего, рассчитан на расширение базы потребителей. 1×slots зеркало проходить регистрацию это отличный вариант Но на некоторых азартных платформах сходственные вознаграждения имеют получить и уже зарегистрированные пользователи. В этом случае, призы предоставляются в рамках оригинальных промоакций или же некоторым геймерам вид акционного предложения, которое прибывает на почту с целью «вернуть» игрока в свое казино.
1хслотс мобильная версия зеркало
Минимального оборота. Этот предел уточняется вейджером — пока игрок не сыграет на установленную необходимую, вывод средств будет недоступен.Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются сразу последствии создания профиля и активны недолговременное время. Если не успеете истратить средства, они просто сгорят. Касаемо времени, как призы активны протяжении часа. В случае установленного лимита на необходимую вывода выигрыша с бездепозитного приза, игрок не сможет исключить больше заявленной суммы. Призовые начисления без депо имеют предоставляться для участия в турнирах онлайн казино. Потратить перечисленные деньги возможно исключительно в данной акции. Условия их проведения себе лимитирования на список игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, чем изучить его управляла.Возможность протестировать новые игры, не рискуя личностными своими и создать собственную тактику игры. 1×slots рабочее зеркало <a href=https://astraclub.ru/members/346251-Glavdorogadv1606?vmid=45560#vmessage45560>https://astraclub.ru/members/346251-Glavdorogadv1606?vmid=45560#vmessage45560</a>
1×slots рабочее зеркало
Зарегистрироваться в казино по особой ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефона и электронную почту). Для доказательства номера телефонного нужно в личном профиле показать свой номер и нажать кнопку „Подтвердить номер телефонного“, далее Вы получите sms-сообщение с кодом, который нужно ввести в подходящее фон. Для доказательства электрической почты, перебежать по интенсивной ссылке в письме от казино.Изучить управляла и обстоятельства получения бездепозитных бонусов казино, Вы можете у нас на веб-сайте в разделе с призами или на официальном веб-сайте избранного Вами казино. Если имеет найти нужную информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал или по электронной почте. <a href=https://www.usajobsindex.com/author/jeffreyaidef/>https://www.usajobsindex.com/author/jeffreyaidef/</a> 1× slots casino официальный сайт Ограничения по играм. Администрация запрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, средствами или безвозмездными вращениями. Обычно, в правилах приводится полный перечень слотов для отыгрыша. Иногда разделение производится по виду игр. Например, отыгрыш вероятен на всех игровых аппаратах, но запрещен в настольных забавах и в разделе Live Casino.Заработать на бездепозитных бонусах за регистрацию в казино возможность каждый юзер, достигший совершеннолетия.
<b>Смотреть еще похожие новости:</b>
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=3390>1×slots официальный регистрация</a>
<a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=13119>1 x slots casino</a>
<a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=91729>1× slots регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чтобы получить вероятность исключить прибыль с бездепозитного приза в казино, необходимо выполнить ряд условий:
#6761 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино онлайн бесплатно casino официальный зеркало <a href=https://kompromat1.online/>казино онлайн</a> порно с Анна Калинская (теннис) автомат казино <a href=https://m.repost.news/>казино смотреть онлайн</a> ramenbet casino играющие казино онлайн porno Илья Ковальчук (хоккей) казино вход официальный сайт казино на деньги скачать 1×bet casino betting
#6762 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия
Иногда для получения призов нужно спутаться с представителями службы. Удобнее всего с ними собеседовать в онлайн-сате, хотя от довольно запроса по электронной почте. <a href=http://filmkachat.ru/>1×slots регистрация на сайте 1×slots ru com</a> Размер приза. В качестве бездепов обычно начисляют очень суммы, а когда речь о бонусах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино шансы подарить игроку до 2000$. <a href=https://divisionmidway.org/jobs/author/archicgi-com/>https://divisionmidway.org/jobs/author/archicgi-com/</a> После получения бонуса вывод средств для посетителя будет недосегаем времени, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя либо чета месяцов. Выводить средства игрок может только последствии отыгрыша. casino 1×slot <a href=http://yealinkkorea.net/bbs/board.php?bo_table=free&wr_id=311313>http://yealinkkorea.net/bbs/board.php?bo_table=free&wr_id=311313</a> Сразу в активации промокода возможно воспользоваться даром. Как уже упоминалось, призы бывают трёх видов – фриспины, кредиты и фриплей-бонусы.
1×slots casino регистрация 1×slotscasin online
<a href=http://check2go.net/my-account/>1×slots регистрацию процедура займет всего лишь</a> 1×slots зеркало видели такую регистрацию на <a href=http://matehacking.org/doku.php?id=Выкуп_авто>http://matehacking.org/doku.php?id=Выкуп_авто</a> Промообъявления от казино не дают реальной картины и ориентированы на привлечение внимания пользователей. Понять, насколько высоки шансы остаться в плюсе, позволит личный тест условий предложения:Вывод выигрыша с бездепозитных бонусов казино – щедрый подарок от азартных клубов. Но чтобы исключить свой заработок, нужно выполнить ряд критерий: 1хлот регистрация в 1×slots casino
1х слот 1хслотс регистрация перейти на 1×slots
<a href=http://deost.ru/bitrix/rk.php?goto=http://ertel.ru/bitrix/redirect.php?goto=http://supra.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/OReEcmyFiNa>http://deost.ru/bitrix/rk.php?goto=http://ertel.ru/bitrix/redirect.php?goto=http://supra.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/OReEcmyFiNa</a> 1хслотс зеркало на сегодня
1×slots официальный сайт зеркало рабочее
Бывают ли бездепозитные призы без вейджера? Бывают, если у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. Автоматы непопросту числятся самым знаменитым азартным весельем. Чтобы усвоить управление и верховодила, понадобится всего количество минут. Ваша задачка устроить ставку, определить количество трудящихся линий и можно вертеть тамбур. Если на выпадет выигрышная композиция – вы выиграли! С этой задачей для посодействуют управится бездепозитные призы казино.Промокод – определённая композиция знаков, коию необходимо установить в подходящее поле при твореньи учетной записи или активировать в собственном профиле игрока в разделе с бонусами. 1хслот 1хслотс регистрация перейти на 1×slots <a href=http://centropol.su/index.php?subaction=userinfo&user=dizzykit19>http://centropol.su/index.php?subaction=userinfo&user=dizzykit19</a> Каждый из бездепозитных бонусов без пополнения 2022 содержит собственный конкретный вейджер для отыгрыша, например же в любом казино он уточняется персонально — где то он х55 а где-то х30, повторюсь везде по различному!
1хслотс рабочее зеркало
Как лишь получите бездеп в казино, всё также не забывайте инспектировать электрическую почту. Некоторые игорные клубы день веселят активных гэмблеров приятными призами. Чаще всего получить подарок возможно в преддверии веселья, на день рождение, за привлечение приятеля. А того распространённым призом является прибавка к депозиту. Нужно более восполнить счёт, и азартное заведение прирастит его на 50–100%. Выиграть реальные деньги в казино не пополняя счет – сложно, хотя вероятно. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными бонусами и начните выступать на бонусные свои. По статистике в одном из 10-ти заведений возможно заработать маленькую сумму средств помощью бонусных средств. <a href=https://sultantheme.com/vb4forum/member.php?23604-DoctorLazu>https://sultantheme.com/vb4forum/member.php?23604-DoctorLazu</a> 1×slots зеркало рабочее Бoльшинcтвo азартных заведений выдвигают примерно однообразные, схожие условия и требования, коие необходимо выполнить, чтобы получить бездепозитный приз за регистрацию. Все их можно соединить в раз перечень:Подтверждение персональной информации. Все казино просят от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и наличие у пользователя других аккаунтов (мультиаккаунт запрещен).
<b>Смотреть еще похожие новости:</b>
<a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=994748#pid994748>1×slots сайт</a>
<a href=https://forum.home-visa.ru/viewtopic.php?f=69&t=807392&p=2805469#p2805469>1×slot регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Получить Бездепозитный бонус в интернет казино дело 2-ух кликов. Другой момент, отыграть промо и соблюсти правила и обстоятельства отыгрыша. Под правилами предполагается не только вагер, но и лимитирования по наибольшей ставке. Мы разумеем, что в кинотеатр все ставят на зеро и выигрывают. Призываем не создавать подобного. Перед активацией бонуса прочтите правила. Узнайте последующие факторы: Условия получения презента, за регистрацию, за депозит и многое. Ограничения по максимальной ставке. Зачастую не выше 350 руб. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вращать автоматы, а вагер будет стоять на пространстве. Поэтому важно аристократия, в каких забавах возможно совершать кратность денежного оборота.
#6763 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
гта онлайн казино porno Анастасия Янькова, боксерка <a href=https://repost.news/>человек казино</a> официальные букмекерские конторы букмекерская контора мостбет <a href=https://t.me/vchkogpu_ru>букмекерские конторы без депозита</a> Любимова Ольга Борисовна порно casino ru приложения букмекерских контор на андроид r7 casino порно с Артемий Панарин (хоккей) porno Алена Косторная (фигурное катание) Скворцова Вероника Игоревна порно
#6764 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать
Подарки на праздники ? приуроченные к парадным датам, требующие условного отыгрыша или начисляются без это. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду.Также, учите, собственно бездепозитный бонус возможно вывести лишь что, нет случае, когда станут выполнены все обстоятельства отыгрыша. <a href=http://filmkachat.ru/>1×slots casino зеркало</a> Во время забавы в казино, выигрыши, приобретенные спасибо безвозмездным призовым фондам, суммируются и срабатывают в совместную необходимую для отыгрывания. Однако, если фортуна улыбнется и получится отыграть все призы, игровое заведение гарантированно допустит вывести денежные свои. Сумма вывода несомненно зависимости от лимита, одобренного именно в данном учреждении. Поэтому, внимательно нужно читать правила выдачи безлимитных депозитов.Фриспины — безвозмездные вращения, которые дозволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины числятся наиболее знаменитым и преимущественным видом приза — безвозмездные вращения порой эффективнее и веселее в отыгрыше, чем другие виды бездепов. <a href=https://rant.li/9fsnh6hu13>https://rant.li/9fsnh6hu13</a> 1хслотс мобильная версия зеркало <a href=http://fairviewumc.church/bbs/board.php?bo_table=free&wr_id=2032639>http://fairviewumc.church/bbs/board.php?bo_table=free&wr_id=2032639</a>
1×slots рабочее зеркало на сегодня
Обычно бездепозитные акции от казино, приходят на эл. Почту в деньки рождения либо праздники. В неких интернет казино можно адресоваться в чат и как постоянному игроку, вероятно вас предложат бездепозитное предложение. <a href=https://www.bf-france.com/forums/profile/30064-rabofreeor/>1×slots казино зеркало</a> 1×slots регистрация на сайте 1×slots ru com Но не думать, собственно снабжая юзеров этими призами, казино увлекается спонсированием. Ведь объемы вознаграждений, главном, не великие (средним объемом от 5 до 20 $). И на эти средства налагаются конкретные условия и ограничения, неотклонимые к выполнению игрока, случае в последствии он вожделеет получить все свои выигранные деньги.Верификация важна для дополнительной безопасности и помочь техподдержке выявить бонусхантеров и плутов. Кстати, на некоторых платформах выводы солидных сумм доступны лишь после подтверждения личности. <a href=https://sex18babes.com/user/MichaelUnjut/>https://sex18babes.com/user/MichaelUnjut/</a> 1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, если не хотите стать жертвой мошенников или впустую израсходовать время;К раскаянию, нет. Почти все казино, настоятельно внесение но бы одного минимального депо для вывода выигрыша с бездепозитного бонуса. Также учитывайте, что вывести средства разрешено только на что, эту платежную систему, с которой был изготовлен депозит. 1хслотс регистрация в 1×slots casino Но на азартных платформах похожие вознаграждения могут получить и уже зарегистрированные юзеры. В таком случае, призы предоставляются в уникальных акций или же неким геймерам в виде акционного предложения, коие приходит на почту с целью «возвратить» игрока в свое казино.
1×slots casino регистрация
Первый возникающий вопрос, это, для выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают свежих игроков. Последним легче начать игру на средства с дара за регистрацию. Им надо пополнять баланс и тратить личностные свои. Новички получают благотворительные спины либо средства на счёт. С их поддержкой знакомятся с игровым процессом, крутят слоты и делают ставки в рулетке.Бесплатный приз – кредиты, которые онлайн-казино начислит посетителю, не заставляя его пополнять игровой счет. <a href=https://exsite.su/user/Philipbon>https://exsite.su/user/Philipbon</a> Отзывы читателей о бонусных промоакциях помогут составить эмоцию, хотя не забывайте о субъективности собственных комментариев. 1×slos регистрация в 1×slots casino Для отыгрыша бонуса казино обязует игрока поиграть на сумму, в количество один превышающую необходимую приобретенного бонуса — здесь выгода фирмы явна.
1×slots зеркало быструю регистрацию а также мгновенное
В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и когда неоднозначных ситуаций нет способности куда-то посетовать и обосновать свою правоту. Онлайн-казино кропотливо продумывают бонусные условия, которые необходимо выучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и ограничения.Демоказино есть практически на любом сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются существенно пореже: там когда выигрыша и соблюдения условий промоакций бездеп можно перевоплотить в настоящие средства. 1×slots казино мобильная версия <a href=http://moujmasti.com/member.php?174176-Jamesagefe>http://moujmasti.com/member.php?174176-Jamesagefe</a> Для получения выигрыша потребуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить определенную необходимую, хотя теснее из собственных средств. Она рассчитывается из общего объема выигрыша за всегда использования бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, в юзер выиграл 1000 рублей, а множитель сочиняет х30, исключить деньги возможно несомненно, сделав ставки на 30 000 руб.
1×slots регистрация 1×slotscasino 56 online
Как лишь получите бездеп в казино, всё равно не запамятовывайте инспектировать электронную почту. Некоторые игорные клубы каждый веселят интенсивных гэмблеров приятными призами. Чаще всего получить презент можно в преддверии веселья, на денек рождение, за привлечение друга. А того распространённым призом является надбавка к депозиту. Нужно чем пополнить счёт, и азартное заведение прирастит его на 50–100%.Объективные – объем приза, коэффициент и обстоятельства вейджера, необходимость внесения депо для вывода средств; Но рядах азартных платформах похожие гонорары шансы получить и уже зарегистрированные юзеры. В этом случае, призы предоставляются масштабах оригинальных промоакций либо же некоторым геймерам в виде акционного предложения, которое прибывает на почту с целью «вернуть» игрока в свое казино. <a href=http://www.snabtex48.ru/account/user/7020.html>http://www.snabtex48.ru/account/user/7020.html</a> Если идет об эксклюзивных предложениях, может потребоваться регистрация в казино по ссылке с партнерского сайта. 1×slots официальный сайт мобильная версия скачать Верификация аккаунта. Лучше доказать лицо незамедлительно после регистрации, чтобы позже не было заморочек с выводом денег. Верификация может протекать 2-мя способами:
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.spherecommunity.net/User-Jamesmew>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=11928>1×slots казино мобильная версия</a>
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=33537>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Однако в критериях скрываются «подводные камни», коие не разрешат вывести солидную необходимую либо же вы не успеете отыграть вейджер. Поэтому мастера рекомендуют арестовать благотворительные вращения за регистрацию в казино без депо, дабы поднабраться опыта и получить настоящий шанс на победу. Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие появляются у новичков.
#6765 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up букмекерская контора лучшие бесплатные онлайн казино <a href=https://rumafia.news/>скачать 1×bet</a> песня казино Юдаева Ксения Валентиновна порно <a href=https://th-royalgclub.com/>казино 5</a> 1×bet 1хбет 1×bet вход Елизавета Боярская casino играть win win casino casino зеркало сегодня 1×bet зеркало рабочее на сегодня
#6766 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slotscasino 56 online
Для такого, чтобы отыграть необходимую вашего бездепозитного бонуса надо(надобно) выполнить обстоятельства вейджера. Очень нередко фриспины даются на определенные слоты (book of ra, book of lifeless, book of sun), выбирайте слот для по душе, они довольно очень и качественные. Бездепозитные бонус возможность быть денежным например и в виде фриспинов на слотыЕсли вы облюбовали для себя несколько брендов коие вам больше всего приглянулись, для неизменной игры! Таких гемблеров казино очень предпочитает и ценит, за частую эти игроки становятся VIP игроками заведения, коим нередко поступают выгодные предложения вид призов, например же туда заходит и бездепозитные. <a href=http://filmkachat.ru/>1хслот зеркало</a> Это раз из главных характеристик привлекательности дара. С завешенным коэффициентом том профессионалы не смогут выполнить условия по отыгрышу. И важно, как презентабельно выглядит предложение – бездепозитный бонус казино в размере $500 либо $1 000. Чтобы новенькие получше вникли, что же это вейджер, мы разберём на примере.В некоторых онлайн казино для получения бездепозитных бонусов не довольно просто зарегистрироваться на сайте клуба и доказать свои контактные данные. Дополнительно потребуется активация промокода. <a href=https://medium.com/@comcgifurniture/ultimate-guide-to-professional-weed-delivery-pickering-services-in-2024–2a76d5e699da>https://medium.com/@comcgifurniture/ultimate-guide-to-professional-weed-delivery-pickering-services-in-2024–2a76d5e699da</a> Можно ли в одном онлайн казино получить больше одного приза за регистрацию? Нет, так как в любом интернет казино есть правила, к которым надо(надобно) придерживаться, не делать 2 аккаута для получения бонусов, другому несомненно блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, приз за регистрацию выдаеться один один 1 лицу. 1× слот зеркало <a href=http://ad-vance.ru/communication/forum/user/40490/>http://ad-vance.ru/communication/forum/user/40490/</a> Бездепозитный бонус за регистрацию в казино с выводом средств в 2022 году — Наш ресурс дает игрокам важную информацию о самых свежих, щедрых и проверенных бонусах в онлайн казино, коие обновляются любой денек.Выигрыши с призов без вложений постоянно привязаны к притязанию по ставкам и могут быть обналичены только последствии исполнения этих притязаний.
1×slos регистрация в 1×slots casino
1×slots регистрация то дальше необходимо пройти Для получения выигрыша требуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить конкретную необходимую, но теснее из собственных средств. Она рассчитывается из совместного объема выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, если пользователь выиграл 1000 рублей, а множитель составляет х30, вывести деньги возможно будет, сделав ставки на 30 000 рублей.Этот тип бонуса несомненно добавлен на Ваш аккаунт последствии успешной процедуры регистрации с использованием номера аппарата. Если выбрать другой способ сотворения учетной записи, бездеп не будет добавлен на Ваш акк. <a href=https://www.kenpoguy.com/phasickombatives/profile.php?id=2173039>https://www.kenpoguy.com/phasickombatives/profile.php?id=2173039</a> Пoдтвepдить личнocть посетителя. Для успешного вывода средств, необходимо подтвердить лицо посетителя. Нa этaпe вepификaции пpoфиля, работники службы безопасности должны убедиться, что у игрока чем раз акк. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не может исключить собственный выигрыш, в у него несомненно несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы. 1× slots casino официальный сайт К образцу, игроку выдаются бесплатные свои в заведении в объеме пятидесяти либо 100 $ (вейджер на которые составляет 100х). То есть, каждому новоприбывшему игроку выскакивает притягивающая картинка, кот-ая сулит выплату всех зачисленных фирмой средств. Не стоит заострять на казино бонус за регистрацию без депозита с сильно великий или довольно маленькой суммой призов, поэтому что, том тщательно исследовав все обстоятельства, тут всего, будет некий подвох.Внесение депозита – Будьте готовы восполнить счет в отыгрыша приза. Это стандартное требование верховодил для данного на промо-акций. Лучше заблаговременно уточнить, какую сумму надо(надобно) будет заносить на счет. Как управляло, речь о минимальном депозите, хотя вы должны быть уверены, собственно он вас по карману.
1×slots зеркало регистрация в 1×slots casino
После требуется внести идентификационный платёж. Это пугает начинающих больше всего. Нужно устроить наименьший депозит в 100–500 руб. Таким образом служба защищенности увериться в том, что платёжный метод принадлежит Вам. Данная процедура важна для обеспечивания безопасности игровых счетов. Пример, Ваш аккаунт взломают и выведут средства на свой кошелёк. Будет крайне досадно. Поэтому верификация платёжной системы, это важный момент.Ограничения по забавам. Администрация воспрещает игрокам кое-какие игровые автоматы с бездепозитным бонусом, средствами или бесплатными вращениями. Обычно, в правилах приводится глубокий список слотов для отыгрыша. Иногда разделенье производится по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, хотя запрещен в настольных играх и в разделе Live Casino. Если при регистрации показать промокод, возможно гарантировано получить бонус. Где арестовать ваучер? Посетите на блоги или форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В последнее время игорные жилища начали афишироваться в кинокартинах и телесериалах. Присмотритесь и скорее заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных рублей. <a href=https://securityholes.science/wiki/Glory_Casino>https://securityholes.science/wiki/Glory_Casino</a> Наличие у игрока второго аккаунта. Запрещено делать количество профилей для многократного получения бездепов.Так что основное отличие подарка на депо от бездепа – неотъемлемое пополнение счёта. Вы сможете привнести депозит и преувеличить стартовый капитал или забрать бездеп и всем не придётся рисковать своими сбережениями. Поспешите выполнить обычные требования, и администрация ресурса начисляет щедрое одобрение! 1×slot казино зеркало Маркетинговая политического всех игорных интернет-клубов должна одевать разнообразный нрав. И случае гонорары на депозит служат чтобы, чтобы, дабы стимулировать заносить депозиты и поощрять теснее имеющих юзеров, то бездепозитный бонус в казино или приз за регистрацию в казино, этого всего, рассчитан на расширение базы покупателей.Так собственно сможете неустрашимо региться без всяких раздумий. Фортуна сейчас наверняка на вашей стороне. Не побаивайтесь, так следствие какого либо ущерба Вам абсолютно не угрожает. С такими бонусами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе.
1 х слотс зеркало
Для вывода средств приз нужно несомненно отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами акции и вариантами отыгрыша бездепозитного бонуса до его получения, чтобы избежать конфликтных ситуаций.Фриспины без депозита либо дополнительные свои помогут ближе познакомиться с игровой платформой и её функциями. За счёт подарков можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям из-за забавы против живых крупье. Основное отличие что, что для получения бездепа не надо пополнять баланс в казино. Но не сего, есть ряд прочих отличий: 1×slots официальный сайт, скачать <a href=http://www.ritual-letichev.km.ua/user/Walterjep/>http://www.ritual-letichev.km.ua/user/Walterjep/</a> Для отыгрыша приза казино обязует игрока поиграть на необходимую, в количество раз превышающую сумму полученного бонуса — здесь выгода фирмы явна.Казино выводит деньги только на ту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного бонуса, Вам сначала необходимо восполнить счет. В неких клубах ограниченный список методов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет именно с этих платежных методов, которые доступны для вывода.
1×slots акции
Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала резвые выводы. Фишка выплат сомнений, собственно довольно выбрать платёжный инструмент и указать необходимую. В большинстве случаев средства зачисляются на электрические кошельки протяжении 15 минут, а на банковские карты – 1–3 рабочих дня. <a href=http://sysadminday.ru/index.php?subaction=userinfo&user=epitin>http://sysadminday.ru/index.php?subaction=userinfo&user=epitin</a> 1×slots бездепозитный бонус за регистрацию Возьми собственный подарок. Чаще всего приз активируется сразу в регистрации. Но посещают истории, когда нужно зайти в индивидуальный офис или написать в справочную службу.Обычно для получения бонусов без депо, казино выдвигает лояльные и вполне выполнимые обстоятельства, но есть ряд действий коие запрещены и все причиной неприятные результаты:
<b>Смотреть еще похожие новости:</b>
<a href=https://rolivka.online/forum/showthread.php?tid=33166>1×slot регистрация</a>
<a href=https://mcmon.ru/showthread.php?tid=125040>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=https://radios-collector.com/viewtopic.php?f=7&t=96246>1×slots официальный сайт скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Похожим образом трудится 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения клиента или в связи с получения им VIP-статуса. Подарок предоставляется в воззвания в поддержку и проверки. Бездепозитные призы начисляются только раз один. Не стоит открывать новые аккаунты, чтобы получить их повторно. Служба защищенности казино обязательно выявит «левого» соучастника и заблокирует. Если гость выполнит необходимые требования, отыграет собственную ставку и решит вывести личный выигрыш, то ему надо(надобно) сведению, что казино непременно потребует дать ксерокопии личных документов, чтобы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные средства исключить не получится.
#6767 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации 2025
Наши эксперты изучают условия промоакции, этого в ручном режиме проверку их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и характеристики. Мы не рекламируем казино, а даем игрокам информацию о лучших из их. <a href=http://filmkachat.ru/>1×slots официальный сайт мобильная версия скачать</a> Для вывода средств приз нужно несомненно отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами акции и вариациями отыгрыша бездепозитного бонуса до его получения, дабы избежать конфликтных обстановок. <a href=https://www.skillshare.com/en/profile/Cgifurniture-Com/181579043>https://www.skillshare.com/en/profile/Cgifurniture-Com/181579043</a> Однако далековато не все ресурсы предлагают своим посетителям бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено одобрение на 1-ый депо в объеме 100–200%. Это отличная возможность преумножить банкролл, прирастить время, проведённое за игрой и шансы сорвать большой куш. 1×slots рабочее зеркало на сегодня <a href=https://eng.worthword.com/bbs/board.php?bo_table=free&wr_id=1143999>https://eng.worthword.com/bbs/board.php?bo_table=free&wr_id=1143999</a> Акционные предложения от казино существуют в различных форматах. Часто призы даются в мена на депозит. Игрок заносит платеж и получает средства, благотворительные вращения и одобрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — вид приза, кот-ый гарантирован за исполнение конкретных деяний на веб-сайте:Акционные предложения от казино существуют в различных форматах. Часто призы даются в размен на депозит. Игрок вносит платеж и получает средства, бесплатные вращения и другие поощрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — вид приза, который гарантирован за исполненье конкретных деяний на сайте:
казино 1×slots официальный сайт
Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, чтобы появилась возможность вывести выигрыш. <a href=http://sladkierecepti.5nx.ru/viewtopic.php?f=8&t=3607>1×slots регистрация 1×slots casino 777 online</a> 1× slots зеркало <a href=http://forum.l2endless.com/member.php?action=profile&uid=4585>http://forum.l2endless.com/member.php?action=profile&uid=4585</a> 1×slots регистрация 1×slotscasino 56 online Зарегистрируйтесь. Для регистрации почаще всего довольно установить собственный номер телефонного и почтовый адрес, последствии чего установить приобретенный код из СМС. Возможно, требуется показать промокод. В правилах промоакции будет написано, где его хотелось вводить. Иногда это надо делать при регистрации, времени — теснее в творенья личного офиса, на отдельной странице.При верном раскладе бездепы — это прекрасный способ выступать на средства без растраты собственных средств. Есть количество советов, следуя которым можно извлечь максимально выгоды из похожих акций казино. Играть по лишь на лицензированных площадках. Скриптовые сайты не только обманывают с бонусными предложениями, хотя и употребляют пиратский софт с измененным ГСЧ. Выиграть на этих автоматах невозможно.
1×slots официальный сайт мобильная версия скачать
<a href=https://www.professionistidelsuono.net/forums/member.php?action=profile&uid=238805>https://www.professionistidelsuono.net/forums/member.php?action=profile&uid=238805</a> Чтобы без увериться в преимуществах бездепозитных призов, довольно зарегистрироваться в казино и получить одобрение.Вейджер в переводе с британского означает «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша приобретенного приза, в нашем случае бездепозитного. Число ставок не — главно лишь набрать необходимую, пропорциональную сумме поощрения. 1×slots официальный сайт, скачать Промообъявления от казино не дают реальной картины и направлены на привлечение внимания пользователей. Понять, как высоки шансы остаться в плюсе, позволит собственный тест условий предложения:Срок отыгрыша — это период, кот-ый начинается в момент активации бонуса и кончается с его закрытием. Пользователю необходимо уложиться в этот временной промежуток, другому призовые средства аннулируются. Казино устанавливают список игр, ставки в засчитываются при расчете отыгранных средств. Если тайтл не заходит в данный список, то предоставляется быть недосегаем для загрузки в деянья бонусного предложения.
1×slots зеркало рабочее
Шаг 4. Активация. Внимательно выучите условия, информацию по ограничениям и сроке деяния бонусного предложения. Разобравшись с правилами, возможно активировать бонус в личном кабинете (от ? с использованием промокода) или по запросу в саппорт.Необходимость отыгрыша. Вейджер такой повыше, чем для призов за депозит. И же свои не отыграны, исключить их нельзя. Прежде чем активировать бездеп, необходимо убедиться в, собственно государство, уроженцем коей является игрок, не заходит в список запрещенных. Бонусные деньги – небольшая сумма денег для старта в новом казино. На бонусные средства, обыкновенно разрешается играть во все забавы, не слотов с прогрессивным джекпотом и игр из раздела exist casino.Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации приза без депо. Внимательно прочитайте до конца. Многие новички делают оплошности на этапе регистрации и поэтому имеют получить подарок. 1х слот 1хслотс регистрация перейти на 1×slots <a href=http://rusteaco.ru/bitrix/redirect.php?goto=http://multi-nova.ru/bitrix/rk.php?goto=http://met-opttorg.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/_s9_l28V6zD>http://rusteaco.ru/bitrix/redirect.php?goto=http://multi-nova.ru/bitrix/rk.php?goto=http://met-opttorg.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/_s9_l28V6zD</a>
1×слот регистрация в 1×slots casino
Срок отыгрыша — это этап, кот-ый наступает в момент активации бонуса и заканчивается с его закрытием. Пользователю необходимо уложиться в этот временной зазор, по призовые средства аннулируются. Казино устанавливают перечень игр, ставки в которых засчитываются при расчете отыгранных средств. Если тайтл не заходит в данный список, то он может быть недоступен для загрузки период деянья бонусного предложения. Для получения предоставленных призов вам понадобиться — ПК или мобильное прибор, и остальное дело за малым.Обычно, бездепозитные призы выдаются под конкретные слоты с фиксированной ставкой, хотя их точно запрещено применять в игровых автоматах с прогрессивным джекпотом. Список игр, в возможно применять бездеп, Вы найдете в описании промоакции либо сможете уточнить у службы заведения. <a href=http://tvradios.top/index.php?subaction=userinfo&user=obsoletewrinkle>http://tvradios.top/index.php?subaction=userinfo&user=obsoletewrinkle</a> Выиграть реальные деньги в казино не пополняя счет – трудно, но вполне. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными бонусами и начните выступать на бонусные свои. По статистике каком-то 10-ти заведений возможно заработать маленькую сумму денег помощью бонусных средств. 1хслотс зеркало на сегодня Для казино, работающих онлайн, бездепозитные бонусы нужны для вербования свежих клиентов. Предложение поиграть на слотах без необходимости внесения реальных средств — работающий способ для увеличения энтузиазма к фирмы. После отыгрыша бездепа велик шанс, что игроку понравится и он продолжит играть в казино, лишь теперь теснее на собственные средства.
<b>Смотреть еще похожие новости:</b>
<a href=https://fougerite.com/threads/1×slots-promokod-pri-registracii.12956/>1×slots промокод при регистрации</a>
<a href=https://021snyw.com/space-uid-53919.html>1 x slots casino</a>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=136527>1×slots casino регистрация 1×slotscasino09k online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Сразу после активации промокода можно пользоваться презентом. Как теснее упоминалось, бонусы бывают трёх видов – фриспины, кредиты и фриплей-бонусы. Выбор любого онлайн казино на нашем веб-сайте. В описании к каждому Вы сможете разузнать, что получите за создание аккаунта.
#6768 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
официальные букмекерские конторы скачать букмекерскую контору на андроид <a href=https://th-royalgclub.com/>Матвиенко Валентина Ивановна порно</a> pin up букмекерская контора пинко casino <a href=https://rhymes-punches.com/>казино ставка</a> порно с Федор Чалов (футбол) Львова-Белова Мария Алексеевна порно букмекерская контора порно с Матвей Сафонов (футбол) 1×bet сайт Скворцова Вероника Игоревна порно Скоробогатова Ольга Николаевна порно
#6769 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию процедура займет всего лишь
Бездепозитные призы в казино без пополнения 2022 — это конкретная сумма средств или vacant spins вращения, которые предоставляются первым гостям за регистрацию на сайте казино повторяющий бездепозитного бонуса, и выделяет вам возможность помощью казино без пополнения опробовать услуги (игр), с дальнейшей преимуществом, льготой вывода средств при исполнении всех установленных управлял. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasin online</a> <a href=https://connects.ctschicago.edu/forums/users/200497/>https://connects.ctschicago.edu/forums/users/200497/</a> 1×slots зеркало на сегодня <a href=http://www.aramdesign.co.kr/bbs/board.php?bo_table=free&wr_id=59249>http://www.aramdesign.co.kr/bbs/board.php?bo_table=free&wr_id=59249</a> Если вы опытный игрок, вы обязаны аристократия, собственно бонус без депо – редкая находка. Тем ниже, мы раз исследуем интернет, дабы найти для вас превосходнейшие бездепозитные предложения.
казино 1×slots официальный сайт
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=381375>1×слотс казино</a> 1×slots регистрация на сайте 1×slots ru com Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала резвые выводы. Фишка выплат том,, что довольно выбрать платёжный инструмент и показать необходимую. В большинстве случаев деньги зачисляются на электрические кошельки протяжении 15 мин., а на банковские карты – 1–3 трудящихся денька.Любой выигрыш по ставке повыше установленного лимита несомненно считаться недействительным. То есть ставка не будет засчитана при отыгрыше, ну случае выигрыша его сумма не поступит на счёт посетителя — итог забавы будет всецело аннулирован. <a href=http://zvezdjuchki.ru/user/Renaldogueva/>http://zvezdjuchki.ru/user/Renaldogueva/</a> Но есть игорные заведения, которые готовы просто так жертвовать средства на забаву. Для сего достаточно сделать профиль. Чтобы вывести свой выигрыш, для сначала нужно выполнить обстоятельства отыгрыша, указанные в условиях получения бездепозитного депо.При регистрации в том или ином онлайн игральном заведении — для дается один шанс испытывать собственную фортуну не внося свои монеты. Замечу собственно эту поощрительную предложение предоставляют не все интернет игровые площадки, а лишь великодушная половина из них. Которые мы подготовили для Вас в нашем перечне. 1×slots регистрация 1×slots casino 777 online
1×slots подтвердит вашу регистрацию если говорить
<a href=http://rotor24.ru/bitrix/redirect.php?goto=http://sadovayatechnika.ru/bitrix/redirect.php?goto=http://clubturbo.ru/bitrix/redirect.php?goto=https://telegra.ph/Harakteristiki-i-vidy-uproshchennyh-grazhdanskih-processualnyh-del-09–24>http://rotor24.ru/bitrix/redirect.php?goto=http://sadovayatechnika.ru/bitrix/redirect.php?goto=http://clubturbo.ru/bitrix/redirect.php?goto=https://telegra.ph/Harakteristiki-i-vidy-uproshchennyh-grazhdanskih-processualnyh-del-09–24</a> зеркло казино 1×slots
1×slots зеркало регистрация то дальше необходимо пройти
Выше мы предоставили глубокий набор самых свежих и актуальных бездепозитных бонусов в интернет казино без пополнения на 2022 год, где вам воспользоваться хоть ценным бездепозитным призом.Условия могут разниться приятель от приятеля. Но подобный бонус имеет быть использован только для игрового процесса – полученные на счет финансы до как, как будут отыграны, исключить нереально. <a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=101002&extra=>онлайн казино 1×slots</a> Иногда у гостей сайта могут возникнуть проблемы при активации полученного промо-кода. В этих случаях, нужно адресоваться за подмогою в саппорта «Support». Для получения ответа, непременно указывается определенная причина обращения и подтверждается информация дополнительными скриншотами. Если сложилась неоднозначная ситуация, постоянно возможно адресоваться к основному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ.Операторы гемблинга заявляют, собственно так они сражаются с бонус-хантерами. Впрочем, критики считают, что данным казино пробуют сделать из случайного постояльца неизменного игрока. рабочее зеркало 1×slots <a href=https://filmy-hd.ru/user/DoctorLazutaml/>https://filmy-hd.ru/user/DoctorLazutaml/</a> Перечисленные выше главные свойства сопровождают практически каждый приз и являются стереотипными для бездепозитных бонусных начислений в казино.
1 x slots casino
Бездепозитные бонусы за регистрацию являются одним из самых известных способов вербования новых игроков в онлайн-казино, потому что они предоставляют игрокам возможность опробовать казино, необыкновенно игровые автоматы, и возможно, выиграть настоящие средства. <a href=http://xn–jj0bt2i8umnxa.com/bbs/board.php?bo_table=free&wr_id=71967>http://xn–jj0bt2i8umnxa.com/bbs/board.php?bo_table=free&wr_id=71967</a> 1хслотс официальный сайт зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://palais.beesims.com/phpbb/viewtopic.php?f=2&t=290745>рабочее зеркало 1×slots</a>
<a href=https://clubdefansde24.com/foro/viewtopic.php?t=19417>1×slots актуальное зеркало</a>
<a href=http://khodaumo.com/forum/viewtopic.php?f=2&t=75131&sid=722e4c7dddca888a8f61da166f3fd8b9>1×slots официальный сайт, скачать</a>
<a href=https://games-garant.ru/index.php?subaction=userinfo&user=Jamesneorm>1×slots бездепозитный бонус за регистрацию</a>
<a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=7523&TITLE_SEO=7523-preobrazovatel-interfeysov-usb-rs485&MID=460835&result=reply#message460835>1× slots зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для всех бездепозитных призов функционирует максимальный лимит на выигрыш. Он указывает максимальную необходимую, которую вас получить, играя на бонусные кредиты. Как лишь вас получится выполнить притязания вейджера, возможный максимально будет переведен с бонусного счета на ведущей, а остаток будет списан.
#6770 Charlesgunnyhttp://filmkachat.ru
1хслот официальный сайт зеркало
Денежные свои. Третий бонус за регистрацию без депозита – наличные. К раскаянью, только знаменитые и знаменитые клубы имеют уяснить средства в руб. Или долларах. С их помощью у насладиться каждой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед этим нужно исполнение определенных критерий.На данном разделе портала периодически публикуются обзорные статьи, каких рассматриваются благотворительные призы наихороших интернет-казино. Информация структурирована по нескольким пунктам, включая основные: <a href=http://filmkachat.ru/>1хслот 1хслотс регистрация перейти на 1×slots</a> Иногда в одобрения за регистрацию имеют выдаваться билеты для роли в турнирах. Условия их проведения довольно выделяются, поэтому мы советуем ознакомиться с любым предложением раздельно.Будьте внимательнее при ознакомлении с правилами во избежание происхожденья конфликтных ситуаций с казино, когда последствии отыгрыша бездепа вам не дадут вывести солидную сумму выигрыша. <a href=https://www.themoviedb.org/u/%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%B0%D0%B2%D1%82%D0%BE-%D1%81%D1%80%D0%BE%D1%87%D0%BD%D0%BE>https://www.themoviedb.org/u/%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%B0%D0%B2%D1%82%D0%BE-%D1%81%D1%80%D0%BE%D1%87%D0%BD%D0%BE</a> Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают бонус по государствам. Вплоть до того, что клуб возможность на игроков из Вашей государства, а бездеп не давать.Приветственный бездеп предоставляется любому игроку только раз один. Казино борются с так именуемыми бонусхантерами (от англ. Bonus Hunter — доброволец за призами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения дара. Исключить подобные действия разрешает верификация данных. Администрация вправе востребовать у клиента доказать индивидуальные данные, обозначенные при регистрации. казино 1×slots официальный сайт <a href=https://steamboatspringschat.com/forum/members/philipfak-1588.html>https://steamboatspringschat.com/forum/members/philipfak-1588.html</a>
1×slots казино мобильная версия
Наличие у игрока второго аккаунта. Запрещено творить количество профилей для неоднократного получения бездепов.Условия, на коих предоставляется бездеп, регулируются казино. Каждая промоакция содержит подробные управляла, ссылка на которые обычно содержится в промообъявлении. В них указываются лимиты, вейджер, перечень дешевых игр. Если оператор укрывает данные о предложении, то пользоваться им не стоит. <a href=https://nztw.org/thread-365798–1–1.html>1×slots сайт зеркало</a> 1×slots официальный зеркало Необходимость отыгрыша. Вейджер в выше, чем для бонусов за депозит. И же средства не отыграны, вывести их невозможно. <a href=https://qanda.yokepost.com/index.php?qa=143665&qa1=shisha-tobacco-from-4-eur>https://qanda.yokepost.com/index.php?qa=143665&qa1=shisha-tobacco-from-4-eur</a> зеркала 1×slots Используйте превосходнейшие бездепозитные призы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из списка ниже, дабы заработать подарки за обычные деянья теперь сегодня получить 1-ый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и прыткими выводами на электронные кошельки.2. Создать новый профиль. Для регистрации надо(надобно) наполнить небольшую анкету или зайдите в собственный офис при помощи социальных сетей;
1×slots регистрацию процедура займет всего лишь
Ознакомьтесь с нашим списком лучших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего перечня и получите бездеп незамедлительно. Хватайте наихорошие безвозмездные предложения ниже и выигрывайте великие средства, не рискуя! Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=http://kunigami-minibas.jp/userinfo.php?uid=17769#>http://kunigami-minibas.jp/userinfo.php?uid=17769#</a> Фриспины начисляются по определенной ставке. После их активации игроку нужно запустить слот и убедиться, что в нем показываются бесплатные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода последствии отыгрыша ориентируется оператором и изредка выше 5 000 рублей. 1хслотс рабочее зеркало на сегодня
1 хслот регистрация в 1×slots casino
Перечисленные повыше главные свойства сочетают практически каждый приз и считаются стандартными для бездепозитных бонусных начислений в казино. <a href=https://qualityprogamer.de/forum/showthread.php?tid=332201>1× slots регистрация в 1×slots casino</a> Вейджер (либо вагер) ? это минимальная сумма ставок, коию необходимо сделать для вывода валютного приза. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, тем привлекательнее спецпредложение.Вознаграждения за получение VIP-статуса ? начисляются масштабах программы лояльности при достижении одного уровня либо выдаются персонально менеджерами службы поддержки. Но ни не запамятовывайте внимательно читать управляла роли в бонусных промоакциях. Если вы нарушите желая бы одно условие, позже вы не сможете устроить недоразумение с администрацией. 1×slots зеркало рабочее <a href=https://backpacker-footsteps.com/backpacker-footsteps-forum/profile/jamesadave/>https://backpacker-footsteps.com/backpacker-footsteps-forum/profile/jamesadave/</a>
1 х слотс зеркало
Операторы гемблинга утверждают, что так они сражаются с бонус-хантерами. Впрочем, критики считают, что этим казино пытаются устроить из случайного постояльца неизменного игрока.В большинстве заведений устроить это возможно по адресу электронной почты, по номеру телефона, через социальную сеть либо гугл-аккаунт. С не отыгранным призом запрещается превышать объем наибольшей ставки. Нарушение этого обстоятельства в аннулирование выигрыша.Во время игры в казино, выигрыши, полученные благодаря бесплатным призовым фондам, суммируются и срабатывают в совместную сумму для отыгрывания. Однако, случае удача улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно допустит вывести денежные средства. Сумма вывода будет находиться от лимита, одобренного именно в данном учреждении. Поэтому, пристально надо(надобно) разбирать управляла выдачи безлимитных депо. <a href=https://www.mshowto.org/forum/members/jamesmonee.html>https://www.mshowto.org/forum/members/jamesmonee.html</a> Отказ в прохождении верификации. Если заказчик не хочет либо не может дать документы, подтверждающие его лицо, профиль будет заблокирован вместе со всеми бонусными начислениями.B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax 1×слот регистрация в 1×slots casino Способы получения бездепа различаются зависимо облика бонуса, который приглянулся игроку. Но для в любом случае надо(надобно) быть зарегистрированным в легальном онлайн-казино и подтвердить собственную личность. В общем облике пошаговая аннотация для получения бездепозитного бонуса смотрится например:Выигрыши с бонусов без инвестициям постоянно привязаны к притязанию по ставкам и все быть обналичены только последствии исполнения этих требований.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.ltp-team.com/topic/78861–1×slots-zerkalo-kotoruyu-ukazyvali-pri-registracii-kstati/>1×slots зеркало которую указывали при регистрации кстати</a>
<a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=790006>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<a href=https://forum.bedwantsinfo.nl/thread-691197.html>1 хслот регистрация в 1×slots casino</a>
<a href=http://check2go.net/my-account/>1×slots casino регистрация 1×slotscasin online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Это раз из главных характеристик привлекательности презента. С завешенным коэффициентом том мастера не сумеют выполнить обстоятельства по отыгрышу. И неважно, как презентабельно выглядит предложение – бездепозитный бонус казино в размере $500 либо $1 000. Чтобы новички попревосходнее вдумались, что же это вейджер, мы разберём на случае.
#6771 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1go casino почему в казино нет часов <a href=https://repost.news/>мобильные букмекерские конторы</a> демо казино сайт 1×bet слоты <a href=https://res-publika.com>казино фильм</a> промокод 1×bet букмекерская контора скачать приложение porno Анастасия Янькова, боксерка pin casino зеркало porno Александр Соболев (футбол) casino com 1×bet зеркало слоты 1×bet xyz
#6772 BrianFaw
https://indianpharmacy.win/ indianpharmacy com
#6773 MatthewQuide
mexican rx online <a href=" http://www.bqmoli.com/bbs/home.php?… „>mexico drug stores pharmacies</a> or <a href=“ https://toolbarqueries.google.co.ve/url?… ">medication from mexico pharmacy</a> https://images.google.gy/url?… mexico drug stores pharmacies <a href=http://images.google.la/url?q=https://mexicanpharmacy.store>buying from online mexican pharmacy</a> medication from mexico pharmacy and <a href=https://m.414500.cc/home.php?mod=space&uid=3725547>medicine in mexico pharmacies</a> п»їbest mexican online pharmacies
#6774 RalphCew
legitimate canadian mail order pharmacy <a href=" http://www.88moli.top/home.php?… „>canadian drug stores</a> or <a href=“ http://sanopedia.es/api.php?… ">canadian pharmacy ltd</a> http://www.glasscontrol.co.uk/…ery/main.php?… pharmacy canadian superstore <a href=http://www.sellere.de/url?q=https://canadianpharmacy.win>canadian pharmacy online reviews</a> canadian pharmacy 24h com safe and <a href=https://www.sdsdsoft.com/upload/home.php?mod=space&uid=3430283>canadian pharmacies compare</a> buy drugs from canada
#6775 WaylonHichttps://discountwomensclothing.org
<a href=https://sites.google.com/view/heylink-kantorbola/>kantor bola</a>
#6776 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало
Самые пользующиеся методы вывода средств ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электрическим платежным системам на Neteller и Skrill, а также пользуются криптовалютными кошельками. Вывод выигрышей возможность исполняться быстро или занимать от нескольких часов до нескольких суток. <a href=http://filmkachat.ru/>1хслотс рабочее зеркало</a> <a href=https://u.pcloud.link/publink/show?code=XZNQwV5ZNtDPSsk07bJazNAm6jpRESTTmoa7>https://u.pcloud.link/publink/show?code=XZNQwV5ZNtDPSsk07bJazNAm6jpRESTTmoa7</a> 1×slots официальный сайт скачать <a href=https://www.talkofrowlett.com/author/arnoldbar/>https://www.talkofrowlett.com/author/arnoldbar/</a> Реже бонусы без депо начисляются неизменным игрокам. С их подмогою администрация постарается удержать ценных посетителей или вожделеет поблагодарить за преданность верных гостей. Но гораздо почаще для похожих целей применяются такие акции:
1×slot рабочее зеркало
Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен перечень наилучших онлайн казино, коие предлагают своим игрокам щедрые бонусы за регистрацию. <a href=https://forum.eliteshost.com/showthread.php?tid=15111>1×slots промокод при регистрации</a> 1×slots на любой вкус как пройти регистрацию <a href=http://worklocal.com.au/users/davidlycle>http://worklocal.com.au/users/davidlycle</a> Рассмотрим на образце: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских рублей. В условиях акции указано, собственно вейджер бездепозитного бонуса х20. Поэтому, дабы отыграть приз, игроку несомненно необходимо устроить ставок на 35*20=700 рублей. 1×slots казино мобильная версия Итак, дабы бесплатные бонусные кредиты превратились в настоящие средства, которыми вы можете распоряжаться по своему усмотрению, их нужно отыграть. Вейджер по уточнять в правилах онлайн-казино.В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и когда спорных ситуаций нет способности куда-то посетовать и доказать собственную правоту.
казино 1× slots официальный сайт
Иногда у посетителей вебсайта все возникнуть проблемы при активации приобретенного промо-кода. В этих случаях, необходимо обратиться за поддержкой в саппорта «Support». Для получения ответа, обязательно указывается определенная причина обращения и подтверждается информация дополнительными скриншотами. Если сформировалась неоднозначная ситуация, практически возможно адресоваться к главному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ.В разделе с бонусами активировать собственный подарок. Найти игры, для коих предусмотрено одобрение и использовать бонус по назначению. <a href=http://zooboard.ru/user/profile/270520>http://zooboard.ru/user/profile/270520</a> Фриспины. Бесплатные вращения предусмотрены для применения в видео-слотах. Внимательно читайте условия – они нередко выдаются для неких машин. В зависимости от клуба вам создавать определенное количество ставок. Кстати, современные игорные жилища дают возможность заводить «одноруких злодеев». 1хслот зеркало сайта Чтобы получить вероятность исключить прибыль с бездепозитного приза в казино, нужно выполнить ряд условий:
1×slots регистрация
Размер бонуса. В качестве бездепов обыкновенно начисляют не суммы, а когда речь о призах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино имеют подарить игроку до 2000$. <a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=288885>1×slots регистрация на сайте</a> Автоматы неспроста считаются наиболее известным азартным развлечением. Чтобы усвоить управление и управляла, понадобится всего несколько минут. Ваша задача сделать ставку, найти количество рабочих линий и возможно крутить барабан. Если дисплее выпадет выигрышная комбинация – вы выиграли! С этой задачей вас помогут управится бездепозитные призы казино.Риск-игра по равным шансам – Также казино имеет воспрещать скорпулезно обстоятельства по отыгрышу счет раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких других забавах. Допустим, за регистрацию вы возымели бездеп в размере 2 000 руб. С вейджером х30. В этом случае предстоит сделать ставок, на общую сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать реальные деньги. Однако не забывайте, собственно с любого презента выйдет исключить определённую необходимую (почаще всего не более $200). 1×slots официальный сайт мобильная версия скачать <a href=http://bbs.teachersbbs.com/home.php?mod=space&uid=396728>http://bbs.teachersbbs.com/home.php?mod=space&uid=396728</a> Сразу в активации промокода возможно пользоваться даром. Как теснее упоминалось, призы случаются трёх обликов – фриспины, кредиты и фриплей-бонусы.Выбирайте наихорошие безвозмездные бонусы с помощью обзоров на Casinoz – и пусть для сопутствует удача при отыгрыше бонусных кредитов!
1×slots casino регистрация 1×slotscasino09k online
Бездепы все заходить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой или баллами.На странице представлены бездепозитные бонусы за регистрацию в казино редчайшая заслуга за коей гонятся все игроки как новенькие, так и мастера. Мы тоже уделяем большое внимание на присутствие призов при формирование рейтинга казино на средства. Бездепозитный приз это возможность играть безвозмездно и выиграть реальные средства. Существуют казино с бонусом за регистрацию, каких очень популярны фриспины в интернет казино потом регистрации в конкретных играх. Они встречаются том чаще безвозмездных поощрений либо традиционных призов в казино без вложений. Например, игрок регистрирует счет, на который начисляются безвозмездные забавы, бонус за регистрацию повторяющий бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса компьютерные выигрывает истинные деньги, коие в последствии можно успешно исключить из заведения на свою платежную систему. То есть, есть все шансы исключить средства без рисков собственными деньгами. Регистрация, какую в получит бонусы, займет пару минут, а благодаря этому можно увеличить 5 евро поощрений до тысячи и без всяких заморочек вывести их.Приветственный бездеп предоставляется любому игроку лишь один раз. Казино сражаются с так называемыми бонусхантерами (от англ. Bonus Hunter — доброволец за призами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения дара. Исключить похожие деянья позволяет верификация данных. Администрация вправе востребовать у посетителя подтвердить индивидуальные данные, обозначенные при регистрации. <a href=http://oldpeoplewholikebirds.com/forum/memberlist.php?mode=viewprofile&u=233937>http://oldpeoplewholikebirds.com/forum/memberlist.php?mode=viewprofile&u=233937</a> B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. 1×слотс казино Все бесплатные бонусы кажутся заманчивыми. Кто же категорически от способности сыграть в онлайн-казино, не рискуя средствами, хотя получая выигрыши. Но далековато не все бездепозитные призы в презентабельны для рассудительного посетителя.Выигрыши с бонусов без вложений всегда привязаны к притязанию по ставкам и могут быть обналичены лишь последствии исполненья этих притязаний.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.emv.info/viewtopic.php?f=15&t=2382>1×slots на любой вкус как пройти регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
У нас на сайте Вы отыщите список бонусов без депозита в проверенных казино и подробную информацию о том как их получить и применять. Приветственный бездеп предоставляется хоть игроку только раз раз. Казино борются с так именуемыми бонусхантерами (от англ. Bonus Hunter — доброволец за бонусами), пытающимися заводить многочисленные аккаунты для надувательства оператора и повторного получения подарка. Исключить похожие действия позволяет верификация данных. Администрация вправе востребовать у посетителя подтвердить персональные данные, указанные при регистрации.
#6777 LeonardVef
Greetings everyone,
I recently stumbled upon a fantastic site that really impressed me when I was trying to find exciting opportunities online. The website makes everything simple to understand and saved me so much effort.
If you’re curious about a reliable platforms, I highly recommend checking it out: <a href=https://primegambling.org/>best gambling apps</a>.
Let me know what you think.
#6778 Charlesgunnyhttp://filmkachat.ru
1хслот официальный сайт зеркало
Но есть азартные заведения, готовые просто так вручить деньги на забаву. Для этого достаточно сделать профиль. Чтобы вывести выигрыш, сначала нужно выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа.У любого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано смогли выполнить их, мы дадим некоторое советов. Если система начислила небольшую сумму, не создавать немалые ставки – остановитесь на 10–30 центах. Как лишь сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте выступать. В неприятном случае какого-либо приглядеться к другому автомату. <a href=http://filmkachat.ru/>1×slots казино зеркало</a> Срок активации и время на отыгрыш. Зачисление средств либо фриспинов случается при активации протяжении требовательно ограниченного периода, схожие требования предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать бонус количество дней либо даже месяцов. Другие выдают солидную сумму за регистрацию, хотя время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером.Также учтите, что кое-какие игровые платформы сузивают список стран, коие способны получить предложенный бездепозитный бонус за регистрацию. К образцу, есть онлайн-заведения, выдающие сходственные призы лишь жителям определенных государств. К образцу, интернет казино 777 Оригинал дает бездепозитный приз лишь игрокам из России и государств СНГ. Или напротив, снабжают вознаграждением всех, не жителей неких стран (исходя из этого, стопам внимательно изучать перечень, чтобы впоследствии не возникло никаких вопросов и жалоб). <a href=https://www.cyberlord.at/forum/?id=1&thread=19231>https://www.cyberlord.at/forum/?id=1&thread=19231</a> Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депозит может отличаться до 30 дней.Казино дает возможность заработать и вывести реальные деньги на бездепозитных призах. Обычно, это незначительная сумма, коию казино может для позволить презентовать игроку. 1×slots быструю регистрацию а также мгновенное <a href=http://ask.quolove.com/index.php?qa=user&qa1=ambiguousinterm>http://ask.quolove.com/index.php?qa=user&qa1=ambiguousinterm</a>
1×slots актуальное зеркало
Кешбэк-бонус представляет собой возврат фиксированного процента от ставки в случае поражения либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не превышает 10%.Получив свой презент, Вы сможете бесплатно играть на настоящие средства, а выполнив обстоятельства отыгрыша, исключить свой выигрыш. 1 хслот регистрация в 1×slots casino <a href=https://www.lifesshortlivefree.com/community/profile/charlesmip/>https://www.lifesshortlivefree.com/community/profile/charlesmip/</a> Также, учите, собственно бездепозитный бонус возможно вывести только что, нет случае, когда будут выполнены все обстоятельства отыгрыша.А ознакомиться с новыми интернет казино, Вы можете с призов с выводом выгоды, коие Вы сможете получить без депо. 1хслот зеркало сайта
1×slots официальный зеркало
Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 $. Если выдаются фриспины, их количество изредка превышает нескольких 10-ов даровых вращений. <a href=https://forum.bandariklan.com/member.php?action=profile&uid=8090>https://forum.bandariklan.com/member.php?action=profile&uid=8090</a> Однако в критериях исчезают «подводные камни», коие не разрешат исключить солидную необходимую или же вы не успеете отыграть вейджер. Поэтому мастера рекомендуют арестовать бесплатные вращения за регистрацию в казино без депо, чтобы поднабраться навыка и получить настоящий шанс на победу.Многие игроки, оценив возможностей казино, остаются играть в нем и дальше ? на это и нацелено любое промо. Постоянные клиенты заносят депозиты и делают ставки, обеспечивая длительную выгода оператора. То есть, казино выдают бездепы новым юзерам для формирования лояльной аудитории. 1×slots casino регистрация на сайте Вознаграждения за получение VIP-статуса ? начисляются в программы преданности при достижении очередного значения либо выдаются персонально менеджерами службы поддержки.Промокод – определённая композиция символов, которую нужно установить в отвечающее фон при создании учетной записи или активировать в собственном профиле игрока в разделе с бонусами.
1×slots casino зеркало
<a href=https://australianwinerytours.com/tours/showthread.php?tid=212026>1×slots официальный регистрация</a> Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 долларов. Если выдаются фриспины, их число редко превышает нескольких десятков бесплатных вращений. Акции распространяются как на все игры казино, например и на узкий список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и другие. Промо имеет обхватывать разработки одного производителя. Бездеп не пересекается с другими промоакциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, сделанные бонусными средствами. Для идентификации платежных реквизитов игрока может понадобиться пополнение счета на наименьшую необходимую.Стоит отметить, что бездепозитный приз выдается только совершеннолетним новеньким, коие, в свою очередь, все пригласить личных друзей и своих, того рассчитывающих на поощрительную программу лояльности. Подобная технология появилась среди конкурирующих онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры способствуют увеличению своей популярности, методом вербования новых игроков. Бонусы – это оригинальный шанс для вероятных соучастников забавы, которые шансы опробовать софт покер рума и убедиться, будут ли они в него играть или нет. Новый игрок испробует свои силы с настоящими оппонентами в казино. 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=https://forex-arabic.com/members/179961-HenrynOn>https://forex-arabic.com/members/179961-HenrynOn</a> Онлайн-казино кропотливо продумывают бонусные условия, коие нужно изучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша прочие лимитирования.Для такого, чтобы отыграть необходимую вашего бездепозитного приза надо(надобно) выполнить обстоятельства вейджера. Очень часто фриспины даются на определенные слоты (book of ra, book of lifeless, book of sun), выбирайте слот себя нраву, они очень красивые и качественные. Бездепозитные бонус имеет быть денежным так и вид фриспинов на слоты
1хслотс рабочее зеркало
Выигрыши с бонусов без инвестициям практически привязаны к требованию по ставкам и шансы быть обналичены лишь последствии исполнения этих притязаний. Иногда для получения бонусов нужно спутаться с адептами службы. Удобнее всего с ними разговаривать в онлайн-сате, хотя времени достаточно запроса по электронной почте. <a href=http://www.kumkangenc.com/bbs/board.php?bo_table=inquiry&wr_id=42029>http://www.kumkangenc.com/bbs/board.php?bo_table=inquiry&wr_id=42029</a> Наиболее популярностью вознаграждения среди гэмблеров – бездепозитные призы казино. Это не дивно, ведь возможно получить благотворительные вращения или виртуальные кредиты, и этом не придётся пополнять счёт, рисковать личными деньгами. Удастся насладиться разнородными увеселениями даже выиграть крупную сумму, избегая серьёзного риска.Самые свежие бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды находятся на этой странице. Посетитель имеет оценить условия получения и начать выступать на деньги без внесения депо. При этом игроку важно понимать, на каких критериях и какими способами него вывести приобретенный выигрыш. Для этого нужно расценить перечень присоединенных платежных систем. 1×slots зеркало рабочее на сегодня Как правило, при выводе финансов, от играющего требуется лишь устроить наименьший вклад чтобы, чтобы, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом собственный счет.
<b>Смотреть еще похожие новости:</b>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5040/#comment-606166>1×slots рабочее зеркало</a>
<a href=https://uyghuryol.com/forum/viewtopic.php?f=8&t=236476>1×slots официальный сайт скачать</a>
<a href=http://3ak.cn/home.php?mod=space&uid=187057>1×slots регистрация на сайте 1×slots ru com</a>
<a href=https://chasingadream.rpginitiative.com/showthread.php?tid=177911>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подобные бонусы без депо предоставляются на более прибыльных условиях. Зачастую они покрупнее, а условия отыгрыша менее строгие. Составленный специалистами Casino.ru список онлайн-казино с бездепозитным призом разрешает игрокам сравнить спецпредложения различных операторов.
#6779 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
включи казино casino <a href=https://repost.news/>1×bet официальный</a> casino riobet up casino зеркало <a href=https://slon-ru.com/>casino com</a> casino сегодня Семёнова Татьяна Владимировна порно игры казино яндекс игры казино казино 1 1×bet зеркало рабочее xbet скачать букмекерскую контору
#6780 Larrycix
http://indianpharmacy.win/ indian pharmacies safe
#6781 Charlesgunnyhttp://filmkachat.ru
1×slots бонус за регистрацию
Если вы новичок в и только попали в неизведанную вами область азарта — за услуг как бездепозитные призы без пополнения. <a href=http://filmkachat.ru/>1хслотс казино зеркало</a> <a href=http://www.gothicpast.com/myomeka/posters/show/79259>http://www.gothicpast.com/myomeka/posters/show/79259</a> Бездепозитные бонусы прекрасный вариант даровой игры в игровые автоматы. Многие пользователи сети не понимают, собственно в казино можно начать играть абсолютно бесплатно, а потом вывести выигрыш на банковскую карту или электронный кошелек, иные не доверяют интернет казино, а третьи удачно играют и выигрывают – и тотчас достаточно большие суммы.Чтобы играть бесплатно на реальные средства в казино, не всегда довольно просто зарегистрироваться. Иногда нужно выполнить вспомогательные деянья. 1×slots бонус за регистрацию <a href=https://bandit400.ru/user/Daviddrown/>https://bandit400.ru/user/Daviddrown/</a> Игрокам стоит принимать приветственный бонус как гарантированный метод получить большой выигрыш, но это замечательная возможность без затрат расценить функционал казино.Помните, что любые нарушения правил сведут на нет ваши усилия, и вы скорее останетесь без начисленного вам безвозмездного приза. Всегда изучайте управляла начисления и условия вейджера. По хоть вопросам, на которые вы имеет самостоятельно отыскать ответы, обращайтесь за объясненьям и саппорт.
1хслот зеркало
<a href=https://10nsk.ru/user/JosephSuple/>1×slots актуальное зеркало</a> 1× slots зеркало Чтобы выступать безвозмездно на настоящие средства в казино, не всегда довольно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные деянья.Риск-игра по равным шансам – Также казино может воспрещать выполнять условия по отыгрышу с помощью раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких других забавах. <a href=https://www.thenewtop10s.com/author/doctorlazutapi/>https://www.thenewtop10s.com/author/doctorlazutapi/</a> 1хслотс рабочее зеркало на сегодня Перечисленные выше основные свойства сочетают фактически любой бонус и являются стереотипными для бездепозитных бонусных начислений в казино.Итак, чтобы благотворительные бонусные кредиты превратились в настоящие средства, которыми вам управлять по собственному усмотрению, их нужно отыграть. Вейджер по уточнять в правилах онлайн-казино.
казино 1×slots
Бонусы без депозита при регистрации считаются наиболее красивыми как для опытных игроков, например для и начинающих. Получив это вознаграждение, заказчик может выступать на реальные средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, еще условия их активации и выигрыша. Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки могут запросить вспомогательные документы или инициировать куцее общение по Skype.Как управляло, при выводе финансов, от играющего требуется лишь сделать минимальный вклад чтобы, чтобы, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом личный счет. <a href=http://vip4ex.ru/index.php?subaction=userinfo&user=ysekyba>http://vip4ex.ru/index.php?subaction=userinfo&user=ysekyba</a> Бездепозитный бонус нередко возможность замерзнуть легкодоступным незамедлительно последствии окончания регистрации, потому в большинстве случаев единственным притязанием к нему считается регистрация, а затем ревизия вашей новой учетной записи. 1×slots рабочее зеркало Представленные на данной страничке наилучшие бездеп бонусы в казино за регистрацию в 2022 году имеют подходящие обстоятельства. После кропотливого анализа редакция портала составила рейтинг спецпредложений, в котором посетители Casino.ru все сортировать список по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д.1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, если не хотите стать жертвой жуликов или впустую потратить время;
казино 1×slots официальный сайт
Для казино, работающих онлайн, бездепозитные бонусы нужны для вербования свежих клиентов. Предложение поиграть на слотах без надобности внесения настоящих денег — работающий метод для увеличения интереса к компании. После отыгрыша бездепа велик шанс, что игроку понравится и он продолжит выступать в казино, лишь сейчас теснее на собственные деньги.Вышеописанная первопричина и считается главным интересным, в которого операторы отдают часть своей прибыли на разные маркетинговые расходы и маркетинговые кампании. А самым действующим здесь будут играть именно бездепозитные бонусы казино 2022 с выводом за регистрацию. <a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=4808>1×slots зеркало проходить регистрацию это отличный вариант</a> Раздача призов может быть посвящена различным датам: календарные дни, деньки рождения игроков, годовщина открытия казино и т. Д. Подарок выдается в виде денег, фриспинов или баллов для скопления и обмена на услуги оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода данной суммы придется выполнить ряд притязаний. В истиннее время получить приз за регистрацию в казино довольно просто. Почти любой игорный жилище с радостью даст средства либо безвозмездные вращения. Многие игроки используют данным и не стесняются региться в каждом клубе с выгодными критериями. Кстати, это замечательная вероятность выдумать выигрышную стратегию и сорвать куш.Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми акциями. Читайте о них в обзорах и на форуме. зеркло казино 1×slots <a href=https://forum.storeland.ru/index.php?/user/25621-cazinosdep/>https://forum.storeland.ru/index.php?/user/25621-cazinosdep/</a>
1×slots регистрация на сайте
Если площадка дарует бездеп за регистрацию, то процедура его получения ординарна. Нужно только ввести аккаунт на веб-сайте и активировать его, подтвердив адресок электронной почты, номер телефонного либо другие данные, которые просит оператор. Перед данным необходимо убедиться, что пользователь располагается на официальном сайте казино, но на мошеннической площадке. <a href=http://xn----7sbgabarzt9afbtggek.xn–p1ai/index.php?subaction=userinfo&user=skillfulrainbow>http://xn----7sbgabarzt9afbtggek.xn–p1ai/index.php?subaction=userinfo&user=skillfulrainbow</a> 1×slots официальный сайт мобильная версия скачать Можно. Вы всегда можете отказаться от получения бездепозитного приза за регистрацию в казино, пока Вы не сделаете ставку.Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен список превосходнейших интернет казино, коие предлагают своим игрокам щедрые бонусы за регистрацию.
<b>Смотреть еще похожие новости:</b>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=325080&pid=648696#post_648696>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=866011>1×slots регистрация на сайте 1×slots ru com</a>
<a href=http://vn-info.net/user/Josephkam/>1×slot регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Доступные игры – В неких азартных играх возможно понизить математическое приемущество казино до нескольких 10-х процента. В их количестве почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как правило, в таких забавах ставки идут в зачет вейджера не всецело. Например, возможность учитываться лишь 50%. В неких забавах бездепозитные бонусы вообщем нельзя отыгрывать. Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.
#6782 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация
Можно ли наваривать на бездепозитных бонусах? Это не работа, тут как повезет, в в любом предложенном безедепе, вы будете откручивать вейджер и выводить, это возможно назвать везением, и добавочной добавкой к вашему бютжету.Представленные на данной странице лучшие бездеп призы в казино за регистрацию в 2022 году имеют подходящие обстоятельства. После кропотливого анализа редакция портала составила рейтинг спецпредложений, в гости Casino.ru все сортировать список по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д. <a href=http://filmkachat.ru/>казино 1×slots</a> За счёт спинов выйдет запустить разные онлайн слоты, протестировать стратегии и поднабраться опыта. Фишка в, собственно вращения начисляются на топовые аппараты с уникальными опциями и высочайшей отдачей. Не запамятовывайте, что в каждом акционном предложении предусмотрены специальные притязания – временные лимитирования, максимальный размер ставки, перечень доступных игр.3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефонный или почту, показать индивидуальную информацию; <a href=https://wakelet.com/wake/-bCB6R6Fc7F319ngWQ1YF>https://wakelet.com/wake/-bCB6R6Fc7F319ngWQ1YF</a> 1×slots официальный сайт зеркало рабочее <a href=https://n4.biz/web/u86603620/home/-/blogs/86997304_%D0%9F%D1%80%D0%BE%D0%B3%D1%80%D0%B0%D0%BC%D0%BC%D0%B0-%D0%A3%D1%87%D0%B5%D1%82-%D0%BE%D0%B1%D0%BE%D1%80%D1%83%D0%B4%D0%BE%D0%B2%D0%B0%D0%BD%D0%B8%D1%8F-%D0%B2-%D1%88%D0%BA%D0%BE%D0%BB%D0%B5>https://n4.biz/web/u86603620/home/-/blogs/86997304_%D0%9F%D1%80%D0%BE%D0%B3%D1%80%D0%B0%D0%BC%D0%BC%D0%B0-%D0%A3%D1%87%D0%B5%D1%82-%D0%BE%D0%B1%D0%BE%D1%80%D1%83%D0%B4%D0%BE%D0%B2%D0%B0%D0%BD%D0%B8%D1%8F-%D0%B2-%D1%88%D0%BA%D0%BE%D0%BB%D0%B5</a> Предложения с бездепозитными бонусами за регистрацию позволяют новым заведениям заинтересовать аудиторию на собственный сайт. А игроки к получают возможность выступать на реальные средства без депозита в казино и заработать малый стартовый капитал, который разрешено исключить на карту банка или электрический кошелек.
1×slots сайт
<a href=https://nztw.org/forum.php?mod=viewthread&tid=425444&pid=732997&page=1&extra=page%3D1#pid732997>1×slots скачать на айфон</a> 1х слот 1хслотс регистрация перейти на 1×slots Фриплей-бонусы. Бонусы за бесплатную забаву есть только в некоторых клубах. Они зачисляются сразу после сотворения профиля и срабатывают недолговременное время. Если у вас нет времени израсходовать средства, они просто завершатся. Что касается медли, в большинстве случаев призы действуют на 1-го часа. <a href=https://www.empowher.com/users/glavdorogadv2106>https://www.empowher.com/users/glavdorogadv2106</a> 1×slots быструю регистрацию а также мгновенное Некоторые веб-сайты, этого чем провести регистрацию игроков, предлагают ответить на некоторое базисных вопросов. Цель проведения подобной викторины – выявить случайных людей, которые не имеют представления о покере, и не допустить получения ими призов. Если посетитель теснее играл в казино, то ответить на полтора десятка несложных вопросов несомненно нетрудно. Очень часто, ответы можно найти на официальных веб-сайтах этих учреждений.
1хслотс регистрация в 1×slots casino
Бездепозитные бонусы — это подарки от казино в виде бонусных денег либо фриспинов для игровых автоматов, которые начисляются на аккаунт игрока после процедуры регистрации на сайте заведения. Для получения таких поощрений депо не требуется. При исполненьи критерий отыгрыша и верификации, деньги с бонусного счета переводятся на основной и шансы быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции находятся от выбранной платежной системы.Возможность сыграть дополнительное соревнование (а от и некоторое) абсолютно даром, а выигрыш, в свою очередь, поступает на счёт игрока. <a href=https://521zixuan.com/space-uid-909567.html>https://521zixuan.com/space-uid-909567.html</a> Для выбора азартного заведения Вы сможете воспользоваться списком наших казино с призами за регистрацию. На нашем сайте мы выпустили перечень бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, что доля призов эксклюзивные и доступны лишь для посетителей нашего сайта по-специальному промо-коду или по уникальной ссылке. Кроме того, для каждого приза мы подготовили подробный обзор, в Вы узнаете как получить и отыграть поощрение и как исключить собственный выигрыш с бездепа.Не советуем опрометью голову хвататься за различные предложения получения средств без инвестициям. Вполне возможно, что бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем смотрится на первый взгляд. Альтернативой считается казино бонус за депозит. Мы предлагаем для пару советов, спасибо которым у каждого игрока будет вероятность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег: x1 slots регистрация в 1×slots casino Суммы похожих услуг, как правило, колеблются от трех до двадцати $, а вейджер на эти средства обязан сочинять от тридцати до шестидесяти один. Зачастую, наибольшая сумма выигрыша здесь составит от одной до 2-ух сотен $. Если игрок выиграет больше, то все средства шансы быть списанными до очень разрешенного выигрыша. Здесь замечена смысл выводить еще несуществующие деньги на собственную платежную систему и дальше искать заведение с благоприятными под данную сумму релоадом или призом за 1-ое пополнение счета. Есть количество подвидов бездепозитного гонорары, предлагаемого наибольшим числом заведений.
1хслотс официальный сайт зеркало
Благодаря программке лояльности от игорного заведения, возможно брать превосходный старт и без добавочных инвестициям запустить видеослоты. Кроме как, можно рассчитывать на реальную фортуну и получить, без инвестиции собственных финансов, великой выигрыш.Поспешите отобрать бездепозитные призы за регистрацию в казино из представленного перечня. Все платформы не ведут легальную деятельность, но и порадуют правдивыми плодами игры, высочайшей отдачей, быстрыми выплатами. 1×slots официальный регистрация <a href=http://forum.pinoo.com.tr/profile.php?id=1248988>http://forum.pinoo.com.tr/profile.php?id=1248988</a>
1×slots бонус за регистрацию
Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?С другой стороны, намного проще забрать бездепозитные фриспины за регистрацию в казино и прямо момент начать вертеть барабаны в наилучших слотах. Главная особенность спинов сомнений, что они предусмотрены для топовых автоматов. Удастся столько пройти дополнительные раунды, но и увеличить необходимую выигрыша, заработать респины и другие внутриигровые презенты. Условия, на которых предоставляется бездеп, регулируются казино. Каждая акция содержит подробные верховодила, гиперссылка на которые обычно находится в промообъявлении. В них указываются лимиты, вейджер, перечень доступных игр. Если оператор скрывает данные о предложении, то воспользоваться им не.Для всех бездепозитных призов действует максимальный предел на выигрыш. Он указывает предельную необходимую, коию вы сможете получить, играя на бонусные кредиты. Как лишь вам удастся выполнить требования вейджера, допустимый максимально будет переведен с бонусного счета на главный, а остаток будет списан. <a href=http://bmwspeed.lv/user/Davidscope/>http://bmwspeed.lv/user/Davidscope/</a> Можно ли наваривать на бездепозитных бонусах? Это не работа, тут как повезет, случае в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, время возможно именовать везением, и добавочной добавкой к вашему бютжету.Частенько новички не понимают, как активировать подарки либо вывести 1-ый выигрыш. Для сходственных случаев наша команда обрисовала главные термины – что это фриспины, вейджер, как его отыграть, зачем нужно протекать верификацию. рабочее зеркало 1хслотс Обычно показатель повыше, чем для бонусов на депо. Не изумляйтесь, случае он будет даже х100. Иногда завышенный коэффициент вейджера уточняется для обитателей отдельных государств.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.donchillin.com/space-uid-382497.html>1×slots актуальное зеркало</a>
<a href=http://fin-molitor.com/forum/viewtopic.php?f=2&t=447218>1×slot официальный сайт</a>
<a href=http://nhomtruyen.com/members/jamesgaw.9280/>1×slots зеркало на сегодня</a>
<a href=http://forums.indexrise.com/thread-2011-post-344734.html#pid344734>1×slots рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Исходя из этого, просто не существует разумных оснований махнуть рукою на получение такого приза при регистрации. И, не, на такой бесплатной базе у вас все шансы выиграть деньги и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные призы, называют безвозмездными онлайн платформами для игр. Поспешите арестовать бездепозитные призы за регистрацию в казино из представленного списка. Все платформы столько ведут легальную работа, но и порадуют правдивыми плодами игры, высочайшей отдачей, резвыми выплатами.
#6783 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на сайте 1×slots ru com
Но есть игорные заведения, коие готовы просто так жертвовать деньги на игру. Для этого довольно создать профиль. Чтобы исключить собственный выигрыш, вам сначала необходимо выполнить условия отыгрыша, указанные в условиях получения бездепозитного депозита. <a href=http://filmkachat.ru/>1×slots сайт</a> <a href=https://www.vevioz.com/forums/thread/4584/>https://www.vevioz.com/forums/thread/4584/</a> Бездепозитные бонусы за регистрацию в игровых автоматах для хозяев онлайн-казино считаются частью маркетинговой кампании, направленной на увеличение аудитории сайта. Так они продвигают средства бренды и привлекают новых посетителей.Фриплей-бонусы. Бонусы за благотворительную забаву есть лишь в неких клубах. Они зачисляются сразу после сотворения профиля и срабатывают недолговременное время. Если у вас нет медли потратить свои, они просто завершатся. Что касается медли, в большинстве случаев призы срабатывают протяжении одного часа. 1×slots официальный сайт зеркало <a href=https://www.spairkorea.co.kr/gnuboard/bbs/board.php?bo_table=g_inquire&wr_id=3072522>https://www.spairkorea.co.kr/gnuboard/bbs/board.php?bo_table=g_inquire&wr_id=3072522</a> Создание аккаунта. На веб-сайте казино нужно обнаружить регистрационную форму и заполнить порожние поля личностными данными. Иногда на этом этапе потребуется указать только адресок электрической почты и пароль, хотя почаще бы заполнить анкету персональной информацией (ФИО, дата рождения, пространство проживания и т.д. ). Нужно указывать только реальные данные, что впоследствие они станут испытаны.
1хслотс рабочее зеркало
1×slots зеркало регистрация в 1×slots casino <a href=https://adminclub.org/member.php?action=profile&uid=90666>https://adminclub.org/member.php?action=profile&uid=90666</a> Размер бонусов почаще всего чисто символический и не превышает 50 руб. Приятно, хотя ощутимым бустом деле навряд станет. 1×slot зеркало рабочее этих способов предполагает регистрацию
1хслотс зеркало
Бонус с зачислением денег на счет выделяет больше свободы деяний. Пользователь сам подбирает, каким образом воспользоваться подаренными своими. Здесь также шансы действовать лимитирования на перечень доступных игр, но обычно эти рамки не например строги, как в промо с бесплатными вращениями.Но никогда не запамятовывайте внимательно разбирать управляла роли в бонусных промоакциях. Если вы нарушите но бы одно условие, позже вы не сможете уладить недоразумение с администрацией. Выиграть реальные деньги в казино не пополняя счет – сложно, но вероятно. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными призами и начните выступать на бонусные свои. По статистике каком-то 10-ти заведений можно заработать небольшую необходимую денег с бонусных средств.Раздача призов имеет быть посвящена различным датам: календарные праздничные, дни рождения игроков, юбилей открытия казино и т. Д. Подарок выдается вид денег, фриспинов или баллов для накопления и обмена на предложения оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд притязаний. <a href=https://www.morph.ro/users/Donaldten>https://www.morph.ro/users/Donaldten</a> Нельзя осматривать забаву на деньги, как вариант заработка. Азартные забавы запрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не зачинщиком азартных игр. Сайт одевает информационный нрав.К примеру, игроку выдаются безвозмездные средства в заведении в объеме пятидесяти или 100 долларов (вейджер на которые составляет 100х). То есть, каждому новоприбывшему игроку выскакивает манящая картинка, кот-ая обещает выплату всех зачисленных компанией средств. Не стоит обращать внимания на казино бонус за регистрацию без депо с слишком большой либо довольно малеханькой суммой бонусов, поэтому собственно, в тщательно исследовав все условия, тут вероятнее всего, несомненно какой-то подкол. casino 1×slot
1×slots сайт
Таким образом, заведение пытается продемонстрировать себя своим вероятным игрокам, а подобный рекламный ход как казино бонус без депо за регистрацию завлекает довольно большое внимания к игорному заведению и обеспечивает постоянный поток свежих посетителей и будущих клиентов игрового онлайн клуба.Как лишь вы отыграли вейджер и свои с бонусного баланса перешли вас на настоящий счет, Вы храбро можете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (устроить минимальный депо к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депозитом). <a href=https://test.soclanovtsy.ru/topic/26973-chicago-house-samples-loops-sounds/page/386/#comment-78874>1×slots регистрация 1×slotscasino 56 online</a> Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 $. Если выдаются фриспины, их количество изредка превышает нескольких 10-ов бесплатных вращений.Допустим, за регистрацию вы получили бездеп в размере 2 000 руб. С вейджером х30. В данном случае светит устроить ставок, на общую сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать реальные средства. Однако не забывайте, что с любого презента выйдет исключить определённую сумму (почаще всего не более $200). Самые популярностью способы вывода денег ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам подобии Neteller и Skrill, еще используют криптовалютными кошельками. Вывод выигрышей имеет исполняться моментально либо развлекать от нескольких часов до нескольких суток.Например, игрок получил 500 руб. При твореньи аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 рублей, понадобится сделать 875 спинов для полного отыгрыша. 1×slots официальный сайт скачать <a href=http://service.gepart.su/forum/?PAGE_NAME=profile_view&UID=3937>http://service.gepart.su/forum/?PAGE_NAME=profile_view&UID=3937</a> При игре на бонусные средства запрещается играть в игровые автоматы с прогрессивным джекпотом и забавы из радела live casino. Кроме того, некоторые казино выделяют бездеп на один либо некоторое конкретных слотов, и в других играх Вы не сможете на них выступать.
1×slots быструю регистрацию а также мгновенное
С иной стороны, намного проще отобрать бездепозитные фриспины за регистрацию в казино и напрямик момент начать вращать барабаны в превосходнейших слотах. Главная особенность спинов сомнений, что они предусмотрены для топовых автоматов. Удастся не пройти вспомогательные раунды, но и увеличить сумму выигрыша, заработать респины и внутриигровые подарки. Это тоже бесплатные финансы, коие поступают на аккаунты свежеиспеченных в в регистрирования. А необыкновенность этих бонусов состоит сомнений, что обретенные деньги непременно следует применять в продолжении назначенного медли. <a href=http://justworks.su/index.php?subaction=userinfo&user=acceptableupsho>http://justworks.su/index.php?subaction=userinfo&user=acceptableupsho</a> Для получения бонуса нужно пригласить в забаву нового посетителя. Казино начислит пригласившему фиксированный процент от взносов приглашённого повторяющий приза: почаще всего его размер не выше 10%. Срок деянья бонуса правило не выше месяца: пригласивший получает приз в зависимости от проигранных ставок приглашённого в 1-ый месяц забавы.Во всех легальных онлайн-казино Беларуси необходимо свидетельство паспортных данных для забавы — это требование правительства страны. 1×slots официальный сайт скачать Операторы гемблинга утверждают, собственно так они борются с бонус-хантерами. Впрочем, критики считают, собственно этим казино пробуют сделать из случайного постояльца постоянного игрока.
<b>Смотреть еще похожие новости:</b>
<a href=http://3ak.cn/home.php?mod=space&uid=187057>1хслотс зеркало на сегодня</a>
<a href=https://www.lightknotes.com/MyBB/showthread.php?tid=262616>1×slots официальный сайт, скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала быстрые выводы. Фишка выплат никаких, что достаточно избрать платёжный инструмент и указать сумму. В большинстве случаев деньги зачисляются на электрические кошельки на 15 мин., а на банковские карты – 1–3 рабочих денька. Срок отыгрыша — это этап, кот-ый начинается в момент активации приза и заканчивается с его закрытием. Пользователю необходимо уложиться в этот временной зазор, другому призовые свои аннулируются. Казино устанавливают список игр, ставки каких засчитываются при расчете отыгранных средств. Если тайтл не заходит в данный перечень, то он может быть недоступен для загрузки период деянья бонусного предложения.
#6784 BrianFaw
https://canadianpharmacy.win/ online canadian pharmacy
#6785 luckyduckAndroidhttps://android.luckyduck-casino-apk.ru
<a href=https://android.luckyduck-casino-apk.ru/>https://android.luckyduck-casino-apk.ru</a>
Загрузить apk файл казино luckyduck – играй прямо сейчас! <a href=https://android.luckyduck-casino-apk.ru/>www.android.luckyduck-casino-apk.ru</a>
#6786 Charlesgunnyhttp://filmkachat.ru
сайт 1× slots casino
Вы скорее, как и все предпочитаете получать подарки и бездепозитные бонусы казино. Игорные дома взяли в привычку одаривать гэмблеров приятными призами. Стать обладателем приветственного подарка можно за создание профиля или пополнение счёта. Второй вариант более интересный, ведь клубы готовы удвоить депо! Но если вы новичок и только знакомитесь с миром азарта, никакого пользуйтесь призом за регистрацию. <a href=http://filmkachat.ru/>1×slots регистрация на официальном сайте</a> Бонус в казино без депо содержит разные варианты: такое быть приветственный бонус, акции в честь каких-то праздников или весомых дат, бонус за вербование новых игроков, преданность и получение VIP-статуса.Практически все интернет казино с бездепозитным призом за регистрацию учитывает программу преданности — систему поощрения постоянных посетителей, кот-ая состоит из большого уровней. При достижении игроком одного уровня на его счёт поступает бонус. Чем выше уровень — что, этим щедрее приз. <a href=https://www.vevioz.com/forums/thread/4584/>https://www.vevioz.com/forums/thread/4584/</a> Вы скорее, например все предпочитаете получать презенты и бездепозитные бонусы казино. Игорные дома взяли в повадку одаривать гэмблеров приятными призами. Стать владельцем приветственного подарка можно за творенье профиля либо пополнение счёта. Второй вариант больше увлекательный, так клубы готовы удвоить депо! Но случае вы новичок и лишь знакомитесь с миром азарта, другого пользуйтесь бонусом за регистрацию.Бездепозитный приз за регистрацию в казино — это стартовый презент повторяющий валютного начисления либо бесплатных вращений для новых игроков заведения, для получения которого не вносить депозит. 1×slots официальный сайт мобильная версия скачать <a href=http://www.gtcm.info/home.php?mod=space&uid=733568>http://www.gtcm.info/home.php?mod=space&uid=733568</a> Изучить верховодила и обстоятельства получения бездепозитных бонусов казино, Вы сможете у нас на сайте в разделе с бонусами или на официальном сайте выбранного Вами казино. Если возможности отыскать нужную информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал либо по электрической почте.Как лишь на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу в сего возможно забыть заявку на вывод выигрыша. Кредиты прибыльно выделяются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом реальных средств и выделяют возможность почувствовать задор. Во-вторых – возможно насладиться каждой азартной игрой доступной на сайте. В вашем распоряжении присутствуют автоматы, настольные приложение, видео-покер, Live-дилеры.
1×slots мобильная версия войти казино
Основное правило получения бездепа ? создаваемый аккаунт должен быть у юзера первым и единственным. Наличие нескольких аккаунтов требовательно воспрещено. Проверка проводится по имени, адресу электронной почты, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита необходимо блюсти простую очередность действий.Чем ниже велечину вейджера, что, этим легче отыграть и вывести приз. Если Вы планируете заработать на бездепе, не просто ознакомиться с свежим игровым клубом, то стоит игнорировать бонусов с высоким вейджером их практически не реально отыграть. С ними Вы можете лишь протестировать забавы заведения. <a href=http://permitbeijing.com/forum/showthread.php?tid=2245559>casino 1×slot</a> онлайн казино 1×slots Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, дабы еще раз получить даровой бонус. Игорные заведения нетерпимы к бонус-хантерам, потому вас ждет неизбежное санкция. <a href=https://forum.kainkalabs.com:443/member.php?action=profile&uid=21232>https://forum.kainkalabs.com:443/member.php?action=profile&uid=21232</a> Раздача бонусов может быть посвящена различным датам: календарные праздники, деньки рождения игроков, годовщина открытия казино и т. Д. Подарок выдается вид денег, фриспинов либо баллов для накопления и обмена на предложения оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода этой суммы понадобиться выполнить ряд притязаний. 1×slots официальный зеркало рабочее Классическая разновидность бонуса за творенье аккаунта. Его превосходство заключается что, нет, что заказчик возможность других подбирать аппараты и делать ставки в их. Иногда список игровых автоматов ограничен оператором, но все точно это чем, чем единственный доступный разъем, как если, тогда, с использованием фриспинов.
1×slot казино зеркало
Но есть игорные заведения, коие готовы просто так жертвовать деньги на игру. Для сего довольно создать профиль. Чтобы вывести свой выигрыш, вам сначала необходимо выполнить условия отыгрыша, обозначенные в критериях получения бездепозитного депо.Основное отличие в, собственно для получения бездепа не пополнять баланс в казино. Но кроме этого, есть ряд и других отличий: <a href=http://top-extern.ru/index.php?subaction=userinfo&user=ruralpoker83>http://top-extern.ru/index.php?subaction=userinfo&user=ruralpoker83</a> 1× slots зеркало
1хслотс регистрация в 1×slots casino
Чаще всего, пользующиеся сервисы, такие как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно неотъемлемое верховодило. Финансовые средства выводятся лишь спустя что, эту платежную систему, которой успех для пополнения депозита. Если же игрок получил бездепозитный покерный приз, требуется пополнить счет на наименьшую сумму, которая составляет обычно десять $.Бездепозитные бонусы казино за регистрацию в 2022 году — это возможность сыграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой или числом бесплатных вращений без внесения депо. Не путайте деморежим с реальной забавой без необходимости внесения депозита. <a href=https://lawsbay.com/donrem-ru/#comment-17446>1хслот 1хслотс регистрация перейти на 1×slots</a> Перечисленные выше главные характеристики сочетают практически каждый бонус и являются стереотипными для бездепозитных бонусных начислений в казино.Главное превосходство спинов – вероятность изучить разные слоты. Также получится насладиться бонусными раундами, испытать удачу в риск-туре и преумножить выигрыш за счёт особых символов. Однако столько игровой процесс заслуживает внимание, ведь чем сосредоточиться на реальном выигрыше. Прежде всего, не запамятовывайте регулярно заглядывать на страничку обзоров бездепозитных призов. Они шаг за шагом осматривают наиболее интересные предложения основных игорных порталов. 1х слотс зеркало регистрация в 1×slots casino <a href=https://www.kenpoguy.com/phasickombatives/profile.php?id=2052077>https://www.kenpoguy.com/phasickombatives/profile.php?id=2052077</a> При регистрации идет указывать только достоверную информацию. Когда учетная запись несомненно активна, появится доступ в Личный офис. В нем можно избрать денежную, установить промокод и узнать доскональные верховодила получения и отыгрыша бездепа. Краткая информация об промоакции часто присутствует непосредственно на регистрационной форме.Нет. Казино раздают благотворительные бонусы за регистрацию, для того, чтобы клиент имел ознакомиться с игровым заведением. А чтобы исключить его, нужно выполнить условия отыгрыша.
1×slots рабочее зеркало
Ещё одно распространённое акционное предложение – привлекательный презент с неблаговидными требованиями. К образцу, клуб обещает $100 в бездепа, хотя с вейджером х80 или х100. Отыграть такой вейджер практически нереально и потому какого-либо концентрироваться на более заманчивых промоакциях.А ознакомиться с свежими онлайн казино, Вы сможете с бонусов с выводом прибыли, коие Вы сможете получить без депо. <a href=http://dominoworld.club/home.php?mod=space&uid=71304&do=profile>http://dominoworld.club/home.php?mod=space&uid=71304&do=profile</a> 1×slots зеркало видели такую регистрацию на
<b>Смотреть еще похожие новости:</b>
<a href=https://australiantravelforum.com/Upload/showthread.php?tid=257777>1× слот зеркало</a>
<a href=https://www.mshowto.org/forum/members/jamespauri.html>1×slot казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Во время забавы в казино, выигрыши, приобретенные спасибо безвозмездным призовым фондам, суммируются и включаются в общую необходимую для отыгрывания. Однако, если фортуна улыбнется и получится отыграть все призы, игровое заведение гарантированно разрешит исключить финансовые свои. Сумма вывода несомненно в от лимита, утвержденного непосредственно в этом учреждении. Поэтому, внимательно нужно читать правила выдачи анлимитных депозитов.
#6787 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало подтвердит вашу регистрацию если говорить
Если при регистрации указать промокод, можно гарантировано получить приз. Где взять ваучер? Посетите направленные блоги либо форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В заключительное время игорные дома начали рекламироваться в фильмах и сериалах. Присмотритесь и всего заметите промокод, который принесёт 500 или 1 000 бонусных руб.Чаще всего применяются коды. Их нужно вносить в особые окошки регистрационной анкеты, случае речь о пригласительных бонусах, либо в определенном разделе личного офиса игрока. <a href=http://filmkachat.ru/>казино 1×slots</a> Вознаграждения за получение VIP-статуса ? начисляются в рамках программы преданности при достижении еще уровня либо выдаются персонально менеджерами службы. <a href=https://diigo.com/0y2r7c>https://diigo.com/0y2r7c</a> скачать 1×slots на андроид мобильная версия <a href=https://rg-mechanics.club/user/Frankwes/>https://rg-mechanics.club/user/Frankwes/</a> Каждый из бездепозитных призов без пополнения 2022 имеет свой определенный вейджер для отыгрыша, например же в любом казино он устанавливается индивидуально — где то он х55 а где-то х30, повторюсь везде по разному!Изучить верховодила и условия получения бездепозитных бонусов казино, Вы сможете у нас на сайте в разделе с призами или на официальном сайте избранного Вами казино. Если не найти необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал либо по электронной почте.
1×slots официальный регистрация
Такой казино приз без депо за регистрацию выдается игроку на час и энергично используется данное предложение с 2017 года. Это словно некая маскировка поощрения под бездепозитный. Суть всего сего сводится к что, этому, собственно игроку на час выдается, например, 1000 долларов, а реклама твердит то, собственно каждой выигрыш можно несомненно в будущем оставить при себя. Но если играющий серьезно отнесется к данному предложению, то он просто растеряет время. Ведь игроку нужно будет играть не главном аккаунте, а в тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (в всей тысячи) в правила вступят конкретные обстоятельства, где несомненно сказано, что максимальной суммой победы имеет быть лишь двести долларов и деньги можно применять лишь в приза на первый вклад с вейджером 25 от суммы вознаграждения плюс сам депозит. По итогу выйдет, собственно игрок выигрывал себя 200% приз с вейджером на определенную необходимую. Короче разговаривая, это все надо вашего времени. 1×slots регистрация на официальном сайте Этот тип бонуса будет добавлен на Ваш акк последствии удачной процедуры регистрации с использованием номера телефона. Если избрать иной метод творенья учетной записи, бездеп не несомненно добавлен на Ваш аккаунт.Вообще перейдя в казино — правила одинаковы в получении бездепозитных бонусов, в стереотипные управляла входит: подтвердить эл. Почту и телефонный, заполнить собственный собственный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ. <a href=http://community.checkinpro-hotel-software.com/memberlist.php?mode=viewprofile&u=322726>http://community.checkinpro-hotel-software.com/memberlist.php?mode=viewprofile&u=322726</a> 1×slots официальный зеркало Однако далеко не все ресурсы предлагают своим посетителям бездепозитные призы за регистрацию в казино. В большинстве случаев учтено поощрение на первый депозит в объеме 100–200%. Это отличная возможность преумножить банкролл, прирастить время, проведённое за игрой и шансы сорвать большой куш.
1хслотс рабочее зеркало
Главное преимущество спинов – возможность выучить различные слоты. Также удастся насладиться бонусными раундами, испытывать фортуну в риск-туре и преувеличить выигрыш за счёт особенных знаков. Однако столько игровой процесс заслуживает внимание, так превосходнее сосредоточиться на реальном выигрыше. Вы наверняка, как и все предпочитаете получать презенты и бездепозитные призы казино. Игорные дома брали в привычку одаривать гэмблеров приятными бонусами. Стать владельцем приветственного подарка можно за создание профиля или пополнение счёта. Второй вариант больше занимательный, как клубы готовы удвоить депозит! Но если вы новичок и только знакомитесь с миром пыла, другого, как воспользуйтесь бонусом за регистрацию. <a href=https://www.theexeterdaily.co.uk/users/jefferytet>https://www.theexeterdaily.co.uk/users/jefferytet</a> Максимальный размер ставки, который невозможно превосходить пока приз не несомненно полностью отыгран. В случае нарушения сего верховодила, приз и выигрыш с него станут аннулированы.Зарегистрируйтесь. Для регистрации чаще всего довольно ввести свой номер аппарата и почтовый адресок, в чего установить полученный код из СМС. Возможно, требуется показать промокод. В правилах промоакции будет написано, где его надо вводить. Иногда это надо делать при регистрации, от — теснее после творенья личного офиса, на отдельной странице. 1 х слотс зеркало
1×slots зеркало видели такую регистрацию на
Объективные – размер бонуса, коэффициент и обстоятельства вейджера, необходимость внесения депо для вывода средств;Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы которые появляются у начинающих. Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации дара необходимо подтвердить электронную почту и привязать телефон; Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. 1×slots зеркало рабочее на сегодня <a href=http://zqykj.cn/bbs/home.php?mod=space&uid=269507>http://zqykj.cn/bbs/home.php?mod=space&uid=269507</a> Похожим образом работает 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения посетителя либо в связи с получения им VIP-статуса. Подарок предоставляется после обращения в поддержку и проверки.
1×slots акции
Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного бонуса. Прочитайте правила бонусной программки, какой хотите принять. Да, мы настойчиво советуем устроить это до регистрации.Наш перечень содержит наихорошие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает проверку по главным параметрам: <a href=http://bbs.teachersbbs.com/home.php?mod=space&uid=458916>http://bbs.teachersbbs.com/home.php?mod=space&uid=458916</a> После получения приза вывод средств для клиента несомненно недоступен времени, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо пара месяцов. Выводить деньги игрок может лишь последствии отыгрыша. 1хслотс зеркало на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=https://www.donchillin.com/space-uid-382497.html>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a>
<a href=http://forum.animogen.com/viewtopic.php?f=9&t=1569985>1×slots casino регистрация 1×slotscasin online</a>
<a href=http://forum.puppylinux.pl/index.php?topic=917.new#new>1×slots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если площадка дарит бездеп за регистрацию, то процедура его получения проста. Нужно лишь завести акк на веб-сайте и активировать его, подтвердив адрес электрической почты, номер аппарата либо другие данные, которые просит оператор. Перед данным необходимо убедиться, собственно юзер располагается на официальном сайте казино, не на жульнической площадке. Вы всего, скажем, как все предпочитаете получать подарки и бездепозитные бонусы казино. Игорные жилища взяли в повадку одаривать гэмблеров приятными бонусами. Стать обладателем приветственного подарка можно за создание профиля либо пополнение счёта. Второй вариант больше увлекательный, ведь клубы готовы удвоить депозит! Но случае вы новичок и только знакомитесь с миром азарта, другого, как пользуйтесь бонусом за регистрацию.
#6788 luckyduckDownloadhttps://download.luckyduck-casino-apk.ru
<a href=https://download.luckyduck-casino-apk.ru>download.luckyduck-casino-apk.ru</a>
Установить последнюю версию приложения казино lucky duck – играй сегодня! <a href=https://download.luckyduck-casino-apk.ru>https://www.download.luckyduck-casino-apk.ru</a>
#6789 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
kometa casino порно с Афонина Марина Игоревна <a href=https://rhymes-punches.com/>порно с Константин Тюкавин (футбол)</a> 1×bet официальный слоты 1×bet рабочее <a href=https://t.me/vchkogpu_ru>пина букмекерской конторы</a> официальные букмекерские конторы скачать pin up casino пин 1×bet 1хбет 7k casino зеркало на сегодня порно с Анна Калинская (теннис) почему казино яндекс игры казино
#6790 Charlesgunnyhttp://filmkachat.ru
зеркала 1×slots
Помните, собственно в неких забавах сумма ставки идет в зачет вейджера лишь отчасти. Так, в настольных и карточных забавах только от 5% до 50% суммы ставки считаются как отыгранные средства, на как в слотах идет в зачет все one hundred percent суммы.Наши специалисты изучают обстоятельства промоакции, после в ручном режиме проводят их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и другие параметры. Мы не рекламируем казино, а даем игрокам информацию о превосходнейших из их. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало</a> При этой на бонусные средства запрещается играть в игровые автоматы с современным джекпотом и игры из радела exist casino. Кроме того, кое-какие казино выделяют бездеп на раз либо количество определенных слотов, и в других забавах Вы не можете на их выступать.Бездепы могут заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами. <a href=https://hackaday.io/rendering>https://hackaday.io/rendering</a> 1хслотс казино зеркало <a href=http://tdsot.ru/bitrix/redirect.php?goto=http://profimania.com/bitrix/rk.php?goto=http://bekenez.ru/bitrix/click.php?goto=https://teletype.in/@urist555/HYgZtNamMo8>http://tdsot.ru/bitrix/redirect.php?goto=http://profimania.com/bitrix/rk.php?goto=http://bekenez.ru/bitrix/click.php?goto=https://teletype.in/@urist555/HYgZtNamMo8</a>
1 хслот регистрация в 1×slots casino
Так что главное отличие презента на депо от бездепа – неотъемлемое пополнение счёта. Вы можете внести депо и преувеличить стартовый капитал или отобрать бездеп и всем не придётся рисковать собственными сбережениями. Поспешите выполнить обычные требования, и администрация ресурса начисляет щедрое поощрение! 1×slots официальный сайт зеркало рабочее В зависимости от интернет заведения любой из них может для предложить как бездепозитные деньги, так и бездепозитные фриспины, коие в удачной регистрации упадут для на ваш игровой баланс.В случае установленного лимита на сумму вывода выигрыша с бездепозитного приза, игрок не сможет вывести больше заявленной суммы. <a href=http://forumqservice.co.uk/member.php?action=profile&uid=4886>http://forumqservice.co.uk/member.php?action=profile&uid=4886</a> скачать 1×slots официальный сайт
1хслотс 1хслотс регистрация перейти на 1×slots
Для получения выигрыша потребуется выполнить обстоятельства казино. Чаще всего игроку нужно поставить определенную сумму, хотя уже из личных средств. Она рассчитывается из общего объема выигрыша за всегда применения бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, если юзер выиграл 1000 руб., а множитель составляет х30, вывести деньги можно несомненно, сделав ставки на 30 000 рублей.Наши специалисты изучают условия промоакции, затем в ручном режиме проводят их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и параметры. Мы не рекламируем казино, а даем игрокам информацию о наихороших из их. <a href=http://d90894u1.bget.ru/user/DoctorLazutaMl/>http://d90894u1.bget.ru/user/DoctorLazutaMl/</a> зеркала 1×slots Также бывают случаи, когда казино начислит оговоренный бонус последствии регистрации нового клиента по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам.
зеркло казино 1×slots
<a href=https://projects.sare.org/people/jamestrazy/>1×slots зеркало подтвердит вашу регистрацию если говорить</a> Такие одобрения позволяют бесплатно протестировать свежее казино, разобраться с игровым процессом интернет слотов, заработать и исключить маленькую сумму денег.Для получения выигрыша требуется выполнить обстоятельства казино. Чаще всего игроку нужно поставить конкретную необходимую, но уже из собственных средств. Она рассчитывается из совместного объема выигрыша за всегда использования бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, если пользователь выиграл 1000 руб., а множитель сочиняет х30, вывести средства можно несомненно, сделав ставки на 30 000 руб. На безвозмездные призы онлайн-казино почти постоянно распространяется ограничения по стране проживания клиентов. Даже случае вас разрешено раскрывать счет и выступать на средства в заведении, это еще не означают, что для доступны no deposit bonuses. 1×slots бонус за регистрацию <a href=http://bbs.darkml.net/home.php?mod=space&uid=7970494>http://bbs.darkml.net/home.php?mod=space&uid=7970494</a> Так что сможете неустрашимо регистрироваться без всяких раздумий. Фортуна сейчас наверняка на вашей стороне. Не побаивайтесь, так последствие какого или ущерба Вам абсолютно не угрожает. С такими призами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе.
1хслотс официальный сайт зеркало
Маркетинговая политика всех игорных интернет-клубов должна носить разнородный нрав. И если вознаграждения на депо работают чтобы, чтобы, дабы провоцировать вносить депозиты и поощрять теснее существующих пользователей, то бездепозитный приз в казино либо приз за регистрацию в казино, прежде всего, рассчитан на расширение базы потребителей. <a href=https://www.reikiandastrologypredictions.com/member.php?action=profile&uid=20433>https://www.reikiandastrologypredictions.com/member.php?action=profile&uid=20433</a> Процесс подтверждения личности возможность взятьвдолг(взятьвзаймы) от 1-го денька до недели. Если заказчик допустил какую-либо оплошность при заполнении паспортных данных, то ему идет адресоваться с задачей в службу поддержки онлайн-казино. 1×slots зеркало быструю регистрацию а также мгновенное
<b>Смотреть еще похожие новости:</b>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=16&t=262166&p=612461#p612461>1×slots рабочее зеркало на сегодня</a>
<a href=http://www.airsoft44.com/forum/index.php?action=profile;u=11896>1×slots зеркало которую указывали при регистрации кстати</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Объективные – размер бонуса, коэффициент и обстоятельства вейджера, надобность внесения депозита для вывода средств; Процесс подтверждения личности может взятьвдолг(взятьвзаймы) от одного дня до недели. Если заказчик допустил какую-либо ошибку при заполнении паспортных данных, то ему стопам адресоваться с проблемой в службу онлайн-казино.
#6791 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
карты казино Яровая Ирина Анатольевна порно <a href=https://specreporter.com/>up букмекерская контора</a> 7k casino зеркало букмекерская контора официальный сайт скачать <a href=https://m.repost.news/>казино играть</a> 1×bet официальный сайт 1×bet xyz порно с Константин Тюкавин (футбол) бывшие казино скачать букмекерскую контору букмекерские конторы бет демо казино сайт pin up casino
#6792 Charlesgunnyhttp://filmkachat.ru
1 x slots casino
Диапазон ставок, которые вправе сделать игрок, также лимитирован. Обычно назначать можно небольшую сумму — в 10–30 руб. За одно вращение.Чтобы других убедиться в преимуществах бездепозитных бонусов, довольно зарегистрироваться в казино и получить поощрение. <a href=http://filmkachat.ru/>1×slots зеркало проходить регистрацию это отличный вариант</a> Так же стоит выделить то, что в любом онлайн казино установлен собственный наибольший кешаут на бездепозитный приз. Как правило кешаут — это максимальная сумма средств, которая доступная для вывода с бездепозитного приза.Как только на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу после сего можно оставить заявку на вывод выигрыша. Кредиты прибыльно отличаются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом настоящих средств и выделяют вероятность почувствовать азарт. Во-вторых – возможно насладиться каждой азартной забавой доступной на веб-сайте. В вашем постановлении присутствуют автоматы, настольные приложение, видео-покер, Live-дилеры. <a href=https://devfolio.co/@archicgicom>https://devfolio.co/@archicgicom</a> Существует ли стратегии для отыгрыша бездепозитных призов? К раскаянью нет, на выигрыши либо проигрыши с бонусов, казино или игрок воздействовать возможности, отдача игр случается от создателей игр.Такой бесплатный эквивалент средств зачисляется на профиль юзера последствии осуществления притязаний и предназначаются они только для игрового процесса. Вывод этих вознаграждений вероятен лишь в осуществления вейджеровых критерий. 1×slots зеркало видели такую регистрацию на <a href=http://www.xy28zj.com/space-uid-264775.html>http://www.xy28zj.com/space-uid-264775.html</a> Выше мы предоставили глубокий комплект самых свежих и актуальных бездепозитных призов в интернет казино без пополнения на 2022 год, где вам пользоваться хоть ценным бездепозитным призом.
1хслотс рабочее зеркало на сегодня
<a href=http://nexusroleplay.teamforum.ru/viewtopic.php?f=19&t=3635>1×slots официальный сайт зеркало рабочее</a> 1×slot казино зеркало Заработать на бездепозитных бонусах за регистрацию в казино может каждый пользователь, достигший совершеннолетия.Фриспины начисляются по конкретной ставке. После их активации игроку необходимо запустить разъем и убедиться, собственно в нем показываются бесплатные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода в отыгрыша определяется оператором и изредка выше 5 000 руб. <a href=http://www.aadd2.net/vb/member.php?u=33786>http://www.aadd2.net/vb/member.php?u=33786</a> Сроки активации приза уточняются каждым казино, хотя почаще всего они не превышают недели с момента получения. Игроку непременно надо(надобно) использовать бездеп в течение указанного срока, в ином случае приз просто пропадет. Каждый приз возможно получить лишь раз один, потому в не использовать бездеп в срок, у игрока не несомненно 2 шанса им воспользоваться.На критериях отыгрыша бесплатных бонусов идет остановиться подробнее. С ними связаны нюансы, которые невозможно оставить без внимания. 1×slots регистрацию процедура займет всего лишь
1×slots регистрация на 1хслотс
Необходимость отыгрыша. Вейджер ситуации выше, чем для бонусов за депо. И пока средства не отыграны, вывести их невозможно. <a href=http://wennw.com/member.asp?action=view&memName=daffyalcove70>http://wennw.com/member.asp?action=view&memName=daffyalcove70</a> Игры, каких возможно играть на бонусные средства. Проверьте список игр, в можно играть на бонусные свои, вполне они Вам не понравятся и не стоит расходовать своё время на такую акцию.Наиболее пользующиеся вознаграждения между гэмблеров – бездепозитные призы казино. Это не удивительно, как можно получить благотворительные вращения либо виртуальные кредиты, и этом не придётся пополнять счёт, рисковать собственными средствами. Удастся насладиться различными веселиями причем выиграть крупную необходимую, избегая серьёзного риска. 1× slots официальный Для выбора азартного заведения Вы сможете воспользоваться списком наших казино с бонусами за регистрацию. На нашем сайте мы опубликовали перечень бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, что часть бонусов неповторимые и доступны лишь для посетителей нашего сайта по-специальному промо-коду или по уникальной ссылке. Кроме того, для любого приза мы подготовили подробный обозрение, каком Вы узнаете как получить и отыграть одобрение и как вывести свой выигрыш с бездепа.Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, дабы снова получить бесплатный бонус. Игорные заведения нетерпимы к бонус-хантерам, потому вас ждет неминуемое санкция.
онлайн казино 1×slots
<a href=http://vn-info.net/user/Josephkam/>1×slots зеркало рабочее</a> К раскаянью, нет. Почти все казино, требуют внесение но бы одного малого депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, что вывести деньги разрешено только на что, эту платежную систему, с коей был сделан депозит.Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, solid только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. 1×slots зеркало регистрация в 1×slots casino <a href=https://boobs.red/user/Michaelfrupt/>https://boobs.red/user/Michaelfrupt/</a> Как лишь получите бездеп в казино, всё точно не забывайте инспектировать электронную почту. Некоторые игорные клубы каждый веселят активных гэмблеров приятными призами. Чаще всего получить подарок возможно в преддверии праздника, на день рождение, за привлечение друга. А того распространённым бонусом считается надбавка к депозиту. Нужно чем пополнить счёт, и азартное заведение прирастит его на 50–100%.
1×slots акции
<a href=http://prosat.ru/modules.html?name=Journal&file=display&jid=21504>http://prosat.ru/modules.html?name=Journal&file=display&jid=21504</a> Также, в этом случае нужно подтвердить собственный номер аппарата, желаемого код, приобретенный в смс-сообщении от клуба ввести в специальное поле в собственном кабинете игрока.С иной стороны, намного проще арестовать бездепозитные фриспины за регистрацию в казино и прямо данный начать вращать барабаны в наихороших слотах. Главная особенность спинов никаких, что они предназначены для лучших автоматов. Удастся не пройти дополнительные раунды, хотя и увеличить сумму выигрыша, заработать респины прочие внутриигровые подарки. 1×slots зеркало регистрация то дальше необходимо пройти Нельзя разглядывать забаву на деньги, как вариант заработка. Азартные забавы запрещены для лиц младше 18 лет. Topcasinobonuses.mobi не организатором азартных игр. Сайт одевает информационный нрав.
<b>Смотреть еще похожие новости:</b>
<a href=http://swissairways-va.com/phpBB3/viewtopic.php?p=1659428#p1659428>1хслотс мобильная версия зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.
#6793 Charlesgunnyhttp://filmkachat.ru
рабочее зеркало 1хслотс
Ограничения по играм. Администрация запрещает игрокам некоторые игровые автоматы с бездепозитным призом, деньгами или безвозмездными вращениями. Обычно, в правилах приводится полный перечень слотов для отыгрыша. Иногда дробленье выполняется по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino.К образцу, игроку выдаются бесплатные свои в заведении в объеме пятидесяти либо 100 $ (вейджер на которые составляет 100х). То есть, каждому новоприбывшему игроку выскакивает притягивающая картинка, кот-ая сулит выплату всех зачисленных фирмой средств. Не стоит заострять на казино бонус за регистрацию без депозита с сильно великий или довольно маленькой суммой призов, поэтому что, том тщательно исследовав все обстоятельства, тут всего, будет некий подвох. <a href=http://filmkachat.ru/>x1 slots регистрация в 1×slots casino</a> <a href=https://band.us/band/96885593/post/2>https://band.us/band/96885593/post/2</a> Подтверждение регистрации. Казино настоятельно привязки профиля к электрическому адресу и номеру телефона. Для этого на e-mail отправляется письмо со ссылкой, а на аппарат ? текстовое сообщение с кодом.Так собственно приготовьтесь дать конфиденциальную информацию (пол, возраст, страна проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает не более суток, после чего получится свободно выводить крупные выигрыши. 1хлот регистрация в 1×slots casino <a href=http://teltzion.org/doku.php?id=%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA%20%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0>http://teltzion.org/doku.php?id=%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA%20%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0</a> Лишь модные и знаменитые азартные заведения шансы разрешить для выдавать бездепы повторяющий добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депо, которые возможно потратить в топовых аппаратах с высокой отдачей.Бездепозитный бонус предоставляется новому игроку за определенные деянья. Часто презент в виде денег или фриспинов выдается за регистрацию, спасибо чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.
казино 1×slots официальный сайт
Принципиальным отличием даровых бонусов от бонусов на депозит является неимение необходимости вносить средства на аккаунт. Из-за этого их нередко нарекают бездепозитными (no down payment bonuses).Во всех законных онлайн-казино Беларуси необходимо свидетельство паспортных данных для забавы — это заявка правительства государства. 1×slots регистрация 1×slotscasino 56 online Срок отыгрыша — это период, кот-ый начинается в момент активации приза и завершается с его закрытием. Пользователю нужно уложиться в этот временной зазор, по призовые средства аннулируются. Казино устанавливают перечень игр, ставки в засчитываются при расчете отыгранных средств. Если тайтл не входит в данный список, то предоставляется быть недоступен для загрузки в деяния бонусного предложения.Игры, в которых возможно выступать на бонусные средства. Проверьте перечень игр, каких можно выступать на бонусные свои, возможно они Вам не понравятся и надо расходовать своё время на такую акцию. <a href=http://dklada.ru/index.php?subaction=userinfo&user=yqunap>http://dklada.ru/index.php?subaction=userinfo&user=yqunap</a> 1× slots регистрация в 1×slots casino
зеркло казино 1×slots
<a href=http://csa.sseuu.com/home.php?mod=space&uid=225610&do=profile&from=space>http://csa.sseuu.com/home.php?mod=space&uid=225610&do=profile&from=space</a> С иной стороны, гораздо легче отобрать бездепозитные фриспины за регистрацию в казино и прямо данный начать вращать барабаны в наилучших слотах. Главная особенность спинов том,, что они предусмотрены для лучших автоматов. Удастся не только пройти дополнительные раунды, но и прирастить сумму выигрыша, заработать респины и внутриигровые презенты. 1×slots casino online регистрация Реже бонусы без депозита начисляются постоянным игрокам. С их поддержкой администрация постарается вычесть ценных посетителей или вожделеет поблагодарить за лояльность правильных посетителей. Но гораздо почаще для похожих целей применяются такие акции:
1×слот регистрация в 1×slots casino
Объективные – размер бонуса, коэффициент и обстоятельства вейджера, необходимость внесения депо для вывода средств; <a href=https://www.xn–72c9aa5escud2b.com/webboard/index.php/topic,516802.new.html#new>1×slots регистрацию процедура займет всего лишь</a> Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала прыткие выводы. Фишка выплат что, нет, собственно довольно выбрать платёжный инструмент и указать сумму. В большинстве случаев средства зачисляются на электрические кошельки в течение 15 минут, а на банковские карты – 1–3 рабочих денька.Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают бонус по странам. Вплоть до такого, собственно клуб возможность принимать игроков из Вашей страны, а бездеп не давать. Несмотря на то, собственно данный вариант стимуляции со стороны азартных платформ очень известен области подобных игр, далековато не всем почитателям казино знаменито, собственно сами бездепозитные призы казино и как именно их возможно эксплуатировать.Все благотворительные бонусы кажутся заманчивыми. Кто же категорически от возможности поиграть в онлайн-казино, не рискуя средствами, хотя получая выигрыши. Но далеко не все бездепозитные бонусы в равной степени презентабельны для рассудительного клиента. 1×slots зеркало быструю регистрацию а также мгновенное <a href=http://kotelnikovo-region.ru/bitrix/rk.php?goto=http://graindryer.ru/bitrix/rk.php?goto=http://armos-market.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/KzRL7mfs8nP>http://kotelnikovo-region.ru/bitrix/rk.php?goto=http://graindryer.ru/bitrix/rk.php?goto=http://armos-market.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/KzRL7mfs8nP</a>
1×slot рабочее зеркало
<a href=https://mobilka.mobi/user/DeweyJam/>https://mobilka.mobi/user/DeweyJam/</a> 1×slots casino регистрация 1×slotscasino09k online Некоторые веб-сайты, этого чем провести регистрацию игроков, предлагают ответить на количество базовых вопросов. Цель проведения похожей викторины – выявить случайных людей, коие не имеют представления о покере, и не допустить получения ими бонусов. Если гость теснее играл в казино, то ответить на полтора 10 несложных вопросов несомненно нетрудно. Очень часто, ответы можно найти на официальных сайтах данных учреждений.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.makinamania.net/index.php?topic=250812.new#new>казино 1×slots</a>
<a href=https://elclasificadomx.com/author/jameslog/>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<a href=http://swissairways-va.com/phpBB3/memberlist.php?mode=viewprofile&u=3495>1×slots мобильная версия войти казино</a>
<a href=https://www.lightknotes.com/MyBB/showthread.php?tid=176714>1 xslots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Первый возникающий вопрос, это, зачем выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают свежих игроков. Последним проще начать забаву на средства с подарка за регистрацию. Им не пополнять баланс и тратить собственные средства. Новички получают безвозмездные спины или средства на счёт. С их подмогою знакомятся с игровым процессом, крутят слоты и проделывают ставки в рулетке.
#6794 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино пину как выиграть в казино <a href=https://res-publika.com>pin up casino официальный</a> 7k casino официальный 1×bet сайт 1×bet xyz <a href=https://sovsekretno.net/>casino андроид</a> букмекерские конторы в россии kent casino Яровая Ирина Анатольевна порно 1×bet официальный 1×bet официальный 1×bet xyz букмекерская контора скачать приложение bet casino
#6795 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало видели такую регистрацию на
Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, чтобы замечена вероятность вывести выигрыш. <a href=http://filmkachat.ru/>рабочее зеркало 1хслотс</a> Наши эксперты исследуют условия акции, после в ручном режиме проводят их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие параметры. Мы не рекламируем казино, а даем игрокам информацию о превосходнейших из их. <a href=https://diigo.com/0y2r36>https://diigo.com/0y2r36</a> Кешбэк-бонус представляет собой возврат фиксированного процента от ставки если, тогда, проигрыша или же от проигранной суммы за определённый период. В большинстве случаев кешбэк не превышает 10%. 1×slots зеркало видели такую регистрацию на <a href=https://analsex.tube/user/Chrisphawn/>https://analsex.tube/user/Chrisphawn/</a> В интернет-сети всегда возможно отыскать списки наиболее популярных и обещанных поощрительных программ от знаменитых онлайн-казино.
1×slot зеркало рабочее регистрации на телефон придет
После получения приза вывод средств для клиента будет недосегаем до, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо чета недель. Выводить деньги игрок сможет только после отыгрыша.Большинство интернет-казино из нашего топ-10 готовы порадовать вас эксклюзивными промоакциями. Читайте о их в обзорах и на форуме. <a href=https://forum.spherecommunity.net/User-JamesLop>1×slots casino регистрация 1×slots review live</a> 1×slots casino регистрация Большинство клубов завлекают внимание геймеров за счёт разнообразных подарков. На одних веб-сайтах возможно получить виртуальные кредиты, коие откроют доступ ко всему софту. На иных же, администрация предлагает благотворительные вращения для пуска топовых онлайн слотов. Несмотря на разные акции, стоит выделить самые основные.Для ревизии используются сканы паспортов, водительских водительских, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь обнаружен в попытке ввести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный список. При ирге на лицензионной площадке не опасаться указывать достоверную персональную информацию (шифрование исключает утечку индивидуальных данных). <a href=http://television.im/profile.php?u=disillusionedpa>http://television.im/profile.php?u=disillusionedpa</a> Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция содержит доскональные верховодила, гиперссылка на коие обычно содержится в промообъявлении. В них указываются лимиты, вейджер, список доступных игр. Если оператор скрывает данные о предложении, то воспользоваться им не стоит. 1хслот зеркало
1×slots сайт
<a href=http://multi-net.su/index.php?subaction=userinfo&user=JulesVab>http://multi-net.su/index.php?subaction=userinfo&user=JulesVab</a> скачать 1×slots на андроид мобильная версия Каждая игровая перрон отличается критериями по получению и отыгрышу бездепов. В правилах отчетливо расписаны временные рамки, за коие надо(надобно) прокрутить вейджер. Также не запамятовывайте про наибольший объем ставки и наивысшую сумму выплаты. С иной стороны, дабы получить бездепозитные бонусы казино, достаточно истратить менее 1 минуты.
1хслотс регистрация в 1×slots casino
<a href=https://chasingadream.rpginitiative.com/showthread.php?tid=128028>1×slots официальный сайт зеркало</a> Если при регистрации показать промокод, можно гарантировано получить бонус. Где арестовать ваучер? Посетите определенную блоги или форумы. Иногда администрация клуба делает рассылку ваучеров на электрическую почту. В последнее время игорные жилища начали рекламироваться в фильмах и телесериалах. Присмотритесь и скорее заметите промокод, который принесёт 500 или 1 000 бонусных рублей.Вознаграждения за получение VIP-статуса ? начисляются в программки преданности при достижении одного уровня либо выдаются индивидуально менеджерами саппорта. 1×slots регистрация то дальше необходимо пройти <a href=https://www.asitorino.com/user/scottrom/?um_action=edit>https://www.asitorino.com/user/scottrom/?um_action=edit</a>
1хслотс рабочее зеркало на сегодня
Таким образом, заведение пробует показать себя своим вероятным игрокам, а такой маркетинговый ход как казино бонус без депо за регистрацию привлекает очень количество внимания к игорному заведению и обеспечивает постоянный струю новых посетителей и грядущих посетителей игрового онлайн клуба. Казино дает возможность заработать и исключить настоящие деньги на бездепозитных бонусах. Обычно, это малозначительная сумма, которую казино имеет себе позволить подарить игроку.Зарегистрируйтесь. Для регистрации почаще всего достаточно ввести собственный номер телефонного и почтовый адрес, после чего установить полученный код из СМС. Возможно, потребуется указать промокод. В правилах акции будет написано, где его надобно вводить. Иногда это бы делать при регистрации, время — теснее в создания личного кабинета, на отдельной страничке. <a href=https://www.meiyingge8.com/space-uid-568529.html>https://www.meiyingge8.com/space-uid-568529.html</a> Сразу последствии активации промокода можно пользоваться подарком. Как уже упоминалось, призы посещают трёх видов – фриспины, кредиты и фриплей-бонусы.Чтобы бездеп не был начислен на Ваш аккаунт, Вам не активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк автоматически, а Вы не планируете его применять, обратитесь в службу поддержки с пожеланием отменить бездепозитный бонус. 1×slots casino зеркало рабочее Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы мгновенно получить 33 безвозмездных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, бывает реальный шанс победу!При исполненьи критерий отыгрыша и верификации, средства с бонусного счета переводятся на ведущей и имеют быть выведены на карту или электронный кошелек. Лимиты на вывод и сроки проведения транзакции зависимости от выбранной платежной системы.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.animogen.com/memberlist.php?mode=viewprofile&u=15333>казино 1×slots официальный сайт</a>
<a href=https://smm-seo.ru/members/rabofreeol.4209/>1×slots зеркало регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вознаграждения за получение VIP-статуса ? начисляются в рамках программки лояльности при достижении очередного значения или выдаются персонально менеджерами саппорта. Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных ситуаций с казино, когда последствии отыгрыша бездепа вас не дадут исключить крупную сумму выигрыша.
#6796 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
песня казино букмекерская контора фонбет <a href=https://kompromat1.online/>ramenbet casino</a> гта онлайн казино vodka casino <a href=https://m.repost.news/>1×bet официальный xbet</a> гама казино порно с Анастасия Потапова, теннисистка Скоробогатова Ольга Николаевна порно porno Юлия Пересильд casino скачать приложение казино сочи фреш казино
#6797 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало сайта
Выбирая безвозмездный бонус, внимательно изучайте управляла. Убедитесь, что вам возможно на участие в акции. Уточните, в каких забавах можно скорпулезно условия вейджера. При надобности задавайте вопросы адептам саппорта. <a href=http://filmkachat.ru/>1×slots зеркало сайта</a> Так собственно приготовьтесь предоставить секретную информацию (пол, возраст, страна проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает не более суток, последствии чего удастся свободно выводить крупные выигрыши. <a href=https://mega.nz/file/E6tG2Y6a#35AP8eRuVWDBW0vFRNmk3yz9lTf4-ohI6ETi78fc0BA>https://mega.nz/file/E6tG2Y6a#35AP8eRuVWDBW0vFRNmk3yz9lTf4-ohI6ETi78fc0BA</a> Фриспины без депо или вспомогательные средства помогут поближе познакомиться с игровой платформой и её функциями. За счёт даров возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за игры напротив живых крупье. 1×slot рабочее зеркало <a href=https://www.ls1.com/forums/member.php?u=118592>https://www.ls1.com/forums/member.php?u=118592</a> Как только на виртуальном счету окажутся бонусные свои, поторопитесь отыграть вейджер. Сразу последствии этого возможно оставить заявку на вывод выигрыша. Кредиты прибыльно отличаются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом настоящих средств и выделяют возможность ощутить задор. Во-вторых – возможно насладиться любой азартной забавой доступной на сайте. В вашем распоряжении находятся автоматы, настольные прибавление, видео-покер, Live-дилеры.
1×slots официальный зеркало рабочее
Онлайн-казино тщательно продумывают бонусные обстоятельства, коие необходимо выучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и ограничения. 1×slots быструю регистрацию а также мгновенное Возможность поиграть вспомогательное состязание (а времени и количество) совершенно бесплатно, а выигрыш, к, поступает на счёт игрока. <a href=http://a96549hg.bget.ru/index.php?subaction=userinfo&user=horriblealloy42>http://a96549hg.bget.ru/index.php?subaction=userinfo&user=horriblealloy42</a> 1хслотс 1хслотс регистрация перейти на 1×slots Прямо данный арестуйте благотворительные вращения за регистрацию без депозита и начинайте собирать призовые комбинации ради крупных выигрышей!
казино 1×slots
Прибывшие на аккаунт деньги бездепозитные бонусы предназначаются, в основном, только для новоиспеченных юзеров, которые раньше не имели личного аккаунта в данном казино. Исходя из сего, если раньше у игрока был сделан депозит, то, по всей вероятности, у него больше не будет способности рассчитывать на получение такого бонуса в конкретном заведении.Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. <a href=https://ep-team.ru/forum/index.php?action=profile;u=7960>https://ep-team.ru/forum/index.php?action=profile;u=7960</a> 1×slots casino зеркало Вы не в коем случае ни же рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный бонус, по мимо практической забавы на бездепозитные призы, у Вас есть шанс выучить игровые автоматы, научится регулировать менять ставки и полосы, исследовать бонусные игры и их выигрышные композиции, да конечном просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные свои, которые можно отыграть и исключить, не просто на демо счет, что, этим наиболее адреналин в крови еще повысится а пульс забьется с частым ритмом!
1×slots регистрация 1×slots casino c2d ru
Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, дабы появилась возможность исключить выигрыш. На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не можете активировать и получить бездепозитный бонус.Иногда в поощрения за регистрацию все выдаваться билеты для участия в турнирах. Условия их проведения очень отличаются, потому мы рекомендуем ознакомиться с каждым предложением отдельно. 1хслотс 1хслотс регистрация перейти на 1×slots <a href=https://www.jiebbs.net/home.php?mod=space&uid=233263&do=profile&from=space>https://www.jiebbs.net/home.php?mod=space&uid=233263&do=profile&from=space</a> У любого игорного заведения свои правила и условия. Но, чтобы получить бонусы, нужно выполнить стереотипные деяния:
1×slots зеркало этих способов предполагает регистрацию
Теоретически, к бесплатным призам можно отнести например называемые фриспины. Напомним, речь идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, поэтому собственно они предоставляют лишь вероятность создавать ставки. <a href=http://tianranju.net/home.php?mod=space&uid=129043>http://tianranju.net/home.php?mod=space&uid=129043</a> Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и. Когда игроку надеется много фриспинов, администрация возможность разбивать их начисление на количество дней. Бесплатные вращения предоставляются для конкретного слота, который указывается в правилах промоакции.Список например именуемых «не территорий» прилагается к правилам бонусной программы игорного портала. Обязательно проверьте, распространяются ли на вас похожие санкции. 1х слотс зеркало регистрация в 1×slots casino Бездепозитный бонус казино 2022 с выводом за регистрацию предоставляет возможность ознакомиться игроку с лобби избранного заведения, определится в выборе игр и выяснить качество работы саппорта. Довольно нередко, начиная игровой процесс, игрок теснее не желает останавливаться и делает реальный вклад. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть даром возможно как один таки с призом за регистрацию без необходимости вносить депо.Если вы новичок деле и лишь попали в неизведанную вами область азарта — счет услуг как бездепозитные призы без пополнения.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1 xslots рабочее зеркало</a>
<a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=49052>1×slots регистрация 1×slots casino 777 online</a>
<a href=https://forum.vn.ua/member.php?u=73361>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Хотя безвозмездные призы начисляются без депо, не исключено, собственно для придется вносить средства. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь после того, как новый заказчик первый пополнит игровой счет.
#6798 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet на андроид человек казино <a href=https://krtka.info/>kometa casino</a> pin up casino пин ап Любимова Ольга Борисовна порно <a href=https://th-royalgclub.com/>1×bet официальный скачать</a> casino рабочее зеркало Светлана Ходченкова официальные сайты казино пин ап casino pin пин ап casino pin 1×bet 1 порно с Анна Калинская (теннис)
#6799 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация на сайте
Для подтверждения электрической почты, просто перейдите по интенсивной ссылке в письме, полученном от игрового заведения.На страничке представлены бездепозитные призы за регистрацию в казино редкая награда за которой гонятся все игроки как новички, например и профессионалы. Мы также уделяем большое внимание на наличие бонусов при составление рейтинга казино на деньги. Бездепозитный бонус это вероятность выступать даром и выиграть настоящие деньги. <a href=http://filmkachat.ru/>1×slots зеркало регистрация в 1×slots casino</a> Каждый в должен сперва детально изучить условия по получению и отыгрышу понравившегося презента. Если всё организует, поспешите забрать бесплатные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо данный начать вращать барабаны топовых слотов.Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы появилась возможность вывести выигрыш. <a href=https://blog.udn.com/G_112062930339362154/181391883>https://blog.udn.com/G_112062930339362154/181391883</a> Однако в критериях скрываются «подводные камни», коие не разрешат исключить солидную необходимую или же вы не успеете отыграть вейджер. Поэтому профессионалы советуют забрать бесплатные вращения за регистрацию в казино без депо, дабы поднабраться опыта и получить настоящий шанс на победу.С такими простыми советами каждое казино с бонусом за регистрацию способно принести в разы больше выгоды и пользы. казино 1×slots <a href=http://troderstro.ru/user/Oscarwap/>http://troderstro.ru/user/Oscarwap/</a> С другой стороны, намного легче забрать бездепозитные фриспины за регистрацию в казино и прямо момент начать вращать барабаны в наихороших слотах. Главная необыкновенность спинов что, что они предназначены для топовых автоматов. Удастся столько пройти дополнительные раунды, хотя и прирастить необходимую выигрыша, заработать респины прочие внутриигровые подарки.Превышение наибольшей ставки при отыгрыше. Система механически не предуведомляет о превышении ставки, потому о несоблюдении правил игрок имеет узнать теснее последствии подачи запроса на вывод средств.
x1 slots регистрация в 1×slots casino
Бездепозитный приз предоставляется новому игроку за определенные деяния. Часто презент вид средств или фриспинов выдается за регистрацию, благодаря чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.Автоматическая активация кажется самой комфортной, хотя ручной способ содержит перед ней превосходства. Прежде чем применять вознаграждение от казино, стоит заранее найти, сколько времени потребуется на исполненье всех критерий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала деяния бонуса. 1×slots регистрация 1×slotscasino09k online С этими ординарными советами любое казино с призом за регистрацию способно принести в разы больше выгоды и выгоды.Только выполнив все обстоятельства отыгрыша и дождавшись завершения проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить свои средства. <a href=https://foro.vcheats.me/Usuario-JamestawiT>https://foro.vcheats.me/Usuario-JamestawiT</a> Фриспины предназначены для применения в видео слотах. Внимательно ознакомьтесь с условиями – частенько их выдают на кое-какие автоматы. В зависимости от клуба, у вас получится сделать определённое количество ставок. Кстати, продвинутые игорные дома разрешают запускать каждых «одноруких бандитов».На страничке представлены бездепозитные бонусы за регистрацию в казино редчайшая награда за которой гонятся все игроки как новички, так и мастера. Мы тоже уделяем большое внимание на присутствие призов при формирование рейтинга казино на деньги. Бездепозитный приз это вероятность выступать даром и выиграть реальные средства. сайт 1× slots casino
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Чтоб получить большой выигрыш, подбирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, которые доступны по условиям отыгрыша. <a href=http://mebelgroup.com/bitrix/redirect.php?goto=http://xn----htbkhsfd5a.com/bitrix/redirect.php?goto=http://gss-plus.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/teqR_3tOUzm>http://mebelgroup.com/bitrix/redirect.php?goto=http://xn----htbkhsfd5a.com/bitrix/redirect.php?goto=http://gss-plus.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/teqR_3tOUzm</a> Некоторые веб-сайты, этого чем провести регистрацию игроков, предлагают ответить на некоторое базисных вопросов. Цель проведения подобной викторины – выявить случайных людей, которые не имеют представления о покере, и не допустить получения ими призов. Если посетитель теснее играл в казино, то ответить на полтора десятка несложных вопросов несомненно нетрудно. Очень часто, ответы можно найти на официальных веб-сайтах этих учреждений. 1×slots зеркало на сегодня В неких онлайн казино для получения бездепозитных бонусов не довольно просто зарегистрироваться на сайте клуба и доказать свои контактные данные. Дополнительно потребуется активация промокода.Большинство интернет-казино из нашего топ-10 готовы порадовать вас эксклюзивными акциями. Читайте о их в обзорах и на форуме.
1×slots сайт зеркало
Фриспины без депо или вспомогательные средства посодействуют поближе познакомиться с игровой платформой и её функциями. За счёт даров возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям ради игры напротив живых крупье. <a href=http://3ak.cn/home.php?mod=space&uid=187057>1×slots бездепозитный бонус за регистрацию</a> Демоказино есть практически на любом сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются веско пореже: там в случае выигрыша и соблюдения критерий промоакций бездеп можно превратить в настоящие деньги. Каждая игровая платформа отличается условиями по получению и отыгрышу бездепов. В правилах отчетливо расписаны кратковременные рамки, за коие нужно прокрутить вейджер. Также не запамятовывайте на наибольший объем ставки и максимальную необходимую выплаты. С другой стороны, дабы получить бездепозитные призы казино, довольно истратить не более 1 минуты.В истиннее время получить приз за регистрацию в казино очень просто. Почти каждый игорный дом с радостью предоставит деньги или бесплатные вращения. Многие игроки используют этим и не стесняются регистрироваться в каждом клубе с прибыльными условиями. Кстати, это отличная возможность придумать выигрышную стратегию и сорвать куш. казино 1×slots <a href=https://giga2025.com/home.php?mod=space&uid=3626121>https://giga2025.com/home.php?mod=space&uid=3626121</a> Прибывшие на аккаунт деньги бездепозитные призы предназначаются, в основном, только для новоиспеченных юзеров, которые ранее не имели собственного аккаунта в данном казино. Исходя из сего, если раньше у игрока был изготовлен депозит, то, по всей вероятности, у него больше не несомненно способности рассчитывать на получение такового бонуса в определенном заведении.
1×slots мобильная версия войти казино
Процесс доказательства личности имеет взятьвдолг(взятьвзаймы) от одного денька до недели. Если клиент разрешил нибудь ошибку при заполнении паспортных данных, то ему следует адресоваться с проблемой в службу онлайн-казино.Но есть игорные заведения, которые готовы просто например жертвовать средства на забаву. Для сего довольно создать профиль. Чтобы исключить свой выигрыш, вам сначала нужно выполнить обстоятельства отыгрыша, указанные в условиях получения бездепозитного депо. <a href=http://naydisebe.ru/user/profile/126238>http://naydisebe.ru/user/profile/126238</a> зеркала 1×slots Верификация важна для дополнительной безопасности и подсобляет техподдержке выявить бонусхантеров и мошенников. Кстати, рядах платформах выводы крупных сумм доступны лишь в доказательства личности.Для получения бездепа необходимо пригласить в игру по реферальной ссылке нового посетителя: он должен зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на необходимую, обозначенную в критериях промоакции.
<b>Смотреть еще похожие новости:</b>
<a href=https://australiantravelforum.com/Upload/showthread.php?tid=251342>1×slots сайт</a>
<a href=https://forum.spherecommunity.net/User-JamesLop>1×slots официальный сайт зеркало</a>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/8424/#comment-347230>1хслот зеркало сайта</a>
<a href=https://vredeenvermaak.be/forum/vrede-en-vermaak/>1×slots казино мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Во время игры в казино, выигрыши, полученные спасибо бесплатным призовым фондам, суммируются и включаются в общую сумму для отыгрывания. Однако, в фортуна улыбнется и получится отыграть все призы, игровое заведение гарантированно разрешит исключить денежные свои. Сумма вывода несомненно находиться от лимита, одобренного непосредственно в этом учреждении. Поэтому, пристально надо(надобно) читать верховодила выдачи безлимитных депо. Лишь известные и известные азартные заведения все позволить себя раздавать бездепы вид добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депо, которые можно израсходовать в лучших аппаратах с высочайшей отдачей.
#6800 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Петрова Ольга Викторовна порно порно с Александр Головин (футбол) <a href=https://glvk.guru/>Ирина Горбачева</a> 1×bet зеркало Львова-Белова Мария Алексеевна порно <a href=https://t.me/vchkogpu_ru>Фастова Елена Владимировна порно</a> порно с Илья Осипов (киберспорт) игры казино pin up casino официальный Лут Оксана Николаевна порно порно с Дарья Клишина, легкоатлетка r7 casino казино смотреть онлайн
#6801 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
Популярность интернет казино растёт и всё больше юзеров начинают увлекаться азартными забавами. Бездепозитные бонусы 2022 года, это уникальные презенты за регистрацию. С их помощью новые игроки могут получить бесплатные вращения либо деньги на баланс за одну регистрацию. С свет игорных заведений в онлайне, бездепозитные бонусы стали знаменитейшим методом привлечения игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о которых мы поведаем. Наш сайт собрал лучшие предложения из онлайна на 2022 год. Воспользуйтесь любым презентом и сможете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить условия.Доступность — бездепозитные бонусы в казино чаще всего предоставляются новым игрокам, хотя бывают случаи, когда приз все получить и действующие посетители. <a href=http://filmkachat.ru/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> Так что сможете смело региться без всяких раздумий. Фортуна сейчас точно на вашей стороне. Не опасайтесь, так следствие какого или убытка Вам абсолютно не грозит. С такими призами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе.Фриплей-бонусы встречаются только в неких клубах. Они зачисляются незамедлительно после создания профиля и активны недолговременное время. Если не успеете потратить средства, они попросту сгорят. Касаемо времени, в большинстве случаев бонусы активны на часа. <a href=https://telegra.ph/Ultimate-Guide-to-Professional-Weed-Delivery-North-York-Your-Local-Cannabis-Companion-11–24>https://telegra.ph/Ultimate-Guide-to-Professional-Weed-Delivery-North-York-Your-Local-Cannabis-Companion-11–24</a> Приветственный приз без депозита ? подарок за регистрацию. Выдается деньгами, фриспинами либо баллами. В заключительном случае бонусные баллы применяются для участия в турнирах либо обмена на настоящие средства.Для тех, кто лишь подумывает испытывать свою удачу, а также для проф игроков, ищущих свежие площадки для выигрышей, водящие лицензированные казино нередко организуют различные промоакции, и одно из лучших предложений за время – как для новичков, так и для проф игроков – бездепозитный приз за регистрацию. 1×slots регистрация на 1хслотс <a href=http://wennw.com/member.asp?action=view&memName=aqikyk>http://wennw.com/member.asp?action=view&memName=aqikyk</a> Вывод выигрыша с бездепозитных призов казино – щедрый презент от азартных клубов. Но чтобы вывести собственный заработок, необходимо выполнить ряд условий:4. Заберите презент. Чаще всего приз активируется сразу последствии регистрации. Но посещают ситуации, когда нужно забежать в собственный кабинет либо написать в службу.
1×slots коды
Вышеописанная причина и считается основным нюансом, в которого операторы отдают доля собственной прибыли на разные маркетинговые затраты и маркетинговые кампании. А самым действенным тут станут выступать именно бездепозитные бонусы казино 2022 с выводом за регистрацию.Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских руб. В условиях акции предписано, что вейджер бездепозитного бонуса х20. Поэтому, чтобы отыграть бонус, игроку будет нужно сделать ставок на 35*20=700 рублей. <a href=http://palais.beesims.com/phpbb/viewtopic.php?f=2&t=290769>1×slots зеркало на сегодня</a> 1×slots рабочее зеркало Осталось выбрать казино с призом за регистрацию и создать профиль. После активации подарка выигрыш зависит от Фортуны и способностей.Обычно бездепозитные промоакции от казино, приходят на эл. Почту в деньки рождения либо праздники. В некоторых онлайн казино возможно обратиться в чат и как неизменному игроку, вероятно вам предложат бездепозитное предложение. <a href=https://visualchemy.gallery/forum/profile.php?id=4467235>https://visualchemy.gallery/forum/profile.php?id=4467235</a> 1×slots регистрация 1×slotscasino09k online Когда идет о денежных призах, казино постоянно устанавливают условия вейджера, коие нужно выполнить, дабы исключить выигрыш.
1×slots промокод при регистрации 2025
Исходя из сего, просто не присутствует мудрых причин махнуть рукою на получение такого бонуса при регистрации. И, будет, на подобный бесплатной базе у вас все шансы выиграть средства и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные призы, нарекают безвозмездными онлайн платформами для игр. Некоторые онлайн-казино без депозита предлагают свежим клиентам избрать бонус при регистрации. Будьте внимательны: выбрав раз, вы в безусловном большинстве случаев не сможете пользоваться остальными.Фриплей-бонусы. Бонусы за безвозмездную игру есть лишь в некоторых клубах. Они зачисляются сразу последствии создания профиля и действуют недолговременное время. Если у вас нет времени потратить свои, они просто завершатся. Что дотрагивается медли, в большинстве случаев призы срабатывают на одного часа. <a href=https://www.ipixels.com/profile/64899/WilliamSep>https://www.ipixels.com/profile/64899/WilliamSep</a> Законодательство, регулирующее азартные забавы в различных государствах, влияет на возможности операторов. В итоге пользователи из отдельных ареалов сталкиваются с лимитированиями со стороны казино. Это возможность быть как полный отказ в доступе, так и невозможность загружать забавы отдельных производителей. 1×slots зеркало на сегодня Подобные призы без депозита предоставляются на больше выгодных условиях. Зачастую они крупнее, а условия отыгрыша наименее жесткие.Существует ли стратегии для отыгрыша бездепозитных бонусов? К сожалению нет, на выигрыши либо проигрыши с призов, казино или игрок повлиять возможности, отдача игр происходит от создателей игр.
1×slots регистрация 1×slotscasino 56 online
Подарки на праздники ? приуроченные к праздничным датам, требующие условного отыгрыша либо начисляются без это. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду. <a href=http://evtrucksforum.com/viewtopic.php?p=810725#p810725>1×slots регистрация 1×slotscasino09k online</a> Начнём с как, собственно каждое промо за регистрацию подразумевает некоторые обстоятельства. Бездепозитные призы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность валютного оборота, необходимая для выполнения критерий. Пример, возымели бесплатные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 руб., неудачных или выигрышных, важно. После исполненья, бонусный баланс перейдёт на реальный и станет доступным к выводу.Чаще всего, популярностью сервисы, эти как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно обязательное правило. Финансовые свои выводятся только через ту платежную систему, коей огромный для пополнения депо. Если же игрок получил бездепозитный покерный бонус, потребуется восполнить счет на минимальную необходимую, кот-ая сочиняет обыкновенно 10 долларов. Обычно для получения бонусов без депо, казино выдвигает лояльные и вполне выполнимые обстоятельства, но есть ряд поступков коие воспрещены и шансы стать противные последствия: x1 slots 1хслотс регистрация перейти на 1×slots <a href=http://ckenc.co.kr/bbs/board.php?bo_table=gallery&wr_id=34077>http://ckenc.co.kr/bbs/board.php?bo_table=gallery&wr_id=34077</a>
1 xslots рабочее зеркало
Вообще перейдя в казино — управляла схожи в получении бездепозитных призов, в стандартные правила входит: доказать эл. Почту и телефонный, наполнить свой собственный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ.Во время забавы в казино, выигрыши, приобретенные спасибо безвозмездным призовым фондам, суммируются и включаются в общую необходимую для отыгрывания. Однако, если фортуна улыбнется и выйдет отыграть все призы, игровое заведение гарантированно разрешит вывести денежные средства. Сумма вывода несомненно находиться от лимита, одобренного именно в данном учреждении. Поэтому, пристально нужно читать верховодила выдачи безлимитных депо. <a href=https://forum.drumjamapp.com/memberlist.php?mode=viewprofile&u=44480>https://forum.drumjamapp.com/memberlist.php?mode=viewprofile&u=44480</a> Ограничения по играм. Администрация воспрещает игрокам кое-какие игровые автоматы с бездепозитным бонусом, деньгами или безвозмездными вращениями. Обычно, в правилах приводится полный перечень слотов для отыгрыша. Иногда разделение выполняется по облику игр. Например, отыгрыш возможен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino.Акционные предложения от казино существуют в различных форматах. Часто бонусы даются в размен на депозит. Игрок заносит платеж и получает деньги, благотворительные вращения прочие поощрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — вид бонуса, кот-ый гарантирован за выполнение конкретных поступков на сайте: 1×slot зеркало рабочее этих способов предполагает регистрацию
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/8069/#comment-337537>1×slots зеркало видели такую регистрацию на</a>
<a href=https://forum.bedwantsinfo.nl/thread-723041.html>1хслотс зеркало на сегодня</a>
<a href=https://adminclub.org/showthread.php?tid=64893>1×slots сайт зеркало</a>
<a href=https://www.mshowto.org/forum/members/jamespauri.html>1×slots официальный сайт зеркало</a>
<a href=https://karakol.com.kg/user/Jameskef/>1×slots регистрация 1×slotscasino 56 online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Приветственный бездеп предоставляется хоть игроку только один раз. Казино борются с так именуемыми бонусхантерами (от англ. Bonus Hunter — охотник за бонусами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения презента. Исключить подобные деянья разрешает верификация данных. Администрация вправе востребовать у посетителя доказать индивидуальные данные, обозначенные при регистрации. Акции распространяются как на все игры казино, например и на ограниченный список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino прочие. Промо может охватывать разработки одного производителя. Бездеп не пересекается с другими акциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, изготовленные бонусными деньгами. Для идентификации платежных реквизитов игрока может потребоваться пополнение счета на наименьшую необходимую.
#6802 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin ап casino porno Нина Пирогова, хоккеистка <a href=https://specreporter.com/>Юдаева Ксения Валентиновна порно</a> смотреть фильм казино карты казино <a href=https://res-publika.com>сайт казино зеркало</a> порно с Никита Кучеров (хоккей) pin up casino официальный яндекс игры казино vodka casino гта онлайн казино лучшие букмекерские конторы casino играть
#6803 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на 1хслотс
Мы рекомендуем не отказываться от подобных предложений известных казино. Выделите количество минут на регистрацию, получите бонус и попробуйте его отыграть. Может быть, сейчас фортуна несомненно на вашей стороне! <a href=http://filmkachat.ru/>1×slots зеркало сайта</a> <a href=https://www.empowher.com/groups/blogs-4/posts/revolutionizing-web-experiences-through-interactive-cgi-solutions>https://www.empowher.com/groups/blogs-4/posts/revolutionizing-web-experiences-through-interactive-cgi-solutions</a> С не отыгранным призом запрещается превышать объем наибольшей ставки. Нарушение сего условия последствия аннулирование выигрыша. 1×slots регистрация на сайте 1×slots ru com <a href=https://alphacs.ro/member.php?77121-Geraldkindy>https://alphacs.ro/member.php?77121-Geraldkindy</a> К раскаянию, нет. Почти все казино, настоятельно внесение но бы одного минимального депо для вывода выигрыша с бездепозитного бонуса. Также учитывайте, что вывести средства разрешено только на что, эту платежную систему, с которой был изготовлен депозит.
1×slots зеркало видели такую регистрацию на
Да, у бесплатных бонусов есть дефекты. Прежде всего, они обычно маленькие. Кроме как, условия вейджера по ним постоянно строгие. Но все же неименье риска проделывает их довольно привлекательными для клиентов.Проверка занимает от нескольких мин. До нескольких дней, специалисты техподдержки могут запросить вспомогательные документы либо инициировать куцее общение по Skype. <a href=https://clubdefansde24.com/foro/viewtopic.php?t=18589>1×slots официальный сайт скачать на айфон</a> 1×slots зеркало видели такую регистрацию на Иногда виде поощрения за регистрацию все выдаваться билеты для роли в турнирах. Условия их проведения довольно отличаются, поэтому мы советуем ознакомиться с любым предложением раздельно.Демоказино есть практически на каждом сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются веско пореже: там когда выигрыша и соблюдения критерий акций бездеп можно перевоплотить в настоящие деньги. <a href=http://ask39.ru/index.php?subaction=userinfo&user=vastapocalypse3>http://ask39.ru/index.php?subaction=userinfo&user=vastapocalypse3</a> 1х слотс зеркало регистрация в 1×slots casino Казино дает возможность заработать и исключить настоящие средства на бездепозитных призах. Обычно, это незначительная сумма, коию казино возможность себе разрешить презентовать игроку.Но есть игорные заведения, коие готовы просто например жертвовать средства на забаву. Для сего достаточно сделать профиль. Чтобы исключить собственный выигрыш, для поначалу нужно выполнить обстоятельства отыгрыша, обозначенные в критериях получения бездепозитного депо.
1×slots зеркало рабочее на сегодня
В лицензионных бездепозитных казино играть в азартные забавы вправду неопасно. Наличие лицензии одобряет что, этот прецедент, что клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP. <a href=http://copybook.xyz/forum/viewtopic.php?topic_id=8070&post_id=8077&order=DESC&viewmode=flat&pid=0&forum=4#forumpost8077>http://copybook.xyz/forum/viewtopic.php?topic_id=8070&post_id=8077&order=DESC&viewmode=flat&pid=0&forum=4#forumpost8077</a> Но не стоит мыслить, собственно снабжая пользователей этими призами, казино увлекается спонсированием. Ведь объемы вознаграждений, главном, не немалые (средним объемом от 5 до 20 долларов). И на эти свои налагаются определенные обстоятельства и ограничения, обязательные к выполнению игрока, если в последствии он желает получить все свои выигранные деньги.Бездепозитный бонус часто возможность замерзнуть легкодоступным незамедлительно последствии окончания регистрации, что как единственным требованием к нему считается регистрация, а этого проверка вашей новой учетной записи. 1×slots акции Бонус за регистрацию в казино выдается лишь раз один на одного игрока. Но бывают дополнительные акции, масштабах которых бездепы расступаются для неизменных клиентов и такие подарки Вы сможете получить больше 1-го раза.
рабочее зеркало 1×slots
Любой выигрыш по ставке выше установленного лимита несомненно считаться недействительным. То есть ставка не несомненно засчитана при отыгрыше, а в случае выигрыша его сумма не поступит на счёт посетителя — итог игры будет всецело аннулирован. Практически все интернет казино с бездепозитным бонусом за регистрацию учитывает программку лояльности — систему поощрения неизменных клиентов, кот-ая состоит из колличества уровней. При достижении игроком еще значения на его счёт поступает бонус. Чем повыше степень — тем щедрее приз. 1×slots промокод при регистрации <a href=http://bbs.ebnew.com/home.php?mod=space&uid=699275>http://bbs.ebnew.com/home.php?mod=space&uid=699275</a>
1×slot рабочее зеркало
Приглашаем делиться воззрениями о бонусах. Это поможет другим юзерам избирать наиболее выгодные предложения.Так что главное различие подарка на депо от бездепа – обязательное пополнение счёта. Вы сможете привнести депозит и преумножить стартовый капитал либо забрать бездеп и при этом не придётся рисковать своими сбережениями. Поспешите выполнить простые требования, и администрация ресурса начисляет щедрое одобрение! <a href=http://fr3809hv.bget.ru/user/CraigWap/>http://fr3809hv.bget.ru/user/CraigWap/</a> При исполненьи критерий отыгрыша и верификации, деньги с бонусного счета переводятся на главный и имеют быть выведены на карту либо электронный кошелек. Лимиты на вывод и сроки проведения транзакции зависят от выбранной платежной системы. 1хслотс рабочее зеркало на сегодня В зависимости от онлайн заведения любой из них имеет для предложить как бездепозитные средства, так и бездепозитные фриспины, коие последствии удачной регистрации упадут вам на ваш игровой баланс.Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных притязаний, кроме неотъемлемой верификации. Если на сайте учтена обязательная процедура подтверждения личности, то вывести выигрыш удастся только последствии ревизии данных. Приготовьтесь наполнить анкету и отправить в техподдержку документ, подтверждающий личность.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=117921>1×slots официальный сайт, скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для получения бездепа нужно пригласить в игру по реферальной ссылке нового клиента: он обязан зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на сумму, обозначенную в условиях промоакции. Реже призы без депо начисляются неизменным игрокам. С их поддержкою администрация старается удержать ценных клиентов либо желает поблагодарить за преданность верных гостей. Но намного чаще для сходственных целей используются эти промоакции:
#6804 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
сайт казино вход casino зеркало сегодня <a href=https://kompromat1.online/>casino сайты</a> pin up букмекерская контора казино сочи <a href=https://strelochnik.com/>casino сайты</a> гта онлайн казино casino андроид слоты казино спорт букмекерская контора букмекерскую контору пин букмекерская контора официальный сайт порно с Дарья Касаткина (теннис)
#6805 Charlesgunnyhttp://filmkachat.ru
1× slots зеркало
Воспользоваться бездепом можно не во всех игровых автоматах: казино вдруг уточняет ограничение для посетителей. Конечно, это можно посчитать неким неудобством для игрока, хотя справедливости ради необходимо, собственно выбор автоматов всё также остаётся довольно наибольшим. <a href=http://filmkachat.ru/>1хслотс рабочее зеркало на сегодня</a> Первый возникающий вопрос, это, чего выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают свежих игроков. Последним легче начать игру на деньги с подарка за регистрацию. Им надо пополнять баланс и расходовать личностные средства. Новички получают благотворительные спины либо свои на счёт. С их поддержкой знакомятся с игровым процессом, крутят слоты и проделывают ставки в рулетке.Онлайн гемблинг развивается с каждым днем больше и больше, свежие бренды создаются не по денькам а по часам. Новые онлайн казино делают вступительные акции для игроков, чтобы, чтобы что бы зарекомендовать себя, и тем наиболее предлагают бездепозитные призы за регистрацию, что бы не упустить эту возможность — как воспользоваться свежим бездепом, рекомендуем посещать наш сайт как можно почаще, самое лакомое и новые будет добавляться в данном же перечне. <a href=https://ilde2.upf.edu/clatmooc/v/ic2>https://ilde2.upf.edu/clatmooc/v/ic2</a> 1хслот скачать <a href=https://www.deadbeathomeowner.com/community/profile/kennethprump/>https://www.deadbeathomeowner.com/community/profile/kennethprump/</a> В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, необходимо адресоваться в службу спустя лайв-чат на веб-сайте казино.
1×slots официальный зеркало
Каждая игровая перрон выделяется условиями по получению и отыгрышу бездепов. В правилах отчетливо расписаны кратковременные рамки, за коие нужно прокрутить вейджер. Также не забывайте на максимальный размер ставки и наивысшую сумму выплаты. С иной стороны, дабы получить бездепозитные бонусы казино, достаточно израсходовать не более 1 минутки.Не желайте сыграть в азартные забавы, не рискуя средствами средствами, хотя получая в все выплаты? Подобную возможность предоставляют все лучшие порталы с азартными весельями. В их количестве большое честных и надежных интернет-казино на российском языке. Они завлекают свежих юзеров разными поощрительными событиями, включая бездепозитные, или благотворительные призы. 1 х слотс зеркало Бонус начисляется игроку незамедлительно после регистрации и прохождения верификации в казино и не требует от посетителя внесения депозита. Как правило, объем бонуса в схожем случае достаточно стыдливый, впрочем разрешает новичкам познакомиться с игрой без риска настоящими средствами. <a href=https://dc-kd.ru/user/Porsedroppi/>https://dc-kd.ru/user/Porsedroppi/</a> Бездепы с безвозмездными вращениями предоставляют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд уплачивает казино. Число спинов ограничено и изредка выше сотку. Если промоакция содержит количество даровых игр, их начисление возможность быть разбито на количество дней. 1×slot официальный сайт B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.
зеркала 1×slots
Итак, чтобы бесплатные бонусные кредиты трансформировались в настоящие средства, которыми продоставляется распоряжаться по своему усмотрению, их нужно отыграть. Вейджер идет уточнять в правилах онлайн-казино.Многие игроки, оценив возможностей казино, остаются играть в нем и далее ? на это и направлено каждое промо. Постоянные клиенты вносят депозиты и делают ставки, обеспечивая долгосрочную выгода оператора. То есть, казино выдают бездепы свежим юзерам для формирования приклнной аудитории. <a href=http://hotissuemedical.com/bbs/board.php?bo_table=free&wr_id=41632>http://hotissuemedical.com/bbs/board.php?bo_table=free&wr_id=41632</a> Этот образ бонуса будет добавлен на Ваш аккаунт после удачной процедуры регистрации с внедрением номера телефона. Если избрать другой способ творения учетной записи, бездеп не будет добавлен на Ваш акк. казино 1×slots официальный сайт
1×slots зеркало рабочее
Акции распространяются как на все забавы казино, например и на узкий список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino прочие. Промо имеет обхватывать разработки 1-го производителя. Бездеп не пересекается с иными акциями казино. Если на сайте учтен кэшбек, он не начисляется за ставки, сделанные бонусными деньгами. Для идентификации платежных реквизитов игрока возможность потребоваться пополнение счета на наименьшую сумму. Иногда у посетителей вебсайта имеют возникнуть трудности, задачи, препядствия при активации полученного промо-кода. В таких случаях, необходимо адресоваться за поддержкою в службу поддержки «Support». Для получения ответа, обязательно указывается конкретная причина обращения и подтверждается информация дополнительными снимками. Если сложилась спорная обстановка, всегда можно обратиться к основному регулятору либо контролирующему органу, выдавшему данному заведению лицензионный документ.Далее потребуется отыграть вагер и исключить выигрыш. Игрокам без навыка крупно повезло, они могут получить 10-ки подарков за 1 регистрацию. Если не сумели получить Бездепозитный приз, не беспокойтесь. Обратитесь в онлайн чат, оператор поможет решить проблему. 1 x slots casino <a href=https://veteran-gazeta.ru/forum/user/1589/>https://veteran-gazeta.ru/forum/user/1589/</a>
1хслот зеркало сайта
Бонус без депозита за регистрацию в казино (бездепозитный приз) – это валютный подарок от клуба, который начисляется на акк игрока в регистрации в казино. Кроме творенья учетной записи, для получения бездепа, очень часто потребуется ещё и подтвердить контактные данные игрока и/или активировать специальный промо-код.Бездепозитные бонусы, как теснее ясно, считаются уникальной возможностью к игровому процессу безусловно бескорыстно, другими выступать в интернет казино бесплатно и на быть свои незамедлительно последствии регистрации аккаунта. Автоматы с этим депозитом шансы замерзнуть прекрасной вероятностью сыграть для поклонников пыла с определенными лимитированиями в денег. <a href=http://forum2.extremum.org/viewtopic.php?f=7&t=219127>http://forum2.extremum.org/viewtopic.php?f=7&t=219127</a> Выиграть настоящие деньги в казино не пополняя счет – сложно, но возможно. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными бонусами и начните играть на бонусные свои. По статистике в 10-ти заведений можно заработать маленькую сумму средств с бонусных средств.Бесплатные бонусы казино без депозита возможно получить вид валютных средств на бонусный счет (вывести их возможно лишь в отыгрыша), фриспинов, забавы либо кешбэк-бонуса. рабочее зеркало 1хслотс
<b>Смотреть еще похожие новости:</b>
<a href=https://www.fromrus.su/index.php?/topic/26643–1×slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-1×slots-review-live/>1×slots регистрация 1×slots review live</a>
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1657#post-48264>рабочее зеркало 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Одним из поводов отдавать привилегию 1 либо иному заведению содержится в привлекательности предлагаемых акций и бесплатных предложений. Безвозмездные фриспины, выдаваемые без дела создавать какой-нибудь вклад, в перечне располагается далековато не в конце.
#6806 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино смотреть 1×bet скачать приложение на андроид <a href=https://kompromat1.online/>1×bet</a> 1×bet телефон 1×bet рабочее <a href=https://th-royalgclub.com/>зеркала казино</a> pin casino зеркало 1×bet на сегодня порно с Васильева Татьяна Викторовна казино проиграл скачать 1×bet на андроид бесплатно фильм казино Елена Лядова
#6807 Charlesgunnyhttp://filmkachat.ru
1×slots официальный demo регистрация в 1×slots casino
Выбор каждого интернет казино на нашем сайте. В описании к любому Вы можете разузнать, собственно получите за творенье аккаунта.Не желаете сыграть в азартные забавы, не рискуя средствами средствами, но получая в все выплаты? Подобную возможность деют все наилучшие порталы с азартными увеселениями. В их числе количество правдивых и надежных интернет-казино на русском языке. Они привлекают свежих пользователей разными поощрительными мероприятиями, включая бездепозитные, или благотворительные бонусы. <a href=http://filmkachat.ru/>1хслотс зеркало</a> <a href=https://www.themoviedb.org/u/%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%B0%D0%B2%D1%82%D0%BE-%D1%81%D1%80%D0%BE%D1%87%D0%BD%D0%BE>https://www.themoviedb.org/u/%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%B0%D0%B2%D1%82%D0%BE-%D1%81%D1%80%D0%BE%D1%87%D0%BD%D0%BE</a> Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? 1×slots коды <a href=http://axiomaj.ru/index.php?subaction=userinfo&user=tearfuldynasty1>http://axiomaj.ru/index.php?subaction=userinfo&user=tearfuldynasty1</a> Фриспины – благотворительные вращения с фиксированной ставкой, коие можно применять в определенных игровых автоматах.
1×slots casino регистрация 1×slotscasino09k online
1×slot зеркало рабочее регистрации на телефон придет На страничке представлены бездепозитные бонусы за регистрацию в казино редчайшая награда за которой гонятся все игроки как новенькие, например и профессионалы. Мы также уделяем великое внимание на наличие бонусов при составление рейтинга казино на деньги. Бездепозитный бонус это возможность выступать бесплатно и выиграть настоящие средства.Когда идет о денежных призах, казино постоянно устанавливают обстоятельства вейджера, коие нужно выполнить, чтобы исключить выигрыш. <a href=http://mlmoli.net/space-uid-2471378.html>http://mlmoli.net/space-uid-2471378.html</a> Бездепозитные призы за регистрацию в игровых автоматах для владельцев онлайн-казино являются долею рекламной кампании, направленной на повышение аудитории вебсайта. Так они продвигают свои бренды и завлекают свежих клиентов.Так собственно основное отличие дара на депо от бездепа – обязательное пополнение счёта. Вы можете привнести депо и преумножить стартовый капитал либо забрать бездеп и при не придётся рисковать собственными сбережениями. Поспешите выполнить простые требования, и администрация ресурса начислит щедрое поощрение! 1×slots casino online регистрация Вейджер (или вагер) ? это наименьшая сумма ставок, коию нужно сделать для вывода денежного бонуса. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение.Исходя из сего, просто не существует мудрых причин махнуть рукой на получение такого бонуса при регистрации. И, лишним, на такой бесплатной базе у вас все шансы выиграть средства и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные призы, называют безвозмездными интернет платформами для игр.
1×slots официальный сайт скачать на айфон
Во время забавы в казино, выигрыши, приобретенные спасибо безвозмездным призовым фондам, суммируются и срабатывают в совместную необходимую для отыгрывания. Однако, если фортуна улыбнется и получится отыграть все призы, игровое заведение гарантированно допустит вывести денежные свои. Сумма вывода несомненно зависимости от лимита, одобренного именно в данном учреждении. Поэтому, внимательно нужно читать правила выдачи безлимитных депозитов.Операторы гемблинга утверждают, собственно так они дерутся с бонус-хантерами. Впрочем, критики считают, что данным казино пробуют сделать из случайного гостя постоянного игрока. Да, у безвозмездных бонусов есть дефекты. Прежде всего, они обыкновенно небольшие. Кроме такого, обстоятельства вейджера по ним практически строгие. Но все же недоступность риска делает их довольно красивыми для посетителей. <a href=http://ww.yeosunet.com/bbs/board.php?bo_table=free&wr_id=54463>http://ww.yeosunet.com/bbs/board.php?bo_table=free&wr_id=54463</a> скачать 1×slots официальный сайт Обычно, бездепозитные призы выдаются под конкретные слоты с фиксированной ставкой, но их точно воспрещено применять в игровых автоматах с прогрессивным джекпотом. Список игр, в которых возможно применять бездеп, Вы найдете в описании промоакции либо можете уточнить у саппорта заведения.Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.
1×slots сайт
Мы проделываем акцент на ключевых положениях правил, рассказываем о территориальных лимитированиях и кратко информируем о других акциях обсуждаемого казино. <a href=https://forum.vn.ua/showthread.php?p=3274258#post3274258>1×слотс казино</a> Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном сайте и выполните вход в собственный офис, чтобы отобрать благотворительные вращения с вейджером х40;Для всех бездепозитных призов функционирует максимальный лимит на выигрыш. Он указывает максимальную необходимую, которую вас получить, играя на бонусные кредиты. Как лишь вас получится выполнить притязания вейджера, возможный максимально будет переведен с бонусного счета на ведущей, а остаток будет списан. 1×slot регистрация <a href=http://www.wonkhouse.co.kr/bbs/board.php?bo_table=free&wr_id=1876266>http://www.wonkhouse.co.kr/bbs/board.php?bo_table=free&wr_id=1876266</a>
1×slots зеркало рабочее на сегодня
Похожим образом работает 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения клиента либо в связи с получения им VIP-статуса. Подарок предоставляется в воззвания в поддержку и проверки. <a href=https://521zixuan.com/space-uid-772879.html>https://521zixuan.com/space-uid-772879.html</a> 1× slots регистрация в 1×slots casino Главное преимущество спинов – вероятность выучить разные слоты. Также удастся насладиться бонусными раундами, испытывать фортуну в риск-туре и преумножить выигрыш за счёт особенных знаков. Однако не игровой процесс заслуживает внимание, как какого-либо сосредоточиться на реальном выигрыше.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.emv.info/viewtopic.php?f=15&t=3040>1×slots зеркало рабочее на сегодня</a>
<a href=https://www.kfz-gringer.at/index.php?option=com_k2&view=itemlist&task=user&id=39720>1×slots регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации приза без депозита. Внимательно прочтите до конца. Многие новенькие проделывают промахи на шаге регистрации и поэтому не получить подарок.
#6808 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино онлайн бесплатно порно с Антропова Валентина Викторовна <a href=https://repost.news/>бесплатные букмекерские конторы</a> казино онлайн официальные букмекерские конторы <a href=https://rucriminal.info/>порно с Елена Никитина, скелетонистка</a> pinco casino 1×bet приложение casino приложения скачать букмекерскую контору порно с Алина Загитова, фигуристка казино вход казино смотреть
#6809 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casinos winning kent casino <a href=https://rhymes-punches.com/>букмекерскую контору пин</a> порно с Евгения Медведева, фигуристка new casino <a href=https://vestnik-jurnal.com/>casino</a> Приезжева Екатерина Геннадьевна порно porno Алена Косторная (фигурное катание) пин ап casino pin up top порно с Алексей Миранчук (футбол) мелбет букмекерская контора яндекс игры казино рабочие зеркала казино
#6810 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пин casino porno Анастасия Янькова, боксерка <a href=https://strelochnik.com/>champion casino</a> porno Катерина Шпица kent casino регистрация <a href=https://repost.news/>суть казино</a> casino up casino online casino официальный porno Дарья Мороз casino рабочее почему в казино нет часов inform@rucriminal.info
#6811 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация в 1×slots casino
Как верховодило, новоприбывшие геймеры для хотят ознакомиться с методами ввода и вывода денежных средств и сроки исполнения поданных заказов дабы четко разуметь, как прытко возможность вывести собственный казино приз за регистрацию без депо на электрический кошелек или же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино соперничают между собой. Ведь если бы определенную фирму давало лишь одно онлайн-заведение, то вряд ли бы клиенты увидели казино с бонусом за регистрацию и имели бы рассчитывать лишь на вознаграждение вид приза на первое вложение. К любому заведению регулярно по завлекать свежих игроков, собственно, в итоге, только на руку всем играющим.Бездепозитные призы казино это экономическая компенсация, предлагаемая юзерам на дармовой базе и вероятность выступать в онлайн казино безвозмездно. Если сопоставлять их с поощрениями за вклад, в средства выдаются лишь впоследствии начального пополнения счета, то бездепозитные гонорары получаются безвозмездно. То есть, играющий получает вероятность создавать ставки на теснее существующие деньги, которые выдаст заведение, исполняя, при этом, обычные деянья, дабы их извлечь (здесь идет речь о регистрация, удостоверении личности с внедрением номера телефона, оформления заказы и т.д. ). <a href=http://filmkachat.ru/>1×slots регистрация на официальном сайте</a> <a href=https://elearn.ellak.gr/mod/forum/discuss.php?d=31646>https://elearn.ellak.gr/mod/forum/discuss.php?d=31646</a> Активация происходит с помощью промокодов, которые вводятся в собственном кабинете в регистрации. Среди спецпредложений в перечне Casino.ru содержатся неповторимые промокоды, которые доступны только гостям портала. Другие методы начисления средств ? автоматическая активация сразу после творенья аккаунта и получение дара по запросу в службу технической помощи. 1×slots официальный сайт зеркало <a href=https://diakov.net/user/WalterNot/>https://diakov.net/user/WalterNot/</a> Чтобы получить вероятность исключить выгода с бездепозитного бонуса в казино, необходимо выполнить ряд условий:
1×slots зеркало 1хслотс регистрация перейти на 1×slots
<a href=https://www.lightknotes.com/MyBB/showthread.php?tid=177257>1хлот регистрация в 1×slots casino</a> 1× slots casino официальный сайт Обычно бездепозитные промоакции от казино, приходят на эл. Почту в деньки рождения либо дни. В неких онлайн казино возможно обратиться в чат и как неизменному игроку, вероятно для предложат бездепозитное предложение. <a href=http://elektrofahrrad-tests.de/forums/member.php?action=profile&uid=42562>http://elektrofahrrad-tests.de/forums/member.php?action=profile&uid=42562</a> Условия отыгрыша приза. Если Вы расчитываете заработать на бездепозитном бонусе, то начала направьте на значение вейджера и срок, кот-ый дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть приз и исключить выигрыш.Иногда операторы настоятельно внесение минимального депо перед выводом для верификации платежного инструмента. В некоторых казино данный депо кроме предстоит отыграть. 1×slots casino регистрация на сайте Процесс доказательства личности может занять от одного дня до недели. Если клиент разрешил нибудь ошибку при заполнении паспортных данных, то ему стопам обратиться с проблемой в саппорта онлайн-казино.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Вейджер (или вагер) ? это наименьшая сумма ставок, коию нужно сделать для вывода валютного приза. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение.Бездепозитные призы — это презенты от казино повторяющий бонусных денег либо фриспинов для игровых автоматов, коие начисляются на акк игрока в процедуры регистрации на веб-сайте заведения. Для получения этих поощрений депозит не потребуется. Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного приза. <a href=https://www.imagekind.com/MemberProfile.aspx?MID=80cd9566–8b6d-423a-8b25-de3a602300be>https://www.imagekind.com/MemberProfile.aspx?MID=80cd9566–8b6d-423a-8b25-de3a602300be</a> 1хслотс зеркало Операторы гемблинга утверждают, что так они сражаются с бонус-хантерами. Впрочем, критики считают, собственно данным казино пробуют устроить из случайного гостя постоянного игрока.
x1 slots регистрация в 1×slots casino
Для тех, кто лишь взвешивает испытать свою фортуну, а для профессиональных игроков, отыскивающих новые площадки для выигрышей, ведущие лицензированные казино часто организуют разные акции, и одно из лучших предложений за время – как для начинающих, так и для профессиональных игроков – бездепозитный приз за регистрацию. <a href=https://koreanstudies.com/forum/viewtopic.php?t=108442>казино 1×slots официальный сайт</a> 1×слот регистрация в 1×slots casino <a href=http://cokn.net/index.php?subaction=userinfo&user=panoramicevasio>http://cokn.net/index.php?subaction=userinfo&user=panoramicevasio</a>
зеркло казино 1×slots
Представленные на этой странице превосходнейшие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные обстоятельства. После кропотливого анализа редакция портала составила рейтинг спецпредложений, в котором гости Casino.ru шансы сортировать перечень по нескольким аспектам: по сумме, вейджеру, максимальной сумме вывода и т.д. Принципиальным различием даровых призов от бонусов на депозит является неимение необходимости заносить средства на аккаунт. Из-за этого их часто нарекают бездепозитными (no down payment bonuses). <a href=http://radshir.com/list/index.php?subaction=userinfo&user=Patricklix>http://radshir.com/list/index.php?subaction=userinfo&user=Patricklix</a> 1×slots регистрация 1×slots review live
<b>Смотреть еще похожие новости:</b>
<a href=http://www.arka-bahce.org/forum/showthread.php?p=764604#post764604>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=138959>1×slot казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Иногда операторы настоятельно внесение малого депо перед выводом для верификации платежного прибора. В некоторых казино этот депо также светит отыграть. B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.
#6812 FobertRhymn
I used to be able to find good info from your blog posts. #@G@G@G@G#
<a href=https://fruitsfromchile.com/news/1×bet_bonus_code_today.html>https://fruitsfromchile.com/news/1×bet_bonus_code_today.html</a>
#6813 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino рабочее зеркало casino игровой автомат <a href=https://specreporter.com/>букмекерские конторы pin</a> porno Ангелина Гончаренко, хоккеистка порно с Дронова Александра Викторовна <a href=https://repost.news/>зеркала официальных сайтов казино</a> букмекерские конторы в россии 1×bet официальный xbet Юдаева Ксения Валентиновна порно лучшие онлайн казино porno Виктория Баркова, легкоатлетка kent casino казино вход
#6814 Charlesgunnyhttp://filmkachat.ru
1 хслот регистрация в 1×slots casino
Даже не выиграв крупную сумму, игрок интересно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе наихороших промоакций с. Достаточно периодически изучать список новых интернет казино с выводом бонуса без депо в данном разделе.Допустим, за регистрацию вы возымели бездеп в объеме 2 000 рублей с вейджером х30. В этом случае предстоит устроить ставок, на совместную сумму в 60 000 рублей (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать реальные деньги. Однако не забывайте, собственно с любого презента выйдет вывести определённую необходимую (чаще всего менее $200). <a href=http://filmkachat.ru/>1хслотс рабочее зеркало на сегодня</a> После получения бонуса вывод средств для клиента будет недоступен времени, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя или чета месяцов. Выводить средства игрок может только после отыгрыша.Нет. Для получения бездепозитного приза в казино нужна обязательная регистрация на сайте. Играть в слоты бесплатно и без регистрации возможно только в демо режиме. <a href=https://smallpdf.com/file#s=947e9bab-f7cd-45be-8e6d-7494ff661b35>https://smallpdf.com/file#s=947e9bab-f7cd-45be-8e6d-7494ff661b35</a> Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен перечень наихороших интернет казино, коие предлагают своим игрокам великодушные бонусы за регистрацию.Вывод выигрыша с бездепозитных призов казино – великодушный подарок от азартных клубов. Но дабы вывести свой доход, нужно выполнить ряд условий: 1×slots официальный сайт зеркало <a href=http://goodjobdongguan.com/home.php?mod=space&uid=3355124>http://goodjobdongguan.com/home.php?mod=space&uid=3355124</a>
казино 1×slots
Так что приготовьтесь предоставить конфиденциальную информацию (пол, возраст, страна проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает не более суток, после чего удастся беспрепятственно выводить солидные выигрыши.Эффективность бездепов в качестве маркетингового инструмента оценили многие операторы. Малоизвестные площадки употребляют эти промоакции, дабы стремительно набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны неизменных гостей. Не все сайты, дающие подарки без депозита, рекомендованы к ирге. За симпатичным промоописанием имеют скрываться неосуществимые условия отыгрыша и другие подводные камешки. <a href=https://www.digicube.de/forum/threads/456555-%D0%B7%D0%B5%D1%80%D0%BA%D0%BB%D0%BE-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-1×slots?p=654110#post654110>зеркло казино 1×slots</a> 1×slots официальный регистрация <a href=https://collinklhb45543.like-blogs.com/30171999/ai-nude-revolutionizing-content-moderation-and-privacy-protection>https://collinklhb45543.like-blogs.com/30171999/ai-nude-revolutionizing-content-moderation-and-privacy-protection</a> Отзывы читателей о бонусных акциях помогут составить эмоцию, но не забывайте о субъективности собственных объяснений. 1×slots рабочее зеркало на сегодня Вейджер (wager) – это коэффициент, кот-ый показывает на какую сумму необходимо сделать ставок, чтобы исключить приз из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода этого приза, Вам нужно сделать ставок на необходимую: 500*70=3500 руб. Только всецело отыграв приз, Вы можете исключить собственный выигрыш.
1× slots зеркало
Существуют казино с призом за регистрацию, в довольно знамениты фриспины в онлайн казино потом регистрации в конкретных играх. Они встречаются в почаще бесплатных поощрений либо традиционных бонусов в казино без вложений. Например, игрок регистрирует счет, на который начисляются бесплатные игры, приз за регистрацию в виде даровых фрспинов, вращения в игровом автомате. Во время игрового процесса игры выигрывает истинные средства, которые в последствии можно удачно вывести из заведения на свою платежную систему. То есть, все шансы исключить свои без рисков своими деньгами. Регистрация, за которую игрок получит призы, займет пару минут, а благодаря данному возможно увеличить пять евро поощрений до тысячи и без всяких проблем вывести их. Возможность протестировать новые игры, не рискуя собственными своими и создать собственную тактику забавы. <a href=https://training.trainingstree.com/author/glennminly/>https://training.trainingstree.com/author/glennminly/</a> 1×slots зеркало регистрацию более популярный вариант это Да, у безвозмездных бонусов есть недостатки. Прежде всего, они обыкновенно маленькие. Кроме такого, условия вейджера по ним всегда жесткие. Но все же отсутствие риска делает их довольно красивыми для клиентов.Срок активации и время на отыгрыш. Зачисление средств или фриспинов случается при активации на требовательно ограниченного периода, подобные требования предъявляются и к срокам отыгрыша. Одни казино позволяют отыгрывать бонус некоторое дней или том месяцов. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с неоправданно высоким вейджером.
1×slots официальный сайт зеркало рабочее
Хотя бесплатные бонусы начисляются без депозита, не исключено, собственно вам понадобиться вносить деньги. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только последствии того, как свежий заказчик впервые пополнит игровой счет. Реже бонусы без депозита начисляются постоянным игрокам. С их поддержкою администрация постарается вычесть ценных посетителей либо желает поблагодарить за преданность правильных гостей. Но намного почаще для сходственных целей используются эти промоакции:Для казино, работающих интернет, бездепозитные призы нужны для вербования новых клиентов. Предложение поиграть на слотах без надобности внесения настоящих средств — работающий способ для увеличения энтузиазма к фирмы. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит выступать в казино, только сейчас теснее на личные средства. онлайн казино 1×slots <a href=https://www.hubtamil.com/talk/member.php?1635107-Scottfuesk>https://www.hubtamil.com/talk/member.php?1635107-Scottfuesk</a> Бонус начисляется игроку сразу последствии регистрации и прохождения верификации в казино и не требует от клиента внесения депо. Как правило, объем бонуса в подобном случае довольно стыдливый, впрочем разрешает новеньким познакомиться с игрой без риска реальными деньгами.Допустим, за регистрацию вы получили бездеп в размере 2 000 руб. С вейджером х30. В данном случае светит сделать ставок, на общую необходимую в 60 000 руб. (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать настоящие средства. Однако не запамятовывайте, что с каждого подарка получится исключить определённую сумму (почаще всего не более $200).
1×slots рабочее зеркало на сегодня
Такой казино приз без депо за регистрацию выдается игроку на час и энергично используется данное предложение с 2017 года. Это словно некая маскировка поощрения под бездепозитный. Суть всего сего сводится к что, этому, собственно игроку на час выдается, например, 1000 долларов, а реклама твердит то, собственно каждой выигрыш можно несомненно в будущем оставить при себя. Но если играющий серьезно отнесется к данному предложению, то он просто растеряет время. Ведь игроку нужно будет играть не главном аккаунте, а в тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (в всей тысячи) в правила вступят конкретные обстоятельства, где несомненно сказано, что максимальной суммой победы имеет быть лишь двести долларов и деньги можно применять лишь в приза на первый вклад с вейджером 25 от суммы вознаграждения плюс сам депозит. По итогу выйдет, собственно игрок выигрывал себя 200% приз с вейджером на определенную необходимую. Короче разговаривая, это все надо вашего времени.Вейджер в переводе с британского значит «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша приобретенного приза, в нашем случае бездепозитного. Число ставок большого — принципиально только набрать необходимую, пропорциональную сумме поощрения. Бесплатные бонусы казино без депозита можно получить в виде валютных средств на бонусный счет (исключить их возможно только последствии отыгрыша), фриспинов, забавы либо кешбэк-бонуса. <a href=http://www.asystechnik.com/index.php/Green_Pharmacy_Slutsk>http://www.asystechnik.com/index.php/Green_Pharmacy_Slutsk</a> Допустим, за регистрацию вы получили бездеп в размере 2 000 руб. С вейджером х30. В данном случае светит сделать ставок, на совместную необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда сделайте условия по отыгрышу, придёт время заработать настоящие средства. Однако не запамятовывайте, собственно с любого подарка получится вывести определённую необходимую (почаще всего менее $200). казино 1×slots Превышение максимальной ставки при отыгрыше. Система механически не предупреждает о превышении ставки, поэтому о нарушении управлял игрок может разузнать теснее последствии подачи запроса на вывод средств.Проверка занимает от нескольких мин. До нескольких дней, спецы техподдержки имеют запросить дополнительные документы или инициировать короткое общение по Skype.
<b>Смотреть еще похожие новости:</b>
<a href=http://3ak.cn/home.php?mod=space&uid=187057>1×slots казино мобильная версия</a>
<a href=http://6000ziyuan.com/forum.php?mod=viewthread&tid=109672&extra=>1×slots casino регистрация 1×slotscasin online</a>
<a href=http://link.5nx.ru/memberlist.php?mode=viewprofile&u=600>1хслотс казино зеркало</a>
<a href=http://timelesshourglass.com/requiem/memberlist.php?mode=viewprofile&u=821>казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы которые возникают у начинающих.
#6815 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация на сайте
Можно ли наваривать на бездепозитных бонусах? Это не работа, здесь как повезет, в в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, это можно именовать везением, и дополнительной добавкой к вашему бюджету. <a href=http://filmkachat.ru/>1×slot казино зеркало</a> У любого игорного клубы различные вейджеровые условия. Чтобы вы гарантировано смогли выполнить их, мы дадим количество советов. Если система начислила небольшую сумму, надо создавать большие ставки – остановитесь на 10–30 центах. Как лишь сможете заработать примерно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте играть. В противном случае превосходнее присмотреться к другому автомату. <a href=http://www.gothicpast.com/myomeka/posters/show/78646>http://www.gothicpast.com/myomeka/posters/show/78646</a> Обычно, бездепозитные призы выдаются под конкретные слоты с фиксированной ставкой, хотя их точно запрещено применять в игровых автоматах с прогрессивным джекпотом. Список игр, в возможно применять бездеп, Вы найдете в описании промоакции либо сможете уточнить у службы заведения.Демоказино есть практически на любом сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются веско реже: там если, тогда, выигрыша и соблюдения критерий промоакций бездеп возможно превратить в реальные средства. 1×slots промокод при регистрации <a href=https://www.ccvgaming.com/forum/member.php?44330-JefferySwova&s=0810ad590d84f9fe51c1a17157d3ac30>https://www.ccvgaming.com/forum/member.php?44330-JefferySwova&s=0810ad590d84f9fe51c1a17157d3ac30</a> Обычно, бездепозитные призы выдаются под определенные слоты с фиксированной ставкой, но их наверняка запрещено использовать в игровых автоматах с прогрессивным джекпотом. Список игр, в которых можно использовать бездеп, Вы отыщите в описании промоакции либо сможете уточнить у службы поддержки заведения.
1×слотс казино
1×slots casino регистрация 1×slots review live Бонусные средства – маленькая сумма средств для старта в новеньком казино. На бонусные деньги, обычно разрешено выступать во все игры, кроме слотов с современным джекпотом и игр из раздела live casino.Прочитайте правила бонусной программы, в хотите участие. Да, мы настойчиво рекомендуем сделать это до регистрации. <a href=http://www.italian-style.ru/Nasha_kompanija/forum/?PAGE_NAME=profile_view&UID=57611>http://www.italian-style.ru/Nasha_kompanija/forum/?PAGE_NAME=profile_view&UID=57611</a> Во всех легальных онлайн-казино Беларуси нужно подтверждение паспортных данных для игры — это требование правительства страны.Бездепозитный бонус по промо-коду несомненно доступен для забавы, только никаких случае когда Вы активируете особый бонусный код в разделе с призами либо укажите промокод при регистрации на веб-сайте. В некоторых случаях, кроме активации кода, придется подтвердить контактные данные игрока и заполнить анкету посетителя. 1×slots официальный demo регистрация в 1×slots casino Бездепозитный приз за регистрацию в казино — это стартовый презент повторяющий денежного начисления или безвозмездных вращений для новых игроков заведения, для получения которого не нужно вносить депо.Стоит обозначить(означить), собственно бездепозитный приз выдается только совершеннолетним новеньким, коие, тому, имеют пригласить личных друзей и своих, кроме рассчитывающих на поощрительную программку преданности. Подобная разработка замечена между конкуренцию онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению собственной популярности, путем вербования новых игроков. Бонусы – это оригинальный шанс для потенциальных соучастников игры, коие имеют опробовать софт покер рума и увериться, будут ли они в него выступать или нет. Новый игрок попробует свои силы с реальными оппонентами в казино.
1хслот зеркало
Автоматы неспроста числятся наиболее знаменитым азартным развлечением. Чтобы усвоить управление и правила, понадобится всего несколько мин. Ваша задачка сделать ставку, определить количество трудящихся линий и можно крутить барабан. Если на экране выпадет выигрышная комбинация – вы выиграли! С этой задачей для помогут справится бездепозитные призы казино.Бонус за регистрацию в казино выдается только один раз на одного игрока. Но бывают вспомогательные акции, в которых бездепы раздаются для неизменных клиентов и такие подарки Вы сможете получить больше 1-го раза. <a href=http://www.yyxw999.com/space-uid-23009.html>http://www.yyxw999.com/space-uid-23009.html</a> Денежные средства. Третий приз за регистрацию без депозита – наличные. К раскаянью, лишь знаменитые и модные клубы могут уяснить деньги в рублях или баксах. С их поддержкой вы сможете насладиться любой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед этим необходимо исполнение определенных критерий.Особую изюминку видео слотам придают оригинальные символы. С их в активируются различные призы. Вы сможете запустить вспомогательный степень и увеличить сумму выигрыша. Есть знаки, которые замещают ненужные составляющие и сами делают выигрышные комбо. Не стоит забывать и тему бонус-тур. После каждого счастливого спина есть шанс увеличить сумму выигрыша в 2 или хорошо раза. онлайн казино 1×slots
1×slots зеркало подтвердит вашу регистрацию если говорить
Итак, чтобы благотворительные бонусные кредиты превратились в настоящие деньги, которыми вы можете распоряжаться по своему усмотрению, их нужно отыграть. Вейджер следует уточнять в правилах онлайн-казино.Бездепозитный бонус за регистрацию в казино — это стартовый презент вид денежного начисления или бесплатных вращений для свежих игроков заведения, для получения которого не нужно заносить депо. <a href=https://rolivka.online/forum/showthread.php?tid=32899>1 x slots</a> 1×slots официальный сайт мобильная версия <a href=http://jejuseapension.com/bbs/board.php?bo_table=free&wr_id=492911>http://jejuseapension.com/bbs/board.php?bo_table=free&wr_id=492911</a> Особую изюминку видео слотам придают уникальные знакы. С их выходом активизируются различные бонусы. Вы можете запустить вспомогательный уровень и увеличить необходимую выигрыша. Есть знаки, которые заменяют ненадобные составляющие и сами делают выигрышные комбо. Не стоит забывать и на бонус-тур. После любого успешного спина есть шанс прирастить сумму выигрыша в 2 или четыре раза.
1×slots подтвердит вашу регистрацию если говорить
Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в обязательном порядке необходимо пополнить счет в казино. Для депозитных бонусов, эта процедура не необходима, так как депозит теснее изготовлен.Но а в вы уже профи по интернет казино, кликаем на красноватую кнопку «Получить» и Вы автоматически перейдете в онлайн казино; <a href=http://illustrator.odub.tomsk.ru/index.php?subaction=userinfo&user=Terrynat>http://illustrator.odub.tomsk.ru/index.php?subaction=userinfo&user=Terrynat</a> Чаще всего интернет-казино предлагают бездепозитные призы новым юзерам. Эта промо-акция очень эффективно завлекает новичков, подталкивая их к открытию счета. Конечно, не они становятся послушными посетителями, хотя сам факт регистрации аккаунта играет на руку заведению. 1×slot рабочее зеркало Фриспины — безвозмездные вращения, которые дозволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины числятся самым знаменитым и желаемым обликом приза — благотворительные вращения иногда эффективнее и веселее в отыгрыше, чем остальные облики бездепов.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.fiat130.it/phpbb3/viewtopic.php?f=14&t=340539>1 хслот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Наиболее популярные вознаграждения среди гэмблеров – бездепозитные призы казино. Это не изумительно, ведь можно получить бесплатные вращения или виртуальные кредиты, и всем не придётся пополнять счёт, рисковать личностными средствами. Удастся насладиться разнообразными веселиями даже выиграть солидную необходимую, избегая серьёзного риска. Принципиальным отличием безвозмездных призов от призов на депозит считается неимение надобности заносить средства на акк. Из-за сего их часто именуют бездепозитными (not the slightest deposit bonuses).
#6816 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
гта казино 7k casino официальный сайт <a href=https://specreporter.com/>казино фильм онлайн</a> букмекерская контора на андроид porno Андрей Рублев (теннис) <a href=https://strelochnik.com/>зеркала казино</a> Хорова Наталья Александровна порно pin casino порно с Матвей Сафонов (футбол) порно с Алексей Миранчук (футбол) бесплатное казино казино рублях бесплатные букмекерские конторы
#6817 Charlesgunnyhttp://filmkachat.ru
1×slots казино зеркало
Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам воспрещено начислять бонусы клиентам, не имеющим денежных средств на счете. Мы предлагаем разглядеть актуальные бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ.Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются незамедлительно в сотворения профиля и активны непродолжительное время. Если не успеете истратить свои, они попросту сгорят. Касаемо времени, правило призы активны протяжении часа. <a href=http://filmkachat.ru/>1×slot зеркало</a> Ознакомьтесь с нашим списком наихороших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего списка и получите бездеп сразу. Хватайте лучшие бесплатные предложения ниже и выигрывайте большие деньги, не рискуя! <a href=https://social.urgclub.com/read-blog/214040>https://social.urgclub.com/read-blog/214040</a> Поспешите зарегистрироваться на официальном сайте Клубника, дабы моментально получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, замечена настоящий шанс победу!Во время забавы в казино, выигрыши, полученные благодаря бесплатным призовым фондам, суммируются и срабатывают в совместную сумму для отыгрывания. Однако, случае удача улыбнется и выйдет отыграть все призы, игровое заведение гарантированно допустит исключить денежные свои. Сумма вывода несомненно находиться от лимита, одобренного именно в этом учреждении. Поэтому, внимательно нужно разбирать правила выдачи анлимитных депо. казино 1×slots официальный сайт <a href=http://peretok.ru/bitrix/redirect.php?goto=http://cnc-redalert.ru/goto/http://pila-online.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/HBKad8cSk3×>http://peretok.ru/bitrix/redirect.php?goto=http://cnc-redalert.ru/goto/http://pila-online.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/HBKad8cSk3×</a> Бездепозитные бонусы, как теснее ясно, считаются уникальной возможностью к игровому процессу безусловно бескорыстно, другими выступать в интернет казино бесплатно и на быть свои незамедлительно последствии регистрации аккаунта. Автоматы с этим депозитом шансы замерзнуть прекрасной вероятностью сыграть для поклонников пыла с определенными лимитированиями в денег.Условия все различаться приятель от друга. Но такой приз имеет быть применен лишь для игрового процесса – приобретенные на счет деньги до как, как будут отыграны, вывести нереально.
1×slots зеркало этих способов предполагает регистрацию
Чаще всего интернет-казино предлагают бездепозитные призы новым юзерам. Эта промо-акция довольно эффективно завлекает начинающих, подталкивая их к открытию счета. Конечно, не все становятся послушными посетителями, но сам факт регистрации аккаунта играет на руку заведению. 1×slots casino зеркало <a href=http://rak.flyboard.ru/viewtopic.php?f=8&t=19316&p=150954#p150954>http://rak.flyboard.ru/viewtopic.php?f=8&t=19316&p=150954#p150954</a> 1×slot официальный сайт Мы собрали и опубликовали список превосходнейших бездепозитных казино с бонусами за регистрацию, которые гарантируют щедрые выигрыши и мгновенные выплаты.При исполнении условий отыгрыша и верификации, средства с бонусного счета переводятся на главной и все быть выведены на карту либо электронный кошелек. Лимиты на вывод и сроки проведения транзакции в от избранной платежной системы.
1×slot зеркало рабочее регистрации на телефон придет
<a href=http://arts.gpaeburgas.org/profile.php?uid=9691>http://arts.gpaeburgas.org/profile.php?uid=9691</a> Только выполнив все обстоятельства отыгрыша и дождавшись завершения проверки аккаунта, Вы можете оформить заявку на вывод средств и получить средства средства. 1×slots зеркало регистрация в 1×slots casino С другой стороны, намного проще забрать бездепозитные фриспины за регистрацию в казино и напрямик сейчас начать вертеть барабаны в превосходнейших слотах. Главная необыкновенность спинов в том, собственно они предназначены для топовых автоматов. Удастся не пройти вспомогательные раунды, хотя и увеличить необходимую выигрыша, заработать респины и другие внутриигровые подарки.
1×slots официальный сайт зеркало
Основное правило получения бездепа ? создаваемый акк обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов требовательно запрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита необходимо блюсти несложную очередность деяний. Но не думать, собственно снабжая юзеров этими призами, казино увлекается спонсированием. Ведь объемы вознаграждений, главном, не великие (средним объемом от 5 до 20 $). И на эти средства налагаются конкретные условия и ограничения, неотклонимые к выполнению игрока, случае в последствии он вожделеет получить все свои выигранные деньги.Шаг 4. Активация. Внимательно исследуйте обстоятельства, информацию по лимитированиям и сроке деянья бонусного предложения. Разобравшись с правилами, можно активировать бонус в собственном офисе (время ? с использованием промокода) либо по запросу в саппорт. 1× slots casino официальный сайт <a href=https://series40.kiev.ua/user/ScottSwoni/>https://series40.kiev.ua/user/ScottSwoni/</a>
1хслотс 1хслотс регистрация перейти на 1×slots
Несмотря на то, собственно этот вариант стимуляции со стороны азартных платформ очень моден в сходственных игр, далеко многим поклонникам казино известно, что сами бездепозитные бонусы казино и как непосредственно их возможно эксплуатировать.Для подтверждения электронной почты, просто перейдите по интенсивной ссылке в письме, полученном от игрового заведения. Получать информацию о самых прибыльных бонусах возможно без неизменного прогноза новостей казино. Мы взяли эту задачу на себя и постоянно смотрим за предложениями операторов, избирая наилучшие из их. В этом разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список акций регулярно дополняется. В топ зашли самые новые бездепозитные бонусы за регистрацию в казино 2020, кратковременные и закрытые рекламную. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру прочим критериям. Если срок действия акции истек, она удаляется из списка. <a href=https://www.openstreetmap.org/user/%D0%92%D1%8B%D0%BA%D1%83%D0%BF%20%D0%B0%D0%B2%D1%82%D0%BE%20%D0%92%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA>https://www.openstreetmap.org/user/%D0%92%D1%8B%D0%BA%D1%83%D0%BF%20%D0%B0%D0%B2%D1%82%D0%BE%20%D0%92%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA</a> Выбирая даровой бонус, пристально изучайте верховодила. Убедитесь, что вас можно на роль в акции. Уточните, в каких забавах возможно скорпулезно условия вейджера. При необходимости задавайте вопросы адептам саппорта. 1×slots casino регистрация Некоторые клубы автоматически начисляют приз на аккаунт игрока после исполнения условий получения, хотя посещают ситуации, когда бонус надо(надобно) активировать игроку самому. Есть несколько способов активации приза:Нет. Казино выдают безвозмездные призы за регистрацию, для того, чтобы клиент возможность ознакомиться с игровым заведением. А чтобы исключить его, нужно выполнить условия отыгрыша.
<b>Смотреть еще похожие новости:</b>
<a href=http://mandala-app.com/forums/memberlist.php?mode=viewprofile&u=3447>скачать 1×slots на андроид мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выиграть реальные средства в казино не пополняя счет – трудно, хотя вероятно. Главное задаться целью и не нарушатьправила заведения. Выберите несколько казино с бездепзитными бонусами и начните выступать на бонусные свои. По статистике каком-то 10-ти заведений можно заработать небольшую сумму денег с бонусных средств.
#6818 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino онлайн porno Дарья Мороз <a href=https://res-publika.com>7k casino зеркало</a> Мухтиярова Елена Вячеславовна порно казино ли <a href=https://m.repost.news/>казино 1</a> пинап казино порно с Каролина Севастьянова Яровая Ирина Анатольевна порно Петрова Ольга Викторовна порно скачать pin casino букмекерская контора скачать приложение порно с Константин Тюкавин (футбол)
#6819 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация то дальше необходимо пройти
Бездепозитные призы начисляются лишь один раз. Не стоит раскрывать свежие аккаунты, дабы получить их повторно. Служба защищенности казино непременно выявит «левого» соучастника и заблокирует. Если посетитель выполнит нужные притязания, отыграет собственную ставку и решит вывести собственный выигрыш, то ему нужно учесть, что казино непременно востребует предоставить ксерокопии собственных документов, чтобы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои вывести не получится.В зависимости от интернет заведения любой из них может для предложить как бездепозитные деньги, так и бездепозитные фриспины, коие в удачной регистрации упадут для на ваш игровой баланс. <a href=http://filmkachat.ru/>1×slot регистрация</a> Эффективность бездепов в рекламного прибора оценили все операторы. Малоизвестные площадки употребляют такие промоакции, чтобы живо набрать базу. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны неизменных гостей. Не все сайты, дающие подарки без депозита, рекомендованы к ирге. За привлекательным промоописанием могут прятаться неосуществимые обстоятельства отыгрыша прочие подводные камни.Бездепозитные бонусы – это самая интересная и более многообещающая промоакция интернет-казино. Они том чем фри-спинов, потому собственно выплаты в бесплатных вращениях не гарантированы, так композиции на барабанах игрового аппарата имеют не сложиться. <a href=https://medium.com/@comcgifurniture/your-complete-guide-to-premium-weed-delivery-pickering-and-local-cannabis-services-c284470081c0>https://medium.com/@comcgifurniture/your-complete-guide-to-premium-weed-delivery-pickering-and-local-cannabis-services-c284470081c0</a> Но эти рамки не смущают числе хайроллеров, что коэффициенты на слотах разрешают рассчитывать на крупные выигрыши, ну неких автоматах разыгрывается прогрессивный джекпот. 1×slots официальный сайт зеркало <a href=https://forum.uoguide.com/memberlist.php?mode=viewprofile&u=681085>https://forum.uoguide.com/memberlist.php?mode=viewprofile&u=681085</a> Также есть онлайн-платформы азартных игр, коие используют раздачу бездепозитных бонусов в специальные даты (как для казино, например и для игрока). Помимо этого, действующие игроки также имеют возможность получить похожие бонусы за свою деятельность (например, за повышения значения либо за схожие заслуги).Обыкновенные бездепозитные бонусы в размере от 3-х до двадцати $ сделаны для того, чтобы в забавы заходили все свежие и свежие игроки. Здесь, вероятнее всего, несомненно ограничение на максимальный выигрыш. Важно, дабы перед минимальным вкладом был отключен бонус за 1-ое пополнение счета, и игры не попадет на повторный вейджер.
1 x slots
Не стоит незамедлительно же отказываться от приветственных подарков в сходственных казино. Администрация готова начислить деньги либо фриспины, но предварительно сотрудники должны убедиться, что вы не аферист. Дело в, собственно развелось слишком количество охотников за бонусами. Они выучились обманывать систему и зарабатывать крупные суммы средств. 1хслотс 1хслотс регистрация перейти на 1×slots <a href=http://www.1moli.top/home.php?mod=space&uid=42423>http://www.1moli.top/home.php?mod=space&uid=42423</a> Бездепозитный бонус – это финансовое вознаграждение, которое выдается участнику забавы в казино, для его вербования и появления заинтересованности. Любой посетитель, кот-ый подходит условиям выдачи похожего бездепозитного бонуса, имеет претендовать на получение вышеуказанного приза. Такое поощрение считается более эффективным методом, дающим вероятность стартовать деле, не вкладывая личных вещественных средств. 1×slots регистрация на сайте 1×slots ru com Акции распространяются как на все игры казино, так и на узкий список. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и другие. Промо имеет охватывать разработки 1-го производителя. Бездеп не пересекается с другими акциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, изготовленные бонусными средствами. Для идентификации платежных реквизитов игрока может понадобиться пополнение счета на минимальную необходимую.Чаще всего интернет-казино предлагают бездепозитные бонусы новым юзерам. Эта промо-акция очень отлично завлекает новичков, подталкивая их к открытию счета. Конечно, не они становятся послушными клиентами, но сам факт регистрации аккаунта играет на руку заведению.
1×slots регистрация
Все бесплатные призы кажутся соблазнительными. Кто же категорически от возможности сыграть в онлайн-казино, не рискуя средствами, хотя получая выигрыши. Но далековато не все бездепозитные бонусы мере привлекательны для рассудительного клиента. Но рядах азартных платформах похожие вознаграждения могут получить и уже зарегистрированные юзеры. В этом случае, призы предоставляются в уникальных промоакций или же некоторым игрокам вид акционного предложения, коие прибывает на почту с целью «вернуть» игрока в свое казино. <a href=https://bjdclub.ru/blog/read/3499>https://bjdclub.ru/blog/read/3499</a> Бездепозитный бонус казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в данном и заключается основное отличие. онлайн казино 1×slots Прежде чем активировать бездеп, нужно увериться что, нет, собственно государство, гражданином коей является игрок, не заходит в список не.На странице представлены бездепозитные бонусы за регистрацию в казино редкая награда за которой гонятся все игроки как новенькие, так и мастера. Мы также уделяем огромное внимание на присутствие призов при формирование рейтинга казино на средства. Бездепозитный приз это вероятность играть бесплатно и выиграть реальные средства.
1х слотс зеркало регистрация в 1×slots casino
<a href=http://maddog-server.org/forum/showthread.php?tid=52797>1×slots акции</a> Такой казино бонус без депозита за регистрацию выдается игроку на час и активно употребляется данное предложение с 2017 года. Это как бы какая-то конспирация одобрения под бездепозитный. Суть всего этого сводится к тому, что геймеру на час выдается, к примеру, 1000 $, а реклама повторяет о том, что любой выигрыш возможно будет в забыть при себе. Но случае играющий всерьез отнесется к этому предложению, то он попросту потеряет время. Ведь геймеру надо(надобно) несомненно выступать не в основном аккаунте, а тренировочном и с ограниченным выбором автоматов и ставок. Да и если, тогда, выигрыша (числе всей тыс. ) в управляла вступят определенные условия, где будет сказано, собственно наибольшей суммой победы возможность быть только двести $ и средства возможно использовать только виде бонуса на 1-ый лепта с вейджером 25 от суммы гонорары плюс сам депо. По результату получится, что игрок выигрывал себе 200% бонус с вейджером на конкретную сумму. Короче говоря, это все не стоит вашего медли.Получив собственный презент, Вы можете безвозмездно выступать на реальные деньги, а выполнив обстоятельства отыгрыша, исключить собственный выигрыш. В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это самая приятная часть игры. Важно, зачастую бездепозитные призы в казино выдаются с ограничениями по максимальной выплате. В среднем возможно рассчитывать на прибыль в некоторое тыщ рублей. Как исключить выигрыш с бонуса без депо. Придётся доказать аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате либо прочитайте в правилах.Доступность — бездепозитные призы в казино почаще всего предоставляются свежим игрокам, но случаются случаи, когда приз имеют получить и действующие посетители. casino 1×slot <a href=http://ods.org.ua/user/Darengew/>http://ods.org.ua/user/Darengew/</a> Фриспины — безвозмездные вращения, коие разрешают игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины считаются наиболее известным и предпочтительным обликом бонуса — безвозмездные вращения порой эффективнее и веселее в отыгрыше, чем другие виды бездепов.
1×slots регистрация на сайте
Выиграть настоящие средства в казино не пополняя счет – сложно, но вполне. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными призами и начните играть на бонусные свои. По статистике в 10-ти заведений можно заработать небольшую сумму денег за счет бонусных средств.Также, в этом случае нужно подтвердить свой номер телефона, результата код, приобретенный в смс-сообщении от клуба установить в специальное фон в личном кабинете игрока. <a href=http://gpp.innim.ru:81/profile/zealouscadre89>http://gpp.innim.ru:81/profile/zealouscadre89</a> зеркло казино 1×slots Чаще всего используются коды. Их надо(надобно) заносить в специальные окна регистрационной анкеты, если речь о пригласительных призах, или в особом разделе собственного кабинета игрока.
<b>Смотреть еще похожие новости:</b>
<a href=https://demo.comuni-italiani.it/forum/viewtopic.php?f=9&t=367033>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<a href=http://nacionrolera.org/foro/viewtopic.php?f=1210&t=89640>1×slots официальный регистрация</a>
<a href=http://www.emv.info/viewtopic.php?f=15&t=3097>1×slots регистрация на официальном сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для доказательства электрической почты, просто перейдите по интенсивной ссылке в послании, приобретенном от игрового заведения.
#6820 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
7k casino официальный вывод казино <a href=https://www.ossetia.tv/>букмекерские контора ап</a> казино вход официальный сайт online casino официальный <a href=https://slon-ru.com/>букмекерские конторы бет</a> 1×bet официальный сайт порно с Евгения Медведева Самойлова Алла Владимировна порно какие казино win win casino 1×bet скачать бесплатно включи казино
#6821 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
К раскаянью, нет. Почти все казино, настоятельно внесение хотя бы одного минимального депозита для вывода выигрыша с бездепозитного бонуса. Также учитывайте, что вывести деньги разрешено только на ту платежную систему, с которой был изготовлен депо. <a href=http://filmkachat.ru/>1×slots регистрацию процедура займет всего лишь</a> <a href=https://airsoftc3.com/article/18052/How-Professional-3D-Modeling-Furniture-Transforms-Modern-Design-Industry>https://airsoftc3.com/article/18052/How-Professional-3D-Modeling-Furniture-Transforms-Modern-Design-Industry</a> Воспользоваться бездепом возможно не во всех игровых автоматах: казино вдруг устанавливает лимитирование для посетителей. Конечно, это возможно счесть некоторым неудобством для игрока, хотя справедливости ради стоит отметить, собственно выбор автоматов всё точно остаётся достаточно наибольшим. скачать 1×slots на андроид мобильная версия <a href=https://electronicsbit.com/doku.php?id=1×slots_%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE_%D0%BC%D0%BE%D0%B1%D0%B8%D0%BB%D1%8C%D0%BD%D0%B0%D1%8F_%D0%B2%D0%B5%D1%80%D1%81%D0%B8%D1%8F>https://electronicsbit.com/doku.php?id=1×slots_%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE_%D0%BC%D0%BE%D0%B1%D0%B8%D0%BB%D1%8C%D0%BD%D0%B0%D1%8F_%D0%B2%D0%B5%D1%80%D1%81%D0%B8%D1%8F</a>
1хслотс официальный сайт зеркало
Чем ниже значение вейджера, что, этим легче отыграть и исключить приз. Если Вы расчитываете заработать на бездепе, а не просто ознакомиться с свежим игровым клубом, то стоит игнорировать призов с высочайшим вейджером их практически не реально отыграть. С ними Вы сможете лишь протестировать забавы заведения.Чтобы играть даром на настоящие деньги в казино, порой достаточно просто зарегистрироваться. Иногда необходимо выполнить дополнительные деяния. <a href=https://forums.scar-divi.com/topic/613292–1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5-%D0%BD%D0%B0-%D1%81%D0%B5%D0%B3%D0%BE%D0%B4%D0%BD%D1%8F/>1×slots зеркало рабочее на сегодня</a> 1×slots зеркало на сегодня Бездепозитный приз – это финансовое вознаграждение, которое выдается соучастнику забавы в казино, для его вербования и возникновения заинтригованности. Любой посетитель, кот-ый подходит условиям выдачи сходственного бездепозитного бонуса, может претендовать на получение вышеуказанного приза. Такое поощрение считается наиболее действенным способом, дающим возможность стартовать деле, не вкладывая личных материальных средств.Фриспины — благотворительные вращения, которые дозволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины считаются самым знаменитым и желаемым видом бонуса — бесплатные вращения порой эффективнее и веселее в отыгрыше, чем остальные виды бездепов. <a href=http://certificate.winko.net/bbs/board.php?bo_table=free&wr_id=329347>http://certificate.winko.net/bbs/board.php?bo_table=free&wr_id=329347</a> 4. Заберите презент. Чаще всего приз активируется незамедлительно в регистрации. Но случаются ситуации, когда надо(надобно) зайти в собственный офис или написать в службу.Создание аккаунта. На веб-сайте казино нужно обнаружить регистрационную форму и заполнить пустопорожние поля личными данными. Иногда на этом шаге потребуется показать лишь адрес электрической почты и пароль, хотя почаще хотелось наполнить анкету персональной информацией (ФИО, дата рождения, место проживания и т.д. ). Нужно указывать лишь реальные данные, что впоследствие они будут проверены. 1×slot казино зеркало Иногда в поощрения за регистрацию шансы выдаваться билеты для участия в турнирах. Условия их проведения довольно выделяются, поэтому мы советуем ознакомиться с любым предложением отдельно.
1 xslots рабочее зеркало
На данном разделе портала периодически публикуются обзорные статьи, каких рассматриваются бесплатные бонусы превосходнейших интернет-казино. Информация структурирована по нескольким пунктам, включая главные:Прибывшие на акк финансы бездепозитные призы предназначаются, в основном, только для свежеиспеченных пользователей, коие раньше не имели личного аккаунта в данном казино. Исходя из сего, в раньше у игрока был сделан депо, то, по всей вероятности, у него больше не будет возможности рассчитывать на получение такого приза в определенном заведении. Для верификации номера телефонного, в собственном профиле выберите опцию „Подтвердить номер телефонного“ и введите в подходящее поле код, приобретенный в sms-сообщении.Бонус за регистрацию в казино без депозита с выводом денег надо(надобно) отыграть. Зачастую для отыгрыша может понадобиться сделать ставки на необходимую, в несколько 10-ов один превышающую необходимую приза или выигрыша. <a href=http://bbs.worldsu.org/home.php?mod=space&uid=223047>http://bbs.worldsu.org/home.php?mod=space&uid=223047</a> Существуют казино с бонусом за регистрацию, в которых очень популярны фриспины в онлайн казино впоследствии регистрации в конкретных забавах. Они встречаются в почаще безвозмездных поощрений или традиционных призов в казино без вложений. Например, игрок регистрирует счет, на который начисляются бесплатные игры, приз за регистрацию вид безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса геймер выигрывает истинные деньги, которые в последствии можно удачно вывести из заведения на свою платежную систему. То есть, все шансы исключить свои без рисков своими деньгами. Регистрация, какую геймер получит бонусы, займет несколько, а благодаря данному возможно прирастить пять евро поощрений до тыс. И без всяких заморочек исключить их. 1×slots зеркало 1хслотс регистрация перейти на 1×slots
1 хслот регистрация в 1×slots casino
Ниже указан актуальный перечень легальных казино в Беларуси с бонусами на первый депозит. Вы можете попасть на официальный сайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. Доступные игры – В неких азартных играх можно снизить математическое приемущество казино до нескольких десятых процента. В их числе почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как правило, в этих забавах ставки идут в зачет вейджера не полностью. Например, возможность учитываться лишь 50%. В некоторых забавах бездепозитные бонусы вообщем невозможно отыгрывать. Третитй бездепозитный приз за регистрацию – валютные средства. К раскаянию, начислить рубли или баксы готовы лишь знаменитые и модные клубы. С их подмогою появится насладиться любой доступной игрой – автоматом, рулеткой, кено, блэкджеком.Бесплатный бонус – кредиты, коие онлайн-казино начислит клиенту, не заставляя его пополнять игровой счет. 1×slots официальный сайт зеркало <a href=https://wlppr.net/user/MiguelAgono/>https://wlppr.net/user/MiguelAgono/</a>
x1 slots регистрация в 1×slots casino
Основное отличие никаких, что для получения бездепа не надо пополнять баланс в казино. Но считая этого, есть ряд и других отличий: <a href=http://dandanos.com/bbs/board.php?bo_table=free&wr_id=2259>http://dandanos.com/bbs/board.php?bo_table=free&wr_id=2259</a> 1×slots зеркало выигрыши обязательно пройдите регистрацию если
<b>Смотреть еще похожие новости:</b>
<a href=http://sharecovid19story.com/memberlist.php?mode=viewprofile&u=5122>1 х слотс зеркало</a>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=64011&result=reply>1×slots зеркало которую указывали при регистрации кстати</a>
<a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=792231>1×slots регистрация 1×slotscasino09k online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Призовые начисления без депо имеют предоставляться для участия в турнирах онлайн казино. Потратить перечисленные деньги возможно исключительно в данной акции. Условия их проведения себе лимитирования на список игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, чем изучить его управляла. Способы получения бездепа различаются в зависимости от вида приза, который приглянулся игроку. Но вас в любом случае нужно быть зарегистрированным в легальном онлайн-казино и доказать свою лицо. В общем облике пошаговая аннотация для получения бездепозитного приза выглядит например:
#6822 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало рабочее регистрации на телефон придет
Бездепозитные бонусы — это презенты от казино повторяющий бонусных денег или фриспинов для игровых автоматов, коие начисляются на акк игрока после процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депо не потребуется.Подарки на конкретные даты выделяются условиями получения. Если одобрение начисляют игроку на денек рождения, то сумма обычно в от совместного размера депозитов за прошедший год. <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> Принципиальным отличием бесплатных призов от призов на депозит считается неименье надобности заносить средства на аккаунт. Из-за этого их часто называют бездепозитными (not the slightest down payment bonuses).Прибывшие на акк деньги бездепозитные бонусы предназначаются, в основном, только для свежеиспеченных юзеров, которые раньше не имели личного аккаунта в данном казино. Исходя из этого, если раньше у игрока был сделан депо, то, по всей вероятности, у него больше не будет возможности рассчитывать на получение такового бонуса в конкретном заведении. <a href=https://ai.ceo/read-blog/225693>https://ai.ceo/read-blog/225693</a> 1×slots регистрация то дальше необходимо пройти <a href=https://bbs.yhmoli.net/space-uid-710200.html?do=profile>https://bbs.yhmoli.net/space-uid-710200.html?do=profile</a> Помните, собственно в неких играх сумма ставки идет в зачет вейджера только отчасти. Так, в настольных и карточных забавах лишь от 5% до 50% суммы ставки числятся как отыгранные средства, момент как в слотах идет в зачет все 100% суммы.
1х слот 1хслотс регистрация перейти на 1×slots
3. Подтвердить данные. В зависимости от клуба, нужно привязать телефонный либо почту, указать индивидуальную информацию; 1×слот регистрация в 1×slots casino Стоит обозначить(означить), что бездепозитный приз выдается только взрослым новеньким, которые, к, имеют пригласить собственных приятелей и людей, кроме претендующих на поощрительную программу преданности. Подобная технология замечена между соперничающих онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению своей популярности, методом привлечения свежих игроков. Бонусы – это уникальный шанс для потенциальных соучастников игры, коие все опробовать софт покер рума и увериться, станут ли они в него выступать либо нет. Новый игрок испробует средства силы с реальными оппонентами в казино. <a href=http://palizh.com/bitrix/redirect.php?goto=http://maps.google.com.ai/url?q=http://bizcom.kz/bitrix/rk.php?goto=https://teletype.in/@urist555/i9BeVC7RFpQ>http://palizh.com/bitrix/redirect.php?goto=http://maps.google.com.ai/url?q=http://bizcom.kz/bitrix/rk.php?goto=https://teletype.in/@urist555/i9BeVC7RFpQ</a> В бонусную программу множества операторов входят систематические бездепы. Это бессрочные акции, поощряющие интенсивных постоянных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают неизменные бонусы без депо в обмен на скопленные баллы лояльности.Благодаря программке лояльности от игорного заведения, возможно брать хороший старт и без дополнительных инвестициям запустить видеослоты. Кроме такого, возможно рассчитывать на реальную удачу и получить, без инвестиции личных финансов, великой выигрыш. 1×slots официальный сайт скачать Новые клиенты онлайн-казино без первого депо все выяснить свою удачливость. К тому же есть возможность преобразовать бездепы в реальные средства за регистрацию в казино, впрочем результата приз необходимо отыграть согласно условиям промоакции.Законодательство, регулирующее азартные забавы в разных государствах, оказывает на полномочия операторов. В итоге юзеры из отдельных регионов сталкиваются с ограничениями со стороны казино. Это может быть как полный отказ в доступе, например и невозможность загружать забавы отдельных производителей.
1×slots регистрация на сайте
Чаще всего используются коды. Их нужно заносить в особые окна регистрационной анкеты, случае идет о пригласительных призах, либо в особом разделе собственного кабинета игрока.Объективные – размер приза, коэффициент и обстоятельства вейджера, надобность внесения депо для вывода денег; <a href=https://pyxc.ru/user/Justinkeync/>https://pyxc.ru/user/Justinkeync/</a> Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают приз по государствам. Вплоть до такого, собственно клуб возможность принимать игроков из Вашей государства, а бездеп мешает.Можно ли наваривать на бездепозитных бонусах? Это не работа, здесь как повезет, если в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, это возможно назвать везением, и добавочной добавкой к вашему бюджету. 1×slots зеркало
1хслотс мобильная версия зеркало
<a href=http://aficionado.pl/showthread.php?169918–1×slots-casino-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE&p=190751>1×slots casino зеркало</a> Процесс доказательства личности имеет занять от 1-го денька до недели. Если клиент разрешил какую оплошность при заполнении паспортных данных, то ему идет обратиться с задачей в саппорта онлайн-казино. На данном разделе портала периодически публикуются обзорные статьи, каких рассматриваются бесплатные призы наихороших интернет-казино. Информация структурирована по нескольким пт, включая основные:За вербование приятеля ? в партнерской программки клиент получает вознаграждение за привлечение свежих юзеров. 1×slots зеркало этих способов предполагает регистрацию <a href=https://wavedream.wiki/index.php/1%D1%85%D1%81%D0%BB%D0%BE%D1%82_%D0%9E%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9_%D0%A1%D0%B0%D0%B9%D1%82_%D0%A1%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C>https://wavedream.wiki/index.php/1%D1%85%D1%81%D0%BB%D0%BE%D1%82_%D0%9E%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9_%D0%A1%D0%B0%D0%B9%D1%82_%D0%A1%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C</a>
1×slots зеркало рабочее
В зависимости от онлайн заведения любой из них возможность вам предложить как бездепозитные деньги, например и бездепозитные фриспины, которые последствии удачной регистрации упадут вам на ваш игровой баланс. <a href=http://multi-net.su/index.php?subaction=userinfo&user=Henryvob>http://multi-net.su/index.php?subaction=userinfo&user=Henryvob</a> Так собственно главное различие презента на депозит от бездепа – неотъемлемое пополнение счёта. Вы сможете внести депо и преумножить стартовый капитал либо арестовать бездеп и этом не придётся рисковать своими сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начисляет щедрое одобрение! 1×slots casino регистрация 1×slotscasin online Похожим образом трудится 3-ий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя или в связи с получения им VIP-статуса. Подарок предоставляется в обращения в поддержку и ревизии.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.deonnyn.com/PSPA/memberlist.php?mode=viewprofile&u=559&sid=7c7e58bb90b7c4fbd34428d7dfb7c3b6>1×slots зеркало регистрацию более популярный вариант это</a>
<a href=http://nhomtruyen.com/members/jamesgaw.9280/>1 x slots casino</a>
<a href=https://surfaceprophets.com/members/davidelicy.5309/>1×slots актуальное зеркало</a>
<a href=https://forum.ltp-team.com/topic/79739–1×slots-oficialnyy-sayt-zerkalo/>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Все обожают получать подарки. Согласитесь, практически каждый играющий человек будет безгранично счастлив, в получит безвозмездный презент для игры в онлайн казино просто за регистрацию или же приз за внесенный депозит, например именуемые приветственные призы для новых игроков. Соответственно эти онлайн клубы станут больше известны и преимущественны у игроков при выборе казино для игры. Топ казино каждый обновляется и прибавляются свежие и занимательные игровые клубы с привлекательной бонусной политикой и всеми возможными привилегиями, к коим относятся такие бонусы как фриспины за регистрацию, денежные бездепозитные призы, а также великодушные бонусы за внесенный депозит. Основное отличие в том, собственно для получения бездепа нужно пополнять баланс в казино. Но кроме этого, есть ряд прочих отличий:
#6823 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало выигрыши обязательно пройдите регистрацию если
За счёт спинов выйдет запустить разные интернет слоты, протестировать стратегии и поднабраться опыта. Фишка что, что вращения начисляются на лучшие аппараты с уникальными опциями и высокой отдачей. Не запамятовывайте, что в любом акционном предложении учтены особые требования – временные ограничения, наибольший объем ставки, список доступных игр.Бездепозитные бонусы казино это экономическая компенсация, предлагаемая пользователям на дармовой основе и возможность выступать в интернет казино даром. Если ассоциировать их с поощрениями за вклад, в свои выдаются лишь впоследствии первоначального пополнения счета, то бездепозитные вознаграждения получаются безвозмездно. То есть, играющий получает возможность создавать ставки на теснее существующие финансы, коие выдаст заведение, исполняя, этом, обычные действия, дабы их извлечь (тут идет речь о регистрация, удостоверении личности с внедрением номера аппарата, дизайна заказы и т.д. ). <a href=http://filmkachat.ru/>1×slots зеркало которую указывали при регистрации кстати</a> <a href=https://www.friend007.com/forums/thread/6498/>https://www.friend007.com/forums/thread/6498/</a> Вышеописанная первопричина и считается главным интересным, из-за которого операторы отдают доля собственной прибыли на разные рекламные затраты и маркетинговые кампании. А наиболее действующим здесь станут выступать именно бездепозитные призы казино 2022 с выводом за регистрацию. 1×slots зеркало регистрацию более популярный вариант это <a href=http://www.annunciogratis.net/author/jeffreycip>http://www.annunciogratis.net/author/jeffreycip</a> Бездепозитные призы истинными деньгами, которые возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадались.
1× slots casino официальный сайт
Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, all лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Самые пользующиеся способы вывода денег ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электрическим платежным системам подобии Neteller и Skrill, а пользуются криптовалютными кошельками. Вывод выигрышей может осуществляться моментально или развлекать от нескольких часов до нескольких суток. 1×slots официальный сайт зеркало Нет. Для получения бездепозитного бонуса в казино нужна обязательная регистрация на сайте. Играть в слоты бесплатно и без регистрации можно только в демо режиме.Бездепозитные бонусы казино это экономическая компенсация, предлагаемая пользователям на дармовой базе и вероятность выступать в интернет казино безвозмездно. Если сравнивать их с поощрениями за вклад, в средства выдаются лишь потом начального пополнения счета, то бездепозитные вознаграждения получаются бесплатно. То есть, играющий получает возможность создавать ставки на теснее быть деньги, которые выдаст заведение, выполняя, этом, обычные деянья, чтобы их извлечь (здесь речь о регистрация, удостоверении личности с использованием номера телефонного, дизайна заказы и т.д. ). <a href=https://forum.bandariklan.com/member.php?action=profile&uid=7772>https://forum.bandariklan.com/member.php?action=profile&uid=7772</a> 1×slots официальный сайт зеркало рабочее Возможность протестировать новые забавы, не рискуя личными средствами и создать собственную стратегию забавы.Первый образующийся вопрос, это, для выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают новых игроков. Последним легче начать игру на деньги с презента за регистрацию. Им надо пополнять баланс и тратить личностные свои. Новички получают безвозмездные спины или свои на счёт. С их помощью знакомятся с игровым процессом, крутят слоты и проделывают ставки в рулетке.
1×slots официальный сайт зеркало рабочее
Верификация аккаунта. Лучше доказать личность незамедлительно последствии регистрации, чтобы потом не было заморочек с выводом денег. Верификация может протекать двумя маршрутами: <a href=http://trisinfronteras.com/davidcastro/component/k2/itemlist/user/455564-justinfairl>http://trisinfronteras.com/davidcastro/component/k2/itemlist/user/455564-justinfairl</a> Выбор любого онлайн казино на нашем веб-сайте. В описании к каждому Вы можете узнать, собственно получите за творенье аккаунта.Приветственный приз без депо ? презент за регистрацию. Выдается деньгами, фриспинами или баллами. В заключительном случае бонусные баллы используются для роли в турнирах либо обмена на настоящие деньги. рабочее зеркало 1хслотс Вышеописанная причина и считается основным нюансом, в которого операторы отдают доля собственной прибыли на разные маркетинговые затраты и маркетинговые кампании. А самым действенным тут станут выступать именно бездепозитные бонусы казино 2022 с выводом за регистрацию.Простая процедура получения бездепозитного бонуса, кот-ая займет менее 2-х минут. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные.
1×slots официальный сайт, скачать
Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации подарка нужно подтвердить электронную почту и привязать аппарат; 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=http://www.ctphome.com/bbs/home.php?mod=space&uid=66493>http://www.ctphome.com/bbs/home.php?mod=space&uid=66493</a>
1×slots зеркало регистрация
Для отыгрыша бонуса казино обязывает игрока сыграть на необходимую, в некоторое раз превышающую сумму приобретенного бонуса — здесь выгода компании очевидна. <a href=http://www.dungdong.com/home.php?mod=space&uid=2960760>http://www.dungdong.com/home.php?mod=space&uid=2960760</a> Частенько новенькие не разумеют, как активировать подарки либо вывести 1-ый выигрыш. Для похожих случаев наша команда описала главные определения – собственно такое фриспины, вейджер, как его отыграть, для необходимо проходить верификацию.Вейджер в переводе с британского означает «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша полученного бонуса, в нашем случае бездепозитного. Число ставок значения — главно лишь набрать необходимую, пропорциональную сумме поощрения. 1×slots официальный сайт мобильная версия Приветственный бонус без депозита ? презент за регистрацию. Выдается средствами, фриспинами или баллами. В заключительном случае бонусные баллы используются для роли в турнирах или размена на реальные деньги.В большинстве заведений сделать это возможно по адресу электронной почты, по номеру телефона, спустя социальную сеть или гугл-аккаунт.
<b>Смотреть еще похожие новости:</b>
<a href=http://griffhunter.com/boards/viewtopic.php?p=306738#p306738>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Далее требуется отыграть вагер и исключить выигрыш. Игрокам без навыка крупно подфартило, у получить 10-ки даров за 1 регистрацию. Если не сумели получить Бездепозитный приз, не тревожьтесь. Обратитесь в онлайн чат, оператор поможет ситуацию. Так что сможете храбро региться без всяких раздумий. Фортуна сегодня точно на вашей стороне. Не бойтесь, ведь следствие какого либо ущерба Вам совершенно не грозит. С такими бонусами как без пополнения, Вы остаетесь только в плюсе, но не как не в минусе.
#6824 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
сколько казино букмекерская контора официальный сайт <a href=https://kompromat1.online/>порно с Ирина Сидоркова</a> 1×bet официальный скачать порно с Константин Тюкавин (футбол) <a href=https://glvk.guru/>porno Дарья Клишина</a> casinos xyz 1×bet зеркало xbet xyz 1×bet зеркало casino официальный сайт порно с Владимир Минеев (ММА) up casino порно с Юлия Ефимова, пловчиха
#6825 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации 2025
Однако в условиях скрываются «подводные камешки», которые не позволят вывести крупную сумму либо же вы не успеете отыграть вейджер. Поэтому профессионалы советуют забрать безвозмездные вращения за регистрацию в казино без депозита, дабы поднабраться опыта и получить реальный шанс на победу.Получить приветственный бонус шансы только свежие посетители онлайн-казино. Способы описаны в условиях промоакции любого законного казино, чаще всего это: <a href=http://filmkachat.ru/>скачать 1×slots на андроид мобильная версия</a> <a href=https://myanimelist.net/profile/shopavto>https://myanimelist.net/profile/shopavto</a> Зачастую бездепозитные призы казино для игры предлагаются различными заведениями азартных игр в качестве рекламных промоакций либо в целях вербования к себе новых игроков. Для бездепозитных бонусов в казино 2022 игроку не пополнять счет до момента вывода желанных средств. 1×slots зеркало регистрация в 1×slots casino <a href=http://adrestyt.ru/index.php?subaction=userinfo&user=giddydinner15>http://adrestyt.ru/index.php?subaction=userinfo&user=giddydinner15</a> Иногда для получения призов нужно спутаться с представителями службы. Удобнее всего с ними собеседовать в онлайн-сате, хотя от довольно запроса по электронной почте.
1× slots регистрация в 1×slots casino
<a href=https://forum.dis-course.net/viewtopic.php?t=436355>1×slots официальный сайт мобильная версия</a> 1×slot зеркало Иногда для получения бонусов нужно связаться с адептами саппорта. Удобнее всего с ними собеседовать в онлайн-сате, хотя иногда достаточно запроса по электронной почте. <a href=https://wfgames.ru/user/Tyronenep/>https://wfgames.ru/user/Tyronenep/</a> Размер бонусов почаще всего чисто символический и не выше 50 руб. Приятно, но ощутимым бустом деле вряд ли будет. 1×slots casino зеркало Стоит отметить, что бездепозитный бонус выдается лишь взрослым новичкам, которые, в свою очередь, могут пригласить собственных приятелей и знакомых, также претендующих на поощрительную программу лояльности. Подобная технология появилась среди конкурирующих онлайн-казино для популяризации и расширения трафика. Покер румы и спонсоры содействуют увеличению своей посещаемости, методом привлечения свежих игроков. Бонусы – это уникальный шанс для вероятных участников забавы, которые все опробовать софт покер рума и убедиться, станут ли они в него играть либо нет. Новый игрок испробует средства силы с настоящими оппонентами в казино.Каждая игровая платформа отличается условиями по получению и отыгрышу бездепов. В правилах детально расписаны кратковременные рамки, за коие нужно прокрутить вейджер. Также не забывайте тему наибольший размер ставки и наивысшую сумму выплаты. С иной стороны, чтобы получить бездепозитные призы казино, достаточно израсходовать не более 1 минуты.
1хслотс казино зеркало
Бездепозитный приз за регистрацию в казино с выводом средств в 2022 году — Наш ресурс дает игрокам актуальную информацию о самых свежих, великодушных и испытанных бонусах в онлайн казино, коие обновляются каждый день.Размер бонуса. В качестве бездепов обычно начисляют очень суммы, а когда речь о призах за депо, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино шансы подарить игроку до 2000$. Такой бесплатный эквивалент средств зачисляется на профиль юзера после воплощения притязаний и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений вероятен только последствии осуществления вейджеровых критерий. <a href=http://xn–b1afaaiqgeiqh0aidle1f1d3c.xn–p1ai/user/JamessousE/>http://xn–b1afaaiqgeiqh0aidle1f1d3c.xn–p1ai/user/JamessousE/</a> 1×slot зеркало Так собственно приготовьтесь предоставить секретную информацию (пол, возраст, страна проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает не более суток, в чего удастся беспрепятственно выводить крупные выигрыши.1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, в не хотите стать жертвой жуликов или впустую потратить время;
1х слот регистрация в 1×slots casino
Лишь известные и знаменитые азартные заведения шансы разрешить себе раздавать бездепы в виде дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депо, которые можно потратить в топовых аппаратах с высокой отдачей.Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми промоакциями. Читайте о них в обзорах и на форуме. Некоторые казино шансы предлагать посетителям бездепы за свидетельство номера либо почты либо репост на страничку в социальных сетях.Для ревизии используются сканы паспортов, водительских прав, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если пользователь обнаружен в попытке завести вспомогательный акк, все его учетные записи подвергаются блокировке, а их владелец попадает в черный перечень. При игре на лицензионной площадке надо бояться указывать достоверную персональную информацию (шифрование исключает утечку персональных данных). Бонус с зачислением средств на счет выделяет больше свободы поступков. Пользователь сам избирает, каким образом распорядиться подаренными своими. Здесь также все действовать лимитирования на перечень дешевых игр, хотя обычно эти рамки не например строги, как в промо с безвозмездными вращениями.Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, чтобы снова получить бесплатный приз. Игорные заведения нетерпимы к бонус-хантерам, потому вас ждет неминуемое санкция. 1×slots зеркало рабочее <a href=https://www.rmbbk.com/space-uid-1870976.html>https://www.rmbbk.com/space-uid-1870976.html</a> Выиграть реальные средства в казино не пополняя счет – сложно, хотя возможно. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными призами и начните играть на бонусные свои. По статистике в 10-ти заведений можно заработать маленькую необходимую средств за счет бонусных средств.Ниже указан важный перечень законных казино в Беларуси с призами на 1-ый депозит. Вы сможете попасть на официальный сайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус.
1×slots мобильная версия войти казино
Риск-игра по равным шансам – Также казино возможность воспрещать исполнять обстоятельства по отыгрышу счет раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких других играх.Активация по промокоду используется в разных видах бездепов. Если речь идет о приветственном призе, то набор символов можно узнать на крупнейшей странице, в регистрационной форме или письме, коие отчаливает пользователю для доказательства адреса электронной почты. Акции все проводиться совместно с партнерскими площадками. Обычно код располагается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется одноразовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем актуальный код для активации в описании любого промо. При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, которое можно посвятить ирге в казино. <a href=http://domamilo.com/bitrix/click.php?goto=http://mosbilliard.ru/bitrix/rk.php?goto=http://biostyle.biz/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/lGSjMffmBfa>http://domamilo.com/bitrix/click.php?goto=http://mosbilliard.ru/bitrix/rk.php?goto=http://biostyle.biz/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/lGSjMffmBfa</a> 1×slots зеркало регистрация Бездепозитный приз часто имеет замерзнуть доступным сразу после окончания регистрации, потому правило единственным притязанием к нему является регистрация, а после ревизия вашей свежей учетной записи.Автоматы непопросту числятся самым популярным азартным веселием. Чтобы освоить управление и управляла, понадобится всего несколько мин. Ваша задача устроить ставку, найти число трудящихся линий и возможно вертеть тамбур. Если дисплее выпадет выигрышная комбинация – вы выиграли! С данной задачей для помогут управится бездепозитные бонусы казино.
<b>Смотреть еще похожие новости:</b>
<a href=http://diablo2r.cn/home.php?mod=space&uid=30130>1×slots регистрация 1×slots casino 777 online</a>
<a href=https://showboysmedia.com/real-music/#comment-60102>1хлот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Возможность протестировать новые игры, не рискуя личными средствами и создать личную тактику игры. Обычно, бездепозитные призы выдаются под конкретные слоты с фиксированной ставкой, хотя их наверняка запрещено использовать в игровых автоматах с прогрессивным джекпотом. Список игр, каких можно применять бездеп, Вы отыщите в описании акции или сможете уточнить у саппорта заведения.
#6826 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
Частенько новенькие не разумеют, как активировать подарки или исключить первый выигрыш. Для сходственных случаев наша команда обрисовала основные термины – собственно такое фриспины, вейджер, как его отыграть, для необходимо проходить верификацию. <a href=http://filmkachat.ru/>1×slots акции</a> <a href=https://www.swiatobrazu.pl/forumgaleria/thread/view/id/590>https://www.swiatobrazu.pl/forumgaleria/thread/view/id/590</a> Некоторые казино шансы предлагать посетителям бездепы за свидетельство номера или почты или репост на страничку в социальных сетях. казино 1× slots официальный сайт <a href=http://www.techieshah.com/2019/08/eclipse-server-tomcat-v85-server-at.html>http://www.techieshah.com/2019/08/eclipse-server-tomcat-v85-server-at.html</a> Мы подготовили список, где есть постоянно животрепещущие и новые бездепозитные призы казино, которые продоставляется получить бесплатно. Для наших пользователей есть особые предложения неповторимые бонусы, коие вы ни не найдете, их мы обозначили специальной красноватой плашкой «Exclusive».
1×slots сайт зеркало
1×slots сайт зеркало Классическая разновидность бонуса за творенье аккаунта. Его преимущество заключается том,, что клиент может самостоятельно подбирать аппараты и делать ставки в их. Иногда перечень игровых автоматов ограничен оператором, хотя все точно это другого, чем единственный доступный разъем, как когда с внедрением фриспинов. <a href=http://www.cristaleriajara.com/galeriajara/profile.php?uid=20437>http://www.cristaleriajara.com/galeriajara/profile.php?uid=20437</a> 1×slots регистрация то дальше необходимо пройти Наличие у игрока 2 аккаунта. Запрещено делать несколько профилей для неоднократного получения бездепов.При забаве на бонусные свои запрещается выступать в игровые автоматы с современным джекпотом и игры из радела live casino. Кроме как, некоторые казино дают бездеп на один либо некоторое определенных слотов, и в других играх Вы не можете на их играть.
1× slots зеркало
Внесение депозита – Будьте готовы пополнить счет последствии отыгрыша приза. Это стандартное заявка верховодил для данного на промо-акций. Лучше заблаговременно уточнить, какую сумму нужно будет вносить на счет. Как правило, идет о минимальном депозите, хотя вы должны быть уверены, собственно он вам по кармашку.Этот образ приза будет добавлен на Ваш акк после удачной процедуры регистрации с внедрением номера телефонного. Если избрать иной метод творенья учетной записи, бездеп не несомненно добавлен на Ваш аккаунт. Получить Бездепозитный приз в онлайн казино дело 2-ух кликов. Другой момент, отыграть промо и соблюсти управляла и условия отыгрыша. Под правилами подразумевается не только вагер, но и лимитирования по наибольшей ставке. Мы понимаем, что в кинотеатр все ставят на зеро и выигрывают. Призываем не делать подобного. Перед активацией приза прочитайте верховодила. Узнайте последующие моменты: Условия получения подарка, за регистрацию, за депо и другое. Ограничения по наибольшей ставке. Зачастую не повыше 350 руб. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на месте. Поэтому важно аристократия, в каких забавах можно совершать кратность валютного оборота. <a href=http://doctor54.ru/user-2628.html>http://doctor54.ru/user-2628.html</a> 1×slots зеркало регистрация то дальше необходимо пройти
скачать 1×slots на андроид мобильная версия
В онлайне количество знаменитых игорных площадок с привлекательными акционными предложениями. Однако внимательно разбирать обстоятельства 10-ов услуг в надоест, да и время отнимет количество. Поэтому наша команда подготовила ТОП-3 сайтов с превосходнейшими бездепозитными призами: <a href=https://shopcms.vsupport.club/topic/10271-pin-up-casino-giris/page-3#entry93798>1хслотс регистрация в 1×slots casino</a> Но такие рамки не смущают числе хайроллеров, поскольку коэффициенты на слотах разрешают рассчитывать на крупные выигрыши, в неких автоматах разыгрывается прогрессивный джекпот.Многие игроки, оценив возможностей казино, остаются играть в нем и дальше ? на это и нацелено каждое промо. Постоянные посетители заносят депозиты и делают ставки, обеспечивая долгосрочную выгода оператора. То есть, казино раздают бездепы свежим юзерам для формирования лояльной аудитории. 1хслотс регистрация в 1×slots casino <a href=http://ruspanda.ru/bitrix/redirect.php?goto=http://muslumovo-sp.ru/bitrix/click.php?goto=http://businessrost.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/GUvdNoo2CYW>http://ruspanda.ru/bitrix/redirect.php?goto=http://muslumovo-sp.ru/bitrix/click.php?goto=http://businessrost.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/GUvdNoo2CYW</a> Выбор каждого онлайн казино на нашем веб-сайте. В описании к любому Вы можете узнать, собственно получите за творение аккаунта.
1×slots сайт зеркало
Операторы гемблинга заявляют, собственно так они борются с бонус-хантерами. Впрочем, критики считают, собственно этим казино пытаются сделать из случайного гостя неизменного игрока. <a href=http://www.haxorware.com/forums/member.php?action=profile&uid=280348>http://www.haxorware.com/forums/member.php?action=profile&uid=280348</a> Ознакомьтесь с нашим перечнем наилучших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего списка и получите бездеп незамедлительно. Хватайте превосходнейшие благотворительные предложения ниже и выигрывайте большие деньги, не рискуя! 1×slots регистрация 1×slotscasino 56 online У каждого игорного клубы разные вейджеровые обстоятельства. Чтобы вы гарантировано сумели выполнить их, мы дадим количество советов. Если система начислила маленькую необходимую, не делать большие ставки – остановитесь на 10–30 центах. Как только сумеете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте выступать. В неприятном случае никакого приглядеться к иному автомату.Еще одно условие дотрагивается объемов ставки. Операторы устанавливают максимальную необходимую, которую игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, выбранной в Личном кабинете. При превышении лимита есть риск лишиться бонуса. Существующие лимитирования относятся и к определенным видам ставок. Например, играя в рулетку, клиент возможность столкнуться с запретом назначать фишки на шансы.
<b>Смотреть еще похожие новости:</b>
<a href=http://nrj.rs.ba/memberlist.php?mode=viewprofile&u=2111>1хслотс рабочее зеркало на сегодня</a>
<a href=https://ragnarok.ch/forum/viewthread.php?thread_id=130153>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Самые модные способы вывода средств ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электрическим платежным системам на Neteller и Skrill, а используют криптовалютными кошельками. Вывод выигрышей возможность осуществляться мгновенно или занимать от нескольких часов до нескольких суток. Нет. Казино раздают бесплатные бонусы за регистрацию, чтобы, чтобы, дабы заказчик мог ознакомиться с игровым заведением. А дабы вывести его, необходимо выполнить обстоятельства отыгрыша.
#6827 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало рабочее
На условиях отыгрыша безвозмездных бонусов идет остановиться подробнее. С ними связаны аспекты, коие нельзя забыть без внимания.Фриплей-бонусы. Бонусы за безвозмездную забаву есть только в неких клубах. Они зачисляются сразу после создания профиля и действуют непродолжительное время. Если у вас нет времени израсходовать свои, они просто закончатся. Что касается времени, как бонусы срабатывают в течение 1-го часа. <a href=http://filmkachat.ru/>1×slots быструю регистрацию а также мгновенное</a> Прежде всего, не запамятовывайте периодически заглядывать на страницу обзоров бездепозитных бонусов. Они шаг за шагом осматривают более занимательные предложения основных игорных порталов.Создание аккаунта. На сайте казино необходимо обнаружить регистрационную форму и заполнить порожние поля собственными данными. Иногда на этом этапе требуется показать только адрес электронной почты и пароль, но почаще хотелось заполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д.). Нужно указывать лишь настоящие данные, что впоследствие они будут проверены. <a href=https://www.hebergementweb.org/threads/mastering-the-art-of-product-lifestyle-images-from-concept-to-completion.2150185/>https://www.hebergementweb.org/threads/mastering-the-art-of-product-lifestyle-images-from-concept-to-completion.2150185/</a> Выше мы дали глубокий комплект самых новых и актуальных бездепозитных бонусов в онлайн казино без пополнения на 2022 год, где вы можете воспользоваться каким ценным бездепозитным бонусом.Фриспины – благотворительные вращения с фиксированной ставкой, которые можно применять в конкретных игровых автоматах. 1×slots регистрация то дальше необходимо пройти <a href=https://escortexxx.ca/author/joshuafap/>https://escortexxx.ca/author/joshuafap/</a> Бездепозитные бонусы казино это финансовая компенсация, предлагаемая юзерам на дармовой базе и возможность играть в онлайн казино бесплатно. Если ассоциировать их с одобрениями за вклад, в которых средства выдаются лишь впоследствии первоначального пополнения счета, то бездепозитные вознаграждения получаются бесплатно. То есть, играющий получает вероятность делать ставки на теснее существующие деньги, которые выдаст заведение, исполняя, при, обычные действия, дабы их извлечь (тут речь о регистрация, удостоверении личности с использованием номера аппарата, дизайна заявки и т.д.).
1 xslots рабочее зеркало
1×slot зеркало рабочее регистрации на телефон придет Исходя из этого, просто не существует осмысленных причин махнуть рукой на получение такового бонуса при регистрации. И, кстати, на подобный безвозмездной базе у вас есть все шансы выиграть деньги и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные призы, нарекают безвозмездными онлайн платформами для игр. <a href=http://bbs.xingxiancn.com/home.php?mod=space&uid=381133>http://bbs.xingxiancn.com/home.php?mod=space&uid=381133</a> Суммы похожих услуг, в, колеблются от трех до 20 $, а вейджер на эти средства обязан составлять от 30 до шестидесяти раз. Зачастую, величайшая сумма выигрыша тут составит от одной до 2-ух сотен $. Если игры выиграет больше, то все средства имеют быть списанными до максимально разрешенного выигрыша. Здесь бывает смысл выводить еще несуществующие финансы на свою платежную систему и дальше находить заведение с благоприятными под данную необходимую релоадом либо бонусом за первое пополнение счета. Есть несколько подвидов бездепозитного гонорары, предлагаемого большим количеством заведений. 1×slots казино зеркало Игрокам стоит принимать приветственный приз как гарантированный метод получить крупный выигрыш, хотя это отличная возможность без расходов расценить перечень казино.Выбирайте превосходнейшие безвозмездные бонусы с помощью обзоров на Casinoz – и пусть для сопутствует удача при отыгрыше бонусных кредитов!
1×slots casino регистрация 1×slotscasino09k online
Подарки на конкретные даты отличаются критериями получения. Если одобрение начисляют игроку на день рождения, то сумма обычно зависимости от совместного размера депо за год.После получения приза вывод средств для клиента несомненно недосегаем того, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо пара месяцов. Выводить деньги игрок сможет только в отыгрыша. <a href=https://boltyshki.unoforum.pro/?1–11–0–00000054–000–0–0–1652127660>https://boltyshki.unoforum.pro/?1–11–0–00000054–000–0–0–1652127660</a> Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и. Когда игроку полагается количество фриспинов, администрация может разбивать их начисление на количество дней. Бесплатные вращения предоставляются для определенного слота, который указывается в правилах промоакции.В бонусную программу многих операторов входят регулярные бездепы. Это бессрочные акции, поощряющие активных неизменных игроков. Популярный формат — раздача фриспинов по определенным дням недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депо в мена на накопленные баллы преданности. 1×slots зеркало регистрацию более популярный вариант это Выше мы предоставили полный комплект самых новых и своевременных бездепозитных бонусов в интернет казино без пополнения на 2022 год, где вы можете пользоваться каким ценным бездепозитным призом.
1хслот 1хслотс регистрация перейти на 1×slots
1×slots казино зеркало <a href=http://tmml.top/home.php?mod=space&uid=101761>http://tmml.top/home.php?mod=space&uid=101761</a> Кешбэк-бонус дает собой возврат фиксированного процента от ставки когда поражения либо же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не выше 10%.
casino 1×slot
Но ни не забывайте пристально разбирать верховодила роли в бонусных акциях. Если вы нарушите желая бы одно условие, позже вы не можете устроить недоразумение с администрацией.Как верховодило, при выводе денег, от играющего требуется лишь сделать минимальный вклад чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом личный счет. <a href=https://gitlab.pavlovia.org/g/0000/-/issues/51>https://gitlab.pavlovia.org/g/0000/-/issues/51</a> 1×slot рабочее зеркало Первый возникающий вопрос, это, для выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают новых игроков. Последним проще начать игру на средства с подарка за регистрацию. Им не нужно пополнять баланс и тратить личностные средства. Новички получают безвозмездные спины или средства на счёт. С их поддержкой знакомятся с игровым ходом, крутят слоты и делают ставки в рулетке.
<b>Смотреть еще похожие новости:</b>
<a href=http://diablo2r.cn/home.php?mod=space&uid=30130>1хлот регистрация в 1×slots casino</a>
<a href=https://forums.scar-divi.com/topic/686771–1×slots-casino-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F/>1×slots casino регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Многие новички сомневаются, собственно поощрительный приз надо несомненно возвращать, числе в они выиграли у казино. Это безусловно неопасно и надежно. Выводя выигранные средства, игрок просто останавливает свое роль при и теряет уникальную возможность – безвозмездно увеличивать личное вещественное положение. Бездепозитные призы отличный вариант бесплатной игры в игровые автоматы. Многие юзеры сети не знают, что в казино можно начать играть полностью безвозмездно, а потом исключить выигрыш на банковскую карту либо электронный кошелек, другие не доверяют онлайн казино, а третьи успешно играют и выигрывают – и подчас достаточно большие суммы.
#6828 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
рабочие зеркала казино porno Юлия Пересильд <a href=https://rumafia.news/>порно с Голикова Татьяна Алексеевна</a> пари букмекерская контора казино зеркало сегодня <a href=https://rucriminal.info/>порно с Евгений Малкин (хоккей)</a> казино смотреть онлайн porno Виктория Баркова, легкоатлетка 1×bet xbet xyz порно с Владимир Минеев (ММА) сайт pin up casino Разуваева Ксения Денисовна порно casino бонус
#6829 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало
Доступные забавы – В некоторых азартных играх возможно снизить математическое приемущество казино до нескольких десятых процента. В их количестве почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как верховодило, в таких забавах ставки идут в зачет вейджера не всецело. Например, возможность учитываться только 50%. В некоторых забавах бездепозитные призы вообще нельзя отыгрывать.Представленные на данной страничке наихорошие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, в гости Casino.ru шансы сортировать перечень по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д. <a href=http://filmkachat.ru/>1×slots зеркало этих способов предполагает регистрацию</a> Возможность протестировать новые игры, не рискуя собственными средствами и разработать личную стратегию игры. <a href=https://www.swiatobrazu.pl/forumgaleria/thread/view/id/590>https://www.swiatobrazu.pl/forumgaleria/thread/view/id/590</a> Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, чтобы снова получить бесплатный приз. Игорные заведения нетерпимы к бонус-хантерам, потому вас ждет неминуемое санкция.Как управляло, при выводе денег, от играющего потребуется только сделать наименьший вклад чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом собственный счет. сайт 1× slots casino <a href=https://forum.bedwantsinfo.nl/member.php?action=profile&uid=90235>https://forum.bedwantsinfo.nl/member.php?action=profile&uid=90235</a> Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, чтобы еще раз получить даровой бонус. Игорные заведения нетерпимы к бонус-хантерам, потому вас ожидает неизбежное санкция.
1×slots официальный сайт, скачать
Как прочие промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает новых посетителей и дозволяет им составить эмоцию о функционале, не рискуя вескими суммами. 1хслот официальный сайт зеркало <a href=http://fumankong2.cc/home.php?mod=space&uid=582016>http://fumankong2.cc/home.php?mod=space&uid=582016</a> Однако далековато не все ресурсы предлагают своим клиентам бездепозитные призы за регистрацию в казино. В большинстве случаев предусмотрено поощрение на первый депо в объеме 100–200%. Это отличная возможность преувеличить банкролл, прирастить время, проведённое за игрой и шансы сорвать крупный куш. сайт 1× slots casino Подарки на дни ? посвященные торжественным датам, требующие символического отыгрыша либо начисляются без того. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду.
1×slot рабочее зеркало
Как только получите бездеп в казино, всё равно не запамятовывайте инспектировать электронную почту. Некоторые игорные клубы каждый веселят интенсивных гэмблеров приятными бонусами. Чаще всего получить презент можно в преддверии веселья, на денек рождение, за привлечение приятеля. А также распространённым бонусом является надбавка к депозиту. Нужно более пополнить счёт, и азартное заведение увеличит его на 50–100%. <a href=http://boyarka-inform.com/index.php?subaction=userinfo&user=expensivespecta>http://boyarka-inform.com/index.php?subaction=userinfo&user=expensivespecta</a> Бонус начисляется игроку незамедлительно в регистрации и прохождения верификации в казино и не требует от клиента внесения депозита. Как верховодило, объем бонуса в сходственном случае довольно стыдливый, однако позволяет новеньким познакомиться с забавой без риска настоящими деньгами.Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных требований, кроме неотъемлемой верификации. Если на веб-сайте предусмотрена обязательная процедура доказательства личности, то вывести выигрыш получится лишь последствии проверки данных. Приготовьтесь наполнить анкету и отправить в техподдержку документ, подтверждающий личность. 1×slots официальный зеркало рабочее Наличие у игрока 2 аккаунта. Запрещено создавать количество профилей для многократного получения бездепов.
1×slots casino регистрация на сайте
Начнём с того, что каждое промо за регистрацию подразумевает некоторые обстоятельства. Бездепозитные бонусы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, нужная для исполнения критерий. Пример, возымели благотворительные вращения и выиграли с них 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 рублей, проигрышных или выигрышных, так. После исполненья, бонусный баланс перейдёт на настоящий и станет легкодоступным к выводу.Маркетинговая политического всех игорных интернет-клубов должна одевать разнообразный нрав. И случае гонорары на депозит служат чтобы, чтобы, дабы стимулировать заносить депозиты и поощрять теснее имеющих юзеров, то бездепозитный бонус в казино или приз за регистрацию в казино, этого всего, рассчитан на расширение базы покупателей. Помните, собственно в некоторых играх сумма ставки идет в зачет вейджера только отчасти. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки считаются как отыгранные средства, в то время как в слотах идет в зачет все one hundred percent суммы.Как верховодило, новоприбывшие игроки начала хотят ознакомиться с методами ввода и вывода денежных средств и сроки выполнения поданных заявок чтобы четко разуметь, как прытко возможность вывести свой казино приз за регистрацию без депо на электрический кошелек или же банковскую карту. К счастью для всех играющих, снутри конкретных холдингов, все казино соперничают между собой. Ведь случае бы определенную компанию представляло только одно онлайн-заведение, то вряд ли бы посетители увидели казино с бонусом за регистрацию и возможность бы рассчитывать лишь на вознаграждение в виде бонуса на 1-ое инвестиция. К любому заведению периодически идет завлекать свежих игроков, что, в, лишь на руку всем играющим. 1×slots рабочее зеркало <a href=https://www.vforum.org/forum/members/25942.html>https://www.vforum.org/forum/members/25942.html</a> 4. Заберите презент. Чаще всего приз активизируется сразу последствии регистрации. Но случаются истории, когда нужно зайти в индивидуальный кабинет или написать в саппорта.
1×slot регистрация
В интернет-сети практически возможно отыскать перечни наиболее модных и обещанных поощрительных программ от популярных онлайн-казино. <a href=http://www.zgbbs.org/space-uid-171523.html>http://www.zgbbs.org/space-uid-171523.html</a> Промообъявления от казино не дают реальной картины и направлены на привлечение внимания юзеров. Понять, насколько высоки шансы остаться в плюсе, позволит собственный тест критерий предложения:Как управляло, новоприбывшие геймеры для желают ознакомиться с способами ввода и вывода валютных средств и сроки исполнения поданных заказов дабы конкретно понимать, как живо меня исключить собственный казино бонус за регистрацию без депозита на электронный кошелек либо же банковскую карту. К счастью для всех играющих, внутри определенных холдингов, все казино конкурируют меж собой. Ведь если бы конкретную фирму давало лишь одно онлайн-заведение, то навряд бы клиенты заметили казино с призом за регистрацию и имели бы рассчитывать только на вознаграждение вид приза на первое вложение. К каждому заведению регулярно по привлекать новых игроков, собственно, в итоге, только на руку всем играющим. онлайн казино 1×slots Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.
<b>Смотреть еще похожие новости:</b>
<a href=http://palais.beesims.com/phpbb/memberlist.php?mode=viewprofile&u=3390>1×slots регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Как правило, новоприбывшие игроки в первую очередь желают ознакомиться с способами ввода и вывода валютных средств и сроки исполнения поданных заявок дабы конкретно осознавать, как быстро у вывести свой казино бонус за регистрацию без депозита на электрический кошелек или же банковскую карту. К счастью для всех играющих, внутри определенных холдингов, все казино конкурируют меж собой. Ведь в бы определенную компанию представляло только одно онлайн-заведение, то ли бы посетители увидели казино с бонусом за регистрацию и могли бы рассчитывать лишь на вознаграждение повторяющий приза на первое вложение. К любому заведению периодически стопам завлекать свежих игроков, собственно, итоге, только на руку всем играющим.
#6830 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало рабочее этих способов предполагает регистрацию
Бездепы шансы входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами.Чтобы самостоятельно убедиться в превосходстве бездепозитных бонусов, довольно зарегистрироваться в казино и получить одобрение. <a href=http://filmkachat.ru/>1×slots официальный зеркало рабочее</a> Чтоб получить большой выигрыш, подбирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша. <a href=https://gab.com/lexxeagle/posts/113498473251532232>https://gab.com/lexxeagle/posts/113498473251532232</a> 1×slots регистрация на 1хслотс <a href=http://avtoworld.lv/index.php?subaction=userinfo&user=desertedtavern5>http://avtoworld.lv/index.php?subaction=userinfo&user=desertedtavern5</a>
1хслотс регистрация в 1×slots casino
Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен перечень лучших интернет казино, коие предлагают своим игрокам щедрые бонусы за регистрацию. зеркло казино 1×slots Ознакомьтесь с нашим списком превосходнейших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего списка и получите бездеп незамедлительно. Хватайте лучшие бесплатные предложения ниже и выигрывайте немалые средства, не рискуя! <a href=http://forum.haddan.ru/journal.php?do=showentry&e=17518&enum=1>http://forum.haddan.ru/journal.php?do=showentry&e=17518&enum=1</a> Хотя безвозмездные призы начисляются без депозита, не исключено, собственно для понадобиться заносить средства. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты только после как, как новый клиент раз пополнит игровой счет. 1×slots быструю регистрацию а также мгновенное Основное правило получения бездепа ? создаваемый акк обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов требовательно запрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита необходимо блюсти несложную очередность деяний.Чтобы получить вероятность исключить прибыль с бездепозитного приза в казино, необходимо выполнить ряд критерий:
1×slots рабочее зеркало
Используйте наихорошие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из списка ниже, чтобы заработать подарки за простые деяния и уже сегодня получить 1-ый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высочайшей отдачей и прыткими выводами на электронные кошельки.Можно. Вы постоянно можете отрешиться от получения бездепозитного приза за регистрацию в казино, же Вы не создадите ставку. <a href=http://doctor54.ru/user-2573.html>http://doctor54.ru/user-2573.html</a> Приветственный бездеп предоставляется хоть игроку только раз раз. Казино борются с так именуемыми бонусхантерами (от англ. Bonus Hunter — доброволец за бонусами), пытающимися заводить многочисленные аккаунты для надувательства оператора и повторного получения подарка. Исключить похожие действия позволяет верификация данных. Администрация вправе востребовать у посетителя подтвердить персональные данные, указанные при регистрации. 1×slots коды Приветственный бездеп предоставляется какому игроку лишь раз раз. Казино дерутся с например называемыми бонусхантерами (от англ. Bonus Hunter — доброволец за бонусами), пытающимися заводить множественные аккаунты для надувательства оператора и повторного получения подарка. Исключить похожие деяния дозволяет верификация данных. Администрация вправе востребовать у клиента доказать персональные данные, указанные при регистрации.Бездепозитный бонус казино 2022 с выводом за регистрацию предоставляет возможность ознакомиться игроку с лобби избранного заведения, определится в выборе игр и проверить качество работы службы поддержки. Довольно часто, начиная игровой процесс, игрок теснее не желает останавливаться и делает настоящий вклад. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть бесплатно возможно как раз таки с бонусом за регистрацию без необходимости заносить депо.
1×slots казино зеркало
Не советуем опрометью голову хвататься за различные предложения получения средств без инвестициям. Вполне возможно, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на 1-ый взгляд. Альтернативой является казино бонус за депо. Мы предлагаем вас пару советов, благодаря коим у каждого игрока будет возможность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом денег:Варианты выигрыша зависят от Вашей удачи и условий игорного портала. Выше мы заявили, собственно некоторые бездепозитные призы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются и те, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность передовых игр на деньги, возможно выиграть невероятные суммы. Сегодняшние игровые автоматы либо видео слоты, как их называют. Могут выдавать крупные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000. 1×slots casino регистрация 1×slotscasino09k online <a href=https://bbs.zzxfsd.com/home.php?mod=space&uid=723671>https://bbs.zzxfsd.com/home.php?mod=space&uid=723671</a> Например, игрок получил 500 руб. При творении аккаунта и обязан отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 рублей, потребуется сделать 875 спинов для полного отыгрыша.
x1 slots 1хслотс регистрация перейти на 1×slots
При маленькой сумме приза рекомендовано выступать по невысоким ставкам, а применять максимальные лучше только сомнений случае, случае вейджер очень большой, а время на отыгрыш сильно ограничено.Каждый из бездепозитных бонусов без пополнения 2022 содержит собственный конкретный вейджер для отыгрыша, так же в каждом казино он уточняется персонально — где то он х55 а кое-где х30, повторюсь всюду по различному! <a href=http://am_14264130.mongdol.net/bbs/board.php?bo_table=free&wr_id=170312>http://am_14264130.mongdol.net/bbs/board.php?bo_table=free&wr_id=170312</a> 1×slots официальный сайт скачать на айфон Необходимость отыгрыша. Вейджер такой повыше, чем для призов за депозит. И же свои не отыграны, исключить их нельзя.Бездепы с безвозмездными вращениями деют юзерам право вертеть барабаны игровых автоматов без снятия средств со счета. За каждый раунд платит казино. Число спинов ограничено и редко превышает сотню. Если акция содержит большое даровых игр, их начисление может быть разбито на несколько дней.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.one2bay.de/forum/showthread.php?tid=348620>1×slots регистрация на официальном сайте</a>
<a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=4905>1×slots бездепозитный бонус за регистрацию</a>
<a href=https://melhorlance.com.br/minha-conta/>1×slots зеркало видели такую регистрацию на</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Некоторые клубы автоматически начисляют бонус на аккаунт игрока последствии выполнения условий получения, хотя случаются ситуации, когда приз нужно активировать игроку самому. Есть количество способов активации приза:
#6831 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Вышеописанная первопричина и считается главным моментом, из-за которого операторы отдают доля своей прибыли на различные рекламные расходы и рекламные кампании. А наиболее действенным тут станут играть именно бездепозитные бонусы казино 2022 с выводом за регистрацию.Для выбора азартного заведения Вы сможете пользоваться списком наших казино с бонусами за регистрацию. На нашем сайте мы опубликовали перечень бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, собственно часть бонусов неповторимые и доступны лишь для гостей нашего сайта по-специальному промо-коду либо по оригинальной ссылке. Кроме такого, для каждого приза мы подготовили доскональный обозрение, в Вы узнаете как получить и отыграть поощрение и как вывести свой выигрыш с бездепа. <a href=http://filmkachat.ru/>рабочее зеркало 1×slots</a> <a href=https://webanketa.com/forms/6gtk2c9q74qpaeb368vked9s/>https://webanketa.com/forms/6gtk2c9q74qpaeb368vked9s/</a> После требуется внести идентификационный платёж. Это стращает новичков больше всего. Нужно устроить наименьший депозит в 100–500 рублей. Таким образом служба защищенности увериться сомнений, собственно платёжный метод принадлежит Вам. Данная процедура необходима для обеспечения безопасности игровых счетов. Пример, Ваш аккаунт взломают и выведут средства на свой кошелёк. Будет очень неприятно. Поэтому верификация платёжной системы, это необходимый момент.Когда речь о получении бездепозитных призов в казино, для направьте на последующие условия: скачать 1×slots на андроид мобильная версия <a href=https://conneraktb96307.elbloglibre.com/30246327/nude-ai-the-ethical-and-technological-challenges-of-artificial-intelligence>https://conneraktb96307.elbloglibre.com/30246327/nude-ai-the-ethical-and-technological-challenges-of-artificial-intelligence</a> Бонус без депозита за регистрацию в казино (бездепозитный приз) – это валютный подарок от клуба, который начисляется на акк игрока последствии регистрации в казино. Кроме сотворения учетной записи, для получения бездепа, очень нередко потребуется ещё и доказать контактные данные игрока и/или активировать особый промо-код.
1×slots зеркало сайта
Это тоже бесплатные деньги, которые поступают на аккаунты свежеиспеченных игры в регистрирования. А необыкновенность этих бонусов состоит в, собственно обретенные финансы обязательно стопам применять в продолжении назначенного времени.Бонус за регистрацию в казино выдается только раз раз на 1-го игрока. Но посещают дополнительные промоакции, в коих бездепы расступаются для постоянных клиентов и эти подарки Вы сможете получить больше 1-го раза. <a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=964663#pid964663>1×slots официальный сайт мобильная версия</a> 1×slos регистрация в 1×slots casino <a href=https://www.forum.bigfozzy.com/viewtopic.php?f=18&t=6115>https://www.forum.bigfozzy.com/viewtopic.php?f=18&t=6115</a> В случае установленного лимита на необходимую вывода выигрыша с бездепозитного приза, игрок не сможет вывести больше заявленной суммы. 1×slots официальный сайт зеркало На страничке представлены бездепозитные призы за регистрацию в казино редкая награда за коей гонятся все игроки как новенькие, например и профессионалы. Мы тоже уделяем великое внимание на присутствие бонусов при формирование рейтинга казино на средства. Бездепозитный бонус это вероятность играть бесплатно и выиграть реальные деньги.
1×slots официальный сайт зеркало рабочее
<a href=https://forum.lazarev.ru/memberlist.php?mode=viewprofile&u=157979>https://forum.lazarev.ru/memberlist.php?mode=viewprofile&u=157979</a> 1×slots официальный сайт мобильная версия скачать
1×slots регистрация 1×slotscasino09k online
Новички не любят сразу же заносить депозит. Это обосновано неименьем навыка и сомнением. К счастью, дни возможно получить бездепозитный бонус за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В любом случае вы не рискуете своими сбережениями. Это отличная возможность запустить понравившийся видео разъем или же испытывать фортуну в настольных забавах. Поспешите зарегистрироваться на официальном сайте Клубника, дабы моментально получить 33 безвозмездных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, появляется настоящий шанс победу!Основное различие в том, собственно для получения бездепа нужно пополнять баланс в казино. Но кроме сего, есть ряд и других различий: Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Как лишь на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу в сего возможно забыть заявку на вывод выигрыша. Кредиты выгодно отличаются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом реальных средств и выделяют возможность почувствовать задор. Во-вторых – возможно насладиться любой азартной игрой доступной на веб-сайте. В вашем распоряжении находятся автоматы, настольные приложение, видео-покер, Live-дилеры. 1×slots регистрация <a href=http://www.apressadadesainha.com/2021/09/polos-masculinas-da-soinyou-mens-polos.html>http://www.apressadadesainha.com/2021/09/polos-masculinas-da-soinyou-mens-polos.html</a>
1×slots регистрация 1×slotscasino 56 online
Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера. <a href=http://bbs.boway.net/home.php?mod=space&uid=985308>http://bbs.boway.net/home.php?mod=space&uid=985308</a> Выбирая бесплатный приз, пристально изучайте правила. Убедитесь, собственно для можно принимать роль в промоакции. Уточните, в каких играх возможно исполнять обстоятельства вейджера. При необходимости задавайте вопросы представителям саппорта. 1×slots зеркало на сегодня Выбор каждого онлайн казино на нашем сайте. В описании к любому Вы сможете узнать, что получите за творенье аккаунта.
<b>Смотреть еще похожие новости:</b>
<a href=https://bookings.co.th/coupon/%e0%b8%aa%e0%b8%a1%e0%b8%b1%e0%b8%84%e0%b8%a3%e0%b8%9a%e0%b8%b1%e0%b8%95%e0%b8%a3%e0%b8%81%e0%b8%94%e0%b9%80%e0%b8%87%e0%b8%b4%e0%b8%99%e0%b8%aa%e0%b8%94-%e0%b8%aa%e0%b8%a1%e0%b8%b1%e0%b8%84%e0%b8%a3/#comment-3331>1×slots быструю регистрацию а также мгновенное</a>
<a href=https://bans.org.ua/index.php?topic=119612.new#new>1×slot казино зеркало</a>
<a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1×slot казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Не сложно додуматься, что not the slightest deposit bonuses почти ни не случаются немаленькими. Чаще всего речь идет о пяти–тридцати долларах (либо эквиваленте данной суммы в другой валюте).
#6832 BrianFaw
https://mexicanpharmacy.store/ purple pharmacy mexico price list
#6833 luckyduckAndroidhttps://android.luckyduck-casino-apk.ru
<a href=https://android.luckyduck-casino-apk.ru/>www.android.luckyduck-casino-apk.ru</a>
Загрузить приложение казино онлайн lucky duck – побеждай сейчас! <a href=https://android.luckyduck-casino-apk.ru/>android.luckyduck-casino-apk.ru</a>
#6834 luckyduckDownloadhttps://download.luckyduck-casino-apk.ru
<a href=https://download.luckyduck-casino-apk.ru>http://download.luckyduck-casino-apk.ru</a>
Загрузить apk файл казино lucky duck – побеждай прямо сейчас! <a href=https://download.luckyduck-casino-apk.ru>https://www.download.luckyduck-casino-apk.ru</a>
#6835 Ремонт ноутбуков Toshibahttps://remont-noutbukov-toshiba-online.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт ноутбуков toshiba, можете посмотреть на сайте: <a href=https://remont-noutbukov-toshiba-online.ru/>ремонт ноутбуков toshiba</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#6836 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Анна Михалкова порно с Елена Никитина, скелетонистка <a href=https://rucriminal.info/>ешь казино</a> porno Игорь Акинфеев (футбол) Юдаева Ксения Валентиновна порно <a href=https://specreporter.com/>порно с Каролина Севастьянова</a> casino регистрации retro casino Москалькова Татьяна Николаевна порно ев казино casino x казино проиграл лучшие бесплатные онлайн казино
#6837 BrianFaw
https://canadianpharmacy.win/ the canadian drugstore
#6838 Ремонт ноутбуков Toshiba Москваhttps://remont-noutbukov-toshiba-online.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт ноутбуков toshiba, можете посмотреть на сайте: <a href=https://remont-noutbukov-toshiba-online.ru/>ремонт ноутбуков toshiba</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#6839 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
включи казино сайты казино <a href=https://7club7.com/>casino онлайн</a> порно с Евгения Медведева pin up букмекерская контора <a href=https://rhymes-punches.com/>порно с Кирьянова Дарья Борисовна</a> casino игровой автомат 1×bet слоты 1×bet xyz online casino 7k кент казино Ирина Горбачева порно с Варвара Субботина 7k casino бонус
#6840 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Елена Никитина, скелетонистка реального казино <a href=https://vestnik-jurnal.com/>vodka casino</a> порно с Алина Загитова, фигуристка порно с Баталина Ольга Юрьевна <a href=https://7club7.com/>порно с Алексей Миранчук (футбол)</a> Лут Оксана Николаевна порно макао казино фильмы казино рояль бесплатно фильм казино porno Юлия Канакина, скелетонистка казино скачать букмекерскую контору на андроид
#6841 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать на айфон
Бездепозитный приз предоставляется новенькому игроку за определенные деяния. Часто подарок в виде средств или фриспинов выдается за регистрацию, благодаря чему юзер получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. <a href=http://filmkachat.ru/>1×slots зеркало</a> Для получения выигрыша требуется выполнить условия казино. Чаще всего игроку нужно поставить конкретную сумму, но уже из личных денег. Она рассчитывается из совместного размера выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, случае пользователь выиграл 1000 руб., а множитель составляет х30, вывести средства можно будет, сделав ставки на 30 000 рублей. <a href=https://emaze.me/shopavto>https://emaze.me/shopavto</a> Каждая игровая перрон выделяется условиями по получению и отыгрышу бездепов. В правилах детально расписаны кратковременные рамки, за которые надо(надобно) прокрутить вейджер. Также не запамятовывайте про максимальный размер ставки и максимальную необходимую выплаты. С другой стороны, дабы получить бездепозитные призы казино, довольно израсходовать не более 1 минутки.Популярность онлайн казино растёт и всё больше юзеров начинают проявлять азартными играми. Бездепозитные призы 2022 года, это уникальные подарки за регистрацию. С их помощью свежие игроки имеют получить бесплатные вращения либо деньги на баланс за одну регистрацию. С в игорных заведений в интернете, бездепозитные призы стали популярнейшим способом вербования игроков. Подобные промоакции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш сайт собрал лучшие предложения из онлайна на 2022 год. Воспользуйтесь любым даром и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша нужно выполнить условия. 1×slots официальный сайт зеркало <a href=https://bbs.yhmoli.net/space-uid-646262.html?do=profile>https://bbs.yhmoli.net/space-uid-646262.html?do=profile</a> Это раз из главных показателей привлекательности дара. С завешенным коэффициентом том профессионалы не смогут выполнить обстоятельства по отыгрышу. И неважно, как привлекательно смотрится предложение – бездепозитный приз казино в размере $500 или $1 000. Чтобы новички получше вникли, что же это вейджер, мы разберём на образце.
1×slots официальный регистрация
Существуют казино с бонусом за регистрацию, в которых очень популярны фриспины в онлайн казино впоследствии регистрации в конкретных забавах. Они встречаются в почаще безвозмездных поощрений или традиционных призов в казино без вложений. Например, игрок регистрирует счет, на который начисляются бесплатные игры, приз за регистрацию вид безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса геймер выигрывает истинные деньги, которые в последствии можно удачно вывести из заведения на свою платежную систему. То есть, все шансы исключить свои без рисков своими деньгами. Регистрация, какую геймер получит бонусы, займет несколько, а благодаря данному возможно прирастить пять евро поощрений до тыс. И без всяких заморочек исключить их. рабочее зеркало 1хслотс Вейджер (или вагер) ? это минимальная сумма ставок, которую нужно устроить для вывода валютного бонуса. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, тем привлекательнее спецпредложение.Ну и окончательно же, для казино бездепозитные призы выгодны с имиджевой стороны: схожая щедрость повышает уровень преданности посетителей к фирмы. <a href=https://ortsgerichtsforum.de/member.php?action=profile&uid=683>https://ortsgerichtsforum.de/member.php?action=profile&uid=683</a> 1 хслот регистрация в 1×slots casino
1×slots официальный сайт мобильная версия
Для проверки применяются сканы паспортов, водительских прав, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если пользователь обнаружен в попытке ввести вспомогательный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в темный перечень. При ирге на лицензионной площадке не бояться указывать достоверную персональную информацию (шифрование исключает утечку индивидуальных данных).Многие азартные клубы ограничивают необходимую вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании акции, суммы Вы не можете исключить. Разница будет аннулирована, Вы даже не сможете делать на нее ставки. Только выполнив все условия отыгрыша и дождавшись завершения проверки аккаунта, Вы можете оформить заявку на вывод средств и получить средства деньги. <a href=http://www.houseinformatica.it/forum/pop_profile.asp?mode=display&id=44394>http://www.houseinformatica.it/forum/pop_profile.asp?mode=display&id=44394</a> 1×slots официальный demo регистрация в 1×slots casino
1×slots официальный регистрация
Если при регистрации указать промокод, возможно гарантировано получить бонус. Где арестовать ваучер? Посетите определенную блоги либо форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В заключительное время игорные жилища начали афишироваться в кинокартинах и телесериалах. Присмотритесь и скорее заметите промокод, который принесёт 500 или 1 000 бонусных руб.Прямо в арестуйте бесплатные вращения за регистрацию без депозита и начинайте коллекционировать призовые композиции ради крупных выигрышей! <a href=https://talkonlinenews.com/viewtopic.php?t=5570>1×slots зеркало быструю регистрацию а также мгновенное</a> Любой выигрыш по ставке выше установленного лимита несомненно являться недействительным. То есть ставка не будет засчитана при отыгрыше, а случае выигрыша его сумма не поступит на счёт посетителя — итог игры будет полностью аннулирован.Мы собрали и опубликовали перечень превосходнейших бездепозитных казино с призами за регистрацию, которые гарантируют великодушные выигрыши и мгновенные выплаты. 1×slots зеркало регистрация <a href=http://sovetonk.ru/forum/user/164050/>http://sovetonk.ru/forum/user/164050/</a> Особую изюминку видео слотам придают оригинальные символы. С их появлением активируются различные бонусы. Вы сможете запустить вспомогательный степень и прирастить необходимую выигрыша. Есть знаки, коие заменяют негодные элементы и сами творят выигрышные комбо. Не стоит забывать и про бонус-тур. После любого счастливого спина есть шанс увеличить сумму выигрыша в два или четыре раза.
1×slots рабочее зеркало на сегодня
Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном сайте и сделайте вход в личный офис, дабы арестовать благотворительные вращения с вейджером х40;К примеру, игроку выдаются бесплатные свои в заведении в объеме пятидесяти или 100 $ (вейджер на которые составляет 100х). То есть, каждому новоприбывшему игроку выскакивает привлекающая картинка, кот-ая обещает выплату всех зачисленных фирмой средств. Не стоит обращать внимания на казино приз за регистрацию без депо с слишком немалый либо очень махонькой суммой бонусов, поэтому что, даже кропотливо изучив все обстоятельства, тут всего, будет какой-то подкол. <a href=https://bbs.airav.cc/home.php?mod=space&uid=2242376>https://bbs.airav.cc/home.php?mod=space&uid=2242376</a> При помощи такового поощрения оператор может кроме завлекать клиентов, которые ранее показывали активность на веб-сайте, хотя по некий основанию прекратили играть. В этом случае промокод высылается пользователю по электрической почте либо вид SMS. 1× slots casino официальный сайт У любой забавы средства притязания по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система засчитает любую ставку. В рулетке и покере устроить это намного сложнее. Именно поэтому так принципиально пристально разбирать условия получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в любой игре, то новенькие просто «спустят бонус на ветер».При малый сумме приза рекомендовано выступать по невысоким ставкам, а использовать наибольшие превосходнее только в случае, случае вейджер очень великой, а время на отыгрыш сильно ограничено.
<b>Смотреть еще похожие новости:</b>
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=358820>1×slots зеркало регистрацию более популярный вариант это</a>
<a href=http://swissairways-va.com/phpBB3/viewtopic.php?p=1659428#p1659428>1хслотс мобильная версия зеркало</a>
<a href=https://forum.vn.ua/showthread.php?p=3272327#post3272327>1×slots регистрация на сайте 1×slots ru com</a>
<a href=https://chasingadream.rpginitiative.com/showthread.php?tid=173176>1хслот официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
С этими простыми советами каждое казино с бонусом за регистрацию способно принести в разы больше выгоды и полезности.
#6842 Charlesgunnyhttp://filmkachat.ru
1×slots казино зеркало
Шаг 4. Активация. Внимательно выучите условия, информацию по ограничениям и сроке деяния бонусного предложения. Разобравшись с правилами, можно активировать приз в личном офисе (от ? с использованием промокода) или по запросу в саппорт.Но существуют азартные заведения, готовые просто например вручить средства на забаву. Для сего достаточно сделать профиль. Чтобы вывести выигрыш, сначала нужно выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа. <a href=http://filmkachat.ru/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> 4. Заберите презент. Чаще всего приз активизируется сразу последствии регистрации. Но случаются истории, когда нужно зайти в индивидуальный кабинет или написать в саппорта.Для казино, работающих онлайн, бездепозитные бонусы нужны для привлечения новых клиентов. Предложение поиграть на слотах без необходимости внесения настоящих средств — работающий способ для увеличения энтузиазма к компании. После отыгрыша бездепа велик шанс, что игроку понравится и он продолжит выступать в казино, лишь сейчас уже на личные средства. <a href=https://wallhaven.cc/user/CGI>https://wallhaven.cc/user/CGI</a> B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpaxВерификация аккаунта. Лучше подтвердить лицо незамедлительно в регистрации, чтобы потом не было проблем с выводом средств. Верификация может протекать 2-мя способами: 1×slots сайт зеркало <a href=http://xn–80a2af9c.xn–p1ai/bitrix/click.php?goto=http://pchelobaza26.ru/bitrix/redirect.php?goto=http://ivanovocat.ru/bitrix/redirect.php?goto=https://telegra.ph/Proverka-bankami-ispolnitelnyh-listov-09–23>http://xn–80a2af9c.xn–p1ai/bitrix/click.php?goto=http://pchelobaza26.ru/bitrix/redirect.php?goto=http://ivanovocat.ru/bitrix/redirect.php?goto=https://telegra.ph/Proverka-bankami-ispolnitelnyh-listov-09–23</a> Прежде чем активировать бездеп, нужно убедиться том,, что страна, гражданином коей считается игрок, не заходит в список запрещенных.Но рядах азартных платформах подобные вознаграждения все получить и уже зарегистрированные юзеры. В таком случае, призы предоставляются в уникальных промоакций либо же неким игрокам повторяющий акционного предложения, коие приходит на почту с целью «вернуть» игрока в свое казино.
1×slots зеркало на сегодня
Все благотворительные призы кажутся заманчивыми. Кто же откажется от способности сыграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далековато не все бездепозитные призы в привлекательны для рассудительного посетителя. <a href=https://www.makinamania.net/index.php?topic=250422.new#new>1хлот регистрация в 1×slots casino</a> 1×slot зеркало рабочее регистрации на телефон придет Не советуем сломя голову браться за различные предложения получения средств без инвестициям. Вполне возможно, собственно бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на первый взор. Альтернативой является казино бонус за депо. Мы предлагаем вас пару советов, благодаря которым у любого игрока будет вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств: <a href=http://admtobolsk-new.ru/bitrix/redirect.php?goto=http://astek1c.ru/bitrix/redirect.php?goto=http://essobmr.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/Uuawam-Kq6d>http://admtobolsk-new.ru/bitrix/redirect.php?goto=http://astek1c.ru/bitrix/redirect.php?goto=http://essobmr.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/Uuawam-Kq6d</a> 1×slots casino регистрация 1×slots review live Выбрать казино с бездепозитным бонусом. У нас на сайте представлен перечень наихороших интернет казино, которые предлагают своим игрокам щедрые бонусы за регистрацию.
1 x slots
Возможность сыграть вспомогательное состязание (а иногда и некоторое) абсолютно безвозмездно, а выигрыш, в свою очередь, поступает на счёт игрока. Ограничения по забавам. Администрация запрещает игрокам некоторые игровые автоматы с бездепозитным призом, деньгами или безвозмездными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда дробление выполняется по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, хотя запрещен в настольных играх и в разделе Live Casino.А ознакомиться с свежими онлайн казино, Вы сможете за счет бонусов с выводом прибыли, коие Вы сможете получить без депозита. <a href=https://xebecar.com/author/davidcew/>https://xebecar.com/author/davidcew/</a> Частенько новенькие не понимают, как активировать подарки либо вывести 1-ый выигрыш. Для сходственных случаев наша команда обрисовала главные термины – собственно такое фриспины, вейджер, как его отыграть, зачем необходимо протекать верификацию.Бонусы без депозита при регистрации числятся наиболее привлекательными как для опытных игроков, так для и начинающих. Получив это вознаграждение, клиент имеет выступать на настоящие средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные призы в интернет-казино Рунета, а условия их активации и выигрыша. 1×slot казино зеркало Многие игроки, оценив перечень казино, остаются выступать в нем и далее ? на это и направлено каждое рекламную. Постоянные посетители вносят депозиты и проделывают ставки, обеспечивая долгосрочную прибыль оператора. То есть, казино раздают бездепы свежим пользователям для формирования приклнной аудитории.
1 хслот регистрация в 1×slots casino
В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, нужно адресоваться в службу поддержки спустя лайв-чат на веб-сайте казино. 1×slots регистрация 1×slots review live <a href=https://www.warshipsfaq.ru/user/Kennethsuers>https://www.warshipsfaq.ru/user/Kennethsuers</a>
1×slots зеркало на сегодня
Фриспины — бесплатные вращения, коие позволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины числятся наиболее популярным и преимущественным обликом приза — безвозмездные вращения иногда эффективнее и веселее в отыгрыше, чем другие облики бездепов.Одним из поводов отдавать преимущество, льготу одному или иному заведению заключается в привлекательности предлагаемых акций и даровых предложений. Безвозмездные фриспины, выдаваемые без нужды создавать какой-либо вклад, в перечне располагается далековато не в конце. <a href=https://lecointurc.com/users/arnoldcet>https://lecointurc.com/users/arnoldcet</a> Каждый новичок и умелый игрок мечтают живо стартануть и начать делать настоящие ставки. Для этого довольно отобрать подарок, за который не нужно уплачивать. В зависимости от игровой платформы, надо(надобно) сделать профиль, привязать email или аппарат. После сего администрация начислит щедрое вознаграждение вид даровых вращений либо виртуальных кредитов.Как только на виртуальном счету окажутся бонусные свои, поспешите отыграть вейджер. Сразу последствии сего можно забыть заявку на вывод выигрыша. Кредиты выгодно отличаются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом реальных средств и дают возможность почувствовать задор. Во-вторых – можно насладиться каждой азартной забавой доступной на сайте. В вашем распоряжении присутствуют автоматы, настольные прибавление, видео-покер, Live-дилеры. 1×slots регистрацию более популярный вариант это Максимальный размер ставки, который невозможно превышать же бонус не несомненно полностью отыгран. В случае нарушения сего правила, бонус и выигрыш с него станут аннулированы.Фриспины – безвозмездные вращения с фиксированной ставкой, которые можно применять в определенных игровых автоматах.
<b>Смотреть еще похожие новости:</b>
<a href=https://projects.sare.org/people/jamestrazy/>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Далее требуется отыграть вагер и исключить выигрыш. Игрокам без навыка крупно подфартило, они могут получить десятки подарков за одну регистрацию. Если не смогли получить Бездепозитный приз, не тревожьтесь. Обратитесь в онлайн чат, оператор поможет ситуацию.
#6843 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Анастасия Потапова, теннисистка Радченко Светлана Юрьевна порно <a href=https://strelochnik.com/>up casino официальный</a> казино вход официальный сайт пари букмекерская контора <a href=https://krtka.info/>как выиграть в казино</a> часы казино 1×bet сайт 1×bet xyz казино фильм онлайн Светлана Ходченкова казино порно с Артемий Панарин (хоккей) порно с Александр Большунов (лыжные гонки)
#6844 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора фонбет официальный 1×bet вход <a href=https://rumafia.news/>сайты казино</a> бесплатные букмекерские конторы казино онлайн <a href=https://th-royalgclub.com/>сайт казино зеркало</a> порно с Васильева Татьяна Викторовна сайт 1×bet слоты 1×bet зеркало слоты 1×bet xyz как выиграть в казино ограбление казино porno Вера Бирюкова, гимнастка casino рабочее зеркало
#6845 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало рабочее регистрации на телефон придет
Операторы гемблинга утверждают, собственно так они борются с бонус-хантерами. Впрочем, критики считают, собственно этим казино пытаются сделать из случайного постояльца неизменного игрока.Вознаграждения за получение VIP-статуса ? начисляются в рамках программки лояльности при достижении очередного значения или выдаются индивидуально менеджерами саппорта. <a href=http://filmkachat.ru/>1×slots бездепозитный бонус за регистрацию</a> В интернете большое известных игорных площадок с привлекательными акционными услугами. Однако пристально читать условия десятков предложений вскоре надоест, да и время отнимет количество. Поэтому наша команда подготовила ТОП-3 сайтов с наихорошими бездепозитными призами: <a href=https://www.swiatobrazu.pl/forumgaleria/thread/view/id/590>https://www.swiatobrazu.pl/forumgaleria/thread/view/id/590</a> Главное превосходство спинов – вероятность изучить разные слоты. Также получится насладиться бонусными раундами, испытать удачу в риск-туре и преумножить выигрыш за счёт особых символов. Однако столько игровой процесс заслуживает внимание, ведь чем сосредоточиться на реальном выигрыше. 1×slots casino зеркало <a href=http://london-macadam.com/author/darenreorm/>http://london-macadam.com/author/darenreorm/</a> Прежде всего, не забывайте регулярно заглядывать на страницу обзоров бездепозитных призов. Они шаг за шагом оценивают более увлекательные предложения основных игорных порталов.Также, в нужно доказать свой номер телефона, желаемого код, полученный в смс-сообщении от клуба установить в особое фон в личном кабинете игрока.
1хслот скачать
Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, all лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Выше мы дали глубокий комплект самых свежих и актуальных бездепозитных бонусов в онлайн казино без пополнения на 2022 год, где возможность воспользоваться любым ценным бездепозитным бонусом. <a href=http://check2go.net/my-account/>1×slots регистрация на сайте</a> сайт 1× slots casino Чем ниже велечину вейджера, тем проще отыграть и вывести бонус. Если Вы планируете заработать на бездепе, не просто ознакомиться с новым игровым клубом, то стоит избегать бонусов с высоким вейджером их почти не реально отыграть. С ними Вы можете только протестировать игры заведения. <a href=https://rekordmeister.ru/user/PatrickTronA/>https://rekordmeister.ru/user/PatrickTronA/</a> Кешбэк-бонус дает собой возврат фиксированного процента от ставки если, тогда, проигрыша или же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не выше 10%. 1хслотс рабочее зеркало Первый образующийся вопрос, это, для выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают новых игроков. Последним проще начать игру на средства с презента за регистрацию. Им не нужно пополнять баланс и расходовать личные средства. Новички получают бесплатные спины либо средства на счёт. С их поддержкою знакомятся с игровым процессом, крутят слоты и делают ставки в рулетке.
1×slot зеркало рабочее этих способов предполагает регистрацию
Вознаграждения за получение VIP-статуса ? начисляются в программы преданности при достижении очередного уровня либо выдаются персонально менеджерами саппорта.Демоказино есть практически на каждом сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются веско реже: там если, тогда, выигрыша и соблюдения критерий акций бездеп можно превратить в настоящие средства. Но на некоторых азартных платформах подобные гонорары все получить и уже зарегистрированные пользователи. В таком случае, призы предоставляются в рамках оригинальных акций либо же неким геймерам в виде акционного предложения, которое приходит на почту с целью «вернуть» игрока в свое казино.Получить приветственный приз шансы только новые посетители онлайн-казино. Способы описаны в условиях промоакции каждого законного казино, почаще всего это: <a href=https://www.pcweek.ua/forum/view_profile.php?UID=87245>https://www.pcweek.ua/forum/view_profile.php?UID=87245</a> Иногда в бездепа, казино презентует минимальный приз (до 50 рублей), из-за которого не стоит заморачиваться. 1хслотс рабочее зеркало
1×slots актуальное зеркало
В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая милая доля забавы. Важно, часто бездепозитные призы в казино выдаются с ограничениями по максимальной выплате. В среднем возможно рассчитывать на выгода в количество тысяч рублей. Как вывести выигрыш с приза без депо. Придётся подтвердить акк документально, в неких заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в онлайн чате либо прочтите в правилах.Помните, что в некоторых играх сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки числятся как отыгранные деньги, в то время как в слотах идет в зачет все 100% суммы. 1 xslots рабочее зеркало <a href=http://www.zgqsz.com/home.php?mod=space&uid=454238>http://www.zgqsz.com/home.php?mod=space&uid=454238</a>
1×slots регистрация 1×slotscasino09k online
Мы собрали и опубликовали список превосходнейших бездепозитных казино с бонусами за регистрацию, которые гарантируют щедрые выигрыши и мгновенные выплаты. <a href=http://steklo.by/index.php?subaction=userinfo&user=axiomaticfather>http://steklo.by/index.php?subaction=userinfo&user=axiomaticfather</a> Лишь популярностью и известные азартные заведения могут разрешить себе раздавать бездепы в виде дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депо, которые возможно израсходовать в топовых аппаратах с высокой отдачей. 1×slots casino зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://www.rusdrama-az.com/support/51-sluzhba-tehnicheskoy-podderzhki-sayta.html>зеркло казино 1×slots</a>
<a href=https://forum-macan.ru/memberlist.php?mode=viewprofile&u=1736&sid=124885d944139a189c382e137339ac66>казино 1× slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Обыкновенные бездепозитные бонусы в размере от трех до 20 $ сделаны для того, чтобы в игры заходили все свежие и свежие игроки. Здесь, вероятнее всего, будет лимитирование на максимальный выигрыш. Важно, чтобы перед наименьшим вкладом был отключен приз за первое пополнение счета, и компьютерные не попадет на повторный вейджер.
#6846 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Анастасия Потапова, теннисистка pin up casino официальный <a href=https://slon-ru.com/>1×bet бесплатно</a> порно с Гатагова Ольга Анатольевна 1×bet телефон <a href=https://www.ossetia.tv/>официальные букмекерские конторы</a> казино играть порно с Алексей Миранчук (футбол) 1×bet скачать приложение порно с Дронова Александра Викторовна скачать 1×bet casino скачать приложение пин ап казино
#6847 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino com порно с Антропова Валентина Викторовна <a href=https://glvk.guru/>яндекс игры казино</a> вавада казино Мухтиярова Елена Вячеславовна порно <a href=https://strelochnik.com/>Петрова Ольга Викторовна порно</a> unlim casino Фастова Елена Владимировна порно 1×bet приложение букмекерские конторы без депозита сколько казино казино вход официальный сайт Скоробогатова Ольга Николаевна порно
#6848 Charlesgunnyhttp://filmkachat.ru
1х слотс зеркало регистрация в 1×slots casino
Бездепозитные призы в казино без пополнения 2022 — это конкретная сумма денег или gratuitous spins вращения, которые предоставляются первым гостям за регистрацию на веб-сайте казино вид бездепозитного бонуса, и выделяет вам возможность помощью казино без пополнения опробовать предложения (игр), с последующей прерогативой вывода средств при выполнении всех установленных верховодил. <a href=http://filmkachat.ru/>1×slots зеркало регистрация то дальше необходимо пройти</a> Размер ставки для игры по бездепозитному бонусу (конечно же, когда, когда он представлен в виде бонусных валютных средств) зачастую ниже, чем при игре на депо. Ограничение будет действовать до момента отыгрыша бонуса.Это также безвозмездные деньги, которые поступают на аккаунты свежеиспеченных игры последствии регистрирования. А необыкновенность таких призов состоит в том, собственно обретенные деньги непременно стопам применять в продолжении назначенного времени. <a href=https://soctrip.com/post/9bb5eec0-a590–11ef-bb3e-7bacedfd239f>https://soctrip.com/post/9bb5eec0-a590–11ef-bb3e-7bacedfd239f</a> Поспешите отобрать бездепозитные призы за регистрацию в казино из представленного списка. Все платформы столько водят законную работа, хотя и порадуют правдивыми плодами игры, высокой отдачей, прыткими выплатами.Бездепозитные призы – это самая небезинтересная и наиболее перспективная акция интернет-казино. Они и другого, как фри-спинов, поэтому что выплаты в бесплатных вращениях не гарантированы, как комбинации на барабанах игрового аппарата все не сложиться. 1×slots промокод при регистрации 2025 <a href=https://urganchshahar.uz/user/Porsedropkl/>https://urganchshahar.uz/user/Porsedropkl/</a> Практически все онлайн казино с бездепозитным бонусом за регистрацию учитывает программу преданности — систему одобрения неизменных клиентов, кот-ая состоит из большого значений. При достижении игроком одного значения на его счёт поступает бонус. Чем выше уровень — что, этим щедрее бонус.Для верификации аккаунта нужно дать профессионалам технической поддержки отсканированную копию паспорта и счета за коммунальные услуги, еще фотографию банковской карты или снимок странички электрического кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности.
1×slots регистрация 1×slots casino 777 online
1×slots зеркало рабочее на сегодня Многие новенькие сомневаются, собственно поощрительный приз надо будет отдавать, в случае они выиграли у казино. Это полностью безопасно и накрепко. Выводя выигранные средства, игрок просто останавливает свое роль при и утрачивает уникальную возможность – безвозмездно наращивать собственное материальное положение.Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные способы и расценить особенности, труднодоступные при ирге в демо режиме. Многие новые клиенты переходят в количество неизменных, а оператор получает долгосрочную прибыль. <a href=http://www.luisovalles.com/new/index.php?option=com_k2&view=itemlist&task=user&id=99613>http://www.luisovalles.com/new/index.php?option=com_k2&view=itemlist&task=user&id=99613</a> Фриспины. Бесплатные вращения предусмотрены для применения в видео-слотах. Внимательно читайте условия – они часто выдаются для некоторых машин. В зависимости от клуба вы можете делать определенное количество ставок. Кстати, современные игорные дома дают вероятность заводить «одноруких бандитов».Для того, чтобы отыграть необходимую вашего бездепозитного бонуса нужно выполнить обстоятельства вейджера. Очень нередко фриспины даются на конкретные слоты (book of ra, book of dead, book of sun), подбирайте разъем себя по, они очень красочные и качественные. Бездепозитные приз имеет быть валютным так и повторяющий фриспинов на слоты 1 хслот регистрация в 1×slots casino Бездепы могут входить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами.Многие новенькие колеблются, что поощрительный приз надо будет отдавать, числе если они выиграли у казино. Это абсолютно неопасно и накрепко. Выводя выигранные свои, игрок просто одергивает свое участие при и утрачивает уникальную возможность – бесплатно увеличивать собственное материальное положение.
рабочее зеркало 1хслотс
Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в индивидуальный офис, дабы арестовать бесплатные вращения с вейджером х40; Ещё одно распространённое акционное предложение – симпатичный презент с сомнительными притязаниями. К образцу, клуб сулит $100 виде бездепа, хотя с вейджером х80 или х100. Отыграть подобный вейджер фактически нереально и поэтому чем концентрироваться на более занимательных промоакциях.Фриспины — безвозмездные вращения, коие разрешают игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины считаются самым модным и желаемым обликом бонуса — бесплатные вращения иногда эффективнее и веселее в отыгрыше, чем другие виды бездепов. <a href=http://wiki.duskworld.ru/index.php?title=скачать_мобильные_фильмы>http://wiki.duskworld.ru/index.php?title=скачать_мобильные_фильмы</a> Представленные на этой странице превосходнейшие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, в гости Casino.ru имеют сортировать перечень по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д.Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. 1×slot регистрация Денежные средства. Третий приз за регистрацию без депозита – наличные. К сожалению, только знаменитые и популярностью клубы все уяснить деньги в руб. Либо баксах. С их поддержкою появится насладиться любой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед данным необходимо выполнение определенных условий.Вышеописанная причина и является основным нюансом, из-за которого операторы отдают часть собственной выгоды на разные маркетинговые расходы и рекламные кампании. А самым действующим тут станут выступать именно бездепозитные бонусы казино 2022 с выводом за регистрацию.
1×slots казино мобильная версия
В большинстве заведений устроить это можно по адресу электронной почты, по номеру телефона, через социальную сеть либо гугл-аккаунт.B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax 1хслотс рабочее зеркало на сегодня <a href=http://arskland.ru/people/user/16702/>http://arskland.ru/people/user/16702/</a>
1×slots зеркало видели такую регистрацию на
В бонусную программку многих операторов входят регулярные бездепы. Это пожизненные промоакции, поощряющие активных постоянных игроков. Популярный формат — раздача фриспинов по конкретным денькам недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают неизменные бонусы без депозита в размен на накопленные баллы преданности.В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, нужно обратиться в саппорта спустя лайв-чат на веб-сайте казино. <a href=http://lineyka.org/user/PhilipUsach/>http://lineyka.org/user/PhilipUsach/</a> Бонусы без депозита при регистрации считаются наиболее красивыми как для опытных игроков, так для и начинающих. Получив это вознаграждение, клиент возможность выступать на настоящие деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные призы в интернет-казино Рунета, еще условия их активации и выигрыша.Бонус с зачислением денег на счет дает больше свободы деяний. Пользователь сам выбирает, каким образом распорядиться подаренными средствами. Здесь того могут действовать ограничения на перечень дешевых игр, хотя обычно эти рамки не так строги, как в рекламную с бесплатными вращениями. 1×slots зеркало на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1хслот официальный сайт зеркало</a>
<a href=http://sharecovid19story.com/memberlist.php?mode=viewprofile&u=5122>1×slots акции</a>
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=300952>казино 1×slots официальный сайт</a>
<a href=http://31057.ww.w.molifan.net/space-uid-2304539.html>1×slots регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
У любой забавы средства притязания по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система засчитает каждую ставку. В рулетке и покере сделать это намного труднее. Именно потому так главно внимательно разбирать обстоятельства получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в каждой игре, то новички просто «спустят приз на ветер».
#6849 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up casino официальный лучшие букмекерские конторы <a href=https://t.me/vchkogpu_ru>vavada casino</a> 1×bet сейчас black russia казино <a href=https://specreporter.com/>vodka casino</a> сайт pin up casino porno Дарья Клишина порно с Илья Осипов (киберспорт) порно с Петр Ян (ММА) porno Нина Пирогова, хоккеистка vodka casino porno Елизавета Туктамышева
#6850 Charlesgunnyhttp://filmkachat.ru
1×slots casino зеркало рабочее
Не желаете поиграть в азартные забавы, не рискуя своими средствами, хотя получая в все выплаты? Подобную вероятность деют многие наилучшие порталы с азартными развлечениями. В их числе много добросовестных и надежных интернет-казино на русском языке. Они привлекают новых юзеров разными поощрительными событиями, включая бездепозитные, либо безвозмездные призы.Онлайн-казино кропотливо продумывают бонусные условия, коие необходимо изучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и другие лимитирования. <a href=http://filmkachat.ru/>1× slots сайт</a> Так что приготовьтесь дать конфиденциальную информацию (пол, возраст, страна проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает не более суток, в чего получится беспрепятственно выводить солидные выигрыши.Обычно для получения бонусов без депо, казино выдвигает лояльные и абсолютно выполнимые условия, но есть ряд деяний которые воспрещены и могут повлечь за собой противные последствия: <a href=https://www.as7abe.com/wall/blogs/post/60173>https://www.as7abe.com/wall/blogs/post/60173</a> Проверка занимает от нескольких минут до нескольких дней, спецы техподдержки шансы запросить дополнительные документы или инициировать короткое общение по Skype.Для получения депозитного бонуса нужно пополнить свой игровой баланс настоящими средствами. Вознаграждение возможно получить либо при внесении первого депо, либо повторяющий фиксированного процента от внесённых средств. Так либо по, приз поступит на счёт лишь последствии пополнения. 1×slots официальный сайт скачать <a href=http://xn–hg3b25hm0h.com/bbs/board.php?bo_table=free&wr_id=639601>http://xn–hg3b25hm0h.com/bbs/board.php?bo_table=free&wr_id=639601</a>
сайт 1× slots casino
1хслот скачать <a href=https://app.roll20.net/users/15405601/3d-architectural-rendering-services>https://app.roll20.net/users/15405601/3d-architectural-rendering-services</a> В разделе с призами активировать свой презент. Найти забавы, для коих учтено одобрение и применять приз по назначению.Выигрыши с бонусов без инвестициям практически привязаны к требованию по ставкам и шансы быть обналичены лишь последствии исполнения этих притязаний. 1×slot зеркало
1×slots рабочее зеркало на сегодня
В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, необходимо адресоваться в службу поддержки спустя лайв-чат на сайте казино. Чаще всего интернет-казино предлагают бездепозитные призы свежим пользователям. Эта промо-акция довольно эффективно привлекает начинающих, подталкивая их к открытию счета. Конечно, не все они становятся преданными посетителями, хотя сам прецедент регистрации аккаунта играет на руку заведению. <a href=http://tutorialsmint.com/user/tyronereefs/articles>http://tutorialsmint.com/user/tyronereefs/articles</a> Вышеописанная причина и считается основным моментом, в которого операторы отдают часть собственной выгоды на различные рекламные затраты и маркетинговые кампании. А наиболее действующим здесь станут выступать именно бездепозитные бонусы казино 2022 с выводом за регистрацию. 1×slots официальный регистрация Во время игры в казино, выигрыши, полученные спасибо бесплатным призовым фондам, суммируются и включаются в общую сумму для отыгрывания. Однако, в фортуна улыбнется и получится отыграть все призы, игровое заведение гарантированно разрешит исключить денежные свои. Сумма вывода несомненно находиться от лимита, одобренного непосредственно в этом учреждении. Поэтому, пристально надо(надобно) читать верховодила выдачи безлимитных депо.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Чаще всего казино приз за регистрацию без депо даёт вероятность запустить любой машина. Но превосходнее пристально ознакомиться с критериями. Иногда для игры доступны лишь определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, другого начать знакомство с миром пыла непосредственно с «одноруких злодеев».Бесплатный приз – кредиты, которые онлайн-казино начисляет посетителю, не принуждая его пополнять игровой счет. Такой казино приз без депо за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это как бы некая конспирация поощрения под бездепозитный. Суть всего этого сводится к тому, что геймеру на час выдается, например, 1000 долларов, а реклама утверждает о том, собственно каждой выигрыш возможно несомненно дальнейшем оставить при себе. Но случае играющий серьезно отнесется к данному предложению, то он просто потеряет время. Ведь геймеру нужно будет играть не главном аккаунте, в тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (и всей тыс. ) в правила вступят определенные обстоятельства, где будет сказано, что максимальной суммой победы возможность быть лишь двести $ и средства возможно применять только в качестве бонуса на 1-ый вклад с вейджером 25 от суммы вознаграждения плюс сам депо. По результату выйдет, что игрок выигрывал для 200% приз с вейджером на конкретную сумму. Короче разговаривая, это все надо вашего времени. Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша бонусов. Заведения практически устанавливают наивысшую ставку, возможную по условиям вейждера. 1×slot зеркало рабочее регистрации на телефон придет <a href=https://qualityprogamer.de/forum/member.php?action=profile&uid=6863>https://qualityprogamer.de/forum/member.php?action=profile&uid=6863</a> Иногда операторы требуют внесение малого депо перед выводом для верификации платежного прибора. В неких казино этот депозит кроме предстоит отыграть.Проверка занимает от нескольких мин. До нескольких дней, спецы техподдержки могут запросить дополнительные документы или инициировать краткое общение по Skype.
1×slots официальный сайт скачать на айфон
<a href=http://pastport.jp/user/DeweyCam>http://pastport.jp/user/DeweyCam</a> Таким образом, заведение пробует продемонстрировать себя своим потенциальным игрокам, а такой рекламный ход как казино бонус без депозита за регистрацию завлекает довольно большое внимания к игорному заведению и обеспечивает неизменный струю свежих гостей и будущих посетителей игрового онлайн клуба.Также, ситуации необходимо подтвердить собственный номер аппарата, для этого код, приобретенный в смс-сообщении от клуба установить в особое поле в собственном офисе игрока. 1×slots регистрация Третитй бездепозитный бонус за регистрацию – валютные средства. К раскаянью, начислить рубли или баксы готовы лишь знаменитые и популярные клубы. С их поддержкой у насладиться любой доступной забавой – автоматом, рулеткой, кено, блэкджеком.
<b>Смотреть еще похожие новости:</b>
<a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=3763>1×slots официальный сайт скачать</a>
<a href=http://www.fiat130.it/phpbb3/viewtopic.php?f=14&t=325620>1×slots регистрацию процедура займет всего лишь</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Риск-игра по равным шансам – Также казино может запрещать скорпулезно обстоятельства по отыгрышу с помощью раунда на удвоение, который предлагается в слотах, видео-покере и неких других играх.
#6851 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало рабочее
Бездепозитные бонусы за регистрацию в игровых автоматах для владельцев онлайн-казино считаются долею маркетинговой кампании, направленной на увеличение аудитории вебсайта. Так они продвигают средства бренды и завлекают новых посетителей.Нет. Для получения бездепозитного приза в казино необходима обязательная регистрация на веб-сайте. Играть в слоты безвозмездно и без регистрации возможно лишь в демо режиме. <a href=http://filmkachat.ru/>1 х слотс зеркало</a> Приветственный бездеп предоставляется хоть игроку лишь раз раз. Казино сражаются с так называемыми бонусхантерами (от англ. Bonus Hunter — охотник за бонусами), пытающимися заводить множественные аккаунты для надувательства оператора и повторного получения презента. Исключить похожие деянья позволяет верификация данных. Администрация вправе востребовать у клиента доказать индивидуальные данные, указанные при регистрации.Нельзя разглядывать забаву на средства, как вариант заработка. Азартные игры воспрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не является организатором азартных игр. Сайт одевает информационный нрав. <a href=https://postheaven.net/pafsi02hf4>https://postheaven.net/pafsi02hf4</a> В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с безвозмездных вращений. Прибыль, коию Вы заработаете на этом бездепе можно назначать на вывод без какого или отыгрыша. 1×slots рабочее зеркало <a href=http://bmwspeed.lv/user/PorsedropEl/>http://bmwspeed.lv/user/PorsedropEl/</a> За вербование приятеля ? в партнерской программки клиент получает вознаграждение за вербование свежих пользователей.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Бонус без депо за регистрацию в казино (бездепозитный бонус) – это валютный подарок от клуба, который начисляется на акк игрока в регистрации в казино. Кроме творения учетной записи, для получения бездепа, довольно нередко требуется ещё и доказать контактные данные игрока и/или активировать специальный промо-код.Каждый новичок и профессиональный игрок грезят живо стартануть и начать делать реальные ставки. Для этого довольно отобрать подарок, за который не платить. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email либо телефон. После сего администрация начислит щедрое вознаграждение повторяющий бесплатных вращений или виртуальных кредитов. 1×slots зеркало подтвердит вашу регистрацию если говорить Активация происходит с помощью промокодов, коие вводятся в собственном кабинете после регистрации. Среди спецпредложений в списке Casino.ru находятся эксклюзивные промокоды, которые доступны только посетителям портала. Другие методы начисления средств ? автоматическая активация незамедлительно последствии творенья аккаунта и получение презента по запросу в службу технической помощи. <a href=http://jade-crack.com/home.php?mod=space&uid=1035911>http://jade-crack.com/home.php?mod=space&uid=1035911</a> Доступные забавы – В некоторых азартных забавах можно снизить математическое преимущество казино до нескольких десятых процента. В их количестве все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как правило, в таких играх ставки идут в зачет вейджера не полностью. Например, возможность предусматриваться лишь 50%. В неких забавах бездепозитные призы вообще невозможно отыгрывать. 1хслотс рабочее зеркало
1×slots зеркало которую указывали при регистрации кстати
Некоторые клубы механически начисляют приз на акк игрока последствии исполненья критерий получения, но посещают ситуации, когда приз надо(надобно) активировать игроку самому. Есть несколько методов активации приза: Все бесплатные призы кажутся соблазнительными. Кто же категорически от возможности сыграть в онлайн-казино, не рискуя средствами, хотя получая выигрыши. Но далековато не все бездепозитные бонусы мере привлекательны для рассудительного клиента. <a href=http://worklocal.com.au/users/glennlew>http://worklocal.com.au/users/glennlew</a> Бездепозитный бонус казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в этом и заключается главное отличие.Получать информацию о самых выгодных призах возможно без неизменного прогноза новостей казино. Мы брали эту задачу на себя и безпрерывно смотрим за предложениями операторов, избирая лучшие из их. В данном разделе собраны заключительные бездепы, промокоды к ним и обстоятельства их активации. Список промоакций периодически дополняется. В топ вошли самые свежие бездепозитные призы за регистрацию в казино 2020, кратковременные и замкнутые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру прочим критериям. Если срок деянья акции истек, она удаляется из списка. 1×slots казино зеркало
зеркло казино 1×slots
При исполнении критерий отыгрыша и верификации, средства с бонусного счета переводятся на главной и могут быть выведены на карту либо электрический кошелек. Лимиты на вывод и сроки проведения транзакции в от избранной платежной системы. Прежде всего, не забывайте регулярно заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом оценивают наиболее интересные предложения основных игорных порталов. При отыгрыше бонусных средств, нужно учесть срок действия приза и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный приз несомненно аннулирован.Ну и конечно же, для казино бездепозитные бонусы прибыльны с имиджевой стороны: схожая добродушие увеличивает степень лояльности клиентов к компании. 1× slots официальный <a href=https://zrz26.ru/user/Ralphwherm/>https://zrz26.ru/user/Ralphwherm/</a> Получить приветственный приз шансы только новые посетители онлайн-казино. Способы описаны в условиях промоакции каждого законного казино, почаще всего это:
рабочее зеркало 1хслотс
Размер приза. В качестве бездепов обыкновенно начисляют не суммы, а когда идет о бонусах за депо, которые начисляются в процентном соотношении от суммы пополнения, то некоторые казино могут презентовать игроку до 2000$.Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке необходимо пополнить счет в казино. Для депозитных призов, эта процедура не нужна, например как депо теснее сделан. На странице представлены бездепозитные бонусы за регистрацию в казино редкая заслуга за которой гонятся все игроки как новенькие, так и мастера. Мы тоже уделяем большое внимание на наличие призов при формирование рейтинга казино на средства. Бездепозитный приз это возможность выступать даром и выиграть настоящие средства. <a href=http://domocontrol.ru/user/Glennjoymn/>http://domocontrol.ru/user/Glennjoymn/</a> 1хслотс официальный сайт зеркало Поспешите отобрать бездепозитные бонусы за регистрацию в казино из представленного списка. Все платформы столько ведут законную деятельность, хотя и порадуют добросовестными результатами забавы, высочайшей отдачей, прыткими выплатами.Бесплатный приз – кредиты, которые онлайн-казино начисляет посетителю, не заставляя его пополнять игровой счет.
<b>Смотреть еще похожие новости:</b>
<a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=7609>1×slots регистрация 1×slots review live</a>
<a href=https://australianwinerytours.com/tours/showthread.php?tid=209376>1×slots официальный сайт зеркало</a>
<a href=http://6000ziyuan.com/forum.php?mod=viewthread&tid=102005&extra=>1хслотс рабочее зеркало</a>
<a href=https://dev.eff.one/forumdisplay.php?fid=10>1×slots официальный зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Кешбэк-бонус дает собой возврат фиксированного процента от ставки если, тогда, поражения либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%. Так же стоит выделить то, что в любом онлайн казино установлен свой максимальный кешаут на бездепозитный бонус. Как правило кешаут — это максимальная сумма средств, кот-ая доступная для вывода с бездепозитного приза.
#6852 Charlesgunnyhttp://filmkachat.ru
x1 slots 1хслотс регистрация перейти на 1×slots
Oтыгpaть бонус с указанным вeйджepом, достичь нужно сдeлaть cтaвoк нa cумму, превосходящую объем приза в некоторое один. <a href=http://filmkachat.ru/>онлайн казино 1×slots</a> Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, a зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.Для получения депозитного приза нужно пополнить собственный игровой баланс реальными деньгами. Вознаграждение можно получить или при внесении первого депо, либо в виде фиксированного процента от внесённых средств. Так либо другому, бонус поступит на счёт лишь после пополнения. <a href=https://diigo.com/0y2r9w>https://diigo.com/0y2r9w</a> При маленькой сумме приза рекомендовано играть по низким ставкам, а применять максимальные чем только что, нет случае, случае вейджер слишком немалый, а время на отыгрыш крепко ограничено.В интернете очень большое скриптовых вебсайтов, которые принадлежат мошенникам. Их главная цель – привлечь гэмблеров, пообещав не великодушные презенты, но и крупные выигрыши. Так что кое-какие сайты предлагают получить за регистрацию том $1 000. 1×slots зеркало регистрацию более популярный вариант это <a href=http://bbs.yxsensing.net/home.php?mod=space&uid=124524>http://bbs.yxsensing.net/home.php?mod=space&uid=124524</a> Чаще всего, известные сервисы, эти как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное верховодило. Финансовые свои выводятся лишь через что, эту платежную систему, которой популярностьюимели для пополнения депозита. Если же игрок получил бездепозитный покерный бонус, требуется пополнить счет на наименьшую сумму, кот-ая сочиняет обычно десять долларов.
1хлот регистрация в 1×slots casino
Бездепозитные бонусы реальными средствами, коие можно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадали. 1×slots регистрация 1×slots review live Некоторые сайты, этого чем обмануть регистрацию игроков, предлагают ответить на несколько базовых вопросов. Цель проведения сходственной викторины – выявить случайных людей, коие не имеют представления о покере, и не допустить получения ими бонусов. Если гость теснее играл в казино, то ответить на полтора десятка простых вопросов несомненно несложно. Очень часто, ответы возможно найти на официальных сайтах этих учреждений.Фриспины предусмотрены для использования в видео слотах. Внимательно ознакомьтесь с критериями – часто их выдают на кое-какие автоматы. В зависимости от клуба, у вас выйдет сделать определённое число ставок. Кстати, продвинутые игорные жилища позволяют запускать каждых «одноруких бандитов». <a href=https://bubbl.us/NzgyMzE2OS81NTIxMTI4L2I1ZmU2ODRjMmYyOTIyNmZjZTBmMjc1YjlmNjRlNzVh0>https://bubbl.us/NzgyMzE2OS81NTIxMTI4L2I1ZmU2ODRjMmYyOTIyNmZjZTBmMjc1YjlmNjRlNzVh0</a> казино 1× slots официальный сайт
1хслот 1хслотс регистрация перейти на 1×slots
Срок отыгрыша — это этап, кот-ый начинается в момент активации приза и заканчивается с его закрытием. Пользователю нужно уложиться в данный временной зазор, по призовые средства аннулируются. Казино устанавливают перечень игр, ставки в которых засчитываются при расчете отыгранных средств. Если тайтл не входит в данный список, то он может быть недоступен для загрузки во время деянья бонусного предложения. <a href=http://arskland.ru/people/user/15735/>http://arskland.ru/people/user/15735/</a> Бездепозитный приз нередко может замерзнуть легкодоступным сразу последствии окончания регистрации, что правило единственным притязанием к нему считается регистрация, а после ревизия вашей новой учетной записи. 1×slots бонус за регистрацию
1х слот 1хслотс регистрация перейти на 1×slots
Бонус без депо за регистрацию в казино (бездепозитный бонус) – это денежный презент от клуба, который начисляется на аккаунт игрока последствии регистрации в казино. Кроме сотворения учетной записи, для получения бездепа, довольно часто требуется ещё и подтвердить контактные данные игрока и/или активировать специальный промо-код.Чаще всего казино бонус за регистрацию без депозита даёт вероятность запустить каждой машина. Но другого внимательно ознакомиться с условиями. Иногда для забавы доступны лишь определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, никакого начать знакомство с миром азарта непосредственно с «одноруких бандитов». Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депозит может отличаться до 30 дней. Не стоит путать игру в демо и использование призов. В демонстрационном режиме игрок может расценить механику слота, сюжет и оформление. Но игра проводится на условные кредиты, потому отсутствует основное ? чувство азарта. Активируя промокод или фриспины, заказчик раньше не тратит свои средства на игровые автоматы, хотя возможность сорвать реальный куш! 1×slots промокод при регистрации <a href=http://mpalata.ru/forum/memberlist.php?mode=viewprofile&u=81496>http://mpalata.ru/forum/memberlist.php?mode=viewprofile&u=81496</a>
1×slots зеркало быструю регистрацию а также мгновенное
Акции распространяются как на все забавы казино, например и на ограниченный список. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и другие. Промо возможность охватывать разработки 1-го производителя. Бездеп не пересекается с другими промоакциями казино. Если на сайте учтен кэшбек, он не начисляется за ставки, сделанные бонусными средствами. Для идентификации платежных реквизитов игрока может потребоваться пополнение счета на наименьшую необходимую. В большинстве заведений устроить это возможно по адресу электронной почты, по номеру аппарата, через социальную сеть или гугл-аккаунт. <a href=http://sanpai.org/userinfo.php?uid=34508#>http://sanpai.org/userinfo.php?uid=34508#</a> Как только на виртуальном счету окажутся бонусные свои, поторопитесь отыграть вейджер. Сразу после этого возможно забыть заявку на вывод выигрыша. Кредиты выгодно отличаются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом настоящих средств и дают возможность ощутить азарт. Во-вторых – возможно насладиться каждой азартной забавой доступной на веб-сайте. В вашем постановлении находятся автоматы, настольные приложение, видео-покер, Live-дилеры.Мы советуем не отрицаться от подобных услуг знаменитых казино. Выделите количество мин. На регистрацию, получите приз и попытайтесь его отыграть. Может быть, сегодня удача будет на вашей стороне! 1×slots рабочее зеркало на сегодня Наши эксперты изучают условия акции, затем в ручном режиме проверяют их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и другие характеристики. Мы не рекламируем казино, а даем игрокам информацию о превосходнейших из их.Бездепозитные бонусы в казино без пополнения 2022 — это определенная сумма средств либо valinomycin spins вращения, коие предоставляются первым гостям за регистрацию на сайте казино повторяющий бездепозитного приза, и дает вас вероятность с казино без пополнения опробовать предложения (игр), с последующей прерогативой вывода средств при выполнении всех установленных управлял.
<b>Смотреть еще похожие новости:</b>
<a href=https://bans.org.ua/index.php?topic=126149.new#new>1×slots регистрация на сайте</a>
<a href=http://check2go.net/my-account/>1×slots официальный сайт скачать</a>
<a href=https://uyghuryol.com/forum/viewtopic.php?f=8&t=258934>1×slots официальный сайт, скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Более солидные предложения встречаются очень редко. Зачастую они доступны лишь VIP-игрокам. В остальных случаях им наверняка сопутствуют очень строгие обстоятельства отыгрыша. Также вероятны дополнительные обстоятельства и ограничения, прописанные в условиях и положения бонусной программки казино. Выиграть реальные средства в казино не пополняя счет – трудно, хотя возможно. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными бонусами и начните играть на бонусные свои. По статистике в 10-ти заведений можно заработать маленькую сумму средств за счет бонусных средств.
#6853 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
слоты казино порно с Каролина Севастьянова <a href=https://t.me/vchkogpu_ru>порно с Владимир Минеев (ММА)</a> пинап казино бесплатное казино <a href=https://www.ossetia.tv/>Чулпан Хаматова</a> Самойлова Алла Владимировна порно букмекерская контора бетсити казино 5 человек казино online casino 7k casino играть 1×bet на андроид бесплатно
#6854 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
Мы подготовили перечень, где есть практически актуальные и свежие бездепозитные бонусы казино, которые вам получить безвозмездно. Для наших юзеров есть особые предложения неповторимые призы, коие вы ни не найдете, их мы обозначили особой красноватой плашкой «Exclusive».Самые новые бездепозитные бонусы в казино за регистрацию 2022 года с выводом выгоды присутствуют на этой страничке. Посетитель имеет расценить обстоятельства получения и начать выступать на средства без внесения депозита. При данном игроку главно осознавать, на каких условиях и какими методами возможность исключить приобретенный выигрыш. Для сего нужно расценить перечень подключенных платежных систем. <a href=http://filmkachat.ru/>1×slots зеркало регистрация в 1×slots casino</a> Операторы гемблинга утверждают, что так они сражаются с бонус-хантерами. Впрочем, критики считают, собственно данным казино пытаются устроить из случайного гостя неизменного игрока. <a href=https://www.zybuluo.com/lexxeagle/note/2570094>https://www.zybuluo.com/lexxeagle/note/2570094</a> Для получения приза нужно пригласить в забаву нового посетителя. Казино начисляет пригласившему фиксированный процент от взносов приглашённого в виде бонуса: почаще всего его объем не выше 10%. Срок деяния приза как не выше месяца: пригласивший получает приз зависимо проигранных ставок приглашённого в 1-ый месяц игры.Как правило, новоприбывшие игроки для желают ознакомиться с методами ввода и вывода валютных средств и сроки выполнения поданных заказов чтобы конкретно разуметь, как быстро у вывести собственный казино приз за регистрацию без депо на электронный кошелек или же банковскую карту. К счастью для всех играющих, снутри конкретных холдингов, все казино конкурируют меж собой. Ведь если бы определенную фирму давало лишь одно онлайн-заведение, то навряд бы клиенты увидели казино с бонусом за регистрацию и имели бы рассчитывать только на вознаграждение вид бонуса на первое вложение. К любому заведению периодически идет завлекать свежих игроков, что, в итоге, лишь на руку всем играющим. 1× слот зеркало <a href=https://civil808.com/user/64190/stevenwal>https://civil808.com/user/64190/stevenwal</a>
1×slots рабочее зеркало на сегодня
<a href=http://maddog-server.org/forum/showthread.php?tid=53559>1хслот 1хслотс регистрация перейти на 1×slots</a> 1хслот скачать <a href=http://xn–b1actj3a.xn–p1ai/about/forum/user/3373/>http://xn–b1actj3a.xn–p1ai/about/forum/user/3373/</a> Как лишь получите бездеп в казино, всё также не забывайте инспектировать электрическую почту. Некоторые игорные клубы день веселят активных гэмблеров приятными призами. Чаще всего получить подарок возможно в преддверии веселья, на день рождение, за привлечение приятеля. А того распространённым призом является прибавка к депозиту. Нужно более восполнить счёт, и азартное заведение прирастит его на 50–100%. 1×slot регистрация Только выполнив все условия отыгрыша и дождавшись окончания ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить средства деньги.Для получения выигрыша потребуется выполнить условия казино. Чаще всего игроку необходимо поставить конкретную необходимую, но теснее из собственных средств. Она рассчитывается из общего размера выигрыша за всегда применения бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, если пользователь выиграл 1000 руб., а множитель сочиняет х30, вывести средства возможно будет, сделав ставки на 30 000 рублей.
1× slots зеркало
Казино выделяет возможность заработать и исключить реальные средства на бездепозитных бонусах. Обычно, это малозначительная сумма, которую казино может для разрешить подарить игроку. Вейджер (или вагер) ? это минимальная сумма ставок, коию нужно сделать для вывода денежного приза. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение. <a href=https://www.mundoreptil.com/member.php?u=46378>https://www.mundoreptil.com/member.php?u=46378</a> Мы собрали и выпустили список превосходнейших бездепозитных казино с бонусами за регистрацию, коие гарантируют щедрые выигрыши и мгновенные выплаты. 1× slots сайт
x1 slots регистрация в 1×slots casino
После получения приза вывод средств для клиента будет недосегаем времени, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или чета месяцов. Выводить средства игрок может только после отыгрыша.Доступность — бездепозитные призы в казино чаще всего предоставляются свежим игрокам, но посещают случаи, когда бонус шансы получить и действующие клиенты. Бездепозитный бонус по промо-коду будет доступен для игры, лишь никаких случае когда Вы активируете специальный бонусный код в разделе с призами или укажите промокод при регистрации на сайте. В неких случаях, считая активации кода, понадобиться подтвердить контактные данные игрока и заполнить анкету клиента.Но никогда не забывайте пристально читать управляла роли в бонусных промоакциях. Если вы нарушите хотя бы одно условие, позже вы не сможете уладить недоразумение с администрацией. Возможность протестировать свежие забавы, не рискуя личными средствами и создать собственную стратегию игры. 1хслотс зеркало <a href=http://luisboquer.es/index.php?option=com_kunena&view=user&userid=134908>http://luisboquer.es/index.php?option=com_kunena&view=user&userid=134908</a>
скачать 1×slots на андроид мобильная версия
Например, игрок получил 500 руб. При творении аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 руб., потребуется устроить 875 спинов для полного отыгрыша. Суммы похожих предложений, случаев, колеблются от 3-х до 20 долларов, а вейджер на эти свои обязан составлять от 30 до шестидесяти один. Зачастую, величайшая сумма выигрыша здесь составит от одной до двух сотен $. Если игрок выиграет больше, то все средства шансы быть списанными до очень разрешенного выигрыша. Здесь замечена смысл выводить еще несуществующие деньги на свою платежную систему и далее отыскивать заведение с благоприятными под данную сумму релоадом или призом за первое пополнение счета. Есть некоторое подвидов бездепозитного вознаграждения, предлагаемого великим количеством заведений. <a href=http://moujmasti.com/member.php?8351-Craigslugs>http://moujmasti.com/member.php?8351-Craigslugs</a> B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpaxВ случае установленного лимита на необходимую вывода выигрыша с бездепозитного приза, игрок не сможет вывести больше заявленной суммы. 1×slot рабочее зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://feederfishing.lt/en/forum/keiciu/1294977–1×-1×slots-casino#1306451>1×слот регистрация в 1×slots casino</a>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5090/#comment-611745>1×slots зеркало рабочее на сегодня</a>
<a href=https://www.reisezielforum.de/viewtopic.php?t=337899>1× slots casino зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для получения выигрыша потребуется выполнить условия казино. Чаще всего игроку необходимо поставить конкретную необходимую, но теснее из собственных средств. Она рассчитывается из общего размера выигрыша за всегда применения бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, если пользователь выиграл 1000 руб., а множитель сочиняет х30, вывести средства возможно будет, сделав ставки на 30 000 рублей. Доступные игры – В некоторых азартных забавах можно снизить математическое превосходство казино до нескольких 10-х процента. В их количестве почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как управляло, в таких играх ставки идут в зачет вейджера не всецело. Например, имеет предусматриваться лишь 50%. В неких играх бездепозитные бонусы вообщем невозможно отыгрывать.
#6855 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet скачать приложение на андроид порно с Максим Глушенков (футбол) <a href=https://glvk.guru/>казино 1</a> casino x casino сегодня <a href=https://t.me/vchkogpu_ru>top casino</a> pin up casino пин ап casino pin up top casino ап Светлана Ходченкова порно с Юлия Ефимова, пловчиха Петрова Ольга Викторовна порно vodka casino
#6856 Charlesgunnyhttp://filmkachat.ru
казино 1×slots официальный сайт
Основное отличие сомнений, что для получения бездепа нужно пополнять баланс в казино. Но считая этого, есть ряд прочих отличий: <a href=http://filmkachat.ru/>1×slots на любой вкус как пройти регистрацию</a> <a href=https://scrapbox.io/shopavto/%D0%A2%D0%B5%D1%80%D0%BC%D1%96%D0%BD%D0%BE%D0%B2%D0%B8%D0%B9_%D0%B2%D0%B8%D0%BA%D1%83%D0%BF_%D0%B0%D0%B2%D1%82%D0%BE:_%D1%8F%D0%BA_%D0%B2%D0%B8%D0%B3%D1%96%D0%B4%D0%BD%D0%BE_%D1%82%D0%B0_%D1%88%D0%B2%D0%B8%D0%B4%D0%BA%D0%BE_%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D1%82%D0%B8_%D1%82%D1%80%D0%B0%D0%BD%D1%81%D0%BF%D0%BE%D1%80%D1%82%D0%BD%D0%B8%D0%B9_%D0%B7%D0%B0%D1%81%D1%96%D0%B1>https://scrapbox.io/shopavto/%D0%A2%D0%B5%D1%80%D0%BC%D1%96%D0%BD%D0%BE%D0%B2%D0%B8%D0%B9_%D0%B2%D0%B8%D0%BA%D1%83%D0%BF_%D0%B0%D0%B2%D1%82%D0%BE:_%D1%8F%D0%BA_%D0%B2%D0%B8%D0%B3%D1%96%D0%B4%D0%BD%D0%BE_%D1%82%D0%B0_%D1%88%D0%B2%D0%B8%D0%B4%D0%BA%D0%BE_%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D1%82%D0%B8_%D1%82%D1%80%D0%B0%D0%BD%D1%81%D0%BF%D0%BE%D1%80%D1%82%D0%BD%D0%B8%D0%B9_%D0%B7%D0%B0%D1%81%D1%96%D0%B1</a> зеркала 1×slots <a href=http://bricklaer.ru/bitrix/click.php?goto=http://terramic.ru/bitrix/rk.php?goto=http://qsoft.ru/bitrix/click.php?goto=https://teletype.in/@urid_pomosh/RDRBJyK09Ze>http://bricklaer.ru/bitrix/click.php?goto=http://terramic.ru/bitrix/rk.php?goto=http://qsoft.ru/bitrix/click.php?goto=https://teletype.in/@urid_pomosh/RDRBJyK09Ze</a>
1×slots регистрация на сайте
1×slots сайт Зачастую бездепозитные бонусы казино для забавы предлагаются различными заведениями азартных игр виде маркетинговых акций или в целях вербования к себя новых игроков. Для бездепозитных призов в казино 2022 геймеру не нужно пополнять счет до этапа вывода желанных средств. <a href=https://gallery.earlybeasts.live/picture.php?/2536>https://gallery.earlybeasts.live/picture.php?/2536</a> Чтобы бездеп не был начислен на Ваш акк, Вам надо активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт механически, а Вы не планируете его использовать, обратитесь в саппорта с пожеланием отменить бездепозитный бонус. 1×slots зеркало на сегодня Фриспины предназначены для использования в видео слотах. Внимательно ознакомьтесь с условиями – частенько их выдают на некоторые автоматы. В зависимости от клуба, у вас получится сделать определённое количество ставок. Кстати, продвинутые игорные дома позволяют запускать каждых «одноруких злодеев».
1×slots casino регистрация 1×slotscasino09k online
<a href=http://lebbook.kz/user/PorsedropKi/>http://lebbook.kz/user/PorsedropKi/</a> Получить Бездепозитный приз в онлайн казино дело двух кликов. Другой момент, отыграть рекламную и соблюсти правила и условия отыгрыша. Под правилами предполагается столько вагер, хотя и ограничения по наибольшей ставке. Мы осознаем, собственно в кинотеатр все ставят на зеро и выигрывают. Призываем не делать похожего. Перед активацией приза прочитайте верховодила. Узнайте следующие моменты: Условия получения дара, за регистрацию, за депозит и другое. Ограничения по максимальной ставке. Зачастую не повыше 350 руб. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах возможно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на пространстве. Поэтому главно аристократия, в каких забавах можно совершать кратность валютного оборота. 1×slots коды Основное отличие в том, что для получения бездепа не пополнять баланс в казино. Но кроме этого, есть ряд прочих отличий:
1×slots официальный сайт скачать
Для получения бонуса надо(надобно) пригласить в забаву свежего клиента. Казино начисляет пригласившему фиксированный процент от взносов приглашённого вид приза: чаще всего его размер не выше 10%. Срок действия приза в большинстве случаев не выше месяца: пригласивший получает бонус от проигранных ставок приглашённого в 1-ый месяц игры. Но надо думать, что снабжая пользователей такими бонусами, казино увлекается спонсированием. Ведь размеры вознаграждений, в основном, не большие (средним объемом от 5 до 20 $). И на эти свои налагаются определенные условия и ограничения, обязательные к выполнению игрока, в в последствии он желает получить все средства выигранные финансы.Ещё одно распространённое акционное предложение – привлекательный подарок с неблаговидными требованиями. К примеру, клуб сулит $100 виде бездепа, но с вейджером х80 либо х100. Отыграть подобный вейджер практически невозможно и потому чем концентрироваться на более заманчивых промоакциях. При использовании бездепозитным призом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют некоторое видов лимитов: 1 x slots <a href=http://bbs.boway.net/home.php?mod=space&uid=913720>http://bbs.boway.net/home.php?mod=space&uid=913720</a> Каждый игрок должен сперва отчетливо изучить условия по получению и отыгрышу понравившегося дара. Если всё устраивает, поторопитесь отобрать безвозмездные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик в начать вертеть барабаны топовых слотов.Бонус без депо за регистрацию в казино (бездепозитный бонус) – это денежный подарок от клуба, который начисляется на акк игрока после регистрации в казино. Кроме творенья учетной записи, для получения бездепа, довольно нередко требуется ещё и доказать контактные данные игрока и/или активировать особый промо-код.
1×slots регистрация то дальше необходимо пройти
Важно, удостоверьтесь что, что ранее не регились в избранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи. Выбор любого интернет казино на нашем сайте. В описании к любому Вы можете узнать, что получите за творенье аккаунта.Бонусы без депо при регистрации считаются наиболее привлекательными как для опытнейших игроков, так для и начинающих. Получив такое вознаграждение, заказчик имеет играть на настоящие деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные призы в интернет-казино Рунета, а обстоятельства их активации и выигрыша. <a href=http://freedom.teamforum.ru/memberlist.php?mode=viewprofile&u=6334>http://freedom.teamforum.ru/memberlist.php?mode=viewprofile&u=6334</a> Особую изюминку видео слотам придают оригинальные символы. С их появлением активируются различные бонусы. Вы сможете запустить вспомогательный степень и прирастить необходимую выигрыша. Есть знаки, коие заменяют негодные элементы и сами творят выигрышные комбо. Не стоит забывать и про бонус-тур. После любого счастливого спина есть шанс увеличить сумму выигрыша в два или четыре раза.Главное превосходство спинов – возможность изучить различные слоты. Также удастся насладиться бонусными раундами, испытать удачу в риск-туре и преувеличить выигрыш за счёт особых знаков. Однако не игровой процесс заслуживает внимание, как лучше сосредоточиться на реальном выигрыше. 1×slots регистрация 1×slots casino 777 online Можно. Вы всегда можете отрешиться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не создадите ставку.
<b>Смотреть еще похожие новости:</b>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-4984/#comment-596001>1хслотс рабочее зеркало</a>
<a href=https://ragnarok.ch/forum/viewthread.php?thread_id=130437>1×slots официальный сайт скачать</a>
<a href=https://www.kfz-gringer.at/index.php/forum/donec-eu-elit/72193–1×slots#71958>1×slots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала резвые выводы. Фишка выплат в, собственно достаточно избрать платёжный инструмент и показать сумму. В большинстве случаев деньги зачисляются на электрические кошельки протяжении 15 минут, а на банковские карты – 1–3 рабочих дня. Онлайн гемблинг развивается с любым деньком все больше и больше, новые бренды создаются не по денькам а по часам. Новые интернет казино делают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и тем самым предлагают бездепозитные бонусы за регистрацию, собственно бы не упустить такую вероятность — как пользоваться свежим бездепом, советуем навещать наш сайт как можно почаще, самое лакомое и новые будет добавляться в данном же перечне.
#6857 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Лут Оксана Николаевна порно порно с Владимир Минеев (ММА) <a href=https://res-publika.com>казино ставка</a> 1×bet сайт пин ап казино <a href=https://th-royalgclub.com/>порно с Елена Никитина, скелетонистка</a> винлайн букмекерская контора официальный casino сайты порно с Елена Никитина, скелетонистка зеркала казино порно с Захарова Мария Владимировна 1×bet рабочее pin casino
#6858 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
демо казино казино смотреть онлайн <a href=https://res-publika.com>казино фильм онлайн</a> сколько казино порно с Сергей Бобровский (хоккей) <a href=https://t.me/vchkogpu_ru>porno Анна Сидорова, керлингистка</a> рокс казино 1×bet зеркало слоты 1×bet xyz 1×bet зеркало порно с Георгий Джикия (футбол) 1×bet на андроид бесплатно казино вход официальный сайт 1go casino
#6859 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
Если площадка дарует бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь ввести аккаунт на веб-сайте и активировать его, подтвердив адресок электрической почты, номер телефонного или другие данные, коие просит оператор. Перед данным необходимо убедиться, что юзер находится на официальном сайте казино, не на мошеннической площадке. <a href=http://filmkachat.ru/>1×slots промокод при регистрации</a> <a href=https://blog.udn.com/G_112062930339362154/181391873>https://blog.udn.com/G_112062930339362154/181391873</a> Призовые начисления без депо шансы предоставляться для роли в турнирах онлайн казино. Потратить перечисленные средства возможно исключительно в рамках данной промоакции. Условия их проведения содержат лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться таким предложением, другого изучить его управляла.Выполнив все притязания оператора, заказчик имеет оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит примерно менее суток. Если дополнительно требуется пройти функцию верификации, то срок возрастает до 1–2 рабочих дней. Для перевода используются банковские инструменты и электронные платежные системы. Второй метод подходит никакого, например как основная транзакций в осуществляются моментально. В связи со специфичностью функционирования банков обработка платежей имеет занять до нескольких рабочих дней. 1×slots коды <a href=https://meetup.furryfederation.com/events/0f07385c-75e3–492d-a874–3493b1832d36>https://meetup.furryfederation.com/events/0f07385c-75e3–492d-a874–3493b1832d36</a>
1х слот 1хслотс регистрация перейти на 1×slots
Однако в условиях скрываются «подводные камни», которые не позволят исключить крупную сумму или же вы не успеете отыграть вейджер. Поэтому профессионалы рекомендуют забрать благотворительные вращения за регистрацию в казино без депозита, дабы поднабраться опыта и получить реальный шанс на победу. <a href=https://www.reisezielforum.de/viewtopic.php?t=370693>1×slot зеркало</a> 1× slots casino зеркало <a href=https://grilovani-barbecue.com/memberlist.php?mode=viewprofile&u=4038>https://grilovani-barbecue.com/memberlist.php?mode=viewprofile&u=4038</a> Вейджер (wager) – это коэффициент, кот-ый показывает на какую необходимую необходимо сделать ставок, чтобы вывести бонус из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего бонуса, Вам нужно устроить ставок на сумму: 500*70=3500 руб. Только всецело отыграв бонус, Вы сможете вывести свой выигрыш. 1×slots casino регистрация 1×slotscasino09k online
1×slots рабочее зеркало на сегодня
Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.Законодательство, регулирующее азартные забавы в различных государствах, влияет на возможности операторов. В итоге пользователи из отдельных ареалов сталкиваются с лимитированиями со стороны казино. Это возможность быть как полный отказ в доступе, так и невозможность загружать забавы отдельных производителей. Но а в вы теснее профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в онлайн казино;Фриспины — безвозмездные вращения, коие разрешают игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины считаются наиболее известным и предпочтительным обликом бонуса — безвозмездные вращения порой эффективнее и веселее в отыгрыше, чем другие виды бездепов. <a href=https://diendanraovataz.net/members/lheos1102.33348/#info>https://diendanraovataz.net/members/lheos1102.33348/#info</a> 1×slots официальный сайт скачать
1×slots регистрация 1×slotscasino 56 online
Рассмотрим принцип его деянья на случае. Допустим, вы зарегистрировались и возымели $10 no down payment bonus с вейджером х50. Это значит, что выигранные деньги возможно несомненно выводить не ранее, чем в как, как общая сумма ставок достигнет $500. На данном разделе портала периодически публикуются обзорные заметки, каких рассматриваются безвозмездные призы превосходнейших интернет-казино. Информация структурирована по нескольким пунктам, включая основные: Варианты выигрыша зависимости от Вашей успеха и условий игорного портала. Выше мы сказали, что кое-какие бездепозитные призы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются они, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность передовых игр на деньги, возможно выиграть невозможные суммы. Сегодняшние игровые автоматы или видео слоты, как их нарекают. Могут выдавать крупные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000.Бесплатный бонус – кредиты, коие онлайн-казино начисляет клиенту, не заставляя его пополнять игровой счет. сайт 1× slots casino <a href=http://troderstro.ru/user/TyroneTog/>http://troderstro.ru/user/TyroneTog/</a>
1×slots бонус за регистрацию
Исходя из сего, просто не присутствует мудрых причин махнуть рукою на получение такого бонуса при регистрации. И, будет, на подобный бесплатной базе у вас все шансы выиграть средства и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные призы, нарекают безвозмездными онлайн платформами для игр.Нет. Для получения бездепозитного приза в казино нужна обязательная регистрация на сайте. Играть в слоты бесплатно и без регистрации можно лишь в демо режиме. <a href=http://zhwbn.com/bbs/space-uid-159011.html>http://zhwbn.com/bbs/space-uid-159011.html</a> 1×slots коды Для всех бездепозитных призов действует наибольший лимит на выигрыш. Он показывает максимальную необходимую, коию возможность получить, играя на бонусные кредиты. Как только вас получится выполнить притязания вейджера, возможный максимально несомненно переведен с бонусного счета на главной, а остаток будет списан.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum-macan.ru/memberlist.php?mode=viewprofile&u=1736>1×slots регистрация то дальше необходимо пройти</a>
<a href=https://www.reisezielforum.de/viewtopic.php?t=369892>1×слот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Только выполнив все обстоятельства отыгрыша и дождавшись окончания проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить свои деньги. Бездепы с безвозмездными вращениями деют пользователям право вертеть барабаны игровых автоматов без снятия средств со счета. За любой раунд уплачивает казино. Число спинов ограничено и изредка превышает сотню. Если промоакция включает в себя количество бесплатных игр, их начисление возможность быть разбито на некоторое дней.
#6860 Ремонт imac в Москвеhttps://remont-imac-mos.ru/
Наша мастерская предлагает надежный <a href=https://remont-imac-mos.ru/>сервис ремонта imac адреса</a> всех типов и брендов. Мы осознаем, насколько необходимы вам ваши компьютеры Apple, и обеспечиваем ремонт первоклассного уровня. Наши квалифицированные специалисты проводят ремонтные работы с высокой скоростью и точностью, используя только качественные детали, что обеспечивает долговечность и надежность наших услуг. Наиболее распространенные поломки, с которыми сталкиваются владельцы iMac, включают проблемы с жестким диском, неисправности дисплея, проблемы с портами, неисправности программного обеспечения и проблемы с охлаждением. Для устранения этих поломок наши профессиональные техники оказывают ремонт жестких дисков, дисплеев, разъемов, ПО и систем охлаждения. Обратившись к нам, вы гарантируете себе надежный и долговечный мастерская по ремонту imac рядом. Подробная информация размещена на сайте: https://remont-imac-mos.ru
#6861 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
gama casino порно с Артемий Панарин (хоккей) <a href=https://strelochnik.com/>казино ставка</a> 1×bet зеркало слоты 1×bet xyz порно с Варвара Субботина <a href=https://repost.news/>1×bet официальный скачать</a> порно с Дронова Александра Викторовна porno Алена Косторная (фигурное катание) up casino скачать porno Марина Александрова 1×bet приложение porno Илона Маркова, хоккеистка black russia казино
#6862 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
В каждом казино с бездепозитным призом предусмотрены вейджеровые обстоятельства. Это единственный «подводный камень», который стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) сделать определённое количество ставок. Чем круче приз, тем сложнее выполнить обстоятельства, и напротив.Мы подготовили список, где есть постоянно актуальные и новые бездепозитные призы казино, коие возможность получить даром. Для наших пользователей есть особые предложения эксклюзивные бонусы, которые вы у не отыщите, их мы определили особой красной плашкой «Exclusive». <a href=http://filmkachat.ru/>1×slots коды</a> На бесплатные призы онлайн-казино почти практически распространяется ограничения по стране проживания клиентов. Даже в вас разрешено открывать счет и играть на средства в заведении, это еще не значат, что вас доступны no down payment bonuses.Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=https://webanketa.com/forms/6gtk2c9q74qpaeb368vked9s/>https://webanketa.com/forms/6gtk2c9q74qpaeb368vked9s/</a> Отыграв бездепозитный приз в казино с выводом также придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если схожее лимитирование присутствует, то единоразово вывести выйдет лишь необходимую, не превосходящую размер приобретенного бонуса.Подарки на праздники ? приуроченные к праздничным датам, требующие условного отыгрыша либо начисляются без это. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду. 1×slots промокод при регистрации 2025 <a href=http://tmwip-chelm.org.pl/profile.php?lookup=19068>http://tmwip-chelm.org.pl/profile.php?lookup=19068</a> Бездепы обычно предлагают с отыгрышем — быстро исключить выигранные свои нельзя. Перевод средств со счета будет вероятен в того, как пользователь выполнит все притязания казино, а сумма не быть выше установленного правилами лимита. Условиями акции фиксируются сроки, на которых клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней последствии активации.Многие игроки, оценив перечень казино, остаются выступать в нем и дальше ? на это и нацелено любое промо. Постоянные посетители вносят депозиты и проделывают ставки, обеспечивая долгосрочную выгода оператора. То есть, казино раздают бездепы новым пользователям для формирования лояльной аудитории.
1×slots сайт
В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, необходимо адресоваться в службу поддержки через лайв-чат на веб-сайте казино.Чем ниже велечину вейджера, тем легче отыграть и исключить приз. Если Вы расчитываете заработать на бездепе, но просто ознакомиться с свежим игровым клубом, то стоит избегать призов с высочайшим вейджером их почти не реально отыграть. С ними Вы можете лишь протестировать забавы заведения. <a href=http://swissairways-va.com/phpBB3/memberlist.php?mode=viewprofile&u=3495>1×slots официальный сайт зеркало</a> 1×slots официальный зеркало рабочее Но эти рамки не смущают даже хайроллеров, поскольку коэффициенты на слотах дозволяют рассчитывать на крупные выигрыши, а некоторых автоматах разыгрывается прогрессивный джекпот.Шаг 4. Активация. Внимательно исследуйте обстоятельства, информацию по лимитированиям и сроке деяния бонусного предложения. Разобравшись с правилами, можно активировать приз в собственном офисе (иногда ? с внедрением промокода) либо по запросу в саппорт. <a href=http://turkteam.10tl.net/member.php?action=profile&uid=1620>http://turkteam.10tl.net/member.php?action=profile&uid=1620</a> 1×slots рабочее зеркало на сегодня Такой казино бонус без депо за регистрацию выдается игроку на час и активно используется данное предложение с 2017 года. Это как бы некая маскировка поощрения под бездепозитный. Суть всего сего сводится к что, этому, собственно игроку на час выдается, к примеру, 1000 долларов, а реклама повторяет о том, что любой выигрыш можно будет в будущем забыть при для. Но если играющий всерьез отнесется к этому предложению, то он просто потеряет время. Ведь геймеру надо(надобно) несомненно играть не главном аккаунте, в тренировочном и с ограниченным выбором автоматов и ставок. Да и если, тогда, выигрыша (даже всей тыс. ) в верховодила вступят определенные обстоятельства, где несомненно сказано, что максимальной суммой победы возможность быть лишь двести $ и средства возможно использовать лишь в качестве бонуса на первый вклад с вейджером 25 от суммы вознаграждения плюс сам депо. По результату получится, что игрок выигрывал для 200% приз с вейджером на конкретную необходимую. Короче разговаривая, это все надо вашего времени.
1×slots регистрация на сайте
<a href=http://twchess.lionfree.net/discuz/home.php?mod=space&uid=27830>http://twchess.lionfree.net/discuz/home.php?mod=space&uid=27830</a> зеркала 1×slots Верификация аккаунта. Лучше доказать личность незамедлительно в регистрации, чтобы потом не было заморочек с выводом средств. Верификация может протекать двумя способами:
1×slots официальный сайт зеркало рабочее
В игровых клубах без лицензии Вы покупаете „кота в мешке“ и когда неоднозначных обстановок нет возможности куда-то пожаловаться и обосновать свою правоту.В настоящее время получить приз за регистрацию в казино очень просто. Почти каждый игорный жилище с готовностью предоставит деньги либо безвозмездные вращения. Многие игроки используют данным и не стесняются региться в каждом клубе с выгодными условиями. Кстати, это отличная вероятность выдумать выигрышную тактику и сорвать куш. 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=http://glax.org/bitrix/rk.php?goto=http://motoxp.ru/bitrix/click.php?goto=http://altendorf-rus.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/UYimtpJtxB8>http://glax.org/bitrix/rk.php?goto=http://motoxp.ru/bitrix/click.php?goto=http://altendorf-rus.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/UYimtpJtxB8</a> При использовании бездепозитным призом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют несколько обликов лимитов:Чем ниже велечину вейджера, что, этим легче отыграть и вывести приз. Если Вы расчитываете заработать на бездепе, не просто ознакомиться с новым игровым клубом, то стоит избегать бонусов с высочайшим вейджером их почти не реально отыграть. С ними Вы можете лишь протестировать игры заведения.
1хслот официальный сайт зеркало
К огорчению, нет. Почти все казино, требуют внесение желая бы одного малого депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, что исключить средства разрешено только на что, эту платежную систему, с которой был изготовлен депозит.Бездепы имеют заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами. <a href=https://xn----htbblufccvgdmek8j.xn–p1ai/forum/messages/forum1/topic926/message113300/?result=new#message113300>https://xn----htbblufccvgdmek8j.xn–p1ai/forum/messages/forum1/topic926/message113300/?result=new#message113300</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots Автоматическая активация первый самой комфортной, хотя ручной метод содержит перед ней достоинства. Прежде чем использовать вознаграждение от казино, стоит заранее определить, сколько времени потребуется на исполненье всех критерий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала действия приза.У любого игорного клубы различные вейджеровые условия. Чтобы вы гарантировано сумели выполнить их, мы дадим некоторое советов. Если система начислила маленькую необходимую, не стоит делать немалые ставки – остановитесь на 10–30 центах. Как только сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте выступать. В неприятном случае лучше присмотреться к иному автомату.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.sgomberisgombero.it/author/jamesapate/>1×slots регистрация 1×slots casino 777 online</a>
<a href=https://uyghuryol.com/forum/viewtopic.php?f=8&t=251686>1×slots официальный сайт зеркало</a>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5080/#comment-610599>1×slots на любой вкус как пройти регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Какие призы у еще получить кроме бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного бонуса, каждое онлайн казино предлагает игрокам выгодное предложение на 1-ый депо, вы совершаете депозит, ваш депо возрастает в двое либо даже в 3, что, этим наиболее начать выступать можно с больше солидной суммой, например же не забываем тему вейджер на бонусы.
#6863 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up casino online casino 7k <a href=https://res-publika.com>казино без</a> pinco casino карты казино <a href=https://m.repost.news/>1×bet слоты</a> 7k casino человек казино официальные сайты казино сайте букмекерской конторы фонбет бесплатные букмекерские конторы порно с Бондаренко Анастасия Борисовна букмекерская контора официальный сайт
#6864 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на официальном сайте
Казино выводит средства только на ту платежную систему, с котрой был сделан депозит. То есть, для вывода бездепозитного бонуса, Вам сначала необходимо восполнить счет. В неких клубах ограниченный перечень способов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с этих платежных методов, которые доступны для вывода. <a href=http://filmkachat.ru/>1×slot зеркало рабочее этих способов предполагает регистрацию</a> Oтыгpaть бонус с указанным вeйджepом, для этого необходимо сдeлaть cтaвoк нa cумму, превышающую объем приза в некоторое один.Прямо в заберите благотворительные вращения за регистрацию без депо и начинайте коллекционировать призовые композиции ради крупных выигрышей! <a href=https://blog.udn.com/G_112062930339362154/181391904>https://blog.udn.com/G_112062930339362154/181391904</a> 1×slots зеркало регистрация <a href=https://hallbook.com.br/blogs/229353/%D0%9F%D1%80%D0%BE%D0%B3%D1%80%D0%B0%D0%BC%D0%BC%D0%B0-%D0%B4%D0%BB%D1%8F-%D1%83%D1%87%D0%B5%D1%82%D0%B0-%D1%81%D1%83%D0%B4%D0%B5%D0%B1%D0%BD%D1%8B%D1%85-%D0%B4%D0%B5%D0%BB>https://hallbook.com.br/blogs/229353/%D0%9F%D1%80%D0%BE%D0%B3%D1%80%D0%B0%D0%BC%D0%BC%D0%B0-%D0%B4%D0%BB%D1%8F-%D1%83%D1%87%D0%B5%D1%82%D0%B0-%D1%81%D1%83%D0%B4%D0%B5%D0%B1%D0%BD%D1%8B%D1%85-%D0%B4%D0%B5%D0%BB</a>
1×slots коды
Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную процедуру активации приза без депо. Внимательно прочитайте до конца. Многие новенькие проделывают промахи на шаге регистрации и поэтому возможности получить презент. <a href=https://www.rusdrama-az.com/support/51-sluzhba-tehnicheskoy-podderzhki-sayta.html>1× slots зеркало</a> 1×slos регистрация в 1×slots casino Также бывают случаи, когда казино начисляет оговоренный бонус после регистрации нового посетителя по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам.У каждого игорного заведения свои управляла и условия. Но, чтобы получить призы, нужно выполнить стандартные деянья: <a href=http://www.haxorware.com/forums/member.php?action=profile&uid=280664>http://www.haxorware.com/forums/member.php?action=profile&uid=280664</a> B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.Подтверждение электрической почты – одно из ведущих условий, которое есть почти в каждом бездепозитном казино. Чтобы верифицировать электронную почту, довольно перебежать по интенсивной ссылке в письме, приобретенном от азартного клуба. 1хлот регистрация в 1×slots casino Можно ли в одном интернет казино получить больше 1-го бонуса за регистрацию? Нет, например как в каждом онлайн казино есть верховодила, к которым надо(надобно) держаться, не творить два аккаута для получения призов, другому несомненно блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, приз за регистрацию выдаеться раз один 1 личику.Также бывают случаи, когда казино начисляет обсужденный приз в регистрации нового клиента по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам.
рабочее зеркало 1хслотс
Чтоб получить большой выигрыш, избирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, которые доступны по условиям отыгрыша.Для тех, кто лишь подумывает испытывать собственную удачу, а также для профессиональных игроков, разыскивающих свежие площадки для выигрышей, основные лицензированные казино нередко устраивают различные акции, и лучшее услуг за последнее время – как для начинающих, например и для проф игроков – бездепозитный бонус за регистрацию. Также существуют онлайн-платформы азартных игр, коие применяют раздачу бездепозитных призов в особые даты (как для казино, так и для игрока). Помимо этого, действующие игроки того имеют возможность получить схожие бонусы за собственную деятельность (к примеру, за увеличения уровня либо за похожие заслуги).Главное превосходство спинов – вероятность изучить разные слоты. Также удастся насладиться бонусными раундами, испытать удачу в риск-туре и преувеличить выигрыш за счёт особенных знаков. Однако не игровой процесс заслуживает внимание, ведь превосходнее сосредоточиться на реальном выигрыше. <a href=https://hothdporn.pro/user/Stevenpheli/>https://hothdporn.pro/user/Stevenpheli/</a> рабочее зеркало 1хслотс Однако в условиях скрываются «подводные камни», коие не позволят исключить крупную необходимую либо же вы не успеете отыграть вейджер. Поэтому профессионалы рекомендуют отобрать бесплатные вращения за регистрацию в казино без депо, дабы поднабраться навыка и получить реальный шанс на победу.
1хслотс официальный сайт зеркало
2. Создать новый профиль. Для регистрации нужно заполнить небольшую анкету либо зайдите в индивидуальный офис при помощи соц сетей; Поспешите забрать бездепозитные призы за регистрацию в казино из представленного перечня. Все платформы не ведут законную деятельность, хотя и порадуют добросовестными результатами забавы, высочайшей отдачей, прыткими выплатами.Для получения бездепа нужно пригласить в забаву по реферальной ссылке свежего посетителя: он обязан зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на необходимую, обозначенную в критериях акции. 1×slots на любой вкус как пройти регистрацию <a href=http://www.ts-gaminggroup.com/member.php?651625-MycsgoMub>http://www.ts-gaminggroup.com/member.php?651625-MycsgoMub</a>
1×slots регистрация на 1хслотс
Бездепозитный приз предоставляется новенькому игроку за конкретные деяния. Часто подарок вид средств либо фриспинов выдается за регистрацию, благодаря чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.Если вы новичок деле и лишь попали в неизведанную вами область пыла — с помощью услуг как бездепозитные призы без пополнения. При использовании бездепозитным бонусом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют несколько обликов лимитов: <a href=http://soundpoolradio.de/profile.php?lookup=16465>http://soundpoolradio.de/profile.php?lookup=16465</a> Для всех бездепозитных бонусов действует наибольший предел на выигрыш. Он указывает предельную сумму, которую вас получить, играя на бонусные кредиты. Как лишь вас удастся выполнить требования вейджера, возможный максимум будет переведен с бонусного счета на главной, а остаток будет списан. 1×slots официальный зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://brilliance.ru/forum/viewtopic.php?f=6&t=41148>1×slot казино зеркало</a>
<a href=https://thetechmodders.com/forums/viewtopic.php?t=61048>1×slots официальный регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Многие игроки, оценив перечень казино, остаются выступать в нем и дальше ? на это и нацелено каждое рекламную. Постоянные посетители заносят депозиты и проделывают ставки, обеспечивая длительную прибыль оператора. То есть, казино выдают бездепы свежим пользователям для формирования лояльной аудитории.
#6865 Charlesgunnyhttp://filmkachat.ru
рабочее зеркало 1×slots
К образцу, игроку выдаются безвозмездные свои в заведении в объеме пятидесяти или ста $ (вейджер на коие сочиняет 100х). То есть, каждому новоприбывшему геймеру выскакивает притягивающая картинка, которая обещает выплату всех зачисленных фирмой средств. Не стоит заострять на казино приз за регистрацию без депо с сильно великий либо довольно малюсенькой суммой бонусов, поэтому что, числе тщательно исследовав все обстоятельства, здесь вероятнее всего, несомненно какой-то подкол.Существует ли стратегии для отыгрыша бездепозитных бонусов? К сожалению нет, на выигрыши либо проигрыши с призов, казино или игрок повлиять возможности, отдача игр происходит от создателей игр. <a href=http://filmkachat.ru/>1 x slots casino</a> Итак, дабы безвозмездные бонусные кредиты превратились в реальные деньги, которыми вы можете управлять по собственному усмотрению, их нужно отыграть. Вейджер стопам уточнять в правилах онлайн-казино.После требуется внести идентификационный платёж. Это пугает начинающих больше всего. Нужно устроить наименьший депозит в 100–500 рублей. Таким образом служба безопасности увериться что, что платёжный метод принадлежит Вам. Данная процедура важна для обеспечивания защищенности игровых счетов. Пример, Ваш акк взломают и выведут средства на свой кошелёк. Будет очень досадно. Поэтому верификация платёжной системы, это необходимый момент. <a href=https://www.emaze.com/@ALIWWWIIQ/looking-to-give-yourhome-a-stunning-makeover-house>https://www.emaze.com/@ALIWWWIIQ/looking-to-give-yourhome-a-stunning-makeover-house</a> Получить Бездепозитный бонус в онлайн казино дело 2-ух кликов. Другой момент, отыграть промо и соблюсти управляла и условия отыгрыша. Под правилами предполагается столько вагер, хотя и ограничения по максимальной ставке. Мы понимаем, что в кинотеатр все ставят на зеро и выигрывают. Призываем не создавать подобного. Перед активацией бонуса прочтите верховодила. Узнайте следующие моменты: Условия получения подарка, за регистрацию, за депо и прочее. Ограничения по максимальной ставке. Зачастую не выше 350 рублей. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на месте. Поэтому важно знать, в каких забавах можно совершать кратность валютного оборота. 1хслотс мобильная версия зеркало <a href=https://free-weblink.com/%D0%B1%D0%BB%D0%BE%D0%B3-%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0-%D1%8F%D0%BD%D0%B4%D0%B5%D0%BA%D1%81-%D0%B4%D0%B7%D0%B5%D0%BD_200461.html>https://free-weblink.com/%D0%B1%D0%BB%D0%BE%D0%B3-%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0-%D1%8F%D0%BD%D0%B4%D0%B5%D0%BA%D1%81-%D0%B4%D0%B7%D0%B5%D0%BD_200461.html</a>
1×slots официальный зеркало рабочее
Иногда у гостей вебсайта имеют появиться трудности, задачи, препядствия при активации полученного промо-кода. В этих случаях, необходимо обратиться за поддержкою в службу «Support». Для получения ответа, непременно указывается определенная причина воззвания и подтверждается информация дополнительными экрана. Если сложилась неоднозначная ситуация, всегда возможно обратиться к основному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ. 1×slots casino регистрация 1×slots review live Как верховодило, новоприбывшие игроки начала хотят ознакомиться с способами ввода и вывода денежных средств и сроки выполнения поданных заказов дабы четко осознавать, как скоро они смогут исключить собственный казино бонус за регистрацию без депозита на электронный кошелек или же банковскую карту. К счастью для всех играющих, внутри конкретных холдингов, все казино конкурируют между собой. Ведь если бы определенную фирму представляло лишь одно онлайн-заведение, то ли бы клиенты увидели казино с бонусом за регистрацию и могли бы рассчитывать только на вознаграждение в виде бонуса на 1-ое инвестиция. К каждому заведению периодически стопам завлекать свежих игроков, что, конечном, только на руку всем играющим.Заработать на бездепозитных призах за регистрацию в казино возможность любой юзер, достигший совершеннолетия. <a href=http://www.beretta-modelle.ch/forum/v_profile.php?user<userid>=48936&s=b9021a110de3397b60db5025a06018b6]http://www.beretta-modelle.ch/forum/v_profile.php?user<userid>=48936&s=b9021a110de3397b60db5025a06018b6</a> 1×slot рабочее зеркало Бонус с зачислением денег на счет выделяет больше свободы поступков. Пользователь сам подбирает, каким образом распорядиться подаренными своими. Здесь того все действовать ограничения на перечень дешевых игр, но обычно эти рамки не например строги, как в промо с бесплатными вращениями.
1×slots рабочее зеркало на сегодня
Вейджер (wager) – это коэффициент, кот-ый показывает на какую необходимую необходимо сделать ставок, дабы вывести приз из казино. Пример: Вы получили за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода этого бонуса, Вам необходимо сделать ставок на необходимую: 500*70=3500 руб. Только полностью отыграв приз, Вы можете вывести собственный выигрыш.Лишь известные и известные азартные заведения имеют разрешить себе раздавать бездепы повторяющий дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, которые можно израсходовать в лучших аппаратах с высокой отдачей. <a href=http://www.so0912.com/home.php?mod=space&uid=2220932>http://www.so0912.com/home.php?mod=space&uid=2220932</a> 1хслот официальный сайт зеркало Но есть игорные заведения, коие готовы просто например жертвовать деньги на игру. Для этого довольно сделать профиль. Чтобы вывести свой выигрыш, для поначалу необходимо выполнить условия отыгрыша, обозначенные в условиях получения бездепозитного депозита.
зеркала 1×slots
1×slots актуальное зеркало <a href=http://pr.lgubiz.net/bbs/board.php?bo_table=free&wr_id=1048203>http://pr.lgubiz.net/bbs/board.php?bo_table=free&wr_id=1048203</a> Бездепозитный бонус нередко возможность стать доступным незамедлительно после завершения регистрации, потому как единственным требованием к нему является регистрация, а этого проверка вашей новой учетной записи.Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция имеет подробные верховодила, ссылка на которые обыкновенно содержится в промообъявлении. В их указываются лимиты, вейджер, перечень дешевых игр. Если оператор укрывает данные о предложении, то пользоваться им не стоит.
1×slot зеркало рабочее регистрации на телефон придет
Фриспины предусмотрены для использования в видео слотах. Внимательно ознакомьтесь с критериями – частенько их выдают на кое-какие автоматы. В зависимости от клуба, у вас получится сделать определённое количество ставок. Кстати, продвинутые игорные дома разрешают запускать любых «одноруких бандитов».Список например называемых «запрещенных территорий» прилагается к правилам бонусной программы игорного портала. Обязательно выясните, распространяются ли на вас сходственные наказания. Бездепозитные бонусы — это подарки от казино повторяющий бонусных денег или фриспинов для игровых автоматов, которые начисляются на аккаунт игрока последствии процедуры регистрации на веб-сайте заведения. Для получения этих поощрений депозит не потребуется.За привлечение друга ? масштабах партнерской программы клиент получает вознаграждение за привлечение новых юзеров. <a href=http://www.tandemkf.com.ua/index.php?subaction=userinfo&user=wirypavillion91>http://www.tandemkf.com.ua/index.php?subaction=userinfo&user=wirypavillion91</a> Возможность поиграть дополнительное соревнование (а иногда и количество) абсолютно безвозмездно, а выигрыш, тому, поступает на счёт игрока. 1×slots регистрация 1×slotscasino09k online
<b>Смотреть еще похожие новости:</b>
<a href=http://weeklywars.de/viewtopic.php?f=12&t=1243&p=534200#p534200>1×slots зеркало сайта</a>
<a href=https://www.rusdrama-az.com/support/51-sluzhba-tehnicheskoy-podderzhki-sayta.html>казино 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Многие казино деют в маркетинговых целях безвозмездные бонусы необыкновенно для наших читателей. Чтобы их получить, надо(надобно) перебежать на игровой сайт по партнерской ссылке с нашего портала.
#6866 RobertBlamihttps://arenda-yahty-dubai.ru
яхта дубай <a href=https://arenda-yahty-dubai.ru/>яхта на прокат</a>
#6867 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Петрова Ольга Викторовна порно vodka casino <a href=https://t.me/vchkogpu_ru>порно с Алина Загитова</a> ramenbet casino скачать 1×bet на андроид <a href=https://glvk.guru/>1×bet приложение</a> casino online зеркало какие казино 1×bet 1 казино рублях порно с Евгения Медведева, фигуристка Лут Оксана Николаевна порно бк букмекерская контора
#6868 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт, скачать
Не трудно додуматься, что no deposit bonuses почти разу не посещают немаленькими. Чаще всего речь о пяти–тридцати баксах (или эквиваленте этой суммы в другой денежной).Каждый новичок и умелый игрок мечтают скоро стартануть и начать делать настоящие ставки. Для сего довольно забрать подарок, за который не нужно платить. В зависимости от игровой платформы, нужно сделать профиль, привязать email либо телефонный. После этого администрация начисляет щедрое вознаграждение повторяющий бесплатных вращений или виртуальных кредитов. <a href=http://filmkachat.ru/>1×slots регистрация на 1хслотс</a> Допустим, за регистрацию вы получили бездеп в размере 2 000 рублей с вейджером х30. В этом случае предстоит устроить ставок, на общую необходимую в 60 000 руб. (2 000 * 30 = 60 000). Когда выполните обстоятельства по отыгрышу, придёт время заработать реальные средства. Однако не запамятовывайте, собственно с любого презента выйдет исключить определённую сумму (почаще всего не более $200).2. Создать новый профиль. Для регистрации нужно заполнить небольшую анкету либо зайдите в собственный офис посредством соц сеток; <a href=https://www.thuum.org/viewthread.php?thread=8824>https://www.thuum.org/viewthread.php?thread=8824</a> При регистрации сомнений либо ином онлайн игральном заведении — для дается один шанс испытывать собственную удачу не внося средства монеты. Замечу что эту поощрительную предложение деют не все интернет игровые площадки, а лишь великодушная половина из их. Которые мы подготовили для Вас в нашем списке. 1×slots casino зеркало рабочее <a href=http://forum.cncprovn.com/members/179794-Kennethdycle>http://forum.cncprovn.com/members/179794-Kennethdycle</a> Заработать на бездепозитных призах за регистрацию в казино может любой пользователь, достигший совершеннолетия.Мы подготовили список, где есть всегда животрепещущие и новые бездепозитные призы казино, коие продоставляется получить бесплатно. Для наших пользователей есть специальные предложения эксклюзивные бонусы, которые вы нигде не отыщите, их мы определили специальной красной плашкой «Exclusive».
1×slots зеркало рабочее
казино 1× slots официальный сайт Условия, на которых предоставляется бездеп, регулируются казино. Каждая акция содержит подробные верховодила, гиперссылка на которые обычно находится в промообъявлении. В них указываются лимиты, вейджер, перечень доступных игр. Если оператор скрывает данные о предложении, то воспользоваться им не. <a href=https://agroinfo.biz.ua/wr_board/tools.php?event=profile&pname=Tyroneimmug>https://agroinfo.biz.ua/wr_board/tools.php?event=profile&pname=Tyroneimmug</a> Некоторые веб-сайты, до чем провести регистрацию игроков, предлагают ответить на несколько базовых вопросов. Цель проведения сходственной викторины – выявить случайных людей, которые не имеют представления о покере, и не разрешить получения ими призов. Если гость теснее играл в казино, то ответить на полтора десятка несложных вопросов будет нетрудно. Очень часто, ответы можно найти на официальных веб-сайтах данных учреждений.Для выбора азартного заведения Вы сможете пользоваться списком наших казино с призами за регистрацию. На нашем веб-сайте мы выпустили список бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, собственно часть призов неповторимые и доступны лишь для гостей нашего вебсайта по-специальному промо-коду или по оригинальной ссылке. Кроме как, для каждого приза мы подготовили подробный обозрение, каком Вы узнаете как получить и отыграть поощрение и как исключить свой выигрыш с бездепа. 1×slots официальный сайт, скачать
1×slots casino регистрация 1×slotscasino09k online
Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных требований, считая обязательной верификации. Если на сайте учтена обязательная процедура подтверждения личности, то вывести выигрыш удастся только после проверки данных. Приготовьтесь наполнить анкету и выслать в техподдержку документ, подтверждающий личность.Индивидуальные поощрения выдаются за совершение действий: подписку на аккаунты площадки в соц сетях, установку мобильного приложения или официального клиента для ПК. В большинстве казино действуют программы преданности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на следующий уровень часто сопровождается выдачей бездепа. Призовые начисления без депозита шансы предоставляться для участия в турнирах интернет казино. Потратить перечисленные деньги можно необыкновенно в данной промоакции. Условия их проведения в ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, превосходнее изучить его управляла.Так собственно можете отважно регистрироваться без всяких размышлений. Фортуна сегодня наверняка на вашей стороне. Не бойтесь, так следствие какого или убытка Вам совершенно не грозит. С этими призами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе. <a href=http://azad.az/user/Raymondmar>http://azad.az/user/Raymondmar</a> casino 1×slot
1хслот скачать
Будьте внимательнее при ознакомлении с правилами во избежание происхожденья конфликтных ситуаций с казино, когда в отыгрыша бездепа вас не дадут вывести солидную сумму выигрыша.4. Заберите подарок. Чаще всего бонус активизируется сразу последствии регистрации. Но посещают ситуации, когда надо(надобно) забежать в индивидуальный кабинет или написать в службу. 3. Подтвердить данные. В зависимости от клуба, нужно привязать телефон либо почту, указать персональную информацию; 1×slots официальный сайт скачать <a href=https://www.mom-ent.co.kr/bbs/board.php?bo_table=free&wr_id=1887385>https://www.mom-ent.co.kr/bbs/board.php?bo_table=free&wr_id=1887385</a> Ограничения по играм. Администрация запрещает игрокам некоторые игровые автоматы с бездепозитным призом, средствами либо безвозмездными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда деление выполняется по виду игр. Например, отыгрыш вероятен на всех игровых аппаратах, хотя запрещен в настольных играх и в разделе Live Casino.
1×slots зеркало быструю регистрацию а также мгновенное
Чаще всего интернет-казино предлагают бездепозитные бонусы свежим юзерам. Эта промо-акция довольно отлично привлекает новичков, подталкивая их к открытию счета. Конечно, не они становятся преданными клиентами, хотя сам факт регистрации аккаунта играет на руку заведению. <a href=http://metabolichealthdigest.com/user/jeffreyjaf/?um_action=edit>http://metabolichealthdigest.com/user/jeffreyjaf/?um_action=edit</a> 1×slots коды
<b>Смотреть еще похожие новости:</b>
<a href=https://orbitsound.com/forum/user-211634.html>1×slots казино зеркало</a>
<a href=https://www.donchillin.com/space-uid-382497.html>1×slots рабочее зеркало на сегодня</a>
<a href=http://forum.audioheritage.net/memberlist.php?mode=viewprofile&u=19451>1×slots рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выбирая бесплатный бонус, внимательно изучайте верховодила. Убедитесь, что для возможно себя роль в промоакции. Уточните, в каких забавах возможно исполнять обстоятельства вейджера. При необходимости задавайте вопросы адептам саппорта.
#6869 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало этих способов предполагает регистрацию
На бесплатные бонусы онлайн-казино практически постоянно распространяется лимитирования по стране проживания клиентов. Даже в для разрешается раскрывать счет и выступать на средства в заведении, это еще не значат, что вас доступны not the slightest down payment bonuses.Бывают ли бездепозитные бонусы без вейджера? Бывают, случае у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный бонус за регистрацию уточняется вейджер во всех казино. <a href=http://filmkachat.ru/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> <a href=https://blog.udn.com/G_112062930339362154/181391691>https://blog.udn.com/G_112062930339362154/181391691</a> Получать информацию о самых выгодных призах возможно без постоянного прогноза новостей казино. Мы взяли данную задачку на себя и непрерывно следим за предложениями операторов, выбирая превосходнейшие из их. В данном разделе собраны последние бездепы, промокоды к ним и условия их активации. Список промоакций регулярно пополняется. В топ зашли самые новые бездепозитные призы за регистрацию в казино 2020, временные и закрытые рекламную. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и критериям. Если срок действия промоакции истек, она удаляется из списка.Бездепы с бесплатными вращениями предоставляют юзерам право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд уплачивает казино. Число спинов ограничено и редко выше сотку. Если акция содержит количество безвозмездных игр, их начисление может быть разбито на несколько дней. 1×slots актуальное зеркало <a href=https://woodmancx.com/user/AnthonySouri/>https://woodmancx.com/user/AnthonySouri/</a> В бонусную программу множества операторов входят регулярные бездепы. Это пожизненные промоакции, поощряющие интенсивных постоянных игроков. Популярный формат — раздача фриспинов по конкретным денькам недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депозита в обмен на скопленные баллы преданности.
1х слотс зеркало регистрация в 1×slots casino
Размер ставки для игры по бездепозитному бонусу (естесственно же, если, тогда,, когда он представлен в виде бонусных валютных средств) зачастую ниже, чем при этой на депозит. Ограничение будет работать до этапа отыгрыша приза. 1×slots официальный зеркало Для верификации номера телефона, в личном профиле выберите опцию „Подтвердить номер аппарата“ и введите в соответствующее фон код, полученный в sms-сообщении.Автоматическая активация на самой удобной, но ручной метод имеет перед ней достоинства. Прежде чем применять вознаграждение от казино, стоит заранее найти, сколько медли требуется на исполнение всех критерий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала действия бонуса. <a href=http://camillacastro.us/forums/profile.php?id=168012>http://camillacastro.us/forums/profile.php?id=168012</a> 1× slots регистрация в 1×slots casino
1×slots регистрация 1×slotscasino 56 online
После получения приза вывод средств для клиента несомненно недоступен до тех пор, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя или пара недель. Выводить деньги игрок сможет лишь в отыгрыша. Размер ставки для игры по бездепозитному бонусу (окончательно же, когда, когда он представлен вид бонусных валютных средств) часто ниже, чем при забаве на депо. Ограничение будет действовать до этапа отыгрыша приза. <a href=https://www.dmxzone.com/support/13984/topic/131294/>https://www.dmxzone.com/support/13984/topic/131294/</a> Если вы новичок данном и только попали в неизведанную вами район пыла — с помощью услуг как бездепозитные призы без пополнения. 1 xslots рабочее зеркало 1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, в не желайте замерзнуть жертвой жуликов или впустую истратить время;Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.
1×slots официальный сайт скачать на айфон
Для получения депозитного приза необходимо восполнить свой игровой баланс настоящими средствами. Вознаграждение возможно получить или при внесении первого депозита, либо вид фиксированного процента от внесённых средств. Так или по, приз поступит на счёт только в пополнения.Бонус за регистрацию в казино без депо с выводом денег нужно отыграть. Зачастую для отыгрыша имеет понадобиться сделать ставки на сумму, в количество десятков раз превышающую необходимую бонуса или выигрыша. Сроки активации бонуса устанавливаются любым казино, хотя почаще всего они не превосходят недели с этапа получения. Игроку обязательно надо(надобно) применять бездеп протяжении указанного срока, в ином случае приз просто исчезнет. Каждый приз можно получить только один раз, поэтому в не использовать бездеп в срок, у игрока не несомненно второго шанса им пользоваться. 1× slots casino официальный сайт <a href=http://xn–e1aoddcgsc8a.xn–p1ai/member.php?action=profile&uid=55614>http://xn–e1aoddcgsc8a.xn–p1ai/member.php?action=profile&uid=55614</a> Если вы избираете проверенное лицензионное онлайн казино и сделайте все обстоятельства получения бездепозитного приза, трудностей с получением дара у Вас не возникнет.
1хслотс рабочее зеркало
В случае установленного лимита на сумму вывода выигрыша с бездепозитного бонуса, игрок не может исключить больше заявленной суммы. <a href=http://arts.gpaeburgas.org/profile.php?uid=12571>http://arts.gpaeburgas.org/profile.php?uid=12571</a> Итак, дабы безвозмездные бонусные кредиты трансформировались в настоящие деньги, которыми продоставляется управлять по собственному усмотрению, их надо(надобно) отыграть. Вейджер стопам уточнять в правилах онлайн-казино. 1×slots регистрацию более популярный вариант это Фриспины – бесплатные вращения с фиксированной ставкой, коие возможно использовать в определенных игровых автоматах.Прямо данный отберите безвозмездные вращения за регистрацию без депо и начинайте коллекционировать призовые комбинации из-за солидных выигрышей!
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=300062#pid300062>1хслотс официальный сайт зеркало</a>
<a href=https://minifishtank.net/forum/showthread.php?tid=704>1× slots зеркало</a>
<a href=https://karakol.com.kg/user/Jameskef/>1×слотс казино</a>
<a href=https://timepost.info/showthread.php?tid=41824>1×slots официальный сайт скачать</a>
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1941#post-55309>1хслот зеркало сайта</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Некоторые веб-сайты, прежде чем обмануть регистрацию игроков, предлагают ответить на количество базовых вопросов. Цель проведения похожей викторины – выявить случайных людей, коие не имеют представления о покере, и не разрешить получения ими бонусов. Если гость теснее играл в казино, то ответить на полтора 10 простых вопросов несомненно несложно. Очень нередко, ответы можно найти на официальных веб-сайтах данных учреждений.
#6870 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino зеркало сегодня рабочее 1×bet сайт 1×bet xyz <a href=https://m.repost.news/>скачать сайт букмекерской конторы</a> слот casino официальные сайты казино <a href=https://krtka.info/>1×bet официальный сайт</a> pinco casino казино фильм онлайн пинап казино порно с Каролина Севастьянова бывшие казино казино онлайн win win casino
#6871 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
new casino Шевцова Татьяна Викторовна порно <a href=https://vestnik-jurnal.com/>up casino официальный</a> бк букмекерская контора пинко casino <a href=https://rucriminal.info/>Яровая Ирина Анатольевна порно</a> букмекерская контора бетсити порно с Захарова Мария Владимировна Черкесова Бэлла Мухарбиевна порно казино на деньги porno Юлия Канакина, скелетонистка 1×bet официальный скачать букмекерскую контору
#6872 Charlesgunnyhttp://filmkachat.ru
зеркло казино 1×slots
Иногда в бездепа, казино презентует наименьший приз (до 50 рублей), ради которого не стоит заморачиваться.Онлайн-казино кропотливо продумывают бонусные условия, которые нужно выучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и другие ограничения. <a href=http://filmkachat.ru/>1× slots зеркало</a> Реже бонусы без депо начисляются постоянным игрокам. С их помощью администрация старается удержать ценных посетителей либо вожделеет поблагодарить за лояльность правильных гостей. Но гораздо чаще для сходственных целей используются такие акции: <a href=https://xiglute.com/blogs/20607658/203148/mastering-the-art-of-professional-home-design-drafting-a-moder>https://xiglute.com/blogs/20607658/203148/mastering-the-art-of-professional-home-design-drafting-a-moder</a> Казино выделяет возможность заработать и вывести настоящие деньги на бездепозитных бонусах. Обычно, это незначительная сумма, которую казино имеет себе разрешить презентовать игроку. 1хслотс официальный сайт зеркало <a href=https://giga2026.com/home.php?mod=space&uid=4189659>https://giga2026.com/home.php?mod=space&uid=4189659</a> Главное превосходство спинов – возможность изучить различные слоты. Также удастся насладиться бонусными раундами, испытать удачу в риск-туре и преувеличить выигрыш за счёт особых знаков. Однако не игровой процесс заслуживает внимание, как лучше сосредоточиться на реальном выигрыше.
1×slots казино зеркало
1×slot официальный сайт <a href=http://l-avt.ru/support/dialog/?PAGE_NAME=profile_view&UID=58083>http://l-avt.ru/support/dialog/?PAGE_NAME=profile_view&UID=58083</a> Например, игрок получил 500 рублей при разработке аккаунта и должен отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 руб., понадобится сделать 875 спинов для полного отыгрыша. 1хслот официальный сайт зеркало Даже не выиграв крупную необходимую, игрок интересно проведет время, изнутри выучит работу площадки, воспримет геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе лучших акций с. Достаточно периодически учить список новых интернет казино с выводом бонуса без депо в данном разделе.
1хслот официальный сайт зеркало
Некоторые онлайн-казино без депозита предлагают свежим посетителям выбрать бонус при регистрации. Будьте внимательны: выбрав раз, вы в абсолютном большинстве случаев не сможете воспользоваться остальными.Благодаря программе преданности от игорного заведения, можно взять неплохой старт и без добавочных вложений запустить видеослоты. Кроме как, можно рассчитывать на реальную фортуну и получить, без вложения собственных денег, великий выигрыш. <a href=http://www.neworleansbbs.com/home.php?mod=space&uid=265268>http://www.neworleansbbs.com/home.php?mod=space&uid=265268</a> Иногда в качестве одобрения за регистрацию все выдаваться билеты для участия в турнирах. Условия их проведения очень выделяются, потому мы советуем ознакомиться с каждым предложением раздельно.В списке притязаний к отыгрышу часто наличествуют лимиты на ставки при этой на личные средства. Так, если отыграть нужно 30 000 рублей, а максимальная сумма ограничена 30 рублями, то вращать барабаны светит 1000 раз. Эта особенность затрудняет соблюдение игроками условий по срокам деянья промоакции. 1хслотс казино зеркало Бонус за регистрацию в казино без депозита с выводом средств нужно отыграть. Зачастую для отыгрыша может понадобиться сделать ставки на сумму, в несколько 10-ов один превышающую необходимую приза либо выигрыша.В некоторых интернет казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на веб-сайте клуба и доказать средства контактные данные. Дополнительно требуется активация промокода.
1×slots casino регистрация 1×slotscasin online
<a href=https://ragnarok.ch/forum/viewthread.php?thread_id=126535>онлайн казино 1×slots</a> Бездепы с бесплатными вращениями предоставляют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд уплачивает казино. Число спинов ограничено и изредка выше сотню. Если промоакция включает в себя большое даровых игр, их начисление может быть разбито на некоторое дней. Возможность протестировать свежие игры, не рискуя собственными средствами и разработать личную тактику забавы.Прежде всего, не запамятовывайте регулярно заглядывать на страничку обзоров бездепозитных призов. Они шаг за шагом оценивают наиболее занимательные предложения ведущих игорных порталов. 1хслотс зеркало <a href=https://e-puzzle.ru/forum/index.php?showuser=64435>https://e-puzzle.ru/forum/index.php?showuser=64435</a>
скачать 1×slots на андроид мобильная версия
Предложения с бездепозитными призами за регистрацию разрешают свежим заведениям привлечь аудиторию на свой сайт. А игроки же получают вероятность играть на реальные деньги без депо в казино и заработать малый стартовый капитал, который разрешается исключить на карту банка либо электрический кошелек. Выбирая даровой бонус, пристально изучайте верховодила. Убедитесь, что вас возможно на участие в промоакции. Уточните, в каких забавах можно выполнять обстоятельства вейджера. При надобности задавайте вопросы адептам саппорта. <a href=https://halqym.kz/user/Raymondunags/>https://halqym.kz/user/Raymondunags/</a> Да, у бесплатных бонусов есть недостатки. Прежде всего, они обычно не. Кроме того, обстоятельства вейджера по ним всегда жесткие. Но все отсутствие риска проделывает их очень привлекательными для посетителей. 1хслотс зеркало Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?В бонусную программку многих операторов входят регулярные бездепы. Это пожизненные промоакции, поощряющие интенсивных неизменных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают постоянные бонусы без депозита в размен на накопленные баллы лояльности.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.cvetq.info/memberlist.php?mode=viewprofile&u=17326>1×slots регистрация 1×slots casino 777 online</a>
<a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=74587&pid=126049#post_126049>1×slots промокод при регистрации</a>
<a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=143681>1×slot казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Также учтите, собственно кое-какие игровые платформы сужают список государств, коие способны получить предложенный бездепозитный бонус за регистрацию. К образцу, есть онлайн-заведения, выдающие похожие призы лишь обитателям определенных стран. К образцу, онлайн казино 777 Оригинал дает бездепозитный приз только игрокам из России и стран СНГ. Или наоборот, снабжают вознаграждением всех, считая обитателей некоторых стран (как сего, следует внимательно изучать перечень, дабы потом не возникло практически вопросов и претензий).
#6873 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Максим Глушенков (футбол) pinco casino <a href=https://rhymes-punches.com/>пин casino</a> Фастова Елена Владимировна порно включи казино <a href=https://strelochnik.com/>casino скачать приложение</a> порно с Бондаренко Анастасия Борисовна casino com порно с Ирина Сидоркова 1×bet официальный сайт 1×bet xyz пина casino casino регистрации официальные букмекерские конторы скачать
#6874 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало
Бонусные деньги – небольшая сумма денег для старта в новом казино. На бонусные деньги, обыкновенно разрешается играть во все забавы, считая слотов с прогрессивным джекпотом и игр из раздела live casino. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> <a href=https://www.friend007.com/forums/thread/7390/>https://www.friend007.com/forums/thread/7390/</a> 1×слот регистрация в 1×slots casino <a href=http://pro-tulu.ru/users/tallsale3>http://pro-tulu.ru/users/tallsale3</a> На бонусные начисления все быть установлены дополнительные ограничения, коие Вы не приняли при отыгрыше. Пока бонус всецело не отыгран — деньги из казино не выводятся.
1хслотс рабочее зеркало на сегодня
Для верификации аккаунта надо(надобно) дать профессионалам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, еще фотографию банковской карты или экрана страницы электронного кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для доказательства личности.Максимальный размер ставки, который невозможно превосходить пока приз не несомненно полностью отыгран. В случае нарушения сего верховодила, приз и выигрыш с него станут аннулированы. x1 slots 1хслотс регистрация перейти на 1×slots <a href=http://mk.xyuanli.com/home.php?mod=space&uid=53514>http://mk.xyuanli.com/home.php?mod=space&uid=53514</a> Основное правило получения бездепа ? творимый аккаунт обязан быть у пользователя первым и единственным. Наличие нескольких аккаунтов строго воспрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита необходимо блюсти несложную последовательность деяний.При регистрации по указывать лишь достоверную информацию. Когда учетная запись несомненно активна, будет доступ в Личный кабинет. В нем возможно избрать денежную, ввести промокод и разузнать подробные правила получения и отыгрыша бездепа. Краткая информация об промоакции часто присутствует непосредственно на регистрационной форме. зеркло казино 1×slots Бездепозитные бонусы – это исключительно небезинтересная и более перспективная акция интернет-казино. Они в другого, как фри-спинов, потому что выплаты в бесплатных вращениях не гарантированы, как композиции на барабанах игрового аппарата могут не сложиться.В онлайне очень большое скриптовых сайтов, которые принадлежат мошенникам. Их основная задача – заинтересовать гэмблеров, пообещав столько щедрые презенты, но и солидные выигрыши. Так что некоторые сайты предлагают получить за регистрацию даже $1 000.
1×slos регистрация в 1×slots casino
Ознакомьтесь с нашим перечнем превосходнейших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего перечня и получите бездеп сразу. Хватайте наилучшие бесплатные предложения ниже и выигрывайте большие средства, не рискуя! <a href=http://edusegogal.edufinancierafcpc.com/index.php/forum/suggestion-box/287491-green-walnut-buy-in-a-pharmacy>http://edusegogal.edufinancierafcpc.com/index.php/forum/suggestion-box/287491-green-walnut-buy-in-a-pharmacy</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots
1×slots официальный сайт скачать
Используйте превосходнейшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из списка ниже, чтобы заработать подарки за обычные деянья теперь сейчас получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и резвыми выводами на электронные кошельки. Классическая разновидность приза за создание аккаунта. Его преимущество заключается что, нет, что клиент возможность без подбирать аппараты и делать ставки в их. Иногда перечень игровых автоматов ограничен оператором, но все равно это превосходнее, чем один-единственный доступный слот, как если, тогда, с внедрением фриспинов. 1×slots официальный сайт мобильная версия <a href=https://mcpe.ru.net/user/Ralphgox/>https://mcpe.ru.net/user/Ralphgox/</a>
1×slots бонус за регистрацию
Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, дабы еще раз получить безвозмездный бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ожидает неизбежное наказание.Для отыгрыша бонуса казино обязует игрока поиграть на необходимую, в некоторое раз превосходящую сумму полученного бонуса — здесь выгода компании явна. <a href=http://xn–ok0bw7u60ff7e69dmyw.com/bbs/board.php?bo_table=free&wr_id=17705>http://xn–ok0bw7u60ff7e69dmyw.com/bbs/board.php?bo_table=free&wr_id=17705</a> Онлайн-казино с бездепозитными призами ставят клиентам обстоятельства для пользования бездепами, поэтому перед ролью в промоакции чем досконально ознакомиться со всеми правилами и нюансами акции. Условия имеют касаться получения приза, его использования и следующего вывода денежных средств в случае выигрыша.В интернете количество известных игорных площадок с красивыми акционными услугами. Однако пристально разбирать обстоятельства десятков предложений времени надоест, ну и время отнимет много. Поэтому наша команда подготовила ТОП-3 вебсайтов с наихорошими бездепозитными бонусами: 1×slots casino регистрация 1×slots review live Так собственно приготовьтесь дать секретную информацию (пол, возраст, государство проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает не более суток, последствии чего удастся свободно выводить крупные выигрыши.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1хслотс казино зеркало</a>
<a href=https://forum.bandariklan.com/member.php?action=profile&uid=13758>1×slots зеркало которую указывали при регистрации кстати</a>
<a href=http://khodaumo.com/forum/viewtopic.php?f=2&t=76770&sid=239ab9fcb8312f87ed2830b42fff94d2>1хслотс официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Срок активации и время на отыгрыш. Зачисление денег либо фриспинов происходит при активации протяжении строго ограниченного периода, подобные требования предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать приз несколько дней либо в недель. Другие выдают крупную необходимую за регистрацию, но время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером. Можно ли в одном интернет казино получить больше 1-го бонуса за регистрацию? Нет, например как в каждом онлайн казино есть верховодила, к коим нужно держаться, не создавать два аккаута для получения призов, по будет блокировка обоих аккаутов, не пытайтесь обмануть онлайн казино, бонус за регистрацию выдаеться раз раз одному личику.
#6875 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Мира Андреева (теннис) сайте букмекерской конторы фонбет <a href=https://strelochnik.com/>порно с Илюшникова Татьяна Александровна</a> порно с Зырянова Анастасия Владимировна casino автомат <a href=https://rumafia.news/>порно с Бондаренко Анастасия Борисовна</a> online casino Самойлова Алла Владимировна порно 1×bet сейчас casino бонус bet casino 1×bet слоты 1×bet xyz официальная казино
#6876 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало
В онлайне много знаменитых игорных площадок с красивыми акционными услугами. Однако пристально читать обстоятельства 10-ов услуг скором надоест, да и время отнимет количество. Поэтому наша команда подготовила ТОП-3 вебсайтов с наихорошими бездепозитными бонусами:Бонус начисляется игроку сразу в регистрации и прохождения верификации в казино и не просит от клиента внесения депозита. Как управляло, размер приза в схожем случае достаточно скромный, однако разрешает новичкам познакомиться с забавой без риска настоящими средствами. <a href=http://filmkachat.ru/>1хслот зеркало сайта</a> В современность довольно просто получить приз за регистрацию в казино. Практически каждый игорный жилище с готовностью начислит деньги или безвозмездные вращения. Многие гэмблеры пользуются данным и не стесняются региться в каждом клубе с выгодными критериями. Кстати, это замечательная вероятность выработать победную стратегию и сорвать джекпот.Активация случается счет промокодов, которые вводятся в собственном кабинете после регистрации. Среди спецпредложений в перечне Casino.ru находятся неповторимые промокоды, коие доступны только гостям портала. Другие способы начисления средств ? автоматическая активация незамедлительно в творения аккаунта и получение презента по запросу в службу технической поддержки. <a href=https://diigo.com/0y2r9w>https://diigo.com/0y2r9w</a> 1×slots регистрация на 1хслотс <a href=https://sex18babes.com/user/Oscarmilia/>https://sex18babes.com/user/Oscarmilia/</a>
онлайн казино 1×slots
1×slot зеркало рабочее регистрации на телефон придет <a href=http://www.baohaibbs.com.cn/home.php?mod=space&uid=37821>http://www.baohaibbs.com.cn/home.php?mod=space&uid=37821</a> Наличие у игрока 2 аккаунта. Запрещено создавать некоторое профилей для неоднократного получения бездепов. скачать 1×slots на андроид мобильная версия
1хслотс официальный сайт зеркало
<a href=http://web.symbol.rs/forum/member.php?action=profile&uid=726611>http://web.symbol.rs/forum/member.php?action=profile&uid=726611</a> Лишь знаменитые и знаменитые азартные заведения все позволить себя выдавать бездепы в виде добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, которые возможно израсходовать в лучших аппаратах с высокой отдачей.Основное управляло получения бездепа ? создаваемый акк должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов требовательно воспрещено. Проверка ведется по имени, e-mal, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депо нужно соблюдать простую последовательность поступков. 1 x slots casino Наличие у игрока второго аккаунта. Запрещено создавать количество профилей для неоднократного получения бездепов.
1×slots казино мобильная версия
1хслотс регистрация в 1×slots casino <a href=http://cheapbooks.cc/memberlist.php?mode=viewprofile&u=40191>http://cheapbooks.cc/memberlist.php?mode=viewprofile&u=40191</a>
1×slots быструю регистрацию а также мгновенное
Существуют казино с бонусом за регистрацию, каких довольно известны фриспины в онлайн казино впоследствии регистрации в определенных забавах. Они встречаются и почаще бесплатных поощрений либо классических призов в казино без вложений. Например, игрок регистрирует счет, на который начисляются безвозмездные игры, бонус за регистрацию в виде бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса игры выигрывает истинные средства, коие в последствии возможно успешно исключить из заведения на свою платежную систему. То есть, есть все шансы вывести средства без рисков собственными финансами. Регистрация, за которую игрок получит призы, займет пару минут, а спасибо этому возможно прирастить 5 евро поощрений до тысячи и без всяких проблем исключить их.Также, учите, собственно бездепозитный приз возможно вывести лишь в случае, когда станут выполнены все обстоятельства отыгрыша. Иногда для получения призов нужно спутаться с представителями службы поддержки. Удобнее всего с ними разговаривать в онлайн-сате, желая иногда достаточно запроса по электрической почте. <a href=http://www.vintageampeg.com/forum/member.php?action=profile&uid=7121>http://www.vintageampeg.com/forum/member.php?action=profile&uid=7121</a> 1хслот 1хслотс регистрация перейти на 1×slots Бездепозитные призы казино за регистрацию в 2022 году — это вероятность сыграть за счёт заведения. Казино даёт клиенту шанс пользоваться определённой суммой или количеством даровых вращений без внесения депо. Не путайте деморежим с реальной забавой без надобности внесения депозита.
<b>Смотреть еще похожие новости:</b>
<a href=https://your-portal.at.ua/forum/67–61286–18#88187>1×slots подтвердит вашу регистрацию если говорить</a>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-4973/#comment-593625>1хслотс регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Как правило, при выводе финансов, от играющего требуется только сделать наименьший вклад чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом индивидуальный счет.
#6877 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino pin официальный 7k casino <a href=https://kompromat1.online/>казино фильм</a> скачать 1×bet на андроид porno Светлана Ходченкова <a href=https://th-royalgclub.com/>pin up casino официальный</a> 1×bet сайт 1×bet xyz Александра Бортич официальная казино kent casino регистрация 7k casino зеркало рабочее casino официальный сайт casino официальный зеркало
#6878 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация то дальше необходимо пройти
Бездепозитный приз казино 2022 с выводом за регистрацию предоставляет возможность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и проверить качество работы саппорта. Довольно нередко, начиная игровой процесс, игрок уже отказывается останавливаться и проделывает настоящий лепта. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть безвозмездно вероятно как раз таки с бонусом за регистрацию без надобности вносить депозит. <a href=http://filmkachat.ru/>1 x slots casino</a> Варианты выигрыша в от Вашей удачи и условий игорного портала. Выше мы сказали, собственно некоторые бездепозитные призы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются и, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность современных игр на средства, можно выиграть невероятные суммы. Сегодняшние игровые автоматы либо видео слоты, как их называют. Могут выдавать солидные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000. <a href=https://vhearts.net/forums/thread/8949/>https://vhearts.net/forums/thread/8949/</a> Бесплатный бонус – кредиты, которые онлайн-казино начислит клиенту, не заставляя его пополнять игровой счет. 1х слот регистрация в 1×slots casino <a href=https://brocollective.com/users/richardbip/>https://brocollective.com/users/richardbip/</a>
1×slots официальный сайт скачать на айфон
Для отыгрыша бонуса казино обязует игрока поиграть на сумму, в некоторое раз превышающую необходимую полученного приза — тут выгода фирмы очевидна. казино 1×slots Бонус за регистрацию в казино без депо с выводом денег нужно отыграть. Зачастую для отыгрыша возможность потребоваться устроить ставки на сумму, в некоторое 10-ов один превосходящую сумму бонуса либо выигрыша.С не отыгранным бонусом запрещается превышать размер наибольшей ставки. Нарушение сего обстоятельства повлечет за собой аннулирование выигрыша. <a href=https://love-n-magic.ru/index.php?subaction=userinfo&user=Harrylag>https://love-n-magic.ru/index.php?subaction=userinfo&user=Harrylag</a> 1 xslots рабочее зеркало
1×slots актуальное зеркало
Как лишь вы отыграли вейджер и средства с бонусного баланса перешли для на настоящий счет, Вы отважно можете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (сделать минимальный депозит к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депо). Шаг 5. Использование и отыгрыш. Бездеп должен быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.Операторы гемблинга заявляют, что например они дерутся с бонус-хантерами. Впрочем, критики считают, что данным казино пытаются устроить из случайного гостя неизменного игрока. <a href=http://hotnews.lv/index.php?subaction=userinfo&user=selectivejoker9>http://hotnews.lv/index.php?subaction=userinfo&user=selectivejoker9</a> Онлайн гемблинг развивается с каждым днем все больше и больше, свежие бренды создаются не по денькам а по часам. Новые онлайн казино делают вступительные акции для игроков, для того собственно бы зарекомендовать себя, и что, этим самым предлагают бездепозитные бонусы за регистрацию, что бы не пропустить такую вероятность — как воспользоваться свежим бездепом, рекомендуем посещать наш сайт как возможно почаще, самое вкусное и новые будет добавляться в данном же перечне. 1×slot казино зеркало Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются сразу последствии творения профиля и активны непродолжительное время. Если не успеете израсходовать средства, они попросту сгорят. Касаемо времени, в большинстве случаев бонусы активны на часа.Когда идет о получении бездепозитных бонусов в казино, для обратите внимание на последующие условия:
1×slots рабочее зеркало на сегодня
Бездепозитные призы казино это финансовая компенсация, предлагаемая пользователям на дармовой базе и вероятность играть в онлайн казино даром. Если сравнивать их с одобрениями за лепта, каких средства выдаются лишь потом начального пополнения счета, то бездепозитные гонорары получаются бесплатно. То есть, играющий получает вероятность делать ставки на теснее существующие деньги, которые выдаст заведение, выполняя, при, обычные деянья, дабы их извлечь (тут речь о регистрация, удостоверении личности с внедрением номера аппарата, дизайна заказы и т.д. ).Представьте момент, когда при ставке в 10 руб. Вы получите схожее умножение. Миллион рублей за одно вращение, собственно абсолютно вероятно. Поэтому вопрос, сколько возможно выиграть остаётся закрытым. Предлагаем выяснить самостоятельно. Регистрируйтесь в одном или нескольких онлайн казино, получайте Бездепозитный бонус и проверяйте фортуну в деле. Разумеется, вывести деньги не так просто. Однако шансы есть у всех. Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. 1×slots сайт <a href=https://games-garant.ru/index.php?subaction=userinfo&user=TyroneSam>https://games-garant.ru/index.php?subaction=userinfo&user=TyroneSam</a>
1хслот официальный сайт зеркало
Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Фриспины начисляются по конкретной ставке. После их активации игроку необходимо запустить разъем и увериться, собственно в нем отображаются благотворительные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода последствии отыгрыша определяется оператором и редко превышает 5 000 руб. <a href=http://tools174.ru/bitrix/redirect.php?goto=http://mr-wheels.ru/bitrix/click.php?goto=http://as-pigments.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/c_W3GpBiuIg>http://tools174.ru/bitrix/redirect.php?goto=http://mr-wheels.ru/bitrix/click.php?goto=http://as-pigments.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/c_W3GpBiuIg</a> Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, дабы еще раз получить даровой бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ждет неминуемое санкция. 1×slots зеркало сайта Перечисленные повыше основные свойства сопровождают фактически любой бонус и считаются стереотипными для бездепозитных бонусных начислений в казино.
<b>Смотреть еще похожие новости:</b>
<a href=https://test.soclanovtsy.ru/topic/26973-chicago-house-samples-loops-sounds/page/200/#comment-64922>1×slots casino зеркало</a>
<a href=http://3ak.cn/home.php?mod=space&uid=187057>1×slots коды</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для ревизии используются сканы паспортов, водительских прав, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если пользователь замечен в попытке ввести дополнительный акк, все его учетные записи подвергаются блокировке, а их владелец попадает в черный перечень. При этой на лицензионной площадке не опасаться указывать достоверную индивидуальную информацию (шифрование исключает утечку персональных данных).
#6879 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino онлайн porno Андрей Рублев (теннис) <a href=https://rhymes-punches.com/>1×bet зеркало слоты 1×bet xyz</a> скачать букмекерскую контору на андроид букмекерская контора мостбет <a href=https://res-publika.com>1×bet сейчас</a> 1×bet зеркало слоты 1×bet xyz порно с Евгения Медведева, фигуристка champion casino порно с Голикова Татьяна Алексеевна пина casino казино проиграл porno Дарья Мороз
#6880 Charlesgunnyhttp://filmkachat.ru
1×slots на любой вкус как пройти регистрацию
Ну и естесственно же, для казино бездепозитные призы выгодны с имиджевой стороны: сходственная щедрость повышает степень преданности посетителей к компании. <a href=http://filmkachat.ru/>1×slots регистрация на 1хслотс</a> <a href=https://bresdel.com/blogs/806517/Mastering-Interior-Shop-Drawings-From-Concept-to-Construction-Excellence>https://bresdel.com/blogs/806517/Mastering-Interior-Shop-Drawings-From-Concept-to-Construction-Excellence</a> В перечне требований к отыгрышу часто присутствуют лимиты на ставки при игре на личные деньги. Так, если отыграть нужно 30 000 рублей, а максимальная сумма ограничена 30 рублями, то вертеть барабаны светит 1000 раз. Эта особенность затрудняет соблюдение игроками условий по срокам деянья промоакции. 1×slots casino регистрация 1×slotscasino09k online <a href=http://lproweb.procempa.com.br/pmpa/prefpoa/pl_geralredireciona.php?p_projeto=426&p_secao=57&p_url=http://childeco.ru/goto/http://zolotco.ru/bitrix/click.php?goto=https://telegra.ph/Ponimanie-srokov-ispolneniya-sudebnogo-prikaza-09–23>http://lproweb.procempa.com.br/pmpa/prefpoa/pl_geralredireciona.php?p_projeto=426&p_secao=57&p_url=http://childeco.ru/goto/http://zolotco.ru/bitrix/click.php?goto=https://telegra.ph/Ponimanie-srokov-ispolneniya-sudebnogo-prikaza-09–23</a>
1×slots зеркало выигрыши обязательно пройдите регистрацию если
1×slots зеркало подтвердит вашу регистрацию если говорить <a href=http://worklocal.com.au/users/doctorlazutama>http://worklocal.com.au/users/doctorlazutama</a> 1×slots официальный сайт зеркало При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, коие можно посвятить ирге в казино.
1хслотс зеркало на сегодня
Большинство интернет-казино из нашего топ-10 готовы порадовать вас неповторимыми промоакциями. Читайте о них в обзорах и на форуме. Не желаете поиграть в азартные игры, не рискуя своими деньгами, но получая в все выплаты? Подобную вероятность деют почти наилучшие порталы с азартными развлечениями. В их числе количество добросовестных и надежных интернет-казино на русском языке. Они привлекают новых пользователей различными поощрительными мероприятиями, включая бездепозитные, либо бесплатные бонусы.Верификация необходима для дополнительной безопасности и помочь техподдержке выявить бонусхантеров и мошенников. Кстати, на некоторых платформах выводы крупных сумм доступны лишь после подтверждения личности. <a href=https://ilottou.com/bbs/board.php?bo_table=free&wr_id=337627>https://ilottou.com/bbs/board.php?bo_table=free&wr_id=337627</a> Помните, собственно в некоторых играх сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных забавах только от 5% до 50% суммы ставки числятся как отыгранные средства, на как в слотах идет в зачет все 100% суммы.Законодательство, регулирующее азартные игры в разных странах, влияние на полномочия операторов. В результате пользователи из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это может быть как полный отказ в доступе, например и невозможность загружать забавы отдельных производителей. 1хслотс казино зеркало Любой выигрыш по ставке повыше установленного лимита несомненно являться недействительным. То есть ставка не будет засчитана при отыгрыше, ну случае выигрыша его сумма не поступит на счёт клиента — итог забавы несомненно всецело аннулирован.Бездепы все заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами.
1хслотс казино зеркало
Заработать на бездепозитных бонусах за регистрацию в казино может каждый юзер, достигший совершеннолетия.Ещё одно распространённое акционное предложение – привлекательный презент с неблаговидными требованиями. К образцу, клуб обещает $100 в бездепа, хотя с вейджером х80 или х100. Отыграть такой вейджер практически нереально и потому какого-либо концентрироваться на более заманчивых промоакциях. В большинстве заведений устроить это можно по e-mal, по номеру телефона, спустя социальную сеть или гугл-аккаунт.Ниже указан важный список легальных казино в Беларуси с призами на 1-ый депо. Вы сможете попасть на официальный вебсайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. 1×slots промокод при регистрации <a href=http://digitalmediasa.net/profile/davidven/>http://digitalmediasa.net/profile/davidven/</a>
1×slots зеркало на сегодня
Подтверждение персональной инфы. Все казино настоятельно от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у пользователя других аккаунтов (мультиаккаунт запрещен). <a href=https://opensourcebridge.science/wiki/User:KimFrizzell>https://opensourcebridge.science/wiki/User:KimFrizzell</a> С такими ординарными советами каждое казино с призом за регистрацию способно принести в разы больше выгоды и пользы.Как лишь получите бездеп в казино, всё точно не запамятовывайте проверять электрическую почту. Некоторые игорные клубы непрерывно веселят активных гэмблеров приятными призами. Чаще всего получить презент можно в преддверии веселья, на денек рождение, за привлечение друга. А того распространённым призом считается прибавка к депозиту. Нужно более восполнить счёт, и азартное заведение прирастит его на 50–100%. 1×slots casino регистрация 1×slotscasin online
<b>Смотреть еще похожие новости:</b>
<a href=https://australiantravelforum.com/Upload/showthread.php?tid=217961>сайт 1× slots casino</a>
<a href=https://forum.oursson.ru/viewtopic.php?f=2&t=8652>1×slots официальный зеркало рабочее</a>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=127757>1хслотс казино зеркало</a>
<a href=https://forum.dis-course.net/viewtopic.php?p=831088#p831088>1×slot зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бонус начисляется игроку незамедлительно в регистрации и прохождения верификации в казино и не просит от посетителя внесения депозита. Как верховодило, объем бонуса в сходственном случае достаточно скромный, однако позволяет новеньким познакомиться с забавой без риска реальными деньгами.
#6881 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Петрова Ольга Викторовна порно porno Анастасия Янькова, боксерка <a href=https://rucriminal.info/>бесплатное казино</a> ramenbet casino 1×bet слоты 1×bet xyz <a href=https://7club7.com/>промокод 1×bet</a> ramenbet casino пин ап казино casino регистрации бесплатные букмекерские конторы 1×bet сейчас online casino 7k игры казино
#6882 Clydeamuck
gramster.ru <a href=" https://www.oppo.xyz/home.php?… „>pinup 2025</a> or <a href=“ http://www.spankingboysvideo.com/Home.aspx?… ">pinup 2025</a> https://www.google.ms/url?… пинап казино <a href=https://www.google.com.gt/url?q=https://gramster.ru>пин ап казино зеркало</a> пинап казино and <a href=http://www.bbmlbb.com/bbs/home.php?mod=space&uid=14573>pinup 2025</a> pinup 2025
#6883 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Юдаева Ксения Валентиновна порно Приезжева Екатерина Геннадьевна порно <a href=https://th-royalgclub.com/>букмекерская контора вход</a> r7 casino casino зеркало сегодня <a href=https://specreporter.com/>порно с Федор Чалов (футбол)</a> какие казино 1×bet xbet 7k casino бонус сайты казино казино в россии porno Анастасия Янькова, боксерка зеркала казино
#6884 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало рабочее регистрации на телефон придет
Но ни не забывайте пристально разбирать верховодила роли в бонусных акциях. Если вы нарушите желая бы одно условие, позже вы не можете устроить недоразумение с администрацией.4. Заберите подарок. Чаще всего приз активируется сразу последствии регистрации. Но случаются ситуации, когда надо(надобно) забежать в собственный кабинет или написать в службу поддержки. <a href=http://filmkachat.ru/>1×slots промокод при регистрации</a> Демоказино есть почти на каждом сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются значительно реже: там в случае выигрыша и соблюдения условий промоакций бездеп возможно превратить в настоящие деньги.Казино выделяет возможность заработать и вывести настоящие деньги на бездепозитных призах. Обычно, это малозначительная сумма, которую казино имеет для позволить презентовать игроку. <a href=https://www.as7abe.com/wall/blogs/post/60173>https://www.as7abe.com/wall/blogs/post/60173</a> Наш перечень содержит наилучшие бездепозитные бонусы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по принципиальным характеристикам: 1×slot рабочее зеркало <a href=https://nodressio1.gitbook.io/nodressio1>https://nodressio1.gitbook.io/nodressio1</a> На бонусные начисления имеют быть установлены дополнительные лимитирования, коие Вы не к при отыгрыше. Пока бонус полностью не отыгран — средства из казино не выводятся.Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке необходимо пополнить счет в казино. Для депозитных бонусов, эта процедура не необходима, так как депозит уже изготовлен.
1х слотс зеркало регистрация в 1×slots casino
<a href=https://karakol.com.kg/user/Jameskef/>1×slots казино зеркало</a> 1×slots casino регистрация на сайте <a href=https://tara-info.biz.ua/wr_board/tools.php?event=profile&pname=Charlesraign>https://tara-info.biz.ua/wr_board/tools.php?event=profile&pname=Charlesraign</a> При малый сумме приза рекомендовано выступать по невысоким ставкам, а использовать наибольшие превосходнее только в случае, случае вейджер очень великой, а время на отыгрыш сильно ограничено. 1 x slots casino Активация по промокоду употребляется в разных видах бездепов. Если идет о приветственном бонусе, то комплект символов можно узнать на крупнейшей страничке, в регистрационной форме или послании, которое отправляется пользователю для подтверждения e-mail. Акции могут проводиться совместно с партнерскими площадками. Обычно код размещается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется одноразовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем актуальный код для активации в описании каждого рекламную.
1хслотс казино зеркало
Прибывшие на аккаунт финансы бездепозитные призы предназначаются, в основном, лишь для новоиспеченных юзеров, которые раньше не имели личного аккаунта в данном казино. Исходя из сего, если ранее у игрока был сделан депо, то, по всей вероятности, у него больше не несомненно возможности рассчитывать на получение такого бонуса в конкретном заведении. Бонус в казино без депозита имеет разные варианты: это может быть приветственный бонус, промоакции в честь каких-то праздников либо главных дат, бонус за вербование свежих игроков, лояльность и получение VIP-статуса.После потребуется привнести идентификационный платёж. Это пугает новичков больше всего. Нужно сделать минимальный депозит в 100–500 руб. Таким образом служба безопасности увериться никаких, собственно платёжный метод принадлежит Вам. Данная процедура необходима для обеспечения безопасности игровых счетов. Пример, Ваш аккаунт взломают и выведут свои на собственный кошелёк. Будет очень неприятно. Поэтому верификация платёжной системы, это важный момент. <a href=https://www.100seinclub.com/bbs/board.php?bo_table=E04_1&wr_id=397105>https://www.100seinclub.com/bbs/board.php?bo_table=E04_1&wr_id=397105</a> Для получения выигрыша требуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить конкретную необходимую, но уже из личных денег. Она рассчитывается из совместного объема выигрыша за все время использования бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, в юзер выиграл 1000 рублей, а множитель сочиняет х30, исключить средства можно несомненно, сделав ставки на 30 000 руб.Выше мы предоставили глубокий комплект самых новых и своевременных бездепозитных призов в онлайн казино без пополнения на 2022 год, где вам воспользоваться хоть ценным бездепозитным бонусом. 1×slots зеркало регистрация Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют важную информацию о not the slightest down payment bonuses и других услугах.В зависимости от интернет заведения любой из их может вам предложить как бездепозитные деньги, так и бездепозитные фриспины, которые в успешной регистрации рухнут вам на ваш игровой баланс.
1×slots casino регистрация 1×slots review live
Сроки активации бонуса устанавливаются каждым казино, хотя почаще всего они не превосходят недели с этапа получения. Игроку обязательно нужно применять бездеп в течение указанного срока, в ином случае бонус просто исчезнет. Каждый бонус возможно получить только один один, поэтому в не использовать бездеп в срок, у игрока не несомненно 2 шанса им воспользоваться. Обычно бездепозитные промоакции от казино, приходят на эл. Почту в дни рождения либо праздники. В некоторых онлайн казино можно обратиться в чат и как неизменному игроку, вполне вас предложат бездепозитное предложение. При подмоги такового одобрения оператор возможность того завлекать посетителей, коие раньше проявляли активность на веб-сайте, но по некий основанию перестали играть. В данном случае промокод высылается юзеру по электрической почте либо повторяющий SMS.Многие новенькие сомневаются, что поощрительный приз надо несомненно возвращать, и случае они выиграли у казино. Это безусловно безопасно и накрепко. Выводя выигранные средства, игрок просто останавливает свое роль в игре и теряет уникальную вероятность – даром наращивать личное материальное положение. 1×slots casino online регистрация <a href=http://mydozimetr.ru/bitrix/rk.php?goto=http://holzerfarbe.ru/bitrix/redirect.php?goto=http://molportal.ru/links.php?go=https://teletype.in/@urist555/sUaEeTfIfA7>http://mydozimetr.ru/bitrix/rk.php?goto=http://holzerfarbe.ru/bitrix/redirect.php?goto=http://molportal.ru/links.php?go=https://teletype.in/@urist555/sUaEeTfIfA7</a> Подтверждение регистрации. Казино требуют привязки профиля к электронному адресу и номеру телефонного. Для этого на e-mail отчаливает письмо со ссылкой, а на телефон ? текстовое извещение с кодом.
1×slots зеркало рабочее на сегодня
Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном сайте и выполните вход в собственный кабинет, чтобы отобрать безвозмездные вращения с вейджером х40;Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. <a href=http://www.sicilianodentro.it/forum/members/258854.html>http://www.sicilianodentro.it/forum/members/258854.html</a> 1хслотс рабочее зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=253808>1×slots зеркало проходить регистрацию это отличный вариант</a>
<a href=https://www.digicube.de/forum/threads/493447-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82?p=694239#post694239>казино 1×slots официальный сайт</a>
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=31260>1×slots официальный demo регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Иногда операторы просят внесение минимального депо перед выводом для верификации платежного прибора. В неких казино данный депозит кроме светит отыграть.
#6885 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пина букмекерской конторы пина casino <a href=https://rumafia.news/>бк букмекерская контора</a> порно с Петр Ян (ММА) порно с Абрамченко Виктория Валериевна <a href=https://sovsekretno.net/>1×bet зеркало рабочее xbet</a> 1win букмекерская контора букмекерские конторы без депозита лучшие казино бесплатно casino зеркало сегодня рабочее казино можно казино играть казино
#6886 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее
В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать собственный выигрыш с даровых вращений. Прибыль, коию Вы заработаете на этом бездепе можно ставить на вывод без какого или отыгрыша.Возможность протестировать свежие игры, не рискуя личными своими и разработать собственную стратегию игры. <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> Вывод выигрыша с бездепозитных бонусов казино – великодушный подарок от азартных клубов. Но чтобы исключить собственный заработок, нужно выполнить ряд критерий:Прежде всего, не запамятовывайте периодически заглядывать на страницу обзоров бездепозитных призов. Они шаг за шагом рассматривают более увлекательные предложения ведущих игорных порталов. <a href=https://www.empowher.com/groups/blogs-4/posts-33>https://www.empowher.com/groups/blogs-4/posts-33</a> В бонусную программку многих операторов входят регулярные бездепы. Это пожизненные акции, поощряющие интенсивных постоянных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают неизменные бонусы без депо в обмен на скопленные баллы лояльности.Несмотря на то, собственно этот вариант стимуляции со стороны азартных платформ очень моден области сходственных игр, далеко не почитателям казино известно, собственно по бездепозитные бонусы казино и как именно их вероятно эксплуатировать. 1×slots на любой вкус как пройти регистрацию <a href=https://www.aura-invest.com/bbs/board.php?bo_table=free&wr_id=1428560>https://www.aura-invest.com/bbs/board.php?bo_table=free&wr_id=1428560</a>
скачать 1×slots официальный сайт
Бонус за регистрацию в казино выдается только раз раз на 1-го игрока. Но случаются вспомогательные промоакции, в коих бездепы расступаются для постоянных посетителей и такие презенты Вы сможете получить больше одного раза.Многие новенькие колеблются, что поощрительный приз не нужно будет отдавать, даже если они выиграли у казино. Это полностью безопасно и накрепко. Выводя выигранные свои, игрок просто одергивает свое участие деле и утрачивает уникальную вероятность – бесплатно наращивать собственное материальное положение. 1×slots регистрация 1×slotscasino09k online Как управляло, при выводе финансов, от играющего потребуется лишь сделать минимальный лепта чтобы, чтобы, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом собственный счет. <a href=https://forum.show-master.ru/forum/index.php?PAGE_NAME=profile_view&UID=50231>https://forum.show-master.ru/forum/index.php?PAGE_NAME=profile_view&UID=50231</a> 1×slots зеркало регистрация Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, так как Вам придется ее подтвердить в будущем при выводе средств.
1×slots быструю регистрацию а также мгновенное
Если вы выбрали себе количество брендов коие вам больше всего приглянулись, для постоянной забавы! Таких гемблеров казино очень любит и ценит, за частую эти игроки становятся VIP игроками заведения, которым нередко поступают прибыльные предложения вид бонусов, так же туда входит и бездепозитные. <a href=http://www.ra-journal.ru/board/member.php?425782-RalphWew>http://www.ra-journal.ru/board/member.php?425782-RalphWew</a> В большинстве заведений устроить это можно по e-mal, по номеру телефонного, через социальную сеть либо гугл-аккаунт. казино 1×slots официальный сайт Доступные забавы – В неких азартных играх возможно понизить математическое преимущество казино до нескольких десятых процента. В их числе многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как правило, в этих забавах ставки идут в зачет вейджера не полностью. Например, возможность учитываться только 50%. В некоторых забавах бездепозитные призы вообще нельзя отыгрывать.
1хслотс рабочее зеркало
Каждый из бездепозитных бонусов без пополнения 2022 имеет собственный конкретный вейджер для отыгрыша, например же в любом казино он устанавливается индивидуально — где то он х55 а кое-где х30, повторюсь везде по разному! Прибывшие на аккаунт деньги бездепозитные бонусы предназначаются, главном, лишь для новоиспеченных юзеров, коие раньше не имели собственного аккаунта в данном казино. Исходя из сего, случае раньше у игрока был изготовлен депо, то, по всей вероятности, у него больше не будет возможности рассчитывать на получение такого бонуса в конкретном заведении.Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депо может отличаться до 30 дней. В качестве призов онлайн казино нередко предлагает выдачу фриспинов, то есть бесплатных вращений игрового барабана. Виртуальные монеты можно использовать для изучения в покерной школе либо для игры в казино. 1хслотс рабочее зеркало на сегодня <a href=https://wlppr.net/user/MiguelAgono/>https://wlppr.net/user/MiguelAgono/</a> Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Во всех законных онлайн-казино Беларуси необходимо подтверждение паспортных данных для забавы — это требование правительства страны.
казино 1×slots официальный сайт
Законодательство, регулирующее азартные забавы в разных государствах, влияние на возможности операторов. В результате пользователи из отдельных ареалов сталкиваются с лимитированиями со стороны казино. Это возможность быть как глубокий отказ в доступе, например и невозможность загружать игры отдельных изготовителей.Каждый новичок и профессиональный игрок грезят стремительно стартануть и начать создавать настоящие ставки. Для сего довольно забрать подарок, за который надо выплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email либо телефон. После этого администрация начисляет щедрое вознаграждение повторяющий безвозмездных вращений или виртуальных кредитов. Зарегистрироваться в казино по специальной ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефонного и электрическую почту). Для подтверждения номера телефона необходимо в собственном профиле указать собственный номер и надавить кнопку „Подтвердить номер аппарата“, дальше Вы получите sms-сообщение с кодом, кот-ый необходимо установить в подходящее поле. Для подтверждения электронной почты, перейти по активной ссылке в послании от казино.В количестве случаев безвозмездные бонусы начисляются в кредитах, коие невозможно незамедлительно исключить со счета. Прежде их нужно отыграть по установленным правилам. Эти требования принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д.). О нем читайте ниже. <a href=https://mobilka.mobi/user/TravisAMILK/>https://mobilka.mobi/user/TravisAMILK/</a> Даже не выиграв крупную сумму, игрок увлекательно проведет время, изнутри выучит работу площадки, воспримет геймплей автоматов. Все это без каких-либо денежных рисков. Быть в курсе превосходнейших промоакций с. Достаточно периодически изучать перечень новых интернет казино с выводом бонуса без депозита в данном разделе. 1×slots официальный сайт зеркало рабочее
<b>Смотреть еще похожие новости:</b>
<a href=http://www.fiat130.it/phpbb3/memberlist.php?mode=viewprofile&u=293>1×slots официальный зеркало</a>
<a href=http://maddog-server.org/forum/showthread.php?tid=53185>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<a href=https://timepost.info/showthread.php?tid=53042>1×slos регистрация в 1×slots casino</a>
<a href=https://uyghuryol.com/forum/viewtopic.php?f=8&t=231312>скачать 1×slots на андроид мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Таким образом онлайн казино получает вероятного игрока. Возможно в будущем либо истинном он захочет поиграть на средства деньги. Так работают бездепозитные призы в онлайн казино. Здесь очень подходит выражение, безвозмездные сыр случается лишь в мышеловке. Начинающие игроки все не обдумывать опасность азарта. Однако времени осознания становится больше. Это тема для отдельного обсуждения. Прибывшие на аккаунт деньги бездепозитные бонусы предназначаются, главном, лишь для новоиспеченных юзеров, коие раньше не имели собственного аккаунта в данном казино. Исходя из сего, случае раньше у игрока был изготовлен депо, то, по всей вероятности, у него больше не будет возможности рассчитывать на получение такого бонуса в конкретном заведении.
#6887 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
официальное казино вход porno Нина Пирогова, хоккеистка <a href=https://7club7.com/>Львова-Белова Мария Алексеевна порно</a> букмекерская контора официальный сайт букмекерская контора официальный сайт <a href=https://res-publika.com>карты казино</a> pin up casino пин промокод 1×bet porno Катерина Шпица retro casino 1×bet зеркало рабочее на сегодня 1×bet на андроид казино вход официальный сайт
#6888 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало рабочее
4. Заберите презент. Чаще всего приз активизируется сразу последствии регистрации. Но случаются истории, когда нужно зайти в индивидуальный кабинет или написать в саппорта. <a href=http://filmkachat.ru/>1×slots подтвердит вашу регистрацию если говорить</a> На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению сего медли, Вы не сможете активировать и получить бездепозитный приз. <a href=https://diccut.com/forums/thread/2610/>https://diccut.com/forums/thread/2610/</a> Для верификации номера аппарата, в личном профиле выберите опцию „Подтвердить номер телефонного“ и введите в соответствующее поле код, приобретенный в sms-сообщении. 1×slots зеркало регистрация то дальше необходимо пройти <a href=https://europe.google.com/url?q=http%3A%2F%2Fdoctorlazuta.by>https://europe.google.com/url?q=http%3A%2F%2Fdoctorlazuta.by</a> Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, чтобы снова получить безвозмездный приз. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ожидает неминуемое наказание.
1×slot официальный сайт
1×slots скачать на айфон <a href=https://forums.twcpilots.com/member.php?action=profile&uid=840>https://forums.twcpilots.com/member.php?action=profile&uid=840</a> 1×slots зеркало рабочее Бездепозитные бонусы за регистрацию в игровых автоматах для хозяев онлайн-казино являются частью рекламной кампании, направленной на увеличение аудитории вебсайта. Так они продвигают свои бренды и завлекают новых посетителей.
1×slots зеркало этих способов предполагает регистрацию
Иногда операторы просят внесение минимального депо перед выводом для верификации платежного прибора. В неких казино данный депо того предстоит отыграть.Ниже указан актуальный перечень легальных казино в Беларуси с бонусами на первый депозит. Вы можете попасть на официальный сайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. Нельзя разглядывать забаву на деньги, как вариант заработка. Азартные забавы запрещены для лиц младше 18 лет. Topcasinobonuses.mobi классифицируется организатором азартных игр. Сайт носит информационный нрав. <a href=http://www.soe-parrot.com/home.php?mod=space&uid=169319>http://www.soe-parrot.com/home.php?mod=space&uid=169319</a> Срок отыгрыша — это период, который наступает в момент активации бонуса и завершается с его закрытием. Пользователю нужно уложиться в данный временной промежуток, другому призовые средства аннулируются. Казино устанавливают перечень игр, ставки каких засчитываются при расчете отыгранных денег. Если тайтл не входит в этот список, то ему быть недосегаем для загрузки в действия бонусного предложения. 1×slots официальный сайт зеркало
1×slot казино зеркало
Процесс подтверждения личности возможность взятьвдолг(взятьвзаймы) от одного денька до недели. Если заказчик допустил нибудь оплошность при заполнении паспортных данных, то ему следует адресоваться с проблемой в саппорта онлайн-казино. <a href=http://miupsik.ru/forums/showthread.php?tid=353196>1х слотс зеркало регистрация в 1×slots casino</a> Бездепозитные призы казино за регистрацию в 2022 году — это возможность поиграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой либо количеством безвозмездных вращений без внесения депо. Не путайте деморежим с реальной забавой без надобности внесения депозита.Если вы выбираете проверенное лицензионное онлайн казино и выполните все условия получения бездепозитного приза, трудностей с получением презента у Вас не возникнет. Бездепозитные призы начисляются только один один. Не стоит раскрывать свежие аккаунты, чтобы получить их повторно. Служба безопасности казино обязательно выявит «левого» участника и заблокирует. Если гость выполнит нужные требования, отыграет свою ставку и решит вывести личный выигрыш, то ему надо(надобно) к, что казино непременно потребует дать ксерокопии собственных документов, чтобы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные свои вывести не удастся.Также, учите, собственно бездепозитный приз можно исключить только никаких случае, когда станут выполнены все условия отыгрыша. 1 xslots рабочее зеркало <a href=http://0lwow.com/home.php?mod=space&uid=20636>http://0lwow.com/home.php?mod=space&uid=20636</a> Обычно показатель выше, чем для бонусов на депозит. Не дивитесь, если он несомненно даже х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных стран.Oтыгpaть приз с обозначенным вeйджepом, результата нужно сдeлaть cтaвoк нa cумму, превышающую размер приза в несколько один.
1×slots регистрация на сайте
Для получения бездепа необходимо пригласить в игру по реферальной ссылке нового посетителя: он должен зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на необходимую, указанную в условиях акции.Это тоже бесплатные финансы, которые поступают на аккаунты свежеиспеченных игры после регистрирования. А необыкновенность таких бонусов состоит сомнений, собственно обретенные деньги обязательно по применять в продолжении назначенного времени. Помните, собственно любые нарушения верховодил сведут на нет ваши усилия, и вы скорее останетесь без начисленного для дарового приза. Всегда изучайте верховодила начисления и условия вейджера. По хоть вопросам, на коие вы не других отыскать ответы, обращайтесь за объясненьям и саппорт. <a href=http://1.235.32.108/doku.php?id=Выкуп_авто>http://1.235.32.108/doku.php?id=Выкуп_авто</a> 1×slots актуальное зеркало Если вы бывалый игрок, вы должны знать, что бонус без депо – редкая находка. Тем не, мы неделю исследуем онлайн, чтобы найти для вас наихорошие бездепозитные предложения.
<b>Смотреть еще похожие новости:</b>
<a href=http://swissairways-va.com/phpBB3/memberlist.php?mode=viewprofile&u=3495>1×slots зеркало проходить регистрацию это отличный вариант</a>
<a href=https://www.reisezielforum.de/viewtopic.php?t=415281>1×slots официальный demo регистрация в 1×slots casino</a>
<a href=http://vn-info.net/user/Josephkam/>1хслотс официальный сайт зеркало</a>
<a href=http://www.forum.kalor.ru/1hslot-zerkalo-t5396.html>1хслот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подарки на праздничные ? посвященные торжественным датам, требующие условного отыгрыша либо начисляются без это. Могут дариться игрокам сутки рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду. Риск-игра по одинаковым шансам – Также казино имеет запрещать исполнять обстоятельства по отыгрышу с помощью раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких других забавах.
#6889 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet рабочее почему в казино нет часов <a href=https://th-royalgclub.com/>porno Мира Андреева (теннис)</a> реального казино порно с Анастасия Потапова, теннисистка <a href=https://7club7.com/>бесплатно фильм казино</a> 7k casino casino зеркало сегодня рабочее порно с Юлия Ефимова вавада казино сайт pin up casino скачать 1×bet 1×bet xyz казино проиграл
#6890 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало
Многие казино предоставляют в маркетинговых целях благотворительные призы исключительно для наших читателей. Чтобы их получить, нужно перейти на игровой вебсайт по партнерской ссылке с нашего портала.Способы получения бездепа различаются зависимо облика бонуса, кот-ый приглянулся игроку. Но для так нужно быть зарегистрированным в легальном онлайн-казино и подтвердить собственную личность. В общем виде пошаговая аннотация для получения бездепозитного бонуса выглядит например: <a href=http://filmkachat.ru/>1хслотс зеркало на сегодня</a> Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, all зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.Каждая игровая платформа выделяется условиями по получению и отыгрышу бездепов. В правилах детально расписаны кратковременные рамки, за коие нужно прокрутить вейджер. Также не забывайте тему максимальный размер ставки и наивысшую необходимую выплаты. С иной стороны, чтобы получить бездепозитные бонусы казино, довольно израсходовать менее 1 минуты. <a href=https://community.wongcw.com/blogs/934091/Transform-Your-Space-with-a-Professional-Interior-Design-Plan-That>https://community.wongcw.com/blogs/934091/Transform-Your-Space-with-a-Professional-Interior-Design-Plan-That</a> Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в личный офис, чтобы забрать бесплатные вращения с вейджером х40; 1×slots официальный сайт зеркало рабочее <a href=http://soicauxoso.rongbachkim.com/rdr.php?url=http://zuya.pxl.su/go?http://donkleenka.ru/bitrix/redirect.php?goto=https://telegra.ph/Olga-Sobachkina-biografiya-i-dostizheniya-09–23>http://soicauxoso.rongbachkim.com/rdr.php?url=http://zuya.pxl.su/go?http://donkleenka.ru/bitrix/redirect.php?goto=https://telegra.ph/Olga-Sobachkina-biografiya-i-dostizheniya-09–23</a> Бонусы без депо при регистрации числятся самыми привлекательными как для опытнейших игроков, так для и новичков. Получив это вознаграждение, клиент возможность выступать на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а обстоятельства их активации и выигрыша.В случае установленного лимита на необходимую вывода выигрыша с бездепозитного приза, игрок не может вывести больше заявленной суммы.
1×slots регистрация 1×slots casino 777 online
<a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1×slots на любой вкус как пройти регистрацию</a> 1× slots сайт Также бездепозитные призы могут работать способом вернуть к игре посетителей, пока приостановивших своё сотрудничество с компанией: уведомление о бездепе поступает на мобильный аппарат или почту.Чем ниже значение вейджера, тем легче отыграть и вывести приз. Если Вы планируете заработать на бездепе, а не просто ознакомиться с новым игровым клубом, то стоит игнорировать призов с высочайшим вейджером их почти не реально отыграть. С ними Вы можете только протестировать игры заведения. <a href=http://ishware.co.uk/fusion/profile.php?lookup=25736>http://ishware.co.uk/fusion/profile.php?lookup=25736</a> У любого игорного клубы различные вейджеровые обстоятельства. Чтобы вы гарантировано сумели выполнить их, мы дадим некоторое советов. Если система начислила небольшую сумму, не создавать большие ставки – остановитесь на 10–30 центах. Как только сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте выступать. В противном случае другого присмотреться к другому автомату. 1×slots зеркало подтвердит вашу регистрацию если говорить
1×slots бездепозитный бонус за регистрацию
Онлайн-казино кропотливо продумывают бонусные обстоятельства, которые нужно выучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и другие лимитирования. <a href=https://graddata.ru/user/Forsedroppr/>https://graddata.ru/user/Forsedroppr/</a> 1хслотс зеркало на сегодня Вы скорее, как и все предпочитаете получать подарки и бездепозитные бонусы казино. Игорные дома брали в привычку одаривать гэмблеров приятными призами. Стать обладателем приветственного подарка можно за создание профиля либо пополнение счёта. Второй вариант более интересный, так клубы готовы удвоить депо! Но если вы новичок и только знакомитесь с миром пыла, лучше воспользуйтесь призом за регистрацию.Какие призы возможность еще получить не бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, каждое интернет казино предлагает игрокам выгодное предложение на первый депозит, вы совершаете депо, ваш депозит увеличивается в двое либо даже в трое, тем наиболее начать выступать можно с более крупной суммой, например же не запамятываем про вейджер на призы.
1×slots регистрация 1×slots review live
Во всех легальных онлайн-казино Беларуси нужно свидетельство паспортных данных для игры — это заявка правительства страны. <a href=https://irc.floobits.com/Jamesamiva>казино 1×slots официальный сайт</a> Максимальная ставка ? устанавливается в денежной счета и ограничивает объем ставки за раз спин. В случае ее превышения приз имеет быть аннулирован. Также в правилах возможность находиться запрет на размещение ставок конкретного облика, примеру, по равным шансам в рулетке (словами, на чет либо нечет, красное или темное и т.д. ).Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. 1×slots зеркало регистрация то дальше необходимо пройти <a href=http://pastport.jp/user/Jamesnipsy>http://pastport.jp/user/Jamesnipsy</a> Рассмотрим принцип его деянья на образце. Допустим, вы зарегистрировались и получили $10 no deposit bonus с вейджером х50. Это означает, собственно выигранные деньги возможно будет выводить не раньше, чем последствии такого, как общая сумма ставок достигнет $500.
1хслотс казино зеркало
Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют актуальную информацию о not the slightest down payment bonuses и предложениях. <a href=https://spencerhakim.com/portfolio/smartdark-for-phpbb3/comment-page-16500/#comment-1090094>https://spencerhakim.com/portfolio/smartdark-for-phpbb3/comment-page-16500/#comment-1090094</a> casino 1×slot Бездепозитные призы в казино без пополнения 2022 — это конкретная сумма денег или valinomycin spins вращения, которые предоставляются первым постояльцам за регистрацию на сайте казино в виде бездепозитного приза, и дает вам возможность за счет казино без пополнения опробовать услуги (игр), с последующей прерогативой вывода средств при исполнении всех установленных правил.Особую изюминку видео слотам придают уникальные символы. С их выходом активируются различные бонусы. Вы можете запустить дополнительный уровень и увеличить сумму выигрыша. Есть знаки, которые сменяют ненадобные составляющие и сами творят выигрышные комбо. Не стоит забывать и про бонус-тур. После любого успешного спина есть шанс увеличить необходимую выигрыша в два либо четыре раза.
<b>Смотреть еще похожие новости:</b>
<a href=http://nakupnidivadlo.cz/index.php/forum/3-pripominky/46542–1×-slots?start=18#234701>1×slot рабочее зеркало</a>
<a href=http://g2clubs.com/healthy-workout/google/>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a>
<a href=http://romb4×4.ru/forum/threads/1×slots-registracija-to-dalshe-neobxodimo-projti.15447/>1×slots регистрация то дальше необходимо пройти</a>
<a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1×slots casino регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Иногда в поощрения за регистрацию шансы выдаваться билеты для участия в турнирах. Условия их проведения довольно выделяются, поэтому мы советуем ознакомиться с любым предложением отдельно.
#6891 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Юлия Ефимова включи казино <a href=https://rumafia.news/>bitz casino</a> 1×bet слоты 1×bet xyz casino рабочее <a href=https://slon-ru.com/>порно с Варвара Субботина</a> казино зеркало сегодня 1×bet зеркало слоты песня казино лучшие букмекерские конторы порно с Елена Никитина, скелетонистка 1win casino казино онлайн
#6892 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало проходить регистрацию это отличный вариант
Первый возникающий вопрос, это, зачем выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают свежих игроков. Последним легче начать забаву на деньги с подарка за регистрацию. Им надо пополнять баланс и тратить собственные свои. Новички получают безвозмездные спины или свои на счёт. С их помощью знакомятся с игровым ходом, крутят слоты и проделывают ставки в рулетке.При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие возможно предназначить забаве в казино. <a href=http://filmkachat.ru/>1×slots подтвердит вашу регистрацию если говорить</a> Любой выигрыш по ставке выше установленного лимита несомненно являться недействительным. То есть ставка не будет засчитана при отыгрыше, ну случае выигрыша его сумма не поступит на счёт клиента — итог забавы будет полностью аннулирован.Простая процедура получения бездепозитного приза, которая займет не более 2-х мин. Для получения бездепов, достаточно зарегистрироваться и доказать контактные данные. <a href=https://xequte.com/forum/topic.asp?TOPIC_ID=15274>https://xequte.com/forum/topic.asp?TOPIC_ID=15274</a> 1х слот регистрация в 1×slots casino <a href=http://bbs.qc0769.com/home.php?mod=space&uid=428321>http://bbs.qc0769.com/home.php?mod=space&uid=428321</a>
1×slots зеркало видели такую регистрацию на
Если при регистрации указать промокод, можно гарантировано получить бонус. Где брать ваучер? Посетите направленные блоги или форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В последнее время игорные жилища начали афишироваться в кинокартинах и телесериалах. Присмотритесь и наверняка заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных руб.Для отыгрыша приза казино обязывает игрока поиграть на сумму, в несколько раз превосходящую сумму приобретенного приза — здесь выгода фирмы очевидна. <a href=https://russiancomputerservice.ru/user/JosephCer/>зеркала 1×slots</a> 1×slots казино мобильная версия Стоит отметить, собственно бездепозитный приз выдается лишь совершеннолетним новичкам, которые, же, могут пригласить собственных приятелей и людей, кроме претендующих на поощрительную программку лояльности. Подобная технология появилась между конкуренцию онлайн-казино для популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению своей популярности, методом привлечения новых игроков. Бонусы – это уникальный шанс для вероятных соучастников забавы, которые шансы опробовать софт покер рума и убедиться, будут ли они в него играть либо нет. Новый игрок попробует средства силы с настоящими оппонентами в казино. <a href=https://finnhnpp90123.digiblogbox.com/55530429/deepnude-ai-navigating-the-complexities-of-technology-and-ethics>https://finnhnpp90123.digiblogbox.com/55530429/deepnude-ai-navigating-the-complexities-of-technology-and-ethics</a> 1×slots регистрация на сайте 1×slots ru com Реже призы без депозита начисляются постоянным игрокам. С их поддержкой администрация постарается удержать ценных посетителей или вожделеет поблагодарить за преданность правильных посетителей. Но намного почаще для подобных целей используются такие акции:Пoдтвepдить личнocть посетителя. Для удачного вывода средств, необходимо доказать лицо клиента. Нa этaпe вepификaции пpoфиля, работники службы безопасности должны убедиться, собственно у игрока не один акк. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не может вывести собственный выигрыш, если у него несомненно некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы.
1×slots официальный сайт скачать на айфон
Обыкновенные бездепозитные бонусы в объеме от трех до двадцати $ созданы чтобы, чтобы, дабы в забавы заходили все новые и свежие игроки. Здесь, вероятнее всего, несомненно ограничение на максимальный выигрыш. Важно, чтобы перед наименьшим вкладом был отключен приз за первое пополнение счета, и в не попадет на повторный вейджер. <a href=https://tools-info.biz.ua/wr_board/tools.php?event=profile&pname=StevenDrere>https://tools-info.biz.ua/wr_board/tools.php?event=profile&pname=StevenDrere</a> Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, чтобы снова получить бесплатный бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ожидает неизбежное санкция.Бездепозитные бонусы за регистрацию в игровых автоматах для хозяев онлайн-казино являются долею рекламной кампании, направленной на повышение аудитории вебсайта. Так они продвигают свои бренды и привлекают свежих клиентов. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots При небольшой сумме приза рекомендуется выступать по низким ставкам, а применять наибольшие никакого только в случае, случае вейджер очень великий, а время на отыгрыш крепко ограничено.
1×slots официальный регистрация
Далее требуется отыграть вагер и исключить выигрыш. Игрокам без опыта крупно подфартило, возможность получить десятки презентов за одну регистрацию. Если не смогли получить Бездепозитный приз, не беспокойтесь. Обратитесь в интернет чат, оператор поможет решить проблему. Так собственно приготовьтесь дать секретную информацию (пол, возраст, государство проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает менее суток, после чего получится беспрепятственно выводить солидные выигрыши. 1×slots рабочее зеркало <a href=http://sglpw.cn/home.php?mod=space&uid=331465>http://sglpw.cn/home.php?mod=space&uid=331465</a> Выше мы предоставили глубокий комплект самых новых и своевременных бездепозитных призов в онлайн казино без пополнения на 2022 год, где продоставляется пользоваться любым ценным бездепозитным бонусом.
1×slots регистрация на официальном сайте
Размер приза. В качестве бездепов обычно начисляют не суммы, а когда идет о бонусах за депозит, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино могут подарить игроку до 2000$.Суммы похожих предложений, как правило, колеблются от 3-х до двадцати $, а вейджер на эти средства должен составлять от 30 до шестидесяти один. Зачастую, наибольшая сумма выигрыша тут составит от одной до двух сотен долларов. Если геймер выиграет больше, то все средства шансы быть списанными до очень разрешенного выигрыша. Здесь замечена смысл выводить еще несуществующие деньги на собственную платежную систему и далее отыскивать заведение с подходящими под данную сумму релоадом либо призом за 1-ое пополнение счета. Есть количество подвидов бездепозитного вознаграждения, предлагаемого наибольшим числом заведений. <a href=http://vnsharing.site/forum/member.php?u=2743913>http://vnsharing.site/forum/member.php?u=2743913</a> 1хслотс 1хслотс регистрация перейти на 1×slots Автоматическая активация может самой удобной, но ручной метод содержит перед ней достоинства. Прежде чем применять вознаграждение от казино, стоит заранее определить, сколько времени потребуется на исполнение всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала действия бонуса.С не отыгранным призом воспрещается превосходить размер максимальной ставки. Нарушение этого условия в аннулирование выигрыша.
<b>Смотреть еще похожие новости:</b>
<a href=http://miupsik.ru/forums/member.php?action=profile&uid=5297>1 хслот регистрация в 1×slots casino</a>
<a href=https://forum.bedwantsinfo.nl/thread-689744.html>1хслот зеркало сайта</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В разделе с бонусами активировать свой подарок. Найти игры, для которых учтено поощрение и использовать приз по назначению. Выбирая безвозмездный приз, внимательно изучайте управляла. Убедитесь, собственно вам возможно брать участие в промоакции. Уточните, в каких играх можно исполнять обстоятельства вейджера. При надобности задавайте вопросы представителям саппорта.
#6893 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino играть 7k casino зеркало на сегодня <a href=https://sovsekretno.net/>porno Яна Троянова</a> pin up casino пин ап porno Катерина Шпица <a href=https://th-royalgclub.com/>официальные букмекерские конторы скачать</a> ставки на спорт букмекерские конторы casino онлайн часы казино порно с Алина Загитова bitz casino казино 1 kent casino регистрация
#6894 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации 2025
Исходя из этого, просто не присутствует мудрых причин махнуть рукой на получение такого бонуса при регистрации. И, будет, на подобный бесплатной базе у вас все шансы выиграть деньги и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные призы, нарекают безвозмездными интернет платформами для игр. <a href=http://filmkachat.ru/>1×slot официальный сайт</a> С иной стороны, намного проще арестовать бездепозитные фриспины за регистрацию в казино и прямо данный начать вращать барабаны в наихороших слотах. Главная особенность спинов никаких, что они предназначены для лучших автоматов. Удастся не пройти дополнительные раунды, хотя и увеличить сумму выигрыша, заработать респины прочие внутриигровые подарки.Используйте наихорошие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из списка ниже, дабы заработать подарки за простые деяния и уже сегодня получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высокой отдачей и быстрыми выводами на электрические кошельки. <a href=http://www.gothicpast.com/myomeka/posters/show/78646>http://www.gothicpast.com/myomeka/posters/show/78646</a> Прибывшие на аккаунт финансы бездепозитные бонусы предназначаются, в основном, только для новоиспеченных юзеров, коие ранее не имели личного аккаунта в данном казино. Исходя из сего, случае ранее у игрока был изготовлен депо, то, по всей вероятности, у него больше не несомненно возможности рассчитывать на получение такового бонуса в конкретном заведении. 1хслотс зеркало на сегодня <a href=https://www.forum-motorrad.net/members/19524-charlesjug.html>https://www.forum-motorrad.net/members/19524-charlesjug.html</a> Шаг 5. Использование и отыгрыш. Бездеп должен быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.
1хлот регистрация в 1×slots casino
Такой казино приз без депо за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это как бы некая маскировка одобрения под бездепозитный. Суть всего этого сводится к тому, собственно геймеру на час выдается, например, 1000 долларов, а реклама твердит о том, что любой выигрыш возможно несомненно в оставить при для. Но случае играющий серьезно отнесется к этому предложению, то он просто растеряет время. Ведь игроку нужно несомненно играть не главном аккаунте, а тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (в всей тыс. ) в управляла вступят определенные условия, где будет сказано, что максимальной суммой победы возможность быть лишь двести долларов и средства можно использовать только в качестве приза на 1-ый вклад с вейджером 25 от суммы гонорары плюс сам депозит. По итогу получится, собственно игрок выигрывал себя 200% бонус с вейджером на определенную необходимую. Короче говоря, это все надо вашего времени. <a href=https://persiankittencat.com/grey-persian-cats-unraveling-the-charm-of-these-feline-beauties/#comment-58357>1×slots бездепозитный бонус за регистрацию</a> 1×slots рабочее зеркало Выигрыши с бонусов без вложений постоянно привязаны к притязанию по ставкам и могут быть обналичены только последствии исполнения этих притязаний.При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, коие возможно предназначить ирге в казино. <a href=http://wp1065308.server-he.de/doku.php?id=Выкуп_авто>http://wp1065308.server-he.de/doku.php?id=Выкуп_авто</a> Перед активацией принципиально внимательно выучить условия акции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют значение также лимиты ставок при отыгрыше и сроки, протяжении которых возможно пользоваться предложением. Если бездеп охватывает узкий список игр, рекомендуется разузнать наибольшие коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят лишь том, случае, случае оператор не установил строгие лимитирования на максимальную необходимую ставки. 1х слот 1хслотс регистрация перейти на 1×slots Получить Бездепозитный бонус в интернет казино дело 2-ух кликов. Другой момент, отыграть рекламную и соблюсти верховодила и обстоятельства отыгрыша. Под правилами предполагается не только вагер, хотя и ограничения по наибольшей ставке. Мы понимаем, собственно в кинотеатр все ставят на зеро и выигрывают. Призываем не делать сходственного. Перед активацией бонуса прочтите правила. Узнайте последующие факторы: Условия получения презента, за регистрацию, за депозит и прочее. Ограничения по максимальной ставке. Зачастую не повыше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах можно отыгрывать вагер. Можно вращать автоматы, а вагер будет стоять на пространстве. Поэтому принципиально аристократия, в каких играх можно совершать кратность денежного оборота.
1х слот регистрация в 1×slots casino
Мы делаем акцент на главных положениях верховодил, рассказываем о территориальных ограничениях и кратко информируем о иных акциях обговариваемого казино. В подавляющем большинстве случаев благотворительные призы начисляются в кредитах, коие нельзя сразу вывести со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже. <a href=http://www.impk10.com/space-uid-361749.html>http://www.impk10.com/space-uid-361749.html</a> Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить необыкновенности, недоступные при этой в демо режиме. Многие новые клиенты перебегают в количество неизменных, а оператор получает долгосрочную выгода.Каждый из бездепозитных призов без пополнения 2022 имеет собственный определенный вейджер для отыгрыша, так же в каждом казино он уточняется персонально — где то он х55 а где-то х30, повторюсь всюду по разному! 1×slots официальный сайт мобильная версия скачать
1×slots рабочее зеркало
Но существуют азартные заведения, готовые просто так вручить деньги на забаву. Для этого достаточно сделать профиль. Чтобы исключить выигрыш, сначала нужно выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа. Как правило, при выводе денег, от играющего потребуется только устроить наименьший вклад чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом индивидуальный счет.Бывают ли бездепозитные призы без вейджера? Бывают, если у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный приз за регистрацию устанавливается вейджер во всех казино. 1×slots casino регистрация 1×slotscasino09k online <a href=http://apa.anenii-noi.com/index.php?subaction=userinfo&user=waterynurture58>http://apa.anenii-noi.com/index.php?subaction=userinfo&user=waterynurture58</a> Реже бонусы без депо начисляются постоянным игрокам. С их помощью администрация старается удержать ценных посетителей либо вожделеет поблагодарить за лояльность правильных гостей. Но гораздо чаще для сходственных целей используются такие акции:Только выполнив все условия отыгрыша и дождавшись завершения ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить средства средства.
1×slots регистрация на сайте 1×slots ru com
Для верификации номера телефонного, в собственном профиле выберите опцию „Подтвердить номер аппарата“ и введите в соответствующее фон код, приобретенный в sms-сообщении. Самые новые бездепозитные бонусы в казино за регистрацию 2022 года с выводом выгоды находятся на данной странице. Посетитель имеет оценить обстоятельства получения и начать играть на деньги без внесения депо. При этом игроку важно разуметь, на каких критериях и какими методами у исключить приобретенный выигрыш. Для сего нужно расценить список подключенных платежных систем. <a href=http://inbim.net/home.php?mod=space&uid=288375>http://inbim.net/home.php?mod=space&uid=288375</a> Прочитайте правила бонусной программы, в хотите участвовать. Да, мы настойчиво советуем сделать это до регистрации. 1хслотс официальный сайт зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=7523&TITLE_SEO=7523-preobrazovatel-interfeysov-usb-rs485&MID=465309&result=reply#message465309>1×slots официальный сайт скачать</a>
<a href=http://smpn1bejen.sch.id/forum/>1×slots официальный сайт зеркало</a>
<a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=71536>1×slots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Активация денежного вознаграждения происходит механически последствии творенья профиля или использования промокода. Иногда операторы предъявляют дополнительные требования: подписаться на странички казино в социальных сетях либо на рассылку маркетинговых сообщений, скачать и установить вспомогательный софт и т.д. За привлечение друга ? в партнерской программки заказчик получает вознаграждение за привлечение свежих пользователей.
#6895 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию процедура займет всего лишь
Составленный знатоками Casino.ru перечень онлайн-казино с бездепозитным призом дозволяет игрокам сравнить спецпредложения различных операторов.Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. <a href=http://filmkachat.ru/>1хслотс рабочее зеркало</a> <a href=https://vhearts.net/forums/thread/8949/>https://vhearts.net/forums/thread/8949/</a> Фриспины начисляются по определенной ставке. После их активации игроку необходимо запустить слот и убедиться, что в нем отображаются благотворительные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода после отыгрыша определяется оператором и изредка выше 5 000 рублей.Отыграв бездепозитный приз в казино с выводом также придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если схожее лимитирование присутствует, то единоразово вывести выйдет лишь необходимую, не превосходящую размер приобретенного бонуса. 1×slots регистрацию более популярный вариант это <a href=https://www.rs6.com/member.php/747989-GlennBusia>https://www.rs6.com/member.php/747989-GlennBusia</a> Для тех, кто лишь подумывает испытать собственную фортуну, еще для профессиональных игроков, разыскивающих новые площадки для выигрышей, ведущие лицензированные казино часто устраивают разные промоакции, и одно из лучших предложений за время – как для новичков, например и для профессиональных игроков – бездепозитный приз за регистрацию.При выполнении критерий отыгрыша и верификации, средства с бонусного счета переводятся на ведущей и шансы быть выведены на карту либо электронный кошелек. Лимиты на вывод и сроки проведения транзакции зависимости от избранной платежной системы.
1×slots регистрация 1×slotscasino 56 online
Бездепозитные бонусы настоящими средствами, коие возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадали.Многие новенькие сомневаются, что поощрительный приз надо несомненно возвращать, числе в они выиграли у казино. Это абсолютно безопасно и накрепко. Выводя выигранные средства, игрок просто одергивает свое роль деле и утрачивает уникальную возможность – безвозмездно наращивать собственное вещественное положение. <a href=http://portal.westcoastbible.org/discussion/viewtopic.php?f=18&t=1932952>1 x slots casino</a> 1×slots официальный сайт зеркало рабочее <a href=http://lkpo2003.esy.es/bbs/home.php?mod=space&uid=1400087>http://lkpo2003.esy.es/bbs/home.php?mod=space&uid=1400087</a> Многие игроки, оценив возможностей казино, остаются играть в нем и дальше ? на это и нацелено любое промо. Постоянные посетители заносят депозиты и проделывают ставки, обеспечивая долгосрочную прибыль оператора. То есть, казино раздают бездепы свежим юзерам для формирования лояльной аудитории.Бездепозитные призы начисляются только раз раз. Не стоит открывать новые аккаунты, чтобы получить их повторно. Служба защищенности казино непременно выявит «левого» участника и перекроет. Если посетитель выполнит нужные требования, отыграет собственную ставку и решит исключить личный выигрыш, то ему нужно сведению, что казино непременно потребует предоставить ксерокопии личных документов, дабы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные свои исключить не удастся. 1×слотс казино Выше мы дали полный набор самых свежих и актуальных бездепозитных бонусов в интернет казино без пополнения на 2022 год, где вы можете пользоваться любым ценным бездепозитным призом.Даже не выиграв крупную сумму, игрок увлекательно проведет время, изнутри исследует работу площадки, оценит геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе наихороших акций легко. Достаточно периодически изучать перечень новых интернет казино с выводом приза без депо в этом разделе.
1× slots casino зеркало
В разделе с призами активировать собственный подарок. Найти забавы, для которых учтено одобрение и использовать бонус по предназначению.Подобные бонусы без депо предоставляются на более выгодных условиях. Зачастую они крупнее, а условия отыгрыша наименее строгие. Риск-игра по одинаковым шансам – Также казино возможность запрещать исполнять условия по отыгрышу за раунда на удвоение, который предлагается в слотах, видео-покере и неких других играх. <a href=https://www.tapatalk.com/groups/dzerjinsky/-t21417-s10.html>https://www.tapatalk.com/groups/dzerjinsky/-t21417-s10.html</a> Казино дает вероятность заработать и исключить настоящие средства на бездепозитных призах. Обычно, это незначительная сумма, коию казино имеет себя разрешить подарить игроку. 1хслотс официальный сайт зеркало Каждый новичок и профессиональный игрок мечтают стремительно стартануть и начать создавать реальные ставки. Для этого довольно арестовать подарок, за который не выплачивать. В зависимости от игровой платформы, нужно сделать профиль, привязать email либо телефон. После сего администрация начисляет щедрое вознаграждение в виде бесплатных вращений либо виртуальных кредитов.Вы не в коем случае ни же рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный бонус, по мимо практической забавы на бездепозитные бонусы, у Вас есть шанс изучить игровые автоматы, выучится регулировать изменять ставки и линии, исследовать бонусные забавы и их выигрышные композиции, ну в конце концов просто зарядится кучей эмоций! Ведь вы будите играть на бонусные свои, которые возможно отыграть и вывести, не просто на демо счет, тем наиболее адреналин в крови еще больше повысится а пульс забьется с частым ритмом!
1×slots зеркало рабочее на сегодня
2. Создать новый профиль. Для регистрации надо(надобно) заполнить небольшую анкету или зайдите в собственный офис посредством соц сетей;Для выбора азартного заведения Вы можете воспользоваться перечнем наших казино с бонусами за регистрацию. На нашем сайте мы опубликовали перечень бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, что доля бонусов эксклюзивные и доступны только для посетителей нашего сайта по-специальному промо-коду либо по уникальной ссылке. Кроме того, для любого бонуса мы подготовили доскональный обзор, в котором Вы узнаете как получить и отыграть одобрение и как вывести собственный выигрыш с бездепа. Многие казино предоставляют в маркетинговых целях благотворительные призы необыкновенно для наших читателей. Чтобы их получить, надо(надобно) перебежать на игровой сайт по партнерской ссылке с нашего портала.Ниже указан важный список легальных казино в Беларуси с призами на первый депозит. Вы можете попасть на официальный сайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз. Таким образом, заведение пробует продемонстрировать себя своим потенциальным игрокам, а такой рекламный ход как казино бонус без депозита за регистрацию завлекает довольно большое внимания к игорному заведению и обеспечивает неизменный струю свежих гостей и будущих посетителей игрового онлайн клуба. 1×slots регистрация на 1хслотс <a href=https://www.sportchap.ru/user/JamesFaick/>https://www.sportchap.ru/user/JamesFaick/</a> При правильном подходе бездепы — это отличный метод играть на деньги без траты личных средств. Есть количество рекомендаций, следуя которым можно извлечь максимум пользы из сходственных промоакций казино. Играть по лишь на лицензированных площадках. Скриптовые веб-сайты не только обманывают с бонусными услугами, но и используют пиратский софт с измененным ГСЧ. Выиграть на этих автоматах невероятно.Поспешите забрать бездепозитные призы за регистрацию в казино из представленного списка. Все платформы не только ведут законную работа, хотя и порадуют правдивыми результатами игры, высокой отдачей, прыткими выплатами.
x1 slots регистрация в 1×slots casino
Выше мы дали полный набор самых свежих и своевременных бездепозитных бонусов в интернет казино без пополнения на 2022 год, где вам пользоваться каким ценным бездепозитным бонусом. При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое можно посвятить забаве в казино. <a href=https://gospeldb.com/index.php?title=%D0%91%D0%BB%D0%BE%D0%B3_%D0%93%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0>https://gospeldb.com/index.php?title=%D0%91%D0%BB%D0%BE%D0%B3_%D0%93%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0</a> Активация происходит за промокодов, которые вводятся в собственном офисе после регистрации. Среди спецпредложений в перечне Casino.ru находятся неповторимые промокоды, коие доступны лишь гостям портала. Другие методы начисления средств ? автоматическая активация сразу последствии творения аккаунта и получение дара по запросу в службу технической поддержки.Наиболее модные гонорары между гэмблеров – бездепозитные призы казино. Это не изумительно, ведь возможно получить благотворительные вращения либо виртуальные кредиты, и при этом не придётся пополнять счёт, рисковать личными деньгами. Удастся насладиться разнообразными весельями даже выиграть солидную сумму, избегая серьёзного риска. 1×slots зеркало сайта Размер бонуса. В качестве бездепов обыкновенно начисляют не суммы, а когда речь о призах за депо, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино могут подарить игроку до 2000$.Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.
<b>Смотреть еще похожие новости:</b>
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=8753>1×slots казино мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Не стоит путать игру в демо и внедрение призов. В демонстрационном режиме игрок возможность расценить механику слота, сюжет и оформление. Но забава проводится на относительные кредиты, поэтому отсутствует основное ? чувство пыла. Активируя промокод или фриспины, заказчик как не тратит средства деньги на игровые автоматы, хотя возможность сорвать настоящий куш! В некоторых интернет казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на веб-сайте клуба и доказать средства контактные данные. Дополнительно требуется активация промокода.
#6896 Charlesgunnyhttp://filmkachat.ru
1 xslots рабочее зеркало
Первый возникающий вопрос, это, чего выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают свежих игроков. Последним легче начать игру на деньги с презента за регистрацию. Им не нужно пополнять баланс и расходовать личностные свои. Новички получают бесплатные спины или свои на счёт. С их помощью знакомятся с игровым процессом, крутят слоты и проделывают ставки в рулетке. <a href=http://filmkachat.ru/>1×slots казино мобильная версия</a> Поспешите отобрать бездепозитные бонусы за регистрацию в казино из представленного перечня. Все платформы столько ведут легальную деятельность, но и обрадуют добросовестными результатами игры, высочайшей отдачей, быстрыми выплатами. <a href=https://webanketa.com/forms/6gtk2c9q6rqkcd1sc8wk4rhr/>https://webanketa.com/forms/6gtk2c9q6rqkcd1sc8wk4rhr/</a> 1×slots официальный сайт зеркало рабочее <a href=https://lorenzoeraj29630.shotblogs.com/deepnude-the-ethical-and-social-dilemma-of-ai-driven-image-manipulation-44332164>https://lorenzoeraj29630.shotblogs.com/deepnude-the-ethical-and-social-dilemma-of-ai-driven-image-manipulation-44332164</a> Вейджер не более х30–35 считается приемлемым. Опытные игроки заявляют, что с этим вейджером реально остаться в плюсе, если верно подойти к выбору игрового аппарата.Многие новички сомневаются, собственно поощрительный приз не несомненно отдавать, даже в они выиграли у казино. Это полностью неопасно и накрепко. Выводя выигранные средства, игрок просто одергивает свое участие при и утрачивает уникальную вероятность – безвозмездно увеличивать собственное материальное положение.
1× slots регистрация в 1×slots casino
Нельзя осматривать игру на средства, как вариант заработка. Азартные забавы воспрещены для лиц моложе 18 лет. Topcasinobonuses.mobi классифицируется зачинщиком азартных игр. Сайт одевает информационный характер.Активация валютного гонорары случается механически после творенья профиля или применения промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на страницы казино в социальных сетях либо на рассылку рекламных сообщений, скачать и установить дополнительный софт и т.д. 1×slots регистрация на сайте Используйте превосходнейшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из списка ниже, дабы заработать подарки за обычные действия теперь сегодня получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и быстрыми выводами на электрические кошельки. <a href=http://fh3809p1.bget.ru/index.php?subaction=userinfo&user=maturepocket98>http://fh3809p1.bget.ru/index.php?subaction=userinfo&user=maturepocket98</a> 1×slots зеркало этих способов предполагает регистрацию
1×слот регистрация в 1×slots casino
Способы получения бездепа различаются зависимо облика приза, кот-ый приглянулся игроку. Но вам иначе нужно быть зарегистрированным в законном онлайн-казино и подтвердить свою лицо. В общем облике пошаговая инструкция для получения бездепозитного бонуса выглядит например: <a href=http://wp1065308.server-he.de/doku.php?id=скачать_кино>http://wp1065308.server-he.de/doku.php?id=скачать_кино</a> Обыкновенные бездепозитные бонусы в размере от 3-х до двадцати долларов сделаны чтобы, чтобы, чтобы в игры заходили все свежие и новые игроки. Здесь, вероятнее всего, будет ограничение на максимальный выигрыш. Важно, дабы перед наименьшим вкладом был отключен бонус за 1-ое пополнение счета, и игры не попадет на повторный вейджер.Если вы выбрали себе количество брендов коие вам больше всего полюбились, для неизменной забавы! Таких гемблеров казино довольно предпочитает и оценивает, за частую такие игроки становятся VIP игроками заведения, которым часто поступают выгодные предложения вид призов, так же туда заходит и бездепозитные. 1×slots зеркало рабочее на сегодня Бездепозитный бонус казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в данном и заключается главное отличие.
1×slot рабочее зеркало
Можно ли наваривать на бездепозитных призах? Это не работа, здесь как повезет, если в любом предложенном безедепе, вы будете откручивать вейджер и выводить, это возможно именовать везением, и дополнительной добавкой к вашему бютжету. <a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=513896>1хслотс рабочее зеркало</a> Можно ли зарабатывать на бездепозитных призах? Это не работа, здесь как повезет, в в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, тогда возможно именовать везением, и добавочной добавкой к вашему бютжету.Фриспины – благотворительные вращения с фиксированной ставкой, которые можно применять в конкретных игровых автоматах. 1×slots казино зеркало <a href=http://wiki.natlife.ru/index.php?title=фильмы_лучшего_качества>http://wiki.natlife.ru/index.php?title=фильмы_лучшего_качества</a> Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, дабы замечена вероятность вывести выигрыш.Так же стоит выделить то, что в любом интернет казино установлен собственный наибольший кешаут на бездепозитный приз. Как управляло кешаут — это максимальная сумма денег, кот-ая дешевая для вывода с бездепозитного бонуса.
1хслотс официальный сайт зеркало
Зачастую бездепозитные призы казино для забавы предлагаются разными заведениями азартных игр в качестве рекламных акций или в целях вербования к себе свежих игроков. Для бездепозитных бонусов в казино 2022 игроку не пополнять счет до момента вывода желанных средств. Некоторые казино шансы предлагать посетителям бездепы за свидетельство номера либо почты или репост на страницу в социальных сетях. <a href=https://praisenpray.org/forums/member.php?action=profile&uid=63121>https://praisenpray.org/forums/member.php?action=profile&uid=63121</a> Ограничения по забавам. Администрация запрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, средствами или безвозмездными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда дробление выполняется по облику игр. Например, отыгрыш возможен на всех игровых аппаратах, хотя запрещен в настольных забавах и в разделе Live Casino.Сразу после активации промокода возможно воспользоваться даром. Как уже упоминалось, призы случаются трёх обликов – фриспины, кредиты и фриплей-бонусы. онлайн казино 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=254775>1х слотс зеркало регистрация в 1×slots casino</a>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5049/#comment-607021>1× slots регистрация в 1×slots casino</a>
<a href=https://forum.vn.ua/showthread.php?p=3272203#post3272203>1×slots регистрация на сайте 1×slots ru com</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Изучить управляла и обстоятельства получения бездепозитных призов казино, Вы сможете у нас на сайте в разделе с призами или на официальном сайте избранного Вами казино. Если возможности найти необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал либо по электрической почте. Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют актуальную информацию о not the slightest deposit bonuses и других предложениях.
#6897 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало xbet xyz играющие казино <a href=https://strelochnik.com/>Ирина Горбачева</a> Кузнецова Анна Юрьевна порно букмекерская контора фонбет <a href=https://m.repost.news/>Фастова Елена Владимировна порно</a> cometa casino гама казино казино рулетка champion casino 7k casino сайт скачать 1×bet 1×bet xyz казино фильм онлайн
#6898 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию процедура займет всего лишь
Помните, что в некоторых играх сумма ставки идет в зачет вейджера лишь отчасти. Так, в настольных и карточных забавах только от 5% до 50% суммы ставки считаются как отыгранные деньги, в то время как в слотах идет в зачет все one hundred percent суммы. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots casino 777 online</a> Так собственно основное отличие дара на депо от бездепа – обязательное пополнение счёта. Вы можете привнести депо и преумножить стартовый капитал либо забрать бездеп и при не придётся рисковать собственными сбережениями. Поспешите выполнить простые требования, и администрация ресурса начислит щедрое поощрение!При забаве на бонусные средства запрещается играть в игровые автоматы с прогрессивным джекпотом и забавы из радела live casino. Кроме такого, некоторые казино дают бездеп на раз или некоторое определенных слотов, и в иных забавах Вы не можете на их выступать. <a href=https://www.4yo.us/blogs/171102/%D0%9A%D0%B0%D0%BA-%D1%80%D0%B0%D0%B1%D0%BE%D1%82%D0%B0%D0%B5%D1%82-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%BC%D0%BE%D1%82%D0%BE%D1%86%D0%B8%D0%BA%D0%BB%D0%BE%D0%B2>https://www.4yo.us/blogs/171102/%D0%9A%D0%B0%D0%BA-%D1%80%D0%B0%D0%B1%D0%BE%D1%82%D0%B0%D0%B5%D1%82-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%BC%D0%BE%D1%82%D0%BE%D1%86%D0%B8%D0%BA%D0%BB%D0%BE%D0%B2</a> Необходимость отыгрыша. Вейджер в этом случае выше, чем для призов за депозит. И же средства не отыграны, исключить их нельзя. 1×slots быструю регистрацию а также мгновенное <a href=https://arjaniki.ru/memberlist.php?mode=viewprofile&u=38878>https://arjaniki.ru/memberlist.php?mode=viewprofile&u=38878</a>
1хслот 1хслотс регистрация перейти на 1×slots
Некоторые клубы автоматически начисляют бонус на аккаунт игрока после выполнения критерий получения, хотя посещают ситуации, когда бонус надо(надобно) активировать игроку самому. Есть несколько способов активации приза:2. Создать свежий профиль. Для регистрации надо(надобно) наполнить небольшую анкету или зайдите в личный кабинет при помощи соц сеток; <a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=133554&pid=374449#pid374449>1×slots зеркало</a> скачать 1×slots на андроид мобильная версия <a href=https://boobs.red/user/Henrybef/>https://boobs.red/user/Henrybef/</a> 1×slots зеркало на сегодня Итак, чтобы бесплатные бонусные кредиты трансформировались в реальные средства, которыми вы можете управлять по собственному усмотрению, их надо(надобно) отыграть. Вейджер идет уточнять в правилах онлайн-казино.Во всех легальных онлайн-казино Беларуси нужно подтверждение паспортных данных для игры — это требование правительства страны.
1×slots сайт
Наш перечень содержит лучшие бездепозитные призы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит ревизию по важным характеристикам: <a href=https://x3.wiki/wiki/Автошкола_Главная_Дорога>https://x3.wiki/wiki/Автошкола_Главная_Дорога</a> 1×slots рабочее зеркало на сегодня После требуется внести идентификационный платёж. Это стращает начинающих больше всего. Нужно устроить минимальный депо в 100–500 рублей. Таким образом служба безопасности убедиться в, собственно платёжный метод принадлежит Вам. Данная процедура важна для обеспечения защищенности игровых счетов. Пример, Ваш акк взломают и выведут средства на свой кошелёк. Будет крайне досадно. Поэтому верификация платёжной системы, это необходимый момент.
1× слот зеркало
Главное преимущество спинов – возможность выучить разные слоты. Также получится насладиться бонусными раундами, испытать удачу в риск-туре и преумножить выигрыш за счёт особых символов. Однако столько игровой процесс заслуживает внимание, ведь лучше сосредоточиться на реальном выигрыше.Каждая игровая перрон выделяется критериями по получению и отыгрышу бездепов. В правилах отчетливо расписаны кратковременные рамки, за коие нужно прокрутить вейджер. Также не запамятовывайте тему наибольший размер ставки и наивысшую необходимую выплаты. С другой стороны, чтобы получить бездепозитные бонусы казино, довольно потратить менее 1 минутки. <a href=http://naturetour.ru/communication/forum/messages/forum3/message24670/6361–1khslots-registratsiya-v-1×slots-casino?sessid=a964f2ba68bf5fccafe347b0b40d07a4&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1хслотс регистрация в 1×slots casino</a> Многие игроки, оценив перечень казино, остаются выступать в нем и дальше ? на это и направлено каждое рекламную. Постоянные клиенты заносят депозиты и проделывают ставки, обеспечивая длительную прибыль оператора. То есть, казино раздают бездепы новым пользователям для формирования приклнной аудитории.В подавляющем большинстве случаев безвозмездные призы начисляются в кредитах, которые нельзя незамедлительно вывести со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д. ). О нем читайте ниже. Осталось выбрать казино с бонусом за регистрацию и сделать профиль. После активации презента выигрыш находится от Фортуны и способностей. 1 х слотс зеркало <a href=https://byinna.com/home.php?mod=space&uid=2397542&do=profile&from=space>https://byinna.com/home.php?mod=space&uid=2397542&do=profile&from=space</a> Фриплей-бонусы. Бонусы за благотворительную забаву есть лишь в неких клубах. Они зачисляются сразу после создания профиля и срабатывают недолговременное время. Если у вас нет медли израсходовать свои, они просто завершатся. Что касается времени, как бонусы действуют в течение одного часа.
1×slots рабочее зеркало на сегодня
<a href=http://classicjam.net/bbs/board.php?bo_table=free&wr_id=728535>http://classicjam.net/bbs/board.php?bo_table=free&wr_id=728535</a> Подтверждение электрической почты – одно из ведущих условий, которое есть практически в любом бездепозитном казино. Чтобы верифицировать электронную почту, достаточно перебежать по активной ссылке в послании, приобретенном от азартного клуба. 1×slot зеркало рабочее этих способов предполагает регистрацию Осталось избрать казино с бонусом за регистрацию и создать профиль. После активации подарка выигрыш зависит от Фортуны и способностей.Для казино, работающих онлайн, бездепозитные бонусы необходимы для привлечения свежих посетителей. Предложение поиграть на слотах без необходимости внесения настоящих денег — работающий метод для увеличения энтузиазма к компании. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит выступать в казино, лишь теперь теснее на личные средства.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.skmecca.com/2011/04/14/leave-the-world-better-than-you-found-it/comment-page-20/#comment-126664>1хслотс зеркало на сегодня</a>
<a href=https://www.fromrus.su/index.php?/topic/22845-%D1%81%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C-1×slots-%D0%BD%D0%B0-%D0%B0%D0%BD%D0%B4%D1%80%D0%BE%D0%B8%D0%B4-%D0%BC%D0%BE%D0%B1%D0%B8%D0%BB%D1%8C%D0%BD%D0%B0%D1%8F-%D0%B2%D0%B5%D1%80%D1%81%D0%B8%D1%8F/>скачать 1×slots на андроид мобильная версия</a>
<a href=http://link.5nx.ru/viewtopic.php?f=5&t=5269>1×slots зеркало видели такую регистрацию на</a>
<a href=https://forum.dis-course.net/viewtopic.php?t=423827>1×slots casino регистрация 1×slotscasin online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?
#6899 Charlesgunnyhttp://filmkachat.ru
1 xslots рабочее зеркало
Необходимость отыгрыша. Вейджер в этом случае выше, чем для призов за депо. И пока свои не отыграны, вывести их невозможно. <a href=http://filmkachat.ru/>1хслотс официальный сайт зеркало</a> <a href=https://www.swiatobrazu.pl/forumgaleria/thread/view/id/591>https://www.swiatobrazu.pl/forumgaleria/thread/view/id/591</a> 1×слот регистрация в 1×slots casino <a href=https://www.camry-club.ru/member.php?318769-Henrydal>https://www.camry-club.ru/member.php?318769-Henrydal</a> Некоторые клубы автоматически начисляют бонус на аккаунт игрока после исполнения критерий получения, но посещают истории, когда приз надо(надобно) активировать игроку самому. Есть количество способов активации бонуса:
1×slos регистрация в 1×slots casino
Основное различие никаких, что для получения бездепа не надо пополнять баланс в казино. Но считая сего, есть ряд прочих различий:Теоретически, к безвозмездным бонусам можно отнести например именуемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, поэтому собственно они предоставляют лишь вероятность создавать ставки. 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=https://hp.dragonland-radio.de/profile.php?lookup=71>https://hp.dragonland-radio.de/profile.php?lookup=71</a> 1хслотс казино зеркало
1×slots casino регистрация 1×slotscasin online
<a href=http://sbjongro.co.kr/bbs/board.php?bo_table=qna&wr_id=614463>http://sbjongro.co.kr/bbs/board.php?bo_table=qna&wr_id=614463</a> 1хслотс рабочее зеркало
казино 1×slots официальный сайт
Обычно, бездепозитные призы выдаются под конкретные слоты с фиксированной ставкой, хотя их наверняка запрещено использовать в игровых автоматах с прогрессивным джекпотом. Список игр, каких можно применять бездеп, Вы отыщите в описании акции или сможете уточнить у саппорта заведения.Почти все игровые клубы требуют свидетельство контактных данных игрока для получения бездепозитного приза. 1×slots официальный сайт зеркало <a href=http://www.lada-4×4.net/member.php?u=23792>http://www.lada-4×4.net/member.php?u=23792</a> Вейджер (wager) – это коэффициент, кот-ый показывает на какую сумму нужно устроить ставок, дабы вывести приз из казино. Пример: Вы получили за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода этого бонуса, Вам необходимо сделать ставок на сумму: 500*70=3500 рублей. Только всецело отыграв приз, Вы можете исключить собственный выигрыш.Бездепозитный приз казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в этом и содержится главное различие.
1×slots регистрация на сайте
Бездепозитный приз за регистрацию в казино — это стартовый презент повторяющий денежного начисления или даровых вращений для новых игроков заведения, для получения которого не вносить депозит. <a href=http://falsecode.ru/bitrix/redirect.php?goto=https://soucial.net/read-blog/6559>http://falsecode.ru/bitrix/redirect.php?goto=https://soucial.net/read-blog/6559</a> 1×slots официальный demo регистрация в 1×slots casino Ознакомьтесь с нашим перечнем превосходнейших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего перечня и получите бездеп незамедлительно. Хватайте превосходнейшие благотворительные предложения ниже и выигрывайте великие деньги, не рискуя!Также бездепозитные бонусы могут служить способом возвратить к игре посетителей, временно приостановивших своё сотрудничество с фирмой: уведомление о бездепе поступает на мобильный телефонный или почту.
<b>Смотреть еще похожие новости:</b>
<a href=http://aficionado.pl//member.php?1386-Rabofreeor&s=80c7be2c9e16ea1401e14c4239ac8159>1×slots casino регистрация 1×slots review live</a>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=325983>1× slots регистрация в 1×slots casino</a>
<a href=https://forum.graylite.com/viewtopic.php?p=304793#p304793>1×slots casino online регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток. Маркетинговая политика всех игорных интернет-клубов должна носить разнородный нрав. И если вознаграждения на депо служат для того, чтобы стимулировать заносить депозиты и поощрять теснее имеющих пользователей, то бездепозитный приз в казино либо приз за регистрацию в казино, этого всего, рассчитан на расширение базы покупателей.
#6900 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию более популярный вариант это
Для получения бездепа нужно пригласить в игру по реферальной ссылке нового посетителя: он должен зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и восполнить счёт на необходимую, указанную в критериях промоакции.Необходимость отыгрыша. Вейджер такой выше, чем для призов за депозит. И пока средства не отыграны, исключить их нельзя. <a href=http://filmkachat.ru/>1×slots официальный сайт мобильная версия</a> Большинство клубов завлекают внимание геймеров за счёт разнородных презентов. На 1 сайтах можно получить виртуальные кредиты, которые откроют доступ ко всему софту. На иных же, администрация предлагает бесплатные вращения для запуска лучших онлайн слотов. Несмотря на различные акции, стоит выделить самые главные. <a href=https://medium.com/@comcgifurniture/ultimate-guide-to-professional-weed-delivery-pickering-services-in-2024–2a76d5e699da>https://medium.com/@comcgifurniture/ultimate-guide-to-professional-weed-delivery-pickering-services-in-2024–2a76d5e699da</a> 1×slots зеркало регистрация <a href=https://wlppr.net/user/DeweyUneds/>https://wlppr.net/user/DeweyUneds/</a> Минимального оборота. Этот предел уточняется вейджером — пока игрок не сыграет на установленную сумму, вывод средств несомненно недосегаем.
1хслотс казино зеркало
<a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=98812>скачать 1×slots официальный сайт</a> 1× слот зеркало <a href=http://krair.kr/bbs/board.php?bo_table=free&wr_id=291713>http://krair.kr/bbs/board.php?bo_table=free&wr_id=291713</a> Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных ситуаций с казино, когда после отыгрыша бездепа для не дадут исключить солидную сумму выигрыша. 1×slot зеркало
1×slos регистрация в 1×slots casino
Бездепозитные бонусы в казино без пополнения 2022 — это определенная сумма средств либо valinomycin spins вращения, коие предоставляются первым гостям за регистрацию на сайте казино повторяющий бездепозитного приза, и дает вас вероятность с казино без пополнения опробовать предложения (игр), с последующей прерогативой вывода средств при выполнении всех установленных управлял. <a href=http://dom3online.ru/user/Miguelpetry/>http://dom3online.ru/user/Miguelpetry/</a> 1хслотс казино зеркало Существует ли стратегии для отыгрыша бездепозитных бонусов? К раскаянию нет, на выигрыши или проигрыши с бонусов, казино либо игрок воздействовать не, отдача игр происходит от разработчиков игр.
1×slots подтвердит вашу регистрацию если говорить
Такой казино приз без депо за регистрацию выдается игроку на час и энергично используется данное предложение с 2017 года. Это словно некая маскировка поощрения под бездепозитный. Суть всего сего сводится к что, этому, собственно игроку на час выдается, например, 1000 долларов, а реклама твердит то, собственно каждой выигрыш можно несомненно в будущем оставить при себя. Но если играющий серьезно отнесется к данному предложению, то он просто растеряет время. Ведь игроку нужно будет играть не главном аккаунте, а в тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (в всей тысячи) в правила вступят конкретные обстоятельства, где несомненно сказано, что максимальной суммой победы имеет быть лишь двести долларов и деньги можно применять лишь в приза на первый вклад с вейджером 25 от суммы вознаграждения плюс сам депозит. По итогу выйдет, собственно игрок выигрывал себя 200% приз с вейджером на определенную необходимую. Короче разговаривая, это все надо вашего времени.Активация происходит за промокодов, которые вводятся в собственном офисе в регистрации. Среди спецпредложений в списке Casino.ru находятся неповторимые промокоды, коие доступны только посетителям портала. Другие методы начисления средств ? автоматическая активация незамедлительно в сотворения аккаунта и получение дара по запросу в службу технической помощи. <a href=https://showboysmedia.com/real-music/#comment-52218>рабочее зеркало 1×slots</a> Также учтите, собственно некоторые игровые платформы сузивают перечень государств, которые способны получить предложенный бездепозитный бонус за регистрацию. К примеру, есть онлайн-заведения, выдающие похожие призы лишь жильцам конкретных стран. К образцу, онлайн казино 777 Оригинал предоставляет бездепозитный приз только игрокам из России и стран СНГ. Или напротив, снабжают вознаграждением всех, не жителей некоторых стран (исходя из сего, идет пристально изучать список, чтобы потом не возникло практически вопросов и претензий). 1×slots бонус за регистрацию <a href=http://00mall.biz/bbs/board.php?bo_table=free&wr_id=228354>http://00mall.biz/bbs/board.php?bo_table=free&wr_id=228354</a>
1×slots рабочее зеркало
Выигрыши с призов без инвестициям практически привязаны к притязанию по ставкам и шансы быть обналичены лишь после выполнения этих притязаний. <a href=http://library.aviaexpress.ru/bitrix/redirect.php?goto=http://xn–80adrabb4aegksdjbafk0u.xn–p1ai/bitrix/redirect.php?goto=http://td-gidroproekt.ru/bitrix/rk.php?goto=https://telegra.ph/Narushenie-pravil-bezopasnogo-ispolzovaniya-i-soderzhaniya-bytovogo-i-vnutrikvartirnogo-gazovogo-oborudovaniya-09–23>http://library.aviaexpress.ru/bitrix/redirect.php?goto=http://xn–80adrabb4aegksdjbafk0u.xn–p1ai/bitrix/redirect.php?goto=http://td-gidroproekt.ru/bitrix/rk.php?goto=https://telegra.ph/Narushenie-pravil-bezopasnogo-ispolzovaniya-i-soderzhaniya-bytovogo-i-vnutrikvartirnogo-gazovogo-oborudovaniya-09–23</a> казино 1× slots официальный сайт
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=39238>1× slots зеркало</a>
<a href=https://www.globalvision2000.com/forum/member.php?action=profile&uid=1072499>1×slots официальный сайт зеркало рабочее</a>
<a href=http://permitbeijing.com/forum/showthread.php?tid=2199183>1×slots зеркало которую указывали при регистрации кстати</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Нет. Казино выдают безвозмездные бонусы за регистрацию, для того, чтобы заказчик имел ознакомиться с игровым заведением. А дабы вывести его, необходимо выполнить условия отыгрыша.
#6901 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Комарова Наталья Владимировна порно casino играть <a href=https://strelochnik.com/>pin casino зеркало</a> сайты казино порно с Дронова Александра Викторовна <a href=https://specreporter.com/>casinos xyz</a> порно с Каролина Севастьянова Комарова Наталья Владимировна порно porno Юлия Пересильд часы казино 1×bet бесплатно сайт казино вход pin up casino пин ап
#6902 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию более популярный вариант это
В лицензионных бездепозитных казино выступать в азартные игры вправду безопасно. Наличие лицензии одобряет что, этот факт, что клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP. <a href=http://filmkachat.ru/>1х слот регистрация в 1×slots casino</a> <a href=https://app.degoo.com/share/hi1FahiiYBqJPnfRRsamrQ?ID=20401830865>https://app.degoo.com/share/hi1FahiiYBqJPnfRRsamrQ?ID=20401830865</a> 1×slots сайт зеркало <a href=http://armrus.org/extranet/forum/user/146528/>http://armrus.org/extranet/forum/user/146528/</a> В интернете большое известных игорных площадок с красивыми акционными предложениями. Однако внимательно читать условия десятков предложений в надоест, ну и время отнимет количество. Поэтому наша команда подготовила ТОП-3 сайтов с лучшими бездепозитными бонусами:
1×slots зеркало регистрация
Подтверждение электронной почты – одно из основных критерий, коие есть почти в каждом бездепозитном казино. Чтобы верифицировать электронную почту, довольно перейти по активной ссылке в письме, полученном от азартного клуба. <a href=https://www.digicube.de/forum/threads/493994–1×slots-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE?p=694801#post694801>1×slots казино зеркало</a> 1×slots зеркало видели такую регистрацию на Онлайн гемблинг развивается с любым днем все больше и больше, свежие бренды создаются не по денькам а по часам. Новые интернет казино делают вступительные акции для игроков, для того собственно бы зарекомендовать себя, и тем самым предлагают бездепозитные призы за регистрацию, что бы не пропустить эту вероятность — как пользоваться новым бездепом, советуем навещать наш сайт как возможно почаще, самое смачное и свежие несомненно добавляться в этом же списке.Онлайн-казино с бездепозитными призами ставят клиентам условия для использования бездепами, поэтому перед участием в акции лучше тщательно ознакомиться со всеми правилами и аспектами акции. Условия имеют прикасаться получения бонуса, его применения и последующего вывода денежных средств в случае выигрыша. <a href=http://xn–2j1bj1bu79c8mb.com/bbs/board.php?bo_table=free&wr_id=264665>http://xn–2j1bj1bu79c8mb.com/bbs/board.php?bo_table=free&wr_id=264665</a> Размер приза. В качестве бездепов обычно начисляют маленькие суммы, а когда речь идет о бонусах за депо, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино могут презентовать игроку до 2000$. 1×slot рабочее зеркало Нет. Казино раздают безвозмездные призы за регистрацию, чтобы, чтобы, чтобы клиент имел ознакомиться с игровым заведением. А дабы вывести его, нужно выполнить обстоятельства отыгрыша.Игры, каких возможно выступать на бонусные средства. Проверьте список игр, каких можно играть на бонусные свои, вероятно они Вам не понравятся и не тратить своё время на такую промоакцию.
1× slots регистрация в 1×slots casino
Промообъявления от казино не дают реальной картины и направлены на вербование внимания юзеров. Понять, как высоки шансы остаться в плюсе, позволит личный анализ условий предложения:Операторы гемблинга заявляют, собственно так они сражаются с бонус-хантерами. Впрочем, критики считают, собственно данным казино пробуют сделать из случайного гостя неизменного игрока. Внесение депо – Будьте готовы пополнить счет в отыгрыша приза. Это стандартное требование верховодил для этого типа промо-акций. Лучше заблаговременно уточнить, какую сумму нужно будет вносить на счет. Как правило, идет о минимальном депозите, хотя вы обязаны быть уверены, собственно он вас по кармашку. <a href=http://printsstars.ru/communication/forum/index.php?PAGE_NAME=profile_view&UID=229470>http://printsstars.ru/communication/forum/index.php?PAGE_NAME=profile_view&UID=229470</a> Третитй бездепозитный приз за регистрацию – денежные средства. К раскаянью, начислить рубли или доллары способны только известные и модные клубы. С их подмогою возможность насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком. 1×slots casino регистрация 1×slotscasino09k online
казино 1×slots
Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие возникают у новичков.Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы которые возникают у начинающих. <a href=http://nacionrolera.org/foro/viewtopic.php?f=1210&t=286551>1хслотс зеркало</a> Онлайн-казино тщательно продумывают бонусные обстоятельства, которые нужно выучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша прочие ограничения.Помимо прочего, для вывода средств по бездепу необходимо внести на счёт собственный 1-ый депо — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально возможную необходимую, после чего вывод средств станет доступен. 1×slots официальный сайт зеркало рабочее <a href=http://autotek.lv/user/DoctorLazutaen/>http://autotek.lv/user/DoctorLazutaen/</a> Каждый из бездепозитных бонусов без пополнения 2022 имеет собственный определенный вейджер для отыгрыша, так же в каждом казино он устанавливается персонально — где то он х55 а где-то х30, повторюсь всюду по разному!
1 x slots casino
Не трудно додуматься, что not the slightest deposit bonuses почти никогда не случаются большими. Чаще всего речь идет о пяти–тридцати баксах (или эквиваленте этой суммы в другой еденице).Верификация необходима для дополнительной защищенности и помочь техподдержке выявить бонусхантеров и жуликов. Кстати, на платформах выводы солидных сумм доступны только после доказательства личности. <a href=https://peugeot-408.ru/blog.php?cp=15300>https://peugeot-408.ru/blog.php?cp=15300</a> 1×slots бездепозитный бонус за регистрацию Мы делаем ударение на главных положениях верховодил, рассказываем о территориальных лимитированиях и вкратце информируем о иных акциях обговариваемого казино.При регистрации идет указывать лишь достоверную информацию. Когда учетная запись будет активна, появится доступ в Личный офис. В нем можно избрать валюту, установить промокод и узнать доскональные верховодила получения и отыгрыша бездепа. Краткая информация об промоакции нередко присутствует непосредственно на регистрационной форме.
<b>Смотреть еще похожие новости:</b>
<a href=http://big.bestforums.org/viewtopic.php?f=7&t=10022>1×slots casino регистрация 1×slots review live</a>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=159&pid=675722#post_675722>1×slots casino регистрация 1×slots review live</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На безвозмездные бонусы онлайн-казино практически постоянно распространяется ограничения по стране проживания клиентов. Даже случае вас разрешено раскрывать счет и играть на деньги в заведении, это еще не означают, собственно вас доступны no deposit bonuses.
#6903 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Екатерина Ефременкова, шорт-трекистка casino daddy <a href=https://glvk.guru/>1×bet скачать приложение на андроид</a> porno Анна Сидорова, керлингистка 1×bet casino <a href=https://kompromat1.online/>порно с Варвара Субботина</a> Шевцова Татьяна Викторовна порно casino pin официальный пина букмекерской конторы casino играть порно с Карен Хачанов (теннис) сайт казино вход порно с Арина и Дина Аверины, гимнастки
#6904 Charlesgunnyhttp://filmkachat.ru
1× slots регистрация в 1×slots casino
Изучить правила и условия получения бездепозитных бонусов казино, Вы сможете у нас на сайте в разделе с бонусами или на официальном веб-сайте выбранного Вами казино. Если возможности отыскать необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электронной почте.Если речь идет об эксклюзивных предложениях, может понадобиться регистрация в казино по ссылке с партнерского сайта. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots casino 777 online</a> У каждого игорного заведения свои управляла и условия. Но, дабы получить призы, нужно выполнить стереотипные деяния:Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=https://blog.udn.com/G_112062930339362154/181391895>https://blog.udn.com/G_112062930339362154/181391895</a> 1×slots зеркало сайта <a href=https://masstr.net/member.php?action=profile&uid=27125>https://masstr.net/member.php?action=profile&uid=27125</a>
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. 1х слотс зеркало регистрация в 1×slots casino <a href=http://ems-shop.com.ua/index.php?subaction=userinfo&user=vastzero0>http://ems-shop.com.ua/index.php?subaction=userinfo&user=vastzero0</a> 1×слот регистрация в 1×slots casino Возможность протестировать свежие игры, не рискуя личными своими и создать собственную тактику забавы.Помимо прочего, для вывода средств по бездепу нужно привнести на счёт свой 1-ый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало возможную необходимую, последствии чего вывод средств станет доступен.
1×slots рабочее зеркало на сегодня
При исполнении условий отыгрыша и верификации, средства с бонусного счета переводятся на главной и все быть выведены на карту либо электронный кошелек. Лимиты на вывод и сроки проведения транзакции в от избранной платежной системы. <a href=https://www.photoall.co.kr/bbs/board.php?bo_table=free&wr_id=1342695>https://www.photoall.co.kr/bbs/board.php?bo_table=free&wr_id=1342695</a> 1×slots официальный сайт зеркало Выполнив все требования оператора, клиент возможность оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит примерно менее суток. Если дополнительно требуется пройти процедуру верификации, то срок увеличивается до 1–2 рабочих дней. Для перевода используются банковские инструменты и электронные платежные системы. Второй метод подходит превосходнее, например как большинство транзакций в этом случае исполняются мгновенно. В связи со специфичностью функционирования банков обработка платежей возможность взятьвдолг(взятьвзаймы) до нескольких трудящихся дней.Активация по промокоду употребляется в различных видах бездепов. Если идет о приветственном бонусе, то набор символов возможно разузнать на крупнейшей странице, в регистрационной форме или послании, которое отчаливает юзеру для подтверждения адреса электронной почты. Акции шансы проводиться вместе с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активируется разовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем важный код для активации в описании любого рекламную.
1 x slots
<a href=http://khodaumo.com/forum/viewtopic.php?f=2&t=77553&sid=84bdd219de7f362312c0ae1bdb06a3bb>1×slots скачать на айфон</a> К примеру, игроку выдаются бесплатные средства в заведении в объеме пятидесяти или ста долларов (вейджер на коие сочиняет 100х). То есть, любому новоприбывшему игроку выскакивает манящая иллюстрация, кот-ая сулит выплату всех зачисленных компанией средств. Не стоит заострять на казино приз за регистрацию без депо с сильно большой или очень малеханькой суммой бонусов, потому собственно, даже кропотливо исследовав все обстоятельства, тут скорее, несомненно какой-то подвох.Иногда для получения призов нужно спутаться с представителями службы. Удобнее всего с ними разговаривать в онлайн-сате, хотя время довольно запроса по электрической почте. 1×slots актуальное зеркало <a href=https://inetlinks.ru/member.php?44637-JoshuaAssic>https://inetlinks.ru/member.php?44637-JoshuaAssic</a> Бoльшинcтвo азартных заведений выдвигают приблизительно однообразные, схожие условия и притязания, которые нужно выполнить, дабы получить бездепозитный бонус за регистрацию. Все их возможно соединить в раз перечень:
1хслотс рабочее зеркало
Исходя из этого, просто не присутствует мудрых причин махнуть рукой на получение такого бонуса при регистрации. И, будет, на подобный бесплатной базе у вас все шансы выиграть деньги и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные призы, нарекают безвозмездными интернет платформами для игр.Мы рекомендуем не отказываться от сходственных услуг известных казино. Выделите некоторое мин. На регистрацию, получите приз и попытайтесь его отыграть. Может быть, сегодня удача несомненно на вашей стороне! <a href=http://lyxondebian.free.fr/dokutest/doku.php?id=Выкуп_авто>http://lyxondebian.free.fr/dokutest/doku.php?id=Выкуп_авто</a> 1×slots официальный сайт зеркало Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера.
<b>Смотреть еще похожие новости:</b>
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=2706>1хслот зеркало</a>
<a href=https://forum.dis-course.net/viewtopic.php?t=442976>1х слотс зеркало регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Рассмотрим принцип его действия на образце. Допустим, вы зарегались и возымели $10 not the slightest deposit bonus с вейджером х50. Это означает, собственно выигранные деньги возможно будет выводить не раньше, чем после того, как общая сумма ставок достигнет $500.
#6905 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Нургалиева Эльвира Рамиловна порно казино ли <a href=https://m.repost.news/>порно с Елена Никитина, скелетонистка</a> пин ап букмекерская контора casino андроид <a href=https://m.repost.news/>почему в казино не бывает настенных часов</a> мобильные букмекерские конторы win win casino 1×slots casino Мухтиярова Елена Вячеславовна порно kent casino регистрация скачать 1×bet на андроид казино ставка
#6906 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на официальном сайте
Фриплей-бонусы. Бонусы за благотворительную игру есть только в некоторых клубах. Они зачисляются незамедлительно последствии создания профиля и срабатывают непродолжительное время. Если у вас нет времени истратить свои, они просто завершатся. Что касается медли, правило призы действуют протяжении 1-го часа.Фриспины — бесплатные вращения, коие дозволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся самым известным и преимущественным обликом приза — безвозмездные вращения порой эффективнее и веселее в отыгрыше, чем остальные облики бездепов. <a href=http://filmkachat.ru/>1хслотс регистрация в 1×slots casino</a> <a href=https://jobhop.co.uk/blog/337503/mastering-the-art-of-professional-interior-design-drafting>https://jobhop.co.uk/blog/337503/mastering-the-art-of-professional-interior-design-drafting</a> Срок активации и время на отыгрыш. Зачисление денег либо фриспинов происходит при активации на взыскательно ограниченного периода, похожие требования предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать приз количество дней либо том недель. Другие выдают солидную сумму за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высоким вейджером.Благодаря программке преданности от игорного заведения, можно взять хороший старт и без добавочных инвестициям запустить видеослоты. Кроме как, можно рассчитывать на реальную фортуну и получить, без вложения собственных финансов, большой выигрыш. 1×slots регистрация 1×slots casino c2d ru <a href=https://waappitalk.com/shopavto>https://waappitalk.com/shopavto</a>
1×slots официальный сайт скачать
1×slots зеркало быструю регистрацию а также мгновенное Ниже указан актуальный список легальных казино в Беларуси с призами на 1-ый депозит. Вы можете попасть на официальный вебсайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз.Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=http://hongtouwen.com/home.php?mod=space&uid=453926&do=profile>http://hongtouwen.com/home.php?mod=space&uid=453926&do=profile</a> Можно. Вы постоянно сможете отказаться от получения бездепозитного приза за регистрацию в казино, же Вы не создадите ставку. 1×slots официальный сайт зеркало
сайт 1× slots casino
Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают бонус по государствам. Вплоть до того, собственно клуб имеет принимать игроков из Вашей страны, а бездеп не давать.Приветственный приз без депозита ? подарок за регистрацию. Выдается средствами, фриспинами либо баллами. В последнем случае бонусные баллы применяются для участия в турнирах или обмена на реальные деньги. <a href=https://www.ccvgaming.com/forum/member.php?38840-JoshuaRaw&s=4ddbe94609ad0af9bac1680528e74a61>https://www.ccvgaming.com/forum/member.php?38840-JoshuaRaw&s=4ddbe94609ad0af9bac1680528e74a61</a> Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. 1хслотс официальный сайт зеркало Прочитайте верховодила бонусной программки, в желайте участие. Да, мы безотступно рекомендуем сделать это до регистрации.Подтверждение индивидуальной инфы. Все казино просят от посетителя пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у юзера иных аккаунтов (мультиаккаунт запрещен).
1хслотс рабочее зеркало на сегодня
К сожалению, нет. Почти все казино, просят внесение хотя бы одного малого депо для вывода выигрыша с бездепозитного приза. Также учитывайте, собственно вывести деньги разрешается только на что, эту платежную систему, с коей был сделан депозит.У любой игры свои притязания по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система засчитает каждую ставку. В рулетке и покере сделать это намного труднее. Именно потому например важно внимательно разбирать обстоятельства получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой забаве, то новички просто «спустят бонус на ветер». 1×slots регистрация 1×slotscasino09k online <a href=http://doctor54.ru/user-2590.html>http://doctor54.ru/user-2590.html</a>
1× слот зеркало
Принципиальным отличием бесплатных бонусов от призов на депо считается недоступность необходимости заносить средства на акк. Из-за сего их часто именуют бездепозитными (no deposit bonuses).В основном случаев бесплатные призы начисляются в кредитах, которые невозможно незамедлительно вывести со счета. Прежде их нужно отыграть по установленным правилам. Эти притязания принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже. Фриспины без депо либо дополнительные свои посодействуют поближе познакомиться с игровой платформой и её функциями. За счёт подарков можно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за забавы напротив живых крупье.Призовые начисления без депозита могут предоставляться для роли в турнирах онлайн казино. Потратить перечисленные деньги возможно исключительно в рамках данной промоакции. Условия их проведения в ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться таким предложением, никакого изучить его верховодила. <a href=https://www.vancouverrowingclub.wiki/index.php/Green_Pharmacy_Of_The_Gardener_Doctor>https://www.vancouverrowingclub.wiki/index.php/Green_Pharmacy_Of_The_Gardener_Doctor</a> 1хслотс 1хслотс регистрация перейти на 1×slots Бонусы без депозита при регистрации считаются наиболее привлекательными как для опытных игроков, например для и новичков. Получив это вознаграждение, клиент возможность играть на настоящие деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные призы в интернет-казино Рунета, а также условия их активации и выигрыша.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=136211>казино 1×slots официальный сайт</a>
<a href=https://www.neocodex.us/forum/topic/94669-g-u-i-d-e-proxys-and-how-to-use-them/page-12#entry2034936>1×slots мобильная версия войти казино</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Это один из главных характеристик привлекательности дара. С завешенным коэффициентом и профессионалы не смогут выполнить обстоятельства по отыгрышу. И не, насколько презентабельно смотрится предложение – бездепозитный приз казино в объеме $500 или $1 000. Чтобы новенькие лучше вникли, собственно же такое вейджер, мы разберём на случае. Подтверждение индивидуальной инфы. Все казино требуют от посетителя пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и присутствие у пользователя иных аккаунтов (мультиаккаунт запрещен).
#6907 Charlesgunnyhttp://filmkachat.ru
1×slots сайт
Таким образом, заведение пробует продемонстрировать себя своим вероятным геймерам, а такой маркетинговый ход как казино бонус без депо за регистрацию привлекает очень количество внимания к игорному заведению и обеспечивает неизменный поток новых гостей и грядущих клиентов игрового онлайн клуба.3. Подтвердить данные. В зависимости от клуба, нужно привязать телефон или почту, показать индивидуальную информацию; <a href=http://filmkachat.ru/>1×slots зеркало на сегодня</a> Особую изюминку видео слотам придают оригинальные знакы. С их свет активизируются различные бонусы. Вы можете запустить вспомогательный степень и прирастить сумму выигрыша. Есть знаки, коие сменяют ненужные составляющие и сами творят выигрышные комбо. Не стоит забывать и на бонус-тур. После каждого успешного спина есть шанс увеличить необходимую выигрыша в 2 либо хорошо раза.Когда идет о валютных бонусах, казино практически устанавливают условия вейджера, которые необходимо выполнить, чтобы вывести выигрыш. <a href=https://www.uannounceit.com/article/1417>https://www.uannounceit.com/article/1417</a> Основное различие сомнений, что для получения бездепа не надо пополнять баланс в казино. Но считая сего, есть ряд прочих различий: 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=https://polonistyka.com/user-2/williamloush/>https://polonistyka.com/user-2/williamloush/</a> Бездепозитные бонусы в казино без пополнения 2022 — это конкретная сумма средств либо vacant spins вращения, коие предоставляются первым гостям за регистрацию на сайте казино повторяющий бездепозитного приза, и дает вам возможность помощью казино без пополнения опробовать предложения (игр), с последующей прерогативой вывода средств при исполненьи всех установленных верховодил.
1хслотс рабочее зеркало
Бездепозитный бонус – это финансовое вознаграждение, которое выдается соучастнику забавы в казино, для его вербования и возникновения заинтригованности. Любой посетитель, который подходит условиям выдачи сходственного бездепозитного бонуса, возможность претендовать на получение вышеуказанного приза. Такое одобрение является более действенным способом, дающим вероятность стартовать в игре, не вкладывая личных вещественных средств. казино 1×slots официальный сайт <a href=https://blackmarke7.com/user-49230.html>https://blackmarke7.com/user-49230.html</a> Для выбора азартного заведения Вы сможете воспользоваться перечнем наших казино с бонусами за регистрацию. На нашем веб-сайте мы опубликовали перечень бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, собственно доля призов эксклюзивные и доступны лишь для посетителей нашего вебсайта по-специальному промо-коду или по оригинальной ссылке. Кроме как, для каждого приза мы подготовили подробный обозрение, в котором Вы узнаете как получить и отыграть одобрение и как вывести собственный выигрыш с бездепа.Но на некоторых азартных платформах подобные гонорары могут получить и уже зарегистрированные юзеры. В таком случае, призы предоставляются в рамках оригинальных промоакций либо же некоторым игрокам повторяющий акционного предложения, коие приходит на почту с целью «вернуть» игрока в свое казино. 1×slots акции
1хслотс 1хслотс регистрация перейти на 1×slots
На критериях отыгрыша безвозмездных призов следует тормознуть подробнее. С ними связаны нюансы, которые невозможно оставить без внимания.Для получения выигрыша требуется выполнить обстоятельства казино. Чаще всего игроку нужно поставить определенную сумму, но уже из собственных средств. Она рассчитывается из совместного объема выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, если юзер выиграл 1000 руб., а множитель составляет х30, вывести средства можно будет, сделав ставки на 30 000 рублей. Если вы избираете испытанное лицензионное онлайн казино и выполните все условия получения бездепозитного приза, трудностей с получением подарка у Вас не возникнет. <a href=https://hothdporn.pro/user/Jamesglums/>https://hothdporn.pro/user/Jamesglums/</a> Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских руб. В критериях акции предписано, что вейджер бездепозитного приза х20. Поэтому, дабы отыграть приз, игроку несомненно нужно устроить ставок на 35*20=700 руб. 1×slots рабочее зеркало на сегодня
1×slots акции
Ниже указан важный список законных казино в Беларуси с бонусами на первый депозит. Вы можете попасть на официальный сайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз. <a href=https://www.donchillin.com/space-uid-382497.html>1×slots зеркало регистрация</a> Максимальный размер ставки, кот-ый невозможно превосходить пока приз не несомненно полностью отыгран. В случае нарушения сего правила, бонус и выигрыш с него станут аннулированы. 1×slot рабочее зеркало <a href=http://www.aytastarim.net/user/Terryder/>http://www.aytastarim.net/user/Terryder/</a> Этот образ бонуса несомненно добавлен на Ваш аккаунт в успешной процедуры регистрации с использованием номера телефонного. Если избрать иной метод создания учетной записи, бездеп не будет добавлен на Ваш аккаунт.Ознакомьтесь с нашим списком наилучших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего списка и получите бездеп сразу. Хватайте превосходнейшие безвозмездные предложения ниже и выигрывайте великие средства, не рискуя!
1×slots официальный зеркало рабочее
Бонусы без депо при регистрации числятся наиболее привлекательными как для опытнейших игроков, так для и начинающих. Получив это вознаграждение, клиент может выступать на реальные средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные призы в интернет-казино Рунета, а также обстоятельства их активации и выигрыша. Бездепозитный приз нередко возможность стать доступным сразу в окончания регистрации, потому как единственным притязанием к нему считается регистрация, а после ревизия вашей новой учетной записи.Бездепозитные бонусы — это подарки от казино в виде бонусных средств либо фриспинов для игровых автоматов, которые начисляются на акк игрока в процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депо не требуется. <a href=https://arjaniki.ru/memberlist.php?mode=viewprofile&u=37606>https://arjaniki.ru/memberlist.php?mode=viewprofile&u=37606</a> Как правило, при выводе денег, от играющего требуется лишь сделать наименьший вклад для того, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом индивидуальный счет.Бездепозитные призы за регистрацию считаются одним из самых модных методов привлечения свежих игроков в онлайн-казино, поэтому собственно они деют игрокам возможность опробовать казино, неподражаемо игровые автоматы, и вполне, выиграть настоящие деньги. 1хслот скачать Более солидные предложения встречаются довольно изредка. Зачастую они доступны только VIP-игрокам. В оставшихся случаях им наверняка сопутствуют очень жесткие условия отыгрыша. Также вероятны дополнительные условия и другие ограничения, прописанные в критериях и положения бонусной программы казино.Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.spherecommunity.net/User-JamesLop>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5015/#comment-602755>1×slots официальный сайт мобильная версия скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских рублей. В условиях промоакции предписано, что вейджер бездепозитного приза х20. Поэтому, дабы отыграть приз, игроку несомненно необходимо устроить ставок на 35*20=700 руб.
#6908 Jeffreyarime
http://gramster.ru/ пин ап вход
#6909 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации 2025
На данном разделе портала регулярно публикуются обзорные статьи, в рассматриваются бесплатные бонусы превосходнейших интернет-казино. Информация структурирована по нескольким пунктам, включая основные: <a href=http://filmkachat.ru/>1×slots зеркало быструю регистрацию а также мгновенное</a> В зависимости от интернет заведения каждый из них может вам предложить как бездепозитные деньги, например и бездепозитные фриспины, коие после удачной регистрации рухнут вам на ваш игровой баланс.Иногда для получения призов нужно связаться с адептами службы. Удобнее всего с ними разговаривать в онлайн-сате, желая от достаточно запроса по электрической почте. <a href=http://prsync.com/shopavto/shopavto-is-a-car-buyout-service-operating-in-odessa-4371377/>http://prsync.com/shopavto/shopavto-is-a-car-buyout-service-operating-in-odessa-4371377/</a> 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=https://technique-tp.com/forum/memberlist.php?mode=viewprofile&u=1846>https://technique-tp.com/forum/memberlist.php?mode=viewprofile&u=1846</a>
1×slots сайт зеркало
Акционные предложения от казино существуют в разных форматах. Часто бонусы даются в мена на депозит. Игрок вносит платеж и получает деньги, безвозмездные вращения и поощрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — вид приза, который гарантирован за исполненье конкретных деяний на веб-сайте: 1×slots регистрация 1×slots casino c2d ru Помните, собственно в неких забавах сумма ставки идет в зачет вейджера только отчасти. Так, в настольных и карточных забавах лишь от 5% до 50% суммы ставки считаются как отыгранные деньги, в то время как в слотах идет в зачет все one hundred percent суммы.В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, необходимо обратиться в саппорта через лайв-чат на веб-сайте казино. <a href=https://www.rmbbk.com/space-uid-1269490.html>https://www.rmbbk.com/space-uid-1269490.html</a> Свежий бонус начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в использовании своими, ну случае отыгрыша оператор имеет установить ограничение на вывод денег.Если вы новичок в и только попали в неизведанную вами район пыла — счет услуг как бездепозитные призы без пополнения. 1×slots зеркало
1×slots официальный сайт зеркало рабочее
При этой на бонусные средства запрещается играть в игровые автоматы с современным джекпотом и игры из радела exist casino. Кроме того, кое-какие казино выделяют бездеп на раз либо количество определенных слотов, и в других забавах Вы не можете на их выступать.Простая процедура получения бездепозитного бонуса, кот-ая займет не более 2-х минут. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные. <a href=http://munservis.mirniy.ru/user/Glennsed/>http://munservis.mirniy.ru/user/Glennsed/</a> Минимального оборота. Этот лимит устанавливается вейджером — пока игрок не сыграет на установленную сумму, вывод средств будет недосегаем. 1×slots рабочее зеркало Однако в условиях исчезают «подводные камни», коие не разрешат вывести солидную необходимую или же вы не успеете отыграть вейджер. Поэтому мастера советуют арестовать благотворительные вращения за регистрацию в казино без депо, дабы поднабраться навыка и получить настоящий шанс на победу.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
<a href=http://khodaumo.com/forum/viewtopic.php?f=2&t=76588&sid=cd080ef2db4845b11503ee33fc2adcaf>1×slots casino зеркало</a> У любого игорного заведения средства верховодила и обстоятельства. Но, чтобы получить бонусы, необходимо выполнить стандартные действия: Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала быстрые выводы. Фишка выплат том,, собственно достаточно выбрать платёжный инструмент и показать необходимую. В большинстве случаев средства зачисляются на электрические кошельки протяжении 15 минут, а на банковские карты – 1–3 трудящихся денька.У каждого игорного заведения средства верховодила и обстоятельства. Но, дабы получить бонусы, нужно выполнить стандартные деяния: 1×slots зеркало рабочее на сегодня <a href=http://adrestyt.ru/index.php?subaction=userinfo&user=gustyharbinger5>http://adrestyt.ru/index.php?subaction=userinfo&user=gustyharbinger5</a> Демоказино есть практически на каждом веб-сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются существенно пореже: там если, тогда, выигрыша и соблюдения условий акций бездеп можно превратить в реальные деньги.
1×slots рабочее зеркало
Прочитайте правила бонусной программки, в которой желаете участие. Да, мы настоятельно рекомендуем сделать это до регистрации. <a href=http://theaesoon.co.kr/bbs/board.php?bo_table=free&wr_id=108243>http://theaesoon.co.kr/bbs/board.php?bo_table=free&wr_id=108243</a> Подтверждение персональной инфы. Все казино просят от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и наличие у пользователя других аккаунтов (мультиаккаунт запрещен). 1×slots зеркало видели такую регистрацию на Не стоит сразу же отказываться от приветственных даров в сходственных казино. Администрация готова начислить средства или фриспины, хотя предварительно работники должны убедиться, собственно вы не мошенник. Дело в том, что развелось очень количество охотников за призами. Они выучились обманывать систему и наваривать крупные суммы средств.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.kfz-gringer.at/index.php/forum/suggestion-box/67394–1#67159>1хслот официальный сайт зеркало</a>
<a href=https://bbs.sinbadgroup.org/index.php?xjkh-tampa-s-poster-pup-for-new-cancer-treatment.t48661.html/page-934#post-141820>1×slots официальный зеркало рабочее</a>
<a href=http://u0382101.isp.regruhosting.ru/index.php/forum/general-questions-and-how-tos/68883-otzyvy-o-tovarakh>1×slots рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Иногда у гостей сайта все появиться проблемы при активации приобретенного промо-кода. В этих случаях, нужно обратиться за поддержкой в службу «Support». Для получения ответа, непременно указывается определенная первопричина воззвания и подтверждается информация дополнительными экрана. Если сформировалась неоднозначная ситуация, постоянно возможно адресоваться к главному регулятору или контролирующему органу, выдавшему этому заведению лицензионный документ.
#6910 Charlesgunnyhttp://filmkachat.ru
скачать 1×slots на андроид мобильная версия
При выполнении критерий отыгрыша и верификации, средства с бонусного счета переводятся на ведущей и имеют быть выведены на карту либо электрический кошелек. Лимиты на вывод и сроки проведения транзакции в от избранной платежной системы. <a href=http://filmkachat.ru/>1×slots сайт</a> Иногда виде одобрения за регистрацию шансы выдаваться билеты для роли в турнирах. Условия их проведения очень отличаются, поэтому мы советуем ознакомиться с любым предложением отдельно.Но а случае вы теснее профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в интернет казино; <a href=https://imageevent.com/lexxeagle/3drenderedproductimages>https://imageevent.com/lexxeagle/3drenderedproductimages</a> Подтвердите регистрацию, чтобы активировать Бездепозитный приз с выводом, требуется наполнить личный профиль. Заполните пустые поля реальными данными о себя. 1×slots на любой вкус как пройти регистрацию <a href=https://wiki.mysupp.ru/index.php?title=скачать_фильм_hd_бесплатно>https://wiki.mysupp.ru/index.php?title=скачать_фильм_hd_бесплатно</a> При отыгрыше бонусных средств, нужно учесть срок деянья бонуса и время, которое дается на отыгрыш. По истечению заявленного медли, не отыгранный бонус будет аннулирован.Бездепозитные бонусы — это подарки от казино повторяющий бонусных денег либо фриспинов для игровых автоматов, коие начисляются на аккаунт игрока после процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депо не требуется.
1×slots официальный сайт зеркало
1×slots зеркало регистрация Казино выводит средства лишь на ту платежную систему, с котрой был сделан депо. То есть, для вывода бездепозитного бонуса, Вам сначала необходимо восполнить счет. В некоторых клубах узкий перечень методов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет непосредственно с данных платежных способов, которые доступны для вывода.Автоматы неспроста считаются самым популярным азартным развлечением. Чтобы усвоить управление и правила, потребуется всего количество минут. Ваша задачка сделать ставку, найти количество рабочих линий и можно крутить барабан. Если дисплее выпадет выигрышная композиция – вы выиграли! С этой задачей для помогут справится бездепозитные бонусы казино. <a href=http://mosoblzerno.ru/index.php?subaction=userinfo&user=grouchyunderdog>http://mosoblzerno.ru/index.php?subaction=userinfo&user=grouchyunderdog</a> 1×slots регистрация 1×slotscasino09k online
1×slot официальный сайт
Чтобы выступать даром на реальные деньги в казино, порой довольно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные деяния. Но а если вы теснее профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы автоматически перейдете в интернет казино;Когда идет о валютных призах, казино постоянно устанавливают обстоятельства вейджера, которые нужно выполнить, дабы вывести выигрыш. <a href=https://peugeot-408.ru/member.php?u=13658>https://peugeot-408.ru/member.php?u=13658</a> 1×slots регистрация на официальном сайте Перед активацией важно пристально выучить условия промоакции. Чем ниже вейджер, что, этим больше потенциальная выгода игрока. Имеют значение кроме лимиты ставок при отыгрыше и сроки, на которых возможно воспользоваться предложением. Если бездеп охватывает ограниченный список игр, рекомендуется узнать максимальные коэффициенты, степень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только в том случае, в оператор не установил жесткие ограничения на наивысшую необходимую ставки.Также бездепозитные бонусы имеют работать способом вернуть к забаве клиентов, временно приостановивших своё сотрудничество с компанией: уведомление о бездепе поступает на мобильный аппарат или почту.
1×slot зеркало рабочее этих способов предполагает регистрацию
<a href=https://talkonlinenews.com/viewtopic.php?t=5683>1×slot зеркало рабочее этих способов предполагает регистрацию</a> При игре на бонусные средства запрещается играть в игровые автоматы с прогрессивным джекпотом и забавы из радела live casino. Кроме того, некоторые казино выделяют бездеп на один либо некоторое конкретных слотов, и в других играх Вы не сможете на них выступать. 1 xslots рабочее зеркало <a href=http://zxos.vip/thread-3428–1–1.html>http://zxos.vip/thread-3428–1–1.html</a> Бездепозитный приз казино 2022 с выводом за регистрацию предоставляет возможность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и проверить качество работы саппорта. Довольно нередко, начиная игровой процесс, игрок уже отказывается останавливаться и проделывает настоящий лепта. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть безвозмездно вероятно как раз таки с бонусом за регистрацию без надобности вносить депозит.Если вы новичок в и только попали в неизведанную вами область азарта — за услуг как бездепозитные призы без пополнения.
1×slots зеркало подтвердит вашу регистрацию если говорить
Но есть игорные заведения, которые готовы просто так жертвовать деньги на игру. Для этого достаточно сделать профиль. Чтобы вывести свой выигрыш, вас сначала необходимо выполнить обстоятельства отыгрыша, обозначенные в условиях получения бездепозитного депо.Для вывода средств приз нужно будет отыграть законам, установленным казино. Внимательно ознакомьтесь с правилами акции и вариантами отыгрыша бездепозитного приза до его получения, дабы избежать конфликтных обстановок. Доступность — бездепозитные призы в казино почаще всего предоставляются новым игрокам, но случаются случаи, когда приз могут получить и действующие посетители.В большинстве заведений сделать это можно по e-mal, по номеру телефонного, спустя социальную сеть либо гугл-аккаунт. <a href=http://mbdou-vishenka.ru/user/ChrisEnags/>http://mbdou-vishenka.ru/user/ChrisEnags/</a> Активация случается счет промокодов, коие вводятся в собственном офисе в регистрации. Среди спецпредложений в перечне Casino.ru находятся эксклюзивные промокоды, коие доступны только гостям портала. Другие методы начисления средств ? автоматическая активация сразу последствии создания аккаунта и получение дара по запросу в службу технической поддержки. казино 1×slots официальный сайт Чтобы получить вероятность исключить прибыль с бездепозитного приза в казино, нужно выполнить ряд условий:
<b>Смотреть еще похожие новости:</b>
<a href=https://www.lightknotes.com/MyBB/showthread.php?tid=212840>1×slots рабочее зеркало на сегодня</a>
<a href=https://clubdefansde24.com/foro/viewtopic.php?t=18701>зеркло казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При регистрации по свидетельствовать только достоверную информацию. Когда учетная запись несомненно активна, замечен доступ в Личный офис. В нем возможно избрать денежную, установить промокод и разузнать подробные верховодила получения и отыгрыша бездепа. Краткая информация об акции нередко присутствует непосредственно на регистрационной форме.
#6911 Charlesrobhttps://progworld.net
Download music <a href=https://progworld.net/>https://progworld.net</a> in high quality without sound loss. Convenient search, wide choice of genres and artists, fast downloads.
#6912 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино ставка порно с Дарья Касаткина (теннис) <a href=https://krtka.info/>black russia казино</a> слоты казино Кузнецова Анна Юрьевна порно <a href=https://vestnik-jurnal.com/>ешь казино</a> online casino 7k pin up букмекерская контора рейтинг казино casino бездепозитный порно с Алина Загитова казино смотреть онлайн бесплатно pin up букмекерская контора
#6913 AllenSaitohttps://tv.zfilm-hd.org/
фильмы 2005 смотреть онлайн <a href=https://tv.zfilm-hd.org/>новинки кино онлайн аниме</a>
#6914 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее
Многие игроки, оценив возможностей казино, остаются играть в нем и далее ? на это и нацелено любое промо. Постоянные посетители вносят депозиты и делают ставки, обеспечивая долгосрочную выгода оператора. То есть, казино выдают бездепы свежим юзерам для формирования лояльной аудитории. <a href=http://filmkachat.ru/>онлайн казино 1×slots</a> <a href=https://forum.amzgame.com/thread/detail?id=330739>https://forum.amzgame.com/thread/detail?id=330739</a> Третитй бездепозитный приз за регистрацию – денежные средства. К раскаянию, начислить рубли или баксы способны только знаменитые и знаменитые клубы. С их поддержкою вас насладиться любой доступной забавой – автоматом, рулеткой, кено, блэкджеком.Превышение максимальной ставки при отыгрыше. Система механически не предуведомляет о превышении ставки, поэтому о нарушении управлял игрок может разузнать теснее последствии подачи запроса на вывод средств. 1×слот регистрация в 1×slots casino <a href=http://wiki.natlife.ru/index.php?title=Выкуп_авто>http://wiki.natlife.ru/index.php?title=Выкуп_авто</a> Вообще перейдя в казино — управляла схожи в получении бездепозитных призов, в стандартные правила входит: доказать эл. Почту и телефонный, наполнить свой собственный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ.
рабочее зеркало 1хслотс
<a href=http://mi.minfish.com/home.php?mod=space&uid=1196847>1×slots актуальное зеркало</a> 1×slot зеркало рабочее этих способов предполагает регистрацию Способы получения бездепа различаются в зависимости от вида приза, который понравился игроку. Но вам так нужно быть зарегистрированным в легальном онлайн-казино и подтвердить свою лицо. В общем облике пошаговая аннотация для получения бездепозитного бонуса выглядит так: <a href=https://images.google.com.pr/url?q=https://doctorlazuta.by/>https://images.google.com.pr/url?q=https://doctorlazuta.by/</a> Зачастую бездепозитные призы казино для забавы предлагаются различными заведениями азартных игр виде маркетинговых промоакций либо в целях вербования к для новых игроков. Для бездепозитных призов в казино 2022 геймеру не пополнять счет до этапа вывода желаемых средств. 1× slots зеркало Наш список включает в себя лучшие бездепозитные призы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по важным параметрам:
1×slot зеркало
Более крупные предложения встречаются очень редко. Зачастую они доступны только VIP-игрокам. В остальных случаях им скорее сопутствуют очень строгие обстоятельства отыгрыша. Также вероятны вспомогательные условия прочие лимитирования, прописанные в условиях и положения бонусной программы казино. <a href=https://avto.russ-forum.ru/viewtopic.php?id=2014>https://avto.russ-forum.ru/viewtopic.php?id=2014</a> Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, the decision зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.Но есть игорные заведения, которые готовы просто так жертвовать деньги на забаву. Для сего довольно сделать профиль. Чтобы вывести свой выигрыш, вас поначалу нужно выполнить обстоятельства отыгрыша, указанные в условиях получения бездепозитного депозита. 1×slots зеркало регистрация
1×slots казино зеркало
Чтобы бездеп не был начислен на Ваш аккаунт, Вам не активировать бонусный код. Если одобрение от казино было добавлено на Ваш аккаунт механически, а Вы не расчитываете его использовать, обратитесь в саппорта с просьбой отменить бездепозитный приз. Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.Да, у бесплатных бонусов есть недостатки. Прежде всего, они обычно не. Кроме того, обстоятельства вейджера по ним всегда жесткие. Но все отсутствие риска проделывает их очень привлекательными для посетителей. Не стоит путать забаву в демо и внедрение бонусов. В демонстрационном режиме игрок имеет оценить механику слота, сюжет и оформление. Но забава ведется на относительные кредиты, поэтому отсутствует главное ? ощущение пыла. Активируя промокод либо фриспины, клиент и не расходует средства деньги на игровые автоматы, но имеет сорвать настоящий куш!При использовании бездепозитным призом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют несколько обликов лимитов: 1×slots официальный сайт скачать <a href=https://www.globalvision2000.com/forum/member.php?action=profile&uid=1060608>https://www.globalvision2000.com/forum/member.php?action=profile&uid=1060608</a> Перед активацией принципиально внимательно выучить обстоятельства акции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, на коих можно воспользоваться предложением. Если бездеп охватывает узкий перечень игр, рекомендовано узнать максимальные коэффициенты, уровень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь что случае, если оператор не установил требовательные лимитирования на наивысшую сумму ставки.Бонус с зачислением средств на счет дает больше свободы поступков. Пользователь сам выбирает, каким образом распорядиться подаренными своими. Здесь кроме шансы работать лимитирования на перечень доступных игр, но обыкновенно эти рамки не так строги, как в промо с бесплатными вращениями.
1×slots регистрация на 1хслотс
Самые известные методы вывода денег ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам подобии Neteller и Skrill, еще пользуются криптовалютными кошельками. Вывод выигрышей имеет осуществляться мгновенно либо развлекать от нескольких часов до нескольких суток. <a href=http://www.pawsarl.es/blog/%D0%BB%D0%B8%D1%86%D0%B5%D0%BD%D0%B7%D0%B8%D1%8F-%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D1%8B.html>http://www.pawsarl.es/blog/%D0%BB%D0%B8%D1%86%D0%B5%D0%BD%D0%B7%D0%B8%D1%8F-%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D1%8B.html</a> В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это исключительно милая доля забавы. Важно, часто бездепозитные бонусы в казино выдаются с лимитированиями по наибольшей выплате. В среднем можно рассчитывать на выгода в некоторое тысяч руб. Как вывести выигрыш с приза без депозита. Придётся подтвердить акк документально, в некоторых заведениях. Процедура верификации обязательна и делается каждым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате или прочтите в правилах. 1×slot регистрация Казино выводит деньги лишь на ту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного бонуса, Вам сначала необходимо пополнить счет. В некоторых клубах ограниченный список способов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет непосредственно с этих платежных способов, коие доступны для вывода.Наши специалисты изучают условия акции, этого в ручном режиме проверку их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и другие характеристики. Мы не рекламируем казино, а даем игрокам информацию о наихороших из их.
<b>Смотреть еще похожие новости:</b>
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1848#post-52917>1×slots официальный сайт скачать на айфон</a>
<a href=https://sparta.training/faq/online-returns/#comment-67002>1хслотс официальный сайт зеркало</a>
<a href=https://tabsgame.ru/user/Jamesbes/>1хслотс казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но на некоторых азартных платформах похожие вознаграждения могут получить теперь зарегистрированные пользователи. В таком случае, бонусы предоставляются в рамках оригинальных акций или же неким геймерам в виде акционного предложения, которое прибывает на почту с целью «вернуть» игрока в свое казино. Важно, удостоверьтесь в том, что ранее не регистрировались в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи.
#6915 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
смотреть фильм казино pin casino зеркало <a href=https://repost.news/>порно с Абрамченко Виктория Валериевна</a> порно с Васильева Татьяна Викторовна порно с Аделия Петросян (фигурное катание) <a href=https://rhymes-punches.com/>сайт казино вход</a> казино вход официальный сайт казино проиграл porno Юлия Канакина, скелетонистка Мухтиярова Елена Вячеславовна порно 1×bet слоты официальный сайт порно с Александр Головин (футбол) порно с Анна Калинская (теннис)
#6916 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up букмекерская контора 1×bet casino <a href=https://t.me/vchkogpu_ru>казино смотреть онлайн бесплатно</a> bet casino казино смотреть <a href=https://kompromat1.online/>pin ап casino</a> porno Дарья Клишина Семёнова Татьяна Владимировна порно porno Александр Соболев (футбол) Ходнева Светлана Владимировна порно порно с Афонина Марина Игоревна официальные букмекерские конторы casino 7k рабочее
#6917 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
Обычно для получения бонусов без депозита, казино выдвигает приклнные и абсолютно выполнимые обстоятельства, хотя есть ряд поступков которые воспрещены и шансы повлечь за собой досадные результаты: <a href=http://filmkachat.ru/>1× slots зеркало</a> Сроки активации бонуса устанавливаются любым казино, хотя чаще всего они не превосходят недели с момента получения. Игроку обязательно нужно применять бездеп протяжении указанного срока, в ином случае приз просто пропадет. Каждый бонус можно получить только раз один, потому если не применять бездеп в срок, у игрока не несомненно 2 шанса им пользоваться.Осталось выбрать казино с призом за регистрацию и создать профиль. После активации подарка выигрыш зависимости от Фортуны и навыков. <a href=https://www.find-topdeals.com/blogs/164113/%D0%A1%D1%80%D0%BE%D1%87%D0%BD%D1%8B%D0%B9-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%BE%D0%B1%D0%B8%D0%BB%D0%B5%D0%B9>https://www.find-topdeals.com/blogs/164113/%D0%A1%D1%80%D0%BE%D1%87%D0%BD%D1%8B%D0%B9-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%BE%D0%B1%D0%B8%D0%BB%D0%B5%D0%B9</a> Бонус начисляется игроку сразу в регистрации и прохождения верификации в казино и не настятельно от клиента внесения депозита. Как управляло, размер приза в подобном случае довольно скромный, впрочем позволяет новичкам познакомиться с игрой без риска настоящими средствами. 1хслот зеркало <a href=http://evermountcap.com/bbs/board.php?bo_table=free&wr_id=188208>http://evermountcap.com/bbs/board.php?bo_table=free&wr_id=188208</a>
casino 1×slot
<a href=http://www.ihavethepussy.com/de/threads/215684–1%D0%A1%E2%80%A6%D0%A1%D0%83%D0%A0%C2%BB%D0%A0%D1%95%D0%A1%E2%80%9A-%D0%A0%C2%B7%D0%A0%C2%B5%D0%A1%D0%82%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%BB%D0%A0%D1%95?p=233245#post233245>1хслот зеркало</a> 1×slots рабочее зеркало на сегодня Основное правило получения бездепа ? творимый аккаунт должен быть у юзера первым и единственным. Наличие нескольких аккаунтов требовательно воспрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депо необходимо соблюдать простую последовательность деяний. <a href=https://www.gay8we.com/user/Forsedropkn/>https://www.gay8we.com/user/Forsedropkn/</a> 1×slots casino зеркало рабочее
1хслотс зеркало на сегодня
Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и расценить особенности, труднодоступные при забаве в демо режиме. Многие свежие клиенты перебегают в количество постоянных, а оператор получает долгосрочную выгода.Казино выводит деньги только на ту платежную систему, с котрой был сделан депозит. То есть, для вывода бездепозитного приза, Вам сначала нужно восполнить счет. В неких клубах ограниченный список способов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет именно с этих платежных методов, которые доступны для вывода. <a href=https://yogicentral.science/wiki/User:TheronPerkin6>https://yogicentral.science/wiki/User:TheronPerkin6</a> Также, в этом случае нужно подтвердить собственный номер аппарата, желаемого код, приобретенный в смс-сообщении от клуба ввести в специальное поле в собственном кабинете игрока. 1×slots подтвердит вашу регистрацию если говорить Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные способы и расценить особенности, недоступные при этой в демо режиме. Многие новые клиенты переходят в количество постоянных, а оператор получает длительную прибыль.Любой выигрыш по ставке повыше установленного лимита несомненно считаться недействительным. То есть ставка не будет засчитана при отыгрыше, в случае выигрыша его сумма не поступит на счёт посетителя — результат забавы несомненно полностью аннулирован.
1×slots сайт
Каждый из бездепозитных бонусов без пополнения 2022 имеет свой определенный вейджер для отыгрыша, так же в каждом казино он устанавливается персонально — где то он х55 а где-то х30, повторюсь всюду по различному!Важно, удостоверьтесь что, нет, что ранее не регистрировались в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи. Приглашаем делиться воззреньями о бонусах. Это поможет другим пользователям выбирать более прибыльные предложения.Нет. Казино раздают безвозмездные призы за регистрацию, чтобы, чтобы, чтобы клиент имел ознакомиться с игровым заведением. А дабы вывести его, нужно выполнить обстоятельства отыгрыша. Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных притязаний, кроме неотъемлемой верификации. Если на веб-сайте учтена обязательная процедура подтверждения личности, то вывести выигрыш получится только в проверки данных. Приготовьтесь заполнить анкету и отправить в техподдержку документ, подтверждающий личность.За вербование приятеля ? масштабах партнерской программы заказчик получает вознаграждение за привлечение новых пользователей. 1× слот зеркало <a href=http://cloudscapehill.com/user/travisfoede/?um_action=edit>http://cloudscapehill.com/user/travisfoede/?um_action=edit</a> Новички не любят незамедлительно же вносить депо. Это обосновано отсутствием навыка и недоверием. К счастью, в наше время можно получить бездепозитный приз за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В любом случае вы не рискуете своими сбережениями. Это отличная возможность запустить понравившийся видео разъем или же испытать фортуну в настольных забавах.
1×slots официальный зеркало рабочее
Условия отыгрыша приза. Если Вы планируете заработать на бездепозитном бонусе, то для внимание на значение вейджера и срок, кот-ый дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, тем легче отыграть приз и вывести выигрыш. Большинство клубов завлекают внимание компьютерные за счёт разнообразных даров. На одних веб-сайтах можно получить виртуальные кредиты, коие откроют доступ ко всему софту. На иных же, администрация предлагает безвозмездные вращения для пуска топовых онлайн слотов. Несмотря на разные акции, стоит выделить самые основные. <a href=http://unnewsusa.com/bbs/board.php?bo_table=free&wr_id=3330754>http://unnewsusa.com/bbs/board.php?bo_table=free&wr_id=3330754</a> 1×slots коды
<b>Смотреть еще похожие новости:</b>
<a href=http://smpn1bejen.sch.id/forum/>1× slots официальный</a>
<a href=https://nauc.info/forums/viewtopic.php?t=20417553>1×slots промокод при регистрации 2025</a>
<a href=http://big.bestforums.org/viewtopic.php?f=7&t=9167>скачать 1×slots официальный сайт</a>
<a href=https://forum.home-visa.ru/viewtopic.php?f=69&t=807392&p=2845942#p2845942>1×slots регистрация 1×slots casino c2d ru</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Наш перечень содержит наилучшие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по важным параметрам: Одним из поводов отдавать преимущество, льготу одному либо иному заведению содержится в привлекательности предлагаемых акций и даровых предложений. Безвозмездные фриспины, выдаваемые без нужды создавать какой-либо вклад, в списке располагается далеко не в конце.
#6918 Ремонт imachttps://remont-imac-mos.ru/
Наша мастерская предлагает высококачественный <a href=https://remont-imac-mos.ru/>мастерская по ремонту аймака с гарантией</a> любых брендов и моделей. Мы знаем, насколько важны для вас ваши iMac, и готовы предложить сервис высочайшего уровня. Наши опытные мастера работают быстро и аккуратно, используя только сертифицированные компоненты, что гарантирует долговечность и надежность выполненных работ. Наиболее общие проблемы, с которыми сталкиваются пользователи моноблоков iMac, включают поломку жесткого диска, неисправности дисплея, проблемы с портами, программные сбои и неисправности системы охлаждения. Для устранения этих проблем наши квалифицированные специалисты проводят ремонт жестких дисков, дисплеев, разъемов, ПО и систем охлаждения. Доверив ремонт нам, вы обеспечиваете себе долговечный и надежный вызвать мастера по ремонту imac. Подробная информация представлена на нашем сайте: https://remont-imac-mos.ru
#6919 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet официальный скачать гта казино <a href=https://glvk.guru/>1×slots casino</a> казино вулкан пина casino <a href=https://vestnik-jurnal.com/>porno Алена Михайлова</a> pin up casino казино играть скачать casino на андроид Любимова Ольга Борисовна порно 1×bet 1 pin up casino зеркало букмекерская контора бесплатно скачать
#6920 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Самойлова Алла Владимировна порно порно с Дронова Александра Викторовна <a href=https://krtka.info/>1×bet сейчас</a> Чулпан Хаматова порно с Константин Тюкавин (футбол) <a href=https://t.me/vchkogpu_ru>pin up casino top top</a> 1×bet скачать бесплатно 1×bet зеркало рабочее на сегодня Набиуллина Эльвира Сахипзадовна порно vavada casino порно с Юлия Ефимова Комарова Наталья Владимировна порно порно с Сергей Бобровский (хоккей)
#6921 Charlesgunnyhttp://filmkachat.ru
1×slots скачать на айфон
Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша призов. Заведения постоянно устанавливают наивысшую ставку, допустимую по условиям вейждера.При малый сумме приза рекомендуется играть по невысоким ставкам, а использовать максимальные другого только сомнений случае, случае вейджер очень великой, а время на отыгрыш сильно ограничено. <a href=http://filmkachat.ru/>скачать 1×slots на андроид мобильная версия</a> Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы замечена возможность вывести выигрыш. <a href=https://medium.com/@comcgifurniture/your-complete-guide-to-premium-weed-delivery-pickering-and-local-cannabis-services-c284470081c0>https://medium.com/@comcgifurniture/your-complete-guide-to-premium-weed-delivery-pickering-and-local-cannabis-services-c284470081c0</a> Если вы опытный игрок, вы обязаны знать, собственно приз без депо – редкая находка. Тем ниже, мы еженедельно исследуем онлайн, дабы найти для вас наихорошие бездепозитные предложения. казино 1×slots официальный сайт <a href=http://shizheng.sabjy.com/home.php?mod=space&uid=19549>http://shizheng.sabjy.com/home.php?mod=space&uid=19549</a> Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы которые возникают у новичков.Для отыгрыша бонуса казино обязует игрока сыграть на сумму, в некоторое раз превышающую сумму полученного приза — здесь выгода фирмы явна.
1×slot регистрация
Самые известные методы вывода денег ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электрическим платежным системам типа Neteller и Skrill, а также пользуются криптовалютными кошельками. Вывод выигрышей возможность осуществляться быстро либо развлекать от нескольких часов до нескольких суток.Доступные игры – В некоторых азартных забавах можно понизить математическое преимущество казино до нескольких 10-х процента. В их количестве все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как правило, в таких играх ставки идут в зачет вейджера не полностью. Например, возможность учитываться лишь 50%. В некоторых играх бездепозитные призы вообщем невозможно отыгрывать. <a href=http://permitbeijing.com/forum/showthread.php?tid=2199623>1×slots регистрация 1×slots review live</a> 1×slots зеркало которую указывали при регистрации кстати <a href=https://club.7ya.ru/glavdorogadv2404/>https://club.7ya.ru/glavdorogadv2404/</a> 1х слот регистрация в 1×slots casino Наш список содержит лучшие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает проверку по главным характеристикам:Бездепозитные призы отличный вариант даровой игры в игровые автоматы. Многие пользователи сети не понимают, что в казино можно начать играть безусловно даром, а позже исключить выигрыш на банковскую карту либо электрический кошелек, другие не доверяют онлайн казино, а третьи успешно играют и выигрывают – и тотчас достаточно большие суммы.
1×slots регистрация 1×slotscasino 56 online
Получить Бездепозитный приз в интернет казино дело двух кликов. Другой момент, отыграть рекламную и соблюсти верховодила и обстоятельства отыгрыша. Под правилами подразумевается не только вагер, но и лимитирования по максимальной ставке. Мы понимаем, собственно в кино все ставят на зеро и выигрывают. Призываем не делать сходственного. Перед активацией приза прочтите управляла. Узнайте следующие факторы: Условия получения подарка, за регистрацию, за депозит и многое. Ограничения по наибольшей ставке. Зачастую не выше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на месте. Поэтому важно аристократия, в каких играх возможно совершать кратность денежного оборота. <a href=http://elymbmx.com/mybb/member.php?action=profile&uid=15140>http://elymbmx.com/mybb/member.php?action=profile&uid=15140</a> Вознаграждения за получение VIP-статуса ? начисляются в программки лояльности при достижении еще уровня либо выдаются персонально менеджерами службы.Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала прыткие выводы. Фишка выплат сомнений, что довольно выбрать платёжный инструмент и указать необходимую. В большинстве случаев деньги зачисляются на электронные кошельки на 15 минут, а на банковские карты – 1–3 трудящихся денька. 1 x slots
1×slots casino регистрация
Мы рекомендуем не отказываться от похожих услуг узнаваемых казино. Выделите некоторое мин. На регистрацию, получите бонус и попробуйте его отыграть. Может быть, сегодня фортуна будет на вашей стороне!Бездепозитный приз предоставляется новому игроку за определенные деянья. Часто подарок вид средств или фриспинов выдается за регистрацию, спасибо чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. <a href=https://forum.graylite.com/viewtopic.php?p=215413#p215413>1×slots казино мобильная версия</a> Подобные призы без депо предоставляются на больше прибыльных критериях. Зачастую они крупнее, а обстоятельства отыгрыша наименее строгие. Для получения депозитного бонуса необходимо пополнить собственный игровой баланс реальными деньгами. Вознаграждение возможно получить либо при внесении первого депозита, либо вид фиксированного процента от внесённых средств. Так либо другому, бонус поступит на счёт лишь после пополнения.Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, all зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. 1хслотс казино зеркало <a href=http://www.qazaqpen-club.kz/en/user/JasperVerty/>http://www.qazaqpen-club.kz/en/user/JasperVerty/</a> Перед активацией важно пристально изучить условия промоакции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют значение кроме лимиты ставок при отыгрыше и сроки, в течение которых возможно воспользоваться предложением. Если бездеп охватывает ограниченный список игр, рекомендовано узнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с невысокими множителями выплат подходят лишь в случае, в оператор не установил жесткие лимитирования на наивысшую необходимую ставки.
1хслотс казино зеркало
Бонус за регистрацию в казино выдается лишь один раз на 1-го игрока. Но случаются вспомогательные промоакции, в рамках коих бездепы раздаются для неизменных посетителей и такие презенты Вы сможете получить более 1-го раза.Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные методы и расценить необыкновенности, труднодоступные при этой в демо режиме. Многие свежие клиенты перебегают в количество постоянных, а оператор получает длительную выгода. <a href=https://www.new.jesusaction.org/bbs/board.php?bo_table=free&wr_id=4357890>https://www.new.jesusaction.org/bbs/board.php?bo_table=free&wr_id=4357890</a> Получив свой подарок, Вы сможете безвозмездно играть на настоящие деньги, а выполнив обстоятельства отыгрыша, исключить собственный выигрыш. скачать 1×slots официальный сайт Обыкновенные бездепозитные призы в размере от 3-х до 20 $ сделаны для того, дабы в игры заходили все свежие и новые игроки. Здесь, скорее, будет ограничение на наибольший выигрыш. Важно, дабы перед наименьшим вкладом был отключен приз за 1-ое пополнение счета, и компьютерные не попадет на повторный вейджер.
<b>Смотреть еще похожие новости:</b>
<a href=https://timepost.info/showthread.php?tid=59791>1×slots быструю регистрацию а также мгновенное</a>
<a href=http://u0382101.isp.regruhosting.ru/index.php/forum/general-questions-and-how-tos/68883-otzyvy-o-tovarakh?start=1134#130039>1×slots casino online регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить необыкновенности, недоступные при забаве в демо режиме. Многие свежие клиенты перебегают в число постоянных, а оператор получает долгосрочную прибыль.
#6922 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
бесплатно фильм казино up букмекерская контора <a href=https://th-royalgclub.com/>букмекерская контора леонов</a> Любимова Ольга Борисовна порно 1×bet слоты <a href=https://7club7.com/>казино пин</a> порно с Диана Шнайдер (теннис) порно с Евгения Медведева букмекерская контора porno Игорь Акинфеев (футбол) играющие казино 1×bet porno Алена Михайлова
#6923 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casinos xyz casino скачать приложение <a href=https://krtka.info/>1×bet официальный</a> casino рабочее Черкесова Бэлла Мухарбиевна порно <a href=https://specreporter.com/>вывод казино</a> gama casino букмекерская контора Скоробогатова Ольга Николаевна порно porno Алена Михайлова pin up casino пин ап Кузнецова Анна Юрьевна порно porno Илья Ковальчук (хоккей)
#6924 Charlesusegehttps://z.go-kinogo.com
фильмы онлайн HD в Украине <a href=http://z.go-kinogo.com/>лучшие фильмы онлайн фантастика</a>
#6925 Jeffreyarime
https://gramster.ru/ pinup 2025
#6926 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Матвей Сафонов (футбол) casino com <a href=https://m.repost.news/>спорт букмекерская контора</a> 1×bet зеркало рабочее на сегодня 1×bet xyz porno Александра Степанова, фигуристка <a href=https://t.me/vchkogpu_ru>online casino официальный</a> пинап казино 1×bet зеркало рабочее kent casino казино 5 pin up casino пин ап 1×bet официальный фильмы казино рояль
#6927 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Используйте наилучшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из списка ниже, дабы заработать подарки за простые деянья теперь сейчас получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и прыткими выводами на электронные кошельки.Нет. Для получения бездепозитного приза в казино необходима обязательная регистрация на сайте. Играть в слоты безвозмездно и без регистрации возможно только в демо режиме. <a href=http://filmkachat.ru/>1×slots официальный зеркало</a> Максимальный объем ставки, кот-ый невозможно превышать же приз не несомненно полностью отыгран. В случае нарушения сего верховодила, бонус и выигрыш с него будут аннулированы. <a href=https://www.4sync.com/s/fpXRu8Czr>https://www.4sync.com/s/fpXRu8Czr</a> Чтобы бездеп не был начислен на Ваш акк, Вам не активировать бонусный код. Если поощрение от казино было добавлено на Ваш акк автоматически, а Вы не планируете его применять, обратитесь в службу поддержки с просьбой отменить бездепозитный бонус. казино 1×slots <a href=http://cloudscapehill.com/user/charlesmaype/?um_action=edit>http://cloudscapehill.com/user/charlesmaype/?um_action=edit</a> Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации дара нужно подтвердить электронную почту и привязать телефон;
сайт 1× slots casino
Риск-игра по равным шансам – Также казино возможность воспрещать выполнять условия по отыгрышу за раунда на удвоение, который предлагается в слотах, видео-покере и неких других забавах. <a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=788776>1хслот 1хслотс регистрация перейти на 1×slots</a> 1хслот официальный сайт зеркало Нельзя рассматривать забаву на средства, как вариант заработка. Азартные игры воспрещены для лиц младше 18 лет. Topcasinobonuses.mobi не является зачинщиком азартных игр. Сайт одевает информационный характер. <a href=https://rg-mechanics.club/user/HenryExope/>https://rg-mechanics.club/user/HenryExope/</a> 1×slots рабочее зеркало на сегодня Сразу последствии активации промокода можно пользоваться презентом. Как теснее упоминалось, бонусы посещают трёх обликов – фриспины, кредиты и фриплей-бонусы.
1×slot рабочее зеркало
<a href=http://agriexpert.kz/user/Jasperabuts/>http://agriexpert.kz/user/Jasperabuts/</a> 1×slots зеркало проходить регистрацию это отличный вариант
1хслот скачать
Изучить управляла и обстоятельства получения бездепозитных призов казино, Вы можете у нас на веб-сайте в разделе с призами либо на официальном сайте избранного Вами казино. Если возможности найти необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электрической почте.На условиях отыгрыша даровых бонусов стопам остановиться подробнее. С ними связаны аспекты, коие нельзя оставить без внимания. <a href=https://koreanstudies.com/forum/viewtopic.php?t=174056>1хслотс мобильная версия зеркало</a> Вы всего, скажем, как все предпочитаете получать презенты и бездепозитные бонусы казино. Игорные жилища брали в повадку одаривать гэмблеров приятными призами. Стать владельцем приветственного подарка возможно за творенье профиля либо пополнение счёта. Второй вариант более занимательный, как клубы готовы удвоить депозит! Но в вы новичок и лишь знакомитесь с миром азарта, превосходнее воспользуйтесь призом за регистрацию. 1×slots официальный зеркало рабочее <a href=https://www.mexicanosenelmundo.com/member.php?action=profile&uid=23654>https://www.mexicanosenelmundo.com/member.php?action=profile&uid=23654</a> Условия, на которых предоставляется бездеп, регулируются казино. Каждая акция имеет доскональные правила, гиперссылка на которые обычно находится в промообъявлении. В их указываются лимиты, вейджер, перечень дешевых игр. Если оператор укрывает данные о предложении, то пользоваться им не.
1×slots официальный зеркало
<a href=http://sante-cinnamon.kr/bbs/board.php?bo_table=free&wr_id=228387>http://sante-cinnamon.kr/bbs/board.php?bo_table=free&wr_id=228387</a> Некоторые веб-сайты, прежде чем обмануть регистрацию игроков, предлагают ответить на несколько базовых вопросов. Цель проведения подобной викторины – выявить случайных людей, коие не имеют представления о покере, и не разрешить получения ими призов. Если гость уже играл в казино, то ответить на полтора десятка несложных вопросов несомненно нетрудно. Очень нередко, ответы возможно отыскать на официальных сайтах этих учреждений. 1×slots промокод при регистрации Наличие у игрока 2 аккаунта. Запрещено создавать количество профилей для неоднократного получения бездепов.Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки имеют запросить вспомогательные документы либо инициировать короткое общение по Skype.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.l2endless.com/member.php?action=profile&uid=6253>казино 1×slots</a>
<a href=https://forum-macan.ru/viewtopic.php?t=10846>1×slots официальный регистрация</a>
<a href=https://smm-seo.ru/members/rabofreeol.4209/>скачать 1×slots на андроид мобильная версия</a>
<a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1×slots регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Простая процедура получения бездепозитного бонуса, кот-ая займет не более 2-х минут. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные. При подмоги такового поощрения оператор имеет также завлекать клиентов, коие раньше проявляли активность на веб-сайте, хотя по какой-то основанию перестали выступать. В данном случае промокод высылается юзеру по электрической почте либо вид SMS.
#6928 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet сайт casino официальный сайт <a href=https://specreporter.com/>1×bet на андроид</a> 1×bet телефон 1×bet официальный сайт <a href=https://krtka.info/>kent casino регистрация</a> букмекерская контора без самое казино porno Светлана Ходченкова порно с Ирина Сидоркова казино сочи casino автомат 1go casino
#6929 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Дронова Александра Викторовна casino pin официальный <a href=https://specreporter.com/>porno Юлия Канакина, скелетонистка</a> казино регистрации букмекерская контора зенит <a href=https://www.ossetia.tv/>Комарова Наталья Владимировна порно</a> порно с Афонина Марина Игоревна букмекерская контора скачать приложение 1×bet официальный xbet казино 1 пина букмекерской конторы pin ап casino гама казино
#6930 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия
Да, у бесплатных бонусов есть дефекты. Прежде всего, они обычно маленькие. Кроме того, обстоятельства вейджера по ним практически жесткие. Но все неименье риска делает их довольно красивыми для посетителей. <a href=http://filmkachat.ru/>зеркло казино 1×slots</a> <a href=https://scrapbox.io/renderings-real-estate/Transform_Real_Estate_Presentations_with_Professional_3D_Renderings>https://scrapbox.io/renderings-real-estate/Transform_Real_Estate_Presentations_with_Professional_3D_Renderings</a> В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, нужно адресоваться в службу поддержки спустя лайв-чат на веб-сайте казино. 1хслотс мобильная версия зеркало <a href=http://www.pk10zc.com/space-uid-354642.html>http://www.pk10zc.com/space-uid-354642.html</a> Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, дабы появилась возможность исключить выигрыш.
зеркло казино 1×slots
Как управляло, при выводе финансов, от играющего требуется только устроить минимальный вклад чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом личный счет.Это раз из основных показателей привлекательности подарка. С завешенным коэффициентом числе мастера не сумеют выполнить условия по отыгрышу. И неважно, как привлекательно выглядит предложение – бездепозитный бонус казино в размере $500 либо $1 000. Чтобы новички получше вдумались, что же это вейджер, мы разберём на примере. <a href=http://loevil.com/phpBB3/viewtopic.php?t=33470>casino 1×slot</a> 1×slots регистрация на сайте 1×slots ru com Иногда в бездепа, казино презентует минимальный приз (до 50 рублей), ради которого не стоит заморачиваться.Доступ к дару возможность открываться механически последствии введения промокода либо воззвания в службу сайта. В первом случае от юзера не требуется никаких поступков. Бездеп с активацией по коду встречается почаще всего. Игроку нужно ввести совокупность знаков в графе, кот-ая может пребывать в регистрационной форме в Личном офисе. <a href=http://202.133.247.70/space-uid-1710271.html>http://202.133.247.70/space-uid-1710271.html</a> В зависимости от интернет заведения любой из них имеет вас предложить как бездепозитные средства, например и бездепозитные фриспины, коие после успешной регистрации рухнут вас на ваш игровой баланс.Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен перечень наилучших онлайн казино, коие предлагают своим игрокам щедрые бонусы за регистрацию. 1×slots рабочее зеркало на сегодня Варианты выигрыша зависят от Вашей успеха и условий игорного портала. Выше мы сказали, что кое-какие бездепозитные бонусы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются другие, все, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на средства, можно выиграть неописуемые суммы. Сегодняшние игровые автоматы или видео слоты, как их нарекают. Могут выдавать солидные умножение от х1.000 и повыше. Некоторые умножают ставку от х100.000.
1×slots зеркало на сегодня
<a href=http://t20suzuki.com/phpBB2/profile.php?mode=viewprofile&u=5119>http://t20suzuki.com/phpBB2/profile.php?mode=viewprofile&u=5119</a> 1×slots бездепозитный бонус за регистрацию Условия отыгрыша приза. Если Вы планируете заработать на бездепозитном бонусе, то для внимание на значение вейджера и срок, который дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, тем легче отыграть приз и исключить выигрыш.
1×slots регистрация
Демоказино есть почти на любом сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются значительно реже: там когда выигрыша и соблюдения критерий промоакций бездеп возможно перевоплотить в настоящие средства.Бесплатные призы казино без депо возможно получить вид денежных средств на бонусный счет (вывести их можно только в отыгрыша), фриспинов, забавы или кешбэк-бонуса. 1×slots официальный сайт зеркало рабочее <a href=http://mallds.com/bbs/board.php?bo_table=free&wr_id=153985>http://mallds.com/bbs/board.php?bo_table=free&wr_id=153985</a> При регистрации в том либо ином интернет игральном заведении — вам дается раз шанс испытать свою фортуну не внося средства монеты. Замечу собственно эту поощрительную предложение деют не все онлайн игровые площадки, а лишь щедрая середина(средина) из их. Которые мы подготовили для Вас в нашем списке.Бездепозитный бонус за регистрацию в казино — это стартовый подарок в виде валютного начисления или даровых вращений для свежих игроков заведения, для получения которого не заносить депозит.
казино 1×slots официальный сайт
Демоказино есть практически на каждом сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются существенно реже: там если, тогда, выигрыша и соблюдения критерий акций бездеп можно перевоплотить в настоящие деньги.Следует выделить, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом. 4. Заберите презент. Чаще всего приз активизируется сразу последствии регистрации. Но случаются истории, когда нужно зайти в индивидуальный кабинет или написать в саппорта. <a href=http://forum.moto-fan.pl/uzytkownik-kennethcrilk>http://forum.moto-fan.pl/uzytkownik-kennethcrilk</a> Фриплей-бонусы. Бонусы за бесплатную игру есть только в некоторых клубах. Они зачисляются сразу после сотворения профиля и срабатывают недолговременное время. Если у вас нет времени израсходовать средства, они просто закончатся. Что дотрагивается медли, в большинстве случаев призы действуют в течение 1-го часа.Самый распространённый из похожих призов, окончательно же, бездеп на денек рождения клиента — приз повторяющий фиксированной суммы либо фриспинов поступает на счёт игрока, а пользоваться им можно в течение установленного периода медли. 1×slots официальный сайт мобильная версия скачать
<b>Смотреть еще похожие новости:</b>
<a href=https://www.bf-france.com/forums/profile/30064-rabofreeor/>1 xslots рабочее зеркало</a>
<a href=https://minifishtank.net/forum/showthread.php?tid=19535>1×slots зеркало регистрацию более популярный вариант это</a>
<a href=http://lynnniman.org/index.php?/topic/2321–1×slots-%D1%81%D0%B0%D0%B9%D1%82/>1×slots сайт</a>
<a href=https://www.176mw.net/forum.php?mod=viewthread&tid=138&pid=546744&page=2950&extra=page%3D1#pid546744>1×slot официальный сайт</a>
<a href=https://tabsgame.ru/user/Jamesbes/>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Риск-игра по равным шансам – Также казино может запрещать исполнять условия по отыгрышу с помощью раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких иных забавах. Получить приветственный приз могут лишь новые клиенты онлайн-казино. Способы описаны в критериях промоакции каждого легального казино, чаще всего это:
#6931 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало рабочее регистрации на телефон придет
На нашем веб-сайте Вы отыщите список актуальных новых бездепозитных призов в казино 2022 года. Также, есть большое эксклюзивных предложений, которые доступны только посетителям нашего вебсайта в регистрации по нашей ссылке или активации особого промокода. <a href=http://filmkachat.ru/>1×slots зеркало рабочее</a> <a href=https://jumpshare.com/v/6DEzisT7cRjyebCJQLAM>https://jumpshare.com/v/6DEzisT7cRjyebCJQLAM</a> Какие призы я могу еще получить не бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, любое онлайн казино предлагает игрокам выгодное предложение на первый депо, вы совершаете депо, ваш депо возрастает в двое либо том в 3, что, этим наиболее начать играть возможно с более крупной суммой, например же не запамятываем про вейджер на призы. 1×slots casino зеркало рабочее <a href=http://vttgauriac.fr/forum/memberlist.php?mode=viewprofile&u=6885>http://vttgauriac.fr/forum/memberlist.php?mode=viewprofile&u=6885</a> Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, чтобы была возможность исключить выигрыш.Для казино, работающих онлайн, бездепозитные бонусы необходимы для вербования свежих посетителей. Предложение сыграть на слотах без надобности внесения реальных средств — работающий метод для увеличения интереса к компании. После отыгрыша бездепа великоват шанс, собственно игроку понравится и он продолжит играть в казино, лишь теперь теснее на собственные средства.
1× slots регистрация в 1×slots casino
Для всех бездепозитных призов функционирует максимальный предел на выигрыш. Он показывает максимальную необходимую, коию вы сможете получить, играя на бонусные кредиты. Как только вам получится выполнить притязания вейджера, дозволенный максимум несомненно переведен с бонусного счета на основной, а остаток будет списан. <a href=https://test.soclanovtsy.ru/topic/37439–1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5-%D0%BD%D0%B0-%D1%81%D0%B5%D0%B3%D0%BE%D0%B4%D0%BD%D1%8F/>1×slots зеркало рабочее на сегодня</a> 1×slots казино зеркало Рассмотрим принцип его действия на образце. Допустим, вы зарегистрировались и возымели $10 not the slightest down payment bonus с вейджером х50. Это значит, собственно выигранные деньги можно будет выводить не раньше, чем в того, как общая сумма ставок достигнет $500.Обычно бездепозитные акции от казино, приходят на эл. Почту в дни рождения или праздничные. В некоторых онлайн казино возможно адресоваться в чат и как постоянному игроку, возможно для предложат бездепозитное предложение. <a href=https://finbi.ru/user/PatrickCoawn/>https://finbi.ru/user/PatrickCoawn/</a> 1хслотс официальный сайт зеркало
1×slots зеркало этих способов предполагает регистрацию
Даже не выиграв солидную сумму, игрок интересно проведет время, изнутри выучит работу площадки, воспримет геймплей автоматов. Все это без каких-то финансовых рисков. Быть в курсе наихороших промоакций с. Достаточно периодически изучать перечень свежих интернет казино с выводом приза без депозита в данном разделе.Чаще всего казино приз за регистрацию без депо даёт возможность запустить любой автомат. Но какого-либо пристально ознакомиться с критериями. Иногда для игры доступны только определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, лучше начать знакомство с миром пыла именно с «одноруких злодеев». <a href=http://prolink-directory.com/Shisha-tobacco-from-4-eur_332295.html>http://prolink-directory.com/Shisha-tobacco-from-4-eur_332295.html</a> Фриспины. Бесплатные вращения предназначены для применения в видео-слотах. Внимательно читайте условия – они часто выдаются для неких машин. В зависимости от клуба возможность делать определенное число ставок. Кстати, современные игорные дома дают возможность заводить «одноруких злодеев».Для казино, работающих онлайн, бездепозитные бонусы необходимы для привлечения свежих посетителей. Предложение сыграть на слотах без необходимости внесения реальных денег — работающий метод для повышения интереса к компании. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит играть в казино, лишь теперь уже на собственные деньги. 1×slots регистрация на сайте 1×slots ru com Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, the decision лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.
1×slots зеркало регистрацию более популярный вариант это
<a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=13119>1хслотс мобильная версия зеркало</a> Законодательство, регулирующее азартные забавы в различных странах, влияние на полномочия операторов. В результате пользователи из отдельных регионов сталкиваются с ограничениями со стороны казино. Это имеет быть как полный отказ в доступе, например и невозможность загружать игры отдельных производителей. Наличие у игрока второго аккаунта. Запрещено творить количество профилей для неоднократного получения бездепов.Бонус без депо за регистрацию в казино (бездепозитный бонус) – это денежный презент от клуба, кот-ый начисляется на аккаунт игрока после регистрации в казино. Кроме творенья учетной записи, для получения бездепа, довольно часто требуется ещё и подтвердить контактные данные игрока и/или активировать специальный промо-код. 1×slots официальный demo регистрация в 1×slots casino <a href=http://jade-crack.com/home.php?mod=space&uid=1043347>http://jade-crack.com/home.php?mod=space&uid=1043347</a>
1×slots зеркало сайта
Помните, собственно в неких забавах сумма ставки идет в зачет вейджера лишь отчасти. Так, в настольных и карточных забавах только от 5% до 50% суммы ставки считаются как отыгранные средства, на как в слотах идет в зачет все 100% суммы. Фриспины – безвозмездные вращения с фиксированной ставкой, коие возможно применять в определенных игровых автоматах.Существуют казино с призом за регистрацию, в которых очень известны фриспины в онлайн казино впоследствии регистрации в конкретных забавах. Они встречаются числе чаще безвозмездных поощрений или традиционных бонусов в казино без вложений. Например, игрок регистрирует счет, на кот-ый начисляются безвозмездные забавы, приз за регистрацию повторяющий безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса геймер выигрывает истинные средства, коие в последствии можно удачно исключить из заведения на собственную платежную систему. То есть, есть все шансы исключить средства без рисков собственными деньгами. Регистрация, какую игры получит призы, займет несколько, а благодаря этому можно прирастить 5 евро поощрений до тысячи и без всяких заморочек исключить их. <a href=https://xn----htbblufccvgdmek8j.xn–p1ai/forum/messages/forum1/topic126/message178/?result=new#message178>https://xn----htbblufccvgdmek8j.xn–p1ai/forum/messages/forum1/topic126/message178/?result=new#message178</a> 1×slots официальный сайт зеркало рабочее
<b>Смотреть еще похожие новости:</b>
<a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=851613#pid851613>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Казино дает вероятность заработать и вывести реальные средства на бездепозитных призах. Обычно, это малозначительная сумма, коию казино возможность для разрешить подарить игроку.
#6932 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
мелбет букмекерская контора 7k casino скачать <a href=https://th-royalgclub.com/>порно с Алина Загитова, фигуристка</a> официальная казино inform@rucriminal.info <a href=https://t.me/vchkogpu_ru>porno Игорь Акинфеев (футбол)</a> яндекс игры казино Кузнецова Анна Юрьевна порно kometa casino порно с Владимир Минеев (ММА) kent casino регистрация pin up casino пин ап r7 casino
#6933 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Мира Андреева (теннис) лучшие букмекерские конторы <a href=https://7club7.com/>порно с Афонина Марина Игоревна</a> порно с Алексей Миранчук (футбол) порно с Артемий Панарин (хоккей) <a href=https://strelochnik.com/>казино в россии</a> pin up casino зеркало 1×bet слоты официальный сайт casino рабочее зеркало pin casino зеркало pin up casino официальный букмекерская контора вход макао казино
#6934 Charlesgunnyhttp://filmkachat.ru
1×slots подтвердит вашу регистрацию если говорить
Бездепы обычно предлагают с отыгрышем — мгновенно вывести выигранные средства нельзя. Перевод денег со счета будет вероятен последствии такого, как пользователь выполнит все требования казино, а сумма имеет превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, протяжении которых заказчик вправе воспользоваться предложением. Обычно они не превышают нескольких дней после активации. <a href=http://filmkachat.ru/>1×slots зеркало сайта</a> Подарки на дни ? приуроченные к праздничным датам, требующие условного отыгрыша или начисляются без такового. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду.В разделе с бонусами активировать собственный подарок. Найти игры, для коих предусмотрено одобрение и применять приз по предназначению. <a href=https://lyfepal.com/forums/thread/7349/Mastering-the-Art-of-CGI-Design-From-Concept-to-Revolutionary>https://lyfepal.com/forums/thread/7349/Mastering-the-Art-of-CGI-Design-From-Concept-to-Revolutionary</a> Иногда для получения призов необходимо спутаться с представителями службы поддержки. Удобнее всего с ними разговаривать в онлайн-сате, но иногда довольно запроса по электрической почте.Но на азартных платформах подобные гонорары шансы получить и уже зарегистрированные пользователи. В этом случае, призы предоставляются в рамках уникальных акций или же неким игрокам в виде акционного предложения, которое приходит на почту с целью «вернуть» игрока в свое казино. 1хслот скачать <a href=http://j67236dr.bget.ru/user/PatrickDraic/>http://j67236dr.bget.ru/user/PatrickDraic/</a>
1 xslots рабочее зеркало
Бездепозитные бонусы – это исключительно интересная и наиболее многообещающая промоакция интернет-казино. Они числе никакого фри-спинов, поэтому собственно выплаты в бесплатных вращениях не гарантированы, как композиции на барабанах игрового аппарата шансы не сложиться. <a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=41223>рабочее зеркало 1хслотс</a> 1×slots casino зеркало Вейджер менее х30–35 считается применимым. Опытные игроки утверждают, собственно с таким вейджером реально остаться в плюсе, если верно подойти к выбору игрового аппарата. <a href=https://www.christiandaily.co.kr/service/bbs/board.php?bo_table=free&wr_id=726613>https://www.christiandaily.co.kr/service/bbs/board.php?bo_table=free&wr_id=726613</a> Многие казино деют в рекламных целях бесплатные призы самая для наших читателей. Чтобы их получить, нужно перебежать на игровой сайт по партнерской ссылке с нашего портала. 1 х слотс зеркало Допустим, за регистрацию вы возымели бездеп в размере 2 000 рублей с вейджером х30. В данном случае предстоит устроить ставок, на совместную необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать реальные средства. Однако не запамятовывайте, собственно с каждого дара выйдет исключить определённую сумму (чаще всего не более $200).
1×slots casino зеркало рабочее
Какие призы я могу еще получить не бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, любое онлайн казино предлагает игрокам выгодное предложение на первый депо, вы совершаете депо, ваш депо возрастает в двое либо том в 3, что, этим наиболее начать играть возможно с более крупной суммой, например же не запамятываем про вейджер на призы.Не хотите поиграть в азартные игры, не рискуя своими деньгами, но получая в все выплаты? Подобную возможность предоставляют почти наилучшие порталы с азартными увеселениями. В их количестве количество честных и надежных интернет-казино на российском языке. Они завлекают свежих юзеров разными поощрительными событиями, включая бездепозитные, либо благотворительные бонусы. <a href=https://tpang.co.kr/bbs/board.php?bo_table=free&wr_id=823796>https://tpang.co.kr/bbs/board.php?bo_table=free&wr_id=823796</a> Превышение максимальной ставки при отыгрыше. Система автоматически не предуведомляет о превышении ставки, потому о несоблюдении правил игрок имеет узнать уже после подачи запроса на вывод средств. 1×slots рабочее зеркало В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, нужно обратиться в службу поддержки через лайв-чат на веб-сайте казино.
1×slots казино мобильная версия
Ознакомьтесь с нашим списком наихороших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего списка и получите бездеп сразу. Хватайте лучшие безвозмездные предложения ниже и выигрывайте большие деньги, не рискуя! С не отыгранным бонусом запрещается превышать размер максимальной ставки. Нарушение этого условия будет аннулирование выигрыша.Не стоит незамедлительно же открещиваться от приветственных даров в похожих казино. Администрация готова начислить средства или фриспины, хотя предварительно работники обязаны увериться, собственно вы не аферист. Дело в, собственно развелось очень большое охотников за бонусами. Они выучились врать систему и наваривать крупные суммы средств. зеркала 1×slots <a href=https://www.google.co.ma/url?q=https://doctorlazuta.by/>https://www.google.co.ma/url?q=https://doctorlazuta.by/</a> Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке необходимо пополнить счет в казино. Для депозитных призов, эта процедура не нужна, например как депо теснее сделан.
1×slot зеркало
Верификация необходима для дополнительной безопасности и помогает техподдержке выявить бонусхантеров и плутов. Кстати, на некоторых платформах выводы крупных сумм доступны только последствии доказательства личности. <a href=http://www.taijiacademy.com/newforum_down/profile.php?mode=viewprofile&u=325275>http://www.taijiacademy.com/newforum_down/profile.php?mode=viewprofile&u=325275</a> 1×слотс казино Промокод – определённая композиция символов, коию нужно ввести в отвечающее фон при разработке учетной записи либо активировать в собственном профиле игрока в разделе с бонусами.
<b>Смотреть еще похожие новости:</b>
<a href=https://chasingadream.rpginitiative.com/showthread.php?tid=153926>1×slot официальный сайт</a>
<a href=https://your-portal.at.ua/forum/6–61891–7#87990>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<a href=http://board.eternityrpc.com/member.php?action=profile&uid=369>1×slots сайт</a>
<a href=https://talkonlinenews.com/memberlist.php?mode=viewprofile&u=778>1×slot зеркало рабочее регистрации на телефон придет</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Основное управляло получения бездепа ? творимый аккаунт обязан быть у пользователя первым и единственным. Наличие нескольких аккаунтов взыскательно запрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депозита необходимо соблюдать простую очередность поступков.
#6935 Jeffreyarime
http://gramster.ru/ пин ап вход
#6936 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало сайта
На бесплатные бонусы онлайн-казино практически постоянно распространяется лимитирования по стране проживания клиентов. Даже в для разрешается раскрывать счет и выступать на средства в заведении, это еще не значат, что вас доступны not the slightest down payment bonuses. <a href=http://filmkachat.ru/>1×slots зеркало регистрация</a> Бонус за регистрацию в казино без депозита с выводом денег нужно отыграть. Зачастую для отыгрыша возможность потребоваться сделать ставки на необходимую, в несколько 10-ов раз превосходящую необходимую бонуса или выигрыша. <a href=https://bresdel.com/blogs/806517/Mastering-Interior-Shop-Drawings-From-Concept-to-Construction-Excellence>https://bresdel.com/blogs/806517/Mastering-Interior-Shop-Drawings-From-Concept-to-Construction-Excellence</a> Обычно бездепозитные акции от казино, приходят на эл. Почту в дни рождения либо дни. В неких интернет казино возможно адресоваться в чат и как постоянному игроку, вполне вам предложат бездепозитное предложение.Бесплатный приз – кредиты, которые онлайн-казино начислит посетителю, не принуждая его пополнять игровой счет. 1× slots зеркало <a href=http://perfectsolutionlabs.com/user/Craigevogs/>http://perfectsolutionlabs.com/user/Craigevogs/</a>
x1 slots регистрация в 1×slots casino
Иногда для получения призов нужно спутаться с адептами службы поддержки. Удобнее всего с ними беседовать в онлайн-сате, но иногда довольно запроса по электронной почте. 1×slots акции <a href=https://elliottgqy75296.blogacep.com/35482458/deep-nude-the-ethical-dilemmas-and-technological-impacts-of-ai-driven-image-manipulation>https://elliottgqy75296.blogacep.com/35482458/deep-nude-the-ethical-dilemmas-and-technological-impacts-of-ai-driven-image-manipulation</a> 1×slots регистрация 1×slotscasino09k online
1×slots официальный регистрация
Составленный специалистами Casino.ru список онлайн-казино с бездепозитным бонусом разрешает игрокам сравнить спецпредложения различных операторов.Приветственный бездеп предоставляется какому игроку лишь раз раз. Казино дерутся с например называемыми бонусхантерами (от англ. Bonus Hunter — доброволец за бонусами), пытающимися заводить множественные аккаунты для надувательства оператора и повторного получения подарка. Исключить похожие деяния дозволяет верификация данных. Администрация вправе востребовать у клиента доказать персональные данные, указанные при регистрации. <a href=http://www.dmgec.com/bbs/board.php?bo_table=free&wr_id=238435>http://www.dmgec.com/bbs/board.php?bo_table=free&wr_id=238435</a> Подтверждение регистрации. Казино настоятельно привязки профиля к электрическому адресу и номеру аппарата. Для сего на e-mail отправляется послание ссылаясь, а на телефон ? текстовое извещение с кодом.Шаг 4. Активация. Внимательно выучите условия, информацию по ограничениям и сроке действия бонусного предложения. Разобравшись с правилами, возможно активировать приз в личном кабинете (иногда ? с использованием промокода) или по запросу в саппорт. 1хслот зеркало
1×slots рабочее зеркало на сегодня
Бездепозитные бонусы настоящими средствами, коие возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадали.Казино выводит средства только на ту платежную систему, с котрой был сделан депозит. То есть, для вывода бездепозитного бонуса, Вам поначалу необходимо пополнить счет. В неких клубах узкий список способов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет именно с этих платежных способов, коие доступны для вывода. Главным нюансом в появлении данных вознаграждений произведено сомнений, что пустив их в ход, геймер ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он спасибо призам какой-нибудь выигрыш или моментально спустит все лишь что прибывшие деньги). То есть, казино снабжает игрока вероятностью на дармовой основе выступать во различные слоты причем спонсирует игру. 1×slots зеркало <a href=http://iawbs.com/home.php?mod=space&uid=812929>http://iawbs.com/home.php?mod=space&uid=812929</a> Способы получения бездепа различаются от облика бонуса, который понравился игроку. Но для иначе нужно быть зарегистрированным в легальном онлайн-казино и подтвердить свою личность. В общем виде пошаговая инструкция для получения бездепозитного приза смотрится например:
1×slot зеркало рабочее этих способов предполагает регистрацию
Классическая разновидность бонуса за создание аккаунта. Его превосходство заключается что, собственно клиент может самостоятельно избирать аппараты и создавать ставки в их. Иногда список игровых автоматов ограничен оператором, хотя все также это другого, как, чем единственный дешевый разъем, как в случае с внедрением фриспинов.Большинство клубов завлекают внимание игры за счёт различных подарков. На 1 сайтах возможно получить виртуальные кредиты, которые откроют доступ ко всему софту. На других же, администрация предлагает благотворительные вращения для запуска топовых интернет слотов. Несмотря на различные акции, стоит выделить самые главные. <a href=https://mantiseye.com/community/patrickgerce>https://mantiseye.com/community/patrickgerce</a> Также бывают случаи, когда казино начисляет обсужденный приз в регистрации нового клиента по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам.Для получения выигрыша потребуется выполнить условия казино. Чаще всего игроку нужно поставить определенную сумму, хотя теснее из собственных средств. Она рассчитывается из общего размера выигрыша за всегда применения бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, если пользователь выиграл 1000 руб., а множитель составляет х30, вывести деньги возможно будет, сделав ставки на 30 000 рублей. 1 хслот регистрация в 1×slots casino Разные казино имеют собственные верховодила по выведению выигрыша. Для бездепозитных бонусов принимаются достаточно высокие притязания. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до 100 один в игровых автоматах. Например, в игрок получил безвозмездно 10 $, то нужно будет отыграть их, поставив одну тыщу спинов по 1 баксу каждый. Стоит отметить, собственно не все казино дают вероятность играть на призы и не во всех увеселительных заведениях схожие правила для отыгрывания. Некоторые казино воспрещают играть на бонусы в блекджек либо ограничивают ставки до пяти процентов, что существенно увеличивает в десятки раз число необходимых игр.
<b>Смотреть еще похожие новости:</b>
<a href=https://russiancomputerservice.ru/user/JosephCer/>1 x slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В любом казино с бездепозитным бонусом учтены вейджеровые условия. Это один-единственный «подводный камень», кот-ый стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) устроить определённое количество ставок. Чем круче бонус, что, этим сложнее выполнить обстоятельства, и наоборот. Нет. Для получения бездепозитного бонуса в казино необходима обязательная регистрация на веб-сайте. Играть в слоты безвозмездно и без регистрации возможно только в демо режиме.
#6937 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать букмекерскую контору на андроид мобильные букмекерские конторы <a href=https://t.me/vchkogpu_ru>порно с Ирина Сидоркова</a> kent casino букмекерская контора фонбет <a href=https://krtka.info/>вывод казино</a> Мухтиярова Елена Вячеславовна порно включи казино porno Анастасия Янькова, боксерка официальные сайты казино порно с Евгений Малкин (хоккей) online casino официальный 1×bet официальный 1×bet xyz
#6938 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало проходить регистрацию это отличный вариант
Для казино, работающих интернет, бездепозитные призы необходимы для привлечения новых посетителей. Предложение сыграть на слотах без надобности внесения настоящих средств — работающий способ для повышения энтузиазма к компании. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит играть в казино, лишь теперь теснее на собственные средства.Активация случается счет промокодов, коие вводятся в личном офисе в регистрации. Среди спецпредложений в списке Casino.ru содержатся эксклюзивные промокоды, коие доступны только посетителям портала. Другие методы начисления средств ? автоматическая активация незамедлительно в создания аккаунта и получение подарка по запросу в службу технической помощи. <a href=http://filmkachat.ru/>1×slots официальный сайт, скачать</a> Наши эксперты изучают условия промоакции, затем в ручном режиме проверку их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие характеристики. Мы не рекламируем казино, а даем игрокам информацию о лучших из них.Вы наверняка, например все любите получать презенты и бездепозитные призы казино. Игорные жилища взяли в привычку одаривать гэмблеров приятными призами. Стать обладателем приветственного презента можно за создание профиля или пополнение счёта. Второй вариант более занимательный, как клубы готовы удвоить депозит! Но если вы новичок и лишь знакомитесь с миром азарта, лучше пользуйтесь бонусом за регистрацию. <a href=https://mega.nz/file/E6tG2Y6a#35AP8eRuVWDBW0vFRNmk3yz9lTf4-ohI6ETi78fc0BA>https://mega.nz/file/E6tG2Y6a#35AP8eRuVWDBW0vFRNmk3yz9lTf4-ohI6ETi78fc0BA</a> Чаще всего, популярные сервисы, эти как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно неотъемлемое верховодило. Финансовые средства выводятся лишь спустя что, эту платежную систему, которой огромный для пополнения депозита. Если же игрок получил бездепозитный покерный приз, потребуется пополнить счет на минимальную сумму, кот-ая сочиняет обычно 10 $. 1×slots рабочее зеркало <a href=http://izovsem.ru/users/uxyqyz>http://izovsem.ru/users/uxyqyz</a> Также есть онлайн-платформы азартных игр, коие применяют раздачу бездепозитных бонусов в специальные даты (как для казино, так и для игрока). Помимо этого, действующие игроки кроме имеют возможность получить похожие бонусы за свою деятельность (к примеру, за повышения уровня либо за схожие заслуги).Так что сможете смело регистрироваться без всяких раздумий. Фортуна сегодня точно на вашей стороне. Не страшитесь, ведь следствие какого или ущерба Вам абсолютно не угрожает. С этими призами как без пополнения, Вы остаетесь лишь в плюсе, хотя не как не в минусе.
скачать 1×slots официальный сайт
<a href=http://miupsik.ru/forums/showthread.php?tid=285065>1×slots регистрацию более популярный вариант это</a> рабочее зеркало 1хслотс Подтвердите личность, предоставив оператору казино свои паспортные данные. Инструкции обыкновенно легкие, главное — конкретно им стопам. Если написано, собственно «на фото должны быть видны все хорошо угла странички паспорта» — устройте непосредственно это фото.В истиннее время получить приз за регистрацию в казино довольно просто. Почти любой игорный жилище с радостью даст средства либо безвозмездные вращения. Многие игроки используют данным и не стесняются региться в каждом клубе с выгодными критериями. Кстати, это замечательная вероятность выдумать выигрышную стратегию и сорвать куш. <a href=http://tvradios.top/index.php?subaction=userinfo&user=absurddome96>http://tvradios.top/index.php?subaction=userinfo&user=absurddome96</a> Вышеописанная причина и считается главным нюансом, следствии которого операторы отдают доля собственной прибыли на различные рекламные затраты и рекламные кампании. А наиболее действенным тут станут играть непосредственно бездепозитные бонусы казино 2022 с выводом за регистрацию. казино 1×slots официальный сайт
1хслотс регистрация в 1×slots casino
Допустим, за регистрацию вы возымели бездеп в объеме 2 000 руб. С вейджером х30. В данном случае светит устроить ставок, на общую необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда выполните обстоятельства по отыгрышу, придёт время заработать реальные деньги. Однако не забывайте, что с любого подарка выйдет вывести определённую необходимую (почаще всего менее $200). Объективные – размер приза, коэффициент и обстоятельства вейджера, надобность внесения депо для вывода денег; <a href=http://g961713h.beget.tech/index.php?subaction=userinfo&user=awegykizy>http://g961713h.beget.tech/index.php?subaction=userinfo&user=awegykizy</a> скачать 1×slots официальный сайт
1×slots официальный сайт мобильная версия скачать
Иногда операторы требуют внесение минимального депо перед выводом для верификации платежного инструмента. В неких казино данный депозит того светит отыграть. 1×slots казино зеркало <a href=http://vip-kitchen.com/index.php?subaction=userinfo&user=unsightlyhitch2>http://vip-kitchen.com/index.php?subaction=userinfo&user=unsightlyhitch2</a> Частенько новички не разумеют, как активировать презенты или исключить первый выигрыш. Для похожих случаев наша команда описала основные определения – что это фриспины, вейджер, как его отыграть, чего нужно проходить верификацию.
1 xslots рабочее зеркало
Акции распространяются как на все игры казино, так и на узкий перечень. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и другие. Промо может охватывать разработки одного производителя. Бездеп не пересекается с иными акциями казино. Если на сайте учтен кэшбек, он не начисляется за ставки, сделанные бонусными деньгами. Для идентификации платежных реквизитов игрока возможность понадобиться пополнение счета на наименьшую сумму. Но не мыслить, что снабжая юзеров такими призами, казино занимается спонсированием. Ведь объемы вознаграждений, в основном, не немалые (средним объемом от 5 до 20 долларов). И на эти свои налагаются конкретные условия и лимитирования, обязательные к исполнению игрока, в в последствии он желает получить все средства выигранные финансы. <a href=http://sglpw.cn/home.php?mod=space&uid=331881>http://sglpw.cn/home.php?mod=space&uid=331881</a> 1×slots рабочее зеркало на сегодня Представленные на данной страничке лучшие бездеп бонусы в казино за регистрацию в 2022 году имеют подходящие обстоятельства. После кропотливого анализа редакция портала составила рейтинг спецпредложений, каком посетители Casino.ru шансы сортировать список по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д.
<b>Смотреть еще похожие новости:</b>
<a href=https://techadron.com/forum/memberlist.php?mode=viewprofile&u=232>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=228919>1×slots зеркало рабочее на сегодня</a>
<a href=https://forumauthority.com/thread-6048-post-39910.html#pid39910>1×slots регистрация 1×slotscasino09k online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Простая процедура получения бездепозитного бонуса, которая займет не более 2-х минут. Для получения бездепов, достаточно зарегистрироваться и доказать контактные данные.
#6939 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
inform@rucriminal.info pin up casino top top <a href=https://strelochnik.com/>porno Мира Андреева (теннис)</a> автомат казино pinco casino <a href=https://m.repost.news/>казино фильм смотреть онлайн</a> порно с Юлия Ефимова порно с Максим Глушенков (футбол) пин ап казино casino регистрации официальные букмекерские конторы casino зеркало сайта porno Нина Пирогова, хоккеистка
#6940 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало быструю регистрацию а также мгновенное
За привлечение друга ? в партнерской программки заказчик получает вознаграждение за привлечение свежих пользователей. <a href=http://filmkachat.ru/>1×slots зеркало рабочее на сегодня</a> Прежде чем активировать бездеп, необходимо увериться что, что страна, гражданином коей считается игрок, не входит в перечень запрещенных.В некоторых интернет казино для получения бездепозитных призов не довольно просто зарегистрироваться на сайте клуба и доказать свои контактные данные. Дополнительно потребуется активация промокода. <a href=https://heyjinni.com/read-blog/177753>https://heyjinni.com/read-blog/177753</a> 1×slots зеркало видели такую регистрацию на <a href=https://hectorufnu63074.shoutmyblog.com/29771622/deepnude-ai-navigating-the-controversial-landscape-of-image-manipulation-technology>https://hectorufnu63074.shoutmyblog.com/29771622/deepnude-ai-navigating-the-controversial-landscape-of-image-manipulation-technology</a> Каждый геймер обязан сначала отчетливо выучить обстоятельства по получению и отыгрышу приглянувшегося подарка. Если всё устраивает, поторопитесь отобрать безвозмездные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик сейчас начать вертеть барабаны лучших слотов.На бонусные начисления имеют быть установлены вспомогательные ограничения, которые Вы не приняли при отыгрыше. Пока бонус всецело не отыгран — деньги из казино не выводятся.
1×slots зеркало регистрация
Несмотря на то, собственно этот вариант стимуляции со стороны азартных платформ довольно популярен в сфере подобных игр, далеко не поклонникам казино ведомо, собственно себе бездепозитные призы казино и как именно их вероятно эксплуатировать.У любого игорного заведения средства управляла и обстоятельства. Но, чтобы получить призы, нужно выполнить стереотипные деянья: 1×slots официальный сайт, скачать <a href=https://troyluem31852.blogsvila.com/30428666/deepnude-ai-navigating-the-fine-line-between-innovation-and-ethics>https://troyluem31852.blogsvila.com/30428666/deepnude-ai-navigating-the-fine-line-between-innovation-and-ethics</a> Можно. Вы всегда можете отказаться от получения бездепозитного бонуса за регистрацию в казино, же Вы не создадите ставку. зеркала 1×slots Для получения выигрыша потребуется выполнить условия казино. Чаще всего игроку нужно поставить определенную необходимую, но уже из личных средств. Она рассчитывается из общего объема выигрыша за все время использования бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, случае пользователь выиграл 1000 рублей, а множитель составляет х30, вывести деньги возможно будет, сделав ставки на 30 000 руб.
1хслотс официальный сайт зеркало
Бoльшинcтвo азартных заведений выдвигают примерно одинаковые условия и притязания, коие необходимо выполнить, дабы получить бездепозитный приз за регистрацию. Все их можно соединить в раз перечень:Вейджер в переводе с английского значит «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша полученного приза, в нашем случае бездепозитного. Число ставок имеет — принципиально только набрать сумму, пропорциональную сумме одобрения. <a href=https://bresdel.com/posts/574016>https://bresdel.com/posts/574016</a> Кешбэк-бонус дает собой возврат фиксированного процента от ставки в случае поражения либо же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не выше 10%.Выше мы дали глубокий набор самых свежих и своевременных бездепозитных бонусов в онлайн казино без пополнения на 2022 год, где вам воспользоваться каким ценным бездепозитным бонусом. 1×slots зеркало Ниже указан важный перечень легальных казино в Беларуси с призами на 1-ый депо. Вы сможете попасть на официальный сайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз.
1хслотс зеркало
Подарки на определенные даты отличаются критериями получения. Если поощрение начисляют игроку на день рождения, то сумма обыкновенно находится от общего объема депо последний год. 1×slots регистрация <a href=https://boobs.red/user/FrankVutty/>https://boobs.red/user/FrankVutty/</a> Денежные средства. Третий бонус за регистрацию без депозита – наличные. К раскаянью, только известные и популярные клубы все дать средства в рублях или баксах. С их помощью у насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед данным нужно исполнение конкретных критерий.
1×slots официальный сайт скачать
Онлайн-казино кропотливо продумывают бонусные условия, коие необходимо изучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и другие лимитирования. Ниже указан актуальный список законных казино в Беларуси с бонусами на первый депозит. Вы можете попасть на официальный вебсайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус.Бездепы обычно предлагают с отыгрышем — быстро исключить выигранные свои нельзя. Перевод денег со счета несомненно возможен последствии такого, как юзер выполнит все притязания казино, а сумма не быть выше установленного правилами лимита. Условиями промоакции фиксируются сроки, протяжении которых клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней после активации. <a href=http://wwwwww.ternovka4school.org.ua/user/PorsedropKl/>http://wwwwww.ternovka4school.org.ua/user/PorsedropKl/</a> 1хслотс мобильная версия зеркало Превышение наибольшей ставки при отыгрыше. Система автоматически не предупреждает о превышении ставки, потому о нарушении управлял игрок возможность разузнать теснее последствии подачи запроса на вывод средств.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.exalto-emirates.com/memberlist.php?mode=viewprofile&u=69997&sid=7293ce4b92bfb2d9ee3ed00042a01cf2>x1 slots регистрация в 1×slots casino</a>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=232631>1× slots casino зеркало</a>
<a href=https://www.donchillin.com/space-uid-382497.html>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Доступные забавы – В неких азартных забавах можно понизить математическое превосходство казино до нескольких 10-х процента. В их количестве почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как верховодило, в таких играх ставки идут в зачет вейджера не полностью. Например, возможность учитываться лишь 50%. В неких забавах бездепозитные бонусы вообще нельзя отыгрывать.
#6941 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet сайт 1×bet xyz пинап казино <a href=https://krtka.info/>рабочие зеркала казино</a> 1×bet телефон porno Екатерина Ефременкова, шорт-трекистка <a href=https://glvk.guru/>порно с Зырянова Анастасия Владимировна</a> 7k casino зеркало на сегодня казино смотреть онлайн up casino зеркало играющие казино онлайн где казино 1×bet 1хбет Черкесова Бэлла Мухарбиевна порно
#6942 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации 2025
Получить Бездепозитный приз в онлайн казино дело 2-ух кликов. Другой момент, отыграть промо и соблюсти управляла и условия отыгрыша. Под правилами подразумевается не только вагер, но и лимитирования по наибольшей ставке. Мы понимаем, что в кинотеатр все ставят на зеро и выигрывают. Призываем не делать подобного. Перед активацией приза прочитайте верховодила. Узнайте последующие моменты: Условия получения подарка, за регистрацию, за депо и другое. Ограничения по наибольшей ставке. Зачастую не повыше 350 руб. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на месте. Поэтому важно аристократия, в каких забавах можно совершать кратность валютного оборота.Такие поощрения разрешают даром протестировать свежее казино, разобраться с игровым ходом онлайн слотов, заработать и вывести маленькую необходимую средств. <a href=http://filmkachat.ru/>1×slots сайт</a> В зависимости от онлайн заведения каждый из их имеет вам предложить как бездепозитные деньги, например и бездепозитные фриспины, которые после удачной регистрации упадут для на ваш игровой баланс.В истиннее время получить приз за регистрацию в казино очень просто. Почти каждый игорный дом с радостью предоставит деньги или бесплатные вращения. Многие игроки используют этим и не стесняются регистрироваться в каждом клубе с прибыльными условиями. Кстати, это отличная возможность придумать выигрышную стратегию и сорвать куш. <a href=https://mega.nz/file/E6tG2Y6a#35AP8eRuVWDBW0vFRNmk3yz9lTf4-ohI6ETi78fc0BA>https://mega.nz/file/E6tG2Y6a#35AP8eRuVWDBW0vFRNmk3yz9lTf4-ohI6ETi78fc0BA</a> Вы не в коем случае ни чем не рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической забавы на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, научится регулировать менять ставки и полосы, исследовать бонусные забавы и их выигрышные комбинации, ну в конце концов просто зарядится кучей впечатлений! Ведь вы будите выступать на бонусные средства, коие возможно отыграть и исключить, а не просто на демо счет, что, этим наиболее адреналин в крови более повысится а пульс забьется с нередким ритмом! 1×slots актуальное зеркало <a href=http://myqiantang.com/space-uid-304831.html&do=profile>http://myqiantang.com/space-uid-304831.html&do=profile</a> Активация происходит за промокодов, которые вводятся в собственном офисе после регистрации. Среди спецпредложений в перечне Casino.ru находятся неповторимые промокоды, коие доступны лишь гостям портала. Другие методы начисления средств ? автоматическая активация сразу последствии творения аккаунта и получение дара по запросу в службу технической поддержки.
казино 1×slots
Промокод – определённая комбинация знаков, коию необходимо ввести в подходящее фон при разработке учетной записи или активировать в личном профиле игрока в разделе с призами.Для казино, работающих онлайн, бездепозитные бонусы нужны для привлечения новых клиентов. Предложение поиграть на слотах без необходимости внесения настоящих средств — работающий способ для увеличения энтузиазма к компании. После отыгрыша бездепа велик шанс, что игроку понравится и он продолжит выступать в казино, лишь сейчас уже на личные средства. 1×slots регистрация на сайте 1×slots ru com <a href=http://hsmg.kr/bbs/board.php?bo_table=free&wr_id=77795>http://hsmg.kr/bbs/board.php?bo_table=free&wr_id=77795</a> 1× slots регистрация в 1×slots casino
1×slots регистрацию процедура займет всего лишь
<a href=http://whitepower.clanweb.eu/profile.php?lookup=26634>http://whitepower.clanweb.eu/profile.php?lookup=26634</a> казино 1× slots официальный сайт Подтверждение электронной почты – одно из ведущих критерий, коие есть практически в каждом бездепозитном казино. Чтобы верифицировать электронную почту, достаточно перейти по активной ссылке в послании, полученном от азартного клуба.
1×slots скачать на айфон
Постарайтесь отыграть вейджер, дабы была возможность забыть заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электронной кошелёк, карту, телефон.Помните, собственно всевозможные нарушения управлял сведут на нет ваши усилия, и вы наверняка останетесь без начисленного для дарового бонуса. Всегда изучайте правила начисления и условия вейджера. По каким вопросам, на коие вы не других отыскать ответы, обращайтесь за разъяснениям и саппорт. 1×slots зеркало регистрация то дальше необходимо пройти <a href=https://qualityprogamer.de/forum/member.php?action=profile&uid=6433>https://qualityprogamer.de/forum/member.php?action=profile&uid=6433</a>
1×slos регистрация в 1×slots casino
Проверка занимает от нескольких мин. До нескольких дней, спецы техподдержки могут запросить дополнительные документы или инициировать краткое общение по Skype.Подтверждение персональной инфы. Все казино настоятельно от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и присутствие у пользователя иных аккаунтов (мультиаккаунт запрещен). <a href=http://forums.ggcorp.me/space-uid-3859142.html>http://forums.ggcorp.me/space-uid-3859142.html</a> Мы подготовили список, где есть постоянно актуальные и новые бездепозитные бонусы казино, коие возможность получить даром. Для наших пользователей есть специальные предложения неповторимые призы, коие вы у не найдете, их мы определили специальной красноватой плашкой «Exclusive».Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. 1хслот скачать B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.Представленные на данной странице лучшие бездеп призы в казино за регистрацию в 2022 году имеют подходящие обстоятельства. После кропотливого анализа редакция портала составила рейтинг спецпредложений, в гости Casino.ru все сортировать список по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В настоящее время получить бонус за регистрацию в казино очень просто. Почти каждый игорный дом с радостью даст средства или благотворительные вращения. Многие игроки пользуются этим и не стесняются региться в каждом клубе с прибыльными условиями. Кстати, это отличная вероятность выдумать выигрышную стратегию и сорвать куш. Популярность онлайн казино растёт и всё больше юзеров начинают увлекаться азартными забавами. Бездепозитные бонусы 2022 года, это уникальные презенты за регистрацию. С их помощью новые игроки шансы получить безвозмездные вращения или деньги на баланс за 1 регистрацию. С в игорных заведений в онлайне, бездепозитные призы стали знаменитейшим методом вербования игроков. Подобные акции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о которых мы расскажем. Наш вебсайт собрал превосходнейшие предложения из онлайна на 2022 год. Воспользуйтесь каким презентом и сможете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить условия.
#6943 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало
Для всех бездепозитных бонусов функционирует максимальный предел на выигрыш. Он указывает предельную сумму, которую вас получить, играя на бонусные кредиты. Как лишь вам удастся выполнить требования вейджера, допустимый максимум будет переведен с бонусного счета на основной, а остаток несомненно списан. <a href=http://filmkachat.ru/>1хслотс рабочее зеркало на сегодня</a> Размер призов чаще всего чисто символический и не превышает 50 руб. Приятно, хотя ощутимым бустом деле ли станет. <a href=http://www.alexandria.gov.eg/Lists/List30/DispForm.aspx?ID=83358>http://www.alexandria.gov.eg/Lists/List30/DispForm.aspx?ID=83358</a> Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала быстрые выводы. Фишка выплат в, собственно довольно избрать платёжный инструмент и показать необходимую. В большинстве случаев средства зачисляются на электронные кошельки на 15 минут, а на банковские карты – 1–3 трудящихся дня.Заработать на бездепозитных бонусах за регистрацию в казино имеет любой юзер, достигший совершеннолетия. 1×slos регистрация в 1×slots casino <a href=https://igridsolutions.com/lagos/languages/blog-ginekologa.html>https://igridsolutions.com/lagos/languages/blog-ginekologa.html</a> Получить Бездепозитный бонус в онлайн казино дело 2-ух кликов. Другой момент, отыграть рекламную и соблюсти управляла и обстоятельства отыгрыша. Под правилами подразумевается не только вагер, хотя и ограничения по наибольшей ставке. Мы осознаем, собственно в кинотеатр все ставят на зеро и выигрывают. Призываем не создавать похожего. Перед активацией бонуса прочитайте управляла. Узнайте последующие моменты: Условия получения подарка, за регистрацию, за депозит и многое. Ограничения по максимальной ставке. Зачастую не повыше 350 рублей. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вращать автоматы, а вагер несомненно стоять на месте. Поэтому принципиально аристократия, в каких играх возможно совершать кратность валютного оборота.Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам запрещено начислять призы клиентам, не имеющим валютных средств на счете. Мы предлагаем рассмотреть животрепещущие бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ.
казино 1×slots
1× slots casino официальный сайт <a href=https://www.weddingbee.com/members/glavdorogadvr/>https://www.weddingbee.com/members/glavdorogadvr/</a> Для получения бонуса нужно ознакомиться с программой лояльности казино и сделать ставки на необходимую, нужную для перехода на грядущий степень. 1×slot казино зеркало Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавления или официального клиента для ПК. В большинстве казино действуют программы лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий уровень нередко сопровождается выдачей бездепа.
1×slots сайт
Сроки активации приза уточняются любым казино, но чаще всего они не превышают недели с момента получения. Игроку непременно надо(надобно) использовать бездеп протяжении обозначенного срока, в ином случае приз просто пропадет. Каждый приз можно получить лишь раз раз, потому в не применять бездеп в срок, у игрока не будет второго шанса им пользоваться. <a href=http://www.dbgjjs.com/home.php?mod=space&uid=440188>http://www.dbgjjs.com/home.php?mod=space&uid=440188</a> Хотя безвозмездные призы начисляются без депозита, не исключено, что вас понадобиться заносить средства. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только после такого, как новый заказчик первый пополнит игровой счет. 1×slots зеркало этих способов предполагает регистрацию Ограничения по забавам. Администрация запрещает игрокам кое-какие игровые автоматы с бездепозитным бонусом, деньгами либо безвозмездными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда дробленье производится по виду игр. Например, отыгрыш вероятен на всех игровых аппаратах, но запрещен в настольных забавах и в разделе Live Casino.Для как, чтобы отыграть необходимую вашего бездепозитного бонуса надо(надобно) выполнить условия вейджера. Очень часто фриспины даются на конкретные слоты (book of ra, book of dead, book of sun), выбирайте слот себе по, они довольно очень и высококачественные. Бездепозитные приз может быть валютным например и в виде фриспинов на слоты
1хслотс рабочее зеркало
Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных ситуаций с казино, когда последствии отыгрыша бездепа вас не дадут исключить крупную сумму выигрыша.Используйте наилучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, дабы заработать презенты за простые деяния теперь сейчас получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и резвыми выводами на электронные кошельки. Условия имеют разниться приятель от друга. Но такой приз возможность быть использован лишь для игрового процесса – полученные на счет деньги до того, как будут отыграны, вывести невозможно.При регистрации следует свидетельствовать лишь достоверную информацию. Когда учетная запись будет активна, будет доступ в Личный офис. В нем можно выбрать валюту, ввести промокод и узнать подробные правила получения и отыгрыша бездепа. Краткая информация об акции нередко присутствует непосредственно на регистрационной форме. 1 xslots рабочее зеркало <a href=https://kivy.club/home.php?mod=space&username=ihyhoju>https://kivy.club/home.php?mod=space&username=ihyhoju</a> Прибывшие на акк финансы бездепозитные призы предназначаются, в основном, только для свежеиспеченных пользователей, коие ранее не имели собственного аккаунта в данном казино. Исходя из этого, в раньше у игрока был изготовлен депозит, то, по всей вероятности, у него больше не несомненно возможности рассчитывать на получение такового приза в конкретном заведении.Максимальная ставка ? уточняется в денежной счета и ограничивает объем ставки за раз спин. В случае ее превышения бонус возможность быть аннулирован. Также в правилах имеет находиться запрет на размещение ставок определенного вида, например, по одинаковым шансам в рулетке (словами, на чет либо нечет, красное или черное и т.д. ).
1хслотс официальный сайт зеркало
Помните, собственно в неких забавах сумма ставки идет в зачет вейджера лишь частично. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки считаются как отыгранные средства, в то время как в слотах идет в зачет все 100% суммы.На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не можете активировать и получить бездепозитный приз. <a href=https://historydb.date/wiki/User:LatriceGrills>https://historydb.date/wiki/User:LatriceGrills</a> 1хслотс официальный сайт зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://www.reisezielforum.de/viewtopic.php?t=369316>1 x slots</a>
<a href=https://forum.bedwantsinfo.nl/member.php?action=profile&uid=83172>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для ревизии применяются сканы паспортов, водительских удостоверений, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь замечен в попытке завести вспомогательный акк, все его учетные записи подвергаются блокировке, а их владелец попадает в черный перечень. При ирге на лицензионной площадке надо бояться свидетельствовать достоверную индивидуальную информацию (шифрование ликвидирует утечку персональных данных). Ознакомьтесь с нашим списком превосходнейших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего списка и получите бездеп незамедлительно. Хватайте лучшие благотворительные предложения ниже и выигрывайте великие деньги, не рискуя!
#6944 Charlesgunnyhttp://filmkachat.ru
1× slots зеркало
В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая приятная доля игры. Важно, зачастую бездепозитные призы в казино выдаются с лимитированиями по наибольшей выплате. В среднем возможно рассчитывать на выгода в несколько тысяч руб. Как исключить выигрыш с приза без депо. Придётся подтвердить акк документально, в неких заведениях. Процедура верификации неотклонима и делается каждым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате или прочитайте в правилах.Для получения выигрыша потребуется выполнить условия казино. Чаще всего игроку нужно поставить конкретную необходимую, хотя теснее из личных средств. Она рассчитывается из совместного размера выигрыша за все время использования бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, если юзер выиграл 1000 рублей, а множитель составляет х30, исключить средства возможно несомненно, сделав ставки на 30 000 рублей. <a href=http://filmkachat.ru/>1×slots бонус за регистрацию</a> Принципиальным различием бесплатных бонусов от призов на депозит считается отсутствие надобности заносить средства на аккаунт. Из-за этого их нередко именуют бездепозитными (not the slightest deposit bonuses).Простая процедура получения бездепозитного приза, которая займет не более 2-х мин. Для получения бездепов, достаточно зарегистрироваться и доказать контактные данные. <a href=https://hanson.net/users/archicgicom>https://hanson.net/users/archicgicom</a> Бездепы обычно предлагают с отыгрышем — моментально исключить выигранные свои нельзя. Перевод средств со счета будет вероятен последствии как, как пользователь выполнит все требования казино, а сумма не превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, в течение коих клиент вправе пользоваться предложением. Обычно они не превышают нескольких дней после активации. 1×slots зеркало регистрация то дальше необходимо пройти <a href=http://jade-crack.com/home.php?mod=space&uid=1059789>http://jade-crack.com/home.php?mod=space&uid=1059789</a>
зеркала 1×slots
Но на азартных платформах сходственные вознаграждения имеют получить и уже зарегистрированные пользователи. В этом случае, бонусы предоставляются в уникальных акций или же некоторым игрокам вид акционного предложения, которое приходит на почту с целью «вернуть» игрока в свое казино.Но есть азартные заведения, готовые просто так вручить средства на забаву. Для этого достаточно сделать профиль. Чтобы исключить выигрыш, сперва необходимо выполнить вейджеровые условия, прописанные в условиях получения бездепа. 1×slots официальный сайт мобильная версия скачать Шаг 4. Активация. Внимательно исследуйте обстоятельства, информацию по лимитированиям и сроке деяния бонусного предложения. Разобравшись с правилами, возможно активировать приз в личном офисе (иногда ? с использованием промокода) или по запросу в саппорт.Но есть игорные заведения, которые готовы просто например жертвовать средства на забаву. Для сего достаточно сделать профиль. Чтобы вывести свой выигрыш, для поначалу нужно выполнить обстоятельства отыгрыша, обозначенные в критериях получения бездепозитного депо. <a href=https://malaysia-forex.com/members/144667-Jamesfluef>https://malaysia-forex.com/members/144667-Jamesfluef</a> Практически все интернет казино с бездепозитным призом за регистрацию учитывает программу преданности — систему одобрения неизменных посетителей, кот-ая состоит из колличества уровней. При достижении игроком еще значения на его счёт поступает бонус. Чем выше уровень — что, этим щедрее бонус. 1× slots официальный Подобные призы без депозита предоставляются на более прибыльных условиях. Зачастую они крупнее, а обстоятельства отыгрыша наименее строгие.Условия вывода выигрыша. В неких заведениях для успешного вывода с бездепозитного приза довольно пополнения баланса и доказательства личности. В иных же клубах, нужно некоторое раз прокрутить собственный депо.
1 x slots casino
Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. Да, у даровых бонусов есть недостатки. Прежде всего, они обыкновенно маленькие. Кроме как, обстоятельства вейджера по ним практически жесткие. Но все неименье риска делает их довольно привлекательными для посетителей. <a href=http://ishware.co.uk/fusion/profile.php?lookup=25767>http://ishware.co.uk/fusion/profile.php?lookup=25767</a> 1×slot зеркало Таким образом онлайн казино получает потенциального игрока. Возможно в будущем либо настоящем он захочет сыграть на средства средства. Так трудятся бездепозитные призы в онлайн казино. Здесь очень подходит выражение, бесплатные сыр посещает лишь в мышеловке. Начинающие игроки имеют не осознавать опасность азарта. Однако со временем осознания становится больше. Это тема для отдельного обсуждения.На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не можете активировать и получить бездепозитный бонус.
1×slot зеркало
<a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1×slots на любой вкус как пройти регистрацию</a> Самые популярностью способы вывода денег ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам подобии Neteller и Skrill, а используют криптовалютными кошельками. Вывод выигрышей возможность исполняться быстро либо занимать от нескольких часов до нескольких суток.Бесплатные бонусы казино без депо возможно получить вид денежных средств на бонусный счет (вывести их возможно только последствии отыгрыша), фриспинов, забавы или кешбэк-бонуса. Срок активации и время на отыгрыш. Зачисление средств или фриспинов случается при активации на взыскательно ограниченного периода, подобные требования предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать приз количество дней либо даже недель. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером. 1×slots регистрация 1×slots review live <a href=http://bananashoes.ru/bitrix/redirect.php?goto=http://uge42.ru/bitrix/redirect.php?goto=http://geogas.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/nAQ-VQVmiso>http://bananashoes.ru/bitrix/redirect.php?goto=http://uge42.ru/bitrix/redirect.php?goto=http://geogas.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/nAQ-VQVmiso</a> Даже не выиграв солидную необходимую, игрок интересно проведет время, изнутри исследует работу площадки, воспримет геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе наилучших промоакций легко. Достаточно периодически учить перечень новых онлайн казино с выводом приза без депозита в этом разделе.Размер приза. В качестве бездепов обыкновенно начисляют большие суммы, а когда идет о бонусах за депо, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино могут презентовать игроку до 2000$.
1хслотс зеркало
1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, случае не желаете стать жертвой мошенников или впустую израсходовать время; <a href=http://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=4987>http://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=4987</a> Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации подарка необходимо доказать электрическую почту и привязать телефонный;Бывают ли бездепозитные бонусы без вейджера? Бывают, случае у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный приз за регистрацию устанавливается вейджер во всех казино. 1×slots официальный сайт скачать Бездепы могут заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами.Но есть азартные заведения, готовые просто так вручить средства на забаву. Для этого довольно создать профиль. Чтобы вывести выигрыш, сперва необходимо выполнить вейджеровые условия, прописанные в условиях получения бездепа.
<b>Смотреть еще похожие новости:</b>
<a href=https://adler.biz/threads/1101/>1×slots акции</a>
<a href=https://acerfans.ru/faq/796-kak-vylozhit-na-forum-informaciju-iz-zhurnala.html>1×slots casino регистрация на сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В интернет-сети постоянно возможно найти списки более популярных и гарантированных поощрительных программ от модных онлайн-казино. Осталось выбрать казино с бонусом за регистрацию и создать профиль. После активации презента выигрыш зависимости от Фортуны и навыков.
#6945 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino вход казино сегодня <a href=https://glvk.guru/>casino online зеркало</a> casino игровой автомат casino скачать приложение <a href=https://rucriminal.info/>казино рояль смотреть</a> лучшие онлайн казино сайте букмекерской конторы фонбет 1×bet официальный 1×bet слоты официальный сайт сайт казино вход суть казино порно с Максим Глушенков (футбол)
#6946 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации
Приветственный бонус без депозита ? подарок за регистрацию. Выдается деньгами, фриспинами либо баллами. В последнем случае бонусные баллы применяются для участия в турнирах либо обмена на реальные деньги. <a href=http://filmkachat.ru/>1× слот зеркало</a> В качестве бонусов онлайн казино часто предлагает выдачу фриспинов, другими бесплатных вращений игрового барабана. Виртуальные монеты можно использовать для изучения в покерной школе или для игры в казино.Главным моментом в возникновении этих вознаграждений произведено сомнений, что пустив их в ход, игрок ничем не рискует и в последствии никому ничего не несомненно обязан (не зависимо, получит ли он благодаря призам какой-либо выигрыш или мгновенно спустит все только собственно прибывшие финансы). То есть, казино снабжает игрока вероятностью на дармовой основе выступать во различные слоты причем спонсирует забаву. <a href=https://hanson.net/users/ShopAvto>https://hanson.net/users/ShopAvto</a> 1×slots рабочее зеркало <a href=https://www.ytdestek.com/members/23310.html>https://www.ytdestek.com/members/23310.html</a>
1×slots зеркало регистрацию более популярный вариант это
1×slots официальный demo регистрация в 1×slots casino <a href=https://australianweddingforum.com/weddings/member.php?action=profile&uid=10369>https://australianweddingforum.com/weddings/member.php?action=profile&uid=10369</a> Особую изюминку видео слотам присваивают уникальные знакы. С их появлением активизируются разные призы. Вы сможете запустить вспомогательный уровень и прирастить необходимую выигрыша. Есть знаки, которые замещают негодные элементы и сами создают выигрышные комбо. Не стоит забывать и на бонус-тур. После каждого успешного спина есть шанс увеличить сумму выигрыша в два либо четыре раза.Помните, собственно любые нарушения правил сведут на нет ваши старания, и вы скорее останетесь без начисленного для безвозмездного бонуса. Всегда изучайте правила начисления и условия вейджера. По каким вопросам, на которые вы не помощи отыскать ответы, обращайтесь за разъяснениям и саппорт. 1×slots официальный сайт зеркало Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают приз по государствам. Вплоть до того, собственно клуб возможность себя игроков из Вашей государства, а бездеп мешает.
1×slots подтвердит вашу регистрацию если говорить
Если речь идет об эксклюзивных услугах, возможность понадобиться регистрация в казино по ссылке с партнерского вебсайта.Например, игрок получил 500 руб. При твореньи аккаунта и обязан отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 руб., понадобится устроить 875 спинов для полного отыгрыша. Получив свой презент, Вы сможете безвозмездно играть на реальные деньги, а выполнив обстоятельства отыгрыша, исключить собственный выигрыш.Если ординарными текстами, бездепы – это определённая сумма денег или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать подарки. Но есть некоторые нюансы. Существуют игорные дома, коие перед что, этим как начислить бонусы просят привязать аппарат, предоставить копии документов. <a href=http://ch-marine.co.kr/bbs/board.php?bo_table=qna&wr_id=51235>http://ch-marine.co.kr/bbs/board.php?bo_table=qna&wr_id=51235</a> Обычно, бездепозитные бонусы выдаются под определенные слоты с фиксированной ставкой, хотя их наверняка запрещено использовать в игровых автоматах с современным джекпотом. Список игр, каких можно использовать бездеп, Вы отыщите в описании акции или сможете уточнить у службы заведения. 1хслот зеркало
1×slots бездепозитный бонус за регистрацию
Любой выигрыш по ставке выше установленного лимита будет являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, а случае выигрыша его сумма не поступит на счёт клиента — итог игры будет всецело аннулирован.Возможность протестировать новые забавы, не рискуя личностными средствами и создать личную тактику игры. Реже бонусы без депо начисляются постоянным игрокам. С их помощью администрация старается вычесть ценных клиентов либо желает поблагодарить за лояльность верных посетителей. Но намного почаще для похожих целей применяются эти акции: 1×slots зеркало регистрация <a href=http://gss-online.ru/bitrix/redirect.php?goto=http://scorcher.ru/autorization/remember.php?from_page=http://prom-pc.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/PshaZG2QpHL>http://gss-online.ru/bitrix/redirect.php?goto=http://scorcher.ru/autorization/remember.php?from_page=http://prom-pc.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/PshaZG2QpHL</a> Так собственно основное различие подарка на депозит от бездепа – обязательное пополнение счёта. Вы сможете привнести депозит и преумножить стартовый капитал либо арестовать бездеп и этом не придётся рисковать своими сбережениями. Поспешите выполнить простые притязания, и администрация ресурса начислит щедрое одобрение!Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, или проигрываете предложенный бонус, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, научится регулировать изменять ставки и полосы, исследовать бонусные забавы и их выигрышные композиции, ну в конце концов просто зарядится кучей впечатлений! Ведь вы будите выступать на бонусные средства, коие можно отыграть и вывести, не просто на демо счет, что, этим наиболее адреналин в крови еще больше повысится а пульс забьется с частым ритмом!
1×slots официальный зеркало
У каждой забавы средства притязания по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система зачтет любую ставку. В рулетке и покере устроить это гораздо сложнее. Именно поэтому так главно внимательно разбирать условия получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой этой, то новенькие просто «спустят бонус на ветер».Бездепозитные бонусы казино за регистрацию в 2022 году — это возможность поиграть за счёт заведения. Казино даёт посетителю шанс пользоваться определённой суммой или количеством бесплатных вращений без внесения депозита. Не путайте деморежим с реальной забавой без необходимости внесения депо. Наличие у игрока второго аккаунта. Запрещено творить количество профилей для неоднократного получения бездепов.Главным интересным в появлении данных вознаграждений состоит в, собственно пустив их в ход, игрок ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он спасибо бонусам какой-нибудь выигрыш либо моментально спустит все лишь собственно прибывшие финансы). То есть, казино снабжает игрока вероятностью на дармовой базе выступать во различные слоты даже спонсирует забаву. <a href=http://2012614.com/home.php?mod=space&uid=74942&do=profile>http://2012614.com/home.php?mod=space&uid=74942&do=profile</a> Бывают ли бездепозитные бонусы без вейджера? Бывают, случае у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино.Чтобы бездеп не был начислен на Ваш акк, Вам надо активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк механически, а Вы не расчитываете его использовать, обратитесь в саппорта с просьбой отменить бездепозитный приз. 1× slots зеркало Акционные предложения от казино существуют в различных форматах. Часто бонусы даются в мена на депозит. Игрок заносит платеж и получает деньги, безвозмездные вращения прочие поощрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — вид приза, кот-ый гарантирован за исполнение конкретных поступков на сайте:Ознакомьтесь с нашим списком лучших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего списка и получите бездеп незамедлительно. Хватайте лучшие благотворительные предложения ниже и выигрывайте немалые деньги, не рискуя!
<b>Смотреть еще похожие новости:</b>
<a href=https://bans.org.ua/index.php?topic=127156.new#new>1×slot регистрация</a>
<a href=https://karakol.com.kg/user/Jameskef/>1×slots регистрацию процедура займет всего лишь</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных бонусов принимаются достаточно высокие требования. Часто онлайн-казино рекомендуют отыграть бонусное поощрение до 100 один в игровых автоматах. Например, случае игрок получил бесплатно десять $, то нужно несомненно отыграть их, поставив одну тысячу спинов по одному доллару любой. Стоит обозначить(означить), что не все казино дают вероятность играть на бонусы и не во всех развлекательных заведениях идентичные правила для отыгрывания. Некоторые казино запрещают выступать на призы в блекджек либо ограничивают ставки до 5 процентов, собственно значительно увеличивает в десятки раз число нужных игр. Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают приз по странам. Вплоть до того, что клуб имеет принимать игроков из Вашей государства, а бездеп мешает.
#6947 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Черкесова Бэлла Мухарбиевна порно порно с Каролина Севастьянова <a href=https://rucriminal.info/>рокс казино</a> играющие казино пин ап casino pin up top <a href=https://res-publika.com>гама казино</a> казино онлайн пин casino сайт pin up casino почему в казино не бывает настенных часов порно с Варвара Субботина kent casino unlim casino
#6948 Charlesgunnyhttp://filmkachat.ru
1×slots официальный регистрация
Почти все игровые клубы просят свидетельство контактных данных игрока для получения бездепозитного бонуса. <a href=http://filmkachat.ru/>1×slots регистрация на 1хслотс</a> Промообъявления от казино не дают реальной картины и ориентированы на привлечение внимания пользователей. Понять, как высоки шансы остаться в плюсе, позволит личный анализ критерий предложения: <a href=https://imageevent.com/lexxeagle/virtualpropertytours>https://imageevent.com/lexxeagle/virtualpropertytours</a> 1×slots регистрация то дальше необходимо пройти <a href=http://etllab.ru/index.php?subaction=userinfo&user=uppitymalady66>http://etllab.ru/index.php?subaction=userinfo&user=uppitymalady66</a> Пoдтвepдить личнocть клиента. Для успешного вывода средств, нужно доказать личность посетителя. Нa этaпe вepификaции пpoфиля, сотрудники службы безопасности должны увериться, что у игрока чем один аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не сможет исключить собственный выигрыш, если у него будет несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы.
1×slots зеркало регистрация то дальше необходимо пройти
1×slots коды Как лишь вы отыграли вейджер и средства с бонусного баланса перебежали для на настоящий счет, Вы смело сможете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (устроить минимальный депозит к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депо).Зарегистрироваться в казино по специальной ссылке либо с бонусным кодом. Подтвердить контактные данные (номер аппарата и электрическую почту). Для доказательства номера телефона нужно в собственном профиле указать свой номер и надавить кнопку „Подтвердить номер телефонного“, дальше Вы получите sms-сообщение с кодом, который нужно ввести в соответствующее поле. Для доказательства электрической почты, перебежать по активной ссылке в письме от казино. <a href=http://mriyamed.ru/bitrix/redirect.php?goto=http://profilv-v.ru/bitrix/rk.php?goto=http://liko-baby.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/Chpjk7viHUL>http://mriyamed.ru/bitrix/redirect.php?goto=http://profilv-v.ru/bitrix/rk.php?goto=http://liko-baby.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/Chpjk7viHUL</a> Раздача призов имеет быть приурочена к разным датам: календарные дни, дни рождения игроков, годовщина открытия казино и т. Д. Подарок выдается вид средств, фриспинов или баллов для накопления и размена на услуги оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд притязаний. 1хслотс 1хслотс регистрация перейти на 1×slots После получения бонуса вывод средств для клиента будет недоступен времени, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя или чета месяцов. Выводить средства игрок может только после отыгрыша.Все обожают получать презенты. Согласитесь, практически любой играющий человек несомненно необъятно рад, в получит безвозмездный подарок для игры в интернет казино просто за регистрацию либо же приз за внесенный депо, например именуемые приветственные призы для новых игроков. Соответственно эти онлайн клубы станут более модны и преимущественны у игроков при выборе казино для игры. Топ казино постоянно обновляется и добавляются свежие и интересные игровые клубы с привлекательной бонусной политикой и всеми вероятными прерогативами, к коим относятся эти бонусы как фриспины за регистрацию, валютные бездепозитные бонусы, еще великодушные бонусы за внесенный депо.
1×slots регистрация 1×slotscasino09k online
Так собственно можете неустрашимо регистрироваться без всяких раздумий. Фортуна сейчас наверняка на вашей стороне. Не опасайтесь, ведь следствие какого или убытка Вам абсолютно не угрожает. С этими призами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе.При правильном раскладе бездепы — это прекрасный способ выступать на деньги без траты собственных средств. Есть некоторое советов, следуя коим можно извлечь максимально выгоды из похожих промоакций казино. Играть стопам только на лицензированных площадках. Скриптовые сайты столько накалывают с бонусными предложениями, но и употребляют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах невозможно. <a href=https://hectorufnu63074.shoutmyblog.com/29771623/deepnude-ai-navigating-the-complexities-of-technology-and-ethics>https://hectorufnu63074.shoutmyblog.com/29771623/deepnude-ai-navigating-the-complexities-of-technology-and-ethics</a> При небольшой сумме бонуса рекомендуется играть по невысоким ставкам, а применять максимальные лучше только том, случае, в вейджер слишком большой, а время на отыгрыш крепко ограничено. 1×slots регистрация то дальше необходимо пройти
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Свежий бонус начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в использовании средствами, а в случае отыгрыша оператор имеет установить ограничение на вывод денег.Обыкновенные бездепозитные призы в размере от 3-х до 20 долларов созданы чтобы, чтобы, чтобы в игры заходили все новые и свежие игроки. Здесь, всего, будет ограничение на наибольший выигрыш. Важно, дабы перед минимальным вкладом был отключен бонус за 1-ое пополнение счета, и игры не попадет на повторный вейджер. <a href=http://vn-info.net/user/Josephkam/>1×slots промокод при регистрации</a> Чтобы играть безвозмездно на реальные деньги в казино, не всегда довольно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные действия.Кешбэк-бонус дает собой возврат фиксированного процента от ставки когда проигрыша или же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не выше 10%. сайт 1× slots casino <a href=http://wiki.serialkiller.adele.im/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D0%B4%D0%B7%D0%B5%D0%BD%20%D1%87%D0%B8%D1%82%D0%B0%D1%82%D1%8C>http://wiki.serialkiller.adele.im/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D0%B4%D0%B7%D0%B5%D0%BD%20%D1%87%D0%B8%D1%82%D0%B0%D1%82%D1%8C</a>
1×slots зеркало регистрация
Прямо сейчас отберите бесплатные вращения за регистрацию без депозита и начинайте коллекционировать призовые композиции ради солидных выигрышей!Бонус без депо за регистрацию в казино (бездепозитный бонус) – это денежный подарок от клуба, который начисляется на аккаунт игрока последствии регистрации в казино. Кроме создания учетной записи, для получения бездепа, очень нередко требуется ещё и доказать контактные данные игрока и/или активировать специальный промо-код. <a href=http://worklocal.com.au/users/raymondforia>http://worklocal.com.au/users/raymondforia</a> Пoдтвepдить личнocть клиента. Для успешного вывода средств, необходимо подтвердить личность посетителя. Нa этaпe вepификaции пpoфиля, работники службы безопасности обязаны увериться, что у игрока всего лишь раз акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не сможет исключить собственный выигрыш, в у него несомненно несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы. 1×slots регистрация на 1хслотс Подтвердите регистрацию, чтобы активировать Бездепозитный бонус с выводом, требуется заполнить личный профиль. Заполните пустующие поля истинными данными о себе.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=385031>1× slots сайт</a>
<a href=https://www.sgomberisgombero.it/author/jamesapate/>1×slots зеркало рабочее на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подарки на дни ? посвященные торжественным датам, требующие условного отыгрыша или начисляются без того. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду.
#6949 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало видели такую регистрацию на
Oтыгpaть бонус с указанным вeйджepом, чтобы нужно сдeлaть cтaвoк нa cумму, превышающую размер бонуса в некоторое один. <a href=http://filmkachat.ru/>1×slots зеркало этих способов предполагает регистрацию</a> Наш перечень содержит наилучшие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по важным параметрам: <a href=https://plaza.rakuten.co.jp/prilla/diary/202411240000/>https://plaza.rakuten.co.jp/prilla/diary/202411240000/</a> Все благотворительные призы кажутся заманчивыми. Кто же категорически от возможности поиграть в онлайн-казино, не рискуя средствами, хотя получая выигрыши. Но далеко не все бездепозитные бонусы мере привлекательны для рассудительного посетителя. 1 x slots casino <a href=https://kcapa.net/bbs/board.php?bo_table=free&wr_id=869317>https://kcapa.net/bbs/board.php?bo_table=free&wr_id=869317</a> Это раз из главных показателей привлекательности подарка. С завешенным коэффициентом и мастера не сумеют выполнить обстоятельства по отыгрышу. И маловажно, как презентабельно смотрится предложение – бездепозитный приз казино в размере $500 либо $1 000. Чтобы новички получше вникли, что же это вейджер, мы разберём на образце.Бездепозитные призы за регистрацию в игровых автоматах для владельцев онлайн-казино являются долею рекламной кампании, направленной на повышение аудитории вебсайта. Так они продвигают свои бренды и завлекают свежих клиентов.
1×slots сайт
Акции, посвященные календарным праздникам, бывают рассчитаны как на всех юзеров, например и на категории: к, подарок на 8 марта девушкам-игрокам либо мужчинам на 23 февраля.Если вы новичок данном и лишь попали в неизведанную вами область азарта — за услуг как бездепозитные призы без пополнения. 1хлот регистрация в 1×slots casino Онлайн-казино кропотливо продумывают бонусные обстоятельства, которые нужно выучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и другие лимитирования.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. <a href=http://myqiantang.com/space-uid-255263.html&do=profile>http://myqiantang.com/space-uid-255263.html&do=profile</a> Срок отыгрыша — это этап, кот-ый начинается в момент активации бонуса и заканчивается с его закрытием. Пользователю нужно уложиться в данный временной промежуток, иначе призовые свои аннулируются. Казино устанавливают перечень игр, ставки каких засчитываются при расчете отыгранных денег. Если тайтл не заходит в данный перечень, то ему быть недоступен для загрузки во время действия бонусного предложения.Такой безвозмездный эквивалент средств зачисляется на профиль пользователя последствии осуществления притязаний и предназначаются они только для игрового процесса. Вывод таких вознаграждений вероятен только в осуществления вейджеровых условий. 1× slots casino официальный сайт
1×slots официальный сайт скачать
Также есть онлайн-платформы азартных игр, коие применяют раздачу бездепозитных призов в особые даты (как для казино, так и для игрока). Помимо этого, действующие игроки также имеют возможность получить похожие призы за собственную деятельность (к примеру, за повышения значения либо за похожие достижения).Как правило, при выводе финансов, от играющего требуется только сделать наименьший вклад чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом индивидуальный счет. <a href=http://fumankong2.cc/home.php?mod=space&uid=483576>http://fumankong2.cc/home.php?mod=space&uid=483576</a> 1×slots casino регистрация Для отыгрыша приза казино обязует игрока сыграть на необходимую, в несколько раз превышающую сумму приобретенного приза — тут выгода компании явна.
1×slot регистрация
<a href=http://forums.indexrise.com/thread-309-post-333783.html#pid333783>casino 1×slot</a> Но эти рамки не смущают в хайроллеров, что коэффициенты на слотах дозволяют рассчитывать на солидные выигрыши, а в некоторых автоматах разыгрывается передовой джекпот. Возьми свой подарок. Чаще всего бонус активируется незамедлительно последствии регистрации. Но случаются истории, когда надо(надобно) зайти в индивидуальный кабинет либо написать в справочную службу.Акции распространяются как на все забавы казино, так и на ограниченный перечень. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino прочие. Промо имеет обхватывать разработки 1-го производителя. Бездеп не пересекается с другими промоакциями казино. Если на сайте предусмотрен кэшбек, он не начисляется за ставки, изготовленные бонусными средствами. Для идентификации платежных реквизитов игрока может потребоваться пополнение счета на минимальную необходимую. 1×slots регистрация на 1хслотс <a href=https://bjdclub.ru/blog/read/3054>https://bjdclub.ru/blog/read/3054</a>
1×slot зеркало рабочее этих способов предполагает регистрацию
Многие новички сомневаются, собственно поощрительный приз надо несомненно возвращать, числе в они выиграли у казино. Это безусловно неопасно и надежно. Выводя выигранные средства, игрок просто останавливает свое роль при и теряет уникальную возможность – безвозмездно увеличивать личное вещественное положение.В качестве призов онлайн казино часто предлагает выдачу фриспинов, словами безвозмездных вращений игрового барабана. Виртуальные монеты можно использовать для изучения в покерной школе или для забавы в казино. Для получения бездепа нужно пригласить в забаву по реферальной ссылке свежего посетителя: он должен зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на необходимую, обозначенную в условиях промоакции. <a href=http://ultfoms.ru/user/GlennLon/>http://ultfoms.ru/user/GlennLon/</a> Так что можете отважно регистрироваться без всяких размышлений. Фортуна сегодня наверняка на вашей стороне. Не опасайтесь, как последствие какого или убытка Вам абсолютно не угрожает. С такими бонусами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе. 1×slots casino зеркало Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном бонусе, то начала обратите внимание на значение вейджера и срок, кот-ый дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть бонус и вывести выигрыш.
<b>Смотреть еще похожие новости:</b>
<a href=https://nztw.org/forum.php?mod=viewthread&tid=395850&pid=702113&page=1&extra=#pid702113>1× slots официальный</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Ознакомьтесь с нашим списком превосходнейших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего перечня и получите бездеп сразу. Хватайте наилучшие благотворительные предложения ниже и выигрывайте великие средства, не рискуя! Даже не выиграв крупную сумму, игрок увлекательно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-либо финансовых рисков. Быть в курсе лучших акций с. Достаточно регулярно изучать список свежих интернет казино с выводом бонуса без депо в данном разделе.
#6950 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
вывод казино 7k casino зеркало на сегодня <a href=https://slon-ru.com/>пинко casino</a> порно с Евгения Медведева, фигуристка casino скачать <a href=https://www.ossetia.tv/>приложения букмекерских контор</a> 7k casino зеркало на сегодня порно с Дронова Александра Викторовна casino официальный сайт включи казино казино в россии слот casino porno Алена Косторная (фигурное катание)
#6951 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало
Можно ли зарабатывать на бездепозитных призах? Это не работа, тут как повезет, случае в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, это можно назвать везением, и дополнительной добавкой к вашему бюджету.Вознаграждения за получение VIP-статуса ? начисляются в программки преданности при достижении еще уровня или выдаются персонально менеджерами службы поддержки. <a href=http://filmkachat.ru/>1× slots официальный</a> <a href=https://mega.nz/file/d28RQCBS#2i_xAXDQfj-rVkVhMWNDPYPXRKJ71NaLOz_MKYAVxxQ>https://mega.nz/file/d28RQCBS#2i_xAXDQfj-rVkVhMWNDPYPXRKJ71NaLOz_MKYAVxxQ</a> Некоторые казино имеют предлагать посетителям бездепы за свидетельство номера либо почты либо репост на страничку в социальных сетях. 1хслот 1хслотс регистрация перейти на 1×slots <a href=https://physicsmastered.com/author/glenndup/>https://physicsmastered.com/author/glenndup/</a> Третитй бездепозитный бонус за регистрацию – валютные средства. К раскаянию, начислить рубли или доллары способны лишь известные и популярностью клубы. С их поддержкой у насладиться любой доступной забавой – автоматом, рулеткой, кено, блэкджеком.Получать информацию о самых прибыльных призах можно без неизменного прогноза новостей казино. Мы взяли эту задачу на себя и постоянно следим за предложениями операторов, выбирая превосходнейшие из них. В этом разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список промоакций периодически пополняется. В топ вошли самые свежие бездепозитные призы за регистрацию в казино 2020, кратковременные и замкнутые промо. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру прочим критериям. Если срок деяния акции истек, она удаляется из перечня.
1×slots сайт
1×slots официальный сайт мобильная версия <a href=http://support-groups.org/memberlist.php?mode=viewprofile&u=163469>http://support-groups.org/memberlist.php?mode=viewprofile&u=163469</a> Для получения бездепа необходимо пригласить в игру по реферальной ссылке нового посетителя: он должен зарегистрироваться, пройти верификацию на сайте онлайн-казино и пополнить счёт на сумму, обозначенную в условиях промоакции.Автоматы непопросту считаются наиболее модным азартным веселием. Чтобы усвоить управление и управляла, понадобится всего количество мин. Ваша задача сделать ставку, определить количество рабочих линий и возможно крутить тамбур. Если дисплее выпадет выигрышная композиция – вы выиграли! С данной задачей вам посодействуют управится бездепозитные бонусы казино. 1×slots зеркало сайта
1×slots зеркало видели такую регистрацию на
Главным моментом в возникновении этих вознаграждений состоит в том, собственно пустив их в ход, игрок ничем не рискует и в последствии никому ничего не будет должен (не зависимо, получит ли он спасибо призам какой-нибудь выигрыш либо моментально спустит все только собственно прибывшие деньги). То есть, казино снабжает игрока возможностью на дармовой базе выступать во всевозможные слоты и даже спонсирует игру.Диапазон ставок, коие вправе сделать игрок, кроме лимитирован. Обычно ставить можно небольшую необходимую — около 10–30 рублей за одно вращение. Большинство интернет-казино из нашего топ-10 готовы повеселить вас эксклюзивными акциями. Читайте о их в обзорах и на форуме. <a href=http://vn-info.net/user/Jamesbag/>http://vn-info.net/user/Jamesbag/</a> Каждый новичок и профессиональный игрок грезят стремительно стартануть и начать создавать реальные ставки. Для этого достаточно отобрать презент, за кот-ый надо уплачивать. В зависимости от игровой платформы, надо(надобно) сделать профиль, привязать email либо аппарат. После сего администрация начислит щедрое вознаграждение вид даровых вращений или виртуальных кредитов.Бездеп с фриспинами возможность охватывать всю коллекцию игр на веб-сайте или разработки одного провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш возможность быть выведен в того, как юзер отыграет эту необходимую. Возможность расценить глубокий перечень слотов — главное достоинство этой разновидности. Игроку становятся доступны что, эти опции, которые отсутствуют в демонстрационном режиме, а возможность выиграть настоящие деньги добавляет ярчайших азартных ощущений. 1×slots зеркало которую указывали при регистрации кстати Несмотря на то, что данный вариант стимуляции со стороны азартных платформ очень известен области похожих игр, далеко не всем поклонникам казино ведомо, что себе бездепозитные бонусы казино и как именно их вероятно эксплуатировать.
1×слот регистрация в 1×slots casino
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=332343&pid=678754#post_678754>1×slot рабочее зеркало</a> Будьте внимательнее при ознакомлении с правилами во избежание появления конфликтных обстановок с казино, когда после отыгрыша бездепа для не дадут исключить солидную необходимую выигрыша.Нельзя разглядывать забаву на деньги, как вариант заработка. Азартные забавы запрещены для лиц младше 18 лет. Topcasinobonuses.mobi классифицируется организатором азартных игр. Сайт носит информационный нрав. Если при регистрации показать промокод, возможно гарантировано получить бонус. Где взять ваучер? Посетите направленные блоги либо форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В последнее время игорные жилища начали рекламироваться в фильмах и сериалах. Присмотритесь и наверняка заметите промокод, который принесёт 500 или 1 000 бонусных рублей.Для вывода средств приз нужно несомненно отыграть законам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариантами отыгрыша бездепозитного приза до его получения, чтобы избежать конфликтных ситуаций. 1×slots зеркало <a href=http://mail.clicksordirectory.com/details.php?id=431217>http://mail.clicksordirectory.com/details.php?id=431217</a>
1хслотс казино зеркало
Выполнив все требования оператора, заказчик имеет оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит в среднем менее суток. Если дополнительно потребуется пройти процедуру верификации, то срок увеличивается до 1–2 трудящихся дней. Для перевода применяются банковские инструменты и электронные платежные системы. Второй метод подходит превосходнее, так как основная транзакций ситуации исполняются моментально. В связи со спецификой функционирования банков обработка платежей имеет взятьвдолг(взятьвзаймы) до нескольких трудящихся дней.Не стоит сразу же открещиваться от приветственных презентов в сходственных казино. Администрация готова начислить средства либо фриспины, хотя сначала работники должны увериться, что вы не аферист. Дело том,, собственно развелось слишком количество охотников за призами. Они научились дурачить систему и зарабатывать крупные суммы средств. Разные казино имеют собственные управляла по выведению выигрыша. Для бездепозитных призов принимаются достаточно высочайшие притязания. Часто онлайн-казино советуют отыграть бонусное поощрение до ста раз в игровых автоматах. Например, если игрок получил бесплатно 10 $, то необходимо несомненно отыграть их, поставив 1 тыщу спинов по 1 доллару любой. Стоит обозначить(означить), что не все казино выделяют вероятность выступать на бонусы и не во всех развлекательных заведениях идентичные правила для отыгрывания. Некоторые казино воспрещают выступать на призы в блекджек или ограничивают ставки до 5 %, что значительно наращивает в десятки раз количество необходимых игр. <a href=https://civil808.com/user/64996/julespaymn>https://civil808.com/user/64996/julespaymn</a> В бонусную программу многих операторов входят систематические бездепы. Это бессрочные акции, поощряющие интенсивных неизменных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают неизменные бонусы без депо в размен на скопленные баллы лояльности.Бездепозитные призы прекрасный вариант даровой игры в игровые автоматы. Многие юзеры сети не понимают, собственно в казино можно начать выступать безусловно даром, а позже вывести выигрыш на банковскую карту или электронный кошелек, иные не доверяют интернет казино, а третьи успешно играют и выигрывают – и тотчас довольно немалые суммы. 1х слот 1хслотс регистрация перейти на 1×slots С этими простыми советами каждое казино с призом за регистрацию способно принести в разы больше выгоды и пользы.К сожалению, нет. Почти все казино, требуют внесение желая бы одного малого депо для вывода выигрыша с бездепозитного бонуса. Также учитывайте, что вывести средства разрешено лишь на ту платежную систему, с коей был сделан депозит.
<b>Смотреть еще похожие новости:</b>
<a href=https://021snyw.com/space-uid-53919.html>1×slots скачать на айфон</a>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=293114>1× slots регистрация в 1×slots casino</a>
<a href=http://fin-molitor.com/forum/memberlist.php?mode=viewprofile&u=8719>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Используйте наихорошие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, чтобы заработать презенты за обычные действия и уже сегодня получить 1-ый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высокой отдачей и прыткими выводами на электрические кошельки.
#6952 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Скворцова Вероника Игоревна порно пин ап казино <a href=https://glvk.guru/>симулятор казино</a> игры казино ап казино <a href=https://7club7.com/>порно с Виктория Синицина, фигуристка</a> приложения букмекерских контор официальные зеркала казино порно с Дарья Клишина, легкоатлетка kometa casino 1×bet слоты 1×bet top casino зеркало сегодня porno Нина Пирогова, хоккеистка
#6953 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino 7k сегодня 1×bet зеркало рабочее на сегодня 1×bet xyz <a href=https://specreporter.com/>скачать сайт букмекерской конторы</a> казино фильм онлайн porno Илья Ковальчук (хоккей) <a href=https://www.ossetia.tv/>Юдаева Ксения Валентиновна порно</a> Анна Михалкова сайт 1×bet слоты Попова Анна Юрьевна порно casino buzz порно с Васильева Татьяна Викторовна порно с Евгения Медведева, фигуристка pin up букмекерская контора
#6954 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало
Бонус начисляется игроку незамедлительно последствии регистрации и прохождения верификации в казино и не требует от клиента внесения депозита. Как правило, размер приза в схожем случае достаточно умеренный, однако позволяет новичкам познакомиться с забавой без риска настоящими деньгами.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. <a href=http://filmkachat.ru/>1×slots промокод при регистрации</a> Чтобы получить возможность вывести прибыль с бездепозитного бонуса в казино, необходимо выполнить ряд критерий:Подтверждение регистрации. Казино просят привязки профиля к электрическому адресу и номеру аппарата. Для сего на e-mail отправляется послание ссылаясь, а на аппарат ? текстовое известие с кодом. <a href=http://www.wmhelp.cz/html/modules.php?name=Forums&file=viewtopic&t=69255>http://www.wmhelp.cz/html/modules.php?name=Forums&file=viewtopic&t=69255</a> При регистрации что или ином интернет игральном заведении — вас дается один шанс испытать собственную удачу не внося средства монеты. Замечу что такую поощрительную услугу деют не все онлайн игровые площадки, а лишь щедрая середина(средина) из их. Которые мы подготовили для Вас в нашем списке.За вербование приятеля ? в партнерской программки клиент получает вознаграждение за вербование свежих пользователей. 1× слот зеркало <a href=https://dc-kd.ru/user/Travisacith/>https://dc-kd.ru/user/Travisacith/</a> Прежде всего, не запамятовывайте периодически заглядывать на страничку обзоров бездепозитных призов. Они шаг за шагом оценивают более увлекательные предложения основных игорных порталов.
1× slots сайт
1×slots зеркало которую указывали при регистрации кстати <a href=http://veda.adrian.ru/doku.php?id=Выкуп_авто>http://veda.adrian.ru/doku.php?id=Выкуп_авто</a> Для тех, кто только взвешивает испытывать собственную фортуну, а также для профессиональных игроков, разыскивающих новые площадки для выигрышей, водящие лицензированные казино часто устраивают различные промоакции, и одно из лучших услуг за последнее время – как для начинающих, так и для профессиональных игроков – бездепозитный бонус за регистрацию.Поспешите забрать бездепозитные призы за регистрацию в казино из представленного списка. Все платформы не только ведут законную работа, хотя и порадуют правдивыми результатами игры, высокой отдачей, прыткими выплатами. 1×slots зеркало рабочее Максимальная ставка ? устанавливается в денежной счета и ограничивает объем ставки за раз спин. В случае ее превышения приз имеет быть аннулирован. Также в правилах возможность находиться запрет на размещение ставок конкретного облика, примеру, по равным шансам в рулетке (словами, на чет либо нечет, красное или темное и т.д. ).
1х слот регистрация в 1×slots casino
Прежде чем активировать бездеп, необходимо увериться что, что страна, гражданином коей считается игрок, не входит в перечень запрещенных. <a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=5441>http://www.predictive-datascience.com/forum/member.php?action=profile&uid=5441</a> Обыкновенные бездепозитные призы в объеме от трех до 20 долларов созданы чтобы, чтобы, дабы в игры заходили все новые и новые игроки. Здесь, скорее, будет лимитирование на наибольший выигрыш. Важно, чтобы перед наименьшим вкладом был отключен приз за первое пополнение счета, и в не попадет на повторный вейджер.Зарегистрироваться в казино по специальной ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефонного и электрическую почту). Для доказательства номера аппарата необходимо в собственном профиле указать свой номер и надавить кнопку „Подтвердить номер телефона“, дальше Вы получите sms-сообщение с кодом, который необходимо установить в отвечающее фон. Для доказательства электрической почты, перебежать по активной ссылке в письме от казино. 1хслотс казино зеркало Наш перечень включает в себя наихорошие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит ревизию по главным параметрам:
казино 1× slots официальный сайт
Большинство клубов завлекают внимание компьютерные за счёт различных даров. На одних сайтах можно получить виртуальные кредиты, коие откроют доступ ко всему софту. На иных же, администрация предлагает благотворительные вращения для запуска лучших интернет слотов. Несмотря на различные акции, стоит выделить самые главные.Иногда в качестве бездепа, казино дарует минимальный приз (до 50 рублей), ради которого не стоит заморачиваться. <a href=http://forum.animogen.com/memberlist.php?mode=viewprofile&u=15333>1×slots регистрация</a> Бездепы обычно предлагают с отыгрышем — моментально исключить выигранные средства нельзя. Перевод средств со счета несомненно возможен последствии того, как юзер выполнит все притязания казино, а сумма возможности быть выше установленного правилами лимита. Условиями акции фиксируются сроки, в течение которых заказчик вправе пользоваться предложением. Обычно они не превышают нескольких дней в активации. Также случаются случаи, когда казино начислит обсужденный бонус после регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам. 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=http://uprzakupokkchr.ru/user/DoctorLazutamt/>http://uprzakupokkchr.ru/user/DoctorLazutamt/</a> Шаг 4. Активация. Внимательно изучите обстоятельства, информацию по лимитированиям и сроке действия бонусного предложения. Разобравшись с правилами, возможно активировать бонус в собственном кабинете (времени ? с внедрением промокода) или по запросу в саппорт.
1×slots официальный сайт мобильная версия
Вознаграждения за получение VIP-статуса ? начисляются в рамках программы преданности при достижении одного значения либо выдаются персонально менеджерами саппорта. Чаще всего казино приз за регистрацию без депо даёт возможность запустить каждой автомат. Но чем пристально ознакомиться с условиями. Иногда для игры доступны только определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, лучше начать знакомство с миром пыла именно с «одноруких злодеев». <a href=http://www.gasts.de/modules.php?name=Your_Account&op=userinfo&username=variousardor75>http://www.gasts.de/modules.php?name=Your_Account&op=userinfo&username=variousardor75</a> 1× slots casino зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://link.5nx.ru/viewtopic.php?f=5&t=6735>скачать 1×slots официальный сайт</a>
<a href=https://qualityprogamer.de/forum/showthread.php?tid=280054>1 x slots casino</a>
<a href=http://www.skmecca.com/2011/04/14/leave-the-world-better-than-you-found-it/comment-page-5/#comment-122688>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<a href=https://creapnl.com/foros/tema/%d1%81%d0%ba%d0%b0%d1%87%d0%b0%d1%82%d1%8c-1×slots-%d0%bd%d0%b0-%d0%b0%d0%bd%d0%b4%d1%80%d0%be%d0%b8%d0%b4-%d0%bc%d0%be%d0%b1%d0%b8%d0%bb%d1%8c%d0%bd%d0%b0%d1%8f-%d0%b2%d0%b5%d1%80%d1%81%d0%b8–50/>скачать 1×slots на андроид мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Большинство интернет-казино из нашего топ-10 готовы порадовать вас эксклюзивными промоакциями. Читайте о их в обзорах и на форуме. Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации приза без депо. Внимательно прочитайте до конца. Многие новенькие делают промахи на шаге регистрации и потому имеют получить подарок.
#6955 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin up букмекерская контора приложения букмекерских контор на андроид <a href=https://glvk.guru/>porno Алена Косторная (фигурное катание)</a> казино гта 5 1×bet сайт <a href=https://rhymes-punches.com/>ев казино</a> почему в казино нет окон casino зеркало сегодня пин ап casino pin официальное казино вход порно с Георгий Джикия (футбол) casino зеркало сегодня рабочее 1×slots casino
#6956 Charlesgunnyhttp://filmkachat.ru
1×slots коды
Oтыгpaть бонус с обозначенным вeйджepом, для этого необходимо сдeлaть cтaвoк нa cумму, превосходящую размер приза в некоторое раз. <a href=http://filmkachat.ru/>1х слотс зеркало регистрация в 1×slots casino</a> <a href=https://xiglute.com/blogs/20607658/203148/mastering-the-art-of-professional-home-design-drafting-a-moder>https://xiglute.com/blogs/20607658/203148/mastering-the-art-of-professional-home-design-drafting-a-moder</a> Условия вывода выигрыша. В некоторых заведениях для успешного вывода с бездепозитного бонуса достаточно пополнения баланса и подтверждения личности. В иных же клубах, необходимо несколько один прокрутить свой депозит. 1× slots официальный <a href=http://e-maxx.ru/forum/profile.php?id=19830>http://e-maxx.ru/forum/profile.php?id=19830</a>
сайт 1× slots casino
Создание аккаунта. На сайте казино необходимо обнаружить регистрационную форму и заполнить пустопорожние поля собственными данными. Иногда на этом шаге требуется указать только адресок электронной почты и пароль, хотя чаще надобно заполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д.). Нужно указывать только реальные данные, поскольку впоследствие они будут проверены. <a href=http://theauction.com.au/my-account/>1×slots casino регистрация</a> x1 slots регистрация в 1×slots casino Варианты выигрыша в от Вашей удачи и критерий игорного портала. Выше мы заявили, собственно некоторые бездепозитные призы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются и, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на деньги, возможно выиграть невозможные суммы. Сегодняшние игровые автоматы или видео слоты, как их называют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые множат ставку от х100.000. <a href=https://mobilka.mobi/user/Henryphogy/>https://mobilka.mobi/user/Henryphogy/</a> 1×slots зеркало регистрация в 1×slots casino Бонус с зачислением средств на счет дает больше свободы деяний. Пользователь сам избирает, каким образом воспользоваться подаренными средствами. Здесь того шансы работать ограничения на список доступных игр, хотя обычно эти рамки не например строги, как в промо с безвозмездными вращениями.
1 хслот регистрация в 1×slots casino
На безвозмездные призы онлайн-казино почти постоянно распространяется ограничения по стране проживания клиентов. Даже случае вас разрешено раскрывать счет и выступать на средства в заведении, это еще не означают, что для доступны no deposit bonuses. <a href=http://forums.darknestfantasy.com/proxy.php?link=http://amgen.ru/bitrix/redirect.php?goto=http://sfinkstv.com/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/3-j0×5ULxDc>http://forums.darknestfantasy.com/proxy.php?link=http://amgen.ru/bitrix/redirect.php?goto=http://sfinkstv.com/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/3-j0×5ULxDc</a> В разделе с бонусами активировать собственный презент. Найти забавы, для коих учтено поощрение и использовать бонус по назначению. 1×slots casino зеркало рабочее У любого игорного заведения средства управляла и обстоятельства. Но, дабы получить призы, нужно выполнить стереотипные действия:Как и другие акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения считаются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих посетителей и дозволяет им составить эмоцию о функционале, не рискуя вескими совокупностями.
1×slot казино зеркало
Чаще всего используются коды. Их нужно заносить в особые окна регистрационной анкеты, если идет о пригласительных бонусах, или в определенном разделе личного офиса игрока.Для получения предоставленных призов вам пригодиться — ПК либо мобильное устройство, и остальное дело за небольшим. <a href=https://forum.bandariklan.com/showthread.php?tid=176825&pid=846357#pid846357>1× slots casino официальный сайт</a> Так же стоит выделить то, собственно в любом онлайн казино установлен свой максимальный кешаут на бездепозитный приз. Как верховодило кешаут — это максимальная сумма денег, которая дешевая для вывода с бездепозитного бонуса.Активация по промокоду используется в разных обликах бездепов. Если речь о приветственном призе, то набор символов возможно разузнать на главной странице, в регистрационной форме или послании, коие отправляется юзеру для доказательства e-mail. Акции все проводиться общо с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активируется одноразовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном кабинете или начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем важный код для активации в описании каждого промо. 1×slots casino зеркало <a href=https://www.mavsboard.com/member.php?action=profile&uid=2492>https://www.mavsboard.com/member.php?action=profile&uid=2492</a> Бездепозитные бонусы – это исключительно интересная и более перспективная акция интернет-казино. Они числе никакого фри-спинов, поэтому что выплаты в безвозмездных вращениях не гарантированы, так комбинации на барабанах игрового аппарата могут не сложиться.
1хслотс регистрация в 1×slots casino
<a href=http://forums.ggcorp.me/space-uid-3859396.html>http://forums.ggcorp.me/space-uid-3859396.html</a> 1×slot зеркало В лицензионных бездепозитных казино выступать в азартные забавы действительно безопасно. Наличие лицензии подтверждает что, этот прецедент, собственно клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP.
<b>Смотреть еще похожие новости:</b>
<a href=http://theauction.com.au/my-account/>1× slots сайт</a>
<a href=http://t954381g.bget.ru/user/JosephPiery/>1× слот зеркало</a>
<a href=https://forum.home-visa.ru/memberlist.php?mode=viewprofile&u=3536>1×slots зеркало быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При ирге на бонусные свои воспрещается выступать в игровые автоматы с современным джекпотом и игры из радела exist casino. Кроме того, некоторые казино выделяют бездеп на раз либо несколько конкретных слотов, и в других забавах Вы не можете на них играть.
#6957 Jeffreyarime
https://gramster.ru/ pinup 2025
#6958 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино без casino riobet <a href=https://repost.news/>порно с Каролина Севастьянова</a> сайт винлайн букмекерская контора 7k casino официальный сайт <a href=https://repost.news/>1×bet официальный 1×bet xyz</a> букмекерская контора фонбет официальный pin up casino porno Алена Михайлова порно с Дарья Касаткина (теннис) сайты казино Радченко Светлана Юрьевна порно porno Вера Бирюкова, гимнастка
#6959 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на сайте
Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала быстрые выводы. Фишка выплат том,, собственно достаточно выбрать платёжный инструмент и показать необходимую. В большинстве случаев средства зачисляются на электрические кошельки протяжении 15 минут, а на банковские карты – 1–3 трудящихся денька.Кешбэк-бонус дает собой возврат фиксированного процента от ставки когда поражения или же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не выше 10%. <a href=http://filmkachat.ru/>1хслотс казино зеркало</a> <a href=https://www.nitrnd.com/blogs/195900/%D0%90%D0%B2%D1%82%D0%BE-%D0%B2%D0%B8%D0%BA%D1%83%D0%BF>https://www.nitrnd.com/blogs/195900/%D0%90%D0%B2%D1%82%D0%BE-%D0%B2%D0%B8%D0%BA%D1%83%D0%BF</a> Исходя из этого, просто не присутствует разумных причин махнуть рукой на получение такого приза при регистрации. И, лишним, на такой безвозмездной базе у вас есть шансы выиграть средства и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, называют бесплатными интернет платформами для игр. 1×slots сайт <a href=https://www.itray.co.kr/bbs/board.php?bo_table=free&wr_id=1928496>https://www.itray.co.kr/bbs/board.php?bo_table=free&wr_id=1928496</a>
1×slots регистрация
Подтверждение индивидуальной инфы. Все казино требуют от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и присутствие у юзера других аккаунтов (мультиаккаунт запрещен).Следует подчеркнуть, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом. 1×slots зеркало регистрация в 1×slots casino Эффективность бездепов в рекламного инструмента расценили почти операторы. Малоизвестные площадки употребляют эти промоакции, чтобы прытко набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны неизменных гостей. Не все сайты, дающие подарки без депо, рекомендованы к игре. За привлекательным промоописанием могут прятаться неосуществимые условия отыгрыша и подводные камешки. <a href=http://agriexpert.kz/user/DoctorLazutasi/>http://agriexpert.kz/user/DoctorLazutasi/</a> Многие новички сомневаются, собственно поощрительный приз не несомненно отдавать, даже в они выиграли у казино. Это полностью неопасно и накрепко. Выводя выигранные средства, игрок просто одергивает свое участие при и утрачивает уникальную вероятность – безвозмездно увеличивать собственное материальное положение.Такой казино бонус без депозита за регистрацию выдается игроку на час и энергично используется данное предложение с 2017 года. Это как бы некая маскировка поощрения под бездепозитный. Суть всего этого сводится к что, этому, собственно игроку на час выдается, например, 1000 $, а реклама повторяет про, собственно любой выигрыш возможно будет в оставить при для. Но в играющий всерьез отнесется к этому предложению, то он попросту растеряет время. Ведь игроку нужно несомненно играть не в аккаунте, ну тренировочном и с ограниченным выбором автоматов и ставок. Да и если, тогда, выигрыша (том всей тыс. ) в верховодила вступят конкретные обстоятельства, где несомненно сказано, собственно максимальной суммой победы имеет быть лишь двести $ и деньги возможно использовать только виде приза на первый вклад с вейджером 25 от суммы вознаграждения плюс сам депо. По результату выйдет, собственно игрок выигрывал себя 200% приз с вейджером на определенную необходимую. Короче разговаривая, это все не вашего медли. 1×слот регистрация в 1×slots casino В онлайне слишком много скриптовых сайтов, коие принадлежат плутам. Их основная задача – заинтересовать гэмблеров, пообещав столько щедрые подарки, хотя и солидные выигрыши. Так собственно некоторые веб-сайты предлагают получить за регистрацию даже $1 000.Бoльшинcтвo азартных заведений выдвигают примерно однообразные, схожие условия и притязания, которые нужно выполнить, дабы получить бездепозитный приз за регистрацию. Все их возможно объединить в раз перечень:
1×slots регистрация 1×slotscasino09k online
Для казино, работающих интернет, бездепозитные бонусы нужны для привлечения свежих клиентов. Предложение сыграть на слотах без надобности внесения настоящих денег — работающий способ для увеличения интереса к компании. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит играть в казино, лишь сейчас уже на собственные деньги.Объективные – объем приза, коэффициент и условия вейджера, надобность внесения депозита для вывода денег; <a href=https://www.twoandahalfminer.de/unser-forum/member.php?action=profile&uid=6527>https://www.twoandahalfminer.de/unser-forum/member.php?action=profile&uid=6527</a> 1×slots зеркало регистрация в 1×slots casino Иногда виде поощрения за регистрацию шансы выдаваться билеты для роли в турнирах. Условия их проведения очень отличаются, поэтому мы советуем ознакомиться с любым предложением отдельно.
сайт 1× slots casino
Чем ниже значение вейджера, что, этим легче отыграть и вывести бонус. Если Вы планируете заработать на бездепе, не просто ознакомиться с свежим игровым клубом, то стоит избегать призов с высочайшим вейджером их почти не реально отыграть. С ними Вы сможете лишь протестировать игры заведения.За счёт спинов выйдет запустить различные онлайн слоты, протестировать стратегии и поднабраться навыка. Фишка что, собственно вращения начисляются на топовые аппараты с оригинальными опциями и высокой отдачей. Не забывайте, что в каждом акционном предложении учтены специальные притязания – кратковременные лимитирования, максимальный размер ставки, список доступных игр. Таким образом онлайн казино получает вероятного игрока. Возможно в будущем либо настоящем он захотит поиграть на свои средства. Так трудятся бездепозитные призы в онлайн казино. Здесь отлично подходит выражение, бесплатные сыр случается лишь в мышеловке. Начинающие игроки могут не осознавать опасность пыла. Однако течением понимания становится больше. Это тема для отдельного обсуждения.Получив свой презент, Вы сможете бесплатно играть на реальные деньги, а выполнив условия отыгрыша, исключить свой выигрыш. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=http://dune.by/bitrix/click.php?goto=http://tiki-tomi.ru/bitrix/redirect.php?goto=http://dverib2b.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/_-5RLBYsMY6>http://dune.by/bitrix/click.php?goto=http://tiki-tomi.ru/bitrix/redirect.php?goto=http://dverib2b.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/_-5RLBYsMY6</a> При забаве на бонусные средства запрещается играть в игровые автоматы с прогрессивным джекпотом и забавы из радела live casino. Кроме такого, некоторые казино дают бездеп на раз или некоторое определенных слотов, и в иных забавах Вы не можете на их выступать.
1×slots официальный сайт мобильная версия
<a href=http://itstula.com/user/Ashleyemexy/>http://itstula.com/user/Ashleyemexy/</a> 1× slots casino официальный сайт Онлайн гемблинг развивается с любым деньком все больше и больше, новые бренды создаются не по дням а по часам. Новые интернет казино проделывают вступительные промоакции для игроков, для того что бы зарекомендовать себя, и что, этим самым предлагают бездепозитные призы за регистрацию, собственно бы не упустить эту вероятность — как пользоваться свежим бездепом, советуем посещать наш сайт как возможно чаще, самое вкусное и новые будет добавляться в данном же списке.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.donchillin.com/space-uid-382497.html>casino 1×slot</a>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=136677>1×slots казино мобильная версия</a>
<a href=http://www.topboard.org/threads/1×slots-oficialnyj-sajt-zerkalo.600219/>1хслотс официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке адепты онлайн-казино публикуют важную информацию о no down payment bonuses прочих предложениях.
#6960 Charlesgunnyhttp://filmkachat.ru
сайт 1× slots casino
Также есть онлайн-платформы азартных игр, коие используют раздачу бездепозитных бонусов в специальные даты (как для казино, например и для игрока). Помимо сего, действующие геймеры того имеют возможность получить похожие бонусы за свою деятельность (например, за повышения значения либо за схожие заслуги).Бонус с зачислением средств на счет дает больше свободы действий. Пользователь сам подбирает, каким образом распорядиться подаренными средствами. Здесь кроме шансы работать ограничения на список доступных игр, но обычно эти рамки не например строги, как в промо с безвозмездными вращениями. <a href=http://filmkachat.ru/>1×slot зеркало рабочее этих способов предполагает регистрацию</a> Бонус в казино без депо имеет разные разновидности: может быть приветственный приз, промоакции в честь каких-либо праздничных либо весомых дат, приз за вербование свежих игроков, преданность и получение VIP-статуса.Бездепы обыкновенно предлагают с отыгрышем — быстро исключить выигранные свои невозможно. Перевод средств со счета несомненно возможен последствии такого, как юзер выполнит все требования казино, а сумма имеет превышать установленного правилами лимита. Условиями акции фиксируются сроки, на коих клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней после активации. <a href=https://speakerdeck.com/shopavto7>https://speakerdeck.com/shopavto7</a> 1×slots рабочее зеркало <a href=http://ttceducation.co.kr/bbs/board.php?bo_table=free&wr_id=756844>http://ttceducation.co.kr/bbs/board.php?bo_table=free&wr_id=756844</a> Какие призы у еще получить кроме бездепозитного приза за регистрацию в казино? По мимо бездепозитного приза, любое интернет казино предлагает игрокам выгодное предложение на первый депозит, вы совершаете депо, ваш депо увеличивается в двое либо числе в трое, тем самым начать играть возможно с более крупной суммой, например же не забываем тему вейджер на бонусы.
1×slots казино мобильная версия
Для получения приза надо(надобно) ознакомиться с программой лояльности казино и сделать ставки на необходимую, нужную для перехода на следующий степень.Существует ли стратегии для отыгрыша бездепозитных призов? К огорчению нет, на выигрыши или проигрыши с призов, казино или игрок воздействовать имеет, отдача игр случается от создателей игр. <a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/6907/#comment-306272>1×slots зеркало регистрация то дальше необходимо пройти</a> 1хслот зеркало сайта С этими ординарными советами любое казино с призом за регистрацию способно принести в разы больше выгоды и выгоды. <a href=http://animemiru.ru/user/Arnoldfeafe/>http://animemiru.ru/user/Arnoldfeafe/</a> 1×slots casino зеркало Онлайн-казино тщательно продумывают бонусные обстоятельства, коие нужно выучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша прочие лимитирования.
1×slots официальный demo регистрация в 1×slots casino
Главное превосходство спинов – возможность изучить разные слоты. Также удастся насладиться бонусными раундами, испытывать удачу в риск-туре и преувеличить выигрыш за счёт особенных знаков. Однако не только игровой процесс заслуживает внимание, ведь никакого сосредоточиться на реальном выигрыше. <a href=http://kidsnighttonight.com:/forums/member.php?action=profile&uid=348063>http://kidsnighttonight.com:/forums/member.php?action=profile&uid=348063</a> 1×slots бонус за регистрацию
1×slots сайт
Получить приветственный бонус имеют лишь свежие клиенты онлайн-казино. Способы описаны в критериях акции любого легального казино, чаще всего это: <a href=https://forumauthority.com/member.php?action=profile&uid=3484>1×slots зеркало</a> Подтверждение электрической почты – одно из основных критерий, которое есть практически в каждом бездепозитном казино. Чтобы верифицировать электронную почту, достаточно перебежать по интенсивной ссылке в послании, приобретенном от азартного клуба. 1×slot зеркало рабочее регистрации на телефон придет <a href=http://eurasiaaz.com/index.php?subaction=userinfo&user=Henryplors>http://eurasiaaz.com/index.php?subaction=userinfo&user=Henryplors</a> Вейджер (либо вагер) ? это минимальная сумма ставок, которую необходимо сделать для вывода валютного бонуса. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Не стоит незамедлительно же отказываться от приветственных презентов в сходственных казино. Администрация готова начислить деньги или фриспины, но предварительно сотрудники должны увериться, что вы не аферист. Дело том,, собственно развелось очень большое охотников за призами. Они научились обманывать систему и наваривать солидные суммы денег. У любого игорного клубы различные вейджеровые условия. Чтобы вы гарантировано смогли выполнить их, мы дадим количество советов. Если система начислила небольшую сумму, надо создавать большие ставки – остановитесь на 10–30 центах. Как лишь сможете заработать примерно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте играть. В противном случае превосходнее присмотреться к другому автомату. <a href=http://www.bbxdn.com/yeepay/home.php?mod=space&uid=343329>http://www.bbxdn.com/yeepay/home.php?mod=space&uid=343329</a> 1×slots регистрацию процедура займет всего лишь При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток.Для выбора азартного заведения Вы сможете воспользоваться списком наших казино с бонусами за регистрацию. На нашем веб-сайте мы выпустили перечень бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, собственно доля призов эксклюзивные и доступны только для гостей нашего вебсайта по-специальному промо-коду либо по оригинальной ссылке. Кроме того, для каждого бонуса мы подготовили подробный обзор, в Вы узнаете как получить и отыграть одобрение и как вывести собственный выигрыш с бездепа.
<b>Смотреть еще похожие новости:</b>
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=2981>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<a href=https://www.ldvd.nl/jammer-3?page=13#comment-239942>1×slots бездепозитный бонус за регистрацию</a>
<a href=http://big.bestforums.org/viewtopic.php?f=7&t=10308>1×slots официальный зеркало</a>
<a href=http://swissairways-va.com/phpBB3/viewtopic.php?p=1422030#p1422030>1×slots casino регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Приветственный бонус без депо ? презент за регистрацию. Выдается средствами, фриспинами или баллами. В последнем случае бонусные баллы используются для роли в турнирах или размена на реальные деньги. Разные казино имеют собственные верховодила по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высочайшие требования. Часто онлайн-казино советуют отыграть бонусное поощрение до 100 раз в игровых автоматах. Например, если игрок получил безвозмездно 10 $, то нужно будет отыграть их, поставив одну тысячу спинов по 1 баксу каждый. Стоит отметить, что не все казино дают вероятность выступать на призы и не во всех увеселительных заведениях схожие правила для отыгрывания. Некоторые казино воспрещают выступать на бонусы в блекджек или ограничивают ставки до пяти %, что значительно увеличивает в десятки один количество необходимых игр.
#6961 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino играть играющие казино онлайн <a href=https://res-publika.com>казино вулкан</a> казино пин порно с Юлия Ефимова <a href=https://th-royalgclub.com/>казино можно</a> букмекерские конторы бет порно с Дарья Касаткина (теннис) Самойлова Алла Владимировна порно 1×bet зеркало рабочее на сегодня мелбет букмекерская контора официальная казино porno Анна Сидорова, керлингистка
#6962 Charlesgunnyhttp://filmkachat.ru
1×slot официальный сайт
Получать информацию о самых прибыльных бонусах можно без неизменного мониторинга новостей казино. Мы брали эту задачу на себя и безпрерывно смотрим за услугами операторов, избирая лучшие из них. В этом разделе собраны заключительные бездепы, промокоды к ним и обстоятельства их активации. Список акций периодически дополняется. В топ вошли самые свежие бездепозитные бонусы за регистрацию в казино 2020, кратковременные и замкнутые промо. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и другим аспектам. Если срок деянья акции истек, она удаляется из перечня. <a href=http://filmkachat.ru/>1×slots зеркало проходить регистрацию это отличный вариант</a> Помимо прочего, для вывода средств по бездепу нужно привнести на счёт свой первый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально возможную необходимую, последствии чего вывод средств станет доступен.Многие новички колеблются, собственно поощрительный приз не несомненно отдавать, в в они выиграли у казино. Это полностью неопасно и накрепко. Выводя выигранные свои, игрок просто останавливает свое участие деле и утрачивает уникальную возможность – бесплатно наращивать личное материальное положение. <a href=https://www.gift-me.net/blogs/228961/Transform-Your-Space-Professional-3D-Living-Room-Design-Made-Simple>https://www.gift-me.net/blogs/228961/Transform-Your-Space-Professional-3D-Living-Room-Design-Made-Simple</a> Заработать на бездепозитных бонусах за регистрацию в казино имеет любой пользователь, достигший совершеннолетия. 1×slots зеркало рабочее <a href=http://www.sixsigmaexams.com/mybb/member.php?action=profile&uid=276714>http://www.sixsigmaexams.com/mybb/member.php?action=profile&uid=276714</a> Если вы бывалый игрок, вы обязаны знать, что приз без депо – редкая находка. Тем ниже, мы раз изучаем онлайн, чтобы отыскать вам наихорошие бездепозитные предложения.Казино выводит средства лишь на что, эту платежную систему, с котрой был сделан депозит. То есть, для вывода бездепозитного приза, Вам сначала необходимо восполнить счет. В неких клубах ограниченный список методов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет непосредственно с данных платежных методов, коие доступны для вывода.
1×slots сайт зеркало
Размер ставки для игры по бездепозитному призу (окончательно же, когда, когда он представлен вид бонусных денежных средств) часто ниже, чем при этой на депозит. Ограничение будет действовать до момента отыгрыша бонуса. скачать 1×slots официальный сайт С не отыгранным бонусом запрещается превышать размер наибольшей ставки. Нарушение этого обстоятельства в аннулирование выигрыша. <a href=http://ternovka4school.org.ua/user/HarrySmose/>http://ternovka4school.org.ua/user/HarrySmose/</a> Призовые начисления без депо имеют предоставляться для участия в турнирах онлайн казино. Потратить перечисленные деньги возможно исключительно в данной акции. Условия их проведения себе лимитирования на список игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, чем изучить его управляла.Да, у бесплатных призов есть дефекты. Прежде всего, они обычно очень. Кроме такого, обстоятельства вейджера по ним практически жесткие. Но все неимение риска делает их довольно красивыми для клиентов. 1×slots официальный сайт, скачать
1хслот зеркало сайта
Доступность — бездепозитные призы в казино чаще всего предоставляются свежим игрокам, но посещают случаи, когда бонус шансы получить и действующие клиенты. <a href=https://www.autorepguide.com/member.php/7829-Walternapse>https://www.autorepguide.com/member.php/7829-Walternapse</a> Для верификации аккаунта нужно предоставить специалистам технической помощи отсканированную копию паспорта и счета за коммунальные предложения, а фотографию банковской карты или скриншот страницы электронного кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для подтверждения личности. 1×slots коды
рабочее зеркало 1×slots
<a href=https://www.kfz-gringer.at/index.php?option=com_k2&view=itemlist&task=user&id=39720>1×slots регистрация</a> Фриспины — благотворительные вращения, коие дозволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся наиболее модным и предпочтительным видом приза — благотворительные вращения порой эффективнее и веселее в отыгрыше, чем другие виды бездепов.Отзывы читателей о бонусных акциях помогут составить эмоцию, но не запамятовывайте о субъективности собственных объяснений. Все любят получать презенты. Согласитесь, почти каждый играющий человек будет очень рад, случае получит безвозмездный презент для забавы в интернет казино просто за регистрацию или же бонус за внесенный депо, так нарекаемые приветственные призы для новых игроков. Соответственно эти онлайн клубы станут более востребованы и преимущественны у игроков при выборе казино для игры. Топ казино каждый обновляется и прибавляются свежие и увлекательные игровые клубы с симпатичной бонусной политикой и всеми вероятными преимуществами, льготами, к которым относятся такие призы как фриспины за регистрацию, денежные бездепозитные бонусы, еще великодушные призы за внесенный депо. 1×slots сайт зеркало <a href=http://wuyuebanzou.com/home.php?mod=space&uid=925395>http://wuyuebanzou.com/home.php?mod=space&uid=925395</a> Представленные на данной странице превосходнейшие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, в котором гости Casino.ru могут сортировать перечень по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д.
1хслотс мобильная версия зеркало
Для верификации номера телефона, в собственном профиле изберите опцию „Подтвердить номер телефона“ и введите в подходящее поле код, приобретенный в sms-сообщении.Также есть онлайн-платформы азартных игр, коие используют раздачу бездепозитных бонусов в специальные даты (как для казино, например и для игрока). Помимо этого, действующие игроки также имеют возможность получить похожие бонусы за свою деятельность (например, за повышения значения либо за схожие заслуги). Перед активацией важно пристально изучить условия акции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, протяжении коих можно пользоваться предложением. Если бездеп обхватывает узкий перечень игр, рекомендуется разузнать максимальные коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только никаких случае, в оператор не установил требовательные лимитирования на максимальную сумму ставки. <a href=https://noosfero.ufba.br/lexxeagle/blog/mastering-silo-images-integration-for-advanced-3d-architectural-visualization>https://noosfero.ufba.br/lexxeagle/blog/mastering-silo-images-integration-for-advanced-3d-architectural-visualization</a> 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.home-visa.ru/viewtopic.php?f=69&t=807392&p=3060384#p3060384>1хслотс официальный сайт зеркало</a>
<a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=995686#pid995686>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В некоторых онлайн казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на веб-сайте клуба и доказать свои контактные данные. Дополнительно потребуется активация промокода. Чтобы бездеп не был начислен на Ваш аккаунт, Вам надо активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк автоматически, а Вы не расчитываете его применять, обратитесь в службу поддержки с просьбой отменить бездепозитный приз.
#6963 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино фильм смотреть онлайн ограбление казино <a href=https://7club7.com/>ап казино</a> порно с Захарова Мария Владимировна 1×bet скачать приложение на андроид <a href=https://res-publika.com>1×bet зеркало слоты 1×bet xyz</a> 7k casino зеркало на сегодня 1×bet официальный xbet казино без casino зеркало сегодня casino сайты порно с Евгения Медведева казино гта 5
#6964 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерские контора ап порно с Карен Хачанов (теннис) <a href=https://t.me/vchkogpu_ru>Комарова Наталья Владимировна порно</a> порно с Петр Ян (ММА) 1×bet зеркало на сегодня 1×bet xyz <a href=https://sovsekretno.net/>porno Алена Косторная (фигурное катание)</a> porno Александра Степанова, фигуристка официальные букмекерские конторы мелбет букмекерская контора букмекерская контора леонов Лут Оксана Николаевна порно порно с Елена Никитина, скелетонистка суть казино
#6965 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на 1хслотс
Подтвердите регистрацию, дабы активировать Бездепозитный приз с выводом, потребуется наполнить собственный профиль. Заполните пустые поля настоящими данными о себя.Большинство интернет-казино из нашего топ-10 готовы повеселить вас эксклюзивными акциями. Читайте о их в обзорах и на форуме. <a href=http://filmkachat.ru/>рабочее зеркало 1хслотс</a> Вознаграждения за получение VIP-статуса ? начисляются в программки преданности при достижении одного уровня либо выдаются индивидуально менеджерами службы.В основном случаев безвозмездные бонусы начисляются в кредитах, которые нельзя сразу исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже. <a href=https://www.thuum.org/viewthread.php?thread=8824>https://www.thuum.org/viewthread.php?thread=8824</a> На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не сможете активировать и получить бездепозитный приз.Промокод – определённая комбинация символов, коию необходимо ввести в подходящее фон при твореньи учетной записи либо активировать в собственном профиле игрока в разделе с бонусами. 1хслотс официальный сайт зеркало <a href=http://vfb7968c.bget.ru/index.php?subaction=userinfo&user=roundcommunity9>http://vfb7968c.bget.ru/index.php?subaction=userinfo&user=roundcommunity9</a> Для всех бездепозитных бонусов функционирует наибольший лимит на выигрыш. Он показывает максимальную сумму, которую у получить, играя на бонусные кредиты. Как только для удастся выполнить требования вейджера, допустимый максимум несомненно переведен с бонусного счета на главной, а остаток несомненно списан.
1×slots актуальное зеркало
1×slots казино зеркало <a href=http://www.handgemaaktplaats.nl/user/profile/75345>http://www.handgemaaktplaats.nl/user/profile/75345</a> Для всех бездепозитных призов функционирует максимальный лимит на выигрыш. Он указывает максимальную необходимую, которую вас получить, играя на бонусные кредиты. Как лишь вас получится выполнить притязания вейджера, возможный максимально будет переведен с бонусного счета на ведущей, а остаток будет списан. 1×slots официальный регистрация
1×слотс казино
<a href=http://www.qazaqpen-club.kz/en/user/WalterWenna/>http://www.qazaqpen-club.kz/en/user/WalterWenna/</a> 1×slots зеркало которую указывали при регистрации кстати
1×slots промокод при регистрации 2025
Обычно показатель выше, чем для призов на депозит. Не изумляйтесь, в он несомненно в х100. Иногда завышенный коэффициент вейджера устанавливается для обитателей отдельных стран.Каждый новичок и профессиональный игрок мечтают прытко стартануть и начать создавать реальные ставки. Для сего достаточно арестовать подарок, за кот-ый надо уплачивать. В зависимости от игровой платформы, нужно сделать профиль, привязать email или телефон. После сего администрация начисляет щедрое вознаграждение повторяющий безвозмездных вращений либо виртуальных кредитов. <a href=http://lider1c.ru/communication/forum/messages/forum5/message20209/16140–1×slots-kody?sessid=9312889f6fcef5e128cc2fa511113169&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1×slots коды</a> Бонусные средства – маленькая сумма средств для старта в новом казино. На бонусные деньги, обычно разрешается играть во все игры, кроме слотов с прогрессивным джекпотом и игр из раздела live casino.Маркетинговая политика всех игорных интернет-клубов должна одевать разнородный нрав. И случае гонорары на депозит работают для того, дабы стимулировать заносить депозиты и поощрять уже существующих пользователей, то бездепозитный приз в казино либо приз за регистрацию в казино, этого всего, рассчитан на расширение базы покупателей. 1×slots бонус за регистрацию <a href=https://xn----htbblufccvgdmek8j.xn–p1ai/forum/messages/forum2/topic851/message112034/?result=new#message112034>https://xn----htbblufccvgdmek8j.xn–p1ai/forum/messages/forum2/topic851/message112034/?result=new#message112034</a>
1×slots актуальное зеркало
<a href=https://blackmarke7.com/user-39882.html>https://blackmarke7.com/user-39882.html</a> Новые клиенты онлайн-казино без первого депозита шансы выяснить собственную удачливость. К тому же есть вероятность конвертировать бездепы в реальные средства за регистрацию в казино, однако достичь приз нужно отыграть сообразно условиям акции.Бездеп с фриспинами возможность обхватывать всю коллекцию игр на веб-сайте либо разработки 1-го провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш возможность быть выведен последствии как, как пользователь отыграет данную сумму. Возможность оценить глубокий перечень слотов — главное достоинство данной разновидности. Игроку становятся доступны что, эти опции, которые отсутствуют в демонстрационном режиме, а вероятность выиграть реальные средства прибавляет ярких азартных ощущений. 1× slots casino официальный сайт Бездепозитные призы за регистрацию считаются одним из самых модных методов вербования новых игроков в онлайн-казино, поэтому что они деют игрокам возможность опробовать казино, особенно игровые автоматы, и вероятно, выиграть настоящие средства.Хотя благотворительные призы начисляются без депозита, не исключено, что для понадобиться вносить деньги. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты только последствии как, как свежий клиент раз пополнит игровой счет.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.formulersupport.com/Thread-1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-demo-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%B2–1×slots-casino–115832>1×slots официальный demo регистрация в 1×slots casino</a>
<a href=http://palais.beesims.com/phpbb/viewtopic.php?f=14&t=288887&p=361667#p361667>1×slots зеркало этих способов предполагает регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чтобы бездеп не был начислен на Ваш акк, Вам не нужно активировать бонусный код. Если одобрение от казино было добавлено на Ваш аккаунт механически, а Вы не планируете его применять, обратитесь в службу с пожеланием отменить бездепозитный бонус.
#6966 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Скворцова Вероника Игоревна порно букмекерская контора леонов <a href=https://slon-ru.com/>порно с Ирина Сидоркова</a> мобильные букмекерские конторы сколько казино <a href=https://rumafia.news/>рабочие зеркала казино</a> казино онлайн бесплатно официальные сайты казино 1×bet официальный скачать скачать 1×bet на андроид бесплатно 1×bet официальный казино рулетка официальные букмекерские конторы скачать
#6967 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
лучшие казино бесплатно зеркала официальных сайтов казино <a href=https://vestnik-jurnal.com/>casino официальный сайт</a> pin up casino скачать 1×bet на андроид <a href=https://m.repost.news/>порно с Константин Тюкавин (футбол)</a> букмекерская контора зенит порно с Максим Глушенков (футбол) букмекерская контора официальный сайт ев казино порно с Карен Хачанов (теннис) порно с Владимир Минеев (ММА) vodka casino
#6968 Charlesgunnyhttp://filmkachat.ru
1×slots сайт
Не хотите сыграть в азартные забавы, не рискуя своими деньгами, но получая в все выплаты? Подобную возможность предоставляют многие наихорошие порталы с азартными веселиями. В их количестве много честных и надежных интернет-казино на русском языке. Они привлекают свежих юзеров различными поощрительными событиями, включая бездепозитные, либо безвозмездные призы. <a href=http://filmkachat.ru/>1×слот регистрация в 1×slots casino</a> <a href=https://hanson.net/users/archicgicom>https://hanson.net/users/archicgicom</a> Даже не выиграв солидную необходимую, игрок интересно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-либо денежных рисков. Быть в курсе наилучших акций легкостью. Достаточно регулярно учить список новых онлайн казино с выводом приза без депозита в данном разделе.4. Заберите презент. Чаще всего бонус активизируется незамедлительно в регистрации. Но случаются истории, когда нужно забежать в собственный офис либо написать в службу. онлайн казино 1×slots <a href=http://www.zgbbs.org/space-uid-172268.html>http://www.zgbbs.org/space-uid-172268.html</a>
1×slots регистрация 1×slotscasino 56 online
Создание аккаунта. На веб-сайте казино необходимо обнаружить регистрационную форму и наполнить пустующие поля личными данными. Иногда на этом этапе потребуется указать только адресок электронной почты и пароль, но почаще бы наполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д. ). Нужно свидетельствовать только реальные данные, поскольку впоследствие они станут испытаны. 1×slots казино зеркало <a href=http://beton.ru/communication/forum/?PAGE_NAME=profile_view&UID=32928>http://beton.ru/communication/forum/?PAGE_NAME=profile_view&UID=32928</a> При небольшой сумме бонуса рекомендовано выступать по невысоким ставкам, а использовать максимальные чем только что, нет случае, если вейджер слишком немалый, а время на отыгрыш крепко ограничено.Бездепозитные призы казино за регистрацию в 2022 году — это возможность сыграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой или количеством бесплатных вращений без внесения депозита. Не путайте деморежим с реальной забавой без надобности внесения депо. x1 slots регистрация в 1×slots casino
1×slots рабочее зеркало
Демоказино есть практически на каждом веб-сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются существенно пореже: там если, тогда, выигрыша и соблюдения условий акций бездеп можно превратить в реальные деньги.В онлайне очень количество скриптовых сайтов, которые принадлежат плутам. Их основная цель – привлечь гэмблеров, пообещав не только щедрые презенты, но и крупные выигрыши. Так собственно некоторые веб-сайты предлагают получить за регистрацию том $1 000. Но надо размышлять, собственно снабжая юзеров этими бонусами, казино увлекается спонсированием. Ведь объемы вознаграждений, в, не великие (средним объемом от 5 до 20 долларов). И на эти свои налагаются конкретные условия и лимитирования, обязательные к выполнению игрока, в в последствии он желает получить все средства выигранные деньги.Иногда виде поощрения за регистрацию шансы выдаваться билеты для роли в турнирах. Условия их проведения очень выделяются, потому мы советуем ознакомиться с каждым предложением отдельно. <a href=http://go-power.ru/bitrix/redirect.php?goto=http://p1.minzdravrso.ru/bitrix/redirect.php?goto=http://catmusic.ru/bitrix/redirect.php?goto=https://telegra.ph/Predvaritelnye-sledstvennye-dejstviya-v-pravoohranitelnyh-organah-09–19>http://go-power.ru/bitrix/redirect.php?goto=http://p1.minzdravrso.ru/bitrix/redirect.php?goto=http://catmusic.ru/bitrix/redirect.php?goto=https://telegra.ph/Predvaritelnye-sledstvennye-dejstviya-v-pravoohranitelnyh-organah-09–19</a> 1× slots регистрация в 1×slots casino
1×slot зеркало рабочее этих способов предполагает регистрацию
Частенько новички не знают, как активировать презенты или вывести 1-ый выигрыш. Для подобных случаев наша команда обрисовала главные термины – собственно такое фриспины, вейджер, как его отыграть, для необходимо протекать верификацию. Срок активации и время на отыгрыш. Зачисление средств либо фриспинов случается при активации протяжении требовательно ограниченного периода, схожие требования предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать бонус количество дней либо даже месяцов. Другие выдают солидную сумму за регистрацию, хотя время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером.Как только вы отыграли вейджер и средства с бонусного баланса перебежали вам на настоящий счет, Вы смело можете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депо). 1×slots официальный сайт скачать <a href=https://roacytomedy.com/bbs/board.php?bo_table=free&wr_id=361528>https://roacytomedy.com/bbs/board.php?bo_table=free&wr_id=361528</a>
1хслотс 1хслотс регистрация перейти на 1×slots
На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не сможете активировать и получить бездепозитный приз. <a href=http://travel.navigator-mas.ru/user/CharlesInwab/>http://travel.navigator-mas.ru/user/CharlesInwab/</a> Бонус в казино без депо имеет различные вариации: это может быть приветственный приз, акции в честь каких-то праздничных или весомых дат, бонус за вербование свежих игроков, преданность и получение VIP-статуса. 1× slots официальный Доступ к дару имеет раскрываться автоматически после введения промокода или обращения в службу поддержки сайта. В первом случае от юзера не требуется практически поступков. Бездеп с активацией по коду встречается почаще всего. Игроку необходимо установить совокупность знаков в графе, кот-ая может находиться в регистрационной форме в Личном кабинете.Частенько новички не понимают, как активировать презенты либо вывести первый выигрыш. Для подобных случаев наша команда обрисовала основные определения – что такое фриспины, вейджер, как его отыграть, для нужно протекать верификацию.
<b>Смотреть еще похожие новости:</b>
<a href=http://cozycotg.com/memberlist.php?mode=viewprofile&u=72740&sid=743e1fabf1f0034309d97f580cb88900>1×slots регистрация 1×slotscasino 56 online</a>
<a href=https://www.donchillin.com/space-uid-382497.html>онлайн казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На бонусные начисления имеют быть установлены дополнительные ограничения, коие Вы не сведению при отыгрыше. Пока приз всецело не отыгран — деньги из казино не выводятся. Бонус начисляется игроку сразу в регистрации и прохождения верификации в казино и не настятельно от клиента внесения депозита. Как управляло, размер приза в подобном случае довольно скромный, впрочем позволяет новичкам познакомиться с игрой без риска настоящими средствами.
#6969 Charlesgunnyhttp://filmkachat.ru
1×slots casino online регистрация
Также, учите, что бездепозитный бонус возможно исключить лишь сомнений случае, когда станут исполнены все обстоятельства отыгрыша. <a href=http://filmkachat.ru/>скачать 1×slots официальный сайт</a> Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного бонуса достаточно пополнения баланса и доказательства личности. В иных же клубах, нужно некоторое один прокрутить свой депо. <a href=https://ai.ceo/read-blog/225693>https://ai.ceo/read-blog/225693</a> 1×slos регистрация в 1×slots casino <a href=http://vidau-cctv.ru/bitrix/redirect.php?goto=http://rnt.ru/bitrix/click.php?goto=http://sokb.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/7_Z56Vo5lqh>http://vidau-cctv.ru/bitrix/redirect.php?goto=http://rnt.ru/bitrix/click.php?goto=http://sokb.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/7_Z56Vo5lqh</a>
1×slots casino регистрация на сайте
Ознакомьтесь с нашим списком наихороших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего списка и получите бездеп незамедлительно. Хватайте превосходнейшие безвозмездные предложения ниже и выигрывайте большие деньги, не рискуя!Хотя бесплатные бонусы начисляются без депозита, не исключено, собственно вас придется заносить деньги. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только последствии как, как свежий заказчик впервые пополнит игровой счет. 1×slots актуальное зеркало Отказ в прохождении верификации. Если клиент не хочет или имеет предоставить документы, подтверждающие его лицо, профиль несомненно заблокирован вместе со всеми бонусными начислениями.Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного бонуса. <a href=https://sportavesti.ru/forums/users/tmseosit1608–2/>https://sportavesti.ru/forums/users/tmseosit1608–2/</a> Самый распространённый из похожих призов, окончательно же, бездеп на денек рождения клиента — приз повторяющий фиксированной суммы либо фриспинов поступает на счёт игрока, а пользоваться им можно в течение установленного периода медли.Бесплатные призы казино без депозита можно получить в виде денежных средств на бонусный счет (вывести их возможно лишь после отыгрыша), фриспинов, забавы или кешбэк-бонуса. 1×слотс казино Чтоб получить большой выигрыш, выбирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша.
1×slots рабочее зеркало
В качестве призов онлайн казино нередко предлагает выдачу фриспинов, словами бесплатных вращений игрового барабана. Виртуальные монеты возможно применять для изучения в покерной школе либо для игры в казино. <a href=https://xs.xylvip.com/home.php?mod=space&uid=1170748>https://xs.xylvip.com/home.php?mod=space&uid=1170748</a> Для проверки используются сканы паспортов, водительских водительских, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь замечен в попытке завести дополнительный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный список. При игре на лицензионной площадке не бояться указывать достоверную индивидуальную информацию (шифрование ликвидирует утечку персональных данных).В качестве призов интернет казино часто предлагает выдачу фриспинов, словами даровых вращений игрового барабана. Виртуальные монеты можно применять для изучения в покерной школе или для забавы в казино. 1×slot казино зеркало Как лишь получите бездеп в казино, всё равно не запамятовывайте инспектировать электронную почту. Некоторые игорные клубы каждый веселят интенсивных гэмблеров приятными призами. Чаще всего получить презент можно в преддверии веселья, на денек рождение, за привлечение друга. А того распространённым призом является надбавка к депозиту. Нужно чем пополнить счёт, и азартное заведение прирастит его на 50–100%.Казино выводит деньги только на ту платежную систему, с котрой был изготовлен депо. То есть, для вывода бездепозитного бонуса, Вам поначалу нужно пополнить счет. В некоторых клубах узкий перечень способов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет именно с этих платежных способов, которые доступны для вывода.
1×slots актуальное зеркало
<a href=https://www.bf-france.com/forums/profile/30064-rabofreeor/>1×slots официальный сайт скачать на айфон</a> Самые знаменитые методы вывода денег ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электронным платежным системам типа Neteller и Skrill, еще пользуются криптовалютными кошельками. Вывод выигрышей может исполняться быстро либо развлекать от нескольких часов до нескольких суток. 1×slots казино зеркало <a href=http://yerliakor.com/user/Charlesdiofe/>http://yerliakor.com/user/Charlesdiofe/</a> Да, у бесплатных призов есть дефекты. Прежде всего, они обыкновенно маленькие. Кроме такого, обстоятельства вейджера по ним всегда жесткие. Но все недоступность риска проделывает их довольно привлекательными для клиентов.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Все обожают получать презенты. Согласитесь, почти каждый играющий человек несомненно необъятно рад, если получит даровой презент для забавы в онлайн казино просто за регистрацию либо же бонус за внесенный депозит, например нарекаемые приветственные бонусы для свежих игроков. Соответственно эти интернет клубы будут больше знамениты и предпочтительны у игроков при выборе казино для игры. Топ казино постоянно обновляется и прибавляются новые и увлекательные игровые клубы с симпатичной бонусной политикой и всеми возможными преимуществами, льготами, к коим относятся такие призы как фриспины за регистрацию, денежные бездепозитные бонусы, а также щедрые призы за внесенный депо. <a href=http://www.god123.xyz/home.php?mod=space&uid=1042601>http://www.god123.xyz/home.php?mod=space&uid=1042601</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots У каждого игорного клубы различные вейджеровые условия. Чтобы вы гарантировано смогли выполнить их, мы дадим количество советов. Если система начислила небольшую сумму, не делать немалые ставки – остановитесь на 10–30 центах. Как лишь сумеете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте играть. В противном случае чем приглядеться к иному автомату.Можно ли в одном интернет казино получить больше одного приза за регистрацию? Нет, например как в каждом интернет казино есть правила, к которым надо(надобно) придерживаться, не делать два аккаута для получения призов, другому будет блокировка обоих аккаутов, не пытайтесь обмануть онлайн казино, приз за регистрацию выдаеться раз один одному личику.
<b>Смотреть еще похожие новости:</b>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5017/#comment-603003>1×slots зеркало регистрацию более популярный вариант это</a>
<a href=http://nhomtruyen.com/members/jamesgaw.9280/>1хслотс зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В некоторых онлайн казино для получения бездепозитных призов не довольно просто зарегистрироваться на сайте клуба и подтвердить средства контактные данные. Дополнительно потребуется активация промокода.
#6970 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино в россии порно с Елена Никитина, скелетонистка <a href=https://krtka.info/>официальная казино</a> карты казино porno Светлана Ходченкова <a href=https://repost.news/>сайт букмекерской конторы</a> online casino казино вход официальный сайт casino pin ап casino Радченко Светлана Юрьевна порно винлайн букмекерская контора официальный сайт Юдаева Ксения Валентиновна порно
#6971 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на сайте 1×slots ru com
Зарегистрируйтесь. Для регистрации чаще всего довольно установить свой номер аппарата и почтовый адрес, в чего ввести приобретенный код из СМС. Возможно, требуется указать промокод. В правилах промоакции несомненно написано, где его бы вводить. Иногда это хотелось создавать при регистрации, времени — уже в создания личного офиса, на отдельной страничке.Обычно для получения призов без депозита, казино выдвигает лояльные и абсолютно выполнимые обстоятельства, хотя есть ряд действий которые запрещены и все стать неприятные результаты: <a href=http://filmkachat.ru/>x1 slots 1хслотс регистрация перейти на 1×slots</a> Когда речь идет о денежных бонусах, казино практически устанавливают обстоятельства вейджера, которые нужно выполнить, чтобы исключить выигрыш. <a href=https://diigo.com/0y2r36>https://diigo.com/0y2r36</a> Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном сайте и выполните вход в личный офис, чтобы забрать безвозмездные вращения с вейджером х40; 1×slots скачать на айфон <a href=https://sklad-slabov.ru/forum/user/9326/>https://sklad-slabov.ru/forum/user/9326/</a> Бывают ли бездепозитные призы без вейджера? Бывают, случае у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино.
1хслот 1хслотс регистрация перейти на 1×slots
Бездепозитные бонусы за регистрацию являются одним из самых популярных методов привлечения новых игроков в онлайн-казино, потому собственно они предоставляют игрокам возможность опробовать казино, более игровые автоматы, и вероятно, выиграть настоящие средства.Фриспины без депозита либо вспомогательные средства посодействуют поближе познакомиться с игровой платформой и её функциями. За счёт презентов возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям ради игры напротив живых крупье. <a href=http://forum.cvetq.info/memberlist.php?mode=viewprofile&u=17326>1хслотс рабочее зеркало на сегодня</a> 1хслот зеркало сайта <a href=http://iminthai.com/home.php?mod=space&uid=247696>http://iminthai.com/home.php?mod=space&uid=247696</a> В лицензионных бездепозитных казино выступать в азартные забавы вправду безопасно. Наличие лицензии подтверждает тот прецедент, собственно клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP. 1×slots официальный сайт мобильная версия
1×slots зеркало регистрация в 1×slots casino
Не трудно додуматься, что no down payment bonuses практически разу не случаются немаленькими. Чаще всего речь о пяти–тридцати баксах (либо эквиваленте этой суммы в другой валюте).Популярность онлайн казино растёт и всё больше юзеров начинают проявлять азартными играми. Бездепозитные призы 2022 года, это уникальные подарки за регистрацию. С их помощью свежие игроки имеют получить бесплатные вращения либо деньги на баланс за одну регистрацию. С в игорных заведений в интернете, бездепозитные призы стали популярнейшим способом вербования игроков. Подобные промоакции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш сайт собрал лучшие предложения из онлайна на 2022 год. Воспользуйтесь любым даром и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша нужно выполнить условия. Игры, в можно выступать на бонусные средства. Проверьте перечень игр, в можно играть на бонусные свои, возможно они Вам не понравятся и надо тратить своё время на эту промоакцию.Наш перечень включает в себя превосходнейшие бездепозитные бонусы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит ревизию по важным параметрам: <a href=https://forum.motr-online.com/user/glavdorogadv2106>https://forum.motr-online.com/user/glavdorogadv2106</a> 1×slots подтвердит вашу регистрацию если говорить Так же стоит выделить то, что в каждом онлайн казино установлен собственный максимальный кешаут на бездепозитный бонус. Как управляло кешаут — это предельная сумма денег, которая дешевая для вывода с бездепозитного приза.Наши эксперты исследуют условия акции, после в ручном режиме проверку их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и параметры. Мы не рекламируем казино, а даем игрокам информацию о превосходнейших из их.
казино 1×slots
В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая милая доля игры. Важно, зачастую бездепозитные призы в казино выдаются с лимитированиями по наибольшей выплате. В среднем возможно рассчитывать на выгода в количество тыщ рублей. Как вывести выигрыш с приза без депозита. Придётся доказать аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате либо прочтите в правилах. <a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-4972/#comment-593623>сайт 1× slots casino</a> На критериях отыгрыша даровых призов следует остановиться подробнее. С ними связаны аспекты, коие нельзя забыть без внимания.Вейджер менее х30–35 является приемлемым. Опытные игроки утверждают, что с таким вейджером реально остаться в плюсе, в правильно подойти к выбору игрового аппарата. Игры, каких можно играть на бонусные средства. Проверьте список игр, каких возможно выступать на бонусные средства, возможно они Вам не понравятся и не стоит расходовать своё время на такую акцию.Лишь пользующиеся и знаменитые азартные заведения все позволить себе выдавать бездепы в виде дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депо, которые возможно истратить в топовых аппаратах с высочайшей отдачей. 1× slots официальный <a href=http://w92248uq.bget.ru/user/JeffreyPax/>http://w92248uq.bget.ru/user/JeffreyPax/</a>
1×слотс казино
Для проверки используются сканы паспортов, водительских водительских, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если юзер обнаружен в попытке ввести вспомогательный аккаунт, все его учетные записи подвергаются блокировке, а их обладатель попадает в темный список. При забаве на лицензионной площадке не опасаться указывать достоверную персональную информацию (шифрование ликвидирует утечку персональных данных).2. Создать новый профиль. Для регистрации надо(надобно) наполнить маленькую анкету либо зайдите в личный кабинет при помощи соц сеток; Для всех бездепозитных призов действует наибольший предел на выигрыш. Он указывает максимальную сумму, которую возможность получить, играя на бонусные кредиты. Как лишь вам получится выполнить требования вейджера, дозволенный максимально несомненно переведен с бонусного счета на ведущей, а остаток несомненно списан.Иногда в поощрения за регистрацию имеют выдаваться билеты для участия в турнирах. Условия их проведения довольно отличаются, поэтому мы советуем ознакомиться с любым предложением отдельно. <a href=http://esitscale.com/forum/profile.php?mode=viewprofile&u=39157>http://esitscale.com/forum/profile.php?mode=viewprofile&u=39157</a> 1×slots коды Выше мы дали полный набор самых свежих и актуальных бездепозитных бонусов в интернет казино без пополнения на 2022 год, где вы можете воспользоваться хоть ценным бездепозитным призом.Сразу последствии активации промокода возможно воспользоваться подарком. Как теснее упоминалось, бонусы посещают трёх видов – фриспины, кредиты и фриплей-бонусы.
<b>Смотреть еще похожие новости:</b>
<a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=51430>1×slots casino регистрация 1×slotscasino09k online</a>
<a href=https://creapnl.com/foros/tema/1×slots-%d0%bf%d1%80%d0%be%d0%bc%d0%be%d0%ba%d0%be%d0%b4-%d0%bf%d1%80%d0%b8-%d1%80%d0%b5%d0%b3%d0%b8%d1%81%d1%82%d1%80%d0%b0%d1%86%d0%b8%d0%b8–2025–9/>1×slots промокод при регистрации 2025</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выбирайте превосходнейшие бесплатные призы счет обзоров на Casinoz – и пусть для сопутствует счастье при отыгрыше бонусных кредитов!
#6972 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Илья Осипов (киберспорт) Анна Михалкова <a href=https://slon-ru.com/>букмекерскую контору пин</a> casino регистрации пин ап casino pin up top <a href=https://res-publika.com>1×bet официальный xbet</a> порно с Елена Никитина, скелетонистка сайт казино вход porno Илья Ковальчук (хоккей) букмекерские конторы без депозита пинко casino сайте букмекерской конторы фонбет Фастова Елена Владимировна порно
#6973 Charlesgunnyhttp://filmkachat.ru
1хслот 1хслотс регистрация перейти на 1×slots
Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, чтобы снова получить бесплатный бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ожидает неизбежное санкция.Все любят получать презенты. Согласитесь, практически каждый играющий человек несомненно бесконечно рад, случае получит бесплатный подарок для игры в онлайн казино просто за регистрацию или же приз за внесенный депо, так именуемые приветственные призы для новых игроков. Соответственно такие интернет клубы станут больше известны и предпочтительны у игроков при выборе казино для забавы. Топ казино каждый обновляется и прибавляются новые и увлекательные игровые клубы с привлекательной бонусной политикой и всеми возможными привилегиями, к которым относятся такие призы как фриспины за регистрацию, денежные бездепозитные бонусы, а великодушные призы за внесенный депо. <a href=http://filmkachat.ru/>1хслот скачать</a> <a href=https://social.urgclub.com/read-blog/214040>https://social.urgclub.com/read-blog/214040</a> Автоматическая активация может самой комфортной, хотя ручной способ имеет перед ней достоинства. Прежде чем использовать вознаграждение от казино, стоит заблаговременно определить, сколько медли требуется на исполненье всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деянья бонуса.Фриспины начисляются по определенной ставке. После их активации игроку необходимо запустить слот и увериться, собственно в нем показываются бесплатные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода после отыгрыша определяется оператором и изредка превышает 5 000 руб. 1х слотс зеркало регистрация в 1×slots casino <a href=http://38.104.231.181/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0>http://38.104.231.181/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0</a>
1×slots casino регистрация
Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, например как Вам понадобиться ее доказать в при выводе денег. 1×slos регистрация в 1×slots casino <a href=https://www.flyingsolo.com.au/members/bktoplist0708/profile/>https://www.flyingsolo.com.au/members/bktoplist0708/profile/</a> Иногда в качестве одобрения за регистрацию все выдаваться билеты для участия в турнирах. Условия их проведения очень выделяются, потому мы советуем ознакомиться с каждым предложением раздельно. казино 1×slots Для всех бездепозитных бонусов функционирует наибольший предел на выигрыш. Он указывает максимальную сумму, которую у получить, играя на бонусные кредиты. Как лишь для удастся выполнить притязания вейджера, допустимый максимум несомненно переведен с бонусного счета на ведущей, а остаток несомненно списан.Если площадка дарует бездеп за регистрацию, то процедура его получения проста. Нужно только завести акк на веб-сайте и активировать его, подтвердив адресок электронной почты, номер телефонного или иные данные, которые просит оператор. Перед этим нужно убедиться, собственно пользователь располагается на официальном веб-сайте казино, но на жульнической площадке.
1×slots актуальное зеркало
<a href=http://ppm.co.jp/userinfo.php?uid=16965#>http://ppm.co.jp/userinfo.php?uid=16965#</a> Но существуют азартные заведения, готовые просто так вручить деньги на забаву. Для сего достаточно сделать профиль. Чтобы исключить выигрыш, сначала необходимо выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа. 1×slots зеркало регистрация в 1×slots casino Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых новых, щедрых и проверенных бонусах в интернет казино, коие обновляются любой день.
1×slots бездепозитный бонус за регистрацию
Акционные предложения от казино есть в различных форматах. Часто бонусы даются в обмен на депо. Игрок заносит платеж и получает средства, благотворительные вращения и поощрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — вид приза, кот-ый гарантирован за выполнение конкретных действий на веб-сайте: Любой выигрыш по ставке выше установленного лимита будет являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, ну случае выигрыша его сумма не поступит на счёт клиента — итог игры несомненно всецело аннулирован.Вы не в коем случае ни чем не рискуете, а только выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, выучится регулировать менять ставки и полосы, изучать бонусные забавы и их выигрышные комбинации, ну в конце концов просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные свои, которые можно отыграть и исключить, а не просто на демо счет, тем наиболее адреналин в крови еще больше повысится а пульс забьется с частым ритмом! Бездепозитный приз часто возможность стать легкодоступным незамедлительно последствии завершения регистрации, поскольку правило единственным притязанием к нему считается регистрация, а после проверка вашей свежей учетной записи. 1×slot рабочее зеркало <a href=https://telegra.ph/Suchasn%D1%96-trendi-modi-ta-stilyu-z-Yana-Beautycomua-v%D1%96dkrivayemo-nov%D1%96-gorizonti-elegantnost%D1%96–10–13>https://telegra.ph/Suchasn%D1%96-trendi-modi-ta-stilyu-z-Yana-Beautycomua-v%D1%96dkrivayemo-nov%D1%96-gorizonti-elegantnost%D1%96–10–13</a> 1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, если не желаете замерзнуть жертвой жуликов или впустую истратить время;Все обожают получать презенты. Согласитесь, почти любой играющий человек несомненно необъятно рад, случае получит безвозмездный подарок для забавы в интернет казино просто за регистрацию либо же приз за внесенный депозит, так называемые приветственные бонусы для свежих игроков. Соответственно такие онлайн клубы станут более знамениты и преимущественны у игроков при выборе казино для игры. Топ казино непрерывно обновляется и прибавляются свежие и занимательные игровые клубы с симпатичной бонусной политикой и всеми вероятными преимуществами, льготами, к коим относятся такие призы как фриспины за регистрацию, валютные бездепозитные призы, а щедрые бонусы за внесенный депозит.
1×slots бонус за регистрацию
<a href=http://www.so0912.com/home.php?mod=space&uid=2240085>http://www.so0912.com/home.php?mod=space&uid=2240085</a> Осталось выбрать казино с бонусом за регистрацию и сделать профиль. После активации дара выигрыш находится от Фортуны и навыков. 1×slots зеркало этих способов предполагает регистрацию Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, a лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Обычно бездепозитные акции от казино, прибывают на эл. Почту в деньки рождения либо праздники. В некоторых интернет казино возможно адресоваться в чат и как неизменному игроку, возможно для предложат бездепозитное предложение.
<b>Смотреть еще похожие новости:</b>
<a href=http://forums.indexrise.com/user-307864.html>казино 1×slots</a>
<a href=https://mit-bbs.com/viewtopic.php?t=128936>1×slots регистрацию процедура займет всего лишь</a>
<a href=http://swissairways-va.com/phpBB3/memberlist.php?mode=viewprofile&u=3495>1×slots регистрация 1×slots casino 777 online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чем ниже значение вейджера, что, этим проще отыграть и исключить бонус. Если Вы планируете заработать на бездепе, не просто ознакомиться с новым игровым клубом, то стоит избегать бонусов с высоким вейджером их почти не реально отыграть. С ними Вы можете лишь протестировать забавы заведения. Не желаете сыграть в азартные забавы, не рискуя средствами средствами, но получая в все выплаты? Подобную возможность деют все наилучшие порталы с азартными увеселениями. В их числе количество правдивых и надежных интернет-казино на русском языке. Они привлекают свежих пользователей разными поощрительными мероприятиями, включая бездепозитные, или благотворительные бонусы.
#6974 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino промокод ап казино <a href=https://rumafia.news/>порно с Юлия Ефимова</a> бесплатные букмекерские конторы 1×bet слоты официальный сайт <a href=https://m.repost.news/>cometa casino</a> букмекерская контора фонбет официальный сайт casino сайты casino официальный зеркало букмекерская контора на андроид казино проиграл ешь казино казино вход официальный сайт
#6975 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Алина Загитова, фигуристка фреш казино <a href=https://rumafia.news/>1×bet официальный xbet</a> 7k casino зеркало на сегодня официальное казино вход <a href=https://7club7.com/>porno Илья Ковальчук (хоккей)</a> букмекерская контора официальный сайт официальные букмекерские конторы Матвиенко Валентина Ивановна порно букмекерские конторы бет скачать букмекерскую контору casino сайты champion casino
#6976 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino рабочее пин ап casino <a href=https://t.me/vchkogpu_ru>скачать букмекерскую контору</a> r7 casino казино вулкан <a href=https://repost.news/>казино рублях</a> casino сайты сайте букмекерской конторы фонбет pin casino 1×bet рабочее ешь казино Шевцова Татьяна Викторовна порно казино смотреть
#6977 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации
Но а в вы теснее профи по интернет казино, кликаем на красную кнопку «Получить» и Вы автоматически перейдете в интернет казино;У любого игорного заведения средства правила и обстоятельства. Но, дабы получить бонусы, необходимо выполнить стереотипные деянья: <a href=http://filmkachat.ru/>1хслотс официальный сайт зеркало</a> Зарегистрируйтесь. Для регистрации чаще всего достаточно ввести свой номер телефона и почтовый адресок, после чего ввести полученный код из СМС. Возможно, потребуется указать промокод. В правилах акции несомненно написано, где его бы включать. Иногда это бы создавать при регистрации, время — уже после сотворения собственного кабинета, на отдельной страничке.Эффективность бездепов в качестве маркетингового инструмента расценили все операторы. Малоизвестные площадки используют эти акции, чтобы прытко набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны неизменных гостей. Не все сайты, дающие презенты без депозита, рекомендованы к этой. За симпатичным промоописанием все скрываться неосуществимые обстоятельства отыгрыша и подводные камешки. <a href=https://www.zybuluo.com/comcgifurniture/note/2570100>https://www.zybuluo.com/comcgifurniture/note/2570100</a> Для отыгрыша бонуса казино обязует игрока сыграть на необходимую, в несколько один превышающую необходимую приобретенного приза — тут выгода фирмы очевидна.Размер бонуса. В качестве бездепов обыкновенно начисляют не суммы, а когда речь идет о призах за депо, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино имеют подарить игроку до 2000$. 1 х слотс зеркало <a href=http://l-avt.ru/support/dialog/?PAGE_NAME=profile_view&UID=74121>http://l-avt.ru/support/dialog/?PAGE_NAME=profile_view&UID=74121</a> Иногда операторы требуют внесение малого депозита перед выводом для верификации платежного прибора. В неких казино этот депозит также светит отыграть.
1×slots зеркало видели такую регистрацию на
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=101504&extra=>1×slot регистрация</a> 1×slots мобильная версия войти казино Рассмотрим принцип его деяния на примере. Допустим, вы зарегистрировались и получили $10 not the slightest deposit bonus с вейджером х50. Это значит, что выигранные деньги можно будет выводить не раньше, чем последствии такого, как общая сумма ставок достигнет $500. <a href=http://teppol.ru/bitrix/rk.php?id=17&site_id=s1&event1=banner&event2=click&goto=http://rtrmarket.ru/bitrix/redirect.php?goto=http://glavmaslo.com/bitrix/redirect.php?goto=https://telegra.ph/Postanovleniya-i-resheniya-Konstitucionnogo-Suda-Rossijskoj-Federacii-i-ih-vliyanie-na-pravilnoe-primenenie-ugolovno-processualn-09–19>http://teppol.ru/bitrix/rk.php?id=17&site_id=s1&event1=banner&event2=click&goto=http://rtrmarket.ru/bitrix/redirect.php?goto=http://glavmaslo.com/bitrix/redirect.php?goto=https://telegra.ph/Postanovleniya-i-resheniya-Konstitucionnogo-Suda-Rossijskoj-Federacii-i-ih-vliyanie-na-pravilnoe-primenenie-ugolovno-processualn-09–19</a> Для как, дабы отыграть сумму вашего бездепозитного бонуса нужно выполнить условия вейджера. Очень часто фриспины даются на определенные слоты (book of ra, book of deceased, book of sun), выбирайте разъем себе нраву, они все довольно красочные и высококачественные. Бездепозитные приз имеет быть денежным например и в виде фриспинов на слотыПринципиальным отличием безвозмездных бонусов от призов на депо считается отсутствие надобности заносить средства на акк. Из-за этого их нередко нарекают бездепозитными (not the slightest deposit bonuses). зеркло казино 1×slots
1×slots casino online регистрация
Для верификации аккаунта нужно предоставить спецам технической поддержки отсканированную копию паспорта и счета за коммунальные услуги, а фотку банковской карты либо экрана странички электрического кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для доказательства личности. Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической забавы на бездепозитные призы, у Вас есть шанс выучить игровые автоматы, научится регулировать изменять ставки и полосы, изучать бонусные забавы и их выигрышные комбинации, да конечном просто зарядится кучей эмоций! Ведь вы будите играть на бонусные свои, коие можно отыграть и исключить, а не просто на демо счет, что, этим наиболее адреналин в крови более повысится а пульс забьется с частым ритмом! <a href=http://xsyywx.com/home.php?mod=space&uid=40661>http://xsyywx.com/home.php?mod=space&uid=40661</a> Автоматическая активация кажется самой комфортной, но ручной способ содержит перед ней достоинства. Прежде чем использовать вознаграждение от казино, стоит заблаговременно найти, сколько медли требуется на выполнение всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала действия приза. 1×slos регистрация в 1×slots casino Если вы выбираете испытанное лицензионное интернет казино и сделайте все обстоятельства получения бездепозитного бонуса, трудностей с получением презента у Вас не возникнет.Чаще всего используются коды. Их нужно заносить в специальные окошки регистрационной анкеты, случае идет о пригласительных призах, либо в особом разделе собственного кабинета игрока.
1×slots регистрация на 1хслотс
<a href=http://policeacademy.teamforum.ru/memberlist.php?mode=viewprofile&u=410>1×slots официальный сайт скачать</a> Ну и окончательно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: схожая добродушие увеличивает степень лояльности клиентов к компании. 1×slots casino регистрация 1×slots review live <a href=http://androidplaymod.com/index.php?subaction=userinfo&user=nervousclaw17>http://androidplaymod.com/index.php?subaction=userinfo&user=nervousclaw17</a> Вообще перейдя в казино — правила схожи в получении бездепозитных бонусов, в стандартные управляла заходит: подтвердить эл. Почту и телефон, наполнить собственный личный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ.
1 xslots рабочее зеркало
Некоторые сайты, прежде чем провести регистрацию игроков, предлагают ответить на количество базовых вопросов. Цель проведения сходственной викторины – выявить случайных людей, которые не имеют представления о покере, и не допустить получения ими бонусов. Если посетитель теснее играл в казино, то ответить на полтора 10 простых вопросов несомненно несложно. Очень часто, ответы можно отыскать на официальных веб-сайтах данных учреждений. <a href=https://band.us/band/92649089>https://band.us/band/92649089</a> зеркло казино 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.bedwantsinfo.nl/thread-688957.html>1×slots casino регистрация</a>
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=3272>1×slos регистрация в 1×slots casino</a>
<a href=https://radios-collector.com/viewtopic.php?f=7&t=39406>1хслот зеркало</a>
<a href=https://nztw.org/forum.php?mod=viewthread&tid=514386&pid=836698&page=1&extra=#pid836698>1хслот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Наиболее популярностью гонорары между гэмблеров – бездепозитные призы казино. Это не изумительно, так возможно получить безвозмездные вращения либо виртуальные кредиты, и при не придётся пополнять счёт, рисковать собственными средствами. Удастся насладиться разнообразными весельями даже выиграть солидную необходимую, избегая серьёзного риска. Максимальный объем ставки, кот-ый нельзя превышать же бонус не будет всецело отыгран. В случае нарушения этого управляла, бонус и выигрыш с него будут аннулированы.
#6978 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало
Если вы новичок деле и только попали в неизведанную вами район пыла — с помощью предложений как бездепозитные бонусы без пополнения.Подтверждение регистрации. Казино просят привязки профиля к электрическому адресу и номеру аппарата. Для сего на e-mail отчаливает письмо ссылаясь, а на аппарат ? текстовое известье с кодом. <a href=http://filmkachat.ru/>казино 1×slots</a> Но разу не забывайте пристально читать правила участия в бонусных акциях. Если вы нарушите желая бы одно условие, позднее вы не можете устроить недоразумение с администрацией. <a href=https://plaza.rakuten.co.jp/prilla/diary/202411240004/>https://plaza.rakuten.co.jp/prilla/diary/202411240004/</a> Акции, приуроченные к календарным дням, случаются рассчитаны как на всех юзеров, так и на категории: к, презент на 8 марта девушкам-игрокам либо мужчинам на 23 февраля. 1×slots зеркало которую указывали при регистрации кстати <a href=http://fr3809hv.bget.ru/user/Stevenereni/>http://fr3809hv.bget.ru/user/Stevenereni/</a> Новички не любят сразу же вносить депо. Это обосновано неименьем навыка и сомненьем. К счастью, в наше время можно получить бездепозитный приз за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В всяком случае вы не рискуете собственными сбережениями. Это отличная вероятность запустить понравившийся видео разъем либо же испытывать удачу в настольных забавах.
рабочее зеркало 1×slots
Oтыгpaть приз с обозначенным вeйджepом, чтобы необходимо сдeлaть cтaвoк нa cумму, превышающую размер бонуса в количество раз.Но разу не забывайте внимательно читать верховодила роли в бонусных акциях. Если вы нарушите хотя бы одно условие, позже вы не сможете устроить недоразумение с администрацией. <a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=4517>1×slots зеркало проходить регистрацию это отличный вариант</a> 1×slots casino регистрация 1×slotscasino09k online Таким образом, заведение пробует показать себя своим потенциальным игрокам, а подобный маркетинговый ход как казино приз без депо за регистрацию привлекает довольно много внимания к игорному заведению и обеспечивает постоянный поток новых посетителей и грядущих клиентов игрового интернет клуба.Чаще всего, модные сервисы, такие как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно обязательное верховодило. Финансовые средства выводятся только спустя что, эту платежную систему, которой успех для пополнения депозита. Если же игрок получил бездепозитный покерный бонус, требуется пополнить счет на наименьшую необходимую, кот-ая составляет обыкновенно 10 долларов. <a href=https://www.professionistidelsuono.net/forums/member.php?action=profile&uid=234780>https://www.professionistidelsuono.net/forums/member.php?action=profile&uid=234780</a> Вейджер в переводе с английского значит «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша приобретенного бонуса, в нашем случае бездепозитного. Число ставок роли не играет — важно только набрать необходимую, пропорциональную сумме поощрения.Бездепозитные бонусы за регистрацию в игровых автоматах для хозяев онлайн-казино считаются частью маркетинговой кампании, направленной на увеличение аудитории сайта. Так они продвигают средства бренды и привлекают новых посетителей. 1×slots зеркало выигрыши обязательно пройдите регистрацию если Составленный экспертами Casino.ru перечень онлайн-казино с бездепозитным призом позволяет игрокам сравнить спецпредложения различных операторов.Такой казино приз без депозита за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это как бы некая маскировка поощрения под бездепозитный. Суть всего этого сводится к что, этому, что игроку на час выдается, например, 1000 долларов, а реклама твердит то, собственно любой выигрыш можно будет в забыть при для. Но в играющий серьезно отнесется к этому предложению, то он просто растеряет время. Ведь игроку надо(надобно) несомненно играть не главном аккаунте, а в тренировочном и с ограниченным выбором автоматов и ставок. Да и если, тогда, выигрыша (том всей тысячи) в правила вступят определенные условия, где будет сказано, что максимальной суммой победы возможность быть только двести $ и средства возможно использовать только в качестве бонуса на первый лепта с вейджером 25 от суммы гонорары плюс сам депозит. По результату выйдет, что игрок выигрывал для 200% бонус с вейджером на определенную необходимую. Короче говоря, это все надо вашего времени.
1×slots casino регистрация на сайте
На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не сможете активировать и получить бездепозитный приз. Для ревизии применяются сканы паспортов, водительских удостоверений, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если юзер замечен в попытке завести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их владелец попадает в темный список. При игре на лицензионной площадке не стоит бояться свидетельствовать достоверную персональную информацию (шифрование ликвидирует утечку индивидуальных данных). <a href=http://bbs.all4seiya.net/home.php?mod=space&uid=964524>http://bbs.all4seiya.net/home.php?mod=space&uid=964524</a> Свежий бонус начисляется вид денежных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в использовании средствами, ну случае отыгрыша оператор может установить лимитирование на вывод средств. 1хлот регистрация в 1×slots casino Возможность поиграть вспомогательное соревнование (а от и некоторое) совершенно даром, а выигрыш, к, поступает на счёт игрока.
1хслотс регистрация в 1×slots casino
<a href=https://forum.bedwantsinfo.nl/thread-724400.html>1× slots регистрация в 1×slots casino</a> Наш список содержит превосходнейшие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по важным параметрам:Выполнив все притязания оператора, клиент может оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем менее суток. Если дополнительно потребуется пройти процедуру верификации, то срок возрастает до 1–2 рабочих дней. Для перевода используются банковские инструменты и электронные платежные системы. Второй метод подходит чем, например как масса транзакций в этом случае осуществляются мгновенно. В связи со спецификой функционирования банков обработка платежей имеет занять до нескольких трудящихся дней. скачать 1×slots официальный сайт <a href=https://findmyjobs.lk/author/geraldamill/>https://findmyjobs.lk/author/geraldamill/</a> К сожалению, нет. Почти все казино, настоятельно внесение желая бы 1-го малого депозита для вывода выигрыша с бездепозитного бонуса. Также учитывайте, что вывести средства разрешается лишь на ту платежную систему, с коей был сделан депозит.
1×slots регистрация на 1хслотс
Акции распространяются как на все забавы казино, например и на ограниченный список. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и другие. Промо может обхватывать разработки одного производителя. Бездеп не пересекается с иными промоакциями казино. Если на сайте предусмотрен кэшбек, он не начисляется за ставки, сделанные бонусными средствами. Для идентификации платежных реквизитов игрока имеет потребоваться пополнение счета на минимальную необходимую.Но такие рамки не смущают том хайроллеров, что коэффициенты на слотах разрешают рассчитывать на крупные выигрыши, а неких автоматах разыгрывается передовой джекпот. <a href=https://full-chip.net/user/DonaldZex/>https://full-chip.net/user/DonaldZex/</a> Воспользоваться бездепом возможно не во всех игровых автоматах: казино и тут устанавливает лимитирование для посетителей. Конечно, это можно посчитать некоторым неудобством для игрока, хотя справедливости необходимо, собственно выбор автоматов всё одинаково остаётся довольно большим.Хотя бесплатные бонусы начисляются без депозита, не исключено, что вас понадобиться вносить средства. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только последствии того, как свежий клиент первый пополнит игровой счет. 1×slots зеркало подтвердит вашу регистрацию если говорить Прежде чем активировать бездеп, необходимо убедиться в, что страна, гражданином коей считается игрок, не входит в список не.
<b>Смотреть еще похожие новости:</b>
<a href=http://romb4×4.ru/forum/members/rabofreepn.4965/>1×slots регистрация 1×slots casino c2d ru</a>
<a href=https://timepost.info/showthread.php?tid=13857&pid=130656#pid130656>1хслот скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чтобы получить вероятность исключить выгода с бездепозитного приза в казино, необходимо выполнить ряд условий:
#6979 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Валентина Матвиенко порно порно с Федор Чалов (футбол) <a href=https://th-royalgclub.com/>букмекерская контора бесплатно скачать</a> casinos xyz online casino 7k <a href=https://slon-ru.com/>спорт букмекерская контора</a> порно с Анна Щербакова, фигуристка Мухтиярова Елена Вячеславовна порно porno Дарья Клишина казино вход официальный сайт casino buzz порно с Дарья Касаткина (теннис) win win casino
#6980 Jeffreyarime
https://gramster.ru/ pinup 2025
#6981 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино онлайн бесплатное казино <a href=https://rucriminal.info/>casinos xyz</a> порно с Алина Загитова kent casino <a href=https://specreporter.com/>1×bet зеркало xbet</a> 1go casino casino автомат Лут Оксана Николаевна порно 1×bet вход porno Елизавета Туктамышева яндекс игры казино казино пину
#6982 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet сайт официальные букмекерские конторы скачать <a href=https://rumafia.news/>букмекерская контора без</a> казино вход porno Алена Косторная (фигурное катание) <a href=https://th-royalgclub.com/>казино гта 5</a> pin up букмекерская контора порно с Илюшникова Татьяна Александровна 1×bet рабочее на сегодня Приезжева Екатерина Геннадьевна порно porno Вера Бирюкова, гимнастка симулятор казино Елена Лядова
#6983 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
приложения букмекерских контор бывшие казино <a href=https://t.me/vchkogpu_ru>демо казино</a> порно с Владимир Минеев (ММА) 7k casino <a href=https://glvk.guru/>скачать букмекерскую контору на андроид</a> porno Виктория Баркова, легкоатлетка Яровая Ирина Анатольевна порно ешь казино порно с Варвара Субботина букмекерские контора ап online casino porno Алена Косторная (фигурное катание)
#6984 Charlesgunnyhttp://filmkachat.ru
1×slots сайт
Бездепы с бесплатными вращениями предоставляют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд платит казино. Число спинов ограничено и изредка выше сотню. Если акция включает в себя количество бесплатных игр, их начисление имеет быть разбито на количество дней. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> Но есть игорные заведения, которые готовы просто так жертвовать средства на забаву. Для сего достаточно создать профиль. Чтобы исключить собственный выигрыш, вас сначала нужно выполнить обстоятельства отыгрыша, указанные в критериях получения бездепозитного депо. <a href=https://devfolio.co/@shopavto>https://devfolio.co/@shopavto</a> Некоторые веб-сайты, до чем провести регистрацию игроков, предлагают ответить на несколько базисных вопросов. Цель проведения сходственной викторины – выявить случайных людей, коие не имеют представления о покере, и не допустить получения ими призов. Если посетитель теснее играл в казино, то ответить на полтора десятка простых вопросов будет нетрудно. Очень часто, ответы можно отыскать на официальных сайтах данных учреждений. 1×slots зеркало регистрацию более популярный вариант это <a href=http://www.ceraunavoltapavullo.it/index.php?option=com_k2&view=itemlist&task=user&id=1079575>http://www.ceraunavoltapavullo.it/index.php?option=com_k2&view=itemlist&task=user&id=1079575</a> Некоторые клубы механически начисляют бонус на акк игрока после выполнения критерий получения, хотя посещают ситуации, когда приз нужно активировать игроку самому. Есть некоторое способов активации приза:При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие возможно предназначить этой в казино.
зеркло казино 1×slots
Некоторые веб-сайты, прежде чем обмануть регистрацию игроков, предлагают ответить на несколько базовых вопросов. Цель проведения подобной викторины – выявить случайных людей, коие не имеют представления о покере, и не разрешить получения ими призов. Если гость уже играл в казино, то ответить на полтора десятка несложных вопросов несомненно нетрудно. Очень нередко, ответы возможно отыскать на официальных сайтах этих учреждений.Новички не любят сразу же заносить депозит. Это обосновано неименьем навыка и сомнением. К счастью, дни возможно получить бездепозитный бонус за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В любом случае вы не рискуете своими сбережениями. Это отличная возможность запустить понравившийся видео разъем или же испытывать фортуну в настольных забавах. <a href=https://www.one2bay.de/forum/showthread.php?tid=462094>1×slots бонус за регистрацию</a> 1×slots официальный сайт мобильная версия Чтобы бездеп не был начислен на Ваш акк, Вам не нужно активировать бонусный код. Если одобрение от казино было добавлено на Ваш аккаунт автоматически, а Вы не планируете его использовать, обратитесь в службу поддержки с пожеланием отменить бездепозитный приз. <a href=http://www.taroko.org/taroko/forums/member.php?action=profile&uid=531>http://www.taroko.org/taroko/forums/member.php?action=profile&uid=531</a> Заполняя данные в личном профиле, указывайте только достоверную информацию, так как Вам понадобиться ее подтвердить в при выводе денег.Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша бонусов. Заведения всегда устанавливают наивысшую ставку, возможную по условиям вейждера. 1×slots акции Чтобы играть бесплатно на реальные средства в казино, не всегда достаточно просто зарегистрироваться. Иногда нужно выполнить дополнительные деяния.В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и в случае спорных ситуаций нет возможности куда-то пожаловаться и обосновать свою правоту.
1×slots регистрацию более популярный вариант это
Для верификации аккаунта нужно дать профессионалам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, а фотку банковской карты либо скриншот странички электрического кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности. Самые популярностью методы вывода денег ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электрическим платежным системам подобии Neteller и Skrill, еще используют криптовалютными кошельками. Вывод выигрышей возможность осуществляться мгновенно или развлекать от нескольких часов до нескольких суток.Бонусы без депозита при регистрации числятся наиболее привлекательными как для опытных игроков, например для и начинающих. Получив это вознаграждение, клиент возможность выступать на реальные средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные призы в интернет-казино Рунета, а также условия их активации и выигрыша. <a href=https://diakov.net/user/DavidByday/>https://diakov.net/user/DavidByday/</a> Мы советуем не отрицаться от подобных предложений узнаваемых казино. Выделите некоторое минут на регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сегодня фортуна несомненно на вашей стороне! 1×slots регистрация 1×slots casino 777 online
1х слот регистрация в 1×slots casino
У нас на сайте Вы найдете перечень бонусов без депо в испытанных казино и доскональную информацию о том как их получить и применять. Классическая разновидность бонуса за создание аккаунта. Его превосходство содержится в том, что клиент имеет помощи избирать аппараты и создавать ставки в их. Иногда перечень игровых автоматов ограничен оператором, хотя все точно это какого-либо, чем один-единственный доступный слот, как если, тогда, с использованием фриспинов. 1хслотс рабочее зеркало <a href=https://www.freebeg.com/forum/member.php?action=profile&uid=22796>https://www.freebeg.com/forum/member.php?action=profile&uid=22796</a> У каждой игры средства требования по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система зачтет любую ставку. В рулетке и покере устроить это гораздо сложнее. Именно потому так принципиально пристально читать обстоятельства получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в каждой этой, то новички попросту «спустят бонус на ветер».
1×slots мобильная версия войти казино
<a href=http://www.carshowsociety.com/forum.php?action=profile;u=6361>http://www.carshowsociety.com/forum.php?action=profile;u=6361</a> Автоматы непопросту числятся самым модным азартным весельем. Чтобы усвоить управление и верховодила, понадобится всего некоторое минут. Ваша задачка устроить ставку, определить количество рабочих линий и можно крутить барабан. Если на выпадет выигрышная комбинация – вы выиграли! С этой задачей вам посодействуют справится бездепозитные призы казино.Наш перечень включает в себя наилучшие бездепозитные бонусы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит ревизию по важным характеристикам: 1×slots регистрация на сайте 1×slots ru com Многие азартные клубы ограничивают необходимую вывода заработанную на призе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не можете вывести. Разница будет аннулирована, Вы том не можете создавать на нее ставки.
<b>Смотреть еще похожие новости:</b>
<a href=https://minifishtank.net/forum/showthread.php?tid=891>1хслотс мобильная версия зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подтвердите регистрацию, чтобы активировать Бездепозитный приз с выводом, требуется заполнить собственный профиль. Заполните пустые поля настоящими данными о для.
#6985 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Виктория Баркова, легкоатлетка казино смотреть онлайн <a href=https://slon-ru.com/>1×bet приложение</a> порно с Каролина Севастьянова зеркала официальных сайтов казино <a href=https://rucriminal.info/>unlim casino</a> 1×bet сайт 1×bet xyz 1×bet скачать приложение на андроид up casino скачать почему казино unlim casino букмекерские конторы в россии 1×bet зеркало xbet
#6986 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
vodka casino 1×bet слоты 1×bet xyz <a href=https://rumafia.news/>порно с Матвей Сафонов (футбол)</a> porno Яна Троянова 7k casino зеркало на сегодня <a href=https://www.ossetia.tv/>up букмекерская контора</a> porno Юлия Канакина, скелетонистка симулятор казино ставки на спорт букмекерские конторы букмекерская контора фонбет официальный сайт ограбление казино Хорова Наталья Александровна порно вывод казино
#6987 Clydeamuck
gramster.ru <a href=" http://www.bbmlbb.com/bbs/home.php?… „>gramster.ru</a> or <a href=“ https://toolbarqueries.google.com.my/url?… ">пин ап вход</a> https://cse.google.gl/url?… пинап казино <a href=https://cse.google.im/url?sa=t&url=https://gramster.ru>pinup 2025</a> пин ап вход and <a href=https://www.support-groups.org/memberlist.php?mode=viewprofile&u=307439>pinup 2025</a> пин ап зеркало
#6988 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало которую указывали при регистрации кстати
Основное верховодило получения бездепа ? создаваемый аккаунт обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов требовательно запрещено. Проверка ведется по имени, e-mal, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита необходимо блюсти несложную очередность действий.Все любят получать презенты. Согласитесь, почти любой играющий человек будет безгранично рад, если получит даровой подарок для забавы в интернет казино просто за регистрацию либо же бонус за внесенный депо, например именуемые приветственные бонусы для новых игроков. Соответственно такие интернет клубы станут больше известны и предпочтительны у игроков при выборе казино для игры. Топ казино постоянно обновляется и прибавляются свежие и занимательные игровые клубы с симпатичной бонусной политикой и всеми возможными привилегиями, к которым относятся эти призы как фриспины за регистрацию, денежные бездепозитные призы, а также великодушные бонусы за внесенный депо. <a href=http://filmkachat.ru/>1×slos регистрация в 1×slots casino</a> Во время забавы в казино, выигрыши, полученные благодаря бесплатным призовым фондам, суммируются и включаются в общую необходимую для отыгрывания. Однако, случае фортуна улыбнется и выйдет отыграть все призы, игровое заведение гарантированно допустит исключить денежные свои. Сумма вывода будет зависеть от лимита, одобренного именно в этом учреждении. Поэтому, пристально надо(надобно) читать правила выдачи безлимитных депо.Можно ли наваривать на бездепозитных бонусах? Это не работа, тут как повезет, в в любом предложенном безедепе, вы будете откручивать вейджер и выводить, это возможно назвать везением, и добавочной добавкой к вашему бютжету. <a href=https://www.find-topdeals.com/blogs/187723/Unlocking-the-Magic-of-Professional-Architectural-Render-Creation>https://www.find-topdeals.com/blogs/187723/Unlocking-the-Magic-of-Professional-Architectural-Render-Creation</a> Однако в критериях скрываются «подводные камни», коие не разрешат вывести солидную необходимую либо же вы не успеете отыграть вейджер. Поэтому мастера рекомендуют арестовать благотворительные вращения за регистрацию в казино без депо, дабы поднабраться опыта и получить настоящий шанс на победу. скачать 1×slots официальный сайт <a href=http://theall.barunweb.co.kr/bbs/board.php?bo_table=free&wr_id=238872>http://theall.barunweb.co.kr/bbs/board.php?bo_table=free&wr_id=238872</a>
1×slots официальный сайт мобильная версия скачать
Верификация аккаунта. Лучше подтвердить лицо незамедлительно в регистрации, чтобы потом не было проблем с выводом средств. Верификация может протекать 2-мя способами: казино 1×slots Фриспины начисляются по определенной ставке. После их активации игроку необходимо запустить слот и убедиться, что в нем отображаются благотворительные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода после отыгрыша определяется оператором и изредка выше 5 000 рублей.В перечне требований к отыгрышу часто присутствуют лимиты на ставки при ирге на собственные деньги. Так, случае отыграть нужно 30 000 рублей, а максимальная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 раз. Эта особенность затрудняет соблюдение игроками критерий по срокам деянья акции. <a href=https://98e.fun/space-uid-8530994.html>https://98e.fun/space-uid-8530994.html</a> Игры, в которых возможно выступать на бонусные средства. Проверьте список игр, в которых можно играть на бонусные свои, вероятно они Вам не понравятся и надо расходовать своё время на такую промоакцию. 1хслотс официальный сайт зеркало Рассмотрим принцип его деяния на случае. Допустим, вы зарегистрировались и возымели $10 no deposit bonus с вейджером х50. Это значит, что выигранные средства можно несомненно выводить не раньше, чем в такого, как общая сумма ставок достигнет $500.
1хслотс рабочее зеркало на сегодня
В большинстве заведений сделать это можно по e-mal, по номеру аппарата, спустя социальную сеть или гугл-аккаунт.Так собственно главное различие презента на депо от бездепа – неотъемлемое пополнение счёта. Вы можете привнести депо и преумножить стартовый капитал или арестовать бездеп и всем не придётся рисковать своими сбережениями. Поспешите выполнить обычные требования, и администрация ресурса начислит щедрое одобрение! <a href=http://krasrec.ru/forum/user/170354/>http://krasrec.ru/forum/user/170354/</a> 1× слот зеркало Выиграть реальные деньги в казино не пополняя счет – сложно, но возможно. Главное задаться целью и не нарушатьправила заведения. Выберите несколько казино с бездепзитными призами и начните выступать на бонусные свои. По статистике каком-то 10-ти заведений можно заработать небольшую сумму средств с бонусных средств.
1×slots официальный зеркало
Реже призы без депо начисляются неизменным игрокам. С их поддержкою администрация старается удержать ценных клиентов либо желает поблагодарить за преданность верных гостей. Но намного чаще для сходственных целей используются эти промоакции: Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке представители онлайн-казино публикуют важную информацию о no down payment bonuses и услугах. 1 x slots <a href=https://rekordmeister.ru/user/Craigsal/>https://rekordmeister.ru/user/Craigsal/</a> Третитй бездепозитный бонус за регистрацию – валютные средства. К раскаянию, начислить рубли или доллары готовы лишь известные и модные клубы. С их поддержкою возможность насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком.4. Заберите подарок. Чаще всего бонус активизируется сразу в регистрации. Но бывают истории, когда надо(надобно) забежать в индивидуальный кабинет либо написать в саппорта.
1×slots казино зеркало
Подарки на праздники ? приуроченные к праздничным датам, требующие условного отыгрыша либо начисляются без это. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду.Игры, в можно играть на бонусные деньги. Проверьте перечень игр, в возможно выступать на бонусные средства, вполне они Вам не понравятся и не стоит тратить своё время на эту акцию. <a href=https://senioredu.net/bbs/board.php?bo_table=free&wr_id=80583>https://senioredu.net/bbs/board.php?bo_table=free&wr_id=80583</a> Как лишь вы отыграли вейджер и средства с бонусного баланса перешли для на настоящий счет, Вы отважно можете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (сделать минимальный депозит к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депо).Для получения бонуса нужно ознакомиться с программкой преданности казино и устроить ставки на сумму, необходимую для перехода на грядущий уровень. 1×slots зеркало на сегодня Вы не в коем случае ни же рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный бонус, по мимо практической забавы на бездепозитные бонусы, у Вас есть шанс изучить игровые автоматы, выучится регулировать изменять ставки и линии, исследовать бонусные забавы и их выигрышные композиции, ну в конце концов просто зарядится кучей эмоций! Ведь вы будите играть на бонусные свои, которые возможно отыграть и вывести, не просто на демо счет, тем наиболее адреналин в крови еще больше повысится а пульс забьется с частым ритмом!
<b>Смотреть еще похожие новости:</b>
<a href=http://miupsik.ru/forums/showthread.php?tid=243034>1×slots зеркало на сегодня</a>
<a href=https://australiantravelforum.com/Upload/showthread.php?tid=194003>рабочее зеркало 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Oтыгpaть бонус с указанным вeйджepом, результата нужно сдeлaть cтaвoк нa cумму, превосходящую объем приза в некоторое один. 1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, если не желаете стать жертвой плутов либо впустую израсходовать время;
#6989 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet рабочее на сегодня порно с Федор Чалов (футбол) <a href=https://sovsekretno.net/>букмекерские конторы бет</a> porno Катерина Шпица Яровая Ирина Анатольевна порно <a href=https://slon-ru.com/>водка казино</a> порно с Александр Большунов (лыжные гонки) казино проиграл яндекс казино казино вход официальный сайт игры казино порно с Сергей Бобровский (хоккей) casino бездепозитный
#6990 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slotscasino 56 online
Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, the decision зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. <a href=http://filmkachat.ru/>1×slots зеркало видели такую регистрацию на</a> <a href=https://jumpshare.com/v/g7cIh0cVypvEGdf6HhDQ>https://jumpshare.com/v/g7cIh0cVypvEGdf6HhDQ</a> Отказ в прохождении верификации. Если заказчик не хочет либо не может предоставить документы, подтверждающие его личность, профиль будет заблокирован вместе со всеми бонусными начислениями. 1×slot официальный сайт <a href=https://testebi.mixgeo.ge/user/JosephGed/>https://testebi.mixgeo.ge/user/JosephGed/</a> Подарки на дни ? посвященные торжественным датам, требующие символического отыгрыша либо начисляются без того. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду.Призовые начисления без депозита имеют предоставляться для роли в турнирах интернет казино. Потратить перечисленные средства возможно необыкновенно в данной акции. Условия их проведения содержат ограничения на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться таким предложением, чем изучить его управляла.
1×slots зеркало на сегодня
Подтверждение индивидуальной инфы. Все казино требуют от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и присутствие у юзера других аккаунтов (мультиаккаунт запрещен).Важно, удостоверьтесь что, нет, собственно ранее не регистрировались в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи. <a href=https://forum.omolenko.com/viewtopic.php?p=204195>1×slots официальный сайт скачать</a> 1×slots casino online регистрация <a href=http://mclassic.com.hk/home.php?mod=space&uid=335041>http://mclassic.com.hk/home.php?mod=space&uid=335041</a> Высокая конкурентность в сегменте азартных игр доказывает операторов привлекать посетителей разнообразными промоакциями. Благодаря этому у посетителей появляется возможность получить призы в казино за регистрацию без депозита. Воспользоваться этим предложением можно, минуя процедуру внесения средств на игровой счет, просто активировав акк на веб-сайте. Наш экскурсовод по бездепам поможет выбрать самую привлекательную бонусную программку, узнать управляла получения такого гонорары и воспользоваться им с наибольшей выгодой.Не стоит незамедлительно же открещиваться от приветственных презентов в подобных казино. Администрация готова начислить деньги либо фриспины, но сначала сотрудники обязаны увериться, что вы не аферист. Дело никаких, собственно развелось слишком большое охотников за бонусами. Они научились дурачить систему и зарабатывать солидные суммы денег. 1×slos регистрация в 1×slots casino Наиболее известные вознаграждения между гэмблеров – бездепозитные бонусы казино. Это не изумительно, как возможно получить благотворительные вращения или виртуальные кредиты, и всем не придётся пополнять счёт, рисковать личностными деньгами. Удастся насладиться разнообразными весельями и даже выиграть солидную необходимую, избегая серьёзного риска.Также существуют онлайн-платформы азартных игр, коие применяют раздачу бездепозитных призов в особые даты (как для казино, так и для игрока). Помимо этого, действующие игроки того имеют возможность получить схожие бонусы за собственную деятельность (к примеру, за увеличения уровня либо за похожие заслуги).
1×slots рабочее зеркало на сегодня
Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала резвые выводы. Фишка выплат что, собственно довольно избрать платёжный инструмент и показать необходимую. В большинстве случаев средства зачисляются на электронные кошельки на 15 мин., а на банковские карты – 1–3 трудящихся дня. Помимо остального, для вывода средств по бездепу нужно внести на счёт собственный первый депозит — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало возможную сумму, после чего вывод средств будет доступен.Для получения бонуса нужно ознакомиться с программкой лояльности казино и устроить ставки на сумму, необходимую для перехода на грядущий уровень. <a href=http://ru2cardclub.xyz/member.php?action=profile&uid=691>http://ru2cardclub.xyz/member.php?action=profile&uid=691</a> зеркло казино 1×slots
1× slots зеркало
Как только на виртуальном счету окажутся бонусные свои, поспешите отыграть вейджер. Сразу последствии сего можно забыть заявку на вывод выигрыша. Кредиты выгодно отличаются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом реальных средств и дают возможность почувствовать задор. Во-вторых – можно насладиться каждой азартной забавой доступной на сайте. В вашем распоряжении присутствуют автоматы, настольные прибавление, видео-покер, Live-дилеры. Для тех, кто лишь взвешивает испытать свою фортуну, а для профессиональных игроков, отыскивающих новые площадки для выигрышей, ведущие лицензированные казино часто организуют разные акции, и одно из лучших предложений за время – как для начинающих, так и для профессиональных игроков – бездепозитный приз за регистрацию.Частенько новенькие не знают, как активировать подарки либо исключить первый выигрыш. Для похожих случаев наша команда описала основные определения – что это фриспины, вейджер, как его отыграть, зачем нужно проходить верификацию. Бонус за регистрацию в казино без депо с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша имеет понадобиться сделать ставки на сумму, в количество десятков раз превосходящую сумму бонуса либо выигрыша.Нет. Для получения бездепозитного бонуса в казино нужна обязательная регистрация на веб-сайте. Играть в слоты бесплатно и без регистрации можно лишь в демо режиме. 1×slots казино мобильная версия <a href=http://dvnshu.com/index.php?subaction=userinfo&user=productivebanis>http://dvnshu.com/index.php?subaction=userinfo&user=productivebanis</a>
1×slot регистрация
Прежде всего, не забывайте периодически заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом разглядывают наиболее интересные предложения водящих игорных порталов.Основное отличие что, собственно для получения бездепа не пополнять баланс в казино. Но кроме сего, есть ряд и различий: Выше мы предоставили глубокий комплект самых свежих и актуальных бездепозитных бонусов в онлайн казино без пополнения на 2022 год, где вы можете воспользоваться каким ценным бездепозитным призом.Обычно бездепозитные акции от казино, прибывают на эл. Почту в деньки рождения либо праздники. В неких онлайн казино возможно обратиться в чат и как постоянному игроку, вероятно вам предложат бездепозитное предложение. <a href=https://www.jotform.com/242282900422044>https://www.jotform.com/242282900422044</a> 1×slots рабочее зеркало на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=90345&result=reply>1хслот 1хслотс регистрация перейти на 1×slots</a>
<a href=https://swordmaster.org/user/JamesVok/>1×slots подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Такой безвозмездный эквивалент средств зачисляется на профиль юзера в осуществления требований и предназначаются они только для игрового процесса. Вывод этих вознаграждений возможен лишь в осуществления вейджеровых условий. Таким образом интернет казино получает потенциального игрока. Возможно в или подлинном он захотит поиграть на средства деньги. Так работают бездепозитные бонусы в онлайн казино. Здесь хорошо подходит выражение, безвозмездные сыр бывает только в мышеловке. Начинающие игроки шансы не обдумывать опасность пыла. Однако со временем понимания становится больше. Это тема для отдельного обсуждения.
#6991 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора официальный сайт винлайн букмекерская контора <a href=https://specreporter.com/>порно с Сергей Бобровский (хоккей)</a> 7k casino зеркало на сегодня симулятор казино <a href=https://rumafia.news/>casino играть</a> лучшие бесплатные онлайн казино porno Виктория Баркова, легкоатлетка лучшие букмекерские конторы online casino официальный официальные букмекерские конторы скачать винлайн букмекерская контора casino com
#6992 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet бесплатно лучшие бесплатные онлайн казино <a href=https://slon-ru.com/>Петрова Ольга Викторовна порно</a> pin casino зеркало porno Марина Александрова <a href=https://krtka.info/>porno Юлия Канакина</a> порно с Васильева Татьяна Викторовна 1×bet телефон казино ли сайт букмекерской конторы рокс казино почему в казино нет окон 7k casino сайт
#6993 Jimmymemhttps://vk.com/jidkost_dlya_forsunok
Приветствуем профессионалов и начинающих мастеров в автомобильном деле
Наша команда CARTEAMS® разработала высококачественную жидкость для тестирования бензиновых форсунок на стенде- Torch 2.0 – незаменимый помощник для тех, кто занимается чисткой и тестированием форсунок-EFI GDI MPI FSI TFSI TSI D-4 NEODI DISI PIEZO Этот продукт специально разработан и протестирован для эффективной проверки форсунок на стендах launch,Nordberg,AUTOOL,GrunBaum и даже на стендах NONAME с китайских барахолок Позволяет быстро выявить и устранить все возможные неисправности топливной форсунки-течь,нарушение факела распыла,нестабильной производительности Преимущества жидкости Torch 2.0
Не горит Не имеет резкого запаха Не испаряется Не пенится Идеально подходит как для профессионалов в автосервисах, так и для новичков, кто уже приобрел оборудование или планирует приобрести https://carteams-shop.ru/ Купить данный экземпляр можно OZON https://www.ozon.ru/…-1752005099/ wildberries https://www.wildberries.ru/…/detail.aspx?…
<a href=https://radikal.host/i/l0caKz><img src=„https://e.radikal.host/2024/11/22/T1.md.png“></a> https://vk.com/…lya_forsunok
#6994 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
промокод 1×bet слот casino <a href=https://www.ossetia.tv/>пин ап казино</a> гта онлайн казино лучшие букмекерские конторы <a href=https://t.me/vchkogpu_ru>1×bet слоты 1×bet xyz</a> скачиваемые казино porno Илья Ковальчук (хоккей) cat casino порно с Никита Кучеров (хоккей) Хорова Наталья Александровна порно пари букмекерская контора 1×bet 1
#6995 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasino09k online
Превышение наибольшей ставки при отыгрыше. Система автоматически не предуведомляет о превышении ставки, поэтому о несоблюдении верховодил игрок имеет узнать теснее после подачи запроса на вывод средств.Самые популярные способы вывода средств ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электронным платежным системам на Neteller и Skrill, а используют криптовалютными кошельками. Вывод выигрышей имеет осуществляться мгновенно или развлекать от нескольких часов до нескольких суток. <a href=http://filmkachat.ru/>1×slots официальный сайт мобильная версия</a> Особую изюминку видео слотам присваивают уникальные символы. С их появлением активируются разные призы. Вы сможете запустить дополнительный уровень и увеличить необходимую выигрыша. Есть знаки, которые сменяют ненужные элементы и сами творят выигрышные комбо. Не стоит забывать и на бонус-тур. После любого успешного спина есть шанс прирастить сумму выигрыша в два или четыре раза. <a href=https://heyjinni.com/read-blog/177752>https://heyjinni.com/read-blog/177752</a> Вейджер не более х30–35 является приемлемым. Опытные игроки заявляют, что с этим вейджером реально остаться в плюсе, в верно подойти к выбору игрового аппарата. казино 1×slots официальный сайт <a href=http://ternovka4school.org.ua/user/Patrickget/>http://ternovka4school.org.ua/user/Patrickget/</a>
1 x slots casino
<a href=https://tabsgame.ru/user/Jamesbes/>1×slots зеркало этих способов предполагает регистрацию</a> 1×slots зеркало проходить регистрацию это отличный вариант <a href=http://filmsgood.ru/index.php?subaction=userinfo&user=rampantfever44>http://filmsgood.ru/index.php?subaction=userinfo&user=rampantfever44</a> казино 1×slots
1хслот зеркало сайта
Это также безвозмездные деньги, коие поступают на аккаунты новоиспеченных игроков после регистрирования. А необыкновенность таких бонусов произведено в том, собственно обретенные деньги обязательно стопам применять в продолжении назначенного времени. <a href=http://oq-ayiq.net/user/Anthonyadupt/>http://oq-ayiq.net/user/Anthonyadupt/</a> Хотя безвозмездные призы начисляются без депозита, не исключено, что для придется заносить деньги. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь в как, как свежий клиент впервые пополнит игровой счет. 1×slots официальный сайт, скачать Чаще всего, известные сервисы, эти как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно неотъемлемое управляло. Финансовые средства выводятся только спустя ту платежную систему, которой пользовались для пополнения депо. Если же игрок получил бездепозитный покерный бонус, потребуется восполнить счет на наименьшую сумму, кот-ая составляет обыкновенно 10 долларов.Отказ в прохождении верификации. Если заказчик не хочет либо возможности дать документы, подтверждающие его личность, профиль несомненно заблокирован совместно, вкупе со всеми бонусными начислениями.
1×slots casino зеркало
Перечисленные повыше основные свойства сочетают фактически каждый приз и считаются стандартными для бездепозитных бонусных начислений в казино. <a href=http://khodaumo.com/forum/viewtopic.php?f=2&t=75963&sid=597575b4a5c801a088424b001b59635a>1× slots регистрация в 1×slots casino</a> Бездепозитный бонус казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в данном и содержится главное различие.Бездепозитный приз казино 2022 с выводом за регистрацию предоставляет вероятность ознакомиться игроку с лобби выбранного заведения, сориентироваться в выборе игр и выяснить качество работы службы поддержки. Довольно часто, начиная игровой процесс, игрок уже не желает останавливаться и проделывает настоящий вклад. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть бесплатно вероятно как один таки с призом за регистрацию без необходимости заносить депо. Также существуют онлайн-платформы азартных игр, которые применяют раздачу бездепозитных призов в особые даты (как для казино, так и для игрока). Помимо этого, действующие игроки также имеют вероятность получить схожие призы за собственную работа (к примеру, за увеличения уровня или за похожие достижения). 1×slots рабочее зеркало на сегодня <a href=http://forum.ttpforum.de/member.php?action=profile&uid=347382>http://forum.ttpforum.de/member.php?action=profile&uid=347382</a> Только выполнив все обстоятельства отыгрыша и дождавшись окончания ревизии аккаунта, Вы сможете оформить заявку на вывод средств и получить свои средства.
1×slots регистрация 1×slots review live
Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают бонус по государствам. Вплоть до как, собственно клуб может себя игроков из Вашей страны, а бездеп не давать.Но есть азартные заведения, готовые просто например вручить деньги на игру. Для сего достаточно сделать профиль. Чтобы исключить выигрыш, сперва нужно выполнить вейджеровые обстоятельства, прописанные в критериях получения бездепа. <a href=https://www.google.com/search?hl=zh-CN&q=www.doctorlazuta.by>https://www.google.com/search?hl=zh-CN&q=www.doctorlazuta.by</a> 1× slots регистрация в 1×slots casino При поддержки такового поощрения оператор может также привлекать посетителей, которые ранее показывали активность на сайте, но по какой-то причине прекратили выступать. В данном случае промокод высылается пользователю по электронной почте либо в виде SMS.Не советуем опрометью голову хвататься за всевозможные предложения получения средств без инвестициям. Вполне возможно, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на первый взор. Альтернативой считается казино приз за депо. Мы предлагаем вам пару советов, благодаря которым у каждого игрока несомненно возможность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег:
<b>Смотреть еще похожие новости:</b>
<a href=https://www.fromrus.su/index.php?/topic/29859–1×slots-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-%D0%BC%D0%BE%D0%B1%D0%B8%D0%BB%D1%8C%D0%BD%D0%B0%D1%8F-%D0%B2%D0%B5%D1%80%D1%81%D0%B8%D1%8F/>1×slots казино мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чаще всего казино бонус за регистрацию без депозита даёт возможность запустить каждой машина. Но превосходнее пристально ознакомиться с критериями. Иногда для забавы доступны лишь определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, какого-либо начать знакомство с миром азарта именно с «одноруких злодеев». Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала резвые выводы. Фишка выплат что, собственно довольно избрать платёжный инструмент и показать необходимую. В большинстве случаев средства зачисляются на электронные кошельки на 15 мин., а на банковские карты – 1–3 трудящихся дня.
#6996 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino 777 online
Бонус в казино без депозита содержит различные варианты: такое быть приветственный приз, промоакции в честь каких-либо дней или важных дат, бонус за привлечение свежих игроков, преданность и получение VIP-статуса.Чтобы выступать безвозмездно на реальные средства в казино, порой довольно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные деяния. <a href=http://filmkachat.ru/>1хслотс официальный сайт зеркало</a> Возможность протестировать новые игры, не рискуя личными средствами и создать собственную тактику забавы. <a href=https://devfolio.co/@archicgicom>https://devfolio.co/@archicgicom</a> 1×slots регистрация 1×slotscasino09k online <a href=http://zxkjio1.com/home.php?mod=space&uid=75685>http://zxkjio1.com/home.php?mod=space&uid=75685</a> Риск-игра по одинаковым шансам – Также казино возможность запрещать выполнять обстоятельства по отыгрышу счет раунда на удвоение, кот-ый предлагается в слотах, видео-покере и некоторых других забавах.
1×slos регистрация в 1×slots casino
Но эти рамки не смущают в хайроллеров, потому коэффициенты на слотах позволяют рассчитывать на солидные выигрыши, а некоторых автоматах разыгрывается прогрессивный джекпот. 1×slots зеркало 1хслотс регистрация перейти на 1×slots Бонус с зачислением денег на счет дает больше свободы поступков. Пользователь сам избирает, каким образом распорядиться подаренными своими. Здесь также шансы действовать лимитирования на список дешевых игр, хотя обыкновенно эти рамки не так строги, как в промо с безвозмездными вращениями.Рассмотрим принцип его деянья на образце. Допустим, вы зарегистрировались и получили $10 no deposit bonus с вейджером х50. Это означает, собственно выигранные деньги возможно будет выводить не раньше, чем последствии такого, как общая сумма ставок достигнет $500. <a href=https://praisenpray.org/forums/member.php?action=profile&uid=61387>https://praisenpray.org/forums/member.php?action=profile&uid=61387</a> Бездеп с фриспинами имеет обхватывать всю коллекцию игр на сайте либо разработки 1-го провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш может быть выведен в как, как пользователь отыграет данную сумму. Возможность оценить полный функционал слотов — основное совершенство данной разновидности. Игроку становятся доступны те функции, коие отсутствуют в демонстрационном режиме, а вероятность выиграть реальные средства прибавляет ясных азартных чувств. 1×slots сайт зеркало
1×slots официальный сайт скачать
У каждого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано сумели выполнить их, мы дадим несколько советов. Если система начислила маленькую сумму, не стоит создавать великие ставки – остановитесь на 10–30 центах. Как только сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте играть. В неприятном случае другого присмотреться к иному автомату. Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=https://qashvqt.uz/index.php?subaction=userinfo&user=Scottdrers>https://qashvqt.uz/index.php?subaction=userinfo&user=Scottdrers</a> Подтвердите регистрацию, чтобы активировать Бездепозитный бонус с выводом, требуется наполнить собственный профиль. Заполните пустые поля настоящими данными о для.Многие казино предоставляют в маркетинговых целях безвозмездные призы исключительно для наших читателей. Чтобы их получить, нужно перейти на игровой вебсайт по партнерской ссылке с нашего портала. 1хслотс зеркало на сегодня
зеркала 1×slots
Предложения с бездепозитными бонусами за регистрацию дозволяют свежим заведениям привлечь аудиторию на собственный вебсайт. А игроки к получают возможность играть на настоящие деньги без депо в казино и заработать маленький стартовый капитал, кот-ый разрешено вывести на карту банка или электрический кошелек.Так что можете неустрашимо региться без всяких размышлений. Фортуна сегодня наверняка на вашей стороне. Не побаивайтесь, ведь последствие какого или ущерба Вам совершенно не грозит. С этими бонусами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе. Самые знаменитые способы вывода средств ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электрическим платежным системам подобии Neteller и Skrill, а также используют криптовалютными кошельками. Вывод выигрышей имеет исполняться моментально или занимать от нескольких часов до нескольких суток. 1хслот официальный сайт зеркало <a href=https://shilinka.ru/user/DoctorLazutakr/>https://shilinka.ru/user/DoctorLazutakr/</a> Как и другие акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такого предложения являются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих гостей и позволяет им составить эмоцию о функционале, не рискуя вескими суммами.
1×slots бездепозитный бонус за регистрацию
Бездепозитный приз по промо-коду будет доступен для забавы, лишь том, случае когда Вы активируете особый бонусный код в разделе с призами либо укажите промокод при регистрации на веб-сайте. В неких случаях, не активации кода, придется подтвердить контактные данные игрока и заполнить анкету посетителя. <a href=http://web.symbol.rs/forum/member.php?action=profile&uid=754783>http://web.symbol.rs/forum/member.php?action=profile&uid=754783</a> Только выполнив все условия отыгрыша и дождавшись окончания ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить свои средства.Бездепозитные бонусы начисляются только один один. Не стоит раскрывать новые аккаунты, чтобы получить их повторно. Служба безопасности казино обязательно выявит «левого» участника и заблокирует. Если гость выполнит необходимые требования, отыграет свою ставку и решит исключить личный выигрыш, то ему надо(надобно) к, собственно казино непременно востребует предоставить ксерокопии личных документов, дабы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные свои вывести не удастся. 1×slots зеркало рабочее Этот образ бонуса несомненно добавлен на Ваш акк последствии успешной процедуры регистрации с внедрением номера телефона. Если избрать иной метод творенья учетной записи, бездеп не будет добавлен на Ваш акк.
<b>Смотреть еще похожие новости:</b>
<a href=http://complainanything.com/node/158?page=966#comment-1302108>1×slots casino зеркало рабочее</a>
<a href=https://radios-collector.com/viewtopic.php?f=7&t=88868>казино 1× slots официальный сайт</a>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/5331/#comment-264713>1×slots промокод при регистрации</a>
<a href=http://big.bestforums.org/viewtopic.php?f=7&t=10056>1×slots промокод при регистрации</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Диапазон ставок, которые вправе сделать игрок, того лимитирован. Обычно ставить можно маленькую необходимую — пределах 10–30 руб. За одно вращение. Шаг 4. Активация. Внимательно исследуйте обстоятельства, информацию по лимитированиям и сроке деянья бонусного предложения. Разобравшись с правилами, можно активировать бонус в собственном офисе (время ? с использованием промокода) либо по запросу в саппорт.
#6997 Jeffreyarime
https://gramster.ru/ pinup 2025
#6998 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало слоты porno Игорь Акинфеев (футбол) <a href=https://vestnik-jurnal.com/>автомат казино</a> 1×bet зеркало рабочее на сегодня бк букмекерская контора <a href=https://krtka.info/>букмекерская контора бетсити</a> casino сегодня человек казино casino betting 1×bet официальный 1×bet xyz казино рояль смотреть порно с Диана Шнайдер (теннис) Комарова Наталья Владимировна порно
#6999 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация
Помните, собственно всевозможные нарушения управлял сведут на нет ваши усилия, и вы наверняка останетесь без начисленного для дарового бонуса. Всегда изучайте правила начисления и условия вейджера. По каким вопросам, на коие вы не других отыскать ответы, обращайтесь за разъяснениям и саппорт.Не стоит незамедлительно же отказываться от приветственных даров в сходственных казино. Администрация готова начислить средства или фриспины, но сначала работники обязаны увериться, собственно вы не аферист. Дело что, что развелось слишком большое охотников за призами. Они выучились обманывать систему и наваривать крупные суммы средств. <a href=http://filmkachat.ru/>1×slots официальный сайт мобильная версия</a> Исходя из сего, просто не существует разумных причин махнуть рукой на получение такового приза при регистрации. И, заметить,, на подобный безвозмездной базе у вас есть шансы выиграть средства и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные призы, называют бесплатными интернет платформами для игр. <a href=https://www.swiatobrazu.pl/forumgaleria/thread/view/id/589>https://www.swiatobrazu.pl/forumgaleria/thread/view/id/589</a> На критериях отыгрыша безвозмездных призов следует остановиться подробнее. С ними связаны аспекты, которые нельзя забыть без внимания.Обычно, бездепозитные бонусы выдаются под определенные слоты с фиксированной ставкой, но их наверняка воспрещено использовать в игровых автоматах с прогрессивным джекпотом. Список игр, каких можно применять бездеп, Вы найдете в описании акции или сможете уточнить у службы заведения. 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=http://www.skypedeenglish.com/userinfo.php?uid=13873#>http://www.skypedeenglish.com/userinfo.php?uid=13873#</a>
1× slots регистрация в 1×slots casino
<a href=https://projects.sare.org/people/jamestrazy/>1×slots casino зеркало рабочее</a> 1хслот зеркало сайта Бездепозитные призы в казино без пополнения 2022 — это конкретная сумма средств или gorovyh spins вращения, которые предоставляются первым постояльцам за регистрацию на сайте казино в виде бездепозитного бонуса, и дает для вероятность с казино без пополнения опробовать предложения (игр), с дальнейшей прерогативой вывода средств при исполненьи всех установленных верховодил. <a href=https://gxfcmao.com/home.php?mod=space&uid=508013>https://gxfcmao.com/home.php?mod=space&uid=508013</a> 1×slot зеркало
1×slots зеркало
Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция имеет подробные верховодила, ссылка на которые обыкновенно содержится в промообъявлении. В их указываются лимиты, вейджер, перечень дешевых игр. Если оператор укрывает данные о предложении, то пользоваться им не стоит.Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала быстрые выводы. Фишка выплат сомнений, что достаточно выбрать платёжный инструмент и указать сумму. В большинстве случаев деньги зачисляются на электрические кошельки протяжении 15 минут, а на банковские карты – 1–3 рабочих денька. <a href=http://forum.xpscenery.net/member.php?action=profile&uid=599>http://forum.xpscenery.net/member.php?action=profile&uid=599</a> Также, такой необходимо подтвердить свой номер телефона, достичь код, приобретенный в смс-сообщении от клуба ввести в специальное поле в личном офисе игрока. казино 1×slots официальный сайт
1×slots зеркало
Бездеп с фриспинами возможность охватывать всю коллекцию игр на сайте или разработки одного провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш может быть выведен в того, как юзер отыграет эту сумму. Возможность расценить глубокий функционал слотов — главное совершенство данной разновидности. Игроку становятся доступны те функции, коие отсутствуют в демонстрационном режиме, а возможность выиграть реальные средства прибавляет ярчайших азартных чувств.Все обожают получать подарки. Согласитесь, почти каждый играющий человек несомненно сильно рад, случае получит безвозмездный подарок для игры в онлайн казино просто за регистрацию или же приз за внесенный депозит, так именуемые приветственные бонусы для новых игроков. Соответственно эти интернет клубы будут больше востребованы и преимущественны у игроков при выборе казино для игры. Топ казино непрерывно обновляется и прибавляются свежие и увлекательные игровые клубы с привлекательной бонусной политикой и всеми возможными привилегиями, к которым относятся такие бонусы как фриспины за регистрацию, денежные бездепозитные бонусы, а щедрые призы за внесенный депозит. 1хслотс мобильная версия зеркало <a href=https://www.twoandahalfminer.de/unser-forum/member.php?action=profile&uid=6495>https://www.twoandahalfminer.de/unser-forum/member.php?action=profile&uid=6495</a> Существуют казино с бонусом за регистрацию, в довольно известны фриспины в онлайн казино потом регистрации в определенных забавах. Они встречаются даже почаще безвозмездных поощрений либо традиционных бонусов в казино без вложений. Например, игрок регистрирует счет, на который начисляются безвозмездные игры, приз за регистрацию в виде бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса геймер выигрывает настоящие деньги, коие в последствии возможно успешно вывести из заведения на свою платежную систему. То есть, есть шансы вывести свои без рисков собственными финансами. Регистрация, какую геймер получит бонусы, займет несколько, а спасибо этому можно увеличить пять евро поощрений до тысячи и без всяких заморочек исключить их.
1 x slots casino
Верификация важна для добавочной защищенности и подсобляет техподдержке выявить бонусхантеров и плутов. Кстати, рядах платформах выводы солидных сумм доступны лишь последствии подтверждения личности.Когда речь идет о валютных призах, казино постоянно устанавливают условия вейджера, которые нужно выполнить, чтобы исключить выигрыш. <a href=https://visualchemy.gallery/forum/profile.php?id=3469802>https://visualchemy.gallery/forum/profile.php?id=3469802</a> Основное правило получения бездепа ? создаваемый акк обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов требовательно запрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита необходимо блюсти несложную очередность деяний. 1×slots регистрация то дальше необходимо пройти
<b>Смотреть еще похожие новости:</b>
<a href=http://lider1c.ru/communication/forum/user/24774/>1×слотс казино</a>
<a href=https://acerfans.ru/user/JamesTed/>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депо возможность отличаться до 30 дней.
#7000 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино онлайн ставки на спорт букмекерские конторы <a href=https://www.ossetia.tv/>порно с Константин Тюкавин (футбол)</a> порно с Александр Головин (футбол) порно с Абрамченко Виктория Валериевна <a href=https://res-publika.com>порно с Антропова Валентина Викторовна</a> казино сочи up casino скачать порно с Карен Хачанов (теннис) 1×bet зеркало на сегодня сколько казино casino официальный сайт 1×bet зеркало рабочее
#7001 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало рабочее
Бездепозитный приз – это экономическое вознаграждение, которое выдается участнику игры в казино, для его вербования и появления заинтригованности. Любой гость, кот-ый соответствует условиям выдачи похожего бездепозитного приза, может претендовать на получение вышеуказанного приза. Такое одобрение считается наиболее действенным методом, дающим возможность стартовать деле, не вкладывая личных вещественных средств. <a href=http://filmkachat.ru/>1×slot регистрация</a> <a href=https://lyfepal.com/forums/thread/7349/Mastering-the-Art-of-CGI-Design-From-Concept-to-Revolutionary>https://lyfepal.com/forums/thread/7349/Mastering-the-Art-of-CGI-Design-From-Concept-to-Revolutionary</a> Существует ли стратегии для отыгрыша бездепозитных призов? К огорчению нет, на выигрыши или проигрыши с бонусов, казино или игрок воздействовать имеет, отдача игр происходит от разработчиков игр.Зачастую бездепозитные призы казино для игры предлагаются разными заведениями азартных игр в рекламных промоакций либо в целях привлечения к себе свежих игроков. Для бездепозитных бонусов в казино 2022 игроку надо пополнять счет до момента вывода хотимых средств. 1×slots зеркало которую указывали при регистрации кстати <a href=https://xn----htbblufccvgdmek8j.xn–p1ai/forum/messages/forum1/topic118/message170/?result=new#message170>https://xn----htbblufccvgdmek8j.xn–p1ai/forum/messages/forum1/topic118/message170/?result=new#message170</a> Обычно показатель выше, чем для бонусов на депозит. Не дивитесь, случае он будет в х100. Иногда завышенный коэффициент вейджера устанавливается для обитателей отдельных государств.Маркетинговая политика всех игорных интернет-клубов должна одевать разнородный нрав. И случае гонорары на депо работают для того, чтобы провоцировать вносить депозиты и поощрять теснее место юзеров, то бездепозитный бонус в казино или приз за регистрацию в казино, до всего, рассчитан на расширение базы покупателей.
1×slots регистрация 1×slotscasino 56 online
Многие азартные клубы ограничивают сумму вывода заработанную на призе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не можете вывести. Разница будет аннулирована, Вы в не можете создавать на нее ставки.Возьми свой подарок. Чаще всего бонус активируется незамедлительно после регистрации. Но посещают ситуации, когда нужно забежать в личный офис либо написать в справочную службу. 1× slots casino официальный сайт Некоторые онлайн-казино без депо предлагают свежим клиентам избрать бонус при регистрации. Будьте внимательны: выбрав один, вы в абсолютном большинстве случаев не сможете воспользоваться остальными. <a href=https://welling.domains.unf.edu/member.php?action=profile&uid=678>https://welling.domains.unf.edu/member.php?action=profile&uid=678</a> Размер бонусов почаще всего чисто символический и не выше 50 руб. Приятно, но ощутимым бустом деле вряд ли будет.Чтоб получить крупный выигрыш, подбирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша. 1×slots casino регистрация 1×slots review live
x1 slots регистрация в 1×slots casino
Законодательство, регулирующее азартные игры в различных странах, влияние на возможности операторов. В результате пользователи из отдельных ареалов сталкиваются с лимитированиями со стороны казино. Это имеет быть как глубокий отказ в доступе, так и невозможность загружать игры отдельных изготовителей. Большинство интернет-казино из нашего топ-10 готовы порадовать вас эксклюзивными промоакциями. Читайте о их в обзорах и на форуме.Способы получения бездепа различаются в зависимости от облика приза, который понравился игроку. Но вас так надо(надобно) быть зарегистрированным в законном онлайн-казино и доказать свою личность. В общем облике пошаговая инструкция для получения бездепозитного приза смотрится так: <a href=http://b98415ql.bget.ru/user/JaspercaW/>http://b98415ql.bget.ru/user/JaspercaW/</a> 1×slots официальный сайт скачать
1×slots casino регистрация 1×slotscasin online
<a href=https://qualityprogamer.de/forum/showthread.php?tid=243577>1×slots зеркало рабочее</a> Получить Бездепозитный приз в онлайн казино дело двух кликов. Другой момент, отыграть рекламную и соблюсти верховодила и условия отыгрыша. Под правилами подразумевается не вагер, хотя и ограничения по максимальной ставке. Мы понимаем, собственно в кино все ставят на зеро и выигрывают. Призываем не делать сходственного. Перед активацией приза прочитайте верховодила. Узнайте следующие моменты: Условия получения дара, за регистрацию, за депо и другое. Ограничения по наибольшей ставке. Зачастую не повыше 350 рублей. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на месте. Поэтому главно знать, в каких играх можно осуществлять кратность валютного оборота.Бонус без депозита за регистрацию в казино (бездепозитный бонус) – это валютный подарок от клуба, кот-ый начисляется на аккаунт игрока в регистрации в казино. Кроме создания учетной записи, для получения бездепа, довольно часто требуется ещё и доказать контактные данные игрока и/или активировать специальный промо-код. Ниже указан важный список законных казино в Беларуси с призами на 1-ый депо. Вы сможете попасть на официальный вебсайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз. 1×slots официальный сайт, скачать <a href=https://www.gamespot.com/profile/glavdorogadv310/>https://www.gamespot.com/profile/glavdorogadv310/</a>
1×slots зеркало рабочее
На нашем сайте Вы отыщите перечень актуальных новых бездепозитных бонусов в казино 2022 года. Также, есть много неповторимых услуг, коие доступны только гостям нашего сайта в регистрации по нашей ссылке либо активации специального промокода. <a href=http://lyxondebian.free.fr/dokutest/doku.php?id=Выкуп_авто>http://lyxondebian.free.fr/dokutest/doku.php?id=Выкуп_авто</a> Наш перечень включает в себя лучшие бездепозитные бонусы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по принципиальным характеристикам: 1хслотс зеркало Таким образом, заведение пытается продемонстрировать себя своим вероятным геймерам, а подобный рекламный ход как казино бонус без депозита за регистрацию привлекает довольно количество внимания к игорному заведению и обеспечивает постоянный поток новых гостей и будущих клиентов игрового интернет клуба.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.azartweb2.com/threads/1×slots-casino-registracija-1×slotscasin-online.229131/>1хслотс зеркало на сегодня</a>
<a href=http://policeacademy.teamforum.ru/memberlist.php?mode=viewprofile&u=410>1×slots зеркало быструю регистрацию а также мгновенное</a>
<a href=https://forum.bedwantsinfo.nl/user-83172.html>1хслот зеркало сайта</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но такие рамки не смущают даже хайроллеров, что коэффициенты на слотах позволяют рассчитывать на крупные выигрыши, а неких автоматах разыгрывается передовой джекпот.
#7002 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
vavada casino casino вход <a href=https://kompromat1.online/>casino приложения</a> рокс казино скачать 1×bet на андроид бесплатно <a href=https://krtka.info/>1×bet на андроид</a> спорт букмекерская контора порно с Кирьянова Дарья Борисовна casino скачать приложение почему в казино не бывает настенных часов casino betting рабочее казино сколько казино
#7003 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пина casino 1×bet на андроид <a href=https://rumafia.news/>casino бездепозитный</a> pin up casino скачать букмекерскую контору <a href=https://specreporter.com/>Самойлова Алла Владимировна порно</a> Петрова Ольга Викторовна порно 1×bet официальный xbet porno Екатерина Ефременкова, шорт-трекистка casino автомат казино ставка порно с Виктория Синицина, фигуристка 1×bet слоты 1×bet xyz
#7004 Charlesgunnyhttp://filmkachat.ru
казино 1×slots официальный сайт
Активация по промокоду употребляется в разных видах бездепов. Если речь о приветственном бонусе, то набор символов можно разузнать на крупнейшей странице, в регистрационной форме либо послании, коие отчаливает юзеру для доказательства e-mail. Акции все проводиться совместно с партнерскими площадками. Обычно код располагается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется одноразовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем актуальный код для активации в описании каждого рекламную.При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток. <a href=http://filmkachat.ru/>1×slots зеркало сайта</a> <a href=https://devfolio.co/@archicgicom>https://devfolio.co/@archicgicom</a> 1×slots зеркало на сегодня <a href=http://redhawkclan.free.fr/index.php?file=Members&op=detail&autor=hesitantyears46>http://redhawkclan.free.fr/index.php?file=Members&op=detail&autor=hesitantyears46</a> Чтобы помощи убедиться в превосходстве бездепозитных призов, довольно зарегистрироваться в казино и получить одобрение.
1×slot зеркало рабочее регистрации на телефон придет
Подтверждение электронной почты – одно из основных критерий, коие есть почти в каждом бездепозитном казино. Чтобы верифицировать электрическую почту, довольно перейти по интенсивной ссылке в письме, полученном от азартного клуба.Существуют казино с призом за регистрацию, в довольно знамениты фриспины в онлайн казино потом регистрации в конкретных играх. Они встречаются в почаще бесплатных поощрений либо традиционных бонусов в казино без вложений. Например, игрок регистрирует счет, на который начисляются бесплатные игры, приз за регистрацию в виде даровых фрспинов, вращения в игровом автомате. Во время игрового процесса игры выигрывает истинные средства, которые в последствии можно удачно вывести из заведения на свою платежную систему. То есть, все шансы исключить свои без рисков своими деньгами. Регистрация, за которую игрок получит призы, займет пару минут, а благодаря данному возможно увеличить пять евро поощрений до тысячи и без всяких проблем вывести их. <a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1154#post-35921>1×slots зеркало рабочее</a> 1×slots регистрацию процедура займет всего лишь Теоретически, к бесплатным бонусам возможно отнести так называемые фриспины. Напомним, речь идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, поэтому что они деют лишь возможность создавать ставки. <a href=http://www.god123.xyz/home.php?mod=space&uid=1022186>http://www.god123.xyz/home.php?mod=space&uid=1022186</a> 1×slots рабочее зеркало Демоказино есть практически на каждом сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются веско пореже: там в случае выигрыша и соблюдения условий акций бездеп возможно перевоплотить в настоящие средства.Бонусные деньги – маленькая сумма средств для старта в новеньком казино. На бонусные деньги, обыкновенно разрешается играть во все забавы, кроме слотов с прогрессивным джекпотом и игр из раздела live casino.
1× slots зеркало
Вышеописанная первопричина и считается основным нюансом, в которого операторы отдают доля своей прибыли на различные рекламные затраты и рекламные кампании. А самым действующим тут станут выступать именно бездепозитные бонусы казино 2022 с выводом за регистрацию. К образцу, игроку выдаются бесплатные свои в заведении в объеме пятидесяти либо 100 $ (вейджер на которые составляет 100х). То есть, каждому новоприбывшему игроку выскакивает притягивающая картинка, кот-ая сулит выплату всех зачисленных фирмой средств. Не стоит заострять на казино бонус за регистрацию без депозита с сильно великий или довольно маленькой суммой призов, поэтому что, том тщательно исследовав все обстоятельства, тут всего, будет некий подвох.Бонус с зачислением средств на счет выделяет больше свободы поступков. Пользователь сам подбирает, каким образом воспользоваться подаренными своими. Здесь кроме могут работать лимитирования на список дешевых игр, хотя обыкновенно эти рамки не например строги, как в промо с безвозмездными вращениями. <a href=https://www.one2bay.de/forum/member.php?action=profile&uid=19615>https://www.one2bay.de/forum/member.php?action=profile&uid=19615</a> Осталось выбрать казино с призом за регистрацию и сделать профиль. После активации подарка выигрыш зависит от Фортуны и навыков.Вейджер в переводе с британского значит «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша приобретенного бонуса, в нашем случае бездепозитного. Число ставок большого — важно лишь набрать сумму, пропорциональную сумме поощрения. скачать 1×slots на андроид мобильная версия После получения бонуса вывод средств для клиента будет недосегаем времени, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо чета недель. Выводить средства игрок сможет лишь после отыгрыша.
1хслот зеркало
Доступные игры – В некоторых азартных забавах возможно понизить математическое приемущество казино до нескольких десятых процента. В их количестве многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как управляло, в этих забавах ставки идут в зачет вейджера не полностью. Например, имеет учитываться только 50%. В неких играх бездепозитные бонусы вообще невозможно отыгрывать. <a href=http://big.bestforums.org/viewtopic.php?f=7&t=9715>1×slots рабочее зеркало на сегодня</a> Чтобы получить вероятность исключить выгода с бездепозитного бонуса в казино, необходимо выполнить ряд условий:Существуют казино с призом за регистрацию, в довольно популярны фриспины в интернет казино впоследствии регистрации в определенных забавах. Они встречаются числе почаще безвозмездных поощрений либо традиционных бонусов в казино без инвестициям. Например, игрок регистрирует счет, на кот-ый начисляются бесплатные игры, бонус за регистрацию в виде даровых фрспинов, вращения в игровом автомате. Во время игрового процесса геймер выигрывает истинные средства, коие в последствии возможно удачно исключить из заведения на свою платежную систему. То есть, есть шансы исключить свои без рисков собственными деньгами. Регистрация, какую геймер получит призы, займет несколько, а благодаря данному можно прирастить пять евро поощрений до тысячи и без всяких заморочек исключить их. 1×slots мобильная версия войти казино <a href=https://casperforum.org/user/scottwet/?um_action=edit>https://casperforum.org/user/scottwet/?um_action=edit</a> Наши эксперты изучают условия акции, затем в ручном режиме проводят их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и другие параметры. Мы не рекламируем казино, а даем игрокам информацию о лучших из них.
1×slots зеркало подтвердит вашу регистрацию если говорить
Если вы новичок в этом деле и только попали в неизведанную вами район азарта — счет предложений как бездепозитные призы без пополнения. Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации презента необходимо доказать электрическую почту и привязать телефонный;Список так называемых «разрешенных землель» прилагается к правилам бонусной программки игорного портала. Обязательно проверьте, распространяются ли на вас подобные санкции. <a href=http://matripedia.de/doku.php?id=фильмы_бесплатно_через_торрент>http://matripedia.de/doku.php?id=фильмы_бесплатно_через_торрент</a> Перед активацией важно внимательно изучить условия промоакции. Чем ниже вейджер, что, этим больше потенциальная выгода игрока. Имеют велечину кроме лимиты ставок при отыгрыше и сроки, на которых возможно пользоваться предложением. Если бездеп обхватывает узкий список игр, рекомендовано узнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь том, случае, если оператор не установил жесткие лимитирования на максимальную сумму ставки.Для получения приза надо(надобно) ознакомиться с программой лояльности казино и устроить ставки на необходимую, нужную для перехода на грядущий степень. 1×slots зеркало на сегодня При регистрации что, нет или ином онлайн игральном заведении — вас дается один шанс испытывать собственную удачу не внося свои монеты. Замечу что эту поощрительную услугу деют не все онлайн игровые площадки, а только великодушная половина из них. Которые мы подготовили для Вас в нашем списке.Бонусные средства – маленькая сумма средств для старта в новеньком казино. На бонусные деньги, обычно разрешено выступать во все игры, кроме слотов с современным джекпотом и игр из раздела live casino.
<b>Смотреть еще похожие новости:</b>
<a href=https://praisenpray.org/forums/showthread.php?tid=97268>1× slots зеркало</a>
<a href=http://www.forum.kalor.ru/1×slots-registraciya-na-sayte-1×slots-ru-com-t4968.html>1×slots регистрация на сайте 1×slots ru com</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При исполнении условий отыгрыша и верификации, деньги с бонусного счета переводятся на основной и все быть выведены на карту или электронный кошелек. Лимиты на вывод и сроки проведения транзакции находятся от избранной платежной системы.
#7005 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
официальное казино вход Елизавета Боярская <a href=https://krtka.info/>casino</a> почему в казино нет окон porno Мира Андреева (теннис) <a href=https://vestnik-jurnal.com/>1×slots casino</a> порно с Ирина Сидоркова Набиуллина Эльвира Сахипзадовна порно bet casino unlim casino человек казино лучшие бесплатные онлайн казино порно с Елена Никитина, скелетонистка
#7006 Charlesgunnyhttp://filmkachat.ru
казино 1×slots официальный сайт
Риск-игра по равным шансам – Также казино может воспрещать выполнять условия по отыгрышу с помощью раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких других забавах.Если вы выбираете проверенное лицензионное интернет казино и сделайте все условия получения бездепозитного бонуса, проблем с получением дара у Вас не возникнет. <a href=http://filmkachat.ru/>1хслотс казино зеркало</a> Такой безвозмездный эквивалент средств зачисляется на профиль пользователя после осуществления требований и предназначаются они только для игрового процесса. Вывод таких вознаграждений возможен только последствии осуществления вейджеровых условий.Доступ к дару имеет раскрываться механически в введения промокода или обращения в службу вебсайта. В первом случае от пользователя не потребуется практически деяний. Бездеп с активацией по коду встречается чаще всего. Игроку нужно ввести совокупа символов в графе, которая возможность находиться в регистрационной форме в Личном офисе. <a href=https://diccut.com/forums/thread/2610/>https://diccut.com/forums/thread/2610/</a> 1×slots официальный сайт, скачать <a href=http://msk-ru.ru/index.php?subaction=userinfo&user=tabooimbecile58>http://msk-ru.ru/index.php?subaction=userinfo&user=tabooimbecile58</a> Некоторые веб-сайты, до чем обмануть регистрацию игроков, предлагают ответить на некоторое базовых вопросов. Цель проведения подобной викторины – выявить случайных людей, коие не имеют представления о покере, и не разрешить получения ими призов. Если посетитель теснее играл в казино, то ответить на полтора 10 простых вопросов будет нетрудно. Очень часто, ответы можно найти на официальных сайтах этих учреждений.Представьте момент, когда при ставке в 10 рублей Вы получите сходственное умножение. Миллион руб. За одно вращение, что вполне вероятно. Поэтому вопрос, сколько можно выиграть остаётся закрытым. Предлагаем проверить других. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный бонус и инспектируйте фортуну в деле. Разумеется, исключить средства сложно. Однако шансы есть у всех.
1×slots акции
B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. 1×slots casino зеркало <a href=https://love-n-magic.ru/index.php?subaction=userinfo&user=Philipguign>https://love-n-magic.ru/index.php?subaction=userinfo&user=Philipguign</a> В интернете количество узнаваемых игорных площадок с красивыми акционными услугами. Однако пристально читать обстоятельства 10-ов услуг вскоре надоест, ну и время отнимет количество. Поэтому наша команда подготовила ТОП-3 вебсайтов с наихорошими бездепозитными призами: 1×slots зеркало 1хслотс регистрация перейти на 1×slots
1×slots сайт зеркало
4. Заберите презент. Чаще всего бонус активизируется незамедлительно в регистрации. Но бывают истории, когда нужно зайти в индивидуальный офис либо написать в службу.Oтыгpaть бонус с обозначенным вeйджepом, для этого необходимо сдeлaть cтaвoк нa cумму, превосходящую размер приза в некоторое раз. <a href=http://vecmir.ru/index.php/vecmirlife/61960-efficaciouspsyc/profile>http://vecmir.ru/index.php/vecmirlife/61960-efficaciouspsyc/profile</a> Еще одно условие дотрагивается размеров ставки. Операторы устанавливают наивысшую необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном офисе. При превышении лимита есть риск потерять бонуса. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, заказчик возможность столкнуться с запретом назначать фишки на шансы.Срок активации и время на отыгрыш. Зачисление денег или фриспинов происходит при активации в течение взыскательно ограниченного периода, подобные требования предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать приз некоторое дней либо и недель. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с неоправданно высоким вейджером. 1×slots зеркало этих способов предполагает регистрацию
1×slots сайт
Выбирайте наилучшие бесплатные бонусы с помощью обзоров на Casinoz – и пусть вас сопутствует счастье при отыгрыше бонусных кредитов!Мы проделываем ударение на ключевых положениях правил, рассказываем о территориальных лимитированиях и вкратце информируем о других промоакциях обсуждаемого казино. Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих притязаний, не неотъемлемой верификации. Если на сайте предусмотрена обязательная процедура подтверждения личности, то исключить выигрыш удастся лишь последствии проверки данных. Приготовьтесь наполнить анкету и выслать в техподдержку документ, подтверждающий личность.Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы которые возникают у начинающих. 1хлот регистрация в 1×slots casino <a href=https://www.mavsboard.com/member.php?action=profile&uid=3566>https://www.mavsboard.com/member.php?action=profile&uid=3566</a> Зарегистрироваться в казино по особой ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефонного и электронную почту). Для подтверждения номера аппарата необходимо в личном профиле показать собственный номер и надавить кнопку „Подтвердить номер телефонного“, далее Вы получите sms-сообщение с кодом, кот-ый необходимо ввести в соответствующее фон. Для доказательства электрической почты, перебежать по активной ссылке в письме от казино.Каждая игровая перрон отличается критериями по получению и отыгрышу бездепов. В правилах отчетливо расписаны временные рамки, за которые надо(надобно) прокрутить вейджер. Также не запамятовывайте на наибольший объем ставки и максимальную сумму выплаты. С другой стороны, дабы получить бездепозитные призы казино, достаточно потратить не более 1 минутки.
1хслотс рабочее зеркало
Высокая конкуренция в сегменте азартных игр доказывает операторов завлекать посетителей разнородными промоакциями. Благодаря данному у гостей бывает возможность получить бонусы в казино за регистрацию без депо. Воспользоваться таким предложением можно, минуя функцию внесения денег на игровой счет, просто активировав акк на сайте. Наш гид по бездепам поможет избрать самую симпатичную бонусную программу, разузнать правила получения такого гонорары и распорядиться им с наибольшей выгодой.В интернете очень большое скриптовых вебсайтов, которые принадлежат мошенникам. Их основная задача – заинтересовать гэмблеров, пообещав столько великодушные презенты, хотя и солидные выигрыши. Так собственно кое-какие веб-сайты предлагают получить за регистрацию и $1 000. <a href=http://muhaylovakoliba.1gb.ua/user/Ashleyrig/>http://muhaylovakoliba.1gb.ua/user/Ashleyrig/</a> Выигрыши с призов без инвестициям практически привязаны к требованию по ставкам и шансы быть обналичены только в исполнения данных требований. 1×slots casino регистрация 1×slots review live Бездепозитные призы начисляются только один раз. Не стоит открывать новые аккаунты, чтобы получить их повторно. Служба защищенности казино обязательно выявит «левого» соучастника и заблокирует. Если гость выполнит нужные притязания, отыграет свою ставку и решит вывести личный выигрыш, то ему нужно к, собственно казино непременно востребует дать ксерокопии собственных документов, чтобы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные средства исключить не получится.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/2614/#comment-189790>1хслотс казино зеркало</a>
<a href=https://tucmas.fi/phpBB/viewtopic.php?f=4&t=354253>1×slots зеркало рабочее на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если ординарными текстами, бездепы – это определённая сумма денег или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать подарки. Но есть некоторые нюансы. Существуют игорные дома, коие перед что, этим как начислить бонусы просят привязать аппарат, предоставить копии документов.
#7007 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию процедура займет всего лишь
Используйте наилучшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, чтобы заработать презенты за простые деяния теперь сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высокой отдачей и прыткими выводами на электронные кошельки. <a href=http://filmkachat.ru/>1×slots регистрация</a> <a href=https://www.zybuluo.com/lexxeagle/note/2570093>https://www.zybuluo.com/lexxeagle/note/2570093</a> Условия шансы различаться друг от приятеля. Но подобный приз может быть применен только для игрового процесса – приобретенные на счет финансы до такого, как станут отыграны, вывести невероятно. казино 1×slots <a href=http://mag-motors.ru/index.php?subaction=userinfo&user=minorsocialite9>http://mag-motors.ru/index.php?subaction=userinfo&user=minorsocialite9</a> Если при регистрации указать промокод, можно гарантировано получить приз. Где взять ваучер? Посетите определенную блоги или форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В последнее время игорные жилища начали афишироваться в фильмах и сериалах. Присмотритесь и всего заметите промокод, кот-ый принесёт 500 или 1 000 бонусных рублей.Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми акциями. Читайте о их в обзорах и на форуме.
1×slots зеркало проходить регистрацию это отличный вариант
После получения бонуса вывод средств для посетителя будет недоступен до, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя либо чета недель. Выводить средства игрок может лишь последствии отыгрыша.Чтобы выступать безвозмездно на реальные деньги в казино, порой довольно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные действия. <a href=https://australianwinerytours.com/tours/showthread.php?tid=240897>онлайн казино 1×slots</a> 1хслотс казино зеркало Для получения приза нужно пригласить в игру нового посетителя. Казино начисляет пригласившему фиксированный процент от взносов приглашённого в виде бонуса: почаще всего его объем не превышает 10%. Срок деяния бонуса в большинстве случаев не превышает месяца: пригласивший получает бонус зависимо проигранных ставок приглашённого в первый месяц забавы. <a href=https://krok.biz/forum/memberlist.php?mode=viewprofile&u=38374>https://krok.biz/forum/memberlist.php?mode=viewprofile&u=38374</a> 1×slos регистрация в 1×slots casino
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Oтыгpaть приз с обозначенным вeйджepом, достичь необходимо сдeлaть cтaвoк нa cумму, превышающую объем бонуса в количество раз.Чем ниже велечину вейджера, тем легче отыграть и вывести бонус. Если Вы планируете заработать на бездепе, но просто ознакомиться с свежим игровым клубом, то стоит игнорировать призов с высоким вейджером их почти не реально отыграть. С ними Вы сможете только протестировать забавы заведения. 2. Создать свежий профиль. Для регистрации нужно заполнить маленькую анкету либо зайдите в собственный офис посредством соц сетей;Бездепозитные призы настоящими деньгами, коие возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадались. <a href=http://yunduost.com/home.php?mod=space&uid=56470>http://yunduost.com/home.php?mod=space&uid=56470</a> Для получения бездепа нужно пригласить в игру по реферальной ссылке свежего клиента: он обязан зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на необходимую, обозначенную в критериях промоакции.При помощи такого одобрения оператор имеет кроме привлекать клиентов, коие ранее показывали активность на веб-сайте, хотя по некий причине прекратили выступать. В данном случае промокод высылается юзеру по электрической почте или в виде SMS. 1×slots зеркало регистрацию более популярный вариант это
1×slots актуальное зеркало
Фриспины – бесплатные вращения с фиксированной ставкой, которые возможно использовать в конкретных игровых автоматах. 1×slots зеркало регистрация в 1×slots casino <a href=https://www.0574snyw.com/space-uid-175923.html>https://www.0574snyw.com/space-uid-175923.html</a> Вы не в коем случае ни же рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный бонус, по мимо практической забавы на бездепозитные бонусы, у Вас есть шанс изучить игровые автоматы, выучится регулировать изменять ставки и линии, исследовать бонусные забавы и их выигрышные композиции, ну в конце концов просто зарядится кучей эмоций! Ведь вы будите играть на бонусные свои, которые возможно отыграть и вывести, не просто на демо счет, тем наиболее адреналин в крови еще больше повысится а пульс забьется с частым ритмом!Такой казино приз без депо за регистрацию выдается игроку на час и активно используется данное предложение с 2017 года. Это как бы какая-то конспирация поощрения под бездепозитный. Суть всего этого сводится к тому, собственно геймеру на час выдается, например, 1000 долларов, а реклама утверждает о том, собственно любой выигрыш можно несомненно дальнейшем оставить при для. Но случае играющий всерьез отнесется к данному предложению, то он просто потеряет время. Ведь геймеру надо(надобно) несомненно играть не в основном аккаунте, а в тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (в всей тысячи) в верховодила вступят конкретные условия, где несомненно сказано, что наибольшей суммой победы имеет быть лишь двести долларов и деньги возможно применять только в качестве бонуса на 1-ый лепта с вейджером 25 от суммы гонорары плюс сам депозит. По итогу выйдет, что игрок выигрывал себе 200% бонус с вейджером на конкретную сумму. Короче говоря, это все не вашего медли.
1×slots официальный сайт мобильная версия
Иногда для получения призов необходимо связаться с представителями службы. Удобнее всего с ними собеседовать в онлайн-сате, желая время довольно запроса по электрической почте. Если при регистрации показать промокод, можно гарантировано получить бонус. Где брать ваучер? Посетите на блоги либо форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В последнее время игорные дома начали афишироваться в кинокартинах и телесериалах. Присмотритесь и всего заметите промокод, который принесёт 500 или 1 000 бонусных рублей.Зачастую бездепозитные бонусы казино для забавы предлагаются различными заведениями азартных игр виде рекламных промоакций либо в целях привлечения к себе новых игроков. Для бездепозитных призов в казино 2022 игроку не нужно пополнять счет до этапа вывода желанных средств. <a href=https://formacion.somoscodenautas.com/forums/topic/%d0%bf%d1%80%d0%be%d0%b4%d0%b2%d0%b8%d0%b6%d0%b5%d0%bd%d0%b8%d0%b5-%d0%b2%d0%b5%d1%87%d0%bd%d1%8b%d0%bc%d0%b8-%d1%81%d1%81%d1%8b%d0%bb%d0%ba%d0%b0%d0%bc%d0%b8/>https://formacion.somoscodenautas.com/forums/topic/%d0%bf%d1%80%d0%be%d0%b4%d0%b2%d0%b8%d0%b6%d0%b5%d0%bd%d0%b8%d0%b5-%d0%b2%d0%b5%d1%87%d0%bd%d1%8b%d0%bc%d0%b8-%d1%81%d1%81%d1%8b%d0%bb%d0%ba%d0%b0%d0%bc%d0%b8/</a> Заработать на бездепозитных бонусах за регистрацию в казино может каждый пользователь, достигший совершеннолетия. 1×slots официальный сайт мобильная версия скачать Начнём с как, что каждое рекламную за регистрацию предполагает некие условия. Бездепозитные призы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, нужная для выполнения критерий. Пример, возымели бесплатные вращения и выиграли с них 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 рублей, неудачных или выигрышных, неважно. После выполнения, бонусный баланс перейдёт на настоящий и будет легкодоступным к выводу.После получения бонуса вывод средств для клиента будет недосегаем времени, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо чета недель. Выводить средства игрок сможет лишь после отыгрыша.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.topboard.org/media/users/rabofreesn.160691/>1×slots казино зеркало</a>
<a href=https://thetechmodders.com/forums/viewtopic.php?t=58883>1хслотс зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Демоказино есть почти на любом веб-сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются значительно реже: там если, тогда, выигрыша и соблюдения условий промоакций бездеп возможно перевоплотить в настоящие средства. Но на азартных платформах сходственные гонорары все получить и уже зарегистрированные пользователи. В таком случае, призы предоставляются в рамках оригинальных акций либо же неким геймерам повторяющий акционного предложения, коие прибывает на почту с целью «вернуть» игрока в свое казино.
#7008 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casinos winning порно с Юлия Ефимова, пловчиха <a href=https://t.me/vchkogpu_ru>Львова-Белова Мария Алексеевна порно</a> скачать сайт букмекерской конторы 1×bet слоты 1×bet top <a href=https://slon-ru.com/>пин casino</a> скачать casino на андроид официальные зеркала казино почему в казино нет часов pin up casino зеркало casino бездепозитный кент казино 7k casino официальный
#7009 Charlesgunnyhttp://filmkachat.ru
1×slot рабочее зеркало
В основном случаев благотворительные бонусы начисляются в кредитах, коие невозможно незамедлительно исключить со счета. Прежде их нужно отыграть по установленным правилам. Эти притязания принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже. <a href=http://filmkachat.ru/>1×slots регистрацию процедура займет всего лишь</a> В перечне притязаний к отыгрышу нередко наличествуют лимиты на ставки при этой на личные деньги. Так, если отыграть нужно 30 000 рублей, а максимальная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам действия промоакции. <a href=https://jobhop.co.uk/blog/337503/mastering-the-art-of-professional-interior-design-drafting>https://jobhop.co.uk/blog/337503/mastering-the-art-of-professional-interior-design-drafting</a> онлайн казино 1×slots <a href=http://fabnews.ru/blog/7266.html>http://fabnews.ru/blog/7266.html</a> Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала прыткие выводы. Фишка выплат что, нет, что достаточно выбрать платёжный инструмент и указать необходимую. В большинстве случаев деньги зачисляются на электронные кошельки в течение 15 минут, а на банковские карты – 1–3 трудящихся денька.Каждый из бездепозитных призов без пополнения 2022 содержит собственный определенный вейджер для отыгрыша, например же в любом казино он устанавливается индивидуально — где то он х55 а где-то х30, повторюсь всюду по разному!
1×slots быструю регистрацию а также мгновенное
1×slots регистрация 1×slots casino 777 online <a href=http://hwani.barunweb.co.kr/bbs/board.php?bo_table=free&wr_id=112369>http://hwani.barunweb.co.kr/bbs/board.php?bo_table=free&wr_id=112369</a> Приглашаем делиться воззреньями о бонусах. Это поможет другим пользователям подбирать более прибыльные предложения.1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, если не хотите стать жертвой мошенников или впустую израсходовать время; 1×slots мобильная версия войти казино
1×slots зеркало рабочее
Поспешите забрать бездепозитные призы за регистрацию в казино из представленного списка. Все платформы не только ведут законную работа, хотя и порадуют правдивыми результатами игры, высокой отдачей, прыткими выплатами. Вообще перейдя в казино — управляла схожи в получении бездепозитных бонусов, в стереотипные верховодила заходит: доказать эл. Почту и аппарат, наполнить свой собственный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ. <a href=https://australianweddingforum.com/weddings/member.php?action=profile&uid=20629>https://australianweddingforum.com/weddings/member.php?action=profile&uid=20629</a> Если при регистрации показать промокод, возможно гарантировано получить приз. Где арестовать ваучер? Посетите определенную блоги либо форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В заключительнее время игорные жилища начали афишироваться в кинокартинах и сериалах. Присмотритесь и наверняка заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных руб.Условия, на коих предоставляется бездеп, регулируются казино. Каждая промоакция имеет подробные верховодила, ссылка на коие обычно содержится в промообъявлении. В них указываются лимиты, вейджер, список дешевых игр. Если оператор укрывает данные о предложении, то воспользоваться им не. 1×слот регистрация в 1×slots casino
1× slots зеркало
Вознаграждения за получение VIP-статуса ? начисляются в рамках программы преданности при достижении одного уровня либо выдаются персонально менеджерами службы поддержки.В реальное время получить приз за регистрацию в казино довольно просто. Почти любой игорный жилище с готовностью предоставит деньги либо безвозмездные вращения. Многие игроки используют данным и не смущяются регистрироваться в любом клубе с выгодными критериями. Кстати, это замечательная возможность придумать выигрышную тактику и сорвать куш. <a href=https://forum-macan.ru/viewtopic.php?t=3586>1×slots зеркало регистрация в 1×slots casino</a> Срок отыгрыша — это период, кот-ый начинается в момент активации бонуса и кончается с его закрытием. Пользователю необходимо уложиться в этот временной промежуток, другому призовые средства аннулируются. Казино устанавливают список игр, ставки в засчитываются при расчете отыгранных средств. Если тайтл не заходит в данный список, то предоставляется быть недосегаем для загрузки в деянья бонусного предложения.Казино выделяет возможность заработать и вывести настоящие деньги на бездепозитных призах. Обычно, это незначительная сумма, коию казино имеет себе позволить презентовать игроку. 1×slot казино зеркало <a href=http://intextv.by/forum/user/65018/>http://intextv.by/forum/user/65018/</a> В любом казино с бездепозитным бонусом предусмотрены вейджеровые обстоятельства. Это один-единственный «подводный камень», который стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, нужно сделать определённое число ставок. Чем круче бонус, что, этим труднее выполнить обстоятельства, и наоборот.Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную функцию активации бонуса без депозита. Внимательно прочтите до конца. Многие новички проделывают промахи на шаге регистрации и потому возможности получить подарок.
казино 1×slots
Как верховодило, при выводе финансов, от играющего потребуется только устроить минимальный вклад для того, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом личный счет. <a href=http://www.atego-club.ru/forum/member.php/134789-CharlesPhype>http://www.atego-club.ru/forum/member.php/134789-CharlesPhype</a> Прямо данный отберите безвозмездные вращения за регистрацию без депо и начинайте коллекционировать призовые комбинации из-за солидных выигрышей! 1хслот 1хслотс регистрация перейти на 1×slots Третитй бездепозитный приз за регистрацию – денежные средства. К огорчению, начислить рубли или баксы способны лишь известные и знаменитые клубы. С их поддержкою вы сможете насладиться каждой доступной игрой – автоматом, рулеткой, кено, блэкджеком.Также бездепозитные бонусы шансы работать способом возвратить к игре клиентов, что приостановивших своё сотрудничество с фирмой: уведомление о бездепе поступает на мобильный телефон или почту.
<b>Смотреть еще похожие новости:</b>
<a href=http://mi.minfish.com/home.php?mod=space&uid=1196847>зеркло казино 1×slots</a>
<a href=https://www.katzenforum.at/forum/threads/sajt-1×-slots-casino.41919/>сайт 1× slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Частенько новенькие не разумеют, как активировать презенты или исключить 1-ый выигрыш. Для подобных случаев наша команда описала главные термины – что это фриспины, вейджер, как его отыграть, чего нужно проходить верификацию. 4. Заберите подарок. Чаще всего бонус активизируется незамедлительно после регистрации. Но посещают истории, когда надо(надобно) зайти в собственный кабинет либо написать в службу.
#7010 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino бонус пин ап казино <a href=https://glvk.guru/>Фастова Елена Владимировна порно</a> 1×bet сайт 1×bet xyz 7k casino сайт <a href=https://www.ossetia.tv/>porno Дарья Клишина</a> porno Юлия Пересильд Комарова Наталья Владимировна порно pin up casino porno Андрей Рублев (теннис) официальная казино up casino порно с Владимир Минеев (ММА)
#7011 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Таким образом, заведение пытается продемонстрировать себя своим вероятным геймерам, а такой рекламный ход как казино бонус без депо за регистрацию завлекает очень количество внимания к игорному заведению и обеспечивает неизменный струю новых посетителей и грядущих клиентов игрового онлайн клуба. <a href=http://filmkachat.ru/>1×slots зеркало подтвердит вашу регистрацию если говорить</a> Обычно для получения бонусов без депозита, казино выдвигает приклнные и абсолютно выполнимые условия, но есть ряд действий коие воспрещены и все повлечь за собой неприятные последствия: <a href=https://mega.nz/file/d28RQCBS#2i_xAXDQfj-rVkVhMWNDPYPXRKJ71NaLOz_MKYAVxxQ>https://mega.nz/file/d28RQCBS#2i_xAXDQfj-rVkVhMWNDPYPXRKJ71NaLOz_MKYAVxxQ</a> Не стоит путать игру в демо и использование призов. В демонстрационном режиме игрок может оценить механику слота, сюжет и оформление. Но забава ведется на условные кредиты, потому отсутствует основное ? ощущение пыла. Активируя промокод или фриспины, клиент как не расходует свои средства на игровые автоматы, хотя имеет сорвать настоящий куш! зеркло казино 1×slots <a href=https://www.sportchap.ru/user/AshleyVob/>https://www.sportchap.ru/user/AshleyVob/</a>
1× slots casino зеркало
<a href=https://10nsk.ru/user/JosephSuple/>1×slots зеркало проходить регистрацию это отличный вариант</a> 1×slots рабочее зеркало на сегодня Бездепозитные бонусы за регистрацию являются одним из самых популярных способов привлечения новых игроков в онлайн-казино, потому собственно они предоставляют игрокам возможность опробовать казино, необыкновенно игровые автоматы, и возможно, выиграть настоящие деньги. <a href=https://forex-arabic.com/members/179404-Geraldfrate>https://forex-arabic.com/members/179404-Geraldfrate</a> На безвозмездные бонусы онлайн-казино почти всегда распространяется лимитирования по стране проживания клиентов. Даже в вам разрешено раскрывать счет и играть на средства в заведении, это еще не означают, собственно вам доступны not the slightest down payment bonuses.Иногда в качестве бездепа, казино презентует наименьший приз (до 50 руб. ), из-за которого не стоит заморачиваться. казино 1×slots
1×slots скачать на айфон
Проверка занимает от нескольких мин. До нескольких дней, спецы техподдержки могут запросить дополнительные документы либо инициировать краткое общение по Skype.Также бездепозитные бонусы шансы служить методом возвращать к забаве клиентов, временно приостановивших своё сотрудничество с фирмой: извещение о бездепе поступает на мобильный телефон или почту. Бонус начисляется игроку незамедлительно в регистрации и прохождения верификации в казино и не требует от посетителя внесения депозита. Как управляло, объем приза в подобном случае довольно скромный, впрочем позволяет новичкам познакомиться с игрой без риска настоящими средствами. <a href=http://cloudscapehill.com/user/justinknone/?um_action=edit>http://cloudscapehill.com/user/justinknone/?um_action=edit</a> 1×slots casino online регистрация
1×slots casino зеркало рабочее
<a href=http://link.5nx.ru/viewtopic.php?f=5&t=4489>1 xslots рабочее зеркало</a> Зачастую бездепозитные призы казино для забавы предлагаются разными заведениями азартных игр в качестве рекламных промоакций или в целях вербования к себе свежих игроков. Для бездепозитных бонусов в казино 2022 геймеру не нужно пополнять счет до этапа вывода желаемых средств.В случае установленного лимита на необходимую вывода выигрыша с бездепозитного бонуса, игрок не сможет вывести больше заявленной суммы. В качестве бонусов интернет казино часто предлагает выдачу фриспинов, то есть даровых вращений игрового барабана. Виртуальные монеты возможно применять для изучения в покерной школе или для игры в казино. 1×slot рабочее зеркало <a href=http://dotmetal.com.ua/wr_board/tools.php?event=profile&pname=wretchedkey50>http://dotmetal.com.ua/wr_board/tools.php?event=profile&pname=wretchedkey50</a> Баланс игрока дополняется на подобающую необходимую. К ней применяется вейджер, указанный в правилах промоакции. Вывести выигрыш можно будет последствии такого, как юзер сделает требуемый объем ставок из личных средств. В редчайших случаях бездеп работает в формате Free Play. На счет юзера зачисляется большая сумма, и предоставляется малый срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по завершении сего периода сумма на счету несомненно превышать изначальную, то разницу можно несомненно вывести или использовать для последующих ставок.Бонус начисляется игроку сразу последствии регистрации и прохождения верификации в казино и не требует от клиента внесения депозита. Как управляло, объем приза в схожем случае достаточно умеренный, впрочем позволяет новичкам познакомиться с игрой без риска настоящими средствами.
1×slots сайт зеркало
Сразу после активации промокода можно пользоваться презентом. Как теснее упоминалось, бонусы бывают трёх видов – фриспины, кредиты и фриплей-бонусы. <a href=http://railway-hospital.spb.ru/bitrix/click.php?goto=http://dianalab.e-ce.uth.gr/html/dianauniverse/graphic.php?url=http://zdravzona.ru/bitrix/click.php?goto=https://teletype.in/@urid_pomosh/N6VI-UFx30V>http://railway-hospital.spb.ru/bitrix/click.php?goto=http://dianalab.e-ce.uth.gr/html/dianauniverse/graphic.php?url=http://zdravzona.ru/bitrix/click.php?goto=https://teletype.in/@urid_pomosh/N6VI-UFx30V</a> Индивидуальные поощрения выдаются за совершение действий: подписку на аккаунты площадки в соц сетях, установку мобильного прибавленья или официального посетителя для ПК. В большинстве казино срабатывают программы преданности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на следующий уровень часто сопровождается выдачей бездепа. 1×slots рабочее зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://31057.ww.w.molifan.net/space-uid-2304539.html>1×slots регистрация на сайте 1×slots ru com</a>
<a href=http://molifan.netwww.molifan.netwww.molifan.net/space-uid-2280308.html>1хслотс рабочее зеркало</a>
<a href=https://forum.spherecommunity.net/User-JamesLop>1×slots регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Размер бонусов почаще всего чисто символический и не выше 50 руб. Приятно, хотя осязаемым бустом деле ли будет. Раздача бонусов может быть приурочена к различным датам: календарные дни, дни рождения игроков, юбилей открытия казино и т. Д. Подарок выдается в виде средств, фриспинов или баллов для скопления и обмена на услуги оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода данной суммы придется выполнить ряд требований.
#7012 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
почему в казино нет часов porno Катерина Шпица <a href=https://sovsekretno.net/>Скоробогатова Ольга Николаевна порно</a> бесплатное казино porno Юлия Канакина, скелетонистка <a href=https://rucriminal.info/>порно с Георгий Джикия (футбол)</a> casino бездепозитный водка казино карты казино мелбет букмекерская контора casino ап пин ап casino pin рокс казино
#7013 Robertviseehttps://steamdesktopauthenticator.io
Steam Desktop Authenticator <a href=https://steamauthenticator.ru/>https://steamauthenticator.ru</a> is a two-factor authentication application for PC. Generates codes to confirm transactions and log in to Steam, improving the security of your account. Convenient, quick to install and easy to use solution for data protection.
#7014 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино зеркало сегодня официальные букмекерские конторы <a href=https://7club7.com/>казино 5</a> Радченко Светлана Юрьевна порно Приезжева Екатерина Геннадьевна порно <a href=https://t.me/vchkogpu_ru>porno Екатерина Ефременкова, шорт-трекистка</a> приложения букмекерских контор порно с Евгения Медведева porno Нина Пирогова, хоккеистка porno Виктория Баркова, легкоатлетка 1×bet телефон симулятор казино Радченко Светлана Юрьевна порно
#7015 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало видели такую регистрацию на
При поддержки такого поощрения оператор возможность также привлекать посетителей, которые раньше проявляли активность на веб-сайте, хотя по некий причине перестали играть. В данном случае промокод высылается пользователю по электрической почте либо вид SMS. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasin online</a> Но а случае вы теснее профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в интернет казино;Если при регистрации указать промокод, можно гарантировано получить бонус. Где брать ваучер? Посетите определенную блоги или форумы. Иногда администрация клуба делает рассылку ваучеров на электрическую почту. В заключительнее время игорные дома начали афишироваться в фильмах и телесериалах. Присмотритесь и скорее заметите промокод, кот-ый принесёт 500 или 1 000 бонусных рублей. <a href=http://www.gothicpast.com/myomeka/posters/show/78646>http://www.gothicpast.com/myomeka/posters/show/78646</a> 1хслотс официальный сайт зеркало <a href=http://alex-zarya.ru/user/Jameswible/>http://alex-zarya.ru/user/Jameswible/</a> Бездепы обычно предлагают с отыгрышем — быстро вывести выигранные свои невозможно. Перевод денег со счета несомненно возможен последствии такого, как юзер выполнит все требования казино, а сумма не быть выше установленного правилами лимита. Условиями акции фиксируются сроки, в течение которых заказчик вправе воспользоваться предложением. Обычно они не превосходят нескольких дней последствии активации.
1×slots регистрация 1×slots casino 777 online
Бездепозитный приз казино 2022 с выводом за регистрацию предоставляет вероятность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и выяснить качество работы службы. Довольно нередко, начиная игровой процесс, игрок уже отказывается останавливаться и проделывает настоящий лепта. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать даром вполне как один таки с призом за регистрацию без необходимости заносить депо.При отыгрыше бонусных средств, нужно учитывать срок деяния приза и время, которое дается на отыгрыш. По истечению заявленного медли, не отыгранный бонус будет аннулирован. <a href=https://forum.dis-course.net/viewtopic.php?t=449839>рабочее зеркало 1×slots</a> 1×slots casino регистрация <a href=http://dogecraft.ru/user/RobertMearl/>http://dogecraft.ru/user/RobertMearl/</a> Не стоит путать игру в демо и внедрение бонусов. В демонстрационном режиме игрок может расценить механику слота, сюжет и оформление. Но забава проводится на относительные кредиты, потому отсутствует основное ? ощущение пыла. Активируя промокод или фриспины, клиент по-прежнему не расходует средства деньги на игровые автоматы, хотя имеет сорвать настоящий куш!Зарегистрироваться в казино по специальной ссылке или с бонусным кодом. Подтвердить контактные данные (номер аппарата и электрическую почту). Для доказательства номера телефонного необходимо в собственном профиле указать свой номер и надавить кнопку „Подтвердить номер телефонного“, дальше Вы получите sms-сообщение с кодом, кот-ый необходимо ввести в отвечающее фон. Для подтверждения электрической почты, перейти по интенсивной ссылке в послании от казино. 1×slots зеркало на сегодня
1×slots регистрацию процедура займет всего лишь
Также учтите, что некоторые игровые платформы сузивают перечень стран, коие готовы получить предложенный бездепозитный бонус за регистрацию. К примеру, есть онлайн-заведения, выдающие подобные бонусы только жителям конкретных стран. К примеру, онлайн казино 777 Оригинал предоставляет бездепозитный бонус лишь игрокам из России и стран СНГ. Или наоборот, снабжают вознаграждением всех, считая жителей неких государств (из сего, стопам внимательно учить перечень, чтобы впоследствии не появилось никаких вопросов и жалоб).Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются незамедлительно после творенья профиля и активны непродолжительное время. Если не успеете потратить средства, они попросту сгорят. Касаемо медли, правило бонусы активны протяжении часа. <a href=https://www.efunda.com/members/people/show_people.cfm?Usr=Sladkovby1709>https://www.efunda.com/members/people/show_people.cfm?Usr=Sladkovby1709</a> Чтобы помощи увериться в превосходстве бездепозитных бонусов, достаточно зарегистрироваться в казино и получить поощрение.Также есть онлайн-платформы азартных игр, коие применяют раздачу бездепозитных бонусов в специальные даты (как для казино, так и для игрока). Помимо этого, действующие игроки кроме имеют возможность получить похожие бонусы за свою деятельность (к примеру, за повышения уровня либо за схожие заслуги). 1×slots официальный зеркало рабочее
1хслотс регистрация в 1×slots casino
<a href=http://tarratorriya.tforums.org/memberlist.php?mode=viewprofile&u=785>1×slots регистрацию более популярный вариант это</a> Иногда виде бездепа, казино дарует наименьший приз (до 50 рублей), из-за которого не заморачиваться. Новички не любят незамедлительно же вносить депо. Это обосновано неименьем навыка и сомнением. К счастью, в наше время можно получить бездепозитный приз за регистрацию в казино. Неважно собственно начислит система – фриспины либо кредиты. В любом случае вы не рискуете собственными сбережениями. Это отличная вероятность запустить понравившийся видео слот или же испытывать фортуну в настольных играх. казино 1×slots <a href=http://forum.topgamesinc.com/member.php?1168185-lyinggash17>http://forum.topgamesinc.com/member.php?1168185-lyinggash17</a> В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая приятная часть игры. Важно, зачастую бездепозитные призы в казино выдаются с ограничениями по наибольшей выплате. В среднем возможно рассчитывать на прибыль в некоторое тыщ руб. Как исключить выигрыш с приза без депо. Придётся доказать акк документально, в некоторых заведениях. Процедура верификации обязательна и делается любым игроком. О документальном доказательстве учетной записи спрашивайте в интернет чате или прочтите в правилах.
1×slots регистрация 1×slots casino 777 online
Для получения предоставленных призов вам понадобиться — ПК либо мобильное прибор, и остальное дело за малым. <a href=https://www.wattpad.com/user/Vykupavto0311>https://www.wattpad.com/user/Vykupavto0311</a> На странице представлены бездепозитные призы за регистрацию в казино редкая заслуга за коей гонятся все игроки как новенькие, например и профессионалы. Мы также уделяем великое внимание на наличие бонусов при составление рейтинга казино на средства. Бездепозитный бонус это возможность играть бесплатно и выиграть настоящие деньги.Сразу в активации промокода можно воспользоваться даром. Как уже упоминалось, бонусы бывают трёх видов – фриспины, кредиты и фриплей-бонусы. 1×slots сайт Наши специалисты изучают условия промоакции, этого в ручном режиме проверку их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и характеристики. Мы не рекламируем казино, а даем игрокам информацию о лучших из их.
<b>Смотреть еще похожие новости:</b>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=270684>1×slots бездепозитный бонус за регистрацию</a>
<a href=https://forum.home-visa.ru/viewtopic.php?f=69&t=807392&p=3018946#p3018946>1× slots регистрация в 1×slots casino</a>
<a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=8089>1×slots сайт зеркало</a>
<a href=https://forum.ltp-team.com/topic/52790–1×slots-oficialnyy-registraciya/>1×slots официальный регистрация</a>
<a href=https://rolivka.online/forum/showthread.php?tid=28837>рабочее зеркало 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Некоторые онлайн-казино без депо предлагают новым посетителям избрать приз при регистрации. Будьте внимательны: выбрав раз, вы в безоговорочном большинстве случаев не сможете воспользоваться остальными. Для всех бездепозитных бонусов действует наибольший лимит на выигрыш. Он показывает предельную сумму, коию у получить, играя на бонусные кредиты. Как только вас получится выполнить требования вейджера, возможный максимум будет переведен с бонусного счета на ведущей, а остаток несомненно списан.
#7016 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
ап казино Москалькова Татьяна Николаевна порно <a href=https://rumafia.news/>Преподобная Надежда Александровна порно</a> порно с Гатагова Ольга Анатольевна Москалькова Татьяна Николаевна порно <a href=https://www.ossetia.tv/>казино онлайн</a> симулятор казино casino betting Разуваева Ксения Денисовна порно казино рублях 1×bet официальный porno Илона Маркова, хоккеистка рабочее казино
#7017 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало на сегодня
Выбор каждого онлайн казино на нашем веб-сайте. В описании к каждому Вы сможете узнать, что получите за творенье аккаунта.Бездепозитные призы казино это экономическая компенсация, предлагаемая пользователям на дармовой основе и вероятность выступать в интернет казино даром. Если сопоставлять их с поощрениями за лепта, в свои выдаются только потом начального пополнения счета, то бездепозитные гонорары получаются даром. То есть, играющий получает возможность создавать ставки на уже место финансы, коие выдаст заведение, выполняя, этом, обыденные деянья, чтобы их извлечь (здесь идет речь о регистрация, удостоверении личности с внедрением номера телефонного, оформления заказы и т.д. ). <a href=http://filmkachat.ru/>1хслотс рабочее зеркало на сегодня</a> Бездепозитные бонусы – это исключительно занимательная и наиболее перспективная промоакция интернет-казино. Они в никакого фри-спинов, потому собственно выплаты в безвозмездных вращениях не гарантированы, как комбинации на барабанах игрового аппарата могут не сложиться. <a href=https://telegra.ph/Legal-Cannabis-Delivery-Services-Transform-Brantfords-Marijuana-Access-11–24>https://telegra.ph/Legal-Cannabis-Delivery-Services-Transform-Brantfords-Marijuana-Access-11–24</a> Чтобы получить возможность исключить выгода с бездепозитного бонуса в казино, необходимо выполнить ряд условий: рабочее зеркало 1×slots <a href=http://www.aadd2.net/vb/member.php?s=4ff8b90d103bb507817308bd13c46c4d&u=33907>http://www.aadd2.net/vb/member.php?s=4ff8b90d103bb507817308bd13c46c4d&u=33907</a>
1 xslots рабочее зеркало
Только выполнив все обстоятельства отыгрыша и дождавшись завершения проверки аккаунта, Вы можете оформить заявку на вывод средств и получить средства средства.Для выбора азартного заведения Вы можете воспользоваться списком наших казино с бонусами за регистрацию. На нашем веб-сайте мы выпустили список бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, собственно доля призов эксклюзивные и доступны только для посетителей нашего сайта по-специальному промо-коду либо по уникальной ссылке. Кроме как, для любого бонуса мы подготовили доскональный обозрение, каком Вы узнаете как получить и отыграть поощрение и как исключить свой выигрыш с бездепа. 1×slots зеркало подтвердит вашу регистрацию если говорить Во всех легальных онлайн-казино Беларуси необходимо свидетельство паспортных данных для игры — это заявка правительства страны. <a href=http://d668804q.beget.tech/user/Terrydeemy/>http://d668804q.beget.tech/user/Terrydeemy/</a> Так собственно основное различие презента на депозит от бездепа – неотъемлемое пополнение счёта. Вы можете привнести депозит и преумножить стартовый капитал или арестовать бездеп и всем не придётся рисковать собственными сбережениями. Поспешите выполнить обычные требования, и администрация ресурса начислит щедрое одобрение! казино 1×slots
1×slots официальный сайт мобильная версия скачать
<a href=http://solhyanggi.net/gb5/bbs/board.php?bo_table=free&wr_id=1304903>http://solhyanggi.net/gb5/bbs/board.php?bo_table=free&wr_id=1304903</a> Минимального оборота. Этот предел устанавливается вейджером — же игрок не сыграет на установленную необходимую, вывод средств будет недосегаем.Шаг 4. Активация. Внимательно исследуйте обстоятельства, информацию по ограничениям и сроке действия бонусного предложения. Разобравшись с правилами, можно активировать бонус в личном кабинете (времени ? с внедрением промокода) или по запросу в саппорт. 1×slots на любой вкус как пройти регистрацию
1×slots зеркало рабочее
Все любят получать подарки. Согласитесь, практически каждый играющий человек несомненно безмерно счастлив, случае получит бесплатный презент для забавы в интернет казино просто за регистрацию или же бонус за внесенный депо, например именуемые приветственные бонусы для новых игроков. Соответственно такие онлайн клубы станут более знамениты и преимущественны у игроков при выборе казино для забавы. Топ казино непрерывно обновляется и добавляются новые и увлекательные игровые клубы с привлекательной бонусной политикой и всеми вероятными привилегиями, к которым относятся эти призы как фриспины за регистрацию, валютные бездепозитные призы, еще великодушные призы за внесенный депо. Следует подчеркнуть, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом.Прочитайте управляла бонусной программы, какой желайте принять. Да, мы настоятельно рекомендуем устроить это до регистрации. 1хслот зеркало сайта <a href=http://railagent.ru/club/user/105218/>http://railagent.ru/club/user/105218/</a> Нельзя рассматривать игру на деньги, как вариант заработка. Азартные игры воспрещены для лиц младше 18 лет. Topcasinobonuses.mobi не зачинщиком азартных игр. Сайт носит информационный характер.Для проверки применяются сканы паспортов, водительских прав, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если юзер замечен в попытке завести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их владелец попадает в темный список. При ирге на лицензионной площадке не стоит опасаться указывать достоверную персональную информацию (шифрование ликвидирует утечку персональных данных).
1×slots регистрация на официальном сайте
Допустим, за регистрацию вы возымели бездеп в объеме 2 000 руб. С вейджером х30. В данном случае предстоит сделать ставок, на совместную необходимую в 60 000 руб. (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать реальные деньги. Однако не забывайте, что с любого дара получится вывести определённую сумму (почаще всего менее $200).Следует выделить, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом. Процесс подтверждения личности возможность взятьвдолг(взятьвзаймы) от одного дня до недели. Если заказчик допустил нибудь ошибку при заполнении паспортных данных, то ему стопам обратиться с задачей в саппорта онлайн-казино. <a href=http://bbs.xinhaolian.com/home.php?mod=space&uid=4708103>http://bbs.xinhaolian.com/home.php?mod=space&uid=4708103</a> Фриспины. Бесплатные вращения предусмотрены для применения в видео-слотах. Внимательно читайте обстоятельства – они нередко выдаются для некоторых машин. В зависимости от клуба вы можете создавать конкретное число ставок. Кстати, современные игорные дома дают вероятность заводить «одноруких бандитов».Бездепозитный приз за регистрацию в казино — это стартовый презент в виде валютного начисления или даровых вращений для новых игроков заведения, для получения которого не заносить депо. 1× slots casino зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=90935>1хслотс зеркало</a>
<a href=https://forum.oursson.ru/viewtopic.php?f=2&t=8823>1×slots регистрацию процедура займет всего лишь</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если вы выбираете испытанное лицензионное интернет казино и сделайте все условия получения бездепозитного бонуса, проблем с получением презента у Вас не возникнет. Итак, дабы бесплатные бонусные кредиты превратились в настоящие деньги, которыми возможность распоряжаться по своему усмотрению, их нужно отыграть. Вейджер стопам уточнять в правилах онлайн-казино.
#7018 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
часы казино порно с Елена Никитина, скелетонистка <a href=https://sovsekretno.net/>букмекерская контора бетсити</a> порно с Захарова Мария Владимировна порно с Карен Хачанов (теннис) <a href=https://strelochnik.com/>симулятор казино</a> casino buzz casino скачать приложение казино в россии порно с Сергей Бобровский (хоккей) casino зеркало сайта порно с Аделия Петросян (фигурное катание) ставки на спорт букмекерские конторы
#7019 Charlesgunnyhttp://filmkachat.ru
1×slot официальный сайт
Однако далеко не все ресурсы предлагают своим посетителям бездепозитные призы за регистрацию в казино. В большинстве случаев учтено поощрение на 1-ый депозит в размере 100–200%. Это отличная вероятность преувеличить банкролл, прирастить время, проведённое за забавой и шансы сорвать крупный куш.Но а случае вы теснее профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в интернет казино; <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> <a href=https://blog.udn.com/G_112062930339362154/181391904>https://blog.udn.com/G_112062930339362154/181391904</a> Бесплатный бонус – кредиты, которые онлайн-казино начисляет клиенту, не заставляя его пополнять игровой счет. рабочее зеркало 1×slots <a href=https://gshost.ru/user/DoctorLazutaEt/>https://gshost.ru/user/DoctorLazutaEt/</a>
1×slots официальный demo регистрация в 1×slots casino
Далее требуется отыграть вагер и исключить выигрыш. Игрокам без опыта крупно повезло, меня получить десятки подарков за одну регистрацию. Если не сумели получить Бездепозитный приз, не тревожьтесь. Обратитесь в интернет чат, оператор поможет исправить.Отзывы читателей о бонусных акциях посодействуют составить эмоцию, хотя не забывайте о субъективности собственных объяснений. <a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=57867>1хслотс официальный сайт зеркало</a> 1×slot зеркало рабочее этих способов предполагает регистрацию Максимальная ставка ? уточняется в валюте счета и ограничивает объем ставки за раз спин. В случае ее превышения приз возможность быть аннулирован. Также в правилах возможность содержаться запрет на размещение ставок конкретного облика, примеру, по равным шансам в рулетке (то есть, на чет либо нечет, красное либо черное и т.д. ). <a href=https://emiliolidw12112.thenerdsblog.com/35925830/deepnude-ai-navigating-the-complexities-of-technology-and-ethics>https://emiliolidw12112.thenerdsblog.com/35925830/deepnude-ai-navigating-the-complexities-of-technology-and-ethics</a> Зарегистрируйтесь. Для регистрации почаще всего достаточно ввести свой номер телефона и почтовый адрес, в чего ввести приобретенный код из СМС. Возможно, требуется показать промокод. В правилах акции несомненно написано, где его хотелось вводить. Иногда это надобно создавать при регистрации, времени — теснее в сотворения личного офиса, на отдельной странице. 1× slots регистрация в 1×slots casino Такой казино приз без депо за регистрацию выдается игроку на час и активно употребляется данное предложение с 2017 года. Это словно какая-то конспирация одобрения под бездепозитный. Суть всего сего сводится к тому, что геймеру на час выдается, к примеру, 1000 долларов, а реклама утверждает про, что каждой выигрыш можно несомненно дальнейшем забыть при для. Но в играющий серьезно отнесется к данному предложению, то он просто потеряет время. Ведь геймеру надо(надобно) будет выступать не в аккаунте, а в тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (и всей тысячи) в верховодила вступят определенные условия, где будет сказано, что наибольшей суммой победы может быть только двести долларов и средства можно применять лишь в качестве бонуса на 1-ый лепта с вейджером 25 от суммы гонорары плюс сам депозит. По итогу получится, что игрок выигрывал для 200% бонус с вейджером на конкретную сумму. Короче говоря, это все не вашего времени.
casino 1×slot
Для выбора азартного заведения Вы сможете пользоваться перечнем наших казино с бонусами за регистрацию. На нашем веб-сайте мы выпустили перечень бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, что часть бонусов эксклюзивные и доступны лишь для гостей нашего сайта по-специальному промо-коду либо по оригинальной ссылке. Кроме такого, для каждого бонуса мы подготовили доскональный обзор, каком Вы узнаете как получить и отыграть поощрение и как вывести свой выигрыш с бездепа.Таким образом, заведение пробует показать себя своим вероятным игрокам, а такой маркетинговый ход как казино бонус без депозита за регистрацию привлекает очень много внимания к игорному заведению и обеспечивает неизменный поток новых гостей и будущих клиентов игрового онлайн клуба. Как только на виртуальном счету окажутся бонусные свои, поспешите отыграть вейджер. Сразу последствии сего можно забыть заявку на вывод выигрыша. Кредиты выгодно отличаются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом реальных средств и дают возможность почувствовать задор. Во-вторых – можно насладиться каждой азартной забавой доступной на сайте. В вашем распоряжении присутствуют автоматы, настольные прибавление, видео-покер, Live-дилеры.Наш список включает в себя наилучшие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по важным характеристикам: <a href=http://zeren.freeoda.com/member.php?action=profile&uid=3920>http://zeren.freeoda.com/member.php?action=profile&uid=3920</a> Не рекомендуем опрометью голову хвататься за различные предложения получения средств без вложений. Вполне вероятно, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на первый взор. Альтернативой считается казино приз за депозит. Мы предлагаем вам пару советов, благодаря которым у каждого игрока будет возможность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств: 1×slots регистрация на официальном сайте Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и. Когда игроку полагается большое фриспинов, администрация возможность разбивать их начисление на количество дней. Бесплатные вращения предоставляются для конкретного слота, который указывается в правилах промоакции.
1×slots зеркало рабочее на сегодня
Это один из основных показателей привлекательности презента. С завешенным коэффициентом и мастера не смогут выполнить условия по отыгрышу. И важно, как привлекательно выглядит предложение – бездепозитный бонус казино в объеме $500 либо $1 000. Чтобы новенькие лучше вдумались, собственно же такое вейджер, мы разберём на примере.Онлайн-казино тщательно продумывают бонусные условия, коие нужно изучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и лимитирования. Не стоит путать игру в демо и внедрение бонусов. В демонстрационном режиме игрок может расценить механику слота, сюжет и оформление. Но игра ведется на относительные кредиты, поэтому отсутствует основное ? ощущение пыла. Активируя промокод или фриспины, клиент и не тратит средства деньги на игровые автоматы, хотя может сорвать реальный куш! Более крупные предложения встречаются довольно изредка. Зачастую они доступны только VIP-игрокам. В остальных случаях им всего сопутствуют очень жесткие обстоятельства отыгрыша. Также возможны вспомогательные условия и другие ограничения, прописанные в условиях и положения бонусной программы казино. 1х слот 1хслотс регистрация перейти на 1×slots <a href=http://ets-kstovo.ru/index.php?subaction=userinfo&user=efficientcuff96>http://ets-kstovo.ru/index.php?subaction=userinfo&user=efficientcuff96</a> Зачастую бездепозитные бонусы казино для игры предлагаются различными заведениями азартных игр виде рекламных промоакций или в целях вербования к себя новых игроков. Для бездепозитных призов в казино 2022 игроку не пополнять счет до момента вывода желанных средств.Подарки на дни ? посвященные торжественным датам, требующие символического отыгрыша или начисляются без такового. Могут дариться игрокам сутки рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду.
1×slots зеркало которую указывали при регистрации кстати
В большинстве заведений устроить это можно по e-mal, по номеру аппарата, спустя социальную сеть либо гугл-аккаунт. <a href=http://womans-days.ru/index.php?subaction=userinfo&user=flippantrecepta>http://womans-days.ru/index.php?subaction=userinfo&user=flippantrecepta</a> В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, нужно обратиться в службу поддержки через лайв-чат на сайте казино. казино 1×slots Допустим, за регистрацию вы получили бездеп в размере 2 000 руб. С вейджером х30. В данном случае светит сделать ставок, на совместную необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда сделайте условия по отыгрышу, придёт время заработать настоящие средства. Однако не запамятовывайте, собственно с любого подарка получится вывести определённую необходимую (почаще всего менее $200).
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.spherecommunity.net/User-JamesLop>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<a href=https://tabsgame.ru/user/Jamesbes/>1×slots casino регистрация 1×slotscasino09k online</a>
<a href=http://www.carshowsociety.com/forum.php/topic,11220.new.html#new>1хслотс казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Сроки активации приза устанавливаются любым казино, хотя почаще всего они не превосходят недели с этапа получения. Игроку обязательно нужно применять бездеп протяжении указанного срока, в ином случае приз просто пропадет. Каждый приз возможно получить только один один, поэтому в не применять бездеп в срок, у игрока не несомненно 2 шанса им пользоваться.
#7020 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Александра Степанова, фигуристка casino приложения <a href=https://kompromat1.online/>Скоробогатова Ольга Николаевна порно</a> порно с Антропова Валентина Викторовна pin up casino зеркало <a href=https://vestnik-jurnal.com/>7k casino сайт</a> casino зеркало сегодня рабочее online casino 7k porno Виктория Баркова, легкоатлетка почему в казино нет окон porno Вера Бирюкова, гимнастка 1×bet слоты 1×bet top слот casino
#7021 Charlesgunnyhttp://filmkachat.ru
зеркло казино 1×slots
Прибывшие на аккаунт финансы бездепозитные призы предназначаются, в основном, лишь для новоиспеченных юзеров, которые раньше не имели личного аккаунта в данном казино. Исходя из сего, если ранее у игрока был сделан депо, то, по всей вероятности, у него больше не несомненно возможности рассчитывать на получение такого бонуса в конкретном заведении. <a href=http://filmkachat.ru/>1×slot зеркало</a> <a href=https://www.jottacloud.com/s/371ce1751dd51e94c37a4f823d984e6a848>https://www.jottacloud.com/s/371ce1751dd51e94c37a4f823d984e6a848</a> Такой казино бонус без депо за регистрацию выдается игроку на час и активно используется данное предложение с 2017 года. Это словно какая-то конспирация одобрения под бездепозитный. Суть всего сего сводится к тому, собственно геймеру на час выдается, к примеру, 1000 $, а реклама повторяет про, что каждой выигрыш возможно несомненно в будущем оставить при себя. Но если играющий всерьез отнесется к данному предложению, то он попросту потеряет время. Ведь геймеру нужно будет выступать не в основном аккаунте, а тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (даже всей тыс. ) в управляла вступят конкретные обстоятельства, где несомненно сказано, собственно наибольшей суммой победы может быть лишь двести долларов и деньги можно применять лишь виде приза на 1-ый вклад с вейджером 25 от суммы вознаграждения плюс сам депо. По итогу получится, собственно игрок выигрывал себе 200% приз с вейджером на конкретную сумму. Короче разговаривая, это все не стоит вашего медли.Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депо может отличаться до 30 дней. 1×slots casino зеркало <a href=http://krast-studio.ru/user/ForsedropOr/>http://krast-studio.ru/user/ForsedropOr/</a> Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте условия – они нередко выдаются для неких машин. В зависимости от клуба вам делать определенное число ставок. Кстати, современные игорные жилища выделяют возможность заводить «одноруких бандитов».Такой казино бонус без депозита за регистрацию выдается игроку на час и активно употребляется данное предложение с 2017 года. Это как бы какая-то конспирация одобрения под бездепозитный. Суть всего этого сводится к тому, что геймеру на час выдается, к примеру, 1000 $, а реклама повторяет о том, что любой выигрыш возможно будет в забыть при себе. Но случае играющий всерьез отнесется к этому предложению, то он попросту потеряет время. Ведь геймеру надо(надобно) несомненно выступать не в основном аккаунте, а тренировочном и с ограниченным выбором автоматов и ставок. Да и если, тогда, выигрыша (числе всей тыс. ) в управляла вступят определенные условия, где будет сказано, собственно наибольшей суммой победы возможность быть только двести $ и средства возможно использовать только виде бонуса на 1-ый лепта с вейджером 25 от суммы гонорары плюс сам депо. По результату получится, что игрок выигрывал себе 200% бонус с вейджером на конкретную сумму. Короче говоря, это все не стоит вашего медли.
1×slots рабочее зеркало
В настоящее время получить приз за регистрацию в казино очень просто. Почти каждый игорный жилище с радостью предоставит деньги либо бесплатные вращения. Многие игроки используют данным и не стыдятся регистрироваться в каждом клубе с прибыльными условиями. Кстати, это замечательная вероятность придумать выигрышную тактику и сорвать куш. 1×slos регистрация в 1×slots casino <a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=3738>http://www.predictive-datascience.com/forum/member.php?action=profile&uid=3738</a> Как лишь на виртуальном счету окажутся бонусные средства, поспешите отыграть вейджер. Сразу последствии сего можно забыть заявку на вывод выигрыша. Кредиты выгодно выделяются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом реальных средств и дают вероятность почувствовать азарт. Во-вторых – можно насладиться каждой азартной игрой доступной на веб-сайте. В вашем постановлении присутствуют автоматы, настольные прибавленье, видео-покер, Live-дилеры.Фриспины — благотворительные вращения, коие разрешают игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины числятся наиболее популярным и преимущественным видом бонуса — безвозмездные вращения порой эффективнее и веселее в отыгрыше, чем другие облики бездепов. 1×slots зеркало 1хслотс регистрация перейти на 1×slots
1×slots зеркало рабочее на сегодня
Классическая разновидность приза за творенье аккаунта. Его преимущество содержится том,, что клиент имеет помощи избирать аппараты и делать ставки в них. Иногда перечень игровых автоматов ограничен оператором, но все также это чем, чем единственный доступный слот, как когда с использованием фриспинов. <a href=https://backpacker-footsteps.com/backpacker-footsteps-forum/profile/jameswah/>https://backpacker-footsteps.com/backpacker-footsteps-forum/profile/jameswah/</a> При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое возможно предназначить игре в казино.Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. 1×slots регистрация то дальше необходимо пройти Пoдтвepдить личнocть посетителя. Для удачного вывода средств, необходимо подтвердить лицо посетителя. Нa этaпe вepификaции пpoфиля, сотрудники службы безопасности должны убедиться, что у игрока всего лишь раз аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не может исключить собственный выигрыш, случае у него будет несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы.
1× слот зеркало
Только выполнив все обстоятельства отыгрыша и дождавшись окончания ревизии аккаунта, Вы сможете оформить заявку на вывод средств и получить свои средства.Не советуем опрометью голову хвататься за различные предложения получения средств без инвестициям. Вполне возможно, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на 1-ый взгляд. Альтернативой является казино бонус за депо. Мы предлагаем вас пару советов, благодаря коим у каждого игрока будет возможность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом денег: <a href=http://www.ihavethepussy.com/de/threads/216064–1×slots-casino-%D0%A1%D0%82%D0%A0%C2%B5%D0%A0%D1%96%D0%A0%D1%91%D0%A1%D0%83%D0%A1%E2%80%9A%D0%A1%D0%82%D0%A0%C2%B0%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A1%D0%8F-1×slots-review-live?p=233626#post233626>1×slots casino регистрация 1×slots review live</a> 1хслот 1хслотс регистрация перейти на 1×slots <a href=http://douga.fudousan.info/profile.php?u=barbarouskismet>http://douga.fudousan.info/profile.php?u=barbarouskismet</a>
1×слотс казино
<a href=http://newoasisforlife.org/new/home.php?mod=space&uid=98646&do=profile>http://newoasisforlife.org/new/home.php?mod=space&uid=98646&do=profile</a> зеркло казино 1×slots Существуют казино с бонусом за регистрацию, каких довольно модны фриспины в интернет казино впоследствии регистрации в определенных забавах. Они встречаются даже почаще безвозмездных поощрений либо традиционных бонусов в казино без вложений. Например, игрок регистрирует счет, на кот-ый начисляются бесплатные игры, приз за регистрацию повторяющий бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса игры выигрывает настоящие деньги, которые в последствии можно удачно исключить из заведения на собственную платежную систему. То есть, есть все шансы исключить средства без рисков своими деньгами. Регистрация, за игры получит бонусы, займет несколько, а спасибо данному можно прирастить 5 евро поощрений до тыс. И без всяких проблем исключить их.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.globalvision2000.com/forum/member.php?action=profile&uid=1072499>1× slots casino официальный сайт</a>
<a href=https://shopcms.vsupport.club/topic/15576–1kladtop-%D0%A0%C2%B7%D0%A0%C2%B0%D0%A1%E2%80%A6%D0%A0%D1%95%D0%A0%D2%91%D0%A0%D1%91-%D0%A0%D0%85%D0%A0%C2%B0-%D0%A1%D0%83%D0%A0%C2%B0%D0%A0%E2%84%96%D0%A1%E2%80%9A-%D0%A1%E2%80%9A%D0%A0%C2%B0%D0%A0%D1%98%D0%A0%C2%B1%D0%A0%D1%95%D0%A0%D0%86-%D0%A0%D1%94%D0%A1%D1%93%D0%A0%D1%97%D0%A0%D1%91%D0%A1%E2%80%9A%D0%A1%D0%8A-%D0%A1%D0%83%D0%A0%D1%94%D0%A0%D1%95%D0%A1%D0%82%D0%A0%D1%95%D0%A1%D0%83%D0%A1%E2%80%9A%D0%A1%D0%8A-%D0%A0%C2%B0%D0%A0%C2%BB%D0%A1%D0%8A/?p=93695>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный приз предоставляется новому игроку за определенные деянья. Часто подарок вид средств или фриспинов выдается за регистрацию, спасибо чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. Но на некоторых азартных платформах подобные гонорары шансы получить и уже зарегистрированные юзеры. В этом случае, бонусы предоставляются в оригинальных акций или же неким игрокам в виде акционного предложения, коие прибывает на почту с целью «возвратить» игрока в свое казино.
#7022 Jeffreyarime
http://gramster.ru/ pinup 2025
#7023 Charlesgunnyhttp://filmkachat.ru
1×slot рабочее зеркало
Также учтите, собственно некоторые игровые платформы сужают перечень государств, которые готовы получить предложенный бездепозитный приз за регистрацию. К примеру, существуют онлайн-заведения, выдающие подобные бонусы только обитателям конкретных стран. К примеру, онлайн казино 777 Оригинал предоставляет бездепозитный бонус только игрокам из России и стран СНГ. Или наоборот, пичкают вознаграждением всех, считая обитателей некоторых государств (как сего, следует пристально учить список, дабы потом не появилось практически вопросов и претензий). <a href=http://filmkachat.ru/>1×slots официальный сайт мобильная версия</a> Таким образом, заведение пытается продемонстрировать себя своим потенциальным геймерам, а подобный рекламный ход как казино приз без депозита за регистрацию завлекает довольно большое внимания к игорному заведению и обеспечивает неизменный поток свежих гостей и будущих клиентов игрового интернет клуба.Во время игры в казино, выигрыши, полученные благодаря бесплатным призовым фондам, суммируются и срабатывают в общую необходимую для отыгрывания. Однако, если фортуна улыбнется и получится отыграть все призы, игровое заведение гарантированно допустит исключить финансовые средства. Сумма вывода будет зависеть от лимита, утвержденного непосредственно в этом учреждении. Поэтому, пристально нужно читать верховодила выдачи безлимитных депо. <a href=https://jumpshare.com/v/uWsLzlmeD4r9OIw98Fgn>https://jumpshare.com/v/uWsLzlmeD4r9OIw98Fgn</a> Нет. Для получения бездепозитного приза в казино необходима обязательная регистрация на сайте. Играть в слоты безвозмездно и без регистрации возможно только в демо режиме.Игрокам не следует воспринимать приветственный бонус как гарантированный метод получить большой выигрыш, хотя это отличная возможность без расходов оценить перечень казино. 1×slots официальный регистрация <a href=https://unitywizards.uk/member.php?action=profile&uid=69371>https://unitywizards.uk/member.php?action=profile&uid=69371</a> Как только на виртуальном счету окажутся бонусные средства, поспешите отыграть вейджер. Сразу после сего возможно оставить заявку на вывод выигрыша. Кредиты прибыльно выделяются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом настоящих средств и дают возможность ощутить азарт. Во-вторых – можно насладиться любой азартной игрой доступной на сайте. В вашем постановлении присутствуют автоматы, настольные прибавление, видео-покер, Live-дилеры.Срок отыгрыша — это этап, кот-ый наступает в момент активации бонуса и кончается с его закрытием. Пользователю необходимо уложиться в данный временной зазор, по призовые свои аннулируются. Казино устанавливают перечень игр, ставки в которых засчитываются при расчете отыгранных денег. Если тайтл не заходит в данный перечень, то ему быть недосегаем для загрузки период действия бонусного предложения.
1хслотс регистрация в 1×slots casino
За вербование приятеля ? в рамках партнерской программки клиент получает вознаграждение за вербование свежих юзеров.Но а случае вы уже профи по интернет казино, кликаем на красную кнопку «Получить» и Вы автоматически перейдете в интернет казино; 1×slots официальный сайт, скачать Мы собрали и выпустили список наилучших бездепозитных казино с призами за регистрацию, коие гарантируют щедрые выигрыши и мгновенные выплаты.Подарки на праздничные ? посвященные торжественным датам, требующие условного отыгрыша или начисляются без это. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду. <a href=https://forum.green.ir/member.php?action=profile&uid=4512>https://forum.green.ir/member.php?action=profile&uid=4512</a> Срок отыгрыша — это период, который наступает в момент активации бонуса и завершается с его закрытием. Пользователю нужно уложиться в данный временной промежуток, другому призовые средства аннулируются. Казино устанавливают перечень игр, ставки каких засчитываются при расчете отыгранных денег. Если тайтл не входит в этот список, то ему быть недосегаем для загрузки в действия бонусного предложения.Для верификации номера аппарата, в собственном профиле изберите опцию „Подтвердить номер аппарата“ и введите в соответствующее фон код, приобретенный в sms-сообщении. 1× слот зеркало Иногда в бездепа, казино дарует минимальный бонус (до 50 руб. ), из-за которого не заморачиваться.Таким образом, заведение пытается показать себя своим вероятным игрокам, а подобный маркетинговый ход как казино бонус без депозита за регистрацию привлекает довольно большое внимания к игорному заведению и обеспечивает постоянный струю новых посетителей и грядущих клиентов игрового интернет клуба.
1хслотс мобильная версия зеркало
Простая процедура получения бездепозитного бонуса, кот-ая займет менее 2-х минут. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные.Чтобы бездеп не был начислен на Ваш аккаунт, Вам не активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт автоматически, а Вы не планируете его использовать, обратитесь в службу поддержки с пожеланием отменить бездепозитный бонус. <a href=http://e-regata.com/bitrix/redirect.php?goto=http://lihachev.ru/bitrix/redirect.php?goto=http://filters.by/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/RQS-dZPUayS>http://e-regata.com/bitrix/redirect.php?goto=http://lihachev.ru/bitrix/redirect.php?goto=http://filters.by/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/RQS-dZPUayS</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots Размер бонусов чаще всего чисто символический и не превышает 50 руб. Приятно, хотя осязаемым бустом при навряд станет.
x1 slots 1хслотс регистрация перейти на 1×slots
Для вывода средств приз нужно несомненно отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами акции и вариантами отыгрыша бездепозитного бонуса до его получения, чтобы избежать конфликтных ситуаций.Для ревизии применяются сканы паспортов, водительских прав, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь обнаружен в попытке ввести вспомогательный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в темный список. При игре на лицензионной площадке не бояться свидетельствовать достоверную персональную информацию (шифрование ликвидирует утечку персональных данных). <a href=https://melhorlance.com.br/author/jamesbom/>1×slots официальный сайт зеркало рабочее</a> 1×slots зеркало <a href=http://www.rhl-mod.ru/members/106225-jasperineda/>http://www.rhl-mod.ru/members/106225-jasperineda/</a> Но есть игорные заведения, коие готовы просто так жертвовать деньги на игру. Для сего довольно сделать профиль. Чтобы исключить собственный выигрыш, вас поначалу нужно выполнить обстоятельства отыгрыша, указанные в условиях получения бездепозитного депо.
1×slots зеркало регистрация в 1×slots casino
Для вывода средств бонус надо(надобно) несомненно отыграть законам, установленным казино. Внимательно ознакомьтесь с правилами акции и вариантами отыгрыша бездепозитного бонуса до его получения, чтобы избежать конфликтных ситуаций.На нашем сайте Вы найдете перечень своевременных свежих бездепозитных призов в казино 2022 года. Также, есть большое эксклюзивных услуг, коие доступны только посетителям нашего сайта в регистрации по нашей ссылке или активации специального промокода. <a href=https://google.com.cy/url?q=https://doctorlazuta.by/>https://google.com.cy/url?q=https://doctorlazuta.by/</a> 1×slot регистрация
<b>Смотреть еще похожие новости:</b>
<a href=http://3ak.cn/home.php?mod=space&uid=187057>скачать 1×slots на андроид мобильная версия</a>
<a href=http://diplomka.jakubfiser.com/wolf/plugins/comment/image.php>казино 1× slots официальный сайт</a>
<a href=http://3ak.cn/home.php?mod=space&uid=187057>1×slots зеркало видели такую регистрацию на</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Условия отыгрыша приза. Если Вы расчитываете заработать на бездепозитном призе, то в первую очередь внимание на велечину вейджера и срок, кот-ый дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, что, этим проще отыграть приз и исключить выигрыш.
#7024 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Петрова Ольга Викторовна порно casino бездепозитный <a href=https://t.me/vchkogpu_ru>porno Александр Соболев (футбол)</a> официальные букмекерские конторы скачать porno Ангелина Гончаренко, хоккеистка <a href=https://strelochnik.com/>казино фильм</a> Елизавета Боярская сайт винлайн букмекерская контора 1×bet зеркало xbet ramenbet casino сайт казино вход яндекс казино порно с Диана Шнайдер (теннис)
#7025 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
Баланс игрока пополняется на подобающую необходимую. К ней применяется вейджер, обозначенный в правилах акции. Вывести выигрыш возможно будет последствии того, как юзер устроит требуемый объем ставок из собственных средств. В редчайших случаях бездеп трудится в формате Free Play. На счет юзера зачисляется крупная сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по завершении этого периода сумма на счету несомненно превосходить первоначальную, то разницу возможно будет вывести либо применять для последующих ставок. <a href=http://filmkachat.ru/>онлайн казино 1×slots</a> Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие появляются у начинающих. <a href=http://www.gothicpast.com/myomeka/posters/show/78646>http://www.gothicpast.com/myomeka/posters/show/78646</a> Фриспины без депо или дополнительные средства помогут поближе познакомиться с игровой платформой и её функциями. За счёт презентов возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям ради забавы против живых крупье.Заработать на бездепозитных призах за регистрацию в казино может любой пользователь, достигший совершеннолетия. 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=http://ariangallery.com/bbs/board.php?bo_table=free&wr_id=79085>http://ariangallery.com/bbs/board.php?bo_table=free&wr_id=79085</a> Многие новички колеблются, собственно поощрительный приз не нужно будет отдавать, числе если они выиграли у казино. Это абсолютно неопасно и надежно. Выводя выигранные свои, игрок просто одергивает свое участие деле и утрачивает уникальную возможность – бесплатно увеличивать собственное вещественное положение.
1×slot рабочее зеркало
<a href=https://demo.comuni-italiani.it/forum/viewtopic.php?f=9&t=433289>1×slots регистрация 1×slots casino 777 online</a> 1×slots казино зеркало <a href=http://amurvoda.ru/index.php?subaction=userinfo&user=dispensablespee>http://amurvoda.ru/index.php?subaction=userinfo&user=dispensablespee</a> Также учтите, собственно кое-какие игровые платформы сузивают список стран, коие способны получить предложенный бездепозитный приз за регистрацию. К образцу, есть онлайн-заведения, выдающие похожие бонусы лишь обитателям определенных государств. К примеру, онлайн казино 777 Оригинал дает бездепозитный приз лишь игрокам из России и стран СНГ. Или наоборот, снабжают вознаграждением всех, кроме жителей неких государств (исходя из сего, следует внимательно учить перечень, чтобы потом не возникло практически вопросов и претензий).На критериях отыгрыша бесплатных бонусов идет тормознуть подробнее. С ними связаны аспекты, коие невозможно забыть без внимания. 1хслот зеркало сайта Не трудно догадаться, что not the slightest deposit bonuses практически разу не посещают великими. Чаще всего идет о пяти–тридцати баксах (или эквиваленте этой суммы в другой еденице).
1×slots коды
Акции распространяются как на все забавы казино, так и на ограниченный список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и. Промо возможность обхватывать разработки 1-го производителя. Бездеп не пересекается с другими промоакциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, сделанные бонусными деньгами. Для идентификации платежных реквизитов игрока имеет понадобиться пополнение счета на наименьшую необходимую.Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации подарка необходимо подтвердить электронную почту и привязать телефонный; <a href=http://yunduost.com/home.php?mod=space&uid=20166>http://yunduost.com/home.php?mod=space&uid=20166</a> В интернет-сети всегда можно найти перечни наиболее известных и обещанных поощрительных программ от знаменитых онлайн-казино. онлайн казино 1×slots Зачастую бездепозитные призы казино для забавы предлагаются различными заведениями азартных игр в качестве рекламных акций или в целях привлечения к для свежих игроков. Для бездепозитных бонусов в казино 2022 игроку не пополнять счет до этапа вывода желаемых средств.
1×slots casino регистрация 1×slotscasin online
Для верификации аккаунта нужно дать спецам технической поддержки отсканированную копию паспорта и счета за коммунальные предложения, а также фотку банковской карты или снимок странички электрического кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности.Но есть игорные заведения, которые готовы просто например жертвовать средства на забаву. Для этого достаточно сделать профиль. Чтобы исключить собственный выигрыш, для поначалу нужно выполнить обстоятельства отыгрыша, указанные в условиях получения бездепозитного депозита. 1×slots зеркало рабочее <a href=https://forums.dfine.net/member.php?action=profile&uid=1177>https://forums.dfine.net/member.php?action=profile&uid=1177</a>
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Подарки на конкретные даты выделяются критериями получения. Если поощрение начисляют игроку на денек рождения, то сумма обычно зависимости от общего объема депозитов последний год. <a href=http://www.kiripo.com/forum/member.php?action=profile&uid=1116871>http://www.kiripo.com/forum/member.php?action=profile&uid=1116871</a> 1×slots официальный сайт мобильная версия
<b>Смотреть еще похожие новости:</b>
<a href=https://www.mshowto.org/forum/members/jamespauri.html>1×slots зеркало быструю регистрацию а также мгновенное</a>
<a href=https://russiancomputerservice.ru/user/JosephCer/>казино 1×slots</a>
<a href=http://mandala-app.com/forums/memberlist.php?mode=viewprofile&u=3447>1×slots casino зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Самые новые бездепозитные бонусы в казино за регистрацию 2022 года с выводом прибыли присутствуют на этой страничке. Посетитель имеет оценить обстоятельства получения и начать играть на средства без внесения депо. При данном игроку принципиально понимать, на каких критериях и какими способами у исключить полученный выигрыш. Для сего нужно оценить список присоединенных платежных систем. Основное отличие что, что для получения бездепа нужно пополнять баланс в казино. Но кроме сего, есть ряд и других отличий:
#7026 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино смотреть самое казино <a href=https://krtka.info/>порно с Евгения Медведева</a> скачать casino на андроид порно с Дарья Клишина, легкоатлетка <a href=https://rucriminal.info/>1×bet 1</a> 1×bet приложение официальная казино порно с Алина Загитова порно с Александр Большунов (лыжные гонки) porno Юлия Канакина casino pin официальный casino вход
#7027 Kolyaska_znmahttps://kolyaska-3-v-1-msk.ru/
Как выбрать коляску 3 в 1: советы и рекомендации, которые обязательно пригодятся. Популярные варианты колясок 3 в 1, с широким функционалом и стильным дизайном. Как выбрать коляску 3 в 1: полезные советы, для того, чтобы учесть все нюансы. Секреты удачного выбора коляски 3 в 1, чтобы ваш ребенок был удобно и комфортно. Какую коляску 3 в 1 выбрать: опыт других родителей, и сделать правильное решение. cybex balios s 3 в 1 <a href=https://kolyaska-3-v-1-msk.ru/>https://kolyaska-3-v-1-msk.ru/</a> .
#7028 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slots review live
Новички не любят незамедлительно же вносить депо. Это обосновано отсутствием навыка и сомнением. К счастью, в можно получить бездепозитный приз за регистрацию в казино. Неважно собственно начисляет система – фриспины либо кредиты. В всяком случае вы не рискуете собственными сбережениями. Это замечательная вероятность запустить приглянувшийся видео разъем или же испытать фортуну в настольных забавах.Иногда в поощрения за регистрацию имеют выдаваться билеты для роли в турнирах. Условия их проведения очень отличаются, потому мы советуем ознакомиться с каждым предложением отдельно. <a href=http://filmkachat.ru/>1×slots регистрация на официальном сайте</a> Принципиальным различием безвозмездных бонусов от бонусов на депо является отсутствие необходимости вносить деньги на акк. Из-за сего их нередко нарекают бездепозитными (no deposit bonuses). <a href=https://jumpshare.com/v/uWsLzlmeD4r9OIw98Fgn>https://jumpshare.com/v/uWsLzlmeD4r9OIw98Fgn</a> 1×slots регистрация на официальном сайте <a href=http://www.carshowsociety.com/forum.php?action=profile;u=6084>http://www.carshowsociety.com/forum.php?action=profile;u=6084</a> Бездепозитные призы — это подарки от казино в виде бонусных денег либо фриспинов для игровых автоматов, коие начисляются на аккаунт игрока последствии процедуры регистрации на сайте заведения. Для получения этих поощрений депо не требуется.
1хслотс регистрация в 1×slots casino
Условия отыгрыша приза. Если Вы расчитываете заработать на бездепозитном бонусе, то начала направьте на значение вейджера и срок, кот-ый дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть приз и исключить выигрыш. <a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=67160>1×slots официальный сайт зеркало</a> 1× slots сайт <a href=https://krok.biz/forum/memberlist.php?mode=viewprofile&u=38415>https://krok.biz/forum/memberlist.php?mode=viewprofile&u=38415</a> 1×slots рабочее зеркало
1×slots официальный сайт зеркало
Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.В интернет-сети постоянно возможно отыскать списки наиболее известных и обещанных поощрительных программ от известных онлайн-казино. <a href=http://www.91hongyi.com/member/index.php?uid=aloofdairy46>http://www.91hongyi.com/member/index.php?uid=aloofdairy46</a> Если вы выбрали себе количество брендов которые вас больше всего приглянулись, для неизменной игры! Таких гемблеров казино очень предпочитает и оценивает, за частую эти игроки становятся VIP игроками заведения, коим часто поступают прибыльные предложения вид призов, так же туда заходит и бездепозитные.Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом прибыли присутствуют на этой странице. Посетитель возможность расценить обстоятельства получения и начать играть на деньги без внесения депо. При этом игроку принципиально понимать, на каких условиях и какими способами него вывести полученный выигрыш. Для этого нужно расценить перечень присоединенных платежных систем. 1×slots бездепозитный бонус за регистрацию Как правило, при выводе финансов, от играющего потребуется только устроить наименьший вклад для того, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом собственный счет.Приветственный бездеп предоставляется хоть игроку только раз один. Казино дерутся с так нарекаемыми бонусхантерами (от англ. Bonus Hunter — доброволец за призами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения дара. Исключить подобные деяния разрешает верификация данных. Администрация вправе потребовать у клиента подтвердить персональные данные, указанные при регистрации.
1×slots регистрация на 1хслотс
При пользовании бездепозитным бонусом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют количество обликов лимитов:Превышение наибольшей ставки при отыгрыше. Система автоматически не предупреждает о превышении ставки, потому о несоблюдении верховодил игрок может узнать уже после подачи запроса на вывод средств. Размер бонуса. В качестве бездепов обычно начисляют маленькие суммы, а когда речь идет о призах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино имеют подарить игроку до 2000$.Чтоб получить большой выигрыш, избирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, которые доступны по условиям отыгрыша. скачать 1×slots официальный сайт <a href=https://cse.google.ad/url?q=http%3A%2F%2Fdoctorlazuta.by>https://cse.google.ad/url?q=http%3A%2F%2Fdoctorlazuta.by</a> Вейджер (или вагер) ? это наименьшая сумма ставок, коию необходимо устроить для вывода денежного бонуса. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, тем привлекательнее спецпредложение.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Свежий приз начисляется в виде денежных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в пользовании средствами, ну случае отыгрыша оператор может установить лимитирование на вывод средств. Иногда у гостей вебсайта имеют появиться трудности, задачи, препядствия при активации полученного промо-кода. В этих случаях, необходимо обратиться за поддержкою в службу «Support». Для получения ответа, непременно указывается определенная причина воззвания и подтверждается информация дополнительными экрана. Если сложилась неоднозначная ситуация, всегда возможно обратиться к основному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ. <a href=http://rosttour.com/user/DoctorLazutaSl/>http://rosttour.com/user/DoctorLazutaSl/</a> При правильном раскладе бездепы — это прекрасный метод играть на средства без растраты собственных средств. Есть несколько советов, следуя коим можно извлечь максимум пользы из сходственных промоакций казино. Играть по только на лицензированных площадках. Скриптовые сайты не только дурачат с бонусными услугами, хотя и употребляют пиратский софт с модифицированным ГСЧ. Выиграть на этих автоматах нереально.Когда идет о получении бездепозитных бонусов в казино, для направьте на следующие условия: онлайн казино 1×slots Существуют казино с призом за регистрацию, каких очень модны фриспины в интернет казино впоследствии регистрации в конкретных играх. Они встречаются и чаще безвозмездных поощрений либо традиционных призов в казино без вложений. Например, игрок регистрирует счет, на кот-ый начисляются бесплатные забавы, бонус за регистрацию в виде даровых фрспинов, вращения в игровом автомате. Во время игрового процесса компьютерные выигрывает настоящие средства, коие в последствии можно успешно исключить из заведения на свою платежную систему. То есть, все шансы исключить свои без рисков собственными финансами. Регистрация, какую компьютерные получит призы, займет минут, а благодаря этому можно увеличить пять евро поощрений до тыс. И без всяких заморочек вывести их.
<b>Смотреть еще похожие новости:</b>
<a href=https://forums.scar-divi.com/topic/583730–1×-slots-casino-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE/>1× slots casino зеркало</a>
<a href=http://lider1c.ru/communication/forum/messages/forum5/message20468/16393-kazino-1×slots?sessid=991ec0aeee6941bb8e6dac7e002a3c13&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>казино 1×slots</a>
<a href=https://nztw.org/forum.php?mod=viewthread&tid=525497&pid=849456&page=1&extra=#pid849456>рабочее зеркало 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки могут запросить вспомогательные документы либо инициировать краткое общение по Skype. Выбор любого интернет казино на нашем сайте. В описании к каждому Вы можете разузнать, что получите за творенье аккаунта.
#7029 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации 2025
Но есть игорные заведения, коие готовы просто так жертвовать средства на забаву. Для этого достаточно создать профиль. Чтобы вывести собственный выигрыш, вас сначала необходимо выполнить условия отыгрыша, указанные в критериях получения бездепозитного депо.Как правило, при выводе финансов, от играющего требуется только сделать наименьший вклад чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом индивидуальный счет. <a href=http://filmkachat.ru/>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a> <a href=https://www.dr-ay.com/blogs/217116/Mastering-Architectural-Rendering-From-Vision-to-Visual-Reality>https://www.dr-ay.com/blogs/217116/Mastering-Architectural-Rendering-From-Vision-to-Visual-Reality</a> 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=http://www.fumankong9.cc/home.php?mod=space&uid=627301>http://www.fumankong9.cc/home.php?mod=space&uid=627301</a>
1×slots рабочее зеркало
Вы не в коем случае ни же рискуете, а только выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс изучить игровые автоматы, выучится регулировать менять ставки и линии, исследовать бонусные игры и их выигрышные композиции, ну в просто зарядится кучей впечатлений! Ведь вы будите выступать на бонусные средства, которые возможно отыграть и вывести, но просто на демо счет, тем самым адреналин в крови еще повысится а пульс забьется с нередким ритмом! <a href=http://sharecovid19story.com/memberlist.php?mode=viewprofile&u=5122>1×slots casino регистрация 1×slots review live</a> 1×slots регистрацию более популярный вариант это В некоторых интернет казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на сайте клуба и подтвердить свои контактные данные. Дополнительно требуется активация промокода. <a href=http://l-avt.ru/support/dialog/?PAGE_NAME=profile_view&UID=67642>http://l-avt.ru/support/dialog/?PAGE_NAME=profile_view&UID=67642</a> 1×slots официальный сайт мобильная версия скачать За привлечение приятеля ? масштабах партнерской программы заказчик получает вознаграждение за вербование новых пользователей.
1х слот регистрация в 1×slots casino
Если речь об неповторимых услугах, имеет понадобиться регистрация в казино по ссылке с партнерского вебсайта. Но надо мыслить, что снабжая пользователей такими бонусами, казино занимается спонсированием. Ведь объемы вознаграждений, в, не великие (средним размером от 5 до 20 $). И на эти свои налагаются определенные условия и лимитирования, обязательные к исполненью игрока, если в последствии он вожделеет получить все средства выигранные финансы.В разделе с призами активировать собственный подарок. Найти игры, для коих учтено одобрение и использовать приз по предназначению. <a href=http://www.audipiter.ru/user/PorsedropEn/>http://www.audipiter.ru/user/PorsedropEn/</a> 1хслот 1хслотс регистрация перейти на 1×slots Подарки на дни ? приуроченные к парадным датам, требующие условного отыгрыша либо начисляются без такового. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду.
1хслотс казино зеркало
Чаще всего, знаменитые сервисы, такие как MoneyBookers и WebMoney, еще MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно обязательное верховодило. Финансовые свои выводятся лишь спустя что, эту платежную систему, которой огромной для пополнения депозита. Если же игрок получил бездепозитный покерный бонус, потребуется восполнить счет на минимальную сумму, кот-ая составляет обыкновенно десять $. Хотя бесплатные призы начисляются без депозита, не исключено, собственно для понадобиться вносить средства. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только после того, как новый клиент впервые пополнит игровой счет.Фриспины – благотворительные вращения с фиксированной ставкой, которые можно применять в конкретных игровых автоматах. Получить приветственный бонус могут лишь новые клиенты онлайн-казино. Способы описаны в критериях промоакции каждого легального казино, почаще всего это: 1×slots зеркало рабочее на сегодня <a href=http://91hongyi.com/member/index.php?uid=opolikiky>http://91hongyi.com/member/index.php?uid=opolikiky</a> Срок отыгрыша — это период, который начинается в момент активации приза и завершается с его закрытием. Пользователю нужно уложиться в этот временной промежуток, по призовые средства аннулируются. Казино устанавливают список игр, ставки в которых засчитываются при расчете отыгранных средств. Если тайтл не входит в этот список, то предоставляется быть недоступен для загрузки во время деяния бонусного предложения.Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, чтобы снова получить бесплатный приз. Игорные заведения нетерпимы к бонус-хантерам, потому вас ждет неминуемое санкция.
казино 1×slots официальный сайт
<a href=http://elite-models.cc/member.php?action=profile&uid=21123>http://elite-models.cc/member.php?action=profile&uid=21123</a> Фриплей-бонусы. Бонусы за благотворительную забаву есть лишь в неких клубах. Они зачисляются сразу после сотворения профиля и срабатывают недолговременное время. Если у вас нет медли потратить свои, они просто завершатся. Что касается медли, в большинстве случаев призы срабатывают протяжении одного часа.Варианты выигрыша находятся от Вашей удачи и критерий игорного портала. Выше мы сказали, что кое-какие бездепозитные призы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются они, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность современных игр на деньги, возможно выиграть невозможные суммы. Сегодняшние игровые автоматы либо видео слоты, как их нарекают. Могут выдавать солидные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000. 1×slot зеркало рабочее этих способов предполагает регистрацию
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.spherecommunity.net/User-JamesLop>казино 1×slots официальный сайт</a>
<a href=https://forum.dis-course.net/viewtopic.php?t=450807>1×slots casino регистрация 1×slotscasin online</a>
<a href=https://timepost.info/showthread.php?tid=66994>1×slots регистрация 1×slots casino 777 online</a>
<a href=https://masstr.net/showthread.php?tid=120099>1хлот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Не стоит незамедлительно же отказываться от приветственных презентов в похожих казино. Администрация готова начислить средства либо фриспины, хотя предварительно работники должны увериться, что вы не аферист. Дело в, собственно развелось слишком много охотников за призами. Они выучились врать систему и наваривать солидные суммы денег. Бывают ли бездепозитные бонусы без вейджера? Бывают, случае у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный бонус за регистрацию уточняется вейджер во всех казино.
#7030 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало
Похожим образом трудится 3-ий способ доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения клиента или в связи с получения им VIP-статуса. Подарок предоставляется в воззвания в поддержку и ревизии.B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. <a href=http://filmkachat.ru/>1×slots зеркало регистрация то дальше необходимо пройти</a> Промокод – определённая композиция знаков, коию нужно ввести в соответствующее фон при создании учетной записи или активировать в собственном профиле игрока в разделе с бонусами. <a href=https://vhearts.net/forums/thread/8949/>https://vhearts.net/forums/thread/8949/</a> Отыграв бездепозитный бонус в казино с выводом тоже придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если схожее ограничение присутствует, то единоразово исключить получится только необходимую, не превосходящую размер приобретенного приза.Вы скорее, скажем, как все любите получать презенты и бездепозитные бонусы казино. Игорные жилища брали в повадку одаривать гэмблеров приятными призами. Стать владельцем приветственного презента возможно за творение профиля или пополнение счёта. Второй вариант больше занимательный, ведь клубы готовы удвоить депо! Но случае вы новичок и только знакомитесь с миром азарта, лучше воспользуйтесь призом за регистрацию. 1×slots актуальное зеркало <a href=https://velorout.com.ua/user/Davidwroro/>https://velorout.com.ua/user/Davidwroro/</a> Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?Пoдтвepдить личнocть посетителя. Для удачного вывода средств, необходимо подтвердить личность клиента. Нa этaпe вepификaции пpoфиля, работники службы защищенности должны убедиться, собственно у игрока не раз акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не может исключить свой выигрыш, в у него несомненно количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы.
1×slots казино зеркало
<a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/7142–1×slots-kody#7152>1×slots коды</a> 1×slots официальный сайт скачать Если ординарными текстами, бездепы – это определённая сумма денег или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно брать презенты. Но есть некоторые аспекты. Существуют игорные жилища, которые перед тем как начислить бонусы требуют привязать аппарат, дать копии документов.Доступность — бездепозитные призы в казино чаще всего предоставляются свежим игрокам, но случаются случаи, когда приз могут получить и действующие посетители. <a href=http://www.carshowsociety.com/forum.php?action=profile;u=6251>http://www.carshowsociety.com/forum.php?action=profile;u=6251</a> 1×slots актуальное зеркало
1хслотс казино зеркало
При отыгрыше бонусных средств, необходимо учесть срок деянья бонуса и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный приз несомненно аннулирован. Бездепозитный приз по промо-коду несомненно доступен для забавы, лишь в случае когда Вы активируете особый бонусный код в разделе с призами либо укажите промокод при регистрации на сайте. В неких случаях, считая активации кода, придется подтвердить контактные данные игрока и заполнить анкету клиента. <a href=https://cs.xuxingdianzikeji.com/home.php?mod=space&uid=2677667&do=profile&from=space>https://cs.xuxingdianzikeji.com/home.php?mod=space&uid=2677667&do=profile&from=space</a> Допустим, за регистрацию вы возымели бездеп в размере 2 000 руб. С вейджером х30. В данном случае предстоит сделать ставок, на общую необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда выполните обстоятельства по отыгрышу, придёт время заработать настоящие деньги. Однако не запамятовывайте, собственно с любого презента выйдет исключить определённую необходимую (чаще всего менее $200).Доступ к дару имеет раскрываться механически в введения промокода или обращения в службу вебсайта. В первом случае от пользователя не потребуется практически деяний. Бездеп с активацией по коду встречается чаще всего. Игроку нужно ввести совокупа символов в графе, которая возможность находиться в регистрационной форме в Личном офисе. 1×slots актуальное зеркало Срок активации и время на отыгрыш. Зачисление средств либо фриспинов происходит при активации в течение взыскательно ограниченного периода, схожие требования предъявляются и к срокам отыгрыша. Одни казино позволяют отыгрывать бонус несколько дней или в недель. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером.Большинство клубов завлекают внимание игроков за счёт разнообразных даров. На одних веб-сайтах возможно получить виртуальные кредиты, которые откроют доступ ко всему софту. На иных же, администрация предлагает бесплатные вращения для запуска лучших интернет слотов. Несмотря на различные акции, стоит выделить самые основные.
1×slot зеркало
<a href=https://adminclub.org/showthread.php?tid=60078>1×slots casino online регистрация</a> Баланс игрока дополняется на соответствующую сумму. К ней применяется вейджер, обозначенный в правилах акции. Вывести выигрыш возможно несомненно после как, как юзер сделает требуемый размер ставок из личных средств. В редких случаях бездеп работает в формате Free Play. На счет юзера зачисляется крупная сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по завершении сего периода сумма на счету несомненно превосходить первоначальную, то разность можно несомненно вывести или применять для дальнейших ставок. У любого игорного заведения свои верховодила и обстоятельства. Но, чтобы получить бонусы, необходимо выполнить стандартные деянья:Фриплей-бонусы встречаются только в некоторых клубах. Они зачисляются незамедлительно после создания профиля и активны недолговременное время. Если не успеете истратить свои, они попросту сгорят. Касаемо времени, как бонусы активны протяжении часа. 1×slots зеркало регистрация <a href=https://www.dmxzone.com/support/13984/topic/76141/>https://www.dmxzone.com/support/13984/topic/76141/</a> Предложения с бездепозитными призами за регистрацию позволяют новым заведениям привлечь аудиторию на свой сайт. А игроки к получают вероятность выступать на настоящие средства без депо в казино и заработать маленькой стартовый капитал, кот-ый разрешено исключить на карту банка либо электронный кошелек.
1×slots регистрация на 1хслотс
Составленный специалистами Casino.ru список онлайн-казино с бездепозитным призом разрешает игрокам сравнить спецпредложения различных операторов.Процесс доказательства личности возможность занять от 1-го денька до недели. Если клиент разрешил нибудь оплошность при заполнении паспортных данных, то ему стопам обратиться с проблемой в службу онлайн-казино. <a href=http://www.makili-aliyev.com/2019/08/research-note-on-nagorno-karabakh.html>http://www.makili-aliyev.com/2019/08/research-note-on-nagorno-karabakh.html</a> Приветственный бонус без депозита ? подарок за регистрацию. Выдается средствами, фриспинами либо баллами. В заключительном случае бонусные баллы используются для роли в турнирах или обмена на реальные деньги. 1 x slots
<b>Смотреть еще похожие новости:</b>
<a href=https://www.formulersupport.com/Thread-x1-slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%B2–1×slots-casino–151903>x1 slots регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Отзывы читателей о бонусных акциях помогут составить впечатление, но не запамятовывайте о субъективности личных объяснений.
#7031 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
рабочие зеркала казино 1×bet слоты 1×bet xyz <a href=https://t.me/vchkogpu_ru>1×bet на сегодня</a> Радченко Светлана Юрьевна порно казино вход <a href=https://m.repost.news/>букмекерская контора фонбет официальный сайт</a> porno Мира Андреева (теннис) pin up casino пин casino daddy porno Анастасия Янькова, боксерка сайте букмекерской конторы фонбет 7k casino скачать casino ап
#7032 ElbertTefhttps://shuriginadiana.info
Официальная страница <a href=https://shuriginadiana.info/>канал диана шурыгина</a>. Только здесь вы найдете личные истории, фото, видео и эксклюзивный контент. Узнавайте первыми о новых проектах и наслаждайтесь моментами её жизни. Подписывайтесь, чтобы быть всегда на связи!
#7033 Clydeamuck
pinup 2025 <a href=" https://www.sdsdsoft.com/upload/home.php?… „>пин ап</a> or <a href=“ http://easygoals.com.au/Redirect.aspx?… ">pinup 2025</a> https://www.knuckleheads.dk/forum/ucp.php?… пин ап казино <a href=https://www.google.mu/url?q=https://gramster.ru>пин ап казино официальный сайт</a> пин ап казино официальный сайт and <a href=https://www.oppo.xyz/home.php?mod=space&uid=6241>pinup 2025</a> pinup 2025
#7034 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Мария Шарапова porno Дарья Клишина <a href=https://repost.news/>1×bet зеркало рабочее</a> скачать 1×bet скачать сайт букмекерской конторы <a href=https://rhymes-punches.com/>pin casino зеркало</a> порно с Петр Ян (ММА) яндекс казино casino на телефон Фастова Елена Владимировна порно букмекерская контора скачать приложение фреш казино порно с Александр Головин (футбол)
#7035 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало видели такую регистрацию на
Зарегистрируйтесь. Для регистрации почаще всего довольно установить свой номер аппарата и почтовый адресок, после чего установить приобретенный код из СМС. Возможно, потребуется указать промокод. В правилах промоакции будет написано, где его бы вводить. Иногда это надо делать при регистрации, иногда — теснее в сотворения собственного кабинета, на отдельной страничке. <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> <a href=https://www.trustlink.org/Ask-The-Community/Question/Business/The-Art-of-Professional-Interior-Design-Layout-Creating-Harmonious-Living-Spaces-16936>https://www.trustlink.org/Ask-The-Community/Question/Business/The-Art-of-Professional-Interior-Design-Layout-Creating-Harmonious-Living-Spaces-16936</a> Сразу последствии активации промокода можно пользоваться презентом. Как теснее упоминалось, призы посещают трёх обликов – фриспины, кредиты и фриплей-бонусы. 1×слот регистрация в 1×slots casino <a href=http://www.haxorware.com/forums/member.php?action=profile&uid=281926>http://www.haxorware.com/forums/member.php?action=profile&uid=281926</a> Диапазон ставок, коие вправе сделать игрок, кроме лимитирован. Обычно назначать можно маленькую сумму — около 10–30 руб. За одно вращение.Поспешите арестовать бездепозитные бонусы за регистрацию в казино из представленного списка. Все платформы не только водят законную работа, хотя и порадуют добросовестными результатами игры, высочайшей отдачей, быстрыми выплатами.
1× slots casino зеркало
Иногда виде одобрения за регистрацию шансы выдаваться билеты для участия в турнирах. Условия их проведения довольно выделяются, потому мы рекомендуем ознакомиться с каждым предложением отдельно. <a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=218351>1×slots зеркало этих способов предполагает регистрацию</a> 1 х слотс зеркало Для получения приза нужно ознакомиться с программкой лояльности казино и устроить ставки на сумму, необходимую для перехода на грядущий уровень. <a href=https://augustuwvu39506.blogocial.com/unlocking-the-strength-of-undress-ai-a-deep-dive-into-nsfw-content-generation-65498901>https://augustuwvu39506.blogocial.com/unlocking-the-strength-of-undress-ai-a-deep-dive-into-nsfw-content-generation-65498901</a> Следует подчеркнуть, что бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом. 1 x slots casino Наиболее популярные вознаграждения среди гэмблеров – бездепозитные бонусы казино. Это не изумительно, как возможно получить благотворительные вращения или виртуальные кредиты, и при этом не придётся пополнять счёт, рисковать личными деньгами. Удастся насладиться разнородными развлечениями причем выиграть солидную необходимую, избегая серьёзного риска.
1×slot зеркало рабочее этих способов предполагает регистрацию
Даже не выиграв крупную сумму, игрок интересно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе наихороших промоакций с. Достаточно периодически изучать список новых интернет казино с выводом бонуса без депо в данном разделе. <a href=https://www.beatstars.com/glavdorogadv1706/about>https://www.beatstars.com/glavdorogadv1706/about</a> Проверка занимает от нескольких минут до нескольких дней, профессионалы техподдержки имеют запросить дополнительные документы либо инициировать куцее общение по Skype.Многие азартные клубы ограничивают сумму вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не сможете исключить. Разница несомненно аннулирована, Вы том не сможете создавать на нее ставки. рабочее зеркало 1хслотс Вознаграждения за получение VIP-статуса ? начисляются масштабах программы лояльности при достижении еще значения или выдаются персонально менеджерами службы поддержки.Бездепозитные призы прекрасный вариант даровой игры в игровые автоматы. Многие юзеры сети не знают, что в казино возможно начать играть безусловно бесплатно, а позже исключить выигрыш на банковскую карту или электронный кошелек, другие не доверяют онлайн казино, а третьи успешно играют и выигрывают – и тотчас достаточно великие суммы.
1×slot зеркало
<a href=https://chasingadream.rpginitiative.com/showthread.php?tid=121503>1хслотс рабочее зеркало</a> Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные методы и расценить необыкновенности, недоступные при игре в демо режиме. Многие свежие клиенты перебегают в число постоянных, а оператор получает долгосрочную выгода.Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные способы и расценить особенности, труднодоступные при этой в демо режиме. Многие свежие посетители перебегают в число неизменных, а оператор получает долгосрочную прибыль. За счёт спинов выйдет запустить разные онлайн слоты, протестировать стратегии и поднабраться опыта. Фишка что, собственно вращения начисляются на лучшие аппараты с уникальными опциями и высочайшей отдачей. Не запамятовывайте, собственно в любом акционном предложении учтены специальные притязания – кратковременные ограничения, наибольший размер ставки, перечень дешевых игр.B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. 1×slots регистрацию более популярный вариант это <a href=http://extreme-look.ru/bitrix/redirect.php?goto=http://shariki.org/bitrix/click.php?goto=http://toolbarqueries.google.co.bw/url?q=https://telegra.ph/Proverka-dorozhnyh-shtrafov-po-pasportnym-dannym-09–23>http://extreme-look.ru/bitrix/redirect.php?goto=http://shariki.org/bitrix/click.php?goto=http://toolbarqueries.google.co.bw/url?q=https://telegra.ph/Proverka-dorozhnyh-shtrafov-po-pasportnym-dannym-09–23</a> Риск-игра по равным шансам – Также казино может воспрещать исполнять условия по отыгрышу с помощью раунда на удвоение, который предлагается в слотах, видео-покере и некоторых иных забавах.В онлайне слишком большое скриптовых вебсайтов, которые принадлежат мошенникам. Их главная цель – заинтересовать гэмблеров, пообещав не только щедрые подарки, хотя и крупные выигрыши. Так собственно кое-какие сайты предлагают получить за регистрацию даже $1 000.
1×slots рабочее зеркало на сегодня
Иногда в качестве одобрения за регистрацию имеют выдаваться билеты для участия в турнирах. Условия их проведения очень отличаются, потому мы рекомендуем ознакомиться с каждым предложением отдельно. <a href=http://tgabsolut-shop.ru/bitrix/redirect.php?goto=http://4print.pro/bitrix/redirect.php?goto=http://ivanovo-trikotag.ru/bitrix/rk.php?goto=https://telegra.ph/Garazhnyj-kollektiv–soobshchestvo-DIY-prostranstv-i-tvorchestva-09–24>http://tgabsolut-shop.ru/bitrix/redirect.php?goto=http://4print.pro/bitrix/redirect.php?goto=http://ivanovo-trikotag.ru/bitrix/rk.php?goto=https://telegra.ph/Garazhnyj-kollektiv–soobshchestvo-DIY-prostranstv-i-tvorchestva-09–24</a> 1×slots подтвердит вашу регистрацию если говорить Иногда для получения призов необходимо спутаться с адептами саппорта. Удобнее всего с ними разговаривать в онлайн-сате, хотя иногда достаточно запроса по электронной почте.После получения бонуса вывод средств для посетителя несомненно недоступен того, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или пара месяцов. Выводить деньги игрок может лишь в отыгрыша.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.survival-readiness.com/viewtopic.php?t=263768>1×slots зеркало</a>
<a href=https://isomedu.com/forum/profile/josephdrons/>1х слот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При отыгрыше бонусных средств, нужно учитывать срок деянья бонуса и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный бонус будет аннулирован.
#7036 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1win casino порно с Карен Хачанов (теннис) <a href=https://repost.news/>new casino</a> up casino 7k casino официальный <a href=https://t.me/vchkogpu_ru>1×bet слоты 1×bet xyz</a> порно с Георгий Джикия (футбол) Радченко Светлана Юрьевна порно скачать 1×bet на андроид Львова-Белова Мария Алексеевна порно какие казино casino казино онлайн
#7037 Charlesgunnyhttp://filmkachat.ru
1×slots коды
В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и если, тогда, неоднозначных ситуаций нет возможности куда-то пожаловаться и обосновать собственную правоту.Стоит отметить, что бездепозитный бонус выдается лишь взрослым новичкам, которые, в свою очередь, могут пригласить собственных приятелей и знакомых, также претендующих на поощрительную программу лояльности. Подобная технология появилась среди конкурирующих онлайн-казино для популяризации и расширения трафика. Покер румы и спонсоры содействуют увеличению своей посещаемости, методом привлечения свежих игроков. Бонусы – это уникальный шанс для вероятных участников забавы, которые все опробовать софт покер рума и убедиться, станут ли они в него играть либо нет. Новый игрок испробует средства силы с настоящими оппонентами в казино. <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino 56 online</a> Для выбора азартного заведения Вы сможете пользоваться списком наших казино с бонусами за регистрацию. На нашем веб-сайте мы опубликовали перечень бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, собственно доля призов эксклюзивные и доступны лишь для посетителей нашего вебсайта по-специальному промо-коду либо по оригинальной ссылке. Кроме такого, для каждого приза мы подготовили доскональный обозрение, каком Вы узнаете как получить и отыграть одобрение и как вывести свой выигрыш с бездепа. <a href=https://ai.ceo/read-blog/225693>https://ai.ceo/read-blog/225693</a> Если вы избираете проверенное лицензионное онлайн казино и сделайте все обстоятельства получения бездепозитного приза, трудностей с получением дара у Вас не возникнет. 1×slots casino регистрация 1×slotscasino09k online <a href=https://www.femina.cz/forums/topic/%d0%b3%d0%bb%d0%b0%d0%b2%d0%bd%d0%b0%d1%8f-%d0%b4%d0%be%d1%80%d0%be%d0%b3%d0%b0-%d0%b0%d0%b2%d1%82%d0%be%d1%88%d0%ba%d0%be%d0%bb%d0%b0-%d0%b2%d0%bb%d0%b0%d0%b4%d0%b8%d0%b2%d0%be%d1%81%d1%82%d0%be/>https://www.femina.cz/forums/topic/%d0%b3%d0%bb%d0%b0%d0%b2%d0%bd%d0%b0%d1%8f-%d0%b4%d0%be%d1%80%d0%be%d0%b3%d0%b0-%d0%b0%d0%b2%d1%82%d0%be%d1%88%d0%ba%d0%be%d0%bb%d0%b0-%d0%b2%d0%bb%d0%b0%d0%b4%d0%b8%d0%b2%d0%be%d1%81%d1%82%d0%be/</a> К примеру, игроку выдаются безвозмездные средства в заведении в размере пятидесяти или 100 долларов (вейджер на которые составляет 100х). То есть, каждому новоприбывшему геймеру выскакивает притягивающая иллюстрация, которая обещает выплату всех зачисленных компанией средств. Не стоит заострять на казино бонус за регистрацию без депозита с чрезмерно большой или довольно малюсенькой суммой бонусов, потому что, том кропотливо изучив все условия, здесь скорее, будет какой-то подвох.
1 xslots рабочее зеркало
В зависимости от интернет заведения каждый из их имеет вас предложить как бездепозитные средства, так и бездепозитные фриспины, коие в успешной регистрации рухнут для на ваш игровой баланс. <a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=39238>1× slots зеркало</a> 1×slot казино зеркало Выбирая безвозмездный бонус, внимательно изучайте управляла. Убедитесь, собственно вас возможно принимать роль в акции. Уточните, в каких играх возможно скорпулезно обстоятельства вейджера. При необходимости задавайте вопросы представителям саппорта. <a href=http://dosaaf64.com/index.php?subaction=userinfo&user=abstractedplast>http://dosaaf64.com/index.php?subaction=userinfo&user=abstractedplast</a> 1×slot зеркало рабочее этих способов предполагает регистрацию Прямо в отберите благотворительные вращения за регистрацию без депозита и начинайте собирать призовые композиции ради крупных выигрышей!
1×slots casino регистрация на сайте
Процесс доказательства личности возможность занять от 1-го денька до недели. Если заказчик разрешил нибудь ошибку при заполнении паспортных данных, то ему следует адресоваться с задачей в саппорта онлайн-казино.Итак, чтобы безвозмездные бонусные кредиты превратились в реальные деньги, которыми возможность распоряжаться по своему усмотрению, их нужно отыграть. Вейджер следует уточнять в правилах онлайн-казино. <a href=http://bbs.all4seiya.net/home.php?mod=space&uid=960978>http://bbs.all4seiya.net/home.php?mod=space&uid=960978</a> 1×slots зеркало рабочее
1×slots регистрация 1×slotscasino 56 online
<a href=https://www.reisezielforum.de/viewtopic.php?t=331880>1×slots зеркало на сегодня</a> Не советуем сломя голову браться за различные предложения получения средств без вложений. Вполне возможно, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на первый взор. Альтернативой считается казино приз за депо. Мы предлагаем вас пару советов, спасибо которым у любого игрока несомненно вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом денег: 1×slots официальный сайт мобильная версия скачать <a href=http://receptom.ru/index.php?subaction=userinfo&user=aquaticinvasion>http://receptom.ru/index.php?subaction=userinfo&user=aquaticinvasion</a> Бездепозитные призы в казино без пополнения 2022 — это конкретная сумма денег либо gorovyh spins вращения, которые предоставляются первым постояльцам за регистрацию на сайте казино вид бездепозитного бонуса, и выделяет вам возможность за счет казино без пополнения опробовать услуги (игр), с дальнейшей прерогативой вывода средств при выполнении всех установленных верховодил.
x1 slots регистрация в 1×slots casino
Но а случае вы теснее профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в интернет казино; Свежий приз начисляется в виде валютных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в пользовании средствами, а случае отыгрыша оператор имеет ввести ограничение на вывод денег.Перечисленные повыше основные свойства сочетают практически каждый приз и являются стандартными для бездепозитных бонусных начислений в казино. <a href=https://truejesus.net/forums/member.php?action=profile&uid=3994>https://truejesus.net/forums/member.php?action=profile&uid=3994</a> Более крупные предложения встречаются очень изредка. Зачастую они доступны только VIP-игрокам. В остальных случаях им всего сопутствуют довольно жесткие условия отыгрыша. Также возможны вспомогательные условия и другие лимитирования, прописанные в условиях и положения бонусной программки казино.Вейджер (либо вагер) ? это минимальная сумма ставок, которую нужно устроить для вывода денежного бонуса. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим красивее спецпредложение. 1×slots casino регистрация на сайте Многие казино предоставляют в маркетинговых целях благотворительные призы самая для наших читателей. Чтобы их получить, нужно перейти на игровой сайт по партнерской ссылке с нашего портала.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.bedwantsinfo.nl/thread-682387.html>1×slots официальный сайт скачать</a>
<a href=http://aficionado.pl/showthread.php?141270–1×slots-%D0%B0%D0%BA%D1%82%D1%83%D0%B0%D0%BB%D1%8C%D0%BD%D0%BE%D0%B5-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE&p=160436>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в неотъемлемом порядке нужно пополнить счет в казино. Для депозитных бонусов, данная процедура не нужна, так как депо уже изготовлен.
#7038 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее на сегодня
Ну и естесственно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: подобная щедрость увеличивает степень преданности посетителей к компании. <a href=http://filmkachat.ru/>1 хслот регистрация в 1×slots casino</a> <a href=https://scrapbox.io/renderings-real-estate/Transform_Real_Estate_Presentations_with_Professional_3D_Renderings>https://scrapbox.io/renderings-real-estate/Transform_Real_Estate_Presentations_with_Professional_3D_Renderings</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=https://cutetusy.cc/member.php?action=profile&uid=35622>https://cutetusy.cc/member.php?action=profile&uid=35622</a> Такой казино бонус без депо за регистрацию выдается игроку на час и активно используется данное предложение с 2017 года. Это словно некая маскировка одобрения под бездепозитный. Суть всего сего сводится к тому, что игроку на час выдается, например, 1000 $, а реклама утверждает про, собственно любой выигрыш можно несомненно дальнейшем забыть при для. Но если играющий всерьез отнесется к данному предложению, то он попросту потеряет время. Ведь геймеру надо(надобно) будет выступать не в аккаунте, в тренировочном и с ограниченным выбором автоматов и ставок. Да и если, тогда, выигрыша (и всей тысячи) в правила вступят конкретные обстоятельства, где будет сказано, что максимальной суммой победы может быть только двести долларов и средства можно использовать только в качестве приза на 1-ый вклад с вейджером 25 от суммы вознаграждения плюс сам депозит. По итогу получится, собственно игрок выигрывал себя 200% бонус с вейджером на определенную необходимую. Короче говоря, это все надо вашего времени.
1×slot казино зеркало
Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? <a href=http://forum.survival-readiness.com/viewtopic.php?t=253367>1× slots сайт</a> 1×слот регистрация в 1×slots casino <a href=http://www.superstitionism.com/forum/profile.php?id=1307755>http://www.superstitionism.com/forum/profile.php?id=1307755</a> 1хслотс казино зеркало У нас на сайте Вы отыщите список бонусов без депозита в испытанных казино и подробную информацию про как их получить и применять.Хотя бесплатные призы начисляются без депозита, не исключено, собственно вам понадобиться заносить средства. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь в такого, как свежий клиент раз пополнит игровой счет.
1×slots сайт зеркало
Необходимость отыгрыша. Вейджер такой повыше, чем для призов за депозит. И же свои не отыграны, вывести их нельзя.В зависимости от онлайн заведения любой из них может для предложить как бездепозитные средства, например и бездепозитные фриспины, которые в удачной регистрации рухнут для на ваш игровой баланс. Самые пользующиеся методы вывода средств ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электрическим платежным системам на Neteller и Skrill, а также пользуются криптовалютными кошельками. Вывод выигрышей возможность исполняться быстро или занимать от нескольких часов до нескольких суток.Проверка занимает от нескольких минут до нескольких дней, спецы техподдержки имеют запросить вспомогательные документы либо инициировать краткое общение по Skype. <a href=http://www.yyxw999.com/space-uid-22286.html>http://www.yyxw999.com/space-uid-22286.html</a> У любого игорного клубы разные вейджеровые обстоятельства. Чтобы вы гарантировано сумели выполнить их, мы дадим несколько советов. Если система начислила маленькую сумму, не делать немалые ставки – остановитесь на 10–30 центах. Как лишь сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте играть. В неприятном случае лучше приглядеться к другому автомату.Но разу не забывайте пристально разбирать верховодила роли в бонусных акциях. Если вы нарушите желая бы одно условие, позднее вы не можете уладить недоразумение с администрацией. 1×slots актуальное зеркало Бездепозитные призы в казино без пополнения 2022 — это конкретная сумма средств или gorovyh spins вращения, которые предоставляются первым постояльцам за регистрацию на сайте казино в виде бездепозитного бонуса, и дает для вероятность с казино без пополнения опробовать предложения (игр), с дальнейшей прерогативой вывода средств при исполненьи всех установленных верховодил.Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала прыткие выводы. Фишка выплат сомнений, что довольно выбрать платёжный инструмент и указать необходимую. В большинстве случаев деньги зачисляются на электронные кошельки на 15 минут, а на банковские карты – 1–3 трудящихся денька.
1×slots промокод при регистрации
Если вы выбираете испытанное лицензионное интернет казино и сделайте все обстоятельства получения бездепозитного приза, проблем с получением дара у Вас не возникнет.Ну и окончательно же, для казино бездепозитные призы выгодны с имиджевой стороны: подобная щедрость увеличивает уровень лояльности клиентов к компании. <a href=http://forums.indexrise.com/thread-72721-post-363623.html#pid363623>зеркло казино 1×slots</a> 1×slots casino зеркало <a href=http://iawbs.com/home.php?mod=space&uid=839800>http://iawbs.com/home.php?mod=space&uid=839800</a> Онлайн-казино с бездепозитными призами ставят посетителям обстоятельства для использования бездепами, поэтому перед участием в промоакции чем тщательно ознакомиться со всеми правилами и нюансами акции. Условия имеют прикасаться получения бонуса, его использования и последующего вывода валютных средств когда выигрыша.Особую изюминку видео слотам придают оригинальные знакы. С их выходом активируются разные призы. Вы можете запустить дополнительный уровень и прирастить необходимую выигрыша. Есть знаки, которые заменяют ненужные элементы и сами творят выигрышные комбо. Не стоит забывать и про бонус-тур. После любого удачного спина есть шанс прирастить сумму выигрыша в 2 или четыре раза.
казино 1×slots официальный сайт
Бонусные деньги – небольшая сумма денег для старта в новом казино. На бонусные средства, обыкновенно разрешается играть во все забавы, не слотов с прогрессивным джекпотом и игр из раздела exist casino. <a href=http://ods.org.ua/user/JeffreyMiz/>http://ods.org.ua/user/JeffreyMiz/</a> Осталось выбрать казино с призом за регистрацию и создать профиль. После активации презента выигрыш зависимости от Фортуны и навыков. 1×slots промокод при регистрации 2025 Чтоб получить крупный выигрыш, избирайте игровые автоматы с максимальным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша.Итак, чтобы бесплатные бонусные кредиты трансформировались в реальные средства, которыми вы можете управлять по собственному усмотрению, их надо(надобно) отыграть. Вейджер идет уточнять в правилах онлайн-казино.
<b>Смотреть еще похожие новости:</b>
<a href=https://mit-bbs.com/viewtopic.php?t=132363>1×slots казино мобильная версия</a>
<a href=http://khodaumo.com/forum/viewtopic.php?f=2&t=75665&sid=082260568ce0cd480c0eef3cdaf80876>1×slots скачать на айфон</a>
<a href=https://www.one2bay.de/forum/showthread.php?tid=416012>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Также случаются случаи, когда казино начислит оговоренный бонус в регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам. Рассмотрим принцип его деяния на примере. Допустим, вы зарегались и возымели $10 not the slightest down payment bonus с вейджером х50. Это значит, что выигранные средства можно несомненно выводить не ранее, чем после как, как общая сумма ставок достигнет $500.
#7039 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
пинко casino Ирина Горбачева <a href=https://krtka.info/>порно с Евгения Медведева, фигуристка</a> retro casino пинап казино <a href=https://th-royalgclub.com/>Лут Оксана Николаевна порно</a> casino porno Нина Пирогова, хоккеистка казино рояль сайты казино яндекс игры казино где казино casino betting
#7040 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
официальные букмекерские конторы 7k casino официальный сайт <a href=https://sovsekretno.net/>казино сочи</a> слот casino 1×bet приложение <a href=https://th-royalgclub.com/>пинко casino</a> casino рабочее зеркало порно с Евгения Медведева автомат казино пина букмекерской конторы букмекерская контора бесплатно скачать суть казино porno Юлия Канакина
#7041 Charlesgunnyhttp://filmkachat.ru
зеркло казино 1×slots
Возможность протестировать новые забавы, не рискуя личными средствами и создать собственную стратегию забавы.Только выполнив все условия отыгрыша и дождавшись завершения ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить свои средства. <a href=http://filmkachat.ru/>1×slots официальный зеркало рабочее</a> Многие азартные клубы ограничивают необходимую вывода заработанную на призе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не можете исключить. Разница несомненно аннулирована, Вы и не можете делать на нее ставки.На странице представлены бездепозитные бонусы за регистрацию в казино редкая награда за которой гонятся все игроки как новенькие, так и мастера. Мы также уделяем огромное внимание на присутствие призов при формирование рейтинга казино на средства. Бездепозитный приз это вероятность играть бесплатно и выиграть реальные средства. <a href=https://band.us/band/96885593/post/3>https://band.us/band/96885593/post/3</a> Бездепы шансы входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами. 1×slots зеркало проходить регистрацию это отличный вариант <a href=http://b77706vw.bget.ru/user/Josephitaps/>http://b77706vw.bget.ru/user/Josephitaps/</a> Способы получения бездепа различаются зависимо вида бонуса, кот-ый приглянулся игроку. Но вам иначе нужно быть зарегистрированным в законном онлайн-казино и доказать собственную лицо. В общем облике пошаговая аннотация для получения бездепозитного бонуса выглядит так:
1×slots регистрация на сайте 1×slots ru com
Можно ли зарабатывать на бездепозитных призах? Это не работа, тут как повезет, если в любом предложенном безедепе, вы будете откручивать вейджер и выводить, время можно назвать везением, и дополнительной добавкой к вашему бютжету.Фриспины начисляются по определенной ставке. После их активации игроку нужно запустить слот и увериться, что в нем отображаются бесплатные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода после отыгрыша ориентируется оператором и редко превышает 5 000 рублей. 1×slots рабочее зеркало Стоит обозначить(означить), собственно бездепозитный приз выдается только взрослым новичкам, коие, к, все пригласить личных друзей и людей, кроме претендующих на поощрительную программу лояльности. Подобная технология была среди создающих онлайн-казино для популяризации и расширения трафика. Покер румы и спонсоры способствуют увеличению своей популярности, методом привлечения новых игроков. Бонусы – это оригинальный шанс для потенциальных соучастников игры, которые могут опробовать софт покер рума и убедиться, станут ли они в него выступать либо нет. Новый игрок испробует средства силы с настоящими оппонентами в казино.В современность очень просто получить приз за регистрацию в казино. Практически каждый игорный дом с готовностью начисляет средства или благотворительные вращения. Многие гэмблеры используют данным и не стыдятся регистрироваться в каждом клубе с прибыльными условиями. Кстати, это замечательная вероятность выработать победную стратегию и сорвать джекпот. <a href=https://www.nkm.no/user/williamthync/?um_action=edit>https://www.nkm.no/user/williamthync/?um_action=edit</a> Но не мыслить, что снабжая юзеров такими бонусами, казино увлекается спонсированием. Ведь размеры вознаграждений, главном, не немалые (средним объемом от 5 до 20 долларов). И на эти средства налагаются определенные обстоятельства и ограничения, обязательные к исполнению игрока, в в последствии он вожделеет получить все свои выигранные финансы. 1×slots зеркало рабочее на сегодня Такой казино приз без депозита за регистрацию выдается игроку на час и энергично используется данное предложение с 2017 года. Это как бы некая конспирация одобрения под бездепозитный. Суть всего сего сводится к что, этому, что геймеру на час выдается, к примеру, 1000 $, а реклама твердит то, что любой выигрыш можно несомненно в оставить при себе. Но случае играющий серьезно отнесется к этому предложению, то он попросту потеряет время. Ведь геймеру нужно несомненно играть не в основном аккаунте, а тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (даже всей тысячи) в управляла вступят определенные условия, где несомненно сказано, что наибольшей суммой победы может быть только двести долларов и деньги возможно использовать лишь в приза на первый вклад с вейджером 25 от суммы вознаграждения плюс сам депо. По итогу получится, собственно игрок выигрывал себе 200% бонус с вейджером на определенную необходимую. Короче разговаривая, это все не стоит вашего времени.Вообще перейдя в казино — верховодила одинаковы в получении бездепозитных бонусов, в стереотипные управляла заходит: подтвердить эл. Почту и аппарат, заполнить собственный личный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ.
1×slots быструю регистрацию а также мгновенное
Но на азартных платформах подобные гонорары шансы получить теперь зарегистрированные юзеры. В таком случае, бонусы предоставляются в оригинальных промоакций или же некоторым геймерам повторяющий акционного предложения, которое прибывает на почту с целью «возвратить» игрока в свое казино.У каждого игорного заведения средства верховодила и условия. Но, чтобы получить бонусы, необходимо выполнить стереотипные деянья: <a href=https://gameitems.trade/user-33409.html>https://gameitems.trade/user-33409.html</a> Бездепозитный приз казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в данном и заключается главное отличие.Минимального оборота. Этот предел устанавливается вейджером — же игрок не поиграет на установленную сумму, вывод средств будет недосегаем. скачать 1×slots на андроид мобильная версия Однако далековато не все ресурсы предлагают своим клиентам бездепозитные призы за регистрацию в казино. В большинстве случаев предусмотрено поощрение на первый депо в объеме 100–200%. Это отличная возможность преувеличить банкролл, прирастить время, проведённое за игрой и шансы сорвать крупный куш.Бездепы с безвозмездными вращениями предоставляют юзерам право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд выплачивает казино. Число спинов ограничено и изредка превышает сотку. Если промоакция включает в себя количество безвозмездных игр, их начисление имеет быть разбито на некоторое дней.
скачать 1×slots официальный сайт
<a href=https://karakol.com.kg/user/Jameskef/>1× slots официальный</a> B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax Первый возникающий вопрос, это, для выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают новых игроков. Последним проще начать игру на средства с подарка за регистрацию. Им не нужно пополнять баланс и тратить личностные средства. Новички получают безвозмездные спины или средства на счёт. С их поддержкой знакомятся с игровым ходом, крутят слоты и делают ставки в рулетке.Суммы подобных предложений, как правило, колеблются от 3-х до 20 $, а вейджер на эти свои обязан сочинять от тридцати до шестидесяти раз. Зачастую, большая сумма выигрыша здесь составит от одной до 2-ух сотен $. Если игры выиграет больше, то все средства шансы быть списанными до максимально разрешенного выигрыша. Здесь появляется смысл выводить еще несуществующие финансы на свою платежную систему и дальше находить заведение с подходящими под данную сумму релоадом или призом за 1-ое пополнение счета. Есть некоторое подвидов бездепозитного гонорары, предлагаемого великим количеством заведений. зеркала 1×slots <a href=https://forum.vgatemall.com/member.php?action=profile&uid=89505>https://forum.vgatemall.com/member.php?action=profile&uid=89505</a> Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.2. Создать новый профиль. Для регистрации нужно заполнить маленькую анкету либо зайдите в индивидуальный офис посредством социальных сетей;
1×slots зеркало рабочее
Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном сайте и сделайте вход в личный офис, дабы арестовать благотворительные вращения с вейджером х40; <a href=https://eccentrictirade.com/forums/member.php?action=profile&uid=2908>https://eccentrictirade.com/forums/member.php?action=profile&uid=2908</a> 1×slots регистрация на 1хслотс Список например называемых «разрешенных землель» прилагается к правилам бонусной программы игорного портала. Обязательно проверьте, распространяются ли на вас похожие санкции.
<b>Смотреть еще похожие новости:</b>
<a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=7930>1×slots рабочее зеркало</a>
<a href=https://forum-macan.ru/viewtopic.php?t=11191>1×slots официальный demo регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, в не желаете замерзнуть жертвой мошенников или впустую израсходовать время;
#7042 Charlesgunnyhttp://filmkachat.ru
1×slots казино зеркало
Бездепы обыкновенно предлагают с отыгрышем — мгновенно вывести выигранные свои невозможно. Перевод денег со счета будет вероятен после как, как пользователь выполнит все требования казино, а сумма не превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, протяжении коих клиент вправе воспользоваться предложением. Обычно они не превосходят нескольких дней последствии активации.Ознакомьтесь с нашим перечнем наилучших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего списка и получите бездеп незамедлительно. Хватайте превосходнейшие благотворительные предложения ниже и выигрывайте большие деньги, не рискуя! <a href=http://filmkachat.ru/>1×slots бездепозитный бонус за регистрацию</a> Самый распространённый из подобных бонусов, естесственно же, бездеп на денек рождения клиента — бонус в виде фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им можно протяжении установленного периода медли. <a href=https://www.chambers.com.au/forum/view_post.php?frm=1&pstid=77273>https://www.chambers.com.au/forum/view_post.php?frm=1&pstid=77273</a> Далее потребуется отыграть вагер и исключить выигрыш. Игрокам без навыка крупно повезло, они могут получить 10-ки подарков за 1 регистрацию. Если не сумели получить Бездепозитный приз, не беспокойтесь. Обратитесь в онлайн чат, оператор поможет решить проблему. 1×slots официальный сайт зеркало <a href=https://www.google.nu/url?q=https://doctorlazuta.by/>https://www.google.nu/url?q=https://doctorlazuta.by/</a>
1×slots зеркало регистрацию более популярный вариант это
Помните, собственно в неких играх сумма ставки идет в зачет вейджера лишь частично. Так, в настольных и карточных играх только от 5% до 50% суммы ставки считаются как отыгранные деньги, момент как в слотах идет в зачет все one hundred percent суммы. <a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=7523&TITLE_SEO=7523-preobrazovatel-interfeysov-usb-rs485&MID=464969&result=reply#message464969>1×slots рабочее зеркало на сегодня</a> 1×slots официальный сайт мобильная версия Можно ли в одном онлайн казино получить больше 1-го бонуса за регистрацию? Нет, например как в любом онлайн казино есть верховодила, к коим нужно придерживаться, не творить 2 аккаута для получения призов, по несомненно блокировка обоих аккаутов, не пытайтесь обмануть онлайн казино, приз за регистрацию выдаеться один раз 1 личику.Бездепозитные призы, как теснее ясно, считаются уникальной возможностью к игровому процессу безусловно бесплатно, другими выступать в онлайн казино даром и на имеющие средства незамедлительно последствии регистрации аккаунта. Автоматы с таким депо шансы замерзнуть прекрасной возможностью поиграть для поклонников азарта с определенными лимитированиями в денег. <a href=http://fabnews.ru/forum/member.php?u=10327>http://fabnews.ru/forum/member.php?u=10327</a> Подарки на праздничные ? приуроченные к праздничным датам, требующие условного отыгрыша либо начисляются без такового. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду.Размер призов почаще всего чисто условный и не превышает 50 руб. Приятно, хотя ощутимым бустом деле ли будет. скачать 1×slots официальный сайт Как лишь вы отыграли вейджер и свои с бонусного баланса перешли вас на настоящий счет, Вы неустрашимо сможете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (устроить минимальный депо к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депозитом).
1×slots официальный сайт, скачать
Прочитайте правила бонусной программы, в которой желаете участвовать. Да, мы настойчиво советуем устроить это до регистрации.Зарегистрироваться в казино по особой ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефонного и электрическую почту). Для доказательства номера аппарата нужно в личном профиле показать свой номер и нажать кнопку „Подтвердить номер телефонного“, дальше Вы получите sms-сообщение с кодом, кот-ый необходимо ввести в соответствующее фон. Для доказательства электронной почты, перейти по активной ссылке в послании от казино. Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие возникают у новичков.Такой казино приз без депозита за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это словно какая-то конспирация одобрения под бездепозитный. Суть всего этого сводится к что, этому, что игроку на час выдается, к примеру, 1000 долларов, а реклама повторяет о том, что каждой выигрыш можно несомненно в забыть при себя. Но случае играющий всерьез отнесется к данному предложению, то он просто растеряет время. Ведь геймеру надо(надобно) будет выступать не в основном аккаунте, ну тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (даже всей тысячи) в управляла вступят конкретные обстоятельства, где несомненно сказано, собственно максимальной суммой победы возможность быть лишь двести $ и деньги возможно применять только в бонуса на 1-ый вклад с вейджером 25 от суммы гонорары плюс сам депозит. По итогу получится, что игрок выигрывал для 200% приз с вейджером на конкретную необходимую. Короче разговаривая, это все не стоит вашего медли. <a href=http://time.am/bitrix/redirect.php?goto=http://metallokons.ru/bitrix/redirect.php?goto=http://sotamb.ru/bitrix/redirect.php?goto=https://telegra.ph/CHto-proishodit-s-dengami-rossiyan-posle-smerti-09–23>http://time.am/bitrix/redirect.php?goto=http://metallokons.ru/bitrix/redirect.php?goto=http://sotamb.ru/bitrix/redirect.php?goto=https://telegra.ph/CHto-proishodit-s-dengami-rossiyan-posle-smerti-09–23</a> Получить Бездепозитный приз в онлайн казино дело двух кликов. Другой момент, отыграть промо и соблюсти верховодила и обстоятельства отыгрыша. Под правилами подразумевается столько вагер, но и ограничения по наибольшей ставке. Мы разумеем, собственно в кино все ставят на зеро и выигрывают. Призываем не делать сходственного. Перед активацией бонуса прочитайте верховодила. Узнайте следующие факторы: Условия получения дара, за регистрацию, за депозит и прочее. Ограничения по максимальной ставке. Зачастую не выше 350 руб. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах можно отыгрывать вагер. Можно вертеть автоматы, а вагер будет стоять на месте. Поэтому принципиально знать, в каких забавах можно осуществлять кратность валютного оборота. 1 xslots рабочее зеркало Получив собственный подарок, Вы сможете даром играть на реальные деньги, а выполнив условия отыгрыша, исключить собственный выигрыш.За счёт спинов получится запустить разные интернет слоты, протестировать стратегии и поднабраться опыта. Фишка что, нет, что вращения начисляются на топовые аппараты с уникальными опциями и высочайшей отдачей. Не забывайте, что в любом акционном предложении учтены специальные требования – кратковременные ограничения, максимальный размер ставки, список доступных игр.
1× слот зеркало
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=https://richmill.co.kr/kor/bbs/board.php?bo_table=free&wr_id=736349>https://richmill.co.kr/kor/bbs/board.php?bo_table=free&wr_id=736349</a> Для отыгрыша приза казино обязывает игрока поиграть на сумму, в несколько один превышающую сумму полученного бонуса — тут выгода фирмы очевидна.
1×slos регистрация в 1×slots casino
<a href=https://www.trustlink.org/Ask-The-Community/Question/Business/The-Art-of-Professional-Interior-Design-Layout-Creating-Harmonious-Living-Spaces-16936>https://www.trustlink.org/Ask-The-Community/Question/Business/The-Art-of-Professional-Interior-Design-Layout-Creating-Harmonious-Living-Spaces-16936</a> Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, a только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. 1×slots зеркало на сегодня Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.
<b>Смотреть еще похожие новости:</b>
<a href=http://permitbeijing.com/forum/member.php?action=profile&uid=191496>рабочее зеркало 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Диапазон ставок, которые вправе сделать игрок, кроме лимитирован. Обычно назначать возможно небольшую необходимую — около 10–30 руб. За одно вращение.
#7043 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино фильм онлайн porno Катерина Шпица <a href=https://res-publika.com>Ходнева Светлана Владимировна порно</a> скачать 1×bet смотреть фильм казино <a href=https://rucriminal.info/>порно с Артемий Панарин (хоккей)</a> фильмы казино рояль Радченко Светлана Юрьевна порно казино пин 1×bet на андроид бесплатно казино фильм букмекерскую контору пин как выиграть в казино
#7044 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать
Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. <a href=http://filmkachat.ru/>1хслот скачать</a> <a href=https://devfolio.co/@shopavto>https://devfolio.co/@shopavto</a> В игровых клубах без лицензии Вы покупаете „кота в мешке“ и если, тогда, неоднозначных обстановок нет способности куда-то посетовать и доказать свою правоту.B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. 1×slots казино мобильная версия <a href=https://mantiseye.com/community/traviskal>https://mantiseye.com/community/traviskal</a> Но разу не забывайте внимательно читать управляла участия в бонусных акциях. Если вы нарушите хотя бы одно условие, позднее вы не можете устроить недоразумение с администрацией.
1×slots зеркало рабочее на сегодня
<a href=https://forum.eliteshost.com/showthread.php?tid=15255>1×slots акции</a> casino 1×slot <a href=http://x70181pe.beget.tech/user/Craiglorma/>http://x70181pe.beget.tech/user/Craiglorma/</a> Однако в условиях скрываются «подводные камешки», которые не позволят исключить крупную необходимую или же вы не успеете отыграть вейджер. Поэтому профессионалы советуют забрать бесплатные вращения за регистрацию в казино без депозита, дабы поднабраться навыка и получить реальный шанс на победу. 1 хслот регистрация в 1×slots casino Прочитайте верховодила бонусной программы, в которой хотите участие. Да, мы настойчиво рекомендуем устроить это до регистрации.
1×slots акции
Главное преимущество спинов – вероятность изучить различные слоты. Также получится насладиться бонусными раундами, испытывать фортуну в риск-туре и преувеличить выигрыш за счёт особенных знаков. Однако столько игровой процесс заслуживает внимание, ведь лучше сосредоточиться на реальном выигрыше.Также случаются случаи, когда казино начислит обсужденный бонус в регистрации нового клиента по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам. <a href=http://bitetheass.com/user/Ralphchoks/>http://bitetheass.com/user/Ralphchoks/</a> 1×slots регистрация 1×slotscasino 56 online
1×slots промокод при регистрации
Вы скорее, как и все предпочитаете получать подарки и бездепозитные бонусы казино. Игорные дома взяли в привычку одаривать гэмблеров приятными призами. Стать обладателем приветственного подарка можно за создание профиля или пополнение счёта. Второй вариант более интересный, ведь клубы готовы удвоить депо! Но если вы новичок и только знакомитесь с миром азарта, никакого пользуйтесь призом за регистрацию.Шаг 4. Активация. Внимательно выучите условия, информацию по ограничениям и сроке деянья бонусного предложения. Разобравшись с правилами, можно активировать приз в личном офисе (иногда ? с использованием промокода) либо по запросу в саппорт. Для получения бездепа необходимо пригласить в забаву по реферальной ссылке нового посетителя: он должен зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на сумму, указанную в условиях акции. 1×slot рабочее зеркало <a href=http://sveres.ru/bitrix/redirect.php?goto=http://stud.epsilon.slu.se/cgi/set_lang?referrer=http://pugofka.com/bitrix/rk.php?goto=https://telegra.ph/Zakazat-debetovuyu-kartu-Sberbanka-onlajn-09–23>http://sveres.ru/bitrix/redirect.php?goto=http://stud.epsilon.slu.se/cgi/set_lang?referrer=http://pugofka.com/bitrix/rk.php?goto=https://telegra.ph/Zakazat-debetovuyu-kartu-Sberbanka-onlajn-09–23</a> У любого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано смогли выполнить их, мы дадим некоторое советов. Если система начислила небольшую сумму, не создавать немалые ставки – остановитесь на 10–30 центах. Как лишь сможете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте выступать. В неприятном случае никакого присмотреться к другому автомату.
казино 1×slots официальный сайт
Так что основное различие дара на депо от бездепа – неотъемлемое пополнение счёта. Вы можете внести депозит и преумножить стартовый капитал или отобрать бездеп и всем не придётся рисковать собственными сбережениями. Поспешите выполнить простые требования, и администрация ресурса начислит щедрое одобрение! <a href=http://forums.overhax.fun/member.php?action=profile&uid=4353>http://forums.overhax.fun/member.php?action=profile&uid=4353</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots При пользовании бездепозитным бонусом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют количество обликов лимитов:Все обожают получать презенты. Согласитесь, практически каждый играющий человек несомненно безгранично счастлив, случае получит даровой презент для забавы в интернет казино просто за регистрацию или же приз за внесенный депозит, так называемые приветственные призы для новых игроков. Соответственно эти онлайн клубы будут больше известны и преимущественны у игроков при выборе казино для игры. Топ казино непрерывно обновляется и добавляются свежие и интересные игровые клубы с привлекательной бонусной политикой и всеми возможными преимуществами, льготами, к которым относятся эти бонусы как фриспины за регистрацию, валютные бездепозитные бонусы, а великодушные призы за внесенный депо.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Какие призы у еще получить кроме бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного бонуса, любое интернет казино предлагает игрокам выгодное предложение на первый депозит, вы совершаете депо, ваш депо возрастает в двое или в в трое, что, этим самым начать играть возможно с больше солидной суммой, например же не запамятываем тему вейджер на призы.
#7045 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало рабочее этих способов предполагает регистрацию
Также учтите, что кое-какие игровые платформы сужают список стран, которые способны получить предложенный бездепозитный приз за регистрацию. К примеру, существуют онлайн-заведения, выдающие похожие бонусы лишь жильцам конкретных стран. К образцу, онлайн казино 777 Оригинал предоставляет бездепозитный приз только игрокам из России и государств СНГ. Или наоборот, пичкают вознаграждением всех, считая жителей некоторых стран (следует сего, идет пристально учить список, дабы потом не возникло никаких вопросов и жалоб). <a href=http://filmkachat.ru/>1×slots casino регистрация</a> <a href=https://app.roll20.net/users/15345358/vykup-avariinykh-avto-p>https://app.roll20.net/users/15345358/vykup-avariinykh-avto-p</a> Каждый игрок должен сначала отчетливо изучить условия по получению и отыгрышу понравившегося презента. Если всё организует, поторопитесь отобрать благотворительные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо момент начать вращать барабаны лучших слотов. 1хслотс регистрация в 1×slots casino <a href=https://23region.info/user/Raymondraf/>https://23region.info/user/Raymondraf/</a>
1×slots официальный сайт, скачать
1хслотс рабочее зеркало <a href=https://www.catfish-assassins.org/forum/memberlist.php?mode=viewprofile&u=1000>https://www.catfish-assassins.org/forum/memberlist.php?mode=viewprofile&u=1000</a> 1×slots casino регистрация 1×slotscasino09k online Бонусные средства – небольшая сумма средств для старта в новом казино. На бонусные средства, обыкновенно разрешено выступать во все игры, считая слотов с современным джекпотом и игр из раздела exist casino.Бесплатные призы казино без депозита можно получить повторяющий валютных средств на бонусный счет (вывести их можно только после отыгрыша), фриспинов, игры или кешбэк-бонуса.
1×slots casino регистрация на сайте
Для получения бонуса надо(надобно) ознакомиться с программой преданности казино и сделать ставки на необходимую, нужную для перехода на следующий степень. Акции распространяются как на все забавы казино, так и на узкий перечень. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и другие. Промо имеет обхватывать разработки одного производителя. Бездеп не пересекается с другими промоакциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, изготовленные бонусными средствами. Для идентификации платежных реквизитов игрока возможность потребоваться пополнение счета на наименьшую сумму. <a href=http://nbrkv.ru/user/Richardgok/>http://nbrkv.ru/user/Richardgok/</a> 1хслотс рабочее зеркало В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, необходимо адресоваться в службу спустя лайв-чат на веб-сайте казино.
1×slots сайт
Некоторые казино шансы предлагать посетителям бездепы за свидетельство номера или почты или репост на страничку в социальных сетях.Бонус начисляется игроку незамедлительно в регистрации и прохождения верификации в казино и не требует от посетителя внесения депозита. Как управляло, объем приза в подобном случае довольно скромный, впрочем позволяет новичкам познакомиться с игрой без риска настоящими средствами. <a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=118152>1×slots зеркало этих способов предполагает регистрацию</a> 1×slots рабочее зеркало на сегодня <a href=http://www.cmpedu.co.kr/bbs/board.php?bo_table=free&wr_id=721127>http://www.cmpedu.co.kr/bbs/board.php?bo_table=free&wr_id=721127</a> Принципиальным отличием бесплатных бонусов от призов на депо считается недоступность надобности вносить деньги на акк. Из-за сего их нередко называют бездепозитными (not the slightest deposit bonuses).
1×slots быструю регистрацию а также мгновенное
Можно ли зарабатывать на бездепозитных бонусах? Это не работа, здесь как повезет, в в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, тогда можно назвать везением, и добавочной добавкой к вашему бютжету. Заработать на бездепозитных бонусах за регистрацию в казино возможность каждый юзер, достигший совершеннолетия. <a href=https://gtorr.net/index.php?subaction=userinfo&user=StevenCyday>https://gtorr.net/index.php?subaction=userinfo&user=StevenCyday</a> В качестве бонусов онлайн казино часто предлагает выдачу фриспинов, другими бесплатных вращений игрового барабана. Виртуальные монеты возможно применять для обучения в покерной школе или для забавы в казино. 1×slot зеркало рабочее этих способов предполагает регистрацию Бездепозитные бонусы — это подарки от казино вид бонусных средств или фриспинов для игровых автоматов, коие начисляются на аккаунт игрока в процедуры регистрации на сайте заведения. Для получения этих поощрений депозит не потребуется.Для как, дабы отыграть сумму вашего бездепозитного приза нужно выполнить условия вейджера. Очень часто фриспины даются на конкретные слоты (book of ra, book of lifeless, book of sun), подбирайте слот для по душе, они все довольно красивые и высококачественные. Бездепозитные приз имеет быть валютным так и повторяющий фриспинов на слоты
<b>Смотреть еще похожие новости:</b>
<a href=http://board.eternityrpc.com/thread-7-post-14592.html#pid14592>1×slots официальный зеркало</a>
<a href=http://nhomtruyen.com/members/jamesgaw.9280/>1×slots зеркало этих способов предполагает регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Ниже указан актуальный список законных казино в Беларуси с бонусами на 1-ый депо. Вы можете попасть на официальный вебсайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. Первый возникающий вопрос, это, для выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают новых игроков. Последним проще начать игру на средства с подарка за регистрацию. Им не нужно пополнять баланс и тратить собственные средства. Новички получают безвозмездные спины или средства на счёт. С их подмогою знакомятся с игровым процессом, крутят слоты и делают ставки в рулетке.
#7046 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
фильмы казино рояль пинко casino <a href=https://m.repost.news/>1×bet 1</a> porno Алена Косторная (фигурное катание) win win casino <a href=https://th-royalgclub.com/>casino зеркало сегодня рабочее</a> casino бездепозитный порно с Голикова Татьяна Алексеевна лучшие казино бесплатно 1×bet слоты 1×bet top букмекерская контора casino промокод рокс казино
#7047 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерская контора фонбет официальный букмекерские конторы pin <a href=https://sovsekretno.net/>up casino скачать</a> casino бездепозитный Скоробогатова Ольга Николаевна порно <a href=https://rumafia.news/>ев казино</a> casino 7k сегодня яндекс игры казино pin up букмекерская контора 1×bet на андроид бесплатно porno Александра Степанова, фигуристка почему в казино нет окон 7k casino зеркало рабочее
#7048 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать
Каждый из бездепозитных бонусов без пополнения 2022 содержит свой конкретный вейджер для отыгрыша, например же в любом казино он устанавливается индивидуально — где то он х55 а кое-где х30, повторюсь везде по различному! <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> <a href=https://mega.nz/file/E6tG2Y6a#35AP8eRuVWDBW0vFRNmk3yz9lTf4-ohI6ETi78fc0BA>https://mega.nz/file/E6tG2Y6a#35AP8eRuVWDBW0vFRNmk3yz9lTf4-ohI6ETi78fc0BA</a> 1×slot регистрация <a href=http://ukrisa.pl/./member.php?action=profile&uid=8783>http://ukrisa.pl/./member.php?action=profile&uid=8783</a> Подобные бонусы без депозита предоставляются на более выгодных условиях. Зачастую они покрупнее, а условия отыгрыша менее жесткие.А ознакомиться с свежими интернет казино, Вы можете помощью бонусов с выводом прибыли, коие Вы можете получить без депо.
1 xslots рабочее зеркало
Верификация важна для добавочной безопасности и подсобляет техподдержке выявить бонусхантеров и плутов. Кстати, рядах платформах выводы крупных сумм доступны лишь последствии подтверждения личности. 1×slots актуальное зеркало Выбор любого интернет казино на нашем сайте. В описании к любому Вы можете узнать, что получите за творенье аккаунта.Бонус без депо за регистрацию в казино (бездепозитный приз) – это денежный подарок от клуба, кот-ый начисляется на аккаунт игрока последствии регистрации в казино. Кроме творенья учетной записи, для получения бездепа, довольно часто потребуется ещё и подтвердить контактные данные игрока и/или активировать особый промо-код. <a href=http://mail.canadalondonchinese.com/home.php?mod=space&uid=259569>http://mail.canadalondonchinese.com/home.php?mod=space&uid=259569</a> Шаг 4. Активация. Внимательно изучите условия, информацию по ограничениям и сроке деянья бонусного предложения. Разобравшись с правилами, можно активировать бонус в личном кабинете (времени ? с внедрением промокода) либо по запросу в саппорт. 1× slots casino зеркало
1×slot зеркало рабочее этих способов предполагает регистрацию
Многие азартные клубы ограничивают необходимую вывода заработанную на призе. Сколько б Вы не выиграли, больше, указанной в описании акции, суммы Вы не можете исключить. Разница несомненно аннулирована, Вы и не сможете делать на нее ставки.B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. Каждая игровая перрон отличается условиями по получению и отыгрышу бездепов. В правилах детально расписаны временные рамки, за которые надо(надобно) прокрутить вейджер. Также не забывайте тему наибольший размер ставки и наивысшую необходимую выплаты. С другой стороны, дабы получить бездепозитные призы казино, достаточно потратить не более 1 минуты. <a href=https://blackmarke7.com/user-41760.html>https://blackmarke7.com/user-41760.html</a> Некоторые казино имеют предлагать посетителям бездепы за свидетельство номера либо почты либо репост на страничку в социальных сетях. скачать 1×slots официальный сайт На бонусные начисления могут быть установлены вспомогательные ограничения, которые Вы не сведению при отыгрыше. Пока бонус полностью не отыгран — деньги из казино не выводятся.
1×slos регистрация в 1×slots casino
Особую изюминку видео слотам придают оригинальные символы. С их свет активируются разные бонусы. Вы сможете запустить вспомогательный степень и прирастить сумму выигрыша. Есть знаки, коие замещают негодные составляющие и сами творят выигрышные комбо. Не стоит забывать и на бонус-тур. После каждого удачного спина есть шанс прирастить необходимую выигрыша в два либо хорошо раза. <a href=https://www.neocodex.us/forum/topic/100332-chapter-12-the-shattered-plain/page-6#entry2034909>1×slots официальный сайт скачать на айфон</a> Бывают ли бездепозитные бонусы без вейджера? Бывают, если у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино. Большинство интернет-казино из нашего топ-10 готовы порадовать вас неповторимыми промоакциями. Читайте о них в обзорах и на форуме.Если речь об эксклюзивных услугах, может понадобиться регистрация в казино по ссылке с партнерского сайта. 1×slots официальный зеркало <a href=https://correspondent.in.ua/user/Stevengab/>https://correspondent.in.ua/user/Stevengab/</a>
1×slots официальный сайт скачать на айфон
Также учтите, собственно кое-какие игровые платформы сужают список государств, которые готовы получить предложенный бездепозитный приз за регистрацию. К примеру, существуют онлайн-заведения, выдающие похожие бонусы только жителям определенных стран. К примеру, интернет казино 777 Оригинал дает бездепозитный бонус лишь игрокам из России и государств СНГ. Или наоборот, пичкают вознаграждением всех, считая жителей некоторых государств (исходя из этого, по внимательно изучать перечень, дабы впоследствии не появилось практически вопросов и претензий). <a href=http://kambereg.ru/bitrix/redirect.php?goto=http://toolbarqueries.google.im/url?q=http://park-mobile.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/_VG0ukFwKfp>http://kambereg.ru/bitrix/redirect.php?goto=http://toolbarqueries.google.im/url?q=http://park-mobile.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/_VG0ukFwKfp</a> Кешбэк-бонус представляет собой возврат фиксированного процента от ставки в случае проигрыша либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%.В любом казино с бездепозитным бонусом учтены вейджеровые условия. Это один-единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, нужно устроить определённое число ставок. Чем круче бонус, что, этим труднее выполнить условия, и наоборот. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Главным нюансом в появлении данных вознаграждений состоит в том, собственно пустив их в ход, геймер ничем не рискует и в последствии никому ничего не будет должен (не зависимо, получит ли он спасибо бонусам какой-нибудь выигрыш либо моментально спустит все лишь что прибывшие деньги). То есть, казино снабжает игрока возможностью на дармовой базе играть во всевозможные слоты и даже спонсирует игру.
<b>Смотреть еще похожие новости:</b>
<a href=http://lider1c.ru/communication/forum/messages/forum4/message18938/14881–1×slots-zerkalo-rabochee-na-segodnya?sessid=76d4802ca70ac158198e8d00106d9cff&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1×slots зеркало рабочее на сегодня</a>
<a href=http://brilliance.ru/forum/viewtopic.php?f=6&t=41089>1×slots зеркало быструю регистрацию а также мгновенное</a>
<a href=http://aurorahcs.com/forum/memberlist.php?mode=viewprofile&u=168982>1×слот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бесплатные бонусы казино без депозита можно получить повторяющий денежных средств на бонусный счет (исключить их возможно лишь после отыгрыша), фриспинов, игры либо кешбэк-бонуса. Бездеп с фриспинами имеет охватывать всю коллекцию игр на веб-сайте либо разработки одного провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш может быть выведен после как, как юзер отыграет данную необходимую. Возможность расценить полный возможностей слотов — главное совершенство данной разновидности. Игроку становятся доступны те опции, которые отсутствуют в демонстрационном режиме, а возможность выиграть настоящие деньги добавляет ясных азартных чувств.
#7049 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
букмекерские конторы бет up букмекерская контора <a href=https://rhymes-punches.com/>kent casino регистрация</a> kent casino официальная казино <a href=https://rumafia.news/>casino скачать</a> 1×bet букмекерская контора на андроид ев казино рокс казино porno Юлия Пересильд казино проиграл 1go casino
#7050 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
винлайн букмекерская контора гама казино <a href=https://vestnik-jurnal.com/>казино ли</a> казино вулкан мелбет букмекерская контора <a href=https://slon-ru.com/>black russia казино</a> как выиграть в казино 1×bet зеркало рабочее на сегодня porno Илья Ковальчук (хоккей) промокод 1×bet retro casino вывод казино casino актуальное зеркало
#7051 Jeffreyarime
https://gramster.ru/ пин ап
#7052 Zackarymekhttps://steamauthenticatordesktop.co
Steam Desktop Authenticator <a href=https://steamauthenticatordesktop.com/>steamauthenticatordesktop.com</a> is a handy app to enhance the security of your Steam account. It generates codes for two-factor authentication, allowing you to easily confirm transactions and logins.
#7053 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало
Обычно, бездепозитные призы выдаются под определенные слоты с фиксированной ставкой, хотя их точно воспрещено использовать в игровых автоматах с прогрессивным джекпотом. Список игр, в которых можно использовать бездеп, Вы отыщите в описании акции либо можете уточнить у саппорта заведения. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasino09k online</a> Выбирая даровой приз, внимательно изучайте верховодила. Убедитесь, что вам можно на участие в промоакции. Уточните, в каких играх возможно выполнять условия вейджера. При надобности задавайте вопросы адептам саппорта. <a href=https://jobhop.co.uk/blog/337503/mastering-the-art-of-professional-interior-design-drafting>https://jobhop.co.uk/blog/337503/mastering-the-art-of-professional-interior-design-drafting</a> 1×slots регистрация на сайте <a href=https://rekordmeister.ru/user/TerryHom/>https://rekordmeister.ru/user/TerryHom/</a> Бездепозитный приз казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в данном и содержится основное отличие.
1×slots casino online регистрация
Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных требований, считая неотъемлемой верификации. Если на веб-сайте учтена неотъемлемая процедура доказательства личности, то исключить выигрыш получится лишь в проверки данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий личность. 1×slots зеркало рабочее на сегодня Срок отыгрыша — это период, который начинается в момент активации приза и завершается с его закрытием. Пользователю нужно уложиться в данный временной промежуток, по призовые свои аннулируются. Казино устанавливают список игр, ставки каких засчитываются при расчете отыгранных денег. Если тайтл не входит в этот перечень, то возможность быть недосегаем для загрузки во время действия бонусного предложения. <a href=https://bezmotora72.ru/communication/forum/user/167/>https://bezmotora72.ru/communication/forum/user/167/</a> 1× slots сайт Наши специалисты изучают обстоятельства акции, после в ручном режиме проводят их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие параметры. Мы не рекламируем казино, а даем игрокам информацию о наихороших из них.
1×slots casino регистрация 1×slotscasino09k online
Доступные забавы – В неких азартных забавах можно снизить математическое преимущество казино до нескольких 10-х процента. В их числе многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как управляло, в этих играх ставки идут в зачет вейджера не всецело. Например, может предусматриваться лишь 50%. В некоторых забавах бездепозитные бонусы вообще нельзя отыгрывать. <a href=https://8fx.info/home.php?mod=space&uid=2483113&do=profile>https://8fx.info/home.php?mod=space&uid=2483113&do=profile</a> Например, игрок получил 500 руб. При твореньи аккаунта и должен отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., потребуется устроить 875 спинов для полного отыгрыша.У любого игорного заведения средства управляла и обстоятельства. Но, дабы получить призы, нужно выполнить стереотипные действия: 1×slots официальный сайт скачать
1хлот регистрация в 1×slots casino
<a href=https://bans.org.ua/index.php?topic=119784.new#new>1×slots зеркало видели такую регистрацию на</a> Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депозит может отличаться до 30 дней. Приветственный приз без депозита ? презент за регистрацию. Выдается деньгами, фриспинами или баллами. В заключительном случае бонусные баллы используются для участия в турнирах либо размена на реальные деньги. 1×slots регистрация на официальном сайте <a href=http://jicc.kr/bbs/board.php?bo_table=hosung3&wr_id=99628>http://jicc.kr/bbs/board.php?bo_table=hosung3&wr_id=99628</a>
1×slots официальный регистрация
<a href=https://advansbum.by/?option=com_k2&view=itemlist&task=user&id=1193818>https://advansbum.by/?option=com_k2&view=itemlist&task=user&id=1193818</a> Однако в условиях исчезают «подводные камешки», которые не позволят исключить крупную сумму либо же вы не успеете отыграть вейджер. Поэтому профессионалы советуют арестовать благотворительные вращения за регистрацию в казино без депо, дабы поднабраться опыта и получить реальный шанс на победу.Акции, приуроченные к календарным праздникам, посещают рассчитаны как на всех пользователей, так и на категории: например, подарок на 8 марта девушкам-игрокам либо мужикам на 23 февраля. 1×slots подтвердит вашу регистрацию если говорить
<b>Смотреть еще похожие новости:</b>
<a href=https://russiancomputerservice.ru/user/JosephCer/>1×slots casino регистрация 1×slotscasin online</a>
<a href=https://www.goslog.ru/forum/messages/forum1/message9731/11-obrashcheniya-grazhdan?result=reply#message9731>1хслотс регистрация в 1×slots casino</a>
<a href=http://diablo2r.cn/home.php?mod=space&uid=30130>1хлот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы отличный вариант даровой игры в игровые автоматы. Многие пользователи сети не знают, собственно в казино возможно начать выступать полностью даром, а позже исключить выигрыш на банковскую карту или электронный кошелек, иные не доверяют онлайн казино, а третьи успешно играют и выигрывают – и подчас довольно немалые суммы. Вейджер (либо вагер) ? это минимальная сумма ставок, которую нужно устроить для вывода денежного бонуса. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим красивее спецпредложение.
#7054 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Юдаева Ксения Валентиновна порно porno Катерина Шпица <a href=https://kompromat1.online/>порно с Алексей Миранчук (футбол)</a> porno Елизавета Туктамышева porno Александра Степанова, фигуристка <a href=https://res-publika.com>champion casino</a> porno Анна Сидорова, керлингистка пин ап casino мелбет букмекерская контора pin up casino зеркало казино смотреть онлайн бесплатно 1×bet официальный сайт лучшие онлайн казино
#7055 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало подтвердит вашу регистрацию если говорить
Однако в условиях скрываются «подводные камни», которые не разрешат вывести крупную необходимую или же вы не успеете отыграть вейджер. Поэтому мастера советуют забрать бесплатные вращения за регистрацию в казино без депозита, дабы поднабраться навыка и получить настоящий шанс на победу. <a href=http://filmkachat.ru/>1×slots регистрация на сайте 1×slots ru com</a> Все обожают получать подарки. Согласитесь, практически любой играющий человек несомненно необъятно счастлив, в получит даровой подарок для игры в онлайн казино просто за регистрацию либо же приз за внесенный депозит, например именуемые приветственные бонусы для свежих игроков. Соответственно такие интернет клубы будут больше известны и предпочтительны у игроков при выборе казино для забавы. Топ казино непрерывно обновляется и добавляются новые и занимательные игровые клубы с привлекательной бонусной политикой и всеми возможными привилегиями, к коим относятся эти бонусы как фриспины за регистрацию, валютные бездепозитные призы, а щедрые бонусы за внесенный депозит. <a href=https://www.jottacloud.com/s/371d1db27e1899f43f18f1216ac5f05f9f6>https://www.jottacloud.com/s/371d1db27e1899f43f18f1216ac5f05f9f6</a> Фриспины предусмотрены для применения в видео слотах. Внимательно ознакомьтесь с критериями – частенько их выдают на кое-какие автоматы. В зависимости от клуба, у вас выйдет устроить определённое количество ставок. Кстати, продвинутые игорные дома разрешают запускать любых «одноруких бандитов». 1×slots сайт зеркало <a href=http://to-kaz.mediatex-n.kz/index.php?subaction=userinfo&user=whimsicalmadhou>http://to-kaz.mediatex-n.kz/index.php?subaction=userinfo&user=whimsicalmadhou</a> В онлайне много известных игорных площадок с красивыми акционными услугами. Однако пристально разбирать условия 10-ов услуг в надоест, ну и время отнимет количество. Поэтому наша команда подготовила ТОП-3 сайтов с превосходнейшими бездепозитными бонусами:
1×slots бездепозитный бонус за регистрацию
Какие призы меня еще получить считая бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного бонуса, любое онлайн казино предлагает игрокам прибыльное предложение на 1-ый депозит, вы совершаете депозит, ваш депозит увеличивается в двое либо том в трое, тем самым начать играть возможно с больше крупной суммой, так же не запамятываем на вейджер на бонусы.Подтверждение регистрации. Казино требуют привязки профиля к электронному адресу и номеру аппарата. Для этого на e-mail отправляется послание ссылаясь, а на аппарат ? текстовое извещенье с кодом. <a href=http://aficionado.pl/showthread.php?106013–1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D0%BD%D0%B0-%D1%81%D0%B5%D0%B3%D0%BE%D0%B4%D0%BD%D1%8F&p=123603>1хслотс рабочее зеркало на сегодня</a> 1×slot регистрация При исполненьи критерий отыгрыша и верификации, деньги с бонусного счета переводятся на ведущей и имеют быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции находятся от выбранной платежной системы. <a href=http://shkola.mitrofanovka.ru/user/Jaspermex/>http://shkola.mitrofanovka.ru/user/Jaspermex/</a> 1×slots зеркало на сегодня
1×slots мобильная версия войти казино
Для получения приза надо(надобно) пригласить в игру свежего посетителя. Казино начислит пригласившему фиксированный процент от взносов приглашённого вид приза: чаще всего его размер не выше 10%. Срок деянья приза в большинстве случаев не выше месяца: пригласивший получает приз зависимо проигранных ставок приглашённого в 1-ый месяц игры.Доступные забавы – В неких азартных играх возможно снизить математическое превосходство казино до нескольких десятых процента. В их числе многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как управляло, в этих забавах ставки идут в зачет вейджера не всецело. Например, может предусматриваться только 50%. В неких забавах бездепозитные бонусы вообще нельзя отыгрывать. <a href=http://apa.anenii-noi.com/index.php?subaction=userinfo&user=upbeatcomedian6>http://apa.anenii-noi.com/index.php?subaction=userinfo&user=upbeatcomedian6</a> Когда идет о получении бездепозитных бонусов в казино, в первую очередь обратите внимание на следующие обстоятельства:Почти все игровые клубы требуют подтверждение контактных данных игрока для получения бездепозитного приза. 1× slots регистрация в 1×slots casino
1×slots регистрация на сайте 1×slots ru com
<a href=https://www.lightknotes.com/MyBB/showthread.php?tid=152218>1х слотс зеркало регистрация в 1×slots casino</a> Вообще перейдя в казино — верховодила одинаковы в получении бездепозитных бонусов, в стереотипные управляла заходит: подтвердить эл. Почту и аппарат, заполнить собственный личный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ. Хотя бесплатные призы начисляются без депозита, не исключено, собственно вам понадобиться заносить средства. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь в такого, как свежий клиент раз пополнит игровой счет.Как правило, при выводе финансов, от играющего потребуется только сделать минимальный вклад для того, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом личный счет. 1хслотс зеркало на сегодня <a href=https://www.camry-club.ru/member.php?318887-Charlesblobe>https://www.camry-club.ru/member.php?318887-Charlesblobe</a> Когда речь о валютных призах, казино всегда устанавливают обстоятельства вейджера, коие нужно выполнить, дабы исключить выигрыш.
x1 slots 1хслотс регистрация перейти на 1×slots
Вывод выигрыша с бездепозитных бонусов казино – щедрый подарок от азартных клубов. Но чтобы исключить свой заработок, нужно выполнить ряд критерий:Во всех законных онлайн-казино Беларуси нужно свидетельство паспортных данных для забавы — это требование правительства государства. Высокая конкуренция в сегменте азартных игр мотивирует операторов завлекать посетителей различными промоакциями. Благодаря данному у гостей появляется возможность получить призы в казино за регистрацию без депо. Воспользоваться этим предложением возможно, избегая функцию внесения денег на игровой счет, просто активировав акк на веб-сайте. Наш гид по бездепам поможет выбрать самую привлекательную бонусную программу, разузнать управляла получения такового вознаграждения и воспользоваться им с наибольшей выгодой.Бонус в казино без депо имеет различные разновидности: может быть приветственный бонус, промоакции в честь каких-либо дней либо главных дат, приз за вербование новых игроков, лояльность и получение VIP-статуса. <a href=https://justpaste.it.com/hny9boaz1t>https://justpaste.it.com/hny9boaz1t</a> казино 1×slots Наличие у игрока 2 аккаунта. Запрещено создавать количество профилей для многократного получения бездепов.Помните, что всевозможные нарушения управлял сведут на нет ваши старания, и вы всего останетесь без начисленного вам безвозмездного приза. Всегда изучайте правила начисления и условия вейджера. По хоть вопросам, на которые вы возможности других найти ответы, обращайтесь за разъяснениям и саппорт.
<b>Смотреть еще похожие новости:</b>
<a href=http://big.bestforums.org/viewtopic.php?f=7&t=9676>1 хслот регистрация в 1×slots casino</a>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5024/#comment-604292>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a>
<a href=http://nhomtruyen.com/members/jamesgaw.9280/>1×slot официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вейджер (wager) – это коэффициент, кот-ый демонстрирует на какую необходимую нужно сделать ставок, дабы исключить приз из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего приза, Вам необходимо устроить ставок на необходимую: 500*70=3500 рублей. Только полностью отыграв бонус, Вы можете исключить собственный выигрыш.
#7056 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
самое казино casino приложения <a href=https://m.repost.news/>букмекерская контора</a> порно с Никита Кучеров (хоккей) 7k casino скачать <a href=https://rumafia.news/>порно с Захарова Мария Владимировна</a> порно с Никита Кучеров (хоккей) casino ru cat casino 7k casino зеркало porno Вера Бирюкова, гимнастка black russia казино 7k casino
#7057 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало рабочее регистрации на телефон придет
Одним из поводов отдавать привилегию одному либо иному заведению содержится в привлекательности предлагаемых промоакций и даровых предложений. Безвозмездные фриспины, выдаваемые без нужды делать какой-либо вклад, в списке находится далеко не в конце. <a href=http://filmkachat.ru/>1×slos регистрация в 1×slots casino</a> <a href=https://jobhop.co.uk/blog/337503/mastering-the-art-of-professional-interior-design-drafting>https://jobhop.co.uk/blog/337503/mastering-the-art-of-professional-interior-design-drafting</a> Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической забавы на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, научится регулировать изменять ставки и линии, исследовать бонусные игры и их выигрышные композиции, да в просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные средства, коие возможно отыграть и вывести, но просто на демо счет, что, этим самым адреналин в крови еще повысится а пульс забьется с нередким ритмом!Для проверки используются сканы паспортов, водительских удостоверений, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь замечен в попытке ввести вспомогательный аккаунт, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный список. При ирге на лицензионной площадке не бояться свидетельствовать достоверную персональную информацию (шифрование исключает утечку персональных данных). 1× slots сайт <a href=http://ledsoft.ru/forum/?PAGE_NAME=message&FID=3&TID=14403&TITLE_SEO=14403-_-_-_&MID=15226&result=new#message15226>http://ledsoft.ru/forum/?PAGE_NAME=message&FID=3&TID=14403&TITLE_SEO=14403-_-_-_&MID=15226&result=new#message15226</a> Если вы выбрали себе количество брендов которые для больше всего приглянулись, для неизменной забавы! Таких гемблеров казино очень любит и оценивает, за частую эти игроки становятся VIP игроками заведения, которым часто поступают выгодные предложения вид бонусов, например же туда заходит и бездепозитные.После требуется внести идентификационный платёж. Это пугает начинающих больше всего. Нужно устроить минимальный депозит в 100–500 рублей. Таким образом служба безопасности убедиться в том, что платёжный способ принадлежит Вам. Данная процедура важна для обеспечивания защищенности игровых счетов. Пример, Ваш акк взломают и выведут свои на свой кошелёк. Будет крайне неприятно. Поэтому верификация платёжной системы, это важный момент.
1× slots casino зеркало
<a href=https://test.soclanovtsy.ru/profile/2098-rabofreesn/>1×slots казино мобильная версия</a> 1×slots рабочее зеркало Обычно показатель повыше, чем для бонусов на депо. Не изумляйтесь, случае он будет даже х100. Иногда завышенный коэффициент вейджера уточняется для обитателей отдельных государств.B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. <a href=https://arenafighter.adult/mybb/member.php?action=profile&uid=262890>https://arenafighter.adult/mybb/member.php?action=profile&uid=262890</a> Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном сайте и выполните вход в индивидуальный кабинет, дабы арестовать безвозмездные вращения с вейджером х40; 1×slots официальный сайт, скачать
1×slots зеркало регистрацию более популярный вариант это
Даже не выиграв крупную необходимую, игрок увлекательно проведет время, изнутри исследует работу площадки, воспримет геймплей автоматов. Все это без каких-либо финансовых рисков. Быть в курсе наилучших промоакций легко. Достаточно регулярно изучать перечень свежих интернет казино с выводом приза без депо в данном разделе. В интернет-сети практически можно отыскать перечни наиболее модных и обещанных поощрительных программ от популярных онлайн-казино. <a href=https://sex18babes.com/user/RalphNiz/>https://sex18babes.com/user/RalphNiz/</a> Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? 1хслотс 1хслотс регистрация перейти на 1×slots В неких онлайн казино для получения бездепозитных призов не довольно просто зарегистрироваться на веб-сайте клуба и подтвердить средства контактные данные. Дополнительно требуется активация промокода.
1×slots акции
Иногда операторы настоятельно внесение минимального депозита перед выводом для верификации платежного инструмента. В некоторых казино данный депозит кроме предстоит отыграть. 1×slots регистрацию более популярный вариант это <a href=http://fze.ohosure.org/bbs/home.php?mod=space&uid=97474>http://fze.ohosure.org/bbs/home.php?mod=space&uid=97474</a>
1×slots регистрация то дальше необходимо пройти
Вейджер в переводе с английского означает «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша полученного приза, в нашем случае бездепозитного. Число ставок не — важно только набрать сумму, пропорциональную сумме одобрения.В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и если, тогда, неоднозначных обстановок нет возможности куда-то пожаловаться и обосновать собственную правоту. <a href=https://lefortovopark.ru/members/iqapam.16562/>https://lefortovopark.ru/members/iqapam.16562/</a> Вейджер в переводе с британского означает «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша приобретенного приза, в нашем случае бездепозитного. Число ставок значения — важно лишь набрать сумму, пропорциональную сумме одобрения.Размер ставки для забавы по бездепозитному призу (естесственно же, когда, когда он представлен в виде бонусных валютных средств) часто ниже, чем при ирге на депо. Ограничение несомненно работать до момента отыгрыша приза. 1×slots регистрация на 1хслотс Зачастую бездепозитные призы казино для забавы предлагаются разными заведениями азартных игр в качестве рекламных промоакций или в целях вербования к себе свежих игроков. Для бездепозитных бонусов в казино 2022 геймеру не нужно пополнять счет до этапа вывода желаемых средств.
<b>Смотреть еще похожие новости:</b>
<a href=http://sladkierecepti.5nx.ru/viewtopic.php?f=8&t=4088>1×slots casino регистрация 1×slotscasino09k online</a>
<a href=https://www.kfz-gringer.at/index.php/forum/donec-eu-elit/70764–1×slots#70529>1×slots зеркало сайта</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного бонуса достаточно пополнения баланса и подтверждения личности. В других же клубах, необходимо количество один прокрутить свой депозит.
#7058 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
сайт 1×bet слоты Анна Михалкова <a href=https://specreporter.com/>скачать букмекерскую контору</a> retro casino играющие казино онлайн <a href=https://www.ossetia.tv/>игры казино</a> 1×bet сайт приложения букмекерских контор porno Вера Бирюкова, гимнастка pin up casino зеркало 1×bet телефон casinos xyz casino ап
#7059 Charlesgunnyhttp://filmkachat.ru
1х слотс зеркало регистрация в 1×slots casino
Большинство интернет-казино из нашего топ-10 готовы порадовать вас эксклюзивными промоакциями. Читайте о их в обзорах и на форуме. <a href=http://filmkachat.ru/>1×slots регистрация на сайте</a> Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. <a href=https://getinkspired.com/ru/blog/519873/post/1478590/how-3d-visualization-companies-are-reshaping-global-business-landscapes/>https://getinkspired.com/ru/blog/519873/post/1478590/how-3d-visualization-companies-are-reshaping-global-business-landscapes/</a> 1×slots регистрация 1×slotscasino09k online <a href=https://www.fundable.com/user-1002820>https://www.fundable.com/user-1002820</a> Как и акции операторов, бездепы — это рекламный инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такового предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих гостей и дозволяет им составить эмоцию о функционале, не рискуя значительными совокупностями.
1×slots регистрацию процедура займет всего лишь
В лицензионных бездепозитных казино играть в азартные забавы действительно неопасно. Наличие лицензии подтверждает тот прецедент, собственно клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP.Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция имеет доскональные управляла, ссылка на которые обычно находится в промообъявлении. В них указываются лимиты, вейджер, перечень доступных игр. Если оператор укрывает данные о предложении, то воспользоваться им не стоит. <a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/7316/#comment-317329>1×slots регистрация</a> 1×slots casino регистрация Обычно, бездепозитные бонусы выдаются под определенные слоты с фиксированной ставкой, но их точно воспрещено применять в игровых автоматах с прогрессивным джекпотом. Список игр, в которых можно применять бездеп, Вы найдете в описании промоакции либо можете уточнить у службы заведения.Фриплей-бонусы. Бонусы за бесплатную игру есть лишь в некоторых клубах. Они зачисляются незамедлительно последствии сотворения профиля и срабатывают недолговременное время. Если у вас нет медли потратить средства, они просто завершатся. Что дотрагивается медли, в большинстве случаев призы действуют на одного часа. <a href=http://www.qazaqpen-club.kz/en/user/Geraldadods/>http://www.qazaqpen-club.kz/en/user/Geraldadods/</a> Бездепозитные бонусы начисляются лишь раз один. Не стоит раскрывать свежие аккаунты, дабы получить их повторно. Служба безопасности казино непременно выявит «левого» участника и перекроет. Если посетитель выполнит необходимые требования, отыграет собственную ставку и решит исключить собственный выигрыш, то ему надо(надобно) учесть, что казино обязательно потребует предоставить ксерокопии личных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои вывести не удастся.Вейджер в переводе с британского значит «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша полученного бонуса, в нашем случае бездепозитного. Число ставок имеет — важно лишь набрать сумму, пропорциональную сумме поощрения. 1×slots актуальное зеркало
1×slots рабочее зеркало
Отыграв бездепозитный приз в казино с выводом тоже придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, случае подобное ограничение существует, то единоразово вывести выйдет лишь сумму, не превышающую размер полученного приза.Проверка занимает от нескольких мин. До нескольких дней, профессионалы техподдержки все запросить дополнительные документы либо инициировать куцее общение по Skype. Вознаграждения за получение VIP-статуса ? начисляются в программы преданности при достижении очередного уровня либо выдаются персонально менеджерами службы. <a href=https://www.orderviewdocs.online/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D0%B4%D0%B7%D0%B5%D0%BD>https://www.orderviewdocs.online/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D0%B4%D0%B7%D0%B5%D0%BD</a> 1×slots зеркало видели такую регистрацию на
1 xslots рабочее зеркало
Если вы новичок данном и лишь попали в неизведанную вами район пыла — счет предложений как бездепозитные бонусы без пополнения.При верном раскладе бездепы — это отличный метод играть на средства без траты собственных средств. Есть несколько советов, следуя которым возможно извлечь максимум полезности из похожих промоакций казино. Играть идет только на лицензированных площадках. Скриптовые сайты столько дурачат с бонусными предложениями, но и используют пиратский софт с измененным ГСЧ. Выиграть на таких автоматах нереально. <a href=https://forum.dis-course.net/viewtopic.php?t=429834>1×slots коды</a> Верификация необходима для добавочной защищенности и помочь техподдержке выявить бонусхантеров и жуликов. Кстати, на некоторых платформах выводы солидных сумм доступны лишь последствии доказательства личности.Мы подготовили перечень, где есть всегда животрепещущие и свежие бездепозитные призы казино, коие возможность получить бесплатно. Для наших пользователей есть специальные предложения неповторимые бонусы, которые вы нигде не найдете, их мы обозначили специальной красноватой плашкой «Exclusive». 1×slots зеркало проходить регистрацию это отличный вариант <a href=http://forums.worldsamba.org/member.php?action=profile&uid=134939>http://forums.worldsamba.org/member.php?action=profile&uid=134939</a> Представьте момент, когда при ставке в 10 руб. Вы получите подобное умножение. Миллион руб. За одно вращение, собственно вполне вполне. Поэтому вопрос, сколько можно выиграть остаётся открытым. Предлагаем проверить помощи. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный приз и инспектируйте удачу в деле. Разумеется, вывести средства не так просто. Однако шансы есть у всех.Если вы выбрали себе количество брендов коие вам больше всего приглянулись, для постоянной забавы! Таких гемблеров казино очень любит и ценит, за частую эти игроки становятся VIP игроками заведения, которым нередко поступают прибыльные предложения вид бонусов, так же туда входит и бездепозитные.
1× slots сайт
Изучить правила и обстоятельства получения бездепозитных призов казино, Вы можете у нас на веб-сайте в разделе с бонусами либо на официальном веб-сайте выбранного Вами казино. Если имеет отыскать нужную информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал или по электрической почте.Похожим образом работает третий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения клиента либо в связи с получения им VIP-статуса. Подарок предоставляется последствии воззвания в поддержку и проверки. Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала быстрые выводы. Фишка выплат том,, что достаточно избрать платёжный инструмент и показать необходимую. В большинстве случаев средства зачисляются на электронные кошельки на 15 минут, а на банковские карты – 1–3 трудящихся денька. <a href=http://rvolchansk.ru/user/Arnoldrounk/>http://rvolchansk.ru/user/Arnoldrounk/</a> 1хслотс зеркало Бездепозитные призы за регистрацию в игровых автоматах для владельцев онлайн-казино считаются долею маркетинговой кампании, направленной на увеличение аудитории вебсайта. Так они продвигают свои бренды и привлекают свежих посетителей.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.reisezielforum.de/viewtopic.php?t=417476>1×slots официальный demo регистрация в 1×slots casino</a>
<a href=http://polishcrazyclan.ugu.pl/member.php?action=profile&uid=272738>1×slots на любой вкус как пройти регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Oтыгpaть приз с обозначенным вeйджepом, результата нужно сдeлaть cтaвoк нa cумму, превышающую объем приза в количество один. Бездепозитные призы начисляются только раз раз. Не стоит открывать свежие аккаунты, чтобы получить их повторно. Служба безопасности казино непременно выявит «левого» соучастника и заблокирует. Если гость выполнит необходимые притязания, отыграет свою ставку и решит вывести собственный выигрыш, то ему надо(надобно) принять, что казино обязательно востребует дать ксерокопии личных документов, дабы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные средства исключить не получится.
#7060 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet casino 1×bet зеркало рабочее на сегодня <a href=https://strelochnik.com/>порно с Евгений Малкин (хоккей)</a> Крючкова Полина Викторовна порно порно с Петр Ян (ММА) <a href=https://res-publika.com>порно с Алина Загитова, фигуристка</a> casino com порно с Дронова Александра Викторовна порно с Матвей Сафонов (футбол) casino автомат казино рулетка casino ru включи казино
#7061 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало рабочее этих способов предполагает регистрацию
Вейджер в переводе с британского значит «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша полученного приза, в нашем случае бездепозитного. Число ставок не — важно только набрать сумму, пропорциональную сумме одобрения.Подобные бонусы без депозита предоставляются на больше выгодных критериях. Зачастую они крупнее, а обстоятельства отыгрыша менее жесткие. <a href=http://filmkachat.ru/>1×slot зеркало рабочее этих способов предполагает регистрацию</a> Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке необходимо пополнить счет в казино. Для депозитных бонусов, эта процедура не необходима, так как депозит уже изготовлен. <a href=https://band.us/band/96885593/post/2>https://band.us/band/96885593/post/2</a> 1×slots казино зеркало <a href=https://www.scottsfasteners.com/users/charlesjal>https://www.scottsfasteners.com/users/charlesjal</a> Вышеописанная первопричина и является главным интересным, следствии которого операторы отдают доля своей прибыли на разные маркетинговые расходы и рекламные кампании. А самым действенным тут будут играть непосредственно бездепозитные призы казино 2022 с выводом за регистрацию.
1×slots casino регистрация 1×slots review live
<a href=http://forums.panzergrenadiers.com/showthread.php?22804–1×slots-%D0%A1%D0%82%D0%A0%C2%B5%D0%A0%D1%96%D0%A0%D1%91%D0%A1%D0%83%D0%A1%E2%80%9A%D0%A1%D0%82%D0%A0%C2%B0%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A1%D0%8F-1×slots-casino-c2d-ru&p=503261#post503261>1×slots регистрация 1×slots casino c2d ru</a> 1×slots рабочее зеркало Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки могут запросить вспомогательные документы либо инициировать краткое общение по Skype.Промокод – определённая композиция символов, которую нужно установить в отвечающее фон при создании учетной записи или активировать в собственном профиле игрока в разделе с бонусами. <a href=https://veteran-gazeta.ru/forum/user/1110/>https://veteran-gazeta.ru/forum/user/1110/</a> Для верификации аккаунта надо(надобно) дать профессионалам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, еще фотографию банковской карты или экрана страницы электронного кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для доказательства личности. 1×slots casino зеркало рабочее Это тоже бесплатные финансы, коие поступают на аккаунты новоиспеченных геймеров в регистрирования. А особенность этих призов произведено в том, что обретенные финансы непременно стопам использовать в продолжении назначенного медли.Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке необходимо пополнить счет в казино. Для депозитных бонусов, эта процедура не нужна, например как депозит теснее сделан.
1хслотс рабочее зеркало на сегодня
В интернет-сети практически можно отыскать перечни наиболее знаменитых и гарантированных поощрительных программ от знаменитых онлайн-казино.Размер призов почаще всего чисто условный и не превышает 50 рублей. Приятно, но ощутимым бустом при ли станет. Не рекомендуем сломя голову браться за различные предложения получения средств без инвестициям. Вполне вполне, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на 1-ый взор. Альтернативой является казино приз за депозит. Мы предлагаем вам пару советов, спасибо которым у каждого игрока несомненно вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом денег: <a href=https://civil808.com/user/64031/michaelinori>https://civil808.com/user/64031/michaelinori</a> 1×slots официальный сайт зеркало рабочее Простая процедура получения бездепозитного бонуса, кот-ая займет менее 2-х минут. Для получения бездепов, достаточно зарегистрироваться и доказать контактные данные.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Для отыгрыша приза казино обязывает игрока сыграть на необходимую, в некоторое один превышающую сумму приобретенного бонуса — тут выгода компании явна.Бесплатный приз – кредиты, коие онлайн-казино начисляет посетителю, не заставляя его пополнять игровой счет. 1хслотс рабочее зеркало <a href=http://pixelmon.ru/proxy.php?link=http://sibseed.ru/bitrix/redirect.php?goto=http://liko-baby.ru/bitrix/click.php?goto=https://telegra.ph/Kak-ustanovit-avtoritet-i-zavoevat-odobrenie-kollektiva-v-kachestve-vremennogo-rukovoditelya-09–19>http://pixelmon.ru/proxy.php?link=http://sibseed.ru/bitrix/redirect.php?goto=http://liko-baby.ru/bitrix/click.php?goto=https://telegra.ph/Kak-ustanovit-avtoritet-i-zavoevat-odobrenie-kollektiva-v-kachestve-vremennogo-rukovoditelya-09–19</a> Можно. Вы практически можете отрешиться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не сделаете ставку.Операторы гемблинга утверждают, что так они сражаются с бонус-хантерами. Впрочем, критики считают, что этим казино пытаются устроить из случайного постояльца неизменного игрока.
1×slots casino регистрация 1×slots review live
Вы не в коем случае ни чем рискуете, а только выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической игры на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, научится регулировать менять ставки и полосы, исследовать бонусные игры и их выигрышные композиции, ну счете просто зарядится кучей впечатлений! Ведь вы будите выступать на бонусные свои, коие можно отыграть и исключить, но просто на демо счет, тем наиболее адреналин в крови еще повысится а пульс забьется с частым ритмом! Срок отыгрыша — это период, кот-ый начинается в момент активации бонуса и завершается с его закрытием. Пользователю необходимо уложиться в этот временной зазор, другому призовые свои аннулируются. Казино устанавливают перечень игр, ставки в засчитываются при расчете отыгранных денег. Если тайтл не входит в данный список, то предоставляется быть недосегаем для загрузки в действия бонусного предложения.4. Заберите презент. Чаще всего приз активируется незамедлительно в регистрации. Но посещают ситуации, когда надо(надобно) зайти в личный офис или написать в службу поддержки. <a href=http://zike.cn/home.php?mod=space&uid=121125>http://zike.cn/home.php?mod=space&uid=121125</a> Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных призов принимаются достаточно высочайшие притязания. Часто онлайн-казино советуют отыграть бонусное одобрение до 100 раз в игровых автоматах. Например, случае игрок получил безвозмездно 10 $, то нужно несомненно отыграть их, поставив 1 тыщу спинов по 1 доллару любой. Стоит отметить, что не все казино дают вероятность выступать на призы и не во всех развлекательных заведениях идентичные верховодила для отыгрывания. Некоторые казино запрещают выступать на призы в блекджек или ограничивают ставки до 5 процентов, что значительно наращивает в 10-ки раз число нужных игр. 1×slots регистрация 1×slots review live
<b>Смотреть еще похожие новости:</b>
<a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=847187#pid847187>1× slots casino официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины – благотворительные вращения с фиксированной ставкой, коие возможно применять в конкретных игровых автоматах.
#7062 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
7k casino официальный casino официальный сайт <a href=https://rucriminal.info/>пин ап casino pin up top</a> казино ли retro casino <a href=https://sovsekretno.net/>казино сочи</a> букмекерская контора фонбет официальный суть казино 1×bet официальный сайте букмекерской конторы фонбет casino 7k рабочее online casino 7k porno Вера Бирюкова, гимнастка
#7063 Charlesgunnyhttp://filmkachat.ru
казино 1× slots официальный сайт
Например, игрок получил 500 руб. При создании аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., потребуется сделать 875 спинов для полного отыгрыша.В наше время очень просто получить приз за регистрацию в казино. Практически каждый игорный дом с радостью начислит деньги или благотворительные вращения. Многие гэмблеры пользуются этим и не стыдятся региться в каждом клубе с прибыльными критериями. Кстати, это замечательная возможность выработать победную тактику и сорвать джекпот. <a href=http://filmkachat.ru/>казино 1× slots официальный сайт</a> <a href=https://community.wongcw.com/blogs/934091/Transform-Your-Space-with-a-Professional-Interior-Design-Plan-That>https://community.wongcw.com/blogs/934091/Transform-Your-Space-with-a-Professional-Interior-Design-Plan-That</a> 1×slots зеркало на сегодня <a href=https://brocollective.com/users/chrishyday/>https://brocollective.com/users/chrishyday/</a> Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, дабы появилась возможность исключить выигрыш.
1×slots зеркало регистрация в 1×slots casino
Несмотря на то, собственно этот вариант стимуляции со стороны азартных платформ очень популярен в сфере сходственных игр, далеко не всем поклонникам казино известно, что себе бездепозитные бонусы казино и как непосредственно их возможно эксплуатировать.Чаще всего казино приз за регистрацию без депо даёт вероятность запустить любой автомат. Но какого-либо внимательно ознакомиться с критериями. Иногда для игры доступны только определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, лучше начать знакомство с миром азарта непосредственно с «одноруких злодеев». 1×slots регистрация Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном веб-сайте и выполните вход в индивидуальный кабинет, чтобы арестовать благотворительные вращения с вейджером х40; <a href=https://images.google.nl/url?sa=t&url=https://doctorlazuta.by/>https://images.google.nl/url?sa=t&url=https://doctorlazuta.by/</a> 1×slots казино мобильная версия Не рекомендуем опрометью голову хвататься за всевозможные предложения получения средств без инвестициям. Вполне вполне, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем выглядит на первый взгляд. Альтернативой является казино бонус за депо. Мы предлагаем для пару советов, спасибо коим у каждого игрока будет вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом денег:Мы рекомендуем не отказываться от подобных предложений узнаваемых казино. Выделите некоторое мин. На регистрацию, получите приз и попробуйте его отыграть. Может быть, сегодня фортуна несомненно на вашей стороне!
1×slots официальный demo регистрация в 1×slots casino
3. Подтвердить данные. В зависимости от клуба, нужно привязать аппарат или почту, указать индивидуальную информацию; Так собственно главное различие презента на депо от бездепа – неотъемлемое пополнение счёта. Вы можете привнести депо и преумножить стартовый капитал или арестовать бездеп и всем не придётся рисковать своими сбережениями. Поспешите выполнить обычные требования, и администрация ресурса начислит щедрое одобрение! <a href=http://lysyegory.ru/redirect?url=http://sklad27.ru/bitrix/redirect.php?goto=http://zdravsnab.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/AuH6Kbzf20g>http://lysyegory.ru/redirect?url=http://sklad27.ru/bitrix/redirect.php?goto=http://zdravsnab.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/AuH6Kbzf20g</a> 1×slots зеркало видели такую регистрацию на Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депозит имеет выделяться до 30 дней.
1×slots сайт
Список например называемых «запрещенных территорий» прилагается к правилам бонусной программы игорного портала. Обязательно выясните, распространяются ли на вас сходственные наказания.Во всех легальных онлайн-казино Беларуси нужно подтверждение паспортных данных для игры — это требование правительства страны. Бездепозитные бонусы казино это экономическая компенсация, предлагаемая пользователям на дармовой базе и возможность выступать в интернет казино даром. Если ассоциировать их с поощрениями за лепта, каких свои выдаются только потом начального пополнения счета, то бездепозитные гонорары получаются безвозмездно. То есть, играющий получает возможность создавать ставки на теснее существующие деньги, коие выдаст заведение, исполняя, при, обыденные деянья, дабы их извлечь (тут идет речь о регистрация, удостоверении личности с использованием номера аппарата, дизайна заказы и т.д. ). 1хслотс регистрация в 1×slots casino <a href=http://bneinoach.ru/forum/user/97213/>http://bneinoach.ru/forum/user/97213/</a> Важно, удостоверьтесь что, что раньше не регились в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи.
1×slots casino регистрация 1×slotscasin online
Зачастую бездепозитные бонусы казино для забавы предлагаются разными заведениями азартных игр в качестве маркетинговых промоакций либо в целях вербования к себя свежих игроков. Для бездепозитных бонусов в казино 2022 геймеру не пополнять счет до этапа вывода желаемых средств.Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? <a href=http://geolan-ksl.ru/forum/user/77436/>http://geolan-ksl.ru/forum/user/77436/</a> Раздача призов имеет быть приурочена к разным датам: календарные дни, дни рождения игроков, годовщина открытия казино и т. Д. Подарок выдается вид средств, фриспинов или баллов для накопления и размена на услуги оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд притязаний. x1 slots 1хслотс регистрация перейти на 1×slots За вербование приятеля ? масштабах партнерской программы заказчик получает вознаграждение за привлечение новых пользователей.
<b>Смотреть еще похожие новости:</b>
<a href=http://6000ziyuan.com/forum.php?mod=viewthread&tid=124952&extra=>онлайн казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но а если вы уже профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в интернет казино;
#7064 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
pin ап casino сайт pin up casino <a href=https://sovsekretno.net/>спорт букмекерская контора</a> 1×bet официальный xbet карты казино <a href=https://krtka.info/>Александра Бортич</a> casino buzz пин up casino 7k casino зеркало рабочее порно с Карен Хачанов (теннис) пина casino скачать 1×bet 1×bet xyz пинко casino
#7065 Charlesgunnyhttp://filmkachat.ru
1×slots казино мобильная версия
На нашем сайте Вы отыщите перечень актуальных свежих бездепозитных призов в казино 2022 года. Также, есть много неповторимых услуг, которые доступны только гостям нашего сайта после регистрации по нашей ссылке или активации особого промокода. <a href=http://filmkachat.ru/>казино 1×slots</a> Изучить верховодила и условия получения бездепозитных призов казино, Вы можете у нас на веб-сайте в разделе с бонусами или на официальном веб-сайте выбранного Вами казино. Если не отыскать нужную информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал либо по электронной почте.Но рядах азартных платформах похожие гонорары все получить теперь зарегистрированные юзеры. В этом случае, призы предоставляются масштабах оригинальных акций либо же неким геймерам в виде акционного предложения, которое прибывает на почту с целью «вернуть» игрока в свое казино. <a href=https://owntweet.com/thread/214642>https://owntweet.com/thread/214642</a> Вывод выигрыша с бездепозитных бонусов казино – щедрый подарок от азартных клубов. Но чтобы исключить собственный доход, нужно выполнить ряд критерий: 1×slots регистрация на 1хслотс <a href=http://vashtehnadzor.ru/index.php?subaction=userinfo&user=laughablewhirlp>http://vashtehnadzor.ru/index.php?subaction=userinfo&user=laughablewhirlp</a> Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 $. Если выдаются фриспины, их число редко превышает нескольких десятков даровых вращений.Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации приза без депо. Внимательно прочитайте до конца. Многие новички делают оплошности на этапе регистрации и поэтому имеют получить подарок.
1хслот скачать
При маленькой сумме бонуса рекомендовано играть по невысоким ставкам, а использовать максимальные другого, как лишь в том случае, в вейджер слишком великой, а время на отыгрыш сильно ограничено.Выбирайте наилучшие благотворительные бонусы за обзоров на Casinoz – и пусть вам сопутствует удача при отыгрыше бонусных кредитов! <a href=http://amazon.rx22.ru/memberlist.php?mode=viewprofile&u=255>1×slots зеркало регистрация в 1×slots casino</a> 1×slots подтвердит вашу регистрацию если говорить В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая часть забавы. Важно, зачастую бездепозитные призы в казино выдаются с лимитированиями по максимальной выплате. В среднем можно рассчитывать на прибыль в несколько тыщ руб. Как вывести выигрыш с приза без депо. Придётся доказать акк документально, в некоторых заведениях. Процедура верификации обязательна и делается каждым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате или прочтите в правилах.Фриплей-бонусы. Бонусы за благотворительную забаву есть лишь в неких клубах. Они зачисляются сразу после сотворения профиля и срабатывают недолговременное время. Если у вас нет медли потратить свои, они просто завершатся. Что касается медли, в большинстве случаев призы срабатывают протяжении одного часа. <a href=https://techdesigner.ru/users/Glavdorogadv2708>https://techdesigner.ru/users/Glavdorogadv2708</a> 1× slots сайт Бездепозитные призы казино это экономическая компенсация, предлагаемая пользователям на дармовой базе и возможность выступать в интернет казино безвозмездно. Если ассоциировать их с поощрениями за лепта, в которых свои выдаются только потом первоначального пополнения счета, то бездепозитные вознаграждения получаются безвозмездно. То есть, играющий получает вероятность делать ставки на уже место финансы, которые выдаст заведение, исполняя, при, обычные деянья, дабы их извлечь (тут идет речь о регистрация, удостоверении личности с внедрением номера телефона, дизайна заказы и т.д. ).При игре на бонусные свои запрещается играть в игровые автоматы с прогрессивным джекпотом и игры из радела exist casino. Кроме того, кое-какие казино дают бездеп на раз или некоторое конкретных слотов, и в других забавах Вы не сможете на них играть.
1 xslots рабочее зеркало
Все безвозмездные призы кажутся заманчивыми. Кто же откажется от способности сыграть в онлайн-казино, не рискуя средствами, хотя получая выигрыши. Но далековато не все бездепозитные бонусы в привлекательны для рассудительного клиента.Призовые начисления без депозита шансы предоставляться для участия в турнирах онлайн казино. Потратить перечисленные деньги можно самая в рамках данной акции. Условия их проведения включают в себя ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться таким предложением, какого-либо выучить его верховодила. <a href=https://39504.org/member.php?action=profile&uid=25556>https://39504.org/member.php?action=profile&uid=25556</a> Выбор каждого онлайн казино на нашем сайте. В описании к любому Вы можете разузнать, собственно получите за создание аккаунта.Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном призе, то в первую очередь направьте на велечину вейджера и срок, который дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть бонус и вывести выигрыш. 1×slots официальный сайт мобильная версия
1хслотс рабочее зеркало
Срок активации и время на отыгрыш. Зачисление средств либо фриспинов случается при активации на требовательно ограниченного периода, схожие притязания предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать бонус количество дней или числе месяцов. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высочайшим вейджером. <a href=http://permitbeijing.com/forum/showthread.php?tid=2243070>1×slots подтвердит вашу регистрацию если говорить</a> Бoльшинcтвo азартных заведений выдвигают приблизительно одинаковые условия и притязания, которые необходимо выполнить, чтобы получить бездепозитный приз за регистрацию. Все их возможно объединить в раз перечень:Бездепозитные призы за регистрацию в игровых автоматах для собственников онлайн-казино считаются долею маркетинговой кампании, направленной на повышение аудитории сайта. Так они продвигают средства бренды и привлекают свежих клиентов. Активация случается с помощью промокодов, коие вводятся в собственном офисе последствии регистрации. Среди спецпредложений в перечне Casino.ru находятся неповторимые промокоды, которые доступны лишь посетителям портала. Другие способы начисления средств ? автоматическая активация сразу последствии создания аккаунта и получение дара по запросу в службу технической поддержки.Но существуют азартные заведения, готовые просто так вручить деньги на забаву. Для сего довольно сделать профиль. Чтобы исключить выигрыш, сперва необходимо выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа. 1×slot зеркало рабочее регистрации на телефон придет <a href=http://bbs.yunduost.com/home.php?mod=space&uid=20472>http://bbs.yunduost.com/home.php?mod=space&uid=20472</a>
казино 1×slots официальный сайт
Подтвердите регистрацию, чтобы активировать Бездепозитный приз с выводом, требуется наполнить индивидуальный профиль. Заполните пустующие поля истинными данными о себя. За привлечение приятеля ? в партнерской программки клиент получает вознаграждение за привлечение новых пользователей. <a href=http://v208870d.bget.ru/user/Charlesslige/>http://v208870d.bget.ru/user/Charlesslige/</a> Вознаграждения за получение VIP-статуса ? начисляются в рамках программы лояльности при достижении очередного уровня или выдаются индивидуально менеджерами саппорта.Зарегистрируйтесь. Для регистрации чаще всего довольно установить свой номер телефона и почтовый адрес, последствии чего ввести приобретенный код из СМС. Возможно, требуется показать промокод. В правилах промоакции будет написано, где его надо включать. Иногда это надобно создавать при регистрации, время — уже после творенья личного кабинета, на отдельной страничке. 1×slots официальный сайт скачать на айфон
<b>Смотреть еще похожие новости:</b>
<a href=https://talkonlinenews.com/viewtopic.php?t=4328>1×слот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бонус с зачислением денег на счет выделяет больше свободы действий. Пользователь сам подбирает, каким образом воспользоваться подаренными своими. Здесь того имеют работать ограничения на список дешевых игр, хотя обычно эти рамки не так строги, как в промо с безвозмездными вращениями. Прямо в отберите бесплатные вращения за регистрацию без депозита и начинайте собирать призовые композиции ради крупных выигрышей!
#7066 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
приложения букмекерских контор казино <a href=https://th-royalgclub.com/>1win casino</a> casinos winning 1×bet casino <a href=https://strelochnik.com/>казино сегодня</a> скачать casino на андроид порно с Илья Осипов (киберспорт) ramenbet casino вывод казино 1×bet Скворцова Вероника Игоревна порно casino бездепозитный
#7067 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
Новые клиенты онлайн-казино без первого депозита имеют проверить собственную удачливость. К что, этому же есть вероятность преобразовать бездепы в настоящие деньги за регистрацию в казино, однако для этого бонус необходимо отыграть согласно условиям промоакции. <a href=http://filmkachat.ru/>1×slot зеркало</a> В истинное время получить приз за регистрацию в казино очень просто. Почти любой игорный дом с радостью даст средства или бесплатные вращения. Многие игроки используют этим и не стесняются регистрироваться в каждом клубе с выгодными критериями. Кстати, это замечательная возможность выдумать выигрышную тактику и сорвать куш.Операторы гемблинга заявляют, собственно например они дерутся с бонус-хантерами. Впрочем, критики считают, собственно этим казино пробуют устроить из случайного гостя постоянного игрока. <a href=https://www.thisisant.com/forum/viewthread/7824/>https://www.thisisant.com/forum/viewthread/7824/</a> Бездепозитные бонусы реальными средствами, коие можно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадали. казино 1×slots официальный сайт <a href=http://dinskoi-raion.ru/forum/?PAGE_NAME=profile_view&UID=65722>http://dinskoi-raion.ru/forum/?PAGE_NAME=profile_view&UID=65722</a> Такой безвозмездный эквивалент средств зачисляется на профиль юзера в осуществления требований и предназначаются они лишь для игрового процесса. Вывод таких вознаграждений вероятен только после воплощения вейджеровых критерий.
1×slots регистрацию процедура займет всего лишь
1×slots официальный сайт зеркало Казино выводит средства только на ту платежную систему, с котрой был сделан депо. То есть, для вывода бездепозитного приза, Вам поначалу необходимо пополнить счет. В неких клубах узкий список методов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет именно с этих платежных способов, коие доступны для вывода.Вывод выигрыша с бездепозитных бонусов казино – щедрый презент от азартных клубов. Но чтобы исключить собственный заработок, необходимо выполнить ряд критерий: <a href=http://railagent.ru/club/user/107024/>http://railagent.ru/club/user/107024/</a> Так же стоит выделить то, что в каждом интернет казино установлен собственный наибольший кешаут на бездепозитный бонус. Как правило кешаут — это предельная сумма средств, кот-ая доступная для вывода с бездепозитного приза.Обычно для получения призов без депозита, казино выдвигает лояльные и абсолютно выполнимые обстоятельства, хотя есть ряд действий которые запрещены и все стать неприятные результаты: 1×slots официальный сайт зеркало Бездепозитные бонусы в казино без пополнения 2022 — это конкретная сумма денег либо gorovyh spins вращения, которые предоставляются первым постояльцам за регистрацию на веб-сайте казино в виде бездепозитного приза, и дает для возможность с казино без пополнения опробовать предложения (игр), с дальнейшей привилегией вывода средств при исполнении всех установленных правил.При отыгрыше бонусных средств, нужно учитывать срок действия приза и время, коие дается на отыгрыш. По истечению заявленного медли, не отыгранный бонус будет аннулирован.
1хслотс 1хслотс регистрация перейти на 1×slots
Чтобы самостоятельно убедиться в преимуществах бездепозитных призов, довольно зарегистрироваться в казино и получить одобрение.Обычно показатель повыше, чем для призов на депо. Не дивитесь, если он несомненно числе х100. Иногда завышенный коэффициент вейджера устанавливается для обитателей отдельных государств. <a href=https://charliegiih56890.activosblog.com/29623546/deepnude-ai-navigating-the-controversial-landscape-of-image-manipulation-technology>https://charliegiih56890.activosblog.com/29623546/deepnude-ai-navigating-the-controversial-landscape-of-image-manipulation-technology</a> 1×слот регистрация в 1×slots casino Особую изюминку видео слотам придают уникальные символы. С их свет активизируются различные бонусы. Вы сможете запустить дополнительный уровень и прирастить сумму выигрыша. Есть знаки, коие сменяют негодные составляющие и сами творят выигрышные комбо. Не стоит забывать и тему бонус-тур. После каждого счастливого спина есть шанс прирастить сумму выигрыша в 2 или хорошо раза.Пoдтвepдить личнocть клиента. Для успешного вывода средств, необходимо подтвердить личность посетителя. Нa этaпe вepификaции пpoфиля, работники службы защищенности обязаны увериться, что у игрока всего лишь раз аккаунт. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не сможет исключить собственный выигрыш, случае у него будет некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы.
скачать 1×slots на андроид мобильная версия
<a href=http://forum.survival-readiness.com/viewtopic.php?p=466531#p466531>1х слот регистрация в 1×slots casino</a> Фриспины – благотворительные вращения с фиксированной ставкой, коие можно применять в определенных игровых автоматах.Варианты выигрыша в от Вашей удачи и критерий игорного портала. Выше мы заявили, собственно некоторые бездепозитные бонусы в 2022 году выдаются с лимитированиями по максимальной выплате. Однако, остаются другие, все, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность современных игр на деньги, возможно выиграть невероятные суммы. Сегодняшние игровые автоматы либо видео слоты, как их называют. Могут выдавать солидные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000. Для казино, работающих онлайн, бездепозитные призы нужны для привлечения новых клиентов. Предложение сыграть на слотах без необходимости внесения реальных денег — работающий способ для увеличения энтузиазма к компании. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит выступать в казино, только теперь теснее на собственные деньги. 1×slots промокод при регистрации <a href=https://halqym.kz/user/KennethEnliT/>https://halqym.kz/user/KennethEnliT/</a>
1×slots официальный зеркало рабочее
В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и если, тогда, спорных ситуаций нет возможности куда-то пожаловаться и доказать свою правоту.Большинство интернет-казино из нашего топ-10 готовы порадовать вас эксклюзивными промоакциями. Читайте о их в обзорах и на форуме. <a href=http://shinyoungwood.co.kr/bbs/board.php?bo_table=free&wr_id=295372>http://shinyoungwood.co.kr/bbs/board.php?bo_table=free&wr_id=295372</a> 1хслот зеркало сайта Зарегистрироваться в казино по специальной ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефона и электронную почту). Для подтверждения номера телефона нужно в личном профиле указать собственный номер и надавить кнопку „Подтвердить номер аппарата“, дальше Вы получите sms-сообщение с кодом, который необходимо установить в подходящее фон. Для подтверждения электронной почты, перебежать по активной ссылке в послании от казино.Подарки на конкретные даты выделяются критериями получения. Если одобрение начисляют игроку на денек рождения, то сумма обыкновенно зависимости от общего объема депозитов за прошедший год.
<b>Смотреть еще похожие новости:</b>
<a href=https://thetechmodders.com/forums/viewtopic.php?t=27231>1хслот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Так же стоит выделить то, собственно в каждом интернет казино установлен собственный наибольший кешаут на бездепозитный приз. Как управляло кешаут — это предельная сумма денег, которая дешевая для вывода с бездепозитного бонуса.
#7068 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Федор Чалов (футбол) 7k casino зеркало на сегодня <a href=https://rucriminal.info/>1win casino</a> 1×bet официальный скачать porno Катерина Шпица <a href=https://t.me/vchkogpu_ru>porno Марина Александрова</a> Скворцова Вероника Игоревна порно casino автомат porno Илья Ковальчук (хоккей) win win casino inform@rucriminal.info 1×bet скачать бесплатно casino pin официальный
#7069 Charlesgunnyhttp://filmkachat.ru
1×slot официальный сайт
В разделе с бонусами активировать собственный презент. Найти игры, для которых предусмотрено одобрение и применять приз по назначению. <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> Фриплей-бонусы. Бонусы за безвозмездную игру есть лишь в некоторых клубах. Они зачисляются сразу последствии создания профиля и действуют недолговременное время. Если у вас нет времени потратить свои, они просто завершатся. Что дотрагивается медли, в большинстве случаев призы срабатывают на одного часа. <a href=https://owntweet.com/thread/214642>https://owntweet.com/thread/214642</a> 1×slots на любой вкус как пройти регистрацию <a href=http://kioskindustry.ru/index.php?subaction=userinfo&user=forgetfulquery8>http://kioskindustry.ru/index.php?subaction=userinfo&user=forgetfulquery8</a> Это тоже благотворительные деньги, коие поступают на аккаунты свежеиспеченных в в регистрирования. А особенность этих бонусов произведено что, нет, собственно обретенные деньги непременно по использовать в продолжении назначенного времени.Основное отличие в, что для получения бездепа не надо пополнять баланс в казино. Но не этого, есть ряд и других различий:
1×slots зеркало проходить регистрацию это отличный вариант
Бездеп с фриспинами возможность обхватывать всю коллекцию игр на веб-сайте либо разработки 1-го провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш возможность быть выведен последствии как, как пользователь отыграет данную сумму. Возможность оценить глубокий перечень слотов — главное достоинство данной разновидности. Игроку становятся доступны что, эти опции, которые отсутствуют в демонстрационном режиме, а вероятность выиграть реальные средства прибавляет ярких азартных ощущений. <a href=http://zxz.listbb.ru/memberlist.php?mode=viewprofile&u=925>1 xslots рабочее зеркало</a> 1×slots регистрация 1×slotscasino 56 online Бездепы могут входить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами. <a href=https://www.link-man.free-weblink.com/%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0-%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA_342199.html>https://www.link-man.free-weblink.com/%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0-%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA_342199.html</a> Несмотря на то, что данный вариант стимуляции со стороны азартных платформ очень моден в похожих игр, далековато не всем поклонникам казино знаменито, собственно себе бездепозитные бонусы казино и как именно их вероятно эксплуатировать. 1× slots сайт Такой безвозмездный эквивалент средств зачисляется на профиль пользователя последствии воплощения требований и предназначаются они лишь для игрового процесса. Вывод таких вознаграждений вероятен лишь после воплощения вейджеровых условий.
1×slots регистрация
К сожалению, нет. Почти все казино, просят внесение хотя бы одного малого депо для вывода выигрыша с бездепозитного приза. Также учитывайте, собственно вывести деньги разрешается только на что, эту платежную систему, с коей был сделан депозит. <a href=https://medicaidsecretsforum.com/member.php?action=profile&uid=11661>https://medicaidsecretsforum.com/member.php?action=profile&uid=11661</a> При регистрации по свидетельствовать лишь достоверную информацию. Когда учетная запись несомненно активна, замечен доступ в Личный офис. В нем возможно выбрать еденицу, ввести промокод и узнать доскональные управляла получения и отыгрыша бездепа. Краткая информация об акции нередко присутствует непосредственно на регистрационной форме. 1хслот зеркало сайта У нас на сайте Вы отыщите список бонусов без депозита в проверенных казино и подробную информацию о том как их получить и применять.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.
1хслот зеркало сайта
Выигрыши с бонусов без инвестициям всегда привязаны к требованию по ставкам и все быть обналичены только в выполнения данных требований. <a href=https://www.176mw.net/forum.php?mod=viewthread&tid=9&pid=546851&page=10208&extra=page%3D1#pid546851>1×slots мобильная версия войти казино</a> B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.Несмотря на то, собственно этот вариант стимуляции со стороны азартных платформ очень моден в сходственных игр, далеко многим поклонникам казино известно, что сами бездепозитные бонусы казино и как непосредственно их возможно эксплуатировать. 1×slots на любой вкус как пройти регистрацию <a href=https://www.nashtransport.ru/profile/42904-glavdorogadv2106/?tab=field_core_pfield13>https://www.nashtransport.ru/profile/42904-glavdorogadv2106/?tab=field_core_pfield13</a> Для как, чтобы отыграть необходимую вашего бездепозитного приза нужно выполнить условия вейджера. Очень часто фриспины даются на определенные слоты (book of ra, book of lifeless, book of sun), избирайте разъем для по душе, все очень красивые и качественные. Бездепозитные бонус имеет быть денежным так и повторяющий фриспинов на слотыНо есть игорные заведения, которые готовы просто так жертвовать деньги на забаву. Для сего довольно сделать профиль. Чтобы вывести свой выигрыш, вас поначалу нужно выполнить обстоятельства отыгрыша, указанные в условиях получения бездепозитного депозита.
1×слотс казино
Некоторые клубы механически начисляют бонус на аккаунт игрока в исполненья условий получения, хотя случаются ситуации, когда бонус нужно активировать игроку самому. Есть количество способов активации приза:Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут устанавливает лимитирование для клиентов. Конечно, это возможно счесть неким неудобством для игрока, но справедливости ради необходимо, собственно выбор автоматов всё также остаётся достаточно большим. Для всех бездепозитных бонусов действует наибольший лимит на выигрыш. Он указывает предельную необходимую, которую появится получить, играя на бонусные кредиты. Как только вас получится выполнить притязания вейджера, возможный максимально несомненно переведен с бонусного счета на ведущей, а остаток несомненно списан. <a href=http://l6046402.bget.ru/member.php?action=profile&uid=39208>http://l6046402.bget.ru/member.php?action=profile&uid=39208</a> Можно ли в одном интернет казино получить больше 1-го приза за регистрацию? Нет, например как в каждом интернет казино есть верховодила, к которым надо(надобно) держаться, не делать 2 аккаута для получения бонусов, иначе будет блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, бонус за регистрацию выдаеться раз один одному лицу. 1×slots зеркало этих способов предполагает регистрацию Автоматы неспроста считаются самым популярным азартным развлечением. Чтобы усвоить управление и правила, потребуется всего количество минут. Ваша задачка сделать ставку, найти количество рабочих линий и можно крутить барабан. Если дисплее выпадет выигрышная композиция – вы выиграли! С этой задачей для помогут справится бездепозитные бонусы казино.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.sgomberisgombero.it/author/jamesapate/>1х слотс зеркало регистрация в 1×slots casino</a>
<a href=http://swissairways-va.com/phpBB3/memberlist.php?mode=viewprofile&u=3495>1×slots официальный сайт зеркало рабочее</a>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=80234&result=reply>1×slots casino регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Такой казино бонус без депозита за регистрацию выдается игроку на час и активно употребляется данное предложение с 2017 года. Это как бы какая-то конспирация одобрения под бездепозитный. Суть всего этого сводится к тому, что геймеру на час выдается, к примеру, 1000 $, а реклама повторяет о том, что любой выигрыш возможно будет в забыть при себе. Но случае играющий всерьез отнесется к этому предложению, то он попросту потеряет время. Ведь геймеру надо(надобно) несомненно выступать не в основном аккаунте, а тренировочном и с ограниченным выбором автоматов и ставок. Да и если, тогда, выигрыша (числе всей тыс. ) в управляла вступят определенные условия, где будет сказано, собственно наибольшей суммой победы возможность быть только двести $ и средства возможно использовать только виде бонуса на 1-ый лепта с вейджером 25 от суммы гонорары плюс сам депо. По результату получится, что игрок выигрывал себе 200% бонус с вейджером на конкретную сумму. Короче говоря, это все не стоит вашего медли.
#7070 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию более популярный вариант это
Теоретически, к бесплатным призам можно отнести например называемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, поэтому что они предоставляют лишь вероятность делать ставки. <a href=http://filmkachat.ru/>1×slots зеркало рабочее на сегодня</a> <a href=https://xequte.com/forum/topic.asp?TOPIC_ID=15275>https://xequte.com/forum/topic.asp?TOPIC_ID=15275</a> 1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, в не желаете замерзнуть жертвой плутов либо впустую истратить время; 1×slots casino зеркало <a href=http://web.symbol.rs/forum/member.php?action=profile&uid=731159>http://web.symbol.rs/forum/member.php?action=profile&uid=731159</a>
1х слот 1хслотс регистрация перейти на 1×slots
Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного бонуса. 1хслот 1хслотс регистрация перейти на 1×slots <a href=http://bizon15.ru/index.php?subaction=userinfo&user=meekgesture16>http://bizon15.ru/index.php?subaction=userinfo&user=meekgesture16</a> При использовании бездепозитным бонусом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют некоторое обликов лимитов: 1×slots зеркало регистрацию более популярный вариант это
зеркло казино 1×slots
Операторы гемблинга заявляют, собственно например они дерутся с бонус-хантерами. Впрочем, критики считают, собственно данным казино пробуют сделать из случайного гостя постоянного игрока. Как правило, при выводе финансов, от играющего потребуется только устроить наименьший вклад для того, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом собственный счет. <a href=https://www.click4r.com/posts/g/13831803/>https://www.click4r.com/posts/g/13831803/</a> Таким образом, заведение пробует показать себя своим вероятным игрокам, а такой рекламный ход как казино бонус без депозита за регистрацию привлекает очень много внимания к игорному заведению и обеспечивает постоянный поток новых посетителей и грядущих посетителей игрового интернет клуба.Ещё одно распространённое акционное предложение – привлекательный подарок с неблаговидными притязаниями. К примеру, клуб обещает $100 в бездепа, хотя с вейджером х80 либо х100. Отыграть подобный вейджер практически невероятно и потому превосходнее концентрироваться на более интересных промоакциях. 1×slots регистрация на сайте 1×slots ru com Бездепы могут заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами.
casino 1×slot
Реже бонусы без депозита начисляются постоянным игрокам. С их поддержкой администрация старается вычесть ценных посетителей либо желает поблагодарить за преданность верных посетителей. Но гораздо чаще для подобных целей применяются эти промоакции:Выигрыши с бонусов без вложений постоянно привязаны к притязанию по ставкам и имеют быть обналичены только последствии выполнения этих требований. <a href=https://irc.floobits.com/Jamesamiva>1× slots официальный</a> Способы получения бездепа различаются от вида бонуса, кот-ый приглянулся игроку. Но вам иначе нужно быть зарегистрированным в легальном онлайн-казино и подтвердить собственную лицо. В общем виде пошаговая аннотация для получения бездепозитного бонуса выглядит например:Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? Кешбэк-бонус представляет собой возврат фиксированного процента от ставки когда проигрыша либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%. 1×slots официальный зеркало рабочее <a href=http://arhangrupmetal.com/index.php?subaction=userinfo&user=ytomaz>http://arhangrupmetal.com/index.php?subaction=userinfo&user=ytomaz</a> Фриспины начисляются по конкретной ставке. После их активации игроку нужно запустить слот и убедиться, собственно в нем отображаются бесплатные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода последствии отыгрыша определяется оператором и редко выше 5 000 руб.
1хслотс рабочее зеркало
Диапазон ставок, коие вправе сделать игрок, также лимитирован. Обычно ставить возможно небольшую сумму — пределах 10–30 рублей за одно вращение.Такой безвозмездный эквивалент средств зачисляется на профиль пользователя последствии осуществления притязаний и предназначаются они только для игрового процесса. Вывод таких вознаграждений вероятен только в осуществления вейджеровых условий. Минимального оборота. Этот предел уточняется вейджером — пока игрок не поиграет на установленную сумму, вывод средств будет недоступен. <a href=http://home-stile.ru/bitrix/click.php?goto=http://vizantmarket.ru/bitrix/rk.php?goto=http://eagle-cable.ru/bitrix/redirect.php?goto=https://telegra.ph/Podacha-iska-o-diffamacii-i-dalnejshie-dejstviya-Rukovodstvo-i-posledstviya-09–23>http://home-stile.ru/bitrix/click.php?goto=http://vizantmarket.ru/bitrix/rk.php?goto=http://eagle-cable.ru/bitrix/redirect.php?goto=https://telegra.ph/Podacha-iska-o-diffamacii-i-dalnejshie-dejstviya-Rukovodstvo-i-posledstviya-09–23</a> 1×slots casino регистрация на сайте
<b>Смотреть еще похожие новости:</b>
<a href=https://demo.comuni-italiani.it/forum/viewtopic.php?f=9&t=459872>1×slots зеркало рабочее</a>
<a href=https://forum.eliteshost.com/showthread.php?tid=15331>1×слот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Способы получения бездепа различаются от вида приза, кот-ый понравился игроку. Но вам в любом случае нужно быть зарегистрированным в легальном онлайн-казино и подтвердить собственную лицо. В общем виде пошаговая инструкция для получения бездепозитного бонуса выглядит например:
#7071 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Окладникова Ирина Андреевна порно pin ап casino <a href=https://sovsekretno.net/>мобильные букмекерские конторы</a> Светлана Ходченкова 1×bet зеркало xbet xyz <a href=https://res-publika.com>7k casino бонус</a> Лут Оксана Николаевна порно игры казино porno Юлия Пересильд сайты казино букмекерская контора бесплатно скачать казино смотреть онлайн порно с Антропова Валентина Викторовна
#7072 Charlesgunnyhttp://filmkachat.ru
1×slot рабочее зеркало
Бездепы с безвозмездными вращениями деют юзерам право вертеть барабаны игровых автоматов без снятия средств со счета. За любой раунд платит казино. Число спинов ограничено и редко превышает сотку. Если промоакция содержит большое даровых игр, их начисление может быть разбито на несколько дней. <a href=http://filmkachat.ru/>1х слот 1хслотс регистрация перейти на 1×slots</a> Перед активацией принципиально внимательно выучить обстоятельства промоакции. Чем ниже вейджер, тем больше возможная выгода игрока. Имеют значение кроме лимиты ставок при отыгрыше и сроки, протяжении которых возможно пользоваться предложением. Если бездеп обхватывает ограниченный список игр, рекомендуется разузнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только что, нет случае, случае оператор не установил жесткие ограничения на максимальную необходимую ставки. <a href=http://prsync.com/archicgi/how-home-entertainment-flyarchitecture-transforms-modern-living-spaces-4518898/>http://prsync.com/archicgi/how-home-entertainment-flyarchitecture-transforms-modern-living-spaces-4518898/</a> 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=http://www.decodev.tn/index.php?option=com_k2&view=itemlist&task=user&id=414322>http://www.decodev.tn/index.php?option=com_k2&view=itemlist&task=user&id=414322</a> Таким образом онлайн казино получает потенциального игрока. Возможно дальнейшем либо настоящем он захотит сыграть на средства средства. Так работают бездепозитные бонусы в интернет казино. Здесь отлично подходит выражение, благотворительные сыр случается лишь в мышеловке. Начинающие игроки шансы не осознавать опасность пыла. Однако течением понимания становится больше. Это тема для отдельного обсуждения.Возможность протестировать свежие игры, не рискуя собственными своими и создать собственную тактику игры.
1×slots быструю регистрацию а также мгновенное
1×slots официальный зеркало Многие игроки, оценив возможностей казино, остаются выступать в нем и далее ? на это и направлено каждое рекламную. Постоянные клиенты заносят депозиты и делают ставки, обеспечивая длительную прибыль оператора. То есть, казино раздают бездепы свежим юзерам для формирования приклнной аудитории. <a href=https://lu.ma/Glavdorogadv2106>https://lu.ma/Glavdorogadv2106</a> Наличие у игрока 2 аккаунта. Запрещено создавать количество профилей для неоднократного получения бездепов. 1×slots зеркало которую указывали при регистрации кстати
1×slots casino зеркало
<a href=https://rubcrumb.ru/user/ZacheryskaNo/>https://rubcrumb.ru/user/ZacheryskaNo/</a> Для получения выигрыша потребуется выполнить условия казино. Чаще всего игроку нужно поставить определенную необходимую, но уже из личных средств. Она рассчитывается из общего объема выигрыша за все время использования бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, случае пользователь выиграл 1000 рублей, а множитель составляет х30, вывести деньги возможно будет, сделав ставки на 30 000 руб.К примеру, игроку выдаются безвозмездные средства в заведении в размере пятидесяти или ста $ (вейджер на которые составляет 100х). То есть, каждому новоприбывшему геймеру выскакивает притягивающая картинка, кот-ая сулит выплату всех зачисленных фирмой средств. Не стоит обращать внимания на казино приз за регистрацию без депозита с слишком большой или очень малюсенькой суммой призов, поэтому собственно, том кропотливо выучив все обстоятельства, тут всего, несомненно некий подкол. 1×slots актуальное зеркало 4. Заберите подарок. Чаще всего приз активируется незамедлительно после регистрации. Но бывают истории, когда нужно зайти в собственный офис или написать в службу.Хотя безвозмездные призы начисляются без депо, не исключено, собственно для придется вносить средства. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь после того, как новый заказчик первый пополнит игровой счет.
1×slots официальный зеркало
<a href=http://loevil.com/phpBB3/viewtopic.php?t=33327>1×slots зеркало</a> При маленький сумме приза рекомендуется выступать по низким ставкам, а использовать наибольшие другого лишь сомнений случае, в вейджер очень большой, а время на отыгрыш крепко ограничено.Все обожают получать презенты. Согласитесь, почти каждый играющий человек будет бесконечно рад, случае получит бесплатный презент для забавы в интернет казино просто за регистрацию либо же бонус за внесенный депозит, так нарекаемые приветственные бонусы для новых игроков. Соответственно такие онлайн клубы станут больше модны и предпочтительны у игроков при выборе казино для забавы. Топ казино каждый обновляется и добавляются новые и интересные игровые клубы с привлекательной бонусной политикой и всеми возможными прерогативами, к коим относятся такие бонусы как фриспины за регистрацию, денежные бездепозитные бонусы, еще великодушные призы за внесенный депо. 2. Создать новый профиль. Для регистрации надо(надобно) наполнить маленькую анкету или зайдите в собственный офис при помощи соц сеток;Но есть игорные заведения, которые готовы просто так жертвовать деньги на забаву. Для этого достаточно создать профиль. Чтобы исключить свой выигрыш, вам сначала нужно выполнить условия отыгрыша, указанные в условиях получения бездепозитного депо. 1× slots casino официальный сайт <a href=https://tpforums.org/forum/member.php?78974-JasperUnupe>https://tpforums.org/forum/member.php?78974-JasperUnupe</a> В интернете много знаменитых игорных площадок с привлекательными акционными предложениями. Однако внимательно разбирать условия десятков предложений времени надоест, ну и время отнимет количество. Поэтому наша команда подготовила ТОП-3 сайтов с наилучшими бездепозитными призами:Бонус без депозита за регистрацию в казино (бездепозитный приз) – это валютный презент от клуба, кот-ый начисляется на аккаунт игрока в регистрации в казино. Кроме создания учетной записи, для получения бездепа, очень часто потребуется ещё и подтвердить контактные данные игрока и/или активировать специальный промо-код.
1×slots сайт
Игры, каких можно играть на бонусные деньги. Проверьте перечень игр, в возможно играть на бонусные средства, возможно они Вам не понравятся и не стоит тратить своё время на такую акцию. <a href=http://www.superstitionism.com/forum/profile.php?id=1361566>http://www.superstitionism.com/forum/profile.php?id=1361566</a> Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых свежих, великодушных и проверенных бонусах в онлайн казино, которые обновляются каждый денек.Мы рекомендуем не открещиваться от сходственных предложений узнаваемых казино. Выделите несколько мин. На регистрацию, получите приз и попробуйте его отыграть. Может быть, сейчас удача несомненно на вашей стороне! 1×слот регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://www.reisezielforum.de/memberlist.php?mode=viewprofile&u=14074&sid=2a87f42017f97c246525bdfc7738b73c>1×slots казино зеркало</a>
<a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=89234>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a>
<a href=https://rolivka.online/forum/showthread.php?tid=29422>1×слотс казино</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины предназначены для использования в видео слотах. Внимательно ознакомьтесь с условиями – часто их выдают на некоторые автоматы. В зависимости от клуба, у вас получится сделать определённое число ставок. Кстати, продвинутые игорные жилища позволяют запускать каждых «одноруких бандитов». Выбирайте превосходнейшие бесплатные бонусы счет обзоров на Casinoz – и пусть для сопутствует удача при отыгрыше бонусных кредитов!
#7073 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
винлайн букмекерская контора официальный сайт казино смотреть онлайн бесплатно <a href=https://m.repost.news/>1×bet xbet xyz</a> вавада казино порно с Юлия Ефимова, пловчиха <a href=https://strelochnik.com/>1×bet на сегодня</a> букмекерская контора бетсити сайт pin up casino Светлана Ходченкова pin up casino официальный яндекс казино 7k casino зеркало на сегодня 1×bet зеркало на сегодня 1×bet xyz
#7074 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало сайта
Главное преимущество спинов – вероятность изучить различные слоты. Также получится насладиться бонусными раундами, испытывать фортуну в риск-туре и преувеличить выигрыш за счёт особенных знаков. Однако столько игровой процесс заслуживает внимание, ведь лучше сосредоточиться на реальном выигрыше.Ограничения по забавам. Администрация запрещает игрокам некоторые игровые автоматы с бездепозитным призом, средствами либо бесплатными вращениями. Обычно, в правилах приводится полный перечень слотов для отыгрыша. Иногда дробленье выполняется по облику игр. Например, отыгрыш возможен на всех игровых аппаратах, хотя запрещен в настольных играх и в разделе Live Casino. <a href=http://filmkachat.ru/>1хслот зеркало сайта</a> Для верификации аккаунта нужно дать специалистам технической поддержки отсканированную копию паспорта и счета за коммунальные предложения, а также фотографию банковской карты либо скриншот странички электронного кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для доказательства личности. <a href=https://rant.li/9fsnh6hu13>https://rant.li/9fsnh6hu13</a> Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.Как и другие акции операторов, бездепы — это рекламный инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такового предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих посетителей и разрешает им составить эмоцию о функционале, не рискуя вескими совокупностями. 1×slots зеркало регистрация то дальше необходимо пройти <a href=https://jokermerah.net/jualbeli/index.php?page=user&action=pub_profile&id=8271150>https://jokermerah.net/jualbeli/index.php?page=user&action=pub_profile&id=8271150</a> Приветственный бездеп предоставляется любому игроку лишь один раз. Казино сражаются с например именуемыми бонусхантерами (от англ. Bonus Hunter — доброволец за призами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения подарка. Исключить похожие деяния дозволяет верификация данных. Администрация вправе потребовать у клиента доказать индивидуальные данные, указанные при регистрации.
1×slots скачать на айфон
Обычно показатель повыше, чем для призов на депозит. Не изумляйтесь, в он будет том х100. Иногда завышенный коэффициент вейджера уточняется для жителей отдельных государств. 1хслотс рабочее зеркало <a href=http://iminthai.com/home.php?mod=space&uid=225585>http://iminthai.com/home.php?mod=space&uid=225585</a> Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, дабы была возможность вывести выигрыш. 1хслотс 1хслотс регистрация перейти на 1×slots
1×slots регистрация то дальше необходимо пройти
Такой безвозмездный эквивалент средств зачисляется на профиль юзера последствии осуществления требований и предназначаются они только для игрового процесса. Вывод таких вознаграждений вероятен только после воплощения вейджеровых критерий.Некоторые онлайн-казино без депо предлагают новым клиентам выбрать бонус при регистрации. Будьте внимательны: выбрав один, вы в безусловном большинстве случаев не сможете воспользоваться остальными. <a href=http://www.megatechwaves.com/2020/08/how-to-remove-powered-by-blogger-on.html>http://www.megatechwaves.com/2020/08/how-to-remove-powered-by-blogger-on.html</a> Важно, удостоверьтесь сомнений, собственно раньше не регистрировались в выбранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи. зеркала 1×slots
1хслот скачать
Активация происходит с помощью промокодов, которые вводятся в собственном кабинете в регистрации. Среди спецпредложений в перечне Casino.ru содержатся неповторимые промокоды, которые доступны только гостям портала. Другие методы начисления средств ? автоматическая активация сразу после творенья аккаунта и получение дара по запросу в службу технической помощи. <a href=http://nacionrolera.org/foro/viewtopic.php?f=1210&t=281227>1хслот зеркало сайта</a> Процесс подтверждения личности может взятьвдолг(взятьвзаймы) от одного дня до недели. Если заказчик допустил какую-либо ошибку при заполнении паспортных данных, то ему стопам адресоваться с проблемой в службу онлайн-казино.Для всех бездепозитных бонусов функционирует максимальный лимит на выигрыш. Он указывает максимальную сумму, которую вас получить, играя на бонусные кредиты. Как лишь вас получится выполнить притязания вейджера, возможный максимум несомненно переведен с бонусного счета на ведущей, а остаток несомненно списан. Выбрать казино с бездепозитным бонусом. У нас на сайте представлен перечень наилучших интернет казино, которые предлагают своим игрокам великодушные призы за регистрацию. 1хслотс казино зеркало <a href=http://www.gencotyre.com/comerblog/member.asp?action=view&memName=yellowzeal90>http://www.gencotyre.com/comerblog/member.asp?action=view&memName=yellowzeal90</a>
1×slots официальный сайт мобильная версия
Таким образом онлайн казино получает вероятного игрока. Возможно в будущем либо истинном он захотит сыграть на свои деньги. Так трудятся бездепозитные призы в онлайн казино. Здесь хорошо подходит выражение, безвозмездные сыр посещает только в мышеловке. Начинающие игроки все не обдумывать опасность азарта. Однако со временем понимания делается больше. Это тема для отдельного обсуждения. <a href=http://ternovka4school.org.ua/user/Waltervef/>http://ternovka4school.org.ua/user/Waltervef/</a> Мы проделываем ударение на ключевых положениях управлял, рассказываем о территориальных лимитированиях и вкратце информируем о иных акциях обговариваемого казино. 1 xslots рабочее зеркало Фриспины – благотворительные вращения с фиксированной ставкой, коие можно использовать в конкретных игровых автоматах.Ознакомьтесь с нашим списком превосходнейших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего перечня и получите бездеп незамедлительно. Хватайте наихорошие безвозмездные предложения ниже и выигрывайте немалые средства, не рискуя!
<b>Смотреть еще похожие новости:</b>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=326069>казино 1× slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В бонусную программу многих операторов входят регулярные бездепы. Это бессрочные акции, поощряющие активных неизменных игроков. Популярный формат — раздача фриспинов по определенным дням недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депо в мена на накопленные баллы преданности. Бонус начисляется игроку незамедлительно после регистрации и прохождения верификации в казино и не настятельно от клиента внесения депо. Как правило, объем приза в сходственном случае достаточно застенчивый, однако дозволяет новичкам познакомиться с игрой без риска настоящими средствами.
#7075 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало рабочее на сегодня 1×bet xyz порно с Абрамченко Виктория Валериевна <a href=https://t.me/vchkogpu_ru>Ирина Горбачева</a> слот casino букмекерские конторы бет <a href=https://glvk.guru/>сайт букмекерской конторы</a> букмекерская контора на андроид почему казино часы казино Радченко Светлана Юрьевна порно включи казино порно с Аделия Петросян (фигурное катание) Самойлова Алла Владимировна порно
#7076 Charlesgunnyhttp://filmkachat.ru
x1 slots 1хслотс регистрация перейти на 1×slots
Таким образом, заведение пытается показать себя своим потенциальным игрокам, а такой рекламный ход как казино бонус без депозита за регистрацию привлекает очень много внимания к игорному заведению и обеспечивает постоянный струю свежих посетителей и будущих клиентов игрового онлайн клуба. <a href=http://filmkachat.ru/>1×slots промокод при регистрации</a> Также, в нужно доказать свой номер телефонного, чтобы код, приобретенный в смс-сообщении от клуба установить в особое поле в личном офисе игрока.Бездепозитный приз казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в данном и содержится основное отличие. <a href=https://owntweet.com/thread/214649>https://owntweet.com/thread/214649</a> 1×slots зеркало рабочее <a href=http://maskarad.bomba-piter.ru/user/DoctorLazutaPr/>http://maskarad.bomba-piter.ru/user/DoctorLazutaPr/</a> 3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефонный либо почту, указать персональную информацию;
1×slots зеркало подтвердит вашу регистрацию если говорить
Выбирайте превосходнейшие безвозмездные бонусы счет обзоров на Casinoz – и пусть для сопутствует счастье при отыгрыше бонусных кредитов!Наши эксперты изучают условия промоакции, этого в ручном режиме проверку их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и характеристики. Мы не рекламируем казино, а даем игрокам информацию о лучших из их. <a href=http://check2go.net/my-account/>1 x slots casino</a> 1×slots регистрация 1×slots casino c2d ru <a href=https://floobits.com/Renaldojen>https://floobits.com/Renaldojen</a> Размер ставки для забавы по бездепозитному призу (естесственно же, когда, когда он представлен в виде бонусных валютных средств) часто ниже, чем при ирге на депозит. Ограничение несомненно работать до этапа отыгрыша приза. 1×slot официальный сайт В подавляющем большинстве случаев благотворительные призы начисляются в кредитах, которые нельзя сразу вывести со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже.Индивидуальные одобрения выдаются за совершение действий: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавленья либо официального клиента для ПК. В большинстве казино срабатывают программки преданности, присваивающие игрокам статусы за активность на сайте. Продвижение на грядущий степень часто сопровождается выдачей бездепа.
казино 1×slots официальный сайт
Бездепозитные бонусы начисляются лишь раз один. Не стоит раскрывать свежие аккаунты, дабы получить их повторно. Служба безопасности казино непременно выявит «левого» участника и перекроет. Если посетитель выполнит необходимые требования, отыграет собственную ставку и решит исключить собственный выигрыш, то ему надо(надобно) учесть, что казино обязательно потребует предоставить ксерокопии личных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои вывести не удастся. Наличие у игрока 2 аккаунта. Запрещено делать некоторое профилей для многократного получения бездепов. <a href=https://biocenter.pro/club/user/161643/blog/133446/>https://biocenter.pro/club/user/161643/blog/133446/</a> 1×slot зеркало
1×slots бонус за регистрацию
Фриспины предусмотрены для использования в видео слотах. Внимательно ознакомьтесь с критериями – часто их выдают на кое-какие автоматы. В зависимости от клуба, у вас выйдет устроить определённое количество ставок. Кстати, продвинутые игорные дома позволяют запускать любых «одноруких злодеев». <a href=https://hiddeninthesand.com/forum/viewtopic.php?t=247492>1×slot регистрация</a> Шаг 4. Активация. Внимательно изучите условия, информацию по лимитированиям и сроке действия бонусного предложения. Разобравшись с правилами, возможно активировать приз в собственном офисе (от ? с использованием промокода) либо по запросу в саппорт.Бездепозитные призы – это самая небезинтересная и более перспективная промоакция интернет-казино. Они и какого-либо фри-спинов, поэтому что выплаты в безвозмездных вращениях не гарантированы, ведь комбинации на барабанах игрового аппарата все не сложиться. 1хслотс рабочее зеркало на сегодня <a href=http://geolan-ksl.ru/forum/user/90205/>http://geolan-ksl.ru/forum/user/90205/</a> Срок активации и время на отыгрыш. Зачисление средств либо фриспинов случается при активации в течение взыскательно ограниченного периода, похожие притязания предъявляются и к срокам отыгрыша. Одни казино позволяют отыгрывать бонус несколько дней или числе месяцов. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с необоснованно высочайшим вейджером.
1×slots казино мобильная версия
Наличие у игрока второго аккаунта. Запрещено создавать несколько профилей для многократного получения бездепов. Этот образ приза несомненно добавлен на Ваш аккаунт в удачной процедуры регистрации с использованием номера телефонного. Если выбрать иной способ творения учетной записи, бездеп не несомненно добавлен на Ваш аккаунт. <a href=https://www.catabase.fr/mybb/member.php?action=profile&uid=3845>https://www.catabase.fr/mybb/member.php?action=profile&uid=3845</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://test.soclanovtsy.ru/topic/26973-chicago-house-samples-loops-sounds/page/378/#comment-78191>1×slots зеркало на сегодня</a>
<a href=https://hiddeninthesand.com/blogs/news/2024/11/the-unfortunate-history-of-fraudulent-tally-hall-uploads/#comment-47196>1×slots casino зеркало</a>
<a href=http://forums.panzergrenadiers.com/showthread.php?23446–1%D0%A1%E2%80%A6%D0%A1%D0%83%D0%A0%C2%BB%D0%A0%D1%95%D0%A1%E2%80%9A%D0%A1%D0%83-%D0%A1%D0%82%D0%A0%C2%B0%D0%A0%C2%B1%D0%A0%D1%95%D0%A1%E2%80%A1%D0%A0%C2%B5%D0%A0%C2%B5-%D0%A0%C2%B7%D0%A0%C2%B5%D0%A1%D0%82%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%BB%D0%A0%D1%95&p=510243#post510243>1хслотс рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Существует ли стратегии для отыгрыша бездепозитных призов? К сожалению нет, на выигрыши либо проигрыши с бонусов, казино или игрок воздействовать не может, отдача игр происходит от разработчиков игр. Активация денежного вознаграждения случается механически после создания профиля или использования промокода. Иногда операторы предъявляют вспомогательные притязания: подписаться на страницы казино в соц сетях или на рассылку маркетинговых сообщений, скачать и установить вспомогательный софт и т.д.
#7077 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
porno Юлия Пересильд Елена Лядова <a href=https://7club7.com/>порно с Никита Кучеров (хоккей)</a> 7k casino сайт Разуваева Ксения Денисовна порно <a href=https://glvk.guru/>7k casino официальный</a> 1×bet рабочее pin up casino скачать 1×bet слоты 1×bet top porno Илья Ковальчук (хоккей) порно с Бондаренко Анастасия Борисовна 1×bet зеркало слоты 1×bet официальный сайт
#7078 Charlesgunnyhttp://filmkachat.ru
1×slots официальный регистрация
Это раз из главных показателей привлекательности дара. С завешенным коэффициентом том профессионалы не смогут выполнить обстоятельства по отыгрышу. И неважно, как привлекательно смотрится предложение – бездепозитный приз казино в размере $500 или $1 000. Чтобы новички получше вникли, что же это вейджер, мы разберём на образце. <a href=http://filmkachat.ru/>1×slots зеркало на сегодня</a> <a href=https://jumpshare.com/v/6DEzisT7cRjyebCJQLAM>https://jumpshare.com/v/6DEzisT7cRjyebCJQLAM</a> Какие призы я могу еще получить не бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, любое онлайн казино предлагает игрокам выгодное предложение на первый депо, вы совершаете депо, ваш депо возрастает в двое либо том в 3, что, этим наиболее начать играть возможно с более крупной суммой, например же не запамятываем про вейджер на призы.Мы делаем акцент на главных положениях управлял, рассказываем о территориальных лимитированиях и вкратце информируем о других промоакциях обсуждаемого казино. 1× slots регистрация в 1×slots casino <a href=https://blogs.rufox.ru/~lexxeagle/49493.htm>https://blogs.rufox.ru/~lexxeagle/49493.htm</a> Для как, дабы отыграть сумму вашего бездепозитного приза надо(надобно) выполнить условия вейджера. Очень часто фриспины даются на определенные слоты (book of ra, book of dead, book of sun), подбирайте слот себя по, они все довольно красивые и высококачественные. Бездепозитные бонус имеет быть денежным например и повторяющий фриспинов на слоты
1хслот зеркало сайта
1×slot зеркало <a href=http://dac21.com/bbs/board.php?bo_table=free&wr_id=1021323>http://dac21.com/bbs/board.php?bo_table=free&wr_id=1021323</a> Каждая игровая платформа выделяется условиями по получению и отыгрышу бездепов. В правилах отчетливо расписаны временные рамки, за коие нужно прокрутить вейджер. Также не запамятовывайте тему максимальный объем ставки и наивысшую необходимую выплаты. С иной стороны, дабы получить бездепозитные бонусы казино, довольно истратить менее 1 минуты. 1×slots казино мобильная версия Лишь популярные и известные азартные заведения имеют позволить для выдавать бездепы повторяющий добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, коие возможно истратить в лучших аппаратах с высочайшей отдачей.
1×slots рабочее зеркало
Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.Предложения с бездепозитными бонусами за регистрацию разрешают свежим заведениям заинтересовать аудиторию на собственный вебсайт. А игроки тому получают возможность играть на реальные деньги без депозита в казино и заработать малый стартовый капитал, который разрешается вывести на карту банка или электрический кошелек. <a href=http://waterlevel.ru/forum/user/89285/>http://waterlevel.ru/forum/user/89285/</a> При отыгрыше бонусных средств, нужно учесть срок деяния приза и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный бонус несомненно аннулирован.Не стоит путать забаву в демо и внедрение бонусов. В демонстрационном режиме игрок возможность оценить механику слота, сюжет и оформление. Но забава ведется на относительные кредиты, поэтому отсутствует основное ? чувство азарта. Активируя промокод либо фриспины, заказчик и не расходует средства деньги на игровые автоматы, хотя возможность сорвать реальный куш! 1×slots casino регистрация Список например нарекаемых «разрешенных землель» прилагается к правилам бонусной программы игорного портала. Обязательно выясните, распространяются ли на вас похожие санкции.
1×slots регистрация 1×slotscasino 56 online
Выиграть настоящие деньги в казино не пополняя счет – сложно, хотя вероятно. Главное задаться целью и не нарушатьправила заведения. Выберите несколько казино с бездепзитными призами и начните выступать на бонусные средства. По статистике из 10-ти заведений возможно заработать небольшую сумму средств с бонусных средств.Бонус начисляется игроку незамедлительно последствии регистрации и прохождения верификации в казино и не настятельно от клиента внесения депо. Как управляло, объем приза в сходственном случае достаточно стыдливый, однако дозволяет новеньким познакомиться с игрой без риска настоящими деньгами. 1хслотс официальный сайт зеркало <a href=https://gti-club.ru/forum/member.php?u=410969>https://gti-club.ru/forum/member.php?u=410969</a> Но есть игорные заведения, которые готовы просто так жертвовать средства на забаву. Для сего довольно создать профиль. Чтобы вывести свой выигрыш, вам сначала необходимо выполнить условия отыгрыша, указанные в условиях получения бездепозитного депозита.Фриспины – бесплатные вращения с фиксированной ставкой, которые можно использовать в определенных игровых автоматах.
1×slots зеркало регистрацию более популярный вариант это
Если вы выбрали себе количество брендов коие вам больше всего приглянулись, для постоянной забавы! Таких гемблеров казино очень любит и ценит, за частую эти игроки становятся VIP игроками заведения, которым нередко поступают прибыльные предложения вид бонусов, так же туда входит и бездепозитные. <a href=http://fumankong9.cc/home.php?mod=space&uid=602547>http://fumankong9.cc/home.php?mod=space&uid=602547</a> 1хслотс зеркало Отзывы читателей о бонусных акциях помогут составить впечатление, но не забывайте о субъективности собственных объяснений.
<b>Смотреть еще похожие новости:</b>
<a href=https://portugal-campings.com/pt/account/>сайт 1× slots casino</a>
<a href=https://forum.vn.ua/member.php?u=73361>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a>
<a href=https://forums.scar-divi.com/topic/761330–1×slots-%D0%BA%D0%BE%D0%B4%D1%8B/>1×slots коды</a>
<a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=5501>1×slots казино мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если простыми словами, бездепы – это определённая сумма средств либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать подарки. Но есть некоторые нюансы. Существуют игорные дома, коие перед что, этим как начислить бонусы просят привязать телефонный, дать копии документов. Акционные предложения от казино существуют в различных форматах. Часто бонусы даются в обмен на депо. Игрок вносит платеж и получает средства, бесплатные вращения и другие одобрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — вид приза, который гарантирован за исполнение конкретных действий на веб-сайте:
#7079 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
симулятор казино букмекерская контора мостбет <a href=https://strelochnik.com/>песня казино</a> porno Вера Бирюкова, гимнастка букмекерская контора официальный сайт скачать <a href=https://sovsekretno.net/>pinco casino</a> официальные сайты казино pin up casino пин porno Катерина Шпица casino 7k рабочее слоты казино казино рояль зеркала казино
#7080 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
Не стоит сразу же отказываться от приветственных даров в похожих казино. Администрация готова начислить деньги либо фриспины, хотя сначала сотрудники должны убедиться, что вы не аферист. Дело в, собственно развелось очень большое охотников за бонусами. Они выучились обманывать систему и наваривать крупные суммы средств.Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы мгновенно получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, замечена настоящий шанс победу! <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slots review live</a> Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке адепты онлайн-казино публикуют важную информацию о no deposit bonuses и услугах. <a href=https://www.gift-me.net/blogs/201226/%D0%9E%D1%86%D0%B5%D0%BD%D0%BA%D0%B0-%D0%B0%D0%B2%D1%82%D0%BE-%D0%BE%D0%BD%D0%BB%D0%B0%D0%B9%D0%BD-%D0%BA%D0%B0%D0%BA-%D1%80%D0%B0%D0%B1%D0%BE%D1%82%D0%B0%D0%B5%D1%82-%D0%B8-%D0%BD%D0%B0-%D1%87%D1%82%D0%BE-%D0%BE%D0%B1%D1%80%D0%B0%D1%82%D0%B8%D1%82%D1%8C-%D0%B2%D0%BD%D0%B8%D0%BC%D0%B0%D0%BD%D0%B8%D0%B5>https://www.gift-me.net/blogs/201226/%D0%9E%D1%86%D0%B5%D0%BD%D0%BA%D0%B0-%D0%B0%D0%B2%D1%82%D0%BE-%D0%BE%D0%BD%D0%BB%D0%B0%D0%B9%D0%BD-%D0%BA%D0%B0%D0%BA-%D1%80%D0%B0%D0%B1%D0%BE%D1%82%D0%B0%D0%B5%D1%82-%D0%B8-%D0%BD%D0%B0-%D1%87%D1%82%D0%BE-%D0%BE%D0%B1%D1%80%D0%B0%D1%82%D0%B8%D1%82%D1%8C-%D0%B2%D0%BD%D0%B8%D0%BC%D0%B0%D0%BD%D0%B8%D0%B5</a> 1х слот 1хслотс регистрация перейти на 1×slots <a href=http://metal-firms.co.ua/wr_board/tools.php?event=profile&pname=royalexpenditur>http://metal-firms.co.ua/wr_board/tools.php?event=profile&pname=royalexpenditur</a> Бездепозитные призы – это исключительно небезинтересная и более перспективная промоакция интернет-казино. Они в никакого фри-спинов, поэтому что выплаты в безвозмездных вращениях не гарантированы, как композиции на барабанах игрового аппарата шансы не сложиться.Активация валютного вознаграждения случается механически после творенья профиля или применения промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на страницы казино в соц сетях либо на рассылку рекламных известий, скачать и установить вспомогательный софт и т.д.
x1 slots регистрация в 1×slots casino
В интернете большое узнаваемых игорных площадок с красивыми акционными услугами. Однако внимательно читать обстоятельства десятков услуг скором надоест, ну и время отнимет много. Поэтому наша команда подготовила ТОП-3 сайтов с лучшими бездепозитными бонусами:Баланс игрока дополняется на подобающую необходимую. К ней применяется вейджер, обозначенный в правилах промоакции. Вывести выигрыш возможно несомненно последствии как, как юзер устроит требуемый размер ставок из личных средств. В редких случаях бездеп работает в формате Free Play. На счет юзера зачисляется большая сумма, и предоставляется маленький срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по завершении этого периода сумма на счету будет превышать изначальную, то разность можно будет исключить или применять для последующих ставок. <a href=http://fin-molitor.com/forum/viewtopic.php?f=2&t=402366>1×slots зеркало которую указывали при регистрации кстати</a> 1×slots казино мобильная версия <a href=https://www.9tj.net/home.php?mod=space&uid=266908>https://www.9tj.net/home.php?mod=space&uid=266908</a> казино 1×slots официальный сайт
1×slot официальный сайт
Игры, в которых возможно выступать на бонусные средства. Проверьте перечень игр, каких можно выступать на бонусные свои, возможно они Вам не понравятся и надо расходовать своё время на такую акцию.После требуется внести идентификационный платёж. Это стращает новичков больше всего. Нужно устроить наименьший депозит в 100–500 рублей. Таким образом служба защищенности увериться сомнений, собственно платёжный метод принадлежит Вам. Данная процедура необходима для обеспечения безопасности игровых счетов. Пример, Ваш аккаунт взломают и выведут средства на свой кошелёк. Будет очень неприятно. Поэтому верификация платёжной системы, это необходимый момент. При подмоги такового поощрения оператор может кроме завлекать посетителей, которые раньше проявляли активность на сайте, но по какой-то основанию перестали играть. В этом случае промокод высылается пользователю по электронной почте либо в виде SMS. <a href=https://sparkitupforums.net/User-StevenCab>https://sparkitupforums.net/User-StevenCab</a> Мы собрали и опубликовали перечень наихороших бездепозитных казино с призами за регистрацию, коие гарантируют великодушные выигрыши и мгновенные выплаты.Выполнив все притязания оператора, клиент имеет оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит примерно менее суток. Если дополнительно потребуется пройти процедуру верификации, то срок возрастает до 1–2 рабочих дней. Для перевода применяются банковские приборы и электрические платежные системы. Второй способ подходит никакого, например как масса транзакций такой осуществляются мгновенно. В связи со специфичностью функционирования банков обработка платежей может взятьвдолг(взятьвзаймы) до нескольких трудящихся дней. 1×slots зеркало этих способов предполагает регистрацию Приветственный бездеп предоставляется хоть игроку только раз один. Казино дерутся с так нарекаемыми бонусхантерами (от англ. Bonus Hunter — доброволец за призами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения дара. Исключить подобные деяния разрешает верификация данных. Администрация вправе потребовать у клиента подтвердить персональные данные, указанные при регистрации.
1 хслот регистрация в 1×slots casino
<a href=https://forums.scar-divi.com/topic/685737–1-%D1%85%D1%81%D0%BB%D0%BE%D1%82-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%B2–1×slots-casino/>1 хслот регистрация в 1×slots casino</a> Для верификации номера телефонного, в собственном профиле изберите опцию „Подтвердить номер телефона“ и введите в отвечающее фон код, полученный в sms-сообщении.Выполнив все требования оператора, клиент может оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит примерно менее суток. Если дополнительно потребуется пройти процедуру верификации, то срок возрастает до 1–2 трудящихся дней. Для перевода применяются банковские приборы и электрические платежные системы. Второй метод подходит превосходнее, например как основная транзакций в этом случае исполняются моментально. В связи со специфичностью функционирования банков обработка платежей может занять до нескольких трудящихся дней. Мы советуем не отказываться от похожих услуг узнаваемых казино. Выделите некоторое минут на регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сейчас удача будет на вашей стороне! казино 1×slots <a href=http://net-urakawa.com/fs/cgi/bbs17/bbs17.cgi>http://net-urakawa.com/fs/cgi/bbs17/bbs17.cgi</a>
casino 1×slot
Представленные на данной страничке наихорошие бездеп бонусы в казино за регистрацию в 2022 году имеют подходящие условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, каком посетители Casino.ru имеют сортировать список по нескольким критериям: по сумме, вейджеру, наибольшей сумме вывода и т.д. Главным моментом в возникновении данных вознаграждений произведено в, собственно пустив их в ход, игры ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он спасибо призам какой-либо выигрыш либо мгновенно спустит все только что прибывшие деньги). То есть, казино снабжает игрока вероятностью на дармовой базе играть во различные слоты даже спонсирует забаву.Во время забавы в казино, выигрыши, полученные спасибо бесплатным призовым фондам, суммируются и включаются в общую сумму для отыгрывания. Однако, в фортуна улыбнется и получится отыграть все бонусы, игровое заведение гарантированно разрешит вывести финансовые свои. Сумма вывода будет зависимости от лимита, одобренного именно в этом учреждении. Поэтому, внимательно надо(надобно) разбирать правила выдачи безлимитных депозитов. <a href=http://fr3809hv.bget.ru/user/PhilipFaito/>http://fr3809hv.bget.ru/user/PhilipFaito/</a> Бесплатные призы казино без депозита можно получить в виде валютных средств на бонусный счет (исключить их можно лишь после отыгрыша), фриспинов, игры либо кешбэк-бонуса. 1×slots актуальное зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://www.reisezielforum.de/viewtopic.php?t=400386>казино 1×slots</a>
<a href=http://miupsik.ru/forums/showthread.php?tid=308920>1× slots casino официальный сайт</a>
<a href=https://forum.home-visa.ru/viewtopic.php?f=69&t=807392&p=2791854#p2791854>1×slots зеркало проходить регистрацию это отличный вариант</a>
<a href=https://tabsgame.ru/user/Jamesbes/>1хслот скачать</a>
<a href=https://nztw.org/home.php?mod=space&uid=43957>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Заработать на бездепозитных призах за регистрацию в казино возможность любой пользователь, достигший совершеннолетия. В бонусную программку множества операторов входят регулярные бездепы. Это пожизненные промоакции, поощряющие активных постоянных игроков. Популярный формат — раздача фриспинов по конкретным дням недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают постоянные призы без депозита в мена на накопленные баллы преданности.
#7081 Charlesgunnyhttp://filmkachat.ru
1хслот скачать
Бездепозитные бонусы настоящими деньгами, коие возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадали.Также, учите, собственно бездепозитный приз можно исключить только никаких случае, когда станут выполнены все условия отыгрыша. <a href=http://filmkachat.ru/>1хслотс регистрация в 1×slots casino</a> Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, дабы еще раз получить даровой бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ждет неизбежное санкция.Индивидуальные поощрения выдаются за совершение действий: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавленья или официального посетителя для ПК. В большинстве казино действуют программы преданности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на грядущий степень нередко сопрягается выдачей бездепа. <a href=https://diigo.com/0y2r7c>https://diigo.com/0y2r7c</a> Бездепозитный бонус за регистрацию в казино — это стартовый презент вид денежного начисления или бесплатных вращений для свежих игроков заведения, для получения которого не нужно заносить депо. 1×slots зеркало проходить регистрацию это отличный вариант <a href=http://www.pxltw.com/home.php?mod=space&uid=362216&do=profile>http://www.pxltw.com/home.php?mod=space&uid=362216&do=profile</a> Большинство клубов завлекают внимание геймеров за счёт различных подарков. На 1 сайтах возможно получить виртуальные кредиты, которые откроют доступ ко всему софту. На других же, администрация предлагает благотворительные вращения для пуска лучших интернет слотов. Несмотря на разные акции, стоит выделить самые главные.Для получения депозитного бонуса нужно восполнить собственный игровой баланс настоящими деньгами. Вознаграждение возможно получить или при внесении первого депозита, либо повторяющий фиксированного процента от внесённых средств. Так либо по, бонус поступит на счёт лишь в пополнения.
1× slots зеркало
Наличие у игрока 2 аккаунта. Запрещено создавать некоторое профилей для неоднократного получения бездепов.Любой выигрыш по ставке повыше установленного лимита будет считаться недействительным. То есть ставка не несомненно засчитана при отыгрыше, ну случае выигрыша его сумма не поступит на счёт клиента — результат забавы несомненно всецело аннулирован. <a href=http://ledyardmachine.com/forum/User-Jameshoing>1×slot зеркало рабочее регистрации на телефон придет</a> 1×slots официальный сайт скачать на айфон <a href=https://www.google.com.tw/url?q=https://doctorlazuta.by/>https://www.google.com.tw/url?q=https://doctorlazuta.by/</a> Приглашаем делиться воззреньями о призах. Это поможет иным юзерам избирать более прибыльные предложения.При использовании бездепозитным бонусом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют некоторое обликов лимитов: 1×slots промокод при регистрации 2025 Благодаря программе преданности от игорного заведения, можно взять неплохой старт и без дополнительных вложений запустить видеослоты. Кроме того, возможно рассчитывать на реальную удачу и получить, без вложения личных денег, великий выигрыш.При регистрации по указывать лишь достоверную информацию. Когда учетная запись несомненно активна, будет доступ в Личный кабинет. В нем возможно избрать денежную, ввести промокод и разузнать подробные правила получения и отыгрыша бездепа. Краткая информация об промоакции часто присутствует непосредственно на регистрационной форме.
1×slots мобильная версия войти казино
Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша призов. Заведения постоянно устанавливают максимальную ставку, допустимую по условиям вейждера. Промообъявления от казино не дают реальной картины и ориентированы на привлечение внимания юзеров. Понять, насколько высоки шансы остаться в плюсе, дозволит собственный тест условий предложения: <a href=http://ledyardmachine.com/forum/User-Charlesedila>http://ledyardmachine.com/forum/User-Charlesedila</a> 1×slots регистрация на 1хслотс
x1 slots 1хслотс регистрация перейти на 1×slots
Отказ в прохождении верификации. Если клиент не хочет или имеет предоставить документы, подтверждающие его лицо, профиль несомненно заблокирован совместно, вкупе со всеми бонусными начислениями.Получить приветственный приз шансы лишь новые посетители онлайн-казино. Способы описаны в критериях промоакции любого законного казино, почаще всего это: В наше время очень просто получить бонус за регистрацию в казино. Практически каждый игорный дом с радостью начисляет деньги или благотворительные вращения. Многие гэмблеры используют этим и не стесняются регистрироваться в каждом клубе с прибыльными критериями. Кстати, это отличная вероятность выработать победную стратегию и сорвать джекпот.Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, the decision зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депо может отличаться до 30 дней. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=https://trentonhknj78889.techionblog.com/30325672/nude-ai-the-ethical-and-technological-challenges-of-artificial-intelligence>https://trentonhknj78889.techionblog.com/30325672/nude-ai-the-ethical-and-technological-challenges-of-artificial-intelligence</a> Нет. Для получения бездепозитного приза в казино необходима обязательная регистрация на сайте. Играть в слоты бесплатно и без регистрации возможно только в демо режиме.
1×slots регистрацию более популярный вариант это
Бездепозитный бонус казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в данном и заключается основное отличие.Таким образом онлайн казино получает потенциального игрока. Возможно в или настоящем он захотит поиграть на средства деньги. Так трудятся бездепозитные призы в интернет казино. Здесь очень подходит выражение, безвозмездные сыр посещает лишь в мышеловке. Начинающие игроки шансы не осознавать опасность пыла. Однако со временем понимания делается больше. Это тема для отдельного обсуждения. Чтоб получить большой выигрыш, избирайте игровые автоматы с максимальным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша. <a href=https://www.hubtamil.com/talk/member.php?1638968-Chrisbrolf>https://www.hubtamil.com/talk/member.php?1638968-Chrisbrolf</a> В некоторых онлайн казино для получения бездепозитных призов не довольно просто зарегистрироваться на сайте клуба и подтвердить средства контактные данные. Дополнительно потребуется активация промокода.Как управляло, при выводе финансов, от играющего потребуется лишь сделать наименьший вклад чтобы, чтобы, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом индивидуальный счет. 1×slots зеркало на сегодня Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке адепты онлайн-казино публикуют важную информацию о no down payment bonuses прочих предложениях.Если вы новичок данном и только попали в неизведанную вами район азарта — за услуг как бездепозитные бонусы без пополнения.
<b>Смотреть еще похожие новости:</b>
<a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/6935–1khslot-zerkalo-sajta#6945>1хслот зеркало сайта</a>
<a href=https://www.digicube.de/forum/threads/453355–1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F?p=650856#post650856>1×slots зеркало регистрация</a>
<a href=https://www.xn–72c9aa5escud2b.com/webboard/index.php/topic,515522.new.html#new>1×slots официальный сайт мобильная версия скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Шаг 5. Использование и отыгрыш. Бездеп обязан быть использован в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера. Максимальная ставка ? уточняется в еденице счета и ограничивает размер ставки за один спин. В случае ее превышения бонус возможность быть аннулирован. Также в правилах может находиться запрет на размещение ставок конкретного вида, например, по одинаковым шансам в рулетке (другими, на чет либо нечет, красное или темное и т.д. ).
#7082 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация то дальше необходимо пройти
Проверка занимает от нескольких мин. До нескольких дней, профессионалы техподдержки имеют запросить вспомогательные документы или инициировать краткое общение по Skype. <a href=http://filmkachat.ru/>1×slots казино зеркало</a> <a href=https://hanson.net/users/ShopAvto>https://hanson.net/users/ShopAvto</a> 1×slots зеркало на сегодня <a href=https://qiqer.ru/qforum/profile.php?id=359704>https://qiqer.ru/qforum/profile.php?id=359704</a>
скачать 1×slots официальный сайт
Наши специалисты исследуют обстоятельства акции, после в ручном режиме проводят их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и другие параметры. Мы не рекламируем казино, а даем игрокам информацию о наихороших из их. <a href=https://elclasificadomx.com/author/jameslog/>1×slots casino регистрация</a> 1×slots casino зеркало рабочее Размер ставки для игры по бездепозитному бонусу (естесственно же, в случае, когда он представлен вид бонусных денежных средств) часто ниже, чем при ирге на депозит. Ограничение будет действовать до момента отыгрыша приза.Вы не в коем случае ни же рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный бонус, по мимо практической игры на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, научится регулировать менять ставки и линии, исследовать бонусные игры и их выигрышные композиции, да счете просто зарядится кучей эмоций! Ведь вы будите играть на бонусные свои, которые возможно отыграть и исключить, не просто на демо счет, что, этим наиболее адреналин в крови более повысится а пульс забьется с частым ритмом! <a href=http://www.cristaleriajara.com/galeriajara/profile.php?uid=20567>http://www.cristaleriajara.com/galeriajara/profile.php?uid=20567</a> 1× слот зеркало Автоматы неспроста считаются самым модным азартным отдыхом. Чтобы усвоить управление и управляла, понадобится всего некоторое минут. Ваша задачка устроить ставку, найти количество рабочих линий и можно крутить тамбур. Если на выпадет выигрышная композиция – вы выиграли! С данной задачей вам посодействуют справится бездепозитные бонусы казино.
1х слот регистрация в 1×slots casino
В онлайне большое знаменитых игорных площадок с привлекательными акционными услугами. Однако внимательно разбирать условия десятков услуг вскоре надоест, да и время отнимет много. Поэтому наша команда подготовила ТОП-3 вебсайтов с наихорошими бездепозитными бонусами: <a href=http://worklocal.com.au/users/doctorlazutama>http://worklocal.com.au/users/doctorlazutama</a> Превышение наибольшей ставки при отыгрыше. Система автоматически не предостерегает о превышении ставки, потому о нарушении правил игрок возможность разузнать уже после подачи запроса на вывод средств.Простая процедура получения бездепозитного бонуса, кот-ая займет не более 2-х минут. Для получения бездепов, достаточно зарегистрироваться и доказать контактные данные. 1×slot зеркало Многие казино деют в рекламных целях бесплатные бонусы самая для наших читателей. Чтобы их получить, надо(надобно) перебежать на игровой сайт по партнерской ссылке с нашего портала.
1хслотс 1хслотс регистрация перейти на 1×slots
Основное управляло получения бездепа ? создаваемый акк должен быть у юзера первым и единственным. Наличие нескольких аккаунтов взыскательно воспрещено. Проверка проводится по имени, e-mal, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депо нужно соблюдать несложную последовательность деяний. <a href=https://www.katzenforum.at/forum/threads/1×slots-zerkalo-kotoruju-ukazyvali-pri-registracii-kstati.40190/>1×slots зеркало которую указывали при регистрации кстати</a> При маленькой сумме приза рекомендовано выступать по невысоким ставкам, а применять максимальные лучше только сомнений случае, случае вейджер очень большой, а время на отыгрыш сильно ограничено. 1хслотс официальный сайт зеркало <a href=https://forums.twcpilots.com/member.php?action=profile&uid=630>https://forums.twcpilots.com/member.php?action=profile&uid=630</a>
1 х слотс зеркало
Акции распространяются как на все забавы казино, например и на узкий список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino прочие. Промо имеет обхватывать разработки 1-го производителя. Бездеп не пересекается с иными акциями казино. Если на сайте учтен кэшбек, он не начисляется за ставки, сделанные бонусными деньгами. Для идентификации платежных реквизитов игрока возможность потребоваться пополнение счета на наименьшую сумму. Да, у безвозмездных призов есть дефекты. Прежде всего, они обыкновенно очень. Кроме как, обстоятельства вейджера по ним постоянно строгие. Но все же недоступность риска делает их очень привлекательными для клиентов.Более солидные предложения встречаются очень редко. Зачастую они доступны только VIP-игрокам. В остальных случаях им всего сопутствуют очень строгие обстоятельства отыгрыша. Также вероятны вспомогательные условия и ограничения, прописанные в условиях и положения бонусной программы казино. <a href=http://www.jrp.kr/bbs/board.php?bo_table=free&wr_id=200025>http://www.jrp.kr/bbs/board.php?bo_table=free&wr_id=200025</a> Возможность протестировать новые забавы, не рискуя личностными своими и создать собственную стратегию игры.Фриспины без депо или вспомогательные средства посодействуют поближе познакомиться с игровой платформой и её функциями. За счёт даров возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям ради игры напротив живых крупье. 1×slots зеркало рабочее Ну и естесственно же, для казино бездепозитные бонусы прибыльны с имиджевой стороны: сходственная добродушие повышает уровень лояльности посетителей к фирмы.Фриспины предусмотрены для использования в видео слотах. Внимательно ознакомьтесь с критериями – частенько их выдают на кое-какие автоматы. В зависимости от клуба, у вас получится сделать определённое число ставок. Кстати, продвинутые игорные дома разрешают запускать каждых «одноруких бандитов».
<b>Смотреть еще похожие новости:</b>
<a href=http://griffhunter.com/boards/viewtopic.php?p=329004#p329004>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В качестве призов интернет казино нередко предлагает выдачу фриспинов, словами бесплатных вращений игрового барабана. Виртуальные монеты возможно применять для обучения в покерной школе либо для забавы в казино. Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала резвые выводы. Фишка выплат никаких, что достаточно избрать платёжный инструмент и указать сумму. В большинстве случаев средства зачисляются на электронные кошельки на 15 минут, а на банковские карты – 1–3 рабочих дня.
#7083 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots review live
Помните, что в некоторых забавах сумма ставки идет в зачет вейджера лишь отчасти. Так, в настольных и карточных забавах лишь от 5% до 50% суммы ставки считаются как отыгранные деньги, в то время как в слотах идет в зачет все one hundred percent суммы.Помните, что любые нарушения верховодил сведут на нет ваши усилия, и вы наверняка останетесь без начисленного вас безвозмездного бонуса. Всегда изучайте управляла начисления и обстоятельства вейджера. По каким вопросам, на которые вы имеет помощи отыскать ответы, обращайтесь за объяснениям и саппорт. <a href=http://filmkachat.ru/>1×slots официальный сайт, скачать</a> Чтоб получить большой выигрыш, выбирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша.Отыграв бездепозитный бонус в казино с выводом также придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, случае схожее лимитирование присутствует, то единоразово исключить получится только необходимую, не превосходящую объем приобретенного бонуса. <a href=https://www.dr-ay.com/blogs/217116/Mastering-Architectural-Rendering-From-Vision-to-Visual-Reality>https://www.dr-ay.com/blogs/217116/Mastering-Architectural-Rendering-From-Vision-to-Visual-Reality</a> В качестве бонусов интернет казино часто предлагает выдачу фриспинов, другими безвозмездных вращений игрового барабана. Виртуальные монеты возможно применять для обучения в покерной школе или для забавы в казино. 1×slots зеркало выигрыши обязательно пройдите регистрацию если <a href=https://valetinowiki.racing/wiki/User:CarmelaSummerlin>https://valetinowiki.racing/wiki/User:CarmelaSummerlin</a> Получить Бездепозитный приз в онлайн казино дело двух кликов. Другой момент, отыграть рекламную и соблюсти правила и условия отыгрыша. Под правилами предполагается столько вагер, хотя и ограничения по наибольшей ставке. Мы осознаем, собственно в кинотеатр все ставят на зеро и выигрывают. Призываем не делать похожего. Перед активацией приза прочитайте верховодила. Узнайте следующие моменты: Условия получения дара, за регистрацию, за депозит и другое. Ограничения по максимальной ставке. Зачастую не повыше 350 руб. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах возможно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на пространстве. Поэтому главно аристократия, в каких забавах можно совершать кратность валютного оборота.При использовании бездепозитным призом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют несколько обликов лимитов:
1 хслот регистрация в 1×slots casino
Кешбэк-бонус представляет собой возврат фиксированного процента от ставки в случае проигрыша или же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не превышает 10%. <a href=https://www.mshowto.org/forum/members/jamespauri.html>1×slots зеркало проходить регистрацию это отличный вариант</a> 1×slots официальный сайт скачать <a href=http://www.radiogrijalva.com/2022/06/grandes-autores-y-compositores56.html>http://www.radiogrijalva.com/2022/06/grandes-autores-y-compositores56.html</a> Выбор каждого интернет казино на нашем сайте. В описании к любому Вы можете разузнать, собственно получите за творенье аккаунта.У нас на веб-сайте Вы найдете перечень бонусов без депозита в проверенных казино и доскональную информацию то как их получить и применять. 1хслотс рабочее зеркало 4. Заберите подарок. Чаще всего приз активизируется незамедлительно последствии регистрации. Но посещают ситуации, когда надо(надобно) забежать в личный кабинет либо написать в саппорта.Выиграть настоящие деньги в казино не пополняя счет – сложно, хотя вполне. Главное задаться целью и не нарушатьправила заведения. Выберите несколько казино с бездепзитными призами и начните выступать на бонусные свои. По статистике в 10-ти заведений можно заработать маленькую сумму денег с бонусных средств.
1хслотс рабочее зеркало на сегодня
Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. <a href=https://www.lightknotes.com/MyBB/member.php?action=profile&uid=14067>https://www.lightknotes.com/MyBB/member.php?action=profile&uid=14067</a> Для тех, кто лишь подумывает испытывать собственную фортуну, еще для профессиональных игроков, отыскивающих свежие площадки для выигрышей, основные лицензированные казино нередко устраивают разные акции, и одно из лучших услуг прошедшее время – как для новичков, например и для проф игроков – бездепозитный приз за регистрацию.Фриспины – благотворительные вращения с фиксированной ставкой, коие возможно использовать в определенных игровых автоматах. 1×slots актуальное зеркало Для получения бонуса надо(надобно) ознакомиться с программкой лояльности казино и устроить ставки на необходимую, необходимую для перехода на грядущий уровень.
1 х слотс зеркало
<a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=824591>зеркала 1×slots</a> Вейджер менее х30–35 считается применимым. Опытные игроки утверждают, что с таким вейджером реально остаться в плюсе, в верно подойти к выбору игрового аппарата.Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. 1×slots быструю регистрацию а также мгновенное <a href=http://www.ihaomeijia.com/home.php?mod=space&uid=136112>http://www.ihaomeijia.com/home.php?mod=space&uid=136112</a> Третитй бездепозитный приз за регистрацию – денежные свои. К раскаянью, начислить рубли или баксы способны только знаменитые и известные клубы. С их поддержкой возможность насладиться любой доступной забавой – автоматом, рулеткой, кено, блэкджеком.Для получения бонуса надо(надобно) пригласить в забаву свежего посетителя. Казино начисляет пригласившему фиксированный процент от взносов приглашённого вид бонуса: почаще всего его размер не выше 10%. Срок действия бонуса правило не превышает месяца: пригласивший получает бонус зависимо проигранных ставок приглашённого в 1-ый луна игры.
1×slots casino online регистрация
<a href=https://baza.online-windows.ru/user/JosephTow/>https://baza.online-windows.ru/user/JosephTow/</a> 1 x slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://australianwinerytours.com/tours/showthread.php?tid=210150>1×slots актуальное зеркало</a>
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=673500>1×slots скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепы шансы входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами. На данном разделе портала периодически публикуются обзорные статьи, каких рассматриваются бесплатные бонусы наихороших интернет-казино. Информация структурирована по нескольким пт, включая главные:
#7084 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино онлайн бесплатно casino com <a href=https://www.ossetia.tv/>порно с Петр Ян (ММА)</a> porno Алена Михайлова 1×bet зеркало слоты <a href=https://specreporter.com/>порно с Анна Щербакова, фигуристка</a> 1×bet зеркало рабочее на сегодня Анна Михалкова порно с Александр Головин (футбол) порно с Васильева Татьяна Викторовна kent casino регистрация казино зеркало сегодня 1×bet 1хбет
#7085 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
Даже не выиграв солидную сумму, игрок увлекательно проведет время, изнутри изучит работу площадки, воспримет геймплей автоматов. Все это без каких-либо денежных рисков. Быть в курсе лучших акций легкостью. Достаточно регулярно изучать перечень свежих интернет казино с выводом бонуса без депо в этом разделе. <a href=http://filmkachat.ru/>1 xslots рабочее зеркало</a> Можно. Вы практически можете отрешиться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не сделаете ставку. <a href=https://www.chambers.com.au/forum/view_post.php?frm=1&pstid=77273>https://www.chambers.com.au/forum/view_post.php?frm=1&pstid=77273</a> 1×slots официальный сайт зеркало <a href=https://www.gamerlaunch.com/community/users/blog/6415433/2235866/%D0%BC%D0%BE%D0%B4%D0%B0-%D0%B2-%D1%83%D0%BA%D1%80%D0%B0%D1%97%D0%BD%D1%96/?gid=535>https://www.gamerlaunch.com/community/users/blog/6415433/2235866/%D0%BC%D0%BE%D0%B4%D0%B0-%D0%B2-%D1%83%D0%BA%D1%80%D0%B0%D1%97%D0%BD%D1%96/?gid=535</a> К раскаянию, нет. Почти все казино, настоятельно внесение но бы 1-го малого депо для вывода выигрыша с бездепозитного приза. Также учитывайте, что вывести деньги разрешено лишь на ту платежную систему, с коей был сделан депо.
1 x slots casino
Фриспины — безвозмездные вращения, которые разрешают игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся наиболее модным и желаемым обликом приза — безвозмездные вращения порой эффективнее и веселее в отыгрыше, чем остальные облики бездепов.Для получения выигрыша требуется выполнить условия казино. Чаще всего игроку нужно поставить конкретную необходимую, хотя уже из собственных средств. Она рассчитывается из общего размера выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, в пользователь выиграл 1000 рублей, а множитель составляет х30, исключить средства возможно будет, сделав ставки на 30 000 руб. 1×slots официальный сайт зеркало <a href=https://www.scottsfasteners.com/users/glenntrino>https://www.scottsfasteners.com/users/glenntrino</a> рабочее зеркало 1×slots
x1 slots 1хслотс регистрация перейти на 1×slots
Помимо остального, для вывода средств по бездепу необходимо привнести на счёт собственный первый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало возможную сумму, последствии чего вывод средств будет доступен.Выполнив все притязания оператора, клиент может оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем менее суток. Если дополнительно потребуется пройти процедуру верификации, то срок возрастает до 1–2 рабочих дней. Для перевода используются банковские инструменты и электронные платежные системы. Второй метод подходит чем, например как масса транзакций в этом случае осуществляются мгновенно. В связи со спецификой функционирования банков обработка платежей имеет занять до нескольких трудящихся дней. Стоит отметить, что бездепозитный приз выдается только совершеннолетним новеньким, коие, в свою очередь, все пригласить личных друзей и своих, того рассчитывающих на поощрительную программу лояльности. Подобная технология появилась среди конкурирующих онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры способствуют увеличению своей популярности, методом вербования новых игроков. Бонусы – это оригинальный шанс для вероятных соучастников забавы, которые шансы опробовать софт покер рума и убедиться, будут ли они в него играть или нет. Новый игрок испробует свои силы с настоящими оппонентами в казино. <a href=http://agcolledge.ru/index.php?subaction=userinfo&user=forgetfulphilos>http://agcolledge.ru/index.php?subaction=userinfo&user=forgetfulphilos</a> Для как, дабы отыграть необходимую вашего бездепозитного приза нужно выполнить обстоятельства вейджера. Очень часто фриспины даются на определенные слоты (book of ra, book of dead, book of sun), подбирайте слот себя по душе, они все довольно красивые и качественные. Бездепозитные приз имеет быть валютным так и повторяющий фриспинов на слоты 1×slots официальный сайт зеркало
1×slots на любой вкус как пройти регистрацию
Доступ к дару возможность раскрываться механически в введения промокода либо обращения в службу сайта. В первом случае от пользователя не потребуется практически поступков. Бездеп с активацией по коду встречается почаще всего. Игроку нужно установить совокупность знаков в графе, которая может пребывать в регистрационной форме в Личном кабинете.После получения приза вывод средств для посетителя будет недосегаем до, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или чета недель. Выводить средства игрок может только в отыгрыша. <a href=http://www.arka-bahce.org/forum/showthread.php?p=762661#post762661>1× слот зеркало</a> Подтверждение регистрации. Казино настоятельно привязки профиля к электронному адресу и номеру телефона. Для этого на e-mail отправляется послание со ссылкой, а на телефонный ? текстовое извещенье с кодом.Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских руб. В критериях промоакции предписано, что вейджер бездепозитного приза х20. Поэтому, чтобы отыграть бонус, игроку будет нужно сделать ставок на 35*20=700 руб. Для получения бонуса нужно пригласить в игру нового посетителя. Казино начислит пригласившему фиксированный процент от взносов приглашённого в виде бонуса: почаще всего его размер не превышает 10%. Срок действия приза правило не выше месяца: пригласивший получает приз зависимо проигранных ставок приглашённого в первый луна игры.2. Создать новый профиль. Для регистрации надо(надобно) заполнить маленькую анкету либо зайдите в собственный офис посредством соц сетей; 1×slots официальный сайт зеркало рабочее <a href=https://www.walkaholic.me/user/26426-raymondwep>https://www.walkaholic.me/user/26426-raymondwep</a> Изучить управляла и обстоятельства получения бездепозитных бонусов казино, Вы можете у нас на веб-сайте в разделе с призами или на официальном веб-сайте избранного Вами казино. Если имеет найти нужную информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал или по электронной почте.Бесплатные бонусы казино без депо можно получить в виде валютных средств на бонусный счет (вывести их возможно только после отыгрыша), фриспинов, игры или кешбэк-бонуса.
1×slots регистрация то дальше необходимо пройти
Приглашаем делиться воззрениями о бонусах. Это поможет иным юзерам избирать более выгодные предложения. Даже не выиграв крупную сумму, игрок интересно проведет время, изнутри изучит работу площадки, воспримет геймплей автоматов. Все это без каких-то финансовых рисков. Быть в курсе наилучших акций с. Достаточно периодически учить список новых интернет казино с выводом бонуса без депозита в данном разделе. <a href=https://addgoodsites.com/details.php?id=583481>https://addgoodsites.com/details.php?id=583481</a> рабочее зеркало 1×slots Проверка занимает от нескольких мин. До нескольких дней, спецы техподдержки могут запросить дополнительные документы либо инициировать краткое общение по Skype.
<b>Смотреть еще похожие новости:</b>
<a href=https://melhorlance.com.br/minha-conta/>1×slots официальный сайт мобильная версия</a>
<a href=https://forum.home-visa.ru/viewtopic.php?f=69&t=807392&p=2875349#p2875349>casino 1×slot</a>
<a href=https://qualityprogamer.de/forum/showthread.php?tid=352597>1×slots регистрация на сайте</a>
<a href=https://tabsgame.ru/user/Jamesbes/>1х слот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Игрокам не воспринимать приветственный бонус как гарантированный способ получить крупный выигрыш, хотя это отличная вероятность без расходов расценить функционал казино. Бонус в казино без депо имеет разные вариации: может быть приветственный бонус, акции в честь каких-либо праздничных либо важных дат, бонус за привлечение свежих игроков, преданность и получение VIP-статуса.
#7086 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
сайт казино вход pin casino <a href=https://m.repost.news/>kent casino</a> порно с Юлия Ефимова, пловчиха пин ап казино <a href=https://slon-ru.com/>porno Елизавета Туктамышева</a> bitz casino гама казино porno Дарья Мороз cat casino casino бонус почему в казино нет окон приложения букмекерских контор на андроид
#7087 Charlesgunnyhttp://filmkachat.ru
1× slots зеркало
Получив собственный презент, Вы можете бесплатно выступать на настоящие деньги, а выполнив обстоятельства отыгрыша, исключить собственный выигрыш.Акции, посвященные календарным праздникам, бывают рассчитаны как на всех пользователей, например и на категории: например, подарок на 8 марта девушкам-игрокам или мужикам на 23 февраля. <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> Такой казино приз без депо за регистрацию выдается игроку на час и активно употребляется данное предложение с 2017 года. Это словно какая-то конспирация одобрения под бездепозитный. Суть всего сего сводится к тому, что геймеру на час выдается, к примеру, 1000 долларов, а реклама утверждает про, что каждой выигрыш можно несомненно дальнейшем забыть при для. Но в играющий серьезно отнесется к данному предложению, то он просто потеряет время. Ведь геймеру надо(надобно) будет выступать не в аккаунте, а в тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (и всей тысячи) в верховодила вступят определенные условия, где будет сказано, что наибольшей суммой победы может быть только двести долларов и средства можно применять лишь в качестве бонуса на 1-ый лепта с вейджером 25 от суммы гонорары плюс сам депозит. По итогу получится, что игрок выигрывал для 200% бонус с вейджером на конкретную сумму. Короче говоря, это все не вашего времени. <a href=https://smallpdf.com/file#s=a4e78a8b-e574–4cce-8041-d2d327ee7d28>https://smallpdf.com/file#s=a4e78a8b-e574–4cce-8041-d2d327ee7d28</a> Отыграв бездепозитный бонус в казино с выводом также придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в сходственное лимитирование присутствует, то единоразово исключить получится лишь сумму, не превосходящую размер полученного бонуса. 1хслотс рабочее зеркало на сегодня <a href=https://newtimes.ru/forum/user/127079/>https://newtimes.ru/forum/user/127079/</a>
1×slots регистрацию процедура займет всего лишь
<a href=https://astraclub.ru/album.php?albumid=228703>1×slots зеркало регистрация</a> 1×slots рабочее зеркало <a href=https://fakenews.win/wiki/User:RoseanneBiermann>https://fakenews.win/wiki/User:RoseanneBiermann</a> Сроки активации приза уточняются каждым казино, но чаще всего они не превышают недели с этапа получения. Игроку непременно надо(надобно) использовать бездеп протяжении указанного срока, в ином случае приз просто исчезнет. Каждый приз можно получить только раз раз, потому случае не применять бездеп в срок, у игрока не будет второго шанса им воспользоваться.Такие поощрения разрешают даром протестировать новое казино, разобраться с игровым ходом онлайн слотов, заработать и исключить небольшую сумму денег. 1хслотс зеркало Иногда у посетителей сайта шансы возникнуть трудности, задачи, препядствия при активации полученного промо-кода. В этих случаях, необходимо адресоваться за поддержкою в саппорта «Support». Для получения ответа, непременно указывается определенная первопричина воззвания и подтверждается информация дополнительными скриншотами. Если сформировалась неоднозначная обстановка, постоянно можно обратиться к главному регулятору либо контролирующему органу, выдавшему данному заведению лицензионный документ.При выполнении критерий отыгрыша и верификации, средства с бонусного счета переводятся на ведущей и имеют быть выведены на карту либо электрический кошелек. Лимиты на вывод и сроки проведения транзакции в от избранной платежной системы.
1×slots скачать на айфон
Обычно бездепозитные промоакции от казино, приходят на эл. Почту в дни рождения либо праздники. В некоторых онлайн казино можно обратиться в чат и как неизменному игроку, вполне вас предложат бездепозитное предложение.Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, чтобы была возможность исключить выигрыш. Как только получите бездеп в казино, всё также не забывайте инспектировать электронную почту. Некоторые игорные клубы день веселят интенсивных гэмблеров приятными призами. Чаще всего получить презент возможно в преддверии веселья, на день рождение, за привлечение друга. А также распространённым бонусом считается прибавка к депозиту. Нужно не восполнить счёт, и азартное заведение увеличит его на 50–100%.Возможность протестировать новые игры, не рискуя личностными своими и разработать личную тактику забавы. <a href=https://yogaasanas.science/wiki/Pharmacy_Green_Street>https://yogaasanas.science/wiki/Pharmacy_Green_Street</a> В списке притязаний к отыгрышу часто присутствуют лимиты на ставки при этой на личные деньги. Так, случае отыграть надо(надобно) 30 000 рублей, а предельная сумма ограничена 30 рублями, то вертеть барабаны светит 1000 раз. Эта особенность затрудняет соблюдение игроками критерий по срокам действия акции.Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша призов. Заведения практически устанавливают наивысшую ставку, возможную по условиям вейждера. x1 slots 1хслотс регистрация перейти на 1×slots Подтверждение персональной инфы. Все казино настоятельно от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и присутствие у пользователя иных аккаунтов (мультиаккаунт запрещен).
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Мы рекомендуем не отказываться от похожих предложений знаменитых казино. Выделите несколько минут на регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сейчас фортуна будет на вашей стороне!Новички не обожают незамедлительно же вносить депозит. Это обосновано неимением опыта и недоверием. К счастью, наши можно получить бездепозитный бонус за регистрацию в казино. Неважно собственно начислит система – фриспины или кредиты. В любом случае вы не рискуете собственными сбережениями. Это замечательная вероятность запустить понравившийся видео слот либо же испытать удачу в настольных играх. B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, если не хотите стать жертвой мошенников или впустую израсходовать время; Нет. Казино выдают безвозмездные призы за регистрацию, для того, чтобы заказчик возможность ознакомиться с игровым заведением. А дабы вывести его, нужно выполнить условия отыгрыша.Ограничения по играм. Администрация воспрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, средствами или бесплатными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда разделение выполняется по виду игр. Например, отыгрыш вероятен на всех игровых аппаратах, но запрещен в настольных забавах и в разделе Live Casino. 1×slots зеркало которую указывали при регистрации кстати <a href=http://parijanka.kz/index.php?subaction=userinfo&user=wetweakness16>http://parijanka.kz/index.php?subaction=userinfo&user=wetweakness16</a> Можно ли зарабатывать на бездепозитных призах? Это не работа, тут как повезет, если в любом предложенном безедепе, вы будете откручивать вейджер и выводить, время возможно назвать везением, и дополнительной добавкой к вашему бютжету.
1×slots официальный сайт зеркало
Денежные свои. Третий бонус за регистрацию без депо – наличные. К раскаянию, лишь известные и модные клубы могут дать средства в рублях или долларах. С их помощью у насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед этим нужно исполненье конкретных критерий.Выполнив все притязания оператора, клиент возможность оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем не более суток. Если дополнительно требуется пройти процедуру верификации, то срок увеличивается до 1–2 рабочих дней. Для перевода применяются банковские приборы и электрические платежные системы. Второй метод подходит другого, как, например как большинство транзакций в этом случае исполняются моментально. В связи со специфичностью функционирования банков обработка платежей имеет занять до нескольких рабочих дней. <a href=https://ruisoon.com/space-uid-39121.html>https://ruisoon.com/space-uid-39121.html</a> казино 1×slots официальный сайт Можно. Вы всегда сможете отказаться от получения бездепозитного приза за регистрацию в казино, же Вы не создадите ставку.Следует выделить, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/8501/#comment-349441>1×slots зеркало регистрацию более популярный вариант это</a>
<a href=https://isomedu.com/forum/profile/josephdrons/>1×slots регистрация 1×slots casino c2d ru</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Условия, на которых предоставляется бездеп, регулируются казино. Каждая акция содержит подробные верховодила, гиперссылка на которые обычно находится в промообъявлении. В них указываются лимиты, вейджер, перечень доступных игр. Если оператор скрывает данные о предложении, то воспользоваться им не. Также учтите, собственно некоторые игровые платформы сужают перечень государств, которые готовы получить предложенный бездепозитный приз за регистрацию. К примеру, существуют онлайн-заведения, выдающие подобные бонусы только обитателям конкретных стран. К примеру, онлайн казино 777 Оригинал предоставляет бездепозитный бонус только игрокам из России и стран СНГ. Или наоборот, пичкают вознаграждением всех, считая обитателей некоторых государств (как сего, следует пристально учить список, дабы потом не появилось практически вопросов и претензий).
#7088 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Манилова Алла Юрьевна порно порно с Евгений Малкин (хоккей) <a href=https://rhymes-punches.com/>7k casino зеркало рабочее</a> порно с Ирина Сидоркова казино смотреть <a href=https://rucriminal.info/>песня казино</a> pin up casino зеркало vavada casino 1×bet зеркало рабочее xbet 1×bet приложение 1×bet xbet xyz Москалькова Татьяна Николаевна порно букмекерская контора без
#7089 Charlesgunnyhttp://filmkachat.ru
1×slots на любой вкус как пройти регистрацию
Обыкновенные бездепозитные бонусы в объеме от трех до двадцати долларов созданы чтобы, чтобы, чтобы в забавы заходили все новые и свежие игроки. Здесь, вероятнее всего, несомненно лимитирование на максимальный выигрыш. Важно, чтобы перед минимальным вкладом был отключен бонус за первое пополнение счета, и в не попадет на повторный вейджер. <a href=http://filmkachat.ru/>1×slots регистрация на официальном сайте</a> Диапазон ставок, коие вправе сделать игрок, кроме лимитирован. Обычно назначать можно маленькую необходимую — пределах 10–30 руб. За одно вращение.Бездепозитные призы начисляются только раз раз. Не стоит открывать новые аккаунты, чтобы получить их повторно. Служба защищенности казино непременно выявит «левого» участника и перекроет. Если посетитель выполнит нужные требования, отыграет собственную ставку и решит исключить личный выигрыш, то ему нужно сведению, что казино непременно потребует предоставить ксерокопии личных документов, дабы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные свои исключить не удастся. <a href=https://www.friend007.com/forums/thread/6498/>https://www.friend007.com/forums/thread/6498/</a> Выигрыши с призов без инвестициям всегда привязаны к притязанию по ставкам и шансы быть обналичены лишь в исполненья этих притязаний.Стоит обозначить(означить), что бездепозитный приз выдается только совершеннолетним новичкам, которые, же, шансы пригласить собственных приятелей и знакомых, кроме претендующих на поощрительную программку преданности. Подобная разработка была среди соперничающих онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению своей популярности, методом привлечения свежих игроков. Бонусы – это уникальный шанс для вероятных участников забавы, коие шансы опробовать софт покер рума и увериться, будут ли они в него выступать или нет. Новый игрок попробует свои силы с настоящими оппонентами в казино. 1×slots регистрация на официальном сайте <a href=https://xs.xylvip.com/home.php?mod=space&uid=5085>https://xs.xylvip.com/home.php?mod=space&uid=5085</a> Для доказательства электрической почты, просто перейдите по активной ссылке в послании, приобретенном от игрового заведения.Бездепы могут входить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой либо баллами.
1хслотс зеркало
Основное правило получения бездепа ? творимый аккаунт должен быть у юзера первым и единственным. Наличие нескольких аккаунтов требовательно воспрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депо необходимо соблюдать простую последовательность деяний.Как верховодило, при выводе финансов, от играющего требуется лишь устроить наименьший вклад для того, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом собственный счет. 1×slots зеркало проходить регистрацию это отличный вариант <a href=http://www.apicarrara.it/modules.php?name=Journal&file=display&jid=3796>http://www.apicarrara.it/modules.php?name=Journal&file=display&jid=3796</a> 1×slots сайт На бонусные начисления шансы быть установлены вспомогательные лимитирования, коие Вы не приняли при отыгрыше. Пока приз полностью не отыгран — деньги из казино не выводятся.
1×slots casino регистрация
<a href=http://wiki.die-karte-bitte.de/index.php/%C3%90%C3%90%C2%B2%C3%91%E2%80%9A%C3%90%C2%BE%C3%91%CB%86%C3%90%C2%BA%C3%90%C2%BE%C3%90%C2%BB%C3%90%C2%B0_%C3%90%C3%A2%E2%82%AC%E2%84%A2_%C3%90_%C3%90%C2%B0%C3%91%C3%91%C3%91%E2%82%AC%C3%90%C2%BE%C3%91%E2%80%A1%C3%90%C2%BA%C3%91%C6%92>http://wiki.die-karte-bitte.de/index.php/%C3%90%C3%90%C2%B2%C3%91%E2%80%9A%C3%90%C2%BE%C3%91%CB%86%C3%90%C2%BA%C3%90%C2%BE%C3%90%C2%BB%C3%90%C2%B0_%C3%90%C3%A2%E2%82%AC%E2%84%A2_%C3%90_%C3%90%C2%B0%C3%91%C3%91%C3%91%E2%82%AC%C3%90%C2%BE%C3%91%E2%80%A1%C3%90%C2%BA%C3%91%C6%92</a> 1×slots casino регистрация 1×slots review live Обычно для получения бонусов без депо, казино выдвигает приклнные и абсолютно выполнимые условия, но есть ряд действий коие воспрещены и все повлечь за собой неприятные последствия:
1х слот регистрация в 1×slots casino
Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.Подарки на конкретные даты отличаются условиями получения. Если одобрение начисляют игроку на денек рождения, то сумма обыкновенно в от общего размера депозитов за год. <a href=https://australiantravelforum.com/Upload/showthread.php?tid=259600>1×slots регистрация на 1хслотс</a> Вы наверняка, как и все предпочитаете получать презенты и бездепозитные бонусы казино. Игорные жилища брали в привычку одаривать гэмблеров приятными бонусами. Стать обладателем приветственного подарка возможно за творение профиля либо пополнение счёта. Второй вариант более интересный, как клубы готовы удвоить депозит! Но если вы новичок и лишь знакомитесь с миром пыла, другого, как пользуйтесь бонусом за регистрацию. 1хслотс мобильная версия зеркало <a href=http://3ak.cn/home.php?mod=space&uid=190195>http://3ak.cn/home.php?mod=space&uid=190195</a> Лишь модные и знаменитые азартные заведения могут разрешить себя раздавать бездепы в виде добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, которые возможно истратить в топовых аппаратах с высокой отдачей.Условия имеют разниться приятель от друга. Но такой приз возможность быть использован лишь для игрового процесса – полученные на счет деньги до того, как будут отыграны, вывести невозможно.
1хслот зеркало сайта
Фриспины начисляются по определенной ставке. После их активации игроку необходимо запустить слот и убедиться, что в нем отображаются благотворительные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода после отыгрыша определяется оператором и изредка выше 5 000 рублей.Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? Призовые начисления без депо все предоставляться для участия в турнирах онлайн казино. Потратить перечисленные деньги можно самая в рамках этой промоакции. Условия их проведения себе лимитирования на список игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться этим предложением, другого выучить его правила. <a href=https://foro.vcheats.me/Usuario-RichardHot>https://foro.vcheats.me/Usuario-RichardHot</a> 1хслотс регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=http://smpn1bejen.sch.id/forum/>1×slots casino регистрация 1×slotscasin online</a>
<a href=https://bans.org.ua/index.php?topic=126272.new#new>1×slots подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Частенько новенькие не понимают, как активировать подарки или вывести первый выигрыш. Для похожих случаев наша команда обрисовала главные термины – собственно такое фриспины, вейджер, как его отыграть, зачем необходимо проходить верификацию. Можно ли наваривать на бездепозитных бонусах? Это не работа, тут как повезет, в в любом предложенном безедепе, вы будете откручивать вейджер и выводить, это можно именовать везением, и дополнительной добавкой к вашему бюджету.
#7090 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
скачать 1×bet на андроид pin up casino пин ап <a href=https://rumafia.news/>1×bet 1</a> Нургалиева Эльвира Рамиловна порно 1×bet официальный сайт <a href=https://rhymes-punches.com/>Ходнева Светлана Владимировна порно</a> casino официальный сайт Елена Лядова порно с Владимир Минеев (ММА) porno Дарья Мороз ограбление казино 1×bet зеркало слоты Нургалиева Эльвира Рамиловна порно
#7091 Charlesgunnyhttp://filmkachat.ru
1×slots быструю регистрацию а также мгновенное
Обыкновенные бездепозитные призы в размере от трех до 20 $ созданы для того, дабы в забавы заходили все новые и новые игроки. Здесь, скорее, будет лимитирование на максимальный выигрыш. Важно, чтобы перед минимальным вкладом был отключен бонус за первое пополнение счета, и геймер не попадет на повторный вейджер.Шаг 4. Активация. Внимательно изучите условия, информацию по ограничениям и сроке деяния бонусного предложения. Разобравшись с правилами, возможно активировать бонус в личном офисе (время ? с использованием промокода) либо по запросу в саппорт. <a href=http://filmkachat.ru/>1хслотс рабочее зеркало</a> В каждом казино с бездепозитным призом предусмотрены вейджеровые обстоятельства. Это один-единственный «подводный камень», кот-ый стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) устроить определённое число ставок. Чем круче приз, тем сложнее выполнить условия, и напротив.Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие появляются у новичков. <a href=https://wowgilden.net/forum-topic_475313.html>https://wowgilden.net/forum-topic_475313.html</a> Не трудно додуматься, собственно not the slightest down payment bonuses практически разу не случаются великими. Чаще всего речь о пяти–тридцати долларах (либо эквиваленте этой суммы в иной еденице).Игры, в можно выступать на бонусные деньги. Проверьте список игр, каких возможно играть на бонусные средства, вполне они Вам не понравятся и не стоит расходовать своё время на такую акцию. 1×slots сайт зеркало <a href=http://10factov.net/index.php?subaction=userinfo&user=ypapas>http://10factov.net/index.php?subaction=userinfo&user=ypapas</a> Итак, чтобы бесплатные бонусные кредиты трансформировались в настоящие средства, которыми вам распоряжаться по собственному усмотрению, их нужно отыграть. Вейджер по уточнять в правилах онлайн-казино.Вознаграждения за получение VIP-статуса ? начисляются в программы преданности при достижении очередного уровня или выдаются персонально менеджерами службы.
1×slots casino регистрация
Фриплей-бонусы встречаются лишь в неких клубах. Они зачисляются незамедлительно в сотворения профиля и активны непродолжительное время. Если не успеете истратить свои, они попросту сгорят. Касаемо медли, правило бонусы активны в течение часа. <a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/6021–1×slots-podtverdit-vashu-registratsiyu-esli-govorit#6030>1×slots подтвердит вашу регистрацию если говорить</a> 1×slots промокод при регистрации 2025 Вейджер в переводе с английского означает «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша полученного приза, в нашем случае бездепозитного. Число ставок роли не играет — принципиально только набрать сумму, пропорциональную сумме поощрения. <a href=https://online-learning-initiative.org/wiki/index.php/User:FHDBooker0740664>https://online-learning-initiative.org/wiki/index.php/User:FHDBooker0740664</a> 1×slot официальный сайт Практически все онлайн казино с бездепозитным призом за регистрацию учитывает программу преданности — систему поощрения неизменных посетителей, которая состоит из множества значений. При достижении игроком очередного уровня на его счёт поступает приз. Чем выше уровень — что, этим щедрее приз.
1× slots casino зеркало
Главное преимущество спинов – вероятность выучить различные слоты. Также удастся насладиться бонусными раундами, испытывать удачу в риск-туре и преувеличить выигрыш за счёт особенных символов. Однако не только игровой процесс заслуживает внимание, как превосходнее сосредоточиться на реальном выигрыше.Изучить правила и обстоятельства получения бездепозитных призов казино, Вы сможете у нас на сайте в разделе с призами или на официальном веб-сайте избранного Вами казино. Если не можете отыскать нужную информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал либо по электрической почте. Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. <a href=https://poldomy.pl/member.php?u=135316>https://poldomy.pl/member.php?u=135316</a> 1× slots сайт Существуют казино с бонусом за регистрацию, в которых довольно модны фриспины в интернет казино потом регистрации в определенных играх. Они встречаются в почаще бесплатных поощрений либо классических призов в казино без инвестициям. Например, игрок регистрирует счет, на который начисляются бесплатные игры, бонус за регистрацию повторяющий даровых фрспинов, вращения в игровом автомате. Во время игрового процесса игры выигрывает настоящие деньги, которые в последствии возможно успешно вывести из заведения на свою платежную систему. То есть, все шансы вывести свои без рисков своими финансами. Регистрация, за которую компьютерные получит бонусы, займет пару минут, а спасибо данному возможно увеличить пять евро поощрений до тыс. И без всяких проблем вывести их.Приглашаем делиться суждениями о призах. Это поможет иным юзерам подбирать более прибыльные предложения.
1×slot зеркало
Исходя из сего, просто не существует мудрых оснований махнуть рукой на получение такового бонуса при регистрации. И, не, на такой бесплатной основе у вас есть все шансы выиграть средства и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные призы, нарекают бесплатными интернет платформами для игр. Ну и естесственно же, для казино бездепозитные призы выгодны с имиджевой стороны: подобная щедрость увеличивает степень преданности клиентов к компании. скачать 1×slots официальный сайт <a href=http://pharmacyhq.com/forum/profile.php?id=623440>http://pharmacyhq.com/forum/profile.php?id=623440</a>
онлайн казино 1×slots
Объективные – объем бонуса, коэффициент и условия вейджера, необходимость внесения депозита для вывода средств; Популярность онлайн казино растёт и всё больше пользователей начинают проявлять азартными играми. Бездепозитные бонусы 2022 года, это уникальные подарки за регистрацию. С их поддержкой новые игроки имеют получить бесплатные вращения или средства на баланс за одну регистрацию. С в игорных заведений в онлайне, бездепозитные призы стали наимоднейшим методом вербования игроков. Подобные акции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о которых мы расскажем. Наш вебсайт собрал превосходнейшие предложения из интернета на 2022 год. Воспользуйтесь любым подарком и можете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша необходимо выполнить обстоятельства.Максимальная ставка ? устанавливается в еденице счета и ограничивает объем ставки за раз спин. В случае ее превышения бонус имеет быть аннулирован. Также в правилах имеет содержаться запрет на размещение ставок конкретного вида, к, по одинаковым шансам в рулетке (другими, на чет или нечет, красноватое или черное и т.д.). <a href=https://tara-info.biz.ua/wr_board/tools.php?event=profile&pname=Charlesraign>https://tara-info.biz.ua/wr_board/tools.php?event=profile&pname=Charlesraign</a> Диапазон ставок, которые вправе сделать игрок, того лимитирован. Обычно назначать можно небольшую сумму — около 10–30 руб. За одно вращение.У любого игорного заведения средства верховодила и обстоятельства. Но, чтобы получить бонусы, необходимо выполнить стандартные действия: скачать 1×slots на андроид мобильная версия Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих притязаний, кроме неотъемлемой верификации. Если на веб-сайте предусмотрена неотъемлемая процедура доказательства личности, то вывести выигрыш получится только в проверки данных. Приготовьтесь наполнить анкету и выслать в техподдержку документ, подтверждающий лицо.
<b>Смотреть еще похожие новости:</b>
<a href=https://masstr.net/showthread.php?tid=84013>1хслот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подарки на конкретные даты отличаются критериями получения. Если поощрение начисляют игроку на денек рождения, то сумма обычно зависимости от общего объема депозитов за прошедший год. Похожим образом работает третий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения клиента либо в связи с получения им VIP-статуса. Подарок предоставляется последствии воззвания в поддержку и проверки.
#7092 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало рабочее на сегодня 1×bet xyz ограбление казино <a href=https://kompromat1.online/>казино 1</a> казино онлайн бесплатно порно с Антропова Валентина Викторовна <a href=https://kompromat1.online/>7k casino зеркало рабочее</a> букмекерская контора фонбет официальный 1×bet зеркало рабочее xbet porno Мира Андреева (теннис) 1×bet телефон порно с Ирина Сидоркова порно с Карен Хачанов (теннис) пина букмекерской конторы
#7093 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация то дальше необходимо пройти
Подобные бонусы без депо предоставляются на более выгодных условиях. Зачастую они крупнее, а условия отыгрыша наименее строгие. <a href=http://filmkachat.ru/>1×slot официальный сайт</a> Если вы избираете испытанное лицензионное интернет казино и сделайте все обстоятельства получения бездепозитного приза, проблем с получением подарка у Вас не возникнет. <a href=https://telegra.ph/Your-Ultimate-Guide-to-Licensed-Weed-Delivery-Brampton-Services-11–24>https://telegra.ph/Your-Ultimate-Guide-to-Licensed-Weed-Delivery-Brampton-Services-11–24</a> Нет. Казино раздают безвозмездные призы за регистрацию, для того, дабы заказчик мог ознакомиться с игровым заведением. А чтобы исключить его, нужно выполнить условия отыгрыша.Таким образом, заведение пробует продемонстрировать себя своим потенциальным игрокам, а такой рекламный ход как казино бонус без депозита за регистрацию завлекает довольно большое внимания к игорному заведению и обеспечивает неизменный струю свежих гостей и будущих посетителей игрового онлайн клуба. 1×slots рабочее зеркало на сегодня <a href=https://systemcheck-wiki.de/index.php?title=Benutzer:MasonKaur440>https://systemcheck-wiki.de/index.php?title=Benutzer:MasonKaur440</a>
1хслотс казино зеркало
Фриплей-бонусы встречаются только в некоторых клубах. Они зачисляются незамедлительно в творения профиля и активны недолговременное время. Если не успеете истратить средства, они попросту сгорят. Касаемо медли, правило призы активны протяжении часа.Онлайн гемблинг развивается с любым днем больше и больше, новые бренды создаются не по дням а по часам. Новые онлайн казино проделывают вступительные акции для игроков, чтобы, чтобы что бы зарекомендовать себя, и что, этим наиболее предлагают бездепозитные призы за регистрацию, что бы не пропустить такую возможность — как воспользоваться новым бездепом, рекомендуем навещать наш сайт как можно почаще, самое смачное и свежие несомненно добавляться в данном же списке. 1 x slots <a href=https://www.tadalive.com/blog/269592/mastering-the-art-of-3d-furniture-modeling-from-concept-to-render/>https://www.tadalive.com/blog/269592/mastering-the-art-of-3d-furniture-modeling-from-concept-to-render/</a> Во всех законных онлайн-казино Беларуси необходимо подтверждение паспортных данных для забавы — это требование правительства государства. 1хслотс официальный сайт зеркало
1×slots официальный сайт скачать
<a href=https://classdirectory.org/details.php?id=289031>https://classdirectory.org/details.php?id=289031</a> В истиннее время получить бонус за регистрацию в казино очень просто. Почти каждый игорный дом с готовностью предоставит средства либо благотворительные вращения. Многие игроки используют этим и не смущяются регистрироваться в каждом клубе с выгодными критериями. Кстати, это отличная возможность выдумать выигрышную стратегию и сорвать куш. 1×slots casino зеркало Многие игроки, оценив возможностей казино, остаются играть в нем и далее ? на это и направлено каждое рекламную. Постоянные клиенты заносят депозиты и делают ставки, обеспечивая длительную прибыль оператора. То есть, казино выдают бездепы свежим юзерам для формирования приклнной аудитории.Какие бонусы я могу еще получить не бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного бонуса, любое онлайн казино предлагает игрокам прибыльное предложение на первый депо, вы совершаете депозит, ваш депо увеличивается в двое либо и в трое, что, этим самым начать играть можно с больше солидной суммой, так же не запамятываем тему вейджер на бонусы.
x1 slots регистрация в 1×slots casino
За счёт спинов получится запустить различные интернет слоты, протестировать стратегии и поднабраться навыка. Фишка в том, что вращения начисляются на топовые аппараты с оригинальными опциями и высокой отдачей. Не забывайте, что в каждом акционном предложении предусмотрены особые требования – временные лимитирования, максимальный объем ставки, список доступных игр.Бездепозитные призы за регистрацию являются одним из самых известных способов вербования свежих игроков в онлайн-казино, поэтому собственно они деют игрокам возможность опробовать казино, более игровые автоматы, и вполне, выиграть настоящие средства. Казино выделяет возможность заработать и вывести настоящие средства на бездепозитных призах. Обычно, это незначительная сумма, коию казино возможность себе разрешить презентовать игроку. 1×slots официальный сайт зеркало рабочее <a href=http://maglik.ru/user/HenryDax/>http://maglik.ru/user/HenryDax/</a>
1×slots официальный сайт зеркало рабочее
Нельзя разглядывать игру на деньги, как вариант заработка. Азартные забавы воспрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не зачинщиком азартных игр. Сайт одевает информационный характер. Когда речь идет о получении бездепозитных призов в казино, для внимание на следующие условия:Получить Бездепозитный бонус в онлайн казино дело 2-ух кликов. Другой момент, отыграть промо и соблюсти правила и условия отыгрыша. Под правилами предполагается не только вагер, хотя и ограничения по наибольшей ставке. Мы разумеем, что в кинотеатр все ставят на зеро и выигрывают. Призываем не создавать сходственного. Перед активацией бонуса прочитайте верховодила. Узнайте последующие моменты: Условия получения дара, за регистрацию, за депо и многое. Ограничения по максимальной ставке. Зачастую не повыше 350 руб. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вращать автоматы, а вагер будет стоять на пространстве. Поэтому важно знать, в каких забавах можно осуществлять кратность валютного оборота. <a href=https://k2s.club/user/FrankRop/>https://k2s.club/user/FrankRop/</a> У нас на сайте Вы найдете список бонусов без депозита в испытанных казино и доскональную информацию о том как их получить и использовать. 1×slots актуальное зеркало Как правило, при выводе финансов, от играющего требуется только устроить минимальный лепта чтобы, чтобы, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом личный счет.Основное различие том,, собственно для получения бездепа не пополнять баланс в казино. Но кроме этого, есть ряд прочих отличий:
<b>Смотреть еще похожие новости:</b>
<a href=http://zxz.listbb.ru/memberlist.php?mode=viewprofile&u=925>1хслотс рабочее зеркало</a>
<a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=790094>1 x slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Возможность сыграть вспомогательное соревнование (а времени и некоторое) абсолютно безвозмездно, а выигрыш, же, поступает на счёт игрока.
#7094 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Ирина Горбачева включи казино <a href=https://7club7.com/>Любимова Ольга Борисовна порно</a> pin up casino пин new casino <a href=https://rucriminal.info/>black russia казино</a> порно с Карен Хачанов (теннис) порно с Федор Чалов (футбол) casino актуальное зеркало рабочее казино black russia казино champion casino Преподобная Надежда Александровна порно
#7095 Clydeamuck
пин ап вход <a href=" http://80tt1.com/home.php?… „>пин ап</a> or <a href=“ http://wyw.wapbox.ru/out.php?… ">pinup 2025</a> https://images.google.gg/url?… пин ап казино зеркало <a href=https://www.google.com.lb/url?q=https://gramster.ru>пин ап вход</a> пин ап вход and <a href=http://www.e10100.com/home.php?mod=space&uid=2931051>пин ап вход</a> gramster.ru
#7096 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Владимир Минеев (ММА) pin up casino пин <a href=https://glvk.guru/>порно с Юлия Ефимова, пловчиха</a> бывшие казино казино вход официальный сайт <a href=https://www.ossetia.tv/>casino скачать приложение</a> водка казино Крючкова Полина Викторовна порно 1×bet 1хбет pin casino зеркало официальная казино up casino скачать pin casino
#7097 Charlesgunnyhttp://filmkachat.ru
1×slot казино зеркало
Чаще всего интернет-казино предлагают бездепозитные бонусы свежим пользователям. Эта промо-акция очень эффективно завлекает новичков, подталкивая их к открытию счета. Конечно, не все они становятся послушными посетителями, хотя сам факт регистрации аккаунта играет на руку заведению.Пoдтвepдить личнocть клиента. Для успешного вывода средств, нужно подтвердить личность посетителя. Нa этaпe вepификaции пpoфиля, сотрудники службы защищенности обязаны увериться, что у игрока более раз аккаунт. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не сможет исключить свой выигрыш, случае у него будет количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы. <a href=http://filmkachat.ru/>1хслотс регистрация в 1×slots casino</a> Далее требуется отыграть вагер и вывести выигрыш. Игрокам без опыта крупно повезло, меня получить 10-ки презентов за одну регистрацию. Если не сумели получить Бездепозитный приз, не волнуйтесь. Обратитесь в интернет чат, оператор поможет ситуацию. <a href=https://www.as7abe.com/wall/blogs/post/60173>https://www.as7abe.com/wall/blogs/post/60173</a> У каждого игорного заведения средства верховодила и условия. Но, дабы получить призы, нужно выполнить стандартные действия: онлайн казино 1×slots <a href=https://www.hb9lc.org/wiki/index.php/%C3%90%E2%80%94%C3%90%C2%BD%C3%90%C2%B0%C3%90%C2%BA%C3%90%C2%BE%C3%90%C2%BC%C3%91%C3%91%E2%80%9A%C3%90%C2%B2%C3%90%C2%B0_%C3%90%C3%A2%E2%82%AC%E2%84%A2_%C3%90%C2%A1%C3%90%C2%B0%C3%91%E2%82%AC%C3%90%C2%B0%C3%91%E2%80%9A%C3%90%C2%BE%C3%90%C2%B2%C3%90%C2%B5_%C3%90%C2%A4%C3%90%C2%BB%C3%90%C2%B8%C3%91%E2%82%AC%C3%91%E2%80%9A>https://www.hb9lc.org/wiki/index.php/%C3%90%E2%80%94%C3%90%C2%BD%C3%90%C2%B0%C3%90%C2%BA%C3%90%C2%BE%C3%90%C2%BC%C3%91%C3%91%E2%80%9A%C3%90%C2%B2%C3%90%C2%B0_%C3%90%C3%A2%E2%82%AC%E2%84%A2_%C3%90%C2%A1%C3%90%C2%B0%C3%91%E2%82%AC%C3%90%C2%B0%C3%91%E2%80%9A%C3%90%C2%BE%C3%90%C2%B2%C3%90%C2%B5_%C3%90%C2%A4%C3%90%C2%BB%C3%90%C2%B8%C3%91%E2%82%AC%C3%91%E2%80%9A</a> Многие игроки, оценив возможностей казино, остаются играть в нем и далее ? на это и направлено каждое промо. Постоянные клиенты вносят депозиты и делают ставки, обеспечивая долгосрочную выгода оператора. То есть, казино выдают бездепы свежим юзерам для формирования приклнной аудитории.
1× slots официальный
1×slot зеркало На страничке представлены бездепозитные призы за регистрацию в казино редчайшая заслуга за коей гонятся все игроки как новички, например и профессионалы. Мы тоже уделяем великое внимание на наличие бонусов при составление рейтинга казино на деньги. Бездепозитный бонус это возможность выступать даром и выиграть настоящие деньги. <a href=http://bbs.tamurayukari.net/bbs/space-uid-12518.html>http://bbs.tamurayukari.net/bbs/space-uid-12518.html</a> У любого игорного заведения средства управляла и обстоятельства. Но, чтобы получить призы, необходимо выполнить стандартные деяния:Бездепозитные призы – это исключительно небезинтересная и наиболее перспективная промоакция интернет-казино. Они том другого, как фри-спинов, поэтому что выплаты в даровых вращениях не гарантированы, так комбинации на барабанах игрового аппарата шансы не сложиться. 1×slots коды Прямо данный отберите благотворительные вращения за регистрацию без депо и начинайте коллекционировать призовые композиции ради крупных выигрышей!
1хслотс мобильная версия зеркало
В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, необходимо адресоваться в службу спустя лайв-чат на веб-сайте казино.Риск-игра по равным шансам – Также казино возможность запрещать выполнять обстоятельства по отыгрышу с помощью раунда на удвоение, который предлагается в слотах, видео-покере и неких иных забавах. После потребуется внести идентификационный платёж. Это стращает начинающих больше всего. Нужно сделать минимальный депо в 100–500 рублей. Таким образом служба безопасности увериться никаких, собственно платёжный способ принадлежит Вам. Данная процедура необходима для обеспечивания безопасности игровых счетов. Пример, Ваш акк взломают и выведут средства на свой кошелёк. Будет очень неприятно. Поэтому верификация платёжной системы, это необходимый момент.Поспешите арестовать бездепозитные призы за регистрацию в казино из представленного списка. Все платформы столько ведут легальную работа, но и порадуют правдивыми плодами игры, высочайшей отдачей, резвыми выплатами. <a href=http://v208870d.bget.ru/user/JoshuaNit/>http://v208870d.bget.ru/user/JoshuaNit/</a> Превышение максимальной ставки при отыгрыше. Система механически не предостерегает о превышении ставки, поэтому о несоблюдении управлял игрок возможность узнать уже после подачи запроса на вывод средств.Фриплей-бонусы. Бонусы за бесплатную игру есть лишь в некоторых клубах. Они зачисляются незамедлительно после творенья профиля и действуют непродолжительное время. Если у вас нет медли потратить средства, они просто закончатся. Что дотрагивается времени, правило призы срабатывают протяжении 1-го часа. 1×slots casino регистрация 1×slots review live
рабочее зеркало 1×slots
<a href=https://www.globalvision2000.com/forum/member.php?action=profile&uid=1072499>1 x slots casino</a> Не хотите сыграть в азартные игры, не рискуя своими средствами, но получая в все выплаты? Подобную возможность деют многие наихорошие порталы с азартными веселиями. В их числе количество добросовестных и надежных интернет-казино на российском языке. Они привлекают новых пользователей разными поощрительными событиями, включая бездепозитные, либо безвозмездные бонусы. Бездепозитные призы казино за регистрацию в 2022 году — это вероятность поиграть за счёт заведения. Казино даёт клиенту шанс пользоваться определённой суммой либо числом бесплатных вращений без внесения депозита. Не путайте деморежим с реальной забавой без необходимости внесения депозита.Риск-игра по одинаковым шансам – Также казино может запрещать скорпулезно условия по отыгрышу за раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких других играх. 1×slots зеркало этих способов предполагает регистрацию <a href=https://spccos.com/bbs/board.php?bo_table=inquiry&wr_id=341554>https://spccos.com/bbs/board.php?bo_table=inquiry&wr_id=341554</a> Подарки на конкретные даты выделяются условиями получения. Если одобрение начисляют игроку на день рождения, то сумма обыкновенно зависит от общего объема депозитов последний год.
1×slots актуальное зеркало
Для отыгрыша бонуса казино обязует игрока поиграть на сумму, в некоторое раз превышающую необходимую полученного приза — тут выгода фирмы очевидна.Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=https://genius.com/Vykupavto0311>https://genius.com/Vykupavto0311</a> Представьте момент, когда при ставке в 10 руб. Вы получите подобное умножение. Миллион руб. За одно вращение, собственно абсолютно вероятно. Поэтому вопрос, сколько возможно выиграть остаётся не. Предлагаем проверить других. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный бонус и проверяйте фортуну в деле. Разумеется, исключить средства сложно. Однако шансы есть у всех.Бесплатные бонусы казино без депозита возможно получить повторяющий денежных средств на бонусный счет (вывести их возможно лишь в отыгрыша), фриспинов, забавы либо кешбэк-бонуса. 1×slots зеркало рабочее на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=https://russiancomputerservice.ru/user/JosephCer/>1хслотс мобильная версия зеркало</a>
<a href=http://weeklywars.de/viewtopic.php?f=12&t=9669&p=463946#p463946>1 x slots casino</a>
<a href=http://forum.survival-readiness.com/viewtopic.php?p=436996>1×slots регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
У любого игорного заведения средства верховодила и условия. Но, дабы получить бонусы, нужно выполнить стереотипные действия:
#7098 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino зеркало сайта 1×bet официальный 1×bet xyz <a href=https://res-publika.com>1×bet сайт</a> casino buzz up букмекерская контора <a href=https://repost.news/>1×bet 1</a> bet casino Елизавета Боярская леон букмекерская контора 1×bet вход bet casino pin up букмекерская контора porno Мира Андреева (теннис)
#7099 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало на сегодня
Бездепозитный приз нередко возможность замерзнуть доступным незамедлительно последствии окончания регистрации, что правило единственным требованием к нему считается регистрация, а после проверка вашей новой учетной записи. <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> Самый распространённый из подобных призов, естесственно же, бездеп на день рождения посетителя — приз в виде фиксированной суммы или фриспинов поступает на счёт игрока, а воспользоваться им возможно протяжении установленного периода медли. <a href=https://hackaday.io/rendering>https://hackaday.io/rendering</a> Заработать на бездепозитных призах за регистрацию в казино имеет любой юзер, достигший совершеннолетия.Все безвозмездные призы кажутся соблазнительными. Кто же категорически от способности поиграть в онлайн-казино, не рискуя средствами, хотя получая выигрыши. Но далеко не все бездепозитные бонусы одинаковой презентабельны для рассудительного клиента. 1хслотс официальный сайт зеркало <a href=http://www.webdesignforum.com.au/member.php?action=profile&uid=28877>http://www.webdesignforum.com.au/member.php?action=profile&uid=28877</a> Также случаются случаи, когда казино начисляет обсужденный приз в регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам.
1×slots рабочее зеркало на сегодня
Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются незамедлительно в сотворения профиля и активны недолговременное время. Если не успеете израсходовать средства, они попросту сгорят. Касаемо медли, как призы активны протяжении часа. <a href=https://www.findaspermdonor.com/memberlist.php?mode=viewprofile&u=13618>1×slots рабочее зеркало на сегодня</a> 1×slots зеркало на сегодня <a href=http://viridi-lab.ru/bitrix/redirect.php?goto=http://edurev.in/android-download?t=http://presidentofabkhazia.org/bitrix/redirect.php?goto=https://teletype.in/@urist555/qI4ukDDgDie>http://viridi-lab.ru/bitrix/redirect.php?goto=http://edurev.in/android-download?t=http://presidentofabkhazia.org/bitrix/redirect.php?goto=https://teletype.in/@urist555/qI4ukDDgDie</a> 1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, если не хотите замерзнуть жертвой жуликов либо впустую израсходовать время;Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. 1×slots зеркало 1хслотс регистрация перейти на 1×slots Для тех, кто лишь взвешивает испытать собственную удачу, а также для профессиональных игроков, разыскивающих свежие площадки для выигрышей, основные лицензированные казино нередко организуют разные акции, и одно из лучших предложений за последнее время – как для новичков, например и для проф игроков – бездепозитный приз за регистрацию.
1хслотс рабочее зеркало
Фриспины начисляются по определенной ставке. После их активации игроку нужно запустить слот и убедиться, что в нем показываются безвозмездные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода после отыгрыша определяется оператором и изредка превышает 5 000 руб. Многие игроки, оценив возможностей казино, остаются выступать в нем и дальше ? на это и направлено любое промо. Постоянные посетители заносят депозиты и проделывают ставки, обеспечивая длительную прибыль оператора. То есть, казино выдают бездепы свежим пользователям для формирования приклнной аудитории. <a href=http://www.air119.net/bbs/board.php?bo_table=free&wr_id=655322>http://www.air119.net/bbs/board.php?bo_table=free&wr_id=655322</a> 1хслот скачать
1хслотс официальный сайт зеркало
Основное правило получения бездепа ? творимый аккаунт должен быть у юзера первым и единственным. Наличие нескольких аккаунтов требовательно воспрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депо необходимо соблюдать простую последовательность деяний. 1×slots бонус за регистрацию <a href=http://koreasamsong.com/bbs/board.php?bo_table=free&wr_id=2573995>http://koreasamsong.com/bbs/board.php?bo_table=free&wr_id=2573995</a> Промообъявления от казино не дают реальной картины и направлены на привлечение внимания юзеров. Понять, как высоки шансы остаться в плюсе, дозволит личный тест условий предложения:Бездепозитные призы начисляются только раз один. Не стоит раскрывать новые аккаунты, дабы получить их повторно. Служба безопасности казино обязательно выявит «левого» участника и заблокирует. Если гость выполнит необходимые требования, отыграет собственную ставку и решит исключить личный выигрыш, то ему надо(надобно) к, что казино обязательно востребует дать ксерокопии личных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои исключить не получится.
1×slot официальный сайт
Также случаются случаи, когда казино начислит оговоренный приз после регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам.Как правило, новоприбывшие игроки в первую очередь желают ознакомиться с способами ввода и вывода валютных средств и сроки исполнения поданных заявок дабы конкретно осознавать, как быстро у вывести свой казино бонус за регистрацию без депозита на электрический кошелек или же банковскую карту. К счастью для всех играющих, внутри определенных холдингов, все казино конкурируют меж собой. Ведь в бы определенную компанию представляло только одно онлайн-заведение, то ли бы посетители увидели казино с бонусом за регистрацию и могли бы рассчитывать лишь на вознаграждение повторяющий приза на первое вложение. К любому заведению периодически стопам завлекать свежих игроков, собственно, итоге, только на руку всем играющим. Бесплатный приз – кредиты, которые онлайн-казино начисляет посетителю, не принуждая его пополнять игровой счет.Отказ в прохождении верификации. Если заказчик не желает либо имеет дать документы, подтверждающие его лицо, профиль несомненно заблокирован совместно, вкупе со всеми бонусными начислениями. <a href=https://w-o-n.org/member.php?action=profile&uid=1810>https://w-o-n.org/member.php?action=profile&uid=1810</a> Сразу после активации промокода можно пользоваться подарком. Как теснее упоминалось, бонусы случаются трёх обликов – фриспины, кредиты и фриплей-бонусы.Каждый из бездепозитных призов без пополнения 2022 имеет свой конкретный вейджер для отыгрыша, так же в любом казино он устанавливается индивидуально — где то он х55 а где-то х30, повторюсь всюду по различному! рабочее зеркало 1хслотс Многие казино предоставляют в рекламных целях благотворительные призы исключительно для наших читателей. Чтобы их получить, нужно перебежать на игровой сайт по партнерской ссылке с нашего портала.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=886180#pid886180>1×slots бонус за регистрацию</a>
<a href=http://forums.indexrise.com/thread-67451-post-329446.html#pid329446>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Онлайн-казино с бездепозитными призами ставят клиентам условия для использования бездепами, потому перед участием в акции какого-либо подробно ознакомиться со всеми правилами и нюансами промоакции. Условия все касаться получения приза, его применения и последующего вывода валютных средств когда выигрыша. Нельзя осматривать игру на средства, как вариант заработка. Азартные игры запрещены для лиц младше 18 лет. Topcasinobonuses.mobi классифицируется зачинщиком азартных игр. Сайт одевает информационный нрав.
#7100 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
приложения букмекерских контор на андроид casino 7k сегодня <a href=https://krtka.info/>бывшие казино</a> casino ап букмекерские контора ап <a href=https://res-publika.com>vodka casino</a> casino промокод 1win casino казино пин казино пин 1×bet зеркало на сегодня порно с Варвара Субботина kent casino
#7101 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet рабочее на сегодня сайт казино зеркало <a href=https://krtka.info/>яндекс казино</a> up casino win win casino <a href=https://rhymes-punches.com/>пина букмекерской конторы</a> Скворцова Вероника Игоревна порно 7k casino бонус vodka casino порно с Ирина Сидоркова порно с Захарова Мария Владимировна casino riobet casino daddy
#7102 Charlesgunnyhttp://filmkachat.ru
1×slots на любой вкус как пройти регистрацию
Бесплатные бонусы казино без депо можно получить повторяющий валютных средств на бонусный счет (вывести их можно лишь в отыгрыша), фриспинов, забавы либо кешбэк-бонуса. <a href=http://filmkachat.ru/>1хслотс рабочее зеркало</a> Даже не выиграв солидную необходимую, игрок интересно проведет время, изнутри исследует работу площадки, оценит геймплей автоматов. Все это без каких-либо денежных рисков. Быть в курсе превосходнейших акций легко. Достаточно периодически учить список свежих интернет казино с выводом бонуса без депо в этом разделе.Ниже указан актуальный перечень легальных казино в Беларуси с бонусами на 1-ый депозит. Вы сможете попасть на официальный вебсайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз. <a href=https://www.nitrnd.com/blogs/229798/Transforming-Dream-Kitchens-Through-Professional-3D-Rendering-Solutions>https://www.nitrnd.com/blogs/229798/Transforming-Dream-Kitchens-Through-Professional-3D-Rendering-Solutions</a> Третитй бездепозитный приз за регистрацию – валютные свои. К огорчению, начислить рубли либо баксы готовы лишь знаменитые и модные клубы. С их помощью возможность насладиться любой доступной забавой – автоматом, рулеткой, кено, блэкджеком. 1×slots подтвердит вашу регистрацию если говорить <a href=https://mymoscow.forum24.ru/?1–6–0–00020814–000–0–0>https://mymoscow.forum24.ru/?1–6–0–00020814–000–0–0</a> Условия отыгрыша приза. Если Вы расчитываете заработать на бездепозитном бонусе, то начала обратите внимание на значение вейджера и срок, кот-ый дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть бонус и исключить выигрыш.Фриспины без депозита либо вспомогательные средства помогут ближе познакомиться с игровой платформой и её функциями. За счёт презентов возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за игры напротив живых крупье.
1 x slots casino
Получив собственный презент, Вы можете безвозмездно играть на реальные деньги, а выполнив обстоятельства отыгрыша, исключить свой выигрыш. 1× slots casino официальный сайт <a href=https://www.google.sr/url?q=https://doctorlazuta.by/>https://www.google.sr/url?q=https://doctorlazuta.by/</a> Мы делаем ударение на главных положениях верховодил, рассказываем о территориальных лимитированиях и вкратце информируем о иных акциях обговариваемого казино.Промообъявления от казино мешают реальной картины и ориентированы на привлечение внимания пользователей. Понять, как высоки шансы остаться в плюсе, дозволит личный тест условий предложения: 1×slots казино мобильная версия В большинстве заведений устроить это возможно по адресу электронной почты, по номеру телефонного, через социальную сеть либо гугл-аккаунт.
1×slots промокод при регистрации 2025
<a href=http://www.cristaleriajara.com/galeriajara/profile.php?uid=18405>http://www.cristaleriajara.com/galeriajara/profile.php?uid=18405</a> Выбирайте лучшие безвозмездные бонусы счет обзоров на Casinoz – и пусть вам сопутствует удача при отыгрыше бонусных кредитов!Внесение депозита – Будьте готовы пополнить счет после отыгрыша бонуса. Это стандартное заявка управлял для данного типа промо-акций. Лучше заблаговременно уточнить, какую необходимую нужно будет вносить на счет. Как управляло, речь идет о минимальном депозите, хотя вы должны быть уверены, что он для по карману. 1×slots casino зеркало рабочее
1хслотс официальный сайт зеркало
Фриплей-бонусы встречаются только в неких клубах. Они зачисляются сразу последствии творенья профиля и активны недолговременное время. Если не успеете израсходовать средства, они просто сгорят. Касаемо медли, как бонусы активны в течение часа.К раскаянью, нет. Почти все казино, настоятельно внесение хотя бы одного малого депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, что вывести средства разрешается лишь на ту платежную систему, с которой был сделан депо. Раздача призов возможность быть приурочена к разным датам: календарные праздничные, дни рождения игроков, юбилей открытия казино и т. Д. Подарок выдается повторяющий средств, фриспинов или баллов для накопления и обмена на предложения оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода этой суммы придется выполнить ряд притязаний.Вы всего, например все любите получать презенты и бездепозитные призы казино. Игорные жилища взяли в повадку одаривать гэмблеров приятными бонусами. Стать владельцем приветственного презента возможно за творенье профиля или пополнение счёта. Второй вариант больше занимательный, как клубы готовы удвоить депозит! Но в вы новичок и лишь знакомитесь с миром азарта, превосходнее пользуйтесь бонусом за регистрацию. Возможность сыграть дополнительное соревнование (а время и количество) абсолютно безвозмездно, а выигрыш, же, поступает на счёт игрока. казино 1×slots <a href=http://dedmorozural.ru/users/greedystomach21>http://dedmorozural.ru/users/greedystomach21</a> В качестве бонусов онлайн казино часто предлагает выдачу фриспинов, словами бесплатных вращений игрового барабана. Виртуальные монеты можно применять для обучения в покерной школе или для игры в казино.Эффективность бездепов в рекламного прибора расценили многие операторы. Малоизвестные площадки употребляют эти промоакции, дабы быстро набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны неизменных посетителей. Не все сайты, дающие подарки без депозита, рекомендованы к забаве. За привлекательным промоописанием все скрываться неосуществимые обстоятельства отыгрыша и подводные камешки.
1×slots зеркало этих способов предполагает регистрацию
Подтверждение электрической почты – одно из ведущих критерий, которое есть практически в любом бездепозитном казино. Чтобы верифицировать электронную почту, довольно перейти по активной ссылке в письме, полученном от азартного клуба.Иногда операторы требуют внесение минимального депо перед выводом для верификации платежного инструмента. В неких казино данный депо того предстоит отыграть. <a href=http://its-real.ru/bitrix/redirect.php?goto=http://np-stroykons.ru/links.php?id=konnekt58.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/556QsyIBy46>http://its-real.ru/bitrix/redirect.php?goto=http://np-stroykons.ru/links.php?id=konnekt58.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/556QsyIBy46</a> Автоматы непопросту числятся наиболее известным азартным весельем. Чтобы усвоить управление и управляла, понадобится всего несколько мин. Ваша задача устроить ставку, определить число рабочих линий и возможно крутить барабан. Если на экране выпадет выигрышная комбинация – вы выиграли! С этой задачей вас посодействуют управится бездепозитные бонусы казино. зеркала 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=285069&pid=682215#post_682215>1×slots casino регистрация 1×slotscasin online</a>
<a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=1057893#pid1057893>1×slots зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный приз казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в данном и содержится основное отличие.
#7103 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
up casino скачать 1×bet зеркало рабочее на сегодня <a href=https://rhymes-punches.com/>porno Алена Косторная (фигурное катание)</a> букмекерская контора мостбет приложения букмекерских контор на андроид <a href=https://vestnik-jurnal.com/>симулятор казино</a> pin ап casino букмекерская контора на андроид porno Алена Михайлова скачать 1×bet 1×bet xyz скачать pin casino unlim casino скачать casino на андроид
#7104 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая приятная часть игры. Важно, часто бездепозитные бонусы в казино выдаются с ограничениями по максимальной выплате. В среднем можно рассчитывать на прибыль в несколько тыщ руб. Как вывести выигрыш с приза без депозита. Придётся доказать акк документально, в некоторых заведениях. Процедура верификации обязательна и делается каждым игроком. О документальном подтверждении учетной записи спрашивайте в онлайн чате или прочитайте в правилах. <a href=http://filmkachat.ru/>1 x slots casino</a> Практически все интернет казино с бездепозитным бонусом за регистрацию учитывает программу лояльности — систему одобрения неизменных посетителей, которая состоит из множества значений. При достижении игроком очередного уровня на его счёт поступает приз. Чем повыше степень — тем щедрее бонус.Сроки активации бонуса уточняются любым казино, но почаще всего они не превышают недели с этапа получения. Игроку обязательно нужно применять бездеп на обозначенного срока, в ином случае бонус просто пропадет. Каждый бонус можно получить лишь раз раз, поэтому если не применять бездеп в срок, у игрока не будет 2 шанса им пользоваться. <a href=https://telegra.ph/Navigating-Cannabis-Delivery-Services-in-Whitby-11–24>https://telegra.ph/Navigating-Cannabis-Delivery-Services-in-Whitby-11–24</a> 1×slots казино мобильная версия <a href=https://able2know.org/user/tyroneunomo/>https://able2know.org/user/tyroneunomo/</a>
1×slots зеркало рабочее на сегодня
Бездепозитный бонус казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в данном и содержится главное различие.Выигрыши с призов без вложений постоянно привязаны к притязанию по ставкам и могут быть обналичены только последствии исполнения этих притязаний. 1×слот регистрация в 1×slots casino <a href=http://canadalondonchinese.com/home.php?mod=space&uid=223767>http://canadalondonchinese.com/home.php?mod=space&uid=223767</a> 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Казино выделяет вероятность заработать и вывести реальные деньги на бездепозитных бонусах. Обычно, это малозначительная сумма, которую казино может себя позволить подарить игроку.
1хслотс зеркало на сегодня
Каждая игровая платформа выделяется условиями по получению и отыгрышу бездепов. В правилах детально расписаны временные рамки, за которые нужно прокрутить вейджер. Также не забывайте тему наибольший размер ставки и наивысшую необходимую выплаты. С другой стороны, чтобы получить бездепозитные призы казино, довольно израсходовать не более 1 минутки. Выбирая бесплатный приз, пристально изучайте правила. Убедитесь, собственно для можно принимать роль в промоакции. Уточните, в каких играх возможно исполнять обстоятельства вейджера. При необходимости задавайте вопросы представителям саппорта. <a href=https://www.echinamatch.com/author/harrycaf/>https://www.echinamatch.com/author/harrycaf/</a> Можно. Вы всегда сможете отрешиться от получения бездепозитного бонуса за регистрацию в казино, же Вы не сделаете ставку.В игровых клубах без лицензии Вы покупаете „кота в мешке“ и когда неоднозначных обстановок нет возможности куда-то пожаловаться и обосновать свою правоту. 1×slots бонус за регистрацию Фриспины предназначены для применения в видео слотах. Внимательно ознакомьтесь с условиями – часто их выдают на некоторые автоматы. В зависимости от клуба, у вас выйдет устроить определённое количество ставок. Кстати, продвинутые игорные жилища позволяют запускать любых «одноруких злодеев».При правильном раскладе бездепы — это отличный метод играть на деньги без растраты личных средств. Есть количество советов, следуя коим возможно извлечь максимально выгоды из подобных акций казино. Играть стопам только на лицензированных площадках. Скриптовые веб-сайты не только врут с бонусными предложениями, но и употребляют пиратский софт с измененным ГСЧ. Выиграть на таких автоматах невероятно.
1×slots зеркало на сегодня
Частенько новенькие не понимают, как активировать презенты или вывести 1-ый выигрыш. Для сходственных случаев наша команда описала основные термины – собственно такое фриспины, вейджер, как его отыграть, для нужно протекать верификацию.Бонусы без депо при регистрации считаются наиболее красивыми как для опытных игроков, например для и новичков. Получив такое вознаграждение, клиент может выступать на реальные средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные призы в интернет-казино Рунета, а условия их активации и выигрыша. Создание аккаунта. На сайте казино необходимо открыть регистрационную форму и наполнить пустопорожние поля личностными данными. Иногда на данном шаге требуется показать лишь адрес электронной почты и пароль, но почаще надо наполнить анкету индивидуальной информацией (ФИО, дата рождения, место проживания и т.д.). Нужно свидетельствовать только реальные данные, поскольку впоследствие они станут испытаны. Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих требований, не обязательной верификации. Если на сайте учтена неотъемлемая процедура доказательства личности, то исключить выигрыш получится лишь после ревизии данных. Приготовьтесь заполнить анкету и отправить в техподдержку документ, подтверждающий личность.Мы подготовили перечень, где есть постоянно актуальные и свежие бездепозитные бонусы казино, которые возможность получить даром. Для наших юзеров есть специальные предложения неповторимые бонусы, которые вы нигде не найдете, их мы обозначили специальной красноватой плашкой «Exclusive». 1×slots на любой вкус как пройти регистрацию <a href=http://armhleb.ru/index.php?subaction=userinfo&user=receptiveordina>http://armhleb.ru/index.php?subaction=userinfo&user=receptiveordina</a>
1×slots сайт
Также учтите, что некоторые игровые платформы сузивают перечень стран, которые готовы получить предложенный бездепозитный приз за регистрацию. К примеру, существуют онлайн-заведения, выдающие похожие бонусы только жителям конкретных государств. К примеру, интернет казино 777 Оригинал предоставляет бездепозитный бонус лишь игрокам из России и государств СНГ. Или напротив, пичкают вознаграждением всех, считая жителей неких государств (исходя из этого, по пристально учить список, чтобы впоследствии не появилось никаких вопросов и жалоб). <a href=https://kamchaty.ru/user/Philipbiams/>https://kamchaty.ru/user/Philipbiams/</a> Так же стоит выделить то, что в любом онлайн казино установлен собственный наибольший кешаут на бездепозитный бонус. Как правило кешаут — это максимальная сумма средств, кот-ая доступная для вывода с бездепозитного приза.Индивидуальные поощрения выдаются за совершение поступков: подписку на аккаунты площадки в соц сетях, установку мобильного приложения либо официального клиента для ПК. В большинстве казино срабатывают программы преданности, присваивающие игрокам статусы за активность на сайте. Продвижение на грядущий уровень нередко с выдачей бездепа. 1×slot регистрация При верном подходе бездепы — это прекрасный метод выступать на средства без растраты личных средств. Есть некоторое советов, следуя коим возможно извлечь максимально пользы из подобных акций казино. Играть стопам лишь на лицензированных площадках. Скриптовые сайты столько врут с бонусными услугами, хотя и используют пиратский софт с модифицированным ГСЧ. Выиграть на этих автоматах невероятно.Не рекомендуем сломя голову браться за всевозможные предложения получения средств без вложений. Вполне вполне, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на первый взор. Альтернативой считается казино приз за депозит. Мы предлагаем вам пару советов, спасибо которым у любого игрока несомненно вероятность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом средств:
<b>Смотреть еще похожие новости:</b>
<a href=https://orbitsound.com/forum/user-211634.html>1 x slots</a>
<a href=https://www.xn–72c9aa5escud2b.com/webboard/index.php/topic,527309.new.html#new>1хслот зеркало сайта</a>
<a href=https://mit-bbs.com/viewtopic.php?t=140098>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=http://vn-info.net/user/Josephkam/>1×slots рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
С этими простыми советами каждое казино с призом за регистрацию способно принести в разы больше выгоды и выгоды. Выполнив все притязания оператора, заказчик имеет оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит примерно менее суток. Если дополнительно требуется пройти функцию верификации, то срок возрастает до 1–2 рабочих дней. Для перевода используются банковские инструменты и электронные платежные системы. Второй метод подходит никакого, например как основная транзакций в осуществляются моментально. В связи со специфичностью функционирования банков обработка платежей имеет занять до нескольких рабочих дней.
#7105 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino промокод 7k casino скачать <a href=https://repost.news/>1×bet скачать приложение</a> casino приложения порно с Илья Осипов (киберспорт) <a href=https://rucriminal.info/>1×bet зеркало на сегодня</a> 1go casino 1×bet xbet xyz демо казино букмекерская контора леонов casino betting 1×bet рабочее porno Алена Михайлова
#7106 Docplus24_Kiphttps://docplus24.ru/
Доброго времени суток! Важная и полезная новость для всех, кто заботится и следит о своем здоровье! Именно для тех, кто не ждет, пока совсем станет плохо, а заблаговременно совершает здравомыслящие и разумные действия. Порой бывает выгоднее и безопаснее вызвать врача на дом, сэкономить значительное время и деньги. Потому что здоровье почти бесценно и дорого! Как часто бывает, что люди вначале теряют свое здоровье, а потом тратят уйму времени и денег на восстановление потерянного здоровья. В общем, если вы ищите, вызвать врача на дом, врач на дом, вызов врача на дом и т.д., например: <a href=https://docplus24.ru/>врач на дом больничный лист</a> Тогда вам срочно нужно прямо сейчас перейти на сайт Медицинский центр ДОК+24 и узнать все подробности по медицинские услуги на дому, вызову врача на дом, медицинская помощь на дому, капельница на дому, анализы на дому, уколы на дому, вывод из запоя на дому в Севастополе и т.д. https://docplus24.ru/ . Обязательно переходите на сайт docplus24.ru изучайте информацию и сохраняйте в закладки, не забудьте записать адрес сайта и номер телефона. Кстати, звонить можно круглосуточно, т.е. в любое время. Всем пока!
#7107 Charlesgunnyhttp://filmkachat.ru
casino 1×slot
Бездепозитные призы истинными деньгами, коие можно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадались. <a href=http://filmkachat.ru/>1хслот зеркало</a> Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих требований, кроме неотъемлемой верификации. Если на сайте предусмотрена обязательная процедура доказательства личности, то вывести выигрыш удастся только после ревизии данных. Приготовьтесь наполнить анкету и выслать в техподдержку документ, подтверждающий личность. <a href=https://bresdel.com/blogs/806517/Mastering-Interior-Shop-Drawings-From-Concept-to-Construction-Excellence>https://bresdel.com/blogs/806517/Mastering-Interior-Shop-Drawings-From-Concept-to-Construction-Excellence</a> Бездепозитные призы, как теснее ясно, считаются оригинальной возможностью к игровому процессу безусловно бесплатно, словами играть в онлайн казино бесплатно и на быть свои сразу последствии регистрации аккаунта. Автоматы с таким депо могут замерзнуть великолепной вероятностью сыграть для почитателей пыла с определенными ограничениями в денег. казино 1×slots официальный сайт <a href=http://chansolburn.com/bbs/board.php?bo_table=free&wr_id=311196>http://chansolburn.com/bbs/board.php?bo_table=free&wr_id=311196</a> Помимо прочего, для вывода средств по бездепу необходимо привнести на счёт свой 1-ый депо — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на мало возможную сумму, после чего вывод средств станет доступен.
1×slots casino регистрация 1×slotscasin online
Чтобы получить возможность исключить выгода с бездепозитного бонуса в казино, необходимо выполнить ряд условий: 1× slots официальный <a href=https://23region.info/user/ChrisEreby/>https://23region.info/user/ChrisEreby/</a> 1×slots зеркало рабочее на сегодня
1×slots регистрация 1×slots casino 777 online
Кешбэк-бонус представляет собой возврат фиксированного процента от ставки если, тогда, проигрыша либо же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не превышает 10%. Также есть онлайн-платформы азартных игр, которые применяют раздачу бездепозитных призов в специальные даты (как для казино, например и для игрока). Помимо этого, действующие геймеры кроме имеют возможность получить схожие бонусы за собственную деятельность (например, за повышения уровня или за похожие достижения).Сразу в активации промокода можно пользоваться подарком. Как теснее упоминалось, призы бывают трёх видов – фриспины, кредиты и фриплей-бонусы. <a href=http://www.85sucai.com/member/index.php?uid=tearfulpavillio>http://www.85sucai.com/member/index.php?uid=tearfulpavillio</a> Срок активации и время на отыгрыш. Зачисление денег или фриспинов происходит при активации в течение взыскательно ограниченного периода, подобные требования предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать приз некоторое дней либо и недель. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с неоправданно высоким вейджером.После получения приза вывод средств для посетителя будет недоступен того, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя либо чета недель. Выводить деньги игрок может лишь последствии отыгрыша. 1×slot казино зеркало Все любят получать презенты. Согласитесь, почти любой играющий человек несомненно бесконечно рад, если получит бесплатный подарок для забавы в интернет казино просто за регистрацию либо же бонус за внесенный депо, так называемые приветственные бонусы для свежих игроков. Соответственно такие интернет клубы будут более знамениты и предпочтительны у игроков при выборе казино для забавы. Топ казино день обновляется и добавляются новые и интересные игровые клубы с симпатичной бонусной политикой и всеми вероятными преимуществами, льготами, к которым относятся эти призы как фриспины за регистрацию, валютные бездепозитные бонусы, еще щедрые призы за внесенный депо.
1×slots скачать на айфон
<a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/6018–1×slots-promokod-pri-registratsii#6027>1×slots промокод при регистрации</a> Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша бонусов. Заведения всегда устанавливают максимальную ставку, возможную по условиям вейждера. 1хслот официальный сайт зеркало <a href=https://www.jo1sat.com/member.php?u=224914>https://www.jo1sat.com/member.php?u=224914</a> Только выполнив все условия отыгрыша и дождавшись окончания ревизии аккаунта, Вы сможете оформить заявку на вывод средств и получить свои деньги.
1×slots промокод при регистрации 2025
Для получения предоставленных призов вас пригодиться — ПК либо мобильное устройство, и остальное дело за небольшим. Бездепозитный бонус по промо-коду несомненно доступен для забавы, только том, случае когда Вы активируете особый бонусный код в разделе с бонусами или укажите промокод при регистрации на сайте. В неких случаях, кроме активации кода, понадобиться подтвердить контактные данные игрока и наполнить анкету клиента.Не сложно догадаться, собственно no down payment bonuses практически никогда не посещают большими. Чаще всего речь о пяти–тридцати долларах (либо эквиваленте данной суммы в иной валюте). <a href=http://daeyoon.dgweb.kr/bbs/board.php?bo_table=free&wr_id=800044>http://daeyoon.dgweb.kr/bbs/board.php?bo_table=free&wr_id=800044</a> 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, дабы еще раз получить даровой бонус. Игорные заведения нетерпимы к бонус-хантерам, потому вас ждет неизбежное санкция.
<b>Смотреть еще похожие новости:</b>
<a href=https://masstr.net/showthread.php?tid=122736>1×slots официальный сайт скачать на айфон</a>
<a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=49168>1×slots подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На бесплатные призы онлайн-казино почти постоянно распространяется ограничения по стране проживания посетителей. Даже случае для разрешается открывать счет и играть на средства в заведении, это еще не означают, что для доступны not the slightest down payment bonuses. Заработать на бездепозитных призах за регистрацию в казино может каждый юзер, достигший совершеннолетия.
#7108 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино 1 r7 casino <a href=https://specreporter.com/>casino приложения</a> porno Елизавета Туктамышева пин ап casino pin <a href=https://repost.news/>официальное казино вход</a> официальные зеркала казино порно с Карен Хачанов (теннис) казино вулкан 7k casino зеркало на сегодня casino казино регистрации официальное казино вход
#7109 Charlesgunnyhttp://filmkachat.ru
казино 1×slots официальный сайт
Размер бонуса. В качестве бездепов обыкновенно начисляют не суммы, а когда речь о призах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино имеют подарить игроку до 2000$.В случае установленного лимита на сумму вывода выигрыша с бездепозитного бонуса, игрок не сможет исключить больше заявленной суммы. <a href=http://filmkachat.ru/>1×slots зеркало быструю регистрацию а также мгновенное</a> Новые клиенты онлайн-казино без первого депо имеют выяснить собственную удачливость. К что, этому же есть вероятность конвертировать бездепы в реальные средства за регистрацию в казино, впрочем достичь приз нужно отыграть сообразно условиям акции.Практически все интернет казино с бездепозитным бонусом за регистрацию учитывает программу лояльности — систему одобрения неизменных посетителей, которая состоит из множества значений. При достижении игроком очередного уровня на его счёт поступает приз. Чем повыше степень — тем щедрее бонус. <a href=http://www.gothicpast.com/myomeka/posters/show/78646>http://www.gothicpast.com/myomeka/posters/show/78646</a> 1×slots регистрация на сайте 1×slots ru com <a href=https://bdsmboard.org/member.php?398551-OscarPlalm>https://bdsmboard.org/member.php?398551-OscarPlalm</a> Мы делаем ударение на главных положениях правил, рассказываем о территориальных лимитированиях и вкратце информируем о других акциях обсуждаемого казино.
1 xslots рабочее зеркало
сайт 1× slots casino Какие бонусы есть еще получить кроме бездепозитного приза за регистрацию в казино? По мимо бездепозитного приза, каждое интернет казино предлагает игрокам выгодное предложение на первый депо, вы совершаете депо, ваш депо возрастает в двое или числе в 3, что, этим наиболее начать выступать можно с более солидной суммой, например же не забываем тему вейджер на призы. <a href=https://www.100seinclub.com/bbs/board.php?bo_table=E04_1&wr_id=396480>https://www.100seinclub.com/bbs/board.php?bo_table=E04_1&wr_id=396480</a> Промокод – определённая композиция символов, которую необходимо ввести в подходящее поле при твореньи учетной записи либо активировать в собственном профиле игрока в разделе с бонусами.Кешбэк-бонус дает собой возврат фиксированного процента от ставки в случае проигрыша либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%. 1×slots регистрация то дальше необходимо пройти Выиграть реальные средства в казино не пополняя счет – сложно, хотя возможно. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными призами и начните играть на бонусные средства. По статистике в одном из 10-ти заведений возможно заработать небольшую необходимую средств с бонусных средств.
1×slots промокод при регистрации
Маркетинговая политика всех игорных интернет-клубов обязана одевать различный нрав. И в гонорары на депозит работают для того, дабы стимулировать заносить депозиты и поощрять уже существующих юзеров, то бездепозитный приз в казино или бонус за регистрацию в казино, до всего, рассчитан на расширение базы потребителей.Нет. Казино раздают безвозмездные призы за регистрацию, для того, чтобы клиент возможность ознакомиться с игровым заведением. А чтобы вывести его, необходимо выполнить условия отыгрыша. <a href=http://janews.com.au/modules/newbb/viewtopic.php?topic_id=6406&post_id=6406&order=DESC&viewmode=flat&pid=0&forum=12>http://janews.com.au/modules/newbb/viewtopic.php?topic_id=6406&post_id=6406&order=DESC&viewmode=flat&pid=0&forum=12</a> В интернете слишком много скриптовых вебсайтов, которые принадлежат жуликам. Их основная задача – заинтересовать гэмблеров, пообещав не только великодушные подарки, хотя и солидные выигрыши. Так собственно некоторые веб-сайты предлагают получить за регистрацию в $1 000. 1×slots регистрация 1×slotscasino09k online Перед активацией главно пристально выучить обстоятельства акции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют велечину также лимиты ставок при отыгрыше и сроки, протяжении которых возможно воспользоваться предложением. Если бездеп охватывает ограниченный список игр, рекомендуется разузнать максимальные коэффициенты, степень отдачи и волатильности. Слоты с невысокими множителями выплат подходят лишь что случае, случае оператор не установил взыскательные лимитирования на максимальную необходимую ставки.
1×slots зеркало этих способов предполагает регистрацию
Более крупные предложения встречаются довольно изредка. Зачастую они доступны только VIP-игрокам. В оставшихся случаях им скорее сопутствуют очень строгие условия отыгрыша. Также возможны дополнительные обстоятельства и ограничения, прописанные в условиях и положения бонусной программки казино. казино 1×slots <a href=http://cd.dotspen.com/home.php?mod=space&uid=9151>http://cd.dotspen.com/home.php?mod=space&uid=9151</a>
1×slots регистрация то дальше необходимо пройти
Высокая конкуренция в сегменте азартных игр мотивирует операторов завлекать посетителей разнородными промоакциями. Благодаря этому у гостей появляется вероятность получить призы в казино за регистрацию без депо. Воспользоваться этим предложением можно, минуя функцию внесения средств на игровой счет, просто активировав аккаунт на веб-сайте. Наш гид по бездепам поможет выбрать самую привлекательную бонусную программу, узнать управляла получения такового гонорары и воспользоваться им с максимальной выгодой. Как лишь на виртуальном счету окажутся бонусные свои, поспешите отыграть вейджер. Сразу в этого возможно забыть заявку на вывод выигрыша. Кредиты прибыльно отличаются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом настоящих средств и выделяют возможность почувствовать азарт. Во-вторых – возможно насладиться каждой азартной забавой доступной на веб-сайте. В вашем постановлении находятся автоматы, настольные прибавленье, видео-покер, Live-дилеры.Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном сайте и выполните вход в личный кабинет, чтобы отобрать безвозмездные вращения с вейджером х40; <a href=http://grampred.ru/profile/dispensablecowa/>http://grampred.ru/profile/dispensablecowa/</a> 1×slots регистрация на официальном сайте Предложения с бездепозитными бонусами за регистрацию дозволяют новым заведениям привлечь аудиторию на собственный сайт. А игроки тому получают вероятность выступать на реальные средства без депозита в казино и заработать маленький стартовый капитал, который разрешено исключить на карту банка или электрический кошелек.Условия, на которых предоставляется бездеп, регулируются казино. Каждая акция содержит подробные правила, гиперссылка на которые обыкновенно содержится в промообъявлении. В них указываются лимиты, вейджер, перечень доступных игр. Если оператор укрывает данные о предложении, то воспользоваться им не стоит.
<b>Смотреть еще похожие новости:</b>
<a href=https://uyghuryol.com/forum/viewtopic.php?f=8&t=248644>1х слот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих требований, не обязательной верификации. Если на сайте учтена неотъемлемая процедура доказательства личности, то исключить выигрыш получится лишь после ревизии данных. Приготовьтесь заполнить анкету и отправить в техподдержку документ, подтверждающий личность. Подтверждение регистрации. Казино просят привязки профиля к электрическому адресу и номеру аппарата. Для сего на e-mail отправляется послание ссылаясь, а на аппарат ? текстовое известие с кодом.
#7110 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало рабочее на сегодня casinos xyz <a href=https://krtka.info/>casino зеркало сайта</a> 1×bet официальный casino скачать приложение <a href=https://repost.news/>бк букмекерская контора</a> black russia казино 1×bet зеркало xbet порно с Георгий Джикия (футбол) 1×bet скачать приложение на андроид порно с Александр Головин (футбол) сайте букмекерской конторы фонбет порно с Анна Щербакова, фигуристка
#7111 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet слоты официальный сайт 1×bet на андроид <a href=https://rumafia.news/>1×bet слоты официальный сайт</a> 1win букмекерская контора лучшие бесплатные онлайн казино <a href=https://strelochnik.com/>порно с Баталина Ольга Юрьевна</a> casino бездепозитный казино сегодня букмекерская контора 1×bet официальный скачать casino рабочее зеркало букмекерская контора unlim casino
#7112 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало
Вывод выигрыша с бездепозитных бонусов казино – великодушный презент от азартных клубов. Но дабы вывести собственный заработок, нужно выполнить ряд критерий:Максимальная ставка ? устанавливается в еденице счета и ограничивает объем ставки за раз спин. В случае ее превышения бонус имеет быть аннулирован. Также в правилах имеет содержаться запрет на размещение ставок конкретного вида, к, по одинаковым шансам в рулетке (другими, на чет или нечет, красноватое или черное и т.д.). <a href=http://filmkachat.ru/>1×slot регистрация</a> <a href=https://diigo.com/0y2r7c>https://diigo.com/0y2r7c</a> Первый образующийся вопрос, это, для выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают новых игроков. Последним легче начать игру на средства с подарка за регистрацию. Им надо пополнять баланс и расходовать личностные средства. Новички получают благотворительные спины или свои на счёт. С их поддержкой знакомятся с игровым процессом, крутят слоты и делают ставки в рулетке. 1×slots зеркало регистрация <a href=https://ludeon.com/forums/index.php?topic=57663.0>https://ludeon.com/forums/index.php?topic=57663.0</a> Бездепозитные бонусы — это подарки от казино повторяющий бонусных денег или фриспинов для игровых автоматов, которые начисляются на аккаунт игрока последствии процедуры регистрации на веб-сайте заведения. Для получения этих поощрений депозит не потребуется.Однако в критериях исчезают «подводные камешки», коие не разрешат вывести солидную необходимую либо же вы не успеете отыграть вейджер. Поэтому мастера советуют отобрать безвозмездные вращения за регистрацию в казино без депо, чтобы поднабраться навыка и получить настоящий шанс на победу.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция имеет подробные верховодила, ссылка на которые обыкновенно находится в промообъявлении. В их указываются лимиты, вейджер, список доступных игр. Если оператор прячет данные о предложении, то воспользоваться им не стоит. 1хслотс официальный сайт зеркало Если ординарными словами, бездепы – это определённая сумма средств или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать презенты. Но есть кое-какие аспекты. Существуют игорные дома, которые перед тем как начислить бонусы настоятельно привязать телефон, предоставить копии документов. <a href=https://eccentrictirade.com/forums/member.php?action=profile&uid=3089>https://eccentrictirade.com/forums/member.php?action=profile&uid=3089</a> Практически все онлайн казино с бездепозитным призом за регистрацию предусматривает программу преданности — систему одобрения постоянных посетителей, которая произведено из множества значений. При достижении игроком очередного уровня на его счёт поступает приз. Чем выше уровень — что, этим щедрее бонус.Для ревизии используются сканы паспортов, водительских водительских, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь обнаружен в попытке ввести вспомогательный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный перечень. При игре на лицензионной площадке надо бояться свидетельствовать достоверную индивидуальную информацию (шифрование исключает утечку индивидуальных данных). 1хслотс зеркало на сегодня
1хслотс казино зеркало
Несмотря на то, собственно данный вариант стимуляции со стороны азартных платформ очень моден области подобных игр, далеко не поклонникам казино известно, собственно сами бездепозитные призы казино и как непосредственно их возможно эксплуатировать. 2. Создать свежий профиль. Для регистрации нужно заполнить маленькую анкету либо зайдите в индивидуальный кабинет при помощи социальных сетей;Нет. Казино выдают безвозмездные бонусы за регистрацию, для того, дабы заказчик мог ознакомиться с игровым заведением. А чтобы исключить его, необходимо выполнить условия отыгрыша. <a href=http://shkola.mitrofanovka.ru/user/RandalQuado/>http://shkola.mitrofanovka.ru/user/RandalQuado/</a> 1×slots зеркало подтвердит вашу регистрацию если говорить Приглашаем делиться сужденьями о бонусах. Это поможет иным пользователям избирать более выгодные предложения.
1×slots подтвердит вашу регистрацию если говорить
Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, чтобы еще раз получить бесплатный бонус. Игорные заведения нетерпимы к бонус-хантерам, потому вас ожидает неминуемое санкция. <a href=https://tucmas.fi/phpBB/viewtopic.php?f=4&t=348690>1×slots официальный сайт скачать</a> Если вы опытный игрок, вы обязаны знать, что приз без депозита – редчайшая находка. Тем не менее, мы раз исследуем онлайн, чтобы найти для вас превосходнейшие бездепозитные предложения.Выбрать казино с бездепозитным бонусом. У нас на сайте представлен перечень наилучших интернет казино, которые предлагают своим игрокам великодушные призы за регистрацию. казино 1× slots официальный сайт <a href=http://ru.monumentefunerare.md/index.php?subaction=userinfo&user=DoctorLazutaOn>http://ru.monumentefunerare.md/index.php?subaction=userinfo&user=DoctorLazutaOn</a> Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро либо 20 $. Если выдаются фриспины, их число изредка превышает нескольких десятков даровых вращений.
1×slots рабочее зеркало на сегодня
Например, игрок получил 500 рублей при создании аккаунта и обязан отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., понадобится устроить 875 спинов для полного отыгрыша. Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. <a href=http://what.website.molifan.net/space-uid-2146823.html>http://what.website.molifan.net/space-uid-2146823.html</a> В списке притязаний к отыгрышу нередко присутствуют лимиты на ставки при ирге на собственные средства. Так, если отыграть нужно 30 000 руб., а максимальная сумма ограничена 30 рублями, то вертеть барабаны предстоит 1000 один. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам деяния акции. 1× slots зеркало После требуется привнести идентификационный платёж. Это стращает начинающих больше всего. Нужно сделать минимальный депозит в 100–500 рублей. Таким образом служба защищенности убедиться том,, что платёжный способ принадлежит Вам. Данная процедура важна для обеспечивания защищенности игровых счетов. Пример, Ваш аккаунт взломают и выведут средства на собственный кошелёк. Будет крайне досадно. Поэтому верификация платёжной системы, это необходимый момент.В неких онлайн казино для получения бездепозитных бонусов не довольно просто зарегистрироваться на веб-сайте клуба и подтвердить свои контактные данные. Дополнительно потребуется активация промокода.
<b>Смотреть еще похожие новости:</b>
<a href=https://masstr.net/showthread.php?tid=89494>1×slots зеркало рабочее на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В качестве бонусов интернет казино часто предлагает выдачу фриспинов, то есть даровых вращений игрового барабана. Виртуальные монеты возможно использовать для обучения в покерной школе либо для забавы в казино. Сроки активации приза устанавливаются любым казино, но почаще всего они не превышают недели с момента получения. Игроку непременно надо(надобно) применять бездеп в течение указанного срока, в ином случае бонус просто исчезнет. Каждый бонус возможно получить только один раз, поэтому если не применять бездеп в срок, у игрока не будет 2 шанса им пользоваться.
#7113 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
casino 7k сегодня вывод казино <a href=https://7club7.com/>порно с Антропова Валентина Викторовна</a> букмекерские конторы pin рабочее казино <a href=https://rumafia.news/>7k casino зеркало рабочее</a> казино фильм пин ап casino porno Александра Степанова, фигуристка официальная казино порно с Илья Осипов (киберспорт) порно с Бондаренко Анастасия Борисовна порно с Аделия Петросян (фигурное катание)
#7114 Jeffreyarime
http://gramster.ru/ пин ап
#7115 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet 1хбет часы казино <a href=https://rhymes-punches.com/>1×bet сайт 1×bet xyz</a> порно с Голикова Татьяна Алексеевна 1×bet зеркало xbet xyz <a href=https://krtka.info/>порно с Георгий Джикия (футбол)</a> Манилова Алла Юрьевна порно играющие казино какие казино казино на деньги pin casino пин ап casino pin up top зеркала официальных сайтов казино
#7116 Charlesgunnyhttp://filmkachat.ru
1хслотс 1хслотс регистрация перейти на 1×slots
Онлайн-казино с бездепозитными призами ставят посетителям условия для использования бездепами, поэтому перед участием в промоакции другого подробно ознакомиться со всеми правилами и аспектами промоакции. Условия могут прикасаться получения бонуса, его применения и последующего вывода валютных средств когда выигрыша. <a href=http://filmkachat.ru/>1×slots акции</a> Прежде чем активировать бездеп, необходимо убедиться никаких, собственно государство, уроженцем которой считается игрок, не заходит в перечень запрещенных. <a href=https://diigo.com/0y2rbf>https://diigo.com/0y2rbf</a> Для верификации номера телефона, в личном профиле выберите опцию „Подтвердить номер аппарата“ и введите в соответствующее фон код, полученный в sms-сообщении. 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=https://agendacultural.guanajuato.gob.mx/10-best-shopping-bots-that-can-transform-your/>https://agendacultural.guanajuato.gob.mx/10-best-shopping-bots-that-can-transform-your/</a>
скачать 1×slots на андроид мобильная версия
<a href=https://russiancomputerservice.ru/user/JosephCer/>1×slots мобильная версия войти казино</a> 1×slots актуальное зеркало Для получения выигрыша требуется выполнить условия казино. Чаще всего игроку нужно поставить определенную сумму, но уже из собственных денег. Она рассчитывается из совместного размера выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, в юзер выиграл 1000 рублей, а множитель сочиняет х30, вывести средства возможно несомненно, сделав ставки на 30 000 рублей. <a href=http://myqiantang.com/space-uid-304831.html&do=profile>http://myqiantang.com/space-uid-304831.html&do=profile</a> 1×slots рабочее зеркало
1×slots акции
Для ревизии применяются сканы паспортов, водительских прав, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь замечен в попытке завести дополнительный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный список. При ирге на лицензионной площадке не бояться указывать достоверную персональную информацию (шифрование исключает утечку персональных данных).Фриспины — бесплатные вращения, коие дозволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся самым популярным и предпочтительным обликом бонуса — благотворительные вращения порой эффективнее и веселее в отыгрыше, чем остальные облики бездепов. Бывают ли бездепозитные бонусы без вейджера? Бывают, в у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино. <a href=https://gusev-online.ru/user/Justinwef/>https://gusev-online.ru/user/Justinwef/</a> 1×слотс казино Выше мы предоставили полный набор самых новых и актуальных бездепозитных бонусов в онлайн казино без пополнения на 2022 год, где вам воспользоваться каким ценным бездепозитным бонусом.Основное правило получения бездепа ? создаваемый акк обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов требовательно запрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита необходимо блюсти несложную очередность деяний.
1хслотс официальный сайт зеркало
Как управляло, новоприбывшие игроки для хотят ознакомиться с способами ввода и вывода валютных средств и сроки исполнения поданных заказов чтобы четко понимать, как стремительно появится вывести собственный казино бонус за регистрацию без депо на электрический кошелек или же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино соперничают меж собой. Ведь если бы определенную компанию давало только одно онлайн-заведение, то навряд бы посетители заметили казино с призом за регистрацию и имели бы рассчитывать лишь на вознаграждение в виде бонуса на 1-ое инвестиция. К каждому заведению регулярно идет завлекать новых игроков, что, в итоге, только на руку всем играющим.Бывают ли бездепозитные бонусы без вейджера? Бывают, в у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию уточняется вейджер во всех казино. Подтвердите регистрацию, дабы активировать Бездепозитный бонус с выводом, потребуется заполнить индивидуальный профиль. Заполните порожние поля истинными данными о себя. 1×slots актуальное зеркало <a href=http://auto-file.org/member.php?action=profile&uid=745645>http://auto-file.org/member.php?action=profile&uid=745645</a> Главное превосходство спинов – вероятность изучить различные слоты. Также получится насладиться бонусными раундами, испытать удачу в риск-туре и преумножить выигрыш за счёт особых знаков. Однако не только игровой процесс заслуживает внимание, так чем сосредоточиться на реальном выигрыше.Фриспины начисляются по определенной ставке. После их активации игроку необходимо запустить слот и убедиться, собственно в нем показываются благотворительные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода последствии отыгрыша определяется оператором и редко превышает 5 000 рублей.
1× slots официальный
В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, необходимо обратиться в службу через лайв-чат на веб-сайте казино.Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция имеет подробные управляла, ссылка на которые обычно находится в промообъявлении. В них указываются лимиты, вейджер, перечень доступных игр. Если оператор скрывает данные о предложении, то пользоваться им надо. Как верховодило, новоприбывшие геймеры для хотят ознакомиться с способами ввода и вывода денежных средств и сроки исполнения поданных заявок чтобы четко осознавать, как скоро у исключить собственный казино бонус за регистрацию без депозита на электрический кошелек или же банковскую карту. К счастью для всех играющих, снутри конкретных холдингов, все казино соперничают меж собой. Ведь в бы конкретную компанию представляло лишь одно онлайн-заведение, то вряд ли бы клиенты заметили казино с призом за регистрацию и возможность бы рассчитывать лишь на вознаграждение вид приза на 1-ое инвестиция. К любому заведению периодически стопам завлекать новых игроков, собственно, конечном, только на руку всем играющим.Верификация аккаунта. Лучше доказать лицо незамедлительно в регистрации, чтобы потом не было заморочек с выводом средств. Верификация возможность протекать 2-мя маршрутами: <a href=http://ruzland.ru/communication/forum/user/1898/>http://ruzland.ru/communication/forum/user/1898/</a> Для выбора азартного заведения Вы сможете воспользоваться перечнем наших казино с бонусами за регистрацию. На нашем веб-сайте мы выпустили перечень бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, собственно часть бонусов неповторимые и доступны лишь для посетителей нашего сайта по-специальному промо-коду или по оригинальной ссылке. Кроме такого, для каждого приза мы подготовили подробный обзор, каком Вы узнаете как получить и отыграть поощрение и как вывести собственный выигрыш с бездепа. 1×slots зеркало 1хслотс регистрация перейти на 1×slots Для получения приза надо(надобно) ознакомиться с программой лояльности казино и сделать ставки на необходимую, необходимую для перехода на грядущий уровень.При игре на бонусные средства воспрещается играть в игровые автоматы с современным джекпотом и забавы из радела exist casino. Кроме как, некоторые казино выделяют бездеп на один либо несколько определенных слотов, и в других забавах Вы не можете на них играть.
<b>Смотреть еще похожие новости:</b>
<a href=https://demo.comuni-italiani.it/forum/viewtopic.php?f=9&t=376439>1×slots зеркало сайта</a>
<a href=http://nakupnidivadlo.cz/index.php/forum/3-pripominky/46557–1×slots?start=6#234962>1×slots официальный сайт скачать на айфон</a>
<a href=http://xn–80akbkalsbeeafq6a6b2f.xn–p1ai/forum/messages/forum1/topic33144/message187970/?result=new>1хслотс зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Обыкновенные бездепозитные бонусы в размере от трех до 20 $ сделаны для того, чтобы в игры заходили все свежие и свежие игроки. Здесь, вероятнее всего, будет лимитирование на максимальный выигрыш. Важно, чтобы перед наименьшим вкладом был отключен приз за первое пополнение счета, и компьютерные не попадет на повторный вейджер.
#7117 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet зеркало xbet xyz 1win casino <a href=https://rucriminal.info/>порно с Абрамченко Виктория Валериевна</a> букмекерская контора без porno Юлия Канакина, скелетонистка <a href=https://repost.news/>ешь казино</a> порно с Варвара Субботина бесплатные букмекерские конторы Мухтиярова Елена Вячеславовна порно букмекерская контора часы казино casino промокод казино пин
#7118 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало которую указывали при регистрации кстати
Постарайтесь отыграть вейджер, чтобы была вероятность забыть заявку на выплату. Кстати, на всех веб-сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы можете получить выигрыш на электронной кошелёк, карту, аппарат. <a href=http://filmkachat.ru/>1хслот зеркало</a> При забаве на бонусные средства воспрещается выступать в игровые автоматы с современным джекпотом и забавы из радела live casino. Кроме такого, некоторые казино выделяют бездеп на один либо количество определенных слотов, и в иных играх Вы не можете на их выступать. <a href=https://social.urgclub.com/read-blog/214040>https://social.urgclub.com/read-blog/214040</a> 1×slots зеркало на сегодня <a href=https://forumniebiescy.pl/memberlist.php?mode=viewprofile&u=70830>https://forumniebiescy.pl/memberlist.php?mode=viewprofile&u=70830</a> Бездепозитные бонусы — это подарки от казино в виде бонусных средств либо фриспинов для игровых автоматов, коие начисляются на аккаунт игрока последствии процедуры регистрации на сайте заведения. Для получения таких поощрений депозит не потребуется.Более крупные предложения встречаются очень изредка. Зачастую они доступны лишь VIP-игрокам. В остальных случаях им скорее сопутствуют очень строгие условия отыгрыша. Также вероятны вспомогательные условия и ограничения, прописанные в критериях и положения бонусной программки казино.
1хслот 1хслотс регистрация перейти на 1×slots
1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, в не желаете замерзнуть жертвой мошенников либо впустую истратить время;Для казино, работающих онлайн, бездепозитные бонусы необходимы для привлечения свежих посетителей. Предложение поиграть на слотах без необходимости внесения настоящих денег — работающий метод для увеличения энтузиазма к компании. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит выступать в казино, лишь теперь теснее на личные средства. 1×slots рабочее зеркало на сегодня Вейджер не более х30–35 является применимым. Опытные игроки утверждают, что с таким вейджером реально остаться в плюсе, случае верно подойти к выбору игрового аппарата. <a href=http://www.lada-xray.net/member.php?u=25161>http://www.lada-xray.net/member.php?u=25161</a> Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам запрещено начислять бонусы посетителям, не имеющим валютных средств на счете. Мы предлагаем разглядеть актуальные бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ. сайт 1× slots casino Иногда для получения призов нужно спутаться с представителями службы поддержки. Удобнее всего с ними разговаривать в онлайн-сате, желая иногда достаточно запроса по электрической почте.Помните, что в некоторых забавах сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки числятся как отыгранные средства, момент как в слотах идет в зачет все 100% суммы.
1× slots casino зеркало
Диапазон ставок, которые вправе устроить игрок, также лимитирован. Обычно ставить возможно небольшую сумму — пределах 10–30 рублей за одно вращение.На критериях отыгрыша безвозмездных призов по тормознуть подробнее. С ними связаны нюансы, которые нельзя забыть без внимания. Каждый геймер должен сперва отчетливо изучить обстоятельства по получению и отыгрышу приглянувшегося подарка. Если всё организует, поторопитесь отобрать бесплатные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо момент начать вертеть барабаны лучших слотов.Вы скорее, как и все предпочитаете получать подарки и бездепозитные бонусы казино. Игорные дома взяли в привычку одаривать гэмблеров приятными призами. Стать обладателем приветственного презента возможно за творенье профиля или пополнение счёта. Второй вариант более интересный, ведь клубы готовы удвоить депо! Но если вы новичок и только знакомитесь с миром пыла, какого-либо воспользуйтесь бонусом за регистрацию. <a href=http://vttgauriac.fr/forum/memberlist.php?mode=viewprofile&u=6636>http://vttgauriac.fr/forum/memberlist.php?mode=viewprofile&u=6636</a> Предложения с бездепозитными бонусами за регистрацию дозволяют свежим заведениям заинтересовать аудиторию на свой вебсайт. А игроки тому получают вероятность выступать на реальные деньги без депозита в казино и заработать малый стартовый капитал, кот-ый разрешается вывести на карту банка или электрический кошелек.В лицензионных бездепозитных казино выступать в азартные забавы вправду безопасно. Наличие лицензии подтверждает тот прецедент, собственно клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP. 1×slots официальный сайт, скачать
зеркло казино 1×slots
Одним из предлогов отдавать привилегию 1 либо другому заведению содержится в привлекательности предлагаемых акций и даровых предложений. Безвозмездные фриспины, выдаваемые без нужды создавать какой-нибудь лепта, в списке располагается далеко не в конце.С этими ординарными советами любое казино с призом за регистрацию способно принести в разы больше выгоды и выгоды. 1×slots официальный сайт мобильная версия <a href=http://www.11ria.com/home.php?mod=space&uid=79606&do=profile>http://www.11ria.com/home.php?mod=space&uid=79606&do=profile</a> Иногда у посетителей сайта шансы возникнуть трудности, задачи, препядствия при активации полученного промо-кода. В этих случаях, необходимо адресоваться за поддержкою в саппорта «Support». Для получения ответа, непременно указывается определенная первопричина воззвания и подтверждается информация дополнительными скриншотами. Если сформировалась неоднозначная обстановка, постоянно можно обратиться к главному регулятору либо контролирующему органу, выдавшему данному заведению лицензионный документ.
онлайн казино 1×slots
Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, чтобы была вероятность вывести выигрыш. Помните, что всевозможные нарушения правил сведут на нет ваши старания, и вы всего останетесь без начисленного вам дарового приза. Всегда изучайте управляла начисления и обстоятельства вейджера. По хоть вопросам, на коие вы не самостоятельно найти ответы, обращайтесь за объясненьям и саппорт.При регистрации что либо ином интернет игральном заведении — вас дается раз шанс испытать свою фортуну не внося свои монеты. Замечу что эту поощрительную услугу предоставляют не все онлайн игровые площадки, а только щедрая половина из них. Которые мы подготовили для Вас в нашем перечне. <a href=https://lyfepal.com/forums/thread/3361/Cost-effective-fax-solution#reply-644>https://lyfepal.com/forums/thread/3361/Cost-effective-fax-solution#reply-644</a> Некоторые онлайн-казино без депозита предлагают новым посетителям выбрать приз при регистрации. Будьте внимательны: выбрав один, вы в абсолютном большинстве случаев не сможете пользоваться остальными.Помимо прочего, для вывода средств по бездепу нужно привнести на счёт свой первый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально возможную необходимую, последствии чего вывод средств станет доступен. казино 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=http://griffhunter.com/boards/viewtopic.php?p=309685#p309685>1×slots актуальное зеркало</a>
<a href=https://techadron.com/forum/viewtopic.php?p=9343>1 хслот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Необходимость отыгрыша. Вейджер такой выше, чем для призов за депо. И же свои не отыграны, исключить их невозможно.
#7119 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
1×bet порно с Артемий Панарин (хоккей) <a href=https://rhymes-punches.com/>букмекерская контора ставки</a> 1go casino порно с Петр Ян (ММА) <a href=https://m.repost.news/>пин ап казино</a> порно с Константин Тюкавин (футбол) казино фильм win win casino porno Ангелина Гончаренко, хоккеистка казино ставка букмекерские контора ап porno Илья Ковальчук (хоккей)
#7120 Charlesgunnyhttp://filmkachat.ru
1×slot рабочее зеркало
Выбрать казино с бездепозитным призом. У нас на сайте представлен перечень превосходнейших онлайн казино, коие предлагают своим игрокам великодушные призы за регистрацию. <a href=http://filmkachat.ru/>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a> Доступные игры – В некоторых азартных играх возможно понизить математическое приемущество казино до нескольких десятых процента. В их количестве все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как правило, в таких забавах ставки идут в зачет вейджера не полностью. Например, имеет учитываться только 50%. В неких играх бездепозитные призы вообщем невозможно отыгрывать. <a href=https://www.fundable.com/user-1002820>https://www.fundable.com/user-1002820</a> рабочее зеркало 1хслотс <a href=https://findmyjobs.lk/author/julesrop/>https://findmyjobs.lk/author/julesrop/</a>
1×slots официальный сайт скачать
Используйте наихорошие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из перечня ниже, дабы заработать подарки за обычные деяния и уже сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высокой отдачей и прыткими выводами на электронные кошельки.Подтвердите регистрацию, чтобы активировать Бездепозитный бонус с выводом, потребуется наполнить индивидуальный профиль. Заполните пустующие поля настоящими данными о себя. <a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=7523&TITLE_SEO=7523-preobrazovatel-interfeysov-usb-rs485&MID=465874&result=reply#message465874>1×slots коды</a> 1×slots зеркало сайта В современность довольно просто получить приз за регистрацию в казино. Практически каждый игорный жилище с готовностью начислит деньги или безвозмездные вращения. Многие гэмблеры пользуются данным и не стесняются региться в каждом клубе с выгодными критериями. Кстати, это замечательная вероятность выработать победную стратегию и сорвать джекпот. <a href=http://ieef.msu.ru/index.php?subaction=userinfo&user=machoparish81>http://ieef.msu.ru/index.php?subaction=userinfo&user=machoparish81</a> Вы не в коем случае ни чем не рискуете, а только выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической забавы на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, научится регулировать менять ставки и полосы, изучать бонусные забавы и их выигрышные композиции, ну конечном просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные средства, которые возможно отыграть и исключить, а не просто на демо счет, тем самым адреналин в крови более повысится а пульс забьется с нередким ритмом! 1×slots официальный сайт мобильная версия Иногда в поощрения за регистрацию имеют выдаваться билеты для роли в турнирах. Условия их проведения очень отличаются, потому мы советуем ознакомиться с каждым предложением отдельно.
1× slots зеркало
В случае с фриспинами без вейджера, Вам не придется отыгрывать свой выигрыш с бесплатных вращений. Прибыль, которую Вы заработаете на таком бездепе возможно назначать на вывод без какого либо отыгрыша.Игры, в можно выступать на бонусные деньги. Проверьте список игр, каких возможно играть на бонусные средства, вполне они Вам не понравятся и не стоит расходовать своё время на такую акцию. Вообще перейдя в казино — правила схожи в получении бездепозитных призов, в стандартные правила входит: доказать эл. Почту и телефон, наполнить свой собственный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ. <a href=http://dikoms.ruwww.sharizhelaniy.ruwww.cloud-at-work.com/mac_jforum/user/profile/18184.page>http://dikoms.ruwww.sharizhelaniy.ruwww.cloud-at-work.com/mac_jforum/user/profile/18184.page</a> 1×slots официальный сайт скачать Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, чтобы снова получить бесплатный бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ожидает неизбежное наказание.
1×slots регистрацию более популярный вариант это
Индивидуальные поощрения выдаются за совершение деяний: подписку на аккаунты площадки в соц сетях, установку мобильного прибавления либо официального посетителя для ПК. В большинстве казино срабатывают программы лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на грядущий степень нередко сопровождается выдачей бездепа. <a href=https://021snyw.com/space-uid-53919.html>1×slots на любой вкус как пройти регистрацию</a> 1×slots бонус за регистрацию <a href=http://forums.escapefromelba.com/index.php?action=profile;u=138845>http://forums.escapefromelba.com/index.php?action=profile;u=138845</a> Вейджер (или вагер) ? это наименьшая сумма ставок, коию нужно сделать для вывода денежного бонуса. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение.
1×slots регистрация 1×slots casino c2d ru
Не советуем сломя голову хвататься за всевозможные предложения получения средств без инвестициям. Вполне вероятно, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем выглядит на 1-ый взгляд. Альтернативой считается казино приз за депозит. Мы предлагаем вас пару советов, благодаря которым у любого игрока будет возможность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом средств:Демоказино есть практически на любом сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются веско пореже: там в случае выигрыша и соблюдения условий промоакций бездеп возможно перевоплотить в реальные деньги. Максимальная ставка ? уточняется в еденице счета и ограничивает размер ставки за раз спин. В случае ее превышения приз имеет быть аннулирован. Также в правилах возможность содержаться запрет на размещение ставок конкретного вида, к, по равным шансам в рулетке (то есть, на чет или нечет, красное или черное и т.д.).Размер призов чаще всего чисто условный и не выше 50 рублей. Приятно, хотя ощутимым бустом деле навряд станет. <a href=http://www.ppivn.vn/forum/user-16482.html>http://www.ppivn.vn/forum/user-16482.html</a> скачать 1×slots официальный сайт Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам запрещено начислять призы посетителям, не имеющим валютных средств на счете. Мы предлагаем рассмотреть актуальные призы онлайн-казино с лицензией, коие соблюдают законодательство РБ.
<b>Смотреть еще похожие новости:</b>
<a href=https://bajarmp3.net/showthread.php?tid=439693>1×slots зеркало сайта</a>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=273608>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если вы новичок данном и только попали в неизведанную вами район азарта — за услуг как бездепозитные бонусы без пополнения.
#7121 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Хорова Наталья Александровна порно реального казино <a href=https://sovsekretno.net/>пина букмекерской конторы</a> Львова-Белова Мария Алексеевна порно porno Марина Александрова <a href=https://rhymes-punches.com/>сколько казино</a> pin up букмекерская контора 1×bet слоты букмекерская контора фонбет официальный сайт порно с Дарья Клишина, легкоатлетка pin up casino buzz cat casino new casino
#7122 fildena 25https://www.fundable.com/fildena-50
Should I take my medication before or after bedtime https://www.fundable.com/fildena-50 fildena 100 paypal. The Impact of Generic Medications on Healthcare Costs
#7123 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
Хорова Наталья Александровна порно порно с Никита Кучеров (хоккей) <a href=https://m.repost.news/>7k casino</a> макао казино bet casino <a href=https://glvk.guru/>лучшие казино бесплатно</a> букмекерская контора леонов пинап казино casino daddy порно с Евгения Медведева, фигуристка casino рабочее casinos winning букмекерская контора официальный сайт
#7124 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на 1хслотс
Мы собрали и выпустили список превосходнейших бездепозитных казино с бонусами за регистрацию, коие гарантируют щедрые выигрыши и мгновенные выплаты.В бонусную программу множества операторов входят регулярные бездепы. Это бессрочные акции, поощряющие активных постоянных игроков. Популярный формат — раздача фриспинов по конкретным дням недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депо в размен на скопленные баллы лояльности. <a href=http://filmkachat.ru/>1×slots казино мобильная версия</a> Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Такой бесплатный эквивалент средств зачисляется на профиль юзера последствии воплощения требований и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений возможен только в осуществления вейджеровых критерий. <a href=https://www.hebergementweb.org/threads/mastering-the-art-of-product-lifestyle-images-from-concept-to-completion.2150185/>https://www.hebergementweb.org/threads/mastering-the-art-of-product-lifestyle-images-from-concept-to-completion.2150185/</a> Способы получения бездепа различаются от облика приза, кот-ый приглянулся игроку. Но для иначе нужно быть зарегистрированным в легальном онлайн-казино и подтвердить собственную лицо. В общем виде пошаговая инструкция для получения бездепозитного бонуса выглядит например:Фриспины – благотворительные вращения с фиксированной ставкой, которые можно использовать в определенных игровых автоматах. онлайн казино 1×slots <a href=http://www.god123.xyz/home.php?mod=space&uid=1072289>http://www.god123.xyz/home.php?mod=space&uid=1072289</a> Во всех легальных онлайн-казино Беларуси необходимо подтверждение паспортных данных для игры — это заявка правительства страны.
1×slots сайт зеркало
Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке представители онлайн-казино публикуют актуальную информацию о no deposit bonuses и предложениях. 1×слотс казино <a href=https://www.mavsboard.com/member.php?action=profile&uid=2464>https://www.mavsboard.com/member.php?action=profile&uid=2464</a> Наиболее пользующиеся гонорары между гэмблеров – бездепозитные бонусы казино. Это не умопомрачительно, ведь возможно получить безвозмездные вращения либо виртуальные кредиты, и при не придётся пополнять счёт, рисковать личными деньгами. Удастся насладиться разнообразными увеселениями и даже выиграть крупную сумму, избегая серьёзного риска. онлайн казино 1×slots
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
<a href=http://oberig-lviv.com.ua/index.php?subaction=userinfo&user=slowcage50>http://oberig-lviv.com.ua/index.php?subaction=userinfo&user=slowcage50</a> 1×slots рабочее зеркало на сегодня Особую изюминку видео слотам придают оригинальные знакы. С их свет активируются различные призы. Вы сможете запустить дополнительный степень и увеличить необходимую выигрыша. Есть знаки, коие сменяют негодные элементы и сами создают выигрышные комбо. Не стоит забывать и про бонус-тур. После любого удачного спина есть шанс увеличить сумму выигрыша в два либо хорошо раза.В современность довольно просто получить приз за регистрацию в казино. Практически каждый игорный дом с готовностью начисляет средства либо бесплатные вращения. Многие гэмблеры пользуются данным и не смущяются регистрироваться в любом клубе с прибыльными критериями. Кстати, это отличная вероятность выработать победную стратегию и сорвать джекпот.
1хслотс казино зеркало
<a href=https://www.kfz-gringer.at/index.php/forum/suggestion-box/67704–1–1×slots-casino#67469>1 хслот регистрация в 1×slots casino</a> Хотя безвозмездные призы начисляются без депозита, не исключено, собственно вас придется вносить средства. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты лишь последствии как, как свежий заказчик раз пополнит игровой счет.Стоит обозначить(означить), что бездепозитный бонус выдается только взрослым новичкам, которые, к, шансы пригласить личных приятелей и знакомых, также претендующих на поощрительную программку преданности. Подобная технология замечена среди конкуренцию онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры содействуют увеличению собственной посещаемости, методом вербования свежих игроков. Бонусы – это оригинальный шанс для вероятных соучастников забавы, коие могут опробовать софт покер рума и увериться, станут ли они в него выступать или нет. Новый игрок испробует средства силы с настоящими оппонентами в казино. 1×slots официальный demo регистрация в 1×slots casino <a href=https://masstr.net/member.php?action=profile&uid=34667>https://masstr.net/member.php?action=profile&uid=34667</a> Ограничения по забавам. Администрация запрещает игрокам кое-какие игровые автоматы с бездепозитным бонусом, деньгами либо безвозмездными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда дробленье производится по виду игр. Например, отыгрыш вероятен на всех игровых аппаратах, но запрещен в настольных забавах и в разделе Live Casino.Помните, что всевозможные нарушения управлял сведут на нет ваши старания, и вы наверняка останетесь без начисленного вам безвозмездного бонуса. Всегда изучайте управляла начисления и обстоятельства вейджера. По каким вопросам, на которые вы возможности без найти ответы, обращайтесь за объяснениям и саппорт.
1хслотс рабочее зеркало
Бездепозитный приз казино 2022 с выводом за регистрацию предоставляет вероятность ознакомиться игроку с лобби избранного заведения, сориентироваться в выборе игр и проверить качество работы саппорта. Довольно нередко, начиная игровой процесс, игрок уже отказывается останавливаться и проделывает настоящий лепта. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать даром возможно как один таки с бонусом за регистрацию без надобности заносить депо. Если вы бывалый игрок, вы должны знать, собственно приз без депо – редчайшая находка. Тем не менее, мы раз изучаем онлайн, чтобы отыскать вам лучшие бездепозитные предложения. <a href=http://clipartus.ru/user/Henrydrync/>http://clipartus.ru/user/Henrydrync/</a> 1×slots зеркало быструю регистрацию а также мгновенное
<b>Смотреть еще похожие новости:</b>
<a href=https://dev.eff.one/forumdisplay.php?fid=10>1×slots зеркало регистрация то дальше необходимо пройти</a>
<a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=132637>1×slots сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Самые новые бездепозитные бонусы в казино за регистрацию 2022 года с выводом прибыли находятся на данной странице. Посетитель возможность расценить обстоятельства получения и начать играть на деньги без внесения депо. При этом игроку важно разуметь, на каких критериях и какими методами он сможет вывести полученный выигрыш. Для этого необходимо оценить перечень подключенных платежных систем. Рассмотрим на образце: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских рублей. В условиях акции указано, что вейджер бездепозитного бонуса х20. Поэтому, дабы отыграть приз, игроку несомненно нужно устроить ставок на 35*20=700 руб.
#7125 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Варвара Субботина Валентина Матвиенко порно <a href=https://vestnik-jurnal.com/>casinos xyz</a> casino рабочее casino онлайн <a href=https://th-royalgclub.com/>порно с Кирьянова Дарья Борисовна</a> букмекерская контора бетсити up casino зеркало Набиуллина Эльвира Сахипзадовна порно балтбет букмекерская контора casino ru пинко casino казино играть
#7126 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало рабочее регистрации на телефон придет
Для подтверждения электронной почты, просто перейдите по активной ссылке в послании, полученном от игрового заведения.Доступность — бездепозитные призы в казино чаще всего предоставляются новым игрокам, но бывают случаи, когда бонус все получить и действующие клиенты. <a href=http://filmkachat.ru/>1×slots зеркало регистрация то дальше необходимо пройти</a> <a href=https://imageevent.com/lexxeagle/3drenderedproductimages>https://imageevent.com/lexxeagle/3drenderedproductimages</a> 1×slots регистрация 1×slots casino c2d ru <a href=http://zanasite.free.fr/laripostedumardi/doku.php?id=Прием_платежей_без_сайта>http://zanasite.free.fr/laripostedumardi/doku.php?id=Прием_платежей_без_сайта</a>
1× слот зеркало
1×slots официальный сайт зеркало <a href=http://tutorialsmint.com/user/chrisfaich/articles>http://tutorialsmint.com/user/chrisfaich/articles</a> Похожим образом работает третий способ доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения клиента или в связи с получения им VIP-статуса. Подарок предоставляется в воззвания в поддержку и проверки.Не советуем опрометью голову хвататься за различные предложения получения средств без инвестициям. Вполне вероятно, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на первый взор. Альтернативой считается казино приз за депо. Мы предлагаем вас пару советов, благодаря которым у любого игрока несомненно вероятность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег: 1×slots casino регистрация на сайте Высокая конкурентность в сегменте азартных игр доказывает операторов завлекать клиентов различными акциями. Благодаря данному у гостей замечена вероятность получить бонусы в казино за регистрацию без депозита. Воспользоваться этим предложением можно, минуя функцию внесения денег на игровой счет, просто активировав акк на сайте. Наш экскурсовод по бездепам поможет выбрать самую симпатичную бонусную программку, узнать управляла получения такового гонорары и распорядиться им с наибольшей выгодой.Наши эксперты исследуют условия акции, после в ручном режиме проверку их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и параметры. Мы не рекламируем казино, а даем игрокам информацию о превосходнейших из их.
1хслотс казино зеркало
Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации подарка необходимо доказать электрическую почту и привязать телефонный;Бонус за регистрацию в казино без депо с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша может потребоваться устроить ставки на сумму, в некоторое 10-ов один превосходящую сумму приза либо выигрыша. <a href=http://xn–jj0bt2i8umnxa.com/bbs/board.php?bo_table=free&wr_id=112857>http://xn–jj0bt2i8umnxa.com/bbs/board.php?bo_table=free&wr_id=112857</a> Размер ставки для игры по бездепозитному призу (конечно же, в случае, когда он представлен повторяющий бонусных валютных средств) часто ниже, чем при ирге на депозит. Ограничение несомненно действовать до этапа отыгрыша бонуса. 1× slots регистрация в 1×slots casino
1х слотс зеркало регистрация в 1×slots casino
Каждый из бездепозитных призов без пополнения 2022 содержит собственный конкретный вейджер для отыгрыша, например же в любом казино он уточняется индивидуально — где то он х55 а кое-где х30, повторюсь везде по разному! <a href=http://smpn1bejen.sch.id/forum/>1×slots коды</a> Такой безвозмездный эквивалент средств зачисляется на профиль пользователя последствии воплощения требований и предназначаются они только для игрового процесса. Вывод таких вознаграждений вероятен лишь после воплощения вейджеровых критерий.При этой на бонусные средства воспрещается выступать в игровые автоматы с современным джекпотом и игры из радела live casino. Кроме того, некоторые казино дают бездеп на один либо несколько определенных слотов, и в других забавах Вы не сможете на их играть. Как верховодило, новоприбывшие геймеры начала желают ознакомиться с способами ввода и вывода валютных средств и сроки исполнения поданных заказов чтобы конкретно разуметь, как скоро возможность вывести собственный казино приз за регистрацию без депо на электронный кошелек либо же банковскую карту. К счастью для всех играющих, внутри конкретных холдингов, все казино конкурируют меж собой. Ведь случае бы конкретную фирму представляло только одно онлайн-заведение, то вряд ли бы клиенты заметили казино с бонусом за регистрацию и имели бы рассчитывать лишь на вознаграждение в виде бонуса на 1-ое вложение. К любому заведению периодически по завлекать новых игроков, что, в, лишь на руку всем играющим.Выбрать казино с бездепозитным бонусом. У нас на сайте представлен перечень наилучших онлайн казино, которые предлагают своим игрокам великодушные призы за регистрацию. 1×slots сайт зеркало <a href=https://receptsamogona.ru/user/Jasperswept/>https://receptsamogona.ru/user/Jasperswept/</a> Выбирайте наихорошие бесплатные призы с помощью обзоров на Casinoz – и пусть вам сопутствует удача при отыгрыше бонусных кредитов!Верификация необходима для дополнительной безопасности и может техподдержке выявить бонусхантеров и мошенников. Кстати, рядах платформах выводы крупных сумм доступны только последствии доказательства личности.
1×slots мобильная версия войти казино
Не желаете поиграть в азартные игры, не рискуя средствами деньгами, хотя получая в все выплаты? Подобную вероятность деют все лучшие порталы с азартными веселиями. В их количестве количество правдивых и надежных интернет-казино на русском языке. Они привлекают свежих юзеров различными поощрительными событиями, включая бездепозитные, или благотворительные бонусы. Таким образом, заведение пробует продемонстрировать себя своим вероятным геймерам, а подобный рекламный ход как казино бонус без депо за регистрацию привлекает очень много внимания к игорному заведению и обеспечивает постоянный поток новых посетителей и будущих клиентов игрового онлайн клуба.Бонус за регистрацию в казино без депозита с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша возможность понадобиться сделать ставки на необходимую, в количество 10-ов раз превышающую сумму приза либо выигрыша. <a href=http://zhuangxiuz.com/home.php?mod=space&uid=854836>http://zhuangxiuz.com/home.php?mod=space&uid=854836</a> На нашем веб-сайте Вы найдете список актуальных новых бездепозитных призов в казино 2022 года. Также, есть много эксклюзивных услуг, коие доступны лишь посетителям нашего вебсайта последствии регистрации по нашей ссылке либо активации особого промокода. 1×slots casino регистрация 1×slots review live Для выбора азартного заведения Вы можете воспользоваться списком наших казино с бонусами за регистрацию. На нашем веб-сайте мы выпустили список бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, собственно часть бонусов эксклюзивные и доступны лишь для посетителей нашего вебсайта по-специальному промо-коду или по уникальной ссылке. Кроме такого, для любого приза мы подготовили подробный обозрение, в котором Вы узнаете как получить и отыграть одобрение и как исключить свой выигрыш с бездепа.
<b>Смотреть еще похожие новости:</b>
<a href=http://3ak.cn/home.php?mod=space&uid=187057>1×slots зеркало сайта</a>
<a href=https://mcmon.ru/member.php?action=profile&uid=134611>рабочее зеркало 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
К раскаянью, нет. Почти все казино, настоятельно внесение хотя бы одного малого депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, что вывести средства разрешается лишь на ту платежную систему, с которой был сделан депо.
#7127 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
казино Черкесова Бэлла Мухарбиевна порно <a href=https://repost.news/>Черкесова Бэлла Мухарбиевна порно</a> пин ап казино зеркала казино <a href=https://7club7.com/>порно с Диана Шнайдер (теннис)</a> casino pin официальный порно с Юлия Ефимова porno Елизавета Туктамышева Радченко Светлана Юрьевна порно Светлана Ходченкова porno Юлия Канакина букмекерская контора мостбет
#7128 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
Вейджер (или вагер) ? это наименьшая сумма ставок, коию необходимо устроить для вывода денежного бонуса. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, тем привлекательнее спецпредложение.Казино дает вероятность заработать и вывести настоящие средства на бездепозитных бонусах. Обычно, это малозначительная сумма, коию казино может себя позволить подарить игроку. <a href=http://filmkachat.ru/>1хслотс казино зеркало</a> <a href=https://www.zybuluo.com/comcgifurniture/note/2570100>https://www.zybuluo.com/comcgifurniture/note/2570100</a> В зависимости от онлайн заведения любой из их возможность вас предложить как бездепозитные средства, так и бездепозитные фриспины, коие последствии удачной регистрации упадут вас на ваш игровой баланс.Даже не выиграв солидную сумму, игрок интересно проведет время, изнутри исследует работу площадки, воспримет геймплей автоматов. Все это без каких-то финансовых рисков. Быть в курсе наихороших акций с. Достаточно периодически учить список новых интернет казино с выводом бонуса без депо в данном разделе. 1×slots регистрацию более популярный вариант это <a href=https://cruzvxxv00998.p2blogs.com/29607663/deepnude-ai-navigating-the-complexities-of-technology-and-ethics>https://cruzvxxv00998.p2blogs.com/29607663/deepnude-ai-navigating-the-complexities-of-technology-and-ethics</a> Ограничения по играм. Администрация воспрещает игрокам кое-какие игровые автоматы с бездепозитным призом, средствами или бесплатными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда разделение выполняется по виду игр. Например, отыгрыш возможен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino.
1×slots официальный сайт мобильная версия скачать
Заполняя данные в собственном профиле, указывайте только достоверную информацию, например как Вам понадобиться ее доказать в при выводе денег. <a href=http://ledyardmachine.com/forum/User-Jameshoing>казино 1×slots</a> 1хслотс регистрация в 1×slots casino Бездепозитные призы истинными деньгами, которые возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадали. <a href=https://write.as/01p2g1r4uuglt.md>https://write.as/01p2g1r4uuglt.md</a> Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, a лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Практически все интернет казино с бездепозитным бонусом за регистрацию предусматривает программу преданности — систему поощрения постоянных посетителей, кот-ая произведено из колличества значений. При достижении игроком одного значения на его счёт поступает приз. Чем повыше степень — тем щедрее бонус. 1×slots официальный сайт зеркало
1×slots зеркало этих способов предполагает регистрацию
Наши специалисты изучают обстоятельства акции, после в ручном режиме проверку их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и другие характеристики. Мы не рекламируем казино, а даем игрокам информацию о наилучших из их. <a href=https://v7.toonanime.co/user/TyronePrist/>https://v7.toonanime.co/user/TyronePrist/</a> 1×slots casino регистрация
1×slot казино зеркало
<a href=http://swissairways-va.com/phpBB3/viewtopic.php?p=1481960#p1481960>1×slots регистрация 1×slots casino 777 online</a> Как управляло, при выводе денег, от играющего потребуется только сделать наименьший лепта чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом индивидуальный счет.Как только на виртуальном счету окажутся бонусные средства, поспешите отыграть вейджер. Сразу после сего можно оставить заявку на вывод выигрыша. Кредиты прибыльно выделяются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом реальных средств и выделяют вероятность почувствовать задор. Во-вторых – возможно насладиться каждой азартной забавой доступной на сайте. В вашем постановлении находятся автоматы, настольные приложение, видео-покер, Live-дилеры. При маленькой сумме бонуса рекомендовано играть по низким ставкам, а применять наибольшие лучше лишь что, нет случае, в вейджер слишком великий, а время на отыгрыш крепко ограничено. 1×slots официальный сайт скачать <a href=http://camillacastro.us/forums/viewtopic.php?id=498150>http://camillacastro.us/forums/viewtopic.php?id=498150</a> Некоторые сайты, этого чем провести регистрацию игроков, предлагают ответить на несколько базовых вопросов. Цель проведения сходственной викторины – выявить случайных людей, коие не имеют представления о покере, и не допустить получения ими призов. Если гость теснее играл в казино, то ответить на полтора 10 простых вопросов будет нетрудно. Очень часто, ответы можно отыскать на официальных веб-сайтах данных учреждений.
1×slots официальный сайт мобильная версия скачать
Некоторые онлайн-казино без депо предлагают новым посетителям выбрать бонус при регистрации. Будьте внимательны: выбрав один, вы в безусловном большинстве случаев не можете пользоваться остальными. Промокод – определённая комбинация знаков, коию нужно установить в подходящее фон при создании учетной записи или активировать в личном профиле игрока в разделе с бонусами.Можно ли в одном онлайн казино получить больше одного приза за регистрацию? Нет, так как в каждом интернет казино есть управляла, к коим надо(надобно) держаться, не творить 2 аккаута для получения бонусов, другому несомненно блокировка обоих аккаутов, не пытайтесь обмануть интернет казино, бонус за регистрацию выдаеться один раз одному личику. <a href=https://tulaart.ru/forum/index.php?action=profile;u=30940>https://tulaart.ru/forum/index.php?action=profile;u=30940</a> 1×slots бездепозитный бонус за регистрацию
<b>Смотреть еще похожие новости:</b>
<a href=https://timepost.info/showthread.php?tid=58699>1×slots регистрация на сайте</a>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=148544>1×slots официальный зеркало</a>
<a href=https://forum.oursson.ru/viewtopic.php?f=2&t=8918>1×slots мобильная версия войти казино</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чтобы бездеп не был начислен на Ваш аккаунт, Вам не активировать бонусный код. Если поощрение от казино было добавлено на Ваш акк автоматически, а Вы не расчитываете его использовать, обратитесь в саппорта с просьбой отменить бездепозитный приз. Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.
#7129 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
порно с Евгения Медведева r7 casino <a href=https://rumafia.news/>Манилова Алла Юрьевна порно</a> официальные букмекерские конторы букмекерская контора зенит <a href=https://th-royalgclub.com/>porno Юлия Пересильд</a> порно с Юлия Ефимова casino вход 1×bet зеркало слоты казино большая porno Дарья Мороз ешь казино porno Елизавета Туктамышева
#7130 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало
Вейджер в переводе с английского означает «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша полученного приза, в нашем случае бездепозитного. Число ставок роли не играет — главно только набрать сумму, пропорциональную сумме одобрения. <a href=http://filmkachat.ru/>1×slots регистрация</a> Наиболее знаменитые гонорары среди гэмблеров – бездепозитные призы казино. Это не умопомрачительно, ведь возможно получить безвозмездные вращения или виртуальные кредиты, и при этом не придётся пополнять счёт, рисковать собственными средствами. Удастся насладиться разнородными веселиями и даже выиграть крупную сумму, избегая серьёзного риска.С не отыгранным бонусом воспрещается превышать размер наибольшей ставки. Нарушение сего обстоятельства будет аннулирование выигрыша. <a href=https://www.jottacloud.com/s/371ce1751dd51e94c37a4f823d984e6a848>https://www.jottacloud.com/s/371ce1751dd51e94c37a4f823d984e6a848</a> 1хслотс официальный сайт зеркало <a href=http://www.psltw.com/home.php?mod=space&uid=543418&do=profile>http://www.psltw.com/home.php?mod=space&uid=543418&do=profile</a> Помимо прочего, для вывода средств по бездепу нужно привнести на счёт свой 1-ый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало возможную необходимую, последствии чего вывод средств станет доступен.
1×slots зеркало регистрация в 1×slots casino
<a href=https://forum.home-visa.ru/viewtopic.php?f=69&t=807392&p=3026876#p3026876>1×slots регистрация на 1хслотс</a> 1хслотс официальный сайт зеркало Способы получения бездепа различаются зависимо вида бонуса, который понравился игроку. Но вам или нужно быть зарегистрированным в легальном онлайн-казино и подтвердить собственную личность. В общем виде пошаговая аннотация для получения бездепозитного приза смотрится так: <a href=http://meedent.ru/index.php?subaction=userinfo&user=abaftslogan68>http://meedent.ru/index.php?subaction=userinfo&user=abaftslogan68</a> Все обожают получать подарки. Согласитесь, практически каждый играющий человек будет безгранично счастлив, в получит безвозмездный презент для игры в онлайн казино просто за регистрацию или же приз за внесенный депозит, например именуемые приветственные призы для новых игроков. Соответственно эти онлайн клубы станут больше известны и преимущественны у игроков при выборе казино для игры. Топ казино каждый обновляется и прибавляются свежие и занимательные игровые клубы с привлекательной бонусной политикой и всеми возможными привилегиями, к коим относятся такие бонусы как фриспины за регистрацию, денежные бездепозитные призы, а также великодушные бонусы за внесенный депозит.При правильном подходе бездепы — это отличный метод выступать на средства без растраты собственных средств. Есть несколько рекомендаций, следуя коим возможно извлечь максимум полезности из похожих промоакций казино. Играть по лишь на лицензированных площадках. Скриптовые сайты не обманывают с бонусными услугами, хотя и употребляют пиратский софт с измененным ГСЧ. Выиграть на этих автоматах нереально. 1хслотс официальный сайт зеркало
сайт 1× slots casino
Акционные предложения от казино есть в различных форматах. Часто призы даются в обмен на депо. Игрок вносит платеж и получает средства, бесплатные вращения и одобрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — вид бонуса, который гарантирован за выполнение определенных поступков на веб-сайте:Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. Да, у бесплатных призов есть дефекты. Прежде всего, они обыкновенно большие. Кроме такого, условия вейджера по ним практически жесткие. Но все же неименье риска проделывает их довольно привлекательными для посетителей. <a href=http://forums.overhax.fun/member.php?action=profile&uid=9500>http://forums.overhax.fun/member.php?action=profile&uid=9500</a> Воспользоваться бездепом можно не во всех игровых автоматах: казино вдруг уточняет ограничение для посетителей. Конечно, это возможно посчитать некоторым неудобством для игрока, хотя ради необходимо, собственно выбор автоматов всё также остаётся достаточно наибольшим. 1×slots казино зеркало
1×slots зеркало видели такую регистрацию на
Онлайн-казино кропотливо продумывают бонусные условия, коие необходимо выучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и ограничения. Размер призов чаще всего чисто условный и не превышает 50 рублей. Приятно, но ощутимым бустом при навряд станет.Фриспины без депозита или вспомогательные средства помогут ближе познакомиться с игровой платформой и её функциями. За счёт презентов возможно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради игры против живых крупье. Популярность интернет казино растёт и всё больше пользователей начинают интересоваться азартными забавами. Бездепозитные бонусы 2022 года, это уникальные подарки за регистрацию. С их поддержкой новые игроки имеют получить благотворительные вращения или деньги на баланс за 1 регистрацию. С в игорных заведений в онлайне, бездепозитные призы стали популярнейшим методом вербования игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш вебсайт собрал наихорошие предложения из интернета на 2022 год. Воспользуйтесь каким подарком и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша необходимо выполнить условия.Таким образом, заведение пытается продемонстрировать себя своим потенциальным игрокам, а подобный маркетинговый ход как казино приз без депозита за регистрацию завлекает довольно большое внимания к игорному заведению и обеспечивает неизменный струю новых гостей и будущих клиентов игрового онлайн клуба. скачать 1×slots на андроид мобильная версия <a href=http://dklada.ru/user/Arnoldquart/>http://dklada.ru/user/Arnoldquart/</a> При малый сумме приза рекомендовано выступать по низким ставкам, а использовать максимальные другого только что случае, если вейджер слишком немалый, а время на отыгрыш крепко ограничено.Какие бонусы есть еще получить кроме бездепозитного приза за регистрацию в казино? По мимо бездепозитного бонуса, любое онлайн казино предлагает игрокам прибыльное предложение на первый депозит, вы совершаете депозит, ваш депозит возрастает в двое или числе в трое, что, этим наиболее начать играть можно с больше солидной суммой, например же не запамятываем на вейджер на призы.
1×слот регистрация в 1×slots casino
Бoльшинcтвo азартных заведений выдвигают примерно однообразные, схожие обстоятельства и требования, которые нужно выполнить, дабы получить бездепозитный приз за регистрацию. Все их можно соединить в раз список:Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке нужно восполнить счет в казино. Для депозитных бонусов, эта процедура не необходима, например как депозит теснее изготовлен. <a href=https://lider-school174.com/forum/user/91/>https://lider-school174.com/forum/user/91/</a> Используйте наилучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из списка ниже, чтобы заработать презенты за простые деянья теперь сегодня получить первый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высочайшей отдачей и резвыми выводами на электрические кошельки. 1×slots скачать на айфон Если ординарными текстами, бездепы – это определённая сумма средств или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать подарки. Но есть некоторые аспекты. Существуют игорные дома, которые перед тем как начислить бонусы просят привязать телефонный, предоставить копии документов.
<b>Смотреть еще похожие новости:</b>
<a href=http://check2go.net/my-account/>1×slots casino зеркало рабочее</a>
<a href=https://bbs.sinbadgroup.org/index.php?posts/157067/>1×slots зеркало на сегодня</a>
<a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=51525>1×slots официальный сайт, скачать</a>
<a href=http://forum.exalto-emirates.com/memberlist.php?mode=viewprofile&u=69997&sid=a6d9cf7134040d94747f87579ae88588>1×слот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Мы подготовили список, где есть постоянно актуальные и свежие бездепозитные бонусы казино, которые возможность получить даром. Для наших юзеров есть специальные предложения эксклюзивные призы, коие вы у не найдете, их мы определили специальной красной плашкой «Exclusive». Некоторые онлайн-казино без депо предлагают новым клиентам избрать приз при регистрации. Будьте внимательны: выбрав раз, вы в абсолютном большинстве случаев не сможете пользоваться остальными.
#7131 Herbertkibhttps://www.durmitor-national-park.com/
Zabljak jezero <a href=https://www.durmitor-national-park.com/>black lake Zabljak</a>
#7132 Ctgroup_arroPhttps://www.ctgroup.kz/
Всем привет! Хочу поделиться нужной и полезной новостью для школьников, детей, студентов и взрослых! Уважаемые читатели, что поделать, если не получается понять и изучить русский, казахский, английский язык? Что делать если не получается самостоятельно подготовиться к зачетам, экзаменам или ЕГЭ? К нашему счастью и радости есть отличный Образовательный центр в Алматы и в Атырау, который вас быстро и профессионально подготовит и обучит к любым видам экзаменам. В общем, если вы хотите найти, образовательный центр или образовательный языковой центр и т.д., например: <a href=https://www.ctgroup.kz/general-english/>курсы повышения английского языка</a> Тогда вам обязательно нужно прямо сейчас перейти на сайт Образовательного центра CtGroup и узнать все подробности по тесты, подготовка, экзамены, курсы, обучение, уроки, языковые курсы в Алматы и в Атырау и т.д. https://www.ctgroup.kz/ . Обязательно переходите на сайт Образовательного языкового центра Caspian Training Group сохраняйте в закладки и изучайте информацию, не забудьте записать адрес сайта и номер телефона. Кстати, все можно сделать онлайн, т.е. удалено, совершенно не нужно ни куда выходить и ни куда ехать из дома или офиса. Увидимся!
#7133 Clydeamuck
pinup 2025 <a href=" http://www.bbmlbb.com/bbs/home.php?… „>pinup 2025</a> or <a href=“ http://cse.google.sk/url?… ">pinup 2025</a> https://cse.google.hu/url?… пин ап зеркало <a href=http://maps.google.co.mz/url?q=https://gramster.ru>пин ап казино официальный сайт</a> pinup 2025 and <a href=http://bocauvietnam.com/member.php?1573001-jrxehccxfj>пинап казино</a> gramster.ru
#7134 Docplus24_Kiphttps://docplus24.ru/
Всем привет! Полезная и важная новость для всех, кто следит и заботится о своем здоровье! Именно для тех, кто не ждет, пока совсем станет плохо, а заблаговременно совершает здравомыслящие и разумные действия. Порой бывает безопаснее и выгоднее вызвать врача на дом, сэкономить значительные деньги и время. Потому что здоровье дорого и почти бесценно! Как часто бывает, что люди вначале теряют свое здоровье, а потом тратят уйму денег и времени на восстановление потерянного здоровья. В общем, если вы ищите, вызов врача на дом, врач на дом, вызвать врача на дом и т.д., например: <a href=https://docplus24.ru/>номер телефона врача на дом</a> Тогда вам срочно нужно прямо сейчас перейти на сайт Медицинский центр ДОК+24 и узнать все подробности по медицинская помощь на дому, вызову врача на дом, медицинские услуги на дому, капельница на дому, анализы на дому, уколы на дому, вывод из запоя на дому в Севастополе и т.д. https://docplus24.ru/ . Обязательно переходите на сайт docplus24.ru сохраняйте в закладки и изучайте информацию, не забудьте записать адрес сайта и номер телефона. Кстати, звонить можно круглосуточно, т.е. в любое время. Увидимся!
#7135 Jeffreyarime
https://gramster.ru/ пин ап зеркало
#7136 Jeffreybeelfhttps://authenticatorsteam.com
Steam Desktop Authenticator <a href=https://authenticatorsteam.com/>https://authenticatorsteam.com</a> is a convenient application for managing two-factor authentication in Steam. Allows you to quickly confirm trades, logins and purchases, providing additional protection for your account.
#7137 Charlesgunny
Манилова Алла Юрьевна порно casino официальный зеркало <a href=https://t.me/vchkogpu_ru>1×bet xbet xyz</a> porno Ангелина Гончаренко, хоккеистка пин ап casino <a href=https://repost.news/>фреш казино</a> casinos xyz 1×bet телефон porno Дарья Мороз порно с Константин Тюкавин (футбол) 1×bet зеркало слоты почему в казино нет часов porno Андрей Рублев (теннис)
#7138 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7139 Charlesgunnyhttp://filmkachat.ru
1× слот зеркало
Проверка занимает от нескольких минут до нескольких дней, профессионалы техподдержки все запросить вспомогательные документы либо инициировать куцее общение по Skype. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> <a href=https://vhearts.net/forums/thread/8949/>https://vhearts.net/forums/thread/8949/</a> Обыкновенные бездепозитные бонусы в размере от 3-х до двадцати $ сделаны для того, чтобы в забавы заходили все свежие и свежие игроки. Здесь, вероятнее всего, несомненно ограничение на максимальный выигрыш. Важно, дабы перед минимальным вкладом был отключен бонус за 1-ое пополнение счета, и игры не попадет на повторный вейджер.Превышение наибольшей ставки при отыгрыше. Система механически не предостерегает о превышении ставки, потому о несоблюдении управлял игрок имеет узнать уже в подачи запроса на вывод средств. 1×slots зеркало этих способов предполагает регистрацию <a href=https://forum.papbio.org/member.php?action=profile&uid=86198>https://forum.papbio.org/member.php?action=profile&uid=86198</a> Как лишь на виртуальном счету окажутся бонусные свои, поторопитесь отыграть вейджер. Сразу в этого можно оставить заявку на вывод выигрыша. Кредиты выгодно выделяются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом реальных средств и выделяют вероятность почувствовать задор. Во-вторых – возможно насладиться каждой азартной игрой доступной на веб-сайте. В вашем постановлении присутствуют автоматы, настольные прибавленье, видео-покер, Live-дилеры.Реже призы без депозита начисляются постоянным игрокам. С их поддержкой администрация постарается вычесть ценных клиентов либо вожделеет поблагодарить за преданность верных посетителей. Но гораздо чаще для сходственных целей используются такие акции:
1× slots регистрация в 1×slots casino
Доступные игры – В некоторых азартных забавах можно снизить математическое превосходство казино до нескольких 10-х процента. В их количестве почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как управляло, в таких играх ставки идут в зачет вейджера не всецело. Например, имеет предусматриваться лишь 50%. В неких играх бездепозитные бонусы вообщем невозможно отыгрывать.Как только получите бездеп в казино, всё одинаково не запамятовывайте проверять электронную почту. Некоторые игорные клубы непрерывно веселят интенсивных гэмблеров приятными призами. Чаще всего получить подарок можно в преддверии праздника, на день рождение, за вербование друга. А того распространённым призом является прибавка к депозиту. Нужно более пополнить счёт, и азартное заведение прирастит его на 50–100%. <a href=http://board.eternityrpc.com/member.php?action=profile&uid=369>1х слотс зеркало регистрация в 1×slots casino</a> 1×slots зеркало регистрация Возможность протестировать новые игры, не рискуя личными средствами и разработать собственную стратегию игры. <a href=https://www.professionistidelsuono.net/forums/member.php?action=profile&uid=241436>https://www.professionistidelsuono.net/forums/member.php?action=profile&uid=241436</a> Для получения предоставленных призов для понадобиться — ПК или мобильное прибор, и остальное дело за малым. 1×slots промокод при регистрации 2025 На нашем сайте Вы отыщите перечень своевременных свежих бездепозитных бонусов в казино 2022 года. Также, есть количество эксклюзивных предложений, коие доступны только посетителям нашего сайта последствии регистрации по нашей ссылке или активации специального промокода.Фриспины — благотворительные вращения, которые разрешают игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины числятся самым модным и предпочтительным видом бонуса — бесплатные вращения иногда эффективнее и веселее в отыгрыше, чем другие виды бездепов.
1×slots регистрация на сайте 1×slots ru com
Бонус с зачислением средств на счет выделяет больше свободы поступков. Пользователь сам избирает, каким образом воспользоваться подаренными средствами. Здесь кроме имеют действовать лимитирования на перечень дешевых игр, но обычно эти рамки не так строги, как в промо с бесплатными вращениями. <a href=https://tpforums.org/forum/member.php?37831-Michaelunsuh>https://tpforums.org/forum/member.php?37831-Michaelunsuh</a> 1× slots регистрация в 1×slots casino Хотя бесплатные бонусы начисляются без депозита, не исключено, что для придется вносить средства. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь после такого, как новый заказчик впервые пополнит игровой счет.Срок активации и время на отыгрыш. Зачисление денег или фриспинов случается при активации протяжении взыскательно ограниченного периода, похожие требования предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать бонус некоторое дней или и недель. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером.
1×slots зеркало проходить регистрацию это отличный вариант
Такие одобрения дозволяют бесплатно протестировать новое казино, разобраться с игровым процессом интернет слотов, заработать и исключить небольшую сумму денег.Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, чтобы была вероятность исключить выигрыш. <a href=https://10nsk.ru/user/JosephSuple/>1 х слотс зеркало</a> Если площадка презентует бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь ввести акк на веб-сайте и активировать его, подтвердив адресок электронной почты, номер телефонного или другие данные, которые просит оператор. Перед данным необходимо убедиться, собственно юзер находится на официальном веб-сайте казино, но на жульнической площадке.Также, учите, собственно бездепозитный бонус можно исключить лишь том, случае, когда станут выполнены все условия отыгрыша. 1×slots сайт <a href=http://mebel-fabrik.com.ua/index.php?subaction=userinfo&user=sillydirective1>http://mebel-fabrik.com.ua/index.php?subaction=userinfo&user=sillydirective1</a>
казино 1×slots официальный сайт
Некоторые клубы автоматически начисляют приз на аккаунт игрока после исполнения условий получения, хотя посещают ситуации, когда бонус надо(надобно) активировать игроку самому. Есть несколько способов активации приза:Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить необыкновенности, труднодоступные при ирге в демо режиме. Многие свежие посетители перебегают в число неизменных, а оператор получает долгосрочную выгода. <a href=http://julia4tied.de/member.php?action=profile&uid=140809>http://julia4tied.de/member.php?action=profile&uid=140809</a> Главным нюансом в появлении этих вознаграждений произведено в том, собственно пустив их в ход, компьютерные ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он спасибо призам какой-либо выигрыш либо мгновенно спустит все лишь собственно прибывшие финансы). То есть, казино снабжает игрока возможностью на дармовой основе выступать во различные слоты и даже спонсирует забаву.Бесплатные призы казино без депозита возможно получить повторяющий денежных средств на бонусный счет (исключить их можно только последствии отыгрыша), фриспинов, забавы или кешбэк-бонуса. 1×slots акции В разделе с бонусами активировать собственный презент. Найти забавы, для коих предусмотрено поощрение и использовать приз по предназначению.Подтвердите регистрацию, чтобы активировать Бездепозитный бонус с выводом, потребуется наполнить индивидуальный профиль. Заполните пустующие поля реальными данными о себя.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Размер ставки для игры по бездепозитному призу (окончательно же, когда, когда он представлен вид бонусных денежных средств) часто ниже, чем при этой на депо. Ограничение несомненно действовать до этапа отыгрыша приза. Зарегистрируйтесь. Для регистрации чаще всего довольно установить свой номер телефона и почтовый адресок, в чего ввести приобретенный код из СМС. Возможно, потребуется указать промокод. В правилах промоакции будет написано, где его бы вводить. Иногда это хотелось делать при регистрации, время — теснее после творенья собственного кабинета, на отдельной странице.
#7140 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7141 Jeffreyarime
https://gramster.ru/ пинап казино
#7142 Dianaveter_seidohttps://dianaveter.ru/
Добрый день! Современные бережные технологии психологического консультирования, индивидуальный подход в каждой истории клиента, максимум поддержки и эмпатии. Решение психологических проблем современными методиками, психологическая консультация. Системный подход, пошаговые программы решения конкретных задач клиентов. <a href=https://dianaveter.ru/>Поддерживающий психологический клуб</a> Если Психолог онлайн и в Екатеринбурге, то это в https://dianaveter.ru/ dianaveter.ru. Главный навык, который нарабатывается в личной терапии – это вера в себя, уверенность и состояние „Я могу решить, я могу справиться, я классный“. Психолог с отзывами, с опытом. Всем пока!
#7143 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7144 Charlesgunnyhttp://filmkachat.ru
1×slots сайт
Новички не любят сразу же вносить депозит. Это обосновано отсутствием навыка и недоверием. К счастью, дни возможно получить бездепозитный приз за регистрацию в казино. Неважно собственно начисляет система – фриспины или кредиты. В всяком случае вы не рискуете собственными сбережениями. Это замечательная вероятность запустить понравившийся видео слот или же испытать фортуну в настольных играх.Для получения приза надо(надобно) пригласить в игру свежего посетителя. Казино начислит пригласившему фиксированный процент от взносов приглашённого вид приза: чаще всего его размер не выше 10%. Срок деянья приза в большинстве случаев не выше месяца: пригласивший получает приз зависимо проигранных ставок приглашённого в 1-ый месяц игры. <a href=http://filmkachat.ru/>1хслотс официальный сайт зеркало</a> Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных требований, считая неотъемлемой верификации. Если на сайте предусмотрена неотъемлемая процедура подтверждения личности, то исключить выигрыш удастся только после ревизии данных. Приготовьтесь наполнить анкету и отправить в техподдержку документ, подтверждающий лицо.Обычно показатель выше, чем для призов на депозит. Не удивляйтесь, если он будет даже х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных стран. <a href=https://groups.google.com/u/2/g/shopavto>https://groups.google.com/u/2/g/shopavto</a> Изучить верховодила и обстоятельства получения бездепозитных бонусов казино, Вы сможете у нас на веб-сайте в разделе с бонусами либо на официальном веб-сайте выбранного Вами казино. Если имеет найти необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал либо по электрической почте. 1хслотс рабочее зеркало <a href=http://hardstorecr.com/mybb/member.php?action=profile&uid=122032>http://hardstorecr.com/mybb/member.php?action=profile&uid=122032</a> В интернет-сети постоянно можно отыскать списки наиболее популярных и гарантированных поощрительных программ от известных онлайн-казино.Заполняя данные в личном профиле, указывайте лишь достоверную информацию, так как Вам понадобиться ее подтвердить в будущем при выводе денег.
1× slots официальный
Некоторые казино могут предлагать клиентам бездепы за свидетельство номера или почты или репост на страничку в социальных сетях.Демоказино есть почти на любом сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются значительно реже: там если, тогда, выигрыша и соблюдения условий промоакций бездеп возможно перевоплотить в настоящие средства. 1×slots регистрация 1×slotscasino09k online Наиболее известные гонорары между гэмблеров – бездепозитные призы казино. Это не изумительно, как возможно получить благотворительные вращения либо виртуальные кредиты, и всем не придётся пополнять счёт, рисковать собственными средствами. Удастся насладиться разнородными увеселениями причем выиграть солидную сумму, избегая серьёзного риска. <a href=https://www.currencylovers.com/forums/member.php?action=profile&uid=82555>https://www.currencylovers.com/forums/member.php?action=profile&uid=82555</a> В неких интернет казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на веб-сайте клуба и доказать средства контактные данные. Дополнительно потребуется активация промокода.Однако в критериях скрываются «подводные камни», которые не позволят вывести крупную необходимую или же вы не успеете отыграть вейджер. Поэтому мастера советуют арестовать бесплатные вращения за регистрацию в казино без депозита, чтобы поднабраться опыта и получить настоящий шанс на победу. x1 slots 1хслотс регистрация перейти на 1×slots Классическая разновидность бонуса за творенье аккаунта. Его превосходство заключается что, нет, что заказчик имеет других избирать аппараты и создавать ставки в их. Иногда перечень игровых автоматов ограничен оператором, хотя все одинаково это никакого, чем один-единственный доступный слот, как если, тогда, с внедрением фриспинов.
1×slots сайт
Маркетинговая политического всех игорных интернет-клубов должна одевать разнородный нрав. И случае гонорары на депо служат для того, чтобы провоцировать заносить депозиты и поощрять теснее имеющих юзеров, то бездепозитный приз в казино либо бонус за регистрацию в казино, до всего, рассчитан на расширение базы покупателей. Получив свой презент, Вы можете даром играть на настоящие средства, а выполнив обстоятельства отыгрыша, вывести свой выигрыш. <a href=https://forum.glodaris.com/member.php?action=profile&uid=54670>https://forum.glodaris.com/member.php?action=profile&uid=54670</a> У нас на веб-сайте Вы найдете список призов без депозита в проверенных казино и подробную информацию про как их получить и использовать.Бонусы без депо при регистрации считаются наиболее красивыми как для опытных игроков, например для и новичков. Получив это вознаграждение, клиент возможность выступать на настоящие деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные призы в интернет-казино Рунета, а также обстоятельства их активации и выигрыша. 1×slots казино мобильная версия Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.
1×slots официальный сайт зеркало
Составленный специалистами Casino.ru список онлайн-казино с бездепозитным бонусом позволяет игрокам сопоставить спецпредложения разных операторов.Теоретически, к бесплатным призам можно отнести например называемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, поэтому что они предоставляют лишь вероятность делать ставки. Обыкновенные бездепозитные бонусы в объеме от 3-х до 20 $ сделаны чтобы, чтобы, дабы в игры заходили все новые и новые игроки. Здесь, вероятнее всего, будет ограничение на максимальный выигрыш. Важно, чтобы перед минимальным вкладом был отключен приз за первое пополнение счета, и геймер не попадет на повторный вейджер. 1×slots регистрация то дальше необходимо пройти <a href=http://georgiantheatre.ge/user/RaymondTon/>http://georgiantheatre.ge/user/RaymondTon/</a> Первый образующийся вопрос, это, зачем выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают новых игроков. Последним проще начать забаву на средства с презента за регистрацию. Им не пополнять баланс и тратить личные свои. Новички получают бесплатные спины или средства на счёт. С их поддержкою знакомятся с игровым ходом, крутят слоты и делают ставки в рулетке.
1×slot зеркало рабочее регистрации на телефон придет
<a href=http://sun-gifts.ru/index.php?subaction=userinfo&user=accidentaleffec>http://sun-gifts.ru/index.php?subaction=userinfo&user=accidentaleffec</a> Вейджер не более х30–35 является приемлемым. Опытные игроки заявляют, что с таким вейджером реально остаться в плюсе, если правильно подойти к выбору игрового аппарата. 1 хслот регистрация в 1×slots casino Этот тип бонуса будет добавлен на Ваш аккаунт в удачной процедуры регистрации с использованием номера аппарата. Если выбрать другой метод создания учетной записи, бездеп не несомненно добавлен на Ваш акк.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Отказ в прохождении верификации. Если клиент не хочет или не дать документы, подтверждающие его личность, профиль несомненно заблокирован вместе со всеми бонусными начислениями. Демоказино есть почти на любом веб-сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются существенно реже: там если, тогда, выигрыша и соблюдения критерий акций бездеп возможно перевоплотить в реальные средства.
#7145 Charlesgunny
porno Юлия Пересильд porno Марина Александрова <a href=https://krtka.info/>porno Юлия Канакина, скелетонистка</a> porno Илья Ковальчук (хоккей) porno Илона Маркова, хоккеистка <a href=https://sovsekretno.net/>порно с Алина Загитова, фигуристка</a> 1×bet зеркало слоты 1×bet xyz online casino официальный Самойлова Алла Владимировна порно casino актуальное зеркало black russia казино black russia казино vavada casino
#7146 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало
Для выбора азартного заведения Вы можете пользоваться перечнем наших казино с бонусами за регистрацию. На нашем веб-сайте мы опубликовали список бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, собственно часть бонусов неповторимые и доступны только для гостей нашего вебсайта по-специальному промо-коду либо по оригинальной ссылке. Кроме такого, для любого бонуса мы подготовили доскональный обозрение, каком Вы узнаете как получить и отыграть одобрение и как вывести свой выигрыш с бездепа.Отзывы читателей о бонусных промоакциях посодействуют составить впечатление, но не запамятовывайте о субъективности собственных объяснений. <a href=http://filmkachat.ru/>1×slots коды</a> При регистрации стопам свидетельствовать только достоверную информацию. Когда учетная запись несомненно активна, замечен доступ в Личный офис. В нем можно выбрать валюту, ввести промокод и узнать доскональные правила получения и отыгрыша бездепа. Краткая информация об акции нередко присутствует именно на регистрационной форме. <a href=https://connects.ctschicago.edu/forums/users/200497/>https://connects.ctschicago.edu/forums/users/200497/</a> Новые посетители онлайн-казино без первого депозита имеют проверить собственную удачливость. К что, этому же есть возможность преобразовать бездепы в реальные средства за регистрацию в казино, впрочем для этого приз нужно отыграть сообразно условиям промоакции.Многие новенькие колеблются, собственно поощрительный приз не нужно будет возвращать, и если они выиграли у казино. Это полностью неопасно и надежно. Выводя выигранные средства, игрок просто одергивает свое роль деле и утрачивает уникальную вероятность – бесплатно наращивать личное материальное положение. 1×slots регистрация 1×slotscasino09k online <a href=http://sunshine2000.co.kr/bbs/board.php?bo_table=free&wr_id=123547>http://sunshine2000.co.kr/bbs/board.php?bo_table=free&wr_id=123547</a>
1×slot зеркало
1×slots зеркало проходить регистрацию это отличный вариант Условия отыгрыша приза. Если Вы планируете заработать на бездепозитном призе, то для направьте на велечину вейджера и срок, который дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть приз и исключить выигрыш. <a href=https://codepen.io/gzpdhmag-the-reactor/pen/qBzLgOE>https://codepen.io/gzpdhmag-the-reactor/pen/qBzLgOE</a> 1×slots официальный зеркало рабочее Как лишь получите бездеп в казино, всё также не забывайте инспектировать электрическую почту. Некоторые игорные клубы каждый радуют активных гэмблеров приятными бонусами. Чаще всего получить презент возможно в преддверии веселья, на денек рождение, за привлечение приятеля. А также распространённым бонусом считается надбавка к депозиту. Нужно чем восполнить счёт, и азартное заведение увеличит его на 50–100%.Бездепозитные бонусы в казино без пополнения 2022 — это конкретная сумма денег или gratuitous spins вращения, коие предоставляются первым постояльцам за регистрацию на веб-сайте казино вид бездепозитного приза, и дает вас вероятность с казино без пополнения опробовать услуги (игр), с дальнейшей привилегией вывода средств при исполненьи всех установленных управлял.
сайт 1× slots casino
На благотворительные бонусы онлайн-казино почти постоянно распространяется лимитирования по стране проживания клиентов. Даже случае для разрешено раскрывать счет и выступать на средства в заведении, это еще не означают, что вам доступны no deposit bonuses.Обыкновенные бездепозитные бонусы в размере от трех до двадцати долларов созданы для того, чтобы в игры заходили все новые и свежие игроки. Здесь, вероятнее всего, несомненно лимитирование на наибольший выигрыш. Важно, чтобы перед минимальным вкладом был отключен приз за 1-ое пополнение счета, и компьютерные не попадет на повторный вейджер. Нельзя рассматривать игру на деньги, как вариант заработка. Азартные забавы запрещены для лиц младше 18 лет. Topcasinobonuses.mobi классифицируется зачинщиком азартных игр. Сайт носит информационный характер.В списке притязаний к отыгрышу нередко присутствуют лимиты на ставки при игре на собственные средства. Так, в отыграть надо(надобно) 30 000 рублей, а предельная сумма ограничена 30 рублями, то вертеть барабаны светит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам действия акции. <a href=https://sub4sub.net/forums/users/anthonychimi/>https://sub4sub.net/forums/users/anthonychimi/</a> Для получения бездепа нужно пригласить в игру по реферальной ссылке свежего посетителя: он должен зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на сумму, обозначенную в критериях промоакции. 1×slot рабочее зеркало Выполнив все притязания оператора, клиент возможность оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем не более суток. Если дополнительно требуется пройти процедуру верификации, то срок увеличивается до 1–2 рабочих дней. Для перевода применяются банковские приборы и электрические платежные системы. Второй метод подходит другого, как, например как большинство транзакций в этом случае исполняются моментально. В связи со специфичностью функционирования банков обработка платежей имеет занять до нескольких рабочих дней.Многие казино предоставляют в маркетинговых целях безвозмездные бонусы необыкновенно для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой сайт по партнерской ссылке с нашего портала.
1х слот регистрация в 1×slots casino
Основное правило получения бездепа ? творимый аккаунт должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов строго запрещено. Проверка ведется по имени, e-mal, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депо необходимо блюсти простую очередность поступков.С не отыгранным призом запрещается превышать объем наибольшей ставки. Нарушение этого обстоятельства виде аннулирование выигрыша. <a href=https://forum.bedwantsinfo.nl/thread-685102.html>1×slots регистрация то дальше необходимо пройти</a> 1×slots бездепозитный бонус за регистрацию <a href=http://tok-ok-dv.ru/index.php?subaction=userinfo&user=quacktradition8>http://tok-ok-dv.ru/index.php?subaction=userinfo&user=quacktradition8</a> Способы получения бездепа различаются от облика приза, который понравился игроку. Но вам так нужно быть зарегистрированным в легальном онлайн-казино и подтвердить собственную личность. В общем облике пошаговая аннотация для получения бездепозитного бонуса смотрится например:Самые популярные способы вывода средств ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам подобии Neteller и Skrill, а также используют криптовалютными кошельками. Вывод выигрышей имеет осуществляться моментально либо развлекать от нескольких часов до нескольких суток.
1 x slots
Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих притязаний, кроме обязательной верификации. Если на сайте учтена неотъемлемая процедура доказательства личности, то вывести выигрыш получится лишь после проверки данных. Приготовьтесь заполнить анкету и отправить в техподдержку документ, подтверждающий личность. <a href=http://forum.ttpforum.de/member.php?action=profile&uid=346646>http://forum.ttpforum.de/member.php?action=profile&uid=346646</a> Любой выигрыш по ставке выше установленного лимита будет являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, ну случае выигрыша его сумма не поступит на счёт клиента — итог игры несомненно всецело аннулирован.Бонус начисляется игроку сразу в регистрации и прохождения верификации в казино и не требует от посетителя внесения депозита. Как верховодило, размер бонуса в подобном случае довольно скромный, однако дозволяет новичкам познакомиться с забавой без риска настоящими средствами. 1×slots актуальное зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://naturetour.ru/communication/forum/messages/forum3/message24337/6029–1×slots-kody?sessid=4e25d189a0c9ab111e5412953c58d7cb&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1×slots коды</a>
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1592#post-46726>1×slots сайт зеркало</a>
<a href=https://isomedu.com/forum/profile/josephdrons/>казино 1×slots</a>
<a href=https://www.formulersupport.com/Thread-1×%D1%81%D0%BB%D0%BE%D1%82-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%B2–1×slots-casino–131030>1×слот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в собственный офис, чтобы отобрать безвозмездные вращения с вейджером х40; Воспользоваться бездепом можно не во всех игровых автоматах: казино вдруг уточняет ограничение для клиентов. Конечно, это возможно счесть неким неудобством для игрока, но справедливости ради необходимо, что выбор автоматов всё точно остаётся достаточно наибольшим.
#7147 Charlesgunny
самое казино ставки на спорт букмекерские конторы <a href=https://krtka.info/>ешь казино</a> Скворцова Вероника Игоревна порно лучшие онлайн казино <a href=https://7club7.com/>порно с Сергей Бобровский (хоккей)</a> Семёнова Татьяна Владимировна порно kent casino cat casino скачать casino на андроид Валентина Матвиенко порно 1×bet зеркало рабочее xbet порно с Абрамченко Виктория Валериевна
#7148 Charlesgunny
porno Нина Пирогова, хоккеистка промокод 1×bet <a href=https://repost.news/>приложения букмекерских контор</a> pin casino зеркало 1win casino <a href=https://vestnik-jurnal.com/>букмекерские контора ап</a> скачать 1×bet на андроид casino бездепозитный 1win casino казино вход официальный сайт pinco casino pin up casino buzz ramenbet casino
#7149 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7150 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало подтвердит вашу регистрацию если говорить
Бездепозитные бонусы за регистрацию в игровых автоматах для собственников онлайн-казино являются частью маркетинговой кампании, направленной на повышение аудитории сайта. Так они продвигают свои бренды и завлекают свежих клиентов. <a href=http://filmkachat.ru/>1×slots регистрация на сайте 1×slots ru com</a> Многие игроки, оценив функционал казино, остаются играть в нем и дальше ? на это и нацелено любое рекламную. Постоянные клиенты вносят депозиты и делают ставки, обеспечивая длительную прибыль оператора. То есть, казино раздают бездепы свежим пользователям для формирования лояльной аудитории.Такие поощрения позволяют даром протестировать новое казино, разобраться с игровым процессом онлайн слотов, заработать и исключить маленькую необходимую средств. <a href=https://hallbook.com.br/blogs/391183/Mastering-Interior-Shop-Drawings-A-Professional-Guide-to-Precision-and>https://hallbook.com.br/blogs/391183/Mastering-Interior-Shop-Drawings-A-Professional-Guide-to-Precision-and</a> Возможность протестировать новые игры, не рискуя личными средствами и разработать собственную стратегию игры. 1×slots официальный сайт, скачать <a href=http://www.odnopolchane.net/forum/member.php?u=600826>http://www.odnopolchane.net/forum/member.php?u=600826</a> Также, учите, собственно бездепозитный приз возможно вывести только что случае, когда будут исполнены все условия отыгрыша.
1×slots акции
В игровых клубах без лицензии Вы покупаете „кота в мешке“ и в случае неоднозначных обстановок нет способности куда-то посетовать и обосновать собственную правоту.При регистрации в либо ином интернет игральном заведении — для дается раз шанс испытывать свою фортуну не внося свои монеты. Замечу собственно эту поощрительную предложение предоставляют не все онлайн игровые площадки, а лишь щедрая половина из них. Которые мы подготовили для Вас в нашем списке. 1×slots рабочее зеркало Подтверждение индивидуальной информации. Все казино просят от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и присутствие у пользователя других аккаунтов (мультиаккаунт запрещен). <a href=https://www.catfish-assassins.org/forum/memberlist.php?mode=viewprofile&u=850>https://www.catfish-assassins.org/forum/memberlist.php?mode=viewprofile&u=850</a> 1хслотс мобильная версия зеркало Промокод – определённая комбинация символов, которую нужно ввести в отвечающее фон при творении учетной записи или активировать в личном профиле игрока в разделе с призами.
1× слот зеркало
Мы проделываем ударение на ключевых положениях правил, рассказываем о территориальных ограничениях и кратко информируем о иных акциях обговариваемого казино.Бездепозитные призы, как уже понятно, являются уникальной вероятностью приступать к игровому процессу полностью бескорыстно, другими выступать в онлайн казино безвозмездно и на место свои сразу в регистрации аккаунта. Автоматы с этим депозитом могут стать прекрасной вероятностью поиграть для поклонников пыла с определенными лимитированиями в финансах. Но такие рамки не смущают числе хайроллеров, потому коэффициенты на слотах позволяют рассчитывать на солидные выигрыши, ну некоторых автоматах разыгрывается прогрессивный джекпот.Бездепозитные бонусы в казино без пополнения 2022 — это определенная сумма денег либо vacant spins вращения, коие предоставляются первым гостям за регистрацию на сайте казино вид бездепозитного бонуса, и выделяет вам вероятность помощью казино без пополнения опробовать услуги (игр), с дальнейшей прерогативой вывода средств при выполнении всех установленных управлял. <a href=https://coinzaa.com/u/MiguelIntig>https://coinzaa.com/u/MiguelIntig</a> Третитй бездепозитный бонус за регистрацию – денежные средства. К сожалению, начислить рубли или баксы готовы только знаменитые и модные клубы. С их поддержкою вас насладиться каждой доступной игрой – автоматом, рулеткой, кено, блэкджеком. 1×slots рабочее зеркало Бoльшинcтвo азартных заведений выдвигают примерно одинаковые условия и требования, которые нужно выполнить, чтобы получить бездепозитный приз за регистрацию. Все их можно соединить в один список:Некоторые клубы механически начисляют бонус на акк игрока после исполнения критерий получения, но посещают ситуации, когда бонус надо(надобно) активировать игроку самому. Есть несколько методов активации бонуса:
1хслотс рабочее зеркало
В игровых клубах без лицензии Вы покупаете „кота в мешке“ и в случае спорных обстановок нет возможности куда-то посетовать и доказать собственную правоту.При ирге на бонусные средства запрещается выступать в игровые автоматы с современным джекпотом и забавы из радела live casino. Кроме того, некоторые казино дают бездеп на раз либо некоторое определенных слотов, и в иных играх Вы не можете на них выступать. <a href=https://forum.spherecommunity.net/User-JamesLop>1×slot зеркало рабочее этих способов предполагает регистрацию</a> рабочее зеркало 1хслотс <a href=http://www.591314.org/space-uid-15039.html>http://www.591314.org/space-uid-15039.html</a>
1×slots зеркало быструю регистрацию а также мгновенное
Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации подарка необходимо доказать электрическую почту и привязать телефонный; <a href=http://certificate.winko.net/bbs/board.php?bo_table=free&wr_id=173396>http://certificate.winko.net/bbs/board.php?bo_table=free&wr_id=173396</a> Риск-игра по одинаковым шансам – Также казино имеет запрещать скорпулезно обстоятельства по отыгрышу счет раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких других играх. 1×slots актуальное зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://thetechmodders.com/forums/memberlist.php?mode=viewprofile&u=945>1×slots регистрацию более популярный вариант это</a>
<a href=https://adminclub.org/showthread.php?tid=48905&pid=283281#pid283281>1х слот регистрация в 1×slots casino</a>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=66661&result=reply>1×slots скачать на айфон</a>
<a href=http://forum.exalto-emirates.com/memberlist.php?mode=viewprofile&u=69997&sid=628ad300a9bec81b134c2b86c1f9be50>1×slots casino зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Итак, дабы бесплатные бонусные кредиты превратились в настоящие деньги, которыми возможность распоряжаться по собственному усмотрению, их надо(надобно) отыграть. Вейджер следует уточнять в правилах онлайн-казино.
#7151 Charlesgunny
7k casino официальный сайт pin up casino официальный <a href=https://kompromat1.online/>casino на телефон</a> 1×bet официальный сайт 1×bet xyz 1×bet рабочее <a href=https://t.me/vchkogpu_ru>порно с Алина Загитова</a> 7k casino скачать вывод казино 1×bet зеркало рабочее xbet casino com казино без pin up casino зеркало сайт казино вход
#7152 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7153 luckyduckDownloadhttps://download.luckyduck-casino-apk.ru
<a href=http://california.bizhwy.com.xx3.kz/go.php?url=https://download.luckyduck-casino-apk.ru>download.luckyduck-casino-apk.ru</a> <a href=http://intendant.su/go/url=https://download.luckyduck-casino-apk.ru>download.luckyduck-casino-apk.ru</a> <a href=http://jasongriffin.com.xx3.kz/go.php?url=https://download.luckyduck-casino-apk.ru>download.luckyduck-casino-apk.ru</a> <a href=http://johnathanulzny.blogolize.com.xx3.kz/go.php?url=https://download.luckyduck-casino-apk.ru>download.luckyduck-casino-apk.ru</a> <a href=http://microsoftaccesssolutions.com.xx3.kz/go.php?url=https://download.luckyduck-casino-apk.ru>download.luckyduck-casino-apk.ru</a> <a href=http://www.laboitenoiredumusicien.com/redirect.php?url=https://download.luckyduck-casino-apk.ru>download.luckyduck-casino-apk.ru</a> <a href=http://gfmis.crru.ac.th/web/redirect.php?url=https://download.luckyduck-casino-apk.ru>download.luckyduck-casino-apk.ru</a> <a href=http://adv.english4u.net/redir.aspx?adv_id=39&adv_url=https://download.luckyduck-casino-apk.ru>download.luckyduck-casino-apk.ru</a> <a href=http://mstsnl.net.xx3.kz/go.php?url=https://download.luckyduck-casino-apk.ru>download.luckyduck-casino-apk.ru</a> <a href=http://justthinkin.com.xx3.kz/go.php?url=https://download.luckyduck-casino-apk.ru>download.luckyduck-casino-apk.ru</a> <a href=http://es.xhamster9.com/exit.php?url=https://download.luckyduck-casino-apk.ru>download.luckyduck-casino-apk.ru</a> <a href=http://xn----8sbn6afubnnd.xn–p1ai/bitrix/redirect.php?goto=https://download.luckyduck-casino-apk.ru>download.luckyduck-casino-apk.ru</a> <a href=http://images.google.com.ph/url?q=https://download.luckyduck-casino-apk.ru>download.luckyduck-casino-apk.ru</a> <a href=http://elnacionalista.mforos.com/visit/?https://download.luckyduck-casino-apk.ru>download.luckyduck-casino-apk.ru</a> <a href=http://inzhener.net/go/url=https://download.luckyduck-casino-apk.ru>download.luckyduck-casino-apk.ru</a>
Install client bookmaker luckyduck – win today! <a href=http://image.google.az/url?rct=i&sa=t&url=https://download.luckyduck-casino-apk.ru>download.luckyduck-casino-apk.ru</a> <a href=http://bowersjewelry.com/?URL=https://download.luckyduck-casino-apk.ru>download.luckyduck-casino-apk.ru</a> <a href=http://080whois.com/en/whois/https://download.luckyduck-casino-apk.ru>download.luckyduck-casino-apk.ru</a> <a href=http://www.mojevideo.cz/link.php?url=https://download.luckyduck-casino-apk.ru>download.luckyduck-casino-apk.ru</a> <a href=http://customizedblends.com/?URL=https://download.luckyduck-casino-apk.ru>download.luckyduck-casino-apk.ru</a> <a href=http://forum.facmedicine.com/proxy.php?link=https://download.luckyduck-casino-apk.ru>download.luckyduck-casino-apk.ru</a> <a href=http://gistoolkit.com/bitrix/redirect.php?event1=&event2=&event3=&goto=https://download.luckyduck-casino-apk.ru>download.luckyduck-casino-apk.ru</a> <a href=http://www.armybiv.ru/redirect/?url=https://download.luckyduck-casino-apk.ru>download.luckyduck-casino-apk.ru</a> <a href=http://www.finet.hk/LangSwitch/?lang=zhCN&url=http%3A%2F%2Fhttps://download.luckyduck-casino-apk.ru>download.luckyduck-casino-apk.ru</a> <a href=http://dmcforum.mforos.com/visit/?https://download.luckyduck-casino-apk.ru>download.luckyduck-casino-apk.ru</a> <a href=http://www.schluessel-doebeling.de/redirect.asp?url=https://download.luckyduck-casino-apk.ru>download.luckyduck-casino-apk.ru</a> <a href=http://tools-world.ru/bitrix/rk.php?goto=https://download.luckyduck-casino-apk.ru>download.luckyduck-casino-apk.ru</a> <a href=http://zdrava.by/bitrix/rk.php?goto=https://download.luckyduck-casino-apk.ru>download.luckyduck-casino-apk.ru</a> <a href=http://www.salue.de/link.php?url=https://download.luckyduck-casino-apk.ru>download.luckyduck-casino-apk.ru</a> <a href=http://libproxy.kw.ac.kr/_Lib_Proxy_Url/https://download.luckyduck-casino-apk.ru>download.luckyduck-casino-apk.ru</a>
#7154 Charlesgunny
ограбление казино сайт казино зеркало <a href=https://strelochnik.com/>казино зеркало сегодня</a> porno Игорь Акинфеев (футбол) букмекерские конторы без депозита <a href=https://vestnik-jurnal.com/>casino онлайн</a> порно с Зырянова Анастасия Владимировна casino com скачать букмекерскую контору яндекс игры казино порно с Каролина Севастьянова букмекерские конторы без депозита порно с Гатагова Ольга Анатольевна
#7155 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7156 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7157 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало сайта
Раздача бонусов имеет быть приурочена к разным датам: календарные праздничные, деньки рождения игроков, юбилей открытия казино и т. Д. Подарок выдается в виде денег, фриспинов или баллов для скопления и обмена на услуги оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода этой суммы придется выполнить ряд притязаний.Это тоже благотворительные финансы, которые поступают на аккаунты новоиспеченных в после регистрирования. А особенность этих призов произведено сомнений, что обретенные деньги непременно следует использовать в продолжении назначенного медли. <a href=http://filmkachat.ru/>1х слот 1хслотс регистрация перейти на 1×slots</a> <a href=https://www.zybuluo.com/lexxeagle/note/2570094>https://www.zybuluo.com/lexxeagle/note/2570094</a> 1× slots зеркало <a href=http://lindberghkidnappinghoax.com/board/member.php?action=profile&uid=64871>http://lindberghkidnappinghoax.com/board/member.php?action=profile&uid=64871</a> Зачастую бездепозитные бонусы казино для игры предлагаются разными заведениями азартных игр виде рекламных промоакций или в целях вербования к для свежих игроков. Для бездепозитных бонусов в казино 2022 геймеру надо пополнять счет до момента вывода хотимых средств.
1×slots зеркало
Вообще перейдя в казино — верховодила схожи в получении бездепозитных бонусов, в стереотипные верховодила заходит: подтвердить эл. Почту и телефонный, наполнить собственный личный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ. 1×slots зеркало которую указывали при регистрации кстати <a href=https://woodmancx.com/user/RalphWhalk/>https://woodmancx.com/user/RalphWhalk/</a> Следует подчеркнуть, собственно бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом.Это раз из главных характеристик привлекательности дара. С завешенным коэффициентом числе профессионалы не смогут выполнить условия по отыгрышу. И так, насколько презентабельно смотрится предложение – бездепозитный бонус казино в размере $500 либо $1 000. Чтобы новенькие получше вдумались, что же это вейджер, мы разберём на образце. 1×slot казино зеркало Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских руб. В условиях акции указано, что вейджер бездепозитного бонуса х20. Поэтому, дабы отыграть приз, игроку несомненно необходимо сделать ставок на 35*20=700 руб.
казино 1×slots официальный сайт
<a href=https://thiamlau.com/forum/member.php?action=profile&uid=3588>https://thiamlau.com/forum/member.php?action=profile&uid=3588</a> Новички не любят незамедлительно же заносить депо. Это обосновано неимением опыта и сомнением. К счастью, дни возможно получить бездепозитный бонус за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В любом случае вы не рискуете своими сбережениями. Это отличная возможность запустить понравившийся видео разъем либо же испытывать удачу в настольных играх. 1×slots официальный зеркало
1хслотс официальный сайт зеркало
Зарегистрируйтесь. Для регистрации почаще всего достаточно установить свой номер телефонного и почтовый адресок, после чего установить приобретенный код из СМС. Возможно, требуется показать промокод. В правилах акции будет написано, где его надобно включать. Иногда это надобно создавать при регистрации, времени — уже в создания личного кабинета, на отдельной страничке. Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных ситуаций с казино, когда после отыгрыша бездепа вас не дадут вывести солидную необходимую выигрыша. А ознакомиться с новыми интернет казино, Вы можете с призов с выводом прибыли, которые Вы сможете получить без депозита.Возможность протестировать новые забавы, не рискуя личными средствами и создать собственную стратегию забавы. 1хслотс мобильная версия зеркало <a href=http://www.volgogradsky.ru/forum/viewtopic.php?p=531767#531767>http://www.volgogradsky.ru/forum/viewtopic.php?p=531767#531767</a> Во время игры в казино, выигрыши, полученные благодаря бесплатным призовым фондам, суммируются и включаются в общую сумму для отыгрывания. Однако, в удача улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно разрешит вывести финансовые свои. Сумма вывода несомненно находиться от лимита, одобренного непосредственно в данном учреждении. Поэтому, внимательно нужно разбирать верховодила выдачи безлимитных депо.
1×slots casino регистрация 1×slotscasino09k online
Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? Большинство клубов завлекают внимание игры за счёт различных подарков. На 1 сайтах возможно получить виртуальные кредиты, которые откроют доступ ко всему софту. На других же, администрация предлагает благотворительные вращения для запуска топовых интернет слотов. Несмотря на различные акции, стоит выделить самые главные. <a href=http://www.haxorware.com/forums/member.php?action=profile&uid=282485>http://www.haxorware.com/forums/member.php?action=profile&uid=282485</a> Создание аккаунта. На сайте казино нужно открыть регистрационную форму и заполнить пустующие поля личными данными. Иногда на этом этапе требуется указать лишь адресок электрической почты и пароль, хотя чаще хотелось заполнить анкету персональной информацией (ФИО, дата рождения, пространство проживания и т.д.). Нужно свидетельствовать лишь реальные данные, поскольку впоследствие они будут испытаны.Мы советуем не отрицаться от сходственных услуг узнаваемых казино. Выделите некоторое минут на регистрацию, получите приз и попытайтесь его отыграть. Может быть, сейчас фортуна будет на вашей стороне! 1хлот регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://portugal-campings.com/pt/account/>1×slots регистрация на сайте</a>
<a href=http://lider1c.ru/communication/forum/messages/forum5/message18249/14326–1×slots-registratsiya-to-dalshe-neobkhodimo-proyti?sessid=b507e428a6228f5fb4bd5d1a4ab30ccb&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1×slots регистрация то дальше необходимо пройти</a>
<a href=http://check2go.net/my-account/>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<a href=https://melhorlance.com.br/minha-conta/>1×slots сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Необходимость отыгрыша. Вейджер в этом случае выше, чем для бонусов за депо. И же свои не отыграны, вывести их нельзя.
#7158 Charlesgunny
1×bet официальный xbet порно с Матвей Сафонов (футбол) <a href=https://sovsekretno.net/>суть казино</a> порно с Александр Большунов (лыжные гонки) r7 casino <a href=https://rucriminal.info/>казино 5</a> порно с Сергей Бобровский (хоккей) Ирина Горбачева casino сайты почему в казино нет часов лучшие бесплатные онлайн казино pin up casino пин ап casino автомат
#7159 Charlesgunnyhttp://filmkachat.ru
casino 1×slot
Бесплатные бонусы казино без депо возможно получить повторяющий денежных средств на бонусный счет (исключить их можно лишь в отыгрыша), фриспинов, забавы либо кешбэк-бонуса. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots casino c2d ru</a> <a href=https://jumpshare.com/v/g7cIh0cVypvEGdf6HhDQ>https://jumpshare.com/v/g7cIh0cVypvEGdf6HhDQ</a> Онлайн-казино с бездепозитными бонусами ставят клиентам условия для пользования бездепами, потому перед ролью в акции другого подробно ознакомиться со всеми правилами и аспектами промоакции. Условия все касаться получения приза, его применения и следующего вывода денежных средств если, тогда, выигрыша. казино 1×slots <a href=http://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=5314>http://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=5314</a>
1×slots официальный сайт скачать на айфон
Фриспины предназначены для применения в видео слотах. Внимательно ознакомьтесь с критериями – часто их выдают на кое-какие автоматы. В зависимости от клуба, у вас получится сделать определённое число ставок. Кстати, продвинутые игорные дома разрешают запускать каждых «одноруких бандитов».Каждый игрок обязан сперва детально изучить обстоятельства по получению и отыгрышу приглянувшегося презента. Если всё устраивает, поспешите арестовать бесплатные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик момент начать вращать барабаны лучших слотов. <a href=https://thetechmodders.com/forums/viewtopic.php?t=24827>x1 slots регистрация в 1×slots casino</a> 1×slots официальный сайт зеркало <a href=http://m1bar.com/index.php?subaction=userinfo&user=tiresomejailer5>http://m1bar.com/index.php?subaction=userinfo&user=tiresomejailer5</a> 1хслот зеркало сайта
1хслотс рабочее зеркало на сегодня
Наш перечень содержит наилучшие бездепозитные призы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по важным характеристикам: <a href=https://gitlab.pavlovia.org/g/0000/-/issues/48>https://gitlab.pavlovia.org/g/0000/-/issues/48</a> x1 slots регистрация в 1×slots casino Но существуют азартные заведения, готовые просто так вручить деньги на забаву. Для этого довольно создать профиль. Чтобы вывести выигрыш, сначала необходимо выполнить вейджеровые условия, прописанные в условиях получения бездепа.
казино 1×slots официальный сайт
Если площадка презентует бездеп за регистрацию, то процедура его получения проста. Нужно только ввести акк на веб-сайте и активировать его, подтвердив адрес электрической почты, номер телефона либо другие данные, коие настятельно оператор. Перед данным нужно убедиться, что юзер располагается на официальном сайте казино, но на жульнической площадке.Способы получения бездепа различаются от облика бонуса, кот-ый приглянулся игроку. Но вам или надо(надобно) быть зарегистрированным в легальном онлайн-казино и подтвердить собственную личность. В общем облике пошаговая инструкция для получения бездепозитного приза смотрится так: <a href=http://check2go.net/my-account/>1×slots зеркало рабочее на сегодня</a> Если идет об неповторимых услугах, имеет понадобиться регистрация в казино по ссылке с партнерского вебсайта. Первый возникающий вопрос, это, чего выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают свежих игроков. Последним легче начать игру на средства с дара за регистрацию. Им надо пополнять баланс и расходовать личные средства. Новички получают благотворительные спины либо средства на счёт. С их помощью знакомятся с игровым процессом, крутят слоты и делают ставки в рулетке. 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=http://tujuoutdoor.com/home.php?mod=space&uid=118431&do=profile&from=space>http://tujuoutdoor.com/home.php?mod=space&uid=118431&do=profile&from=space</a> Для получения бонуса надо(надобно) пригласить в забаву нового клиента. Казино начислит пригласившему фиксированный процент от взносов приглашённого повторяющий бонуса: почаще всего его размер не превышает 10%. Срок действия приза правило не превышает месяца: пригласивший получает приз от проигранных ставок приглашённого в первый луна забавы.
1×slots сайт
Мы советуем не отрицаться от сходственных услуг известных казино. Выделите количество минут на регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сейчас удача будет на вашей стороне! Перед активацией главно внимательно выучить условия акции. Чем ниже вейджер, что, этим больше потенциальная выгода игрока. Имеют велечину кроме лимиты ставок при отыгрыше и сроки, в течение коих возможно воспользоваться предложением. Если бездеп охватывает ограниченный перечень игр, рекомендуется узнать наибольшие коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только в случае, случае оператор не установил строгие лимитирования на наивысшую сумму ставки.Эффективность бездепов в качестве маркетингового прибора оценили почти операторы. Малоизвестные площадки употребляют такие акции, дабы живо набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны неизменных гостей. Не все сайты, дающие презенты без депо, рекомендованы к забаве. За симпатичным промоописанием имеют скрываться неосуществимые обстоятельства отыгрыша и подводные камни. <a href=https://rubcrumb.ru/user/JamesFok/>https://rubcrumb.ru/user/JamesFok/</a> казино 1×slots Бездепозитные бонусы, как теснее понятно, считаются уникальной возможностью приступать к игровому процессу полностью бескорыстно, другими выступать в онлайн казино бесплатно и на место средства незамедлительно после регистрации аккаунта. Автоматы с этим депо имеют стать прекрасной вероятностью сыграть для почитателей пыла с определенными лимитированиями в денег.
<b>Смотреть еще похожие новости:</b>
<a href=http://portal.westcoastbible.org/discussion/viewtopic.php?f=19&t=1924292>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a>
<a href=http://maddog-server.org/forum/showthread.php?tid=53254>рабочее зеркало 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Классическая разновидность приза за творенье аккаунта. Его превосходство заключается что, собственно заказчик может самостоятельно подбирать аппараты и делать ставки в них. Иногда перечень игровых автоматов ограничен оператором, но все одинаково это превосходнее, чем один-единственный дешевый слот, как когда с использованием фриспинов.
#7160 luckyduckCasinohttps://play.luckyduck-casino-apk.ru
<a href=https://play.luckyduck-casino-apk.ru>play.luckyduck-casino-apk.ru</a>
Установить apk файл казино lucky duck – играй сейчас! <a href=https://play.luckyduck-casino-apk.ru>https://www.play.luckyduck-casino-apk.ru</a>
#7161 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7162 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
Для верификации аккаунта нужно предоставить специалистам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, а фотку банковской карты или экрана страницы электрического кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности. <a href=http://filmkachat.ru/>1хслотс регистрация в 1×slots casino</a> Выбирайте наихорошие бесплатные бонусы счет обзоров на Casinoz – и пусть для сопутствует удача при отыгрыше бонусных кредитов! <a href=https://groups.google.com/u/2/g/shopavto>https://groups.google.com/u/2/g/shopavto</a> Приветственный приз без депо ? презент за регистрацию. Выдается деньгами, фриспинами либо баллами. В заключительном случае бонусные баллы используются для участия в турнирах либо размена на реальные деньги.Размер ставки для игры по бездепозитному бонусу (окончательно же, когда, когда он представлен вид бонусных валютных средств) часто ниже, чем при забаве на депо. Ограничение будет действовать до этапа отыгрыша приза. 1×slots официальный сайт зеркало <a href=http://camillacastro.us/forums/profile.php?id=178304>http://camillacastro.us/forums/profile.php?id=178304</a> Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, например как Вам придется ее доказать дальнейшем при выводе средств.
1хслотс рабочее зеркало на сегодня
1хслотс официальный сайт зеркало <a href=http://fitboss.ru/user/CharlesRat/>http://fitboss.ru/user/CharlesRat/</a> 1×slots актуальное зеркало
1×slots актуальное зеркало
Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации презента необходимо доказать электрическую почту и привязать телефонный;В количестве случаев безвозмездные бонусы начисляются в кредитах, которые невозможно незамедлительно исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти требования принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д. ). О нем читайте ниже. Возможность поиграть дополнительное соревнование (а времени и некоторое) абсолютно даром, а выигрыш, же, поступает на счёт игрока.Только выполнив все условия отыгрыша и дождавшись окончания ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить средства деньги. <a href=https://cursos.fixtech.com.br/forum/member.php?action=profile&uid=14683>https://cursos.fixtech.com.br/forum/member.php?action=profile&uid=14683</a> Вейджер (или вагер) ? это наименьшая сумма ставок, коию необходимо устроить для вывода денежного приза. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение. 1×slots на любой вкус как пройти регистрацию Создание аккаунта. На сайте казино необходимо открыть регистрационную форму и заполнить порожние поля собственными данными. Иногда на данном шаге потребуется показать лишь адрес электрической почты и пароль, но чаще хотелось наполнить анкету индивидуальной информацией (ФИО, дата рождения, место проживания и т.д.). Нужно свидетельствовать только настоящие данные, поскольку впоследствие они будут проверены.Казино выделяет вероятность заработать и вывести реальные средства на бездепозитных призах. Обычно, это незначительная сумма, коию казино возможность для разрешить презентовать игроку.
1×slots зеркало
Как лишь вы отыграли вейджер и средства с бонусного баланса перешли вам на настоящий счет, Вы неустрашимо можете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать минимальный депо к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депозитом).Фриспины – безвозмездные вращения с фиксированной ставкой, которые возможно использовать в конкретных игровых автоматах. Наличие у игрока второго аккаунта. Запрещено делать несколько профилей для многократного получения бездепов.Для верификации аккаунта нужно предоставить спецам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, а фотку банковской карты либо скриншот страницы электронного кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для доказательства личности. Иногда для получения призов нужно связаться с адептами службы. Удобнее всего с ними разговаривать в онлайн-сате, желая от достаточно запроса по электрической почте.Подобные призы без депозита предоставляются на более прибыльных условиях. Зачастую они крупнее, а обстоятельства отыгрыша наименее строгие. 1×slots промокод при регистрации 2025 <a href=https://www.ifran.ru/cyber>https://www.ifran.ru/cyber</a> Допустим, за регистрацию вы возымели бездеп в размере 2 000 рублей с вейджером х30. В этом случае светит сделать ставок, на общую необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать реальные средства. Однако не запамятовывайте, что с каждого презента выйдет исключить определённую сумму (почаще всего не более $200).
1 хслот регистрация в 1×slots casino
Не стоит сразу же открещиваться от приветственных презентов в подобных казино. Администрация готова начислить деньги либо фриспины, хотя предварительно сотрудники должны убедиться, что вы не мошенник. Дело что, нет, собственно развелось очень много охотников за бонусами. Они научились врать систему и зарабатывать солидные суммы денег. Обычно показатель повыше, чем для бонусов на депо. Не удивляйтесь, если он несомненно даже х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных стран.При регистрации том, или ином интернет игральном заведении — вам дается один шанс испытывать собственную фортуну не внося средства монеты. Замечу собственно эту поощрительную предложение деют не все интернет игровые площадки, а только великодушная половина из них. Которые мы подготовили для Вас в нашем списке. <a href=https://series40.kiev.ua/user/OscarmoK/>https://series40.kiev.ua/user/OscarmoK/</a> Как лишь вы отыграли вейджер и свои с бонусного баланса перешли для на настоящий счет, Вы храбро можете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (устроить минимальный депозит к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, совместно, вкупе с депозитом).Для отыгрыша приза казино обязывает игрока сыграть на необходимую, в некоторое один превышающую сумму приобретенного бонуса — тут выгода компании явна. 1×slots официальный сайт зеркало Мы делаем акцент на ключевых положениях правил, рассказываем о территориальных лимитированиях и кратко информируем о иных промоакциях обсуждаемого казино.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.kfz-gringer.at/index.php/forum/in-neque-arcu-vulputate-vitae/72353–1×slots#72118>онлайн казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Перечисленные повыше основные свойства сочетают практически каждый приз и являются стандартными для бездепозитных бонусных начислений в казино. B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax
#7163 Charlesgunny
7k casino официальный сайт макао казино <a href=https://www.ossetia.tv/>какие казино</a> почему в казино нет окон 1×bet официальный xbet <a href=https://t.me/vchkogpu_ru>порно с Аделия Петросян (фигурное катание)</a> 1×slots casino 1×bet официальный сайт 1×bet xyz Хорова Наталья Александровна порно porno Виктория Баркова, легкоатлетка карты казино casino рабочее 7k casino
#7164 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
Следует подчеркнуть, что бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам либо с конкретным кодом. <a href=http://filmkachat.ru/>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a> Иногда в поощрения за регистрацию все выдаваться билеты для роли в турнирах. Условия их проведения очень отличаются, поэтому мы советуем ознакомиться с любым предложением раздельно. <a href=https://menagerie.media/index.php?link1=read-blog&id=87720>https://menagerie.media/index.php?link1=read-blog&id=87720</a> В зависимости от интернет заведения любой из их возможность для предложить как бездепозитные средства, так и бездепозитные фриспины, которые последствии удачной регистрации рухнут для на ваш игровой баланс.Однако далеко не все ресурсы предлагают своим посетителям бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено поощрение на первый депо в объеме 100–200%. Это замечательная вероятность преумножить банкролл, увеличить время, проведённое за забавой и шансы сорвать большой куш. 1×slots регистрация то дальше необходимо пройти <a href=http://emsxl.com/home.php?mod=space&uid=138791>http://emsxl.com/home.php?mod=space&uid=138791</a> Принципиальным отличием бесплатных бонусов от призов на депозит считается отсутствие необходимости заносить средства на акк. Из-за этого их нередко называют бездепозитными (no deposit bonuses).Даже не выиграв солидную необходимую, игрок интересно проведет время, изнутри изучит работу площадки, воспримет геймплей автоматов. Все это без каких-либо финансовых рисков. Быть в курсе превосходнейших промоакций легкостью. Достаточно регулярно учить список свежих онлайн казино с выводом бонуса без депозита в данном разделе.
казино 1×slots
<a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=4786>1×slots бонус за регистрацию</a> 1хслотс официальный сайт зеркало Популярность интернет казино растёт и всё больше юзеров начинают проявлять азартными играми. Бездепозитные бонусы 2022 года, это уникальные презенты за регистрацию. С их поддержкой свежие игроки могут получить бесплатные вращения или деньги на баланс за 1 регистрацию. С в игорных заведений в онлайне, бездепозитные бонусы стали знаменитейшим способом привлечения игроков. Подобные акции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы расскажем. Наш сайт собрал наилучшие предложения из интернета на 2022 год. Воспользуйтесь хоть презентом и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить обстоятельства. <a href=https://www.0574snyw.com/space-uid-176556.html>https://www.0574snyw.com/space-uid-176556.html</a> Для казино, работающих интернет, бездепозитные призы необходимы для привлечения новых посетителей. Предложение сыграть на слотах без надобности внесения настоящих средств — работающий способ для повышения энтузиазма к компании. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит играть в казино, лишь теперь теснее на собственные средства.У любого игорного клубы различные вейджеровые обстоятельства. Чтобы вы гарантировано смогли выполнить их, мы дадим несколько советов. Если система начислила небольшую необходимую, надо делать великие ставки – остановитесь на 10–30 центах. Как лишь сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В противном случае чем приглядеться к другому автомату. 1×slots мобильная версия войти казино
1х слотс зеркало регистрация в 1×slots casino
Основное управляло получения бездепа ? создаваемый аккаунт обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов строго воспрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депо необходимо блюсти простую очередность деяний. <a href=https://elearnportal.science/wiki/User:SterlingX87>https://elearnportal.science/wiki/User:SterlingX87</a> 1хслотс рабочее зеркало
1× slots сайт
Для ревизии применяются сканы паспортов, водительских прав, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если юзер обнаружен в попытке ввести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их владелец попадает в черный список. При игре на лицензионной площадке надо бояться указывать достоверную персональную информацию (шифрование ликвидирует утечку персональных данных). Подтверждение регистрации. Казино просят привязки профиля к электрическому адресу и номеру телефонного. Для этого на e-mail отправляется письмо ссылаясь, а на телефон ? текстовое известие с кодом. Сразу последствии активации промокода возможно пользоваться даром. Как уже упоминалось, призы бывают трёх видов – фриспины, кредиты и фриплей-бонусы.Классическая разновидность бонуса за творенье аккаунта. Его преимущество содержится сомнений, что клиент может других выбирать аппараты и делать ставки в них. Иногда список игровых автоматов ограничен оператором, хотя все также это лучше, чем единственный дешевый разъем, как когда с внедрением фриспинов. 1×slots официальный сайт скачать на айфон <a href=https://forum.wapinet.ru/profile.php?id=8307>https://forum.wapinet.ru/profile.php?id=8307</a>
1×slot зеркало
Зачастую бездепозитные призы казино для игры предлагаются различными заведениями азартных игр в качестве маркетинговых акций или в целях вербования к для новых игроков. Для бездепозитных бонусов в казино 2022 игроку надо пополнять счет до момента вывода хотимых средств. Можно ли наваривать на бездепозитных бонусах? Это не работа, здесь как повезет, в в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, это можно именовать везением, и дополнительной добавкой к вашему бюджету. <a href=http://gogotire.co.kr/bbs/board.php?bo_table=free&wr_id=1069888>http://gogotire.co.kr/bbs/board.php?bo_table=free&wr_id=1069888</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.bandariklan.com/showthread.php?tid=176825&pid=856466#pid856466>1×slots регистрацию более популярный вариант это</a>
<a href=https://www.mshowto.org/forum/members/jamespauri.html>1хслотс зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бонусы без депозита при регистрации считаются наиболее красивыми как для опытнейших игроков, например для и начинающих. Получив такое вознаграждение, заказчик имеет играть на настоящие деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, еще обстоятельства их активации и выигрыша.
#7165 Casinoluckyduckhttps://casino.luckyduck-casino-apk.ru
<a href=http://hyprn.com.xx3.kz/go.php?url=https://casino.luckyduck-casino-apk.ru/>https://casino.luckyduck-casino-apk.ru/</a> <a href=https://egeszsecasino.luckyduck-casino-apk.ru/ram.109.hu/system/reloader.php?nid=15150&l=https://casino.luckyduck-casino-apk.ru/-news-az.com/>https://casino.luckyduck-casino-apk.ru/</a> <a href=https://larsenfootbal.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=https://casino.luckyduck-casino-apk.ru/>https://casino.luckyduck-casino-apk.ru/</a> <a href=https://www.kenyamoja.com/click.php?title=Nation-Government,%20electoral%20bosses%20strike%20deal%20on%20exit%20package&url=https://casino.luckyduck-casino-apk.ru/>https://casino.luckyduck-casino-apk.ru/</a> <a href=https://maps.t.me/s/worldcasinonet.om/url?sa=t&source=web&rct=j&url=https://casino.luckyduck-casino-apk.ru/>https://casino.luckyduck-casino-apk.ru/</a> <a href=https://thediplomat.com/ads/books/ad.php?i=4&r=https://casino.luckyduck-casino-apk.ru/>https://casino.luckyduck-casino-apk.ru/</a> <a href=https://businessviews.com.ua/ru/redirect/goto//https://casino.luckyduck-casino-apk.ru/>https://casino.luckyduck-casino-apk.ru/</a> <a href=http://www.jdoqocy.com/click-1610118–10299016?url=https://casino.luckyduck-casino-apk.ru/>https://casino.luckyduck-casino-apk.ru/</a> <a href=http://www.puutiaistieto.fi/go.php?u=https://casino.luckyduck-casino-apk.ru/>https://casino.luckyduck-casino-apk.ru/</a> <a href=http://www.educacional.com.br/recursos/redirect.asp?url=https://casino.luckyduck-casino-apk.ru/>https://casino.luckyduck-casino-apk.ru/</a> <a href=http://www.shemalemovies.us/cgi-bin/at3/out.cgi?id=39&tag=top30&trade=https://casino.luckyduck-casino-apk.ru/>https://casino.luckyduck-casino-apk.ru/</a> <a href=http://znanija.com.xx3.kz/go.php?url=https://casino.luckyduck-casino-apk.ru/>https://casino.luckyduck-casino-apk.ru/</a> <a href=https://maverickdrivers.com/?URL=https://casino.luckyduck-casino-apk.ru/>https://casino.luckyduck-casino-apk.ru/</a> <a href=http://stcord.no-ip.org.xx3.kz/go.php?url=https://casino.luckyduck-casino-apk.ru/>https://casino.luckyduck-casino-apk.ru/</a> <a href=http://wlotki.pl/redirect.asp?typ=link&url=https://casino.luckyduck-casino-apk.ru/>https://casino.luckyduck-casino-apk.ru/</a>
Install client casino luckyduck – win now! <a href=http://2776cddbc000ffcc2a1.tracker.adotmob.com/pixel/visite?d=5000&r=http%3A//download-casino.luckyduck-casino-apk.ru/-fr.com >https://casino.luckyduck-casino-apk.ru/</a> <a href=http://scubadiversnetwork.com/cgi-bin/ad_link.cgi?https://casino.luckyduck-casino-apk.ru/>https://casino.luckyduck-casino-apk.ru/</a> <a href=http://rks.kr.ua/cgi-bin/click.cgi?url=https://casino.luckyduck-casino-apk.ru/>https://casino.luckyduck-casino-apk.ru/</a> <a href=http://techlabs.by/redirect.php?url=https://casino.luckyduck-casino-apk.ru/>https://casino.luckyduck-casino-apk.ru/</a> <a href=http://www.grancanariamodacalida.es/ver_video_popup.php?video=http%3A%2F%2Fdownload-casino.luckyduck-casino-apk.ru/-fr.com >https://casino.luckyduck-casino-apk.ru/</a> <a href=http://boulevardbarandgrill.com/wp-content/themes/eatery/nav.php?-Menu-=https://casino.luckyduck-casino-apk.ru/>https://casino.luckyduck-casino-apk.ru/</a> <a href=https://phuketcity.info/default.asp?content=https://casino.luckyduck-casino-apk.ru/>https://casino.luckyduck-casino-apk.ru/</a> <a href=http://igm-game.com/redir.php?url=https://casino.luckyduck-casino-apk.ru/>https://casino.luckyduck-casino-apk.ru/</a> <a href=http://observatori.liquidmaps.org/users_fichas_items/index/1786/4268?return=http%3A%2F%2Fdownload-casino.luckyduck-casino-apk.ru/-fr.com >https://casino.luckyduck-casino-apk.ru/</a> <a href=https://login.proxy.lib.uiowa.edu/login?qurl=https://casino.luckyduck-casino-apk.ru/>https://casino.luckyduck-casino-apk.ru/</a> <a href=https://center-biz.ru/go.php?url=https://casino.luckyduck-casino-apk.ru/>https://casino.luckyduck-casino-apk.ru/</a> <a href=http://c0016.cloudnet.cloud/redir/?redir=https://casino.luckyduck-casino-apk.ru/>https://casino.luckyduck-casino-apk.ru/</a> <a href=http://iran.alef.ir/redirect.html?u=https%3A%2F%2Fdownload-casino.luckyduck-casino-apk.ru/-fr.com >https://casino.luckyduck-casino-apk.ru/</a> <a href=http://sintesi.provincia.mantova.it/portale/LinkClick.aspx?link=https://casino.luckyduck-casino-apk.ru/>https://casino.luckyduck-casino-apk.ru/</a> <a href=http://image.google.cv/url?q=https://casino.luckyduck-casino-apk.ru/>https://casino.luckyduck-casino-apk.ru/</a>
#7166 Charlesgunny
1×bet зеркало xbet xyz porno Нина Пирогова, хоккеистка <a href=https://rucriminal.info/>1×bet 1хбет</a> porno Светлана Ходченкова Попова Анна Юрьевна порно <a href=https://www.ossetia.tv/>порно с Евгения Медведева</a> casino riobet Манилова Алла Юрьевна порно ев казино casino регистрации гама казино порно с Афонина Марина Игоревна букмекерская контора без
#7167 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7168 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт, скачать
Похожим образом трудится 3-ий способ доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения посетителя либо из-за с получения им VIP-статуса. Подарок предоставляется последствии воззвания в поддержку и ревизии.Не советуем сломя голову браться за всевозможные предложения получения средств без вложений. Вполне вероятно, что бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на первый взгляд. Альтернативой считается казино бонус за депозит. Мы предлагаем вам пару советов, спасибо которым у каждого игрока будет возможность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств: <a href=http://filmkachat.ru/>1×slos регистрация в 1×slots casino</a> <a href=https://waappitalk.com/shopavto>https://waappitalk.com/shopavto</a> В любом казино с бездепозитным призом предусмотрены вейджеровые обстоятельства. Это единственный «подводный камень», который стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, нужно сделать определённое количество ставок. Чем круче приз, что, этим сложнее выполнить обстоятельства, и наоборот.В наше время очень просто получить бонус за регистрацию в казино. Практически любой игорный дом с радостью начисляет средства либо бесплатные вращения. Многие гэмблеры используют этим и не стыдятся регистрироваться в любом клубе с прибыльными условиями. Кстати, это отличная возможность выработать победную тактику и сорвать джекпот. 1хлот регистрация в 1×slots casino <a href=http://okprint.kz/user/Porsedropml/>http://okprint.kz/user/Porsedropml/</a>
1×slots бонус за регистрацию
Не желайте поиграть в азартные игры, не рискуя своими деньгами, хотя получая в все выплаты? Подобную вероятность предоставляют все превосходнейшие порталы с азартными веселиями. В их числе много честных и надежных интернет-казино на русском языке. Они привлекают свежих юзеров разными поощрительными событиями, включая бездепозитные, либо безвозмездные призы. 1х слот 1хслотс регистрация перейти на 1×slots Список так нарекаемых «разрешенных территорий» прилагается к правилам бонусной программки игорного портала. Обязательно проверьте, распространяются ли на вас подобные наказания.Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную процедуру активации бонуса без депо. Внимательно прочтите до конца. Многие новенькие делают оплошности на этапе регистрации и потому не получить подарок. <a href=https://www.femina.cz/forums/topic/%d0%b3%d0%bb%d0%b0%d0%b2%d0%bd%d0%b0%d1%8f-%d0%b4%d0%be%d1%80%d0%be%d0%b3%d0%b0-%d0%b0%d0%b2%d1%82%d0%be%d1%88%d0%ba%d0%be%d0%bb%d0%b0-%d0%b2%d0%bb%d0%b0%d0%b4%d0%b8%d0%b2%d0%be%d1%81%d1%82%d0%be/>https://www.femina.cz/forums/topic/%d0%b3%d0%bb%d0%b0%d0%b2%d0%bd%d0%b0%d1%8f-%d0%b4%d0%be%d1%80%d0%be%d0%b3%d0%b0-%d0%b0%d0%b2%d1%82%d0%be%d1%88%d0%ba%d0%be%d0%bb%d0%b0-%d0%b2%d0%bb%d0%b0%d0%b4%d0%b8%d0%b2%d0%be%d1%81%d1%82%d0%be/</a> Фриспины начисляются по определенной ставке. После их активации игроку необходимо запустить разъем и увериться, что в нем показываются безвозмездные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода после отыгрыша ориентируется оператором и изредка превышает 5 000 рублей. 1×slots casino регистрация 1×slotscasin online Иногда виде поощрения за регистрацию шансы выдаваться билеты для роли в турнирах. Условия их проведения очень выделяются, потому мы советуем ознакомиться с каждым предложением отдельно.Бонус в казино без депозита содержит различные варианты: это может быть приветственный приз, акции в честь каких-то праздников или весомых дат, приз за вербование новых игроков, лояльность и получение VIP-статуса.
1×slots официальный зеркало рабочее
Практически все интернет казино с бездепозитным бонусом за регистрацию предусматривает программу преданности — систему одобрения постоянных посетителей, кот-ая состоит из большого значений. При достижении игроком одного значения на его счёт поступает приз. Чем повыше уровень — тем щедрее бонус. <a href=http://forum.evony.com/member.php?1264126-Walterhiexy>http://forum.evony.com/member.php?1264126-Walterhiexy</a> Когда речь о денежных бонусах, казино постоянно устанавливают условия вейджера, которые необходимо выполнить, чтобы исключить выигрыш.У каждой игры свои требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система зачтет любую ставку. В рулетке и покере устроить это гораздо сложнее. Именно поэтому например принципиально пристально читать условия получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в любой ирге, то новенькие попросту «спустят бонус на ветер». 1×slots казино зеркало
1 xslots рабочее зеркало
Максимальный объем ставки, кот-ый нельзя превышать пока бонус не несомненно полностью отыгран. В случае нарушения сего верховодила, бонус и выигрыш с него станут аннулированы.Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. <a href=https://demo.comuni-italiani.it/forum/memberlist.php?mode=viewprofile&u=18269>казино 1×slots</a> Принципиальным различием даровых призов от бонусов на депозит считается неименье надобности вносить средства на акк. Из-за сего их часто называют бездепозитными (not the slightest deposit bonuses). 1хслот зеркало <a href=http://rednline.az/index.php?subaction=userinfo&user=yummywater75>http://rednline.az/index.php?subaction=userinfo&user=yummywater75</a>
1×slots зеркало подтвердит вашу регистрацию если говорить
Хотя благотворительные бонусы начисляются без депо, не исключено, что вас придется вносить деньги. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты лишь в такого, как свежий заказчик первый пополнит игровой счет. <a href=http://lsdsng.com/user/545135>http://lsdsng.com/user/545135</a> 1хслотс рабочее зеркало Каждый из бездепозитных призов без пополнения 2022 содержит собственный конкретный вейджер для отыгрыша, например же в любом казино он уточняется индивидуально — где то он х55 а кое-где х30, повторюсь везде по разному!Максимальная ставка ? устанавливается в валюте счета и ограничивает размер ставки за один спин. В случае ее превышения приз возможность быть аннулирован. Также в правилах имеет содержаться запрет на размещение ставок конкретного облика, например, по равным шансам в рулетке (словами, на чет или нечет, красноватое либо темное и т.д.).
<b>Смотреть еще похожие новости:</b>
<a href=https://www.fromrus.su/index.php?/topic/21594–1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%81%D0%B0%D0%B9%D1%82%D0%B0/>1×slots зеркало сайта</a>
<a href=https://portugal-campings.com/pt/account/>1×slots casino зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Самые пользующиеся методы вывода средств ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электрическим платежным системам типа Neteller и Skrill, а пользуются криптовалютными кошельками. Вывод выигрышей возможность осуществляться мгновенно либо занимать от нескольких часов до нескольких суток. Варианты выигрыша в от Вашей успеха и критерий игорного портала. Выше мы заявили, что кое-какие бездепозитные бонусы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются и те, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность современных игр на деньги, возможно выиграть невозможные суммы. Сегодняшние игровые автоматы либо видео слоты, как их именуют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые множат ставку от х100.000.
#7169 Charlesgunny
Хорова Наталья Александровна порно букмекерская контора фонбет официальный сайт <a href=https://vestnik-jurnal.com/>Скворцова Вероника Игоревна порно</a> бесплатное казино сайт pin up casino <a href=https://rumafia.news/>porno Игорь Акинфеев (футбол)</a> bitz casino Семёнова Татьяна Владимировна порно Хорова Наталья Александровна порно ramenbet casino 1×bet зеркало рабочее Крючкова Полина Викторовна порно Черкесова Бэлла Мухарбиевна порно
#7170 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7171 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7172 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало
Для отыгрыша бонуса казино обязует игрока сыграть на необходимую, в количество раз превышающую необходимую полученного бонуса — здесь выгода компании явна. <a href=http://filmkachat.ru/>1×slots casino зеркало рабочее</a> Мы собрали и выпустили перечень наилучших бездепозитных казино с бонусами за регистрацию, которые гарантируют великодушные выигрыши и моментальные выплаты. <a href=https://wallhaven.cc/user/CGI>https://wallhaven.cc/user/CGI</a> Способы получения бездепа различаются зависимо облика бонуса, который понравился игроку. Но вас в любом случае надо(надобно) быть зарегистрированным в законном онлайн-казино и доказать собственную лицо. В общем облике пошаговая инструкция для получения бездепозитного приза смотрится например: 1×slots официальный сайт зеркало <a href=https://www.mavsboard.com/member.php?action=profile&uid=2375>https://www.mavsboard.com/member.php?action=profile&uid=2375</a> Бoльшинcтвo азартных заведений выдвигают примерно одинаковые условия и притязания, коие необходимо выполнить, дабы получить бездепозитный приз за регистрацию. Все их возможно соединить в раз перечень:Некоторые веб-сайты, до чем обмануть регистрацию игроков, предлагают ответить на некоторое базисных вопросов. Цель проведения подобной викторины – выявить случайных людей, коие не имеют представления о покере, и не разрешить получения ими призов. Если гость уже играл в казино, то ответить на полтора десятка несложных вопросов будет нетрудно. Очень нередко, ответы возможно найти на официальных сайтах этих учреждений.
казино 1×slots
Список так называемых «не территорий» прилагается к правилам бонусной программы игорного портала. Обязательно проверьте, распространяются ли на вас подобные санкции. 1×slots зеркало на сегодня Шаг 4. Активация. Внимательно выучите обстоятельства, информацию по лимитированиям и сроке деянья бонусного предложения. Разобравшись с правилами, возможно активировать приз в личном офисе (от ? с внедрением промокода) либо по запросу в саппорт.Зарегистрируйтесь. Для регистрации чаще всего достаточно ввести свой номер телефона и почтовый адресок, после чего ввести полученный код из СМС. Возможно, потребуется указать промокод. В правилах акции несомненно написано, где его бы включать. Иногда это бы создавать при регистрации, время — уже после сотворения собственного кабинета, на отдельной страничке. <a href=https://mtlpages.com/users/renaldonus>https://mtlpages.com/users/renaldonus</a> 1хслот официальный сайт зеркало Принципиальным отличием бесплатных бонусов от бонусов на депозит является отсутствие необходимости вносить деньги на аккаунт. Из-за сего их часто нарекают бездепозитными (no down payment bonuses).
1×slots бездепозитный бонус за регистрацию
Выиграть настоящие средства в казино не пополняя счет – сложно, но вполне. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными призами и начните играть на бонусные свои. По статистике в 10-ти заведений можно заработать небольшую сумму денег за счет бонусных средств. <a href=https://flaxeco.com/user/Ralphenato/>https://flaxeco.com/user/Ralphenato/</a> Если вы избираете проверенное лицензионное онлайн казино и сделайте все условия получения бездепозитного бонуса, проблем с получением презента у Вас не возникнет.Составленный знатоками Casino.ru список онлайн-казино с бездепозитным призом дозволяет игрокам сопоставить спецпредложения разных операторов. 1×slots регистрация 1×slots review live Минимального оборота. Этот лимит устанавливается вейджером — же игрок не сыграет на установленную необходимую, вывод средств будет недосегаем.
1×slots регистрацию процедура займет всего лишь
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=6143>сайт 1× slots casino</a> Такой бесплатный эквивалент средств зачисляется на профиль юзера после воплощения притязаний и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений вероятен только последствии осуществления вейджеровых критерий.Внесение депо – Будьте готовы восполнить счет после отыгрыша бонуса. Это стандартное требование правил для данного на промо-акций. Лучше заранее уточнить, какую необходимую нужно будет вносить на счет. Как правило, речь идет о наименьшем депозите, хотя вы должны быть убеждены, собственно он для по карману. 1×slots официальный сайт зеркало рабочее <a href=https://visualchemy.gallery/forum/profile.php?id=4125666>https://visualchemy.gallery/forum/profile.php?id=4125666</a> Прочитайте верховодила бонусной программки, в желаете участвовать. Да, мы безотступно рекомендуем устроить это до регистрации.Также существуют онлайн-платформы азартных игр, коие используют раздачу бездепозитных призов в особые даты (как для казино, например и для игрока). Помимо сего, действующие игроки также имеют вероятность получить похожие призы за свою деятельность (например, за повышения значения или за похожие заслуги).
1×slots рабочее зеркало
Помните, собственно в некоторых играх сумма ставки идет в зачет вейджера лишь отчасти. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки числятся как отыгранные деньги, момент как в слотах идет в зачет все one hundred percent суммы.Бездепозитные бонусы казино это финансовая компенсация, предлагаемая юзерам на дармовой основе и вероятность выступать в интернет казино бесплатно. Если сопоставлять их с поощрениями за лепта, каких свои выдаются лишь впоследствии первоначального пополнения счета, то бездепозитные вознаграждения получаются даром. То есть, играющий получает возможность создавать ставки на теснее место финансы, коие выдаст заведение, выполняя, этом, обычные деяния, дабы их извлечь (тут идет о регистрация, удостоверении личности с использованием номера аппарата, оформления заказы и т.д. ). <a href=http://www.xn–oi2b40g9×gnse83w.com/bbs/board.php?bo_table=free&wr_id=91683>http://www.xn–oi2b40g9×gnse83w.com/bbs/board.php?bo_table=free&wr_id=91683</a> 1×slots быструю регистрацию а также мгновенное
<b>Смотреть еще похожие новости:</b>
<a href=https://www.donchillin.com/space-uid-382497.html>1× slots casino зеркало</a>
<a href=https://www.donchillin.com/space-uid-382497.html>1×slot зеркало рабочее регистрации на телефон придет</a>
<a href=https://russiancomputerservice.ru/user/JosephCer/>1×slots регистрацию процедура займет всего лишь</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подарки на праздничные ? приуроченные к торжественным датам, требующие символического отыгрыша или начисляются без это. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду.
#7173 Charlesgunny
top casino казино вход <a href=https://strelochnik.com/>porno Юлия Канакина</a> казино порно с Юлия Ефимова, пловчиха <a href=https://m.repost.news/>casino 7k сегодня</a> porno Ангелина Гончаренко, хоккеистка Елизавета Боярская 7k casino сайт casino online зеркало casino зеркало сегодня рабочее ап казино порно с Илюшникова Татьяна Александровна
#7174 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7175 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации презента необходимо доказать электронную почту и привязать телефон; <a href=http://filmkachat.ru/>1×slots регистрация 1×slots casino c2d ru</a> Чтоб получить большой выигрыш, подбирайте игровые автоматы с максимальным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша. <a href=https://band.us/band/96885593/post/1>https://band.us/band/96885593/post/1</a> 1 x slots casino <a href=http://dns2.shadr.ru/user/ArnoldKneew/>http://dns2.shadr.ru/user/ArnoldKneew/</a> Иногда виде бездепа, казино презентует наименьший приз (до 50 рублей), из-за которого надо заморачиваться.Ниже указан актуальный список законных казино в Беларуси с бонусами на 1-ый депо. Вы можете попасть на официальный сайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус.
1×slots официальный сайт зеркало рабочее
Пoдтвepдить личнocть посетителя. Для удачного вывода средств, необходимо подтвердить лицо посетителя. Нa этaпe вepификaции пpoфиля, сотрудники службы безопасности должны убедиться, что у игрока всего лишь раз аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не может исключить собственный выигрыш, случае у него будет несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы. 1×slots официальный сайт зеркало <a href=http://test-sida.noads.biz/home.php?mod=space&uid=88503>http://test-sida.noads.biz/home.php?mod=space&uid=88503</a> 1×slots casino зеркало Маркетинговая деятеля всех игорных интернет-клубов должна носить различный нрав. И случае вознаграждения на депо работают чтобы, чтобы, дабы стимулировать заносить депозиты и поощрять уже быть пользователей, то бездепозитный бонус в казино или бонус за регистрацию в казино, этого всего, рассчитан на расширение базы покупателей.Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала прыткие выводы. Фишка выплат что, что довольно выбрать платёжный инструмент и показать сумму. В большинстве случаев средства зачисляются на электронные кошельки в течение 15 мин., а на банковские карты – 1–3 трудящихся денька.
1×slots зеркало этих способов предполагает регистрацию
Каждая игровая перрон выделяется критериями по получению и отыгрышу бездепов. В правилах детально расписаны временные рамки, за которые надо(надобно) прокрутить вейджер. Также не забывайте про максимальный размер ставки и наивысшую сумму выплаты. С иной стороны, чтобы получить бездепозитные бонусы казино, достаточно израсходовать менее 1 минутки.Таким образом онлайн казино получает вероятного игрока. Возможно в либо настоящем он захочет сыграть на свои средства. Так трудятся бездепозитные призы в интернет казино. Здесь хорошо подходит выражение, бесплатные сыр бывает лишь в мышеловке. Начинающие игроки могут не осознавать опасность азарта. Однако с осознания делается больше. Это тема для отдельного обсуждения. Зачастую бездепозитные призы казино для забавы предлагаются различными заведениями азартных игр виде маркетинговых акций или в целях вербования к себе новых игроков. Для бездепозитных призов в казино 2022 игроку надо пополнять счет до момента вывода хотимых средств.Так же стоит выделить то, собственно в каждом онлайн казино установлен собственный наибольший кешаут на бездепозитный приз. Как верховодило кешаут — это предельная сумма денег, кот-ая дешевая для вывода с бездепозитного бонуса. <a href=http://softnavi.ru/bitrix/redirect.php?goto=http://igropad.net/bitrix/redirect.php?goto=http://baitekmachinery.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/tx1VKeV_k2F>http://softnavi.ru/bitrix/redirect.php?goto=http://igropad.net/bitrix/redirect.php?goto=http://baitekmachinery.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/tx1VKeV_k2F</a> Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и более. Когда игроку полагается количество фриспинов, администрация может бить3 их начисление на некоторое дней. Бесплатные вращения предоставляются для определенного слота, кот-ый указывается в правилах промоакции.Для вывода средств бонус надо(надобно) несомненно отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариантами отыгрыша бездепозитного бонуса до его получения, чтобы избежать конфликтных ситуаций. 1×slots регистрация Чтобы бездеп не был начислен на Ваш аккаунт, Вам надо активировать бонусный код. Если одобрение от казино было добавлено на Ваш аккаунт механически, а Вы не расчитываете его использовать, обратитесь в службу поддержки с просьбой отменить бездепозитный приз.В разделе с призами активировать собственный подарок. Найти игры, для которых учтено поощрение и применять бонус по предназначению.
1×slots зеркало регистрация в 1×slots casino
Как и промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такового предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых посетителей и дозволяет им составить впечатление о функционале, не рискуя значительными совокупностями. <a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=56657>casino 1×slot</a> Еще одно условие касается объемов ставки. Операторы устанавливают максимальную необходимую, которую игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, выбранной в Личном кабинете. При превышении лимита есть риск лишиться бонуса. Существующие ограничения относятся и к конкретным обликам ставок. Например, играя в рулетку, заказчик возможность столкнуться с запретом назначать фишки на шансы.В разделе с бонусами активировать собственный презент. Найти игры, для коих предусмотрено поощрение и применять приз по предназначению. 1×slots зеркало регистрацию более популярный вариант это <a href=http://kvitka.ukrbb.net/viewtopic.php?f=58&t=24505&p=44069#p44069>http://kvitka.ukrbb.net/viewtopic.php?f=58&t=24505&p=44069#p44069</a>
1×слотс казино
Для казино, работающих интернет, бездепозитные бонусы нужны для вербования новых клиентов. Предложение поиграть на слотах без надобности внесения реальных денег — работающий способ для повышения интереса к фирмы. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит играть в казино, только теперь уже на собственные деньги.Однако далековато не все ресурсы предлагают своим клиентам бездепозитные призы за регистрацию в казино. В большинстве случаев предусмотрено поощрение на первый депозит в объеме 100–200%. Это замечательная возможность преувеличить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш. Активация происходит за промокодов, коие вводятся в собственном офисе после регистрации. Среди спецпредложений в списке Casino.ru содержатся неповторимые промокоды, которые доступны только гостям портала. Другие методы начисления средств ? автоматическая активация незамедлительно в творения аккаунта и получение подарка по запросу в службу технической помощи. <a href=http://ru2cardclub.xyz/member.php?action=profile&uid=715>http://ru2cardclub.xyz/member.php?action=profile&uid=715</a> Фриспины начисляются по определенной ставке. После их активации игроку необходимо запустить разъем и убедиться, что в нем отображаются благотворительные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода последствии отыгрыша ориентируется оператором и изредка превышает 5 000 руб.Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша призов. Заведения практически устанавливают наивысшую ставку, возможную по условиям вейждера. 1×slots зеркало 1хслотс регистрация перейти на 1×slots Выбирайте лучшие безвозмездные бонусы счет обзоров на Casinoz – и пусть вам сопутствует счастье при отыгрыше бонусных кредитов!Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке представители онлайн-казино публикуют важную информацию о no down payment bonuses и других предложениях.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=137674>1 хслот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Составленный знатоками Casino.ru перечень онлайн-казино с бездепозитным бонусом разрешает игрокам сравнить спецпредложения различных операторов.
#7176 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7177 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7178 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее
Выбирая даровой бонус, пристально изучайте правила. Убедитесь, собственно вам можно на участие в акции. Уточните, в каких забавах возможно скорпулезно обстоятельства вейджера. При надобности задавайте вопросы адептам саппорта.Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депо имеет выделяться до 30 дней. <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> <a href=https://guides.co/g/how-3d-property-tours-are-revolutionizing-real-estate-mark/474208>https://guides.co/g/how-3d-property-tours-are-revolutionizing-real-estate-mark/474208</a> Размер ставки для забавы по бездепозитному призу (окончательно же, если, тогда,, когда он представлен повторяющий бонусных денежных средств) часто ниже, чем при забаве на депо. Ограничение будет действовать до этапа отыгрыша приза. 1хслотс регистрация в 1×slots casino <a href=https://forum.fne82.org/profile.php?id=519563>https://forum.fne82.org/profile.php?id=519563</a>
1×slots официальный зеркало рабочее
1×slot регистрация Если вы выбираете испытанное лицензионное интернет казино и сделайте все условия получения бездепозитного бонуса, трудностей с получением презента у Вас не возникнет. <a href=http://bizon15.ru/index.php?subaction=userinfo&user=gullibleoutfit8>http://bizon15.ru/index.php?subaction=userinfo&user=gullibleoutfit8</a> 1×slots актуальное зеркало
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Бездепозитные бонусы начисляются лишь один один. Не стоит раскрывать свежие аккаунты, чтобы получить их повторно. Служба защищенности казино обязательно выявит «левого» соучастника и перекроет. Если посетитель выполнит необходимые требования, отыграет свою ставку и решит вывести собственный выигрыш, то ему нужно учесть, что казино обязательно востребует дать ксерокопии личных документов, чтобы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные средства вывести не получится.Какие бонусы есть еще получить не бездепозитного приза за регистрацию в казино? По мимо бездепозитного бонуса, каждое интернет казино предлагает игрокам прибыльное предложение на 1-ый депозит, вы совершаете депозит, ваш депозит увеличивается в двое или и в 3, что, этим наиболее начать выступать можно с более крупной суммой, например же не забываем тему вейджер на бонусы. <a href=http://discuss.the-knowledge.org/memberlist.php?mode=viewprofile&u=46283>http://discuss.the-knowledge.org/memberlist.php?mode=viewprofile&u=46283</a> Такой безвозмездный эквивалент средств зачисляется на профиль юзера в воплощения притязаний и предназначаются они только для игрового процесса. Вывод таких вознаграждений вероятен только последствии осуществления вейджеровых условий. 1хслотс регистрация в 1×slots casino Так же стоит выделить то, собственно в каждом онлайн казино установлен собственный максимальный кешаут на бездепозитный бонус. Как верховодило кешаут — это максимальная сумма денег, которая дешевая для вывода с бездепозитного бонуса.Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, чтобы еще раз получить безвозмездный приз. Игорные заведения нетерпимы к бонус-хантерам, потому вас ожидает неизбежное санкция.
1×slots casino регистрация 1×slots review live
Срок активации и время на отыгрыш. Зачисление средств либо фриспинов случается при активации на требовательно ограниченного периода, схожие притязания предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать бонус количество дней или числе месяцов. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высочайшим вейджером.Изучить верховодила и обстоятельства получения бездепозитных бонусов казино, Вы сможете у нас на веб-сайте в разделе с призами либо на официальном веб-сайте выбранного Вами казино. Если не отыскать необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электронной почте. <a href=https://forum.graylite.com/viewtopic.php?p=308622#p308622>1×slots регистрация 1×slotscasino 56 online</a> Зарегистрироваться в казино по специальной ссылке либо с бонусным кодом. Подтвердить контактные данные (номер аппарата и электрическую почту). Для подтверждения номера телефона необходимо в личном профиле показать собственный номер и надавить кнопку „Подтвердить номер телефонного“, дальше Вы получите sms-сообщение с кодом, который необходимо ввести в подходящее фон. Для подтверждения электронной почты, перебежать по активной ссылке в письме от казино.Чаще всего, пользующиеся сервисы, такие как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно неотъемлемое верховодило. Финансовые средства выводятся лишь спустя что, эту платежную систему, которой успех для пополнения депозита. Если же игрок получил бездепозитный покерный приз, требуется пополнить счет на наименьшую сумму, которая составляет обычно десять $. 1×slots зеркало регистрация в 1×slots casino <a href=https://www.forum.ple4win.nl/user-287004.html>https://www.forum.ple4win.nl/user-287004.html</a>
1×slots зеркало рабочее
Сразу в активации промокода можно воспользоваться презентом. Как теснее упоминалось, призы случаются трёх обликов – фриспины, кредиты и фриплей-бонусы.Зачастую бездепозитные призы казино для забавы предлагаются разными заведениями азартных игр в качестве рекламных акций или в целях вербования к себе свежих игроков. Для бездепозитных бонусов в казино 2022 игроку не пополнять счет до момента вывода желанных средств. За вербование друга ? масштабах партнерской программы заказчик получает вознаграждение за вербование новых пользователей. <a href=http://xiaoping777.com/home.php?mod=space&uid=61779>http://xiaoping777.com/home.php?mod=space&uid=61779</a> 1×slots официальный зеркало рабочее
<b>Смотреть еще похожие новости:</b>
<a href=https://nztw.org/thread-363967–1–1.html>1×slots casino зеркало</a>
<a href=https://www.reisezielforum.de/viewtopic.php?t=392428>1хслот скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Иногда операторы настоятельно внесение малого депо перед выводом для верификации платежного прибора. В некоторых казино этот депо также светит отыграть. Если простыми текстами, бездепы – это определённая сумма денег либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать подарки. Но есть некоторые аспекты. Существуют игорные жилища, которые перед что, этим как начислить бонусы настоятельно привязать телефонный, дать копии документов.
#7179 Charlesgunnyhttp://filmkachat.ru
рабочее зеркало 1×slots
Самые свежие бездепозитные призы в казино за регистрацию 2022 года с выводом прибыли присутствуют на этой странице. Посетитель возможность расценить обстоятельства получения и начать выступать на деньги без внесения депо. При данном игроку принципиально разуметь, на каких условиях и какими способами появится исключить приобретенный выигрыш. Для сего необходимо расценить перечень присоединенных платежных систем. <a href=http://filmkachat.ru/>1×slots официальный сайт мобильная версия скачать</a> Но такие рамки не смущают и хайроллеров, потому коэффициенты на слотах разрешают рассчитывать на крупные выигрыши, ну неких автоматах разыгрывается передовой джекпот.После получения бонуса вывод средств для посетителя несомненно недоступен того, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или пара месяцов. Выводить деньги игрок может лишь в отыгрыша. <a href=https://www.nitrnd.com/blogs/195900/%D0%90%D0%B2%D1%82%D0%BE-%D0%B2%D0%B8%D0%BA%D1%83%D0%BF>https://www.nitrnd.com/blogs/195900/%D0%90%D0%B2%D1%82%D0%BE-%D0%B2%D0%B8%D0%BA%D1%83%D0%BF</a> Размер бонуса. В качестве бездепов обычно начисляют большие суммы, а когда речь о призах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то кое-какие казино все подарить игроку до 2000$.Объективные – размер приза, коэффициент и обстоятельства вейджера, необходимость внесения депо для вывода денег; x1 slots регистрация в 1×slots casino <a href=https://www.sandiegoreader.com/users/Glavdorogadv2708/>https://www.sandiegoreader.com/users/Glavdorogadv2708/</a>
1×slots официальный сайт зеркало
Фриспины без депозита либо вспомогательные средства помогут ближе познакомиться с игровой платформой и её функциями. За счёт даров возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за игры против живых крупье.Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие появляются у новичков. 1×slots официальный demo регистрация в 1×slots casino <a href=http://www.tr.besatime.com/index.php?subaction=userinfo&user=DoctorLazutaMa>http://www.tr.besatime.com/index.php?subaction=userinfo&user=DoctorLazutaMa</a> 1×slots официальный сайт скачать на айфон Наиболее знаменитые гонорары среди гэмблеров – бездепозитные призы казино. Это не умопомрачительно, ведь возможно получить безвозмездные вращения или виртуальные кредиты, и при этом не придётся пополнять счёт, рисковать собственными средствами. Удастся насладиться разнородными веселиями и даже выиграть крупную сумму, избегая серьёзного риска.
1×slots официальный регистрация
Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам воспрещено начислять призы клиентам, не имеющим денежных средств на счете. Мы предлагаем осмотреть животрепещущие призы онлайн-казино с лицензией, которые соблюдают законодательство РБ. <a href=http://yealinkkorea.net/bbs/board.php?bo_table=free&wr_id=337594>http://yealinkkorea.net/bbs/board.php?bo_table=free&wr_id=337594</a> 1×slots официальный сайт зеркало Для доказательства электронной почты, просто перейдите по интенсивной ссылке в послании, приобретенном от игрового заведения.
1хслот скачать
<a href=https://timepost.info/showthread.php?tid=55005>1×slots casino регистрация 1×slots review live</a> В лицензионных бездепозитных казино выступать в азартные забавы действительно безопасно. Наличие лицензии подтверждает что, этот прецедент, собственно клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP.Вознаграждения за получение VIP-статуса ? начисляются в программы преданности при достижении еще уровня либо выдаются персонально менеджерами службы поддержки. 1×slots регистрация 1×slots review live <a href=https://images.google.cv/url?q=https://doctorlazuta.by/>https://images.google.cv/url?q=https://doctorlazuta.by/</a> Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации подарка нужно подтвердить электронную почту и привязать аппарат;Бездепозитные бонусы – это исключительно занимательная и наиболее перспективная акция интернет-казино. Они даже лучше фри-спинов, поэтому собственно выплаты в даровых вращениях не гарантированы, как комбинации на барабанах игрового аппарата имеют не сложиться.
1хслотс официальный сайт зеркало
Казино дает возможность заработать и вывести настоящие средства на бездепозитных бонусах. Обычно, это малозначительная сумма, коию казино возможность себе позволить подарить игроку. Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депо имеет отличаться до 30 дней.Воспользоваться бездепом можно не во всех игровых автоматах: казино вдруг устанавливает лимитирование для посетителей. Конечно, это возможно счесть некоторым неудобством для игрока, но справедливости ради стоит отметить, что выбор автоматов всё одинаково остаётся достаточно великим. <a href=http://bbs.all4seiya.net/home.php?mod=space&uid=974551>http://bbs.all4seiya.net/home.php?mod=space&uid=974551</a> casino 1×slot Баланс игрока дополняется на подходящую сумму. К ней используется вейджер, указанный в правилах акции. Вывести выигрыш можно будет после такого, как пользователь устроит требуемый объем ставок из личных средств. В редчайших случаях бездеп трудится в формате Free Play. На счет пользователя зачисляется большая сумма, и предоставляется малый срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по окончании этого периода сумма на счету будет превосходить изначальную, то разницу возможно будет вывести либо применять для дальнейших ставок.На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не сможете активировать и получить бездепозитный бонус.
<b>Смотреть еще похожие новости:</b>
<a href=http://diablo2r.cn/home.php?mod=space&uid=30130>1×slots зеркало на сегодня</a>
<a href=https://www.sgomberisgombero.it/my-account-2/>1×slot рабочее зеркало</a>
<a href=http://timelesshourglass.com/requiem/memberlist.php?mode=viewprofile&u=821>1×slots зеркало регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Составленный экспертами Casino.ru перечень онлайн-казино с бездепозитным бонусом разрешает игрокам сравнить спецпредложения разных операторов. Бездепозитные бонусы в казино без пополнения 2022 — это конкретная сумма средств либо vacant spins вращения, коие предоставляются первым гостям за регистрацию на сайте казино повторяющий бездепозитного приза, и дает вам возможность помощью казино без пополнения опробовать предложения (игр), с последующей прерогативой вывода средств при исполненьи всех установленных верховодил.
#7180 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7181 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
В некоторых интернет казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на сайте клуба и доказать средства контактные данные. Дополнительно потребуется активация промокода.В истиннее время получить бонус за регистрацию в казино довольно просто. Почти каждый игорный жилище с готовностью даст средства или благотворительные вращения. Многие игроки пользуются этим и не стыдятся региться в каждом клубе с выгодными критериями. Кстати, это отличная вероятность выдумать выигрышную тактику и сорвать куш. <a href=http://filmkachat.ru/>1×slots на любой вкус как пройти регистрацию</a> Для всех бездепозитных призов действует максимальный предел на выигрыш. Он указывает предельную необходимую, коию вы сможете получить, играя на бонусные кредиты. Как лишь вас получится выполнить притязания вейджера, допустимый максимально будет переведен с бонусного счета на ведущей, а остаток будет списан. <a href=https://diigo.com/0y2r7c>https://diigo.com/0y2r7c</a> В зависимости от интернет заведения любой из них может вам предложить как бездепозитные деньги, например и бездепозитные фриспины, коие в успешной регистрации упадут вас на ваш игровой баланс.Можно ли в одном онлайн казино получить больше одного приза за регистрацию? Нет, например как в каждом онлайн казино есть правила, к коим нужно держаться, не делать 2 аккаута для получения бонусов, иначе будет блокировка обоих аккаутов, не пытайтесь перехитрить онлайн казино, приз за регистрацию выдаеться один один 1 личику. казино 1×slots <a href=http://www.tr.besatime.com/index.php?subaction=userinfo&user=AshleySleby>http://www.tr.besatime.com/index.php?subaction=userinfo&user=AshleySleby</a> Не стоит незамедлительно же открещиваться от приветственных подарков в подобных казино. Администрация готова начислить средства или фриспины, но предварительно работники обязаны увериться, собственно вы не мошенник. Дело сомнений, что развелось слишком много охотников за призами. Они научились дурачить систему и зарабатывать солидные суммы денег.Наличие у игрока второго аккаунта. Запрещено создавать количество профилей для неоднократного получения бездепов.
1×slots регистрация то дальше необходимо пройти
Онлайн-казино кропотливо продумывают бонусные обстоятельства, которые необходимо выучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и другие ограничения.Бонус начисляется игроку сразу после регистрации и прохождения верификации в казино и не настятельно от клиента внесения депо. Как правило, размер бонуса в схожем случае достаточно стыдливый, однако разрешает новеньким познакомиться с забавой без риска реальными деньгами. 1 хслот регистрация в 1×slots casino Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция содержит доскональные управляла, ссылка на которые обыкновенно содержится в промообъявлении. В их указываются лимиты, вейджер, список доступных игр. Если оператор укрывает данные о предложении, то воспользоваться им надо. <a href=http://3g.m.molifan.net/space-uid-2177663.html>http://3g.m.molifan.net/space-uid-2177663.html</a> 1×slots зеркало выигрыши обязательно пройдите регистрацию если Не советуем опрометью голову хвататься за всевозможные предложения получения средств без инвестициям. Вполне возможно, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на первый взор. Альтернативой считается казино приз за депо. Мы предлагаем вам пару советов, благодаря которым у каждого игрока несомненно возможность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег:
1хлот регистрация в 1×slots casino
При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое возможно посвятить игре в казино. Наличие у игрока второго аккаунта. Запрещено творить некоторое профилей для неоднократного получения бездепов. <a href=http://droid-gamers.ru/index.php?subaction=userinfo&user=creepydairy90>http://droid-gamers.ru/index.php?subaction=userinfo&user=creepydairy90</a> Бонусные средства – маленькая сумма денег для старта в новом казино. На бонусные деньги, обычно разрешено выступать во все игры, считая слотов с прогрессивным джекпотом и игр из раздела live casino. 1×slots рабочее зеркало на сегодня Бонус начисляется игроку сразу в регистрации и прохождения верификации в казино и не просит от клиента внесения депо. Как верховодило, размер приза в сходственном случае достаточно умеренный, впрочем позволяет новеньким познакомиться с игрой без риска настоящими деньгами.Можно. Вы практически можете отказаться от получения бездепозитного приза за регистрацию в казино, же Вы не сделаете ставку.
1хслот официальный сайт зеркало
Выше мы предоставили полный набор самых новых и актуальных бездепозитных бонусов в онлайн казино без пополнения на 2022 год, где вам воспользоваться каким ценным бездепозитным бонусом. <a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=555036>1хслотс регистрация в 1×slots casino</a> Бездепозитные призы отличный вариант бесплатной игры в игровые автоматы. Многие юзеры сети не понимают, собственно в казино можно начать играть полностью бесплатно, а позже исключить выигрыш на банковскую карту или электронный кошелек, иные не доверяют интернет казино, а третьи удачно играют и выигрывают – и подчас довольно немалые суммы. Для получения предоставленных призов вам понадобиться — ПК или мобильное прибор, и остальное дело за малым. 1×slots casino online регистрация <a href=https://www.itray.co.kr/bbs/board.php?bo_table=free&wr_id=1847384>https://www.itray.co.kr/bbs/board.php?bo_table=free&wr_id=1847384</a> Чаще всего используются коды. Их нужно заносить в особые окна регистрационной анкеты, случае идет о пригласительных призах, либо в особом разделе собственного кабинета игрока.Вейджер в переводе с английского значит «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша приобретенного приза, в нашем случае бездепозитного. Число ставок не — главно лишь набрать необходимую, пропорциональную сумме одобрения.
1×slots сайт
Варианты выигрыша находятся от Вашей удачи и критерий игорного портала. Выше мы заявили, собственно кое-какие бездепозитные бонусы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются и, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность современных игр на деньги, возможно выиграть невозможные суммы. Сегодняшние игровые автоматы или видео слоты, как их нарекают. Могут выдавать крупные умножение от х1.000 и повыше. Некоторые умножают ставку от х100.000.Можно ли зарабатывать на бездепозитных призах? Это не работа, тут как повезет, если в любом предложенном безедепе, вы будете откручивать вейджер и выводить, время возможно назвать везением, и дополнительной добавкой к вашему бютжету. При регистрации по указывать только достоверную информацию. Когда учетная запись несомненно активна, появится доступ в Личный кабинет. В нем можно выбрать еденицу, установить промокод и узнать подробные управляла получения и отыгрыша бездепа. Краткая информация об промоакции часто находится непосредственно на регистрационной форме. <a href=https://newsnviews.larsentoubro.com/Lists/Comments/ViewComment.aspx?ID=1961>https://newsnviews.larsentoubro.com/Lists/Comments/ViewComment.aspx?ID=1961</a> Обычно, бездепозитные бонусы выдаются под конкретные слоты с фиксированной ставкой, хотя их точно воспрещено использовать в игровых автоматах с современным джекпотом. Список игр, в которых можно использовать бездеп, Вы найдете в описании акции либо сможете уточнить у саппорта заведения. 1×slot казино зеркало Иногда в качестве бездепа, казино дарует минимальный приз (до 50 рублей), ради которого не стоит заморачиваться.
<b>Смотреть еще похожие новости:</b>
<a href=https://surfaceprophets.com/threads/1×slos-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%B2–1×slots-casino.26714/>1×slos регистрация в 1×slots casino</a>
<a href=https://www.formulersupport.com/Thread-1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D0%B2%D0%B8%D0%B4%D0%B5%D0%BB%D0%B8-%D1%82%D0%B0%D0%BA%D1%83%D1%8E-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8E-%D0%BD%D0%B0–128035>1×slots зеркало видели такую регистрацию на</a>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=61441&result=reply>1×slots скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подобные призы без депозита предоставляются на больше прибыльных условиях. Зачастую они покрупнее, а условия отыгрыша менее жесткие.
#7182 Charlesgunny
1×bet зеркало рабочее на сегодня букмекерская контора леонов <a href=https://th-royalgclub.com/>1×bet приложение</a> 1go casino 1×bet на андроид бесплатно <a href=https://www.ossetia.tv/>порно с Елена Никитина, скелетонистка</a> букмекерскую контору пин казино фильм смотреть онлайн человек казино почему казино включи казино порно с Антропова Валентина Викторовна ап казино
#7183 Jeffreyarime
https://gramster.ru/ пин ап казино
#7184 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7185 Charlesgunny
Александра Бортич porno Юлия Пересильд <a href=https://m.repost.news/>бывшие казино</a> Мухтиярова Елена Вячеславовна порно casino ru <a href=https://res-publika.com>casino регистрации</a> 1×bet скачать приложение 1×bet 1 Нургалиева Эльвира Рамиловна порно Разуваева Ксения Денисовна порно pin up casino top top почему казино букмекерская контора без
#7186 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7187 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия
Зачастую бездепозитные бонусы казино для забавы предлагаются различными заведениями азартных игр в качестве рекламных промоакций либо в целях вербования к для новых игроков. Для бездепозитных призов в казино 2022 геймеру не пополнять счет до этапа вывода желанных средств. <a href=http://filmkachat.ru/>1×slots акции</a> Популярность онлайн казино растёт и всё больше пользователей начинают увлекаться азартными забавами. Бездепозитные призы 2022 года, это оригинальные презенты за регистрацию. С их подмогою свежие игроки шансы получить бесплатные вращения или деньги на баланс за 1 регистрацию. С свет игорных заведений в интернете, бездепозитные бонусы стали знаменитейшим методом привлечения игроков. Подобные акции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о которых мы поведаем. Наш вебсайт собрал наилучшие предложения из интернета на 2022 год. Воспользуйтесь каким подарком и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить условия.Бонус с зачислением денег на счет выделяет больше свободы действий. Пользователь сам подбирает, каким образом распорядиться подаренными своими. Здесь также имеют действовать лимитирования на перечень дешевых игр, но обыкновенно эти рамки не так строги, как в рекламную с бесплатными вращениями. <a href=https://letterboxd.com/lexxeagle/list/revolutionary-approaches-in-modern-virtual/>https://letterboxd.com/lexxeagle/list/revolutionary-approaches-in-modern-virtual/</a> Игрокам стоит воспринимать приветственный приз как гарантированный метод получить большой выигрыш, хотя это замечательная вероятность без затрат оценить возможностей казино.Перечисленные выше главные характеристики сочетают фактически любой приз и являются стандартными для бездепозитных бонусных начислений в казино. 1×slot зеркало <a href=https://pixel-brush.ru/user/OscarTub/>https://pixel-brush.ru/user/OscarTub/</a>
1×slots промокод при регистрации
Индивидуальные поощрения выдаются за совершение поступков: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавленья либо официального посетителя для ПК. В большинстве казино действуют программки преданности, присваивающие игрокам статусы за активность на сайте. Продвижение на грядущий степень нередко с выдачей бездепа. 1×slots сайт К примеру, игроку выдаются бесплатные средства в заведении в объеме пятидесяти либо 100 долларов (вейджер на которые сочиняет 100х). То есть, любому новоприбывшему игроку выскакивает привлекающая иллюстрация, кот-ая сулит выплату всех зачисленных фирмой средств. Не стоит заострять на казино приз за регистрацию без депо с чрезмерно великой либо очень малеханькой суммой призов, поэтому что, числе тщательно исследовав все условия, тут всего, несомненно какой-то подкол.Пoдтвepдить личнocть клиента. Для успешного вывода средств, необходимо доказать лицо клиента. Нa этaпe вepификaции пpoфиля, сотрудники службы защищенности должны убедиться, собственно у игрока всего лишь раз акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не сможет исключить собственный выигрыш, в у него несомненно количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы. <a href=https://ep-team.ru/forum/index.php?action=profile;u=7892>https://ep-team.ru/forum/index.php?action=profile;u=7892</a> Фриспины — благотворительные вращения, которые разрешают игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся наиболее популярным и предпочтительным видом приза — бесплатные вращения порой эффективнее и веселее в отыгрыше, чем другие виды бездепов. 1× слот зеркало Зачастую бездепозитные призы казино для забавы предлагаются разными заведениями азартных игр в качестве рекламных промоакций или в целях вербования к себе свежих игроков. Для бездепозитных бонусов в казино 2022 геймеру не нужно пополнять счет до этапа вывода желаемых средств.
1 х слотс зеркало
Мы подготовили список, где есть постоянно актуальные и свежие бездепозитные бонусы казино, которые возможность получить даром. Для наших юзеров есть специальные предложения эксклюзивные призы, коие вы у не найдете, их мы определили специальной красной плашкой «Exclusive». Как прочие промоакции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такого предложения являются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых гостей и позволяет им составить впечатление о функционале, не рискуя значительными суммами.Бывают ли бездепозитные призы без вейджера? Бывают, если у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный приз за регистрацию устанавливается вейджер во всех казино. <a href=http://zemli.com/index.php?subaction=userinfo&user=oceanicattorney>http://zemli.com/index.php?subaction=userinfo&user=oceanicattorney</a> Некоторые клубы автоматически начисляют приз на акк игрока в исполнения условий получения, но случаются ситуации, когда приз надо(надобно) активировать игроку самому. Есть количество способов активации бонуса: 1х слотс зеркало регистрация в 1×slots casino Несмотря на то, что этот вариант стимуляции со стороны азартных платформ довольно известен в похожих игр, далеко не почитателям казино известно, собственно себе бездепозитные призы казино и как именно их вполне эксплуатировать.Начнём с как, собственно каждое рекламную за регистрацию предполагает некоторые условия. Бездепозитные призы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность валютного оборота, нужная для выполнения условий. Пример, возымели бесплатные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 руб., неудачных либо выигрышных, не. После исполнения, бонусный баланс перейдёт на реальный и станет легкодоступным к выводу.
1хслотс казино зеркало
Казино выводит деньги только на что, эту платежную систему, с котрой был сделан депо. То есть, для вывода бездепозитного бонуса, Вам поначалу нужно восполнить счет. В некоторых клубах ограниченный список методов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с этих платежных способов, коие доступны для вывода. 1хслот скачать <a href=https://rabofree.diary.ru/p222118212_mp-stats-v-skladchinu.htm>https://rabofree.diary.ru/p222118212_mp-stats-v-skladchinu.htm</a> Некоторые клубы механически начисляют приз на аккаунт игрока в исполненья условий получения, но посещают истории, когда бонус нужно активировать игроку самому. Есть количество способов активации бонуса:
1хслотс регистрация в 1×slots casino
Для получения бездепа нужно пригласить в забаву по реферальной ссылке нового посетителя: он обязан зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на сумму, указанную в условиях акции. <a href=https://filmy-hd.ru/user/ForsedropMn/>https://filmy-hd.ru/user/ForsedropMn/</a> При отыгрыше бонусных средств, нужно учитывать срок деяния бонуса и время, которое дается на отыгрыш. По истечению заявленного медли, не отыгранный приз будет аннулирован.Какие бонусы есть еще получить кроме бездепозитного приза за регистрацию в казино? По мимо бездепозитного приза, каждое интернет казино предлагает игрокам выгодное предложение на первый депо, вы совершаете депо, ваш депо возрастает в двое или числе в 3, что, этим наиболее начать выступать можно с более солидной суммой, например же не забываем тему вейджер на призы. 1×slots регистрация то дальше необходимо пройти Не стоит незамедлительно же открещиваться от приветственных подарков в похожих казино. Администрация готова начислить средства или фриспины, но предварительно сотрудники обязаны убедиться, что вы не аферист. Дело что, нет, что развелось слишком количество охотников за бонусами. Они научились дурачить систему и наваривать солидные суммы денег.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.kfz-gringer.at/index.php/forum/donec-eu-elit/63567–1×slots-casino-1×slotscasino09k-online#63332>1×slots casino регистрация 1×slotscasino09k online</a>
<a href=http://palais.beesims.com/phpbb/viewtopic.php?f=2&t=290501>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<a href=https://www.formulersupport.com/Thread-1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5–106978>1×slots зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бонус в казино без депо содержит различные вариации: такое быть приветственный приз, акции в честь каких-либо дней или важных дат, приз за привлечение новых игроков, преданность и получение VIP-статуса.
#7188 Charlesgunny
1×bet сайт 1×bet xyz фильмы казино рояль <a href=https://th-royalgclub.com/>1×bet скачать приложение на андроид</a> porno Игорь Акинфеев (футбол) казино зеркало сегодня <a href=https://vestnik-jurnal.com/>винлайн букмекерская контора официальный</a> casino скачать 1×bet на андроид букмекерские контора ап 1×bet телефон пари букмекерская контора pinco casino porno Анастасия Янькова, боксерка
#7189 AlfredPlavahttps://czmicro.cz
Идеальное решение для скрытой связи — купить <a href=https://czmicro.cz/>нанонаушник</a>. Широкий выбор моделей, гарантия качества и выгодные условия покупки. Надёжная связь, компактный размер и удобство использования.
#7190 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasin online
Игры, в которых возможно выступать на бонусные деньги. Проверьте список игр, в возможно выступать на бонусные средства, возможно они Вам не понравятся и надо тратить своё время на такую промоакцию.Если речь идет об эксклюзивных предложениях, имеет понадобиться регистрация в казино по ссылке с партнерского вебсайта. <a href=http://filmkachat.ru/>онлайн казино 1×slots</a> Заработать на бездепозитных бонусах за регистрацию в казино может каждый пользователь, достигший совершеннолетия. <a href=https://playcode.io/2205736>https://playcode.io/2205736</a> Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. 1×slots зеркало рабочее на сегодня <a href=https://hp.dragonland-radio.de/profile.php?lookup=90>https://hp.dragonland-radio.de/profile.php?lookup=90</a> Отказ в прохождении верификации. Если заказчик не желает либо имеет дать документы, подтверждающие его лицо, профиль несомненно заблокирован совместно, вкупе со всеми бонусными начислениями.Особую изюминку видео слотам придают оригинальные символы. С их выходом активируются различные бонусы. Вы можете запустить дополнительный степень и увеличить сумму выигрыша. Есть знаки, коие заменяют ненужные составляющие и сами творят выигрышные комбо. Не стоит забывать и про бонус-тур. После любого счастливого спина есть шанс прирастить необходимую выигрыша в 2 или хорошо раза.
скачать 1×slots на андроид мобильная версия
<a href=https://forum.vn.ua/member.php?u=73361>1хслот зеркало</a> 1×slots официальный сайт скачать на айфон Чаще всего применяются коды. Их нужно вносить в особые окна регистрационной анкеты, если идет о пригласительных бонусах, или в особом разделе собственного кабинета игрока. <a href=https://jobhop.co.uk/blog/337503/exploring-the-impact-of-architectural-animation-in-modern-design>https://jobhop.co.uk/blog/337503/exploring-the-impact-of-architectural-animation-in-modern-design</a> Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. казино 1×slots официальный сайт Новые клиенты онлайн-казино без первого депозита все выяснить собственную удачливость. К тому же есть вероятность конвертировать бездепы в настоящие средства за регистрацию в казино, впрочем желаемого приз нужно отыграть согласно условиям промоакции.При малый сумме приза рекомендовано выступать по невысоким ставкам, а использовать наибольшие превосходнее только в случае, случае вейджер очень великой, а время на отыгрыш сильно ограничено.
1×slots регистрация
У любого игорного заведения свои правила и обстоятельства. Но, чтобы получить бонусы, необходимо выполнить стереотипные деяния:Как правило, при выводе денег, от играющего потребуется лишь устроить минимальный лепта для того, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом индивидуальный счет. <a href=https://astraclub.ru/members/345589-Scotterunk>https://astraclub.ru/members/345589-Scotterunk</a> Объективные – объем бонуса, коэффициент и обстоятельства вейджера, необходимость внесения депо для вывода средств;Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, чтобы была возможность вывести выигрыш. 1×slots официальный сайт скачать Чтобы получить вероятность исключить выгода с бездепозитного приза в казино, необходимо выполнить ряд условий:В интернет-сети практически возможно отыскать списки более знаменитых и гарантированных поощрительных программ от модных онлайн-казино.
1×slots зеркало которую указывали при регистрации кстати
Похожим образом работает третий метод доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения клиента либо из-за с получения им VIP-статуса. Подарок предоставляется в обращения в поддержку и ревизии. Какие призы возможность еще получить кроме бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного бонуса, каждое интернет казино предлагает игрокам выгодное предложение на первый депозит, вы совершаете депо, ваш депозит возрастает в двое либо том в трое, что, этим наиболее начать играть возможно с более крупной суммой, например же не забываем про вейджер на бонусы. Промокод – определённая комбинация символов, коию нужно установить в соответствующее поле при творении учетной записи или активировать в личном профиле игрока в разделе с призами. 1×slots зеркало рабочее на сегодня <a href=https://gunnercmuc07529.elbloglibre.com/30246283/ai-nude-revolutionizing-content-moderation-and-privacy-protection>https://gunnercmuc07529.elbloglibre.com/30246283/ai-nude-revolutionizing-content-moderation-and-privacy-protection</a> 2. Создать новый профиль. Для регистрации надо(надобно) наполнить маленькую анкету либо зайдите в личный кабинет при помощи соц сеток;Первый образующийся вопрос, это, для выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают свежих игроков. Последним проще начать игру на деньги с дара за регистрацию. Им не нужно пополнять баланс и расходовать личные средства. Новички получают бесплатные спины либо свои на счёт. С их подмогою знакомятся с игровым ходом, крутят слоты и проделывают ставки в рулетке.
1хслотс рабочее зеркало на сегодня
Игрокам не следует воспринимать приветственный бонус как гарантированный метод получить большой выигрыш, хотя это отличная возможность без расходов оценить перечень казино.Для отыгрыша бонуса казино обязывает игрока поиграть на сумму, в количество один превышающую необходимую полученного бонуса — тут выгода фирмы явна. <a href=http://xn–p39a61g3vz0ye.com/bbs/board.php?bo_table=free&wr_id=25661>http://xn–p39a61g3vz0ye.com/bbs/board.php?bo_table=free&wr_id=25661</a> Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном призе, то в первую очередь обратите внимание на велечину вейджера и срок, кот-ый дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть приз и вывести выигрыш. 1×slots рабочее зеркало на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=https://bbs.sinbadgroup.org/index.php?xjkh-tampa-s-poster-pup-for-new-cancer-treatment.t48661.html/page-1505#post-153468>1×slots casino зеркало</a>
<a href=https://autoplates.com/post-format-video/#comment-743>1×slots подтвердит вашу регистрацию если говорить</a>
<a href=http://naturetour.ru/communication/forum/messages/forum3/message23449/5152–1×slot-ofitsialnyy-sayt?sessid=9e1315582d700cd112934c264346b0c9&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1×slot официальный сайт</a>
<a href=https://forum.bandariklan.com/showthread.php?tid=176825&pid=846247#pid846247>рабочее зеркало 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На странице представлены бездепозитные бонусы за регистрацию в казино редчайшая заслуга за коей гонятся все игроки как новички, так и профессионалы. Мы также уделяем огромное внимание на наличие бонусов при составление рейтинга казино на средства. Бездепозитный приз это вероятность выступать безвозмездно и выиграть реальные средства.
#7191 Charlesgunny
бывшие казино Александра Бортич <a href=https://strelochnik.com/>порно с Захарова Мария Владимировна</a> 1×bet регистрация букмекерские конторы без депозита <a href=https://t.me/vchkogpu_ru>букмекерские конторы бет</a> up casino porno Юлия Пересильд казино онлайн pin up casino top top казино в россии casino buzz pin up casino пин ап
#7192 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7193 Jeffreyarime
http://gramster.ru/ pinup 2025
#7194 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
С этими простыми советами любое казино с призом за регистрацию способно принести в разы больше выгоды и полезности. <a href=http://filmkachat.ru/>1×slots регистрация на сайте 1×slots ru com</a> При поддержки такового одобрения оператор может также привлекать клиентов, коие раньше проявляли активность на веб-сайте, но по некий причине перестали выступать. В данном случае промокод высылается пользователю по электрической почте или вид SMS. <a href=https://elearn.ellak.gr/mod/forum/discuss.php?d=31646>https://elearn.ellak.gr/mod/forum/discuss.php?d=31646</a> казино 1×slots <a href=http://sols9.com/batheo/Forum/User-Ralphpef>http://sols9.com/batheo/Forum/User-Ralphpef</a> Подарки на праздники ? приуроченные к парадным датам, требующие символического отыгрыша либо начисляются без такового. Могут дариться игрокам сутки рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду.Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.
1×slot казино зеркало
Если вы выбираете испытанное лицензионное интернет казино и сделайте все условия получения бездепозитного бонуса, трудностей с получением презента у Вас не возникнет.Вообще перейдя в казино — верховодила схожи в получении бездепозитных бонусов, в стереотипные верховодила заходит: подтвердить эл. Почту и телефонный, наполнить собственный личный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ. рабочее зеркало 1хслотс Объективные – объем приза, коэффициент и обстоятельства вейджера, надобность внесения депозита для вывода денег;Для вывода средств приз нужно будет отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариациями отыгрыша бездепозитного приза до его получения, дабы избежать конфликтных обстановок. <a href=http://o96737zj.beget.tech/user/GeraldTag/>http://o96737zj.beget.tech/user/GeraldTag/</a> онлайн казино 1×slots Мы собрали и выпустили список наилучших бездепозитных казино с призами за регистрацию, коие гарантируют великодушные выигрыши и моментальные выплаты.Выбрать казино с бездепозитным бонусом. У нас на веб-сайте представлен перечень превосходнейших онлайн казино, коие предлагают своим игрокам щедрые бонусы за регистрацию.
1 х слотс зеркало
Зарегистрируйтесь. Для регистрации почаще всего достаточно ввести свой номер телефона и почтовый адрес, в чего ввести приобретенный код из СМС. Возможно, требуется показать промокод. В правилах акции несомненно написано, где его хотелось вводить. Иногда это надобно создавать при регистрации, времени — теснее в сотворения личного офиса, на отдельной странице. Это один из главных характеристик привлекательности дара. С завешенным коэффициентом в мастера не сумеют выполнить условия по отыгрышу. И не, как презентабельно смотрится предложение – бездепозитный бонус казино в размере $500 или $1 000. Чтобы новички лучше вникли, что же такое вейджер, мы разберём на случае.Нельзя осматривать игру на деньги, как вариант заработка. Азартные забавы запрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не является организатором азартных игр. Сайт одевает информационный нрав. <a href=http://chemoform.ru/bitrix/redirect.php?goto=http://vzmr.ru/bitrix/rk.php?goto=http://solyankapark.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/a3H7uBEyhON>http://chemoform.ru/bitrix/redirect.php?goto=http://vzmr.ru/bitrix/rk.php?goto=http://solyankapark.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/a3H7uBEyhON</a> Маркетинговая политика всех игорных интернет-клубов обязана носить разнородный характер. И случае вознаграждения на депо служат чтобы, чтобы, чтобы провоцировать вносить депозиты и поощрять теснее место юзеров, то бездепозитный бонус в казино или бонус за регистрацию в казино, этого всего, рассчитан на расширение базы потребителей.Бездепозитные призы начисляются только раз один. Не стоит открывать новые аккаунты, чтобы получить их повторно. Служба безопасности казино непременно выявит «левого» соучастника и заблокирует. Если посетитель выполнит необходимые требования, отыграет свою ставку и решит исключить личный выигрыш, то ему надо(надобно) к, что казино непременно потребует дать ксерокопии личных документов, чтобы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои исключить не удастся. 1×slots рабочее зеркало Приветственный бонус без депозита ? презент за регистрацию. Выдается деньгами, фриспинами или баллами. В последнем случае бонусные баллы применяются для роли в турнирах либо обмена на настоящие деньги.
1×slot зеркало рабочее регистрации на телефон придет
Автоматы непопросту считаются наиболее модным азартным веселием. Чтобы усвоить управление и правила, понадобится всего количество мин. Ваша задачка устроить ставку, найти количество рабочих линий и можно крутить барабан. Если на выпадет выигрышная комбинация – вы выиграли! С данной задачей вам помогут справится бездепозитные бонусы казино. На условиях отыгрыша даровых призов следует тормознуть подробнее. С ними связаны аспекты, коие нельзя забыть без внимания.Подтверждение регистрации. Казино просят привязки профиля к электрическому адресу и номеру телефона. Для сего на e-mail отчаливает послание ссылаясь, а на телефон ? текстовое сообщение с кодом. 1×slots рабочее зеркало <a href=https://andrezuka11988.newbigblog.com/36296224/nude-ai-understanding-the-intersection-of-innovation-and-ethics-in-image-manipulation>https://andrezuka11988.newbigblog.com/36296224/nude-ai-understanding-the-intersection-of-innovation-and-ethics-in-image-manipulation</a> Бездепозитный приз казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в этом и заключается основное отличие.
1×slots casino регистрация 1×slotscasino09k online
Казино выводит деньги лишь на что, эту платежную систему, с котрой был сделан депо. То есть, для вывода бездепозитного бонуса, Вам поначалу необходимо восполнить счет. В неких клубах ограниченный список способов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с данных платежных способов, коие доступны для вывода.Бездеп с фриспинами может обхватывать всю коллекцию игр на веб-сайте или разработки 1-го провайдера. Обычно предлагается конкретный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш может быть выведен после того, как пользователь отыграет данную необходимую. Возможность оценить глубокий функционал слотов — главное достоинство данной разновидности. Игроку становятся доступны что, эти опции, которые отсутствуют в демонстрационном режиме, а возможность выиграть реальные средства добавляет ярких азартных чувств. На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению этого времени, Вы не можете активировать и получить бездепозитный приз.За счёт спинов выйдет запустить различные онлайн слоты, протестировать стратегии и поднабраться опыта. Фишка никаких, собственно вращения начисляются на топовые аппараты с оригинальными опциями и высочайшей отдачей. Не запамятовывайте, что в любом акционном предложении предусмотрены особые требования – кратковременные ограничения, максимальный размер ставки, перечень доступных игр. <a href=http://forum.moderncompany.de/profile.php?lookup=15793>http://forum.moderncompany.de/profile.php?lookup=15793</a> 1×slots зеркало регистрация Поспешите забрать бездепозитные призы за регистрацию в казино из представленного списка. Все платформы не водят законную работа, хотя и обрадуют добросовестными плодами игры, высочайшей отдачей, быстрыми выплатами.При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, коие можно предназначить игре в казино.
<b>Смотреть еще похожие новости:</b>
<a href=http://b2s.bulwork.com/node/1581?page=82#comment-22605>онлайн казино 1×slots</a>
<a href=https://forum.dis-course.net/viewtopic.php?t=404118>1хслот скачать</a>
<a href=https://rolivka.online/forum/member.php?action=profile&uid=57095>казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Практически все интернет казино с бездепозитным бонусом за регистрацию предусматривает программку преданности — систему одобрения постоянных клиентов, которая состоит из колличества значений. При достижении игроком очередного значения на его счёт поступает приз. Чем повыше степень — тем щедрее бонус. В бонусную программку множества операторов входят систематические бездепы. Это пожизненные промоакции, поощряющие активных постоянных игроков. Популярный формат — раздача фриспинов по определенным дням недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают постоянные бонусы без депозита в обмен на накопленные баллы преданности.
#7195 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots review live
Обычно, бездепозитные призы выдаются под определенные слоты с фиксированной ставкой, хотя их точно воспрещено использовать в игровых автоматах с прогрессивным джекпотом. Список игр, в которых можно использовать бездеп, Вы отыщите в описании акции либо можете уточнить у саппорта заведения. <a href=http://filmkachat.ru/>1×slots зеркало подтвердит вашу регистрацию если говорить</a> У нас на сайте Вы найдете перечень бонусов без депозита в проверенных казино и доскональную информацию о том как их получить и применять. <a href=https://diigo.com/0y2r7c>https://diigo.com/0y2r7c</a> Не желаете поиграть в азартные игры, не рискуя своими деньгами, но получая в все выплаты? Подобную вероятность деют почти наилучшие порталы с азартными развлечениями. В их числе количество добросовестных и надежных интернет-казино на русском языке. Они привлекают новых пользователей различными поощрительными мероприятиями, включая бездепозитные, либо бесплатные бонусы. 1×slots регистрация 1×slots review live <a href=https://www.hb9lc.org/wiki/index.php/User:RodolfoKeysor>https://www.hb9lc.org/wiki/index.php/User:RodolfoKeysor</a>
1×slots регистрация на 1хслотс
Бездепозитные призы в казино без пополнения 2022 — это конкретная сумма денег или valinomycin spins вращения, которые предоставляются первым постояльцам за регистрацию на сайте казино в виде бездепозитного приза, и дает вам возможность за счет казино без пополнения опробовать услуги (игр), с последующей прерогативой вывода средств при исполнении всех установленных правил. <a href=https://karakol.com.kg/user/Jameskef/>1× слот зеркало</a> 1×slot официальный сайт Для выбора азартного заведения Вы сможете пользоваться перечнем наших казино с бонусами за регистрацию. На нашем сайте мы опубликовали перечень бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, что доля призов неповторимые и доступны лишь для гостей нашего сайта по-специальному промо-коду или по уникальной ссылке. Кроме как, для каждого бонуса мы подготовили доскональный обзор, каком Вы узнаете как получить и отыграть поощрение и как исключить свой выигрыш с бездепа.Срок активации и время на отыгрыш. Зачисление денег либо фриспинов происходит при активации на взыскательно ограниченного периода, похожие требования предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать приз количество дней либо том недель. Другие выдают солидную сумму за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высоким вейджером. <a href=http://rings.ru/r/?url=http://maps.google.bt/url?q=http://md-rhesus.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/a3H7uBEyhON>http://rings.ru/r/?url=http://maps.google.bt/url?q=http://md-rhesus.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/a3H7uBEyhON</a> Мы собрали и опубликовали список лучших бездепозитных казино с бонусами за регистрацию, коие гарантируют великодушные выигрыши и мгновенные выплаты.Вейджер (wager) – это коэффициент, который демонстрирует на какую сумму нужно устроить ставок, дабы вывести бонус из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода сего бонуса, Вам нужно устроить ставок на необходимую: 500*70=3500 рублей. Только полностью отыграв приз, Вы можете исключить собственный выигрыш. 1×slots зеркало регистрация то дальше необходимо пройти Бездепозитный бонус за регистрацию в казино — это стартовый презент вид валютного начисления или безвозмездных вращений для свежих игроков заведения, для получения которого не вносить депозит.
казино 1×slots официальный сайт
В качестве бонусов онлайн казино нередко предлагает выдачу фриспинов, то есть безвозмездных вращений игрового барабана. Виртуальные монеты возможно использовать для обучения в покерной школе либо для игры в казино.Чаще всего интернет-казино предлагают бездепозитные призы свежим пользователям. Эта промо-акция довольно отлично завлекает начинающих, подталкивая их к открытию счета. Конечно, не они становятся послушными клиентами, но сам прецедент регистрации аккаунта играет на руку заведению. Список так нарекаемых «запрещенных землель» прилагается к правилам бонусной программки игорного портала. Обязательно выясните, распространяются ли на вас сходственные наказания.Высокая конкуренция в разделе азартных игр мотивирует операторов завлекать клиентов разнородными акциями. Благодаря данному у гостей бывает вероятность получить бонусы в казино за регистрацию без депо. Воспользоваться таким предложением возможно, избегая функцию внесения денег на игровой счет, просто активировав аккаунт на сайте. Наш гид по бездепам поможет избрать самую симпатичную бонусную программу, разузнать правила получения такового вознаграждения и распорядиться им с максимальной выгодой. <a href=http://h96375tu.bget.ru/member.php?action=profile&uid=127160>http://h96375tu.bget.ru/member.php?action=profile&uid=127160</a> 1× slots регистрация в 1×slots casino Если простыми текстами, бездепы – это определённая сумма средств либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать подарки. Но есть некоторые аспекты. Существуют игорные дома, которые перед тем как начислить призы требуют привязать телефон, дать копии документов.После требуется внести идентификационный платёж. Это стращает новичков больше всего. Нужно устроить наименьший депозит в 100–500 рублей. Таким образом служба защищенности увериться сомнений, собственно платёжный метод принадлежит Вам. Данная процедура необходима для обеспечения безопасности игровых счетов. Пример, Ваш аккаунт взломают и выведут средства на свой кошелёк. Будет очень неприятно. Поэтому верификация платёжной системы, это необходимый момент.
1× слот зеркало
<a href=http://forum.survival-readiness.com/memberlist.php?mode=viewprofile&u=30498>1×slots казино зеркало</a> Во время игры в казино, выигрыши, полученные благодаря бесплатным призовым фондам, суммируются и срабатывают в общую необходимую для отыгрывания. Однако, если фортуна улыбнется и получится отыграть все призы, игровое заведение гарантированно допустит исключить финансовые средства. Сумма вывода будет зависеть от лимита, утвержденного непосредственно в этом учреждении. Поэтому, пристально нужно читать верховодила выдачи безлимитных депо. Суммы сходственных услуг, большинстве, колеблются от трех до двадцати $, а вейджер на эти свои обязан составлять от 30 до шестидесяти раз. Зачастую, наивеличайшая сумма выигрыша тут составит от одной до 2-ух сотен $. Если игры выиграет больше, то все средства все быть списанными до очень разрешенного выигрыша. Здесь появляется смысл выводить еще несуществующие финансы на свою платежную систему и далее искать заведение с подходящими под данную необходимую релоадом или призом за 1-ое пополнение счета. Есть количество подвидов бездепозитного вознаграждения, предлагаемого наибольшим количеством заведений. 1×slots casino регистрация 1×slotscasin online <a href=https://buketik39.ru/user/Tyronezem/>https://buketik39.ru/user/Tyronezem/</a> Если при регистрации показать промокод, можно гарантировано получить бонус. Где брать ваучер? Посетите на блоги либо форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В последнее время игорные дома начали афишироваться в кинокартинах и телесериалах. Присмотритесь и всего заметите промокод, который принесёт 500 или 1 000 бонусных рублей.Иногда в одобрения за регистрацию могут выдаваться билеты для роли в турнирах. Условия их проведения очень отличаются, потому мы рекомендуем ознакомиться с каждым предложением раздельно.
1×slot зеркало рабочее регистрации на телефон придет
Нет. Для получения бездепозитного приза в казино необходима неотъемлемая регистрация на веб-сайте. Играть в слоты даром и без регистрации возможно лишь в демо режиме. Некоторые клубы автоматически начисляют приз на акк игрока после исполненья критерий получения, но посещают ситуации, когда приз нужно активировать игроку самому. Есть несколько методов активации бонуса:Бездепозитные призы — это презенты от казино вид бонусных средств либо фриспинов для игровых автоматов, коие начисляются на акк игрока последствии процедуры регистрации на сайте заведения. Для получения таких поощрений депо не требуется. <a href=http://land-rover-kazan.ru/index.php?subaction=userinfo&user=devilishovervie>http://land-rover-kazan.ru/index.php?subaction=userinfo&user=devilishovervie</a> Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам воспрещено начислять призы клиентам, не имеющим валютных средств на счете. Мы предлагаем рассмотреть животрепещущие бонусы онлайн-казино с лицензией, которые соблюдают законодательство РБ.Возможность протестировать новые игры, не рискуя личностными средствами и создать собственную тактику игры. 1хслотс рабочее зеркало Вейджер в переводе с английского значит «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша приобретенного приза, в нашем случае бездепозитного. Число ставок роли не играет — принципиально только набрать необходимую, пропорциональную сумме поощрения.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Осталось выбрать казино с бонусом за регистрацию и создать профиль. После активации подарка выигрыш находится от Фортуны и навыков. Варианты выигрыша зависят от Вашей удачи и условий игорного портала. Выше мы заявили, собственно некоторые бездепозитные призы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются и те, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность передовых игр на деньги, возможно выиграть невероятные суммы. Сегодняшние игровые автоматы либо видео слоты, как их называют. Могут выдавать крупные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000.
#7196 Charlesgunny
порно с Илюшникова Татьяна Александровна 1win букмекерская контора <a href=https://vestnik-jurnal.com/>Ходнева Светлана Владимировна порно</a> 1×bet зеркало слоты 1×bet xyz Александра Бортич <a href=https://rhymes-punches.com/>1×bet регистрация</a> pin up casino buzz up casino зеркало казино можно 1×bet слоты порно с Дарья Клишина, легкоатлетка porno Алена Косторная (фигурное катание) казино рулетка
#7197 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7198 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7199 WilliamhulsEhttps://taya365-download-app.com/app.html
Download online <a href=https://taya365-download-app.com/app.html>Taya365 app</a> and discover a new level of mobile gaming. Slots, live casino, exclusive bonuses – all this is available on your smartphone. Enjoy the game anytime, anywhere!
#7200 Charlesgunny
1×bet зеркало на сегодня 1×bet xyz up букмекерская контора <a href=https://glvk.guru/>казино гта 5</a> пин casino Яровая Ирина Анатольевна порно <a href=https://repost.news/>казино фильм</a> Манилова Алла Юрьевна порно pin ап casino порно с Антропова Валентина Викторовна бесплатно играем казино пина букмекерской конторы мелбет букмекерская контора бывшие казино
#7201 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
Простая процедура получения бездепозитного бонуса, которая займет менее 2-х мин. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные.Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? <a href=http://filmkachat.ru/>1хслотс рабочее зеркало на сегодня</a> Диапазон ставок, коие вправе сделать игрок, кроме лимитирован. Обычно ставить возможно маленькую сумму — в 10–30 рублей за одно вращение.После потребуется внести идентификационный платёж. Это стращает начинающих больше всего. Нужно сделать наименьший депозит в 100–500 руб. Таким образом служба безопасности увериться сомнений, что платёжный метод принадлежит Вам. Данная процедура важна для обеспечения безопасности игровых счетов. Пример, Ваш аккаунт взломают и выведут средства на свой кошелёк. Будет очень неприятно. Поэтому верификация платёжной системы, это важный момент. <a href=https://forum.prusa3d.com/forum/profile/3d-product-rendering/>https://forum.prusa3d.com/forum/profile/3d-product-rendering/</a> казино 1×slots <a href=http://43.240.15.40/home.php?mod=space&uid=581944>http://43.240.15.40/home.php?mod=space&uid=581944</a> Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте условия – они нередко выдаются для неких машин. В зависимости от клуба вам делать определенное число ставок. Кстати, современные игорные жилища выделяют возможность заводить «одноруких бандитов».
1×слотс казино
Казино выделяет вероятность заработать и вывести настоящие средства на бездепозитных бонусах. Обычно, это незначительная сумма, которую казино имеет себя разрешить подарить игроку. <a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=58173&result=reply>1×slots регистрацию более популярный вариант это</a> 1хслотс зеркало Отзывы читателей о бонусных промоакциях помогут составить впечатление, хотя не забывайте о субъективности собственных объяснений. <a href=http://akva.by/forum/index.php?action=profile;u=17441>http://akva.by/forum/index.php?action=profile;u=17441</a> Бездепозитные призы отличный вариант безвозмездной забавы в игровые автоматы. Многие пользователи сети не знают, что в казино возможно начать играть безусловно даром, а потом исключить выигрыш на банковскую карту либо электрический кошелек, иные не доверяют интернет казино, а третьи успешно играют и выигрывают – и подчас довольно немалые суммы.В лицензионных бездепозитных казино играть в азартные забавы вправду неопасно. Наличие лицензии одобряет тот факт, что клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP. 1×slots casino регистрация 1×slotscasin online
зеркло казино 1×slots
Постарайтесь отыграть вейджер, чтобы замечена возможность оставить заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные приборы. Вы сможете получить выигрыш на электрической кошелёк, карту, телефон.Обыкновенные бездепозитные призы в объеме от трех до 20 долларов созданы чтобы, чтобы, дабы в игры заходили все новые и новые игроки. Здесь, скорее, будет лимитирование на наибольший выигрыш. Важно, чтобы перед наименьшим вкладом был отключен приз за первое пополнение счета, и в не попадет на повторный вейджер. Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации дара необходимо доказать электрическую почту и привязать телефонный; <a href=https://goblin-film.net/user/Walterhuh/>https://goblin-film.net/user/Walterhuh/</a> 1×slots бонус за регистрацию Помните, что в некоторых забавах сумма ставки идет в зачет вейджера лишь частично. Так, в настольных и карточных играх только от 5% до 50% суммы ставки числятся как отыгранные деньги, на как в слотах идет в зачет все 100% суммы.
казино 1×slots
На страничке представлены бездепозитные бонусы за регистрацию в казино редкая награда за которой гонятся все игроки как новенькие, например и профессионалы. Мы также уделяем большое внимание на присутствие призов при формирование рейтинга казино на средства. Бездепозитный приз это возможность выступать бесплатно и выиграть реальные деньги. На страничке представлены бездепозитные бонусы за регистрацию в казино редчайшая награда за которой гонятся все игроки как новички, например и мастера. Мы также уделяем огромное внимание на присутствие призов при формирование рейтинга казино на средства. Бездепозитный бонус это возможность выступать безвозмездно и выиграть реальные деньги. Чаще всего интернет-казино предлагают бездепозитные призы новым юзерам. Эта промо-акция довольно эффективно привлекает новичков, подталкивая их к открытию счета. Конечно, не все они становятся послушными клиентами, хотя сам прецедент регистрации аккаунта играет на руку заведению.Фриспины предусмотрены для применения в видео слотах. Внимательно ознакомьтесь с критериями – часто их выдают на некоторые автоматы. В зависимости от клуба, у вас получится устроить определённое количество ставок. Кстати, продвинутые игорные жилища разрешают запускать каждых «одноруких бандитов». 1×slots официальный сайт мобильная версия <a href=https://www.sportsheadsgames.com/profile/Glenncluro>https://www.sportsheadsgames.com/profile/Glenncluro</a>
1× slots casino зеркало
Этот образ бонуса будет добавлен на Ваш аккаунт после удачной процедуры регистрации с внедрением номера телефона. Если избрать другой способ творения учетной записи, бездеп не будет добавлен на Ваш акк.Такие поощрения дозволяют безвозмездно протестировать новое казино, разобраться с игровым ходом онлайн слотов, заработать и исключить небольшую сумму денег. <a href=http://ledsoft.ru/forum/?PAGE_NAME=profile_view&UID=54084>http://ledsoft.ru/forum/?PAGE_NAME=profile_view&UID=54084</a> Бонусы без депозита при регистрации числятся самыми привлекательными как для опытнейших игроков, так для и начинающих. Получив такое вознаграждение, заказчик возможность играть на реальные средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, еще условия их активации и выигрыша.В разделе с бонусами активировать собственный подарок. Найти игры, для коих предусмотрено поощрение и использовать бонус по предназначению. 1×слот регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.vn.ua/showthread.php?p=3272295#post3272295>1×slots казино мобильная версия</a>
<a href=https://www.goslog.ru/forum/messages/forum1/message12784/11-obrashcheniya-grazhdan?result=reply#message12784>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<a href=https://qualityprogamer.de/forum/showthread.php?tid=259986>1×slots регистрацию процедура займет всего лишь</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать аппарат или почту, показать персональную информацию;
#7202 Ctgroup_arroPhttps://www.ctgroup.kz/
Доброго времени суток! Хочу поделиться нужной и полезной новостью для школьников, детей, студентов и взрослых! Уважаемые читатели, что поделать, если не получается понять и изучить казахский, русский, английский язык? Что делать если не получается самостоятельно подготовиться к зачетам, экзаменам или ЕГЭ? К нашей радости и счастью есть отличный Образовательный центр в Алматы и в Атырау, который вас профессионально и быстро обучит и подготовит к любым видам экзаменам. В общем, если вы хотите найти, образовательный языковой центр или образовательный центр и т.д., например: <a href=https://www.ctgroup.kz/specialized-courses/>курсы иностранного языка</a> Тогда вам обязательно нужно прямо сейчас перейти на сайт Образовательного центра CtGroup и узнать все подробности по курсы, подготовка, экзамены, тесты, обучение, уроки, языковые курсы в Алматы и в Атырау и т.д. https://www.ctgroup.kz/ . Обязательно переходите на сайт Образовательного языкового центра Caspian Training Group сохраняйте в закладки и изучайте информацию, не забудьте записать номер телефона и адрес сайта. Кстати, все можно сделать онлайн, т.е. удалено, совершенно не нужно ни куда ехать и ни куда выходить из офиса или дома. Увидимся!
#7203 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1226/7b/510e4550a3a24a923b4f05c2390ab77b.png“> 3D станки по металлу — это специализированное оборудование, созданное трехмерной резки прочие обработки металлических изделий. Они употребляют разные технологии, такие как лазерная резка, плазменная резка и фрезерование, чтобы снабдить высокую точность прочие качество обработки. Применение 3D станков
Автомобильная индустрию: 3D станки часто применяются для резки и другие обработки подробностей автомашин, охватывая трудные формы и другие системы. Строительство: Эти станки могут возделывать металлические составляющие для строй систем, обеспечивая точность и надежность. Производство оборудования: Используются для создания частей прочие компонент для разнообразных машин и механизмов.
Преимущества 3D станков
Высокая точность <a href=https://giperplasma.ru/extra3d>https://giperplasma.ru/extra3d</a>: Позволяют исполнять сложные резы легкостью наименьшими допусками. Гибкость: Возможность работы с различными материалами прочие формами. Автоматизация: Числовое программное управление (ЧПУ) дозволяет автоматизировать процессы, что понижает возможность ошибок прочие наращивает производительность.
Примеры технологий
Лазерные 3D станки: Используют лазерный луч для резки, обеспечивая высшую скорость прочие качество обработки. Например, роботизированные лазерные станки все обрабатывать как плоские, например и другие объемные подробности. Плазменные 3D станки: Применяют струю плазмы для резки, что дозволяет работать просто толстыми металлами прочие сложными формами.
#7204 Charlesgunny
porno Александр Соболев (футбол) 1×bet зеркало рабочее <a href=https://krtka.info/>бесплатно играем казино</a> скачать букмекерскую контору лучшие букмекерские конторы <a href=https://m.repost.news/>Семёнова Татьяна Владимировна порно</a> 7k casino официальный сайт Радченко Светлана Юрьевна порно pin up casino скачать kent casino регистрация porno Андрей Рублев (теннис) casino игровой автомат букмекерская контора официальный сайт
#7205 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7206 Charlesgunnyhttp://filmkachat.ru
1хлот регистрация в 1×slots casino
Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, a только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Таким образом, заведение пытается продемонстрировать себя своим потенциальным геймерам, а подобный маркетинговый ход как казино приз без депо за регистрацию завлекает довольно количество внимания к игорному заведению и обеспечивает неизменный струю свежих гостей и будущих клиентов игрового онлайн клуба. <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> <a href=https://guides.co/g/how-3d-property-tours-are-revolutionizing-real-estate-mark/474208>https://guides.co/g/how-3d-property-tours-are-revolutionizing-real-estate-mark/474208</a> Казино выводит средства лишь на ту платежную систему, с котрой был сделан депо. То есть, для вывода бездепозитного бонуса, Вам поначалу необходимо восполнить счет. В неких клубах ограниченный список способов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с этих платежных методов, которые доступны для вывода. рабочее зеркало 1×slots <a href=https://gamesdrive.net/User-PatrickFal>https://gamesdrive.net/User-PatrickFal</a> Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала резвые выводы. Фишка выплат что, собственно довольно выбрать платёжный инструмент и показать необходимую. В большинстве случаев деньги зачисляются на электрические кошельки в течение 15 мин., а на банковские карты – 1–3 трудящихся денька.Вы не в коем случае ни же рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической забавы на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, научится регулировать изменять ставки и линии, исследовать бонусные игры и их выигрышные композиции, да в просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные свои, которые можно отыграть и вывести, не просто на демо счет, тем самым адреналин в крови еще больше повысится а пульс забьется с частым ритмом!
1хслотс 1хслотс регистрация перейти на 1×slots
1×slots зеркало этих способов предполагает регистрацию Только выполнив все условия отыгрыша и дождавшись окончания ревизии аккаунта, Вы сможете оформить заявку на вывод средств и получить свои деньги. <a href=http://uoup.net/space-uid-496638.html>http://uoup.net/space-uid-496638.html</a> Для тех, кто только взвешивает испытать собственную фортуну, а также для профессиональных игроков, разыскивающих новые площадки для выигрышей, водящие лицензированные казино часто организуют разные промоакции, и лучшее предложений за время – как для начинающих, например и для профессиональных игроков – бездепозитный бонус за регистрацию.Чтобы бездеп не был начислен на Ваш аккаунт, Вам не активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт механически, а Вы не планируете его использовать, обратитесь в службу с пожеланием отменить бездепозитный бонус. 1 xslots рабочее зеркало Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном сайте и выполните вход в личный офис, чтобы забрать безвозмездные вращения с вейджером х40;
1хслотс рабочее зеркало
Бездепозитные бонусы, как уже понятно, являются уникальной вероятностью обратиться игровому процессу полностью безвозмездно, то есть выступать в интернет казино безвозмездно и на существующие средства незамедлительно в регистрации аккаунта. Автоматы с этим депозитом шансы стать прекрасной возможностью поиграть для поклонников азарта с определенными лимитированиями в финансах.Нет. Для получения бездепозитного бонуса в казино необходима неотъемлемая регистрация на веб-сайте. Играть в слоты даром и без регистрации возможно только в демо режиме. <a href=http://k98727wu.beget.tech/user/Justinalilt/>http://k98727wu.beget.tech/user/Justinalilt/</a> Казино выделяет вероятность заработать и вывести реальные деньги на бездепозитных бонусах. Обычно, это малозначительная сумма, которую казино может себя позволить подарить игроку. 1×slots зеркало регистрация то дальше необходимо пройти
скачать 1×slots официальный сайт
Получить приветственный бонус шансы только свежие клиенты онлайн-казино. Способы описаны в критериях промоакции любого законного казино, чаще всего это: <a href=http://nhomtruyen.com/members/jamesgaw.9280/>1× slots регистрация в 1×slots casino</a> Получать информацию о самых прибыльных бонусах можно без постоянного прогноза новостей казино. Мы взяли эту задачу на себя и постоянно следим за предложениями операторов, избирая превосходнейшие из их. В этом разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список акций периодически пополняется. В топ зашли самые свежие бездепозитные бонусы за регистрацию в казино 2020, кратковременные и закрытые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру прочим аспектам. Если срок деяния промоакции истек, она удаляется из списка.Денежные свои. Третий приз за регистрацию без депозита – наличные. К раскаянью, только известные и популярностью клубы шансы уяснить средства в руб. Либо долларах. С их поддержкою вас насладиться любой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед данным необходимо исполнение конкретных условий. Только выполнив все условия отыгрыша и дождавшись завершения ревизии аккаунта, Вы сможете оформить заявку на вывод средств и получить свои средства.У каждого игорного клубы различные вейджеровые условия. Чтобы вы гарантировано сумели выполнить их, мы дадим несколько советов. Если система начислила маленькую необходимую, не создавать немалые ставки – остановитесь на 10–30 центах. Как лишь сумеете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте играть. В противном случае другого, как присмотреться к другому автомату. 1хслотс зеркало на сегодня <a href=http://forums.worldsamba.org/member.php?action=profile&uid=137176>http://forums.worldsamba.org/member.php?action=profile&uid=137176</a> Помимо остального, для вывода средств по бездепу необходимо привнести на счёт собственный 1-ый депо — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на минимально возможную сумму, после чего вывод средств будет доступен.
сайт 1× slots casino
Заработать на бездепозитных бонусах за регистрацию в казино может каждый пользователь, достигший совершеннолетия.Все обожают получать презенты. Согласитесь, практически каждый играющий человек будет беспредельно рад, если получит бесплатный презент для забавы в интернет казино просто за регистрацию либо же бонус за внесенный депозит, так называемые приветственные бонусы для новых игроков. Соответственно эти интернет клубы станут больше известны и преимущественны у игроков при выборе казино для забавы. Топ казино день обновляется и прибавляются новые и занимательные игровые клубы с привлекательной бонусной политикой и всеми вероятными преимуществами, льготами, к коим относятся эти бонусы как фриспины за регистрацию, денежные бездепозитные призы, еще великодушные бонусы за внесенный депо. Для получения бездепа нужно пригласить в игру по реферальной ссылке свежего посетителя: он должен зарегистрироваться, пройти верификацию на сайте онлайн-казино и пополнить счёт на необходимую, обозначенную в условиях акции. <a href=http://t20suzuki.com/phpBB2/profile.php?mode=viewprofile&u=3907>http://t20suzuki.com/phpBB2/profile.php?mode=viewprofile&u=3907</a> 1×slots сайт
<b>Смотреть еще похожие новости:</b>
<a href=http://permitbeijing.com/forum/showthread.php?tid=2222469>1×slots зеркало видели такую регистрацию на</a>
<a href=http://naturetour.ru/communication/forum/messages/forum3/message24344/6036–1×-slots-sayt?sessid=226b03b658bf23c2dcad643d0bbccc76&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1× slots сайт</a>
<a href=https://www.xn–72c9aa5escud2b.com/webboard/index.php/topic,528587.new.html#new>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<a href=https://www.one2bay.de/forum/showthread.php?tid=385910>1× slots casino зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выбирая бесплатный приз, пристально изучайте правила. Убедитесь, собственно для можно принимать роль в промоакции. Уточните, в каких играх возможно исполнять обстоятельства вейджера. При необходимости задавайте вопросы представителям саппорта. Если речь об неповторимых предложениях, возможность понадобиться регистрация в казино по ссылке с партнерского сайта.
#7207 Dianaveter_seidohttps://dianaveter.ru/
Доброго времени суток! Современные бережные технологии психологического консультирования, индивидуальный подход в каждой истории клиента, максимум поддержки и эмпатии. Психологическая консультация, решение психологических проблем современными методиками. Системный подход, пошаговые программы решения конкретных задач клиентов. <a href=https://dianaveter.ru/>Поддерживающий психологический клуб</a> Если Психолог в Екатеринбурге и онлайн, то это в https://dianaveter.ru/ dianaveter.ru. Главный навык, который нарабатывается в личной терапии – это уверенность, вера в себя и состояние „Я могу решить, я могу справиться, я классный“. Психолог с отзывами, с опытом. Увидимся!
#7208 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7209 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7210 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало на сегодня
Поспешите забрать бездепозитные призы за регистрацию в казино из представленного перечня. Все платформы не водят легальную работа, но и обрадуют правдивыми плодами игры, высокой отдачей, быстрыми выплатами.Прежде чем активировать бездеп, нужно увериться что, нет, что страна, гражданином которой считается игрок, не входит в перечень разрешенных. <a href=http://filmkachat.ru/>1×slots подтвердит вашу регистрацию если говорить</a> <a href=https://diigo.com/0y2r93>https://diigo.com/0y2r93</a> 1×slots зеркало быструю регистрацию а также мгновенное <a href=http://miupsik.ru/forums/member.php?action=profile&uid=3858>http://miupsik.ru/forums/member.php?action=profile&uid=3858</a> Бездепы с безвозмездными вращениями предоставляют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд платит казино. Число спинов ограничено и редко выше сотку. Если промоакция включает в себя много даровых игр, их начисление имеет быть разбито на количество дней.
1×slots регистрация 1×slots review live
За вербование друга ? в рамках партнерской программки клиент получает вознаграждение за вербование новых пользователей. <a href=http://aficionado.pl/showthread.php?103574–1×slots-%D0%BC%D0%BE%D0%B1%D0%B8%D0%BB%D1%8C%D0%BD%D0%B0%D1%8F-%D0%B2%D0%B5%D1%80%D1%81%D0%B8%D1%8F-%D0%B2%D0%BE%D0%B9%D1%82%D0%B8-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE&p=121026>1×slots мобильная версия войти казино</a> 1×slots сайт Бездепозитные бонусы за регистрацию являются одним из самых популярных методов вербования свежих игроков в онлайн-казино, поэтому что они предоставляют игрокам вероятность опробовать казино, неподражаемо игровые автоматы, и вполне, выиграть реальные деньги. <a href=https://correspondent.in.ua/user/Miguelthelf/>https://correspondent.in.ua/user/Miguelthelf/</a> Также, в нужно подтвердить собственный номер телефона, результата код, полученный в смс-сообщении от клуба установить в специальное фон в собственном кабинете игрока.Фриспины предусмотрены для использования в видео слотах. Внимательно ознакомьтесь с критериями – часто их выдают на некоторые автоматы. В зависимости от клуба, у вас выйдет устроить определённое количество ставок. Кстати, продвинутые игорные жилища позволяют запускать каждых «одноруких злодеев». 1×slot официальный сайт Когда речь идет о получении бездепозитных бонусов в казино, в первую очередь направьте на следующие обстоятельства:
1×slots зеркало сайта
Бoльшинcтвo азартных заведений выдвигают примерно одинаковые условия и притязания, коие необходимо выполнить, дабы получить бездепозитный приз за регистрацию. Все их возможно соединить в раз перечень:Таким образом, заведение пробует показать себя своим вероятным игрокам, а такой маркетинговый ход как казино бонус без депозита за регистрацию завлекает очень много внимания к игорному заведению и обеспечивает неизменный поток свежих посетителей и грядущих клиентов игрового интернет клуба. При поддержки такого одобрения оператор возможность кроме привлекать посетителей, которые ранее показывали активность на сайте, но по некий причине прекратили играть. В этом случае промокод высылается пользователю по электронной почте или в виде SMS. <a href=https://www.battle-scape.com/members/249733-Tyronesausy&tab=vbs-notifications>https://www.battle-scape.com/members/249733-Tyronesausy&tab=vbs-notifications</a> В разделе с бонусами активировать свой презент. Найти игры, для коих учтено одобрение и применять бонус по назначению.Бездепозитные бонусы, как теснее ясно, считаются оригинальной вероятностью обратиться игровому процессу безусловно безвозмездно, словами выступать в интернет казино безвозмездно и на существующие средства сразу последствии регистрации аккаунта. Автоматы с таким депо могут замерзнуть прекрасной вероятностью поиграть для почитателей азарта с определенными лимитированиями в финансах. 1×slots регистрацию более популярный вариант это
1×slots регистрация 1×slots casino 777 online
<a href=https://your-portal.at.ua/forum/42–61928–2#88197>1хслотс 1хслотс регистрация перейти на 1×slots</a> Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте условия – они нередко выдаются для некоторых машин. В зависимости от клуба вы можете делать конкретное число ставок. Кстати, современные игорные жилища выделяют возможность заводить «одноруких злодеев». 1×slots регистрация <a href=http://x70181pe.beget.tech/user/JamesAmafe/>http://x70181pe.beget.tech/user/JamesAmafe/</a> Бездепозитный приз за регистрацию в казино с выводом средств в 2022 году — Наш ресурс дает игрокам актуальную информацию о самых новых, щедрых и испытанных призах в онлайн казино, коие обновляются любой день.Акционные предложения от казино есть в разных форматах. Часто бонусы даются в обмен на депо. Игрок вносит платеж и получает деньги, безвозмездные вращения и другие поощрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — вид бонуса, который гарантирован за выполнение определенных деяний на сайте:
1хслотс мобильная версия зеркало
Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 $. Если выдаются фриспины, их число изредка превышает нескольких десятков бесплатных вращений.Для как, дабы отыграть сумму вашего бездепозитного приза нужно выполнить условия вейджера. Очень часто фриспины даются на конкретные слоты (book of ra, book of lifeless, book of sun), подбирайте слот для по душе, они все довольно красивые и высококачественные. Бездепозитные приз имеет быть валютным так и повторяющий фриспинов на слоты <a href=http://receptom.ru/index.php?subaction=userinfo&user=decisivetact18>http://receptom.ru/index.php?subaction=userinfo&user=decisivetact18</a> Для такого, чтобы отыграть сумму вашего бездепозитного приза надо(надобно) выполнить обстоятельства вейджера. Очень нередко фриспины даются на конкретные слоты (book of ra, book of deceased, book of sun), избирайте разъем себе нраву, они все довольно очень и высококачественные. Бездепозитные приз возможность быть денежным например и повторяющий фриспинов на слотыМногие азартные клубы ограничивают сумму вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не сможете исключить. Разница несомненно аннулирована, Вы том не сможете создавать на нее ставки. 1хслот скачать Бездепы с бесплатными вращениями предоставляют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд выплачивает казино. Число спинов ограничено и изредка превышает сотку. Если промоакция включает в себя много безвозмездных игр, их начисление имеет быть разбито на количество дней.
<b>Смотреть еще похожие новости:</b>
<a href=http://permitbeijing.com/forum/showthread.php?tid=2202200>1×slots зеркало регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Казино выводит деньги только на что, эту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного приза, Вам сначала нужно пополнить счет. В некоторых клубах узкий перечень методов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет именно с данных платежных способов, коие доступны для вывода. А ознакомиться с свежими интернет казино, Вы сможете помощью призов с выводом выгоды, которые Вы можете получить без депо.
#7211 Charlesgunny
casino pin официальный 1×slots casino <a href=https://glvk.guru/>1×bet сайт 1×bet xyz</a> официальные букмекерские конторы скачать где казино <a href=https://rhymes-punches.com/>Нургалиева Эльвира Рамиловна порно</a> porno Виктория Баркова, легкоатлетка casino официальный зеркало 1×bet рабочее porno Александра Степанова, фигуристка casino актуальное зеркало casino официальный сайт казино ли
#7212 Charlesgunnyhttp://filmkachat.ru
1×slots казино мобильная версия
При правильном раскладе бездепы — это прекрасный метод играть на средства без растраты собственных средств. Есть несколько советов, следуя коим можно извлечь максимум пользы из сходственных промоакций казино. Играть по только на лицензированных площадках. Скриптовые сайты не только дурачат с бонусными услугами, хотя и употребляют пиратский софт с модифицированным ГСЧ. Выиграть на этих автоматах нереально.Прибывшие на акк финансы бездепозитные призы предназначаются, в, только для свежеиспеченных юзеров, коие ранее не имели собственного аккаунта в данном казино. Исходя из этого, случае раньше у игрока был сделан депозит, то, по всей вероятности, у него больше не будет способности рассчитывать на получение такового приза в определенном заведении. <a href=http://filmkachat.ru/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> <a href=https://imageevent.com/lexxeagle/virtualpropertytours>https://imageevent.com/lexxeagle/virtualpropertytours</a> 1×slot рабочее зеркало <a href=http://www.seoulschool.org/bbs/board.php?bo_table=free&wr_id=461739>http://www.seoulschool.org/bbs/board.php?bo_table=free&wr_id=461739</a>
1×слот регистрация в 1×slots casino
1×slots зеркало на сегодня Бонусные средства – маленькая сумма средств для старта в новеньком казино. На бонусные средства, обыкновенно разрешается играть во все забавы, кроме слотов с современным джекпотом и игр из раздела live casino.Зачастую бездепозитные призы казино для игры предлагаются различными заведениями азартных игр в маркетинговых промоакций или в целях вербования к для свежих игроков. Для бездепозитных бонусов в казино 2022 игроку не пополнять счет до момента вывода желаемых средств. <a href=http://b775218w.bget.ru/user/JasperStOky/>http://b775218w.bget.ru/user/JasperStOky/</a> 1×slots промокод при регистрации
1×slots зеркало проходить регистрацию это отличный вариант
<a href=https://www.vennews.net/home.php?mod=space&uid=161655&do=profile&from=space>https://www.vennews.net/home.php?mod=space&uid=161655&do=profile&from=space</a> Возьми собственный презент. Чаще всего бонус активизируется сразу в регистрации. Но бывают истории, когда надо(надобно) забежать в собственный кабинет либо написать в справочную службу. казино 1×slots Обычно для получения бонусов без депозита, казино выдвигает приклнные и вполне выполнимые обстоятельства, хотя есть ряд деяний коие воспрещены и шансы повлечь за собой противные последствия:
1×slots зеркало видели такую регистрацию на
Постарайтесь отыграть вейджер, чтобы появилась вероятность оставить заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные приборы. Вы сможете получить выигрыш на электронной кошелёк, карту, аппарат.Денежные средства. Третий бонус за регистрацию без депозита – наличные. К раскаянью, только известные и популярные клубы все дать средства в рублях или баксах. С их помощью у насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед данным нужно исполнение конкретных критерий. При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, которое возможно посвятить ирге в казино.Риск-игра по равным шансам – Также казино может воспрещать выполнять обстоятельства по отыгрышу с помощью раунда на удвоение, кот-ый предлагается в слотах, видео-покере и некоторых иных забавах. 1×slots промокод при регистрации <a href=https://forex-bitcoin.com/members/352026-oscarnes>https://forex-bitcoin.com/members/352026-oscarnes</a>
1×slots официальный сайт, скачать
Объективные – размер бонуса, коэффициент и обстоятельства вейджера, надобность внесения депо для вывода средств; Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. <a href=http://generalcommunication.ru/bitrix/rk.php?goto=http://analiticspro.ru/bitrix/redirect.php?goto=http://xn----7sbbuaxkcggo4g3a.xn–p1ai/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/-_tXeyTkvSt>http://generalcommunication.ru/bitrix/rk.php?goto=http://analiticspro.ru/bitrix/redirect.php?goto=http://xn----7sbbuaxkcggo4g3a.xn–p1ai/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/-_tXeyTkvSt</a> 1×slots зеркало выигрыши обязательно пройдите регистрацию если Создание аккаунта. На сайте казино необходимо открыть регистрационную форму и наполнить пустые поля личными данными. Иногда на этом этапе потребуется указать лишь адрес электронной почты и пароль, хотя чаще надобно наполнить анкету персональной информацией (ФИО, дата рождения, место проживания и т.д.). Нужно указывать лишь настоящие данные, что впоследствие они станут проверены.Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депо имеет выделяться до 30 дней.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.audioheritage.net/memberlist.php?mode=viewprofile&u=19451>1 xslots рабочее зеркало</a>
<a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1×slots рабочее зеркало на сегодня</a>
<a href=https://forum.vn.ua/showthread.php?p=3276193#post3276193>казино 1× slots официальный сайт</a>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=200084>1×slots регистрация 1×slots casino c2d ru</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
После получения приза вывод средств для посетителя будет недоступен до, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя либо пара месяцов. Выводить средства игрок сможет лишь последствии отыгрыша.
#7213 Charlesgunny
казино рейтинг казино <a href=https://glvk.guru/>ев казино</a> 1×bet приложение casino betting <a href=https://slon-ru.com/>Манилова Алла Юрьевна порно</a> kent casino симулятор казино казино можно букмекерская контора без Светлана Ходченкова Елизавета Боярская unlim casino
#7214 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slotscasino 56 online
Также учтите, собственно кое-какие игровые платформы сузивают список государств, которые готовы получить предложенный бездепозитный бонус за регистрацию. К примеру, есть онлайн-заведения, выдающие похожие бонусы лишь жителям определенных стран. К образцу, онлайн казино 777 Оригинал дает бездепозитный приз лишь игрокам из России и государств СНГ. Или напротив, снабжают вознаграждением всех, кроме жителей неких государств (из сего, идет внимательно учить перечень, дабы впоследствии не появилось практически вопросов и претензий).Можно. Вы практически можете отрешиться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не создадите ставку. <a href=http://filmkachat.ru/>1×slots casino online регистрация</a> <a href=https://u.pcloud.link/publink/show?code=XZNQwV5ZNtDPSsk07bJazNAm6jpRESTTmoa7>https://u.pcloud.link/publink/show?code=XZNQwV5ZNtDPSsk07bJazNAm6jpRESTTmoa7</a> Как только вы отыграли вейджер и свои с бонусного баланса перешли для на реальный счет, Вы отважно можете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать минимальный депо к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депозитом). 1×slots сайт зеркало <a href=http://agenciafrog-host.com.br/redesocial_v0/index.php/profile/torpidalibi55>http://agenciafrog-host.com.br/redesocial_v0/index.php/profile/torpidalibi55</a>
1хслотс регистрация в 1×slots casino
Бездепозитные бонусы реальными средствами, которые возможно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадали.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. <a href=http://portal.westcoastbible.org/memberlist.php?mode=viewprofile&u=400061&sid=2e0de8cab8b3ba626a5deb7bd28670d3>1×slots скачать на айфон</a> 1×slots скачать на айфон <a href=https://adminclub.org/member.php?action=profile&uid=99340>https://adminclub.org/member.php?action=profile&uid=99340</a> 1×slots зеркало на сегодня
1×slots зеркало регистрация то дальше необходимо пройти
Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном бонусе, то в первую очередь обратите внимание на велечину вейджера и срок, кот-ый дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть приз и вывести выигрыш.Чаще всего, популярностью сервисы, эти как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно обязательное правило. Финансовые свои выводятся только через ту платежную систему, коей огромный для пополнения депо. Если же игрок получил бездепозитный покерный бонус, потребуется восполнить счет на минимальную необходимую, кот-ая сочиняет обыкновенно 10 долларов. <a href=http://forum.combat-arnis.ru/profile.php?mode=viewprofile&u=286828>http://forum.combat-arnis.ru/profile.php?mode=viewprofile&u=286828</a> При малый сумме приза рекомендовано выступать по низким ставкам, а использовать максимальные лучше лишь сомнений случае, случае вейджер слишком большой, а время на отыгрыш сильно ограничено.Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен список наилучших онлайн казино, которые предлагают своим игрокам великодушные бонусы за регистрацию. 1хслотс казино зеркало Способы получения бездепа различаются зависимо вида приза, кот-ый понравился игроку. Но вам иначе нужно быть зарегистрированным в законном онлайн-казино и доказать свою лицо. В общем виде пошаговая инструкция для получения бездепозитного приза выглядит так:Игры, каких можно играть на бонусные средства. Проверьте список игр, каких возможно играть на бонусные средства, возможно они Вам не понравятся и не стоит расходовать своё время на такую акцию.
1хслотс зеркало на сегодня
В разделе с бонусами активировать свой презент. Найти забавы, для коих учтено поощрение и применять приз по предназначению. 1×slots официальный сайт зеркало <a href=http://multi-net.su/index.php?subaction=userinfo&user=RenaldoBip>http://multi-net.su/index.php?subaction=userinfo&user=RenaldoBip</a> Для казино, работающих интернет, бездепозитные бонусы нужны для вербования новых клиентов. Предложение поиграть на слотах без надобности внесения реальных денег — работающий способ для повышения интереса к фирмы. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит играть в казино, только теперь уже на собственные деньги.
1×slots официальный регистрация
Такой казино бонус без депозита за регистрацию выдается игроку на час и активно используется данное предложение с 2017 года. Это как бы некая маскировка одобрения под бездепозитный. Суть всего сего сводится к что, этому, что геймеру на час выдается, например, 1000 $, а реклама утверждает о том, собственно каждой выигрыш можно несомненно дальнейшем оставить при себя. Но в играющий серьезно отнесется к данному предложению, то он попросту растеряет время. Ведь геймеру надо(надобно) несомненно выступать не главном аккаунте, а в тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (том всей тысячи) в правила вступят конкретные обстоятельства, где несомненно сказано, что максимальной суммой победы может быть лишь двести $ и деньги возможно применять только виде бонуса на первый вклад с вейджером 25 от суммы гонорары плюс сам депо. По результату выйдет, что игрок выигрывал себе 200% приз с вейджером на конкретную сумму. Короче разговаривая, это все не стоит вашего медли.Обычно показатель выше, чем для бонусов на депозит. Не удивляйтесь, случае он будет и х100. Иногда завышенный коэффициент вейджера уточняется для жителей отдельных стран. <a href=https://carpentryforums.com/member.php?action=profile&uid=4758>https://carpentryforums.com/member.php?action=profile&uid=4758</a> К раскаянию, нет. Почти все казино, просят внесение желая бы 1-го минимального депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, что исключить средства разрешается только на ту платежную систему, с которой был изготовлен депо.Активация случается за промокодов, которые вводятся в собственном офисе после регистрации. Среди спецпредложений в перечне Casino.ru содержатся эксклюзивные промокоды, коие доступны только гостям портала. Другие способы начисления средств ? автоматическая активация сразу в творения аккаунта и получение презента по запросу в службу технической помощи. 1хслотс мобильная версия зеркало Наиболее популярностью гонорары между гэмблеров – бездепозитные призы казино. Это не изумительно, так возможно получить безвозмездные вращения либо виртуальные кредиты, и при не придётся пополнять счёт, рисковать собственными средствами. Удастся насладиться разнообразными весельями даже выиграть солидную необходимую, избегая серьёзного риска.В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, необходимо обратиться в саппорта через лайв-чат на веб-сайте казино.
<b>Смотреть еще похожие новости:</b>
<a href=https://forums.scar-divi.com/topic/684865–1×slots-%D0%B1%D0%B5%D0%B7%D0%B4%D0%B5%D0%BF%D0%BE%D0%B7%D0%B8%D1%82%D0%BD%D1%8B%D0%B9-%D0%B1%D0%BE%D0%BD%D1%83%D1%81-%D0%B7%D0%B0-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8E/>1×slots бездепозитный бонус за регистрацию</a>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=136444>1хслотс рабочее зеркало</a>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=326223>1хслотс официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, случае не хотите замерзнуть жертвой плутов или впустую потратить время; Более солидные предложения встречаются довольно редко. Зачастую они доступны лишь VIP-игрокам. В оставшихся случаях им скорее сопутствуют очень строгие обстоятельства отыгрыша. Также вероятны дополнительные обстоятельства и ограничения, прописанные в критериях и положения бонусной программы казино.
#7215 Charlesgunny
пин up casino Черкесова Бэлла Мухарбиевна порно <a href=https://slon-ru.com/>букмекерские конторы в россии</a> casino бездепозитный casino online зеркало <a href=https://vestnik-jurnal.com/>почему в казино не бывает настенных часов</a> cometa casino порно с Федор Чалов (футбол) 1×bet официальный сайт 1×bet xyz casino betting pin casino зеркало 1×bet приложение black russia казино
#7216 Charlesgunnyhttp://filmkachat.ru
1хслот официальный сайт зеркало
Заработать на бездепозитных призах за регистрацию в казино возможность любой пользователь, достигший совершеннолетия.Выбрать казино с бездепозитным бонусом. У нас на веб-сайте представлен список превосходнейших онлайн казино, которые предлагают своим игрокам щедрые призы за регистрацию. <a href=http://filmkachat.ru/>1 x slots casino</a> Выбор каждого интернет казино на нашем веб-сайте. В описании к любому Вы сможете узнать, что получите за творенье аккаунта. <a href=https://warofdragons.com/forum/index.php?page=UserGuestbook&userID=83123>https://warofdragons.com/forum/index.php?page=UserGuestbook&userID=83123</a> 1×slots сайт зеркало <a href=https://seniordance.ru/forum/member.php/41144-GeraldLew>https://seniordance.ru/forum/member.php/41144-GeraldLew</a> Вы не в коем случае ни чем рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный бонус, по мимо практической забавы на бездепозитные призы, у Вас есть шанс выучить игровые автоматы, выучится регулировать изменять ставки и линии, исследовать бонусные игры и их выигрышные комбинации, да счете просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные свои, коие можно отыграть и вывести, но просто на демо счет, тем наиболее адреналин в крови более повысится а пульс забьется с нередким ритмом!
1×slots мобильная версия войти казино
<a href=http://www.ihavethepussy.com/de/threads/199528–1%D0%A1%E2%80%A6%D0%A1%D0%83%D0%A0%C2%BB%D0%A0%D1%95%D0%A1%E2%80%9A%D0%A1%D0%83-%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%B7%D0%A0%D1%91%D0%A0%D0%85%D0%A0%D1%95-%D0%A0%C2%B7%D0%A0%C2%B5%D0%A1%D0%82%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%BB%D0%A0%D1%95?p=217062#post217062>1хслотс казино зеркало</a> 1×slots официальный сайт мобильная версия <a href=http://www.baohaibbs.com.cn/home.php?mod=space&uid=38582>http://www.baohaibbs.com.cn/home.php?mod=space&uid=38582</a> 1×slots регистрация на сайте Основное отличие в, собственно для получения бездепа не пополнять баланс в казино. Но кроме этого, есть ряд и других отличий:Варианты выигрыша находятся от Вашей удачи и критерий игорного портала. Выше мы заявили, собственно некоторые бездепозитные бонусы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются и те, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность современных игр на средства, можно выиграть неописуемые суммы. Сегодняшние игровые автоматы либо видео слоты, как их именуют. Могут выдавать солидные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Бесплатный бонус – кредиты, которые онлайн-казино начисляет посетителю, не заставляя его пополнять игровой счет.Самый распространённый из похожих призов, окончательно же, бездеп на день рождения посетителя — бонус вид фиксированной суммы либо фриспинов поступает на счёт игрока, а воспользоваться им можно в течение установленного периода времени. Для получения предоставленных призов для пригодиться — ПК или мобильное устройство, и остальное дело за небольшим.С не отыгранным бонусом запрещается превышать объем наибольшей ставки. Нарушение сего обстоятельства иметь аннулирование выигрыша. <a href=https://kcapa.net/bbs/board.php?bo_table=free&wr_id=755162>https://kcapa.net/bbs/board.php?bo_table=free&wr_id=755162</a> Демоказино есть практически на каждом сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются веско пореже: там если, тогда, выигрыша и соблюдения критерий акций бездеп можно превратить в настоящие средства. 1×slots casino зеркало
1×slots акции
<a href=https://hiddeninthesand.com/blogs/news/2024/11/the-unfortunate-history-of-fraudulent-tally-hall-uploads/#comment-48876>1× slots casino зеркало</a> Для всех бездепозитных призов функционирует наибольший предел на выигрыш. Он показывает предельную сумму, которую вы сможете получить, играя на бонусные кредиты. Как только для удастся выполнить притязания вейджера, допустимый максимально несомненно переведен с бонусного счета на главный, а остаток будет списан. Для ревизии используются сканы паспортов, водительских водительских, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь обнаружен в попытке ввести вспомогательный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный перечень. При игре на лицензионной площадке надо бояться свидетельствовать достоверную индивидуальную информацию (шифрование исключает утечку индивидуальных данных). 1×slots официальный зеркало рабочее <a href=https://forum.supermamki.ru/viewtopic.php?f=3&t=347261&p=20724678#p20724678>https://forum.supermamki.ru/viewtopic.php?f=3&t=347261&p=20724678#p20724678</a>
1 хслот регистрация в 1×slots casino
Вейджер (wager) – это коэффициент, который демонстрирует на какую сумму нужно сделать ставок, дабы исключить бонус из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего бонуса, Вам необходимо сделать ставок на сумму: 500*70=3500 руб. Только полностью отыграв приз, Вы можете вывести собственный выигрыш. <a href=http://bbarlock.com/index.php?title=%D0%A4%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B%20%D0%90%D0%97%D0%A1:%20%D0%9F%D0%B5%D1%80%D1%81%D0%BF%D0%B5%D0%BA%D1%82%D0%B8%D0%B2%D1%8B%20%D0%B8%20%D0%B2%D0%BE%D0%B7%D0%BC%D0%BE%D0%B6%D0%BD%D0%BE%D1%81%D1%82%D0%B8%20%D0%B2%20%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8>http://bbarlock.com/index.php?title=%D0%A4%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B%20%D0%90%D0%97%D0%A1:%20%D0%9F%D0%B5%D1%80%D1%81%D0%BF%D0%B5%D0%BA%D1%82%D0%B8%D0%B2%D1%8B%20%D0%B8%20%D0%B2%D0%BE%D0%B7%D0%BC%D0%BE%D0%B6%D0%BD%D0%BE%D1%81%D1%82%D0%B8%20%D0%B2%20%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8</a> Основное различие том,, собственно для получения бездепа не надо пополнять баланс в казино. Но кроме этого, есть ряд прочих отличий: 1×slots casino регистрация 1×slots review live
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.home-visa.ru/memberlist.php?mode=viewprofile&u=3536>1хслот 1хслотс регистрация перейти на 1×slots</a>
<a href=https://www.bf-france.com/forums/profile/30064-rabofreeor/>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a>
<a href=http://www.topboard.org/threads/1×slots-klubu1×slots-1×slots-registracija-perejti-na-1×slots.602157/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При правильном раскладе бездепы — это отличный способ играть на деньги без траты собственных средств. Есть несколько рекомендаций, следуя которым можно извлечь максимум полезности из подобных промоакций казино. Играть идет только на лицензированных площадках. Скриптовые веб-сайты не дурачат с бонусными предложениями, но и употребляют пиратский софт с измененным ГСЧ. Выиграть на таких автоматах нереально. Бездепозитные бонусы начисляются лишь один один. Не стоит раскрывать свежие аккаунты, дабы получить их повторно. Служба защищенности казино непременно выявит «левого» соучастника и перекроет. Если посетитель выполнит нужные притязания, отыграет свою ставку и решит исключить личный выигрыш, то ему нужно учесть, что казино обязательно потребует дать ксерокопии личных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои вывести не удастся.
#7217 Charlesgunny
porno Мира Андреева (теннис) букмекерская контора зенит <a href=https://rucriminal.info/>porno Нина Пирогова, хоккеистка</a> букмекерская контора porno Ангелина Гончаренко, хоккеистка <a href=https://kompromat1.online/>porno Ангелина Гончаренко, хоккеистка</a> скачать букмекерскую контору на андроид 1×bet зеркало на сегодня 1×bet xyz Нургалиева Эльвира Рамиловна порно букмекерская контора бесплатно скачать порно с Каролина Севастьянова порно с Анна Калинская (теннис) спорт букмекерская контора
#7218 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7219 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало рабочее
Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.Варианты выигрыша зависимости от Вашей удачи и критерий игорного портала. Выше мы заявили, собственно кое-какие бездепозитные бонусы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются и, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность современных игр на деньги, можно выиграть неописуемые суммы. Сегодняшние игровые автоматы или видео слоты, как их называют. Могут выдавать солидные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000. <a href=http://filmkachat.ru/>1×slots зеркало на сегодня</a> <a href=https://rant.li/9fsnh6hu13>https://rant.li/9fsnh6hu13</a> 1×slots casino регистрация 1×slotscasin online <a href=http://forum.n34.pl/profile.php?mode=viewprofile&u=1469>http://forum.n34.pl/profile.php?mode=viewprofile&u=1469</a> Проверка занимает от нескольких мин. До нескольких дней, специалисты техподдержки шансы запросить дополнительные документы или инициировать куцее общение по Skype.
1×slots зеркало на сегодня
1×slot казино зеркало Ниже указан важный список законных казино в Беларуси с призами на первый депо. Вы сможете попасть на официальный сайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. <a href=http://vn-info.net/user/Stevenguish/>http://vn-info.net/user/Stevenguish/</a> Самые новые бездепозитные бонусы в казино за регистрацию 2022 года с выводом прибыли находятся на этой странице. Посетитель может расценить условия получения и начать играть на средства без внесения депо. При этом игроку принципиально понимать, на каких условиях и какими методами у вывести полученный выигрыш. Для этого необходимо расценить список присоединенных платежных систем.Игрокам стоит принимать приветственный приз как гарантированный способ получить крупный выигрыш, но это замечательная вероятность без затрат расценить функционал казино. рабочее зеркало 1×slots Отказ в прохождении верификации. Если клиент не хочет или возможности предоставить документы, подтверждающие его личность, профиль будет заблокирован вместе со всеми бонусными начислениями.
1×slot официальный сайт
Если вы новичок деле и лишь попали в неизведанную вами район азарта — счет услуг как бездепозитные бонусы без пополнения.Бездепозитные призы казино за регистрацию в 2022 году — это возможность поиграть за счёт заведения. Казино даёт клиенту шанс пользоваться определённой суммой либо числом бесплатных вращений без внесения депозита. Не путайте деморежим с реальной забавой без надобности внесения депо. <a href=http://dobrknigi.ru/howto/?PAGE_NAME=profile_view&UID=20587>http://dobrknigi.ru/howto/?PAGE_NAME=profile_view&UID=20587</a> казино 1× slots официальный сайт Не советуем опрометью голову браться за всевозможные предложения получения средств без инвестициям. Вполне возможно, собственно бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на первый взгляд. Альтернативой считается казино бонус за депозит. Мы предлагаем для пару советов, благодаря которым у каждого игрока будет вероятность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом средств:Перечисленные выше основные свойства сопровождают практически каждый бонус и являются стандартными для бездепозитных бонусных начислений в казино.
1хслот 1хслотс регистрация перейти на 1×slots
Бесплатный приз – кредиты, которые онлайн-казино начислит посетителю, не принуждая его пополнять игровой счет.Выигрыши с призов без инвестициям практически привязаны к притязанию по ставкам и шансы быть обналичены лишь после выполнения этих притязаний. Когда речь о валютных призах, казино практически устанавливают условия вейджера, коие необходимо выполнить, дабы вывести выигрыш. 1× slots регистрация в 1×slots casino <a href=http://wood.biz.ua/wr_board/tools.php?event=profile&pname=deeplytask14>http://wood.biz.ua/wr_board/tools.php?event=profile&pname=deeplytask14</a> Хотя благотворительные призы начисляются без депозита, не исключено, собственно для понадобиться вносить средства. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты лишь в такого, как новый клиент впервые пополнит игровой счет.Во время забавы в казино, выигрыши, полученные спасибо бесплатным призовым фондам, суммируются и включаются в общую сумму для отыгрывания. Однако, в удача улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно разрешит исключить финансовые средства. Сумма вывода будет находиться от лимита, утвержденного именно в этом учреждении. Поэтому, пристально нужно разбирать верховодила выдачи анлимитных депо.
1×slots зеркало быструю регистрацию а также мгновенное
Но на азартных платформах подобные вознаграждения имеют получить теперь зарегистрированные пользователи. В этом случае, бонусы предоставляются в рамках уникальных акций или же неким геймерам вид акционного предложения, которое прибывает на почту с целью «возвратить» игрока в свое казино. Иногда для получения призов нужно спутаться с представителями службы. Удобнее всего с ними разговаривать в онлайн-сате, хотя время довольно запроса по электрической почте. <a href=http://vn-info.net/user/DoctorLazutaSa/>http://vn-info.net/user/DoctorLazutaSa/</a> Выбор каждого интернет казино на нашем сайте. В описании к любому Вы сможете разузнать, что получите за создание аккаунта.Прежде всего, не забывайте периодически заглядывать на страницу обзоров бездепозитных бонусов. Они шаг за шагом разглядывают более интересные предложения основных игорных порталов. 1×slots регистрация 1×slots review live Промообъявления от казино мешают реальной картины и направлены на привлечение внимания юзеров. Понять, как высоки шансы остаться в плюсе, позволит личный анализ критерий предложения:
<b>Смотреть еще похожие новости:</b>
<a href=http://board.eternityrpc.com/member.php?action=profile&uid=369>1×slots регистрацию процедура займет всего лишь</a>
<a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=89195>1хслот зеркало сайта</a>
<a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=3358>зеркала 1×slots</a>
<a href=http://mandala-app.com/forums/memberlist.php?mode=viewprofile&u=3447>1×slots официальный сайт, скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Отзывы читателей о бонусных акциях помогут составить эмоцию, хотя не забывайте о субъективности личных комментариев.
#7220 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7221 luckyduckApkhttps://apk.luckyduck-casino-apk.ru
<a href=http://www.kozelben.hu/derefer/index?url=https://apk.luckyduck-casino-apk.ru/>https://apk.luckyduck-casino-apk.ru/</a> <a href=http://magikon-barnaul.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=https://apk.luckyduck-casino-apk.ru/>https://apk.luckyduck-casino-apk.ru/</a> <a href=http://t-res.ru/bitrix/rk.php?goto=https://apk.luckyduck-casino-apk.ru/>https://apk.luckyduck-casino-apk.ru/</a> <a href=https://bristol-cathedral.co.uk/?URL=https://apk.luckyduck-casino-apk.ru/>https://apk.luckyduck-casino-apk.ru/</a> <a href=https://inmusicbrands.com/?URL=https://apk.luckyduck-casino-apk.ru/>https://apk.luckyduck-casino-apk.ru/</a> <a href=http://white-blue.kiev.ua/goto.php?url=https://apk.luckyduck-casino-apk.ru/>https://apk.luckyduck-casino-apk.ru/</a> <a href=http://unikom.org/bitrix/redirect.php?event1=&event2=&event3=&goto=https://apk.luckyduck-casino-apk.ru/>https://apk.luckyduck-casino-apk.ru/</a> <a href=http://site.cascadelaser.com.xx3.kz/go.php?url=https://apk.luckyduck-casino-apk.ru/>https://apk.luckyduck-casino-apk.ru/</a> <a href=http://www.marstruct-vi.com/feedback.aspx?page=https:/https://apk.luckyduck-casino-apk.ru/>https://apk.luckyduck-casino-apk.ru/</a> <a href=https://oldbid.com/bitrix/redirect.php?goto=https://apk.luckyduck-casino-apk.ru/>https://apk.luckyduck-casino-apk.ru/</a> <a href=https://icar2019.aconf.org/news/download?file_url=https://apk.luckyduck-casino-apk.ru/>https://apk.luckyduck-casino-apk.ru/</a> <a href=http://cumshots.poonfarm.com/at/out.cgi?id=22&trade=https://apk.luckyduck-casino-apk.ru/>https://apk.luckyduck-casino-apk.ru/</a> <a href=http://blizsoft.com/AlstraSoft_Efriends/banners/index.php?url=https://apk.luckyduck-casino-apk.ru/>https://apk.luckyduck-casino-apk.ru/</a> <a href=http://www.atlantic-county.org/webadmin/MainPages/redirect.asp?page=https://apk.luckyduck-casino-apk.ru/>https://apk.luckyduck-casino-apk.ru/</a> <a href=https://www.huizen-belgie.nl/redirect.php?id=1886&link=https://apk.luckyduck-casino-apk.ru/>https://apk.luckyduck-casino-apk.ru/</a>
Upload application online casino luckyduck – win now! <a href=http://sawmillguide.com/countclickthru.asp?us=205&goto=https://apk.luckyduck-casino-apk.ru/>https://apk.luckyduck-casino-apk.ru/</a> <a href=https://www.psk6.ru/bitrix/click.php?goto=https://apk.luckyduck-casino-apk.ru/>https://apk.luckyduck-casino-apk.ru/</a> <a href=https://zlat.roscarservis.ru/bitrix/redirect.php?goto=https://apk.luckyduck-casino-apk.ru/>https://apk.luckyduck-casino-apk.ru/</a> <a href=https://psarquitetos.com/Home/change_language/en-us?ab=https://apk.luckyduck-casino-apk.ru/>https://apk.luckyduck-casino-apk.ru/</a> <a href=https://image.google.co.zw/url?sa=t&source=web&rct=j&url=https://apk.luckyduck-casino-apk.ru/>https://apk.luckyduck-casino-apk.ru/</a> <a href=http://twinkcute.com/cgi-bin/out.cgi?id=31&l=top_top&req=1&t=100t&u=https://apk.luckyduck-casino-apk.ru/>https://apk.luckyduck-casino-apk.ru/</a> <a href=http://tesay.com.tr/en?go=https://apk.luckyduck-casino-apk.ru/>https://apk.luckyduck-casino-apk.ru/</a> <a href=http://aniten.biz/out.html?id=aniyu&go=https://apk.luckyduck-casino-apk.ru/>https://apk.luckyduck-casino-apk.ru/</a> <a href=http://www.transline-rus.com/redir.php?url=http%3A%2F%2Fwww.mongodb.com/community/forums/t/mug-helsinki-in-house-ai-models-and-mobile-game-servers/264613>https://apk.luckyduck-casino-apk.ru/</a> <a href=http://www.resistance.today/redirect/frameset.php?url=//www.mongodb.com/community/forums/t/mug-helsinki-in-house-ai-models-and-mobile-game-servers/264613>https://apk.luckyduck-casino-apk.ru/</a> <a href=http://neo-net.pl.xx3.kz/go.php?url=https://apk.luckyduck-casino-apk.ru/>https://apk.luckyduck-casino-apk.ru/</a> <a href=http://copy16.ru/bitrix/rk.php?goto=https://apk.luckyduck-casino-apk.ru/>https://apk.luckyduck-casino-apk.ru/</a> <a href=https://www.kenyamoja.com/click.php?title=Nation-Government,%20electoral%20bosses%20strike%20deal%20on%20exit%20package&url=https://apk.luckyduck-casino-apk.ru/>https://apk.luckyduck-casino-apk.ru/</a> <a href=http://jufachina.ff66.net/productshow.asp?id=1065&mnid=48069&mc=%C6%BB%B9%FB4%B4%FA75GRO%B4%BF%CB%AE%BB%FA&url=http%3A%2F%2Fwww.mongodb.com/community/forums/t/mug-helsinki-in-house-ai-models-and-mobile-game-servers/264613>https://apk.luckyduck-casino-apk.ru/</a> <a href=https://ponkotsu33.com/st-manager/click/track?id=10876&type=raw&url=https://apk.luckyduck-casino-apk.ru/>https://apk.luckyduck-casino-apk.ru/</a>
#7222 Charlesgunny
1×bet зеркало слоты букмекерская контора вход <a href=https://t.me/vchkogpu_ru>балтбет букмекерская контора</a> Скворцова Вероника Игоревна порно скачать сайт букмекерской конторы <a href=https://www.ossetia.tv/>r7 casino</a> порно с Федор Чалов (футбол) порно с Антропова Валентина Викторовна Преподобная Надежда Александровна порно casino 7k рабочее porno Алена Михайлова порно с Елена Никитина, скелетонистка Комарова Наталья Владимировна порно
#7223 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7224 Charlesgunny
online casino 7k porno Мира Андреева (теннис) <a href=https://slon-ru.com/>игры казино</a> casino x up casino <a href=https://rumafia.news/>скачать букмекерскую контору на андроид</a> порно с Евгения Медведева, фигуристка casino скачать приложение porno Алена Михайлова сайте букмекерской конторы фонбет 1×bet зеркало xbet xyz рабочие зеркала казино скачать 1×bet на андроид бесплатно
#7225 promokod_dzplhttp://promokod-prodam.ru
промокод prodamus <a href=http://www.promokod-prodam.ru>http://www.promokod-prodam.ru</a> .
#7226 Charlesgunnyhttp://filmkachat.ru
1×slot официальный сайт
Прежде чем активировать бездеп, нужно убедиться никаких, собственно страна, уроженцем которой является игрок, не заходит в перечень не. <a href=http://filmkachat.ru/>1×slots промокод при регистрации</a> <a href=https://blog.udn.com/G_112062930339362154/181391883>https://blog.udn.com/G_112062930339362154/181391883</a> 1×slots зеркало сайта <a href=https://rekordmeister.ru/user/HenryDok/>https://rekordmeister.ru/user/HenryDok/</a>
1×slots официальный сайт мобильная версия скачать
Какие призы меня еще получить считая бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного бонуса, любое онлайн казино предлагает игрокам прибыльное предложение на 1-ый депозит, вы совершаете депозит, ваш депозит увеличивается в двое либо том в трое, тем самым начать играть возможно с больше крупной суммой, так же не запамятываем на вейджер на бонусы. <a href=https://sparta.training/faq/online-returns/#comment-67045>1×slots официальный сайт зеркало рабочее</a> 1хслотс мобильная версия зеркало <a href=https://xn----7sbarohhk4a0dxb3c.xn–p1ai/user/Oscardwern/>https://xn----7sbarohhk4a0dxb3c.xn–p1ai/user/Oscardwern/</a> При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток.В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с безвозмездных вращений. Прибыль, коию Вы заработаете на этом бездепе можно назначать на вывод без какого или отыгрыша. 1×slots промокод при регистрации 2025 Приветственный бонус без депо ? презент за регистрацию. Выдается деньгами, фриспинами или баллами. В последнем случае бонусные баллы используются для участия в турнирах или обмена на реальные средства.
1×slots зеркало регистрацию более популярный вариант это
Диапазон ставок, коие вправе устроить игрок, кроме лимитирован. Обычно ставить можно небольшую необходимую — пределах 10–30 рублей за одно вращение.Баланс игрока дополняется на соответствующую необходимую. К ней применяется вейджер, указанный в правилах промоакции. Вывести выигрыш можно будет в такого, как пользователь сделает требуемый объем ставок из собственных средств. В редких случаях бездеп трудится в формате Free Play. На счет юзера зачисляется крупная сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по завершении этого периода сумма на счету будет превышать первоначальную, то разность можно несомненно исключить либо применять для последующих ставок. <a href=https://forum.vgatemall.com/member.php?action=profile&uid=89505>https://forum.vgatemall.com/member.php?action=profile&uid=89505</a> При отыгрыше бонусных средств, нужно учесть срок деяния приза и время, которое дается на отыгрыш. По истечению заявленного времени, не отыгранный бонус будет аннулирован.Хотя благотворительные бонусы начисляются без депо, не исключено, собственно вам придется заносить деньги. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только в такого, как новый заказчик впервые пополнит игровой счет. 1хслот зеркало сайта Ещё одно распространённое акционное предложение – привлекательный подарок с сомнительными притязаниями. К образцу, клуб обещает $100 в качестве бездепа, но с вейджером х80 или х100. Отыграть подобный вейджер фактически нереально и потому другого концентрироваться на более заманчивых промоакциях.Не трудно додуматься, собственно no deposit bonuses почти ни не случаются немаленькими. Чаще всего идет о пяти–тридцати долларах (или эквиваленте этой суммы в иной денежной).
1×slots бонус за регистрацию
Шаг 5. Использование и отыгрыш. Бездеп обязан быть использован в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера. Бездепозитный бонус – это экономическое вознаграждение, которое выдается участнику игры в казино, для его привлечения и появления заинтригованности. Любой гость, который подходит условиям выдачи похожего бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое одобрение является наиболее эффективным методом, дающим вероятность стартовать при, не вкладывая личных вещественных средств. 1×slots casino зеркало рабочее <a href=http://droid-comz.ru/index.php?subaction=userinfo&user=abusivearbiter8>http://droid-comz.ru/index.php?subaction=userinfo&user=abusivearbiter8</a> Вознаграждения за получение VIP-статуса ? начисляются в программки преданности при достижении одного уровня либо выдаются персонально менеджерами службы поддержки.
1×slots промокод при регистрации 2025
Бонусы без депо при регистрации числятся наиболее красивыми как для опытнейших игроков, например для и начинающих. Получив такое вознаграждение, клиент имеет выступать на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные призы в интернет-казино Рунета, еще обстоятельства их активации и выигрыша.Не рекомендуем опрометью голову хвататься за различные предложения получения средств без вложений. Вполне вероятно, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на первый взор. Альтернативой считается казино приз за депозит. Мы предлагаем вам пару советов, благодаря которым у каждого игрока будет возможность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств: Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми акциями. Читайте о них в обзорах и на форуме. <a href=http://bbs.xinhaolian.com/home.php?mod=space&uid=4004169>http://bbs.xinhaolian.com/home.php?mod=space&uid=4004169</a> В основном случаев безвозмездные бонусы начисляются в кредитах, коие невозможно незамедлительно вывести со счета. Прежде их нужно отыграть по установленным правилам. Эти притязания принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже.Как только получите бездеп в казино, всё равно не забывайте инспектировать электронную почту. Некоторые игорные клубы непрерывно веселят интенсивных гэмблеров приятными бонусами. Чаще всего получить подарок можно в преддверии праздника, на день рождение, за вербование друга. А также распространённым призом считается надбавка к депозиту. Нужно всего лишь восполнить счёт, и азартное заведение увеличит его на 50–100%. 1×slots скачать на айфон Чтобы получить возможность вывести выгода с бездепозитного бонуса в казино, нужно выполнить ряд условий:
<b>Смотреть еще похожие новости:</b>
<a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=870110>1×slots зеркало видели такую регистрацию на</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный приз казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в этом и содержится главное различие.
#7227 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7228 Charlesgunny
букмекерская контора на андроид казино на деньги <a href=https://kompromat1.online/>porno Мира Андреева (теннис)</a> казино сегодня casino играть <a href=https://7club7.com/>1×bet зеркало xbet xyz</a> скачать pin casino kent casino регистрация 1win casino спорт букмекерская контора пина casino Скоробогатова Ольга Николаевна порно up casino
#7229 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7230 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало
Иногда в поощрения за регистрацию все выдаваться билеты для участия в турнирах. Условия их проведения довольно выделяются, потому мы рекомендуем ознакомиться с каждым предложением раздельно.Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. <a href=http://filmkachat.ru/>1хслотс официальный сайт зеркало</a> Чаще всего применяются коды. Их надо(надобно) вносить в особые окна регистрационной анкеты, случае идет о пригласительных бонусах, либо в особом разделе собственного офиса игрока. <a href=https://www.empowher.com/groups/blogs-4/posts-33>https://www.empowher.com/groups/blogs-4/posts-33</a> Обычно, бездепозитные бонусы выдаются под определенные слоты с фиксированной ставкой, хотя их наверняка запрещено применять в игровых автоматах с прогрессивным джекпотом. Список игр, каких можно применять бездеп, Вы найдете в описании акции либо сможете уточнить у службы заведения.Активация по промокоду используется в различных обликах бездепов. Если речь идет о приветственном призе, то набор символов возможно разузнать на главной страничке, в регистрационной форме или письме, коие отправляется пользователю для доказательства e-mail. Акции имеют проводиться общо с партнерскими площадками. Обычно код располагается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется разовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном кабинете либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем важный код для активации в описании любого рекламную. 1хслотс 1хслотс регистрация перейти на 1×slots <a href=http://nv-study.ru/bitrix/redirect.php?goto=http://olbuss.ru/bitrix/redirect.php?goto=http://deserved.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/9d9T2LV7usg>http://nv-study.ru/bitrix/redirect.php?goto=http://olbuss.ru/bitrix/redirect.php?goto=http://deserved.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/9d9T2LV7usg</a> Получать информацию о самых прибыльных призах возможно без постоянного прогноза новостей казино. Мы взяли эту задачу на себя и постоянно следим за услугами операторов, выбирая лучшие из их. В данном разделе собраны последние бездепы, промокоды к ним и условия их активации. Список промоакций периодически пополняется. В топ вошли самые свежие бездепозитные бонусы за регистрацию в казино 2020, временные и закрытые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и другим аспектам. Если срок действия промоакции истек, она удаляется из списка.Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные способы и расценить особенности, труднодоступные при этой в демо режиме. Многие свежие посетители перебегают в число неизменных, а оператор получает долгосрочную прибыль.
1×slots зеркало которую указывали при регистрации кстати
Чаще всего, пользующиеся сервисы, такие как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно неотъемлемое верховодило. Финансовые свои выводятся только через что, эту платежную систему, коей огромный для пополнения депозита. Если же игрок получил бездепозитный покерный приз, потребуется пополнить счет на наименьшую необходимую, кот-ая составляет обыкновенно 10 долларов.Это раз из главных характеристик привлекательности подарка. С завешенным коэффициентом числе профессионалы не сумеют выполнить обстоятельства по отыгрышу. И не, насколько презентабельно смотрится предложение – бездепозитный приз казино в размере $500 или $1 000. Чтобы новички получше вникли, что же это вейджер, мы разберём на образце. <a href=https://praisenpray.org/forums/showthread.php?tid=95461&pid=98485#pid98485>1×slots официальный сайт зеркало</a> 1×slot зеркало При исполненьи критерий отыгрыша и верификации, средства с бонусного счета переводятся на ведущей и имеют быть выведены на карту или электронный кошелек. Лимиты на вывод и сроки проведения транзакции зависимости от выбранной платежной системы. <a href=http://polishcrazyclan.ugu.pl/member.php?action=profile&uid=268697>http://polishcrazyclan.ugu.pl/member.php?action=profile&uid=268697</a> Простая процедура получения бездепозитного бонуса, кот-ая займет менее 2-х минут. Для получения бездепов, достаточно зарегистрироваться и подтвердить контактные данные. 1хслот официальный сайт зеркало
1×slots зеркало регистрация то дальше необходимо пройти
Акции распространяются как на все игры казино, например и на ограниченный перечень. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino прочие. Промо имеет обхватывать разработки 1-го производителя. Бездеп не пересекается с другими промоакциями казино. Если на сайте предусмотрен кэшбек, он не начисляется за ставки, сделанные бонусными средствами. Для идентификации платежных реквизитов игрока возможность понадобиться пополнение счета на минимальную необходимую.Только выполнив все обстоятельства отыгрыша и дождавшись завершения проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить средства деньги. <a href=http://www.fire-team.ru/forum/member.php?u=4518>http://www.fire-team.ru/forum/member.php?u=4518</a> На данном разделе портала регулярно публикуются обзорные статьи, каких рассматриваются бесплатные бонусы наихороших интернет-казино. Информация структурирована по нескольким пунктам, включая основные:В бонусную программу множества операторов входят регулярные бездепы. Это пожизненные акции, поощряющие интенсивных постоянных игроков. Популярный формат — раздача фриспинов по конкретным денькам недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депо в обмен на скопленные баллы лояльности. 1×slots регистрация то дальше необходимо пройти
1× slots casino официальный сайт
Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. Эффективность бездепов в качестве маркетингового прибора расценили все операторы. Малоизвестные площадки употребляют эти акции, дабы прытко набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны неизменных посетителей. Не все веб-сайты, дающие презенты без депо, рекомендованы к игре. За привлекательным промоописанием имеют прятаться невыполнимые условия отыгрыша и подводные камешки.В интернет-сети всегда можно отыскать перечни наиболее известных и обещанных поощрительных программ от популярных онлайн-казино. 1×slots сайт <a href=https://www.ccvgaming.com/forum/member.php?38803-Raymondelils&s=ac19a756408b6f4291df64fa07d582e6>https://www.ccvgaming.com/forum/member.php?38803-Raymondelils&s=ac19a756408b6f4291df64fa07d582e6</a> Если вы новичок деле и лишь попали в неизведанную вами район азарта — счет услуг как бездепозитные бонусы без пополнения.Выиграть реальные средства в казино не пополняя счет – трудно, но вполне. Главное задаться целью и не нарушатьправила заведения. Выберите несколько казино с бездепзитными бонусами и начните играть на бонусные свои. По статистике в одном из 10-ти заведений можно заработать небольшую сумму денег помощью бонусных средств.
1×slots сайт
Новички не любят незамедлительно же вносить депо. Это обусловлено неимением опыта и сомненьем. К счастью, в возможно получить бездепозитный приз за регистрацию в казино. Неважно собственно начислит система – фриспины или кредиты. В всяком случае вы не рискуете своими сбережениями. Это замечательная вероятность запустить понравившийся видео разъем либо же испытывать фортуну в настольных забавах.Главное преимущество спинов – вероятность изучить различные слоты. Также получится насладиться бонусными раундами, испытывать фортуну в риск-туре и преувеличить выигрыш за счёт особенных знаков. Однако столько игровой процесс заслуживает внимание, ведь лучше сосредоточиться на реальном выигрыше. <a href=http://doctor54.ru/blogs/view/3923.html>http://doctor54.ru/blogs/view/3923.html</a> С иной стороны, гораздо легче забрать бездепозитные фриспины за регистрацию в казино и напрямик данный начать вращать барабаны в лучших слотах. Главная необыкновенность спинов том,, собственно они предназначены для лучших автоматов. Удастся не только пройти вспомогательные раунды, хотя и прирастить сумму выигрыша, заработать респины и внутриигровые подарки. онлайн казино 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://clubdefansde24.com/foro/viewtopic.php?t=18659>1×slots casino регистрация 1×slots review live</a>
<a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/5817–1×-slots-casino-ofitsialnyj-sajt#5826>1× slots casino официальный сайт</a>
<a href=https://australiantravelforum.com/Upload/showthread.php?tid=187834>1хслот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Существует ли стратегии для отыгрыша бездепозитных бонусов? К сожалению нет, на выигрыши либо проигрыши с призов, казино или игрок воздействовать не, отдача игр случается от разработчиков игр. Условия вывода выигрыша. В неких заведениях для удачного вывода с бездепозитного бонуса достаточно пополнения баланса и подтверждения личности. В других же клубах, нужно количество раз прокрутить собственный депо.
#7231 Charlesgunny
pin ап casino ограбление казино <a href=https://m.repost.news/>Преподобная Надежда Александровна порно</a> почему в казино не бывает настенных часов Набиуллина Эльвира Сахипзадовна порно <a href=https://sovsekretno.net/>казино без</a> букмекерские конторы pin vavada casino casino на телефон смотреть фильм казино порно с Варвара Субботина реального казино скачать букмекерскую контору на андроид
#7232 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7233 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать
Новички не обожают сразу же вносить депозит. Это обосновано отсутствием опыта и недоверием. К счастью, в наше время можно получить бездепозитный бонус за регистрацию в казино. Неважно собственно начисляет система – фриспины или кредиты. В всяком случае вы не рискуете собственными сбережениями. Это замечательная вероятность запустить приглянувшийся видео слот либо же испытывать удачу в настольных забавах.Для верификации аккаунта нужно предоставить профессионалам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, а фотку банковской карты либо скриншот страницы электрического кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для подтверждения личности. <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> Бездепозитный бонус за регистрацию в казино — это стартовый подарок в виде денежного начисления или безвозмездных вращений для свежих игроков заведения, для получения которого надо заносить депо. <a href=https://webanketa.com/forms/6gtk2c9r64qk4cb5cgw66c9p/>https://webanketa.com/forms/6gtk2c9r64qk4cb5cgw66c9p/</a> Многие азартные клубы ограничивают необходимую вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании акции, суммы Вы не сможете исключить. Разница будет аннулирована, Вы том не можете создавать на нее ставки. 1×slots официальный зеркало <a href=https://www.battle-scape.com/members/249959-Joshuacar>https://www.battle-scape.com/members/249959-Joshuacar</a>
1×slots рабочее зеркало
<a href=https://portugal-campings.com/pt/account/>1×slots casino зеркало</a> 1×slots официальный сайт зеркало Для подтверждения электронной почты, просто перейдите по интенсивной ссылке в письме, полученном от игрового заведения. <a href=https://familydir.com/%D0%BA%D1%83%D0%BF%D0%B8%D1%82%D1%8C-%D0%B2%D0%BD%D0%B5%D1%88%D0%BD%D0%B8%D0%B5-%D1%81%D1%81%D1%8B%D0%BB%D0%BA%D0%B8-%D0%BD%D0%B0-%D1%81%D0%B0%D0%B9%D1%82_442902.html>https://familydir.com/%D0%BA%D1%83%D0%BF%D0%B8%D1%82%D1%8C-%D0%B2%D0%BD%D0%B5%D1%88%D0%BD%D0%B8%D0%B5-%D1%81%D1%81%D1%8B%D0%BB%D0%BA%D0%B8-%D0%BD%D0%B0-%D1%81%D0%B0%D0%B9%D1%82_442902.html</a> В интернет-сети постоянно возможно отыскать списки наиболее модных и обещанных поощрительных программ от популярных онлайн-казино.Все любят получать презенты. Согласитесь, почти любой играющий человек несомненно бесконечно рад, если получит бесплатный подарок для забавы в интернет казино просто за регистрацию либо же бонус за внесенный депо, так называемые приветственные бонусы для свежих игроков. Соответственно такие интернет клубы будут более знамениты и предпочтительны у игроков при выборе казино для забавы. Топ казино день обновляется и добавляются новые и интересные игровые клубы с симпатичной бонусной политикой и всеми вероятными преимуществами, льготами, к которым относятся эти призы как фриспины за регистрацию, валютные бездепозитные бонусы, еще щедрые призы за внесенный депо. 1×slots casino регистрация на сайте В реальное время получить приз за регистрацию в казино довольно просто. Почти любой игорный жилище с радостью даст деньги или безвозмездные вращения. Многие игроки пользуются данным и не стесняются региться в любом клубе с прибыльными условиями. Кстати, это замечательная вероятность придумать выигрышную тактику и сорвать куш.
1 х слотс зеркало
Баланс игрока дополняется на подобающую сумму. К ней применяется вейджер, указанный в правилах промоакции. Вывести выигрыш возможно будет последствии того, как пользователь сделает требуемый размер ставок из собственных средств. В редких случаях бездеп работает в формате Free Play. На счет пользователя зачисляется крупная сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по завершении этого периода сумма на счету будет превышать изначальную, то разницу возможно будет исключить или использовать для дальнейших ставок.Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам воспрещено начислять бонусы клиентам, не имеющим валютных средств на счете. Мы предлагаем рассмотреть актуальные призы онлайн-казино с лицензией, коие соблюдают законодательство РБ. Каждый новичок и умелый игрок грезят стремительно стартануть и начать делать реальные ставки. Для этого довольно забрать презент, за кот-ый надо выплачивать. В зависимости от игровой платформы, нужно создать профиль, привязать email либо телефон. После сего администрация начислит щедрое вознаграждение вид безвозмездных вращений или виртуальных кредитов. <a href=http://www.graphicalyzer.x10.mx/member.php?u=163807>http://www.graphicalyzer.x10.mx/member.php?u=163807</a> 1хлот регистрация в 1×slots casino Наличие у игрока второго аккаунта. Запрещено создавать некоторое профилей для многократного получения бездепов.
1×slots регистрация то дальше необходимо пройти
Бонус за регистрацию в казино без депозита с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша имеет понадобиться сделать ставки на необходимую, в некоторое десятков раз превышающую необходимую приза или выигрыша.Как только вы отыграли вейджер и свои с бонусного баланса перешли вас на реальный счет, Вы неустрашимо можете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (сделать наименьший депо например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депозитом). Срок активации и время на отыгрыш. Зачисление денег или фриспинов происходит при активации в течение взыскательно ограниченного периода, подобные требования предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать приз некоторое дней либо и недель. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с неоправданно высоким вейджером. Минимального оборота. Этот лимит устанавливается вейджером — же игрок не сыграет на установленную необходимую, вывод средств будет недосегаем.Вейджер (либо вагер) ? это минимальная сумма ставок, коию необходимо сделать для вывода валютного приза. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, тем привлекательнее спецпредложение. 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=https://zarctvo.ru/user/porsedropml/>https://zarctvo.ru/user/porsedropml/</a> Каждая игровая платформа выделяется условиями по получению и отыгрышу бездепов. В правилах детально расписаны кратковременные рамки, за коие нужно прокрутить вейджер. Также не забывайте тему максимальный размер ставки и наивысшую необходимую выплаты. С иной стороны, чтобы получить бездепозитные бонусы казино, довольно израсходовать менее 1 минуты.
1×slots зеркало этих способов предполагает регистрацию
<a href=http://it.euroweb.ro/wiki/index.php/User:KishaBuring7>http://it.euroweb.ro/wiki/index.php/User:KishaBuring7</a> Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке адепты онлайн-казино публикуют актуальную информацию о not the slightest deposit bonuses прочих предложениях. 1×slot официальный сайт Реже призы без депозита начисляются неизменным игрокам. С их подмогою администрация постарается удержать ценных посетителей или желает поблагодарить за лояльность правильных посетителей. Но гораздо чаще для похожих целей используются такие промоакции:
<b>Смотреть еще похожие новости:</b>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=82601&result=reply>1×slots casino регистрация 1×slotscasin online</a>
<a href=https://chasingadream.rpginitiative.com/showthread.php?tid=153619>1×slots зеркало сайта</a>
<a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=93413>1×slots регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подтверждение регистрации. Казино требуют привязки профиля к электронному адресу и номеру телефона. Для сего на e-mail отчаливает послание ссылаясь, а на аппарат ? текстовое извещенье с кодом.
#7234 Charlesgunny
казино пин Черкесова Бэлла Мухарбиевна порно <a href=https://specreporter.com/>рабочее казино</a> порно с Георгий Джикия (футбол) пин up casino <a href=https://t.me/vchkogpu_ru>как выиграть в казино</a> симулятор казино up casino официальный ешь казино почему в казино нет окон 1×bet сайт букмекерская контора вход порно с Виктория Синицина, фигуристка
#7235 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7236 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало проходить регистрацию это отличный вариант
За привлечение приятеля ? в рамках партнерской программы заказчик получает вознаграждение за вербование свежих юзеров. <a href=http://filmkachat.ru/>1×slot официальный сайт</a> В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с бесплатных вращений. Прибыль, коию Вы заработаете на таком бездепе можно назначать на вывод без какого либо отыгрыша. <a href=https://menagerie.media/index.php?link1=read-blog&id=91838>https://menagerie.media/index.php?link1=read-blog&id=91838</a> Наиболее популярностью гонорары между гэмблеров – бездепозитные бонусы казино. Это не дивно, как можно получить бесплатные вращения либо виртуальные кредиты, и при не придётся пополнять счёт, рисковать личными средствами. Удастся насладиться различными весельями причем выиграть крупную необходимую, избегая серьёзного риска. 1×slots мобильная версия войти казино <a href=https://mega-games.pl/user/JoshuaFip/>https://mega-games.pl/user/JoshuaFip/</a>
1хслот зеркало
Активация по промокоду употребляется в разных обликах бездепов. Если идет о приветственном бонусе, то набор символов возможно разузнать на основной странице, в регистрационной форме либо письме, коие отправляется юзеру для доказательства адреса электронной почты. Акции шансы проводиться совместно с партнерскими площадками. Обычно код располагается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется одноразовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем актуальный код для активации в описании каждого рекламную.Разные казино имеют собственные управляла по выведению выигрыша. Для бездепозитных призов принимаются достаточно высочайшие притязания. Часто онлайн-казино рекомендуют отыграть бонусное поощрение до ста один в игровых автоматах. Например, если игрок получил безвозмездно 10 долларов, то необходимо несомненно отыграть их, поставив одну тысячу спинов по одному баксу каждый. Стоит обозначить(означить), что не все казино выделяют вероятность выступать на бонусы и не во всех увеселительных заведениях идентичные правила для отыгрывания. Некоторые казино воспрещают играть на призы в блекджек либо ограничивают ставки до пяти %, что значительно увеличивает в 10-ки раз количество необходимых игр. <a href=https://praisenpray.org/forums/showthread.php?tid=94839>1×slots регистрация 1×slots review live</a> 1 х слотс зеркало После получения приза вывод средств для посетителя будет недосегаем до, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя либо пара месяцов. Выводить деньги игрок может только после отыгрыша. <a href=http://alice8833.com/home.php?mod=space&uid=74495>http://alice8833.com/home.php?mod=space&uid=74495</a> 1хслотс казино зеркало Подтверждение регистрации. Казино настоятельно привязки профиля к электронному адресу и номеру телефона. Для этого на e-mail отчаливает письмо со ссылкой, а на телефонный ? текстовое известье с кодом.
1×slots зеркало рабочее
Возьми свой презент. Чаще всего приз активизируется незамедлительно последствии регистрации. Но посещают ситуации, когда нужно зайти в личный офис либо написать в справочную службу.Возможность протестировать свежие забавы, не рискуя личными средствами и разработать личную стратегию забавы. <a href=http://www.sixsigmaexams.com/mybb/member.php?action=profile&uid=271360>http://www.sixsigmaexams.com/mybb/member.php?action=profile&uid=271360</a> Вейджер (либо вагер) ? это минимальная сумма ставок, коию необходимо устроить для вывода валютного приза. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, тем привлекательнее спецпредложение.Для получения приза нужно ознакомиться с программкой лояльности казино и сделать ставки на сумму, нужную для перехода на следующий степень. 1×slots промокод при регистрации 2025 Подтвердите личность, предоставив оператору казино средства паспортные данные. Инструкции обыкновенно несложные, главное — конкретно им по. Если написано, собственно «на фото должны быть видны все четыре угла страницы паспорта» — сделайте непосредственно это фото.
1×slots актуальное зеркало
<a href=http://board.eternityrpc.com/member.php?action=profile&uid=369>1× slots casino официальный сайт</a> Некоторые онлайн-казино без депо предлагают новым клиентам избрать приз при регистрации. Будьте внимательны: выбрав один, вы в безоговорочном большинстве случаев не можете пользоваться остальными. 1 x slots casino <a href=https://timeoftheworld.date/index.php?title=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D0%BE%D0%B2%20%D0%B8%D0%B7%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO>https://timeoftheworld.date/index.php?title=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D0%BE%D0%B2%20%D0%B8%D0%B7%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO</a>
1×slots зеркало этих способов предполагает регистрацию
Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте обстоятельства – они нередко выдаются для некоторых машин. В зависимости от клуба продоставляется делать конкретное количество ставок. Кстати, современные игорные жилища дают вероятность заводить «одноруких бандитов». Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=http://uralremput.ru/index.php?subaction=userinfo&user=abjectmotto29>http://uralremput.ru/index.php?subaction=userinfo&user=abjectmotto29</a> Игры, в можно выступать на бонусные средства. Проверьте список игр, в можно играть на бонусные средства, вероятно они Вам не понравятся и надо расходовать своё время на эту акцию.У нас на веб-сайте Вы отыщите перечень бонусов без депо в испытанных казино и подробную информацию то как их получить и применять. 1×slots регистрация на 1хслотс
<b>Смотреть еще похожие новости:</b>
<a href=https://www.goslog.ru/forum/messages/forum1/message13332/11-obrashcheniya-grazhdan?result=reply#message13332>1×slots регистрация на 1хслотс</a>
<a href=http://palais.beesims.com/phpbb/viewtopic.php?f=2&t=290613>1×slots официальный зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Так собственно сможете отважно регистрироваться без всяких размышлений. Фортуна сейчас наверняка на вашей стороне. Не побаивайтесь, так следствие какого либо ущерба Вам совершенно не угрожает. С этими бонусами как без пополнения, Вы остаетесь лишь в плюсе, хотя не как не в минусе.
#7237 Charlesgunny
про казино online casino официальный <a href=https://repost.news/>порно с Зырянова Анастасия Владимировна</a> porno Анна Сидорова, керлингистка new casino <a href=https://th-royalgclub.com/>casino играть</a> порно с Баталина Ольга Юрьевна 1×bet слоты porno Анастасия Янькова, боксерка casinos winning 1×bet зеркало 1×bet скачать приложение на андроид casino андроид
#7238 Clydecringhttps://www.cctvfocus.ru
Лучшие 10 программ <a href=https://www.cctvfocus.ru/>https://www.cctvfocus.ru</a> для видеонаблюдения. Программное обеспечение для видеонаблюдения. При выборе программного обеспечения важно учитывать наличие функции обнаружения объектов с использованием искусственного интеллекта.
#7239 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7240 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino 777 online
Главное превосходство спинов – возможность выучить разные слоты. Также получится насладиться бонусными раундами, испытать фортуну в риск-туре и преумножить выигрыш за счёт особенных символов. Однако столько игровой процесс заслуживает внимание, так другого сосредоточиться на реальном выигрыше.Фриплей-бонусы. Бонусы за бесплатную игру есть лишь в некоторых клубах. Они зачисляются сразу в творенья профиля и действуют непродолжительное время. Если у вас нет времени потратить свои, они просто закончатся. Что касается времени, правило призы действуют в течение 1-го часа. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots review live</a> В онлайне много знаменитых игорных площадок с привлекательными акционными предложениями. Однако пристально разбирать условия 10-ов предложений вскоре надоест, да и время отнимет много. Поэтому наша команда подготовила ТОП-3 вебсайтов с наилучшими бездепозитными призами: <a href=https://pinshape.com/users/4313519-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%BC%D0%BE%D1%82%D0%BE%D1%86%D0%B8%D0%BA%D0%BB%D0%BE%D0%B2#prints-tab-open>https://pinshape.com/users/4313519-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%BC%D0%BE%D1%82%D0%BE%D1%86%D0%B8%D0%BA%D0%BB%D0%BE%D0%B2#prints-tab-open</a> Если вы выбираете проверенное лицензионное интернет казино и выполните все условия получения бездепозитного приза, проблем с получением дара у Вас не возникнет.Онлайн-казино тщательно продумывают бонусные условия, коие нужно изучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и лимитирования. 1×slots зеркало выигрыши обязательно пройдите регистрацию если <a href=http://xiaoping777.com/home.php?mod=space&uid=59308>http://xiaoping777.com/home.php?mod=space&uid=59308</a>
1×slots зеркало регистрацию более популярный вариант это
Не рекомендуем опрометью голову хвататься за различные предложения получения средств без вложений. Вполне вероятно, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на первый взор. Альтернативой считается казино приз за депозит. Мы предлагаем вам пару советов, благодаря которым у каждого игрока будет возможность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств: 1×slots официальный сайт скачать Риск-игра по равным шансам – Также казино может воспрещать скорпулезно условия по отыгрышу за раунда на удвоение, который предлагается в слотах, видео-покере и неких иных забавах. <a href=https://acerfans.ru/user/Charleslax/>https://acerfans.ru/user/Charleslax/</a> Обычно для получения призов без депо, казино выдвигает лояльные и вполне выполнимые условия, но есть ряд действий коие запрещены и все повлечь за собой досадные последствия: 1×slots зеркало 1хслотс регистрация перейти на 1×slots Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам запрещено начислять призы клиентам, не имеющим валютных средств на счете. Мы предлагаем рассмотреть животрепещущие бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ.
1хслотс официальный сайт зеркало
Бездепозитный бонус казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в данном и содержится главное отличие.Лишь популярностью и известные азартные заведения все позволить себя раздавать бездепы повторяющий добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депо, которые можно израсходовать в топовых аппаратах с высочайшей отдачей. <a href=http://intentionalpress.com/author/franknemia/>http://intentionalpress.com/author/franknemia/</a> 1×slots casino зеркало Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, solid лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.
1хслотс официальный сайт зеркало
Бездепозитные бонусы – это исключительно интересная и наиболее перспективная промоакция интернет-казино. Они даже другого, как фри-спинов, поэтому что выплаты в бесплатных вращениях не гарантированы, так комбинации на барабанах игрового аппарата могут не сложиться.С этими ординарными советами каждое казино с призом за регистрацию способно принести в разы больше выгоды и пользы. Рассмотрим на образце: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских рублей. В критериях промоакции предписано, собственно вейджер бездепозитного приза х20. Поэтому, дабы отыграть приз, игроку будет нужно устроить ставок на 35*20=700 руб. скачать 1×slots на андроид мобильная версия <a href=https://r.rumedia.top/user/HenryArgub/>https://r.rumedia.top/user/HenryArgub/</a> Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы которые возникают у начинающих.Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают бонус по государствам. Вплоть до такого, собственно клуб имеет брать игроков из Вашей страны, а бездеп не давать.
1×slots регистрация 1×slots review live
Oтыгpaть бонус с указанным вeйджepом, чтобы необходимо сдeлaть cтaвoк нa cумму, превышающую объем бонуса в несколько раз.Осталось избрать казино с бонусом за регистрацию и создать профиль. После активации дара выигрыш зависит от Фортуны и навыков. Многие казино предоставляют в маркетинговых целях безвозмездные бонусы необыкновенно для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой сайт по партнерской ссылке с нашего портала.Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют важную информацию о not the slightest deposit bonuses и предложениях. <a href=http://www.tianyecollege.com/home.php?mod=space&uid=44008&do=profile&from=space>http://www.tianyecollege.com/home.php?mod=space&uid=44008&do=profile&from=space</a> Зачастую бездепозитные призы казино для игры предлагаются различными заведениями азартных игр в маркетинговых промоакций или в целях вербования к для свежих игроков. Для бездепозитных бонусов в казино 2022 игроку не пополнять счет до момента вывода желаемых средств. 1×слотс казино Изучить верховодила и условия получения бездепозитных бонусов казино, Вы сможете у нас на сайте в разделе с бонусами или на официальном веб-сайте выбранного Вами казино. Если имеет отыскать нужную информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал либо по электронной почте.Размер приза. В качестве бездепов обыкновенно начисляют большие суммы, а когда идет о бонусах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино все подарить игроку до 2000$.
<b>Смотреть еще похожие новости:</b>
<a href=http://t954381g.bget.ru/user/JosephPiery/>1×slots регистрация на сайте 1×slots ru com</a>
<a href=http://amazon.rx22.ru/viewtopic.php?f=5&t=1701>казино 1×slots официальный сайт</a>
<a href=https://forum.vn.ua/member.php?u=73361>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Таким образом онлайн казино получает потенциального игрока. Возможно дальнейшем или истинном он захотит поиграть на свои деньги. Так работают бездепозитные призы в интернет казино. Здесь хорошо подходит выражение, благотворительные сыр бывает лишь в мышеловке. Начинающие игроки все не обдумывать опасность азарта. Однако времени осознания делается больше. Это тема для отдельного обсуждения.
#7241 Charlesgunny
1×bet скачать бесплатно casino онлайн <a href=https://vestnik-jurnal.com/>вавада казино</a> казино можно Приезжева Екатерина Геннадьевна порно <a href=https://strelochnik.com/>букмекерская контора зенит</a> casino порно с Сергей Бобровский (хоккей) сайте букмекерской конторы фонбет сайт pin up casino лучшие онлайн казино казино вход 7k casino зеркало рабочее
#7242 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7243 Charlesgunnyhttp://filmkachat.ru
1хлот регистрация в 1×slots casino
Вышеописанная причина и считается главным моментом, следствии которого операторы отдают доля собственной прибыли на различные маркетинговые расходы и маркетинговые кампании. А самым действующим здесь станут выступать непосредственно бездепозитные призы казино 2022 с выводом за регистрацию.Казино выводит средства только на что, эту платежную систему, с котрой был сделан депо. То есть, для вывода бездепозитного приза, Вам поначалу нужно восполнить счет. В некоторых клубах узкий перечень способов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет непосредственно с данных платежных методов, коие доступны для вывода. <a href=http://filmkachat.ru/>1×slots зеркало подтвердит вашу регистрацию если говорить</a> <a href=https://owntweet.com/thread/214646>https://owntweet.com/thread/214646</a> 1×slot официальный сайт <a href=http://www.cooperativacoomultexco.com/user/CharlesKat/>http://www.cooperativacoomultexco.com/user/CharlesKat/</a> Несмотря на то, собственно данный вариант стимуляции со стороны азартных платформ очень востребован области сходственных игр, далековато не всем поклонникам казино знаменито, что являют собой бездепозитные бонусы казино и как непосредственно их вероятно эксплуатировать.Каждый из бездепозитных бонусов без пополнения 2022 имеет свой конкретный вейджер для отыгрыша, так же в любом казино он устанавливается индивидуально — где то он х55 а кое-где х30, повторюсь везде по разному!
1 хслот регистрация в 1×slots casino
<a href=http://djdrewski.co.uk/lfsbangers/viewtopic.php?f=32&t=35130>1хслотс регистрация в 1×slots casino</a> 1х слотс зеркало регистрация в 1×slots casino <a href=https://backpacker-footsteps.com/backpacker-footsteps-forum/profile/jameswah/>https://backpacker-footsteps.com/backpacker-footsteps-forum/profile/jameswah/</a> Но такие рамки не смущают даже хайроллеров, что коэффициенты на слотах позволяют рассчитывать на крупные выигрыши, а неких автоматах разыгрывается передовой джекпот.Получить Бездепозитный приз в интернет казино дело двух кликов. Другой момент, отыграть рекламную и соблюсти правила и обстоятельства отыгрыша. Под правилами подразумевается не вагер, хотя и лимитирования по максимальной ставке. Мы разумеем, что в кинотеатр все ставят на зеро и выигрывают. Призываем не создавать похожего. Перед активацией приза прочтите верховодила. Узнайте последующие моменты: Условия получения дара, за регистрацию, за депо и другое. Ограничения по наибольшей ставке. Зачастую не повыше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вращать автоматы, а вагер несомненно стоять на месте. Поэтому главно знать, в каких забавах возможно осуществлять кратность валютного оборота. 1×slots официальный зеркало рабочее Для подтверждения электронной почты, просто перейдите по интенсивной ссылке в послании, приобретенном от игрового заведения.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 долларов. Если выдаются фриспины, их число редко выше нескольких 10-ов бесплатных вращений.
1×slots регистрация 1×slots review live
При небольшой сумме приза рекомендовано играть по невысоким ставкам, а использовать максимальные другого, как только в случае, случае вейджер слишком немалый, а время на отыгрыш крепко ограничено. В разделе с бонусами активировать собственный подарок. Найти игры, для коих предусмотрено поощрение и использовать бонус по предназначению.Представленные на этой странице превосходнейшие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные обстоятельства. После кропотливого анализа редакция портала составила рейтинг спецпредложений, в котором гости Casino.ru шансы сортировать перечень по нескольким аспектам: по сумме, вейджеру, максимальной сумме вывода и т.д. <a href=https://google.com.tj/url?q=https://doctorlazuta.by/>https://google.com.tj/url?q=https://doctorlazuta.by/</a> Зарегистрироваться в казино по особой ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефона и электронную почту). Для подтверждения номера телефона нужно в собственном профиле указать собственный номер и надавить кнопку „Подтвердить номер телефона“, дальше Вы получите sms-сообщение с кодом, который необходимо ввести в подходящее поле. Для подтверждения электронной почты, перебежать по активной ссылке в послании от казино. x1 slots 1хслотс регистрация перейти на 1×slots В подавляющем большинстве случаев бесплатные призы начисляются в кредитах, коие нельзя сразу вывести со счета. Прежде их нужно отыграть по установленным правилам. Эти притязания принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д.). О нем читайте ниже.
1×слотс казино
Подтверждение персональной инфы. Все казино просят от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и присутствие у юзера других аккаунтов (мультиаккаунт запрещен).Не желаете поиграть в азартные забавы, не рискуя своими средствами, хотя получая в все выплаты? Подобную возможность деют почти наилучшие порталы с азартными веселиями. В их числе количество правдивых и надежных интернет-казино на российском языке. Они привлекают свежих пользователей различными поощрительными мероприятиями, включая бездепозитные, или безвозмездные бонусы. <a href=https://forum.pmpobc.ca/index.php?topic=44925.new#new>x1 slots 1хслотс регистрация перейти на 1×slots</a> Размер призов чаще всего чисто условный и не превышает 50 рублей. Приятно, хотя осязаемым бустом при навряд станет. Чаще всего применяются коды. Их надо(надобно) вносить в специальные окна регистрационной анкеты, в речь о пригласительных бонусах, либо в особом разделе собственного кабинета игрока. x1 slots регистрация в 1×slots casino <a href=https://messiahzira85296.bloggerswise.com/37075794/nude-ai-app-transforming-image-moderation-and-privacy-in-the-digital-age>https://messiahzira85296.bloggerswise.com/37075794/nude-ai-app-transforming-image-moderation-and-privacy-in-the-digital-age</a> Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном призе, то для направьте на значение вейджера и срок, который дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, что, этим проще отыграть приз и вывести выигрыш.Почти все игровые клубы настоятельно свидетельство контактных данных игрока для получения бездепозитного приза.
1×slots регистрация на сайте 1×slots ru com
В количестве случаев бесплатные призы начисляются в кредитах, которые невозможно незамедлительно исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти требования принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже. <a href=https://gidro2000.com/forum-gidro/user/21718/>https://gidro2000.com/forum-gidro/user/21718/</a> 1×slots зеркало быструю регистрацию а также мгновенное В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая доля игры. Важно, зачастую бездепозитные призы в казино выдаются с ограничениями по максимальной выплате. В среднем возможно рассчитывать на прибыль в несколько тысяч руб. Как вывести выигрыш с приза без депо. Придётся подтвердить аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате или прочитайте в правилах.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=972509#pid972509>1хслотс казино зеркало</a>
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=36500>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Хотя безвозмездные призы начисляются без депозита, не исключено, что вам понадобиться заносить средства. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только после того, как новый клиент раз пополнит игровой счет.
#7244 Charlesgunny
porno Мария Шарапова pin up casino официальный <a href=https://res-publika.com>1win casino</a> 1×bet 1 1×slots casino <a href=https://krtka.info/>порно с Захарова Мария Владимировна</a> Юдаева Ксения Валентиновна порно бесплатно играем казино порно с Илья Осипов (киберспорт) casino сайты porno Яна Троянова retro casino black russia казино
#7245 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7246 Charlesgunnyhttp://filmkachat.ru
рабочее зеркало 1×slots
Бездепы обыкновенно предлагают с отыгрышем — быстро исключить выигранные средства невозможно. Перевод денег со счета будет возможен после как, как юзер выполнит все притязания казино, а сумма не может превышать установленного правилами лимита. Условиями акции фиксируются сроки, на которых клиент вправе воспользоваться предложением. Обычно они не превосходят нескольких дней последствии активации.Простая процедура получения бездепозитного бонуса, которая займет не более 2-х минут. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные. <a href=http://filmkachat.ru/>1×slots зеркало регистрация то дальше необходимо пройти</a> Мы советуем не отрицаться от сходственных услуг известных казино. Выделите количество минут на регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сейчас удача будет на вашей стороне!При правильном раскладе бездепы — это прекрасный способ выступать на деньги без траты собственных средств. Есть некоторое советов, следуя коим можно извлечь максимально выгоды из похожих промоакций казино. Играть стопам только на лицензированных площадках. Скриптовые сайты столько накалывают с бонусными предложениями, но и употребляют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах невозможно. <a href=https://medium.com/@comcgifurniture/professional-cannabis-delivery-services-a-complete-guide-for-cambridge-residents-b435bbfcdc10>https://medium.com/@comcgifurniture/professional-cannabis-delivery-services-a-complete-guide-for-cambridge-residents-b435bbfcdc10</a> Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, дабы снова получить даровой бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ждет неминуемое наказание. 1×slots зеркало видели такую регистрацию на <a href=http://duryunsan.kr/bbs/board.php?bo_table=free&wr_id=271682>http://duryunsan.kr/bbs/board.php?bo_table=free&wr_id=271682</a>
1×slots официальный сайт мобильная версия скачать
Бонусные деньги – маленькая сумма средств для старта в новеньком казино. На бонусные деньги, обычно разрешено выступать во все забавы, считая слотов с современным джекпотом и игр из раздела exist casino.В современность довольно просто получить бонус за регистрацию в казино. Практически любой игорный дом с радостью начисляет средства или безвозмездные вращения. Многие гэмблеры пользуются данным и не смущяются региться в любом клубе с выгодными условиями. Кстати, это замечательная возможность выработать победную стратегию и сорвать джекпот. <a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=68699&result=reply>1×slot зеркало</a> 1×slots casino зеркало Бездепозитные бонусы за регистрацию являются одним из самых популярных методов вербования свежих игроков в онлайн-казино, поэтому что они предоставляют игрокам вероятность опробовать казино, неподражаемо игровые автоматы, и вполне, выиграть реальные деньги.Большинство клубов завлекают внимание игроков за счёт разнородных даров. На одних сайтах можно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает бесплатные вращения для запуска лучших онлайн слотов. Несмотря на разные промоакции, стоит выделить самые главные. <a href=http://enter-city.ru/bitrix/redirect.php?goto=http://teksneva.ru/bitrix/redirect.php?goto=http://yalmarkt.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/kd4Aa96-znB>http://enter-city.ru/bitrix/redirect.php?goto=http://teksneva.ru/bitrix/redirect.php?goto=http://yalmarkt.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/kd4Aa96-znB</a> 1×slots регистрацию процедура займет всего лишь В разделе с призами активировать собственный презент. Найти игры, для коих учтено одобрение и использовать приз по предназначению.
1×slots бездепозитный бонус за регистрацию
Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и. Когда игроку полагается много фриспинов, администрация имеет бить3 их начисление на несколько дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах промоакции. Вы скорее, скажем, как все любите получать подарки и бездепозитные призы казино. Игорные жилища брали в привычку одаривать гэмблеров приятными призами. Стать владельцем приветственного подарка можно за творенье профиля либо пополнение счёта. Второй вариант больше увлекательный, ведь клубы готовы удвоить депо! Но случае вы новичок и лишь знакомитесь с миром азарта, чем воспользуйтесь бонусом за регистрацию.Прежде чем активировать бездеп, нужно увериться никаких, собственно государство, уроженцем которой является игрок, не заходит в перечень не. <a href=http://1k9g.com/space-uid-197408.html>http://1k9g.com/space-uid-197408.html</a> Максимальная ставка ? уточняется в валюте счета и ограничивает размер ставки за раз спин. В случае ее превышения приз имеет быть аннулирован. Также в правилах возможность содержаться запрет на размещение ставок определенного вида, примеру, по равным шансам в рулетке (то есть, на чет или нечет, красное либо темное и т.д.).Популярность интернет казино растёт и всё больше пользователей начинают проявлять азартными играми. Бездепозитные бонусы 2022 года, это оригинальные подарки за регистрацию. С их поддержкою свежие игроки все получить безвозмездные вращения либо деньги на баланс за одну регистрацию. С свет игорных заведений в онлайне, бездепозитные бонусы стали знаменитейшим методом привлечения игроков. Подобные промоакции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш вебсайт собрал превосходнейшие предложения из онлайна на 2022 год. Воспользуйтесь каким презентом и сможете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша нужно выполнить обстоятельства. казино 1× slots официальный сайт Зарегистрироваться в казино по специальной ссылке либо с бонусным кодом. Подтвердить контактные данные (номер аппарата и электронную почту). Для доказательства номера телефонного необходимо в собственном профиле указать собственный номер и надавить кнопку „Подтвердить номер аппарата“, дальше Вы получите sms-сообщение с кодом, кот-ый необходимо установить в отвечающее фон. Для доказательства электронной почты, перебежать по активной ссылке в послании от казино.
1хслотс казино зеркало
Многие игроки, оценив возможностей казино, остаются играть в нем и дальше ? на это и направлено любое промо. Постоянные посетители заносят депозиты и делают ставки, обеспечивая долгосрочную выгода оператора. То есть, казино выдают бездепы свежим юзерам для формирования лояльной аудитории. <a href=http://nakupnidivadlo.cz/index.php/forum/3-pripominky/46545–1?start=12#234751>1×slots casino регистрация 1×slots review live</a> Не трудно додуматься, собственно not the slightest down payment bonuses практически разу не случаются великими. Чаще всего речь о пяти–тридцати долларах (либо эквиваленте этой суммы в иной еденице).Чтобы получить возможность исключить выгода с бездепозитного приза в казино, необходимо выполнить ряд критерий: 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=http://turkteam.10tl.net/member.php?action=profile&uid=1338>http://turkteam.10tl.net/member.php?action=profile&uid=1338</a>
1×slots на любой вкус как пройти регистрацию
Рассмотрим принцип его действия на примере. Допустим, вы зарегались и возымели $10 not the slightest down payment bonus с вейджером х50. Это означает, что выигранные средства возможно будет выводить не ранее, чем в как, как общая сумма ставок достигнет $500. <a href=http://medik.co.kr/bbs/board.php?bo_table=free&wr_id=684074>http://medik.co.kr/bbs/board.php?bo_table=free&wr_id=684074</a> x1 slots 1хслотс регистрация перейти на 1×slots Отыграв бездепозитный приз в казино с выводом также придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в подобное ограничение присутствует, то единоразово исключить выйдет лишь сумму, не превышающую размер приобретенного бонуса.Бездепозитный приз нередко может замерзнуть легкодоступным сразу в завершения регистрации, поскольку как единственным требованием к нему считается регистрация, а этого ревизия вашей новой учетной записи.
<b>Смотреть еще похожие новости:</b>
<a href=https://foro.vcheats.me/Hilo-board-%D0%B1%D0%BE%D1%80%D1%82-%D0%BF%D0%BE%D0%B4%D0%BD%D0%B8%D0%BC%D0%B0%D1%82%D1%8C%D1%81%D1%8F-%D0%BD%D0%B0-%D0%B1%D0%BE%D1%80%D1%82?pid=8351#pid8351>1×slots регистрация на 1хслотс</a>
<a href=https://astraclub.ru/album.php?albumid=228110>1×slots casino регистрация 1×slotscasino09k online</a>
<a href=https://australiantravelforum.com/Upload/showthread.php?tid=188098>1×slots промокод при регистрации</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, a только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. 4. Заберите подарок. Чаще всего бонус активируется незамедлительно после регистрации. Но посещают ситуации, когда надо(надобно) забежать в личный офис либо написать в службу поддержки.
#7247 Charlesgunny
букмекерская контора официальный сайт порно с Елена Никитина, скелетонистка <a href=https://slon-ru.com/>casino приложения</a> букмекерская контора вход pin ап casino <a href=https://rumafia.news/>букмекерские конторы бет</a> порно с Илюшникова Татьяна Александровна porno Елизавета Туктамышева какие казино online casino официальный гама казино казино играть порно с Анастасия Потапова, теннисистка
#7248 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7249 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало видели такую регистрацию на
Отказ в прохождении верификации. Если клиент не желает или имеет дать документы, подтверждающие его лицо, профиль несомненно заблокирован совместно, вкупе со всеми бонусными начислениями.При правильном подходе бездепы — это отличный метод играть на средства без траты собственных средств. Есть количество рекомендаций, следуя коим можно извлечь максимально полезности из похожих промоакций казино. Играть следует лишь на лицензированных площадках. Скриптовые веб-сайты столько накалывают с бонусными услугами, хотя и используют пиратский софт с модифицированным ГСЧ. Выиграть на этих автоматах нереально. <a href=http://filmkachat.ru/>1×slots регистрацию процедура займет всего лишь</a> Наличие у игрока 2 аккаунта. Запрещено делать количество профилей для многократного получения бездепов. <a href=https://www.uannounceit.com/article/1415>https://www.uannounceit.com/article/1415</a> Индивидуальные поощрения выдаются за совершение действий: подписку на аккаунты площадки в соц сетях, установку мобильного приложения или официального клиента для ПК. В большинстве казино действуют программы преданности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на следующий уровень часто сопровождается выдачей бездепа.Если при регистрации указать промокод, можно гарантировано получить приз. Где брать ваучер? Посетите направленные блоги или форумы. Иногда администрация клуба проделывает рассылку ваучеров на электронную почту. В последнее время игорные жилища начали рекламироваться в кинокартинах и телесериалах. Присмотритесь и наверняка заметите промокод, который принесёт 500 или 1 000 бонусных рублей. 1× slots официальный <a href=https://git.forum.ircam.fr/batecom0602/Batecom0602/-/issues/4>https://git.forum.ircam.fr/batecom0602/Batecom0602/-/issues/4</a>
1×slots зеркало регистрация в 1×slots casino
<a href=http://big.bestforums.org/viewtopic.php?f=7&t=12214>1×слот регистрация в 1×slots casino</a> 1×slos регистрация в 1×slots casino При небольшой сумме бонуса рекомендуется выступать по невысоким ставкам, а использовать наибольшие никакого только в случае, в вейджер слишком великой, а время на отыгрыш крепко ограничено.Ограничения по забавам. Администрация воспрещает игрокам некоторые игровые автоматы с бездепозитным призом, деньгами или бесплатными вращениями. Обычно, в правилах приводится полный перечень слотов для отыгрыша. Иногда разделение выполняется по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino. <a href=http://intalia.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://orbit-boutique.ru/bitrix/redirect.php?goto=http://pushkin.kubannet.ru/bitrix/click.php?goto=https://telegra.ph/CHto-delat-esli-kto-to-perevel-dengi-na-vashu-kartu-Sberbanka-09–23>http://intalia.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://orbit-boutique.ru/bitrix/redirect.php?goto=http://pushkin.kubannet.ru/bitrix/click.php?goto=https://telegra.ph/CHto-delat-esli-kto-to-perevel-dengi-na-vashu-kartu-Sberbanka-09–23</a> Можно ли зарабатывать на бездепозитных призах? Это не работа, тут как повезет, если в любом предложенном безедепе, вы будете откручивать вейджер и выводить, время можно назвать везением, и дополнительной добавкой к вашему бютжету.Большинство клубов привлекают внимание игроков за счёт различных подарков. На одних веб-сайтах можно получить виртуальные кредиты, коие откроют доступ ко всему софту. На иных же, администрация предлагает бесплатные вращения для запуска топовых онлайн слотов. Несмотря на различные промоакции, стоит выделить самые основные. 1×slots регистрация на официальном сайте На благотворительные призы онлайн-казино практически всегда распространяется ограничения по стране проживания посетителей. Даже случае для разрешается открывать счет и играть на деньги в заведении, это еще не означают, что для доступны not the slightest deposit bonuses.
1хслотс зеркало на сегодня
Самые свежие бездепозитные бонусы в казино за регистрацию 2022 года с выводом прибыли присутствуют на данной страничке. Посетитель может расценить обстоятельства получения и начать играть на деньги без внесения депозита. При данном игроку важно разуметь, на каких критериях и какими методами он сможет вывести приобретенный выигрыш. Для сего необходимо оценить перечень подключенных платежных систем. <a href=http://adrestyt.ru/user/OscarTic/>http://adrestyt.ru/user/OscarTic/</a> 1×slots сайт Подтверждение индивидуальной информации. Все казино просят от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и присутствие у юзера иных аккаунтов (мультиаккаунт запрещен).Необходимость отыгрыша. Вейджер в этом случае выше, чем для призов за депозит. И же средства не отыграны, вывести их нельзя.
1×slots сайт
Особую изюминку видео слотам присваивают оригинальные символы. С их свет активируются разные бонусы. Вы сможете запустить вспомогательный степень и прирастить необходимую выигрыша. Есть знаки, коие замещают негодные элементы и сами творят выигрышные комбо. Не стоит забывать и про бонус-тур. После любого успешного спина есть шанс увеличить необходимую выигрыша в 2 либо четыре раза. <a href=http://evtrucksforum.com/viewtopic.php?p=781020#p781020>1×slot казино зеркало</a> 1×slots официальный зеркало <a href=http://g2p.ru/url_relay.php?url=http://tau24.kz/bitrix/redirect.php?goto=http://doka-baza.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/5JlfEb82yga>http://g2p.ru/url_relay.php?url=http://tau24.kz/bitrix/redirect.php?goto=http://doka-baza.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/5JlfEb82yga</a>
1×slots зеркало рабочее на сегодня
Но ни не запамятовывайте внимательно читать верховодила роли в бонусных промоакциях. Если вы нарушите но бы одно условие, позднее вы не сможете устроить недоразумение с администрацией.На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не можете активировать и получить бездепозитный бонус. <a href=https://dallasjsai18529.imblogs.net/80088549/deepnude-ai-navigating-the-complexities-of-technology-and-ethics>https://dallasjsai18529.imblogs.net/80088549/deepnude-ai-navigating-the-complexities-of-technology-and-ethics</a> Эффективность бездепов в качестве маркетингового инструмента оценили почти операторы. Малоизвестные площадки употребляют такие акции, чтобы скоро набрать базу. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны постоянных гостей. Не все веб-сайты, дающие презенты без депо, рекомендованы к игре. За симпатичным промоописанием имеют прятаться неосуществимые обстоятельства отыгрыша прочие подводные камни. 1× slots официальный В неких интернет казино для получения бездепозитных бонусов не довольно просто зарегистрироваться на сайте клуба и подтвердить свои контактные данные. Дополнительно требуется активация промокода.
<b>Смотреть еще похожие новости:</b>
<a href=https://koreanstudies.com/forum/viewtopic.php?t=114455>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=http://t954381g.bget.ru/user/JosephPiery/>1×slots регистрация то дальше необходимо пройти</a>
<a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=3947>1×slots регистрацию процедура займет всего лишь</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Все любят получать подарки. Согласитесь, практически каждый играющий человек несомненно сильно рад, в получит даровой презент для забавы в интернет казино просто за регистрацию либо же бонус за внесенный депо, например нарекаемые приветственные призы для свежих игроков. Соответственно такие онлайн клубы будут больше популярны и предпочтительны у игроков при выборе казино для забавы. Топ казино постоянно обновляется и прибавляются свежие и увлекательные игровые клубы с привлекательной бонусной политикой и всеми возможными прерогативами, к коим относятся эти призы как фриспины за регистрацию, валютные бездепозитные бонусы, а также щедрые призы за внесенный депозит. Возьми свой подарок. Чаще всего бонус активизируется сразу в регистрации. Но случаются истории, когда нужно зайти в индивидуальный кабинет либо написать в справочную службу.
#7250 Charlesgunnyhttp://filmkachat.ru
1×slots сайт зеркало
Прежде всего, не запамятовывайте регулярно заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом рассматривают наиболее увлекательные предложения основных игорных порталов.Разные казино имеют собственные верховодила по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высочайшие требования. Часто онлайн-казино советуют отыграть бонусное поощрение до 100 раз в игровых автоматах. Например, если игрок получил безвозмездно 10 $, то нужно будет отыграть их, поставив одну тысячу спинов по 1 баксу каждый. Стоит отметить, что не все казино дают вероятность выступать на призы и не во всех увеселительных заведениях схожие правила для отыгрывания. Некоторые казино воспрещают выступать на бонусы в блекджек или ограничивают ставки до пяти %, что значительно увеличивает в десятки один количество необходимых игр. <a href=http://filmkachat.ru/>1×slots регистрация на официальном сайте</a> Допустим, за регистрацию вы возымели бездеп в размере 2 000 руб. С вейджером х30. В данном случае предстоит сделать ставок, на общую необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда выполните обстоятельства по отыгрышу, придёт время заработать настоящие деньги. Однако не запамятовывайте, собственно с любого презента выйдет исключить определённую необходимую (чаще всего менее $200).Подтверждение электронной почты – одно из основных критерий, коие есть почти в каждом бездепозитном казино. Чтобы верифицировать электрическую почту, довольно перейти по интенсивной ссылке в послании, приобретенном от азартного клуба. <a href=https://diigo.com/0y2rbf>https://diigo.com/0y2rbf</a> Теоретически, к бесплатным бонусам можно отнести например именуемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, потому что они деют лишь возможность делать ставки. 1×slots зеркало регистрация то дальше необходимо пройти <a href=http://www.28tongji.com/space-uid-995601.html>http://www.28tongji.com/space-uid-995601.html</a>
1× слот зеркало
Многие казино предоставляют в маркетинговых целях безвозмездные призы исключительно для наших читателей. Чтобы их получить, нужно перейти на игровой вебсайт по партнерской ссылке с нашего портала. <a href=http://www.skmecca.com/2011/04/14/leave-the-world-better-than-you-found-it/comment-page-6/#comment-123300>1×slots регистрация на сайте</a> 1× слот зеркало Многие казино деют в рекламных целях благотворительные призы исключительно для наших читателей. Чтобы их получить, нужно перебежать на игровой вебсайт по партнерской ссылке с нашего портала.Однако в условиях исчезают «подводные камни», которые не разрешат исключить солидную сумму или же вы не успеете отыграть вейджер. Поэтому мастера советуют арестовать благотворительные вращения за регистрацию в казино без депозита, чтобы поднабраться навыка и получить настоящий шанс на победу. <a href=http://torrent-repack.club/index.php?subaction=userinfo&user=unaxanem>http://torrent-repack.club/index.php?subaction=userinfo&user=unaxanem</a> Приглашаем делиться воззреньями о бонусах. Это поможет другим пользователям избирать наиболее выгодные предложения.Главным интересным в появлении данных вознаграждений состоит в, собственно пустив их в ход, игрок ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он спасибо бонусам какой-нибудь выигрыш либо моментально спустит все лишь собственно прибывшие финансы). То есть, казино снабжает игрока вероятностью на дармовой базе выступать во различные слоты даже спонсирует забаву. 1×slots регистрация 1×slotscasino09k online
1×slots коды
Также, такой нужно доказать свой номер аппарата, чтобы код, полученный в смс-сообщении от клуба установить в специальное фон в собственном офисе игрока.Все обожают получать подарки. Согласитесь, почти любой играющий человек будет очень счастлив, случае получит бесплатный презент для забавы в интернет казино просто за регистрацию либо же бонус за внесенный депозит, например называемые приветственные бонусы для свежих игроков. Соответственно эти онлайн клубы будут более модны и преимущественны у игроков при выборе казино для игры. Топ казино день обновляется и добавляются свежие и интересные игровые клубы с симпатичной бонусной политикой и всеми вероятными привилегиями, к коим относятся эти бонусы как фриспины за регистрацию, валютные бездепозитные призы, еще щедрые бонусы за внесенный депозит. <a href=http://vnsharing.site/forum/member.php?u=2739068>http://vnsharing.site/forum/member.php?u=2739068</a> Заработать на бездепозитных призах за регистрацию в казино может каждый юзер, достигший совершеннолетия. 1×slots зеркало на сегодня Фриспины предназначены для применения в видео слотах. Внимательно ознакомьтесь с условиями – частенько их выдают на кое-какие автоматы. В зависимости от клуба, у вас выйдет устроить определённое число ставок. Кстати, продвинутые игорные дома позволяют запускать любых «одноруких бандитов».
1×slots casino online регистрация
На бонусные начисления все быть установлены дополнительные ограничения, коие Вы не приняли при отыгрыше. Пока приз всецело не отыгран — средства из казино не выводятся.Бездепозитный бонус нередко имеет стать легкодоступным сразу после завершения регистрации, поскольку в большинстве случаев единственным требованием к нему считается регистрация, а затем проверка вашей новой учетной записи. <a href=https://test.soclanovtsy.ru/topic/26973-chicago-house-samples-loops-sounds/page/3/#comment-41742>1хслотс рабочее зеркало</a> 1×slots официальный сайт зеркало <a href=https://montreesounds.com/index.php?action=profile;u=34872>https://montreesounds.com/index.php?action=profile;u=34872</a> Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Некоторые казино все предлагать клиентам бездепы за подтверждение номера либо почты или репост на страничку в соц сетях.
1×slots рабочее зеркало на сегодня
Обычно, бездепозитные призы выдаются под определенные слоты с фиксированной ставкой, хотя их наверняка запрещено использовать в игровых автоматах с прогрессивным джекпотом. Список игр, в возможно использовать бездеп, Вы найдете в описании акции либо можете уточнить у службы заведения. Хотя бесплатные призы начисляются без депозита, не исключено, собственно вам понадобиться заносить средства. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь в такого, как свежий клиент раз пополнит игровой счет.Срок отыгрыша — это период, кот-ый начинается в момент активации бонуса и кончается с его закрытием. Пользователю необходимо уложиться в этот временной промежуток, другому призовые средства аннулируются. Казино устанавливают список игр, ставки в засчитываются при расчете отыгранных средств. Если тайтл не заходит в данный список, то предоставляется быть недосегаем для загрузки в деянья бонусного предложения. <a href=http://www.carshowsociety.com/forum.php?action=profile;u=6084>http://www.carshowsociety.com/forum.php?action=profile;u=6084</a> Похожим образом работает третий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения клиента или в связи с получения им VIP-статуса. Подарок предоставляется после обращения в поддержку и проверки. 1хслот 1хслотс регистрация перейти на 1×slots Для получения бонуса надо(надобно) ознакомиться с программкой преданности казино и устроить ставки на необходимую, нужную для перехода на следующий уровень.Промокод – определённая комбинация знаков, коию нужно установить в подходящее фон при создании учетной записи или активировать в личном профиле игрока в разделе с бонусами.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.formulersupport.com/Thread-1×slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8E-%D0%B1%D0%BE%D0%BB%D0%B5%D0%B5-%D0%BF%D0%BE%D0%BF%D1%83%D0%BB%D1%8F%D1%80%D0%BD%D1%8B%D0%B9-%D0%B2%D0%B0%D1%80%D0%B8%D0%B0%D0%BD%D1%82-%D1%8D%D1%82%D0%BE–150958>1×slots регистрацию более популярный вариант это</a>
<a href=https://bajarmp3.net/showthread.php?tid=447170>1×slot зеркало</a>
<a href=http://smpn1bejen.sch.id/forum/>1хслотс зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чтобы бездеп не был начислен на Ваш аккаунт, Вам не нужно активировать бонусный код. Если поощрение от казино было добавлено на Ваш акк автоматически, а Вы не планируете его использовать, обратитесь в саппорта с пожеланием отменить бездепозитный приз. Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.
#7251 Charlesgunny
1×bet зеркало рабочее казино <a href=https://t.me/vchkogpu_ru>какие казино</a> слот casino porno Екатерина Ефременкова, шорт-трекистка <a href=https://res-publika.com>1×bet сейчас</a> пин ап casino pin up top водка казино порно с Антропова Валентина Викторовна сайт винлайн букмекерская контора casino промокод porno Яна Троянова casino сайты
#7252 Charlesgunnyhttp://filmkachat.ru
казино 1×slots официальный сайт
Чаще всего, пользующиеся сервисы, эти как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно обязательное верховодило. Финансовые свои выводятся только спустя что, эту платежную систему, которой популярностьюимели для пополнения депо. Если же игрок получил бездепозитный покерный приз, потребуется восполнить счет на минимальную сумму, которая составляет обыкновенно десять $. <a href=http://filmkachat.ru/>1×slot зеркало</a> Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. <a href=http://prsync.com/cgifurniturecom/top-d-model-marketplaces-expert-guide-to-finding-quality-digital-assets-4446659/>http://prsync.com/cgifurniturecom/top-d-model-marketplaces-expert-guide-to-finding-quality-digital-assets-4446659/</a> Во время игры в казино, выигрыши, полученные благодаря бесплатным призовым фондам, суммируются и срабатывают в совместную сумму для отыгрывания. Однако, случае удача улыбнется и выйдет отыграть все призы, игровое заведение гарантированно допустит исключить финансовые свои. Сумма вывода будет зависеть от лимита, утвержденного именно в данном учреждении. Поэтому, пристально надо(надобно) разбирать верховодила выдачи безлимитных депозитов.Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном призе, то для направьте на значение вейджера и срок, который дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, что, этим проще отыграть приз и вывести выигрыш. 1×slos регистрация в 1×slots casino <a href=https://translation.profalians.com.ua/ru/ochen-vazhno-umet-gramotno-perevodit/>https://translation.profalians.com.ua/ru/ochen-vazhno-umet-gramotno-perevodit/</a> Получать информацию о самых выгодных бонусах можно без неизменного прогноза новостей казино. Мы брали данную задачку на себя и непрерывно следим за предложениями операторов, избирая наихорошие из них. В этом разделе собраны последние бездепы, промокоды к ним и условия их активации. Список промоакций регулярно пополняется. В топ вошли самые свежие бездепозитные бонусы за регистрацию в казино 2020, кратковременные и замкнутые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру прочим критериям. Если срок деянья промоакции истек, она удаляется из перечня.Почти все игровые клубы настоятельно свидетельство контактных данных игрока для получения бездепозитного приза.
1 х слотс зеркало
Прежде чем активировать бездеп, нужно убедиться том,, что государство, гражданином коей является игрок, не заходит в перечень не. <a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=276203>1хлот регистрация в 1×slots casino</a> 1хслотс рабочее зеркало <a href=http://forum.drustvogil-galad.si/index.php?action=profile;u=47574>http://forum.drustvogil-galad.si/index.php?action=profile;u=47574</a> 1×slots зеркало которую указывали при регистрации кстати Стоит отметить, собственно бездепозитный приз выдается лишь совершеннолетним новичкам, которые, же, могут пригласить собственных приятелей и людей, кроме претендующих на поощрительную программку лояльности. Подобная технология появилась между конкуренцию онлайн-казино для популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению своей популярности, методом привлечения новых игроков. Бонусы – это уникальный шанс для вероятных соучастников забавы, которые шансы опробовать софт покер рума и убедиться, будут ли они в него играть либо нет. Новый игрок попробует средства силы с настоящими оппонентами в казино.
1×slots регистрация на сайте
Подтверждение регистрации. Казино требуют привязки профиля к электрическому адресу и номеру аппарата. Для сего на e-mail отправляется послание ссылаясь, а на аппарат ? текстовое сообщение с кодом. <a href=https://leavec.co.kr/bbs/board.php?bo_table=free&wr_id=203642>https://leavec.co.kr/bbs/board.php?bo_table=free&wr_id=203642</a> 1хслот скачать Самые модные способы вывода средств ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электрическим платежным системам на Neteller и Skrill, а используют криптовалютными кошельками. Вывод выигрышей имеет осуществляться быстро или занимать от нескольких часов до нескольких суток.
1×слот регистрация в 1×slots casino
<a href=https://shopcms.vsupport.club/topic/15651-%D0%A0%D1%94%D0%A1%D1%93%D0%A0%D1%97%D0%A0%D1%91%D0%A1%E2%80%9A%D0%A1%D0%8A-%D0%A0%D1%98%D0%A0%C2%B5%D0%A1%E2%80%9E%D0%A0%C2%B5%D0%A0%D2%91%D0%A1%D0%82%D0%A0%D1%95%D0%A0%D0%85-%D0%A0%D0%86-%D0%A0%D1%94%D0%A0%D1%91%D0%A0%C2%B5%D0%A0%D0%86%D0%A0%C2%B5-%D0%A1%D0%83%D0%A1%D0%83%D0%A1%E2%80%B9%D0%A0%C2%BB%D0%A0%D1%94%D0%A0%C2%B0-cocainvip-%D0%A0%D2%91%D0%A0%D1%95%D0%A1%D0%83%D0%A1%E2%80%9A%D0%A0%C2%B0%D0%A0%D0%86%D0%A0%D1%94%D0%A0%C2%B0-%D0%A0%D1%97%D0%A0%D1%95-%D0%A1%D1%93%D0%A0%D1%94/?p=94801>1×slots регистрация на 1хслотс</a> Активация происходит с помощью промокодов, которые вводятся в личном офисе в регистрации. Среди спецпредложений в списке Casino.ru содержатся неповторимые промокоды, которые доступны только гостям портала. Другие способы начисления средств ? автоматическая активация незамедлительно после творенья аккаунта и получение дара по запросу в службу технической помощи.Помните, собственно любые нарушения правил сведут на нет ваши старания, и вы всего останетесь без начисленного вас дарового приза. Всегда изучайте верховодила начисления и условия вейджера. По каким вопросам, на коие вы не можете самостоятельно отыскать ответы, обращайтесь за разъяснениям и саппорт. 1 x slots <a href=https://www.dermandar.com/user/Glavdorogadv1605/>https://www.dermandar.com/user/Glavdorogadv1605/</a>
1×slots зеркало быструю регистрацию а также мгновенное
Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных призов принимаются достаточно высокие притязания. Часто онлайн-казино рекомендуют отыграть бонусное поощрение до ста один в игровых автоматах. Например, в игрок получил бесплатно десять $, то нужно будет отыграть их, поставив одну тысячу спинов по одному баксу любой. Стоит отметить, что не все казино дают возможность выступать на призы и не во всех развлекательных заведениях схожие верховодила для отыгрывания. Некоторые казино воспрещают играть на бонусы в блекджек либо ограничивают ставки до пяти процентов, что существенно наращивает в 10-ки один число нужных игр.Итак, чтобы бесплатные бонусные кредиты трансформировались в реальные средства, которыми возможность управлять по своему усмотрению, их нужно отыграть. Вейджер по уточнять в правилах онлайн-казино. <a href=https://masterarms.se/user/michaeltup/>https://masterarms.se/user/michaeltup/</a> Если вы выбираете проверенное лицензионное онлайн казино и выполните все обстоятельства получения бездепозитного бонуса, трудностей с получением дара у Вас не возникнет. 1×slot зеркало рабочее этих способов предполагает регистрацию Обычно, бездепозитные призы выдаются под определенные слоты с фиксированной ставкой, хотя их наверняка запрещено применять в игровых автоматах с современным джекпотом. Список игр, в можно применять бездеп, Вы отыщите в описании промоакции либо сможете уточнить у службы заведения.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.lightknotes.com/MyBB/showthread.php?tid=150889>1 х слотс зеркало</a>
<a href=http://permitbeijing.com/forum/member.php?action=profile&uid=191496>1×slots регистрация 1×slots casino 777 online</a>
<a href=https://bbs.sinbadgroup.org/index.php?xjkh-tampa-s-poster-pup-for-new-cancer-treatment.t48661.html/page-2129#post-166215>1×slots актуальное зеркало</a>
<a href=https://forum.home-visa.ru/memberlist.php?mode=viewprofile&u=3536>1хслот скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но существуют азартные заведения, готовые просто например вручить средства на игру. Для сего достаточно создать профиль. Чтобы исключить выигрыш, сперва нужно выполнить вейджеровые условия, прописанные в критериях получения бездепа. С такими ординарными советами каждое казино с призом за регистрацию способно принести в разы больше выгоды и выгоды.
#7253 Charlesgunny
Черкесова Бэлла Мухарбиевна порно kometa casino <a href=https://repost.news/>1×bet зеркало</a> казино можно бесплатно играем казино <a href=https://m.repost.news/>рейтинг казино</a> casino зеркало сегодня рабочее Набиуллина Эльвира Сахипзадовна порно сколько казино часы казино casino автомат online casino Валентина Матвиенко порно
#7254 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7255 Charlesgunnyhttp://filmkachat.ru
1× slots официальный
Третитй бездепозитный приз за регистрацию – денежные свои. К огорчению, начислить рубли либо баксы готовы только знаменитые и знаменитые клубы. С их помощью вас насладиться каждой доступной игрой – автоматом, рулеткой, кено, блэкджеком. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало рабочее</a> <a href=https://soctrip.com/post/9bb5eec0-a590–11ef-bb3e-7bacedfd239f>https://soctrip.com/post/9bb5eec0-a590–11ef-bb3e-7bacedfd239f</a> Практически все онлайн казино с бездепозитным бонусом за регистрацию предусматривает программку преданности — систему одобрения неизменных клиентов, которая произведено из колличества значений. При достижении игроком очередного уровня на его счёт поступает приз. Чем повыше уровень — что, этим щедрее приз. 1хслотс зеркало <a href=https://www.guliotanzania.com/user/profile/18349>https://www.guliotanzania.com/user/profile/18349</a> Подтвердите регистрацию, чтобы активировать Бездепозитный бонус с выводом, потребуется наполнить индивидуальный профиль. Заполните пустующие поля настоящими данными о себя.
1×slots рабочее зеркало
Такие поощрения позволяют безвозмездно протестировать новое казино, разобраться с игровым ходом интернет слотов, заработать и вывести небольшую сумму денег.Можно ли в одном онлайн казино получить больше одного приза за регистрацию? Нет, так как в каждом интернет казино есть управляла, к коим надо(надобно) держаться, не творить 2 аккаута для получения бонусов, другому несомненно блокировка обоих аккаутов, не пытайтесь обмануть интернет казино, бонус за регистрацию выдаеться один раз одному личику. <a href=https://www.formulersupport.com/Thread-1×slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8E-%D0%B1%D0%BE%D0%BB%D0%B5%D0%B5-%D0%BF%D0%BE%D0%BF%D1%83%D0%BB%D1%8F%D1%80%D0%BD%D1%8B%D0%B9-%D0%B2%D0%B0%D1%80%D0%B8%D0%B0%D0%BD%D1%82-%D1%8D%D1%82%D0%BE–137924>1×slots регистрацию более популярный вариант это</a> 1×slots регистрацию более популярный вариант это Как управляло, новоприбывшие игроки в первую очередь желают ознакомиться с способами ввода и вывода валютных средств и сроки выполнения поданных заявок чтобы конкретно осознавать, как стремительно появится исключить свой казино бонус за регистрацию без депозита на электронный кошелек либо же банковскую карту. К счастью для всех играющих, внутри конкретных холдингов, все казино конкурируют меж собой. Ведь случае бы конкретную компанию представляло только одно онлайн-заведение, то навряд бы посетители заметили казино с призом за регистрацию и возможность бы рассчитывать только на вознаграждение в виде бонуса на 1-ое инвестиция. К каждому заведению периодически следует привлекать новых игроков, что, итоге, лишь на руку всем играющим. <a href=http://www.en.besatime.com/index.php?subaction=userinfo&user=RichardGorce>http://www.en.besatime.com/index.php?subaction=userinfo&user=RichardGorce</a> Промокод – определённая комбинация символов, которую нужно ввести в отвечающее фон при творении учетной записи или активировать в личном профиле игрока в разделе с призами.Выбирайте лучшие благотворительные призы с помощью обзоров на Casinoz – и пусть вам сопутствует удача при отыгрыше бонусных кредитов! 1×slots зеркало Высокая конкурентность в разделе азартных игр мотивирует операторов завлекать посетителей разнородными акциями. Благодаря данному у посетителей замечена вероятность получить бонусы в казино за регистрацию без депозита. Воспользоваться этим предложением возможно, минуя функцию внесения средств на игровой счет, просто активировав аккаунт на сайте. Наш экскурсовод по бездепам поможет избрать самую привлекательную бонусную программу, разузнать управляла получения такого вознаграждения и воспользоваться им с наибольшей выгодой.Доступность — бездепозитные призы в казино чаще всего предоставляются свежим игрокам, но посещают случаи, когда приз имеют получить и действующие клиенты.
1×slots бонус за регистрацию
Не хотите сыграть в азартные забавы, не рискуя средствами средствами, хотя получая в все выплаты? Подобную вероятность деют все наихорошие порталы с азартными развлечениями. В их числе большое добросовестных и надежных интернет-казино на русском языке. Они привлекают новых пользователей различными поощрительными мероприятиями, включая бездепозитные, или благотворительные призы. <a href=http://linkedin-directory.com/details.php?id=309383>http://linkedin-directory.com/details.php?id=309383</a> В зависимости от онлайн заведения каждый из них возможность для предложить как бездепозитные средства, например и бездепозитные фриспины, которые в удачной регистрации рухнут вас на ваш игровой баланс. 1×slots casino регистрация на сайте
1×slots казино мобильная версия
При игре на бонусные свои воспрещается выступать в игровые автоматы с современным джекпотом и игры из радела live casino. Кроме такого, кое-какие казино дают бездеп на раз или некоторое определенных слотов, и в иных забавах Вы не можете на них выступать.Заработать на бездепозитных бонусах за регистрацию в казино возможность каждый юзер, достигший совершеннолетия. Вознаграждения за получение VIP-статуса ? начисляются в рамках программы преданности при достижении еще значения либо выдаются персонально менеджерами службы.Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном сайте и сделайте вход в собственный офис, чтобы арестовать благотворительные вращения с вейджером х40; 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=https://0752snyw.com/space-uid-109563.html>https://0752snyw.com/space-uid-109563.html</a> Составленный специалистами Casino.ru перечень онлайн-казино с бездепозитным призом позволяет игрокам сопоставить спецпредложения различных операторов.Прибывшие на аккаунт финансы бездепозитные призы предназначаются, в, только для свежеиспеченных пользователей, которые раньше не имели собственного аккаунта в данном казино. Исходя из этого, в ранее у игрока был сделан депозит, то, по всей вероятности, у него больше не будет возможности рассчитывать на получение такового бонуса в конкретном заведении.
1×slots официальный сайт скачать
В большинстве заведений устроить это возможно по e-mal, по номеру телефонного, спустя социальную сеть либо гугл-аккаунт. <a href=https://bybak.com/home.php?mod=space&uid=3809018>https://bybak.com/home.php?mod=space&uid=3809018</a> 1×slots быструю регистрацию а также мгновенное Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала резвые выводы. Фишка выплат что, что достаточно выбрать платёжный инструмент и указать необходимую. В большинстве случаев деньги зачисляются на электрические кошельки протяжении 15 мин., а на банковские карты – 1–3 трудящихся дня.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 долларов. Если выдаются фриспины, их число редко выше нескольких 10-ов бесплатных вращений.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.goslog.ru/forum/messages/forum1/message12044/11-obrashcheniya-grazhdan?result=reply#message12044>1×slots официальный зеркало рабочее</a>
<a href=http://162.241.164.67/phpbb/phpBB3/memberlist.php?mode=viewprofile&u=121525>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Многие азартные клубы ограничивают необходимую вывода заработанную на призе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не можете исключить. Разница несомненно аннулирована, Вы и не можете делать на нее ставки.
#7256 Charlesgunny
казино проиграл casino зеркало сегодня <a href=https://th-royalgclub.com/>casino игровой автомат</a> 1×bet зеркало на сегодня казино онлайн <a href=https://rucriminal.info/>букмекерская контора официальный сайт скачать</a> казино смотреть онлайн Юдаева Ксения Валентиновна порно мелбет букмекерская контора casino официальный сайт Фастова Елена Владимировна порно ешь казино казино играть
#7257 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7258 Charlesgunny
cometa casino 1×bet зеркало рабочее на сегодня <a href=https://specreporter.com/>казино сегодня</a> бесплатное казино Хорова Наталья Александровна порно <a href=https://kompromat1.online/>Самойлова Алла Владимировна порно</a> лучшие казино бесплатно porno Дарья Мороз лучшие бесплатные онлайн казино Хорова Наталья Александровна порно включи казино официальное казино вход кент casino
#7259 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7260 Charlesgunny
порно с Зырянова Анастасия Владимировна Москалькова Татьяна Николаевна порно <a href=https://glvk.guru/>человек казино</a> porno Андрей Рублев (теннис) 1×bet на андроид <a href=https://th-royalgclub.com/>про казино</a> porno Юлия Канакина букмекерская контора официальный сайт скачать порно с Васильева Татьяна Викторовна скачать casino на андроид 1×bet телефон Манилова Алла Юрьевна порно порно с Евгения Медведева, фигуристка
#7261 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7262 Charlesgunnyhttp://filmkachat.ru
1×slots коды
За привлечение друга ? в рамках партнерской программки клиент получает вознаграждение за вербование свежих юзеров. <a href=http://filmkachat.ru/>1×slots зеркало рабочее на сегодня</a> <a href=https://www.swiatobrazu.pl/forumgaleria/thread/view/id/524>https://www.swiatobrazu.pl/forumgaleria/thread/view/id/524</a> x1 slots регистрация в 1×slots casino <a href=http://mashspec.ru/user/PhilipSip/>http://mashspec.ru/user/PhilipSip/</a>
1×slots быструю регистрацию а также мгновенное
<a href=https://www.goslog.ru/forum/messages/forum1/message9899/11-obrashcheniya-grazhdan?result=reply#message9899>1×slots рабочее зеркало на сегодня</a> 1 x slots casino Бонус за регистрацию в казино без депозита с выводом средств нужно отыграть. Зачастую для отыгрыша может понадобиться устроить ставки на сумму, в несколько 10-ов один превосходящую сумму приза или выигрыша.Бoльшинcтвo азартных заведений выдвигают приблизительно одинаковые условия и требования, коие необходимо выполнить, чтобы получить бездепозитный приз за регистрацию. Все их возможно объединить в один перечень: <a href=https://maps.google.com.pg/url?q=https://doctorlazuta.by/>https://maps.google.com.pg/url?q=https://doctorlazuta.by/</a> В неких онлайн казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на сайте клуба и подтвердить свои контактные данные. Дополнительно требуется активация промокода. 1×slots акции Процесс доказательства личности может взятьвдолг(взятьвзаймы) от 1-го денька до недели. Если заказчик разрешил какую ошибку при заполнении паспортных данных, то ему следует обратиться с проблемой в службу поддержки онлайн-казино.
1 хслот регистрация в 1×slots casino
Бонус за регистрацию в казино выдается только раз раз на 1-го игрока. Но бывают вспомогательные акции, в коих бездепы раздаются для постоянных посетителей и такие презенты Вы сможете получить больше 1-го раза.1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, в не желайте стать жертвой плутов либо впустую истратить время; <a href=https://www.nkm.no/user/geraldgak/?um_action=edit>https://www.nkm.no/user/geraldgak/?um_action=edit</a> Простая процедура получения бездепозитного приза, кот-ая займет не более 2-х мин. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные.Суммы подобных предложений, как правило, колеблются от 3-х до 20 $, а вейджер на эти свои обязан сочинять от тридцати до шестидесяти раз. Зачастую, большая сумма выигрыша здесь составит от одной до 2-ух сотен $. Если игры выиграет больше, то все средства шансы быть списанными до максимально разрешенного выигрыша. Здесь появляется смысл выводить еще несуществующие финансы на свою платежную систему и дальше находить заведение с подходящими под данную сумму релоадом или призом за 1-ое пополнение счета. Есть некоторое подвидов бездепозитного гонорары, предлагаемого великим количеством заведений. 1хслот официальный сайт зеркало
1хслот зеркало сайта
Если вы выбрали для себя несколько брендов коие вас больше всего полюбились, для неизменной забавы! Таких гемблеров казино очень любит и оценивает, за частую эти игроки становятся VIP игроками заведения, коим часто поступают прибыльные предложения в виде призов, так же туда входит и бездепозитные.В перечне притязаний к отыгрышу нередко присутствуют лимиты на ставки при ирге на личные деньги. Так, если отыграть нужно 30 000 руб., а максимальная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам действия промоакции. Шаг 5. Использование и отыгрыш. Бездеп обязан быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. онлайн казино 1×slots <a href=http://putevki.by/index.php?name=account&op=info&uname=flashyrash32>http://putevki.by/index.php?name=account&op=info&uname=flashyrash32</a>
x1 slots регистрация в 1×slots casino
На условиях отыгрыша бесплатных бонусов стопам тормознуть подробнее. С ними связаны нюансы, коие невозможно оставить без внимания. Ознакомьтесь с нашим списком наилучших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего списка и получите бездеп сразу. Хватайте превосходнейшие безвозмездные предложения ниже и выигрывайте великие средства, не рискуя! <a href=http://masyasha.ru/index.php?option=com_k2&view=itemlist&task=user&id=83954>http://masyasha.ru/index.php?option=com_k2&view=itemlist&task=user&id=83954</a> Активация денежного вознаграждения случается механически последствии создания профиля либо применения промокода. Иногда операторы предъявляют дополнительные требования: подписаться на странички казино в социальных сетях либо на рассылку маркетинговых извещений, скачать и ввести дополнительный софт и т.д. 1×slots регистрация на 1хслотс
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Список например называемых «запрещенных землель» прилагается к правилам бонусной программки игорного портала. Обязательно проверьте, распространяются ли на вас похожие санкции. Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала резвые выводы. Фишка выплат в, что достаточно избрать платёжный инструмент и указать сумму. В большинстве случаев деньги зачисляются на электронные кошельки протяжении 15 мин., а на банковские карты – 1–3 рабочих денька.
#7263 Charlesgunny
1×bet вход pin up casino top top <a href=https://rucriminal.info/>играющие казино</a> водка казино casino играть <a href=https://t.me/vchkogpu_ru>рабочее казино</a> inform@rucriminal.info porno Яна Троянова casino daddy казино ставка Набиуллина Эльвира Сахипзадовна порно официальное казино вход Светлана Ходченкова
#7264 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7265 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7266 Charlesgunny
casino вход 1go casino <a href=https://m.repost.news/>casino daddy</a> porno Илья Ковальчук (хоккей) casino скачать приложение <a href=https://rumafia.news/>cat casino</a> Скоробогатова Ольга Николаевна порно казино пину casino buzz 1×bet зеркало рабочее на сегодня 1×bet xyz Крючкова Полина Викторовна порно смотреть фильм казино сколько казино
#7267 Ремонт посудомоечных машин AEGhttps://remont-posudomoechnyh-mashin-aeg-expert.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт посудомоечных машин aeg цены, можете посмотреть на сайте: <a href=https://remont-posudomoechnyh-mashin-aeg-expert.ru/>ремонт посудомоечных машин aeg адреса</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#7268 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7269 MarvinWronyhttps://sliv-kursov213.ru
слитые курсы skillbox <a href=https://sliv-kursov213.ru/>сливы курсов купить</a>
#7270 Charlesgunnyhttp://filmkachat.ru
рабочее зеркало 1хслотс
Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам воспрещено начислять призы клиентам, не имеющим валютных средств на счете. Мы предлагаем рассмотреть животрепещущие бонусы онлайн-казино с лицензией, которые соблюдают законодательство РБ. <a href=http://filmkachat.ru/>1×slots casino регистрация на сайте</a> <a href=https://graph.org/Transform-Your-Furniture-Ideas-into-Reality-A-Deep-Dive-into-3D-Design-Tools-11–22>https://graph.org/Transform-Your-Furniture-Ideas-into-Reality-A-Deep-Dive-into-3D-Design-Tools-11–22</a> 1хслотс рабочее зеркало на сегодня <a href=http://www.nefiskokulutarifler.com/search?q=%5Burl%3Dhttps%3A%2F%2Fdoctorlazuta.by%2Fblog%5D%D0%B1%D0%BB%D0%BE%D0%B3+%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0+%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0+%D0%B4%D0%B7%D0%B5%D0%BD%5B%2Furl%5D+%D0%B1%D0%BB%D0%BE%D0%B3+%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0+%D1%87%D0%B8%D1%82%D0%B0%D1%82%D1%8C>http://www.nefiskokulutarifler.com/search?q=%5Burl%3Dhttps%3A%2F%2Fdoctorlazuta.by%2Fblog%5D%D0%B1%D0%BB%D0%BE%D0%B3+%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0+%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0+%D0%B4%D0%B7%D0%B5%D0%BD%5B%2Furl%5D+%D0%B1%D0%BB%D0%BE%D0%B3+%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0+%D1%87%D0%B8%D1%82%D0%B0%D1%82%D1%8C</a>
1×slots зеркало регистрацию более популярный вариант это
<a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=851126>1×slots зеркало регистрация</a> 1×slots акции Сроки активации приза уточняются любым казино, но чаще всего они не превышают недели с момента получения. Игроку обязательно нужно применять бездеп в течение указанного срока, в ином случае бонус просто пропадет. Каждый приз можно получить лишь один раз, потому если не использовать бездеп в срок, у игрока не будет 2 шанса им воспользоваться.Но на некоторых азартных платформах сходственные вознаграждения все получить теперь зарегистрированные пользователи. В таком случае, бонусы предоставляются в уникальных акций или же неким игрокам повторяющий акционного предложения, коие приходит на почту с целью «возвратить» игрока в свое казино. <a href=http://forum.ttpforum.de/member.php?action=profile&uid=354591>http://forum.ttpforum.de/member.php?action=profile&uid=354591</a> Минимального оборота. Этот лимит устанавливается вейджером — же игрок не поиграет на установленную необходимую, вывод средств будет недоступен. 1×slots casino регистрация 1×slotscasin online
1×slot зеркало рабочее этих способов предполагает регистрацию
Да, у даровых призов есть дефекты. Прежде всего, они обыкновенно очень. Кроме как, условия вейджера по ним постоянно строгие. Но таки неимение риска делает их довольно красивыми для клиентов. <a href=https://correspondent.in.ua/user/HenryBialk/>https://correspondent.in.ua/user/HenryBialk/</a> 1хслот официальный сайт зеркало
1×slots официальный demo регистрация в 1×slots casino
Некоторые сайты, прежде чем обмануть регистрацию игроков, предлагают ответить на некоторое базовых вопросов. Цель проведения похожей викторины – выявить случайных людей, которые не имеют представления о покере, и не допустить получения ими призов. Если гость теснее играл в казино, то ответить на полтора десятка несложных вопросов будет несложно. Очень часто, ответы можно отыскать на официальных веб-сайтах этих учреждений.Обычно показатель повыше, чем для бонусов на депо. Не удивляйтесь, в он несомненно даже х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных стран. Самый распространённый из подобных бонусов, окончательно же, бездеп на день рождения клиента — приз вид фиксированной суммы либо фриспинов поступает на счёт игрока, а воспользоваться им можно в течение установленного периода медли.Фриспины – бесплатные вращения с фиксированной ставкой, коие возможно использовать в определенных игровых автоматах. рабочее зеркало 1×slots <a href=https://www.heraldcontest.com/bbs/board.php?bo_table=free&wr_id=96073>https://www.heraldcontest.com/bbs/board.php?bo_table=free&wr_id=96073</a> Чем ниже значение вейджера, тем легче отыграть и вывести приз. Если Вы планируете заработать на бездепе, но просто ознакомиться с новым игровым клубом, то стоит избегать бонусов с высочайшим вейджером их практически не реально отыграть. С ними Вы сможете только протестировать забавы заведения.
1×slots зеркало видели такую регистрацию на
<a href=https://visualchemy.gallery/forum/profile.php?id=4081445>https://visualchemy.gallery/forum/profile.php?id=4081445</a> Бездепозитные бонусы начисляются лишь один раз. Не стоит открывать свежие аккаунты, чтобы получить их повторно. Служба защищенности казино непременно выявит «левого» соучастника и перекроет. Если посетитель выполнит нужные притязания, отыграет свою ставку и решит вывести собственный выигрыш, то ему нужно учесть, собственно казино непременно потребует предоставить ксерокопии собственных документов, чтобы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные средства вывести не удастся.Первый образующийся вопрос, это, для выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают новых игроков. Последним легче начать игру на средства с подарка за регистрацию. Им надо пополнять баланс и расходовать личностные средства. Новички получают благотворительные спины или свои на счёт. С их поддержкой знакомятся с игровым процессом, крутят слоты и делают ставки в рулетке. сайт 1× slots casino Ниже указан важный список законных казино в Беларуси с призами на первый депо. Вы сможете попасть на официальный сайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус.Бесплатный бонус – кредиты, коие онлайн-казино начисляет клиенту, не заставляя его пополнять игровой счет.
<b>Смотреть еще похожие новости:</b>
<a href=https://test.soclanovtsy.ru/profile/2098-rabofreesn/>1×слотс казино</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Возможность поиграть вспомогательное состязание (а иногда и количество) абсолютно бесплатно, а выигрыш, же, поступает на счёт игрока.
#7271 Ремонт посудомоечных машин Hotpoint Ariston Москваhttps://remont-posudomoechnyh-mashin-hotpoint-ariston-style.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт посудомоечных машин hotpoint ariston в москве, можете посмотреть на сайте: <a href=https://remont-posudomoechnyh-mashin-hotpoint-ariston-style.ru/>ремонт посудомоечных машин hotpoint ariston в москве</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#7272 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7273 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию процедура займет всего лишь
Подобные призы без депо предоставляются на больше прибыльных критериях. Зачастую они крупнее, а обстоятельства отыгрыша наименее строгие.Даже не выиграв крупную необходимую, игрок увлекательно проведет время, изнутри исследует работу площадки, воспримет геймплей автоматов. Все это без каких-либо финансовых рисков. Быть в курсе наилучших промоакций легко. Достаточно регулярно изучать перечень свежих интернет казино с выводом приза без депо в данном разделе. <a href=http://filmkachat.ru/>казино 1×slots</a> С иной стороны, гораздо легче забрать бездепозитные фриспины за регистрацию в казино и прямо момент начать вертеть барабаны в наихороших слотах. Главная необыкновенность спинов в, что они предусмотрены для лучших автоматов. Удастся не пройти дополнительные раунды, хотя и прирастить сумму выигрыша, заработать респины прочие внутриигровые подарки. <a href=https://u.pcloud.link/publink/show?code=XZwmwV5ZN5EzkUmIs98GzTKGBBEB6jVtE9aV>https://u.pcloud.link/publink/show?code=XZwmwV5ZN5EzkUmIs98GzTKGBBEB6jVtE9aV</a> Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша бонусов. Заведения всегда устанавливают максимальную ставку, возможную по условиям вейждера. 1×slot регистрация <a href=http://bbs.1001860.com/home.php?mod=space&uid=2413382>http://bbs.1001860.com/home.php?mod=space&uid=2413382</a> При пользовании бездепозитным призом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют количество обликов лимитов:
казино 1×slots
Если вы опытный игрок, вы должны аристократия, собственно бонус без депозита – редкая находка. Тем не менее, мы еженедельно исследуем интернет, дабы отыскать для вас наихорошие бездепозитные предложения.Бездепозитный бонус по промо-коду будет доступен для игры, лишь что, нет случае когда Вы активируете особый бонусный код в разделе с призами или укажите промокод при регистрации на веб-сайте. В некоторых случаях, не активации кода, придется доказать контактные данные игрока и заполнить анкету посетителя. 1хлот регистрация в 1×slots casino Далее требуется отыграть вагер и вывести выигрыш. Игрокам без навыка крупно подфартило, у получить десятки даров за 1 регистрацию. Если не смогли получить Бездепозитный бонус, не беспокойтесь. Обратитесь в интернет чат, оператор поможет исправить.Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, или проигрываете предложенный бонус, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, научится регулировать изменять ставки и полосы, исследовать бонусные забавы и их выигрышные композиции, ну в конце концов просто зарядится кучей впечатлений! Ведь вы будите выступать на бонусные средства, коие можно отыграть и вывести, не просто на демо счет, что, этим наиболее адреналин в крови еще больше повысится а пульс забьется с частым ритмом! <a href=http://place-e.ru/index.php?title=РР·_чего_состоит_диета_Елены_Малышевой>http://place-e.ru/index.php?title=РР·_чего_состоит_диета_Елены_Малышевой</a> Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации приза без депозита. Внимательно прочитайте до конца. Многие новички делают промахи на шаге регистрации и потому возможности получить подарок. 1×slots регистрация 1×slots casino 777 online Бонусы без депозита при регистрации считаются наиболее красивыми как для опытных игроков, например для и начинающих. Получив такое вознаграждение, заказчик имеет играть на настоящие средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные призы в интернет-казино Рунета, а также условия их активации и выигрыша.2. Создать свежий профиль. Для регистрации нужно заполнить маленькую анкету либо зайдите в собственный офис посредством соц сетей;
1хслотс регистрация в 1×slots casino
Чаще всего казино приз за регистрацию без депо даёт вероятность запустить любой машина. Но превосходнее пристально ознакомиться с критериями. Иногда для игры доступны лишь определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, другого начать знакомство с миром пыла непосредственно с «одноруких злодеев». <a href=http://arisusteel.com/bbs/board.php?bo_table=qa&wr_id=542381>http://arisusteel.com/bbs/board.php?bo_table=qa&wr_id=542381</a> 1 хслот регистрация в 1×slots casino
1×slots зеркало быструю регистрацию а также мгновенное
Чаще всего, знаменитые сервисы, эти как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно неотъемлемое верховодило. Финансовые средства выводятся только спустя что, эту платежную систему, коей пользовались для пополнения депо. Если же игрок получил бездепозитный покерный бонус, потребуется пополнить счет на минимальную необходимую, кот-ая составляет обычно десять долларов. Рассмотрим на образце: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских рублей. В условиях промоакции указано, собственно вейджер бездепозитного бонуса х20. Поэтому, чтобы отыграть бонус, игроку несомненно нужно сделать ставок на 35*20=700 рублей.Ограничения по играм. Администрация воспрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, средствами или бесплатными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда разделение выполняется по виду игр. Например, отыгрыш вероятен на всех игровых аппаратах, но запрещен в настольных забавах и в разделе Live Casino. 1×slots регистрация <a href=https://latino-forex.com/members/239290-jamesgelay>https://latino-forex.com/members/239290-jamesgelay</a> Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды присутствуют на данной страничке. Посетитель имеет оценить условия получения и начать играть на деньги без внесения депо. При этом игроку важно осознавать, на каких условиях и какими методами возможность вывести приобретенный выигрыш. Для сего необходимо оценить список подключенных платежных систем.Важно, удостоверьтесь в том, что раньше не регистрировались в выбранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи.
1хлот регистрация в 1×slots casino
<a href=https://bajarmp3.net/member.php?action=profile&uid=4278>https://bajarmp3.net/member.php?action=profile&uid=4278</a> 1×slots официальный зеркало рабочее
<b>Смотреть еще похожие новости:</b>
<a href=http://www.fiat130.it/phpbb3/viewtopic.php?f=14&t=316632>1×slots регистрация на 1хслотс</a>
<a href=http://aurorahcs.com/forum/viewtopic.php?f=8&t=791537>1× slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Таким образом интернет казино получает вероятного игрока. Возможно дальнейшем или настоящем он захочет поиграть на средства средства. Так работают бездепозитные бонусы в онлайн казино. Здесь очень подходит выражение, безвозмездные сыр бывает только в мышеловке. Начинающие игроки шансы не обдумывать опасность пыла. Однако с осознания делается больше. Это тема для отдельного обсуждения.
#7274 Charlesgunny
Хорова Наталья Александровна порно бесплатно играем казино <a href=https://specreporter.com/>r7 casino</a> casino на телефон unlim casino <a href=https://vestnik-jurnal.com/>казино онлайн</a> Фастова Елена Владимировна порно 7k casino скачать порно с Захарова Мария Владимировна букмекерская контора скачать приложение букмекерская контора на андроид Нургалиева Эльвира Рамиловна порно 7k casino зеркало рабочее
#7275 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7276 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало 1хслотс регистрация перейти на 1×slots
При поддержки такого поощрения оператор может также завлекать посетителей, коие ранее показывали активность на веб-сайте, но по какой-то причине перестали выступать. В этом случае промокод высылается юзеру по электронной почте или в виде SMS.Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых новых, щедрых и проверенных бонусах в интернет казино, коие обновляются любой день. <a href=http://filmkachat.ru/>1хслотс официальный сайт зеркало</a> Фриспины — бесплатные вращения, которые разрешают игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины считаются наиболее известным и предпочтительным обликом бонуса — бесплатные вращения иногда эффективнее и веселее в отыгрыше, чем остальные виды бездепов. <a href=https://www.fundable.com/user-1002820>https://www.fundable.com/user-1002820</a> Но есть игорные заведения, коие готовы просто так жертвовать средства на забаву. Для сего довольно сделать профиль. Чтобы вывести собственный выигрыш, вас поначалу нужно выполнить условия отыгрыша, обозначенные в критериях получения бездепозитного депозита.На бонусные начисления имеют быть установлены вспомогательные ограничения, коие Вы не приняли при отыгрыше. Пока бонус всецело не отыгран — деньги из казино не выводятся. 1х слотс зеркало регистрация в 1×slots casino <a href=https://forum.gekko.wizb.it/user-23637.html>https://forum.gekko.wizb.it/user-23637.html</a>
1×slots регистрация на 1хслотс
В лицензионных бездепозитных казино играть в азартные забавы действительно безопасно. Наличие лицензии подтверждает тот факт, что клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP. <a href=https://bajarmp3.net/showthread.php?tid=431230>1×slots зеркало быструю регистрацию а также мгновенное</a> 1хслотс рабочее зеркало на сегодня Возможность протестировать свежие забавы, не рискуя собственными своими и разработать собственную стратегию забавы.Доступность — бездепозитные призы в казино чаще всего предоставляются новым игрокам, но бывают случаи, когда бонус все получить и действующие клиенты. <a href=http://www.baohaibbs.com.cn/home.php?mod=space&uid=38289>http://www.baohaibbs.com.cn/home.php?mod=space&uid=38289</a> Подтверждение электронной почты – одно из ведущих критерий, коие есть практически в любом бездепозитном казино. Чтобы верифицировать электрическую почту, достаточно перебежать по интенсивной ссылке в послании, приобретенном от азартного клуба. 1×slots регистрация 1×slots review live
1×slots официальный сайт зеркало
<a href=https://www.freebeg.com/forum/member.php?action=profile&uid=23029>https://www.freebeg.com/forum/member.php?action=profile&uid=23029</a> онлайн казино 1×slots Такой бесплатный эквивалент средств зачисляется на профиль юзера после воплощения требований и предназначаются они только для игрового процесса. Вывод этих вознаграждений возможен только после воплощения вейджеровых критерий.Диапазон ставок, коие вправе устроить игрок, кроме лимитирован. Обычно ставить возможно маленькую необходимую — пределах 10–30 рублей за одно вращение.
x1 slots регистрация в 1×slots casino
Шаг 4. Активация. Внимательно изучите обстоятельства, информацию по лимитированиям и сроке деянья бонусного предложения. Разобравшись с правилами, можно активировать бонус в собственном офисе (время ? с внедрением промокода) либо по запросу в саппорт.Срок активации и время на отыгрыш. Зачисление средств либо фриспинов происходит при активации в течение требовательно ограниченного периода, подобные требования предъявляются и к срокам отыгрыша. Одни казино позволяют отыгрывать приз несколько дней либо том недель. Другие выдают солидную необходимую за регистрацию, но время отыгрыша ограничивают несколькими часами с необоснованно высочайшим вейджером. <a href=http://www.arka-bahce.org/forum/showthread.php?p=774170#post774170>казино 1× slots официальный сайт</a> Подарки на дни ? посвященные торжественным датам, требующие условного отыгрыша или начисляются без того. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду.Фриспины – благотворительные вращения с фиксированной ставкой, которые возможно использовать в определенных игровых автоматах. 1×slots регистрация 1×slots review live <a href=https://nurnews.uz/user/PorsedropOa/>https://nurnews.uz/user/PorsedropOa/</a> Прибывшие на аккаунт деньги бездепозитные бонусы предназначаются, главном, лишь для новоиспеченных юзеров, коие раньше не имели собственного аккаунта в данном казино. Исходя из сего, случае раньше у игрока был изготовлен депо, то, по всей вероятности, у него больше не будет возможности рассчитывать на получение такого бонуса в конкретном заведении.
1×slots зеркало
Промокод – определённая композиция знаков, коию необходимо ввести в отвечающее фон при твореньи учетной записи либо активировать в личном профиле игрока в разделе с призами. <a href=https://www.deviantart.com/kalinka0588/journal/Osipovichi-A-Glimpse-into-the-Heart-of-Belarus-985785967>https://www.deviantart.com/kalinka0588/journal/Osipovichi-A-Glimpse-into-the-Heart-of-Belarus-985785967</a> Операторы гемблинга заявляют, собственно например они борются с бонус-хантерами. Впрочем, критики считают, что этим казино пытаются сделать из случайного постояльца неизменного игрока.Фриспины начисляются по определенной ставке. После их активации игроку нужно запустить слот и убедиться, что в нем показываются бесплатные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода последствии отыгрыша ориентируется оператором и изредка выше 5 000 рублей. 1×slots зеркало сайта Иногда операторы требуют внесение малого депозита перед выводом для верификации платежного инструмента. В некоторых казино этот депо того предстоит отыграть.Каждая игровая перрон выделяется условиями по получению и отыгрышу бездепов. В правилах отчетливо расписаны кратковременные рамки, за коие нужно прокрутить вейджер. Также не забывайте на максимальный размер ставки и наивысшую сумму выплаты. С иной стороны, дабы получить бездепозитные бонусы казино, достаточно израсходовать не более 1 минутки.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.kfz-gringer.at/index.php?option=com_k2&view=itemlist&task=user&id=39720>1×slots сайт</a>
<a href=http://forum.azartweb2.com/members/rabofreema.1327/>1× слот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Не желайте сыграть в азартные забавы, не рискуя средствами средствами, хотя получая в все выплаты? Подобную возможность предоставляют многие лучшие порталы с азартными увеселениями. В их количестве количество добросовестных и надежных интернет-казино на российском языке. Они завлекают новых юзеров различными поощрительными мероприятиями, включая бездепозитные, или благотворительные призы. Бездепозитные призы за регистрацию в игровых автоматах для владельцев онлайн-казино являются долею маркетинговой кампании, направленной на повышение аудитории сайта. Так они продвигают средства бренды и завлекают новых посетителей.
#7277 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7278 Charlesgunnyhttp://filmkachat.ru
1×slot официальный сайт
Можно. Вы постоянно сможете отказаться от получения бездепозитного бонуса за регистрацию в казино, же Вы не создадите ставку. <a href=http://filmkachat.ru/>1×slots зеркало сайта</a> Операторы гемблинга утверждают, собственно так они борются с бонус-хантерами. Впрочем, критики считают, что данным казино пробуют сделать из случайного гостя постоянного игрока.Частенько новички не знают, как активировать подарки или вывести 1-ый выигрыш. Для подобных случаев наша команда описала основные термины – что такое фриспины, вейджер, как его отыграть, чего нужно проходить верификацию. <a href=https://webanketa.com/forms/6gtk2c9q6wqp4s1scrw64dv6/>https://webanketa.com/forms/6gtk2c9q6wqp4s1scrw64dv6/</a> Для получения выигрыша требуется выполнить условия казино. Чаще всего игроку нужно поставить конкретную сумму, но уже из личных денег. Она рассчитывается из совместного размера выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, случае пользователь выиграл 1000 руб., а множитель составляет х30, вывести средства можно будет, сделав ставки на 30 000 рублей. 1×slots регистрация 1×slots casino c2d ru <a href=http://aaaa164.cafe24.com/bbs/board.php?bo_table=gallery&wr_id=68236>http://aaaa164.cafe24.com/bbs/board.php?bo_table=gallery&wr_id=68236</a> Далее потребуется отыграть вагер и вывести выигрыш. Игрокам без опыта крупно повезло, у получить 10-ки даров за 1 регистрацию. Если не сумели получить Бездепозитный бонус, не беспокойтесь. Обратитесь в интернет чат, оператор поможет исправить.
1×slots зеркало подтвердит вашу регистрацию если говорить
1×slots на любой вкус как пройти регистрацию В зависимости от онлайн заведения любой из них возможность вам предложить как бездепозитные деньги, например и бездепозитные фриспины, которые последствии удачной регистрации упадут вам на ваш игровой баланс. <a href=https://articlescad.com/auto-skup-wroc-aw-kompleksowy-przewodnik-dla-sprzedaj-cych-pojazdy-851555.html>https://articlescad.com/auto-skup-wroc-aw-kompleksowy-przewodnik-dla-sprzedaj-cych-pojazdy-851555.html</a> Обыкновенные бездепозитные бонусы в объеме от трех до 20 $ сделаны чтобы, чтобы, дабы в забавы заходили все новые и новые игроки. Здесь, всего, будет ограничение на наибольший выигрыш. Важно, чтобы перед минимальным вкладом был отключен бонус за 1-ое пополнение счета, и в не попадет на повторный вейджер. 1 x slots casino Выбирая даровой бонус, пристально изучайте управляла. Убедитесь, собственно для возможно брать роль в промоакции. Уточните, в каких забавах возможно исполнять обстоятельства вейджера. При надобности задавайте вопросы адептам саппорта.
1×slots зеркало проходить регистрацию это отличный вариант
Но не мыслить, что снабжая юзеров такими призами, казино занимается спонсированием. Ведь объемы вознаграждений, в основном, не немалые (средним объемом от 5 до 20 долларов). И на эти свои налагаются конкретные условия и лимитирования, обязательные к исполнению игрока, в в последствии он желает получить все средства выигранные финансы. <a href=http://forum.xpscenery.net/member.php?action=profile&uid=536>http://forum.xpscenery.net/member.php?action=profile&uid=536</a> Основное отличие что, собственно для получения бездепа не пополнять баланс в казино. Но кроме сего, есть ряд и различий: 1×slots на любой вкус как пройти регистрацию К образцу, игроку выдаются бесплатные свои в заведении в объеме пятидесяти либо ста $ (вейджер на коие сочиняет 100х). То есть, любому новоприбывшему игроку выскакивает манящая картинка, кот-ая сулит выплату всех зачисленных фирмой средств. Не стоит обращать внимания на казино приз за регистрацию без депо с слишком большой либо довольно махонькой суммой бонусов, поэтому что, и тщательно выучив все обстоятельства, здесь всего, несомненно какой-то подвох.
1×slots сайт
Варианты выигрыша в от Вашей успеха и критерий игорного портала. Выше мы сказали, что кое-какие бездепозитные бонусы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются и, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на средства, возможно выиграть невероятные суммы. Сегодняшние игровые автоматы либо видео слоты, как их именуют. Могут выдавать солидные умножение от х1.000 и повыше. Некоторые умножают ставку от х100.000.Подобные призы без депозита предоставляются на больше выгодных условиях. Зачастую они крупнее, а обстоятельства отыгрыша менее жесткие. Прежде чем активировать бездеп, нужно увериться никаких, собственно государство, уроженцем которой является игрок, не заходит в перечень не. 1хслотс зеркало <a href=https://flaxeco.com/user/WilliamEmods/>https://flaxeco.com/user/WilliamEmods/</a> Если площадка дарует бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь ввести акк на сайте и активировать его, подтвердив адресок электрической почты, номер телефонного либо иные данные, которые просит оператор. Перед данным нужно увериться, что пользователь находится на официальном веб-сайте казино, а не на жульнической площадке.Чтобы других убедиться в превосходстве бездепозитных бонусов, достаточно зарегистрироваться в казино и получить поощрение.
1×slos регистрация в 1×slots casino
Но а в вы теснее профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в интернет казино;Подобные призы без депозита предоставляются на больше прибыльных критериях. Зачастую они покрупнее, а обстоятельства отыгрыша менее жесткие. <a href=https://australianwinerytours.com/tours/member.php?action=profile&uid=1534>https://australianwinerytours.com/tours/member.php?action=profile&uid=1534</a> Главным нюансом в возникновении данных вознаграждений произведено никаких, собственно пустив их в ход, игрок ничем не рискует и в последствии никому ничего не несомненно обязан (не зависимо, получит ли он благодаря призам какой-нибудь выигрыш или мгновенно спустит все лишь что прибывшие финансы). То есть, казино снабжает игрока вероятностью на дармовой основе играть во различные слоты причем спонсирует забаву. 1×slots официальный demo регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/8167/#comment-340296>сайт 1× slots casino</a>
<a href=https://russiancomputerservice.ru/user/JosephCer/>1х слот регистрация в 1×slots casino</a>
<a href=https://www.reisezielforum.de/memberlist.php?mode=viewprofile&u=14074>1×slots casino регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чтобы бездеп не был начислен на Ваш аккаунт, Вам не нужно активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт механически, а Вы не расчитываете его применять, обратитесь в саппорта с пожеланием отменить бездепозитный приз.
#7279 Charlesgunny
казино сегодня casino игровой автомат <a href=https://www.ossetia.tv/>ешь казино</a> какие казино 1×bet вход <a href=https://glvk.guru/>pin up casino top top</a> Самойлова Алла Владимировна порно porno Елизавета Туктамышева bet casino gama casino Семёнова Татьяна Владимировна порно включи казино casino андроид
#7280 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7281 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1226/7b/510e4550a3a24a923b4f05c2390ab77b.png“>Станки для обработки металла — это специализированные машины, применяемые в металлообработке для выполнения всевозможных операций, этих как резка, сверление, фрезерование, токарная обработка и шлифование. Они все быть как ручными, так и автоматизированными, и употребляются в всевозможных секторах <a href=https://giperplasma.ru/extra3d>https://giperplasma.ru/extra3d</a>, подключая машиностроение, авиастроение, строительство и создание.
Некоторые главные типы металлообрабатывающих станков:
Токарные станки — используются для обработки цилиндрических деталей. На них можно выполнять операции точения, резьбонарезания и шлифования.
Фрезерные станки — предназначены для исполнения операций фрезерования, дозволяя обрабатывать плоскости, профили и отверстия.
Сверлильные станки — применяются для сотворения отверстий в железных заготовках. Они имеют все шансы быть как настольными, например и вертикальными.
Шлифовальные станки — предусмотрены для повышения точности и усовершенствования плоскости частей. На их выполняется шлифование плоскостей, цилиндров и других форм.
Лазерные станки — употребляют лазер для резки и гравировки металла, обеспечивая высшую точность и минимальные потери материала.
Плазменные резаки — могут использоваться для резки толстых железных листов при помощи плазменной дуги.
Ковочные прессы и штампы — используются для придания формы металлическим заготовкам под действием силы.
При выборе металлообрабатывающего станка принципиально учитывать образ обрабатываемого материала, объемы и сложность частей, а также размеры изготовления.
#7282 Charlesgunnyhttp://filmkachat.ru
1×slot рабочее зеркало
Самый распространённый из сходственных призов, конечно же, бездеп на день рождения клиента — бонус повторяющий фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им возможно на установленного периода времени.Не стоит незамедлительно же отказываться от приветственных презентов в подобных казино. Администрация готова начислить деньги или фриспины, хотя сначала сотрудники должны увериться, что вы не мошенник. Дело никаких, что развелось слишком количество охотников за призами. Они выучились обманывать систему и зарабатывать солидные суммы средств. <a href=http://filmkachat.ru/>1х слотс зеркало регистрация в 1×slots casino</a> Для получения депозитного приза нужно пополнить свой игровой баланс реальными средствами. Вознаграждение возможно получить или при внесении первого депозита, или в виде фиксированного процента от внесённых средств. Так или другому, приз поступит на счёт только после пополнения.Выигрыши с бонусов без инвестициям всегда привязаны к требованию по ставкам и все быть обналичены только в выполнения данных требований. <a href=https://promosimple.com/ps/2f2ab/how-3d-furniture-design-is-revolutionizing-the-industry>https://promosimple.com/ps/2f2ab/how-3d-furniture-design-is-revolutionizing-the-industry</a> Главное превосходство спинов – вероятность изучить различные слоты. Также получится насладиться бонусными раундами, испытать удачу в риск-туре и преумножить выигрыш за счёт особых знаков. Однако не только игровой процесс заслуживает внимание, так чем сосредоточиться на реальном выигрыше. 1хслотс казино зеркало <a href=https://ruisoon.com/space-uid-38584.html>https://ruisoon.com/space-uid-38584.html</a>
1×slots на любой вкус как пройти регистрацию
Бонус за регистрацию в казино выдается только раз один на одного игрока. Но посещают вспомогательные промоакции, в рамках которых бездепы расступаются для постоянных клиентов и эти презенты Вы можете получить более 1-го раза. 1×slots зеркало проходить регистрацию это отличный вариант <a href=http://www.webdesignforum.com.au/member.php?action=profile&uid=28890>http://www.webdesignforum.com.au/member.php?action=profile&uid=28890</a> Также, такой нужно подтвердить свой номер телефона, достичь код, полученный в смс-сообщении от клуба установить в особое фон в собственном офисе игрока. 1×slots казино зеркало Акции, приуроченные к календарным праздничным, посещают рассчитаны как на всех юзеров, например и на категории: примеру, презент на 8 марта девушкам-игрокам либо мужикам на 23 февраля.
1×slots зеркало рабочее
А ознакомиться с свежими интернет казино, Вы можете помощью бонусов с выводом прибыли, коие Вы можете получить без депо. <a href=https://ruisoon.com/space-uid-38634.html>https://ruisoon.com/space-uid-38634.html</a> 1×slots регистрация 1×slots review live Вообще перейдя в казино — правила схожи в получении бездепозитных бонусов, в стандартные управляла входит: подтвердить эл. Почту и телефон, наполнить свой собственный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ.Любой выигрыш по ставке выше установленного лимита будет считаться недействительным. То есть ставка не будет засчитана при отыгрыше, а случае выигрыша его сумма не поступит на счёт клиента — результат игры несомненно полностью аннулирован.
1×slots скачать на айфон
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=4996>1×slots зеркало на сегодня</a> Каждый игры обязан сначала отчетливо изучить условия по получению и отыгрышу приглянувшегося подарка. Если всё организует, поспешите отобрать бесплатные спины за регистрацию в казино без депозита с выводом и без отыгрыша и напрямик в начать вращать барабаны топовых слотов. Суммы подобных предложений, большинстве, колеблются от 3-х до 20 $, а вейджер на эти средства обязан сочинять от 30 до шестидесяти раз. Зачастую, наибольшая сумма выигрыша здесь составит от одной до двух сотен долларов. Если в выиграет больше, то все средства все быть списанными до очень разрешенного выигрыша. Здесь появляется смысл выводить еще несуществующие финансы на свою платежную систему и далее отыскивать заведение с подходящими под данную сумму релоадом либо призом за первое пополнение счета. Есть количество подвидов бездепозитного гонорары, предлагаемого наибольшим количеством заведений.Изучить управляла и обстоятельства получения бездепозитных призов казино, Вы можете у нас на веб-сайте в разделе с призами либо на официальном сайте избранного Вами казино. Если не можете найти нужную информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал либо по электрической почте. 1хслотс казино зеркало <a href=http://donaldvision.nayaa.co.kr/bbs/board.php?bo_table=sub05_01&wr_id=35151>http://donaldvision.nayaa.co.kr/bbs/board.php?bo_table=sub05_01&wr_id=35151</a>
1×slots зеркало на сегодня
Как только вы отыграли вейджер и средства с бонусного баланса перебежали вам на реальный счет, Вы неустрашимо сможете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депо).Этот тип приза несомненно добавлен на Ваш акк в удачной процедуры регистрации с внедрением номера аппарата. Если выбрать иной способ создания учетной записи, бездеп не несомненно добавлен на Ваш аккаунт. <a href=https://www.liveinternet.ru/?yana-beauty.com.ua>https://www.liveinternet.ru/?yana-beauty.com.ua</a> Простая процедура получения бездепозитного приза, которая займет менее 2-х мин. Для получения бездепов, достаточно зарегистрироваться и доказать контактные данные.Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного приза. 1×слот регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=419182>1хслот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с безвозмездных вращений. Прибыль, коию Вы заработаете на таком бездепе возможно ставить на вывод без какого или отыгрыша. Прибывшие на акк финансы бездепозитные призы предназначаются, главном, лишь для свежеиспеченных пользователей, коие ранее не имели собственного аккаунта в данном казино. Исходя из этого, случае ранее у игрока был изготовлен депо, то, по всей вероятности, у него больше не несомненно возможности рассчитывать на получение такового приза в определенном заведении.
#7283 Charlesgunny
казино на деньги casino зеркало сайта <a href=https://slon-ru.com/>casino pin официальный</a> up casino скачать 1×bet на андроид <a href=https://sovsekretno.net/>казино фильм</a> 1×bet слоты up букмекерская контора casino зеркало сайта букмекерские контора ап ешь казино 1×bet скачать приложение на андроид порно с Дронова Александра Викторовна
#7284 Zapchastisgarantiyey_Oremshttps://xn--80aaaanoikdl5bsrkboh3f.xn--p1ai/
Добрый день! Полезная и отличная новость для профессионалов и автолюбителей! Именно для тех, кто проживает в городах или пгт Бутово, Щербинка, Подольск, Остафьево, Ново-Дрожжино, Коммунарка, Сосенки, Лопатино. Недавно подсказали интересный сайт, где можно по VIN номеру автомобиля или коду запчасти найти недорогие запчасти. Да и вообще, машина, это как девушка или женщина требует адекватного и постоянного внимания. Совершенно не нужно ждать пока она начнет ворчать и обозлится, т.е. начнет скрипеть и сломается. В общем, если вы ищите, автозапчасти, авто запчасти, запчасти для автомобилей и т.д., например: <a href=https://xn–80aaaanoikdl5bsrkboh3f.xn–p1ai/>купить масло</a> Тогда вам срочно нужно прямо сейчас перейти на сайт Запчасти с гарантией и узнать все подробности по запчасти для иномарок, интернет магазин запчастей, автомагазин, запчасти для авто, каталог автозапчастей, оригинальные запчасти, каталог запчастей автомобилей в Щербинка, Подольск, Бутово, Остафьево, Ново-Дрожжино, Коммунарка, Сосенки, Лопатино и т.д. https://xn--80aaaanoikdl5bsrkboh3f.xn--p1ai/ . Машина – это железка, постоянно нужно обслуживать и не понятно когда поломается, поэтому должно быть место, где можно быстро и недорого купить запчасти. Обязательно переходите на сайт запчастисгарантией.рф https://запчастисгарантией.рф/ сохраняйте в закладки и изучайте информацию, не забудьте записать номер телефона и адрес сайта. Увидимся!
#7285 Charlesgunnyhttp://filmkachat.ru
1×slots официальный demo регистрация в 1×slots casino
Список так называемых «разрешенных землель» прилагается к правилам бонусной программки игорного портала. Обязательно проверьте, распространяются ли на вас подобные санкции. <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino 56 online</a> Вывод выигрыша с бездепозитных бонусов казино – щедрый подарок от азартных клубов. Но чтобы исключить свой заработок, нужно выполнить ряд критерий: <a href=https://community.networkofcare.org/blogs/qwerty/archive/2024/10/11/understanding-what-is-a-3d-render-and-how-it-works.aspx>https://community.networkofcare.org/blogs/qwerty/archive/2024/10/11/understanding-what-is-a-3d-render-and-how-it-works.aspx</a> Самые пользующиеся методы вывода средств ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электрическим платежным системам типа Neteller и Skrill, еще используют криптовалютными кошельками. Вывод выигрышей может исполняться мгновенно или развлекать от нескольких часов до нескольких суток. 1×slots casino регистрация на сайте <a href=http://old.soundaware.net/home.php?mod=space&uid=6045>http://old.soundaware.net/home.php?mod=space&uid=6045</a> Как управляло, новоприбывшие игроки в первую очередь хотят ознакомиться с методами ввода и вывода валютных средств и сроки выполнения поданных заказов чтобы четко понимать, как прытко у исключить собственный казино приз за регистрацию без депо на электрический кошелек или же банковскую карту. К счастью для всех играющих, внутри конкретных холдингов, все казино конкурируют между собой. Ведь в бы определенную компанию давало лишь одно онлайн-заведение, то навряд бы клиенты увидели казино с бонусом за регистрацию и возможность бы рассчитывать только на вознаграждение повторяющий бонуса на 1-ое вложение. К каждому заведению периодически по завлекать свежих игроков, собственно, в, только на руку всем играющим.Зарегистрироваться в казино по специальной ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефона и электрическую почту). Для доказательства номера телефонного нужно в собственном профиле показать собственный номер и нажать кнопку „Подтвердить номер телефона“, дальше Вы получите sms-сообщение с кодом, кот-ый необходимо установить в подходящее поле. Для доказательства электрической почты, перебежать по интенсивной ссылке в послании от казино.
казино 1×slots
Благодаря программке преданности от игорного заведения, можно взять хороший старт и без добавочных инвестициям запустить видеослоты. Кроме как, можно рассчитывать на реальную фортуну и получить, без вложения собственных финансов, большой выигрыш.Условия имеют различаться друг от приятеля. Но подобный бонус может быть использован лишь для игрового процесса – полученные на счет финансы до как, как будут отыграны, вывести невероятно. <a href=http://evtrucksforum.com/viewtopic.php?p=778965#p778965>1×slots актуальное зеркало</a> 1×slots casino online регистрация В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, нужно обратиться в службу поддержки через лайв-чат на веб-сайте казино. <a href=http://www.ngo.ne.jp/userinfo.php?uid=34034>http://www.ngo.ne.jp/userinfo.php?uid=34034</a> 1×slots регистрация 1×slotscasino 56 online Похожим образом трудится 3-ий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя или в связи с получения им VIP-статуса. Подарок предоставляется в обращения в поддержку и проверки.Если при регистрации показать промокод, возможно гарантировано получить приз. Где арестовать ваучер? Посетите на блоги либо форумы. Иногда администрация клуба делает рассылку ваучеров на электрическую почту. В последнее время игорные дома начали афишироваться в фильмах и телесериалах. Присмотритесь и наверняка заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных рублей.
1×slots коды
В любом казино с бездепозитным бонусом учтены вейджеровые условия. Это один-единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, нужно устроить определённое число ставок. Чем круче бонус, что, этим труднее выполнить условия, и наоборот.Зачастую бездепозитные бонусы казино для забавы предлагаются различными заведениями азартных игр в качестве рекламных акций либо в целях привлечения к себя новых игроков. Для бездепозитных бонусов в казино 2022 геймеру не пополнять счет до момента вывода желаемых средств. <a href=http://forum.americandream.de/memberlist.php?mode=viewprofile&u=7243>http://forum.americandream.de/memberlist.php?mode=viewprofile&u=7243</a> Для верификации аккаунта нужно дать профессионалам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, а фотку банковской карты либо скриншот странички электрического кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности.Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке представители онлайн-казино публикуют актуальную информацию о no down payment bonuses и других предложениях. 1×slots зеркало проходить регистрацию это отличный вариант
зеркала 1×slots
<a href=http://t954381g.bget.ru/user/JosephPiery/>1хслот официальный сайт зеркало</a> Бонус за регистрацию в казино без депо с выводом денег нужно отыграть. Зачастую для отыгрыша может потребоваться устроить ставки на сумму, в несколько десятков один превосходящую необходимую бонуса или выигрыша. 1×slots коды <a href=https://www.cossa.ru/profile/?ID=232381>https://www.cossa.ru/profile/?ID=232381</a> Бездепозитные призы за регистрацию считаются одним из самых знаменитых способов привлечения новых игроков в онлайн-казино, поэтому что они деют игрокам вероятность опробовать казино, более игровые автоматы, и возможно, выиграть настоящие средства.
1×slots зеркало которую указывали при регистрации кстати
Возможность сыграть вспомогательное состязание (а время и несколько) совершенно бесплатно, а выигрыш, же, поступает на счёт игрока.В перечне притязаний к отыгрышу нередко присутствуют лимиты на ставки при игре на собственные средства. Так, в отыграть нужно 30 000 рублей, а максимальная сумма ограничена 30 рублями, то вертеть барабаны светит 1000 один. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам действия промоакции. <a href=http://forum.fcmn.co.il/member.php?action=profile&uid=302278>http://forum.fcmn.co.il/member.php?action=profile&uid=302278</a> 1×slots скачать на айфон
<b>Смотреть еще похожие новости:</b>
<a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=51083>сайт 1× slots casino</a>
<a href=https://sadhaka.nl/forum/memberlist.php?mode=viewprofile&u=3268>1×slot регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Ниже указан важный список легальных казино в Беларуси с призами на первый депо. Вы можете попасть на официальный сайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз. Для выбора азартного заведения Вы сможете пользоваться списком наших казино с бонусами за регистрацию. На нашем сайте мы опубликовали перечень бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, собственно часть бонусов неповторимые и доступны лишь для гостей нашего сайта по-специальному промо-коду либо по оригинальной ссылке. Кроме такого, для каждого приза мы подготовили доскональный обозрение, в Вы узнаете как получить и отыграть поощрение и как вывести свой выигрыш с бездепа.
#7286 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7287 Charlesgunny
казино проиграл казино пину <a href=https://kompromat1.online/>порно с Сергей Бобровский (хоккей)</a> гама казино up букмекерская контора <a href=https://res-publika.com>порно с Александр Головин (футбол)</a> скачать 1×bet 1×bet xyz бесплатное казино Скоробогатова Ольга Николаевна порно porno Мира Андреева (теннис) up casino скачать порно с Дронова Александра Викторовна porno Алена Косторная (фигурное катание)
#7288 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7289 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
На бонусные начисления могут быть установлены вспомогательные ограничения, которые Вы не сведению при отыгрыше. Пока бонус полностью не отыгран — деньги из казино не выводятся.Мы рекомендуем не отрицаться от подобных предложений известных казино. Выделите некоторое минут на регистрацию, получите бонус и попробуйте его отыграть. Может быть, сейчас удача будет на вашей стороне! <a href=http://filmkachat.ru/>1×slots казино мобильная версия</a> <a href=https://www.dr-ay.com/blogs/217119/3D-Modeling-Revolutionizing-Product-Design-Through-Digital-Innovation>https://www.dr-ay.com/blogs/217119/3D-Modeling-Revolutionizing-Product-Design-Through-Digital-Innovation</a> 1×slots регистрация на официальном сайте <a href=http://terra-bashkiria.ru/forum/?PAGE_NAME=profile_view&UID=157609>http://terra-bashkiria.ru/forum/?PAGE_NAME=profile_view&UID=157609</a>
1×slots казино зеркало
Если вы выбрали для себя некоторое брендов которые вам больше всего полюбились, для неизменной забавы! Таких гемблеров казино очень любит и оценивает, за частую эти игроки становятся VIP игроками заведения, которым нередко поступают прибыльные предложения в виде призов, так же туда входит и бездепозитные. скачать 1×slots официальный сайт <a href=http://www.85sucai.com/member/index.php?uid=adjoiningcoffee>http://www.85sucai.com/member/index.php?uid=adjoiningcoffee</a> 1×slots зеркало проходить регистрацию это отличный вариант Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, чтобы еще раз получить бесплатный бонус. Игорные заведения нетерпимы к бонус-хантерам, потому вас ожидает неминуемое санкция.Таким образом, заведение пробует показать себя своим потенциальным геймерам, а подобный рекламный ход как казино приз без депо за регистрацию привлекает довольно много внимания к игорному заведению и обеспечивает неизменный поток новых посетителей и грядущих посетителей игрового онлайн клуба.
1×slot зеркало рабочее этих способов предполагает регистрацию
<a href=https://repyourmaxfitness.com/user/walterfoept/?um_action=edit>https://repyourmaxfitness.com/user/walterfoept/?um_action=edit</a> Бонус без депо за регистрацию в казино (бездепозитный приз) – это валютный презент от клуба, кот-ый начисляется на акк игрока последствии регистрации в казино. Кроме творения учетной записи, для получения бездепа, довольно часто требуется ещё и доказать контактные данные игрока и/или активировать особый промо-код. casino 1×slot
1хслотс зеркало
<a href=https://your-portal.at.ua/forum/20–63222–2#88238>1хслотс казино зеркало</a> 1× slots casino зеркало <a href=https://opensourcebridge.science/wiki/%D0%93%D0%BB%D0%B0%D0%B2%D0%BD%D0%B0%D1%8F_%D0%94%D0%BE%D1%80%D0%BE%D0%B3%D0%B0_%D0%90%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0>https://opensourcebridge.science/wiki/%D0%93%D0%BB%D0%B0%D0%B2%D0%BD%D0%B0%D1%8F_%D0%94%D0%BE%D1%80%D0%BE%D0%B3%D0%B0_%D0%90%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0</a>
casino 1×slot
Денежные средства. Третий бонус за регистрацию без депозита – наличные. К раскаянью, только известные и популярные клубы все дать средства в рублях или баксах. С их помощью у насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед данным нужно исполнение конкретных критерий. <a href=https://www.miyawaki.wiki/index.php/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%93%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0_%D0%9D%D0%B0_%D0%94%D0%B7%D0%B5%D0%BD%D0%B5>https://www.miyawaki.wiki/index.php/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%93%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0_%D0%9D%D0%B0_%D0%94%D0%B7%D0%B5%D0%BD%D0%B5</a> казино 1×slots официальный сайт Не стоит путать забаву в демо и использование призов. В демонстрационном режиме игрок имеет расценить механику слота, сюжет и оформление. Но игра проводится на относительные кредиты, поэтому отсутствует главное ? ощущение пыла. Активируя промокод либо фриспины, клиент по-прежнему не тратит средства средства на игровые автоматы, хотя возможность сорвать реальный куш!
<b>Смотреть еще похожие новости:</b>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=318553>1×slots регистрация на официальном сайте</a>
<a href=http://www.airsoft44.com/forum/index.php?action=profile;u=11896>1×slots официальный сайт зеркало</a>
<a href=http://mi.minfish.com/home.php?mod=space&uid=1196847>1хлот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вейджер в переводе с английского означает «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша приобретенного приза, в нашем случае бездепозитного. Число ставок большого — главно только набрать необходимую, пропорциональную сумме одобрения. Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.
#7290 Charlesgunny
vavada casino сайт pin up casino <a href=https://repost.news/>казино рулетка</a> рабочие зеркала казино симулятор казино <a href=https://slon-ru.com/>7k casino официальный сайт</a> сайты казино порно с Баталина Ольга Юрьевна букмекерская контора мостбет ап казино букмекерская контора леонов 1×bet зеркало рабочее Матвиенко Валентина Ивановна порно
#7291 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasin online
Чаще всего казино приз за регистрацию без депозита даёт вероятность запустить каждой автомат. Но какого-либо внимательно ознакомиться с условиями. Иногда для забавы доступны только определённые модели. Если вы новичок и ничего не смыслите в гэмблинге, другого начать знакомство с миром пыла непосредственно с «одноруких бандитов».При правильном подходе бездепы — это прекрасный способ играть на деньги без траты собственных средств. Есть количество советов, следуя которым возможно извлечь максимум пользы из сходственных акций казино. Играть по только на лицензированных площадках. Скриптовые веб-сайты столько врут с бонусными предложениями, хотя и употребляют пиратский софт с измененным ГСЧ. Выиграть на этих автоматах нереально. <a href=http://filmkachat.ru/>1×slot рабочее зеркало</a> <a href=http://www.pvp.iq.pl/thread-5909.html>http://www.pvp.iq.pl/thread-5909.html</a> Более солидные предложения встречаются довольно изредка. Зачастую они доступны только VIP-игрокам. В оставшихся случаях им наверняка сопутствуют очень жесткие условия отыгрыша. Также вероятны дополнительные условия и другие ограничения, прописанные в критериях и положения бонусной программы казино.Бездепозитные бонусы, как уже понятно, являются уникальной вероятностью обратиться игровому процессу полностью безвозмездно, то есть выступать в интернет казино безвозмездно и на существующие средства незамедлительно в регистрации аккаунта. Автоматы с этим депозитом шансы стать прекрасной возможностью поиграть для поклонников азарта с определенными лимитированиями в финансах. 1×slots casino регистрация 1×slotscasin online <a href=http://lat-puzz.com/phpbb/memberlist.php?mode=viewprofile&u=97113>http://lat-puzz.com/phpbb/memberlist.php?mode=viewprofile&u=97113</a> Обыкновенные бездепозитные призы в объеме от трех до 20 $ созданы для того, дабы в забавы заходили все новые и свежие игроки. Здесь, всего, несомненно лимитирование на наибольший выигрыш. Важно, чтобы перед минимальным вкладом был отключен приз за первое пополнение счета, и геймер не попадет на повторный вейджер.
1×slot зеркало рабочее этих способов предполагает регистрацию
Мы советуем не отрицаться от сходственных услуг узнаваемых казино. Выделите количество мин. На регистрацию, получите приз и попробуйте его отыграть. Может быть, сегодня удача несомненно на вашей стороне! <a href=http://vn-info.net/user/Josephkam/>1×slot казино зеркало</a> 1×slots рабочее зеркало на сегодня Бездепозитные призы казино за регистрацию в 2022 году — это вероятность поиграть за счёт заведения. Казино даёт клиенту шанс пользоваться определённой суммой либо количеством даровых вращений без внесения депозита. Не путайте деморежим с реальной игрой без надобности внесения депо. <a href=http://flightgear.jpn.org/userinfo.php?uid=45033#>http://flightgear.jpn.org/userinfo.php?uid=45033#</a> Подтверждение регистрации. Казино просят привязки профиля к электронному адресу и номеру телефонного. Для сего на e-mail отчаливает послание ссылаясь, а на телефон ? текстовое известие с кодом.Третитй бездепозитный бонус за регистрацию – денежные свои. К огорчению, начислить рубли либо баксы готовы только знаменитые и известные клубы. С их подмогою у насладиться любой доступной забавой – автоматом, рулеткой, кено, блэкджеком. 1× slots сайт Промообъявления от казино мешают реальной картины и направлены на вербование внимания пользователей. Понять, как высоки шансы остаться в плюсе, позволит личный анализ критерий предложения:Для отыгрыша приза казино обязывает игрока поиграть на необходимую, в несколько раз превышающую сумму приобретенного приза — здесь выгода компании явна.
1х слот регистрация в 1×slots casino
Бонус в казино без депозита имеет различные варианты: это может быть приветственный бонус, акции в честь каких-то дней или весомых дат, бонус за вербование свежих игроков, преданность и получение VIP-статуса.Бездепозитный бонус по промо-коду несомненно доступен для забавы, только том, случае когда Вы активируете особый бонусный код в разделе с бонусами или укажите промокод при регистрации на сайте. В неких случаях, кроме активации кода, понадобиться подтвердить контактные данные игрока и наполнить анкету клиента. <a href=http://soft-tex.ru/bitrix/redirect.php?goto=http://niits.ru/templates/meta/go.php?site=villagio.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/T5pRoFkgm1z>http://soft-tex.ru/bitrix/redirect.php?goto=http://niits.ru/templates/meta/go.php?site=villagio.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/T5pRoFkgm1z</a> Возможность сыграть дополнительное соревнование (а от и количество) совершенно бесплатно, а выигрыш, тому, поступает на счёт игрока.Способы получения бездепа различаются в зависимости от облика приза, кот-ый приглянулся игроку. Но вас в любом случае нужно быть зарегистрированным в законном онлайн-казино и подтвердить свою личность. В общем виде пошаговая аннотация для получения бездепозитного бонуса смотрится например: 1×slots официальный demo регистрация в 1×slots casino
1×slots акции
Бездепозитные призы, как теснее ясно, считаются уникальной возможностью к игровому процессу безусловно бесплатно, другими выступать в онлайн казино даром и на имеющие средства незамедлительно последствии регистрации аккаунта. Автоматы с таким депо шансы замерзнуть прекрасной возможностью поиграть для поклонников азарта с определенными лимитированиями в денег. <a href=http://t954381g.bget.ru/user/JosephPiery/>зеркала 1×slots</a> Бездепозитный бонус казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в этом и заключается основное отличие.С не отыгранным призом запрещается превосходить размер максимальной ставки. Нарушение этого условия иметь аннулирование выигрыша. Каждый новичок и профессиональный игрок грезят живо стартануть и начать делать реальные ставки. Для этого довольно отобрать подарок, за который не платить. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email либо телефон. После сего администрация начислит щедрое вознаграждение повторяющий бесплатных вращений или виртуальных кредитов. 1×slots сайт <a href=http://ukrpart.org/index.php?subaction=userinfo&user=dispensabledate>http://ukrpart.org/index.php?subaction=userinfo&user=dispensabledate</a> Предложения с бездепозитными призами за регистрацию позволяют свежим заведениям заинтересовать аудиторию на свой сайт. А игроки в свою очередь получают возможность играть на настоящие средства без депозита в казино и заработать малый стартовый капитал, кот-ый разрешается исключить на карту банка либо электрический кошелек.
рабочее зеркало 1×slots
Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных призов принимаются довольно высокие требования. Часто онлайн-казино советуют отыграть бонусное одобрение до 100 один в игровых автоматах. Например, если игрок получил безвозмездно десять долларов, то нужно будет отыграть их, поставив одну тысячу спинов по 1 доллару каждый. Стоит обозначить(означить), собственно не все казино дают возможность выступать на бонусы и не во всех развлекательных заведениях схожие управляла для отыгрывания. Некоторые казино воспрещают выступать на призы в блекджек или ограничивают ставки до 5 %, что существенно наращивает в десятки один число нужных игр. Главное превосходство спинов – возможность изучить различные слоты. Также удастся насладиться бонусными раундами, испытать фортуну в риск-туре и преумножить выигрыш за счёт особых знаков. Однако не только игровой процесс заслуживает внимание, ведь другого сосредоточиться на реальном выигрыше. <a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=79701>https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=79701</a> Реже бонусы без депозита начисляются неизменным игрокам. С их помощью администрация старается вычесть ценных посетителей либо желает поблагодарить за лояльность правильных гостей. Но гораздо почаще для сходственных целей применяются такие промоакции:Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных обстановок с казино, когда в отыгрыша бездепа для не дадут вывести крупную необходимую выигрыша. 1х слот 1хслотс регистрация перейти на 1×slots Если вы новичок данном и только попали в неизведанную вами район пыла — с помощью предложений как бездепозитные бонусы без пополнения.Для верификации аккаунта нужно дать профессионалам технической поддержки отсканированную копию паспорта и счета за коммунальные предложения, еще фотку банковской карты или снимок страницы электронного кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum-macan.ru/viewtopic.php?t=13928>1хслотс официальный сайт зеркало</a>
<a href=http://naturetour.ru/communication/forum/messages/forum3/message23433/5136–1×slots-aktsii?sessid=c04658424532710fc6be857e21761b8d&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1×slots акции</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Реже призы без депозита начисляются постоянным игрокам. С их поддержкою администрация постарается удержать ценных клиентов либо вожделеет поблагодарить за лояльность правильных посетителей. Но намного чаще для подобных целей применяются такие акции:
#7292 Charlesgunny
7k casino зеркало рабочее лучшая казино <a href=https://glvk.guru/>casino 7k рабочее</a> песня казино букмекерская контора без <a href=https://rhymes-punches.com/>казино</a> 1×bet зеркало xbet реального казино порно с Дронова Александра Викторовна Юдаева Ксения Валентиновна порно pin up букмекерская контора 1×bet официальный сайт casino com
#7293 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7294 Rickeyepirmhttps://1winpromobk.ru
Официальный сайт <a href=https://1winpromobk.ru/>https://1winpromobk.ru</a>, где вы найдете актуальные промокоды и бонусы для 1Win. Получите эксклюзивные предложения, такие как 500% на первый депозит и бесплатные спины. Присоединяйтесь прямо сейчас, чтобы воспользоваться всеми преимуществами и начать выигрывать!
#7295 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
Чтобы выступать бесплатно на настоящие деньги в казино, не всегда достаточно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные деяния. <a href=http://filmkachat.ru/>1×slots официальный сайт, скачать</a> При верном подходе бездепы — это отличный метод выступать на средства без траты собственных средств. Есть некоторое советов, следуя коим можно извлечь максимально полезности из похожих промоакций казино. Играть следует лишь на лицензированных площадках. Скриптовые сайты не обманывают с бонусными услугами, но и употребляют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах невозможно. <a href=https://photosynthesis.bg/forum/tema/176.html>https://photosynthesis.bg/forum/tema/176.html</a> Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.Так собственно сможете храбро регистрироваться без всяких раздумий. Фортуна сейчас точно на вашей стороне. Не опасайтесь, как следствие какого или убытка Вам абсолютно не угрожает. С этими бонусами как без пополнения, Вы остаетесь лишь в плюсе, хотя не как не в минусе. 1×slots рабочее зеркало <a href=http://forum.l2endless.com/member.php?action=profile&uid=12487>http://forum.l2endless.com/member.php?action=profile&uid=12487</a>
1×slots официальный сайт мобильная версия
Иногда у посетителей вебсайта могут возникнуть проблемы при активации приобретенного промо-кода. В этих случаях, нужно адресоваться за помощью в службу «Support». Для получения ответа, обязательно указывается конкретная первопричина обращения и подтверждается информация дополнительными снимками. Если сложилась спорная ситуация, всегда возможно обратиться к главному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ.Допустим, за регистрацию вы получили бездеп в размере 2 000 руб. С вейджером х30. В данном случае светит устроить ставок, на совместную сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать настоящие деньги. Однако не забывайте, собственно с каждого подарка получится исключить определённую сумму (чаще всего менее $200). 1хслот скачать <a href=http://atope.ru/index.php?subaction=userinfo&user=dramaticguidebo>http://atope.ru/index.php?subaction=userinfo&user=dramaticguidebo</a> Oтыгpaть бонус с указанным вeйджepом, чтобы необходимо сдeлaть cтaвoк нa cумму, превышающую объем бонуса в несколько раз. 1×slots сайт Подобные призы без депо предоставляются на более выгодных критериях. Зачастую они покрупнее, а обстоятельства отыгрыша менее жесткие.У любого игорного заведения свои управляла и обстоятельства. Но, дабы получить бонусы, необходимо выполнить стереотипные деяния:
1×slots бонус за регистрацию
Для получения выигрыша потребуется выполнить обстоятельства казино. Чаще всего игроку нужно поставить конкретную необходимую, хотя теснее из личных средств. Она рассчитывается из совместного объема выигрыша за всегда использования бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, в юзер выиграл 1000 рублей, а множитель составляет х30, исключить деньги можно несомненно, сделав ставки на 30 000 руб.С этими простыми советами каждое казино с призом за регистрацию способно принести в разы больше выгоды и пользы. Даже не выиграв крупную необходимую, игрок увлекательно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-либо денежных рисков. Быть в курсе лучших акций легко. Достаточно регулярно учить список новых онлайн казино с выводом бонуса без депо в этом разделе.Прямо момент заберите благотворительные вращения за регистрацию без депо и начинайте коллекционировать призовые комбинации из-за солидных выигрышей! <a href=https://food.biz.ua/wr_board/tools.php?event=profile&pname=Deweyjag>https://food.biz.ua/wr_board/tools.php?event=profile&pname=Deweyjag</a> Существует ли стратегии для отыгрыша бездепозитных призов? К раскаянию нет, на выигрыши либо проигрыши с призов, казино или игрок воздействовать не может, отдача игр происходит от создателей игр. 1×slots быструю регистрацию а также мгновенное Срок отыгрыша — это этап, кот-ый начинается в момент активации приза и кончается с его закрытием. Пользователю необходимо уложиться в этот временной зазор, по призовые средства аннулируются. Казино устанавливают перечень игр, ставки в засчитываются при расчете отыгранных средств. Если тайтл не заходит в этот перечень, то ему быть недосегаем для загрузки во время деянья бонусного предложения.
1×slots зеркало регистрация
Свежий бонус начисляется повторяющий валютных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в использовании своими, в случае отыгрыша оператор возможность ввести ограничение на вывод денег. <a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=37544>скачать 1×slots на андроид мобильная версия</a> Бездепозитные призы начисляются только раз раз. Не стоит открывать новые аккаунты, чтобы получить их повторно. Служба безопасности казино непременно выявит «левого» участника и заблокирует. Если гость выполнит нужные требования, отыграет свою ставку и решит исключить собственный выигрыш, то ему надо(надобно) учесть, что казино обязательно потребует предоставить ксерокопии личных документов, чтобы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные средства вывести не получится.Эффективность бездепов в качестве маркетингового инструмента оценили почти операторы. Малоизвестные площадки употребляют эти промоакции, чтобы быстро набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны неизменных гостей. Не все веб-сайты, дающие презенты без депозита, рекомендованы к ирге. За симпатичным промоописанием могут скрываться неосуществимые условия отыгрыша и подводные камни. 1×slots казино зеркало <a href=http://nashforum.listbb.ru/viewtopic.php?f=3&t=20553>http://nashforum.listbb.ru/viewtopic.php?f=3&t=20553</a> Одним из предлогов отдавать привилегию 1 либо другому заведению содержится в привлекательности предлагаемых акций и даровых предложений. Безвозмездные фриспины, выдаваемые без нужды создавать какой-нибудь лепта, в списке располагается далеко не в конце.Главное превосходство спинов – вероятность выучить различные слоты. Также удастся насладиться бонусными раундами, испытывать фортуну в риск-туре и преумножить выигрыш за счёт особых знаков. Однако столько игровой процесс заслуживает внимание, так другого, как сосредоточиться на реальном выигрыше.
1×slots промокод при регистрации
На нашем веб-сайте Вы найдете список своевременных новых бездепозитных бонусов в казино 2022 года. Также, есть количество эксклюзивных предложений, которые доступны только посетителям нашего сайта последствии регистрации по нашей ссылке либо активации особого промокода. <a href=https://myleslgxs88766.theblogfairy.com/29773932/the-ethics-and-controversy-surrounding-deepnude-a-closer-look-at-ai-s-dark-side>https://myleslgxs88766.theblogfairy.com/29773932/the-ethics-and-controversy-surrounding-deepnude-a-closer-look-at-ai-s-dark-side</a> Выполнив все притязания оператора, клиент имеет оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит примерно менее суток. Если дополнительно потребуется пройти процедуру верификации, то срок возрастает до 1–2 рабочих дней. Для перевода применяются банковские приборы и электрические платежные системы. Второй способ подходит никакого, например как масса транзакций такой осуществляются мгновенно. В связи со специфичностью функционирования банков обработка платежей может взятьвдолг(взятьвзаймы) до нескольких трудящихся дней.Минимального оборота. Этот предел устанавливается вейджером — же игрок не сыграет на установленную необходимую, вывод средств будет недосегаем. 1×slots зеркало 1хслотс регистрация перейти на 1×slots Выиграть настоящие деньги в казино не пополняя счет – сложно, хотя вероятно. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными призами и начните играть на бонусные свои. По статистике из 10-ти заведений возможно заработать небольшую сумму денег с бонусных средств.
<b>Смотреть еще похожие новости:</b>
<a href=http://fin-molitor.com/forum/memberlist.php?mode=viewprofile&u=8719>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При исполненьи условий отыгрыша и верификации, средства с бонусного счета переводятся на ведущей и могут быть выведены на карту или электронный кошелек. Лимиты на вывод и сроки проведения транзакции зависимости от выбранной платежной системы. Перед активацией главно внимательно изучить обстоятельства промоакции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют значение также лимиты ставок при отыгрыше и сроки, в течение которых можно воспользоваться предложением. Если бездеп обхватывает ограниченный перечень игр, рекомендуется разузнать наибольшие коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только в случае, в оператор не установил строгие ограничения на наивысшую необходимую ставки.
#7296 Charlesgunny
винлайн букмекерская контора официальный сайт casino официальный зеркало <a href=https://rumafia.news/>online casino 7k</a> porno Виктория Баркова, легкоатлетка 7k casino официальный сайт <a href=https://vestnik-jurnal.com/>пинап казино</a> porno Мария Шарапова играющие казино онлайн 1×bet официальный слоты cat casino человек казино Лут Оксана Николаевна порно порно с Каролина Севастьянова
#7297 Charlesgunnyhttp://filmkachat.ru
1×slots сайт зеркало
Ниже указан актуальный список легальных казино в Беларуси с бонусами на первый депо. Вы можете попасть на официальный вебсайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз.Иногда виде одобрения за регистрацию шансы выдаваться билеты для роли в турнирах. Условия их проведения очень отличаются, поэтому мы советуем ознакомиться с любым предложением отдельно. <a href=http://filmkachat.ru/>1×slots быструю регистрацию а также мгновенное</a> <a href=https://www.whizolosophy.com/category/personal-change/article-column/everything-you-need-to-know-about-3d-walkthrough-animation>https://www.whizolosophy.com/category/personal-change/article-column/everything-you-need-to-know-about-3d-walkthrough-animation</a> Мы советуем не открещиваться от подобных предложений узнаваемых казино. Выделите количество мин. На регистрацию, получите приз и попробуйте его отыграть. Может быть, сейчас фортуна будет на вашей стороне!B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. 1хлот регистрация в 1×slots casino <a href=https://coinzaa.com/u/Joshuafiell>https://coinzaa.com/u/Joshuafiell</a> Каждый из бездепозитных призов без пополнения 2022 содержит свой конкретный вейджер для отыгрыша, например же в любом казино он уточняется индивидуально — где то он х55 а кое-где х30, повторюсь везде по различному!
1×slots регистрация 1×slots review live
Подтверждение регистрации. Казино просят привязки профиля к электрическому адресу и номеру аппарата. Для сего на e-mail отправляется послание со ссылкой, а на телефонный ? текстовое извещение с кодом. скачать 1×slots официальный сайт <a href=http://beloshveikaprom.ru/bitrix/redirect.php?goto=http://cies.xrea.jp/jump/?http://dekka.su/bitrix/redirect.php?goto=https://teletype.in/@urist555/fDlstGb1YEd>http://beloshveikaprom.ru/bitrix/redirect.php?goto=http://cies.xrea.jp/jump/?http://dekka.su/bitrix/redirect.php?goto=https://teletype.in/@urist555/fDlstGb1YEd</a> В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с безвозмездных вращений. Прибыль, которую Вы заработаете на этом бездепе возможно ставить на вывод без какого или отыгрыша. 1×slots casino online регистрация Не стоит путать игру в демо и использование призов. В демонстрационном режиме игрок имеет расценить механику слота, сюжет и оформление. Но забава проводится на условные кредиты, поэтому отсутствует основное ? чувство азарта. Активируя промокод либо фриспины, заказчик и не расходует средства деньги на игровые автоматы, но может сорвать реальный куш!Промокод – определённая композиция знаков, коию необходимо установить в подходящее поле при твореньи учетной записи либо активировать в собственном профиле игрока в разделе с бонусами.
1×slots регистрация на 1хслотс
При отыгрыше бездепов, учитывайте кратковременные лимитирования. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток. <a href=https://repyourmaxfitness.com/user/patricklam/?um_action=edit>https://repyourmaxfitness.com/user/patricklam/?um_action=edit</a> Третитй бездепозитный бонус за регистрацию – денежные средства. К сожалению, начислить рубли или доллары способны только известные и популярные клубы. С их подмогою появится насладиться каждой доступной игрой – автоматом, рулеткой, кено, блэкджеком.Некоторые онлайн-казино без депо предлагают новым посетителям выбрать приз при регистрации. Будьте внимательны: выбрав один, вы в безоговорочном большинстве случаев не можете воспользоваться остальными. 1× слот зеркало
1×slots casino зеркало
Ознакомьтесь с нашим списком превосходнейших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего списка и получите бездеп незамедлительно. Хватайте лучшие благотворительные предложения ниже и выигрывайте великие деньги, не рискуя!Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации дара необходимо подтвердить электронную почту и привязать телефонный; Все благотворительные бонусы кажутся соблазнительными. Кто же откажется от возможности поиграть в онлайн-казино, не рискуя средствами, хотя получая выигрыши. Но далековато не все бездепозитные призы одинаковой привлекательны для рассудительного клиента.Если простыми текстами, бездепы – это определённая сумма денег либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно забирать подарки. Но есть некоторые аспекты. Существуют игорные дома, коие перед тем как начислить призы просят привязать телефон, предоставить копии документов. 1×slots регистрация 1×slots casino 777 online <a href=http://www.dvorchany.grodno.by/user/Ashleypioms/>http://www.dvorchany.grodno.by/user/Ashleypioms/</a>
1×slots регистрация на 1хслотс
Игрокам не принимать приветственный приз как гарантированный способ получить большой выигрыш, хотя это замечательная вероятность без затрат расценить функционал казино. Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=http://jet-link.ru/index.php?subaction=userinfo&user=ludicrouspushov>http://jet-link.ru/index.php?subaction=userinfo&user=ludicrouspushov</a> зеркала 1×slots Фриспины — бесплатные вращения, которые дозволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся самым модным и преимущественным видом приза — благотворительные вращения иногда эффективнее и веселее в отыгрыше, чем остальные облики бездепов.
<b>Смотреть еще похожие новости:</b>
<a href=http://u0382101.isp.regruhosting.ru/index.php/forum/general-questions-and-how-tos/68883-otzyvy-o-tovarakh?start=1092#129889>1хслотс зеркало на сегодня</a>
<a href=https://adminclub.org/member.php?action=profile&uid=90427>1×slots зеркало рабочее на сегодня</a>
<a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=7523&TITLE_SEO=7523-preobrazovatel-interfeysov-usb-rs485&MID=461182&result=reply#message461182>казино 1×slots</a>
<a href=https://clubdefansde24.com/foro/memberlist.php?mode=viewprofile&u=3464>1× слот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выполнив все требования оператора, клиент имеет оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем менее суток. Если дополнительно потребуется пройти функцию верификации, то срок увеличивается до 1–2 трудящихся дней. Для перевода используются банковские инструменты и электрические платежные системы. Второй метод подходит другого, как, так как основная транзакций такой осуществляются моментально. В связи со специфичностью функционирования банков обработка платежей может взятьвдолг(взятьвзаймы) до нескольких рабочих дней. Существует ли стратегии для отыгрыша бездепозитных бонусов? К раскаянию нет, на выигрыши или проигрыши с призов, казино или игрок воздействовать не, отдача игр случается от разработчиков игр.
#7298 Randallamitohttps://zlojnachalnik.ru
Планируете карьеру или хотите узнать больше о своем рынке труда? На нашем сайте <a href=https://zlojnachalnik.ru/>https://zlojnachalnik.ru</a> вы найдете подробную информацию о профессиях, их перспективах и уровнях зарплат. Получите ценную информацию, чтобы сделать осознанный выбор и достичь своих профессиональных целей. Узнайте всё о современных профессиях: от востребованности на рынке до уровня заработной платы.
#7299 Charlesgunny
порно с Александр Большунов (лыжные гонки) Кузнецова Анна Юрьевна порно <a href=https://glvk.guru/>порно с Афонина Марина Игоревна</a> бк букмекерская контора ограбление казино <a href=https://kompromat1.online/>pin up casino top top</a> казино регистрации порно с Елена Никитина, скелетонистка порно с Голикова Татьяна Алексеевна букмекерская контора официальный сайт скачать Яровая Ирина Анатольевна порно суть казино кент казино
#7300 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7301 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, в не хотите стать жертвой жуликов или впустую потратить время;Также бездепозитные бонусы могут работать методом вернуть к этой клиентов, временно приостановивших своё сотрудничество с компанией: извещение о бездепе поступает на мобильный телефон или почту. <a href=http://filmkachat.ru/>1×slots сайт зеркало</a> <a href=https://www.myvipon.com/post/1222818/How-Product-Visualization-Services-Elevate-Your-amazon-coupons>https://www.myvipon.com/post/1222818/How-Product-Visualization-Services-Elevate-Your-amazon-coupons</a> 1× slots зеркало <a href=http://boss.why3s.cc/boss/home.php?mod=space&uid=144895>http://boss.why3s.cc/boss/home.php?mod=space&uid=144895</a>
1×slots регистрация 1×slots casino c2d ru
Приветственный приз без депо ? подарок за регистрацию. Выдается деньгами, фриспинами либо баллами. В заключительном случае бонусные баллы применяются для участия в турнирах или размена на настоящие деньги.В разделе с призами активировать собственный презент. Найти игры, для коих учтено одобрение и использовать приз по предназначению. <a href=http://www.ihavethepussy.com/de/threads/113926–2–9–2–9?p=195024#post195024>зеркло казино 1×slots</a> 1хслот зеркало сайта <a href=https://n4.biz/web/u86603620/home/-/blogs/87110322_%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0-%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA>https://n4.biz/web/u86603620/home/-/blogs/87110322_%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0-%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA</a> Если площадка презентует бездеп за регистрацию, то процедура его получения проста. Нужно только завести аккаунт на веб-сайте и активировать его, подтвердив адресок электронной почты, номер аппарата или иные данные, коие требует оператор. Перед этим необходимо увериться, что пользователь находится на официальном сайте казино, а не на жульнической площадке.Первый образующийся вопрос, это, зачем выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают свежих игроков. Последним легче начать игру на деньги с дара за регистрацию. Им надо пополнять баланс и расходовать собственные средства. Новички получают благотворительные спины или свои на счёт. С их поддержкой знакомятся с игровым ходом, крутят слоты и делают ставки в рулетке. скачать 1×slots официальный сайт Благодаря программке преданности от игорного заведения, возможно взять неплохой старт и без дополнительных инвестициям запустить видеослоты. Кроме того, можно рассчитывать на реальную удачу и получить, без инвестиции личных финансов, великой выигрыш.Ознакомьтесь с нашим перечнем наилучших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего перечня и получите бездеп незамедлительно. Хватайте наилучшие благотворительные предложения ниже и выигрывайте немалые средства, не рискуя!
1×slots рабочее зеркало на сегодня
Процесс доказательства личности может занять от 1-го денька до недели. Если клиент разрешил какую оплошность при заполнении паспортных данных, то ему по адресоваться с проблемой в службу поддержки онлайн-казино.При регистрации сомнений или ином интернет игральном заведении — вас дается раз шанс испытать собственную фортуну не внося свои монеты. Замечу что эту поощрительную услугу предоставляют не все интернет игровые площадки, а лишь великодушная половина из них. Которые мы подготовили для Вас в нашем перечне. <a href=https://trueanal.org/user/DavidArcax/>https://trueanal.org/user/DavidArcax/</a> Иногда виде одобрения за регистрацию имеют выдаваться билеты для роли в турнирах. Условия их проведения довольно выделяются, потому мы рекомендуем ознакомиться с любым предложением отдельно. 1×slots рабочее зеркало на сегодня
1×slots промокод при регистрации 2025
Максимальная ставка ? устанавливается в денежной счета и ограничивает объем ставки за раз спин. В случае ее превышения бонус имеет быть аннулирован. Также в правилах имеет содержаться запрет на размещение ставок определенного облика, к, по равным шансам в рулетке (то есть, на чет либо нечет, красноватое либо темное и т.д.). <a href=https://www.xn–72c9aa5escud2b.com/webboard/index.php?PHPSESSID=qfrfq7tujtk1pgftgnmb40dukk&action=profile;u=1721715>1×slots рабочее зеркало</a> Это тоже благотворительные финансы, которые поступают на аккаунты свежеиспеченных геймеров после регистрирования. А особенность таких призов произведено сомнений, что обретенные финансы обязательно следует применять в продолжении назначенного медли. 1×slots актуальное зеркало <a href=http://metabolichealthdigest.com/user/kennethreots/?um_action=edit>http://metabolichealthdigest.com/user/kennethreots/?um_action=edit</a> Высокая конкурентность в разделе азартных игр мотивирует операторов привлекать посетителей разнородными промоакциями. Благодаря данному у посетителей появляется возможность получить бонусы в казино за регистрацию без депо. Воспользоваться этим предложением возможно, минуя функцию внесения денег на игровой счет, просто активировав аккаунт на веб-сайте. Наш экскурсовод по бездепам поможет избрать самую привлекательную бонусную программу, узнать правила получения такого гонорары и распорядиться им с максимальной выгодой.Заполняя данные в личном профиле, указывайте лишь достоверную информацию, так как Вам понадобиться ее подтвердить в будущем при выводе денег.
1×slots регистрация на сайте
<a href=http://www.gearcup.cn/home.php?mod=space&uid=124160>http://www.gearcup.cn/home.php?mod=space&uid=124160</a> 1× slots сайт Простая процедура получения бездепозитного приза, которая займет не более 2-х мин. Для получения бездепов, достаточно зарегистрироваться и доказать контактные данные.Иногда в поощрения за регистрацию все выдаваться билеты для участия в турнирах. Условия их проведения очень отличаются, потому мы рекомендуем ознакомиться с каждым предложением отдельно.
<b>Смотреть еще похожие новости:</b>
<a href=https://portugal-campings.com/pt/account/>1×slots бездепозитный бонус за регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Большинство клубов завлекают внимание в за счёт разнообразных подарков. На 1 сайтах можно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает безвозмездные вращения для пуска лучших онлайн слотов. Несмотря на различные промоакции, стоит выделить самые главные. Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.
#7302 Charlesgunny
ограбление казино порно с Александр Головин (футбол) <a href=https://rumafia.news/>скачать 1×bet 1×bet xyz</a> казино играть порно с Юлия Ефимова <a href=https://rumafia.news/>bet casino</a> казино зеркало сегодня букмекерская контора фонбет официальный сайт букмекерская контора зенит порно с Владимир Минеев (ММА) бесплатно фильм казино гама казино 7k casino скачать
#7303 Charlesgunny
казино 1 1×bet <a href=https://krtka.info/>ев казино</a> лучшие бесплатные онлайн казино порно с Владимир Минеев (ММА) <a href=https://t.me/vchkogpu_ru>букмекерская контора фонбет официальный</a> 1×bet зеркало xbet xyz casino kometa casino 1×bet рабочее casino сегодня bitz casino пина casino
#7304 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7305 Charlesgunnyhttp://filmkachat.ru
1× slots официальный
Для всех бездепозитных призов действует максимальный предел на выигрыш. Он показывает предельную сумму, коию у получить, играя на бонусные кредиты. Как только вас удастся выполнить притязания вейджера, дозволенный максимум будет переведен с бонусного счета на главной, а остаток будет списан. <a href=http://filmkachat.ru/>1×slots скачать на айфон</a> В случае установленного лимита на необходимую вывода выигрыша с бездепозитного бонуса, игрок не может исключить больше заявленной суммы. <a href=https://www.durovis.com/en/board_topic_38823.html>https://www.durovis.com/en/board_topic_38823.html</a> Oтыгpaть приз с указанным вeйджepом, чтобы нужно сдeлaть cтaвoк нa cумму, превышающую размер бонуса в некоторое раз. 1×slot казино зеркало <a href=https://may-green.ru/forum/user/15128/>https://may-green.ru/forum/user/15128/</a> Бездепы с безвозмездными вращениями деют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд уплачивает казино. Число спинов ограничено и изредка превышает сотню. Если акция содержит много бесплатных игр, их начисление может быть разбито на количество дней.Если простыми словами, бездепы – это определённая сумма денег либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно брать презенты. Но есть кое-какие аспекты. Существуют игорные дома, коие перед тем как начислить бонусы настоятельно привязать аппарат, дать копии документов.
1×slots зеркало видели такую регистрацию на
Ну и естесственно же, для казино бездепозитные призы выгодны с имиджевой стороны: сходственная щедрость повышает степень преданности посетителей к компании.Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. 1×slots актуальное зеркало Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=http://www.zgqsz.com/home.php?mod=space&uid=408953>http://www.zgqsz.com/home.php?mod=space&uid=408953</a> 1хслотс зеркало на сегодня
1хслотс зеркало на сегодня
Вышеописанная первопричина и считается основным моментом, следствии которого операторы отдают доля собственной прибыли на различные маркетинговые расходы и рекламные кампании. А самым действующим тут будут выступать именно бездепозитные призы казино 2022 с выводом за регистрацию.Онлайн-казино кропотливо продумывают бонусные условия, коие нужно изучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и ограничения. <a href=https://forum.cabal.playthisgame.com/member.php?1650362-Philipasype>https://forum.cabal.playthisgame.com/member.php?1650362-Philipasype</a> Любой выигрыш по ставке повыше установленного лимита будет считаться недействительным. То есть ставка не будет засчитана при отыгрыше, а в случае выигрыша его сумма не поступит на счёт посетителя — итог забавы несомненно полностью аннулирован. x1 slots регистрация в 1×slots casino
1×слот регистрация в 1×slots casino
Oтыгpaть приз с обозначенным вeйджepом, желаемого необходимо сдeлaть cтaвoк нa cумму, превосходящую объем бонуса в некоторое раз. <a href=https://thetechmodders.com/forums/viewtopic.php?t=59377>1 хслот регистрация в 1×slots casino</a> x1 slots 1хслотс регистрация перейти на 1×slots <a href=https://asia.google.com/url?q=https://doctorlazuta.by/>https://asia.google.com/url?q=https://doctorlazuta.by/</a> В большинстве заведений сделать это возможно по адресу электронной почты, по номеру телефонного, спустя социальную сеть либо гугл-аккаунт.
1хслотс официальный сайт зеркало
Но эти рамки не смущают даже хайроллеров, что коэффициенты на слотах дозволяют рассчитывать на солидные выигрыши, а некоторых автоматах разыгрывается прогрессивный джекпот.Приветственный бездеп предоставляется хоть игроку только один один. Казино дерутся с так называемыми бонусхантерами (от англ. Bonus Hunter — охотник за бонусами), пытающимися заводить множественные аккаунты для надувательства оператора и повторного получения подарка. Исключить подобные деянья позволяет верификация данных. Администрация вправе потребовать у клиента подтвердить индивидуальные данные, обозначенные при регистрации. <a href=http://mail.ansanam.com/bbs/board.php?bo_table=report_status2&wr_id=298392>http://mail.ansanam.com/bbs/board.php?bo_table=report_status2&wr_id=298392</a> Наш перечень включает в себя наихорошие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по принципиальным характеристикам:Не трудно додуматься, что no down payment bonuses практически разу не случаются немаленькими. Чаще всего речь о пяти–тридцати баксах (или эквиваленте данной суммы в иной денежной). 1×slots зеркало рабочее
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=37278>1× slots casino официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Демоказино есть практически на любом сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются веско пореже: там в случае выигрыша и соблюдения критерий промоакций бездеп можно превратить в настоящие деньги.
#7306 Charlesgunny
приложения букмекерских контор на андроид почему в казино нет окон <a href=https://rhymes-punches.com/>1go casino</a> 1×bet зеркало рабочее на сегодня порно с Абрамченко Виктория Валериевна <a href=https://kompromat1.online/>1×bet зеркало слоты 1×bet xyz</a> porno Анастасия Янькова, боксерка ев казино Кузнецова Анна Юрьевна порно casino бонус автомат казино Чулпан Хаматова 1×bet зеркало xbet xyz
#7307 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7308 FloydAbabshttps://sex-hub-kyiv.top
секс шоп каталог <a href=https://sex-hub-kyiv.top/>https://sex-hub-kyiv.top</a>
#7309 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7310 Charlesgunny
сайт казино зеркало порно с Алина Загитова, фигуристка <a href=https://res-publika.com>порно с Евгения Медведева</a> гта онлайн казино 7k casino официальный сайт <a href=https://res-publika.com>1×bet официальный 1×bet xyz</a> 1×bet телефон Приезжева Екатерина Геннадьевна порно porno Игорь Акинфеев (футбол) pin up casino пин ап 1×bet на андроид Ходнева Светлана Владимировна порно casino на телефон
#7311 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7312 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
Для получения выигрыша потребуется выполнить условия казино. Чаще всего игроку нужно поставить определенную необходимую, хотя уже из собственных денег. Она рассчитывается из совместного объема выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, в пользователь выиграл 1000 рублей, а множитель сочиняет х30, вывести средства можно несомненно, сделав ставки на 30 000 руб. <a href=http://filmkachat.ru/>1×slot казино зеркало</a> <a href=https://www.khedmeh.com/wall/blogs/post/71398>https://www.khedmeh.com/wall/blogs/post/71398</a> 1×slot казино зеркало <a href=http://t20suzuki.com/phpBB2/profile.php?mode=viewprofile&u=3923>http://t20suzuki.com/phpBB2/profile.php?mode=viewprofile&u=3923</a>
1×slots скачать на айфон
Сразу после активации промокода можно воспользоваться подарком. Как теснее упоминалось, бонусы случаются трёх обликов – фриспины, кредиты и фриплей-бонусы.Доступные игры – В некоторых азартных забавах можно понизить математическое приемущество казино до нескольких десятых процента. В их числе многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как управляло, в этих играх ставки идут в зачет вейджера не полностью. Например, может предусматриваться лишь 50%. В неких забавах бездепозитные бонусы вообщем нельзя отыгрывать. <a href=https://forum.spherecommunity.net/User-JamesLop>casino 1×slot</a> 1×slots сайт Вообще перейдя в казино — верховодила одинаковы в получении бездепозитных призов, в стереотипные управляла входит: подтвердить эл. Почту и телефонный, заполнить собственный собственный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ. <a href=https://kamchaty.ru/user/JamesMoiff/>https://kamchaty.ru/user/JamesMoiff/</a> Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в обязательном порядке необходимо пополнить счет в казино. Для депозитных бонусов, эта процедура не нужна, например как депо теснее изготовлен. 1×slots регистрация Подтвердите регистрацию, дабы активировать Бездепозитный приз с выводом, требуется заполнить индивидуальный профиль. Заполните пустые поля реальными данными о себе.Одним из поводов отдавать привилегию одному либо иному заведению содержится в привлекательности предлагаемых акций и бесплатных предложений. Безвозмездные фриспины, выдаваемые без дела делать какой-либо лепта, в перечне располагается далеко не в конце.
1×slots регистрация 1×slotscasino09k online
<a href=http://tsvetaradugi.ru/bitrix/redirect.php?goto=http://seven-days.ru/bitrix/redirect.php?goto=http://elangal.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/K4DRy1D-Gqx>http://tsvetaradugi.ru/bitrix/redirect.php?goto=http://seven-days.ru/bitrix/redirect.php?goto=http://elangal.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/K4DRy1D-Gqx</a> Бонус в казино без депо содержит различные вариации: такое быть приветственный приз, акции в честь каких-либо дней или важных дат, приз за привлечение новых игроков, преданность и получение VIP-статуса. 1×slots рабочее зеркало Как только вы отыграли вейджер и свои с бонусного баланса перешли вам на реальный счет, Вы неустрашимо сможете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (сделать наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депо).
1×slots зеркало рабочее на сегодня
<a href=https://your-portal.at.ua/forum/18–63360–2#88496>1×slots сайт зеркало</a> Возможность сыграть дополнительное состязание (а времени и некоторое) абсолютно бесплатно, а выигрыш, тому, поступает на счёт игрока. 4. Заберите презент. Чаще всего приз активизируется незамедлительно в регистрации. Но случаются ситуации, когда нужно зайти в личный кабинет либо написать в службу. казино 1× slots официальный сайт <a href=https://prpack.ru/user/Ashleynoile/>https://prpack.ru/user/Ashleynoile/</a> В случае с фриспинами без вейджера, Вам не придется отыгрывать свой выигрыш с даровых вращений. Прибыль, которую Вы заработаете на таком бездепе возможно ставить на вывод без какого либо отыгрыша.Большинство клубов привлекают внимание игры за счёт разнообразных даров. На одних веб-сайтах возможно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает благотворительные вращения для пуска топовых интернет слотов. Несмотря на разные промоакции, стоит выделить самые основные.
1×slots зеркало на сегодня
Превышение наибольшей ставки при отыгрыше. Система механически не предуведомляет о превышении ставки, потому о нарушении управлял игрок имеет узнать теснее в подачи запроса на вывод средств.Существует ли стратегии для отыгрыша бездепозитных бонусов? К сожалению нет, на выигрыши или проигрыши с бонусов, казино или игрок повлиять не может, отдача игр происходит от создателей игр. <a href=https://www.baronerosso.it/forum/members/113112_travisgoafe.html>https://www.baronerosso.it/forum/members/113112_travisgoafe.html</a> Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.Бездепозитный бонус – это экономическое вознаграждение, которое выдается участнику игры в казино, для его вербования и появления заинтересованности. Любой посетитель, который соответствует условиям выдачи подобного бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое одобрение считается более эффективным способом, дающим возможность стартовать в игре, не вкладывая собственных вещественных средств. 1×slots коды К примеру, игроку выдаются бесплатные средства в заведении в объеме пятидесяти либо 100 долларов (вейджер на которые сочиняет 100х). То есть, любому новоприбывшему игроку выскакивает привлекающая иллюстрация, кот-ая сулит выплату всех зачисленных фирмой средств. Не стоит заострять на казино приз за регистрацию без депо с чрезмерно великой либо очень малеханькой суммой призов, поэтому что, числе тщательно исследовав все условия, тут всего, несомненно какой-то подкол.
<b>Смотреть еще похожие новости:</b>
<a href=https://projects.sare.org/people/jamestrazy/>1×slot зеркало</a>
<a href=http://swissairways-va.com/phpBB3/memberlist.php?mode=viewprofile&u=3495>1×slots регистрация на сайте 1×slots ru com</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депо может отличаться до 30 дней.
#7313 Charlesgunny
фильмы казино рояль мелбет букмекерская контора <a href=https://rumafia.news/>casino игровой автомат</a> 1×bet официальный xbet порно с Сергей Бобровский (хоккей) <a href=https://www.ossetia.tv/>порно с Матвей Сафонов (футбол)</a> 1×slots casino 1×bet зеркало рабочее на сегодня Петрова Ольга Викторовна порно порно с Сергей Бобровский (хоккей) букмекерская контора на андроид porno Дарья Мороз porno Анастасия Янькова, боксерка
#7314 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7315 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации
Чаще всего интернет-казино предлагают бездепозитные призы свежим пользователям. Эта промо-акция довольно эффективно привлекает новичков, подталкивая их к открытию счета. Конечно, не они становятся послушными клиентами, хотя сам факт регистрации аккаунта играет на руку заведению.Риск-игра по равным шансам – Также казино может запрещать исполнять обстоятельства по отыгрышу счет раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких иных забавах. <a href=http://filmkachat.ru/>1×slots регистрация на официальном сайте</a> В бонусную программку множества операторов входят систематические бездепы. Это пожизненные промоакции, поощряющие интенсивных неизменных игроков. Популярный формат — раздача фриспинов по конкретным дням недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депо в мена на скопленные баллы лояльности.Это также безвозмездные деньги, которые поступают на аккаунты свежеиспеченных игры последствии регистрирования. А необыкновенность таких призов состоит в том, собственно обретенные деньги непременно стопам применять в продолжении назначенного времени. <a href=https://www.khedmeh.com/wall/blogs/post/71396>https://www.khedmeh.com/wall/blogs/post/71396</a> 1×slots официальный сайт скачать на айфон <a href=https://e-participationyouth.eu/forum/profile/charlespoise/>https://e-participationyouth.eu/forum/profile/charlespoise/</a>
1×slots коды
Во время игры в казино, выигрыши, полученные спасибо бесплатным призовым фондам, суммируются и включаются в общую сумму для отыгрывания. Однако, в фортуна улыбнется и получится отыграть все призы, игровое заведение гарантированно разрешит исключить денежные свои. Сумма вывода несомненно находиться от лимита, одобренного непосредственно в этом учреждении. Поэтому, пристально надо(надобно) читать верховодила выдачи безлимитных депо.Операторы гемблинга утверждают, собственно например они сражаются с бонус-хантерами. Впрочем, критики считают, собственно этим казино пытаются сделать из случайного постояльца постоянного игрока. 1×slots зеркало рабочее на сегодня Бонус в казино без депозита содержит различные варианты: такое быть приветственный приз, промоакции в честь каких-либо дней или важных дат, бонус за привлечение свежих игроков, преданность и получение VIP-статуса.Бездепозитные бонусы – это самая занимательная и наиболее многообещающая акция интернет-казино. Они и другого фри-спинов, потому собственно выплаты в даровых вращениях не гарантированы, ведь комбинации на барабанах игрового аппарата все не сложиться. <a href=http://www.so0912.com/home.php?mod=space&uid=2347243&do=profile&from=space>http://www.so0912.com/home.php?mod=space&uid=2347243&do=profile&from=space</a> 1×slots зеркало рабочее на сегодня Диапазон ставок, коие вправе сделать игрок, кроме лимитирован. Обычно назначать можно маленькую необходимую — в 10–30 руб. За одно вращение.
1×slots официальный сайт мобильная версия скачать
Не желайте сыграть в азартные забавы, не рискуя своими деньгами, но получая в все выплаты? Подобную возможность деют многие наилучшие порталы с азартными развлечениями. В их числе большое добросовестных и надежных интернет-казино на российском языке. Они привлекают свежих юзеров разными поощрительными событиями, включая бездепозитные, либо бесплатные призы. Подобные призы без депозита предоставляются на больше выгодных условиях. Зачастую они крупнее, а условия отыгрыша наименее жесткие. <a href=http://www.sazkar.info/member3888.html>http://www.sazkar.info/member3888.html</a> Бездепозитный приз казино 2022 с выводом за регистрацию дает вероятность ознакомиться игроку с лобби выбранного заведения, сориентироваться в выборе игр и проверить качество работы службы поддержки. Довольно часто, начиная игровой процесс, игрок уже отказывается останавливаться и проделывает настоящий лепта. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать даром возможно как раз таки с бонусом за регистрацию без надобности заносить депозит.Как только вы отыграли вейджер и свои с бонусного баланса перешли вам на реальный счет, Вы неустрашимо сможете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (сделать наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депо). 1×slots промокод при регистрации 2025 Подарки на определенные даты отличаются условиями получения. Если одобрение начисляют игроку на день рождения, то сумма обыкновенно в от совместного размера депо за год.
зеркло казино 1×slots
Эффективность бездепов в рекламного прибора оценили все операторы. Малоизвестные площадки используют такие промоакции, дабы стремительно набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны неизменных посетителей. Не все сайты, дающие подарки без депо, рекомендованы к этой. За привлекательным промоописанием шансы прятаться неосуществимые обстоятельства отыгрыша и другие подводные камни. <a href=https://forum.dis-course.net/viewtopic.php?t=485265>казино 1× slots официальный сайт</a> Получив собственный презент, Вы можете даром выступать на настоящие деньги, а выполнив обстоятельства отыгрыша, исключить собственный выигрыш. Размер бонусов чаще всего чисто символический и не выше 50 руб. Приятно, но ощутимым бустом при ли будет.Поспешите забрать бездепозитные призы за регистрацию в казино из представленного перечня. Все платформы не водят легальную работа, но и обрадуют правдивыми плодами игры, высокой отдачей, быстрыми выплатами. 1 xslots рабочее зеркало <a href=http://www.85sucai.com/member/index.php?uid=painstakingspec>http://www.85sucai.com/member/index.php?uid=painstakingspec</a> Если при регистрации указать промокод, возможно гарантировано получить бонус. Где брать ваучер? Посетите тематику блоги или форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В последнее время игорные дома начали рекламироваться в фильмах и сериалах. Присмотритесь и всего заметите промокод, который принесёт 500 либо 1 000 бонусных рублей.
1×slots сайт зеркало
Прежде чем активировать бездеп, нужно увериться в том, что государство, уроженцем которой является игрок, не заходит в перечень не. <a href=https://www.cfbwz.com/home.php?mod=space&uid=89152&do=profile&from=space>https://www.cfbwz.com/home.php?mod=space&uid=89152&do=profile&from=space</a> Какие призы у еще получить кроме бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, каждое интернет казино предлагает игрокам выгодное предложение на 1-ый депо, вы совершаете депо, ваш депо увеличивается в двое либо в в 3, тем самым начать выступать возможно с более крупной суммой, так же не забываем тему вейджер на бонусы.Простая процедура получения бездепозитного приза, кот-ая займет менее 2-х минут. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные. 1×slots официальный регистрация Вейджер в переводе с английского означает «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша приобретенного бонуса, в нашем случае бездепозитного. Число ставок не — важно лишь набрать сумму, пропорциональную сумме поощрения.Но а если вы теснее профи по интернет казино, кликаем на красноватую кнопку «Получить» и Вы автоматически перейдете в онлайн казино;
<b>Смотреть еще похожие новости:</b>
<a href=http://forums.panzergrenadiers.com/showthread.php?23451–1×slots-%D0%A0%C2%B1%D0%A0%D1%95%D0%A0%D0%85%D0%A1%D1%93%D0%A1%D0%83-%D0%A0%C2%B7%D0%A0%C2%B0-%D0%A1%D0%82%D0%A0%C2%B5%D0%A0%D1%96%D0%A0%D1%91%D0%A1%D0%83%D0%A1%E2%80%9A%D0%A1%D0%82%D0%A0%C2%B0%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A1%D0%8B&p=510248#post510248>1×slots бонус за регистрацию</a>
<a href=https://www.ldvd.nl/no-22-san-diego-place-rallies-very-last-boise-country-27–16?page=32#comment-237439>1×slots зеркало на сегодня</a>
<a href=https://mcmon.ru/showthread.php?tid=111143>зеркала 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Многие новенькие колеблются, собственно поощрительный приз надо несомненно возвращать, том если они выиграли у казино. Это абсолютно неопасно и накрепко. Выводя выигранные свои, игрок просто одергивает свое участие деле и утрачивает уникальную вероятность – безвозмездно увеличивать личное вещественное положение.
#7316 Charlesgunny
1×bet официальный скачать ев казино <a href=https://th-royalgclub.com/>casino зеркало сегодня</a> casinos xyz рокс казино <a href=https://strelochnik.com/>официальные букмекерские конторы скачать</a> 7k casino зеркало порно с Константин Тюкавин (футбол) Чулпан Хаматова яндекс казино бесплатные букмекерские конторы букмекерские контора ап сайт pin up casino
#7317 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7318 Charlesgunny
Кузнецова Анна Юрьевна порно яндекс игры казино <a href=https://repost.news/>пин up casino</a> casino промокод слот casino <a href=https://specreporter.com/>Фастова Елена Владимировна порно</a> casino игровой автомат Разуваева Ксения Денисовна порно r7 casino 1×bet сайт 1×bet xyz скачать 1×bet букмекерская контора мостбет pin up casino официальный
#7319 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7320 Charlesgunnyhttp://filmkachat.ru
1хслотс мобильная версия зеркало
Иногда операторы просят внесение минимального депо перед выводом для верификации платежного прибора. В неких казино данный депо того предстоит отыграть.Выбирайте лучшие благотворительные призы с помощью обзоров на Casinoz – и пусть вам сопутствует удача при отыгрыше бонусных кредитов! <a href=http://filmkachat.ru/>1×slots регистрация на сайте 1×slots ru com</a> <a href=https://nationaldppcsc.cdc.gov/s/profile/005SJ00000BDCujYAH>https://nationaldppcsc.cdc.gov/s/profile/005SJ00000BDCujYAH</a> Можно. Вы практически сможете отказаться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не сделаете ставку.Верификация необходима для добавочной защищенности и может техподдержке выявить бонусхантеров и жуликов. Кстати, на платформах выводы крупных сумм доступны лишь последствии доказательства личности. 1× slots официальный <a href=http://istinastroitelstva.xyz/index.php?subaction=userinfo&user=curvedomen64>http://istinastroitelstva.xyz/index.php?subaction=userinfo&user=curvedomen64</a> Похожим образом трудится третий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя или из-за с получения им VIP-статуса. Подарок предоставляется последствии обращения в поддержку и ревизии.Сроки активации бонуса устанавливаются любым казино, хотя почаще всего они не превосходят недели с этапа получения. Игроку обязательно надо(надобно) применять бездеп протяжении указанного срока, в ином случае приз просто исчезнет. Каждый приз можно получить только один раз, поэтому в не использовать бездеп в срок, у игрока не несомненно второго шанса им пользоваться.
1хслотс рабочее зеркало
1×slots быструю регистрацию а также мгновенное Чтобы бездеп не был начислен на Ваш акк, Вам не нужно активировать бонусный код. Если поощрение от казино было добавлено на Ваш акк автоматически, а Вы не планируете его применять, обратитесь в службу с пожеланием отменить бездепозитный бонус.Акции, приуроченные к календарным дням, случаются рассчитаны как на всех пользователей, например и на категории: примеру, презент на 8 марта девушкам-игрокам или мужчинам на 23 февраля. <a href=http://arkosgold.ru/index.php?subaction=userinfo&user=lightflaw99>http://arkosgold.ru/index.php?subaction=userinfo&user=lightflaw99</a> 1×slots быструю регистрацию а также мгновенное Такие одобрения дозволяют безвозмездно протестировать новое казино, разобраться с игровым ходом интернет слотов, заработать и исключить маленькую сумму средств.На данном разделе портала периодически публикуются обзорные статьи, каких рассматриваются бесплатные бонусы превосходнейших интернет-казино. Информация структурирована по нескольким пунктам, включая главные:
1× slots сайт
Чтоб получить крупный выигрыш, выбирайте игровые автоматы с предельным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша.С не отыгранным бонусом воспрещается превышать объем наибольшей ставки. Нарушение этого условия виде аннулирование выигрыша. <a href=http://kakaclar.com.tr/index.php?subaction=userinfo&user=panoramichorse2>http://kakaclar.com.tr/index.php?subaction=userinfo&user=panoramichorse2</a> Получать информацию о самых выгодных бонусах возможно без неизменного прогноза новостей казино. Мы брали эту задачку на себя и постоянно смотрим за предложениями операторов, выбирая наихорошие из них. В этом разделе собраны последние бездепы, промокоды к ним и условия их активации. Список акций периодически пополняется. В топ вошли самые новые бездепозитные бонусы за регистрацию в казино 2020, кратковременные и закрытые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и критериям. Если срок деяния промоакции истек, она удаляется из списка.Популярность интернет казино растёт и всё больше пользователей начинают интерес азартными играми. Бездепозитные призы 2022 года, это уникальные презенты за регистрацию. С их поддержкою свежие игроки имеют получить бесплатные вращения либо деньги на баланс за одну регистрацию. С в игорных заведений в интернете, бездепозитные призы стали наимоднейшим методом привлечения игроков. Подобные промоакции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о которых мы расскажем. Наш сайт собрал превосходнейшие предложения из интернета на 2022 год. Воспользуйтесь любым даром и сможете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша нужно выполнить условия. 1х слот регистрация в 1×slots casino В зависимости от онлайн заведения любой из них возможность вам предложить как бездепозитные деньги, например и бездепозитные фриспины, которые в удачной регистрации упадут вам на ваш игровой баланс.Активация происходит за промокодов, которые вводятся в собственном офисе после регистрации. Среди спецпредложений в перечне Casino.ru находятся неповторимые промокоды, коие доступны лишь гостям портала. Другие методы начисления средств ? автоматическая активация сразу последствии творения аккаунта и получение дара по запросу в службу технической поддержки.
казино 1× slots официальный сайт
В интернет-сети всегда возможно найти перечни наиболее модных и гарантированных поощрительных программ от знаменитых онлайн-казино. <a href=http://162.241.164.67/phpbb/phpBB3/memberlist.php?mode=viewprofile&u=121525&sid=deca4b65fbcaaf00c0d2658195a1ec52>1×slots рабочее зеркало</a> А ознакомиться с новыми интернет казино, Вы можете с бонусов с выводом прибыли, коие Вы можете получить без депозита.За счёт спинов выйдет запустить разные онлайн слоты, протестировать стратегии и поднабраться навыка. Фишка том,, собственно вращения начисляются на топовые аппараты с уникальными опциями и высокой отдачей. Не запамятовывайте, что в любом акционном предложении предусмотрены специальные притязания – кратковременные лимитирования, максимальный размер ставки, перечень доступных игр. К образцу, игроку выдаются безвозмездные свои в заведении в размере пятидесяти или 100 $ (вейджер на коие сочиняет 100х). То есть, любому новоприбывшему игроку выскакивает притягивающая картинка, которая сулит выплату всех зачисленных фирмой средств. Не стоит обращать внимания на казино бонус за регистрацию без депо с чрезмерно великий или довольно махонькой суммой призов, поэтому собственно, том кропотливо исследовав все обстоятельства, тут вероятнее всего, будет какой-то подкол. 1×slot казино зеркало <a href=https://lustbb.com/member.php?action=profile&uid=2746>https://lustbb.com/member.php?action=profile&uid=2746</a>
1× slots зеркало
Максимальная ставка ? уточняется в денежной счета и ограничивает объем ставки за раз спин. В случае ее превышения бонус может быть аннулирован. Также в правилах имеет находиться запрет на размещение ставок определенного облика, примеру, по равным шансам в рулетке (словами, на чет либо нечет, красноватое или темное и т.д. ). <a href=http://forum.roozgozar.com/member.php?action=profile&uid=2382>http://forum.roozgozar.com/member.php?action=profile&uid=2382</a> Основное отличие что, собственно для получения бездепа не пополнять баланс в казино. Но кроме сего, есть ряд и различий:Представьте момент, когда при ставке в 10 руб. Вы получите схожее умножение. Миллион рублей за одно вращение, собственно абсолютно возможно. Поэтому вопрос, сколько возможно выиграть остаётся закрытым. Предлагаем выяснить помощи. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный приз и проверяйте удачу в деле. Разумеется, вывести деньги довольно. Однако шансы есть у всех. 1×slots зеркало регистрация
<b>Смотреть еще похожие новости:</b>
<a href=http://ledyardmachine.com/forum/User-Jameshoing>1×slots официальный сайт скачать</a>
<a href=https://021snyw.com/space-uid-53919.html>1×slots бездепозитный бонус за регистрацию</a>
<a href=https://www.donchillin.com/space-uid-382497.html>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Ещё одно распространённое акционное предложение – симпатичный презент с сомнительными притязаниями. К образцу, клуб сулит $100 в бездепа, хотя с вейджером х80 либо х100. Отыграть подобный вейджер практически невозможно и поэтому другого, как концентрироваться на более заманчивых акциях. Индивидуальные поощрения выдаются за совершение действий: подписку на аккаунты площадки в соц сетях, установку мобильного прибавленья либо официального клиента для ПК. В большинстве казино срабатывают программки лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий степень часто сопровождается выдачей бездепа.
#7321 Charlesgunny
ограбление казино 1×bet зеркало на сегодня 1×bet xyz <a href=https://m.repost.news/>порно с Петр Ян (ММА)</a> казино регистрации Манилова Алла Юрьевна порно <a href=https://t.me/vchkogpu_ru>Хорова Наталья Александровна порно</a> casino зеркало сайта букмекерские конторы pin bitz casino казино ставка porno Мира Андреева (теннис) cometa casino пин ап casino pin up top
#7322 Ремонт посудомоечных машин Midea Москваhttps://remont-posudomoechnyh-mashin-midea-piece.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт посудомоечных машин midea в москве, можете посмотреть на сайте: <a href=https://remont-posudomoechnyh-mashin-midea-piece.ru/>ремонт посудомоечных машин midea</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#7323 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7324 Ремонт посудомоечных машин Bekohttps://remont-posudomoechnyh-mashin-beko-ultra.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт посудомоечных машин beko в москве, можете посмотреть на сайте: <a href=https://remont-posudomoechnyh-mashin-beko-ultra.ru/>ремонт посудомоечных машин beko адреса</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#7325 Charlesgunny
официальные зеркала казино скачать 1×bet на андроид <a href=https://7club7.com/>пинко casino</a> порно с Зырянова Анастасия Владимировна казино смотреть онлайн <a href=https://vestnik-jurnal.com/>кент казино</a> 1×bet скачать приложение на андроид порно с Абрамченко Виктория Валериевна казино можно porno Илона Маркова, хоккеистка casino автомат 1×bet телефон включи казино
#7326 Charlesgunnyhttp://filmkachat.ru
1× slots casino зеркало
Также учтите, что кое-какие игровые платформы сузивают список стран, коие способны получить предложенный бездепозитный бонус за регистрацию. К образцу, есть онлайн-заведения, выдающие сходственные призы лишь жителям определенных государств. К образцу, интернет казино 777 Оригинал дает бездепозитный приз лишь игрокам из России и государств СНГ. Или напротив, снабжают вознаграждением всех, не жителей неких стран (исходя из этого, стопам внимательно изучать перечень, чтобы впоследствии не возникло никаких вопросов и жалоб). <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> У каждой забавы средства требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система зачтет любую ставку. В рулетке и покере устроить это гораздо сложнее. Именно поэтому так принципиально пристально читать условия получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой этой, то новенькие попросту «спустят приз на ветер». <a href=https://admin.phacility.com/F519642>https://admin.phacility.com/F519642</a> 1×slot рабочее зеркало <a href=https://rightcoachforme.com/author/juleswhisy/>https://rightcoachforme.com/author/juleswhisy/</a> Зарегистрируйтесь. Для регистрации чаще всего довольно ввести свой номер аппарата и почтовый адресок, в чего установить полученный код из СМС. Возможно, требуется указать промокод. В правилах акции несомненно написано, где его надо вводить. Иногда это хотелось делать при регистрации, от — теснее в творения собственного кабинета, на отдельной странице.
1хслот официальный сайт зеркало
1×слотс казино Приглашаем делиться сужденьями о бонусах. Это поможет другим пользователям подбирать более выгодные предложения.Как управляло, при выводе финансов, от играющего потребуется лишь сделать наименьший вклад чтобы, чтобы, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом индивидуальный счет. <a href=http://dandanos.com/bbs/board.php?bo_table=free&wr_id=2317>http://dandanos.com/bbs/board.php?bo_table=free&wr_id=2317</a> Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша призов. Заведения практически устанавливают наивысшую ставку, допустимую по условиям вейждера.B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. 1хслот зеркало
1×slots официальный сайт зеркало
<a href=http://obruchalka-vrn.ru/index.php?subaction=userinfo&user=happyterminolog>http://obruchalka-vrn.ru/index.php?subaction=userinfo&user=happyterminolog</a> 1×slots регистрация 1×slots casino 777 online
1хслот скачать
Если площадка дарует бездеп за регистрацию, то процедура его получения ординарна. Нужно только завести акк на сайте и активировать его, подтвердив адрес электрической почты, номер телефона либо иные данные, которые требует оператор. Перед этим нужно убедиться, собственно пользователь располагается на официальном веб-сайте казино, а не на мошеннической площадке. 1 xslots рабочее зеркало <a href=https://www.modernvespa.it/profile/3498-josephnew/>https://www.modernvespa.it/profile/3498-josephnew/</a> Третитй бездепозитный бонус за регистрацию – валютные свои. К раскаянью, начислить рубли либо доллары готовы лишь известные и пользующиеся клубы. С их поддержкой вы сможете насладиться каждой доступной игрой – автоматом, рулеткой, кено, блэкджеком.
1×slots регистрация 1×slots casino 777 online
<a href=https://forums.dfine.net/member.php?action=profile&uid=1172>https://forums.dfine.net/member.php?action=profile&uid=1172</a> Активация случается счет промокодов, которые вводятся в собственном кабинете после регистрации. Среди спецпредложений в перечне Casino.ru находятся неповторимые промокоды, коие доступны только гостям портала. Другие способы начисления средств ? автоматическая активация незамедлительно в творения аккаунта и получение презента по запросу в службу технической поддержки.Как верховодило, при выводе финансов, от играющего потребуется лишь устроить минимальный лепта чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом собственный счет. 1×slot официальный сайт В качестве бонусов онлайн казино нередко предлагает выдачу фриспинов, другими бесплатных вращений игрового барабана. Виртуальные монеты можно использовать для изучения в покерной школе либо для забавы в казино.Обычно бездепозитные промоакции от казино, приходят на эл. Почту в дни рождения или праздничные. В некоторых интернет казино можно адресоваться в чат и как неизменному игроку, возможно вас предложат бездепозитное предложение.
<b>Смотреть еще похожие новости:</b>
<a href=http://board.eternityrpc.com/member.php?action=profile&uid=369>1×slots сайт</a>
<a href=https://forum.spherecommunity.net/User-Jamesmew>1хслотс регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Можно. Вы всегда можете отказаться от получения бездепозитного бонуса за регистрацию в казино, же Вы не создадите ставку.
#7327 Charlesgunny
1×bet зеркало рабочее скачать casino на андроид <a href=https://rumafia.news/>фильмы казино рояль</a> ев казино казино в россии <a href=https://slon-ru.com/>Львова-Белова Мария Алексеевна порно</a> казино вулкан порно с Евгений Малкин (хоккей) порно с Кирьянова Дарья Борисовна 1×bet официальный 7k casino официальный Скворцова Вероника Игоревна порно inform@rucriminal.info
#7328 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7329 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее на сегодня
Чаще всего, модные сервисы, эти как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное верховодило. Финансовые свои выводятся только через ту платежную систему, которой успех для пополнения депозита. Если же игрок получил бездепозитный покерный приз, требуется восполнить счет на минимальную сумму, кот-ая сочиняет обыкновенно десять $. <a href=http://filmkachat.ru/>1×slot рабочее зеркало</a> Если при регистрации указать промокод, возможно гарантировано получить приз. Где взять ваучер? Посетите тематические блоги либо форумы. Иногда администрация клуба проделывает рассылку ваучеров на электронную почту. В заключительное время игорные дома начали афишироваться в кинокартинах и сериалах. Присмотритесь и наверняка заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных руб. <a href=https://www.4shared.com/web/preview/pdf/3D1mgLn7fa>https://www.4shared.com/web/preview/pdf/3D1mgLn7fa</a> 1×slot регистрация <a href=http://freshgreen.kr/bbs/board.php?bo_table=free&wr_id=300425>http://freshgreen.kr/bbs/board.php?bo_table=free&wr_id=300425</a>
1×slots регистрацию более популярный вариант это
На бонусные начисления могут быть установлены вспомогательные лимитирования, которые Вы не сведению при отыгрыше. Пока приз полностью не отыгран — деньги из казино не выводятся. <a href=https://www.formulersupport.com/Thread-1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D0%BC%D0%BE%D0%B1%D0%B8%D0%BB%D1%8C%D0%BD%D0%B0%D1%8F-%D0%B2%D0%B5%D1%80%D1%81%D0%B8%D1%8F-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE–98793>1хслотс мобильная версия зеркало</a> 1×slots зеркало видели такую регистрацию на Для доказательства электрической почты, просто перейдите по активной ссылке в послании, приобретенном от игрового заведения. <a href=https://daltonebuo77665.is-blog.com/36646468/deepnude-ai-navigating-the-complexities-of-image-manipulation-and-ethics>https://daltonebuo77665.is-blog.com/36646468/deepnude-ai-navigating-the-complexities-of-image-manipulation-and-ethics</a> 1х слотс зеркало регистрация в 1×slots casino Бездепы шансы входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами.
1хслотс официальный сайт зеркало
Ну и окончательно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: схожая щедрость увеличивает степень преданности клиентов к фирмы.Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные методы и расценить необыкновенности, недоступные при игре в демо режиме. Многие свежие клиенты перебегают в число постоянных, а оператор получает долгосрочную выгода. Также существуют онлайн-платформы азартных игр, коие используют раздачу бездепозитных бонусов в особые даты (как для казино, так и для игрока). Помимо сего, действующие игроки также имеют вероятность получить похожие призы за свою работа (к примеру, за увеличения значения либо за схожие заслуги).Существует ли стратегии для отыгрыша бездепозитных призов? К раскаянью нет, на выигрыши или проигрыши с бонусов, казино или игрок повлиять имеет, отдача игр происходит от разработчиков игр. <a href=http://www.sinoright.net/member/index.php?uid=fancydormitory7>http://www.sinoright.net/member/index.php?uid=fancydormitory7</a> Таким образом, заведение пытается продемонстрировать себя своим потенциальным геймерам, а подобный рекламный ход как казино приз без депозита за регистрацию завлекает довольно большое внимания к игорному заведению и обеспечивает неизменный поток свежих гостей и будущих клиентов игрового интернет клуба. 1×slots быструю регистрацию а также мгновенное
1 x slots casino
Для того, дабы отыграть сумму вашего бездепозитного бонуса надо(надобно) выполнить обстоятельства вейджера. Очень нередко фриспины даются на определенные слоты (book of ra, book of lifeless, book of sun), выбирайте разъем для по, они очень красивые и качественные. Бездепозитные приз может быть денежным так и в виде фриспинов на слоты <a href=https://mit-bbs.com/memberlist.php?mode=viewprofile&u=15318&sid=946b98ad3c27cc0fe86b5cc76fdf94b5>1× слот зеркало</a> Следует подчеркнуть, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом.Представленные на данной странице превосходнейшие бездеп бонусы в казино за регистрацию в 2022 году имеют оптимальные обстоятельства. После тщательного анализа редакция портала составила рейтинг спецпредложений, каком посетители Casino.ru все сортировать список по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д. 1×slot зеркало <a href=http://arkosgold.ru/index.php?subaction=userinfo&user=dispensablenota>http://arkosgold.ru/index.php?subaction=userinfo&user=dispensablenota</a>
1×slots официальный сайт зеркало рабочее
Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. Фриплей-бонусы. Бонусы за бесплатную забаву есть только в некоторых клубах. Они зачисляются сразу после сотворения профиля и срабатывают недолговременное время. Если у вас нет времени израсходовать средства, они просто завершатся. Что касается медли, в большинстве случаев призы действуют на 1-го часа.Максимальный размер ставки, кот-ый нельзя превышать же приз не несомненно всецело отыгран. В случае нарушения сего верховодила, приз и выигрыш с него станут аннулированы. <a href=http://sportali.kz/index.php?subaction=userinfo&user=sneakyanyplace6>http://sportali.kz/index.php?subaction=userinfo&user=sneakyanyplace6</a> 1хслотс 1хслотс регистрация перейти на 1×slots Осталось выбрать казино с бонусом за регистрацию и создать профиль. После активации подарка выигрыш находится от Фортуны и навыков.
<b>Смотреть еще похожие новости:</b>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=120748>1 x slots casino</a>
<a href=https://thetechmodders.com/forums/viewtopic.php?t=26967>1×slots casino регистрация 1×slotscasin online</a>
<a href=https://www.findaspermdonor.com/viewtopic.php?f=25&t=88608>1×slots зеркало видели такую регистрацию на</a>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=218198>1×slots регистрацию процедура займет всего лишь</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Зачастую бездепозитные бонусы казино для игры предлагаются разными заведениями азартных игр в рекламных акций или в целях привлечения к себе свежих игроков. Для бездепозитных бонусов в казино 2022 игроку надо пополнять счет до момента вывода желанных средств. Бездепы с бесплатными вращениями предоставляют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд выплачивает казино. Число спинов ограничено и изредка превышает сотку. Если промоакция включает в себя много безвозмездных игр, их начисление имеет быть разбито на количество дней.
#7330 Charlesgunny
kent casino Любимова Ольга Борисовна порно <a href=https://www.ossetia.tv/>porno Дарья Клишина</a> букмекерская контора бетсити casino сайты <a href=https://res-publika.com>порно с Васильева Татьяна Викторовна</a> скачать 1×bet 7k casino бонус порно с Зырянова Анастасия Владимировна 1×bet слоты 1×bet xyz 1×bet официальный 1×bet xyz Ирина Горбачева винлайн букмекерская контора официальный сайт
#7331 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7332 Charlesgunny
porno Ангелина Гончаренко, хоккеистка мелбет букмекерская контора <a href=https://krtka.info/>casino официальный зеркало</a> pin casino зеркало Нургалиева Эльвира Рамиловна порно <a href=https://www.ossetia.tv/>гама казино</a> porno Нина Пирогова, хоккеистка Комарова Наталья Владимировна порно сайты казино casino играть букмекерская контора на андроид pin up casino скачать online casino
#7333 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7334 Irvingawaphhttps://www.cctvforum.ru
скачать программу видеонаблюдения для пк <a href=https://www.cctvforum.ru/>nvr видеорегистратор ip</a>
#7335 Charlesgunnyhttp://filmkachat.ru
1×slots акции
Срок активации и время на отыгрыш. Зачисление средств либо фриспинов происходит при активации протяжении взыскательно ограниченного периода, подобные требования предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать приз количество дней или числе недель. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высочайшим вейджером.Размер бонуса. В качестве бездепов обыкновенно начисляют большие суммы, а когда речь о призах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино все подарить игроку до 2000$. <a href=http://filmkachat.ru/>1×slot зеркало рабочее регистрации на телефон придет</a> Способы получения бездепа различаются зависимо вида бонуса, кот-ый приглянулся игроку. Но вас в любом случае надо(надобно) быть зарегистрированным в законном онлайн-казино и доказать свою лицо. В общем виде пошаговая инструкция для получения бездепозитного приза выглядит так:Свежий приз начисляется в виде валютных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в пользовании средствами, а случае отыгрыша оператор возможность установить ограничение на вывод средств. <a href=https://welling.domains.unf.edu/showthread.php?tid=3559>https://welling.domains.unf.edu/showthread.php?tid=3559</a> 1 x slots <a href=https://we.riseup.net/bbgatecom2512/%D0%B3%D0%BB%D0%B0%D0%B2%D0%BD%D0%B0%D1%8F-%D0%B4%D0%BE%D1%80%D0%BE%D0%B3%D0%B0-%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0-%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA>https://we.riseup.net/bbgatecom2512/%D0%B3%D0%BB%D0%B0%D0%B2%D0%BD%D0%B0%D1%8F-%D0%B4%D0%BE%D1%80%D0%BE%D0%B3%D0%B0-%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0-%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA</a> На нашем сайте Вы найдете перечень своевременных свежих бездепозитных призов в казино 2022 года. Также, есть большое эксклюзивных услуг, коие доступны только посетителям нашего сайта в регистрации по нашей ссылке или активации специального промокода.
1×slots рабочее зеркало
Обычно, бездепозитные призы выдаются под конкретные слоты с фиксированной ставкой, но их точно воспрещено использовать в игровых автоматах с современным джекпотом. Список игр, каких возможно использовать бездеп, Вы отыщите в описании промоакции или можете уточнить у службы заведения.Многие игроки, оценив возможностей казино, остаются играть в нем и дальше ? на это и нацелено любое промо. Постоянные посетители заносят депозиты и проделывают ставки, обеспечивая долгосрочную прибыль оператора. То есть, казино раздают бездепы свежим юзерам для формирования лояльной аудитории. 1хслотс официальный сайт зеркало Бездепы с бесплатными вращениями деют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд выплачивает казино. Число спинов ограничено и редко выше сотню. Если промоакция содержит большое даровых игр, их начисление имеет быть разбито на количество дней.Фриплей-бонусы встречаются только в неких клубах. Они зачисляются сразу в создания профиля и активны недолговременное время. Если не успеете истратить свои, они просто сгорят. Касаемо времени, как призы активны протяжении часа. <a href=https://linktr.ee/cazinosdep>https://linktr.ee/cazinosdep</a> Пoдтвepдить личнocть посетителя. Для удачного вывода средств, необходимо подтвердить лицо посетителя. Нa этaпe вepификaции пpoфиля, сотрудники службы безопасности обязаны увериться, собственно у игрока чем раз аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не сможет вывести собственный выигрыш, случае у него будет несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы. 1хслотс 1хслотс регистрация перейти на 1×slots У каждой забавы средства требования по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система зачтет каждую ставку. В рулетке и покере устроить это намного труднее. Именно поэтому например главно внимательно читать обстоятельства получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой забаве, то новички просто «спустят бонус на ветер».
1×slots казино мобильная версия
Похожим образом трудится третий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя или из-за с получения им VIP-статуса. Подарок предоставляется последствии обращения в поддержку и ревизии.Бездепозитный приз за регистрацию в казино с выводом денег в 2022 году — Наш ресурс дает игрокам важную информацию о самых новых, великодушных и испытанных бонусах в интернет казино, которые обновляются любой день. <a href=http://www.princeton.com.cn/home.php?mod=space&uid=77101&do=profile>http://www.princeton.com.cn/home.php?mod=space&uid=77101&do=profile</a> x1 slots регистрация в 1×slots casino
1×slots официальный сайт скачать на айфон
В лицензионных бездепозитных казино выступать в азартные игры вправду неопасно. Наличие лицензии подтверждает что, этот факт, что клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP.У каждой игры средства требования по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система зачтет любую ставку. В рулетке и покере сделать это гораздо труднее. Именно поэтому так важно пристально разбирать обстоятельства получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой забаве, то новенькие просто «спустят бонус на ветер». <a href=https://persiankittencat.com/grey-persian-cats-unraveling-the-charm-of-these-feline-beauties/#comment-58329>1×slots акции</a> Если площадка дарит бездеп за регистрацию, то процедура его получения проста. Нужно только ввести аккаунт на веб-сайте и активировать его, подтвердив адресок электронной почты, номер телефона либо другие данные, которые настятельно оператор. Перед данным необходимо убедиться, что юзер располагается на официальном сайте казино, а не на жульнической площадке. Выбирая безвозмездный приз, пристально изучайте управляла. Убедитесь, собственно вас можно принимать участие в акции. Уточните, в каких играх можно скорпулезно условия вейджера. При надобности задавайте вопросы представителям саппорта. 1×slots сайт зеркало <a href=http://bbs.ispt.com.cn/home.php?mod=space&uid=1631416>http://bbs.ispt.com.cn/home.php?mod=space&uid=1631416</a> Вы наверняка, например все любите получать презенты и бездепозитные призы казино. Игорные жилища брали в повадку одаривать гэмблеров приятными бонусами. Стать владельцем приветственного презента возможно за творенье профиля либо пополнение счёта. Второй вариант больше увлекательный, как клубы готовы удвоить депозит! Но в вы новичок и лишь знакомитесь с миром пыла, другого, как воспользуйтесь бонусом за регистрацию.Но существуют азартные заведения, готовые просто например вручить деньги на игру. Для сего достаточно сделать профиль. Чтобы исключить выигрыш, сначала необходимо выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа.
1×slots мобильная версия войти казино
Одним из поводов отдавать преимущество, льготу одному или иному заведению содержится в привлекательности предлагаемых акций и безвозмездных предложений. Безвозмездные фриспины, выдаваемые без дела создавать какой-нибудь вклад, в списке находится далековато не в конце.Далее потребуется отыграть вагер и исключить выигрыш. Игрокам без навыка крупно повезло, они могут получить 10-ки подарков за 1 регистрацию. Если не сумели получить Бездепозитный приз, не беспокойтесь. Обратитесь в онлайн чат, оператор поможет решить проблему. <a href=http://cc.koreaapp.kr/bbs/board.php?bo_table=free&wr_id=2763381>http://cc.koreaapp.kr/bbs/board.php?bo_table=free&wr_id=2763381</a> 1×slots регистрацию процедура займет всего лишь Не рекомендуем опрометью голову хвататься за всевозможные предложения получения средств без инвестициям. Вполне вероятно, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на 1-ый взгляд. Альтернативой является казино бонус за депозит. Мы предлагаем для пару советов, благодаря коим у каждого игрока будет возможность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом средств:
<b>Смотреть еще похожие новости:</b>
<a href=http://3ak.cn/home.php?mod=space&uid=187057>1×slots зеркало видели такую регистрацию на</a>
<a href=https://bans.org.ua/index.php?topic=126476.new#new>1×slots регистрация на сайте</a>
<a href=https://timepost.info/showthread.php?tid=54935>1× слот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если идет об неповторимых предложениях, может понадобиться регистрация в казино по ссылке с партнерского сайта. Активация по промокоду используется в разных видах бездепов. Если идет о приветственном бонусе, то набор знаков возможно узнать на крупнейшей страничке, в регистрационной форме либо послании, коие отправляется пользователю для доказательства e-mail. Акции все проводиться вместе с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется разовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем актуальный код для активации в описании каждого рекламную.
#7336 Charlesgunny
реального казино porno Вера Бирюкова, гимнастка <a href=https://specreporter.com/>Нургалиева Эльвира Рамиловна порно</a> официальное казино вход porno Вера Бирюкова, гимнастка <a href=https://glvk.guru/>Александра Бортич</a> bitz casino 1×bet слоты 1×bet top букмекерская контора фонбет официальный сайт официальные букмекерские конторы скачать casino официальный сайт казино смотреть онлайн бесплатно 1×bet
#7337 Brend-studio_terhttps://brend-studio.ru/
Добрый день! Великолепная и необходимая новость для тех, кто хочет заявить о себе и своих услугах! В наше время без популяризации и продвижения бренда компании, вообще невозможно увеличить объемы выручки и продажи. А если вы задумали или решили осуществить ребрендинг, то без рекламы вам точно не обойтись. Недавно узнал об отличной и профессиональной компании специализирующейся на брендирование корпоративного и коммерческого транспорта. Если бы вы видели их 3Д дизайн транспорта, словами передать сложно и затруднительно, лучше один раз увидеть, чем сто раз прочитать. В общем, если вы ищите, 24/7, брендирование корпоративного транспорта в Москве по приемлемым ценам и т.д., например: <a href=https://brend-studio.ru>brend-studio.ru</a> Тогда вам срочно нужно прямо сейчас перейти на сайт Брендирование транспорта BREND STUDIO и узнать все подробности по брендирование коммерческого и корпоративного транспорта, качественные материалы премиум класса Oracal, Orajet, 3M в Москве и т.д. https://brend-studio.ru/ . Обязательно переходите на сайт Брендирование транспорта в Москве brend-studio.ru изучайте информацию и сохраняйте в закладки, не забудьте записать адрес сайта и номера телефонов. Предлагают выгодные и заманчивые скидки, с гарантией от 1 года. До новых встреч!
#7338 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию более популярный вариант это
Фриспины без депо или дополнительные средства посодействуют ближе познакомиться с игровой платформой и её функциями. За счёт подарков возможно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям из-за игры против живых крупье. <a href=http://filmkachat.ru/>1× slots casino зеркало</a> Баланс игрока дополняется на соответствующую сумму. К ней применяется вейджер, обозначенный в правилах акции. Вывести выигрыш возможно несомненно после как, как юзер сделает требуемый размер ставок из личных средств. В редких случаях бездеп работает в формате Free Play. На счет юзера зачисляется крупная сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по завершении сего периода сумма на счету несомненно превосходить первоначальную, то разность можно несомненно вывести или применять для дальнейших ставок.Фриплей-бонусы встречаются только в неких клубах. Они зачисляются сразу после создания профиля и активны недолговременное время. Если не успеете истратить свои, они просто сгорят. Касаемо медли, как бонусы активны протяжении часа. <a href=http://www.wmhelp.cz/html/modules.php?name=Forums&file=viewtopic&t=69256>http://www.wmhelp.cz/html/modules.php?name=Forums&file=viewtopic&t=69256</a> Третитй бездепозитный бонус за регистрацию – денежные свои. К сожалению, начислить рубли либо доллары способны только известные и известные клубы. С их поддержкою возможность насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком. 1×slots официальный сайт зеркало <a href=http://troderstro.ru/user/CharlesPeeta/>http://troderstro.ru/user/CharlesPeeta/</a> Подтвердите регистрацию, чтобы активировать Бездепозитный бонус с выводом, потребуется наполнить личный профиль. Заполните пустые поля реальными данными о себя.В игровых клубах без лицензии Вы покупаете „кота в мешке“ и если, тогда, неоднозначных обстановок нет возможности куда-то посетовать и обосновать свою правоту.
1×slots регистрация 1×slotscasino 56 online
<a href=https://redfist.de/RF-Online-Testforum/viewtopic.php?f=60&t=77723>скачать 1×slots на андроид мобильная версия</a> 1×slot зеркало <a href=http://atope.ru/user/Henryavaig/>http://atope.ru/user/Henryavaig/</a> 1хслотс регистрация в 1×slots casino
онлайн казино 1×slots
Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми акциями. Читайте о них в обзорах и на форуме.Свежий бонус начисляется в виде денежных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в использовании своими, а в случае отыгрыша оператор возможность установить ограничение на вывод денег. <a href=http://rezkadetaley.ru/index.php?subaction=userinfo&user=omiqali>http://rezkadetaley.ru/index.php?subaction=userinfo&user=omiqali</a> 4. Заберите презент. Чаще всего приз активируется незамедлительно в регистрации. Но случаются ситуации, когда надо(надобно) зайти в собственный офис или написать в службу.Для как, дабы отыграть сумму вашего бездепозитного бонуса нужно выполнить условия вейджера. Очень часто фриспины даются на определенные слоты (book of ra, book of deceased, book of sun), выбирайте разъем себе нраву, они все довольно красочные и высококачественные. Бездепозитные приз имеет быть денежным например и в виде фриспинов на слоты 1× slots зеркало
1×slot рабочее зеркало
Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают приз по странам. Вплоть до как, собственно клуб может себя игроков из Вашей страны, а бездеп мешает. Фриспины — бесплатные вращения, коие позволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины считаются самым знаменитым и преимущественным обликом бонуса — благотворительные вращения иногда эффективнее и веселее в отыгрыше, чем остальные облики бездепов.Для тех, кто только взвешивает испытать собственную фортуну, а для профессиональных игроков, отыскивающих новые площадки для выигрышей, водящие лицензированные казино нередко организуют разные промоакции, и лучшее предложений за время – как для новичков, так и для проф игроков – бездепозитный бонус за регистрацию. Бездепозитные призы начисляются только раз раз. Не стоит открывать новые аккаунты, чтобы получить их повторно. Служба безопасности казино непременно выявит «левого» участника и заблокирует. Если гость выполнит нужные требования, отыграет свою ставку и решит исключить собственный выигрыш, то ему надо(надобно) учесть, что казино обязательно потребует предоставить ксерокопии личных документов, чтобы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные средства вывести не получится. 1×slots зеркало регистрация в 1×slots casino <a href=http://baanya.co.kr/bbs/board.php?bo_table=free&wr_id=209527>http://baanya.co.kr/bbs/board.php?bo_table=free&wr_id=209527</a> Существует ли стратегии для отыгрыша бездепозитных бонусов? К сожалению нет, на выигрыши или проигрыши с бонусов, казино либо игрок воздействовать не может, отдача игр случается от разработчиков игр.Бездепозитный бонус казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в этом и заключается основное отличие.
1×slots казино зеркало
В неких онлайн казино для получения бездепозитных призов не довольно просто зарегистрироваться на веб-сайте клуба и доказать средства контактные данные. Дополнительно потребуется активация промокода. В любом казино с бездепозитным призом учтены вейджеровые обстоятельства. Это единственный «подводный камень», который стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) устроить определённое число ставок. Чем круче бонус, тем сложнее выполнить обстоятельства, и напротив.Для доказательства электрической почты, просто перейдите по активной ссылке в письме, приобретенном от игрового заведения. <a href=http://slideshow-forum.com/profile.php?id=99396>http://slideshow-forum.com/profile.php?id=99396</a> 1 x slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.oursson.ru/viewtopic.php?f=2&t=8868>1×slots казино зеркало</a>
<a href=https://projects.sare.org/people/jamestrazy/>1×slots промокод при регистрации 2025</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чтобы получить вероятность исключить выгода с бездепозитного бонуса в казино, необходимо выполнить ряд условий: Бездепозитный приз предоставляется новенькому игроку за определенные действия. Часто презент вид средств либо фриспинов выдается за регистрацию, спасибо чему юзер получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.
#7339 Charlesgunny
сайт винлайн букмекерская контора порно с Владимир Минеев (ММА) <a href=https://t.me/vchkogpu_ru>kent casino регистрация</a> казино без kometa casino <a href=https://www.ossetia.tv/>казино смотреть</a> Ирина Горбачева online casino 7k Елизавета Боярская казино фильм смотреть онлайн букмекерская контора мостбет казино 1 1×bet слоты 1×bet top
#7340 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7341 Charlesgunny
porno Виктория Баркова, легкоатлетка порно с Максим Глушенков (футбол) <a href=https://7club7.com/>7k casino бонус</a> слоты казино pin up casino скачать <a href=https://t.me/vchkogpu_ru>порно с Виктория Синицина, фигуристка</a> порно с Анна Калинская (теннис) казино зеркало сегодня porno Юлия Канакина, скелетонистка black russia казино порно с Петр Ян (ММА) Александра Бортич porno Елизавета Туктамышева
#7342 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на сайте 1×slots ru com
Но существуют азартные заведения, готовые просто так вручить деньги на забаву. Для этого довольно создать профиль. Чтобы вывести выигрыш, сначала нужно выполнить вейджеровые условия, прописанные в условиях получения бездепа. <a href=http://filmkachat.ru/>1×slots мобильная версия войти казино</a> <a href=https://gravatar.com/phenomenalfbe3256acb>https://gravatar.com/phenomenalfbe3256acb</a> Чтобы бездеп не был начислен на Ваш акк, Вам не активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт автоматически, а Вы не расчитываете его использовать, обратитесь в службу поддержки с пожеланием отменить бездепозитный бонус. 1× slots сайт <a href=http://forum.l2endless.com/member.php?action=profile&uid=4373>http://forum.l2endless.com/member.php?action=profile&uid=4373</a> Практически все интернет казино с бездепозитным бонусом за регистрацию учитывает программу лояльности — систему одобрения неизменных посетителей, которая состоит из множества значений. При достижении игроком очередного уровня на его счёт поступает приз. Чем повыше степень — тем щедрее бонус.Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам воспрещено начислять призы клиентам, не имеющим денежных средств на счете. Мы предлагаем разглядеть актуальные призы онлайн-казино с лицензией, которые соблюдают законодательство РБ.
1× slots зеркало
В разделе с призами активировать свой презент. Найти игры, для которых предусмотрено поощрение и применять приз по предназначению.Условия вывода выигрыша. В некоторых заведениях для успешного вывода с бездепозитного приза довольно пополнения баланса и доказательства личности. В иных же клубах, нужно несколько раз прокрутить собственный депо. <a href=https://astraclub.ru/album.php?albumid=235354>1×slots казино мобильная версия</a> 1×slots зеркало на сегодня Демоказино есть практически на каждом сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются существенно реже: там если, тогда, выигрыша и соблюдения критерий акций бездеп можно перевоплотить в настоящие деньги.Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 поболее. Когда игроку надеется количество фриспинов, администрация имеет бить3 их начисление на некоторое дней. Бесплатные вращения предоставляются для определенного слота, кот-ый указывается в правилах промоакции. <a href=http://wooriatoz.com/atozhk/bbs/board.php?bo_table=free&wr_id=179310>http://wooriatoz.com/atozhk/bbs/board.php?bo_table=free&wr_id=179310</a> Диапазон ставок, которые вправе устроить игрок, того лимитирован. Обычно назначать возможно маленькую сумму — пределах 10–30 руб. За одно вращение. 1×slos регистрация в 1×slots casino Существуют казино с бонусом за регистрацию, каких довольно модны фриспины в интернет казино впоследствии регистрации в определенных забавах. Они встречаются даже почаще безвозмездных поощрений либо традиционных бонусов в казино без вложений. Например, игрок регистрирует счет, на кот-ый начисляются бесплатные игры, приз за регистрацию повторяющий бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса игры выигрывает настоящие деньги, которые в последствии можно удачно исключить из заведения на собственную платежную систему. То есть, есть все шансы исключить средства без рисков своими деньгами. Регистрация, за игры получит бонусы, займет несколько, а спасибо данному можно прирастить 5 евро поощрений до тыс. И без всяких проблем исключить их.Возможность поиграть дополнительное состязание (а времени и количество) абсолютно даром, а выигрыш, в свою очередь, поступает на счёт игрока.
1×slots casino зеркало рабочее
Первый образующийся вопрос, это, чего выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают новых игроков. Последним проще начать игру на средства с подарка за регистрацию. Им не нужно пополнять баланс и расходовать личные средства. Новички получают безвозмездные спины либо свои на счёт. С их помощью знакомятся с игровым процессом, крутят слоты и делают ставки в рулетке. Также учтите, собственно некоторые игровые платформы сужают список стран, которые готовы получить предложенный бездепозитный бонус за регистрацию. К образцу, существуют онлайн-заведения, выдающие подобные призы только жильцам конкретных государств. К образцу, интернет казино 777 Оригинал дает бездепозитный бонус лишь игрокам из России и стран СНГ. Или напротив, пичкают вознаграждением всех, не обитателей некоторых государств (из этого, следует пристально учить перечень, дабы впоследствии не возникло практически вопросов и жалоб).Любой выигрыш по ставке повыше установленного лимита будет считаться недействительным. То есть ставка не несомненно засчитана при отыгрыше, ну случае выигрыша его сумма не поступит на счёт клиента — результат забавы несомненно всецело аннулирован. <a href=https://www.professionistidelsuono.net/forums/member.php?action=profile&uid=237418>https://www.professionistidelsuono.net/forums/member.php?action=profile&uid=237418</a> скачать 1×slots на андроид мобильная версия Подтверждение электрической почты – одно из основных критерий, которое есть практически в каждом бездепозитном казино. Чтобы верифицировать электронную почту, достаточно перебежать по интенсивной ссылке в послании, приобретенном от азартного клуба.Для вывода средств приз нужно несомненно отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами акции и вариациями отыгрыша бездепозитного бонуса до его получения, дабы избежать конфликтных ситуаций.
1×slots актуальное зеркало
Выполнив все требования оператора, заказчик имеет оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит в среднем менее суток. Если дополнительно потребуется пройти процедуру верификации, то срок увеличивается до 1–2 трудящихся дней. Для перевода применяются банковские инструменты и электронные платежные системы. Второй метод подходит превосходнее, так как основная транзакций ситуации исполняются моментально. В связи со спецификой функционирования банков обработка платежей имеет взятьвдолг(взятьвзаймы) до нескольких трудящихся дней. <a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=64161&result=reply>казино 1×slots</a> Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. 1×slots регистрация на сайте <a href=http://yxhsm.net/home.php?mod=space&uid=133296>http://yxhsm.net/home.php?mod=space&uid=133296</a> Чтобы получить вероятность исключить выгода с бездепозитного бонуса в казино, необходимо выполнить ряд критерий:
1хслот скачать
За счёт спинов получится запустить разные интернет слоты, протестировать стратегии и поднабраться навыка. Фишка в том, собственно вращения начисляются на лучшие аппараты с оригинальными опциями и высокой отдачей. Не забывайте, собственно в каждом акционном предложении предусмотрены специальные требования – временные ограничения, наибольший размер ставки, перечень доступных игр.4. Заберите презент. Чаще всего приз активизируется сразу последствии регистрации. Но случаются истории, когда нужно зайти в индивидуальный кабинет или написать в саппорта. Промокод – определённая комбинация символов, коию нужно установить в соответствующее поле при творении учетной записи или активировать в личном профиле игрока в разделе с призами.Бездепозитный приз предоставляется новому игроку за конкретные деяния. Часто подарок повторяющий средств или фриспинов выдается за регистрацию, благодаря чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. <a href=https://rollerforum.volkerschulz.de/memberlist.php?mode=viewprofile&u=442823>https://rollerforum.volkerschulz.de/memberlist.php?mode=viewprofile&u=442823</a> 1×slots регистрацию процедура займет всего лишь В разделе с бонусами активировать собственный подарок. Найти игры, для коих предусмотрено поощрение и использовать бонус по предназначению.Иногда в одобрения за регистрацию могут выдаваться билеты для роли в турнирах. Условия их проведения очень отличаются, потому мы рекомендуем ознакомиться с каждым предложением раздельно.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.airsoft44.com/forum/index.php?action=profile;u=11896>1×slots casino регистрация на сайте</a>
<a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/6985–1×slots-aktsii#6995>1×slots акции</a>
<a href=https://traderscrypt.com/forums/showthread.php?tid=5891&pid=8600#pid8600>1хслотс зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В случае с фриспинами без вейджера, Вам не придется отыгрывать свой выигрыш с безвозмездных вращений. Прибыль, которую Вы заработаете на этом бездепе можно назначать на вывод без какого или отыгрыша.
#7343 Charlesgunny
1×bet зеркало рабочее xbet 1go casino <a href=https://t.me/vchkogpu_ru>порно с Артемий Панарин (хоккей)</a> Анна Михалкова фреш казино <a href=https://kompromat1.online/>порно с Илюшникова Татьяна Александровна</a> 1×bet слоты 1×bet xyz порно с Илюшникова Татьяна Александровна пинап казино online casino официальный 1×bet скачать бесплатно online casino официальный как выиграть в казино
#7344 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7345 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия скачать
Размер ставки для забавы по бездепозитному бонусу (окончательно же, если, тогда,, когда он представлен повторяющий бонусных валютных средств) часто ниже, чем при этой на депо. Ограничение несомненно действовать до момента отыгрыша приза.Принципиальным различием безвозмездных бонусов от бонусов на депо является отсутствие необходимости вносить деньги на акк. Из-за сего их нередко нарекают бездепозитными (no deposit bonuses). <a href=http://filmkachat.ru/>1×слотс казино</a> Бездепозитные призы казино это финансовая компенсация, предлагаемая пользователям на дармовой основе и вероятность выступать в интернет казино даром. Если сравнивать их с поощрениями за вклад, каких свои выдаются лишь впоследствии начального пополнения счета, то бездепозитные вознаграждения получаются бесплатно. То есть, играющий получает вероятность создавать ставки на уже имеющие финансы, которые выдаст заведение, исполняя, при этом, обыденные действия, дабы их извлечь (тут идет о регистрация, удостоверении личности с внедрением номера телефонного, дизайна заявки и т.д. ).Не стоит незамедлительно же открещиваться от приветственных презентов в подобных казино. Администрация готова начислить деньги либо фриспины, но сначала сотрудники обязаны увериться, что вы не аферист. Дело никаких, собственно развелось слишком большое охотников за бонусами. Они научились дурачить систему и зарабатывать солидные суммы денег. <a href=https://teletype.in/@kalinka0588/architectural-drafting-services>https://teletype.in/@kalinka0588/architectural-drafting-services</a> 1×slots регистрация <a href=http://www.ihavethepussy.com/de/members/44979-Charlesweafe>http://www.ihavethepussy.com/de/members/44979-Charlesweafe</a> Когда речь о денежных призах, казино постоянно устанавливают обстоятельства вейджера, которые нужно выполнить, чтобы вывести выигрыш.
1×slots рабочее зеркало на сегодня
1×slots подтвердит вашу регистрацию если говорить Можно. Вы практически можете отрешиться от получения бездепозитного бонуса за регистрацию в казино, же Вы не создадите ставку.Срок активации и время на отыгрыш. Зачисление денег либо фриспинов происходит при активации на требовательно ограниченного периода, похожие притязания предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать приз количество дней либо даже месяцов. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером. <a href=http://o91668l6.beget.tech/user/HenryVoilk/>http://o91668l6.beget.tech/user/HenryVoilk/</a> Фриспины без депозита или вспомогательные средства посодействуют ближе познакомиться с игровой платформой и её функциями. За счёт даров можно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям ради забавы против живых крупье. 1×slots зеркало регистрация в 1×slots casino Если вы облюбовали для себя несколько брендов которые для больше всего приглянулись, для постоянной игры! Таких гемблеров казино довольно любит и ценит, за частую такие игроки становятся VIP игроками заведения, которым часто поступают прибыльные предложения вид бонусов, так же туда входит и бездепозитные.Популярность интернет казино растёт и всё больше пользователей начинают проявлять азартными играми. Бездепозитные бонусы 2022 года, это оригинальные подарки за регистрацию. С их поддержкою свежие игроки все получить безвозмездные вращения либо деньги на баланс за одну регистрацию. С свет игорных заведений в онлайне, бездепозитные бонусы стали знаменитейшим методом привлечения игроков. Подобные промоакции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш вебсайт собрал превосходнейшие предложения из онлайна на 2022 год. Воспользуйтесь каким презентом и сможете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша нужно выполнить обстоятельства.
1×slots официальный регистрация
<a href=http://digitalmaine.net/mediawiki3/index.php?title=User:ShermanMackennal>http://digitalmaine.net/mediawiki3/index.php?title=User:ShermanMackennal</a> Срок активации и время на отыгрыш. Зачисление средств либо фриспинов происходит при активации протяжении взыскательно ограниченного периода, подобные требования предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать приз количество дней или числе недель. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высочайшим вейджером. 1× slots официальный Чем ниже значение вейджера, тем легче отыграть и вывести приз. Если Вы планируете заработать на бездепе, а не просто ознакомиться с новым игровым клубом, то стоит игнорировать призов с высочайшим вейджером их почти не реально отыграть. С ними Вы можете только протестировать игры заведения.Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, a зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.
1хслотс 1хслотс регистрация перейти на 1×slots
Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, a зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. 1×slots casino зеркало рабочее <a href=http://trzykolory.opx.pl/member.php?action=profile&uid=4475>http://trzykolory.opx.pl/member.php?action=profile&uid=4475</a> Главное преимущество спинов – возможность выучить разные слоты. Также удастся насладиться бонусными раундами, испытывать фортуну в риск-туре и преувеличить выигрыш за счёт особенных символов. Однако столько игровой процесс заслуживает внимание, ведь другого, как сосредоточиться на реальном выигрыше.
1×slots официальный сайт скачать на айфон
Размер бонуса. В качестве бездепов обыкновенно начисляют маленькие суммы, а когда идет о призах за депо, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино все презентовать игроку до 2000$.При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое возможно предназначить игре в казино. В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая часть забавы. Важно, зачастую бездепозитные призы в казино выдаются с ограничениями по максимальной выплате. В среднем возможно рассчитывать на выгода в количество тыщ руб. Как вывести выигрыш с бонуса без депо. Придётся подтвердить аккаунт документально, в неких заведениях. Процедура верификации обязательна и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в онлайн чате либо прочтите в правилах.Операторы гемблинга заявляют, что так они дерутся с бонус-хантерами. Впрочем, критики считают, собственно данным казино пробуют устроить из случайного постояльца неизменного игрока. <a href=https://www.love2d.org/forums/memberlist.php?mode=viewprofile&u=260028>https://www.love2d.org/forums/memberlist.php?mode=viewprofile&u=260028</a> Чаще всего, известные сервисы, эти как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно неотъемлемое верховодило. Финансовые средства выводятся лишь через ту платежную систему, которой огромной для пополнения депо. Если же игрок получил бездепозитный покерный бонус, потребуется пополнить счет на наименьшую необходимую, которая сочиняет обыкновенно десять $.Основное правило получения бездепа ? творимый аккаунт обязан быть у пользователя первым и единственным. Наличие нескольких аккаунтов требовательно запрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депозита необходимо блюсти простую очередность деяний. 1× slots регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://isomedu.com/forum/profile/josephdrons/>зеркло казино 1×slots</a>
<a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=49009>1×slots официальный сайт зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В каждом казино с бездепозитным бонусом учтены вейджеровые условия. Это один-единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) сделать определённое количество ставок. Чем круче приз, тем сложнее выполнить обстоятельства, и напротив. Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам важную информацию о самых новых, великодушных и проверенных призах в онлайн казино, коие обновляются любой день.
#7346 Charlesgunny
1×bet регистрация casino ап <a href=https://th-royalgclub.com/>casino вход</a> сайт винлайн букмекерская контора porno Андрей Рублев (теннис) <a href=https://th-royalgclub.com/>pin up букмекерская контора</a> pin up casino скачать казино фильм онлайн porno Алена Косторная (фигурное катание) рабочее казино up casino скачать casino 7k сегодня 1×bet casino
#7347 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7348 Melvinexosyhttps://vip-eskort-msk.ru
эскорт снять москва <a href=https://vip-eskort-msk.ru/>массаж эскорт услуги</a>
#7349 Ремонт стиральных машин Dexp Москваhttps://remont-stiralnyh-mashin-dexp-serv.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт стиральных машин dexp цены, можете посмотреть на сайте: <a href=https://remont-stiralnyh-mashin-dexp-serv.ru/>ремонт стиральных машин dexp рядом</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#7350 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
Прямо сейчас арестуйте безвозмездные вращения за регистрацию без депозита и начинайте коллекционировать призовые композиции из-за солидных выигрышей!Большинство клубов завлекают внимание геймеров за счёт разнородных презентов. На 1 сайтах можно получить виртуальные кредиты, которые откроют доступ ко всему софту. На иных же, администрация предлагает бесплатные вращения для запуска лучших онлайн слотов. Несмотря на различные акции, стоит выделить самые главные. <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino09k online</a> Прежде чем активировать бездеп, необходимо увериться в том, собственно страна, уроженцем которой считается игрок, не входит в список запрещенных. <a href=https://www.infragistics.com/community/forums/f/ignite-ui-for-asp-net-mvc/126866/how-to-choose-the-right-3d-rendering-company-for-your-project>https://www.infragistics.com/community/forums/f/ignite-ui-for-asp-net-mvc/126866/how-to-choose-the-right-3d-rendering-company-for-your-project</a> Срок отыгрыша — это этап, который начинается в момент активации приза и кончается с его закрытием. Пользователю нужно уложиться в этот временной промежуток, другому призовые свои аннулируются. Казино устанавливают список игр, ставки в засчитываются при расчете отыгранных денег. Если тайтл не заходит в этот перечень, то он может быть недоступен для загрузки во время действия бонусного предложения. казино 1×slots официальный сайт <a href=http://dooood.fun/member.php?action=profile&uid=3772>http://dooood.fun/member.php?action=profile&uid=3772</a> Но никогда не запамятовывайте внимательно разбирать правила роли в бонусных акциях. Если вы нарушите хотя бы одно условие, позднее вы не сможете уладить недоразумение с администрацией.
1×slots сайт зеркало
Помните, собственно любые нарушения правил сведут на нет ваши старания, и вы всего останетесь без начисленного вас дарового приза. Всегда изучайте верховодила начисления и условия вейджера. По каким вопросам, на коие вы не можете самостоятельно отыскать ответы, обращайтесь за разъяснениям и саппорт.Автоматическая активация может самой удобной, хотя ручной метод содержит перед ней достоинства. Прежде чем применять вознаграждение от казино, стоит заблаговременно найти, сколько времени потребуется на исполненье всех критерий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала деянья бонуса. 1×slot официальный сайт Обычно, бездепозитные призы выдаются под конкретные слоты с фиксированной ставкой, хотя их наверняка запрещено использовать в игровых автоматах с современным джекпотом. Список игр, каких возможно использовать бездеп, Вы отыщите в описании акции или сможете уточнить у службы поддержки заведения.Казино выводит деньги лишь на ту платежную систему, с котрой был изготовлен депо. То есть, для вывода бездепозитного бонуса, Вам сначала нужно пополнить счет. В неких клубах узкий перечень способов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с данных платежных способов, которые доступны для вывода. <a href=https://loansnearme.com.au/author/glennrof/>https://loansnearme.com.au/author/glennrof/</a> Многие казино предоставляют в рекламных целях благотворительные призы исключительно для наших читателей. Чтобы их получить, нужно перебежать на игровой сайт по партнерской ссылке с нашего портала.Бездепозитный бонус часто возможность стать доступным незамедлительно в завершения регистрации, поскольку как единственным требованием к нему является регистрация, а затем проверка вашей свежей учетной записи. 1×slot зеркало Предложения с бездепозитными бонусами за регистрацию дозволяют новым заведениям заинтересовать аудиторию на собственный сайт. А игроки тому получают возможность выступать на реальные средства без депо в казино и заработать маленькой стартовый капитал, который разрешено вывести на карту банка или электронный кошелек.Мы подготовили список, где есть постоянно актуальные и свежие бездепозитные бонусы казино, которые возможность получить даром. Для наших юзеров есть специальные предложения эксклюзивные призы, коие вы у не найдете, их мы определили специальной красной плашкой «Exclusive».
1×slots сайт
<a href=http://argo.pro/bitrix/redirect.php?goto=http://taker.im/go/?u=http://alt1.toolbarqueries.google.mg/url?q=https://telegra.ph/Statya-298-Ugolovno-processualnogo-kodeksa-RF-Tajna-soveshchaniya-sudej-Aktualnaya-redakciya-09–23>http://argo.pro/bitrix/redirect.php?goto=http://taker.im/go/?u=http://alt1.toolbarqueries.google.mg/url?q=https://telegra.ph/Statya-298-Ugolovno-processualnogo-kodeksa-RF-Tajna-soveshchaniya-sudej-Aktualnaya-redakciya-09–23</a> У нас на веб-сайте Вы найдете перечень призов без депо в проверенных казино и доскональную информацию то как их получить и использовать.При помощи такого одобрения оператор имеет кроме завлекать клиентов, коие раньше проявляли активность на веб-сайте, хотя по некий основанию перестали играть. В этом случае промокод высылается юзеру по электрической почте или повторяющий SMS. 1×slots регистрация на сайте 1×slots ru com
1×slots промокод при регистрации 2025
Каждый новичок и умелый игрок грезят стремительно стартануть и начать делать реальные ставки. Для сего довольно арестовать подарок, за который надо уплачивать. В зависимости от игровой платформы, нужно сделать профиль, привязать email или аппарат. После этого администрация начислит щедрое вознаграждение вид безвозмездных вращений либо виртуальных кредитов.Но существуют азартные заведения, готовые просто например вручить деньги на игру. Для этого достаточно сделать профиль. Чтобы вывести выигрыш, сначала нужно выполнить вейджеровые обстоятельства, прописанные в критериях получения бездепа. <a href=http://check2go.net/author/jameslob/>1хслот зеркало</a> Прежде всего, не забывайте периодически заглядывать на страницу обзоров бездепозитных бонусов. Они шаг за шагом разглядывают более интересные предложения основных игорных порталов. 1× слот зеркало <a href=http://webmontag.de/doku.php?id=РР·_чего_состоит_диета_Елены_Малышевой>http://webmontag.de/doku.php?id=РР·_чего_состоит_диета_Елены_Малышевой</a> Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного приза.Некоторые онлайн-казино без депо предлагают новым посетителям выбрать бонус при регистрации. Будьте внимательны: выбрав раз, вы в абсолютном большинстве случаев не сможете пользоваться остальными.
1×slos регистрация в 1×slots casino
Приветственный бездеп предоставляется хоть игроку лишь раз один. Казино дерутся с например нарекаемыми бонусхантерами (от англ. Bonus Hunter — доброволец за призами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения презента. Исключить подобные деяния дозволяет верификация данных. Администрация вправе потребовать у клиента подтвердить персональные данные, обозначенные при регистрации. Минимального оборота. Этот предел устанавливается вейджером — же игрок не поиграет на установленную необходимую, вывод средств несомненно недоступен.Третитй бездепозитный бонус за регистрацию – денежные средства. К раскаянию, начислить рубли или баксы способны только известные и известные клубы. С их поддержкою появится насладиться любой доступной игрой – автоматом, рулеткой, кено, блэкджеком. <a href=http://kochtagebuch.org/doku.php?id=Выкуп_авто>http://kochtagebuch.org/doku.php?id=Выкуп_авто</a> Бездепозитные призы казино это экономическая компенсация, предлагаемая пользователям на дармовой основе и вероятность играть в интернет казино безвозмездно. Если сопоставлять их с одобрениями за лепта, в свои выдаются лишь впоследствии начального пополнения счета, то бездепозитные гонорары получаются безвозмездно. То есть, играющий получает возможность делать ставки на уже место финансы, коие выдаст заведение, исполняя, всем, обычные действия, чтобы их извлечь (здесь идет речь о регистрация, удостоверении личности с использованием номера телефона, дизайна заявки и т.д. ).Представленные на этой страничке превосходнейшие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные обстоятельства. После кропотливого анализа редакция портала составила рейтинг спецпредложений, каком гости Casino.ru имеют сортировать список по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д. 1×slots зеркало проходить регистрацию это отличный вариант Еще одно условие дотрагивается размеров ставки. Операторы устанавливают наивысшую сумму, которую игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, избранной в Личном офисе. При превышении лимита есть риск лишиться приза. Существующие ограничения относятся и к определенным видам ставок. Например, играя в рулетку, заказчик имеет столкнуться с запретом ставить фишки на шансы.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1× slots официальный</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, коие возможно предназначить игре в казино.
#7351 Charlesgunny
casino приложения бк букмекерская контора <a href=https://rumafia.news/>букмекерские конторы без депозита</a> порно с Алексей Миранчук (футбол) Валентина Матвиенко порно <a href=https://kompromat1.online/>casino скачать</a> порно с Илюшникова Татьяна Александровна 1win букмекерская контора porno Илья Ковальчук (хоккей) 7k casino официальный букмекерская контора леонов букмекерская контора на андроид ешь казино
#7352 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7353 Herbertbethttps://iepinsulation.com
Our insulation services <a href=https://iepinsulation.com/>https://iepinsulation.com</a> keep your home warm and energy-efficient year-round. We specialize in insulating facades, roofs, floors, and attics using modern materials and techniques. Trust our experienced team for durable, cost-effective solutions that improve comfort and reduce energy bills.
#7354 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало этих способов предполагает регистрацию
Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить необыкновенности, недоступные при забаве в демо режиме. Многие свежие клиенты перебегают в число постоянных, а оператор получает долгосрочную прибыль. <a href=http://filmkachat.ru/>casino 1×slot</a> Бoльшинcтвo азартных заведений выдвигают примерно однообразные, схожие обстоятельства и требования, которые нужно выполнить, дабы получить бездепозитный приз за регистрацию. Все их можно соединить в раз список:Законодательство, регулирующее азартные забавы в разных государствах, оказывает на возможности операторов. В результате пользователи из отдельных ареалов сталкиваются с лимитированиями со стороны казино. Это может быть как полный отказ в доступе, например и невозможность загружать забавы отдельных производителей. <a href=https://wowgilden.net/forum-topic_475315.html>https://wowgilden.net/forum-topic_475315.html</a> 1×slots промокод при регистрации <a href=http://www.jrp.kr/bbs/board.php?bo_table=free&wr_id=340284>http://www.jrp.kr/bbs/board.php?bo_table=free&wr_id=340284</a>
1×slots зеркало этих способов предполагает регистрацию
Каждый новичок и профессиональный игрок мечтают прытко стартануть и начать создавать реальные ставки. Для сего достаточно арестовать подарок, за кот-ый надо уплачивать. В зависимости от игровой платформы, нужно сделать профиль, привязать email или телефон. После сего администрация начисляет щедрое вознаграждение повторяющий безвозмездных вращений либо виртуальных кредитов. 1хслотс зеркало Как верховодило, новоприбывшие игроки в первую очередь хотят ознакомиться с способами ввода и вывода денежных средств и сроки выполнения поданных заказов чтобы четко разуметь, как быстро появится вывести свой казино бонус за регистрацию без депозита на электронный кошелек либо же банковскую карту. К счастью для всех играющих, внутри определенных холдингов, все казино соперничают между собой. Ведь случае бы определенную компанию давало лишь одно онлайн-заведение, то ли бы клиенты увидели казино с призом за регистрацию и имели бы рассчитывать лишь на вознаграждение повторяющий бонуса на 1-ое вложение. К каждому заведению периодически идет завлекать свежих игроков, что, в, лишь на руку всем играющим.Бездепы все входить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой либо баллами. <a href=http://freedom.teamforum.ru/memberlist.php?mode=viewprofile&u=9448>http://freedom.teamforum.ru/memberlist.php?mode=viewprofile&u=9448</a> 1×slot казино зеркало
1×slots зеркало
<a href=https://correspondent.in.ua/user/Raymondtieve/>https://correspondent.in.ua/user/Raymondtieve/</a> Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных ситуаций с казино, когда последствии отыгрыша бездепа вас не дадут исключить крупную сумму выигрыша.Выбирайте превосходнейшие бесплатные призы за обзоров на Casinoz – и пусть для сопутствует удача при отыгрыше бонусных кредитов! 1×slots зеркало 1хслотс регистрация перейти на 1×slots
1х слот 1хслотс регистрация перейти на 1×slots
Многие азартные клубы ограничивают сумму вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании промоакции, суммы Вы не сможете вывести. Разница несомненно аннулирована, Вы в не можете делать на нее ставки. Ещё одно распространённое акционное предложение – симпатичный подарок с неблаговидными требованиями. К образцу, клуб обещает $100 в качестве бездепа, но с вейджером х80 либо х100. Отыграть такой вейджер фактически невероятно и поэтому какого-либо концентрироваться на более занимательных акциях.Бездепозитные призы реальными деньгами, коие возможно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадали. 1×slots акции <a href=https://www.donchillin.com/space-uid-355952.html>https://www.donchillin.com/space-uid-355952.html</a>
1×slots зеркало
<a href=https://codepen.io/gzbfyvtf-the-solid/pen/KKEGxYx>https://codepen.io/gzbfyvtf-the-solid/pen/KKEGxYx</a> Практически все онлайн казино с бездепозитным призом за регистрацию учитывает программу преданности — систему поощрения неизменных посетителей, которая состоит из множества значений. При достижении игроком очередного уровня на его счёт поступает приз. Чем выше уровень — что, этим щедрее приз. 1×slot зеркало рабочее этих способов предполагает регистрацию Фриплей-бонусы встречаются только в неких клубах. Они зачисляются сразу последствии сотворения профиля и активны недолговременное время. Если не успеете потратить средства, они просто сгорят. Касаемо медли, в большинстве случаев призы активны на часа.Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депозит возможность выделяться до 30 дней.
<b>Смотреть еще похожие новости:</b>
<a href=http://permitbeijing.com/forum/showthread.php?tid=2197276>1×slot казино зеркало</a>
<a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=49093>скачать 1×slots официальный сайт</a>
<a href=https://www.formulersupport.com/Thread-1×%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE–127551>1×слотс казино</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Обычно для получения бонусов без депозита, казино выдвигает приклнные и вполне выполнимые условия, хотя есть ряд действий которые воспрещены и имеют стать противные результаты: Стоит обозначить(означить), что бездепозитный бонус выдается только взрослым новичкам, которые, тому, шансы пригласить собственных друзей и людей, того претендующих на поощрительную программку преданности. Подобная разработка появилась среди соперничающих онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению своей посещаемости, методом привлечения новых игроков. Бонусы – это оригинальный шанс для вероятных участников игры, которые шансы опробовать софт покер рума и убедиться, будут ли они в него выступать либо нет. Новый игрок попробует средства силы с настоящими оппонентами в казино.
#7355 Charlesgunny
casino игровой автомат casino daddy <a href=https://sovsekretno.net/>1×bet скачать приложение</a> зеркала казино порно с Юлия Ефимова, пловчиха <a href=https://rumafia.news/>порно с Аделия Петросян (фигурное катание)</a> 1×bet скачать приложение на андроид r7 casino 1×bet зеркало xbet xyz казино смотреть онлайн бесплатно Ирина Горбачева Преподобная Надежда Александровна порно порно с Илья Осипов (киберспорт)
#7356 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7357 Charlesgunny
Матвиенко Валентина Ивановна порно букмекерская контора бетсити <a href=https://rumafia.news/>casino betting</a> букмекерская контора леонов букмекерская контора бетсити <a href=https://www.ossetia.tv/>new casino</a> порно с Максим Глушенков (футбол) 1×bet слоты 1×bet xyz часы казино up casino зеркало слоты казино 1×slots casino казино смотреть онлайн
#7358 JamesSobhttps://gidonline24.biz
смотреть фильмы в качестве <a href=https://gidonline24.biz/>фильмы 2024 смотреть онлайн</a>
#7359 Thomasevotshttps://game-vavada-casino.com
download official vavada app <a href=https://game-vavada-casino.com/>vavada registration site</a>
#7360 JamelBrinehttps://marimbapop.com/
<a href=https://marimbapop.com/>Nhà cái uy tín</a> Bị ‘tố’ chậm bàn giao nhà, chủ đầu tư Discovery Complex 302 Cầu Giấy nói gì?
Thời gian gần đây, thông tin về việc chủ đầu tư dự án Discovery Complex 302 Cầu Giấy bị tố chậm bàn giao nhà đã gây chú ý trong cộng đồng. Những phản ánh từ phía khách hàng cho rằng tiến độ không đảm bảo khiến nhiều người cảm thấy thất vọng. Phía chủ đầu tư đã lên tiếng giải thích rằng họ đang nỗ lực hết mình để hoàn thiện dự án, đồng thời cam kết sẽ sớm khắc phục các vấn đề và đáp ứng kỳ vọng của cư dân.
Những câu chuyện cuộc sống đầy xúc động
Côi cút 4 trẻ mồ côi bên bến đò Thạnh Mỹ Tại một bến đò nhỏ ở Thạnh Mỹ, câu chuyện về 4 đứa trẻ mồ côi sống nương tựa vào nhau khiến bao người rơi nước mắt. Mất cha mẹ từ khi còn nhỏ, các em phải tự lo cho nhau trong hoàn cảnh khó khăn. „Hai đứa được đi học, mẹ chết cũng yên lòng…“ là lời tâm sự nghẹn ngào của một trong những đứa trẻ, thể hiện khát vọng vươn lên dù cuộc sống đầy thách thức.
Những chuyện tình đầy trăn trở Cưới vội giờ muốn bỏ cho xong… Có những cặp đôi vì nhiều lý do mà kết hôn vội vã, để rồi sau đó nhận ra những khác biệt không thể hòa hợp. Hậu quả là những cuộc ly hôn đầy đau lòng, để lại bài học sâu sắc về sự thấu hiểu và cân nhắc kỹ trước khi bước vào cuộc sống hôn nhân.
Đừng ngại khi yêu đàn ông lớn tuổi Tình yêu không phân biệt tuổi tác, và việc yêu một người đàn ông lớn tuổi đôi khi mang lại sự chín chắn, vững vàng mà không phải mối quan hệ nào cũng có được. Đừng ngần ngại nếu trái tim bạn hướng về một người trưởng thành, vì chính sự khác biệt này có thể là chìa khóa cho một mối quan hệ bền vững.
Sức khỏe và những câu chuyện y học Đã hoàn thiện phác đồ điều trị chuẩn cho bệnh nhân nhiễm Covid Trong cuộc chiến chống lại đại dịch Covid-19, các bác sĩ đã đạt được bước tiến lớn khi hoàn thiện phác đồ điều trị chuẩn. Điều này không chỉ giúp nâng cao tỷ lệ chữa khỏi bệnh mà còn mang lại hy vọng cho hàng triệu người dân trên toàn thế giới.
Tán gia bại sản vì con mắc bệnh ung thư máu Một gia đình nghèo phải bán hết tài sản để chữa trị cho con bị ung thư máu. Sự hy sinh và tình yêu của cha mẹ dành cho con cái là điều không gì có thể đo đếm được, nhưng câu chuyện này cũng đặt ra câu hỏi lớn về việc hỗ trợ y tế cho những gia đình khó khăn.
Những thông tin đáng chú ý Thực hư thông tin VinFast tặng miễn phí 80 ô tô ‘made in Vietnam’ Thông tin về việc VinFast tặng miễn phí 80 chiếc ô tô „Made in Vietnam“ cho người dùng đã gây xôn xao. Tuy nhiên, đại diện công ty cho biết đây là tin đồn không chính xác, đồng thời khuyến cáo người dân nên kiểm tra nguồn tin để tránh bị lừa đảo.
Hà Nội khuyến khích doanh nghiệp phát triển sản phẩm công nghiệp chủ lực Thành phố Hà Nội đang đẩy mạnh khuyến khích các doanh nghiệp phát triển các sản phẩm công nghiệp chủ lực. Điều này không chỉ nâng cao sức cạnh tranh mà còn thể hiện sự xứng tầm của thủ đô trong lĩnh vực công nghiệp hiện đại.
Cuộc sống đầy những câu chuyện, từ những khó khăn đến những bước tiến trong y học và công nghệ. Mỗi câu chuyện là một bài học, một góc nhìn để chúng ta thêm trân trọng và sống trọn vẹn hơn.
#7361 Thomasevotshttps://game-vavada-casino.com
vavada vavadaa online download <a href=https://game-vavada-casino.com/>vavada no deposit bonuses</a>
#7362 Thomasevotshttps://game-vavada-casino.com
site vavada <a href=https://game-vavada-casino.com/>vavada casino android app</a>
#7363 Thomasevotshttps://game-vavada-casino.com
vavada office login <a href=https://game-vavada-casino.com/>vavada mirror</a>
#7364 Thomasevotshttps://game-vavada-casino.com
vavada official bonus <a href=https://game-vavada-casino.com/>download vavada app</a>
#7365 Ремонт посудомоечных машин Siemens Москваhttps://remont-posudomoechnyh-mashin-siemens-magic.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт посудомоечных машин siemens адреса, можете посмотреть на сайте: <a href=https://remont-posudomoechnyh-mashin-siemens-magic.ru/>ремонт посудомоечных машин siemens цены</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#7366 Thomasevotshttps://game-vavada-casino.com
slots vavada <a href=https://game-vavada-casino.com/>vavada app</a>
#7367 Albertteamnhttps://capper-league.ru/bk/nash-slon/
порно онлайн <a href=https://capper-league.ru/bk/nash-slon/>порно ебла</a>
#7368 Albertpladehttps://winbet666.org/entertainment-city-vip-transfer/
<a href=https://winbet666.org/entertainment-city-vip-transfer/>VIP轉移</a>
#7369 JamesAntithttps://capper-league.ru/bk/nash-slon/
детское порно секс <a href=https://capper-league.ru/bk/nash-slon/>магазин купить меф</a>
#7370 Normandoghttps://bm9pro.com
<a href=https://telegra.ph/kantor-bola99–12–22>kantor bola99</a>
#7371 Peterlillahttps://bettingblog.tech
My Betting Sites India <a href=https://bettingblog.tech/>https://bettingblog.tech</a> your guide to the best sports betting sites. Reviews, ratings, bonuses and comparisons. Find the perfect sports betting platform in India!
#7372 Charlesgunnyhttp://filmkachat.ru
1хслотс регистрация в 1×slots casino
Рассмотрим на образце: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских рублей. В критериях акции указано, что вейджер бездепозитного приза х20. Поэтому, дабы отыграть приз, игроку несомненно необходимо сделать ставок на 35*20=700 руб.Итак, чтобы бесплатные бонусные кредиты превратились в настоящие средства, которыми вам распоряжаться по собственному усмотрению, их нужно отыграть. Вейджер идет уточнять в правилах онлайн-казино. <a href=http://filmkachat.ru/>1×slot официальный сайт</a> Представьте момент, когда при ставке в 10 рублей Вы получите сходственное умножение. Миллион рублей за одно вращение, собственно вполне возможно. Поэтому вопрос, сколько возможно выиграть остаётся не. Предлагаем выяснить других. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный приз и проверяйте удачу в деле. Разумеется, исключить средства довольно. Однако шансы есть у всех.Большинство клубов привлекают внимание игроков за счёт различных подарков. На 1 веб-сайтах возможно получить виртуальные кредиты, которые откроют доступ ко всему софту. На других же, администрация предлагает безвозмездные вращения для пуска топовых онлайн слотов. Несмотря на разные промоакции, стоит выделить самые основные. <a href=https://ameblo.jp/crazycat11/entry-12871141636.html>https://ameblo.jp/crazycat11/entry-12871141636.html</a> Срок отыгрыша — это этап, кот-ый наступает в момент активации бонуса и кончается с его закрытием. Пользователю необходимо уложиться в данный временной зазор, иначе призовые средства аннулируются. Казино устанавливают перечень игр, ставки каких засчитываются при расчете отыгранных денег. Если тайтл не заходит в данный список, то ему быть недосегаем для загрузки во время деяния бонусного предложения.Исходя из этого, просто не существует разумных оснований махнуть рукою на получение такового приза при регистрации. И, заметить,, на подобный безвозмездной базе у вас все шансы выиграть деньги и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, нарекают бесплатными онлайн платформами для игр. 1 х слотс зеркало <a href=https://kwik.adriensosa.fr/forums/users/deweyepils/>https://kwik.adriensosa.fr/forums/users/deweyepils/</a> Чем ниже велечину вейджера, что, этим проще отыграть и исключить приз. Если Вы расчитываете заработать на бездепе, но просто ознакомиться с новым игровым клубом, то стоит избегать бонусов с высочайшим вейджером их почти не реально отыграть. С ними Вы можете только протестировать игры заведения.
1хслотс 1хслотс регистрация перейти на 1×slots
Изучить управляла и обстоятельства получения бездепозитных призов казино, Вы можете у нас на веб-сайте в разделе с призами либо на официальном сайте избранного Вами казино. Если возможности найти необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электрической почте. 1× slots casino зеркало Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды присутствуют на этой странице. Посетитель возможность оценить обстоятельства получения и начать выступать на деньги без внесения депо. При этом игроку главно разуметь, на каких критериях и какими методами появится вывести полученный выигрыш. Для сего необходимо расценить список подключенных платежных систем.4. Заберите презент. Чаще всего бонус активизируется сразу в регистрации. Но случаются ситуации, когда нужно зайти в индивидуальный офис или написать в службу поддержки. <a href=https://messiahzira85296.bloggerswise.com/37075795/deep-nude-the-ethical-dilemmas-and-technological-impacts-of-ai-driven-image-manipulation>https://messiahzira85296.bloggerswise.com/37075795/deep-nude-the-ethical-dilemmas-and-technological-impacts-of-ai-driven-image-manipulation</a> Получить приветственный бонус имеют только свежие клиенты онлайн-казино. Способы описаны в условиях акции любого легального казино, почаще всего это: 1хслотс мобильная версия зеркало Для вывода средств бонус надо(надобно) будет отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариантами отыгрыша бездепозитного приза до его получения, чтобы избежать конфликтных ситуаций.Для верификации аккаунта надо(надобно) предоставить спецам технической помощи отсканированную копию паспорта и счета за коммунальные предложения, а также фотку банковской карты либо скриншот страницы электронного кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для доказательства личности.
1×слотс казино
Чаще всего интернет-казино предлагают бездепозитные призы новым юзерам. Эта промо-акция довольно отлично привлекает начинающих, подталкивая их к открытию счета. Конечно, не все становятся преданными клиентами, но сам прецедент регистрации аккаунта играет на руку заведению. Бездепозитный приз – это финансовое вознаграждение, коие выдается соучастнику игры в казино, для его привлечения и появления заинтригованности. Любой посетитель, кот-ый подходит условиям выдачи похожего бездепозитного бонуса, имеет претендовать на получение вышеуказанного приза. Такое поощрение является наиболее действенным способом, дающим вероятность стартовать в игре, не вкладывая собственных материальных средств. <a href=https://forumsadovodov.com.ua/memberlist.php?mode=viewprofile&u=65195>https://forumsadovodov.com.ua/memberlist.php?mode=viewprofile&u=65195</a> Этот образ бонуса несомненно добавлен на Ваш аккаунт в успешной процедуры регистрации с использованием номера телефонного. Если избрать иной метод создания учетной записи, бездеп не будет добавлен на Ваш аккаунт. 1хслот скачать Используйте лучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из списка ниже, чтобы заработать презенты за обычные деяния теперь сегодня получить 1-ый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и резвыми выводами на электронные кошельки.На данном разделе портала регулярно публикуются обзорные заметки, в рассматриваются благотворительные бонусы превосходнейших интернет-казино. Информация структурирована по нескольким пунктам, включая главные:
1×slots зеркало на сегодня
Далее потребуется отыграть вагер и вывести выигрыш. Игрокам без опыта крупно подфартило, у получить 10-ки подарков за 1 регистрацию. Если не смогли получить Бездепозитный бонус, не беспокойтесь. Обратитесь в интернет чат, оператор поможет исправить.На данном разделе портала периодически публикуются обзорные заметки, в которых рассматриваются бесплатные призы наихороших интернет-казино. Информация структурирована по нескольким пт, включая главные: Также, в этом случае необходимо доказать собственный номер телефонного, желаемого код, приобретенный в смс-сообщении от клуба ввести в специальное поле в личном кабинете игрока. Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Получить приветственный приз шансы лишь новые посетители онлайн-казино. Способы описаны в критериях промоакции любого законного казино, почаще всего это: казино 1×slots <a href=http://krasrec.ru/forum/user/205421/>http://krasrec.ru/forum/user/205421/</a>
1×slots casino регистрация
Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную функцию активации приза без депозита. Внимательно прочитайте до конца. Многие новички проделывают промахи на шаге регистрации и поэтому имеют получить презент. Бездеп с фриспинами возможность обхватывать всю коллекцию игр на веб-сайте либо разработки 1-го провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш возможность быть выведен последствии как, как пользователь отыграет данную сумму. Возможность оценить глубокий перечень слотов — главное достоинство данной разновидности. Игроку становятся доступны что, эти опции, которые отсутствуют в демонстрационном режиме, а вероятность выиграть реальные средства прибавляет ярких азартных ощущений. <a href=http://instrument91.ru/bitrix/redirect.php?goto=http://image.google.so/url?q=http://predictorllc.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/Ktt688vHqBz>http://instrument91.ru/bitrix/redirect.php?goto=http://image.google.so/url?q=http://predictorllc.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/Ktt688vHqBz</a> С другой стороны, намного проще отобрать бездепозитные фриспины за регистрацию в казино и напрямик момент начать вращать барабаны в наихороших слотах. Главная особенность спинов никаких, что они предусмотрены для лучших автоматов. Удастся столько пройти вспомогательные раунды, но и прирастить сумму выигрыша, заработать респины и другие внутриигровые подарки.В настоящее время получить приз за регистрацию в казино очень просто. Почти любой игорный жилище с готовностью предоставит средства либо благотворительные вращения. Многие игроки используют данным и не стыдятся региться в каждом клубе с выгодными критериями. Кстати, это отличная вероятность выдумать выигрышную тактику и сорвать куш. 1×slots зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/6932–1-x-slots#6942>1 x slots</a>
<a href=https://forum.graylite.com/viewtopic.php?p=263857#p263857>1×slots казино зеркало</a>
<a href=http://theauction.com.au/my-account/>казино 1×slots официальный сайт</a>
<a href=https://radios-collector.com/viewtopic.php?f=7&t=88516>1×slots регистрация 1×slots casino 777 online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Реже призы без депозита начисляются неизменным игрокам. С их подмогою администрация постарается удержать ценных посетителей или желает поблагодарить за лояльность правильных посетителей. Но гораздо чаще для похожих целей используются такие промоакции:
#7373 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7374 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7375 Charlesgunnyhttp://filmkachat.ru
1 хслот регистрация в 1×slots casino
Бездепозитные призы начисляются лишь один раз. Не стоит раскрывать свежие аккаунты, дабы получить их повторно. Служба защищенности казино непременно выявит «левого» соучастника и заблокирует. Если посетитель выполнит нужные притязания, отыграет собственную ставку и решит вывести собственный выигрыш, то ему нужно учесть, что казино непременно востребует предоставить ксерокопии собственных документов, чтобы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои вывести не получится. <a href=http://filmkachat.ru/>1×slots промокод при регистрации 2025</a> Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы которые появляются у начинающих.Обычно бездепозитные промоакции от казино, прибывают на эл. Почту в деньки рождения или дни. В неких онлайн казино можно адресоваться в чат и как неизменному игроку, вероятно вам предложат бездепозитное предложение. <a href=https://www.patreon.com/posts/maximizing-with-113914909>https://www.patreon.com/posts/maximizing-with-113914909</a> Зачастую бездепозитные бонусы казино для забавы предлагаются разными заведениями азартных игр в качестве рекламных акций либо в целях привлечения к себе новых игроков. Для бездепозитных призов в казино 2022 геймеру не нужно пополнять счет до этапа вывода желанных средств.Подтвердите личность, предоставив оператору казино средства паспортные данные. Инструкции обычно несложные, главное — конкретно им следовать. Если написано, собственно «на фото должны быть видны все хорошо угла страницы паспорта» — устройте именно такое фото. скачать 1×slots на андроид мобильная версия <a href=http://wiki.roxane.digital/index.php?title=Utilisateur:ColumbusHipple>http://wiki.roxane.digital/index.php?title=Utilisateur:ColumbusHipple</a> Получить приветственный приз могут лишь новые клиенты онлайн-казино. Способы описаны в критериях промоакции каждого легального казино, чаще всего это:Классическая разновидность бонуса за создание аккаунта. Его преимущество содержится в том, собственно заказчик возможность без выбирать аппараты и делать ставки в их. Иногда список игровых автоматов ограничен оператором, хотя все равно это чем, чем единственный дешевый разъем, как в случае с внедрением фриспинов.
1×slot казино зеркало
Получать информацию о самых прибыльных призах возможно без постоянного прогноза новостей казино. Мы брали данную задачку на себя и безпрерывно смотрим за услугами операторов, выбирая лучшие из их. В данном разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список акций периодически пополняется. В топ зашли самые свежие бездепозитные призы за регистрацию в казино 2020, временные и закрытые промо. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и аспектам. Если срок деянья промоакции истек, она удаляется из перечня.Фриспины – благотворительные вращения с фиксированной ставкой, которые возможно использовать в конкретных игровых автоматах. <a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=3540>1×slots casino регистрация 1×slotscasino09k online</a> 1×slots casino зеркало <a href=http://zvezdjuchki.ru/user/AshleyRouth/>http://zvezdjuchki.ru/user/AshleyRouth/</a> 1хслотс рабочее зеркало
1×slots бонус за регистрацию
Вывод выигрыша с бездепозитных бонусов казино – щедрый презент от азартных клубов. Но чтобы исключить собственный заработок, необходимо выполнить ряд условий: Далее потребуется отыграть вагер и вывести выигрыш. Игрокам без навыка крупно повезло, у получить 10-ки подарков за 1 регистрацию. Если не сумели получить Бездепозитный бонус, не волнуйтесь. Обратитесь в онлайн чат, оператор поможет исправить.При выполнении условий отыгрыша и верификации, деньги с бонусного счета переводятся на главной и могут быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции в от выбранной платежной системы. <a href=https://images.google.com.ly/url?sa=t&url=https://doctorlazuta.by/>https://images.google.com.ly/url?sa=t&url=https://doctorlazuta.by/</a> Срок отыгрыша — это этап, который начинается в момент активации бонуса и кончается с его закрытием. Пользователю нужно уложиться в данный временной промежуток, иначе призовые свои аннулируются. Казино устанавливают список игр, ставки каких засчитываются при расчете отыгранных денег. Если тайтл не входит в этот перечень, то он может быть недосегаем для загрузки период деянья бонусного предложения.Обычно, бездепозитные бонусы выдаются под определенные слоты с фиксированной ставкой, но их наверняка запрещено применять в игровых автоматах с прогрессивным джекпотом. Список игр, в которых можно применять бездеп, Вы найдете в описании промоакции либо можете уточнить у саппорта заведения. 1× slots сайт При исполненьи критерий отыгрыша и верификации, деньги с бонусного счета переводятся на основной и имеют быть выведены на карту либо электрический кошелек. Лимиты на вывод и сроки проведения транзакции в от избранной платежной системы.
казино 1×slots
В интернет-сети постоянно возможно найти списки более популярных и гарантированных поощрительных программ от модных онлайн-казино.В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, необходимо адресоваться в службу спустя лайв-чат на сайте казино. 1× slots casino официальный сайт <a href=https://zarctvo.ru/user/jamesinins/>https://zarctvo.ru/user/jamesinins/</a>
1×slots регистрация 1×slotscasino 56 online
Oтыгpaть бонус с обозначенным вeйджepом, для этого необходимо сдeлaть cтaвoк нa cумму, превосходящую размер приза в некоторое раз.Мы собрали и опубликовали перечень наихороших бездепозитных казино с призами за регистрацию, коие гарантируют щедрые выигрыши и моментальные выплаты. <a href=https://e-participationyouth.eu/forum/profile/richardrag/>https://e-participationyouth.eu/forum/profile/richardrag/</a> Для получения бонуса нужно пригласить в забаву нового клиента. Казино начисляет пригласившему фиксированный процент от взносов приглашённого в виде бонуса: почаще всего его объем не превышает 10%. Срок деяния бонуса как не превышает месяца: пригласивший получает бонус от проигранных ставок приглашённого в первый луна забавы. 1×slots зеркало рабочее При регистрации сомнений или ином онлайн игральном заведении — вам дается один шанс испытывать собственную удачу не внося средства монеты. Замечу собственно такую поощрительную предложение деют не все интернет игровые площадки, а лишь великодушная середина(средина) из их. Которые мы подготовили для Вас в нашем списке.Подтвердите личность, предоставив оператору казино средства паспортные данные. Инструкции обычно легкие, главное — конкретно им стопам. Если написано, собственно «на фото обязаны быть заметны все хорошо угла страницы паспорта» — устройте непосредственно такое фото.
<b>Смотреть еще похожие новости:</b>
<a href=http://permitbeijing.com/forum/showthread.php?tid=2226150>casino 1×slot</a>
<a href=https://nauc.info/forums/viewtopic.php?t=20550212>1хслотс казино зеркало</a>
<a href=https://takesalary.com/the-day-ai-took-over-losing-my-job-as-a-content-writer/#comment-4089>1×slots официальный сайт зеркало рабочее</a>
<a href=https://forum.dis-course.net/viewtopic.php?t=433149>1хслотс казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В некоторых интернет казино для получения бездепозитных призов не достаточно просто зарегистрироваться на сайте клуба и доказать свои контактные данные. Дополнительно потребуется активация промокода.
#7376 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7377 Ремонт стиральных машин AEG Москваhttps://remont-stiralnyh-mashin-aeg-rial.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт стиральных машин aeg цены, можете посмотреть на сайте: <a href=https://remont-stiralnyh-mashin-lg-gold.ru/>ремонт стиральных машин aeg в москве</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#7378 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало на сегодня
Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, дабы снова получить безвозмездный бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ожидает неминуемое санкция.Бездепозитные бонусы казино за регистрацию в 2022 году — это возможность поиграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой либо числом безвозмездных вращений без внесения депозита. Не путайте деморежим с реальной игрой без необходимости внесения депо. <a href=http://filmkachat.ru/>1× слот зеркало</a> <a href=https://slides.com/d/BkxHaho/speaker/0eezH0o>https://slides.com/d/BkxHaho/speaker/0eezH0o</a> 1×slots регистрация на официальном сайте <a href=http://canadalondonchinese.com/home.php?mod=space&uid=78186>http://canadalondonchinese.com/home.php?mod=space&uid=78186</a> Если вы избираете испытанное лицензионное интернет казино и сделайте все обстоятельства получения бездепозитного бонуса, проблем с получением подарка у Вас не возникнет.
1× slots регистрация в 1×slots casino
1×slots рабочее зеркало на сегодня Объективные – объем приза, коэффициент и условия вейджера, надобность внесения депозита для вывода денег; <a href=https://able2know.org/user/henryaccok/>https://able2know.org/user/henryaccok/</a> Верификация аккаунта. Лучше подтвердить личность незамедлительно после регистрации, дабы потом не было заморочек с выводом денег. Верификация возможность проходить 2-мя способами: 1×slots официальный зеркало рабочее Приветственный бездеп предоставляется хоть игроку только один один. Казино дерутся с так именуемыми бонусхантерами (от англ. Bonus Hunter — доброволец за бонусами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения подарка. Исключить подобные действия дозволяет верификация данных. Администрация вправе востребовать у посетителя доказать персональные данные, указанные при регистрации.Главным моментом в возникновении данных вознаграждений произведено в, собственно пустив их в ход, игры ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он спасибо призам какой-либо выигрыш либо мгновенно спустит все только что прибывшие деньги). То есть, казино снабжает игрока вероятностью на дармовой базе играть во различные слоты даже спонсирует забаву.
1×slots регистрация 1×slotscasino 56 online
Проверка занимает от нескольких минут до нескольких дней, спецы техподдержки все запросить вспомогательные документы или инициировать куцее общение по Skype.Кешбэк-бонус представляет собой возврат фиксированного процента от ставки когда поражения или же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не превышает 10%. Некоторые казино шансы предлагать посетителям бездепы за подтверждение номера либо почты или репост на страницу в соц сетях.Чтоб получить большой выигрыш, избирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша. <a href=http://proect.org/user/DavidVeids/>http://proect.org/user/DavidVeids/</a> Также есть онлайн-платформы азартных игр, коие используют раздачу бездепозитных призов в особые даты (как для казино, например и для игрока). Помимо сего, действующие геймеры также имеют возможность получить схожие призы за собственную работа (например, за повышения уровня или за схожие заслуги).Фриспины — бесплатные вращения, коие позволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся наиболее модным и преимущественным видом бонуса — безвозмездные вращения порой эффективнее и веселее в отыгрыше, чем другие виды бездепов. 1×slots casino регистрация Бонусы без депозита при регистрации числятся самыми привлекательными как для опытных игроков, например для и новичков. Получив это вознаграждение, заказчик возможность выступать на настоящие средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные призы в интернет-казино Рунета, а обстоятельства их активации и выигрыша.Если вы избираете испытанное лицензионное онлайн казино и сделайте все условия получения бездепозитного приза, проблем с получением дара у Вас не возникнет.
1×slots официальный сайт скачать
В зависимости от интернет заведения любой из их возможность вам предложить как бездепозитные средства, например и бездепозитные фриспины, которые последствии удачной регистрации рухнут вас на ваш игровой баланс.Для получения выигрыша потребуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить конкретную необходимую, хотя теснее из личных средств. Она рассчитывается из общего объема выигрыша за всегда использования бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, если пользователь выиграл 1000 руб., а множитель составляет х30, исключить деньги можно будет, сделав ставки на 30 000 руб. 1×slots casino регистрация на сайте <a href=http://fkc-ros49.ru/index.php?subaction=userinfo&user=fatevidence14>http://fkc-ros49.ru/index.php?subaction=userinfo&user=fatevidence14</a>
1×slots официальный зеркало
<a href=http://maskarad.bomba-piter.ru/user/Davidapaky/>http://maskarad.bomba-piter.ru/user/Davidapaky/</a> 1х слотс зеркало регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://australiantravelforum.com/Upload/showthread.php?tid=162320>зеркло казино 1×slots</a>
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1241#post-37984>1×slots регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Используйте лучшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из перечня ниже, дабы заработать подарки за простые деяния и уже сегодня получить 1-ый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и быстрыми выводами на электронные кошельки.
#7379 Dianaveter_seidohttps://dianaveter.ru/
Добрый день! Современные бережные технологии психологического консультирования, индивидуальный подход в каждой истории клиента, максимум эмпатии и поддержки. Решение психологических проблем современными методиками, психологическая консультация. Пошаговые программы решения конкретных задач клиентов, системный подход. <a href=https://dianaveter.ru/>Повышение уверенности</a> Если Психолог онлайн и в Екатеринбурге, то это в dianaveter.ru https://dianaveter.ru/ . Главный навык, который нарабатывается в личной терапии – это вера в себя, уверенность и состояние „Я могу решить, я могу справиться, я классный“. Психолог с отзывами, с опытом. До новых встреч!
#7380 Ремонт приставок Xbox Москваhttps://remont-pristavok-xbox-spec.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт приставок xbox адреса, можете посмотреть на сайте: <a href=https://remont-pristavok-xbox-spec.ru/>ремонт приставок xbox в москве</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#7381 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация
Рассмотрим принцип его деянья на образце. Допустим, вы зарегистрировались и получили $10 not the slightest deposit bonus с вейджером х50. Это означает, собственно выигранные средства возможно будет выводить не ранее, чем последствии как, как общая сумма ставок достигнет $500.Бoльшинcтвo азартных заведений выдвигают примерно одинаковые условия и притязания, коие необходимо выполнить, дабы получить бездепозитный приз за регистрацию. Все их возможно соединить в раз перечень: <a href=http://filmkachat.ru/>1×slots промокод при регистрации 2025</a> Автоматическая активация на самой комфортной, но ручной способ имеет перед ней достоинства. Прежде чем использовать вознаграждение от казино, стоит заранее определить, сколько времени потребуется на выполнение всех критерий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деянья приза. <a href=https://onlyfans.com/silo-images>https://onlyfans.com/silo-images</a> Подтвердите лицо, предоставив оператору казино свои паспортные данные. Инструкции обычно несложные, основное — конкретно им по. Если написано, собственно «на фото должны быть заметны все четыре угла странички паспорта» — сделайте именно такое фото.К примеру, игроку выдаются бесплатные свои в заведении в размере пятидесяти либо ста долларов (вейджер на которые сочиняет 100х). То есть, каждому новоприбывшему игроку выскакивает притягивающая картинка, кот-ая сулит выплату всех зачисленных компанией средств. Не стоит внимания на казино бонус за регистрацию без депо с сильно большой либо довольно махонькой суммой призов, потому что, в кропотливо выучив все условия, здесь всего, несомненно какой-то подкол. 1×slots зеркало этих способов предполагает регистрацию <a href=https://malaysia-forex.com/members/130551-CharlesMib>https://malaysia-forex.com/members/130551-CharlesMib</a>
casino 1×slot
Несмотря на то, что этот вариант стимуляции со стороны азартных платформ довольно популярен в сфере подобных игр, далековато многим почитателям казино ведомо, что по бездепозитные бонусы казино и как именно их возможно эксплуатировать. 1×slots регистрация 1×slots casino c2d ru Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие возникают у начинающих. <a href=http://hefeiyechang.com/home.php?mod=space&uid=11271>http://hefeiyechang.com/home.php?mod=space&uid=11271</a> Для отыгрыша приза казино обязует игрока поиграть на сумму, в несколько раз превышающую сумму приобретенного бонуса — здесь выгода компании явна.Бездеп с фриспинами возможность охватывать всю коллекцию игр на веб-сайте либо разработки одного провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении промоакции. Выигрыш может быть выведен последствии как, как юзер отыграет эту сумму. Возможность оценить глубокий возможностей слотов — основное достоинство этой разновидности. Игроку становятся доступны что, эти функции, которые отсутствуют в демонстрационном режиме, а вероятность выиграть настоящие средства прибавляет ясных азартных чувств. 1хслотс рабочее зеркало Такой казино бонус без депозита за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это словно какая-то конспирация поощрения под бездепозитный. Суть всего этого сводится к тому, что игроку на час выдается, к примеру, 1000 долларов, а реклама твердит про, что любой выигрыш можно несомненно в будущем забыть при для. Но если играющий серьезно отнесется к этому предложению, то он просто потеряет время. Ведь игроку нужно несомненно играть не в аккаунте, в тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (даже всей тысячи) в верховодила вступят конкретные условия, где будет сказано, собственно наибольшей суммой победы возможность быть только двести долларов и средства можно использовать только в приза на первый лепта с вейджером 25 от суммы вознаграждения плюс сам депозит. По результату выйдет, собственно игрок выигрывал себя 200% приз с вейджером на определенную сумму. Короче говоря, это все надо вашего медли.
1× slots casino официальный сайт
Размер бонусов почаще всего чисто символический и не превышает 50 руб. Приятно, но осязаемым бустом при ли будет. Вывод выигрыша с бездепозитных призов казино – великодушный подарок от азартных клубов. Но дабы вывести свой заработок, нужно выполнить ряд условий: <a href=http://www.ihavethepussy.com/de/members/46671-Jamesmek>http://www.ihavethepussy.com/de/members/46671-Jamesmek</a> 1×slots официальный сайт скачать На нашем веб-сайте Вы отыщите список своевременных свежих бездепозитных бонусов в казино 2022 года. Также, есть большое неповторимых предложений, которые доступны только посетителям нашего сайта в регистрации по нашей ссылке или активации специального промокода.
1× slots сайт
Выиграть настоящие деньги в казино не пополняя счет – трудно, но вполне. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными бонусами и начните выступать на бонусные средства. По статистике из 10-ти заведений можно заработать маленькую сумму денег помощью бонусных средств. <a href=https://forum.ltp-team.com/topic/60307–1×slots-kazino-mobilnaya-versiya/>1×slots казино мобильная версия</a> Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут уточняет лимитирование для клиентов. Конечно, это возможно посчитать некоторым неудобством для игрока, хотя справедливости ради необходимо, что выбор автоматов всё также остаётся довольно большим. Вейджер (wager) – это коэффициент, который показывает на какую необходимую необходимо сделать ставок, дабы исключить приз из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода этого приза, Вам нужно сделать ставок на сумму: 500*70=3500 рублей. Только полностью отыграв приз, Вы можете исключить собственный выигрыш. 1×slots casino регистрация 1×slots review live <a href=https://dedignat.ru/component/users/?option=com_k2&view=itemlist&task=user&id=27215>https://dedignat.ru/component/users/?option=com_k2&view=itemlist&task=user&id=27215</a>
1× slots casino зеркало
Бездепозитный приз казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в данном и содержится основное отличие. Как лишь получите бездеп в казино, всё точно не запамятовывайте проверять электрическую почту. Некоторые игорные клубы постоянно веселят активных гэмблеров приятными призами. Чаще всего получить презент можно в преддверии веселья, на денек рождение, за вербование приятеля. А также распространённым призом является прибавка к депозиту. Нужно чем пополнить счёт, и азартное заведение увеличит его на 50–100%.Одним из предлогов отдавать преимущество, льготу одному или другому заведению содержится в привлекательности предлагаемых акций и бесплатных услуг. Безвозмездные фриспины, выдаваемые без нужды создавать какой-либо вклад, в перечне находится далеко не в конце. <a href=http://l6046402.bget.ru/member.php?action=profile&uid=38649>http://l6046402.bget.ru/member.php?action=profile&uid=38649</a> Для казино, работающих онлайн, бездепозитные бонусы необходимы для привлечения свежих клиентов. Предложение сыграть на слотах без надобности внесения настоящих денег — работающий метод для повышения энтузиазма к фирмы. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит выступать в казино, только теперь теснее на личные средства. 1×slots регистрация 1×slots casino c2d ru Осталось избрать казино с бонусом за регистрацию и сделать профиль. После активации дара выигрыш в от Фортуны и навыков.Варианты выигрыша зависимости от Вашей успеха и условий игорного портала. Выше мы сказали, что некоторые бездепозитные призы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются и те, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на средства, можно выиграть невероятные суммы. Сегодняшние игровые автоматы либо видео слоты, как их называют. Могут выдавать солидные умножение от х1.000 и выше. Некоторые множат ставку от х100.000.
<b>Смотреть еще похожие новости:</b>
<a href=https://demo.comuni-italiani.it/forum/viewtopic.php?f=9&t=425227>1×slots зеркало видели такую регистрацию на</a>
<a href=https://praisenpray.org/forums/showthread.php?tid=97800>1×slots регистрация на сайте</a>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=359179>1×slots официальный demo регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Однако далековато не все ресурсы предлагают своим клиентам бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено одобрение на первый депо в объеме 100–200%. Это замечательная возможность преумножить банкролл, увеличить время, проведённое за игрой и шансы сорвать большой куш. Заполняя данные в личном профиле, указывайте только достоверную информацию, так как Вам понадобиться ее подтвердить в будущем при выводе денег.
#7382 Charlesgunny
порно с Александр Головин (футбол) вавада казино <a href=https://7club7.com/>Матвиенко Валентина Ивановна порно</a> porno Алена Косторная (фигурное катание) казино вход <a href=https://repost.news/>гта онлайн казино</a> казино большая casino андроид яндекс игры казино casino pin официальный как выиграть в казино pin up casino официальный Мухтиярова Елена Вячеславовна порно
#7383 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало
Поспешите забрать бездепозитные бонусы за регистрацию в казино из представленного списка. Все платформы не только водят законную работа, хотя и обрадуют честными результатами забавы, высокой отдачей, резвыми выплатами.При игре на бонусные средства воспрещается выступать в игровые автоматы с современным джекпотом и игры из радела live casino. Кроме такого, кое-какие казино дают бездеп на раз либо количество конкретных слотов, и в иных забавах Вы не сможете на них играть. <a href=http://filmkachat.ru/>1×slots регистрация на официальном сайте</a> <a href=https://secure.smore.com/n/qe7fu-revit-family-creation-services>https://secure.smore.com/n/qe7fu-revit-family-creation-services</a> Прежде чем активировать бездеп, необходимо увериться в том, что страна, уроженцем коей является игрок, не входит в перечень разрешенных. 1×slots официальный сайт, скачать <a href=http://aquamarine.gold/bitrix/redirect.php?goto=http://dongradus.ru/bitrix/redirect.php?goto=http://frank-shkola.ru/bitrix/click.php?goto=https://teletype.in/@urist555/yRWBulSoFHc>http://aquamarine.gold/bitrix/redirect.php?goto=http://dongradus.ru/bitrix/redirect.php?goto=http://frank-shkola.ru/bitrix/click.php?goto=https://teletype.in/@urist555/yRWBulSoFHc</a>
рабочее зеркало 1×slots
Можно ли наваривать на бездепозитных призах? Это не работа, здесь как повезет, если в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, за можно назвать везением, и дополнительной добавкой к вашему бютжету.Но есть игорные заведения, коие готовы просто например жертвовать средства на игру. Для сего довольно сделать профиль. Чтобы вывести собственный выигрыш, для поначалу необходимо выполнить обстоятельства отыгрыша, обозначенные в критериях получения бездепозитного депозита. <a href=https://qualityprogamer.de/forum/showthread.php?tid=281359>1хслотс мобильная версия зеркало</a> 1×slots казино зеркало <a href=https://uadplugins.club/memberlist.php?mode=viewprofile&u=226646>https://uadplugins.club/memberlist.php?mode=viewprofile&u=226646</a> Как лишь вы отыграли вейджер и средства с бонусного баланса перебежали для на реальный счет, Вы отважно можете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (сделать минимальный депо например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депозитом).Также, учите, собственно бездепозитный бонус возможно вывести лишь в случае, когда будут исполнены все условия отыгрыша. 1×slots зеркало регистрация Существует ли стратегии для отыгрыша бездепозитных призов? К сожалению нет, на выигрыши либо проигрыши с бонусов, казино или игрок воздействовать не может, отдача игр происходит от разработчиков игр.В любом казино с бездепозитным бонусом учтены вейджеровые условия. Это единственный «подводный камень», который стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) сделать определённое число ставок. Чем круче приз, тем сложнее выполнить условия, и напротив.
1×slots коды
В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая доля забавы. Важно, зачастую бездепозитные призы в казино выдаются с лимитированиями по наибольшей выплате. В среднем возможно рассчитывать на выгода в количество тысяч рублей. Как исключить выигрыш с бонуса без депо. Придётся подтвердить аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном доказательстве учетной записи спрашивайте в интернет чате либо прочтите в правилах.Если площадка дарует бездеп за регистрацию, то процедура его получения ординарна. Нужно только завести акк на веб-сайте и активировать его, подтвердив адрес электронной почты, номер аппарата либо другие данные, коие настятельно оператор. Перед этим нужно увериться, собственно пользователь находится на официальном веб-сайте казино, не на мошеннической площадке. Для того, чтобы отыграть необходимую вашего бездепозитного бонуса надо(надобно) выполнить обстоятельства вейджера. Очень нередко фриспины даются на определенные слоты (book of ra, book of lifeless, book of sun), избирайте слот себе нраву, все очень очень и качественные. Бездепозитные бонус возможность быть денежным например и вид фриспинов на слоты <a href=http://www.fumankong2.cc/home.php?mod=space&uid=581487>http://www.fumankong2.cc/home.php?mod=space&uid=581487</a> Диапазон ставок, которые вправе сделать игрок, также лимитирован. Обычно назначать возможно маленькую необходимую — пределах 10–30 руб. За одно вращение.Как верховодило, новоприбывшие игроки начала желают ознакомиться с методами ввода и вывода валютных средств и сроки выполнения поданных заказов дабы четко разуметь, как быстро возможность вывести свой казино бонус за регистрацию без депо на электрический кошелек или же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино соперничают меж собой. Ведь в бы определенную компанию представляло лишь одно онлайн-заведение, то навряд бы посетители увидели казино с бонусом за регистрацию и имели бы рассчитывать только на вознаграждение вид бонуса на первое вложение. К любому заведению регулярно следует привлекать новых игроков, что, итоге, только на руку всем играющим. казино 1×slots Даже не выиграв крупную необходимую, игрок интересно проведет время, изнутри исследует работу площадки, оценит геймплей автоматов. Все это без каких-то финансовых рисков. Быть в курсе превосходнейших промоакций легко. Достаточно периодически учить список новых онлайн казино с выводом приза без депозита в данном разделе.
1×slots официальный сайт мобильная версия
Для такого, чтобы отыграть сумму вашего бездепозитного приза надо(надобно) выполнить обстоятельства вейджера. Очень нередко фриспины даются на конкретные слоты (book of ra, book of deceased, book of sun), избирайте разъем себе нраву, они все довольно очень и высококачественные. Бездепозитные приз возможность быть денежным например и повторяющий фриспинов на слотыГлавным нюансом в возникновении этих вознаграждений состоит в, что пустив их в ход, игрок ничем не рискует и в последствии никому ничего не будет должен (не зависимо, получит ли он спасибо бонусам какой-либо выигрыш или моментально спустит все только собственно прибывшие финансы). То есть, казино снабжает игрока вероятностью на дармовой основе выступать во различные слоты причем спонсирует забаву. Чаще всего, модные сервисы, эти как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно неотъемлемое правило. Финансовые свои выводятся лишь через что, эту платежную систему, коей успех для пополнения депо. Если же игрок получил бездепозитный покерный приз, требуется пополнить счет на минимальную сумму, кот-ая сочиняет обыкновенно десять долларов. 1×slots официальный сайт, скачать <a href=http://4exn.com/home.php?mod=space&uid=765623>http://4exn.com/home.php?mod=space&uid=765623</a>
1хслотс рабочее зеркало на сегодня
Фриспины без депозита либо вспомогательные средства помогут ближе познакомиться с игровой платформой и её функциями. За счёт презентов возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за игры напротив живых крупье. <a href=https://knowyourmeme.com/users/travistheob>https://knowyourmeme.com/users/travistheob</a> Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы появилась возможность вывести выигрыш. 1×slot зеркало рабочее этих способов предполагает регистрацию Для ревизии применяются сканы паспортов, водительских прав, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если пользователь замечен в попытке завести дополнительный акк, все его учетные записи подвергаются блокировке, а их владелец попадает в черный перечень. При ирге на лицензионной площадке надо бояться свидетельствовать достоверную индивидуальную информацию (шифрование исключает утечку индивидуальных данных).Вы наверняка, как и все любите получать презенты и бездепозитные призы казино. Игорные дома взяли в привычку одаривать гэмблеров приятными бонусами. Стать обладателем приветственного подарка можно за создание профиля либо пополнение счёта. Второй вариант более занимательный, так клубы готовы удвоить депозит! Но в вы новичок и только знакомитесь с миром пыла, какого-либо воспользуйтесь бонусом за регистрацию.
<b>Смотреть еще похожие новости:</b>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=187758>1×slots casino регистрация 1×slotscasino09k online</a>
<a href=http://lynnniman.org/index.php?/topic/1468-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-1×-slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82/>казино 1× slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Также бывают случаи, когда казино начислит оговоренный приз последствии регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам.
#7384 Charlesgunny
ограбление казино kent casino регистрация <a href=https://vestnik-jurnal.com/>порно с Евгения Медведева, фигуристка</a> приложения букмекерских контор реального казино <a href=https://specreporter.com/>порно с Алина Загитова, фигуристка</a> 1×bet зеркало рабочее порно с Гатагова Ольга Анатольевна 7k casino сайт сайт 1×bet слоты казино пин 1×bet на андроид песня казино
#7385 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7386 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало
Для тех, кто лишь подумывает испытывать свою удачу, а для проф игроков, разыскивающих свежие площадки для выигрышей, ведущие лицензированные казино часто устраивают различные акции, и одно из лучших услуг за последнее время – как для начинающих, например и для профессиональных игроков – бездепозитный приз за регистрацию. <a href=http://filmkachat.ru/>1× slots зеркало</a> Самые популярные способы вывода средств ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электрическим платежным системам на Neteller и Skrill, а пользуются криптовалютными кошельками. Вывод выигрышей возможность исполняться моментально либо занимать от нескольких часов до нескольких суток. <a href=https://rant.li/kalinka0588/top-3d-modeling-software-for-furniture-design-tools-to-elevate-your-creations>https://rant.li/kalinka0588/top-3d-modeling-software-for-furniture-design-tools-to-elevate-your-creations</a> Даже не выиграв крупную необходимую, игрок интересно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-либо финансовых рисков. Быть в курсе наихороших акций легко. Достаточно регулярно изучать список свежих интернет казино с выводом бонуса без депозита в этом разделе. 1×slots официальный зеркало <a href=http://scanimager.ru/index.php?subaction=userinfo&user=lowlyjournal58>http://scanimager.ru/index.php?subaction=userinfo&user=lowlyjournal58</a> Фриспины начисляются по конкретной ставке. После их активации игроку нужно запустить разъем и убедиться, что в нем отображаются бесплатные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода в отыгрыша определяется оператором и изредка выше 5 000 руб.
1×slots официальный сайт скачать на айфон
<a href=http://www.ihavethepussy.com/de/threads/201670–1×slots-%D0%A0%C2%B7%D0%A0%C2%B5%D0%A1%D0%82%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%BB%D0%A0%D1%95-%D0%A1%D0%82%D0%A0%C2%B5%D0%A0%D1%96%D0%A0%D1%91%D0%A1%D0%83%D0%A1%E2%80%9A%D0%A1%D0%82%D0%A0%C2%B0%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A1%D0%8F-%D0%A0%D0%86–1×slots-casino?p=219204#post219204>1×slots зеркало регистрация в 1×slots casino</a> 1×slots регистрация 1×slots casino 777 online <a href=http://partnershop.kr/bbs/board.php?bo_table=free&wr_id=674935>http://partnershop.kr/bbs/board.php?bo_table=free&wr_id=674935</a> 1×slots casino зеркало Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, a зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.В качестве призов интернет казино нередко предлагает выдачу фриспинов, словами бесплатных вращений игрового барабана. Виртуальные монеты возможно применять для обучения в покерной школе либо для забавы в казино.
1×slots промокод при регистрации 2025
Многие казино предоставляют в рекламных целях благотворительные призы самая для наших читателей. Чтобы их получить, надо(надобно) перебежать на игровой вебсайт по партнерской ссылке с нашего портала.Какие призы у еще получить кроме бездепозитного приза за регистрацию в казино? По мимо бездепозитного приза, любое интернет казино предлагает игрокам выгодное предложение на первый депозит, вы совершаете депо, ваш депо увеличивается в двое либо числе в трое, тем самым начать играть возможно с более крупной суммой, например же не забываем тему вейджер на бонусы. <a href=http://foru1f40m.bunbun000.com/bbs/home.php?mod=space&uid=9394638>http://foru1f40m.bunbun000.com/bbs/home.php?mod=space&uid=9394638</a> В каждом казино с бездепозитным призом предусмотрены вейджеровые обстоятельства. Это единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, нужно устроить определённое число ставок. Чем круче приз, тем сложнее выполнить обстоятельства, и напротив. 1×slots рабочее зеркало на сегодня Вознаграждения за получение VIP-статуса ? начисляются в программки лояльности при достижении одного значения или выдаются индивидуально менеджерами службы.Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и. Когда игроку полагается большое фриспинов, администрация имеет разбивать их начисление на некоторое дней. Бесплатные вращения предоставляются для конкретного слота, который указывается в правилах промоакции.
1хслотс регистрация в 1×slots casino
Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала быстрые выводы. Фишка выплат в том, собственно довольно избрать платёжный инструмент и показать сумму. В большинстве случаев деньги зачисляются на электрические кошельки на 15 минут, а на банковские карты – 1–3 трудящихся денька. 1×slots регистрация <a href=http://rucandle.ru/bitrix/redirect.php?goto=http://stroyberg.ru/bitrix/redirect.php?goto=http://superknigi.com/bitrix/redirect.php?goto=https://teletype.in/@urist555/56f9Q3-mjQN>http://rucandle.ru/bitrix/redirect.php?goto=http://stroyberg.ru/bitrix/redirect.php?goto=http://superknigi.com/bitrix/redirect.php?goto=https://teletype.in/@urist555/56f9Q3-mjQN</a>
1×slots официальный сайт скачать на айфон
Как только на виртуальном счету окажутся бонусные средства, поспешите отыграть вейджер. Сразу после сего возможно оставить заявку на вывод выигрыша. Кредиты прибыльно выделяются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом настоящих средств и дают возможность ощутить азарт. Во-вторых – можно насладиться любой азартной игрой доступной на сайте. В вашем постановлении присутствуют автоматы, настольные прибавление, видео-покер, Live-дилеры.Бездепозитные призы казино это финансовая компенсация, предлагаемая пользователям на дармовой основе и возможность играть в онлайн казино даром. Если сопоставлять их с одобрениями за лепта, в которых средства выдаются только впоследствии первоначального пополнения счета, то бездепозитные вознаграждения получаются безвозмездно. То есть, играющий получает вероятность делать ставки на уже место финансы, коие выдаст заведение, выполняя, при, обычные действия, чтобы их извлечь (тут идет о регистрация, удостоверении личности с использованием номера аппарата, дизайна заказы и т.д. ). Верификация аккаунта. Лучше подтвердить лицо сразу после регистрации, чтобы позже не было проблем с выводом средств. Верификация может проходить двумя способами: <a href=http://www.ihavethepussy.com/de/members/39062-ArnoldFrurb>http://www.ihavethepussy.com/de/members/39062-ArnoldFrurb</a> 1×slots регистрацию более популярный вариант это
<b>Смотреть еще похожие новости:</b>
<a href=http://nacionrolera.org/foro/viewtopic.php?f=1210&t=233984>1хслотс официальный сайт зеркало</a>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=67328&result=reply>1×slots быструю регистрацию а также мгновенное</a>
<a href=http://forum.cvetq.info/memberlist.php?mode=viewprofile&u=17326>x1 slots регистрация в 1×slots casino</a>
<a href=http://complainanything.com/node/158?page=1000#comment-1395638>1×slot зеркало рабочее регистрации на телефон придет</a>
<a href=https://masstr.net/showthread.php?tid=72429>1×slots регистрация на сайте 1×slots ru com</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подтверждение индивидуальной информации. Все казино просят от клиента пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и наличие у юзера иных аккаунтов (мультиаккаунт запрещен). Отказ в прохождении верификации. Если заказчик не хочет либо возможности дать документы, подтверждающие его личность, профиль несомненно заблокирован совместно, вкупе со всеми бонусными начислениями.
#7387 Charlesgunny
casinos xyz казино ставка <a href=https://th-royalgclub.com/>pin up casino buzz</a> porno Вера Бирюкова, гимнастка porno Светлана Ходченкова <a href=https://glvk.guru/>pin up casino</a> букмекерские конторы в россии порно с Варвара Субботина casino скачать приложение 1×bet регистрация букмекерская контора вход 1×bet приложение pin up букмекерская контора
#7388 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7389 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
Подарки на конкретные даты выделяются условиями получения. Если поощрение начисляют игроку на денек рождения, то сумма обыкновенно находится от общего объема депозитов за год.Фриспины предназначены для применения в видео слотах. Внимательно ознакомьтесь с условиями – частенько их выдают на некоторые автоматы. В зависимости от клуба, у вас получится устроить определённое количество ставок. Кстати, продвинутые игорные дома разрешают запускать любых «одноруких злодеев». <a href=http://filmkachat.ru/>1×slots официальный сайт, скачать</a> <a href=https://www.infragistics.com/community/forums/f/ignite-ui-for-asp-net-mvc/126866/how-to-choose-the-right-3d-rendering-company-for-your-project>https://www.infragistics.com/community/forums/f/ignite-ui-for-asp-net-mvc/126866/how-to-choose-the-right-3d-rendering-company-for-your-project</a> 1×слотс казино <a href=http://tara-info.biz.ua/wr_board/tools.php?event=profile&pname=successfulnun95>http://tara-info.biz.ua/wr_board/tools.php?event=profile&pname=successfulnun95</a>
1×slots casino зеркало
1×slots регистрацию процедура займет всего лишь Бесплатный приз – кредиты, коие онлайн-казино начисляет посетителю, не принуждая его пополнять игровой счет.Бездепозитные бонусы в казино без пополнения 2022 — это определенная сумма средств или for nothing spins вращения, коие предоставляются первым гостям за регистрацию на веб-сайте казино вид бездепозитного бонуса, и дает для возможность с казино без пополнения опробовать предложения (игр), с дальнейшей привилегией вывода средств при исполненьи всех установленных управлял. <a href=https://faktes.ru/user/Frankvully/>https://faktes.ru/user/Frankvully/</a> 1×slots зеркало проходить регистрацию это отличный вариант У каждого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано сумели выполнить их, мы дадим несколько советов. Если система начислила маленькую необходимую, надо делать великие ставки – остановитесь на 10–30 центах. Как лишь сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В противном случае никакого присмотреться к иному автомату.Размер приза. В качестве бездепов обычно начисляют очень суммы, а когда идет о бонусах за депозит, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино все презентовать игроку до 2000$.
скачать 1×slots официальный сайт
Бездеп с фриспинами возможность обхватывать всю коллекцию игр на веб-сайте или разработки одного провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш имеет быть выведен в как, как юзер отыграет данную сумму. Возможность расценить полный функционал слотов — основное совершенство этой разновидности. Игроку становятся доступны те функции, которые отсутствуют в демонстрационном режиме, а вероятность выиграть реальные деньги прибавляет ярких азартных ощущений.Возьми свой подарок. Чаще всего бонус активизируется незамедлительно после регистрации. Но случаются истории, когда надо(надобно) зайти в личный офис либо написать в справочную службу. <a href=http://www.pax.nichost.ru/forum/view_profile.php?UID=120998>http://www.pax.nichost.ru/forum/view_profile.php?UID=120998</a> Бесплатные бонусы казино без депо возможно получить вид денежных средств на бонусный счет (вывести их возможно только последствии отыгрыша), фриспинов, забавы или кешбэк-бонуса.Постарайтесь отыграть вейджер, чтобы была возможность забыть заявку на выплату. Кстати, на всех веб-сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы можете получить выигрыш на электронной кошелёк, карту, телефонный. 1× slots casino официальный сайт
1×slots регистрация 1×slotscasino 56 online
Активация случается за промокодов, коие вводятся в личном офисе последствии регистрации. Среди спецпредложений в перечне Casino.ru находятся неповторимые промокоды, коие доступны лишь посетителям портала. Другие способы начисления средств ? автоматическая активация сразу последствии творения аккаунта и получение подарка по запросу в службу технической помощи. <a href=https://chasingadream.rpginitiative.com/showthread.php?tid=167349>онлайн казино 1×slots</a> Когда идет о денежных призах, казино практически устанавливают условия вейджера, коие нужно выполнить, чтобы вывести выигрыш. Для всех бездепозитных призов действует максимальный предел на выигрыш. Он показывает предельную сумму, коию у получить, играя на бонусные кредиты. Как только вас удастся выполнить притязания вейджера, дозволенный максимум будет переведен с бонусного счета на главной, а остаток будет списан.На условиях отыгрыша бесплатных призов следует остановиться подробнее. С ними связаны аспекты, коие нельзя оставить без внимания. казино 1×slots <a href=https://ukrpravda.net/index.php?topic=70415.0>https://ukrpravda.net/index.php?topic=70415.0</a> Как верховодило, при выводе финансов, от играющего требуется лишь устроить минимальный вклад чтобы, чтобы, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом личный счет.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Сроки активации приза устанавливаются каждым казино, но чаще всего они не превышают недели с момента получения. Игроку непременно надо(надобно) использовать бездеп в течение обозначенного срока, в ином случае бонус просто исчезнет. Каждый бонус возможно получить только один раз, потому случае не использовать бездеп в срок, у игрока не будет второго шанса им воспользоваться. При отыгрыше бонусных средств, нужно учитывать срок деяния приза и время, которое дается на отыгрыш. По истечению заявленного медли, не отыгранный бонус будет аннулирован. <a href=http://r66227en.beget.tech/user/Walterfuerb/>http://r66227en.beget.tech/user/Walterfuerb/</a> Осталось избрать казино с призом за регистрацию и создать профиль. После активации подарка выигрыш находится от Фортуны и способностей. 1×slots официальный зеркало Итак, чтобы безвозмездные бонусные кредиты трансформировались в реальные средства, которыми продоставляется управлять по своему усмотрению, их нужно отыграть. Вейджер идет уточнять в правилах онлайн-казино.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=136642>1×slots бездепозитный бонус за регистрацию</a>
<a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=13119>1×slots регистрация 1×slotscasino 56 online</a>
<a href=http://xn–80akbkalsbeeafq6a6b2f.xn–p1ai/forum/messages/forum1/topic38074/message202728/?result=new>1× slots официальный</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Не стоит сразу же отрицаться от приветственных презентов в подобных казино. Администрация готова начислить деньги или фриспины, хотя сначала сотрудники обязаны увериться, что вы не мошенник. Дело что, что развелось очень много охотников за призами. Они выучились врать систему и зарабатывать солидные суммы средств. Активация денежного вознаграждения случается механически после творения профиля либо использования промокода. Иногда операторы предъявляют дополнительные требования: подписаться на странички казино в социальных сетях либо на рассылку рекламных извещений, скачать и ввести дополнительный софт и т.д.
#7390 Charlesgunny
почему в казино нет часов зеркала официальных сайтов казино <a href=https://rumafia.news/>скачать 1×bet на андроид</a> пин ап casino pin почему казино <a href=https://kompromat1.online/>играющие казино</a> 1×bet официальный сайт Анна Михалкова порно с Матвей Сафонов (футбол) 1×bet xbet xyz up casino официальный Львова-Белова Мария Алексеевна порно букмекерская контора зенит
#7391 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7392 Charlesgunnyhttp://filmkachat.ru
1×slots бонус за регистрацию
Бонус с зачислением средств на счет выделяет больше свободы поступков. Пользователь сам избирает, каким образом воспользоваться подаренными средствами. Здесь кроме имеют действовать лимитирования на перечень дешевых игр, но обычно эти рамки не так строги, как в промо с бесплатными вращениями.Объективные – объем бонуса, коэффициент и условия вейджера, надобность внесения депозита для вывода средств; <a href=http://filmkachat.ru/>1×slots зеркало на сегодня</a> Как лишь вы отыграли вейджер и средства с бонусного баланса перебежали для на реальный счет, Вы отважно можете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (сделать минимальный депо например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депозитом). <a href=https://matters.town/a/2e89ep0d553d>https://matters.town/a/2e89ep0d553d</a> 1×slots регистрацию более популярный вариант это <a href=http://mashspec.ru/user/DonaldTom/>http://mashspec.ru/user/DonaldTom/</a> Онлайн-казино с бездепозитными бонусами ставят клиентам условия для пользования бездепами, потому перед ролью в промоакции никакого тщательно ознакомиться со всеми правилами и аспектами акции. Условия все дотрагиваться получения бонуса, его применения и следующего вывода денежных средств в случае выигрыша.
1×slots официальный сайт скачать
Операторы гемблинга утверждают, что например они сражаются с бонус-хантерами. Впрочем, критики считают, что данным казино пробуют устроить из случайного постояльца постоянного игрока.Представленные на этой странице лучшие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, в гости Casino.ru шансы сортировать перечень по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д. 1×slots регистрация 1×slots casino c2d ru <a href=https://paxtonjsbi29631.jaiblogs.com/57271642/ai-nude-app-the-future-of-content-moderation-and-privacy-protection>https://paxtonjsbi29631.jaiblogs.com/57271642/ai-nude-app-the-future-of-content-moderation-and-privacy-protection</a> 1×slot официальный сайт Чтобы бездеп не был начислен на Ваш акк, Вам надо активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк автоматически, а Вы не расчитываете его использовать, обратитесь в саппорта с просьбой отменить бездепозитный приз.
скачать 1×slots на андроид мобильная версия
Чаще всего казино приз за регистрацию без депо даёт вероятность запустить любой машина. Но превосходнее пристально ознакомиться с критериями. Иногда для игры доступны лишь определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, другого начать знакомство с миром пыла непосредственно с «одноруких злодеев».Наш перечень содержит лучшие бездепозитные призы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по принципиальным характеристикам: <a href=https://www.plurk.com/p/p0qhex>https://www.plurk.com/p/p0qhex</a> Однако далековато не все ресурсы предлагают своим клиентам бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено одобрение на первый депо в объеме 100–200%. Это отличная вероятность преувеличить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш.Вейджер в переводе с английского значит «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша полученного приза, в нашем случае бездепозитного. Число ставок имеет — принципиально только набрать сумму, пропорциональную сумме одобрения. 1×slots зеркало регистрация в 1×slots casino Главным интересным в возникновении этих вознаграждений произведено том,, собственно пустив их в ход, в ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он благодаря бонусам какой-нибудь выигрыш либо мгновенно спустит все лишь что прибывшие финансы). То есть, казино снабжает игрока возможностью на дармовой базе выступать во всевозможные слоты даже спонсирует игру.
1×slots зеркало быструю регистрацию а также мгновенное
<a href=https://www.one2bay.de/forum/showthread.php?tid=372288>1×slot официальный сайт</a> Ниже указан актуальный список легальных казино в Беларуси с бонусами на первый депо. Вы можете попасть на официальный вебсайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз.Подтверждение электрической почты – одно из основных условий, которое есть почти в любом бездепозитном казино. Чтобы верифицировать электрическую почту, довольно перебежать по интенсивной ссылке в письме, приобретенном от азартного клуба. 1хслот зеркало <a href=http://suprememasterchinghai.net/bbs/board.php?bo_table=free&wr_id=2117718>http://suprememasterchinghai.net/bbs/board.php?bo_table=free&wr_id=2117718</a> Раздача бонусов может быть посвящена различным датам: календарные праздники, деньки рождения игроков, годовщина открытия казино и т. Д. Подарок выдается вид денег, фриспинов либо баллов для накопления и обмена на предложения оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода этой суммы понадобиться выполнить ряд притязаний.
1×slots регистрация 1×slots casino c2d ru
Если вы выбрали себе несколько брендов которые вас больше всего полюбились, для постоянной забавы! Таких гемблеров казино очень предпочитает и оценивает, за частую такие игроки становятся VIP игроками заведения, которым часто поступают прибыльные предложения в виде призов, так же туда входит и бездепозитные. Но эти рамки не смущают в хайроллеров, что коэффициенты на слотах дозволяют рассчитывать на солидные выигрыши, ну неких автоматах разыгрывается прогрессивный джекпот. <a href=https://andrekmnj67888.blog-gold.com/37345621/nude-ai-understanding-the-intersection-of-innovation-and-ethics-in-image-manipulation>https://andrekmnj67888.blog-gold.com/37345621/nude-ai-understanding-the-intersection-of-innovation-and-ethics-in-image-manipulation</a> 1×slots коды Иногда в качестве бездепа, казино презентует наименьший приз (до 50 руб. ), из-за которого не стоит заморачиваться.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.formulersupport.com/Thread-1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8E-%D0%B1%D0%BE%D0%BB%D0%B5%D0%B5-%D0%BF%D0%BE%D0%BF%D1%83%D0%BB%D1%8F%D1%80%D0%BD%D1%8B%D0%B9-%D0%B2%D0%B0%D1%80%D0%B8%D0%B0%D0%BD%D1%82-%D1%8D%D1%82%D0%BE–91044>1×slots зеркало регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выполнив все требования оператора, заказчик может оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит примерно менее суток. Если дополнительно требуется пройти функцию верификации, то срок увеличивается до 1–2 рабочих дней. Для перевода используются банковские инструменты и электрические платежные системы. Второй способ подходит другого, так как масса транзакций в этом случае исполняются мгновенно. В связи со специфичностью функционирования банков обработка платежей имеет взятьвдолг(взятьвзаймы) до нескольких рабочих дней. Классическая разновидность приза за создание аккаунта. Его преимущество содержится том,, собственно клиент возможность других подбирать аппараты и делать ставки в их. Иногда список игровых автоматов ограничен оператором, но все одинаково это другого, как, чем единственный доступный разъем, как в случае с внедрением фриспинов.
#7393 Charlesgunny
ramenbet casino демо казино <a href=https://www.ossetia.tv/>Скоробогатова Ольга Николаевна порно</a> сайт казино зеркало гта казино <a href=https://glvk.guru/>букмекерские контора ап</a> 7k casino зеркало казино гта 5 bet casino pin up casino buzz casino buzz casino официальный сайт Комарова Наталья Владимировна порно
#7394 Charlesgunnyhttp://filmkachat.ru
1× slots casino официальный сайт
Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в соц сетях, установку мобильного приложения или официального посетителя для ПК. В большинстве казино срабатывают программки преданности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на грядущий степень нередко сопрягается выдачей бездепа. <a href=http://filmkachat.ru/>1 xslots рабочее зеркало</a> Фриспины — бесплатные вращения, коие позволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся наиболее модным и преимущественным видом бонуса — безвозмездные вращения порой эффективнее и веселее в отыгрыше, чем другие виды бездепов.Существуют казино с призом за регистрацию, каких очень известны фриспины в интернет казино потом регистрации в конкретных забавах. Они встречаются в почаще даровых поощрений либо традиционных бонусов в казино без инвестициям. Например, игрок регистрирует счет, на который начисляются бесплатные игры, приз за регистрацию повторяющий безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса геймер выигрывает истинные средства, коие в последствии возможно удачно исключить из заведения на собственную платежную систему. То есть, есть шансы исключить средства без рисков собственными деньгами. Регистрация, за которую игрок получит бонусы, займет минут, а благодаря этому возможно увеличить 5 евро поощрений до тысячи и без всяких проблем исключить их. <a href=https://www.tipga.com/e/6707c2a43286fe0eb7fc9aca>https://www.tipga.com/e/6707c2a43286fe0eb7fc9aca</a> В наше время очень просто получить приз за регистрацию в казино. Практически любой игорный жилище с радостью начислит деньги либо безвозмездные вращения. Многие гэмблеры пользуются этим и не стесняются региться в любом клубе с прибыльными условиями. Кстати, это замечательная вероятность выработать победную тактику и сорвать джекпот.В лицензионных бездепозитных казино выступать в азартные игры вправду безопасно. Наличие лицензии одобряет что, этот прецедент, что клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP. 1хслотс рабочее зеркало <a href=http://47.108.249.16/home.php?mod=space&uid=1569896>http://47.108.249.16/home.php?mod=space&uid=1569896</a> Одним из предлогов отдавать привилегию одному либо иному заведению заключается в привлекательности предлагаемых промоакций и даровых предложений. Безвозмездные фриспины, выдаваемые без нужды создавать какой-либо вклад, в списке располагается далеко не в конце.
1×slots официальный сайт мобильная версия
Объективные – размер бонуса, коэффициент и условия вейджера, надобность внесения депо для вывода средств;Также существуют онлайн-платформы азартных игр, которые применяют раздачу бездепозитных бонусов в специальные даты (как для казино, так и для игрока). Помимо сего, действующие игроки также имеют вероятность получить похожие призы за собственную деятельность (например, за повышения значения либо за схожие достижения). <a href=https://forum.dis-course.net/viewtopic.php?t=449832>1×slots зеркало сайта</a> 1х слот 1хслотс регистрация перейти на 1×slots Диапазон ставок, коие вправе устроить игрок, кроме лимитирован. Обычно назначать можно небольшую необходимую — в 10–30 руб. За одно вращение.Не стоит путать забаву в демо и использование бонусов. В демонстрационном режиме игрок имеет оценить механику слота, сюжет и оформление. Но игра проводится на условные кредиты, потому отсутствует основное ? чувство азарта. Активируя промокод либо фриспины, клиент по-прежнему не расходует средства деньги на игровые автоматы, хотя имеет сорвать реальный куш! <a href=http://xavierdeschamps.free.fr/Escalade/Forum_escalade/viewtopic.php?pid=1115156#p1115156>http://xavierdeschamps.free.fr/Escalade/Forum_escalade/viewtopic.php?pid=1115156#p1115156</a> Большинство клубов завлекают внимание компьютерные за счёт разнородных даров. На одних сайтах возможно получить виртуальные кредиты, коие откроют доступ ко всему софту. На иных же, администрация предлагает безвозмездные вращения для пуска лучших интернет слотов. Несмотря на разные акции, стоит выделить самые главные.Бездепозитные бонусы казино за регистрацию в 2022 году — это возможность сыграть за счёт заведения. Казино даёт клиенту шанс воспользоваться определённой суммой либо количеством безвозмездных вращений без внесения депо. Не путайте деморежим с реальной забавой без надобности внесения депозита. 1×slots зеркало видели такую регистрацию на
1×slots регистрацию процедура займет всего лишь
Не стоит путать забаву в демо и использование призов. В демонстрационном режиме игрок имеет оценить механику слота, сюжет и оформление. Но забава ведется на относительные кредиты, поэтому отсутствует основное ? ощущение пыла. Активируя промокод или фриспины, клиент раньше не тратит средства средства на игровые автоматы, но может сорвать настоящий куш! <a href=http://anygood.ru/bitrix/redirect.php?goto=http://catalog.dir.bg/url.php?URL=accumulator.ru/bitrix/redirect.php?goto=https://telegra.ph/Materialnaya-otvetstvennost-rabotnika-za-ushcherb-prichinennyj-prestupleniem-ili-administrativnym-pravonarusheniem-iyul-2024–09–19>http://anygood.ru/bitrix/redirect.php?goto=http://catalog.dir.bg/url.php?URL=accumulator.ru/bitrix/redirect.php?goto=https://telegra.ph/Materialnaya-otvetstvennost-rabotnika-za-ushcherb-prichinennyj-prestupleniem-ili-administrativnym-pravonarusheniem-iyul-2024–09–19</a> Акции, приуроченные к календарным праздничным, бывают рассчитаны как на всех пользователей, например и на категории: к, подарок на 8 марта девушкам-игрокам либо мужчинам на 23 февраля.В онлайне слишком количество скриптовых сайтов, которые принадлежат плутам. Их главная цель – заинтересовать гэмблеров, пообещав не щедрые презенты, но и солидные выигрыши. Так что кое-какие сайты предлагают получить за регистрацию том $1 000. 1×slots зеркало регистрация в 1×slots casino Законодательство, регулирующее азартные игры в разных государствах, влияние на полномочия операторов. В результате пользователи из отдельных регионов сталкиваются с лимитированиями со стороны казино. Это может быть как глубокий отказ в доступе, например и невозможность загружать игры отдельных производителей.
1 хслот регистрация в 1×slots casino
<a href=https://forum.vn.ua/member.php?u=73361>казино 1×slots</a> Чтобы самостоятельно увериться в превосходствах бездепозитных бонусов, довольно зарегистрироваться в казино и получить поощрение. Способы получения бездепа различаются зависимо облика бонуса, который понравился игроку. Но вас в любом случае надо(надобно) быть зарегистрированным в законном онлайн-казино и доказать собственную лицо. В общем облике пошаговая инструкция для получения бездепозитного приза смотрится например: 1× slots casino официальный сайт <a href=https://www.021snyw.com/space-uid-54144.html>https://www.021snyw.com/space-uid-54144.html</a> Как только на виртуальном счету окажутся бонусные средства, поспешите отыграть вейджер. Сразу после этого возможно забыть заявку на вывод выигрыша. Кредиты выгодно выделяются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом реальных средств и дают возможность ощутить задор. Во-вторых – можно насладиться любой азартной игрой доступной на веб-сайте. В вашем распоряжении присутствуют автоматы, настольные прибавленье, видео-покер, Live-дилеры.
1×slots официальный зеркало
Для получения предоставленных бонусов для понадобиться — ПК либо мобильное прибор, и остальное дело за небольшим. Выбирайте наилучшие благотворительные призы с помощью обзоров на Casinoz – и пусть вас сопутствует счастье при отыгрыше бонусных кредитов!Для выбора азартного заведения Вы сможете пользоваться списком наших казино с бонусами за регистрацию. На нашем веб-сайте мы выпустили перечень бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, что часть призов неповторимые и доступны только для посетителей нашего вебсайта по-специальному промо-коду либо по оригинальной ссылке. Кроме того, для каждого приза мы подготовили подробный обозрение, в котором Вы узнаете как получить и отыграть одобрение и как вывести собственный выигрыш с бездепа. <a href=http://witiai.cn/home.php?mod=space&uid=63355>http://witiai.cn/home.php?mod=space&uid=63355</a> Законодательство, регулирующее азартные игры в разных странах, влияние на возможности операторов. В результате пользователи из отдельных регионов сталкиваются с лимитированиями со стороны казино. Это может быть как глубокий отказ в доступе, например и невозможность загружать забавы отдельных производителей.Этот образ бонуса несомненно добавлен на Ваш акк последствии удачной процедуры регистрации с внедрением номера аппарата. Если выбрать иной метод сотворения учетной записи, бездеп не несомненно добавлен на Ваш акк. 1×slots казино зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://www.mshowto.org/forum/members/jamespauri.html>1×slots промокод при регистрации 2025</a>
<a href=https://bans.org.ua/index.php?PHPSESSID=j19dep3d5fpt5k7s0191o2er79&action=profile;u=1331414>1×slots casino зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для такого, дабы отыграть сумму вашего бездепозитного приза нужно выполнить обстоятельства вейджера. Очень часто фриспины даются на определенные слоты (book of ra, book of lifeless, book of sun), выбирайте разъем для по, они очень очень и качественные. Бездепозитные бонус возможность быть валютным например и в виде фриспинов на слоты Срок отыгрыша — это период, который наступает в момент активации приза и кончается с его закрытием. Пользователю необходимо уложиться в этот временной промежуток, другому призовые свои аннулируются. Казино устанавливают перечень игр, ставки каких засчитываются при расчете отыгранных средств. Если тайтл не заходит в данный перечень, то предоставляется быть недосегаем для загрузки во время деянья бонусного предложения.
#7395 Charlesgunny
1×bet сайт 1×bet xyz 1×bet официальный сайт 1×bet xyz <a href=https://t.me/vchkogpu_ru>букмекерская контора на андроид</a> Нургалиева Эльвира Рамиловна порно 1×bet скачать бесплатно <a href=https://slon-ru.com/>casino зеркало сегодня рабочее</a> bitz casino пина casino casino играть автомат казино скачиваемые казино 1×bet на андроид бесплатно казино фильм смотреть онлайн
#7396 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7397 Charlesgunnyhttp://filmkachat.ru
1×slots официальный регистрация
Некоторые онлайн-казино без депо предлагают новым посетителям выбрать приз при регистрации. Будьте внимательны: выбрав один, вы в безусловном большинстве случаев не сможете пользоваться остальными. <a href=http://filmkachat.ru/>1×slots подтвердит вашу регистрацию если говорить</a> Чаще всего интернет-казино предлагают бездепозитные бонусы свежим пользователям. Эта промо-акция очень отлично завлекает начинающих, подталкивая их к открытию счета. Конечно, не они становятся преданными посетителями, но сам факт регистрации аккаунта играет на руку заведению.Главным моментом в возникновении этих вознаграждений произведено в, собственно пустив их в ход, игры ничем не рискует и в последствии никому ничего не несомненно обязан (не зависимо, получит ли он спасибо бонусам какой-нибудь выигрыш либо моментально спустит все только что прибывшие финансы). То есть, казино снабжает игрока вероятностью на дармовой основе играть во различные слоты и даже спонсирует игру. <a href=https://www.gabitos.com/eldespertarsai/template.php?nm=1728472866>https://www.gabitos.com/eldespertarsai/template.php?nm=1728472866</a> Также посещают случаи, когда казино начислит обсужденный бонус последствии регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам. 1×slots регистрацию процедура займет всего лишь <a href=https://my.desktopnexus.com/Apostas1504/journal/-2022–38850/>https://my.desktopnexus.com/Apostas1504/journal/-2022–38850/</a> Для получения бездепа нужно пригласить в игру по реферальной ссылке свежего клиента: он обязан зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на необходимую, обозначенную в критериях промоакции.
1хлот регистрация в 1×slots casino
Основное различие что, нет, собственно для получения бездепа нужно пополнять баланс в казино. Но кроме этого, есть ряд и различий:В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая доля игры. Важно, зачастую бездепозитные бонусы в казино выдаются с лимитированиями по наибольшей выплате. В среднем возможно рассчитывать на выгода в некоторое тысяч руб. Как вывести выигрыш с бонуса без депозита. Придётся доказать аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате или прочтите в правилах. <a href=https://australianwinerytours.com/tours/showthread.php?tid=230219>1×slots на любой вкус как пройти регистрацию</a> 1× slots официальный <a href=http://stroyrem-master.ru/user/Terryirome/>http://stroyrem-master.ru/user/Terryirome/</a> С другой стороны, намного проще арестовать бездепозитные фриспины за регистрацию в казино и напрямик в начать вращать барабаны в превосходнейших слотах. Главная особенность спинов сомнений, собственно они предназначены для топовых автоматов. Удастся столько пройти вспомогательные раунды, но и увеличить необходимую выигрыша, заработать респины и другие внутриигровые презенты.Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских рублей. В критериях промоакции указано, собственно вейджер бездепозитного приза х20. Поэтому, дабы отыграть приз, игроку несомненно необходимо устроить ставок на 35*20=700 руб. сайт 1× slots casino В интернете очень много скриптовых вебсайтов, коие принадлежат мошенникам. Их основная задача – привлечь гэмблеров, пообещав столько великодушные подарки, хотя и крупные выигрыши. Так собственно некоторые веб-сайты предлагают получить за регистрацию и $1 000.Это раз из основных показателей привлекательности подарка. С завешенным коэффициентом в мастера не сумеют выполнить обстоятельства по отыгрышу. И маловажно, насколько привлекательно выглядит предложение – бездепозитный приз казино в объеме $500 либо $1 000. Чтобы новенькие получше вдумались, собственно же это вейджер, мы разберём на примере.
1хслотс рабочее зеркало на сегодня
Проверка занимает от нескольких мин. До нескольких дней, профессионалы техподдержки все запросить дополнительные документы либо инициировать короткое общение по Skype. Высокая конкурентность в сегменте азартных игр доказывает операторов завлекать клиентов разнообразными акциями. Благодаря этому у посетителей замечена вероятность получить призы в казино за регистрацию без депозита. Воспользоваться таким предложением возможно, минуя процедуру внесения денег на игровой счет, просто активировав аккаунт на веб-сайте. Наш гид по бездепам поможет избрать самую симпатичную бонусную программку, узнать верховодила получения такого вознаграждения и распорядиться им с наибольшей выгодой.Популярность интернет казино растёт и всё больше пользователей начинают увлекаться азартными забавами. Бездепозитные бонусы 2022 года, это оригинальные презенты за регистрацию. С их поддержкой новые игроки шансы получить безвозмездные вращения или средства на баланс за 1 регистрацию. С свет игорных заведений в онлайне, бездепозитные бонусы стали известнейшим методом привлечения игроков. Подобные акции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о которых мы расскажем. Наш вебсайт собрал превосходнейшие предложения из интернета на 2022 год. Воспользуйтесь хоть презентом и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша необходимо выполнить обстоятельства. <a href=http://zamok31.ru/bitrix/redirect.php?goto=http://ekspomebel.ru/bitrix/redirect.php?goto=http://bigcom.ru/bitrix/redirect.php?goto=https://telegra.ph/Osnovnaya-informaciya-kotoruyu-vy-dolzhny-znat-dlya-ehffektivnogo-SMS-marketinga-09–19>http://zamok31.ru/bitrix/redirect.php?goto=http://ekspomebel.ru/bitrix/redirect.php?goto=http://bigcom.ru/bitrix/redirect.php?goto=https://telegra.ph/Osnovnaya-informaciya-kotoruyu-vy-dolzhny-znat-dlya-ehffektivnogo-SMS-marketinga-09–19</a> Какие призы у еще получить кроме бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного бонуса, каждое онлайн казино предлагает игрокам выгодное предложение на первый депо, вы совершаете депозит, ваш депозит увеличивается в двое либо числе в 3, что, этим самым начать играть возможно с более солидной суммой, например же не запамятываем на вейджер на призы.Несмотря на то, что этот вариант стимуляции со стороны азартных платформ очень известен в похожих игр, далеко не почитателям казино известно, собственно являют собой бездепозитные призы казино и как именно их вполне эксплуатировать. 1×slots подтвердит вашу регистрацию если говорить Бонусные средства – небольшая сумма средств для старта в новеньком казино. На бонусные средства, обыкновенно разрешается играть во все забавы, кроме слотов с прогрессивным джекпотом и игр из раздела exist casino.
1×slots casino регистрация 1×slotscasino09k online
У каждого игорного клубы различные вейджеровые условия. Чтобы вы гарантировано смогли выполнить их, мы дадим количество советов. Если система начислила небольшую сумму, не делать немалые ставки – остановитесь на 10–30 центах. Как лишь сумеете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте играть. В противном случае чем приглядеться к иному автомату.При регистрации идет свидетельствовать только достоверную информацию. Когда учетная запись несомненно активна, замечен доступ в Личный кабинет. В нем возможно выбрать еденицу, ввести промокод и узнать подробные верховодила получения и отыгрыша бездепа. Краткая информация об промоакции нередко находится непосредственно на регистрационной форме. <a href=https://www.donchillin.com/space-uid-382497.html>1×slots казино зеркало</a> Многие азартные клубы ограничивают необходимую вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании акции, суммы Вы не сможете исключить. Разница будет аннулирована, Вы том не можете создавать на нее ставки. Баланс игрока пополняется на подходящую необходимую. К ней применяется вейджер, обозначенный в правилах акции. Вывести выигрыш возможно будет после такого, как юзер устроит требуемый объем ставок из собственных средств. В редких случаях бездеп трудится в формате Free Play. На счет юзера зачисляется большая сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по завершении сего периода сумма на счету будет превосходить изначальную, то разность можно будет исключить либо использовать для последующих ставок. 1хслот 1хслотс регистрация перейти на 1×slots <a href=http://kathkatherina.com/?s=%3Ca+href%3Dhttps%3A%2F%2Fdoctorlazuta.by%2Fblog%3E%D0%B1%D0%BB%D0%BE%D0%B3+%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0+%D1%8F%D0%BD%D0%B4%D0%B5%D0%BA%D1%81+%D0%B4%D0%B7%D0%B5%D0%BD%3C%2Fa%3E+%D0%B1%D0%BB%D0%BE%D0%B3+%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0+%D1%8F%D0%BD%D0%B4%D0%B5%D0%BA%D1%81+%D0%B4%D0%B7%D0%B5%D0%BD+%D1%87%D0%B8%D1%82%D0%B0%D1%82%D1%8C&x=0&y=0>http://kathkatherina.com/?s=%3Ca+href%3Dhttps%3A%2F%2Fdoctorlazuta.by%2Fblog%3E%D0%B1%D0%BB%D0%BE%D0%B3+%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0+%D1%8F%D0%BD%D0%B4%D0%B5%D0%BA%D1%81+%D0%B4%D0%B7%D0%B5%D0%BD%3C%2Fa%3E+%D0%B1%D0%BB%D0%BE%D0%B3+%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0+%D1%8F%D0%BD%D0%B4%D0%B5%D0%BA%D1%81+%D0%B4%D0%B7%D0%B5%D0%BD+%D1%87%D0%B8%D1%82%D0%B0%D1%82%D1%8C&x=0&y=0</a> Акции распространяются как на все забавы казино, так и на узкий перечень. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и. Промо может обхватывать разработки одного производителя. Бездеп не пересекается с иными промоакциями казино. Если на сайте предусмотрен кэшбек, он не начисляется за ставки, изготовленные бонусными деньгами. Для идентификации платежных реквизитов игрока имеет потребоваться пополнение счета на наименьшую сумму.Вейджер (либо вагер) ? это наименьшая сумма ставок, которую необходимо устроить для вывода валютного бонуса. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение.
1×slots зеркало подтвердит вашу регистрацию если говорить
В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая доля игры. Важно, зачастую бездепозитные призы в казино выдаются с ограничениями по наибольшей выплате. В среднем можно рассчитывать на прибыль в несколько тысяч рублей. Как исключить выигрыш с бонуса без депозита. Придётся подтвердить акк документально, в некоторых заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате либо прочтите в правилах.Основное верховодило получения бездепа ? творимый аккаунт должен быть у юзера первым и единственным. Наличие нескольких аккаунтов строго запрещено. Проверка проводится по имени, e-mal, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита нужно блюсти несложную последовательность поступков. <a href=http://www.jingsuanwu.com/home.php?mod=space&username=Harrywroke>http://www.jingsuanwu.com/home.php?mod=space&username=Harrywroke</a> 1×slots официальный demo регистрация в 1×slots casino Стоит отметить, что бездепозитный приз выдается лишь взрослым новеньким, которые, же, шансы пригласить собственных друзей и своих, также рассчитывающих на поощрительную программу преданности. Подобная технология была среди создающих онлайн-казино для популяризации и расширения трафика. Покер румы и спонсоры содействуют повышению своей посещаемости, путем вербования новых игроков. Бонусы – это уникальный шанс для вероятных участников игры, которые шансы опробовать софт покер рума и увериться, станут ли они в него выступать либо нет. Новый игрок испробует средства силы с настоящими оппонентами в казино.
<b>Смотреть еще похожие новости:</b>
<a href=https://australiantravelforum.com/Upload/showthread.php?tid=182345>1×slots сайт</a>
<a href=https://forum.graylite.com/viewtopic.php?p=297784#p297784>1×slots зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Даже не выиграв крупную необходимую, игрок интересно проведет время, изнутри исследует работу площадки, оценит геймплей автоматов. Все это без каких-то финансовых рисков. Быть в курсе превосходнейших промоакций легко. Достаточно периодически учить список новых онлайн казино с выводом приза без депозита в данном разделе. Если ординарными словами, бездепы – это определённая сумма средств или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать презенты. Но есть кое-какие аспекты. Существуют игорные дома, которые перед тем как начислить бонусы настоятельно привязать телефон, предоставить копии документов.
#7398 Charlesgunny
гта казино casino промокод <a href=https://specreporter.com/>букмекерскую контору пин</a> Петрова Ольга Викторовна порно порно с Елена Никитина, скелетонистка <a href=https://res-publika.com>кент casino</a> 1×bet официальный 1×bet xyz ramenbet casino казино онлайн порно с Алексей Миранчук (футбол) лучшая казино казино регистрации porno Юлия Пересильд
#7399 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7400 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7401 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее
Разные казино имеют собственные управляла по выведению выигрыша. Для бездепозитных бонусов принимаются достаточно высочайшие требования. Часто онлайн-казино советуют отыграть бонусное поощрение до 100 раз в игровых автоматах. Например, если игрок получил бесплатно 10 долларов, то необходимо несомненно отыграть их, поставив одну тысячу спинов по одному доллару любой. Стоит отметить, собственно не все казино выделяют вероятность играть на призы и не во всех развлекательных заведениях идентичные верховодила для отыгрывания. Некоторые казино запрещают выступать на призы в блекджек либо ограничивают ставки до пяти процентов, собственно существенно увеличивает в десятки раз число необходимых игр.Пoдтвepдить личнocть клиента. Для удачного вывода средств, необходимо подтвердить личность клиента. Нa этaпe вepификaции пpoфиля, работники службы защищенности должны убедиться, собственно у игрока более один акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не сможет вывести свой выигрыш, случае у него будет количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы. <a href=http://filmkachat.ru/>онлайн казино 1×slots</a> Но есть игорные заведения, которые готовы просто так жертвовать средства на забаву. Для сего достаточно сделать профиль. Чтобы вывести свой выигрыш, для сначала нужно выполнить обстоятельства отыгрыша, указанные в условиях получения бездепозитного депо.Бездепозитный бонус за регистрацию в казино с выводом средств в 2022 году — Наш ресурс предоставляет игрокам важную информацию о самых свежих, великодушных и проверенных призах в онлайн казино, коие обновляются каждый денек. <a href=https://rant.li/9fsnh6hu13>https://rant.li/9fsnh6hu13</a> 1 хслот регистрация в 1×slots casino <a href=http://www.ydelection.com/bbs/board.php?bo_table=free&wr_id=1369242>http://www.ydelection.com/bbs/board.php?bo_table=free&wr_id=1369242</a> Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную процедуру активации бонуса без депозита. Внимательно прочтите до конца. Многие новенькие проделывают оплошности на шаге регистрации и потому не могут получить презент.
1х слотс зеркало регистрация в 1×slots casino
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=64011&result=reply>1×slots зеркало которую указывали при регистрации кстати</a> 1×slots зеркало видели такую регистрацию на Не трудно догадаться, что not the slightest down payment bonuses практически никогда не случаются великими. Чаще всего идет о пяти–тридцати баксах (либо эквиваленте этой суммы в другой еденице). <a href=https://forum.spherecommunity.net/User-Forsedroppr>https://forum.spherecommunity.net/User-Forsedroppr</a> рабочее зеркало 1хслотс
1хслот 1хслотс регистрация перейти на 1×slots
Бездеп с фриспинами возможность обхватывать всю коллекцию игр на сайте или разработки одного провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш может быть выведен после такого, как юзер отыграет эту сумму. Возможность оценить глубокий возможностей слотов — главное достоинство этой разновидности. Игроку становятся доступны что, эти функции, коие отсутствуют в демонстрационном режиме, а возможность выиграть настоящие деньги добавляет ярких азартных чувств. Для как, чтобы отыграть необходимую вашего бездепозитного приза надо(надобно) выполнить обстоятельства вейджера. Очень нередко фриспины даются на конкретные слоты (book of ra, book of deceased, book of sun), избирайте разъем себя нраву, они очень красочные и высококачественные. Бездепозитные бонус может быть денежным так и повторяющий фриспинов на слотыТак что основное различие презента на депо от бездепа – обязательное пополнение счёта. Вы сможете внести депозит и преувеличить стартовый капитал или арестовать бездеп и всем не придётся рисковать своими сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начислит щедрое одобрение! <a href=https://nc750.ru/member.php?u=3584>https://nc750.ru/member.php?u=3584</a> На нашем сайте Вы отыщите перечень актуальных новых бездепозитных бонусов в казино 2022 года. Также, есть много неповторимых услуг, коие доступны только гостям нашего сайта в регистрации по нашей ссылке либо активации специального промокода. казино 1× slots официальный сайт 4. Заберите презент. Чаще всего бонус активизируется сразу последствии регистрации. Но посещают ситуации, когда надо(надобно) забежать в индивидуальный кабинет либо написать в службу поддержки.
1× слот зеркало
Для получения бездепа нужно пригласить в забаву по реферальной ссылке нового посетителя: он обязан зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на сумму, указанную в условиях акции. <a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=636729>1×slots бонус за регистрацию</a> Только выполнив все обстоятельства отыгрыша и дождавшись завершения проверки аккаунта, Вы можете оформить заявку на вывод средств и получить средства средства. Законодательство, регулирующее азартные забавы в различных государствах, оказывает на полномочия операторов. В итоге юзеры из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это имеет быть как полный отказ в доступе, так и невозможность загружать игры отдельных изготовителей.Кешбэк-бонус дает собой возврат фиксированного процента от ставки в случае проигрыша или же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не выше 10%. 1×slots casino регистрация <a href=http://bbs.guitarw.com/home.php?mod=space&uid=30918>http://bbs.guitarw.com/home.php?mod=space&uid=30918</a>
1×slots официальный сайт мобильная версия
Бонус с зачислением средств на счет выделяет больше свободы деяний. Пользователь сам избирает, каким образом воспользоваться подаренными своими. Здесь того все действовать лимитирования на список доступных игр, но обыкновенно эти рамки не например строги, как в промо с бесплатными вращениями.Бездепозитные призы, как уже понятно, являются уникальной вероятностью приступать к игровому процессу полностью безвозмездно, то есть играть в интернет казино бесплатно и на место свои незамедлительно последствии регистрации аккаунта. Автоматы с этим депозитом все стать прекрасной возможностью поиграть для почитателей пыла с определенными ограничениями в финансах. Но а случае вы уже профи по интернет казино, кликаем на красную кнопку «Получить» и Вы автоматически перейдете в интернет казино; <a href=http://www.qqqtttt.com/home.php?mod=space&uid=38625&do=profile>http://www.qqqtttt.com/home.php?mod=space&uid=38625&do=profile</a> Обычно показатель повыше, чем для призов на депозит. Не дивитесь, в он несомненно том х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных стран.Акции, посвященные календарным праздничным, посещают рассчитаны как на всех юзеров, так и на категории: примеру, презент на 8 марта девушкам-игрокам либо мужчинам на 23 февраля. 1×slots актуальное зеркало В наше время довольно просто получить бонус за регистрацию в казино. Практически каждый игорный дом с готовностью начисляет средства или безвозмездные вращения. Многие гэмблеры пользуются этим и не стыдятся региться в любом клубе с выгодными условиями. Кстати, это отличная вероятность выработать победную стратегию и сорвать джекпот.Некоторые клубы автоматически начисляют бонус на акк игрока после исполнения условий получения, хотя случаются истории, когда приз нужно активировать игроку самому. Есть количество способов активации бонуса:
<b>Смотреть еще похожие новости:</b>
<a href=https://thetechmodders.com/forums/viewtopic.php?t=41500>1×slots официальный сайт, скачать</a>
<a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=94922&p=1430716#p1430716>1×slots зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Получить Бездепозитный бонус в интернет казино дело 2-ух кликов. Другой момент, отыграть промо и соблюсти верховодила и обстоятельства отыгрыша. Под правилами подразумевается не только вагер, но и лимитирования по максимальной ставке. Мы понимаем, что в кино все ставят на зеро и выигрывают. Призываем не создавать подобного. Перед активацией бонуса прочтите управляла. Узнайте последующие факторы: Условия получения подарка, за регистрацию, за депо и многое. Ограничения по наибольшей ставке. Зачастую не выше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах можно отыгрывать вагер. Можно вращать автоматы, а вагер будет стоять на месте. Поэтому принципиально знать, в каких играх возможно осуществлять кратность денежного оборота. Выигрыши с призов без инвестициям всегда привязаны к требованию по ставкам и все быть обналичены лишь после исполнения данных требований.
#7402 Charlesgunny
1×bet на андроид бесплатно порно с Ирина Сидоркова <a href=https://rucriminal.info/>включи казино</a> порно с Анна Щербакова, фигуристка casino актуальное зеркало <a href=https://slon-ru.com/>casino скачать приложение</a> порно с Евгения Медведева казино ли porno Алена Михайлова 7k casino сайт 7k casino сайт леон букмекерская контора слот casino
#7403 Charlesgunnyhttp://filmkachat.ru
1х слот 1хслотс регистрация перейти на 1×slots
Когда речь о валютных призах, казино постоянно устанавливают обстоятельства вейджера, коие нужно выполнить, дабы исключить выигрыш. <a href=http://filmkachat.ru/>1х слот регистрация в 1×slots casino</a> При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие можно посвятить ирге в казино. <a href=https://www.haikudeck.com/the-power-of-3d-visualization-in-real-estate-marketing-and-sales-uncategorized-presentation-22d5852555#deck-outline>https://www.haikudeck.com/the-power-of-3d-visualization-in-real-estate-marketing-and-sales-uncategorized-presentation-22d5852555#deck-outline</a> Вы скорее, как и все предпочитаете получать подарки и бездепозитные бонусы казино. Игорные дома взяли в привычку одаривать гэмблеров приятными призами. Стать обладателем приветственного презента возможно за творенье профиля или пополнение счёта. Второй вариант более интересный, ведь клубы готовы удвоить депо! Но если вы новичок и только знакомитесь с миром пыла, какого-либо воспользуйтесь бонусом за регистрацию.Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в обязательном порядке нужно восполнить счет в казино. Для депозитных призов, данная процедура не нужна, так как депозит теснее изготовлен. x1 slots регистрация в 1×slots casino <a href=http://besstizhie.ru/user/Henrybut/>http://besstizhie.ru/user/Henrybut/</a> Если вы опытный игрок, вы должны знать, что бонус без депо – редчайшая находка. Тем не менее, мы в исследуем онлайн, дабы отыскать для вас превосходнейшие бездепозитные предложения.
1×slots casino регистрация на сайте
Как лишь вы отыграли вейджер и средства с бонусного баланса перебежали для на настоящий счет, Вы смело можете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (устроить минимальный депо к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депозитом).Подтвердите регистрацию, чтобы активировать Бездепозитный бонус с выводом, требуется наполнить личный профиль. Заполните порожние поля истинными данными о себе. 1×slots казино зеркало В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с безвозмездных вращений. Прибыль, коию Вы заработаете на этом бездепе можно назначать на вывод без какого или отыгрыша. <a href=http://bbs.topeetboard.com/home.php?mod=space&username=Donaldriz>http://bbs.topeetboard.com/home.php?mod=space&username=Donaldriz</a> Во время игры в казино, выигрыши, полученные благодаря бесплатным призовым фондам, суммируются и срабатывают в совместную сумму для отыгрывания. Однако, случае удача улыбнется и выйдет отыграть все призы, игровое заведение гарантированно допустит исключить финансовые свои. Сумма вывода будет зависеть от лимита, утвержденного именно в данном учреждении. Поэтому, пристально надо(надобно) разбирать верховодила выдачи безлимитных депозитов.В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая доля забавы. Важно, часто бездепозитные бонусы в казино выдаются с лимитированиями по максимальной выплате. В среднем можно рассчитывать на выгода в количество тысяч рублей. Как вывести выигрыш с бонуса без депозита. Придётся подтвердить аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается каждым игроком. О документальном подтверждении учетной записи спрашивайте в онлайн чате либо прочитайте в правилах. 1×slots официальный регистрация
1× slots зеркало
В большинстве заведений устроить это можно по e-mal, по номеру телефона, через социальную сеть или гугл-аккаунт. Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских руб. В критериях акции предписано, что вейджер бездепозитного бонуса х20. Поэтому, чтобы отыграть приз, игроку будет необходимо устроить ставок на 35*20=700 рублей.Подтвердите лицо, предоставив оператору казино средства паспортные данные. Инструкции обыкновенно несложные, основное — конкретно им стопам. Если написано, что «на фото должны быть видны все четыре угла страницы паспорта» — устройте непосредственно это фото. <a href=https://www.cfbwz.com/space-uid-71233.html>https://www.cfbwz.com/space-uid-71233.html</a> 1×slot регистрация Самые свежие бездепозитные бонусы в казино за регистрацию 2022 года с выводом выгоды находятся на данной странице. Посетитель имеет оценить условия получения и начать выступать на деньги без внесения депо. При данном игроку важно разуметь, на каких критериях и какими методами у вывести приобретенный выигрыш. Для этого необходимо оценить список присоединенных платежных систем.
1×slots зеркало на сегодня
Бездепы обыкновенно предлагают с отыгрышем — мгновенно вывести выигранные свои невозможно. Перевод средств со счета будет возможен после как, как юзер выполнит все притязания казино, а сумма имеет превышать установленного правилами лимита. Условиями акции фиксируются сроки, на которых заказчик вправе воспользоваться предложением. Обычно они не превышают нескольких дней в активации. 1×slots зеркало рабочее <a href=http://bbs.all4seiya.net/home.php?mod=space&uid=938893>http://bbs.all4seiya.net/home.php?mod=space&uid=938893</a>
1×slots быструю регистрацию а также мгновенное
Подарки на праздничные ? посвященные праздничным датам, требующие символического отыгрыша или начисляются без того. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду. Бездепозитный бонус по промо-коду будет доступен для забавы, только что, нет случае когда Вы активируете специальный бонусный код в разделе с призами или укажите промокод при регистрации на сайте. В некоторых случаях, не активации кода, понадобиться подтвердить контактные данные игрока и наполнить анкету клиента.В большинстве заведений сделать это возможно по адресу электронной почты, по номеру телефонного, спустя социальную сеть либо гугл-аккаунт. <a href=http://o96737zj.beget.tech/user/PatrickMeark/>http://o96737zj.beget.tech/user/PatrickMeark/</a> 1 хслот регистрация в 1×slots casino Многие игроки, оценив перечень казино, остаются играть в нем и дальше ? на это и направлено любое рекламную. Постоянные посетители вносят депозиты и проделывают ставки, обеспечивая длительную прибыль оператора. То есть, казино раздают бездепы свежим юзерам для формирования приклнной аудитории.
<b>Смотреть еще похожие новости:</b>
<a href=http://b2s.bulwork.com/node/1581?page=110#comment-24012>1хслотс рабочее зеркало</a>
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=56281>1×slots зеркало регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Каждый компьютерные должен сначала отчетливо выучить условия по получению и отыгрышу приглянувшегося презента. Если всё устраивает, поспешите отобрать благотворительные спины за регистрацию в казино без депозита с выводом и без отыгрыша и напрямик сейчас начать вертеть барабаны лучших слотов. Способы получения бездепа различаются в зависимости от вида бонуса, который понравился игроку. Но для так надо(надобно) быть зарегистрированным в законном онлайн-казино и доказать свою личность. В общем облике пошаговая аннотация для получения бездепозитного приза смотрится так:
#7404 Charlesgunny
порно с Варвара Субботина казино гта 5 <a href=https://rucriminal.info/>казино рояль смотреть</a> Александра Бортич гама казино <a href=https://m.repost.news/>порно с Евгений Малкин (хоккей)</a> порно с Каролина Севастьянова порно с Матвей Сафонов (футбол) порно с Анастасия Потапова, теннисистка лучшие казино бесплатно online casino официальный Комарова Наталья Владимировна порно 1×bet слоты
#7405 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7406 Charlesgunnyhttp://filmkachat.ru
1×слотс казино
Бывают ли бездепозитные призы без вейджера? Бывают, если у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино. <a href=http://filmkachat.ru/>1×slots казино зеркало</a> <a href=http://xmariox.webd.pl/viewtopic.php?f=28&t=177119&sid=e241a1176290e42a10b8564653452fff>http://xmariox.webd.pl/viewtopic.php?f=28&t=177119&sid=e241a1176290e42a10b8564653452fff</a> Акционные предложения от казино есть в разных форматах. Часто бонусы даются в обмен на депо. Игрок вносит платеж и получает деньги, благотворительные вращения прочие одобрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — картина бонуса, кот-ый гарантирован за исполненье конкретных деяний на сайте: 1 хслот регистрация в 1×slots casino <a href=https://thirdparty.yeelight.com/topics/9351/sekrety-vykupa-avto-v-polshe>https://thirdparty.yeelight.com/topics/9351/sekrety-vykupa-avto-v-polshe</a>
1×slots casino регистрация на сайте
<a href=https://www.reisezielforum.de/viewtopic.php?t=355944>1хслотс зеркало на сегодня</a> 1×slots промокод при регистрации 2025 <a href=https://lavteam.org/user/Porsedropsa/>https://lavteam.org/user/Porsedropsa/</a> Каждый игры обязан сначала детально выучить условия по получению и отыгрышу приглянувшегося подарка. Если всё организует, поторопитесь арестовать бесплатные спины за регистрацию в казино без депозита с выводом и без отыгрыша и напрямик момент начать вращать барабаны топовых слотов. 1×slots бездепозитный бонус за регистрацию
casino 1×slot
Бесплатные призы казино без депозита возможно получить в виде денежных средств на бонусный счет (исключить их можно лишь последствии отыгрыша), фриспинов, забавы или кешбэк-бонуса. <a href=https://raygunmvp.com/user/geraldorefs-geraldorefs/?um_action=edit>https://raygunmvp.com/user/geraldorefs-geraldorefs/?um_action=edit</a> За привлечение друга ? в партнерской программы клиент получает вознаграждение за привлечение новых пользователей.Для казино, работающих интернет, бездепозитные бонусы необходимы для привлечения свежих клиентов. Предложение сыграть на слотах без надобности внесения реальных средств — работающий метод для повышения интереса к компании. После отыгрыша бездепа великоват шанс, собственно игроку понравится и он продолжит выступать в казино, только сейчас теснее на собственные средства. 1хслотс официальный сайт зеркало Казино выделяет возможность заработать и вывести настоящие средства на бездепозитных призах. Обычно, это малозначительная сумма, которую казино возможность себе разрешить презентовать игроку.Перечисленные выше главные свойства сочетают практически любой бонус и являются стандартными для бездепозитных бонусных начислений в казино.
1хслотс казино зеркало
Классическая разновидность приза за создание аккаунта. Его преимущество содержится том,, собственно клиент возможность других подбирать аппараты и делать ставки в их. Иногда список игровых автоматов ограничен оператором, но все одинаково это другого, как, чем единственный доступный разъем, как в случае с внедрением фриспинов. Для получения приза нужно пригласить в игру свежего клиента. Казино начисляет пригласившему фиксированный процент от взносов приглашённого в виде приза: почаще всего его размер не выше 10%. Срок действия приза в большинстве случаев не превышает месяца: пригласивший получает приз в зависимости от проигранных ставок приглашённого в первый луна игры. Активация случается счет промокодов, коие вводятся в собственном кабинете последствии регистрации. Среди спецпредложений в перечне Casino.ru находятся эксклюзивные промокоды, коие доступны лишь посетителям портала. Другие методы начисления средств ? автоматическая активация сразу последствии сотворения аккаунта и получение дара по запросу в службу технической поддержки. x1 slots 1хслотс регистрация перейти на 1×slots <a href=http://www.dllaoma.com/home.php?mod=space&uid=373444>http://www.dllaoma.com/home.php?mod=space&uid=373444</a> Например, игрок получил 500 руб. При создании аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 рублей, потребуется сделать 875 спинов для полного отыгрыша.Бездепы обычно предлагают с отыгрышем — быстро исключить выигранные свои невозможно. Перевод денег со счета будет возможен последствии того, как пользователь выполнит все требования казино, а сумма имеет быть выше установленного правилами лимита. Условиями промоакции фиксируются сроки, протяжении коих заказчик вправе пользоваться предложением. Обычно они не превосходят нескольких дней в активации.
1×slot зеркало рабочее этих способов предполагает регистрацию
Основное отличие сомнений, собственно для получения бездепа не пополнять баланс в казино. Но не этого, есть ряд и других отличий:Каждый из бездепозитных призов без пополнения 2022 содержит собственный определенный вейджер для отыгрыша, так же в любом казино он уточняется индивидуально — где то он х55 а кое-где х30, повторюсь всюду по разному! Сроки активации бонуса уточняются любым казино, но почаще всего они не превышают недели с этапа получения. Игроку обязательно нужно применять бездеп на обозначенного срока, в ином случае бонус просто пропадет. Каждый бонус можно получить лишь раз раз, поэтому если не применять бездеп в срок, у игрока не будет 2 шанса им пользоваться. <a href=http://woo.amonds.kr/bbs/board.php?bo_table=free&wr_id=234459>http://woo.amonds.kr/bbs/board.php?bo_table=free&wr_id=234459</a> 1х слотс зеркало регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.bedwantsinfo.nl/thread-705549.html>казино 1×slots</a>
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-955#post-30996>1×slot регистрация</a>
<a href=https://thetechmodders.com/forums/viewtopic.php?t=27382>1хслотс казино зеркало</a>
<a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1×slots рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Список например именуемых «разрешенных землель» прилагается к правилам бонусной программы игорного портала. Обязательно выясните, распространяются ли на вас похожие санкции. Для вывода средств приз надо(надобно) будет отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариантами отыгрыша бездепозитного приза до его получения, дабы избежать конфликтных обстановок.
#7407 Ctgroup_arroPhttps://www.ctgroup.kz/
Доброго времени суток! Хочу поделиться полезной и нужной новостью для школьников, детей, студентов и взрослых! Уважаемые читатели, что поделать, если не получается понять и изучить английский, русский, казахский язык? Что делать если не получается самостоятельно подготовиться к экзаменам, зачетам или ЕГЭ? К нашей радости и счастью есть отличный Образовательный центр в Атырау и в Алматы, который вас профессионально и быстро обучит и подготовит к любым видам экзаменам. В общем, если вы хотите найти, образовательный центр или образовательный языковой центр и т.д., например: <a href=https://www.ctgroup.kz/kursy-anglijskogo/>английский язык для детей курсы</a> Тогда вам обязательно нужно прямо сейчас перейти на сайт Образовательного центра CtGroup и узнать все подробности по тесты, подготовка, экзамены, курсы, обучение, уроки, языковые курсы в Алматы и в Атырау и т.д. https://www.ctgroup.kz/ . Обязательно переходите на сайт Образовательного языкового центра Caspian Training Group изучайте информацию и сохраняйте в закладки, не забудьте записать номер телефона и адрес сайта. Кстати, все можно сделать онлайн, т.е. удалено, совершенно не нужно ни куда выходить и ни куда ехать из офиса или дома. Увидимся!
#7408 Charlesgunny
яндекс игры казино порно с Захарова Мария Владимировна <a href=https://t.me/vchkogpu_ru>Хорова Наталья Александровна порно</a> песня казино porno Юлия Пересильд <a href=https://m.repost.news/>порно с Алина Загитова, фигуристка</a> порно с Петр Ян (ММА) казино играть сайт букмекерской конторы казино рублях сайт винлайн букмекерская контора 1×bet регистрация лучшие онлайн казино
#7409 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7410 Charlesgunnyhttp://filmkachat.ru
1х слот регистрация в 1×slots casino
Операторы гемблинга заявляют, собственно например они сражаются с бонус-хантерами. Впрочем, критики считают, что этим казино пытаются устроить из случайного гостя постоянного игрока. <a href=http://filmkachat.ru/>1 х слотс зеркало</a> У любого игорного клубы разные вейджеровые обстоятельства. Чтобы вы гарантировано смогли выполнить их, мы дадим некоторое советов. Если система начислила небольшую сумму, не стоит делать великие ставки – остановитесь на 10–30 центах. Как только сможете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте выступать. В неприятном случае другого приглядеться к иному автомату.Как лишь вы отыграли вейджер и свои с бонусного баланса перешли вам на реальный счет, Вы отважно сможете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (устроить минимальный депо к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депозитом). <a href=https://www.babelio.com/livres/Maupassant-Bel-Ami/2125/forum/42180/Exploring-Architectural-Rendering-From-Concept-to>https://www.babelio.com/livres/Maupassant-Bel-Ami/2125/forum/42180/Exploring-Architectural-Rendering-From-Concept-to</a> Такие поощрения разрешают даром протестировать новое казино, разобраться с игровым ходом онлайн слотов, заработать и вывести небольшую необходимую средств. 1×slots зеркало регистрация в 1×slots casino <a href=http://art-metall.su/user/Glennpoige/>http://art-metall.su/user/Glennpoige/</a> Обычно бездепозитные акции от казино, прибывают на эл. Почту в дни рождения или дни. В неких онлайн казино можно адресоваться в чат и как неизменному игроку, вероятно вас предложат бездепозитное предложение.Выбирайте превосходнейшие безвозмездные бонусы счет обзоров на Casinoz – и пусть для сопутствует счастье при отыгрыше бонусных кредитов!
1×slots зеркало которую указывали при регистрации кстати
Для отыгрыша бонуса казино обязует игрока сыграть на сумму, в несколько один превосходящую необходимую полученного бонуса — здесь выгода компании явна.Приветственный бездеп предоставляется любому игроку только один раз. Казино борются с так именуемыми бонусхантерами (от англ. Bonus Hunter — охотник за бонусами), пытающимися заводить множественные аккаунты для надувательства оператора и повторного получения дара. Исключить сходственные действия разрешает верификация данных. Администрация вправе потребовать у клиента подтвердить индивидуальные данные, обозначенные при регистрации. 1×slots регистрацию более популярный вариант это <a href=https://urganchshahar.uz/user/Oscarkes/>https://urganchshahar.uz/user/Oscarkes/</a> Чаще всего, популярные сервисы, такие как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно неотъемлемое правило. Финансовые средства выводятся только спустя что, эту платежную систему, которой пользовались для пополнения депо. Если же игрок получил бездепозитный покерный бонус, требуется пополнить счет на минимальную необходимую, кот-ая составляет обычно десять долларов. 1хслотс рабочее зеркало Получать информацию о самых выгодных бонусах возможно без неизменного прогноза новостей казино. Мы брали эту задачку на себя и постоянно смотрим за предложениями операторов, выбирая наихорошие из них. В этом разделе собраны последние бездепы, промокоды к ним и условия их активации. Список акций периодически пополняется. В топ вошли самые новые бездепозитные бонусы за регистрацию в казино 2020, кратковременные и закрытые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и критериям. Если срок деяния промоакции истек, она удаляется из списка.Также бездепозитные призы имеют служить методом вернуть к ирге клиентов, пока приостановивших своё сотрудничество с фирмой: уведомление о бездепе поступает на мобильный телефон или почту.
1×slots зеркало быструю регистрацию а также мгновенное
Но такие рамки не смущают и хайроллеров, потому коэффициенты на слотах разрешают рассчитывать на крупные выигрыши, ну неких автоматах разыгрывается передовой джекпот. <a href=https://archives.megadiyhelp.com/member.php?158878-AshleyJax>https://archives.megadiyhelp.com/member.php?158878-AshleyJax</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots Подтвердите личность, предоставив оператору казино средства паспортные данные. Инструкции обычно легкие, главное — конкретно им стопам. Если написано, собственно «на фото обязаны быть заметны все хорошо угла страницы паспорта» — устройте непосредственно такое фото.
сайт 1× slots casino
Превышение максимальной ставки при отыгрыше. Система механически не предостерегает о превышении ставки, потому о несоблюдении управлял игрок может узнать теснее последствии подачи запроса на вывод средств. <a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=132067>1×slots акции</a> 1 хслот регистрация в 1×slots casino <a href=http://alexanderramm.com/index.php?subaction=userinfo&user=drunklounge60>http://alexanderramm.com/index.php?subaction=userinfo&user=drunklounge60</a>
1×slot казино зеркало
<a href=http://avto.izmail.es/user/CraigFrier/>http://avto.izmail.es/user/CraigFrier/</a> Для получения бездепа необходимо пригласить в игру по реферальной ссылке нового клиента: он обязан зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на необходимую, обозначенную в критериях акции. 1×slots официальный зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://naturetour.ru/communication/forum/messages/forum3/message24381/6072–1×slots-ofitsialnyy-sayt-mobilnaya-versiya?sessid=291a41611e7d58a4e4b8f30fbf4e2b86&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1×slots официальный сайт мобильная версия</a>
<a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1×slots подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, a зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. В онлайне слишком количество скриптовых сайтов, которые принадлежат плутам. Их главная цель – заинтересовать гэмблеров, пообещав не щедрые презенты, но и солидные выигрыши. Так что кое-какие сайты предлагают получить за регистрацию том $1 000.
#7411 Charlesgunny
Москалькова Татьяна Николаевна порно 1×bet рабочее на сегодня <a href=https://slon-ru.com/>фреш казино</a> самое казино порно с Александр Головин (футбол) <a href=https://rucriminal.info/>1×bet вход</a> casino на телефон мелбет букмекерская контора казино сегодня букмекерские конторы бет букмекерская контора ставки порно с Евгений Малкин (хоккей) retro casino
#7412 FosterDok
amoxicillin capsules 250mg <a href=" http://xy.ksjiyi.com/home.php?… „>buy amoxicillin online mexico</a> or <a href=“ http://englmaier.de/url?… ">over the counter amoxicillin</a> https://www.cheapassgamer.com/redirect.php?… amoxicillin without a doctors prescription <a href=http://extern.allgaeu.info/index.shtml?seite=lis_wintersportbericht&url=amoxstar.com&id=11981>buy amoxicillin 500mg canada</a> amoxicillin 500mg capsules and <a href=https://quantrinet.com/forum/member.php?u=720477>amoxicillin 500 tablet</a> where can i buy amoxicillin without prec
#7413 Daniellef
http://clomidonpharm.com/ can i get clomid no prescription
#7414 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на сайте 1×slots ru com
Важно, удостоверьтесь сомнений, что раньше не регистрировались в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи. <a href=http://filmkachat.ru/>онлайн казино 1×slots</a> Чаще всего, популярностью сервисы, эти как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно неотъемлемое правило. Финансовые свои выводятся лишь спустя ту платежную систему, коей огромной для пополнения депо. Если же игрок получил бездепозитный покерный приз, потребуется восполнить счет на наименьшую сумму, кот-ая составляет обыкновенно десять долларов. <a href=https://start.me/w/wJxxbP>https://start.me/w/wJxxbP</a> 2. Создать новый профиль. Для регистрации надо(надобно) наполнить небольшую анкету либо зайдите в личный кабинет при помощи социальных сетей; 1×slots зеркало рабочее на сегодня <a href=https://auto69.ru/communication/forum/user/1295/>https://auto69.ru/communication/forum/user/1295/</a> Иногда в поощрения за регистрацию шансы выдаваться билеты для роли в турнирах. Условия их проведения очень выделяются, поэтому мы советуем ознакомиться с любым предложением отдельно.
1×slots регистрация 1×slotscasino 56 online
Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте обстоятельства – они нередко выдаются для неких машин. В зависимости от клуба продоставляется создавать конкретное число ставок. Кстати, современные игорные жилища выделяют возможность заводить «одноруких злодеев». 1× slots зеркало <a href=https://directory8.org/details.php?id=296502>https://directory8.org/details.php?id=296502</a> 1×slots зеркало регистрация в 1×slots casino
1×slots зеркало видели такую регистрацию на
Чаще всего применяются коды. Их надо(надобно) вносить в специальные окна регистрационной анкеты, в речь о пригласительных бонусах, либо в особом разделе собственного кабинета игрока.Чтоб получить крупный выигрыш, выбирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша. В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и когда неоднозначных ситуаций нет способности куда-то пожаловаться и обосновать собственную правоту.Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в социальных сетях, установку мобильного приложения или официального клиента для ПК. В большинстве казино действуют программки преданности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на следующий уровень часто с выдачей бездепа. <a href=http://www.apressadadesainha.com/2021/09/polos-masculinas-da-soinyou-mens-polos.html>http://www.apressadadesainha.com/2021/09/polos-masculinas-da-soinyou-mens-polos.html</a> Возьми собственный презент. Чаще всего приз активизируется сразу последствии регистрации. Но бывают истории, когда надо(надобно) зайти в собственный кабинет или написать в справочную службу.Бездепозитные бонусы отличный вариант бесплатной забавы в игровые автоматы. Многие пользователи сети не понимают, собственно в казино можно начать играть безусловно даром, а потом исключить выигрыш на банковскую карту или электронный кошелек, другие не доверяют интернет казино, а третьи удачно играют и выигрывают – и тотчас довольно большие суммы. 1×slots зеркало 1хслотс регистрация перейти на 1×slots
1хслотс регистрация в 1×slots casino
рабочее зеркало 1хслотс <a href=http://maxima-shop.ru/bitrix/redirect.php?goto=http://pro-halal.ru/bitrix/rk.php?goto=http://ar-asmar.ru/bitrix/rk.php?goto=https://telegra.ph/Poluchenie-sertifikata-na-regionalnyj-materinskij-semejnyj-kapital-09–23>http://maxima-shop.ru/bitrix/redirect.php?goto=http://pro-halal.ru/bitrix/rk.php?goto=http://ar-asmar.ru/bitrix/rk.php?goto=https://telegra.ph/Poluchenie-sertifikata-na-regionalnyj-materinskij-semejnyj-kapital-09–23</a> Для всех бездепозитных призов функционирует максимальный лимит на выигрыш. Он указывает максимальную сумму, которую вы сможете получить, играя на бонусные кредиты. Как лишь вас удастся выполнить притязания вейджера, допустимый максимум несомненно переведен с бонусного счета на главный, а остаток несомненно списан.
1×slots официальный сайт мобильная версия
В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с безвозмездных вращений. Прибыль, коию Вы заработаете на таком бездепе возможно назначать на вывод без какого либо отыгрыша. Как только вы отыграли вейджер и средства с бонусного баланса перебежали для на настоящий счет, Вы отважно можете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (устроить минимальный депозит к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депо).Этот тип приза будет добавлен на Ваш аккаунт в удачной процедуры регистрации с использованием номера аппарата. Если выбрать другой способ творения учетной записи, бездеп не несомненно добавлен на Ваш аккаунт. <a href=https://boobs.red/user/TerryQuady/>https://boobs.red/user/TerryQuady/</a> Шаг 5. Использование и отыгрыш. Бездеп обязан быть использован в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера. 1×slots промокод при регистрации Несмотря на то, собственно этот вариант стимуляции со стороны азартных платформ довольно популярен в сфере подобных игр, далеко не поклонникам казино ведомо, собственно себе бездепозитные призы казино и как именно их вероятно эксплуатировать.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.eliteshost.com/showthread.php?tid=17199>1×slots зеркало регистрация то дальше необходимо пройти</a>
<a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=954115#pid954115>1х слот 1хслотс регистрация перейти на 1×slots</a>
<a href=http://check2go.net/my-account/>рабочее зеркало 1×slots</a>
<a href=http://swissairways-va.com/phpBB3/viewtopic.php?p=1658812#p1658812>1×slots зеркало этих способов предполагает регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подобные бонусы без депо предоставляются на более выгодных условиях. Зачастую они крупнее, а условия отыгрыша наименее строгие. Мы собрали и опубликовали перечень лучших бездепозитных казино с бонусами за регистрацию, коие гарантируют щедрые выигрыши и мгновенные выплаты.
#7415 Charlesgunnyhttp://filmkachat.ru
1×slots мобильная версия войти казино
Но есть игорные заведения, коие готовы просто так жертвовать средства на забаву. Для этого достаточно создать профиль. Чтобы вывести собственный выигрыш, вас сначала необходимо выполнить условия отыгрыша, указанные в критериях получения бездепозитного депо. <a href=http://filmkachat.ru/>1хслотс рабочее зеркало</a> Бонусные деньги – небольшая сумма денег для старта в новом казино. На бонусные деньги, обыкновенно разрешается выступать во все игры, не слотов с прогрессивным джекпотом и игр из раздела exist casino.Для доказательства электронной почты, просто перейдите по интенсивной ссылке в письме, полученном от игрового заведения. <a href=https://thecontingent.microsoftcrmportals.com/forums/general-discussion/e700d610–6e88-ef11–9443–000d3a59cb8e>https://thecontingent.microsoftcrmportals.com/forums/general-discussion/e700d610–6e88-ef11–9443–000d3a59cb8e</a> 1×slots зеркало на сегодня <a href=http://biyografiforum.10tl.net/member.php?action=profile&uid=3336>http://biyografiforum.10tl.net/member.php?action=profile&uid=3336</a>
1хслотс официальный сайт зеркало
Для получения бонуса надо(надобно) ознакомиться с программой преданности казино и сделать ставки на необходимую, необходимую для перехода на грядущий уровень.Помните, что в некоторых играх сумма ставки идет в зачет вейджера лишь отчасти. Так, в настольных и карточных забавах лишь от 5% до 50% суммы ставки числятся как отыгранные средства, тот как в слотах идет в зачет все one hundred percent суммы. <a href=http://216.38.0.7/memberlist.php?mode=viewprofile&u=4020>1×slots casino регистрация</a> 1×slots регистрация на официальном сайте Бонус за регистрацию в казино выдается только один один на одного игрока. Но посещают вспомогательные акции, масштабах коих бездепы расступаются для неизменных посетителей и такие презенты Вы сможете получить более 1-го раза. <a href=http://www.apressadadesainha.com/2021/09/polos-masculinas-da-soinyou-mens-polos.html>http://www.apressadadesainha.com/2021/09/polos-masculinas-da-soinyou-mens-polos.html</a> Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Чтобы получить вероятность исключить выгода с бездепозитного бонуса в казино, необходимо выполнить ряд условий: 1×slots зеркало регистрация в 1×slots casino Также бывают случаи, когда казино начислит оговоренный бонус последствии регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам.Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских рублей. В критериях промоакции предписано, собственно вейджер бездепозитного приза х20. Поэтому, чтобы отыграть бонус, игроку будет нужно устроить ставок на 35*20=700 рублей.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Заработать на бездепозитных призах за регистрацию в казино может любой юзер, достигший совершеннолетия. Ну и окончательно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: подобная добродушие повышает степень преданности клиентов к фирмы.Вывод выигрыша с бездепозитных призов казино – щедрый презент от азартных клубов. Но дабы вывести свой доход, необходимо выполнить ряд условий: <a href=http://gticlub.lv/user/MichaelcaX/>http://gticlub.lv/user/MichaelcaX/</a> 1×slots casino зеркало Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша бонусов. Заведения постоянно устанавливают наивысшую ставку, возможную по условиям вейждера.
1×slots регистрация
Как верховодило, при выводе финансов, от играющего потребуется только устроить наименьший лепта чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом индивидуальный счет. В случае установленного лимита на необходимую вывода выигрыша с бездепозитного приза, игрок не сможет исключить больше заявленной суммы.Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. Для верификации аккаунта надо(надобно) предоставить спецам технической помощи отсканированную копию паспорта и счета за коммунальные предложения, а также фотку банковской карты или экрана страницы электронного кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для доказательства личности. 1хслотс зеркало <a href=http://www.ocide.org/forum/index.php?action=profile;u=14071>http://www.ocide.org/forum/index.php?action=profile;u=14071</a> Реже призы без депо начисляются неизменным игрокам. С их подмогою администрация старается удержать ценных клиентов либо желает поблагодарить за преданность правильных посетителей. Но гораздо чаще для похожих целей используются эти промоакции:
1×slots официальный сайт мобильная версия скачать
Для доказательства электронной почты, просто перейдите по интенсивной ссылке в послании, полученном от игрового заведения. Бонусы без депозита при регистрации числятся самыми красивыми как для опытных игроков, например для и новичков. Получив это вознаграждение, клиент может выступать на реальные средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а также условия их активации и выигрыша.Каждый новичок и профессиональный игрок мечтают быстро стартануть и начать делать настоящие ставки. Для сего достаточно арестовать презент, за который надо платить. В зависимости от игровой платформы, нужно сделать профиль, привязать email или телефонный. После этого администрация начислит щедрое вознаграждение в виде бесплатных вращений или виртуальных кредитов. <a href=http://yunduost.com/home.php?mod=space&uid=20316>http://yunduost.com/home.php?mod=space&uid=20316</a> 1×slots casino регистрация Хотя благотворительные призы начисляются без депо, не исключено, что для понадобиться вносить средства. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь после того, как новый клиент раз пополнит игровой счет.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.arka-bahce.org/forum/showthread.php?p=766397#post766397>1× slots официальный</a>
<a href=https://forum.pmpobc.ca/index.php?topic=132078.new#new>1×slots скачать на айфон</a>
<a href=https://mcmon.ru/showthread.php?tid=103905>1×slots сайт</a>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-4977/#comment-594785>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
За вербование друга ? в рамках партнерской программки клиент получает вознаграждение за вербование новых пользователей. Бездепозитные призы за регистрацию в игровых автоматах для хозяев онлайн-казино являются частью маркетинговой кампании, направленной на повышение аудитории вебсайта. Так они продвигают средства бренды и завлекают свежих посетителей.
#7416 Charlesgunny
самое казино Мухтиярова Елена Вячеславовна порно <a href=https://res-publika.com>online casino</a> букмекерские контора ап букмекерская контора фонбет официальный сайт <a href=https://sovsekretno.net/>porno Илона Маркова, хоккеистка</a> винлайн букмекерская контора официальный сайт 7k casino скачать самое казино casino на телефон слот casino casino daddy казино рулетка
#7417 Holographicnjmhttp://Ваша сссылка с HTTP:// БЕЗ закрывающего слеша
bride, Julie d'Angenne.
#7418 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало рабочее регистрации на телефон придет
Обычно бездепозитные акции от казино, прибывают на эл. Почту в деньки рождения либо праздники. В неких онлайн казино возможно адресоваться в чат и как постоянному игроку, вероятно вам предложат бездепозитное предложение.Бездепы имеют заходить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами. <a href=http://filmkachat.ru/>1× slots регистрация в 1×slots casino</a> Но существуют азартные заведения, готовые просто так вручить деньги на забаву. Для этого довольно создать профиль. Чтобы вывести выигрыш, сначала необходимо выполнить вейджеровые условия, прописанные в условиях получения бездепа.Составленный специалистами Casino.ru список онлайн-казино с бездепозитным призом дозволяет игрокам сравнить спецпредложения разных операторов. <a href=https://telegra.ph/How-Revit-Family-Creation-Benefits-Manufacturers-in-a-Digital-World-10–13>https://telegra.ph/How-Revit-Family-Creation-Benefits-Manufacturers-in-a-Digital-World-10–13</a> Вообще перейдя в казино — правила одинаковы в получении бездепозитных призов, в стереотипные верховодила входит: доказать эл. Почту и аппарат, заполнить собственный личный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ. 1× slots сайт <a href=http://troderstro.ru/user/MichaelDooms/>http://troderstro.ru/user/MichaelDooms/</a> Вообще перейдя в казино — управляла схожи в получении бездепозитных бонусов, в стандартные правила заходит: подтвердить эл. Почту и телефон, наполнить свой индивидуальный профиль, активировать рекламную код либо активировать предложения во вкладке БОНУСЫ.
1 х слотс зеркало
В реальное время получить приз за регистрацию в казино довольно просто. Почти любой игорный жилище с готовностью предоставит деньги либо безвозмездные вращения. Многие игроки используют данным и не смущяются регистрироваться в любом клубе с выгодными критериями. Кстати, это замечательная возможность придумать выигрышную тактику и сорвать куш. <a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=790403>1×slots официальный сайт скачать на айфон</a> 1×slots официальный сайт мобильная версия К примеру, игроку выдаются бесплатные средства в заведении в объеме пятидесяти либо 100 долларов (вейджер на которые сочиняет 100х). То есть, любому новоприбывшему игроку выскакивает привлекающая иллюстрация, кот-ая сулит выплату всех зачисленных фирмой средств. Не стоит заострять на казино приз за регистрацию без депо с чрезмерно великой либо очень малеханькой суммой призов, поэтому что, числе тщательно исследовав все условия, тут всего, несомненно какой-то подкол.Не сложно догадаться, что no deposit bonuses практически разу не случаются немаленькими. Чаще всего идет о пяти–тридцати долларах (или эквиваленте этой суммы в иной валюте). <a href=https://www.metal-tracker.com/forum/member.php?action=profile&uid=927407340>https://www.metal-tracker.com/forum/member.php?action=profile&uid=927407340</a> 1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, если не хотите замерзнуть жертвой жуликов или впустую израсходовать время; 1×slots регистрация на сайте 1×slots ru com
1хслот зеркало сайта
Существуют казино с призом за регистрацию, в которых очень известны фриспины в онлайн казино впоследствии регистрации в конкретных забавах. Они встречаются числе чаще безвозмездных поощрений или традиционных бонусов в казино без вложений. Например, игрок регистрирует счет, на кот-ый начисляются безвозмездные забавы, приз за регистрацию повторяющий безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса геймер выигрывает истинные средства, коие в последствии можно удачно исключить из заведения на собственную платежную систему. То есть, есть все шансы исключить средства без рисков собственными деньгами. Регистрация, какую игры получит призы, займет несколько, а благодаря этому можно прирастить 5 евро поощрений до тысячи и без всяких заморочек исключить их. У нас на веб-сайте Вы найдете перечень призов без депо в проверенных казино и доскональную информацию то как их получить и использовать. <a href=http://xn–e1aaqjt5d.xn–p1ai/redirect?url=http://kolomna-speed-skating.ru/bitrix/redirect.php?goto=http://avtolab74.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/butRBv_M1Zs>http://xn–e1aaqjt5d.xn–p1ai/redirect?url=http://kolomna-speed-skating.ru/bitrix/redirect.php?goto=http://avtolab74.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/butRBv_M1Zs</a> Для вывода средств бонус надо(надобно) несомненно отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариациями отыгрыша бездепозитного приза до его получения, чтобы избежать конфликтных ситуаций. 1×slots рабочее зеркало на сегодня Ещё одно распространённое акционное предложение – симпатичный подарок с неблаговидными требованиями. К примеру, клуб сулит $100 виде бездепа, но с вейджером х80 либо х100. Отыграть подобный вейджер практически невероятно и поэтому превосходнее концентрироваться на более заманчивых акциях.1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, в не хотите стать жертвой мошенников либо впустую потратить время;
1×слот регистрация в 1×slots casino
Наиболее пользующиеся вознаграждения между гэмблеров – бездепозитные призы казино. Это не удивительно, как можно получить благотворительные вращения либо виртуальные кредиты, и этом не придётся пополнять счёт, рисковать собственными средствами. Удастся насладиться различными веселиями причем выиграть крупную необходимую, избегая серьёзного риска.Таким образом, заведение пытается показать себя своим потенциальным игрокам, а такой маркетинговый ход как казино приз без депозита за регистрацию завлекает довольно много внимания к игорному заведению и обеспечивает неизменный струю свежих гостей и грядущих посетителей игрового интернет клуба. Бонус за регистрацию в казино без депо с выводом средств нужно отыграть. Зачастую для отыгрыша может потребоваться сделать ставки на сумму, в несколько десятков один превосходящую сумму бонуса либо выигрыша.На бонусные начисления могут быть установлены вспомогательные ограничения, которые Вы не сведению при отыгрыше. Пока бонус полностью не отыгран — деньги из казино не выводятся. 1×slots зеркало на сегодня <a href=https://wavedream.wiki/index.php/Shisha_Tobacco_From4_Eur>https://wavedream.wiki/index.php/Shisha_Tobacco_From4_Eur</a> Даже не выиграв солидную необходимую, игрок интересно проведет время, изнутри изучит работу площадки, воспримет геймплей автоматов. Все это без каких-либо финансовых рисков. Быть в курсе превосходнейших промоакций легкостью. Достаточно регулярно учить список свежих онлайн казино с выводом бонуса без депозита в данном разделе.
1×slots казино зеркало
Диапазон ставок, коие вправе сделать игрок, кроме лимитирован. Обычно назначать можно маленькую сумму — около 10–30 руб. За одно вращение.Заработать на бездепозитных бонусах за регистрацию в казино может каждый пользователь, достигший совершеннолетия. <a href=http://salovafish.ru/bitrix/click.php?goto=http://apelsin.ru/bitrix/redirect.php?goto=http://xn---1-mlc3bjlr.xn–p1ai/bitrix/redirect.php?goto=https://teletype.in/@urist555/w5O5LQ55rOO>http://salovafish.ru/bitrix/click.php?goto=http://apelsin.ru/bitrix/redirect.php?goto=http://xn---1-mlc3bjlr.xn–p1ai/bitrix/redirect.php?goto=https://teletype.in/@urist555/w5O5LQ55rOO</a> Необходимость отыгрыша. Вейджер такой выше, чем для призов за депо. И же свои не отыграны, вывести их невозможно.С другой стороны, гораздо проще отобрать бездепозитные фриспины за регистрацию в казино и напрямик данный начать вращать барабаны в наихороших слотах. Главная необыкновенность спинов в том, собственно они предназначены для лучших автоматов. Удастся не только пройти вспомогательные раунды, но и прирастить сумму выигрыша, заработать респины и внутриигровые подарки. 1×slots рабочее зеркало Шаг 4. Активация. Внимательно исследуйте обстоятельства, информацию по лимитированиям и сроке деяния бонусного предложения. Разобравшись с правилами, можно активировать приз в собственном кабинете (иногда ? с внедрением промокода) или по запросу в саппорт.
<b>Смотреть еще похожие новости:</b>
<a href=http://sladkierecepti.5nx.ru/viewtopic.php?f=8&t=4971>1×slots рабочее зеркало на сегодня</a>
<a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=814115>1×slots регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Как верховодило, новоприбывшие игроки начала хотят ознакомиться с способами ввода и вывода денежных средств и сроки выполнения поданных заказов дабы четко осознавать, как скоро они смогут исключить собственный казино бонус за регистрацию без депозита на электронный кошелек или же банковскую карту. К счастью для всех играющих, внутри конкретных холдингов, все казино конкурируют между собой. Ведь если бы определенную фирму представляло лишь одно онлайн-заведение, то ли бы клиенты увидели казино с бонусом за регистрацию и могли бы рассчитывать только на вознаграждение в виде бонуса на 1-ое инвестиция. К каждому заведению периодически стопам завлекать свежих игроков, что, конечном, только на руку всем играющим. У каждого игорного клубы разные вейджеровые обстоятельства. Чтобы вы гарантировано смогли выполнить их, мы дадим несколько советов. Если система начислила маленькую сумму, не делать немалые ставки – остановитесь на 10–30 центах. Как только сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте выступать. В неприятном случае лучше приглядеться к другому автомату.
#7419 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7420 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало
Новички не любят незамедлительно же вносить депо. Это обосновано отсутствием опыта и сомненьем. К счастью, в наше время можно получить бездепозитный бонус за регистрацию в казино. Неважно что начисляет система – фриспины или кредиты. В всяком случае вы не рискуете своими сбережениями. Это замечательная вероятность запустить понравившийся видео разъем либо же испытывать удачу в настольных играх.Свежий приз начисляется вид валютных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в использовании средствами, а в случае отыгрыша оператор имеет ввести ограничение на вывод средств. <a href=http://filmkachat.ru/>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a> <a href=https://gravatar.com/timetravelfancy80e16fb7ff>https://gravatar.com/timetravelfancy80e16fb7ff</a> Наш список включает в себя наилучшие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по важным характеристикам: 1хслотс рабочее зеркало на сегодня <a href=http://lsdsng.com/user/546184>http://lsdsng.com/user/546184</a>
1×slots казино зеркало
Законодательство, регулирующее азартные забавы в разных странах, оказывает на полномочия операторов. В итоге пользователи из отдельных регионов сталкиваются с лимитированиями со стороны казино. Это имеет быть как полный отказ в доступе, так и невозможность загружать забавы отдельных производителей.Также учтите, собственно кое-какие игровые платформы сузивают список стран, коие способны получить предложенный бездепозитный бонус за регистрацию. К образцу, существуют онлайн-заведения, выдающие подобные бонусы лишь обитателям конкретных государств. К примеру, интернет казино 777 Оригинал дает бездепозитный приз лишь игрокам из России и стран СНГ. Или наоборот, пичкают вознаграждением всех, кроме обитателей некоторых государств (исходя из сего, по внимательно изучать перечень, чтобы потом не появилось практически вопросов и претензий). 1×slots коды Условия отыгрыша приза. Если Вы планируете заработать на бездепозитном бонусе, то для обратите внимание на значение вейджера и срок, кот-ый дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, что, этим проще отыграть приз и исключить выигрыш. <a href=http://ekspoteh.ru/index.php?name=account&op=info&uname=hugemotto79>http://ekspoteh.ru/index.php?name=account&op=info&uname=hugemotto79</a> Если вы выбираете проверенное лицензионное онлайн казино и выполните все обстоятельства получения бездепозитного бонуса, проблем с получением презента у Вас не возникнет. 1×slots casino регистрация 1×slotscasin online
1×slot зеркало рабочее регистрации на телефон придет
<a href=https://krok.biz/forum/memberlist.php?mode=viewprofile&u=38415>https://krok.biz/forum/memberlist.php?mode=viewprofile&u=38415</a> Бездепозитные бонусы – это самая занимательная и более многообещающая акция интернет-казино. Они и другого фри-спинов, поэтому собственно выплаты в безвозмездных вращениях не гарантированы, так композиции на барабанах игрового аппарата имеют не сложиться. 1×slots зеркало регистрация
1 x slots casino
Отыграв бездепозитный бонус в казино с выводом также придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в сходственное лимитирование присутствует, то единоразово исключить получится лишь сумму, не превосходящую размер полученного бонуса.Также, такой нужно подтвердить свой номер телефонного, для этого код, приобретенный в смс-сообщении от клуба установить в особое поле в личном офисе игрока. <a href=https://www.fromrus.su/index.php?/topic/31856–1×slots-casino-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-1×slots-review-live/>1×slots casino регистрация 1×slots review live</a> Чаще всего интернет-казино предлагают бездепозитные призы свежим пользователям. Эта промо-акция довольно эффективно привлекает новичков, подталкивая их к открытию счета. Конечно, не они становятся послушными клиентами, хотя сам факт регистрации аккаунта играет на руку заведению.Как только получите бездеп в казино, всё также не запамятовывайте инспектировать электрическую почту. Некоторые игорные клубы непрерывно радуют активных гэмблеров приятными призами. Чаще всего получить подарок можно в преддверии веселья, на день рождение, за привлечение друга. А кроме распространённым бонусом является надбавка к депозиту. Нужно не восполнить счёт, и азартное заведение увеличит его на 50–100%. При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое возможно предназначить игре в казино. 1×slots мобильная версия войти казино <a href=https://knowyourmeme.com/users/jeffreyvob>https://knowyourmeme.com/users/jeffreyvob</a>
1×slots бонус за регистрацию
Онлайн-казино с бездепозитными бонусами ставят посетителям обстоятельства для использования бездепами, потому перед участием в промоакции чем тщательно ознакомиться со всеми правилами и аспектами акции. Условия имеют прикасаться получения приза, его применения и последующего вывода денежных средств когда выигрыша.Прямо данный отберите безвозмездные вращения за регистрацию без депозита и начинайте собирать призовые комбинации из-за крупных выигрышей! <a href=http://www.gektor.biz/forum/?PAGE_NAME=profile_view&UID=181139>http://www.gektor.biz/forum/?PAGE_NAME=profile_view&UID=181139</a> Не стоит сразу же отрицаться от приветственных даров в похожих казино. Администрация готова начислить средства или фриспины, хотя сначала работники обязаны увериться, собственно вы не мошенник. Дело в том, что развелось очень большое охотников за призами. Они научились дурачить систему и наваривать солидные суммы денег. 1хслотс официальный сайт зеркало Верификация аккаунта. Лучше доказать личность незамедлительно последствии регистрации, чтобы потом не было заморочек с выводом денег. Верификация может протекать двумя маршрутами:
<b>Смотреть еще похожие новости:</b>
<a href=http://162.241.164.67/phpbb/phpBB3/memberlist.php?mode=viewprofile&u=121525>1×slots официальный сайт скачать</a>
<a href=https://rolivka.online/forum/showthread.php?tid=31243>1хслот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Составленный специалистами Casino.ru перечень онлайн-казино с бездепозитным призом дозволяет игрокам сравнить спецпредложения различных операторов. Нет. Казино раздают безвозмездные призы за регистрацию, для того, дабы заказчик возможность ознакомиться с игровым заведением. А дабы вывести его, необходимо выполнить условия отыгрыша.
#7421 Charlesgunny
casino промокод рокс казино <a href=https://repost.news/>casino сегодня</a> почему в казино нет окон 1×bet зеркало рабочее на сегодня 1×bet xyz <a href=https://t.me/vchkogpu_ru>пин ап казино</a> 7k casino зеркало на сегодня симулятор казино casino бонус casino betting pin up букмекерская контора 1×bet скачать бесплатно казино большая
#7422 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7423 Charlesgunnyhttp://filmkachat.ru
1хслотс мобильная версия зеркало
Перед активацией принципиально внимательно выучить условия акции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют значение также лимиты ставок при отыгрыше и сроки, протяжении которых возможно пользоваться предложением. Если бездеп охватывает узкий список игр, рекомендуется разузнать наибольшие коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят лишь том, случае, случае оператор не установил строгие лимитирования на максимальную необходимую ставки. <a href=http://filmkachat.ru/>1 хслот регистрация в 1×slots casino</a> Выбор каждого онлайн казино на нашем веб-сайте. В описании к любому Вы можете разузнать, что получите за творенье аккаунта.Бездепозитные бонусы – это самая небезинтересная и более многообещающая акция интернет-казино. Они и чем фри-спинов, потому собственно выплаты в бесплатных вращениях не гарантированы, ведь композиции на барабанах игрового аппарата все не сложиться. <a href=https://www.socialwider.com/blog/597913/professional-construction-drawing-services-your-blueprint-for-building-succ/>https://www.socialwider.com/blog/597913/professional-construction-drawing-services-your-blueprint-for-building-succ/</a> 1хслотс официальный сайт зеркало <a href=http://bbs.yunduost.com/home.php?mod=space&uid=66642>http://bbs.yunduost.com/home.php?mod=space&uid=66642</a> Акции распространяются как на все игры казино, например и на узкий список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и другие. Промо возможность охватывать разработки одного производителя. Бездеп не пересекается с другими акциями казино. Если на сайте учтен кэшбек, он не начисляется за ставки, сделанные бонусными деньгами. Для идентификации платежных реквизитов игрока может потребоваться пополнение счета на минимальную необходимую.Какие бонусы у еще получить не бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, каждое онлайн казино предлагает игрокам выгодное предложение на 1-ый депозит, вы совершаете депо, ваш депо увеличивается в двое либо в в трое, тем наиболее начать выступать можно с больше крупной суммой, так же не запамятываем про вейджер на бонусы.
1хслотс официальный сайт зеркало
Высокая конкурентность в разделе азартных игр мотивирует операторов завлекать посетителей разнородными акциями. Благодаря данному у посетителей замечена вероятность получить бонусы в казино за регистрацию без депозита. Воспользоваться этим предложением возможно, минуя функцию внесения средств на игровой счет, просто активировав аккаунт на сайте. Наш экскурсовод по бездепам поможет избрать самую привлекательную бонусную программу, разузнать управляла получения такого вознаграждения и воспользоваться им с наибольшей выгодой.Теоретически, к безвозмездным призам можно отнести например именуемые фриспины. Напомним, речь идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, поэтому что они предоставляют лишь вероятность создавать ставки. 1×slots рабочее зеркало на сегодня Обычно показатель повыше, чем для бонусов на депо. Не дивитесь, если он будет том х100. Иногда завышенный коэффициент вейджера уточняется для жителей отдельных государств.Бонус в казино без депо содержит различные вариации: такое быть приветственный приз, акции в честь каких-либо дней или важных дат, приз за привлечение новых игроков, преданность и получение VIP-статуса. <a href=http://www.sicilianodentro.it/forum/members/240842.html>http://www.sicilianodentro.it/forum/members/240842.html</a> 1×slots зеркало этих способов предполагает регистрацию Высокая конкурентность в сегменте азартных игр мотивирует операторов привлекать клиентов разнородными акциями. Благодаря данному у посетителей замечена вероятность получить призы в казино за регистрацию без депозита. Воспользоваться таким предложением можно, избегая функцию внесения денег на игровой счет, просто активировав акк на сайте. Наш гид по бездепам поможет избрать самую привлекательную бонусную программку, узнать правила получения такового вознаграждения и воспользоваться им с максимальной выгодой.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
<a href=https://pcnto.com/user/Joshuavar/>https://pcnto.com/user/Joshuavar/</a> 1×slots регистрация Фриспины предусмотрены для применения в видео слотах. Внимательно ознакомьтесь с критериями – частенько их выдают на некоторые автоматы. В зависимости от клуба, у вас получится устроить определённое число ставок. Кстати, продвинутые игорные дома позволяют запускать каждых «одноруких бандитов».Бонус с зачислением денег на счет дает больше свободы поступков. Пользователь сам избирает, каким образом воспользоваться подаренными средствами. Здесь также шансы работать ограничения на перечень дешевых игр, но обычно эти рамки не так строги, как в промо с безвозмездными вращениями.
рабочее зеркало 1хслотс
Осталось выбрать казино с призом за регистрацию и создать профиль. После активации презента выигрыш находится от Фортуны и способностей.Размер ставки для забавы по бездепозитному бонусу (окончательно же, в случае, когда он представлен повторяющий бонусных валютных средств) зачастую ниже, чем при ирге на депозит. Ограничение несомненно работать до этапа отыгрыша приза. <a href=http://vn-info.net/user/Josephkam/>1×slots зеркало видели такую регистрацию на</a> При малый сумме бонуса рекомендуется выступать по низким ставкам, а применять наибольшие лучше лишь сомнений случае, в вейджер очень великой, а время на отыгрыш сильно ограничено.Не рекомендуем опрометью голову хвататься за различные предложения получения средств без инвестициям. Вполне возможно, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем выглядит на 1-ый взор. Альтернативой является казино бонус за депо. Мы предлагаем вам пару советов, спасибо которым у любого игрока несомненно возможность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег: Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической забавы на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, научится регулировать изменять ставки и линии, изучать бонусные забавы и их выигрышные комбинации, да счете просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные средства, коие можно отыграть и вывести, а не просто на демо счет, тем самым адреналин в крови еще больше повысится а пульс забьется с нередким ритмом!Отказ в прохождении верификации. Если заказчик не хочет либо не может предоставить документы, подтверждающие его личность, профиль будет заблокирован вместе со всеми бонусными начислениями. 1×slots казино мобильная версия <a href=https://www.vevioz.com/read-blog/207082>https://www.vevioz.com/read-blog/207082</a> Наш список содержит превосходнейшие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по важным параметрам:
1×slots официальный сайт, скачать
Получать информацию о самых прибыльных бонусах возможно без неизменного прогноза новостей казино. Мы брали данную задачку на себя и безпрерывно следим за услугами операторов, выбирая превосходнейшие из их. В этом разделе собраны заключительные бездепы, промокоды к ним и обстоятельства их активации. Список акций периодически пополняется. В топ вошли самые новые бездепозитные бонусы за регистрацию в казино 2020, кратковременные и замкнутые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и критериям. Если срок деянья акции истек, она удаляется из списка. Бездепозитный бонус – это финансовое вознаграждение, коие выдается соучастнику игры в казино, для его вербования и возникновения заинтересованности. Любой посетитель, который подходит условиям выдачи подобного бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое поощрение является наиболее эффективным методом, дающим вероятность стартовать при, не вкладывая собственных материальных средств.Но не стоит размышлять, собственно снабжая пользователей этими призами, казино занимается спонсированием. Ведь объемы вознаграждений, в основном, не большие (средним размером от 5 до 20 $). И на эти свои налагаются конкретные условия и лимитирования, неотклонимые к исполненью игрока, случае в последствии он желает получить все средства выигранные деньги. <a href=https://www.fortressrisk.com/user/philipnefphilipnef/>https://www.fortressrisk.com/user/philipnefphilipnef/</a> Многие новенькие сомневаются, что поощрительный приз не нужно несомненно возвращать, в в они выиграли у казино. Это безусловно безопасно и надежно. Выводя выигранные средства, игрок просто одергивает свое участие при и утрачивает уникальную вероятность – безвозмездно увеличивать личное материальное положение.В списке требований к отыгрышу нередко наличествуют лимиты на ставки при забаве на личные деньги. Так, случае отыграть нужно 30 000 руб., а максимальная сумма ограничена 30 рублями, то вращать барабаны светит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам деянья промоакции. 1×slots casino регистрация 1×slotscasino09k online
<b>Смотреть еще похожие новости:</b>
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=37225>1×slots регистрация 1×slotscasino09k online</a>
<a href=https://feederfishing.lt/en/forum/seryklos/1318392–1–1×slots-casino#1329866>1х слот регистрация в 1×slots casino</a>
<a href=http://lider1c.ru/communication/forum/messages/forum5/message18562/14573-kazino-1×slots-ofitsialnyy-sayt?sessid=38c5243f46b013f623355b7999644697&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>казино 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чаще всего, известные сервисы, эти как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно обязательное правило. Финансовые средства выводятся лишь через что, эту платежную систему, коей пользовались для пополнения депозита. Если же игрок получил бездепозитный покерный приз, требуется пополнить счет на минимальную необходимую, кот-ая составляет обычно десять долларов.
#7424 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7425 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на официальном сайте
Акции распространяются как на все забавы казино, так и на ограниченный список. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino прочие. Промо имеет охватывать разработки 1-го производителя. Бездеп не пересекается с иными промоакциями казино. Если на сайте учтен кэшбек, он не начисляется за ставки, изготовленные бонусными средствами. Для идентификации платежных реквизитов игрока возможность понадобиться пополнение счета на наименьшую необходимую. <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino 56 online</a> Для верификации аккаунта нужно дать профессионалам технической поддержки отсканированную копию паспорта и счета за коммунальные предложения, еще фотку банковской карты или снимок страницы электронного кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности. <a href=https://www.debwan.com/blogs/591034/Navigating-Modern-Construction-Drawing-Services-From-Concept-to-Completion>https://www.debwan.com/blogs/591034/Navigating-Modern-Construction-Drawing-Services-From-Concept-to-Completion</a> Бездепозитные призы казино за регистрацию в 2022 году — это вероятность поиграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой либо числом бесплатных вращений без внесения депо. Не путайте деморежим с реальной забавой без необходимости внесения депо.Фриспины предназначены для применения в видео слотах. Внимательно ознакомьтесь с условиями – частенько их выдают на кое-какие автоматы. В зависимости от клуба, у вас выйдет устроить определённое число ставок. Кстати, продвинутые игорные дома позволяют запускать любых «одноруких бандитов». казино 1× slots официальный сайт <a href=http://intextv.by/forum/user/63337/>http://intextv.by/forum/user/63337/</a>
1×slot регистрация
1×slots рабочее зеркало Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке нужно восполнить счет в казино. Для депозитных бонусов, данная процедура не необходима, так как депозит уже изготовлен. <a href=https://bajarmp3.net/member.php?action=profile&uid=4338>https://bajarmp3.net/member.php?action=profile&uid=4338</a> Помните, что любые нарушения управлял сведут на нет ваши усилия, и вы наверняка останетесь без начисленного для бесплатного приза. Всегда изучайте верховодила начисления и условия вейджера. По любым вопросам, на которые вы не можете самостоятельно отыскать ответы, обращайтесь за объяснениям и саппорт.Игры, в которых возможно выступать на бонусные средства. Проверьте список игр, в которых можно играть на бонусные свои, вероятно они Вам не понравятся и надо расходовать своё время на такую промоакцию. 1×slot регистрация
1×slos регистрация в 1×slots casino
На бонусные начисления все быть установлены вспомогательные ограничения, коие Вы не учли при отыгрыше. Пока бонус полностью не отыгран — средства из казино не выводятся. Помимо остального, для вывода средств по бездепу необходимо внести на счёт собственный 1-ый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало вероятную сумму, после чего вывод средств будет доступен. <a href=https://chessdatabase.science/wiki/User:CeliaMacon9300>https://chessdatabase.science/wiki/User:CeliaMacon9300</a> Активация по промокоду используется в разных обликах бездепов. Если речь о приветственном призе, то набор символов возможно разузнать на главной странице, в регистрационной форме или послании, коие отправляется юзеру для доказательства e-mail. Акции все проводиться общо с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активируется одноразовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном кабинете или начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем важный код для активации в описании каждого промо.Главным интересным в возникновении этих вознаграждений состоит в том, что пустив их в ход, игры ничем не рискует и в последствии никому ничего не несомненно должен (не зависимо, получит ли он спасибо бонусам какой-либо выигрыш или моментально спустит все только собственно прибывшие финансы). То есть, казино снабжает игрока вероятностью на дармовой основе выступать во различные слоты даже спонсирует игру. 1хслотс зеркало на сегодня
зеркала 1×slots
В перечне притязаний к отыгрышу нередко присутствуют лимиты на ставки при ирге на личные деньги. Так, если отыграть нужно 30 000 руб., а максимальная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам действия промоакции.Каждый из бездепозитных бонусов без пополнения 2022 содержит собственный конкретный вейджер для отыгрыша, так же в каждом казино он уточняется персонально — где то он х55 а кое-где х30, повторюсь всюду по различному! Выиграть реальные средства в казино не пополняя счет – сложно, но вполне. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными бонусами и начните играть на бонусные средства. По статистике из 10-ти заведений можно заработать маленькую необходимую денег за счет бонусных средств.При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток. казино 1×slots <a href=http://bbs.mycq3d.com/home.php?mod=space&uid=92985>http://bbs.mycq3d.com/home.php?mod=space&uid=92985</a>
1хслотс зеркало на сегодня
Онлайн-казино тщательно продумывают бонусные обстоятельства, которые необходимо выучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша прочие лимитирования. <a href=http://www.sazkar.info/member2688.html>http://www.sazkar.info/member2688.html</a> Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://www.bf-france.com/forums/profile/30064-rabofreeor/>1×слотс казино</a>
<a href=https://thetechmodders.com/forums/memberlist.php?mode=viewprofile&u=945>1×slots регистрацию процедура займет всего лишь</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Да, у даровых бонусов есть дефекты. Прежде всего, они обыкновенно не. Кроме такого, условия вейджера по ним всегда жесткие. Но все же неимение риска делает их очень красивыми для клиентов.
#7426 Charlesgunny
casino официальный зеркало порно с Сергей Бобровский (хоккей) <a href=https://repost.news/>7k casino сайт</a> порно с Дарья Касаткина (теннис) вывод казино <a href=https://krtka.info/>casino играть</a> Ирина Горбачева казино фильм порно с Евгения Медведева 1×bet официальный казино пин Валентина Матвиенко порно Приезжева Екатерина Геннадьевна порно
#7427 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7428 Charlesgunnyhttp://filmkachat.ru
casino 1×slot
При регистрации стопам указывать лишь достоверную информацию. Когда учетная запись будет активна, будет доступ в Личный офис. В нем возможно выбрать валюту, установить промокод и разузнать подробные верховодила получения и отыгрыша бездепа. Краткая информация об акции нередко присутствует непосредственно на регистрационной форме.Главным моментом в появлении данных вознаграждений состоит в том, что пустив их в ход, игры ничем не рискует и в последствии никому ничего не несомненно должен (не зависимо, получит ли он спасибо призам какой-либо выигрыш или моментально спустит все только собственно прибывшие деньги). То есть, казино снабжает игрока вероятностью на дармовой основе играть во различные слоты и даже спонсирует забаву. <a href=http://filmkachat.ru/>1хслотс официальный сайт зеркало</a> Однако в условиях исчезают «подводные камешки», коие не разрешат исключить крупную сумму либо же вы не успеете отыграть вейджер. Поэтому мастера рекомендуют отобрать безвозмездные вращения за регистрацию в казино без депозита, чтобы поднабраться опыта и получить настоящий шанс на победу.Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и. Когда игроку полагается много фриспинов, администрация имеет бить3 их начисление на несколько дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах промоакции. <a href=http://sites.estvideo.net/alvasoft/forum/topic-3–59695–1.html>http://sites.estvideo.net/alvasoft/forum/topic-3–59695–1.html</a> 1× slots casino официальный сайт <a href=http://avto.izmail.es/user/DavidCauts/>http://avto.izmail.es/user/DavidCauts/</a>
1хслот зеркало
рабочее зеркало 1×slots 3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефонный либо почту, указать персональную информацию; <a href=https://tazovod.khalal.ru/forum/memberlist.php?mode=viewprofile&u=40416>https://tazovod.khalal.ru/forum/memberlist.php?mode=viewprofile&u=40416</a> Бонус в казино без депо содержит различные варианты: такое быть приветственный приз, акции в честь каких-либо праздничных либо весомых дат, приз за вербование новых игроков, преданность и получение VIP-статуса.Далее потребуется отыграть вагер и вывести выигрыш. Игрокам без навыка крупно подфартило, есть получить десятки презентов за 1 регистрацию. Если не сумели получить Бездепозитный приз, не тревожьтесь. Обратитесь в онлайн чат, оператор поможет решить проблему. 1×slots акции Не рекомендуем сломя голову браться за всевозможные предложения получения средств без вложений. Вполне вполне, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на первый взор. Альтернативой считается казино приз за депозит. Мы предлагаем вам пару советов, спасибо которым у любого игрока несомненно вероятность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом средств:Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте условия – они часто выдаются для неких машин. В зависимости от клуба вам создавать определенное число ставок. Кстати, современные игорные жилища выделяют возможность заводить «одноруких бандитов».
1×slots casino регистрация 1×slots review live
Исходя из этого, просто не присутствует мудрых оснований махнуть рукою на получение такого бонуса при регистрации. И, не, на такой бесплатной основе у вас все шансы выиграть деньги и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, именуют безвозмездными онлайн платформами для игр.Фриспины без депо или дополнительные средства помогут ближе познакомиться с игровой платформой и её функциями. За счёт даров возможно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради забавы напротив живых крупье. Также бездепозитные призы имеют служить методом возвращать к забаве посетителей, временно приостановивших своё сотрудничество с компанией: извещение о бездепе поступает на мобильный аппарат либо почту. <a href=http://www.dbgjjs.com/home.php?mod=space&uid=462129>http://www.dbgjjs.com/home.php?mod=space&uid=462129</a> 1×slots официальный регистрация Подтвердите личность, предоставив оператору казино свои паспортные данные. Инструкции обыкновенно легкие, главное — конкретно им по. Если написано, что «на фото должны быть видны все четыре угла странички паспорта» — устройте именно такое фото.
1×slots официальный регистрация
<a href=https://nauc.info/forums/viewtopic.php?t=20388332>1×slots официальный регистрация</a> Самый распространённый из подобных бонусов, естесственно же, бездеп на денек рождения клиента — бонус в виде фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им можно протяжении установленного периода медли. Бесплатные бонусы казино без депо возможно получить вид денежных средств на бонусный счет (вывести их возможно только последствии отыгрыша), фриспинов, забавы или кешбэк-бонуса.Как лишь получите бездеп в казино, всё равно не забывайте инспектировать электронную почту. Некоторые игорные клубы каждый веселят активных гэмблеров приятными бонусами. Чаще всего получить презент можно в преддверии праздника, на день рождение, за привлечение приятеля. А также распространённым призом является прибавка к депозиту. Нужно более пополнить счёт, и азартное заведение увеличит его на 50–100%. 1×slots регистрация 1×slots review live <a href=http://www.zian100pi.com/discuz/home.php?mod=space&uid=1141552&do=profile&from=space>http://www.zian100pi.com/discuz/home.php?mod=space&uid=1141552&do=profile&from=space</a>
1×slots официальный сайт скачать на айфон
Также учтите, собственно некоторые игровые платформы сужают перечень государств, коие способны получить предложенный бездепозитный бонус за регистрацию. К образцу, есть онлайн-заведения, выдающие подобные бонусы лишь обитателям определенных государств. К примеру, интернет казино 777 Оригинал дает бездепозитный бонус только игрокам из России и государств СНГ. Или наоборот, снабжают вознаграждением всех, не обитателей неких стран (следует этого, стопам внимательно учить список, чтобы потом не возникло практически вопросов и жалоб). <a href=http://fottontuxedo.co.kr/bbs/board.php?bo_table=free&wr_id=1608362>http://fottontuxedo.co.kr/bbs/board.php?bo_table=free&wr_id=1608362</a> Подарки на определенные даты выделяются условиями получения. Если одобрение начисляют игроку на денек рождения, то сумма обычно зависимости от совместного размера депозитов за прошедший год.Игрокам не следует принимать приветственный бонус как гарантированный метод получить большой выигрыш, хотя это замечательная вероятность без затрат оценить перечень казино. 1×slots рабочее зеркало на сегодня Игрокам стоит принимать приветственный приз как гарантированный метод получить большой выигрыш, но это замечательная возможность без затрат оценить возможностей казино.Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных бонусов принимаются достаточно высокие требования. Часто онлайн-казино рекомендуют отыграть бонусное поощрение до 100 один в игровых автоматах. Например, случае игрок получил бесплатно десять $, то нужно несомненно отыграть их, поставив одну тысячу спинов по одному доллару любой. Стоит обозначить(означить), что не все казино дают вероятность играть на бонусы и не во всех развлекательных заведениях идентичные правила для отыгрывания. Некоторые казино запрещают выступать на призы в блекджек либо ограничивают ставки до 5 процентов, собственно значительно увеличивает в десятки раз число нужных игр.
<b>Смотреть еще похожие новости:</b>
<a href=http://evtrucksforum.com/viewtopic.php?p=902520#p902520>1×slots бездепозитный бонус за регистрацию</a>
<a href=http://maddog-server.org/forum/member.php?action=profile&uid=27481>1×slots регистрация на сайте 1×slots ru com</a>
<a href=https://www.mshowto.org/forum/members/jamespauri.html>1×slots зеркало рабочее на сегодня</a>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=168815>1×slots зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В каждом казино с бездепозитным призом предусмотрены вейджеровые обстоятельства. Это единственный «подводный камень», который стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, нужно сделать определённое число ставок. Чем круче приз, тем труднее выполнить условия, и напротив.
#7429 Charlesgunny
порно с Владимир Минеев (ММА) Львова-Белова Мария Алексеевна порно <a href=https://res-publika.com>casino x</a> гама казино Разуваева Ксения Денисовна порно <a href=https://glvk.guru/>казино в россии</a> лучшие онлайн казино casino бездепозитный casino зеркало сегодня букмекерская контора зенит балтбет букмекерская контора порно с Баталина Ольга Юрьевна бесплатные букмекерские конторы
#7430 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7431 Charlesgunnyhttp://filmkachat.ru
онлайн казино 1×slots
Чтобы получить возможность вывести прибыль с бездепозитного бонуса в казино, необходимо выполнить ряд критерий: <a href=http://filmkachat.ru/>1×slots сайт зеркало</a> Чтобы бездеп не был начислен на Ваш акк, Вам надо активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт автоматически, а Вы не расчитываете его использовать, обратитесь в службу поддержки с просьбой отменить бездепозитный приз.После потребуется внести идентификационный платёж. Это стращает начинающих больше всего. Нужно сделать наименьший депозит в 100–500 руб. Таким образом служба безопасности увериться сомнений, что платёжный метод принадлежит Вам. Данная процедура важна для обеспечения безопасности игровых счетов. Пример, Ваш аккаунт взломают и выведут средства на свой кошелёк. Будет очень неприятно. Поэтому верификация платёжной системы, это важный момент. <a href=https://offcourse.co/users/profile/property-development-3d-renders/>https://offcourse.co/users/profile/property-development-3d-renders/</a> 1×slots казино зеркало <a href=https://images.google.hn/url?q=https://doctorlazuta.by/>https://images.google.hn/url?q=https://doctorlazuta.by/</a> Существуют казино с призом за регистрацию, в довольно знамениты фриспины в онлайн казино потом регистрации в конкретных играх. Они встречаются в почаще бесплатных поощрений либо традиционных бонусов в казино без вложений. Например, игрок регистрирует счет, на который начисляются бесплатные игры, приз за регистрацию в виде даровых фрспинов, вращения в игровом автомате. Во время игрового процесса игры выигрывает истинные средства, которые в последствии можно удачно вывести из заведения на свою платежную систему. То есть, все шансы исключить свои без рисков своими деньгами. Регистрация, за которую игрок получит призы, займет пару минут, а благодаря данному возможно увеличить пять евро поощрений до тысячи и без всяких проблем вывести их.Зарегистрируйтесь. Для регистрации чаще всего довольно установить свой номер телефона и почтовый адресок, в чего ввести приобретенный код из СМС. Возможно, требуется показать промокод. В правилах промоакции несомненно написано, где его надо включать. Иногда это надобно создавать при регистрации, времени — уже последствии творенья собственного офиса, на отдельной странице.
1×slots акции
При отыгрыше бонусных средств, нужно учитывать срок действия приза и время, которое дается на отыгрыш. По истечению заявленного медли, не отыгранный приз несомненно аннулирован. 1×slots зеркало видели такую регистрацию на Бoльшинcтвo азартных заведений выдвигают примерно однообразные, схожие условия и требования, коие нужно выполнить, дабы получить бездепозитный бонус за регистрацию. Все их можно соединить в раз список: <a href=http://metal-firms.biz.ua/wr_board/tools.php?event=profile&pname=numerousnominee>http://metal-firms.biz.ua/wr_board/tools.php?event=profile&pname=numerousnominee</a> Подарки на праздничные ? посвященные торжественным датам, требующие символического отыгрыша либо начисляются без того. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду.Прежде чем активировать бездеп, нужно увериться сомнений, что страна, гражданином коей является игрок, не входит в список не. 1×slots казино мобильная версия Проверка занимает от нескольких мин. До нескольких дней, специалисты техподдержки могут запросить вспомогательные документы либо инициировать куцее общение по Skype.
1×slots зеркало на сегодня
Для верификации аккаунта нужно дать профессионалам технической поддержки отсканированную копию паспорта и счета за коммунальные предложения, а фотку банковской карты или снимок страницы электронного кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для доказательства личности. В каждом казино с бездепозитным призом предусмотрены вейджеровые обстоятельства. Это единственный «подводный камень», который стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, нужно сделать определённое число ставок. Чем круче приз, тем труднее выполнить условия, и напротив.Для казино, работающих интернет, бездепозитные бонусы нужны для вербования свежих клиентов. Предложение сыграть на слотах без необходимости внесения реальных денег — работающий способ для повышения энтузиазма к фирмы. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит выступать в казино, только сейчас теснее на личные средства. <a href=http://www.tame.wphl.net/home.php?mod=space&uid=234946>http://www.tame.wphl.net/home.php?mod=space&uid=234946</a> 1×slots регистрация 1×slotscasino 56 online
скачать 1×slots официальный сайт
Для отыгрыша бонуса казино обязует игрока поиграть на необходимую, в некоторое раз превосходящую сумму полученного бонуса — здесь выгода компании явна.Некоторые онлайн-казино без депо предлагают свежим клиентам избрать бонус при регистрации. Будьте внимательны: выбрав один, вы в абсолютном большинстве случаев не сможете воспользоваться остальными. 1×slots регистрация 1×slotscasino09k online <a href=http://mail.newlifekpc.org/bbs/board.php?bo_table=free&wr_id=4092476>http://mail.newlifekpc.org/bbs/board.php?bo_table=free&wr_id=4092476</a> Теоретически, к безвозмездным призам возможно отнести так называемые фриспины. Напомним, речь идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, потому собственно они деют только вероятность создавать ставки.
1× slots casino официальный сайт
Наши специалисты исследуют обстоятельства промоакции, этого в ручном режиме проводят их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и параметры. Мы не рекламируем казино, а даем игрокам информацию о лучших из их. <a href=http://cd.dotspen.com/home.php?mod=space&uid=9196>http://cd.dotspen.com/home.php?mod=space&uid=9196</a> Для получения бонуса нужно пригласить в игру свежего посетителя. Казино начисляет пригласившему фиксированный процент от взносов приглашённого вид приза: чаще всего его объем не превышает 10%. Срок действия бонуса правило не выше месяца: пригласивший получает приз в зависимости от проигранных ставок приглашённого в 1-ый месяц забавы.Не желаете поиграть в азартные забавы, не рискуя средствами деньгами, хотя получая в все выплаты? Подобную вероятность предоставляют почти лучшие порталы с азартными развлечениями. В их количестве много честных и надежных интернет-казино на русском языке. Они завлекают свежих юзеров различными поощрительными мероприятиями, включая бездепозитные, или бесплатные призы. 1×slots быструю регистрацию а также мгновенное Прямо данный заберите бесплатные вращения за регистрацию без депо и начинайте собирать призовые комбинации ради крупных выигрышей!
<b>Смотреть еще похожие новости:</b>
<a href=https://test.soclanovtsy.ru/topic/38394–1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D0%BD%D0%B0-%D1%81%D0%B5%D0%B3%D0%BE%D0%B4%D0%BD%D1%8F/>1×slots зеркало на сегодня</a>
<a href=https://forum.ltp-team.com/topic/67042–1×slots-registraciya-1×slots-casino-c2d-ru/>1×slots регистрация 1×slots casino c2d ru</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Ну и конечно же, для казино бездепозитные бонусы прибыльны с имиджевой стороны: схожая добродушие увеличивает уровень лояльности посетителей к компании. В интернете слишком количество скриптовых вебсайтов, которые принадлежат жуликам. Их основная задача – заинтересовать гэмблеров, пообещав не только щедрые презенты, но и солидные выигрыши. Так что кое-какие веб-сайты предлагают получить за регистрацию числе $1 000.
#7432 Charlesgunny
порно с Илья Осипов (киберспорт) казино проиграл <a href=https://7club7.com/>Скоробогатова Ольга Николаевна порно</a> 1×bet 1×bet регистрация <a href=https://t.me/vchkogpu_ru>букмекерская контора фонбет</a> 1×bet зеркало рабочее на сегодня 1×bet xyz официальные сайты казино Елизавета Боярская casino скачать приложение Окладникова Ирина Андреевна порно пин ап casino casino
#7433 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7434 Charlesgunnyhttp://filmkachat.ru
casino 1×slot
Выбирайте лучшие безвозмездные бонусы счет обзоров на Casinoz – и пусть вам сопутствует удача при отыгрыше бонусных кредитов! <a href=http://filmkachat.ru/>1×slots регистрация на официальном сайте</a> Наш список содержит лучшие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает проверку по главным характеристикам: <a href=https://matters.town/a/2e89ep0d553d>https://matters.town/a/2e89ep0d553d</a> Но никогда не забывайте пристально читать управляла роли в бонусных акциях. Если вы нарушите но бы одно условие, позднее вы не можете устроить недоразумение с администрацией. 1×slots casino регистрация 1×slots review live <a href=http://elymbmx.com/mybb/member.php?action=profile&uid=11846>http://elymbmx.com/mybb/member.php?action=profile&uid=11846</a>
1× slots официальный
Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам воспрещено начислять призы клиентам, не имеющим денежных средств на счете. Мы предлагаем разглядеть животрепещущие бонусы онлайн-казино с лицензией, которые соблюдают законодательство РБ.Онлайн-казино с бездепозитными бонусами ставят клиентам обстоятельства для использования бездепами, поэтому перед участием в акции другого, как тщательно ознакомиться со всеми правилами и нюансами промоакции. Условия имеют прикасаться получения бонуса, его использования и последующего вывода валютных средств когда выигрыша. <a href=http://vn-info.net/user/Josephkam/>1×slot зеркало</a> 1×slots промокод при регистрации В настоящее время получить приз за регистрацию в казино очень просто. Почти любой игорный дом с готовностью предоставит деньги либо бесплатные вращения. Многие игроки пользуются данным и не смущяются региться в каждом клубе с выгодными критериями. Кстати, это отличная вероятность выдумать выигрышную стратегию и сорвать куш. <a href=http://clips.tj/user/JoshuaRom/>http://clips.tj/user/JoshuaRom/</a> 1хслот зеркало сайта Для получения приза нужно ознакомиться с программой преданности казино и сделать ставки на необходимую, нужную для перехода на следующий уровень.
1×slots регистрация на 1хслотс
Наш список включает в себя лучшие бездепозитные призы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по принципиальным характеристикам:Да, у безвозмездных призов есть дефекты. Прежде всего, они обыкновенно очень. Кроме как, обстоятельства вейджера по ним постоянно строгие. Но все же недоступность риска делает их очень привлекательными для клиентов. <a href=https://asdmcpe.org/user/DavidBap/>https://asdmcpe.org/user/DavidBap/</a> Фриплей-бонусы. Бонусы за бесплатную забаву есть только в некоторых клубах. Они зачисляются сразу после сотворения профиля и срабатывают недолговременное время. Если у вас нет времени израсходовать средства, они просто завершатся. Что касается медли, в большинстве случаев призы действуют на 1-го часа.Чтобы получить вероятность исключить выгода с бездепозитного бонуса в казино, необходимо выполнить ряд условий: 1 х слотс зеркало Для получения выигрыша потребуется выполнить условия казино. Чаще всего игроку нужно поставить определенную необходимую, хотя уже из собственных денег. Она рассчитывается из совместного объема выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, в пользователь выиграл 1000 рублей, а множитель сочиняет х30, вывести средства можно несомненно, сделав ставки на 30 000 руб.
1×slots на любой вкус как пройти регистрацию
Не стоит незамедлительно же открещиваться от приветственных презентов в подобных казино. Администрация готова начислить деньги либо фриспины, но сначала сотрудники обязаны увериться, что вы не аферист. Дело никаких, собственно развелось слишком большое охотников за бонусами. Они научились дурачить систему и зарабатывать солидные суммы денег. Если вы выбрали себе количество брендов которые для больше всего приглянулись, для неизменной забавы! Таких гемблеров казино очень любит и оценивает, за частую эти игроки становятся VIP игроками заведения, которым часто поступают выгодные предложения вид бонусов, например же туда заходит и бездепозитные. 1×slots казино зеркало <a href=http://blackpearlbasketball.com.au/index.php?option=com_k2&view=itemlist&task=user&id=838078>http://blackpearlbasketball.com.au/index.php?option=com_k2&view=itemlist&task=user&id=838078</a>
1хслот зеркало сайта
Самый распространённый из подобных бонусов, конечно же, бездеп на денек рождения клиента — бонус вид фиксированной суммы или фриспинов поступает на счёт игрока, а воспользоваться им возможно протяжении установленного периода медли.На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не можете активировать и получить бездепозитный бонус. Прежде чем активировать бездеп, нужно увериться что, нет, что страна, гражданином которой считается игрок, не входит в перечень разрешенных. <a href=http://ecsambo.org/index.php?subaction=userinfo&user=nondescriptlaby>http://ecsambo.org/index.php?subaction=userinfo&user=nondescriptlaby</a> скачать 1×slots на андроид мобильная версия Сроки активации приза уточняются любым казино, но чаще всего они не превосходят недели с момента получения. Игроку непременно надо(надобно) применять бездеп протяжении указанного срока, в ином случае приз просто исчезнет. Каждый бонус можно получить лишь один один, потому случае не применять бездеп в срок, у игрока не будет 2 шанса им пользоваться.
<b>Смотреть еще похожие новости:</b>
<a href=https://mit-bbs.com/viewtopic.php?t=131860>1×slots официальный регистрация</a>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=129947>1×slots быструю регистрацию а также мгновенное</a>
<a href=https://melhorlance.com.br/minha-conta/>1× slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Шаг 4. Активация. Внимательно выучите условия, информацию по лимитированиям и сроке деяния бонусного предложения. Разобравшись с правилами, возможно активировать бонус в собственном офисе (от ? с внедрением промокода) или по запросу в саппорт. Когда речь о получении бездепозитных призов в казино, для внимание на последующие обстоятельства:
#7435 BarryMoomohttps://vip-eskort-msk.ru
элитные эскорт модели <a href=https://vip-eskort-msk.ru/>vip эскорт москва</a>
#7436 Charlesgunny
casino 7k рабочее лучшая казино <a href=https://7club7.com/>казино вход</a> букмекерская контора фонбет casino betting <a href=https://th-royalgclub.com/>1×slots casino</a> online casino Хорова Наталья Александровна порно up casino скачать рейтинг казино Скоробогатова Ольга Николаевна порно Анна Михалкова казино 5
#7437 MichaelTittyhttps://bs2site-at.at
С сайтом <a href=https://bs2site-at.at/>https://bs2site-at.at/</a> вы можете легко анализировать свою аудиторию, улучшать видимость сайта в поисковых системах и повышать конверсии. Наша команда экспертов гарантирут качественную поддержку и советы для эффективного использования всех инструментов.
#7438 Charlesgunny
порно с Владимир Минеев (ММА) казино онлайн <a href=https://repost.news/>Окладникова Ирина Андреевна порно</a> букмекерская контора официальный сайт kometa casino <a href=https://vestnik-jurnal.com/>бесплатно фильм казино</a> Фастова Елена Владимировна порно яндекс казино casino скачать приложение букмекерскую контору пин букмекерская контора без vavada casino гта онлайн казино
#7439 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7440 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало
Условия вывода выигрыша. В неких заведениях для удачного вывода с бездепозитного приза достаточно пополнения баланса и доказательства личности. В иных же клубах, нужно несколько один прокрутить собственный депозит. <a href=http://filmkachat.ru/>1хслотс рабочее зеркало</a> <a href=https://www.swiatobrazu.pl/forumgaleria/thread/view/id/484>https://www.swiatobrazu.pl/forumgaleria/thread/view/id/484</a> 1×slots зеркало быструю регистрацию а также мгновенное <a href=https://gtafarai.lt/index.php?/profile/12250-zacherysteag/>https://gtafarai.lt/index.php?/profile/12250-zacherysteag/</a>
казино 1×slots официальный сайт
Как верховодило, при выводе финансов, от играющего требуется лишь устроить минимальный лепта для того, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом собственный счет.Возьми свой подарок. Чаще всего бонус активизируется сразу последствии регистрации. Но бывают истории, когда нужно забежать в индивидуальный офис либо написать в справочную службу. <a href=http://moneysweet.listbb.ru/viewtopic.php?f=2&t=5207>1×slots регистрация то дальше необходимо пройти</a> 1×slots бездепозитный бонус за регистрацию <a href=http://a96549hg.bget.ru/user/Glennthype/>http://a96549hg.bget.ru/user/Glennthype/</a> В интернете слишком количество скриптовых вебсайтов, коие принадлежат плутам. Их главная цель – привлечь гэмблеров, пообещав столько великодушные подарки, хотя и крупные выигрыши. Так собственно кое-какие веб-сайты предлагают получить за регистрацию том $1 000.Особую изюминку видео слотам присваивают оригинальные символы. С их в активизируются различные бонусы. Вы можете запустить дополнительный уровень и увеличить необходимую выигрыша. Есть знаки, которые заменяют ненадобные составляющие и сами создают выигрышные комбо. Не стоит забывать и тему бонус-тур. После каждого успешного спина есть шанс увеличить необходимую выигрыша в два либо хорошо раза. 1×slots зеркало рабочее Третитй бездепозитный бонус за регистрацию – валютные свои. К раскаянью, начислить рубли или баксы способны только знаменитые и популярностью клубы. С их помощью возможность насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком.
1×slots casino зеркало
Постарайтесь отыграть вейджер, дабы замечена возможность оставить заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электрической кошелёк, карту, аппарат.В некоторых онлайн казино для получения бездепозитных призов не довольно просто зарегистрироваться на веб-сайте клуба и подтвердить свои контактные данные. Дополнительно требуется активация промокода. Существуют казино с бонусом за регистрацию, каких довольно известны фриспины в онлайн казино впоследствии регистрации в определенных забавах. Они встречаются и почаще бесплатных поощрений либо классических призов в казино без вложений. Например, игрок регистрирует счет, на который начисляются безвозмездные игры, бонус за регистрацию в виде бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса игры выигрывает истинные средства, коие в последствии возможно успешно исключить из заведения на свою платежную систему. То есть, есть все шансы вывести средства без рисков собственными финансами. Регистрация, за которую игрок получит призы, займет пару минут, а спасибо этому возможно прирастить 5 евро поощрений до тысячи и без всяких проблем исключить их.Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. <a href=http://www.hpt.co.kr/bbs/board.php?bo_table=free&wr_id=47182>http://www.hpt.co.kr/bbs/board.php?bo_table=free&wr_id=47182</a> Чтобы других увериться в превосходствах бездепозитных призов, достаточно зарегистрироваться в казино и получить поощрение.Если вы бывалый игрок, вы должны знать, что приз без депо – редчайшая находка. Тем не, мы неделю исследуем онлайн, чтобы отыскать вам наихорошие бездепозитные предложения. 1×slots зеркало подтвердит вашу регистрацию если говорить Но никогда не запамятовывайте внимательно разбирать правила роли в бонусных промоакциях. Если вы нарушите хотя бы одно условие, позже вы не сможете уладить недоразумение с администрацией.Для как, дабы отыграть сумму вашего бездепозитного приза надо(надобно) выполнить условия вейджера. Очень часто фриспины даются на определенные слоты (book of ra, book of dead, book of sun), подбирайте слот себя по, они все довольно красивые и высококачественные. Бездепозитные бонус имеет быть денежным например и повторяющий фриспинов на слоты
1×slots зеркало регистрацию более популярный вариант это
Вообще перейдя в казино — правила одинаковы в получении бездепозитных бонусов, в стереотипные управляла входит: подтвердить эл. Почту и аппарат, заполнить свой собственный профиль, активировать промо код или активировать предложения во вкладке БОНУСЫ. 1×slots официальный сайт мобильная версия скачать <a href=http://ledyardmachine.com/forum/User-Ralphfug>http://ledyardmachine.com/forum/User-Ralphfug</a>
1×slots зеркало рабочее на сегодня
Составленный экспертами Casino.ru список онлайн-казино с бездепозитным бонусом разрешает игрокам сравнить спецпредложения разных операторов.B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. <a href=http://www.en.besatime.com/index.php?subaction=userinfo&user=HenryTap>http://www.en.besatime.com/index.php?subaction=userinfo&user=HenryTap</a> 1×slots регистрация 1×slotscasino 56 online Как и другие промоакции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения являются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает свежих гостей и позволяет им составить эмоцию о функционале, не рискуя вескими суммами.
<b>Смотреть еще похожие новости:</b>
<a href=http://check2go.net/author/jameslob/>1×slots мобильная версия войти казино</a>
<a href=https://showboysmedia.com/real-music/#comment-60402>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=133994>1×slots бездепозитный бонус за регистрацию</a>
<a href=https://www.makinamania.net/index.php?topic=251961.new#new>1×slots сайт</a>
<a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=13119>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Помните, что в неких забавах сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки числятся как отыгранные средства, в то время как в слотах идет в зачет все one hundred percent суммы. Обычно показатель повыше, чем для призов на депозит. Не изумляйтесь, в он будет том х100. Иногда завышенный коэффициент вейджера уточняется для жителей отдельных государств.
#7441 Dianaveter_seidohttps://dianaveter.ru/
Добрый день! Современные бережные технологии психологического консультирования, индивидуальный подход в каждой истории клиента, максимум поддержки и эмпатии. Решение психологических проблем современными методиками, психологическая консультация. Системный подход, пошаговые программы решения конкретных задач клиентов. <a href=https://dianaveter.ru/>Повышенная тревожность психолог</a> Если Психолог онлайн и в Екатеринбурге, то это в https://dianaveter.ru/ dianaveter.ru. Главный навык, который нарабатывается в личной терапии – это уверенность, вера в себя и состояние „Я могу решить, я могу справиться, я классный“. Психолог с отзывами, с опытом. Всем пока!
#7442 Charlesgunny
porno Игорь Акинфеев (футбол) 1×bet регистрация <a href=https://7club7.com/>ешь казино</a> pin up casino скачать up casino скачать <a href=https://www.ossetia.tv/>лучшие букмекерские конторы</a> 1×bet на сегодня скачать 1×bet пина casino 1×bet 1 букмекерская контора бетсити приложения букмекерских контор на андроид 1×bet скачать приложение
#7443 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7444 Charlesgunnyhttp://filmkachat.ru
1× slots официальный
Операторы гемблинга утверждают, что так они сражаются с бонус-хантерами. Впрочем, критики считают, собственно данным казино пробуют устроить из случайного гостя постоянного игрока. <a href=http://filmkachat.ru/>1хслотс официальный сайт зеркало</a> Условия отыгрыша приза. Если Вы планируете заработать на бездепозитном бонусе, то для внимание на значение вейджера и срок, кот-ый дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, тем легче отыграть приз и вывести выигрыш.Создание аккаунта. На веб-сайте казино необходимо открыть регистрационную форму и заполнить порожние поля собственными данными. Иногда на этом этапе требуется показать лишь адресок электронной почты и пароль, хотя почаще бы наполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д.). Нужно свидетельствовать лишь реальные данные, потому впоследствие они будут испытаны. <a href=https://www.dr-ay.com/blogs/217116/Mastering-Architectural-Rendering-From-Vision-to-Visual-Reality>https://www.dr-ay.com/blogs/217116/Mastering-Architectural-Rendering-From-Vision-to-Visual-Reality</a> Хотя безвозмездные призы начисляются без депозита, не исключено, что вам понадобиться заносить средства. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только после того, как новый клиент раз пополнит игровой счет. 1хслот зеркало <a href=https://gtorr.net/index.php?subaction=userinfo&user=JosephAlict>https://gtorr.net/index.php?subaction=userinfo&user=JosephAlict</a>
1×slots официальный сайт мобильная версия скачать
1хлот регистрация в 1×slots casino <a href=http://www.unique-listing.com/details.php?id=340333>http://www.unique-listing.com/details.php?id=340333</a> 1×slot казино зеркало При регистрации следует указывать лишь достоверную информацию. Когда учетная запись несомненно активна, появится доступ в Личный кабинет. В нем возможно избрать еденицу, ввести промокод и узнать доскональные правила получения и отыгрыша бездепа. Краткая информация об акции нередко находится непосредственно на регистрационной форме.Приветственный бездеп предоставляется любому игроку только один раз. Казино сражаются с например именуемыми бонусхантерами (от англ. Bonus Hunter — охотник за бонусами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения подарка. Исключить сходственные деяния позволяет верификация данных. Администрация вправе потребовать у клиента доказать индивидуальные данные, обозначенные при регистрации.
1×slots зеркало регистрация в 1×slots casino
Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации дара необходимо доказать электронную почту и привязать телефон; Бездепозитные призы в казино без пополнения 2022 — это определенная сумма денег или for nothing spins вращения, коие предоставляются первым постояльцам за регистрацию на сайте казино в виде бездепозитного бонуса, и дает для возможность с казино без пополнения опробовать услуги (игр), с последующей преимуществом, льготой вывода средств при исполненьи всех установленных правил. <a href=http://www.the.organmagazine.com/bbs/board.php?bo_table=free&wr_id=220642>http://www.the.organmagazine.com/bbs/board.php?bo_table=free&wr_id=220642</a> Даже не выиграв солидную сумму, игрок интересно проведет время, изнутри выучит работу площадки, воспримет геймплей автоматов. Все это без каких-то финансовых рисков. Быть в курсе наихороших промоакций с. Достаточно периодически изучать перечень свежих интернет казино с выводом приза без депозита в данном разделе. 1 х слотс зеркало Иногда у посетителей вебсайта все появиться трудности, задачи, препядствия при активации полученного промо-кода. В таких случаях, необходимо обратиться за поддержкою в службу поддержки «Support». Для получения ответа, непременно указывается определенная первопричина воззвания и подтверждается информация дополнительными экрана. Если сформировалась неоднозначная ситуация, всегда возможно адресоваться к главному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ.При регистрации стопам свидетельствовать только достоверную информацию. Когда учетная запись будет активна, будет доступ в Личный офис. В нем можно выбрать валюту, установить промокод и разузнать подробные верховодила получения и отыгрыша бездепа. Краткая информация об промоакции часто присутствует именно на регистрационной форме.
1хслотс мобильная версия зеркало
Рассмотрим на образце: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских рублей. В условиях акции указано, собственно вейджер бездепозитного бонуса х20. Поэтому, дабы отыграть приз, игроку несомненно необходимо устроить ставок на 35*20=700 рублей.Чаще всего, знаменитые сервисы, такие как MoneyBookers и WebMoney, еще MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное правило. Финансовые свои выводятся только через ту платежную систему, коей огромный для пополнения депо. Если же игрок получил бездепозитный покерный бонус, требуется восполнить счет на наименьшую необходимую, которая составляет обыкновенно десять долларов. 1×slots официальный demo регистрация в 1×slots casino <a href=https://resheto.ru/users/Cazinosdep/art/142492>https://resheto.ru/users/Cazinosdep/art/142492</a> Эффективность бездепов в рекламного прибора оценили все операторы. Малоизвестные площадки употребляют такие промоакции, чтобы живо набрать базу. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны неизменных гостей. Не все сайты, дающие подарки без депозита, рекомендованы к ирге. За привлекательным промоописанием могут прятаться неосуществимые обстоятельства отыгрыша прочие подводные камни.
скачать 1×slots на андроид мобильная версия
Вознаграждения за получение VIP-статуса ? начисляются в рамках программы лояльности при достижении очередного уровня или выдаются индивидуально менеджерами саппорта. <a href=http://forum.notionmusic.com/memberlist.php?mode=viewprofile&u=25522>http://forum.notionmusic.com/memberlist.php?mode=viewprofile&u=25522</a> Также учтите, собственно некоторые игровые платформы сужают перечень государств, которые готовы получить предложенный бездепозитный приз за регистрацию. К примеру, существуют онлайн-заведения, выдающие подобные бонусы только обитателям конкретных стран. К примеру, онлайн казино 777 Оригинал предоставляет бездепозитный бонус только игрокам из России и стран СНГ. Или наоборот, пичкают вознаграждением всех, считая обитателей некоторых государств (как сего, следует пристально учить список, дабы потом не появилось практически вопросов и претензий).Варианты выигрыша находятся от Вашей удачи и критерий игорного портала. Выше мы заявили, собственно некоторые бездепозитные бонусы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются и те, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность современных игр на средства, можно выиграть неописуемые суммы. Сегодняшние игровые автоматы либо видео слоты, как их именуют. Могут выдавать солидные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000. 1×slots зеркало Но такие рамки не смущают даже хайроллеров, потому коэффициенты на слотах дозволяют рассчитывать на солидные выигрыши, а неких автоматах разыгрывается прогрессивный джекпот.Это раз из главных характеристик привлекательности презента. С завешенным коэффициентом числе профессионалы не смогут выполнить обстоятельства по отыгрышу. И неважно, как привлекательно смотрится предложение – бездепозитный бонус казино в объеме $500 либо $1 000. Чтобы новички попревосходнее вникли, собственно же такое вейджер, мы разберём на образце.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.exalto-emirates.com/memberlist.php?mode=viewprofile&u=69997&sid=a6d9cf7134040d94747f87579ae88588>1×слот регистрация в 1×slots casino</a>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=134009>1хслотс официальный сайт зеркало</a>
<a href=https://www.goslog.ru/forum/messages/forum1/message13374/11-obrashcheniya-grazhdan?result=reply#message13374>1хслотс зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы — это подарки от казино повторяющий бонусных денег или фриспинов для игровых автоматов, которые начисляются на аккаунт игрока последствии процедуры регистрации на веб-сайте заведения. Для получения этих поощрений депозит не потребуется.
#7445 Charlesgunny
porno Алена Михайлова пари букмекерская контора <a href=https://sovsekretno.net/>pin up casino</a> букмекерскую контору пин casino регистрации <a href=https://m.repost.news/>7k casino официальный</a> казино зеркало сегодня где казино r7 casino porno Александр Соболев (футбол) pin up casino пин порно с Анастасия Потапова, теннисистка Юдаева Ксения Валентиновна порно
#7446 Albertpladehttps://koreaautonews.com/
<a href=https://koreaautonews.com/> 음주 운전 초범 벌금</a>
#7447 Charlesgunny
online casino 7k casino онлайн <a href=https://th-royalgclub.com/>порно с Юлия Ефимова, пловчиха</a> порно с Георгий Джикия (футбол) 1×bet xbet xyz <a href=https://7club7.com/>порно с Афонина Марина Игоревна</a> 7k casino официальный Черкесова Бэлла Мухарбиевна порно казино 1 скачать pin casino casino сегодня скачать 1×bet на андроид бесплатно pin casino зеркало
#7448 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7449 Rogerrekhttps://cheap-cigarettes.org/cigarettes/marlboro/
<a href=https://cheap-cigarettes.org/cigarettes/marlboro/>Shop Marlboro</a> Marlboro: A Legacy of Quality and Diversity
For decades, Marlboro smokes have been linked with excellence, recognizable style, and a wide array of options, making them a preferred option among mature consumers.
Why Is This Brand Stand Out?
Unrivaled Excellence Marlboro products are made with meticulousness and care, providing a smooth use with all products. Their dedication to maintaining top quality has secured them a loyal following, making this brand a preferred pick for those who seek consistency.
Legendary Branding The iconic appearance has grown into a symbol, easily identified and connected with the brand’s universal charm. Apart from its design, this product's design is crafted for durability and functionality, demonstrating the brand's care for its users.
Wide Variety of Blends Marlboro Cigarettes offers a wide array of options to cater to all preferences, including:
– Traditional Choices: Ideal for people who prefer a traditional flavor. – Light Flavors: Crafted for smokers who enjoy a gentler blend. – Unique Options: Catering to unique palates, this category offer a fresh twist on the Marlboro experience.
Reasons Why This Brand Remain a Popular Selection?
1. Quality Assurance: The company has established a legacy for delivering the reliable experience in every product, irrespective of blend.
2. Worldwide Recognition: As a choice enjoyed by smokers in various regions, Marlboro symbolizes reliability and excellence.
3. Creativity: Marlboro keeps evolving, introducing modern choices and styles to suit the modern demands of clients.
Browse the Brand Offerings
Regardless of whether you are desiring the robust taste or a lighter blend, This brand has something for every taste. Explore the reasons so many adult smokers stick with the company as their preferred name and enjoy the name of superiority and options for yourself.
This Brand: A Legacy You Can Trust, A Flavor You’ll Enjoy.
#7450 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7451 Nelsonhighttps://bs02shop.gl
Узнайте свою аудиторию лучше <a href=https://bs02site2.at/>https://bs02site2.at</a> анализ данных, улучшение опыта пользователей и рост конверсий. Помогаем привлекать клиентов и увеличивать доход.
#7452 Ремонт стиральных машин LG Москваhttps://remont-stiralnyh-mashin-lg-gold.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт стиральных машин lg цены, можете посмотреть на сайте: <a href=https://remont-stiralnyh-mashin-lg-gold.ru/>ремонт стиральных машин lg</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#7453 Ремонт стиральных машин Indesit Москваhttps://remont-stiralnyh-mashin-indesit-plus.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт стиральных машин indesit, можете посмотреть на сайте: <a href=https://remont-stiralnyh-mashin-indesit-plus.ru/>ремонт стиральных машин indesit рядом</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#7454 Jefferyfremehttps://bs2baest.at
С помощью платформы <a href=https://bc2site.gl>https://bc2site.gl</a> вы получите доступ к инновационным инструментам, которые помогут преуспеть в онлайн-продвижении. Управление проектами, оптимизация SEO и аналитика — все это доступно на bs2site.
#7455 Charlesgunnyhttp://filmkachat.ru
1× слот зеркало
Также, ситуации необходимо подтвердить собственный номер телефона, достичь код, полученный в смс-сообщении от клуба ввести в специальное фон в собственном кабинете игрока. <a href=http://filmkachat.ru/>1×slots официальный зеркало</a> <a href=https://www.goldenline.pl/grupy/Przedsiebiorcy_biznesmeni/health-economics/exploring-the-power-of-3d-product-visualization-services-for-your-business,3947890/>https://www.goldenline.pl/grupy/Przedsiebiorcy_biznesmeni/health-economics/exploring-the-power-of-3d-product-visualization-services-for-your-business,3947890/</a> 1×slots зеркало выигрыши обязательно пройдите регистрацию если <a href=http://animemiru.ru/user/Charlesodoth/>http://animemiru.ru/user/Charlesodoth/</a> При использовании бездепозитным бонусом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют некоторое видов лимитов:Автоматическая активация первый самой комфортной, хотя ручной способ имеет перед ней достоинства. Прежде чем использовать вознаграждение от казино, стоит заблаговременно найти, сколько медли требуется на исполнение всех критерий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала действия приза.
рабочее зеркало 1×slots
1хслотс казино зеркало <a href=https://agroinfo.biz.ua/wr_board/tools.php?event=profile&pname=MiguelCeape>https://agroinfo.biz.ua/wr_board/tools.php?event=profile&pname=MiguelCeape</a> Чтобы выступать даром на реальные деньги в казино, порой достаточно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные деянья. 1×slots регистрация 1×slotscasino 56 online Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации презента необходимо доказать электрическую почту и привязать телефонный;Выбор любого интернет казино на нашем сайте. В описании к каждому Вы сможете узнать, собственно получите за создание аккаунта.
1×slots официальный сайт скачать
Сразу после активации промокода можно пользоваться подарком. Как уже упоминалось, бонусы случаются трёх видов – фриспины, кредиты и фриплей-бонусы. Прежде всего, не запамятовывайте периодически заглядывать на страничку обзоров бездепозитных призов. Они шаг за шагом оценивают более увлекательные предложения основных игорных порталов. <a href=https://domivka.biz.ua/wr_board/tools.php?event=profile&pname=ChrisBem>https://domivka.biz.ua/wr_board/tools.php?event=profile&pname=ChrisBem</a> 1×slots регистрацию более популярный вариант это
1×slots официальный сайт скачать на айфон
Каждый новичок и профессиональный игрок мечтают прытко стартануть и начать создавать реальные ставки. Для сего достаточно арестовать подарок, за кот-ый надо уплачивать. В зависимости от игровой платформы, нужно сделать профиль, привязать email или телефон. После сего администрация начисляет щедрое вознаграждение повторяющий безвозмездных вращений либо виртуальных кредитов. <a href=https://ragnarok.ch/forum/viewthread.php?thread_id=126927>1хслотс рабочее зеркало</a> Перечисленные повыше основные свойства сочетают практически каждый приз и являются стандартными для бездепозитных бонусных начислений в казино. Доступные игры – В неких азартных играх можно снизить математическое преимущество казино до нескольких десятых процента. В их числе почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как правило, в этих забавах ставки идут в зачет вейджера не всецело. Например, имеет предусматриваться только 50%. В неких играх бездепозитные бонусы вообщем нельзя отыгрывать.Активация по промокоду употребляется в разных обликах бездепов. Если речь о приветственном бонусе, то набор знаков возможно разузнать на главной странице, в регистрационной форме либо послании, коие отправляется юзеру для доказательства адреса электронной почты. Акции имеют проводиться общо с партнерскими площадками. Обычно код размещается на стороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активируется разовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем актуальный код для активации в описании любого рекламную. 1×slots casino регистрация <a href=https://systemcheck-wiki.de/index.php?title=%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%94%D0%B7%D0%B5%D0%BD_%D0%A7%D0%B8%D1%82%D0%B0%D1%82%D1%8C>https://systemcheck-wiki.de/index.php?title=%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%94%D0%B7%D0%B5%D0%BD_%D0%A7%D0%B8%D1%82%D0%B0%D1%82%D1%8C</a>
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Все безвозмездные призы кажутся заманчивыми. Кто же откажется от способности сыграть в онлайн-казино, не рискуя деньгами, хотя получая выигрыши. Но далеко не все бездепозитные бонусы одинаковой презентабельны для рассудительного клиента.Подтвердите личность, предоставив оператору казино средства паспортные данные. Инструкции обыкновенно несложные, главное — конкретно им по. Если написано, собственно «на фото должны быть видны все четыре угла страницы паспорта» — сделайте непосредственно это фото. <a href=https://www.ccvgaming.com/forum/member.php?38524-Donaldunlic>https://www.ccvgaming.com/forum/member.php?38524-Donaldunlic</a> 1×slots зеркало регистрация то дальше необходимо пройти
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/8020/#comment-336041>1×slots зеркало быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чаще всего интернет-казино предлагают бездепозитные бонусы новым юзерам. Эта промо-акция очень отлично завлекает новичков, подталкивая их к открытию счета. Конечно, не они становятся послушными клиентами, но сам факт регистрации аккаунта играет на руку заведению. Размер бонусов чаще всего чисто символический и не превышает 50 рублей. Приятно, но ощутимым бустом при вряд ли станет.
#7456 Charlesgunny
лучшая казино сайты казино <a href=https://th-royalgclub.com/>казино фильм смотреть онлайн</a> ограбление казино Нургалиева Эльвира Рамиловна порно <a href=https://specreporter.com/>kometa casino</a> casino 7k рабочее казино в россии казино онлайн бесплатно кент casino pin up casino зеркало pin up casino пин Кузнецова Анна Юрьевна порно
#7457 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7458 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации
Если вы облюбовали себе количество брендов которые вам больше всего приглянулись, для постоянной игры! Таких гемблеров казино довольно предпочитает и ценит, за частую такие игроки становятся VIP игроками заведения, которым нередко поступают выгодные предложения повторяющий бонусов, например же туда заходит и бездепозитные.Бонус за регистрацию в казино без депо с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша может потребоваться устроить ставки на сумму, в некоторое 10-ов один превосходящую сумму приза либо выигрыша. <a href=http://filmkachat.ru/>1×slots регистрацию более популярный вариант это</a> Каждая игровая платформа выделяется условиями по получению и отыгрышу бездепов. В правилах отчетливо расписаны кратковременные рамки, за коие надо(надобно) прокрутить вейджер. Также не запамятовывайте на наибольший объем ставки и максимальную необходимую выплаты. С другой стороны, чтобы получить бездепозитные призы казино, достаточно истратить не более 1 минутки.Подарки на праздники ? приуроченные к праздничным датам, требующие условного отыгрыша либо начисляются без такового. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду. <a href=https://www.gencon.com/forums/18-off-topic/topics/19973–3d-rendering-understanding-the-art-and-science-of-digital-image-creation>https://www.gencon.com/forums/18-off-topic/topics/19973–3d-rendering-understanding-the-art-and-science-of-digital-image-creation</a> Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам запрещено начислять бонусы клиентам, не имеющим валютных средств на счете. Мы предлагаем осмотреть актуальные бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ. 1хслот зеркало сайта <a href=http://sanpai.org/userinfo.php?uid=31958#>http://sanpai.org/userinfo.php?uid=31958#</a> Не советуем сломя голову браться за всевозможные предложения получения средств без вложений. Вполне вероятно, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем смотрится на первый взгляд. Альтернативой считается казино приз за депозит. Мы предлагаем вас пару советов, благодаря коим у каждого игрока будет вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств:
1х слот 1хслотс регистрация перейти на 1×slots
Как только получите бездеп в казино, всё также не запамятовывайте инспектировать электрическую почту. Некоторые игорные клубы непрерывно радуют активных гэмблеров приятными бонусами. Чаще всего получить подарок возможно в преддверии веселья, на день рождение, за привлечение друга. А того распространённым бонусом считается прибавка к депозиту. Нужно всего лишь восполнить счёт, и азартное заведение прирастит его на 50–100%.Большинство клубов привлекают внимание в за счёт разнородных подарков. На 1 сайтах можно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает благотворительные вращения для пуска топовых онлайн слотов. Несмотря на разные промоакции, стоит выделить самые главные. <a href=https://forum.graylite.com/viewtopic.php?t=60840>1×slots рабочее зеркало на сегодня</a> 1×slots регистрация на сайте <a href=http://www.sport-technology.ru/index.php?subaction=userinfo&user=whimsicalmalpra>http://www.sport-technology.ru/index.php?subaction=userinfo&user=whimsicalmalpra</a> Некоторые клубы механически начисляют бонус на акк игрока после исполнения критерий получения, но посещают ситуации, когда бонус надо(надобно) активировать игроку самому. Есть несколько методов активации бонуса:Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных обстановок с казино, когда после отыгрыша бездепа для не дадут вывести солидную необходимую выигрыша. 1×slots бонус за регистрацию В интернет-сети практически можно найти списки более модных и гарантированных поощрительных программ от популярных онлайн-казино.Во время игры в казино, выигрыши, приобретенные спасибо безвозмездным призовым фондам, суммируются и срабатывают в совместную сумму для отыгрывания. Однако, случае удача улыбнется и получится отыграть все бонусы, игровое заведение гарантированно допустит вывести денежные свои. Сумма вывода будет в от лимита, утвержденного непосредственно в этом учреждении. Поэтому, внимательно надо(надобно) разбирать управляла выдачи анлимитных депо.
1×slots зеркало на сегодня
Следует выделить, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом. Бонус с зачислением средств на счет дает больше свободы поступков. Пользователь сам выбирает, каким образом воспользоваться подаренными средствами. Здесь кроме все действовать ограничения на перечень дешевых игр, хотя обыкновенно эти рамки не так строги, как в промо с безвозмездными вращениями. <a href=https://iprodam.by/user/profile/23768>https://iprodam.by/user/profile/23768</a> Как правило, новоприбывшие геймеры начала хотят ознакомиться с методами ввода и вывода денежных средств и сроки выполнения поданных заказов чтобы четко осознавать, как скоро появится исключить собственный казино приз за регистрацию без депо на электронный кошелек либо же банковскую карту. К счастью для всех играющих, снутри конкретных холдингов, все казино соперничают между собой. Ведь в бы конкретную фирму давало лишь одно онлайн-заведение, то навряд бы клиенты заметили казино с призом за регистрацию и могли бы рассчитывать только на вознаграждение повторяющий бонуса на 1-ое инвестиция. К каждому заведению регулярно следует привлекать новых игроков, что, конечном, лишь на руку всем играющим.Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, так как Вам придется ее подтвердить в будущем при выводе средств. 1хслотс мобильная версия зеркало Денежные средства. Третий приз за регистрацию без депозита – наличные. К раскаянью, лишь знаменитые и знаменитые клубы имеют дать деньги в руб. Либо долларах. С их подмогою появится насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед этим нужно исполнение определенных критерий.Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, дабы появилась возможность исключить выигрыш.
1×slots регистрация 1×slots casino c2d ru
<a href=http://miupsik.ru/forums/showthread.php?tid=225802>1хслотс рабочее зеркало на сегодня</a> Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция имеет подробные правила, ссылка на которые обыкновенно содержится в промообъявлении. В них указываются лимиты, вейджер, список доступных игр. Если оператор прячет данные о предложении, то пользоваться им надо. x1 slots 1хслотс регистрация перейти на 1×slots <a href=https://swordmaster.org/user/PatrickUnsaf/>https://swordmaster.org/user/PatrickUnsaf/</a>
x1 slots регистрация в 1×slots casino
Во время игры в казино, выигрыши, полученные благодаря бесплатным призовым фондам, суммируются и срабатывают в общую необходимую для отыгрывания. Однако, если фортуна улыбнется и получится отыграть все призы, игровое заведение гарантированно допустит исключить финансовые средства. Сумма вывода будет зависеть от лимита, утвержденного непосредственно в этом учреждении. Поэтому, пристально нужно читать верховодила выдачи безлимитных депо. Бонус за регистрацию в казино без депо с выводом средств нужно отыграть. Зачастую для отыгрыша может понадобиться сделать ставки на сумму, в некоторое 10-ов один превосходящую сумму приза либо выигрыша. <a href=https://play.eslgaming.com/player/myinfos/20327685/>https://play.eslgaming.com/player/myinfos/20327685/</a> К огорчению, нет. Почти все казино, просят внесение хотя бы 1-го минимального депо для вывода выигрыша с бездепозитного бонуса. Также учитывайте, собственно исключить средства разрешается лишь на ту платежную систему, с которой был изготовлен депо. 1хслотс официальный сайт зеркало Это раз из основных характеристик привлекательности дара. С завешенным коэффициентом и мастера не сумеют выполнить условия по отыгрышу. И маловажно, как презентабельно выглядит предложение – бездепозитный бонус казино в размере $500 либо $1 000. Чтобы новенькие попревосходнее вникли, что же это вейджер, мы разберём на образце.Каждый игры обязан сперва детально выучить обстоятельства по получению и отыгрышу понравившегося презента. Если всё устраивает, поспешите отобрать бесплатные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик момент начать вертеть барабаны топовых слотов.
<b>Смотреть еще похожие новости:</b>
<a href=https://praisenpray.org/forums/showthread.php?tid=97797>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<a href=https://forum.home-visa.ru/viewtopic.php?f=69&t=807392&p=2814377#p2814377>1хслотс рабочее зеркало на сегодня</a>
<a href=https://nauc.info/forums/viewtopic.php?t=20377102>1×slots зеркало видели такую регистрацию на</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Иногда виде бездепа, казино дарит минимальный бонус (до 50 рублей), ради которого надо заморачиваться.
#7459 Charlesgunny
рабочее казино 1×bet скачать приложение на андроид <a href=https://res-publika.com>официальные зеркала казино</a> Елена Лядова порно с Васильева Татьяна Викторовна <a href=https://krtka.info/>1×bet официальный сайт</a> 1×bet зеркало рабочее xbet зеркала казино pin up casino buzz 1×bet сейчас kent casino регистрация порно с Антропова Валентина Викторовна суть казино
#7460 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7461 Ctgroup_arroPhttps://www.ctgroup.kz/
Всем привет! Хочу поделиться полезной и нужной новостью для студентов, детей, школьников и взрослых! Уважаемые читатели, что поделать, если не получается понять и изучить казахский, русский, английский язык? Что делать если не получается самостоятельно подготовиться к ЕГЭ, экзаменам или зачетам? К нашему счастью и радости есть отличный Образовательный центр в Атырау и в Алматы, который вас быстро и профессионально обучит и подготовит к любым видам экзаменам. В общем, если вы хотите найти, образовательный центр или образовательный языковой центр и т.д., например: <a href=https://www.ctgroup.kz/online-english/>онлайн курсы английского языка</a> Тогда вам срочно нужно прямо сейчас перейти на сайт Образовательного центра CtGroup и узнать все подробности по подготовка, экзамены, тесты, курсы, обучение, уроки, языковые курсы в Алматы и в Атырау и т.д. https://www.ctgroup.kz/ . Обязательно переходите на сайт Образовательного языкового центра Caspian Training Group изучайте информацию и сохраняйте в закладки, не забудьте записать адрес сайта и номер телефона. Кстати, все можно сделать онлайн, т.е. удалено, совершенно не нужно ни куда ехать и ни куда выходить из дома или офиса. Всем пока!
#7462 Ремонт стиральных машинhttps://remont-stiralnyh-mashin-ace.ru/
Наши специалисты предлагает высококачественный <a href=https://remont-stiralnyh-mashin-ace.ru/>качественный ремонт стиральной машины</a> различных марок и моделей. Мы понимаем, насколько необходимы вам ваши устройства для стирки, и стремимся предоставить услуги высочайшего уровня. Наши профессиональные техники работают быстро и аккуратно, используя только сертифицированные компоненты, что предоставляет длительную работу наших услуг. Наиболее общие проблемы, с которыми сталкиваются владельцы стиральных машин, включают неисправности барабана, проблемы с нагревом воды, неисправности программного обеспечения, неработающий насос и поломки компонентов. Для устранения этих неисправностей наши опытные мастера оказывают ремонт барабанов, нагревательных элементов, ПО, насосов и механических компонентов. Доверив ремонт нам, вы получаете долговечный и надежный сервис ремонта стиральных машин. Подробная информация представлена на нашем сайте: https://remont-stiralnyh-mashin-ace.ru
#7463 JamesAdubshttps://bs2site2.net
Анализируйте поведение своей аудитории <a href=https://bs2site2.net/>https://bs2site2.net</a> находите точки роста и повышайте конверсии сайта. Поможем вам сделать ваш бизнес эффективнее и увеличить доход.
#7464 Charlesgunnyhttp://filmkachat.ru
1×slots скачать на айфон
Как только получите бездеп в казино, всё одинаково не забывайте инспектировать электронную почту. Некоторые игорные клубы день радуют интенсивных гэмблеров приятными бонусами. Чаще всего получить подарок возможно в преддверии праздника, на день рождение, за привлечение друга. А того распространённым бонусом считается надбавка к депозиту. Нужно не восполнить счёт, и азартное заведение прирастит его на 50–100%.Бонус с зачислением денег на счет дает больше свободы деяний. Пользователь сам избирает, каким образом распорядиться подаренными средствами. Здесь также имеют действовать ограничения на перечень дешевых игр, но обычно эти рамки не например строги, как в рекламную с безвозмездными вращениями. <a href=http://filmkachat.ru/>1хслот зеркало</a> <a href=https://rentry.co/p284m9cr>https://rentry.co/p284m9cr</a> Используйте превосходнейшие бездепозитные призы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из списка ниже, дабы заработать подарки за обычные деянья теперь сегодня получить 1-ый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и прыткими выводами на электронные кошельки.При правильном раскладе бездепы — это прекрасный метод выступать на средства без траты личных средств. Есть некоторое рекомендаций, следуя которым можно извлечь максимально выгоды из сходственных промоакций казино. Играть следует лишь на лицензированных площадках. Скриптовые веб-сайты столько накалывают с бонусными услугами, хотя и используют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах невероятно. казино 1×slots <a href=https://www.club-q5.ru/forum/blog.php?cp=7062>https://www.club-q5.ru/forum/blog.php?cp=7062</a>
1×slots акции
<a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=7523&TITLE_SEO=7523-preobrazovatel-interfeysov-usb-rs485&MID=475400&result=reply#message475400>казино 1×slots официальный сайт</a> 1хслотс 1хслотс регистрация перейти на 1×slots <a href=http://stroyrem-master.ru/user/Davidexcic/>http://stroyrem-master.ru/user/Davidexcic/</a> Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам запрещено начислять бонусы посетителям, не имеющим валютных средств на счете. Мы предлагаем разглядеть актуальные бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ. 1хслотс официальный сайт зеркало
1×slots акции
Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации бонуса без депозита. Внимательно прочитайте до конца. Многие новенькие делают ошибки на шаге регистрации и поэтому возможности получить презент.Лишь известные и знаменитые азартные заведения имеют позволить себе выдавать бездепы в виде добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депо, которые возможно истратить в лучших аппаратах с высокой отдачей. <a href=https://knowyourmeme.com/users/scottvew>https://knowyourmeme.com/users/scottvew</a> 1хслотс официальный сайт зеркало Ограничения по забавам. Администрация воспрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, деньгами либо безвозмездными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда разделение выполняется по виду игр. Например, отыгрыш возможен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino.
1× slots регистрация в 1×slots casino
Бездепозитные призы отличный вариант бесплатной игры в игровые автоматы. Многие юзеры сети не понимают, собственно в казино можно начать играть полностью бесплатно, а позже исключить выигрыш на банковскую карту или электронный кошелек, иные не доверяют интернет казино, а третьи удачно играют и выигрывают – и подчас довольно немалые суммы. 1×slots актуальное зеркало <a href=http://www.hondacityclub.com/all_new/home.php?mod=space&uid=824523>http://www.hondacityclub.com/all_new/home.php?mod=space&uid=824523</a> Но разу не забывайте пристально читать управляла участия в бонусных акциях. Если вы нарушите желая бы одно условие, позднее вы не можете устроить недоразумение с администрацией.
1×slots сайт
Бонус в казино без депозита имеет различные вариации: может быть приветственный бонус, промоакции в честь каких-либо праздничных или главных дат, приз за вербование новых игроков, лояльность и получение VIP-статуса.Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=http://blog.isport.ua/rabindex/other/119810.html>http://blog.isport.ua/rabindex/other/119810.html</a> Выбирая безвозмездный приз, внимательно изучайте управляла. Убедитесь, собственно вам возможно брать участие в промоакции. Уточните, в каких играх можно исполнять обстоятельства вейджера. При надобности задавайте вопросы представителям саппорта.Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и. Когда игроку полагается большое фриспинов, администрация имеет разбивать их начисление на количество дней. Бесплатные вращения предоставляются для определенного слота, кот-ый указывается в правилах акции. casino 1×slot Ознакомьтесь с нашим перечнем лучших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего перечня и получите бездеп незамедлительно. Хватайте наилучшие благотворительные предложения ниже и выигрывайте немалые деньги, не рискуя!
<b>Смотреть еще похожие новости:</b>
<a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/7130–1×slots-zerkalo-registratsiya-to-dalshe-neobkhodimo-projti#7140>1×slots зеркало регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Таким образом онлайн казино получает вероятного игрока. Возможно в будущем либо настоящем он захочет сыграть на средства деньги. Так работают бездепозитные бонусы в онлайн казино. Здесь очень подходит выражение, безвозмездные сыр посещает лишь в мышеловке. Начинающие игроки шансы не обдумывать опасность пыла. Однако с понимания делается больше. Это тема для отдельного обсуждения.
#7465 Charlesgunny
casino com retro casino <a href=https://7club7.com/>казино рояль</a> 7k casino скачать porno Алена Михайлова <a href=https://th-royalgclub.com/>букмекерскую контору пин</a> пин ап букмекерская контора casino бездепозитный Ходнева Светлана Владимировна порно porno Илона Маркова, хоккеистка пин casino 1×bet зеркало рабочее бесплатные букмекерские конторы
#7466 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7467 Charlesgunnyhttp://filmkachat.ru
1×slots сайт зеркало
B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.Главным нюансом в возникновении данных вознаграждений произведено том,, собственно пустив их в ход, игры ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он спасибо бонусам какой-нибудь выигрыш или моментально спустит все только что прибывшие деньги). То есть, казино снабжает игрока вероятностью на дармовой базе выступать во различные слоты причем спонсирует забаву. <a href=http://filmkachat.ru/>1×slots регистрацию процедура займет всего лишь</a> Бездепозитный бонус казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в этом и заключается главное различие. <a href=https://www.dmxzone.com/support/13984/topic/148653/>https://www.dmxzone.com/support/13984/topic/148653/</a> 1×slots зеркало этих способов предполагает регистрацию <a href=https://party.biz/profile/Glavdorogadv1808?tab=541>https://party.biz/profile/Glavdorogadv1808?tab=541</a> Некоторые клубы механически начисляют приз на акк игрока в исполненья условий получения, но случаются истории, когда приз нужно активировать игроку самому. Есть некоторое методов активации бонуса:
1×slots коды
Мы проделываем ударение на ключевых положениях верховодил, рассказываем о территориальных ограничениях и вкратце информируем о других промоакциях обсуждаемого казино.Выбор каждого интернет казино на нашем сайте. В описании к любому Вы можете разузнать, собственно получите за творенье аккаунта. x1 slots регистрация в 1×slots casino После получения бонуса вывод средств для посетителя будет недосегаем до тех пор, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или чета недель. Выводить средства игрок сможет только в отыгрыша. <a href=http://julia4tied.de/member.php?action=profile&uid=123386>http://julia4tied.de/member.php?action=profile&uid=123386</a> 1×slots рабочее зеркало на сегодня На бонусные начисления имеют быть установлены вспомогательные лимитирования, которые Вы не учли при отыгрыше. Пока приз полностью не отыгран — средства из казино не выводятся.Способы получения бездепа различаются в зависимости от облика бонуса, кот-ый приглянулся игроку. Но вас иначе нужно быть зарегистрированным в законном онлайн-казино и подтвердить собственную лицо. В общем облике пошаговая аннотация для получения бездепозитного приза смотрится так:
1×slots актуальное зеркало
Как лишь на виртуальном счету окажутся бонусные свои, поторопитесь отыграть вейджер. Сразу после этого возможно оставить заявку на вывод выигрыша. Кредиты прибыльно отличаются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом настоящих средств и выделяют возможность почувствовать задор. Во-вторых – возможно насладиться каждой азартной забавой доступной на веб-сайте. В вашем распоряжении присутствуют автоматы, настольные приложение, видео-покер, Live-дилеры. Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала резвые выводы. Фишка выплат в, собственно достаточно избрать платёжный инструмент и показать сумму. В большинстве случаев деньги зачисляются на электрические кошельки протяжении 15 минут, а на банковские карты – 1–3 рабочих дня.У каждой игры средства притязания по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система засчитает каждую ставку. В рулетке и покере сделать это намного сложнее. Именно поэтому например важно внимательно читать обстоятельства получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в каждой ирге, то новенькие просто «спустят бонус на ветер». <a href=https://njt.ru/forum/user/144657/>https://njt.ru/forum/user/144657/</a> 1×slots регистрация 1×slots casino 777 online
1×slots регистрация 1×slots casino 777 online
На нашем сайте Вы отыщите список актуальных новых бездепозитных бонусов в казино 2022 года. Также, есть большое неповторимых предложений, которые доступны только посетителям нашего сайта в регистрации по нашей ссылке или активации специального промокода.Вейджер (wager) – это коэффициент, кот-ый показывает на какую сумму необходимо сделать ставок, чтобы вывести бонус из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего приза, Вам нужно сделать ставок на необходимую: 500*70=3500 руб. Только всецело отыграв приз, Вы можете вывести свой выигрыш. В интернет-сети практически возможно отыскать перечни более популярных и обещанных поощрительных программ от модных онлайн-казино.Обычно показатель повыше, чем для призов на депо. Не дивитесь, если он несомненно числе х100. Иногда завышенный коэффициент вейджера устанавливается для обитателей отдельных государств. Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам воспрещено начислять призы клиентам, не имеющим денежных средств на счете. Мы предлагаем осмотреть животрепещущие призы онлайн-казино с лицензией, которые соблюдают законодательство РБ. 1×slots зеркало регистрацию более популярный вариант это <a href=http://www.annunciogratis.net/author/matildacons>http://www.annunciogratis.net/author/matildacons</a>
1×slots зеркало рабочее
Также бездепозитные призы имеют служить методом возвращать к забаве клиентов, временно приостановивших своё сотрудничество с компанией: извещение о бездепе поступает на мобильный телефон либо почту. <a href=http://g70787z8.beget.tech/user/HarrySoamn/>http://g70787z8.beget.tech/user/HarrySoamn/</a> Иногда операторы требуют внесение малого депо перед выводом для верификации платежного прибора. В неких казино этот депо того светит отыграть.Высокая конкурентность в сегменте азартных игр доказывает операторов привлекать посетителей разнородными акциями. Благодаря данному у гостей замечена вероятность получить бонусы в казино за регистрацию без депозита. Воспользоваться этим предложением можно, минуя процедуру внесения денег на игровой счет, просто активировав акк на сайте. Наш экскурсовод по бездепам поможет избрать самую симпатичную бонусную программку, разузнать верховодила получения такового гонорары и воспользоваться им с максимальной выгодой. 1×slot регистрация Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша бонусов. Заведения всегда устанавливают наивысшую ставку, возможную по условиям вейждера.
<b>Смотреть еще похожие новости:</b>
<a href=https://portugal-campings.com/pt/profile/jamescip/>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<a href=http://www.carshowsociety.com/forum.php?action=profile;u=2398>1×slots зеркало регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В зависимости от интернет заведения любой из них возможность вас предложить как бездепозитные средства, так и бездепозитные фриспины, коие в успешной регистрации рухнут вам на ваш игровой баланс. Любой выигрыш по ставке повыше установленного лимита несомненно считаться недействительным. То есть ставка не будет засчитана при отыгрыше, ну случае выигрыша его сумма не поступит на счёт клиента — итог игры будет полностью аннулирован.
#7468 Charlesgunny
казино регистрации казино ли <a href=https://strelochnik.com/>самое казино</a> казино вход Приезжева Екатерина Геннадьевна порно <a href=https://m.repost.news/>1×bet скачать приложение на андроид</a> 1×bet официальный скачать Светлана Ходченкова pin up casino buzz человек казино винлайн букмекерская контора Самойлова Алла Владимировна порно Преподобная Надежда Александровна порно
#7469 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7470 Charlesgunny
casino андроид ап казино <a href=https://rumafia.news/>Светлана Ходченкова</a> казино фильм онлайн 1×bet 1 <a href=https://kompromat1.online/>1×bet зеркало слоты</a> Елизавета Боярская порно с Дарья Клишина, легкоатлетка 1×bet сайт слоты казино букмекерские контора ап pin up casino зеркало казино фильм
#7471 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7472 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
Высокая конкуренция в разделе азартных игр мотивирует операторов привлекать посетителей разнородными промоакциями. Благодаря этому у посетителей бывает возможность получить призы в казино за регистрацию без депо. Воспользоваться таким предложением возможно, избегая процедуру внесения средств на игровой счет, просто активировав аккаунт на веб-сайте. Наш гид по бездепам поможет избрать самую привлекательную бонусную программу, разузнать правила получения такого вознаграждения и воспользоваться им с максимальной выгодой. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> Главное преимущество спинов – возможность изучить разные слоты. Также получится насладиться бонусными раундами, испытать удачу в риск-туре и преувеличить выигрыш за счёт особенных символов. Однако не только игровой процесс заслуживает внимание, как другого сосредоточиться на реальном выигрыше.Существует ли стратегии для отыгрыша бездепозитных призов? К раскаянию нет, на выигрыши или проигрыши с призов, казино либо игрок воздействовать имеет, отдача игр происходит от разработчиков игр. <a href=https://www.as7abe.com/wall/blogs/post/60173>https://www.as7abe.com/wall/blogs/post/60173</a> Как только вы отыграли вейджер и средства с бонусного баланса перебежали для на настоящий счет, Вы отважно можете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (устроить минимальный депозит к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депо). 1×slots быструю регистрацию а также мгновенное <a href=http://alla-print.ru/index.php?subaction=userinfo&user=irateshoe46>http://alla-print.ru/index.php?subaction=userinfo&user=irateshoe46</a>
казино 1×slots
Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном сайте и выполните вход в собственный кабинет, дабы арестовать благотворительные вращения с вейджером х40;Варианты выигрыша в от Вашей удачи и критерий игорного портала. Выше мы заявили, собственно некоторые бездепозитные призы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются и, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на деньги, возможно выиграть невозможные суммы. Сегодняшние игровые автоматы или видео слоты, как их называют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые множат ставку от х100.000. 1×slots зеркало подтвердит вашу регистрацию если говорить Бонус в казино без депо имеет разные разновидности: такое быть приветственный бонус, промоакции в честь каких-либо дней либо важных дат, бонус за привлечение свежих игроков, преданность и получение VIP-статуса.Если вы избираете испытанное лицензионное онлайн казино и выполните все условия получения бездепозитного приза, трудностей с получением подарка у Вас не возникнет. <a href=http://oren.kabb.ru/viewtopic.php?f=19&t=32786&p=53300#p53300>http://oren.kabb.ru/viewtopic.php?f=19&t=32786&p=53300#p53300</a> 1×слот регистрация в 1×slots casino
казино 1×slots
Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки шансы запросить вспомогательные документы или инициировать короткое общение по Skype. <a href=http://www.techieshah.com/2019/08/eclipse-server-tomcat-v85-server-at.html>http://www.techieshah.com/2019/08/eclipse-server-tomcat-v85-server-at.html</a> 1хслотс мобильная версия зеркало
1×slots на любой вкус как пройти регистрацию
Рассмотрим на образце: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских руб. В условиях промоакции предписано, собственно вейджер бездепозитного бонуса х20. Поэтому, чтобы отыграть приз, игроку несомненно необходимо сделать ставок на 35*20=700 рублей.Бездепы имеют входить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой либо баллами. <a href=https://mit-bbs.com/viewtopic.php?t=125808>1хслот зеркало</a> Промообъявления от казино не дают реальной картины и направлены на вербование внимания юзеров. Понять, как высоки шансы остаться в плюсе, позволит личный анализ условий предложения:Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, дабы появилась возможность исключить выигрыш. Еще одно условие дотрагивается размеров ставки. Операторы устанавливают максимальную необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, выбранной в Личном офисе. При превышении лимита есть риск потерять приза. Существующие ограничения относятся и к конкретным обликам ставок. Например, играя в рулетку, заказчик возможность столкнуться с запретом ставить фишки на шансы.Важно, убедитесь сомнений, собственно раньше не регились в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи. 1×slots сайт <a href=http://forum.centrum-hvac.pl/User-Glennhof>http://forum.centrum-hvac.pl/User-Glennhof</a> Подарки на конкретные даты отличаются условиями получения. Если одобрение начисляют игроку на день рождения, то сумма обыкновенно зависит от совместного размера депозитов за прошедший год.Способы получения бездепа различаются зависимо вида бонуса, кот-ый приглянулся игроку. Но вам иначе нужно быть зарегистрированным в законном онлайн-казино и доказать собственную лицо. В общем облике пошаговая аннотация для получения бездепозитного бонуса выглядит так:
1×slots casino зеркало
Возьми свой презент. Чаще всего приз активируется сразу в регистрации. Но бывают ситуации, когда нужно зайти в личный кабинет либо написать в справочную службу.Бывают ли бездепозитные бонусы без вейджера? Бывают, в у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию уточняется вейджер во всех казино. <a href=https://sociallist.org/submit.php?url=https%3A%2F%2Fmucho-rest.ru%2F&title=%D0%A0%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD+MUCHO&tag=knownvacancy35&lang=nl&show_all=1&text=%5Burl%3Dhttps%3A%2F%2Fmucho-rest.ru%2F%5D%D0%A0%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD+MUCHO%5B%2Furl%5D>https://sociallist.org/submit.php?url=https%3A%2F%2Fmucho-rest.ru%2F&title=%D0%A0%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD+MUCHO&tag=knownvacancy35&lang=nl&show_all=1&text=%5Burl%3Dhttps%3A%2F%2Fmucho-rest.ru%2F%5D%D0%A0%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD+MUCHO%5B%2Furl%5D</a> Начнём с того, что любое промо за регистрацию предполагает некоторые условия. Бездепозитные призы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность денежного оборота, необходимая для выполнения условий. Пример, возымели благотворительные вращения и выиграли с них 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 рублей, проигрышных или выигрышных, не. После исполнения, бонусный баланс перейдёт на настоящий и будет легкодоступным к выводу.Бонусы без депозита при регистрации считаются самыми привлекательными как для опытных игроков, так для и новичков. Получив это вознаграждение, заказчик возможность играть на настоящие средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, еще условия их активации и выигрыша. 1×slots casino регистрация 1×slotscasin online Такие одобрения позволяют безвозмездно протестировать новое казино, разобраться с игровым ходом интернет слотов, заработать и вывести небольшую необходимую денег.Будьте внимательнее при ознакомлении с правилами во избежание появления конфликтных ситуаций с казино, когда в отыгрыша бездепа для не дадут исключить солидную сумму выигрыша.
<b>Смотреть еще похожие новости:</b>
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=4611>1×слотс казино</a>
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=54596>1×slots регистрация на сайте</a>
<a href=https://isomedu.com/forum/profile/josephdrons/>1×slots регистрация 1×slots casino 777 online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, дабы снова получить безвозмездный приз. Игорные заведения нетерпимы к бонус-хантерам, потому вас ожидает неминуемое наказание. С иной стороны, намного проще отобрать бездепозитные фриспины за регистрацию в казино и прямо сейчас начать вращать барабаны в наихороших слотах. Главная необыкновенность спинов в, собственно они предусмотрены для лучших автоматов. Удастся столько пройти вспомогательные раунды, хотя и увеличить сумму выигрыша, заработать респины прочие внутриигровые подарки.
#7473 Charlesgunny
букмекерская контора без 7k casino официальный <a href=https://7club7.com/>порно с Константин Тюкавин (футбол)</a> porno Мира Андреева (теннис) кент казино <a href=https://rucriminal.info/>1×bet слоты 1×bet xyz</a> casino онлайн pin up casino официальный сайт pin up casino почему в казино не бывает настенных часов Елизавета Боярская Валентина Матвиенко порно gama casino
#7474 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7475 Martinruphttps://2news.com.ua
Самые актуальные новости Украины <a href=https://2news.com.ua/category/finansy/>https://2news.com.ua/category/finansy/</a> политика, экономика, общество и культура. Только проверенные факты и оперативная подача информации.
#7476 Rent-wheel_gaidohttps://rent-wheel.ru/
Всем привет! Отличная и полезная новость для жителей и гостей Краснодара! Бывают моменты, когда быстро и срочно нужен автомобиль, авто или машина. Своими ногами много не находишь, дороже выйдет и потратишь больше времени, чем арендовать или взять на прокат авто. Недавно узнал, об отличной и нужной организации специализирующейся на аренде автомобилей без залога. В общем, если вы хотите найти, аренда автомобиля, аренда авто, аренда машины и т.д., например: <a href=https://rent-wheel.ru/>машина на прокат</a> Тогда вам обязательно нужно прямо сейчас перейти на сайт Рентвил и узнать все подробности по прокат авто, прокат автомобилей, машина на прокат, автопрокат, аренда авто без водителя, аренда авто без залога, аренда авто посуточно, прокат авто без водителя в Краснодаре и т.д. https://rent-wheel.ru/ . Обязательно переходите на сайт RENTWHEEL rent-wheel.ru сохраняйте в закладки и изучайте информацию, не забудьте записать номер телефона и адрес сайта. На сайте можно заказать обратный звонок для уточнений моделей авто и цены проката или аренды автомобилей. Всем пока!
#7477 Charlesgunnyhttp://filmkachat.ru
1×slots бездепозитный бонус за регистрацию
Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.Бездепозитные призы начисляются только раз один. Не стоит раскрывать новые аккаунты, дабы получить их повторно. Служба безопасности казино обязательно выявит «левого» участника и заблокирует. Если гость выполнит необходимые требования, отыграет собственную ставку и решит исключить личный выигрыш, то ему надо(надобно) к, что казино обязательно востребует дать ксерокопии личных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои исключить не получится. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasino09k online</a> <a href=https://www.blogger.com/u/2/profile/14802926188705876448>https://www.blogger.com/u/2/profile/14802926188705876448</a> 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=http://mutons.ru/club/user/7249/>http://mutons.ru/club/user/7249/</a> Размер приза. В качестве бездепов обыкновенно начисляют небольшие суммы, а когда идет о призах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то кое-какие казино имеют подарить игроку до 2000$.B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.
1×slots бездепозитный бонус за регистрацию
1 х слотс зеркало Доступ к подарку имеет раскрываться автоматически последствии введения промокода или воззвания в саппорта вебсайта. В первом случае от юзера не потребуется никаких поступков. Бездеп с активацией по коду встречается чаще всего. Игроку нужно ввести совокупа знаков в графе, кот-ая может находиться в регистрационной форме в Личном офисе. <a href=http://www.fadimamooneira.com/2019/06/five-things-that-makes-iu-most16.html>http://www.fadimamooneira.com/2019/06/five-things-that-makes-iu-most16.html</a> 1×slots зеркало быструю регистрацию а также мгновенное
1× slots casino официальный сайт
Так что приготовьтесь предоставить секретную информацию (пол, возраст, страна проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев проверка данных занимает не более суток, после чего получится беспрепятственно выводить крупные выигрыши.Процесс доказательства личности возможность взятьвдолг(взятьвзаймы) от 1-го денька до недели. Если клиент разрешил какую-либо ошибку при заполнении паспортных данных, то ему идет обратиться с проблемой в службу онлайн-казино. В неких онлайн казино для получения бездепозитных призов не довольно просто зарегистрироваться на сайте клуба и подтвердить свои контактные данные. Дополнительно потребуется активация промокода. <a href=http://stroygorod.su/user/Travisemurb/>http://stroygorod.su/user/Travisemurb/</a> Как правило, новоприбывшие игроки для хотят ознакомиться с способами ввода и вывода валютных средств и сроки выполнения поданных заказов чтобы конкретно осознавать, как прытко они смогут исключить собственный казино приз за регистрацию без депо на электронный кошелек или же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино соперничают меж собой. Ведь в бы конкретную компанию представляло лишь одно онлайн-заведение, то навряд бы клиенты увидели казино с бонусом за регистрацию и возможность бы рассчитывать только на вознаграждение повторяющий бонуса на первое инвестиция. К каждому заведению регулярно идет завлекать новых игроков, что, конечном, только на руку всем играющим.Только выполнив все условия отыгрыша и дождавшись завершения проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить свои деньги. 1х слотс зеркало регистрация в 1×slots casino
казино 1×slots
Приветственный приз без депозита ? презент за регистрацию. Выдается деньгами, фриспинами или баллами. В последнем случае бонусные баллы применяются для участия в турнирах или обмена на настоящие деньги.Новые клиенты онлайн-казино без первого депозита могут выяснить собственную удачливость. К что, этому же есть возможность преобразовать бездепы в настоящие деньги за регистрацию в казино, впрочем чтобы бонус нужно отыграть сообразно условиям промоакции. 1×slots рабочее зеркало <a href=http://www.rhl-mod.ru/members/101144-ralphliads/>http://www.rhl-mod.ru/members/101144-ralphliads/</a> Фриспины начисляются по конкретной ставке. После их активации игроку необходимо запустить слот и убедиться, собственно в нем отображаются бесплатные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода в отыгрыша определяется оператором и редко превышает 5 000 рублей.
1×slots зеркало на сегодня
Таким образом, заведение пробует показать себя своим вероятным игрокам, а такой рекламный ход как казино приз без депозита за регистрацию завлекает очень много внимания к игорному заведению и обеспечивает постоянный струю свежих посетителей и будущих посетителей игрового онлайн клуба. Для получения бездепа необходимо пригласить в игру по реферальной ссылке нового посетителя: он должен зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на необходимую, обозначенную в критериях промоакции.Бездепозитные бонусы, как уже ясно, считаются уникальной возможностью обратиться игровому процессу абсолютно безвозмездно, словами выступать в онлайн казино безвозмездно и на существующие свои сразу после регистрации аккаунта. Автоматы с этим депозитом все замерзнуть прекрасной вероятностью сыграть для поклонников азарта с определенными ограничениями в финансах. <a href=http://o93743rh.bget.ru/user/Kennethtefly/>http://o93743rh.bget.ru/user/Kennethtefly/</a> У любого игорного клубы различные вейджеровые обстоятельства. Чтобы вы гарантировано смогли выполнить их, мы дадим некоторое советов. Если система начислила маленькую необходимую, надо делать немалые ставки – остановитесь на 10–30 центах. Как лишь сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте играть. В неприятном случае лучше приглядеться к другому автомату. казино 1×slots Бездепозитный бонус за регистрацию в казино с выводом средств в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых свежих, великодушных и проверенных призах в онлайн казино, которые обновляются любой денек.После получения бонуса вывод средств для посетителя будет недосегаем до тех пор, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или чета недель. Выводить средства игрок сможет только в отыгрыша.
<b>Смотреть еще похожие новости:</b>
<a href=https://dev.eff.one/forumdisplay.php?fid=10>1×слот регистрация в 1×slots casino</a>
<a href=https://uyghuryol.com/forum/viewtopic.php?f=8&t=239090>1хслотс зеркало на сегодня</a>
<a href=https://uyghuryol.com/forum/viewtopic.php?f=8&t=238037>1хслотс мобильная версия зеркало</a>
<a href=https://www.rusdrama-az.com/support/51-sluzhba-tehnicheskoy-podderzhki-sayta.html>1хслотс казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выиграть настоящие средства в казино не пополняя счет – сложно, хотя возможно. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными бонусами и начните выступать на бонусные средства. По статистике в 10-ти заведений возможно заработать маленькую сумму денег помощью бонусных средств. Бонус без депозита за регистрацию в казино (бездепозитный бонус) – это денежный презент от клуба, который начисляется на акк игрока после регистрации в казино. Кроме творения учетной записи, для получения бездепа, довольно нередко требуется ещё и подтвердить контактные данные игрока и/или активировать особый промо-код.
#7478 Charlesgunny
1×bet сайт casino ru <a href=https://7club7.com/>casino регистрации</a> 1×bet зеркало слоты 1×bet xyz где казино <a href=https://7club7.com/>лучшие казино бесплатно</a> casino автомат сколько казино сайты казино porno Мария Шарапова порно с Арина и Дина Аверины, гимнастки Львова-Белова Мария Алексеевна порно Манилова Алла Юрьевна порно
#7479 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7480 Charlesgunny
casino x казино сегодня <a href=https://t.me/vchkogpu_ru>porno Алена Косторная (фигурное катание)</a> сайты казино porno Илья Ковальчук (хоккей) <a href=https://7club7.com/>1×bet зеркало слоты</a> Ирина Горбачева Юдаева Ксения Валентиновна порно pinco casino Нургалиева Эльвира Рамиловна порно пинко casino casino рабочее зеркало пинап казино
#7481 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7482 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Активация случается за промокодов, которые вводятся в собственном офисе после регистрации. Среди спецпредложений в перечне Casino.ru содержатся эксклюзивные промокоды, коие доступны только гостям портала. Другие способы начисления средств ? автоматическая активация сразу в творения аккаунта и получение презента по запросу в службу технической помощи. <a href=http://filmkachat.ru/>1×slots casino зеркало рабочее</a> Вейджер (или вагер) ? это наименьшая сумма ставок, коию необходимо сделать для вывода валютного приза. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, тем привлекательнее спецпредложение.Онлайн-казино с бездепозитными бонусами ставят клиентам обстоятельства для использования бездепами, потому перед участием в акции какого-либо подробно ознакомиться со всеми правилами и нюансами акции. Условия все дотрагиваться получения приза, его использования и последующего вывода денежных средств в случае выигрыша. <a href=https://justpaste.me/zGst1>https://justpaste.me/zGst1</a> Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие возникают у начинающих.Верификация аккаунта. Лучше доказать личность сразу последствии регистрации, дабы потом не было заморочек с выводом средств. Верификация может проходить 2-мя маршрутами: 1×slots актуальное зеркало <a href=http://rus-troika.ru/forum/profile.php?mode=viewprofile&u=354549>http://rus-troika.ru/forum/profile.php?mode=viewprofile&u=354549</a> Не стоит путать игру в демо и внедрение бонусов. В демонстрационном режиме игрок может расценить механику слота, сюжет и оформление. Но игра ведется на относительные кредиты, поэтому отсутствует основное ? ощущение пыла. Активируя промокод или фриспины, клиент и не тратит средства деньги на игровые автоматы, хотя может сорвать реальный куш!
1 x slots
1хслот 1хслотс регистрация перейти на 1×slots Бoльшинcтвo азартных заведений выдвигают примерно одинаковые условия и притязания, коие необходимо выполнить, дабы получить бездепозитный приз за регистрацию. Все их возможно соединить в раз перечень: <a href=http://crystal-angel.com.ua/index.php?subaction=userinfo&user=roastedcolleagu>http://crystal-angel.com.ua/index.php?subaction=userinfo&user=roastedcolleagu</a> У каждой забавы свои притязания по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система засчитает каждую ставку. В рулетке и покере сделать это намного сложнее. Именно поэтому например принципиально внимательно читать обстоятельства получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой игре, то новенькие попросту «спустят бонус на ветер». 1хслотс рабочее зеркало
1×slots casino регистрация 1×slots review live
Чаще всего интернет-казино предлагают бездепозитные бонусы свежим пользователям. Эта промо-акция довольно эффективно привлекает начинающих, подталкивая их к открытию счета. Конечно, не все они становятся послушными клиентами, хотя сам прецедент регистрации аккаунта играет на руку заведению.2. Создать новый профиль. Для регистрации нужно заполнить небольшую анкету либо зайдите в индивидуальный офис при помощи соц сетей; <a href=https://receptsamogona.ru/user/Travisfub/>https://receptsamogona.ru/user/Travisfub/</a> 1×slots быструю регистрацию а также мгновенное
1×slots зеркало регистрацию более популярный вариант это
Ниже указан важный список законных казино в Беларуси с бонусами на 1-ый депо. Вы сможете попасть на официальный вебсайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз. <a href=https://rolivka.online/forum/showthread.php?tid=28775>1×slots официальный зеркало рабочее</a> Эффективность бездепов в маркетингового инструмента расценили многие операторы. Малоизвестные площадки употребляют эти акции, чтобы скоро набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны постоянных гостей. Не все веб-сайты, дающие презенты без депозита, рекомендованы к игре. За симпатичным промоописанием имеют скрываться невыполнимые условия отыгрыша и другие подводные камешки. 1×slots официальный зеркало рабочее <a href=http://zimmu.com/api/manual/doku.php?id=скачать_русские_фильмы_на_телефон_бесплатно>http://zimmu.com/api/manual/doku.php?id=скачать_русские_фильмы_на_телефон_бесплатно</a> На страничке представлены бездепозитные бонусы за регистрацию в казино редчайшая награда за которой гонятся все игроки как новички, например и мастера. Мы также уделяем огромное внимание на присутствие призов при формирование рейтинга казино на средства. Бездепозитный бонус это возможность выступать безвозмездно и выиграть реальные деньги.Варианты выигрыша зависят от Вашей удачи и критерий игорного портала. Выше мы заявили, что кое-какие бездепозитные призы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются другие, все, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность современных игр на деньги, можно выиграть невозможные суммы. Сегодняшние игровые автоматы или видео слоты, как их нарекают. Могут выдавать крупные умножение от х1.000 и повыше. Некоторые умножают ставку от х100.000.
1×slots casino регистрация
B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax <a href=http://ihaomeijia.com/home.php?mod=space&uid=133993>http://ihaomeijia.com/home.php?mod=space&uid=133993</a> Многие казино предоставляют в маркетинговых целях безвозмездные бонусы необыкновенно для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой сайт по партнерской ссылке с нашего портала.Заработать на бездепозитных бонусах за регистрацию в казино может каждый пользователь, достигший совершеннолетия. 1хслотс рабочее зеркало на сегодня Нет. Казино раздают благотворительные призы за регистрацию, чтобы, чтобы, чтобы клиент возможность ознакомиться с игровым заведением. А дабы вывести его, нужно выполнить обстоятельства отыгрыша.
<b>Смотреть еще похожие новости:</b>
<a href=https://creapnl.com/foros/tema/1%d1%85%d1%81%d0%bb%d0%be%d1%82%d1%81-%d0%b7%d0%b5%d1%80%d0%ba%d0%b0%d0%bb%d0%be-50/>1хслотс зеркало</a>
<a href=http://forum.exalto-emirates.com/memberlist.php?mode=viewprofile&u=69997>1×slots зеркало</a>
<a href=http://www.airsoft44.com/forum/index.php?action=profile;u=11896>1×slots рабочее зеркало</a>
<a href=https://www.kfz-gringer.at/index.php/forum/in-neque-arcu-vulputate-vitae/73235–1×slot#73000>1×slot официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Перечисленные выше главные характеристики сопровождают фактически любой приз и считаются стереотипными для бездепозитных бонусных начислений в казино.
#7483 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша бонусов. Заведения постоянно устанавливают наивысшую ставку, возможную по условиям вейждера.В некоторых интернет казино для получения бездепозитных призов не довольно просто зарегистрироваться на сайте клуба и доказать свои контактные данные. Дополнительно потребуется активация промокода. <a href=http://filmkachat.ru/>1×slots casino регистрация</a> <a href=https://issuu.com/kalinka0588/docs/_>https://issuu.com/kalinka0588/docs/_</a> Условия, на коих предоставляется бездеп, регулируются казино. Каждая промоакция имеет доскональные управляла, ссылка на коие обычно находится в промообъявлении. В их указываются лимиты, вейджер, список дешевых игр. Если оператор скрывает данные о предложении, то пользоваться им надо.Ниже указан важный перечень легальных казино в Беларуси с бонусами на 1-ый депозит. Вы можете попасть на официальный сайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз. 1×slots официальный сайт зеркало <a href=http://moujmasti.com/member.php?7452-Zacheryfrels>http://moujmasti.com/member.php?7452-Zacheryfrels</a>
1×slots рабочее зеркало на сегодня
В большинстве заведений сделать это можно по e-mal, по номеру телефонного, спустя социальную сеть либо гугл-аккаунт. <a href=http://lynnniman.org/index.php?/topic/1174–1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D0%B2%D0%B8%D0%B4%D0%B5%D0%BB%D0%B8-%D1%82%D0%B0%D0%BA%D1%83%D1%8E-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8E-%D0%BD%D0%B0/>1×slots зеркало видели такую регистрацию на</a> 1×slot официальный сайт <a href=http://biyografiforum.10tl.net/member.php?action=profile&uid=3433>http://biyografiforum.10tl.net/member.php?action=profile&uid=3433</a> Автоматическая активация на самой удобной, хотя ручной способ содержит перед ней превосходства. Прежде чем использовать вознаграждение от казино, стоит заранее определить, сколько времени потребуется на исполнение всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деяния бонуса. 1хслот официальный сайт зеркало Для отыгрыша приза казино обязывает игрока поиграть на сумму, в некоторое раз превосходящую сумму полученного бонуса — здесь выгода компании явна.Например, игрок получил 500 руб. При творении аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 рублей, понадобится устроить 875 спинов для полного отыгрыша.
1×slots зеркало регистрация то дальше необходимо пройти
<a href=https://0752snyw.com/space-uid-125968.html>https://0752snyw.com/space-uid-125968.html</a> Максимальная ставка ? уточняется в еденице счета и ограничивает объем ставки за один спин. В случае ее превышения бонус возможность быть аннулирован. Также в правилах имеет содержаться запрет на размещение ставок определенного вида, примеру, по одинаковым шансам в рулетке (словами, на чет или нечет, красное или темное и т.д. ). 1×slots регистрация 1×slots casino c2d ru Некоторые казино имеют предлагать посетителям бездепы за свидетельство номера либо почты или репост на страничку в социальных сетях.Однако в критериях скрываются «подводные камни», коие не разрешат вывести солидную необходимую либо же вы не успеете отыграть вейджер. Поэтому мастера рекомендуют арестовать благотворительные вращения за регистрацию в казино без депо, дабы поднабраться опыта и получить настоящий шанс на победу.
1×slots казино зеркало
Также учтите, что некоторые игровые платформы сузивают перечень стран, коие готовы получить предложенный бездепозитный приз за регистрацию. К примеру, существуют онлайн-заведения, выдающие сходственные бонусы лишь жильцам конкретных стран. К примеру, интернет казино 777 Оригинал предоставляет бездепозитный приз лишь игрокам из России и государств СНГ. Или наоборот, пичкают вознаграждением всех, кроме обитателей некоторых стран (следует этого, следует пристально изучать список, дабы впоследствии не возникло никаких вопросов и жалоб).Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих притязаний, кроме неотъемлемой верификации. Если на веб-сайте предусмотрена неотъемлемая процедура доказательства личности, то вывести выигрыш получится только в проверки данных. Приготовьтесь наполнить анкету и выслать в техподдержку документ, подтверждающий лицо. Некоторые веб-сайты, до чем обмануть регистрацию игроков, предлагают ответить на некоторое базовых вопросов. Цель проведения подобной викторины – выявить случайных людей, коие не имеют представления о покере, и не разрешить получения ими призов. Если посетитель теснее играл в казино, то ответить на полтора 10 простых вопросов будет нетрудно. Очень часто, ответы можно найти на официальных сайтах этих учреждений. 1×slots коды <a href=http://honevi.grodno.by/index.php?subaction=userinfo&user=RaymondSew>http://honevi.grodno.by/index.php?subaction=userinfo&user=RaymondSew</a> Подарки на конкретные даты выделяются условиями получения. Если поощрение начисляют игроку на денек рождения, то сумма обыкновенно находится от общего объема депозитов за год.При помощи такого одобрения оператор может кроме завлекать посетителей, коие ранее показывали активность на сайте, хотя по какой-то основанию перестали играть. В данном случае промокод высылается юзеру по электронной почте либо повторяющий SMS.
1 x slots casino
Получать информацию о самых прибыльных призах возможно без постоянного прогноза новостей казино. Мы взяли эту задачу на себя и постоянно следим за услугами операторов, выбирая лучшие из их. В данном разделе собраны последние бездепы, промокоды к ним и условия их активации. Список промоакций периодически пополняется. В топ вошли самые свежие бездепозитные бонусы за регистрацию в казино 2020, временные и закрытые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и другим аспектам. Если срок действия промоакции истек, она удаляется из списка. Баланс игрока пополняется на соответствующую сумму. К ней используется вейджер, обозначенный в правилах акции. Вывести выигрыш можно несомненно в такого, как юзер сделает требуемый объем ставок из собственных средств. В редчайших случаях бездеп работает в формате Free Play. На счет пользователя зачисляется большая сумма, и предоставляется небольшой срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по завершении этого периода сумма на счету будет превосходить изначальную, то разность возможно несомненно исключить либо использовать для дальнейших ставок.Процесс доказательства личности возможность занять от 1-го денька до недели. Если заказчик разрешил нибудь ошибку при заполнении паспортных данных, то ему следует адресоваться с задачей в саппорта онлайн-казино. <a href=http://popkrn.net/bbs/board.php?bo_table=free&wr_id=3738078>http://popkrn.net/bbs/board.php?bo_table=free&wr_id=3738078</a> Бонус в казино без депозита имеет разные разновидности: это может быть приветственный бонус, промоакции в честь каких-то дней или важных дат, бонус за привлечение свежих игроков, лояльность и получение VIP-статуса.Выиграть реальные средства в казино не пополняя счет – трудно, но вероятно. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными бонусами и начните играть на бонусные средства. По статистике из 10-ти заведений возможно заработать небольшую необходимую средств с бонусных средств. 1×slots промокод при регистрации Можно ли зарабатывать на бездепозитных бонусах? Это не работа, тут как повезет, в в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, за можно назвать везением, и добавочной добавкой к вашему бюджету.Шаг 5. Использование и отыгрыш. Бездеп обязан быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.
<b>Смотреть еще похожие новости:</b>
<a href=https://qualityprogamer.de/forum/showthread.php?tid=341165>casino 1×slot</a>
<a href=http://khodaumo.com/forum/memberlist.php?mode=viewprofile&u=146&sid=ed078182f33ec9f19fb960b88d162cfc>1×slot рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины предусмотрены для использования в видео слотах. Внимательно ознакомьтесь с критериями – часто их выдают на кое-какие автоматы. В зависимости от клуба, у вас выйдет сделать определённое число ставок. Кстати, продвинутые игорные жилища позволяют запускать каждых «одноруких бандитов».
#7484 Charlesgunnyhttp://filmkachat.ru
сайт 1× slots casino
Хотя бесплатные бонусы начисляются без депо, не исключено, что для понадобиться заносить деньги. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты только после того, как новый клиент раз пополнит игровой счет.Отказ в прохождении верификации. Если клиент не желает или возможности дать документы, подтверждающие его личность, профиль несомненно заблокирован вместе со всеми бонусными начислениями. <a href=http://filmkachat.ru/>1хслотс мобильная версия зеркало</a> <a href=https://postheaven.net/pafsi02hf4>https://postheaven.net/pafsi02hf4</a> 1хслотс рабочее зеркало на сегодня <a href=https://www.notoutreview.com/author/patricksap/>https://www.notoutreview.com/author/patricksap/</a> Третитй бездепозитный приз за регистрацию – валютные свои. К сожалению, начислить рубли либо баксы способны только знаменитые и популярностью клубы. С их поддержкою вас насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком.
1× slots зеркало
Чтобы выступать даром на настоящие деньги в казино, порой довольно просто зарегистрироваться. Иногда нужно выполнить дополнительные действия. <a href=http://naturetour.ru/personal/profile/index.php?PAGE_NAME=profile_view&UID=2416>1хслотс рабочее зеркало</a> 1×slot казино зеркало Используйте наилучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, дабы заработать подарки за простые деяния теперь сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высокой отдачей и резвыми выводами на электронные кошельки.Благодаря программке лояльности от игорного заведения, можно взять превосходный старт и без дополнительных инвестициям запустить видеослоты. Кроме того, возможно рассчитывать на реальную фортуну и получить, без вложения собственных финансов, великий выигрыш. <a href=https://www.mexicanservers.com/member.php?action=profile&uid=10099>https://www.mexicanservers.com/member.php?action=profile&uid=10099</a> Наши эксперты исследуют условия акции, после в ручном режиме проверку их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и параметры. Мы не рекламируем казино, а даем игрокам информацию о превосходнейших из их.Подтверждение регистрации. Казино просят привязки профиля к электрическому адресу и номеру аппарата. Для сего на e-mail отчаливает письмо со ссылкой, а на телефон ? текстовое извещение с кодом. 1×slots коды Итак, чтобы благотворительные бонусные кредиты трансформировались в реальные деньги, которыми вам распоряжаться по собственному усмотрению, их надо(надобно) отыграть. Вейджер следует уточнять в правилах онлайн-казино.Все любят получать подарки. Согласитесь, почти каждый играющий человек несомненно сильно рад, если получит безвозмездный презент для забавы в интернет казино просто за регистрацию либо же приз за внесенный депозит, например называемые приветственные призы для новых игроков. Соответственно эти интернет клубы будут больше известны и преимущественны у игроков при выборе казино для забавы. Топ казино день обновляется и добавляются новые и интересные игровые клубы с симпатичной бонусной политикой и всеми вероятными преимуществами, льготами, к которым относятся эти призы как фриспины за регистрацию, денежные бездепозитные призы, а также щедрые призы за внесенный депозит.
1×slots casino регистрация
Но никогда не запамятовывайте внимательно разбирать правила роли в бонусных акциях. Если вы нарушите но бы одно условие, позже вы не можете уладить недоразумение с администрацией.Ну и конечно же, для казино бездепозитные бонусы прибыльны с имиджевой стороны: схожая добродушие увеличивает уровень лояльности посетителей к компании. Бездепозитный приз казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в этом и заключается главное различие. <a href=http://www.adgoods.ru/user/profile/6147>http://www.adgoods.ru/user/profile/6147</a> Еще одно условие дотрагивается объемов ставки. Операторы устанавливают наивысшую необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, избранной в Личном офисе. При превышении лимита есть риск лишиться бонуса. Существующие ограничения относятся и к конкретным обликам ставок. Например, играя в рулетку, заказчик может столкнуться с запретом ставить фишки на шансы.Демоказино есть почти на любом веб-сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются веско пореже: там когда выигрыша и соблюдения условий акций бездеп возможно превратить в настоящие средства. 1×slot зеркало Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие появляются у новичков.
1×slots зеркало быструю регистрацию а также мгновенное
Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. <a href=http://diablo2r.cn/home.php?mod=space&uid=30130>1×slots casino регистрация 1×slots review live</a> Обычно показатель повыше, чем для призов на депо. Не изумляйтесь, если он несомненно числе х100. Иногда завышенный коэффициент вейджера уточняется для обитателей отдельных стран. Также существуют онлайн-платформы азартных игр, которые используют раздачу бездепозитных бонусов в специальные даты (как для казино, так и для игрока). Помимо этого, действующие игроки того имеют вероятность получить схожие призы за собственную работа (к примеру, за увеличения уровня или за схожие достижения). зеркло казино 1×slots <a href=http://www.wy881688.com/home.php?mod=space&uid=682473&do=profile>http://www.wy881688.com/home.php?mod=space&uid=682473&do=profile</a> 4. Заберите презент. Чаще всего приз активизируется незамедлительно после регистрации. Но случаются истории, когда нужно забежать в индивидуальный кабинет либо написать в службу поддержки.
1×slots официальный сайт мобильная версия
Если площадка дарует бездеп за регистрацию, то процедура его получения проста. Нужно лишь завести аккаунт на сайте и активировать его, подтвердив адрес электронной почты, номер телефонного или иные данные, которые просит оператор. Перед данным нужно убедиться, собственно пользователь располагается на официальном сайте казино, но на жульнической площадке. <a href=https://google.mk/url?q=https://doctorlazuta.by/>https://google.mk/url?q=https://doctorlazuta.by/</a> Бездепозитные призы — это подарки от казино вид бонусных денег либо фриспинов для игровых автоматов, коие начисляются на аккаунт игрока последствии процедуры регистрации на сайте заведения. Для получения таких поощрений депозит не потребуется. 1х слотс зеркало регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://sadhaka.nl/forum/memberlist.php?mode=viewprofile&u=3268>казино 1×slots</a>
<a href=http://forum.puppylinux.pl/index.php?topic=793.new#new>сайт 1× slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Зачастую бездепозитные призы казино для забавы предлагаются разными заведениями азартных игр в качестве маркетинговых акций либо в целях привлечения к для свежих игроков. Для бездепозитных бонусов в казино 2022 геймеру не нужно пополнять счет до этапа вывода желаемых средств. Стоит отметить, собственно бездепозитный бонус выдается только взрослым новичкам, которые, тому, могут пригласить собственных друзей и знакомых, также претендующих на поощрительную программку преданности. Подобная разработка появилась между создающих онлайн-казино для популяризации и расширения трафика. Покер румы и спонсоры содействуют увеличению своей популярности, методом вербования свежих игроков. Бонусы – это уникальный шанс для потенциальных соучастников забавы, коие имеют опробовать софт покер рума и убедиться, будут ли они в него выступать или нет. Новый игрок попробует средства силы с настоящими оппонентами в казино.
#7485 Charlesgunny
слот casino фреш казино <a href=https://rucriminal.info/>официальные сайты казино</a> casino официальный зеркало порно с Каролина Севастьянова <a href=https://glvk.guru/>вавада казино</a> casino 7k сегодня porno Александра Степанова, фигуристка порно с Елена Никитина, скелетонистка букмекерская контора мостбет Кузнецова Анна Юрьевна порно включи казино официальные букмекерские конторы
#7486 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7487 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
Активация валютного гонорары происходит автоматически после творения профиля либо применения промокода. Иногда операторы предъявляют дополнительные требования: подписаться на странички казино в социальных сетях либо на рассылку рекламных извещений, скачать и ввести дополнительный софт и т.д.2. Создать новый профиль. Для регистрации надо(надобно) наполнить небольшую анкету либо зайдите в собственный офис посредством социальных сеток; <a href=http://filmkachat.ru/>1×slots casino регистрация</a> <a href=https://gravatar.com/phenomenalfbe3256acb>https://gravatar.com/phenomenalfbe3256acb</a> 1×slots casino зеркало рабочее <a href=https://historydb.date/wiki/User:IraWragge9>https://historydb.date/wiki/User:IraWragge9</a> Фриспины без депозита либо вспомогательные свои посодействуют ближе познакомиться с игровой платформой и её функциями. За счёт даров можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям из-за игры напротив живых крупье.Да, у даровых бонусов есть недостатки. Прежде всего, они обыкновенно маленькие. Кроме как, обстоятельства вейджера по ним практически жесткие. Но все неименье риска делает их довольно привлекательными для посетителей.
1хслотс официальный сайт зеркало
<a href=https://mcmon.ru/member.php?action=profile&uid=134611>1×слотс казино</a> 1×slots казино зеркало <a href=http://sunshine2000.co.kr/bbs/board.php?bo_table=free&wr_id=146491>http://sunshine2000.co.kr/bbs/board.php?bo_table=free&wr_id=146491</a> 1×slots зеркало выигрыши обязательно пройдите регистрацию если
1×слотс казино
Так что основное отличие презента на депозит от бездепа – неотъемлемое пополнение счёта. Вы сможете внести депо и преувеличить стартовый капитал или забрать бездеп и этом не придётся рисковать своими сбережениями. Поспешите выполнить обычные требования, и администрация ресурса начисляет щедрое поощрение! Также случаются случаи, когда казино начислит обсужденный приз в регистрации нового посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам.Как управляло, при выводе денег, от играющего потребуется лишь устроить наименьший лепта для того, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом личный счет. <a href=http://promarket.in.ua/index.php?subaction=userinfo&user=longingharmony2>http://promarket.in.ua/index.php?subaction=userinfo&user=longingharmony2</a> А ознакомиться с новыми онлайн казино, Вы сможете помощью призов с выводом выгоды, коие Вы сможете получить без депозита. 1хслот зеркало сайта
1×slots официальный сайт зеркало
Третитй бездепозитный приз за регистрацию – валютные средства. К огорчению, начислить рубли либо доллары готовы только знаменитые и популярные клубы. С их поддержкой появится насладиться любой доступной игрой – автоматом, рулеткой, кено, блэкджеком.Если вы выбираете испытанное лицензионное онлайн казино и выполните все условия получения бездепозитного бонуса, проблем с получением подарка у Вас не возникнет. <a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=117229>1×slot регистрация</a> 1×slots регистрация на сайте <a href=https://backpacker-footsteps.com/backpacker-footsteps-forum/profile/tyronejouts/>https://backpacker-footsteps.com/backpacker-footsteps-forum/profile/tyronejouts/</a> Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в обязательном порядке необходимо пополнить счет в казино. Для депозитных бонусов, эта процедура не нужна, например как депо теснее изготовлен.Акционные предложения от казино есть в разных форматах. Часто бонусы даются в размен на депо. Игрок вносит платеж и получает деньги, безвозмездные вращения прочие поощрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — картина бонуса, который гарантирован за исполненье определенных деяний на веб-сайте:
1×slots официальный demo регистрация в 1×slots casino
<a href=https://medium.com/@minsky10/%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0-%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA-%D0%B3%D0%BB%D0%B0%D0%B2%D0%BD%D0%B0%D1%8F-%D0%B4%D0%BE%D1%80%D0%BE%D0%B3%D0%B0–9a0f36db8685>https://medium.com/@minsky10/%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0-%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA-%D0%B3%D0%BB%D0%B0%D0%B2%D0%BD%D0%B0%D1%8F-%D0%B4%D0%BE%D1%80%D0%BE%D0%B3%D0%B0–9a0f36db8685</a> Используйте лучшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из перечня ниже, дабы заработать подарки за простые деяния и уже сегодня получить 1-ый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и быстрыми выводами на электронные кошельки. 1×slots бездепозитный бонус за регистрацию
<b>Смотреть еще похожие новости:</b>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=335888>1×slots регистрацию процедура займет всего лишь</a>
<a href=https://www.rusdrama-az.com/support/51-sluzhba-tehnicheskoy-podderzhki-sayta.html>1×slots casino регистрация 1×slots review live</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
К образцу, игроку выдаются бесплатные свои в заведении в объеме пятидесяти либо ста $ (вейджер на коие сочиняет 100х). То есть, любому новоприбывшему игроку выскакивает манящая картинка, кот-ая сулит выплату всех зачисленных фирмой средств. Не стоит обращать внимания на казино приз за регистрацию без депо с слишком большой либо довольно махонькой суммой бонусов, поэтому что, и тщательно выучив все обстоятельства, здесь всего, несомненно какой-то подвох. Не советуем сломя голову браться за всевозможные предложения получения средств без вложений. Вполне вероятно, собственно бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на 1-ый взгляд. Альтернативой является казино бонус за депозит. Мы предлагаем вас пару советов, благодаря которым у каждого игрока будет возможность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег:
#7488 Charlesgunny
Семёнова Татьяна Владимировна порно порно с Ирина Сидоркова <a href=https://m.repost.news/>лучшие бесплатные онлайн казино</a> kometa casino porno Дарья Клишина <a href=https://vestnik-jurnal.com/>1×bet зеркало на сегодня 1×bet xyz</a> лучшие онлайн казино пин ап casino казино ставка пин ап казино порно с Дарья Клишина, легкоатлетка казино смотреть промокод 1×bet
#7489 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7490 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slotscasino 56 online
Бонусные средства – небольшая сумма денег для старта в новеньком казино. На бонусные средства, обычно разрешается выступать во все забавы, кроме слотов с современным джекпотом и игр из раздела live casino. <a href=http://filmkachat.ru/>казино 1×slots</a> Бездепозитный приз – это экономическое вознаграждение, которое выдается участнику игры в казино, для его привлечения и появления заинтригованности. Любой посетитель, который соответствует условиям выдачи подобного бездепозитного бонуса, может претендовать на получение вышеуказанного приза. Такое поощрение является наиболее действенным способом, дающим вероятность стартовать при, не вкладывая собственных материальных средств. <a href=https://soctrip.com/post/4b9e6f10-a591–11ef-855f-0770b154db22>https://soctrip.com/post/4b9e6f10-a591–11ef-855f-0770b154db22</a> 1 x slots <a href=https://hackernoon.com/preview/wUCPTvUWomQfnhQQoXdF>https://hackernoon.com/preview/wUCPTvUWomQfnhQQoXdF</a> На нашем сайте Вы отыщите список своевременных свежих бездепозитных призов в казино 2022 года. Также, есть количество эксклюзивных предложений, коие доступны только посетителям нашего вебсайта после регистрации по нашей ссылке либо активации особого промокода.
1×слот регистрация в 1×slots casino
<a href=https://mcmon.ru/showthread.php?tid=110228>1×slots официальный demo регистрация в 1×slots casino</a> 1×slots регистрация 1×slots casino 777 online Как верховодило, новоприбывшие геймеры начала хотят ознакомиться с методами ввода и вывода валютных средств и сроки выполнения поданных заявок дабы четко осознавать, как скоро возможность исключить собственный казино приз за регистрацию без депо на электрический кошелек или же банковскую карту. К счастью для всех играющих, внутри определенных холдингов, все казино соперничают меж собой. Ведь случае бы определенную компанию давало лишь одно онлайн-заведение, то ли бы посетители заметили казино с бонусом за регистрацию и возможность бы рассчитывать лишь на вознаграждение повторяющий приза на 1-ое вложение. К любому заведению регулярно стопам завлекать свежих игроков, собственно, конечном, только на руку всем играющим.На данном разделе портала периодически публикуются обзорные статьи, каких рассматриваются бесплатные бонусы наихороших интернет-казино. Информация структурирована по нескольким пт, включая главные: <a href=https://www.vforum.org/forum/members/26975.html>https://www.vforum.org/forum/members/26975.html</a> 1хслотс 1хслотс регистрация перейти на 1×slots Многие азартные клубы ограничивают необходимую вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании акции, суммы Вы не сможете вывести. Разница будет аннулирована, Вы даже не сможете создавать на нее ставки.
1хслотс официальный сайт зеркало
Автоматы неспроста считаются наиболее популярным азартным веселием. Чтобы освоить управление и верховодила, потребуется всего некоторое минут. Ваша задача сделать ставку, определить количество рабочих линий и можно вертеть барабан. Если на выпадет выигрышная комбинация – вы выиграли! С данной задачей вас помогут управится бездепозитные призы казино. <a href=https://maps.google.co.in/url?sa=t&url=https://doctorlazuta.by/>https://maps.google.co.in/url?sa=t&url=https://doctorlazuta.by/</a> Как правило, при выводе денег, от играющего требуется только сделать наименьший вклад для того, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом индивидуальный счет. казино 1×slots официальный сайт При верном подходе бездепы — это отличный метод выступать на средства без траты собственных средств. Есть некоторое советов, следуя коим можно извлечь максимально полезности из похожих промоакций казино. Играть следует лишь на лицензированных площадках. Скриптовые сайты не обманывают с бонусными услугами, но и употребляют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах невозможно.
1×slots регистрация то дальше необходимо пройти
Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми акциями. Читайте о их в обзорах и на форуме.Чаще всего используются коды. Их надо(надобно) вносить в особые окошки регистрационной анкеты, случае речь идет о пригласительных призах, или в определенном разделе личного офиса игрока. 1×slots промокод при регистрации <a href=http://vshop.livek.tv/yc/bbs/board.php?bo_table=user_feed&wr_id=1394630>http://vshop.livek.tv/yc/bbs/board.php?bo_table=user_feed&wr_id=1394630</a>
1×slots официальный регистрация
Бездепозитный бонус предоставляется новенькому игроку за конкретные действия. Часто подарок в виде денег либо фриспинов выдается за регистрацию, спасибо чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.В лицензионных бездепозитных казино выступать в азартные забавы вправду безопасно. Наличие лицензии одобряет что, этот прецедент, что клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP. <a href=http://www.handgemaaktplaats.nl/user/profile/77886>http://www.handgemaaktplaats.nl/user/profile/77886</a> Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке необходимо восполнить счет в казино. Для депозитных бонусов, эта процедура не необходима, например как депозит уже сделан.Чтоб получить большой выигрыш, выбирайте игровые автоматы с предельным процентом отдачи (RTP) из списка тех, коие доступны по условиям отыгрыша. 1хслотс рабочее зеркало Новички не обожают сразу же заносить депо. Это обосновано неименьем опыта и сомнением. К счастью, в можно получить бездепозитный бонус за регистрацию в казино. Неважно что начисляет система – фриспины или кредиты. В любом случае вы не рискуете собственными сбережениями. Это отличная возможность запустить приглянувшийся видео разъем либо же испытать фортуну в настольных играх.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.ldvd.nl/no-22-san-diego-place-rallies-very-last-boise-country-27–16?page=46#comment-238157>1хслотс мобильная версия зеркало</a>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=273743>1×slos регистрация в 1×slots casino</a>
<a href=https://forums.scar-divi.com/topic/655985–1-%D1%85-%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE/>1 х слотс зеркало</a>
<a href=https://minifishtank.net/forum/member.php?action=profile&uid=1356>1×slots акции</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке необходимо пополнить счет в казино. Для депозитных бонусов, эта процедура не необходима, так как депозит уже изготовлен. Как управляло, при выводе финансов, от играющего требуется только сделать наименьший вклад чтобы, чтобы, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом собственный счет.
#7491 Charlesgunny
online casino официальный 1×bet зеркало <a href=https://th-royalgclub.com/>casino на телефон</a> casino бонус casino com <a href=https://specreporter.com/>casino автомат</a> яндекс казино сайт казино вход бывшие казино Черкесова Бэлла Мухарбиевна порно casino онлайн порно с Анна Щербакова, фигуристка porno Вера Бирюкова, гимнастка
#7492 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7493 Charlesgunny
porno Юлия Канакина официальная казино <a href=https://sovsekretno.net/>7k casino зеркало рабочее</a> bitz casino 1×bet рабочее на сегодня <a href=https://res-publika.com>макао казино</a> Юдаева Ксения Валентиновна порно скачиваемые казино Попова Анна Юрьевна порно porno Катерина Шпица пина casino Елизавета Боярская casino ru
#7494 Charlesgunnyhttp://filmkachat.ru
1×slots мобильная версия войти казино
Выиграть настоящие деньги в казино не пополняя счет – сложно, но вполне. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными призами и начните играть на бонусные средства. По статистике из 10-ти заведений возможно заработать маленькую необходимую средств помощью бонусных средств. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> Представьте момент, когда при ставке в 10 руб. Вы получите схожее умножение. Миллион рублей за одно вращение, что вполне вероятно. Поэтому вопрос, сколько возможно выиграть остаётся открытым. Предлагаем выяснить других. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный бонус и инспектируйте удачу в деле. Разумеется, исключить средства довольно. Однако шансы есть у всех. <a href=https://issuu.com/kalinka0588/docs/exploring_the_future_of_architectural_visualizatio>https://issuu.com/kalinka0588/docs/exploring_the_future_of_architectural_visualizatio</a> 1×slos регистрация в 1×slots casino <a href=http://ringturbine.com:80/index.php/%D0%A2%D0%B5%D0%BB%D0%B5%D0%B3%D1%80%D0%B0%D0%BC_%D0%A4%D0%BB%D0%B8%D1%80%D1%82_%D0%97%D0%BD%D0%B0%D0%BA%D0%BE%D0%BC%D1%81%D1%82%D0%B2%D0%B0>http://ringturbine.com:80/index.php/%D0%A2%D0%B5%D0%BB%D0%B5%D0%B3%D1%80%D0%B0%D0%BC_%D0%A4%D0%BB%D0%B8%D1%80%D1%82_%D0%97%D0%BD%D0%B0%D0%BA%D0%BE%D0%BC%D1%81%D1%82%D0%B2%D0%B0</a> Мы собрали и опубликовали перечень наихороших бездепозитных казино с призами за регистрацию, коие гарантируют великодушные выигрыши и мгновенные выплаты.Поспешите забрать бездепозитные призы за регистрацию в казино из представленного списка. Все платформы не только водят законную деятельность, но и обрадуют честными результатами игры, высочайшей отдачей, резвыми выплатами.
1×slots на любой вкус как пройти регистрацию
1×slots регистрацию процедура займет всего лишь Бездепозитные бонусы за регистрацию в игровых автоматах для собственников онлайн-казино являются частью маркетинговой кампании, направленной на повышение аудитории сайта. Так они продвигают свои бренды и завлекают свежих клиентов.Когда речь идет о денежных призах, казино практически устанавливают обстоятельства вейджера, коие необходимо выполнить, дабы исключить выигрыш. <a href=http://fr79056g.bget.ru/index.php?name=account&op=info&uname=flippantalloy50>http://fr79056g.bget.ru/index.php?name=account&op=info&uname=flippantalloy50</a> Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают бонус по государствам. Вплоть до такого, что клуб может брать игроков из Вашей страны, а бездеп не давать. 1хслотс казино зеркало Главное преимущество спинов – возможность изучить разные слоты. Также получится насладиться бонусными раундами, испытать удачу в риск-туре и преувеличить выигрыш за счёт особенных символов. Однако не только игровой процесс заслуживает внимание, как другого сосредоточиться на реальном выигрыше.Не стоит сразу же открещиваться от приветственных презентов в подобных казино. Администрация готова начислить средства или фриспины, но сначала сотрудники должны убедиться, что вы не мошенник. Дело сомнений, собственно развелось слишком много охотников за бонусами. Они научились врать систему и наваривать крупные суммы средств.
1×slots зеркало рабочее
На страничке представлены бездепозитные бонусы за регистрацию в казино редчайшая заслуга за коей гонятся все игроки как новички, так и профессионалы. Мы также уделяем огромное внимание на наличие призов при составление рейтинга казино на деньги. Бездепозитный бонус это вероятность выступать даром и выиграть реальные средства.Если речь об неповторимых услугах, имеет понадобиться регистрация в казино по ссылке с партнерского сайта. <a href=http://fb7707ng.bget.ru/user/Geraldtrunc/>http://fb7707ng.bget.ru/user/Geraldtrunc/</a> Фриспины начисляются по конкретной ставке. После их активации игроку нужно запустить слот и увериться, что в нем отображаются благотворительные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода последствии отыгрыша ориентируется оператором и изредка выше 5 000 рублей. 1хслот 1хслотс регистрация перейти на 1×slots В случае установленного лимита на необходимую вывода выигрыша с бездепозитного приза, игрок не может вывести больше заявленной суммы.При отыгрыше бонусных средств, нужно учитывать срок деянья бонуса и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный приз будет аннулирован.
1хслот зеркало
<a href=http://romb4×4.ru/forum/members/rabofreepn.4965/>1х слотс зеркало регистрация в 1×slots casino</a> Основное отличие сомнений, собственно для получения бездепа не пополнять баланс в казино. Но не этого, есть ряд и других отличий: 1×slots бездепозитный бонус за регистрацию <a href=http://www.link-boy.org/details.php?id=305197>http://www.link-boy.org/details.php?id=305197</a> Но такие рамки не смущают числе хайроллеров, поскольку коэффициенты на слотах разрешают рассчитывать на крупные выигрыши, в неких автоматах разыгрывается прогрессивный джекпот.Не советуем опрометью голову хвататься за всевозможные предложения получения средств без инвестициям. Вполне возможно, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на первый взор. Альтернативой считается казино приз за депо. Мы предлагаем вам пару советов, благодаря которым у каждого игрока несомненно возможность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег:
1×slot зеркало
Обычно, бездепозитные призы выдаются под конкретные слоты с фиксированной ставкой, хотя их точно воспрещено применять в игровых автоматах с современным джекпотом. Список игр, каких возможно применять бездеп, Вы найдете в описании акции либо можете уточнить у саппорта заведения. Размер приза. В качестве бездепов обыкновенно начисляют очень суммы, а когда идет о призах за депо, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино все презентовать игроку до 2000$.Обычно бездепозитные промоакции от казино, приходят на эл. Почту в деньки рождения либо праздники. В неких интернет казино можно обратиться в чат и как постоянному игроку, вполне для предложат бездепозитное предложение. <a href=https://foxsheets.statfoxsports.com/UserProfile/tabid/57/userId/191841/Default.aspx>https://foxsheets.statfoxsports.com/UserProfile/tabid/57/userId/191841/Default.aspx</a> Вышеописанная первопричина и считается основным интересным, следствии которого операторы отдают доля своей выгоды на различные маркетинговые расходы и маркетинговые кампании. А самым действующим здесь будут играть именно бездепозитные призы казино 2022 с выводом за регистрацию.Теоретически, к бесплатным призам можно отнести например называемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, поэтому что они предоставляют лишь вероятность делать ставки. 1×slots зеркало подтвердит вашу регистрацию если говорить Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам запрещено начислять призы посетителям, не имеющим денежных средств на счете. Мы предлагаем рассмотреть животрепещущие бонусы онлайн-казино с лицензией, которые соблюдают законодательство РБ.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.vn.ua/showthread.php?p=3272645#post3272645>зеркло казино 1×slots</a>
<a href=https://isomedu.com/forum/profile/josephdrons/>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=133584>казино 1× slots официальный сайт</a>
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1233#post-37778>1×slots регистрация 1×slots casino c2d ru</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В бонусную программу множества операторов входят регулярные бездепы. Это пожизненные акции, поощряющие активных неизменных игроков. Популярный формат — раздача фриспинов по конкретным дням недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают неизменные бонусы без депозита в обмен на накопленные баллы лояльности.
#7495 Charlesgunny
промокод 1×bet порно с Арина и Дина Аверины, гимнастки <a href=https://strelochnik.com/>Елена Лядова</a> суть казино казино проиграл <a href=https://vestnik-jurnal.com/>скачать pin casino</a> casino рабочее зеркало кент casino Мухтиярова Елена Вячеславовна порно casino бездепозитный 1×bet бесплатно официальная казино вавада казино
#7496 Charlesgunny
Валентина Матвиенко порно 1×bet сайт 1×bet xyz <a href=https://glvk.guru/>1×bet официальный 1×bet xyz</a> гама казино casino вход <a href=https://7club7.com/>лучшая казино</a> Разуваева Ксения Денисовна порно казино онлайн почему казино порно с Васильева Татьяна Викторовна казино фильм играющие казино официальные зеркала казино
#7497 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7498 Charlesgunny
казино большая Семёнова Татьяна Владимировна порно <a href=https://kompromat1.online/>казино можно</a> казино сегодня играющие казино <a href=https://slon-ru.com/>гта онлайн казино</a> сайт винлайн букмекерская контора порно с Алина Загитова про казино casino buzz порно с Сергей Бобровский (хоккей) ограбление казино Попова Анна Юрьевна порно
#7499 Ремонт стиральных машин Smeghttps://remont-stiralnyh-mashin-smeg-club.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт стиральных машин smeg, можете посмотреть на сайте: <a href=https://remont-stiralnyh-mashin-smeg-club.ru/>ремонт стиральных машин smeg цены</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#7500 Charlesgunny
сайте букмекерской конторы фонбет порно с Абрамченко Виктория Валериевна <a href=https://glvk.guru/>casino com</a> Черкесова Бэлла Мухарбиевна порно ставки на спорт букмекерские конторы <a href=https://rhymes-punches.com/>Лут Оксана Николаевна порно</a> 1×slots casino почему в казино нет часов pin up casino ramenbet casino 1×bet официальный слоты porno Катерина Шпица Приезжева Екатерина Геннадьевна порно
#7501 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7502 Charlesgunny
порно с Матвей Сафонов (футбол) casino x <a href=https://t.me/vchkogpu_ru>porno Юлия Пересильд</a> porno Анастасия Янькова, боксерка смотреть фильм казино <a href=https://7club7.com/>порно с Владимир Минеев (ММА)</a> букмекерская контора фонбет 1win букмекерская контора casino скачать приложение Скоробогатова Ольга Николаевна порно автомат казино яндекс казино inform@rucriminal.info
#7503 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7504 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
Для получения бездепа необходимо пригласить в забаву по реферальной ссылке свежего посетителя: он должен зарегистрироваться, пройти верификацию на сайте онлайн-казино и пополнить счёт на необходимую, обозначенную в условиях промоакции. <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> Доступность — бездепозитные бонусы в казино почаще всего предоставляются свежим игрокам, хотя случаются случаи, когда бонус имеют получить и действующие клиенты.Фриспины без депо или вспомогательные средства помогут поближе познакомиться с игровой платформой и её функциями. За счёт даров возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за игры напротив живых крупье. <a href=https://rant.li/9fsnh6hu13>https://rant.li/9fsnh6hu13</a> Как верховодило, новоприбывшие геймеры для хотят ознакомиться с способами ввода и вывода валютных средств и сроки выполнения поданных заявок чтобы четко понимать, как быстро возможность исключить собственный казино бонус за регистрацию без депо на электрический кошелек либо же банковскую карту. К счастью для всех играющих, снутри конкретных холдингов, все казино конкурируют между собой. Ведь в бы конкретную фирму давало лишь одно онлайн-заведение, то ли бы посетители увидели казино с бонусом за регистрацию и имели бы рассчитывать лишь на вознаграждение вид приза на первое инвестиция. К любому заведению периодически следует привлекать свежих игроков, собственно, в итоге, лишь на руку всем играющим.Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке нужно пополнить счет в казино. Для депозитных бонусов, эта процедура не необходима, так как депозит теснее изготовлен. 1×slots официальный сайт зеркало <a href=https://www.esurveyspro.com/Survey.aspx?id=e5d0558a-425d-4b35–9bed-59b6a47d0310>https://www.esurveyspro.com/Survey.aspx?id=e5d0558a-425d-4b35–9bed-59b6a47d0310</a> Для тех, кто только подумывает испытывать собственную удачу, а для профессиональных игроков, разыскивающих новые площадки для выигрышей, основные лицензированные казино часто устраивают различные промоакции, и лучшее предложений прошедшее время – как для новичков, например и для профессиональных игроков – бездепозитный бонус за регистрацию.Доступность — бездепозитные призы в казино чаще всего предоставляются новым игрокам, но бывают случаи, когда приз имеют получить и действующие посетители.
1×slots сайт зеркало
Срок отыгрыша — это период, который наступает в момент активации бонуса и завершается с его закрытием. Пользователю нужно уложиться в данный временной промежуток, иначе призовые свои аннулируются. Казино устанавливают список игр, ставки в которых засчитываются при расчете отыгранных денег. Если тайтл не входит в данный список, то предоставляется быть недоступен для загрузки период деяния бонусного предложения.Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации подарка нужно доказать электронную почту и привязать аппарат; <a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=242858>1 хслот регистрация в 1×slots casino</a> 1×slots скачать на айфон <a href=https://trevorywsk54321.techionblog.com/30325618/deepnude-ai-navigating-the-fine-line-between-innovation-and-ethics>https://trevorywsk54321.techionblog.com/30325618/deepnude-ai-navigating-the-fine-line-between-innovation-and-ethics</a> Подтверждение индивидуальной информации. Все казино требуют от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у пользователя иных аккаунтов (мультиаккаунт запрещен). 1хслотс рабочее зеркало на сегодня Эффективность бездепов виде маркетингового прибора расценили все операторы. Малоизвестные площадки употребляют такие акции, дабы быстро набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны неизменных посетителей. Не все веб-сайты, дающие подарки без депозита, рекомендованы к этой. За симпатичным промоописанием шансы прятаться неосуществимые условия отыгрыша прочие подводные камни.
1хслотс зеркало
Однако в условиях исчезают «подводные камешки», коие не разрешат вывести крупную сумму или же вы не успеете отыграть вейджер. Поэтому мастера советуют арестовать бесплатные вращения за регистрацию в казино без депо, чтобы поднабраться опыта и получить настоящий шанс на победу. Бездепозитные бонусы настоящими деньгами, коие возможно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадали. <a href=http://moregasmsplease.com/component/kunena/user/554756-glennseals>http://moregasmsplease.com/component/kunena/user/554756-glennseals</a> 1хслотс официальный сайт зеркало Подтверждение электронной почты – одно из главных критерий, коие есть практически в каждом бездепозитном казино. Чтобы верифицировать электронную почту, достаточно перебежать по интенсивной ссылке в письме, приобретенном от азартного клуба.Так что сможете смело региться без всяких раздумий. Фортуна сегодня точно на вашей стороне. Не страшитесь, так следствие какого либо ущерба Вам совершенно не угрожает. С такими бонусами как без пополнения, Вы остаетесь лишь в плюсе, хотя не как не в минусе.
1× slots casino зеркало
После потребуется внести идентификационный платёж. Это стращает новичков больше всего. Нужно устроить наименьший депозит в 100–500 руб. Таким образом служба безопасности увериться в том, собственно платёжный способ принадлежит Вам. Данная процедура необходима для обеспечивания безопасности игровых счетов. Пример, Ваш аккаунт взломают и выведут средства на свой кошелёк. Будет очень досадно. Поэтому верификация платёжной системы, это важный момент. <a href=http://nhomtruyen.com/members/jamesgaw.9280/>1хслот скачать</a> 1×slots зеркало регистрация <a href=https://exsite.su/user/Jamesmip>https://exsite.su/user/Jamesmip</a> Таким образом, заведение пробует показать себя своим потенциальным игрокам, а подобный маркетинговый ход как казино приз без депозита за регистрацию привлекает довольно большое внимания к игорному заведению и обеспечивает постоянный поток свежих гостей и будущих посетителей игрового интернет клуба.
x1 slots регистрация в 1×slots casino
С другой стороны, гораздо проще арестовать бездепозитные фриспины за регистрацию в казино и прямо данный начать вертеть барабаны в наилучших слотах. Главная особенность спинов никаких, собственно они предназначены для топовых автоматов. Удастся не только пройти вспомогательные раунды, но и прирастить сумму выигрыша, заработать респины прочие внутриигровые подарки. <a href=http://suwonprint.com/bbs/board.php?bo_table=free&wr_id=44741>http://suwonprint.com/bbs/board.php?bo_table=free&wr_id=44741</a> Многие новенькие колеблются, собственно поощрительный приз не нужно несомненно отдавать, в случае они выиграли у казино. Это безусловно неопасно и надежно. Выводя выигранные свои, игрок просто останавливает свое роль деле и утрачивает уникальную вероятность – даром увеличивать личное вещественное положение. 1×slots казино мобильная версия
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=133539>1×slots официальный сайт мобильная версия скачать</a>
<a href=https://koreanstudies.com/forum/memberlist.php?mode=viewprofile&u=2906>1×slots казино зеркало</a>
<a href=https://www.xn–72c9aa5escud2b.com/webboard/index.php?PHPSESSID=490mp7388g3bnlchthofpddru7&action=profile;u=1721715>1×slot казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Прежде чем активировать бездеп, нужно убедиться что, нет, что государство, уроженцем которой считается игрок, не заходит в перечень разрешенных. Максимальная ставка ? уточняется в валюте счета и ограничивает размер ставки за раз спин. В случае ее превышения бонус может быть аннулирован. Также в правилах может содержаться запрет на размещение ставок определенного облика, к, по одинаковым шансам в рулетке (то есть, на чет или нечет, красноватое или черное и т.д.).
#7505 Сenter_Empathy_scacthttps://empathycenter.ru/
Всем привет! Центр ментального здоровья «Эмпатия». Центр «Эмпатия» — это команда профессионалов в сфере психического здоровья и психологической помощи. Врачи-нейропсихологи, психиатры, психотерапевты, психологи и эндокринологи объединились вместе для восстановления Вашего внутреннего равновесия и гармоничных отношений с окружающими. Наши специалисты лечат весь спектр психических расстройств, включая самые тяжелые случаи, деликатно и бережно помогают в решении сложных жизненных ситуаций. Мы создали для Вас среду, где вы получите квалифицированную помощь и почувствуете заботу, уважение и принятие. <a href=https://empathycenter.ru/articles/lissofobiya/>лиссофобия что это</a> Если Центр ментального здоровья или Сеть клиник доказательной психиатрии в Реутове и Москве, то это в Эмпатия Центр https://empathycenter.ru/ . Консультации как очно в Москве и Реутове, так и онлайн по всей России. Звоните и консультируйтесь по бесплатному номеру 8–800–775–07–12. Всем пока!
#7506 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7507 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, например как Вам понадобиться ее подтвердить дальнейшем при выводе денег. <a href=http://filmkachat.ru/>1×slots casino online регистрация</a> <a href=https://camp-fire.jp/profile/0ca752102464>https://camp-fire.jp/profile/0ca752102464</a> Так же стоит выделить то, собственно в каждом интернет казино установлен собственный максимальный кешаут на бездепозитный бонус. Как верховодило кешаут — это предельная сумма денег, кот-ая дешевая для вывода с бездепозитного приза. 1×slots регистрация 1×slotscasino09k online <a href=http://empyrethegame.com/forum/memberlist.php?mode=viewprofile&u=355964>http://empyrethegame.com/forum/memberlist.php?mode=viewprofile&u=355964</a>
1×слотс казино
Для проверки применяются сканы паспортов, водительских прав, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если пользователь обнаружен в попытке ввести вспомогательный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в темный перечень. При ирге на лицензионной площадке не бояться указывать достоверную персональную информацию (шифрование исключает утечку индивидуальных данных).Но никогда не запамятовывайте внимательно разбирать верховодила участия в бонусных промоакциях. Если вы нарушите хотя бы одно условие, позднее вы не сможете устроить недоразумение с администрацией. 1×slot официальный сайт Бездепозитные бонусы — это презенты от казино повторяющий бонусных денег или фриспинов для игровых автоматов, коие начисляются на акк игрока после процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депо не потребуется.Автоматы непопросту считаются самым знаменитым азартным веселием. Чтобы усвоить управление и управляла, понадобится всего количество мин. Ваша задача сделать ставку, найти число трудящихся линий и можно крутить барабан. Если на экране выпадет выигрышная комбинация – вы выиграли! С этой задачей для посодействуют управится бездепозитные призы казино. <a href=https://xia.h5gamebbs.cndw.com/home.php?mod=space&uid=387569>https://xia.h5gamebbs.cndw.com/home.php?mod=space&uid=387569</a> Бонус за регистрацию в казино без депо с выводом средств нужно отыграть. Зачастую для отыгрыша может понадобиться сделать ставки на сумму, в некоторое 10-ов один превосходящую сумму приза либо выигрыша. 1×slots casino online регистрация
1×slots регистрацию более популярный вариант это
Осталось избрать казино с призом за регистрацию и сделать профиль. После активации подарка выигрыш в от Фортуны и способностей.Приглашаем делиться воззреньями о бонусах. Это поможет иным пользователям подбирать более выгодные предложения. <a href=http://www.fire-team.ru/forum/member.php?u=5088>http://www.fire-team.ru/forum/member.php?u=5088</a> Чем ниже велечину вейджера, что, этим проще отыграть и исключить приз. Если Вы расчитываете заработать на бездепе, но просто ознакомиться с свежим игровым клубом, то стоит избегать бонусов с высочайшим вейджером их почти не реально отыграть. С ними Вы можете только протестировать игры заведения. 1×slots регистрация 1×slots casino c2d ru Получить приветственный бонус имеют лишь свежие клиенты онлайн-казино. Способы описаны в условиях промоакции любого законного казино, чаще всего это:Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в соц сетях, установку мобильного прибавления или официального клиента для ПК. В большинстве казино действуют программы преданности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий уровень часто с выдачей бездепа.
1×slots официальный сайт мобильная версия
<a href=http://sfessd.listbb.ru/memberlist.php?mode=viewprofile&u=86>1×slots зеркало регистрацию более популярный вариант это</a> Кешбэк-бонус дает собой возврат фиксированного процента от ставки если, тогда, проигрыша или же от проигранной суммы за определённый период. В большинстве случаев кешбэк не превышает 10%. Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. казино 1×slots официальный сайт <a href=https://emilianoisah19630.snack-blog.com/30245346/ai-nude-revolutionizing-content-moderation-and-privacy-protection>https://emilianoisah19630.snack-blog.com/30245346/ai-nude-revolutionizing-content-moderation-and-privacy-protection</a> Все благотворительные бонусы кажутся заманчивыми. Кто же откажется от способности поиграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далеко не все бездепозитные призы в равной степени презентабельны для рассудительного посетителя.Заполняя данные в собственном профиле, указывайте только достоверную информацию, например как Вам понадобиться ее доказать дальнейшем при выводе средств.
1хслотс зеркало на сегодня
Онлайн гемблинг развивается с каждым днем больше и больше, свежие бренды создаются не по денькам а по часам. Новые онлайн казино делают вступительные акции для игроков, чтобы, чтобы собственно бы зарекомендовать себя, и тем наиболее предлагают бездепозитные бонусы за регистрацию, что бы не пропустить такую возможность — как воспользоваться новым бездепом, рекомендуем навещать наш вебсайт как можно почаще, самое смачное и свежие несомненно добавляться в этом же перечне. <a href=https://botdb.win/wiki/%D0%90%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0_%D0%A1%D0%B0%D0%B9%D1%82>https://botdb.win/wiki/%D0%90%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0_%D0%A1%D0%B0%D0%B9%D1%82</a> Для всех бездепозитных призов функционирует наибольший предел на выигрыш. Он указывает предельную необходимую, которую появится получить, играя на бонусные кредиты. Как только вам получится выполнить требования вейджера, допустимый максимально несомненно переведен с бонусного счета на ведущей, а остаток будет списан.Мы собрали и опубликовали список наилучших бездепозитных казино с бонусами за регистрацию, которые гарантируют великодушные выигрыши и моментальные выплаты. 1×slots официальный зеркало Варианты выигрыша зависят от Вашей успеха и условий игорного портала. Выше мы заявили, что кое-какие бездепозитные бонусы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются и те, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность передовых игр на деньги, возможно выиграть невероятные суммы. Сегодняшние игровые автоматы либо видео слоты, как их именуют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000.Мы подготовили список, где есть практически актуальные и свежие бездепозитные призы казино, коие вам получить безвозмездно. Для наших юзеров есть особые предложения неповторимые бонусы, которые вы ни не отыщите, их мы обозначили особой красной плашкой «Exclusive».
<b>Смотреть еще похожие новости:</b>
<a href=http://www.airsoft44.com/forum/index.php?action=profile;u=11896>1хслотс зеркало на сегодня</a>
<a href=http://permitbeijing.com/forum/member.php?action=profile&uid=191496>1×slots регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Простая процедура получения бездепозитного приза, которая займет не более 2-х мин. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные.
#7508 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7509 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать
Например, игрок получил 500 рублей при творении аккаунта и должен отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 рублей, потребуется устроить 875 спинов для полного отыгрыша. <a href=http://filmkachat.ru/>1×slots регистрация на 1хслотс</a> Во всех законных онлайн-казино Беларуси нужно свидетельство паспортных данных для забавы — это заявка правительства государства.Наш список включает в себя лучшие бездепозитные призы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по принципиальным характеристикам: <a href=https://community.networkofcare.org/blogs/qwerty/archive/2024/10/11/understanding-what-is-a-3d-render-and-how-it-works.aspx>https://community.networkofcare.org/blogs/qwerty/archive/2024/10/11/understanding-what-is-a-3d-render-and-how-it-works.aspx</a> 1хслотс зеркало на сегодня <a href=https://rivervxdf45577.blog-ezine.com/30400780/nude-ai-the-ethical-and-technological-challenges-of-artificial-intelligence>https://rivervxdf45577.blog-ezine.com/30400780/nude-ai-the-ethical-and-technological-challenges-of-artificial-intelligence</a> В лицензионных бездепозитных казино выступать в азартные забавы действительно безопасно. Наличие лицензии подтверждает что, этот факт, что клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP.
1×slots промокод при регистрации
Фриспины предусмотрены для применения в видео слотах. Внимательно ознакомьтесь с условиями – часто их выдают на некоторые автоматы. В зависимости от клуба, у вас получится устроить определённое число ставок. Кстати, продвинутые игорные жилища разрешают запускать любых «одноруких бандитов».Бездепозитные бонусы за регистрацию считаются одним из самых популярных способов привлечения свежих игроков в онлайн-казино, поэтому собственно они предоставляют игрокам возможность опробовать казино, необыкновенно игровые автоматы, и вполне, выиграть настоящие деньги. 1×slots зеркало на сегодня Для получения бездепа необходимо пригласить в забаву по реферальной ссылке свежего посетителя: он обязан зарегистрироваться, пройти верификацию на сайте онлайн-казино и пополнить счёт на сумму, обозначенную в условиях промоакции. <a href=https://cruzvxxv00998.p2blogs.com/29607662/deepnude-ai-navigating-the-controversial-landscape-of-image-manipulation-technology>https://cruzvxxv00998.p2blogs.com/29607662/deepnude-ai-navigating-the-controversial-landscape-of-image-manipulation-technology</a> Таким образом онлайн казино получает вероятного игрока. Возможно в будущем либо настоящем он захотит поиграть на свои средства. Так трудятся бездепозитные призы в онлайн казино. Здесь отлично подходит выражение, бесплатные сыр случается лишь в мышеловке. Начинающие игроки могут не осознавать опасность пыла. Однако течением понимания становится больше. Это тема для отдельного обсуждения.Чаще всего применяются коды. Их нужно вносить в особые окна регистрационной анкеты, если речь о пригласительных бонусах, или в особом разделе собственного кабинета игрока. 1×slots официальный сайт скачать Такие поощрения разрешают даром протестировать свежее казино, разобраться с игровым ходом онлайн слотов, заработать и вывести маленькую необходимую средств.
1×slots мобильная версия войти казино
Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных требований, считая обязательной верификации. Если на веб-сайте предусмотрена неотъемлемая процедура доказательства личности, то исключить выигрыш получится лишь после проверки данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий лицо.Бездепозитные призы казино за регистрацию в 2022 году — это возможность сыграть за счёт заведения. Казино даёт клиенту шанс пользоваться определённой суммой или количеством даровых вращений без внесения депо. Не путайте деморежим с реальной забавой без необходимости внесения депозита. Можно. Вы всегда сможете отрешиться от получения бездепозитного бонуса за регистрацию в казино, же Вы не сделаете ставку. <a href=http://whdf.ru/forum/user/84086/>http://whdf.ru/forum/user/84086/</a> 1х слотс зеркало регистрация в 1×slots casino
1×slots промокод при регистрации 2025
<a href=http://nrj.rs.ba/memberlist.php?mode=viewprofile&u=2111>1×slot зеркало рабочее регистрации на телефон придет</a> Бездепозитные призы истинными деньгами, которые возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадали. В онлайне слишком много скриптовых сайтов, коие принадлежат жуликам. Их основная цель – привлечь гэмблеров, пообещав не только щедрые подарки, но и солидные выигрыши. Так что некоторые веб-сайты предлагают получить за регистрацию числе $1 000. 1×slots сайт <a href=https://astraclub.ru/blog.php?cp=3364>https://astraclub.ru/blog.php?cp=3364</a>
1хслотс казино зеркало
Но на некоторых азартных платформах похожие вознаграждения могут получить теперь зарегистрированные пользователи. В таком случае, бонусы предоставляются в рамках оригинальных акций или же неким геймерам в виде акционного предложения, которое прибывает на почту с целью «вернуть» игрока в свое казино. Для выбора азартного заведения Вы можете воспользоваться списком наших казино с бонусами за регистрацию. На нашем веб-сайте мы опубликовали список бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, собственно часть бонусов неповторимые и доступны только для гостей нашего сайта по-специальному промо-коду или по оригинальной ссылке. Кроме такого, для любого бонуса мы подготовили подробный обозрение, в котором Вы узнаете как получить и отыграть одобрение и как исключить свой выигрыш с бездепа. <a href=https://www.gay8we.com/user/JamesAcrot/>https://www.gay8we.com/user/JamesAcrot/</a> Благодаря программке преданности от игорного заведения, возможно брать неплохой старт и без дополнительных вложений запустить видеослоты. Кроме такого, возможно рассчитывать на реальную удачу и получить, без инвестиции личных финансов, большой выигрыш. 1×slot казино зеркало При использовании бездепозитным призом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют количество видов лимитов:Не стоит путать забаву в демо и внедрение бонусов. В демонстрационном режиме игрок возможность оценить механику слота, сюжет и оформление. Но забава ведется на относительные кредиты, поэтому отсутствует основное ? чувство азарта. Активируя промокод либо фриспины, заказчик и не расходует средства деньги на игровые автоматы, хотя возможность сорвать реальный куш!
<b>Смотреть еще похожие новости:</b>
<a href=http://naturetour.ru/communication/forum/messages/forum3/message23840/5537-kazino-1×slots-ofitsialnyy-sayt?sessid=e368666eec9136083646acb14da5cc6c&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>казино 1×slots официальный сайт</a>
<a href=https://portugal-campings.com/pt/account/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Перед активацией главно пристально выучить обстоятельства промоакции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют значение также лимиты ставок при отыгрыше и сроки, в течение которых можно воспользоваться предложением. Если бездеп охватывает узкий перечень игр, рекомендовано узнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь в случае, в оператор не установил взыскательные лимитирования на наивысшую сумму ставки. Кешбэк-бонус представляет собой возврат фиксированного процента от ставки если, тогда, проигрыша или же от проигранной суммы за определённый период. В большинстве случаев кешбэк не превышает 10%.
#7510 Charlesgunny
kent casino Ходнева Светлана Владимировна порно <a href=https://specreporter.com/>ставки на спорт букмекерские конторы</a> Крючкова Полина Викторовна порно casino онлайн <a href=https://sovsekretno.net/>porno Юлия Канакина, скелетонистка</a> казино проиграл официальные зеркала казино inform@rucriminal.info приложения букмекерских контор казино казино вход 1×bet слоты
#7511 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7512 Charlesgunnyhttp://filmkachat.ru
онлайн казино 1×slots
Для верификации номера телефона, в собственном профиле изберите опцию „Подтвердить номер аппарата“ и введите в подходящее фон код, полученный в sms-сообщении.Наши эксперты исследуют условия акции, затем в ручном режиме проверку их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие характеристики. Мы не рекламируем казино, а даем игрокам информацию о лучших из них. <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino09k online</a> Чаще всего интернет-казино предлагают бездепозитные бонусы новым пользователям. Эта промо-акция довольно эффективно привлекает начинающих, подталкивая их к открытию счета. Конечно, не все они становятся послушными клиентами, но сам прецедент регистрации аккаунта играет на руку заведению. <a href=https://www.haikudeck.com/the-power-of-3d-visualization-in-real-estate-marketing-and-sales-uncategorized-presentation-22d5852555#deck-outline>https://www.haikudeck.com/the-power-of-3d-visualization-in-real-estate-marketing-and-sales-uncategorized-presentation-22d5852555#deck-outline</a> Бездепы с безвозмездными вращениями предоставляют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд платит казино. Число спинов ограничено и изредка выше сотню. Если акция включает в себя количество безвозмездных игр, их начисление имеет быть разбито на количество дней.Главное преимущество спинов – возможность изучить различные слоты. Также удастся насладиться бонусными раундами, испытать фортуну в риск-туре и преумножить выигрыш за счёт особых знаков. Однако не только игровой процесс заслуживает внимание, ведь никакого сосредоточиться на реальном выигрыше. 1×slots бездепозитный бонус за регистрацию <a href=https://bdsmboard.org/member.php?436104-RalphCep>https://bdsmboard.org/member.php?436104-RalphCep</a> Для доказательства электрической почты, просто перейдите по активной ссылке в послании, приобретенном от игрового заведения.
1 x slots
Поспешите зарегистрироваться на официальном сайте Клубника, чтобы мгновенно получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, замечена настоящий шанс победу! <a href=https://www.mshowto.org/forum/members/jamespauri.html>1×slots рабочее зеркало на сегодня</a> 1×slot зеркало <a href=http://forum.informatyk.edu.pl/member.php?action=profile&uid=13485>http://forum.informatyk.edu.pl/member.php?action=profile&uid=13485</a> 1×slots официальный зеркало рабочее
1×slots регистрация то дальше необходимо пройти
Даже не выиграв крупную необходимую, игрок увлекательно проведет время, изнутри изучит работу площадки, оценит геймплей автоматов. Все это без каких-либо денежных рисков. Быть в курсе наилучших промоакций легко. Достаточно регулярно изучать перечень свежих онлайн казино с выводом приза без депозита в этом разделе.Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном сайте и выполните вход в индивидуальный офис, чтобы отобрать безвозмездные вращения с вейджером х40; <a href=https://maps.google.ba/url?q=https://doctorlazuta.by/>https://maps.google.ba/url?q=https://doctorlazuta.by/</a> Чтобы выступать бесплатно на настоящие средства в казино, не всегда достаточно просто зарегистрироваться. Иногда необходимо выполнить дополнительные деяния.Для получения предоставленных бонусов вам понадобиться — ПК либо мобильное устройство, и остальное дело за малым. casino 1×slot Условия отыгрыша приза. Если Вы расчитываете заработать на бездепозитном бонусе, то начала обратите внимание на значение вейджера и срок, кот-ый дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть бонус и исключить выигрыш.Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном бонусе, то в первую очередь внимание на значение вейджера и срок, кот-ый дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, тем легче отыграть бонус и вывести выигрыш.
1хслот скачать
Любой выигрыш по ставке повыше установленного лимита будет являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, ну случае выигрыша его сумма не поступит на счёт посетителя — результат игры несомненно всецело аннулирован.Чтобы получить возможность вывести выгода с бездепозитного приза в казино, нужно выполнить ряд критерий: Самый распространённый из подобных бонусов, конечно же, бездеп на день рождения клиента — бонус повторяющий фиксированной суммы либо фриспинов поступает на счёт игрока, а воспользоваться им возможно протяжении установленного периода медли. 1×slots регистрация 1×slots review live <a href=https://eco-kamchatka.ru/user/Joshuasmomy/>https://eco-kamchatka.ru/user/Joshuasmomy/</a> Почти все игровые клубы требуют подтверждение контактных данных игрока для получения бездепозитного бонуса.B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax
1×slots рабочее зеркало на сегодня
Чаще всего казино приз за регистрацию без депозита даёт возможность запустить каждой машина. Но другого, как пристально ознакомиться с условиями. Иногда для игры доступны лишь определённые модели. Если вы новичок и ничего не смыслите в гэмблинге, чем начать знакомство с миром азарта непосредственно с «одноруких злодеев». Создание аккаунта. На сайте казино необходимо открыть регистрационную форму и заполнить порожние поля собственными данными. Иногда на данном шаге потребуется показать лишь адрес электрической почты и пароль, но чаще хотелось наполнить анкету индивидуальной информацией (ФИО, дата рождения, место проживания и т.д.). Нужно свидетельствовать только настоящие данные, поскольку впоследствие они будут проверены. <a href=https://sc-grandmaster.ru/forum/?PAGE_NAME=profile_view&UID=15175>https://sc-grandmaster.ru/forum/?PAGE_NAME=profile_view&UID=15175</a> 1×slots коды Обыкновенные бездепозитные бонусы в размере от трех до двадцати долларов созданы для того, дабы в забавы заходили все новые и свежие игроки. Здесь, всего, несомненно лимитирование на максимальный выигрыш. Важно, дабы перед минимальным вкладом был отключен приз за первое пополнение счета, и игры не попадет на повторный вейджер.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.xn–72c9aa5escud2b.com/webboard/index.php/topic,40886.new.html#new>1×slot зеркало</a>
<a href=https://forum.eliteshost.com/member.php?action=profile&uid=8111>рабочее зеркало 1хслотс</a>
<a href=https://www.kfz-gringer.at/index.php/forum/in-neque-arcu-vulputate-vitae/67768–1×slots-1×slots-casino-c2d-ru#67533>1×slots регистрация 1×slots casino c2d ru</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Доступность — бездепозитные призы в казино почаще всего предоставляются свежим игрокам, но случаются случаи, когда приз все получить и действующие посетители. Если речь об неповторимых услугах, может понадобиться регистрация в казино по ссылке с партнерского сайта.
#7513 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7514 Charlesgunny
win win casino 1×bet слоты 1×bet top <a href=https://slon-ru.com/>букмекерская контора фонбет официальный сайт</a> порно с Анна Щербакова, фигуристка casino ru <a href=https://rumafia.news/>1×bet официальный слоты</a> 1×bet зеркало рабочее на сегодня 1×bet xyz казино вход официальный сайт рейтинг казино порно с Алексей Миранчук (футбол) смотреть фильм казино porno Мира Андреева (теннис) porno Андрей Рублев (теннис)
#7515 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация в 1×slots casino
Когда речь идет о денежных бонусах, казино всегда устанавливают условия вейджера, коие необходимо выполнить, чтобы исключить выигрыш.Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную процедуру активации бонуса без депо. Внимательно прочтите до конца. Многие новенькие проделывают ошибки на этапе регистрации и поэтому имеют получить презент. <a href=http://filmkachat.ru/>скачать 1×slots официальный сайт</a> B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. <a href=https://www.saphirnews.com/forum/3D-Visualization-Portfolio_m266048.html>https://www.saphirnews.com/forum/3D-Visualization-Portfolio_m266048.html</a> 1×slots официальный сайт зеркало <a href=https://hallbook.com.br/blogs/289170/%D0%9D%D0%B0%D1%83%D1%87%D0%BD%D0%B0%D1%8F-%D0%BC%D0%BE%D0%BD%D0%BE%D0%B3%D1%80%D0%B0%D1%84%D0%B8%D1%8F-%D0%B2%D0%B0%D1%88-%D0%B1%D1%8B%D1%81%D1%82%D1%80%D1%8B%D0%B9-%D0%BF%D1%83%D1%82%D1%8C-%D0%BA-%D1%83%D1%81%D0%BF%D0%B5%D1%85%D1%83>https://hallbook.com.br/blogs/289170/%D0%9D%D0%B0%D1%83%D1%87%D0%BD%D0%B0%D1%8F-%D0%BC%D0%BE%D0%BD%D0%BE%D0%B3%D1%80%D0%B0%D1%84%D0%B8%D1%8F-%D0%B2%D0%B0%D1%88-%D0%B1%D1%8B%D1%81%D1%82%D1%80%D1%8B%D0%B9-%D0%BF%D1%83%D1%82%D1%8C-%D0%BA-%D1%83%D1%81%D0%BF%D0%B5%D1%85%D1%83</a> Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.
1×slots зеркало сайта
x1 slots 1хслотс регистрация перейти на 1×slots Выше мы дали полный набор самых новых и своевременных бездепозитных призов в интернет казино без пополнения на 2022 год, где возможность пользоваться любым ценным бездепозитным бонусом.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. <a href=https://www.google.ml/url?q=https://doctorlazuta.by/>https://www.google.ml/url?q=https://doctorlazuta.by/</a> Oтыгpaть приз с обозначенным вeйджepом, для этого необходимо сдeлaть cтaвoк нa cумму, превышающую размер приза в несколько один.Игрокам стоит принимать приветственный бонус как гарантированный метод получить большой выигрыш, но это замечательная возможность без затрат расценить функционал казино. 1хслот зеркало сайта Бесплатный приз – кредиты, коие онлайн-казино начисляет посетителю, не принуждая его пополнять игровой счет.Не стоит путать забаву в демо и внедрение бонусов. В демонстрационном режиме игрок может расценить механику слота, сюжет и оформление. Но забава ведется на относительные кредиты, поэтому отсутствует главное ? ощущение пыла. Активируя промокод или фриспины, заказчик раньше не расходует свои средства на игровые автоматы, хотя имеет сорвать настоящий куш!
1хслотс 1хслотс регистрация перейти на 1×slots
Лишь пользующиеся и известные азартные заведения могут разрешить себя выдавать бездепы в виде добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депо, коие возможно потратить в топовых аппаратах с высокой отдачей. <a href=https://zakon.ru/Profile/Show/280409>https://zakon.ru/Profile/Show/280409</a> 1×slots актуальное зеркало
рабочее зеркало 1×slots
Эффективность бездепов виде рекламного прибора расценили почти операторы. Малоизвестные площадки употребляют эти акции, чтобы стремительно набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны постоянных посетителей. Не все веб-сайты, дающие подарки без депо, рекомендованы к этой. За привлекательным промоописанием могут скрываться неосуществимые обстоятельства отыгрыша и другие подводные камни.Будьте внимательнее при ознакомлении с правилами во избежание происхожденья конфликтных обстановок с казино, когда последствии отыгрыша бездепа для не дадут вывести солидную сумму выигрыша. У любой игры свои притязания по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система засчитает каждую ставку. В рулетке и покере сделать это намного труднее. Именно потому например важно внимательно разбирать обстоятельства получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой забаве, то новички просто «спустят бонус на ветер». B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax 1×slots актуальное зеркало <a href=https://forum.lavalink.com/member.php?action=profile&uid=95476>https://forum.lavalink.com/member.php?action=profile&uid=95476</a>
1×slots зеркало видели такую регистрацию на
<a href=https://istinastroitelstva.xyz/user/Jeffreyagoks/>https://istinastroitelstva.xyz/user/Jeffreyagoks/</a> На бонусные начисления шансы быть установлены вспомогательные лимитирования, коие Вы не к при отыгрыше. Пока приз всецело не отыгран — деньги из казино не выводятся. 1×slots зеркало на сегодня Бездепы с безвозмездными вращениями деют юзерам право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд платит казино. Число спинов ограничено и изредка превышает сотню. Если промоакция содержит большое безвозмездных игр, их начисление может быть разбито на некоторое дней.Даже не выиграв крупную необходимую, игрок увлекательно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе превосходнейших промоакций с. Достаточно периодически изучать список новых интернет казино с выводом бонуса без депозита в данном разделе.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.pcmadd.com/index.php?/topic/708-sistem-dell-inspiron-530/page/6/#comment-248158>зеркала 1×slots</a>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=119913>1×slots актуальное зеркало</a>
<a href=https://www.mshowto.org/forum/members/jamespauri.html>1× slots casino зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Перечисленные повыше основные характеристики сочетают практически каждый бонус и являются стандартными для бездепозитных бонусных начислений в казино.
#7516 Charlesgunny
casino автомат online casino 7k <a href=https://strelochnik.com/>порно с Дарья Касаткина (теннис)</a> cat casino казино смотреть онлайн бесплатно <a href=https://m.repost.news/>porno Мария Шарапова</a> pin up casino скачать Ирина Горбачева casino рабочее 1×bet слоты 1×bet xyz букмекерскую контору пин 1×bet вход кент казино
#7517 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7518 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало на сегодня
При регистрации сомнений либо ином интернет игральном заведении — вам дается раз шанс испытать свою фортуну не внося средства монеты. Замечу собственно такую поощрительную предложение предоставляют не все интернет игровые площадки, а лишь щедрая середина(средина) из их. Которые мы подготовили для Вас в нашем перечне. <a href=http://filmkachat.ru/>1×slots casino регистрация</a> К примеру, игроку выдаются бесплатные средства в заведении в объеме пятидесяти либо 100 долларов (вейджер на которые сочиняет 100х). То есть, любому новоприбывшему игроку выскакивает привлекающая иллюстрация, кот-ая сулит выплату всех зачисленных фирмой средств. Не стоит заострять на казино приз за регистрацию без депо с чрезмерно великой либо очень малеханькой суммой призов, поэтому что, числе тщательно исследовав все условия, тут всего, несомненно какой-то подкол.Стоит обозначить(означить), что бездепозитный приз выдается только совершеннолетним новичкам, коие, к, могут пригласить личных друзей и людей, также претендующих на поощрительную программу лояльности. Подобная разработка была среди конкурирующих онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры содействуют повышению собственной популярности, путем привлечения новых игроков. Бонусы – это оригинальный шанс для потенциальных участников игры, коие шансы опробовать софт покер рума и увериться, станут ли они в него играть или нет. Новый игрок попробует средства силы с реальными оппонентами в казино. <a href=https://www.reverbnation.com/%D1%81%D0%BA%D1%83%D0%BF%D0%BA%D0%B0%D0%B0%D0%B2%D1%82%D0%BE%D0%BF%D0%BE%D1%81%D0%BB%D0%B5%D0%B4%D1%82%D0%BF>https://www.reverbnation.com/%D1%81%D0%BA%D1%83%D0%BF%D0%BA%D0%B0%D0%B0%D0%B2%D1%82%D0%BE%D0%BF%D0%BE%D1%81%D0%BB%D0%B5%D0%B4%D1%82%D0%BF</a> Не стоит сразу же отрицаться от приветственных презентов в похожих казино. Администрация готова начислить средства либо фриспины, хотя сначала работники обязаны убедиться, собственно вы не мошенник. Дело сомнений, что развелось слишком много охотников за бонусами. Они выучились врать систему и зарабатывать крупные суммы средств.Бездепозитные призы казино за регистрацию в 2022 году — это возможность сыграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой или количеством бесплатных вращений без внесения депозита. Не путайте деморежим с реальной забавой без надобности внесения депо. 1хслотс официальный сайт зеркало <a href=http://avestalaw.ru/index.php?subaction=userinfo&user=abacktongue59>http://avestalaw.ru/index.php?subaction=userinfo&user=abacktongue59</a> Таким образом онлайн казино получает потенциального игрока. Возможно в или подлинном он захочет сыграть на средства деньги. Так работают бездепозитные бонусы в интернет казино. Здесь хорошо подходит выражение, благотворительные сыр случается только в мышеловке. Начинающие игроки могут не обдумывать опасность пыла. Однако с осознания делается больше. Это тема для отдельного обсуждения.
1хслот зеркало сайта
Акции распространяются как на все забавы казино, так и на узкий перечень. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и другие. Промо имеет охватывать разработки 1-го производителя. Бездеп не пересекается с другими промоакциями казино. Если на сайте учтен кэшбек, он не начисляется за ставки, изготовленные бонусными деньгами. Для идентификации платежных реквизитов игрока имеет потребоваться пополнение счета на наименьшую необходимую. 1×slots на любой вкус как пройти регистрацию <a href=http://yunduost.com/home.php?mod=space&uid=20467>http://yunduost.com/home.php?mod=space&uid=20467</a> 1×slots официальный регистрация Акционные предложения от казино есть в различных форматах. Часто призы даются в размен на депо. Игрок вносит платеж и получает средства, благотворительные вращения прочие одобрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — картина бонуса, кот-ый гарантирован за исполнение конкретных деяний на веб-сайте:Бездепозитные призы – это самая интересная и более многообещающая акция интернет-казино. Они в лучше фри-спинов, поэтому что выплаты в бесплатных вращениях не гарантированы, ведь композиции на барабанах игрового аппарата все не сложиться.
1 х слотс зеркало
На бонусные начисления шансы быть установлены вспомогательные лимитирования, которые Вы не к при отыгрыше. Пока приз полностью не отыгран — средства из казино не выводятся.Получить Бездепозитный приз в интернет казино дело двух кликов. Другой момент, отыграть рекламную и соблюсти управляла и обстоятельства отыгрыша. Под правилами подразумевается не вагер, но и лимитирования по наибольшей ставке. Мы разумеем, собственно в кино все ставят на зеро и выигрывают. Призываем не делать сходственного. Перед активацией приза прочитайте правила. Узнайте последующие факторы: Условия получения презента, за регистрацию, за депозит и прочее. Ограничения по наибольшей ставке. Зачастую не повыше 350 руб. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вращать автоматы, а вагер будет стоять на пространстве. Поэтому важно аристократия, в каких играх возможно осуществлять кратность денежного оборота. Во время игры в казино, выигрыши, полученные спасибо безвозмездным призовым фондам, суммируются и срабатывают в общую сумму для отыгрывания. Однако, в удача улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно допустит исключить денежные средства. Сумма вывода будет зависимости от лимита, одобренного именно в этом учреждении. Поэтому, пристально нужно читать правила выдачи безлимитных депозитов.Мы делаем акцент на ключевых положениях управлял, рассказываем о территориальных ограничениях и кратко информируем о других акциях обсуждаемого казино. <a href=http://klotzlube.ru/forum/user/272284/>http://klotzlube.ru/forum/user/272284/</a> Осталось избрать казино с бонусом за регистрацию и сделать профиль. После активации подарка выигрыш зависит от Фортуны и способностей.Как только на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу в сего можно оставить заявку на вывод выигрыша. Кредиты прибыльно отличаются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом реальных средств и дают возможность ощутить задор. Во-вторых – можно насладиться каждой азартной игрой доступной на сайте. В вашем распоряжении находятся автоматы, настольные приложение, видео-покер, Live-дилеры. 1×slots коды Бездепы могут входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой или баллами.
1 x slots
<a href=http://khodaumo.com/forum/viewtopic.php?f=2&t=76531&sid=4600375254a4064180c53cab5cf49655>1×slots регистрация на сайте 1×slots ru com</a> Казино выводит деньги лишь на ту платежную систему, с котрой был изготовлен депо. То есть, для вывода бездепозитного бонуса, Вам сначала нужно пополнить счет. В неких клубах узкий перечень способов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с данных платежных способов, которые доступны для вывода.Для выбора азартного заведения Вы можете пользоваться перечнем наших казино с призами за регистрацию. На нашем веб-сайте мы выпустили список бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, собственно доля призов эксклюзивные и доступны только для гостей нашего вебсайта по-специальному промо-коду либо по оригинальной ссылке. Кроме как, для каждого бонуса мы подготовили доскональный обзор, в котором Вы узнаете как получить и отыграть поощрение и как исключить собственный выигрыш с бездепа. казино 1×slots <a href=https://forum.spherecommunity.net/User-Glennskash>https://forum.spherecommunity.net/User-Glennskash</a> Нельзя разглядывать забаву на деньги, как вариант заработка. Азартные игры воспрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не является организатором азартных игр. Сайт носит информационный характер.В разделе с бонусами активировать собственный презент. Найти игры, для которых предусмотрено одобрение и применять приз по назначению.
1хслот официальный сайт зеркало
Бездепозитные бонусы за регистрацию в игровых автоматах для владельцев онлайн-казино являются частью маркетинговой кампании, направленной на повышение аудитории вебсайта. Так они продвигают свои бренды и завлекают свежих посетителей. Минимального оборота. Этот предел уточняется вейджером — же игрок не поиграет на установленную необходимую, вывод средств несомненно недоступен. <a href=https://honcure.com/user/Henryredge/>https://honcure.com/user/Henryredge/</a> Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, чтобы снова получить бесплатный бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ожидает неизбежное санкция.Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми промоакциями. Читайте о них в обзорах и на форуме. 1хслотс казино зеркало При подмоги такового одобрения оператор может того завлекать посетителей, которые раньше проявляли активность на сайте, но по какой-то основанию перестали выступать. В этом случае промокод высылается юзеру по электрической почте либо вид SMS.
<b>Смотреть еще похожие новости:</b>
<a href=https://mit-bbs.com/viewtopic.php?t=132643>1хслотс рабочее зеркало</a>
<a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=50621>1× слот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вейджер (wager) – это коэффициент, который демонстрирует на какую необходимую необходимо сделать ставок, чтобы исключить бонус из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего приза, Вам нужно устроить ставок на необходимую: 500*70=3500 руб. Только полностью отыграв бонус, Вы сможете вывести свой выигрыш. Бездепозитные бонусы казино это экономическая компенсация, предлагаемая юзерам на дармовой базе и вероятность играть в интернет казино бесплатно. Если сравнивать их с поощрениями за лепта, в которых свои выдаются лишь впоследствии начального пополнения счета, то бездепозитные гонорары получаются бесплатно. То есть, играющий получает вероятность создавать ставки на теснее место деньги, коие выдаст заведение, выполняя, всем, обыденные деяния, дабы их извлечь (здесь идет о регистрация, удостоверении личности с внедрением номера телефонного, дизайна заказы и т.д.).
#7519 Charlesgunny
вавада казино часы казино <a href=https://kompromat1.online/>порно с Кирьянова Дарья Борисовна</a> 1×bet официальный скачать 1×bet официальный слоты <a href=https://m.repost.news/>1×bet регистрация</a> pin ап casino бк букмекерская контора porno Яна Троянова vavada casino gama casino 1×bet зеркало на сегодня 1×slots casino
#7520 Charlesgunnyhttp://filmkachat.ru
1 xslots рабочее зеркало
Новые клиенты онлайн-казино без первого депо шансы выяснить собственную удачливость. К что, этому же есть возможность конвертировать бездепы в настоящие средства за регистрацию в казино, однако для этого приз нужно отыграть сообразно условиям промоакции. <a href=http://filmkachat.ru/>1х слотс зеркало регистрация в 1×slots casino</a> <a href=https://www.babelio.com/livres/Maupassant-Bel-Ami/2125/forum/42180/Exploring-Architectural-Rendering-From-Concept-to>https://www.babelio.com/livres/Maupassant-Bel-Ami/2125/forum/42180/Exploring-Architectural-Rendering-From-Concept-to</a> 1×slots регистрация на сайте 1×slots ru com <a href=http://yartube.ru/user/aylattsoz4864/>http://yartube.ru/user/aylattsoz4864/</a> Также учтите, собственно некоторые игровые платформы сужают перечень стран, коие способны получить предложенный бездепозитный бонус за регистрацию. К примеру, существуют онлайн-заведения, выдающие сходственные призы только жильцам конкретных стран. К примеру, интернет казино 777 Оригинал дает бездепозитный бонус лишь игрокам из России и стран СНГ. Или наоборот, пичкают вознаграждением всех, считая обитателей некоторых государств (из этого, по пристально изучать список, чтобы впоследствии не возникло практически вопросов и претензий).Бездепозитные призы в казино без пополнения 2022 — это конкретная сумма денег или valinomycin spins вращения, коие предоставляются первым гостям за регистрацию на сайте казино вид бездепозитного приза, и дает вас вероятность за счет казино без пополнения опробовать предложения (игр), с дальнейшей прерогативой вывода средств при исполнении всех установленных верховодил.
1×slot рабочее зеркало
1хслотс зеркало Законодательство, регулирующее азартные игры в различных странах, влияет на полномочия операторов. В итоге юзеры из отдельных регионов сталкиваются с ограничениями со стороны казино. Это может быть как полный отказ в доступе, так и невозможность загружать забавы отдельных производителей. <a href=http://forum.fcmn.co.il/member.php?action=profile&uid=304768>http://forum.fcmn.co.il/member.php?action=profile&uid=304768</a> В разделе с призами активировать собственный презент. Найти игры, для которых учтено поощрение и использовать бонус по предназначению. 1 хслот регистрация в 1×slots casino
зеркала 1×slots
<a href=https://xn–2n1b32rgho83a7no.kr/bbs/board.php?bo_table=free&wr_id=712417>https://xn–2n1b32rgho83a7no.kr/bbs/board.php?bo_table=free&wr_id=712417</a> Можно ли в одном онлайн казино получить больше 1-го приза за регистрацию? Нет, так как в каждом онлайн казино есть правила, к коим нужно держаться, не создавать 2 аккаута для получения призов, по несомненно блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, бонус за регистрацию выдаеться раз раз одному личику.Бездепозитный приз за регистрацию в казино с выводом средств в 2022 году — Наш ресурс дает игрокам важную информацию о самых новых, щедрых и проверенных бонусах в интернет казино, коие обновляются каждый день. 1×slots на любой вкус как пройти регистрацию Если вы бывалый игрок, вы обязаны аристократия, что бонус без депо – редчайшая находка. Тем ниже, мы неделю исследуем онлайн, дабы найти для вас наихорошие бездепозитные предложения.Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации презента необходимо подтвердить электрическую почту и привязать телефон;
1хслотс казино зеркало
Активация по промокоду используется в различных обликах бездепов. Если речь идет о приветственном призе, то комплект знаков возможно узнать на основной страничке, в регистрационной форме или письме, которое отправляется пользователю для подтверждения адреса электронной почты. Акции имеют проводиться общо с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активируется разовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном кабинете или начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем важный код для активации в описании любого промо.Бонусы без депо при регистрации считаются наиболее красивыми как для опытных игроков, например для и новичков. Получив это вознаграждение, клиент возможность выступать на настоящие деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные призы в интернет-казино Рунета, а также обстоятельства их активации и выигрыша. 1×slot рабочее зеркало <a href=http://nvkb.ru/forum/index.php/user/105068/>http://nvkb.ru/forum/index.php/user/105068/</a>
1× slots casino зеркало
При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие возможно посвятить этой в казино.Демоказино есть почти на любом веб-сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются существенно пореже: там если, тогда, выигрыша и соблюдения критерий промоакций бездеп возможно превратить в настоящие деньги. В истинное время получить приз за регистрацию в казино довольно просто. Почти каждый игорный жилище с радостью даст деньги или благотворительные вращения. Многие игроки пользуются данным и не смущяются регистрироваться в каждом клубе с выгодными условиями. Кстати, это замечательная вероятность придумать выигрышную тактику и сорвать куш.Обыкновенные бездепозитные призы в размере от 3-х до двадцати долларов созданы для того, чтобы в игры заходили все новые и свежие игроки. Здесь, всего, будет ограничение на максимальный выигрыш. Важно, дабы перед минимальным вкладом был отключен приз за первое пополнение счета, и игры не попадет на повторный вейджер. <a href=http://www.gtcm.info/home.php?mod=space&uid=733226>http://www.gtcm.info/home.php?mod=space&uid=733226</a> Денежные свои. Третий приз за регистрацию без депо – наличные. К сожалению, лишь знаменитые и известные клубы шансы уяснить деньги в руб. Либо долларах. С их поддержкой возможность насладиться любой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед этим необходимо исполненье определенных условий. рабочее зеркало 1×slots Подтверждение электронной почты – одно из главных условий, коие есть практически в каждом бездепозитном казино. Чтобы верифицировать электрическую почту, довольно перейти по активной ссылке в послании, полученном от азартного клуба.Выбор каждого онлайн казино на нашем сайте. В описании к любому Вы сможете разузнать, что получите за творение аккаунта.
<b>Смотреть еще похожие новости:</b>
<a href=https://talkonlinenews.com/viewtopic.php?t=3483>1×slots зеркало регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бонус за регистрацию в казино без депо с выводом денег нужно отыграть. Зачастую для отыгрыша может потребоваться устроить ставки на сумму, в несколько десятков один превосходящую необходимую бонуса или выигрыша.
#7521 Charlesgunny
порно с Антропова Валентина Викторовна casino официальный зеркало <a href=https://rhymes-punches.com/>Валентина Матвиенко порно</a> Фастова Елена Владимировна порно порно с Сергей Бобровский (хоккей) <a href=https://krtka.info/>7k casino сайт</a> Елена Лядова casino актуальное зеркало рабочее казино 7k casino сайт порно с Евгения Медведева Фастова Елена Владимировна порно 1×bet слоты 1×bet xyz
#7522 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало этих способов предполагает регистрацию
На страничке представлены бездепозитные бонусы за регистрацию в казино редчайшая награда за которой гонятся все игроки как новички, так и мастера. Мы тоже уделяем большое внимание на присутствие призов при формирование рейтинга казино на деньги. Бездепозитный приз это вероятность выступать даром и выиграть реальные средства.Практически все интернет казино с бездепозитным бонусом за регистрацию учитывает программу лояльности — систему одобрения неизменных посетителей, которая состоит из множества значений. При достижении игроком очередного уровня на его счёт поступает приз. Чем повыше степень — тем щедрее бонус. <a href=http://filmkachat.ru/>1×slots зеркало этих способов предполагает регистрацию</a> Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и более. Когда игроку надеется количество фриспинов, администрация имеет бить3 их начисление на несколько дней. Бесплатные вращения предоставляются для определенного слота, кот-ый указывается в правилах акции. <a href=http://www.wmhelp.cz/html/modules.php?name=Forums&file=viewtopic&t=69255>http://www.wmhelp.cz/html/modules.php?name=Forums&file=viewtopic&t=69255</a> Практически все интернет казино с бездепозитным бонусом за регистрацию учитывает программку преданности — систему одобрения постоянных посетителей, которая состоит из колличества уровней. При достижении игроком еще уровня на его счёт поступает приз. Чем повыше степень — тем щедрее бонус.Приглашаем делиться суждениями о призах. Это поможет иным пользователям подбирать более прибыльные предложения. 1×slots рабочее зеркало <a href=http://nasamomdele.su/forum/memberlist.php?mode=viewprofile&u=64807>http://nasamomdele.su/forum/memberlist.php?mode=viewprofile&u=64807</a> Бонус за регистрацию в казино без депозита с выводом денег надо(надобно) отыграть. Зачастую для отыгрыша может понадобиться сделать ставки на необходимую, в несколько 10-ов один превышающую необходимую приза или выигрыша.
казино 1×slots
Мы собрали и выпустили перечень наилучших бездепозитных казино с бонусами за регистрацию, коие гарантируют щедрые выигрыши и мгновенные выплаты. 1×slots казино мобильная версия <a href=http://korea-shipping.co.kr/bbs/board.php?bo_table=free&wr_id=323238>http://korea-shipping.co.kr/bbs/board.php?bo_table=free&wr_id=323238</a> 1хслотс мобильная версия зеркало
1×slots сайт
Не стоит путать забаву в демо и использование призов. В демонстрационном режиме игрок может оценить механику слота, сюжет и оформление. Но игра проводится на условные кредиты, поэтому отсутствует основное ? чувство пыла. Активируя промокод или фриспины, клиент по-прежнему не тратит средства средства на игровые автоматы, но возможность сорвать настоящий куш! Суммы подобных предложений, случаев, колеблются от 3-х до 20 $, а вейджер на эти средства обязан составлять от тридцати до шестидесяти один. Зачастую, большая сумма выигрыша тут составит от одной до 2-ух сотен долларов. Если игры выиграет больше, то все средства имеют быть списанными до максимально разрешенного выигрыша. Здесь появляется смысл выводить еще несуществующие финансы на свою платежную систему и далее отыскивать заведение с подходящими под данную необходимую релоадом либо бонусом за 1-ое пополнение счета. Есть количество подвидов бездепозитного гонорары, предлагаемого наибольшим количеством заведений.Более крупные предложения встречаются довольно редко. Зачастую они доступны лишь VIP-игрокам. В остальных случаях им всего сопутствуют довольно жесткие условия отыгрыша. Также возможны вспомогательные обстоятельства и лимитирования, прописанные в критериях и положения бонусной программки казино. <a href=http://droid-comz.ru/index.php?subaction=userinfo&user=obedientcard78>http://droid-comz.ru/index.php?subaction=userinfo&user=obedientcard78</a> Используйте лучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, чтобы заработать презенты за обычные деянья и уже сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высочайшей отдачей и прыткими выводами на электронные кошельки.Какие бонусы есть еще получить не бездепозитного приза за регистрацию в казино? По мимо бездепозитного приза, любое интернет казино предлагает игрокам прибыльное предложение на первый депозит, вы совершаете депо, ваш депозит увеличивается в двое или том в трое, тем самым начать играть возможно с более крупной суммой, так же не запамятываем про вейджер на призы. 1хслотс 1хслотс регистрация перейти на 1×slots Казино выводит средства лишь на ту платежную систему, с котрой был сделан депо. То есть, для вывода бездепозитного бонуса, Вам сначала необходимо восполнить счет. В некоторых клубах узкий перечень методов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет непосредственно с данных платежных способов, которые доступны для вывода.
1х слотс зеркало регистрация в 1×slots casino
Выбирайте наихорошие бесплатные призы счет обзоров на Casinoz – и пусть вас сопутствует удача при отыгрыше бонусных кредитов! <a href=https://techadron.com/forum/memberlist.php?mode=viewprofile&u=232>1×slots официальный сайт скачать на айфон</a> Создание аккаунта. На веб-сайте казино необходимо открыть регистрационную форму и заполнить порожние поля собственными данными. Иногда на этом этапе требуется показать лишь адресок электронной почты и пароль, хотя почаще бы наполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д.). Нужно свидетельствовать лишь реальные данные, потому впоследствие они будут испытаны. Когда идет о получении бездепозитных бонусов в казино, в первую очередь обратите внимание на следующие обстоятельства:Вышеописанная причина и является главным моментом, из-за которого операторы отдают часть собственной прибыли на разные рекламные затраты и рекламные кампании. А наиболее действенным тут станут выступать непосредственно бездепозитные бонусы казино 2022 с выводом за регистрацию. казино 1× slots официальный сайт <a href=http://krast-studio.ru/user/Renaldoevoxy/>http://krast-studio.ru/user/Renaldoevoxy/</a> Верификация важна для дополнительной безопасности и может техподдержке выявить бонусхантеров и плутов. Кстати, на платформах выводы крупных сумм доступны только в подтверждения личности.
1×слотс казино
Более солидные предложения встречаются довольно редко. Зачастую они доступны лишь VIP-игрокам. В оставшихся случаях им скорее сопутствуют очень строгие обстоятельства отыгрыша. Также вероятны дополнительные обстоятельства и ограничения, прописанные в критериях и положения бонусной программы казино. <a href=https://ruisoon.com/space-uid-39413.html>https://ruisoon.com/space-uid-39413.html</a> Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, или проигрываете предложенный бонус, по мимо практической игры на бездепозитные призы, у Вас есть шанс выучить игровые автоматы, выучится регулировать менять ставки и линии, исследовать бонусные забавы и их выигрышные композиции, ну в просто зарядится кучей впечатлений! Ведь вы будите выступать на бонусные средства, которые можно отыграть и вывести, не просто на демо счет, тем наиболее адреналин в крови еще больше повысится а пульс забьется с частым ритмом! 1×slots зеркало Помните, собственно любые нарушения правил сведут на нет ваши старания, и вы всего останетесь без начисленного вас дарового приза. Всегда изучайте верховодила начисления и условия вейджера. По каким вопросам, на коие вы не можете самостоятельно отыскать ответы, обращайтесь за разъяснениям и саппорт.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Онлайн-казино с бездепозитными призами ставят посетителям условия для пользования бездепами, потому перед ролью в промоакции другого тщательно ознакомиться со всеми правилами и аспектами акции. Условия все касаться получения бонуса, его применения и последующего вывода денежных средств когда выигрыша.
#7523 Charlesgunny
porno Ангелина Гончаренко, хоккеистка casino официальный сайт <a href=https://sovsekretno.net/>казино пин</a> retro casino kent casino <a href=https://www.ossetia.tv/>порно с Юлия Ефимова, пловчиха</a> казино 1 Нургалиева Эльвира Рамиловна порно porno Юлия Канакина, скелетонистка официальные сайты казино casino daddy Шевцова Татьяна Викторовна порно порно с Аделия Петросян (фигурное катание)
#7524 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало видели такую регистрацию на
Процесс подтверждения личности имеет взятьвдолг(взятьвзаймы) от одного дня до недели. Если клиент допустил какую-либо оплошность при заполнении паспортных данных, то ему по обратиться с проблемой в службу поддержки онлайн-казино. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало</a> <a href=https://www.workingnotworking.com/projects/416961-exploring-photorealistic-cgi-how-it-s-transforming-visual-experiences>https://www.workingnotworking.com/projects/416961-exploring-photorealistic-cgi-how-it-s-transforming-visual-experiences</a> 1×slots казино мобильная версия <a href=https://humanlove.stream/wiki/User:SamReedy97465>https://humanlove.stream/wiki/User:SamReedy97465</a>
1×slots официальный сайт мобильная версия скачать
Каждая игровая перрон выделяется условиями по получению и отыгрышу бездепов. В правилах детально расписаны временные рамки, за коие нужно прокрутить вейджер. Также не запамятовывайте тему наибольший объем ставки и наивысшую сумму выплаты. С иной стороны, чтобы получить бездепозитные призы казино, довольно израсходовать менее 1 минуты. 1×slots регистрация 1×slots casino 777 online У нас на веб-сайте Вы найдете перечень призов без депо в испытанных казино и доскональную информацию про как их получить и использовать. <a href=https://www.mavsboard.com/member.php?action=profile&uid=2403>https://www.mavsboard.com/member.php?action=profile&uid=2403</a> Как правило, при выводе финансов, от играющего требуется только сделать наименьший вклад чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом индивидуальный счет.В перечне притязаний к отыгрышу нередко присутствуют лимиты на ставки при этой на собственные средства. Так, случае отыграть нужно 30 000 рублей, а максимальная сумма ограничена 30 рублями, то вращать барабаны светит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками условий по срокам деянья промоакции. 1хслотс регистрация в 1×slots casino Возможность протестировать новые забавы, не рискуя личностными средствами и создать личную тактику игры.
1×slots регистрация на сайте 1×slots ru com
Подарки на определенные даты отличаются критериями получения. Если поощрение начисляют игроку на денек рождения, то сумма обычно находится от совместного размера депо за прошедший год.Бывают ли бездепозитные призы без вейджера? Бывают, случае у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино. За счёт спинов получится запустить различные интернет слоты, протестировать стратегии и поднабраться опыта. Фишка том,, что вращения начисляются на топовые аппараты с оригинальными опциями и высокой отдачей. Не забывайте, что в любом акционном предложении учтены особые притязания – временные ограничения, наибольший размер ставки, перечень доступных игр. <a href=https://39504.org/member.php?action=profile&uid=25931>https://39504.org/member.php?action=profile&uid=25931</a> 1×slots casino регистрация 1×slots review live Зачастую бездепозитные бонусы казино для забавы предлагаются разными заведениями азартных игр виде рекламных промоакций либо в целях привлечения к себя свежих игроков. Для бездепозитных призов в казино 2022 геймеру надо пополнять счет до этапа вывода хотимых средств.
1хслотс мобильная версия зеркало
Акционные предложения от казино есть в разных форматах. Часто бонусы даются в мена на депо. Игрок заносит платеж и получает деньги, безвозмездные вращения и одобрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — картина бонуса, кот-ый гарантирован за выполнение определенных действий на веб-сайте:Максимальная ставка ? устанавливается в валюте счета и ограничивает размер ставки за раз спин. В случае ее превышения бонус имеет быть аннулирован. Также в правилах может содержаться запрет на размещение ставок конкретного облика, примеру, по равным шансам в рулетке (словами, на чет либо нечет, красноватое либо черное и т.д. ). <a href=http://afpd.onlinebbs.ru/memberlist.php?mode=viewprofile&u=121>1×slots сайт зеркало</a> Следует подчеркнуть, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам либо с конкретным кодом.Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам запрещено начислять призы клиентам, не имеющим валютных средств на счете. Мы предлагаем разглядеть актуальные бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ. 1×slots зеркало сайта <a href=http://www.ihaomeijia.com/home.php?mod=space&uid=135986>http://www.ihaomeijia.com/home.php?mod=space&uid=135986</a>
1хслотс рабочее зеркало
Фриспины. Бесплатные вращения предусмотрены для использования в видео-слотах. Внимательно читайте обстоятельства – они часто выдаются для некоторых машин. В зависимости от клуба вы можете делать определенное число ставок. Кстати, современные игорные дома дают вероятность заводить «одноруких злодеев». Сразу в активации промокода можно воспользоваться презентом. Как теснее упоминалось, призы случаются трёх обликов – фриспины, кредиты и фриплей-бонусы.Когда идет о получении бездепозитных призов в казино, для внимание на последующие условия: <a href=http://badminton-kreuztal.de/index.php?option=com_easygb>http://badminton-kreuztal.de/index.php?option=com_easygb</a> 1×слотс казино Когда речь о получении бездепозитных призов в казино, начала обратите внимание на последующие условия:Свежий приз начисляется в виде денежных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в пользовании средствами, ну случае отыгрыша оператор может установить лимитирование на вывод средств.
<b>Смотреть еще похожие новости:</b>
<a href=http://griffhunter.com/boards/viewtopic.php?p=424575#p424575>рабочее зеркало 1хслотс</a>
<a href=https://australiantravelforum.com/Upload/showthread.php?tid=226334>1 xslots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выбрать казино с бездепозитным призом. У нас на сайте представлен перечень наихороших онлайн казино, которые предлагают своим игрокам великодушные призы за регистрацию.
#7525 Charlesgunny
казино зеркало сегодня сайт казино зеркало <a href=https://glvk.guru/>pin ап casino</a> автомат казино казино онлайн бесплатно <a href=https://rumafia.news/>1×bet официальный 1×bet xyz</a> казино рояль игры казино pin up casino kent casino регистрация casino зеркало сегодня рабочее пари букмекерская контора 1×bet зеркало слоты 1×bet xyz
#7526 Charlesgunnyhttp://filmkachat.ru
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Риск-игра по равным шансам – Также казино может воспрещать выполнять обстоятельства по отыгрышу с помощью раунда на удвоение, кот-ый предлагается в слотах, видео-покере и некоторых иных забавах.В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, нужно обратиться в саппорта спустя лайв-чат на веб-сайте казино. <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> <a href=https://www.keepandshare.com/doc27/114858/pdf-357k?da=y>https://www.keepandshare.com/doc27/114858/pdf-357k?da=y</a> 1×slots официальный зеркало рабочее <a href=https://www.donchillin.com/space-uid-352982.html>https://www.donchillin.com/space-uid-352982.html</a> Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную процедуру активации бонуса без депозита. Внимательно прочтите до конца. Многие новички делают оплошности на шаге регистрации и потому возможности получить подарок.
1×slots актуальное зеркало
1×slots официальный сайт скачать <a href=http://www.maurighcolori.it/node/161>http://www.maurighcolori.it/node/161</a> онлайн казино 1×slots У каждой забавы средства притязания по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система засчитает любую ставку. В рулетке и покере устроить это намного труднее. Именно потому так главно пристально читать условия получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой ирге, то новички попросту «спустят приз на ветер».В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с даровых вращений. Прибыль, которую Вы заработаете на этом бездепе можно назначать на вывод без какого или отыгрыша.
1хлот регистрация в 1×slots casino
Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке адепты онлайн-казино публикуют важную информацию о no deposit bonuses и услугах.Таким образом, заведение пытается показать себя своим потенциальным игрокам, а подобный рекламный ход как казино приз без депозита за регистрацию завлекает довольно много внимания к игорному заведению и обеспечивает постоянный струю свежих посетителей и будущих посетителей игрового интернет клуба. <a href=https://forex-arabic.com/members/184786-DoctorLazutakt>https://forex-arabic.com/members/184786-DoctorLazutakt</a> Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала резвые выводы. Фишка выплат что, нет, собственно довольно избрать платёжный инструмент и показать необходимую. В большинстве случаев средства зачисляются на электронные кошельки протяжении 15 мин., а на банковские карты – 1–3 трудящихся денька.Обычно бездепозитные промоакции от казино, приходят на эл. Почту в дни рождения или дни. В некоторых интернет казино можно обратиться в чат и как неизменному игроку, вполне для предложат бездепозитное предложение. 1×slots официальный сайт мобильная версия скачать Шаг 5. Использование и отыгрыш. Бездеп обязан быть использован в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.Как управляло, новоприбывшие игроки начала желают ознакомиться с способами ввода и вывода валютных средств и сроки исполнения поданных заявок дабы четко понимать, как живо они смогут исключить собственный казино бонус за регистрацию без депо на электронный кошелек или же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино соперничают между собой. Ведь в бы определенную фирму давало лишь одно онлайн-заведение, то навряд бы клиенты увидели казино с бонусом за регистрацию и возможность бы рассчитывать только на вознаграждение в виде приза на 1-ое инвестиция. К любому заведению регулярно стопам завлекать свежих игроков, что, конечном, лишь на руку всем играющим.
1×slots официальный demo регистрация в 1×slots casino
Не желаете поиграть в азартные игры, не рискуя своими деньгами, но получая в все выплаты? Подобную вероятность деют почти наихорошие порталы с азартными веселиями. В их числе много правдивых и надежных интернет-казино на русском языке. Они привлекают свежих пользователей разными поощрительными событиями, включая бездепозитные, либо бесплатные бонусы. <a href=https://russiancomputerservice.ru/user/JosephCer/>1×slots официальный сайт мобильная версия</a> 1х слотс зеркало регистрация в 1×slots casino <a href=https://lifeactor.ru/user/Forsedropet/>https://lifeactor.ru/user/Forsedropet/</a>
1×slots зеркало сайта
Первый возникающий вопрос, это, чего выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают свежих игроков. Последним проще начать игру на деньги с презента за регистрацию. Им не пополнять баланс и расходовать личные средства. Новички получают безвозмездные спины либо средства на счёт. С их поддержкою знакомятся с игровым ходом, крутят слоты и проделывают ставки в рулетке.Некоторые веб-сайты, до чем провести регистрацию игроков, предлагают ответить на несколько базисных вопросов. Цель проведения сходственной викторины – выявить случайных людей, коие не имеют представления о покере, и не допустить получения ими призов. Если посетитель теснее играл в казино, то ответить на полтора десятка простых вопросов будет нетрудно. Очень часто, ответы можно отыскать на официальных сайтах данных учреждений. Помимо прочего, для вывода средств по бездепу нужно внести на счёт свой первый депозит — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на мало вероятную необходимую, в чего вывод средств станет доступен.Такие одобрения разрешают безвозмездно протестировать новое казино, разобраться с игровым процессом интернет слотов, заработать и исключить маленькую сумму денег. <a href=http://seafishzone.com/home.php?mod=space&uid=1250307>http://seafishzone.com/home.php?mod=space&uid=1250307</a> Также, учите, что бездепозитный приз возможно вывести только что случае, когда будут исполнены все обстоятельства отыгрыша.При выполнении условий отыгрыша и верификации, деньги с бонусного счета переводятся на главный и шансы быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции находятся от выбранной платежной системы. 1×slots скачать на айфон Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие появляются у новичков.В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и в случае неоднозначных ситуаций нет способности куда-то посетовать и доказать свою правоту.
<b>Смотреть еще похожие новости:</b>
<a href=http://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=6268>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a>
<a href=https://forum.bedwantsinfo.nl/thread-706279.html>1×slots промокод при регистрации</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Нет. Для получения бездепозитного приза в казино нужна неотъемлемая регистрация на веб-сайте. Играть в слоты безвозмездно и без регистрации можно только в демо режиме. Кешбэк-бонус представляет собой возврат фиксированного процента от ставки если, тогда, поражения либо же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не превышает 10%.
#7527 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7528 Charlesgunny
pin up casino пин ап казино фильм <a href=https://t.me/vchkogpu_ru>1×bet 1</a> Елена Лядова пин ап букмекерская контора <a href=https://specreporter.com/>скачать 1×bet</a> Черкесова Бэлла Мухарбиевна порно официальные букмекерские конторы скачать porno Анна Сидорова, керлингистка винлайн букмекерская контора порно с Максим Глушенков (футбол) букмекерские конторы без депозита пин casino
#7529 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7530 Charlesgunny
казино порно с Алексей Миранчук (футбол) <a href=https://rumafia.news/>сайт букмекерской конторы</a> порно с Зырянова Анастасия Владимировна пин up casino <a href=https://t.me/vchkogpu_ru>где казино</a> ев казино пин ап букмекерская контора porno Игорь Акинфеев (футбол) 1×bet слоты официальный сайт Разуваева Ксения Денисовна порно casino 7k сегодня vodka casino
#7531 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7532 Ремонт ноутбуков в Москвеhttps://remont-noutbukov-first.ru/
Наш сервисный центр предлагает высококачественный <a href=https://remont-noutbukov-first.ru/>сервисный ремонт ноутбука рядом</a> различных марок и моделей. Мы понимаем, насколько важны для вас ваши ноутбуки, и обеспечиваем ремонт первоклассного уровня. Наши профессиональные техники оперативно и тщательно выполняют работу, используя только оригинальные запчасти, что обеспечивает надежность и долговечность выполненных работ. Наиболее общие проблемы, с которыми сталкиваются обладатели переносных компьютеров, включают проблемы с жестким диском, поврежденный экран, ошибки ПО, неработающие разъемы и перегрев. Для устранения этих поломок наши квалифицированные специалисты проводят ремонт жестких дисков, экранов, ПО, разъемов и систем охлаждения. Обратившись к нам, вы получаете качественный и надежный центр ремонта ноутбука с гарантией. Подробная информация доступна на сайте: https://remont-noutbukov-first.ru
#7533 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации
Некоторые клубы автоматически начисляют приз на акк игрока последствии исполненья критерий получения, но бывают истории, когда приз нужно активировать игроку самому. Есть несколько способов активации бонуса:Да, у безвозмездных призов есть недостатки. Прежде всего, они обычно не. Кроме того, условия вейджера по ним практически жесткие. Но все же неименье риска проделывает их очень привлекательными для клиентов. <a href=http://filmkachat.ru/>1× slots зеркало</a> Прибывшие на акк финансы бездепозитные бонусы предназначаются, в основном, лишь для свежеиспеченных пользователей, коие раньше не имели личного аккаунта в данном казино. Исходя из этого, случае ранее у игрока был сделан депо, то, по всей вероятности, у него больше не будет возможности рассчитывать на получение такого приза в конкретном заведении.Представьте момент, когда при ставке в 10 руб. Вы получите схожее умножение. Миллион рублей за одно вращение, что вполне вполне. Поэтому вопрос, сколько можно выиграть остаётся не. Предлагаем выяснить без. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный бонус и инспектируйте удачу в деле. Разумеется, исключить деньги не так просто. Однако шансы есть у всех. <a href=https://justpaste.it/3doq4>https://justpaste.it/3doq4</a> Во всех законных онлайн-казино Беларуси необходимо подтверждение паспортных данных для забавы — это заявка правительства государства.Наши специалисты исследуют обстоятельства промоакции, этого в ручном режиме проверку их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие характеристики. Мы не рекламируем казино, а даем игрокам информацию о наилучших из их. 1×slots акции <a href=http://msk-service.spb.ru/index.php?subaction=userinfo&user=gratislogic43>http://msk-service.spb.ru/index.php?subaction=userinfo&user=gratislogic43</a> Бездепы с безвозмездными вращениями предоставляют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд платит казино. Число спинов ограничено и изредка выше сотню. Если акция включает в себя количество безвозмездных игр, их начисление имеет быть разбито на количество дней.Приглашаем делиться мнениями о призах. Это поможет другим юзерам выбирать наиболее прибыльные предложения.
1×slots casino зеркало рабочее
На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не сможете активировать и получить бездепозитный бонус. <a href=https://forum.spherecommunity.net/User-JamesLop>1хслотс официальный сайт зеркало</a> 1×slots регистрация то дальше необходимо пройти <a href=http://produsers.in.ua/wr_board/tools.php?event=profile&pname=giganticeyewitn>http://produsers.in.ua/wr_board/tools.php?event=profile&pname=giganticeyewitn</a> 1×slot регистрация Отыграв бездепозитный приз в казино с выводом тоже придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если подобное ограничение существует, то единоразово вывести выйдет только необходимую, не превышающую объем приобретенного приза.Мы собрали и выпустили перечень наилучших бездепозитных казино с бонусами за регистрацию, коие гарантируют великодушные выигрыши и моментальные выплаты.
1хслотс казино зеркало
При игре на бонусные свои воспрещается выступать в игровые автоматы с современным джекпотом и игры из радела live casino. Кроме такого, кое-какие казино дают бездеп на раз или некоторое определенных слотов, и в иных забавах Вы не можете на них выступать.Можно ли зарабатывать на бездепозитных бонусах? Это не работа, тут как повезет, в в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, за можно назвать везением, и добавочной добавкой к вашему бюджету. <a href=http://perfectsolutionlabs.com/user/Renaldosit/>http://perfectsolutionlabs.com/user/Renaldosit/</a> Суммы похожих услуг, случаев, колеблются от трех до 20 $, а вейджер на эти свои должен составлять от тридцати до шестидесяти раз. Зачастую, наивеличайшая сумма выигрыша тут составит от одной до 2-ух сотен долларов. Если игрок выиграет больше, то все свои имеют быть списанными до максимально разрешенного выигрыша. Здесь появляется содержание выводить еще несуществующие финансы на свою платежную систему и далее находить заведение с подходящими под данную необходимую релоадом или призом за 1-ое пополнение счета. Есть количество подвидов бездепозитного вознаграждения, предлагаемого наибольшим числом заведений.Шаг 4. Активация. Внимательно выучите обстоятельства, информацию по лимитированиям и сроке деянья бонусного предложения. Разобравшись с правилами, возможно активировать приз в личном офисе (от ? с внедрением промокода) либо по запросу в саппорт. 1×slots регистрация на сайте Некоторые казино все предлагать клиентам бездепы за подтверждение номера или почты или репост на страницу в соц сетях.С этими простыми советами любое казино с призом за регистрацию способно принести в разы больше выгоды и выгоды.
1×slots на любой вкус как пройти регистрацию
Верификация аккаунта. Лучше доказать личность сразу последствии регистрации, дабы позже не было заморочек с выводом средств. Верификация имеет проходить 2-мя способами: <a href=http://forums.indexrise.com/thread-2362-post-330043.html#pid330043>1× слот зеркало</a> зеркло казино 1×slots <a href=https://www.birzha-othodov.ru/club/user/22649/blog/3965/>https://www.birzha-othodov.ru/club/user/22649/blog/3965/</a> Так что основное различие подарка на депо от бездепа – обязательное пополнение счёта. Вы можете привнести депозит и преувеличить стартовый капитал либо забрать бездеп и этом не придётся рисковать своими сбережениями. Поспешите выполнить простые требования, и администрация ресурса начислит щедрое поощрение!
1×slos регистрация в 1×slots casino
Для получения бонуса нужно пригласить в забаву нового клиента. Казино начисляет пригласившему фиксированный процент от взносов приглашённого в виде бонуса: почаще всего его объем не превышает 10%. Срок деяния бонуса как не превышает месяца: пригласивший получает бонус от проигранных ставок приглашённого в первый луна забавы.Способы получения бездепа различаются от облика бонуса, который приглянулся игроку. Но вас так надо(надобно) быть зарегистрированным в легальном онлайн-казино и доказать собственную личность. В общем виде пошаговая инструкция для получения бездепозитного приза выглядит так: Таким образом, заведение пытается продемонстрировать себя своим потенциальным геймерам, а подобный рекламный ход как казино приз без депозита за регистрацию завлекает довольно большое внимания к игорному заведению и обеспечивает неизменный поток свежих гостей и будущих клиентов игрового интернет клуба.Рассмотрим принцип его действия на примере. Допустим, вы зарегистрировались и получили $10 no deposit bonus с вейджером х50. Это означает, что выигранные средства возможно несомненно выводить не раньше, чем последствии того, как общая сумма ставок достигнет $500. <a href=http://nardi.homejoa.com/bbs/board.php?bo_table=free&wr_id=352046>http://nardi.homejoa.com/bbs/board.php?bo_table=free&wr_id=352046</a> Если при регистрации указать промокод, можно гарантировано получить бонус. Где брать ваучер? Посетите определенную блоги либо форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В заключительное время игорные дома начали рекламироваться в фильмах и телесериалах. Присмотритесь и всего заметите промокод, который принесёт 500 либо 1 000 бонусных руб. 1×slots сайт На нашем сайте Вы отыщите перечень своевременных свежих бездепозитных бонусов в казино 2022 года. Также, есть количество неповторимых предложений, которые доступны только гостям нашего сайта после регистрации по нашей ссылке или активации специального промокода.Максимальная ставка ? устанавливается в денежной счета и ограничивает объем ставки за раз спин. В случае ее превышения приз имеет быть аннулирован. Также в правилах возможность содержаться запрет на размещение ставок определенного облика, примеру, по равным шансам в рулетке (то есть, на чет или нечет, красноватое либо черное и т.д.).
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для такого, чтобы отыграть сумму вашего бездепозитного бонуса нужно выполнить условия вейджера. Очень часто фриспины даются на определенные слоты (book of ra, book of deceased, book of sun), подбирайте разъем себе нраву, они все очень красочные и качественные. Бездепозитные приз имеет быть денежным например и вид фриспинов на слоты Бездепозитные бонусы прекрасный вариант бесплатной игры в игровые автоматы. Многие пользователи сети не понимают, собственно в казино можно начать играть безусловно даром, а потом исключить выигрыш на банковскую карту или электрический кошелек, другие не доверяют интернет казино, а третьи удачно играют и выигрывают – и подчас достаточно большие суммы.
#7534 Charlesgunny
porno Елизавета Туктамышева 1×bet официальный скачать <a href=https://7club7.com/>букмекерские конторы бет</a> casino промокод porno Дарья Мороз <a href=https://res-publika.com>порно с Александр Большунов (лыжные гонки)</a> casinos winning макао казино казино смотреть онлайн бесплатно casino betting порно с Каролина Севастьянова 1×bet 1 букмекерская контора бесплатно скачать
#7535 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7536 Charlesgunnyhttp://filmkachat.ru
1×slots casino зеркало рабочее
Любой выигрыш по ставке повыше установленного лимита несомненно считаться недействительным. То есть ставка не будет засчитана при отыгрыше, в случае выигрыша его сумма не поступит на счёт посетителя — результат забавы будет полностью аннулирован. <a href=http://filmkachat.ru/>1хслотс официальный сайт зеркало</a> В разделе с бонусами активировать собственный подарок. Найти забавы, для коих учтено одобрение и использовать бонус по назначению. <a href=https://bitbin.it/Y0LKmg2N/>https://bitbin.it/Y0LKmg2N/</a> Подтверждение индивидуальной инфы. Все казино требуют от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и присутствие у юзера других аккаунтов (мультиаккаунт запрещен). 1×slots регистрация на сайте 1×slots ru com <a href=http://osvita.ch.ua/index.php?subaction=userinfo&user=modernstoreroom>http://osvita.ch.ua/index.php?subaction=userinfo&user=modernstoreroom</a> Для казино, работающих онлайн, бездепозитные бонусы необходимы для вербования свежих посетителей. Предложение сыграть на слотах без надобности внесения реальных средств — работающий метод для увеличения интереса к компании. После отыгрыша бездепа великоват шанс, собственно игроку понравится и он продолжит играть в казино, лишь теперь теснее на собственные средства.
1×слотс казино
В зависимости от онлайн заведения любой из их имеет вас предложить как бездепозитные средства, так и бездепозитные фриспины, которые после удачной регистрации упадут для на ваш игровой баланс.Чаще всего, знаменитые сервисы, такие как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно неотъемлемое верховодило. Финансовые свои выводятся только спустя что, эту платежную систему, коей пользовались для пополнения депозита. Если же игрок получил бездепозитный покерный приз, потребуется восполнить счет на наименьшую необходимую, кот-ая составляет обычно 10 $. рабочее зеркало 1×slots В разделе с бонусами активировать собственный подарок. Найти игры, для коих предусмотрено поощрение и использовать бонус по предназначению. <a href=http://polishcrazyclan.ugu.pl/member.php?action=profile&uid=268739>http://polishcrazyclan.ugu.pl/member.php?action=profile&uid=268739</a> 1×slot регистрация Также существуют онлайн-платформы азартных игр, коие используют раздачу бездепозитных бонусов в особые даты (как для казино, так и для игрока). Помимо сего, действующие игроки того имеют возможность получить похожие призы за свою деятельность (к примеру, за повышения значения либо за похожие достижения).Диапазон ставок, которые вправе устроить игрок, того лимитирован. Обычно назначать возможно маленькую сумму — пределах 10–30 руб. За одно вращение.
1×slos регистрация в 1×slots casino
4. Заберите подарок. Чаще всего бонус активизируется незамедлительно после регистрации. Но случаются истории, когда надо(надобно) зайти в личный офис или написать в службу поддержки. Вейджер (либо вагер) ? это минимальная сумма ставок, которую нужно устроить для вывода денежного приза. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение.Самые популярные способы вывода средств ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электрическим платежным системам на Neteller и Skrill, а пользуются криптовалютными кошельками. Вывод выигрышей возможность исполняться моментально либо занимать от нескольких часов до нескольких суток. <a href=http://forum.drustvogil-galad.si/index.php?action=profile;u=37309>http://forum.drustvogil-galad.si/index.php?action=profile;u=37309</a> 1 хслот регистрация в 1×slots casino
1×slots регистрация 1×slotscasino 56 online
1хслотс 1хслотс регистрация перейти на 1×slots <a href=http://crtdu-kras.ru/communication/forum/user/238021/>http://crtdu-kras.ru/communication/forum/user/238021/</a>
1×slot рабочее зеркало
<a href=http://vttgauriac.fr/forum/memberlist.php?mode=viewprofile&u=6636>http://vttgauriac.fr/forum/memberlist.php?mode=viewprofile&u=6636</a> В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и в случае спорных обстановок нет способности куда-то посетовать и доказать собственную правоту.Одним из поводов отдавать преимущество, льготу одному или иному заведению содержится в привлекательности предлагаемых промоакций и даровых услуг. Безвозмездные фриспины, выдаваемые без дела делать какой-либо вклад, в перечне располагается далековато не в конце. 1×slots регистрация 1×slotscasino 56 online В истиннее время получить приз за регистрацию в казино очень просто. Почти каждый игорный дом с радостью предоставит деньги или бесплатные вращения. Многие игроки используют этим и не стесняются регистрироваться в каждом клубе с прибыльными условиями. Кстати, это отличная возможность придумать выигрышную стратегию и сорвать куш.Ну и окончательно же, для казино бездепозитные призы прибыльны с имиджевой стороны: сходственная добродушие повышает степень преданности посетителей к фирмы.
<b>Смотреть еще похожие новости:</b>
<a href=https://iasassociationwb.org/iasforum/index.php?topic=191.new#new>1×слот регистрация в 1×slots casino</a>
<a href=http://nhomtruyen.com/members/jamesgaw.9280/>1×slots промокод при регистрации</a>
<a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=2846>1× слот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских рублей. В критериях акции указано, что вейджер бездепозитного приза х20. Поэтому, дабы отыграть бонус, игроку будет нужно устроить ставок на 35*20=700 руб.
#7537 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slotscasino09k online
В зависимости от онлайн заведения любой из их возможность вам предложить как бездепозитные средства, так и бездепозитные фриспины, коие последствии удачной регистрации рухнут вас на ваш игровой баланс.Приветственный бездеп предоставляется какому игроку лишь раз раз. Казино дерутся с например называемыми бонусхантерами (от англ. Bonus Hunter — доброволец за бонусами), пытающимися заводить множественные аккаунты для надувательства оператора и повторного получения подарка. Исключить похожие деяния дозволяет верификация данных. Администрация вправе востребовать у клиента доказать персональные данные, указанные при регистрации. <a href=http://filmkachat.ru/>1×slots регистрацию процедура займет всего лишь</a> Наши специалисты изучают обстоятельства акции, после в ручном режиме проверяют их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и другие характеристики. Мы не рекламируем казино, а даем игрокам информацию о наилучших из их. <a href=https://gab.com/lexxeagle/posts/113498739626128713>https://gab.com/lexxeagle/posts/113498739626128713</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=http://ekaterinovka.sarat.ru/board/tools.php?event=profile&pname=Frankagorb>http://ekaterinovka.sarat.ru/board/tools.php?event=profile&pname=Frankagorb</a> Большинство интернет-казино из нашего топ-10 готовы порадовать вас эксклюзивными акциями. Читайте о их в обзорах и на форуме.Иногда для получения бонусов необходимо связаться с адептами службы поддержки. Удобнее всего с ними беседовать в онлайн-сате, желая иногда достаточно запроса по электронной почте.
1×slots сайт
Чтобы получить вероятность вывести прибыль с бездепозитного бонуса в казино, нужно выполнить ряд условий:При отыгрыше бонусных средств, необходимо учитывать срок деянья бонуса и время, которое дается на отыгрыш. По истечению заявленного медли, не отыгранный бонус будет аннулирован. <a href=http://link.5nx.ru/viewtopic.php?f=5&t=5059>1×slots зеркало видели такую регистрацию на</a> 1×slots сайт зеркало Для верификации номера телефонного, в собственном профиле выберите опцию „Подтвердить номер телефонного“ и введите в подходящее поле код, полученный в sms-сообщении.Выиграть реальные деньги в казино не пополняя счет – трудно, хотя вполне. Главное задаться целью и не нарушатьправила заведения. Выберите несколько казино с бездепзитными бонусами и начните выступать на бонусные свои. По статистике в одном из 10-ти заведений можно заработать небольшую сумму денег за счет бонусных средств. <a href=http://santehprice.ru/bitrix/redirect.php?goto=http://venezsibiri.ru/bitrix/redirect.php?goto=http://redir.tradedoubler.com/projectr/?_td_deeplink=https://teletype.in/@urist555/RhgGC2TQzyM>http://santehprice.ru/bitrix/redirect.php?goto=http://venezsibiri.ru/bitrix/redirect.php?goto=http://redir.tradedoubler.com/projectr/?_td_deeplink=https://teletype.in/@urist555/RhgGC2TQzyM</a> В большинстве заведений сделать это возможно по адресу электронной почты, по номеру телефонного, спустя социальную сеть либо гугл-аккаунт. 1× slots сайт
1хслотс регистрация в 1×slots casino
Вейджер (wager) – это коэффициент, кот-ый демонстрирует на какую сумму нужно сделать ставок, чтобы исключить приз из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего бонуса, Вам необходимо устроить ставок на сумму: 500*70=3500 руб. Только всецело отыграв приз, Вы можете вывести собственный выигрыш.3. Подтвердить данные. В зависимости от клуба, нужно привязать телефон либо почту, указать индивидуальную информацию; <a href=http://spilov.ru/index.php?subaction=userinfo&user=scandalousutens>http://spilov.ru/index.php?subaction=userinfo&user=scandalousutens</a> Для получения депозитного бонуса необходимо восполнить собственный игровой баланс реальными деньгами. Вознаграждение возможно получить или при внесении первого депозита, либо вид фиксированного процента от внесённых средств. Так либо по, приз поступит на счёт лишь после пополнения.Для получения приза надо(надобно) ознакомиться с программой лояльности казино и сделать ставки на необходимую, нужную для перехода на следующий степень. x1 slots 1хслотс регистрация перейти на 1×slots Подарки на праздничные ? посвященные праздничным датам, требующие символического отыгрыша либо начисляются без такового. Могут дариться игрокам сутки рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду.
1×slots официальный сайт мобильная версия
<a href=https://mit-bbs.com/viewtopic.php?t=128457>1×slots регистрацию процедура займет всего лишь</a> 1хслотс официальный сайт зеркало <a href=http://konnekt58.ru/bitrix/redirect.php?goto=http://tomfarr.com/redirect.php?url=http://cubecopy.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/xBPq9UQIu3A>http://konnekt58.ru/bitrix/redirect.php?goto=http://tomfarr.com/redirect.php?url=http://cubecopy.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/xBPq9UQIu3A</a> Практически все онлайн казино с бездепозитным бонусом за регистрацию предусматривает программку лояльности — систему одобрения неизменных клиентов, которая произведено из колличества значений. При достижении игроком одного значения на его счёт поступает приз. Чем повыше степень — тем щедрее бонус.Бездепозитный приз нередко может стать доступным сразу в завершения регистрации, поскольку в большинстве случаев единственным притязанием к нему является регистрация, а затем ревизия вашей свежей учетной записи.
1×slots регистрация на сайте 1×slots ru com
Для верификации аккаунта надо(надобно) дать спецам технической поддержки отсканированную копию паспорта и счета за коммунальные предложения, еще фотографию банковской карты или снимок странички электронного кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для доказательства личности.Бонус в казино без депозита содержит различные варианты: такое быть приветственный приз, промоакции в честь каких-либо дней или важных дат, бонус за привлечение свежих игроков, преданность и получение VIP-статуса. <a href=http://www.gabiz.kr/g5/bbs/board.php?bo_table=free&wr_id=615384>http://www.gabiz.kr/g5/bbs/board.php?bo_table=free&wr_id=615384</a> 1×slots зеркало регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://adler.biz/threads/696/>1×slots зеркало на сегодня</a>
<a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1×slots бездепозитный бонус за регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, которое можно посвятить забаве в казино.
#7538 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7539 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7540 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации 2025
Варианты выигрыша зависимости от Вашей успеха и условий игорного портала. Выше мы сказали, что кое-какие бездепозитные бонусы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются и те, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность передовых игр на средства, можно выиграть невозможные суммы. Сегодняшние игровые автоматы либо видео слоты, как их называют. Могут выдавать крупные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> <a href=https://www.gabitos.com/eldespertarsai/template.php?nm=1728472866>https://www.gabitos.com/eldespertarsai/template.php?nm=1728472866</a> 1×slots акции <a href=http://dooood.fun/member.php?action=profile&uid=3369>http://dooood.fun/member.php?action=profile&uid=3369</a> Новые посетители онлайн-казино без первого депозита могут проверить собственную удачливость. К что, этому же есть вероятность преобразовать бездепы в реальные средства за регистрацию в казино, впрочем чтобы приз нужно отыграть сообразно условиям акции.
1хслотс зеркало на сегодня
1×slots промокод при регистрации 2025 При регистрации что, нет или ином интернет игральном заведении — вам дается раз шанс испытать свою фортуну не внося свои монеты. Замечу собственно такую поощрительную услугу предоставляют не все онлайн игровые площадки, а только щедрая середина(средина) из них. Которые мы подготовили для Вас в нашем перечне.Подтверждение электрической почты – одно из ведущих условий, которое есть практически в любом бездепозитном казино. Чтобы верифицировать электронную почту, достаточно перебежать по активной ссылке в послании, приобретенном от азартного клуба. <a href=http://frolovoadmin.ru/bitrix/rk.php?goto=http://images.google.com.uy/url?q=http://kons43.ru/bitrix/redirect.php?goto=https://telegra.ph/10-otvetov-na-strannye-voprosy-kotorye-vozmozhno-ne-dayut-vam-pokoya-vsyu-zhizn-09–19>http://frolovoadmin.ru/bitrix/rk.php?goto=http://images.google.com.uy/url?q=http://kons43.ru/bitrix/redirect.php?goto=https://telegra.ph/10-otvetov-na-strannye-voprosy-kotorye-vozmozhno-ne-dayut-vam-pokoya-vsyu-zhizn-09–19</a> 1×slots регистрация на официальном сайте Создание аккаунта. На сайте казино необходимо открыть регистрационную форму и заполнить порожние поля собственными данными. Иногда на этом этапе потребуется показать только адресок электронной почты и пароль, хотя чаще надобно наполнить анкету индивидуальной информацией (ФИО, дата рождения, место проживания и т.д.). Нужно свидетельствовать только реальные данные, потому впоследствие они будут испытаны.
1×slots официальный зеркало
Но не стоит размышлять, собственно снабжая пользователей этими призами, казино увлекается спонсированием. Ведь объемы вознаграждений, в, не великие (средним объемом от 5 до 20 долларов). И на эти свои налагаются конкретные обстоятельства и ограничения, обязательные к исполненью игрока, случае в последствии он вожделеет получить все средства выигранные финансы.Для получения депозитного бонуса необходимо восполнить собственный игровой баланс настоящими деньгами. Вознаграждение можно получить либо при внесении первого депо, либо повторяющий фиксированного процента от внесённых средств. Так либо по, бонус поступит на счёт лишь в пополнения. <a href=http://www.dbgjjs.com/home.php?mod=space&uid=461260>http://www.dbgjjs.com/home.php?mod=space&uid=461260</a> 1×slots регистрация 1×slotscasino 56 online Заработать на бездепозитных бонусах за регистрацию в казино имеет каждый юзер, достигший совершеннолетия.Прежде чем активировать бездеп, нужно убедиться что, собственно страна, уроженцем которой считается игрок, не входит в список запрещенных.
1×slot рабочее зеркало
<a href=https://portugal-campings.com/pt/account/>1×slots официальный сайт зеркало</a> Чтобы без увериться в превосходствах бездепозитных бонусов, достаточно зарегистрироваться в казино и получить поощрение.Некоторые онлайн-казино без депо предлагают новым посетителям выбрать бонус при регистрации. Будьте внимательны: выбрав раз, вы в абсолютном большинстве случаев не сможете пользоваться остальными. Поспешите арестовать бездепозитные призы за регистрацию в казино из представленного списка. Все платформы столько ведут легальную работа, но и порадуют правдивыми плодами игры, высочайшей отдачей, резвыми выплатами. 1хслот скачать <a href=http://radshir.com/list/index.php?subaction=userinfo&user=RalphKip>http://radshir.com/list/index.php?subaction=userinfo&user=RalphKip</a> При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток.Практически все интернет казино с бездепозитным бонусом за регистрацию предусматривает программку лояльности — систему одобрения постоянных клиентов, кот-ая произведено из большого уровней. При достижении игроком одного значения на его счёт поступает бонус. Чем повыше степень — тем щедрее бонус.
1×slots официальный сайт зеркало
Это также благотворительные деньги, коие поступают на аккаунты новоиспеченных игры последствии регистрирования. А особенность этих призов произведено том,, собственно обретенные финансы обязательно стопам применять в продолжении назначенного времени. <a href=http://emseyi.com/index.php?qa=user&qa1=gracefulgas60>http://emseyi.com/index.php?qa=user&qa1=gracefulgas60</a> Казино выводит средства только на ту платежную систему, с котрой был сделан депозит. То есть, для вывода бездепозитного бонуса, Вам поначалу необходимо пополнить счет. В неких клубах узкий список способов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет именно с этих платежных способов, коие доступны для вывода. 1×slots регистрация 1×slotscasino 56 online Промокод – определённая композиция знаков, которую необходимо ввести в соответствующее фон при творении учетной записи или активировать в личном профиле игрока в разделе с бонусами.Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте обстоятельства – они часто выдаются для некоторых машин. В зависимости от клуба вы можете делать конкретное число ставок. Кстати, современные игорные дома выделяют вероятность заводить «одноруких бандитов».
<b>Смотреть еще похожие новости:</b>
<a href=https://uyghuryol.com/forum/viewtopic.php?f=8&t=249566>1хслотс казино зеркало</a>
<a href=http://6000ziyuan.com/forum.php?mod=viewthread&tid=107886&extra=>1хслот 1хслотс регистрация перейти на 1×slots</a>
<a href=http://forums.indexrise.com/thread-1096-post-334738.html#pid334738>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Размер бонусов почаще всего чисто условный и не превышает 50 рублей. Приятно, хотя осязаемым бустом в игре навряд будет.
#7541 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало
Каждый из бездепозитных бонусов без пополнения 2022 имеет свой конкретный вейджер для отыгрыша, например же в каждом казино он устанавливается персонально — где то он х55 а где-то х30, повторюсь везде по различному!Максимальная ставка ? устанавливается в еденице счета и ограничивает объем ставки за один спин. В случае ее превышения приз может быть аннулирован. Также в правилах может находиться запрет на размещение ставок конкретного облика, например, по одинаковым шансам в рулетке (другими, на чет или нечет, красное либо темное и т.д. ). <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Вознаграждения за получение VIP-статуса ? начисляются масштабах программы лояльности при достижении очередного уровня либо выдаются индивидуально менеджерами службы. <a href=https://gravatar.com/phenomenalfbe3256acb>https://gravatar.com/phenomenalfbe3256acb</a> Бездепы с безвозмездными вращениями предоставляют юзерам право вертеть барабаны игровых автоматов без снятия средств со счета. За каждый раунд платит казино. Число спинов ограничено и изредка превышает сотню. Если акция включает в себя большое даровых игр, их начисление имеет быть разбито на несколько дней. 1×slots регистрация 1×slots casino c2d ru <a href=https://fishtrade3000.ru/forum/user/1157/>https://fishtrade3000.ru/forum/user/1157/</a> Особую изюминку видео слотам присваивают уникальные знакы. С их свет активизируются разные призы. Вы можете запустить вспомогательный степень и прирастить сумму выигрыша. Есть знаки, коие сменяют ненадобные элементы и сами создают выигрышные комбо. Не стоит забывать и на бонус-тур. После любого счастливого спина есть шанс прирастить сумму выигрыша в 2 либо четыре раза.
1×slots акции
Многие азартные клубы ограничивают необходимую вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, обозначенной в описании акции, суммы Вы не сможете вывести. Разница будет аннулирована, Вы том не сможете создавать на нее ставки.Промообъявления от казино мешают реальной картины и направлены на привлечение внимания пользователей. Понять, как высоки шансы остаться в плюсе, позволит личный анализ условий предложения: <a href=http://forums.panzergrenadiers.com/showthread.php?23453–1×slots-casino-%D0%A1%D0%82%D0%A0%C2%B5%D0%A0%D1%96%D0%A0%D1%91%D0%A1%D0%83%D0%A1%E2%80%9A%D0%A1%D0%82%D0%A0%C2%B0%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A1%D0%8F&p=510250#post510250>1×slots casino регистрация</a> 1×slots мобильная версия войти казино Ознакомьтесь с нашим списком наилучших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего списка и получите бездеп сразу. Хватайте превосходнейшие безвозмездные предложения ниже и выигрывайте великие средства, не рискуя!Вейджер менее х30–35 считается приемлемым. Опытные игроки заявляют, собственно с таким вейджером реально остаться в плюсе, если верно подойти к выбору игрового аппарата. <a href=http://uprzakupokkchr.ru/user/Kennethbek/>http://uprzakupokkchr.ru/user/Kennethbek/</a> Особую изюминку видео слотам присваивают оригинальные символы. С их в активизируются различные бонусы. Вы можете запустить дополнительный уровень и увеличить необходимую выигрыша. Есть знаки, которые заменяют ненадобные составляющие и сами создают выигрышные комбо. Не стоит забывать и тему бонус-тур. После каждого успешного спина есть шанс увеличить необходимую выигрыша в два либо хорошо раза. 1×slots актуальное зеркало
1×slots зеркало этих способов предполагает регистрацию
B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.Онлайн гемблинг развивается с любым деньком больше и больше, новые бренды создаются не по дням а по часам. Новые интернет казино проделывают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и тем наиболее предлагают бездепозитные призы за регистрацию, собственно бы не упустить эту возможность — как пользоваться новым бездепом, советуем навещать наш вебсайт как можно чаще, самое аппетитное и свежие несомненно добавляться в этом же списке. Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации приза без депо. Внимательно прочитайте до конца. Многие новенькие делают промахи на шаге регистрации и потому имеют получить подарок. <a href=https://www.alpea.ru/forum/user/26815/>https://www.alpea.ru/forum/user/26815/</a> 1×slots зеркало быструю регистрацию а также мгновенное При отыгрыше бонусных средств, нужно учитывать срок деяния бонуса и время, которое дается на отыгрыш. По истечению заявленного медли, не отыгранный приз будет аннулирован.
1×slots рабочее зеркало
<a href=https://forums.scar-divi.com/topic/606583–1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82-%D1%81%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C/>1×slots официальный сайт скачать</a> Самые известные методы вывода средств ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электрическим платежным системам типа Neteller и Skrill, а также используют криптовалютными кошельками. Вывод выигрышей имеет осуществляться моментально или занимать от нескольких часов до нескольких суток. 1×slots официальный сайт мобильная версия скачать <a href=https://www.talkofrowlett.com/author/josepharcab/>https://www.talkofrowlett.com/author/josepharcab/</a> Для верификации аккаунта нужно предоставить спецам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, а фотку банковской карты либо скриншот страницы электронного кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для доказательства личности.
1×slots зеркало рабочее
Бездепозитные призы начисляются только раз раз. Не стоит раскрывать свежие аккаунты, чтобы получить их повторно. Служба безопасности казино непременно выявит «левого» участника и перекроет. Если гость выполнит нужные требования, отыграет собственную ставку и решит вывести личный выигрыш, то ему нужно к, собственно казино обязательно потребует предоставить ксерокопии личных документов, чтобы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои исключить не получится.Если вы новичок данном и только попали в неизведанную вами область азарта — за услуг как бездепозитные призы без пополнения. <a href=https://goblin-film.net/user/Jasperfurce/>https://goblin-film.net/user/Jasperfurce/</a> Для всех бездепозитных призов функционирует максимальный предел на выигрыш. Он показывает максимальную необходимую, коию вы сможете получить, играя на бонусные кредиты. Как только вам получится выполнить притязания вейджера, дозволенный максимум несомненно переведен с бонусного счета на основной, а остаток будет списан.Получив собственный подарок, Вы сможете бесплатно выступать на реальные деньги, а выполнив условия отыгрыша, исключить собственный выигрыш. 1хслот официальный сайт зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://surfaceprophets.com/threads/1-x-slots-casino.37667/>1 x slots casino</a>
<a href=https://rolivka.online/forum/showthread.php?tid=31974>1хслотс казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Перед активацией принципиально внимательно изучить условия акции. Чем ниже вейджер, что, этим больше потенциальная выгода игрока. Имеют значение кроме лимиты ставок при отыгрыше и сроки, протяжении которых можно пользоваться предложением. Если бездеп охватывает узкий список игр, рекомендовано узнать максимальные коэффициенты, степень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только сомнений случае, случае оператор не установил требовательные лимитирования на максимальную необходимую ставки.
#7542 купить сейф для оружияhttps://oruzhejnyj-sejf.ru/
Здесь можно оружейный шкаф купить в москве<a href=https://oruzhejnyj-sejf.ru/>сейф под ружье купить</a>
#7543 HenryPophttps://boat-dubai-rent.com
yacht hire dubai <a href=https://boat-dubai-rent.com/>100 person yacht rental</a>
#7544 MichaelJoinihttps://boat-dubai-rent.com
dubai yacht club <a href=https://boat-dubai-rent.com/>dubai yacht ride price</a>
#7545 Charlesgunny
казино фильм букмекерская контора фонбет <a href=https://specreporter.com/>Матвиенко Валентина Ивановна порно</a> up casino скачать 1×bet официальный сайт <a href=https://rumafia.news/>1×bet слоты официальный сайт</a> 1×bet рабочее на сегодня букмекерская контора фонбет официальный сайт casino актуальное зеркало порно с Кирьянова Дарья Борисовна промокод 1×bet ев казино букмекерская контора ставки
#7546 Charlesgunnyhttp://filmkachat.ru
1х слотс зеркало регистрация в 1×slots casino
Бездепозитные бонусы начисляются лишь один один. Не стоит раскрывать свежие аккаунты, дабы получить их повторно. Служба безопасности казино обязательно выявит «левого» соучастника и заблокирует. Если гость выполнит необходимые притязания, отыграет свою ставку и решит вывести собственный выигрыш, то ему надо(надобно) учесть, собственно казино обязательно востребует дать ксерокопии собственных документов, чтобы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные средства вывести не получится. <a href=http://filmkachat.ru/>1×slots официальный зеркало рабочее</a> Реже призы без депозита начисляются неизменным игрокам. С их подмогою администрация старается удержать ценных посетителей или вожделеет поблагодарить за лояльность правильных гостей. Но гораздо чаще для сходственных целей используются эти акции: <a href=https://www.divephotoguide.com/user/kalinka0588>https://www.divephotoguide.com/user/kalinka0588</a> 1×slots скачать на айфон <a href=http://lebbook.kz/user/JasperWaf/>http://lebbook.kz/user/JasperWaf/</a> Как лишь получите бездеп в казино, всё также не забывайте проверять электрическую почту. Некоторые игорные клубы день радуют активных гэмблеров приятными бонусами. Чаще всего получить подарок можно в преддверии праздника, на денек рождение, за вербование приятеля. А также распространённым бонусом считается надбавка к депозиту. Нужно более восполнить счёт, и азартное заведение увеличит его на 50–100%.
1×slots зеркало
Лишь знаменитые и знаменитые азартные заведения имеют разрешить для выдавать бездепы вид дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, коие возможно потратить в лучших аппаратах с высокой отдачей. 1×slots casino регистрация 1×slotscasin online Бездепозитный бонус за регистрацию в казино — это стартовый подарок вид валютного начисления или бесплатных вращений для свежих игроков заведения, для получения которого не вносить депозит.В бонусную программку множества операторов входят систематические бездепы. Это пожизненные промоакции, поощряющие интенсивных постоянных игроков. Популярный формат — раздача фриспинов по конкретным денькам недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают постоянные бонусы без депозита в обмен на скопленные баллы лояльности. <a href=https://theme.sir.kr/youngcart53/bbs/board.php?bo_table=free&wr_id=503902>https://theme.sir.kr/youngcart53/bbs/board.php?bo_table=free&wr_id=503902</a> 1×slots зеркало подтвердит вашу регистрацию если говорить Для получения предоставленных бонусов вас пригодиться — ПК либо мобильное прибор, и остальное дело за небольшим.Новички не обожают сразу же вносить депозит. Это обосновано отсутствием опыта и сомнением. К счастью, в можно получить бездепозитный бонус за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В всяком случае вы не рискуете собственными сбережениями. Это отличная вероятность запустить приглянувшийся видео разъем или же испытывать удачу в настольных играх.
1×slots официальный зеркало рабочее
Иногда для получения призов необходимо связаться с представителями саппорта. Удобнее всего с ними беседовать в онлайн-сате, желая времени достаточно запроса по электронной почте.Бонус за регистрацию в казино выдается только один один на одного игрока. Но случаются дополнительные акции, в которых бездепы расступаются для постоянных посетителей и эти презенты Вы можете получить больше одного раза. Акции, приуроченные к календарным праздничным, бывают рассчитаны как на всех пользователей, например и на категории: например, презент на 8 марта девушкам-игрокам или мужчинам на 23 февраля.При верном раскладе бездепы — это прекрасный способ выступать на средства без растраты собственных средств. Есть несколько советов, следуя коим возможно извлечь максимально полезности из сходственных акций казино. Играть идет только на лицензированных площадках. Скриптовые сайты столько накалывают с бонусными предложениями, хотя и употребляют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах невозможно. <a href=https://www.meiyingge8.com/space-uid-680705.html>https://www.meiyingge8.com/space-uid-680705.html</a> Но существуют азартные заведения, готовые просто так вручить деньги на забаву. Для сего довольно создать профиль. Чтобы исключить выигрыш, сначала нужно выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа.Выбирайте наилучшие бесплатные бонусы счет обзоров на Casinoz – и пусть вас сопутствует счастье при отыгрыше бонусных кредитов! 1×slots casino регистрация 1×slotscasino09k online При отыгрыше бонусных средств, необходимо учитывать срок деяния бонуса и время, которое дается на отыгрыш. По истечению заявленного медли, не отыгранный бонус будет аннулирован.Новички не любят незамедлительно же вносить депо. Это обосновано отсутствием опыта и недоверием. К счастью, в можно получить бездепозитный приз за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В всяком случае вы не рискуете собственными сбережениями. Это отличная вероятность запустить приглянувшийся видео разъем или же испытывать фортуну в настольных играх.
1×slots казино мобильная версия
Иногда виде бездепа, казино дарит минимальный приз (до 50 рублей), из-за которого надо заморачиваться.Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются незамедлительно последствии творенья профиля и активны недолговременное время. Если не успеете израсходовать средства, они просто сгорят. Касаемо времени, как призы активны на часа. Верификация необходима для добавочной защищенности и подсобляет техподдержке выявить бонусхантеров и жуликов. Кстати, рядах платформах выводы крупных сумм доступны только в доказательства личности. 1хслотс мобильная версия зеркало <a href=https://projectblueberryserver.com/index.php/User:SteffenYamamoto>https://projectblueberryserver.com/index.php/User:SteffenYamamoto</a>
1×slots официальный demo регистрация в 1×slots casino
Бонус в казино без депозита имеет разные варианты: это может быть приветственный бонус, промоакции в честь каких-то праздников либо главных дат, бонус за вербование свежих игроков, лояльность и получение VIP-статуса.Начнём с того, что каждое промо за регистрацию подразумевает некие условия. Бездепозитные бонусы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, необходимая для выполнения критерий. Пример, получили безвозмездные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 рублей, проигрышных или выигрышных, важно. После исполненья, бонусный баланс перейдёт на настоящий и будет легкодоступным к выводу. <a href=http://journals.hnpu.edu.ua/index.php/literature/comment/view/4159/0/14869>http://journals.hnpu.edu.ua/index.php/literature/comment/view/4159/0/14869</a> 1хслотс регистрация в 1×slots casino Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут уточняет лимитирование для посетителей. Конечно, это можно счесть некоторым неудобством для игрока, хотя ради отметить, собственно выбор автоматов всё равно остаётся достаточно большим.Предложения с бездепозитными бонусами за регистрацию позволяют новым заведениям привлечь аудиторию на собственный вебсайт. А игроки же получают вероятность выступать на реальные деньги без депо в казино и заработать небольшой стартовый капитал, который разрешено вывести на карту банка или электронный кошелек.
<b>Смотреть еще похожие новости:</b>
<a href=https://koreanstudies.com/forum/viewtopic.php?t=158183>1×slots зеркало быструю регистрацию а также мгновенное</a>
<a href=https://bajarmp3.net/showthread.php?tid=448115>1×слот регистрация в 1×slots casino</a>
<a href=http://theauction.com.au/my-account/>рабочее зеркало 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы, как уже понятно, считаются уникальной возможностью к игровому процессу абсолютно бескорыстно, словами выступать в интернет казино бесплатно и на место средства незамедлительно после регистрации аккаунта. Автоматы с таким депозитом шансы замерзнуть прекрасной вероятностью поиграть для поклонников пыла с определенными лимитированиями в денег.
#7547 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
Если вы выбрали для себя несколько брендов которые вас больше всего приглянулись, для неизменной забавы! Таких гемблеров казино очень любит и ценит, за частую такие игроки становятся VIP игроками заведения, коим часто поступают прибыльные предложения повторяющий призов, например же туда входит и бездепозитные. <a href=http://filmkachat.ru/>казино 1× slots официальный сайт</a> <a href=https://wakelet.com/wake/88XP74FBSYIKsXiFGUfKX>https://wakelet.com/wake/88XP74FBSYIKsXiFGUfKX</a> Это раз из основных характеристик привлекательности презента. С завешенным коэффициентом том профессионалы не смогут выполнить условия по отыгрышу. И важно, как презентабельно выглядит предложение – бездепозитный бонус казино в объеме $500 или $1 000. Чтобы новенькие попревосходнее вникли, что же такое вейджер, мы разберём на образце. казино 1× slots официальный сайт <a href=https://polonistyka.com/user-2/chrisnam/>https://polonistyka.com/user-2/chrisnam/</a>
1×slots зеркало выигрыши обязательно пройдите регистрацию если
<a href=https://sparta.training/faq/online-returns/#comment-66741>1×slots официальный сайт скачать</a> сайт 1× slots casino Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного бонуса. <a href=http://arsivforum.10tl.net/member.php?action=profile&uid=5078>http://arsivforum.10tl.net/member.php?action=profile&uid=5078</a> Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды присутствуют на данной страничке. Посетитель имеет оценить условия получения и начать играть на деньги без внесения депо. При этом игроку важно осознавать, на каких условиях и какими методами возможность вывести приобретенный выигрыш. Для сего необходимо оценить список подключенных платежных систем. 1 xslots рабочее зеркало Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высокие требования. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до 100 один в игровых автоматах. Например, случае игрок получил даром десять долларов, то нужно будет отыграть их, поставив одну тысячу спинов по одному баксу каждый. Стоит отметить, собственно не все казино дают возможность играть на призы и не во всех увеселительных заведениях схожие управляла для отыгрывания. Некоторые казино запрещают играть на бонусы в блекджек либо ограничивают ставки до пяти процентов, собственно существенно увеличивает в 10-ки один число нужных игр.Также учтите, что кое-какие игровые платформы сузивают список государств, коие способны получить предложенный бездепозитный приз за регистрацию. К примеру, существуют онлайн-заведения, выдающие подобные призы только жильцам конкретных стран. К образцу, онлайн казино 777 Оригинал предоставляет бездепозитный бонус только игрокам из России и стран СНГ. Или наоборот, снабжают вознаграждением всех, не жителей некоторых государств (из этого, следует внимательно учить перечень, чтобы впоследствии не возникло никаких вопросов и жалоб).
1×slots мобильная версия войти казино
Бездепы с безвозмездными вращениями деют юзерам право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд уплачивает казино. Число спинов ограничено и изредка выше сотню. Если промоакция содержит количество безвозмездных игр, их начисление имеет быть разбито на несколько дней.Похожим образом трудится 3-ий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя или в связи с получения им VIP-статуса. Подарок предоставляется после воззвания в поддержку и проверки. <a href=http://www.plcolor.co.kr/bbs/board.php?bo_table=free&wr_id=1018511>http://www.plcolor.co.kr/bbs/board.php?bo_table=free&wr_id=1018511</a> При регистрации идет указывать только достоверную информацию. Когда учетная запись будет активна, будет доступ в Личный кабинет. В нем возможно избрать валюту, ввести промокод и разузнать доскональные правила получения и отыгрыша бездепа. Краткая информация об акции нередко находится именно на регистрационной форме.Изучить правила и обстоятельства получения бездепозитных призов казино, Вы можете у нас на веб-сайте в разделе с бонусами либо на официальном веб-сайте выбранного Вами казино. Если не можете отыскать нужную информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электрической почте. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
1×slots регистрация 1×slotscasino09k online
Основное отличие в, что для получения бездепа не надо пополнять баланс в казино. Но не этого, есть ряд и других различий:Вейджер (или вагер) ? это минимальная сумма ставок, коию нужно устроить для вывода валютного бонуса. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение. <a href=https://swordmaster.org/user/JamesVok/>x1 slots регистрация в 1×slots casino</a> Обычно, бездепозитные бонусы выдаются под определенные слоты с фиксированной ставкой, но их точно воспрещено применять в игровых автоматах с современным джекпотом. Список игр, каких возможно использовать бездеп, Вы найдете в описании промоакции либо можете уточнить у службы поддержки заведения. Такие одобрения разрешают бесплатно протестировать свежее казино, разобраться с игровым ходом интернет слотов, заработать и вывести небольшую необходимую средств. 1 x slots <a href=http://image.google.cg/url?sa=i&rct=j&url=http://image.google.mv/url?q=http://termopartner.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/amTIzgG3lGx>http://image.google.cg/url?sa=i&rct=j&url=http://image.google.mv/url?q=http://termopartner.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/amTIzgG3lGx</a> Акционные предложения от казино есть в различных форматах. Часто призы даются в размен на депо. Игрок заносит платеж и получает средства, безвозмездные вращения прочие одобрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — картина бонуса, который гарантирован за выполнение конкретных поступков на сайте:Большинство клубов завлекают внимание в за счёт разнородных даров. На одних сайтах можно получить виртуальные кредиты, которые откроют доступ ко всему софту. На иных же, администрация предлагает безвозмездные вращения для запуска лучших интернет слотов. Несмотря на разные промоакции, стоит выделить самые главные.
1×slots casino зеркало рабочее
Зарегистрироваться в казино по особой ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефона и электронную почту). Для подтверждения номера аппарата необходимо в личном профиле показать собственный номер и нажать кнопку „Подтвердить номер телефона“, далее Вы получите sms-сообщение с кодом, кот-ый необходимо установить в подходящее фон. Для подтверждения электронной почты, перейти по интенсивной ссылке в послании от казино. <a href=https://asdmcpe.org/user/CharlesDycle/>https://asdmcpe.org/user/CharlesDycle/</a> В истиннее время получить бонус за регистрацию в казино очень просто. Почти каждый игорный дом с готовностью предоставит средства либо благотворительные вращения. Многие игроки используют этим и не смущяются регистрироваться в каждом клубе с выгодными критериями. Кстати, это отличная возможность выдумать выигрышную стратегию и сорвать куш.Бездепозитный бонус за регистрацию в казино — это стартовый подарок повторяющий денежного начисления либо бесплатных вращений для свежих игроков заведения, для получения которого надо заносить депозит. 1×slots мобильная версия войти казино Зарегистрируйтесь. Для регистрации почаще всего достаточно ввести свой номер телефонного и почтовый адресок, после чего установить приобретенный код из СМС. Возможно, требуется указать промокод. В правилах промоакции несомненно написано, где его надобно вводить. Иногда это надо делать при регистрации, времени — уже последствии сотворения личного кабинета, на отдельной странице.Мы подготовили список, где есть постоянно животрепещущие и свежие бездепозитные призы казино, которые вам получить даром. Для наших пользователей есть особые предложения эксклюзивные призы, которые вы у не отыщите, их мы обозначили особой красной плашкой «Exclusive».
<b>Смотреть еще похожие новости:</b>
<a href=https://australiantravelforum.com/Upload/showthread.php?tid=193427>1×slots рабочее зеркало на сегодня</a>
<a href=http://forum.cvetq.info/viewtopic.php?f=8&t=260489>1х слот 1хслотс регистрация перейти на 1×slots</a>
<a href=https://www.kfz-gringer.at/index.php/forum/suggestion-box/67255–1#67020>1хслотс зеркало на сегодня</a>
<a href=https://timepost.info/showthread.php?tid=46814>1×slots регистрация</a>
<a href=https://www.lightknotes.com/MyBB/showthread.php?tid=205495>1×slots коды</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
У каждого игорного заведения средства управляла и обстоятельства. Но, дабы получить призы, нужно выполнить стереотипные деянья: Выше мы предоставили глубокий комплект самых новых и своевременных бездепозитных призов в онлайн казино без пополнения на 2022 год, где продоставляется пользоваться любым ценным бездепозитным бонусом.
#7548 Charlesgunny
casino сайты 1×bet регистрация <a href=https://7club7.com/>vodka casino</a> 1×bet скачать приложение pinco casino <a href=https://glvk.guru/>Шевцова Татьяна Викторовна порно</a> водка казино bitz casino как выиграть в казино 7k casino официальный сайт Приезжева Екатерина Геннадьевна порно приложения букмекерских контор Разуваева Ксения Денисовна порно
#7549 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7550 Charlesgunny
1×bet слоты 1×bet xyz porno Дарья Клишина <a href=https://repost.news/>сайты казино</a> kent casino регистрация пин up casino <a href=https://repost.news/>фреш казино</a> мобильные букмекерские конторы casino buzz 1win casino порно с Антропова Валентина Викторовна 7k casino скачать pin up casino зеркало слот casino
#7551 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7552 Charlesgunny
кент казино казино пин <a href=https://7club7.com/>pin up casino зеркало</a> букмекерская контора 1×bet 1 <a href=https://strelochnik.com/>пина букмекерской конторы</a> букмекерская контора Светлана Ходченкова online casino официальный порно с Анна Щербакова, фигуристка порно с Евгений Малкин (хоккей) 1win букмекерская контора букмекерская контора леонов
#7553 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия скачать
Бонус в казино без депо содержит разные вариации: такое быть приветственный приз, промоакции в честь каких-то праздников или весомых дат, приз за привлечение свежих игроков, преданность и получение VIP-статуса.Нет. Для получения бездепозитного приза в казино необходима неотъемлемая регистрация на сайте. Играть в слоты безвозмездно и без регистрации возможно лишь в демо режиме. <a href=http://filmkachat.ru/>1×slots официальный сайт мобильная версия скачать</a> Любой выигрыш по ставке повыше установленного лимита будет являться недействительным. То есть ставка не будет засчитана при отыгрыше, а в случае выигрыша его сумма не поступит на счёт клиента — результат забавы несомненно полностью аннулирован.Выбирайте превосходнейшие безвозмездные бонусы с помощью обзоров на Casinoz – и пусть для сопутствует удача при отыгрыше бонусных кредитов! <a href=https://glose.com/activity/670513e5ed2e698377922591>https://glose.com/activity/670513e5ed2e698377922591</a> 1× slots сайт <a href=https://www.morph.ro/users/AshleyEvict>https://www.morph.ro/users/AshleyEvict</a> Но не мыслить, что снабжая юзеров такими призами, казино занимается спонсированием. Ведь объемы вознаграждений, в основном, не немалые (средним объемом от 5 до 20 долларов). И на эти свои налагаются конкретные условия и лимитирования, обязательные к исполнению игрока, в в последствии он желает получить все средства выигранные финансы.Бездепозитный приз казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в данном и содержится главное различие.
1×slots казино зеркало
Далее требуется отыграть вагер и вывести выигрыш. Игрокам без опыта крупно повезло, у получить 10-ки даров за 1 регистрацию. Если не смогли получить Бездепозитный приз, не волнуйтесь. Обратитесь в интернет чат, оператор поможет исправить. <a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=33512>1 xslots рабочее зеркало</a> 1×slots скачать на айфон Фриплей-бонусы встречаются только в неких клубах. Они зачисляются сразу после творенья профиля и активны непродолжительное время. Если не успеете израсходовать средства, они просто сгорят. Касаемо времени, в большинстве случаев бонусы активны в течение часа.При помощи такового поощрения оператор может также привлекать клиентов, которые раньше проявляли активность на веб-сайте, но по некий причине прекратили выступать. В этом случае промокод высылается пользователю по электрической почте или повторяющий SMS. <a href=http://molbiol.ru/forums/index.php?showtopic=1046662>http://molbiol.ru/forums/index.php?showtopic=1046662</a> В основном случаев бесплатные бонусы начисляются в кредитах, которые невозможно сразу вывести со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже. 1×slots регистрация 1×slots review live Особую изюминку видео слотам придают оригинальные символы. С их свет активируются разные бонусы. Вы сможете запустить вспомогательный степень и прирастить сумму выигрыша. Есть знаки, коие замещают негодные составляющие и сами творят выигрышные комбо. Не стоит забывать и на бонус-тур. После каждого удачного спина есть шанс прирастить необходимую выигрыша в два либо хорошо раза.В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и в случае спорных ситуаций нет способности куда-то посетовать и обосновать свою правоту.
1хслотс зеркало
Прибывшие на аккаунт деньги бездепозитные бонусы предназначаются, главном, лишь для новоиспеченных юзеров, которые раньше не имели личного аккаунта в данном казино. Исходя из сего, если ранее у игрока был сделан депо, то, по всей вероятности, у него больше не будет способности рассчитывать на получение такого бонуса в определенном заведении.Казино выводит деньги только на ту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного приза, Вам поначалу нужно пополнить счет. В некоторых клубах узкий список способов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с данных платежных способов, которые доступны для вывода. <a href=http://smpnegeri1tembarak.sch.id/forum/>http://smpnegeri1tembarak.sch.id/forum/</a> Объективные – размер бонуса, коэффициент и условия вейджера, надобность внесения депо для вывода средств; x1 slots регистрация в 1×slots casino Вы наверняка, как и все любите получать подарки и бездепозитные бонусы казино. Игорные дома взяли в повадку одаривать гэмблеров приятными призами. Стать владельцем приветственного подарка можно за творение профиля или пополнение счёта. Второй вариант более интересный, так клубы готовы удвоить депо! Но случае вы новичок и лишь знакомитесь с миром пыла, чем пользуйтесь бонусом за регистрацию.Возможность протестировать новые игры, не рискуя личными средствами и создать собственную тактику забавы.
1×slot зеркало рабочее этих способов предполагает регистрацию
Размер бонуса. В качестве бездепов обычно начисляют большие суммы, а когда речь идет о бонусах за депо, которые начисляются в процентном соотношении от суммы пополнения, то некоторые казино все презентовать игроку до 2000$.Все безвозмездные призы кажутся соблазнительными. Кто же откажется от возможности сыграть в онлайн-казино, не рискуя деньгами, хотя получая выигрыши. Но далеко не все бездепозитные бонусы мере привлекательны для рассудительного посетителя. Такой бесплатный эквивалент средств зачисляется на профиль юзера после воплощения требований и предназначаются они только для игрового процесса. Вывод этих вознаграждений возможен лишь после воплощения вейджеровых критерий. 1×slos регистрация в 1×slots casino <a href=http://k636419q.beget.tech/user/AshleyFal/>http://k636419q.beget.tech/user/AshleyFal/</a> В онлайне слишком много скриптовых вебсайтов, коие принадлежат плутам. Их главная цель – заинтересовать гэмблеров, пообещав не только великодушные подарки, хотя и крупные выигрыши. Так что некоторые сайты предлагают получить за регистрацию и $1 000.Доступные забавы – В неких азартных забавах возможно понизить математическое превосходство казино до нескольких 10-х процента. В их количестве многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как верховодило, в этих забавах ставки идут в зачет вейджера не всецело. Например, имеет учитываться только 50%. В неких забавах бездепозитные призы вообще нельзя отыгрывать.
казино 1×slots
Бонус без депо за регистрацию в казино (бездепозитный бонус) – это валютный подарок от клуба, кот-ый начисляется на аккаунт игрока в регистрации в казино. Кроме создания учетной записи, для получения бездепа, очень нередко потребуется ещё и подтвердить контактные данные игрока и/или активировать специальный промо-код.Вывод выигрыша с бездепозитных призов казино – щедрый подарок от азартных клубов. Но чтобы исключить свой заработок, нужно выполнить ряд критерий: Ну и естесственно же, для казино бездепозитные призы прибыльны с имиджевой стороны: подобная щедрость повышает уровень преданности посетителей к фирмы.Бездепозитные бонусы — это подарки от казино повторяющий бонусных денег или фриспинов для игровых автоматов, которые начисляются на аккаунт игрока последствии процедуры регистрации на веб-сайте заведения. Для получения этих поощрений депозит не потребуется. <a href=https://www.vancouverrowingclub.wiki/index.php/User:TrishaWoodhouse>https://www.vancouverrowingclub.wiki/index.php/User:TrishaWoodhouse</a> 1×slots зеркало регистрацию более популярный вариант это Размер ставки для игры по бездепозитному призу (окончательно же, когда, когда он представлен вид бонусных денежных средств) часто ниже, чем при этой на депо. Ограничение несомненно действовать до этапа отыгрыша приза.
<b>Смотреть еще похожие новости:</b>
<a href=https://redfist.de/RF-Online-Testforum/viewtopic.php?f=60&t=77737>1хслот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чаще всего, популярные сервисы, такие как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно неотъемлемое правило. Финансовые средства выводятся только спустя что, эту платежную систему, которой пользовались для пополнения депо. Если же игрок получил бездепозитный покерный бонус, требуется пополнить счет на минимальную необходимую, кот-ая составляет обычно десять долларов.
#7554 Empathycenter_Tubhttps://empathycenter.ru/
Всем привет! Центр Эмпатия — сеть клиник доказательной психиатрии. Более 60 врачей работают с взрослыми и детьми, применяя эффективные и современные методы лечения и диагностики. <a href=https://empathycenter.ru/articles/maniakalno-depressivnyy-psikhoz/>маниакально депрессивный психоз</a> Если сеть клиник доказательной психиатрии с более чем 60 работающих специалистов и врачей в Москве, то это в Центре ментального здоровья Эмпатия https://empathycenter.ru/ . Выбирайте рядом с вами Эмпатия м. Университет, Эмпатия м. Электрозаводская, Эмпатия Реутов м. Новокосино. Увидимся!
#7555 EddieWabhttps://taya365casino.app
Online casinos <a href=https://taya365casino.app/registration.html>here</a> are thousands of slots, live games, profitable promotions and instant wins. Try your luck in a comfortable and safe environment, enjoying the excitement at any time and from any device.
#7556 Charlesgunny
Радченко Светлана Юрьевна порно казино 1 <a href=https://rumafia.news/>cat casino</a> порно с Максим Глушенков (футбол) black russia казино <a href=https://repost.news/>скачать букмекерскую контору на андроид</a> букмекерская контора фонбет винлайн букмекерская контора официальный Ходнева Светлана Владимировна порно porno Илона Маркова, хоккеистка 1×bet скачать бесплатно 1×bet зеркало xbet xyz пин up casino
#7557 Charlesgunny
1×bet телефон ставки на спорт букмекерские конторы <a href=https://strelochnik.com/>1×bet рабочее</a> скачать casino на андроид kent casino регистрация <a href=https://krtka.info/>порно с Юлия Ефимова, пловчиха</a> симулятор казино казино играть 1×bet сайт 1×bet слоты порно с Захарова Мария Владимировна промокод 1×bet пин ап букмекерская контора
#7558 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7559 Charlesgunny
порно с Васильева Татьяна Викторовна casino приложения <a href=https://www.ossetia.tv/>porno Андрей Рублев (теннис)</a> 7k casino зеркало на сегодня Крючкова Полина Викторовна порно <a href=https://rhymes-punches.com/>гта онлайн казино</a> часы казино porno Екатерина Ефременкова, шорт-трекистка зеркала казино kometa casino win win casino казино фильм смотреть онлайн Ходнева Светлана Владимировна порно
#7560 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7561 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7562 Charlesgunnyhttp://filmkachat.ru
1хслот скачать
Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро либо 20 долларов. Если выдаются фриспины, их количество изредка выше нескольких десятков даровых вращений. <a href=http://filmkachat.ru/>1×slots зеркало подтвердит вашу регистрацию если говорить</a> Как только на виртуальном счету окажутся бонусные средства, поспешите отыграть вейджер. Сразу в сего можно оставить заявку на вывод выигрыша. Кредиты выгодно отличаются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом настоящих средств и дают вероятность почувствовать задор. Во-вторых – можно насладиться любой азартной забавой доступной на сайте. В вашем постановлении присутствуют автоматы, настольные прибавление, видео-покер, Live-дилеры.Зарегистрироваться в казино по специальной ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефона и электронную почту). Для подтверждения номера аппарата необходимо в собственном профиле показать свой номер и надавить кнопку „Подтвердить номер телефонного“, далее Вы получите sms-сообщение с кодом, который нужно установить в подходящее поле. Для подтверждения электронной почты, перебежать по интенсивной ссылке в послании от казино. <a href=https://www.dr-ay.com/blogs/217116/Mastering-Architectural-Rendering-From-Vision-to-Visual-Reality>https://www.dr-ay.com/blogs/217116/Mastering-Architectural-Rendering-From-Vision-to-Visual-Reality</a> На нашем сайте Вы найдете перечень актуальных новых бездепозитных призов в казино 2022 года. Также, есть большое эксклюзивных предложений, коие доступны только посетителям нашего вебсайта последствии регистрации по нашей ссылке либо активации специального промокода.Бесплатные бонусы казино без депо можно получить вид валютных средств на бонусный счет (вывести их возможно лишь в отыгрыша), фриспинов, игры либо кешбэк-бонуса. 1×slots сайт зеркало <a href=http://bbs.wbdatavis.com/home.php?mod=space&uid=15380&do=profile>http://bbs.wbdatavis.com/home.php?mod=space&uid=15380&do=profile</a> Казино выделяет вероятность заработать и вывести настоящие деньги на бездепозитных призах. Обычно, это незначительная сумма, которую казино может себя позволить презентовать игроку.Внесение депо – Будьте готовы пополнить счет после отыгрыша бонуса. Это обычное требование верховодил для данного типа промо-акций. Лучше заблаговременно уточнить, какую необходимую нужно будет заносить на счет. Как правило, идет о наименьшем депозите, хотя вы обязаны быть уверены, собственно он вас по кармашку.
1× slots зеркало
1×slot зеркало рабочее этих способов предполагает регистрацию Обычно показатель выше, чем для призов на депозит. Не дивитесь, случае он будет в х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных стран.При помощи такого одобрения оператор имеет кроме привлекать клиентов, коие ранее показывали активность на веб-сайте, хотя по некий причине прекратили выступать. В данном случае промокод высылается юзеру по электрической почте или в виде SMS. <a href=https://www.google.com/search?q=%3Ca+href%3Dhttps%3A%2F%2Fsitesseo.ru%2Fvneshnyaya-ssylochnaya-massa-dlya-prodvizheniya-sajta%2F%3E%D1%81%D1%81%D1%8B%D0%BB%D0%BE%D1%87%D0%BD%D0%B0%D1%8F+%D0%BC%D0%B0%D1%81%D1%81%D0%B0+%D0%B4%D0%BB%D1%8F+%D1%81%D0%B0%D0%B9%D1%82%D0%B0%3C%2Fa%3E+%D0%BA%D0%B0%D0%BA+%D1%83%D0%B2%D0%B5%D0%BB%D0%B8%D1%87%D0%B8%D1%82%D1%8C+%D1%81%D1%81%D1%8B%D0%BB%D0%BE%D1%87%D0%BD%D1%83%D1%8E+%D0%BC%D0%B0%D1%81%D1%81%D1%83&sca_esv=593671130&ei=4ytpZoPVBcaP7NYP84Wb4AY>https://www.google.com/search?q=%3Ca+href%3Dhttps%3A%2F%2Fsitesseo.ru%2Fvneshnyaya-ssylochnaya-massa-dlya-prodvizheniya-sajta%2F%3E%D1%81%D1%81%D1%8B%D0%BB%D0%BE%D1%87%D0%BD%D0%B0%D1%8F+%D0%BC%D0%B0%D1%81%D1%81%D0%B0+%D0%B4%D0%BB%D1%8F+%D1%81%D0%B0%D0%B9%D1%82%D0%B0%3C%2Fa%3E+%D0%BA%D0%B0%D0%BA+%D1%83%D0%B2%D0%B5%D0%BB%D0%B8%D1%87%D0%B8%D1%82%D1%8C+%D1%81%D1%81%D1%8B%D0%BB%D0%BE%D1%87%D0%BD%D1%83%D1%8E+%D0%BC%D0%B0%D1%81%D1%81%D1%83&sca_esv=593671130&ei=4ytpZoPVBcaP7NYP84Wb4AY</a> 1×slots скачать на айфон Наши эксперты исследуют обстоятельства промоакции, затем в ручном режиме проводят их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и параметры. Мы не рекламируем казино, а даем игрокам информацию о превосходнейших из них.Зарегистрироваться в казино по специальной ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефона и электрическую почту). Для доказательства номера телефона необходимо в личном профиле показать свой номер и нажать кнопку „Подтвердить номер аппарата“, далее Вы получите sms-сообщение с кодом, кот-ый нужно установить в подходящее фон. Для доказательства электрической почты, перейти по интенсивной ссылке в письме от казино.
1×slots официальный сайт, скачать
Проверка занимает от нескольких мин. До нескольких дней, специалисты техподдержки все запросить вспомогательные документы или инициировать куцее общение по Skype.Бонус с зачислением денег на счет дает больше свободы действий. Пользователь сам выбирает, каким образом распорядиться подаренными средствами. Здесь кроме могут работать ограничения на перечень дешевых игр, хотя обычно эти рамки не так строги, как в рекламную с безвозмездными вращениями. Так что приготовьтесь дать секретную информацию (пол, возраст, страна проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает менее суток, после чего получится свободно выводить крупные выигрыши.Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации презента нужно подтвердить электронную почту и привязать телефонный; <a href=http://j90806hs.bget.ru/user/CharlesHab/>http://j90806hs.bget.ru/user/CharlesHab/</a> При правильном подходе бездепы — это отличный метод играть на деньги без траты личных средств. Есть количество рекомендаций, следуя которым можно извлечь максимум пользы из сходственных промоакций казино. Играть по лишь на лицензированных площадках. Скриптовые веб-сайты не только обманывают с бонусными услугами, но и используют пиратский софт с измененным ГСЧ. Выиграть на этих автоматах невероятно. 1×slots официальный сайт зеркало
1×slots регистрация то дальше необходимо пройти
Бездепозитные бонусы начисляются лишь один один. Не стоит открывать свежие аккаунты, чтобы получить их повторно. Служба безопасности казино непременно выявит «левого» соучастника и перекроет. Если гость выполнит нужные притязания, отыграет собственную ставку и решит исключить личный выигрыш, то ему нужно сведению, что казино обязательно востребует предоставить ксерокопии личных документов, чтобы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои исключить не удастся. Возьми собственный подарок. Чаще всего бонус активизируется сразу после регистрации. Но случаются ситуации, когда надо(надобно) забежать в личный офис либо написать в справочную службу. Так собственно приготовьтесь предоставить конфиденциальную информацию (пол, возраст, государство проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает не более суток, в чего получится беспрепятственно выводить крупные выигрыши.Чтобы бездеп не был начислен на Ваш акк, Вам надо активировать бонусный код. Если поощрение от казино было добавлено на Ваш акк автоматически, а Вы не планируете его применять, обратитесь в службу поддержки с пожеланием отменить бездепозитный бонус. 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=http://www.jzkoo.net/home.php?mod=space&uid=16117&do=profile>http://www.jzkoo.net/home.php?mod=space&uid=16117&do=profile</a> Для верификации номера телефонного, в собственном профиле выберите опцию „Подтвердить номер аппарата“ и введите в соответствующее фон код, приобретенный в sms-сообщении.
1×slots регистрацию процедура займет всего лишь
Чем ниже значение вейджера, тем проще отыграть и исключить приз. Если Вы планируете заработать на бездепе, а не просто ознакомиться с свежим игровым клубом, то стоит избегать призов с высоким вейджером их практически не реально отыграть. С ними Вы сможете только протестировать забавы заведения.B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. Только выполнив все обстоятельства отыгрыша и дождавшись завершения проверки аккаунта, Вы можете оформить заявку на вывод средств и получить средства деньги. <a href=https://historydb.date/wiki/Glory_Casino>https://historydb.date/wiki/Glory_Casino</a> 1×slots casino регистрация Многие игроки, оценив функционал казино, остаются выступать в нем и далее ? на это и нацелено каждое рекламную. Постоянные клиенты вносят депозиты и проделывают ставки, обеспечивая длительную прибыль оператора. То есть, казино раздают бездепы новым пользователям для формирования приклнной аудитории.
<b>Смотреть еще похожие новости:</b>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=133554&pid=325273#pid325273>1×slots актуальное зеркало</a>
<a href=https://melhorlance.com.br/minha-conta/>1× slots регистрация в 1×slots casino</a>
<a href=https://sadhaka.nl/forum/viewtopic.php?t=102475>1хслотс зеркало на сегодня</a>
<a href=http://big.bestforums.org/viewtopic.php?f=7&t=12222>1×slots официальный зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Прежде всего, не забывайте периодически заглядывать на страницу обзоров бездепозитных призов. Они шаг за шагом осматривают более интересные предложения водящих игорных порталов. В зависимости от онлайн заведения каждый из них имеет вас предложить как бездепозитные деньги, так и бездепозитные фриспины, которые после успешной регистрации рухнут для на ваш игровой баланс.
#7563 Charlesgunny
играющие казино win win casino <a href=https://krtka.info/>слот casino</a> скачать 1×bet на андроид бесплатно 1×bet официальный скачать <a href=https://th-royalgclub.com/>1×bet зеркало слоты</a> porno Катерина Шпица почему в казино не бывает настенных часов букмекерская контора зенит champion casino porno Игорь Акинфеев (футбол) человек казино casino сегодня
#7564 Charlesgunnyhttp://filmkachat.ru
1× слот зеркало
Если площадка презентует бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь завести акк на сайте и активировать его, подтвердив адресок электронной почты, номер аппарата либо иные данные, которые требует оператор. Перед этим нужно убедиться, что пользователь находится на официальном веб-сайте казино, но на мошеннической площадке. <a href=http://filmkachat.ru/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> Размер бонусов чаще всего чисто условный и не превышает 50 руб. Приятно, хотя ощутимым бустом в игре вряд ли станет. <a href=https://we.riseup.net/lexxeagle/enhancing-your-projects-with-professional-architec>https://we.riseup.net/lexxeagle/enhancing-your-projects-with-professional-architec</a> 1× slots зеркало <a href=http://dooood.fun/member.php?action=profile&uid=7967>http://dooood.fun/member.php?action=profile&uid=7967</a> При пользовании бездепозитным бонусом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют несколько видов лимитов:Предложения с бездепозитными призами за регистрацию позволяют свежим заведениям привлечь аудиторию на свой вебсайт. А игроки тому получают вероятность выступать на реальные средства без депозита в казино и заработать небольшой стартовый капитал, который разрешено вывести на карту банка или электронный кошелек.
1 x slots
При правильном подходе бездепы — это отличный метод выступать на деньги без траты собственных средств. Есть несколько рекомендаций, следуя которым возможно извлечь максимум выгоды из похожих акций казино. Играть стопам только на лицензированных площадках. Скриптовые веб-сайты столько обманывают с бонусными предложениями, хотя и употребляют пиратский софт с измененным ГСЧ. Выиграть на таких автоматах невозможно.Важно, убедитесь что, собственно раньше не регились в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи. 1×slots casino зеркало В интернете количество известных игорных площадок с красивыми акционными услугами. Однако пристально разбирать обстоятельства десятков предложений времени надоест, ну и время отнимет много. Поэтому наша команда подготовила ТОП-3 вебсайтов с наихорошими бездепозитными бонусами:Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие возникают у начинающих. <a href=http://pechi-sibir.ru/bitrix/redirect.php?goto=http://fismart.ru/bitrix/rk.php?goto=http://tdatm.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/pdENICw1yKo>http://pechi-sibir.ru/bitrix/redirect.php?goto=http://fismart.ru/bitrix/rk.php?goto=http://tdatm.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/pdENICw1yKo</a> В случае установленного лимита на необходимую вывода выигрыша с бездепозитного приза, игрок не сможет вывести больше заявленной суммы. 1×slots официальный сайт скачать на айфон Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную функцию активации приза без депо. Внимательно прочтите до конца. Многие новенькие делают ошибки на шаге регистрации и потому имеют получить подарок.
1×slots официальный сайт мобильная версия скачать
<a href=http://bbs.mycq3d.com/home.php?mod=space&uid=88091>http://bbs.mycq3d.com/home.php?mod=space&uid=88091</a> Так что приготовьтесь предоставить секретную информацию (пол, возраст, государство проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает менее суток, в чего удастся свободно выводить солидные выигрыши.Для всех бездепозитных бонусов функционирует максимальный лимит на выигрыш. Он указывает предельную необходимую, которую вас получить, играя на бонусные кредиты. Как лишь вам получится выполнить притязания вейджера, дозволенный максимально будет переведен с бонусного счета на основной, а остаток будет списан. 1×slots бездепозитный бонус за регистрацию
1×slot регистрация
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=326811&pid=651908#post_651908>1×slots акции</a> 1×slots зеркало регистрацию более популярный вариант это <a href=https://amvnews.ru/forum/profile.php?mode=viewprofile&u=75392>https://amvnews.ru/forum/profile.php?mode=viewprofile&u=75392</a> Бездепозитные бонусы казино это экономическая компенсация, предлагаемая пользователям на дармовой основе и возможность выступать в интернет казино даром. Если ассоциировать их с поощрениями за вклад, в свои выдаются лишь впоследствии первоначального пополнения счета, то бездепозитные вознаграждения получаются безвозмездно. То есть, играющий получает возможность создавать ставки на теснее существующие финансы, коие выдаст заведение, исполняя, этом, обычные действия, дабы их извлечь (тут идет речь о регистрация, удостоверении личности с внедрением номера аппарата, дизайна заказы и т.д. ).На условиях отыгрыша безвозмездных призов по тормознуть подробнее. С ними связаны нюансы, которые невозможно забыть без внимания.
1× слот зеркало
Чаще всего, знаменитые сервисы, эти как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно обязательное управляло. Финансовые свои выводятся только через ту платежную систему, коей популярностьюимели для пополнения депо. Если же игрок получил бездепозитный покерный бонус, требуется восполнить счет на наименьшую необходимую, кот-ая сочиняет обыкновенно 10 долларов. <a href=https://boobs.red/user/DoctorLazutaMt/>https://boobs.red/user/DoctorLazutaMt/</a> Осталось избрать казино с бонусом за регистрацию и сделать профиль. После активации подарка выигрыш зависит от Фортуны и способностей. 1хслотс зеркало на сегодня Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 поболее. Когда игроку надеется количество фриспинов, администрация может бить3 их начисление на некоторое дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах акции.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.reisezielforum.de/viewtopic.php?t=371327>1×slots casino online регистрация</a>
<a href=https://forum.bedwantsinfo.nl/thread-718708.html>1хслотс рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция имеет подробные правила, ссылка на которые обыкновенно содержится в промообъявлении. В них указываются лимиты, вейджер, список доступных игр. Если оператор прячет данные о предложении, то пользоваться им надо.
#7565 Charlesgunny
пинап казино 1×bet зеркало на сегодня 1×bet xyz <a href=https://strelochnik.com/>porno Юлия Канакина</a> pin up casino 1×bet слоты <a href=https://vestnik-jurnal.com/>casino 7k сегодня</a> porno Нина Пирогова, хоккеистка порно с Сергей Бобровский (хоккей) 1×bet скачать приложение на андроид порно с Захарова Мария Владимировна 1×bet официальный сайт 1×bet xyz vavada casino порно с Каролина Севастьянова
#7566 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7567 Ремонт стиральных машин Zanussihttps://remont-stiralnyh-mashin-zanussi-best.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт стиральных машин zanussi сервис, можете посмотреть на сайте: <a href=https://remont-stiralnyh-mashin-zanussi-best.ru/>ремонт стиральных машин zanussi рядом</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#7568 Charlesgunny
ramenbet casino казино рояль <a href=https://rumafia.news/>r7 casino</a> балтбет букмекерская контора скачать букмекерскую контору <a href=https://slon-ru.com/>бесплатно играем казино</a> online casino 7k porno Алена Косторная (фигурное катание) порно с Кирьянова Дарья Борисовна официальное казино вход лучшие онлайн казино casinos winning porno Ангелина Гончаренко, хоккеистка
#7569 Charlesgunnyhttp://filmkachat.ru
казино 1× slots официальный сайт
Наличие у игрока 2 аккаунта. Запрещено творить некоторое профилей для неоднократного получения бездепов. <a href=http://filmkachat.ru/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> Каждый из бездепозитных бонусов без пополнения 2022 содержит свой конкретный вейджер для отыгрыша, например же в каждом казино он уточняется персонально — где то он х55 а где-то х30, повторюсь везде по разному!Наличие у игрока второго аккаунта. Запрещено творить некоторое профилей для неоднократного получения бездепов. <a href=https://mssg.me/7dltc>https://mssg.me/7dltc</a> Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. 1хслотс зеркало на сегодня <a href=https://towin.co.kr/bbs/board.php?bo_table=free&wr_id=20207>https://towin.co.kr/bbs/board.php?bo_table=free&wr_id=20207</a> Некоторые веб-сайты, до чем провести регистрацию игроков, предлагают ответить на количество базовых вопросов. Цель проведения сходственной викторины – выявить случайных людей, коие не имеют представления о покере, и не допустить получения ими бонусов. Если посетитель теснее играл в казино, то ответить на полтора десятка простых вопросов будет несложно. Очень нередко, ответы можно отыскать на официальных веб-сайтах этих учреждений.
1×slots зеркало этих способов предполагает регистрацию
В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая доля забавы. Важно, часто бездепозитные призы в казино выдаются с ограничениями по наибольшей выплате. В среднем возможно рассчитывать на выгода в некоторое тыщ рублей. Как исключить выигрыш с приза без депозита. Придётся доказать аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается каждым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате либо прочтите в правилах.Чтобы других увериться в превосходствах бездепозитных призов, достаточно зарегистрироваться в казино и получить поощрение. <a href=http://forums.panzergrenadiers.com/showthread.php?22787–1×slots-casino-%D0%A1%D0%82%D0%A0%C2%B5%D0%A0%D1%96%D0%A0%D1%91%D0%A1%D0%83%D0%A1%E2%80%9A%D0%A1%D0%82%D0%A0%C2%B0%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A1%D0%8F-1×slotscasin-online&p=503241#post503241>1×slots casino регистрация 1×slotscasin online</a> 1×slots официальный сайт скачать Предложения с бездепозитными бонусами за регистрацию позволяют свежим заведениям привлечь аудиторию на свой сайт. А игроки тому получают возможность играть на настоящие деньги без депозита в казино и заработать малый стартовый капитал, кот-ый разрешено вывести на карту банка либо электрический кошелек.Если вы бывалый игрок, вы должны аристократия, что бонус без депозита – редчайшая находка. Тем не менее, мы в изучаем интернет, чтобы отыскать вам наилучшие бездепозитные предложения. <a href=https://www.s-quo.com/club/club.php/user/60975/blog/1635/>https://www.s-quo.com/club/club.php/user/60975/blog/1635/</a> Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных обстановок с казино, когда последствии отыгрыша бездепа вам не дадут вывести крупную необходимую выигрыша.С иной стороны, намного проще арестовать бездепозитные фриспины за регистрацию в казино и прямо данный начать вращать барабаны в наихороших слотах. Главная особенность спинов никаких, что они предназначены для лучших автоматов. Удастся не пройти дополнительные раунды, хотя и увеличить сумму выигрыша, заработать респины прочие внутриигровые подарки. 1× slots сайт
1хслотс рабочее зеркало
Вышеописанная причина и считается основным моментом, из-за которого операторы отдают доля своей прибыли на различные маркетинговые затраты и рекламные кампании. А наиболее действенным тут станут выступать именно бездепозитные призы казино 2022 с выводом за регистрацию.Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых новых, щедрых и испытанных бонусах в онлайн казино, которые обновляются каждый день. Ещё одно распространённое акционное предложение – симпатичный подарок с сомнительными притязаниями. К примеру, клуб сулит $100 в качестве бездепа, но с вейджером х80 либо х100. Отыграть подобный вейджер фактически невероятно и поэтому чем концентрироваться на больше интересных акциях.В количестве случаев благотворительные бонусы начисляются в кредитах, которые невозможно сразу вывести со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти требования принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже. <a href=https://forex-arabic.com/members/179904-DonaldNog>https://forex-arabic.com/members/179904-DonaldNog</a> Бездепозитные призы за регистрацию в игровых автоматах для хозяев онлайн-казино являются частью маркетинговой кампании, направленной на увеличение аудитории вебсайта. Так они продвигают средства бренды и завлекают новых посетителей.Для вывода средств бонус надо(надобно) будет отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариантами отыгрыша бездепозитного приза до его получения, чтобы избежать конфликтных ситуаций. 1х слотс зеркало регистрация в 1×slots casino
онлайн казино 1×slots
Бездепозитные бонусы реальными деньгами, которые можно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадались.Таким образом, заведение пробует продемонстрировать себя своим вероятным геймерам, а такой маркетинговый ход как казино бонус без депо за регистрацию привлекает очень количество внимания к игорному заведению и обеспечивает неизменный поток новых гостей и грядущих клиентов игрового онлайн клуба. Бездепозитные призы казино за регистрацию в 2022 году — это вероятность сыграть за счёт заведения. Казино даёт клиенту шанс воспользоваться определённой суммой либо количеством даровых вращений без внесения депозита. Не путайте деморежим с реальной игрой без надобности внесения депозита.Акции распространяются как на все игры казино, например и на ограниченный список. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino прочие. Промо может охватывать разработки 1-го производителя. Бездеп не пересекается с иными акциями казино. Если на сайте предусмотрен кэшбек, он не начисляется за ставки, сделанные бонусными деньгами. Для идентификации платежных реквизитов игрока имеет понадобиться пополнение счета на минимальную необходимую. Если вы избираете испытанное лицензионное интернет казино и сделайте все условия получения бездепозитного приза, трудностей с получением дара у Вас не возникнет.В интернет-сети постоянно возможно найти списки более популярных и гарантированных поощрительных программ от знаменитых онлайн-казино. казино 1×slots официальный сайт <a href=http://bbarlock.com/index.php?title=новый_сериал>http://bbarlock.com/index.php?title=новый_сериал</a>
1× slots сайт
Обычно показатель повыше, чем для призов на депо. Не удивляйтесь, если он несомненно в х100. Иногда завышенный коэффициент вейджера устанавливается для обитателей отдельных стран.Также бездепозитные призы шансы работать методом возвращать к ирге клиентов, что приостановивших своё сотрудничество с компанией: уведомление о бездепе поступает на мобильный аппарат либо почту. Третитй бездепозитный бонус за регистрацию – денежные свои. К сожалению, начислить рубли либо доллары способны только известные и известные клубы. С их поддержкою возможность насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком. <a href=http://kpforma.ru/bitrix/rk.php?goto=http://avt-1c.ru/bitrix/redirect.php?goto=http://flegl.blog.idnes.cz/redir.aspx?url=https://telegra.ph/Kak-najti-mestonahozhdenie-zaklyuchennogo-po-ego-familii-09–23>http://kpforma.ru/bitrix/rk.php?goto=http://avt-1c.ru/bitrix/redirect.php?goto=http://flegl.blog.idnes.cz/redir.aspx?url=https://telegra.ph/Kak-najti-mestonahozhdenie-zaklyuchennogo-po-ego-familii-09–23</a> Итак, дабы бесплатные бонусные кредиты превратились в настоящие деньги, которыми возможность распоряжаться по своему усмотрению, их нужно отыграть. Вейджер стопам уточнять в правилах онлайн-казино.Бонус за регистрацию в казино без депо с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша имеет потребоваться устроить ставки на сумму, в количество 10-ов один превосходящую сумму приза или выигрыша. 1×slots официальный сайт мобильная версия скачать Казино выделяет вероятность заработать и исключить настоящие средства на бездепозитных бонусах. Обычно, это малозначительная сумма, которую казино имеет себе разрешить подарить игроку.Предложения с бездепозитными призами за регистрацию разрешают свежим заведениям заинтересовать аудиторию на свой сайт. А игроки же получают вероятность играть на настоящие деньги без депозита в казино и заработать небольшой стартовый капитал, который разрешается исключить на карту банка или электрический кошелек.
<b>Смотреть еще похожие новости:</b>
<a href=https://tabsgame.ru/user/Jamesbes/>1×slots официальный зеркало</a>
<a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=13119>1хслотс мобильная версия зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Превышение наибольшей ставки при отыгрыше. Система автоматически не предупреждает о превышении ставки, потому о нарушении правил игрок возможность узнать теснее в подачи запроса на вывод средств. Диапазон ставок, которые вправе устроить игрок, кроме лимитирован. Обычно ставить возможно небольшую сумму — около 10–30 рублей за одно вращение.
#7570 Charlesgunny
фреш казино казино ли <a href=https://res-publika.com>казино пину</a> порно с Дарья Клишина, легкоатлетка официальные зеркала казино <a href=https://strelochnik.com/>porno Мария Шарапова</a> порно с Ирина Сидоркова 7k casino зеркало на сегодня 1×bet зеркало слоты песня казино 1×bet зеркало на сегодня пин casino porno Юлия Канакина, скелетонистка
#7571 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7572 Charlesgunny
Преподобная Надежда Александровна порно смотреть фильм казино <a href=https://glvk.guru/>Чулпан Хаматова</a> порно с Федор Чалов (футбол) порно с Виктория Синицина, фигуристка <a href=https://rhymes-punches.com/>casino online зеркало</a> карты казино казино смотреть Москалькова Татьяна Николаевна порно играющие казино онлайн букмекерские конторы без депозита почему в казино нет часов porno Мария Шарапова
#7573 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7574 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало
Вейджер не более х30–35 является приемлемым. Опытные игроки утверждают, собственно с этим вейджером реально остаться в плюсе, если правильно подойти к выбору игрового аппарата.Выигрыши с призов без инвестициям постоянно привязаны к требованию по ставкам и шансы быть обналичены лишь последствии выполнения данных требований. <a href=http://filmkachat.ru/>1×slots быструю регистрацию а также мгновенное</a> <a href=https://www.diigo.com/item/note/b3jhr/obr2>https://www.diigo.com/item/note/b3jhr/obr2</a> 1 xslots рабочее зеркало <a href=http://minivenebi.ge/index.php?subaction=userinfo&user=measlytyro39>http://minivenebi.ge/index.php?subaction=userinfo&user=measlytyro39</a>
1×slots регистрация на официальном сайте
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=2871>1хслотс официальный сайт зеркало</a> 1хслот зеркало сайта Поспешите забрать бездепозитные призы за регистрацию в казино из представленного списка. Все платформы не только ведут законную работа, хотя и порадуют правдивыми результатами игры, высокой отдачей, прыткими выплатами. <a href=https://aqvakr.forum24.ru/?1–7–0–00010253–000–0–0>https://aqvakr.forum24.ru/?1–7–0–00010253–000–0–0</a> Это раз из главных характеристик привлекательности дара. С завешенным коэффициентом числе профессионалы не смогут выполнить условия по отыгрышу. И так, насколько презентабельно смотрится предложение – бездепозитный бонус казино в размере $500 либо $1 000. Чтобы новенькие получше вдумались, что же это вейджер, мы разберём на образце.Для получения выигрыша требуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить конкретную сумму, хотя уже из собственных денег. Она рассчитывается из общего объема выигрыша за всегда использования бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, случае юзер выиграл 1000 рублей, а множитель составляет х30, исключить средства возможно несомненно, сделав ставки на 30 000 рублей. зеркала 1×slots Все бесплатные призы кажутся соблазнительными. Кто же откажется от способности сыграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далековато не все бездепозитные призы мере привлекательны для рассудительного посетителя.Будьте внимательнее при ознакомлении с правилами во избежание происхожденья конфликтных ситуаций с казино, когда последствии отыгрыша бездепа вам не дадут исключить крупную необходимую выигрыша.
x1 slots 1хслотс регистрация перейти на 1×slots
В игровых клубах без лицензии Вы покупаете „кота в мешке“ и когда неоднозначных обстановок нет способности куда-то посетовать и доказать собственную правоту. В разделе с призами активировать свой подарок. Найти игры, для коих предусмотрено поощрение и применять бонус по предназначению.Фриспины без депо или вспомогательные средства помогут поближе познакомиться с игровой платформой и её функциями. За счёт даров возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за игры напротив живых крупье. <a href=https://cadpower.iitcsolution.com/bbs/board.php?bo_table=free&wr_id=110768>https://cadpower.iitcsolution.com/bbs/board.php?bo_table=free&wr_id=110768</a> На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не сможете активировать и получить бездепозитный бонус.Кешбэк-бонус дает собой возврат фиксированного процента от ставки если, тогда, поражения либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%. 1×slots казино мобильная версия
1×slots бездепозитный бонус за регистрацию
Иногда виде бездепа, казино дарует наименьший приз (до 50 рублей), из-за которого не стоит заморачиваться.Для получения предоставленных бонусов вас пригодиться — ПК или мобильное устройство, и остальное дело за небольшим. <a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=49094>1×slots бездепозитный бонус за регистрацию</a> Изучить управляла и обстоятельства получения бездепозитных бонусов казино, Вы можете у нас на веб-сайте в разделе с призами или на официальном сайте избранного Вами казино. Если не найти нужную информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал или по электрической почте. 1хслотс официальный сайт зеркало <a href=http://www.truenorthis.com.au/mediawiki/index.php/%D0%98%D0%B7_%D0%A7%D0%B5%D0%B3%D0%BE_%D0%A1%D0%BE%D1%81%D1%82%D0%BE%D0%B8%D1%82_%D0%94%D0%B8%D0%B5%D1%82%D0%B0_%D0%95%D0%BB%D0%B5%D0%BD%D1%8B_%D0%9C%D0%B0%D0%BB%D1%8B%D1%88%D0%B5%D0%B2%D0%BE%D0%B9>http://www.truenorthis.com.au/mediawiki/index.php/%D0%98%D0%B7_%D0%A7%D0%B5%D0%B3%D0%BE_%D0%A1%D0%BE%D1%81%D1%82%D0%BE%D0%B8%D1%82_%D0%94%D0%B8%D0%B5%D1%82%D0%B0_%D0%95%D0%BB%D0%B5%D0%BD%D1%8B_%D0%9C%D0%B0%D0%BB%D1%8B%D1%88%D0%B5%D0%B2%D0%BE%D0%B9</a>
1 хслот регистрация в 1×slots casino
Многие новички сомневаются, что поощрительный приз не будет возвращать, и в они выиграли у казино. Это безусловно безопасно и накрепко. Выводя выигранные средства, игрок просто одергивает свое участие в игре и теряет уникальную возможность – бесплатно наращивать собственное материальное положение.Более солидные предложения встречаются довольно изредка. Зачастую они доступны только VIP-игрокам. В остальных случаях им всего сопутствуют очень строгие обстоятельства отыгрыша. Также вероятны дополнительные обстоятельства прочие лимитирования, прописанные в условиях и положения бонусной программы казино. <a href=http://clipartus.ru/user/DeweyShugs/>http://clipartus.ru/user/DeweyShugs/</a> Особую изюминку видео слотам присваивают оригинальные знакы. С их свет активизируются разные призы. Вы сможете запустить дополнительный степень и увеличить необходимую выигрыша. Есть знаки, которые замещают негодные элементы и сами создают выигрышные комбо. Не стоит забывать и на бонус-тур. После любого удачного спина есть шанс прирастить сумму выигрыша в два либо четыре раза.Поспешите забрать бездепозитные призы за регистрацию в казино из представленного списка. Все платформы не водят законную работа, хотя и обрадуют добросовестными плодами игры, высочайшей отдачей, быстрыми выплатами. 1×slots регистрацию более популярный вариант это
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=36318>1×slots casino зеркало</a>
<a href=http://soumoli.com/home.php?mod=space&uid=24916>1×slots регистрацию процедура займет всего лишь</a>
<a href=https://www.xn–72c9aa5escud2b.com/webboard/index.php/topic,525570.new.html#new>1хслотс регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Постарайтесь отыграть вейджер, чтобы появилась вероятность забыть заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные приборы. Вы можете получить выигрыш на электронной кошелёк, карту, телефон.
#7575 Charlesgunny
букмекерскую контору пин 1×bet официальный <a href=https://vestnik-jurnal.com/>включи казино</a> порно с Виктория Синицина, фигуристка pin up casino top top <a href=https://res-publika.com>букмекерские контора ап</a> казино рояль официальные сайты казино казино фильм онлайн vavada casino песня казино почему в казино нет часов сайт казино зеркало
#7576 Charlesgunnyhttp://filmkachat.ru
1× slots регистрация в 1×slots casino
Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке нужно восполнить счет в казино. Для депозитных бонусов, эта процедура не необходима, например как депозит теснее изготовлен.Не советуем сломя голову хвататься за всевозможные предложения получения средств без инвестициям. Вполне возможно, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на первый взор. Альтернативой является казино бонус за депо. Мы предлагаем вам пару советов, благодаря коим у каждого игрока будет возможность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств: <a href=http://filmkachat.ru/>1×slots зеркало регистрация</a> <a href=https://www.divephotoguide.com/user/kalinka0588>https://www.divephotoguide.com/user/kalinka0588</a> Сроки активации приза устанавливаются любым казино, хотя почаще всего они не превышают недели с этапа получения. Игроку непременно надо(надобно) применять бездеп на указанного срока, в ином случае бонус просто пропадет. Каждый приз можно получить лишь один один, поэтому если не применять бездеп в срок, у игрока не несомненно второго шанса им воспользоваться. 1×slots зеркало видели такую регистрацию на <a href=https://training.trainingstree.com/author/jamesreeme/>https://training.trainingstree.com/author/jamesreeme/</a> Вышеописанная причина и является главным интересным, из-за которого операторы отдают часть своей прибыли на различные рекламные расходы и маркетинговые кампании. А наиболее действенным тут будут играть непосредственно бездепозитные призы казино 2022 с выводом за регистрацию.Постарайтесь отыграть вейджер, дабы появилась возможность оставить заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные приборы. Вы можете получить выигрыш на электронной кошелёк, карту, телефонный.
1хслотс зеркало на сегодня
<a href=https://creapnl.com/foros/tema/1×slot-%d0%be%d1%84%d0%b8%d1%86%d0%b8%d0%b0%d0%bb%d1%8c%d0%bd%d1%8b%d0%b9-%d1%81%d0%b0%d0%b9%d1%82–48/>1×slot официальный сайт</a> 1хслот зеркало Практически все интернет казино с бездепозитным бонусом за регистрацию предусматривает программку преданности — систему одобрения постоянных клиентов, которая состоит из колличества значений. При достижении игроком очередного значения на его счёт поступает приз. Чем повыше степень — тем щедрее бонус. <a href=http://www.kiripo.com/forum/member.php?action=profile&uid=1114544>http://www.kiripo.com/forum/member.php?action=profile&uid=1114544</a> 1хслотс казино зеркало
1×slots casino зеркало
В каждом казино с бездепозитным призом предусмотрены вейджеровые обстоятельства. Это один-единственный «подводный камень», кот-ый стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, нужно сделать определённое количество ставок. Чем круче бонус, тем сложнее выполнить условия, и наоборот. <a href=http://www.ceraunavoltapavullo.it/index.php?option=com_k2&view=itemlist&task=user&id=1128856>http://www.ceraunavoltapavullo.it/index.php?option=com_k2&view=itemlist&task=user&id=1128856</a> Превышение максимальной ставки при отыгрыше. Система автоматически не предуведомляет о превышении ставки, поэтому о нарушении правил игрок возможность разузнать теснее после подачи запроса на вывод средств.Многие азартные клубы ограничивают необходимую вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не сможете вывести. Разница несомненно аннулирована, Вы и не сможете создавать на нее ставки. 1хслотс 1хслотс регистрация перейти на 1×slots Некоторые онлайн-казино без депо предлагают новым посетителям выбрать бонус при регистрации. Будьте внимательны: выбрав один, вы в абсолютном большинстве случаев не можете пользоваться остальными.
1×slots casino регистрация 1×slotscasin online
Иногда у посетителей сайта все появиться проблемы при активации приобретенного промо-кода. В таких случаях, нужно адресоваться за подмогою в службу поддержки «Support». Для получения ответа, обязательно указывается определенная первопричина воззвания и подтверждается информация дополнительными снимками. Если сложилась спорная ситуация, всегда возможно обратиться к главному регулятору или контролирующему органу, выдавшему этому заведению лицензионный документ. <a href=http://check2go.net/my-account/>1×slots casino регистрация 1×slotscasin online</a> Акции распространяются как на все забавы казино, например и на узкий список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino прочие. Промо имеет обхватывать разработки 1-го производителя. Бездеп не пересекается с иными акциями казино. Если на сайте учтен кэшбек, он не начисляется за ставки, сделанные бонусными деньгами. Для идентификации платежных реквизитов игрока возможность потребоваться пополнение счета на наименьшую сумму. 1×slots коды <a href=http://yartube.ru/user/JoshuaDiank/>http://yartube.ru/user/JoshuaDiank/</a>
1×slot регистрация
Бесплатный бонус – кредиты, коие онлайн-казино начислит клиенту, не заставляя его пополнять игровой счет.Бездепозитные призы казино за регистрацию в 2022 году — это вероятность поиграть за счёт заведения. Казино даёт посетителю шанс пользоваться определённой суммой либо количеством даровых вращений без внесения депо. Не путайте деморежим с реальной забавой без надобности внесения депозита. <a href=http://artshi.ru/index.php?subaction=userinfo&user=demonicevidence>http://artshi.ru/index.php?subaction=userinfo&user=demonicevidence</a> 1×slots промокод при регистрации 2025 Обычно, бездепозитные призы выдаются под определенные слоты с фиксированной ставкой, но их наверняка воспрещено применять в игровых автоматах с прогрессивным джекпотом. Список игр, каких можно применять бездеп, Вы найдете в описании акции или можете уточнить у службы заведения.Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и более. Когда игроку полагается количество фриспинов, администрация имеет разбивать их начисление на количество дней. Бесплатные вращения предоставляются для определенного слота, который указывается в правилах промоакции.
<b>Смотреть еще похожие новости:</b>
<a href=http://t954381g.bget.ru/user/JosephPiery/>1×slots casino регистрация на сайте</a>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=192795>скачать 1×slots на андроид мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Предложения с бездепозитными бонусами за регистрацию разрешают новым заведениям заинтересовать аудиторию на собственный сайт. А игроки же получают возможность играть на настоящие деньги без депо в казино и заработать маленький стартовый капитал, кот-ый разрешается исключить на карту банка либо электрический кошелек. Верификация необходима для дополнительной защищенности и может техподдержке выявить бонусхантеров и мошенников. Кстати, на некоторых платформах выводы солидных сумм доступны лишь после подтверждения личности.
#7577 Charlesgunny
лучшая казино играющие казино онлайн <a href=https://m.repost.news/>букмекерская контора скачать приложение</a> 1×bet зеркало на сегодня сайт винлайн букмекерская контора <a href=https://slon-ru.com/>какие казино</a> букмекерская контора фонбет Юдаева Ксения Валентиновна порно официальные сайты казино 7k casino официальный сайт порно с Зырянова Анастасия Владимировна casino автомат букмекерская контора бетсити
#7578 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7579 Charlesgunnyhttp://filmkachat.ru
1×slots мобильная версия войти казино
В интернете очень много скриптовых вебсайтов, коие принадлежат мошенникам. Их основная задача – привлечь гэмблеров, пообещав столько великодушные подарки, хотя и крупные выигрыши. Так собственно некоторые веб-сайты предлагают получить за регистрацию и $1 000.Чем ниже значение вейджера, что, этим проще отыграть и вывести приз. Если Вы расчитываете заработать на бездепе, не просто ознакомиться с свежим игровым клубом, то стоит избегать бонусов с высочайшим вейджером их почти не реально отыграть. С ними Вы можете лишь протестировать игры заведения. <a href=http://filmkachat.ru/>1×slots регистрация на сайте 1×slots ru com</a> Мы подготовили перечень, где есть постоянно животрепещущие и свежие бездепозитные бонусы казино, коие вы можете получить бесплатно. Для наших пользователей есть особые предложения эксклюзивные бонусы, коие вы у не найдете, их мы обозначили особой красной плашкой «Exclusive».Чаще всего, популярные сервисы, эти как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно обязательное правило. Финансовые средства выводятся только спустя ту платежную систему, которой пользовались для пополнения депо. Если же игрок получил бездепозитный покерный приз, потребуется восполнить счет на минимальную необходимую, кот-ая сочиняет обыкновенно 10 долларов. <a href=http://www.alexandria.gov.eg/Lists/List30/DispForm.aspx?ID=78730>http://www.alexandria.gov.eg/Lists/List30/DispForm.aspx?ID=78730</a> рабочее зеркало 1хслотс <a href=https://www.conduttricitv.com/2022/12/caterina-balivo-il-grande-valore.html>https://www.conduttricitv.com/2022/12/caterina-balivo-il-grande-valore.html</a> Доступ к дару имеет раскрываться механически в введения промокода или обращения в службу вебсайта. В первом случае от пользователя не потребуется практически деяний. Бездеп с активацией по коду встречается чаще всего. Игроку нужно ввести совокупа символов в графе, которая возможность находиться в регистрационной форме в Личном офисе.Существуют казино с бонусом за регистрацию, в довольно популярны фриспины в онлайн казино впоследствии регистрации в определенных играх. Они встречаются том чаще бесплатных поощрений или классических призов в казино без вложений. Например, игрок регистрирует счет, на кот-ый начисляются безвозмездные забавы, бонус за регистрацию повторяющий безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса игрок выигрывает настоящие деньги, которые в последствии можно успешно вывести из заведения на свою платежную систему. То есть, есть шансы вывести свои без рисков своими финансами. Регистрация, за компьютерные получит призы, займет несколько, а спасибо данному можно прирастить пять евро поощрений до тыс. И без всяких заморочек вывести их.
зеркала 1×slots
Создание аккаунта. На сайте казино необходимо открыть регистрационную форму и заполнить порожние поля собственными данными. Иногда на данном шаге потребуется показать лишь адрес электрической почты и пароль, но чаще хотелось наполнить анкету индивидуальной информацией (ФИО, дата рождения, место проживания и т.д.). Нужно свидетельствовать только настоящие данные, поскольку впоследствие они будут проверены. 1×slots casino регистрация 1×slots review live Но такие рамки не смущают числе хайроллеров, поскольку коэффициенты на слотах разрешают рассчитывать на крупные выигрыши, а в некоторых автоматах разыгрывается прогрессивный джекпот. <a href=http://www.gwmph.cn/home.php?mod=space&username=plantpowder96>http://www.gwmph.cn/home.php?mod=space&username=plantpowder96</a> Акции распространяются как на все игры казино, так и на ограниченный список. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и другие. Промо имеет обхватывать разработки 1-го производителя. Бездеп не пересекается с иными промоакциями казино. Если на веб-сайте предусмотрен кэшбек, он не начисляется за ставки, сделанные бонусными деньгами. Для идентификации платежных реквизитов игрока может потребоваться пополнение счета на минимальную необходимую. 1хслотс официальный сайт зеркало Не стоит незамедлительно же открещиваться от приветственных презентов в похожих казино. Администрация готова начислить деньги или фриспины, но предварительно работники обязаны убедиться, что вы не аферист. Дело в том, собственно развелось очень много охотников за призами. Они выучились дурачить систему и наваривать крупные суммы денег.
1хслотс мобильная версия зеркало
Для получения выигрыша требуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить определенную необходимую, но теснее из личных денег. Она рассчитывается из совместного размера выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, случае пользователь выиграл 1000 руб., а множитель составляет х30, исключить деньги возможно несомненно, сделав ставки на 30 000 рублей. <a href=http://stroygorod.su/user/Henryvilla/>http://stroygorod.su/user/Henryvilla/</a> 1×slots casino зеркало
сайт 1× slots casino
Для получения приза нужно пригласить в игру нового клиента. Казино начислит пригласившему фиксированный процент от взносов приглашённого в виде приза: чаще всего его объем не превышает 10%. Срок действия приза как не выше месяца: пригласивший получает приз в зависимости от проигранных ставок приглашённого в первый месяц забавы.Большинство клубов завлекают внимание компьютерные за счёт разнородных даров. На одних сайтах возможно получить виртуальные кредиты, коие откроют доступ ко всему софту. На иных же, администрация предлагает безвозмездные вращения для пуска лучших интернет слотов. Несмотря на разные акции, стоит выделить самые главные. Акции распространяются как на все игры казино, так и на узкий перечень. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и другие. Промо имеет охватывать разработки 1-го производителя. Бездеп не пересекается с другими акциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, изготовленные бонусными деньгами. Для идентификации платежных реквизитов игрока имеет понадобиться пополнение счета на наименьшую сумму. 1×slots зеркало этих способов предполагает регистрацию <a href=http://obruchalka-vrn.ru/index.php?subaction=userinfo&user=tightfistedtask>http://obruchalka-vrn.ru/index.php?subaction=userinfo&user=tightfistedtask</a>
1×slots сайт
Такой казино бонус без депо за регистрацию выдается игроку на час и активно употребляется данное предложение с 2017 года. Это словно какая-то маскировка поощрения под бездепозитный. Суть всего этого сводится к тому, собственно игроку на час выдается, например, 1000 долларов, а реклама утверждает про, собственно каждой выигрыш возможно будет дальнейшем забыть при себя. Но в играющий всерьез отнесется к данному предложению, то он просто растеряет время. Ведь игроку надо(надобно) будет выступать не в аккаунте, а в тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (в всей тыс. ) в правила вступят конкретные обстоятельства, где будет сказано, собственно максимальной суммой победы имеет быть лишь двести $ и средства можно применять только виде бонуса на 1-ый лепта с вейджером 25 от суммы гонорары плюс сам депозит. По результату выйдет, что игрок выигрывал себя 200% приз с вейджером на конкретную сумму. Короче говоря, это все не вашего медли.Баланс игрока дополняется на подходящую сумму. К ней применяется вейджер, обозначенный в правилах акции. Вывести выигрыш возможно будет последствии того, как юзер сделает требуемый объем ставок из личных средств. В редчайших случаях бездеп трудится в формате Free Play. На счет юзера зачисляется крупная сумма, и предоставляется маленький срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по окончании этого периода сумма на счету несомненно превосходить изначальную, то разницу можно несомненно исключить либо применять для дальнейших ставок. <a href=https://clicgo.ru/user/HenryCASTY/>https://clicgo.ru/user/HenryCASTY/</a> Для получения приза надо(надобно) ознакомиться с программой лояльности казино и сделать ставки на необходимую, необходимую для перехода на грядущий уровень. 1×slots официальный сайт мобильная версия скачать
<b>Смотреть еще похожие новости:</b>
<a href=http://aficionado.pl/showthread.php?141888-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82&p=161102>казино 1×slots официальный сайт</a>
<a href=https://g2clubs.com/healthy-workout/google/#comment-23996>казино 1×slots</a>
<a href=https://clubdefansde24.com/foro/viewtopic.php?t=18246>1×slots зеркало видели такую регистрацию на</a>
<a href=https://showboysmedia.com/real-music/#comment-54165>1×slots регистрацию процедура займет всего лишь</a>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-4977/#comment-594777>скачать 1×slots на андроид мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные призы казино за регистрацию в 2022 году — это возможность сыграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой или количеством бесплатных вращений без внесения депозита. Не путайте деморежим с реальной забавой без надобности внесения депо.
#7580 Charlesgunny
порно с Карен Хачанов (теннис) 1×bet вход <a href=https://vestnik-jurnal.com/>пина casino</a> porno Юлия Канакина рейтинг казино <a href=https://t.me/vchkogpu_ru>Александра Бортич</a> Яровая Ирина Анатольевна порно Набиуллина Эльвира Сахипзадовна порно зеркала казино 1×bet слоты почему казино казино вход официальный сайт Анна Михалкова
#7581 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7582 Charlesgunnyhttp://filmkachat.ru
1х слот 1хслотс регистрация перейти на 1×slots
Таким образом, заведение пытается показать себя своим потенциальным игрокам, а подобный маркетинговый ход как казино бонус без депозита за регистрацию привлекает очень количество внимания к игорному заведению и обеспечивает постоянный поток новых посетителей и грядущих клиентов игрового интернет клуба.Кешбэк-бонус дает собой возврат фиксированного процента от ставки в случае проигрыша либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%. <a href=http://filmkachat.ru/>казино 1×slots</a> <a href=https://www.dmxzone.com/support/13984/topic/148653/>https://www.dmxzone.com/support/13984/topic/148653/</a> Нет. Для получения бездепозитного бонуса в казино необходима неотъемлемая регистрация на веб-сайте. Играть в слоты даром и без регистрации возможно только в демо режиме. 1× slots официальный <a href=https://emaze.me/glavdorogadv0307#untitled>https://emaze.me/glavdorogadv0307#untitled</a> Чтобы бездеп не был начислен на Ваш акк, Вам не активировать бонусный код. Если поощрение от казино было добавлено на Ваш акк автоматически, а Вы не планируете его применять, обратитесь в службу поддержки с просьбой отменить бездепозитный бонус.Простая процедура получения бездепозитного приза, которая займет не более 2-х мин. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные.
1х слот 1хслотс регистрация перейти на 1×slots
Помните, собственно всевозможные нарушения управлял сведут на нет ваши усилия, и вы скорее останетесь без начисленного вас бесплатного приза. Всегда изучайте верховодила начисления и условия вейджера. По каким вопросам, на коие вы не самостоятельно найти ответы, обращайтесь за разъяснениям и саппорт.Исходя из сего, просто не существует мудрых оснований махнуть рукой на получение такого бонуса при регистрации. И, заметить,, на такой бесплатной базе у вас все шансы выиграть средства и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные призы, называют безвозмездными онлайн платформами для игр. <a href=https://adminclub.org/showthread.php?tid=62186>1×slots регистрация 1×slots casino 777 online</a> 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=http://wiki.iurium.cz/w/U%C5%BEivatel:AldaPerdriau4>http://wiki.iurium.cz/w/U%C5%BEivatel:AldaPerdriau4</a> 1хслотс казино зеркало
1×slots быструю регистрацию а также мгновенное
<a href=http://radshir.com/products/index.php?subaction=userinfo&user=voicelesseyesig>http://radshir.com/products/index.php?subaction=userinfo&user=voicelesseyesig</a> При регистрации сомнений или ином онлайн игральном заведении — вам дается один шанс испытывать собственную удачу не внося средства монеты. Замечу собственно такую поощрительную предложение деют не все интернет игровые площадки, а лишь великодушная середина(средина) из их. Которые мы подготовили для Вас в нашем списке. 1×slot зеркало рабочее регистрации на телефон придет
1хслотс зеркало на сегодня
Бездепозитные бонусы — это подарки от казино в виде бонусных средств либо фриспинов для игровых автоматов, которые начисляются на акк игрока в процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депо не требуется. <a href=https://www.mshowto.org/forum/members/jamespauri.html>1×slots казино зеркало</a> Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают бонус по государствам. Вплоть до такого, что клуб имеет себя игроков из Вашей государства, а бездеп мешает. Большинство интернет-казино из нашего топ-10 готовы порадовать вас неповторимыми промоакциями. Читайте о них в обзорах и на форуме. 1×slot казино зеркало <a href=https://coinzaa.com/u/Patrickskync>https://coinzaa.com/u/Patrickskync</a>
1хслотс рабочее зеркало на сегодня
Рассмотрим принцип его деянья на образце. Допустим, вы зарегались и возымели $10 no down payment bonus с вейджером х50. Это означает, собственно выигранные средства возможно несомненно выводить не ранее, чем после того, как общая сумма ставок достигнет $500.Так что приготовьтесь предоставить секретную информацию (пол, возраст, страна проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев проверка данных занимает не более суток, после чего получится беспрепятственно выводить крупные выигрыши. Отзывы читателей о бонусных акциях помогут составить эмоцию, хотя не запамятовывайте о субъективности собственных объяснений.Внесение депозита – Будьте готовы восполнить счет последствии отыгрыша приза. Это обычное требование верховодил для данного типа промо-акций. Лучше заранее уточнить, какую необходимую надо(надобно) будет заносить на счет. Как верховодило, речь о минимальном депозите, хотя вы обязаны быть уверены, что он вам по кармашку. <a href=http://www.postcount.net/forum/member.php?117452-Charlesprete>http://www.postcount.net/forum/member.php?117452-Charlesprete</a> 1хлот регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://portugal-campings.com/pt/profile/jamescip/>1×slots официальный сайт мобильная версия</a>
<a href=http://www.arka-bahce.org/forum/showthread.php?p=763456#post763456>1×slots акции</a>
<a href=https://forum.ltp-team.com/topic/48991–1×slots-oficialnyy-sayt-skachat/>1×slots официальный сайт скачать</a>
<a href=https://www.ldvd.nl/no-22-san-diego-place-rallies-very-last-boise-country-27–16?page=48#comment-238276>1× slots регистрация в 1×slots casino</a>
<a href=http://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=6268>1×slots быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бонусы без депо при регистрации числятся наиболее привлекательными как для опытнейших игроков, так для и начинающих. Получив это вознаграждение, клиент может выступать на реальные средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные призы в интернет-казино Рунета, а также обстоятельства их активации и выигрыша.
#7583 Charlesgunnyhttp://filmkachat.ru
1×slot регистрация
Фриспины. Бесплатные вращения предусмотрены для применения в видео-слотах. Внимательно читайте обстоятельства – они часто выдаются для некоторых машин. В зависимости от клуба возможность создавать конкретное количество ставок. Кстати, современные игорные дома дают вероятность заводить «одноруких злодеев».Не сложно догадаться, собственно not the slightest deposit bonuses почти никогда не бывают большими. Чаще всего идет о пяти–тридцати долларах (или эквиваленте данной суммы в иной денежной). <a href=http://filmkachat.ru/>1х слот 1хслотс регистрация перейти на 1×slots</a> Кешбэк-бонус представляет собой возврат фиксированного процента от ставки если, тогда, поражения либо же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не превышает 10%.Наш список содержит лучшие бездепозитные бонусы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по принципиальным параметрам: <a href=http://www.pvp.iq.pl/thread-5909.html>http://www.pvp.iq.pl/thread-5909.html</a> 1×слотс казино <a href=http://boltyshki.unoforum.pro/?1–2–0–00003895–000–0–0>http://boltyshki.unoforum.pro/?1–2–0–00003895–000–0–0</a> Это один из основных показателей привлекательности подарка. С завешенным коэффициентом том профессионалы не сумеют выполнить обстоятельства по отыгрышу. И маловажно, как привлекательно выглядит предложение – бездепозитный бонус казино в объеме $500 или $1 000. Чтобы новенькие попревосходнее вдумались, собственно же это вейджер, мы разберём на образце.Для получения депозитного приза необходимо восполнить собственный игровой баланс реальными средствами. Вознаграждение можно получить или при внесении первого депозита, или повторяющий фиксированного процента от внесённых средств. Так либо иначе, бонус поступит на счёт лишь после пополнения.
1×slots зеркало рабочее
Прежде чем активировать бездеп, нужно увериться сомнений, что страна, гражданином коей является игрок, не входит в список не.Можно. Вы всегда сможете отрешиться от получения бездепозитного бонуса за регистрацию в казино, же Вы не создадите ставку. <a href=https://www.sgomberisgombero.it/my-account-2/>1×slots регистрация 1×slotscasino09k online</a> 1×slots зеркало сайта На бонусные начисления могут быть установлены вспомогательные лимитирования, коие Вы не сведению при отыгрыше. Пока бонус всецело не отыгран — деньги из казино не выводятся.Иногда для получения призов нужно связаться с адептами службы поддержки. Удобнее всего с ними беседовать в онлайн-сате, хотя времени достаточно запроса по электрической почте. <a href=http://suncheon.info/bbs/board.php?bo_table=free&wr_id=91287>http://suncheon.info/bbs/board.php?bo_table=free&wr_id=91287</a> Бонусные деньги – небольшая сумма денег для старта в новом казино. На бонусные деньги, обыкновенно разрешается выступать во все игры, не слотов с прогрессивным джекпотом и игр из раздела exist casino.Реже бонусы без депо начисляются неизменным игрокам. С их помощью администрация старается вычесть ценных клиентов либо вожделеет поблагодарить за преданность верных посетителей. Но намного почаще для сходственных целей используются такие промоакции: 1×slots зеркало видели такую регистрацию на В истинное время получить бонус за регистрацию в казино довольно просто. Почти любой игорный дом с радостью предоставит средства либо безвозмездные вращения. Многие игроки используют этим и не стыдятся региться в любом клубе с выгодными критериями. Кстати, это отличная возможность выдумать выигрышную тактику и сорвать куш.B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.
1×slots регистрацию процедура займет всего лишь
На данном разделе портала периодически публикуются обзорные заметки, в рассматриваются безвозмездные бонусы наилучших интернет-казино. Информация структурирована по нескольким пт, включая главные: B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. <a href=https://opaseke.com/users/7877>https://opaseke.com/users/7877</a> Такой бесплатный эквивалент средств зачисляется на профиль юзера в осуществления притязаний и предназначаются они только для игрового процесса. Вывод этих вознаграждений возможен только в осуществления вейджеровых критерий.Возможность поиграть дополнительное состязание (а время и несколько) совершенно даром, а выигрыш, тому, поступает на счёт игрока. 1×slots регистрация то дальше необходимо пройти В реальное время получить приз за регистрацию в казино довольно просто. Почти любой игорный жилище с радостью даст деньги или безвозмездные вращения. Многие игроки пользуются данным и не стесняются региться в любом клубе с прибыльными условиями. Кстати, это замечательная вероятность придумать выигрышную тактику и сорвать куш.
зеркло казино 1×slots
Мы собрали и выпустили список наилучших бездепозитных казино с призами за регистрацию, коие гарантируют великодушные выигрыши и моментальные выплаты.Операторы гемблинга утверждают, что так они борются с бонус-хантерами. Впрочем, критики считают, что этим казино пробуют устроить из случайного постояльца постоянного игрока. Маркетинговая политического всех игорных интернет-клубов должна одевать разнородный нрав. И случае гонорары на депо служат для того, чтобы провоцировать заносить депозиты и поощрять теснее имеющих юзеров, то бездепозитный приз в казино либо бонус за регистрацию в казино, до всего, рассчитан на расширение базы покупателей.В списке требований к отыгрышу нередко наличествуют лимиты на ставки при игре на личные деньги. Так, в отыграть надо(надобно) 30 000 рублей, а максимальная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 один. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам деянья промоакции. Онлайн гемблинг развивается с каждым деньком больше и больше, свежие бренды создаются не по дням а по часам. Новые онлайн казино проделывают вступительные промоакции для игроков, чтобы, чтобы собственно бы зарекомендовать себя, и что, этим самым предлагают бездепозитные призы за регистрацию, что бы не пропустить такую вероятность — как пользоваться новым бездепом, советуем посещать наш сайт как можно чаще, самое аппетитное и новые несомненно добавляться в данном же перечне. 1×slots сайт <a href=https://orbitalscoreboard.com/user/ralpheroxy/>https://orbitalscoreboard.com/user/ralpheroxy/</a> Нет. Казино выдают безвозмездные бонусы за регистрацию, для того, дабы заказчик мог ознакомиться с игровым заведением. А чтобы исключить его, необходимо выполнить условия отыгрыша.Как лишь на виртуальном счету окажутся бонусные свои, поторопитесь отыграть вейджер. Сразу после сего возможно оставить заявку на вывод выигрыша. Кредиты выгодно отличаются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом реальных средств и выделяют возможность ощутить задор. Во-вторых – можно насладиться любой азартной игрой доступной на сайте. В вашем распоряжении присутствуют автоматы, настольные прибавленье, видео-покер, Live-дилеры.
1хслотс рабочее зеркало на сегодня
Но а если вы уже профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в интернет казино; <a href=http://autobrands.lv/user/RandalNot/>http://autobrands.lv/user/RandalNot/</a> Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? 1×slots зеркало регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=http://portal.westcoastbible.org/discussion/viewtopic.php?f=18&t=1928629>1хслот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Можно ли наваривать на бездепозитных бонусах? Это не работа, тут как повезет, в в любом предложенном безедепе, вы будете откручивать вейджер и выводить, это можно именовать везением, и дополнительной добавкой к вашему бюджету. B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.
#7584 Charlesgunny
7k casino официальный сайт где казино <a href=https://www.ossetia.tv/>kent casino регистрация</a> рейтинг казино Окладникова Ирина Андреевна порно <a href=https://krtka.info/>casino ru</a> Приезжева Екатерина Геннадьевна порно пина casino Черкесова Бэлла Мухарбиевна порно casino приложения официальное казино вход Александра Бортич 1×bet официальный xbet
#7585 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7586 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации 2025
Бесплатный бонус – кредиты, которые онлайн-казино начислит клиенту, не принуждая его пополнять игровой счет.Однако далековато не все ресурсы предлагают своим клиентам бездепозитные призы за регистрацию в казино. В большинстве случаев предусмотрено одобрение на 1-ый депо в объеме 100–200%. Это замечательная возможность преумножить банкролл, увеличить время, проведённое за игрой и шансы сорвать большой куш. <a href=http://filmkachat.ru/>1хслотс рабочее зеркало на сегодня</a> Наш список включает в себя превосходнейшие бездепозитные бонусы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по важным параметрам:В количестве случаев безвозмездные бонусы начисляются в кредитах, коие невозможно незамедлительно исключить со счета. Прежде их нужно отыграть по установленным правилам. Эти требования принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д.). О нем читайте ниже. <a href=https://www.dailygram.com/blog/1319572/how-modern-architectural-drafting-companies-transform-design-ideas-into-rea/>https://www.dailygram.com/blog/1319572/how-modern-architectural-drafting-companies-transform-design-ideas-into-rea/</a> 1хслотс казино зеркало <a href=http://noydpo67.ru/bitrix/redirect.php?goto=http://ritual-1.ru/bitrix/rk.php?goto=http://latinsubcul.hatenablog.com/iframe/hatena_bookmark_comment?canonical_uri=https://teletype.in/@urist555/BDqB8AaIdAM>http://noydpo67.ru/bitrix/redirect.php?goto=http://ritual-1.ru/bitrix/rk.php?goto=http://latinsubcul.hatenablog.com/iframe/hatena_bookmark_comment?canonical_uri=https://teletype.in/@urist555/BDqB8AaIdAM</a> Каждый игры обязан сначала детально выучить обстоятельства по получению и отыгрышу понравившегося подарка. Если всё организует, поспешите отобрать благотворительные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо момент начать вращать барабаны топовых слотов.Если вы выбрали себе количество брендов коие вас больше всего полюбились, для неизменной игры! Таких гемблеров казино очень любит и ценит, за частую такие игроки становятся VIP игроками заведения, коим нередко поступают выгодные предложения повторяющий бонусов, например же туда заходит и бездепозитные.
1×slots зеркало регистрация то дальше необходимо пройти
Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации презента необходимо доказать электрическую почту и привязать телефон;Помните, что любые нарушения верховодил сведут на нет ваши усилия, и вы наверняка останетесь без начисленного вас безвозмездного бонуса. Всегда изучайте управляла начисления и обстоятельства вейджера. По каким вопросам, на которые вы имеет помощи отыскать ответы, обращайтесь за объяснениям и саппорт. 1×slots рабочее зеркало Это тоже бесплатные финансы, коие поступают на аккаунты новоиспеченных геймеров в регистрирования. А особенность этих призов произведено в том, что обретенные финансы непременно стопам использовать в продолжении назначенного медли.Также бездепозитные призы имеют служить методом возвратить к игре посетителей, что приостановивших своё сотрудничество с компанией: извещение о бездепе поступает на мобильный аппарат или почту. <a href=https://dawonprint.com/bbs/board.php?bo_table=free&wr_id=237294>https://dawonprint.com/bbs/board.php?bo_table=free&wr_id=237294</a> Приветственный бездеп предоставляется хоть игроку только один один. Казино борются с так называемыми бонусхантерами (от англ. Bonus Hunter — охотник за призами), пытающимися заводить многочисленные аккаунты для обмана оператора и повторного получения подарка. Исключить сходственные действия разрешает верификация данных. Администрация вправе потребовать у посетителя подтвердить персональные данные, обозначенные при регистрации.При небольшой сумме бонуса рекомендуется выступать по невысоким ставкам, а использовать наибольшие никакого только в случае, в вейджер слишком великой, а время на отыгрыш крепко ограничено. 1хслот скачать Принципиальным отличием даровых бонусов от бонусов на депозит является неимение необходимости вносить средства на аккаунт. Из-за этого их нередко нарекают бездепозитными (no down payment bonuses).
1хслотс зеркало
Однако в условиях скрываются «подводные камешки», которые не разрешат исключить солидную сумму или же вы не успеете отыграть вейджер. Поэтому профессионалы рекомендуют забрать благотворительные вращения за регистрацию в казино без депо, чтобы поднабраться навыка и получить реальный шанс на победу. После получения приза вывод средств для клиента несомненно недосегаем того, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо пара месяцов. Выводить деньги игрок сможет только в отыгрыша.Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных обстановок с казино, когда после отыгрыша бездепа вас не дадут вывести солидную сумму выигрыша. <a href=https://www.kenpoguy.com/phasickombatives/profile.php?id=2185987>https://www.kenpoguy.com/phasickombatives/profile.php?id=2185987</a> 1×slots зеркало сайта Так собственно приготовьтесь дать секретную информацию (пол, возраст, страна проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает не более суток, последствии чего удастся беспрепятственно выводить крупные выигрыши.Если вы опытный игрок, вы обязаны аристократия, собственно бонус без депо – редкая находка. Тем ниже, мы раз исследуем интернет, дабы найти для вас превосходнейшие бездепозитные предложения.
1×slots зеркало регистрация в 1×slots casino
<a href=http://theauction.com.au/my-account/>1×slots официальный сайт зеркало рабочее</a> Так собственно приготовьтесь дать секретную информацию (пол, возраст, страна проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает менее суток, последствии чего удастся беспрепятственно выводить крупные выигрыши. Объективные – объем бонуса, коэффициент и обстоятельства вейджера, необходимость внесения депо для вывода средств;Также есть онлайн-платформы азартных игр, коие применяют раздачу бездепозитных призов в особые даты (как для казино, например и для игрока). Помимо сего, действующие геймеры также имеют возможность получить похожие бонусы за свою деятельность (например, за повышения значения либо за похожие заслуги). 1×slots регистрация на официальном сайте <a href=https://telegra.ph/Unlock-the-Power-of-3D-Modeling-A-Comprehensive-Guide-to-Top-Notch-Services-06–18>https://telegra.ph/Unlock-the-Power-of-3D-Modeling-A-Comprehensive-Guide-to-Top-Notch-Services-06–18</a> У любого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано смогли выполнить их, мы дадим некоторое советов. Если система начислила небольшую сумму, не создавать немалые ставки – остановитесь на 10–30 центах. Как лишь сможете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте выступать. В неприятном случае никакого присмотреться к другому автомату.Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, дабы еще раз получить безвозмездный бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ожидает неизбежное наказание.
1×slots зеркало на сегодня
Для всех бездепозитных призов действует наибольший предел на выигрыш. Он показывает предельную необходимую, коию появится получить, играя на бонусные кредиты. Как только для удастся выполнить требования вейджера, дозволенный максимально будет переведен с бонусного счета на главный, а остаток будет списан. Баланс игрока дополняется на подобающую необходимую. К ней используется вейджер, указанный в правилах промоакции. Вывести выигрыш возможно будет после как, как пользователь устроит требуемый размер ставок из собственных средств. В редких случаях бездеп трудится в формате Free Play. На счет юзера зачисляется большая сумма, и предоставляется небольшой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по окончании этого периода сумма на счету несомненно превосходить изначальную, то разницу возможно несомненно исключить или применять для последующих ставок. <a href=http://w92248uq.bget.ru/user/GlennBulty/>http://w92248uq.bget.ru/user/GlennBulty/</a> Казино выделяет возможность заработать и вывести реальные деньги на бездепозитных бонусах. Обычно, это малозначительная сумма, которую казино может для позволить презентовать игроку.У нас на веб-сайте Вы найдете перечень призов без депозита в испытанных казино и доскональную информацию то как их получить и использовать. 1× slots casino зеркало При подмоги такового одобрения оператор может того завлекать клиентов, коие ранее показывали активность на сайте, хотя по некий причине перестали выступать. В этом случае промокод высылается юзеру по электрической почте или вид SMS.
<b>Смотреть еще похожие новости:</b>
<a href=https://radios-collector.com/viewtopic.php?f=7&t=49038>1× slots casino официальный сайт</a>
<a href=https://forum.oursson.ru/viewtopic.php?f=2&t=9664>рабочее зеркало 1×slots</a>
<a href=http://www.ihavethepussy.com/de/threads/190726–1%D0%A1%E2%80%A6%D0%A1%D0%83%D0%A0%C2%BB%D0%A0%D1%95%D0%A1%E2%80%9A%D0%A1%D0%83–1%D0%A1%E2%80%A6%D0%A1%D0%83%D0%A0%C2%BB%D0%A0%D1%95%D0%A1%E2%80%9A%D0%A1%D0%83-%D0%A1%D0%82%D0%A0%C2%B5%D0%A0%D1%96%D0%A0%D1%91%D0%A1%D0%83%D0%A1%E2%80%9A%D0%A1%D0%82%D0%A0%C2%B0%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A1%D0%8F-%D0%A0%D1%97%D0%A0%C2%B5%D0%A1%D0%82%D0%A0%C2%B5%D0%A0%E2%84%96%D0%A1%E2%80%9A%D0%A0%D1%91-%D0%A0%D0%85%D0%A0%C2%B0–1×slots?p=208260#post208260>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=135976>рабочее зеркало 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Заработать на бездепозитных призах за регистрацию в казино может каждый юзер, достигший совершеннолетия. Отзывы читателей о бонусных акциях помогут составить эмоцию, хотя не запамятовывайте о субъективности собственных объяснений.
#7587 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7588 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало сайта
Чаще всего интернет-казино предлагают бездепозитные бонусы свежим пользователям. Эта промо-акция очень отлично завлекает начинающих, подталкивая их к открытию счета. Конечно, не они становятся преданными посетителями, но сам факт регистрации аккаунта играет на руку заведению.Минимального оборота. Этот предел устанавливается вейджером — же игрок не сыграет на установленную сумму, вывод средств будет недосегаем. <a href=http://filmkachat.ru/>1×slots зеркало быструю регистрацию а также мгновенное</a> <a href=https://community.networkofcare.org/blogs/qwerty/archive/2024/10/11/understanding-what-is-a-3d-render-and-how-it-works.aspx>https://community.networkofcare.org/blogs/qwerty/archive/2024/10/11/understanding-what-is-a-3d-render-and-how-it-works.aspx</a> С иной стороны, гораздо проще отобрать бездепозитные фриспины за регистрацию в казино и прямо момент начать вертеть барабаны в наилучших слотах. Главная особенность спинов никаких, собственно они предназначены для топовых автоматов. Удастся не только пройти вспомогательные раунды, но и прирастить сумму выигрыша, заработать респины и другие внутриигровые подарки. 1хслотс регистрация в 1×slots casino <a href=http://www.jisangmarket.kr/bbs/board.php?bo_table=free&wr_id=109740>http://www.jisangmarket.kr/bbs/board.php?bo_table=free&wr_id=109740</a>
1× slots зеркало
Существует ли стратегии для отыгрыша бездепозитных бонусов? К сожалению нет, на выигрыши или проигрыши с бонусов, казино либо игрок повлиять возможности, отдача игр случается от разработчиков игр. <a href=http://link.5nx.ru/viewtopic.php?f=5&t=4949>1×slots casino online регистрация</a> 1хслот зеркало сайта <a href=https://opaseke.com/users/6879>https://opaseke.com/users/6879</a> 1×slots казино зеркало
1×slots актуальное зеркало
В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, необходимо адресоваться в службу спустя лайв-чат на веб-сайте казино. Иногда у посетителей вебсайта имеют возникнуть трудности, задачи, препядствия при активации полученного промо-кода. В таких случаях, необходимо адресоваться за поддержкою в службу поддержки «Support». Для получения ответа, обязательно указывается конкретная причина обращения и подтверждается информация дополнительными снимками. Если сложилась спорная обстановка, всегда можно обратиться к основному регулятору либо контролирующему органу, выдавшему данному заведению лицензионный документ.Акции распространяются как на все игры казино, например и на ограниченный перечень. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и. Промо возможность охватывать разработки 1-го производителя. Бездеп не пересекается с иными акциями казино. Если на сайте учтен кэшбек, он не начисляется за ставки, изготовленные бонусными средствами. Для идентификации платежных реквизитов игрока возможность понадобиться пополнение счета на минимальную необходимую. <a href=https://escortexxx.ca/author/arnoldionic/>https://escortexxx.ca/author/arnoldionic/</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots
1×slots официальный сайт скачать
<a href=http://smpn1bejen.sch.id/forum/>1×slots casino online регистрация</a> Oтыгpaть приз с обозначенным вeйджepом, желаемого нужно сдeлaть cтaвoк нa cумму, превышающую размер бонуса в количество раз.При правильном раскладе бездепы — это прекрасный способ выступать на деньги без траты собственных средств. Есть некоторое советов, следуя коим можно извлечь максимально выгоды из похожих промоакций казино. Играть стопам только на лицензированных площадках. Скриптовые сайты столько накалывают с бонусными предложениями, но и употребляют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах невозможно. 1×slots актуальное зеркало <a href=http://dklada.ru/user/Zacherytewly/>http://dklada.ru/user/Zacherytewly/</a>
1×slots казино зеркало
Oтыгpaть бонус с обозначенным вeйджepом, для этого нужно сдeлaть cтaвoк нa cумму, превышающую размер приза в количество один.Заработать на бездепозитных призах за регистрацию в казино может каждый юзер, достигший совершеннолетия. На данном разделе портала периодически публикуются обзорные статьи, в которых рассматриваются бесплатные призы наихороших интернет-казино. Информация структурирована по нескольким пунктам, включая главные:Но надо думать, собственно снабжая юзеров этими призами, казино увлекается спонсированием. Ведь размеры вознаграждений, в, не великие (средним объемом от 5 до 20 долларов). И на эти средства налагаются конкретные обстоятельства и ограничения, неотклонимые к выполнению игрока, если в последствии он желает получить все свои выигранные деньги. <a href=http://goodtime63.ru/index.php?subaction=userinfo&user=ignorantideal97>http://goodtime63.ru/index.php?subaction=userinfo&user=ignorantideal97</a> 1×slots официальный сайт мобильная версия скачать
<b>Смотреть еще похожие новости:</b>
<a href=https://tabsgame.ru/user/Jamesbes/>1хслотс рабочее зеркало на сегодня</a>
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=77349&extra=>1 хслот регистрация в 1×slots casino</a>
<a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=789595>1хслотс зеркало</a>
<a href=https://www.makinamania.net/index.php?topic=250579.new#new>зеркала 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Простая процедура получения бездепозитного приза, которая займет менее 2-х мин. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные.
#7589 Charlesgunny
pin up casino скачать Окладникова Ирина Андреевна порно <a href=https://sovsekretno.net/>ешь казино</a> казино вулкан porno Александр Соболев (футбол) <a href=https://t.me/vchkogpu_ru>пари букмекерская контора</a> 1×bet casino порно с Диана Шнайдер (теннис) ев казино online casino официальный 1×bet официальный 1×bet xyz скачать букмекерскую контору на андроид Хорова Наталья Александровна порно
#7590 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7591 сейф взломостойкийhttps://vzlomostojkie-sejfy.ru/
Тут можно преобрести cейфы взломостойкие <a href=https://vzlomostojkie-sejfy.ru/>сейфы взломостойкие</a>
#7592 Charlesgunny
1×bet зеркало рабочее на сегодня casino 7k сегодня <a href=https://kompromat1.online/>порно с Баталина Ольга Юрьевна</a> Матвиенко Валентина Ивановна порно слоты казино <a href=https://7club7.com/>букмекерскую контору пин</a> официальные сайты казино бесплатно играем казино мобильные букмекерские конторы Преподобная Надежда Александровна порно сколько казино сайт букмекерской конторы champion casino
#7593 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7594 Charlesgunny
порно с Анна Щербакова, фигуристка приложения букмекерских контор <a href=https://strelochnik.com/>про казино</a> Крючкова Полина Викторовна порно скачать 1×bet на андроид бесплатно <a href=https://slon-ru.com/>лучшие казино бесплатно</a> up casino официальный casino официальный сайт промокод 1×bet скачать букмекерскую контору на андроид Мухтиярова Елена Вячеславовна порно porno Марина Александрова Шевцова Татьяна Викторовна порно
#7595 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7596 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
Oтыгpaть приз с обозначенным вeйджepом, желаемого необходимо сдeлaть cтaвoк нa cумму, превосходящую объем бонуса в некоторое раз. <a href=http://filmkachat.ru/>1×slots коды</a> <a href=https://admin.phacility.com/F520885>https://admin.phacility.com/F520885</a> 1×slots официальный сайт скачать <a href=https://itkvariat.com/user/AshleyRor/>https://itkvariat.com/user/AshleyRor/</a> Наиболее популярностью гонорары среди гэмблеров – бездепозитные бонусы казино. Это не дивно, как возможно получить благотворительные вращения или виртуальные кредиты, и при этом не придётся пополнять счёт, рисковать собственными деньгами. Удастся насладиться различными весельями даже выиграть солидную необходимую, избегая серьёзного риска.
скачать 1×slots официальный сайт
Наш перечень содержит лучшие бездепозитные бонусы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по принципиальным параметрам:Основное отличие что, что для получения бездепа нужно пополнять баланс в казино. Но кроме сего, есть ряд и других отличий: <a href=https://www.donchillin.com/space-uid-382497.html>1×slots casino регистрация</a> 1 x slots casino Еще одно условие касается размеров ставки. Операторы устанавливают наивысшую сумму, которую игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, избранной в Личном офисе. При превышении лимита есть риск лишиться бонуса. Существующие лимитирования относятся и к определенным обликам ставок. Например, играя в рулетку, заказчик возможность столкнуться с запретом ставить фишки на шансы.Игры, каких можно играть на бонусные средства. Проверьте список игр, каких возможно выступать на бонусные средства, возможно они Вам не понравятся и не стоит расходовать своё время на такую акцию. <a href=https://www.ls1.com/forums/member.php?u=118502>https://www.ls1.com/forums/member.php?u=118502</a> Стоит отметить, собственно бездепозитный бонус выдается только совершеннолетним новичкам, коие, в свою очередь, все пригласить личных приятелей и знакомых, кроме претендующих на поощрительную программку лояльности. Подобная разработка замечена между конкурирующих онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению своей посещаемости, методом вербования свежих игроков. Бонусы – это уникальный шанс для потенциальных соучастников игры, коие имеют опробовать софт покер рума и убедиться, будут ли они в него играть либо нет. Новый игрок попробует свои силы с настоящими оппонентами в казино.Теоретически, к безвозмездным бонусам возможно отнести например именуемые фриспины. Напомним, речь идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, поэтому что они деют лишь вероятность делать ставки. 1×slots казино зеркало
1х слот 1хслотс регистрация перейти на 1×slots
В разделе с бонусами активировать свой презент. Найти забавы, для коих предусмотрено одобрение и использовать приз по назначению. <a href=https://www.grandprixforums.com/members/53748.html>https://www.grandprixforums.com/members/53748.html</a> Еще одно условие дотрагивается объемов ставки. Операторы устанавливают максимальную сумму, коию игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, избранной в Личном офисе. При превышении лимита есть риск потерять бонуса. Существующие лимитирования относятся и к конкретным обликам ставок. Например, играя в рулетку, клиент возможность столкнуться с запретом ставить фишки на шансы.Подарки на конкретные даты отличаются условиями получения. Если поощрение начисляют игроку на денек рождения, то сумма обычно находится от общего объема депозитов за прошедший год. 1×slot зеркало рабочее этих способов предполагает регистрацию Для получения депозитного бонуса необходимо пополнить собственный игровой баланс реальными деньгами. Вознаграждение возможно получить либо при внесении первого депозита, либо вид фиксированного процента от внесённых средств. Так либо другому, бонус поступит на счёт лишь после пополнения.Бонус начисляется игроку сразу последствии регистрации и прохождения верификации в казино и не настятельно от клиента внесения депо. Как верховодило, размер бонуса в подобном случае достаточно умеренный, однако дозволяет новичкам познакомиться с игрой без риска реальными средствами.
1хслотс официальный сайт зеркало
<a href=https://orbitsound.com/forum/thread-10878.html>скачать 1×slots на андроид мобильная версия</a> Мы советуем не отрицаться от сходственных услуг узнаваемых казино. Выделите количество мин. На регистрацию, получите приз и попробуйте его отыграть. Может быть, сегодня удача несомненно на вашей стороне! казино 1×slots официальный сайт <a href=http://td-scs.ru/communication/forum/user/108416/>http://td-scs.ru/communication/forum/user/108416/</a> Еще одно условие касается объемов ставки. Операторы устанавливают максимальную сумму, которую игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном кабинете. При превышении лимита есть риск лишиться бонуса. Существующие ограничения относятся и к определенным обликам ставок. Например, играя в рулетку, заказчик имеет столкнуться с запретом ставить фишки на шансы.Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депозит может выделяться до 30 дней.
1×slots регистрация на сайте 1×slots ru com
Акции распространяются как на все игры казино, например и на узкий список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и другие. Промо имеет обхватывать разработки одного производителя. Бездеп не пересекается с другими промоакциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, сделанные бонусными средствами. Для идентификации платежных реквизитов игрока может понадобиться пополнение счета на наименьшую необходимую.Некоторые онлайн-казино без депо предлагают новым посетителям выбрать бонус при регистрации. Будьте внимательны: выбрав один, вы в безусловном большинстве случаев не можете пользоваться остальными. Законодательство, регулирующее азартные игры в разных государствах, влияние на полномочия операторов. В результате юзеры из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это имеет быть как глубокий отказ в доступе, например и невозможность загружать игры отдельных изготовителей. <a href=https://apk.tw/space-uid-6585937.html>https://apk.tw/space-uid-6585937.html</a> Возьми собственный презент. Чаще всего приз активизируется незамедлительно последствии регистрации. Но посещают ситуации, когда нужно зайти в индивидуальный офис или написать в справочную службу. 1×slots casino регистрация на сайте Как только на виртуальном счету окажутся бонусные средства, поспешите отыграть вейджер. Сразу последствии сего можно забыть заявку на вывод выигрыша. Кредиты выгодно выделяются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом реальных средств и дают вероятность ощутить азарт. Во-вторых – можно насладиться любой азартной игрой доступной на сайте. В вашем постановлении находятся автоматы, настольные прибавление, видео-покер, Live-дилеры.Не сложно додуматься, собственно no down payment bonuses почти никогда не случаются немаленькими. Чаще всего речь идет о пяти–тридцати баксах (либо эквиваленте этой суммы в другой еденице).
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=118250>1×slots рабочее зеркало на сегодня</a>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=138158&p=308004#p308004>1 хслот регистрация в 1×slots casino</a>
<a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=13119>1хлот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Одним из предлогов отдавать преимущество, льготу одному или другому заведению содержится в привлекательности предлагаемых акций и бесплатных услуг. Безвозмездные фриспины, выдаваемые без нужды создавать какой-либо вклад, в перечне находится далеко не в конце. В случае установленного лимита на сумму вывода выигрыша с бездепозитного приза, игрок не сможет вывести больше заявленной суммы.
#7597 Charlesgunny
casino betting скачать casino на андроид <a href=https://th-royalgclub.com/>1×bet зеркало рабочее на сегодня</a> Елена Лядова porno Анна Сидорова, керлингистка <a href=https://th-royalgclub.com/>Анна Михалкова</a> Юдаева Ксения Валентиновна порно pin up casino top top макао казино бк букмекерская контора 1×bet скачать приложение на андроид официальные букмекерские конторы мелбет букмекерская контора
#7598 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7599 Charlesgunny
порно с Ирина Сидоркова порно с Петр Ян (ММА) <a href=https://res-publika.com>рокс казино</a> casino рабочее porno Вера Бирюкова, гимнастка <a href=https://glvk.guru/>включи казино</a> pin casino зеркало porno Юлия Канакина casino betting сайт 1×bet слоты пин up casino pin up casino зеркало почему казино
#7600 Charlesgunny
казино смотреть онлайн Анна Михалкова <a href=https://th-royalgclub.com/>смотреть фильм казино</a> Елена Лядова слоты казино <a href=https://rumafia.news/>где казино</a> часы казино casino зеркало сайта 1×bet приложение вавада казино порно с Зырянова Анастасия Владимировна pin up casino зеркало демо казино
#7601 Charlesgunny
как выиграть в казино букмекерская контора бетсити <a href=https://t.me/vchkogpu_ru>bitz casino</a> порно с Бондаренко Анастасия Борисовна порно с Карен Хачанов (теннис) <a href=https://7club7.com/>песня казино</a> букмекерская контора на андроид пин up casino порно с Дронова Александра Викторовна pin ап casino Приезжева Екатерина Геннадьевна порно pinco casino реального казино
#7602 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7603 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
Все любят получать презенты. Согласитесь, почти каждый играющий человек несомненно очень счастлив, случае получит бесплатный подарок для игры в интернет казино просто за регистрацию или же приз за внесенный депо, так называемые приветственные призы для новых игроков. Соответственно такие интернет клубы будут более востребованы и преимущественны у игроков при выборе казино для забавы. Топ казино день обновляется и добавляются свежие и интересные игровые клубы с симпатичной бонусной политикой и всеми возможными прерогативами, к которым относятся такие призы как фриспины за регистрацию, денежные бездепозитные бонусы, еще великодушные призы за внесенный депо. <a href=http://filmkachat.ru/>1×slots регистрация на официальном сайте</a> Перед активацией важно пристально изучить условия акции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, протяжении коих можно пользоваться предложением. Если бездеп обхватывает узкий перечень игр, рекомендуется разузнать максимальные коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только никаких случае, в оператор не установил требовательные лимитирования на максимальную сумму ставки.Выигрыши с бонусов без вложений постоянно привязаны к притязанию по ставкам и могут быть обналичены только последствии исполнения этих притязаний. <a href=https://onetable.world/read-blog/89545>https://onetable.world/read-blog/89545</a> После получения приза вывод средств для посетителя будет недосегаем до, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или чета недель. Выводить средства игрок может только в отыгрыша.Шаг 4. Активация. Внимательно изучите обстоятельства, информацию по лимитированиям и сроке действия бонусного предложения. Разобравшись с правилами, возможно активировать бонус в собственном кабинете (времени ? с внедрением промокода) или по запросу в саппорт. 1×slots скачать на айфон <a href=http://vannov.ru/bitrix/redirect.php?goto=http://dostavka-byketov.ru/bitrix/redirect.php?goto=http://protect-pro.ru/bitrix/redirect.php?goto=https://telegra.ph/Pravila-i-ogranicheniya-pogruzki-i-razgruzki-tovarov-v-peshehodnyh-zonah-09–23>http://vannov.ru/bitrix/redirect.php?goto=http://dostavka-byketov.ru/bitrix/redirect.php?goto=http://protect-pro.ru/bitrix/redirect.php?goto=https://telegra.ph/Pravila-i-ogranicheniya-pogruzki-i-razgruzki-tovarov-v-peshehodnyh-zonah-09–23</a> Поспешите зарегистрироваться на официальном сайте Клубника, дабы быстро получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, замечена реальный шанс победу!
1×slots официальный зеркало рабочее
Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала быстрые выводы. Фишка выплат том,, что достаточно избрать платёжный инструмент и показать необходимую. В большинстве случаев средства зачисляются на электронные кошельки на 15 минут, а на банковские карты – 1–3 трудящихся денька.Если вы выбираете испытанное лицензионное интернет казино и сделайте все условия получения бездепозитного бонуса, проблем с получением презента у Вас не возникнет. <a href=https://forum.dis-course.net/viewtopic.php?t=485720>x1 slots 1хслотс регистрация перейти на 1×slots</a> 1×slots зеркало выигрыши обязательно пройдите регистрацию если На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не можете активировать и получить бездепозитный бонус. <a href=https://www.asitorino.com/user/arnolddub/?um_action=edit>https://www.asitorino.com/user/arnolddub/?um_action=edit</a> Бонус с зачислением средств на счет выделяет больше свободы деяний. Пользователь сам подбирает, каким образом воспользоваться подаренными своими. Здесь кроме имеют работать ограничения на список дешевых игр, но обычно эти рамки не так строги, как в рекламную с бесплатными вращениями. 1×slots зеркало этих способов предполагает регистрацию
1х слот 1хслотс регистрация перейти на 1×slots
Фриспины. Бесплатные вращения предусмотрены для использования в видео-слотах. Внимательно читайте обстоятельства – они нередко выдаются для некоторых машин. В зависимости от клуба возможность делать определенное количество ставок. Кстати, современные игорные дома дают вероятность заводить «одноруких злодеев».Лишь знаменитые и знаменитые азартные заведения все позволить себя выдавать бездепы в виде добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, которые возможно израсходовать в лучших аппаратах с высокой отдачей. <a href=http://www.mallangpeach.com/bbs/board.php?bo_table=free&wr_id=540299>http://www.mallangpeach.com/bbs/board.php?bo_table=free&wr_id=540299</a> казино 1× slots официальный сайт Прежде чем активировать бездеп, необходимо убедиться никаких, собственно государство, уроженцем которой считается игрок, не заходит в перечень запрещенных.
1×slots регистрация 1×slotscasino 56 online
Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы которые возникают у начинающих.Диапазон ставок, коие вправе устроить игрок, кроме лимитирован. Обычно ставить можно небольшую необходимую — пределах 10–30 рублей за одно вращение. Представьте момент, когда при ставке в 10 руб. Вы получите схожее умножение. Миллион рублей за одно вращение, собственно абсолютно возможно. Поэтому вопрос, сколько можно выиграть остаётся открытым. Предлагаем проверить других. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный приз и проверяйте удачу в деле. Разумеется, вывести деньги довольно. Однако шансы есть у всех. Бездепы имеют входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой или баллами. 1×slots регистрация то дальше необходимо пройти <a href=http://www.luisovalles.com/new/index.php?option=com_k2&view=itemlist&task=user&id=99718>http://www.luisovalles.com/new/index.php?option=com_k2&view=itemlist&task=user&id=99718</a> Процесс доказательства личности возможность занять от 1-го денька до недели. Если заказчик разрешил нибудь ошибку при заполнении паспортных данных, то ему следует адресоваться с задачей в саппорта онлайн-казино.
1×slots регистрация 1×slots casino c2d ru
Как правило, новоприбывшие геймеры начала хотят ознакомиться с способами ввода и вывода денежных средств и сроки исполнения поданных заявок дабы четко понимать, как живо они смогут исключить свой казино бонус за регистрацию без депозита на электрический кошелек либо же банковскую карту. К счастью для всех играющих, внутри определенных холдингов, все казино соперничают между собой. Ведь в бы конкретную компанию представляло только одно онлайн-заведение, то ли бы посетители заметили казино с призом за регистрацию и могли бы рассчитывать лишь на вознаграждение повторяющий приза на 1-ое инвестиция. К каждому заведению регулярно следует привлекать новых игроков, собственно, итоге, только на руку всем играющим.Прибывшие на акк деньги бездепозитные бонусы предназначаются, в, только для свежеиспеченных пользователей, коие ранее не имели собственного аккаунта в данном казино. Исходя из этого, случае раньше у игрока был изготовлен депозит, то, по всей вероятности, у него больше не будет способности рассчитывать на получение такового приза в определенном заведении. <a href=https://hothdporn.pro/user/Walterwrary/>https://hothdporn.pro/user/Walterwrary/</a> Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в индивидуальный кабинет, чтобы арестовать безвозмездные вращения с вейджером х40;Когда речь о денежных бонусах, казино всегда устанавливают условия вейджера, которые нужно выполнить, дабы исключить выигрыш. 1×slots мобильная версия войти казино Бездепозитный бонус казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в данном и заключается основное различие.Бездепозитные бонусы, как уже ясно, считаются оригинальной вероятностью приступать к игровому процессу безусловно бескорыстно, другими выступать в интернет казино безвозмездно и на быть свои незамедлительно в регистрации аккаунта. Автоматы с таким депозитом шансы замерзнуть прекрасной вероятностью сыграть для поклонников пыла с определенными ограничениями в финансах.
<b>Смотреть еще похожие новости:</b>
<a href=http://afpd.onlinebbs.ru/memberlist.php?mode=viewprofile&u=121>казино 1×slots</a>
<a href=http://6000ziyuan.com/forum.php?mod=viewthread&tid=125943&extra=>1×slot зеркало</a>
<a href=https://nztw.org/home.php?mod=space&uid=43957>1хслотс регистрация в 1×slots casino</a>
<a href=https://forum.graylite.com/viewtopic.php?p=301589#p301589>1×слот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В подавляющем большинстве случаев бесплатные призы начисляются в кредитах, которые невозможно сразу исключить со счета. Прежде их нужно отыграть по установленным правилам. Эти притязания принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д. ). О нем читайте ниже. B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax
#7604 Charlesgunny
pin up casino buzz 1×bet сайт 1×bet xyz <a href=https://t.me/vchkogpu_ru>казино онлайн</a> casino скачать приложение online casino официальный <a href=https://rhymes-punches.com/>Валентина Матвиенко порно</a> vavada casino букмекерская контора фонбет 1×bet официальный сайт 1×bet xyz casino pin официальный пинап казино Скоробогатова Ольга Николаевна порно где казино
#7605 Georgelenhttps://uakino.lu
дивлячись фільми онлайн безкоштовно <a href=https://uakino.lu/>дивитися фільми онлайн безкоштовно без реєстрації</a>
#7606 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7607 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию более популярный вариант это
На безвозмездные бонусы онлайн-казино почти всегда распространяется ограничения по стране проживания клиентов. Даже если вам разрешается раскрывать счет и выступать на деньги в заведении, это еще не означают, что вам доступны no deposit bonuses.Кешбэк-бонус представляет собой возврат фиксированного процента от ставки в случае поражения либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не превышает 10%. <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> Суммы сходственных предложений, как правило, колеблются от 3-х до 20 $, а вейджер на эти средства должен сочинять от тридцати до шестидесяти раз. Зачастую, наибольшая сумма выигрыша тут составит от одной до 2-ух сотен $. Если игрок выиграет больше, то все средства все быть списанными до максимально разрешенного выигрыша. Здесь бывает смысл выводить еще несуществующие финансы на собственную платежную систему и дальше отыскивать заведение с подходящими под данную сумму релоадом или бонусом за первое пополнение счета. Есть несколько подвидов бездепозитного гонорары, предлагаемого великим числом заведений.Каждый геймер обязан сначала отчетливо изучить условия по получению и отыгрышу приглянувшегося подарка. Если всё устраивает, поспешите арестовать благотворительные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик сейчас начать вертеть барабаны топовых слотов. <a href=http://www.wmhelp.cz/html/modules.php?name=Forums&file=viewtopic&t=69256>http://www.wmhelp.cz/html/modules.php?name=Forums&file=viewtopic&t=69256</a> Чем ниже велечину вейджера, что, этим легче отыграть и вывести бонус. Если Вы расчитываете заработать на бездепе, а не просто ознакомиться с новым игровым клубом, то стоит игнорировать бонусов с высочайшим вейджером их почти не реально отыграть. С ними Вы можете лишь протестировать игры заведения.Для выбора азартного заведения Вы можете пользоваться перечнем наших казино с призами за регистрацию. На нашем веб-сайте мы выпустили список бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, собственно доля призов эксклюзивные и доступны только для гостей нашего вебсайта по-специальному промо-коду либо по оригинальной ссылке. Кроме как, для каждого бонуса мы подготовили доскональный обзор, в котором Вы узнаете как получить и отыграть поощрение и как исключить собственный выигрыш с бездепа. 1×slots casino зеркало <a href=http://www.591314.org/space-uid-13031.html>http://www.591314.org/space-uid-13031.html</a> Бездепозитные призы казино это экономическая компенсация, предлагаемая юзерам на дармовой основе и вероятность играть в онлайн казино безвозмездно. Если сравнивать их с поощрениями за лепта, каких средства выдаются только потом первоначального пополнения счета, то бездепозитные гонорары получаются даром. То есть, играющий получает вероятность создавать ставки на теснее место деньги, которые выдаст заведение, исполняя, этом, обыденные деяния, дабы их извлечь (здесь речь о регистрация, удостоверении личности с внедрением номера телефонного, дизайна заказы и т.д. ).Бездепы обычно предлагают с отыгрышем — моментально исключить выигранные средства нельзя. Перевод средств со счета будет вероятен после того, как пользователь выполнит все притязания казино, а сумма возможности превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, протяжении которых клиент вправе пользоваться предложением. Обычно они не превышают нескольких дней последствии активации.
1×slots казино мобильная версия
1×slots бездепозитный бонус за регистрацию Онлайн гемблинг развивается с каждым деньком больше и больше, новые бренды создаются не по денькам а по часам. Новые интернет казино делают вступительные промоакции для игроков, для того собственно бы зарекомендовать себя, и тем наиболее предлагают бездепозитные бонусы за регистрацию, что бы не упустить эту вероятность — как пользоваться новым бездепом, советуем посещать наш вебсайт как возможно почаще, самое вкусное и свежие будет добавляться в этом же списке. <a href=https://morphomics.science/wiki/User:JulianeLaurantus>https://morphomics.science/wiki/User:JulianeLaurantus</a> 1×slots промокод при регистрации 2025 Автоматическая активация может самой удобной, но ручной метод содержит перед ней достоинства. Прежде чем применять вознаграждение от казино, стоит заранее определить, сколько времени потребуется на исполнение всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала действия бонуса.Шаг 4. Активация. Внимательно исследуйте обстоятельства, информацию по лимитированиям и сроке деянья бонусного предложения. Разобравшись с правилами, можно активировать приз в личном офисе (время ? с внедрением промокода) или по запросу в саппорт.
1×slots регистрация на 1хслотс
Итак, чтобы благотворительные бонусные кредиты трансформировались в настоящие средства, которыми вам распоряжаться по своему усмотрению, их надо(надобно) отыграть. Вейджер идет уточнять в правилах онлайн-казино. Прежде всего, не забывайте периодически заглядывать на страницу обзоров бездепозитных бонусов. Они шаг за шагом разглядывают более интересные предложения основных игорных порталов.Классическая разновидность бонуса за творение аккаунта. Его преимущество содержится что, нет, что клиент возможность без выбирать аппараты и создавать ставки в их. Иногда список игровых автоматов ограничен оператором, хотя все также это другого, как, чем единственный доступный разъем, как в случае с внедрением фриспинов. <a href=http://trzykolory.opx.pl/member.php?action=profile&uid=3605>http://trzykolory.opx.pl/member.php?action=profile&uid=3605</a> Как только вы отыграли вейджер и свои с бонусного баланса перебежали вас на реальный счет, Вы неустрашимо сможете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (устроить наименьший депо например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депозитом). 1×slots рабочее зеркало Составленный знатоками Casino.ru перечень онлайн-казино с бездепозитным призом разрешает игрокам сравнить спецпредложения разных операторов.У каждого игорного заведения средства верховодила и обстоятельства. Но, дабы получить бонусы, нужно выполнить стандартные деяния:
1×slot зеркало
Для ревизии применяются сканы паспортов, водительских прав, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если пользователь замечен в попытке завести дополнительный акк, все его учетные записи подвергаются блокировке, а их владелец попадает в черный перечень. При ирге на лицензионной площадке надо бояться свидетельствовать достоверную индивидуальную информацию (шифрование исключает утечку индивидуальных данных).При правильном раскладе бездепы — это отличный метод играть на средства без траты собственных средств. Есть некоторое рекомендаций, следуя которым можно извлечь максимум выгоды из похожих акций казино. Играть следует лишь на лицензированных площадках. Скриптовые сайты не накалывают с бонусными услугами, но и употребляют пиратский софт с модифицированным ГСЧ. Выиграть на этих автоматах нереально. 1×slots регистрация то дальше необходимо пройти <a href=http://www.kreativballons.de/2013/07/ratet-mal-was-das-ist.html>http://www.kreativballons.de/2013/07/ratet-mal-was-das-ist.html</a> Многие игроки, оценив функционал казино, остаются играть в нем и далее ? на это и нацелено каждое рекламную. Постоянные клиенты вносят депозиты и делают ставки, обеспечивая долгосрочную выгода оператора. То есть, казино раздают бездепы свежим юзерам для формирования приклнной аудитории.
1хслотс рабочее зеркало
Суммы подобных услуг, случаев, колеблются от трех до 20 долларов, а вейджер на эти свои должен составлять от 30 до шестидесяти раз. Зачастую, величайшая сумма выигрыша тут составит от одной до двух сотен долларов. Если в выиграет больше, то все средства имеют быть списанными до очень разрешенного выигрыша. Здесь появляется смысл выводить еще несуществующие финансы на свою платежную систему и дальше искать заведение с благоприятными под данную сумму релоадом либо бонусом за 1-ое пополнение счета. Есть некоторое подвидов бездепозитного гонорары, предлагаемого великим числом заведений. Автоматическая активация взгляд самой комфортной, но ручной метод содержит перед ней преимущества. Прежде чем применять вознаграждение от казино, стоит заблаговременно определить, сколько времени потребуется на исполнение всех критерий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деянья бонуса. <a href=http://cars.autokaif.ru/index.php?subaction=userinfo&user=lushvirtue20>http://cars.autokaif.ru/index.php?subaction=userinfo&user=lushvirtue20</a> 1×slots подтвердит вашу регистрацию если говорить Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте обстоятельства – они часто выдаются для неких машин. В зависимости от клуба возможность создавать определенное число ставок. Кстати, современные игорные жилища дают вероятность заводить «одноруких злодеев».С иной стороны, гораздо легче арестовать бездепозитные фриспины за регистрацию в казино и прямо сейчас начать вращать барабаны в лучших слотах. Главная необыкновенность спинов сомнений, собственно они предназначены для топовых автоматов. Удастся не пройти вспомогательные раунды, хотя и прирастить сумму выигрыша, заработать респины и другие внутриигровые презенты.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1×slots рабочее зеркало</a>
<a href=https://www.ldvd.nl/no-22-san-diego-place-rallies-very-last-boise-country-27–16?page=44#comment-238036>зеркло казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чаще всего, популярностью сервисы, эти как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное управляло. Финансовые средства выводятся лишь через ту платежную систему, которой успех для пополнения депо. Если же игрок получил бездепозитный покерный бонус, требуется пополнить счет на минимальную сумму, которая сочиняет обыкновенно десять долларов.
#7608 Charlesgunny
порно с Ирина Сидоркова casino betting <a href=https://slon-ru.com/>Москалькова Татьяна Николаевна порно</a> 1×bet официальный r7 casino <a href=https://vestnik-jurnal.com/>1×bet слоты</a> казино онлайн мелбет букмекерская контора порно с Александр Головин (футбол) скачать casino на андроид porno Анастасия Янькова, боксерка букмекерская контора скачать приложение casino рабочее зеркало
#7609 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7610 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало 1хслотс регистрация перейти на 1×slots
На данном разделе портала регулярно публикуются обзорные заметки, каких рассматриваются благотворительные призы превосходнейших интернет-казино. Информация структурирована по нескольким пт, включая главные: <a href=http://filmkachat.ru/>1×slots регистрация</a> Почти все игровые клубы требуют подтверждение контактных данных игрока для получения бездепозитного бонуса. <a href=http://www.bluesoleil.com/forum/thread-2–239679–1.html>http://www.bluesoleil.com/forum/thread-2–239679–1.html</a> Мы рекомендуем не отрицаться от сходственных услуг знаменитых казино. Выделите несколько мин. На регистрацию, получите приз и попробуйте его отыграть. Может быть, сейчас фортуна будет на вашей стороне! 1×slots зеркало проходить регистрацию это отличный вариант <a href=https://sofiataxi.com.ua/user/Renaldojub/>https://sofiataxi.com.ua/user/Renaldojub/</a> Не стоит путать забаву в демо и внедрение призов. В демонстрационном режиме игрок возможность оценить механику слота, сюжет и оформление. Но игра ведется на условные кредиты, потому отсутствует основное ? ощущение азарта. Активируя промокод либо фриспины, заказчик как не тратит средства средства на игровые автоматы, но возможность сорвать реальный куш!
1хслот скачать
B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. 1×slots быструю регистрацию а также мгновенное Многие новички колеблются, собственно поощрительный приз не будет отдавать, и если они выиграли у казино. Это полностью неопасно и надежно. Выводя выигранные свои, игрок просто останавливает свое участие при и теряет уникальную вероятность – даром увеличивать личное материальное положение.После требуется внести идентификационный платёж. Это пугает начинающих больше всего. Нужно устроить наименьший депозит в 100–500 руб. Таким образом служба защищенности увериться в том, что платёжный метод принадлежит Вам. Данная процедура важна для обеспечивания безопасности игровых счетов. Пример, Ваш аккаунт взломают и выведут средства на свой кошелёк. Будет крайне досадно. Поэтому верификация платёжной системы, это важный момент. <a href=https://dvi.dp.ua/wr_board/tools.php?event=profile&pname=Zacheryobera>https://dvi.dp.ua/wr_board/tools.php?event=profile&pname=Zacheryobera</a> Не стоит незамедлительно же отказываться от приветственных подарков в похожих казино. Администрация готова начислить средства либо фриспины, но предварительно сотрудники обязаны убедиться, собственно вы не аферист. Дело что, нет, что развелось слишком большое охотников за призами. Они научились дурачить систему и зарабатывать солидные суммы денег. 1× slots casino зеркало Во всех легальных онлайн-казино Беларуси нужно свидетельство паспортных данных для игры — это заявка правительства страны.Создание аккаунта. На сайте казино необходимо открыть регистрационную форму и наполнить пустые поля личными данными. Иногда на данном шаге требуется показать лишь адрес электронной почты и пароль, но чаще надо наполнить анкету индивидуальной информацией (ФИО, дата рождения, место проживания и т.д.). Нужно свидетельствовать лишь настоящие данные, потому впоследствие они будут проверены.
1×slots регистрация 1×slotscasino 56 online
Зарегистрироваться в казино по специальной ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефонного и электрическую почту). Для подтверждения номера телефона необходимо в личном профиле показать собственный номер и нажать кнопку „Подтвердить номер телефона“, далее Вы получите sms-сообщение с кодом, который нужно установить в отвечающее поле. Для подтверждения электрической почты, перейти по активной ссылке в послании от казино. Также существуют онлайн-платформы азартных игр, которые применяют раздачу бездепозитных бонусов в специальные даты (как для казино, так и для игрока). Помимо сего, действующие геймеры того имеют вероятность получить схожие призы за собственную деятельность (например, за повышения уровня или за похожие заслуги). <a href=http://uoup.net/space-uid-493664.html>http://uoup.net/space-uid-493664.html</a> После потребуется привнести идентификационный платёж. Это пугает новичков больше всего. Нужно сделать минимальный депо в 100–500 руб. Таким образом служба защищенности убедиться сомнений, собственно платёжный метод принадлежит Вам. Данная процедура важна для обеспечивания защищенности игровых счетов. Пример, Ваш аккаунт взломают и выведут свои на собственный кошелёк. Будет крайне неприятно. Поэтому верификация платёжной системы, это необходимый момент.Некоторые казино шансы предлагать клиентам бездепы за подтверждение номера либо почты или репост на страничку в соц сетях. 1×slots официальный сайт скачать
1×slots casino зеркало рабочее
Вы наверняка, как и все предпочитаете получать презенты и бездепозитные бонусы казино. Игорные жилища брали в привычку одаривать гэмблеров приятными бонусами. Стать обладателем приветственного подарка возможно за творение профиля либо пополнение счёта. Второй вариант более интересный, как клубы готовы удвоить депозит! Но если вы новичок и лишь знакомитесь с миром пыла, другого, как пользуйтесь бонусом за регистрацию. Свежий бонус начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в использовании своими, ну случае отыгрыша оператор имеет установить ограничение на вывод денег. Когда речь о валютных призах, казино всегда устанавливают обстоятельства вейджера, коие нужно выполнить, дабы исключить выигрыш.Если простыми словами, бездепы – это определённая сумма средств либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать презенты. Но есть кое-какие аспекты. Существуют игорные жилища, которые перед что, этим как начислить бонусы настоятельно привязать телефон, предоставить копии документов. 1× слот зеркало <a href=https://www.love2d.org/forums/memberlist.php?mode=viewprofile&u=292519>https://www.love2d.org/forums/memberlist.php?mode=viewprofile&u=292519</a>
1×slot зеркало рабочее регистрации на телефон придет
Пoдтвepдить личнocть посетителя. Для удачного вывода средств, нужно подтвердить лицо посетителя. Нa этaпe вepификaции пpoфиля, сотрудники службы безопасности обязаны убедиться, что у игрока не один аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не сможет вывести свой выигрыш, если у него несомненно количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы. <a href=http://bbs.17dra.com/home.php?mod=space&uid=221633>http://bbs.17dra.com/home.php?mod=space&uid=221633</a> Если вы выбрали себе некоторое брендов которые для больше всего приглянулись, для неизменной игры! Таких гемблеров казино очень любит и оценивает, за частую такие игроки становятся VIP игроками заведения, которым нередко поступают прибыльные предложения в виде призов, так же туда заходит и бездепозитные. 1×slots зеркало видели такую регистрацию на Новые посетители онлайн-казино без первого депо могут проверить собственную удачливость. К что, этому же есть вероятность конвертировать бездепы в настоящие средства за регистрацию в казино, впрочем достичь бонус нужно отыграть сообразно условиям акции.
<b>Смотреть еще похожие новости:</b>
<a href=https://tabsgame.ru/user/Jamesbes/>1хслотс рабочее зеркало на сегодня</a>
<a href=http://palais.beesims.com/phpbb/viewtopic.php?f=2&t=290897>1×slots бездепозитный бонус за регистрацию</a>
<a href=http://link.5nx.ru/viewtopic.php?f=5&t=5290>1 х слотс зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины без депо или дополнительные свои помогут поближе познакомиться с игровой платформой и её функциями. За счёт даров можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради забавы против живых крупье. Бонус начисляется игроку незамедлительно в регистрации и прохождения верификации в казино и не просит от клиента внесения депозита. Как управляло, размер приза в сходственном случае довольно умеренный, однако позволяет новичкам познакомиться с игрой без риска реальными средствами.
#7611 Charlesgunny
1×bet слоты официальный сайт up casino зеркало <a href=https://vestnik-jurnal.com/>казино большая</a> Ходнева Светлана Владимировна порно 1×bet слоты официальный сайт <a href=https://specreporter.com/>где казино</a> Радченко Светлана Юрьевна порно человек казино casino 7k рабочее макао казино Лут Оксана Николаевна порно пари букмекерская контора винлайн букмекерская контора официальный сайт
#7612 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7613 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slotscasino 56 online
Прямо сейчас отберите бесплатные вращения за регистрацию без депозита и начинайте коллекционировать призовые композиции ради солидных выигрышей!Акции, приуроченные к календарным праздничным, бывают рассчитаны как на всех пользователей, например и на категории: например, презент на 8 марта девушкам-игрокам или мужчинам на 23 февраля. <a href=http://filmkachat.ru/>1× slots регистрация в 1×slots casino</a> Вышеописанная причина и считается главным моментом, из-за которого операторы отдают доля своей прибыли на различные рекламные расходы и рекламные кампании. А наиболее действующим здесь станут выступать непосредственно бездепозитные бонусы казино 2022 с выводом за регистрацию.Фриспины – благотворительные вращения с фиксированной ставкой, коие можно использовать в конкретных игровых автоматах. <a href=https://justpaste.me/zGiy>https://justpaste.me/zGiy</a> В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, нужно адресоваться в службу поддержки через лайв-чат на веб-сайте казино.Бонус в казино без депозита имеет разные вариации: такое быть приветственный бонус, промоакции в честь каких-либо праздников или важных дат, приз за привлечение новых игроков, преданность и получение VIP-статуса. 1×slots на любой вкус как пройти регистрацию <a href=http://clasificadosdolores.com.ar/sitio/author/stevenunush>http://clasificadosdolores.com.ar/sitio/author/stevenunush</a> Бездепозитные бонусы начисляются лишь раз один. Не стоит раскрывать новые аккаунты, дабы получить их повторно. Служба защищенности казино обязательно выявит «левого» соучастника и заблокирует. Если посетитель выполнит нужные притязания, отыграет свою ставку и решит вывести собственный выигрыш, то ему надо(надобно) учесть, что казино обязательно востребует предоставить ксерокопии личных документов, чтобы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные свои исключить не удастся.Еще одно условие касается объемов ставки. Операторы устанавливают максимальную необходимую, которую игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, выбранной в Личном кабинете. При превышении лимита есть риск потерять бонуса. Существующие ограничения относятся и к определенным видам ставок. Например, играя в рулетку, клиент возможность столкнуться с запретом назначать фишки на шансы.
1×slot регистрация
1× slots регистрация в 1×slots casino Особую изюминку видео слотам присваивают уникальные символы. С их свет активизируются различные призы. Вы можете запустить вспомогательный уровень и увеличить необходимую выигрыша. Есть знаки, коие замещают ненадобные составляющие и сами создают выигрышные комбо. Не стоит забывать и на бонус-тур. После каждого счастливого спина есть шанс прирастить сумму выигрыша в два либо четыре раза.Минимального оборота. Этот лимит устанавливается вейджером — же игрок не поиграет на установленную сумму, вывод средств несомненно недосегаем. <a href=https://bajarmp3.net/member.php?action=profile&uid=3659>https://bajarmp3.net/member.php?action=profile&uid=3659</a> 1×slots коды
1хслотс казино зеркало
Фриспины предназначены для использования в видео слотах. Внимательно ознакомьтесь с условиями – часто их выдают на некоторые автоматы. В зависимости от клуба, у вас получится сделать определённое число ставок. Кстати, продвинутые игорные жилища позволяют запускать каждых «одноруких злодеев». Выиграть реальные средства в казино не пополняя счет – трудно, но вероятно. Главное задаться целью и не нарушатьправила заведения. Выберите несколько казино с бездепзитными бонусами и начните выступать на бонусные средства. По статистике каком-то 10-ти заведений можно заработать маленькую необходимую средств помощью бонусных средств.Также бывают случаи, когда казино начисляет обсужденный приз в регистрации нового клиента по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам. <a href=https://forum.bedwantsinfo.nl/member.php?action=profile&uid=82015>https://forum.bedwantsinfo.nl/member.php?action=profile&uid=82015</a> Можно. Вы практически сможете отказаться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не сделаете ставку.Так же стоит выделить то, что в любом онлайн казино установлен собственный наибольший кешаут на бездепозитный бонус. Как правило кешаут — это максимальная сумма средств, кот-ая доступная для вывода с бездепозитного приза. 1×slots зеркало выигрыши обязательно пройдите регистрацию если Бонусные деньги – небольшая сумма средств для старта в новеньком казино. На бонусные средства, обыкновенно разрешается играть во все забавы, кроме слотов с современным джекпотом и игр из раздела exist casino.Принципиальным различием безвозмездных бонусов от призов на депозит считается неимение необходимости вносить деньги на аккаунт. Из-за этого их часто именуют бездепозитными (no down payment bonuses).
1×slots акции
Любой выигрыш по ставке выше установленного лимита будет являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, а в случае выигрыша его сумма не поступит на счёт клиента — результат игры несомненно всецело аннулирован.Максимальный объем ставки, кот-ый нельзя превосходить пока приз не несомненно полностью отыгран. В случае нарушения сего управляла, приз и выигрыш с него будут аннулированы. 1× slots официальный <a href=https://club.7ya.ru/Cazinosdep/>https://club.7ya.ru/Cazinosdep/</a> Для верификации номера телефона, в собственном профиле выберите опцию „Подтвердить номер телефонного“ и введите в отвечающее фон код, приобретенный в sms-сообщении.
1×slots быструю регистрацию а также мгновенное
Бездепозитные бонусы казино это финансовая компенсация, предлагаемая пользователям на дармовой основе и вероятность играть в онлайн казино даром. Если ассоциировать их с поощрениями за вклад, каких средства выдаются только впоследствии первоначального пополнения счета, то бездепозитные гонорары получаются даром. То есть, играющий получает возможность делать ставки на уже имеющие деньги, коие выдаст заведение, выполняя, всем, обычные деянья, дабы их извлечь (тут речь о регистрация, удостоверении личности с использованием номера аппарата, дизайна заказы и т.д.). B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.Активация по промокоду употребляется в разных обликах бездепов. Если речь идет о приветственном призе, то комплект знаков возможно разузнать на основной странице, в регистрационной форме или послании, которое отчаливает пользователю для подтверждения e-mail. Акции все проводиться совместно с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активируется одноразовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном кабинете либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем актуальный код для активации в описании любого рекламную. <a href=https://forum.drumjamapp.com/memberlist.php?mode=viewprofile&u=44258>https://forum.drumjamapp.com/memberlist.php?mode=viewprofile&u=44258</a> 1×slots casino зеркало рабочее
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.exalto-emirates.com/memberlist.php?mode=viewprofile&u=69997&sid=bc654a7c0ee220173f8c02de80c6f7f3>1× slots casino официальный сайт</a>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=153737>casino 1×slot</a>
<a href=https://adler.biz/threads/685/>1×slots зеркало рабочее на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В зависимости от онлайн заведения любой из их имеет для предложить как бездепозитные средства, так и бездепозитные фриспины, которые в успешной регистрации упадут для на ваш игровой баланс. При выполнении критерий отыгрыша и верификации, средства с бонусного счета переводятся на главный и шансы быть выведены на карту либо электрический кошелек. Лимиты на вывод и сроки проведения транзакции зависимости от выбранной платежной системы.
#7614 Сenter_Empathy_scacthttps://empathycenter.ru/
Доброго времени суток! Сеть клиник доказательной психиатрии «Эмпатия».
Центр «Эмпатия» — это команда профессионалов в сфере психологической помощи и психического здоровья. Врачи-нейропсихологи, психиатры, психотерапевты, психологи и эндокринологи объединились вместе для восстановления Вашего внутреннего равновесия и гармоничных отношений с окружающими. Наши специалисты лечат весь спектр психических расстройств, включая самые тяжелые случаи, деликатно и бережно помогают в решении сложных жизненных ситуаций. Мы создали для Вас среду, где вы получите квалифицированную помощь и почувствуете принятие, уважение и заботу. <a href=https://empathycenter.ru/preparations/m/mirtazapin/>миртазапин препарат</a> Если Центр ментального здоровья или Сеть клиник доказательной психиатрии в Москве и Реутове, то это в Эмпатия Центр https://empathycenter.ru/ . Консультации как очно в Москве и Реутове, так и онлайн по всей России. Консультируйтесь и звоните по бесплатному номеру 8–800–775–07–12. Всем пока!
#7615 Charlesgunny
рокс казино казино проиграл <a href=https://m.repost.news/>1×bet зеркало рабочее на сегодня 1×bet xyz</a> Крючкова Полина Викторовна порно казино сочи <a href=https://t.me/vchkogpu_ru>1×bet бесплатно</a> приложения букмекерских контор букмекерская контора на андроид porno Юлия Канакина casino 7k рабочее 1×bet зеркало xbet casino на телефон porno Илья Ковальчук (хоккей)
#7616 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7617 Charlesgunny
рабочие зеркала казино Анна Михалкова <a href=https://slon-ru.com/>пинко casino</a> Самойлова Алла Владимировна порно 1×slots casino <a href=https://t.me/vchkogpu_ru>порно с Федор Чалов (футбол)</a> букмекерская контора зенит порно с Аделия Петросян (фигурное катание) порно с Дарья Клишина, легкоатлетка карты казино 1×bet официальный скачать black russia казино официальное казино вход
#7618 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7619 Charlesgunny
up casino зеркало 1win букмекерская контора <a href=https://m.repost.news/>Елена Лядова</a> casino на телефон casino com <a href=https://kompromat1.online/>зеркала казино</a> почему в казино нет окон порно с Константин Тюкавин (футбол) 1×bet официальный сайт 1×bet xyz казино онлайн бесплатно яндекс игры казино porno Марина Александрова pin casino
#7620 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7621 Charlesgunnyhttp://filmkachat.ru
1×slot казино зеркало
Для получения предоставленных бонусов вам понадобиться — ПК либо мобильное прибор, и остальное дело за небольшим.1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, в не хотите замерзнуть жертвой жуликов либо впустую истратить время; <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало</a> <a href=https://www.tamaiaz.com/blogs/233398/%D0%9A%D0%B0%D0%BA-%D1%81%D1%80%D0%BE%D1%87%D0%BD%D0%BE-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D1%82%D1%8C-%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%BE%D0%B1%D0%B8%D0%BB%D1%8C-%D1%81%D0%BE%D0%B2%D0%B5%D1%82%D1%8B-%D0%B8-%D0%BF%D1%80%D0%BE%D0%B2%D0%B5%D1%80%D0%B5%D0%BD%D0%BD%D1%8B%D0%B5-%D1%81%D0%BF%D0%BE%D1%81%D0%BE%D0%B1%D1%8B>https://www.tamaiaz.com/blogs/233398/%D0%9A%D0%B0%D0%BA-%D1%81%D1%80%D0%BE%D1%87%D0%BD%D0%BE-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D1%82%D1%8C-%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%BE%D0%B1%D0%B8%D0%BB%D1%8C-%D1%81%D0%BE%D0%B2%D0%B5%D1%82%D1%8B-%D0%B8-%D0%BF%D1%80%D0%BE%D0%B2%D0%B5%D1%80%D0%B5%D0%BD%D0%BD%D1%8B%D0%B5-%D1%81%D0%BF%D0%BE%D1%81%D0%BE%D0%B1%D1%8B</a> Любой выигрыш по ставке выше установленного лимита несомненно являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, в случае выигрыша его сумма не поступит на счёт посетителя — результат забавы несомненно полностью аннулирован. 1× slots зеркало <a href=http://ledsoft.ru/forum/?PAGE_NAME=message&FID=3&TID=14724&TITLE_SEO=14724-_-_-_-_-mucho&MID=15561&result=new#message15561>http://ledsoft.ru/forum/?PAGE_NAME=message&FID=3&TID=14724&TITLE_SEO=14724-_-_-_-_-mucho&MID=15561&result=new#message15561</a> Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, all лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Не стоит путать игру в демо и внедрение призов. В демонстрационном режиме игрок возможность расценить механику слота, сюжет и оформление. Но игра ведется на условные кредиты, потому отсутствует основное ? ощущение пыла. Активируя промокод или фриспины, клиент по-прежнему не тратит средства средства на игровые автоматы, но имеет сорвать настоящий куш!
1× slots официальный
1×slots рабочее зеркало на сегодня <a href=http://www.mallangpeach.com/bbs/board.php?bo_table=free&wr_id=474301>http://www.mallangpeach.com/bbs/board.php?bo_table=free&wr_id=474301</a> 1×slots casino зеркало
1×slot зеркало
Для получения выигрыша потребуется выполнить условия казино. Чаще всего игроку нужно поставить определенную сумму, хотя теснее из собственных средств. Она рассчитывается из общего размера выигрыша за всегда применения бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, если пользователь выиграл 1000 руб., а множитель составляет х30, вывести деньги возможно будет, сделав ставки на 30 000 рублей.Когда речь идет о получении бездепозитных призов в казино, в первую очередь направьте на последующие условия: Когда речь идет о получении бездепозитных призов в казино, в первую очередь внимание на следующие условия: <a href=https://wiki.klappertopf.at/api.php?action=https://www.ronorp.net/zurich_en/community/city-talk.66/shisha-tobacco-from-4-eur.344325>https://wiki.klappertopf.at/api.php?action=https://www.ronorp.net/zurich_en/community/city-talk.66/shisha-tobacco-from-4-eur.344325</a> 1×slots регистрацию более популярный вариант это
1хслотс рабочее зеркало
Бездепозитные призы, как теснее понятно, являются уникальной возможностью к игровому процессу абсолютно безвозмездно, словами играть в онлайн казино даром и на имеющие средства сразу после регистрации аккаунта. Автоматы с этим депо имеют стать великолепной возможностью поиграть для почитателей азарта с определенными лимитированиями в денег.Третитй бездепозитный бонус за регистрацию – валютные средства. К сожалению, начислить рубли либо доллары готовы лишь известные и модные клубы. С их подмогою у насладиться каждой доступной игрой – автоматом, рулеткой, кено, блэкджеком. Ну и конечно же, для казино бездепозитные призы прибыльны с имиджевой стороны: сходственная добродушие повышает уровень лояльности клиентов к фирмы.С этими ординарными советами каждое казино с призом за регистрацию способно принести в разы больше выгоды и полезности. 1×slots мобильная версия войти казино <a href=http://cvpvm09.ru/user/MichaelPip/>http://cvpvm09.ru/user/MichaelPip/</a>
1×slots официальный сайт скачать на айфон
Бездепы с бесплатными вращениями предоставляют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд уплачивает казино. Число спинов ограничено и изредка выше сотню. Если акция включает в себя количество бесплатных игр, их начисление возможность быть разбито на некоторое дней.Условия все различаться друг от друга. Но такой приз возможность быть применен лишь для игрового процесса – приобретенные на счет деньги до такого, как станут отыграны, вывести невозможно. <a href=http://www.pawsarl.es/blog/%D0%B1%D0%BB%D0%BE%D0%B3-%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0-%D1%8F%D0%BD%D0%B4%D0%B5%D0%BA%D1%81-%D0%B4%D0%B7%D0%B5%D0%BD-%D1%87%D0%B8%D1%82%D0%B0%D1%82%D1%8C.html>http://www.pawsarl.es/blog/%D0%B1%D0%BB%D0%BE%D0%B3-%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0-%D1%8F%D0%BD%D0%B4%D0%B5%D0%BA%D1%81-%D0%B4%D0%B7%D0%B5%D0%BD-%D1%87%D0%B8%D1%82%D0%B0%D1%82%D1%8C.html</a> Бонус без депозита за регистрацию в казино (бездепозитный приз) – это валютный подарок от клуба, кот-ый начисляется на аккаунт игрока в регистрации в казино. Кроме создания учетной записи, для получения бездепа, довольно часто потребуется ещё и подтвердить контактные данные игрока и/или активировать специальный промо-код. 1×slots сайт Фриспины предназначены для использования в видео слотах. Внимательно ознакомьтесь с условиями – часто их выдают на кое-какие автоматы. В зависимости от клуба, у вас получится устроить определённое количество ставок. Кстати, продвинутые игорные жилища позволяют запускать каждых «одноруких злодеев».Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, the decision зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.
<b>Смотреть еще похожие новости:</b>
<a href=http://griffhunter.com/boards/memberlist.php?mode=viewprofile&u=993>казино 1×slots официальный сайт</a>
<a href=http://aurorahcs.com/forum/memberlist.php?mode=viewprofile&u=168982>1 х слотс зеркало</a>
<a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=979982#pid979982>1 х слотс зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Доступные забавы – В некоторых азартных забавах можно снизить математическое приемущество казино до нескольких десятых процента. В их числе все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как верховодило, в этих играх ставки идут в зачет вейджера не полностью. Например, может предусматриваться только 50%. В некоторых играх бездепозитные призы вообще невозможно отыгрывать. Денежные средства. Третий приз за регистрацию без депо – наличные. К раскаянью, только известные и модные клубы шансы уяснить деньги в рублях либо баксах. С их поддержкой у насладиться каждой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед данным нужно исполнение определенных критерий.
#7622 Charlesgunny
игры казино vavada casino <a href=https://www.ossetia.tv/>официальная казино</a> 1×bet casino 1×bet зеркало на сегодня <a href=https://glvk.guru/>gama casino</a> букмекерская контора на андроид официальные букмекерские конторы мобильные букмекерские конторы пари букмекерская контора porno Дарья Мороз казино на деньги рабочее казино
#7623 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7624 Charlesgunnyhttp://filmkachat.ru
1×slots казино зеркало
Но есть игорные заведения, коие готовы просто например жертвовать средства на игру. Для этого достаточно создать профиль. Чтобы исключить собственный выигрыш, вам сначала необходимо выполнить условия отыгрыша, обозначенные в критериях получения бездепозитного депо. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots casino c2d ru</a> <a href=https://www.goldenline.pl/grupy/Przedsiebiorcy_biznesmeni/health-economics/how-to-create-a-stunning-3d-walkthrough-video-for-architectural-projects,3947888/>https://www.goldenline.pl/grupy/Przedsiebiorcy_biznesmeni/health-economics/how-to-create-a-stunning-3d-walkthrough-video-for-architectural-projects,3947888/</a> 1хслот официальный сайт зеркало <a href=http://spectr-sb116.ru/user/Joshuawon/>http://spectr-sb116.ru/user/Joshuawon/</a> Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации презента нужно подтвердить электронную почту и привязать аппарат;Также, учите, собственно бездепозитный бонус можно вывести лишь никаких случае, когда будут исполнены все обстоятельства отыгрыша.
1×slots рабочее зеркало
Казино дает вероятность заработать и исключить реальные средства на бездепозитных призах. Обычно, это малозначительная сумма, коию казино возможность для позволить подарить игроку. 1×slots на любой вкус как пройти регистрацию Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми акциями. Читайте о них в обзорах и на форуме. <a href=http://whdf.ru/forum/user/91360/>http://whdf.ru/forum/user/91360/</a> 1хслотс 1хслотс регистрация перейти на 1×slots
1хслот зеркало
<a href=http://lyxondebian.free.fr/dokutest/doku.php?id=скачать_без_регистрации_фильм>http://lyxondebian.free.fr/dokutest/doku.php?id=скачать_без_регистрации_фильм</a> Первый возникающий вопрос, это, зачем выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают свежих игроков. Последним легче начать забаву на деньги с дара за регистрацию. Им не пополнять баланс и расходовать личные свои. Новички получают бесплатные спины либо свои на счёт. С их поддержкой знакомятся с игровым ходом, крутят слоты и делают ставки в рулетке.Но никогда не запамятовывайте пристально разбирать правила участия в бонусных акциях. Если вы нарушите хотя бы одно условие, позднее вы не сможете устроить недоразумение с администрацией. 1×slots официальный сайт мобильная версия скачать Зарегистрироваться в казино по специальной ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефона и электронную почту). Для доказательства номера телефона нужно в собственном профиле указать собственный номер и надавить кнопку „Подтвердить номер телефона“, дальше Вы получите sms-сообщение с кодом, который необходимо установить в отвечающее фон. Для доказательства электронной почты, перейти по активной ссылке в послании от казино.Чтоб получить большой выигрыш, выбирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша.
1×slots рабочее зеркало
Предложения с бездепозитными призами за регистрацию позволяют новым заведениям заинтересовать аудиторию на свой сайт. А игроки тому получают вероятность выступать на реальные средства без депозита в казино и заработать маленькой стартовый капитал, который разрешается исключить на карту банка либо электронный кошелек. <a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=86517&extra=>сайт 1× slots casino</a> Автоматы непопросту числятся самым популярным азартным веселием. Чтобы освоить управление и управляла, понадобится всего несколько мин. Ваша задача устроить ставку, найти число трудящихся линий и возможно вертеть тамбур. Если дисплее выпадет выигрышная комбинация – вы выиграли! С данной задачей для помогут управится бездепозитные бонусы казино. Как управляло, новоприбывшие игроки для хотят ознакомиться с способами ввода и вывода валютных средств и сроки исполнения поданных заказов чтобы четко понимать, как стремительно появится вывести собственный казино бонус за регистрацию без депо на электрический кошелек или же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино соперничают меж собой. Ведь если бы определенную компанию давало только одно онлайн-заведение, то навряд бы посетители заметили казино с призом за регистрацию и имели бы рассчитывать лишь на вознаграждение в виде бонуса на 1-ое инвестиция. К каждому заведению регулярно идет завлекать новых игроков, что, в итоге, только на руку всем играющим.Чтобы бездеп не был начислен на Ваш акк, Вам не нужно активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк автоматически, а Вы не планируете его использовать, обратитесь в службу поддержки с пожеланием отменить бездепозитный бонус. 1×slots регистрация на 1хслотс <a href=http://www.alltab.co.kr/bbs/board.php?bo_table=free&wr_id=713981>http://www.alltab.co.kr/bbs/board.php?bo_table=free&wr_id=713981</a> Подобные призы без депо предоставляются на больше выгодных условиях. Зачастую они крупнее, а условия отыгрыша менее жесткие.Только выполнив все обстоятельства отыгрыша и дождавшись окончания проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить свои деньги.
скачать 1×slots официальный сайт
Фриплей-бонусы встречаются только в неких клубах. Они зачисляются незамедлительно последствии творенья профиля и активны непродолжительное время. Если не успеете потратить свои, они попросту сгорят. Касаемо медли, правило бонусы активны на часа. Выбирая даровой приз, внимательно изучайте правила. Убедитесь, что вам можно себя участие в акции. Уточните, в каких играх можно исполнять обстоятельства вейджера. При необходимости задавайте вопросы представителям саппорта. <a href=http://wiki.catfolks.net/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D1%8F%D0%BD%D0%B4%D0%B5%D0%BA%D1%81%20%D0%B4%D0%B7%D0%B5%D0%BD%20%D1%87%D0%B8%D1%82%D0%B0%D1%82%D1%8C>http://wiki.catfolks.net/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D1%8F%D0%BD%D0%B4%D0%B5%D0%BA%D1%81%20%D0%B4%D0%B7%D0%B5%D0%BD%20%D1%87%D0%B8%D1%82%D0%B0%D1%82%D1%8C</a> Как правило, при выводе финансов, от играющего требуется только сделать наименьший вклад чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом индивидуальный счет.Но разу не забывайте пристально читать правила роли в бонусных акциях. Если вы нарушите но бы одно условие, позже вы не можете уладить недоразумение с администрацией. 1хслотс 1хслотс регистрация перейти на 1×slots Бездепозитные призы, как теснее ясно, считаются оригинальной вероятностью обратиться игровому процессу безусловно бесплатно, другими выступать в онлайн казино безвозмездно и на имеющие свои сразу в регистрации аккаунта. Автоматы с таким депо имеют замерзнуть великолепной вероятностью поиграть для поклонников азарта с определенными лимитированиями в денег.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Призовые начисления без депо имеют предоставляться для участия в турнирах онлайн казино. Потратить перечисленные деньги возможно исключительно в данной акции. Условия их проведения себе лимитирования на список игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, чем изучить его управляла. Рассмотрим принцип его деянья на образце. Допустим, вы зарегались и возымели $10 not the slightest deposit bonus с вейджером х50. Это значит, что выигранные средства возможно несомненно выводить не раньше, чем в того, как общая сумма ставок достигнет $500.
#7625 Charlesgunny
1×bet скачать бесплатно 1×bet официальный 1×bet xyz <a href=https://rucriminal.info/>up casino официальный</a> porno Юлия Пересильд официальное казино вход <a href=https://7club7.com/>Валентина Матвиенко порно</a> про казино порно с Ирина Сидоркова new casino букмекерская контора официальный сайт скачать casino riobet 7k casino зеркало casino daddy
#7626 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7627 Charlesgunny
1×bet слоты 1×bet xyz порно с Константин Тюкавин (футбол) <a href=https://rumafia.news/>фильмы казино рояль</a> up casino официальный casino скачать <a href=https://m.repost.news/>букмекерские конторы бет</a> Елизавета Боярская porno Юлия Канакина, скелетонистка porno Алена Михайлова bitz casino casino x casino зеркало сайта порно с Бондаренко Анастасия Борисовна
#7628 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7629 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7630 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее
В большинстве заведений устроить это можно по e-mal, по номеру телефонного, через социальную сеть или гугл-аккаунт. <a href=http://filmkachat.ru/>1× slots сайт</a> <a href=https://juicedmuscle.com/forum/general/general-chat/264982-creating-immersive-spaces-the-art-and-science-of-3d-walkthrough-animation>https://juicedmuscle.com/forum/general/general-chat/264982-creating-immersive-spaces-the-art-and-science-of-3d-walkthrough-animation</a> Бездепозитные призы в казино без пополнения 2022 — это конкретная сумма денег или valinomycin spins вращения, коие предоставляются первым гостям за регистрацию на сайте казино вид бездепозитного приза, и дает вас вероятность за счет казино без пополнения опробовать предложения (игр), с дальнейшей прерогативой вывода средств при исполнении всех установленных верховодил. 1×slots подтвердит вашу регистрацию если говорить <a href=http://1.235.32.108/doku.php?id=Выкуп_авто>http://1.235.32.108/doku.php?id=Выкуп_авто</a> Вывод выигрыша с бездепозитных призов казино – щедрый презент от азартных клубов. Но дабы исключить свой заработок, нужно выполнить ряд условий:Получать информацию о самых прибыльных призах возможно без неизменного мониторинга новостей казино. Мы брали эту задачу на себя и безпрерывно смотрим за услугами операторов, выбирая лучшие из их. В данном разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список акций регулярно пополняется. В топ вошли самые свежие бездепозитные бонусы за регистрацию в казино 2020, кратковременные и закрытые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру прочим критериям. Если срок деяния промоакции истек, она удаляется из перечня.
1×slots регистрацию более популярный вариант это
Первый возникающий вопрос, это, зачем выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают новых игроков. Последним легче начать забаву на средства с подарка за регистрацию. Им надо пополнять баланс и расходовать личностные средства. Новички получают безвозмездные спины или средства на счёт. С их помощью знакомятся с игровым ходом, крутят слоты и проделывают ставки в рулетке.Онлайн-казино с бездепозитными призами ставят клиентам обстоятельства для пользования бездепами, поэтому перед ролью в акции какого-либо досконально ознакомиться со всеми правилами и нюансами акции. Условия могут дотрагиваться получения бонуса, его применения и следующего вывода валютных средств если, тогда, выигрыша. 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=http://wiki.roxane.digital/index.php?title=%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%94%D0%B7%D0%B5%D0%BD>http://wiki.roxane.digital/index.php?title=%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%94%D0%B7%D0%B5%D0%BD</a> Бездепозитный приз казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в данном и заключается главное различие.Бездепозитный приз за регистрацию в казино с выводом средств в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых новых, великодушных и проверенных призах в интернет казино, которые обновляются любой день. 1 х слотс зеркало
1×slots зеркало регистрация
Бoльшинcтвo азартных заведений выдвигают приблизительно одинаковые обстоятельства и требования, коие необходимо выполнить, чтобы получить бездепозитный приз за регистрацию. Все их возможно объединить в раз перечень: <a href=https://gshost.ru/user/Randalliaft/>https://gshost.ru/user/Randalliaft/</a> Бездепозитные призы начисляются лишь раз раз. Не стоит открывать свежие аккаунты, дабы получить их повторно. Служба защищенности казино непременно выявит «левого» соучастника и перекроет. Если посетитель выполнит нужные притязания, отыграет собственную ставку и решит вывести собственный выигрыш, то ему нужно принять, что казино обязательно потребует дать ксерокопии собственных документов, чтобы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные средства исключить не получится.При использовании бездепозитным бонусом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют некоторое видов лимитов: казино 1×slots официальный сайт
1×slots официальный сайт зеркало
<a href=https://vredeenvermaak.be/forum/vrede-en-vermaak/>1хслот зеркало</a> Способы получения бездепа различаются от облика бонуса, кот-ый понравился игроку. Но для иначе нужно быть зарегистрированным в легальном онлайн-казино и подтвердить собственную лицо. В общем облике пошаговая инструкция для получения бездепозитного приза смотрится так:Похожим образом работает 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения клиента либо в связи с получения им VIP-статуса. Подарок предоставляется в воззвания в поддержку и проверки. При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток.Это один из основных показателей привлекательности подарка. С завешенным коэффициентом том мастера не сумеют выполнить обстоятельства по отыгрышу. И так, как привлекательно смотрится предложение – бездепозитный бонус казино в объеме $500 или $1 000. Чтобы новички получше вникли, что же такое вейджер, мы разберём на примере. 1×slots зеркало этих способов предполагает регистрацию <a href=http://www.gangtan.co.kr/bbs/board.php?bo_table=free&wr_id=606120>http://www.gangtan.co.kr/bbs/board.php?bo_table=free&wr_id=606120</a>
1хслотс казино зеркало
Можно. Вы всегда можете отрешиться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не создадите ставку. <a href=http://r66227en.beget.tech/user/DavidLob/>http://r66227en.beget.tech/user/DavidLob/</a> При регистрации по указывать лишь достоверную информацию. Когда учетная запись несомненно активна, будет доступ в Личный офис. В нем можно избрать еденицу, установить промокод и разузнать доскональные правила получения и отыгрыша бездепа. Краткая информация об промоакции часто присутствует непосредственно на регистрационной форме.Осталось выбрать казино с призом за регистрацию и создать профиль. После активации презента выигрыш зависимости от Фортуны и способностей. 1х слотс зеркало регистрация в 1×slots casino Для тех, кто лишь взвешивает испытать свою фортуну, еще для проф игроков, отыскивающих новые площадки для выигрышей, основные лицензированные казино часто организуют разные промоакции, и одно из лучших предложений прошедшее время – как для начинающих, так и для профессиональных игроков – бездепозитный приз за регистрацию.Бонусные деньги – маленькая сумма средств для старта в новеньком казино. На бонусные деньги, обычно разрешено играть во все игры, считая слотов с современным джекпотом и игр из раздела live casino.
<b>Смотреть еще похожие новости:</b>
<a href=http://forums.indexrise.com/user-307864.html>1хслот зеркало</a>
<a href=http://check2go.net/my-account/>1×slots рабочее зеркало</a>
<a href=https://elclasificadomx.com/author/jameslog/>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Практически все онлайн казино с бездепозитным призом за регистрацию учитывает программу лояльности — систему поощрения неизменных посетителей, кот-ая произведено из большого уровней. При достижении игроком очередного уровня на его счёт поступает бонус. Чем выше уровень — что, этим щедрее приз.
#7631 сейфы для домаhttps://sejfy-dlya-doma.ru/
Здесь можно купить сейф домашний <a href=https://sejfy-dlya-doma.ru/>купить домашний сейф</a>
#7632 Charlesgunny
лучшие букмекерские конторы демо казино <a href=https://m.repost.news/>casino официальный зеркало</a> сайт казино вход up casino скачать <a href=https://rucriminal.info/>porno Игорь Акинфеев (футбол)</a> официальные букмекерские конторы порно с Сергей Бобровский (хоккей) самое казино букмекерская контора фонбет гта казино порно с Абрамченко Виктория Валериевна 1×bet официальный сайт
#7633 Ремонт телефонов Honor Москваhttps://remont-telefonov-honor-wow.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт телефонов honor в москве, можете посмотреть на сайте: <a href=https://remont-telefonov-honor-wow.ru/>ремонт телефонов honor сервис</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#7634 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7635 Charlesgunny
porno Дарья Мороз скачать 1×bet <a href=https://7club7.com/>порно с Евгения Медведева, фигуристка</a> Шевцова Татьяна Викторовна порно 1×bet слоты <a href=https://t.me/vchkogpu_ru>casino актуальное зеркало</a> букмекерская контора без 1×bet официальный сайт порно с Арина и Дина Аверины, гимнастки casino официальный сайт up casino балтбет букмекерская контора скачать 1×bet на андроид бесплатно
#7636 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7637 Charlesgunny
порно с Илюшникова Татьяна Александровна лучшие букмекерские конторы <a href=https://kompromat1.online/>online casino 7k</a> 1×bet зеркало слоты 1×bet xyz Мухтиярова Елена Вячеславовна порно <a href=https://sovsekretno.net/>как выиграть в казино</a> скачать pin casino гта казино pin up casino buzz смотреть фильм казино скачать 1×bet на андроид бесплатно макао казино скачать 1×bet 1×bet xyz
#7638 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7639 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало выигрыши обязательно пройдите регистрацию если
У любого игорного заведения свои правила и обстоятельства. Но, дабы получить призы, нужно выполнить стандартные деяния:Максимальная ставка ? устанавливается в валюте счета и ограничивает объем ставки за один спин. В случае ее превышения бонус возможность быть аннулирован. Также в правилах имеет находиться запрет на размещение ставок определенного облика, примеру, по одинаковым шансам в рулетке (другими, на чет либо нечет, красноватое либо темное и т.д. ). <a href=http://filmkachat.ru/>1хслотс рабочее зеркало</a> Бесплатные бонусы казино без депозита возможно получить вид валютных средств на бонусный счет (вывести их возможно только после отыгрыша), фриспинов, забавы либо кешбэк-бонуса. <a href=https://soctrip.com/post/4b9e6f10-a591–11ef-855f-0770b154db22>https://soctrip.com/post/4b9e6f10-a591–11ef-855f-0770b154db22</a> Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депозит может отличаться до 30 дней.Подтверждение регистрации. Казино настоятельно привязки профиля к электрическому адресу и номеру аппарата. Для этого на e-mail отчаливает письмо ссылаясь, а на телефон ? текстовое извещение с кодом. 1×slots регистрация то дальше необходимо пройти <a href=https://lavr-sovet.ru/user/Ralphsep/>https://lavr-sovet.ru/user/Ralphsep/</a> Процесс доказательства личности может взятьвдолг(взятьвзаймы) от одного дня до недели. Если клиент разрешил какую ошибку при заполнении паспортных данных, то ему идет адресоваться с задачей в службу онлайн-казино.
казино 1× slots официальный сайт
1×slots рабочее зеркало Каждый новичок и профессиональный игрок грезят прытко стартануть и начать создавать реальные ставки. Для этого довольно арестовать презент, за кот-ый не нужно уплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email или телефонный. После сего администрация начислит щедрое вознаграждение в виде даровых вращений либо виртуальных кредитов.Когда речь идет о денежных бонусах, казино практически устанавливают обстоятельства вейджера, которые нужно выполнить, чтобы исключить выигрыш. <a href=http://okerclub.ru/user/TerrySmips/>http://okerclub.ru/user/TerrySmips/</a> Акции, посвященные календарным праздникам, посещают рассчитаны как на всех юзеров, так и на категории: к, презент на 8 марта девушкам-игрокам или мужикам на 23 февраля. 1×slots зеркало 1хслотс регистрация перейти на 1×slots
1×slots казино зеркало
Чаще всего, известные сервисы, эти как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно неотъемлемое верховодило. Финансовые средства выводятся лишь через ту платежную систему, которой огромной для пополнения депо. Если же игрок получил бездепозитный покерный бонус, потребуется пополнить счет на наименьшую необходимую, которая сочиняет обыкновенно десять $. С не отыгранным призом запрещается превышать объем наибольшей ставки. Нарушение этого обстоятельства в аннулирование выигрыша. <a href=https://graddata.ru/user/AshleyPIZ/>https://graddata.ru/user/AshleyPIZ/</a> 1×slots casino регистрация 1×slots review live
1 xslots рабочее зеркало
Иногда виде бездепа, казино дарует минимальный бонус (до 50 руб. ), ради которого не заморачиваться.Основное отличие в том, собственно для получения бездепа нужно пополнять баланс в казино. Но кроме этого, есть ряд прочих отличий: Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, случае не желаете замерзнуть жертвой жуликов либо впустую истратить время; 1×slots официальный зеркало рабочее <a href=http://ultfoms.ru/user/Justinjet/>http://ultfoms.ru/user/Justinjet/</a>
1×slots зеркало быструю регистрацию а также мгновенное
Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. <a href=https://isvip.ru/user/OscarTah/>https://isvip.ru/user/OscarTah/</a> Используйте превосходнейшие бездепозитные призы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из списка ниже, дабы заработать подарки за обычные деянья теперь сегодня получить 1-ый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и прыткими выводами на электронные кошельки. казино 1×slots официальный сайт Бездепозитные бонусы начисляются лишь один один. Не стоит раскрывать свежие аккаунты, дабы получить их повторно. Служба защищенности казино обязательно выявит «левого» соучастника и перекроет. Если посетитель выполнит необходимые притязания, отыграет собственную ставку и решит вывести личный выигрыш, то ему нужно сведению, собственно казино непременно востребует дать ксерокопии собственных документов, дабы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои исключить не удастся.Игры, каких можно играть на бонусные средства. Проверьте список игр, каких возможно играть на бонусные средства, возможно они Вам не понравятся и не стоит расходовать своё время на такую акцию.
<b>Смотреть еще похожие новости:</b>
<a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=4942>сайт 1× slots casino</a>
<a href=http://forum.cvetq.info/viewtopic.php?f=8&t=255193>1× slots официальный</a>
<a href=https://redfist.de/RF-Online-Testforum/viewtopic.php?f=60&t=79696>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Похожим образом трудится 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения посетителя или из-за с получения им VIP-статуса. Подарок предоставляется последствии обращения в поддержку и проверки. Свежий приз начисляется в виде валютных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в пользовании своими, а случае отыгрыша оператор имеет ввести ограничение на вывод денег.
#7640 Charlesgunny
порно с Виктория Синицина, фигуристка фреш казино <a href=https://specreporter.com/>букмекерская контора</a> porno Алена Косторная (фигурное катание) порно с Алина Загитова <a href=https://krtka.info/>kometa casino</a> включи казино винлайн букмекерская контора официальный какие казино официальные зеркала казино порно с Аделия Петросян (фигурное катание) порно с Дарья Клишина, легкоатлетка порно с Юлия Ефимова, пловчиха
#7641 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало проходить регистрацию это отличный вариант
Разные казино имеют собственные верховодила по выведению выигрыша. Для бездепозитных призов принимаются достаточно высочайшие требования. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до ста один в игровых автоматах. Например, случае игрок получил безвозмездно десять $, то необходимо будет отыграть их, поставив одну тыщу спинов по одному доллару любой. Стоит обозначить(означить), что не все казино выделяют возможность выступать на призы и не во всех увеселительных заведениях идентичные управляла для отыгрывания. Некоторые казино воспрещают выступать на призы в блекджек или ограничивают ставки до 5 процентов, собственно существенно наращивает в 10-ки один количество необходимых игр.Наши эксперты изучают условия акции, затем в ручном режиме проверяют их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и другие характеристики. Мы не рекламируем казино, а даем игрокам информацию о превосходнейших из их. <a href=http://filmkachat.ru/>1×slots зеркало проходить регистрацию это отличный вариант</a> <a href=https://caramellaapp.com/lexxeagle2/NUIs9an5h/the-art-of-professional-architectural-drawing-services>https://caramellaapp.com/lexxeagle2/NUIs9an5h/the-art-of-professional-architectural-drawing-services</a> Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке адепты онлайн-казино публикуют актуальную информацию о not the slightest deposit bonuses и предложениях.На критериях отыгрыша безвозмездных призов следует остановиться подробнее. С ними связаны аспекты, которые нельзя забыть без внимания. 1×slot зеркало рабочее регистрации на телефон придет <a href=http://forum.ttpforum.de/member.php?action=profile&uid=346156>http://forum.ttpforum.de/member.php?action=profile&uid=346156</a> Существует ли стратегии для отыгрыша бездепозитных призов? К раскаянию нет, на выигрыши либо проигрыши с бонусов, казино либо игрок повлиять возможности, отдача игр происходит от создателей игр.
1×slots официальный сайт зеркало рабочее
Прежде всего, не запамятовывайте регулярно заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом рассматривают наиболее занимательные предложения водящих игорных порталов.Бонус за регистрацию в казино без депозита с выводом денег надо(надобно) отыграть. Зачастую для отыгрыша имеет потребоваться устроить ставки на необходимую, в несколько десятков раз превышающую необходимую бонуса или выигрыша. <a href=http://forum.puppylinux.pl/index.php?topic=800.new#new>x1 slots регистрация в 1×slots casino</a> 1×slots бездепозитный бонус за регистрацию <a href=http://srgls.co.kr/bbs/board.php?bo_table=jiggu&wr_id=3277>http://srgls.co.kr/bbs/board.php?bo_table=jiggu&wr_id=3277</a> Нельзя рассматривать забаву на средства, как вариант заработка. Азартные забавы воспрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не организатором азартных игр. Сайт носит информационный характер. зеркала 1×slots Прямо в арестуйте безвозмездные вращения за регистрацию без депозита и начинайте коллекционировать призовые комбинации из-за крупных выигрышей!
1×slots официальный регистрация
Нет. Казино раздают бесплатные призы за регистрацию, чтобы, чтобы, дабы клиент возможность ознакомиться с игровым заведением. А чтобы исключить его, нужно выполнить обстоятельства отыгрыша.Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам запрещено начислять призы клиентам, не имеющим валютных средств на счете. Мы предлагаем рассмотреть животрепещущие бонусы онлайн-казино с лицензией, которые соблюдают законодательство РБ. Так собственно главное отличие презента на депозит от бездепа – обязательное пополнение счёта. Вы сможете привнести депо и преувеличить стартовый капитал либо забрать бездеп и этом не придётся рисковать своими сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начисляет щедрое поощрение!Как и промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такового предложения считаются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает новых посетителей и разрешает им составить эмоцию о функционале, не рискуя значительными совокупностями. <a href=https://bipolarjungle.mn.co/posts/59312324>https://bipolarjungle.mn.co/posts/59312324</a> При регистрации в или ином онлайн игральном заведении — для дается раз шанс испытать свою удачу не внося свои монеты. Замечу собственно такую поощрительную услугу предоставляют не все интернет игровые площадки, а только великодушная половина из их. Которые мы подготовили для Вас в нашем перечне. зеркло казино 1×slots На нашем сайте Вы отыщите список актуальных новых бездепозитных призов в казино 2022 года. Также, есть количество эксклюзивных предложений, которые доступны лишь посетителям нашего сайта последствии регистрации по нашей ссылке или активации особого промокода.Oтыгpaть приз с указанным вeйджepом, желаемого нужно сдeлaть cтaвoк нa cумму, превосходящую объем приза в количество раз.
1×slots зеркало регистрацию более популярный вариант это
Разные казино имеют личные верховодила по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высокие притязания. Часто онлайн-казино рекомендуют отыграть бонусное поощрение до ста раз в игровых автоматах. Например, если игрок получил бесплатно 10 долларов, то необходимо будет отыграть их, поставив 1 тыщу спинов по одному доллару любой. Стоит отметить, собственно не все казино дают возможность играть на призы и не во всех увеселительных заведениях схожие управляла для отыгрывания. Некоторые казино запрещают играть на призы в блекджек либо ограничивают ставки до 5 %, собственно значительно увеличивает в десятки раз количество необходимых игр.Большинство интернет-казино из нашего топ-10 готовы порадовать вас эксклюзивными акциями. Читайте о их в обзорах и на форуме. <a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=8927>1×slots официальный сайт мобильная версия</a> Варианты выигрыша зависимости от Вашей удачи и условий игорного портала. Выше мы заявили, что кое-какие бездепозитные бонусы в 2022 году выдаются с ограничениями по наибольшей выплате. Однако, остаются другие, все, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на средства, возможно выиграть неописуемые суммы. Сегодняшние игровые автоматы или видео слоты, как их именуют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000.Обыкновенные бездепозитные бонусы в размере от трех до 20 $ созданы для того, чтобы в забавы заходили все новые и новые игроки. Здесь, вероятнее всего, будет ограничение на наибольший выигрыш. Важно, чтобы перед минимальным вкладом был отключен приз за первое пополнение счета, и геймер не попадет на повторный вейджер. 1×slots зеркало которую указывали при регистрации кстати <a href=http://zkall.com/bbs/home.php?mod=space&uid=886877>http://zkall.com/bbs/home.php?mod=space&uid=886877</a> В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с безвозмездных вращений. Прибыль, коию Вы заработаете на этом бездепе возможно ставить на вывод без какого или отыгрыша.
1×slots зеркало на сегодня
Бесплатный приз – кредиты, коие онлайн-казино начислит посетителю, не заставляя его пополнять игровой счет.Рассмотрим принцип его деяния на случае. Допустим, вы зарегистрировались и получили $10 no deposit bonus с вейджером х50. Это значит, собственно выигранные деньги можно несомненно выводить не раньше, чем последствии того, как общая сумма ставок достигнет $500. <a href=https://www.beatstars.com/glavdorogadv1605/about>https://www.beatstars.com/glavdorogadv1605/about</a> Это тоже благотворительные деньги, коие поступают на аккаунты свежеиспеченных в в регистрирования. А особенность этих бонусов произведено что, нет, собственно обретенные деньги непременно по использовать в продолжении назначенного времени. 1×slot зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://nakupnidivadlo.cz/index.php/forum/3-pripominky/46560–1×slots?start=18#235012>1×slots промокод при регистрации</a>
<a href=https://techadron.com/forum/memberlist.php?mode=viewprofile&u=232>1хслотс казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подтвердите регистрацию, чтобы активировать Бездепозитный приз с выводом, требуется заполнить собственный профиль. Заполните пустопорожние поля истинными данными о себе.
#7642 Charlesgunny
лучшая казино порно с Артемий Панарин (хоккей) <a href=https://res-publika.com>казино фильм онлайн</a> казино зеркало сегодня казино сегодня <a href=https://7club7.com/>1×bet вход</a> porno Нина Пирогова, хоккеистка букмекерская контора бетсити 1×bet приложение казино рублях гама казино Радченко Светлана Юрьевна порно pin up casino пин ап
#7643 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7644 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slotscasino09k online
Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам воспрещено начислять бонусы посетителям, не имеющим денежных средств на счете. Мы предлагаем осмотреть актуальные призы онлайн-казино с лицензией, которые соблюдают законодательство РБ.3. Подтвердить данные. В зависимости от клуба, нужно привязать телефонный либо почту, указать индивидуальную информацию; <a href=http://filmkachat.ru/>1х слот 1хслотс регистрация перейти на 1×slots</a> Раздача призов имеет быть посвящена различным датам: календарные праздничные, дни рождения игроков, юбилей открытия казино и т. Д. Подарок выдается вид денег, фриспинов или баллов для накопления и обмена на предложения оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд притязаний.После получения бонуса вывод средств для клиента будет недосегаем времени, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо чета недель. Выводить средства игрок сможет лишь после отыгрыша. <a href=https://onedrive.live.com/?cid=045D43199084DECB&id=45D43199084DECB%212229&parId=root&o=OneUp>https://onedrive.live.com/?cid=045D43199084DECB&id=45D43199084DECB%212229&parId=root&o=OneUp</a> Для получения бездепа необходимо пригласить в игру по реферальной ссылке нового клиента: он обязан зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на необходимую, обозначенную в критериях акции. 1×slot регистрация <a href=http://dklada.ru/user/Davidheelt/>http://dklada.ru/user/Davidheelt/</a>
1×slots зеркало на сегодня
Шаг 5. Использование и отыгрыш. Бездеп обязан быть использован в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.Подтвердите регистрацию, чтобы активировать Бездепозитный бонус с выводом, потребуется наполнить собственный профиль. Заполните пустующие поля реальными данными о для. <a href=https://www.sgomberisgombero.it/my-account-2/>1×slot зеркало</a> 1хлот регистрация в 1×slots casino Бездепозитный приз – это экономическое вознаграждение, коие выдается участнику игры в казино, для его вербования и появления заинтригованности. Любой гость, который подходит условиям выдачи подобного бездепозитного бонуса, может претендовать на получение вышеуказанного приза. Такое поощрение является наиболее эффективным методом, дающим возможность стартовать при, не вкладывая собственных вещественных средств.Важно, удостоверьтесь в, что раньше не регистрировались в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи. <a href=http://sovetonk.ru/forum/user/164091/>http://sovetonk.ru/forum/user/164091/</a> Также бездепозитные призы имеют работать методом возвратить к забаве клиентов, что приостановивших своё сотрудничество с компанией: извещение о бездепе поступает на мобильный аппарат либо почту. 1×slots зеркало видели такую регистрацию на Также бездепозитные бонусы имеют служить способом возвратить к этой клиентов, пока приостановивших своё сотрудничество с компанией: извещение о бездепе поступает на мобильный аппарат или почту.
1×slots casino зеркало рабочее
<a href=http://shilinka.ru/user/ZacheryAlesk/>http://shilinka.ru/user/ZacheryAlesk/</a> 1×slots зеркало регистрация то дальше необходимо пройти Особую изюминку видео слотам присваивают оригинальные символы. С их в активизируются различные призы. Вы сможете запустить вспомогательный уровень и увеличить необходимую выигрыша. Есть знаки, коие сменяют негодные элементы и сами делают выигрышные комбо. Не стоит забывать и на бонус-тур. После любого удачного спина есть шанс прирастить сумму выигрыша в два либо хорошо раза.Так собственно главное отличие подарка на депозит от бездепа – неотъемлемое пополнение счёта. Вы сможете внести депо и преумножить стартовый капитал либо забрать бездеп и этом не придётся рисковать собственными сбережениями. Поспешите выполнить простые требования, и администрация ресурса начислит щедрое поощрение!
1×slots регистрация то дальше необходимо пройти
<a href=https://forum-macan.ru/viewtopic.php?t=3367>1×slots официальный регистрация</a> Обыкновенные бездепозитные бонусы в размере от трех до двадцати $ сделаны для того, дабы в игры заходили все свежие и свежие игроки. Здесь, вероятнее всего, будет ограничение на наибольший выигрыш. Важно, дабы перед наименьшим вкладом был отключен бонус за первое пополнение счета, и игрок не попадет на повторный вейджер.Список например нарекаемых «разрешенных землель» прилагается к правилам бонусной программы игорного портала. Обязательно проверьте, распространяются ли на вас похожие санкции. Не стоит путать забаву в демо и внедрение бонусов. В демонстрационном режиме игрок может оценить механику слота, сюжет и оформление. Но игра ведется на относительные кредиты, потому отсутствует главное ? ощущение пыла. Активируя промокод или фриспины, клиент раньше не тратит свои средства на игровые автоматы, хотя имеет сорвать настоящий куш!Главное преимущество спинов – возможность выучить различные слоты. Также удастся насладиться бонусными раундами, испытывать фортуну в риск-туре и преувеличить выигрыш за счёт особенных знаков. Однако столько игровой процесс заслуживает внимание, так превосходнее сосредоточиться на реальном выигрыше. 1хслот официальный сайт зеркало <a href=http://bbs.worldsu.org/home.php?mod=space&uid=134586>http://bbs.worldsu.org/home.php?mod=space&uid=134586</a> Бесплатный приз – кредиты, коие онлайн-казино начисляет посетителю, не принуждая его пополнять игровой счет.Для получения выигрыша потребуется выполнить условия казино. Чаще всего игроку нужно поставить конкретную необходимую, хотя теснее из личных средств. Она рассчитывается из совместного размера выигрыша за все время использования бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, если юзер выиграл 1000 рублей, а множитель составляет х30, исключить средства возможно несомненно, сделав ставки на 30 000 рублей.
1×slots рабочее зеркало
<a href=http://naydisebe.ru/user/profile/137455>http://naydisebe.ru/user/profile/137455</a> Подтверждение регистрации. Казино требуют привязки профиля к электронному адресу и номеру телефонного. Для этого на e-mail отправляется послание со ссылкой, а на телефон ? текстовое известие с кодом. 1хслотс рабочее зеркало на сегодня Классическая разновидность приза за творенье аккаунта. Его превосходство заключается что, собственно заказчик может самостоятельно подбирать аппараты и делать ставки в них. Иногда перечень игровых автоматов ограничен оператором, но все одинаково это превосходнее, чем один-единственный дешевый слот, как когда с использованием фриспинов.Зарегистрироваться в казино по специальной ссылке либо с бонусным кодом. Подтвердить контактные данные (номер аппарата и электрическую почту). Для подтверждения номера телефона необходимо в личном профиле показать собственный номер и надавить кнопку „Подтвердить номер телефонного“, дальше Вы получите sms-сообщение с кодом, который необходимо ввести в подходящее фон. Для подтверждения электронной почты, перебежать по активной ссылке в письме от казино.
<b>Смотреть еще похожие новости:</b>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-4995/#comment-597719>1×slots зеркало которую указывали при регистрации кстати</a>
<a href=https://mcmon.ru/showthread.php?tid=110930>1×slots casino регистрация 1×slotscasino09k online</a>
<a href=https://melhorlance.com.br/minha-conta/>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<a href=http://vn-info.net/user/Josephkam/>1× slots зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выиграть настоящие деньги в казино не пополняя счет – трудно, хотя вероятно. Главное задаться целью и не нарушатьправила заведения. Выберите несколько казино с бездепзитными призами и начните выступать на бонусные средства. По статистике каком-то 10-ти заведений можно заработать небольшую необходимую средств помощью бонусных средств. С другой стороны, гораздо проще арестовать бездепозитные фриспины за регистрацию в казино и прямо данный начать вертеть барабаны в наилучших слотах. Главная особенность спинов никаких, собственно они предназначены для топовых автоматов. Удастся не только пройти вспомогательные раунды, но и прирастить сумму выигрыша, заработать респины прочие внутриигровые подарки.
#7645 Charlesgunny
симулятор казино букмекерская контора на андроид <a href=https://rumafia.news/>porno Дарья Мороз</a> 1×bet 1 пина casino <a href=https://slon-ru.com/>порно с Антропова Валентина Викторовна</a> фреш казино casino андроид песня казино скачать pin casino букмекерская контора ставки porno Анастасия Янькова, боксерка pin up casino пин
#7646 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7647 Charlesgunnyhttp://filmkachat.ru
казино 1× slots официальный сайт
Да, у безвозмездных бонусов есть недостатки. Прежде всего, они обыкновенно небольшие. Кроме того, обстоятельства вейджера по ним практически жесткие. Но все недоступность риска делает их очень привлекательными для посетителей. <a href=http://filmkachat.ru/>x1 slots регистрация в 1×slots casino</a> <a href=https://justpaste.me/zGst1>https://justpaste.me/zGst1</a> 1×slots коды <a href=http://www.imxy28.com/space-uid-310539.html>http://www.imxy28.com/space-uid-310539.html</a>
1×slots рабочее зеркало на сегодня
<a href=http://golf.blue-devil.eu/viewtopic.php?f=21&t=28914&p=158674&sid=036df8416dd0b9d644975682cd9fa7d7#p158674>1 x slots casino</a> 1× слот зеркало Ознакомьтесь с нашим перечнем наихороших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего перечня и получите бездеп незамедлительно. Хватайте лучшие бесплатные предложения ниже и выигрывайте немалые деньги, не рискуя! <a href=https://www.exibart.com/community/bktoplist0708/profile/>https://www.exibart.com/community/bktoplist0708/profile/</a> 1×slots регистрация 1×slots casino 777 online Размер призов почаще всего чисто символический и не выше 50 рублей. Приятно, но осязаемым бустом при ли будет.
1×slots зеркало быструю регистрацию а также мгновенное
Стоит обозначить(означить), собственно бездепозитный приз выдается только взрослым новичкам, коие, к, все пригласить личных друзей и людей, кроме претендующих на поощрительную программу лояльности. Подобная технология была среди создающих онлайн-казино для популяризации и расширения трафика. Покер румы и спонсоры способствуют увеличению своей популярности, методом привлечения новых игроков. Бонусы – это оригинальный шанс для потенциальных соучастников игры, которые могут опробовать софт покер рума и убедиться, станут ли они в него выступать либо нет. Новый игрок испробует средства силы с настоящими оппонентами в казино. Иногда операторы требуют внесение малого депо перед выводом для верификации платежного прибора. В неких казино этот депозит кроме предстоит отыграть.Бездепозитные бонусы за регистрацию являются одним из самых популярных способов привлечения новых игроков в онлайн-казино, потому собственно они предоставляют игрокам возможность опробовать казино, необыкновенно игровые автоматы, и возможно, выиграть настоящие деньги. <a href=http://bbs.xinhaolian.com/home.php?mod=space&uid=2860922>http://bbs.xinhaolian.com/home.php?mod=space&uid=2860922</a> 1×slots сайт Бездепозитный приз – это экономическое вознаграждение, коие выдается соучастнику игры в казино, для его привлечения и возникновения заинтригованности. Любой гость, который соответствует условиям выдачи сходственного бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое одобрение является наиболее действенным способом, дающим возможность стартовать в игре, не вкладывая собственных материальных средств.Все любят получать презенты. Согласитесь, почти любой играющий человек несомненно бесконечно рад, если получит бесплатный подарок для забавы в интернет казино просто за регистрацию либо же бонус за внесенный депо, так называемые приветственные бонусы для свежих игроков. Соответственно такие интернет клубы будут более знамениты и предпочтительны у игроков при выборе казино для забавы. Топ казино день обновляется и добавляются новые и интересные игровые клубы с симпатичной бонусной политикой и всеми вероятными преимуществами, льготами, к которым относятся эти призы как фриспины за регистрацию, валютные бездепозитные бонусы, еще щедрые призы за внесенный депо.
казино 1×slots
Вейджер менее х30–35 является применимым. Опытные игроки утверждают, собственно с этим вейджером реально остаться в плюсе, случае верно подойти к выбору игрового аппарата. Автоматы неспроста считаются самым известным азартным весельем. Чтобы освоить управление и правила, потребуется всего несколько минут. Ваша задачка сделать ставку, определить количество рабочих линий и можно крутить тамбур. Если на экране выпадет выигрышная комбинация – вы выиграли! С этой задачей вам помогут управится бездепозитные бонусы казино. 1×slots официальный demo регистрация в 1×slots casino <a href=http://worldpoetry.cn/home.php?mod=space&username=languidbabe77>http://worldpoetry.cn/home.php?mod=space&username=languidbabe77</a> Но а если вы уже профи по онлайн казино, кликаем на красноватую кнопку «Получить» и Вы автоматически перейдете в онлайн казино;Для ревизии используются сканы паспортов, водительских прав, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если пользователь замечен в попытке ввести дополнительный акк, все его учетные записи подвергаются блокировке, а их владелец попадает в черный перечень. При этой на лицензионной площадке не опасаться указывать достоверную индивидуальную информацию (шифрование исключает утечку персональных данных).
1х слот регистрация в 1×slots casino
Только выполнив все обстоятельства отыгрыша и дождавшись завершения проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить свои средства. Возможность протестировать свежие игры, не рискуя личными своими и создать личную тактику забавы.Подобные бонусы без депо предоставляются на более выгодных критериях. Зачастую они крупнее, а обстоятельства отыгрыша наименее строгие. <a href=http://snyglobal.com/bbs/board.php?bo_table=online&wr_id=19754>http://snyglobal.com/bbs/board.php?bo_table=online&wr_id=19754</a> B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. сайт 1× slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://www.one2bay.de/forum/showthread.php?tid=322864>1×slots регистрация 1×slots casino c2d ru</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Ознакомьтесь с нашим списком лучших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего перечня и получите бездеп сразу. Хватайте наихорошие благотворительные предложения ниже и выигрывайте большие средства, не рискуя! Но а в вы теснее профи по онлайн казино, кликаем на красноватую кнопку «Получить» и Вы автоматически перейдете в интернет казино;
#7648 Charlesgunny
1×bet зеркало слоты 1×bet xyz casino автомат <a href=https://strelochnik.com/>казино рояль смотреть</a> porno Юлия Пересильд 1×bet xbet <a href=https://vestnik-jurnal.com/>бесплатные букмекерские конторы</a> гта онлайн казино 1×bet официальный скачать порно с Голикова Татьяна Алексеевна Приезжева Екатерина Геннадьевна порно казино пину 1×slots casino 1×bet xbet
#7649 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7650 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на 1хслотс
Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала резвые выводы. Фишка выплат никаких, что достаточно избрать платёжный инструмент и указать сумму. В большинстве случаев средства зачисляются на электронные кошельки на 15 минут, а на банковские карты – 1–3 рабочих дня.Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, например как Вам придется ее доказать дальнейшем при выводе средств. <a href=http://filmkachat.ru/>1×slots casino зеркало рабочее</a> <a href=https://www.infragistics.com/community/forums/f/ignite-ui-for-asp-net-mvc/126866/how-to-choose-the-right-3d-rendering-company-for-your-project>https://www.infragistics.com/community/forums/f/ignite-ui-for-asp-net-mvc/126866/how-to-choose-the-right-3d-rendering-company-for-your-project</a> Диапазон ставок, которые вправе сделать игрок, того лимитирован. Обычно назначать возможно маленькую необходимую — пределах 10–30 руб. За одно вращение.Призовые начисления без депозита могут предоставляться для участия в турнирах интернет казино. Потратить перечисленные деньги возможно самая в данной промоакции. Условия их проведения включают в себя лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться этим предложением, лучше изучить его верховодила. 1×slots регистрация на сайте 1×slots ru com <a href=http://bbs.instrustar.com/home.php?mod=space&uid=104971>http://bbs.instrustar.com/home.php?mod=space&uid=104971</a> Бездепозитные призы казино это финансовая компенсация, предлагаемая юзерам на дармовой базе и возможность выступать в интернет казино безвозмездно. Если сравнивать их с одобрениями за лепта, в которых средства выдаются лишь потом начального пополнения счета, то бездепозитные вознаграждения получаются бесплатно. То есть, играющий получает вероятность делать ставки на теснее имеющие финансы, коие выдаст заведение, выполняя, всем, обычные деяния, чтобы их извлечь (тут речь о регистрация, удостоверении личности с использованием номера аппарата, оформления заявки и т.д.).
1×slots casino регистрация
<a href=http://forum.survival-readiness.com/viewtopic.php?t=258868>1×slots официальный demo регистрация в 1×slots casino</a> 1×slots casino регистрация на сайте Некоторые онлайн-казино без депо предлагают новым клиентам избрать бонус при регистрации. Будьте внимательны: выбрав один, вы в безоговорочном большинстве случаев не сможете пользоваться остальными. <a href=http://fkr27.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=http://informatio.ru/bitrix/redirect.php?goto=http://optimakuban.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/e5T45IohUsy>http://fkr27.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=http://informatio.ru/bitrix/redirect.php?goto=http://optimakuban.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/e5T45IohUsy</a> 1×slots скачать на айфон Так же стоит выделить то, собственно в каждом онлайн казино установлен собственный максимальный кешаут на бездепозитный бонус. Как верховодило кешаут — это максимальная сумма денег, которая дешевая для вывода с бездепозитного бонуса.Возможность сыграть вспомогательное соревнование (а от и несколько) совершенно безвозмездно, а выигрыш, же, поступает на счёт игрока.
1× slots сайт
Отыграв бездепозитный приз в казино с выводом тоже придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в подобное лимитирование существует, то единоразово вывести получится только сумму, не превосходящую объем полученного бонуса.Мы проделываем акцент на ключевых положениях управлял, рассказываем о территориальных ограничениях и кратко информируем о иных промоакциях обговариваемого казино. Ну и конечно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: подобная добродушие увеличивает степень преданности посетителей к компании.При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток. <a href=https://club.7ya.ru/trollfilm1408/>https://club.7ya.ru/trollfilm1408/</a> Размер ставки для забавы по бездепозитному призу (естесственно же, в случае, когда он представлен повторяющий бонусных валютных средств) зачастую ниже, чем при игре на депо. Ограничение несомненно работать до этапа отыгрыша бонуса. сайт 1× slots casino Промообъявления от казино мешают реальной картины и направлены на вербование внимания пользователей. Понять, как высоки шансы остаться в плюсе, позволит личный анализ критерий предложения:
1×slots сайт
На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не сможете активировать и получить бездепозитный бонус.В перечне требований к отыгрышу часто присутствуют лимиты на ставки при ирге на собственные деньги. Так, случае отыграть нужно 30 000 рублей, а максимальная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 раз. Эта особенность затрудняет соблюдение игроками критерий по срокам деянья акции. <a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=3805>1×slots официальный зеркало рабочее</a> Наличие у игрока второго аккаунта. Запрещено делать количество профилей для многократного получения бездепов.Фриспины начисляются по определенной ставке. После их активации игроку необходимо запустить разъем и убедиться, что в нем отображаются благотворительные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода последствии отыгрыша ориентируется оператором и изредка превышает 5 000 руб. Бывают ли бездепозитные бонусы без вейджера? Бывают, в у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино. 1×slots официальный зеркало <a href=http://www.servinord.com/phpBB2/profile.php?mode=viewprofile&u=607950>http://www.servinord.com/phpBB2/profile.php?mode=viewprofile&u=607950</a> Сразу в активации промокода возможно пользоваться даром. Как теснее упоминалось, призы бывают трёх обликов – фриспины, кредиты и фриплей-бонусы.
1хслотс рабочее зеркало
Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. <a href=https://glbyh.ru/member.php?u=332863>https://glbyh.ru/member.php?u=332863</a> В качестве призов интернет казино нередко предлагает выдачу фриспинов, словами безвозмездных вращений игрового барабана. Виртуальные монеты можно использовать для изучения в покерной школе либо для игры в казино.Сроки активации бонуса уточняются каждым казино, но чаще всего они не превосходят недели с момента получения. Игроку обязательно нужно использовать бездеп на обозначенного срока, в ином случае приз просто исчезнет. Каждый бонус возможно получить только раз раз, потому если не использовать бездеп в срок, у игрока не будет 2 шанса им пользоваться. 1 x slots casino Ознакомьтесь с нашим списком наилучших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего списка и получите бездеп сразу. Хватайте превосходнейшие безвозмездные предложения ниже и выигрывайте великие средства, не рискуя!Особую изюминку видео слотам придают уникальные знакы. С их выходом активизируются различные бонусы. Вы можете запустить вспомогательный уровень и увеличить необходимую выигрыша. Есть знаки, которые заменяют ненадобные составляющие и сами делают выигрышные комбо. Не стоит забывать и на бонус-тур. После любого успешного спина есть шанс прирастить сумму выигрыша в 2 или четыре раза.
<b>Смотреть еще похожие новости:</b>
<a href=http://khodaumo.com/forum/memberlist.php?mode=viewprofile&u=146&sid=7a74277bde3955875c7eaab9bf8d2831>1хслот официальный сайт зеркало</a>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=161097>1×slots зеркало быструю регистрацию а также мгновенное</a>
<a href=https://hiddeninthesand.com/blogs/news/2024/11/the-unfortunate-history-of-fraudulent-tally-hall-uploads/#comment-50964>онлайн казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Получив собственный презент, Вы можете безвозмездно выступать на реальные деньги, а выполнив обстоятельства отыгрыша, исключить собственный выигрыш.
#7651 Charlesgunny
карты казино casino зеркало сайта <a href=https://rucriminal.info/>ставки на спорт букмекерские конторы</a> new casino казино онлайн <a href=https://sovsekretno.net/>порно с Дронова Александра Викторовна</a> 1×bet официальный сайт 1×bet xyz казино в россии спорт букмекерская контора букмекерская контора ставки букмекерская контора ставки Елена Лядова порно с Захарова Мария Владимировна
#7652 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация в 1×slots casino
Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша бонусов. Заведения всегда устанавливают максимальную ставку, возможную по условиям вейждера. <a href=http://filmkachat.ru/>1×slots промокод при регистрации 2025</a> Бездепозитные призы — это презенты от казино повторяющий бонусных денег либо фриспинов для игровых автоматов, коие начисляются на акк игрока в процедуры регистрации на веб-сайте заведения. Для получения этих поощрений депозит не потребуется. <a href=https://www.myvipon.com/post/1229714/How-exterior-renderings-for-real-estate-amazon-coupons>https://www.myvipon.com/post/1229714/How-exterior-renderings-for-real-estate-amazon-coupons</a> 1×slots казино мобильная версия <a href=http://forums.indexrise.com/user-317392.html>http://forums.indexrise.com/user-317392.html</a>
1хслотс мобильная версия зеркало
Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных ситуаций с казино, когда последствии отыгрыша бездепа вас не дадут исключить солидную необходимую выигрыша.Для получения депозитного бонуса необходимо восполнить собственный игровой баланс реальными деньгами. Вознаграждение возможно получить или при внесении первого депозита, либо вид фиксированного процента от внесённых средств. Так либо по, приз поступит на счёт лишь после пополнения. <a href=http://sladkierecepti.5nx.ru/viewtopic.php?f=8&t=4779>1×slots официальный сайт, скачать</a> 1хслотс казино зеркало Объективные – объем приза, коэффициент и условия вейджера, необходимость внесения депозита для вывода средств;Казино выводит средства лишь на что, эту платежную систему, с котрой был сделан депо. То есть, для вывода бездепозитного приза, Вам поначалу нужно пополнить счет. В некоторых клубах узкий перечень способов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет непосредственно с данных платежных способов, коие доступны для вывода. <a href=https://forums.dfine.net/member.php?action=profile&uid=1172>https://forums.dfine.net/member.php?action=profile&uid=1172</a> Будьте внимательнее при ознакомлении с правилами во избежание появления конфликтных обстановок с казино, когда последствии отыгрыша бездепа для не дадут исключить солидную сумму выигрыша.Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? 1хслотс официальный сайт зеркало У каждого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано смогли выполнить их, мы дадим некоторое советов. Если система начислила маленькую сумму, не создавать немалые ставки – остановитесь на 10–30 центах. Как только сумеете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В противном случае превосходнее приглядеться к другому автомату.Сроки активации приза уточняются каждым казино, но чаще всего они не превышают недели с этапа получения. Игроку непременно надо(надобно) использовать бездеп протяжении указанного срока, в ином случае приз просто исчезнет. Каждый приз можно получить только раз раз, потому случае не применять бездеп в срок, у игрока не будет второго шанса им воспользоваться.
1×slots зеркало этих способов предполагает регистрацию
Кешбэк-бонус дает собой возврат фиксированного процента от ставки когда проигрыша или же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не выше 10%.Зарегистрируйтесь. Для регистрации почаще всего достаточно установить собственный номер телефона и почтовый адрес, в чего ввести приобретенный код из СМС. Возможно, требуется показать промокод. В правилах промоакции несомненно написано, где его надобно вводить. Иногда это надо делать при регистрации, от — уже после сотворения личного кабинета, на отдельной странице. Классическая разновидность бонуса за творение аккаунта. Его преимущество содержится что, нет, что клиент возможность без выбирать аппараты и создавать ставки в их. Иногда список игровых автоматов ограничен оператором, хотя все также это другого, как, чем единственный доступный разъем, как в случае с внедрением фриспинов.Бездепы имеют входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами. <a href=http://easyye.com/home.php?mod=space&uid=130265>http://easyye.com/home.php?mod=space&uid=130265</a> Так собственно приготовьтесь предоставить секретную информацию (пол, возраст, страна проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает не более суток, последствии чего получится беспрепятственно выводить крупные выигрыши. 1хслотс рабочее зеркало Иногда в поощрения за регистрацию шансы выдаваться билеты для участия в турнирах. Условия их проведения довольно выделяются, потому мы советуем ознакомиться с любым предложением отдельно.
рабочее зеркало 1×slots
Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депозит может отличаться до 30 дней.Допустим, за регистрацию вы возымели бездеп в объеме 2 000 рублей с вейджером х30. В данном случае светит сделать ставок, на общую сумму в 60 000 рублей (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать настоящие деньги. Однако не забывайте, собственно с любого подарка получится исключить определённую необходимую (чаще всего менее $200). Осталось выбрать казино с призом за регистрацию и сделать профиль. После активации подарка выигрыш зависит от Фортуны и способностей.Наши специалисты исследуют условия акции, этого в ручном режиме проводят их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие параметры. Мы не рекламируем казино, а даем игрокам информацию о лучших из них. Некоторые онлайн-казино без депо предлагают новым посетителям избрать бонус при регистрации. Будьте внимательны: выбрав один, вы в безусловном большинстве случаев не можете пользоваться остальными.Многие казино предоставляют в маркетинговых целях безвозмездные бонусы самая для наших читателей. Чтобы их получить, нужно перебежать на игровой сайт по партнерской ссылке с нашего портала. casino 1×slot <a href=http://avto.izmail.es/index.php?subaction=userinfo&user=orangeknowledge>http://avto.izmail.es/index.php?subaction=userinfo&user=orangeknowledge</a>
казино 1×slots официальный сайт
Вы наверняка, как и все любите получать презенты и бездепозитные призы казино. Игорные дома брали в привычку одаривать гэмблеров приятными призами. Стать владельцем приветственного презента возможно за творение профиля или пополнение счёта. Второй вариант более увлекательный, так клубы готовы удвоить депо! Но если вы новичок и лишь знакомитесь с миром пыла, превосходнее воспользуйтесь призом за регистрацию. <a href=http://shichaoliuluntan.com/home.php?mod=space&uid=330017>http://shichaoliuluntan.com/home.php?mod=space&uid=330017</a> 1×слотс казино
<b>Смотреть еще похожие новости:</b>
<a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=766894>1×slots регистрацию процедура займет всего лишь</a>
<a href=http://nacionrolera.org/foro/viewtopic.php?f=1210&t=110427>1×slots актуальное зеркало</a>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=257466>1хслотс мобильная версия зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
С такими ординарными советами любое казино с бонусом за регистрацию способно принести в разы больше выгоды и выгоды. Важно, удостоверьтесь сомнений, что раньше не регистрировались в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи.
#7653 Charlesgunny
casino pin официальный bitz casino <a href=https://rumafia.news/>porno Светлана Ходченкова</a> Фастова Елена Владимировна порно Анна Михалкова <a href=https://t.me/vchkogpu_ru>пина букмекерской конторы</a> сайт винлайн букмекерская контора porno Илья Ковальчук (хоккей) up casino kometa casino Разуваева Ксения Денисовна порно pin casino зеркало порно с Федор Чалов (футбол)
#7654 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7655 Charlesgunny
casino com почему в казино нет часов <a href=https://th-royalgclub.com/>букмекерская контора фонбет официальный сайт</a> 1×bet официальный сайт kent casino регистрация <a href=https://specreporter.com/>слот casino</a> лучшие бесплатные онлайн казино балтбет букмекерская контора промокод 1×bet букмекерская контора вход пинап казино porno Илья Ковальчук (хоккей) kent casino регистрация
#7656 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7657 Charlesgunny
ограбление казино porno Мария Шарапова <a href=https://res-publika.com>casino андроид</a> Набиуллина Эльвира Сахипзадовна порно casino скачать приложение <a href=https://vestnik-jurnal.com/>ев казино</a> Чулпан Хаматова казино фильм Светлана Ходченкова pin up casino зеркало online casino casino скачать приложение почему в казино нет окон
#7658 Charlesgunny
порно с Анна Калинская (теннис) casino зеркало сегодня <a href=https://t.me/vchkogpu_ru>порно с Александр Большунов (лыжные гонки)</a> 1×bet бесплатно 1×bet скачать бесплатно <a href=https://th-royalgclub.com/>бесплатные букмекерские конторы</a> casino играть порно с Евгений Малкин (хоккей) Елена Лядова pin ап casino Попова Анна Юрьевна порно porno Александра Степанова, фигуристка про казино
#7659 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7660 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало
Возможность протестировать новые игры, не рискуя личными средствами и создать собственную тактику забавы. <a href=http://filmkachat.ru/>1×slots подтвердит вашу регистрацию если говорить</a> <a href=http://www.alexandria.gov.eg/Lists/List30/DispForm.aspx?ID=83358>http://www.alexandria.gov.eg/Lists/List30/DispForm.aspx?ID=83358</a> Как лишь вы отыграли вейджер и свои с бонусного баланса перешли вас на настоящий счет, Вы храбро можете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (устроить минимальный депо к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депозитом). казино 1×slots официальный сайт <a href=https://www.100seinclub.com/bbs/board.php?bo_table=E04_1&wr_id=396517>https://www.100seinclub.com/bbs/board.php?bo_table=E04_1&wr_id=396517</a> Призовые начисления без депозита все предоставляться для роли в турнирах интернет казино. Потратить перечисленные деньги возможно самая в данной акции. Условия их проведения содержат лимитирования на список игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться этим предложением, другого выучить его верховодила.
1×slots коды
<a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1×slots casino online регистрация</a> 1хслотс рабочее зеркало <a href=http://m2motors.com.ua/index.php?subaction=userinfo&user=jazzycadre17>http://m2motors.com.ua/index.php?subaction=userinfo&user=jazzycadre17</a> 1×slots промокод при регистрации В качестве призов интернет казино нередко предлагает выдачу фриспинов, другими бесплатных вращений игрового барабана. Виртуальные монеты можно применять для обучения в покерной школе или для игры в казино.
1×slots зеркало подтвердит вашу регистрацию если говорить
Фриплей-бонусы встречаются только в неких клубах. Они зачисляются сразу после творения профиля и активны непродолжительное время. Если не успеете истратить свои, они попросту сгорят. Касаемо медли, в большинстве случаев бонусы активны в течение часа. Важно, удостоверьтесь в том, что раньше не регились в избранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи.Выигрыши с призов без инвестициям практически привязаны к требованию по ставкам и могут быть обналичены только после исполнения данных притязаний. <a href=http://sanpai.org/userinfo.php?uid=32241#>http://sanpai.org/userinfo.php?uid=32241#</a> Бездепозитный бонус часто возможность стать доступным незамедлительно в завершения регистрации, поскольку как единственным требованием к нему является регистрация, а затем проверка вашей свежей учетной записи. 1×slots официальный сайт скачать
1хслот зеркало
<a href=http://naturetour.ru/communication/forum/messages/forum3/message23802/5499–1kh-slot-registratsiya-v-1×slots-casino?sessid=80752f7be041814f12d74e3269f4a45d&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1х слот регистрация в 1×slots casino</a> Онлайн гемблинг развивается с каждым днем все больше и больше, новые бренды создаются не по дням а по часам. Новые интернет казино делают вступительные акции для игроков, для того собственно бы зарекомендовать себя, и что, этим самым предлагают бездепозитные бонусы за регистрацию, собственно бы не пропустить такую вероятность — как пользоваться новым бездепом, рекомендуем посещать наш вебсайт как возможно чаще, самое аппетитное и свежие будет добавляться в этом же списке. зеркала 1×slots <a href=https://demotos.ru/go.php?node=say.la/read-blog/63203>https://demotos.ru/go.php?node=say.la/read-blog/63203</a> Подтверждение электронной почты – одно из главных условий, коие есть практически в каждом бездепозитном казино. Чтобы верифицировать электрическую почту, довольно перейти по активной ссылке в послании, полученном от азартного клуба.
1×slots casino регистрация на сайте
Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 поболее. Когда игроку надеется большое фриспинов, администрация возможность бить3 их начисление на несколько дней. Бесплатные вращения предоставляются для конкретного слота, который указывается в правилах промоакции. Шаг 5. Использование и отыгрыш. Бездеп обязан быть применен в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера.Онлайн гемблинг развивается с каждым днем больше и больше, свежие бренды создаются не по денькам а по часам. Новые онлайн казино делают вступительные акции для игроков, чтобы, чтобы что бы зарекомендовать себя, и тем наиболее предлагают бездепозитные призы за регистрацию, что бы не упустить эту возможность — как воспользоваться свежим бездепом, рекомендуем посещать наш сайт как можно почаще, самое лакомое и новые будет добавляться в данном же перечне. <a href=https://ww.interdance.ru/user/WalterUnige/>https://ww.interdance.ru/user/WalterUnige/</a> Частенько новенькие не знают, как активировать подарки или исключить 1-ый выигрыш. Для похожих случаев наша команда обрисовала главные определения – собственно это фриспины, вейджер, как его отыграть, для нужно протекать верификацию. 1хслотс зеркало на сегодня Мы рекомендуем не открещиваться от похожих предложений известных казино. Выделите количество минут на регистрацию, получите приз и попробуйте его отыграть. Может быть, сейчас фортуна несомненно на вашей стороне!Но существуют азартные заведения, готовые просто так вручить деньги на забаву. Для этого довольно создать профиль. Чтобы вывести выигрыш, сначала нужно выполнить вейджеровые условия, прописанные в условиях получения бездепа.
<b>Смотреть еще похожие новости:</b>
<a href=https://elclasificadomx.com/author/jameslog/>1хслотс зеркало на сегодня</a>
<a href=https://www.neocodex.us/forum/topic/134503-%D0%A1%D0%82%D0%A0%C2%B0%D0%A0%C2%B1%D0%A0%D1%95%D0%A1%E2%80%A1%D0%A0%C2%B5%D0%A0%C2%B5-%D0%A0%C2%B7%D0%A0%C2%B5%D0%A1%D0%82%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%BB%D0%A0%D1%95–1%D0%A1%E2%80%A6%D0%A1%D0%83%D0%A0%C2%BB%D0%A0%D1%95%D0%A1%E2%80%9A%D0%A1%D0%83/>рабочее зеркало 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Осталось выбрать казино с призом за регистрацию и создать профиль. После активации презента выигрыш находится от Фортуны и способностей.
#7661 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7662 Charlesgunnyhttp://filmkachat.ru
1×slots коды
Если идет об неповторимых предложениях, может понадобиться регистрация в казино по ссылке с партнерского сайта.Одним из предлогов отдавать преимущество, льготу 1 либо другому заведению заключается в привлекательности предлагаемых промоакций и безвозмездных услуг. Безвозмездные фриспины, выдаваемые без дела делать какой-либо вклад, в списке располагается далеко не в конце. <a href=http://filmkachat.ru/>1×slots casino зеркало рабочее</a> Активация случается за промокодов, коие вводятся в личном офисе последствии регистрации. Среди спецпредложений в перечне Casino.ru находятся неповторимые промокоды, коие доступны лишь посетителям портала. Другие способы начисления средств ? автоматическая активация сразу последствии творения аккаунта и получение подарка по запросу в службу технической помощи.Сразу после активации промокода возможно воспользоваться подарком. Как теснее упоминалось, призы посещают трёх обликов – фриспины, кредиты и фриплей-бонусы. <a href=https://www.keepandshare.com/doc27/114861/exploring-the-power-of-architectural-3d-rendering-in-modern-design-pdf-631k?dn=y&dnad=y>https://www.keepandshare.com/doc27/114861/exploring-the-power-of-architectural-3d-rendering-in-modern-design-pdf-631k?dn=y&dnad=y</a> Таким образом онлайн казино получает вероятного игрока. Возможно в или истинном он захочет сыграть на свои деньги. Так работают бездепозитные призы в онлайн казино. Здесь отлично подходит выражение, безвозмездные сыр случается лишь в мышеловке. Начинающие игроки все не осознавать опасность азарта. Однако течением понимания становится больше. Это тема для отдельного обсуждения.Благодаря программе преданности от игорного заведения, возможно арестовать хороший старт и без добавочных вложений запустить видеослоты. Кроме как, можно рассчитывать на реальную удачу и получить, без инвестиции личных денег, немалый выигрыш. 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=https://www.uned-psicologia.com/index.php?action=profile;u=28594>https://www.uned-psicologia.com/index.php?action=profile;u=28594</a> Можно. Вы практически можете отказаться от получения бездепозитного приза за регистрацию в казино, пока Вы не создадите ставку.
1×slots рабочее зеркало
Поспешите зарегистрироваться на официальном сайте Клубника, чтобы моментально получить 33 безвозмездных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, появляется реальный шанс победу! 1×slots регистрация 1×slotscasino09k online Можно. Вы практически можете отказаться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не создадите ставку.Наш перечень содержит превосходнейшие бездепозитные призы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по главным параметрам: <a href=http://xn–80aphfq.xn–p1ai/user/JamesFoern/>http://xn–80aphfq.xn–p1ai/user/JamesFoern/</a> Новые посетители онлайн-казино без первого депо шансы проверить свою удачливость. К что, этому же есть возможность преобразовать бездепы в реальные деньги за регистрацию в казино, однако для этого бонус необходимо отыграть сообразно условиям акции. 1×slots сайт зеркало Прямо момент заберите бесплатные вращения за регистрацию без депо и начинайте коллекционировать призовые композиции из-за крупных выигрышей!
1×slots зеркало регистрация
Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют актуальную информацию о no deposit bonuses прочих услугах.Допустим, за регистрацию вы получили бездеп в объеме 2 000 рублей с вейджером х30. В данном случае светит сделать ставок, на общую необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать реальные средства. Однако не забывайте, что с любого презента выйдет исключить определённую необходимую (чаще всего менее $200). <a href=https://we.riseup.net/lexxeagle/3d-product-visualization-revolutionizing-online-sh>https://we.riseup.net/lexxeagle/3d-product-visualization-revolutionizing-online-sh</a> Если ординарными текстами, бездепы – это определённая сумма денег или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать презенты. Но есть кое-какие нюансы. Существуют игорные дома, коие перед что, этим как начислить бонусы требуют привязать телефонный, дать копии документов. сайт 1× slots casino
1×slots casino регистрация 1×slotscasino09k online
С другой стороны, намного легче забрать бездепозитные фриспины за регистрацию в казино и напрямик в начать вращать барабаны в лучших слотах. Главная необыкновенность спинов в том, что они предусмотрены для лучших автоматов. Удастся столько пройти дополнительные раунды, хотя и увеличить необходимую выигрыша, заработать респины и внутриигровые презенты.Такой казино приз без депо за регистрацию выдается игроку на час и энергично используется данное предложение с 2017 года. Это словно какая-то маскировка поощрения под бездепозитный. Суть всего сего сводится к что, этому, что игроку на час выдается, к примеру, 1000 долларов, а реклама повторяет то, что каждой выигрыш можно несомненно дальнейшем оставить при себе. Но в играющий серьезно отнесется к данному предложению, то он попросту потеряет время. Ведь геймеру надо(надобно) несомненно выступать не главном аккаунте, в тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (и всей тыс. ) в верховодила вступят определенные условия, где будет сказано, собственно наибольшей суммой победы может быть только двести долларов и средства можно применять только виде приза на первый лепта с вейджером 25 от суммы вознаграждения плюс сам депо. По результату получится, собственно игрок выигрывал для 200% бонус с вейджером на конкретную необходимую. Короче говоря, это все не стоит вашего времени. 1хслот скачать <a href=http://worldpoetry.cn/home.php?mod=space&uid=329540>http://worldpoetry.cn/home.php?mod=space&uid=329540</a> Бонусы без депо при регистрации числятся наиболее привлекательными как для опытнейших игроков, так для и начинающих. Получив это вознаграждение, заказчик возможность играть на настоящие средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, еще обстоятельства их активации и выигрыша.При правильном подходе бездепы — это отличный способ играть на средства без растраты собственных средств. Есть количество рекомендаций, следуя коим возможно извлечь максимально пользы из похожих акций казино. Играть идет только на лицензированных площадках. Скриптовые сайты не дурачат с бонусными предложениями, хотя и употребляют пиратский софт с измененным ГСЧ. Выиграть на этих автоматах невероятно.
1×slots casino регистрация 1×slotscasin online
Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Oтыгpaть приз с указанным вeйджepом, желаемого нужно сдeлaть cтaвoк нa cумму, превосходящую объем приза в количество раз. <a href=https://www.lightknotes.com/MyBB/member.php?action=profile&uid=14192>https://www.lightknotes.com/MyBB/member.php?action=profile&uid=14192</a> Как лишь на виртуальном счету окажутся бонусные свои, поспешите отыграть вейджер. Сразу после этого можно оставить заявку на вывод выигрыша. Кредиты прибыльно выделяются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом реальных средств и выделяют вероятность почувствовать азарт. Во-вторых – можно насладиться любой азартной игрой доступной на сайте. В вашем постановлении находятся автоматы, настольные прибавленье, видео-покер, Live-дилеры.Помните, собственно всевозможные нарушения управлял сведут на нет ваши старания, и вы скорее останетесь без начисленного для дарового бонуса. Всегда изучайте верховодила начисления и обстоятельства вейджера. По любым вопросам, на коие вы не можете самостоятельно отыскать ответы, обращайтесь за объяснениям и саппорт. 1×slot официальный сайт Также, такой нужно доказать собственный номер телефона, результата код, полученный в смс-сообщении от клуба установить в специальное поле в личном кабинете игрока.
<b>Смотреть еще похожие новости:</b>
<a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=814190>1×slots рабочее зеркало на сегодня</a>
<a href=http://brilliance.ru/forum/viewtopic.php?f=6&t=32076>1×slots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чем ниже значение вейджера, что, этим проще отыграть и исключить приз. Если Вы планируете заработать на бездепе, не просто ознакомиться с новым игровым клубом, то стоит избегать бонусов с высочайшим вейджером их практически не реально отыграть. С ними Вы можете лишь протестировать игры заведения.
#7663 Charlesgunny
слоты казино Скоробогатова Ольга Николаевна порно <a href=https://7club7.com/>пин up casino</a> Львова-Белова Мария Алексеевна порно casino pin официальный <a href=https://th-royalgclub.com/>ап казино</a> 7k casino скачать гта казино casino сегодня 7k casino бонус симулятор казино суть казино сайты казино
#7664 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7665 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
Фриспины начисляются по конкретной ставке. После их активации игроку необходимо запустить разъем и увериться, собственно в нем показываются безвозмездные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода после отыгрыша ориентируется оператором и изредка превышает 5 000 руб. <a href=http://filmkachat.ru/>1×slots официальный зеркало рабочее</a> Бездепозитный приз казино 2022 с выводом за регистрацию дает вероятность ознакомиться игроку с лобби выбранного заведения, сориентироваться в выборе игр и выяснить качество работы саппорта. Довольно нередко, начиная игровой процесс, игрок уже отказывается останавливаться и проделывает реальный лепта. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать даром вполне как один таки с призом за регистрацию без надобности вносить депозит.В подавляющем большинстве случаев безвозмездные бонусы начисляются в кредитах, коие невозможно сразу вывести со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже. <a href=https://medium.com/@kalinka0588/exploring-the-benefits-and-applications-of-architectural-drawing-services-dd4b0f523176>https://medium.com/@kalinka0588/exploring-the-benefits-and-applications-of-architectural-drawing-services-dd4b0f523176</a> 1×slots официальный регистрация <a href=http://stroy-resurs.ru/bitrix/rk.php?goto=http://dialweb.ru/bitrix/redirect.php?goto=http://morozmarket.ru/bitrix/redirect.php?goto=https://telegra.ph/Moi-spory-s-professorami-v-kolledzhe-09–19>http://stroy-resurs.ru/bitrix/rk.php?goto=http://dialweb.ru/bitrix/redirect.php?goto=http://morozmarket.ru/bitrix/redirect.php?goto=https://telegra.ph/Moi-spory-s-professorami-v-kolledzhe-09–19</a> Подтверждение регистрации. Казино просят привязки профиля к электрическому адресу и номеру аппарата. Для сего на e-mail отчаливает письмо ссылаясь, а на телефонный ? текстовое извещение с кодом.
1×slots casino регистрация 1×slots review live
После потребуется привнести идентификационный платёж. Это пугает новичков больше всего. Нужно устроить минимальный депозит в 100–500 рублей. Таким образом служба безопасности увериться том,, собственно платёжный метод принадлежит Вам. Данная процедура важна для обеспечения защищенности игровых счетов. Пример, Ваш аккаунт взломают и выведут свои на собственный кошелёк. Будет крайне досадно. Поэтому верификация платёжной системы, это необходимый момент.Так собственно главное различие дара на депо от бездепа – обязательное пополнение счёта. Вы можете привнести депо и преумножить стартовый капитал либо отобрать бездеп и этом не придётся рисковать собственными сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начислит щедрое поощрение! <a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1221#post-37501>1× slots casino официальный сайт</a> 1×slots casino регистрация 1×slotscasin online В большинстве заведений устроить это возможно по адресу электронной почты, по номеру телефонного, через социальную сеть либо гугл-аккаунт. <a href=http://maskarad.bomba-piter.ru/user/Jaspermix/>http://maskarad.bomba-piter.ru/user/Jaspermix/</a> Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации дара необходимо доказать электронную почту и привязать телефон; 1х слот 1хслотс регистрация перейти на 1×slots Можно ли в одном онлайн казино получить больше одного бонуса за регистрацию? Нет, так как в любом интернет казино есть правила, к которым нужно придерживаться, не творить два аккаута для получения бонусов, иначе несомненно блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, бонус за регистрацию выдаеться один раз одному личику.
1×slot зеркало рабочее этих способов предполагает регистрацию
С другой стороны, намного легче арестовать бездепозитные фриспины за регистрацию в казино и напрямик данный начать вращать барабаны в превосходнейших слотах. Главная необыкновенность спинов в, что они предусмотрены для топовых автоматов. Удастся столько пройти дополнительные раунды, но и прирастить необходимую выигрыша, заработать респины и внутриигровые презенты.Бездепозитные бонусы – это исключительно интересная и наиболее многообещающая акция интернет-казино. Они числе какого-либо фри-спинов, потому что выплаты в бесплатных вращениях не гарантированы, как композиции на барабанах игрового аппарата шансы не сложиться. <a href=http://diezel.kr/bbs/board.php?bo_table=contact&wr_id=77409>http://diezel.kr/bbs/board.php?bo_table=contact&wr_id=77409</a> С иной стороны, гораздо легче забрать бездепозитные фриспины за регистрацию в казино и напрямик момент начать вертеть барабаны в наихороших слотах. Главная необыкновенность спинов в том, собственно они предусмотрены для топовых автоматов. Удастся не пройти дополнительные раунды, но и прирастить необходимую выигрыша, заработать респины прочие внутриигровые подарки.Для вывода средств приз нужно несомненно отыграть законам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариантами отыгрыша бездепозитного приза до его получения, чтобы избежать конфликтных ситуаций. 1×slots бонус за регистрацию
1×slots зеркало которую указывали при регистрации кстати
1хслотс рабочее зеркало на сегодня <a href=https://www.jo1sat.com/member.php?u=224618>https://www.jo1sat.com/member.php?u=224618</a> С такими простыми советами каждое казино с призом за регистрацию способно принести в разы больше выгоды и полезности.
1×slots официальный сайт скачать на айфон
Шаг 4. Активация. Внимательно изучите условия, информацию по ограничениям и сроке деянья бонусного предложения. Разобравшись с правилами, можно активировать бонус в личном кабинете (времени ? с внедрением промокода) либо по запросу в саппорт. <a href=http://bbs.darkml.net/home.php?mod=space&uid=7974771>http://bbs.darkml.net/home.php?mod=space&uid=7974771</a> В основном случаев благотворительные бонусы начисляются в кредитах, коие невозможно сразу исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти требования принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д. ). О нем читайте ниже.В случае установленного лимита на сумму вывода выигрыша с бездепозитного бонуса, игрок не сможет исключить больше заявленной суммы. 1×slots зеркало 1хслотс регистрация перейти на 1×slots Как прочие промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такового предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает свежих гостей и позволяет им составить впечатление о функционале, не рискуя вескими суммами.
<b>Смотреть еще похожие новости:</b>
<a href=http://youhotel.ru/forum/memberlist.php?mode=viewprofile&u=29954>1хслот 1хслотс регистрация перейти на 1×slots</a>
<a href=http://griffhunter.com/boards/viewtopic.php?p=416492#p416492>1× slots casino зеркало</a>
<a href=http://theauction.com.au/my-account/>1×slots официальный сайт скачать на айфон</a>
<a href=https://minifishtank.net/forum/showthread.php?tid=849>1×slots официальный сайт скачать на айфон</a>
<a href=https://forum.dis-course.net/viewtopic.php?t=452392>1×slots зеркало регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Активация валютного вознаграждения случается автоматически последствии творенья профиля или применения промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на странички казино в социальных сетях либо на рассылку маркетинговых извещений, скачать и установить дополнительный софт и т.д.
#7666 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7667 Charlesgunnyhttp://filmkachat.ru
x1 slots 1хслотс регистрация перейти на 1×slots
Наиболее модные гонорары среди гэмблеров – бездепозитные призы казино. Это не дивно, так возможно получить безвозмездные вращения либо виртуальные кредиты, и при не придётся пополнять счёт, рисковать личностными средствами. Удастся насладиться разнообразными весельями и даже выиграть крупную необходимую, избегая серьёзного риска.Бездепозитные бонусы – это исключительно интересная и более перспективная акция интернет-казино. Они числе никакого фри-спинов, поэтому что выплаты в безвозмездных вращениях не гарантированы, так комбинации на барабанах игрового аппарата могут не сложиться. <a href=http://filmkachat.ru/>1×slots официальный сайт мобильная версия скачать</a> Если речь об эксклюзивных предложениях, может потребоваться регистрация в казино по ссылке с партнерского сайта. <a href=https://www.4shared.com/web/preview/pdf/DJvufUzlku>https://www.4shared.com/web/preview/pdf/DJvufUzlku</a> Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Однако далеко не все ресурсы предлагают своим посетителям бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено одобрение на первый депо в объеме 100–200%. Это замечательная вероятность преувеличить банкролл, прирастить время, проведённое за игрой и шансы сорвать большой куш. 1×slots официальный сайт зеркало рабочее <a href=http://seafishzone.com/home.php?mod=space&uid=1251911>http://seafishzone.com/home.php?mod=space&uid=1251911</a>
скачать 1×slots официальный сайт
Не рекомендуем сломя голову браться за различные предложения получения средств без инвестициям. Вполне вполне, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на 1-ый взор. Альтернативой является казино приз за депозит. Мы предлагаем вам пару советов, спасибо коим у каждого игрока будет возможность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег: <a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=49068>казино 1× slots официальный сайт</a> 1 x slots casino <a href=http://www.gangtan.co.kr/bbs/board.php?bo_table=free&wr_id=586555>http://www.gangtan.co.kr/bbs/board.php?bo_table=free&wr_id=586555</a> Отзывы читателей о бонусных промоакциях посодействуют составить эмоцию, хотя не забывайте о субъективности личных объяснений. 1×slots официальный зеркало рабочее Популярность онлайн казино растёт и всё больше юзеров начинают проявлять азартными играми. Бездепозитные призы 2022 года, это уникальные подарки за регистрацию. С их поддержкой новые игроки имеют получить безвозмездные вращения или средства на баланс за одну регистрацию. С выходом игорных заведений в интернете, бездепозитные призы стали популярнейшим методом вербования игроков. Подобные акции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о которых мы расскажем. Наш сайт собрал превосходнейшие предложения из интернета на 2022 год. Воспользуйтесь любым даром и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша нужно выполнить условия.
зеркло казино 1×slots
<a href=https://foxsheets.statfoxsports.com/UserProfile/tabid/57/userId/191694/Default.aspx>https://foxsheets.statfoxsports.com/UserProfile/tabid/57/userId/191694/Default.aspx</a> Для отыгрыша приза казино обязывает игрока поиграть на необходимую, в некоторое раз превышающую сумму приобретенного приза — тут выгода фирмы очевидна. 1×slots актуальное зеркало При регистрации по указывать только достоверную информацию. Когда учетная запись будет активна, замечен доступ в Личный кабинет. В нем возможно избрать денежную, ввести промокод и узнать подробные верховодила получения и отыгрыша бездепа. Краткая информация об акции часто находится непосредственно на регистрационной форме.Фриспины — благотворительные вращения, которые разрешают игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины считаются наиболее знаменитым и желаемым обликом бонуса — безвозмездные вращения иногда эффективнее и веселее в отыгрыше, чем другие облики бездепов.
1хслотс 1хслотс регистрация перейти на 1×slots
Казино выделяет возможность заработать и исключить реальные деньги на бездепозитных призах. Обычно, это незначительная сумма, которую казино имеет для разрешить презентовать игроку. Бесплатный приз – кредиты, которые онлайн-казино начисляет посетителю, не принуждая его пополнять игровой счет.За вербование приятеля ? в партнерской программки заказчик получает вознаграждение за вербование свежих юзеров. 1×slot зеркало <a href=http://o96737zj.beget.tech/user/Harryset/>http://o96737zj.beget.tech/user/Harryset/</a> Помните, что в некоторых забавах сумма ставки идет в зачет вейджера лишь частично. Так, в настольных и карточных забавах лишь от 5% до 50% суммы ставки считаются как отыгранные средства, в то время как в слотах идет в зачет все 100% суммы.Нельзя осматривать забаву на средства, как вариант заработка. Азартные забавы запрещены для лиц моложе 18 лет. Topcasinobonuses.mobi классифицируется организатором азартных игр. Сайт одевает информационный нрав.
1хслотс рабочее зеркало
Выиграть настоящие средства в казино не пополняя счет – сложно, хотя возможно. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными бонусами и начните выступать на бонусные средства. По статистике в 10-ти заведений возможно заработать маленькую сумму денег помощью бонусных средств.Иногда операторы просят внесение минимального депо перед выводом для верификации платежного инструмента. В неких казино данный депозит того светит отыграть. <a href=http://www.fumankong3.cc/home.php?mod=space&uid=580131>http://www.fumankong3.cc/home.php?mod=space&uid=580131</a> 1×slots официальный сайт скачать
<b>Смотреть еще похожие новости:</b>
<a href=https://hiddeninthesand.com/forum/viewtopic.php?t=236753>1×слот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Нет. Для получения бездепозитного бонуса в казино нужна неотъемлемая регистрация на веб-сайте. Играть в слоты бесплатно и без регистрации можно лишь в демо режиме.
#7668 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7669 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Но никогда не запамятовывайте внимательно разбирать верховодила участия в бонусных промоакциях. Если вы нарушите хотя бы одно условие, позднее вы не сможете устроить недоразумение с администрацией. <a href=http://filmkachat.ru/>1×slots регистрацию более популярный вариант это</a> <a href=https://mssg.me/7dltc>https://mssg.me/7dltc</a> 1хслот зеркало <a href=http://cniper.ru/bitrix/click.php?goto=http://toolbarqueries.google.ml/url?q=http://noydpo67.ru/bitrix/rk.php?goto=https://telegra.ph/Kak-najti-vladelca-nedvizhimosti-po-kadastrovomu-nomeru-besplatno-09–19>http://cniper.ru/bitrix/click.php?goto=http://toolbarqueries.google.ml/url?q=http://noydpo67.ru/bitrix/rk.php?goto=https://telegra.ph/Kak-najti-vladelca-nedvizhimosti-po-kadastrovomu-nomeru-besplatno-09–19</a> Когда речь идет о получении бездепозитных призов в казино, в первую очередь направьте на последующие условия:
1×slots актуальное зеркало
Для получения депозитного приза необходимо восполнить свой игровой баланс настоящими деньгами. Вознаграждение можно получить или при внесении первого депозита, либо в виде фиксированного процента от внесённых средств. Так либо иначе, приз поступит на счёт лишь последствии пополнения. <a href=https://g2clubs.com/healthy-workout/google/#comment-24888>1×слот регистрация в 1×slots casino</a> 1×slots регистрация на сайте 1×slots ru com Акции, приуроченные к календарным праздничным, бывают рассчитаны как на всех пользователей, например и на категории: например, презент на 8 марта девушкам-игрокам или мужчинам на 23 февраля. <a href=http://www.aytastarim.net/index.php?subaction=userinfo&user=boorishdecoy8>http://www.aytastarim.net/index.php?subaction=userinfo&user=boorishdecoy8</a> Выполнив все требования оператора, заказчик возможность оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем не более суток. Если дополнительно потребуется пройти функцию верификации, то срок возрастает до 1–2 рабочих дней. Для перевода применяются банковские приборы и электрические платежные системы. Второй метод подходит превосходнее, так как большинство транзакций такой осуществляются моментально. В связи со специфичностью функционирования банков обработка платежей возможность взятьвдолг(взятьвзаймы) до нескольких трудящихся дней.Для верификации аккаунта нужно предоставить профессионалам технической поддержки отсканированную копию паспорта и счета за коммунальные предложения, еще фотку банковской карты или скриншот страницы электрического кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для доказательства личности. 1×slots зеркало которую указывали при регистрации кстати
1× slots casino зеркало
На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не сможете активировать и получить бездепозитный бонус.Еще одно условие дотрагивается размеров ставки. Операторы устанавливают максимальную необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, выбранной в Личном кабинете. При превышении лимита есть риск лишиться приза. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, заказчик имеет столкнуться с запретом назначать фишки на шансы. <a href=http://odis.pw/bitrix/redirect.php?goto=http://rts-rad.ru/bitrix/redirect.php?goto=http://paliart.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/TQca0HQ5z6Y>http://odis.pw/bitrix/redirect.php?goto=http://rts-rad.ru/bitrix/redirect.php?goto=http://paliart.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/TQca0HQ5z6Y</a> 1хслотс регистрация в 1×slots casino Основное управляло получения бездепа ? создаваемый акк должен быть у юзера первым и единственным. Наличие нескольких аккаунтов взыскательно воспрещено. Проверка проводится по имени, e-mal, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депо нужно соблюдать несложную последовательность деяний.Некоторые казино имеют предлагать посетителям бездепы за свидетельство номера или почты либо репост на страницу в социальных сетях.
1×slot регистрация
Как только получите бездеп в казино, всё одинаково не забывайте инспектировать электронную почту. Некоторые игорные клубы день радуют интенсивных гэмблеров приятными бонусами. Чаще всего получить подарок возможно в преддверии праздника, на день рождение, за вербование приятеля. А кроме распространённым бонусом является надбавка к депозиту. Нужно чем пополнить счёт, и азартное заведение увеличит его на 50–100%. <a href=http://c-strike.fakaheda.eu/profile.php?lookup=26984>1×slots официальный сайт мобильная версия</a> Нет. Для получения бездепозитного бонуса в казино необходима неотъемлемая регистрация на сайте. Играть в слоты безвозмездно и без регистрации возможно лишь в демо режиме.Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депозит возможность отличаться до 30 дней. Для получения депозитного приза нужно восполнить собственный игровой баланс настоящими деньгами. Вознаграждение возможно получить или при внесении первого депозита, либо в виде фиксированного процента от внесённых средств. Так или по, бонус поступит на счёт только в пополнения. казино 1×slots официальный сайт <a href=http://www.zgqsz.com/home.php?mod=space&uid=328573>http://www.zgqsz.com/home.php?mod=space&uid=328573</a> Чаще всего интернет-казино предлагают бездепозитные бонусы свежим пользователям. Эта промо-акция очень отлично привлекает начинающих, подталкивая их к открытию счета. Конечно, не все становятся преданными клиентами, но сам прецедент регистрации аккаунта играет на руку заведению.Вейджер (либо вагер) ? это наименьшая сумма ставок, которую необходимо сделать для вывода денежного приза. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение.
1×slots сайт зеркало
Мы советуем не отрицаться от похожих предложений знаменитых казино. Выделите несколько мин. На регистрацию, получите приз и попытайтесь его отыграть. Может быть, сейчас удача несомненно на вашей стороне! <a href=https://pyxc.ru/user/CharlesPaync/>https://pyxc.ru/user/CharlesPaync/</a> 1×slots зеркало сайта
<b>Смотреть еще похожие новости:</b>
<a href=https://minifishtank.net/forum/showthread.php?tid=1573>1×slots casino online регистрация</a>
<a href=http://check2go.net/my-account/>1×slots зеркало рабочее на сегодня</a>
<a href=https://minifishtank.net/forum/showthread.php?tid=4301>1хслотс зеркало на сегодня</a>
<a href=http://theauction.com.au/my-account/>1×slot зеркало</a>
<a href=https://dev.eff.one/forumdisplay.php?fid=10>1хслот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Размер приза. В качестве бездепов обыкновенно начисляют небольшие суммы, а когда идет о призах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то кое-какие казино имеют подарить игроку до 2000$. В перечне требований к отыгрышу нередко присутствуют лимиты на ставки при забаве на собственные деньги. Так, в отыграть надо(надобно) 30 000 руб., а предельная сумма ограничена 30 рублями, то вертеть барабаны предстоит 1000 один. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам деяния акции.
#7670 Charlesgunny
порно с Матвей Сафонов (футбол) вывод казино <a href=https://m.repost.news/>1×bet зеркало рабочее на сегодня 1×bet xyz</a> винлайн букмекерская контора официальный лучшие бесплатные онлайн казино <a href=https://vestnik-jurnal.com/>букмекерская контора фонбет</a> Александра Бортич порно с Диана Шнайдер (теннис) порно с Баталина Ольга Юрьевна porno Мария Шарапова casino ru online casino 7k казино зеркало сегодня
#7671 Charlesgunny
порно с Антропова Валентина Викторовна казино вход <a href=https://slon-ru.com/>casino ru</a> champion casino казино смотреть онлайн <a href=https://specreporter.com/>Крючкова Полина Викторовна порно</a> Хорова Наталья Александровна порно porno Марина Александрова 1×bet casino 7k casino зеркало рабочее казино гта 5 1×bet зеркало рабочее порно с Александр Головин (футбол)
#7672 Ремонт телефонов Meizu Москваhttps://remont-telefonov-meizu-top.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт телефонов meizu, можете посмотреть на сайте: <a href=https://remont-telefonov-meizu-top.ru/>срочный ремонт телефонов meizu</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#7673 promokody_wmEthttps://vip.mybb.rocks
продамус промокод скидка <a href=http://vip.mybb.rocks/viewtopic.php?id=8484#p22318>продамус промокод скидка</a> .
#7674 Ремонт телефонов Poco Москваhttps://remont-telefonov-poco-now.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт телефонов poco, можете посмотреть на сайте: <a href=https://remont-telefonov-poco-now.ru/>ремонт телефонов poco цены</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#7675 Charlesgunny
мелбет букмекерская контора яндекс казино <a href=https://m.repost.news/>pin ап casino</a> казино ли porno Вера Бирюкова, гимнастка <a href=https://m.repost.news/>скачать pin casino</a> 7k casino смотреть фильм казино лучшие казино бесплатно официальные зеркала казино Юдаева Ксения Валентиновна порно порно с Федор Чалов (футбол) казино пину
#7676 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7677 Charlesgunny
демо казино порно с Арина и Дина Аверины, гимнастки <a href=https://glvk.guru/>реального казино</a> pin ап casino Чулпан Хаматова <a href=https://res-publika.com>казино рулетка</a> букмекерские конторы pin Львова-Белова Мария Алексеевна порно casino сегодня pin casino зеркало 1×bet официальный 7k casino зеркало рабочее casino онлайн
#7678 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7679 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация
Каждая игровая перрон выделяется критериями по получению и отыгрышу бездепов. В правилах отчетливо расписаны временные рамки, за которые надо(надобно) прокрутить вейджер. Также не запамятовывайте тему максимальный размер ставки и максимальную необходимую выплаты. С иной стороны, чтобы получить бездепозитные бонусы казино, достаточно израсходовать менее 1 минутки. <a href=http://filmkachat.ru/>1×slots скачать на айфон</a> <a href=https://community.networkofcare.org/blogs/qwerty/archive/2024/10/11/how-to-master-3d-walkthrough-animation-for-architectural-projects.aspx>https://community.networkofcare.org/blogs/qwerty/archive/2024/10/11/how-to-master-3d-walkthrough-animation-for-architectural-projects.aspx</a> 1×slots зеркало на сегодня <a href=http://lineyka.org/user/StevenPseuh/>http://lineyka.org/user/StevenPseuh/</a> В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и когда спорных ситуаций нет способности куда-то посетовать и доказать собственную правоту.
зеркло казино 1×slots
Существуют казино с призом за регистрацию, в довольно популярны фриспины в интернет казино впоследствии регистрации в определенных забавах. Они встречаются числе почаще безвозмездных поощрений либо традиционных бонусов в казино без инвестициям. Например, игрок регистрирует счет, на кот-ый начисляются бесплатные игры, бонус за регистрацию в виде даровых фрспинов, вращения в игровом автомате. Во время игрового процесса геймер выигрывает истинные средства, коие в последствии возможно удачно исключить из заведения на свою платежную систему. То есть, есть шансы исключить свои без рисков собственными деньгами. Регистрация, какую геймер получит призы, займет несколько, а благодаря данному можно прирастить пять евро поощрений до тысячи и без всяких заморочек исключить их. 1×slots регистрация 1×slotscasino09k online Вейджер в переводе с британского означает «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша полученного бонуса, в нашем случае бездепозитного. Число ставок значения — важно только набрать сумму, пропорциональную сумме поощрения. <a href=http://www.scrapblog.cz/2016/11/kalendarovy-maraton-2016–9-den.html>http://www.scrapblog.cz/2016/11/kalendarovy-maraton-2016–9-den.html</a> Наиболее пользующиеся вознаграждения среди гэмблеров – бездепозитные призы казино. Это не умопомрачительно, ведь можно получить бесплатные вращения либо виртуальные кредиты, и при не придётся пополнять счёт, рисковать личными средствами. Удастся насладиться различными веселиями и даже выиграть солидную необходимую, избегая серьёзного риска.Так что можете смело регистрироваться без всяких размышлений. Фортуна сегодня точно на вашей стороне. Не бойтесь, ведь последствие какого или убытка Вам совершенно не грозит. С этими призами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе. 1хслотс регистрация в 1×slots casino Также, в необходимо подтвердить свой номер телефонного, желаемого код, полученный в смс-сообщении от клуба установить в особое фон в собственном кабинете игрока.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 $. Если выдаются фриспины, их число редко превышает нескольких 10-ов безвозмездных вращений.
1 хслот регистрация в 1×slots casino
Приветственный бездеп предоставляется хоть игроку только один раз. Казино дерутся с так называемыми бонусхантерами (от англ. Bonus Hunter — доброволец за призами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения дара. Исключить похожие деяния дозволяет верификация данных. Администрация вправе востребовать у клиента подтвердить персональные данные, указанные при регистрации.Далее требуется отыграть вагер и исключить выигрыш. Игрокам без опыта крупно повезло, есть получить 10-ки подарков за одну регистрацию. Если не смогли получить Бездепозитный приз, не волнуйтесь. Обратитесь в онлайн чат, оператор поможет исправить. <a href=http://onolearn.co.il/jono/profile/nannie92l936912/>http://onolearn.co.il/jono/profile/nannie92l936912/</a> 1×slots актуальное зеркало
1×slots официальный зеркало рабочее
Срок отыгрыша — это этап, кот-ый начинается в момент активации бонуса и заканчивается с его закрытием. Пользователю нужно уложиться в данный временной промежуток, иначе призовые свои аннулируются. Казино устанавливают перечень игр, ставки каких засчитываются при расчете отыгранных денег. Если тайтл не заходит в данный перечень, то ему быть недоступен для загрузки во время действия бонусного предложения. <a href=https://www.formulersupport.com/Thread-1×slots-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE–104665>1×slots рабочее зеркало</a> Зарегистрироваться в казино по особой ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефонного и электронную почту). Для подтверждения номера аппарата необходимо в личном профиле показать собственный номер и надавить кнопку „Подтвердить номер телефонного“, далее Вы получите sms-сообщение с кодом, кот-ый необходимо ввести в соответствующее фон. Для доказательства электрической почты, перебежать по активной ссылке в письме от казино. Вы не в коем случае ни не рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный бонус, по мимо практической игры на бездепозитные призы, у Вас есть шанс выучить игровые автоматы, выучится регулировать менять ставки и полосы, исследовать бонусные игры и их выигрышные композиции, ну в конце концов просто зарядится кучей впечатлений! Ведь вы будите выступать на бонусные средства, коие возможно отыграть и исключить, не просто на демо счет, что, этим самым адреналин в крови еще повысится а пульс забьется с нередким ритмом!Если площадка презентует бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь завести акк на сайте и активировать его, подтвердив адресок электронной почты, номер аппарата либо иные данные, которые требует оператор. Перед этим нужно убедиться, что пользователь находится на официальном веб-сайте казино, но на мошеннической площадке. 1×slots официальный сайт скачать <a href=https://unservfl.de/user-2178.html>https://unservfl.de/user-2178.html</a> Приветственный приз без депо ? презент за регистрацию. Выдается средствами, фриспинами или баллами. В заключительном случае бонусные баллы используются для роли в турнирах или размена на настоящие средства.Не советуем опрометью голову браться за различные предложения получения средств без инвестициям. Вполне возможно, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на 1-ый взор. Альтернативой считается казино бонус за депо. Мы предлагаем для пару советов, спасибо которым у любого игрока несомненно возможность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом денег:
1×slots зеркало сайта
С этими простыми советами любое казино с бонусом за регистрацию способно принести в разы больше выгоды и выгоды.Более солидные предложения встречаются очень редко. Зачастую они доступны лишь VIP-игрокам. В оставшихся случаях им наверняка сопутствуют довольно жесткие условия отыгрыша. Также возможны дополнительные условия прочие лимитирования, прописанные в критериях и положения бонусной программы казино. Подтверждение персональной инфы. Все казино требуют от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у пользователя иных аккаунтов (мультиаккаунт запрещен).Для казино, работающих интернет, бездепозитные призы нужны для вербования новых клиентов. Предложение поиграть на слотах без надобности внесения настоящих средств — работающий способ для увеличения энтузиазма к фирмы. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит выступать в казино, только сейчас теснее на личные средства. <a href=https://www.russuchka.com/user/DoctorLazutama/>https://www.russuchka.com/user/DoctorLazutama/</a> 1×slots регистрация 1×slots casino 777 online Большинство клубов привлекают внимание геймеров за счёт разнородных презентов. На 1 сайтах возможно получить виртуальные кредиты, которые откроют доступ ко всему софту. На других же, администрация предлагает благотворительные вращения для запуска лучших интернет слотов. Несмотря на различные промоакции, стоит выделить самые главные.
<b>Смотреть еще похожие новости:</b>
<a href=https://tabsgame.ru/user/Jamesbes/>1 x slots</a>
<a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=118620>1×slots официальный сайт скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для получения депозитного приза нужно пополнить свой игровой баланс реальными средствами. Вознаграждение возможно получить или при внесении первого депозита, или в виде фиксированного процента от внесённых средств. Так или другому, приз поступит на счёт только после пополнения. В игровых клубах без лицензии Вы покупаете „кота в мешке“ и в случае спорных ситуаций нет возможности куда-то посетовать и обосновать свою правоту.
#7680 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7681 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7682 Ремонт телефонов Samsunghttps://remont-telefonov-samsung-sot.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт телефонов samsung в москве, можете посмотреть на сайте: <a href=https://remont-telefonov-samsung-sot.ru/>ремонт телефонов samsung сервис</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#7683 Charlesgunny
1×bet бесплатно порно с Федор Чалов (футбол) <a href=https://www.ossetia.tv/>1×bet скачать приложение на андроид</a> букмекерская контора бесплатно скачать 1×bet телефон <a href=https://www.ossetia.tv/>cat casino</a> пин ап casino pin up top официальные букмекерские конторы гта казино казино ставка порно с Георгий Джикия (футбол) 1×bet на андроид порно с Матвей Сафонов (футбол)
#7684 купить сейф для охотничьего ружьяhttps://oruzhejnyj-sejf.ru/
Здесь можно сейф под ружье цена<a href=https://oruzhejnyj-sejf.ru/>сейф для оружия купить</a>
#7685 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7686 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее
Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депозит имеет выделяться до 30 дней. <a href=http://filmkachat.ru/>1×slots casino зеркало</a> Каждый новичок и профессиональный игрок мечтают живо стартануть и начать создавать настоящие ставки. Для этого довольно арестовать презент, за который не выплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email или телефон. После сего администрация начисляет щедрое вознаграждение повторяющий безвозмездных вращений либо виртуальных кредитов.Большинство интернет-казино из нашего топ-10 готовы порадовать вас неповторимыми промоакциями. Читайте о них в обзорах и на форуме. <a href=https://juicedmuscle.com/forum/general/general-chat/264982-creating-immersive-spaces-the-art-and-science-of-3d-walkthrough-animation>https://juicedmuscle.com/forum/general/general-chat/264982-creating-immersive-spaces-the-art-and-science-of-3d-walkthrough-animation</a> Активация по промокоду употребляется в разных обликах бездепов. Если идет о приветственном призе, то комплект знаков можно разузнать на главной странице, в регистрационной форме либо письме, коие отправляется юзеру для подтверждения адреса электронной почты. Акции все проводиться вместе с партнерскими площадками. Обычно код располагается на постороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активизируется разовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем актуальный код для активации в описании каждого рекламную. 1хслотс зеркало на сегодня <a href=http://kbszw.com/home.php?mod=space&uid=18836>http://kbszw.com/home.php?mod=space&uid=18836</a> Нет. Для получения бездепозитного бонуса в казино необходима обязательная регистрация на веб-сайте. Играть в слоты безвозмездно и без регистрации возможно только в демо режиме.Иногда в поощрения за регистрацию шансы выдаваться билеты для роли в турнирах. Условия их проведения очень выделяются, поэтому мы советуем ознакомиться с любым предложением раздельно.
1×slots бездепозитный бонус за регистрацию
Так собственно приготовьтесь дать секретную информацию (пол, возраст, страна проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает не более суток, в чего удастся свободно выводить крупные выигрыши. 1хслотс регистрация в 1×slots casino Поспешите забрать бездепозитные призы за регистрацию в казино из представленного списка. Все платформы не только водят законную деятельность, но и обрадуют честными результатами игры, высочайшей отдачей, резвыми выплатами. <a href=https://bbs.o2jam.cc/home.php?mod=space&uid=1420825>https://bbs.o2jam.cc/home.php?mod=space&uid=1420825</a> 1×slots casino online регистрация
1×slots официальный сайт зеркало
Чтобы выступать бесплатно на настоящие средства в казино, порой достаточно просто зарегистрироваться. Иногда нужно выполнить дополнительные деянья.Бонус за регистрацию в казино выдается лишь один раз на 1-го игрока. Но случаются вспомогательные акции, масштабах которых бездепы расступаются для постоянных посетителей и такие презенты Вы можете получить больше 1-го раза. Заполняя данные в личном профиле, указывайте только достоверную информацию, так как Вам придется ее доказать дальнейшем при выводе средств.Как правило, новоприбывшие геймеры в первую очередь желают ознакомиться с методами ввода и вывода денежных средств и сроки выполнения поданных заявок дабы конкретно разуметь, как скоро у исключить свой казино приз за регистрацию без депозита на электронный кошелек либо же банковскую карту. К счастью для всех играющих, внутри конкретных холдингов, все казино конкурируют между собой. Ведь случае бы конкретную фирму представляло лишь одно онлайн-заведение, то ли бы клиенты увидели казино с бонусом за регистрацию и возможность бы рассчитывать только на вознаграждение повторяющий приза на первое вложение. К любому заведению периодически следует привлекать свежих игроков, собственно, конечном, лишь на руку всем играющим. <a href=http://iawbs.com/home.php?mod=space&uid=813694>http://iawbs.com/home.php?mod=space&uid=813694</a> Практически все интернет казино с бездепозитным призом за регистрацию учитывает программу преданности — систему одобрения неизменных клиентов, кот-ая произведено из множества значений. При достижении игроком очередного значения на его счёт поступает приз. Чем выше степень — что, этим щедрее бонус. 1 х слотс зеркало
1×slots регистрация 1×slots casino c2d ru
Чтобы бездеп не был начислен на Ваш акк, Вам не нужно активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт механически, а Вы не расчитываете его применять, обратитесь в саппорта с просьбой отменить бездепозитный бонус. Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных ситуаций с казино, когда в отыгрыша бездепа вам не дадут исключить солидную сумму выигрыша.Во время игры в казино, выигрыши, приобретенные благодаря бесплатным призовым фондам, суммируются и срабатывают в совместную сумму для отыгрывания. Однако, случае фортуна улыбнется и получится отыграть все призы, игровое заведение гарантированно допустит вывести финансовые свои. Сумма вывода будет зависеть от лимита, одобренного непосредственно в этом учреждении. Поэтому, пристально надо(надобно) читать управляла выдачи анлимитных депозитов. 1×slots зеркало регистрацию более популярный вариант это <a href=http://behzistiardabil.ir/index.php?subaction=userinfo&user=healthyproposal>http://behzistiardabil.ir/index.php?subaction=userinfo&user=healthyproposal</a> Казино выводит средства лишь на ту платежную систему, с котрой был сделан депо. То есть, для вывода бездепозитного бонуса, Вам сначала необходимо восполнить счет. В некоторых клубах узкий перечень методов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет непосредственно с данных платежных способов, которые доступны для вывода.
1×slots рабочее зеркало
<a href=https://www.vforum.org/forum/members/26828.html>https://www.vforum.org/forum/members/26828.html</a> Не желаете поиграть в азартные забавы, не рискуя средствами средствами, хотя получая в все выплаты? Подобную вероятность предоставляют многие превосходнейшие порталы с азартными веселиями. В их числе много честных и надежных интернет-казино на русском языке. Они привлекают свежих пользователей различными поощрительными мероприятиями, включая бездепозитные, или бесплатные призы.Наши специалисты исследуют обстоятельства промоакции, затем в ручном режиме проверяют их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и другие параметры. Мы не рекламируем казино, а даем игрокам информацию о наилучших из их. 1×slos регистрация в 1×slots casino Акционные предложения от казино есть в разных форматах. Часто призы даются в обмен на депо. Игрок вносит платеж и получает деньги, безвозмездные вращения прочие одобрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — картина приза, который гарантирован за исполненье определенных поступков на веб-сайте:Бездепозитные бонусы — это презенты от казино повторяющий бонусных денег либо фриспинов для игровых автоматов, которые начисляются на акк игрока после процедуры регистрации на сайте заведения. Для получения таких поощрений депо не требуется.
<b>Смотреть еще похожие новости:</b>
<a href=http://timelesshourglass.com/requiem/memberlist.php?mode=viewprofile&u=821>1×slots рабочее зеркало</a>
<a href=http://3ak.cn/home.php?mod=space&uid=187057>1×slots официальный сайт мобильная версия</a>
<a href=http://portal.westcoastbible.org/discussion/memberlist.php?mode=viewprofile&u=400061>1×slots регистрацию более популярный вариант это</a>
<a href=https://shopcms.vsupport.club/topic/15644-%D0%A0%D1%97%D0%A1%D0%82%D0%A0%D1%95%D0%A0%D2%91%D0%A0%D0%86%D0%A0%D1%91%D0%A0%C2%B6%D0%A0%C2%B5%D0%A0%D0%85%D0%A0%D1%91%D0%A0%C2%B5-web-20/?p=94471>1× slots casino официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Так что основное отличие дара на депозит от бездепа – обязательное пополнение счёта. Вы сможете внести депозит и преувеличить стартовый капитал либо забрать бездеп и при не придётся рисковать собственными сбережениями. Поспешите выполнить простые притязания, и администрация ресурса начисляет щедрое поощрение! Бесплатный приз – кредиты, которые онлайн-казино начисляет посетителю, не принуждая его пополнять игровой счет.
#7687 Charlesgunny
казино ставка 1×bet на сегодня <a href=https://krtka.info/>порно с Евгения Медведева, фигуристка</a> 1×bet официальный pin up casino top top <a href=https://slon-ru.com/>порно с Голикова Татьяна Алексеевна</a> сайт винлайн букмекерская контора 1×bet зеркало xbet казино рулетка балтбет букмекерская контора Ходнева Светлана Владимировна порно pin up casino пин online casino 7k
#7688 Charlesgunny
казино в россии Окладникова Ирина Андреевна порно <a href=https://sovsekretno.net/>где казино</a> Крючкова Полина Викторовна порно букмекерские контора ап <a href=https://7club7.com/>скачать 1×bet на андроид</a> порно с Виктория Синицина, фигуристка сайт казино зеркало порно с Илья Осипов (киберспорт) суть казино порно с Александр Головин (футбол) Семёнова Татьяна Владимировна порно Москалькова Татьяна Николаевна порно
#7689 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало
Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки все запросить дополнительные документы либо инициировать краткое общение по Skype.3. Подтвердить данные. В зависимости от клуба, нужно привязать телефон либо почту, указать персональную информацию; <a href=http://filmkachat.ru/>1×slots официальный сайт скачать на айфон</a> Все обожают получать презенты. Согласитесь, почти любой играющий человек несомненно необъятно рад, случае получит безвозмездный подарок для забавы в интернет казино просто за регистрацию либо же приз за внесенный депозит, так называемые приветственные бонусы для свежих игроков. Соответственно такие онлайн клубы станут более знамениты и преимущественны у игроков при выборе казино для игры. Топ казино непрерывно обновляется и прибавляются свежие и занимательные игровые клубы с симпатичной бонусной политикой и всеми вероятными преимуществами, льготами, к коим относятся такие призы как фриспины за регистрацию, валютные бездепозитные призы, а щедрые бонусы за внесенный депозит. <a href=https://www.blogger.com/profile/02787966745735669287>https://www.blogger.com/profile/02787966745735669287</a> 1х слот регистрация в 1×slots casino <a href=http://www.pax.nichost.ru/forum/view_profile.php?UID=137771>http://www.pax.nichost.ru/forum/view_profile.php?UID=137771</a> Доступность — бездепозитные призы в казино чаще всего предоставляются новым игрокам, но бывают случаи, когда приз имеют получить и действующие посетители.Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных притязаний, считая неотъемлемой верификации. Если на веб-сайте предусмотрена обязательная процедура подтверждения личности, то вывести выигрыш удастся только в проверки данных. Приготовьтесь наполнить анкету и выслать в техподдержку документ, подтверждающий лицо.
1×slots зеркало сайта
1×slots зеркало быструю регистрацию а также мгновенное Заработать на бездепозитных призах за регистрацию в казино может каждый юзер, достигший совершеннолетия. <a href=http://paradestate.ru/bitrix/redirect.php?goto=http://images.google.vg/url?q=http://ip-ping.ru/whois/?host=https://teletype.in/@urid_pomosh/lQmMWqiHjOw>http://paradestate.ru/bitrix/redirect.php?goto=http://images.google.vg/url?q=http://ip-ping.ru/whois/?host=https://teletype.in/@urid_pomosh/lQmMWqiHjOw</a> скачать 1×slots на андроид мобильная версия Максимальный размер ставки, который невозможно превосходить пока бонус не несомненно всецело отыгран. В случае нарушения сего верховодила, приз и выигрыш с него станут аннулированы.Если идет об неповторимых предложениях, возможность потребоваться регистрация в казино по ссылке с партнерского вебсайта.
1хслот зеркало
Многие азартные клубы ограничивают сумму вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании акции, суммы Вы не можете исключить. Разница будет аннулирована, Вы даже не можете делать на нее ставки.Для выбора азартного заведения Вы сможете пользоваться списком наших казино с бонусами за регистрацию. На нашем сайте мы выпустили список бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, собственно часть призов неповторимые и доступны только для гостей нашего вебсайта по-специальному промо-коду либо по оригинальной ссылке. Кроме как, для любого приза мы подготовили доскональный обзор, в Вы узнаете как получить и отыграть одобрение и как исключить свой выигрыш с бездепа. Прежде чем активировать бездеп, нужно убедиться что, нет, собственно государство, гражданином которой считается игрок, не заходит в список разрешенных. <a href=http://mashspec.ru/user/TerryMon/>http://mashspec.ru/user/TerryMon/</a> При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток. 1×slots casino регистрация Большинство интернет-казино из нашего топ-10 готовы порадовать вас эксклюзивными промоакциями. Читайте о их в обзорах и на форуме.
1×slots зеркало регистрация то дальше необходимо пройти
Условия шансы различаться приятель от приятеля. Но такой приз имеет быть использован только для игрового процесса – полученные на счет деньги до того, как будут отыграны, исключить нереально.Если вы облюбовали для себя несколько брендов коие вам больше всего полюбились, для постоянной забавы! Таких гемблеров казино довольно любит и ценит, за частую такие игроки становятся VIP игроками заведения, которым нередко поступают выгодные предложения повторяющий бонусов, например же туда входит и бездепозитные. 1×slots зеркало регистрация то дальше необходимо пройти <a href=https://bofh69.com/wiki/index.php/User:InaBennet0641>https://bofh69.com/wiki/index.php/User:InaBennet0641</a>
1×slots casino регистрация 1×slots review live
Можно ли в одном интернет казино получить больше одного бонуса за регистрацию? Нет, так как в любом интернет казино есть управляла, к коим нужно придерживаться, не создавать 2 аккаута для получения бонусов, другому несомненно блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, бонус за регистрацию выдаеться один раз одному лицу.Фриспины – благотворительные вращения с фиксированной ставкой, которые возможно использовать в конкретных игровых автоматах. Иногда у посетителей вебсайта все появиться трудности, задачи, препядствия при активации приобретенного промо-кода. В таких случаях, необходимо обратиться за поддержкой в службу поддержки «Support». Для получения ответа, обязательно указывается конкретная первопричина воззвания и подтверждается информация дополнительными экрана. Если сформировалась спорная обстановка, практически можно обратиться к главному регулятору или контролирующему органу, выдавшему данному заведению лицензионный документ. <a href=https://notabug.org/Batecom1102/Batecom1102/wiki/%D0%BB%D1%83%D1%87%D1%88%D0%B8%D0%B5+%D0%B1%D1%83%D0%BA%D0%BC%D0%B5%D0%BA%D0%B5%D1%80%D1%8B+%D0%B2+%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8>https://notabug.org/Batecom1102/Batecom1102/wiki/%D0%BB%D1%83%D1%87%D1%88%D0%B8%D0%B5+%D0%B1%D1%83%D0%BA%D0%BC%D0%B5%D0%BA%D0%B5%D1%80%D1%8B+%D0%B2+%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8</a> 1×slots официальный сайт скачать на айфон Прочитайте верховодила бонусной программки, в которой желайте участвовать. Да, мы безотступно советуем устроить это до регистрации.
<b>Смотреть еще похожие новости:</b>
<a href=http://complainanything.com/node/158?page=917#comment-1107828>1×slots коды</a>
<a href=https://www.ldvd.nl/no-22-san-diego-place-rallies-very-last-boise-country-27–16?page=52#comment-238454>1×slots рабочее зеркало на сегодня</a>
<a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=36163>рабочее зеркало 1хслотс</a>
<a href=https://www.makinamania.net/index.php?topic=250804.new#new>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В реальное время получить приз за регистрацию в казино довольно просто. Почти любой игорный жилище с радостью даст деньги или безвозмездные вращения. Многие игроки пользуются данным и не стесняются региться в любом клубе с прибыльными условиями. Кстати, это замечательная вероятность придумать выигрышную тактику и сорвать куш. Казино выделяет вероятность заработать и исключить реальные деньги на бездепозитных призах. Обычно, это незначительная сумма, которую казино может себя разрешить презентовать игроку.
#7690 izziCasinohttps://izzi-casino-apk.ru
<a href=https://izzi-casino-apk.ru>izzi-casino-apk.ru</a>
Скачать приложение онлайн казино Изи – выигрывай прямо сейчас! <a href=https://izzi-casino-apk.ru>izzi-casino-apk.ru</a>
#7691 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7692 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация
Бездепозитный приз предоставляется новому игроку за определенные действия. Часто презент в виде средств либо фриспинов выдается за регистрацию, благодаря чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.Если площадка презентует бездеп за регистрацию, то процедура его получения проста. Нужно только завести аккаунт на веб-сайте и активировать его, подтвердив адрес электронной почты, номер телефона или другие данные, коие настятельно оператор. Перед этим необходимо убедиться, собственно юзер располагается на официальном сайте казино, а не на мошеннической площадке. <a href=http://filmkachat.ru/>1×slots casino зеркало рабочее</a> Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие появляются у новичков.Исходя из сего, просто не существует мудрых оснований махнуть рукой на получение такового бонуса при регистрации. И, не, на такой бесплатной основе у вас есть все шансы выиграть средства и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные призы, нарекают бесплатными интернет платформами для игр. <a href=https://peatix.com/group/16399770/activity>https://peatix.com/group/16399770/activity</a> Фриспины без депо или дополнительные средства помогут ближе познакомиться с игровой платформой и её функциями. За счёт даров возможно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради забавы напротив живых крупье.В списке притязаний к отыгрышу нередко присутствуют лимиты на ставки при игре на собственные деньги. Так, случае отыграть надо(надобно) 30 000 руб., а максимальная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 раз. Эта особенность затрудняет соблюдение игроками критерий по срокам деяния акции. 1хслот официальный сайт зеркало <a href=https://www.lifeisphoto.ru/page.aspx?id=84863>https://www.lifeisphoto.ru/page.aspx?id=84863</a> Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?Для отыгрыша бонуса казино обязывает игрока поиграть на сумму, в количество один превосходящую необходимую полученного бонуса — здесь выгода фирмы очевидна.
x1 slots регистрация в 1×slots casino
Выбор любого интернет казино на нашем веб-сайте. В описании к каждому Вы можете узнать, собственно получите за творенье аккаунта. <a href=http://aurorahcs.com/forum/viewtopic.php?f=8&t=778104>1х слотс зеркало регистрация в 1×slots casino</a> 1×slots регистрация то дальше необходимо пройти Если площадка дарит бездеп за регистрацию, то процедура его получения проста. Нужно только завести акк на веб-сайте и активировать его, подтвердив адресок электронной почты, номер телефона или другие данные, которые просит оператор. Перед данным необходимо убедиться, что пользователь находится на официальном веб-сайте казино, но на жульнической площадке.Существуют казино с призом за регистрацию, в довольно популярны фриспины в интернет казино впоследствии регистрации в определенных забавах. Они встречаются числе почаще безвозмездных поощрений либо традиционных бонусов в казино без инвестициям. Например, игрок регистрирует счет, на кот-ый начисляются бесплатные игры, бонус за регистрацию в виде даровых фрспинов, вращения в игровом автомате. Во время игрового процесса геймер выигрывает истинные средства, коие в последствии возможно удачно исключить из заведения на свою платежную систему. То есть, есть шансы исключить свои без рисков собственными деньгами. Регистрация, какую геймер получит призы, займет несколько, а благодаря данному можно прирастить пять евро поощрений до тысячи и без всяких заморочек исключить их. <a href=http://www.cwpass.com/ver2/bbs/board.php?bo_table=free&wr_id=678124>http://www.cwpass.com/ver2/bbs/board.php?bo_table=free&wr_id=678124</a> Бесплатные бонусы казино без депо можно получить в виде денежных средств на бонусный счет (вывести их можно лишь в отыгрыша), фриспинов, забавы либо кешбэк-бонуса. 1×slots рабочее зеркало на сегодня Каждый из бездепозитных бонусов без пополнения 2022 имеет свой конкретный вейджер для отыгрыша, например же в любом казино он уточняется индивидуально — где то он х55 а кое-где х30, повторюсь везде по различному!
x1 slots регистрация в 1×slots casino
При правильном раскладе бездепы — это прекрасный способ играть на деньги без растраты личных средств. Есть количество рекомендаций, следуя которым возможно извлечь максимум выгоды из сходственных акций казино. Играть по только на лицензированных площадках. Скриптовые веб-сайты не только накалывают с бонусными предложениями, хотя и используют пиратский софт с измененным ГСЧ. Выиграть на этих автоматах невероятно.Как и промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такового предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых посетителей и дозволяет им составить впечатление о функционале, не рискуя значительными совокупностями. В разделе с бонусами активировать собственный подарок. Найти игры, для коих предусмотрено одобрение и применять приз по назначению.Онлайн-казино кропотливо продумывают бонусные условия, которые нужно выучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и другие ограничения. <a href=http://021bababa.org/space-uid-495904.html>http://021bababa.org/space-uid-495904.html</a> Можно. Вы практически можете отрешиться от получения бездепозитного бонуса за регистрацию в казино, же Вы не сделаете ставку.Фриспины без депо либо вспомогательные средства помогут поближе познакомиться с игровой платформой и её функциями. За счёт презентов возможно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради забавы против живых крупье. зеркала 1×slots
x1 slots регистрация в 1×slots casino
Не советуем опрометью голову хвататься за различные предложения получения средств без инвестициям. Вполне возможно, что бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем смотрится на первый взгляд. Альтернативой считается казино бонус за депозит. Мы предлагаем для пару советов, спасибо которым у каждого игрока будет вероятность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег: 1×slots регистрация 1×slotscasino09k online <a href=http://www.fumankong4.cc/home.php?mod=space&uid=582387>http://www.fumankong4.cc/home.php?mod=space&uid=582387</a> Бездепозитные призы — это презенты от казино вид бонусных денег или фриспинов для игровых автоматов, коие начисляются на аккаунт игрока последствии процедуры регистрации на сайте заведения. Для получения этих поощрений депозит не потребуется.Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.
1×slots рабочее зеркало на сегодня
Подтвердите лицо, предоставив оператору казино свои паспортные данные. Инструкции обычно несложные, главное — конкретно им идти. Если написано, что «на фото обязаны быть заметны все четыре угла страницы паспорта» — устройте именно такое фото. <a href=http://farsrig.com/index.php?subaction=userinfo&user=animatedknoll12>http://farsrig.com/index.php?subaction=userinfo&user=animatedknoll12</a> Частенько новички не разумеют, как активировать подарки или вывести первый выигрыш. Для похожих случаев наша команда описала главные определения – что такое фриспины, вейджер, как его отыграть, для необходимо проходить верификацию.Зачастую бездепозитные призы казино для игры предлагаются различными заведениями азартных игр в маркетинговых промоакций или в целях вербования к для свежих игроков. Для бездепозитных бонусов в казино 2022 игроку не пополнять счет до момента вывода желаемых средств. 1×slots зеркало выигрыши обязательно пройдите регистрацию если Многие азартные клубы ограничивают необходимую вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании акции, суммы Вы не можете исключить. Разница будет аннулирована, Вы даже не сможете делать на нее ставки.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.forum.kalor.ru/1×slot-zerkalo-rabochee-registracii-na-telefon-pridet-t4830.html>1×slot зеркало рабочее регистрации на телефон придет</a>
<a href=https://tabsgame.ru/user/Jamesbes/>x1 slots регистрация в 1×slots casino</a>
<a href=https://karakol.com.kg/user/Jameskef/>онлайн казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Риск-игра по одинаковым шансам – Также казино имеет запрещать выполнять обстоятельства по отыгрышу за раунда на удвоение, кот-ый предлагается в слотах, видео-покере и некоторых иных играх. Список так называемых «разрешенных территорий» прилагается к правилам бонусной программы игорного портала. Обязательно проверьте, распространяются ли на вас сходственные санкции.
#7693 Charlesgunny
1×bet официальный играющие казино <a href=https://strelochnik.com/>casino сайты</a> 1×bet официальный 1×bet xyz Ирина Горбачева <a href=https://glvk.guru/>макао казино</a> 1×bet официальный казино проиграл Александра Бортич 1×bet зеркало xbet porno Илья Ковальчук (хоккей) porno Илона Маркова, хоккеистка casino ru
#7694 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7695 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7696 Casinolegzohttps://legzo-casino-apk.ru/legzo-casino/
<a href=https://bangdream.gamerch.com/gamerch/external_link/?url=https://legzo-casino-apk.ru/legzo-casino/>https://legzo-casino-apk.ru/legzo-casino/</a> <a href=https://arma2academy.ru/redirect?url=https://legzo-casino-apk.ru/legzo-casino/>https://legzo-casino-apk.ru/legzo-casino/</a> <a href=http://www.arabportal.net/redirect.php?url=https://legzo-casino-apk.ru/legzo-casino/>https://legzo-casino-apk.ru/legzo-casino/</a> <a href=https://cse.google.im/url?q=j&source=web&rct=j&url=https://legzo-casino-apk.ru/legzo-casino/>https://legzo-casino-apk.ru/legzo-casino/</a> <a href=https://blahastanislav.blog.idnes.cz/redir.aspx?url=https://legzo-casino-apk.ru/legzo-casino/>https://legzo-casino-apk.ru/legzo-casino/</a> <a href=http://intimmeitene.lv/count.php?user=5&link=https://legzo-casino-apk.ru/legzo-casino/>https://legzo-casino-apk.ru/legzo-casino/</a> <a href=https://brichacek.blog.idnes.cz/redir.aspx?url=https://legzo-casino-apk.ru/legzo-casino/-news-az.com/>https://legzo-casino-apk.ru/legzo-casino/</a> <a href=https://images.t.me/s/worldcasinonet.bo/url?q=https://legzo-casino-apk.ru/legzo-casino/>https://legzo-casino-apk.ru/legzo-casino/</a> <a href=http://hatut.ru/adv/?url=https://legzo-casino-apk.ru/legzo-casino/>https://legzo-casino-apk.ru/legzo-casino/</a> <a href=http://www.cartoonterritory.com/cgi-bin/out.cgi?click=002.jpg.19710&url=https://legzo-casino-apk.ru/legzo-casino/>https://legzo-casino-apk.ru/legzo-casino/</a> <a href=http://igohiresales.com.xx3.kz/go.php?url=https://legzo-casino-apk.ru/legzo-casino/>https://legzo-casino-apk.ru/legzo-casino/</a> <a href=https://m.olco.co.kr/member/login.html?noMemberOrder=&returnUrl=https://legzo-casino-apk.ru/legzo-casino/>https://legzo-casino-apk.ru/legzo-casino/</a> <a href=http://systema-plus.ru/bitrix/rk.php?goto=https://legzo-casino-apk.ru/legzo-casino/>https://legzo-casino-apk.ru/legzo-casino/</a> <a href=http://www.friscowebsites.com/Redirect.aspx?destination=https://legzo-casino-apk.ru/legzo-casino/-news-az.com/>https://legzo-casino-apk.ru/legzo-casino/</a> <a href=http://matherfield.biz.xx3.kz/go.php?url=https://legzo-casino-apk.ru/legzo-casino/>https://legzo-casino-apk.ru/legzo-casino/</a>
Upload apk file bookmaker legzo – win right now! <a href=http://m.movia.jpn.com/mpc_customize_seamless.php?url=https://legzo-casino-apk.ru/legzo-casino/>https://legzo-casino-apk.ru/legzo-casino/</a> <a href=https://www.skiurlaub-infos.de/mtb.php?grandparent=site&a=250&bannerId=34&bannerUrl=https%3A%2F%2Fdownload-legzo-casino-apk.ru/legzo-casino/-fr.com >https://legzo-casino-apk.ru/legzo-casino/</a> <a href=https://nl.xhofficial.com/exit.php?url=https://legzo-casino-apk.ru/legzo-casino/>https://legzo-casino-apk.ru/legzo-casino/</a> <a href=https://www.fitnessbar.ru/bitrix/rk.php?goto=https://legzo-casino-apk.ru/legzo-casino/>https://legzo-casino-apk.ru/legzo-casino/</a> <a href=http://lyze.jp/jmp?url=https://legzo-casino-apk.ru/legzo-casino/>https://legzo-casino-apk.ru/legzo-casino/</a> <a href=http://dansen-web.com/redirect.php?url=https://legzo-casino-apk.ru/legzo-casino/>https://legzo-casino-apk.ru/legzo-casino/</a> <a href=http://staging.peterblum.com/ReleaseNotes.aspx?Returnurl=https://legzo-casino-apk.ru/legzo-casino/>https://legzo-casino-apk.ru/legzo-casino/</a> <a href=https://82.glawandius.com/index/d2?diff=0&source=og&campaign=13142&content=&clickid=y0vzpup0zwsnl3yj&aurl=http%3A%2F%2Fdownload-legzo-casino-apk.ru/legzo-casino/-fr.com &pushMode=>https://legzo-casino-apk.ru/legzo-casino/</a> <a href=https://capitalandprovincial.com/?URL=https://legzo-casino-apk.ru/legzo-casino/>https://legzo-casino-apk.ru/legzo-casino/</a> <a href=http://weigaocrafts.com/productshow.asp?id=793&mnid=47797&mc=PU%D0%BF%D1%97%D0%85%D0%BF%D1%97%D0%85%D0%BF%D1%97%D0%85%D0%B0%D1%91%D0%8E%D0%9B%C2%AE&url=http%3A%2F%2Fdownload-legzo-casino-apk.ru/legzo-casino/-fr.com >https://legzo-casino-apk.ru/legzo-casino/</a> <a href=http://alt1.toolbarqueries.google.is/url?q=https://legzo-casino-apk.ru/legzo-casino/>https://legzo-casino-apk.ru/legzo-casino/</a> <a href=https://maps.t.me/s/worldcasinonet.np/url?q=https://legzo-casino-apk.ru/legzo-casino/>https://legzo-casino-apk.ru/legzo-casino/</a> <a href=https://jcsalesweb.com/Home/SetCulture?culture=es&returnUrl=https://legzo-casino-apk.ru/legzo-casino/>https://legzo-casino-apk.ru/legzo-casino/</a> <a href=https://eventiyoga.it/gotourl/?url=&id=4091https://legzo-casino-apk.ru/legzo-casino/>https://legzo-casino-apk.ru/legzo-casino/</a> <a href=https://www.d-ability.org/html/redirect.php?id=1985&url=https://legzo-casino-apk.ru/legzo-casino/>https://legzo-casino-apk.ru/legzo-casino/</a>
#7697 Charlesgunny
порно с Юлия Ефимова, пловчиха казино сегодня <a href=https://strelochnik.com/>порно с Бондаренко Анастасия Борисовна</a> Крючкова Полина Викторовна порно porno Мира Андреева (теннис) <a href=https://th-royalgclub.com/>Мухтиярова Елена Вячеславовна порно</a> 1×bet зеркало рабочее на сегодня 1×bet xyz 1×bet официальный 1×bet xyz балтбет букмекерская контора Черкесова Бэлла Мухарбиевна порно 1×bet официальный слоты 1×bet рабочее смотреть фильм казино
#7698 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7699 Charlesgunnyhttp://filmkachat.ru
1×slot казино зеркало
Реже бонусы без депозита начисляются неизменным игрокам. С их помощью администрация старается вычесть ценных посетителей либо вожделеет поблагодарить за преданность верных посетителей. Но намного почаще для подобных целей применяются эти акции:Для получения бездепа необходимо пригласить в игру по реферальной ссылке нового клиента: он должен зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на сумму, указанную в условиях промоакции. <a href=http://filmkachat.ru/>скачать 1×slots на андроид мобильная версия</a> Существует ли стратегии для отыгрыша бездепозитных призов? К раскаянию нет, на выигрыши либо проигрыши с призов, казино или игрок воздействовать не может, отдача игр происходит от создателей игр. <a href=https://www.keepandshare.com/doc27/114858/pdf-357k?da=y>https://www.keepandshare.com/doc27/114858/pdf-357k?da=y</a> 4. Заберите презент. Чаще всего приз активизируется незамедлительно в регистрации. Но случаются ситуации, когда нужно зайти в личный кабинет либо написать в службу. 1×slots зеркало регистрация <a href=https://www.walkaholic.me/user/27533-porsedropea>https://www.walkaholic.me/user/27533-porsedropea</a> Хотя бесплатные призы начисляются без депозита, не исключено, что для понадобиться вносить средства. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты только последствии того, как новый заказчик первый пополнит игровой счет.При исполнении условий отыгрыша и верификации, деньги с бонусного счета переводятся на главный и могут быть выведены на карту либо электронный кошелек. Лимиты на вывод и сроки проведения транзакции в от избранной платежной системы.
1×slots промокод при регистрации 2025
<a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=3201>1хслотс официальный сайт зеркало</a> 1×slots официальный сайт зеркало рабочее <a href=https://loansnearme.com.au/author/joshuamoush/>https://loansnearme.com.au/author/joshuamoush/</a> 1×slots рабочее зеркало на сегодня
1хслотс рабочее зеркало
Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных требований, считая обязательной верификации. Если на веб-сайте предусмотрена обязательная процедура доказательства личности, то исключить выигрыш удастся только после ревизии данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий личность.У каждой игры средства требования по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система зачтет любую ставку. В рулетке и покере сделать это гораздо труднее. Именно поэтому так важно пристально разбирать обстоятельства получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой забаве, то новенькие просто «спустят бонус на ветер». <a href=https://www.gamerlaunch.com/community/users/blog/6287402/2293949/redico/?gid=535>https://www.gamerlaunch.com/community/users/blog/6287402/2293949/redico/?gid=535</a> 1хслотс официальный сайт зеркало Раздача призов имеет быть приурочена к различным датам: календарные дни, дни рождения игроков, юбилей открытия казино и т. Д. Подарок выдается повторяющий средств, фриспинов либо баллов для накопления и размена на предложения оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода этой суммы придется выполнить ряд притязаний.Далее требуется отыграть вагер и вывести выигрыш. Игрокам без опыта крупно подфартило, меня получить десятки презентов за одну регистрацию. Если не смогли получить Бездепозитный бонус, не волнуйтесь. Обратитесь в интернет чат, оператор поможет исправить.
1×slots регистрация на сайте 1×slots ru com
В игровых клубах без лицензии Вы покупаете „кота в мешке“ и когда неоднозначных обстановок нет способности куда-то посетовать и доказать собственную правоту. 1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, случае не желаете замерзнуть жертвой мошенников либо впустую потратить время; 1×slots регистрация то дальше необходимо пройти <a href=http://littleyaksa.yodev.net/bbs/board.php?bo_table=free&wr_id=3656163>http://littleyaksa.yodev.net/bbs/board.php?bo_table=free&wr_id=3656163</a> Можно ли наваривать на бездепозитных бонусах? Это не работа, здесь как повезет, если в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, это возможно назвать везением, и добавочной добавкой к вашему бюджету.
1х слот регистрация в 1×slots casino
Новички не любят сразу же вносить депо. Это обосновано отсутствием опыта и сомнением. К счастью, в наше время возможно получить бездепозитный приз за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В любом случае вы не рискуете своими сбережениями. Это отличная вероятность запустить понравившийся видео слот либо же испытать удачу в настольных играх. Бездепозитный бонус предоставляется новенькому игроку за конкретные деяния. Часто подарок вид денег или фриспинов выдается за регистрацию, спасибо чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. <a href=https://google.com.mx/url?q=https://doctorlazuta.by/>https://google.com.mx/url?q=https://doctorlazuta.by/</a> 1×slots официальный сайт скачать Бесплатные призы казино без депозита можно получить в виде валютных средств на бонусный счет (исключить их можно лишь после отыгрыша), фриспинов, игры либо кешбэк-бонуса.Бонус в казино без депо содержит разные вариации: это может быть приветственный приз, акции в честь каких-то праздников либо весомых дат, приз за привлечение свежих игроков, лояльность и получение VIP-статуса.
<b>Смотреть еще похожие новости:</b>
<a href=https://clubdefansde24.com/foro/viewtopic.php?t=18854>1×slots акции</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми акциями. Читайте о них в обзорах и на форуме. Для верификации аккаунта надо(надобно) предоставить профессионалам технической поддержки отсканированную копию паспорта и счета за коммунальные услуги, еще фотку банковской карты либо экрана странички электронного кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности.
#7700 Charlesgunnyhttp://filmkachat.ru
1×slot регистрация
Но надо думать, собственно снабжая юзеров этими призами, казино занимается спонсированием. Ведь объемы вознаграждений, в основном, не великие (средним размером от 5 до 20 долларов). И на эти средства налагаются конкретные обстоятельства и лимитирования, неотклонимые к исполненью игрока, в в последствии он вожделеет получить все свои выигранные деньги. <a href=http://filmkachat.ru/>скачать 1×slots на андроид мобильная версия</a> Иногда виде бездепа, казино дарует наименьший приз (до 50 рублей), из-за которого не стоит заморачиваться. <a href=https://pixabay.com/users/46661731/>https://pixabay.com/users/46661731/</a> А ознакомиться с свежими онлайн казино, Вы сможете за счет бонусов с выводом прибыли, коие Вы сможете получить без депозита.Основное различие в, собственно для получения бездепа нужно пополнять баланс в казино. Но не сего, есть ряд и различий: 1×slots зеркало рабочее на сегодня <a href=https://magazin.orgsoft.ru/forum/user/184567/>https://magazin.orgsoft.ru/forum/user/184567/</a> Изучить правила и условия получения бездепозитных бонусов казино, Вы можете у нас на веб-сайте в разделе с бонусами либо на официальном веб-сайте избранного Вами казино. Если возможности найти нужную информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал либо по электронной почте.
1×slot зеркало
Отказ в прохождении верификации. Если клиент не хочет или не дать документы, подтверждающие его личность, профиль несомненно заблокирован вместе со всеми бонусными начислениями.Бесплатный бонус – кредиты, коие онлайн-казино начисляет клиенту, не заставляя его пополнять игровой счет. <a href=https://adminclub.org/showthread.php?tid=66112>1хслотс казино зеркало</a> 1×slots официальный сайт скачать Бонусы без депозита при регистрации числятся самыми привлекательными как для опытнейших игроков, так для и начинающих. Получив это вознаграждение, заказчик имеет играть на настоящие деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а также обстоятельства их активации и выигрыша. <a href=https://blog.udn.com/G_107482553777754991/180626154>https://blog.udn.com/G_107482553777754991/180626154</a> 1× slots casino зеркало Но не мыслить, собственно снабжая пользователей этими бонусами, казино увлекается спонсированием. Ведь размеры вознаграждений, в, не великие (средним объемом от 5 до 20 $). И на эти средства налагаются определенные обстоятельства и лимитирования, неотклонимые к исполнению игрока, если в последствии он вожделеет получить все средства выигранные деньги.Если вы облюбовали для себя некоторое брендов коие вам больше всего полюбились, для постоянной игры! Таких гемблеров казино довольно предпочитает и ценит, за частую такие игроки становятся VIP игроками заведения, коим нередко поступают прибыльные предложения повторяющий призов, так же туда входит и бездепозитные.
1×slot зеркало
Также, учите, что бездепозитный приз возможно исключить только сомнений случае, когда станут исполнены все условия отыгрыша.Размер бонусов чаще всего чисто условный и не выше 50 руб. Приятно, но осязаемым бустом при вряд ли будет. Активация валютного гонорары случается автоматически в сотворения профиля либо применения промокода. Иногда операторы предъявляют вспомогательные притязания: подписаться на страницы казино в соц сетях или на рассылку рекламных извещений, скачать и ввести дополнительный софт и т.д.Как только получите бездеп в казино, всё равно не запамятовывайте проверять электрическую почту. Некоторые игорные клубы постоянно радуют активных гэмблеров приятными бонусами. Чаще всего получить подарок можно в преддверии веселья, на денек рождение, за вербование приятеля. А кроме распространённым бонусом считается надбавка к депозиту. Нужно не пополнить счёт, и азартное заведение прирастит его на 50–100%. <a href=https://lider-school174.com/forum/user/87/>https://lider-school174.com/forum/user/87/</a> Вы не в коем случае ни же рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный бонус, по мимо практической игры на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, научится регулировать менять ставки и линии, исследовать бонусные игры и их выигрышные композиции, да счете просто зарядится кучей эмоций! Ведь вы будите играть на бонусные свои, которые возможно отыграть и исключить, не просто на демо счет, что, этим наиболее адреналин в крови более повысится а пульс забьется с частым ритмом! рабочее зеркало 1×slots Более крупные предложения встречаются очень изредка. Зачастую они доступны только VIP-игрокам. В остальных случаях им всего сопутствуют довольно жесткие условия отыгрыша. Также возможны вспомогательные условия и другие лимитирования, прописанные в условиях и положения бонусной программки казино.B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax
1×slots зеркало 1хслотс регистрация перейти на 1×slots
2. Создать новый профиль. Для регистрации нужно заполнить небольшую анкету или зайдите в индивидуальный офис при помощи социальных сеток; Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в собственный офис, чтобы отобрать безвозмездные вращения с вейджером х40;В игровых клубах без лицензии Вы покупаете „кота в мешке“ и когда спорных ситуаций нет возможности куда-то пожаловаться и обосновать собственную правоту. В неких интернет казино для получения бездепозитных призов не довольно просто зарегистрироваться на сайте клуба и подтвердить средства контактные данные. Дополнительно требуется активация промокода.Бездепозитные призы в казино без пополнения 2022 — это определенная сумма денег или gratuitous spins вращения, которые предоставляются первым постояльцам за регистрацию на веб-сайте казино в виде бездепозитного бонуса, и выделяет для вероятность с казино без пополнения опробовать услуги (игр), с дальнейшей привилегией вывода средств при выполнении всех установленных правил. 1×slots регистрация 1×slots review live <a href=https://lunar.az/user/JulesJoymn/>https://lunar.az/user/JulesJoymn/</a> Не рекомендуем опрометью голову браться за всевозможные предложения получения средств без вложений. Вполне возможно, что бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на первый взгляд. Альтернативой является казино бонус за депо. Мы предлагаем вас пару советов, благодаря коим у каждого игрока несомненно вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств:Еще одно условие касается объемов ставки. Операторы устанавливают максимальную необходимую, которую игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, выбранной в Личном кабинете. При превышении лимита есть риск лишиться бонуса. Существующие ограничения относятся и к конкретным обликам ставок. Например, играя в рулетку, заказчик возможность столкнуться с запретом назначать фишки на шансы.
1×slots регистрацию более популярный вариант это
Условия, на коих предоставляется бездеп, регулируются казино. Каждая промоакция имеет доскональные управляла, ссылка на коие обычно находится в промообъявлении. В их указываются лимиты, вейджер, список дешевых игр. Если оператор скрывает данные о предложении, то пользоваться им надо.Ну и естесственно же, для казино бездепозитные призы выгодны с имиджевой стороны: схожая добродушие увеличивает степень лояльности посетителей к фирмы. Если простыми словами, бездепы – это определённая сумма денег либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно брать презенты. Но есть кое-какие аспекты. Существуют игорные дома, коие перед тем как начислить бонусы настоятельно привязать аппарат, дать копии документов. <a href=http://am_14264130.mongdol.net/bbs/board.php?bo_table=free&wr_id=123463>http://am_14264130.mongdol.net/bbs/board.php?bo_table=free&wr_id=123463</a> Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить необыкновенности, недоступные при забаве в демо режиме. Многие свежие посетители перебегают в число постоянных, а оператор получает длительную выгода. 1хслот зеркало сайта Условия шансы разниться друг от друга. Но такой приз возможность быть применен только для игрового процесса – приобретенные на счет финансы до того, как будут отыграны, исключить невероятно.
<b>Смотреть еще похожие новости:</b>
<a href=https://bajarmp3.net/showthread.php?tid=424756>1×slots регистрация то дальше необходимо пройти</a>
<a href=https://www.katzenforum.at/forum/media/users/jamesagema.16012/>1×slots зеркало рабочее</a>
<a href=https://www.goslog.ru/forum/messages/forum1/message14553/11-obrashcheniya-grazhdan?result=reply#message14553>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<a href=https://forum.dis-course.net/viewtopic.php?t=499191>1×slots регистрация на сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Новые посетители онлайн-казино без первого депо могут проверить свою удачливость. К тому же есть вероятность конвертировать бездепы в настоящие средства за регистрацию в казино, однако для этого бонус необходимо отыграть согласно условиям промоакции. В интернет-сети всегда можно найти списки наиболее известных и обещанных поощрительных программ от знаменитых онлайн-казино.
#7701 Charlesgunny
ставки на спорт букмекерские конторы мобильные букмекерские конторы <a href=https://rumafia.news/>часы казино</a> Петрова Ольга Викторовна порно рейтинг казино <a href=https://specreporter.com/>бесплатные букмекерские конторы</a> 7k casino официальный порно с Георгий Джикия (футбол) Хорова Наталья Александровна порно gama casino кент казино vodka casino Преподобная Надежда Александровна порно
#7702 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
Поспешите зарегистрироваться на официальном веб-сайте Клубника, дабы быстро получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, замечена настоящий шанс победу! <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> На условиях отыгрыша даровых бонусов следует остановиться подробнее. С ними связаны аспекты, коие невозможно оставить без внимания.В бонусную программу множества операторов входят регулярные бездепы. Это бессрочные акции, поощряющие интенсивных постоянных игроков. Популярный формат — раздача фриспинов по конкретным денькам недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают неизменные бонусы без депозита в мена на накопленные баллы лояльности. <a href=https://gravatar.com/briefe33e4234c6>https://gravatar.com/briefe33e4234c6</a> 1×slots скачать на айфон <a href=http://www.sazkar.info/member2541.html>http://www.sazkar.info/member2541.html</a> Фриспины. Бесплатные вращения предусмотрены для применения в видео-слотах. Внимательно читайте обстоятельства – они нередко выдаются для некоторых машин. В зависимости от клуба возможность делать конкретное количество ставок. Кстати, современные игорные дома дают вероятность заводить «одноруких злодеев».
1×slots зеркало проходить регистрацию это отличный вариант
Подобные бонусы без депо предоставляются на более прибыльных критериях. Зачастую они покрупнее, а условия отыгрыша наименее строгие. 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=http://xavierdeschamps.free.fr/Escalade/Forum_escalade/profile.php?id=577604>http://xavierdeschamps.free.fr/Escalade/Forum_escalade/profile.php?id=577604</a> 1хслотс зеркало на сегодня
1×slots акции
Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, дабы замечена вероятность исключить выигрыш.Благодаря программке лояльности от игорного заведения, возможно брать превосходный старт и без добавочных вложений запустить видеослоты. Кроме как, можно рассчитывать на реальную удачу и получить, без вложения личных денег, большой выигрыш. <a href=http://www.rhl-mod.ru/members/98123-williamkic/>http://www.rhl-mod.ru/members/98123-williamkic/</a> Такой казино бонус без депо за регистрацию выдается игроку на час и активно используется данное предложение с 2017 года. Это как бы некая маскировка поощрения под бездепозитный. Суть всего сего сводится к что, этому, собственно игроку на час выдается, к примеру, 1000 долларов, а реклама повторяет о том, что любой выигрыш можно будет в будущем забыть при для. Но если играющий всерьез отнесется к этому предложению, то он просто потеряет время. Ведь геймеру надо(надобно) несомненно играть не главном аккаунте, в тренировочном и с ограниченным выбором автоматов и ставок. Да и если, тогда, выигрыша (даже всей тыс. ) в верховодила вступят определенные обстоятельства, где несомненно сказано, что максимальной суммой победы возможность быть лишь двести $ и средства возможно использовать лишь в качестве бонуса на первый вклад с вейджером 25 от суммы вознаграждения плюс сам депо. По результату получится, что игрок выигрывал для 200% приз с вейджером на конкретную необходимую. Короче разговаривая, это все надо вашего времени. 1×slots быструю регистрацию а также мгновенное Самый распространённый из сходственных призов, конечно же, бездеп на денек рождения клиента — бонус повторяющий фиксированной суммы либо фриспинов поступает на счёт игрока, а воспользоваться им можно на установленного периода времени.
1×слот регистрация в 1×slots casino
Фриспины предусмотрены для применения в видео слотах. Внимательно ознакомьтесь с критериями – частенько их выдают на кое-какие автоматы. В зависимости от клуба, у вас выйдет устроить определённое количество ставок. Кстати, продвинутые игорные дома разрешают запускать любых «одноруких злодеев».Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного приза достаточно пополнения баланса и подтверждения личности. В других же клубах, нужно несколько раз прокрутить свой депозит. <a href=https://surfaceprophets.com/threads/1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5.27770/>1×slots официальный сайт зеркало рабочее</a> Поспешите зарегистрироваться на официальном сайте Клубника, дабы быстро получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, бывает настоящий шанс победу! Получить приветственный приз все только новые клиенты онлайн-казино. Способы описаны в критериях промоакции любого легального казино, чаще всего это: 1×slots регистрация на 1хслотс <a href=https://wmg.by/1×slot-%d0%b7%d0%b5%d1%80%d0%ba%d0%b0%d0%bb%d0%be/>https://wmg.by/1×slot-%d0%b7%d0%b5%d1%80%d0%ba%d0%b0%d0%bb%d0%be/</a> При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, коие можно посвятить ирге в казино.
1хслотс зеркало на сегодня
Свежий приз начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в пользовании средствами, ну случае отыгрыша оператор может установить лимитирование на вывод средств. <a href=https://form.jotform.com/241374235396056>https://form.jotform.com/241374235396056</a> Бесплатные бонусы казино без депо возможно получить в виде денежных средств на бонусный счет (исключить их возможно только последствии отыгрыша), фриспинов, забавы либо кешбэк-бонуса. 1×slots официальный регистрация В случае установленного лимита на необходимую вывода выигрыша с бездепозитного приза, игрок не может исключить больше заявленной суммы.
<b>Смотреть еще похожие новости:</b>
<a href=http://khodaumo.com/forum/viewtopic.php?f=2&t=75381&sid=9ac8f723374b270ead1a91cc4a928f93>1×slots официальный сайт мобильная версия</a>
<a href=https://hiddeninthesand.com/forum/viewtopic.php?t=310300>1×slots бонус за регистрацию</a>
<a href=http://lider1c.ru/communication/forum/messages/forum5/message19390/15326–1×slots-registratsiya-na-1khslots?sessid=c596078ba1a2450b9c9d95e0d8657a96&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1×slots регистрация на 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный бонус предоставляется новенькому игроку за определенные деяния. Часто подарок вид денег либо фриспинов выдается за регистрацию, спасибо чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.
#7703 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7704 Charlesgunnyhttp://filmkachat.ru
casino 1×slot
Получить приветственный приз имеют только свежие посетители онлайн-казино. Способы описаны в критериях промоакции любого законного казино, чаще всего это:Для получения бездепа необходимо пригласить в игру по реферальной ссылке нового посетителя: он должен зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на необходимую, указанную в условиях акции. <a href=http://filmkachat.ru/>1×slots коды</a> <a href=https://onetable.world/read-blog/89547>https://onetable.world/read-blog/89547</a> Подтверждение регистрации. Казино настоятельно привязки профиля к электронному адресу и номеру телефона. Для сего на e-mail отчаливает послание со ссылкой, а на телефонный ? текстовое извещенье с кодом.При выполнении критерий отыгрыша и верификации, средства с бонусного счета переводятся на главный и шансы быть выведены на карту либо электрический кошелек. Лимиты на вывод и сроки проведения транзакции зависимости от выбранной платежной системы. 1×слотс казино <a href=https://www.gamerlaunch.com/community/users/blog/6287402/2295454/>https://www.gamerlaunch.com/community/users/blog/6287402/2295454/</a>
1хслотс рабочее зеркало на сегодня
Также посещают случаи, когда казино начисляет обсужденный приз в регистрации нового клиента по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам.Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают приз по странам. Вплоть до как, собственно клуб может на игроков из Вашей страны, а бездеп не давать. зеркала 1×slots <a href=http://t20suzuki.com/phpBB2/profile.php?mode=viewprofile&u=3395>http://t20suzuki.com/phpBB2/profile.php?mode=viewprofile&u=3395</a> x1 slots регистрация в 1×slots casino
1×slots casino регистрация 1×slots review live
Не стоит путать игру в демо и внедрение бонусов. В демонстрационном режиме игрок имеет оценить механику слота, сюжет и оформление. Но забава ведется на условные кредиты, потому отсутствует главное ? ощущение пыла. Активируя промокод или фриспины, заказчик как не расходует средства деньги на игровые автоматы, но имеет сорвать реальный куш! <a href=http://www.xn–2z1br13a3go1k.com/bbs/board.php?bo_table=free&wr_id=53444>http://www.xn–2z1br13a3go1k.com/bbs/board.php?bo_table=free&wr_id=53444</a> Если вы выбираете проверенное лицензионное онлайн казино и выполните все обстоятельства получения бездепозитного бонуса, проблем с получением презента у Вас не возникнет.Большинство интернет-казино из нашего топ-10 готовы повеселить вас эксклюзивными промоакциями. Читайте о их в обзорах и на форуме. 1×slots casino регистрация на сайте Игры, каких можно играть на бонусные средства. Проверьте список игр, каких возможно выступать на бонусные средства, возможно они Вам не понравятся и не стоит расходовать своё время на такую акцию.Для доказательства электрической почты, просто перейдите по активной ссылке в письме, приобретенном от игрового заведения.
x1 slots регистрация в 1×slots casino
<a href=https://clubdefansde24.com/foro/viewtopic.php?t=18198>1×slots регистрация 1×slots casino 777 online</a> 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=http://ruzland.ru/communication/forum/user/2700/>http://ruzland.ru/communication/forum/user/2700/</a>
1×slots зеркало подтвердит вашу регистрацию если говорить
В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с безвозмездных вращений. Прибыль, коию Вы заработаете на таком бездепе возможно ставить на вывод без какого либо отыгрыша. Необходимость отыгрыша. Вейджер в повыше, чем для бонусов за депо. И пока средства не отыграны, вывести их невозможно.Бездепозитные бонусы – это исключительно небезинтересная и более перспективная промоакция интернет-казино. Они том другого фри-спинов, поэтому собственно выплаты в даровых вращениях не гарантированы, как композиции на барабанах игрового аппарата шансы не сложиться. <a href=https://todaydent.com/landing/474139>https://todaydent.com/landing/474139</a> Ну и конечно же, для казино бездепозитные бонусы прибыльны с имиджевой стороны: сходственная щедрость повышает уровень преданности клиентов к компании. 1×slots сайт
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В некоторых онлайн казино для получения бездепозитных призов не достаточно просто зарегистрироваться на сайте клуба и подтвердить средства контактные данные. Дополнительно требуется активация промокода.
#7705 Charlesgunny
казино казино смотреть онлайн <a href=https://glvk.guru/>Валентина Матвиенко порно</a> сайт букмекерской конторы casino x <a href=https://m.repost.news/>пина букмекерской конторы</a> рейтинг казино порно с Юлия Ефимова ап казино 1×bet официальный xbet Кузнецова Анна Юрьевна порно Семёнова Татьяна Владимировна порно Мухтиярова Елена Вячеславовна порно
#7706 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7707 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало видели такую регистрацию на
Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного приза.Объективные – объем приза, коэффициент и обстоятельства вейджера, надобность внесения депо для вывода средств; <a href=http://filmkachat.ru/>1×slots зеркало которую указывали при регистрации кстати</a> Бездепозитные бонусы казино за регистрацию в 2022 году — это возможность сыграть за счёт заведения. Казино даёт клиенту шанс воспользоваться определённой суммой или числом бесплатных вращений без внесения депозита. Не путайте деморежим с реальной игрой без необходимости внесения депо.Операторы гемблинга заявляют, что так они борются с бонус-хантерами. Впрочем, критики считают, что данным казино пробуют устроить из случайного гостя неизменного игрока. <a href=https://gab.com/lexxeagle/posts/113498473251532232>https://gab.com/lexxeagle/posts/113498473251532232</a> рабочее зеркало 1хслотс <a href=http://www.isexsex.com/home.php?mod=space&uid=2719311&do=profile&from=space>http://www.isexsex.com/home.php?mod=space&uid=2719311&do=profile&from=space</a> Для вывода средств бонус надо(надобно) будет отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами акции и вариациями отыгрыша бездепозитного бонуса до его получения, дабы избежать конфликтных обстановок.
1× слот зеркало
<a href=http://miupsik.ru/forums/showthread.php?tid=229077>1×slot зеркало рабочее этих способов предполагает регистрацию</a> 1×slots зеркало быструю регистрацию а также мгновенное При регистрации идет указывать только достоверную информацию. Когда учетная запись несомненно активна, появится доступ в Личный офис. В нем можно избрать денежную, установить промокод и узнать доскональные верховодила получения и отыгрыша бездепа. Краткая информация об промоакции часто присутствует непосредственно на регистрационной форме.Допустим, за регистрацию вы получили бездеп в объеме 2 000 рублей с вейджером х30. В данном случае светит сделать ставок, на общую необходимую в 60 000 руб. (2 000 * 30 = 60 000). Когда выполните обстоятельства по отыгрышу, придёт время заработать настоящие средства. Однако не забывайте, что с любого презента выйдет исключить определённую сумму (чаще всего менее $200). <a href=https://lunar.az/user/HenryInasy/>https://lunar.az/user/HenryInasy/</a> 1×slots регистрация на официальном сайте Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической забавы на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, выучится регулировать менять ставки и линии, исследовать бонусные забавы и их выигрышные комбинации, ну конечном просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные средства, которые можно отыграть и вывести, не просто на демо счет, что, этим самым адреналин в крови еще повысится а пульс забьется с частым ритмом!При отыгрыше бонусных средств, необходимо учесть срок деянья бонуса и время, которое дается на отыгрыш. По истечению заявленного времени, не отыгранный приз несомненно аннулирован.
1х слотс зеркало регистрация в 1×slots casino
Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депозит может выделяться до 30 дней. <a href=http://witiai.cn/home.php?mod=space&uid=74794>http://witiai.cn/home.php?mod=space&uid=74794</a> Фриспины начисляются по определенной ставке. После их активации игроку нужно запустить разъем и увериться, что в нем показываются безвозмездные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода в отыгрыша определяется оператором и изредка выше 5 000 рублей. 1×slots зеркало быструю регистрацию а также мгновенное
1хслотс зеркало
Верификация необходима для добавочной защищенности и подсобляет техподдержке выявить бонусхантеров и плутов. Кстати, на платформах выводы солидных сумм доступны только в подтверждения личности.Онлайн-казино тщательно продумывают бонусные условия, коие нужно изучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и лимитирования. Такой бесплатный эквивалент средств зачисляется на профиль пользователя после воплощения притязаний и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений возможен лишь после воплощения вейджеровых критерий.Основное верховодило получения бездепа ? творимый аккаунт должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов требовательно запрещено. Проверка проводится по имени, адресу электронной почты, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депо нужно соблюдать несложную очередность поступков. Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие возникают у начинающих. casino 1×slot <a href=http://0lwow.com/home.php?mod=space&uid=20572>http://0lwow.com/home.php?mod=space&uid=20572</a> Каждый из бездепозитных призов без пополнения 2022 содержит собственный определенный вейджер для отыгрыша, например же в любом казино он уточняется индивидуально — где то он х55 а кое-где х30, повторюсь везде по разному!За счёт спинов получится запустить различные онлайн слоты, протестировать стратегии и поднабраться навыка. Фишка в, собственно вращения начисляются на топовые аппараты с оригинальными опциями и высочайшей отдачей. Не забывайте, собственно в каждом акционном предложении предусмотрены специальные притязания – кратковременные лимитирования, максимальный размер ставки, перечень дешевых игр.
1×slots официальный сайт зеркало
Однако в критериях исчезают «подводные камешки», коие не разрешат вывести солидную необходимую либо же вы не успеете отыграть вейджер. Поэтому мастера советуют отобрать безвозмездные вращения за регистрацию в казино без депо, чтобы поднабраться навыка и получить настоящий шанс на победу.Но эти рамки не смущают том хайроллеров, что коэффициенты на слотах дозволяют рассчитывать на солидные выигрыши, в некоторых автоматах разыгрывается прогрессивный джекпот. Вывод выигрыша с бездепозитных призов казино – щедрый презент от азартных клубов. Но дабы исключить собственный заработок, необходимо выполнить ряд критерий:Похожим образом трудится 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения посетителя или из-за с получения им VIP-статуса. Подарок предоставляется последствии обращения в поддержку и ревизии. <a href=http://www.zgbbs.org/space-uid-183291.html>http://www.zgbbs.org/space-uid-183291.html</a> x1 slots регистрация в 1×slots casino 4. Заберите презент. Чаще всего приз активизируется сразу последствии регистрации. Но случаются истории, когда нужно зайти в индивидуальный кабинет или написать в саппорта.Бездепозитные призы казино за регистрацию в 2022 году — это вероятность поиграть за счёт заведения. Казино даёт посетителю шанс пользоваться определённой суммой или числом даровых вращений без внесения депозита. Не путайте деморежим с реальной забавой без необходимости внесения депо.
<b>Смотреть еще похожие новости:</b>
<a href=http://nhomtruyen.com/members/jamesgaw.9280/>1× slots casino зеркало</a>
<a href=https://forum-macan.ru/viewtopic.php?t=11042>1×slots casino регистрация на сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Все любят получать презенты. Согласитесь, почти каждый играющий человек несомненно очень счастлив, если получит бесплатный подарок для игры в интернет казино просто за регистрацию или же бонус за внесенный депо, например нарекаемые приветственные призы для свежих игроков. Соответственно эти онлайн клубы станут больше знамениты и преимущественны у игроков при выборе казино для игры. Топ казино каждый обновляется и добавляются новые и занимательные игровые клубы с привлекательной бонусной политикой и всеми возможными привилегиями, к коим относятся такие призы как фриспины за регистрацию, валютные бездепозитные призы, а великодушные бонусы за внесенный депо.
#7708 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7709 Charlesgunny
online casino лучшие казино бесплатно <a href=https://7club7.com/>ап казино</a> 7k casino зеркало рабочее казино фильм онлайн <a href=https://m.repost.news/>казино ли</a> Мухтиярова Елена Вячеславовна порно 1×bet зеркало слоты porno Дарья Клишина casino online зеркало казино сочи казино 5 казино фильм онлайн
#7710 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7711 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации 2025
Вознаграждения за получение VIP-статуса ? начисляются масштабах программы лояльности при достижении очередного значения или выдаются индивидуально менеджерами саппорта. <a href=http://filmkachat.ru/>зеркло казино 1×slots</a> <a href=http://www.alexandria.gov.eg/Lists/List30/DispForm.aspx?ID=83358>http://www.alexandria.gov.eg/Lists/List30/DispForm.aspx?ID=83358</a> Иногда у гостей сайта имеют возникнуть проблемы при активации приобретенного промо-кода. В таких случаях, нужно обратиться за поддержкою в саппорта «Support». Для получения ответа, непременно указывается определенная причина воззвания и подтверждается информация дополнительными скриншотами. Если сложилась неоднозначная ситуация, всегда возможно адресоваться к основному регулятору или контролирующему органу, выдавшему данному заведению лицензионный документ. 1×slots зеркало этих способов предполагает регистрацию <a href=http://www.taodemo.com/home.php?mod=space&uid=377903&do=profile>http://www.taodemo.com/home.php?mod=space&uid=377903&do=profile</a> Перечисленные выше основные свойства сочетают фактически любой приз и считаются стереотипными для бездепозитных бонусных начислений в казино.Только выполнив все условия отыгрыша и дождавшись завершения проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить средства деньги.
1×slots регистрация то дальше необходимо пройти
Эффективность бездепов виде маркетингового инструмента расценили почти операторы. Малоизвестные площадки употребляют такие акции, дабы прытко набрать базу. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны постоянных гостей. Не все веб-сайты, дающие подарки без депозита, рекомендованы к этой. За привлекательным промоописанием имеют прятаться невыполнимые условия отыгрыша и подводные камешки.Минимального оборота. Этот лимит уточняется вейджером — пока игрок не поиграет на установленную сумму, вывод средств несомненно недоступен. <a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=243857>1×slots рабочее зеркало на сегодня</a> 1хслотс рабочее зеркало на сегодня Но существуют азартные заведения, готовые просто так вручить деньги на забаву. Для этого довольно создать профиль. Чтобы вывести выигрыш, сначала необходимо выполнить вейджеровые условия, прописанные в условиях получения бездепа. <a href=http://yinyue7.com/space-uid-1028846.html>http://yinyue7.com/space-uid-1028846.html</a> Обычно показатель выше, чем для бонусов на депозит. Не изумляйтесь, в он будет и х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных государств.Акции распространяются как на все забавы казино, так и на узкий перечень. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino прочие. Промо может обхватывать разработки 1-го производителя. Бездеп не пересекается с иными промоакциями казино. Если на сайте предусмотрен кэшбек, он не начисляется за ставки, сделанные бонусными средствами. Для идентификации платежных реквизитов игрока возможность понадобиться пополнение счета на минимальную сумму. 1×slots официальный demo регистрация в 1×slots casino
1×slots регистрацию процедура займет всего лишь
Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро или 20 долларов. Если выдаются фриспины, их количество редко выше нескольких 10-ов безвозмездных вращений.Возможность протестировать свежие игры, не рискуя личными своими и разработать собственную стратегию забавы. Бездепозитные бонусы за регистрацию являются одним из самых популярных способов привлечения свежих игроков в онлайн-казино, потому собственно они предоставляют игрокам вероятность опробовать казино, более игровые автоматы, и вероятно, выиграть реальные деньги. <a href=http://azbuka-remonta.com/bitrix/redirect.php?goto=http://stroitelnie-materiali.ru/bitrix/rk.php?goto=http://orthosmolensk.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/LJrWzZkeHfR>http://azbuka-remonta.com/bitrix/redirect.php?goto=http://stroitelnie-materiali.ru/bitrix/rk.php?goto=http://orthosmolensk.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/LJrWzZkeHfR</a> 1×slots казино мобильная версия
1хслот официальный сайт зеркало
Игры, в возможно выступать на бонусные деньги. Проверьте перечень игр, в можно играть на бонусные свои, вероятно они Вам не понравятся и надо тратить своё время на эту промоакцию.Чтобы других увериться в преимуществах бездепозитных бонусов, достаточно зарегистрироваться в казино и получить поощрение. <a href=https://www.bf-france.com/forums/profile/30064-rabofreeor/>1×slots промокод при регистрации</a> Онлайн-казино кропотливо продумывают бонусные условия, коие нужно изучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и другие ограничения.После получения приза вывод средств для клиента несомненно недоступен времени, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо пара месяцов. Выводить деньги игрок может лишь последствии отыгрыша. 1 х слотс зеркало <a href=https://ebooksworld.com.pl/user/JosephRup/>https://ebooksworld.com.pl/user/JosephRup/</a> Возможность сыграть вспомогательное соревнование (а времени и количество) совершенно бесплатно, а выигрыш, тому, поступает на счёт игрока.Подарки на определенные даты выделяются условиями получения. Если одобрение начисляют игроку на денек рождения, то сумма обычно находится от общего размера депозитов за прошедший год.
1хслотс рабочее зеркало
Возьми свой подарок. Чаще всего приз активируется сразу после регистрации. Но случаются истории, когда надо(надобно) зайти в собственный кабинет или написать в справочную службу. B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpaxЕсли площадка дарит бездеп за регистрацию, то процедура его получения проста. Нужно лишь ввести аккаунт на веб-сайте и активировать его, подтвердив адрес электрической почты, номер телефона либо иные данные, которые требует оператор. Перед этим необходимо увериться, что пользователь находится на официальном веб-сайте казино, но на мошеннической площадке. <a href=https://www.clashfarmer.com/forum/member.php?action=profile&uid=45669>https://www.clashfarmer.com/forum/member.php?action=profile&uid=45669</a> Даже не выиграв солидную необходимую, игрок интересно проведет время, изнутри исследует работу площадки, оценит геймплей автоматов. Все это без каких-то финансовых рисков. Быть в курсе лучших акций легкостью. Достаточно регулярно учить список свежих онлайн казино с выводом приза без депо в этом разделе. 1хслот официальный сайт зеркало Во всех легальных онлайн-казино Беларуси необходимо подтверждение паспортных данных для игры — это заявка правительства страны.
<b>Смотреть еще похожие новости:</b>
<a href=http://nrj.rs.ba/memberlist.php?mode=viewprofile&u=2111>1×slots коды</a>
<a href=https://smm-seo.ru/threads/1×-slots-zerkalo-registracija-v-1×slots-casino.38170/>1х слотс зеркало регистрация в 1×slots casino</a>
<a href=https://portugal-campings.com/pt/account/>казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В современность довольно просто получить приз за регистрацию в казино. Практически каждый игорный жилище с готовностью начислит деньги или безвозмездные вращения. Многие гэмблеры пользуются данным и не стесняются региться в каждом клубе с выгодными критериями. Кстати, это замечательная вероятность выработать победную стратегию и сорвать джекпот.
#7712 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7713 Charlesgunny
порно с Арина и Дина Аверины, гимнастки porno Юлия Канакина, скелетонистка <a href=https://7club7.com/>Комарова Наталья Владимировна порно</a> kent casino регистрация Скворцова Вероника Игоревна порно <a href=https://www.ossetia.tv/>букмекерская контора фонбет официальный</a> Приезжева Екатерина Геннадьевна порно порно с Афонина Марина Игоревна казино 5 слоты казино гама казино казино зеркало сегодня порно с Алина Загитова, фигуристка
#7714 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7715 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало
Мы подготовили перечень, где есть практически актуальные и новые бездепозитные бонусы казино, коие вы можете получить безвозмездно. Для наших юзеров есть специальные предложения неповторимые бонусы, коие вы ни не найдете, их мы определили специальной красноватой плашкой «Exclusive». <a href=http://filmkachat.ru/>1×slots официальный сайт мобильная версия скачать</a> <a href=https://www.blogger.com/u/4/profile/08074802049930635971>https://www.blogger.com/u/4/profile/08074802049930635971</a> Акции, посвященные календарным праздничным, бывают рассчитаны как на всех пользователей, так и на категории: к, подарок на 8 марта девушкам-игрокам или мужчинам на 23 февраля. 1× slots регистрация в 1×slots casino <a href=https://oncob2b.co.kr/_NBoard/board.php?bo_table=free&wr_id=163251>https://oncob2b.co.kr/_NBoard/board.php?bo_table=free&wr_id=163251</a> Наиболее популярные гонорары между гэмблеров – бездепозитные призы казино. Это не дивно, как возможно получить бесплатные вращения или виртуальные кредиты, и этом не придётся пополнять счёт, рисковать собственными средствами. Удастся насладиться разнородными веселиями и даже выиграть крупную необходимую, избегая серьёзного риска.
1 x slots
В качестве призов онлайн казино нередко предлагает выдачу фриспинов, словами безвозмездных вращений игрового барабана. Виртуальные монеты можно применять для изучения в покерной школе или для игры в казино.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. <a href=https://karakol.com.kg/user/Jameskef/>1×slots зеркало регистрацию более популярный вариант это</a> 1× slots регистрация в 1×slots casino В случае установленного лимита на сумму вывода выигрыша с бездепозитного приза, игрок не может исключить больше заявленной суммы.Бездепозитный бонус предоставляется новому игроку за конкретные действия. Часто презент вид денег либо фриспинов выдается за регистрацию, благодаря чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. <a href=http://e-audit.gefest.me/index.php?subaction=userinfo&user=gabbyscrutiny39>http://e-audit.gefest.me/index.php?subaction=userinfo&user=gabbyscrutiny39</a> В наше время довольно просто получить приз за регистрацию в казино. Практически каждый игорный жилище с радостью начисляет деньги либо благотворительные вращения. Многие гэмблеры пользуются данным и не стесняются регистрироваться в каждом клубе с выгодными условиями. Кстати, это отличная вероятность выработать победную тактику и сорвать джекпот. 1×slots зеркало видели такую регистрацию на
1 хслот регистрация в 1×slots casino
Помните, собственно в неких забавах сумма ставки идет в зачет вейджера лишь отчасти. Так, в настольных и карточных забавах только от 5% до 50% суммы ставки считаются как отыгранные средства, на как в слотах идет в зачет все 100% суммы.Не стоит сразу же отрицаться от приветственных подарков в похожих казино. Администрация готова начислить средства или фриспины, но сначала работники должны увериться, собственно вы не мошенник. Дело никаких, что развелось слишком количество охотников за призами. Они научились врать систему и наваривать солидные суммы средств. Далее потребуется отыграть вагер и вывести выигрыш. Игрокам без навыка крупно повезло, у получить 10-ки подарков за 1 регистрацию. Если не сумели получить Бездепозитный бонус, не волнуйтесь. Обратитесь в онлайн чат, оператор поможет исправить. <a href=https://forexzloty.pl/members/384247-charlesdoomi>https://forexzloty.pl/members/384247-charlesdoomi</a> После получения приза вывод средств для клиента будет недоступен того, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо пара недель. Выводить средства игрок может лишь в отыгрыша.Еще одно условие касается объемов ставки. Операторы устанавливают максимальную необходимую, которую игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, выбранной в Личном кабинете. При превышении лимита есть риск потерять бонуса. Существующие ограничения относятся и к определенным видам ставок. Например, играя в рулетку, клиент возможность столкнуться с запретом назначать фишки на шансы. 1×slots официальный сайт скачать Минимального оборота. Этот предел уточняется вейджером — пока игрок не сыграет на установленную необходимую, вывод средств будет недоступен.
1×slots сайт
<a href=https://redfist.de/RF-Online-Testforum/viewtopic.php?f=60&t=78019>1× slots casino официальный сайт</a> К примеру, игроку выдаются безвозмездные средства в заведении в размере пятидесяти или 100 долларов (вейджер на которые составляет 100х). То есть, каждому новоприбывшему геймеру выскакивает манящая иллюстрация, которая обещает выплату всех зачисленных компанией средств. Не стоит внимания на казино бонус за регистрацию без депозита с слишком немалый или очень малеханькой суммой призов, потому собственно, и кропотливо выучив все условия, тут скорее, будет некий подкол.Бездеп с фриспинами имеет охватывать всю коллекцию игр на веб-сайте либо разработки 1-го провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш возможность быть выведен последствии как, как пользователь отыграет данную необходимую. Возможность расценить полный функционал слотов — основное совершенство данной разновидности. Игроку становятся доступны те опции, которые отсутствуют в демонстрационном режиме, а вероятность выиграть реальные средства прибавляет ярчайших азартных ощущений. 1×slots на любой вкус как пройти регистрацию <a href=http://www.diablo2r.cn/home.php?mod=space&uid=18354>http://www.diablo2r.cn/home.php?mod=space&uid=18354</a> Размер бонуса. В качестве бездепов обыкновенно начисляют небольшие суммы, а когда идет о бонусах за депозит, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино шансы презентовать игроку до 2000$.Большинство клубов завлекают внимание в за счёт различных подарков. На одних сайтах возможно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает бесплатные вращения для запуска топовых онлайн слотов. Несмотря на разные акции, стоит выделить самые основные.
1×slots зеркало регистрация то дальше необходимо пройти
Прежде чем активировать бездеп, необходимо увериться том,, собственно страна, уроженцем коей считается игрок, не входит в перечень разрешенных. <a href=http://sovetonk.ru/forum/user/164119/>http://sovetonk.ru/forum/user/164119/</a> После требуется внести идентификационный платёж. Это пугает начинающих больше всего. Нужно сделать наименьший депозит в 100–500 рублей. Таким образом служба безопасности увериться в, что платёжный способ принадлежит Вам. Данная процедура важна для обеспечения безопасности игровых счетов. Пример, Ваш акк взломают и выведут средства на свой кошелёк. Будет очень досадно. Поэтому верификация платёжной системы, это необходимый момент. 1хслотс официальный сайт зеркало Необходимость отыгрыша. Вейджер в повыше, чем для призов за депо. И же свои не отыграны, исключить их нельзя.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.findaspermdonor.com/memberlist.php?mode=viewprofile&u=13618&sid=6ae702e3267cb34b82ce4e4a27372445>1хслотс рабочее зеркало</a>
<a href=https://forum.bedwantsinfo.nl/thread-701512.html>1×slot рабочее зеркало</a>
<a href=https://timepost.info/showthread.php?tid=53827>1× slots зеркало</a>
<a href=https://thetechmodders.com/forums/viewtopic.php?t=26771>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Лишь знаменитые и известные азартные заведения могут разрешить себе выдавать бездепы в виде добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, которые можно потратить в лучших аппаратах с высочайшей отдачей.
#7716 Charlesgunny
vodka casino порно с Артемий Панарин (хоккей) <a href=https://t.me/vchkogpu_ru>пинко casino</a> porno Юлия Канакина, скелетонистка 1×bet 1 <a href=https://rumafia.news/>casino betting</a> casinos xyz почему в казино не бывает настенных часов casinos winning 1×bet скачать бесплатно retro casino казино фильм смотреть онлайн человек казино
#7717 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7718 Charlesgunny
bitz casino porno Илья Ковальчук (хоккей) <a href=https://www.ossetia.tv/>казино смотреть</a> порно с Баталина Ольга Юрьевна new casino <a href=https://7club7.com/>официальные сайты казино</a> casino официальный сайт порно с Дарья Касаткина (теннис) букмекерские конторы бет porno Светлана Ходченкова 1×bet телефон casino зеркало сегодня casino x
#7719 Charlesgunny
Валентина Матвиенко порно Любимова Ольга Борисовна порно <a href=https://res-publika.com>Александра Бортич</a> casino 7k рабочее сайте букмекерской конторы фонбет <a href=https://rumafia.news/>casino скачать приложение</a> 1×bet бесплатно почему в казино нет окон казино рояль смотреть порно с Владимир Минеев (ММА) порно с Петр Ян (ММА) официальные букмекерские конторы скачать porno Светлана Ходченкова
#7720 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация
Выбор любого интернет казино на нашем веб-сайте. В описании к каждому Вы можете разузнать, что получите за творение аккаунта. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало</a> <a href=http://www.alexandria.gov.eg/Lists/List30/DispForm.aspx?ID=78730>http://www.alexandria.gov.eg/Lists/List30/DispForm.aspx?ID=78730</a> Еще одно условие касается размеров ставки. Операторы устанавливают наивысшую необходимую, которую игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, избранной в Личном офисе. При превышении лимита есть риск лишиться приза. Существующие ограничения относятся и к определенным обликам ставок. Например, играя в рулетку, клиент может столкнуться с запретом назначать фишки на шансы.Лишь знаменитые и знаменитые азартные заведения могут позволить себя выдавать бездепы в виде дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депо, коие возможно израсходовать в лучших аппаратах с высокой отдачей. 1×slot регистрация <a href=https://training.trainingstree.com/author/henryprend/>https://training.trainingstree.com/author/henryprend/</a> Нет. Казино выдают благотворительные бонусы за регистрацию, для того, дабы клиент мог ознакомиться с игровым заведением. А дабы исключить его, необходимо выполнить обстоятельства отыгрыша.
казино 1×slots официальный сайт
1×slots рабочее зеркало На данном разделе портала регулярно публикуются обзорные заметки, в рассматриваются безвозмездные бонусы лучших интернет-казино. Информация структурирована по нескольким пт, включая главные: <a href=https://gusev-online.ru/user/Davidreifs/>https://gusev-online.ru/user/Davidreifs/</a> В качестве призов онлайн казино часто предлагает выдачу фриспинов, то есть безвозмездных вращений игрового барабана. Виртуальные монеты возможно применять для обучения в покерной школе или для игры в казино.Каждая игровая перрон выделяется условиями по получению и отыгрышу бездепов. В правилах детально расписаны временные рамки, за коие нужно прокрутить вейджер. Также не запамятовывайте тему наибольший объем ставки и наивысшую сумму выплаты. С иной стороны, чтобы получить бездепозитные призы казино, довольно израсходовать менее 1 минуты. 1 x slots У нас на веб-сайте Вы отыщите перечень призов без депозита в проверенных казино и доскональную информацию то как их получить и использовать.Ознакомьтесь с нашим перечнем наилучших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего перечня и получите бездеп сразу. Хватайте наилучшие бесплатные предложения ниже и выигрывайте немалые средства, не рискуя!
казино 1×slots официальный сайт
<a href=https://bongatoken.com/user/DeweySig/>https://bongatoken.com/user/DeweySig/</a> Необходимость отыгрыша. Вейджер такой повыше, чем для бонусов за депо. И пока свои не отыграны, исключить их невозможно.При регистрации что, нет или ином интернет игральном заведении — вам дается раз шанс испытать свою фортуну не внося свои монеты. Замечу собственно такую поощрительную услугу предоставляют не все онлайн игровые площадки, а только щедрая середина(средина) из них. Которые мы подготовили для Вас в нашем перечне. 1хлот регистрация в 1×slots casino Необходимость отыгрыша. Вейджер ситуации выше, чем для призов за депозит. И же свои не отыграны, исключить их нельзя.
1×slots регистрация 1×slotscasino 56 online
<a href=https://test.soclanovtsy.ru/topic/53564–1×-slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9/>1× slots официальный</a> Так же стоит выделить то, что в любом онлайн казино установлен собственный наибольший кешаут на бездепозитный приз. Как правило кешаут — это максимальная сумма средств, которая доступная для вывода с бездепозитного приза.Подтвердите лицо, предоставив оператору казино средства паспортные данные. Инструкции обыкновенно легкие, главное — четко им стопам. Если написано, собственно «на фото должны быть заметны все хорошо угла странички паспорта» — сделайте именно это фото. Также бывают случаи, когда казино начислит обсужденный бонус после регистрации нового клиента по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам.Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают приз по странам. Вплоть до такого, что клуб возможность брать игроков из Вашей государства, а бездеп мешает. 1×slots актуальное зеркало <a href=https://gti-club.ru/forum/member.php?u=411462>https://gti-club.ru/forum/member.php?u=411462</a> Возможность протестировать свежие забавы, не рискуя личностными своими и создать собственную тактику забавы.Обычно для получения бонусов без депо, казино выдвигает лояльные и абсолютно выполнимые обстоятельства, но есть ряд поступков коие запрещены и все стать противные результаты:
1хслотс казино зеркало
Такой казино приз без депо за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это как бы некая конспирация поощрения под бездепозитный. Суть всего этого сводится к тому, что геймеру на час выдается, например, 1000 долларов, а реклама утверждает о том, собственно каждой выигрыш возможно несомненно дальнейшем оставить при себе. Но случае играющий серьезно отнесется к данному предложению, то он просто потеряет время. Ведь геймеру нужно будет играть не главном аккаунте, в тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (и всей тыс. ) в правила вступят определенные обстоятельства, где будет сказано, что максимальной суммой победы возможность быть лишь двести $ и средства возможно применять только в качестве бонуса на 1-ый вклад с вейджером 25 от суммы вознаграждения плюс сам депо. По результату выйдет, что игрок выигрывал для 200% приз с вейджером на конкретную сумму. Короче разговаривая, это все надо вашего времени.Ну и окончательно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: подобная добродушие увеличивает степень лояльности посетителей к компании. Возможность протестировать свежие забавы, не рискуя личностными своими и создать личную тактику игры. <a href=http://www.altasugar.it/new/index.php?option=com_kunena&view=topic&catid=3&id=134294&Itemid=151>http://www.altasugar.it/new/index.php?option=com_kunena&view=topic&catid=3&id=134294&Itemid=151</a> Индивидуальные одобрения выдаются за совершение действий: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавленья либо официального клиента для ПК. В большинстве казино срабатывают программки преданности, присваивающие игрокам статусы за активность на сайте. Продвижение на грядущий степень часто сопровождается выдачей бездепа. 1×slots зеркало подтвердит вашу регистрацию если говорить
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.dis-course.net/viewtopic.php?t=392993>1×slots зеркало рабочее на сегодня</a>
<a href=https://dev.eff.one/forumdisplay.php?fid=10>1 xslots рабочее зеркало</a>
<a href=http://aurorahcs.com/forum/viewtopic.php?f=8&t=769424>1х слотс зеркало регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чтобы выступать бесплатно на настоящие средства в казино, не всегда достаточно просто зарегистрироваться. Иногда нужно выполнить вспомогательные деяния. Реже призы без депо начисляются неизменным игрокам. С их подмогою администрация постарается удержать ценных клиентов или вожделеет поблагодарить за лояльность правильных гостей. Но намного почаще для сходственных целей используются такие акции:
#7721 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7722 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Некоторые казино шансы предлагать посетителям бездепы за свидетельство номера или почты или репост на страничку в социальных сетях. <a href=http://filmkachat.ru/>1×slots сайт</a> Наши эксперты исследуют обстоятельства акции, этого в ручном режиме проводят их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и параметры. Мы не рекламируем казино, а даем игрокам информацию о лучших из них.Бонус начисляется игроку незамедлительно последствии регистрации и прохождения верификации в казино и не требует от посетителя внесения депо. Как верховодило, объем бонуса в сходственном случае достаточно застенчивый, однако дозволяет новеньким познакомиться с забавой без риска реальными деньгами. <a href=https://www.cyberlord.at/forum/?id=1&thread=19234>https://www.cyberlord.at/forum/?id=1&thread=19234</a> Приветственный бонус без депозита ? презент за регистрацию. Выдается средствами, фриспинами или баллами. В последнем случае бонусные баллы используются для роли в турнирах либо обмена на реальные средства. 1×slots зеркало которую указывали при регистрации кстати <a href=http://www.soe-parrot.com/home.php?mod=space&uid=168510>http://www.soe-parrot.com/home.php?mod=space&uid=168510</a> Казино дает вероятность заработать и исключить реальные деньги на бездепозитных бонусах. Обычно, это малозначительная сумма, которую казино имеет себя позволить подарить игроку.
1×slots рабочее зеркало
1×slots сайт Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить необыкновенности, недоступные при забаве в демо режиме. Многие новые клиенты переходят в количество постоянных, а оператор получает длительную выгода. <a href=https://mcpe.ru.net/user/GlennCes/>https://mcpe.ru.net/user/GlennCes/</a> Законодательство, регулирующее азартные забавы в разных государствах, оказывает на полномочия операторов. В итоге юзеры из отдельных регионов сталкиваются с ограничениями со стороны казино. Это может быть как полный отказ в доступе, например и невозможность загружать забавы отдельных производителей.С другой стороны, гораздо проще отобрать бездепозитные фриспины за регистрацию в казино и прямо в начать вращать барабаны в наихороших слотах. Главная необыкновенность спинов что, нет, собственно они предусмотрены для лучших автоматов. Удастся столько пройти вспомогательные раунды, хотя и прирастить сумму выигрыша, заработать респины прочие внутриигровые презенты. 1× слот зеркало Основное верховодило получения бездепа ? творимый акк должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов взыскательно воспрещено. Проверка ведется по имени, e-mal, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депо нужно блюсти несложную очередность деяний.
1×slot регистрация
В интернете количество известных игорных площадок с привлекательными акционными предложениями. Однако внимательно читать условия десятков услуг скором надоест, да и время отнимет количество. Поэтому наша команда подготовила ТОП-3 сайтов с наихорошими бездепозитными бонусами:В случае установленного лимита на необходимую вывода выигрыша с бездепозитного бонуса, игрок не может вывести больше заявленной суммы. <a href=http://test.sozapag.ru/forum/user/210961/>http://test.sozapag.ru/forum/user/210961/</a> казино 1× slots официальный сайт
1×slots зеркало
Вейджер менее х30–35 считается применимым. Опытные игроки заявляют, что с таким вейджером реально остаться в плюсе, в верно подойти к выбору игрового аппарата.Воспользоваться бездепом возможно не во всех игровых автоматах: казино и тут устанавливает ограничение для посетителей. Конечно, это возможно посчитать некоторым неудобством для игрока, но справедливости ради стоит отметить, собственно выбор автоматов всё равно остаётся достаточно большим. Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 $. Если выдаются фриспины, их число изредка превышает нескольких десятков безвозмездных вращений. 1×slots casino регистрация 1×slotscasin online <a href=http://maglik.ru/user/Geraldcep/>http://maglik.ru/user/Geraldcep/</a> Некоторые клубы автоматически начисляют приз на акк игрока последствии исполнения критерий получения, но бывают истории, когда приз надо(надобно) активировать игроку самому. Есть несколько методов активации бонуса:А ознакомиться с свежими онлайн казино, Вы можете с призов с выводом прибыли, коие Вы сможете получить без депо.
1×slots casino зеркало
Наши специалисты исследуют обстоятельства акции, после в ручном режиме проводят их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие параметры. Мы не рекламируем казино, а даем игрокам информацию о наихороших из них.Первый образующийся вопрос, это, для выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают новых игроков. Последним легче начать игру на деньги с презента за регистрацию. Им надо пополнять баланс и тратить личностные свои. Новички получают безвозмездные спины или свои на счёт. С их помощью знакомятся с игровым процессом, крутят слоты и проделывают ставки в рулетке. Варианты выигрыша зависят от Вашей успеха и условий игорного портала. Выше мы заявили, что кое-какие бездепозитные бонусы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются и те, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность передовых игр на деньги, возможно выиграть невероятные суммы. Сегодняшние игровые автоматы либо видео слоты, как их именуют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000.При верном раскладе бездепы — это прекрасный способ выступать на деньги без растраты личных средств. Есть некоторое советов, следуя которым возможно извлечь максимум выгоды из подобных акций казино. Играть стопам только на лицензированных площадках. Скриптовые сайты не дурачат с бонусными предложениями, но и употребляют пиратский софт с измененным ГСЧ. Выиграть на таких автоматах невероятно. <a href=http://tdsouz.kz/bitrix/redirect.php?goto=http://houses.ru/bitrix/rk.php?goto=http://sib-lada.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/a3H7uBEyhON>http://tdsouz.kz/bitrix/redirect.php?goto=http://houses.ru/bitrix/rk.php?goto=http://sib-lada.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/a3H7uBEyhON</a> Размер приза. В качестве бездепов обычно начисляют маленькие суммы, а когда речь идет о бонусах за депо, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино могут презентовать игроку до 2000$.Фриспины предназначены для использования в видео слотах. Внимательно ознакомьтесь с условиями – частенько их выдают на кое-какие автоматы. В зависимости от клуба, у вас получится устроить определённое количество ставок. Кстати, продвинутые игорные дома разрешают запускать любых «одноруких бандитов». 1х слот регистрация в 1×slots casino У каждого игорного заведения средства правила и обстоятельства. Но, дабы получить призы, необходимо выполнить стандартные деяния:Бездепозитные призы начисляются только раз раз. Не стоит открывать свежие аккаунты, чтобы получить их повторно. Служба безопасности казино непременно выявит «левого» соучастника и заблокирует. Если гость выполнит необходимые притязания, отыграет свою ставку и решит вывести собственный выигрыш, то ему надо(надобно) принять, что казино обязательно востребует дать ксерокопии личных документов, дабы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные средства исключить не получится.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. На критериях отыгрыша безвозмездных призов по тормознуть подробнее. С ними связаны нюансы, которые нельзя забыть без внимания.
#7723 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7724 Charlesgunnyhttp://filmkachat.ru
1×slots официальный регистрация
Бездепозитный приз – это экономическое вознаграждение, коие выдается участнику забавы в казино, для его вербования и появления заинтересованности. Любой посетитель, кот-ый соответствует условиям выдачи сходственного бездепозитного приза, может претендовать на получение вышеуказанного приза. Такое поощрение является более эффективным методом, дающим вероятность стартовать в игре, не вкладывая собственных вещественных средств.Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, чтобы появилась возможность исключить выигрыш. <a href=http://filmkachat.ru/>1×slots casino зеркало рабочее</a> Все благотворительные бонусы кажутся заманчивыми. Кто же откажется от способности поиграть в онлайн-казино, не рискуя средствами, но получая выигрыши. Но далековато не все бездепозитные призы мере привлекательны для рассудительного посетителя.Многие казино деют в рекламных целях бесплатные призы исключительно для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой вебсайт по партнерской ссылке с нашего портала. <a href=https://www.click4r.com/posts/g/18439427/understanding-cad-files-from-basics-to-advanced-implementation>https://www.click4r.com/posts/g/18439427/understanding-cad-files-from-basics-to-advanced-implementation</a> 1 x slots casino <a href=http://leonidsong.de/index.php?subaction=userinfo&user=nebulousface52>http://leonidsong.de/index.php?subaction=userinfo&user=nebulousface52</a> Бездепозитный приз за регистрацию в казино с выводом средств в 2022 году — Наш ресурс дает игрокам актуальную информацию о самых новых, щедрых и испытанных призах в онлайн казино, коие обновляются любой день.Принципиальным различием бесплатных призов от призов на депо считается недоступность надобности заносить деньги на акк. Из-за сего их часто именуют бездепозитными (not the slightest deposit bonuses).
1хслотс казино зеркало
1×slot официальный сайт Бездепозитный приз часто может замерзнуть легкодоступным незамедлительно в окончания регистрации, что правило единственным требованием к нему считается регистрация, а этого проверка вашей новой учетной записи. <a href=http://it.euroweb.ro/wiki/index.php/User:DarlaHuman975>http://it.euroweb.ro/wiki/index.php/User:DarlaHuman975</a> Подобные бонусы без депозита предоставляются на более прибыльных критериях. Зачастую они покрупнее, а обстоятельства отыгрыша наименее строгие. 1×slots регистрацию процедура займет всего лишь
1×slots казино мобильная версия
Для верификации аккаунта надо(надобно) предоставить спецам технической помощи отсканированную копию паспорта и счета за коммунальные предложения, а также фотку банковской карты или экрана страницы электронного кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для доказательства личности.Сразу в активации промокода можно воспользоваться презентом. Как теснее упоминалось, призы случаются трёх обликов – фриспины, кредиты и фриплей-бонусы. <a href=http://bbs.xuwm2.com/home.php?mod=space&uid=43443>http://bbs.xuwm2.com/home.php?mod=space&uid=43443</a> Новички не обожают незамедлительно же заносить депозит. Это обусловлено неименьем навыка и сомненьем. К счастью, наши можно получить бездепозитный бонус за регистрацию в казино. Неважно собственно начисляет система – фриспины либо кредиты. В всяком случае вы не рискуете собственными сбережениями. Это замечательная возможность запустить приглянувшийся видео разъем или же испытывать фортуну в настольных забавах. 1×slots casino online регистрация
1×слот регистрация в 1×slots casino
Заполняя данные в личном профиле, указывайте лишь достоверную информацию, например как Вам понадобиться ее доказать в будущем при выводе денег. Бонусы без депозита при регистрации считаются наиболее привлекательными как для опытнейших игроков, например для и начинающих. Получив такое вознаграждение, заказчик может играть на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, еще обстоятельства их активации и выигрыша.Также есть онлайн-платформы азартных игр, коие используют раздачу бездепозитных призов в специальные даты (как для казино, например и для игрока). Помимо сего, действующие игроки того имеют вероятность получить схожие бонусы за свою работа (например, за увеличения значения либо за схожие достижения). У любой игры средства требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система зачтет любую ставку. В рулетке и покере устроить это гораздо труднее. Именно потому так принципиально пристально разбирать условия получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой ирге, то новички просто «спустят приз на ветер».Возможность сыграть дополнительное соревнование (а от и количество) совершенно бесплатно, а выигрыш, тому, поступает на счёт игрока. 1×slots casino регистрация 1×slotscasin online <a href=http://www.cruzenews.com/wp-content/plugins/zingiri-forum/mybb/member.php?action=profile&uid=1917523>http://www.cruzenews.com/wp-content/plugins/zingiri-forum/mybb/member.php?action=profile&uid=1917523</a> При пользовании бездепозитным бонусом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют количество видов лимитов:Только выполнив все условия отыгрыша и дождавшись завершения проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить средства деньги.
1×slots регистрация 1×slots review live
<a href=http://avestalaw.ru/index.php?subaction=userinfo&user=nappydress78>http://avestalaw.ru/index.php?subaction=userinfo&user=nappydress78</a> Законодательство, регулирующее азартные забавы в различных государствах, влияет на возможности операторов. В итоге пользователи из отдельных ареалов сталкиваются с лимитированиями со стороны казино. Это возможность быть как полный отказ в доступе, так и невозможность загружать забавы отдельных производителей.Срок активации и время на отыгрыш. Зачисление денег либо фриспинов происходит при активации на строго ограниченного периода, подобные требования предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать приз количество дней либо том месяцов. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером. 1х слотс зеркало регистрация в 1×slots casino Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы замечена возможность вывести выигрыш.
<b>Смотреть еще похожие новости:</b>
<a href=https://portugal-campings.com/pt/account/>1×slots рабочее зеркало на сегодня</a>
<a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1хслот зеркало сайта</a>
<a href=https://www.neocodex.us/forum/topic/94669-g-u-i-d-e-proxys-and-how-to-use-them/page-12#entry2034936>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<a href=http://check2go.net/author/jameslob/>1×слотс казино</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Доступ к дару возможность открываться автоматически последствии введения промокода или обращения в службу поддержки вебсайта. В первом случае от юзера не потребуется никаких деяний. Бездеп с активацией по коду встречается почаще всего. Игроку необходимо ввести совокупность символов в графе, которая может находиться в регистрационной форме в Личном офисе.
#7725 Charlesgunny
скачать 1×bet на андроид Самойлова Алла Владимировна порно <a href=https://repost.news/>1×bet зеркало слоты</a> 7k casino зеркало рабочее порно с Юлия Ефимова, пловчиха <a href=https://vestnik-jurnal.com/>скачать 1×bet</a> сайты казино порно с Диана Шнайдер (теннис) порно с Алина Загитова, фигуристка пари букмекерская контора скачать casino на андроид vavada casino порно с Юлия Ефимова
#7726 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7727 Charlesgunnyhttp://filmkachat.ru
1×slot регистрация
Процесс доказательства личности имеет взятьвдолг(взятьвзаймы) от 1-го денька до недели. Если клиент разрешил нибудь ошибку при заполнении паспортных данных, то ему по обратиться с задачей в саппорта онлайн-казино.При исполненьи условий отыгрыша и верификации, деньги с бонусного счета переводятся на главный и имеют быть выведены на карту либо электронный кошелек. Лимиты на вывод и сроки проведения транзакции зависят от избранной платежной системы. <a href=http://filmkachat.ru/>1×slots зеркало рабочее</a> <a href=https://mssg.me/7dltc>https://mssg.me/7dltc</a> Бездепозитный приз нередко может замерзнуть легкодоступным сразу последствии окончания регистрации, что правило единственным притязанием к нему считается регистрация, а после ревизия вашей новой учетной записи. 1×slots официальный сайт мобильная версия скачать <a href=http://ceh-i.ru/user/JamesvOf/>http://ceh-i.ru/user/JamesvOf/</a> Бoльшинcтвo азартных заведений выдвигают примерно однообразные, схожие условия и притязания, коие нужно выполнить, дабы получить бездепозитный приз за регистрацию. Все их возможно соединить в раз список:Обычно для получения бонусов без депо, казино выдвигает лояльные и абсолютно выполнимые обстоятельства, хотя есть ряд поступков которые запрещены и могут причиной противные последствия:
1хслотс рабочее зеркало на сегодня
1×slots сайт <a href=https://skobka.com.ua/forum/user/4794/>https://skobka.com.ua/forum/user/4794/</a> Наличие у игрока 2 аккаунта. Запрещено творить количество профилей для неоднократного получения бездепов.При небольшой сумме приза рекомендуется выступать по низким ставкам, а применять наибольшие никакого только в случае, случае вейджер очень великий, а время на отыгрыш крепко ограничено. 1× slots casino зеркало Доступ к подарку может раскрываться механически после введения промокода либо воззвания в саппорта сайта. В первом случае от пользователя не потребуется никаких поступков. Бездеп с активацией по коду встречается почаще всего. Игроку нужно ввести совокупа символов в графе, которая имеет пребывать в регистрационной форме в Личном офисе.Максимальный объем ставки, который нельзя превосходить пока приз не несомненно полностью отыгран. В случае нарушения этого управляла, приз и выигрыш с него станут аннулированы.
скачать 1×slots официальный сайт
Для получения депозитного приза необходимо восполнить собственный игровой баланс реальными деньгами. Вознаграждение можно получить или при внесении первого депозита, или вид фиксированного процента от внесённых средств. Так или другому, бонус поступит на счёт только после пополнения. Шаг 4. Активация. Внимательно выучите обстоятельства, информацию по ограничениям и сроке действия бонусного предложения. Разобравшись с правилами, возможно активировать бонус в собственном офисе (времени ? с внедрением промокода) или по запросу в саппорт.Даже не выиграв солидную сумму, игрок интересно проведет время, изнутри выучит работу площадки, воспримет геймплей автоматов. Все это без каких-то финансовых рисков. Быть в курсе наихороших промоакций с. Достаточно периодически изучать перечень свежих интернет казино с выводом приза без депозита в данном разделе. <a href=http://xn–b1afaaiqgeiqh0aidle1f1d3c.xn–p1ai/user/JamespreaW/>http://xn–b1afaaiqgeiqh0aidle1f1d3c.xn–p1ai/user/JamespreaW/</a> Еще одно условие касается объемов ставки. Операторы устанавливают максимальную сумму, коию игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, выбранной в Личном кабинете. При превышении лимита есть риск лишиться приза. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, заказчик имеет столкнуться с запретом ставить фишки на шансы.Перед активацией принципиально пристально выучить обстоятельства промоакции. Чем ниже вейджер, тем больше возможная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, протяжении коих возможно воспользоваться предложением. Если бездеп обхватывает ограниченный перечень игр, рекомендуется разузнать наибольшие коэффициенты, уровень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь в случае, если оператор не установил взыскательные ограничения на наивысшую сумму ставки. 1×slots casino регистрация 1×slots review live Чтобы бездеп не был начислен на Ваш акк, Вам не нужно активировать бонусный код. Если одобрение от казино было добавлено на Ваш аккаунт механически, а Вы не планируете его применять, обратитесь в службу с пожеланием отменить бездепозитный бонус.
рабочее зеркало 1×slots
Превышение наибольшей ставки при отыгрыше. Система автоматически не предостерегает о превышении ставки, потому о несоблюдении верховодил игрок имеет узнать уже в подачи запроса на вывод средств. Многие игроки, оценив перечень казино, остаются играть в нем и дальше ? на это и направлено любое рекламную. Постоянные посетители вносят депозиты и проделывают ставки, обеспечивая длительную прибыль оператора. То есть, казино раздают бездепы свежим юзерам для формирования приклнной аудитории.Большинство интернет-казино из нашего топ-10 готовы порадовать вас эксклюзивными промоакциями. Читайте о их в обзорах и на форуме. За счёт спинов выйдет запустить различные интернет слоты, протестировать стратегии и поднабраться опыта. Фишка что, нет, собственно вращения начисляются на лучшие аппараты с уникальными опциями и высокой отдачей. Не забывайте, собственно в любом акционном предложении учтены особые требования – временные ограничения, наибольший объем ставки, перечень доступных игр.Бездепозитные призы за регистрацию считаются одним из самых популярных методов привлечения свежих игроков в онлайн-казино, поэтому собственно они деют игрокам вероятность опробовать казино, особенно игровые автоматы, и вполне, выиграть реальные деньги. 1×slots актуальное зеркало <a href=http://lnx.hotelresidencevillateresaischia.com/casamicciola/index.php?option=com_k2&view=itemlist&task=user&id=424795>http://lnx.hotelresidencevillateresaischia.com/casamicciola/index.php?option=com_k2&view=itemlist&task=user&id=424795</a> Особую изюминку видео слотам придают уникальные знакы. С их появлением активизируются разные призы. Вы можете запустить вспомогательный уровень и прирастить сумму выигрыша. Есть знаки, которые заменяют ненадобные составляющие и сами создают выигрышные комбо. Не стоит забывать и про бонус-тур. После любого удачного спина есть шанс прирастить необходимую выигрыша в 2 либо четыре раза.
1×slots регистрация на официальном сайте
Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке нужно восполнить счет в казино. Для депозитных призов, данная процедура не необходима, например как депозит уже сделан.Онлайн-казино кропотливо продумывают бонусные условия, коие необходимо изучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и другие лимитирования. Популярность онлайн казино растёт и всё больше пользователей начинают интерес азартными играми. Бездепозитные призы 2022 года, это уникальные презенты за регистрацию. С их поддержкою новые игроки могут получить бесплатные вращения либо средства на баланс за одну регистрацию. С появлением игорных заведений в онлайне, бездепозитные призы стали наимоднейшим методом привлечения игроков. Подобные акции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш сайт собрал наихорошие предложения из интернета на 2022 год. Воспользуйтесь любым даром и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить обстоятельства. <a href=http://www.decodev.tn/index.php?option=com_k2&view=itemlist&task=user&id=414322>http://www.decodev.tn/index.php?option=com_k2&view=itemlist&task=user&id=414322</a> Перед активацией главно внимательно выучить условия акции. Чем ниже вейджер, что, этим больше потенциальная выгода игрока. Имеют велечину кроме лимиты ставок при отыгрыше и сроки, в течение коих возможно воспользоваться предложением. Если бездеп охватывает ограниченный перечень игр, рекомендуется узнать наибольшие коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только в случае, случае оператор не установил строгие лимитирования на наивысшую сумму ставки.Исходя из этого, просто не присутствует осмысленных причин махнуть рукою на получение такого бонуса при регистрации. И, кстати, на подобный бесплатной базе у вас все шансы выиграть деньги и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, именуют бесплатными интернет платформами для игр. 1хслотс рабочее зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.cvetq.info/viewtopic.php?f=8&t=266492>1хслотс казино зеркало</a>
<a href=https://nztw.org/home.php?mod=space&uid=43957>сайт 1× slots casino</a>
<a href=https://forumauthority.com/thread-6594-post-39429.html#pid39429>1×slots зеркало сайта</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но есть игорные заведения, коие готовы просто так жертвовать деньги на игру. Для этого довольно создать профиль. Чтобы исключить собственный выигрыш, вам сначала необходимо выполнить условия отыгрыша, указанные в условиях получения бездепозитного депозита. Можно ли в одном онлайн казино получить больше 1-го приза за регистрацию? Нет, так как в любом интернет казино есть правила, к коим надо(надобно) придерживаться, не делать 2 аккаута для получения бонусов, другому будет блокировка обоих аккаутов, не пытайтесь обмануть интернет казино, приз за регистрацию выдаеться раз раз одному лицу.
#7728 spgOxigenhttps://dzen.ru/id/601fc4eb0c34da5eddcddc03
Spectrum of gases – cargo Ulyanovsk <img src=„https://gas73.ru/assets/img/O2_C3H8.png“> <a href=https://dzen.ru/id/601fc4eb0c34da5eddcddc03>Hidrogen Air</a> Phones: +7(9272)70–80–09 Fax: +7 (8422) 65–10–78. 2025
#7729 Charlesgunny
рабочее казино пин ап casino pin up top <a href=https://th-royalgclub.com/>букмекерская контора официальный сайт скачать</a> kent casino регистрация Елена Лядова <a href=https://7club7.com/>порно с Дарья Клишина, легкоатлетка</a> 7k casino бонус casino онлайн лучшие онлайн казино retro casino porno Александр Соболев (футбол) скачиваемые казино casino андроид
#7730 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
Многие казино предоставляют в маркетинговых целях благотворительные призы самая для наших читателей. Чтобы их получить, нужно перебежать на игровой сайт по партнерской ссылке с нашего портала. <a href=http://filmkachat.ru/>1×slot регистрация</a> Условия, на коих предоставляется бездеп, регулируются казино. Каждая промоакция содержит подробные управляла, ссылка на которые обычно содержится в промообъявлении. В них указываются лимиты, вейджер, перечень дешевых игр. Если оператор укрывает данные о предложении, то пользоваться им не стоит.У любой забавы свои притязания по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система засчитает каждую ставку. В рулетке и покере устроить это намного сложнее. Именно потому например принципиально внимательно читать условия получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой этой, то новички попросту «спустят приз на ветер». <a href=https://www.myvipon.com/post/1229714/How-exterior-renderings-for-real-estate-amazon-coupons>https://www.myvipon.com/post/1229714/How-exterior-renderings-for-real-estate-amazon-coupons</a> Баланс игрока дополняется на подходящую сумму. К ней применяется вейджер, обозначенный в правилах акции. Вывести выигрыш возможно будет последствии того, как юзер сделает требуемый объем ставок из личных средств. В редчайших случаях бездеп трудится в формате Free Play. На счет юзера зачисляется крупная сумма, и предоставляется маленький срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по окончании этого периода сумма на счету несомненно превосходить изначальную, то разницу можно несомненно исключить либо применять для дальнейших ставок. 1×slot зеркало рабочее регистрации на телефон придет <a href=http://bbs.sj.58qiqu.com/home.php?mod=space&uid=131330>http://bbs.sj.58qiqu.com/home.php?mod=space&uid=131330</a> Бездепозитные бонусы реальными деньгами, коие возможно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадали.Заполняя данные в личном профиле, указывайте только достоверную информацию, так как Вам понадобиться ее доказать дальнейшем при выводе денег.
1×slots официальный сайт зеркало рабочее
<a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=13119>казино 1×slots</a> 1×slots зеркало проходить регистрацию это отличный вариант Помните, что всевозможные нарушения верховодил сведут на нет ваши усилия, и вы всего останетесь без начисленного вас дарового приза. Всегда изучайте управляла начисления и обстоятельства вейджера. По хоть вопросам, на коие вы имеет других найти ответы, обращайтесь за объяснениям и саппорт.Прежде чем активировать бездеп, нужно убедиться что, нет, собственно государство, гражданином которой считается игрок, не заходит в список разрешенных. <a href=http://www.lifelvzhou.org/bbs/home.php?mod=space&uid=325516&do=profile>http://www.lifelvzhou.org/bbs/home.php?mod=space&uid=325516&do=profile</a> 1х слотс зеркало регистрация в 1×slots casino
1×slots сайт
Бонус в казино без депозита имеет разные варианты: это может быть приветственный бонус, промоакции в честь каких-то праздников либо главных дат, бонус за вербование свежих игроков, лояльность и получение VIP-статуса. <a href=http://itunit.com.ua/index.php/profile/17246-encouragingidol>http://itunit.com.ua/index.php/profile/17246-encouragingidol</a> Нельзя осматривать забаву на средства, как вариант заработка. Азартные игры воспрещены для лиц моложе 18 лет. Topcasinobonuses.mobi классифицируется организатором азартных игр. Сайт одевает информационный характер.Также, ситуации необходимо подтвердить собственный номер телефона, достичь код, полученный в смс-сообщении от клуба ввести в специальное фон в собственном кабинете игрока. 1хслотс регистрация в 1×slots casino Нет. Для получения бездепозитного приза в казино необходима обязательная регистрация на веб-сайте. Играть в слоты безвозмездно и без регистрации возможно лишь в демо режиме.Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить особенности, труднодоступные при игре в демо режиме. Многие свежие посетители переходят в число неизменных, а оператор получает долгосрочную прибыль.
1×slots зеркало
Не сложно додуматься, собственно no down payment bonuses почти никогда не случаются немаленькими. Чаще всего речь идет о пяти–тридцати баксах (либо эквиваленте этой суммы в другой еденице). Если простыми словами, бездепы – это определённая сумма средств либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно брать подарки. Но есть некоторые нюансы. Существуют игорные жилища, которые перед что, этим как начислить призы настоятельно привязать аппарат, дать копии документов.Выигрыши с бонусов без вложений всегда привязаны к требованию по ставкам и все быть обналичены только после выполнения данных требований. Бездепы обыкновенно предлагают с отыгрышем — быстро вывести выигранные средства невозможно. Перевод денег со счета несомненно возможен после того, как юзер выполнит все притязания казино, а сумма имеет быть выше установленного правилами лимита. Условиями акции фиксируются сроки, протяжении которых заказчик вправе воспользоваться предложением. Обычно они не превосходят нескольких дней в активации.Выполнив все притязания оператора, заказчик может оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит примерно не более суток. Если дополнительно требуется пройти процедуру верификации, то срок возрастает до 1–2 рабочих дней. Для перевода применяются банковские приборы и электронные платежные системы. Второй способ подходит лучше, например как масса транзакций ситуации исполняются мгновенно. В связи со спецификой функционирования банков обработка платежей может занять до нескольких трудящихся дней. 1× slots casino официальный сайт <a href=http://forums.escapefromelba.com/index.php?action=profile;u=127697>http://forums.escapefromelba.com/index.php?action=profile;u=127697</a> Но а если вы уже профи по онлайн казино, кликаем на красноватую кнопку «Получить» и Вы автоматически перейдете в онлайн казино;Новички не обожают незамедлительно же заносить депозит. Это обосновано неимением навыка и недоверием. К счастью, наши можно получить бездепозитный бонус за регистрацию в казино. Неважно собственно начисляет система – фриспины или кредиты. В любом случае вы не рискуете собственными сбережениями. Это отличная вероятность запустить понравившийся видео разъем либо же испытывать фортуну в настольных играх.
1×slots рабочее зеркало
Любой выигрыш по ставке повыше установленного лимита будет являться недействительным. То есть ставка не будет засчитана при отыгрыше, а случае выигрыша его сумма не поступит на счёт посетителя — итог забавы будет всецело аннулирован.Законодательство, регулирующее азартные игры в различных странах, влияет на полномочия операторов. В итоге пользователи из отдельных ареалов сталкиваются с лимитированиями со стороны казино. Это возможность быть как полный отказ в доступе, так и невозможность загружать забавы отдельных производителей. <a href=https://morph.ro/users/JamesRaill>https://morph.ro/users/JamesRaill</a> 1×slots сайт зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://creapnl.com/foros/tema/1×slots-%d0%ba%d0%b0%d0%b7%d0%b8%d0%bd%d0%be-%d0%b7%d0%b5%d1%80%d0%ba%d0%b0%d0%bb%d0%be-118/>1×slots казино зеркало</a>
<a href=https://forum.ltp-team.com/topic/47361–1×slots-zerkalo-registraciyu-bolee-populyarnyy-variant-eto/>1×slots зеркало регистрацию более популярный вариант это</a>
<a href=https://qualityprogamer.de/forum/showthread.php?tid=314674>1×slots официальный сайт мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Размер ставки для игры по бездепозитному призу (конечно же, в случае, когда он представлен в виде бонусных денежных средств) зачастую ниже, чем при игре на депозит. Ограничение будет работать до момента отыгрыша приза.
#7731 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7732 Charlesgunny
казино проиграл казино регистрации <a href=https://rumafia.news/>официальное казино вход</a> порно с Карен Хачанов (теннис) casino online зеркало <a href=https://m.repost.news/>7k casino официальный сайт</a> porno Андрей Рублев (теннис) pin up casino buzz гта казино pin up casino buzz балтбет букмекерская контора porno Алена Косторная (фигурное катание) casinos xyz
#7733 izziCasinohttps://izzi-casino-apk.ru
<a href=https://izzi-casino-apk.ru>http://izzi-casino-apk.ru</a>
Загрузить apk файл казино онлайн izzi – побеждай сейчас! <a href=https://izzi-casino-apk.ru>https://www.izzi-casino-apk.ru</a>
#7734 izziAndroidhttps://izzi-casino-apk.ru/izzi-na-androjd/
<a href=http://rusere.ru/bitrix/redirect.php?event1=catalog_out&event2=http2FE0EEE0E8CCF2EC%E5E8CE&goto=https://izzi-casino-apk.ru/izzi-na-androjd/>https://izzi-casino-apk.ru/izzi-na-androjd/</a> <a href=http://www.ukcampsite.co.uk/redirect.asp?redir=https://izzi-casino-apk.ru/izzi-na-androjd/>https://izzi-casino-apk.ru/izzi-na-androjd/</a> <a href=http://stupidgals.com/go.php?url=https://izzi-casino-apk.ru/izzi-na-androjd/>https://izzi-casino-apk.ru/izzi-na-androjd/</a> <a href=http://www.dvdcollections.co.uk/search/redirect.php?retailer=000&deeplink=https://izzi-casino-apk.ru/izzi-na-androjd/>https://izzi-casino-apk.ru/izzi-na-androjd/</a> <a href=http://spencercountybank.com/redirect.asp?path=https://izzi-casino-apk.ru/izzi-na-androjd/>https://izzi-casino-apk.ru/izzi-na-androjd/</a> <a href=https://kcm.ua/bitrix/redirect.php?goto=https://izzi-casino-apk.ru/izzi-na-androjd/>https://izzi-casino-apk.ru/izzi-na-androjd/</a> <a href=http://gorodkanash.ru/engine/go.php?url=https://izzi-casino-apk.ru/izzi-na-androjd/>https://izzi-casino-apk.ru/izzi-na-androjd/</a> <a href=http://www.newellpalmer.com.au/?goto=https://izzi-casino-apk.ru/izzi-na-androjd/>https://izzi-casino-apk.ru/izzi-na-androjd/</a> <a href=http://www.poringa.net/?go=https://izzi-casino-apk.ru/izzi-na-androjd/>https://izzi-casino-apk.ru/izzi-na-androjd/</a> <a href=http://www.ourglocal.com/url/?url=https://izzi-casino-apk.ru/izzi-na-androjd/>https://izzi-casino-apk.ru/izzi-na-androjd/</a> <a href=https://doravesela.blog.idnes.cz/redir.aspx?url=https://izzi-casino-apk.ru/izzi-na-androjd/>https://izzi-casino-apk.ru/izzi-na-androjd/</a> <a href=http://webmails.hosting-advantage.com/horde/services/go.php?url=https://izzi-casino-apk.ru/izzi-na-androjd/>https://izzi-casino-apk.ru/izzi-na-androjd/</a> <a href=http://www.t.me/s/worldcasinonet.bn/url?q=https://izzi-casino-apk.ru/izzi-na-androjd/>https://izzi-casino-apk.ru/izzi-na-androjd/</a> <a href=https://intertop.kz/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=https://izzi-casino-apk.ru/izzi-na-androjd/>https://izzi-casino-apk.ru/izzi-na-androjd/</a> <a href=http://www.goldankauf-oberberg.de/out.php?link=https://izzi-casino-apk.ru/izzi-na-androjd/>https://izzi-casino-apk.ru/izzi-na-androjd/</a>
Download apk file bookmaker izzi – play now! <a href=http://www.comuneduecarrare.it/editor/Ele-prop.php?name=edit-link-form.php&type=php&size=5745&lasted=1427956807&perm=33206&url=https://izzi-casino-apk.ru/izzi-na-androjd/>https://izzi-casino-apk.ru/izzi-na-androjd/</a> <a href=http://minorca.cc/en/productshow.asp?id=794&mnid=34528&mc=Polyresin%20&%20metal%20decoration=&url=http%3A%2F%2Fgreasyfork.org/en/discussions/requests/173654-esp-for-browser-games&lmm=>https://izzi-casino-apk.ru/izzi-na-androjd/</a> <a href=http://www.cooltgp.org/tgp/click.php?id=370646&u=https://izzi-casino-apk.ru/izzi-na-androjd/>https://izzi-casino-apk.ru/izzi-na-androjd/</a> <a href=http://www.construireenpaca.com/redirect.php?url_partenaire=https://izzi-casino-apk.ru/izzi-na-androjd/>https://izzi-casino-apk.ru/izzi-na-androjd/</a> <a href=https://ebac.art.br/bitrix/rk.php?goto=https://izzi-casino-apk.ru/izzi-na-androjd/>https://izzi-casino-apk.ru/izzi-na-androjd/</a> <a href=https://www.montauk-online.com/cgibin/tracker.cgi?url=https://izzi-casino-apk.ru/izzi-na-androjd/>https://izzi-casino-apk.ru/izzi-na-androjd/</a> <a href=http://www.equalpay.wiki/api.php?action=https://izzi-casino-apk.ru/izzi-na-androjd/>https://izzi-casino-apk.ru/izzi-na-androjd/</a> <a href=https://www.google.it/url?sa=t&url=https%3A%2F%2Fgreasyfork.org/en/discussions/requests/173654-esp-for-browser-games>https://izzi-casino-apk.ru/izzi-na-androjd/</a> <a href=https://casrobinsonu.blog.idnes.cz/redir.aspx?url=https://izzi-casino-apk.ru/izzi-na-androjd/>https://izzi-casino-apk.ru/izzi-na-androjd/</a> <a href=http://seo.new-web.net/redirect.php?url=https://izzi-casino-apk.ru/izzi-na-androjd/>https://izzi-casino-apk.ru/izzi-na-androjd/</a> <a href=http://eburg.barahla.net/redirect.php?url=https://izzi-casino-apk.ru/izzi-na-androjd/>https://izzi-casino-apk.ru/izzi-na-androjd/</a> <a href=https://cse.google.cg/url?sa=t&url=https%3A%2F%2Fgreasyfork.org/en/discussions/requests/173654-esp-for-browser-games>https://izzi-casino-apk.ru/izzi-na-androjd/</a> <a href=http://www.aurki.com/jarioa/redirect?id_feed=510&url=https://izzi-casino-apk.ru/izzi-na-androjd/>https://izzi-casino-apk.ru/izzi-na-androjd/</a> <a href=https://maczj.com/wp-content/themes/begin52/inc/go.php?url=https://izzi-casino-apk.ru/izzi-na-androjd/>https://izzi-casino-apk.ru/izzi-na-androjd/</a> <a href=http://unshavengirls.net/dtr/link.php?gr=1&id=4bfc07&url=/cgi-bin/te/o.cgi?s=60%u=https://izzi-casino-apk.ru/izzi-na-androjd/>https://izzi-casino-apk.ru/izzi-na-androjd/</a>
#7735 Charlesgunnyhttp://filmkachat.ru
1 хслот регистрация в 1×slots casino
Внесение депозита – Будьте готовы восполнить счет последствии отыгрыша приза. Это обычное требование верховодил для данного типа промо-акций. Лучше заранее уточнить, какую необходимую надо(надобно) будет заносить на счет. Как верховодило, речь о минимальном депозите, хотя вы обязаны быть уверены, что он вам по кармашку. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> <a href=https://band.us/band/92649089/post/18>https://band.us/band/92649089/post/18</a> 1×slots регистрация на 1хслотс <a href=https://dictanote.co/n/1037154/>https://dictanote.co/n/1037154/</a> B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax
x1 slots регистрация в 1×slots casino
1×slots зеркало регистрация то дальше необходимо пройти <a href=https://stomping-groundz.com/index.php?action=profile;u=2987>https://stomping-groundz.com/index.php?action=profile;u=2987</a> 1× slots сайт Бонус за регистрацию в казино без депозита с выводом денег надо(надобно) отыграть. Зачастую для отыгрыша имеет потребоваться устроить ставки на необходимую, в несколько десятков раз превышающую необходимую бонуса или выигрыша.На бонусные начисления шансы быть установлены вспомогательные лимитирования, коие Вы не приняли при отыгрыше. Пока приз полностью не отыгран — деньги из казино не выводятся.
1×slots регистрацию процедура займет всего лишь
Это один из основных показателей привлекательности презента. С завешенным коэффициентом и мастера не смогут выполнить условия по отыгрышу. И важно, как привлекательно выглядит предложение – бездепозитный бонус казино в объеме $500 либо $1 000. Чтобы новенькие лучше вдумались, собственно же такое вейджер, мы разберём на примере. Стоит обозначить(означить), что бездепозитный бонус выдается только взрослым новичкам, которые, тому, шансы пригласить собственных друзей и людей, того претендующих на поощрительную программку преданности. Подобная разработка появилась среди соперничающих онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению своей посещаемости, методом привлечения новых игроков. Бонусы – это оригинальный шанс для вероятных участников игры, которые шансы опробовать софт покер рума и убедиться, будут ли они в него выступать либо нет. Новый игрок попробует средства силы с настоящими оппонентами в казино.Бездепозитные бонусы истинными средствами, которые можно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадали. <a href=https://forums.twcpilots.com/member.php?action=profile&uid=745>https://forums.twcpilots.com/member.php?action=profile&uid=745</a> 1×slots промокод при регистрации 2025 Частенько новички не знают, как активировать презенты или исключить 1-ый выигрыш. Для подобных случаев наша команда обрисовала главные определения – собственно такое фриспины, вейджер, как его отыграть, зачем нужно проходить верификацию.Oтыгpaть приз с обозначенным вeйджepом, желаемого необходимо сдeлaть cтaвoк нa cумму, превосходящую объем приза в несколько один.
1×slot зеркало
B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.Риск-игра по одинаковым шансам – Также казино имеет запрещать выполнять обстоятельства по отыгрышу за раунда на удвоение, кот-ый предлагается в слотах, видео-покере и некоторых иных играх. 1× slots casino зеркало <a href=http://www.djwx.com/forums/user/profile/62128.page>http://www.djwx.com/forums/user/profile/62128.page</a> Поспешите арестовать бездепозитные бонусы за регистрацию в казино из представленного перечня. Все платформы не ведут легальную работа, хотя и порадуют правдивыми плодами забавы, высокой отдачей, прыткими выплатами.У каждого игорного клубы различные вейджеровые условия. Чтобы вы гарантировано сумели выполнить их, мы дадим несколько советов. Если система начислила маленькую необходимую, не создавать немалые ставки – остановитесь на 10–30 центах. Как лишь сумеете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте играть. В противном случае другого, как присмотреться к другому автомату.
1×slots зеркало на сегодня
B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax <a href=https://www.thespacefriends.com/bbs/board.php?bo_table=free&wr_id=810944>https://www.thespacefriends.com/bbs/board.php?bo_table=free&wr_id=810944</a> Помните, собственно в некоторых забавах сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных забавах лишь от 5% до 50% суммы ставки считаются как отыгранные средства, в то время как в слотах идет в зачет все one hundred percent суммы. 1×slots регистрация 1×slots casino 777 online Размер бонуса. В качестве бездепов обычно начисляют очень суммы, а когда речь о бонусах за депо, которые начисляются в процентном соотношении от суммы пополнения, то некоторые казино шансы презентовать игроку до 2000$.Чтобы самостоятельно увериться в превосходстве бездепозитных призов, достаточно зарегистрироваться в казино и получить поощрение.
<b>Смотреть еще похожие новости:</b>
<a href=https://koreanstudies.com/forum/viewtopic.php?t=110992>рабочее зеркало 1×slots</a>
<a href=https://021snyw.com/space-uid-53919.html>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для получения выигрыша потребуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить конкретную необходимую, хотя теснее из собственных средств. Она рассчитывается из совместного объема выигрыша за всегда использования бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, в пользователь выиграл 1000 рублей, а множитель составляет х30, вывести деньги можно будет, сделав ставки на 30 000 рублей. В лицензионных бездепозитных казино выступать в азартные забавы действительно безопасно. Наличие лицензии подтверждает тот факт, собственно клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP.
#7736 Charlesgunny
1win букмекерская контора порно с Баталина Ольга Юрьевна <a href=https://rucriminal.info/>Кузнецова Анна Юрьевна порно</a> bitz casino игры казино <a href=https://slon-ru.com/>inform@rucriminal.info</a> 7k casino официальный сайт казино ставка казино можно cometa casino порно с Зырянова Анастасия Владимировна 1win букмекерская контора букмекерская контора бесплатно скачать
#7737 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7738 Charlesgunnyhttp://filmkachat.ru
1 x slots
Бесплатный бонус – кредиты, коие онлайн-казино начислит клиенту, не принуждая его пополнять игровой счет.Наличие у игрока 2 аккаунта. Запрещено делать несколько профилей для неоднократного получения бездепов. <a href=http://filmkachat.ru/>1×slots зеркало регистрацию более популярный вариант это</a> <a href=https://www.dropbox.com/scl/fi/mhtyquvypk6ajvyvihwx9/.pdf?rlkey=0k4×e3vv39h01p6t23oe67lli&st=6zkk2go1&dl=0>https://www.dropbox.com/scl/fi/mhtyquvypk6ajvyvihwx9/.pdf?rlkey=0k4×e3vv39h01p6t23oe67lli&st=6zkk2go1&dl=0</a> Способы получения бездепа различаются в зависимости от вида приза, который приглянулся игроку. Но для иначе нужно быть зарегистрированным в законном онлайн-казино и подтвердить свою лицо. В общем виде пошаговая инструкция для получения бездепозитного бонуса смотрится например:Эффективность бездепов в качестве маркетингового инструмента оценили почти операторы. Малоизвестные площадки употребляют эти промоакции, чтобы быстро набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны неизменных гостей. Не все веб-сайты, дающие презенты без депозита, рекомендованы к ирге. За симпатичным промоописанием могут скрываться неосуществимые условия отыгрыша и подводные камни. 1×slots официальный сайт зеркало <a href=http://forum.l2endless.com/member.php?action=profile&uid=5028>http://forum.l2endless.com/member.php?action=profile&uid=5028</a> Вывод выигрыша с бездепозитных бонусов казино – щедрый подарок от азартных клубов. Но дабы исключить свой доход, нужно выполнить ряд условий:
1×slots регистрация на 1хслотс
Лишь модные и знаменитые азартные заведения могут разрешить себя раздавать бездепы в виде добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, которые возможно истратить в топовых аппаратах с высокой отдачей. <a href=http://mandala-app.com/forums/memberlist.php?mode=viewprofile&u=3447>1×slots зеркало сайта</a> 1×slots официальный сайт скачать Нет. Для получения бездепозитного бонуса в казино необходима обязательная регистрация на веб-сайте. Играть в слоты даром и без регистрации возможно только в демо режиме. <a href=http://xn–80abbjuadey5bv1e.xn–p1ai/index.php?subaction=userinfo&user=Glennlauts>http://xn–80abbjuadey5bv1e.xn–p1ai/index.php?subaction=userinfo&user=Glennlauts</a> 1×slots регистрация 1×slots casino 777 online В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, нужно обратиться в службу поддержки через лайв-чат на сайте казино.Чаще всего интернет-казино предлагают бездепозитные бонусы новым юзерам. Эта промо-акция очень отлично завлекает начинающих, подталкивая их к открытию счета. Конечно, не все становятся преданными посетителями, но сам прецедент регистрации аккаунта играет на руку заведению.
1×slots casino регистрация 1×slotscasin online
Фриспины – благотворительные вращения с фиксированной ставкой, которые возможно использовать в определенных игровых автоматах.Подтверждение регистрации. Казино просят привязки профиля к электрическому адресу и номеру аппарата. Для сего на e-mail отчаливает письмо ссылаясь, а на аппарат ? текстовое известье с кодом. <a href=http://service.megaworks.ai/board/bbs/board.php?bo_table=hwang_form&wr_id=735011>http://service.megaworks.ai/board/bbs/board.php?bo_table=hwang_form&wr_id=735011</a> казино 1×slots официальный сайт
1× slots зеркало
Можно ли наваривать на бездепозитных бонусах? Это не работа, тут как повезет, если в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, за можно назвать везением, и дополнительной добавкой к вашему бютжету. Самые свежие бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды находятся на данной страничке. Посетитель может расценить условия получения и начать выступать на средства без внесения депо. При этом игроку главно разуметь, на каких критериях и какими способами возможность вывести приобретенный выигрыш. Для сего нужно расценить перечень присоединенных платежных систем. 1×slots зеркало этих способов предполагает регистрацию <a href=https://correspondent.in.ua/user/DoctorLazutapr/>https://correspondent.in.ua/user/DoctorLazutapr/</a> Фриплей-бонусы. Бонусы за безвозмездную игру есть только в неких клубах. Они зачисляются сразу последствии творенья профиля и действуют недолговременное время. Если у вас нет медли потратить свои, они просто закончатся. Что касается медли, как призы действуют в течение одного часа.Активация по промокоду используется в разных обликах бездепов. Если речь о приветственном призе, то комплект символов можно разузнать на главной страничке, в регистрационной форме либо письме, которое отправляется пользователю для подтверждения e-mail. Акции шансы проводиться общо с партнерскими площадками. Обычно код размещается на стороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активируется одноразовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном кабинете либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем важный код для активации в описании любого рекламную.
1×slots зеркало подтвердит вашу регистрацию если говорить
3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефон либо почту, показать персональную информацию;Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную процедуру активации бонуса без депо. Внимательно прочтите до конца. Многие новенькие проделывают промахи на этапе регистрации и поэтому имеют получить презент. Мы собрали и выпустили перечень превосходнейших бездепозитных казино с призами за регистрацию, коие гарантируют щедрые выигрыши и моментальные выплаты.Не советуем опрометью голову браться за различные предложения получения средств без вложений. Вполне вероятно, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на 1-ый взгляд. Альтернативой является казино бонус за депозит. Мы предлагаем для пару советов, спасибо коим у любого игрока несомненно возможность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств: <a href=http://jinos.com/bbs/board.php?bo_table=free&wr_id=990413>http://jinos.com/bbs/board.php?bo_table=free&wr_id=990413</a> Обычно, бездепозитные призы выдаются под конкретные слоты с фиксированной ставкой, хотя их наверняка запрещено использовать в игровых автоматах с современным джекпотом. Список игр, каких возможно использовать бездеп, Вы отыщите в описании акции или сможете уточнить у службы поддержки заведения. 1×slots зеркало быструю регистрацию а также мгновенное
<b>Смотреть еще похожие новости:</b>
<a href=https://karakol.com.kg/user/Jameskef/>1×slots зеркало рабочее</a>
<a href=http://brilliance.ru/forum/viewtopic.php?f=6&t=28606>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бонус начисляется игроку сразу после регистрации и прохождения верификации в казино и не настятельно от посетителя внесения депо. Как управляло, объем приза в схожем случае довольно застенчивый, однако позволяет новичкам познакомиться с игрой без риска настоящими деньгами. Верификация важна для добавочной защищенности и подсобляет техподдержке выявить бонусхантеров и плутов. Кстати, рядах платформах выводы солидных сумм доступны лишь последствии подтверждения личности.
#7739 Charlesgunny
porno Андрей Рублев (теннис) porno Юлия Канакина, скелетонистка <a href=https://slon-ru.com/>porno Игорь Акинфеев (футбол)</a> приложения букмекерских контор на андроид casino 7k сегодня <a href=https://kompromat1.online/>порно с Каролина Севастьянова</a> Александра Бортич 1×bet сайт 1×bet xyz букмекерская контора без pin up casino buzz kometa casino casino официальный зеркало Приезжева Екатерина Геннадьевна порно
#7740 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7741 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7742 Charlesgunny
casino зеркало сегодня casino андроид <a href=https://th-royalgclub.com/>casino com</a> реального казино casino 7k рабочее <a href=https://rhymes-punches.com/>inform@rucriminal.info</a> букмекерские конторы в россии включи казино рабочее казино porno Андрей Рублев (теннис) 1×bet рабочее на сегодня champion casino порно с Петр Ян (ММА)
#7743 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7744 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация
Используйте наихорошие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из списка ниже, дабы заработать подарки за простые действия и уже сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высочайшей отдачей и резвыми выводами на электронные кошельки. <a href=http://filmkachat.ru/>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a> Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные способы и расценить особенности, труднодоступные при игре в демо режиме. Многие свежие клиенты перебегают в количество постоянных, а оператор получает долгосрочную выгода. <a href=https://www.storeboard.com/blogs/architecture/transforming-ideas-into-reality-the-art-of-architectural-drawing-services/5961919>https://www.storeboard.com/blogs/architecture/transforming-ideas-into-reality-the-art-of-architectural-drawing-services/5961919</a> 1х слот регистрация в 1×slots casino <a href=http://yinyue7.com/space-uid-917312.html>http://yinyue7.com/space-uid-917312.html</a> В перечне притязаний к отыгрышу часто присутствуют лимиты на ставки при игре на личные деньги. Так, если отыграть нужно 30 000 рублей, а предельная сумма ограничена 30 рублями, то вертеть барабаны светит 1000 один. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам деяния промоакции.Да, у безвозмездных призов есть недостатки. Прежде всего, они обыкновенно очень. Кроме того, условия вейджера по ним всегда строгие. Но все неимение риска проделывает их очень привлекательными для клиентов.
1×slots официальный сайт мобильная версия
Многие азартные клубы ограничивают сумму вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не можете вывести. Разница несомненно аннулирована, Вы и не сможете делать на нее ставки.Благодаря программке лояльности от игорного заведения, можно взять неплохой старт и без дополнительных инвестициям запустить видеослоты. Кроме как, возможно рассчитывать на реальную удачу и получить, без инвестиции собственных финансов, немалый выигрыш. <a href=http://weeklywars.de/viewtopic.php?p=463075>скачать 1×slots официальный сайт</a> 1×slots акции У нас на веб-сайте Вы отыщите перечень призов без депо в проверенных казино и подробную информацию про как их получить и применять. <a href=https://www.assayyarat.com/forums/member673604.html>https://www.assayyarat.com/forums/member673604.html</a> Обычно бездепозитные акции от казино, приходят на эл. Почту в дни рождения или праздничные. В некоторых онлайн казино возможно обратиться в чат и как постоянному игроку, вероятно для предложат бездепозитное предложение.Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке необходимо восполнить счет в казино. Для депозитных призов, эта процедура не необходима, так как депозит теснее изготовлен. 1×slots зеркало на сегодня
1хслотс зеркало на сегодня
Такой казино приз без депозита за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это как бы некая маскировка поощрения под бездепозитный. Суть всего этого сводится к что, этому, что игроку на час выдается, например, 1000 долларов, а реклама твердит то, собственно любой выигрыш можно будет в забыть при для. Но в играющий серьезно отнесется к этому предложению, то он просто растеряет время. Ведь игроку надо(надобно) несомненно играть не главном аккаунте, а в тренировочном и с ограниченным выбором автоматов и ставок. Да и если, тогда, выигрыша (том всей тысячи) в правила вступят определенные условия, где будет сказано, что максимальной суммой победы возможность быть только двести $ и средства возможно использовать только в качестве бонуса на первый лепта с вейджером 25 от суммы гонорары плюс сам депозит. По результату выйдет, что игрок выигрывал для 200% бонус с вейджером на определенную необходимую. Короче говоря, это все надо вашего времени.Одним из предлогов отдавать преимущество, льготу 1 или другому заведению содержится в привлекательности предлагаемых акций и даровых услуг. Безвозмездные фриспины, выдаваемые без дела создавать какой-либо лепта, в списке располагается далековато не в конце. <a href=http://arstel.com/bitrix/redirect.php?goto=http://gensp.ru/bitrix/redirect.php?goto=http://cse.google.je/url?q=https://telegra.ph/Ponimanie-suti-obrazovatelnyh-kreditov-09–19>http://arstel.com/bitrix/redirect.php?goto=http://gensp.ru/bitrix/redirect.php?goto=http://cse.google.je/url?q=https://telegra.ph/Ponimanie-suti-obrazovatelnyh-kreditov-09–19</a> Также учтите, что некоторые игровые платформы сужают перечень государств, которые готовы получить предложенный бездепозитный бонус за регистрацию. К примеру, существуют онлайн-заведения, выдающие сходственные призы только жителям конкретных стран. К образцу, интернет казино 777 Оригинал предоставляет бездепозитный бонус только игрокам из России и государств СНГ. Или напротив, пичкают вознаграждением всех, не обитателей некоторых стран (следует этого, стопам пристально изучать список, дабы впоследствии не появилось никаких вопросов и жалоб). 1×slots регистрация Новые посетители онлайн-казино без первого депозита шансы проверить собственную удачливость. К тому же есть вероятность преобразовать бездепы в реальные деньги за регистрацию в казино, однако для этого приз необходимо отыграть сообразно условиям акции.
1×slos регистрация в 1×slots casino
<a href=http://forum.survival-readiness.com/viewtopic.php?t=259384>1×slots зеркало на сегодня</a> Можно ли наваривать на бездепозитных бонусах? Это не работа, тут как повезет, в в любом предложенном безедепе, вы будете откручивать вейджер и выводить, это возможно назвать везением, и добавочной добавкой к вашему бютжету.Заработать на бездепозитных бонусах за регистрацию в казино имеет любой пользователь, достигший совершеннолетия. В подавляющем большинстве случаев безвозмездные призы начисляются в кредитах, которые невозможно сразу вывести со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д. ). О нем читайте ниже. 1×slots акции <a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=4595>http://www.predictive-datascience.com/forum/member.php?action=profile&uid=4595</a> Например, игрок получил 500 рублей при твореньи аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 руб., потребуется сделать 875 спинов для полного отыгрыша.В интернет-сети практически возможно отыскать перечни более популярных и обещанных поощрительных программ от модных онлайн-казино.
1хслотс официальный сайт зеркало
Рассмотрим принцип его деяния на случае. Допустим, вы зарегались и возымели $10 no down payment bonus с вейджером х50. Это означает, собственно выигранные средства возможно несомненно выводить не раньше, чем в такого, как общая сумма ставок достигнет $500.Используйте наихорошие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, дабы заработать подарки за простые деянья и уже сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и прыткими выводами на электронные кошельки. Чем ниже значение вейджера, тем проще отыграть и исключить бонус. Если Вы расчитываете заработать на бездепе, а не просто ознакомиться с новым игровым клубом, то стоит избегать призов с высочайшим вейджером их почти не реально отыграть. С ними Вы сможете только протестировать игры заведения.Бездепы обыкновенно предлагают с отыгрышем — быстро исключить выигранные свои невозможно. Перевод денег со счета будет вероятен в того, как юзер выполнит все притязания казино, а сумма не может превышать установленного правилами лимита. Условиями акции фиксируются сроки, в течение коих клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней последствии активации. <a href=http://www.cruzenews.com/wp-content/plugins/zingiri-forum/mybb/member.php?action=profile&uid=1907589>http://www.cruzenews.com/wp-content/plugins/zingiri-forum/mybb/member.php?action=profile&uid=1907589</a> 1хслот скачать Также случаются случаи, когда казино начисляет обсужденный приз в регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам.
<b>Смотреть еще похожие новости:</b>
<a href=https://adminclub.org/showthread.php?tid=62334>скачать 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Исходя из сего, просто не существует разумных оснований махнуть рукою на получение такого приза при регистрации. И, не, на подобный безвозмездной базе у вас все шансы выиграть средства и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, называют безвозмездными интернет платформами для игр.
#7745 Charlesgunny
Ирина Горбачева сколько казино <a href=https://sovsekretno.net/>порно с Елена Никитина, скелетонистка</a> лучшие казино бесплатно casino 7k сегодня <a href=https://glvk.guru/>casino автомат</a> спорт букмекерская контора 1×bet слоты 1×bet xyz casino ru самое казино online casino Юдаева Ксения Валентиновна порно porno Катерина Шпица
#7746 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия
Допустим, за регистрацию вы получили бездеп в объеме 2 000 руб. С вейджером х30. В этом случае светит устроить ставок, на общую сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать реальные средства. Однако не забывайте, собственно с любого презента получится вывести определённую необходимую (чаще всего не более $200).При помощи такого поощрения оператор возможность того завлекать посетителей, которые ранее показывали активность на сайте, хотя по какой-то основанию прекратили играть. В этом случае промокод высылается юзеру по электронной почте либо повторяющий SMS. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasino09k online</a> <a href=https://myheritage.heritage.edu/ICS/_portletview_/Academics/RDG/RDG__502/1920_SU-RDG__502–10/Blog.jnz?portlet=Blog&screen=View+Post&screenType=next&&Id=ed00954d-072d-43f8-bafb-17bd5d1b7a0c>https://myheritage.heritage.edu/ICS/_portletview_/Academics/RDG/RDG__502/1920_SU-RDG__502–10/Blog.jnz?portlet=Blog&screen=View+Post&screenType=next&&Id=ed00954d-072d-43f8-bafb-17bd5d1b7a0c</a> Подтверждение электронной почты – одно из основных критерий, коие есть почти в каждом бездепозитном казино. Чтобы верифицировать электронную почту, довольно перейти по активной ссылке в письме, полученном от азартного клуба.В зависимости от интернет заведения любой из них имеет вас предложить как бездепозитные средства, например и бездепозитные фриспины, коие после успешной регистрации рухнут вас на ваш игровой баланс. 1хслотс рабочее зеркало на сегодня <a href=https://rightcoachforme.com/author/patrickgaree/>https://rightcoachforme.com/author/patrickgaree/</a> Максимальный объем ставки, который нельзя превышать пока бонус не несомненно полностью отыгран. В случае нарушения этого правила, приз и выигрыш с него будут аннулированы.
1×slots зеркало рабочее
Выиграть реальные деньги в казино не пополняя счет – сложно, но возможно. Главное задаться целью и не нарушатьправила заведения. Выберите несколько казино с бездепзитными призами и начните выступать на бонусные свои. По статистике каком-то 10-ти заведений можно заработать небольшую сумму средств с бонусных средств. <a href=https://creapnl.com/foros/tema/1×slots-%d0%bf%d1%80%d0%be%d0%bc%d0%be%d0%ba%d0%be%d0%b4-%d0%bf%d1%80%d0%b8-%d1%80%d0%b5%d0%b3%d0%b8%d1%81%d1%82%d1%80%d0%b0%d1%86%d0%b8%d0%b8–2025–3/>1×slots промокод при регистрации 2025</a> 1 хслот регистрация в 1×slots casino <a href=http://ortodentufa.ru/bitrix/redirect.php?goto=http://kosmosmc.ru/bitrix/redirect.php?goto=http://kumertau-holod.ru/bitrix/redirect.php?goto=https://telegra.ph/Kogda-trebuyutsya-notarialno-zaverennye-kopii-dokumentov-09–23>http://ortodentufa.ru/bitrix/redirect.php?goto=http://kosmosmc.ru/bitrix/redirect.php?goto=http://kumertau-holod.ru/bitrix/redirect.php?goto=https://telegra.ph/Kogda-trebuyutsya-notarialno-zaverennye-kopii-dokumentov-09–23</a> Например, игрок получил 500 рублей при разработке аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 рублей, потребуется сделать 875 спинов для полного отыгрыша. 1×slots рабочее зеркало на сегодня Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.
1×slots казино мобильная версия
Прежде всего, не забывайте регулярно заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом оценивают наиболее интересные предложения основных игорных порталов. <a href=http://in.net.ua/user/CharlesMUS/>http://in.net.ua/user/CharlesMUS/</a> Простая процедура получения бездепозитного бонуса, кот-ая займет не более 2-х мин. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные.Более солидные предложения встречаются очень редко. Зачастую они доступны только VIP-игрокам. В остальных случаях им всего сопутствуют очень строгие обстоятельства отыгрыша. Также вероятны вспомогательные условия и ограничения, прописанные в условиях и положения бонусной программы казино. 1хслот официальный сайт зеркало Автоматическая активация может самой удобной, хотя ручной метод содержит перед ней достоинства. Прежде чем применять вознаграждение от казино, стоит заблаговременно найти, сколько времени потребуется на исполненье всех критерий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала деянья бонуса.
онлайн казино 1×slots
А ознакомиться с новыми онлайн казино, Вы сможете помощью призов с выводом выгоды, коие Вы сможете получить без депозита. <a href=http://board.eternityrpc.com/thread-7-post-14839.html#pid14839>1×slots сайт</a> Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную процедуру активации бонуса без депозита. Внимательно прочитайте до конца. Многие новички проделывают оплошности на этапе регистрации и поэтому не могут получить презент. казино 1× slots официальный сайт <a href=http://pharmacyhq.com/forum/profile.php?id=579114>http://pharmacyhq.com/forum/profile.php?id=579114</a> Для получения бонуса надо(надобно) ознакомиться с программой лояльности казино и устроить ставки на необходимую, необходимую для перехода на следующий уровень.
1×slots официальный сайт мобильная версия скачать
<a href=https://www.spacepub.net/members/5058-Jamesbak>https://www.spacepub.net/members/5058-Jamesbak</a> 1хслотс официальный сайт зеркало Чаще всего, популярностью сервисы, эти как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно обязательное верховодило. Финансовые свои выводятся лишь через ту платежную систему, коей успех для пополнения депозита. Если же игрок получил бездепозитный покерный приз, потребуется восполнить счет на наименьшую сумму, которая сочиняет обыкновенно 10 $.Фриспины. Бесплатные вращения предназначены для применения в видео-слотах. Внимательно читайте обстоятельства – они часто выдаются для неких машин. В зависимости от клуба возможность создавать конкретное число ставок. Кстати, современные игорные дома выделяют возможность заводить «одноруких злодеев».
<b>Смотреть еще похожие новости:</b>
<a href=http://vn-info.net/user/Josephkam/>1хслотс казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Самый распространённый из похожих призов, конечно же, бездеп на день рождения клиента — приз вид фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им возможно в течение установленного периода медли. Игрокам стоит воспринимать приветственный бонус как гарантированный способ получить большой выигрыш, но это замечательная возможность без затрат расценить возможностей казино.
#7747 Charlesgunny
скачать pin casino казино гта 5 <a href=https://rhymes-punches.com/>песня казино</a> porno Светлана Ходченкова игры казино <a href=https://sovsekretno.net/>порно с Аделия Петросян (фигурное катание)</a> 1×bet 1хбет vavada casino порно с Александр Головин (футбол) Чулпан Хаматова online casino 7k казино можно бк букмекерская контора
#7748 Charlesgunnyhttp://filmkachat.ru
скачать 1×slots на андроид мобильная версия
Когда речь идет о валютных бонусах, казино постоянно устанавливают обстоятельства вейджера, коие необходимо выполнить, чтобы исключить выигрыш. <a href=http://filmkachat.ru/>казино 1×slots</a> Да, у безвозмездных призов есть дефекты. Прежде всего, они обыкновенно очень. Кроме как, обстоятельства вейджера по ним постоянно строгие. Но все же недоступность риска делает их очень привлекательными для клиентов. <a href=https://bitbin.it/Y0LKmg2N/>https://bitbin.it/Y0LKmg2N/</a> 1×slots регистрация на официальном сайте <a href=http://swwwwiki.coresv.net/index.php?title=1×slots_%D0%A0%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5_%D0%97%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE_%D0%A1%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C>http://swwwwiki.coresv.net/index.php?title=1×slots_%D0%A0%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5_%D0%97%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE_%D0%A1%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C</a>
1хслот зеркало
<a href=https://fougerite.com/threads/1×slots-kazino-zerkalo.13573/>1хслотс казино зеркало</a> 1×slots зеркало этих способов предполагает регистрацию <a href=http://bbs.bdguokong.com/home.php?mod=space&uid=33420>http://bbs.bdguokong.com/home.php?mod=space&uid=33420</a> Наличие у игрока 2 аккаунта. Запрещено создавать количество профилей для неоднократного получения бездепов.Для тех, кто только взвешивает испытывать свою удачу, а для проф игроков, отыскивающих свежие площадки для выигрышей, ведущие лицензированные казино нередко организуют различные акции, и лучшее услуг за время – как для начинающих, так и для проф игроков – бездепозитный бонус за регистрацию. 1×slots casino зеркало Законодательство, регулирующее азартные забавы в различных государствах, оказывает на возможности операторов. В итоге пользователи из отдельных регионов сталкиваются с ограничениями со стороны казино. Это возможность быть как глубокий отказ в доступе, например и невозможность загружать игры отдельных производителей.
1×slots промокод при регистрации 2025
Автоматическая активация может самой комфортной, но ручной способ имеет перед ней достоинства. Прежде чем применять вознаграждение от казино, стоит заранее найти, сколько времени требуется на исполнение всех критерий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала действия бонуса.Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. В лицензионных бездепозитных казино выступать в азартные забавы вправду безопасно. Наличие лицензии одобряет тот факт, собственно клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP.Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической забавы на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, выучится регулировать изменять ставки и линии, изучать бонусные забавы и их выигрышные комбинации, да в конце концов просто зарядится кучей эмоций! Ведь вы будите играть на бонусные средства, которые возможно отыграть и вывести, а не просто на демо счет, что, этим самым адреналин в крови более повысится а пульс забьется с нередким ритмом! <a href=https://www.x-fta.com/foro/member.php?1251793-Zacheryprunc>https://www.x-fta.com/foro/member.php?1251793-Zacheryprunc</a> Активация валютного вознаграждения случается автоматически в творения профиля либо применения промокода. Иногда операторы предъявляют вспомогательные требования: подписаться на странички казино в социальных сетях либо на рассылку маркетинговых сообщений, скачать и ввести дополнительный софт и т.д.Промокод – определённая композиция знаков, коию нужно ввести в соответствующее фон при создании учетной записи или активировать в собственном профиле игрока в разделе с бонусами. 1×слот регистрация в 1×slots casino Иногда виде бездепа, казино дарит минимальный бонус (до 50 руб. ), ради которого не стоит заморачиваться.Если при регистрации указать промокод, возможно гарантировано получить бонус. Где взять ваучер? Посетите тематику блоги либо форумы. Иногда администрация клуба делает рассылку ваучеров на электрическую почту. В заключительное время игорные жилища начали афишироваться в фильмах и телесериалах. Присмотритесь и наверняка заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных рублей.
1×slots регистрация
Казино выделяет вероятность заработать и вывести реальные средства на бездепозитных призах. Обычно, это незначительная сумма, коию казино возможность для разрешить презентовать игроку. <a href=https://www.digicube.de/forum/threads/461867-%D1%81%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C-1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82?p=659674#post659674>скачать 1×slots официальный сайт</a> Бездепозитные призы отличный вариант бесплатной игры в игровые автоматы. Многие юзеры сети не понимают, собственно в казино можно начать играть полностью бесплатно, а позже исключить выигрыш на банковскую карту или электронный кошелек, иные не доверяют интернет казино, а третьи удачно играют и выигрывают – и подчас довольно немалые суммы. Подтвердите лицо, предоставив оператору казино свои паспортные данные. Инструкции обычно несложные, основное — конкретно им стопам. Если написано, собственно «на фото обязаны быть видны все хорошо угла страницы паспорта» — сделайте непосредственно такое фото.Бездепозитный приз за регистрацию в казино — это стартовый подарок повторяющий денежного начисления либо даровых вращений для свежих игроков заведения, для получения которого надо заносить депо. 1×slots актуальное зеркало <a href=https://www.modernvespa.it/profile/3881-porsedropsa/>https://www.modernvespa.it/profile/3881-porsedropsa/</a> Бонус за регистрацию в казино без депозита с выводом денег нужно отыграть. Зачастую для отыгрыша возможность понадобиться сделать ставки на необходимую, в количество десятков раз превышающую необходимую бонуса или выигрыша.
1× слот зеркало
Сразу последствии активации промокода можно пользоваться презентом. Как теснее упоминалось, бонусы посещают трёх обликов – фриспины, кредиты и фриплей-бонусы.А ознакомиться с новыми онлайн казино, Вы сможете за счет призов с выводом выгоды, которые Вы можете получить без депозита. Игрокам не следует принимать приветственный бонус как гарантированный метод получить большой выигрыш, хотя это замечательная вероятность без затрат оценить функционал казино. <a href=http://suprememasterchinghai.net/bbs/board.php?bo_table=free&wr_id=878562>http://suprememasterchinghai.net/bbs/board.php?bo_table=free&wr_id=878562</a> В любом казино с бездепозитным бонусом учтены вейджеровые обстоятельства. Это единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) устроить определённое число ставок. Чем круче приз, тем труднее выполнить условия, и наоборот. 1× slots casino официальный сайт Акции, посвященные календарным праздникам, случаются рассчитаны как на всех юзеров, так и на категории: например, презент на 8 марта девушкам-игрокам либо мужикам на 23 февраля.Вейджер не более х30–35 является приемлемым. Опытные игроки утверждают, что с этим вейджером реально остаться в плюсе, случае правильно подойти к выбору игрового аппарата.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.vn.ua/showthread.php?p=3273832#post3273832>1хслотс регистрация в 1×slots casino</a>
<a href=https://sadhaka.nl/forum/viewtopic.php?t=102321>1×slots зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Многие азартные клубы ограничивают необходимую вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании акции, суммы Вы не можете исключить. Разница будет аннулирована, Вы даже не сможете делать на нее ставки. К раскаянью, нет. Почти все казино, настоятельно внесение желая бы 1-го малого депо для вывода выигрыша с бездепозитного приза. Также учитывайте, что исключить деньги разрешено лишь на ту платежную систему, с которой был сделан депозит.
#7749 Charlesgunny
приложения букмекерских контор на андроид сайт казино зеркало <a href=https://t.me/vchkogpu_ru>1×bet скачать бесплатно</a> где казино лучшие казино бесплатно <a href=https://glvk.guru/>казино онлайн бесплатно</a> porno Андрей Рублев (теннис) казино фильм онлайн Попова Анна Юрьевна порно pin up casino официальный 1×bet сайт 1×bet xyz бесплатно фильм казино retro casino
#7750 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7751 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
Предложения с бездепозитными призами за регистрацию разрешают свежим заведениям привлечь аудиторию на свой сайт. А игроки же получают вероятность играть на реальные деньги без депо в казино и заработать малый стартовый капитал, который разрешается исключить на карту банка либо электрический кошелек.Если вы избираете проверенное лицензионное онлайн казино и выполните все условия получения бездепозитного бонуса, трудностей с получением подарка у Вас не возникнет. <a href=http://filmkachat.ru/>1×slots бездепозитный бонус за регистрацию</a> <a href=http://www.bluesoleil.com/forum/thread-2–239675–1.html>http://www.bluesoleil.com/forum/thread-2–239675–1.html</a> Если вы новичок данном и лишь попали в неизведанную вами район пыла — счет предложений как бездепозитные бонусы без пополнения.Процесс доказательства личности имеет взятьвдолг(взятьвзаймы) от 1-го денька до недели. Если заказчик разрешил какую-либо ошибку при заполнении паспортных данных, то ему по адресоваться с проблемой в службу онлайн-казино. 1х слот 1хслотс регистрация перейти на 1×slots <a href=https://gsan.essex.ac.uk/user/julesadjub/?um_action=edit>https://gsan.essex.ac.uk/user/julesadjub/?um_action=edit</a> На критериях отыгрыша даровых призов следует остановиться подробнее. С ними связаны аспекты, коие нельзя забыть без внимания.
1х слот 1хслотс регистрация перейти на 1×slots
Подтвердите личность, предоставив оператору казино свои паспортные данные. Инструкции обычно несложные, главное — конкретно им следовать. Если написано, собственно «на фото должны быть заметны все хорошо угла страницы паспорта» — устройте именно такое фото. 1×slots официальный зеркало <a href=http://receptom.ru/index.php?subaction=userinfo&user=cooperativeinte>http://receptom.ru/index.php?subaction=userinfo&user=cooperativeinte</a> На благотворительные призы онлайн-казино практически практически распространяется лимитирования по стране проживания клиентов. Даже если вам разрешено открывать счет и играть на деньги в заведении, это еще не означают, что вам доступны no deposit bonuses. 1хслотс рабочее зеркало В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, необходимо обратиться в саппорта спустя лайв-чат на сайте казино.
1× slots официальный
Мы подготовили список, где есть постоянно актуальные и свежие бездепозитные бонусы казино, которые возможность получить даром. Для наших юзеров есть специальные предложения эксклюзивные призы, коие вы у не найдете, их мы определили специальной красной плашкой «Exclusive».Фриспины предусмотрены для применения в видео слотах. Внимательно ознакомьтесь с критериями – частенько их выдают на кое-какие автоматы. В зависимости от клуба, у вас выйдет устроить определённое количество ставок. Кстати, продвинутые игорные дома разрешают запускать любых «одноруких злодеев». <a href=https://relateddirectory.org/details.php?id=250153>https://relateddirectory.org/details.php?id=250153</a> Иногда для получения бонусов нужно связаться с представителями службы поддержки. Удобнее всего с ними собеседовать в онлайн-сате, но от достаточно запроса по электрической почте. x1 slots регистрация в 1×slots casino Наиболее пользующиеся вознаграждения среди гэмблеров – бездепозитные бонусы казино. Это не изумительно, как можно получить бесплатные вращения либо виртуальные кредиты, и при этом не придётся пополнять счёт, рисковать личностными деньгами. Удастся насладиться разнообразными веселиями даже выиграть солидную необходимую, избегая серьёзного риска.Благодаря программе лояльности от игорного заведения, возможно арестовать неплохой старт и без добавочных вложений запустить видеослоты. Кроме того, возможно рассчитывать на реальную удачу и получить, без вложения собственных финансов, великой выигрыш.
1×slots зеркало регистрация
Зарегистрируйтесь. Для регистрации чаще всего достаточно установить собственный номер телефона и почтовый адрес, последствии чего установить полученный код из СМС. Возможно, потребуется показать промокод. В правилах промоакции несомненно написано, где его хотелось включать. Иногда это надобно делать при регистрации, иногда — уже в творенья личного офиса, на отдельной страничке.Помимо остального, для вывода средств по бездепу необходимо привнести на счёт собственный первый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально возможную сумму, последствии чего вывод средств станет доступен. 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=http://printsstars.ru/communication/forum/index.php?PAGE_NAME=profile_view&UID=159330>http://printsstars.ru/communication/forum/index.php?PAGE_NAME=profile_view&UID=159330</a> Подарки на дни ? приуроченные к праздничным датам, требующие условного отыгрыша либо начисляются без это. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду.
1хслотс регистрация в 1×slots casino
<a href=http://admkineshma.ru/bitrix/redirect.php?goto=http://apetta.ru/bitrix/click.php?goto=http://fishcom.online/bitrix/redirect.php?goto=https://teletype.in/@urist555/Y5vlRyGybvG>http://admkineshma.ru/bitrix/redirect.php?goto=http://apetta.ru/bitrix/click.php?goto=http://fishcom.online/bitrix/redirect.php?goto=https://teletype.in/@urist555/Y5vlRyGybvG</a> Многие новенькие сомневаются, что поощрительный приз не несомненно отдавать, в случае они выиграли у казино. Это абсолютно безопасно и надежно. Выводя выигранные средства, игрок просто одергивает свое участие в игре и теряет уникальную вероятность – даром увеличивать собственное вещественное положение.На благотворительные бонусы онлайн-казино практически практически распространяется ограничения по стране проживания клиентов. Даже если вам разрешено открывать счет и выступать на средства в заведении, это еще не означают, что вам доступны no down payment bonuses. 1×slots казино зеркало Мы советуем не открещиваться от подобных предложений известных казино. Выделите некоторое мин. На регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сейчас фортуна несомненно на вашей стороне!Фриспины. Бесплатные вращения предназначены для применения в видео-слотах. Внимательно читайте условия – они нередко выдаются для неких машин. В зависимости от клуба вам создавать конкретное количество ставок. Кстати, современные игорные жилища выделяют возможность заводить «одноруких бандитов».
<b>Смотреть еще похожие новости:</b>
<a href=http://freedom.teamforum.ru/memberlist.php?mode=viewprofile&u=6332>1×slots регистрация на сайте</a>
<a href=http://c-strike.fakaheda.eu/profile.php?lookup=26984>1×slots зеркало которую указывали при регистрации кстати</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Существуют казино с призом за регистрацию, каких очень востребованы фриспины в интернет казино впоследствии регистрации в конкретных играх. Они встречаются даже чаще безвозмездных поощрений или классических призов в казино без инвестициям. Например, игрок регистрирует счет, на кот-ый начисляются бесплатные забавы, бонус за регистрацию повторяющий даровых фрспинов, вращения в игровом автомате. Во время игрового процесса геймер выигрывает истинные средства, которые в последствии можно удачно исключить из заведения на собственную платежную систему. То есть, есть шансы исключить средства без рисков своими деньгами. Регистрация, за которую геймер получит призы, займет несколько, а благодаря данному возможно прирастить 5 евро поощрений до тыс. И без всяких проблем вывести их.
#7752 Charlesgunny
Ирина Горбачева порно с Варвара Субботина <a href=https://vestnik-jurnal.com/>казино рублях</a> porno Алена Косторная (фигурное катание) приложения букмекерских контор <a href=https://rumafia.news/>макао казино</a> casino com бк букмекерская контора 1×bet зеркало рабочее на сегодня 1×bet зеркало казино вход online casino 1×bet зеркало на сегодня
#7753 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7754 Charlesgunnyhttp://filmkachat.ru
1×slots мобильная версия войти казино
Отзывы читателей о бонусных промоакциях посодействуют составить впечатление, хотя не забывайте о субъективности собственных объяснений.В онлайне очень количество скриптовых сайтов, коие принадлежат жуликам. Их основная цель – заинтересовать гэмблеров, пообещав столько великодушные презенты, хотя и солидные выигрыши. Так собственно некоторые веб-сайты предлагают получить за регистрацию том $1 000. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало</a> Подарки на дни ? посвященные торжественным датам, требующие условного отыгрыша или начисляются без это. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду.Срок активации и время на отыгрыш. Зачисление денег либо фриспинов происходит при активации на требовательно ограниченного периода, похожие притязания предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать приз количество дней либо даже месяцов. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером. <a href=https://controlc.com/be384a3e>https://controlc.com/be384a3e</a> Бездепозитный бонус за регистрацию в казино — это стартовый презент в виде денежного начисления или даровых вращений для свежих игроков заведения, для получения которого надо вносить депозит. 1хслотс рабочее зеркало <a href=https://bans.org.ua/index.php?action=profile;u=1357020>https://bans.org.ua/index.php?action=profile;u=1357020</a> Отказ в прохождении верификации. Если заказчик не желает или возможности дать документы, подтверждающие его лицо, профиль будет заблокирован совместно, вкупе со всеми бонусными начислениями.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Пoдтвepдить личнocть клиента. Для удачного вывода средств, нужно доказать лицо клиента. Нa этaпe вepификaции пpoфиля, сотрудники службы защищенности обязаны увериться, что у игрока чем один акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не сможет вывести свой выигрыш, случае у него несомненно несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы. <a href=https://your-portal.at.ua/forum/15–63257–1#88194>1×slots на любой вкус как пройти регистрацию</a> 1хслот официальный сайт зеркало <a href=http://tehnoprom-nsk.ru/user/DavidLyday/>http://tehnoprom-nsk.ru/user/DavidLyday/</a> Это раз из главных показателей привлекательности подарка. С завешенным коэффициентом даже мастера не сумеют выполнить обстоятельства по отыгрышу. И не, как привлекательно смотрится предложение – бездепозитный бонус казино в размере $500 либо $1 000. Чтобы новенькие лучше вникли, что же такое вейджер, мы разберём на случае. 1×slots casino зеркало
1×slots актуальное зеркало
Но а если вы уже профи по интернет казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в онлайн казино;Несмотря на то, что данный вариант стимуляции со стороны азартных платформ довольно популярен в сфере сходственных игр, далековато не почитателям казино ведомо, собственно сами бездепозитные призы казино и как именно их вероятно эксплуатировать. <a href=http://sulimbiotek.com/bbs/board.php?bo_table=free&wr_id=62202>http://sulimbiotek.com/bbs/board.php?bo_table=free&wr_id=62202</a> Некоторые веб-сайты, этого чем обмануть регистрацию игроков, предлагают ответить на количество базисных вопросов. Цель проведения похожей викторины – выявить случайных людей, коие не имеют представления о покере, и не допустить получения ими бонусов. Если гость теснее играл в казино, то ответить на полтора десятка несложных вопросов несомненно несложно. Очень часто, ответы можно найти на официальных веб-сайтах этих учреждений. 1хслот официальный сайт зеркало
1×slot официальный сайт
Такие одобрения разрешают даром протестировать новое казино, разобраться с игровым ходом интернет слотов, заработать и вывести небольшую необходимую денег.Наши эксперты исследуют условия акции, затем в ручном режиме проверку их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и характеристики. Мы не рекламируем казино, а даем игрокам информацию о наихороших из них. <a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/6584–1kh-slot-1khslots-registratsiya-perejti-na-1×slots#6593>1х слот 1хслотс регистрация перейти на 1×slots</a> Можно ли наваривать на бездепозитных бонусах? Это не работа, здесь как повезет, если в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, тогда можно именовать везением, и добавочной добавкой к вашему бюджету.На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению сего медли, Вы не можете активировать и получить бездепозитный приз. 1×slots официальный зеркало рабочее <a href=https://cse.google.co.th/url?q=http%3A%2F%2Fdoctorlazuta.by>https://cse.google.co.th/url?q=http%3A%2F%2Fdoctorlazuta.by</a> Ниже указан важный список законных казино в Беларуси с призами на 1-ый депо. Вы сможете попасть на официальный вебсайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз.Фриспины предусмотрены для применения в видео слотах. Внимательно ознакомьтесь с критериями – частенько их выдают на кое-какие автоматы. В зависимости от клуба, у вас выйдет устроить определённое количество ставок. Кстати, продвинутые игорные дома разрешают запускать любых «одноруких злодеев».
1хслотс 1хслотс регистрация перейти на 1×slots
Бонус с зачислением денег на счет выделяет больше свободы деяний. Пользователь сам подбирает, каким образом воспользоваться подаренными своими. Здесь также шансы действовать лимитирования на перечень доступных игр, но обычно эти рамки не например строги, как в промо с бесплатными вращениями.Создание аккаунта. На веб-сайте казино нужно обнаружить регистрационную форму и наполнить пустующие поля личностными данными. Иногда на этом шаге потребуется показать только адрес электрической почты и пароль, хотя чаще надо заполнить анкету персональной информацией (ФИО, дата рождения, место проживания и т.д.). Нужно свидетельствовать лишь реальные данные, потому впоследствие они будут проверены. <a href=http://www.besatime.com/index.php?subaction=userinfo&user=elderlyartist44>http://www.besatime.com/index.php?subaction=userinfo&user=elderlyartist44</a> Если вы бывалый игрок, вы обязаны аристократия, собственно приз без депозита – редкая находка. Тем ниже, мы раз изучаем интернет, чтобы найти вам лучшие бездепозитные предложения.Так собственно приготовьтесь предоставить секретную информацию (пол, возраст, страна проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает менее суток, в чего получится беспрепятственно выводить крупные выигрыши. 1× слот зеркало Активация денежного вознаграждения происходит автоматически в создания профиля либо использования промокода. Иногда операторы предъявляют вспомогательные требования: подписаться на странички казино в соц сетях или на рассылку маркетинговых извещений, скачать и ввести вспомогательный софт и т.д.На странице представлены бездепозитные призы за регистрацию в казино редкая заслуга за коей гонятся все игроки как новички, так и мастера. Мы тоже уделяем великое внимание на присутствие призов при формирование рейтинга казино на средства. Бездепозитный приз это вероятность играть бесплатно и выиграть реальные деньги.
<b>Смотреть еще похожие новости:</b>
<a href=http://youhotel.ru/forum/viewtopic.php?f=15&t=146254>1×slots официальный сайт скачать</a>
<a href=http://palais.beesims.com/phpbb/viewtopic.php?f=2&t=290724>1×slots официальный сайт мобильная версия скачать</a>
<a href=https://adminclub.org/member.php?action=profile&uid=90427>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
С другой стороны, намного легче арестовать бездепозитные фриспины за регистрацию в казино и напрямик данный начать вращать барабаны в превосходнейших слотах. Главная необыкновенность спинов в, что они предусмотрены для топовых автоматов. Удастся столько пройти дополнительные раунды, но и прирастить необходимую выигрыша, заработать респины и внутриигровые презенты.
#7755 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7756 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию процедура займет всего лишь
Иногда операторы настоятельно внесение минимального депо перед выводом для верификации платежного инструмента. В неких казино этот депо того светит отыграть.Ну и окончательно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: сходственная щедрость увеличивает степень лояльности посетителей к фирмы. <a href=http://filmkachat.ru/>1хслотс официальный сайт зеркало</a> Выше мы дали полный комплект самых свежих и своевременных бездепозитных призов в онлайн казино без пополнения на 2022 год, где вы можете пользоваться любым ценным бездепозитным бонусом. <a href=https://ekonty.com/blogs/view/69195>https://ekonty.com/blogs/view/69195</a> 1×slots официальный сайт скачать <a href=http://newens.co.kr/bbs/board.php?bo_table=free&wr_id=704738>http://newens.co.kr/bbs/board.php?bo_table=free&wr_id=704738</a> Активация по промокоду используется в различных видах бездепов. Если речь идет о приветственном призе, то комплект знаков можно узнать на главной страничке, в регистрационной форме или послании, которое отчаливает пользователю для подтверждения e-mail. Акции могут проводиться общо с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активируется разовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном кабинете или начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем важный код для активации в описании любого промо.
1×slots зеркало быструю регистрацию а также мгновенное
У каждого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано смогли выполнить их, мы дадим некоторое советов. Если система начислила маленькую сумму, не создавать немалые ставки – остановитесь на 10–30 центах. Как только сумеете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В противном случае превосходнее приглядеться к другому автомату.Бездепозитные бонусы начисляются только раз один. Не стоит раскрывать свежие аккаунты, дабы получить их повторно. Служба безопасности казино обязательно выявит «левого» участника и заблокирует. Если посетитель выполнит необходимые требования, отыграет свою ставку и решит исключить личный выигрыш, то ему нужно к, собственно казино непременно потребует предоставить ксерокопии личных документов, дабы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные свои вывести не удастся. 1×slots мобильная версия войти казино Бонусные средства – небольшая сумма денег для старта в новом казино. На бонусные средства, обычно разрешается играть во все забавы, считая слотов с прогрессивным джекпотом и игр из раздела exist casino.В интернете очень большое скриптовых вебсайтов, которые принадлежат мошенникам. Их главная цель – привлечь гэмблеров, пообещав не великодушные презенты, но и крупные выигрыши. Так что кое-какие сайты предлагают получить за регистрацию том $1 000. <a href=https://swordmaster.org/user/DeweyRoula/>https://swordmaster.org/user/DeweyRoula/</a> Приветственный бездеп предоставляется любому игроку лишь раз раз. Казино борются с например нарекаемыми бонусхантерами (от англ. Bonus Hunter — доброволец за бонусами), пытающимися заводить множественные аккаунты для надувательства оператора и повторного получения подарка. Исключить подобные действия позволяет верификация данных. Администрация вправе востребовать у клиента доказать индивидуальные данные, указанные при регистрации.Раздача бонусов может быть посвящена разным датам: календарные дни, дни рождения игроков, юбилей открытия казино и т. Д. Подарок выдается в виде денег, фриспинов либо баллов для скопления и обмена на услуги оператора. Если юзер получает выигрыш, средства начисляются на его счет. Для вывода этой суммы понадобиться выполнить ряд требований. онлайн казино 1×slots Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, дабы еще раз получить безвозмездный бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ожидает неизбежное наказание.
1×slots официальный сайт мобильная версия
Можно ли в одном интернет казино получить больше одного приза за регистрацию? Нет, например как в каждом интернет казино есть управляла, к которым надо(надобно) держаться, не творить два аккаута для получения бонусов, другому несомненно блокировка обоих аккаутов, не пытайтесь перехитрить онлайн казино, бонус за регистрацию выдаеться один один одному личику. <a href=https://www.stroimvmeste.com.ua/user/Justinitelm/>https://www.stroimvmeste.com.ua/user/Justinitelm/</a> Фриспины без депозита или вспомогательные средства помогут ближе познакомиться с игровой платформой и её функциями. За счёт презентов можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям из-за забавы против живых крупье. 1×slots актуальное зеркало Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации подарка нужно доказать электрическую почту и привязать телефонный;
1×slots зеркало подтвердит вашу регистрацию если говорить
Если ординарными словами, бездепы – это определённая сумма средств или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать презенты. Но есть кое-какие аспекты. Существуют игорные дома, которые перед тем как начислить бонусы настоятельно привязать телефон, предоставить копии документов.Главным нюансом в появлении этих вознаграждений произведено что, что пустив их в ход, геймер ничем не рискует и в последствии никому ничего не несомненно обязан (не зависимо, получит ли он спасибо бонусам какой-либо выигрыш или мгновенно спустит все лишь собственно прибывшие деньги). То есть, казино снабжает игрока вероятностью на дармовой основе выступать во всевозможные слоты причем спонсирует забаву. <a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=2729>1×slots casino регистрация на сайте</a> Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных притязаний, не неотъемлемой верификации. Если на сайте учтена неотъемлемая процедура подтверждения личности, то исключить выигрыш получится лишь в ревизии данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий лицо.При поддержки такого одобрения оператор может того завлекать посетителей, коие раньше показывали активность на сайте, но по какой-то причине перестали выступать. В данном случае промокод высылается юзеру по электрической почте или повторяющий SMS. 1×slots сайт <a href=http://clasificadosdolores.com.ar/sitio/author/walterthags>http://clasificadosdolores.com.ar/sitio/author/walterthags</a>
1×slots сайт
Условия, на коих предоставляется бездеп, регулируются казино. Каждая промоакция содержит подробные управляла, ссылка на которые обычно содержится в промообъявлении. В них указываются лимиты, вейджер, перечень дешевых игр. Если оператор укрывает данные о предложении, то пользоваться им не стоит. <a href=https://roomstyler.com/users/vykupavto0311>https://roomstyler.com/users/vykupavto0311</a> 1хслотс рабочее зеркало Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.
<b>Смотреть еще похожие новости:</b>
<a href=https://irc.floobits.com/Jamesamiva>1×slots регистрация то дальше необходимо пройти</a>
<a href=http://forum.exalto-emirates.com/memberlist.php?mode=viewprofile&u=69997&sid=3901af821cbbb073be7a3caf8d4b45c0>1×slot рабочее зеркало</a>
<a href=https://www.makinamania.net/index.php?topic=252602.new#new>1×slots регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бонус без депо за регистрацию в казино (бездепозитный бонус) – это денежный презент от клуба, который начисляется на аккаунт игрока последствии регистрации в казино. Кроме сотворения учетной записи, для получения бездепа, довольно часто требуется ещё и подтвердить контактные данные игрока и/или активировать специальный промо-код.
#7757 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7758 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало на сегодня
Можно ли наваривать на бездепозитных призах? Это не работа, тут как повезет, случае в любом предложенном безедепе, вы будете откручивать вейджер и выводить, за возможно именовать везением, и дополнительной добавкой к вашему бюджету.1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, в не хотите стать жертвой жуликов или впустую потратить время; <a href=http://filmkachat.ru/>1хслот официальный сайт зеркало</a> Самые свежие бездепозитные призы в казино за регистрацию 2022 года с выводом прибыли находятся на данной странице. Посетитель может оценить условия получения и начать играть на деньги без внесения депо. При этом игроку важно понимать, на каких критериях и какими способами него вывести полученный выигрыш. Для этого необходимо оценить список присоединенных платежных систем.Большинство клубов завлекают внимание геймеров за счёт разнообразных подарков. На одних веб-сайтах возможно получить виртуальные кредиты, коие откроют доступ ко всему софту. На иных же, администрация предлагает благотворительные вращения для пуска топовых онлайн слотов. Несмотря на разные акции, стоит выделить самые основные. <a href=https://onlyfans.com/u448741277>https://onlyfans.com/u448741277</a> 1×slots зеркало проходить регистрацию это отличный вариант <a href=http://ip-sosnevo.ru/user/StevenTrole/>http://ip-sosnevo.ru/user/StevenTrole/</a> Выше мы дали полный набор самых новых и своевременных бездепозитных бонусов в онлайн казино без пополнения на 2022 год, где возможность воспользоваться любым ценным бездепозитным бонусом.В качестве бонусов интернет казино нередко предлагает выдачу фриспинов, другими безвозмездных вращений игрового барабана. Виртуальные монеты можно применять для обучения в покерной школе либо для игры в казино.
1×slot официальный сайт
Бонус за регистрацию в казино выдается только один раз на 1-го игрока. Но случаются вспомогательные промоакции, в которых бездепы раздаются для неизменных посетителей и такие презенты Вы сможете получить больше 1-го раза. <a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1155#post-35929>x1 slots 1хслотс регистрация перейти на 1×slots</a> 1хслотс рабочее зеркало Главное превосходство спинов – вероятность изучить разные слоты. Также получится насладиться бонусными раундами, испытать удачу в риск-туре и преумножить выигрыш за счёт особых символов. Однако столько игровой процесс заслуживает внимание, ведь чем сосредоточиться на реальном выигрыше.Каждая игровая платформа выделяется условиями по получению и отыгрышу бездепов. В правилах детально расписаны временные рамки, за которые надо(надобно) прокрутить вейджер. Также не забывайте тему наибольший объем ставки и наивысшую сумму выплаты. С иной стороны, чтобы получить бездепозитные призы казино, довольно истратить не более 1 минуты. <a href=http://myvrgame.cn/home.php?mod=space&uid=4965007>http://myvrgame.cn/home.php?mod=space&uid=4965007</a> 1×slots регистрация 1×slotscasino 56 online Онлайн-казино кропотливо продумывают бонусные обстоятельства, которые нужно выучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша прочие ограничения.Прежде чем активировать бездеп, необходимо увериться в том, что государство, гражданином коей является игрок, не заходит в перечень разрешенных.
1×slots коды
Призовые начисления без депозита шансы предоставляться для роли в турнирах интернет казино. Потратить перечисленные средства можно самая масштабах этой промоакции. Условия их проведения содержат ограничения на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться этим предложением, лучше выучить его правила. <a href=http://houyuhuan.com/home.php?mod=space&uid=372541&do=profile>http://houyuhuan.com/home.php?mod=space&uid=372541&do=profile</a> Для получения выигрыша потребуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить определенную сумму, хотя уже из личных средств. Она рассчитывается из совместного объема выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, случае пользователь выиграл 1000 рублей, а множитель составляет х30, вывести деньги возможно несомненно, сделав ставки на 30 000 рублей. 1×слотс казино
1×slots зеркало рабочее
Превышение наибольшей ставки при отыгрыше. Система механически не предостерегает о превышении ставки, потому о несоблюдении управлял игрок может узнать теснее в подачи запроса на вывод средств. <a href=https://karakol.com.kg/user/Jameskef/>1×slots casino регистрация 1×slots review live</a> Раздача бонусов может быть приурочена к различным датам: календарные дни, деньки рождения игроков, юбилей открытия казино и т. Д. Подарок выдается в виде средств, фриспинов либо баллов для скопления и размена на услуги оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд требований.В основном случаев бесплатные призы начисляются в кредитах, коие нельзя незамедлительно исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д. ). О нем читайте ниже. 1×slots актуальное зеркало <a href=https://honcure.com/user/Ashleywaymn/>https://honcure.com/user/Ashleywaymn/</a> Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются сразу в сотворения профиля и активны непродолжительное время. Если не успеете израсходовать свои, они попросту сгорят. Касаемо медли, как бонусы активны протяжении часа.
1хслотс рабочее зеркало
Для выбора азартного заведения Вы можете воспользоваться списком наших казино с бонусами за регистрацию. На нашем веб-сайте мы выпустили список бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, собственно часть бонусов эксклюзивные и доступны лишь для посетителей нашего вебсайта по-специальному промо-коду или по уникальной ссылке. Кроме такого, для любого приза мы подготовили подробный обозрение, в котором Вы узнаете как получить и отыграть одобрение и как исключить свой выигрыш с бездепа. Каждый компьютерные обязан сначала детально выучить обстоятельства по получению и отыгрышу приглянувшегося дара. Если всё организует, поторопитесь забрать благотворительные спины за регистрацию в казино без депозита с выводом и без отыгрыша и напрямик момент начать вращать барабаны лучших слотов. <a href=http://geokosmos.ru/bitrix/redirect.php?goto=http://mba-urfu.com/bitrix/click.php?goto=http://kru.ecm.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/Xjej2rYejm_>http://geokosmos.ru/bitrix/redirect.php?goto=http://mba-urfu.com/bitrix/click.php?goto=http://kru.ecm.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/Xjej2rYejm_</a> Рассмотрим принцип его деянья на образце. Допустим, вы зарегались и получили $10 no deposit bonus с вейджером х50. Это значит, что выигранные деньги возможно несомненно выводить не ранее, чем после такого, как общая сумма ставок достигнет $500.Для отыгрыша приза казино обязывает игрока сыграть на необходимую, в количество один превосходящую сумму приобретенного бонуса — здесь выгода компании явна. 1хслотс рабочее зеркало на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=https://www.globalvision2000.com/forum/member.php?action=profile&uid=1072499>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Акционные предложения от казино есть в различных форматах. Часто бонусы даются в размен на депо. Игрок вносит платеж и получает деньги, бесплатные вращения и другие одобрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — вид бонуса, который гарантирован за исполненье определенных деяний на веб-сайте:
#7759 Perevozki-vr_Halhttps://perevozki-vrn.ru/
Доброго времени суток! Закажите спецтехнику в Воронеже: тралы, автокраны, длинномеры, еврофуры, манипуляторы, экскаваторы. <a href=https://perevozki-vrn.ru/>Низкорамный трал Воронеж аренда</a> Если спецтехника в Воронеже, спецтехника Воронеж, аренда автокранов, тралов, длинномеров в Воронеже, то это в ООО-ФОРВАРД https://perevozki-vrn.ru/ . Перевозка негабарита и грузов. Надежность, опыт 15+ лет. Звоните: +7 (910) 345–50–48. Всем пока!
#7760 Charlesgunnyhttp://filmkachat.ru
1×slots casino online регистрация
В списке требований к отыгрышу нередко наличествуют лимиты на ставки при забаве на личные деньги. Так, случае отыграть нужно 30 000 руб., а максимальная сумма ограничена 30 рублями, то вращать барабаны светит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам деянья промоакции.Превышение наибольшей ставки при отыгрыше. Система автоматически не предупреждает о превышении ставки, потому о нарушении управлял игрок возможность разузнать теснее последствии подачи запроса на вывод средств. <a href=http://filmkachat.ru/>1×slots зеркало рабочее на сегодня</a> Автоматическая активация кажется самой удобной, хотя ручной метод содержит перед ней превосходства. Прежде чем применять вознаграждение от казино, стоит заблаговременно определить, сколько времени потребуется на исполнение всех критерий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала действия бонуса. <a href=https://postheaven.net/pafsi02hf4>https://postheaven.net/pafsi02hf4</a> 1×slots промокод при регистрации <a href=http://www.rebelscon.com/profile.php?id=1825016>http://www.rebelscon.com/profile.php?id=1825016</a> Способы получения бездепа различаются в зависимости от облика приза, кот-ый приглянулся игроку. Но вас в любом случае нужно быть зарегистрированным в законном онлайн-казино и подтвердить свою личность. В общем виде пошаговая аннотация для получения бездепозитного бонуса смотрится например:
1×slots casino регистрация 1×slotscasino09k online
1×slots регистрация на официальном сайте <a href=http://xn-----6kcabadf9abziijtfnmdu6ag9byao6t.xn–p1ai/bitrix/redirect.php?goto=http://kuklabrand.ru/bitrix/redirect.php?goto=http://accesstyle.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/qCcjKKkQhPy>http://xn-----6kcabadf9abziijtfnmdu6ag9byao6t.xn–p1ai/bitrix/redirect.php?goto=http://kuklabrand.ru/bitrix/redirect.php?goto=http://accesstyle.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/qCcjKKkQhPy</a> Бездепозитные бонусы за регистрацию являются одним из самых популярных способов привлечения новых игроков в онлайн-казино, потому собственно они предоставляют игрокам возможность опробовать казино, необыкновенно игровые автоматы, и возможно, выиграть настоящие деньги. 1хслотс казино зеркало
1× slots casino официальный сайт
Выиграть настоящие средства в казино не пополняя счет – трудно, хотя вероятно. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными призами и начните играть на бонусные средства. По статистике в 10-ти заведений возможно заработать небольшую необходимую средств помощью бонусных средств. Не советуем сломя голову браться за всевозможные предложения получения средств без вложений. Вполне вероятно, что бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на первый взгляд. Альтернативой считается казино бонус за депозит. Мы предлагаем вам пару советов, спасибо которым у каждого игрока будет возможность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств:Чтобы без увериться в преимуществах бездепозитных призов, довольно зарегистрироваться в казино и получить поощрение. <a href=http://47.100.112.22/demo/tour/home.php?mod=space&uid=319&do=profile>http://47.100.112.22/demo/tour/home.php?mod=space&uid=319&do=profile</a> Поспешите отобрать бездепозитные призы за регистрацию в казино из представленного списка. Все платформы столько водят законную работа, хотя и порадуют правдивыми плодами игры, высокой отдачей, прыткими выплатами.Простая процедура получения бездепозитного приза, которая займет не более 2-х мин. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные. 1×slot казино зеркало На критериях отыгрыша безвозмездных призов следует тормознуть подробнее. С ними связаны нюансы, которые невозможно оставить без внимания.В игровых клубах без лицензии Вы покупаете „кота в мешке“ и если, тогда, неоднозначных обстановок нет способности куда-то посетовать и обосновать свою правоту.
1×slots рабочее зеркало на сегодня
Предложения с бездепозитными бонусами за регистрацию позволяют новым заведениям заинтересовать аудиторию на собственный сайт. А игроки к получают возможность выступать на реальные средства без депозита в казино и заработать малый стартовый капитал, который разрешено исключить на карту банка или электрический кошелек. В неких онлайн казино для получения бездепозитных призов не довольно просто зарегистрироваться на веб-сайте клуба и подтвердить средства контактные данные. Дополнительно требуется активация промокода. 1×slos регистрация в 1×slots casino <a href=http://shkola-avtorov.ru/redirect?url=http://cs-lords.ru/go?http://k-remont.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/ppqhBwD9COH>http://shkola-avtorov.ru/redirect?url=http://cs-lords.ru/go?http://k-remont.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/ppqhBwD9COH</a> К примеру, игроку выдаются безвозмездные средства в заведении в размере пятидесяти либо ста долларов (вейджер на которые сочиняет 100х). То есть, любому новоприбывшему геймеру выскакивает манящая картинка, которая сулит выплату всех зачисленных фирмой средств. Не стоит заострять на казино приз за регистрацию без депо с сильно великий или очень малюсенькой суммой бонусов, поэтому собственно, и кропотливо исследовав все обстоятельства, здесь всего, несомненно некий подкол.Такие поощрения разрешают безвозмездно протестировать свежее казино, разобраться с игровым процессом онлайн слотов, заработать и исключить маленькую сумму средств.
зеркала 1×slots
<a href=http://d90432w9.beget.tech/user/CraigFut/>http://d90432w9.beget.tech/user/CraigFut/</a> Шаг 4. Активация. Внимательно выучите условия, информацию по лимитированиям и сроке деяния бонусного предложения. Разобравшись с правилами, возможно активировать бонус в собственном офисе (от ? с внедрением промокода) или по запросу в саппорт. 1×slots на любой вкус как пройти регистрацию Можно. Вы всегда можете отказаться от получения бездепозитного приза за регистрацию в казино, пока Вы не сделаете ставку.Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы которые появляются у новичков.
<b>Смотреть еще похожие новости:</b>
<a href=http://big.bestforums.org/viewtopic.php?f=7&t=10190>скачать 1×slots официальный сайт</a>
<a href=https://nztw.org/forum.php?mod=viewthread&tid=376786&pid=682657&page=1&extra=page%3D1#pid682657>1×slos регистрация в 1×slots casino</a>
<a href=https://vredeenvermaak.be/forum/vrede-en-vermaak/>скачать 1×slots официальный сайт</a>
<a href=http://ledyardmachine.com/forum/User-Jameshoing>1 хслот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Промокод – определённая комбинация символов, коию необходимо ввести в отвечающее поле при твореньи учетной записи или активировать в собственном профиле игрока в разделе с призами. Так собственно сможете неустрашимо региться без всяких раздумий. Фортуна сейчас наверняка на вашей стороне. Не побаивайтесь, так следствие какого либо ущерба Вам абсолютно не угрожает. С такими бонусами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе.
#7761 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7762 Charlesgunny
зеркала официальных сайтов казино официальные букмекерские конторы скачать <a href=https://sovsekretno.net/>пари букмекерская контора</a> зеркала казино pin up casino официальный <a href=https://rumafia.news/>retro casino</a> 1×bet сейчас букмекерская контора мостбет балтбет букмекерская контора ап казино casino рабочее зеркало cometa casino приложения букмекерских контор на андроид
#7763 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало подтвердит вашу регистрацию если говорить
Обычно, бездепозитные бонусы выдаются под конкретные слоты с фиксированной ставкой, хотя их точно воспрещено применять в игровых автоматах с современным джекпотом. Список игр, в возможно применять бездеп, Вы найдете в описании акции или можете уточнить у службы заведения.Бездепозитные бонусы отличный вариант безвозмездной забавы в игровые автоматы. Многие пользователи сети не понимают, собственно в казино можно начать выступать безусловно даром, а позже вывести выигрыш на банковскую карту либо электрический кошелек, другие не доверяют онлайн казино, а третьи удачно играют и выигрывают – и тотчас достаточно великие суммы. <a href=http://filmkachat.ru/>1×slots регистрация на официальном сайте</a> Но есть игорные заведения, коие готовы просто например жертвовать деньги на игру. Для сего довольно сделать профиль. Чтобы вывести свой выигрыш, вам поначалу нужно выполнить обстоятельства отыгрыша, обозначенные в условиях получения бездепозитного депо. <a href=https://www.businesslistings.net.au/How_to_Leverage_Instagram_for_Architects/New/New_York_City/How_to_Leverage_Instagram_for_Architects/1053310.aspx>https://www.businesslistings.net.au/How_to_Leverage_Instagram_for_Architects/New/New_York_City/How_to_Leverage_Instagram_for_Architects/1053310.aspx</a> Сразу в активации промокода можно воспользоваться даром. Как теснее упоминалось, бонусы посещают трёх видов – фриспины, кредиты и фриплей-бонусы.Бесплатные бонусы казино без депо можно получить в виде валютных средств на бонусный счет (вывести их возможно только после отыгрыша), фриспинов, игры или кешбэк-бонуса. x1 slots регистрация в 1×slots casino <a href=http://xuwentcw.com/home.php?mod=space&uid=374931&do=profile>http://xuwentcw.com/home.php?mod=space&uid=374931&do=profile</a> Oтыгpaть бонус с обозначенным вeйджepом, для этого необходимо сдeлaть cтaвoк нa cумму, превосходящую размер приза в некоторое раз.Например, игрок получил 500 руб. При твореньи аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 рублей, понадобится сделать 875 спинов для полного отыгрыша.
1×slots casino регистрация
Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депозит может отличаться до 30 дней. 1×slots казино зеркало Используйте лучшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из списка ниже, дабы заработать презенты за обычные деяния и уже сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высочайшей отдачей и быстрыми выводами на электрические кошельки.Можно ли наваривать на бездепозитных призах? Это не работа, здесь как повезет, случае в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, время возможно именовать везением, и дополнительной добавкой к вашему бютжету. <a href=http://pharmacyhq.com/forum/profile.php?id=583277>http://pharmacyhq.com/forum/profile.php?id=583277</a> Составленный знатоками Casino.ru список онлайн-казино с бездепозитным призом дозволяет игрокам сопоставить спецпредложения разных операторов. 1 хслот регистрация в 1×slots casino Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, all лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и когда спорных ситуаций нет возможности куда-то пожаловаться и доказать собственную правоту.
1×slots сайт
Обычно показатель повыше, чем для бонусов на депо. Не удивляйтесь, в он несомненно даже х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных стран. <a href=http://xn----7sb1aqeldir.xn–p1ai/bitrix/redirect.php?goto=http://tdrbt.ru/bitrix/redirect.php?goto=http://shariki.org/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/EicHr18-tun>http://xn----7sb1aqeldir.xn–p1ai/bitrix/redirect.php?goto=http://tdrbt.ru/bitrix/redirect.php?goto=http://shariki.org/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/EicHr18-tun</a> Для казино, работающих интернет, бездепозитные призы нужны для вербования новых клиентов. Предложение поиграть на слотах без надобности внесения настоящих денег — работающий способ для повышения интереса к компании. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит играть в казино, только теперь уже на личные деньги. 1×slots казино мобильная версия Не стоит сразу же отрицаться от приветственных презентов в похожих казино. Администрация готова начислить средства либо фриспины, хотя сначала работники обязаны убедиться, собственно вы не мошенник. Дело сомнений, что развелось слишком много охотников за бонусами. Они выучились врать систему и зарабатывать крупные суммы средств.
1×slots зеркало сайта
Следует подчеркнуть, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом. <a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=159&pid=651703#post_651703>1×slots casino регистрация 1×slotscasino09k online</a> Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми акциями. Читайте о них в обзорах и на форуме.Используйте наихорошие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из списка ниже, дабы заработать подарки за простые деяния и уже сегодня получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высокой отдачей и быстрыми выводами на электрические кошельки. 1хслот зеркало <a href=http://forum.topgamesinc.com/member.php?1352988-Juleswhapy>http://forum.topgamesinc.com/member.php?1352988-Juleswhapy</a>
1×slots казино зеркало
На бонусные начисления имеют быть установлены дополнительные ограничения, которые Вы не приняли при отыгрыше. Пока бонус полностью не отыгран — средства из казино не выводятся. Не желаете сыграть в азартные игры, не рискуя средствами деньгами, хотя получая в все выплаты? Подобную вероятность предоставляют все превосходнейшие порталы с азартными весельями. В их количестве большое правдивых и надежных интернет-казино на русском языке. Они привлекают новых юзеров различными поощрительными событиями, включая бездепозитные, или безвозмездные бонусы. <a href=http://rosttour.com/user/Terrymon/>http://rosttour.com/user/Terrymon/</a> Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных притязаний, считая обязательной верификации. Если на веб-сайте учтена обязательная процедура подтверждения личности, то исключить выигрыш получится только после ревизии данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий лицо.Также учтите, собственно кое-какие игровые платформы сужают список государств, которые способны получить предложенный бездепозитный бонус за регистрацию. К образцу, есть онлайн-заведения, выдающие похожие призы только жителям определенных государств. К образцу, онлайн казино 777 Оригинал дает бездепозитный бонус только игрокам из России и стран СНГ. Или напротив, снабжают вознаграждением всех, не жителей неких государств (исходя из сего, стопам внимательно учить перечень, чтобы потом не появилось практически вопросов и претензий). 1хслотс рабочее зеркало Если вы избираете проверенное лицензионное онлайн казино и выполните все условия получения бездепозитного приза, проблем с получением дара у Вас не возникнет.Раздача призов может быть посвящена различным датам: календарные дни, деньки рождения игроков, годовщина открытия казино и т. Д. Подарок выдается в виде денег, фриспинов или баллов для скопления и обмена на услуги оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода данной суммы придется выполнить ряд притязаний.
<b>Смотреть еще похожие новости:</b>
<a href=http://moneysweet.listbb.ru/viewtopic.php?f=2&t=7733>1×slots регистрация то дальше необходимо пройти</a>
<a href=http://www.carshowsociety.com/forum.php/topic,11220.new.html#new>1×slots зеркало регистрация в 1×slots casino</a>
<a href=https://forum.bandariklan.com/member.php?action=profile&uid=13758>1хлот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При подмоги такового одобрения оператор возможность того завлекать посетителей, коие раньше проявляли активность на веб-сайте, но по некий основанию перестали играть. В данном случае промокод высылается юзеру по электрической почте либо повторяющий SMS. Предложения с бездепозитными призами за регистрацию разрешают новым заведениям заинтересовать аудиторию на собственный вебсайт. А игроки в свою очередь получают вероятность выступать на реальные средства без депо в казино и заработать маленькой стартовый капитал, который разрешается исключить на карту банка или электронный кошелек.
#7764 Charlesgunny
Ходнева Светлана Владимировна порно букмекерская контора фонбет <a href=https://strelochnik.com/>казино сочи</a> Хорова Наталья Александровна порно казино рулетка <a href=https://slon-ru.com/>букмекерская контора леонов</a> Юдаева Ксения Валентиновна порно Фастова Елена Владимировна порно 1×bet телефон казино сегодня мобильные букмекерские конторы человек казино порно с Илья Осипов (киберспорт)
#7765 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7766 Charlesgunnyhttp://filmkachat.ru
1×slot официальный сайт
Максимальная ставка ? уточняется в еденице счета и ограничивает размер ставки за один спин. В случае ее превышения приз имеет быть аннулирован. Также в правилах может находиться запрет на размещение ставок определенного облика, например, по равным шансам в рулетке (другими, на чет либо нечет, красное либо темное и т.д. ).В большинстве заведений сделать это возможно по e-mal, по номеру телефона, через социальную сеть либо гугл-аккаунт. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots casino 777 online</a> В случае установленного лимита на сумму вывода выигрыша с бездепозитного приза, игрок не может исключить больше заявленной суммы.Риск-игра по одинаковым шансам – Также казино возможность запрещать исполнять условия по отыгрышу за раунда на удвоение, который предлагается в слотах, видео-покере и неких других играх. <a href=https://www.as7abe.com/wall/blogs/post/60174>https://www.as7abe.com/wall/blogs/post/60174</a> 1×slots регистрация то дальше необходимо пройти <a href=https://clients1.google.com.co/url?q=https://doctorlazuta.by/>https://clients1.google.com.co/url?q=https://doctorlazuta.by/</a> Мы советуем не отрицаться от сходственных предложений знаменитых казино. Выделите некоторое мин. На регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сегодня удача будет на вашей стороне!Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки шансы запросить вспомогательные документы или инициировать короткое общение по Skype.
1×slots регистрация 1×slots casino 777 online
1×slots официальный сайт, скачать <a href=http://domocontrol.ru/user/PhilipFlaks/>http://domocontrol.ru/user/PhilipFlaks/</a> 1×slots зеркало этих способов предполагает регистрацию Практически все интернет казино с бездепозитным бонусом за регистрацию предусматривает программу преданности — систему одобрения постоянных посетителей, кот-ая состоит из большого значений. При достижении игроком одного значения на его счёт поступает приз. Чем повыше уровень — тем щедрее бонус.Предложения с бездепозитными бонусами за регистрацию позволяют свежим заведениям заинтересовать аудиторию на свой сайт. А игроки тому получают вероятность выступать на реальные деньги без депозита в казино и заработать малый стартовый капитал, кот-ый разрешено исключить на карту банка или электрический кошелек.
1×slots зеркало регистрация то дальше необходимо пройти
В игровых клубах без лицензии Вы покупаете „кота в мешке“ и если, тогда, спорных обстановок нет возможности куда-то пожаловаться и доказать собственную правоту. <a href=https://ekvall.co/member.php?action=profile&uid=38328>https://ekvall.co/member.php?action=profile&uid=38328</a> Демоказино есть почти на каждом сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются существенно пореже: там если, тогда, выигрыша и соблюдения критерий промоакций бездеп возможно перевоплотить в реальные средства. 1×slots казино зеркало
1×slots зеркало видели такую регистрацию на
<a href=https://www.katzenforum.at/forum/media/users/jamesagema.16012/>1хслотс 1хслотс регистрация перейти на 1×slots</a> 1 хслот регистрация в 1×slots casino <a href=http://eurasiaaz.com/index.php?subaction=userinfo&user=Josephweece>http://eurasiaaz.com/index.php?subaction=userinfo&user=Josephweece</a>
1хслот зеркало сайта
Фриспины без депозита или дополнительные свои помогут ближе познакомиться с игровой платформой и её функциями. За счёт даров возможно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради забавы напротив живых крупье. <a href=https://ai.igcps.com/home.php?mod=space&uid=730181&do=profile>https://ai.igcps.com/home.php?mod=space&uid=730181&do=profile</a> казино 1×slots Также, ситуации нужно доказать собственный номер аппарата, результата код, полученный в смс-сообщении от клуба установить в особое фон в собственном кабинете игрока.
<b>Смотреть еще похожие новости:</b>
<a href=http://mandala-app.com/forums/memberlist.php?mode=viewprofile&u=3447>1хслотс рабочее зеркало на сегодня</a>
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1244#post-38048>1× slots регистрация в 1×slots casino</a>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5027/#comment-604609>1×slots зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Ещё одно распространённое акционное предложение – симпатичный презент с сомнительными требованиями. К образцу, клуб сулит $100 в качестве бездепа, хотя с вейджером х80 либо х100. Отыграть такой вейджер фактически невероятно и потому другого, как концентрироваться на больше занимательных акциях. Риск-игра по равным шансам – Также казино имеет воспрещать выполнять обстоятельства по отыгрышу счет раунда на удвоение, который предлагается в слотах, видео-покере и некоторых иных забавах.
#7767 Charlesgunny
Комарова Наталья Владимировна порно inform@rucriminal.info <a href=https://www.ossetia.tv/>Кузнецова Анна Юрьевна порно</a> порно с Евгений Малкин (хоккей) букмекерская контора бетсити <a href=https://repost.news/>pin up букмекерская контора</a> pin up casino пин порно с Аделия Петросян (фигурное катание) 1×bet официальный сайт порно с Максим Глушенков (футбол) casino buzz букмекерская контора без гама казино
#7768 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7769 Charlesgunny
open ai nsfw nsfw ai gif <a href=https://cruzdpzg18529.vidublog.com/29617825/ai-nude-app-the-future-of-content-moderation-and-privacy-protection>nsfw ai chat</a> ai боты без nsfw бесплатный etm ai nsfw <a href=http://forum.hobbytula.ru/index.php?action=profile;u=3698>free nsfw ai</a> ai nsfw gallery character ai nsfw reddit chat ai bot girl nsfw как отключить nsfw фильтр в character ai nsfw chat with ai moemate char ai nsfw ai nsfw chat animal
#7770 Charlesgunny
секс nsfw ai chat furry nsfw ai <a href=https://riverqzip41852.post-blogs.com/51750853/deepnude-ai-navigating-the-controversial-landscape-of-image-manipulation-technology>free nsfw ai</a> ai face swap nsfw ai role play nsfw <a href=https://augustuwvu39506.blogocial.com/unlocking-the-strength-of-undress-ai-a-deep-dive-into-nsfw-content-generation-65498901>ai art nsfw</a> janitor ai nsfw uncensored ai image nsfw nsfw ai скачать nsfw ai чат с фото ai nude nsfw hi ai есть ли фильтр nsfw сайты ai nsfw
#7771 Charlesgunny
nsfw ai chat nicole watterson https perchance org ai nsfw image <a href=https://elliotaiqx85296.aioblogs.com/83782674/deepnude-the-dark-side-of-ai-and-digital-manipulation>nsfw ai generator</a> генерация изображения ai без цензуры nsfw nsfw боты бесплатно ai <a href=https://fernandomkfa11233.activosblog.com/29623535/the-ethics-and-controversy-surrounding-deepnude-a-closer-look-at-ai-s-dark-side>nsfw ai bot</a> ai art nsfw nsfw ai generator no registration nsfw 5 year old daughter ai chat nsfw ai chat no registration ai girlfriend nsfw sex nsfw ai chat android nsfw ai sexting
#7772 Charlesgunny
nsfw chst ai perchance ai nsfw image <a href=http://himagro.md/forum/user/42003/>nsfw ai generator</a> ai girlfriend roleplay nsfw character ai how to enable nsfw <a href=https://judahzwrh53221.blogproducer.com/36810747/deepnude-the-dark-side-of-ai-and-digital-manipulation>nsfw ai</a> best nsfw ai bots nsfw chat ai no pay free messages ai персонажи nsfw ai nsfw gallery poly ai есть ли nsfw ai nsfw comix generator nsfw ai free sexting
#7773 Charlesgunny
free nsfw ai cat milf ai girlfriend nsfw <a href=http://sysadminday.ru/index.php?subaction=userinfo&user=epitin>nsfw ai generator</a> ai allowing nsfw ai chat girl voice nsfw <a href=http://prosmart.by/index.php?subaction=userinfo&user=oqokibyj>character ai nsfw</a> nsfw ai art generator ai futa nsfw tavern ai nsfw ai character vk nsfw ai girlfriend nsfw no limit free hosemistress nsfw ai nsfw ai чат
#7774 Charlesgunny
perchance ai image generator nsfw nsfw ai chat game <a href=https://collinyuoe32109.ttblogs.com/9857625/deep-nude-the-ethical-dilemmas-and-technological-impacts-of-ai-driven-image-manipulation>nsfw ai generator</a> ai chat nsfw 18 как выключить nsfw фильтр в c ai <a href=https://cncfa.com/home.php?mod=space&uid=2571724>nsfw ai chat</a> character ai без nsfw фильтра бесплатно лучшие ai nsfw nsfw ai futa chat nsfw ai art reddit ai nsfw video generator free nsfw ai generation anime ai chat porno nsfw
#7775 Empathy_center_aritahttps://empathycenter.ru/
Добрый день! Центр ментального здоровья «Эмпатия». Цель каждого специалиста нашей команды – забота о ментальном здоровье людей через предоставление как можно более доступной и качественной медицинской помощи, а также через психопросветительскую деятельность и дестигматизацию ментальных расстройств. Панова Надежда Вячеславовна главный врач центра „Эмпатия“. <a href=https://empathycenter.ru/preparations/a/amantadin/>таблетки амантадин</a> Если Центр ментального здоровья Эмпатия с более чем 60 работающих специалистов и врачей в Реутове и Москве, то это в сети клиник доказательной психиатрии https://empathycenter.ru/ . Звоните к нам и узнавайте по бесплатному номеру телефона 8–800–775–07–12. До новых встреч!
#7776 Charlesgunny
perchance prg nsfw ai nsfw ai чат с фото <a href=https://modest-sparrow-m5p134.mystrikingly.com/>nsfw ai chat</a> ai talking nsfw 18 nsfw ai art porno telegram <a href=http://forums.wolflair.com/member.php?u=116220>character ai nsfw</a> nsfw ai art generator nsfw ai prompt character ai alternatives without nsfw ai nsfw bot tg nsfw chat ai top nsfw ai chat anime and game chai ai nsfw
#7777 Charlesgunny
character ai nsfw аналоги nsfw chat character ai ai скачать <a href=http://5.101.112.134/profile/ewibavu/>character ai nsfw</a> best nsfw ai bots furry yiff ai nsfw chats <a href=https://www.riptapparel.com/pages/member?nodressio5>nsfw ai</a> nsfw ai fantasy game talkie ai nsfw nsfw ai no sign character ai как включить nsfw nsfw ai chat ender dragon nsfw изнасилование лары ai ai боты для бесплатного создания nsfw картинок
#7778 Charlesgunny
ai chat nsfw girlfriend anime porn chat ai nsfw free <a href=https://lorenzobjsa86397.wssblogs.com/30342082/deepnude-ai-navigating-the-fine-line-between-innovation-and-ethics>nsfw ai chat</a> nsfw ai chat no sign up ai nsfw comix generator <a href=https://www.catchgod.com/space-uid-134725.html>nsfw ai</a> nsfw ai prompt ai roleplay chat nsfw call nsfw ai bots free nsfw ai chat apk nsfw ai rp ai diffusion nsfw ai nsfw online free
#7779 Charlesgunny
nsfw ai no message limit novel ai nsfw <a href=https://conneraktb96307.elbloglibre.com/30246327/nude-ai-the-ethical-and-technological-challenges-of-artificial-intelligence>ai art nsfw</a> free porn ai nsfw секс nsfw ai chat <a href=https://troyluem31852.blogsvila.com/30428666/deepnude-ai-navigating-the-fine-line-between-innovation-and-ethics>nsfw ai chat</a> character ai nsfw скачать nsfw ai games nsfw ai без регистрации character ai nsfw контент nsfw ai sexting nsfw ai generator download как обойти nsfw фильтр в character ai
#7780 Charlesgunny
free ai nsfw sex chats top nsfw ai <a href=http://trekliano.eu/index.php?subaction=userinfo&user=uvepywuxo>character ai nsfw</a> боты nsfw character ai nsfw ai virt chat free <a href=http://www.ironbodies.com/userinfo.php?uid=61243>nsfw ai chat</a> character ai как обойти nsfw фильтр цензуру замена c ai без фильтра nsfw nsfw ai чаты без ограничений nsfw loli ai character ai как включить nsfw nsfw ai на телефон ai nsfw text free
#7781 Charlesgunny
the best nsfw gay ai chat nsfw ai chat no filters <a href=https://jaredtdls52974.blogdosaga.com/30221540/ai-nude-revolutionizing-content-moderation-and-privacy-protection>nsfw ai generator</a> nsfw chatgpt free ai tool nsfw ai gif <a href=https://connervzxt00000.diowebhost.com/85377377/nude-ai-app-navigating-the-balance-between-privacy-and-technology>nsfw ai generator</a> sexting ai girlfriend nsfw 18 perchance ai image generator nsfw nsfw как убрать ограничение character ai ai nsfw картинки nsfw chat ai top nsfw ai app seaart ai nsfw
#7782 Charlesgunny
ai face swap nsfw giantess ai generator nsfw <a href=https://narodovmnogo-omsk.ru/forum/user/5899/>nsfw ai chat</a> аналоги character ai без nsfw фильтра nsfw ai furry porn generator <a href=https://dantemfwl66776.pages10.com/deep-nude-exploring-the-ethics-and-impact-of-ai-powered-image-manipulation-65872681>nsfw ai</a> создание аниме карта nsfw ai nsfw ai cara delevigne nsfw ai pics character ai без nsfw альтернатива nsfw image edit ai nsfw ai chat bot nsfw ai girl free
#7783 Charlesgunny
sailo ai bot nsfw ai girlfriend nsfw no sign up <a href=http://xiangnianro.imotor.com/space.php?uid=2010215>nsfw ai</a> nsfw chating ai free sexting ai girlfriend nsfw <a href=https://archervfow63185.blogdun.com/30873742/deepnude-the-dark-side-of-ai-technology-and-its-ethical-implications>nsfw ai bot</a> nsfw ai porn generator ????? ai animated 3d porn nsfw 6 генератор nsfw ai nsfw ai character generator nsfw ai хентай чат free nsfw ai chatbot nsfw ai generator no registration
#7784 Charlesgunny
nsfw ai chat no registration ai чат бот nsfw <a href=https://edwinijhf83949.blogripley.com/30109347/the-reducing-fringe-of-nsfw-ai-discovering-the-features-of-undress-ai>ai art nsfw</a> open ai nsfw ai nsfw free bots <a href=http://donggoudi.com/home.php?mod=space&uid=1204875>ai art nsfw</a> free nsfw ai generator remove character ai nsfw filters ai chat nsfw cr top 8 nsfw ai models ollama hi ai nsfw ai girlfriend nsfw no limit free ai chat nsfw tailsko
#7785 Charlesgunny
shido ryusei ai chat nsfw ai nsfw text free <a href=http://favorit-games.ru/profile.php?u=inagigeh>ai art nsfw</a> perchance prg nsfw ai nsfw ai no sign <a href=http://uz-test.ru/index.php?subaction=userinfo&user=odufuh>nsfw ai bot</a> chat ai nsfw unlimited free top nsfw ai ai girl gallery nsfw sakura haruno nsfw ai chat character ai nsfw скачать nsfw hypnosis ai chat ai generated games nsfw
#7786 Charlesgunny
ai photo editor nsfw character ai nsfw <a href=https://elliottqsqo28384.blogdosaga.com/29434347/the-reducing-edge-of-nsfw-ai-discovering-the-functions-of-undress-ai>character ai nsfw</a> free nsfw ai cat nsfw ai fantasy game <a href=http://bbs.yunduost.com/home.php?mod=space&username=yleniron>nsfw ai</a> shido ryusei ai chat nsfw ai generated arts free unlimited nsfw ais бесплатный nsfw ai chat character ai nsfw скачать telegram nsfw ai chat ai nsfw free bots unrestricted nsfw ai image generator
#7787 Charlesgunny
gay nsfw ai chat nsfw ai без ограничений <a href=https://connerstvr01233.develop-blog.com/36710092/deepnude-the-dark-side-of-ai-and-digital-manipulation>ai art nsfw</a> секс nsfw ai chat 18 nsfw ai art porno telegram <a href=https://knoxumfw10990.howeweb.com/30874803/deepnude-the-dark-side-of-ai-technology-and-its-ethical-implications>nsfw ai generator</a> chai ai nsfw аналоги character ai без nsfw фильтра nsfw ai tools kristoph gavin chat ai nsfw nsfw generator ai chat bot sakura ai nsfw sakura ai nsfw
#7788 Charlesgunny
ai story generator nsfw best nsfw ai <a href=https://nodressio11.hashnode.dev/nodressio1>nsfw ai generator</a> nsfw chatgpt free ai tool chat ai nsfw unlimited free <a href=https://www.buhgalteria.ru/forums/user/78822/>nsfw ai chat</a> ai чат nsfw бесплатно nun nurse latex ai nsfw вконтакте реалистичный nsfw ai бот как в c ai отключить фильтр nsfw character ai как обойти nsfw фильтр цензуру nsfw ai text character ai without nsfw filter
#7789 Charlesgunny
nsfw ai chat girlfriend nsfw ai chat harley quinn <a href=https://andresuqiw98766.blogdon.net/deepnude-ai-navigating-the-complexities-of-image-manipulation-and-ethics-46478673>nsfw ai chat</a> nsfw ai без ограничений call nsfw ai bots free <a href=https://brookstcfc12333.articlesblogger.com/53363585/deepnude-ai-navigating-the-controversial-landscape-of-ai-generated-content>character ai nsfw</a> nsfw ai charai uncensored ai generator nsfw альтернатива character ai без nsfw фильтра ai боты без nsfw nsfw ai charai nsfw ai charai lopunny nsfw ai chat
#7790 Charlesgunny
nsfw ai generation nsfw ai chat <a href=http://forum.master-namereniya.ru/profile.php?mode=viewprofile&u=6274>character ai nsfw</a> ai nsfw gener alpha nsfw character ai <a href=https://cruzdpzg18529.vidublog.com/29617825/ai-nude-app-the-future-of-content-moderation-and-privacy-protection>free nsfw ai</a> nsfw ai no message limit remove character ai nsfw filters free nsfw ai image generators character ai как обойти nsfw фильтр цензуру nsfw ai porno best ai nsfw chat free top free nsfw ai chats
#7791 Charlesgunny
turn off nsfw filter character ai ai generated nsfw девушки леордадс галерея фото <a href=http://lsdsng.com/user/579922>free nsfw ai</a> ai generated arts free unlimited nsfw ais ai nsfw image to image <a href=https://kylerwvqi67788.eedblog.com/30375901/deepnude-ai-navigating-the-fine-line-between-innovation-and-ethics>character ai nsfw</a> nsfw ai на телефон giantess ai generator nsfw character ai как включить nsfw nsfw chat ai без ограничений nsfw ai story ai generated games nsfw furry gay ai nsfw chat
#7792 Charlesgunny
character ai nsfw how nsfw ai generator no login <a href=http://changye.com.cn/bbs/home.php?mod=space&username=isosifot>nsfw ai generator</a> moescape ai nsfw nsfw hentai ai character bot image <a href=https://rock8899.com/home.php?mod=space&uid=2471632>nsfw ai bot</a> скачать nsfw c ai ai chat nsfw rus nsfw ai generation nsfw ai chat free unlimited text ai porn nsfw the best nsfw gay ai chat ai nsfw gallery
#7793 Charlesgunny
ai nsfw 18 вк ai nsfw online free <a href=https://gunnerqbls52963.post-blogs.com/51750845/the-ethics-and-controversy-surrounding-deepnude-a-closer-look-at-ai-s-dark-side>nsfw ai</a> character ai nsfw filter bypass nsfw ai телеграм <a href=http://bbs.maibu.cc/space-uid-515251.html>character ai nsfw</a> ai talking nsfw nsfw ai chat ender dragon character ai alternatives without nsfw itch io nsfw ai cha ai nsfw character ai без nsfw фильтра скачать nsfw ai chat with photos free
#7794 Charlesgunny
nsfw ai bots telegram ai generator chat nsfw <a href=http://d992387h.bget.ru/index.php?subaction=userinfo&user=ybagoji>nsfw ai bot</a> nsfw chat ai top nsfw ai furry porn generator <a href=https://felixbddc83940.articlesblogger.com/52569069/deepfake-nudes-exploring-the-controversial-technologies-at-the-rear-of-nsfw-articles-generation>character ai nsfw</a> sakura haruno nsfw ai chat character ai на русском nsfw best nsfw ai generator аналоги character ai без nsfw фильтра ai without nsfw perchance ai image generator nsfw nsfw ai porn generator
#7795 Charlesgunny
ai nsfw chat perchance nsfw ai android <a href=https://safesspace.com/exploring-the-ai-face-swap-tool-fun-and-creative-uses/>nsfw ai chat</a> nsfw ai models ollama yaoi gay ai nsfw <a href=http://suvenir.k-78.ru/communication/forum/user/50027/>nsfw ai chat</a> murder drones nsfw chat ai ai боты для бесплатного создания nsfw картинок character ai без nsfw moescape ai nsfw ai story generator nsfw femboy nsfw ai chat nsfw ai chatbot
#7796 Charlesgunny
nsfw picture ai free nsfw ai reddit <a href=http://galiaf.net/index.php?subaction=userinfo&user=yqusope>nsfw ai generator</a> yodayo advanced ai nsfw art generator nsfw ai chat 50 massengers <a href=http://sportchap.ru/index.php?subaction=userinfo&user=ylicavik>nsfw ai</a> moescape ai nsfw ai nude nsfw nsfw ai sites femboy nsfw ai chat ai nsfw roleplay free nsfw character ai взлом ai rp nsfw ru
#7797 Junkgarbageremoval_Inomshttps://junkgarbageremoval.com/
Hello everyone! Useful and excellent news for almost all people, for any kind and type of activity! The question of cleaning and removing garbage, as well as removing boats, furniture, car homes and all sorts of junk always and constantly arises. If you need to remove various trash and other trash, do dismantling, then you are in the right place. In general, if you are looking for, pro junk dispatch junk removal, clean up & clean outs, etc., for example: <a href=https://junkgarbageremoval.com/>estate cleanout phoenix arizona</a> Then you need to go to the Pro Junk Dispatch website right now and find out all the details about junk removal and hauling service, affordable furniture removal, property clean outs, and clean up, rv removal, junk removal, boat removal, estate cleanout, etc. https://junkgarbageremoval.com/ . Be sure to go to the site junkgarbageremoval.com , save it to your bookmarks and study the information, do not forget to write down the site address. See you soon!
#7798 Charlesgunny
top nsfw ai ai chat nsfw girl <a href=http://japanese-cars.ru/profile.php?u=acijen>nsfw ai bot</a> ai чат nsfw бесплатно ai generated porn nsfw pics image jpg <a href=http://cmsthemefinder.com/userinfo.php?uid=36621#>free nsfw ai</a> бесплатный nsfw ai chat nsfw ai sexting nsfw ai gallery 18 nsfw ai chat no sign up ai photo generator nsfw top nsfw generator ai nsfw ai io
#7799 Charlesgunny
ai nsfw xxx nsfw ai взлом <a href=https://angelovuni57666.sharebyblog.com/30195298/deepnude-ai-navigating-the-fine-line-between-innovation-and-ethics>free nsfw ai</a> ai боты без nsfw фильтра nsfw ai unlimited messages <a href=http://ukrtibet.net/index.php?subaction=userinfo&user=ifenimani>ai art nsfw</a> ai nsfw hentai views discord nsfw ai character ai nsfw аналоги uncensored ai image nsfw free ai nsfw sex chats ai make nsfw аналоги character ai без nsfw
#7800 Charlesgunny
nsfw ai sexting nsfw ai generator no registration <a href=https://kameronbfzv01099.mdkblog.com/36007213/nude-ai-understanding-the-intersection-of-innovation-and-ethics-in-image-manipulation>free nsfw ai</a> gojo ai chat nsfw unlimited free character ai chat nsfw <a href=https://holdenkmli95061.blogzag.com/73813336/the-increase-of-deepfake-deal-with-swapping-how-ai-is-transforming-personalized-media>nsfw ai generator</a> ai photo editor nsfw аналоги character ai без фильтра nsfw бесплатно nsfw ai без ограничений ai girlfriend nsfw meowchat ai nsfw ai nsfw chat loli nsfw sex ai chat
#7801 Charlesgunny
ai nsfw game master ai generated nsfw девушки леордадс галерея фото <a href=https://rafaelyfhg68901.blog-eye.com/30401829/nude-ai-the-ethical-and-technological-challenges-of-artificial-intelligence>nsfw ai</a> nsfw ai image creator nsfw ai chat unlimited messages <a href=http://erotikfoto.ru/index.php?subaction=userinfo&user=owisu>nsfw ai chat</a> nsfw ai story write ai generated nsfw nsfw hypnosis ai chat ai nsfw gif generator sakura ai nsfw top free nsfw ai chats nsfw ai porn generator
#7802 Charlesgunny
nsfw чат ai русский nsfw ai story write <a href=http://rusnord.ru/index.php?subaction=userinfo&user=omovagy>nsfw ai</a> ai nsfw online lora как отключить nsfw в character ai <a href=https://beckettprrm67777.blogpostie.com/52424356/nude-ai-exploring-the-boundaries-of-technology-and-ethics>nsfw ai chat</a> ai lora nsfw undress ai nsfw ai chat nsfw rus character ai похожие без nsfw perchance ai story nsfw nsfw ai chat на русском и бесплатно uncensored ai image generator nsfw
#7803 Charlesgunny
ai generated arts free unlimited nsfw ais spicy chat ai nsfw <a href=http://yxhsm.net/home.php?mod=space&uid=133296>nsfw ai</a> ai rp nsfw ru nsfw ai io <a href=https://dominickgdas88876.bloggip.com/30338285/deepnude-ai-navigating-the-fine-line-between-innovation-and-ethics>character ai nsfw</a> ai girlfriend chatbot nsfw ai nsfw girls nsfw picture ai free bahasa indonesia nsfw ai nsfw ai generator no registration nsfw chat character ai ai скачать ai story generator nsfw
#7804 Charlesgunny
nsfw ai apk ai rpg nsfw <a href=http://xn–h1a1ab.xn–p1ai/index.php?name=account&op=info&uname=ihobop>nsfw ai bot</a> nsfw ai story free nsfw ai porn text generator <a href=http://pro-tulu.ru/users/yfyhyhi>nsfw ai bot</a> nsfw ai chat porn sex ai nsfw ai nsfw generate free nsfw ai charai nsfw ai chat no registration free nsfw ai chat online sailo ai bot nsfw
#7805 Charlesgunny
ai nsfw image to image editor nsfw hypno ai chat unlimited messages images <a href=https://rowanffaw22211.blogsvila.com/30428742/nude-ai-the-ethical-and-technological-challenges-of-artificial-intelligence>free nsfw ai</a> porn chat ai nsfw free hosemistress nsfw ai <a href=https://tituskiif32108.tokka-blog.com/30530376/deep-nude-ethical-concerns-and-the-impact-of-ai-on-privacy>nsfw ai generator</a> nsfw ai porno nsfw gial ai chat porn chat ai nsfw free character ai nsfw контент nsfw ai text generator ai nsfw comix generator nsfw ai image generation
#7806 Charlesgunny
роль mantic nsfw ai чат nsfw ai generator no registration <a href=https://beckettenvc18429.review-blogger.com/52672946/ai-nude-app-the-future-of-content-moderation-and-privacy-protection>character ai nsfw</a> celebrity ai nsfw maker free nsfw ai image generator telegram unlimited <a href=http://spectr-sb116.ru/index.php?subaction=userinfo&user=ivohiw>nsfw ai</a> nsfw ai взлом charhub ai nsfw moescape ai nsfw nsfw ai story free furry nsfw ai scp 166 nsfw ai chat shido ryusei ai chat nsfw
#7807 Charlesgunny
perchance free nsfw ai nsfw ai chat with pictures <a href=https://rylanyhqy85307.educationalimpactblog.com/52589927/ai-nude-app-the-future-of-content-moderation-and-privacy-protection>nsfw ai chat</a> nsfw ai online ai girlfriend nsfw sex <a href=http://g3rmaica.de/elfredo/member.php?action=showprofile&user_id=21343>nsfw ai generator</a> nsfw ai chat tg ai генерация изображений nsfw nsfw ai creator лучшие замены character ai без nsfw фильтра nsfw текстовые игры ai ai futa nsfw ai боты без nsfw
#7808 Charlesgunny
как обойти nsfw фильтр в character ai best ai nsfw chat free <a href=http://sysadminday.ru/index.php?subaction=userinfo&user=epitin>nsfw ai bot</a> ai boy nsfw ai nsfw kissing free <a href=https://trentonebwo76542.blognody.com/30443956/deepnude-ai-navigating-the-controversial-landscape-of-image-manipulation-technology>free nsfw ai</a> ai без nsfw фильтра nsfw ai bot nsfw ai боты генератор nsfw ai замена character ai без nsfw ai nsfw kissing free open ai nsfw
#7809 Charlesgunny
top nsfw ai character ai как обойти nsfw фильтр цензуру <a href=http://sgs-penza.ru/index.php?subaction=userinfo&user=obiceh>nsfw ai</a> ai nsfw cuckold character ai how to enable nsfw <a href=https://kylerwvqi67788.eedblog.com/30375901/deepnude-ai-navigating-the-fine-line-between-innovation-and-ethics>nsfw ai</a> live3d nsfw ai art generator pony diffusion prompt art ai nsfw nsfw ai чат ai персонажи nsfw замена character ai без nsfw фильтра ai девушка nsfw free ai nsfw sex chats
#7810 Charlesgunny
yaoi gay ai nsfw аналоги character ai без nsfw фильтра <a href=https://chancefowe07519.theisblog.com/30503118/ai-nude-revolutionizing-content-moderation-and-privacy-protection>nsfw ai bot</a> ai nsfw game master telegram nsfw ai chat <a href=https://cristianpmlf22109.bloggip.com/30338306/deep-nude-ethical-concerns-and-the-impact-of-ai-on-privacy>nsfw ai bot</a> best nsfw ai chatbots the best nsfw gay ai chat ai девушка nsfw ai персонажи nsfw nsfw gbt ai ai nsfw writing generator talkie ai nsfw
#7811 Charlesgunny
ai nsfw hentai views the best nsfw gay ai chat <a href=http://www.mrkineshma.ru/support/forum/view_profile.php?UID=227503>free nsfw ai</a> скачать character ai без nsfw alpha nsfw character ai <a href=http://uz-test.ru/index.php?subaction=userinfo&user=odufuh>nsfw ai bot</a> character ai nsfw how генераторы nsfw ai бесплатные бесплатный nsfw ai chat nsfw ai porn generator ai lora nsfw nsfw как убрать ограничение character ai ai chat with any characters nsfw
#7812 Charlesgunny
ai nsfw generate free nsfw ai without registration <a href=https://www.intensedebate.com/people/nodressio1>nsfw ai</a> nsfw ai girl free ai role play nsfw <a href=https://daltonnpom17273.blogzet.com/unlocking-the-strength-of-undress-ai-a-deep-dive-into-nsfw-written-content-development-44301585>nsfw ai bot</a> ai боты для бесплатного создания nsfw картинок ai character vk nsfw sakura ai nsfw альтернатива character ai без nsfw фильтра nsfw gial ai chat ai story generator nsfw ai nsfw girls
#7813 Charlesgunny
аналоги character ai без nsfw фильтра лучшие замены character ai без nsfw фильтра <a href=https://andresajsb86455.designertoblog.com/61714919/nude-ai-app-navigating-the-balance-between-privacy-and-technology>nsfw ai generator</a> nsfw ai erotic ai sexting ai girlfriend nsfw <a href=http://starterkit.ru/html/index.php?name=account&op=info&uname=obobywoq>nsfw ai</a> nsfw gay ai remove character ai nsfw ai боты без nsfw фильтра nsfw ai chat android nsfw ai chat with photos free nsfw чат ai русский ai art 18 nsfw
#7814 Erotichttps://sex-wien.ru
sexanzeigen wien <a href=https://sex-wien.ru/>sexkontakt wien</a>
#7815 Leroysquichttps://pegasus-airavia.ru
Летайте выгодно с <a href=https://pegasus-airavia.ru/>Pegasus Airlines</a> предлагаем доступные билеты, удобные маршруты и современный сервис. Внутренние и международные рейсы для комфортных путешествий.
#7816 RichardPafhttps://www.wildberries.ru/seller/479523
Наши <a href=https://www.wildberries.ru/seller/479523>спортивный бюстгальтер</a> предлагают идеальное сочетание стиля и комфорта. Выберите бюстгальтер без косточек для мягкой поддержки или кружевной бюстгальтер для романтичного образа. Для будущих мам подойдут бюстгальтеры для беременных и бюстгальтеры для кормления. Обратите внимание на бюстгальтер с пуш-ап для эффекта увеличения груди и комфортные бюстгальтеры для повседневного ношения.
#7817 Lancesemhttps://podarki-suveniry-vip.ru
Интернет – магазин уникальных сувениров от производителя <a href=https://podarki-suveniry-vip.ru/>https://podarki-suveniry-vip.ru</a>
#7818 Charlesgunny
ai teen nsfw ai generator 18 nsfw <a href=https://dallasyuoh54433.theobloggers.com/36430748/deepnude-ai-navigating-the-controversial-landscape-of-image-manipulation-technology>nsfw ai bot</a> nsfw как убрать ограничение character ai nsfw изнасилование лары ai <a href=http://himagro.md/forum/user/42003/>nsfw ai generator</a> nsfw character ai com nsfw ai futanari лучшие ai nsfw uncensored ai image nsfw free ai porno nsfw nsfw как убрать ограничение character ai nsfw image edit ai
#7819 Charlesgunny
nsfw images ai drew flat chest teen ai story generator nsfw <a href=https://edgartbkr52963.onzeblog.com/30307131/ai-nude-revolutionizing-content-moderation-and-privacy-protection>character ai nsfw</a> nsfw ai girl free ai image to video nsfw <a href=https://sketchfab.com/nodressio1>nsfw ai generator</a> nsfw ai generation anime nsfw ai chat apk scp 166 nsfw ai chat лучшие ai nsfw ai nsfw фото nsfw ai chatbot ai girl gallery nsfw
#7820 fildena double 200https://community.jmp.com/t5/user/viewprofilepage/user-id/62270
How can I get medication for over-the-counter eye redness relief https://community.jmp.com/…ser-id/62270 fildena 150mg tablet. Medications and Asthma Control – Breathing Freely, Living Fully
#7821 MiguelHek
http://amoxstar.com/ amoxicillin 500 mg tablet
#7822 Jamesjeorohttps://yandex.ru/maps/org/tsentr_tekhosmotra/4958508914/?ll=30.425840%2C59.893805&z=16
оформить ДК <a href=https://yandex.ru/maps/org/tsentr_tekhosmotra/4958508914/?ll=30.425840%2C59.893805&z=16>техосмотр 2024 купить</a>
#7823 promokody_jdEthttps://planeta.mybb.social
продамус промокод скидка на подключение <a href=https://mozaisk.anihub.me/viewtopic.php?id=4682#p9296>https://forumbar.anihub.me/viewtopic.php?id=9823#p</a> .
#7824 Ремонт телефонов Sony Москваhttps://remont-telefonov-sony-max.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали срочный ремонт телефонов sony, можете посмотреть на сайте: <a href=https://remont-telefonov-sony-max.ru/>ремонт телефонов sony</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#7825 Stephenprombhttps://helium-balloons.ru
шары с гелием <a href=https://helium-balloons.ru/>гелевые шары с доставкой</a>
#7826 Ремонт телефонов Realmehttps://remont-telefonov-realme-mob.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт телефонов realme адреса, можете посмотреть на сайте: <a href=https://remont-telefonov-realme-mob.ru/>ремонт телефонов realme цены</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#7827 Ronniesoghttps://playgama.com
Free Online Games <a href=https://playgama.com/>game</a> your gateway to a world of free online entertainment! Explore a vast collection of games, from puzzles and card games to action and arcade classics. Play instantly on any device without registration or downloads
#7828 MarcusCeshttps://silverugleron.ru
Назальный спрей <a href=https://silverugleron.ru/>Silver Ugleron</a> надежная защита вашего дыхания. Активный углерод и ионы серебра очищают носовые ходы, увлажняют слизистую и помогают бороться с бактериями.
#7829 Junkgarbageremoval_Inomshttps://junkgarbageremoval.com/
Good day! Excellent and useful news for almost all people, for any type and kind of activity! The question of cleaning and removing garbage, as well as removing car homes, furniture, boats and all sorts of junk always and constantly arises. If you need to do dismantling, remove various trash and other junk, then you are in the right place. In general, if you want to find, clean outs & clean up, pro junk dispatch junk removal, etc., for example: <a href=https://junkgarbageremoval.com/>garbage removal</a> Then you definitely need to go to the Pro Junk Dispatch website right now and find out all the details about junk removal and hauling service, affordable furniture removal, property clean outs, and clean up, estate cleanout, junk removal, rv removal, boat removal, etc. https://junkgarbageremoval.com/ . Be sure to go to the site junkgarbageremoval.com , study the information and save it to your bookmarks, do not forget to write down the site address. See you soon!
#7830 MiguelHek
http://clomidonpharm.com/ can i order cheap clomid pill
#7831 Charlesgunny
character ai without nsfw filter character ai без nsfw фильтра бесплатно <a href=http://shizheng.sabjy.com/home.php?mod=space&username=yrote>ai art nsfw</a> nsfw ai чат с фото ai nsfw free bots <a href=https://penzu.com/p/795a54b1d096247f>nsfw ai bot</a> perchance ai nsfw art uncensored nsfw ai ai girlfriend nsfw аналоги character ai без nsfw nsfw фильтр character ai nsfw ai chat на русском nsfw ai telegram
#7832 Charlesgunny
no login nsfw ai chatbot character ai nsfw bot <a href=https://tysonsohw87644.qodsblog.com/30326083/deepnude-the-dark-side-of-ai-technology-and-its-ethical-implications>nsfw ai chat</a> nsfw ai no sign аналоги character ai nsfw бесплатные <a href=http://d992387h.bget.ru/index.php?subaction=userinfo&user=ybagoji>nsfw ai bot</a> реалистичный nsfw ai бот character ai как обойти nsfw фильтр цензуру nun nurse latex ai nsfw вконтакте nsfw ai chat glory hole bahasa indonesia nsfw ai nsfw ai writer есть ли nsfw в character ai
#7833 Charlesgunny
ai nsfw roleplay free как убрать фильтр в character ai nsfw <a href=https://rylanyhqy85307.educationalimpactblog.com/52589927/ai-nude-app-the-future-of-content-moderation-and-privacy-protection>ai art nsfw</a> hailuo ai nsfw nsfw chat with ai moemate <a href=https://rafaelpziq52863.onesmablog.com/deep-nude-exploring-the-ethics-and-impact-of-ai-powered-image-manipulation-70686453>nsfw ai</a> hi ai nsfw ai girlfriend nsfw sex character ai nsfw filter ai generator nsfw futanari ai girl gallery nsfw shido ryusei ai chat nsfw nsfw character ai roleplay
#7834 Charlesgunny
nsfw ai chat girlfriend ai girlfriend roleplay nsfw <a href=https://trevorzmuz75185.collectblogs.com/74985357/discovering-the-frontier-of-ai-driven-deal-with-swap-movies-a-deep-dive-into-deepnude>nsfw ai chat</a> ai girlfriend nsfw боты nsfw character ai <a href=http://www.3vzq.com/space-uid-162510.html>nsfw ai</a> best nsfw character ai nsfw chat ai no pay free messages nsfw ai chat bot nsfw ai sexting with male characters nsfw chatgpt free ai tool c ai nsfw character ai без nsfw фильтра
#7835 Josephmiseehttps://china-top.ru
Автодоставка из Китая <a href=https://china-top.ru/>https://china-top.ru</a> быстрая и надежная транспортировка товаров. Полный цикл: от оформления документов до доставки на склад клиента.
#7836 MiguelTahhttps://ukrainianpages.com.ua
Журнал про строительство и ремонт <a href=https://ukrainianpages.com.ua/>https://ukrainianpages.com.ua</a> профессиональные статьи о ремонте любой сложности. Как оптимизировать расходы, найти подрядчиков и добиться идеального результата.
#7837 Charlesgunny
ai girl gallery nsfw ai без nsfw без nsfw <a href=http://testowik.ru/index.php/forum/user/54697-uhymo>free nsfw ai</a> character ai похожие без nsfw nsfw chat ai top <a href=http://548382.com/home.php?mod=space&uid=13655>free nsfw ai</a> character ai nsfw alternatives ai chat nsfw 18 бесплатный nsfw ai chat с генерацией фото character ai nsfw reddit nsfw art ai generator free nsfw loli ai nsfw ai text to image online
#7838 Charlesgunny
nsfw ai porno ai bot chat with sage nsfw <a href=https://andyprrr01234.isblog.net/deepnude-the-dark-side-of-ai-and-digital-manipulation-47524223>character ai nsfw</a> character ai без nsfw фильтра free nsfw ai image <a href=http://bts.clanweb.eu/profile.php?lookup=40041>ai art nsfw</a> nsfw ai генератор картинок giantess ai generator nsfw nsfw ai chat with photos free charhub ai nsfw nsfw chat ai app nsfw ai bot jenny wakeman nsfw ai chat
#7839 Charlesgunny
nsfw ai voice nsfw ai чат с фото <a href=http://forum.farmer.pl/profile/151471-ehyky/>nsfw ai chat</a> remove character ai nsfw filters ai chat girl voice nsfw <a href=https://zaneppkg33334.isblog.net/deepnude-ai-navigating-the-complexities-of-image-manipulation-and-ethics-47524107>nsfw ai</a> nsfw ai without registration unholy bait 18 nsfw ai ai nsfw фото free nsfw ai chat jack perchance free nsfw ai free ai sexy little girl nsfw image как отключить nsfw фильтр в character ai
#7840 Charlesgunny
ai nsfw 18 вк free nsfw ai art <a href=http://borsa-motokari.com/user/ekala>nsfw ai</a> undress ai nsfw character ai без nsfw фильтра скачать <a href=https://alexoutlook.com/how-to-create-engaging-content-with-face-swap-videos-tool-tips-and-tricks/>nsfw ai generator</a> perchance ai nsfw art perchance ai nsfw image character ai alternatives without nsfw filter character ai без nsfw фильтра скачать nsfw ai futanari ai nsfw story writer character ai как обойти nsfw фильтр цензуру
#7841 Charlesgunny
ai generated images nsfw lopunny nsfw ai chat <a href=https://daltonlmll06172.bloggazzo.com/28972670/the-reducing-edge-of-nsfw-ai-discovering-the-attributes-of-undress-ai>nsfw ai bot</a> stable diffusion ai nsfw ai picture generator nsfw <a href=http://www.audipiter.ru/index.php?subaction=userinfo&user=ivyrofa>nsfw ai chat</a> nsfw ai chat ender dragon nsfw ai story nsfw ai naked ai girl gallery nsfw discord nsfw ai anime nsfw ai ai girl gallery nsfw
#7842 Charlesgunny
perchance prg nsfw ai ai nsfw hentai смотреть <a href=http://aydinproses.com/index.php?subaction=userinfo&user=ideny>free nsfw ai</a> murder drones nsfw chat ai nsfw images ai petite hot <a href=http://bbs.all4seiya.net/home.php?mod=space&uid=974551>nsfw ai chat</a> character ai without nsfw perchance ai nsfw character ai похожие без nsfw фильтра nsfw ai чат с фото flux ai nsfw nsfw loli ai nsfw ai fantasy game
#7843 Charlesgunny
best ai nsfw chat free nsfw ai video <a href=http://xuwentcw.com/home.php?mod=space&uid=370289&do=profile>character ai nsfw</a> call nsfw ai bots free nsfw ai generator <a href=https://tech-edu.uk/the-undress-ai-tool-an-overview-of-its-features-and-functionality/>nsfw ai bot</a> nsfw ai взлом uncensored ai generator nsfw ai lora nsfw ai nsfw chat offline pc windows nsfw ai generator cha ai nsfw ai чат бот nsfw
#7844 Charlesgunny
chat ai bot girl nsfw nsfw ai unlimited <a href=https://52day0.top/home.php?mod=space&uid=7302&do=profile>ai art nsfw</a> 3d porno comics ai nsfw character ai alternatives without nsfw <a href=http://mos-it.ru/index.php?subaction=userinfo&user=ukynud>nsfw ai generator</a> ai nsfw chat loli nsfw ai art reddit giantess ai generator nsfw character ai nsfw аналоги moescape ai nsfw pokemon nsfw ai chats бесплатный nsfw ai chat с генерацией фото
#7845 Charlesgunny
novel ai nsfw nsfw ai chat на русском <a href=http://justworks.su/index.php?subaction=userinfo&user=umufaj>free nsfw ai</a> perchance ai nsfw undress ai nsfw <a href=https://simonwqhz10098.review-blogger.com/52672937/the-ethics-and-controversy-surrounding-deepnude-a-closer-look-at-ai-s-dark-side>nsfw ai</a> giantess ai generator nsfw ai nsfw video generator free top nsfw ai nsfw ai боты chai ai nsfw anime nsfw ai generator character ai alternatives without nsfw
#7846 Charlesgunny
nsfw ai chat futanari pony diffusion prompt art ai nsfw <a href=http://medimpex.kg/index.php?subaction=userinfo&user=ohuhipi>nsfw ai generator</a> free nsfw anime ai image generator ai girl gallery nsfw <a href=http://taran63.ru/index.php?subaction=userinfo&user=ejobisu>free nsfw ai</a> nsfw picture ai free free porn ai nsfw sunset shimmer nsfw chat ai ai gf nsfw ai nsfw girls hi ai есть ли фильтр nsfw nsfw ai unlimited
#7847 Charlesgunny
ai girlfriend nsfw sex character ai без nsfw фильтра <a href=https://brookschii45677.rimmablog.com/29784075/the-ethics-and-controversy-surrounding-deepnude-a-closer-look-at-ai-s-dark-side>nsfw ai</a> ai roleplay nsfw free with images nsfw ai models ollama <a href=https://reidcigg56788.csublogs.com/36700579/deep-nude-the-ethical-dilemmas-and-technological-impacts-of-ai-driven-image-manipulation>nsfw ai generator</a> nsfw ai chat anime and game nsfw ai generation anime nsfw ai генератор историй аналоги character ai без nsfw фильтра sonic nsfw ai nsfw ai futa chat nsfw ai by photo
#7848 Charlesgunny
ai nsfw game master jenny wakeman nsfw ai chat <a href=https://nodressio.mypixieset.com/experience/>nsfw ai bot</a> ai generation free nsfw nsfw chat ai no pay free messages <a href=https://cesarmvdl20741.blogkoo.com/nude-ai-understanding-the-intersection-of-innovation-and-ethics-in-image-manipulation-49927271>nsfw ai chat</a> ai nsfw content chapter ai nsfw free nsfw characters ai perchance ai story nsfw nsfw ai charai etm ai nsfw ai nsfw топ
#7849 Charlesgunny
nsfw ai chat no registration ai nsfw chat perchance <a href=https://devinmnqo79001.blogsvila.com/30428695/deep-nude-ethical-concerns-and-the-impact-of-ai-on-privacy>character ai nsfw</a> ai nsfw xxx chapter ai nsfw <a href=https://dantemfwl66776.pages10.com/deep-nude-exploring-the-ethics-and-impact-of-ai-powered-image-manipulation-65872681>free nsfw ai</a> chai ai nsfw ai боты без nsfw бесплатный flux ai nsfw unholy bait 18 nsfw ai nsfw chats ai скачать на андроид nsfw art ai generator free ai face swap nsfw
#7850 Charlesgunny
nsfw ai android nsfw ai на телефон <a href=https://dominickvenu64185.blogsidea.com/36555303/nude-ai-app-transforming-image-moderation-and-privacy-in-the-digital-age>nsfw ai bot</a> ai generated nsfw nsfw gpt ai <a href=http://yunduost.com/home.php?mod=space&uid=24451>ai art nsfw</a> nsfw ai pics generator ai девушка nsfw nsfw ai chat photo and video nsfw ai генератор историй секс nsfw ai chat порно nsfw ai top nsfw ai
#7851 Charlesgunny
ai nsfw chat loli nsfw ai video generator <a href=https://martinwsma10976.newsbloger.com/30847149/deepnude-the-dark-side-of-ai-technology-and-its-ethical-implications>nsfw ai chat</a> free nsfw ai art ariana grande nsfw chat ai <a href=https://beauvizw08520.mybloglicious.com/51280785/deepnude-ai-navigating-the-complexities-of-technology-and-ethics>nsfw ai chat</a> femboy nsfw ai chat ai generation free nsfw nsfw c ai free ai lora nsfw nsfw gial ai chat nsfw ai generation anime ai talking nsfw
#7852 Charlesgunny
ai chat porno nsfw nsfw ai no sign up <a href=https://beckettgqzh18520.gynoblog.com/29766512/deep-nude-understanding-the-implications-of-ai-generated-imagery>nsfw ai chat</a> ariana grande nsfw chat ai free nsfw ai art gen <a href=https://emiliowhpw74296.blogvivi.com/30870062/deep-nude-ethical-concerns-and-the-impact-of-ai-on-privacy>nsfw ai</a> top 10 ai for nsfw nsfw ai erotic chat ai girlfriend roleplay nsfw nsfw ai generator download ai nsfw фото nsfw crush ai nsfw ai no registration
#7853 Charlesgunny
character ai без nsfw фильтра бесплатно nsfw ai chat bot <a href=https://elliotttmdx00899.qodsblog.com/30326108/deep-nude-ethical-concerns-and-the-impact-of-ai-on-privacy>nsfw ai bot</a> ai nsfw писатель free character ai chat nsfw <a href=http://forum.combat-arnis.ru/profile.php?mode=viewprofile&u=351276>free nsfw ai</a> nsfw ai chat no sign up nsfw ai no sign ai photo generator nsfw nsfw furry ai generator ai generated arts free unlimited nsfw ais nsfw images ai drew flat chest teen nsfw ai chat nicole watterson
#7854 Charlesgunny
nsfw ai chat aphrodite hailuo ai nsfw <a href=http://megashipping.ru/index.php?subaction=userinfo&user=ajaqo>nsfw ai generator</a> замена c ai без фильтра nsfw nsfw ai <a href=https://jaredtdls52974.blogdosaga.com/30221540/ai-nude-revolutionizing-content-moderation-and-privacy-protection>nsfw ai</a> ai generated images nsfw nsfw ai бесплатно аналоги nsfw ai pictures free nsfw ai image generator telegram unlimited nsfw art ai generator free реалистичный nsfw ai бот furry ai nsfw chat
#7855 Charlesgunny
ai image to video nsfw nsfw ai no sign up <a href=http://agatbratsk.ru/index.php?subaction=userinfo&user=ywebyju>free nsfw ai</a> cara delevigne nsfw ai pics ai nsfw girls <a href=http://trj.easyye.com/home.php?mod=space&uid=140228&do=profile>ai art nsfw</a> nsfw как убрать ограничение character ai ai generated images nsfw hailuo ai nsfw nsfw ai models ollama lopunny nsfw ai chat ai без nsfw фильтра ai without nsfw filters
#7856 Charlesgunny
ai art anime nsfw ai talking nsfw <a href=http://retail-ts.ru/index.php?subaction=userinfo&user=ozakuso>nsfw ai</a> nsfw ai charai novel ai nsfw <a href=http://balticseamen.com/forum/index.php?action=profile;u=17227>nsfw ai bot</a> lopunny nsfw ai chat free nsfw ai art аналоги character ai без nsfw фильтра реалистичный nsfw ai бот character ai похожие без nsfw фильтра best nsfw character ai ai rpg nsfw
#7857 Charlesgunny
nsfw ai prompt nsfw ai чат с картинками бесплатно <a href=http://cobaki.ru/users.php?m=details&id=91801>nsfw ai chat</a> nsfw character ai roleplay nsfw images ai drew flat chest teen <a href=http://bbs.worldsu.org/home.php?mod=space&uid=197827>nsfw ai bot</a> ai image to video nsfw nsfw ai generator free porn ai nsfw unrestricted nsfw ai image generator ai nsfw image gallery and prompt ai generated pictur 18 nsfw hentai nsfw ai bots telegram
#7858 Charlesgunny
character ai without nsfw filter unrestricted nsfw ai image generator <a href=http://whatsauto.ru/profile.php?u=ewygala>nsfw ai chat</a> ai nsfw tg sunset shimmer nsfw chat ai <a href=https://riverqaip41853.onesmablog.com/nude-ai-app-navigating-the-balance-between-privacy-and-technology-70686371>ai art nsfw</a> nsfw ai gif free ai nsfw sex chats open ai nsfw порно nsfw ai ai generated pictur 18 nsfw hentai uncensored ai image nsfw shido ryusei ai chat nsfw
#7859 Ремонт телефонов Xiaomi Москваhttps://remont-telefonov-xiaomi-mos.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт телефонов xiaomi, можете посмотреть на сайте: <a href=https://remont-telefonov-xiaomi-mos.ru/>ремонт телефонов xiaomi</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#7860 Ремонт посудомоечных машинhttps://remont-posudomoechnyh-mashin-expert.ru/
Наш сервисный центр предлагает надежный <a href=https://remont-posudomoechnyh-mashin-expert.ru/>мастерская по ремонту посудомоечной машины на выезде</a> любых брендов и моделей. Мы понимаем, насколько значимы для вас ваши посудомоечные машины, и обеспечиваем ремонт первоклассного уровня. Наши профессиональные техники работают быстро и аккуратно, используя только качественные детали, что обеспечивает долговечность и надежность наших услуг. Наиболее общие проблемы, с которыми сталкиваются владельцы посудомоечных машин, включают проблемы с нагревом воды, неисправности насосов, программные сбои, неработающие разъемы и механические повреждения. Для устранения этих неисправностей наши профессиональные техники проводят ремонт нагревательных элементов, насосов, ПО, разъемов и механических компонентов. Обращаясь в наш сервисный центр, вы обеспечиваете себе надежный и долговечный сервис ремонта посудомоечной машины на дому. Подробная информация размещена на сайте: https://remont-posudomoechnyh-mashin-expert.ru
#7861 Josephhofhttps://nashinervy.ru/bez-rubriki/vyvod-iz-zapoya-i-kodirovka-ot-alkogolizma-na-domu-professionalnyj
Кодировка и вывод из запоя на дому <a href=https://nashinervy.ru/bez-rubriki/vyvod-iz-zapoya-i-kodirovka-ot-alkogolizma-na-domu-professionalnyj-podhod-k-vosstanovleniyu-zdorovya.html>https://nashinervy.ru/bez-rubriki/vyvod-iz-zapoya-i-kodirovka-ot-alkogolizma-na-domu-professionalnyj-podhod-k-vosstanovleniyu-zdorovya.html</a> безопасно, эффективно и анонимно. Помощь специалистов 24/7 для возвращения к трезвой жизни в комфортных условиях.
#7862 Davidcet
india online pharmacy <a href=" https://www.soumoli.com/home.php?… „>world pharmacy india</a> or <a href=“ http://erwap.ru/jump.php?… ">buy prescription drugs from india</a> https://clients1.google.gg/url?… mail order pharmacy india <a href=https://images.google.com.sg/url?q=https://indiapharmi.com>best india pharmacy</a> п»їlegitimate online pharmacies india and <a href=http://bocauvietnam.com/member.php?1567025-gwnjinlexh>Online medicine order</a> india pharmacy
#7863 Josephapponhttps://kry19.at
Официальные доступ <a href=https://kry19.at/>кракен ссылка</a> быстрый и безопасный доступ к сайту, обходя блокировки и сохраняя полную анонимность пользователей.
#7864 Parkertughttps://ukrainianpages.com.ua
Журнал про строительство и ремонт <a href=https://ukrainianpages.com.ua/>https://ukrainianpages.com.ua</a> профессиональные статьи о ремонте любой сложности. Как оптимизировать расходы, найти подрядчиков и добиться идеального результата.
#7865 Ремонт телевизоров LG Москваhttps://remont-televizorov-lg-ink.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт телевизоров lg цены, можете посмотреть на сайте: <a href=https://remont-televizorov-lg-ink.ru/>срочный ремонт телевизоров lg</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#7866 Josephwexhttps://techproduct.com.ua
Гид по ремонту <a href=https://techproduct.com.ua/>https://techproduct.com.ua</a> идеи и советы для самостоятельного ремонта: экономичные решения, готовые проекты, обзоры материалов и дизайнерские лайфхаки.
#7867 JosephInhahhttps://stinol.com.ua
Информационный портал о ремонте <a href=https://stinol.com.ua/>https://stinol.com.ua</a> практичные советы, проверенные методики и новинки рынка. Помощь в планировании, выборе подрядчиков и создании идеального пространства.
#7868 KevinCewhttps://solution-ltd.com.ua
Портал об архитектуре <a href=https://solution-ltd.com.ua/>https://solution-ltd.com.ua</a> информация о культовых проектах, новые технологии строительства, эстетика пространств и актуальные решения для городов и частных
#7869 Julessighttps://sevgr.org.ua
Информационный портал о ремонте <a href=https://sevgr.org.ua/>https://sevgr.org.ua</a> практичные советы, проверенные методики и новинки рынка. Помощь в планировании, выборе подрядчиков и создании идеального пространства.
#7870 Ремонт телевизоров Haierhttps://remont-televizorov-haier-key.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали срочный ремонт телевизоров haier, можете посмотреть на сайте: <a href=https://remont-televizorov-haier-key.ru/>ремонт телевизоров haier рядом</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#7871 Davidvalhttps://rvps.kiev.ua
Портал о ремонте <a href=https://rvps.kiev.ua/>https://rvps.kiev.ua</a> практичные рекомендации, дизайн-идеи, современные технологии и инструкции для успешного ремонта любого уровня сложно
#7872 Ronalddeenehttps://selma.com.ua
Журнал о строительстве и ремонте <a href=https://selma.com.ua/>https://selma.com.ua</a> советы экспертов, обзор материалов, тренды в интерьере и готовые решения для качественного ремонта вашего дома или офиса.
#7873 XMC-PL-BUMhttps://xmc.pl
Hello everyone,
I'm looking for advice on the most effective ways to promote a website. With so many methods out there—SEO, social media, email marketing, paid ads, and more—it can be overwhelming to figure out what works best.
Here are some questions to spark discussion:
Which promotion strategies have worked best for you? How do you balance organic versus paid methods? Are there specific tools or platforms you'd recommend for beginners? What are the biggest pitfalls to avoid when promoting a website? I'd love to hear your experiences and tips, whether you're a seasoned marketer or just starting out. Let's share knowledge and help each other grow!
Looking forward to your insights
#7874 BrianNuapshttps://rusproekt.org
Мастерская креативных идей <a href=https://rusproekt.org/>https://rusproekt.org</a> пространство для творчества и инноваций. Уникальные решения для дизайна, декора и проектов любого масштаба.
#7875 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало которую указывали при регистрации кстати
Осталось выбрать казино с бонусом за регистрацию и создать профиль. После активации подарка выигрыш зависимости от Фортуны и способностей.К раскаянию, нет. Почти все казино, настоятельно внесение желая бы 1-го минимального депозита для вывода выигрыша с бездепозитного бонуса. Также учитывайте, что исключить средства разрешено лишь на ту платежную систему, с которой был изготовлен депо. <a href=http://filmkachat.ru/>1×slos регистрация в 1×slots casino</a> На условиях отыгрыша бесплатных призов стопам остановиться подробнее. С ними связаны нюансы, коие нельзя оставить без внимания. <a href=https://www.myvipon.com/post/1222818/How-Product-Visualization-Services-Elevate-Your-amazon-coupons>https://www.myvipon.com/post/1222818/How-Product-Visualization-Services-Elevate-Your-amazon-coupons</a> Демоказино есть почти на любом веб-сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются существенно пореже: там в случае выигрыша и соблюдения условий промоакций бездеп возможно перевоплотить в реальные деньги.В бонусную программу множества операторов входят регулярные бездепы. Это пожизненные промоакции, поощряющие активных неизменных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают неизменные бонусы без депозита в размен на скопленные баллы преданности. 1× слот зеркало <a href=http://xn–2j1bj1bu79c8mb.com/bbs/board.php?bo_table=free&wr_id=294862>http://xn–2j1bj1bu79c8mb.com/bbs/board.php?bo_table=free&wr_id=294862</a> В интернете много знаменитых игорных площадок с привлекательными акционными предложениями. Однако внимательно разбирать условия десятков предложений времени надоест, ну и время отнимет количество. Поэтому наша команда подготовила ТОП-3 сайтов с наилучшими бездепозитными призами:Простая процедура получения бездепозитного бонуса, которая займет менее 2-х минут. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные.
1×slots сайт зеркало
Это также безвозмездные финансы, которые поступают на аккаунты свежеиспеченных геймеров последствии регистрирования. А необыкновенность этих призов произведено что, что обретенные деньги непременно по применять в продолжении назначенного медли.Выбрать казино с бездепозитным бонусом. У нас на сайте представлен перечень наилучших интернет казино, которые предлагают своим игрокам великодушные призы за регистрацию. <a href=https://forumauthority.com/thread-6630-post-39784.html#pid39784>1хслотс казино зеркало</a> 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=http://zeom.ru/index.php?subaction=userinfo&user=heartbreakingex>http://zeom.ru/index.php?subaction=userinfo&user=heartbreakingex</a> С не отыгранным бонусом запрещается превосходить объем наибольшей ставки. Нарушение сего обстоятельства последствия аннулирование выигрыша. 1×slots на любой вкус как пройти регистрацию Хотя благотворительные бонусы начисляются без депо, не исключено, что вас придется вносить деньги. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только последствии как, как новый заказчик впервые пополнит игровой счет.
1× slots casino официальный сайт
Бездеп с фриспинами имеет обхватывать всю коллекцию игр на сайте либо разработки 1-го провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш может быть выведен в как, как пользователь отыграет данную сумму. Возможность оценить полный функционал слотов — основное совершенство данной разновидности. Игроку становятся доступны те функции, коие отсутствуют в демонстрационном режиме, а вероятность выиграть реальные средства прибавляет ясных азартных чувств. Вейджер (или вагер) ? это наименьшая сумма ставок, коию нужно сделать для вывода денежного приза. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение. <a href=https://bajarmp3.net/member.php?action=profile&uid=4205>https://bajarmp3.net/member.php?action=profile&uid=4205</a> Используйте превосходнейшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, дабы заработать презенты за обычные деяния теперь сегодня получить первый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высочайшей отдачей и быстрыми выводами на электронные кошельки.Маркетинговая деятеля всех игорных интернет-клубов обязана носить разнообразный нрав. И случае гонорары на депо работают чтобы, чтобы, чтобы провоцировать заносить депозиты и поощрять теснее место юзеров, то бездепозитный бонус в казино или бонус за регистрацию в казино, прежде всего, рассчитан на расширение базы потребителей. 1хслотс официальный сайт зеркало Условия, на коих предоставляется бездеп, регулируются казино. Каждая промоакция имеет подробные верховодила, ссылка на коие обычно содержится в промообъявлении. В них указываются лимиты, вейджер, список дешевых игр. Если оператор укрывает данные о предложении, то воспользоваться им не.
1×slots регистрация на официальном сайте
Такой казино бонус без депозита за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это словно некая маскировка одобрения под бездепозитный. Суть всего этого сводится к тому, собственно геймеру на час выдается, например, 1000 долларов, а реклама твердит то, что каждой выигрыш можно будет в оставить при себя. Но случае играющий серьезно отнесется к данному предложению, то он просто растеряет время. Ведь геймеру нужно несомненно играть не в аккаунте, в тренировочном и с ограниченным выбором автоматов и ставок. Да и если, тогда, выигрыша (том всей тысячи) в правила вступят определенные условия, где несомненно сказано, что наибольшей суммой победы возможность быть лишь двести долларов и деньги можно использовать только виде бонуса на первый вклад с вейджером 25 от суммы гонорары плюс сам депозит. По итогу выйдет, собственно игрок выигрывал себе 200% бонус с вейджером на определенную сумму. Короче говоря, это все не вашего медли. <a href=https://msknovostroy.com/showthread.php?tid=105754>1×slos регистрация в 1×slots casino</a> Разные казино имеют собственные управляла по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высокие притязания. Часто онлайн-казино рекомендуют отыграть бонусное поощрение до 100 один в игровых автоматах. Например, в игрок получил безвозмездно 10 долларов, то нужно будет отыграть их, поставив одну тыщу спинов по 1 доллару любой. Стоит отметить, собственно не все казино дают возможность играть на бонусы и не во всех увеселительных заведениях идентичные управляла для отыгрывания. Некоторые казино запрещают выступать на бонусы в блекджек или ограничивают ставки до 5 %, собственно существенно увеличивает в десятки раз число необходимых игр.Изучить верховодила и обстоятельства получения бездепозитных бонусов казино, Вы сможете у нас на веб-сайте в разделе с призами либо на официальном веб-сайте выбранного Вами казино. Если не отыскать необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электронной почте. Помните, что любые нарушения управлял сведут на нет ваши старания, и вы всего останетесь без начисленного для бесплатного бонуса. Всегда изучайте правила начисления и условия вейджера. По любым вопросам, на коие вы не других отыскать ответы, обращайтесь за разъяснениям и саппорт.Это один из основных характеристик привлекательности презента. С завешенным коэффициентом числе профессионалы не смогут выполнить условия по отыгрышу. И так, насколько привлекательно выглядит предложение – бездепозитный бонус казино в объеме $500 или $1 000. Чтобы новенькие лучше вдумались, собственно же такое вейджер, мы разберём на случае. 1×slots актуальное зеркало <a href=https://www.9tj.net/home.php?mod=space&uid=209913>https://www.9tj.net/home.php?mod=space&uid=209913</a> Чаще всего интернет-казино предлагают бездепозитные призы новым юзерам. Эта промо-акция довольно эффективно завлекает начинающих, подталкивая их к открытию счета. Конечно, не все становятся преданными клиентами, хотя сам факт регистрации аккаунта играет на руку заведению.У нас на веб-сайте Вы найдете перечень призов без депо в проверенных казино и доскональную информацию то как их получить и использовать.
1×slot регистрация
Перед активацией принципиально внимательно выучить условия акции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют значение также лимиты ставок при отыгрыше и сроки, протяжении которых возможно пользоваться предложением. Если бездеп охватывает узкий список игр, рекомендуется разузнать наибольшие коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят лишь том, случае, случае оператор не установил строгие лимитирования на максимальную необходимую ставки.Реже призы без депозита начисляются постоянным игрокам. С их поддержкою администрация постарается удержать ценных клиентов либо вожделеет поблагодарить за лояльность правильных посетителей. Но намного чаще для подобных целей применяются такие акции: <a href=https://biowiki.clinomics.com/index.php?title=фильмы_android>https://biowiki.clinomics.com/index.php?title=фильмы_android</a> Иногда у гостей сайта могут возникнуть проблемы при активации полученного промо-кода. В этих случаях, нужно адресоваться за подмогою в саппорта «Support». Для получения ответа, непременно указывается определенная причина обращения и подтверждается информация дополнительными скриншотами. Если сложилась неоднозначная ситуация, постоянно возможно адресоваться к основному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ.Верификация необходима для добавочной защищенности и может техподдержке выявить бонусхантеров и жуликов. Кстати, рядах платформах выводы солидных сумм доступны только после подтверждения личности. 1× slots официальный
<b>Смотреть еще похожие новости:</b>
<a href=http://khodaumo.com/forum/viewtopic.php?f=2&t=75247&sid=62be68ddcbc51a426316da2e4e4f2996>зеркло казино 1×slots</a>
<a href=https://www.bf-france.com/forums/profile/30064-rabofreeor/>1хслотс зеркало на сегодня</a>
<a href=https://www.formulersupport.com/Thread-1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE–106400>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
2. Создать свежий профиль. Для регистрации надо(надобно) наполнить небольшую анкету или зайдите в индивидуальный офис посредством социальных сеток; Шаг 5. Использование и отыгрыш. Бездеп должен быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.
#7876 Charlesgunny
bet casino слоты казино <a href=https://glvk.guru/>гта онлайн казино</a> pin casino зеркало 1×bet приложение <a href=https://rhymes-punches.com/>Скоробогатова Ольга Николаевна порно</a> балтбет букмекерская контора 1×bet зеркало слоты 1×bet xyz gama casino порно с Баталина Ольга Юрьевна Юдаева Ксения Валентиновна порно Окладникова Ирина Андреевна порно официальные букмекерские конторы
#7877 Charlesgunny
Попова Анна Юрьевна порно r7 casino <a href=https://vestnik-jurnal.com/>Шевцова Татьяна Викторовна порно</a> сколько казино Преподобная Надежда Александровна порно <a href=https://vestnik-jurnal.com/>porno Вера Бирюкова, гимнастка</a> casino ап пин up casino порно с Федор Чалов (футбол) порно с Захарова Мария Владимировна лучшие букмекерские конторы демо казино порно с Варвара Субботина
#7878 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7879 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация
Бездепозитный бонус казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в данном и содержится главное различие.Кешбэк-бонус представляет собой возврат фиксированного процента от ставки в случае проигрыша либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не превышает 10%. <a href=http://filmkachat.ru/>1хслотс казино зеркало</a> Существуют казино с призом за регистрацию, каких довольно модны фриспины в интернет казино впоследствии регистрации в конкретных забавах. Они встречаются числе почаще безвозмездных поощрений или классических призов в казино без инвестициям. Например, игрок регистрирует счет, на который начисляются безвозмездные забавы, приз за регистрацию повторяющий безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса в выигрывает истинные средства, которые в последствии можно удачно исключить из заведения на собственную платежную систему. То есть, все шансы вывести средства без рисков своими деньгами. Регистрация, за которую геймер получит призы, займет несколько, а благодаря данному возможно прирастить 5 евро поощрений до тыс. И без всяких проблем вывести их.В лицензионных бездепозитных казино играть в азартные игры вправду неопасно. Наличие лицензии подтверждает тот факт, собственно клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP. <a href=http://www.bluesoleil.com/forum/thread-2–239679–1.html>http://www.bluesoleil.com/forum/thread-2–239679–1.html</a> 1×slots сайт зеркало <a href=https://reveal.ru/gate.html?name=Journal&file=display&jid=49748>https://reveal.ru/gate.html?name=Journal&file=display&jid=49748</a> Нельзя разглядывать забаву на средства, как вариант заработка. Азартные забавы воспрещены для лиц младше 18 лет. Topcasinobonuses.mobi не зачинщиком азартных игр. Сайт носит информационный нрав.Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, нужно обратиться в службу через лайв-чат на сайте казино.Бонус за регистрацию в казино выдается лишь раз один на одного игрока. Но случаются дополнительные акции, в коих бездепы расступаются для постоянных клиентов и эти подарки Вы можете получить более одного раза. 1×slots рабочее зеркало на сегодня <a href=http://mobile.molifan.net/space-uid-1974063.html>http://mobile.molifan.net/space-uid-1974063.html</a> Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, дабы появилась возможность исключить выигрыш.В интернете очень много скриптовых сайтов, коие принадлежат плутам. Их основная задача – привлечь гэмблеров, пообещав не великодушные презенты, но и солидные выигрыши. Так что некоторые веб-сайты предлагают получить за регистрацию числе $1 000. 1×slots казино мобильная версия Как прочие промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения являются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает новых гостей и дозволяет им составить эмоцию о функционале, не рискуя значительными суммами.
1хслотс официальный сайт зеркало
Приветственный бездеп предоставляется хоть игроку только один один. Казино сражаются с так нарекаемыми бонусхантерами (от англ. Bonus Hunter — охотник за призами), пытающимися заводить многочисленные аккаунты для обмана оператора и повторного получения презента. Исключить сходственные деянья позволяет верификация данных. Администрация вправе потребовать у посетителя подтвердить индивидуальные данные, обозначенные при регистрации.Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные методы и расценить необыкновенности, труднодоступные при этой в демо режиме. Многие свежие клиенты перебегают в количество постоянных, а оператор получает длительную выгода. <a href=https://pornodrochka.club/user/Henryken/>https://pornodrochka.club/user/Henryken/</a> 1×slots казино мобильная версия
1×slots сайт зеркало
<a href=https://nztw.org/home.php?mod=space&uid=43957>1× slots официальный</a> 1×slot зеркало <a href=http://www.zgyssyw.com/home.php?mod=space&uid=2957500&do=profile>http://www.zgyssyw.com/home.php?mod=space&uid=2957500&do=profile</a> Сразу последствии активации промокода возможно пользоваться презентом. Как уже упоминалось, призы бывают трёх обликов – фриспины, кредиты и фриплей-бонусы.Демоказино есть практически на каждом веб-сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются существенно пореже: там если, тогда, выигрыша и соблюдения критерий акций бездеп возможно перевоплотить в реальные средства.
1×slots быструю регистрацию а также мгновенное
Игрокам стоит воспринимать приветственный бонус как гарантированный метод получить большой выигрыш, хотя это отличная вероятность без расходов оценить возможностей казино. Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депозит имеет выделяться до 30 дней. <a href=https://www.9lewan.com/space-uid-8393.html>https://www.9lewan.com/space-uid-8393.html</a> Как верховодило, при выводе финансов, от играющего потребуется только устроить наименьший лепта чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом индивидуальный счет.Онлайн гемблинг развивается с любым деньком все больше и больше, новые бренды создаются не по денькам а по часам. Новые интернет казино делают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и тем самым предлагают бездепозитные бонусы за регистрацию, собственно бы не упустить такую вероятность — как пользоваться свежим бездепом, советуем навещать наш сайт как можно почаще, самое лакомое и новые будет добавляться в данном же перечне. казино 1×slots официальный сайт
<b>Смотреть еще похожие новости:</b>
<a href=https://demo.comuni-italiani.it/forum/viewtopic.php?f=9&t=381163>1×slots зеркало этих способов предполагает регистрацию</a>
<a href=http://aficionado.pl/showthread.php?111754–1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%B2–1×slots-casino&p=129618>1×slots зеркало регистрация в 1×slots casino</a>
<a href=http://lider1c.ru/communication/forum/messages/forum5/message20241/16172–1×-slots-casino-zerkalo?sessid=d831cdf0366d4c46e70710667afbe262&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1× slots casino зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для получения выигрыша потребуется выполнить условия казино. Чаще всего игроку необходимо поставить определенную сумму, хотя теснее из личных денег. Она рассчитывается из общего размера выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, случае юзер выиграл 1000 рублей, а множитель составляет х30, исключить деньги возможно будет, сделав ставки на 30 000 рублей.
#7880 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7881 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация то дальше необходимо пройти
Для подтверждения электрической почты, просто перейдите по интенсивной ссылке в письме, приобретенном от игрового заведения.Многие игроки, оценив возможностей казино, остаются играть в нем и дальше ? на это и нацелено любое промо. Постоянные посетители вносят депозиты и проделывают ставки, обеспечивая долгосрочную выгода оператора. То есть, казино выдают бездепы новым пользователям для формирования лояльной аудитории. <a href=http://filmkachat.ru/>1 х слотс зеркало</a> Доступные забавы – В неких азартных играх возможно снизить математическое превосходство казино до нескольких десятых процента. В их числе многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как управляло, в этих забавах ставки идут в зачет вейджера не всецело. Например, может предусматриваться только 50%. В неких забавах бездепозитные бонусы вообще нельзя отыгрывать. <a href=https://wowgilden.net/forum-topic_475315.html>https://wowgilden.net/forum-topic_475315.html</a> Ознакомьтесь с нашим списком превосходнейших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего списка и получите бездеп незамедлительно. Хватайте лучшие безвозмездные предложения ниже и выигрывайте немалые средства, не рискуя!Практически все онлайн казино с бездепозитным призом за регистрацию учитывает программку лояльности — систему поощрения неизменных клиентов, которая произведено из множества уровней. При достижении игроком еще уровня на его счёт поступает бонус. Чем выше степень — что, этим щедрее приз. 1хслот 1хслотс регистрация перейти на 1×slots <a href=http://am_14264130.mongdol.net/bbs/board.php?bo_table=free&wr_id=798909>http://am_14264130.mongdol.net/bbs/board.php?bo_table=free&wr_id=798909</a> Шаг 4. Активация. Внимательно исследуйте обстоятельства, информацию по лимитированиям и сроке деяния бонусного предложения. Разобравшись с правилами, можно активировать приз в собственном кабинете (иногда ? с внедрением промокода) или по запросу в саппорт.
1×slots официальный сайт мобильная версия
На страничке представлены бездепозитные призы за регистрацию в казино редкая заслуга за которой гонятся все игроки как новички, так и профессионалы. Мы тоже уделяем большое внимание на присутствие бонусов при формирование рейтинга казино на деньги. Бездепозитный бонус это вероятность играть безвозмездно и выиграть реальные деньги. 1х слот регистрация в 1×slots casino <a href=https://www.evangelie.eu/forum/members/83925.html>https://www.evangelie.eu/forum/members/83925.html</a> 1хслотс казино зеркало
1×slots зеркало на сегодня
За привлечение друга ? в рамках партнерской программы клиент получает вознаграждение за привлечение свежих юзеров. <a href=http://znakisudbi.ru/bitrix/redirect.php?goto=http://docs.astro.columbia.edu/search?q=http://i-igrushki.ru/bitrix/redirect.php?goto=https://telegra.ph/Preimushchestva-tehnicheskoj-podderzhki-sistemy-Honest-SIGN-09–23>http://znakisudbi.ru/bitrix/redirect.php?goto=http://docs.astro.columbia.edu/search?q=http://i-igrushki.ru/bitrix/redirect.php?goto=https://telegra.ph/Preimushchestva-tehnicheskoj-podderzhki-sistemy-Honest-SIGN-09–23</a> Сразу после активации промокода можно пользоваться подарком. Как уже упоминалось, бонусы случаются трёх видов – фриспины, кредиты и фриплей-бонусы.Далее потребуется отыграть вагер и вывести выигрыш. Игрокам без навыка крупно подфартило, они могут получить десятки подарков за одну регистрацию. Если не сумели получить Бездепозитный приз, не волнуйтесь. Обратитесь в онлайн чат, оператор поможет решить проблему. 1×slots зеркало быструю регистрацию а также мгновенное Ниже указан важный список законных казино в Беларуси с бонусами на первый депозит. Вы можете попасть на официальный сайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз.Призовые начисления без депозита могут предоставляться для роли в турнирах онлайн казино. Потратить перечисленные средства можно необыкновенно в рамках этой акции. Условия их проведения включают в себя лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться этим предложением, превосходнее выучить его правила.
1×slots на любой вкус как пройти регистрацию
На данном разделе портала регулярно публикуются обзорные заметки, в рассматриваются безвозмездные бонусы наилучших интернет-казино. Информация структурирована по нескольким пунктам, включая основные:Можно ли в одном онлайн казино получить больше 1-го приза за регистрацию? Нет, так как в каждом онлайн казино есть верховодила, к которым нужно держаться, не творить 2 аккаута для получения бонусов, другому несомненно блокировка обоих аккаутов, не пытайтесь перехитрить онлайн казино, приз за регистрацию выдаеться один один одному личику. Таким образом интернет казино получает вероятного игрока. Возможно в или подлинном он захочет сыграть на средства средства. Так работают бездепозитные бонусы в интернет казино. Здесь очень подходит выражение, благотворительные сыр посещает только в мышеловке. Начинающие игроки шансы не осознавать опасность пыла. Однако со временем осознания становится больше. Это тема для отдельного обсуждения. 1×slots подтвердит вашу регистрацию если говорить <a href=https://tabsgame.ru/user/Davidalats/>https://tabsgame.ru/user/Davidalats/</a> Отказ в прохождении верификации. Если заказчик не хочет либо не может предоставить документы, подтверждающие его личность, профиль будет заблокирован вместе со всеми бонусными начислениями.Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских руб. В условиях акции указано, что вейджер бездепозитного бонуса х20. Поэтому, дабы отыграть приз, игроку несомненно необходимо сделать ставок на 35*20=700 руб.
1хслот зеркало сайта
Наличие у игрока второго аккаунта. Запрещено делать количество профилей для многократного получения бездепов. <a href=https://lustbb.com/member.php?action=profile&uid=5504>https://lustbb.com/member.php?action=profile&uid=5504</a> Кешбэк-бонус дает собой возврат фиксированного процента от ставки когда проигрыша либо же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не превышает 10%.Oтыгpaть приз с обозначенным вeйджepом, желаемого необходимо сдeлaть cтaвoк нa cумму, превосходящую объем бонуса в некоторое раз. зеркло казино 1×slots Кешбэк-бонус дает собой возврат фиксированного процента от ставки в случае проигрыша либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%.
<b>Смотреть еще похожие новости:</b>
<a href=https://your-portal.at.ua/forum/2–131–82#88373>1×slots регистрация на сайте</a>
<a href=http://www.arka-bahce.org/forum/showthread.php?p=763528#post763528>1×slots бонус за регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, a только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. Стоит обозначить(означить), собственно бездепозитный бонус выдается лишь взрослым новеньким, коие, тому, имеют пригласить личных приятелей и людей, того рассчитывающих на поощрительную программу лояльности. Подобная разработка была между соперничающих онлайн-казино для популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению собственной популярности, путем привлечения новых игроков. Бонусы – это уникальный шанс для вероятных участников игры, коие все опробовать софт покер рума и убедиться, будут ли они в него играть либо нет. Новый игрок попробует средства силы с настоящими оппонентами в казино.
#7882 Charlesgunny
Юдаева Ксения Валентиновна порно букмекерская контора зенит <a href=https://repost.news/>1×bet официальный сайт</a> top casino Фастова Елена Владимировна порно <a href=https://th-royalgclub.com/>пин ап casino</a> букмекерская контора без порно с Голикова Татьяна Алексеевна Львова-Белова Мария Алексеевна порно 7k casino Набиуллина Эльвира Сахипзадовна порно porno Юлия Канакина скачать pin casino
#7883 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7884 Charlesgunnyhttp://filmkachat.ru
1×slots бонус за регистрацию
Вывод выигрыша с бездепозитных призов казино – великодушный презент от азартных клубов. Но дабы вывести собственный доход, необходимо выполнить ряд условий:Получать информацию о самых прибыльных бонусах возможно без неизменного прогноза новостей казино. Мы брали данную задачку на себя и безпрерывно следим за услугами операторов, выбирая превосходнейшие из их. В этом разделе собраны заключительные бездепы, промокоды к ним и обстоятельства их активации. Список акций периодически пополняется. В топ вошли самые новые бездепозитные бонусы за регистрацию в казино 2020, кратковременные и замкнутые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и критериям. Если срок деянья акции истек, она удаляется из списка. <a href=http://filmkachat.ru/>1×slots официальный сайт, скачать</a> Мы собрали и опубликовали список наилучших бездепозитных казино с бонусами за регистрацию, которые гарантируют великодушные выигрыши и мгновенные выплаты. <a href=https://www.businesslistings.net.au/The_Future_of_3D_Furniture_Design/New/New_York_City/cgifurniturecom/1053295.aspx>https://www.businesslistings.net.au/The_Future_of_3D_Furniture_Design/New/New_York_City/cgifurniturecom/1053295.aspx</a> 1×slots рабочее зеркало <a href=http://pisateli-za-dobro.com/redirect?url=http://universal-optica.ru/bitrix/redirect.php?goto=http://dcc.su/bitrix/redirect.php?goto=https://teletype.in/@urist555/XhxlPmhYt7q>http://pisateli-za-dobro.com/redirect?url=http://universal-optica.ru/bitrix/redirect.php?goto=http://dcc.su/bitrix/redirect.php?goto=https://teletype.in/@urist555/XhxlPmhYt7q</a> Бонус с зачислением средств на счет дает больше свободы поступков. Пользователь сам выбирает, каким образом распорядиться подаренными средствами. Здесь того могут работать ограничения на список дешевых игр, хотя обыкновенно эти рамки не так строги, как в рекламную с безвозмездными вращениями.Раздача призов может быть посвящена различным датам: календарные дни, деньки рождения игроков, годовщина открытия казино и т. Д. Подарок выдается в виде денег, фриспинов или баллов для скопления и обмена на услуги оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода данной суммы придется выполнить ряд притязаний.
1×slots зеркало видели такую регистрацию на
Новички не любят сразу же заносить депо. Это обусловлено неименьем навыка и сомненьем. К счастью, в возможно получить бездепозитный приз за регистрацию в казино. Неважно что начисляет система – фриспины либо кредиты. В всяком случае вы не рискуете своими сбережениями. Это отличная возможность запустить приглянувшийся видео разъем или же испытывать фортуну в настольных забавах. <a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1 xslots рабочее зеркало</a> 1×slots casino зеркало рабочее Нет. Казино раздают бесплатные призы за регистрацию, чтобы, чтобы, чтобы клиент возможность ознакомиться с игровым заведением. А чтобы вывести его, необходимо выполнить условия отыгрыша.В большинстве заведений устроить это можно по e-mal, по номеру аппарата, спустя социальную сеть или гугл-аккаунт. <a href=http://hsduct.nhub.kr/bbs/board.php?bo_table=qna&wr_id=179142>http://hsduct.nhub.kr/bbs/board.php?bo_table=qna&wr_id=179142</a> Сроки активации бонуса уточняются каждым казино, но почаще всего они не превышают недели с момента получения. Игроку непременно надо(надобно) применять бездеп в течение указанного срока, в ином случае бонус просто исчезнет. Каждый бонус возможно получить только раз раз, поэтому случае не применять бездеп в срок, у игрока не несомненно второго шанса им воспользоваться.Бездепозитные бонусы настоящими средствами, коие можно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадали. 1×slots казино зеркало Но есть игорные заведения, которые готовы просто например жертвовать средства на забаву. Для сего довольно создать профиль. Чтобы исключить свой выигрыш, вам сначала нужно выполнить обстоятельства отыгрыша, указанные в условиях получения бездепозитного депо.
1×slots регистрация 1×slots casino c2d ru
Все безвозмездные бонусы кажутся соблазнительными. Кто же откажется от способности сыграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далековато не все бездепозитные призы одинаковой презентабельны для рассудительного клиента. <a href=http://52hk.net/space-uid-149214.html>http://52hk.net/space-uid-149214.html</a> Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают бонус по государствам. Вплоть до как, собственно клуб может себя игроков из Вашей страны, а бездеп не давать.Как верховодило, при выводе финансов, от играющего требуется лишь устроить наименьший вклад для того, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом собственный счет. 1×слотс казино
1×slots зеркало регистрацию более популярный вариант это
Лишь популярностью и известные азартные заведения все позволить себя раздавать бездепы повторяющий добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депо, которые можно израсходовать в топовых аппаратах с высочайшей отдачей. Благодаря программке лояльности от игорного заведения, возможно брать хороший старт и без дополнительных инвестициям запустить видеослоты. Кроме такого, возможно рассчитывать на реальную удачу и получить, без инвестиции личных финансов, великой выигрыш.Иногда операторы требуют внесение малого депозита перед выводом для верификации платежного инструмента. В некоторых казино этот депо того предстоит отыграть. 1×slots промокод при регистрации <a href=https://veteran-gazeta.ru/forum/user/1162/>https://veteran-gazeta.ru/forum/user/1162/</a> Подтвердите лицо, предоставив оператору казино средства паспортные данные. Инструкции обычно несложные, главное — четко им идти. Если написано, собственно «на фото обязаны быть заметны все четыре угла страницы паспорта» — устройте непосредственно это фото.Самые популярностью методы вывода денег ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам типа Neteller и Skrill, еще пользуются криптовалютными кошельками. Вывод выигрышей возможность исполняться мгновенно либо развлекать от нескольких часов до нескольких суток.
сайт 1× slots casino
<a href=https://lavteam.org/user/RandalViawl/>https://lavteam.org/user/RandalViawl/</a> 1×slots официальный сайт мобильная версия скачать
<b>Смотреть еще похожие новости:</b>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=290649>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=http://complainanything.com/node/158?page=928#comment-1147146>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<a href=https://your-portal.at.ua/forum/54–61274–4#88258>1хлот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Прочитайте верховодила бонусной программы, в которой желаете принять. Да, мы настойчиво советуем устроить это до регистрации.
#7885 Charlesgunny
порно с Зырянова Анастасия Владимировна зеркала казино <a href=https://rucriminal.info/>как выиграть в казино</a> porno Мария Шарапова официальное казино вход <a href=https://slon-ru.com/>Александра Бортич</a> порно с Сергей Бобровский (хоккей) карты казино casino daddy 1×bet слоты 1×bet top букмекерская контора зенит казино можно 1×bet 1хбет
#7886 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7887 Charlesgunnyhttp://filmkachat.ru
1× slots casino официальный сайт
Но есть игорные заведения, коие готовы просто так жертвовать деньги на игру. Для сего довольно сделать профиль. Чтобы исключить собственный выигрыш, вас поначалу нужно выполнить обстоятельства отыгрыша, указанные в условиях получения бездепозитного депо. <a href=http://filmkachat.ru/>1×slots casino регистрация на сайте</a> Подобные призы без депозита предоставляются на более выгодных условиях. Зачастую они покрупнее, а условия отыгрыша наименее жесткие.Первый образующийся вопрос, это, чего выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают новых игроков. Последним проще начать забаву на средства с подарка за регистрацию. Им не нужно пополнять баланс и расходовать собственные свои. Новички получают благотворительные спины или свои на счёт. С их подмогою знакомятся с игровым ходом, крутят слоты и делают ставки в рулетке. <a href=http://www.wmhelp.cz/html/modules.php?name=Forums&file=viewtopic&t=69256>http://www.wmhelp.cz/html/modules.php?name=Forums&file=viewtopic&t=69256</a> Но не думать, собственно снабжая юзеров этими призами, казино увлекается спонсированием. Ведь объемы вознаграждений, главном, не великие (средним объемом от 5 до 20 $). И на эти средства налагаются конкретные условия и ограничения, неотклонимые к выполнению игрока, случае в последствии он вожделеет получить все свои выигранные деньги.Риск-игра по равным шансам – Также казино может воспрещать скорпулезно условия по отыгрышу за раунда на удвоение, который предлагается в слотах, видео-покере и неких иных забавах. 1хлот регистрация в 1×slots casino <a href=https://www.google.com.ng/url?sa=t&url=http%3A%2F%2Fdoctorlazuta.by>https://www.google.com.ng/url?sa=t&url=http%3A%2F%2Fdoctorlazuta.by</a> Теоретически, к безвозмездным призам можно отнести например называемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, потому собственно они предоставляют лишь вероятность создавать ставки.
1× slots регистрация в 1×slots casino
1хслотс рабочее зеркало Бездеп с фриспинами имеет охватывать всю коллекцию игр на веб-сайте или разработки одного провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш имеет быть выведен после того, как пользователь отыграет эту сумму. Возможность оценить глубокий перечень слотов — основное достоинство данной разновидности. Игроку становятся доступны что, эти опции, которые отсутствуют в демонстрационном режиме, а вероятность выиграть реальные деньги прибавляет ясных азартных ощущений. <a href=https://adbellmedia.com/posts/gorodskie-novosti-osipovici>https://adbellmedia.com/posts/gorodskie-novosti-osipovici</a> Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют актуальную информацию о not the slightest down payment bonuses и предложениях.На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не можете активировать и получить бездепозитный приз. 1×slots зеркало регистрация то дальше необходимо пройти
1×slots подтвердит вашу регистрацию если говорить
Раздача призов возможность быть приурочена к различным датам: календарные праздники, деньки рождения игроков, юбилей открытия казино и т. Д. Подарок выдается в виде денег, фриспинов либо баллов для скопления и обмена на предложения оператора. Если пользователь получает выигрыш, деньги начисляются на его счет. Для вывода этой суммы понадобиться выполнить ряд требований.При ирге на бонусные средства воспрещается играть в игровые автоматы с современным джекпотом и игры из радела exist casino. Кроме того, некоторые казино выделяют бездеп на один или несколько конкретных слотов, и в иных играх Вы не сможете на их выступать. <a href=http://specialacel.hu/component/community/inconclusiveyea/profile>http://specialacel.hu/component/community/inconclusiveyea/profile</a> В интернет-сети всегда возможно отыскать списки наиболее популярных и обещанных поощрительных программ от знаменитых онлайн-казино.Маркетинговая политического всех игорных интернет-клубов должна носить разнородный нрав. И случае вознаграждения на депо работают для того, чтобы стимулировать заносить депозиты и поощрять уже существующих пользователей, то бездепозитный бонус в казино либо бонус за регистрацию в казино, этого всего, рассчитан на расширение базы покупателей. 1хслотс зеркало на сегодня Если вы опытный игрок, вы обязаны аристократия, собственно бонус без депо – редкая находка. Тем ниже, мы раз исследуем интернет, дабы найти для вас превосходнейшие бездепозитные предложения.
1×slot официальный сайт
Прочитайте правила бонусной программы, в хотите участвовать. Да, мы настоятельно рекомендуем устроить это до регистрации. 1×slots актуальное зеркало <a href=https://mail.1directory.org/details.php?id=289561>https://mail.1directory.org/details.php?id=289561</a> Предложения с бездепозитными призами за регистрацию позволяют новым заведениям заинтересовать аудиторию на свой сайт. А игроки к получают возможность играть на реальные средства без депо в казино и заработать малый стартовый капитал, кот-ый разрешено вывести на карту банка или электронный кошелек.
казино 1×slots официальный сайт
Но на азартных платформах похожие вознаграждения шансы получить теперь зарегистрированные юзеры. В этом случае, бонусы предоставляются в уникальных промоакций или же некоторым игрокам повторяющий акционного предложения, коие прибывает на почту с целью «возвратить» игрока в свое казино.Существуют казино с призом за регистрацию, в которых очень знамениты фриспины в онлайн казино впоследствии регистрации в определенных играх. Они встречаются и почаще безвозмездных поощрений или классических бонусов в казино без вложений. Например, игрок регистрирует счет, на который начисляются безвозмездные игры, приз за регистрацию вид безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса в выигрывает настоящие средства, коие в последствии возможно успешно исключить из заведения на свою платежную систему. То есть, есть все шансы вывести свои без рисков собственными финансами. Регистрация, за которую игрок получит бонусы, займет пару минут, а благодаря данному возможно увеличить 5 евро поощрений до тыс. И без всяких заморочек исключить их. <a href=http://l-avt.ru/support/dialog/?PAGE_NAME=profile_view&UID=68249>http://l-avt.ru/support/dialog/?PAGE_NAME=profile_view&UID=68249</a> Перечисленные выше главные характеристики сопровождают фактически любой приз и считаются стереотипными для бездепозитных бонусных начислений в казино. 1×slots регистрацию более популярный вариант это В реальное время получить бонус за регистрацию в казино довольно просто. Почти любой игорный жилище с готовностью даст средства либо благотворительные вращения. Многие игроки пользуются данным и не стыдятся региться в любом клубе с выгодными критериями. Кстати, это замечательная вероятность выдумать выигрышную тактику и сорвать куш.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.topboard.org/media/users/rabofreesn.160691/>1хслотс зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Похожим образом работает третий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя или из-за с получения им VIP-статуса. Подарок предоставляется последствии обращения в поддержку и проверки.
#7888 Charlesgunny
симулятор казино 1×bet вход <a href=https://repost.news/>7k casino зеркало рабочее</a> casino рабочее букмекерская контора фонбет официальный сайт <a href=https://www.ossetia.tv/>porno Александр Соболев (футбол)</a> казино рояль смотреть порно с Евгения Медведева Фастова Елена Владимировна порно скачать сайт букмекерской конторы top casino казино играть 1×bet зеркало рабочее на сегодня
#7889 Charlesgunny
казино сочи букмекерские конторы в россии <a href=https://res-publika.com>1×bet зеркало на сегодня 1×bet xyz</a> казино большая порно с Варвара Субботина <a href=https://rucriminal.info/>сайт казино вход</a> порно с Елена Никитина, скелетонистка kometa casino casino официальный сайт лучшие бесплатные онлайн казино pin up casino buzz мобильные букмекерские конторы porno Игорь Акинфеев (футбол)
#7890 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7891 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее на сегодня
4. Заберите подарок. Чаще всего приз активируется сразу после регистрации. Но бывают истории, когда нужно зайти в индивидуальный кабинет либо написать в службу.Похожим образом работает третий способ доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения клиента или в связи с получения им VIP-статуса. Подарок предоставляется в воззвания в поддержку и проверки. <a href=http://filmkachat.ru/>1×slots казино зеркало</a> Не желайте сыграть в азартные игры, не рискуя средствами деньгами, но получая в все выплаты? Подобную вероятность предоставляют многие превосходнейшие порталы с азартными весельями. В их количестве много честных и надежных интернет-казино на русском языке. Они завлекают новых юзеров разными поощрительными событиями, включая бездепозитные, либо бесплатные призы. <a href=https://juicedmuscle.com/forum/general/general-chat/264984-the-art-of-product-visualization-making-digital-dreams-come-real>https://juicedmuscle.com/forum/general/general-chat/264984-the-art-of-product-visualization-making-digital-dreams-come-real</a> зеркала 1×slots <a href=http://cqr3d.ru/user/FrankNuare/>http://cqr3d.ru/user/FrankNuare/</a> Но ни не запамятовывайте внимательно читать верховодила участия в бонусных промоакциях. Если вы нарушите хотя бы одно условие, позднее вы не сможете уладить недоразумение с администрацией.
1×slots рабочее зеркало на сегодня
1×slots коды Вообще перейдя в казино — верховодила схожи в получении бездепозитных бонусов, в стандартные управляла заходит: подтвердить эл. Почту и телефон, наполнить свой индивидуальный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ.Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, чтобы была вероятность вывести выигрыш. <a href=https://pyxc.ru/user/Raymondkix/>https://pyxc.ru/user/Raymondkix/</a> Бонус без депозита за регистрацию в казино (бездепозитный приз) – это денежный презент от клуба, который начисляется на акк игрока после регистрации в казино. Кроме творения учетной записи, для получения бездепа, довольно часто требуется ещё и доказать контактные данные игрока и/или активировать особый промо-код. 1 xslots рабочее зеркало
1×slots быструю регистрацию а также мгновенное
Рассмотрим принцип его деянья на случае. Допустим, вы зарегались и возымели $10 not the slightest down payment bonus с вейджером х50. Это значит, собственно выигранные деньги можно будет выводить не раньше, чем последствии как, как общая сумма ставок достигнет $500. Как правило, при выводе финансов, от играющего потребуется лишь устроить минимальный лепта для того, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом собственный счет.При отыгрыше бонусных средств, нужно учитывать срок деяния бонуса и время, которое дается на отыгрыш. По истечению заявленного медли, не отыгранный приз будет аннулирован. <a href=http://r0757478.bget.ru/home.php?mod=space&uid=17881&do=profile>http://r0757478.bget.ru/home.php?mod=space&uid=17881&do=profile</a> Игры, в которых возможно выступать на бонусные деньги. Проверьте перечень игр, в которых можно выступать на бонусные свои, вероятно они Вам не понравятся и не тратить своё время на эту акцию. 1×slot рабочее зеркало Для того, дабы отыграть сумму вашего бездепозитного бонуса нужно выполнить условия вейджера. Очень нередко фриспины даются на конкретные слоты (book of ra, book of deceased, book of sun), подбирайте разъем для по, все довольно очень и высококачественные. Бездепозитные приз может быть валютным например и в виде фриспинов на слотыРазмер призов чаще всего чисто символический и не превышает 50 руб. Приятно, хотя ощутимым бустом деле ли станет.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Многие новички сомневаются, что поощрительный приз надо несомненно отдавать, числе если они выиграли у казино. Это безусловно неопасно и надежно. Выводя выигранные свои, игрок просто останавливает свое роль деле и теряет уникальную вероятность – безвозмездно увеличивать личное вещественное положение.Для тех, кто лишь подумывает испытывать собственную фортуну, еще для проф игроков, отыскивающих свежие площадки для выигрышей, ведущие лицензированные казино нередко устраивают разные акции, и одно из лучших услуг прошедшее время – как для начинающих, например и для профессиональных игроков – бездепозитный приз за регистрацию. Автоматическая активация показаться самой комфортной, хотя ручной метод содержит перед ней преимущества. Прежде чем применять вознаграждение от казино, стоит заранее определить, сколько медли требуется на выполнение всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деяния бонуса.Разные казино имеют собственные управляла по выведению выигрыша. Для бездепозитных призов принимаются достаточно высочайшие требования. Часто онлайн-казино советуют отыграть бонусное одобрение до 100 один в игровых автоматах. Например, если игрок получил даром десять $, то нужно несомненно отыграть их, поставив одну тысячу спинов по 1 баксу каждый. Стоит обозначить(означить), что не все казино выделяют вероятность выступать на бонусы и не во всех развлекательных заведениях идентичные правила для отыгрывания. Некоторые казино воспрещают выступать на бонусы в блекджек или ограничивают ставки до пяти процентов, что существенно наращивает в 10-ки один число нужных игр. Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные способы и расценить особенности, труднодоступные при этой в демо режиме. Многие свежие посетители перебегают в число неизменных, а оператор получает долгосрочную прибыль. 1× slots сайт <a href=http://www.fumankong5.cc/home.php?mod=space&uid=581835>http://www.fumankong5.cc/home.php?mod=space&uid=581835</a> Да, у безвозмездных призов есть дефекты. Прежде всего, они обыкновенно маленькие. Кроме того, условия вейджера по ним всегда строгие. Но все же неимение риска проделывает их очень привлекательными для посетителей.Наличие у игрока второго аккаунта. Запрещено создавать некоторое профилей для многократного получения бездепов.
зеркло казино 1×slots
Чтобы без увериться в превосходствах бездепозитных бонусов, достаточно зарегистрироваться в казино и получить одобрение.Индивидуальные поощрения выдаются за совершение деяний: подписку на аккаунты площадки в соц сетях, установку мобильного прибавления либо официального посетителя для ПК. В большинстве казино срабатывают программы лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на грядущий степень нередко сопровождается выдачей бездепа. Обыкновенные бездепозитные призы в объеме от 3-х до 20 $ сделаны чтобы, чтобы, чтобы в игры заходили все свежие и новые игроки. Здесь, скорее, будет ограничение на наибольший выигрыш. Важно, чтобы перед наименьшим вкладом был отключен бонус за 1-ое пополнение счета, и игрок не попадет на повторный вейджер.Призовые начисления без депо шансы предоставляться для роли в турнирах онлайн казино. Потратить перечисленные средства возможно исключительно в рамках данной промоакции. Условия их проведения содержат лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться таким предложением, другого изучить его управляла. <a href=http://x4kurd.freetzi.com/member.php?action=profile&uid=81819>http://x4kurd.freetzi.com/member.php?action=profile&uid=81819</a> Обычно, бездепозитные призы выдаются под конкретные слоты с фиксированной ставкой, хотя их точно запрещено применять в игровых автоматах с прогрессивным джекпотом. Список игр, в возможно применять бездеп, Вы найдете в описании промоакции либо сможете уточнить у службы заведения.Бездепозитные призы прекрасный вариант безвозмездной игры в игровые автоматы. Многие юзеры сети не знают, что в казино возможно начать играть полностью безвозмездно, а потом вывести выигрыш на банковскую карту или электронный кошелек, иные не доверяют онлайн казино, а третьи удачно играют и выигрывают – и тотчас достаточно немалые суммы. скачать 1×slots официальный сайт
<b>Смотреть еще похожие новости:</b>
<a href=https://www.formulersupport.com/Thread-1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D0%BD%D0%B0-%D1%81%D0%B5%D0%B3%D0%BE%D0%B4%D0%BD%D1%8F–107180>1×slots зеркало на сегодня</a>
<a href=https://adminclub.org/showthread.php?tid=66827>1×slots регистрация на сайте 1×slots ru com</a>
<a href=https://www.sgomberisgombero.it/author/jamesapate/>1×slot рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подарки на праздничные ? посвященные праздничным датам, требующие символического отыгрыша или начисляются без того. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду.
#7892 LloydKewhttps://mikrosluchatko-cena.cz
Kompaktni zarizeni <a href=https://mikrosluchatko-cena.cz/>nanosondy</a> poskytuje spolehlivy prenos, pevny, nenapadny design a pohodlne se nosi v kazde situaci.
#7893 Charlesgunny
лучшая казино леон букмекерская контора <a href=https://sovsekretno.net/>porno Елизавета Туктамышева</a> демо казино букмекерская контора фонбет официальный сайт <a href=https://repost.news/>приложения букмекерских контор на андроид</a> 1×bet приложение казино можно порно с Анна Калинская (теннис) 1×bet рабочее на сегодня спорт букмекерская контора Разуваева Ксения Денисовна порно porno Юлия Пересильд
#7894 Charlesimpedhttps://mia.km.ua
Асфальтирование и ремонт дорог <a href=https://mia.km.ua/>https://mia.km.ua</a> информация о технологиях укладки асфальта, методах ремонта покрытий и современных материалах.
#7895 Charlesgunnyhttp://filmkachat.ru
онлайн казино 1×slots
Денежные средства. Третий бонус за регистрацию без депозита – наличные. К огорчению, только известные и модные клубы все дать деньги в руб. Либо баксах. С их поддержкой у насладиться любой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед этим необходимо исполнение определенных критерий. <a href=http://filmkachat.ru/>1×slots регистрация на сайте 1×slots ru com</a> Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного приза. <a href=https://www.truxgo.net/blogs/461433/1606261/the-impact-of-cgi-rendering-for-real-estate-marketing>https://www.truxgo.net/blogs/461433/1606261/the-impact-of-cgi-rendering-for-real-estate-marketing</a> 1×slots рабочее зеркало <a href=http://archive.ynpress.com/bitrix/redirect.php?goto=http://avrora-it.ru/bitrix/redirect.php?goto=http://dvahalata.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/FoZx_G1wjCy>http://archive.ynpress.com/bitrix/redirect.php?goto=http://avrora-it.ru/bitrix/redirect.php?goto=http://dvahalata.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/FoZx_G1wjCy</a> Можно ли зарабатывать на бездепозитных призах? Это не работа, тут как повезет, случае в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, это можно назвать везением, и дополнительной добавкой к вашему бюджету.
рабочее зеркало 1×slots
1×slots казино мобильная версия Мы делаем акцент на главных положениях управлял, рассказываем о территориальных лимитированиях и вкратце информируем о других промоакциях обговариваемого казино.При исполненьи критерий отыгрыша и верификации, деньги с бонусного счета переводятся на основной и шансы быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции находятся от выбранной платежной системы. <a href=http://www.oymalitepe.net/modules.php?name=Your_Account&op=userinfo&username=nullace71>http://www.oymalitepe.net/modules.php?name=Your_Account&op=userinfo&username=nullace71</a> Каждая игровая платформа выделяется критериями по получению и отыгрышу бездепов. В правилах детально расписаны кратковременные рамки, за коие надо(надобно) прокрутить вейджер. Также не запамятовывайте на наибольший объем ставки и наивысшую необходимую выплаты. С иной стороны, дабы получить бездепозитные бонусы казино, достаточно потратить не более 1 минуты. 1 x slots
1×slots быструю регистрацию а также мгновенное
Промообъявления от казино не дают реальной картины и ориентированы на вербование внимания пользователей. Понять, как высоки шансы остаться в плюсе, дозволит личный анализ условий предложения:Исходя из этого, просто не существует мудрых оснований махнуть рукой на получение такового приза при регистрации. И, кстати, на такой безвозмездной основе у вас есть шансы выиграть деньги и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, именуют бесплатными интернет платформами для игр. Вознаграждения за получение VIP-статуса ? начисляются масштабах программки лояльности при достижении еще значения или выдаются индивидуально менеджерами саппорта. <a href=https://amvnews.ru/forum/profile.php?mode=viewprofile&u=67178>https://amvnews.ru/forum/profile.php?mode=viewprofile&u=67178</a> 1хслотс мобильная версия зеркало
1хслот 1хслотс регистрация перейти на 1×slots
Но ни не запамятовывайте пристально читать управляла участия в бонусных промоакциях. Если вы нарушите хотя бы одно условие, позже вы не можете устроить недоразумение с администрацией.Бездепозитный бонус казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби избранного заведения, определится в выборе игр и проверить качество работы саппорта. Довольно часто, начиная игровой процесс, игрок уже не желает останавливаться и проделывает настоящий лепта. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать даром вполне как раз таки с бонусом за регистрацию без надобности заносить депо. 1×slots на любой вкус как пройти регистрацию <a href=http://zqykj.com/bbs/home.php?mod=space&uid=276829>http://zqykj.com/bbs/home.php?mod=space&uid=276829</a> Чем ниже значение вейджера, тем легче отыграть и вывести приз. Если Вы планируете заработать на бездепе, не просто ознакомиться с новым игровым клубом, то стоит игнорировать призов с высоким вейджером их практически не реально отыграть. С ними Вы сможете лишь протестировать забавы заведения.Получать информацию о самых выгодных призах возможно без неизменного прогноза новостей казино. Мы брали данную задачку на себя и непрерывно следим за услугами операторов, избирая превосходнейшие из них. В этом разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список акций регулярно дополняется. В топ зашли самые свежие бездепозитные призы за регистрацию в казино 2020, временные и закрытые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и другим критериям. Если срок действия акции истек, она удаляется из списка.
1× слот зеркало
Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих требований, кроме обязательной верификации. Если на веб-сайте учтена неотъемлемая процедура доказательства личности, то вывести выигрыш удастся лишь последствии проверки данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий личность. Заработать на бездепозитных призах за регистрацию в казино имеет любой пользователь, достигший совершеннолетия.Все любят получать подарки. Согласитесь, почти любой играющий человек несомненно бесконечно счастлив, в получит даровой подарок для игры в онлайн казино просто за регистрацию или же приз за внесенный депо, например нарекаемые приветственные призы для свежих игроков. Соответственно такие онлайн клубы будут более популярны и предпочтительны у игроков при выборе казино для игры. Топ казино непрерывно обновляется и добавляются свежие и интересные игровые клубы с симпатичной бонусной политикой и всеми возможными прерогативами, к которым относятся такие призы как фриспины за регистрацию, валютные бездепозитные бонусы, а также щедрые призы за внесенный депозит. <a href=http://images.google.com.hk/url?q=http://go-power.ru/bitrix/redirect.php?goto=http://diamir.su/bitrix/rk.php?goto=https://teletype.in/@urist_free/9EGaa9enhVb>http://images.google.com.hk/url?q=http://go-power.ru/bitrix/redirect.php?goto=http://diamir.su/bitrix/rk.php?goto=https://teletype.in/@urist_free/9EGaa9enhVb</a> 1×slots актуальное зеркало При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, которое можно посвятить этой в казино.
<b>Смотреть еще похожие новости:</b>
<a href=https://fougerite.com/threads/1×slots-oficialnyj-sajt-skachat.13532/>1×slots официальный сайт скачать</a>
<a href=https://nauc.info/forums/viewtopic.php?t=20404134>1×slots регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чтобы играть бесплатно на реальные средства в казино, не всегда достаточно просто зарегистрироваться. Иногда нужно выполнить дополнительные деяния. Мы рекомендуем не отказываться от сходственных услуг узнаваемых казино. Выделите некоторое минут на регистрацию, получите приз и попробуйте его отыграть. Может быть, сегодня удача будет на вашей стороне!
#7896 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать
Бонус с зачислением средств на счет дает больше свободы деяний. Пользователь сам выбирает, каким образом распорядиться подаренными своими. Здесь кроме шансы работать лимитирования на перечень дешевых игр, хотя обычно эти рамки не например строги, как в промо с бесплатными вращениями.На страничке представлены бездепозитные призы за регистрацию в казино редчайшая заслуга за коей гонятся все игроки как новички, так и мастера. Мы тоже уделяем большое внимание на присутствие призов при формирование рейтинга казино на деньги. Бездепозитный бонус это возможность играть бесплатно и выиграть настоящие деньги. <a href=http://filmkachat.ru/>1×slot регистрация</a> Несмотря на то, что этот вариант стимуляции со стороны азартных платформ довольно востребован области сходственных игр, далеко многим поклонникам казино знаменито, что по бездепозитные призы казино и как именно их вероятно эксплуатировать.К сожалению, нет. Почти все казино, требуют внесение желая бы 1-го минимального депозита для вывода выигрыша с бездепозитного бонуса. Также учитывайте, что вывести деньги разрешено только на ту платежную систему, с коей был изготовлен депозит. <a href=https://rant.li/9fsnh6hu13>https://rant.li/9fsnh6hu13</a> 1×slots casino online регистрация <a href=https://graddata.ru/user/DeweyseD/>https://graddata.ru/user/DeweyseD/</a>
1×slots зеркало этих способов предполагает регистрацию
Как правило, новоприбывшие игроки начала желают ознакомиться с способами ввода и вывода денежных средств и сроки выполнения поданных заказов дабы конкретно осознавать, как прытко они смогут вывести свой казино бонус за регистрацию без депо на электронный кошелек или же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино конкурируют между собой. Ведь если бы определенную фирму представляло лишь одно онлайн-заведение, то вряд ли бы посетители увидели казино с бонусом за регистрацию и могли бы рассчитывать лишь на вознаграждение повторяющий приза на 1-ое инвестиция. К каждому заведению регулярно стопам привлекать новых игроков, собственно, итоге, лишь на руку всем играющим. 1×slots актуальное зеркало Для вывода средств бонус нужно будет отыграть законам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариациями отыгрыша бездепозитного приза до его получения, чтобы избежать конфликтных обстановок. <a href=http://bbs.xinhaolian.com/home.php?mod=space&uid=4552666>http://bbs.xinhaolian.com/home.php?mod=space&uid=4552666</a> 1×slots зеркало регистрация в 1×slots casino Чем ниже велечину вейджера, тем легче отыграть и вывести бонус. Если Вы планируете заработать на бездепе, но просто ознакомиться с новым игровым клубом, то стоит игнорировать призов с высочайшим вейджером их практически не реально отыграть. С ними Вы можете только протестировать забавы заведения.Онлайн-казино тщательно продумывают бонусные условия, коие необходимо выучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и другие лимитирования.
1× slots регистрация в 1×slots casino
Обыкновенные бездепозитные бонусы в объеме от 3-х до 20 долларов созданы для того, чтобы в игры заходили все свежие и новые игроки. Здесь, скорее, будет ограничение на наибольший выигрыш. Важно, чтобы перед наименьшим вкладом был отключен приз за 1-ое пополнение счета, и игрок не попадет на повторный вейджер. <a href=http://julia4tied.de/member.php?action=profile&uid=123839>http://julia4tied.de/member.php?action=profile&uid=123839</a> Чем ниже значение вейджера, что, этим проще отыграть и вывести бонус. Если Вы планируете заработать на бездепе, а не просто ознакомиться с новым игровым клубом, то стоит игнорировать бонусов с высоким вейджером их практически не реально отыграть. С ними Вы сможете только протестировать игры заведения. 1× slots сайт
1хслотс 1хслотс регистрация перейти на 1×slots
<a href=https://orbitsound.com/forum/user-211634.html>1× slots сайт</a> При отыгрыше бонусных средств, необходимо учитывать срок действия бонуса и время, коие дается на отыгрыш. По истечению заявленного медли, не отыгранный приз несомненно аннулирован.Поспешите зарегистрироваться на официальном веб-сайте Клубника, дабы моментально получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, бывает настоящий шанс победу! Вы не в коем случае ни чем не рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической забавы на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, научится регулировать менять ставки и полосы, исследовать бонусные забавы и их выигрышные комбинации, ну в конце концов просто зарядится кучей впечатлений! Ведь вы будите выступать на бонусные средства, коие возможно отыграть и исключить, а не просто на демо счет, что, этим наиболее адреналин в крови более повысится а пульс забьется с нередким ритмом!Не стоит сразу же отрицаться от приветственных презентов в подобных казино. Администрация готова начислить деньги или фриспины, хотя сначала сотрудники обязаны увериться, что вы не мошенник. Дело что, что развелось очень много охотников за призами. Они выучились врать систему и зарабатывать солидные суммы средств. 1×slots регистрация на официальном сайте <a href=https://onmogul.com/dfac0650-a41b-4f30–94ef-01393c09b0b9>https://onmogul.com/dfac0650-a41b-4f30–94ef-01393c09b0b9</a> Казино дает вероятность заработать и исключить настоящие средства на бездепозитных призах. Обычно, это незначительная сумма, коию казино имеет себя разрешить подарить игроку.
1хслот скачать
Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.Не стоит незамедлительно же отказываться от приветственных даров в сходственных казино. Администрация готова начислить средства или фриспины, но сначала работники обязаны увериться, собственно вы не аферист. Дело что, что развелось слишком большое охотников за призами. Они выучились обманывать систему и наваривать крупные суммы средств. Но на азартных платформах похожие гонорары все получить теперь зарегистрированные юзеры. В таком случае, призы предоставляются масштабах уникальных промоакций или же некоторым игрокам вид акционного предложения, коие приходит на почту с целью «вернуть» игрока в свое казино.Бонус за регистрацию в казино без депо с выводом денег надо(надобно) отыграть. Зачастую для отыгрыша имеет понадобиться сделать ставки на сумму, в количество 10-ов один превосходящую необходимую приза или выигрыша. <a href=https://cadetmove.ru/index.php?subaction=userinfo&user=Glenngew>https://cadetmove.ru/index.php?subaction=userinfo&user=Glenngew</a> 1×slots casino регистрация
<b>Смотреть еще похожие новости:</b>
<a href=https://clubdefansde24.com/foro/viewtopic.php?t=19287>1×slots официальный сайт мобильная версия скачать</a>
<a href=http://www.arka-bahce.org/forum/showthread.php?p=764388#post764388>1×slots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и более. Когда игроку надеется много фриспинов, администрация возможность бить3 их начисление на несколько дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах акции.
#7897 Charlesgunny
Лут Оксана Николаевна порно казино смотреть онлайн бесплатно <a href=https://m.repost.news/>скачать сайт букмекерской конторы</a> casino зеркала официальных сайтов казино <a href=https://rucriminal.info/>cat casino</a> new casino порно с Зырянова Анастасия Владимировна порно с Петр Ян (ММА) Яровая Ирина Анатольевна порно букмекерская контора бетсити porno Анна Сидорова, керлингистка сайт винлайн букмекерская контора
#7898 Craigbithttps://kennan.kiev.ua
Все о строительстве и ремонте <a href=https://kennan.kiev.ua/>https://kennan.kiev.ua</a> практичные рекомендации, идеи интерьеров, новинки рынка и советы профессионалов.
#7899 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7900 Charlesgunny
порно с Захарова Мария Владимировна pin up casino buzz <a href=https://glvk.guru/>cometa casino</a> 1×bet официальный сайт скачать casino на андроид <a href=https://th-royalgclub.com/>1×bet скачать приложение на андроид</a> порно с Александр Головин (футбол) cometa casino казино смотреть онлайн бесплатно Александра Бортич 1×bet скачать приложение порно с Зырянова Анастасия Владимировна vavada casino
#7901 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7902 Charlesgunny
казино пину casino промокод <a href=https://sovsekretno.net/>порно с Никита Кучеров (хоккей)</a> почему казино Валентина Матвиенко порно <a href=https://rhymes-punches.com/>играющие казино онлайн</a> порно с Артемий Панарин (хоккей) казино сочи 1×bet скачать приложение казино ставка Приезжева Екатерина Геннадьевна порно casino рабочее зеркало казино ли
#7903 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7904 Robertoinsemhttps://ibss.org.ua
Строительные технологии <a href=https://ibss.org.ua/>https://ibss.org.ua</a> новейшие разработки и решения в строительной сфере. Материалы, оборудование, инновации и тренды для профессионалов и застройщиков.
#7905 Edmundquidahttps://hydromech.kiev.ua
Сайт о строительстве и ремонте <a href=https://hydromech.kiev.ua/>https://hydromech.kiev.ua</a> полезные советы, инструкции, обзоры материалов и технологий. Все этапы: от фундамента до отделки.
#7906 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало
Ознакомьтесь с нашим перечнем наихороших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего списка и получите бездеп незамедлительно. Хватайте превосходнейшие благотворительные предложения ниже и выигрывайте великие деньги, не рискуя!При пользовании бездепозитным бонусом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют некоторое обликов лимитов: <a href=http://filmkachat.ru/>1×slots зеркало этих способов предполагает регистрацию</a> <a href=http://webanketa.com/forms/6gt3ac1k60qpas9r75jp6shs/>http://webanketa.com/forms/6gt3ac1k60qpas9r75jp6shs/</a> 1× slots сайт <a href=http://xn–jj0bt2i8umnxa.com/bbs/board.php?bo_table=free&wr_id=112857>http://xn–jj0bt2i8umnxa.com/bbs/board.php?bo_table=free&wr_id=112857</a> На безвозмездные бонусы онлайн-казино почти всегда распространяется ограничения по стране проживания клиентов. Даже если вам разрешается раскрывать счет и выступать на деньги в заведении, это еще не означают, что вам доступны no deposit bonuses.
1×slots скачать на айфон
1×slots зеркало регистрацию более популярный вариант это Можно. Вы всегда сможете отрешиться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не создадите ставку. <a href=https://pornodrochka.club/user/Charlescal/>https://pornodrochka.club/user/Charlescal/</a> Казино выделяет возможность заработать и исключить настоящие средства на бездепозитных бонусах. Обычно, это незначительная сумма, коию казино возможность для разрешить презентовать игроку. 1×slots промокод при регистрации 2025
1×slots сайт
1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, если не желаете замерзнуть жертвой жуликов либо впустую истратить время; Составленный экспертами Casino.ru перечень онлайн-казино с бездепозитным бонусом разрешает игрокам сравнить спецпредложения разных операторов. <a href=http://shichaoliuluntan.com/home.php?mod=space&uid=341946>http://shichaoliuluntan.com/home.php?mod=space&uid=341946</a> 1хлот регистрация в 1×slots casino Не стоит путать забаву в демо и использование бонусов. В демонстрационном режиме игрок может оценить механику слота, сюжет и оформление. Но забава проводится на относительные кредиты, поэтому отсутствует главное ? чувство азарта. Активируя промокод либо фриспины, заказчик как не расходует свои деньги на игровые автоматы, хотя возможность сорвать реальный куш!Какие призы у еще получить кроме бездепозитного приза за регистрацию в казино? По мимо бездепозитного приза, любое онлайн казино предлагает игрокам выгодное предложение на первый депо, вы совершаете депо, ваш депо увеличивается в двое или даже в трое, тем самым начать играть можно с больше крупной суммой, например же не забываем тему вейджер на бонусы.
1хслот скачать
<a href=http://3ak.cn/home.php?mod=space&uid=187057>казино 1×slots официальный сайт</a> С не отыгранным призом воспрещается превосходить объем максимальной ставки. Нарушение этого обстоятельства иметь аннулирование выигрыша. К раскаянию, нет. Почти все казино, просят внесение желая бы 1-го минимального депо для вывода выигрыша с бездепозитного бонуса. Также учитывайте, собственно исключить деньги разрешено только на что, эту платежную систему, с коей был изготовлен депозит.Так что основное отличие подарка на депо от бездепа – обязательное пополнение счёта. Вы сможете внести депо и преувеличить стартовый капитал или арестовать бездеп и при не придётся рисковать своими сбережениями. Поспешите выполнить обычные требования, и администрация ресурса начисляет щедрое одобрение! 1хслотс зеркало <a href=https://sixn.net/home.php?mod=space&uid=3301204>https://sixn.net/home.php?mod=space&uid=3301204</a> Практически все интернет казино с бездепозитным призом за регистрацию учитывает программку преданности — систему одобрения постоянных клиентов, которая состоит из множества уровней. При достижении игроком одного значения на его счёт поступает бонус. Чем повыше уровень — тем щедрее бонус.
1×слот регистрация в 1×slots casino
Если вы выбираете проверенное лицензионное интернет казино и выполните все условия получения бездепозитного приза, проблем с получением дара у Вас не возникнет. Бонус без депозита за регистрацию в казино (бездепозитный приз) – это валютный подарок от клуба, кот-ый начисляется на акк игрока после регистрации в казино. Кроме создания учетной записи, для получения бездепа, довольно часто потребуется ещё и доказать контактные данные игрока и/или активировать специальный промо-код.Подтвердите лицо, предоставив оператору казино средства паспортные данные. Инструкции обыкновенно легкие, главное — четко им стопам. Если написано, собственно «на фото должны быть заметны все хорошо угла странички паспорта» — сделайте именно это фото. <a href=http://g95887q6.beget.tech/user/Jameshaict/>http://g95887q6.beget.tech/user/Jameshaict/</a> Для получения бонуса нужно ознакомиться с программкой преданности казино и устроить ставки на сумму, необходимую для перехода на грядущий уровень.Выиграть настоящие деньги в казино не пополняя счет – трудно, но вполне. Главное задаться целью и не нарушатьправила заведения. Выберите несколько казино с бездепзитными бонусами и начните выступать на бонусные средства. По статистике из 10-ти заведений возможно заработать небольшую сумму денег помощью бонусных средств. 1×slots официальный сайт скачать Активация денежного вознаграждения случается механически последствии создания профиля либо применения промокода. Иногда операторы предъявляют дополнительные требования: подписаться на странички казино в социальных сетях либо на рассылку маркетинговых извещений, скачать и ввести дополнительный софт и т.д.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.topboard.org/threads/1×slots-oficialnyj-sajt-skachat.599741/>1×slots официальный сайт, скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Зарегистрироваться в казино по особой ссылке или с бонусным кодом. Подтвердить контактные данные (номер аппарата и электронную почту). Для доказательства номера аппарата нужно в собственном профиле указать свой номер и надавить кнопку „Подтвердить номер аппарата“, дальше Вы получите sms-сообщение с кодом, кот-ый необходимо ввести в соответствующее фон. Для доказательства электронной почты, перебежать по интенсивной ссылке в письме от казино.
#7907 Charlesgunny
казино ли 1×bet рабочее <a href=https://res-publika.com>лучшие бесплатные онлайн казино</a> порно с Юлия Ефимова unlim casino <a href=https://t.me/vchkogpu_ru>up casino скачать</a> casino сайты почему казино бесплатное казино inform@rucriminal.info порно с Константин Тюкавин (футбол) спорт букмекерская контора Окладникова Ирина Андреевна порно
#7908 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7909 Charlesgunnyhttp://filmkachat.ru
1×slots скачать на айфон
Особую изюминку видео слотам присваивают уникальные знакы. С их в активизируются разные бонусы. Вы сможете запустить вспомогательный уровень и прирастить сумму выигрыша. Есть знаки, коие замещают ненадобные элементы и сами создают выигрышные комбо. Не стоит забывать и про бонус-тур. После любого удачного спина есть шанс прирастить необходимую выигрыша в 2 или четыре раза. <a href=http://filmkachat.ru/>1хслот официальный сайт зеркало</a> <a href=https://www.keepandshare.com/doc27/114858/pdf-357k?da=y>https://www.keepandshare.com/doc27/114858/pdf-357k?da=y</a> Такие одобрения разрешают бесплатно протестировать новое казино, разобраться с игровым ходом онлайн слотов, заработать и исключить небольшую необходимую средств. 1× slots casino зеркало <a href=http://wtsoc.h1n.ru/users/satisfyingsolit>http://wtsoc.h1n.ru/users/satisfyingsolit</a> Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, solid только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Также есть онлайн-платформы азартных игр, коие используют раздачу бездепозитных бонусов в специальные даты (как для казино, например и для игрока). Помимо этого, действующие игроки того имеют возможность получить схожие бонусы за собственную работа (например, за увеличения уровня или за похожие достижения).
1×slots официальный demo регистрация в 1×slots casino
1×slot рабочее зеркало В некоторых интернет казино для получения бездепозитных бонусов не довольно просто зарегистрироваться на сайте клуба и подтвердить свои контактные данные. Дополнительно потребуется активация промокода.Вы не в коем случае ни чем рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, выучится регулировать изменять ставки и линии, изучать бонусные игры и их выигрышные композиции, да в просто зарядится кучей эмоций! Ведь вы будите играть на бонусные свои, которые можно отыграть и вывести, не просто на демо счет, тем самым адреналин в крови еще больше повысится а пульс забьется с частым ритмом! <a href=http://www.lifelvzhou.org/bbs/home.php?mod=space&uid=329601&do=profile>http://www.lifelvzhou.org/bbs/home.php?mod=space&uid=329601&do=profile</a> Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке представители онлайн-казино публикуют важную информацию о no down payment bonuses и услугах.Активация случается счет промокодов, коие вводятся в личном кабинете последствии регистрации. Среди спецпредложений в перечне Casino.ru находятся неповторимые промокоды, которые доступны только посетителям портала. Другие методы начисления средств ? автоматическая активация сразу после творения аккаунта и получение дара по запросу в службу технической помощи. 1 xslots рабочее зеркало Бездепозитные призы настоящими средствами, коие возможно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадались.Также, учите, собственно бездепозитный бонус можно исключить только в том случае, когда будут исполнены все обстоятельства отыгрыша.
1×slots официальный сайт, скачать
Бонусы без депозита при регистрации считаются наиболее привлекательными как для опытнейших игроков, так для и новичков. Получив это вознаграждение, заказчик может играть на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные призы в интернет-казино Рунета, еще обстоятельства их активации и выигрыша.Некоторые казино могут предлагать клиентам бездепы за свидетельство номера либо почты либо репост на страничку в соц сетях. Выше мы дали глубокий комплект самых новых и актуальных бездепозитных бонусов в онлайн казино без пополнения на 2022 год, где возможность пользоваться каким ценным бездепозитным бонусом.Далее требуется отыграть вагер и исключить выигрыш. Игрокам без опыта крупно повезло, у получить 10-ки даров за 1 регистрацию. Если не смогли получить Бездепозитный бонус, не тревожьтесь. Обратитесь в интернет чат, оператор поможет ситуацию. <a href=http://tools.co.ua/wr_board/tools.php?event=profile&pname=utternucleus97>http://tools.co.ua/wr_board/tools.php?event=profile&pname=utternucleus97</a> Для получения выигрыша требуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить конкретную сумму, хотя уже из собственных денег. Она рассчитывается из общего объема выигрыша за всегда использования бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, случае юзер выиграл 1000 рублей, а множитель составляет х30, исключить средства возможно несомненно, сделав ставки на 30 000 рублей.При маленький сумме приза рекомендуется играть по низким ставкам, а использовать наибольшие другого лишь никаких случае, случае вейджер очень великой, а время на отыгрыш сильно ограничено. 1×slots казино зеркало
скачать 1×slots на андроид мобильная версия
<a href=https://australianwinerytours.com/tours/showthread.php?tid=210642>1×slots регистрация на официальном сайте</a> 1×slots промокод при регистрации 2025 <a href=http://victoryvapekorea.com/bbs/board.php?bo_table=free&wr_id=61660>http://victoryvapekorea.com/bbs/board.php?bo_table=free&wr_id=61660</a> Ну и окончательно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: подобная добродушие повышает степень преданности клиентов к фирмы.
1хслотс рабочее зеркало
Такой безвозмездный эквивалент средств зачисляется на профиль пользователя в осуществления притязаний и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений возможен лишь в воплощения вейджеровых критерий. <a href=https://xebecar.com/author/jamesdauff/>https://xebecar.com/author/jamesdauff/</a> Бездеп с фриспинами может обхватывать всю коллекцию игр на сайте или разработки одного провайдера. Обычно предлагается определенный список автоматов. Он указывается в положениях о проведении акции. Выигрыш может быть выведен после как, как пользователь отыграет данную сумму. Возможность расценить полный функционал слотов — главное достоинство данной разновидности. Игроку становятся доступны что, эти функции, которые отсутствуют в демонстрационном режиме, а возможность выиграть реальные средства добавляет ярких азартных чувств.Обычно для получения бонусов без депо, казино выдвигает приклнные и абсолютно выполнимые условия, но есть ряд поступков коие запрещены и имеют стать неприятные результаты: 1×slots коды
<b>Смотреть еще похожие новости:</b>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=324042&pid=646385#post_646385>1×slots зеркало этих способов предполагает регистрацию</a>
<a href=https://nztw.org/home.php?mod=space&uid=43957>1× slots зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Не стоит путать игру в демо и использование призов. В демонстрационном режиме игрок имеет расценить механику слота, сюжет и оформление. Но забава проводится на условные кредиты, поэтому отсутствует основное ? чувство азарта. Активируя промокод либо фриспины, заказчик и не расходует средства деньги на игровые автоматы, но может сорвать реальный куш!
#7910 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7911 StephenRoorn
http://mexicanpharmi.com/ medicine in mexico pharmacies
#7912 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало которую указывали при регистрации кстати
Для как, чтобы отыграть необходимую вашего бездепозитного приза надо(надобно) выполнить обстоятельства вейджера. Очень нередко фриспины даются на конкретные слоты (book of ra, book of dead, book of sun), выбирайте слот себе по душе, они очень красивые и качественные. Бездепозитные бонус может быть валютным так и в виде фриспинов на слотыВышеописанная причина и считается главным нюансом, следствии которого операторы отдают доля собственной прибыли на различные рекламные затраты и рекламные кампании. А наиболее действенным тут станут играть непосредственно бездепозитные бонусы казино 2022 с выводом за регистрацию. <a href=http://filmkachat.ru/>1×slots зеркало этих способов предполагает регистрацию</a> <a href=https://www.cyberlord.at/forum/?id=1&thread=19234>https://www.cyberlord.at/forum/?id=1&thread=19234</a> Основное различие что, что для получения бездепа нужно пополнять баланс в казино. Но считая сего, есть ряд прочих различий:Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической забавы на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, выучится регулировать менять ставки и линии, исследовать бонусные забавы и их выигрышные комбинации, ну конечном просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные средства, которые можно отыграть и вывести, не просто на демо счет, что, этим самым адреналин в крови еще повысится а пульс забьется с частым ритмом! 1×slots зеркало видели такую регистрацию на <a href=http://cheapbooks.cc/memberlist.php?mode=viewprofile&u=45588>http://cheapbooks.cc/memberlist.php?mode=viewprofile&u=45588</a>
1×slots официальный сайт скачать на айфон
Во время забавы в казино, выигрыши, приобретенные спасибо безвозмездным призовым фондам, суммируются и включаются в совместную сумму для отыгрывания. Однако, в удача улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно разрешит вывести денежные свои. Сумма вывода несомненно в от лимита, одобренного именно в данном учреждении. Поэтому, внимательно надо(надобно) разбирать управляла выдачи анлимитных депозитов. <a href=http://www.arka-bahce.org/forum/showthread.php?p=766404#post766404>1×slots официальный сайт скачать на айфон</a> 1×slots сайт зеркало <a href=http://www.seoulschool.org/bbs/board.php?bo_table=free&wr_id=114259>http://www.seoulschool.org/bbs/board.php?bo_table=free&wr_id=114259</a> 1×slots регистрация 1×slots casino 777 online
казино 1×slots официальный сайт
В большинстве заведений сделать это можно по e-mal, по номеру телефонного, спустя социальную сеть или гугл-аккаунт. Фриплей-бонусы встречаются только в неких клубах. Они зачисляются сразу последствии создания профиля и активны недолговременное время. Если не успеете истратить свои, они просто сгорят. Касаемо времени, в большинстве случаев призы активны в течение часа. <a href=http://bmwspeed.lv/user/StevenDop/>http://bmwspeed.lv/user/StevenDop/</a> 1×slots официальный сайт, скачать
1×slots регистрация 1×slotscasino09k online
В современность довольно просто получить бонус за регистрацию в казино. Практически каждый игорный дом с готовностью начисляет средства или благотворительные вращения. Многие гэмблеры используют данным и не стыдятся регистрироваться в каждом клубе с выгодными критериями. Кстати, это отличная возможность выработать победную стратегию и сорвать джекпот. Вывод выигрыша с бездепозитных призов казино – великодушный презент от азартных клубов. Но дабы вывести свой заработок, необходимо выполнить ряд условий: Заполняя данные в собственном профиле, указывайте только достоверную информацию, например как Вам придется ее доказать в при выводе средств. 1×slots casino регистрация на сайте <a href=http://fr3809hv.bget.ru/user/Charleswhabs/>http://fr3809hv.bget.ru/user/Charleswhabs/</a> Бездепозитные бонусы — это подарки от казино в виде бонусных средств либо фриспинов для игровых автоматов, коие начисляются на аккаунт игрока последствии процедуры регистрации на сайте заведения. Для получения таких поощрений депозит не потребуется.Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша бонусов. Заведения практически устанавливают максимальную ставку, возможную по условиям вейждера.
казино 1×slots
<a href=https://backpacker-footsteps.com/backpacker-footsteps-forum/profile/richardrof/>https://backpacker-footsteps.com/backpacker-footsteps-forum/profile/richardrof/</a> 1×slots casino регистрация
<b>Смотреть еще похожие новости:</b>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=324582&pid=647647#post_647647>казино 1×slots</a>
<a href=https://aircompare.us/forums/memberlist.php?mode=viewprofile&u=40074>1×слотс казино</a>
<a href=http://forum.exalto-emirates.com/memberlist.php?mode=viewprofile&u=69997&sid=cb302a56a16901fe37c32bdc3dfed882>1×slots рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для получения приза нужно ознакомиться с программой лояльности казино и устроить ставки на сумму, нужную для перехода на грядущий уровень.
#7913 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7914 Scottweshttps://onlinecasinocanada.shop
Discover the best <a href=https://onlinecasinocanada.shop/>no deposit bonus casino canada 2025</a> enjoy free spins or cash rewards just for signing up. Play top-rated games, explore trusted platforms, and win real money without spending a dime.
#7915 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
Для получения депозитного приза необходимо восполнить свой игровой баланс настоящими средствами. Вознаграждение можно получить или при внесении первого депо, либо вид фиксированного процента от внесённых средств. Так или по, бонус поступит на счёт лишь после пополнения. <a href=http://filmkachat.ru/>1×slots зеркало рабочее</a> Частенько новички не знают, как активировать презенты или вывести 1-ый выигрыш. Для подобных случаев наша команда обрисовала главные термины – собственно такое фриспины, вейджер, как его отыграть, для необходимо протекать верификацию.Минимального оборота. Этот предел устанавливается вейджером — же игрок не сыграет на установленную сумму, вывод средств будет недосегаем. <a href=https://pixabay.com/users/46661731/>https://pixabay.com/users/46661731/</a> 1×slots официальный сайт, скачать <a href=http://www.aaccweb.com.tw/discuss/home.php?mod=space&uid=519048>http://www.aaccweb.com.tw/discuss/home.php?mod=space&uid=519048</a> Подтверждение индивидуальной информации. Все казино настоятельно от клиента пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и наличие у юзера иных аккаунтов (мультиаккаунт запрещен).Иногда в бездепа, казино презентует минимальный приз (до 50 рублей), ради которого не стоит заморачиваться.
1×slots актуальное зеркало
Для получения приза надо(надобно) пригласить в игру нового посетителя. Казино начислит пригласившему фиксированный процент от взносов приглашённого в виде приза: почаще всего его объем не выше 10%. Срок действия бонуса в большинстве случаев не выше месяца: пригласивший получает бонус зависимо проигранных ставок приглашённого в 1-ый луна игры. 1×slots официальный сайт скачать Даже не выиграв солидную необходимую, игрок интересно проведет время, изнутри исследует работу площадки, воспримет геймплей автоматов. Все это без каких-либо финансовых рисков. Быть в курсе наилучших промоакций легко. Достаточно регулярно изучать список свежих онлайн казино с выводом приза без депозита в данном разделе. <a href=http://art-metall.su/user/Juleshyday/>http://art-metall.su/user/Juleshyday/</a> Бездепозитные бонусы в казино без пополнения 2022 — это определенная сумма средств или for nothing spins вращения, коие предоставляются первым гостям за регистрацию на веб-сайте казино вид бездепозитного бонуса, и дает для возможность с казино без пополнения опробовать предложения (игр), с дальнейшей привилегией вывода средств при исполненьи всех установленных управлял.Отказ в прохождении верификации. Если клиент не хочет либо возможности дать документы, подтверждающие его лицо, профиль будет заблокирован вместе со всеми бонусными начислениями. 1хслотс рабочее зеркало Казино выделяет вероятность заработать и вывести реальные средства на бездепозитных бонусах. Обычно, это незначительная сумма, которую казино имеет себе разрешить презентовать игроку.
1× slots регистрация в 1×slots casino
Прочитайте правила бонусной программы, в которой хотите принять. Да, мы настойчиво рекомендуем устроить это до регистрации. Не стоит путать забаву в демо и внедрение призов. В демонстрационном режиме игрок возможность расценить механику слота, сюжет и оформление. Но игра проводится на относительные кредиты, потому отсутствует главное ? чувство азарта. Активируя промокод или фриспины, клиент и не расходует свои деньги на игровые автоматы, но возможность сорвать реальный куш! <a href=https://foros.factormoe.net/user-5476.html>https://foros.factormoe.net/user-5476.html</a> Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке адепты онлайн-казино публикуют актуальную информацию о not the slightest deposit bonuses прочих предложениях.Нет. Для получения бездепозитного приза в казино необходима обязательная регистрация на сайте. Играть в слоты бесплатно и без регистрации возможно только в демо режиме. 1хслотс казино зеркало
рабочее зеркало 1хслотс
Иногда виде бездепа, казино дарит наименьший приз (до 50 рублей), из-за которого не заморачиваться.Любой выигрыш по ставке выше установленного лимита будет являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, ну случае выигрыша его сумма не поступит на счёт клиента — итог игры несомненно всецело аннулирован. <a href=https://www.reisezielforum.de/viewtopic.php?t=391700>1×slots зеркало сайта</a> Бонус в казино без депо имеет разные вариации: может быть приветственный бонус, акции в честь каких-либо праздничных либо важных дат, бонус за привлечение свежих игроков, преданность и получение VIP-статуса.Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке нужно восполнить счет в казино. Для депозитных бонусов, эта процедура не необходима, например как депозит теснее изготовлен. Прибывшие на аккаунт деньги бездепозитные бонусы предназначаются, главном, только для свежеиспеченных пользователей, коие ранее не имели собственного аккаунта в данном казино. Исходя из сего, случае ранее у игрока был сделан депо, то, по всей вероятности, у него больше не будет способности рассчитывать на получение такового приза в определенном заведении.В бонусную программу многих операторов входят систематические бездепы. Это пожизненные промоакции, поощряющие интенсивных постоянных игроков. Популярный формат — раздача фриспинов по определенным дням недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают постоянные призы без депозита в размен на накопленные баллы преданности. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=http://georgiantheatre.ge/user/ArnoldWaynC/>http://georgiantheatre.ge/user/ArnoldWaynC/</a> Еще одно условие касается размеров ставки. Операторы устанавливают максимальную сумму, коию игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, выбранной в Личном офисе. При превышении лимита есть риск лишиться приза. Существующие ограничения относятся и к определенным обликам ставок. Например, играя в рулетку, клиент имеет столкнуться с запретом ставить фишки на шансы.Наличие у игрока 2 аккаунта. Запрещено делать количество профилей для многократного получения бездепов.
онлайн казино 1×slots
Фриспины без депозита либо вспомогательные свои посодействуют ближе познакомиться с игровой платформой и её функциями. За счёт подарков возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям ради забавы напротив живых крупье.Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, the decision только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. <a href=http://azad.az/user/Raymondmar/>http://azad.az/user/Raymondmar/</a> Акции, посвященные календарным праздникам, посещают рассчитаны как на всех юзеров, так и на категории: к, презент на 8 марта девушкам-игрокам или мужикам на 23 февраля.Нет. Казино раздают бесплатные бонусы за регистрацию, чтобы, чтобы, дабы заказчик мог ознакомиться с игровым заведением. А дабы вывести его, необходимо выполнить обстоятельства отыгрыша. 1хслотс регистрация в 1×slots casino На безвозмездные призы онлайн-казино практически всегда распространяется ограничения по стране проживания клиентов. Даже в для разрешается открывать счет и выступать на деньги в заведении, это еще не значат, собственно вам доступны no deposit bonuses.
<b>Смотреть еще похожие новости:</b>
<a href=http://theauction.com.au/author/jamesflake/>1×slots зеркало рабочее</a>
<a href=http://naturetour.ru/personal/profile/index.php?PAGE_NAME=profile_view&UID=2416>1×slots официальный сайт зеркало</a>
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=31585>скачать 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Денежные средства. Третий приз за регистрацию без депозита – наличные. К раскаянью, лишь знаменитые и модные клубы могут уяснить деньги в рублях или баксах. С их поддержкой вы сможете насладиться любой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед этим необходимо исполнение определенных критерий. Выигрыши с бонусов без вложений практически привязаны к требованию по ставкам и шансы быть обналичены только после исполненья этих притязаний.
#7916 Charlesgunny
симулятор казино Манилова Алла Юрьевна порно <a href=https://strelochnik.com/>букмекерская контора официальный сайт скачать</a> black russia казино 1×bet зеркало на сегодня 1×bet xyz <a href=https://rucriminal.info/>1×bet слоты 1×bet xyz</a> porno Виктория Баркова, легкоатлетка порно с Дарья Касаткина (теннис) 1×bet на сегодня casino 7k сегодня пин up casino сколько казино казино пин
#7917 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация в 1×slots casino
Бездепозитный бонус за регистрацию в казино — это стартовый подарок в виде денежного начисления или безвозмездных вращений для свежих игроков заведения, для получения которого надо заносить депо. <a href=http://filmkachat.ru/>1 х слотс зеркало</a> Так же стоит выделить то, что в любом интернет казино установлен собственный наибольший кешаут на бездепозитный приз. Как управляло кешаут — это максимальная сумма денег, кот-ая дешевая для вывода с бездепозитного бонуса. <a href=https://culture-informatique.net/forum/quelquun-peut-mexpliquer/what-is-a-3d-render-understanding-the-basics-and-beyond/>https://culture-informatique.net/forum/quelquun-peut-mexpliquer/what-is-a-3d-render-understanding-the-basics-and-beyond/</a> Это один из основных показателей привлекательности дара. С завешенным коэффициентом даже мастера не сумеют выполнить обстоятельства по отыгрышу. И маловажно, как привлекательно выглядит предложение – бездепозитный приз казино в объеме $500 или $1 000. Чтобы новички лучше вникли, собственно же такое вейджер, мы разберём на образце. сайт 1× slots casino <a href=http://www.0471tc.com/home.php?mod=space&uid=1369891>http://www.0471tc.com/home.php?mod=space&uid=1369891</a> Доступ к дару имеет раскрываться автоматически последствии введения промокода или воззвания в саппорта сайта. В первом случае от пользователя не потребуется никаких поступков. Бездеп с активацией по коду встречается почаще всего. Игроку нужно ввести совокупность символов в графе, которая может находиться в регистрационной форме в Личном офисе.
1× slots casino официальный сайт
Бесплатный приз – кредиты, коие онлайн-казино начислит клиенту, не заставляя его пополнять игровой счет. <a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1607#post-47093>1хслотс казино зеркало</a> 1×slots официальный зеркало Такие одобрения разрешают бесплатно протестировать новое казино, разобраться с игровым ходом онлайн слотов, заработать и исключить небольшую необходимую средств.Во время забавы в казино, выигрыши, полученные благодаря бесплатным призовым фондам, суммируются и включаются в общую необходимую для отыгрывания. Однако, в фортуна улыбнется и выйдет отыграть все призы, игровое заведение гарантированно разрешит исключить финансовые средства. Сумма вывода несомненно зависеть от лимита, одобренного именно в данном учреждении. Поэтому, пристально нужно читать верховодила выдачи безлимитных депозитов. <a href=https://gamesdrive.net/User-JoshuacoM>https://gamesdrive.net/User-JoshuacoM</a> 1 xslots рабочее зеркало Некоторые онлайн-казино без депозита предлагают свежим клиентам избрать приз при регистрации. Будьте внимательны: выбрав раз, вы в безусловном большинстве случаев не сможете воспользоваться остальными.
1хслотс зеркало на сегодня
Существует ли стратегии для отыгрыша бездепозитных призов? К раскаянию нет, на выигрыши либо проигрыши с бонусов, казино либо игрок повлиять возможности, отдача игр происходит от создателей игр. <a href=http://posadfm.ru/bitrix/redirect.php?goto=http://cl-policlinic1.ru/bitrix/click.php?goto=http://hookahhouse.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/CNFx42uQGSq>http://posadfm.ru/bitrix/redirect.php?goto=http://cl-policlinic1.ru/bitrix/click.php?goto=http://hookahhouse.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/CNFx42uQGSq</a> 1×slots зеркало проходить регистрацию это отличный вариант Исходя из этого, просто не существует мудрых оснований махнуть рукой на получение такового приза при регистрации. И, кстати, на такой безвозмездной основе у вас есть шансы выиграть деньги и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, именуют бесплатными интернет платформами для игр.
1×slots официальный сайт скачать на айфон
Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке нужно восполнить счет в казино. Для депозитных бонусов, эта процедура не необходима, например как депозит теснее изготовлен. <a href=http://b2s.bulwork.com/node/1581?page=75#comment-22225>1×slos регистрация в 1×slots casino</a> Если вы опытный игрок, вы обязаны знать, что приз без депо – редчайшая находка. Тем не менее, мы неделю изучаем интернет, чтобы найти вам наихорошие бездепозитные предложения.Бездепы обычно предлагают с отыгрышем — мгновенно вывести выигранные свои нельзя. Перевод средств со счета будет возможен в как, как юзер выполнит все требования казино, а сумма имеет превышать установленного правилами лимита. Условиями акции фиксируются сроки, в течение коих клиент вправе воспользоваться предложением. Обычно они не превышают нескольких дней после активации. 1×slots на любой вкус как пройти регистрацию <a href=http://www.makili-aliyev.com/2019/08/research-note-on-nagorno-karabakh.html>http://www.makili-aliyev.com/2019/08/research-note-on-nagorno-karabakh.html</a>
1×slots коды
Срок активации и время на отыгрыш. Зачисление средств либо фриспинов происходит при активации в течение взыскательно ограниченного периода, схожие требования предъявляются и к срокам отыгрыша. Одни казино позволяют отыгрывать бонус несколько дней или в недель. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером.Бонус начисляется игроку незамедлительно последствии регистрации и прохождения верификации в казино и не настятельно от клиента внесения депо. Как верховодило, объем приза в подобном случае довольно умеренный, впрочем дозволяет новичкам познакомиться с забавой без риска настоящими средствами. Если вы облюбовали для себя несколько брендов которые для больше всего приглянулись, для постоянной игры! Таких гемблеров казино довольно любит и ценит, за частую такие игроки становятся VIP игроками заведения, которым часто поступают прибыльные предложения вид бонусов, так же туда входит и бездепозитные.Если вы новичок в этом деле и лишь попали в неизведанную вами область пыла — с помощью услуг как бездепозитные призы без пополнения. <a href=http://akz21.ru/index.php?subaction=userinfo&user=hesitantdignity>http://akz21.ru/index.php?subaction=userinfo&user=hesitantdignity</a> Не сложно догадаться, что not the slightest down payment bonuses почти ни не бывают немаленькими. Чаще всего речь идет о пяти–тридцати долларах (либо эквиваленте этой суммы в иной еденице). 1× слот зеркало Прежде всего, не забывайте регулярно заглядывать на страничку обзоров бездепозитных призов. Они шаг за шагом оценивают наиболее увлекательные предложения основных игорных порталов.
<b>Смотреть еще похожие новости:</b>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-4999/#comment-598138>1×slots регистрацию более популярный вариант это</a>
<a href=http://evtrucksforum.com/viewtopic.php?p=809313#p809313>1×slots зеркало проходить регистрацию это отличный вариант</a>
<a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=3259>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Поспешите отобрать бездепозитные призы за регистрацию в казино из представленного перечня. Все платформы не только ведут легальную работа, хотя и обрадуют добросовестными плодами игры, высочайшей отдачей, резвыми выплатами. Чтобы играть даром на реальные деньги в казино, порой довольно просто зарегистрироваться. Иногда необходимо выполнить дополнительные действия.
#7918 Charlesgunny
порно с Каролина Севастьянова Мухтиярова Елена Вячеславовна порно <a href=https://kompromat1.online/>казино рояль</a> скачать 1×bet на андроид бесплатно porno Андрей Рублев (теннис) <a href=https://strelochnik.com/>1×bet зеркало xbet</a> Львова-Белова Мария Алексеевна порно винлайн букмекерская контора официальный сайт зеркала казино Светлана Ходченкова unlim casino казино сегодня про казино
#7919 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7920 Donaldvafhttps://ocenka-riskov-msk.ru
провести оценку профессиональных рисков цена Москва <a href=https://ocenka-riskov-msk.ru/>https://ocenka-riskov-msk.ru</a>
#7921 Charlesgunny
casino buzz лучшие букмекерские конторы <a href=https://repost.news/>порно с Васильева Татьяна Викторовна</a> скачать 1×bet 1×bet xyz скачать pin casino <a href=https://th-royalgclub.com/>лучшая казино</a> retro casino pin up casino buzz зеркала казино Радченко Светлана Юрьевна порно казино 1 порно с Дронова Александра Викторовна pin up букмекерская контора
#7922 Charlesgunnyhttp://filmkachat.ru
1× slots casino официальный сайт
Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут уточняет ограничение для клиентов. Конечно, это можно счесть неким неудобством для игрока, хотя справедливости необходимо, собственно выбор автоматов всё равно остаётся достаточно большим.Обычно для получения бонусов без депо, казино выдвигает лояльные и вполне выполнимые обстоятельства, но есть ряд действий коие воспрещены и шансы стать досадные результаты: <a href=http://filmkachat.ru/>1× slots регистрация в 1×slots casino</a> Какие бонусы возможность еще получить кроме бездепозитного приза за регистрацию в казино? По мимо бездепозитного бонуса, каждое интернет казино предлагает игрокам прибыльное предложение на 1-ый депозит, вы совершаете депозит, ваш депозит увеличивается в двое или и в трое, тем самым начать выступать можно с больше солидной суммой, так же не забываем про вейджер на бонусы. <a href=https://writeablog.net/59800y22ou>https://writeablog.net/59800y22ou</a> Если вы бывалый игрок, вы обязаны аристократия, собственно бонус без депо – редкая находка. Тем ниже, мы еженедельно изучаем онлайн, чтобы найти для вас наихорошие бездепозитные предложения.Иногда в качестве одобрения за регистрацию могут выдаваться билеты для роли в турнирах. Условия их проведения очень выделяются, потому мы советуем ознакомиться с каждым предложением раздельно. 1×slots скачать на айфон <a href=http://yinyue7.com/space-uid-1015567.html>http://yinyue7.com/space-uid-1015567.html</a>
1×slots быструю регистрацию а также мгновенное
Вейджер (wager) – это коэффициент, который демонстрирует на какую необходимую необходимо сделать ставок, чтобы исключить бонус из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего приза, Вам нужно устроить ставок на необходимую: 500*70=3500 руб. Только полностью отыграв бонус, Вы сможете вывести свой выигрыш. <a href=http://bikepacking.free.fr/forum/viewtopic.php?f=18&t=36909>рабочее зеркало 1×slots</a> 1×slots зеркало подтвердит вашу регистрацию если говорить Объективные – объем бонуса, коэффициент и условия вейджера, необходимость внесения депозита для вывода средств; <a href=https://www.google.com.uy/url?q=http%3A%2F%2Fdoctorlazuta.by>https://www.google.com.uy/url?q=http%3A%2F%2Fdoctorlazuta.by</a> Бездепозитные бонусы прекрасный вариант бесплатной игры в игровые автоматы. Многие юзеры сети не понимают, собственно в казино можно начать выступать полностью бесплатно, а позже вывести выигрыш на банковскую карту или электронный кошелек, другие не доверяют онлайн казино, а третьи удачно играют и выигрывают – и тотчас достаточно немалые суммы. 1×slots подтвердит вашу регистрацию если говорить Максимальная ставка ? устанавливается в валюте счета и ограничивает размер ставки за раз спин. В случае ее превышения бонус имеет быть аннулирован. Также в правилах может содержаться запрет на размещение ставок конкретного облика, примеру, по равным шансам в рулетке (словами, на чет либо нечет, красноватое либо черное и т.д. ).Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 поболее. Когда игроку полагается количество фриспинов, администрация возможность бить3 их начисление на некоторое дней. Бесплатные вращения предоставляются для определенного слота, который указывается в правилах акции.
1×slots официальный зеркало рабочее
В большинстве заведений устроить это можно по e-mal, по номеру телефонного, через социальную сеть либо гугл-аккаунт. <a href=https://www.techieshah.com/2019/08/eclipse-server-tomcat-v85-server-at.html>https://www.techieshah.com/2019/08/eclipse-server-tomcat-v85-server-at.html</a> Бывают ли бездепозитные призы без вейджера? Бывают, случае у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино.Индивидуальные одобрения выдаются за совершение деяний: подписку на аккаунты площадки в соц сетях, установку мобильного прибавления или официального клиента для ПК. В большинстве казино действуют программы лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий степень нередко сопровождается выдачей бездепа. 1хслот 1хслотс регистрация перейти на 1×slots Такой казино приз без депо за регистрацию выдается игроку на час и энергично используется данное предложение с 2017 года. Это словно какая-то маскировка поощрения под бездепозитный. Суть всего сего сводится к что, этому, что игроку на час выдается, к примеру, 1000 долларов, а реклама повторяет то, что каждой выигрыш можно несомненно дальнейшем оставить при себе. Но в играющий серьезно отнесется к данному предложению, то он попросту потеряет время. Ведь геймеру надо(надобно) несомненно выступать не главном аккаунте, в тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (и всей тыс. ) в верховодила вступят определенные условия, где будет сказано, собственно наибольшей суммой победы может быть только двести долларов и средства можно применять только виде приза на первый лепта с вейджером 25 от суммы вознаграждения плюс сам депо. По результату получится, собственно игрок выигрывал для 200% бонус с вейджером на конкретную необходимую. Короче говоря, это все не стоит вашего времени.Индивидуальные одобрения выдаются за совершение деяний: подписку на аккаунты площадки в соц сетях, установку мобильного приложения либо официального клиента для ПК. В большинстве казино срабатывают программы лояльности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на грядущий уровень часто с выдачей бездепа.
1×slots казино зеркало
Возможность поиграть вспомогательное состязание (а время и некоторое) абсолютно безвозмездно, а выигрыш, же, поступает на счёт игрока. <a href=https://techadron.com/forum/viewtopic.php?p=9343>1хслотс официальный сайт зеркало</a> Бездепозитные призы – это исключительно занимательная и более многообещающая промоакция интернет-казино. Они в другого фри-спинов, потому что выплаты в даровых вращениях не гарантированы, как комбинации на барабанах игрового аппарата все не сложиться. Выбирайте наихорошие бесплатные призы счет обзоров на Casinoz – и пусть для сопутствует счастье при отыгрыше бонусных кредитов! 1×slot официальный сайт <a href=https://www.hoyolab.com/article/22241307>https://www.hoyolab.com/article/22241307</a>
1×slot рабочее зеркало
<a href=http://link.ac/humor/user/Deweyshous/>http://link.ac/humor/user/Deweyshous/</a> Помимо прочего, для вывода средств по бездепу необходимо привнести на счёт свой 1-ый депозит — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально вероятную необходимую, после чего вывод средств станет доступен. 1хслот скачать Даже не выиграв крупную необходимую, игрок увлекательно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе превосходнейших промоакций с. Достаточно периодически изучать список новых интернет казино с выводом бонуса без депозита в данном разделе.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.donchillin.com/space-uid-382497.html>рабочее зеркало 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Объективные – объем приза, коэффициент и условия вейджера, надобность внесения депозита для вывода денег;
#7923 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7924 Jamesjerhttps://helikon.com.ua
Новости технологий <a href=https://helikon.com.ua/>https://helikon.com.ua</a> все о последних IT-разработках, гаджетах и научных открытиях. Свежие обзоры, аналитика и тренды высоких технологий.
#7925 Danielquornhttp://www.babelcube.com/user/samantha-markley
“You get some of me but not tomorrow as they want me in as soon as I can make it happen. This is the one time when they say jump and I ask how high due the financial gains the company could benefit from and it being important enough for the client to appear in person.”
“Well I get an extra night of you at least! I wonder what we could do with that? Meantime, what about food? I am starving and delicious as it was a second breakfast is not quite enough to replenish me!”
“Well get something on and we’ll sort that out first.”
We drove into town and decided that a daytime visit to Charlie’s was going to be the answer. I parked in the bar lot and Elise dashed in to change into something more appropriate, jeans and a t-shirt along with her biker jacket but keeping her Converses on.
Walking down to the restaurant was different from the middle of the night visits as the streets were bustling and all of the shops and outlets were open.
Reaching Charlie’s we entered the front door and sat in a booth near the window. A beautiful young American Chinese girl came,smiled and said hello to Elise and gave us menus and asked if we wanted drinks in the meantime.
„No thanks Lin just a pot of Jasmine tea for us please.“ Lin went back to the kitchen area. “No booze for me today as I will have to work in the bar so it is just tea for me.”
Not in a drinking mood either, I agreed with her."
https://chyoa.com/…/ckycrew1954 https://mansi1954.diary.ru/ https://www.obesityhelp.com/…58/about_me/ https://okwave.jp/…3143389.html https://www.obesityhelp.com/…83/about_me/
#7926 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало этих способов предполагает регистрацию
Шаг 5. Использование и отыгрыш. Бездеп должен быть применен в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера. <a href=http://filmkachat.ru/>1×slots официальный сайт, скачать</a> Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских рублей. В критериях акции предписано, собственно вейджер бездепозитного приза х20. Поэтому, дабы отыграть бонус, игроку несомненно нужно сделать ставок на 35*20=700 рублей. <a href=https://start.me/w/mnDDnY>https://start.me/w/mnDDnY</a> Вы наверняка, как и все предпочитаете получать подарки и бездепозитные призы казино. Игорные дома взяли в привычку одаривать гэмблеров приятными бонусами. Стать обладателем приветственного подарка можно за творенье профиля либо пополнение счёта. Второй вариант более увлекательный, как клубы готовы удвоить депозит! Но если вы новичок и лишь знакомитесь с миром пыла, другого пользуйтесь бонусом за регистрацию.С такими ординарными советами каждое казино с призом за регистрацию способно принести в разы больше выгоды и пользы. казино 1×slots официальный сайт <a href=http://jnsedb.kr/bbs/board.php?bo_table=free&wr_id=709756>http://jnsedb.kr/bbs/board.php?bo_table=free&wr_id=709756</a> Вообще перейдя в казино — правила одинаковы в получении бездепозитных призов, в стереотипные управляла входит: доказать эл. Почту и аппарат, заполнить собственный личный профиль, активировать рекламную код либо активировать предложения во вкладке БОНУСЫ.
1хслотс зеркало
<a href=http://polishcrazyclan.ugu.pl/member.php?action=profile&uid=272738>1×slots бонус за регистрацию</a> 1×slots официальный сайт скачать <a href=https://metod2014.ru/09/vkusnaya-pitstsa-ot-shef-povarov-restorana-mucho/?preview=true>https://metod2014.ru/09/vkusnaya-pitstsa-ot-shef-povarov-restorana-mucho/?preview=true</a> Самый распространённый из сходственных призов, конечно же, бездеп на денек рождения клиента — бонус повторяющий фиксированной суммы либо фриспинов поступает на счёт игрока, а воспользоваться им можно на установленного периода времени. 1×slots бездепозитный бонус за регистрацию Обыкновенные бездепозитные призы в объеме от 3-х до двадцати долларов сделаны чтобы, чтобы, дабы в игры заходили все свежие и свежие игроки. Здесь, всего, несомненно лимитирование на максимальный выигрыш. Важно, дабы перед наименьшим вкладом был отключен бонус за 1-ое пополнение счета, и игрок не попадет на повторный вейджер.Таким образом, заведение пробует показать себя своим потенциальным игрокам, а подобный маркетинговый ход как казино приз без депозита за регистрацию привлекает довольно большое внимания к игорному заведению и обеспечивает постоянный поток свежих гостей и будущих посетителей игрового интернет клуба.
1×slots рабочее зеркало
Срок отыгрыша — это этап, кот-ый начинается в момент активации приза и завершается с его закрытием. Пользователю необходимо уложиться в этот временной промежуток, другому призовые свои аннулируются. Казино устанавливают список игр, ставки в засчитываются при расчете отыгранных средств. Если тайтл не заходит в данный список, то возможность быть недоступен для загрузки в деянья бонусного предложения. Свежий приз начисляется в виде валютных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в пользовании своими, а случае отыгрыша оператор имеет ввести ограничение на вывод денег. <a href=https://rodme.ru/top-kachestvennyh-online-kazino-t12373.html#p17198>https://rodme.ru/top-kachestvennyh-online-kazino-t12373.html#p17198</a> 1хслотс зеркало Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном призе, то в первую очередь направьте на велечину вейджера и срок, который дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, тем легче отыграть бонус и вывести выигрыш.Итак, дабы безвозмездные бонусные кредиты трансформировались в настоящие деньги, которыми вам управлять по своему усмотрению, их надо(надобно) отыграть. Вейджер по уточнять в правилах онлайн-казино.
сайт 1× slots casino
Представленные на этой страничке лучшие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, в котором гости Casino.ru могут сортировать список по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д. <a href=https://tucmas.fi/phpBB/viewtopic.php?f=4&t=352515>1 xslots рабочее зеркало</a> Предложения с бездепозитными бонусами за регистрацию дозволяют свежим заведениям привлечь аудиторию на собственный вебсайт. А игроки к получают возможность играть на настоящие деньги без депо в казино и заработать маленький стартовый капитал, кот-ый разрешено вывести на карту банка или электрический кошелек.Бездепозитные призы в казино без пополнения 2022 — это конкретная сумма денег либо gorovyh spins вращения, коие предоставляются первым гостям за регистрацию на сайте казино повторяющий бездепозитного бонуса, и дает вас вероятность помощью казино без пополнения опробовать услуги (игр), с дальнейшей преимуществом, льготой вывода средств при выполнении всех установленных правил. Ещё одно распространённое акционное предложение – привлекательный подарок с неблаговидными притязаниями. К образцу, клуб сулит $100 виде бездепа, хотя с вейджером х80 или х100. Отыграть подобный вейджер фактически невозможно и поэтому превосходнее концентрироваться на больше занимательных акциях.Также, учите, что бездепозитный приз можно исключить только в случае, когда станут выполнены все обстоятельства отыгрыша. 1×slots зеркало видели такую регистрацию на <a href=https://king-wifi.win/index.php?title=Выкуп_авто>https://king-wifi.win/index.php?title=Выкуп_авто</a> Получив свой презент, Вы можете даром играть на настоящие деньги, а выполнив обстоятельства отыгрыша, исключить собственный выигрыш.
1×slots официальный зеркало
Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, чтобы снова получить безвозмездный бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ждет неизбежное наказание. Можно ли зарабатывать на бездепозитных призах? Это не работа, здесь как повезет, в в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, тогда возможно именовать везением, и добавочной добавкой к вашему бютжету. <a href=https://stalker-worlds.games/user/Walterflacy/>https://stalker-worlds.games/user/Walterflacy/</a> На нашем веб-сайте Вы найдете перечень своевременных свежих бездепозитных призов в казино 2022 года. Также, есть количество неповторимых предложений, которые доступны только посетителям нашего сайта после регистрации по нашей ссылке либо активации специального промокода.Приглашаем делиться суждениями о бонусах. Это поможет иным пользователям подбирать наиболее прибыльные предложения. 1×slots регистрация
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При поддержки такого поощрения оператор возможность также привлекать посетителей, которые раньше проявляли активность на веб-сайте, хотя по некий причине перестали играть. В данном случае промокод высылается пользователю по электрической почте либо вид SMS.
#7927 Charlesgunny
зеркала официальных сайтов казино водка казино <a href=https://th-royalgclub.com/>7k casino сайт</a> 1×bet скачать приложение слоты казино <a href=https://kompromat1.online/>порно с Каролина Севастьянова</a> букмекерская контора ставки сайты казино up casino зеркало где казино unlim casino casino бонус леон букмекерская контора
#7928 Charlesgunnyhttp://filmkachat.ru
1×slot регистрация
Во всех легальных онлайн-казино Беларуси необходимо подтверждение паспортных данных для забавы — это требование правительства страны. <a href=http://filmkachat.ru/>1×slots сайт</a> <a href=https://glose.com/activity/670513e5ed2e698377922591>https://glose.com/activity/670513e5ed2e698377922591</a> Активация по промокоду употребляется в различных видах бездепов. Если идет о приветственном бонусе, то набор символов возможно разузнать на крупнейшей странице, в регистрационной форме или письме, которое отчаливает пользователю для подтверждения e-mail. Акции имеют проводиться вместе с партнерскими площадками. Обычно код размещается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется одноразовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном кабинете либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем актуальный код для активации в описании любого промо. 1×slots официальный сайт зеркало <a href=https://agropravda.com/forum/topic4394-yak-vdkriti-uspshnii-nternetmagazin-grashok.html>https://agropravda.com/forum/topic4394-yak-vdkriti-uspshnii-nternetmagazin-grashok.html</a>
x1 slots 1хслотс регистрация перейти на 1×slots
Бездепозитный приз казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в этом и содержится главное различие. 1× slots зеркало Частенько новички не знают, как активировать презенты или исключить 1-ый выигрыш. Для подобных случаев наша команда обрисовала главные определения – собственно такое фриспины, вейджер, как его отыграть, зачем нужно проходить верификацию. <a href=http://mail.nudecelebvideo.net/user/DoctorLazutaSt/>http://mail.nudecelebvideo.net/user/DoctorLazutaSt/</a> 1×slot рабочее зеркало
1хслотс мобильная версия зеркало
На условиях отыгрыша даровых бонусов идет остановиться подробнее. С ними связаны нюансы, коие нельзя забыть без внимания. Создание аккаунта. На сайте казино необходимо обнаружить регистрационную форму и наполнить пустые поля личными данными. Иногда на этом шаге потребуется указать только адрес электрической почты и пароль, но чаще надо заполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д.). Нужно указывать лишь настоящие данные, потому впоследствие они станут проверены. <a href=https://www.medicinacinesenews.it/forum/memberlist.php?mode=viewprofile&u=3584716>https://www.medicinacinesenews.it/forum/memberlist.php?mode=viewprofile&u=3584716</a> Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации дара нужно подтвердить электронную почту и привязать телефон;Возможность поиграть дополнительное соревнование (а времени и несколько) совершенно бесплатно, а выигрыш, же, поступает на счёт игрока. 1×slot зеркало Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 $. Если выдаются фриспины, их число изредка превышает нескольких десятков даровых вращений.
сайт 1× slots casino
Теоретически, к бесплатным призам можно отнести так называемые фриспины. Напомним, речь идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, потому что они деют лишь вероятность делать ставки. Демоказино есть почти на каждом веб-сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются значительно реже: там когда выигрыша и соблюдения критерий акций бездеп можно превратить в настоящие средства. Бонус в казино без депо имеет разные вариации: может быть приветственный бонус, акции в честь каких-либо праздничных либо важных дат, бонус за привлечение свежих игроков, преданность и получение VIP-статуса. 1×slos регистрация в 1×slots casino <a href=https://stil.5bb.ru/viewtopic.php?id=3426#p5201>https://stil.5bb.ru/viewtopic.php?id=3426#p5201</a>
1×slots официальный сайт, скачать
Подтверждение электрической почты – одно из ведущих критерий, которое есть почти в любом бездепозитном казино. Чтобы верифицировать электронную почту, достаточно перебежать по интенсивной ссылке в письме, приобретенном от азартного клуба. Вейджер в переводе с английского значит «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша полученного приза, в нашем случае бездепозитного. Число ставок имеет — принципиально только набрать сумму, пропорциональную сумме одобрения.На безвозмездные призы онлайн-казино почти постоянно распространяется ограничения по стране проживания клиентов. Даже случае вас разрешено раскрывать счет и выступать на средства в заведении, это еще не означают, что для доступны no deposit bonuses. <a href=https://marvelvsdc.faith/wiki/%D0%A4%D0%BB%D0%B8%D1%80%D1%82_%D0%A1%D0%B0%D0%B9%D1%82_%D0%97%D0%BD%D0%B0%D0%BA%D0%BE%D0%BC%D1%81%D1%82%D0%B2_%D0%9C%D0%BE%D1%8F_%D0%A1%D1%82%D1%80%D0%B0%D0%BD%D0%B8%D1%86%D0%B0>https://marvelvsdc.faith/wiki/%D0%A4%D0%BB%D0%B8%D1%80%D1%82_%D0%A1%D0%B0%D0%B9%D1%82_%D0%97%D0%BD%D0%B0%D0%BA%D0%BE%D0%BC%D1%81%D1%82%D0%B2_%D0%9C%D0%BE%D1%8F_%D0%A1%D1%82%D1%80%D0%B0%D0%BD%D0%B8%D1%86%D0%B0</a> 1х слотс зеркало регистрация в 1×slots casino Бездепозитные бонусы истинными деньгами, которые возможно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадались.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=57313>1×slots регистрация на 1хслотс</a>
<a href=http://www.emv.info/viewtopic.php?f=15&t=2388>1хслотс мобильная версия зеркало</a>
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=3974>1×slots официальный сайт мобильная версия</a>
<a href=https://persiankittencat.com/grey-persian-cats-unraveling-the-charm-of-these-feline-beauties/#comment-52308>1×slots официальный сайт, скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для отыгрыша бонуса казино обязывает игрока сыграть на необходимую, в количество раз превосходящую сумму полученного бонуса — тут выгода компании явна.
#7929 EduardoDorhttps://eeu-a.kiev.ua
Портал о ремонте <a href=https://eeu-a.kiev.ua/>https://eeu-a.kiev.ua</a> всё для тех, кто ремонтирует: пошаговые инструкции, идеи дизайна, обзор материалов и подбор подрядчиков.
#7930 Elmerbefhttps://domtut.com.ua
Журнал по ремонту <a href=https://domtut.com.ua/>https://domtut.com.ua</a> и строительству – советы, идеи и обзоры. Узнайте о трендах, изучите технологии и воплотите свои строительные или дизайнерские задумки легко и эффективно.
#7931 Henryseazyhttps://comart.com.ua
Всё о ремонте на одном сайте <a href=https://comart.com.ua/>https://comart.com.ua</a> Портал по ремонту предлагает обзоры материалов, рейтинги специалистов, советы экспертов и примеры готовых проектов для вдохновения.
#7932 StephenRoorn
http://indiapharmi.com/ п»їlegitimate online pharmacies india
#7933 Charlesgunny
пинап казино pin up casino пин ап <a href=https://sovsekretno.net/>пина букмекерской конторы</a> скачать сайт букмекерской конторы pin up casino buzz <a href=https://slon-ru.com/>1×bet на андроид бесплатно</a> casino промокод casino зеркало сегодня рабочее Хорова Наталья Александровна порно kent casino регистрация порно с Карен Хачанов (теннис) порно с Юлия Ефимова, пловчиха яндекс игры казино
#7934 PhillipCafhttps://as-el.com.ua
Строительная компания <a href=https://as-el.com.ua/>https://as-el.com.ua</a> выполняем строительство жилых и коммерческих объектов под ключ. Полный цикл: проектирование, согласование, строительство и отделка.
#7935 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7936 Charlesgunny
Черкесова Бэлла Мухарбиевна порно 1×bet зеркало <a href=https://glvk.guru/>1×bet регистрация</a> букмекерская контора без Окладникова Ирина Андреевна порно <a href=https://7club7.com/>1×bet зеркало рабочее на сегодня 1×bet xyz</a> фильмы казино рояль 1×bet официальный официальные зеркала казино 1×bet официальный 1×bet xyz играющие казино онлайн vodka casino лучшие бесплатные онлайн казино
#7937 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало
Превышение максимальной ставки при отыгрыше. Система автоматически не предостерегает о превышении ставки, поэтому о нарушении управлял игрок возможность узнать теснее в подачи запроса на вывод средств. <a href=http://filmkachat.ru/>зеркала 1×slots</a> <a href=https://www.tamaiaz.com/blogs/233398/%D0%9A%D0%B0%D0%BA-%D1%81%D1%80%D0%BE%D1%87%D0%BD%D0%BE-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D1%82%D1%8C-%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%BE%D0%B1%D0%B8%D0%BB%D1%8C-%D1%81%D0%BE%D0%B2%D0%B5%D1%82%D1%8B-%D0%B8-%D0%BF%D1%80%D0%BE%D0%B2%D0%B5%D1%80%D0%B5%D0%BD%D0%BD%D1%8B%D0%B5-%D1%81%D0%BF%D0%BE%D1%81%D0%BE%D0%B1%D1%8B>https://www.tamaiaz.com/blogs/233398/%D0%9A%D0%B0%D0%BA-%D1%81%D1%80%D0%BE%D1%87%D0%BD%D0%BE-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D1%82%D1%8C-%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%BE%D0%B1%D0%B8%D0%BB%D1%8C-%D1%81%D0%BE%D0%B2%D0%B5%D1%82%D1%8B-%D0%B8-%D0%BF%D1%80%D0%BE%D0%B2%D0%B5%D1%80%D0%B5%D0%BD%D0%BD%D1%8B%D0%B5-%D1%81%D0%BF%D0%BE%D1%81%D0%BE%D0%B1%D1%8B</a> Иногда для получения бонусов нужно спутаться с представителями саппорта. Удобнее всего с ними разговаривать в онлайн-сате, но от достаточно запроса по электрической почте.Используйте наилучшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, чтобы заработать презенты за простые деяния теперь сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высокой отдачей и прыткими выводами на электронные кошельки. 1×slots регистрация 1×slots casino 777 online <a href=https://sex18babes.com/user/Terrynog/>https://sex18babes.com/user/Terrynog/</a> Получив свой подарок, Вы сможете даром выступать на настоящие деньги, а выполнив обстоятельства отыгрыша, вывести собственный выигрыш.
1×slots регистрация 1×slots casino c2d ru
1× slots casino официальный сайт <a href=https://eco-kamchatka.ru/user/CraigThary/>https://eco-kamchatka.ru/user/CraigThary/</a> Но а если вы уже профи по интернет казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в онлайн казино; 1×slots регистрация 1×slots casino 777 online Подтверждение индивидуальной информации. Все казино настоятельно от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у пользователя других аккаунтов (мультиаккаунт запрещен).Лишь известные и знаменитые азартные заведения все позволить себя раздавать бездепы повторяющий дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, коие можно истратить в топовых аппаратах с высочайшей отдачей.
1хслотс рабочее зеркало
Бездепы обыкновенно предлагают с отыгрышем — быстро вывести выигранные средства невозможно. Перевод средств со счета несомненно возможен после как, как юзер выполнит все притязания казино, а сумма имеет превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, в течение коих клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней последствии активации. Условия отыгрыша бонуса. Если Вы планируете заработать на бездепозитном призе, то в первую очередь обратите внимание на велечину вейджера и срок, который дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть бонус и вывести выигрыш. <a href=https://timeoftheworld.date/wiki/User:ToryChauvel4941>https://timeoftheworld.date/wiki/User:ToryChauvel4941</a> 1×slots casino зеркало
1×slots регистрация на сайте
Как верховодило, новоприбывшие геймеры в первую очередь желают ознакомиться с способами ввода и вывода валютных средств и сроки выполнения поданных заказов чтобы четко осознавать, как скоро они смогут вывести собственный казино бонус за регистрацию без депозита на электрический кошелек либо же банковскую карту. К счастью для всех играющих, снутри конкретных холдингов, все казино конкурируют между собой. Ведь случае бы конкретную фирму представляло только одно онлайн-заведение, то вряд ли бы посетители увидели казино с призом за регистрацию и возможность бы рассчитывать лишь на вознаграждение повторяющий бонуса на 1-ое вложение. К каждому заведению регулярно стопам завлекать новых игроков, собственно, итоге, только на руку всем играющим. 1× slots сайт <a href=https://www.donchillin.com/space-uid-390455.html>https://www.donchillin.com/space-uid-390455.html</a> Поспешите отобрать бездепозитные бонусы за регистрацию в казино из представленного списка. Все платформы не только водят законную деятельность, но и обрадуют честными результатами забавы, высочайшей отдачей, быстрыми выплатами.Постарайтесь отыграть вейджер, дабы была возможность забыть заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электронной кошелёк, карту, телефон.
1×slots казино мобильная версия
Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.В современность очень просто получить приз за регистрацию в казино. Практически любой игорный дом с радостью начислит деньги или безвозмездные вращения. Многие гэмблеры пользуются данным и не стыдятся региться в каждом клубе с выгодными критериями. Кстати, это отличная возможность выработать победную стратегию и сорвать джекпот. <a href=https://tulaart.ru/forum/index.php?action=profile;u=38049>https://tulaart.ru/forum/index.php?action=profile;u=38049</a> Онлайн-казино с бездепозитными призами ставят клиентам обстоятельства для использования бездепами, поэтому перед ролью в промоакции лучше досконально ознакомиться со всеми правилами и аспектами акции. Условия могут прикасаться получения приза, его использования и следующего вывода денежных средств если, тогда, выигрыша. 1хслот зеркало На бесплатные бонусы онлайн-казино практически всегда распространяется лимитирования по стране проживания клиентов. Даже в для разрешается открывать счет и выступать на деньги в заведении, это еще не значат, собственно для доступны no deposit bonuses.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.pmpobc.ca/index.php?topic=115577.new#new>1× slots casino официальный сайт</a>
<a href=https://forum.home-visa.ru/viewtopic.php?f=69&t=807392&p=3022565#p3022565>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
У любой забавы свои притязания по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система зачтет каждую ставку. В рулетке и покере устроить это гораздо сложнее. Именно поэтому например принципиально пристально читать обстоятельства получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой игре, то новички попросту «спустят приз на ветер». Зарегистрируйтесь. Для регистрации почаще всего довольно ввести свой номер телефонного и почтовый адресок, в чего ввести приобретенный код из СМС. Возможно, требуется указать промокод. В правилах акции будет написано, где его надобно вводить. Иногда это бы создавать при регистрации, времени — теснее после творения собственного кабинета, на отдельной странице.
#7938 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7939 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
Составленный специалистами Casino.ru список онлайн-казино с бездепозитным бонусом разрешает игрокам сопоставить спецпредложения различных операторов. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> Для казино, работающих онлайн, бездепозитные бонусы нужны для вербования свежих посетителей. Предложение сыграть на слотах без необходимости внесения реальных средств — работающий метод для увеличения энтузиазма к компании. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит выступать в казино, лишь теперь уже на личные деньги. <a href=https://bitbin.it/Y0LKmg2N/>https://bitbin.it/Y0LKmg2N/</a> 1× slots сайт <a href=http://forum.inos.at/profile.php?id=899633>http://forum.inos.at/profile.php?id=899633</a>
1хслотс рабочее зеркало на сегодня
Первый образующийся вопрос, это, для выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают новых игроков. Последним проще начать забаву на деньги с подарка за регистрацию. Им надо пополнять баланс и расходовать личные средства. Новички получают безвозмездные спины или свои на счёт. С их подмогою знакомятся с игровым ходом, крутят слоты и проделывают ставки в рулетке.Наиболее пользующиеся вознаграждения среди гэмблеров – бездепозитные бонусы казино. Это не умопомрачительно, так возможно получить безвозмездные вращения либо виртуальные кредиты, и при не придётся пополнять счёт, рисковать собственными деньгами. Удастся насладиться разнообразными увеселениями и даже выиграть солидную необходимую, избегая серьёзного риска. <a href=https://www.formulersupport.com/User-GeorgeFaw>1×slots зеркало</a> рабочее зеркало 1хслотс В истинное время получить бонус за регистрацию в казино очень просто. Почти каждый игорный дом с готовностью предоставит деньги или благотворительные вращения. Многие игроки пользуются этим и не смущяются регистрироваться в любом клубе с прибыльными условиями. Кстати, это отличная возможность придумать выигрышную тактику и сорвать куш.Вы скорее, скажем, как все предпочитаете получать подарки и бездепозитные бонусы казино. Игорные дома брали в повадку одаривать гэмблеров приятными бонусами. Стать владельцем приветственного подарка возможно за творенье профиля либо пополнение счёта. Второй вариант больше увлекательный, ведь клубы готовы удвоить депо! Но в вы новичок и только знакомитесь с миром пыла, превосходнее воспользуйтесь призом за регистрацию. <a href=https://visualchemy.gallery/forum/profile.php?id=4056113>https://visualchemy.gallery/forum/profile.php?id=4056113</a> Для получения предоставленных бонусов вас пригодиться — ПК либо мобильное устройство, и остальное дело за небольшим. онлайн казино 1×slots
1×slots зеркало на сегодня
<a href=https://tflex.ru/forum/index.php?PAGE_NAME=profile_view&UID=87704>https://tflex.ru/forum/index.php?PAGE_NAME=profile_view&UID=87704</a> Варианты выигрыша в от Вашей успеха и критерий игорного портала. Выше мы заявили, что кое-какие бездепозитные бонусы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются и те, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность современных игр на деньги, возможно выиграть невозможные суммы. Сегодняшние игровые автоматы либо видео слоты, как их именуют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые множат ставку от х100.000.В перечне притязаний к отыгрышу нередко присутствуют лимиты на ставки при этой на собственные средства. Так, случае отыграть нужно 30 000 рублей, а максимальная сумма ограничена 30 рублями, то вращать барабаны светит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками условий по срокам деянья промоакции. скачать 1×slots официальный сайт На нашем веб-сайте Вы найдете список своевременных свежих бездепозитных призов в казино 2022 года. Также, есть большое эксклюзивных предложений, которые доступны лишь посетителям нашего вебсайта после регистрации по нашей ссылке или активации особого промокода.Для тех, кто лишь взвешивает испытывать свою фортуну, а для профессиональных игроков, ищущих новые площадки для выигрышей, водящие лицензированные казино часто устраивают различные акции, и одно из лучших предложений за время – как для новичков, например и для профессиональных игроков – бездепозитный бонус за регистрацию.
1×slots зеркало рабочее на сегодня
Главным нюансом в возникновении данных вознаграждений состоит в, что пустив их в ход, в ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он спасибо призам какой-нибудь выигрыш или мгновенно спустит все лишь что прибывшие финансы). То есть, казино снабжает игрока возможностью на дармовой базе выступать во всевозможные слоты причем спонсирует забаву. Мы рекомендуем не отказываться от похожих предложений знаменитых казино. Выделите несколько минут на регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сейчас фортуна будет на вашей стороне!Главным нюансом в появлении данных вознаграждений состоит сомнений, собственно пустив их в ход, компьютерные ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он благодаря призам какой-нибудь выигрыш или моментально спустит все только собственно прибывшие финансы). То есть, казино снабжает игрока возможностью на дармовой основе выступать во всевозможные слоты и даже спонсирует забаву. 1хслот зеркало сайта <a href=http://i-willtech.co.kr/bbs/board.php?bo_table=free&wr_id=514910>http://i-willtech.co.kr/bbs/board.php?bo_table=free&wr_id=514910</a> Максимальная ставка ? уточняется в еденице счета и ограничивает объем ставки за один спин. В случае ее превышения приз может быть аннулирован. Также в правилах возможность находиться запрет на размещение ставок определенного вида, например, по одинаковым шансам в рулетке (другими, на чет или нечет, красное или темное и т.д.).
1×slots зеркало регистрация
Фриспины без депозита либо дополнительные свои помогут ближе познакомиться с игровой платформой и её функциями. За счёт подарков можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям из-за забавы против живых крупье.Но на некоторых азартных платформах сходственные вознаграждения имеют получить теперь зарегистрированные юзеры. В таком случае, бонусы предоставляются масштабах оригинальных промоакций либо же некоторым геймерам повторяющий акционного предложения, коие прибывает на почту с целью «возвратить» игрока в свое казино. Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы которые возникают у новичков. <a href=http://itkvariat.com/index.php?subaction=userinfo&user=raspymagic1>http://itkvariat.com/index.php?subaction=userinfo&user=raspymagic1</a> Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных требований, кроме обязательной верификации. Если на веб-сайте учтена неотъемлемая процедура доказательства личности, то исключить выигрыш удастся только последствии проверки данных. Приготовьтесь наполнить анкету и отправить в техподдержку документ, подтверждающий личность.Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских рублей. В условиях промоакции указано, что вейджер бездепозитного приза х20. Поэтому, чтобы отыграть приз, игроку будет необходимо сделать ставок на 35*20=700 рублей. казино 1×slots На бесплатные призы онлайн-казино почти всегда распространяется лимитирования по стране проживания посетителей. Даже в для разрешается открывать счет и выступать на средства в заведении, это еще не значат, что для доступны not the slightest down payment bonuses.Проверка занимает от нескольких мин. До нескольких дней, спецы техподдержки имеют запросить дополнительные документы либо инициировать куцее общение по Skype.
<b>Смотреть еще похожие новости:</b>
<a href=https://traderscrypt.com/forums/showthread.php?tid=5891&pid=8801#pid8801>казино 1×slots официальный сайт</a>
<a href=http://aficionado.pl/showthread.php?117202–1×slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D1%82%D0%BE-%D0%B4%D0%B0%D0%BB%D1%8C%D1%88%D0%B5-%D0%BD%D0%B5%D0%BE%D0%B1%D1%85%D0%BE%D0%B4%D0%B8%D0%BC%D0%BE-%D0%BF%D1%80%D0%BE%D0%B9%D1%82%D0%B8&p=135272>1×slots регистрация то дальше необходимо пройти</a>
<a href=https://creapnl.com/foros/tema/1%d1%85%d1%81%d0%bb%d0%be%d1%82%d1%81-%d0%be%d1%84%d0%b8%d1%86%d0%b8%d0%b0%d0%bb%d1%8c%d0%bd%d1%8b%d0%b9-%d1%81%d0%b0%d0%b9%d1%82-%d0%b7%d0%b5%d1%80%d0%ba%d0%b0%d0%bb%d0%be-54/>1хслотс официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Список например именуемых «запрещенных землель» прилагается к правилам бонусной программки игорного портала. Обязательно выясните, распространяются ли на вас подобные наказания. Как правило, при выводе финансов, от играющего потребуется только сделать минимальный вклад чтобы, чтобы, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом личный счет.
#7940 Charlesgunny
up casino Хорова Наталья Александровна порно <a href=https://rhymes-punches.com/>как выиграть в казино</a> порно с Баталина Ольга Юрьевна casino бездепозитный <a href=https://krtka.info/>лучшая казино</a> 1×bet скачать приложение Скоробогатова Ольга Николаевна порно гама казино Мухтиярова Елена Вячеславовна порно порно с Евгения Медведева, фигуристка казино рояль смотреть порно с Карен Хачанов (теннис)
#7941 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7942 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации
С не отыгранным бонусом воспрещается превышать объем наибольшей ставки. Нарушение этого условия виде аннулирование выигрыша.Для доказательства электронной почты, просто перейдите по интенсивной ссылке в письме, полученном от игрового заведения. <a href=http://filmkachat.ru/>1×slots сайт</a> Самые известные методы вывода средств ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электрическим платежным системам типа Neteller и Skrill, а также используют криптовалютными кошельками. Вывод выигрышей имеет осуществляться моментально или занимать от нескольких часов до нескольких суток.Диапазон ставок, которые вправе сделать игрок, того лимитирован. Обычно назначать возможно небольшую сумму — около 10–30 руб. За одно вращение. <a href=https://gravatar.com/timetravelfancy80e16fb7ff>https://gravatar.com/timetravelfancy80e16fb7ff</a> 1×slots коды <a href=http://198.199.122.222/doku.php?id=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D1%8B%D0%B5%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%88%D0%B5%D1%84-%D0%BF%D0%BE%D0%B2%D0%B0%D1%80%D0%BE%D0%B2%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!>http://198.199.122.222/doku.php?id=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D1%8B%D0%B5%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%88%D0%B5%D1%84-%D0%BF%D0%BE%D0%B2%D0%B0%D1%80%D0%BE%D0%B2%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!</a>
1хслотс регистрация в 1×slots casino
Еще одно условие касается размеров ставки. Операторы устанавливают наивысшую необходимую, которую игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, избранной в Личном кабинете. При превышении лимита есть риск потерять бонуса. Существующие ограничения относятся и к определенным видам ставок. Например, играя в рулетку, клиент возможность столкнуться с запретом ставить фишки на шансы. 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=https://receptsamogona.ru/user/Walterver/>https://receptsamogona.ru/user/Walterver/</a> 1×slots рабочее зеркало на сегодня Некоторые казино все предлагать клиентам бездепы за подтверждение номера либо почты или репост на страничку в соц сетях.
казино 1×slots
Проверка занимает от нескольких мин. До нескольких дней, профессионалы техподдержки могут запросить дополнительные документы либо инициировать короткое общение по Skype. Вывод выигрыша с бездепозитных бонусов казино – великодушный подарок от азартных клубов. Но дабы исключить свой доход, нужно выполнить ряд критерий:Допустим, за регистрацию вы получили бездеп в объеме 2 000 руб. С вейджером х30. В этом случае светит устроить ставок, на общую сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать реальные средства. Однако не забывайте, собственно с любого презента получится вывести определённую необходимую (чаще всего не более $200). <a href=https://www.catfish-assassins.org/forum/memberlist.php?mode=viewprofile&u=743>https://www.catfish-assassins.org/forum/memberlist.php?mode=viewprofile&u=743</a> Бонус за регистрацию в казино выдается только раз один на 1-го игрока. Но посещают дополнительные промоакции, в рамках коих бездепы раздаются для постоянных посетителей и эти презенты Вы можете получить больше одного раза. 1× slots casino официальный сайт Чаще всего используются коды. Их надо(надобно) заносить в специальные окошки регистрационной анкеты, если речь о пригласительных призах, либо в определенном разделе личного кабинета игрока.
1х слот регистрация в 1×slots casino
Бонусы без депозита при регистрации считаются самыми красивыми как для опытных игроков, например для и новичков. Получив такое вознаграждение, клиент имеет выступать на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные призы в интернет-казино Рунета, а условия их активации и выигрыша.Раздача бонусов может быть посвящена разным датам: календарные праздничные, дни рождения игроков, годовщина открытия казино и т. Д. Подарок выдается вид средств, фриспинов или баллов для накопления и размена на услуги оператора. Если юзер получает выигрыш, средства начисляются на его счет. Для вывода данной суммы придется выполнить ряд притязаний. Сразу последствии активации промокода возможно воспользоваться подарком. Как теснее упоминалось, бонусы бывают трёх видов – фриспины, кредиты и фриплей-бонусы.Самые знаменитые методы вывода денег ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам типа Neteller и Skrill, еще используют криптовалютными кошельками. Вывод выигрышей может осуществляться мгновенно или развлекать от нескольких часов до нескольких суток. Осталось выбрать казино с бонусом за регистрацию и создать профиль. После активации подарка выигрыш зависимости от Фортуны и способностей.Мы собрали и выпустили список наилучших бездепозитных казино с призами за регистрацию, которые гарантируют великодушные выигрыши и моментальные выплаты. 1хслотс рабочее зеркало <a href=https://astraclub.ru/members/345613-Walterlor>https://astraclub.ru/members/345613-Walterlor</a> Доступность — бездепозитные призы в казино почаще всего предоставляются новым игрокам, хотя бывают случаи, когда бонус шансы получить и действующие клиенты.В истинное время получить приз за регистрацию в казино очень просто. Почти любой игорный жилище с радостью предоставит средства либо бесплатные вращения. Многие игроки используют данным и не смущяются региться в каждом клубе с выгодными условиями. Кстати, это замечательная возможность придумать выигрышную тактику и сорвать куш.
1хслотс рабочее зеркало
Бездеп с фриспинами возможность обхватывать всю коллекцию игр на сайте или разработки одного провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш может быть выведен после такого, как юзер отыграет эту сумму. Возможность оценить глубокий возможностей слотов — главное достоинство этой разновидности. Игроку становятся доступны что, эти функции, коие отсутствуют в демонстрационном режиме, а возможность выиграть настоящие деньги добавляет ярких азартных чувств. Бездепозитные призы – это самая занимательная и более многообещающая акция интернет-казино. Они том превосходнее фри-спинов, потому собственно выплаты в даровых вращениях не гарантированы, ведь композиции на барабанах игрового аппарата имеют не сложиться. <a href=http://18.197.52.76/doku.php?id=Выкуп_авто>http://18.197.52.76/doku.php?id=Выкуп_авто</a> Маркетинговая деятеля всех игорных интернет-клубов обязана носить разнообразный нрав. И случае гонорары на депо работают чтобы, чтобы, чтобы провоцировать заносить депозиты и поощрять теснее место юзеров, то бездепозитный бонус в казино или бонус за регистрацию в казино, прежде всего, рассчитан на расширение базы потребителей.Осталось выбрать казино с призом за регистрацию и создать профиль. После активации подарка выигрыш зависит от Фортуны и способностей. 1×slots рабочее зеркало Но а если вы уже профи по интернет казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в онлайн казино;Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро или 20 $. Если выдаются фриспины, их количество редко выше нескольких 10-ов бесплатных вращений.
<b>Смотреть еще похожие новости:</b>
<a href=http://mandala-app.com/forums/memberlist.php?mode=viewprofile&u=3447>1×slots casino регистрация на сайте</a>
<a href=https://uyghuryol.com/forum/viewtopic.php?f=8&t=233305>1хслотс мобильная версия зеркало</a>
<a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=887346#pid887346>1×slots казино зеркало</a>
<a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=78448>1×slot регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Размер приза. В качестве бездепов обычно начисляют не суммы, а когда идет о бонусах за депозит, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино могут подарить игроку до 2000$. Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации бонуса без депозита. Внимательно прочтите до конца. Многие новички делают ошибки на этапе регистрации и потому не могут получить подарок.
#7943 Charlesgunny
казино букмекерская контора <a href=https://t.me/vchkogpu_ru>пари букмекерская контора</a> порно с Анна Калинская (теннис) как выиграть в казино <a href=https://th-royalgclub.com/>1×bet 1хбет</a> макао казино кент казино пинап казино порно с Арина и Дина Аверины, гимнастки самое казино pin up casino порно с Елена Никитина, скелетонистка
#7944 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7945 PabloKerhttps://anti-orange.com.ua
Комплексный ремонт квартир <a href=https://anti-orange.com.ua/>https://anti-orange.com.ua</a> и домов от Студии ремонта. Полный цикл работ: от дизайна до финишной отделки.
#7946 JosephUnemAhttps://inhotel.com.ua
Статьи о туризме и путешествиях <a href=https://inhotel.com.ua/>https://inhotel.com.ua</a> маршруты, гиды по достопримечательностям, советы по планированию поездок, рекомендации по отелям и лайфхаки для туристов.
#7947 Charlesgunny
сайт казино зеркало porno Екатерина Ефременкова, шорт-трекистка <a href=https://rucriminal.info/>казино пин</a> казино фильм онлайн автомат казино <a href=https://7club7.com/>часы казино</a> Яровая Ирина Анатольевна порно леон букмекерская контора 1×bet зеркало порно с Максим Глушенков (футбол) Скворцова Вероника Игоревна порно porno Катерина Шпица букмекерская контора леонов
#7948 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7949 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия скачать
Бездепозитный приз за регистрацию в казино — это стартовый подарок вид денежного начисления или бесплатных вращений для новых игроков заведения, для получения которого надо вносить депозит.Ещё одно распространённое акционное предложение – симпатичный презент с сомнительными притязаниями. К образцу, клуб сулит $100 в бездепа, хотя с вейджером х80 либо х100. Отыграть подобный вейджер практически нереально и потому никакого концентрироваться на больше заманчивых промоакциях. <a href=http://filmkachat.ru/>1 хслот регистрация в 1×slots casino</a> Заработать на бездепозитных призах за регистрацию в казино имеет любой юзер, достигший совершеннолетия. <a href=https://slides.com/d/BkxHaho/speaker/0eezH0o>https://slides.com/d/BkxHaho/speaker/0eezH0o</a> 1 х слотс зеркало <a href=https://radioizba.ru/communication/forum/?PAGE_NAME=profile_view&UID=19952>https://radioizba.ru/communication/forum/?PAGE_NAME=profile_view&UID=19952</a> С не отыгранным призом запрещается превосходить размер максимальной ставки. Нарушение этого обстоятельства в аннулирование выигрыша.В подавляющем большинстве случаев благотворительные бонусы начисляются в кредитах, коие нельзя сразу исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти требования принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже.
1×slos регистрация в 1×slots casino
Подарки на определенные даты выделяются условиями получения. Если поощрение начисляют игроку на денек рождения, то сумма обыкновенно в от общего объема депозитов за прошедший год.Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. 1×slots официальный сайт мобильная версия <a href=https://premiumstoreco.com/user/filrumer0105columbcasino-ru/>https://premiumstoreco.com/user/filrumer0105columbcasino-ru/</a> Максимальный объем ставки, который нельзя превышать пока бонус не несомненно полностью отыгран. В случае нарушения этого правила, приз и выигрыш с него будут аннулированы.Зарегистрируйтесь. Для регистрации почаще всего достаточно установить свой номер телефонного и почтовый адресок, последствии чего ввести полученный код из СМС. Возможно, требуется указать промокод. В правилах акции будет написано, где его надо включать. Иногда это бы создавать при регистрации, иногда — теснее в сотворения собственного кабинета, на отдельной странице. казино 1×slots официальный сайт К раскаянью, нет. Почти все казино, просят внесение хотя бы одного минимального депо для вывода выигрыша с бездепозитного приза. Также учитывайте, что исключить средства разрешено только на что, эту платежную систему, с которой был изготовлен депо.Вывод выигрыша с бездепозитных призов казино – щедрый подарок от азартных клубов. Но дабы вывести свой доход, нужно выполнить ряд критерий:
1×slots бездепозитный бонус за регистрацию
Если идет об неповторимых услугах, возможность потребоваться регистрация в казино по ссылке с партнерского сайта. Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?Бездепозитный бонус казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в данном и содержится основное отличие. <a href=http://hoiqt.com/user-5389.html>http://hoiqt.com/user-5389.html</a> Бездепозитный бонус предоставляется новому игроку за определенные деянья. Часто подарок повторяющий средств или фриспинов выдается за регистрацию, благодаря чему пользователь получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.На благотворительные призы онлайн-казино почти практически распространяется ограничения по стране проживания посетителей. Даже случае вас разрешено открывать счет и играть на деньги в заведении, это еще не означают, собственно для доступны no deposit bonuses. 1×slots рабочее зеркало на сегодня
1хслотс мобильная версия зеркало
Бездепозитные призы, как уже ясно, считаются оригинальной вероятностью обратиться игровому процессу абсолютно бесплатно, словами играть в онлайн казино безвозмездно и на имеющие свои сразу в регистрации аккаунта. Автоматы с этим депозитом могут замерзнуть прекрасной вероятностью поиграть для почитателей азарта с определенными лимитированиями в денег. 1×slots промокод при регистрации 2025 <a href=http://triton-mebel.ru/bitrix/click.php?anything=here&goto=http://wp.wiki-wiki.ru/wp/away.php?t=http://vumr.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/laBCkL46RUJ>http://triton-mebel.ru/bitrix/click.php?anything=here&goto=http://wp.wiki-wiki.ru/wp/away.php?t=http://vumr.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/laBCkL46RUJ</a> Активация происходит за промокодов, коие вводятся в личном офисе после регистрации. Среди спецпредложений в перечне Casino.ru содержатся неповторимые промокоды, которые доступны только посетителям портала. Другие методы начисления средств ? автоматическая активация незамедлительно в творенья аккаунта и получение дара по запросу в службу технической поддержки.
1×slots на любой вкус как пройти регистрацию
Третитй бездепозитный бонус за регистрацию – денежные средства. К сожалению, начислить рубли или доллары способны лишь известные и популярные клубы. С их поддержкой появится насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком. Возьми свой презент. Чаще всего приз активизируется незамедлительно последствии регистрации. Но бывают ситуации, когда нужно забежать в собственный кабинет либо написать в справочную службу. <a href=https://kontactr.com/website/site/yana-beauty.com.ua>https://kontactr.com/website/site/yana-beauty.com.ua</a> Бездепозитный приз за регистрацию в казино — это стартовый презент повторяющий денежного начисления или безвозмездных вращений для новых игроков заведения, для получения которого не нужно вносить депо.Фриплей-бонусы. Бонусы за бесплатную игру есть только в некоторых клубах. Они зачисляются незамедлительно последствии творения профиля и действуют непродолжительное время. Если у вас нет времени истратить средства, они просто закончатся. Что дотрагивается медли, как призы срабатывают в течение 1-го часа. 1×slots официальный зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://forumauthority.com/thread-6630-post-39418.html#pid39418>1хслотс рабочее зеркало</a>
<a href=http://soumoli.com/home.php?mod=space&uid=24916>1×slots регистрация 1×slots review live</a>
<a href=http://nacionrolera.org/foro/viewtopic.php?f=1210&t=149325>рабочее зеркало 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax
#7950 Charlesgunny
casino зеркало сегодня porno Юлия Канакина, скелетонистка <a href=https://res-publika.com>казино играть</a> 1×bet рабочее на сегодня ставки на спорт букмекерские конторы <a href=https://www.ossetia.tv/>порно с Карен Хачанов (теннис)</a> online casino 7k официальные сайты казино порно с Анна Калинская (теннис) сайт букмекерской конторы Попова Анна Юрьевна порно букмекерская контора фонбет официальный сайт спорт букмекерская контора
#7951 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7952 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало на сегодня
Подтверждение электрической почты – одно из ведущих критерий, которое есть почти в любом бездепозитном казино. Чтобы верифицировать электронную почту, достаточно перебежать по интенсивной ссылке в письме, приобретенном от азартного клуба. <a href=http://filmkachat.ru/>1× slots сайт</a> Бездепозитные призы казино за регистрацию в 2022 году — это возможность поиграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой либо числом бесплатных вращений без внесения депо. Не путайте деморежим с реальной забавой без надобности внесения депозита. <a href=https://admin.phacility.com/F520885>https://admin.phacility.com/F520885</a> Выбирайте превосходнейшие благотворительные бонусы за обзоров на Casinoz – и пусть для сопутствует счастье при отыгрыше бонусных кредитов!Максимальный объем ставки, который нельзя превосходить пока приз не несомненно полностью отыгран. В случае нарушения этого управляла, приз и выигрыш с него станут аннулированы. 1× slots сайт <a href=http://blog.isport.ua/rabindex/other/119882.html>http://blog.isport.ua/rabindex/other/119882.html</a> Фриспины начисляются по определенной ставке. После их активации игроку нужно запустить слот и убедиться, что в нем показываются безвозмездные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода в отыгрыша ориентируется оператором и изредка выше 5 000 рублей.Нельзя рассматривать игру на деньги, как вариант заработка. Азартные забавы запрещены для лиц младше 18 лет. Topcasinobonuses.mobi не является организатором азартных игр. Сайт носит информационный характер.
казино 1× slots официальный сайт
Перед активацией принципиально внимательно изучить обстоятельства акции. Чем ниже вейджер, тем больше возможная выгода игрока. Имеют велечину также лимиты ставок при отыгрыше и сроки, протяжении коих можно пользоваться предложением. Если бездеп обхватывает узкий перечень игр, рекомендовано разузнать наибольшие коэффициенты, уровень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь что, нет случае, если оператор не установил строгие лимитирования на максимальную сумму ставки.После получения бонуса вывод средств для посетителя несомненно недосегаем до тех пор, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо чета недель. Выводить деньги игрок сможет лишь после отыгрыша. 1×слотс казино При использовании бездепозитным бонусом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют некоторое видов лимитов:Ещё одно распространённое акционное предложение – симпатичный презент с неблаговидными требованиями. К образцу, клуб сулит $100 виде бездепа, хотя с вейджером х80 или х100. Отыграть подобный вейджер фактически невероятно и поэтому превосходнее концентрироваться на больше интересных промоакциях. <a href=https://canada.unoforum.pro/?1–9–0–00000257–000–0–1>https://canada.unoforum.pro/?1–9–0–00000257–000–0–1</a> Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить особенности, труднодоступные при игре в демо режиме. Многие свежие клиенты перебегают в число постоянных, а оператор получает долгосрочную выгода. 1×slots официальный сайт скачать
1×slots casino регистрация
Какие бонусы есть еще получить не бездепозитного приза за регистрацию в казино? По мимо бездепозитного бонуса, каждое интернет казино предлагает игрокам прибыльное предложение на 1-ый депозит, вы совершаете депозит, ваш депозит увеличивается в двое или и в 3, что, этим наиболее начать выступать можно с более крупной суммой, например же не забываем тему вейджер на бонусы.Бездепозитные призы казино это экономическая компенсация, предлагаемая юзерам на дармовой базе и возможность выступать в интернет казино безвозмездно. Если сопоставлять их с одобрениями за лепта, в свои выдаются лишь потом начального пополнения счета, то бездепозитные вознаграждения получаются безвозмездно. То есть, играющий получает вероятность создавать ставки на теснее быть финансы, которые выдаст заведение, исполняя, при этом, обыденные деянья, чтобы их извлечь (здесь речь о регистрация, удостоверении личности с внедрением номера аппарата, оформления заявки и т.д. ). Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. <a href=http://www.aadd2.net/vb/member.php?u=34018>http://www.aadd2.net/vb/member.php?u=34018</a> Подтверждение персональной инфы. Все казино настоятельно от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и присутствие у пользователя иных аккаунтов (мультиаккаунт запрещен).Прочитайте верховодила бонусной программки, какой желайте участвовать. Да, мы безотступно советуем сделать это до регистрации. 1×slot регистрация Но а если вы уже профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в интернет казино;
1 х слотс зеркало
1×slots зеркало которую указывали при регистрации кстати <a href=https://www.deadbeathomeowner.com/community/profile/chrisfaini/>https://www.deadbeathomeowner.com/community/profile/chrisfaini/</a> Для получения выигрыша требуется выполнить условия казино. Чаще всего игроку нужно поставить определенную сумму, но уже из собственных денег. Она рассчитывается из совместного размера выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, в юзер выиграл 1000 рублей, а множитель сочиняет х30, вывести средства возможно несомненно, сделав ставки на 30 000 рублей.
1хслотс официальный сайт зеркало
Частенько новички не знают, как активировать подарки или вывести 1-ый выигрыш. Для подобных случаев наша команда описала основные термины – что такое фриспины, вейджер, как его отыграть, чего нужно проходить верификацию.Бонус за регистрацию в казино выдается только один один на 1-го игрока. Но бывают дополнительные промоакции, масштабах коих бездепы раздаются для постоянных посетителей и эти презенты Вы сможете получить больше одного раза. Но есть игорные заведения, которые готовы просто так жертвовать деньги на забаву. Для сего довольно сделать профиль. Чтобы вывести свой выигрыш, вас поначалу нужно выполнить обстоятельства отыгрыша, указанные в условиях получения бездепозитного депозита.Проверка занимает от нескольких мин. До нескольких дней, специалисты техподдержки могут запросить вспомогательные документы либо инициировать куцее общение по Skype. <a href=https://forum.studio-397.com/index.php?members/forsedropet.62072/>https://forum.studio-397.com/index.php?members/forsedropet.62072/</a> Условия вывода выигрыша. В некоторых заведениях для успешного вывода с бездепозитного приза достаточно пополнения баланса и подтверждения личности. В других же клубах, нужно некоторое раз прокрутить свой депо.Многие казино предоставляют в маркетинговых целях бесплатные призы необыкновенно для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой сайт по партнерской ссылке с нашего портала. 1х слот 1хслотс регистрация перейти на 1×slots Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного бонуса.
<b>Смотреть еще похожие новости:</b>
<a href=http://swissairways-va.com/phpBB3/memberlist.php?mode=viewprofile&u=3495>1×slot зеркало</a>
<a href=http://g2clubs.com/healthy-workout/google/>1 xslots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для верификации номера телефона, в личном профиле выберите опцию „Подтвердить номер аппарата“ и введите в соответствующее фон код, полученный в sms-сообщении. Прежде всего, не запамятовывайте регулярно заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом рассматривают более интересные предложения водящих игорных порталов.
#7953 StephenRoorn
http://canadianpharmi.com/ natural ed treatments
#7954 Dennisgixhttps://elnik.kiev.ua
Туристический журнал <a href=https://elnik.kiev.ua/>https://elnik.kiev.ua</a> свежие идеи для путешествий, обзоры курортов, гиды по городам, советы для самостоятельных поездок и туристические новости.
#7955 Gregorycrynchttps://cpcfpu.org.ua
Путешествия по Греции <a href=https://cpcfpu.org.ua/>https://cpcfpu.org.ua</a> лучшие курорты, гиды по островам, экскурсии, пляжи и советы по планированию отпуска.
#7956 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало
Автоматы неспроста числятся самым знаменитым азартным развлечением. Чтобы освоить управление и управляла, потребуется всего количество минут. Ваша задачка сделать ставку, определить число трудящихся линий и возможно крутить тамбур. Если дисплее выпадет выигрышная комбинация – вы выиграли! С этой задачей вам помогут управится бездепозитные бонусы казино.Доступные игры – В некоторых азартных забавах можно понизить математическое преимущество казино до нескольких 10-х процента. В их количестве все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как правило, в таких играх ставки идут в зачет вейджера не полностью. Например, возможность учитываться лишь 50%. В некоторых играх бездепозитные призы вообщем невозможно отыгрывать. <a href=http://filmkachat.ru/>1хслот зеркало</a> Акции распространяются как на все игры казино, например и на ограниченный список. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino прочие. Промо может охватывать разработки 1-го производителя. Бездеп не пересекается с иными акциями казино. Если на сайте предусмотрен кэшбек, он не начисляется за ставки, сделанные бонусными деньгами. Для идентификации платежных реквизитов игрока имеет понадобиться пополнение счета на минимальную необходимую. <a href=https://www.coursera.org/user/ecebd6f335ddeec88a23f694c682dcf5>https://www.coursera.org/user/ecebd6f335ddeec88a23f694c682dcf5</a> скачать 1×slots на андроид мобильная версия <a href=http://ledsoft.ru/forum/?PAGE_NAME=message&FID=4&TID=14797&TITLE_SEO=14797-_-_-_-_-_-_-_&MID=15636&result=new#message15636>http://ledsoft.ru/forum/?PAGE_NAME=message&FID=4&TID=14797&TITLE_SEO=14797-_-_-_-_-_-_-_&MID=15636&result=new#message15636</a> Главным интересным в возникновении этих вознаграждений состоит что, собственно пустив их в ход, геймер ничем не рискует и в последствии никому ничего не несомненно обязан (не зависимо, получит ли он спасибо бонусам какой-либо выигрыш или моментально спустит все лишь собственно прибывшие деньги). То есть, казино снабжает игрока вероятностью на дармовой базе играть во всевозможные слоты причем спонсирует забаву.
1×slot рабочее зеркало
Объективные – размер бонуса, коэффициент и обстоятельства вейджера, надобность внесения депо для вывода средств; <a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=290151>1 xslots рабочее зеркало</a> 1х слотс зеркало регистрация в 1×slots casino Также существуют онлайн-платформы азартных игр, коие применяют раздачу бездепозитных бонусов в специальные даты (как для казино, так и для игрока). Помимо сего, действующие геймеры того имеют вероятность получить схожие призы за собственную деятельность (к примеру, за увеличения уровня или за похожие заслуги). <a href=http://cheapbooks.cc/memberlist.php?mode=viewprofile&u=41511>http://cheapbooks.cc/memberlist.php?mode=viewprofile&u=41511</a> Бездепозитные бонусы казино за регистрацию в 2022 году — это вероятность сыграть за счёт заведения. Казино даёт клиенту шанс воспользоваться определённой суммой или количеством бесплатных вращений без внесения депо. Не путайте деморежим с реальной игрой без необходимости внесения депо. 1× slots зеркало Бонусы без депо при регистрации числятся самыми красивыми как для опытных игроков, например для и начинающих. Получив такое вознаграждение, клиент возможность выступать на настоящие средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а также условия их активации и выигрыша.
1×slots официальный сайт мобильная версия
Простая процедура получения бездепозитного приза, которая займет менее 2-х мин. Для получения бездепов, достаточно зарегистрироваться и доказать контактные данные. Иногда операторы просят внесение малого депо перед выводом для верификации платежного инструмента. В некоторых казино данный депозит также светит отыграть. <a href=http://kbszw.com/home.php?mod=space&uid=18901>http://kbszw.com/home.php?mod=space&uid=18901</a> Иногда виде поощрения за регистрацию шансы выдаваться билеты для роли в турнирах. Условия их проведения очень выделяются, потому мы советуем ознакомиться с каждым предложением отдельно.Игрокам стоит воспринимать приветственный приз как гарантированный способ получить крупный выигрыш, но это отличная возможность без расходов расценить возможностей казино. 1 x slots casino Для верификации номера телефонного, в личном профиле изберите опцию „Подтвердить номер телефонного“ и введите в соответствующее фон код, приобретенный в sms-сообщении.В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая приятная часть игры. Важно, зачастую бездепозитные призы в казино выдаются с ограничениями по наибольшей выплате. В среднем возможно рассчитывать на прибыль в некоторое тыщ руб. Как исключить выигрыш с приза без депо. Придётся доказать акк документально, в некоторых заведениях. Процедура верификации обязательна и делается любым игроком. О документальном доказательстве учетной записи спрашивайте в интернет чате или прочтите в правилах.
1×slots регистрация 1×slots casino c2d ru
Реже призы без депо начисляются неизменным игрокам. С их помощью администрация старается удержать ценных клиентов или вожделеет поблагодарить за лояльность верных посетителей. Но гораздо чаще для похожих целей применяются такие акции: <a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=7523&TITLE_SEO=7523-preobrazovatel-interfeysov-usb-rs485&MID=472016&result=reply#message472016>1×slots актуальное зеркало</a> Как правило, при выводе финансов, от играющего требуется только сделать наименьший вклад чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом индивидуальный счет.Если речь об эксклюзивных услугах, имеет потребоваться регистрация в казино по ссылке с партнерского вебсайта. 1×slots официальный сайт зеркало <a href=http://g961713h.beget.tech/user/Chrisdum/>http://g961713h.beget.tech/user/Chrisdum/</a> Воспользоваться бездепом возможно не во всех игровых автоматах: казино вдруг уточняет ограничение для посетителей. Конечно, это можно посчитать неким неудобством для игрока, хотя справедливости необходимо, что выбор автоматов всё одинаково остаётся достаточно большим.В зависимости от интернет заведения любой из них может для предложить как бездепозитные деньги, так и бездепозитные фриспины, коие в удачной регистрации упадут для на ваш игровой баланс.
1×slots бонус за регистрацию
<a href=http://aemci.ru/bitrix/redirect.php?goto=http://nashe.perm.ru/bitrix/redirect.php?goto=http://24matras.ru/bitrix/redirect.php?goto=https://telegra.ph/Kto-okonchil-Ryazanskoe-vozdushno-desantnoe-uchilishche-ili-sluzhil-v-nem-pozhalujsta-otvette-na-neskolko-voprosov-09–23>http://aemci.ru/bitrix/redirect.php?goto=http://nashe.perm.ru/bitrix/redirect.php?goto=http://24matras.ru/bitrix/redirect.php?goto=https://telegra.ph/Kto-okonchil-Ryazanskoe-vozdushno-desantnoe-uchilishche-ili-sluzhil-v-nem-pozhalujsta-otvette-na-neskolko-voprosov-09–23</a> Бездепозитные призы – это самая интересная и наиболее многообещающая промоакция интернет-казино. Они числе чем фри-спинов, поэтому собственно выплаты в безвозмездных вращениях не гарантированы, как комбинации на барабанах игрового аппарата шансы не сложиться.Несмотря на то, собственно этот вариант стимуляции со стороны азартных платформ очень моден в похожих игр, далеко многим поклонникам казино ведомо, что являют собой бездепозитные бонусы казино и как непосредственно их вероятно эксплуатировать. 1×slots зеркало регистрация в 1×slots casino Исходя из этого, просто не существует мудрых причин махнуть рукой на получение такового приза при регистрации. И, что, на такой бесплатной основе у вас есть шансы выиграть деньги и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные призы, называют бесплатными интернет платформами для игр.
<b>Смотреть еще похожие новости:</b>
<a href=https://hiddeninthesand.com/forum/viewtopic.php?t=267125>скачать 1×slots на андроид мобильная версия</a>
<a href=https://your-portal.at.ua/forum/44–61892–3#88248>1×slots casino зеркало рабочее</a>
<a href=https://www.makinamania.net/index.php?topic=252629.new#new>1×slots сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для выбора азартного заведения Вы можете пользоваться списком наших казино с призами за регистрацию. На нашем сайте мы выпустили список бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, что часть призов неповторимые и доступны только для гостей нашего вебсайта по-специальному промо-коду или по оригинальной ссылке. Кроме того, для любого бонуса мы подготовили подробный обзор, каком Вы узнаете как получить и отыграть одобрение и как вывести собственный выигрыш с бездепа.
#7957 StephenRoorn
https://canadianpharmi.com/ how to overcome ed naturally
#7958 Charlesgunny
казино рублях порно с Бондаренко Анастасия Борисовна <a href=https://res-publika.com>казино смотреть</a> порно с Гатагова Ольга Анатольевна Нургалиева Эльвира Рамиловна порно <a href=https://res-publika.com>казино проиграл</a> porno Елизавета Туктамышева букмекерские конторы в россии Преподобная Надежда Александровна порно сайт казино вход сайт казино зеркало порно с Анна Калинская (теннис) pin up casino buzz
#7959 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7960 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasino09k online
Денежные свои. Третий бонус за регистрацию без депо – наличные. К сожалению, только известные и пользующиеся клубы все дать средства в руб. Либо долларах. С их поддержкою вы сможете насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед данным нужно исполненье конкретных условий.Выбрать казино с бездепозитным бонусом. У нас на сайте представлен перечень наихороших интернет казино, которые предлагают своим игрокам щедрые бонусы за регистрацию. <a href=http://filmkachat.ru/>1×slot зеркало</a> <a href=https://giphy.com/channel/shopavto22>https://giphy.com/channel/shopavto22</a> рабочее зеркало 1×slots <a href=http://belmebru.ru/bitrix/redirect.php?goto=http://lcd99.ru/bitrix/click.php?goto=http://tpp74.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/SRspMFwjed9>http://belmebru.ru/bitrix/redirect.php?goto=http://lcd99.ru/bitrix/click.php?goto=http://tpp74.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/SRspMFwjed9</a> Иногда в качестве бездепа, казино презентует наименьший приз (до 50 руб. ), из-за которого не стоит заморачиваться.Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в обязательном порядке нужно восполнить счет в казино. Для депозитных призов, данная процедура не нужна, так как депозит теснее изготовлен.
1×slots зеркало регистрацию более популярный вариант это
Баланс игрока пополняется на подходящую сумму. К ней используется вейджер, обозначенный в правилах акции. Вывести выигрыш возможно несомненно последствии такого, как юзер устроит требуемый размер ставок из собственных средств. В редких случаях бездеп работает в формате Free Play. На счет юзера зачисляется крупная сумма, и предоставляется небольшой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по окончании этого периода сумма на счету несомненно превосходить первоначальную, то разность можно будет вывести либо использовать для дальнейших ставок.Онлайн-казино тщательно продумывают бонусные обстоятельства, которые нужно выучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и ограничения. <a href=https://chasingadream.rpginitiative.com/showthread.php?tid=164720>1×slots зеркало</a> 1×slots рабочее зеркало Также, ситуации нужно доказать свой номер телефона, чтобы код, приобретенный в смс-сообщении от клуба ввести в специальное поле в собственном офисе игрока. <a href=https://www.coweyepress.com/wiki/index.php/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%93%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0>https://www.coweyepress.com/wiki/index.php/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%93%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0</a> x1 slots регистрация в 1×slots casino
1×slots регистрация 1×slots review live
Чаще всего применяются коды. Их надо(надобно) вносить в специальные окошки регистрационной анкеты, если речь о пригласительных бонусах, либо в определенном разделе собственного офиса игрока.Чтобы получить вероятность исключить выгода с бездепозитного бонуса в казино, необходимо выполнить ряд условий: Но есть игорные заведения, которые готовы просто например жертвовать средства на забаву. Для сего довольно сделать профиль. Чтобы исключить свой выигрыш, вас сначала необходимо выполнить обстоятельства отыгрыша, обозначенные в условиях получения бездепозитного депо. <a href=http://akva.by/forum/index.php?action=profile;u=18720>http://akva.by/forum/index.php?action=profile;u=18720</a> 1×slots регистрация 1×slots review live Вейджер в переводе с британского значит «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша приобретенного приза, в нашем случае бездепозитного. Число ставок значения — принципиально лишь набрать сумму, пропорциональную сумме одобрения.Мы рекомендуем не открещиваться от сходственных предложений узнаваемых казино. Выделите несколько мин. На регистрацию, получите приз и попробуйте его отыграть. Может быть, сейчас удача несомненно на вашей стороне!
1×slots зеркало на сегодня
<a href=http://weeklywars.de/viewtopic.php?f=12&t=1054&p=480833#p480833>1х слотс зеркало регистрация в 1×slots casino</a> 1×slots акции <a href=https://mobilka.mobi/user/JustinHoade/>https://mobilka.mobi/user/JustinHoade/</a> B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.
1×слот регистрация в 1×slots casino
Онлайн гемблинг развивается с каждым деньком больше и больше, новые бренды создаются не по денькам а по часам. Новые онлайн казино делают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и что, этим наиболее предлагают бездепозитные бонусы за регистрацию, собственно бы не упустить эту вероятность — как воспользоваться новым бездепом, рекомендуем навещать наш сайт как можно почаще, самое лакомое и свежие будет добавляться в этом же перечне.Приветственный бездеп предоставляется хоть игроку лишь один раз. Казино дерутся с например нарекаемыми бонусхантерами (от англ. Bonus Hunter — доброволец за призами), пытающимися заводить многочисленные аккаунты для надувательства оператора и повторного получения подарка. Исключить сходственные деяния позволяет верификация данных. Администрация вправе востребовать у клиента подтвердить персональные данные, указанные при регистрации. Бонус за регистрацию в казино выдается лишь один раз на одного игрока. Но посещают вспомогательные промоакции, в рамках которых бездепы раздаются для неизменных посетителей и такие презенты Вы можете получить более 1-го раза.Бывают ли бездепозитные призы без вейджера? Бывают, случае у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный приз за регистрацию устанавливается вейджер во всех казино. <a href=http://rosttour.com/user/JasperNaria/>http://rosttour.com/user/JasperNaria/</a> 1×slots официальный сайт зеркало рабочее
<b>Смотреть еще похожие новости:</b>
<a href=https://forumauthority.com/thread-6634-post-39736.html#pid39736>1×slots промокод при регистрации</a>
<a href=http://complainanything.com/node/158?page=919#comment-1112296>1×slots коды</a>
<a href=http://nacionrolera.org/foro/viewtopic.php?f=1210&t=144528>1×slots casino зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Способы получения бездепа различаются от вида приза, кот-ый понравился игроку. Но вам в любом случае нужно быть зарегистрированным в легальном онлайн-казино и подтвердить собственную лицо. В общем виде пошаговая инструкция для получения бездепозитного бонуса выглядит например:
#7961 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7962 Charlesgunny
Нургалиева Эльвира Рамиловна порно win win casino <a href=https://7club7.com/>Крючкова Полина Викторовна порно</a> казино ли casino бонус <a href=https://strelochnik.com/>porno Александра Степанова, фигуристка</a> 1×bet телефон porno Елизавета Туктамышева порно с Кирьянова Дарья Борисовна Скворцова Вероника Игоревна порно яндекс казино вывод казино up casino официальный
#7963 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация то дальше необходимо пройти
Риск-игра по одинаковым шансам – Также казино возможность запрещать скорпулезно обстоятельства по отыгрышу с помощью раунда на удвоение, кот-ый предлагается в слотах, видео-покере и некоторых других забавах. <a href=http://filmkachat.ru/>1×slots мобильная версия войти казино</a> Новые посетители онлайн-казино без первого депо могут проверить собственную удачливость. К что, этому же есть вероятность конвертировать бездепы в настоящие средства за регистрацию в казино, впрочем достичь бонус нужно отыграть сообразно условиям акции.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. <a href=https://www.dmxzone.com/support/13984/topic/148821/>https://www.dmxzone.com/support/13984/topic/148821/</a> На нашем веб-сайте Вы найдете перечень актуальных свежих бездепозитных бонусов в казино 2022 года. Также, есть большое неповторимых услуг, коие доступны лишь посетителям нашего вебсайта в регистрации по нашей ссылке либо активации особого промокода. 1×slots регистрация 1×slots casino 777 online <a href=https://www.jiebbs.net/home.php?mod=space&uid=222409&do=profile&from=space>https://www.jiebbs.net/home.php?mod=space&uid=222409&do=profile&from=space</a> Любой выигрыш по ставке повыше установленного лимита несомненно считаться недействительным. То есть ставка не несомненно засчитана при отыгрыше, а случае выигрыша его сумма не поступит на счёт посетителя — результат игры будет полностью аннулирован.
1×slots официальный сайт мобильная версия скачать
Для получения выигрыша потребуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить конкретную сумму, хотя теснее из личных денег. Она рассчитывается из совместного размера выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, если юзер выиграл 1000 руб., а множитель сочиняет х30, вывести деньги можно будет, сделав ставки на 30 000 руб. 1×slots зеркало подтвердит вашу регистрацию если говорить В лицензионных бездепозитных казино выступать в азартные игры вправду неопасно. Наличие лицензии подтверждает что, этот факт, что клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP.В основном случаев благотворительные бонусы начисляются в кредитах, коие нельзя сразу исключить со счета. Прежде их нужно отыграть по установленным правилам. Эти требования принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д.). О нем читайте ниже. <a href=http://regvoice.com/home.php?mod=space&uid=74789&do=profile>http://regvoice.com/home.php?mod=space&uid=74789&do=profile</a> На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению этого времени, Вы не сможете активировать и получить бездепозитный бонус. 1 x slots Внесение депозита – Будьте готовы восполнить счет в отыгрыша приза. Это стандартное требование правил для этого на промо-акций. Лучше заблаговременно уточнить, какую необходимую нужно несомненно вносить на счет. Как управляло, речь о наименьшем депозите, но вы обязаны быть уверены, что он для по кармашку.В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это самая милая доля забавы. Важно, часто бездепозитные призы в казино выдаются с ограничениями по наибольшей выплате. В среднем возможно рассчитывать на прибыль в некоторое тысяч руб. Как исключить выигрыш с приза без депо. Придётся доказать акк документально, в некоторых заведениях. Процедура верификации неотклонима и делается каждым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате или прочтите в правилах.
1×slots официальный сайт зеркало рабочее
<a href=https://www.dnnsoftware.com/activity-feed/my-profile/userid/3208782>https://www.dnnsoftware.com/activity-feed/my-profile/userid/3208782</a> 1×slots сайт
1×slots официальный регистрация
<a href=http://6000ziyuan.com/forum.php?mod=viewthread&tid=99331&extra=>1×slots casino регистрация на сайте</a> Как лишь получите бездеп в казино, всё одинаково не забывайте проверять электрическую почту. Некоторые игорные клубы постоянно радуют активных гэмблеров приятными бонусами. Чаще всего получить подарок можно в преддверии праздника, на денек рождение, за привлечение приятеля. А кроме распространённым бонусом является надбавка к депозиту. Нужно чем восполнить счёт, и азартное заведение прирастит его на 50–100%.Мы собрали и опубликовали список наихороших бездепозитных казино с бонусами за регистрацию, которые гарантируют великодушные выигрыши и моментальные выплаты. 1хслот зеркало <a href=http://mtpkrskstate.ru/forum/user/170494/>http://mtpkrskstate.ru/forum/user/170494/</a>
1×slots сайт зеркало
Основное отличие в, собственно для получения бездепа не пополнять баланс в казино. Но кроме этого, есть ряд и других отличий: Вейджер менее х30–35 считается применимым. Опытные игроки утверждают, что с таким вейджером реально остаться в плюсе, случае верно подойти к выбору игрового аппарата. <a href=https://malaysia-forex.com/members/132011-HarrytooRp>https://malaysia-forex.com/members/132011-HarrytooRp</a> 1×slots регистрация то дальше необходимо пройти Также есть онлайн-платформы азартных игр, коие используют раздачу бездепозитных призов в особые даты (как для казино, например и для игрока). Помимо этого, действующие геймеры того имеют возможность получить схожие бонусы за свою работа (к примеру, за увеличения уровня или за похожие заслуги).В случае установленного лимита на сумму вывода выигрыша с бездепозитного приза, игрок не сможет исключить больше заявленной суммы.
<b>Смотреть еще похожие новости:</b>
<a href=http://miupsik.ru/forums/showthread.php?tid=295172>1×slots регистрация 1×slotscasino 56 online</a>
<a href=https://melhorlance.com.br/minha-conta/>1×слотс казино</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Особую изюминку видео слотам присваивают уникальные символы. С их в активизируются разные бонусы. Вы можете запустить вспомогательный уровень и прирастить сумму выигрыша. Есть знаки, которые заменяют ненужные составляющие и сами делают выигрышные комбо. Не стоит забывать и тему бонус-тур. После каждого счастливого спина есть шанс прирастить необходимую выигрыша в 2 или четыре раза.
#7964 Charlesgunny
1×bet зеркало рабочее на сегодня 1×bet xyz официальная казино <a href=https://strelochnik.com/>vodka casino</a> casino x включи казино <a href=https://res-publika.com>porno Катерина Шпица</a> казино вход букмекерская контора без 1×bet зеркало слоты 1×bet xyz 1×bet зеркало песня казино 1×bet слоты 1×bet xyz порно с Захарова Мария Владимировна
#7965 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7966 Charlesgunny
человек казино Кузнецова Анна Юрьевна порно <a href=https://krtka.info/>букмекерская контора</a> казино фильм онлайн casino игровой автомат <a href=https://www.ossetia.tv/>porno Катерина Шпица</a> up букмекерская контора играющие казино Кузнецова Анна Юрьевна порно бесплатно играем казино Елизавета Боярская букмекерская контора фонбет скачать casino на андроид
#7967 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7968 Charlesgunnyhttp://filmkachat.ru
x1 slots регистрация в 1×slots casino
Внесение депо – Будьте готовы восполнить счет в отыгрыша бонуса. Это обычное заявка верховодил для этого подобии промо-акций. Лучше заранее уточнить, какую сумму нужно будет заносить на счет. Как управляло, речь о минимальном депозите, но вы обязаны быть уверены, что он вас по карману. <a href=http://filmkachat.ru/>1×slots casino регистрация на сайте</a> Зарегистрироваться в казино по специальной ссылке либо с бонусным кодом. Подтвердить контактные данные (номер аппарата и электрическую почту). Для подтверждения номера телефона необходимо в личном профиле показать собственный номер и надавить кнопку „Подтвердить номер телефонного“, дальше Вы получите sms-сообщение с кодом, который необходимо ввести в подходящее фон. Для подтверждения электронной почты, перебежать по активной ссылке в письме от казино.Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации презента нужно доказать электрическую почту и привязать аппарат; <a href=https://www.as7abe.com/wall/blogs/post/60174>https://www.as7abe.com/wall/blogs/post/60174</a> 1×slots регистрация на официальном сайте <a href=http://clips.tj/user/Walteraxosy/>http://clips.tj/user/Walteraxosy/</a> Такие поощрения позволяют безвозмездно протестировать новое казино, разобраться с игровым ходом интернет слотов, заработать и вывести небольшую сумму денег.
1×slots зеркало рабочее на сегодня
Каждый в должен сперва отчетливо изучить условия по получению и отыгрышу приглянувшегося подарка. Если всё устраивает, поторопитесь арестовать безвозмездные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо в начать вращать барабаны топовых слотов. 1×slots официальный demo регистрация в 1×slots casino Помимо остального, для вывода средств по бездепу нужно привнести на счёт свой первый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало вероятную необходимую, после чего вывод средств станет доступен.Чтобы выступать даром на настоящие деньги в казино, не всегда достаточно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные деянья. <a href=https://black.volyn.net/forum/viewtopic.php?t=81701>https://black.volyn.net/forum/viewtopic.php?t=81701</a> Нет. Для получения бездепозитного бонуса в казино необходима обязательная регистрация на веб-сайте. Играть в слоты даром и без регистрации возможно только в демо режиме. casino 1×slot Денежные средства. Третий приз за регистрацию без депо – наличные. К раскаянию, лишь знаменитые и популярные клубы шансы уяснить средства в руб. Либо баксах. С их помощью возможность насладиться любой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед данным нужно выполнение конкретных условий.
1×slots сайт
Выполнив все требования оператора, клиент может оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит примерно менее суток. Если дополнительно потребуется пройти процедуру верификации, то срок возрастает до 1–2 трудящихся дней. Для перевода применяются банковские приборы и электрические платежные системы. Второй метод подходит превосходнее, например как основная транзакций в этом случае исполняются моментально. В связи со специфичностью функционирования банков обработка платежей может занять до нескольких трудящихся дней.В разделе с бонусами активировать собственный подарок. Найти игры, для которых предусмотрено поощрение и использовать бонус по предназначению. Чаще всего, пользующиеся сервисы, эти как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно неотъемлемое управляло. Финансовые свои выводятся лишь через ту платежную систему, коей огромной для пополнения депо. Если же игрок получил бездепозитный покерный приз, потребуется восполнить счет на минимальную сумму, которая сочиняет обычно десять $. <a href=https://www.google.com.kw/url?q=https://doctorlazuta.by/>https://www.google.com.kw/url?q=https://doctorlazuta.by/</a> 1×slots официальный сайт зеркало Чтоб получить большой выигрыш, подбирайте игровые автоматы с максимальным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша.Для получения бонуса надо(надобно) пригласить в игру свежего клиента. Казино начислит пригласившему фиксированный процент от взносов приглашённого вид приза: чаще всего его размер не превышает 10%. Срок деяния бонуса как не превышает месяца: пригласивший получает бонус в зависимости от проигранных ставок приглашённого в первый луна забавы.
1х слотс зеркало регистрация в 1×slots casino
<a href=https://www.sgomberisgombero.it/my-account-2/>1×slots casino регистрация 1×slotscasino09k online</a> Выигрыши с бонусов без вложений всегда привязаны к требованию по ставкам и все быть обналичены только после выполнения данных требований. 1×slots зеркало рабочее на сегодня <a href=http://radiat.ru/bitrix/redirect.php?goto=http://tenax-shop.ru/bitrix/redirect.php?goto=http://egeteka.ru/bitrix/rk.php?goto=https://telegra.ph/Obrazec-pretenzii-na-vozvrat-neispravnogo-vysokotehnologichnogo-tovara-nahodyashchegosya-na-garantii-09–24>http://radiat.ru/bitrix/redirect.php?goto=http://tenax-shop.ru/bitrix/redirect.php?goto=http://egeteka.ru/bitrix/rk.php?goto=https://telegra.ph/Obrazec-pretenzii-na-vozvrat-neispravnogo-vysokotehnologichnogo-tovara-nahodyashchegosya-na-garantii-09–24</a>
рабочее зеркало 1×slots
Акции распространяются как на все игры казино, так и на узкий перечень. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и другие. Промо может охватывать разработки одного производителя. Бездеп не пересекается с иными акциями казино. Если на сайте учтен кэшбек, он не начисляется за ставки, сделанные бонусными деньгами. Для идентификации платежных реквизитов игрока возможность понадобиться пополнение счета на наименьшую сумму.Осталось избрать казино с призом за регистрацию и сделать профиль. После активации дара выигрыш в от Фортуны и способностей. Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных обстановок с казино, когда в отыгрыша бездепа вас не дадут исключить крупную сумму выигрыша. <a href=https://cse.google.nu/url?sa=t&url=https://www.ronorp.net/zurich_en/community/city-talk.66/shisha-tobacco-from-4-eur.344325>https://cse.google.nu/url?sa=t&url=https://www.ronorp.net/zurich_en/community/city-talk.66/shisha-tobacco-from-4-eur.344325</a> Бездепозитный бонус за регистрацию в казино — это стартовый презент повторяющий валютного начисления либо бесплатных вращений для свежих игроков заведения, для получения которого не нужно заносить депо.Каждый из бездепозитных призов без пополнения 2022 содержит собственный конкретный вейджер для отыгрыша, например же в каждом казино он уточняется персонально — где то он х55 а кое-где х30, повторюсь везде по разному! казино 1×slots официальный сайт Для верификации аккаунта нужно предоставить специалистам технической поддержки отсканированную копию паспорта и счета за коммунальные услуги, а фотографию банковской карты либо скриншот страницы электронного кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для доказательства личности.
<b>Смотреть еще похожие новости:</b>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=326462&pid=651098#post_651098>1×slots зеркало на сегодня</a>
<a href=http://diablo2r.cn/home.php?mod=space&uid=30130>1× slots регистрация в 1×slots casino</a>
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=378905>1×slots зеркало быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Основное управляло получения бездепа ? создаваемый акк обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов строго воспрещено. Проверка ведется по имени, e-mal, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита необходимо блюсти простую последовательность поступков. Активация по промокоду используется в разных обликах бездепов. Если речь идет о приветственном призе, то набор символов можно разузнать на крупнейшей страничке, в регистрационной форме либо послании, которое отправляется пользователю для доказательства e-mail. Акции шансы проводиться совместно с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активизируется одноразовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном кабинете или начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем актуальный код для активации в описании любого промо.
#7969 Charlesgunny
Попова Анна Юрьевна порно kent casino регистрация <a href=https://sovsekretno.net/>казино онлайн бесплатно</a> Разуваева Ксения Денисовна порно букмекерские контора ап <a href=https://specreporter.com/>порно с Владимир Минеев (ММА)</a> автомат казино где казино скачать 1×bet 1×bet xyz 1×bet зеркало xbet 1×bet бесплатно porno Александр Соболев (футбол) мелбет букмекерская контора
#7970 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7971 WilliamCletshttps://cmc.com.ua
Всё для путешествий <a href=https://cmc.com.ua/>https://cmc.com.ua</a> уникальные маршруты, гиды по городам, актуальные акции на туры и полезные статьи для туристов.
#7972 Charlesgunny
почему в казино не бывает настенных часов букмекерская контора ставки <a href=https://kompromat1.online/>букмекерскую контору пин</a> 1×bet 1хбет бесплатно фильм казино <a href=https://sovsekretno.net/>казино играть</a> porno Нина Пирогова, хоккеистка 7k casino зеркало рабочее casino официальный зеркало казино в россии порно с Владимир Минеев (ММА) Фастова Елена Владимировна порно порно с Петр Ян (ММА)
#7973 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7974 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7975 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slotscasino 56 online
Исходя из этого, просто не присутствует мудрых оснований махнуть рукою на получение такого бонуса при регистрации. И, не, на такой бесплатной основе у вас все шансы выиграть деньги и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, именуют безвозмездными онлайн платформами для игр.Шаг 4. Активация. Внимательно изучите условия, информацию по лимитированиям и сроке действия бонусного предложения. Разобравшись с правилами, можно активировать бонус в личном офисе (от ? с использованием промокода) или по запросу в саппорт. <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> <a href=https://myportal.utt.edu.tt/ICS/_portletview_/Campus_Life/Campus_Groups/Safer/Discussion.jnz?portlet=Forums&screen=PostView&screenType=change&id=7104b34f-41c6–47b5-abe3-e4db446728a6>https://myportal.utt.edu.tt/ICS/_portletview_/Campus_Life/Campus_Groups/Safer/Discussion.jnz?portlet=Forums&screen=PostView&screenType=change&id=7104b34f-41c6–47b5-abe3-e4db446728a6</a> Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам запрещено начислять бонусы посетителям, не имеющим валютных средств на счете. Мы предлагаем осмотреть животрепещущие бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ. x1 slots 1хслотс регистрация перейти на 1×slots <a href=http://dklada.ru/user/DoctorLazutapt/>http://dklada.ru/user/DoctorLazutapt/</a> Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, дабы появилась возможность исключить выигрыш.
1×slots скачать на айфон
Такой казино бонус без депозита за регистрацию выдается игроку на час и активно используется данное предложение с 2017 года. Это словно какая-то маскировка одобрения под бездепозитный. Суть всего сего сводится к что, этому, собственно игроку на час выдается, к примеру, 1000 $, а реклама твердит то, что любой выигрыш можно будет в будущем забыть при себя. Но если играющий всерьез отнесется к этому предложению, то он попросту растеряет время. Ведь игроку надо(надобно) несомненно выступать не в основном аккаунте, а тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (даже всей тысячи) в управляла вступят конкретные условия, где несомненно сказано, собственно наибольшей суммой победы может быть только двести долларов и деньги можно использовать лишь в приза на первый лепта с вейджером 25 от суммы гонорары плюс сам депозит. По итогу получится, собственно игрок выигрывал себе 200% бонус с вейджером на определенную необходимую. Короче говоря, это все не стоит вашего медли.Внесение депозита – Будьте готовы восполнить счет в отыгрыша приза. Это стандартное требование правил для этого на промо-акций. Лучше заблаговременно уточнить, какую необходимую нужно несомненно вносить на счет. Как управляло, речь о наименьшем депозите, но вы обязаны быть уверены, что он для по кармашку. 1×слот регистрация в 1×slots casino <a href=http://lider1c.ru/communication/forum/messages/forum3/message8243/6246-ssylochnaya-massa-onlayn?result=new#message8243>http://lider1c.ru/communication/forum/messages/forum3/message8243/6246-ssylochnaya-massa-onlayn?result=new#message8243</a> Процесс подтверждения личности имеет занять от одного денька до недели. Если заказчик допустил какую-либо оплошность при заполнении паспортных данных, то ему по адресоваться с проблемой в саппорта онлайн-казино.Бездепы все заходить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами. 1×slots регистрация 1×slots casino 777 online Бонус за регистрацию в казино без депо с выводом денег нужно отыграть. Зачастую для отыгрыша возможность потребоваться устроить ставки на сумму, в некоторое 10-ов один превосходящую сумму бонуса либо выигрыша.Для выбора азартного заведения Вы сможете воспользоваться перечнем наших казино с бонусами за регистрацию. На нашем веб-сайте мы опубликовали перечень бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, собственно доля бонусов эксклюзивные и доступны лишь для посетителей нашего сайта по-специальному промо-коду либо по уникальной ссылке. Кроме как, для каждого приза мы подготовили доскональный обозрение, в Вы узнаете как получить и отыграть поощрение и как исключить свой выигрыш с бездепа.
1× слот зеркало
Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную процедуру активации приза без депо. Внимательно прочтите до конца. Многие новенькие делают оплошности на шаге регистрации и потому не могут получить презент.Выполнив все притязания оператора, заказчик возможность оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем не более суток. Если дополнительно требуется пройти функцию верификации, то срок увеличивается до 1–2 рабочих дней. Для перевода используются банковские инструменты и электронные платежные системы. Второй способ подходит другого, как, так как масса транзакций в осуществляются мгновенно. В связи со спецификой функционирования банков обработка платежей имеет взятьвдолг(взятьвзаймы) до нескольких рабочих дней. Во время игры в казино, выигрыши, полученные благодаря бесплатным призовым фондам, суммируются и срабатывают в совместную сумму для отыгрывания. Однако, случае удача улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно допустит вывести денежные средства. Сумма вывода будет находиться от лимита, одобренного именно в данном учреждении. Поэтому, пристально надо(надобно) разбирать управляла выдачи безлимитных депо. <a href=https://pf-k.ru/profile/69785-prostoysoft0105/?tab=field_core_pfield15>https://pf-k.ru/profile/69785-prostoysoft0105/?tab=field_core_pfield15</a> Первый образующийся вопрос, это, зачем выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают свежих игроков. Последним легче начать забаву на средства с презента за регистрацию. Им надо пополнять баланс и тратить личностные средства. Новички получают благотворительные спины или средства на счёт. С их поддержкой знакомятся с игровым ходом, крутят слоты и делают ставки в рулетке.Выше мы дали полный набор самых новых и актуальных бездепозитных призов в онлайн казино без пополнения на 2022 год, где вы можете воспользоваться любым ценным бездепозитным призом. 1×slots регистрация на сайте 1×slots ru com Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, solid лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.
1×slots официальный сайт, скачать
<a href=http://nhomtruyen.com/members/jamesgaw.9280/>1×slots официальный сайт скачать</a> Благодаря программе лояльности от игорного заведения, можно арестовать превосходный старт и без добавочных инвестициям запустить видеослоты. Кроме того, можно рассчитывать на реальную удачу и получить, без вложения личных финансов, немалый выигрыш. 1×slots сайт <a href=https://hypothes.is/users/Glavdorogadv2106>https://hypothes.is/users/Glavdorogadv2106</a> Бонус без депо за регистрацию в казино (бездепозитный приз) – это валютный подарок от клуба, кот-ый начисляется на акк игрока в регистрации в казино. Кроме творенья учетной записи, для получения бездепа, очень нередко потребуется ещё и подтвердить контактные данные игрока и/или активировать специальный промо-код.Чтобы помощи увериться в превосходстве бездепозитных бонусов, достаточно зарегистрироваться в казино и получить поощрение.
1×slots актуальное зеркало
<a href=https://sportavesti.ru/forums/users/tmseosit1608–2/>https://sportavesti.ru/forums/users/tmseosit1608–2/</a> 4. Заберите подарок. Чаще всего приз активизируется сразу последствии регистрации. Но случаются истории, когда надо(надобно) зайти в собственный кабинет либо написать в службу. 1×slots зеркало на сегодня После требуется привнести идентификационный платёж. Это пугает новичков больше всего. Нужно устроить минимальный депо в 100–500 рублей. Таким образом служба защищенности убедиться в, собственно платёжный способ принадлежит Вам. Данная процедура необходима для обеспечивания защищенности игровых счетов. Пример, Ваш акк взломают и выведут свои на собственный кошелёк. Будет крайне досадно. Поэтому верификация платёжной системы, это необходимый момент.Некоторые онлайн-казино без депозита предлагают новым клиентам выбрать приз при регистрации. Будьте внимательны: выбрав один, вы в абсолютном большинстве случаев не сможете воспользоваться остальными.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Когда речь о получении бездепозитных бонусов в казино, для внимание на последующие условия: Частенько новички не понимают, как активировать презенты или исключить первый выигрыш. Для подобных случаев наша команда обрисовала основные термины – что это фриспины, вейджер, как его отыграть, зачем нужно протекать верификацию.
#7976 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7977 Charlesgunnyhttp://filmkachat.ru
1хслотс мобильная версия зеркало
Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> Объективные – объем бонуса, коэффициент и условия вейджера, необходимость внесения депозита для вывода средств;Постарайтесь отыграть вейджер, чтобы появилась вероятность забыть заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные приборы. Вы можете получить выигрыш на электронной кошелёк, карту, телефон. <a href=https://www.gabitos.com/eldespertarsai/template.php?nm=1728134833>https://www.gabitos.com/eldespertarsai/template.php?nm=1728134833</a> Отзывы читателей о бонусных промоакциях посодействуют составить эмоцию, хотя не запамятовывайте о субъективности собственных объяснений.Иногда для получения призов необходимо связаться с представителями службы. Удобнее всего с ними собеседовать в онлайн-сате, желая время довольно запроса по электрической почте. 1× slots зеркало <a href=https://sklad-slabov.ru/forum/user/3963/>https://sklad-slabov.ru/forum/user/3963/</a>
1×slots бездепозитный бонус за регистрацию
Не советуем опрометью голову хвататься за всевозможные предложения получения средств без вложений. Вполне возможно, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на первый взгляд. Альтернативой считается казино бонус за депо. Мы предлагаем для пару советов, благодаря коим у любого игрока будет возможность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом средств:Вейджер менее х30–35 является приемлемым. Опытные игроки утверждают, что с таким вейджером реально остаться в плюсе, в правильно подойти к выбору игрового аппарата. 1×slots рабочее зеркало <a href=http://web.symbol.rs/forum/member.php?action=profile&uid=765922>http://web.symbol.rs/forum/member.php?action=profile&uid=765922</a> 1×slots рабочее зеркало
1хслот скачать
Срок активации и время на отыгрыш. Зачисление средств или фриспинов происходит при активации протяжении строго ограниченного периода, похожие требования предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать бонус несколько дней либо и недель. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высочайшим вейджером. <a href=https://lockright.uk/forum/profile/PauletteFr>https://lockright.uk/forum/profile/PauletteFr</a> Варианты выигрыша в от Вашей успеха и условий игорного портала. Выше мы сказали, что некоторые бездепозитные призы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются другие, все, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на деньги, можно выиграть неописуемые суммы. Сегодняшние игровые автоматы или видео слоты, как их именуют. Могут выдавать солидные умножение от х1.000 и выше. Некоторые множат ставку от х100.000. 1хслотс рабочее зеркало на сегодня Также учтите, что кое-какие игровые платформы сузивают перечень государств, коие готовы получить предложенный бездепозитный приз за регистрацию. К образцу, существуют онлайн-заведения, выдающие сходственные бонусы только обитателям определенных государств. К образцу, интернет казино 777 Оригинал предоставляет бездепозитный бонус только игрокам из России и стран СНГ. Или напротив, снабжают вознаграждением всех, считая жителей некоторых стран (следует сего, стопам внимательно изучать перечень, дабы впоследствии не возникло практически вопросов и претензий).Промообъявления от казино не дают реальной картины и ориентированы на привлечение внимания юзеров. Понять, насколько высоки шансы остаться в плюсе, дозволит собственный тест условий предложения:
1×slots официальный сайт скачать на айфон
Многие азартные клубы ограничивают сумму вывода заработанную на призе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не можете исключить. Разница несомненно аннулирована, Вы и не можете делать на нее ставки.Для ревизии используются сканы паспортов, водительских водительских, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если юзер замечен в попытке завести вспомогательный аккаунт, все его учетные записи подвергаются блокировке, а их владелец попадает в черный список. При этой на лицензионной площадке не стоит бояться указывать достоверную индивидуальную информацию (шифрование исключает утечку индивидуальных данных). Главное превосходство спинов – вероятность изучить различные слоты. Также удастся насладиться бонусными раундами, испытывать фортуну в риск-туре и преувеличить выигрыш за счёт особенных знаков. Однако не только игровой процесс заслуживает внимание, как чем сосредоточиться на реальном выигрыше.Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают приз по странам. Вплоть до того, что клуб возможность на игроков из Вашей государства, а бездеп мешает. Бездепозитный приз за регистрацию в казино — это стартовый подарок вид валютного начисления либо бесплатных вращений для новых игроков заведения, для получения которого не заносить депозит.Также посещают случаи, когда казино начислит оговоренный бонус после регистрации нового посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам. 1×slots официальный demo регистрация в 1×slots casino <a href=https://asteroidsathome.net/boinc/view_profile.php?userid=728914>https://asteroidsathome.net/boinc/view_profile.php?userid=728914</a> Создание аккаунта. На веб-сайте казино нужно открыть регистрационную форму и наполнить порожние поля личностными данными. Иногда на данном этапе потребуется показать лишь адрес электрической почты и пароль, но почаще надо наполнить анкету персональной информацией (ФИО, дата рождения, место проживания и т.д. ). Нужно свидетельствовать лишь настоящие данные, потому впоследствие они станут испытаны.
1×slots сайт
Во всех легальных онлайн-казино Беларуси необходимо свидетельство паспортных данных для забавы — это требование правительства страны. <a href=http://b77706vw.bget.ru/user/DoctorLazutaer/>http://b77706vw.bget.ru/user/DoctorLazutaer/</a> Такой казино бонус без депозита за регистрацию выдается игроку на час и активно используется данное предложение с 2017 года. Это как бы некая маскировка одобрения под бездепозитный. Суть всего сего сводится к что, этому, что геймеру на час выдается, например, 1000 $, а реклама утверждает о том, собственно каждой выигрыш можно несомненно дальнейшем оставить при себя. Но в играющий серьезно отнесется к данному предложению, то он попросту растеряет время. Ведь геймеру надо(надобно) несомненно выступать не главном аккаунте, а в тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (том всей тысячи) в правила вступят конкретные обстоятельства, где несомненно сказано, что максимальной суммой победы может быть лишь двести $ и деньги возможно применять только виде бонуса на первый вклад с вейджером 25 от суммы гонорары плюс сам депо. По результату выйдет, что игрок выигрывал себе 200% приз с вейджером на конкретную сумму. Короче разговаривая, это все не стоит вашего медли.Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают бонус по государствам. Вплоть до такого, что клуб имеет себя игроков из Вашей государства, а бездеп мешает. 1×slots зеркало регистрация Во всех легальных онлайн-казино Беларуси необходимо подтверждение паспортных данных для игры — это требование правительства страны.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.bf-france.com/forums/profile/30064-rabofreeor/>1×slots официальный сайт зеркало</a>
<a href=https://redfist.de/RF-Online-Testforum/viewtopic.php?f=60&t=77369>1×slots промокод при регистрации 2025</a>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=204023>1×slots официальный сайт мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный бонус казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в этом и содержится основное различие.
#7978 StephenRoorn
http://indiapharmi.com/ top 10 pharmacies in india
#7979 Charlesgunny
лучшие букмекерские конторы cometa casino <a href=https://res-publika.com>Мухтиярова Елена Вячеславовна порно</a> pin casino скачать 1×bet 1×bet xyz <a href=https://krtka.info/>порно с Илья Осипов (киберспорт)</a> casino зеркало сегодня 1×bet сейчас карты казино почему в казино нет часов скачать 1×bet на андроид 1×bet официальный сайт 1×bet xyz unlim casino
#7980 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало
Баланс игрока пополняется на подходящую сумму. К ней используется вейджер, обозначенный в правилах акции. Вывести выигрыш возможно несомненно последствии того, как юзер устроит требуемый размер ставок из личных средств. В редчайших случаях бездеп работает в формате Free Play. На счет пользователя зачисляется большая сумма, и предоставляется малый срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по окончании сего периода сумма на счету несомненно превосходить изначальную, то разницу возможно будет вывести или использовать для дальнейших ставок.Наиболее знаменитые вознаграждения между гэмблеров – бездепозитные бонусы казино. Это не умопомрачительно, так можно получить благотворительные вращения или виртуальные кредиты, и при этом не придётся пополнять счёт, рисковать личными деньгами. Удастся насладиться различными увеселениями даже выиграть солидную сумму, избегая серьёзного риска. <a href=http://filmkachat.ru/>1×slots зеркало рабочее на сегодня</a> Фриплей-бонусы. Бонусы за безвозмездную забаву есть лишь в неких клубах. Они зачисляются незамедлительно в творения профиля и действуют непродолжительное время. Если у вас нет медли потратить свои, они просто завершатся. Что касается времени, как бонусы срабатывают на одного часа.Возможность протестировать новые забавы, не рискуя личностными средствами и разработать личную стратегию забавы. <a href=https://camp-fire.jp/profile/silo-images/projects>https://camp-fire.jp/profile/silo-images/projects</a> казино 1×slots официальный сайт <a href=http://radshir.com/list/index.php?subaction=userinfo&user=CharlesQualm>http://radshir.com/list/index.php?subaction=userinfo&user=CharlesQualm</a> Бездепозитные бонусы отличный вариант бесплатной забавы в игровые автоматы. Многие пользователи сети не понимают, собственно в казино можно начать играть безусловно даром, а потом исключить выигрыш на банковскую карту или электронный кошелек, другие не доверяют интернет казино, а третьи удачно играют и выигрывают – и тотчас довольно большие суммы.
1хслотс 1хслотс регистрация перейти на 1×slots
1×slots регистрация на официальном сайте Также существуют онлайн-платформы азартных игр, коие применяют раздачу бездепозитных бонусов в особые даты (как для казино, например и для игрока). Помимо этого, действующие геймеры кроме имеют вероятность получить похожие призы за собственную деятельность (к примеру, за увеличения значения либо за похожие заслуги).Для отыгрыша бонуса казино обязывает игрока поиграть на необходимую, в несколько один превышающую необходимую полученного приза — здесь выгода фирмы явна. <a href=http://www.god123.xyz/home.php?mod=space&uid=1036171>http://www.god123.xyz/home.php?mod=space&uid=1036171</a> В случае установленного лимита на сумму вывода выигрыша с бездепозитного бонуса, игрок не может исключить больше заявленной суммы. 1×slots сайт
1хслотс казино зеркало
Oтыгpaть приз с указанным вeйджepом, для этого необходимо сдeлaть cтaвoк нa cумму, превосходящую объем приза в некоторое один.Нельзя разглядывать забаву на деньги, как вариант заработка. Азартные забавы воспрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не организатором азартных игр. Сайт носит информационный характер. <a href=http://www.fumankong5.cc/home.php?mod=space&uid=600990>http://www.fumankong5.cc/home.php?mod=space&uid=600990</a> Можно ли в одном онлайн казино получить больше 1-го приза за регистрацию? Нет, так как в каждом онлайн казино есть правила, к коим нужно держаться, не создавать 2 аккаута для получения призов, по несомненно блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, бонус за регистрацию выдаеться раз раз одному личику.Только выполнив все обстоятельства отыгрыша и дождавшись окончания проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить средства деньги. 1×slots зеркало рабочее
1хслотс казино зеркало
Создание аккаунта. На веб-сайте казино нужно обнаружить регистрационную форму и наполнить пустующие поля личностными данными. Иногда на этом шаге потребуется показать только адрес электрической почты и пароль, хотя чаще надо заполнить анкету персональной информацией (ФИО, дата рождения, место проживания и т.д.). Нужно свидетельствовать лишь реальные данные, потому впоследствие они будут проверены. <a href=https://elclasificadomx.com/author/jameslog/>1×slots регистрация 1×slots casino c2d ru</a> зеркала 1×slots <a href=http://www1.xuesheng360.cn/bbs/home.php?mod=space&uid=1081612&do=index&view=boringmadhouse9>http://www1.xuesheng360.cn/bbs/home.php?mod=space&uid=1081612&do=index&view=boringmadhouse9</a> Для отыгрыша бонуса казино обязывает игрока поиграть на сумму, в количество один превышающую необходимую полученного бонуса — тут выгода фирмы явна.В интернете количество известных игорных площадок с красивыми акционными услугами. Однако пристально читать условия десятков услуг времени надоест, ну и время отнимет много. Поэтому наша команда подготовила ТОП-3 вебсайтов с превосходнейшими бездепозитными бонусами:
1хслотс рабочее зеркало
Но такие рамки не смущают том хайроллеров, поскольку коэффициенты на слотах позволяют рассчитывать на крупные выигрыши, а некоторых автоматах разыгрывается прогрессивный джекпот.Третитй бездепозитный бонус за регистрацию – денежные средства. К огорчению, начислить рубли либо баксы способны лишь известные и знаменитые клубы. С их поддержкой у насладиться любой доступной игрой – автоматом, рулеткой, кено, блэкджеком. Подарки на праздничные ? приуроченные к торжественным датам, требующие символического отыгрыша либо начисляются без того. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду. <a href=http://pclub.cc/home.php?mod=space&uid=228715>http://pclub.cc/home.php?mod=space&uid=228715</a> Обычно показатель повыше, чем для призов на депозит. Не дивитесь, в он несомненно в х100. Иногда завышенный коэффициент вейджера уточняется для жителей отдельных государств. 1×slots регистрация на сайте 1×slots ru com
<b>Смотреть еще похожие новости:</b>
<a href=https://vredeenvermaak.be/forum/vrede-en-vermaak/>1×слотс казино</a>
<a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=7523&TITLE_SEO=7523-preobrazovatel-interfeysov-usb-rs485&MID=465596&result=reply#message465596>1 хслот регистрация в 1×slots casino</a>
<a href=https://forum.bedwantsinfo.nl/thread-712916.html>онлайн казино 1×slots</a>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-5043/#comment-606352>1х слот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Свежий бонус начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в использовании средствами, а в случае отыгрыша оператор имеет установить ограничение на вывод денег.
#7981 Charlesgunny
официальные букмекерские конторы 1×bet сейчас <a href=https://glvk.guru/>казино</a> Анна Михалкова porno Илья Ковальчук (хоккей) <a href=https://www.ossetia.tv/>официальная казино</a> porno Анна Сидорова, керлингистка bet casino Чулпан Хаматова казино фильм онлайн букмекерские контора ап букмекерская контора фонбет официальный сайт сайты казино
#7982 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7983 Charlesgunnyhttp://filmkachat.ru
1×slots акции
На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не сможете активировать и получить бездепозитный бонус. <a href=http://filmkachat.ru/>1 хслот регистрация в 1×slots casino</a> Также учтите, собственно некоторые игровые платформы сужают перечень государств, которые готовы получить предложенный бездепозитный приз за регистрацию. К примеру, существуют онлайн-заведения, выдающие подобные бонусы только обитателям конкретных стран. К примеру, онлайн казино 777 Оригинал предоставляет бездепозитный бонус только игрокам из России и стран СНГ. Или наоборот, пичкают вознаграждением всех, считая обитателей некоторых государств (как сего, следует пристально учить список, дабы потом не появилось практически вопросов и претензий). <a href=https://wowgilden.net/forum-topic_475315.html>https://wowgilden.net/forum-topic_475315.html</a> Если площадка дарит бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь завести аккаунт на сайте и активировать его, подтвердив адресок электрической почты, номер телефона либо иные данные, которые настятельно оператор. Перед этим необходимо увериться, что пользователь располагается на официальном веб-сайте казино, не на мошеннической площадке.Чтобы получить вероятность вывести прибыль с бездепозитного бонуса в казино, нужно выполнить ряд условий: 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=http://vse-ekonomim.ru/author/joshuadib/>http://vse-ekonomim.ru/author/joshuadib/</a> Такие одобрения позволяют безвозмездно протестировать новое казино, разобраться с игровым ходом интернет слотов, заработать и вывести небольшую необходимую денег.Бездепозитные бонусы отличный вариант бесплатной игры в игровые автоматы. Многие юзеры сети не знают, что в казино возможно начать играть полностью даром, а потом вывести выигрыш на банковскую карту или электрический кошелек, иные не доверяют интернет казино, а третьи успешно играют и выигрывают – и тотчас довольно немалые суммы.
1× slots casino официальный сайт
Бездепозитные призы – это самая интересная и наиболее многообещающая промоакция интернет-казино. Они числе чем фри-спинов, поэтому собственно выплаты в безвозмездных вращениях не гарантированы, ведь комбинации на барабанах игрового аппарата имеют не сложиться. 1хслотс регистрация в 1×slots casino Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.Игрокам стоит принимать приветственный приз как гарантированный способ получить крупный выигрыш, но это замечательная вероятность без затрат расценить функционал казино. <a href=https://www.x-fta.com/foro/member.php?1253733-JustinHix>https://www.x-fta.com/foro/member.php?1253733-JustinHix</a> 1× slots зеркало Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.
1×slots регистрация 1×slots casino c2d ru
Вейджер (или вагер) ? это наименьшая сумма ставок, которую нужно устроить для вывода денежного приза. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение. Бездепы с бесплатными вращениями предоставляют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд выплачивает казино. Число спинов ограничено и изредка превышает сотку. Если промоакция включает в себя много безвозмездных игр, их начисление имеет быть разбито на количество дней.Существует ли стратегии для отыгрыша бездепозитных бонусов? К огорчению нет, на выигрыши или проигрыши с призов, казино либо игрок воздействовать не может, отдача игр случается от создателей игр. <a href=http://r66227en.beget.tech/user/Patrickgried/>http://r66227en.beget.tech/user/Patrickgried/</a> В зависимости от интернет заведения любой из их возможность вам предложить как бездепозитные средства, например и бездепозитные фриспины, которые последствии удачной регистрации рухнут вас на ваш игровой баланс. 1×slots регистрация Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие появляются у начинающих.
1×slots официальный регистрация
<a href=http://cozycotg.com/forum/memberlist.php?mode=viewprofile&u=72740>1×slots регистрация на сайте</a> Теоретически, к бесплатным призам возможно отнести например нарекаемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, потому что они предоставляют лишь возможность создавать ставки.Возьми собственный презент. Чаще всего бонус активизируется незамедлительно последствии регистрации. Но бывают ситуации, когда нужно зайти в собственный кабинет либо написать в справочную службу. Свежий бонус начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в пользовании своими, а в случае отыгрыша оператор может ввести лимитирование на вывод средств. 1×slots официальный зеркало <a href=http://seneka-vl.ru/index.php?subaction=userinfo&user=noisybroker50>http://seneka-vl.ru/index.php?subaction=userinfo&user=noisybroker50</a>
1× slots casino зеркало
<a href=https://ai-db.science/wiki/User:FFGBettye4>https://ai-db.science/wiki/User:FFGBettye4</a> Размер ставки для игры по бездепозитному бонусу (естесственно же, если, тогда,, когда он представлен в виде бонусных валютных средств) зачастую ниже, чем при этой на депозит. Ограничение будет работать до этапа отыгрыша приза.Да, у бесплатных призов есть дефекты. Прежде всего, они обычно небольшие. Кроме того, условия вейджера по ним постоянно строгие. Но таки недоступность риска делает их очень привлекательными для клиентов. казино 1×slots официальный сайт Новички не любят сразу же вносить депо. Это обосновано неименьем навыка и сомненьем. К счастью, в наше время можно получить бездепозитный приз за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В всяком случае вы не рискуете собственными сбережениями. Это отличная вероятность запустить понравившийся видео разъем либо же испытывать удачу в настольных забавах.Но ни не запамятовывайте внимательно разбирать управляла участия в бонусных промоакциях. Если вы нарушите но бы одно условие, позднее вы не сможете устроить недоразумение с администрацией.
<b>Смотреть еще похожие новости:</b>
<a href=https://adminclub.org/showthread.php?tid=64267>1×slots на любой вкус как пройти регистрацию</a>
<a href=https://nauc.info/forums/viewtopic.php?t=20402256>1×slots коды</a>
<a href=http://mi.minfish.com/home.php?mod=space&uid=1196847>1×слотс казино</a>
<a href=http://khodaumo.com/forum/memberlist.php?mode=viewprofile&u=146&sid=a1ea2c4362e268df858fed4851635885>1×slots зеркало на сегодня</a>
<a href=http://romb4×4.ru/forum/members/rabofreepn.4965/>1хслотс официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бонус без депо за регистрацию в казино (бездепозитный бонус) – это валютный презент от клуба, который начисляется на акк игрока в регистрации в казино. Кроме сотворения учетной записи, для получения бездепа, очень нередко требуется ещё и подтвердить контактные данные игрока и/или активировать особый промо-код. Шаг 5. Использование и отыгрыш. Бездеп должен быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.
#7984 Charlesgunny
casino регистрации porno Яна Троянова <a href=https://7club7.com/>казино сегодня</a> мелбет букмекерская контора Набиуллина Эльвира Сахипзадовна порно <a href=https://www.ossetia.tv/>porno Александра Степанова, фигуристка</a> букмекерские конторы в россии сайт казино зеркало порно с Сергей Бобровский (хоккей) порно с Илюшникова Татьяна Александровна официальные зеркала казино Попова Анна Юрьевна порно казино играть
#7985 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7986 EverettBefhttps://stylewoman.kyiv.ua
Женский онлайн-журнал <a href=https://stylewoman.kyiv.ua/>https://stylewoman.kyiv.ua</a> стиль, уход, здоровье, отношения, семья, кулинарные рецепты, психология и карьера.
#7987 Charlesgunnyhttp://filmkachat.ru
1× slots сайт
Далее требуется отыграть вагер и исключить выигрыш. Игрокам без опыта крупно подфартило, есть получить десятки даров за одну регистрацию. Если не сумели получить Бездепозитный бонус, не тревожьтесь. Обратитесь в интернет чат, оператор поможет исправить. <a href=http://filmkachat.ru/>1×slots зеркало на сегодня</a> Рассмотрим принцип его действия на образце. Допустим, вы зарегались и получили $10 not the slightest deposit bonus с вейджером х50. Это означает, собственно выигранные средства можно будет выводить не раньше, чем после как, как общая сумма ставок достигнет $500.У любого игорного клубы различные вейджеровые обстоятельства. Чтобы вы гарантировано сумели выполнить их, мы дадим несколько советов. Если система начислила небольшую сумму, надо делать великие ставки – остановитесь на 10–30 центах. Как лишь сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В неприятном случае превосходнее присмотреться к другому автомату. <a href=https://rentry.co/p284m9cr>https://rentry.co/p284m9cr</a> Итак, чтобы благотворительные бонусные кредиты трансформировались в реальные деньги, которыми вам распоряжаться по собственному усмотрению, их надо(надобно) отыграть. Вейджер следует уточнять в правилах онлайн-казино. 1хслотс регистрация в 1×slots casino <a href=http://tmml.top/home.php?mod=space&uid=94157>http://tmml.top/home.php?mod=space&uid=94157</a> При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие возможно посвятить забаве в казино.
1×slots зеркало которую указывали при регистрации кстати
Начнём с такого, собственно каждое рекламную за регистрацию предполагает некие обстоятельства. Бездепозитные бонусы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, нужная для исполненья условий. Пример, возымели бесплатные вращения и выиграли с их 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 руб., проигрышных либо выигрышных, маловажно. После исполненья, бонусный баланс перейдёт на настоящий и станет доступным к выводу.Бездепозитный приз нередко имеет замерзнуть доступным сразу после завершения регистрации, потому правило единственным притязанием к нему является регистрация, а после ревизия вашей свежей учетной записи. <a href=https://mit-bbs.com/viewtopic.php?t=130930>1×slots регистрация то дальше необходимо пройти</a> 1хслотс рабочее зеркало на сегодня Многие азартные клубы ограничивают сумму вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании промоакции, суммы Вы не можете вывести. Разница несомненно аннулирована, Вы даже не сможете делать на нее ставки.Рассмотрим принцип его действия на образце. Допустим, вы зарегались и получили $10 no down payment bonus с вейджером х50. Это означает, собственно выигранные средства возможно будет выводить не раньше, чем в как, как общая сумма ставок достигнет $500. <a href=http://istinastroitelstva.xyz/index.php?subaction=userinfo&user=unsuitablewealt>http://istinastroitelstva.xyz/index.php?subaction=userinfo&user=unsuitablewealt</a> 1хслотс казино зеркало Наш перечень содержит лучшие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по важным характеристикам:Вознаграждения за получение VIP-статуса ? начисляются в программы преданности при достижении очередного уровня либо выдаются персонально менеджерами саппорта.
1×slots зеркало этих способов предполагает регистрацию
<a href=https://poldomy.pl/member.php?u=137559>https://poldomy.pl/member.php?u=137559</a> Денежные свои. Третий бонус за регистрацию без депозита – наличные. К раскаянью, только известные и модные клубы шансы дать деньги в руб. Либо долларах. С их помощью возможность насладиться любой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед этим необходимо исполненье конкретных критерий. 1хслот скачать
1× slots casino официальный сайт
Законодательство, регулирующее азартные игры в различных государствах, оказывает на полномочия операторов. В результате пользователи из отдельных регионов сталкиваются с ограничениями со стороны казино. Это может быть как глубокий отказ в доступе, например и невозможность загружать забавы отдельных изготовителей.Еще одно условие касается объемов ставки. Операторы устанавливают наивысшую сумму, которую игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, избранной в Личном кабинете. При превышении лимита есть риск лишиться бонуса. Существующие лимитирования относятся и к определенным видам ставок. Например, играя в рулетку, клиент может столкнуться с запретом назначать фишки на шансы. <a href=http://fin-molitor.com/forum/viewtopic.php?f=2&t=419952>1×slots официальный demo регистрация в 1×slots casino</a> Представьте момент, когда при ставке в 10 рублей Вы получите сходственное умножение. Миллион рублей за одно вращение, собственно вполне возможно. Поэтому вопрос, сколько возможно выиграть остаётся не. Предлагаем выяснить других. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный приз и проверяйте удачу в деле. Разумеется, исключить средства довольно. Однако шансы есть у всех.Мы проделываем ударение на ключевых положениях правил, рассказываем о территориальных ограничениях и кратко информируем о иных акциях обсуждаемого казино. 1×slots сайт <a href=http://linuxmagazin.3×.ro/modules.php?name=Your_Account&op=userinfo&username=permissibleback>http://linuxmagazin.3×.ro/modules.php?name=Your_Account&op=userinfo&username=permissibleback</a> В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая милая доля забавы. Важно, часто бездепозитные призы в казино выдаются с ограничениями по максимальной выплате. В среднем возможно рассчитывать на выгода в количество тысяч рублей. Как вывести выигрыш с приза без депо. Придётся подтвердить акк документально, в неких заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в онлайн чате либо прочтите в правилах.
1хслотс рабочее зеркало
Размер ставки для забавы по бездепозитному призу (естесственно же, когда, когда он представлен в виде бонусных валютных средств) часто ниже, чем при ирге на депозит. Ограничение несомненно работать до этапа отыгрыша приза. <a href=http://webdo.cc/yuyue/upload/home.php?mod=space&uid=172077>http://webdo.cc/yuyue/upload/home.php?mod=space&uid=172077</a> Бездепозитный бонус казино 2022 с выводом за регистрацию предоставляет вероятность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и проверить качество работы саппорта. Довольно нередко, начиная игровой процесс, игрок теснее не желает останавливаться и проделывает реальный лепта. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать безвозмездно вероятно как раз таки с призом за регистрацию без надобности заносить депо.Нельзя разглядывать игру на средства, как вариант заработка. Азартные игры воспрещены для лиц младше 18 лет. Topcasinobonuses.mobi классифицируется организатором азартных игр. Сайт носит информационный характер. 1×slots зеркало регистрация Чтобы получить возможность вывести прибыль с бездепозитного приза в казино, нужно выполнить ряд критерий:Да, у безвозмездных призов есть недостатки. Прежде всего, они обычно очень. Кроме такого, обстоятельства вейджера по ним практически строгие. Но все же отсутствие риска делает их довольно привлекательными для посетителей.
<b>Смотреть еще похожие новости:</b>
<a href=https://masstr.net/showthread.php?tid=81340>1×slots регистрация на сайте</a>
<a href=http://6000ziyuan.com/forum.php?mod=viewthread&tid=99380&extra=>1×slots скачать на айфон</a>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/7272/#comment-316158>1х слот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Обычно, бездепозитные призы выдаются под конкретные слоты с фиксированной ставкой, но их наверняка воспрещено применять в игровых автоматах с современным джекпотом. Список игр, в можно применять бездеп, Вы отыщите в описании акции либо можете уточнить у саппорта заведения. Прежде чем активировать бездеп, нужно увериться что, что государство, гражданином которой считается игрок, не входит в перечень запрещенных.
#7988 AlbertSoymnhttps://ковка116.рф
офисная мебель от производителя в спб <a href=https://ковка116.рф/>https://ковка116.рф</a>
#7989 Charlesgunny
casino регистрации vodka casino <a href=https://res-publika.com>casino бездепозитный</a> 1×bet зеркало xbet xyz Преподобная Надежда Александровна порно <a href=https://t.me/vchkogpu_ru>porno Елизавета Туктамышева</a> 7k casino зеркало рабочее 1×bet слоты официальный сайт где казино порно с Гатагова Ольга Анатольевна слоты казино игры казино почему в казино нет часов
#7990 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7991 Charlesgunny
porno Юлия Канакина, скелетонистка бесплатно играем казино <a href=https://kompromat1.online/>1×bet бесплатно</a> 1×bet 1хбет порно с Елена Никитина, скелетонистка <a href=https://glvk.guru/>винлайн букмекерская контора официальный</a> лучшие онлайн казино porno Яна Троянова сайт 1×bet слоты казино рулетка казино играть Крючкова Полина Викторовна порно Ирина Горбачева
#7992 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7993 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7994 Charlesgunnyhttp://filmkachat.ru
1хслот официальный сайт зеркало
Обычно для получения бонусов без депо, казино выдвигает приклнные и вполне выполнимые условия, но есть ряд деяний коие запрещены и имеют стать досадные последствия:Размер бонусов почаще всего чисто символический и не превышает 50 руб. Приятно, но осязаемым бустом при ли будет. <a href=http://filmkachat.ru/>1×slots зеркало регистрацию более популярный вариант это</a> <a href=https://www.diigo.com/item/note/b3jhr/obr2>https://www.diigo.com/item/note/b3jhr/obr2</a> Бездепозитный приз за регистрацию в казино — это стартовый презент вид денежного начисления или даровых вращений для новых игроков заведения, для получения которого не нужно заносить депозит. казино 1× slots официальный сайт <a href=https://yandexforum.ru:443/member.php?u=296588>https://yandexforum.ru:443/member.php?u=296588</a>
казино 1× slots официальный сайт
В бонусную программку множества операторов входят регулярные бездепы. Это бессрочные акции, поощряющие активных неизменных игроков. Популярный формат — раздача фриспинов по конкретным денькам недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают неизменные бонусы без депо в мена на скопленные баллы лояльности.Выбирайте наихорошие благотворительные призы с помощью обзоров на Casinoz – и пусть вас сопутствует счастье при отыгрыше бонусных кредитов! 1×slots casino зеркало <a href=https://swordmaster.org/user/Craigtrand/>https://swordmaster.org/user/Craigtrand/</a> Бездепозитные бонусы начисляются лишь один раз. Не стоит раскрывать свежие аккаунты, дабы получить их повторно. Служба защищенности казино обязательно выявит «левого» участника и перекроет. Если гость выполнит нужные притязания, отыграет собственную ставку и решит вывести собственный выигрыш, то ему нужно принять, собственно казино обязательно востребует предоставить ксерокопии собственных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные средства вывести не получится. 1х слот регистрация в 1×slots casino Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.Законодательство, регулирующее азартные игры в разных странах, оказывает на полномочия операторов. В итоге пользователи из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это возможность быть как глубокий отказ в доступе, например и невозможность загружать игры отдельных изготовителей.
1 хслот регистрация в 1×slots casino
Как верховодило, при выводе денег, от играющего требуется лишь устроить минимальный лепта для того, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом собственный счет.Однако далековато не все ресурсы предлагают своим посетителям бездепозитные бонусы за регистрацию в казино. В большинстве случаев учтено одобрение на первый депозит в объеме 100–200%. Это отличная вероятность преувеличить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш. Бездепозитные призы — это презенты от казино вид бонусных средств либо фриспинов для игровых автоматов, коие начисляются на акк игрока последствии процедуры регистрации на сайте заведения. Для получения таких поощрений депо не требуется. <a href=http://eco-adamant.kz/index.php?subaction=userinfo&user=sablenationalit>http://eco-adamant.kz/index.php?subaction=userinfo&user=sablenationalit</a> На страничке представлены бездепозитные бонусы за регистрацию в казино редкая заслуга за коей гонятся все игроки как новички, так и мастера. Мы также уделяем великое внимание на наличие призов при формирование рейтинга казино на средства. Бездепозитный бонус это возможность выступать бесплатно и выиграть настоящие деньги. 1 хслот регистрация в 1×slots casino
казино 1×slots
Минимального оборота. Этот лимит уточняется вейджером — же игрок не поиграет на установленную сумму, вывод средств несомненно недоступен. Суммы подобных предложений, в, колеблются от 3-х до двадцати долларов, а вейджер на эти свои должен составлять от тридцати до шестидесяти раз. Зачастую, наибольшая сумма выигрыша здесь составит от одной до 2-ух сотен $. Если геймер выиграет больше, то все средства могут быть списанными до очень разрешенного выигрыша. Здесь замечена содержание выводить еще несуществующие деньги на собственную платежную систему и далее искать заведение с подходящими под данную необходимую релоадом либо призом за первое пополнение счета. Есть некоторое подвидов бездепозитного гонорары, предлагаемого великим числом заведений.Получить Бездепозитный приз в онлайн казино дело двух кликов. Другой момент, отыграть промо и соблюсти верховодила и обстоятельства отыгрыша. Под правилами подразумевается столько вагер, но и ограничения по наибольшей ставке. Мы разумеем, собственно в кино все ставят на зеро и выигрывают. Призываем не делать сходственного. Перед активацией бонуса прочитайте верховодила. Узнайте следующие факторы: Условия получения дара, за регистрацию, за депозит и прочее. Ограничения по максимальной ставке. Зачастую не выше 350 руб. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах можно отыгрывать вагер. Можно вертеть автоматы, а вагер будет стоять на месте. Поэтому принципиально знать, в каких забавах можно осуществлять кратность валютного оборота. Бездепозитный приз казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби избранного заведения, определится в выборе игр и проверить качество работы саппорта. Довольно часто, начиная игровой процесс, игрок теснее отказывается останавливаться и проделывает настоящий лепта. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть бесплатно вероятно как один таки с бонусом за регистрацию без надобности заносить депозит. 1×slots casino регистрация на сайте <a href=https://www.google.sn/url?q=https://doctorlazuta.by/>https://www.google.sn/url?q=https://doctorlazuta.by/</a>
1×slots скачать на айфон
Воспользоваться бездепом можно не во всех игровых автоматах: казино вдруг устанавливает лимитирование для посетителей. Конечно, это возможно счесть некоторым неудобством для игрока, но справедливости ради стоит отметить, что выбор автоматов всё одинаково остаётся достаточно великим. <a href=http://zeren.freeoda.com/member.php?action=profile&uid=14249>http://zeren.freeoda.com/member.php?action=profile&uid=14249</a> Благодаря программе преданности от игорного заведения, можно арестовать неплохой старт и без добавочных инвестициям запустить видеослоты. Кроме такого, возможно рассчитывать на реальную удачу и получить, без инвестиции собственных финансов, немалый выигрыш.Классическая разновидность бонуса за творение аккаунта. Его преимущество содержится что, нет, что клиент возможность без выбирать аппараты и создавать ставки в их. Иногда список игровых автоматов ограничен оператором, хотя все также это другого, как, чем единственный доступный разъем, как в случае с внедрением фриспинов. 1×slots зеркало быструю регистрацию а также мгновенное
<b>Смотреть еще похожие новости:</b>
<a href=https://sadhaka.nl/forum/viewtopic.php?t=102430>1 xslots рабочее зеркало</a>
<a href=http://www.ihavethepussy.com/de/threads/175417–1×-slots-%D0%A1%D0%83%D0%A0%C2%B0%D0%A0%E2%84%96%D0%A1%E2%80%9A?p=192929#post192929>1× slots сайт</a>
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1624#post-47487>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=288999>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Таким образом интернет казино получает вероятного игрока. Возможно в или подлинном он захочет сыграть на средства средства. Так работают бездепозитные бонусы в интернет казино. Здесь очень подходит выражение, благотворительные сыр посещает только в мышеловке. Начинающие игроки шансы не осознавать опасность пыла. Однако со временем осознания становится больше. Это тема для отдельного обсуждения.
#7995 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#7996 Charlesgunny
Черкесова Бэлла Мухарбиевна порно Набиуллина Эльвира Сахипзадовна порно <a href=https://sovsekretno.net/>1×bet зеркало на сегодня</a> скачать букмекерскую контору на андроид букмекерская контора официальный сайт <a href=https://7club7.com/>мобильные букмекерские конторы</a> букмекерская контора официальный сайт porno Алена Михайлова casino андроид порно с Петр Ян (ММА) порно с Георгий Джикия (футбол) Самойлова Алла Владимировна порно pin up casino buzz
#7997 Charlesgunnyhttp://filmkachat.ru
1 хслот регистрация в 1×slots casino
Приветственный приз без депо ? подарок за регистрацию. Выдается деньгами, фриспинами либо баллами. В заключительном случае бонусные баллы используются для роли в турнирах или обмена на реальные средства. <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются сразу в сотворения профиля и активны непродолжительное время. Если не успеете израсходовать свои, они попросту сгорят. Касаемо медли, как бонусы активны протяжении часа.Бездепозитные призы за регистрацию в игровых автоматах для владельцев онлайн-казино считаются частью маркетинговой кампании, направленной на увеличение аудитории сайта. Так они продвигают средства бренды и завлекают новых посетителей. <a href=https://steemit.com/design/@kalinka0588/enhancing-furniture-design-with-revit-family-creation-services-for-manufacturers>https://steemit.com/design/@kalinka0588/enhancing-furniture-design-with-revit-family-creation-services-for-manufacturers</a> Для получения бонуса нужно ознакомиться с программкой лояльности казино и устроить ставки на необходимую, нужную для перехода на следующий уровень. 1×slots зеркало рабочее на сегодня <a href=https://ide-ai.online/member.php?action=profile&uid=2745>https://ide-ai.online/member.php?action=profile&uid=2745</a> В лицензионных бездепозитных казино играть в азартные забавы действительно неопасно. Наличие лицензии подтверждает тот факт, собственно клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP.
1×slots зеркало быструю регистрацию а также мгновенное
Выполнив все требования оператора, заказчик возможность оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем не более суток. Если дополнительно потребуется пройти функцию верификации, то срок возрастает до 1–2 рабочих дней. Для перевода применяются банковские приборы и электрические платежные системы. Второй метод подходит превосходнее, так как большинство транзакций такой осуществляются моментально. В связи со специфичностью функционирования банков обработка платежей возможность взятьвдолг(взятьвзаймы) до нескольких трудящихся дней.Вейджер (или вагер) ? это наименьшая сумма ставок, коию необходимо сделать для вывода валютного бонуса. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение. <a href=https://forum.pmpobc.ca/index.php?topic=141983.new#new>1×slots casino регистрация 1×slots review live</a> 1×slots официальный зеркало <a href=http://cezares.ru/bitrix/redirect.php?goto=http://imtprofi.ru/bitrix/redirect.php?goto=http://na-balu.ru/bitrix/rk.php?goto=https://telegra.ph/Soderzhanie-i-struktura-zaklyucheniya-prokurora-v-grazhdanskom-processe-09–19>http://cezares.ru/bitrix/redirect.php?goto=http://imtprofi.ru/bitrix/redirect.php?goto=http://na-balu.ru/bitrix/rk.php?goto=https://telegra.ph/Soderzhanie-i-struktura-zaklyucheniya-prokurora-v-grazhdanskom-processe-09–19</a> При регистрации в либо ином онлайн игральном заведении — для дается раз шанс испытать собственную удачу не внося свои монеты. Замечу что такую поощрительную предложение деют не все интернет игровые площадки, а лишь щедрая половина из них. Которые мы подготовили для Вас в нашем списке. 1×slots официальный зеркало На критериях отыгрыша даровых бонусов стопам остановиться подробнее. С ними связаны аспекты, коие невозможно забыть без внимания.
1×slots регистрация на официальном сайте
Однако в условиях скрываются «подводные камешки», которые не позволят вывести крупную необходимую или же вы не успеете отыграть вейджер. Поэтому профессионалы рекомендуют арестовать бесплатные вращения за регистрацию в казино без депо, дабы поднабраться навыка и получить настоящий шанс на победу. Свежий бонус начисляется вид денежных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в пользовании средствами, а случае отыгрыша оператор может ввести ограничение на вывод средств. <a href=https://www.polovw.it/foro/memberlist.php?mode=viewprofile&u=74912>https://www.polovw.it/foro/memberlist.php?mode=viewprofile&u=74912</a> Такой казино приз без депозита за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это словно какая-то конспирация одобрения под бездепозитный. Суть всего этого сводится к что, этому, что игроку на час выдается, к примеру, 1000 долларов, а реклама повторяет о том, что каждой выигрыш можно несомненно в забыть при себя. Но случае играющий всерьез отнесется к данному предложению, то он просто растеряет время. Ведь геймеру надо(надобно) будет выступать не в основном аккаунте, ну тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (даже всей тысячи) в управляла вступят конкретные обстоятельства, где несомненно сказано, собственно максимальной суммой победы возможность быть лишь двести $ и деньги возможно применять только в бонуса на 1-ый вклад с вейджером 25 от суммы гонорары плюс сам депозит. По итогу получится, что игрок выигрывал для 200% приз с вейджером на конкретную необходимую. Короче разговаривая, это все не стоит вашего медли. 1×slots регистрация 1×slots review live
1×slot зеркало
Для выбора азартного заведения Вы можете воспользоваться списком наших казино с призами за регистрацию. На нашем сайте мы опубликовали список бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, собственно доля призов неповторимые и доступны только для посетителей нашего вебсайта по-специальному промо-коду или по уникальной ссылке. Кроме как, для любого приза мы подготовили подробный обозрение, в котором Вы узнаете как получить и отыграть одобрение и как исключить собственный выигрыш с бездепа. <a href=http://board.eternityrpc.com/member.php?action=profile&uid=369>1× slots casino зеркало</a> 1×slots официальный сайт, скачать <a href=https://www.itray.co.kr/bbs/board.php?bo_table=free&wr_id=1927350>https://www.itray.co.kr/bbs/board.php?bo_table=free&wr_id=1927350</a> Сразу последствии активации промокода возможно воспользоваться подарком. Как теснее упоминалось, бонусы посещают трёх видов – фриспины, кредиты и фриплей-бонусы.Шаг 4. Активация. Внимательно изучите условия, информацию по ограничениям и сроке действия бонусного предложения. Разобравшись с правилами, возможно активировать приз в собственном офисе (время ? с использованием промокода) либо по запросу в саппорт.
1хслотс официальный сайт зеркало
Прежде чем активировать бездеп, необходимо убедиться в, собственно страна, уроженцем коей считается игрок, не заходит в список разрешенных. Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации дара необходимо подтвердить электронную почту и привязать телефонный; <a href=http://lsrczx.com/home.php?mod=space&uid=181970>http://lsrczx.com/home.php?mod=space&uid=181970</a> Если площадка дарит бездеп за регистрацию, то процедура его получения проста. Нужно лишь ввести акк на веб-сайте и активировать его, подтвердив адресок электронной почты, номер телефонного либо иные данные, которые просит оператор. Перед данным необходимо убедиться, собственно юзер находится на официальном веб-сайте казино, но на мошеннической площадке. 1×slots актуальное зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://timepost.info/showthread.php?tid=59118>1×slots зеркало рабочее</a>
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=109&p=70905#p70905>1×slots регистрация на сайте</a>
<a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1×slots бездепозитный бонус за регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Мы делаем ударение на главных положениях правил, рассказываем о территориальных лимитированиях и вкратце информируем о других акциях обсуждаемого казино.
#7998 Charlesgunny
1×bet 1хбет casino автомат <a href=https://rucriminal.info/>Окладникова Ирина Андреевна порно</a> пин ап casino pin up top казино сочи <a href=https://sovsekretno.net/>up casino официальный</a> пин ап букмекерская контора порно с Дронова Александра Викторовна казино вулкан Юдаева Ксения Валентиновна порно ев казино pin casino порно с Абрамченко Виктория Валериевна
#7999 WillardGar
http://mexicanpharmi.com/ buying prescription drugs in mexico
#8000 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8001 GregoryBroaphttps://detiwki.com.ua
Познавательный портал для детей <a href=https://detiwki.com.ua/>https://detiwki.com.ua</a> обучающие материалы, интересные факты, научные эксперименты, игры и задания для развития кругозора.
#8002 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
При верном раскладе бездепы — это прекрасный способ выступать на деньги без растраты личных средств. Есть некоторое советов, следуя которым возможно извлечь максимум выгоды из подобных акций казино. Играть стопам только на лицензированных площадках. Скриптовые сайты не дурачат с бонусными предложениями, но и употребляют пиратский софт с измененным ГСЧ. Выиграть на таких автоматах невероятно. <a href=http://filmkachat.ru/>1×slots акции</a> Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке необходимо пополнить счет в казино. Для депозитных бонусов, эта процедура не необходима, так как депозит уже изготовлен.Иногда у посетителей вебсайта все возникнуть проблемы при активации приобретенного промо-кода. В этих случаях, необходимо обратиться за поддержкой в саппорта «Support». Для получения ответа, обязательно указывается определенная причина обращения и подтверждается информация дополнительными скриншотами. Если сформировалась неоднозначная ситуация, практически возможно адресоваться к главному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ. <a href=https://we.riseup.net/lexxeagle/enhancing-your-projects-with-professional-architec>https://we.riseup.net/lexxeagle/enhancing-your-projects-with-professional-architec</a> Чтобы получить вероятность исключить выгода с бездепозитного бонуса в казино, необходимо выполнить ряд критерий: 1 xslots рабочее зеркало <a href=http://art-metall.su/user/Travisheict/>http://art-metall.su/user/Travisheict/</a> Чем ниже велечину вейджера, что, этим легче отыграть и вывести бонус. Если Вы планируете заработать на бездепе, а не просто ознакомиться с новым игровым клубом, то стоит игнорировать призов с высочайшим вейджером их почти не реально отыграть. С ними Вы можете лишь протестировать игры заведения.Сроки активации бонуса уточняются каждым казино, хотя чаще всего они не превосходят недели с этапа получения. Игроку обязательно нужно использовать бездеп протяжении обозначенного срока, в ином случае приз просто пропадет. Каждый приз можно получить лишь раз один, потому случае не использовать бездеп в срок, у игрока не несомненно второго шанса им воспользоваться.
казино 1×slots
1×slots зеркало рабочее на сегодня Чем ниже велечину вейджера, тем легче отыграть и вывести бонус. Если Вы планируете заработать на бездепе, но просто ознакомиться с новым игровым клубом, то стоит игнорировать призов с высочайшим вейджером их практически не реально отыграть. С ними Вы можете только протестировать забавы заведения. <a href=http://www.pax.nichost.ru/forum/view_profile.php?UID=120691>http://www.pax.nichost.ru/forum/view_profile.php?UID=120691</a> Изучить управляла и условия получения бездепозитных призов казино, Вы сможете у нас на веб-сайте в разделе с бонусами либо на официальном веб-сайте выбранного Вами казино. Если не можете отыскать необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал либо по электрической почте. 1х слот 1хслотс регистрация перейти на 1×slots Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 поболее. Когда игроку надеется количество фриспинов, администрация может бить3 их начисление на количество дней. Бесплатные вращения предоставляются для определенного слота, кот-ый указывается в правилах акции.
1×slots регистрация на официальном сайте
Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.Операторы гемблинга заявляют, собственно например они борются с бонус-хантерами. Впрочем, критики считают, собственно этим казино пробуют сделать из случайного гостя неизменного игрока. На бесплатные призы онлайн-казино практически постоянно распространяется лимитирования по стране проживания посетителей. Даже случае для разрешено раскрывать счет и играть на средства в заведении, это еще не означают, что вам доступны not the slightest deposit bonuses.При небольшой сумме приза рекомендуется выступать по низким ставкам, а применять наибольшие никакого только в случае, случае вейджер очень великий, а время на отыгрыш крепко ограничено. <a href=http://radshir.com/list/index.php?subaction=userinfo&user=Joshuaerymn>http://radshir.com/list/index.php?subaction=userinfo&user=Joshuaerymn</a> Основное отличие том,, что для получения бездепа не надо пополнять баланс в казино. Но не этого, есть ряд и различий: 1×slots зеркало которую указывали при регистрации кстати Вы всего, как и все любите получать презенты и бездепозитные призы казино. Игорные жилища взяли в повадку одаривать гэмблеров приятными бонусами. Стать владельцем приветственного подарка можно за создание профиля или пополнение счёта. Второй вариант более занимательный, как клубы готовы удвоить депозит! Но если вы новичок и только знакомитесь с миром пыла, чем воспользуйтесь бонусом за регистрацию.В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая приятная часть игры. Важно, зачастую бездепозитные бонусы в казино выдаются с лимитированиями по максимальной выплате. В среднем можно рассчитывать на прибыль в количество тысяч руб. Как вывести выигрыш с бонуса без депо. Придётся подтвердить акк документально, в некоторых заведениях. Процедура верификации обязательна и делается любым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате или прочитайте в правилах.
1×slots casino зеркало
<a href=https://elclasificadomx.com/author/jameslog/>1хслотс зеркало</a> Любой выигрыш по ставке выше установленного лимита будет являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, ну случае выигрыша его сумма не поступит на счёт посетителя — результат игры несомненно полностью аннулирован.Чаще всего, модные сервисы, эти как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно неотъемлемое правило. Финансовые свои выводятся лишь через что, эту платежную систему, коей успех для пополнения депо. Если же игрок получил бездепозитный покерный приз, требуется пополнить счет на минимальную сумму, кот-ая сочиняет обыкновенно десять долларов. Подобные призы без депо предоставляются на более прибыльных условиях. Зачастую они покрупнее, а условия отыгрыша наименее строгие. 1х слот регистрация в 1×slots casino <a href=https://demo5651.asly.nl/index.php/author/proudseries92/>https://demo5651.asly.nl/index.php/author/proudseries92/</a> Помните, что всевозможные нарушения верховодил сведут на нет ваши усилия, и вы скорее останетесь без начисленного для безвозмездного бонуса. Всегда изучайте верховодила начисления и условия вейджера. По любым вопросам, на которые вы имеет других отыскать ответы, обращайтесь за объяснениям и саппорт.
рабочее зеркало 1хслотс
Это раз из главных характеристик привлекательности презента. С завешенным коэффициентом том мастера не сумеют выполнить обстоятельства по отыгрышу. И неважно, как презентабельно выглядит предложение – бездепозитный бонус казино в размере $500 либо $1 000. Чтобы новички попревосходнее вдумались, что же это вейджер, мы разберём на случае. <a href=http://sglpw.cn/home.php?mod=space&uid=331881>http://sglpw.cn/home.php?mod=space&uid=331881</a> Вейджер менее х30–35 считается применимым. Опытные игроки утверждают, собственно с этим вейджером реально остаться в плюсе, случае верно подойти к выбору игрового аппарата.В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это исключительно приятная часть забавы. Важно, часто бездепозитные бонусы в казино выдаются с лимитированиями по наибольшей выплате. В среднем можно рассчитывать на выгода в несколько тыщ руб. Как исключить выигрыш с бонуса без депозита. Придётся доказать акк документально, в некоторых заведениях. Процедура верификации неотклонима и делается каждым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате либо прочитайте в правилах. 1×slots зеркало видели такую регистрацию на
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.oursson.ru/viewtopic.php?f=2&t=8886>1×slots официальный demo регистрация в 1×slots casino</a>
<a href=http://forums.panzergrenadiers.com/showthread.php?23759–1×-slots-%D0%A0%C2%B7%D0%A0%C2%B5%D0%A1%D0%82%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%BB%D0%A0%D1%95&p=510595#post510595>1× slots зеркало</a>
<a href=https://persiankittencat.com/grey-persian-cats-unraveling-the-charm-of-these-feline-beauties/#comment-38560>casino 1×slot</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Превышение максимальной ставки при отыгрыше. Система механически не предупреждает о превышении ставки, потому о несоблюдении управлял игрок имеет узнать теснее в подачи запроса на вывод средств.
#8003 Charlesgunny
up букмекерская контора порно с Елена Никитина, скелетонистка <a href=https://kompromat1.online/>демо казино</a> фреш казино casino ап <a href=https://krtka.info/>пин up casino</a> кент казино сайт казино вход букмекерская контора официальный сайт скачать порно с Диана Шнайдер (теннис) 1×bet официальный сайт букмекерские контора ап мелбет букмекерская контора
#8004 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8005 Charlesgunnyhttp://filmkachat.ru
1 хслот регистрация в 1×slots casino
Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке представители онлайн-казино публикуют важную информацию о no down payment bonuses и других предложениях.Бездепозитные бонусы за регистрацию являются одним из самых известных способов вербования новых игроков в онлайн-казино, потому что они предоставляют игрокам возможность опробовать казино, необыкновенно игровые автоматы, и возможно, выиграть настоящие средства. <a href=http://filmkachat.ru/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> Да, у бесплатных призов есть дефекты. Прежде всего, они обыкновенно большие. Кроме такого, условия вейджера по ним практически жесткие. Но все же неименье риска проделывает их довольно привлекательными для посетителей. <a href=https://www.fbioyf.unr.edu.ar/evirtual/mod/forum/discuss.php?d=44688>https://www.fbioyf.unr.edu.ar/evirtual/mod/forum/discuss.php?d=44688</a> 1хслот 1хслотс регистрация перейти на 1×slots <a href=https://diigo.com/0×62ub>https://diigo.com/0×62ub</a>
1×slots зеркало которую указывали при регистрации кстати
Как управляло, новоприбывшие геймеры для желают ознакомиться с способами ввода и вывода валютных средств и сроки исполнения поданных заказов дабы конкретно понимать, как живо меня исключить собственный казино бонус за регистрацию без депозита на электронный кошелек либо же банковскую карту. К счастью для всех играющих, внутри определенных холдингов, все казино конкурируют меж собой. Ведь если бы конкретную фирму давало лишь одно онлайн-заведение, то навряд бы клиенты заметили казино с призом за регистрацию и имели бы рассчитывать только на вознаграждение вид приза на первое вложение. К каждому заведению регулярно по привлекать новых игроков, собственно, в итоге, только на руку всем играющим.Это также бесплатные деньги, коие поступают на аккаунты свежеиспеченных игроков после регистрирования. А необыкновенность этих бонусов состоит что, что обретенные деньги непременно стопам использовать в продолжении назначенного медли. <a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=50032>1 х слотс зеркало</a> 1×slots casino регистрация 1×slotscasino09k online <a href=http://www.diywiki.org/index.php/User:Abraham3824>http://www.diywiki.org/index.php/User:Abraham3824</a> 1×slots casino регистрация 1×slotscasin online
рабочее зеркало 1хслотс
Вывод выигрыша с бездепозитных бонусов казино – щедрый презент от азартных клубов. Но чтобы вывести собственный заработок, необходимо выполнить ряд условий: <a href=https://loansnearme.com.au/author/henrymen/>https://loansnearme.com.au/author/henrymen/</a> Во всех легальных онлайн-казино Беларуси необходимо подтверждение паспортных данных для игры — это требование правительства страны. 1×slots зеркало быструю регистрацию а также мгновенное Если вы новичок в этом деле и лишь попали в неизведанную вами область пыла — счет услуг как бездепозитные бонусы без пополнения.
1× slots регистрация в 1×slots casino
<a href=https://forum.drumjamapp.com/memberlist.php?mode=viewprofile&u=43982&sid=91a27a90ff6b53d93f9973a8c6fd495b>1×slots казино зеркало</a> Казино дает возможность заработать и исключить реальные средства на бездепозитных призах. Обычно, это незначительная сумма, которую казино возможность себя разрешить подарить игроку.Бездепозитный бонус за регистрацию в казино — это стартовый презент повторяющий валютного начисления либо безвозмездных вращений для новых игроков заведения, для получения которого надо вносить депо. 1хслотс официальный сайт зеркало <a href=http://www.khleeg.net/vb/member.php?u=7202>http://www.khleeg.net/vb/member.php?u=7202</a>
1хслотс официальный сайт зеркало
<a href=http://szhk.on-line.com.hk/home.php?mod=space&uid=119467&do=profile>http://szhk.on-line.com.hk/home.php?mod=space&uid=119467&do=profile</a> Для доказательства электронной почты, просто перейдите по активной ссылке в письме, полученном от игрового заведения.4. Заберите подарок. Чаще всего бонус активизируется сразу в регистрации. Но посещают истории, когда нужно забежать в собственный кабинет либо написать в саппорта. 1×slots официальный зеркало Используйте лучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, чтобы заработать презенты за обычные деянья и уже сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высочайшей отдачей и прыткими выводами на электронные кошельки.
<b>Смотреть еще похожие новости:</b>
<a href=http://big.bestforums.org/viewtopic.php?f=7&t=12179>1×slots регистрация 1×slotscasino 56 online</a>
<a href=https://forum.ltp-team.com/topic/45762–1×slots-zerkalo-na-segodnya/>1×slots зеркало на сегодня</a>
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=37211>1×slots зеркало проходить регистрацию это отличный вариант</a>
<a href=https://forum.oursson.ru/viewtopic.php?f=2&t=8075>1×slots зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Самые известные методы вывода средств ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электрическим платежным системам подобии Neteller и Skrill, а также пользуются криптовалютными кошельками. Вывод выигрышей имеет осуществляться быстро или развлекать от нескольких часов до нескольких суток.
#8006 Charlesgunny
pin up casino пин ап порно с Юлия Ефимова, пловчиха <a href=https://rumafia.news/>1×bet рабочее</a> Матвиенко Валентина Ивановна порно мобильные букмекерские конторы <a href=https://krtka.info/>1×bet телефон</a> рабочее казино порно с Евгения Медведева, фигуристка 7k casino зеркало на сегодня porno Елизавета Туктамышева бесплатное казино Комарова Наталья Владимировна порно песня казино
#8007 StephenRoorn
https://mexicanpharmi.com/ buying from online mexican pharmacy
#8008 Charlesgunny
pin up casino пин ап casino pin <a href=https://rumafia.news/>1×bet 1хбет</a> casino официальный сайт порно с Гатагова Ольга Анатольевна <a href=https://rhymes-punches.com/>сайте букмекерской конторы фонбет</a> порно с Дарья Клишина, легкоатлетка казино можно casino игровой автомат casino x porno Катерина Шпица казино можно vodka casino
#8009 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8010 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots review live
На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению этого времени, Вы не можете активировать и получить бездепозитный бонус. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasin online</a> Теоретически, к бесплатным призам возможно отнести например именуемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, поэтому что они предоставляют лишь вероятность создавать ставки.Если вы выбрали себе количество брендов коие вам больше всего полюбились, для неизменной забавы! Таких гемблеров казино довольно предпочитает и оценивает, за частую такие игроки становятся VIP игроками заведения, которым часто поступают выгодные предложения вид призов, так же туда заходит и бездепозитные. <a href=https://www.dailygram.com/blog/1319572/how-modern-architectural-drafting-companies-transform-design-ideas-into-rea/>https://www.dailygram.com/blog/1319572/how-modern-architectural-drafting-companies-transform-design-ideas-into-rea/</a> 1хслот зеркало <a href=http://ecsambo.org/index.php?subaction=userinfo&user=squareenthusias>http://ecsambo.org/index.php?subaction=userinfo&user=squareenthusias</a> Особую изюминку видео слотам придают уникальные символы. С их выходом активизируются разные бонусы. Вы можете запустить вспомогательный степень и прирастить необходимую выигрыша. Есть знаки, которые сменяют ненужные составляющие и сами создают выигрышные комбо. Не стоит забывать и про бонус-тур. После каждого удачного спина есть шанс увеличить сумму выигрыша в 2 или хорошо раза.Когда идет о валютных бонусах, казино практически устанавливают условия вейджера, которые необходимо выполнить, чтобы вывести выигрыш.
1×slots рабочее зеркало
При верном раскладе бездепы — это отличный метод выступать на средства без растраты собственных средств. Есть некоторое рекомендаций, следуя коим можно извлечь максимум полезности из подобных промоакций казино. Играть следует только на лицензированных площадках. Скриптовые веб-сайты не только дурачат с бонусными услугами, хотя и используют пиратский софт с измененным ГСЧ. Выиграть на таких автоматах невозможно.Бонус за регистрацию в казино без депо с выводом денег надо(надобно) отыграть. Зачастую для отыгрыша имеет потребоваться устроить ставки на необходимую, в количество десятков раз превосходящую сумму бонуса или выигрыша. 1×slots зеркало сайта <a href=http://nvkb.ru/forum/index.php/user/105229/>http://nvkb.ru/forum/index.php/user/105229/</a> Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских руб. В критериях акции предписано, собственно вейджер бездепозитного бонуса х20. Поэтому, дабы отыграть бонус, игроку несомненно нужно устроить ставок на 35*20=700 руб.Почти все игровые клубы требуют свидетельство контактных данных игрока для получения бездепозитного приза. 1х слот 1хслотс регистрация перейти на 1×slots
1х слот 1хслотс регистрация перейти на 1×slots
Некоторые клубы механически начисляют приз на акк игрока в исполненья критерий получения, но бывают истории, когда бонус надо(надобно) активировать игроку самому. Есть некоторое методов активации бонуса:Превышение максимальной ставки при отыгрыше. Система автоматически не предуведомляет о превышении ставки, потому о несоблюдении правил игрок имеет узнать уже после подачи запроса на вывод средств. <a href=https://carecepthealth.com/community/profile/tyronetutty/>https://carecepthealth.com/community/profile/tyronetutty/</a> Популярность онлайн казино растёт и всё больше пользователей начинают интересоваться азартными играми. Бездепозитные призы 2022 года, это уникальные презенты за регистрацию. С их поддержкою новые игроки шансы получить безвозмездные вращения либо деньги на баланс за одну регистрацию. С свет игорных заведений в интернете, бездепозитные призы стали известнейшим способом вербования игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш сайт собрал наихорошие предложения из интернета на 2022 год. Воспользуйтесь каким даром и сможете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша нужно выполнить обстоятельства. 1× slots зеркало Начнём с как, собственно любое рекламную за регистрацию предполагает некие условия. Бездепозитные призы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность денежного оборота, необходимая для выполнения условий. Пример, получили бесплатные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 руб., неудачных либо выигрышных, важно. После исполнения, бонусный баланс перейдёт на реальный и будет доступным к выводу.Бездепы с бесплатными вращениями деют пользователям право вертеть барабаны игровых автоматов без снятия средств со счета. За каждый раунд уплачивает казино. Число спинов ограничено и редко выше сотку. Если промоакция содержит количество безвозмездных игр, их начисление может быть разбито на количество дней.
1хслотс зеркало на сегодня
Например, игрок получил 500 руб. При разработке аккаунта и должен отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 рублей, потребуется сделать 875 спинов для полного отыгрыша. При правильном раскладе бездепы — это отличный способ играть на средства без растраты собственных средств. Есть количество советов, следуя коим можно извлечь максимально выгоды из похожих промоакций казино. Играть идет лишь на лицензированных площадках. Скриптовые веб-сайты не врут с бонусными предложениями, хотя и употребляют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах невозможно. 1×slots зеркало регистрация в 1×slots casino <a href=https://mcpe.ru.net/user/JamesAwact/>https://mcpe.ru.net/user/JamesAwact/</a>
1×slots официальный сайт зеркало рабочее
Но никогда не запамятовывайте пристально разбирать правила роли в бонусных промоакциях. Если вы нарушите желая бы одно условие, позднее вы не можете уладить недоразумение с администрацией. Каждая игровая платформа отличается условиями по получению и отыгрышу бездепов. В правилах отчетливо расписаны кратковременные рамки, за коие нужно прокрутить вейджер. Также не запамятовывайте на наибольший объем ставки и максимальную необходимую выплаты. С другой стороны, дабы получить бездепозитные призы казино, довольно истратить не более 1 минуты.Для выбора азартного заведения Вы сможете пользоваться списком наших казино с призами за регистрацию. На нашем веб-сайте мы опубликовали перечень бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, собственно часть бонусов эксклюзивные и доступны лишь для посетителей нашего сайта по-специальному промо-коду или по уникальной ссылке. Кроме как, для каждого бонуса мы подготовили доскональный обзор, в котором Вы узнаете как получить и отыграть поощрение и как исключить свой выигрыш с бездепа. <a href=http://www.hku88.hk/home.php?mod=space&uid=16955>http://www.hku88.hk/home.php?mod=space&uid=16955</a> При исполнении условий отыгрыша и верификации, деньги с бонусного счета переводятся на главной и имеют быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции зависимости от избранной платежной системы. 1х слот регистрация в 1×slots casino Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депо возможность выделяться до 30 дней.Бонус начисляется игроку сразу в регистрации и прохождения верификации в казино и не настятельно от посетителя внесения депо. Как верховодило, размер приза в подобном случае достаточно стыдливый, однако дозволяет новеньким познакомиться с игрой без риска реальными средствами.
<b>Смотреть еще похожие новости:</b>
<a href=http://amazon.rx22.ru/memberlist.php?mode=viewprofile&u=255>1×slots зеркало рабочее</a>
<a href=http://www.topboard.org/threads/1×slot-zerkalo-rabochee-registracii-na-telefon-pridet.605847/>1×slot зеркало рабочее регистрации на телефон придет</a>
<a href=https://elclasificadomx.com/author/jameslog/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Разные казино имеют собственные верховодила по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высочайшие требования. Часто онлайн-казино советуют отыграть бонусное поощрение до ста один в игровых автоматах. Например, если игрок получил бесплатно десять долларов, то необходимо будет отыграть их, поставив 1 тысячу спинов по 1 доллару любой. Стоит обозначить(означить), собственно не все казино выделяют возможность играть на призы и не во всех увеселительных заведениях идентичные управляла для отыгрывания. Некоторые казино запрещают выступать на бонусы в блекджек или ограничивают ставки до пяти процентов, что существенно увеличивает в десятки раз число нужных игр.
#8011 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8012 RonaldHophttps://brewsugar.ru
Всё о самогоноварении <a href=https://brewsugar.ru/>https://brewsugar.ru</a> на одном сайте: от истории напитка до современных технологий перегонки.
#8013 WillardGar
https://canadianpharmi.com/ ed meds
#8014 JustinErype
http://pinup2025.com/ пин ап вход
#8015 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8016 Charlesgunny
Приезжева Екатерина Геннадьевна порно песня казино <a href=https://www.ossetia.tv/>демо казино</a> казино сочи порно с Арина и Дина Аверины, гимнастки <a href=https://7club7.com/>new casino</a> casino riobet рабочие зеркала казино porno Илона Маркова, хоккеистка порно с Александр Головин (футбол) порно с Юлия Ефимова, пловчиха 1×bet зеркало рабочее на сегодня 1×bet xyz 1×bet зеркало на сегодня 1×bet xyz
#8017 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8018 Veronahhzhttps://ukrjizn.com/
Приветствую Вас товарищи<a href=https://ukrjizn.com/>!</a> Если Вы хотите найти качественный источник информации о событиях Украины на каждый день, тогда Вы обратились корректно. Мы являемся ТОПовым(ой) новостной интернет газетой в Украины, созданным независимыми редакторами, чтобы дать потребителю контента независимую информацию. Над каждым разделом работает группа редакторов, которые ищут правдивую информацию по крупицам и на выходе получается актуальная новость, которую так долго ждет читатель.
<a href=https://ukrjizn.com/><img src=„https://i114.fastpic.ru/big/2021/0530/7e/595fc32114c917dbddab190b3648467e.jpg“></a> У Нас Вы можете найти лучшие подборки новостей по таким разделам как, пенсии, зарплаты, субсидии, прогнозы, финансы, предсказания и тд. Вот несколько последних новостей за последнее время: 1)<a href=https://ukrjizn.com/>Посівний календар на 2024 рік для України </a> 2)<a href=https://ukrjizn.com/>Китайский календарь определения пола ребенка на 2024 год </a> 3)<a href=https://ukrjizn.com//>Точні прогнози для України та Росії на 2024 рік</a> 4)<a href=https://ukrjizn.com/>Важный гороскоп на 2024 год для Украины от сильнейших экстрасенсов </a> 5)<a href=https://ukrjizn.com/>Важливі передбачення мольфарів для України на 2024 рік </a> 6)<a href=https://ukrjizn.com/>Повышение зарплаты срочникам в Украине 2024 года </a> 7)<a href=https://ukrjizn.com/>Нерабочие праздничные дни в 2024 году в Украине </a> 8)<a href=https://ukrjizn.com/>Астрологічний прогноз на 2024 рік для України від екстрасенсів </a> 9)<a href=https://ukrjizn.com/>Состав потребительской корзины в Украине 2024 года </a> 10)<a href=https://ukrjizn.com/>Новые предсказания о Донбассе на 2024 год </a> Всегда рады помочь Вам! С уважением, команда Ukrjizn
<a href=https://ukrjizn.com/>спутник 2024 карта</a> <a href=https://ukrjizn.com/>новые тарифы киевстар 2024</a> <a href=https://ukrjizn.com/>что ждет предпринимателей в 2024 году</a> <a href=https://ukrjizn.com/>какая будет весна 2024 года</a> <a href=https://ukrjizn.com/>самый дешевый тариф МТС без интернета</a> <a href=https://ukrjizn.com/>потребительская корзина украина</a> <a href=https://ukrjizn.com/>закончится ли война на Украине в 2024 году</a> <a href=https://ukrjizn.com/>астрологический прогноз для украины 2024</a> <a href=https://ukrjizn.com/>предсказания ванги про україну</a> <a href=https://ukrjizn.com/>астрологический прогноз от экстрасенсов Украины на 2024 год для Украины</a> <a href=https://ukrjizn.com/>пророцтва про україну 2024</a> <a href=https://ukrjizn.com/>соборування що це</a> <a href=https://ukrjizn.com/>алена курилова про украину</a> <a href=https://ukrjizn.com/>параметры спутника hotbird</a> <a href=https://ukrjizn.com/>рыболовный календарь украина</a> <a href=https://ukrjizn.com/>сокращение сотрудников ДСНС в 2024 году в Украине</a> <a href=https://ukrjizn.com/>фазы Луны в 2024 году на июнь</a> <a href=https://ukrjizn.com/>сексуальни пози</a> <a href=https://ukrjizn.com/>карта україни спутник</a> <a href=https://ukrjizn.com/>когда в украину придет зима</a> <a href=https://ukrjizn.com/>распечатать календарь рыболова 2024</a> <a href=https://ukrjizn.com/>настройки спутника амос</a> <a href=https://ukrjizn.com/>когда будет Соборование</a> <a href=https://ukrjizn.com/>предсказания на 2024 год глоба</a> <a href=https://ukrjizn.com/>настроить спутник амос</a> <a href=https://ukrjizn.com/>когда будет тепло</a> <a href=https://ukrjizn.com/>какого числа перечисляют детские пособия в украине</a> <a href=https://ukrjizn.com/>киевстар для пенсионеров</a> <a href=https://ukrjizn.com/>коли закінчиться війна на сході україни екстрасенси</a> <a href=https://ukrjizn.com/>сокращение пограничников в 2024 году в Украине</a> <a href=https://ukrjizn.com/>пророцтво на 2024 рік</a> <a href=https://ukrjizn.com/>виробничий календар – 2024 таблиця</a> <a href=https://ukrjizn.com/>тариф водафон лайт плюс год без абонплат</a> <a href=https://ukrjizn.com/>жартівливі передбачення на майбутнє</a> <a href=https://ukrjizn.com/>споживчий кошик 2024</a> <a href=https://ukrjizn.com/>найновіші пророцтва про україну</a> <a href=https://ukrjizn.com/>нужно ли приглашение для въезда в Украину</a> <a href=https://ukrjizn.com/>мессинг про украину</a> <a href=https://ukrjizn.com/>карта спутниковая</a> <a href=https://ukrjizn.com/>нові параметри супутникових каналів</a> <a href=https://ukrjizn.com/>какой будет весна 2024</a> <a href=https://ukrjizn.com/>астропрогноз для украины</a> <a href=https://ukrjizn.com/>как получить 4 гб интернета водафон бесплатно 2024</a> <a href=https://ukrjizn.com/>амос настройка</a> <a href=https://ukrjizn.com/>смішні передбачення</a> <a href=https://ukrjizn.com/>карта україни хороша якість</a> <a href=https://ukrjizn.com/>когда закончится война в украине 2024</a> <a href=https://ukrjizn.com/>безвизовые страны для граждан Украины в 2024 году</a> <a href=https://ukrjizn.com/>якою буде зима 2024 року</a> <a href=https://ukrjizn.com/>самый дешевый тариф водафон 2024 без интернета</a>
#8019 Charlesgunnyhttp://filmkachat.ru
1 хслот регистрация в 1×slots casino
Вышеописанная причина и является главным интересным, в которого операторы отдают часть собственной выгоды на разные рекламные затраты и маркетинговые кампании. А наиболее действующим здесь станут выступать именно бездепозитные призы казино 2022 с выводом за регистрацию.Основное верховодило получения бездепа ? творимый акк обязан быть у пользователя первым и единственным. Наличие нескольких аккаунтов строго запрещено. Проверка ведется по имени, e-mal, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депо нужно соблюдать несложную последовательность деяний. <a href=http://filmkachat.ru/>1×slots casino online регистрация</a> <a href=https://www.hoyolab.com/article/35154676>https://www.hoyolab.com/article/35154676</a> Многие новички колеблются, собственно поощрительный приз надо будет возвращать, том в они выиграли у казино. Это безусловно неопасно и накрепко. Выводя выигранные свои, игрок просто останавливает свое роль при и утрачивает уникальную возможность – безвозмездно наращивать личное материальное положение. 1× слот зеркало <a href=https://leavec.co.kr/bbs/board.php?bo_table=free&wr_id=204185>https://leavec.co.kr/bbs/board.php?bo_table=free&wr_id=204185</a> Бездеп с фриспинами имеет охватывать всю коллекцию игр на веб-сайте либо разработки 1-го провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш возможность быть выведен последствии как, как пользователь отыграет данную необходимую. Возможность расценить полный функционал слотов — основное совершенство данной разновидности. Игроку становятся доступны те опции, которые отсутствуют в демонстрационном режиме, а вероятность выиграть реальные средства прибавляет ярчайших азартных ощущений.
1×slots регистрацию процедура займет всего лишь
1×slots регистрация то дальше необходимо пройти Самый распространённый из подобных призов, окончательно же, бездеп на денек рождения клиента — бонус повторяющий фиксированной суммы либо фриспинов поступает на счёт игрока, а воспользоваться им возможно на установленного периода медли.Но существуют азартные заведения, готовые просто например вручить деньги на игру. Для этого достаточно сделать профиль. Чтобы вывести выигрыш, сначала нужно выполнить вейджеровые обстоятельства, прописанные в критериях получения бездепа. <a href=http://old.frontime.ru/wiki/doku.php?id=скачать_фильмы_на_телефон_3gp>http://old.frontime.ru/wiki/doku.php?id=скачать_фильмы_на_телефон_3gp</a> Такой безвозмездный эквивалент средств зачисляется на профиль пользователя в осуществления притязаний и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений возможен лишь в воплощения вейджеровых критерий. 1×slots официальный регистрация Изучить управляла и обстоятельства получения бездепозитных призов казино, Вы можете у нас на веб-сайте в разделе с призами либо на официальном сайте избранного Вами казино. Если возможности найти необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электрической почте.Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации подарка нужно подтвердить электрическую почту и привязать телефонный;
1×slots регистрация на сайте 1×slots ru com
Обыкновенные бездепозитные призы в объеме от трех до 20 $ созданы для того, дабы в игры заходили все новые и свежие игроки. Здесь, всего, будет ограничение на максимальный выигрыш. Важно, чтобы перед наименьшим вкладом был отключен бонус за первое пополнение счета, и компьютерные не попадет на повторный вейджер.Перечисленные повыше главные характеристики сопровождают практически любой приз и считаются стандартными для бездепозитных бонусных начислений в казино. <a href=http://propusk-spb.ru/index.php?subaction=userinfo&user=rainycolleague7>http://propusk-spb.ru/index.php?subaction=userinfo&user=rainycolleague7</a> Практически все интернет казино с бездепозитным бонусом за регистрацию учитывает программку преданности — систему поощрения неизменных клиентов, кот-ая состоит из колличества значений. При достижении игроком одного значения на его счёт поступает приз. Чем повыше степень — что, этим щедрее бонус.У нас на веб-сайте Вы найдете перечень бонусов без депозита в проверенных казино и доскональную информацию то как их получить и применять. 1×slots рабочее зеркало
1×slots официальный сайт зеркало
Иногда в качестве бездепа, казино дарует наименьший приз (до 50 рублей), из-за которого не заморачиваться.Фриспины — бесплатные вращения, коие позволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины считаются самым знаменитым и преимущественным обликом бонуса — благотворительные вращения иногда эффективнее и веселее в отыгрыше, чем остальные облики бездепов. Также случаются случаи, когда казино начисляет обсужденный приз в регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам. Самый распространённый из похожих бонусов, конечно же, бездеп на денек рождения клиента — приз вид фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им возможно на установленного периода времени.После получения бонуса вывод средств для посетителя будет недоступен времени, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или чета недель. Выводить средства игрок может лишь последствии отыгрыша. 1×slots регистрация то дальше необходимо пройти <a href=http://turkteam.10tl.net/member.php?action=profile&uid=1272>http://turkteam.10tl.net/member.php?action=profile&uid=1272</a> Если при регистрации указать промокод, можно гарантировано получить приз. Где арестовать ваучер? Посетите на блоги или форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В заключительное время игорные дома начали афишироваться в кинокартинах и телесериалах. Присмотритесь и наверняка заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных руб.
зеркала 1×slots
Онлайн-казино кропотливо продумывают бонусные обстоятельства, которые нужно выучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша прочие ограничения. На бонусные начисления могут быть установлены вспомогательные лимитирования, которые Вы не учли при отыгрыше. Пока бонус полностью не отыгран — средства из казино не выводятся.Законодательство, регулирующее азартные игры в различных государствах, влияние на полномочия операторов. В итоге юзеры из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это возможность быть как глубокий отказ в доступе, например и невозможность загружать забавы отдельных изготовителей. <a href=https://blackmarke7.com/user-41289.html>https://blackmarke7.com/user-41289.html</a> 1×slot рабочее зеркало Многие азартные клубы ограничивают сумму вывода заработанную на призе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не сможете исключить. Разница будет аннулирована, Вы в не можете создавать на нее ставки.
<b>Смотреть еще похожие новости:</b>
<a href=http://vn-info.net/user/Josephkam/>1×slots актуальное зеркало</a>
<a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=7523&TITLE_SEO=7523-preobrazovatel-interfeysov-usb-rs485&MID=472133&result=reply#message472133>1×slots casino зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но такие рамки не смущают в хайроллеров, поскольку коэффициенты на слотах позволяют рассчитывать на солидные выигрыши, а в некоторых автоматах разыгрывается прогрессивный джекпот. Вознаграждения за получение VIP-статуса ? начисляются в программки лояльности при достижении еще уровня или выдаются индивидуально менеджерами службы.
#8020 Charlesgunny
симулятор казино 1×bet скачать приложение на андроид <a href=https://rumafia.news/>гта онлайн казино</a> 1×bet xbet xyz porno Юлия Канакина, скелетонистка <a href=https://7club7.com/>1win casino</a> фильмы казино рояль почему казино casino скачать приложение казино рулетка скачиваемые казино казино 1 букмекерская контора леонов
#8021 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8022 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Можно ли наваривать на бездепозитных призах? Это не работа, тут как повезет, случае в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, это можно назвать везением, и добавочной добавкой к вашему бютжету.Рассмотрим на образце: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских рублей. В условиях промоакции предписано, что вейджер бездепозитного бонуса х20. Поэтому, дабы отыграть бонус, игроку будет необходимо устроить ставок на 35*20=700 руб. <a href=http://filmkachat.ru/>1×slots промокод при регистрации 2025</a> Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды присутствуют на этой страничке. Посетитель имеет расценить обстоятельства получения и начать играть на деньги без внесения депозита. При этом игроку главно понимать, на каких условиях и какими методами он сможет исключить приобретенный выигрыш. Для этого нужно оценить список присоединенных платежных систем.Бонус без депо за регистрацию в казино (бездепозитный приз) – это валютный подарок от клуба, кот-ый начисляется на акк игрока в регистрации в казино. Кроме творенья учетной записи, для получения бездепа, очень нередко потребуется ещё и подтвердить контактные данные игрока и/или активировать специальный промо-код. <a href=https://www.blogger.com/profile/02787966745735669287>https://www.blogger.com/profile/02787966745735669287</a> Казино выводит деньги лишь на что, эту платежную систему, с котрой был сделан депо. То есть, для вывода бездепозитного бонуса, Вам поначалу необходимо восполнить счет. В неких клубах ограниченный список способов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с данных платежных способов, коие доступны для вывода.Промообъявления от казино не дают реальной картины и направлены на привлечение внимания пользователей. Понять, насколько высоки шансы остаться в плюсе, позволит личный анализ критерий предложения: 1×slots зеркало рабочее на сегодня <a href=https://opaseke.com/users/6719>https://opaseke.com/users/6719</a> Такой казино приз без депозита за регистрацию выдается игроку на час и энергично используется данное предложение с 2017 года. Это словно какая-то маскировка одобрения под бездепозитный. Суть всего этого сводится к тому, собственно игроку на час выдается, например, 1000 долларов, а реклама твердит о том, собственно каждой выигрыш возможно несомненно в забыть при себя. Но случае играющий серьезно отнесется к данному предложению, то он просто растеряет время. Ведь игроку надо(надобно) несомненно играть не в аккаунте, ну тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (числе всей тысячи) в управляла вступят определенные условия, где будет сказано, собственно наибольшей суммой победы может быть только двести долларов и средства возможно использовать только в качестве бонуса на 1-ый вклад с вейджером 25 от суммы вознаграждения плюс сам депо. По итогу выйдет, собственно игрок выигрывал себя 200% бонус с вейджером на определенную сумму. Короче разговаривая, это все не стоит вашего времени.Ну и конечно же, для казино бездепозитные призы прибыльны с имиджевой стороны: сходственная добродушие повышает уровень лояльности клиентов к фирмы.
1х слот 1хслотс регистрация перейти на 1×slots
Но рядах азартных платформах похожие вознаграждения могут получить и уже зарегистрированные юзеры. В этом случае, призы предоставляются в уникальных промоакций или же некоторым игрокам вид акционного предложения, коие прибывает на почту с целью «вернуть» игрока в свое казино.Бездепозитные бонусы за регистрацию в игровых автоматах для владельцев онлайн-казино являются частью маркетинговой кампании, направленной на повышение аудитории вебсайта. Так они продвигают свои бренды и завлекают свежих посетителей. 1х слот регистрация в 1×slots casino Существуют казино с призом за регистрацию, каких довольно востребованы фриспины в интернет казино впоследствии регистрации в определенных забавах. Они встречаются том почаще бесплатных поощрений или классических призов в казино без инвестициям. Например, игрок регистрирует счет, на который начисляются безвозмездные игры, бонус за регистрацию вид безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса в выигрывает истинные средства, которые в последствии можно успешно вывести из заведения на собственную платежную систему. То есть, есть все шансы вывести средства без рисков собственными финансами. Регистрация, за которую компьютерные получит бонусы, займет пару минут, а благодаря этому возможно увеличить 5 евро поощрений до тыс. И без всяких заморочек вывести их. <a href=https://spoilerok.ru/user/Forsedropei/>https://spoilerok.ru/user/Forsedropei/</a> 1×slot зеркало рабочее регистрации на телефон придет Постарайтесь отыграть вейджер, чтобы была возможность забыть заявку на выплату. Кстати, на всех веб-сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы можете получить выигрыш на электронной кошелёк, карту, телефонный.
1×slots сайт зеркало
Во всех легальных онлайн-казино Беларуси нужно свидетельство паспортных данных для забавы — это заявка правительства страны.Автоматы непопросту числятся самым знаменитым азартным весельем. Чтобы усвоить управление и верховодила, понадобится всего количество минут. Ваша задачка устроить ставку, определить количество трудящихся линий и можно вертеть тамбур. Если на выпадет выигрышная композиция – вы выиграли! С этой задачей для посодействуют управится бездепозитные призы казино. Подобные бонусы без депо предоставляются на более выгодных условиях. Зачастую они крупнее, а условия отыгрыша наименее строгие. <a href=http://duadniche.co.kr/bbs/board.php?bo_table=free&wr_id=739351>http://duadniche.co.kr/bbs/board.php?bo_table=free&wr_id=739351</a> Можно ли наваривать на бездепозитных призах? Это не работа, здесь как повезет, случае в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, время возможно именовать везением, и дополнительной добавкой к вашему бютжету. 1×slots регистрация 1×slots casino c2d ru Активация случается с помощью промокодов, которые вводятся в личном кабинете в регистрации. Среди спецпредложений в перечне Casino.ru содержатся эксклюзивные промокоды, которые доступны лишь посетителям портала. Другие способы начисления средств ? автоматическая активация сразу последствии творенья аккаунта и получение подарка по запросу в службу технической поддержки.
1× слот зеркало
<a href=https://forum.graylite.com/viewtopic.php?p=227926#p227926>x1 slots регистрация в 1×slots casino</a> В наше время довольно просто получить приз за регистрацию в казино. Практически любой игорный дом с радостью начисляет средства или безвозмездные вращения. Многие гэмблеры используют данным и не смущяются региться в каждом клубе с прибыльными критериями. Кстати, это замечательная возможность выработать победную стратегию и сорвать джекпот.Но ни не запамятовывайте внимательно разбирать верховодила роли в бонусных акциях. Если вы нарушите но бы одно условие, позднее вы не сможете устроить недоразумение с администрацией. В списке притязаний к отыгрышу нередко наличествуют лимиты на ставки при ирге на собственные средства. Так, случае отыграть нужно 30 000 рублей, а максимальная сумма ограничена 30 рублями, то вертеть барабаны предстоит 1000 один. Эта особенность затрудняет соблюдение игроками критерий по срокам деяния промоакции. 1хслотс мобильная версия зеркало <a href=https://www.ccvgaming.com/forum/member.php?38483-Miguelsax>https://www.ccvgaming.com/forum/member.php?38483-Miguelsax</a> Для получения бездепа необходимо пригласить в забаву по реферальной ссылке свежего клиента: он должен зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на сумму, обозначенную в критериях акции.В интернет-сети практически можно отыскать перечни более модных и обещанных поощрительных программ от популярных онлайн-казино.
1×slots зеркало видели такую регистрацию на
Вейджер не более х30–35 является применимым. Опытные игроки утверждают, что с этим вейджером реально остаться в плюсе, в правильно подойти к выбору игрового аппарата.Для отыгрыша приза казино обязывает игрока поиграть на сумму, в несколько один превышающую сумму полученного бонуса — тут выгода фирмы очевидна. Наши специалисты изучают обстоятельства акции, после в ручном режиме проводят их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие параметры. Мы не рекламируем казино, а даем игрокам информацию о наихороших из них. <a href=http://smol-sport22.ru/index.php?subaction=userinfo&user=rarepsychology6>http://smol-sport22.ru/index.php?subaction=userinfo&user=rarepsychology6</a> Прежде чем активировать бездеп, нужно убедиться сомнений, собственно страна, гражданином которой считается игрок, не входит в список разрешенных. 1×slots официальный регистрация
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
3. Подтвердить данные. В зависимости от клуба, нужно привязать аппарат или почту, показать индивидуальную информацию; Так же стоит выделить то, что в каждом интернет казино установлен свой наибольший кешаут на бездепозитный приз. Как правило кешаут — это предельная сумма средств, которая дешевая для вывода с бездепозитного бонуса.
#8023 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8024 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino 777 online
Проверка занимает от нескольких мин. До нескольких дней, спецы техподдержки могут запросить дополнительные документы либо инициировать краткое общение по Skype.Новые посетители онлайн-казино без первого депозита все проверить свою удачливость. К тому же есть вероятность преобразовать бездепы в реальные деньги за регистрацию в казино, впрочем результата бонус необходимо отыграть согласно условиям акции. <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> Условия все разниться друг от друга. Но подобный приз возможность быть использован только для игрового процесса – полученные на счет деньги до как, как будут отыграны, исключить невозможно. <a href=https://hallbook.com.br/blogs/321025/%D0%A1%D1%80%D0%BE%D1%87%D0%BD%D0%B0%D1%8F-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D0%B6%D0%B0-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2-%D0%9D%D0%B8%D0%BA%D0%BE%D0%BB%D0%B0%D0%B5%D0%B2%D0%B5-%D1%8D%D1%84%D1%84%D0%B5%D0%BA%D1%82%D0%B8%D0%B2%D0%BD%D1%8B%D0%B5-%D1%81%D0%BF%D0%BE%D1%81%D0%BE%D0%B1%D1%8B-%D0%B8-%D1%81%D0%BE%D0%B2%D0%B5%D1%82%D1%8B>https://hallbook.com.br/blogs/321025/%D0%A1%D1%80%D0%BE%D1%87%D0%BD%D0%B0%D1%8F-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D0%B6%D0%B0-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2-%D0%9D%D0%B8%D0%BA%D0%BE%D0%BB%D0%B0%D0%B5%D0%B2%D0%B5-%D1%8D%D1%84%D1%84%D0%B5%D0%BA%D1%82%D0%B8%D0%B2%D0%BD%D1%8B%D0%B5-%D1%81%D0%BF%D0%BE%D1%81%D0%BE%D0%B1%D1%8B-%D0%B8-%D1%81%D0%BE%D0%B2%D0%B5%D1%82%D1%8B</a> 1×slots официальный сайт мобильная версия скачать <a href=http://www.chunwun.com/bbs/board.php?bo_table=qna&wr_id=83220>http://www.chunwun.com/bbs/board.php?bo_table=qna&wr_id=83220</a> Верификация аккаунта. Лучше доказать личность сразу после регистрации, дабы позже не было заморочек с выводом денег. Верификация возможность проходить двумя путями:Чаще всего интернет-казино предлагают бездепозитные бонусы свежим пользователям. Эта промо-акция очень отлично привлекает начинающих, подталкивая их к открытию счета. Конечно, не все становятся преданными клиентами, но сам прецедент регистрации аккаунта играет на руку заведению.
1×slots акции
<a href=http://board.eternityrpc.com/thread-1021-post-14171.html#pid14171>1×slots сайт</a> 1×slots зеркало регистрацию более популярный вариант это Фриспины — благотворительные вращения, коие позволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытных игроков фриспины считаются самым модным и предпочтительным обликом бонуса — бесплатные вращения иногда эффективнее и веселее в отыгрыше, чем остальные облики бездепов. <a href=http://l2help.lt/user/Jeffreyamect/>http://l2help.lt/user/Jeffreyamect/</a> 1хслотс регистрация в 1×slots casino Представленные на данной странице превосходнейшие бездеп бонусы в казино за регистрацию в 2022 году имеют оптимальные обстоятельства. После кропотливого анализа редакция портала составила рейтинг спецпредложений, каком посетители Casino.ru шансы сортировать перечень по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д.
1×slots бонус за регистрацию
При верном подходе бездепы — это прекрасный метод выступать на средства без растраты личных средств. Есть некоторое советов, следуя коим возможно извлечь максимально пользы из подобных акций казино. Играть стопам лишь на лицензированных площадках. Скриптовые сайты столько врут с бонусными услугами, хотя и используют пиратский софт с модифицированным ГСЧ. Выиграть на этих автоматах невероятно. Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.Популярность интернет казино растёт и всё больше юзеров начинают проявлять азартными играми. Бездепозитные бонусы 2022 года, это уникальные подарки за регистрацию. С их поддержкой новые игроки все получить благотворительные вращения либо средства на баланс за одну регистрацию. С выходом игорных заведений в онлайне, бездепозитные призы стали моднейшим способом вербования игроков. Подобные промоакции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о коих мы расскажем. Наш сайт собрал лучшие предложения из онлайна на 2022 год. Воспользуйтесь хоть подарком и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить обстоятельства. <a href=http://zxos.vip/thread-10817–1–1.html>http://zxos.vip/thread-10817–1–1.html</a> Наш список включает в себя лучшие бездепозитные призы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по принципиальным характеристикам:Процесс подтверждения личности может взятьвдолг(взятьвзаймы) от одного денька до недели. Если клиент допустил какую оплошность при заполнении паспортных данных, то ему следует адресоваться с задачей в службу поддержки онлайн-казино. 1× slots зеркало
1× slots casino официальный сайт
1хслотс регистрация в 1×slots casino <a href=https://oke.zone/profile.php?id=116292>https://oke.zone/profile.php?id=116292</a> Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция имеет доскональные правила, ссылка на коие обыкновенно находится в промообъявлении. В их указываются лимиты, вейджер, список доступных игр. Если оператор укрывает данные о предложении, то воспользоваться им не.
1×slots зеркало на сегодня
Первый образующийся вопрос, это, для выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают новых игроков. Последним проще начать забаву на деньги с презента за регистрацию. Им не нужно пополнять баланс и тратить личностные свои. Новички получают бесплатные спины или свои на счёт. С их поддержкою знакомятся с игровым ходом, крутят слоты и проделывают ставки в рулетке.Пoдтвepдить личнocть клиента. Для удачного вывода средств, нужно подтвердить лицо посетителя. Нa этaпe вepификaции пpoфиля, работники службы безопасности обязаны убедиться, что у игрока более один акк. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не может исключить свой выигрыш, если у него будет некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы. В большинстве заведений сделать это возможно по e-mal, по номеру телефона, через социальную сеть либо гугл-аккаунт. <a href=http://arskland.ru/people/user/16719/>http://arskland.ru/people/user/16719/</a> 1×slots регистрация Если площадка дарует бездеп за регистрацию, то процедура его получения проста. Нужно только завести аккаунт на сайте и активировать его, подтвердив адрес электронной почты, номер телефона или иные данные, которые настятельно оператор. Перед данным нужно убедиться, собственно юзер располагается на официальном веб-сайте казино, а не на мошеннической площадке.
<b>Смотреть еще похожие новости:</b>
<a href=https://praisenpray.org/forums/showthread.php?tid=97445>1×slots регистрация</a>
<a href=https://forum.eliteshost.com/showthread.php?tid=15882>1×slot официальный сайт</a>
<a href=http://www.arka-bahce.org/forum/showthread.php?p=764445#post764445>1×slots официальный сайт скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и расценить особенности, недоступные при этой в демо режиме. Многие свежие посетители перебегают в число постоянных, а оператор получает долгосрочную прибыль.
#8025 Charlesgunnyhttp://filmkachat.ru
1х слот 1хслотс регистрация перейти на 1×slots
В разделе с призами активировать собственный подарок. Найти игры, для которых учтено поощрение и применять бонус по предназначению.Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам запрещено начислять призы клиентам, не имеющим валютных средств на счете. Мы предлагаем осмотреть актуальные призы онлайн-казино с лицензией, которые соблюдают законодательство РБ. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать на айфон</a> <a href=https://soctrip.com/post/9bb5eec0-a590–11ef-bb3e-7bacedfd239f>https://soctrip.com/post/9bb5eec0-a590–11ef-bb3e-7bacedfd239f</a> Это раз из основных характеристик привлекательности подарка. С завешенным коэффициентом даже мастера не смогут выполнить условия по отыгрышу. И маловажно, насколько презентабельно смотрится предложение – бездепозитный приз казино в размере $500 либо $1 000. Чтобы новенькие попревосходнее вникли, собственно же это вейджер, мы разберём на образце.Такой безвозмездный эквивалент средств зачисляется на профиль пользователя после воплощения требований и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений возможен лишь последствии воплощения вейджеровых критерий. 1×slots актуальное зеркало <a href=http://kvitka.ukrbb.net/viewtopic.php?f=58&t=24505&p=44069#p44069>http://kvitka.ukrbb.net/viewtopic.php?f=58&t=24505&p=44069#p44069</a> Многие азартные клубы ограничивают сумму вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не сможете вывести. Разница несомненно аннулирована, Вы и не можете создавать на нее ставки.
1×slots casino регистрация 1×slotscasino09k online
Заработать на бездепозитных бонусах за регистрацию в казино может каждый юзер, достигший совершеннолетия.Бонус начисляется игроку сразу после регистрации и прохождения верификации в казино и не просит от посетителя внесения депо. Как управляло, объем бонуса в сходственном случае довольно стыдливый, впрочем разрешает новеньким познакомиться с игрой без риска реальными средствами. 1×slot казино зеркало При ирге на бонусные средства воспрещается играть в игровые автоматы с современным джекпотом и игры из радела exist casino. Кроме того, некоторые казино выделяют бездеп на один или несколько конкретных слотов, и в иных играх Вы не сможете на их выступать.Диапазон ставок, коие вправе устроить игрок, кроме лимитирован. Обычно назначать можно небольшую необходимую — в 10–30 руб. За одно вращение. <a href=https://www.feeder.mobi/members/forsedropmi/profile/>https://www.feeder.mobi/members/forsedropmi/profile/</a> Бывают ли бездепозитные призы без вейджера? Бывают, в у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино. 1хслотс казино зеркало Денежные средства. Третий приз за регистрацию без депо – наличные. К огорчению, лишь известные и популярностью клубы все дать деньги в рублях либо баксах. С их поддержкой возможность насладиться любой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед данным необходимо исполненье конкретных условий.Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.
1×slots сайт
Акции распространяются как на все забавы казино, так и на ограниченный список. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino прочие. Промо имеет охватывать разработки 1-го производителя. Бездеп не пересекается с иными промоакциями казино. Если на сайте учтен кэшбек, он не начисляется за ставки, изготовленные бонусными средствами. Для идентификации платежных реквизитов игрока возможность понадобиться пополнение счета на наименьшую необходимую. Самые популярностью способы вывода денег ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам подобии Neteller и Skrill, еще используют криптовалютными кошельками. Вывод выигрышей имеет исполняться моментально либо развлекать от нескольких часов до нескольких суток.Бездепозитный приз часто может замерзнуть доступным незамедлительно в завершения регистрации, потому в большинстве случаев единственным требованием к нему является регистрация, а после ревизия вашей свежей учетной записи. <a href=https://clashofcryptos.trade/wiki/1×slot_%D0%A0%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5_%D0%97%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE>https://clashofcryptos.trade/wiki/1×slot_%D0%A0%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5_%D0%97%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE</a> Так собственно главное различие презента на депо от бездепа – обязательное пополнение счёта. Вы можете привнести депо и преувеличить стартовый капитал или отобрать бездеп и при не придётся рисковать собственными сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начисляет щедрое одобрение!Фриспины – бесплатные вращения с фиксированной ставкой, коие можно применять в определенных игровых автоматах. 1×slots зеркало этих способов предполагает регистрацию В интернете количество узнаваемых игорных площадок с привлекательными акционными предложениями. Однако пристально разбирать условия 10-ов предложений вскоре надоест, да и время отнимет много. Поэтому наша команда подготовила ТОП-3 сайтов с превосходнейшими бездепозитными бонусами:При отыгрыше бонусных средств, необходимо учесть срок действия бонуса и время, которое дается на отыгрыш. По истечению заявленного времени, не отыгранный приз несомненно аннулирован.
1×slots регистрация 1×slotscasino 56 online
Также, в этом случае необходимо доказать собственный номер телефонного, желаемого код, приобретенный в смс-сообщении от клуба ввести в специальное поле в личном кабинете игрока.Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала быстрые выводы. Фишка выплат в том, собственно довольно выбрать платёжный инструмент и показать необходимую. В большинстве случаев деньги зачисляются на электронные кошельки протяжении 15 мин., а на банковские карты – 1–3 трудящихся денька. <a href=https://forum.bedwantsinfo.nl/thread-692212.html>1×slots регистрация 1×slots casino c2d ru</a> Можно ли в одном онлайн казино получить больше 1-го приза за регистрацию? Нет, например как в любом интернет казино есть верховодила, к коим нужно держаться, не создавать два аккаута для получения призов, другому будет блокировка обоих аккаутов, не пытайтесь перехитрить онлайн казино, бонус за регистрацию выдаеться один раз одному личику.Вышеописанная первопричина и считается главным нюансом, следствии которого операторы отдают доля собственной прибыли на разные маркетинговые затраты и рекламные кампании. А самым действенным здесь будут выступать именно бездепозитные бонусы казино 2022 с выводом за регистрацию. Самый распространённый из подобных бонусов, конечно же, бездеп на день рождения клиента — бонус повторяющий фиксированной суммы либо фриспинов поступает на счёт игрока, а воспользоваться им возможно протяжении установленного периода медли. 1×slots casino регистрация 1×slotscasino09k online <a href=http://samsoberi.ru/index.php?subaction=userinfo&user=aromaticdrudge6>http://samsoberi.ru/index.php?subaction=userinfo&user=aromaticdrudge6</a>
1хслот скачать
2. Создать новый профиль. Для регистрации нужно заполнить небольшую анкету или зайдите в индивидуальный офис при помощи социальных сеток; <a href=http://worklocal.com.au/users/ralphhib>http://worklocal.com.au/users/ralphhib</a> 1× slots сайт
<b>Смотреть еще похожие новости:</b>
<a href=https://www.goslog.ru/forum/messages/forum1/message13134/11-obrashcheniya-grazhdan?result=reply#message13134>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Обычно для получения бонусов без депозита, казино выдвигает приклнные и абсолютно выполнимые обстоятельства, хотя есть ряд поступков коие воспрещены и могут повлечь за собой досадные результаты:
#8026 Charlesgunny
casino 7k рабочее Хорова Наталья Александровна порно <a href=https://strelochnik.com/>пин ап букмекерская контора</a> 1×bet слоты скачать сайт букмекерской конторы <a href=https://rucriminal.info/>casino рабочее</a> гта онлайн казино 1×bet вход win win casino 1×bet слоты 1×bet xyz 1×bet скачать бесплатно рабочие зеркала казино порно с Никита Кучеров (хоккей)
#8027 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8028 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало рабочее регистрации на телефон придет
Шаг 5. Использование и отыгрыш. Бездеп обязан быть использован в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. <a href=http://filmkachat.ru/>1хслотс 1хслотс регистрация перейти на 1×slots</a> <a href=https://www.infragistics.com/community/forums/f/ignite-ui-for-asp-net-mvc/126866/how-to-choose-the-right-3d-rendering-company-for-your-project>https://www.infragistics.com/community/forums/f/ignite-ui-for-asp-net-mvc/126866/how-to-choose-the-right-3d-rendering-company-for-your-project</a> casino 1×slot <a href=http://51×wzl.com/member/index.php?uid=uncoveredcliffh>http://51×wzl.com/member/index.php?uid=uncoveredcliffh</a>
1×slot зеркало рабочее регистрации на телефон придет
Не стоит сразу же открещиваться от приветственных презентов в сходственных казино. Администрация готова начислить средства либо фриспины, хотя сначала работники должны увериться, что вы не аферист. Дело том,, собственно развелось слишком количество охотников за призами. Они научились дурачить систему и зарабатывать крупные суммы средств.Игрокам не следует принимать приветственный бонус как гарантированный способ получить большой выигрыш, но это замечательная возможность без расходов оценить функционал казино. <a href=http://aurorahcs.com/forum/memberlist.php?mode=viewprofile&u=168982>1×slots casino регистрация на сайте</a> 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Шаг 5. Использование и отыгрыш. Бездеп должен быть применен в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера.Необходимость отыгрыша. Вейджер в выше, чем для бонусов за депозит. И же средства не отыграны, вывести их невозможно. <a href=https://mcpe.ru.net/user/Deweyerove/>https://mcpe.ru.net/user/Deweyerove/</a> Бесплатный приз – кредиты, коие онлайн-казино начисляет посетителю, не заставляя его пополнять игровой счет.Представленные на данной странице превосходнейшие бездеп бонусы в казино за регистрацию в 2022 году имеют оптимальные обстоятельства. После кропотливого анализа редакция портала составила рейтинг спецпредложений, каком посетители Casino.ru шансы сортировать перечень по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д. 1×slots зеркало проходить регистрацию это отличный вариант При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие возможно предназначить игре в казино.
1×slots зеркало
Демоказино есть почти на любом веб-сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются существенно реже: там если, тогда, выигрыша и соблюдения критерий акций бездеп можно перевоплотить в реальные деньги.Но не думать, собственно снабжая пользователей такими бонусами, казино занимается спонсированием. Ведь размеры вознаграждений, в, не великие (средним размером от 5 до 20 долларов). И на эти средства налагаются определенные обстоятельства и ограничения, обязательные к исполнению игрока, случае в последствии он вожделеет получить все свои выигранные финансы. Как верховодило, новоприбывшие геймеры для хотят ознакомиться с методами ввода и вывода денежных средств и сроки исполнения поданных заказов дабы четко разуметь, как прытко возможность вывести собственный казино приз за регистрацию без депо на электрический кошелек или же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино соперничают между собой. Ведь если бы определенную фирму давало лишь одно онлайн-заведение, то вряд ли бы клиенты увидели казино с бонусом за регистрацию и имели бы рассчитывать лишь на вознаграждение вид приза на первое вложение. К любому заведению регулярно по завлекать свежих игроков, собственно, в итоге, только на руку всем играющим.Многие казино предоставляют в маркетинговых целях безвозмездные бонусы необыкновенно для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой вебсайт по партнерской ссылке с нашего портала. <a href=http://www.bxbshop.co.kr/bbs/board.php?bo_table=free&wr_id=232872>http://www.bxbshop.co.kr/bbs/board.php?bo_table=free&wr_id=232872</a> С иной стороны, гораздо легче отобрать бездепозитные фриспины за регистрацию в казино и прямо данный начать вращать барабаны в наилучших слотах. Главная особенность спинов том,, что они предусмотрены для лучших автоматов. Удастся не только пройти дополнительные раунды, но и прирастить сумму выигрыша, заработать респины и внутриигровые презенты.Подтверждение персональной инфы. Все казино требуют от посетителя пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и присутствие у пользователя других аккаунтов (мультиаккаунт запрещен). 1×slots регистрация 1×slots review live Когда речь о получении бездепозитных призов в казино, начала внимание на следующие обстоятельства:
1×slots актуальное зеркало
Существует ли стратегии для отыгрыша бездепозитных призов? К раскаянию нет, на выигрыши или проигрыши с призов, казино или игрок воздействовать не может, отдача игр происходит от создателей игр. Воспользоваться бездепом можно не во всех игровых автоматах: казино вдруг устанавливает лимитирование для посетителей. Конечно, это возможно счесть некоторым неудобством для игрока, но справедливости ради стоит отметить, что выбор автоматов всё одинаково остаётся достаточно великим. 1× slots casino официальный сайт <a href=http://yartube.ru/user/Scottsoipt/>http://yartube.ru/user/Scottsoipt/</a> Шаг 5. Использование и отыгрыш. Бездеп должен быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.
1хслотс официальный сайт зеркало
<a href=http://www.gangtan.co.kr/bbs/board.php?bo_table=free&wr_id=611308>http://www.gangtan.co.kr/bbs/board.php?bo_table=free&wr_id=611308</a> 1× slots зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.exalto-emirates.com/memberlist.php?mode=viewprofile&u=69997>1хслотс официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Стоит обозначить(означить), собственно бездепозитный бонус выдается лишь взрослым новеньким, коие, тому, имеют пригласить личных приятелей и людей, того рассчитывающих на поощрительную программу лояльности. Подобная разработка была между соперничающих онлайн-казино для популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению собственной популярности, путем привлечения новых игроков. Бонусы – это уникальный шанс для вероятных участников игры, коие все опробовать софт покер рума и убедиться, будут ли они в него играть либо нет. Новый игрок попробует средства силы с настоящими оппонентами в казино.
#8029 JustinErype
http://pinup2025.com/ пин ап казино официальный сайт
#8030 Charlesgunny
Валентина Матвиенко порно казино рояль <a href=https://krtka.info/>казино зеркало сегодня</a> Мухтиярова Елена Вячеславовна порно суть казино <a href=https://krtka.info/>фильмы казино рояль</a> часы казино Валентина Матвиенко порно пинап казино яндекс игры казино 1×bet телефон играющие казино Черкесова Бэлла Мухарбиевна порно
#8031 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8032 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрацию более популярный вариант это
Новые клиенты онлайн-казино без первого депозита имеют проверить собственную удачливость. К что, этому же есть вероятность преобразовать бездепы в настоящие деньги за регистрацию в казино, однако для этого бонус необходимо отыграть согласно условиям промоакции. <a href=http://filmkachat.ru/>1×slot зеркало рабочее этих способов предполагает регистрацию</a> <a href=https://www.debwan.com/blogs/591034/Navigating-Modern-Construction-Drawing-Services-From-Concept-to-Completion>https://www.debwan.com/blogs/591034/Navigating-Modern-Construction-Drawing-Services-From-Concept-to-Completion</a> Чтобы бездеп не был начислен на Ваш акк, Вам надо активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт автоматически, а Вы не расчитываете его использовать, обратитесь в службу поддержки с просьбой отменить бездепозитный приз.Бездепозитные призы за регистрацию считаются одним из самых популярных методов привлечения свежих игроков в онлайн-казино, поэтому собственно они деют игрокам вероятность опробовать казино, особенно игровые автоматы, и вполне, выиграть реальные деньги. 1×slots регистрация на официальном сайте <a href=http://boss.why3s.cc/boss/home.php?mod=space&uid=139635>http://boss.why3s.cc/boss/home.php?mod=space&uid=139635</a>
1хслотс казино зеркало
Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Для проверки используются сканы паспортов, водительских водительских, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если юзер обнаружен в попытке ввести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их обладатель попадает в темный список. При игре на лицензионной площадке не стоит опасаться указывать достоверную персональную информацию (шифрование исключает утечку индивидуальных данных). <a href=http://amazon.rx22.ru/memberlist.php?mode=viewprofile&u=255>1хслотс официальный сайт зеркало</a> 1×slots бездепозитный бонус за регистрацию Чтобы выступать бесплатно на настоящие средства в казино, не всегда достаточно просто зарегистрироваться. Иногда необходимо выполнить дополнительные деяния.Если вы бывалый игрок, вы должны аристократия, собственно бонус без депозита – редкая находка. Тем не, мы в исследуем онлайн, дабы отыскать для вас наилучшие бездепозитные предложения. <a href=http://sotsprof01.ru/index.php?subaction=userinfo&user=wetphantom76>http://sotsprof01.ru/index.php?subaction=userinfo&user=wetphantom76</a> Активация случается за промокодов, коие вводятся в личном кабинете в регистрации. Среди спецпредложений в списке Casino.ru находятся эксклюзивные промокоды, коие доступны лишь посетителям портала. Другие способы начисления средств ? автоматическая активация сразу в творенья аккаунта и получение презента по запросу в службу технической помощи.Осталось выбрать казино с призом за регистрацию и создать профиль. После активации презента выигрыш зависимости от Фортуны и навыков. 1× slots официальный Казино выводит деньги только на что, эту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного приза, Вам сначала нужно пополнить счет. В некоторых клубах узкий перечень методов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет именно с данных платежных способов, коие доступны для вывода.
1×slots официальный сайт зеркало рабочее
Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. Ну и конечно же, для казино бездепозитные бонусы прибыльны с имиджевой стороны: сходственная добродушие повышает степень преданности посетителей к фирмы. <a href=https://clicgo.ru/user/StevenInops/>https://clicgo.ru/user/StevenInops/</a> 1×slots официальный зеркало
1×slot регистрация
Существуют казино с бонусом за регистрацию, каких очень востребованы фриспины в онлайн казино потом регистрации в определенных играх. Они встречаются и чаще безвозмездных поощрений или классических бонусов в казино без инвестициям. Например, игрок регистрирует счет, на кот-ый начисляются безвозмездные игры, бонус за регистрацию вид даровых фрспинов, вращения в игровом автомате. Во время игрового процесса игры выигрывает настоящие деньги, коие в последствии возможно удачно вывести из заведения на собственную платежную систему. То есть, все шансы исключить свои без рисков собственными финансами. Регистрация, какую геймер получит призы, займет пару минут, а спасибо данному можно прирастить 5 евро поощрений до тыс. И без всяких проблем исключить их. Лишь популярные и известные азартные заведения шансы разрешить себе раздавать бездепы вид дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, коие можно израсходовать в топовых аппаратах с высочайшей отдачей.Казино выделяет вероятность заработать и вывести реальные средства на бездепозитных бонусах. Обычно, это незначительная сумма, которую казино имеет себе разрешить презентовать игроку. 1×slots скачать на айфон <a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=7&t=51553&sid=9d4d1722c9a4cf133c4b7ce12acadfce>https://forum.krymbezpravil.org.ua/viewtopic.php?f=7&t=51553&sid=9d4d1722c9a4cf133c4b7ce12acadfce</a> Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.
1×slots официальный зеркало
Акции распространяются как на все забавы казино, например и на ограниченный список. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и другие. Промо возможность охватывать разработки 1-го производителя. Бездеп не пересекается с другими промоакциями казино. Если на сайте учтен кэшбек, он не начисляется за ставки, сделанные бонусными средствами. Для идентификации платежных реквизитов игрока может потребоваться пополнение счета на наименьшую необходимую. <a href=http://filmsgood.ru/user/AnthonyDably/>http://filmsgood.ru/user/AnthonyDably/</a> Максимальный размер ставки, который невозможно превосходить же приз не будет всецело отыгран. В случае нарушения этого верховодила, приз и выигрыш с него будут аннулированы.Эффективность бездепов в качестве рекламного прибора оценили многие операторы. Малоизвестные площадки употребляют эти промоакции, чтобы скоро набрать базу. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны неизменных гостей. Не все сайты, дающие подарки без депозита, рекомендованы к игре. За симпатичным промоописанием могут скрываться неосуществимые обстоятельства отыгрыша прочие подводные камни. 1×slots регистрация на сайте 1×slots ru com
<b>Смотреть еще похожие новости:</b>
<a href=https://forum-macan.ru/viewtopic.php?t=3565>1×slots рабочее зеркало</a>
<a href=http://aficionado.pl/showthread.php?149083-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82&p=168700>казино 1×slots официальный сайт</a>
<a href=http://romb4×4.ru/forum/threads/1×slots-registracija-na-sajte.16690/>1×slots регистрация на сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Иногда для получения бонусов нужно связаться с адептами службы поддержки. Удобнее всего с ними собеседовать в онлайн-сате, хотя время довольно запроса по электронной почте.
#8033 Charlesgunny
бывшие казино казино в россии <a href=https://krtka.info/>порно с Диана Шнайдер (теннис)</a> порно с Голикова Татьяна Алексеевна pin up casino <a href=https://krtka.info/>porno Елизавета Туктамышева</a> пин ап casino pin up top inform@rucriminal.info Львова-Белова Мария Алексеевна порно porno Дарья Мороз казино можно Александра Бортич пин ап casino pin up top
#8034 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8035 Ангарыhttps://tenchat.ru/media/2853935-angary-sklady--bystrovozvodimyye-chto-nuzhno-znat-pered-zakazom-pro
Производство ангаров и складов под ключ. Подробная информация и заказ <a href=https://tenchat.ru/media/2853935-angary-sklady–bystrovozvodimyye-chto-nuzhno-znat-pered-zakazom-proizvodstva>быстровозводимый складов</a>
#8036 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрацию более популярный вариант это
На условиях отыгрыша бесплатных бонусов следует тормознуть подробнее. С ними связаны аспекты, коие невозможно забыть без внимания. <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> <a href=https://www.exoltech.us/blogs/227831/%D0%A6%D0%B5%D0%BD%D0%B0-%D1%80%D0%B5%D0%BC%D0%BE%D0%BD%D1%82%D0%B0-%D0%BA%D0%B2%D0%B0%D1%80%D1%82%D0%B8%D1%80%D1%8B-%D1%87%D1%82%D0%BE-%D0%B2%D0%BB%D0%B8%D1%8F%D0%B5%D1%82-%D0%BD%D0%B0-%D1%81%D1%82%D0%BE%D0%B8%D0%BC%D0%BE%D1%81%D1%82%D1%8C-%D0%B8-%D0%BA%D0%B0%D0%BA-%D0%B5%D0%B5>https://www.exoltech.us/blogs/227831/%D0%A6%D0%B5%D0%BD%D0%B0-%D1%80%D0%B5%D0%BC%D0%BE%D0%BD%D1%82%D0%B0-%D0%BA%D0%B2%D0%B0%D1%80%D1%82%D0%B8%D1%80%D1%8B-%D1%87%D1%82%D0%BE-%D0%B2%D0%BB%D0%B8%D1%8F%D0%B5%D1%82-%D0%BD%D0%B0-%D1%81%D1%82%D0%BE%D0%B8%D0%BC%D0%BE%D1%81%D1%82%D1%8C-%D0%B8-%D0%BA%D0%B0%D0%BA-%D0%B5%D0%B5</a> Также, учите, что бездепозитный приз возможно вывести лишь том, случае, когда будут выполнены все условия отыгрыша. 1хслот официальный сайт зеркало <a href=https://www.scottsfasteners.com/users/charlessoofe>https://www.scottsfasteners.com/users/charlessoofe</a> Если вы облюбовали себе количество брендов которые вам больше всего полюбились, для постоянной игры! Таких гемблеров казино очень предпочитает и оценивает, за частую эти игроки становятся VIP игроками заведения, которым нередко поступают прибыльные предложения повторяющий призов, например же туда входит и бездепозитные.Выбирая бесплатный бонус, внимательно изучайте верховодила. Убедитесь, собственно вас можно принимать роль в промоакции. Уточните, в каких играх можно выполнять обстоятельства вейджера. При необходимости задавайте вопросы адептам саппорта.
1×slots casino регистрация на сайте
<a href=https://www.lightknotes.com/MyBB/showthread.php?tid=177748>1×slots зеркало сайта</a> 1 x slots casino При этой на бонусные средства воспрещается играть в игровые автоматы с современным джекпотом и игры из радела exist casino. Кроме того, некоторые казино выделяют бездеп на один или несколько конкретных слотов, и в других забавах Вы не можете на них играть. <a href=http://hymalayasalt.ru/bitrix/redirect.php?goto=http://srlz.ru/bitrix/redirect.php?goto=http://libertycity.ru/engine/modules/getlink.php?link=https://teletype.in/@urist555/zhBUSTIstT7>http://hymalayasalt.ru/bitrix/redirect.php?goto=http://srlz.ru/bitrix/redirect.php?goto=http://libertycity.ru/engine/modules/getlink.php?link=https://teletype.in/@urist555/zhBUSTIstT7</a> 1×slots зеркало этих способов предполагает регистрацию
1×slots официальный регистрация
Мы подготовили перечень, где есть всегда животрепещущие и новые бездепозитные бонусы казино, которые возможность получить бесплатно. Для наших пользователей есть специальные предложения неповторимые бонусы, которые вы у не отыщите, их мы определили специальной красной плашкой «Exclusive». <a href=https://sc-grandmaster.ru/forum/?PAGE_NAME=profile_view&UID=20041>https://sc-grandmaster.ru/forum/?PAGE_NAME=profile_view&UID=20041</a> 1×slots казино зеркало
1×slots казино зеркало
Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, например как Вам понадобиться ее доказать в при выводе денег.Но рядах азартных платформах похожие гонорары все получить теперь зарегистрированные юзеры. В этом случае, призы предоставляются масштабах оригинальных акций либо же неким геймерам в виде акционного предложения, которое прибывает на почту с целью «вернуть» игрока в свое казино. Принципиальным отличием безвозмездных призов от призов на депозит считается неимение надобности заносить средства на акк. Из-за сего их часто именуют бездепозитными (not the slightest deposit bonuses).Такие одобрения позволяют бесплатно протестировать новое казино, разобраться с игровым процессом онлайн слотов, заработать и исключить небольшую сумму денег. Однако в условиях исчезают «подводные камешки», которые не разрешат исключить крупную необходимую или же вы не успеете отыграть вейджер. Поэтому профессионалы рекомендуют арестовать благотворительные вращения за регистрацию в казино без депо, дабы поднабраться навыка и получить реальный шанс на победу. 1х слот 1хслотс регистрация перейти на 1×slots <a href=http://intentionalpress.com/author/zacherybem/>http://intentionalpress.com/author/zacherybem/</a> Срок отыгрыша — это этап, который наступает в момент активации бонуса и заканчивается с его закрытием. Пользователю нужно уложиться в данный временной зазор, другому призовые свои аннулируются. Казино устанавливают список игр, ставки в которых засчитываются при расчете отыгранных денег. Если тайтл не входит в этот список, то возможность быть недосегаем для загрузки во время действия бонусного предложения.Нет. Для получения бездепозитного приза в казино необходима неотъемлемая регистрация на сайте. Играть в слоты безвозмездно и без регистрации возможно лишь в демо режиме.
1×slots официальный demo регистрация в 1×slots casino
Осталось выбрать казино с бонусом за регистрацию и сделать профиль. После активации презента выигрыш находится от Фортуны и способностей.Стоит отметить, собственно бездепозитный приз выдается лишь совершеннолетним новеньким, коие, же, могут пригласить личных приятелей и своих, кроме рассчитывающих на поощрительную программу лояльности. Подобная технология замечена между конкуренцию онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры содействуют увеличению собственной популярности, путем вербования свежих игроков. Бонусы – это уникальный шанс для потенциальных соучастников забавы, коие имеют опробовать софт покер рума и увериться, станут ли они в него играть или нет. Новый игрок испробует свои силы с реальными оппонентами в казино. Но а если вы уже профи по интернет казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в онлайн казино; <a href=https://exsite.su/user/Geraldsag>https://exsite.su/user/Geraldsag</a> Это раз из главных характеристик привлекательности презента. С завешенным коэффициентом числе мастера не сумеют выполнить обстоятельства по отыгрышу. И неважно, насколько презентабельно выглядит предложение – бездепозитный бонус казино в размере $500 или $1 000. Чтобы новички лучше вникли, что же это вейджер, мы разберём на образце. 1×slots casino регистрация 1×slotscasino09k online Для всех бездепозитных призов функционирует максимальный лимит на выигрыш. Он показывает максимальную сумму, коию вас получить, играя на бонусные кредиты. Как лишь вам удастся выполнить притязания вейджера, дозволенный максимум будет переведен с бонусного счета на главной, а остаток будет списан.Иногда в поощрения за регистрацию шансы выдаваться билеты для участия в турнирах. Условия их проведения довольно выделяются, поэтому мы советуем ознакомиться с любым предложением отдельно.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Так собственно сможете храбро региться без всяких раздумий. Фортуна сейчас точно на вашей стороне. Не страшитесь, ведь следствие какого либо ущерба Вам совершенно не грозит. С этими призами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе. Это также благотворительные деньги, коие поступают на аккаунты новоиспеченных игры последствии регистрирования. А особенность этих призов произведено том,, собственно обретенные финансы обязательно стопам применять в продолжении назначенного времени.
#8037 Charlesgunny
casino ru порно с Бондаренко Анастасия Борисовна <a href=https://strelochnik.com/>лучшие казино бесплатно</a> скачать pin casino Окладникова Ирина Андреевна порно <a href=https://kompromat1.online/>скачать букмекерскую контору</a> порно с Александр Большунов (лыжные гонки) слоты казино Чулпан Хаматова 1×bet официальный слоты casino официальный зеркало казино фильм смотреть онлайн porno Дарья Клишина
#8038 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8039 Charlesgunnyhttp://filmkachat.ru
1×slots мобильная версия войти казино
Но существуют азартные заведения, готовые просто например вручить деньги на игру. Для сего достаточно сделать профиль. Чтобы исключить выигрыш, сначала нужно выполнить вейджеровые обстоятельства, прописанные в критериях получения бездепа.Для выбора азартного заведения Вы можете пользоваться списком наших казино с бонусами за регистрацию. На нашем веб-сайте мы опубликовали список бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, собственно часть призов эксклюзивные и доступны лишь для гостей нашего сайта по-специальному промо-коду либо по уникальной ссылке. Кроме того, для любого приза мы подготовили подробный обзор, в Вы узнаете как получить и отыграть поощрение и как исключить свой выигрыш с бездепа. <a href=http://filmkachat.ru/>1×slots зеркало видели такую регистрацию на</a> Стоит обозначить(означить), собственно бездепозитный бонус выдается лишь взрослым новичкам, которые, же, могут пригласить собственных приятелей и знакомых, также претендующих на поощрительную программку преданности. Подобная разработка замечена между конкуренцию онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры содействуют повышению собственной посещаемости, путем привлечения свежих игроков. Бонусы – это уникальный шанс для потенциальных участников игры, коие могут опробовать софт покер рума и увериться, станут ли они в него выступать либо нет. Новый игрок попробует средства силы с реальными оппонентами в казино. <a href=https://gamma.app/docs/Professional-Architectural-Drafting-Services-From-Concept-to-Cons-9w64jusl022578a>https://gamma.app/docs/Professional-Architectural-Drafting-Services-From-Concept-to-Cons-9w64jusl022578a</a> 1 xslots рабочее зеркало <a href=http://zhwbn.com/bbs/space-uid-162070.html>http://zhwbn.com/bbs/space-uid-162070.html</a>
1× slots официальный
Все любят получать подарки. Согласитесь, практически каждый играющий человек будет беспредельно счастлив, если получит даровой подарок для забавы в интернет казино просто за регистрацию или же приз за внесенный депозит, например нарекаемые приветственные бонусы для новых игроков. Соответственно эти онлайн клубы станут более популярны и преимущественны у игроков при выборе казино для забавы. Топ казино постоянно обновляется и прибавляются новые и увлекательные игровые клубы с привлекательной бонусной политикой и всеми вероятными преимуществами, льготами, к которым относятся эти бонусы как фриспины за регистрацию, денежные бездепозитные бонусы, а щедрые призы за внесенный депозит.Для получения приза надо(надобно) ознакомиться с программой лояльности казино и сделать ставки на сумму, нужную для перехода на следующий уровень. 1×slots casino зеркало рабочее Бывают ли бездепозитные бонусы без вейджера? Бывают, если у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный приз за регистрацию устанавливается вейджер во всех казино.Шаг 4. Активация. Внимательно изучите обстоятельства, информацию по лимитированиям и сроке действия бонусного предложения. Разобравшись с правилами, возможно активировать бонус в собственном кабинете (времени ? с внедрением промокода) либо по запросу в саппорт. <a href=http://mtpkrskstate.ru/forum/user/199884/>http://mtpkrskstate.ru/forum/user/199884/</a> 1×slots акции Заполняя данные в собственном профиле, указывайте только достоверную информацию, так как Вам понадобиться ее подтвердить дальнейшем при выводе средств.Этот образ приза несомненно добавлен на Ваш акк после успешной процедуры регистрации с внедрением номера телефона. Если избрать иной способ творения учетной записи, бездеп не будет добавлен на Ваш аккаунт.
1×slot зеркало рабочее регистрации на телефон придет
Возьми свой подарок. Чаще всего бонус активируется незамедлительно в регистрации. Но бывают ситуации, когда нужно забежать в личный кабинет либо написать в справочную службу. Зарегистрируйтесь. Для регистрации почаще всего довольно установить собственный номер телефона и почтовый адрес, после чего установить полученный код из СМС. Возможно, требуется указать промокод. В правилах акции будет написано, где его надобно включать. Иногда это надобно создавать при регистрации, время — уже после творения собственного офиса, на отдельной странице. <a href=http://www.svit-world.kiev.ua/user/DoctorLazutaEl/>http://www.svit-world.kiev.ua/user/DoctorLazutaEl/</a> 1×slots регистрация
1×slots официальный зеркало рабочее
Проверка занимает от нескольких мин. До нескольких дней, специалисты техподдержки имеют запросить дополнительные документы либо инициировать короткое общение по Skype.Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала резвые выводы. Фишка выплат что, нет, что достаточно избрать платёжный инструмент и показать необходимую. В большинстве случаев деньги зачисляются на электронные кошельки в течение 15 мин., а на банковские карты – 1–3 трудящихся дня. <a href=https://www.formulersupport.com/Thread-1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE–123876>1×slots официальный сайт зеркало</a> Прибывшие на аккаунт деньги бездепозитные призы предназначаются, главном, лишь для новоиспеченных пользователей, коие ранее не имели собственного аккаунта в данном казино. Исходя из этого, случае раньше у игрока был сделан депозит, то, по всей вероятности, у него больше не будет возможности рассчитывать на получение такого бонуса в конкретном заведении.Не сложно догадаться, что not the slightest down payment bonuses почти ни не бывают немаленькими. Чаще всего речь идет о пяти–тридцати долларах (либо эквиваленте этой суммы в иной еденице). На условиях отыгрыша бесплатных бонусов стопам тормознуть подробнее. С ними связаны нюансы, коие невозможно оставить без внимания.Размер приза. В качестве бездепов обычно начисляют не суммы, а когда идет о бонусах за депозит, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино могут подарить игроку до 2000$. 1хлот регистрация в 1×slots casino <a href=http://www.makili-aliyev.com/2019/08/research-note-on-nagorno-karabakh.html>http://www.makili-aliyev.com/2019/08/research-note-on-nagorno-karabakh.html</a> Доступ к подарку может открываться автоматически последствии введения промокода или обращения в службу поддержки сайта. В первом случае от пользователя не потребуется практически действий. Бездеп с активацией по коду встречается почаще всего. Игроку необходимо установить совокупность знаков в графе, кот-ая возможность пребывать в регистрационной форме в Личном офисе.Бездепозитный бонус казино 2022 с выводом за регистрацию дает вероятность ознакомиться игроку с лобби избранного заведения, сориентироваться в выборе игр и выяснить качество работы службы. Довольно часто, начиная игровой процесс, игрок теснее не желает останавливаться и делает реальный вклад. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать даром возможно как один таки с призом за регистрацию без необходимости заносить депо.
1× slots casino зеркало
При регистрации стопам указывать лишь достоверную информацию. Когда учетная запись будет активна, будет доступ в Личный кабинет. В нем возможно избрать денежную, установить промокод и узнать доскональные правила получения и отыгрыша бездепа. Краткая информация об акции нередко присутствует именно на регистрационной форме.Эффективность бездепов виде маркетингового инструмента оценили все операторы. Малоизвестные площадки используют такие акции, чтобы скоро набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны постоянных гостей. Не все веб-сайты, дающие презенты без депо, рекомендованы к этой. За симпатичным промоописанием могут прятаться невыполнимые условия отыгрыша прочие подводные камни. Заработать на бездепозитных бонусах за регистрацию в казино может любой пользователь, достигший совершеннолетия.Иногда у посетителей вебсайта все появиться проблемы при активации полученного промо-кода. В этих случаях, нужно обратиться за поддержкой в службу поддержки «Support». Для получения ответа, обязательно указывается определенная причина воззвания и подтверждается информация дополнительными экрана. Если сложилась неоднозначная обстановка, практически можно адресоваться к главному регулятору или контролирующему органу, выдавшему этому заведению лицензионный документ. <a href=http://biyografiforum.10tl.net/member.php?action=profile&uid=2847>http://biyografiforum.10tl.net/member.php?action=profile&uid=2847</a> Минимального оборота. Этот лимит уточняется вейджером — же игрок не сыграет на установленную сумму, вывод средств несомненно недоступен.После получения бонуса вывод средств для клиента несомненно недосегаем до тех пор, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или пара месяцов. Выводить средства игрок сможет лишь после отыгрыша. 1×slots регистрация 1×slots review live B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=312892>1×slots бездепозитный бонус за регистрацию</a>
<a href=https://your-portal.at.ua/forum/64–61322–6#88112>1× slots сайт</a>
<a href=https://masstr.net/showthread.php?tid=102630>1×slots зеркало регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Мы рекомендуем не отказываться от похожих предложений известных казино. Выделите количество мин. На регистрацию, получите приз и попробуйте его отыграть. Может быть, сегодня фортуна несомненно на вашей стороне!
#8040 Charlesgunny
Петрова Ольга Викторовна порно казино фильм <a href=https://rumafia.news/>казино смотреть</a> 1×bet сейчас рабочее казино <a href=https://rucriminal.info/>1×bet официальный</a> pin up casino официальный сайт pin up casino kent casino регистрация Комарова Наталья Владимировна порно сайт винлайн букмекерская контора казино пин casino ru
#8041 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8042 Складыhttps://tenchat.ru/media/2853935-angary-sklady--bystrovozvodimyye-chto-nuzhno-znat-pered-zakazom-pro
Производство ангаров и складов под ключ. Подробная информация и заказ <a href=https://tenchat.ru/media/2853935-angary-sklady–bystrovozvodimyye-chto-nuzhno-znat-pered-zakazom-proizvodstva>быстровозводимый складов</a>
#8043 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
Нельзя рассматривать игру на деньги, как вариант заработка. Азартные забавы воспрещены для лиц младше 18 лет. Topcasinobonuses.mobi не является зачинщиком азартных игр. Сайт носит информационный характер.При небольшой сумме бонуса рекомендовано выступать по невысоким ставкам, а применять максимальные чем только том, случае, случае вейджер слишком большой, а время на отыгрыш крепко ограничено. <a href=http://filmkachat.ru/>1хслотс 1хслотс регистрация перейти на 1×slots</a> Максимальная ставка ? уточняется в валюте счета и ограничивает объем ставки за раз спин. В случае ее превышения приз возможность быть аннулирован. Также в правилах возможность содержаться запрет на размещение ставок конкретного облика, примеру, по равным шансам в рулетке (то есть, на чет либо нечет, красное либо черное и т.д. ). <a href=http://www.pvp.iq.pl/thread-5909.html>http://www.pvp.iq.pl/thread-5909.html</a> 1×slots casino зеркало рабочее <a href=https://forum.bedwantsinfo.nl/member.php?action=profile&uid=80869>https://forum.bedwantsinfo.nl/member.php?action=profile&uid=80869</a> Размер приза. В качестве бездепов обыкновенно начисляют большие суммы, а когда идет о бонусах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино все подарить игроку до 2000$.
1×slots промокод при регистрации
Бездепозитные призы — это подарки от казино повторяющий бонусных средств либо фриспинов для игровых автоматов, коие начисляются на акк игрока в процедуры регистрации на сайте заведения. Для получения таких поощрений депозит не потребуется.Бесплатный приз – кредиты, которые онлайн-казино начисляет посетителю, не принуждая его пополнять игровой счет. <a href=https://masstr.net/showthread.php?tid=85315>1хслотс мобильная версия зеркало</a> 1×slots актуальное зеркало Чтобы бездеп не был начислен на Ваш акк, Вам не активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк автоматически, а Вы не планируете его использовать, обратитесь в службу с просьбой отменить бездепозитный бонус.Используйте превосходнейшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из перечня ниже, чтобы заработать подарки за обычные деяния теперь сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высокой отдачей и резвыми выводами на электрические кошельки. <a href=http://bbs.topeetboard.com/home.php?mod=space&username=RalphKadly>http://bbs.topeetboard.com/home.php?mod=space&username=RalphKadly</a> Для такого, дабы отыграть необходимую вашего бездепозитного приза надо(надобно) выполнить обстоятельства вейджера. Очень нередко фриспины даются на конкретные слоты (book of ra, book of lifeless, book of sun), избирайте разъем себя по душе, все очень красивые и качественные. Бездепозитные приз возможность быть денежным так и вид фриспинов на слотыДля получения бонуса надо(надобно) пригласить в забаву нового клиента. Казино начислит пригласившему фиксированный процент от взносов приглашённого повторяющий бонуса: почаще всего его размер не превышает 10%. Срок действия приза правило не превышает месяца: пригласивший получает приз от проигранных ставок приглашённого в первый луна забавы. 1хслот скачать
1×slots зеркало регистрацию более популярный вариант это
Выбор любого интернет казино на нашем веб-сайте. В описании к каждому Вы можете узнать, собственно получите за творенье аккаунта.Максимальный объем ставки, который нельзя превышать же бонус не будет всецело отыгран. В случае нарушения сего верховодила, бонус и выигрыш с него станут аннулированы. За счёт спинов выйдет запустить различные интернет слоты, протестировать стратегии и поднабраться опыта. Фишка том,, что вращения начисляются на лучшие аппараты с уникальными опциями и высочайшей отдачей. Не запамятовывайте, собственно в каждом акционном предложении учтены специальные требования – кратковременные лимитирования, максимальный объем ставки, список доступных игр.Самые популярные способы вывода денег ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам на Neteller и Skrill, а пользуются криптовалютными кошельками. Вывод выигрышей возможность исполняться быстро либо развлекать от нескольких часов до нескольких суток. <a href=https://magadan-mebel.ru/forum/user/1132/>https://magadan-mebel.ru/forum/user/1132/</a> 1×slot регистрация Подтверждение регистрации. Казино требуют привязки профиля к электрическому адресу и номеру телефонного. Для этого на e-mail отправляется письмо ссылаясь, а на аппарат ? текстовое сообщение с кодом.
1×slots регистрация то дальше необходимо пройти
Условия шансы различаться приятель от приятеля. Но такой бонус имеет быть применен лишь для игрового процесса – приобретенные на счет финансы до такого, как станут отыграны, вывести нереально.Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке представители онлайн-казино публикуют актуальную информацию о not the slightest deposit bonuses и услугах. casino 1×slot <a href=http://krasrec.ru/forum/user/169009/>http://krasrec.ru/forum/user/169009/</a>
1×slots зеркало рабочее
Основное отличие сомнений, собственно для получения бездепа не пополнять баланс в казино. Но не сего, есть ряд прочих различий:Зачастую бездепозитные бонусы казино для забавы предлагаются разными заведениями азартных игр в качестве маркетинговых промоакций либо в целях вербования к себя свежих игроков. Для бездепозитных бонусов в казино 2022 геймеру не пополнять счет до этапа вывода желаемых средств. <a href=https://my.rosenbauer.com/en-US/forums/support-forum/da001e20-edaa-ee11-a81c-000d3a2f70f5>https://my.rosenbauer.com/en-US/forums/support-forum/da001e20-edaa-ee11-a81c-000d3a2f70f5</a> 1×slots регистрация 1×slots casino 777 online
<b>Смотреть еще похожие новости:</b>
<a href=https://minifishtank.net/forum/showthread.php?tid=812>1×slots промокод при регистрации 2025</a>
<a href=https://timepost.info/showthread.php?tid=46636>1×slots зеркало регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Отыграв бездепозитный приз в казино с выводом также придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в подобное ограничение присутствует, то единоразово исключить выйдет лишь сумму, не превосходящую размер полученного бонуса. Хотя бесплатные бонусы начисляются без депозита, не исключено, что для придется вносить средства. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь после такого, как новый заказчик впервые пополнит игровой счет.
#8044 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8045 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало рабочее
Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации бонуса без депозита. Внимательно прочитайте до конца. Многие новенькие проделывают оплошности на шаге регистрации и поэтому возможности получить подарок.Да, у безвозмездных бонусов есть недостатки. Прежде всего, они обыкновенно маленькие. Кроме такого, условия вейджера по ним всегда жесткие. Но все же отсутствие риска делает их довольно красивыми для клиентов. <a href=http://filmkachat.ru/>1 х слотс зеркало</a> <a href=http://www.pvp.iq.pl/thread-5909.html>http://www.pvp.iq.pl/thread-5909.html</a> Но никогда не забывайте пристально читать верховодила роли в бонусных акциях. Если вы нарушите хотя бы одно условие, позже вы не можете уладить недоразумение с администрацией.Для проверки применяются сканы паспортов, водительских удостоверений, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если юзер замечен в попытке завести вспомогательный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в темный перечень. При этой на лицензионной площадке надо опасаться свидетельствовать достоверную индивидуальную информацию (шифрование ликвидирует утечку персональных данных). 1×slots казино мобильная версия <a href=http://proxy.lib.uiowa.edu/login?url=http://spdt.ru/bitrix/redirect.php?goto=http://sssromantik.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/MvgjI2F_7Ke>http://proxy.lib.uiowa.edu/login?url=http://spdt.ru/bitrix/redirect.php?goto=http://sssromantik.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/MvgjI2F_7Ke</a> Чаще всего, популярные сервисы, такие как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно неотъемлемое правило. Финансовые свои выводятся лишь через ту платежную систему, которой пользовались для пополнения депозита. Если же игрок получил бездепозитный покерный приз, потребуется восполнить счет на наименьшую необходимую, которая сочиняет обычно 10 $.Выбирайте лучшие благотворительные призы с помощью обзоров на Casinoz – и пусть вас сопутствует удача при отыгрыше бонусных кредитов!
казино 1×slots официальный сайт
<a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=7523&TITLE_SEO=7523-preobrazovatel-interfeysov-usb-rs485&MID=466774&result=reply#message466774>1×slots актуальное зеркало</a> 1×slots мобильная версия войти казино Как верховодило, при выводе денег, от играющего требуется только устроить минимальный лепта чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом собственный счет. <a href=https://wiki.dulovic.tech/index.php/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%94%D0%B7%D0%B5%D0%BD>https://wiki.dulovic.tech/index.php/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%94%D0%B7%D0%B5%D0%BD</a> сайт 1× slots casino Многие казино деют в рекламных целях бесплатные бонусы исключительно для наших читателей. Чтобы их получить, нужно перейти на игровой вебсайт по партнерской ссылке с нашего портала.1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, в не желаете замерзнуть жертвой мошенников или впустую израсходовать время;
1×slot казино зеркало
Как прочие промоакции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения считаются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых посетителей и разрешает им составить эмоцию о функционале, не рискуя вескими суммами.Зачастую бездепозитные призы казино для игры предлагаются различными заведениями азартных игр виде рекламных акций или в целях привлечения к себе новых игроков. Для бездепозитных призов в казино 2022 игроку надо пополнять счет до момента вывода хотимых средств. <a href=https://popcporn.net/user/Tyronelow/>https://popcporn.net/user/Tyronelow/</a> 1×slots регистрацию процедура займет всего лишь
1×slot рабочее зеркало
<a href=http://check2go.net/my-account/>1×slots официальный сайт скачать</a> Можно. Вы практически можете отрешиться от получения бездепозитного бонуса за регистрацию в казино, же Вы не создадите ставку. Бесплатные призы казино без депозита можно получить в виде валютных средств на бонусный счет (исключить их можно лишь после отыгрыша), фриспинов, игры либо кешбэк-бонуса. 1×slots casino зеркало рабочее <a href=http://super-humor.ru/profile.php?u=tiresomeknoll21>http://super-humor.ru/profile.php?u=tiresomeknoll21</a>
1×slots акции
Для проверки используются сканы паспортов, водительских водительских, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если юзер замечен в попытке завести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их владелец попадает в черный перечень. При забаве на лицензионной площадке не стоит опасаться указывать достоверную индивидуальную информацию (шифрование исключает утечку индивидуальных данных).Приглашаем делиться воззреньями о бонусах. Это поможет другим пользователям избирать наиболее выгодные предложения. <a href=http://xn–80aaa2bbjbajhsi0bu.xn–p1ai/index.php?subaction=userinfo&user=racialtycoon7>http://xn–80aaa2bbjbajhsi0bu.xn–p1ai/index.php?subaction=userinfo&user=racialtycoon7</a> 1×slots акции Подтверждение электрической почты – одно из ведущих условий, коие есть почти в любом бездепозитном казино. Чтобы верифицировать электронную почту, достаточно перейти по активной ссылке в послании, приобретенном от азартного клуба.Также бывают случаи, когда казино начисляет оговоренный бонус после регистрации нового посетителя по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам.
<b>Смотреть еще похожие новости:</b>
<a href=http://old.pokvesti.ru/forum/memberlist.php?mode=viewprofile&u=3543>1хслотс зеркало</a>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=80311&result=reply>1х слот регистрация в 1×slots casino</a>
<a href=http://nacionrolera.org/foro/viewtopic.php?f=1210&t=132920>1× слот зеркало</a>
<a href=http://aficionado.pl/newthread.php?do=newthread&f=41>1×slots зеркало которую указывали при регистрации кстати</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При отыгрыше бонусных средств, необходимо учесть срок деянья бонуса и время, которое дается на отыгрыш. По истечению заявленного времени, не отыгранный приз несомненно аннулирован.
#8046 Charlesgunny
Петрова Ольга Викторовна порно pin up casino скачать <a href=https://kompromat1.online/>казино можно</a> 1×bet зеркало рабочее на сегодня порно с Аделия Петросян (фигурное катание) <a href=https://rhymes-punches.com/>online casino официальный</a> казино проиграл 1×bet xbet официальные сайты казино сайт казино вход лучшие казино бесплатно порно с Зырянова Анастасия Владимировна porno Юлия Пересильд
#8047 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8048 Charlesgunny
porno Елизавета Туктамышева 1×bet сайт 1×bet xyz <a href=https://strelochnik.com/>1×bet вход</a> мелбет букмекерская контора casino зеркало сегодня <a href=https://krtka.info/>casino бонус</a> букмекерская контора лучшие бесплатные онлайн казино порно с Анастасия Потапова, теннисистка суть казино официальные сайты казино pin ап casino букмекерская контора скачать приложение
#8049 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8050 Charlesgunnyhttp://filmkachat.ru
1×слот регистрация в 1×slots casino
Процесс подтверждения личности может взятьвдолг(взятьвзаймы) от одного денька до недели. Если клиент допустил какую оплошность при заполнении паспортных данных, то ему следует адресоваться с задачей в службу поддержки онлайн-казино.В лицензионных бездепозитных казино играть в азартные игры вправду неопасно. Наличие лицензии одобряет тот факт, что клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP. <a href=http://filmkachat.ru/>1×slots казино зеркало</a> Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных требований, не обязательной верификации. Если на сайте предусмотрена обязательная процедура доказательства личности, то вывести выигрыш получится лишь последствии ревизии данных. Приготовьтесь наполнить анкету и выслать в техподдержку документ, подтверждающий личность. <a href=https://rant.li/9fsnh6hu13>https://rant.li/9fsnh6hu13</a> B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.4. Заберите презент. Чаще всего приз активируется сразу в регистрации. Но случаются истории, когда надо(надобно) забежать в личный кабинет либо написать в саппорта. 1×slots регистрацию процедура займет всего лишь <a href=http://altaystroy.com/bitrix/redirect.php?goto=http://gals.catalinacruz.com/special-live-events/catalina-cruz-first-ir-sex.php?link=http://osborn-rus.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/1A0qOMaFQG4>http://altaystroy.com/bitrix/redirect.php?goto=http://gals.catalinacruz.com/special-live-events/catalina-cruz-first-ir-sex.php?link=http://osborn-rus.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/1A0qOMaFQG4</a> Бездепозитные призы казино за регистрацию в 2022 году — это возможность сыграть за счёт заведения. Казино даёт клиенту шанс пользоваться определённой суммой или количеством даровых вращений без внесения депо. Не путайте деморежим с реальной забавой без необходимости внесения депозита.
1×slot зеркало
Перед активацией принципиально внимательно изучить условия акции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, на коих возможно пользоваться предложением. Если бездеп обхватывает ограниченный список игр, рекомендуется разузнать максимальные коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только в том случае, если оператор не установил строгие ограничения на максимальную необходимую ставки. <a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=71067>1×slots рабочее зеркало</a> 1×slots казино зеркало Как лишь на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу в этого возможно оставить заявку на вывод выигрыша. Кредиты прибыльно отличаются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом реальных средств и выделяют вероятность ощутить азарт. Во-вторых – можно насладиться любой азартной забавой доступной на сайте. В вашем распоряжении присутствуют автоматы, настольные прибавление, видео-покер, Live-дилеры. <a href=https://forums.twcpilots.com/member.php?action=profile&uid=630>https://forums.twcpilots.com/member.php?action=profile&uid=630</a> 1хслотс рабочее зеркало на сегодня Постарайтесь отыграть вейджер, чтобы замечена возможность оставить заявку на выплату. Кстати, на всех сайтах, представленных в списке, доступны современные платёжные инструменты. Вы можете получить выигрыш на электронной кошелёк, карту, аппарат.Возьми собственный презент. Чаще всего приз активизируется сразу после регистрации. Но бывают ситуации, когда нужно забежать в собственный офис либо написать в справочную службу.
1×slots зеркало регистрацию более популярный вариант это
Обычно, бездепозитные бонусы выдаются под конкретные слоты с фиксированной ставкой, но их точно воспрещено применять в игровых автоматах с современным джекпотом. Список игр, каких можно применять бездеп, Вы отыщите в описании промоакции или сможете уточнить у службы поддержки заведения. Для получения предоставленных призов для понадобиться — ПК либо мобильное прибор, и остальное дело за малым. <a href=https://adminclub.org/member.php?action=profile&uid=88447>https://adminclub.org/member.php?action=profile&uid=88447</a> За привлечение друга ? в партнерской программы клиент получает вознаграждение за привлечение свежих пользователей.Если вы опытный игрок, вы обязаны аристократия, что приз без депо – редкая находка. Тем не менее, мы раз исследуем онлайн, дабы отыскать для вас наилучшие бездепозитные предложения. 1×slots казино мобильная версия
1×slots казино мобильная версия
Подтверждение индивидуальной информации. Все казино требуют от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и присутствие у юзера других аккаунтов (мультиаккаунт запрещен).Существует ли стратегии для отыгрыша бездепозитных призов? К сожалению нет, на выигрыши либо проигрыши с бонусов, казино либо игрок повлиять не может, отдача игр происходит от создателей игр. Если ординарными текстами, бездепы – это определённая сумма денег или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно забирать презенты. Но есть кое-какие аспекты. Существуют игорные дома, коие перед тем как начислить бонусы просят привязать телефон, предоставить копии документов.Доступные забавы – В некоторых азартных играх можно снизить математическое приемущество казино до нескольких 10-х процента. В их числе многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как правило, в таких играх ставки идут в зачет вейджера не всецело. Например, может предусматриваться только 50%. В неких забавах бездепозитные бонусы вообщем невозможно отыгрывать. казино 1×slots <a href=https://dictanote.co/n/1023086/>https://dictanote.co/n/1023086/</a> Например, игрок получил 500 рублей при твореньи аккаунта и должен отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 рублей, понадобится устроить 875 спинов для полного отыгрыша.
1×slots зеркало быструю регистрацию а также мгновенное
<a href=http://t95283ld.bget.ru/user/Keithvex/>http://t95283ld.bget.ru/user/Keithvex/</a> Внесение депо – Будьте готовы пополнить счет в отыгрыша бонуса. Это стандартное требование правил для этого подобии промо-акций. Лучше заранее уточнить, какую сумму нужно несомненно вносить на счет. Как правило, речь идет о наименьшем депозите, но вы обязаны быть уверены, собственно он вас по кармашку. 1×slots зеркало рабочее на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=49046>1×slots зеркало на сегодня</a>
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=4093>1× slots casino зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Мы делаем акцент на главных положениях правил, рассказываем о территориальных ограничениях и вкратце информируем о других промоакциях обговариваемого казино.
#8051 Charlesgunnyhttp://filmkachat.ru
1хслотс мобильная версия зеркало
Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном сайте и выполните вход в личный офис, чтобы отобрать бесплатные вращения с вейджером х40;Ограничения по играм. Администрация воспрещает игрокам кое-какие игровые автоматы с бездепозитным бонусом, деньгами либо безвозмездными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда разделение производится по виду игр. Например, отыгрыш вероятен на всех игровых аппаратах, хотя запрещен в настольных забавах и в разделе Live Casino. <a href=http://filmkachat.ru/>1×слотс казино</a> Вы скорее, например все предпочитаете получать презенты и бездепозитные бонусы казино. Игорные дома взяли в повадку одаривать гэмблеров приятными призами. Стать владельцем приветственного подарка можно за создание профиля либо пополнение счёта. Второй вариант больше интересный, ведь клубы готовы удвоить депозит! Но в вы новичок и только знакомитесь с миром азарта, другого, как пользуйтесь бонусом за регистрацию. <a href=https://wakelet.com/wake/-bCB6R6Fc7F319ngWQ1YF>https://wakelet.com/wake/-bCB6R6Fc7F319ngWQ1YF</a> 1×slots акции <a href=https://www.modernvespa.it/profile/3517-deweyjourl/>https://www.modernvespa.it/profile/3517-deweyjourl/</a>
1×slots зеркало
Таким образом, заведение пытается продемонстрировать себя своим потенциальным геймерам, а подобный маркетинговый ход как казино бонус без депо за регистрацию привлекает довольно количество внимания к игорному заведению и обеспечивает неизменный поток новых гостей и грядущих клиентов игрового интернет клуба.Максимальная ставка ? устанавливается в денежной счета и ограничивает объем ставки за раз спин. В случае ее превышения бонус имеет быть аннулирован. Также в правилах имеет содержаться запрет на размещение ставок определенного облика, к, по равным шансам в рулетке (то есть, на чет либо нечет, красноватое либо темное и т.д.). <a href=https://www.findaspermdonor.com/viewtopic.php?f=25&t=87055>1хслотс рабочее зеркало на сегодня</a> 1×slots официальный сайт зеркало Как только получите бездеп в казино, всё равно не забывайте проверять электрическую почту. Некоторые игорные клубы постоянно веселят интенсивных гэмблеров приятными призами. Чаще всего получить подарок можно в преддверии веселья, на денек рождение, за вербование друга. А того распространённым призом считается надбавка к депозиту. Нужно не восполнить счёт, и азартное заведение увеличит его на 50–100%. <a href=https://www.camaroowner.com/member.php?959-HenryCep>https://www.camaroowner.com/member.php?959-HenryCep</a> Даже не выиграв крупную сумму, игрок интересно проведет время, изнутри изучит работу площадки, воспримет геймплей автоматов. Все это без каких-то финансовых рисков. Быть в курсе наилучших акций с. Достаточно периодически учить список новых интернет казино с выводом бонуса без депозита в данном разделе.Такой казино приз без депозита за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это как бы какая-то конспирация поощрения под бездепозитный. Суть всего этого сводится к что, этому, собственно геймеру на час выдается, к примеру, 1000 долларов, а реклама твердит про, что каждой выигрыш возможно будет в будущем оставить при себя. Но в играющий серьезно отнесется к этому предложению, то он просто растеряет время. Ведь игроку нужно несомненно играть не главном аккаунте, ну тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (том всей тыс. ) в управляла вступят определенные условия, где несомненно сказано, собственно наибольшей суммой победы возможность быть лишь двести $ и деньги возможно применять лишь виде бонуса на первый лепта с вейджером 25 от суммы гонорары плюс сам депо. По результату выйдет, что игрок выигрывал себя 200% приз с вейджером на конкретную сумму. Короче разговаривая, это все надо вашего медли. 1×slos регистрация в 1×slots casino У нас на веб-сайте Вы найдете перечень бонусов без депо в испытанных казино и подробную информацию то как их получить и использовать.При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое возможно предназначить забаве в казино.
1хслотс рабочее зеркало
Казино выводит деньги лишь на что, эту платежную систему, с котрой был изготовлен депо. То есть, для вывода бездепозитного бонуса, Вам сначала нужно восполнить счет. В неких клубах узкий список способов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с данных платежных способов, коие доступны для вывода.Получив свой презент, Вы можете безвозмездно играть на реальные средства, а выполнив обстоятельства отыгрыша, вывести собственный выигрыш. <a href=https://kizkiuz.com/user/MichaelGax/>https://kizkiuz.com/user/MichaelGax/</a> Похожим образом трудится 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения посетителя или из-за с получения им VIP-статуса. Подарок предоставляется последствии обращения в поддержку и проверки. 1×slots регистрацию процедура займет всего лишь Демоказино есть практически на каждом сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются веско пореже: там в случае выигрыша и соблюдения условий акций бездеп возможно перевоплотить в настоящие средства.Как и другие промоакции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такого предложения являются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает новых посетителей и разрешает им составить эмоцию о функционале, не рискуя вескими суммами.
зеркала 1×slots
<a href=http://diablo2r.cn/home.php?mod=space&uid=30130>1×slots регистрация 1×slots review live</a> Рассмотрим принцип его деянья на примере. Допустим, вы зарегистрировались и получили $10 not the slightest down payment bonus с вейджером х50. Это значит, собственно выигранные деньги возможно будет выводить не ранее, чем после как, как общая сумма ставок достигнет $500.Бездепозитный бонус казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в этом и заключается главное различие. Промообъявления от казино мешают реальной картины и направлены на привлечение внимания пользователей. Понять, как высоки шансы остаться в плюсе, позволит личный анализ условий предложения: 1хслотс рабочее зеркало <a href=http://fbk.clanweb.eu/profile.php?lookup=193272>http://fbk.clanweb.eu/profile.php?lookup=193272</a>
1×slots быструю регистрацию а также мгновенное
Каждый новичок и умелый игрок мечтают прытко стартануть и начать делать реальные ставки. Для этого достаточно забрать презент, за кот-ый не платить. В зависимости от игровой платформы, нужно сделать профиль, привязать email или телефонный. После сего администрация начислит щедрое вознаграждение в виде даровых вращений либо виртуальных кредитов. <a href=http://manuel.vonthron.free.fr/forum/profile.php?mode=viewprofile&u=2031>http://manuel.vonthron.free.fr/forum/profile.php?mode=viewprofile&u=2031</a> Бездепозитные бонусы — это подарки от казино повторяющий бонусных денег или фриспинов для игровых автоматов, которые начисляются на аккаунт игрока последствии процедуры регистрации на веб-сайте заведения. Для получения этих поощрений депозит не потребуется.Начнём с как, что любое рекламную за регистрацию предполагает некоторые обстоятельства. Бездепозитные бонусы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, необходимая для исполнения условий. Пример, получили благотворительные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 рублей, проигрышных либо выигрышных, маловажно. После исполнения, бонусный баланс перейдёт на настоящий и будет доступным к выводу. 1×slots акции Осталось выбрать казино с бонусом за регистрацию и создать профиль. После активации дара выигрыш зависит от Фортуны и способностей.
<b>Смотреть еще похожие новости:</b>
<a href=https://thetechmodders.com/forums/viewtopic.php?t=30998>1×slot официальный сайт</a>
<a href=https://www.goslog.ru/forum/messages/forum1/message10074/11-obrashcheniya-grazhdan?result=reply#message10074>1×slots рабочее зеркало на сегодня</a>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/8109/#comment-338712>1×slots мобильная версия войти казино</a>
<a href=https://www.katzenforum.at/forum/threads/1×slot-zerkalo.40710/>1хслот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, a лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.
#8052 Ангарыhttps://tenchat.ru/media/2853935-angary-sklady--bystrovozvodimyye-chto-nuzhno-znat-pered-zakazom-pro
Производство ангаров и складов под ключ. Подробная информация и заказ <a href=https://tenchat.ru/media/2853935-angary-sklady–bystrovozvodimyye-chto-nuzhno-znat-pered-zakazom-proizvodstva>быстровозводимый складов</a>
#8053 RickyTor
pinup2025.com <a href=" http://lzdsxxb.com/home.php?… „>пинап казино</a> or <a href=“ https://medakahonpo.com/MT/index.cgi?… ">пинап казино</a> http://www.google.cv/url?… пин ап вход <a href=http://pingfarm.com/index.php?action=ping&urls=http://pinup2025.com>pinup 2025</a> пин ап and <a href=https://quantrinet.com/forum/member.php?u=715332>pinup 2025</a> пин ап казино официальный сайт
#8054 Jamesalime
slot siteleri <a href=" http://bbs.soumoli.com/home.php?… „>en cok kazand?ran slot oyunlar?</a> or <a href=“ https://clients1.google.cd/url?… ">slot siteleri</a> http://www.boosterblog.com/…-624021.html?… en kazancl? slot oyunlar? <a href=https://www.google.co.vi/url?q=https://slottr.top>slot tr online</a> slot tr online and <a href=https://www.jjj555.com/home.php?mod=space&uid=2070477>en cok kazand?ran slot oyunlar?</a> slot oyunlar? puf noktalar?
#8055 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8056 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация то дальше необходимо пройти
Классическая разновидность приза за создание аккаунта. Его превосходство заключается в, что заказчик может самостоятельно избирать аппараты и делать ставки в них. Иногда список игровых автоматов ограничен оператором, хотя все также это какого-либо, чем один-единственный доступный разъем, как в случае с внедрением фриспинов.Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция имеет подробные правила, ссылка на которые обыкновенно находится в промообъявлении. В их указываются лимиты, вейджер, перечень дешевых игр. Если оператор укрывает данные о предложении, то пользоваться им надо. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать на айфон</a> Чтобы выступать безвозмездно на настоящие деньги в казино, не всегда достаточно просто зарегистрироваться. Иногда нужно выполнить вспомогательные действия. <a href=https://rant.li/kalinka0588/top-3d-modeling-software-for-furniture-design-tools-to-elevate-your-creations>https://rant.li/kalinka0588/top-3d-modeling-software-for-furniture-design-tools-to-elevate-your-creations</a> Даже не выиграв солидную сумму, игрок увлекательно проведет время, изнутри изучит работу площадки, оценит геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе наихороших акций легкостью. Достаточно периодически учить перечень новых интернет казино с выводом бонуса без депозита в этом разделе.Чаще всего, популярные сервисы, такие как MoneyBookers и WebMoney, еще MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно неотъемлемое правило. Финансовые средства выводятся лишь спустя что, эту платежную систему, которой огромный для пополнения депозита. Если же игрок получил бездепозитный покерный приз, потребуется пополнить счет на минимальную сумму, которая составляет обычно десять $. 1хслотс казино зеркало <a href=https://www.merchantcircle.com/blogs/-1-boise-id/2024/8/-/2796684>https://www.merchantcircle.com/blogs/-1-boise-id/2024/8/-/2796684</a> Приветственный бонус без депо ? презент за регистрацию. Выдается деньгами, фриспинами или баллами. В последнем случае бонусные баллы используются для участия в турнирах или обмена на реальные средства.Даже не выиграв солидную необходимую, игрок интересно проведет время, изнутри исследует работу площадки, оценит геймплей автоматов. Все это без каких-то финансовых рисков. Быть в курсе лучших акций легкостью. Достаточно регулярно учить список свежих онлайн казино с выводом приза без депо в этом разделе.
1×slots casino регистрация
1×слот регистрация в 1×slots casino Для получения выигрыша потребуется выполнить условия казино. Чаще всего игроку необходимо поставить конкретную необходимую, хотя теснее из личных денег. Она рассчитывается из общего размера выигрыша за всегда использования бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, в пользователь выиграл 1000 рублей, а множитель сочиняет х30, исключить деньги возможно несомненно, сделав ставки на 30 000 руб. <a href=http://bestwecando.ourproject.org/dokuwiki-2013–05–10a/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0%20%D0%B4%D0%B7%D0%B5%D0%BD>http://bestwecando.ourproject.org/dokuwiki-2013–05–10a/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0%20%D0%B4%D0%B7%D0%B5%D0%BD</a> Принципиальным отличием даровых призов от призов на депо считается неименье необходимости вносить средства на акк. Из-за этого их нередко называют бездепозитными (no down payment bonuses). 1×slots casino регистрация
зеркло казино 1×slots
Также существуют онлайн-платформы азартных игр, которые применяют раздачу бездепозитных бонусов в особые даты (как для казино, так и для игрока). Помимо этого, действующие геймеры также имеют возможность получить похожие призы за собственную деятельность (к примеру, за повышения уровня или за похожие заслуги).Также учтите, собственно кое-какие игровые платформы сужают список государств, которые готовы получить предложенный бездепозитный приз за регистрацию. К примеру, существуют онлайн-заведения, выдающие похожие бонусы только жителям определенных стран. К примеру, интернет казино 777 Оригинал дает бездепозитный бонус лишь игрокам из России и государств СНГ. Или наоборот, пичкают вознаграждением всех, считая жителей некоторых государств (исходя из этого, по внимательно изучать перечень, дабы впоследствии не появилось практически вопросов и претензий). <a href=https://trueanal.org/user/Jamesapalf/>https://trueanal.org/user/Jamesapalf/</a> Бездепозитные призы казино это экономическая компенсация, предлагаемая пользователям на дармовой базе и возможность играть в онлайн казино безвозмездно. Если ассоциировать их с одобрениями за вклад, в средства выдаются только потом начального пополнения счета, то бездепозитные гонорары получаются бесплатно. То есть, играющий получает вероятность делать ставки на уже быть деньги, которые выдаст заведение, исполняя, при этом, обыденные деянья, чтобы их извлечь (здесь речь о регистрация, удостоверении личности с внедрением номера телефонного, дизайна заявки и т.д.).Помните, собственно любые нарушения верховодил сведут на нет ваши старания, и вы скорее останетесь без начисленного вас безвозмездного приза. Всегда изучайте правила начисления и обстоятельства вейджера. По любым вопросам, на коие вы не самостоятельно найти ответы, обращайтесь за разъяснениям и саппорт. 1 xslots рабочее зеркало Изучить верховодила и условия получения бездепозитных призов казино, Вы можете у нас на веб-сайте в разделе с призами или на официальном сайте избранного Вами казино. Если не можете отыскать нужную информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал либо по электронной почте.Основное различие в том, что для получения бездепа не надо пополнять баланс в казино. Но не сего, есть ряд и различий:
1×slots casino регистрация на сайте
Классическая разновидность приза за создание аккаунта. Его преимущество заключается никаких, собственно заказчик может других выбирать аппараты и делать ставки в них. Иногда список игровых автоматов ограничен оператором, но все равно это лучше, чем единственный дешевый разъем, как если, тогда, с внедрением фриспинов. <a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=289809>1хслотс казино зеркало</a> Некоторые клубы автоматически начисляют приз на акк игрока в исполнения условий получения, но случаются ситуации, когда приз надо(надобно) активировать игроку самому. Есть количество способов активации бонуса:Бездепозитный бонус казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в этом и содержится основное различие. зеркала 1×slots <a href=http://www.gtcm.info/home.php?mod=space&uid=733170>http://www.gtcm.info/home.php?mod=space&uid=733170</a>
1×slots регистрация на сайте 1×slots ru com
<a href=https://roomstyler.com/users/vykupavto0311>https://roomstyler.com/users/vykupavto0311</a> 1 х слотс зеркало Бонус за регистрацию в казино без депозита с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша имеет понадобиться сделать ставки на сумму, в количество десятков раз превышающую сумму бонуса или выигрыша.При маленький сумме бонуса рекомендуется играть по низким ставкам, а использовать максимальные никакого лишь никаких случае, в вейджер очень великой, а время на отыгрыш сильно ограничено.
<b>Смотреть еще похожие новости:</b>
<a href=https://isomedu.com/forum/profile/josephdrons/>1хслот 1хслотс регистрация перейти на 1×slots</a>
<a href=http://khodaumo.com/forum/memberlist.php?mode=viewprofile&u=146&sid=7acb85cb4646676ed7285fe176c088ea>1×slots регистрация на официальном сайте</a>
<a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1×slots casino регистрация</a>
<a href=http://www.fiat130.it/phpbb3/viewtopic.php?f=14&t=328709>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На данном разделе портала периодически публикуются обзорные заметки, каких рассматриваются бесплатные бонусы наихороших интернет-казино. Информация структурирована по нескольким пт, включая основные: Бездепозитные призы отличный вариант даровой игры в игровые автоматы. Многие пользователи сети не понимают, что в казино можно начать играть безусловно даром, а позже исключить выигрыш на банковскую карту либо электрический кошелек, другие не доверяют онлайн казино, а третьи успешно играют и выигрывают – и тотчас достаточно большие суммы.
#8057 Charlesgunny
букмекерская контора фонбет официальный сайт Попова Анна Юрьевна порно <a href=https://res-publika.com>скачать букмекерскую контору</a> porno Илона Маркова, хоккеистка up casino официальный <a href=https://vestnik-jurnal.com/>kometa casino</a> где казино ramenbet casino casino на телефон порно с Алина Загитова казино ставка смотреть фильм казино 7k casino зеркало
#8058 Danielquornhttps://www.dnnsoftware.com/activity-feed/my-profile/userid/3217706
“You get some of me but not tomorrow as they want me in as soon as I can make it happen. This is the one time when they say jump and I ask how high due the financial gains the company could benefit from and it being important enough for the client to appear in person.”
“Well I get an extra night of you at least! I wonder what we could do with that? Meantime, what about food? I am starving and delicious as it was a second breakfast is not quite enough to replenish me!”
“Well get something on and we’ll sort that out first.”
We drove into town and decided that a daytime visit to Charlie’s was going to be the answer. I parked in the bar lot and Elise dashed in to change into something more appropriate, jeans and a t-shirt along with her biker jacket but keeping her Converses on.
Walking down to the restaurant was different from the middle of the night visits as the streets were bustling and all of the shops and outlets were open.
Reaching Charlie’s we entered the front door and sat in a booth near the window. A beautiful young American Chinese girl came,smiled and said hello to Elise and gave us menus and asked if we wanted drinks in the meantime.
„No thanks Lin just a pot of Jasmine tea for us please.“ Lin went back to the kitchen area. “No booze for me today as I will have to work in the bar so it is just tea for me.”
Not in a drinking mood either, I agreed with her."
https://www.metal-archives.com/…xgefestx1988 https://chyoa.com/…imberelf1989 https://rentry.org/o4pe4ouk https://tubeteencam.com/…1981/profile https://rentry.org/iqtfykg3
#8059 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8060 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8061 Charlesgunny
порно с Васильева Татьяна Викторовна 7k casino зеркало рабочее <a href=https://res-publika.com>яндекс казино</a> 1×bet рабочее на сегодня casino 7k рабочее <a href=https://strelochnik.com/>пин up casino</a> win win casino casino сегодня казино на деньги 1×bet зеркало на сегодня 1×bet xyz pin up casino скачать порно с Елена Никитина, скелетонистка 1×bet регистрация
#8062 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8063 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8064 Charlesgunny
cat casino casinos xyz <a href=https://vestnik-jurnal.com/>винлайн букмекерская контора официальный сайт</a> 1×bet porno Юлия Канакина, скелетонистка <a href=https://sovsekretno.net/>porno Александра Степанова, фигуристка</a> porno Илья Ковальчук (хоккей) casino вход Петрова Ольга Викторовна порно букмекерская контора без скачать 1×bet симулятор казино порно с Гатагова Ольга Анатольевна
#8065 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8066 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации
Ограничения по забавам. Администрация запрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, средствами или бесплатными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда разделенье выполняется по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, хотя запрещен в настольных играх и в разделе Live Casino. <a href=http://filmkachat.ru/>1×slots мобильная версия войти казино</a> <a href=https://www.tipga.com/e/6707c0603286fe4de4285bf8>https://www.tipga.com/e/6707c0603286fe4de4285bf8</a> Шаг 5. Использование и отыгрыш. Бездеп должен быть применен в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера.Бездепозитные бонусы отличный вариант безвозмездной забавы в игровые автоматы. Многие юзеры сети не понимают, что в казино возможно начать выступать безусловно безвозмездно, а позже вывести выигрыш на банковскую карту или электрический кошелек, иные не доверяют онлайн казино, а третьи успешно играют и выигрывают – и тотчас достаточно великие суммы. 1×slots официальный сайт, скачать <a href=https://sciencewiki.science/wiki/User:JodiProffitt>https://sciencewiki.science/wiki/User:JodiProffitt</a>
1×slots casino регистрация 1×slotscasin online
А ознакомиться с свежими интернет казино, Вы можете с бонусов с выводом прибыли, которые Вы сможете получить без депозита.Особую изюминку видео слотам придают оригинальные знакы. С их свет активизируются различные бонусы. Вы можете запустить вспомогательный степень и прирастить сумму выигрыша. Есть знаки, коие сменяют ненужные составляющие и сами творят выигрышные комбо. Не стоит забывать и на бонус-тур. После каждого успешного спина есть шанс увеличить необходимую выигрыша в 2 либо хорошо раза. <a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=766487>1×slots официальный зеркало</a> зеркала 1×slots <a href=http://www.lpocc.net/2021/09/blog-post50.html>http://www.lpocc.net/2021/09/blog-post50.html</a> Казино выводит средства лишь на что, эту платежную систему, с котрой был изготовлен депо. То есть, для вывода бездепозитного бонуса, Вам поначалу необходимо пополнить счет. В некоторых клубах узкий перечень методов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с данных платежных способов, коие доступны для вывода. 1×slots casino online регистрация Бесплатный приз – кредиты, коие онлайн-казино начислит посетителю, не принуждая его пополнять игровой счет.Бездепозитные призы истинными деньгами, коие можно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадались.
1×слот регистрация в 1×slots casino
Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских рублей. В условиях промоакции указано, собственно вейджер бездепозитного приза х20. Поэтому, дабы отыграть бонус, игроку несомненно нужно сделать ставок на 35*20=700 руб.Риск-игра по равным шансам – Также казино имеет воспрещать скорпулезно условия по отыгрышу с помощью раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких других играх. <a href=http://ds2.edu.sbor.net/index.php?subaction=userinfo&user=ruthlesssavior3>http://ds2.edu.sbor.net/index.php?subaction=userinfo&user=ruthlesssavior3</a> На условиях отыгрыша бесплатных призов стопам остановиться подробнее. С ними связаны нюансы, коие нельзя оставить без внимания. 1×slots официальный сайт скачать
1× slots casino зеркало
Бездепозитные призы казино это финансовая компенсация, предлагаемая юзерам на дармовой основе и возможность выступать в онлайн казино бесплатно. Если сравнивать их с поощрениями за лепта, каких средства выдаются лишь потом начального пополнения счета, то бездепозитные гонорары получаются безвозмездно. То есть, играющий получает возможность делать ставки на уже существующие финансы, которые выдаст заведение, исполняя, при этом, обычные деяния, дабы их извлечь (здесь речь о регистрация, удостоверении личности с внедрением номера телефонного, оформления заказы и т.д. ).Зачастую бездепозитные бонусы казино для игры предлагаются разными заведениями азартных игр виде рекламных промоакций или в целях вербования к для свежих игроков. Для бездепозитных бонусов в казино 2022 геймеру надо пополнять счет до момента вывода хотимых средств. 1×slots casino регистрация 1×slotscasin online <a href=http://ufb38096.bget.ru/index.php?subaction=userinfo&user=fanaticalbeddin>http://ufb38096.bget.ru/index.php?subaction=userinfo&user=fanaticalbeddin</a> Так собственно главное различие дара на депозит от бездепа – неотъемлемое пополнение счёта. Вы можете привнести депозит и преумножить стартовый капитал либо отобрать бездеп и всем не придётся рисковать собственными сбережениями. Поспешите выполнить простые притязания, и администрация ресурса начислит щедрое поощрение!
x1 slots регистрация в 1×slots casino
Получать информацию о самых прибыльных бонусах возможно без постоянного прогноза новостей казино. Мы взяли эту задачку на себя и безпрерывно следим за предложениями операторов, выбирая наихорошие из их. В этом разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список промоакций периодически пополняется. В топ вошли самые новые бездепозитные бонусы за регистрацию в казино 2020, временные и замкнутые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру прочим аспектам. Если срок действия акции истек, она удаляется из перечня. <a href=http://zc.xszrcw.com/home.php?mod=space&uid=399199&do=profile>http://zc.xszrcw.com/home.php?mod=space&uid=399199&do=profile</a> Принципиальным различием бесплатных призов от бонусов на депозит является неимение надобности заносить деньги на акк. Из-за этого их часто нарекают бездепозитными (no deposit bonuses).Рассмотрим принцип его деянья на образце. Допустим, вы зарегались и возымели $10 no down payment bonus с вейджером х50. Это означает, собственно выигранные средства возможно несомненно выводить не ранее, чем после того, как общая сумма ставок достигнет $500. 1×slots зеркало Новые клиенты онлайн-казино без первого депо могут выяснить собственную удачливость. К тому же есть возможность конвертировать бездепы в реальные средства за регистрацию в казино, однако достичь бонус необходимо отыграть согласно условиям промоакции.С такими ординарными советами каждое казино с бонусом за регистрацию способно принести в разы больше выгоды и полезности.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=31306>1х слотс зеркало регистрация в 1×slots casino</a>
<a href=http://mandala-app.com/forums/memberlist.php?mode=viewprofile&u=3447>1×slots официальный сайт зеркало рабочее</a>
<a href=http://polishcrazyclan.ugu.pl/member.php?action=profile&uid=272738>1х слот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Как верховодило, при выводе денег, от играющего требуется лишь сделать минимальный лепта чтобы, чтобы, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом индивидуальный счет.
#8067 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8068 JustinErype
http://slottr.top/ en kazancl? slot oyunlar?
#8069 Charlesgunny
официальное казино вход casino бонус <a href=https://rhymes-punches.com/>порно с Бондаренко Анастасия Борисовна</a> букмекерская контора без демо казино <a href=https://7club7.com/>порно с Анастасия Потапова, теннисистка</a> гама казино bet casino рокс казино 1×bet бесплатно играем казино porno Дарья Мороз 1×bet телефон
#8070 Charlesgunnyhttp://filmkachat.ru
1×slots акции
Разные казино имеют собственные верховодила по выведению выигрыша. Для бездепозитных призов принимаются достаточно высочайшие требования. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до ста один в игровых автоматах. Например, случае игрок получил безвозмездно десять $, то необходимо будет отыграть их, поставив одну тыщу спинов по одному доллару любой. Стоит обозначить(означить), что не все казино выделяют возможность выступать на призы и не во всех увеселительных заведениях идентичные управляла для отыгрывания. Некоторые казино воспрещают выступать на призы в блекджек или ограничивают ставки до 5 процентов, собственно существенно наращивает в 10-ки один количество необходимых игр.Исходя из сего, просто не существует осмысленных оснований махнуть рукою на получение такого бонуса при регистрации. И, не, на такой безвозмездной базе у вас есть шансы выиграть деньги и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные призы, именуют бесплатными интернет платформами для игр. <a href=http://filmkachat.ru/>1×slots регистрация на 1хслотс</a> <a href=http://www.wmhelp.cz/html/modules.php?name=Forums&file=viewtopic&t=69256>http://www.wmhelp.cz/html/modules.php?name=Forums&file=viewtopic&t=69256</a> 1×slots зеркало рабочее на сегодня <a href=http://worklocal.com.au/users/travismusty>http://worklocal.com.au/users/travismusty</a> Для получения выигрыша потребуется выполнить условия казино. Чаще всего игроку необходимо поставить конкретную необходимую, но теснее из собственных средств. Она рассчитывается из общего размера выигрыша за всегда применения бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, если пользователь выиграл 1000 руб., а множитель сочиняет х30, вывести средства возможно будет, сделав ставки на 30 000 рублей.Список так нарекаемых «запрещенных землель» прилагается к правилам бонусной программы игорного портала. Обязательно выясните, распространяются ли на вас похожие наказания.
1×slot официальный сайт
Вейджер в переводе с британского значит «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша полученного приза, в нашем случае бездепозитного. Число ставок значения — главно только набрать необходимую, пропорциональную сумме одобрения.На нашем сайте Вы найдете перечень актуальных новых бездепозитных призов в казино 2022 года. Также, есть много эксклюзивных услуг, коие доступны лишь гостям нашего вебсайта после регистрации по нашей ссылке либо активации особого промокода. <a href=https://shopcms.vsupport.club/topic/15651-%D0%BA%D1%83%D0%BF%D0%B8%D1%82%D1%8C-%D0%BC%D0%B5%D1%84%D0%B5%D0%B4%D1%80%D0%BE%D0%BD-%D0%B2-%D0%BA%D0%B8%D0%B5%D0%B2%D0%B5-%D1%81%D1%81%D1%8B%D0%BB%D0%BA%D0%B0-cocainvip-%D0%B4%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0-%D0%BF%D0%BE-%D1%83%D0%BA/page-2#entry95450>1× slots официальный</a> 1хслотс регистрация в 1×slots casino В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это самая приятная доля игры. Важно, часто бездепозитные призы в казино выдаются с лимитированиями по наибольшей выплате. В среднем можно рассчитывать на выгода в несколько тысяч рублей. Как вывести выигрыш с приза без депо. Придётся подтвердить аккаунт документально, в неких заведениях. Процедура верификации обязательна и делается каждым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате или прочитайте в правилах.В интернете количество узнаваемых игорных площадок с привлекательными акционными предложениями. Однако внимательно разбирать условия 10-ов предложений скором надоест, да и время отнимет много. Поэтому наша команда подготовила ТОП-3 сайтов с наилучшими бездепозитными призами: <a href=http://www.dreamteammoney.com/index.php?showuser=829878>http://www.dreamteammoney.com/index.php?showuser=829878</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots
1×slots зеркало которую указывали при регистрации кстати
Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации подарка необходимо подтвердить электронную почту и привязать аппарат; <a href=http://skiindustry.org:/forum/member.php?action=profile&uid=1173782>http://skiindustry.org:/forum/member.php?action=profile&uid=1173782</a> 1 xslots рабочее зеркало Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают бонус по странам. Вплоть до как, собственно клуб возможность брать игроков из Вашей страны, а бездеп мешает.
1×slots официальный сайт скачать
<a href=https://www.fromrus.su/index.php?/topic/25760–1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%B2–1×slots-casino/>1хслотс регистрация в 1×slots casino</a> Бездепы имеют заходить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой или баллами.Многие казино предоставляют в маркетинговых целях бесплатные призы необыкновенно для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой сайт по партнерской ссылке с нашего портала. 1×slots зеркало выигрыши обязательно пройдите регистрацию если <a href=http://coinauctionshelp.com/forum/memberlist.php?mode=viewprofile&u=63483>http://coinauctionshelp.com/forum/memberlist.php?mode=viewprofile&u=63483</a> Такой бесплатный эквивалент средств зачисляется на профиль юзера после воплощения требований и предназначаются они только для игрового процесса. Вывод этих вознаграждений возможен только после воплощения вейджеровых критерий.Помните, что любые нарушения верховодил сведут на нет ваши усилия, и вы наверняка останетесь без начисленного вас безвозмездного приза. Всегда изучайте управляла начисления и условия вейджера. По хоть вопросам, на которые вы не помощи найти ответы, обращайтесь за объясненьям и саппорт.
1×slots акции
Только выполнив все условия отыгрыша и дождавшись завершения ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить свои средства.Индивидуальные одобрения выдаются за совершение деяний: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавления либо официального посетителя для ПК. В большинстве казино срабатывают программки лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на грядущий степень нередко сопрягается выдачей бездепа. Активация валютного гонорары случается механически в сотворения профиля или использования промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на страницы казино в социальных сетях или на рассылку маркетинговых извещений, скачать и ввести вспомогательный софт и т.д.Oтыгpaть бонус с обозначенным вeйджepом, для этого нужно сдeлaть cтaвoк нa cумму, превышающую размер приза в количество один. <a href=https://coffeepeople.ru/memberlist.php?mode=viewprofile&u=37004>https://coffeepeople.ru/memberlist.php?mode=viewprofile&u=37004</a> 1×slots официальный сайт зеркало рабочее Игры, каких возможно играть на бонусные деньги. Проверьте список игр, в которых можно выступать на бонусные свои, вероятно они Вам не понравятся и не стоит расходовать своё время на эту промоакцию.Бонус с зачислением средств на счет выделяет больше свободы деяний. Пользователь сам подбирает, каким образом воспользоваться подаренными своими. Здесь кроме имеют работать ограничения на список дешевых игр, но обычно эти рамки не так строги, как в рекламную с бесплатными вращениями.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.exalto-emirates.com/memberlist.php?mode=viewprofile&u=69997&sid=cf14a2c43069432b7934bbacf0b6ba7f>1×slots регистрацию более популярный вариант это</a>
<a href=https://forum-macan.ru/viewtopic.php?t=11146>1×slots зеркало регистрация в 1×slots casino</a>
<a href=http://board.eternityrpc.com/member.php?action=profile&uid=369>1×slots зеркало регистрация</a>
<a href=http://smpn1bejen.sch.id/forum/>1 x slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепы все заходить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой или баллами.
#8071 Charlesgunny
casino ru porno Илона Маркова, хоккеистка <a href=https://sovsekretno.net/>порно с Анна Щербакова, фигуристка</a> casino ап 1×bet официальный <a href=https://specreporter.com/>Окладникова Ирина Андреевна порно</a> казино рояль 1×bet официальный xbet пин casino casino зеркало сегодня casino зеркало сегодня Лут Оксана Николаевна порно Шевцова Татьяна Викторовна порно
#8072 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8073 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8074 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать
Иногда у гостей вебсайта имеют возникнуть трудности, задачи, препядствия при активации приобретенного промо-кода. В этих случаях, необходимо адресоваться за помощью в саппорта «Support». Для получения ответа, непременно указывается конкретная причина воззвания и подтверждается информация дополнительными скриншотами. Если сложилась неоднозначная ситуация, всегда можно обратиться к основному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ.При отыгрыше бонусных средств, необходимо учесть срок деянья бонуса и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный приз несомненно аннулирован. <a href=http://filmkachat.ru/>1×slots зеркало подтвердит вашу регистрацию если говорить</a> Фриспины — бесплатные вращения, коие разрешают игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины считаются самым знаменитым и желаемым обликом приза — бесплатные вращения иногда эффективнее и веселее в отыгрыше, чем другие облики бездепов. <a href=https://offcourse.co/users/profile/property-development-3d-renders/>https://offcourse.co/users/profile/property-development-3d-renders/</a> Шаг 4. Активация. Внимательно изучите условия, информацию по ограничениям и сроке действия бонусного предложения. Разобравшись с правилами, возможно активировать приз в собственном офисе (время ? с использованием промокода) либо по запросу в саппорт. 1× slots casino зеркало <a href=https://premiumstoreco.com/user/koreanxr0611inbox-lv/>https://premiumstoreco.com/user/koreanxr0611inbox-lv/</a>
1×slots подтвердит вашу регистрацию если говорить
Обычно для получения бонусов без депо, казино выдвигает лояльные и вполне выполнимые обстоятельства, но есть ряд поступков коие воспрещены и шансы стать противные последствия:Отзывы читателей о бонусных акциях помогут составить впечатление, но не запамятовывайте о субъективности личных объяснений. <a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=55171&extra=>1× slots зеркало</a> 1×slots зеркало на сегодня <a href=https://backpacker-footsteps.com/backpacker-footsteps-forum/profile/forsedropka/>https://backpacker-footsteps.com/backpacker-footsteps-forum/profile/forsedropka/</a> Вы не в коем случае ни чем рискуете, а только выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической игры на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, научится регулировать менять ставки и полосы, исследовать бонусные игры и их выигрышные композиции, ну счете просто зарядится кучей впечатлений! Ведь вы будите выступать на бонусные свои, коие можно отыграть и исключить, но просто на демо счет, тем наиболее адреналин в крови еще повысится а пульс забьется с частым ритмом!Максимальный размер ставки, кот-ый невозможно превышать же бонус не будет всецело отыгран. В случае нарушения сего правила, бонус и выигрыш с него будут аннулированы. 1×slots зеркало быструю регистрацию а также мгновенное
x1 slots регистрация в 1×slots casino
Для верификации аккаунта нужно дать специалистам технической помощи отсканированную копию паспорта и счета за коммунальные предложения, еще фотографию банковской карты либо экрана страницы электронного кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для доказательства личности.Бесплатные призы казино без депо можно получить в виде валютных средств на бонусный счет (исключить их можно лишь последствии отыгрыша), фриспинов, забавы или кешбэк-бонуса. <a href=http://l2help.lt/user/Walterput/>http://l2help.lt/user/Walterput/</a> Бездепозитный бонус казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в этом и заключается основное различие. 1×слот регистрация в 1×slots casino Если вы бывалый игрок, вы должны аристократия, собственно бонус без депо – редкая находка. Тем ниже, мы еженедельно изучаем интернет, дабы отыскать вам лучшие бездепозитные предложения.Каждый из бездепозитных призов без пополнения 2022 содержит собственный определенный вейджер для отыгрыша, так же в любом казино он уточняется персонально — где то он х55 а где-то х30, повторюсь везде по различному!
1×slots актуальное зеркало
Многие азартные клубы ограничивают сумму вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании промоакции, суммы Вы не сможете вывести. Разница несомненно аннулирована, Вы в не можете делать на нее ставки.Шаг 4. Активация. Внимательно исследуйте условия, информацию по лимитированиям и сроке действия бонусного предложения. Разобравшись с правилами, можно активировать приз в личном офисе (от ? с использованием промокода) или по запросу в саппорт. <a href=https://sadhaka.nl/forum/viewtopic.php?t=102561>1×slots быструю регистрацию а также мгновенное</a> Необходимость отыгрыша. Вейджер в этом случае повыше, чем для призов за депо. И пока свои не отыграны, вывести их нельзя.Также учтите, собственно некоторые игровые платформы сужают перечень стран, которые готовы получить предложенный бездепозитный бонус за регистрацию. К образцу, есть онлайн-заведения, выдающие сходственные бонусы лишь жителям определенных государств. К примеру, интернет казино 777 Оригинал дает бездепозитный приз лишь игрокам из России и государств СНГ. Или напротив, пичкают вознаграждением всех, кроме обитателей неких стран (как сего, стопам пристально изучать список, дабы потом не появилось практически вопросов и претензий). 1×slots коды <a href=https://oke.zone/profile.php?id=51510>https://oke.zone/profile.php?id=51510</a> На странице представлены бездепозитные бонусы за регистрацию в казино редкая заслуга за коей гонятся все игроки как новенькие, так и мастера. Мы тоже уделяем огромное внимание на присутствие призов при формирование рейтинга казино на средства. Бездепозитный бонус это возможность выступать даром и выиграть реальные деньги.
сайт 1× slots casino
Игры, в можно играть на бонусные деньги. Проверьте перечень игр, в возможно выступать на бонусные средства, вполне они Вам не понравятся и не стоит тратить своё время на эту акцию.Иногда виде одобрения за регистрацию все выдаваться билеты для роли в турнирах. Условия их проведения очень выделяются, поэтому мы рекомендуем ознакомиться с любым предложением отдельно. <a href=https://www.bondhuplus.com/read-blog/87441>https://www.bondhuplus.com/read-blog/87441</a> Получить приветственный приз могут лишь новые клиенты онлайн-казино. Способы описаны в критериях промоакции каждого легального казино, чаще всего это:Фриспины без депо либо дополнительные свои посодействуют поближе познакомиться с игровой платформой и её функциями. За счёт даров возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям ради игры напротив живых крупье. 1×slots официальный зеркало рабочее
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.survival-readiness.com/viewtopic.php?t=251408>1×slots официальный регистрация</a>
<a href=https://bajarmp3.net/showthread.php?tid=400127>1×slot официальный сайт</a>
<a href=https://forum.home-visa.ru/memberlist.php?mode=viewprofile&u=3536>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чтобы выступать даром на реальные деньги в казино, порой достаточно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные деянья.
#8075 Charlesgunny
букмекерская контора бетсити ставки на спорт букмекерские конторы <a href=https://kompromat1.online/>порно с Матвей Сафонов (футбол)</a> порно с Константин Тюкавин (футбол) леон букмекерская контора <a href=https://krtka.info/>vavada casino</a> 1×bet официальный играющие казино онлайн ограбление казино винлайн букмекерская контора официальный сайт гта казино порно с Бондаренко Анастасия Борисовна пинко casino
#8076 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8077 Charlesgunnyhttp://filmkachat.ru
зеркло казино 1×slots
Каждый из бездепозитных бонусов без пополнения 2022 содержит свой конкретный вейджер для отыгрыша, например же в каждом казино он уточняется персонально — где то он х55 а где-то х30, повторюсь везде по разному!Бездепозитный бонус предоставляется новому игроку за конкретные действия. Часто презент вид денег либо фриспинов выдается за регистрацию, благодаря чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. <a href=http://filmkachat.ru/>1хслотс рабочее зеркало</a> <a href=https://www.slideshare.net/ssuser16af54>https://www.slideshare.net/ssuser16af54</a> 1×slots рабочее зеркало на сегодня <a href=http://www.iinspiradas.com/2017/01/como-comprar-da-china-aliexpress.html>http://www.iinspiradas.com/2017/01/como-comprar-da-china-aliexpress.html</a>
1×slots сайт
1хслотс рабочее зеркало Мы советуем не отрицаться от подобных услуг известных казино. Выделите количество минут на регистрацию, получите приз и попытайтесь его отыграть. Может быть, сегодня удача несомненно на вашей стороне! <a href=http://xiaoping777.com/home.php?mod=space&uid=55530>http://xiaoping777.com/home.php?mod=space&uid=55530</a> Важно, убедитесь том,, что раньше не регистрировались в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи. 1×slots зеркало регистрацию более популярный вариант это
1×slots официальный зеркало
Но есть игорные заведения, которые готовы просто например жертвовать средства на забаву. Для этого достаточно сделать профиль. Чтобы исключить собственный выигрыш, для поначалу нужно выполнить обстоятельства отыгрыша, указанные в условиях получения бездепозитного депозита. <a href=https://www.varranger.com/vforum/index.php?action=profile;u=36263>https://www.varranger.com/vforum/index.php?action=profile;u=36263</a> 1×slots регистрация 1×slotscasino 56 online Игры, каких можно играть на бонусные средства. Проверьте список игр, каких возможно играть на бонусные средства, возможно они Вам не понравятся и не стоит расходовать своё время на такую акцию.Условия, на коих предоставляется бездеп, регулируются казино. Каждая промоакция имеет доскональные управляла, ссылка на коие обычно находится в промообъявлении. В их указываются лимиты, вейджер, список дешевых игр. Если оператор скрывает данные о предложении, то пользоваться им надо.
1× slots casino зеркало
Прочитайте правила бонусной программки, какой желайте принять. Да, мы безотступно рекомендуем устроить это до регистрации. <a href=https://forum.dis-course.net/viewtopic.php?t=492851>1×slots зеркало регистрация</a> Заполняя данные в личном профиле, указывайте лишь достоверную информацию, так как Вам понадобиться ее подтвердить в при выводе денег. Частенько новенькие не понимают, как активировать презенты или вывести первый выигрыш. Для сходственных случаев наша команда описала основные определения – собственно это фриспины, вейджер, как его отыграть, чего необходимо протекать верификацию. 1× slots casino официальный сайт <a href=https://gusev-online.ru/user/DoctorLazutaOa/>https://gusev-online.ru/user/DoctorLazutaOa/</a> Одним из поводов отдавать преимущество, льготу одному либо иному заведению содержится в привлекательности предлагаемых акций и даровых предложений. Безвозмездные фриспины, выдаваемые без нужды создавать какой-либо вклад, в списке располагается далеко не в конце.
казино 1× slots официальный сайт
Вывод выигрыша с бездепозитных бонусов казино – щедрый подарок от азартных клубов. Но дабы исключить свой доход, нужно выполнить ряд условий:Для получения бонуса нужно пригласить в забаву свежего клиента. Казино начисляет пригласившему фиксированный процент от взносов приглашённого повторяющий бонуса: почаще всего его размер не превышает 10%. Срок действия приза в большинстве случаев не превышает месяца: пригласивший получает приз в зависимости от проигранных ставок приглашённого в 1-ый месяц игры. Казино выделяет возможность заработать и исключить реальные деньги на бездепозитных призах. Обычно, это незначительная сумма, которую казино имеет для разрешить презентовать игроку. <a href=https://www.ecigtalk.org/blogs/u194226/custom-3695.html>https://www.ecigtalk.org/blogs/u194226/custom-3695.html</a> 1× slots casino зеркало Диапазон ставок, коие вправе устроить игрок, кроме лимитирован. Обычно ставить возможно маленькую необходимую — пределах 10–30 рублей за одно вращение.Иногда в качестве бездепа, казино дарует наименьший бонус (до 50 руб. ), ради которого не заморачиваться.
<b>Смотреть еще похожие новости:</b>
<a href=http://g2clubs.com/healthy-workout/google/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<a href=https://forum.bedwantsinfo.nl/thread-692350.html>зеркло казино 1×slots</a>
<a href=https://your-portal.at.ua/forum/43–61929–3#88485>1×slots зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для всех бездепозитных призов действует максимальный лимит на выигрыш. Он показывает предельную необходимую, коию возможность получить, играя на бонусные кредиты. Как только вас получится выполнить требования вейджера, допустимый максимально будет переведен с бонусного счета на главной, а остаток будет списан. Подтверждение регистрации. Казино просят привязки профиля к электрическому адресу и номеру аппарата. Для сего на e-mail отчаливает письмо со ссылкой, а на телефон ? текстовое извещение с кодом.
#8078 Charlesgunny
casino играть up casino <a href=https://7club7.com/>включи казино</a> Анна Михалкова казино рояль смотреть <a href=https://vestnik-jurnal.com/>казино вход</a> Черкесова Бэлла Мухарбиевна порно casino pin официальный pin up casino официальный порно с Петр Ян (ММА) порно с Артемий Панарин (хоккей) retro casino casino 7k сегодня
#8079 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8080 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия
Активация денежного вознаграждения происходит механически в творения профиля или применения промокода. Иногда операторы предъявляют вспомогательные притязания: подписаться на странички казино в соц сетях или на рассылку рекламных извещений, скачать и установить вспомогательный софт и т.д. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasino09k online</a> <a href=https://onlyfans.com/u448741277>https://onlyfans.com/u448741277</a> 1×slots регистрация 1×slotscasino 56 online <a href=https://praisenpray.org/forums/member.php?action=profile&uid=62850>https://praisenpray.org/forums/member.php?action=profile&uid=62850</a> В разделе с призами активировать свой подарок. Найти игры, для которых учтено одобрение и применять бонус по назначению.Мы собрали и выпустили список лучших бездепозитных казино с бонусами за регистрацию, которые гарантируют щедрые выигрыши и моментальные выплаты.
1×slots регистрация на официальном сайте
Но эти рамки не смущают и хайроллеров, поскольку коэффициенты на слотах разрешают рассчитывать на солидные выигрыши, а в некоторых автоматах разыгрывается прогрессивный джекпот.Бонусные деньги – небольшая сумма денег для старта в новом казино. На бонусные средства, обыкновенно разрешено играть во все забавы, не слотов с прогрессивным джекпотом и игр из раздела live casino. 1×slots зеркало проходить регистрацию это отличный вариант <a href=https://www.walkscore.com/people/278190099144/osipovichi>https://www.walkscore.com/people/278190099144/osipovichi</a> Многие азартные клубы ограничивают сумму вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании промоакции, суммы Вы не сможете вывести. Разница несомненно аннулирована, Вы в не можете делать на нее ставки.В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и когда неоднозначных ситуаций нет способности куда-то посетовать и обосновать свою правоту. 1х слот регистрация в 1×slots casino Получать информацию о самых прибыльных бонусах можно без постоянного прогноза новостей казино. Мы взяли эту задачку на себя и безпрерывно следим за услугами операторов, избирая лучшие из них. В данном разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список промоакций периодически пополняется. В топ вошли самые свежие бездепозитные призы за регистрацию в казино 2020, кратковременные и закрытые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и аспектам. Если срок деянья промоакции истек, она удаляется из списка.Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, например как Вам придется ее доказать дальнейшем при выводе денег.
1×slots зеркало регистрацию более популярный вариант это
Высокая конкурентность в сегменте азартных игр мотивирует операторов привлекать клиентов разнородными промоакциями. Благодаря данному у гостей появляется вероятность получить призы в казино за регистрацию без депо. Воспользоваться таким предложением возможно, минуя процедуру внесения денег на игровой счет, просто активировав акк на сайте. Наш гид по бездепам поможет выбрать самую привлекательную бонусную программку, разузнать управляла получения такого гонорары и воспользоваться им с наибольшей выгодой. <a href=https://escortexxx.ca/author/jameslor/>https://escortexxx.ca/author/jameslor/</a> 1×slots регистрация 1×slotscasino09k online Варианты выигрыша находятся от Вашей удачи и критерий игорного портала. Выше мы заявили, что кое-какие бездепозитные бонусы в 2022 году выдаются с лимитированиями по максимальной выплате. Однако, остаются другие, все, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на деньги, можно выиграть неописуемые суммы. Сегодняшние игровые автоматы либо видео слоты, как их называют. Могут выдавать солидные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000.
1хслотс 1хслотс регистрация перейти на 1×slots
Ещё одно распространённое акционное предложение – привлекательный презент с сомнительными требованиями. К примеру, клуб сулит $100 в качестве бездепа, но с вейджером х80 или х100. Отыграть такой вейджер фактически нереально и поэтому другого, как концентрироваться на более заманчивых акциях. <a href=http://big.bestforums.org/viewtopic.php?f=7&t=10286>1×slots рабочее зеркало на сегодня</a> Фриспины. Бесплатные вращения предназначены для применения в видео-слотах. Внимательно читайте условия – они часто выдаются для некоторых машин. В зависимости от клуба возможность делать конкретное количество ставок. Кстати, современные игорные жилища выделяют вероятность заводить «одноруких бандитов».Поспешите забрать бездепозитные бонусы за регистрацию в казино из представленного перечня. Все платформы не только ведут легальную деятельность, но и обрадуют добросовестными результатами забавы, высочайшей отдачей, резвыми выплатами. 1×slots регистрация 1×slots review live <a href=http://j90806hs.bget.ru/user/Raymondviart/>http://j90806hs.bget.ru/user/Raymondviart/</a> Бездепозитный приз предоставляется новому игроку за определенные деяния. Часто презент вид средств или фриспинов выдается за регистрацию, благодаря чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.
1× slots зеркало
Это также благотворительные финансы, коие поступают на аккаунты свежеиспеченных геймеров в регистрирования. А необыкновенность этих бонусов произведено что, нет, собственно обретенные деньги непременно стопам применять в продолжении назначенного медли. Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, the decision только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.За привлечение друга ? в рамках партнерской программки клиент получает вознаграждение за вербование новых пользователей. <a href=https://clients1.google.co.zw/url?q=https://doctorlazuta.by/>https://clients1.google.co.zw/url?q=https://doctorlazuta.by/</a> При игре на бонусные свои воспрещается выступать в игровые автоматы с современным джекпотом и игры из радела live casino. Кроме такого, кое-какие казино дают бездеп на раз или некоторое определенных слотов, и в иных забавах Вы не можете на них выступать. скачать 1×slots на андроид мобильная версия Первый образующийся вопрос, это, для выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают новых игроков. Последним проще начать забаву на средства с презента за регистрацию. Им не нужно пополнять баланс и расходовать личные средства. Новички получают бесплатные спины или свои на счёт. С их помощью знакомятся с игровым процессом, крутят слоты и проделывают ставки в рулетке.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.emv.info/memberlist.php?mode=viewprofile&u=424>зеркала 1×slots</a>
<a href=https://karakol.com.kg/user/Jameskef/>1× slots регистрация в 1×slots casino</a>
<a href=http://moneysweet.listbb.ru/viewtopic.php?f=2&t=5201>1×slots регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Отказ в прохождении верификации. Если заказчик не желает либо не может дать документы, подтверждающие его личность, профиль несомненно заблокирован совместно, вкупе со всеми бонусными начислениями. Если вы опытный игрок, вы обязаны знать, собственно бонус без депозита – редкая находка. Тем не, мы еженедельно исследуем онлайн, дабы найти вам наихорошие бездепозитные предложения.
#8081 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8082 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало быструю регистрацию а также мгновенное
Иногда у гостей сайта шансы возникнуть проблемы при активации полученного промо-кода. В таких случаях, необходимо адресоваться за подмогою в службу «Support». Для получения ответа, обязательно указывается конкретная причина воззвания и подтверждается информация дополнительными снимками. Если сложилась неоднозначная обстановка, практически возможно адресоваться к главному регулятору или контролирующему органу, выдавшему данному заведению лицензионный документ. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots casino c2d ru</a> Постарайтесь отыграть вейджер, чтобы появилась вероятность оставить заявку на выплату. Кстати, на всех сайтах, представленных в списке, доступны современные платёжные приборы. Вы сможете получить выигрыш на электронной кошелёк, карту, телефонный.Теоретически, к бесплатным призам можно отнести например называемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, поэтому что они предоставляют лишь вероятность делать ставки. <a href=https://culture-informatique.net/forum/quelquun-peut-mexpliquer/what-is-a-3d-render-understanding-the-basics-and-beyond/>https://culture-informatique.net/forum/quelquun-peut-mexpliquer/what-is-a-3d-render-understanding-the-basics-and-beyond/</a> Получив свой презент, Вы сможете бесплатно играть на настоящие деньги, а выполнив условия отыгрыша, вывести свой выигрыш.Необходимость отыгрыша. Вейджер в этом случае повыше, чем для призов за депо. И пока свои не отыграны, вывести их нельзя. 1×slots регистрация то дальше необходимо пройти <a href=https://www.google.ne/url?q=http%3A%2F%2Fdoctorlazuta.by>https://www.google.ne/url?q=http%3A%2F%2Fdoctorlazuta.by</a> Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша бонусов. Заведения постоянно устанавливают наивысшую ставку, возможную по условиям вейждера.При регистрации в либо ином интернет игральном заведении — для дается раз шанс испытывать свою фортуну не внося свои монеты. Замечу собственно эту поощрительную предложение предоставляют не все онлайн игровые площадки, а лишь щедрая половина из них. Которые мы подготовили для Вас в нашем списке.
1×slot регистрация
1×slots актуальное зеркало Все безвозмездные бонусы кажутся заманчивыми. Кто же категорически от способности сыграть в онлайн-казино, не рискуя средствами, хотя получая выигрыши. Но далеко не все бездепозитные бонусы мере презентабельны для рассудительного посетителя. <a href=https://orbitalscoreboard.com/user/forsedropot/>https://orbitalscoreboard.com/user/forsedropot/</a> 1×slots регистрация то дальше необходимо пройти К сожалению, нет. Почти все казино, просят внесение хотя бы одного малого депо для вывода выигрыша с бездепозитного приза. Также учитывайте, собственно вывести деньги разрешается только на что, эту платежную систему, с коей был сделан депозит.Помните, собственно в неких забавах сумма ставки идет в зачет вейджера только отчасти. Так, в настольных и карточных забавах лишь от 5% до 50% суммы ставки считаются как отыгранные деньги, в то время как в слотах идет в зачет все one hundred percent суммы.
1хслотс официальный сайт зеркало
Бездепы имеют заходить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами.Вейджер (wager) – это коэффициент, кот-ый показывает на какую сумму необходимо сделать ставок, чтобы исключить приз из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода этого приза, Вам нужно сделать ставок на необходимую: 500*70=3500 руб. Только всецело отыграв приз, Вы можете исключить собственный выигрыш. Еще одно условие касается объемов ставки. Операторы устанавливают наивысшую необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном кабинете. При превышении лимита есть риск потерять бонуса. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, заказчик может столкнуться с запретом назначать фишки на шансы.Минимального оборота. Этот предел устанавливается вейджером — пока игрок не поиграет на установленную необходимую, вывод средств будет недосегаем. <a href=https://www.spacepub.net/members/5051-Joshuaordiz?s=6d65ace5c292be5e026f5f863eb72db8>https://www.spacepub.net/members/5051-Joshuaordiz?s=6d65ace5c292be5e026f5f863eb72db8</a> 1×slots регистрация то дальше необходимо пройти
1×slots casino зеркало
Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро или 20 $. Если выдаются фриспины, их число редко выше нескольких десятков бесплатных вращений. <a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=257341>1×slots зеркало регистрацию более популярный вариант это</a> Большинство клубов привлекают внимание игроков за счёт разнообразных подарков. На одних веб-сайтах можно получить виртуальные кредиты, которые откроют доступ ко всему софту. На иных же, администрация предлагает бесплатные вращения для запуска лучших интернет слотов. Несмотря на различные промоакции, стоит выделить самые основные. Приглашаем делиться воззрениями о призах. Это поможет иным юзерам избирать наиболее выгодные предложения.Баланс игрока пополняется на подходящую необходимую. К ней используется вейджер, указанный в правилах промоакции. Вывести выигрыш можно будет после того, как пользователь устроит требуемый объем ставок из собственных средств. В редчайших случаях бездеп трудится в формате Free Play. На счет пользователя зачисляется большая сумма, и предоставляется малый срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по окончании этого периода сумма на счету будет превышать изначальную, то разницу возможно будет исключить либо использовать для последующих ставок. 1×slot регистрация <a href=https://backpacker-footsteps.com/backpacker-footsteps-forum/profile/jameswah/>https://backpacker-footsteps.com/backpacker-footsteps-forum/profile/jameswah/</a> Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.
1×slots регистрация то дальше необходимо пройти
Практически все онлайн казино с бездепозитным бонусом за регистрацию учитывает программу преданности — систему одобрения постоянных клиентов, кот-ая произведено из колличества уровней. При достижении игроком еще уровня на его счёт поступает приз. Чем выше уровень — тем щедрее бонус. <a href=https://forums.dfine.net/member.php?action=profile&uid=1143>https://forums.dfine.net/member.php?action=profile&uid=1143</a> Получив свой презент, Вы сможете безвозмездно играть на реальные деньги, а выполнив обстоятельства отыгрыша, исключить собственный выигрыш.В большинстве заведений сделать это возможно по e-mal, по номеру телефона, через социальную сеть либо гугл-аккаунт. 1×slots сайт Отказ в прохождении верификации. Если клиент не желает или имеет предоставить документы, подтверждающие его лицо, профиль будет заблокирован вместе со всеми бонусными начислениями.Бездепы обыкновенно предлагают с отыгрышем — мгновенно вывести выигранные свои невозможно. Перевод денег со счета будет вероятен после как, как пользователь выполнит все требования казино, а сумма не превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, протяжении коих клиент вправе воспользоваться предложением. Обычно они не превосходят нескольких дней последствии активации.
<b>Смотреть еще похожие новости:</b>
<a href=http://moneysweet.listbb.ru/memberlist.php?mode=viewprofile&u=6851&sid=b5d0b8fc6feca1bd26adfa53b46d3144>1×slots зеркало этих способов предполагает регистрацию</a>
<a href=http://khodaumo.com/forum/viewtopic.php?f=2&t=75931&sid=2a8cc00a27b2101afece877742c990a4>1×slots официальный demo регистрация в 1×slots casino</a>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=288260&pid=673582#post_673582>1×slots регистрация на 1хслотс</a>
<a href=https://10nsk.ru/user/JosephSuple/>рабочее зеркало 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Это раз из основных показателей привлекательности презента. С завешенным коэффициентом том мастера не смогут выполнить обстоятельства по отыгрышу. И важно, насколько привлекательно выглядит предложение – бездепозитный приз казино в размере $500 либо $1 000. Чтобы новенькие лучше вникли, что же такое вейджер, мы разберём на примере. В большинстве заведений устроить это возможно по адресу электронной почты, по номеру аппарата, через социальную сеть или гугл-аккаунт.
#8083 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8084 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Особую изюминку видео слотам присваивают оригинальные знакы. С их появлением активируются различные призы. Вы сможете запустить дополнительный уровень и увеличить сумму выигрыша. Есть знаки, коие сменяют ненадобные элементы и сами делают выигрышные комбо. Не стоит забывать и тему бонус-тур. После любого удачного спина есть шанс прирастить необходимую выигрыша в два либо четыре раза. <a href=http://filmkachat.ru/>1×slots казино мобильная версия</a> Наши специалисты изучают обстоятельства акции, после в ручном режиме проверку их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и другие характеристики. Мы не рекламируем казино, а даем игрокам информацию о наилучших из их.Обычно для получения призов без депозита, казино выдвигает приклнные и вполне выполнимые условия, хотя есть ряд действий которые воспрещены и шансы повлечь за собой досадные последствия: <a href=https://www.fortunetelleroracle.com/technical/how-hospitality-design-visualization-elevates-guest-experience-936407>https://www.fortunetelleroracle.com/technical/how-hospitality-design-visualization-elevates-guest-experience-936407</a> Начнём с такого, собственно каждое рекламную за регистрацию подразумевает некие условия. Бездепозитные бонусы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, нужная для исполнения условий. Пример, получили безвозмездные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 рублей, неудачных либо выигрышных, неважно. После исполненья, бонусный баланс перейдёт на настоящий и станет доступным к выводу.Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. 1×slots регистрация на 1хслотс <a href=http://youyanggse.co.kr/board/bbs/board.php?bo_table=free&wr_id=231577>http://youyanggse.co.kr/board/bbs/board.php?bo_table=free&wr_id=231577</a> Бесплатный приз – кредиты, которые онлайн-казино начисляет посетителю, не заставляя его пополнять игровой счет.
1×slots рабочее зеркало на сегодня
1×slots регистрация на 1хслотс <a href=http://g95887q6.beget.tech/user/GlennDut/>http://g95887q6.beget.tech/user/GlennDut/</a> Нет. Казино раздают бесплатные бонусы за регистрацию, для того, дабы заказчик имел ознакомиться с игровым заведением. А дабы исключить его, нужно выполнить обстоятельства отыгрыша. 1×slots официальный сайт мобильная версия B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.
1×slots казино зеркало
Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и более. Когда игроку полагается много фриспинов, администрация имеет бить3 их начисление на несколько дней. Бесплатные вращения предоставляются для определенного слота, который указывается в правилах акции. Воспользоваться бездепом можно не во всех игровых автоматах: казино вдруг устанавливает лимитирование для посетителей. Конечно, это возможно счесть некоторым неудобством для игрока, но справедливости ради стоит отметить, что выбор автоматов всё одинаково остаётся достаточно великим.Возьми собственный презент. Чаще всего бонус активируется сразу после регистрации. Но бывают ситуации, когда нужно забежать в собственный офис либо написать в справочную службу. <a href=https://bbs.epday.com/home.php?mod=space&uid=635593>https://bbs.epday.com/home.php?mod=space&uid=635593</a> x1 slots 1хслотс регистрация перейти на 1×slots Приветственный бездеп предоставляется любому игроку лишь раз один. Казино дерутся с например называемыми бонусхантерами (от англ. Bonus Hunter — доброволец за призами), пытающимися заводить многочисленные аккаунты для надувательства оператора и повторного получения подарка. Исключить сходственные деяния дозволяет верификация данных. Администрация вправе потребовать у клиента подтвердить персональные данные, указанные при регистрации.Когда идет о денежных бонусах, казино всегда устанавливают обстоятельства вейджера, коие нужно выполнить, дабы вывести выигрыш.
1×slots регистрацию процедура займет всего лишь
<a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=89050>1×slots рабочее зеркало</a> Самые свежие бездепозитные призы в казино за регистрацию 2022 года с выводом прибыли присутствуют на этой страничке. Посетитель возможность расценить условия получения и начать выступать на средства без внесения депозита. При данном игроку главно понимать, на каких условиях и какими способами него вывести полученный выигрыш. Для этого необходимо оценить перечень присоединенных платежных систем.Бездепозитные бонусы за регистрацию в игровых автоматах для владельцев онлайн-казино являются долею маркетинговой кампании, направленной на увеличение аудитории вебсайта. Так они продвигают свои бренды и привлекают новых посетителей. 1х слотс зеркало регистрация в 1×slots casino <a href=http://biosafe.tj/user/ArnoldZem/>http://biosafe.tj/user/ArnoldZem/</a> Иногда операторы настоятельно внесение минимального депо перед выводом для верификации платежного инструмента. В некоторых казино данный депо кроме предстоит отыграть.В наше время довольно просто получить бонус за регистрацию в казино. Практически любой игорный дом с готовностью начисляет деньги или бесплатные вращения. Многие гэмблеры пользуются этим и не стесняются региться в любом клубе с выгодными критериями. Кстати, это замечательная вероятность выработать победную стратегию и сорвать джекпот.
1×slots официальный зеркало
Самый распространённый из сходственных бонусов, окончательно же, бездеп на денек рождения клиента — приз вид фиксированной суммы либо фриспинов поступает на счёт игрока, а воспользоваться им возможно в течение установленного периода медли.При пользовании бездепозитным призом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют количество видов лимитов: Когда речь идет о получении бездепозитных призов в казино, для направьте на следующие обстоятельства: <a href=http://suprememasterchinghai.net/bbs/board.php?bo_table=free&wr_id=854808>http://suprememasterchinghai.net/bbs/board.php?bo_table=free&wr_id=854808</a> Но а в вы теснее профи по интернет казино, кликаем на красную кнопку «Получить» и Вы автоматически перейдете в интернет казино; 1×slos регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://www.fromrus.su/index.php?/topic/24359–1×slot-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE/>1×slot зеркало</a>
<a href=https://forum.bedwantsinfo.nl/thread-689989.html>1×slots официальный сайт скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Максимальная ставка ? устанавливается в денежной счета и ограничивает объем ставки за раз спин. В случае ее превышения приз возможность быть аннулирован. Также в правилах может содержаться запрет на размещение ставок определенного облика, к, по равным шансам в рулетке (словами, на чет либо нечет, красноватое или темное и т.д. ). Как управляло, при выводе финансов, от играющего требуется только устроить минимальный вклад чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом личный счет.
#8085 WalterCrichhttps://skins4all.store/
<a href=https://skins4all.store/>Explore CS2 Skin</a> Discover the Universe of CS2 Weapon Skins: Select the Best Appearance for Your Playstyle
Improve your performance with distinct, superior CS2 skins that elevate the look of your gear and make your inventory truly be exceptional. We provide a wide range of items — from exclusive skins to special edition collections, enabling you the ability to tailor your equipment and display your preferences.
Reasons to Pick Us? Getting Counter-Strike 2 skins here is efficient, reliable, and simple. With rapid automated fulfillment straight to your in-game storage, you can immediately playing with your recently purchased gear immediately.
Top Benefits: – Safe Payment: Enjoy trusted, risk-free transactions on every order. – Competitive Prices: We deliver the lowest item rates with frequent price drops. – Diverse Options: From low-cost to top-tier designs, we offer it all.
Steps to Buy: 1. View the Collection Navigate our wide catalog of items, categorized by style, rarity, and appearance. 2. Select Your Option Once you select the preferred design, place it to your order and move to purchase. 3. Apply Your Recently Purchased Gear Access your gear instantly and apply them while gaming to show off.
Why We Are Trusted: – Extensive Variety: Discover cosmetics for all style. – Transparent Costs: Clear rates with zero extra surprises. – Quick Transfer: Get your skins right away. – Secure Transactions: Trusted and protected transactions. – Customer Support: Our staff is here to guide you around the clock.
Get Started Immediately! Uncover the best designs and boost your playstyle to the top tier. Whether you’re planning to improve your inventory, assemble a premium inventory, or merely be unique, we|our store|our site|our marketplace is your preferred destination for high-end Counter-Strike 2 skins.
Join us and select the skin that highlights your taste!
#8086 JustinErype
https://pinup2025.com/ пин ап зеркало
#8087 JustinErype
https://casinositeleri2025.pro/ en iyi bahis sitesi hangisi
#8088 EdwardRek
https://pinup2025.com/ пин ап казино зеркало
#8089 KennethCrapehttps://adventuresinminecraft.com
Explore the Realm of Minecraft: Your Supreme Endurance and Disorder Exploration Welcome to your Gateway to the Exceptionally Exciting and Engaging Minecraft Online Experience. Whether you’re a Builder, Fighter, Adventurer, or Schemer, our Server Presents Infinite Chances to Take Part In Endurance and Freedom Features in Methods you’ve Rarely seen Before.
Why Opt For Explorations in Minecraft? Our Realm is Created to Offer the Best Minecraft Journey, Combining Tailored Worlds, Exciting Mechanics, and a Vibrant Community. Traverse, Overcome, and Design your own Journeys with Exclusive Components Designed for All type of User.
Key Highlights – Survival and Chaos Options: Encounter the Excitement of Persisting against the odds or Plunge into Chaotic PvP Engagements with no rules and full freedom. – Huge Network Scale: With Space for up to 3,750 Users, the Gameplay never stops. – 24/7 Platform Uptime: Join At Any Moment to Explore Lag-Free, Stable Interaction. – Custom Content: Navigate our Expertly Designed Minecraft Worlds Packed with Enhancements, Extras, and Exclusive Objects from our Online Shop.
Distinctive Interaction Modes
Endurance Option In Endurance Option, you’ll Traverse Wide Terrains, Procure Resources, and Design to your heart's content. Battle off Creatures, Team Up with Partners, or Conquer on Single-Player Trials where only the Resilient Overcome. Chaos Scenario For Players Wanting Anarchy and Excitement, Anarchy Option Offers a World with Unlimited Play. Dive in Intense PvP Battles, Build Groups, or Dominate Enemies to Control the Realm. Here, Persistence of the Best is the Sole Rule.
Special Minecraft Features – Exploration Terrains: Traverse Custom Minecraft Maps and Adventurous Tasks. – Trading and Exchanges: Our Community-Driven Economy Permits you to Exchange, Buy, and Offer Products to Ascend the Ranks and Establish Your Identity as a Strong User. – Minecraft Store: Enter Exclusive Tools, Improvements, and Levels that Boost your Interaction.
Minecraft Inventory: Power Up Your Experience Our Virtual System Provides a Range of Improvements, Levels, and Goods to Suit every Approach. From Inexpensive Contribution Packs to High-Tier Statuses, you can Gain Exciting Options and Bring your Journey to the Top.
Top Items – Donate Offers (x10) – €1.00 – VIP – €1.40 – Elysium Tier – €20.00 – OWNER Status – €40.00 – BOSS Rank – €60.00
Top Ranks for Top Players – CREATOR (€10.00) – Unlock Creative Options to Bring Out your Vision. – Vanguard (€12.00) – Top Features and Special Advantages. – Paragon (€59.10) – Top Privileges for the Premier Player. – Luminescent (€50.00) – Dominate as a Elite Champion on the Server.
Join Our Active Minecraft Community We Strive in Developing a Welcoming, Engaging, and Welcoming Group. Whether you’re Challenging RPG Adventures, Traversing Custom Zones, or Competing in User-Led PvP, there’s Constantly something Different to Discover.
Elements You Can Look Forward To – Friendly Network: Interact With Like-Minded Minecraft Enthusiasts from Different Countries. – Exciting Challenges: Take Part in Thrilling Challenges, Competitions, and Community-Wide Contests. – Dedicated Team: Our Team Provides Reliable Experience and Guides you with any Issues.
#8090 JustinErype
https://pinup2025.com/ pinup2025.com
#8091 StephenFag
kumar oynama siteleri <a href=" http://mi.minfish.com/home.php?… „>oyun s</a> or <a href=“ http://irc.lc/…nonplusradio ">gore siteler</a> http://www.kukuts.info/…redirect.php?… son bahis giriЕџ <a href=http://www.nokiazone.ru/nz?rid=94006&link=http://casinositeleri2025.pro>yeni casino siteleri</a> gore siteler and <a href=http://www.9kuan9.com/home.php?mod=space&uid=2103115>casino malta</a> bahis siteleei
#8092 CharlesAnityhttps://sex-shop-kh.top/
магазин интимных игрушек <a href=https://sex-shop-kh.top/>https://sex-shop-kh.top</a>
#8093 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8094 Charlesgunny
porno Виктория Баркова, легкоатлетка ramenbet casino <a href=https://vestnik-jurnal.com/>Нургалиева Эльвира Рамиловна порно</a> 1×bet слоты 1×bet top up casino скачать <a href=https://strelochnik.com/>pin up casino официальный</a> 1×bet зеркало на сегодня 1×bet xyz porno Виктория Баркова, легкоатлетка сайт 1×bet слоты ев казино 1×bet слоты ешь казино порно с Дарья Клишина, легкоатлетка
#8095 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8096 Charlesgunnyhttp://filmkachat.ru
казино 1× slots официальный сайт
Бездепы с безвозмездными вращениями предоставляют пользователям право вертеть барабаны игровых автоматов без снятия средств со счета. За каждый раунд выплачивает казино. Число спинов ограничено и редко выше сотку. Если акция содержит много безвозмездных игр, их начисление может быть разбито на некоторое дней. <a href=http://filmkachat.ru/>x1 slots 1хслотс регистрация перейти на 1×slots</a> Не рекомендуем опрометью голову хвататься за различные предложения получения средств без вложений. Вполне вероятно, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на первый взор. Альтернативой считается казино приз за депозит. Мы предлагаем вам пару советов, благодаря которым у каждого игрока будет возможность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств: <a href=https://pixabay.com/users/46661731/>https://pixabay.com/users/46661731/</a> 1хслотс рабочее зеркало <a href=https://truejesus.net/forums/member.php?action=profile&uid=4517>https://truejesus.net/forums/member.php?action=profile&uid=4517</a> Особую изюминку видео слотам присваивают уникальные символы. С их появлением активируются разные призы. Вы сможете запустить дополнительный уровень и увеличить необходимую выигрыша. Есть знаки, которые сменяют ненужные элементы и сами творят выигрышные комбо. Не стоит забывать и на бонус-тур. После любого успешного спина есть шанс прирастить сумму выигрыша в два или четыре раза.
1×slots регистрация 1×slotscasino09k online
Онлайн гемблинг развивается с любым деньком все больше и больше, новые бренды создаются не по дням а по часам. Новые интернет казино проделывают вступительные промоакции для игроков, для того собственно бы зарекомендовать себя, и что, этим самым предлагают бездепозитные бонусы за регистрацию, собственно бы не пропустить такую вероятность — как пользоваться новым бездепом, советуем навещать наш вебсайт как возможно чаще, самое смачное и свежие несомненно добавляться в этом же списке.Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. <a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=5513>1×slot казино зеркало</a> 1×slots актуальное зеркало Рассмотрим принцип его деяния на случае. Допустим, вы зарегались и получили $10 no deposit bonus с вейджером х50. Это означает, что выигранные деньги можно несомненно выводить не ранее, чем в того, как общая сумма ставок достигнет $500.Бездепозитные бонусы за регистрацию в игровых автоматах для хозяев онлайн-казино считаются долею маркетинговой кампании, направленной на увеличение аудитории сайта. Так они продвигают средства бренды и привлекают новых клиентов. <a href=http://www.cooperativacoomultexco.com/user/JamesRek/>http://www.cooperativacoomultexco.com/user/JamesRek/</a> 1×slot казино зеркало Как только вы отыграли вейджер и средства с бонусного баланса перебежали вам на настоящий счет, Вы отважно сможете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (устроить наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, совместно, вкупе с депо).
рабочее зеркало 1хслотс
Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы которые появляются у новичков. За счёт спинов получится запустить различные интернет слоты, протестировать стратегии и поднабраться навыка. Фишка сомнений, что вращения начисляются на топовые аппараты с оригинальными опциями и высокой отдачей. Не забывайте, собственно в любом акционном предложении учтены специальные требования – кратковременные ограничения, наибольший объем ставки, список дешевых игр.Все любят получать подарки. Согласитесь, практически каждый играющий человек будет сильно счастлив, если получит бесплатный презент для игры в онлайн казино просто за регистрацию или же бонус за внесенный депо, например именуемые приветственные призы для новых игроков. Соответственно эти интернет клубы будут больше востребованы и предпочтительны у игроков при выборе казино для забавы. Топ казино постоянно обновляется и добавляются новые и интересные игровые клубы с привлекательной бонусной политикой и всеми возможными привилегиями, к которым относятся эти бонусы как фриспины за регистрацию, денежные бездепозитные бонусы, еще великодушные призы за внесенный депо. <a href=https://takesalary.com/user/julesjef/?um_action=edit>https://takesalary.com/user/julesjef/?um_action=edit</a> казино 1×slots Иногда в качестве бездепа, казино дарит минимальный бонус (до 50 руб. ), ради которого не заморачиваться.
1хслотс официальный сайт зеркало
1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, если не хотите замерзнуть жертвой жуликов либо впустую потратить время; Составленный специалистами Casino.ru перечень онлайн-казино с бездепозитным бонусом разрешает игрокам сравнить спецпредложения разных операторов.Выбирая безвозмездный бонус, внимательно изучайте управляла. Убедитесь, собственно вас возможно принимать роль в акции. Уточните, в каких играх возможно скорпулезно обстоятельства вейджера. При необходимости задавайте вопросы представителям саппорта. 1×slots промокод при регистрации <a href=http://quasix.ru/user/AnthonyUnuct/>http://quasix.ru/user/AnthonyUnuct/</a> Пoдтвepдить личнocть посетителя. Для удачного вывода средств, нужно подтвердить личность посетителя. Нa этaпe вepификaции пpoфиля, работники службы защищенности должны убедиться, собственно у игрока чем раз акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не сможет исключить свой выигрыш, в у него будет несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы.Бездепозитный бонус казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и выяснить качество работы службы. Довольно часто, начиная игровой процесс, игрок теснее не желает останавливаться и делает реальный вклад. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть безвозмездно вероятно как раз таки с призом за регистрацию без необходимости вносить депозит.
1хслотс регистрация в 1×slots casino
Итак, дабы безвозмездные бонусные кредиты трансформировались в реальные деньги, которыми продоставляется управлять по собственному усмотрению, их надо(надобно) отыграть. Вейджер стопам уточнять в правилах онлайн-казино. <a href=https://sklad-slabov.ru/forum/user/9582/>https://sklad-slabov.ru/forum/user/9582/</a> Для верификации аккаунта надо(надобно) предоставить спецам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, а также фотографию банковской карты либо экрана странички электрического кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для доказательства личности. 1×slots регистрация 1×slots review live Многие казино деют в рекламных целях бесплатные призы самая для наших читателей. Чтобы их получить, нужно перебежать на игровой сайт по партнерской ссылке с нашего портала.Вышеописанная причина и считается главным моментом, следствии которого операторы отдают часть собственной прибыли на разные рекламные затраты и маркетинговые кампании. А самым действующим тут будут играть непосредственно бездепозитные призы казино 2022 с выводом за регистрацию.
<b>Смотреть еще похожие новости:</b>
<a href=http://theauction.com.au/my-account/>1×slots casino регистрация 1×slotscasino09k online</a>
<a href=https://isomedu.com/forum/profile/josephdrons/>1× slots casino зеркало</a>
<a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=123618>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<a href=https://masstr.net/showthread.php?tid=102910>1×slots casino online регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Главное преимущество спинов – вероятность выучить разные слоты. Также получится насладиться бонусными раундами, испытывать удачу в риск-туре и преумножить выигрыш за счёт особых символов. Однако не игровой процесс заслуживает внимание, ведь лучше сосредоточиться на реальном выигрыше. Верификация аккаунта. Лучше доказать личность незамедлительно после регистрации, чтобы потом не было заморочек с выводом средств. Верификация возможность протекать 2-мя путями:
#8097 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8098 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на 1хслотс
Так же стоит выделить то, что в каждом интернет казино установлен свой наибольший кешаут на бездепозитный приз. Как правило кешаут — это предельная сумма средств, которая дешевая для вывода с бездепозитного бонуса.Автоматическая активация кажется самой комфортной, но ручной метод имеет перед ней преимущества. Прежде чем применять вознаграждение от казино, стоит заблаговременно найти, сколько времени требуется на выполнение всех критерий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деяния приза. <a href=http://filmkachat.ru/>1×slots промокод при регистрации 2025</a> Как только на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу последствии сего можно забыть заявку на вывод выигрыша. Кредиты прибыльно выделяются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом настоящих средств и выделяют вероятность почувствовать азарт. Во-вторых – можно насладиться любой азартной игрой доступной на сайте. В вашем распоряжении находятся автоматы, настольные приложение, видео-покер, Live-дилеры. <a href=http://webanketa.com/forms/6gt3ac1k60qpas9r75jp6shs/>http://webanketa.com/forms/6gt3ac1k60qpas9r75jp6shs/</a> 1 x slots casino <a href=http://www.chenjiagou.net/home.php?mod=space&uid=197165>http://www.chenjiagou.net/home.php?mod=space&uid=197165</a> Мы рекомендуем не открещиваться от подобных услуг узнаваемых казино. Выделите некоторое минут на регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сегодня удача несомненно на вашей стороне!
1× slots casino официальный сайт
казино 1×slots официальный сайт Возьми собственный подарок. Чаще всего бонус активируется сразу в регистрации. Но бывают истории, когда надо(надобно) забежать в собственный кабинет или написать в справочную службу.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. <a href=http://farm-snab.ru/index.php?subaction=userinfo&user=racialteam60>http://farm-snab.ru/index.php?subaction=userinfo&user=racialteam60</a> Бездепы могут входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами.Создание аккаунта. На сайте казино нужно обнаружить регистрационную форму и наполнить пустопорожние поля собственными данными. Иногда на данном этапе потребуется указать лишь адресок электронной почты и пароль, хотя чаще хотелось заполнить анкету персональной информацией (ФИО, дата рождения, место проживания и т.д. ). Нужно свидетельствовать только настоящие данные, потому впоследствие они будут испытаны. 1×slot рабочее зеркало Нельзя осматривать забаву на средства, как вариант заработка. Азартные забавы запрещены для лиц моложе 18 лет. Topcasinobonuses.mobi классифицируется организатором азартных игр. Сайт одевает информационный нрав.
1× slots сайт
Стоит отметить, собственно бездепозитный приз выдается лишь совершеннолетним новеньким, которые, тому, шансы пригласить собственных приятелей и знакомых, того претендующих на поощрительную программку преданности. Подобная технология появилась среди конкуренцию онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры содействуют увеличению своей посещаемости, методом вербования новых игроков. Бонусы – это уникальный шанс для вероятных соучастников игры, коие все опробовать софт покер рума и убедиться, будут ли они в него играть или нет. Новый игрок испробует свои силы с настоящими оппонентами в казино.Фриспины — благотворительные вращения, коие позволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины считаются наиболее известным и желаемым обликом приза — бесплатные вращения иногда эффективнее и веселее в отыгрыше, чем другие виды бездепов. Не сложно додуматься, что no deposit bonuses почти ни не посещают великими. Чаще всего идет о пяти–тридцати долларах (либо эквиваленте данной суммы в иной валюте). <a href=https://bongfood.kr/bbs/board.php?bo_table=free&wr_id=528124>https://bongfood.kr/bbs/board.php?bo_table=free&wr_id=528124</a> x1 slots 1хслотс регистрация перейти на 1×slots Если вы опытный игрок, вы обязаны знать, собственно бонус без депо – редкая находка. Тем не, мы раз исследуем интернет, дабы найти вам превосходнейшие бездепозитные предложения.
1×slots регистрация 1×slotscasino09k online
Как управляло, при выводе денег, от играющего требуется только сделать минимальный вклад для того, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом личный счет.Условия отыгрыша приза. Если Вы планируете заработать на бездепозитном призе, то для направьте на велечину вейджера и срок, который дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, что, этим проще отыграть приз и исключить выигрыш. Чаще всего применяются коды. Их нужно заносить в специальные окошки регистрационной анкеты, если речь идет о пригласительных призах, либо в особом разделе личного кабинета игрока. сайт 1× slots casino <a href=https://igia.cv.ua/index.php/forum/skrin-ka-propozitsij/1597-gde-kupit-ssylki-dlya-prodvizheniya-sajta#326115>https://igia.cv.ua/index.php/forum/skrin-ka-propozitsij/1597-gde-kupit-ssylki-dlya-prodvizheniya-sajta#326115</a> Следует выделить, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом.Простая процедура получения бездепозитного приза, которая займет не более 2-х мин. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные.
скачать 1×slots на андроид мобильная версия
Но есть азартные заведения, готовые просто так вручить деньги на забаву. Для этого довольно сделать профиль. Чтобы вывести выигрыш, сначала необходимо выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа. <a href=https://foros.factormoe.net/user-5496.html>https://foros.factormoe.net/user-5496.html</a> Бoльшинcтвo азартных заведений выдвигают приблизительно одинаковые условия и требования, коие необходимо выполнить, чтобы получить бездепозитный приз за регистрацию. Все их возможно объединить в один перечень:Приветственный бездеп предоставляется хоть игроку лишь раз один. Казино дерутся с например называемыми бонусхантерами (от англ. Bonus Hunter — доброволец за бонусами), пытающимися заводить многочисленные аккаунты для надувательства оператора и повторного получения презента. Исключить похожие действия разрешает верификация данных. Администрация вправе потребовать у посетителя доказать персональные данные, обозначенные при регистрации. 1×slots официальный сайт зеркало На безвозмездные бонусы онлайн-казино практически практически распространяется лимитирования по стране проживания клиентов. Даже если вам разрешено раскрывать счет и выступать на деньги в заведении, это еще не значат, собственно вас доступны no deposit bonuses.Игрокам стоит принимать приветственный приз как гарантированный метод получить большой выигрыш, но это замечательная возможность без затрат оценить возможностей казино.
<b>Смотреть еще похожие новости:</b>
<a href=https://smm-seo.ru/threads/1×slots-promokod-pri-registracii.35964/>1×slots casino регистрация на сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Создание аккаунта. На веб-сайте казино необходимо открыть регистрационную форму и заполнить пустые поля личностными данными. Иногда на этом шаге требуется показать только адрес электрической почты и пароль, но почаще надо наполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д.). Нужно указывать лишь реальные данные, поскольку впоследствие они станут проверены. Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.
#8099 Charlesgunny
pin casino porno Илона Маркова, хоккеистка <a href=https://t.me/vchkogpu_ru>скачать сайт букмекерской конторы</a> Ходнева Светлана Владимировна порно карты казино <a href=https://kompromat1.online/>1×bet сайт</a> Скоробогатова Ольга Николаевна порно black russia казино porno Нина Пирогова, хоккеистка casino андроид симулятор казино порно с Алина Загитова, фигуристка букмекерская контора леонов
#8100 Charlesgunnyhttp://filmkachat.ru
1×slots казино мобильная версия
Мы подготовили перечень, где есть всегда актуальные и свежие бездепозитные бонусы казино, коие возможность получить бесплатно. Для наших пользователей есть специальные предложения неповторимые бонусы, коие вы кого не отыщите, их мы определили особой красной плашкой «Exclusive». <a href=http://filmkachat.ru/>1×slots casino регистрация на сайте</a> <a href=https://postheaven.net/pafsi02hf4>https://postheaven.net/pafsi02hf4</a> Шаг 4. Активация. Внимательно изучите условия, информацию по ограничениям и сроке действия бонусного предложения. Разобравшись с правилами, возможно активировать приз в собственном офисе (время ? с использованием промокода) либо по запросу в саппорт. 1×slot казино зеркало <a href=https://ls-rcr.com/forum/memberlist.php?mode=viewprofile&u=46529>https://ls-rcr.com/forum/memberlist.php?mode=viewprofile&u=46529</a> Частенько новенькие не разумеют, как активировать презенты либо исключить первый выигрыш. Для сходственных случаев наша команда обрисовала главные определения – собственно это фриспины, вейджер, как его отыграть, для необходимо протекать верификацию.
1х слот регистрация в 1×slots casino
<a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/5926–1×-slots-casino-zerkalo#5935>1× slots casino зеркало</a> сайт 1× slots casino Вейджер менее х30–35 считается приемлемым. Опытные игроки заявляют, собственно с таким вейджером реально остаться в плюсе, если верно подойти к выбору игрового аппарата.В неких онлайн казино для получения бездепозитных призов не довольно просто зарегистрироваться на веб-сайте клуба и доказать средства контактные данные. Дополнительно потребуется активация промокода. <a href=https://disgaeawiki.info/index.php/User:KarlaConsidine>https://disgaeawiki.info/index.php/User:KarlaConsidine</a> Фриспины предусмотрены для применения в видео слотах. Внимательно ознакомьтесь с условиями – часто их выдают на некоторые автоматы. В зависимости от клуба, у вас получится сделать определённое число ставок. Кстати, продвинутые игорные жилища позволяют запускать любых «одноруких бандитов».Если площадка дарует бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь ввести акк на сайте и активировать его, подтвердив адрес электрической почты, номер телефонного либо другие данные, которые настятельно оператор. Перед данным нужно убедиться, собственно юзер располагается на официальном веб-сайте казино, а не на мошеннической площадке. онлайн казино 1×slots Подтвердите лицо, предоставив оператору казино свои паспортные данные. Инструкции обыкновенно несложные, главное — четко им по. Если написано, что «на фото должны быть заметны все хорошо угла страницы паспорта» — сделайте непосредственно такое фото.
1хслот официальный сайт зеркало
Также учтите, собственно некоторые игровые платформы сужают перечень государств, которые готовы получить предложенный бездепозитный приз за регистрацию. К примеру, существуют онлайн-заведения, выдающие подобные бонусы только обитателям конкретных стран. К примеру, онлайн казино 777 Оригинал предоставляет бездепозитный бонус только игрокам из России и стран СНГ. Или наоборот, пичкают вознаграждением всех, считая обитателей некоторых государств (как сего, следует пристально учить список, дабы потом не появилось практически вопросов и претензий).Бoльшинcтвo азартных заведений выдвигают примерно одинаковые условия и притязания, коие нужно выполнить, дабы получить бездепозитный бонус за регистрацию. Все их возможно объединить в раз список: Прибывшие на аккаунт финансы бездепозитные призы предназначаются, в основном, только для новоиспеченных пользователей, коие ранее не имели собственного аккаунта в данном казино. Исходя из этого, случае раньше у игрока был изготовлен депо, то, по всей вероятности, у него больше не несомненно возможности рассчитывать на получение такого бонуса в конкретном заведении.B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. <a href=http://www.bxbshop.co.kr/bbs/board.php?bo_table=free&wr_id=230892>http://www.bxbshop.co.kr/bbs/board.php?bo_table=free&wr_id=230892</a> рабочее зеркало 1×slots Размер ставки для забавы по бездепозитному призу (конечно же, в случае, когда он представлен вид бонусных денежных средств) зачастую ниже, чем при забаве на депо. Ограничение будет действовать до момента отыгрыша приза.
1×slots мобильная версия войти казино
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=39615>1×slots официальный сайт скачать на айфон</a> За вербование приятеля ? масштабах партнерской программы заказчик получает вознаграждение за привлечение новых пользователей. В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это самая приятная доля игры. Важно, часто бездепозитные бонусы в казино выдаются с лимитированиями по наибольшей выплате. В среднем возможно рассчитывать на выгода в несколько тысяч руб. Как исключить выигрыш с приза без депозита. Придётся доказать акк документально, в некоторых заведениях. Процедура верификации обязательна и делается любым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате или прочитайте в правилах. 1хслотс официальный сайт зеркало <a href=http://lyxondebian.free.fr/dokutest/doku.php?id=Выкуп_авто>http://lyxondebian.free.fr/dokutest/doku.php?id=Выкуп_авто</a> Популярность онлайн казино растёт и всё больше юзеров начинают увлекаться азартными забавами. Бездепозитные бонусы 2022 года, это уникальные презенты за регистрацию. С их помощью новые игроки шансы получить безвозмездные вращения или деньги на баланс за 1 регистрацию. С в игорных заведений в онлайне, бездепозитные призы стали знаменитейшим методом вербования игроков. Подобные акции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о которых мы расскажем. Наш вебсайт собрал превосходнейшие предложения из онлайна на 2022 год. Воспользуйтесь каким презентом и сможете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить условия.Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте обстоятельства – они нередко выдаются для неких машин. В зависимости от клуба продоставляется делать конкретное количество ставок. Кстати, современные игорные дома выделяют вероятность заводить «одноруких злодеев».
1×slots казино зеркало
Также посещают случаи, когда казино начисляет обсужденный приз последствии регистрации нового клиента по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам. Зарегистрируйтесь. Для регистрации чаще всего довольно установить собственный номер аппарата и почтовый адресок, после чего ввести полученный код из СМС. Возможно, потребуется показать промокод. В правилах акции будет написано, где его бы включать. Иногда это хотелось создавать при регистрации, времени — уже последствии создания личного офиса, на отдельной странице. <a href=http://krasna-devica.ru/forum/puteshestviya/5434-s-turciey-pohozhe-oblom-gde-otdyhat-budem#comment-32888>http://krasna-devica.ru/forum/puteshestviya/5434-s-turciey-pohozhe-oblom-gde-otdyhat-budem#comment-32888</a> 1×slots быструю регистрацию а также мгновенное Несмотря на то, собственно данный вариант стимуляции со стороны азартных платформ довольно популярен в сфере сходственных игр, далековато многим почитателям казино ведомо, что сами бездепозитные бонусы казино и как непосредственно их возможно эксплуатировать.Все любят получать презенты. Согласитесь, практически любой играющий человек будет очень рад, в получит безвозмездный презент для забавы в интернет казино просто за регистрацию либо же бонус за внесенный депо, так называемые приветственные призы для новых игроков. Соответственно такие интернет клубы будут больше модны и предпочтительны у игроков при выборе казино для игры. Топ казино постоянно обновляется и добавляются свежие и занимательные игровые клубы с симпатичной бонусной политикой и всеми возможными привилегиями, к которым относятся такие призы как фриспины за регистрацию, денежные бездепозитные бонусы, а щедрые бонусы за внесенный депозит.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Суммы сходственных услуг, большинстве, колеблются от 3-х до двадцати долларов, а вейджер на эти средства должен сочинять от тридцати до шестидесяти один. Зачастую, наивеличайшая сумма выигрыша тут составит от одной до двух сотен долларов. Если в выиграет больше, то все свои могут быть списанными до очень разрешенного выигрыша. Здесь замечена содержание выводить еще несуществующие финансы на собственную платежную систему и далее находить заведение с подходящими под данную необходимую релоадом либо призом за 1-ое пополнение счета. Есть несколько подвидов бездепозитного гонорары, предлагаемого большим количеством заведений.
#8101 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8102 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать на айфон
Все любят получать презенты. Согласитесь, практически любой играющий человек несомненно беспредельно рад, случае получит безвозмездный подарок для игры в интернет казино просто за регистрацию либо же бонус за внесенный депозит, так именуемые приветственные призы для свежих игроков. Соответственно такие интернет клубы станут более известны и преимущественны у игроков при выборе казино для игры. Топ казино каждый обновляется и прибавляются свежие и занимательные игровые клубы с симпатичной бонусной политикой и всеми вероятными прерогативами, к которым относятся такие бонусы как фриспины за регистрацию, денежные бездепозитные призы, а великодушные бонусы за внесенный депозит. <a href=http://filmkachat.ru/>1× slots casino официальный сайт</a> Следует выделить, что бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам либо с конкретным кодом. <a href=https://www.saphirnews.com/forum/Augmented-reality-furniture-transforming-your-home-design-experience_m266011.html>https://www.saphirnews.com/forum/Augmented-reality-furniture-transforming-your-home-design-experience_m266011.html</a> Бездепозитные призы в казино без пополнения 2022 — это определенная сумма денег или gratuitous spins вращения, которые предоставляются первым постояльцам за регистрацию на веб-сайте казино в виде бездепозитного бонуса, и выделяет для вероятность с казино без пополнения опробовать услуги (игр), с дальнейшей привилегией вывода средств при выполнении всех установленных правил.Мы подготовили перечень, где есть постоянно животрепещущие и свежие бездепозитные бонусы казино, коие вы можете получить безвозмездно. Для наших пользователей есть специальные предложения неповторимые призы, которые вы у не найдете, их мы обозначили специальной красноватой плашкой «Exclusive». 1х слот 1хслотс регистрация перейти на 1×slots <a href=http://www.sincano.com/author/albajudd033>http://www.sincano.com/author/albajudd033</a>
1хслот официальный сайт зеркало
Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие появляются у новичков. <a href=https://10nsk.ru/user/JosephSuple/>1×slots регистрация на 1хслотс</a> 1×slots зеркало быструю регистрацию а также мгновенное При пользовании бездепозитным призом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют количество обликов лимитов: <a href=https://forum.papbio.org/member.php?action=profile&uid=80032>https://forum.papbio.org/member.php?action=profile&uid=80032</a> Вейджер в переводе с британского означает «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша полученного бонуса, в нашем случае бездепозитного. Число ставок значения — важно только набрать сумму, пропорциональную сумме поощрения. 1×slots коды После получения бонуса вывод средств для посетителя несомненно недосегаем времени, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или чета месяцов. Выводить деньги игрок сможет только после отыгрыша.
1хслот зеркало
Для проверки применяются сканы паспортов, водительских прав, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если пользователь обнаружен в попытке ввести вспомогательный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в темный перечень. При ирге на лицензионной площадке не бояться указывать достоверную персональную информацию (шифрование исключает утечку индивидуальных данных). В перечне требований к отыгрышу часто присутствуют лимиты на ставки при этой на личные деньги. Так, если отыграть надо(надобно) 30 000 руб., а предельная сумма ограничена 30 рублями, то вращать барабаны светит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками условий по срокам действия акции.Бездепозитные бонусы отличный вариант даровой игры в игровые автоматы. Многие пользователи сети не понимают, что в казино возможно начать играть абсолютно безвозмездно, а позже исключить выигрыш на банковскую карту либо электрический кошелек, иные не доверяют онлайн казино, а третьи успешно играют и выигрывают – и подчас достаточно великие суммы. <a href=https://maps.google.com.bz/url?sa=t&url=https://doctorlazuta.by/>https://maps.google.com.bz/url?sa=t&url=https://doctorlazuta.by/</a> 1×slots официальный сайт скачать
1×slots казино мобильная версия
Так собственно сможете неустрашимо регистрироваться без всяких размышлений. Фортуна сейчас наверняка на вашей стороне. Не побаивайтесь, ведь следствие какого или ущерба Вам абсолютно не угрожает. С такими бонусами как без пополнения, Вы остаетесь только в плюсе, но не как не в минусе. <a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=6078>1×slots бездепозитный бонус за регистрацию</a> В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с бесплатных вращений. Прибыль, коию Вы заработаете на этом бездепе можно назначать на вывод без какого либо отыгрыша.У любой игры свои притязания по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система засчитает любую ставку. В рулетке и покере сделать это гораздо сложнее. Именно потому так важно пристально разбирать условия получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой этой, то новенькие попросту «спустят приз на ветер». 1×slots подтвердит вашу регистрацию если говорить <a href=http://toolbarqueries.google.hn/url?q=http://sinara-group.com/bitrix/rk.php?goto=http://maxima-center.ru/bitrix/redirect.php?goto=https://telegra.ph/Klyuchevye-aspekty-sluzhby-v-armii-po-kontraktu-09–23>http://toolbarqueries.google.hn/url?q=http://sinara-group.com/bitrix/rk.php?goto=http://maxima-center.ru/bitrix/redirect.php?goto=https://telegra.ph/Klyuchevye-aspekty-sluzhby-v-armii-po-kontraktu-09–23</a>
рабочее зеркало 1хслотс
Бесплатный бонус – кредиты, коие онлайн-казино начислит клиенту, не принуждая его пополнять игровой счет.На нашем веб-сайте Вы найдете перечень актуальных свежих бездепозитных бонусов в казино 2022 года. Также, есть большое неповторимых услуг, коие доступны лишь посетителям нашего вебсайта в регистрации по нашей ссылке либо активации особого промокода. Для получения выигрыша требуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить определенную необходимую, но теснее из собственных средств. Она рассчитывается из совместного размера выигрыша за все время использования бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, в пользователь выиграл 1000 рублей, а множитель составляет х30, вывести средства возможно несомненно, сделав ставки на 30 000 рублей. <a href=http://jade-crack.com/home.php?mod=space&uid=1026042>http://jade-crack.com/home.php?mod=space&uid=1026042</a> Также учтите, собственно некоторые игровые платформы сужают перечень стран, коие способны получить предложенный бездепозитный бонус за регистрацию. К примеру, существуют онлайн-заведения, выдающие сходственные призы только жильцам конкретных стран. К примеру, интернет казино 777 Оригинал дает бездепозитный бонус лишь игрокам из России и стран СНГ. Или наоборот, пичкают вознаграждением всех, считая обитателей некоторых государств (из этого, по пристально изучать список, чтобы впоследствии не возникло практически вопросов и претензий).Бонус за регистрацию в казино выдается лишь раз один на 1-го игрока. Но случаются дополнительные промоакции, в коих бездепы раздаются для неизменных посетителей и такие презенты Вы сможете получить больше одного раза. 1×slots регистрация 1×slotscasino09k online Фриспины – безвозмездные вращения с фиксированной ставкой, коие можно использовать в конкретных игровых автоматах.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=137178>1×slots зеркало</a>
<a href=https://masstr.net/showthread.php?tid=84192>онлайн казино 1×slots</a>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=125170>1×slots зеркало этих способов предполагает регистрацию</a>
<a href=http://big.bestforums.org/viewtopic.php?f=7&t=9528>1×slots подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Основное различие в том, что для получения бездепа не надо пополнять баланс в казино. Но считая этого, есть ряд и других отличий:
#8103 Charlesgunny
porno Юлия Пересильд яндекс казино <a href=https://rhymes-punches.com/>porno Ангелина Гончаренко, хоккеистка</a> казино фильм букмекерские конторы в россии <a href=https://krtka.info/>суть казино</a> порно с Диана Шнайдер (теннис) самое казино порно с Зырянова Анастасия Владимировна какие казино pin up casino зеркало гама казино пин ап букмекерская контора
#8104 Charlesgunnyhttp://filmkachat.ru
1 x slots casino
Каждый компьютерные должен сперва детально изучить обстоятельства по получению и отыгрышу понравившегося презента. Если всё организует, поторопитесь отобрать безвозмездные спины за регистрацию в казино без депо с выводом и без отыгрыша и прямо в начать вращать барабаны топовых слотов. <a href=http://filmkachat.ru/>1×slots казино мобильная версия</a> Как верховодило, при выводе финансов, от играющего требуется лишь устроить минимальный вклад для того, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом личный счет. <a href=https://postheaven.net/pafsi02hf4>https://postheaven.net/pafsi02hf4</a> На данном разделе портала периодически публикуются обзорные статьи, в которых рассматриваются безвозмездные бонусы лучших интернет-казино. Информация структурирована по нескольким пт, включая основные:В основном случаев бесплатные призы начисляются в кредитах, которые невозможно незамедлительно вывести со счета. Прежде их нужно отыграть по установленным правилам. Эти притязания принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже. 1×slots казино мобильная версия <a href=http://r66227en.beget.tech/user/RalphTrasy/>http://r66227en.beget.tech/user/RalphTrasy/</a> Получить приветственный приз шансы только свежие клиенты онлайн-казино. Способы описаны в критериях промоакции любого легального казино, чаще всего это:
1хслотс мобильная версия зеркало
Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в социальных сетях, установку мобильного приложения либо официального посетителя для ПК. В большинстве казино действуют программы преданности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий уровень нередко сопрягается выдачей бездепа. <a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=78204&result=reply>1×slots регистрация 1×slotscasino09k online</a> 1×slots зеркало выигрыши обязательно пройдите регистрацию если Чаще всего используются коды. Их нужно вносить в специальные окна регистрационной анкеты, в речь идет о пригласительных призах, либо в определенном разделе собственного кабинета игрока. <a href=http://www.bj1777.com/dzbbs/home.php?mod=space&username=skillfulsaga93>http://www.bj1777.com/dzbbs/home.php?mod=space&username=skillfulsaga93</a> Но на некоторых азартных платформах сходственные вознаграждения имеют получить теперь зарегистрированные юзеры. В таком случае, бонусы предоставляются масштабах оригинальных промоакций либо же некоторым геймерам повторяющий акционного предложения, коие прибывает на почту с целью «возвратить» игрока в свое казино.У каждой забавы средства требования по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система зачтет каждую ставку. В рулетке и покере устроить это намного труднее. Именно поэтому например главно внимательно читать обстоятельства получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой забаве, то новички просто «спустят бонус на ветер». 1×slots casino зеркало рабочее Выиграть реальные средства в казино не пополняя счет – трудно, но возможно. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными бонусами и начните играть на бонусные свои. По статистике в одном из 10-ти заведений можно заработать маленькую необходимую денег помощью бонусных средств.Это раз из основных характеристик привлекательности подарка. С завешенным коэффициентом даже мастера не смогут выполнить условия по отыгрышу. И маловажно, насколько презентабельно смотрится предложение – бездепозитный приз казино в размере $500 либо $1 000. Чтобы новенькие попревосходнее вникли, собственно же это вейджер, мы разберём на образце.
1×slots регистрация то дальше необходимо пройти
Прежде чем активировать бездеп, необходимо увериться в том, собственно страна, уроженцем которой считается игрок, не входит в список запрещенных. <a href=http://vttgauriac.fr/forum/memberlist.php?mode=viewprofile&u=5159>http://vttgauriac.fr/forum/memberlist.php?mode=viewprofile&u=5159</a> Классическая разновидность приза за создание аккаунта. Его преимущество заключается никаких, собственно заказчик может других выбирать аппараты и делать ставки в них. Иногда список игровых автоматов ограничен оператором, но все равно это лучше, чем единственный дешевый разъем, как если, тогда, с внедрением фриспинов. 1×slots регистрацию более популярный вариант это
1× slots зеркало
1хслотс рабочее зеркало <a href=http://k636419q.beget.tech/user/RaymondClime/>http://k636419q.beget.tech/user/RaymondClime/</a>
1×slots рабочее зеркало на сегодня
В лицензионных бездепозитных казино выступать в азартные игры вправду неопасно. Наличие лицензии одобряет тот факт, собственно клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP. <a href=https://timeoftheworld.date/wiki/User:CarmellaAzh>https://timeoftheworld.date/wiki/User:CarmellaAzh</a> 1×slots промокод при регистрации
<b>Смотреть еще похожие новости:</b>
<a href=https://www.lightknotes.com/MyBB/showthread.php?tid=163294>скачать 1×slots на андроид мобильная версия</a>
<a href=https://seniordance.ru/forum/showthread.php/69697–1×slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%BD%D0%B0-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D0%BE%D0%BC-%D1%81%D0%B0%D0%B9%D1%82%D0%B5?p=99131#post99131>1×slots регистрация на официальном сайте</a>
<a href=https://isomedu.com/forum/profile/josephdrons/>1×slots регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Такие поощрения позволяют даром протестировать свежее казино, разобраться с игровым ходом интернет слотов, заработать и исключить небольшую необходимую денег.
#8105 Charlesgunny
casinos xyz зеркала казино <a href=https://7club7.com/>Приезжева Екатерина Геннадьевна порно</a> 1win букмекерская контора up casino официальный <a href=https://strelochnik.com/>самое казино</a> порно с Александр Большунов (лыжные гонки) casino Разуваева Ксения Денисовна порно казино фильм смотреть онлайн 1×bet официальный сайт 1×bet официальный сайт 1×bet xyz casino рабочее зеркало
#8106 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8107 Charlesgunny
слот casino казино ставка <a href=https://rhymes-punches.com/>букмекерскую контору пин</a> порно с Анастасия Потапова, теннисистка суть казино <a href=https://res-publika.com>kometa casino</a> porno Ангелина Гончаренко, хоккеистка Чулпан Хаматова casino играть ramenbet casino порно с Афонина Марина Игоревна casino скачать 7k casino зеркало на сегодня
#8108 Charlesgunnyhttp://filmkachat.ru
1хслотс 1хслотс регистрация перейти на 1×slots
Варианты выигрыша в от Вашей успеха и условий игорного портала. Выше мы сказали, что некоторые бездепозитные призы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются другие, все, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на деньги, можно выиграть неописуемые суммы. Сегодняшние игровые автоматы или видео слоты, как их именуют. Могут выдавать солидные умножение от х1.000 и выше. Некоторые множат ставку от х100.000.Бездепозитный приз предоставляется новенькому игроку за определенные деянья. Часто подарок повторяющий денег либо фриспинов выдается за регистрацию, благодаря чему пользователь получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino09k online</a> Помните, собственно в некоторых играх сумма ставки идет в зачет вейджера только отчасти. Так, в настольных и карточных забавах лишь от 5% до 50% суммы ставки числятся как отыгранные средства, момент как в слотах идет в зачет все 100% суммы. <a href=https://postheaven.net/ofwo25um52>https://postheaven.net/ofwo25um52</a> Вознаграждения за получение VIP-статуса ? начисляются в программы лояльности при достижении еще значения или выдаются индивидуально менеджерами службы поддержки. 1хслотс казино зеркало <a href=https://prof-komplekt.com/club/user/11588/blog/11812/>https://prof-komplekt.com/club/user/11588/blog/11812/</a> Законодательство, регулирующее азартные забавы в разных странах, влияние на возможности операторов. В итоге пользователи из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это возможность быть как полный отказ в доступе, например и невозможность загружать забавы отдельных изготовителей.
1×slots мобильная версия войти казино
Шаг 5. Использование и отыгрыш. Бездеп обязан быть использован в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.Следует выделить, собственно бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с определенным кодом. <a href=http://aficionado.pl/showthread.php?105983–1×-slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%B2–1×slots-casino&p=123573>1× slots регистрация в 1×slots casino</a> 1хслотс официальный сайт зеркало Каждая игровая платформа отличается критериями по получению и отыгрышу бездепов. В правилах отчетливо расписаны временные рамки, за коие нужно прокрутить вейджер. Также не забывайте на наибольший объем ставки и наивысшую сумму выплаты. С иной стороны, чтобы получить бездепозитные бонусы казино, достаточно истратить менее 1 минуты. <a href=https://www.mycncuk.com/members/77602-Davidcot>https://www.mycncuk.com/members/77602-Davidcot</a> Высокая конкурентность в разделе азартных игр мотивирует операторов завлекать клиентов разнообразными акциями. Благодаря данному у гостей бывает вероятность получить призы в казино за регистрацию без депозита. Воспользоваться таким предложением можно, минуя функцию внесения средств на игровой счет, просто активировав аккаунт на сайте. Наш гид по бездепам поможет выбрать самую привлекательную бонусную программу, узнать правила получения такового вознаграждения и распорядиться им с максимальной выгодой. 1×slots казино зеркало В случае установленного лимита на сумму вывода выигрыша с бездепозитного бонуса, игрок не может вывести больше заявленной суммы.Бездепозитный приз часто возможность замерзнуть доступным сразу последствии окончания регистрации, поскольку в большинстве случаев единственным притязанием к нему считается регистрация, а этого ревизия вашей новой учетной записи.
1хслотс официальный сайт зеркало
Как лишь вы отыграли вейджер и свои с бонусного баланса перебежали вас на настоящий счет, Вы неустрашимо сможете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (сделать наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депо). <a href=http://silabgarza.net/forums/member.php?action=profile&uid=214650>http://silabgarza.net/forums/member.php?action=profile&uid=214650</a> Вы скорее, скажем, как все предпочитаете получать подарки и бездепозитные бонусы казино. Игорные жилища брали в повадку одаривать гэмблеров приятными призами. Стать владельцем приветственного презента возможно за творенье профиля или пополнение счёта. Второй вариант больше увлекательный, как клубы готовы удвоить депо! Но случае вы новичок и лишь знакомитесь с миром азарта, превосходнее пользуйтесь призом за регистрацию. 1хслотс мобильная версия зеркало К примеру, игроку выдаются бесплатные средства в заведении в размере пятидесяти либо 100 долларов (вейджер на которые составляет 100х). То есть, любому новоприбывшему игроку выскакивает привлекающая иллюстрация, кот-ая сулит выплату всех зачисленных компанией средств. Не стоит внимания на казино бонус за регистрацию без депозита с чрезмерно великой или очень маленькой суммой призов, потому собственно, в кропотливо изучив все условия, тут скорее, будет некий подвох.Какие призы есть еще получить считая бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, каждое интернет казино предлагает игрокам выгодное предложение на 1-ый депо, вы совершаете депо, ваш депозит возрастает в двое или даже в 3, тем самым начать играть возможно с больше солидной суммой, например же не забываем тему вейджер на призы.
1×slots регистрация на 1хслотс
Ниже указан важный список легальных казино в Беларуси с бонусами на первый депозит. Вы можете попасть на официальный сайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус.Можно ли в одном интернет казино получить больше 1-го приза за регистрацию? Нет, так как в любом интернет казино есть верховодила, к которым надо(надобно) держаться, не делать два аккаута для получения бонусов, по несомненно блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, приз за регистрацию выдаеться один раз 1 лицу. Бездеп с фриспинами может охватывать всю коллекцию игр на сайте или разработки одного провайдера. Обычно предлагается конкретный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш может быть выведен в как, как пользователь отыграет данную необходимую. Возможность расценить глубокий возможностей слотов — основное совершенство этой разновидности. Игроку становятся доступны что, эти опции, коие отсутствуют в демонстрационном режиме, а вероятность выиграть реальные деньги добавляет ярчайших азартных ощущений.Даже не выиграв крупную необходимую, игрок увлекательно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-либо денежных рисков. Быть в курсе лучших акций легко. Достаточно регулярно учить список новых онлайн казино с выводом бонуса без депо в этом разделе. 1хслотс регистрация в 1×slots casino <a href=https://www.agrosoft.ru/support/forum/index.php?PAGE_NAME=profile_view&UID=85410>https://www.agrosoft.ru/support/forum/index.php?PAGE_NAME=profile_view&UID=85410</a>
1 x slots casino
Особую изюминку видео слотам присваивают оригинальные символы. С их появлением активизируются различные призы. Вы можете запустить дополнительный уровень и увеличить сумму выигрыша. Есть знаки, которые заменяют ненадобные элементы и сами делают выигрышные комбо. Не стоит забывать и на бонус-тур. После каждого счастливого спина есть шанс прирастить сумму выигрыша в 2 или хорошо раза. <a href=https://lecointurc.com/users/walterral>https://lecointurc.com/users/walterral</a> 1 x slots casino На условиях отыгрыша безвозмездных бонусов идет остановиться подробнее. С ними связаны аспекты, которые нельзя оставить без внимания.Помимо остального, для вывода средств по бездепу необходимо привнести на счёт собственный 1-ый депозит — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально возможную сумму, последствии чего вывод средств станет доступен.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.mshowto.org/forum/members/jamespauri.html>1×slots регистрация 1×slotscasino09k online</a>
<a href=https://forum.bandariklan.com/showthread.php?tid=385649>1×slots зеркало быструю регистрацию а также мгновенное</a>
<a href=https://australianwinerytours.com/tours/showthread.php?tid=201254>1×slots регистрация 1×slotscasino 56 online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вейджер в переводе с английского значит «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша полученного бонуса, в нашем случае бездепозитного. Число ставок значения — принципиально лишь набрать сумму, пропорциональную сумме поощрения. Вейджер (wager) – это коэффициент, который показывает на какую необходимую нужно устроить ставок, дабы исключить бонус из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода этого приза, Вам необходимо сделать ставок на сумму: 500*70=3500 руб. Только всецело отыграв приз, Вы можете вывести собственный выигрыш.
#8109 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8110 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
Фриспины без депозита или дополнительные свои помогут ближе познакомиться с игровой платформой и её функциями. За счёт даров возможно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради забавы напротив живых крупье. <a href=http://filmkachat.ru/>1хслотс зеркало на сегодня</a> К образцу, игроку выдаются безвозмездные свои в заведении в размере пятидесяти или ста $ (вейджер на которые сочиняет 100х). То есть, каждому новоприбывшему игроку выскакивает привлекающая картинка, которая обещает выплату всех зачисленных фирмой средств. Не стоит обращать внимания на казино бонус за регистрацию без депо с слишком большой или довольно малюсенькой суммой призов, потому что, даже кропотливо изучив все условия, тут вероятнее всего, будет некий подвох.Вейджер (либо вагер) ? это наименьшая сумма ставок, которую необходимо сделать для вывода денежного приза. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение. <a href=https://www.fbioyf.unr.edu.ar/evirtual/mod/forum/discuss.php?d=44688>https://www.fbioyf.unr.edu.ar/evirtual/mod/forum/discuss.php?d=44688</a> Исходя из этого, просто не присутствует мудрых оснований махнуть рукой на получение такого бонуса при регистрации. И, что, на подобный безвозмездной основе у вас есть все шансы выиграть деньги и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, называют бесплатными онлайн платформами для игр. 1× slots сайт <a href=http://www.glaschat.ru/glas-f/member.php?529720-JamesSleta>http://www.glaschat.ru/glas-f/member.php?529720-JamesSleta</a>
1×slots зеркало регистрация то дальше необходимо пройти
Многие казино деют в маркетинговых целях бесплатные бонусы необыкновенно для наших читателей. Чтобы их получить, надо(надобно) перебежать на игровой сайт по партнерской ссылке с нашего портала. <a href=https://forum.bandariklan.com/showthread.php?tid=399555>1×slots официальный demo регистрация в 1×slots casino</a> рабочее зеркало 1×slots Для доказательства электронной почты, просто перейдите по активной ссылке в письме, приобретенном от игрового заведения. <a href=https://www.mom-ent.co.kr/bbs/board.php?bo_table=free&wr_id=1234482>https://www.mom-ent.co.kr/bbs/board.php?bo_table=free&wr_id=1234482</a> Для получения бездепа нужно пригласить в забаву по реферальной ссылке свежего клиента: он должен зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и восполнить счёт на необходимую, указанную в критериях промоакции.Вывод выигрыша с бездепозитных призов казино – щедрый подарок от азартных клубов. Но чтобы исключить собственный доход, нужно выполнить ряд условий: 1 хслот регистрация в 1×slots casino Многие новички колеблются, что поощрительный приз надо будет отдавать, числе если они выиграли у казино. Это абсолютно безопасно и надежно. Выводя выигранные средства, игрок просто останавливает свое участие при и теряет уникальную возможность – безвозмездно увеличивать личное вещественное положение.
1×slots официальный demo регистрация в 1×slots casino
Чтобы бездеп не был начислен на Ваш аккаунт, Вам не активировать бонусный код. Если одобрение от казино было добавлено на Ваш аккаунт механически, а Вы не расчитываете его использовать, обратитесь в саппорта с просьбой отменить бездепозитный приз.Предложения с бездепозитными призами за регистрацию позволяют новым заведениям привлечь аудиторию на свой сайт. А игроки к получают вероятность выступать на настоящие средства без депо в казино и заработать маленькой стартовый капитал, кот-ый разрешено исключить на карту банка либо электронный кошелек. Oтыгpaть приз с указанным вeйджepом, достичь нужно сдeлaть cтaвoк нa cумму, превышающую размер бонуса в несколько раз. <a href=http://iminthai.com/home.php?mod=space&uid=247696>http://iminthai.com/home.php?mod=space&uid=247696</a> 1× slots сайт Рассмотрим принцип его деяния на случае. Допустим, вы зарегистрировались и возымели $10 no deposit bonus с вейджером х50. Это значит, что выигранные средства можно несомненно выводить не раньше, чем в такого, как общая сумма ставок достигнет $500.Бoльшинcтвo азартных заведений выдвигают приблизительно одинаковые условия и требования, которые нужно выполнить, дабы получить бездепозитный приз за регистрацию. Все их возможно соединить в один перечень:
1×slots casino регистрация на сайте
Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала прыткие выводы. Фишка выплат том,, собственно достаточно избрать платёжный инструмент и показать необходимую. В большинстве случаев деньги зачисляются на электрические кошельки на 15 минут, а на банковские карты – 1–3 трудящихся денька. При ирге на бонусные свои запрещается выступать в игровые автоматы с прогрессивным джекпотом и забавы из радела exist casino. Кроме того, кое-какие казино выделяют бездеп на раз или количество конкретных слотов, и в других играх Вы не можете на них играть.Чтобы без увериться в преимуществах бездепозитных призов, достаточно зарегистрироваться в казино и получить одобрение. Но ни не запамятовывайте внимательно разбирать верховодила роли в бонусных промоакциях. Если вы нарушите желая бы одно условие, позже вы не сможете уладить недоразумение с администрацией.Многие новички сомневаются, собственно поощрительный приз надо несомненно возвращать, даже случае они выиграли у казино. Это безусловно неопасно и надежно. Выводя выигранные средства, игрок просто одергивает свое роль при и теряет уникальную возможность – бесплатно наращивать личное материальное положение. 1×slots казино мобильная версия <a href=https://www.nkm.no/user/christab/?um_action=edit>https://www.nkm.no/user/christab/?um_action=edit</a> Да, у безвозмездных бонусов есть недостатки. Прежде всего, они обыкновенно небольшие. Кроме того, обстоятельства вейджера по ним практически жесткие. Но все недоступность риска делает их очень привлекательными для посетителей.Не стоит путать игру в демо и внедрение призов. В демонстрационном режиме игрок может расценить механику слота, сюжет и оформление. Но забава ведется на относительные кредиты, поэтому отсутствует главное ? ощущение пыла. Активируя промокод или фриспины, заказчик и не тратит свои средства на игровые автоматы, но возможность сорвать настоящий куш!
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Подарки на определенные даты отличаются условиями получения. Если поощрение начисляют игроку на денек рождения, то сумма обыкновенно зависит от общего объема депозитов за год. <a href=http://www2.bio.ulaval.ca/landrylab/bioinfo/doku.php?id=%D0%BC%D1%83%D0%B6%D1%87%D0%B8%D0%BD%D1%8B%20%D1%84%D0%BB%D0%B8%D1%80%D1%82%20%D0%B7%D0%BD%D0%B0%D0%BA%D0%BE%D0%BC%D1%81%D1%82%D0%B2%D0%B0>http://www2.bio.ulaval.ca/landrylab/bioinfo/doku.php?id=%D0%BC%D1%83%D0%B6%D1%87%D0%B8%D0%BD%D1%8B%20%D1%84%D0%BB%D0%B8%D1%80%D1%82%20%D0%B7%D0%BD%D0%B0%D0%BA%D0%BE%D0%BC%D1%81%D1%82%D0%B2%D0%B0</a> 1×slots официальный регистрация Маркетинговая деятеля всех игорных интернет-клубов обязана одевать разнообразный характер. И если гонорары на депозит служат для того, чтобы провоцировать вносить депозиты и поощрять теснее место юзеров, то бездепозитный приз в казино либо приз за регистрацию в казино, прежде всего, рассчитан на расширение базы потребителей.Чаще всего, популярностью сервисы, такие как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное правило. Финансовые свои выводятся лишь через ту платежную систему, которой огромный для пополнения депозита. Если же игрок получил бездепозитный покерный приз, требуется восполнить счет на наименьшую сумму, которая сочиняет обыкновенно 10 $.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.xn–72c9aa5escud2b.com/webboard/index.php/topic,510014.new.html#new>казино 1×slots</a>
<a href=https://projects.sare.org/people/jamestrazy/>1×slots регистрация 1×slotscasino09k online</a>
<a href=http://3ak.cn/home.php?mod=space&uid=187057>1×slots регистрация 1×slotscasino 56 online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Такой безвозмездный эквивалент средств зачисляется на профиль пользователя после воплощения требований и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений вероятен лишь последствии воплощения вейджеровых критерий. Более крупные предложения встречаются довольно редко. Зачастую они доступны лишь VIP-игрокам. В остальных случаях им всего сопутствуют довольно жесткие условия отыгрыша. Также возможны вспомогательные обстоятельства и лимитирования, прописанные в критериях и положения бонусной программки казино.
#8111 Charlesgunny
гта онлайн казино порно с Захарова Мария Владимировна <a href=https://7club7.com/>porno Александра Степанова, фигуристка</a> винлайн букмекерская контора казино в россии <a href=https://rucriminal.info/>букмекерские контора ап</a> официальные букмекерские конторы pinco casino песня казино зеркала официальных сайтов казино casino рабочее включи казино casino скачать
#8112 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8113 Charlesgunnyhttp://filmkachat.ru
1× slots регистрация в 1×slots casino
2. Создать свежий профиль. Для регистрации надо(надобно) наполнить маленькую анкету либо зайдите в собственный кабинет посредством соц сетей; <a href=http://filmkachat.ru/>1×slots официальный сайт мобильная версия</a> Получить Бездепозитный приз в онлайн казино дело двух кликов. Другой момент, отыграть рекламную и соблюсти управляла и условия отыгрыша. Под правилами подразумевается не вагер, но и лимитирования по наибольшей ставке. Мы понимаем, собственно в кино все ставят на зеро и выигрывают. Призываем не делать похожего. Перед активацией приза прочитайте управляла. Узнайте последующие моменты: Условия получения презента, за регистрацию, за депозит и другое. Ограничения по наибольшей ставке. Зачастую не повыше 350 руб. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах можно отыгрывать вагер. Можно вращать автоматы, а вагер несомненно стоять на месте. Поэтому главно аристократия, в каких забавах можно совершать кратность валютного оборота.Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие возникают у начинающих. <a href=https://nationaldppcsc.cdc.gov/s/profile/005SJ00000BDeSjYAL>https://nationaldppcsc.cdc.gov/s/profile/005SJ00000BDeSjYAL</a> Суммы сходственных услуг, как правило, колеблются от трех до двадцати $, а вейджер на эти средства должен сочинять от тридцати до шестидесяти раз. Зачастую, наивеличайшая сумма выигрыша тут составит от одной до 2-ух сотен долларов. Если в выиграет больше, то все свои все быть списанными до максимально разрешенного выигрыша. Здесь появляется содержание выводить еще несуществующие финансы на собственную платежную систему и дальше искать заведение с подходящими под данную необходимую релоадом либо бонусом за 1-ое пополнение счета. Есть количество подвидов бездепозитного гонорары, предлагаемого большим числом заведений. 1×slots зеркало регистрация в 1×slots casino <a href=http://pharmacyhq.com/forum/profile.php?id=587769>http://pharmacyhq.com/forum/profile.php?id=587769</a>
1хлот регистрация в 1×slots casino
Новички не обожают сразу же заносить депо. Это обусловлено неимением навыка и сомненьем. К счастью, наши возможно получить бездепозитный приз за регистрацию в казино. Неважно собственно начисляет система – фриспины либо кредиты. В любом случае вы не рискуете собственными сбережениями. Это отличная вероятность запустить понравившийся видео слот либо же испытать удачу в настольных забавах. 1×slots зеркало При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, которое возможно предназначить забаве в казино. <a href=https://www.hukuki.net/member.php?260155-HenryPag>https://www.hukuki.net/member.php?260155-HenryPag</a> Промообъявления от казино мешают реальной картины и направлены на привлечение внимания юзеров. Понять, как высоки шансы остаться в плюсе, позволит личный анализ критерий предложения:Да, у даровых бонусов есть дефекты. Прежде всего, они обычно очень. Кроме как, условия вейджера по ним постоянно жесткие. Но все неименье риска делает их очень привлекательными для посетителей. 1х слот регистрация в 1×slots casino Индивидуальные одобрения выдаются за совершение деяний: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавления или официального посетителя для ПК. В большинстве казино действуют программы преданности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на грядущий уровень нередко сопрягается выдачей бездепа.Стоит обозначить(означить), собственно бездепозитный приз выдается только взрослым новичкам, коие, же, могут пригласить личных приятелей и своих, кроме рассчитывающих на поощрительную программку преданности. Подобная разработка появилась среди конкурирующих онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению собственной популярности, методом привлечения свежих игроков. Бонусы – это оригинальный шанс для потенциальных соучастников игры, коие все опробовать софт покер рума и увериться, станут ли они в него выступать или нет. Новый игрок испробует свои силы с реальными оппонентами в казино.
казино 1× slots официальный сайт
Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются незамедлительно в сотворения профиля и активны недолговременное время. Если не успеете потратить свои, они попросту сгорят. Касаемо медли, как призы активны на часа.Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке представители онлайн-казино публикуют актуальную информацию о no down payment bonuses и других предложениях. <a href=https://www.theexeterdaily.co.uk/users/arnoldmyday>https://www.theexeterdaily.co.uk/users/arnoldmyday</a> Выбрать казино с бездепозитным призом. У нас на сайте представлен список наихороших интернет казино, коие предлагают своим игрокам щедрые призы за регистрацию.Бездепозитные призы — это презенты от казино вид бонусных средств либо фриспинов для игровых автоматов, которые начисляются на аккаунт игрока в процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депо не требуется. 1×slots казино зеркало В онлайне большое известных игорных площадок с привлекательными акционными предложениями. Однако внимательно разбирать условия десятков предложений скором надоест, да и время отнимет большое. Поэтому наша команда подготовила ТОП-3 сайтов с превосходнейшими бездепозитными бонусами:
1хслотс казино зеркало
На бонусные начисления могут быть установлены дополнительные ограничения, которые Вы не сведению при отыгрыше. Пока бонус полностью не отыгран — деньги из казино не выводятся.Еще одно условие касается объемов ставки. Операторы устанавливают максимальную необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном офисе. При превышении лимита есть риск лишиться бонуса. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, заказчик возможность столкнуться с запретом ставить фишки на шансы. Как и другие акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такого предложения являются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих гостей и позволяет им составить эмоцию о функционале, не рискуя вескими совокупностями.Размер приза. В качестве бездепов обычно начисляют не суммы, а когда речь идет о бонусах за депозит, которые начисляются в процентном соотношении от суммы пополнения, то некоторые казино все презентовать игроку до 2000$. Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных обстановок с казино, когда последствии отыгрыша бездепа вам не дадут вывести крупную необходимую выигрыша. казино 1×slots <a href=https://medvin.ucoz.ua/forum/2–475–1#3963>https://medvin.ucoz.ua/forum/2–475–1#3963</a>
1×slots зеркало быструю регистрацию а также мгновенное
Подтверждение электрической почты – одно из основных критерий, коие есть практически в любом бездепозитном казино. Чтобы верифицировать электронную почту, достаточно перейти по интенсивной ссылке в письме, полученном от азартного клуба. <a href=https://bajarmp3.net/member.php?action=profile&uid=10605>https://bajarmp3.net/member.php?action=profile&uid=10605</a> 1хслот зеркало сайта Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Бездепы обычно предлагают с отыгрышем — моментально вывести выигранные свои нельзя. Перевод средств со счета будет возможен в как, как пользователь выполнит все требования казино, а сумма не может быть выше установленного правилами лимита. Условиями промоакции фиксируются сроки, на которых заказчик вправе пользоваться предложением. Обычно они не превышают нескольких дней последствии активации.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.exalto-emirates.com/memberlist.php?mode=viewprofile&u=69997&sid=a9b0e6313763514c586535c162ea3f58>1×slots зеркало регистрация в 1×slots casino</a>
<a href=http://weeklywars.de/viewtopic.php?f=12&t=1127&p=484859#p484859>1 хслот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные призы — это подарки от казино повторяющий бонусных средств либо фриспинов для игровых автоматов, коие начисляются на акк игрока в процедуры регистрации на сайте заведения. Для получения таких поощрений депозит не потребуется. Реже призы без депозита начисляются постоянным игрокам. С их подмогою администрация старается вычесть ценных клиентов либо вожделеет поблагодарить за лояльность правильных посетителей. Но гораздо чаще для похожих целей применяются эти акции:
#8114 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8115 JustinErype
http://slottr.top/ az parayla cok kazandiran slot oyunlar?
#8116 Josephhut
kaГ§ak bahis siteleri bonus veren: <a href=" http://casinositeleri2025.pro/ ">tГјrkiye bahis siteleri</a> – bet turkiye
#8117 StephenFag
+18 canli yayin siteleri <a href=" https://forexzloty.pl/…6-jbvunlglgc „>bahis siteleri 2024</a> or <a href=“ http://forum.himko.vip/proxy.php?… ">curacao lisans siteleri</a> https://images.google.dm/url?… canlД± bahis siteleri <a href=http://images.google.com.tr/url?q=https://casinositeleri2025.pro>en iyi bahis sitesi hangisi</a> casinonaxi and <a href=https://www.jjj555.com/home.php?mod=space&uid=2072246>kazino online</a> gercek para kazandД±ran casino oyunlarД±
#8118 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8119 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать
Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, all зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.Помимо остального, для вывода средств по бездепу необходимо внести на счёт собственный 1-ый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально вероятную сумму, последствии чего вывод средств будет доступен. <a href=http://filmkachat.ru/>1×slots casino зеркало рабочее</a> Чаще всего, известные сервисы, эти как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно неотъемлемое управляло. Финансовые свои выводятся лишь через что, эту платежную систему, коей популярностьюимели для пополнения депозита. Если же игрок получил бездепозитный покерный бонус, потребуется восполнить счет на минимальную необходимую, которая сочиняет обыкновенно десять долларов. <a href=https://www.jotform.com/242864496748071>https://www.jotform.com/242864496748071</a> Выбирая безвозмездный приз, пристально изучайте управляла. Убедитесь, что для возможно брать участие в промоакции. Уточните, в каких забавах возможно выполнять обстоятельства вейджера. При необходимости задавайте вопросы адептам саппорта. 1×slots официальный сайт мобильная версия <a href=https://www.wow-interfaces.com/users/Henrynow>https://www.wow-interfaces.com/users/Henrynow</a> Бонус с зачислением денег на счет выделяет больше свободы деяний. Пользователь сам избирает, каким образом воспользоваться подаренными средствами. Здесь того все действовать ограничения на список дешевых игр, хотя обычно эти рамки не например строги, как в рекламную с безвозмездными вращениями.
1хслотс зеркало
1хслот зеркало Бездепозитные призы, как теснее понятно, считаются уникальной вероятностью к игровому процессу безусловно безвозмездно, то есть выступать в онлайн казино даром и на место свои незамедлительно в регистрации аккаунта. Автоматы с таким депо могут замерзнуть великолепной возможностью сыграть для почитателей пыла с определенными ограничениями в денег.Подобные призы без депозита предоставляются на больше прибыльных условиях. Зачастую они крупнее, а условия отыгрыша менее строгие. <a href=https://sc-grandmaster.ru/forum/?PAGE_NAME=profile_view&UID=20012>https://sc-grandmaster.ru/forum/?PAGE_NAME=profile_view&UID=20012</a> 1×slots официальный сайт скачать Как управляло, новоприбывшие геймеры для желают ознакомиться с способами ввода и вывода валютных средств и сроки исполнения поданных заказов дабы конкретно понимать, как живо меня исключить собственный казино бонус за регистрацию без депозита на электронный кошелек либо же банковскую карту. К счастью для всех играющих, внутри определенных холдингов, все казино конкурируют меж собой. Ведь если бы конкретную фирму давало лишь одно онлайн-заведение, то навряд бы клиенты заметили казино с призом за регистрацию и имели бы рассчитывать только на вознаграждение вид приза на первое вложение. К каждому заведению регулярно по привлекать новых игроков, собственно, в итоге, только на руку всем играющим.Бездепозитный приз казино 2022 с выводом за регистрацию предоставляет вероятность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и выяснить качество работы службы. Довольно часто, начиная игровой процесс, игрок уже отказывается останавливаться и делает настоящий лепта. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать безвозмездно возможно как раз таки с призом за регистрацию без надобности вносить депо.
1×slots официальный зеркало
Свежий бонус начисляется вид валютных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в пользовании средствами, в случае отыгрыша оператор возможность ввести ограничение на вывод денег. Бoльшинcтвo азартных заведений выдвигают примерно однообразные, схожие условия и притязания, которые нужно выполнить, дабы получить бездепозитный бонус за регистрацию. Все их можно соединить в один список: <a href=https://mega-zaim96.ru/forum/user/37276/>https://mega-zaim96.ru/forum/user/37276/</a> На данном разделе портала периодически публикуются обзорные заметки, каких рассматриваются безвозмездные призы превосходнейших интернет-казино. Информация структурирована по нескольким пунктам, включая основные: скачать 1×slots официальный сайт Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, all лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.
1×slot зеркало рабочее этих способов предполагает регистрацию
<a href=http://smpn1bejen.sch.id/forum/>1хслотс мобильная версия зеркало</a> С другой стороны, гораздо проще отобрать бездепозитные фриспины за регистрацию в казино и прямо сейчас начать вращать барабаны в лучших слотах. Главная особенность спинов что, собственно они предназначены для лучших автоматов. Удастся не только пройти дополнительные раунды, хотя и прирастить сумму выигрыша, заработать респины и внутриигровые подарки. 1× slots casino зеркало <a href=https://www.freebeg.com/forum/member.php?action=profile&uid=23300>https://www.freebeg.com/forum/member.php?action=profile&uid=23300</a> Каждая игровая платформа выделяется критериями по получению и отыгрышу бездепов. В правилах детально расписаны кратковременные рамки, за коие надо(надобно) прокрутить вейджер. Также не запамятовывайте на наибольший объем ставки и наивысшую необходимую выплаты. С иной стороны, дабы получить бездепозитные бонусы казино, достаточно потратить не более 1 минуты.Размер приза. В качестве бездепов обычно начисляют маленькие суммы, а когда речь о призах за депо, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино имеют подарить игроку до 2000$.
1×slots официальный сайт мобильная версия скачать
Прямо в арестуйте безвозмездные вращения за регистрацию без депозита и начинайте коллекционировать призовые комбинации ради солидных выигрышей! Разные казино имеют собственные управляла по выведению выигрыша. Для бездепозитных призов принимаются достаточно высочайшие притязания. Часто онлайн-казино советуют отыграть бонусное поощрение до ста раз в игровых автоматах. Например, если игрок получил бесплатно 10 $, то необходимо несомненно отыграть их, поставив 1 тыщу спинов по 1 доллару любой. Стоит обозначить(означить), что не все казино выделяют вероятность выступать на бонусы и не во всех развлекательных заведениях идентичные правила для отыгрывания. Некоторые казино воспрещают выступать на призы в блекджек или ограничивают ставки до 5 %, что значительно наращивает в десятки раз количество необходимых игр. <a href=https://play.ntop.tv/user/Walterwreva/>https://play.ntop.tv/user/Walterwreva/</a> Если площадка дарует бездеп за регистрацию, то процедура его получения ординарна. Нужно только ввести аккаунт на веб-сайте и активировать его, подтвердив адресок электронной почты, номер телефонного либо другие данные, которые просит оператор. Перед данным необходимо убедиться, что пользователь располагается на официальном сайте казино, но на мошеннической площадке.Акции, приуроченные к календарным дням, посещают рассчитаны как на всех юзеров, например и на категории: примеру, презент на 8 марта девушкам-игрокам либо мужикам на 23 февраля. 1 х слотс зеркало На условиях отыгрыша безвозмездных призов по остановиться подробнее. С ними связаны аспекты, которые невозможно забыть без внимания.Также есть онлайн-платформы азартных игр, коие применяют раздачу бездепозитных бонусов в специальные даты (как для казино, так и для игрока). Помимо этого, действующие игроки кроме имеют возможность получить похожие бонусы за свою деятельность (к примеру, за повышения уровня либо за схожие заслуги).
<b>Смотреть еще похожие новости:</b>
<a href=https://www.lightknotes.com/MyBB/showthread.php?tid=174218>1х слот 1хслотс регистрация перейти на 1×slots</a>
<a href=http://weeklywars.de/memberlist.php?mode=viewprofile&u=860>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=https://www.neocodex.us/forum/topic/133933-why-this-forum-become-dead-now/page-2#entry2034895>1× slots casino официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Не сложно догадаться, что no deposit bonuses почти ни не бывают великими. Чаще всего речь идет о пяти–тридцати долларах (или эквиваленте этой суммы в другой еденице).
#8120 Charlesgunny
Мухтиярова Елена Вячеславовна порно балтбет букмекерская контора <a href=https://rucriminal.info/>скачать pin casino</a> винлайн букмекерская контора 1×bet зеркало рабочее на сегодня 1×bet xyz <a href=https://res-publika.com>Матвиенко Валентина Ивановна порно</a> игры казино букмекерская контора фонбет официальный мелбет букмекерская контора pin up букмекерская контора 1×bet вход пин ап casino pin up top казино большая
#8121 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8122 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8123 JustinErype
https://casinositeleri2025.pro/ online casino turkey
#8124 Charlesgunny
1win букмекерская контора 1×bet зеркало слоты <a href=https://res-publika.com>скачать pin casino</a> официальные букмекерские конторы скачать почему в казино нет окон <a href=https://specreporter.com/>Кузнецова Анна Юрьевна порно</a> бесплатные букмекерские конторы 1×bet 1 black russia казино где казино pin up casino buzz casinos winning порно с Анна Калинская (теннис)
#8125 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8126 Victoryoahttps://vika-service.by/
Добрый день товарищи<a href=https://vika-service.by/>!</a>
<a href=https://vika-service.by><img src=„http://i72.fastpic.ru/big/2015/0721/d6/b34753cd24859e9a072d463a06119ed6.jpg“></a>
Для заправки лазерного принтера не нужно иметь специального образования и десятилетия опыта, но нужно иметь инструмент и понимание того, что ты делаешь. Самостоятельное вмешательство в работу техники допустимо, даже необходимо! Тем самым вы не оставите компаний вроде нашей без работы. Заправляем лазерные картриджи ведущих мировых производителей – hp, canon, samsung и другие. Работаем с моделями увеличенного объема. Заправляем картриджи с выездом в офис. Это позволяет сэкономить ваше время и не отвлекаться от основной работы. Наша организация занимается свыше 10 лет ремонтом и обслуживанием оргтехники в городе Минске.Основные направления и виды нашей деятельности: 1)<a href=https://vika-service.by/>заправка картриджей минск</a> 2)<a href=https://vika-service.by/>разработка сайтов минск</a> 3)<a href=https://vika-service.by/>продвижение сайтов минск</a> 4)<a href=https://vika-service.by/>ремонт ноутбуков минск</a> 5)<a href=https://vika-service.by/>ремонт компьютеров минск</a> 6)<a href=https://vika-service.by/>ремонт принтеров минск</a> Нам будет приятно видеть у нас на вебресурсе <a href=https://vika-service.by/>НАЖМИТЕ ССЫЛКУ</a> Всегда рады помочь Вам!С уважением,ТЕХНОСЕРВИC <a href=https://vika-service.by/service/printer-repairing/>ремонт принтеров xerox</a> <a href=https://vika-service.by/service/printer-maintenance/>обслуживание принтеров минск</a> <a href=https://vika-service.by/service/printer-maintenance/>ремонт обслуживание мфу</a> <a href=https://vika-service.by/service/printer-repairing/>ремонт принтеров</a> <a href=https://vika-service.by/service/printer-repairing/>услуги ремонта принтеров</a> <a href=https://vika-service.by/service/printer-repairing/>ремонт принтера ml</a> <a href=https://vika-service.by/service/printer-repairing/>ремонт xerox</a> <a href=https://vika-service.by/service/printer-repairing/>сервис инженер по ремонту оргтехники</a> <a href=https://vika-service.by/service/printer-maintenance/>диагностика и ремонт принтеров</a> <a href=https://vika-service.by/service/printer-maintenance/>ремонт принтеров epson stylus</a> <a href=https://vika-service.by/service/printer-repairing/>ремонт ксерокса</a> <a href=https://vika-service.by/service/printer-repairing/>ремонт принтера epson выездом</a> <a href=https://vika-service.by/service/printer-maintenance/>ремонт профилактика принтеров</a> <a href=https://vika-service.by/service/printer-maintenance/>ремонт принтера epson в минске</a> <a href=https://vika-service.by/service/printer-repairing/>ремонт принтеров заправка картриджей</a> <a href=https://vika-service.by/service/printer-repairing/>ремонт офисной техники</a> <a href=https://vika-service.by/service/printer-maintenance/>ремонт xerox</a> <a href=https://vika-service.by/service/printer-maintenance/>ремонт мфу на дому в минске</a> <a href=https://vika-service.by/service/printer-maintenance/>ремонт мфу и копировальных аппаратов</a> <a href=https://vika-service.by/service/printer-repairing/>ремонт сканеров мфу</a> <a href=https://vika-service.by/service/printer-maintenance/>ремонт принтеров hp</a> <a href=https://vika-service.by/service/printer-maintenance/>сканер ремонт</a> <a href=https://vika-service.by/service/printer-repairing/>ремонт принтеров panasonic</a> <a href=https://vika-service.by/service/printer-maintenance/>ремонт принтеров с выездом на дом</a> <a href=https://vika-service.by/service/printer-repairing/>обслуживание принтеров</a> <a href=https://vika-service.by/service/printer-maintenance/>ремонт принтера epson</a> <a href=https://vika-service.by/service/printer-repairing/>ремонт цветных лазерных принтеров</a> <a href=https://vika-service.by/service/printer-maintenance/>ремонт принтера hp в минске</a> <a href=https://vika-service.by/service/printer-repairing/>ремонт мфу hp</a> <a href=https://vika-service.by/service/printer-repairing/>мастер по ремонту принтеров</a> <a href=https://vika-service.by/service/printer-maintenance/>обслуживание принтеров xerox</a> <a href=https://vika-service.by/service/printer-maintenance/>ремонт мфу минск</a> <a href=https://vika-service.by/service/printer-maintenance/>ремонт оргтехники минск</a> <a href=https://vika-service.by/service/printer-repairing/>ремонт и обслуживание принтеров</a> <a href=https://vika-service.by/service/printer-repairing/>ремонт принтеров xerox phaser</a> <a href=https://vika-service.by/service/printer-maintenance/>ремонт epson</a> <a href=https://vika-service.by/service/printer-repairing/>профилактика ремонт мфу</a> <a href=https://vika-service.by/service/printer-repairing/>ремонт мфу и копировальных аппаратов</a> <a href=https://vika-service.by/service/printer-repairing/>обслуживание принтера hp laserjet</a> <a href=https://vika-service.by/service/printer-repairing/>ремонт epson в минске</a> <a href=https://vika-service.by/service/printer-maintenance/>обслуживание лазерного принтера</a> <a href=https://vika-service.by/service/printer-repairing/>срочный ремонт принтеров hp</a> <a href=https://vika-service.by/service/printer-maintenance/>ремонт принтеров panasonic</a> <a href=https://vika-service.by/service/printer-maintenance/>ремонт мфу</a> <a href=https://vika-service.by/service/printer-maintenance/>ремонт мфу canon в минске на дому</a> <a href=https://vika-service.by/service/printer-repairing/>ремонт мфу xerox</a> <a href=https://vika-service.by/service/printer-maintenance/>ремонт принтеров с выездом</a> <a href=https://vika-service.by/service/printer-maintenance/>ремонт цветных принтеров</a> <a href=https://vika-service.by/service/printer-repairing/>ремонт мфу на дому в минске</a> <a href=https://vika-service.by/service/printer-maintenance/>ремонт и заправка принтеров</a>
#8127 Charlesgunny
фильмы казино рояль casino вход <a href=https://vestnik-jurnal.com/>порно с Евгений Малкин (хоккей)</a> casino официальный сайт pin up casino зеркало <a href=https://vestnik-jurnal.com/>casino бонус</a> официальные зеркала казино casino официальный зеркало 1×bet 1хбет скачиваемые казино casino сайты 1×slots casino почему казино
#8128 prodamys promokod_jjplhttp://promokod-prod.ru
промокод на продамус скидка подключение <a href=http://promokod-prod.ru/>http://promokod-prod.ru/</a> .
#8129 GeraldSizhttps://lastdepcasino.ru/
топ казино с выводом <a href=https://lastdepcasino.ru/>казино онлайн рейтинг 2024</a>
#8130 GeraldSizhttps://lastdepcasino.ru/
лучшее казино <a href=https://lastdepcasino.ru/>https://lastdepcasino.ru</a>
#8131 Charlesgunny
Светлана Ходченкова яндекс игры казино <a href=https://specreporter.com/>казино ставка</a> порно с Владимир Минеев (ММА) Елизавета Боярская <a href=https://th-royalgclub.com/>суть казино</a> макао казино porno Светлана Ходченкова unlim casino porno Анастасия Янькова, боксерка порно с Анна Калинская (теннис) гта казино букмекерская контора зенит
#8132 MichaelErynchttps://zip.org.ua/
Ваш гид в мире строительства <a href=https://zip.org.ua/>https://zip.org.ua</a> и ремонта. Советы специалистов, пошаговые инструкции, полезные статьи и ответы на популярные вопросы.
#8133 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8134 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало на сегодня
Основное различие никаких, собственно для получения бездепа не надо пополнять баланс в казино. Но считая сего, есть ряд и других отличий: <a href=http://filmkachat.ru/>1× slots casino зеркало</a> Так что можете смело региться без всяких размышлений. Фортуна сейчас точно на вашей стороне. Не страшитесь, так последствие какого или ущерба Вам совершенно не угрожает. С такими бонусами как без пополнения, Вы остаетесь лишь в плюсе, хотя не как не в минусе. <a href=https://issuu.com/kalinka0588/docs/_>https://issuu.com/kalinka0588/docs/_</a> Классическая разновидность приза за создание аккаунта. Его преимущество содержится том,, собственно клиент возможность других подбирать аппараты и делать ставки в их. Иногда список игровых автоматов ограничен оператором, но все одинаково это другого, как, чем единственный доступный разъем, как в случае с внедрением фриспинов. казино 1×slots <a href=http://forums.ghc-games.com/member.php?action=profile&uid=105754>http://forums.ghc-games.com/member.php?action=profile&uid=105754</a>
1×slot зеркало
<a href=http://216.38.0.7/viewtopic.php?f=12&t=142109>1×slots зеркало проходить регистрацию это отличный вариант</a> 1× slots casino зеркало <a href=http://l-avt.ru/support/dialog/?PAGE_NAME=profile_view&UID=56918>http://l-avt.ru/support/dialog/?PAGE_NAME=profile_view&UID=56918</a> 1хслот 1хслотс регистрация перейти на 1×slots Для верификации аккаунта надо(надобно) предоставить спецам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, а также фотографию банковской карты либо экрана странички электрического кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для доказательства личности.
1×slots зеркало регистрацию более популярный вариант это
Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке нужно пополнить счет в казино. Для депозитных бонусов, данная процедура не нужна, например как депо уже сделан. Основное правило получения бездепа ? творимый аккаунт обязан быть у пользователя первым и единственным. Наличие нескольких аккаунтов требовательно запрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депозита необходимо блюсти простую очередность деяний.Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные способы и расценить особенности, труднодоступные при ирге в демо режиме. Многие новые посетители переходят в количество неизменных, а оператор получает длительную выгода. <a href=https://diart.su/user/Ralphagisy/>https://diart.su/user/Ralphagisy/</a> Максимальный объем ставки, который нельзя превышать пока бонус не несомненно полностью отыгран. В случае нарушения этого правила, приз и выигрыш с него будут аннулированы. 1хслотс официальный сайт зеркало Приветственный бездеп предоставляется какому игроку лишь раз один. Казино сражаются с так называемыми бонусхантерами (от англ. Bonus Hunter — охотник за призами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения подарка. Исключить подобные деяния разрешает верификация данных. Администрация вправе востребовать у клиента доказать индивидуальные данные, обозначенные при регистрации.После получения бонуса вывод средств для посетителя будет недоступен времени, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или чета недель. Выводить средства игрок может лишь последствии отыгрыша.
1×slots зеркало регистрация
Если речь идет об эксклюзивных услугах, может потребоваться регистрация в казино по ссылке с партнерского вебсайта.Подарки на праздничные ? приуроченные к торжественным датам, требующие символического отыгрыша либо начисляются без того. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду. Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, a лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. Размер приза. В качестве бездепов обыкновенно начисляют очень суммы, а когда речь о призах за депо, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино имеют презентовать игроку до 2000$. 1×слот регистрация в 1×slots casino <a href=https://morph.ro/users/DavidStups>https://morph.ro/users/DavidStups</a>
1х слот регистрация в 1×slots casino
Бывают ли бездепозитные призы без вейджера? Бывают, случае у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный бонус за регистрацию уточняется вейджер во всех казино.Зарегистрируйтесь. Для регистрации чаще всего довольно ввести собственный номер аппарата и почтовый адрес, в чего установить приобретенный код из СМС. Возможно, потребуется показать промокод. В правилах промоакции несомненно написано, где его хотелось вводить. Иногда это хотелось делать при регистрации, времени — уже последствии создания личного офиса, на отдельной страничке. Как и другие акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такого предложения являются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих гостей и позволяет им составить эмоцию о функционале, не рискуя вескими совокупностями. <a href=https://goblin-film.net/user/JamesOreni/>https://goblin-film.net/user/JamesOreni/</a> 1 xslots рабочее зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://miupsik.ru/forums/showthread.php?tid=246490>1×slots сайт</a>
<a href=https://www.fromrus.su/index.php?/topic/20384–1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82-%D0%BC%D0%BE%D0%B1%D0%B8%D0%BB%D1%8C%D0%BD%D0%B0%D1%8F-%D0%B2%D0%B5%D1%80%D1%81%D0%B8%D1%8F-%D1%81%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C/>1×slots официальный сайт мобильная версия скачать</a>
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=577922>1×slots зеркало регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Не желаете поиграть в азартные игры, не рискуя своими деньгами, но получая в все выплаты? Подобную вероятность деют почти наилучшие порталы с азартными развлечениями. В их числе количество добросовестных и надежных интернет-казино на русском языке. Они привлекают новых пользователей различными поощрительными мероприятиями, включая бездепозитные, либо бесплатные бонусы. Бездепы имеют заходить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами.
#8135 Charlesgunny
гта онлайн казино porno Илья Ковальчук (хоккей) <a href=https://specreporter.com/>kometa casino</a> 1×bet сайт porno Вера Бирюкова, гимнастка <a href=https://rhymes-punches.com/>порно с Алексей Миранчук (футбол)</a> casino pin официальный порно с Евгений Малкин (хоккей) кент casino porno Марина Александрова pin up casino скачать 7k casino официальный сайт букмекерская контора ставки
#8136 GeraldSizhttps://lastdepcasino.ru/
казино онлайн 2024 топ <a href=https://lastdepcasino.ru/>топ 100 казино</a>
#8137 Jamesalime
en cok kazand?ran slot oyunlar? <a href=" http://czn.com.cn/…-205665.html „>en cok kazand?ran slot oyunlar?</a> or <a href=“ https://toolbarqueries.google.co.ao/url?… ">en cok kazand?ran slot oyunlar?</a> http://www.google.bt/url?… en cok kazand?ran slot oyunlar? <a href=https://maps.google.lv/url?sa=t&url=https://slottr.top>slot oyunlar?</a> en kazancl? slot oyunlar? and <a href=http://bbs.cheaa.com/home.php?mod=space&uid=3307130>az parayla cok kazandiran slot oyunlar?</a> az parayla cok kazandiran slot oyunlar?
#8138 Charlesgunnyhttp://filmkachat.ru
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Мы проделываем ударение на главных положениях правил, рассказываем о территориальных лимитированиях и вкратце информируем о иных промоакциях обговариваемого казино. <a href=http://filmkachat.ru/>1×slots зеркало регистрация в 1×slots casino</a> Срок активации и время на отыгрыш. Зачисление денег либо фриспинов случается при активации на взыскательно ограниченного периода, похожие притязания предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать приз количество дней или даже недель. Другие выдают солидную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с необоснованно высоким вейджером. <a href=https://juicedmuscle.com/forum/general/general-chat/264984-the-art-of-product-visualization-making-digital-dreams-come-real>https://juicedmuscle.com/forum/general/general-chat/264984-the-art-of-product-visualization-making-digital-dreams-come-real</a> Вы не в коем случае ни чем рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный бонус, по мимо практической забавы на бездепозитные призы, у Вас есть шанс выучить игровые автоматы, выучится регулировать изменять ставки и линии, исследовать бонусные игры и их выигрышные комбинации, да счете просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные свои, коие можно отыграть и вывести, но просто на демо счет, тем наиболее адреналин в крови более повысится а пульс забьется с нередким ритмом!Более солидные предложения встречаются довольно редко. Зачастую они доступны только VIP-игрокам. В оставшихся случаях им наверняка сопутствуют довольно жесткие обстоятельства отыгрыша. Также возможны дополнительные обстоятельства и другие лимитирования, прописанные в условиях и положения бонусной программы казино. 1×slots casino регистрация 1×slots review live <a href=http://freedom.teamforum.ru/memberlist.php?mode=viewprofile&u=6550>http://freedom.teamforum.ru/memberlist.php?mode=viewprofile&u=6550</a>
1×slots зеркало на сегодня
<a href=http://nacionrolera.org/foro/memberlist.php?mode=viewprofile&u=41202>1×slots официальный demo регистрация в 1×slots casino</a> 1×slots зеркало быструю регистрацию а также мгновенное Фриспины – благотворительные вращения с фиксированной ставкой, коие возможно применять в конкретных игровых автоматах. <a href=http://c909201u.beget.tech/user/DavidEnant/>http://c909201u.beget.tech/user/DavidEnant/</a> Чаще всего интернет-казино предлагают бездепозитные бонусы новым пользователям. Эта промо-акция довольно эффективно завлекает начинающих, подталкивая их к открытию счета. Конечно, не все они становятся послушными посетителями, но сам факт регистрации аккаунта играет на руку заведению.В интернет-сети практически возможно отыскать перечни более популярных и обещанных поощрительных программ от модных онлайн-казино. 1×slots зеркало регистрация то дальше необходимо пройти
1×slots зеркало сайта
<a href=https://www.notoutreview.com/author/deweymog/>https://www.notoutreview.com/author/deweymog/</a> 1×slots регистрация то дальше необходимо пройти Для ревизии применяются сканы паспортов, водительских удостоверений, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если юзер замечен в попытке завести вспомогательный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный перечень. При игре на лицензионной площадке не стоит бояться свидетельствовать достоверную индивидуальную информацию (шифрование исключает утечку персональных данных).Самые пользующиеся способы вывода денег ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электрическим платежным системам подобии Neteller и Skrill, а пользуются криптовалютными кошельками. Вывод выигрышей может осуществляться моментально или развлекать от нескольких часов до нескольких суток.
1×слот регистрация в 1×slots casino
Стоит обозначить(означить), собственно бездепозитный бонус выдается только совершеннолетним новеньким, которые, же, могут пригласить собственных приятелей и людей, того претендующих на поощрительную программку лояльности. Подобная разработка была между конкуренцию онлайн-казино для популяризации и расширения трафика. Покер румы и спонсоры содействуют увеличению своей посещаемости, путем вербования свежих игроков. Бонусы – это оригинальный шанс для потенциальных соучастников игры, которые могут опробовать софт покер рума и убедиться, будут ли они в него выступать либо нет. Новый игрок попробует средства силы с настоящими оппонентами в казино. <a href=https://forum.vn.ua/showthread.php?p=3272103#post3272103>casino 1×slot</a> На странице представлены бездепозитные призы за регистрацию в казино редкая заслуга за коей гонятся все игроки как новенькие, например и профессионалы. Мы также уделяем великое внимание на наличие бонусов при составление рейтинга казино на средства. Бездепозитный бонус это возможность играть бесплатно и выиграть настоящие деньги. 1× slots зеркало <a href=http://krasrec.ru/forum/user/206629/>http://krasrec.ru/forum/user/206629/</a>
1×slot зеркало рабочее регистрации на телефон придет
3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефонный или почту, показать персональную информацию;Размер ставки для забавы по бездепозитному призу (окончательно же, когда, когда он представлен повторяющий бонусных денежных средств) зачастую ниже, чем при игре на депо. Ограничение несомненно действовать до этапа отыгрыша бонуса. <a href=http://m1bar.com/index.php?subaction=userinfo&user=headyradical29>http://m1bar.com/index.php?subaction=userinfo&user=headyradical29</a> Но рядах азартных платформах похожие вознаграждения могут получить и уже зарегистрированные юзеры. В этом случае, призы предоставляются в уникальных промоакций или же некоторым игрокам вид акционного предложения, коие прибывает на почту с целью «вернуть» игрока в свое казино. 1×slot рабочее зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://showboysmedia.com/real-music/#comment-61309>1×slots акции</a>
<a href=https://orbitsound.com/forum/user-211634.html>1×slots казино зеркало</a>
<a href=https://adminclub.org/member.php?action=profile&uid=90427>1×slots сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы за регистрацию в игровых автоматах для хозяев онлайн-казино являются частью рекламной кампании, направленной на увеличение аудитории сайта. Так они продвигают средства бренды и завлекают новых клиентов.
#8139 Charlesgunny
казино регистрации порно с Евгения Медведева, фигуристка <a href=https://rhymes-punches.com/>porno Виктория Баркова, легкоатлетка</a> порно с Ирина Сидоркова букмекерская контора фонбет официальный <a href=https://vestnik-jurnal.com/>porno Анастасия Янькова, боксерка</a> букмекерская контора скачать приложение порно с Диана Шнайдер (теннис) Елизавета Боярская Комарова Наталья Владимировна порно казино фильм casino ап Окладникова Ирина Андреевна порно
#8140 GeraldSizhttps://lastdepcasino.ru/
лучшее казино <a href=https://lastdepcasino.ru/>https://lastdepcasino.ru</a>
#8141 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8142 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало
Иногда в качестве бездепа, казино дарит наименьший бонус (до 50 руб. ), из-за которого надо заморачиваться.При верном раскладе бездепы — это прекрасный метод выступать на средства без траты собственных средств. Есть количество рекомендаций, следуя коим возможно извлечь максимум выгоды из сходственных акций казино. Играть по лишь на лицензированных площадках. Скриптовые веб-сайты не только врут с бонусными предложениями, хотя и используют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах невероятно. <a href=http://filmkachat.ru/>1×slots зеркало регистрацию более популярный вариант это</a> <a href=https://www.as7abe.com/wall/blogs/post/60173>https://www.as7abe.com/wall/blogs/post/60173</a> Наиболее модные вознаграждения среди гэмблеров – бездепозитные бонусы казино. Это не удивительно, так можно получить безвозмездные вращения или виртуальные кредиты, и при не придётся пополнять счёт, рисковать личными деньгами. Удастся насладиться различными веселиями и даже выиграть крупную необходимую, избегая серьёзного риска.У любого игорного заведения средства управляла и условия. Но, чтобы получить бонусы, необходимо выполнить стандартные действия: 1×slot зеркало рабочее регистрации на телефон придет <a href=http://maskarad.bomba-piter.ru/user/RalphElire/>http://maskarad.bomba-piter.ru/user/RalphElire/</a> Каждый геймер должен сперва отчетливо изучить условия по получению и отыгрышу приглянувшегося презента. Если всё устраивает, поторопитесь арестовать бесплатные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик сейчас начать вертеть барабаны лучших слотов.Бездепозитные бонусы за регистрацию в игровых автоматах для собственников онлайн-казино считаются долею рекламной кампании, направленной на увеличение аудитории вебсайта. Так они продвигают средства бренды и привлекают свежих клиентов.
1×slots регистрация то дальше необходимо пройти
Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного бонуса довольно пополнения баланса и подтверждения личности. В других же клубах, нужно некоторое один прокрутить свой депозит.Вы не в коем случае ни же рискуете, а только выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс изучить игровые автоматы, выучится регулировать менять ставки и линии, исследовать бонусные игры и их выигрышные композиции, ну в просто зарядится кучей впечатлений! Ведь вы будите выступать на бонусные средства, которые возможно отыграть и вывести, но просто на демо счет, тем самым адреналин в крови еще повысится а пульс забьется с нередким ритмом! <a href=https://rf-lowrate.ru/index.php?/topic/4212-%D0%BF%D0%BB%D0%B0%D0%BD%D0%BE%D0%B2%D0%B0%D1%8F-%D1%81%D0%BF%D0%B5%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D0%B0%D1%8F-%D0%BE%D1%86%D0%B5%D0%BD%D0%BA%D0%B0-%D1%83%D1%81%D0%BB%D0%BE%D0%B2%D0%B8%D0%B9-%D1%82%D1%80%D1%83%D0%B4%D0%B0/page/77/#comment-216882>1хслот зеркало</a> зеркло казино 1×slots <a href=https://output.jsbin.com/terirax>https://output.jsbin.com/terirax</a> 1×slots casino регистрация Игры, в которых возможно выступать на бонусные деньги. Проверьте список игр, в которых возможно выступать на бонусные средства, вероятно они Вам не понравятся и не стоит тратить своё время на такую акцию.Для казино, работающих онлайн, бездепозитные бонусы нужны для вербования свежих клиентов. Предложение поиграть на слотах без необходимости внесения реальных средств — работающий способ для увеличения энтузиазма к фирмы. После отыгрыша бездепа велик шанс, что игроку понравится и он продолжит играть в казино, лишь теперь теснее на собственные средства.
1× slots casino зеркало
У каждого игорного заведения средства верховодила и условия. Но, чтобы получить бонусы, необходимо выполнить стереотипные деянья: Операторы гемблинга заявляют, собственно например они борются с бонус-хантерами. Впрочем, критики считают, что этим казино пробуют сделать из случайного постояльца постоянного игрока.Доступ к дару может раскрываться автоматически в введения промокода или обращения в службу поддержки сайта. В первом случае от юзера не требуется никаких действий. Бездеп с активацией по коду встречается почаще всего. Игроку нужно установить совокупность символов в графе, которая возможность находиться в регистрационной форме в Личном офисе. <a href=http://www.tiendahinchables.com/blog/%D0%B2%D0%BE%D0%B4%D0%B8%D1%82%D0%B5%D0%BB%D1%8C%D1%81%D0%BA%D0%B8%D0%B5-%D0%BF%D1%80%D0%B0%D0%B2%D0%B0-%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA.html>http://www.tiendahinchables.com/blog/%D0%B2%D0%BE%D0%B4%D0%B8%D1%82%D0%B5%D0%BB%D1%8C%D1%81%D0%BA%D0%B8%D0%B5-%D0%BF%D1%80%D0%B0%D0%B2%D0%B0-%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA.html</a> Основное управляло получения бездепа ? творимый акк должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов взыскательно воспрещено. Проверка проводится по имени, адресу электронной почты, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депо нужно соблюдать простую последовательность поступков.Далее требуется отыграть вагер и исключить выигрыш. Игрокам без опыта крупно повезло, у получить 10-ки даров за 1 регистрацию. Если не смогли получить Бездепозитный бонус, не тревожьтесь. Обратитесь в интернет чат, оператор поможет ситуацию. 1×slots регистрация на сайте
1×слотс казино
<a href=http://forum.exalto-emirates.com/memberlist.php?mode=viewprofile&u=69997&sid=e2842c014380b51c2edb1562dc422709>1×slots casino регистрация 1×slotscasino09k online</a> Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала быстрые выводы. Фишка выплат в, собственно достаточно выбрать платёжный инструмент и показать сумму. В большинстве случаев средства зачисляются на электрические кошельки в течение 15 мин., а на банковские карты – 1–3 трудящихся дня.Бонус начисляется игроку незамедлительно после регистрации и прохождения верификации в казино и не просит от посетителя внесения депо. Как правило, размер бонуса в подобном случае довольно застенчивый, однако дозволяет новеньким познакомиться с забавой без риска реальными деньгами. 1×slots регистрация на 1хслотс <a href=http://witiai.cn/home.php?mod=space&uid=63305>http://witiai.cn/home.php?mod=space&uid=63305</a> Фриплей-бонусы встречаются лишь в неких клубах. Они зачисляются сразу после творения профиля и активны непродолжительное время. Если не успеете потратить средства, они попросту сгорят. Касаемо времени, в большинстве случаев призы активны в течение часа.Благодаря программке лояльности от игорного заведения, возможно брать хороший старт и без дополнительных инвестициям запустить видеослоты. Кроме такого, возможно рассчитывать на реальную удачу и получить, без инвестиции личных финансов, великой выигрыш.
1хслотс мобильная версия зеркало
<a href=https://steemit.com/avtoshkola/@mobilecards2203/avtoshkola-vladivostok>https://steemit.com/avtoshkola/@mobilecards2203/avtoshkola-vladivostok</a> Обычно бездепозитные промоакции от казино, прибывают на эл. Почту в дни рождения или дни. В некоторых онлайн казино возможно обратиться в чат и как неизменному игроку, возможно вам предложат бездепозитное предложение. 1× slots casino официальный сайт
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.home-visa.ru/memberlist.php?mode=viewprofile&u=3536>1×slots зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Ограничения по забавам. Администрация воспрещает игрокам кое-какие игровые автоматы с бездепозитным бонусом, средствами либо бесплатными вращениями. Обычно, в правилах приводится полный перечень слотов для отыгрыша. Иногда дробленье выполняется по виду игр. Например, отыгрыш возможен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino. Если вы опытный игрок, вы должны знать, что бонус без депо – редкая находка. Тем не менее, мы еженедельно изучаем интернет, чтобы отыскать вам наилучшие бездепозитные предложения.
#8143 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8144 EdwardRek
http://slottr.top/ slot oyunlar?
#8145 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8146 Charlesgunnyhttp://filmkachat.ru
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Бонус за регистрацию в казино без депо с выводом денег надо(надобно) отыграть. Зачастую для отыгрыша возможность понадобиться сделать ставки на сумму, в некоторое десятков один превосходящую необходимую приза или выигрыша. <a href=http://filmkachat.ru/>1× слот зеркало</a> Для получения приза нужно ознакомиться с программой преданности казино и устроить ставки на необходимую, необходимую для перехода на следующий степень. <a href=https://secure.smore.com/n/qe7fu-revit-family-creation-services>https://secure.smore.com/n/qe7fu-revit-family-creation-services</a> Большинство клубов завлекают внимание геймеров за счёт разнородных презентов. На 1 сайтах можно получить виртуальные кредиты, которые откроют доступ ко всему софту. На иных же, администрация предлагает бесплатные вращения для запуска лучших онлайн слотов. Несмотря на различные акции, стоит выделить самые главные.Призовые начисления без депо имеют предоставляться для роли в турнирах интернет казино. Потратить перечисленные деньги возможно самая в данной акции. Условия их проведения включают в себя ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться этим предложением, другого, как выучить его управляла. 1×slots официальный сайт, скачать <a href=http://forum.fcmn.co.il/member.php?action=profile&uid=289814>http://forum.fcmn.co.il/member.php?action=profile&uid=289814</a> Фриспины без депозита или дополнительные свои посодействуют ближе познакомиться с игровой платформой и её функциями. За счёт подарков можно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за игры напротив живых крупье.На бесплатные призы онлайн-казино почти постоянно распространяется ограничения по стране проживания посетителей. Даже случае для разрешается открывать счет и играть на средства в заведении, это еще не означают, что для доступны not the slightest down payment bonuses.
1 xslots рабочее зеркало
<a href=http://brilliance.ru/forum/viewtopic.php?f=6&t=42728>1× slots регистрация в 1×slots casino</a> 1×slots casino регистрация на сайте Новички не обожают сразу же вносить депозит. Это обосновано отсутствием опыта и сомнением. К счастью, в можно получить бездепозитный бонус за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В всяком случае вы не рискуете собственными сбережениями. Это отличная вероятность запустить приглянувшийся видео разъем или же испытывать удачу в настольных играх. <a href=http://directapklinks.blogspot.com/2015/10/open-vpn-handler-ui.html>http://directapklinks.blogspot.com/2015/10/open-vpn-handler-ui.html</a> Не стоит путать забаву в демо и использование бонусов. В демонстрационном режиме игрок возможность оценить механику слота, сюжет и оформление. Но игра проводится на относительные кредиты, потому отсутствует главное ? ощущение азарта. Активируя промокод или фриспины, заказчик и не тратит свои средства на игровые автоматы, но может сорвать настоящий куш!Некоторые онлайн-казино без депо предлагают свежим клиентам избрать бонус при регистрации. Будьте внимательны: выбрав раз, вы в безоговорочном большинстве случаев не можете воспользоваться остальными. 1×slot казино зеркало В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, необходимо обратиться в службу поддержки через лайв-чат на веб-сайте казино.
1×slots мобильная версия войти казино
Более солидные предложения встречаются очень редко. Зачастую они доступны лишь VIP-игрокам. В остальных случаях им наверняка сопутствуют довольно жесткие обстоятельства отыгрыша. Также вероятны вспомогательные условия прочие лимитирования, прописанные в критериях и положения бонусной программы казино. В онлайне большое узнаваемых игорных площадок с привлекательными акционными предложениями. Однако внимательно читать условия 10-ов услуг в надоест, да и время отнимет большое. Поэтому наша команда подготовила ТОП-3 сайтов с превосходнейшими бездепозитными призами:После требуется внести идентификационный платёж. Это пугает начинающих больше всего. Нужно устроить наименьший депозит в 100–500 рублей. Таким образом служба безопасности увериться что, что платёжный метод принадлежит Вам. Данная процедура важна для обеспечивания защищенности игровых счетов. Пример, Ваш акк взломают и выведут средства на свой кошелёк. Будет очень досадно. Поэтому верификация платёжной системы, это необходимый момент. <a href=https://board.dionis.net.ua/tools.php?event=profile&pname=Josephsleda>https://board.dionis.net.ua/tools.php?event=profile&pname=Josephsleda</a> Для верификации номера аппарата, в личном профиле выберите опцию „Подтвердить номер телефона“ и введите в отвечающее фон код, приобретенный в sms-сообщении.Основное управляло получения бездепа ? создаваемый акк должен быть у юзера первым и единственным. Наличие нескольких аккаунтов взыскательно воспрещено. Проверка проводится по имени, e-mal, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депо нужно соблюдать несложную последовательность деяний. 1× slots casino зеркало Бездепозитный приз по промо-коду будет доступен для забавы, лишь том, случае когда Вы активируете особый бонусный код в разделе с призами либо укажите промокод при регистрации на веб-сайте. В неких случаях, не активации кода, придется подтвердить контактные данные игрока и заполнить анкету посетителя.
1×слотс казино
Но надо думать, собственно снабжая пользователей этими бонусами, казино занимается спонсированием. Ведь размеры вознаграждений, главном, не большие (средним объемом от 5 до 20 долларов). И на эти свои налагаются определенные условия и ограничения, неотклонимые к исполнению игрока, в в последствии он желает получить все свои выигранные финансы. 1×slots официальный сайт мобильная версия <a href=https://www.mmopro.org/members/466712.html?s=db28e7945ced801bc4fa802b695b4c27>https://www.mmopro.org/members/466712.html?s=db28e7945ced801bc4fa802b695b4c27</a> У любого игорного клубы разные вейджеровые обстоятельства. Чтобы вы гарантировано сумели выполнить их, мы дадим некоторое советов. Если система начислила маленькую необходимую, не стоит создавать великие ставки – остановитесь на 10–30 центах. Как только сможете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте выступать. В неприятном случае какого-либо присмотреться к другому автомату.При ирге на бонусные средства запрещается выступать в игровые автоматы с современным джекпотом и забавы из радела live casino. Кроме того, некоторые казино дают бездеп на раз либо некоторое определенных слотов, и в иных играх Вы не можете на них выступать.
1 хслот регистрация в 1×slots casino
Выполнив все притязания оператора, клиент имеет оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит примерно менее суток. Если дополнительно требуется пройти функцию верификации, то срок увеличивается до 1–2 рабочих дней. Для перевода применяются банковские инструменты и электронные платежные системы. Второй метод подходит никакого, например как масса транзакций в исполняются моментально. В связи со спецификой функционирования банков обработка платежей может занять до нескольких трудящихся дней.Фриплей-бонусы. Бонусы за безвозмездную забаву есть только в некоторых клубах. Они зачисляются незамедлительно после творения профиля и срабатывают непродолжительное время. Если у вас нет медли израсходовать свои, они просто завершатся. Что касается времени, правило бонусы действуют на одного часа. Приглашаем делиться мнениями о призах. Это поможет другим юзерам выбирать наиболее прибыльные предложения. <a href=https://kwik.adriensosa.fr/forums/users/chrisnib/>https://kwik.adriensosa.fr/forums/users/chrisnib/</a> Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых свежих, щедрых и испытанных бонусах в интернет казино, которые обновляются каждый день.Приглашаем делиться мнениями о призах. Это поможет иным юзерам выбирать наиболее выгодные предложения. 1хслотс официальный сайт зеркало Хотя бесплатные бонусы начисляются без депозита, не исключено, собственно вам понадобиться вносить деньги. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только последствии того, как свежий заказчик впервые пополнит игровой счет.
<b>Смотреть еще похожие новости:</b>
<a href=https://australianwinerytours.com/tours/showthread.php?tid=204036>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<a href=https://adminclub.org/showthread.php?tid=59698>1×slots официальный сайт зеркало</a>
<a href=https://nztw.org/home.php?mod=space&uid=43957>1×slots официальный сайт скачать</a>
<a href=http://diablo2r.cn/home.php?mod=space&uid=30130>1×slots регистрацию процедура займет всего лишь</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Суммы сходственных услуг, в, колеблются от трех до двадцати $, а вейджер на эти средства обязан сочинять от 30 до шестидесяти раз. Зачастую, наивеличайшая сумма выигрыша здесь составит от одной до 2-ух сотен $. Если игры выиграет больше, то все средства имеют быть списанными до очень разрешенного выигрыша. Здесь бывает смысл выводить еще несуществующие деньги на собственную платежную систему и далее находить заведение с благоприятными под данную необходимую релоадом или бонусом за первое пополнение счета. Есть несколько подвидов бездепозитного гонорары, предлагаемого великим количеством заведений.
#8147 JustinErype
https://pinup2025.com/ пин ап зеркало
#8148 LorenzoTedhttps://medium.com/@kostumchik.kiev.ua/todo-sobre-el-juego-de-plinko-en-m%C3%A9xico-instrucciones-de
Plinko se ha convertido <a href=https://medium.com/@kostumchik.kiev.ua/todo-sobre-el-juego-de-plinko-en-m%C3%A9×ico-instrucciones-demos-opiniones-y-m%C3%A1s-d1fde2d99338>https://medium.com/@kostumchik.kiev.ua/todo-sobre-el-juego-de-plinko-en-m%C3%A9×ico-instrucciones-demos-opiniones-y-m%C3%A1s-d1fde2d99338</a> en una de las opciones favoritas de los jugadores de casinos en Mexico. Conocido por su simplicidad y gran potencial de ganancias, este adictivo juego ahora cuenta con una plataforma oficial en Mexico.
#8149 Charlesgunny
сайт казино вход порно с Евгения Медведева <a href=https://rumafia.news/>porno Мира Андреева (теннис)</a> казино вход официальный сайт casino 7k рабочее <a href=https://www.ossetia.tv/>порно с Дарья Клишина, легкоатлетка</a> porno Мира Андреева (теннис) порно с Юлия Ефимова, пловчиха гама казино зеркала казино 1×bet зеркало xbet xyz casino riobet online casino 7k
#8150 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8151 Charlesgunny
1×bet 1хбет porno Елизавета Туктамышева <a href=https://kompromat1.online/>порно с Георгий Джикия (футбол)</a> почему в казино нет окон porno Яна Троянова <a href=https://kompromat1.online/>казино зеркало сегодня</a> порно с Кирьянова Дарья Борисовна unlim casino яндекс казино букмекерская контора фонбет официальный сайт 1×bet xbet xyz бесплатно фильм казино пина casino
#8152 Charlesgunnyhttp://filmkachat.ru
1×slots подтвердит вашу регистрацию если говорить
Подтвердите лицо, предоставив оператору казино средства паспортные данные. Инструкции обыкновенно легкие, основное — четко им по. Если написано, что «на фото обязаны быть видны все четыре угла странички паспорта» — сделайте непосредственно это фото.Во всех законных онлайн-казино Беларуси нужно свидетельство паспортных данных для игры — это требование правительства страны. <a href=http://filmkachat.ru/>1хслотс рабочее зеркало</a> Денежные свои. Третий бонус за регистрацию без депо – наличные. К огорчению, только известные и пользующиеся клубы шансы уяснить средства в рублях или баксах. С их поддержкой вы сможете насладиться любой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед данным необходимо выполнение конкретных условий. <a href=https://photosynthesis.bg/forum/tema/176.html>https://photosynthesis.bg/forum/tema/176.html</a> На условиях отыгрыша безвозмездных призов по тормознуть подробнее. С ними связаны нюансы, которые невозможно забыть без внимания. 1×slots официальный зеркало <a href=https://www.entoads.com/author/jefferyjot/>https://www.entoads.com/author/jefferyjot/</a> Получить Бездепозитный бонус в онлайн казино дело 2-ух кликов. Другой момент, отыграть рекламную и соблюсти управляла и обстоятельства отыгрыша. Под правилами подразумевается не только вагер, хотя и ограничения по наибольшей ставке. Мы осознаем, собственно в кинотеатр все ставят на зеро и выигрывают. Призываем не создавать похожего. Перед активацией бонуса прочитайте управляла. Узнайте последующие моменты: Условия получения подарка, за регистрацию, за депозит и многое. Ограничения по максимальной ставке. Зачастую не повыше 350 рублей. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вращать автоматы, а вагер несомненно стоять на месте. Поэтому принципиально аристократия, в каких играх возможно совершать кратность валютного оборота.Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала прыткие выводы. Фишка выплат в том, собственно достаточно избрать платёжный инструмент и указать сумму. В большинстве случаев средства зачисляются на электронные кошельки на 15 минут, а на банковские карты – 1–3 рабочих дня.
1×slots зеркало которую указывали при регистрации кстати
Так собственно главное отличие подарка на депозит от бездепа – неотъемлемое пополнение счёта. Вы можете привнести депо и преумножить стартовый капитал либо забрать бездеп и при не придётся рисковать собственными сбережениями. Поспешите выполнить простые требования, и администрация ресурса начисляет щедрое поощрение! <a href=https://www.xn–72c9aa5escud2b.com/webboard/index.php/topic,516590.new.html#new>1×slots рабочее зеркало</a> 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=https://carecepthealth.com/community/profile/glennjex/>https://carecepthealth.com/community/profile/glennjex/</a> Акции, приуроченные к календарным праздничным, посещают рассчитаны как на всех пользователей, например и на категории: к, презент на 8 марта девушкам-игрокам либо мужикам на 23 февраля.Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном веб-сайте и выполните вход в индивидуальный офис, чтобы арестовать безвозмездные вращения с вейджером х40; 1×slots зеркало видели такую регистрацию на Представленные на данной страничке наихорошие бездеп бонусы в казино за регистрацию в 2022 году имеют подходящие условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, каком посетители Casino.ru имеют сортировать список по нескольким критериям: по сумме, вейджеру, наибольшей сумме вывода и т.д.
казино 1×slots официальный сайт
Акционные предложения от казино есть в различных форматах. Часто призы даются в мена на депозит. Игрок заносит платеж и получает средства, безвозмездные вращения прочие поощрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — вид бонуса, который гарантирован за исполненье определенных деяний на веб-сайте: Подарки на конкретные даты выделяются условиями получения. Если поощрение начисляют игроку на денек рождения, то сумма обыкновенно находится от совместного размера депозитов за год.В количестве случаев безвозмездные бонусы начисляются в кредитах, которые невозможно незамедлительно исключить со счета. Прежде их нужно отыграть по установленным правилам. Эти требования принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже. <a href=https://aiia.su/index.php?subaction=userinfo&user=JustinBuila>https://aiia.su/index.php?subaction=userinfo&user=JustinBuila</a> 1×slots casino online регистрация
рабочее зеркало 1×slots
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=358470>1×slos регистрация в 1×slots casino</a> Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке необходимо восполнить счет в казино. Для депозитных призов, данная процедура не нужна, например как депо уже сделан.Получив собственный презент, Вы можете безвозмездно играть на реальные средства, а выполнив обстоятельства отыгрыша, вывести собственный выигрыш. 1 x slots casino <a href=https://www.weddingbee.com/members/glavdorogadvr/>https://www.weddingbee.com/members/glavdorogadvr/</a> Выбор каждого интернет казино на нашем веб-сайте. В описании к каждому Вы можете разузнать, что получите за творение аккаунта.
1×slots актуальное зеркало
Вы наверняка, как и все любите получать презенты и бездепозитные призы казино. Игорные дома брали в привычку одаривать гэмблеров приятными призами. Стать владельцем приветственного презента возможно за творение профиля или пополнение счёта. Второй вариант более увлекательный, так клубы готовы удвоить депо! Но если вы новичок и лишь знакомитесь с миром пыла, превосходнее воспользуйтесь призом за регистрацию. <a href=http://mallds.com/bbs/board.php?bo_table=free&wr_id=192219>http://mallds.com/bbs/board.php?bo_table=free&wr_id=192219</a> Можно. Вы практически можете отрешиться от получения бездепозитного бонуса за регистрацию в казино, же Вы не сделаете ставку. 1хслотс мобильная версия зеркало Обычно показатель выше, чем для бонусов на депо. Не изумляйтесь, случае он будет том х100. Иногда завышенный коэффициент вейджера уточняется для жителей отдельных государств.Бонус за регистрацию в казино выдается лишь один один на 1-го игрока. Но бывают дополнительные акции, в рамках которых бездепы расступаются для неизменных посетителей и такие подарки Вы можете получить более одного раза.
<b>Смотреть еще похожие новости:</b>
<a href=http://check2go.net/author/jameslob/>1х слот 1хслотс регистрация перейти на 1×slots</a>
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=6011>1×slots официальный зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
После потребуется привнести идентификационный платёж. Это стращает новичков больше всего. Нужно сделать наименьший депо в 100–500 руб. Таким образом служба защищенности увериться том,, собственно платёжный метод принадлежит Вам. Данная процедура необходима для обеспечения безопасности игровых счетов. Пример, Ваш аккаунт взломают и выведут средства на собственный кошелёк. Будет очень досадно. Поэтому верификация платёжной системы, это необходимый момент. Бонусные деньги – маленькая сумма средств для старта в новом казино. На бонусные деньги, обыкновенно разрешено играть во все игры, считая слотов с прогрессивным джекпотом и игр из раздела exist casino.
#8153 Charlesgunny
porno Яна Троянова Радченко Светлана Юрьевна порно <a href=https://specreporter.com/>top casino</a> макао казино 1×bet 1 <a href=https://slon-ru.com/>бесплатное казино</a> porno Дарья Мороз порно с Абрамченко Виктория Валериевна porno Катерина Шпица казино вулкан 1×bet телефон 1×bet телефон casino андроид
#8154 HarryMarhttps://tss-generators.ru
генератор бензиновый купить 5 квт <a href=https://tss-generators.ru/>https://tss-generators.ru</a>
#8155 Jameswedhttps://akkumulyatory-avtomobilnye-spb.ru
купить дешевый автомобильный аккумулятор <a href=https://akkumulyatory-avtomobilnye-spb.ru/>аккумулятор для автомобиля</a>
#8156 StephenFag
pacanele online <a href=" http://bbs.soumoli.com/home.php?… „>gГјvenilir deneme bonusu veren siteler</a> or <a href=“ http://info56.ru/redirect.php?… ">deneme bonusu veren yeni casino siteleri</a> https://images.google.com.vc/url?… bonus veren yasal siteler <a href=https://images.google.gm/url?sa=t&url=https://casinositeleri2025.pro>casino bonanza gГјncel giriЕџ</a> en iyi oyun siteleri and <a href=http://bocauvietnam.com/member.php?1564442-ntqjubyooo>deneme bonusu veren yeni casino siteleri</a> bedbo
#8157 Charlesgunny
casino зеркало сайта 1×bet вход <a href=https://t.me/vchkogpu_ru>Радченко Светлана Юрьевна порно</a> casino автомат Приезжева Екатерина Геннадьевна порно <a href=https://res-publika.com>букмекерская контора фонбет официальный</a> порно с Георгий Джикия (футбол) бесплатные букмекерские конторы 1×bet на андроид Петрова Ольга Викторовна порно казино фильм промокод 1×bet porno Марина Александрова
#8158 Charlesgunny
рабочие зеркала казино казино вход <a href=https://strelochnik.com/>лучшие бесплатные онлайн казино</a> casino daddy 1×bet 1 <a href=https://sovsekretno.net/>7k casino сайт</a> porno Илона Маркова, хоккеистка почему казино casino pin официальный Хорова Наталья Александровна порно retro casino казино рояль смотреть порно с Каролина Севастьянова
#8159 Ronniesmalfhttps://priem-akb-spb.ru/
прием акб <a href=https://priem-akb-spb.ru/>прием бу аккумуляторов в спб</a>
#8160 HarryGaphttps://geodezist-spb.ru
геодезическое сопровождение строительства спб <a href=https://geodezist-spb.ru/>геодезические работы</a>
#8161 Robertquisy
slot siteleri <a href=https://slottr.top/#>en kazancl? slot oyunlar?</a> en kazancl? slot oyunlar?
#8162 Ремонт телевизоров Hisense Москваhttps://remont-televizorov-hisense-job.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт телевизоров hisense в москве, можете посмотреть на сайте: <a href=https://remont-televizorov-hisense-job.ru/>ремонт телевизоров hisense адреса</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#8163 Charlesgunny
винлайн букмекерская контора официальный 1×bet зеркало на сегодня <a href=https://res-publika.com>Манилова Алла Юрьевна порно</a> 1×bet телефон casino скачать <a href=https://t.me/vchkogpu_ru>casino зеркало сегодня</a> казино на деньги Петрова Ольга Викторовна порно порно с Никита Кучеров (хоккей) порно с Петр Ян (ММА) Самойлова Алла Владимировна порно 1×bet 1 порно с Илья Осипов (киберспорт)
#8164 Charlesgunnyhttp://filmkachat.ru
1×slots официальный регистрация
Промообъявления от казино мешают реальной картины и направлены на вербование внимания юзеров. Понять, как высоки шансы остаться в плюсе, позволит личный анализ условий предложения:Если ординарными текстами, бездепы – это определённая сумма денег или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать подарки. Но есть некоторые нюансы. Существуют игорные дома, коие перед тем как начислить призы просят привязать телефонный, дать копии документов. <a href=http://filmkachat.ru/>1×slots регистрацию более популярный вариант это</a> <a href=https://photosynthesis.bg/forum/tema/203.html>https://photosynthesis.bg/forum/tema/203.html</a> Возьми собственный презент. Чаще всего бонус активизируется сразу в регистрации. Но посещают истории, когда нужно зайти в индивидуальный офис или написать в справочную службу.Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера. 1×slots зеркало рабочее <a href=http://xsyywx.com/home.php?mod=space&uid=42755>http://xsyywx.com/home.php?mod=space&uid=42755</a> В количестве случаев безвозмездные призы начисляются в кредитах, которые нельзя незамедлительно вывести со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже.4. Заберите подарок. Чаще всего приз активизируется незамедлительно после регистрации. Но бывают истории, когда надо(надобно) зайти в собственный офис либо написать в саппорта.
1×slots зеркало на сегодня
Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, a лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Нельзя осматривать игру на деньги, как вариант заработка. Азартные забавы запрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не организатором азартных игр. Сайт носит информационный нрав. 1×slots быструю регистрацию а также мгновенное Зарегистрироваться в казино по специальной ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефона и электрическую почту). Для доказательства номера телефона необходимо в личном профиле показать свой номер и нажать кнопку „Подтвердить номер аппарата“, далее Вы получите sms-сообщение с кодом, кот-ый нужно установить в подходящее фон. Для доказательства электрической почты, перейти по интенсивной ссылке в письме от казино.Бездеп с фриспинами может охватывать всю коллекцию игр на сайте или разработки 1-го провайдера. Обычно предлагается определенный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш возможность быть выведен после как, как юзер отыграет эту необходимую. Возможность оценить глубокий возможностей слотов — основное совершенство этой разновидности. Игроку становятся доступны что, эти опции, коие отсутствуют в демонстрационном режиме, а возможность выиграть реальные деньги прибавляет ярчайших азартных ощущений. <a href=http://web.symbol.rs/forum/member.php?action=profile&uid=743196>http://web.symbol.rs/forum/member.php?action=profile&uid=743196</a> Чтобы других убедиться в превосходствах бездепозитных призов, достаточно зарегистрироваться в казино и получить одобрение. 1хслот скачать Баланс игрока пополняется на соответствующую необходимую. К ней используется вейджер, указанный в правилах акции. Вывести выигрыш возможно несомненно после такого, как пользователь сделает требуемый размер ставок из собственных средств. В редких случаях бездеп работает в формате Free Play. На счет пользователя зачисляется большая сумма, и предоставляется малый срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по завершении сего периода сумма на счету несомненно превышать изначальную, то разность возможно несомненно вывести либо использовать для дальнейших ставок.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Фриспины предназначены для применения в видео слотах. Внимательно ознакомьтесь с условиями – часто их выдают на кое-какие автоматы. В зависимости от клуба, у вас выйдет устроить определённое количество ставок. Кстати, продвинутые игорные жилища разрешают запускать каждых «одноруких бандитов». Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную процедуру активации бонуса без депо. Внимательно прочтите до конца. Многие новенькие проделывают промахи на этапе регистрации и поэтому имеют получить презент.Фриспины – бесплатные вращения с фиксированной ставкой, коие возможно применять в конкретных игровых автоматах. <a href=http://akb-video.ru/profile.php?u=plantmaniac33>http://akb-video.ru/profile.php?u=plantmaniac33</a> Объективные – размер бонуса, коэффициент и обстоятельства вейджера, надобность внесения депозита для вывода средств; 1×slots регистрацию более популярный вариант это Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?
зеркала 1×slots
Во время игры в казино, выигрыши, приобретенные спасибо бесплатным призовым фондам, суммируются и включаются в общую сумму для отыгрывания. Однако, если удача улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно допустит вывести финансовые свои. Сумма вывода будет в от лимита, одобренного непосредственно в этом учреждении. Поэтому, внимательно надо(надобно) читать управляла выдачи безлимитных депо. <a href=https://orbitsound.com/forum/user-211634.html>казино 1×slots</a> Простая процедура получения бездепозитного приза, которая займет не более 2-х мин. Для получения бездепов, достаточно зарегистрироваться и доказать контактные данные. 1×slots зеркало рабочее на сегодня <a href=http://silveronika.com/bitrix/redirect.php?goto=http://spbluxwatches.ru/bitrix/redirect.php?goto=http://drobmash.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/WWlY-FzThsq>http://silveronika.com/bitrix/redirect.php?goto=http://spbluxwatches.ru/bitrix/redirect.php?goto=http://drobmash.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/WWlY-FzThsq</a> Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного приза.
1×slots скачать на айфон
Внесение депо – Будьте готовы восполнить счет после отыгрыша приза. Это стандартное требование правил для данного на промо-акций. Лучше заблаговременно уточнить, какую необходимую нужно будет заносить на счет. Как управляло, речь о наименьшем депозите, но вы обязаны быть уверены, что он вам по карману.Если вы выбираете проверенное лицензионное интернет казино и выполните все условия получения бездепозитного приза, проблем с получением дара у Вас не возникнет. <a href=https://cameradb.review/index.php?title=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D0%B5%D0%B9%D1%88%D0%B8%D0%B5%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BF%D1%80%D1%8F%D0%BC%D0%BE%20%D1%83%20%D1%81%D0%B5%D0%B1%D1%8F%20%D0%B4%D0%BE%D0%BC%D0%B0%20-%20%D0%B4%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D0%BE%D0%B2%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO>https://cameradb.review/index.php?title=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D0%B5%D0%B9%D1%88%D0%B8%D0%B5%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BF%D1%80%D1%8F%D0%BC%D0%BE%20%D1%83%20%D1%81%D0%B5%D0%B1%D1%8F%20%D0%B4%D0%BE%D0%BC%D0%B0%20-%20%D0%B4%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D0%BE%D0%B2%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO</a> 1×slots casino online регистрация
<b>Смотреть еще похожие новости:</b>
<a href=http://permitbeijing.com/forum/showthread.php?tid=2225591>1× slots зеркало</a>
<a href=https://isomedu.com/forum/profile/josephdrons/>1×slots casino зеркало</a>
<a href=https://test.soclanovtsy.ru/topic/36671–1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE/>1хслотс казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подтверждение индивидуальной инфы. Все казино настоятельно от посетителя пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и присутствие у пользователя других аккаунтов (мультиаккаунт запрещен).
#8165 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8166 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
Условия вывода выигрыша. В некоторых заведениях для успешного вывода с бездепозитного бонуса довольно пополнения баланса и доказательства личности. В других же клубах, нужно некоторое раз прокрутить собственный депо.Для получения предоставленных бонусов вас понадобиться — ПК или мобильное прибор, и остальное дело за малым. <a href=http://filmkachat.ru/>1×slots зеркало рабочее</a> Приветственный приз без депо ? презент за регистрацию. Выдается средствами, фриспинами или баллами. В заключительном случае бонусные баллы применяются для участия в турнирах или обмена на реальные средства.Многие игроки, оценив перечень казино, остаются выступать в нем и дальше ? на это и направлено любое рекламную. Постоянные клиенты вносят депозиты и проделывают ставки, обеспечивая длительную выгода оператора. То есть, казино выдают бездепы свежим юзерам для формирования приклнной аудитории. <a href=https://blog.libero.it/wp/kalinka0588/2024/10/14/autocad-drawing-services-enhance-design-and-construction-projects/>https://blog.libero.it/wp/kalinka0588/2024/10/14/autocad-drawing-services-enhance-design-and-construction-projects/</a> Но не мыслить, что снабжая пользователей этими бонусами, казино увлекается спонсированием. Ведь объемы вознаграждений, в, не немалые (средним объемом от 5 до 20 $). И на эти свои налагаются определенные обстоятельства и ограничения, обязательные к выполнению игрока, если в последствии он вожделеет получить все свои выигранные финансы.Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную функцию активации бонуса без депозита. Внимательно прочтите до конца. Многие новенькие проделывают оплошности на шаге регистрации и поэтому не могут получить подарок. 1×slots подтвердит вашу регистрацию если говорить <a href=http://bitetheass.com/user/JasperBipsy/>http://bitetheass.com/user/JasperBipsy/</a> Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам воспрещено начислять призы клиентам, не имеющим валютных средств на счете. Мы предлагаем разглядеть актуальные призы онлайн-казино с лицензией, коие соблюдают законодательство РБ.
1× slots регистрация в 1×slots casino
Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие появляются у новичков.Обычно для получения бонусов без депозита, казино выдвигает лояльные и абсолютно выполнимые условия, но есть ряд деяний коие воспрещены и имеют причиной противные результаты: <a href=http://forum.animogen.com/viewtopic.php?p=3321305>1хслотс казино зеркало</a> 1×slots бонус за регистрацию Казино выводит средства только на ту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного приза, Вам сначала нужно пополнить счет. В некоторых клубах узкий перечень методов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет именно с этих платежных методов, которые доступны для вывода.Игры, в можно выступать на бонусные средства. Проверьте список игр, в можно играть на бонусные средства, вероятно они Вам не понравятся и надо расходовать своё время на эту акцию. <a href=http://fromair.ru/communication/forum/user/75524/>http://fromair.ru/communication/forum/user/75524/</a> 1×slots скачать на айфон
1×слотс казино
Для получения бездепа нужно пригласить в игру по реферальной ссылке свежего посетителя: он обязан зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на сумму, указанную в критериях акции. <a href=https://www.feeder.mobi/members/renaldojaw/profile/>https://www.feeder.mobi/members/renaldojaw/profile/</a> Фриспины без депозита либо вспомогательные свои посодействуют поближе познакомиться с игровой платформой и её функциями. За счёт подарков можно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за игры против живых крупье. казино 1×slots официальный сайт
1×slots зеркало этих способов предполагает регистрацию
Возможность поиграть вспомогательное соревнование (а время и количество) совершенно бесплатно, а выигрыш, к, поступает на счёт игрока. <a href=https://forums.scar-divi.com/topic/608995–1%D1%85%D1%81%D0%BB%D0%BE%D1%82-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE/>1хслот зеркало</a> Фриплей-бонусы. Бонусы за безвозмездную игру есть только в неких клубах. Они зачисляются сразу последствии творенья профиля и действуют недолговременное время. Если у вас нет медли потратить свои, они просто закончатся. Что касается медли, как призы действуют в течение одного часа. 1 х слотс зеркало <a href=https://www.vforum.org/forum/members/27253.html?s=1722c8214af9f0aeaf2004aef3bf5475>https://www.vforum.org/forum/members/27253.html?s=1722c8214af9f0aeaf2004aef3bf5475</a>
1×slots зеркало быструю регистрацию а также мгновенное
Например, игрок получил 500 руб. При твореньи аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., потребуется сделать 875 спинов для полного отыгрыша. <a href=http://islamdini.kg/index.php?subaction=userinfo&user=uppityremorse22>http://islamdini.kg/index.php?subaction=userinfo&user=uppityremorse22</a> Чтобы бездеп не был начислен на Ваш акк, Вам надо активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт автоматически, а Вы не расчитываете его использовать, обратитесь в службу поддержки с просьбой отменить бездепозитный приз. 1×slots сайт
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.eliteshost.com/showthread.php?tid=15609>1хслот зеркало сайта</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Разные казино имеют личные верховодила по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высокие притязания. Часто онлайн-казино рекомендуют отыграть бонусное поощрение до ста раз в игровых автоматах. Например, если игрок получил бесплатно 10 долларов, то необходимо будет отыграть их, поставив 1 тыщу спинов по одному доллару любой. Стоит отметить, собственно не все казино дают возможность играть на призы и не во всех увеселительных заведениях схожие управляла для отыгрывания. Некоторые казино запрещают играть на призы в блекджек либо ограничивают ставки до 5 %, собственно значительно увеличивает в десятки раз количество необходимых игр. Бездепозитные бонусы за регистрацию в игровых автоматах для собственников онлайн-казино считаются долею рекламной кампании, направленной на увеличение аудитории вебсайта. Так они продвигают средства бренды и завлекают новых посетителей.
#8167 Charlesgunny
пинап казино казино смотреть <a href=https://7club7.com/>1×bet</a> скачать 1×bet на андроид Скворцова Вероника Игоревна порно <a href=https://specreporter.com/>букмекерские конторы pin</a> Нургалиева Эльвира Рамиловна порно официальное казино вход яндекс игры казино бесплатное казино букмекерская контора фонбет казино проиграл Москалькова Татьяна Николаевна порно
#8168 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8169 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8170 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало рабочее
Ниже указан актуальный перечень легальных казино в Беларуси с призами на 1-ый депо. Вы сможете попасть на официальный вебсайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. <a href=http://filmkachat.ru/>1×slot рабочее зеркало</a> <a href=https://www.khedmeh.com/wall/blogs/post/71398>https://www.khedmeh.com/wall/blogs/post/71398</a> Операторы гемблинга утверждают, что так они сражаются с бонус-хантерами. Впрочем, критики считают, собственно этим казино пробуют сделать из случайного гостя постоянного игрока.Этот образ приза будет добавлен на Ваш аккаунт после успешной процедуры регистрации с использованием номера аппарата. Если избрать другой метод творения учетной записи, бездеп не будет добавлен на Ваш акк. 1×slots зеркало регистрацию более популярный вариант это <a href=http://b98415ql.bget.ru/user/PatrickVen/>http://b98415ql.bget.ru/user/PatrickVen/</a> Для казино, работающих интернет, бездепозитные призы необходимы для привлечения новых посетителей. Предложение сыграть на слотах без надобности внесения настоящих средств — работающий способ для повышения энтузиазма к компании. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит играть в казино, лишь теперь теснее на собственные средства.Бездепы обыкновенно предлагают с отыгрышем — быстро вывести выигранные свои нельзя. Перевод денег со счета несомненно возможен последствии как, как пользователь выполнит все требования казино, а сумма не может превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, протяжении которых заказчик вправе воспользоваться предложением. Обычно они не превышают нескольких дней после активации.
1× slots зеркало
К примеру, игроку выдаются безвозмездные свои в заведении в объеме пятидесяти либо 100 долларов (вейджер на коие сочиняет 100х). То есть, каждому новоприбывшему игроку выскакивает манящая иллюстрация, кот-ая обещает выплату всех зачисленных компанией средств. Не стоит заострять на казино бонус за регистрацию без депозита с чрезмерно великой либо довольно маленькой суммой призов, потому что, и тщательно исследовав все обстоятельства, здесь вероятнее всего, несомненно какой-то подкол.Но такие рамки не смущают том хайроллеров, что коэффициенты на слотах разрешают рассчитывать на крупные выигрыши, а неких автоматах разыгрывается передовой джекпот. 1×slots промокод при регистрации <a href=http://www.dvorchany.grodno.by/user/Scottnut/>http://www.dvorchany.grodno.by/user/Scottnut/</a> 1× slots сайт Также существуют онлайн-платформы азартных игр, коие используют раздачу бездепозитных бонусов в особые даты (как для казино, так и для игрока). Помимо сего, действующие игроки того имеют возможность получить похожие призы за свою деятельность (к примеру, за повышения значения либо за похожие достижения).Прочитайте верховодила бонусной программы, в которой желайте участвовать. Да, мы безотступно советуем устроить это до регистрации.
1×slots подтвердит вашу регистрацию если говорить
Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного приза достаточно пополнения баланса и подтверждения личности. В других же клубах, необходимо количество один прокрутить собственный депозит. <a href=https://wifidb.science/wiki/%D0%A1%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81>https://wifidb.science/wiki/%D0%A1%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81</a> 1×slots мобильная версия войти казино Ниже указан актуальный перечень законных казино в Беларуси с бонусами на 1-ый депо. Вы сможете попасть на официальный вебсайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус.
1×slot рабочее зеркало
Фриплей-бонусы встречаются только в некоторых клубах. Они зачисляются сразу в сотворения профиля и активны недолговременное время. Если не успеете истратить средства, они просто сгорят. Касаемо медли, правило бонусы активны в течение часа. Не рекомендуем опрометью голову браться за различные предложения получения средств без вложений. Вполне вполне, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем смотрится на первый взор. Альтернативой является казино бонус за депо. Мы предлагаем для пару советов, спасибо коим у каждого игрока несомненно вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом денег: 1хслот 1хслотс регистрация перейти на 1×slots <a href=http://bitetheass.com/user/JulesTax/>http://bitetheass.com/user/JulesTax/</a>
1хслот скачать
Теоретически, к бесплатным бонусам возможно отнести так называемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, потому собственно они деют только возможность делать ставки.Если вы облюбовали себе некоторое брендов коие для больше всего полюбились, для постоянной игры! Таких гемблеров казино довольно предпочитает и оценивает, за частую эти игроки становятся VIP игроками заведения, которым нередко поступают выгодные предложения в виде бонусов, так же туда заходит и бездепозитные. Не стоит путать забаву в демо и использование призов. В демонстрационном режиме игрок возможность оценить механику слота, сюжет и оформление. Но игра ведется на условные кредиты, поэтому отсутствует основное ? чувство азарта. Активируя промокод либо фриспины, заказчик раньше не тратит свои средства на игровые автоматы, но возможность сорвать настоящий куш! <a href=http://ww.ansanam.com/bbs/board.php?bo_table=report_status2&wr_id=359788>http://ww.ansanam.com/bbs/board.php?bo_table=report_status2&wr_id=359788</a> Иногда для получения призов необходимо связаться с адептами службы поддержки. Удобнее всего с ними беседовать в онлайн-сате, хотя иногда довольно запроса по электрической почте. 1×slots регистрация 1×slots casino c2d ru
<b>Смотреть еще похожие новости:</b>
<a href=http://diablo2r.cn/home.php?mod=space&uid=30130>1×slots casino регистрация 1×slotscasino09k online</a>
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=36319>1×slots регистрация то дальше необходимо пройти</a>
<a href=https://dev.eff.one/forumdisplay.php?fid=10>1×slots зеркало этих способов предполагает регистрацию</a>
<a href=https://koreanstudies.com/forum/viewtopic.php?t=118319>1×slots рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вейджер не более х30–35 является применимым. Опытные игроки утверждают, что с этим вейджером реально остаться в плюсе, в правильно подойти к выбору игрового аппарата.
#8171 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8172 Danielquornhttps://anotepad.com/notes/awhm64qq
“You get some of me but not tomorrow as they want me in as soon as I can make it happen. This is the one time when they say jump and I ask how high due the financial gains the company could benefit from and it being important enough for the client to appear in person.”
“Well I get an extra night of you at least! I wonder what we could do with that? Meantime, what about food? I am starving and delicious as it was a second breakfast is not quite enough to replenish me!”
“Well get something on and we’ll sort that out first.”
We drove into town and decided that a daytime visit to Charlie’s was going to be the answer. I parked in the bar lot and Elise dashed in to change into something more appropriate, jeans and a t-shirt along with her biker jacket but keeping her Converses on.
Walking down to the restaurant was different from the middle of the night visits as the streets were bustling and all of the shops and outlets were open.
Reaching Charlie’s we entered the front door and sat in a booth near the window. A beautiful young American Chinese girl came,smiled and said hello to Elise and gave us menus and asked if we wanted drinks in the meantime.
„No thanks Lin just a pot of Jasmine tea for us please.“ Lin went back to the kitchen area. “No booze for me today as I will have to work in the bar so it is just tea for me.”
Not in a drinking mood either, I agreed with her."
https://chyoa.com/user/kreta1961 https://chyoa.com/user/linnie1994 https://tubeteencam.com/…1999/profile https://www.hentai-foundry.com/…1959/profile https://cocasin1973.diary.ru/
#8173 Charlesgunnyhttp://filmkachat.ru
1×slots казино зеркало
Для получения выигрыша потребуется выполнить условия казино. Чаще всего игроку нужно поставить конкретную сумму, хотя уже из личных денег. Она рассчитывается из общего объема выигрыша за всегда применения бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, если юзер выиграл 1000 руб., а множитель сочиняет х30, исключить деньги можно будет, сделав ставки на 30 000 руб.Допустим, за регистрацию вы возымели бездеп в объеме 2 000 руб. С вейджером х30. В данном случае светит устроить ставок, на общую необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда выполните обстоятельства по отыгрышу, придёт время заработать реальные деньги. Однако не забывайте, что с любого подарка выйдет вывести определённую необходимую (почаще всего менее $200). <a href=http://filmkachat.ru/>1 хслот регистрация в 1×slots casino</a> Выбирая безвозмездный приз, пристально изучайте управляла. Убедитесь, что вас возможно себя роль в промоакции. Уточните, в каких играх возможно выполнять условия вейджера. При надобности задавайте вопросы представителям саппорта.Активация по промокоду употребляется в разных видах бездепов. Если речь о приветственном бонусе, то набор символов можно разузнать на крупнейшей странице, в регистрационной форме либо послании, коие отчаливает юзеру для доказательства e-mail. Акции все проводиться совместно с партнерскими площадками. Обычно код располагается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется одноразовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем актуальный код для активации в описании каждого рекламную. <a href=https://jicsweb.texascollege.edu/ICS/Academics/RELI/RELI_1311/2016_FA-RELI_1311–04/ford.jnz?portlet=Blog&screen=View+Post&screenType=next&&Id=3df82543–4619–4bc4-a172-adc3f66d923b>https://jicsweb.texascollege.edu/ICS/Academics/RELI/RELI_1311/2016_FA-RELI_1311–04/ford.jnz?portlet=Blog&screen=View+Post&screenType=next&&Id=3df82543–4619–4bc4-a172-adc3f66d923b</a> 1хслот зеркало сайта <a href=http://wmrc.co.kr/bbs/board.php?bo_table=free&wr_id=14930>http://wmrc.co.kr/bbs/board.php?bo_table=free&wr_id=14930</a> У нас на веб-сайте Вы найдете перечень призов без депо в проверенных казино и доскональную информацию то как их получить и использовать.Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и. Когда игроку полагается большое фриспинов, администрация может бить3 их начисление на несколько дней. Бесплатные вращения предоставляются для определенного слота, кот-ый указывается в правилах акции.
1×slots casino регистрация
Далее требуется отыграть вагер и исключить выигрыш. Игрокам без опыта крупно подфартило, есть получить десятки даров за одну регистрацию. Если не сумели получить Бездепозитный бонус, не тревожьтесь. Обратитесь в интернет чат, оператор поможет исправить. <a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=517955>1хлот регистрация в 1×slots casino</a> казино 1×slots официальный сайт <a href=http://www.designdarum.co.kr/bbs/board.php?bo_table=free&wr_id=1465613>http://www.designdarum.co.kr/bbs/board.php?bo_table=free&wr_id=1465613</a> 1×slots официальный сайт мобильная версия скачать Выбор любого интернет казино на нашем веб-сайте. В описании к каждому Вы можете разузнать, собственно получите за творенье аккаунта.
1×slots casino online регистрация
B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpaxЧастенько новички не разумеют, как активировать презенты либо исключить 1-ый выигрыш. Для сходственных случаев наша команда обрисовала основные термины – собственно такое фриспины, вейджер, как его отыграть, для необходимо проходить верификацию. <a href=http://matadoor.ru/bitrix/click.php?goto=http://repository.kaznaru.edu.kz/cgi/set_lang?referrer=http://mikhailovsk24.ru/redirect?url=https://telegra.ph/Narushenie-srokov-platezhej-po-mirovym-soglasheniyam-09–19>http://matadoor.ru/bitrix/click.php?goto=http://repository.kaznaru.edu.kz/cgi/set_lang?referrer=http://mikhailovsk24.ru/redirect?url=https://telegra.ph/Narushenie-srokov-platezhej-po-mirovym-soglasheniyam-09–19</a> Маркетинговая политика всех игорных интернет-клубов обязана одевать различный нрав. И в гонорары на депозит работают для того, дабы стимулировать заносить депозиты и поощрять уже существующих юзеров, то бездепозитный приз в казино или бонус за регистрацию в казино, до всего, рассчитан на расширение базы потребителей. 1×slots зеркало на сегодня Однако в условиях исчезают «подводные камешки», которые не позволят исключить крупную сумму либо же вы не успеете отыграть вейджер. Поэтому профессионалы советуют арестовать благотворительные вращения за регистрацию в казино без депо, дабы поднабраться опыта и получить реальный шанс на победу.Для получения депозитного бонуса нужно пополнить свой игровой баланс настоящими деньгами. Вознаграждение возможно получить или при внесении первого депо, либо вид фиксированного процента от внесённых средств. Так либо другому, приз поступит на счёт только в пополнения.
1хслотс официальный сайт зеркало
<a href=https://10nsk.ru/user/JosephSuple/>casino 1×slot</a> Вейджер (либо вагер) ? это минимальная сумма ставок, которую нужно устроить для вывода денежного бонуса. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим красивее спецпредложение. 1×slots зеркало видели такую регистрацию на <a href=http://u-cars.ru/modules.php?name=Your_Account&op=userinfo&username=endurablemosaic>http://u-cars.ru/modules.php?name=Your_Account&op=userinfo&username=endurablemosaic</a>
1×slots казино зеркало
Эффективность бездепов в маркетингового инструмента расценили почти операторы. Малоизвестные площадки употребляют эти акции, чтобы живо набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны постоянных гостей. Не все сайты, дающие презенты без депо, рекомендованы к этой. За привлекательным промоописанием шансы скрываться невыполнимые обстоятельства отыгрыша и другие подводные камешки.Для доказательства электрической почты, просто перейдите по интенсивной ссылке в письме, приобретенном от игрового заведения. <a href=http://m-kabel.ru/index.php?subaction=userinfo&user=deadpanbunch20>http://m-kabel.ru/index.php?subaction=userinfo&user=deadpanbunch20</a> 1хслот 1хслотс регистрация перейти на 1×slots Несмотря на то, собственно данный вариант стимуляции со стороны азартных платформ очень востребован в сфере подобных игр, далековато не поклонникам казино ведомо, собственно себе бездепозитные призы казино и как именно их вполне эксплуатировать.Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, the decision лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.
<b>Смотреть еще похожие новости:</b>
<a href=https://koreanstudies.com/forum/viewtopic.php?t=108004>1×slots бездепозитный бонус за регистрацию</a>
<a href=https://orbitsound.com/forum/user-211634.html>рабочее зеркало 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подтверждение электронной почты – одно из основных критерий, коие есть почти в каждом бездепозитном казино. Чтобы верифицировать электронную почту, довольно перейти по активной ссылке в письме, полученном от азартного клуба.
#8174 Charlesgunny
порно с Баталина Ольга Юрьевна порно с Матвей Сафонов (футбол) <a href=https://krtka.info/>порно с Георгий Джикия (футбол)</a> casino сегодня pin up casino <a href=https://specreporter.com/>up casino зеркало</a> casino скачать приложение сайт pin up casino казино большая cometa casino 7k casino сайт пина casino casinos winning
#8175 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8176 Charlesgunnyhttp://filmkachat.ru
1× слот зеркало
Каждый новичок и профессиональный игрок грезят прытко стартануть и начать создавать реальные ставки. Для этого довольно арестовать презент, за кот-ый не нужно уплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email или телефонный. После сего администрация начислит щедрое вознаграждение в виде даровых вращений либо виртуальных кредитов. <a href=http://filmkachat.ru/>1×slots регистрация</a> Вообще перейдя в казино — правила схожи в получении бездепозитных призов, в стандартные управляла заходит: доказать эл. Почту и аппарат, наполнить собственный индивидуальный профиль, активировать рекламную код либо активировать предложения во вкладке БОНУСЫ. <a href=https://www.tamaiaz.com/blogs/233398/%D0%9A%D0%B0%D0%BA-%D1%81%D1%80%D0%BE%D1%87%D0%BD%D0%BE-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D1%82%D1%8C-%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%BE%D0%B1%D0%B8%D0%BB%D1%8C-%D1%81%D0%BE%D0%B2%D0%B5%D1%82%D1%8B-%D0%B8-%D0%BF%D1%80%D0%BE%D0%B2%D0%B5%D1%80%D0%B5%D0%BD%D0%BD%D1%8B%D0%B5-%D1%81%D0%BF%D0%BE%D1%81%D0%BE%D0%B1%D1%8B>https://www.tamaiaz.com/blogs/233398/%D0%9A%D0%B0%D0%BA-%D1%81%D1%80%D0%BE%D1%87%D0%BD%D0%BE-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D1%82%D1%8C-%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%BE%D0%B1%D0%B8%D0%BB%D1%8C-%D1%81%D0%BE%D0%B2%D0%B5%D1%82%D1%8B-%D0%B8-%D0%BF%D1%80%D0%BE%D0%B2%D0%B5%D1%80%D0%B5%D0%BD%D0%BD%D1%8B%D0%B5-%D1%81%D0%BF%D0%BE%D1%81%D0%BE%D0%B1%D1%8B</a> 1×slots официальный сайт мобильная версия <a href=http://peremenka.com/bitrix/redirect.php?goto=http://ufa.rusquantum.ru/bitrix/redirect.php?goto=http://alt1.toolbarqueries.google.li/url?q=https://teletype.in/@urist555/ra5m4YYvAKB>http://peremenka.com/bitrix/redirect.php?goto=http://ufa.rusquantum.ru/bitrix/redirect.php?goto=http://alt1.toolbarqueries.google.li/url?q=https://teletype.in/@urist555/ra5m4YYvAKB</a> Классическая разновидность бонуса за творенье аккаунта. Его превосходство заключается в том, собственно заказчик имеет без избирать аппараты и создавать ставки в их. Иногда перечень игровых автоматов ограничен оператором, но все также это лучше, чем единственный дешевый разъем, как если, тогда, с использованием фриспинов.
1хслот зеркало
Вывод выигрыша с бездепозитных призов казино – великодушный презент от азартных клубов. Но чтобы вывести собственный заработок, необходимо выполнить ряд критерий: 1×slots актуальное зеркало <a href=http://www.0pcdd.com/space-uid-272575.html>http://www.0pcdd.com/space-uid-272575.html</a> Для получения приза нужно ознакомиться с программой лояльности казино и устроить ставки на сумму, нужную для перехода на грядущий уровень. 1×slot казино зеркало Новые клиенты онлайн-казино без первого депо могут выяснить собственную удачливость. К тому же есть возможность конвертировать бездепы в реальные средства за регистрацию в казино, однако достичь бонус необходимо отыграть согласно условиям промоакции.
1×slots официальный demo регистрация в 1×slots casino
Не желаете поиграть в азартные игры, не рискуя своими деньгами, но получая в все выплаты? Подобную вероятность деют почти наилучшие порталы с азартными развлечениями. В их числе количество добросовестных и надежных интернет-казино на русском языке. Они привлекают новых пользователей различными поощрительными мероприятиями, включая бездепозитные, либо бесплатные бонусы. Минимального оборота. Этот лимит уточняется вейджером — же игрок не сыграет на установленную сумму, вывод средств несомненно недоступен. <a href=http://mikepomranz.com/index.php?title=смотреть_фильмы_через_торрент>http://mikepomranz.com/index.php?title=смотреть_фильмы_через_торрент</a> 1×slots официальный сайт зеркало рабочее На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не можете активировать и получить бездепозитный приз.При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток.
1×slots официальный сайт мобильная версия скачать
После требуется привнести идентификационный платёж. Это пугает новичков больше всего. Нужно устроить минимальный депо в 100–500 рублей. Таким образом служба защищенности убедиться в, собственно платёжный способ принадлежит Вам. Данная процедура необходима для обеспечивания защищенности игровых счетов. Пример, Ваш акк взломают и выведут свои на собственный кошелёк. Будет крайне досадно. Поэтому верификация платёжной системы, это необходимый момент.Фриспины предусмотрены для применения в видео слотах. Внимательно ознакомьтесь с критериями – частенько их выдают на кое-какие автоматы. В зависимости от клуба, у вас выйдет устроить определённое количество ставок. Кстати, продвинутые игорные дома разрешают запускать любых «одноруких злодеев». <a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>зеркала 1×slots</a> Постарайтесь отыграть вейджер, дабы появилась возможность оставить заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные приборы. Вы можете получить выигрыш на электронной кошелёк, карту, телефонный. 1×slots casino online регистрация <a href=http://jet-link.ru/index.php?subaction=userinfo&user=hurriedtask37>http://jet-link.ru/index.php?subaction=userinfo&user=hurriedtask37</a> Когда речь идет о валютных бонусах, казино постоянно устанавливают обстоятельства вейджера, коие необходимо выполнить, чтобы исключить выигрыш.Нет. Казино выдают безвозмездные призы за регистрацию, для того, чтобы клиент возможность ознакомиться с игровым заведением. А чтобы исключить его, нужно выполнить условия отыгрыша.
1хслотс мобильная версия зеркало
Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Автоматическая активация кажется самой удобной, хотя ручной метод содержит перед ней превосходства. Прежде чем использовать вознаграждение от казино, стоит заблаговременно определить, сколько медли потребуется на выполнение всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деянья приза. Обычно, бездепозитные призы выдаются под определенные слоты с фиксированной ставкой, но их наверняка запрещено использовать в игровых автоматах с прогрессивным джекпотом. Список игр, в которых можно использовать бездеп, Вы отыщите в описании промоакции либо сможете уточнить у службы поддержки заведения. <a href=http://t95283ld.bget.ru/user/DoctorLazutaPt/>http://t95283ld.bget.ru/user/DoctorLazutaPt/</a> 1×slots зеркало быструю регистрацию а также мгновенное Промокод – определённая комбинация знаков, коию необходимо установить в отвечающее фон при творении учетной записи или активировать в личном профиле игрока в разделе с призами.Чаще всего интернет-казино предлагают бездепозитные бонусы новым юзерам. Эта промо-акция довольно эффективно завлекает новичков, подталкивая их к открытию счета. Конечно, не все становятся преданными посетителями, хотя сам факт регистрации аккаунта играет на руку заведению.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.azartweb2.com/threads/1×slots-registracija-na-sajte.237143/>1×slots регистрация на сайте</a>
<a href=http://mi.minfish.com/home.php?mod=space&uid=1196847>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, a лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и более. Когда игроку полагается много фриспинов, администрация возможность разбивать их начисление на количество дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах акции.
#8177 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8178 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
Для получения бездепа нужно пригласить в игру по реферальной ссылке свежего клиента: он обязан зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на необходимую, обозначенную в критериях промоакции.Некоторые казино могут предлагать клиентам бездепы за подтверждение номера или почты или репост на страницу в соц сетях. <a href=http://filmkachat.ru/>1×slots регистрация на сайте 1×slots ru com</a> Раздача бонусов имеет быть посвящена разным датам: календарные дни, дни рождения игроков, годовщина открытия казино и т. Д. Подарок выдается вид средств, фриспинов или баллов для скопления и обмена на услуги оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода этой суммы придется выполнить ряд требований. <a href=https://www.goldenline.pl/grupy/Przedsiebiorcy_biznesmeni/health-economics/exploring-the-power-of-3d-product-visualization-services-for-your-business,3947890/>https://www.goldenline.pl/grupy/Przedsiebiorcy_biznesmeni/health-economics/exploring-the-power-of-3d-product-visualization-services-for-your-business,3947890/</a> B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax 1хслот 1хслотс регистрация перейти на 1×slots <a href=http://www.hucellbio.com/bbs/board.php?bo_table=free&wr_id=155044>http://www.hucellbio.com/bbs/board.php?bo_table=free&wr_id=155044</a> Это также бесплатные финансы, коие поступают на аккаунты новоиспеченных геймеров после регистрирования. А особенность этих призов состоит в, что обретенные деньги непременно по использовать в продолжении назначенного времени.
1×slots регистрация на 1хслотс
Выбрать казино с бездепозитным бонусом. У нас на сайте представлен перечень наилучших онлайн казино, которые предлагают своим игрокам великодушные призы за регистрацию. онлайн казино 1×slots Приглашаем делиться суждениями о призах. Это поможет другим юзерам выбирать более прибыльные предложения.Список так нарекаемых «не территорий» прилагается к правилам бонусной программки игорного портала. Обязательно проверьте, распространяются ли на вас сходственные наказания. <a href=http://empyrethegame.com/forum/memberlist.php?mode=viewprofile&u=278904&sid=d1a7041734aafb1e76cca30717aaa5ec>http://empyrethegame.com/forum/memberlist.php?mode=viewprofile&u=278904&sid=d1a7041734aafb1e76cca30717aaa5ec</a> Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации презента нужно подтвердить электронную почту и привязать телефонный;Чаще всего казино приз за регистрацию без депозита даёт вероятность запустить любой машина. Но другого внимательно ознакомиться с условиями. Иногда для игры доступны лишь определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, лучше начать знакомство с миром азарта непосредственно с «одноруких злодеев». казино 1×slots официальный сайт Объективные – размер бонуса, коэффициент и обстоятельства вейджера, необходимость внесения депо для вывода средств;
1× slots регистрация в 1×slots casino
<a href=https://google.com.gt/url?q=https://doctorlazuta.by/>https://google.com.gt/url?q=https://doctorlazuta.by/</a> Чем ниже велечину вейджера, что, этим проще отыграть и исключить бонус. Если Вы расчитываете заработать на бездепе, но просто ознакомиться с новым игровым клубом, то стоит игнорировать призов с высоким вейджером их практически не реально отыграть. С ними Вы сможете только протестировать игры заведения.Отзывы читателей о бонусных акциях посодействуют составить впечатление, но не забывайте о субъективности личных объяснений. 1хслотс официальный сайт зеркало Бездепозитный бонус – это экономическое вознаграждение, которое выдается участнику игры в казино, для его привлечения и появления заинтересованности. Любой посетитель, который соответствует условиям выдачи похожего бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое одобрение считается более действенным способом, дающим возможность стартовать в игре, не вкладывая собственных материальных средств.В зависимости от онлайн заведения любой из них возможность вам предложить как бездепозитные деньги, например и бездепозитные фриспины, которые последствии удачной регистрации упадут вам на ваш игровой баланс.
1× slots зеркало
Нет. Для получения бездепозитного бонуса в казино необходима обязательная регистрация на сайте. Играть в слоты безвозмездно и без регистрации можно лишь в демо режиме. 1×slots официальный регистрация <a href=https://rekordmeister.ru/user/CharlesHow/>https://rekordmeister.ru/user/CharlesHow/</a> Постарайтесь отыграть вейджер, чтобы замечена вероятность забыть заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные приборы. Вы можете получить выигрыш на электронной кошелёк, карту, телефон.Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, дабы еще раз получить бесплатный приз. Игорные заведения нетерпимы к бонус-хантерам, потому вас ждет неминуемое санкция.
1×slots сайт зеркало
Бездепозитные призы настоящими средствами, коие возможно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадались.Верификация важна для добавочной защищенности и помогает техподдержке выявить бонусхантеров и жуликов. Кстати, на некоторых платформах выводы крупных сумм доступны лишь последствии доказательства личности. Важно, удостоверьтесь том,, что раньше не регились в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи.Принципиальным различием даровых призов от призов на депо считается недоступность надобности заносить средства на акк. Из-за этого их нередко называют бездепозитными (not the slightest deposit bonuses). <a href=http://bbs.xinhaolian.com/home.php?mod=space&uid=4490051>http://bbs.xinhaolian.com/home.php?mod=space&uid=4490051</a> Если вы опытный игрок, вы должны знать, что бонус без депо – редчайшая находка. Тем не менее, мы неделю изучаем интернет, чтобы найти вам наихорошие бездепозитные предложения. 1×slots казино мобильная версия
<b>Смотреть еще похожие новости:</b>
<a href=http://lider1c.ru/communication/forum/messages/forum5/message22562/18451–1×slots-zerkalo-registratsiya-v-1×slots-casino?sessid=445d02dc54d61219928dd19d82112b5c&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1×slots зеркало регистрация в 1×slots casino</a>
<a href=https://koreanstudies.com/forum/viewtopic.php?t=125037>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Такой казино приз без депозита за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это словно какая-то конспирация поощрения под бездепозитный. Суть всего сего сводится к тому, собственно игроку на час выдается, например, 1000 $, а реклама утверждает то, что каждой выигрыш можно будет в будущем оставить при себя. Но случае играющий серьезно отнесется к данному предложению, то он просто растеряет время. Ведь геймеру нужно несомненно играть не главном аккаунте, а тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (в всей тыс. ) в управляла вступят конкретные условия, где несомненно сказано, собственно наибольшей суммой победы возможность быть лишь двести долларов и средства возможно применять только в качестве приза на 1-ый вклад с вейджером 25 от суммы вознаграждения плюс сам депо. По итогу получится, что игрок выигрывал себя 200% приз с вейджером на конкретную необходимую. Короче говоря, это все надо вашего времени. Многие игроки, оценив функционал казино, остаются играть в нем и далее ? на это и нацелено каждое рекламную. Постоянные клиенты вносят депозиты и делают ставки, обеспечивая длительную выгода оператора. То есть, казино раздают бездепы новым юзерам для формирования приклнной аудитории.
#8179 Charlesgunny
букмекерская контора фонбет официальный casino приложения <a href=https://slon-ru.com/>спорт букмекерская контора</a> porno Алена Косторная (фигурное катание) casino скачать приложение <a href=https://slon-ru.com/>1×bet на андроид</a> казино в россии казино 5 vavada casino порно с Алина Загитова, фигуристка casinos xyz porno Марина Александрова pin up casino пин ап
#8180 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало
Первый возникающий вопрос, это, зачем выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают свежих игроков. Последним легче начать забаву на деньги с дара за регистрацию. Им не пополнять баланс и расходовать личные свои. Новички получают бесплатные спины либо свои на счёт. С их поддержкой знакомятся с игровым ходом, крутят слоты и делают ставки в рулетке. <a href=http://filmkachat.ru/>1×slots казино мобильная версия</a> Сразу в активации промокода можно пользоваться подарком. Как теснее упоминалось, призы бывают трёх видов – фриспины, кредиты и фриплей-бонусы. <a href=https://hallbook.com.br/blogs/321025/%D0%A1%D1%80%D0%BE%D1%87%D0%BD%D0%B0%D1%8F-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D0%B6%D0%B0-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2-%D0%9D%D0%B8%D0%BA%D0%BE%D0%BB%D0%B0%D0%B5%D0%B2%D0%B5-%D1%8D%D1%84%D1%84%D0%B5%D0%BA%D1%82%D0%B8%D0%B2%D0%BD%D1%8B%D0%B5-%D1%81%D0%BF%D0%BE%D1%81%D0%BE%D0%B1%D1%8B-%D0%B8-%D1%81%D0%BE%D0%B2%D0%B5%D1%82%D1%8B>https://hallbook.com.br/blogs/321025/%D0%A1%D1%80%D0%BE%D1%87%D0%BD%D0%B0%D1%8F-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D0%B6%D0%B0-%D0%B0%D0%B2%D1%82%D0%BE-%D0%B2-%D0%9D%D0%B8%D0%BA%D0%BE%D0%BB%D0%B0%D0%B5%D0%B2%D0%B5-%D1%8D%D1%84%D1%84%D0%B5%D0%BA%D1%82%D0%B8%D0%B2%D0%BD%D1%8B%D0%B5-%D1%81%D0%BF%D0%BE%D1%81%D0%BE%D0%B1%D1%8B-%D0%B8-%D1%81%D0%BE%D0%B2%D0%B5%D1%82%D1%8B</a> Вы не в коем случае ни же рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической забавы на бездепозитные призы, у Вас есть шанс выучить игровые автоматы, выучится регулировать менять ставки и линии, исследовать бонусные забавы и их выигрышные композиции, ну конечном просто зарядится кучей впечатлений! Ведь вы будите выступать на бонусные средства, которые можно отыграть и вывести, но просто на демо счет, тем самым адреналин в крови более повысится а пульс забьется с нередким ритмом!Чтобы получить вероятность вывести выгода с бездепозитного приза в казино, нужно выполнить ряд критерий: 1×slots официальный сайт зеркало <a href=http://1k9g.com/space-uid-195786.html>http://1k9g.com/space-uid-195786.html</a> Получить приветственный приз шансы только новые клиенты онлайн-казино. Способы описаны в условиях акции любого законного казино, почаще всего это:Вообще перейдя в казино — верховодила одинаковы в получении бездепозитных бонусов, в стереотипные управляла заходит: подтвердить эл. Почту и аппарат, заполнить собственный личный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ.
1×slots зеркало регистрация
<a href=https://tabsgame.ru/user/Jamesbes/>x1 slots регистрация в 1×slots casino</a> 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=http://xn–80aaa2bbjbajhsi0bu.xn–p1ai/index.php?subaction=userinfo&user=mammothelation5>http://xn–80aaa2bbjbajhsi0bu.xn–p1ai/index.php?subaction=userinfo&user=mammothelation5</a> Выше мы дали полный набор самых новых и своевременных бездепозитных призов в интернет казино без пополнения на 2022 год, где возможность пользоваться любым ценным бездепозитным бонусом. 1×slots зеркало видели такую регистрацию на Выполнив все требования оператора, заказчик возможность оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит примерно не более суток. Если дополнительно требуется пройти функцию верификации, то срок увеличивается до 1–2 трудящихся дней. Для перевода используются банковские приборы и электронные платежные системы. Второй способ подходит никакого, например как большинство транзакций в этом случае исполняются мгновенно. В связи со спецификой функционирования банков обработка платежей возможность взятьвдолг(взятьвзаймы) до нескольких трудящихся дней.
1×slots регистрация на официальном сайте
При выполнении условий отыгрыша и верификации, деньги с бонусного счета переводятся на главной и могут быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции в от выбранной платежной системы. <a href=http://immun-center.ru/bitrix/redirect.php?goto=http://tim-tim.ru/bitrix/redirect.php?goto=http://alt1.toolbarqueries.google.lu/url?q=https://teletype.in/@urid_pomosh/jk6f3×hMAkQ>http://immun-center.ru/bitrix/redirect.php?goto=http://tim-tim.ru/bitrix/redirect.php?goto=http://alt1.toolbarqueries.google.lu/url?q=https://teletype.in/@urid_pomosh/jk6f3×hMAkQ</a> Несмотря на то, собственно данный вариант стимуляции со стороны азартных платформ довольно моден в подобных игр, далековато не поклонникам казино известно, собственно являют собой бездепозитные бонусы казино и как непосредственно их возможно эксплуатировать.Доступность — бездепозитные бонусы в казино почаще всего предоставляются новым игрокам, хотя случаются случаи, когда приз имеют получить и действующие посетители. казино 1×slots
1 х слотс зеркало
Такие поощрения позволяют бесплатно протестировать свежее казино, разобраться с игровым процессом онлайн слотов, заработать и исключить маленькую сумму средств. <a href=https://praisenpray.org/forums/showthread.php?tid=98744>1×slots бездепозитный бонус за регистрацию</a> Если вы выбираете проверенное лицензионное интернет казино и сделайте все условия получения бездепозитного бонуса, проблем с получением дара у Вас не возникнет.Не трудно додуматься, собственно not the slightest deposit bonuses почти разу не бывают большими. Чаще всего речь идет о пяти–тридцати баксах (либо эквиваленте данной суммы в другой еденице). Такие поощрения разрешают даром протестировать новое казино, разобраться с игровым ходом онлайн слотов, заработать и вывести небольшую необходимую средств.Индивидуальные поощрения выдаются за совершение деяний: подписку на аккаунты площадки в соц сетях, установку мобильного прибавленья либо официального клиента для ПК. В большинстве казино срабатывают программки лояльности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на следующий уровень часто сопровождается выдачей бездепа. 1×slots сайт <a href=https://www.rs6.com/member.php/747989-GlennBusia>https://www.rs6.com/member.php/747989-GlennBusia</a> Бездепозитный бонус – это финансовое вознаграждение, которое выдается участнику игры в казино, для его привлечения и возникновения заинтересованности. Любой посетитель, который подходит условиям выдачи сходственного бездепозитного приза, может претендовать на получение вышеуказанного приза. Такое поощрение считается наиболее эффективным способом, дающим возможность стартовать при, не вкладывая собственных вещественных средств.
1х слот регистрация в 1×slots casino
Возможность сыграть дополнительное состязание (а время и несколько) совершенно безвозмездно, а выигрыш, же, поступает на счёт игрока. Бездепозитные призы отличный вариант даровой игры в игровые автоматы. Многие пользователи сети не понимают, что в казино можно начать играть безусловно даром, а позже исключить выигрыш на банковскую карту либо электрический кошелек, другие не доверяют онлайн казино, а третьи успешно играют и выигрывают – и тотчас достаточно большие суммы.Допустим, за регистрацию вы возымели бездеп в размере 2 000 руб. С вейджером х30. В этом случае предстоит устроить ставок, на совместную сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать настоящие деньги. Однако не запамятовывайте, собственно с каждого дара получится вывести определённую сумму (почаще всего не более $200). <a href=https://goblin-film.net/user/Forsedropen/>https://goblin-film.net/user/Forsedropen/</a> 1хслотс рабочее зеркало Осталось избрать казино с призом за регистрацию и сделать профиль. После активации подарка выигрыш в от Фортуны и способностей.Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам запрещено начислять призы клиентам, не имеющим валютных средств на счете. Мы предлагаем осмотреть актуальные призы онлайн-казино с лицензией, которые соблюдают законодательство РБ.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>рабочее зеркало 1хслотс</a>
<a href=https://masstr.net/showthread.php?tid=85307>1×slot рабочее зеркало</a>
<a href=http://big.bestforums.org/viewtopic.php?f=7&t=12244>1хслотс официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Только выполнив все обстоятельства отыгрыша и дождавшись окончания ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить свои деньги.
#8181 Empathy_center_aritahttps://empathycenter.ru/
Добрый день! Центр ментального здоровья «Эмпатия». Цель каждого специалиста нашей команды – забота о ментальном здоровье людей через предоставление как можно более доступной и качественной медицинской помощи, а также через дестигматизацию ментальных расстройств и психопросветительскую деятельность. Главный врач центра „Эмпатия“ Панова Надежда Вячеславовна. <a href=https://empathycenter.ru/preparations/b/buspiron/>бусприрон применение</a> Если Центр ментального здоровья Эмпатия с более чем 60 работающих врачей и специалистов в Реутове и Москве, то это в сети клиник доказательной психиатрии https://empathycenter.ru/ . Узнавайте и звоните к нам по бесплатному номеру телефона 8–800–775–07–12. Всем пока!
#8182 Charlesgunny
porno Виктория Баркова, легкоатлетка porno Алена Косторная (фигурное катание) <a href=https://slon-ru.com/>вавада казино</a> порно с Максим Глушенков (футбол) букмекерские конторы без депозита <a href=https://th-royalgclub.com/>скачать pin casino</a> porno Юлия Канакина, скелетонистка пинап казино порно с Гатагова Ольга Анатольевна Елизавета Боярская bet casino порно с Кирьянова Дарья Борисовна Ирина Горбачева
#8183 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8184 Charlesgunny
1×bet официальный скачать casino pin официальный <a href=https://specreporter.com/>1×bet скачать приложение на андроид</a> pin casino 1×bet зеркало на сегодня <a href=https://glvk.guru/>1×bet casino</a> лучшие казино бесплатно яндекс казино casino бездепозитный casino ru Анна Михалкова играющие казино казино фильм
#8185 Charlesgunny
лучшие букмекерские конторы porno Мария Шарапова <a href=https://7club7.com/>Юдаева Ксения Валентиновна порно</a> пин ап casino pin up top лучшая казино <a href=https://th-royalgclub.com/>казино рублях</a> скачать 1×bet 1×bet xyz приложения букмекерских контор на андроид слоты казино up casino up casino скачать рейтинг казино porno Светлана Ходченкова
#8186 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8187 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8188 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8189 RobertImirehttps://dveri-mezhkomnatnye-sale.ru
межкомнатные двери <a href=https://dveri-mezhkomnatnye-sale.ru/>https://dveri-mezhkomnatnye-sale.ru</a>
#8190 Charlesgunny
casino com порно с Юлия Ефимова <a href=https://krtka.info/>Шевцова Татьяна Викторовна порно</a> порно с Баталина Ольга Юрьевна cat casino <a href=https://glvk.guru/>ев казино</a> яндекс казино casino актуальное зеркало казино вход макао казино смотреть фильм казино Ходнева Светлана Владимировна порно Хорова Наталья Александровна порно
#8191 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8192 Charlesgunnyhttp://filmkachat.ru
1 xslots рабочее зеркало
В списке требований к отыгрышу нередко наличествуют лимиты на ставки при ирге на личные деньги. Так, случае отыграть надо(надобно) 30 000 рублей, а максимальная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 один. Эта особенность затрудняет соблюдение игроками условий по срокам деяния промоакции. <a href=http://filmkachat.ru/>скачать 1×slots на андроид мобильная версия</a> Начнём с того, собственно каждое промо за регистрацию подразумевает некоторые условия. Бездепозитные бонусы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, необходимая для исполнения условий. Пример, возымели благотворительные вращения и выиграли с них 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 рублей, неудачных либо выигрышных, важно. После исполнения, бонусный баланс перейдёт на настоящий и станет доступным к выводу. <a href=https://uberant.com/article/2064001-mastering-the-art-of-interior-design-floor-plans-a-guide-to-spatial-excellence/>https://uberant.com/article/2064001-mastering-the-art-of-interior-design-floor-plans-a-guide-to-spatial-excellence/</a> 1хслотс официальный сайт зеркало <a href=https://maps.google.bg/url?sa=t&url=https://doctorlazuta.by/>https://maps.google.bg/url?sa=t&url=https://doctorlazuta.by/</a>
1× slots официальный
Принципиальным различием бесплатных бонусов от бонусов на депозит считается неименье необходимости заносить деньги на акк. Из-за этого их нередко называют бездепозитными (no down payment bonuses). <a href=http://aficionado.pl/showthread.php?141460–1%D1%85%D0%BB%D0%BE%D1%82-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%B2–1×slots-casino&p=160641>1хлот регистрация в 1×slots casino</a> 1×slots акции <a href=https://domivka.biz.ua/wr_board/tools.php?event=profile&pname=HarrySal>https://domivka.biz.ua/wr_board/tools.php?event=profile&pname=HarrySal</a> 1х слот регистрация в 1×slots casino
1хслотс зеркало
Иногда для получения бонусов нужно связаться с адептами службы. Удобнее всего с ними собеседовать в онлайн-сате, хотя времени достаточно запроса по электронной почте. B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax <a href=http://www.hrfrat.com/home.php?mod=space&uid=194165>http://www.hrfrat.com/home.php?mod=space&uid=194165</a> Бонусные средства – небольшая сумма средств для старта в новеньком казино. На бонусные средства, обыкновенно разрешается играть во все забавы, кроме слотов с прогрессивным джекпотом и игр из раздела exist casino. 1хслот зеркало Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, all лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.В онлайне очень большое скриптовых сайтов, коие принадлежат плутам. Их главная цель – привлечь гэмблеров, пообещав столько щедрые презенты, но и крупные выигрыши. Так что кое-какие сайты предлагают получить за регистрацию числе $1 000.
1 x slots casino
<a href=https://creapnl.com/foros/tema/1%d1%85%d1%81%d0%bb%d0%be%d1%82%d1%81-%d1%80%d0%b0%d0%b1%d0%be%d1%87%d0%b5%d0%b5-%d0%b7%d0%b5%d1%80%d0%ba%d0%b0%d0%bb%d0%be-%d0%bd%d0%b0-%d1%81%d0%b5%d0%b3%d0%be%d0%b4%d0%bd%d1%8f-47/>1хслотс рабочее зеркало на сегодня</a> Бездепозитный бонус за регистрацию в казино — это стартовый презент повторяющий денежного начисления или безвозмездных вращений для свежих игроков заведения, для получения которого надо заносить депозит. 1×slots регистрация 1×slotscasino 56 online <a href=http://users.atw.hu/adf/profile.php?mode=viewprofile&u=11604>http://users.atw.hu/adf/profile.php?mode=viewprofile&u=11604</a> В интернете очень большое скриптовых вебсайтов, которые принадлежат мошенникам. Их главная задача – заинтересовать гэмблеров, пообещав не великодушные презенты, хотя и крупные выигрыши. Так собственно кое-какие сайты предлагают получить за регистрацию даже $1 000.Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут уточняет лимитирование для клиентов. Конечно, это возможно посчитать некоторым неудобством для игрока, хотя справедливости ради необходимо, что выбор автоматов всё также остаётся довольно большим.
1×slots бонус за регистрацию
<a href=https://timeoftheworld.date/wiki/1×slots_%D0%9E%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9_%D0%97%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE>https://timeoftheworld.date/wiki/1×slots_%D0%9E%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9_%D0%97%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE</a> Наш перечень содержит лучшие бездепозитные призы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит ревизию по важным характеристикам: 1×slots коды В зависимости от интернет заведения каждый из них может вас предложить как бездепозитные деньги, например и бездепозитные фриспины, коие в успешной регистрации упадут вас на ваш игровой баланс.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.bandariklan.com/showthread.php?tid=385424>1 x slots</a>
<a href=https://forum.home-visa.ru/memberlist.php?mode=viewprofile&u=3536>скачать 1×slots официальный сайт</a>
<a href=https://adminclub.org/showthread.php?tid=60313>1×slots промокод при регистрации</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины – благотворительные вращения с фиксированной ставкой, которые можно использовать в определенных игровых автоматах. Подтверждение электронной почты – одно из основных критерий, коие есть практически в любом бездепозитном казино. Чтобы верифицировать электрическую почту, достаточно перейти по активной ссылке в послании, полученном от азартного клуба.
#8193 Charlesgunny
porno Алена Михайлова casino online зеркало <a href=https://t.me/vchkogpu_ru>1×bet официальный 1×bet xyz</a> Юдаева Ксения Валентиновна порно порно с Васильева Татьяна Викторовна <a href=https://slon-ru.com/>1×bet зеркало xbet</a> порно с Евгений Малкин (хоккей) porno Алена Михайлова порно с Владимир Минеев (ММА) kent casino porno Яна Троянова pin up casino пин ап casino онлайн
#8194 Charlesgunny
1×bet зеркало рабочее xbet ramenbet casino <a href=https://res-publika.com>1×bet на андроид</a> casino онлайн порно с Юлия Ефимова, пловчиха <a href=https://specreporter.com/>пари букмекерская контора</a> букмекерская контора скачать приложение карты казино Черкесова Бэлла Мухарбиевна порно 1×bet зеркало слоты 1×bet xyz приложения букмекерских контор на андроид официальные букмекерские конторы как выиграть в казино
#8195 Charlesgunny
демо казино букмекерская контора фонбет официальный <a href=https://rucriminal.info/>букмекерская контора мостбет</a> бесплатно играем казино фильмы казино рояль <a href=https://th-royalgclub.com/>водка казино</a> скачиваемые казино порно с Александр Головин (футбол) порно с Константин Тюкавин (футбол) почему в казино нет часов букмекерская контора фонбет casino сегодня 1×bet зеркало рабочее
#8196 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8197 Charlesgunny
смотреть фильм казино casino бонус <a href=https://www.ossetia.tv/>реального казино</a> человек казино casino ru <a href=https://strelochnik.com/>порно с Антропова Валентина Викторовна</a> casino online зеркало пари букмекерская контора up casino лучшие казино бесплатно porno Светлана Ходченкова up букмекерская контора Мухтиярова Елена Вячеславовна порно
#8198 RobertImirehttps://dveri-mezhkomnatnye-sale.ru
купить входные двери <a href=https://dveri-mezhkomnatnye-sale.ru/>двери межкомнатные купить в спб</a>
#8199 Charlesgunnyhttp://filmkachat.ru
1×слот регистрация в 1×slots casino
Казино выделяет вероятность заработать и вывести реальные средства на бездепозитных бонусах. Обычно, это незначительная сумма, которую казино имеет себе разрешить презентовать игроку. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasin online</a> <a href=https://www.dropbox.com/scl/fi/mhtyquvypk6ajvyvihwx9/.pdf?rlkey=0k4×e3vv39h01p6t23oe67lli&st=6zkk2go1&dl=0>https://www.dropbox.com/scl/fi/mhtyquvypk6ajvyvihwx9/.pdf?rlkey=0k4×e3vv39h01p6t23oe67lli&st=6zkk2go1&dl=0</a> Бездепы с безвозмездными вращениями предоставляют юзерам право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд выплачивает казино. Число спинов ограничено и изредка превышает сотню. Если акция включает в себя много бесплатных игр, их начисление возможность быть разбито на некоторое дней.Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных требований, кроме обязательной верификации. Если на веб-сайте учтена неотъемлемая процедура доказательства личности, то вывести выигрыш получится только в ревизии данных. Приготовьтесь заполнить анкету и отправить в техподдержку документ, подтверждающий лицо. 1×slots регистрация 1×slots casino c2d ru <a href=https://australiantravelforum.com/Upload/member.php?action=profile&uid=5920>https://australiantravelforum.com/Upload/member.php?action=profile&uid=5920</a>
1 xslots рабочее зеркало
Используйте лучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, чтобы заработать презенты за обычные деянья и уже сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высочайшей отдачей и прыткими выводами на электронные кошельки.Сроки активации приза уточняются каждым казино, хотя почаще всего они не превосходят недели с момента получения. Игроку непременно нужно использовать бездеп на обозначенного срока, в ином случае приз просто исчезнет. Каждый бонус возможно получить лишь раз раз, поэтому если не применять бездеп в срок, у игрока не несомненно второго шанса им пользоваться. <a href=https://www.bf-france.com/forums/profile/30064-rabofreeor/>1×slots сайт</a> 1×slots официальный сайт зеркало С этими ординарными советами каждое казино с призом за регистрацию способно принести в разы больше выгоды и полезности.Внесение депозита – Будьте готовы пополнить счет последствии отыгрыша бонуса. Это стандартное требование правил для этого подобии промо-акций. Лучше заранее уточнить, какую сумму надо(надобно) несомненно вносить на счет. Как верховодило, речь о наименьшем депозите, хотя вы должны быть убеждены, собственно он для по кармашку. <a href=http://www.ihaomeijia.com/home.php?mod=space&uid=141158>http://www.ihaomeijia.com/home.php?mod=space&uid=141158</a> Возможность сыграть дополнительное состязание (а иногда и количество) абсолютно бесплатно, а выигрыш, в свою очередь, поступает на счёт игрока. 1× slots casino зеркало
сайт 1× slots casino
Даже не выиграв солидную сумму, игрок интересно проведет время, изнутри выучит работу площадки, воспримет геймплей автоматов. Все это без каких-то финансовых рисков. Быть в курсе наихороших промоакций с. Достаточно периодически изучать перечень свежих интернет казино с выводом приза без депозита в данном разделе.Для казино, работающих онлайн, бездепозитные призы нужны для вербования новых клиентов. Предложение сыграть на слотах без необходимости внесения реальных средств — работающий метод для увеличения энтузиазма к фирмы. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит выступать в казино, лишь теперь уже на личные средства. Для верификации аккаунта нужно предоставить профессионалам технической поддержки отсканированную копию паспорта и счета за коммунальные предложения, а также фотографию банковской карты либо скриншот страницы электрического кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для подтверждения личности.Для получения бонуса надо(надобно) ознакомиться с программой лояльности казино и устроить ставки на необходимую, необходимую для перехода на следующий уровень. <a href=http://google.com.gt/url?q=http://schottnyc.ru/bitrix/redirect.php?goto=http://sakura-nsk.com/bitrix/click.php?goto=https://telegra.ph/Nasledstvennye-prava-padcheric-i-sovershennoletnih-detej-v-brake-bez-zaveshchaniya-09–24>http://google.com.gt/url?q=http://schottnyc.ru/bitrix/redirect.php?goto=http://sakura-nsk.com/bitrix/click.php?goto=https://telegra.ph/Nasledstvennye-prava-padcheric-i-sovershennoletnih-detej-v-brake-bez-zaveshchaniya-09–24</a> 1×slots casino регистрация Чем ниже велечину вейджера, тем легче отыграть и вывести приз. Если Вы расчитываете заработать на бездепе, но просто ознакомиться с свежим игровым клубом, то стоит игнорировать призов с высочайшим вейджером их практически не реально отыграть. С ними Вы сможете только протестировать игры заведения.
1×slot зеркало рабочее регистрации на телефон придет
<a href=https://rolivka.online/forum/showthread.php?tid=30105>1×slots промокод при регистрации 2025</a> Бездепозитные бонусы казино за регистрацию в 2022 году — это возможность сыграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой или числом бесплатных вращений без внесения депо. Не путайте деморежим с реальной забавой без необходимости внесения депозита. Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают приз по странам. Вплоть до как, собственно клуб может на игроков из Вашей страны, а бездеп не давать.Фриплей-бонусы встречаются только в неких клубах. Они зачисляются сразу последствии творенья профиля и активны непродолжительное время. Если не успеете истратить свои, они просто сгорят. Касаемо времени, в большинстве случаев бонусы активны в течение часа. 1×slots рабочее зеркало <a href=http://diezel.kr/bbs/board.php?bo_table=contact&wr_id=225551>http://diezel.kr/bbs/board.php?bo_table=contact&wr_id=225551</a> Фриспины. Бесплатные вращения предусмотрены для применения в видео-слотах. Внимательно читайте условия – они часто выдаются для некоторых машин. В зависимости от клуба вы можете делать определенное количество ставок. Кстати, современные игорные дома дают вероятность заводить «одноруких бандитов».
1×slot зеркало рабочее этих способов предполагает регистрацию
При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, коие возможно предназначить игре в казино. <a href=http://ddininder.com/home.php?mod=space&uid=53790>http://ddininder.com/home.php?mod=space&uid=53790</a> 1 xslots рабочее зеркало Каждый новичок и умелый игрок мечтают скоро стартануть и начать делать настоящие ставки. Для сего довольно забрать подарок, за который не нужно платить. В зависимости от игровой платформы, нужно сделать профиль, привязать email либо телефонный. После этого администрация начисляет щедрое вознаграждение повторяющий бесплатных вращений или виртуальных кредитов.
<b>Смотреть еще похожие новости:</b>
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=666067>1×slots casino зеркало рабочее</a>
<a href=http://www.arka-bahce.org/forum/showthread.php?p=764591#post764591>1×slots казино зеркало</a>
<a href=https://australianwinerytours.com/tours/showthread.php?tid=201351>1×slots casino зеркало</a>
<a href=http://miupsik.ru/forums/showthread.php?tid=272670>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. В большинстве заведений устроить это можно по e-mal, по номеру телефона, спустя социальную сеть или гугл-аккаунт.
#8200 RobertImirehttps://dveri-mezhkomnatnye-sale.ru
купить двери спб <a href=https://dveri-mezhkomnatnye-sale.ru/>https://dveri-mezhkomnatnye-sale.ru</a>
#8201 Charlesgunny
водка казино казино проиграл <a href=https://rumafia.news/>Радченко Светлана Юрьевна порно</a> 1×bet официальный xbet pin up casino скачать <a href=https://kompromat1.online/>официальные букмекерские конторы скачать</a> пина букмекерской конторы казино вход официальный сайт 1×bet xbet xyz casino pin официальный porno Алена Михайлова букмекерскую контору пин 1×bet 1
#8202 Charlesgunnyhttp://filmkachat.ru
1×slots casino online регистрация
Акции, приуроченные к календарным праздничным, бывают рассчитаны как на всех пользователей, например и на категории: например, презент на 8 марта девушкам-игрокам или мужчинам на 23 февраля.Бывают ли бездепозитные призы без вейджера? Бывают, в у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино. <a href=http://filmkachat.ru/>1хслотс официальный сайт зеркало</a> В качестве бонусов интернет казино нередко предлагает выдачу фриспинов, другими бесплатных вращений игрового барабана. Виртуальные монеты возможно применять для обучения в покерной школе либо для игры в казино. <a href=https://pixabay.com/users/46661731/>https://pixabay.com/users/46661731/</a> Выполнив все притязания оператора, клиент может оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем менее суток. Если дополнительно потребуется пройти процедуру верификации, то срок возрастает до 1–2 рабочих дней. Для перевода применяются банковские инструменты и электрические платежные системы. Второй метод подходит какого-либо, так как масса транзакций в осуществляются моментально. В связи со специфичностью функционирования банков обработка платежей имеет занять до нескольких рабочих дней. 1×slots рабочее зеркало <a href=https://zarabotok.forumrpg.ru/viewtopic.php?id=68435#p149283>https://zarabotok.forumrpg.ru/viewtopic.php?id=68435#p149283</a> Этот образ приза несомненно добавлен на Ваш аккаунт последствии успешной процедуры регистрации с использованием номера телефонного. Если избрать другой способ творенья учетной записи, бездеп не будет добавлен на Ваш аккаунт.Превышение наибольшей ставки при отыгрыше. Система автоматически не предостерегает о превышении ставки, потому о нарушении верховодил игрок может разузнать теснее в подачи запроса на вывод средств.
1×slots сайт
<a href=https://test.soclanovtsy.ru/topic/26973-chicago-house-samples-loops-sounds/page/200/#comment-64894>1×slots актуальное зеркало</a> 1хслотс зеркало Для отыгрыша бонуса казино обязует игрока сыграть на сумму, в несколько один превосходящую необходимую полученного бонуса — тут выгода фирмы очевидна. <a href=http://jkmulti.vip/bbs/board.php?bo_table=free&wr_id=1842313>http://jkmulti.vip/bbs/board.php?bo_table=free&wr_id=1842313</a> Подтверждение электрической почты – одно из главных условий, которое есть практически в любом бездепозитном казино. Чтобы верифицировать электронную почту, достаточно перебежать по активной ссылке в письме, полученном от азартного клуба. 1 x slots Высокая конкурентность в разделе азартных игр мотивирует операторов привлекать клиентов разнообразными промоакциями. Благодаря данному у посетителей появляется вероятность получить призы в казино за регистрацию без депозита. Воспользоваться этим предложением можно, избегая процедуру внесения средств на игровой счет, просто активировав акк на сайте. Наш гид по бездепам поможет выбрать самую привлекательную бонусную программку, узнать правила получения такового гонорары и распорядиться им с наибольшей выгодой.Фриспины — безвозмездные вращения, коие разрешают игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины считаются самым модным и желаемым обликом бонуса — бесплатные вращения иногда эффективнее и веселее в отыгрыше, чем другие виды бездепов.
1×slots зеркало сайта
<a href=http://ecsambo.org/index.php?subaction=userinfo&user=astonishingbonf>http://ecsambo.org/index.php?subaction=userinfo&user=astonishingbonf</a> 1×slots рабочее зеркало
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Бездеп с фриспинами может охватывать всю коллекцию игр на сайте или разработки 1-го провайдера. Обычно предлагается определенный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш возможность быть выведен после как, как юзер отыграет эту необходимую. Возможность оценить глубокий возможностей слотов — основное совершенство этой разновидности. Игроку становятся доступны что, эти опции, коие отсутствуют в демонстрационном режиме, а возможность выиграть реальные деньги прибавляет ярчайших азартных ощущений. <a href=http://forums.panzergrenadiers.com/showthread.php?23408–1%D0%A1%E2%80%A6-%D0%A1%D0%83%D0%A0%C2%BB%D0%A0%D1%95%D0%A1%E2%80%9A-1%D0%A1%E2%80%A6%D0%A1%D0%83%D0%A0%C2%BB%D0%A0%D1%95%D0%A1%E2%80%9A%D0%A1%D0%83-%D0%A1%D0%82%D0%A0%C2%B5%D0%A0%D1%96%D0%A0%D1%91%D0%A1%D0%83%D0%A1%E2%80%9A%D0%A1%D0%82%D0%A0%C2%B0%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A1%D0%8F-%D0%A0%D1%97%D0%A0%C2%B5%D0%A1%D0%82%D0%A0%C2%B5%D0%A0%E2%84%96%D0%A1%E2%80%9A%D0%A0%D1%91-%D0%A0%D0%85%D0%A0%C2%B0–1×slots&p=509497#post509497>1х слот 1хслотс регистрация перейти на 1×slots</a> Изучить управляла и условия получения бездепозитных призов казино, Вы сможете у нас на сайте в разделе с призами либо на официальном сайте избранного Вами казино. Если не можете найти нужную информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электрической почте. 1×slots зеркало регистрация в 1×slots casino <a href=http://www.markstrongcn.com/home.php?mod=space&uid=4112&do=profile>http://www.markstrongcn.com/home.php?mod=space&uid=4112&do=profile</a> Это один из главных показателей привлекательности презента. С завешенным коэффициентом числе профессионалы не смогут выполнить обстоятельства по отыгрышу. И так, насколько привлекательно смотрится предложение – бездепозитный приз казино в объеме $500 или $1 000. Чтобы новички получше вдумались, собственно же такое вейджер, мы разберём на примере.Акционные предложения от казино есть в разных форматах. Часто призы даются в обмен на депо. Игрок вносит платеж и получает деньги, безвозмездные вращения прочие одобрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — картина приза, который гарантирован за исполненье определенных поступков на веб-сайте:
1×slots бонус за регистрацию
<a href=http://avestalaw.ru/index.php?subaction=userinfo&user=accurateoffice9>http://avestalaw.ru/index.php?subaction=userinfo&user=accurateoffice9</a> Активация валютного вознаграждения происходит автоматически последствии творенья профиля либо использования промокода. Иногда операторы предъявляют вспомогательные притязания: подписаться на страницы казино в соц сетях либо на рассылку рекламных извещений, скачать и ввести дополнительный софт и т.д.В истиннее время получить приз за регистрацию в казино очень просто. Почти каждый игорный дом с радостью предоставит деньги или бесплатные вращения. Многие игроки используют этим и не стесняются регистрироваться в каждом клубе с прибыльными условиями. Кстати, это отличная возможность придумать выигрышную стратегию и сорвать куш. 1×slots официальный demo регистрация в 1×slots casino Бонусные деньги – маленькая сумма средств для старта в новеньком казино. На бонусные деньги, обыкновенно разрешено играть во все забавы, кроме слотов с современным джекпотом и игр из раздела live casino.Многие азартные клубы ограничивают сумму вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании акции, суммы Вы не сможете вывести. Разница несомненно аннулирована, Вы в не сможете создавать на нее ставки.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum-macan.ru/memberlist.php?mode=viewprofile&u=1736>1×slots casino регистрация на сайте</a>
<a href=http://forum.cvetq.info/memberlist.php?mode=viewprofile&u=17326>1×slots рабочее зеркало</a>
<a href=https://www.sgomberisgombero.it/my-account-2/>1×slots зеркало проходить регистрацию это отличный вариант</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы — это подарки от казино в виде бонусных средств либо фриспинов для игровых автоматов, которые начисляются на акк игрока в процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депо не требуется. Для получения выигрыша требуется выполнить условия казино. Чаще всего игроку необходимо поставить конкретную сумму, хотя теснее из собственных средств. Она рассчитывается из совместного объема выигрыша за все время использования бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, если пользователь выиграл 1000 рублей, а множитель составляет х30, исключить деньги возможно несомненно, сделав ставки на 30 000 рублей.
#8203 Charlesgunny
порно с Карен Хачанов (теннис) как выиграть в казино <a href=https://www.ossetia.tv/>unlim casino</a> казино ли casino промокод <a href=https://kompromat1.online/>балтбет букмекерская контора</a> букмекерская контора бесплатно скачать 1×bet на андроид бесплатно Ирина Горбачева pin up casino пин букмекерская контора на андроид официальные сайты казино 1×bet сайт
#8204 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8205 RobertImirehttps://dveri-mezhkomnatnye-sale.ru
межкомнатные двери <a href=https://dveri-mezhkomnatnye-sale.ru/>купить двери</a>
#8206 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8207 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать
Также посещают случаи, когда казино начисляет оговоренный бонус в регистрации нового клиента по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам. <a href=http://filmkachat.ru/>1×slots регистрация на сайте 1×slots ru com</a> <a href=https://www.dr-ay.com/blogs/217116/Mastering-Architectural-Rendering-From-Vision-to-Visual-Reality>https://www.dr-ay.com/blogs/217116/Mastering-Architectural-Rendering-From-Vision-to-Visual-Reality</a> Необходимость отыгрыша. Вейджер в этом случае выше, чем для призов за депозит. И пока средства не отыграны, вывести их невозможно.Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке адепты онлайн-казино публикуют важную информацию о not the slightest deposit bonuses прочих услугах. казино 1×slots <a href=http://zvezdjuchki.ru/user/DoctorLazutakt/>http://zvezdjuchki.ru/user/DoctorLazutakt/</a> Такой казино бонус без депозита за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это как бы некая конспирация поощрения под бездепозитный. Суть всего этого сводится к тому, что игроку на час выдается, например, 1000 $, а реклама повторяет то, собственно каждой выигрыш возможно будет в будущем оставить при себя. Но если играющий всерьез отнесется к данному предложению, то он просто растеряет время. Ведь игроку надо(надобно) несомненно играть не главном аккаунте, в тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (в всей тысячи) в верховодила вступят конкретные условия, где будет сказано, что максимальной суммой победы имеет быть лишь двести $ и средства можно применять только виде приза на первый вклад с вейджером 25 от суммы вознаграждения плюс сам депозит. По результату выйдет, собственно игрок выигрывал себя 200% бонус с вейджером на определенную сумму. Короче разговаривая, это все не вашего медли.
1 х слотс зеркало
Получив собственный презент, Вы можете безвозмездно играть на реальные средства, а выполнив обстоятельства отыгрыша, вывести собственный выигрыш.Отыграв бездепозитный бонус в казино с выводом тоже придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в схожее ограничение присутствует, то единоразово вывести получится только необходимую, не превышающую размер полученного бонуса. <a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=375352>1×slots зеркало регистрация в 1×slots casino</a> 1× slots зеркало <a href=http://www.fumankong1.cc/home.php?mod=space&uid=578870>http://www.fumankong1.cc/home.php?mod=space&uid=578870</a> 1×slots рабочее зеркало на сегодня Обычно для получения бонусов без депо, казино выдвигает лояльные и вполне выполнимые обстоятельства, но есть ряд поступков коие воспрещены и шансы стать противные последствия:Не стоит путать забаву в демо и внедрение бонусов. В демонстрационном режиме игрок может оценить механику слота, сюжет и оформление. Но игра ведется на относительные кредиты, потому отсутствует главное ? ощущение пыла. Активируя промокод или фриспины, клиент раньше не тратит свои средства на игровые автоматы, хотя имеет сорвать настоящий куш!
1хслот 1хслотс регистрация перейти на 1×slots
Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Проверка занимает от нескольких минут до нескольких дней, профессионалы техподдержки все запросить вспомогательные документы либо инициировать куцее общение по Skype. <a href=http://cheapbooks.cc/memberlist.php?mode=viewprofile&u=54093>http://cheapbooks.cc/memberlist.php?mode=viewprofile&u=54093</a> Нет. Казино раздают бесплатные призы за регистрацию, для того, чтобы заказчик мог ознакомиться с игровым заведением. А чтобы вывести его, необходимо выполнить обстоятельства отыгрыша. 1×slots казино зеркало Мы рекомендуем не отказываться от сходственных услуг узнаваемых казино. Выделите некоторое минут на регистрацию, получите приз и попробуйте его отыграть. Может быть, сегодня удача будет на вашей стороне!
1×slots рабочее зеркало
Обычно для получения бонусов без депо, казино выдвигает приклнные и вполне выполнимые условия, но есть ряд деяний коие запрещены и имеют стать досадные последствия:Исходя из этого, просто не существует осмысленных оснований махнуть рукою на получение такого приза при регистрации. И, будет, на подобный бесплатной базе у вас все шансы выиграть деньги и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, нарекают безвозмездными интернет платформами для игр. <a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=227092>1 x slots casino</a> Подтверждение индивидуальной инфы. Все казино просят от клиента пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у пользователя других аккаунтов (мультиаккаунт запрещен). Некоторые клубы механически начисляют бонус на акк игрока в выполнения критерий получения, но бывают истории, когда приз нужно активировать игроку самому. Есть количество методов активации бонуса:Простая процедура получения бездепозитного бонуса, которая займет менее 2-х минут. Для получения бездепов, достаточно зарегистрироваться и доказать контактные данные. 1хслотс официальный сайт зеркало <a href=http://nedv-revda.ru/index.php?subaction=userinfo&user=macholap95>http://nedv-revda.ru/index.php?subaction=userinfo&user=macholap95</a> Денежные свои. Третий приз за регистрацию без депозита – наличные. К раскаянью, только известные и популярностью клубы шансы уяснить средства в руб. Либо долларах. С их поддержкою вас насладиться любой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед данным необходимо исполнение конкретных условий.Самый распространённый из похожих призов, естесственно же, бездеп на денек рождения клиента — приз вид фиксированной суммы либо фриспинов поступает на счёт игрока, а пользоваться им возможно на установленного периода медли.
1×slots регистрация 1×slots casino c2d ru
Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро либо 20 долларов. Если выдаются фриспины, их количество изредка превышает нескольких 10-ов даровых вращений.Стоит отметить, что бездепозитный приз выдается лишь взрослым новеньким, которые, же, могут пригласить личных друзей и людей, того рассчитывающих на поощрительную программу преданности. Подобная технология была среди конкурирующих онлайн-казино для популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению своей посещаемости, путем вербования свежих игроков. Бонусы – это уникальный шанс для потенциальных соучастников забавы, коие все опробовать софт покер рума и убедиться, будут ли они в него играть или нет. Новый игрок испробует свои силы с реальными оппонентами в казино. Доступность — бездепозитные призы в казино чаще всего предоставляются новым игрокам, но бывают случаи, когда бонус все получить и действующие клиенты.Вообще перейдя в казино — управляла одинаковы в получении бездепозитных бонусов, в стандартные верховодила заходит: доказать эл. Почту и телефонный, заполнить свой личный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ. <a href=https://www.0574snyw.com/space-uid-176013.html>https://www.0574snyw.com/space-uid-176013.html</a> Постарайтесь отыграть вейджер, чтобы появилась возможность забыть заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы можете получить выигрыш на электронной кошелёк, карту, аппарат. казино 1× slots официальный сайт Новые клиенты онлайн-казино без первого депозита имеют выяснить собственную удачливость. К тому же есть вероятность конвертировать бездепы в настоящие средства за регистрацию в казино, однако желаемого бонус необходимо отыграть сообразно условиям промоакции.
<b>Смотреть еще похожие новости:</b>
<a href=https://australianwinerytours.com/tours/showthread.php?tid=181326>1×slots зеркало на сегодня</a>
<a href=http://fin-molitor.com/forum/viewtopic.php?f=2&t=406729>скачать 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Риск-игра по равным шансам – Также казино имеет запрещать исполнять условия по отыгрышу за раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких иных играх.
#8208 Travisnusty
pinup 2025: <a href=" https://pinup2025.com/ ">пин ап казино официальный сайт</a> – pinup2025.com
#8209 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8210 DouglasBoghttps://tehpomosh-krasnodar.ru
техпомощь прикурить <a href=https://tehpomosh-krasnodar.ru/>https://tehpomosh-krasnodar.ru</a>
#8211 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на 1хслотс
Фриплей-бонусы встречаются лишь в неких клубах. Они зачисляются сразу в создания профиля и активны недолговременное время. Если не успеете израсходовать свои, они просто сгорят. Касаемо медли, как призы активны на часа.Объективные – размер бонуса, коэффициент и условия вейджера, надобность внесения депо для вывода средств; <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino09k online</a> Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные методы и расценить особенности, недоступные при забаве в демо режиме. Многие свежие посетители переходят в количество постоянных, а оператор получает долгосрочную выгода.В зависимости от интернет заведения любой из их возможность вам предложить как бездепозитные средства, например и бездепозитные фриспины, которые последствии удачной регистрации рухнут вас на ваш игровой баланс. <a href=https://www.reverbnation.com/interiordesign3d>https://www.reverbnation.com/interiordesign3d</a> Нет. Для получения бездепозитного бонуса в казино нужна неотъемлемая регистрация на сайте. Играть в слоты даром и без регистрации можно только в демо режиме.На нашем веб-сайте Вы отыщите список актуальных новых бездепозитных бонусов в казино 2022 года. Также, есть много неповторимых предложений, которые доступны лишь гостям нашего вебсайта после регистрации по нашей ссылке либо активации особого промокода. 1×slots casino регистрация 1×slots review live <a href=https://ic-info.ru/forum/user/168577/>https://ic-info.ru/forum/user/168577/</a> 2. Создать свежий профиль. Для регистрации нужно заполнить маленькую анкету или зайдите в личный офис посредством соц сеток;Выбрать казино с бездепозитным призом. У нас на сайте представлен список наихороших интернет казино, коие предлагают своим игрокам щедрые призы за регистрацию.
1×slots регистрацию более популярный вариант это
<a href=https://smm-seo.ru/members/rabofreeol.4209/>1 х слотс зеркало</a> 1×slots зеркало регистрация то дальше необходимо пройти <a href=http://porno18let.ru/index.php?subaction=userinfo&user=glibschedule48>http://porno18let.ru/index.php?subaction=userinfo&user=glibschedule48</a> 1хслотс рабочее зеркало Если речь идет об эксклюзивных услугах, может потребоваться регистрация в казино по ссылке с партнерского вебсайта.При правильном раскладе бездепы — это отличный способ играть на деньги без траты собственных средств. Есть несколько рекомендаций, следуя которым можно извлечь максимум полезности из подобных промоакций казино. Играть идет только на лицензированных площадках. Скриптовые веб-сайты не дурачат с бонусными предложениями, но и употребляют пиратский софт с измененным ГСЧ. Выиграть на таких автоматах нереально.
1×slots зеркало рабочее на сегодня
Еще одно условие дотрагивается размеров ставки. Операторы устанавливают наивысшую необходимую, которую игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, избранной в Личном офисе. При превышении лимита есть риск потерять бонуса. Существующие ограничения относятся и к определенным обликам ставок. Например, играя в рулетку, клиент может столкнуться с запретом назначать фишки на шансы. Приветственный бездеп предоставляется любому игроку лишь один раз. Казино сражаются с например именуемыми бонусхантерами (от англ. Bonus Hunter — доброволец за призами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения подарка. Исключить похожие деяния дозволяет верификация данных. Администрация вправе потребовать у клиента доказать индивидуальные данные, указанные при регистрации. <a href=http://khretech.com/bbs/board.php?bo_table=notice&wr_id=3546>http://khretech.com/bbs/board.php?bo_table=notice&wr_id=3546</a> 1хслот скачать
1×slots сайт
Реже бонусы без депозита начисляются постоянным игрокам. С их подмогою администрация постарается вычесть ценных клиентов либо вожделеет поблагодарить за преданность верных гостей. Но намного почаще для сходственных целей используются эти промоакции:Для получения депозитного приза необходимо восполнить свой игровой баланс настоящими деньгами. Вознаграждение возможно получить либо при внесении первого депо, либо повторяющий фиксированного процента от внесённых средств. Так либо другому, приз поступит на счёт лишь последствии пополнения. На бонусные начисления могут быть установлены вспомогательные лимитирования, которые Вы не сведению при отыгрыше. Пока приз полностью не отыгран — деньги из казино не выводятся.Бонус за регистрацию в казино выдается только один один на одного игрока. Но случаются дополнительные акции, в которых бездепы расступаются для постоянных посетителей и эти презенты Вы можете получить больше одного раза. 1×slots зеркало регистрация в 1×slots casino <a href=http://lnx.hotelresidencevillateresaischia.com/casamicciola/index.php?option=com_k2&view=itemlist&task=user&id=450374>http://lnx.hotelresidencevillateresaischia.com/casamicciola/index.php?option=com_k2&view=itemlist&task=user&id=450374</a>
1хслотс регистрация в 1×slots casino
Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен перечень наихороших интернет казино, которые предлагают своим игрокам щедрые бонусы за регистрацию. При регистрации по указывать только достоверную информацию. Когда учетная запись несомненно активна, появится доступ в Личный кабинет. В нем можно выбрать еденицу, установить промокод и узнать подробные управляла получения и отыгрыша бездепа. Краткая информация об промоакции часто находится непосредственно на регистрационной форме. <a href=http://www.taijiacademy.com/newforum_down/profile.php?mode=viewprofile&u=303062>http://www.taijiacademy.com/newforum_down/profile.php?mode=viewprofile&u=303062</a> 1×slots промокод при регистрации Доступность — бездепозитные бонусы в казино чаще всего предоставляются свежим игрокам, хотя бывают случаи, когда приз могут получить и действующие посетители.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.vn.ua/member.php?u=73361>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины начисляются по конкретной ставке. После их активации игроку нужно запустить разъем и убедиться, что в нем отображаются бесплатные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода в отыгрыша определяется оператором и изредка выше 5 000 руб. Вышеописанная первопричина и считается основным нюансом, следствии которого операторы отдают доля своей прибыли на различные маркетинговые расходы и рекламные кампании. А самым действенным тут будут играть непосредственно бездепозитные бонусы казино 2022 с выводом за регистрацию.
#8212 Charlesgunny
водка казино балтбет букмекерская контора <a href=https://rhymes-punches.com/>казино 1</a> 1×bet зеркало винлайн букмекерская контора <a href=https://slon-ru.com/>сколько казино</a> Радченко Светлана Юрьевна порно 1×bet сайт пин up casino casinos xyz порно с Илюшникова Татьяна Александровна вавада казино порно с Евгения Медведева, фигуристка
#8213 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
На данном разделе портала регулярно публикуются обзорные статьи, в которых рассматриваются благотворительные бонусы лучших интернет-казино. Информация структурирована по нескольким пт, включая главные:А ознакомиться с новыми онлайн казино, Вы сможете за счет бонусов с выводом выгоды, которые Вы можете получить без депо. <a href=http://filmkachat.ru/>1хслотс рабочее зеркало</a> Представьте момент, когда при ставке в 10 рублей Вы получите подобное умножение. Миллион рублей за одно вращение, что абсолютно вполне. Поэтому вопрос, сколько возможно выиграть остаётся закрытым. Предлагаем выяснить самостоятельно. Регистрируйтесь в одном или нескольких онлайн казино, получайте Бездепозитный бонус и проверяйте удачу в деле. Разумеется, вывести деньги сложно. Однако шансы есть у всех.Все любят получать подарки. Согласитесь, почти каждый играющий человек будет бесконечно счастлив, случае получит даровой презент для забавы в онлайн казино просто за регистрацию или же бонус за внесенный депозит, так именуемые приветственные бонусы для свежих игроков. Соответственно такие интернет клубы будут больше известны и предпочтительны у игроков при выборе казино для забавы. Топ казино день обновляется и прибавляются новые и увлекательные игровые клубы с симпатичной бонусной политикой и всеми возможными привилегиями, к которым относятся такие призы как фриспины за регистрацию, денежные бездепозитные призы, а также щедрые призы за внесенный депозит. <a href=http://www.redsea.gov.eg/deutsche/Lists/Beschwerden_List/DispForm.aspx?ID=7439>http://www.redsea.gov.eg/deutsche/Lists/Beschwerden_List/DispForm.aspx?ID=7439</a> 1×slots регистрация на 1хслотс <a href=http://tskc.ru/index.php?subaction=userinfo&user=dramaticoomph77>http://tskc.ru/index.php?subaction=userinfo&user=dramaticoomph77</a> Чаще всего применяются коды. Их надо(надобно) заносить в особые окошки регистрационной анкеты, случае речь о пригласительных призах, либо в определенном разделе личного кабинета игрока.
1×slots официальный регистрация
Благодаря программке лояльности от игорного заведения, можно взять неплохой старт и без дополнительных инвестициям запустить видеослоты. Кроме как, возможно рассчитывать на реальную удачу и получить, без инвестиции собственных финансов, немалый выигрыш.Вознаграждения за получение VIP-статуса ? начисляются в программки преданности при достижении одного уровня либо выдаются индивидуально менеджерами саппорта. 1хслотс официальный сайт зеркало Ниже указан важный перечень легальных казино в Беларуси с призами на первый депозит. Вы сможете попасть на официальный вебсайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз.При верном подходе бездепы — это прекрасный метод выступать на деньги без траты личных средств. Есть количество рекомендаций, следуя которым возможно извлечь максимум пользы из похожих акций казино. Играть следует только на лицензированных площадках. Скриптовые сайты не только накалывают с бонусными услугами, но и используют пиратский софт с измененным ГСЧ. Выиграть на этих автоматах невероятно. <a href=https://nextsemi-skku.co.kr/bbs/board.php?bo_table=free&wr_id=103898>https://nextsemi-skku.co.kr/bbs/board.php?bo_table=free&wr_id=103898</a> 1×slots подтвердит вашу регистрацию если говорить
1×slots зеркало
Получить Бездепозитный приз в онлайн казино дело 2-ух кликов. Другой момент, отыграть рекламную и соблюсти правила и обстоятельства отыгрыша. Под правилами предполагается не вагер, хотя и ограничения по максимальной ставке. Мы осознаем, собственно в кино все ставят на зеро и выигрывают. Призываем не создавать похожего. Перед активацией приза прочтите управляла. Узнайте последующие факторы: Условия получения презента, за регистрацию, за депозит и многое. Ограничения по наибольшей ставке. Зачастую не повыше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах возможно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на пространстве. Поэтому главно аристократия, в каких забавах можно совершать кратность денежного оборота. <a href=http://www.zgqsz.com/home.php?mod=space&uid=403962>http://www.zgqsz.com/home.php?mod=space&uid=403962</a> Свежий бонус начисляется вид валютных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в пользовании средствами, ну случае отыгрыша оператор имеет установить ограничение на вывод средств.Законодательство, регулирующее азартные игры в различных странах, влияние на полномочия операторов. В итоге пользователи из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это имеет быть как полный отказ в доступе, так и невозможность загружать игры отдельных производителей. 1 xslots рабочее зеркало Создание аккаунта. На сайте казино необходимо открыть регистрационную форму и заполнить порожние поля собственными данными. Иногда на этом этапе потребуется показать только адресок электронной почты и пароль, хотя чаще надобно наполнить анкету индивидуальной информацией (ФИО, дата рождения, место проживания и т.д.). Нужно свидетельствовать только реальные данные, потому впоследствие они будут испытаны.
скачать 1×slots официальный сайт
Баланс игрока дополняется на соответствующую необходимую. К ней используется вейджер, обозначенный в правилах акции. Вывести выигрыш можно несомненно последствии как, как юзер сделает требуемый размер ставок из собственных средств. В редчайших случаях бездеп работает в формате Free Play. На счет пользователя зачисляется большая сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по окончании сего периода сумма на счету будет превосходить изначальную, то разницу возможно будет исключить либо использовать для последующих ставок.Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке представители онлайн-казино публикуют важную информацию о no down payment bonuses и других предложениях. В интернет-сети постоянно можно отыскать списки наиболее популярных и обещанных поощрительных программ от популярных онлайн-казино.Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша призов. Заведения постоянно устанавливают наивысшую ставку, допустимую по условиям вейждера. 1×слот регистрация в 1×slots casino <a href=http://besstizhie.ru/user/CharlesPeaxy/>http://besstizhie.ru/user/CharlesPeaxy/</a>
1хслотс зеркало на сегодня
<a href=http://www.orlandogamers.org/forum/member.php?action=profile&uid=4283>http://www.orlandogamers.org/forum/member.php?action=profile&uid=4283</a> Денежные средства. Третий приз за регистрацию без депо – наличные. К раскаянью, лишь знаменитые и известные клубы могут уяснить деньги в рублях либо баксах. С их поддержкой вас насладиться каждой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед данным нужно выполнение конкретных критерий.Бездепозитные бонусы, как теснее понятно, считаются уникальной вероятностью обратиться игровому процессу безусловно бесплатно, другими выступать в интернет казино бесплатно и на место средства сразу последствии регистрации аккаунта. Автоматы с таким депозитом шансы замерзнуть великолепной вероятностью поиграть для поклонников азарта с определенными лимитированиями в денег. 1×slots промокод при регистрации Во время забавы в казино, выигрыши, приобретенные спасибо безвозмездным призовым фондам, суммируются и включаются в общую необходимую для отыгрывания. Однако, в фортуна улыбнется и получится отыграть все бонусы, игровое заведение гарантированно разрешит вывести денежные средства. Сумма вывода несомненно находиться от лимита, одобренного непосредственно в этом учреждении. Поэтому, внимательно нужно читать правила выдачи анлимитных депо.Но такие рамки не смущают том хайроллеров, что коэффициенты на слотах разрешают рассчитывать на крупные выигрыши, а неких автоматах разыгрывается передовой джекпот.
<b>Смотреть еще похожие новости:</b>
<a href=https://adminclub.org/showthread.php?tid=62547>1 х слотс зеркало</a>
<a href=http://big.bestforums.org/viewtopic.php?f=7&t=9312>1×slots регистрация 1×slotscasino09k online</a>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=229260>1×slots casino регистрация 1×slots review live</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если ординарными словами, бездепы – это определённая сумма денег или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать презенты. Но есть кое-какие нюансы. Существуют игорные жилища, коие перед что, этим как начислить бонусы просят привязать аппарат, предоставить копии документов.
#8214 Charlesgunny
порно с Арина и Дина Аверины, гимнастки слоты казино <a href=https://www.ossetia.tv/>1×bet официальный</a> порно с Арина и Дина Аверины, гимнастки пин ап casino pin <a href=https://kompromat1.online/>казино</a> сайт 1×bet слоты казино играть porno Илона Маркова, хоккеистка порно с Владимир Минеев (ММА) букмекерская контора официальный сайт скачать часы казино букмекерские конторы бет
#8215 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
Простая процедура получения бездепозитного приза, которая займет менее 2-х минут. Для получения бездепов, достаточно зарегистрироваться и подтвердить контактные данные. <a href=http://filmkachat.ru/>1×slot казино зеркало</a> Каждый новичок и умелый игрок мечтают быстро стартануть и начать создавать реальные ставки. Для этого довольно забрать презент, за кот-ый не нужно выплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email или аппарат. После этого администрация начислит щедрое вознаграждение в виде безвозмездных вращений либо виртуальных кредитов. <a href=https://www.goldenline.pl/grupy/Przedsiebiorcy_biznesmeni/health-economics/how-to-create-a-stunning-3d-walkthrough-video-for-architectural-projects,3947888/>https://www.goldenline.pl/grupy/Przedsiebiorcy_biznesmeni/health-economics/how-to-create-a-stunning-3d-walkthrough-video-for-architectural-projects,3947888/</a> 1×slots зеркало <a href=http://fitboss.ru/user/Harryescon/>http://fitboss.ru/user/Harryescon/</a> Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен перечень наилучших интернет казино, коие предлагают своим игрокам великодушные бонусы за регистрацию.
1×slots официальный зеркало
При малый сумме приза рекомендуется выступать по низким ставкам, а использовать наибольшие другого лишь сомнений случае, в вейджер очень немалый, а время на отыгрыш крепко ограничено.Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают приз по странам. Вплоть до того, что клуб возможность на игроков из Вашей государства, а бездеп не давать. 1×slots сайт Каждый из бездепозитных бонусов без пополнения 2022 имеет собственный определенный вейджер для отыгрыша, так же в каждом казино он устанавливается персонально — где то он х55 а где-то х30, повторюсь всюду по разному! <a href=https://halqym.kz/user/Jamestek/>https://halqym.kz/user/Jamestek/</a> Бездепы могут входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой или баллами. 1×slots зеркало сайта
1×slot зеркало
Мы советуем не отрицаться от сходственных услуг известных казино. Выделите количество минут на регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сейчас удача будет на вашей стороне!Как лишь вы отыграли вейджер и средства с бонусного баланса перешли вас на настоящий счет, Вы отважно можете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (устроить минимальный депозит к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, вместе с депозитом). <a href=https://arenafighter.adult/mybb/member.php?action=profile&uid=262890>https://arenafighter.adult/mybb/member.php?action=profile&uid=262890</a> Реже бонусы без депо начисляются неизменным игрокам. С их помощью администрация старается вычесть ценных клиентов либо вожделеет поблагодарить за преданность верных посетителей. Но намного почаще для сходственных целей используются такие промоакции: 1×slots зеркало регистрацию более популярный вариант это Особую изюминку видео слотам присваивают уникальные символы. С их появлением активизируются различные бонусы. Вы сможете запустить дополнительный степень и прирастить необходимую выигрыша. Есть знаки, коие заменяют ненадобные элементы и сами создают выигрышные комбо. Не стоит забывать и на бонус-тур. После каждого удачного спина есть шанс увеличить необходимую выигрыша в два или четыре раза.Риск-игра по одинаковым шансам – Также казино может воспрещать исполнять условия по отыгрышу за раунда на удвоение, который предлагается в слотах, видео-покере и неких других играх.
казино 1×slots официальный сайт
Вышеописанная первопричина и является основным моментом, следствии которого операторы отдают часть своей прибыли на разные маркетинговые затраты и рекламные кампании. А наиболее действующим здесь станут играть непосредственно бездепозитные бонусы казино 2022 с выводом за регистрацию.Онлайн гемблинг развивается с любым деньком больше и больше, новые бренды создаются не по дням а по часам. Новые интернет казино проделывают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и тем наиболее предлагают бездепозитные призы за регистрацию, собственно бы не упустить эту возможность — как пользоваться новым бездепом, советуем навещать наш вебсайт как можно чаще, самое аппетитное и свежие несомненно добавляться в этом же списке. <a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=64056&result=reply>1×slots зеркало регистрация</a> Прежде чем активировать бездеп, нужно увериться что, собственно страна, гражданином которой является игрок, не заходит в список не.Исходя из этого, просто не присутствует осмысленных причин махнуть рукой на получение такового бонуса при регистрации. И, кстати, на такой бесплатной основе у вас есть шансы выиграть деньги и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные призы, нарекают бесплатными онлайн платформами для игр. Иногда для получения призов нужно связаться с адептами службы поддержки. Удобнее всего с ними беседовать в онлайн-сате, хотя времени достаточно запроса по электрической почте.Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте условия – они часто выдаются для неких машин. В зависимости от клуба вам создавать определенное число ставок. Кстати, современные игорные жилища выделяют возможность заводить «одноруких бандитов». 1×slots подтвердит вашу регистрацию если говорить <a href=https://tyciis.com/thread-302228–1–1.html>https://tyciis.com/thread-302228–1–1.html</a> Процесс доказательства личности имеет взятьвдолг(взятьвзаймы) от 1-го дня до недели. Если заказчик разрешил какую-либо ошибку при заполнении паспортных данных, то ему по обратиться с задачей в саппорта онлайн-казино.Обычно для получения бонусов без депозита, казино выдвигает приклнные и вполне выполнимые обстоятельства, хотя есть ряд деяний коие воспрещены и шансы повлечь за собой противные последствия:
1хслотс рабочее зеркало
Бездепозитный бонус за регистрацию в казино — это стартовый презент вид денежного начисления или бесплатных вращений для свежих игроков заведения, для получения которого не нужно заносить депо.Любой выигрыш по ставке выше установленного лимита будет являться недействительным. То есть ставка не будет засчитана при отыгрыше, а в случае выигрыша его сумма не поступит на счёт клиента — итог забавы несомненно всецело аннулирован. <a href=http://www.rrtea.cn/home.php?mod=space&uid=23963>http://www.rrtea.cn/home.php?mod=space&uid=23963</a> Бесплатный бонус – кредиты, которые онлайн-казино начислит клиенту, не заставляя его пополнять игровой счет.Для получения бездепа нужно пригласить в игру по реферальной ссылке нового клиента: он должен зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на сумму, обозначенную в условиях акции. 1×slots casino зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://vn-info.net/user/Josephkam/>1×slot зеркало рабочее регистрации на телефон придет</a>
<a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=88627>1×slots зеркало на сегодня</a>
<a href=http://check2go.net/my-account/>1×slots зеркало регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Наши специалисты исследуют обстоятельства промоакции, после в ручном режиме проверку их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и другие параметры. Мы не рекламируем казино, а даем игрокам информацию о наихороших из них. Акционные предложения от казино есть в различных форматах. Часто бонусы даются в обмен на депозит. Игрок вносит платеж и получает деньги, безвозмездные вращения и другие поощрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — картина приза, кот-ый гарантирован за исполненье конкретных поступков на веб-сайте:
#8216 Charlesgunny
casino сайт винлайн букмекерская контора <a href=https://slon-ru.com/>pinco casino</a> казино играть Яровая Ирина Анатольевна порно <a href=https://vestnik-jurnal.com/>Матвиенко Валентина Ивановна порно</a> champion casino казино ли демо казино играющие казино ешь казино казино в россии casino андроид
#8217 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8218 SamuelWaymnhttps://casinosha.ru
казино онлайн 2024 <a href=https://casinosha.ru/>https://casinosha.ru</a>
#8219 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8220 Charlesgunnyhttp://filmkachat.ru
casino 1×slot
Подарки на праздничные ? посвященные праздничным датам, требующие символического отыгрыша либо начисляются без такового. Могут дариться игрокам сутки рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду.Вы не в коем случае ни чем не рискуете, а только выигрываете и выводите на платежную систему, либо проигрываете предложенный приз, по мимо практической забавы на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, выучится регулировать менять ставки и линии, изучать бонусные игры и их выигрышные комбинации, да в просто зарядится кучей эмоций! Ведь вы будите играть на бонусные свои, которые возможно отыграть и исключить, но просто на демо счет, тем самым адреналин в крови еще повысится а пульс забьется с нередким ритмом! <a href=http://filmkachat.ru/>1×slots регистрация то дальше необходимо пройти</a> После потребуется привнести идентификационный платёж. Это пугает начинающих больше всего. Нужно сделать минимальный депо в 100–500 руб. Таким образом служба безопасности убедиться никаких, что платёжный способ принадлежит Вам. Данная процедура важна для обеспечивания защищенности игровых счетов. Пример, Ваш акк взломают и выведут свои на собственный кошелёк. Будет крайне досадно. Поэтому верификация платёжной системы, это важный момент.Получить приветственный приз шансы только свежие клиенты онлайн-казино. Способы описаны в критериях промоакции любого легального казино, чаще всего это: <a href=https://www.evernote.com/shard/s532/sh/05500901–0670–1a1a-0216–51c2b9055fe5/YjAxtnwrPvPChGESQ6BrqbbNaBkw96Si9QvYDkZoEblgQMFxZiTJGMGB6w>https://www.evernote.com/shard/s532/sh/05500901–0670–1a1a-0216–51c2b9055fe5/YjAxtnwrPvPChGESQ6BrqbbNaBkw96Si9QvYDkZoEblgQMFxZiTJGMGB6w</a> казино 1×slots официальный сайт <a href=http://s9524047.beget.tech/user/JamesOptop/>http://s9524047.beget.tech/user/JamesOptop/</a> Подарки на определенные даты отличаются критериями получения. Если одобрение начисляют игроку на денек рождения, то сумма обычно зависит от совместного объема депозитов за год.
1×slot рабочее зеркало
Большинство интернет-казино из нашего топ-10 готовы повеселить вас эксклюзивными промоакциями. Читайте о них в обзорах и на форуме. <a href=https://forum.home-visa.ru/memberlist.php?mode=viewprofile&u=3536>1х слот регистрация в 1×slots casino</a> 1×slots официальный сайт зеркало Но такие рамки не смущают том хайроллеров, потому коэффициенты на слотах позволяют рассчитывать на крупные выигрыши, в неких автоматах разыгрывается передовой джекпот.Ограничения по играм. Администрация запрещает игрокам кое-какие игровые автоматы с бездепозитным призом, средствами или бесплатными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда разделенье производится по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, хотя запрещен в настольных забавах и в разделе Live Casino. <a href=https://premiumstoreco.com/user/xrus1ites2605inbox-lv/>https://premiumstoreco.com/user/xrus1ites2605inbox-lv/</a> На данном разделе портала периодически публикуются обзорные заметки, в рассматриваются безвозмездные бонусы наилучших интернет-казино. Информация структурирована по нескольким пт, включая главные: 1×slots регистрация 1×slotscasino 56 online
1× слот зеркало
Помните, собственно в неких забавах сумма ставки идет в зачет вейджера лишь отчасти. Так, в настольных и карточных забавах только от 5% до 50% суммы ставки считаются как отыгранные средства, на как в слотах идет в зачет все 100% суммы.В истиннее время получить бонус за регистрацию в казино очень просто. Почти каждый игорный дом с готовностью предоставит средства или бесплатные вращения. Многие игроки используют данным и не стыдятся регистрироваться в любом клубе с прибыльными условиями. Кстати, это замечательная вероятность выдумать выигрышную стратегию и сорвать куш. <a href=http://www.phxwomenshealth.com/index.php?option=com_k2&view=itemlist&task=user&id=1014437>http://www.phxwomenshealth.com/index.php?option=com_k2&view=itemlist&task=user&id=1014437</a> зеркала 1×slots
1×slots коды
Онлайн-казино тщательно продумывают бонусные условия, которые необходимо изучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша прочие ограничения.Процесс подтверждения личности возможность взятьвдолг(взятьвзаймы) от одного дня до недели. Если заказчик допустил нибудь ошибку при заполнении паспортных данных, то ему стопам обратиться с задачей в саппорта онлайн-казино. В большинстве заведений сделать это возможно по адресу электронной почты, по номеру телефонного, через социальную сеть или гугл-аккаунт.Процесс доказательства личности имеет занять от 1-го денька до недели. Если клиент разрешил какую оплошность при заполнении паспортных данных, то ему идет обратиться с задачей в саппорта онлайн-казино. 1хслот скачать <a href=https://images.google.ki/url?q=https://doctorlazuta.by/>https://images.google.ki/url?q=https://doctorlazuta.by/</a>
1×slot рабочее зеркало
Также учтите, что кое-какие игровые платформы сужают список стран, которые способны получить предложенный бездепозитный бонус за регистрацию. К примеру, существуют онлайн-заведения, выдающие похожие призы лишь жителям определенных государств. К образцу, онлайн казино 777 Оригинал дает бездепозитный приз только игрокам из России и стран СНГ. Или напротив, снабжают вознаграждением всех, считая жителей некоторых государств (как этого, следует внимательно учить перечень, дабы потом не появилось практически вопросов и претензий).Бонусные деньги – маленькая сумма средств для старта в новеньком казино. На бонусные деньги, обычно разрешено играть во все игры, считая слотов с современным джекпотом и игр из раздела live casino. При регистрации том, или ином онлайн игральном заведении — для дается раз шанс испытать собственную фортуну не внося средства монеты. Замечу что такую поощрительную предложение предоставляют не все интернет игровые площадки, а лишь щедрая половина из них. Которые мы подготовили для Вас в нашем перечне. <a href=http://coldskillers.hys.cz/profile.php?lookup=213528>http://coldskillers.hys.cz/profile.php?lookup=213528</a> скачать 1×slots официальный сайт Oтыгpaть бонус с обозначенным вeйджepом, результата необходимо сдeлaть cтaвoк нa cумму, превосходящую объем приза в несколько один.Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в обязательном порядке нужно пополнить счет в казино. Для депозитных бонусов, данная процедура не нужна, например как депо теснее изготовлен.
<b>Смотреть еще похожие новости:</b>
<a href=http://timelesshourglass.com/requiem/memberlist.php?mode=viewprofile&u=821>1× slots casino официальный сайт</a>
<a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=118024>1×slots на любой вкус как пройти регистрацию</a>
<a href=http://board.eternityrpc.com/member.php?action=profile&uid=369>1×slots официальный сайт скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Начнём с как, собственно любое рекламную за регистрацию предполагает некие условия. Бездепозитные призы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность денежного оборота, необходимая для выполнения условий. Пример, получили бесплатные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 руб., неудачных либо выигрышных, важно. После исполнения, бонусный баланс перейдёт на реальный и будет доступным к выводу. Обычно, бездепозитные бонусы выдаются под определенные слоты с фиксированной ставкой, хотя их точно запрещено использовать в игровых автоматах с прогрессивным джекпотом. Список игр, каких возможно использовать бездеп, Вы найдете в описании промоакции или сможете уточнить у службы поддержки заведения.
#8221 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8222 Charlesgunnyhttp://filmkachat.ru
1×slots казино зеркало
У нас на веб-сайте Вы отыщите перечень призов без депозита в проверенных казино и доскональную информацию то как их получить и использовать. <a href=http://filmkachat.ru/>x1 slots регистрация в 1×slots casino</a> Этот образ приза несомненно добавлен на Ваш акк после успешной процедуры регистрации с внедрением номера телефона. Если избрать иной способ творения учетной записи, бездеп не будет добавлен на Ваш аккаунт. <a href=https://www.tipga.com/e/6707c2a43286fe0eb7fc9aca>https://www.tipga.com/e/6707c2a43286fe0eb7fc9aca</a> Верификация аккаунта. Лучше доказать лицо сразу последствии регистрации, чтобы потом не было заморочек с выводом средств. Верификация имеет протекать 2-мя маршрутами:При маленькой сумме бонуса рекомендовано играть по низким ставкам, а применять наибольшие лучше лишь что, нет случае, в вейджер слишком великий, а время на отыгрыш крепко ограничено. 1×slots официальный регистрация <a href=https://acomics.ru/-Glavdorogadv2404>https://acomics.ru/-Glavdorogadv2404</a> Популярность онлайн казино растёт и всё больше пользователей начинают интересоваться азартными забавами. Бездепозитные бонусы 2022 года, это уникальные подарки за регистрацию. С их поддержкою свежие игроки шансы получить бесплатные вращения или средства на баланс за одну регистрацию. С в игорных заведений в интернете, бездепозитные бонусы стали популярнейшим методом вербования игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш сайт собрал наихорошие предложения из интернета на 2022 год. Воспользуйтесь каким подарком и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить обстоятельства.Но никогда не запамятовывайте внимательно разбирать правила роли в бонусных промоакциях. Если вы нарушите хотя бы одно условие, позже вы не сможете уладить недоразумение с администрацией.
1хслотс зеркало
<a href=https://forum-macan.ru/viewtopic.php?t=3938>1× слот зеркало</a> рабочее зеркало 1×slots <a href=http://forums.ggcorp.me/space-uid-3862076.html>http://forums.ggcorp.me/space-uid-3862076.html</a> 1хслот зеркало Акции распространяются как на все игры казино, так и на узкий список. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и другие. Промо имеет охватывать разработки 1-го производителя. Бездеп не пересекается с другими акциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, изготовленные бонусными средствами. Для идентификации платежных реквизитов игрока может понадобиться пополнение счета на минимальную необходимую.Как лишь вы отыграли вейджер и свои с бонусного баланса перебежали вас на настоящий счет, Вы неустрашимо можете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (устроить минимальный депозит к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депо).
1×slots рабочее зеркало
Для получения предоставленных призов вам понадобиться — ПК или мобильное устройство, и остальное дело за небольшим. <a href=http://bbs.5ihangpai.com/home.php?mod=space&uid=39711>http://bbs.5ihangpai.com/home.php?mod=space&uid=39711</a> Шаг 4. Активация. Внимательно исследуйте обстоятельства, информацию по лимитированиям и сроке деяния бонусного предложения. Разобравшись с правилами, возможно активировать приз в личном офисе (иногда ? с использованием промокода) или по запросу в саппорт. 1×slots зеркало выигрыши обязательно пройдите регистрацию если
1×slots официальный сайт зеркало рабочее
Получить приветственный приз шансы только новые клиенты онлайн-казино. Способы описаны в критериях промоакции каждого легального казино, почаще всего это: Это раз из основных показателей привлекательности презента. С завешенным коэффициентом даже профессионалы не смогут выполнить обстоятельства по отыгрышу. И важно, насколько привлекательно выглядит предложение – бездепозитный приз казино в объеме $500 либо $1 000. Чтобы новенькие попревосходнее вдумались, собственно же это вейджер, мы разберём на образце. 1×slots регистрация на сайте 1×slots ru com <a href=http://www.ihavethepussy.com/de/members/45551-TyroneTug>http://www.ihavethepussy.com/de/members/45551-TyroneTug</a> Автоматическая активация кажется самой удобной, хотя ручной метод содержит перед ней превосходства. Прежде чем применять вознаграждение от казино, стоит заблаговременно определить, сколько времени потребуется на исполнение всех критерий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала действия бонуса.При поддержки такого одобрения оператор может также привлекать посетителей, коие раньше показывали активность на веб-сайте, хотя по некий основанию перестали играть. В данном случае промокод высылается пользователю по электрической почте или в виде SMS.
рабочее зеркало 1×slots
В разделе с бонусами активировать собственный подарок. Найти игры, для коих предусмотрено одобрение и использовать бонус по назначению. Для выбора азартного заведения Вы можете пользоваться перечнем наших казино с призами за регистрацию. На нашем веб-сайте мы выпустили список бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, собственно доля призов эксклюзивные и доступны только для гостей нашего вебсайта по-специальному промо-коду либо по оригинальной ссылке. Кроме как, для каждого бонуса мы подготовили доскональный обзор, в котором Вы узнаете как получить и отыграть поощрение и как исключить собственный выигрыш с бездепа. <a href=https://veteran-gazeta.ru/forum/user/1644/>https://veteran-gazeta.ru/forum/user/1644/</a> 1×slots casino регистрация 1×slots review live
<b>Смотреть еще похожие новости:</b>
<a href=http://mandala-app.com/memberlist.php?mode=viewprofile&u=3447&sid=33c9613b074776f2060b33e441baebcb>1×slots зеркало этих способов предполагает регистрацию</a>
<a href=http://forum.animogen.com/memberlist.php?mode=viewprofile&u=15333>казино 1×slots</a>
<a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1×slots промокод при регистрации 2025</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Важно, убедитесь что, собственно ранее не регистрировались в выбранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи. Риск-игра по равным шансам – Также казино имеет воспрещать выполнять обстоятельства по отыгрышу счет раунда на удвоение, который предлагается в слотах, видео-покере и некоторых иных забавах.
#8223 Charlesgunny
слот casino порно с Афонина Марина Игоревна <a href=https://rucriminal.info/>порно с Дарья Касаткина (теннис)</a> casino ап порно с Георгий Джикия (футбол) <a href=https://kompromat1.online/>казино на деньги</a> букмекерская контора мостбет порно с Алина Загитова песня казино порно с Юлия Ефимова букмекерская контора без 1×bet зеркало слоты 1×bet xyz симулятор казино
#8224 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8225 JustinErype
http://casinositeleri2025.pro/ slot oyunlarД±
#8226 Robertquisy
slot siteleri <a href=http://slottr.top/#>slot oyunlar? puf noktalar?</a> slot tr online
#8227 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8228 Ремонт телевизоров Hisense Москваhttps://remont-televizorov-hisense-job.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали срочный ремонт телевизоров hisense, можете посмотреть на сайте: <a href=https://remont-televizorov-hisense-job.ru/>ремонт телевизоров hisense рядом</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#8229 Ремонт телевизоров Hisensehttps://remont-televizorov-hisense-job.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт телевизоров hisense в москве, можете посмотреть на сайте: <a href=https://remont-televizorov-hisense-job.ru/>ремонт телевизоров hisense цены</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#8230 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasin online
Вейджер в переводе с английского значит «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша приобретенного бонуса, в нашем случае бездепозитного. Число ставок большого — важно лишь набрать сумму, пропорциональную сумме поощрения. <a href=http://filmkachat.ru/>1×slots акции</a> Фриспины — благотворительные вращения, коие позволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся наиболее знаменитым и преимущественным видом бонуса — благотворительные вращения порой эффективнее и веселее в отыгрыше, чем другие виды бездепов.Все бесплатные бонусы кажутся заманчивыми. Кто же категорически от возможности сыграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далековато не все бездепозитные призы в презентабельны для рассудительного посетителя. <a href=https://www.indiegogo.com/individuals/38144440>https://www.indiegogo.com/individuals/38144440</a> 3. Подтвердить данные. В зависимости от клуба, нужно привязать телефон или почту, показать индивидуальную информацию; 1×slots официальный регистрация <a href=http://rogerfilms.com/index.php?title=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D0%BE%D0%B2%20%D0%B8%D0%B7%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO>http://rogerfilms.com/index.php?title=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D0%BE%D0%B2%20%D0%B8%D0%B7%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO</a> Однако в критериях скрываются «подводные камни», коие не разрешат исключить солидную сумму либо же вы не успеете отыграть вейджер. Поэтому мастера советуют арестовать благотворительные вращения за регистрацию в казино без депо, чтобы поднабраться навыка и получить реальный шанс на победу.С этими простыми советами любое казино с призом за регистрацию способно принести в разы больше выгоды и полезности.
1х слотс зеркало регистрация в 1×slots casino
Как только на виртуальном счету окажутся бонусные средства, поспешите отыграть вейджер. Сразу после сего возможно забыть заявку на вывод выигрыша. Кредиты прибыльно отличаются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом настоящих средств и дают возможность ощутить азарт. Во-вторых – можно насладиться любой азартной забавой доступной на сайте. В вашем распоряжении находятся автоматы, настольные прибавление, видео-покер, Live-дилеры. 1×slots мобильная версия войти казино Бесплатные призы казино без депозита можно получить в виде валютных средств на бонусный счет (исключить их можно лишь после отыгрыша), фриспинов, игры либо кешбэк-бонуса. <a href=http://e-audit.gefest.me/index.php?subaction=userinfo&user=cageytenant69>http://e-audit.gefest.me/index.php?subaction=userinfo&user=cageytenant69</a> Пoдтвepдить личнocть клиента. Для успешного вывода средств, нужно доказать личность посетителя. Нa этaпe вepификaции пpoфиля, сотрудники службы безопасности должны увериться, что у игрока чем один аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не сможет исключить собственный выигрыш, если у него будет несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы. 1×slots регистрация на сайте Для тех, кто лишь подумывает испытать собственную фортуну, еще для профессиональных игроков, разыскивающих новые площадки для выигрышей, ведущие лицензированные казино часто устраивают разные промоакции, и одно из лучших предложений за время – как для новичков, например и для профессиональных игроков – бездепозитный приз за регистрацию.
1×slot зеркало рабочее регистрации на телефон придет
Бездепозитные призы, как теснее понятно, являются оригинальной вероятностью к игровому процессу полностью бесплатно, то есть играть в онлайн казино даром и на место средства сразу после регистрации аккаунта. Автоматы с этим депо могут замерзнуть великолепной возможностью сыграть для поклонников азарта с определенными лимитированиями в финансах.Это также бесплатные финансы, коие поступают на аккаунты новоиспеченных компьютерные в регистрирования. А необыкновенность этих бонусов произведено никаких, собственно обретенные финансы непременно следует использовать в продолжении назначенного медли. <a href=http://www.russtars.tv/user/Deweygof/>http://www.russtars.tv/user/Deweygof/</a> На нашем веб-сайте Вы найдете список актуальных новых бездепозитных призов в казино 2022 года. Также, есть много эксклюзивных услуг, коие доступны лишь посетителям нашего вебсайта последствии регистрации по нашей ссылке либо активации особого промокода.Бездепозитные призы за регистрацию считаются одним из самых модных способов привлечения новых игроков в онлайн-казино, потому собственно они деют игрокам возможность опробовать казино, неподражаемо игровые автоматы, и вполне, выиграть настоящие средства. 1×slots официальный сайт скачать Бездепозитный приз предоставляется новенькому игроку за определенные действия. Часто презент вид средств либо фриспинов выдается за регистрацию, спасибо чему юзер получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.
1×slots casino регистрация 1×slotscasino09k online
Демоказино есть почти на любом сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются значительно реже: там когда выигрыша и соблюдения критерий промоакций бездеп возможно перевоплотить в настоящие средства.Таким образом, заведение пытается продемонстрировать себя своим потенциальным геймерам, а подобный маркетинговый ход как казино приз без депо за регистрацию завлекает довольно количество внимания к игорному заведению и обеспечивает неизменный струю свежих гостей и будущих клиентов игрового онлайн клуба. <a href=https://forum.bedwantsinfo.nl/thread-706247.html>казино 1×slots официальный сайт</a> Некоторые онлайн-казино без депозита предлагают свежим клиентам выбрать бонус при регистрации. Будьте внимательны: выбрав один, вы в абсолютном большинстве случаев не можете пользоваться остальными. Онлайн гемблинг развивается с любым деньком все больше и больше, свежие бренды создаются не по денькам а по часам. Новые интернет казино делают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и что, этим наиболее предлагают бездепозитные призы за регистрацию, что бы не пропустить такую вероятность — как воспользоваться новым бездепом, рекомендуем навещать наш сайт как можно чаще, самое аппетитное и свежие несомненно добавляться в данном же списке.Главное преимущество спинов – вероятность выучить разные слоты. Также получится насладиться бонусными раундами, испытывать фортуну в риск-туре и преумножить выигрыш за счёт особенных символов. Однако столько игровой процесс заслуживает внимание, так превосходнее сосредоточиться на реальном выигрыше. 1хслот официальный сайт зеркало <a href=http://whdf.ru/forum/user/79719/>http://whdf.ru/forum/user/79719/</a>
1 хслот регистрация в 1×slots casino
Возможность протестировать свежие игры, не рискуя собственными средствами и создать личную стратегию забавы. Эффективность бездепов в качестве маркетингового инструмента оценили многие операторы. Малоизвестные площадки употребляют эти промоакции, дабы стремительно набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны неизменных гостей. Не все сайты, дающие подарки без депозита, рекомендованы к ирге. За симпатичным промоописанием имеют скрываться неосуществимые условия отыгрыша и другие подводные камешки. <a href=https://www.muttsworldmine.com/forums/user/475904-davidsog/>https://www.muttsworldmine.com/forums/user/475904-davidsog/</a> Для ревизии применяются сканы паспортов, водительских прав, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если пользователь замечен в попытке завести дополнительный акк, все его учетные записи подвергаются блокировке, а их владелец попадает в черный перечень. При ирге на лицензионной площадке надо бояться свидетельствовать достоверную индивидуальную информацию (шифрование исключает утечку индивидуальных данных).Даже не выиграв солидную сумму, игрок интересно проведет время, изнутри изучит работу площадки, оценит геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе лучших акций легкостью. Достаточно периодически учить список новых онлайн казино с выводом бонуса без депозита в этом разделе. 1×slots актуальное зеркало Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, чтобы снова получить бесплатный приз. Игорные заведения нетерпимы к бонус-хантерам, потому вас ждет неминуемое санкция.
<b>Смотреть еще похожие новости:</b>
<a href=https://chasingadream.rpginitiative.com/showthread.php?tid=127276>1хслот 1хслотс регистрация перейти на 1×slots</a>
<a href=https://demo.comuni-italiani.it/forum/viewtopic.php?f=9&t=424828>1×slot регистрация</a>
<a href=http://6000ziyuan.com/forum.php?mod=viewthread&tid=104052&extra=>1×slots актуальное зеркало</a>
<a href=https://forum.vn.ua/showthread.php?p=3271957#post3271957>1×slots зеркало которую указывали при регистрации кстати</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если простыми текстами, бездепы – это определённая сумма денег либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать подарки. Но есть некоторые аспекты. Существуют игорные жилища, которые перед что, этим как начислить бонусы настоятельно привязать телефонный, дать копии документов.
#8231 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8232 Charlesgunnyhttp://filmkachat.ru
казино 1×slots официальный сайт
Бездепы обычно предлагают с отыгрышем — быстро исключить выигранные свои невозможно. Перевод денег со счета будет возможен последствии того, как пользователь выполнит все требования казино, а сумма имеет быть выше установленного правилами лимита. Условиями промоакции фиксируются сроки, протяжении коих заказчик вправе пользоваться предложением. Обычно они не превосходят нескольких дней в активации.Популярность онлайн казино растёт и всё больше пользователей начинают интересоваться азартными забавами. Бездепозитные бонусы 2022 года, это оригинальные подарки за регистрацию. С их подмогою свежие игроки все получить безвозмездные вращения или средства на баланс за 1 регистрацию. С выходом игорных заведений в онлайне, бездепозитные бонусы стали знаменитейшим методом привлечения игроков. Подобные акции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о коих мы расскажем. Наш вебсайт собрал наихорошие предложения из онлайна на 2022 год. Воспользуйтесь каким даром и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить обстоятельства. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать на айфон</a> <a href=http://www.getjob.us/usa-jobs-view/job-posting-901790-Mastering-the-Craft-of-a-3D-Visualization-Artist-Skills-Tools-and-Impact.html>http://www.getjob.us/usa-jobs-view/job-posting-901790-Mastering-the-Craft-of-a-3D-Visualization-Artist-Skills-Tools-and-Impact.html</a> скачать 1×slots на андроид мобильная версия <a href=http://ask39.ru/index.php?subaction=userinfo&user=vastapocalypse3>http://ask39.ru/index.php?subaction=userinfo&user=vastapocalypse3</a> На нашем веб-сайте Вы найдете перечень своевременных свежих бездепозитных призов в казино 2022 года. Также, есть количество неповторимых предложений, которые доступны только посетителям нашего сайта после регистрации по нашей ссылке либо активации специального промокода.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
1×slots casino регистрация 1×slotscasin online Основное различие что, нет, собственно для получения бездепа не пополнять баланс в казино. Но не этого, есть ряд и отличий:Подобные призы без депо предоставляются на больше выгодных условиях. Зачастую они крупнее, а условия отыгрыша менее жесткие. <a href=http://x70181pe.beget.tech/user/JaspervaK/>http://x70181pe.beget.tech/user/JaspervaK/</a> 1 х слотс зеркало
1×slot зеркало
Бездепозитные бонусы за регистрацию в игровых автоматах для собственников онлайн-казино являются частью маркетинговой кампании, направленной на повышение аудитории сайта. Так они продвигают свои бренды и завлекают свежих клиентов.Бездепозитный бонус казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в этом и содержится основное различие. Чтоб получить крупный выигрыш, избирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша.При маленький сумме приза рекомендуется играть по низким ставкам, а применять наибольшие чем только в случае, случае вейджер слишком большой, а время на отыгрыш сильно ограничено. <a href=http://forum.gokturkvirtual.com/uye-raymondcof.html>http://forum.gokturkvirtual.com/uye-raymondcof.html</a> Иногда у посетителей вебсайта имеют возникнуть трудности, задачи, препядствия при активации полученного промо-кода. В таких случаях, необходимо адресоваться за поддержкою в службу поддержки «Support». Для получения ответа, обязательно указывается конкретная причина обращения и подтверждается информация дополнительными снимками. Если сложилась спорная обстановка, всегда можно обратиться к основному регулятору либо контролирующему органу, выдавшему данному заведению лицензионный документ. 1×slots casino online регистрация В интернет-сети всегда возможно отыскать списки наиболее модных и гарантированных поощрительных программ от модных онлайн-казино.Максимальный объем ставки, кот-ый нельзя превышать же бонус не будет всецело отыгран. В случае нарушения этого управляла, бонус и выигрыш с него будут аннулированы.
1×slots зеркало регистрация
<a href=https://www.bf-france.com/forums/profile/30064-rabofreeor/>casino 1×slot</a> 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=https://www.wow-interfaces.com/users/PhilipCam>https://www.wow-interfaces.com/users/PhilipCam</a>
1×slots регистрация 1×slots review live
<a href=https://t1.pricepirates.com/r.pl?country=DE&m=google&url=https://doctorlazuta.by/>https://t1.pricepirates.com/r.pl?country=DE&m=google&url=https://doctorlazuta.by/</a> При отыгрыше бонусных средств, нужно учесть срок деяния приза и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный бонус несомненно аннулирован.В зависимости от интернет заведения любой из их возможность для предложить как бездепозитные средства, например и бездепозитные фриспины, коие последствии удачной регистрации упадут вас на ваш игровой баланс. 1х слот регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://australianwinerytours.com/tours/showthread.php?tid=201157>1×slots официальный регистрация</a>
<a href=https://www.mshowto.org/forum/members/jamespauri.html>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Также, ситуации нужно доказать свой номер телефонного, желаемого код, полученный в смс-сообщении от клуба ввести в специальное поле в личном кабинете игрока. Но надо размышлять, что снабжая юзеров такими бонусами, казино занимается спонсированием. Ведь размеры вознаграждений, в основном, не большие (средним размером от 5 до 20 $). И на эти средства налагаются конкретные условия и лимитирования, неотклонимые к исполненью игрока, в в последствии он вожделеет получить все средства выигранные финансы.
#8233 Charlesgunny
porno Игорь Акинфеев (футбол) up casino зеркало <a href=https://krtka.info/>казино 5</a> casino online зеркало рабочее казино <a href=https://rumafia.news/>pin up casino зеркало</a> порно с Диана Шнайдер (теннис) Чулпан Хаматова бк букмекерская контора почему в казино нет окон porno Анастасия Янькова, боксерка зеркала официальных сайтов казино лучшие бесплатные онлайн казино
#8234 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало подтвердит вашу регистрацию если говорить
Выбирайте лучшие безвозмездные бонусы за обзоров на Casinoz – и пусть вас сопутствует счастье при отыгрыше бонусных кредитов! <a href=http://filmkachat.ru/>1×slots casino зеркало</a> Еще одно условие дотрагивается размеров ставки. Операторы устанавливают наивысшую необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, избранной в Личном офисе. При превышении лимита есть риск потерять приза. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, клиент возможность столкнуться с запретом назначать фишки на шансы.Большинство клубов привлекают внимание игроков за счёт различных презентов. На одних веб-сайтах возможно получить виртуальные кредиты, которые откроют доступ ко всему софту. На иных же, администрация предлагает благотворительные вращения для запуска топовых интернет слотов. Несмотря на разные акции, стоит выделить самые основные. <a href=https://medium.com/@kalinka0588/exploring-the-benefits-and-applications-of-architectural-drawing-services-dd4b0f523176>https://medium.com/@kalinka0588/exploring-the-benefits-and-applications-of-architectural-drawing-services-dd4b0f523176</a> 1×slots регистрация <a href=http://littleyaksa.yodev.net/bbs/board.php?bo_table=free&wr_id=3204008>http://littleyaksa.yodev.net/bbs/board.php?bo_table=free&wr_id=3204008</a>
1×slot казино зеркало
Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.Большинство интернет-казино из нашего топ-10 готовы повеселить вас эксклюзивными промоакциями. Читайте о них в обзорах и на форуме. 1×slots зеркало на сегодня <a href=http://bbs.xinhaolian.com/home.php?mod=space&uid=4565751>http://bbs.xinhaolian.com/home.php?mod=space&uid=4565751</a> Также бывают случаи, когда казино начисляет оговоренный приз после регистрации нового клиента по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам.Законодательство, регулирующее азартные забавы в разных странах, оказывает на полномочия операторов. В итоге пользователи из отдельных регионов сталкиваются с лимитированиями со стороны казино. Это имеет быть как полный отказ в доступе, так и невозможность загружать забавы отдельных производителей. 1×slos регистрация в 1×slots casino
1×slots зеркало видели такую регистрацию на
Ниже указан актуальный перечень законных казино в Беларуси с бонусами на 1-ый депо. Вы сможете попасть на официальный вебсайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус.Фриспины. Бесплатные вращения предназначены для применения в видео-слотах. Внимательно читайте обстоятельства – они нередко выдаются для неких машин. В зависимости от клуба продоставляется создавать конкретное количество ставок. Кстати, современные игорные жилища дают возможность заводить «одноруких злодеев». <a href=https://maps.google.mg/url?q=https://doctorlazuta.by/>https://maps.google.mg/url?q=https://doctorlazuta.by/</a> рабочее зеркало 1×slots При небольшой сумме приза рекомендуется играть по невысоким ставкам, а использовать наибольшие другого, как лишь в том случае, если вейджер очень большой, а время на отыгрыш крепко ограничено.Если речь идет об эксклюзивных услугах, имеет потребоваться регистрация в казино по ссылке с партнерского сайта.
1×slots казино мобильная версия
Чтоб получить крупный выигрыш, подбирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша. Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми акциями. Читайте о них в обзорах и на форуме.Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного приза. 1хслотс рабочее зеркало на сегодня <a href=https://lavr-sovet.ru/user/DoctorLazutael/>https://lavr-sovet.ru/user/DoctorLazutael/</a>
1хслотс зеркало
4. Заберите презент. Чаще всего бонус активизируется незамедлительно последствии регистрации. Но случаются ситуации, когда надо(надобно) забежать в собственный офис или написать в саппорта. Так собственно можете смело регистрироваться без всяких размышлений. Фортуна сейчас наверняка на вашей стороне. Не страшитесь, так последствие какого или убытка Вам абсолютно не угрожает. С этими призами как без пополнения, Вы остаетесь лишь в плюсе, хотя не как не в минусе.Бездеп с фриспинами может охватывать всю коллекцию игр на веб-сайте или разработки одного провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении промоакции. Выигрыш имеет быть выведен после такого, как пользователь отыграет эту сумму. Возможность расценить глубокий перечень слотов — главное достоинство этой разновидности. Игроку становятся доступны что, эти опции, которые отсутствуют в демонстрационном режиме, а возможность выиграть настоящие средства прибавляет ярких азартных чувств. <a href=http://nasamomdele.su/forum/memberlist.php?mode=viewprofile&u=64620>http://nasamomdele.su/forum/memberlist.php?mode=viewprofile&u=64620</a> Бездепозитные призы в казино без пополнения 2022 — это определенная сумма средств или for nothing spins вращения, коие предоставляются первым гостям за регистрацию на сайте казино вид бездепозитного бонуса, и выделяет вам вероятность за счет казино без пополнения опробовать услуги (игр), с последующей прерогативой вывода средств при выполнении всех установленных верховодил. 1×slots официальный зеркало рабочее Бездепозитные призы казино за регистрацию в 2022 году — это вероятность поиграть за счёт заведения. Казино даёт клиенту шанс пользоваться определённой суммой либо числом бесплатных вращений без внесения депозита. Не путайте деморежим с реальной забавой без необходимости внесения депозита.Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен список лучших интернет казино, коие предлагают своим игрокам щедрые бонусы за регистрацию.
<b>Смотреть еще похожие новости:</b>
<a href=https://australianwinerytours.com/tours/showthread.php?tid=211903>1×slots casino online регистрация</a>
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=37208>1×slots бонус за регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Свежий приз начисляется повторяющий валютных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в пользовании средствами, а случае отыгрыша оператор может ввести лимитирование на вывод средств. Обыкновенные бездепозитные призы в объеме от 3-х до 20 долларов созданы чтобы, чтобы, дабы в забавы заходили все новые и новые игроки. Здесь, скорее, несомненно ограничение на максимальный выигрыш. Важно, чтобы перед наименьшим вкладом был отключен бонус за первое пополнение счета, и игры не попадет на повторный вейджер.
#8235 Stephendughttps://uzhealth.uz
Откройте мир азарта с <a href=https://uzhealth.uz/>1win yuklab olish</a> широкий ассортимент игр, бонусы на старте, прозрачные правила и надёжные выплаты делают наше онлайн-казино выбором тысяч игроков. Играйте и выигрывайте вместе с нами!
#8236 Kevindaphttps://pinko-kasino.org
Пинко Отзывы Казино <a href=https://pinko-kasino.org/>Сайт Pinco Casino</a>
#8237 Charlesgunnyhttp://filmkachat.ru
x1 slots регистрация в 1×slots casino
Для того, дабы отыграть сумму вашего бездепозитного бонуса надо(надобно) выполнить обстоятельства вейджера. Очень нередко фриспины даются на определенные слоты (book of ra, book of lifeless, book of sun), выбирайте разъем для по, они очень красивые и качественные. Бездепозитные приз может быть денежным так и в виде фриспинов на слоты <a href=http://filmkachat.ru/>1хслот официальный сайт зеркало</a> Эффективность бездепов виде маркетингового инструмента оценили многие операторы. Малоизвестные площадки используют такие промоакции, дабы живо набрать базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны постоянных посетителей. Не все сайты, дающие подарки без депозита, рекомендованы к этой. За привлекательным промоописанием имеют скрываться неосуществимые обстоятельства отыгрыша и другие подводные камешки.Фриспины предусмотрены для использования в видео слотах. Внимательно ознакомьтесь с критериями – часто их выдают на кое-какие автоматы. В зависимости от клуба, у вас выйдет устроить определённое количество ставок. Кстати, продвинутые игорные дома позволяют запускать любых «одноруких злодеев». <a href=https://gamma.app/docs/Professional-Architectural-Drafting-Services-From-Concept-to-Cons-9w64jusl022578a>https://gamma.app/docs/Professional-Architectural-Drafting-Services-From-Concept-to-Cons-9w64jusl022578a</a> Бонус за регистрацию в казино без депозита с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша имеет понадобиться сделать ставки на необходимую, в некоторое десятков раз превышающую необходимую приза или выигрыша. 1× slots официальный <a href=http://egsosh1.ru/bitrix/rk.php?goto=http://cullinan.com.ua/bitrix/redirect.php?goto=http://mebelmarket31.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/LXaXbrZOGD3>http://egsosh1.ru/bitrix/rk.php?goto=http://cullinan.com.ua/bitrix/redirect.php?goto=http://mebelmarket31.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/LXaXbrZOGD3</a>
рабочее зеркало 1×slots
Главное преимущество спинов – возможность выучить разные слоты. Также удастся насладиться бонусными раундами, испытывать фортуну в риск-туре и преувеличить выигрыш за счёт особенных символов. Однако столько игровой процесс заслуживает внимание, ведь другого, как сосредоточиться на реальном выигрыше. <a href=https://adminclub.org/showthread.php?tid=60952>скачать 1×slots официальный сайт</a> 1 x slots casino При использовании бездепозитным призом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют количество видов лимитов: <a href=https://maps.google.mn/url?q=https://doctorlazuta.by/>https://maps.google.mn/url?q=https://doctorlazuta.by/</a> Основное правило получения бездепа ? творимый аккаунт должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов строго запрещено. Проверка ведется по имени, e-mal, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депо необходимо блюсти простую очередность поступков. казино 1×slots официальный сайт Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша призов. Заведения практически устанавливают наивысшую ставку, допустимую по условиям вейждера.
1×slots зеркало регистрация
Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам запрещено начислять призы посетителям, не имеющим валютных средств на счете. Мы предлагаем рассмотреть животрепещущие призы онлайн-казино с лицензией, которые соблюдают законодательство РБ. Размер призов почаще всего чисто символический и не превышает 50 руб. Приятно, но осязаемым бустом деле навряд будет. <a href=https://mcmon.ru/member.php?action=profile&uid=135415>https://mcmon.ru/member.php?action=profile&uid=135415</a> Для вывода средств приз нужно несомненно отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами акции и вариантами отыгрыша бездепозитного приза до его получения, дабы избежать конфликтных ситуаций. 1×slot регистрация Однако далеко не все ресурсы предлагают своим посетителям бездепозитные призы за регистрацию в казино. В большинстве случаев учтено поощрение на первый депозит в объеме 100–200%. Это отличная возможность преумножить банкролл, прирастить время, проведённое за игрой и шансы сорвать большой куш.
1× slots регистрация в 1×slots casino
Бездепозитные бонусы — это презенты от казино в виде бонусных денег или фриспинов для игровых автоматов, которые начисляются на акк игрока в процедуры регистрации на сайте заведения. Для получения этих поощрений депо не требуется.Бездепы с безвозмездными вращениями предоставляют пользователям право вертеть барабаны игровых автоматов без снятия средств со счета. За каждый раунд выплачивает казино. Число спинов ограничено и редко выше сотку. Если акция содержит много безвозмездных игр, их начисление может быть разбито на некоторое дней. 4. Заберите подарок. Чаще всего приз активизируется незамедлительно последствии регистрации. Но посещают ситуации, когда надо(надобно) забежать в личный кабинет либо написать в саппорта. Зарегистрироваться в казино по специальной ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефонного и электрическую почту). Для подтверждения номера телефона необходимо в собственном профиле указать собственный номер и надавить кнопку „Подтвердить номер аппарата“, дальше Вы получите sms-сообщение с кодом, кот-ый необходимо установить в подходящее поле. Для подтверждения электронной почты, перейти по активной ссылке в послании от казино.Создание аккаунта. На веб-сайте казино необходимо открыть регистрационную форму и заполнить пустые поля личностными данными. Иногда на этом шаге требуется показать только адрес электрической почты и пароль, но почаще надо наполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д.). Нужно указывать лишь реальные данные, поскольку впоследствие они станут проверены. 1×slot официальный сайт <a href=https://xn–80aa6acmqdpq.xn–p1ai/user/Arnoldmug/>https://xn–80aa6acmqdpq.xn–p1ai/user/Arnoldmug/</a>
1×slots casino регистрация на сайте
<a href=https://valetinowiki.racing/wiki/User:EveSalazar>https://valetinowiki.racing/wiki/User:EveSalazar</a> 1×slots официальный зеркало Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную процедуру активации бонуса без депозита. Внимательно прочитайте до конца. Многие новички делают промахи на шаге регистрации и потому имеют получить подарок.
<b>Смотреть еще похожие новости:</b>
<a href=https://timepost.info/member.php?action=profile&uid=2064>1×slots зеркало регистрация</a>
<a href=https://hiddeninthesand.com/forum/viewtopic.php?p=343415#p343415>1×slots официальный зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации презента необходимо подтвердить электрическую почту и привязать телефон;
#8238 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8239 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
Принципиальным отличием бесплатных бонусов от призов на депо считается недоступность надобности вносить деньги на акк. Из-за сего их нередко называют бездепозитными (not the slightest deposit bonuses). <a href=http://filmkachat.ru/>1×slots коды</a> Свежий бонус начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в пользовании своими, ну случае отыгрыша оператор может установить лимитирование на вывод денег.Существует ли стратегии для отыгрыша бездепозитных призов? К раскаянью нет, на выигрыши или проигрыши с бонусов, казино или игрок воздействовать не может, отдача игр происходит от создателей игр. <a href=https://www.khedmeh.com/wall/blogs/post/71396>https://www.khedmeh.com/wall/blogs/post/71396</a> 1×slots зеркало регистрацию более популярный вариант это <a href=https://bandit400.ru/user/PorsedropSl/>https://bandit400.ru/user/PorsedropSl/</a>
скачать 1×slots на андроид мобильная версия
<a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1×slots мобильная версия войти казино</a> 1×slots официальный сайт скачать на айфон <a href=http://incorgrupp.ua/index.php?subaction=userinfo&user=giganticrubbish>http://incorgrupp.ua/index.php?subaction=userinfo&user=giganticrubbish</a> Онлайн гемблинг развивается с любым днем больше и больше, новые бренды создаются не по дням а по часам. Новые онлайн казино проделывают вступительные акции для игроков, чтобы, чтобы что бы зарекомендовать себя, и что, этим наиболее предлагают бездепозитные призы за регистрацию, что бы не пропустить такую возможность — как воспользоваться новым бездепом, рекомендуем навещать наш сайт как можно почаще, самое смачное и свежие несомненно добавляться в данном же списке.При помощи такого одобрения оператор имеет кроме привлекать клиентов, коие ранее показывали активность на веб-сайте, хотя по некий причине прекратили выступать. В данном случае промокод высылается юзеру по электрической почте или в виде SMS. онлайн казино 1×slots
1×slots сайт
Выигрыши с призов без вложений постоянно привязаны к притязанию по ставкам и все быть обналичены только после выполнения данных требований. <a href=http://e-cigarette.md/bitrix/click.php?goto=http://stmagazine.ru/bitrix/redirect.php?goto=http://cse.google.com.cu/url?q=https://telegra.ph/CHto-delat-esli-kto-to-perevel-dengi-na-vashu-kartu-Sberbanka-09–23>http://e-cigarette.md/bitrix/click.php?goto=http://stmagazine.ru/bitrix/redirect.php?goto=http://cse.google.com.cu/url?q=https://telegra.ph/CHto-delat-esli-kto-to-perevel-dengi-na-vashu-kartu-Sberbanka-09–23</a> Каждая игровая перрон выделяется критериями по получению и отыгрышу бездепов. В правилах отчетливо расписаны временные рамки, за которые надо(надобно) прокрутить вейджер. Также не запамятовывайте про наибольший размер ставки и максимальную необходимую выплаты. С иной стороны, чтобы получить бездепозитные призы казино, достаточно израсходовать не более 1 минуты. 1×slot официальный сайт Большинство клубов привлекают внимание в за счёт разнородных даров. На 1 веб-сайтах возможно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает безвозмездные вращения для запуска топовых онлайн слотов. Несмотря на различные промоакции, стоит выделить самые основные.
1×slots регистрация 1×slots casino 777 online
С не отыгранным бонусом запрещается превышать размер максимальной ставки. Нарушение этого условия будет аннулирование выигрыша. <a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/7103/#comment-311620>1х слотс зеркало регистрация в 1×slots casino</a> Нет. Для получения бездепозитного приза в казино необходима обязательная регистрация на веб-сайте. Играть в слоты безвозмездно и без регистрации возможно лишь в демо режиме. Зарегистрируйтесь. Для регистрации чаще всего достаточно ввести собственный номер телефона и почтовый адрес, последствии чего ввести полученный код из СМС. Возможно, требуется показать промокод. В правилах акции несомненно написано, где его хотелось включать. Иногда это хотелось создавать при регистрации, от — уже последствии творения личного офиса, на отдельной странице. 1×slots сайт <a href=http://g95887q6.beget.tech/index.php?subaction=userinfo&user=therapeuticboyf>http://g95887q6.beget.tech/index.php?subaction=userinfo&user=therapeuticboyf</a> Денежные средства. Третий бонус за регистрацию без депо – наличные. К огорчению, лишь известные и пользующиеся клубы все дать средства в рублях либо долларах. С их помощью вас насладиться любой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед данным необходимо выполнение конкретных критерий.
1×slots регистрация на сайте
Перечисленные выше основные свойства сочетают практически каждый приз и являются стандартными для бездепозитных бонусных начислений в казино.Бездепозитные призы, как теснее ясно, являются уникальной возможностью к игровому процессу безусловно безвозмездно, словами играть в онлайн казино даром и на быть свои сразу последствии регистрации аккаунта. Автоматы с таким депозитом имеют стать великолепной возможностью поиграть для поклонников пыла с определенными ограничениями в денег. Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, the decision зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.Ниже указан важный список легальных казино в Беларуси с бонусами на 1-ый депо. Вы сможете попасть на официальный вебсайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз. <a href=http://forum.combat-arnis.ru/profile.php?mode=viewprofile&u=331658>http://forum.combat-arnis.ru/profile.php?mode=viewprofile&u=331658</a> Реже призы без депозита начисляются неизменным игрокам. С их поддержкою администрация постарается вычесть ценных клиентов либо желает поблагодарить за преданность правильных посетителей. Но намного чаще для похожих целей используются такие акции: 1× slots регистрация в 1×slots casino Для ревизии используются сканы паспортов, водительских прав, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если пользователь замечен в попытке ввести дополнительный акк, все его учетные записи подвергаются блокировке, а их владелец попадает в черный перечень. При этой на лицензионной площадке не опасаться указывать достоверную индивидуальную информацию (шифрование исключает утечку персональных данных).
<b>Смотреть еще похожие новости:</b>
<a href=https://tabsgame.ru/user/Jamesbes/>1×slots зеркало</a>
<a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1×slots промокод при регистрации 2025</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Не стоит путать игру в демо и внедрение призов. В демонстрационном режиме игрок может расценить механику слота, сюжет и оформление. Но забава ведется на относительные кредиты, поэтому отсутствует главное ? ощущение пыла. Активируя промокод или фриспины, заказчик и не тратит свои средства на игровые автоматы, но возможность сорвать настоящий куш!
#8240 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8241 Charlesgunnyhttp://filmkachat.ru
скачать 1×slots на андроид мобильная версия
Подтверждение электронной почты – одно из основных критерий, коие есть почти в каждом бездепозитном казино. Чтобы верифицировать электрическую почту, довольно перейти по интенсивной ссылке в послании, приобретенном от азартного клуба. <a href=http://filmkachat.ru/>зеркала 1×slots</a> Выше мы дали полный набор самых свежих и актуальных бездепозитных бонусов в интернет казино без пополнения на 2022 год, где вы можете пользоваться любым ценным бездепозитным призом. <a href=https://www.tamaiaz.com/blogs/236182/%D0%A0%D0%B5%D0%BC%D0%BE%D0%BD%D1%82-%D0%BA%D0%B2%D0%B0%D1%80%D1%82%D0%B8%D1%80-%D1%81-%D1%80%D0%B0%D1%81%D1%86%D0%B5%D0%BD%D0%BA%D0%B0%D0%BC%D0%B8-%D0%BF%D0%BB%D0%B0%D0%BD%D0%B8%D1%80%D0%BE%D0%B2%D0%B0%D0%BD%D0%B8%D0%B5-%D1%8D%D1%82%D0%B0%D0%BF%D1%8B-%D0%B8-%D1%81%D0%BE%D0%B2%D0%B5%D1%82%D1%8B-%D0%BF%D0%BE-%D1%8D%D0%BA%D0%BE%D0%BD%D0%BE%D0%BC%D0%B8%D0%B8>https://www.tamaiaz.com/blogs/236182/%D0%A0%D0%B5%D0%BC%D0%BE%D0%BD%D1%82-%D0%BA%D0%B2%D0%B0%D1%80%D1%82%D0%B8%D1%80-%D1%81-%D1%80%D0%B0%D1%81%D1%86%D0%B5%D0%BD%D0%BA%D0%B0%D0%BC%D0%B8-%D0%BF%D0%BB%D0%B0%D0%BD%D0%B8%D1%80%D0%BE%D0%B2%D0%B0%D0%BD%D0%B8%D0%B5-%D1%8D%D1%82%D0%B0%D0%BF%D1%8B-%D0%B8-%D1%81%D0%BE%D0%B2%D0%B5%D1%82%D1%8B-%D0%BF%D0%BE-%D1%8D%D0%BA%D0%BE%D0%BD%D0%BE%D0%BC%D0%B8%D0%B8</a> Одним из предлогов отдавать привилегию 1 или иному заведению заключается в привлекательности предлагаемых промоакций и бесплатных предложений. Безвозмездные фриспины, выдаваемые без нужды делать какой-либо лепта, в перечне находится далековато не в конце.Бесплатный приз – кредиты, коие онлайн-казино начисляет посетителю, не заставляя его пополнять игровой счет. 1×slots официальный зеркало рабочее <a href=https://kizkiuz.com/user/Renaldoorago/>https://kizkiuz.com/user/Renaldoorago/</a> Отыграв бездепозитный бонус в казино с выводом также придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в сходственное лимитирование присутствует, то единоразово исключить получится лишь сумму, не превосходящую размер полученного бонуса.Для выбора азартного заведения Вы можете пользоваться перечнем наших казино с призами за регистрацию. На нашем сайте мы выпустили список бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, собственно часть призов неповторимые и доступны лишь для посетителей нашего вебсайта по-специальному промо-коду либо по оригинальной ссылке. Кроме такого, для каждого бонуса мы подготовили подробный обзор, в Вы узнаете как получить и отыграть одобрение и как исключить собственный выигрыш с бездепа.
рабочее зеркало 1хслотс
А ознакомиться с свежими онлайн казино, Вы сможете помощью бонусов с выводом выгоды, коие Вы сможете получить без депозита. 1×slots casino регистрация 1×slotscasino09k online При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток. <a href=http://www.baohaibbs.com.cn/home.php?mod=space&uid=38616>http://www.baohaibbs.com.cn/home.php?mod=space&uid=38616</a> Максимальный объем ставки, который невозможно превышать же приз не будет всецело отыгран. В случае нарушения этого верховодила, приз и выигрыш с него будут аннулированы. 1×slots официальный зеркало рабочее Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке представители онлайн-казино публикуют актуальную информацию о not the slightest deposit bonuses и услугах.
1×slots скачать на айфон
Шаг 4. Активация. Внимательно исследуйте обстоятельства, информацию по лимитированиям и сроке деяния бонусного предложения. Разобравшись с правилами, возможно активировать приз в личном офисе (иногда ? с использованием промокода) или по запросу в саппорт. Размер приза. В качестве бездепов обычно начисляют маленькие суммы, а когда речь идет о бонусах за депозит, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино имеют презентовать игроку до 2000$.Иногда для получения призов нужно связаться с адептами службы поддержки. Удобнее всего с ними разговаривать в онлайн-сате, но времени довольно запроса по электрической почте. <a href=https://tpang.co.kr/bbs/board.php?bo_table=free&wr_id=823688>https://tpang.co.kr/bbs/board.php?bo_table=free&wr_id=823688</a> 1×slots официальный зеркало рабочее Условия отыгрыша приза. Если Вы расчитываете заработать на бездепозитном призе, то начала направьте на значение вейджера и срок, который дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть бонус и исключить выигрыш.
1×slots регистрация 1×slots review live
<a href=https://forum.oursson.ru/viewtopic.php?f=2&t=8459>1хслотс регистрация в 1×slots casino</a> Акционные предложения от казино есть в разных форматах. Часто бонусы даются в обмен на депо. Игрок вносит платеж и получает деньги, безвозмездные вращения и другие поощрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — вид бонуса, который гарантирован за выполнение определенных деяний на сайте:Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, the decision зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. 1хслотс зеркало <a href=http://taiwanzhenglun5.com/home.php?mod=space&uid=154732>http://taiwanzhenglun5.com/home.php?mod=space&uid=154732</a>
1×slots регистрация 1×slotscasino09k online
Таким образом интернет казино получает потенциального игрока. Возможно в будущем либо настоящем он захотит сыграть на средства средства. Так трудятся бездепозитные призы в интернет казино. Здесь очень подходит выражение, бесплатные сыр случается только в мышеловке. Начинающие игроки могут не осознавать опасность азарта. Однако времени осознания становится больше. Это тема для отдельного обсуждения.Риск-игра по равным шансам – Также казино может воспрещать скорпулезно обстоятельства по отыгрышу за раунда на удвоение, кот-ый предлагается в слотах, видео-покере и некоторых иных играх. <a href=https://craigslistdir.org/%D0%B1%D0%BB%D0%BE%D0%B3-%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0-%D0%B4%D0%B7%D0%B5%D0%BD_356813.html>https://craigslistdir.org/%D0%B1%D0%BB%D0%BE%D0%B3-%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0-%D0%B4%D0%B7%D0%B5%D0%BD_356813.html</a> С другой стороны, намного проще арестовать бездепозитные фриспины за регистрацию в казино и напрямик в начать вертеть барабаны в наилучших слотах. Главная особенность спинов в, что они предусмотрены для лучших автоматов. Удастся столько пройти дополнительные раунды, но и увеличить необходимую выигрыша, заработать респины прочие внутриигровые подарки.В наше время очень просто получить бонус за регистрацию в казино. Практически каждый игорный дом с радостью начисляет деньги или благотворительные вращения. Многие гэмблеры используют этим и не стесняются регистрироваться в каждом клубе с прибыльными критериями. Кстати, это отличная вероятность выработать победную стратегию и сорвать джекпот. 1×slots акции При выполнении критерий отыгрыша и верификации, средства с бонусного счета переводятся на главный и могут быть выведены на карту либо электрический кошелек. Лимиты на вывод и сроки проведения транзакции в от выбранной платежной системы.Бездепозитные призы начисляются только раз один. Не стоит открывать новые аккаунты, чтобы получить их повторно. Служба безопасности казино непременно выявит «левого» соучастника и заблокирует. Если посетитель выполнит необходимые требования, отыграет свою ставку и решит исключить личный выигрыш, то ему надо(надобно) к, что казино непременно потребует дать ксерокопии личных документов, чтобы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои исключить не удастся.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.krymbezpravil.org.ua/memberlist.php?mode=viewprofile&u=10552>1×slot зеркало рабочее регистрации на телефон придет</a>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=330830>1×slot казино зеркало</a>
<a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=89621>1хслот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если речь идет об эксклюзивных предложениях, имеет понадобиться регистрация в казино по ссылке с партнерского сайта. Вы не в коем случае ни чем рискуете, а только выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической игры на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, научится регулировать менять ставки и полосы, исследовать бонусные игры и их выигрышные композиции, ну счете просто зарядится кучей впечатлений! Ведь вы будите выступать на бонусные свои, коие можно отыграть и исключить, но просто на демо счет, тем наиболее адреналин в крови еще повысится а пульс забьется с частым ритмом!
#8242 Charlesgunny
казино фильм скачать 1×bet на андроид бесплатно <a href=https://slon-ru.com/>7k casino зеркало</a> up casino скачать гама казино <a href=https://krtka.info/>гама казино</a> 1×bet сейчас леон букмекерская контора 1×bet официальный слоты сайт 1×bet слоты champion casino играющие казино online casino
#8243 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8244 JustinErype
http://pinup2025.com/ пин ап зеркало
#8245 Charlesgunny
слот casino лучшие онлайн казино <a href=https://rhymes-punches.com/>самое казино</a> порно с Артемий Панарин (хоккей) up casino скачать <a href=https://kompromat1.online/>леон букмекерская контора</a> казино porno Катерина Шпица казино рулетка casino играть casino daddy кент казино Елизавета Боярская
#8246 Jamesbeetehttps://smotri-fhdl.ru
Смотреть фильмы онлайн <a href=https://smotri-fhdl.ru/>https://smotri-fhdl.ru</a> бесплатно в хорошем качестве в онлайн кинотеатре. Фильмы онлайн и новинки кино бесплатно. Смотрите сериалы, клипы, мультфильмы и фильмы онлайн бесплатно на вашем устройстве!
#8247 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8248 Charlesgunny
1×bet сайт 1×bet xyz бесплатно фильм казино <a href=https://slon-ru.com/>7k casino зеркало</a> casino x 1×bet скачать приложение на андроид <a href=https://rhymes-punches.com/>casino андроид</a> porno Нина Пирогова, хоккеистка Самойлова Алла Владимировна порно ев казино Хорова Наталья Александровна порно пина casino казино 1 порно с Владимир Минеев (ММА)
#8249 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8250 Charlesgunnyhttp://filmkachat.ru
1×slots официальный demo регистрация в 1×slots casino
Не стоит сразу же отказываться от приветственных подарков в сходственных казино. Администрация готова начислить средства либо фриспины, но предварительно работники обязаны убедиться, что вы не аферист. Дело том,, что развелось слишком количество охотников за бонусами. Они выучились врать систему и наваривать солидные суммы денег. <a href=http://filmkachat.ru/>1×slots регистрация на сайте</a> Выбирая даровой бонус, пристально изучайте правила. Убедитесь, собственно вам возможно принимать участие в промоакции. Уточните, в каких забавах можно выполнять условия вейджера. При надобности задавайте вопросы представителям саппорта. <a href=https://www.whizolosophy.com/category/personal-change/article-column/everything-you-need-to-know-about-3d-walkthrough-animation>https://www.whizolosophy.com/category/personal-change/article-column/everything-you-need-to-know-about-3d-walkthrough-animation</a> Отзывы читателей о бонусных акциях посодействуют составить впечатление, но не забывайте о субъективности личных объяснений. 1×slots зеркало на сегодня <a href=https://m1bar.com/user/Jamesron/>https://m1bar.com/user/Jamesron/</a> Свежий приз начисляется в виде валютных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в пользовании средствами, а в случае отыгрыша оператор возможность ввести лимитирование на вывод средств.
1×slot зеркало рабочее регистрации на телефон придет
Главным моментом в появлении данных вознаграждений произведено сомнений, собственно пустив их в ход, игрок ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он благодаря призам какой-нибудь выигрыш либо мгновенно спустит все лишь что прибывшие деньги). То есть, казино снабжает игрока возможностью на дармовой базе играть во всевозможные слоты и даже спонсирует забаву. <a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=3422>1×slots актуальное зеркало</a> скачать 1×slots официальный сайт <a href=http://boss.why3s.cc/boss/home.php?mod=space&uid=139054>http://boss.why3s.cc/boss/home.php?mod=space&uid=139054</a> казино 1×slots официальный сайт
1×slot казино зеркало
Приветственный бонус без депозита ? подарок за регистрацию. Выдается средствами, фриспинами либо баллами. В последнем случае бонусные баллы используются для роли в турнирах или обмена на настоящие деньги. Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала прыткие выводы. Фишка выплат никаких, что достаточно выбрать платёжный инструмент и указать сумму. В большинстве случаев деньги зачисляются на электрические кошельки протяжении 15 мин., а на банковские карты – 1–3 рабочих денька.Лишь известные и известные азартные заведения все позволить себя раздавать бездепы вид добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депо, которые можно израсходовать в лучших аппаратах с высочайшей отдачей. <a href=https://vadaszapro.eu/user/profile/1280853>https://vadaszapro.eu/user/profile/1280853</a> Вывод выигрыша с бездепозитных бонусов казино – щедрый презент от азартных клубов. Но чтобы исключить собственный заработок, необходимо выполнить ряд условий: 1х слот регистрация в 1×slots casino Бонусные деньги – маленькая сумма средств для старта в новеньком казино. На бонусные средства, обыкновенно разрешается выступать во все забавы, кроме слотов с прогрессивным джекпотом и игр из раздела exist casino.Онлайн гемблинг развивается с любым деньком больше и больше, новые бренды создаются не по дням а по часам. Новые онлайн казино проделывают вступительные промоакции для игроков, для того собственно бы зарекомендовать себя, и тем наиболее предлагают бездепозитные призы за регистрацию, собственно бы не пропустить эту вероятность — как воспользоваться свежим бездепом, рекомендуем посещать наш сайт как можно чаще, самое лакомое и новые несомненно добавляться в этом же перечне.
1×slots регистрация 1×slotscasino 56 online
Обычно показатель выше, чем для бонусов на депо. Не изумляйтесь, случае он будет том х100. Иногда завышенный коэффициент вейджера уточняется для жителей отдельных государств.Ознакомьтесь с нашим перечнем наилучших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего списка и получите бездеп незамедлительно. Хватайте превосходнейшие благотворительные предложения ниже и выигрывайте большие деньги, не рискуя! Большинство интернет-казино из нашего топ-10 готовы порадовать вас эксклюзивными промоакциями. Читайте о их в обзорах и на форуме. Обычно бездепозитные промоакции от казино, приходят на эл. Почту в дни рождения или праздники. В некоторых онлайн казино можно обратиться в чат и как постоянному игроку, возможно вам предложат бездепозитное предложение.1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, в не желайте замерзнуть жертвой жуликов или впустую истратить время; 1×slot регистрация <a href=https://sex18babes.com/user/CharlesShews/>https://sex18babes.com/user/CharlesShews/</a> Отыграв бездепозитный бонус в казино с выводом также придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, случае схожее лимитирование присутствует, то единоразово исключить получится только необходимую, не превосходящую объем приобретенного бонуса.
1×slots зеркало регистрация
Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. Такие поощрения позволяют даром протестировать свежее казино, разобраться с игровым ходом интернет слотов, заработать и исключить небольшую необходимую денег.На бесплатные призы онлайн-казино почти постоянно распространяется ограничения по стране проживания посетителей. Даже случае для разрешается открывать счет и играть на средства в заведении, это еще не означают, что для доступны not the slightest down payment bonuses. <a href=https://ads.kazakh-zerno.net/user/HarryCrods/>https://ads.kazakh-zerno.net/user/HarryCrods/</a> 1 х слотс зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.puppylinux.pl/index.php?topic=826.new#new>1хслотс регистрация в 1×slots casino</a>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-4965/#comment-592690>1×slot официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Принципиальным отличием безвозмездных бонусов от бонусов на депо является недоступность надобности заносить средства на акк. Из-за сего их часто нарекают бездепозитными (no down payment bonuses). Вейджер (или вагер) ? это минимальная сумма ставок, коию нужно устроить для вывода валютного бонуса. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение.
#8251 Charlesgunny
pin casino зеркало 1go casino <a href=https://rucriminal.info/>casino 7k сегодня</a> porno Дарья Мороз автомат казино <a href=https://7club7.com/>казино большая</a> 1×bet casino porno Александр Соболев (футбол) промокод 1×bet up casino зеркало 1×bet 1 1×bet 1хбет официальные букмекерские конторы
#8252 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8253 Charlesgunnyhttp://filmkachat.ru
1×slots мобильная версия войти казино
Почти все игровые клубы требуют подтверждение контактных данных игрока для получения бездепозитного бонуса.В списке притязаний к отыгрышу нередко наличествуют лимиты на ставки при забаве на собственные средства. Так, в отыграть надо(надобно) 30 000 руб., а предельная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 один. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам действия акции. <a href=http://filmkachat.ru/>зеркала 1×slots</a> Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала быстрые выводы. Фишка выплат в том, собственно довольно избрать платёжный инструмент и показать сумму. В большинстве случаев средства зачисляются на электрические кошельки протяжении 15 мин., а на банковские карты – 1–3 рабочих дня. <a href=https://www.evernote.com/shard/s532/sh/05500901–0670–1a1a-0216–51c2b9055fe5/YjAxtnwrPvPChGESQ6BrqbbNaBkw96Si9QvYDkZoEblgQMFxZiTJGMGB6w>https://www.evernote.com/shard/s532/sh/05500901–0670–1a1a-0216–51c2b9055fe5/YjAxtnwrPvPChGESQ6BrqbbNaBkw96Si9QvYDkZoEblgQMFxZiTJGMGB6w</a> Так собственно приготовьтесь предоставить секретную информацию (пол, возраст, государство проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев проверка данных занимает менее суток, после чего удастся свободно выводить крупные выигрыши.Подтверждение регистрации. Казино настоятельно привязки профиля к электронному адресу и номеру телефона. Для этого на e-mail отчаливает послание ссылаясь, а на аппарат ? текстовое известье с кодом. 1×slots зеркало этих способов предполагает регистрацию <a href=https://maps.google.co.kr/url?q=https://doctorlazuta.by/>https://maps.google.co.kr/url?q=https://doctorlazuta.by/</a> У любой игры свои требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система зачтет каждую ставку. В рулетке и покере сделать это гораздо сложнее. Именно поэтому например важно внимательно разбирать обстоятельства получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой этой, то новенькие просто «спустят бонус на ветер».При поддержки такового поощрения оператор имеет того привлекать клиентов, коие раньше проявляли активность на веб-сайте, но по какой-то основанию прекратили играть. В данном случае промокод высылается пользователю по электронной почте или повторяющий SMS.
1×slots рабочее зеркало на сегодня
1хслотс регистрация в 1×slots casino Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, чтобы появилась вероятность исключить выигрыш. <a href=https://www.jutianwang.cn/home.php?mod=space&uid=3447&do=profile&from=space>https://www.jutianwang.cn/home.php?mod=space&uid=3447&do=profile&from=space</a> Сразу последствии активации промокода возможно воспользоваться даром. Как теснее упоминалось, призы бывают трёх обликов – фриспины, кредиты и фриплей-бонусы. 1×slots бездепозитный бонус за регистрацию Не стоит путать забаву в демо и использование бонусов. В демонстрационном режиме игрок может расценить механику слота, сюжет и оформление. Но забава ведется на условные кредиты, потому отсутствует основное ? ощущение азарта. Активируя промокод или фриспины, заказчик и не тратит свои средства на игровые автоматы, но возможность сорвать реальный куш!
1×slots зеркало регистрацию более популярный вариант это
Внесение депозита – Будьте готовы восполнить счет после отыгрыша бонуса. Это обычное заявка правил для данного на промо-акций. Лучше заблаговременно уточнить, какую сумму нужно будет заносить на счет. Как верховодило, идет о наименьшем депозите, хотя вы должны быть уверены, что он вам по кармашку.Классическая разновидность бонуса за создание аккаунта. Его преимущество содержится в том, собственно заказчик возможность без выбирать аппараты и делать ставки в их. Иногда список игровых автоматов ограничен оператором, хотя все равно это чем, чем единственный дешевый разъем, как в случае с внедрением фриспинов. Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских руб. В критериях промоакции предписано, что вейджер бездепозитного приза х20. Поэтому, чтобы отыграть бонус, игроку будет нужно сделать ставок на 35*20=700 руб. <a href=https://g.clicgo.ru/user/ZacheryCeact/>https://g.clicgo.ru/user/ZacheryCeact/</a> Главное преимущество спинов – вероятность выучить разные слоты. Также получится насладиться бонусными раундами, испытывать удачу в риск-туре и преумножить выигрыш за счёт особых символов. Однако не игровой процесс заслуживает внимание, ведь лучше сосредоточиться на реальном выигрыше.Новые посетители онлайн-казино без первого депозита шансы выяснить собственную удачливость. К что, этому же есть возможность преобразовать бездепы в реальные средства за регистрацию в казино, впрочем результата бонус необходимо отыграть согласно условиям промоакции. казино 1× slots официальный сайт
зеркала 1×slots
<a href=http://www.arka-bahce.org/forum/showthread.php?p=761896#post761896>1хлот регистрация в 1×slots casino</a> Первый возникающий вопрос, это, чего выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают новых игроков. Последним проще начать забаву на средства с презента за регистрацию. Им не нужно пополнять баланс и тратить личные свои. Новички получают благотворительные спины либо средства на счёт. С их поддержкою знакомятся с игровым процессом, крутят слоты и проделывают ставки в рулетке. 1×slots рабочее зеркало <a href=https://www.xn–9n3bn8ewuh9zp.kr/bbs/board.php?bo_table=free&wr_id=538526>https://www.xn–9n3bn8ewuh9zp.kr/bbs/board.php?bo_table=free&wr_id=538526</a> Одним из поводов отдавать привилегию 1 либо иному заведению заключается в привлекательности предлагаемых промоакций и даровых предложений. Безвозмездные фриспины, выдаваемые без дела делать какой-нибудь лепта, в списке располагается далековато не в конце.Каждый из бездепозитных призов без пополнения 2022 содержит собственный определенный вейджер для отыгрыша, например же в любом казино он устанавливается индивидуально — где то он х55 а где-то х30, повторюсь всюду по разному!
1×slots официальный сайт зеркало
Каждый из бездепозитных призов без пополнения 2022 содержит собственный определенный вейджер для отыгрыша, так же в любом казино он уточняется персонально — где то он х55 а где-то х30, повторюсь везде по различному!Выполнив все притязания оператора, клиент имеет оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит в среднем не более суток. Если дополнительно требуется пройти функцию верификации, то срок увеличивается до 1–2 рабочих дней. Для перевода применяются банковские приборы и электрические платежные системы. Второй способ подходит другого, так как основная транзакций такой исполняются мгновенно. В связи со специфичностью функционирования банков обработка платежей может взятьвдолг(взятьвзаймы) до нескольких рабочих дней. <a href=http://altajska.cz/forum/user/2107-psychedelicarso>http://altajska.cz/forum/user/2107-psychedelicarso</a> Однако в критериях исчезают «подводные камни», коие не позволят вывести крупную сумму или же вы не успеете отыграть вейджер. Поэтому мастера советуют забрать бесплатные вращения за регистрацию в казино без депо, дабы поднабраться навыка и получить реальный шанс на победу.Перед активацией главно пристально изучить обстоятельства промоакции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, на коих можно воспользоваться предложением. Если бездеп обхватывает ограниченный перечень игр, рекомендовано узнать максимальные коэффициенты, степень отдачи и волатильности. Слоты с низкими множителями выплат подходят только том, случае, если оператор не установил требовательные ограничения на наивысшую сумму ставки. 1×slot зеркало рабочее регистрации на телефон придет Также случаются случаи, когда казино начислит обсужденный приз в регистрации свежего клиента по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам.
<b>Смотреть еще похожие новости:</b>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=324030&pid=646376#post_646376>1х слот регистрация в 1×slots casino</a>
<a href=https://hiddeninthesand.com/forum/viewtopic.php?t=288322>1×slots официальный сайт зеркало</a>
<a href=http://b2s.bulwork.com/node/1581?page=73#comment-22139>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Срок отыгрыша — это период, который наступает в момент активации бонуса и завершается с его закрытием. Пользователю необходимо уложиться в этот временной зазор, другому призовые средства аннулируются. Казино устанавливают список игр, ставки каких засчитываются при расчете отыгранных денег. Если тайтл не входит в данный перечень, то предоставляется быть недоступен для загрузки во время деяния бонусного предложения. Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды присутствуют на этой странице. Посетитель имеет расценить обстоятельства получения и начать выступать на средства без внесения депо. При этом игроку принципиально разуметь, на каких критериях и какими способами него исключить полученный выигрыш. Для сего нужно расценить перечень подключенных платежных систем.
#8254 Charlesgunny
1×bet официальный сайт 1×bet xyz порно с Евгений Малкин (хоккей) <a href=https://rhymes-punches.com/>casino com</a> порно с Карен Хачанов (теннис) Комарова Наталья Владимировна порно <a href=https://th-royalgclub.com/>Попова Анна Юрьевна порно</a> porno Екатерина Ефременкова, шорт-трекистка ограбление казино casino com casino регистрации порно с Арина и Дина Аверины, гимнастки 7k casino скачать суть казино
#8255 Travisnusty
deneme bonusu veren bet siteleri: <a href=" https://casinositeleri2025.pro/ ">jav siteleri</a> – betler
#8256 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8257 Robertquisy
en kazancl? slot oyunlar? <a href=http://slottr.top/#>slot oyunlar? puf noktalar?</a> az parayla cok kazandiran slot oyunlar?
#8258 Charlesgunny
сайт pin up casino 1×bet <a href=https://rucriminal.info/>1×bet на сегодня</a> casino betting cat casino <a href=https://specreporter.com/>Валентина Матвиенко порно</a> online casino почему в казино нет окон порно с Анна Щербакова, фигуристка фильмы казино рояль рабочее казино pin up casino официальный порно с Матвей Сафонов (футбол)
#8259 Empathy_center_aritahttps://empathycenter.ru/
Всем привет! Центр ментального здоровья «Эмпатия». Цель каждого специалиста нашей команды – забота о ментальном здоровье людей через предоставление как можно более доступной и качественной медицинской помощи, а также через психопросветительскую деятельность и дестигматизацию ментальных расстройств. Панова Надежда Вячеславовна главный врач центра „Эмпатия“. <a href=https://empathycenter.ru/preparations/a/anvifen/>анвифен</a> Если Центр ментального здоровья Эмпатия с более чем 60 работающих врачей и специалистов в Реутове и Москве, то это в сети клиник доказательной психиатрии https://empathycenter.ru/ . Узнавайте и звоните к нам по бесплатному номеру телефона 8–800–775–07–12. Всем пока!
#8260 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8261 Charlesgunny
casino бонус порно с Баталина Ольга Юрьевна <a href=https://www.ossetia.tv/>unlim casino</a> казино играть champion casino <a href=https://krtka.info/>казино рояль смотреть</a> казино рублях casino приложения casino автомат мелбет букмекерская контора сайт букмекерской конторы Елизавета Боярская Валентина Матвиенко порно
#8262 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8263 Charlesgunnyhttp://filmkachat.ru
1хслот 1хслотс регистрация перейти на 1×slots
Также существуют онлайн-платформы азартных игр, которые применяют раздачу бездепозитных бонусов в специальные даты (как для казино, так и для игрока). Помимо сего, действующие геймеры также имеют возможность получить похожие призы за собственную работа (например, за повышения уровня или за схожие заслуги). <a href=http://filmkachat.ru/>1×slots сайт</a> Также существуют онлайн-платформы азартных игр, коие применяют раздачу бездепозитных бонусов в особые даты (как для казино, например и для игрока). Помимо этого, действующие геймеры кроме имеют вероятность получить похожие призы за собственную деятельность (к примеру, за увеличения значения либо за похожие заслуги).Некоторые онлайн-казино без депозита предлагают новым клиентам избрать приз при регистрации. Будьте внимательны: выбрав один, вы в абсолютном большинстве случаев не сможете воспользоваться остальными. <a href=https://www.dr-ay.com/blogs/217116/Mastering-Architectural-Rendering-From-Vision-to-Visual-Reality>https://www.dr-ay.com/blogs/217116/Mastering-Architectural-Rendering-From-Vision-to-Visual-Reality</a> 1×slot регистрация <a href=http://elka54.ru/forum/?PAGE_NAME=profile_view&UID=102696>http://elka54.ru/forum/?PAGE_NAME=profile_view&UID=102696</a>
1хслотс официальный сайт зеркало
Если идет об эксклюзивных услугах, может потребоваться регистрация в казино по ссылке с партнерского вебсайта.Наличие у игрока второго аккаунта. Запрещено творить несколько профилей для неоднократного получения бездепов. 1×slot официальный сайт Такой казино бонус без депо за регистрацию выдается игроку на час и энергично используется данное предложение с 2017 года. Это как бы некая маскировка поощрения под бездепозитный. Суть всего этого сводится к тому, что геймеру на час выдается, например, 1000 долларов, а реклама утверждает про, собственно любой выигрыш возможно будет в будущем оставить при себя. Но случае играющий серьезно отнесется к этому предложению, то он попросту потеряет время. Ведь игроку нужно будет играть не в аккаунте, ну тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (даже всей тыс. ) в правила вступят конкретные условия, где несомненно сказано, собственно наибольшей суммой победы возможность быть только двести $ и средства можно применять только в качестве бонуса на первый вклад с вейджером 25 от суммы вознаграждения плюс сам депозит. По итогу получится, собственно игрок выигрывал для 200% бонус с вейджером на конкретную необходимую. Короче говоря, это все не вашего медли.Выбор любого онлайн казино на нашем сайте. В описании к каждому Вы можете разузнать, собственно получите за создание аккаунта. <a href=https://tflex.ru/forum/index.php?PAGE_NAME=profile_view&UID=88108>https://tflex.ru/forum/index.php?PAGE_NAME=profile_view&UID=88108</a> В качестве бонусов интернет казино часто предлагает выдачу фриспинов, словами даровых вращений игрового барабана. Виртуальные монеты можно использовать для обучения в покерной школе или для забавы в казино.Подтверждение персональной инфы. Все казино настоятельно от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у пользователя других аккаунтов (мультиаккаунт запрещен). 1×slots зеркало этих способов предполагает регистрацию Некоторые сайты, этого чем провести регистрацию игроков, предлагают ответить на несколько базовых вопросов. Цель проведения похожей викторины – выявить случайных людей, которые не имеют представления о покере, и не разрешить получения ими призов. Если посетитель теснее играл в казино, то ответить на полтора 10 простых вопросов несомненно несложно. Очень нередко, ответы возможно найти на официальных веб-сайтах этих учреждений.2. Создать свежий профиль. Для регистрации надо(надобно) наполнить маленькую анкету либо зайдите в индивидуальный офис посредством социальных сеток;
1×slots казино зеркало
<a href=http://alex-zarya.ru/user/ArnoldEmott/>http://alex-zarya.ru/user/ArnoldEmott/</a> Иногда операторы настоятельно внесение минимального депозита перед выводом для верификации платежного инструмента. В неких казино данный депо также светит отыграть. 1×slots casino регистрация Нет. Казино раздают безвозмездные призы за регистрацию, чтобы, чтобы, дабы заказчик имел ознакомиться с игровым заведением. А чтобы исключить его, нужно выполнить обстоятельства отыгрыша.
1×slots зеркало этих способов предполагает регистрацию
Чтобы бездеп не был начислен на Ваш аккаунт, Вам не нужно активировать бонусный код. Если поощрение от казино было добавлено на Ваш акк механически, а Вы не расчитываете его применять, обратитесь в саппорта с просьбой отменить бездепозитный бонус. Возможность поиграть дополнительное соревнование (а иногда и количество) абсолютно безвозмездно, а выигрыш, тому, поступает на счёт игрока.Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам запрещено начислять бонусы клиентам, не имеющим валютных средств на счете. Мы предлагаем осмотреть актуальные призы онлайн-казино с лицензией, которые соблюдают законодательство РБ. 1×slot официальный сайт <a href=https://datasphere.ru/club/user/50/>https://datasphere.ru/club/user/50/</a> Эффективность бездепов виде рекламного прибора оценили все операторы. Малоизвестные площадки используют такие промоакции, дабы прытко набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны постоянных гостей. Не все сайты, дающие презенты без депозита, рекомендованы к забаве. За привлекательным промоописанием могут скрываться неосуществимые условия отыгрыша и подводные камешки.
онлайн казино 1×slots
Почти все игровые клубы просят свидетельство контактных данных игрока для получения бездепозитного бонуса.Также есть онлайн-платформы азартных игр, которые используют раздачу бездепозитных призов в специальные даты (как для казино, например и для игрока). Помимо сего, действующие геймеры того имеют вероятность получить похожие бонусы за собственную работа (например, за увеличения значения либо за похожие заслуги). <a href=http://hxzq.org.cn/space-uid-1970.html>http://hxzq.org.cn/space-uid-1970.html</a> Практически все интернет казино с бездепозитным призом за регистрацию учитывает программу лояльности — систему поощрения постоянных посетителей, кот-ая состоит из большого уровней. При достижении игроком одного значения на его счёт поступает бонус. Чем выше степень — тем щедрее бонус.Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и расценить особенности, труднодоступные при забаве в демо режиме. Многие свежие клиенты перебегают в количество постоянных, а оператор получает долгосрочную выгода. 1хслот 1хслотс регистрация перейти на 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://masstr.net/showthread.php?tid=89032>1×slots рабочее зеркало</a>
<a href=http://naturetour.ru/communication/forum/messages/forum3/message24616/6307–1×slots-registratsiya-1×slots-review-live?sessid=0e2bfc4a2a8e7618e98b94a87c841354&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1×slots регистрация 1×slots review live</a>
<a href=http://sfessd.listbb.ru/memberlist.php?mode=viewprofile&u=86>зеркала 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чтобы других убедиться в преимуществах бездепозитных бонусов, довольно зарегистрироваться в казино и получить поощрение. Вейджер в переводе с английского значит «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша полученного бонуса, в нашем случае бездепозитного. Число ставок значения — принципиально лишь набрать сумму, пропорциональную сумме поощрения.
#8264 Michaelephemhttps://protortiki.ru
Торты на заказ с доставкой <a href=https://protortiki.ru/>https://protortiki.ru</a> в Москве. Кондитерская «Магиссимо» предлагает заказать в Москве торты под заказ для различных мероприятий: свадеб, корпоративов, детских праздников и пр.
#8265 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало
Новички не обожают сразу же заносить депо. Это обусловлено неимением навыка и сомненьем. К счастью, наши возможно получить бездепозитный приз за регистрацию в казино. Неважно собственно начисляет система – фриспины либо кредиты. В любом случае вы не рискуете собственными сбережениями. Это отличная вероятность запустить понравившийся видео слот либо же испытать удачу в настольных забавах.Несмотря на то, собственно данный вариант стимуляции со стороны азартных платформ довольно востребован области подобных игр, далеко не почитателям казино ведомо, что себе бездепозитные призы казино и как именно их вполне эксплуатировать. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasino09k online</a> Максимальная ставка ? уточняется в валюте счета и ограничивает размер ставки за раз спин. В случае ее превышения приз имеет быть аннулирован. Также в правилах возможность содержаться запрет на размещение ставок определенного вида, примеру, по равным шансам в рулетке (то есть, на чет или нечет, красное либо темное и т.д.). <a href=https://www.saphirnews.com/forum/Augmented-reality-furniture-transforming-your-home-design-experience_m266011.html>https://www.saphirnews.com/forum/Augmented-reality-furniture-transforming-your-home-design-experience_m266011.html</a> 1×slots актуальное зеркало <a href=https://educationweb.com.gh/education/ges-school-selection-guidelines/>https://educationweb.com.gh/education/ges-school-selection-guidelines/</a> Если вы избираете проверенное лицензионное онлайн казино и выполните все обстоятельства получения бездепозитного приза, проблем с получением подарка у Вас не возникнет.
1×slots зеркало
Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.При небольшой сумме бонуса рекомендовано выступать по невысоким ставкам, а использовать максимальные чем только что, нет случае, если вейджер слишком немалый, а время на отыгрыш крепко ограничено. <a href=http://www.ihavethepussy.com/de/threads/222755–1×slot-%D0%A0%D1%95%D0%A1%E2%80%9E%D0%A0%D1%91%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A0%C2%B0%D0%A0%C2%BB%D0%A1%D0%8A%D0%A0%D0%85%D0%A1%E2%80%B9%D0%A0%E2%84%96-%D0%A1%D0%83%D0%A0%C2%B0%D0%A0%E2%84%96%D0%A1%E2%80%9A?p=240399#post240399>1×slot официальный сайт</a> 1×slots зеркало регистрация то дальше необходимо пройти <a href=http://domocontrol.ru/user/Chrisuselp/>http://domocontrol.ru/user/Chrisuselp/</a> Итак, дабы благотворительные бонусные кредиты превратились в реальные деньги, которыми возможность управлять по собственному усмотрению, их надо(надобно) отыграть. Вейджер по уточнять в правилах онлайн-казино.Ну и конечно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: подобная добродушие увеличивает степень преданности клиентов к фирмы. 1×slots зеркало быструю регистрацию а также мгновенное Нельзя разглядывать забаву на деньги, как вариант заработка. Азартные забавы воспрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не организатором азартных игр. Сайт носит информационный характер.Перед активацией главно пристально изучить условия акции. Чем ниже вейджер, что, этим больше потенциальная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, на которых можно пользоваться предложением. Если бездеп обхватывает ограниченный список игр, рекомендуется разузнать максимальные коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только что, нет случае, случае оператор не установил взыскательные лимитирования на максимальную необходимую ставки.
1×slots официальный зеркало рабочее
Теоретически, к безвозмездным призам возможно отнести так называемые фриспины. Напомним, речь идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, потому собственно они деют только вероятность создавать ставки.Допустим, за регистрацию вы возымели бездеп в размере 2 000 руб. С вейджером х30. В этом случае предстоит сделать ставок, на общую необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать настоящие средства. Однако не забывайте, собственно с каждого дара получится вывести определённую сумму (почаще всего не более $200). <a href=http://tegos.su/index.php?subaction=userinfo&user=nondescripttong>http://tegos.su/index.php?subaction=userinfo&user=nondescripttong</a> Заработать на бездепозитных призах за регистрацию в казино возможность каждый пользователь, достигший совершеннолетия.Бездепозитные призы прекрасный вариант безвозмездной игры в игровые автоматы. Многие юзеры сети не знают, что в казино возможно начать играть абсолютно даром, а потом исключить выигрыш на банковскую карту или электронный кошелек, иные не доверяют интернет казино, а третьи успешно играют и выигрывают – и подчас довольно великие суммы. 1×slots официальный регистрация Чаще всего используются коды. Их нужно заносить в особые окна регистрационной анкеты, если идет о пригласительных бонусах, или в определенном разделе личного офиса игрока.
1×slots официальный сайт скачать на айфон
Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депозит может выделяться до 30 дней. Oтыгpaть приз с обозначенным вeйджepом, достичь необходимо сдeлaть cтaвoк нa cумму, превышающую объем бонуса в количество раз. Это также благотворительные деньги, которые поступают на аккаунты свежеиспеченных в в регистрирования. А необыкновенность этих призов произведено в, что обретенные финансы непременно идет применять в продолжении назначенного времени. 1хслотс казино зеркало <a href=http://mashspec.ru/user/Davidneugs/>http://mashspec.ru/user/Davidneugs/</a> Подтверждение регистрации. Казино настоятельно привязки профиля к электронному адресу и номеру телефона. Для сего на e-mail отчаливает письмо ссылаясь, а на телефонный ? текстовое извещение с кодом.
1×slots официальный сайт скачать
Необходимость отыгрыша. Вейджер в повыше, чем для призов за депо. И же свои не отыграны, исключить их нельзя.Как лишь вы отыграли вейджер и средства с бонусного баланса перебежали для на реальный счет, Вы неустрашимо сможете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (устроить наименьший депо например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депозитом). <a href=http://xn–p39a61g3vz0ye.com/bbs/board.php?bo_table=free&wr_id=28804>http://xn–p39a61g3vz0ye.com/bbs/board.php?bo_table=free&wr_id=28804</a> Подтверждение индивидуальной информации. Все казино настоятельно от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и присутствие у юзера других аккаунтов (мультиаккаунт запрещен).Да, у даровых призов есть недостатки. Прежде всего, они обычно небольшие. Кроме того, обстоятельства вейджера по ним практически строгие. Но таки неимение риска делает их довольно красивыми для клиентов. 1×slots на любой вкус как пройти регистрацию Ну и окончательно же, для казино бездепозитные призы прибыльны с имиджевой стороны: схожая добродушие повышает уровень преданности клиентов к компании.
<b>Смотреть еще похожие новости:</b>
<a href=https://australianwinerytours.com/tours/showthread.php?tid=215628>1хслотс рабочее зеркало</a>
<a href=https://demo.comuni-italiani.it/forum/memberlist.php?mode=viewprofile&u=18269>1хслот 1хслотс регистрация перейти на 1×slots</a>
<a href=http://aficionado.pl/showthread.php?110107–1%D1%85%D1%81%D0%BB%D0%BE%D1%82-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%81%D0%B0%D0%B9%D1%82%D0%B0&p=127911>1хслот зеркало сайта</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Не стоит незамедлительно же отказываться от приветственных подарков в похожих казино. Администрация готова начислить средства либо фриспины, но предварительно сотрудники обязаны убедиться, собственно вы не аферист. Дело что, нет, что развелось слишком большое охотников за призами. Они научились дурачить систему и зарабатывать солидные суммы денег. Доступность — бездепозитные бонусы в казино чаще всего предоставляются новым игрокам, хотя посещают случаи, когда бонус имеют получить и действующие клиенты.
#8266 Charlesgunny
casino скачать пин ап casino pin up top <a href=https://specreporter.com/>спорт букмекерская контора</a> 1×bet рабочее 1×bet зеркало слоты <a href=https://t.me/vchkogpu_ru>сайт 1×bet слоты</a> 1×bet приложение официальная казино casino pin официальный казино сочи казино регистрации 1×bet официальный сайт Петрова Ольга Викторовна порно
#8267 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Популярность онлайн казино растёт и всё больше юзеров начинают интерес азартными играми. Бездепозитные призы 2022 года, это оригинальные презенты за регистрацию. С их помощью свежие игроки шансы получить благотворительные вращения либо средства на баланс за одну регистрацию. С выходом игорных заведений в интернете, бездепозитные бонусы стали известнейшим способом привлечения игроков. Подобные акции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о которых мы расскажем. Наш сайт собрал наилучшие предложения из онлайна на 2022 год. Воспользуйтесь хоть даром и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша нужно выполнить обстоятельства.Будьте внимательнее при ознакомлении с правилами во избежание появления конфликтных обстановок с казино, когда после отыгрыша бездепа для не дадут исключить солидную необходимую выигрыша. <a href=http://filmkachat.ru/>1хслотс мобильная версия зеркало</a> В разделе с бонусами активировать собственный подарок. Найти игры, для которых учтено поощрение и использовать приз по предназначению.Также бездепозитные бонусы могут работать способом вернуть к этой посетителей, пока приостановивших своё сотрудничество с фирмой: уведомление о бездепе поступает на мобильный телефонный или почту. <a href=https://www.truxgo.net/blogs/461433/1606204/the-future-of-e-commerce-how-3d-product-visualization-services>https://www.truxgo.net/blogs/461433/1606204/the-future-of-e-commerce-how-3d-product-visualization-services</a> Мы делаем акцент на главных положениях верховодил, рассказываем о территориальных ограничениях и кратко информируем о иных акциях обговариваемого казино.Бездепы с бесплатными вращениями предоставляют пользователям право вертеть барабаны игровых автоматов без снятия средств со счета. За каждый раунд выплачивает казино. Число спинов ограничено и редко выше сотку. Если акция включает в себя много даровых игр, их начисление возможность быть разбито на количество дней. 1 хслот регистрация в 1×slots casino <a href=http://testowik.ru/index.php/forum/user/52575-foregoingcrook4>http://testowik.ru/index.php/forum/user/52575-foregoingcrook4</a>
1х слот 1хслотс регистрация перейти на 1×slots
Выигрыши с бонусов без вложений практически привязаны к требованию по ставкам и имеют быть обналичены только после исполнения данных требований. <a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=32709>1×slots бездепозитный бонус за регистрацию</a> 1×slots регистрация 1×slotscasino 56 online Это также безвозмездные деньги, коие поступают на аккаунты новоиспеченных игроков в регистрирования. А особенность этих призов произведено в том, что обретенные финансы непременно идет использовать в продолжении назначенного медли. <a href=https://www.airlines-inform.ru/personal/user/?UID=61795>https://www.airlines-inform.ru/personal/user/?UID=61795</a> рабочее зеркало 1хслотс Фриспины – благотворительные вращения с фиксированной ставкой, коие возможно использовать в конкретных игровых автоматах.Онлайн-казино с бездепозитными бонусами ставят клиентам обстоятельства для использования бездепами, поэтому перед участием в промоакции превосходнее подробно ознакомиться со всеми правилами и аспектами акции. Условия могут касаться получения приза, его применения и следующего вывода денежных средств если, тогда, выигрыша.
скачать 1×slots официальный сайт
Самый распространённый из сходственных призов, окончательно же, бездеп на денек рождения клиента — бонус в виде фиксированной суммы или фриспинов поступает на счёт игрока, а воспользоваться им можно на установленного периода времени. Бездепы с безвозмездными вращениями деют юзерам право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд выплачивает казино. Число спинов ограничено и изредка превышает сотню. Если промоакция включает в себя большое безвозмездных игр, их начисление имеет быть разбито на некоторое дней. <a href=https://www.tumblr.com/rabofree/760249379604103168/%D0%B3%D0%BB%D0%B0%D0%B2%D0%BD%D0%B0%D1%8F-%D0%B4%D0%BE%D1%80%D0%BE%D0%B3%D0%B0-%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0-%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA>https://www.tumblr.com/rabofree/760249379604103168/%D0%B3%D0%BB%D0%B0%D0%B2%D0%BD%D0%B0%D1%8F-%D0%B4%D0%BE%D1%80%D0%BE%D0%B3%D0%B0-%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0-%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA</a> 1 х слотс зеркало Для получения депозитного приза необходимо пополнить собственный игровой баланс настоящими средствами. Вознаграждение можно получить или при внесении первого депозита, или в виде фиксированного процента от внесённых средств. Так либо иначе, приз поступит на счёт только последствии пополнения.Если площадка дарует бездеп за регистрацию, то процедура его получения проста. Нужно только ввести акк на сайте и активировать его, подтвердив адресок электрической почты, номер телефонного или иные данные, которые просит оператор. Перед этим нужно увериться, что пользователь находится на официальном сайте казино, а не на жульнической площадке.
1×слотс казино
<a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=851532#pid851532>1×слотс казино</a> 1×slots зеркало выигрыши обязательно пройдите регистрацию если <a href=https://www.debwan.com/blogs/531239/%D0%9C%D0%BE%D0%B4%D0%BD%D1%96-%D0%B0%D0%BA%D1%81%D0%B5%D1%81%D1%83%D0%B0%D1%80%D0%B8-%D0%B4%D0%BB%D1%8F-%D0%BF%D1%96%D0%B4%D0%BB%D1%96%D1%82%D0%BA%D1%96%D0%B2>https://www.debwan.com/blogs/531239/%D0%9C%D0%BE%D0%B4%D0%BD%D1%96-%D0%B0%D0%BA%D1%81%D0%B5%D1%81%D1%83%D0%B0%D1%80%D0%B8-%D0%B4%D0%BB%D1%8F-%D0%BF%D1%96%D0%B4%D0%BB%D1%96%D1%82%D0%BA%D1%96%D0%B2</a> Бездеп с фриспинами имеет обхватывать всю коллекцию игр на сайте либо разработки 1-го провайдера. Обычно предлагается определенный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш возможность быть выведен в такого, как пользователь отыграет эту необходимую. Возможность оценить глубокий возможностей слотов — основное совершенство этой разновидности. Игроку становятся доступны те функции, которые отсутствуют в демонстрационном режиме, а возможность выиграть настоящие средства прибавляет ярчайших азартных чувств.Бонус начисляется игроку сразу в регистрации и прохождения верификации в казино и не настятельно от клиента внесения депозита. Как управляло, размер приза в подобном случае довольно скромный, впрочем позволяет новичкам познакомиться с игрой без риска настоящими средствами.
1×slots бонус за регистрацию
В списке требований к отыгрышу нередко наличествуют лимиты на ставки при этой на собственные средства. Так, случае отыграть надо(надобно) 30 000 руб., а максимальная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 раз. Эта особенность затрудняет соблюдение игроками условий по срокам действия акции. <a href=http://ekaterinovka.sarat.ru/board/tools.php?event=profile&pname=DoctorLazutaOn>http://ekaterinovka.sarat.ru/board/tools.php?event=profile&pname=DoctorLazutaOn</a> 1×slots казино зеркало Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция содержит доскональные управляла, ссылка на которые обыкновенно содержится в промообъявлении. В них указываются лимиты, вейджер, список дешевых игр. Если оператор прячет данные о предложении, то воспользоваться им не.
<b>Смотреть еще похожие новости:</b>
<a href=https://australianwinerytours.com/tours/showthread.php?tid=182833>1× slots casino зеркало</a>
<a href=http://www.topboard.org/threads/kazino-1×slots.600572/>казино 1×slots</a>
<a href=https://www.reisezielforum.de/viewtopic.php?p=431753#p431753>1×slots зеркало проходить регистрацию это отличный вариант</a>
<a href=http://forum.survival-readiness.com/viewtopic.php?t=254451>1хслотс зеркало на сегодня</a>
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=673500>1×slots скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Предложения с бездепозитными бонусами за регистрацию дозволяют свежим заведениям привлечь аудиторию на собственный вебсайт. А игроки к получают возможность играть на настоящие деньги без депо в казино и заработать маленький стартовый капитал, кот-ый разрешено вывести на карту банка или электрический кошелек. Казино выделяет вероятность заработать и вывести реальные деньги на бездепозитных бонусах. Обычно, это малозначительная сумма, коию казино имеет себе разрешить презентовать игроку.
#8268 Charlesgunny
1×bet зеркало xbet xyz порно с Афонина Марина Игоревна <a href=https://strelochnik.com/>ramenbet casino</a> демо казино букмекерские конторы pin <a href=https://t.me/vchkogpu_ru>казино сочи</a> Елена Лядова балтбет букмекерская контора 7k casino зеркало рабочее casino рабочее porno Виктория Баркова, легкоатлетка casino x смотреть фильм казино
#8269 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8270 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать на айфон
Диапазон ставок, коие вправе устроить игрок, также лимитирован. Обычно ставить можно маленькую сумму — пределах 10–30 рублей за одно вращение. <a href=http://filmkachat.ru/>1×slots зеркало регистрация то дальше необходимо пройти</a> <a href=https://www.truxgo.net/blogs/461433/1606261/the-impact-of-cgi-rendering-for-real-estate-marketing>https://www.truxgo.net/blogs/461433/1606261/the-impact-of-cgi-rendering-for-real-estate-marketing</a> 1×slots регистрация на официальном сайте <a href=https://www.formulersupport.com/User-JoshuaBoymn>https://www.formulersupport.com/User-JoshuaBoymn</a> Автоматическая активация первый самой удобной, но ручной метод имеет перед ней преимущества. Прежде чем применять вознаграждение от казино, стоит заранее определить, сколько медли требуется на выполнение всех критерий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деяния приза.Такие поощрения позволяют безвозмездно протестировать свежее казино, разобраться с игровым ходом онлайн слотов, заработать и исключить небольшую сумму средств.
1×slots рабочее зеркало на сегодня
Вышеописанная причина и считается главным моментом, следствии которого операторы отдают доля собственной прибыли на различные маркетинговые расходы и маркетинговые кампании. А самым действующим здесь станут выступать непосредственно бездепозитные призы казино 2022 с выводом за регистрацию. 1×slots зеркало регистрация то дальше необходимо пройти <a href=https://champ-design.xooit.com/profile.php?mode=viewprofile&u=23018>https://champ-design.xooit.com/profile.php?mode=viewprofile&u=23018</a> Также, учите, что бездепозитный приз возможно исключить только том, случае, когда будут исполнены все условия отыгрыша. 1×slots регистрация 1×slots casino 777 online Сразу в активации промокода возможно пользоваться подарком. Как теснее упоминалось, призы бывают трёх видов – фриспины, кредиты и фриплей-бонусы.Представьте момент, когда при ставке в 10 руб. Вы получите подобное умножение. Миллион рублей за одно вращение, что абсолютно вполне. Поэтому вопрос, сколько можно выиграть остаётся не. Предлагаем проверить других. Регистрируйтесь в одном либо нескольких интернет казино, получайте Бездепозитный бонус и проверяйте фортуну в деле. Разумеется, исключить деньги не так просто. Однако шансы есть у всех.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
В большинстве заведений сделать это можно по адресу электронной почты, по номеру аппарата, спустя социальную сеть либо гугл-аккаунт.Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в обязательном порядке необходимо восполнить счет в казино. Для депозитных призов, эта процедура не необходима, например как депо уже сделан. Чаще всего, модные сервисы, эти как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно неотъемлемое правило. Финансовые свои выводятся лишь через что, эту платежную систему, коей успех для пополнения депо. Если же игрок получил бездепозитный покерный приз, требуется пополнить счет на минимальную сумму, кот-ая сочиняет обыкновенно десять долларов. <a href=http://forum.moderncompany.de/profile.php?lookup=13214>http://forum.moderncompany.de/profile.php?lookup=13214</a> 1хслот зеркало Подтвердите лицо, предоставив оператору казино средства паспортные данные. Инструкции обычно несложные, основное — четко им идти. Если написано, что «на фото обязаны быть заметны все четыре угла страницы паспорта» — сделайте именно такое фото.
1 х слотс зеркало
Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных притязаний, не обязательной верификации. Если на веб-сайте учтена обязательная процедура подтверждения личности, то исключить выигрыш удастся только последствии ревизии данных. Приготовьтесь заполнить анкету и отправить в техподдержку документ, подтверждающий лицо.Бездепозитные призы, как уже понятно, считаются оригинальной вероятностью к игровому процессу абсолютно безвозмездно, другими играть в онлайн казино бесплатно и на место средства сразу в регистрации аккаунта. Автоматы с этим депозитом могут замерзнуть прекрасной вероятностью поиграть для почитателей азарта с определенными ограничениями в денег. <a href=https://forum.oursson.ru/viewtopic.php?f=2&t=8503>1×slots зеркало сайта</a> 1хслот официальный сайт зеркало <a href=https://www.mybbaddons.com/board/user-71772.html>https://www.mybbaddons.com/board/user-71772.html</a> Не хотите сыграть в азартные забавы, не рискуя своими средствами, но получая в все выплаты? Подобную возможность предоставляют многие лучшие порталы с азартными весельями. В их числе много правдивых и надежных интернет-казино на российском языке. Они привлекают новых юзеров разными поощрительными событиями, включая бездепозитные, или безвозмездные бонусы.Бездепозитный бонус казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в этом и заключается главное различие.
1хслотс казино зеркало
<a href=http://lada.forum-top.ru/viewtopic.php?id=509>http://lada.forum-top.ru/viewtopic.php?id=509</a> Размер бонуса. В качестве бездепов обыкновенно начисляют не суммы, а когда речь идет о призах за депо, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино имеют подарить игроку до 2000$.Также случаются случаи, когда казино начислит обсужденный приз в регистрации свежего клиента по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам. зеркала 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://persiankittencat.com/grey-persian-cats-unraveling-the-charm-of-these-feline-beauties/#comment-36416>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Не советуем опрометью голову браться за всевозможные предложения получения средств без инвестициям. Вполне возможно, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем смотрится на первый взгляд. Альтернативой считается казино бонус за депозит. Мы предлагаем для пару советов, благодаря коим у каждого игрока несомненно вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом денег: Хотя безвозмездные призы начисляются без депо, не исключено, что для понадобиться вносить деньги. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь в того, как новый заказчик первый пополнит игровой счет.
#8271 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8272 Thomasfuhhttps://soap2dayalt.com
soap2day movies <a href=https://soap2dayalt.com/>soap2day watch movies</a>
#8273 Charlesgunny
1×bet слоты официальный сайт гта онлайн казино <a href=https://th-royalgclub.com/>порно с Никита Кучеров (хоккей)</a> автомат казино 1×bet casino <a href=https://vestnik-jurnal.com/>порно с Кирьянова Дарья Борисовна</a> 1×bet 1хбет лучшие онлайн казино порно с Юлия Ефимова, пловчиха порно с Афонина Марина Игоревна pin up casino скачать porno Юлия Канакина, скелетонистка порно с Артемий Панарин (хоккей)
#8274 Charlesgunny
казино ли 1×bet регистрация <a href=https://slon-ru.com/>1×bet официальный xbet</a> casino зеркало сегодня рабочее порно с Алина Загитова, фигуристка <a href=https://kompromat1.online/>casino андроид</a> казино смотреть онлайн вавада казино казино рублях букмекерская контора фонбет официальный casino онлайн retro casino казино рулетка
#8275 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
Бездепозитный бонус часто возможность стать легкодоступным незамедлительно последствии окончания регистрации, поскольку правило единственным требованием к нему считается регистрация, а этого ревизия вашей свежей учетной записи. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> <a href=https://www.reverbnation.com/interiordesign3d>https://www.reverbnation.com/interiordesign3d</a> 1хслотс мобильная версия зеркало <a href=http://istartw.lineageinc.com/home.php?mod=space&uid=3429177&do=profile&from=space>http://istartw.lineageinc.com/home.php?mod=space&uid=3429177&do=profile&from=space</a> Пoдтвepдить личнocть клиента. Для удачного вывода средств, нужно доказать личность клиента. Нa этaпe вepификaции пpoфиля, сотрудники службы защищенности обязаны увериться, собственно у игрока всего лишь один аккаунт. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не сможет вывести свой выигрыш, если у него будет количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы.
1 х слотс зеркало
1×slots коды <a href=http://zhuangxiuz.com/home.php?mod=space&uid=854836>http://zhuangxiuz.com/home.php?mod=space&uid=854836</a> Допустим, за регистрацию вы возымели бездеп в объеме 2 000 рублей с вейджером х30. В этом случае предстоит устроить ставок, на общую сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда выполните обстоятельства по отыгрышу, придёт время заработать реальные деньги. Однако не забывайте, что с каждого дара выйдет исключить определённую сумму (чаще всего не более $200).Прежде всего, не запамятовывайте периодически заглядывать на страницу обзоров бездепозитных призов. Они шаг за шагом рассматривают более занимательные предложения водящих игорных порталов. 1 x slots
1хслотс 1хслотс регистрация перейти на 1×slots
Прежде всего, не запамятовывайте периодически заглядывать на страницу обзоров бездепозитных бонусов. Они шаг за шагом осматривают более занимательные предложения основных игорных порталов. <a href=https://king.az/index.php?subaction=userinfo&user=GeraldCearm>https://king.az/index.php?subaction=userinfo&user=GeraldCearm</a> 1х слот регистрация в 1×slots casino
1хслотс регистрация в 1×slots casino
Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются сразу в сотворения профиля и активны непродолжительное время. Если не успеете израсходовать свои, они попросту сгорят. Касаемо медли, как бонусы активны протяжении часа. <a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=7523&TITLE_SEO=7523-preobrazovatel-interfeysov-usb-rs485&MID=487210&result=reply#message487210>1хслотс зеркало на сегодня</a> Важно, удостоверьтесь сомнений, собственно ранее не регились в избранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи. Какие призы у еще получить считая бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, любое онлайн казино предлагает игрокам выгодное предложение на первый депо, вы совершаете депо, ваш депо возрастает в двое либо числе в трое, тем самым начать играть возможно с больше солидной суммой, так же не запамятываем на вейджер на призы.2. Создать свежий профиль. Для регистрации надо(надобно) наполнить маленькую анкету или зайдите в собственный кабинет посредством социальных сеток; 1хслот зеркало <a href=https://www.amateur-girls-posts.com/forums/profile.php?mode=viewprofile&u=2950565>https://www.amateur-girls-posts.com/forums/profile.php?mode=viewprofile&u=2950565</a> При использовании бездепозитным призом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют количество видов лимитов:
1хслот скачать
В зависимости от онлайн заведения каждый из их имеет вам предложить как бездепозитные средства, так и бездепозитные фриспины, коие последствии успешной регистрации рухнут для на ваш игровой баланс. <a href=http://krasrec.ru/forum/user/170442/>http://krasrec.ru/forum/user/170442/</a> Подарки на конкретные даты отличаются критериями получения. Если поощрение начисляют игроку на день рождения, то сумма обычно находится от общего объема депо за прошедший год. 1×slots регистрация на 1хслотс В современность очень просто получить приз за регистрацию в казино. Практически каждый игорный жилище с радостью начислит средства либо безвозмездные вращения. Многие гэмблеры используют данным и не стесняются регистрироваться в каждом клубе с прибыльными условиями. Кстати, это отличная возможность выработать победную тактику и сорвать джекпот.Ещё одно распространённое акционное предложение – привлекательный презент с сомнительными требованиями. К образцу, клуб обещает $100 в бездепа, но с вейджером х80 или х100. Отыграть такой вейджер практически невероятно и потому превосходнее концентрироваться на больше занимательных акциях.
<b>Смотреть еще похожие новости:</b>
<a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=89763>1×slots сайт зеркало</a>
<a href=http://ledyardmachine.com/forum/User-Jameshoing>1×slots промокод при регистрации</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездеп с фриспинами имеет обхватывать всю коллекцию игр на сайте либо разработки 1-го провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш может быть выведен в как, как пользователь отыграет данную сумму. Возможность оценить полный функционал слотов — основное совершенство данной разновидности. Игроку становятся доступны те функции, коие отсутствуют в демонстрационном режиме, а вероятность выиграть реальные средства прибавляет ясных азартных чувств.
#8276 Charlesgunny
kent casino кент casino <a href=https://strelochnik.com/>porno Юлия Канакина</a> porno Дарья Мороз порно с Сергей Бобровский (хоккей) <a href=https://rumafia.news/>pin up букмекерская контора</a> Чулпан Хаматова порно с Баталина Ольга Юрьевна почему казино скачать 1×bet на андроид Мухтиярова Елена Вячеславовна порно 1×bet бесплатно 1×bet официальный xbet
#8277 Charlesgunny
1×bet слоты официальные зеркала казино <a href=https://specreporter.com/>1×bet зеркало xbet xyz</a> порно с Зырянова Анастасия Владимировна pin up casino пин ап <a href=https://specreporter.com/>где казино</a> 1×bet зеркало рабочее на сегодня 1×bet xyz 1×bet сайт 1×bet xyz казино casino регистрации casino играть сайты казино порно с Антропова Валентина Викторовна
#8278 Charlesgunny
Валентина Матвиенко порно фреш казино <a href=https://slon-ru.com/>1×bet зеркало рабочее на сегодня 1×bet xyz</a> кент казино casino игровой автомат <a href=https://vestnik-jurnal.com/>букмекерская контора фонбет официальный сайт</a> 1×bet официальный скачать официальные сайты казино pin casino зеркало рабочее казино букмекерская контора зенит казино рояль смотреть casino регистрации
#8279 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8280 Thomasfuhhttps://soap2dayalt.com
soap2day thrillers <a href=https://soap2dayalt.com/>soap2day how to find</a>
#8281 Thomasfuhhttps://soap2dayalt.com
soap2day superhero movies <a href=https://soap2dayalt.com/>https://soap2dayalt.com</a>
#8282 Thomasfuhhttps://soap2dayalt.com
soap2day news <a href=https://soap2dayalt.com/>soap2day cartoons</a>
#8283 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8284 Charlesgunnyhttp://filmkachat.ru
1хслотс 1хслотс регистрация перейти на 1×slots
Для получения выигрыша требуется выполнить обстоятельства казино. Чаще всего игроку нужно поставить определенную сумму, но уже из собственных средств. Она рассчитывается из совместного объема выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, если юзер выиграл 1000 руб., а множитель составляет х30, вывести средства можно будет, сделав ставки на 30 000 рублей.Представьте момент, когда при ставке в 10 руб. Вы получите схожее умножение. Миллион рублей за одно вращение, собственно абсолютно возможно. Поэтому вопрос, сколько можно выиграть остаётся открытым. Предлагаем проверить других. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный приз и проверяйте удачу в деле. Разумеется, вывести деньги довольно. Однако шансы есть у всех. <a href=http://filmkachat.ru/>онлайн казино 1×slots</a> Вейджер в переводе с британского означает «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша полученного приза, в нашем случае бездепозитного. Число ставок большого — главно только набрать сумму, пропорциональную сумме одобрения. <a href=https://webyourself.eu/blogs/533063/The-Art-and-Skills-Behind-Being-a-3D-Rendering-Artist>https://webyourself.eu/blogs/533063/The-Art-and-Skills-Behind-Being-a-3D-Rendering-Artist</a> 2. Создать свежий профиль. Для регистрации нужно заполнить маленькую анкету либо зайдите в индивидуальный кабинет посредством соц сеток;Получить приветственный приз все лишь новые клиенты онлайн-казино. Способы описаны в критериях акции каждого легального казино, почаще всего это: казино 1×slots <a href=http://droid-comz.ru/user/TerryDaupt/>http://droid-comz.ru/user/TerryDaupt/</a>
1×slots быструю регистрацию а также мгновенное
Когда идет о получении бездепозитных бонусов в казино, в первую очередь внимание на последующие условия: 1×slots зеркало проходить регистрацию это отличный вариант Бездепозитные бонусы казино это финансовая компенсация, предлагаемая юзерам на дармовой базе и вероятность выступать в интернет казино даром. Если ассоциировать их с одобрениями за вклад, в средства выдаются только потом начального пополнения счета, то бездепозитные вознаграждения получаются даром. То есть, играющий получает вероятность делать ставки на теснее место деньги, коие выдаст заведение, исполняя, при, обычные деянья, дабы их извлечь (здесь идет речь о регистрация, удостоверении личности с использованием номера телефонного, дизайна заказы и т.д.).Обычно для получения призов без депо, казино выдвигает лояльные и абсолютно выполнимые условия, но есть ряд поступков которые запрещены и имеют причиной досадные результаты: <a href=http://www.carshowsociety.com/forum.php?action=profile;u=8880>http://www.carshowsociety.com/forum.php?action=profile;u=8880</a> Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации презента необходимо доказать электронную почту и привязать телефон; 1×slots официальный сайт, скачать Некоторые казино могут предлагать посетителям бездепы за подтверждение номера или почты или репост на страничку в соц сетях.
1хслот скачать
Объективные – размер бонуса, коэффициент и условия вейджера, надобность внесения депо для вывода средств; Бонус начисляется игроку незамедлительно после регистрации и прохождения верификации в казино и не просит от клиента внесения депо. Как правило, размер бонуса в схожем случае достаточно застенчивый, впрочем разрешает новеньким познакомиться с забавой без риска реальными средствами.Бывают ли бездепозитные бонусы без вейджера? Бывают, в у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино. <a href=http://www.credforum.ru/showthread.php?p=54581#post54581>http://www.credforum.ru/showthread.php?p=54581#post54581</a> Акции, посвященные календарным праздникам, бывают рассчитаны как на всех юзеров, например и на категории: к, презент на 8 марта девушкам-игрокам либо мужчинам на 23 февраля. 1×slots casino регистрация на сайте Получив свой подарок, Вы можете бесплатно играть на настоящие средства, а выполнив условия отыгрыша, вывести собственный выигрыш.Бездепы с бесплатными вращениями деют юзерам право вертеть барабаны игровых автоматов без снятия средств со счета. За любой раунд выплачивает казино. Число спинов ограничено и изредка выше сотку. Если акция содержит много даровых игр, их начисление может быть разбито на количество дней.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Бездепозитные призы настоящими средствами, коие возможно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадали.Эффективность бездепов виде маркетингового прибора расценили все операторы. Малоизвестные площадки используют эти промоакции, чтобы стремительно набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны постоянных посетителей. Не все веб-сайты, дающие презенты без депозита, рекомендованы к забаве. За симпатичным промоописанием могут скрываться невыполнимые обстоятельства отыгрыша прочие подводные камешки. Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.Но на азартных платформах похожие вознаграждения могут получить и уже зарегистрированные юзеры. В таком случае, призы предоставляются в уникальных акций или же неким геймерам в виде акционного предложения, коие приходит на почту с целью «возвратить» игрока в свое казино. 1×slots зеркало регистрация то дальше необходимо пройти <a href=http://www.pjpens.com/forumt/profile.php?userid=90>http://www.pjpens.com/forumt/profile.php?userid=90</a> На бонусные начисления имеют быть установлены дополнительные лимитирования, которые Вы не приняли при отыгрыше. Пока приз всецело не отыгран — средства из казино не выводятся.Изучить управляла и условия получения бездепозитных бонусов казино, Вы сможете у нас на сайте в разделе с призами или на официальном сайте избранного Вами казино. Если возможности найти необходимую информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал либо по электронной почте.
1хслот зеркало
Доступ к дару возможность раскрываться механически после введения промокода или воззвания в саппорта вебсайта. В первом случае от юзера не потребуется никаких действий. Бездеп с активацией по коду встречается чаще всего. Игроку необходимо ввести совокупность знаков в графе, кот-ая имеет пребывать в регистрационной форме в Личном офисе. <a href=https://trueanal.org/user/ScotttoT/>https://trueanal.org/user/ScotttoT/</a> Прежде чем активировать бездеп, нужно убедиться никаких, собственно государство, уроженцем которой является игрок, не заходит в список не.Можно ли зарабатывать на бездепозитных бонусах? Это не работа, здесь как повезет, случае в любом предложенном безедепе, вы будете откручивать вейджер и выводить, за возможно именовать везением, и дополнительной добавкой к вашему бюджету. 1×slots рабочее зеркало на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=https://www.rusdrama-az.com/support/51-sluzhba-tehnicheskoy-podderzhki-sayta.html>casino 1×slot</a>
<a href=http://www.ihavethepussy.com/de/threads/222726-x1-slots-1%D0%A1%E2%80%A6%D0%A1%D0%83%D0%A0%C2%BB%D0%A0%D1%95%D0%A1%E2%80%9A%D0%A1%D0%83-%D0%A1%D0%82%D0%A0%C2%B5%D0%A0%D1%96%D0%A0%D1%91%D0%A1%D0%83%D0%A1%E2%80%9A%D0%A1%D0%82%D0%A0%C2%B0%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A1%D0%8F-%D0%A0%D1%97%D0%A0%C2%B5%D0%A1%D0%82%D0%A0%C2%B5%D0%A0%E2%84%96%D0%A1%E2%80%9A%D0%A0%D1%91-%D0%A0%D0%85%D0%A0%C2%B0–1×slots?p=240370#post240370>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Высокая конкурентность в сегменте азартных игр мотивирует операторов привлекать клиентов различными промоакциями. Благодаря этому у посетителей бывает вероятность получить призы в казино за регистрацию без депозита. Воспользоваться таким предложением возможно, избегая процедуру внесения денег на игровой счет, просто активировав акк на сайте. Наш экскурсовод по бездепам поможет выбрать самую привлекательную бонусную программку, узнать верховодила получения такового гонорары и воспользоваться им с наибольшей выгодой.
#8285 Thomasfuhhttps://soap2dayalt.com
soap2day family movies <a href=https://soap2dayalt.com/>soap2day for tablet</a>
#8286 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало
Акционные предложения от казино есть в разных форматах. Часто бонусы даются в обмен на депо. Игрок вносит платеж и получает деньги, безвозмездные вращения и другие поощрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — вид бонуса, который гарантирован за выполнение определенных деяний на сайте:Раздача призов возможность быть приурочена к различным датам: календарные праздничные, деньки рождения игроков, годовщина открытия казино и т. Д. Подарок выдается вид средств, фриспинов или баллов для накопления и размена на предложения оператора. Если пользователь получает выигрыш, деньги начисляются на его счет. Для вывода данной суммы придется выполнить ряд притязаний. <a href=http://filmkachat.ru/>1хслотс официальный сайт зеркало</a> <a href=https://bresdel.com/blogs/736135/%D0%A1%D0%BA%D0%BE%D0%BB%D1%8C%D0%BA%D0%BE-%D1%81%D1%82%D0%BE%D0%B8%D1%82-%D0%B4%D0%BE%D0%BC-%D0%BF%D0%BE%D1%81%D1%82%D1%80%D0%BE%D0%B8%D1%82%D1%8C-%D0%B2-%D0%A3%D0%BA%D1%80%D0%B0%D0%B8%D0%BD%D0%B5>https://bresdel.com/blogs/736135/%D0%A1%D0%BA%D0%BE%D0%BB%D1%8C%D0%BA%D0%BE-%D1%81%D1%82%D0%BE%D0%B8%D1%82-%D0%B4%D0%BE%D0%BC-%D0%BF%D0%BE%D1%81%D1%82%D1%80%D0%BE%D0%B8%D1%82%D1%8C-%D0%B2-%D0%A3%D0%BA%D1%80%D0%B0%D0%B8%D0%BD%D0%B5</a> Главное превосходство спинов – возможность изучить разные слоты. Также удастся насладиться бонусными раундами, испытать фортуну в риск-туре и преумножить выигрыш за счёт особенных символов. Однако не только игровой процесс заслуживает внимание, как превосходнее сосредоточиться на реальном выигрыше.Воспользоваться бездепом возможно не во всех игровых автоматах: казино вдруг устанавливает лимитирование для посетителей. Конечно, это возможно счесть некоторым неудобством для игрока, хотя справедливости ради стоит отметить, собственно выбор автоматов всё точно остаётся достаточно наибольшим. 1×slots регистрация то дальше необходимо пройти <a href=https://gti-club.ru/forum/member.php?u=414187>https://gti-club.ru/forum/member.php?u=414187</a>
1×слот регистрация в 1×slots casino
1× slots casino зеркало <a href=http://xn–80aphfq.xn–p1ai/user/Jasperalock/>http://xn–80aphfq.xn–p1ai/user/Jasperalock/</a> Зарегистрируйтесь. Для регистрации чаще всего достаточно ввести собственный номер телефона и почтовый адрес, последствии чего ввести полученный код из СМС. Возможно, требуется указать промокод. В правилах промоакции несомненно написано, где его бы включать. Иногда это хотелось делать при регистрации, иногда — уже в сотворения личного кабинета, на отдельной странице. сайт 1× slots casino Отыграв бездепозитный бонус в казино с выводом также придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в сходственное ограничение существует, то единоразово исключить получится лишь необходимую, не превышающую размер полученного приза.
1×slot рабочее зеркало
Наши эксперты исследуют обстоятельства акции, этого в ручном режиме проводят их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и параметры. Мы не рекламируем казино, а даем игрокам информацию о лучших из них.Внесение депозита – Будьте готовы пополнить счет последствии отыгрыша бонуса. Это обычное требование правил для данного на промо-акций. Лучше заранее уточнить, какую необходимую нужно несомненно вносить на счет. Как управляло, речь о минимальном депозите, хотя вы обязаны быть убеждены, что он вам по карману. <a href=https://library.kemu.ac.ke/kemuwiki/index.php/User:ClaritaCouvreur>https://library.kemu.ac.ke/kemuwiki/index.php/User:ClaritaCouvreur</a> 1×slot рабочее зеркало Такой безвозмездный эквивалент средств зачисляется на профиль юзера последствии осуществления требований и предназначаются они только для игрового процесса. Вывод таких вознаграждений вероятен только после воплощения вейджеровых критерий.Бездепозитный бонус за регистрацию в казино — это стартовый презент вид валютного начисления либо даровых вращений для свежих игроков заведения, для получения которого не нужно вносить депо.
1×slots официальный сайт, скачать
Все любят получать подарки. Согласитесь, практически каждый играющий человек несомненно безмерно счастлив, случае получит бесплатный презент для забавы в интернет казино просто за регистрацию или же бонус за внесенный депо, например именуемые приветственные бонусы для новых игроков. Соответственно такие онлайн клубы станут более знамениты и преимущественны у игроков при выборе казино для забавы. Топ казино непрерывно обновляется и добавляются новые и увлекательные игровые клубы с привлекательной бонусной политикой и всеми вероятными привилегиями, к которым относятся эти призы как фриспины за регистрацию, валютные бездепозитные призы, еще великодушные призы за внесенный депо. С другой стороны, гораздо проще арестовать бездепозитные фриспины за регистрацию в казино и прямо данный начать вертеть барабаны в наилучших слотах. Главная особенность спинов никаких, собственно они предназначены для топовых автоматов. Удастся не только пройти вспомогательные раунды, но и прирастить сумму выигрыша, заработать респины прочие внутриигровые подарки.Иногда в качестве бездепа, казино дарует наименьший бонус (до 50 руб. ), ради которого не заморачиваться. 1хслотс рабочее зеркало <a href=https://komfort.rusff.me/viewtopic.php?id=7131#p42717>https://komfort.rusff.me/viewtopic.php?id=7131#p42717</a> Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми промоакциями. Читайте о них в обзорах и на форуме.
1×slots casino регистрация 1×slotscasino09k online
Во всех легальных онлайн-казино Беларуси нужно свидетельство паспортных данных для игры — это заявка правительства страны. <a href=http://railagent.ru/club/user/104984/>http://railagent.ru/club/user/104984/</a> Какие бонусы возможность еще получить не бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, каждое интернет казино предлагает игрокам прибыльное предложение на первый депо, вы совершаете депо, ваш депо возрастает в двое или даже в 3, что, этим наиболее начать выступать возможно с более солидной суммой, так же не запамятываем про вейджер на призы. 1 x slots casino Такие одобрения позволяют безвозмездно протестировать новое казино, разобраться с игровым ходом интернет слотов, заработать и вывести небольшую необходимую денег.
<b>Смотреть еще похожие новости:</b>
<a href=http://fin-molitor.com/forum/viewtopic.php?f=2&t=427443>1×slots казино зеркало</a>
<a href=http://b2s.bulwork.com/node/1581?page=94#comment-23180>1хслот официальный сайт зеркало</a>
<a href=https://forum.home-visa.ru/viewtopic.php?f=69&t=807392&p=2871974#p2871974>1хслотс регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для ревизии используются сканы паспортов, водительских водительских, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь обнаружен в попытке ввести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный список. При ирге на лицензионной площадке не опасаться указывать достоверную персональную информацию (шифрование исключает утечку индивидуальных данных). Разные казино имеют собственные правила по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высокие притязания. Часто онлайн-казино советуют отыграть бонусное поощрение до ста один в игровых автоматах. Например, случае игрок получил бесплатно десять долларов, то нужно будет отыграть их, поставив 1 тысячу спинов по 1 баксу любой. Стоит отметить, собственно не все казино выделяют вероятность выступать на бонусы и не во всех развлекательных заведениях схожие управляла для отыгрывания. Некоторые казино воспрещают выступать на призы в блекджек или ограничивают ставки до пяти процентов, собственно существенно наращивает в десятки раз количество нужных игр.
#8287 Charlesgunny
казино рояль 7k casino официальный <a href=https://th-royalgclub.com/>up casino официальный</a> реального казино казино рублях <a href=https://krtka.info/>казино пину</a> винлайн букмекерская контора официальный Самойлова Алла Владимировна порно 7k casino зеркало на сегодня Скворцова Вероника Игоревна порно gama casino Ирина Горбачева порно с Никита Кучеров (хоккей)
#8288 Jamestixhttps://swap.cloud
МТЮ Лизинг <a href=https://depo.rent/>https://depo.rent</a> предоставляет аренду автомобилей в Крыму, включая Симферополь. Удобный онлайн-сервис позволяет оформить аренду на сайте за несколько минут. Широкий выбор автомобилей и выгодные условия делают поездки по региону комфортными и доступными.
#8289 Jamestixhttps://swap.cloud
РПНУ Лизинг <a href=https://rpnu-leasing.ru/>https://rpnu-leasing.ru</a> надежный партнер в лизинге автомобилей, спецтехники и оборудования. Гарантируем отсутствие отказов благодаря индивидуальному подходу к каждому клиенту. Удобные условия и быстрое оформление помогают получить нужное имущество без лишних сложностей.
#8290 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8291 Jamestixhttps://swap.cloud
АО Ти И Эл Лизинг <a href=https://avtee.ru/>https://avtee.ru</a> предлагает услуги проката автомобилей в России, Турции, ОАЭ, Черногории, Испании и других странах по всему миру. Широкий выбор авто, выгодные условия и удобное бронирование делают поездки комфортными и доступными для каждого клиента.
#8292 Thomasfuhhttps://soap2dayalt.com
soap2day best collections <a href=https://soap2dayalt.com/>soap2day most popular</a>
#8293 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? <a href=http://filmkachat.ru/>1×slots casino регистрация</a> Иногда операторы настоятельно внесение минимального депозита перед выводом для верификации платежного инструмента. В неких казино данный депозит также предстоит отыграть. <a href=https://myjudson.judsonu.edu/ICS/Community/Alumni/JUMP_Mentor_Hub__Resources.jnz?portlet=Forums&screen=PostView&screenType=change&id=4798e326–004e-4dfe-9501–9cfb50f69970>https://myjudson.judsonu.edu/ICS/Community/Alumni/JUMP_Mentor_Hub__Resources.jnz?portlet=Forums&screen=PostView&screenType=change&id=4798e326–004e-4dfe-9501–9cfb50f69970</a> Новички не любят незамедлительно же вносить депо. Это обосновано отсутствием навыка и сомнением. К счастью, в можно получить бездепозитный приз за регистрацию в казино. Неважно собственно начисляет система – фриспины либо кредиты. В всяком случае вы не рискуете собственными сбережениями. Это замечательная вероятность запустить приглянувшийся видео разъем или же испытать фортуну в настольных забавах. 1×slots регистрация на сайте <a href=https://bleachrpg.com.br/wiki/index.php/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%AF%D0%BD%D0%B4%D0%B5%D0%BA%D1%81_%D0%94%D0%B7%D0%B5%D0%BD>https://bleachrpg.com.br/wiki/index.php/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%AF%D0%BD%D0%B4%D0%B5%D0%BA%D1%81_%D0%94%D0%B7%D0%B5%D0%BD</a>
1×slots официальный сайт мобильная версия
После получения бонуса вывод средств для клиента несомненно недосегаем до тех пор, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя или пара месяцов. Выводить средства игрок сможет только в отыгрыша. <a href=https://sadhaka.nl/forum/viewtopic.php?t=102844>1×slot казино зеркало</a> 1×slots зеркало этих способов предполагает регистрацию <a href=http://armhleb.ru/index.php?subaction=userinfo&user=scrawnydispatch>http://armhleb.ru/index.php?subaction=userinfo&user=scrawnydispatch</a> casino 1×slot Как только на виртуальном счету окажутся бонусные свои, поспешите отыграть вейджер. Сразу после этого можно оставить заявку на вывод выигрыша. Кредиты прибыльно выделяются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом настоящих средств и дают вероятность ощутить азарт. Во-вторых – можно насладиться каждой азартной забавой доступной на сайте. В вашем постановлении присутствуют автоматы, настольные прибавленье, видео-покер, Live-дилеры.
1×slots регистрация то дальше необходимо пройти
<a href=http://www.haxorware.com/forums/member.php?action=profile&uid=280721>http://www.haxorware.com/forums/member.php?action=profile&uid=280721</a> Бездепозитные бонусы — это подарки от казино в виде бонусных средств либо фриспинов для игровых автоматов, которые начисляются на аккаунт игрока в процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депозит не требуется. 1×slots официальный сайт зеркало
1хслотс официальный сайт зеркало
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=337248>1хслотс казино зеркало</a> Обычно бездепозитные акции от казино, приходят на эл. Почту в дни рождения или дни. В некоторых интернет казино можно адресоваться в чат и как неизменному игроку, возможно вам предложат бездепозитное предложение.Вы не в коем случае ни чем не рискуете, а только выигрываете и выводите на платежную систему, либо проигрываете предложенный приз, по мимо практической забавы на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, выучится регулировать менять ставки и линии, изучать бонусные игры и их выигрышные комбинации, да в просто зарядится кучей эмоций! Ведь вы будите играть на бонусные свои, которые возможно отыграть и исключить, но просто на демо счет, тем самым адреналин в крови еще повысится а пульс забьется с нередким ритмом! Можно ли в одном онлайн казино получить больше 1-го приза за регистрацию? Нет, например как в любом интернет казино есть верховодила, к коим нужно держаться, не создавать два аккаута для получения призов, другому будет блокировка обоих аккаутов, не пытайтесь перехитрить онлайн казино, бонус за регистрацию выдаеться один раз одному личику. 1×slots casino регистрация 1×slotscasino09k online <a href=http://forums.overhax.fun/member.php?action=profile&uid=8830>http://forums.overhax.fun/member.php?action=profile&uid=8830</a>
1хслотс зеркало на сегодня
В бонусную программу множества операторов входят систематические бездепы. Это бессрочные акции, поощряющие активных постоянных игроков. Популярный формат — раздача фриспинов по конкретным денькам недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депозита в мена на скопленные баллы преданности.Подарки на конкретные даты выделяются критериями получения. Если поощрение начисляют игроку на день рождения, то сумма обычно зависимости от совместного объема депо за год. <a href=http://hairdesign482.com/userinfo.php?uid=13331#>http://hairdesign482.com/userinfo.php?uid=13331#</a> Отыграв бездепозитный бонус в казино с выводом также придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в подобное лимитирование присутствует, то единоразово исключить выйдет лишь сумму, не превышающую размер приобретенного приза.Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских руб. В критериях промоакции предписано, собственно вейджер бездепозитного бонуса х20. Поэтому, чтобы отыграть бонус, игроку будет нужно устроить ставок на 35*20=700 руб. казино 1×slots Не сложно додуматься, собственно not the slightest down payment bonuses практически никогда не бывают великими. Чаще всего речь о пяти–тридцати долларах (или эквиваленте этой суммы в другой денежной).
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чтоб получить большой выигрыш, выбирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша.
#8294 Charlesgunny
почему в казино нет часов рокс казино <a href=https://strelochnik.com/>casino официальный сайт</a> pin up casino скачать казино 5 <a href=https://glvk.guru/>Комарова Наталья Владимировна порно</a> 1×bet xbet Лут Оксана Николаевна порно букмекерская контора официальный сайт скачать вавада казино casino скачать вывод казино макао казино
#8295 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8296 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slots review live
В интернете количество узнаваемых игорных площадок с красивыми акционными услугами. Однако пристально читать обстоятельства 10-ов услуг вскоре надоест, ну и время отнимет количество. Поэтому наша команда подготовила ТОП-3 вебсайтов с наихорошими бездепозитными призами:Максимальная ставка ? устанавливается в денежной счета и ограничивает объем ставки за один спин. В случае ее превышения бонус может быть аннулирован. Также в правилах может находиться запрет на размещение ставок конкретного облика, например, по одинаковым шансам в рулетке (словами, на чет либо нечет, красноватое или черное и т.д. ). <a href=http://filmkachat.ru/>1× slots регистрация в 1×slots casino</a> Составленный экспертами Casino.ru перечень онлайн-казино с бездепозитным призом позволяет игрокам сравнить спецпредложения разных операторов.Благодаря программе лояльности от игорного заведения, возможно арестовать хороший старт и без дополнительных вложений запустить видеослоты. Кроме такого, можно рассчитывать на реальную удачу и получить, без инвестиции собственных денег, великой выигрыш. <a href=https://nationaldppcsc.cdc.gov/s/profile/005SJ000008ZiZSYA0>https://nationaldppcsc.cdc.gov/s/profile/005SJ000008ZiZSYA0</a> Во всех законных онлайн-казино Беларуси необходимо подтверждение паспортных данных для забавы — это заявка правительства страны.Прочитайте управляла бонусной программки, в желаете участвовать. Да, мы настоятельно советуем сделать это до регистрации. 1×slots зеркало <a href=http://ternovka4school.org.ua/user/FrankWar/>http://ternovka4school.org.ua/user/FrankWar/</a>
1×slots регистрация 1×slotscasino09k online
B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. <a href=http://djdrewski.co.uk/lfsbangers/viewtopic.php?f=32&t=26126>1×slots казино мобильная версия</a> 1хслот зеркало сайта Представленные на данной странице лучшие бездеп призы в казино за регистрацию в 2022 году имеют подходящие обстоятельства. После кропотливого анализа редакция портала составила рейтинг спецпредложений, в гости Casino.ru все сортировать список по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д. <a href=https://dawonprint.com/bbs/board.php?bo_table=free&wr_id=237294>https://dawonprint.com/bbs/board.php?bo_table=free&wr_id=237294</a> Такие одобрения разрешают безвозмездно протестировать новое казино, разобраться с игровым процессом интернет слотов, заработать и исключить маленькую сумму денег. 1×slots зеркало которую указывали при регистрации кстати На бонусные начисления шансы быть установлены вспомогательные ограничения, которые Вы не учли при отыгрыше. Пока приз всецело не отыгран — средства из казино не выводятся.
1×slots официальный сайт зеркало
Благодаря программке преданности от игорного заведения, возможно взять превосходный старт и без дополнительных инвестициям запустить видеослоты. Кроме такого, возможно рассчитывать на реальную фортуну и получить, без инвестиции личных финансов, немалый выигрыш. <a href=http://d90894u1.bget.ru/user/Raymondsmode/>http://d90894u1.bget.ru/user/Raymondsmode/</a> Бездепозитный приз казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в данном и содержится основное отличие.Бонус в казино без депо содержит разные вариации: такое быть приветственный приз, промоакции в честь каких-то праздников или весомых дат, приз за привлечение свежих игроков, преданность и получение VIP-статуса. 1×slots casino online регистрация
1хслотс рабочее зеркало
Казино выводит деньги лишь на ту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного бонуса, Вам сначала необходимо пополнить счет. В некоторых клубах ограниченный список способов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет непосредственно с этих платежных способов, коие доступны для вывода.Следует подчеркнуть, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом. <a href=https://forum.vn.ua/showthread.php?p=3273944#post3273944>1×slot регистрация</a> Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция содержит подробные правила, гиперссылка на которые обыкновенно содержится в промообъявлении. В их указываются лимиты, вейджер, список доступных игр. Если оператор скрывает данные о предложении, то пользоваться им не стоит. 1×slot зеркало рабочее регистрации на телефон придет <a href=http://iwlnx.com/forum/member.php?action=profile&uid=106876>http://iwlnx.com/forum/member.php?action=profile&uid=106876</a> На странице представлены бездепозитные бонусы за регистрацию в казино редкая награда за коей гонятся все игроки как новенькие, так и мастера. Мы тоже уделяем огромное внимание на наличие призов при формирование рейтинга казино на средства. Бездепозитный бонус это возможность играть безвозмездно и выиграть настоящие средства.Стоит обозначить(означить), что бездепозитный бонус выдается лишь совершеннолетним новеньким, коие, тому, имеют пригласить личных приятелей и людей, также рассчитывающих на поощрительную программку лояльности. Подобная технология появилась между создающих онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры содействуют повышению собственной посещаемости, методом привлечения свежих игроков. Бонусы – это оригинальный шанс для потенциальных соучастников игры, которые шансы опробовать софт покер рума и увериться, станут ли они в него выступать либо нет. Новый игрок попробует средства силы с реальными оппонентами в казино.
1×slot зеркало рабочее регистрации на телефон придет
<a href=https://controlc.com/1459e2f2>https://controlc.com/1459e2f2</a> Зачастую бездепозитные призы казино для игры предлагаются различными заведениями азартных игр виде маркетинговых промоакций или в целях вербования к себя новых игроков. Для бездепозитных бонусов в казино 2022 геймеру не нужно пополнять счет до этапа вывода желаемых средств. 1×slots регистрация на официальном сайте
<b>Смотреть еще похожие новости:</b>
<a href=http://mandala-app.com/memberlist.php?mode=viewprofile&u=3447&sid=4df044fd3054e3bb7f93128749b50fee>1× slots официальный</a>
<a href=http://forum.survival-readiness.com/viewtopic.php?t=259741>1×slots casino зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
4. Заберите подарок. Чаще всего бонус активизируется сразу в регистрации. Но посещают истории, когда нужно забежать в собственный кабинет либо написать в саппорта.
#8297 Charlesgunny
казино вход букмекерская контора официальный сайт <a href=https://specreporter.com/>включи казино</a> самое казино 1×bet casino <a href=https://krtka.info/>porno Юлия Канакина, скелетонистка</a> r7 casino букмекерская контора бетсити 7k casino официальный букмекерская контора бетсити casinos winning спорт букмекерская контора casino buzz
#8298 Jamestixhttps://swap.cloud
РПНУ Лизинг <a href=https://rpnu-leasing.ru/>https://rpnu-leasing.ru</a> надежный партнер в лизинге автомобилей, спецтехники и оборудования. Гарантируем отсутствие отказов благодаря индивидуальному подходу к каждому клиенту. Удобные условия и быстрое оформление помогают получить нужное имущество без лишних сложностей.
#8299 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8300 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало на сегодня
Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, дабы замечена возможность исключить выигрыш. <a href=http://filmkachat.ru/>1 x slots</a> <a href=https://forum.blackstaramps.com/viewtopic.php?f=2&t=338533&sid=394fc063c8e20ebf0c81afbdb5636d4f>https://forum.blackstaramps.com/viewtopic.php?f=2&t=338533&sid=394fc063c8e20ebf0c81afbdb5636d4f</a> 1хслотс официальный сайт зеркало <a href=https://penzu.com/p/94567d0e0ab84f1e>https://penzu.com/p/94567d0e0ab84f1e</a> Срок отыгрыша — это этап, который наступает в момент активации бонуса и заканчивается с его закрытием. Пользователю необходимо уложиться в данный временной промежуток, иначе призовые свои аннулируются. Казино устанавливают список игр, ставки в которых засчитываются при расчете отыгранных денег. Если тайтл не заходит в этот перечень, то ему быть недосегаем для загрузки период действия бонусного предложения.Как верховодило, при выводе денег, от играющего требуется лишь сделать минимальный вклад чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом личный счет.
1×slots регистрация то дальше необходимо пройти
При использовании бездепозитным бонусом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют некоторое обликов лимитов: 1×slot рабочее зеркало <a href=https://www.jcouncil.net/user31987.html>https://www.jcouncil.net/user31987.html</a> При пользовании бездепозитным бонусом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют некоторое обликов лимитов: 1×slots бонус за регистрацию Подтвердите регистрацию, дабы активировать Бездепозитный приз с выводом, потребуется заполнить индивидуальный профиль. Заполните пустопорожние поля истинными данными о себе.
1×slots официальный сайт, скачать
Бездепы с бесплатными вращениями деют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд платит казино. Число спинов ограничено и редко выше сотку. Если промоакция содержит много безвозмездных игр, их начисление может быть разбито на несколько дней. Лишь известные и знаменитые азартные заведения могут позволить себе раздавать бездепы в виде дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, которые можно израсходовать в топовых аппаратах с высочайшей отдачей.В истиннее время получить приз за регистрацию в казино довольно просто. Почти любой игорный жилище с радостью даст средства либо безвозмездные вращения. Многие игроки используют данным и не стесняются региться в каждом клубе с выгодными критериями. Кстати, это замечательная вероятность выдумать выигрышную стратегию и сорвать куш. <a href=http://www.carshowsociety.com/forum.php?action=profile;u=10544>http://www.carshowsociety.com/forum.php?action=profile;u=10544</a> Прежде чем активировать бездеп, необходимо увериться что, что страна, гражданином коей считается игрок, не входит в перечень запрещенных. 1хслот зеркало Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Бонус начисляется игроку незамедлительно последствии регистрации и прохождения верификации в казино и не настятельно от клиента внесения депо. Как верховодило, объем приза в подобном случае довольно умеренный, впрочем дозволяет новичкам познакомиться с забавой без риска настоящими средствами.
1хслотс мобильная версия зеркало
Приглашаем делиться суждениями о призах. Это поможет иным юзерам подбирать более прибыльные предложения.Для верификации аккаунта нужно дать специалистам технической поддержки отсканированную копию паспорта и счета за коммунальные услуги, а фотографию банковской карты или скриншот странички электронного кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности. <a href=https://elclasificadomx.com/author/jameslog/>1×slot рабочее зеркало</a> 1хслот зеркало <a href=http://www.rw2828.com/home.php?mod=space&uid=1808017>http://www.rw2828.com/home.php?mod=space&uid=1808017</a>
1хслотс 1хслотс регистрация перейти на 1×slots
На благотворительные бонусы онлайн-казино практически всегда распространяется ограничения по стране проживания посетителей. Даже если вам разрешено раскрывать счет и выступать на деньги в заведении, это еще не значат, что вас доступны no down payment bonuses.Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных бонусов принимаются достаточно высокие требования. Часто онлайн-казино рекомендуют отыграть бонусное поощрение до 100 один в игровых автоматах. Например, случае игрок получил бесплатно десять $, то нужно несомненно отыграть их, поставив одну тысячу спинов по одному доллару любой. Стоит обозначить(означить), что не все казино дают вероятность играть на бонусы и не во всех развлекательных заведениях идентичные правила для отыгрывания. Некоторые казино запрещают выступать на призы в блекджек либо ограничивают ставки до 5 процентов, собственно значительно увеличивает в десятки раз число нужных игр. Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша бонусов. Заведения постоянно устанавливают максимальную ставку, допустимую по условиям вейждера.Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. <a href=https://biznes-knigi.com/user/PhilipChoop/>https://biznes-knigi.com/user/PhilipChoop/</a> Сроки активации бонуса устанавливаются каждым казино, хотя почаще всего они не превосходят недели с этапа получения. Игроку непременно надо(надобно) использовать бездеп протяжении обозначенного срока, в ином случае приз просто исчезнет. Каждый бонус возможно получить только раз один, поэтому случае не применять бездеп в срок, у игрока не несомненно второго шанса им пользоваться.Законодательство, регулирующее азартные игры в разных государствах, влияние на полномочия операторов. В результате юзеры из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это имеет быть как глубокий отказ в доступе, например и невозможность загружать игры отдельных изготовителей. 1×slots регистрация 1×slots casino 777 online Постарайтесь отыграть вейджер, дабы замечена возможность оставить заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электронной кошелёк, карту, аппарат.2. Создать свежий профиль. Для регистрации надо(надобно) заполнить маленькую анкету либо зайдите в личный кабинет при помощи соц сеток;
<b>Смотреть еще похожие новости:</b>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=148970>1×slos регистрация в 1×slots casino</a>
<a href=https://qualityprogamer.de/forum/showthread.php?tid=266976>1×slots зеркало этих способов предполагает регистрацию</a>
<a href=https://sparta.training/faq/online-returns/#comment-67058>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для получения предоставленных бонусов для пригодиться — ПК или мобильное устройство, и остальное дело за малым. Большинство интернет-казино из нашего топ-10 готовы порадовать вас неповторимыми промоакциями. Читайте о них в обзорах и на форуме.
#8301 Charlesgunny
порно с Петр Ян (ММА) казино регистрации <a href=https://strelochnik.com/>1×bet зеркало xbet</a> pin up casino pin up casino официальный <a href=https://rhymes-punches.com/>порно с Каролина Севастьянова</a> букмекерская контора скачать приложение букмекерская контора зенит up casino зеркало 1×bet слоты 1×bet xyz Любимова Ольга Борисовна порно порно с Никита Кучеров (хоккей) bitz casino
#8302 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8303 Jamestixhttps://swap.cloud
АО Ти И Эл Лизинг <a href=https://avtee.ru/>https://avtee.ru</a> предлагает услуги проката автомобилей в России, Турции, ОАЭ, Черногории, Испании и других странах по всему миру. Широкий выбор авто, выгодные условия и удобное бронирование делают поездки комфортными и доступными для каждого клиента.
#8304 Charlesgunnyhttp://filmkachat.ru
1× slots официальный
Нет. Для получения бездепозитного приза в казино необходима обязательная регистрация на сайте. Играть в слоты даром и без регистрации можно лишь в демо режиме.При этой на бонусные средства воспрещается играть в игровые автоматы с современным джекпотом и игры из радела exist casino. Кроме того, некоторые казино выделяют бездеп на один или несколько конкретных слотов, и в других забавах Вы не можете на них играть. <a href=http://filmkachat.ru/>1х слот регистрация в 1×slots casino</a> <a href=https://www.gencon.com/forums/18-off-topic/topics/19973–3d-rendering-understanding-the-art-and-science-of-digital-image-creation>https://www.gencon.com/forums/18-off-topic/topics/19973–3d-rendering-understanding-the-art-and-science-of-digital-image-creation</a> Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных ситуаций с казино, когда последствии отыгрыша бездепа для не дадут вывести солидную сумму выигрыша. скачать 1×slots официальный сайт <a href=http://droid-comz.ru/user/Craigevems/>http://droid-comz.ru/user/Craigevems/</a> Некоторые онлайн-казино без депо предлагают новым клиентам избрать приз при регистрации. Будьте внимательны: выбрав один, вы в безоговорочном большинстве случаев не можете пользоваться остальными.
1×slots промокод при регистрации
Однако в критериях исчезают «подводные камешки», коие не позволят вывести солидную необходимую или же вы не успеете отыграть вейджер. Поэтому профессионалы рекомендуют забрать бесплатные вращения за регистрацию в казино без депозита, чтобы поднабраться опыта и получить реальный шанс на победу. 1×slots коды В перечне притязаний к отыгрышу нередко наличествуют лимиты на ставки при этой на собственные деньги. Так, если отыграть нужно 30 000 рублей, а предельная сумма ограничена 30 рублями, то вертеть барабаны светит 1000 один. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам действия промоакции. <a href=http://www.webdesignforum.com.au/member.php?action=profile&uid=31660>http://www.webdesignforum.com.au/member.php?action=profile&uid=31660</a> Промообъявления от казино мешают реальной картины и направлены на вербование внимания пользователей. Понять, как высоки шансы остаться в плюсе, позволит личный анализ критерий предложения: рабочее зеркало 1×slots Не стоит сразу же отрицаться от приветственных даров в сходственных казино. Администрация готова начислить деньги или фриспины, хотя сначала работники должны увериться, что вы не мошенник. Дело никаких, собственно развелось очень много охотников за бонусами. Они выучились врать систему и наваривать крупные суммы средств.Наличие у игрока 2 аккаунта. Запрещено создавать количество профилей для неоднократного получения бездепов.
1×slots мобильная версия войти казино
Некоторые казино все предлагать посетителям бездепы за свидетельство номера либо почты или репост на страницу в социальных сетях. Представленные на этой страничке лучшие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, в котором гости Casino.ru могут сортировать список по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д.Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут уточняет лимитирование для посетителей. Конечно, это возможно посчитать неким неудобством для игрока, хотя ради отметить, собственно выбор автоматов всё одинаково остаётся достаточно наибольшим. <a href=https://7apk.ru/user/Ashleyhib/>https://7apk.ru/user/Ashleyhib/</a> Представленные на этой странице превосходнейшие бездеп бонусы в казино за регистрацию в 2022 году имеют подходящие обстоятельства. После кропотливого анализа редакция портала составила рейтинг спецпредложений, в котором посетители Casino.ru могут сортировать список по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д. x1 slots регистрация в 1×slots casino
1×slots акции
<a href=https://orbitsound.com/forum/user-211634.html>1×slots casino зеркало рабочее</a> Если ординарными словами, бездепы – это определённая сумма средств или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно брать презенты. Но есть некоторые аспекты. Существуют игорные дома, коие перед что, этим как начислить призы требуют привязать телефон, дать копии документов.Проверка занимает от нескольких мин. До нескольких дней, специалисты техподдержки могут запросить дополнительные документы либо инициировать краткое общение по Skype. При верном подходе бездепы — это прекрасный метод выступать на деньги без траты личных средств. Есть количество рекомендаций, следуя которым возможно извлечь максимум пользы из похожих акций казино. Играть следует только на лицензированных площадках. Скриптовые сайты не только накалывают с бонусными услугами, но и используют пиратский софт с измененным ГСЧ. Выиграть на этих автоматах невероятно.Игры, каких возможно выступать на бонусные средства. Проверьте список игр, каких можно играть на бонусные свои, вероятно они Вам не понравятся и не тратить своё время на такую промоакцию. 1×slots регистрацию более популярный вариант это <a href=https://forum.21up.co.uk/member.php?action=profile&uid=7987>https://forum.21up.co.uk/member.php?action=profile&uid=7987</a>
1хслот зеркало сайта
Бездепы имеют входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой или баллами. <a href=http://v208870d.bget.ru/user/WalterSaf/>http://v208870d.bget.ru/user/WalterSaf/</a> 1хслотс зеркало на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=http://miupsik.ru/forums/showthread.php?tid=272732>1×slots зеркало сайта</a>
<a href=http://forum.audioheritage.net/memberlist.php?mode=viewprofile&u=19451&sid=da69a18b1fd431ebc5a80099a74ba699>1×slots casino online регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Популярность интернет казино растёт и всё больше юзеров начинают интересоваться азартными забавами. Бездепозитные призы 2022 года, это оригинальные презенты за регистрацию. С их подмогою свежие игроки все получить благотворительные вращения либо деньги на баланс за 1 регистрацию. С свет игорных заведений в интернете, бездепозитные бонусы стали наимоднейшим способом привлечения игроков. Подобные промоакции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш сайт собрал наихорошие предложения из онлайна на 2022 год. Воспользуйтесь каким подарком и сможете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша нужно выполнить условия. Ограничения по забавам. Администрация воспрещает игрокам кое-какие игровые автоматы с бездепозитным бонусом, средствами либо бесплатными вращениями. Обычно, в правилах приводится полный перечень слотов для отыгрыша. Иногда дробленье выполняется по виду игр. Например, отыгрыш возможен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino.
#8305 Charlesgunny
pin up casino скачать kent casino <a href=https://rumafia.news/>casino зеркало сегодня</a> казино фильм смотреть онлайн букмекерская контора без <a href=https://kompromat1.online/>казино смотреть</a> casino рабочее зеркало bitz casino porno Юлия Канакина cat casino скачать сайт букмекерской конторы казино вход порно с Евгения Медведева
#8306 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8307 Charlesgunnyhttp://filmkachat.ru
1× slots сайт
Далее потребуется отыграть вагер и исключить выигрыш. Игрокам без опыта крупно повезло, возможность получить 10-ки презентов за 1 регистрацию. Если не сумели получить Бездепозитный приз, не волнуйтесь. Обратитесь в интернет чат, оператор поможет решить проблему. <a href=http://filmkachat.ru/>1×slots зеркало рабочее на сегодня</a> Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, чтобы снова получить безвозмездный бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ждет неизбежное наказание.Если площадка презентует бездеп за регистрацию, то процедура его получения проста. Нужно лишь завести акк на сайте и активировать его, подтвердив адрес электрической почты, номер аппарата или иные данные, коие настятельно оператор. Перед этим нужно увериться, собственно юзер находится на официальном веб-сайте казино, не на жульнической площадке. <a href=https://myjudson.judsonu.edu/ICS/Community/Alumni/JUMP_Mentor_Hub__Resources.jnz?portlet=Forums&screen=PostView&screenType=change&id=4798e326–004e-4dfe-9501–9cfb50f69970>https://myjudson.judsonu.edu/ICS/Community/Alumni/JUMP_Mentor_Hub__Resources.jnz?portlet=Forums&screen=PostView&screenType=change&id=4798e326–004e-4dfe-9501–9cfb50f69970</a> Классическая разновидность приза за создание аккаунта. Его превосходство заключается в, собственно заказчик возможность помощи избирать аппараты и создавать ставки в их. Иногда перечень игровых автоматов ограничен оператором, но все одинаково это другого, чем один-единственный доступный слот, как если, тогда, с использованием фриспинов.Активация по промокоду используется в различных видах бездепов. Если речь о приветственном бонусе, то комплект символов можно узнать на крупнейшей странице, в регистрационной форме либо послании, коие отправляется пользователю для доказательства e-mail. Акции имеют проводиться совместно с партнерскими площадками. Обычно код размещается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активируется разовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном кабинете либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем актуальный код для активации в описании любого рекламную. 1×slots зеркало которую указывали при регистрации кстати <a href=http://www.vocal.com.ua/node/63094>http://www.vocal.com.ua/node/63094</a> В большинстве заведений сделать это возможно по e-mal, по номеру телефона, спустя социальную сеть либо гугл-аккаунт.Но на азартных платформах подобные гонорары шансы получить и уже зарегистрированные пользователи. В этом случае, призы предоставляются в рамках уникальных акций или же неким игрокам в виде акционного предложения, которое приходит на почту с целью «вернуть» игрока в свое казино.
1×slots официальный зеркало рабочее
1×slots регистрация на официальном сайте В интернет-сети постоянно возможно найти перечни более знаменитых и обещанных поощрительных программ от знаменитых онлайн-казино. <a href=https://johnnylist.org/Glory-Casino_256458.html>https://johnnylist.org/Glory-Casino_256458.html</a> В случае установленного лимита на необходимую вывода выигрыша с бездепозитного бонуса, игрок не может исключить больше заявленной суммы.Все любят получать презенты. Согласитесь, почти любой играющий человек будет безгранично счастлив, если получит безвозмездный подарок для игры в онлайн казино просто за регистрацию либо же приз за внесенный депозит, например нарекаемые приветственные бонусы для новых игроков. Соответственно такие онлайн клубы станут более знамениты и преимущественны у игроков при выборе казино для игры. Топ казино постоянно обновляется и добавляются новые и занимательные игровые клубы с симпатичной бонусной политикой и всеми вероятными преимуществами, льготами, к которым относятся эти призы как фриспины за регистрацию, валютные бездепозитные призы, еще щедрые бонусы за внесенный депозит. 1×slot рабочее зеркало В разделе с призами активировать свой презент. Найти забавы, для коих предусмотрено одобрение и применять бонус по назначению.Верификация важна для добавочной безопасности и подсобляет техподдержке выявить бонусхантеров и плутов. Кстати, рядах платформах выводы крупных сумм доступны лишь последствии подтверждения личности.
1×slots официальный сайт зеркало
Законодательство, регулирующее азартные игры в различных странах, влияние на полномочия операторов. В итоге пользователи из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это имеет быть как полный отказ в доступе, так и невозможность загружать игры отдельных производителей.Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. <a href=http://www.gasts.de/modules.php?name=Your_Account&op=userinfo&username=fertileideal75>http://www.gasts.de/modules.php?name=Your_Account&op=userinfo&username=fertileideal75</a> 1×slots зеркало видели такую регистрацию на Нет. Казино выдают безвозмездные бонусы за регистрацию, для того, дабы заказчик мог ознакомиться с игровым заведением. А чтобы исключить его, необходимо выполнить условия отыгрыша.
1×slot официальный сайт
Получить Бездепозитный приз в онлайн казино дело 2-ух кликов. Другой момент, отыграть рекламную и соблюсти правила и обстоятельства отыгрыша. Под правилами предполагается не вагер, хотя и ограничения по максимальной ставке. Мы осознаем, собственно в кино все ставят на зеро и выигрывают. Призываем не создавать похожего. Перед активацией приза прочтите управляла. Узнайте последующие факторы: Условия получения презента, за регистрацию, за депозит и многое. Ограничения по наибольшей ставке. Зачастую не повыше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах возможно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на пространстве. Поэтому главно аристократия, в каких забавах можно совершать кратность денежного оборота. В современность очень просто получить приз за регистрацию в казино. Практически каждый игорный дом с готовностью начислит средства или бесплатные вращения. Многие гэмблеры используют данным и не стыдятся регистрироваться в каждом клубе с прибыльными критериями. Кстати, это замечательная возможность выработать победную стратегию и сорвать джекпот. Как верховодило, новоприбывшие игроки в первую очередь хотят ознакомиться с способами ввода и вывода денежных средств и сроки выполнения поданных заказов чтобы четко разуметь, как быстро появится вывести свой казино бонус за регистрацию без депозита на электронный кошелек либо же банковскую карту. К счастью для всех играющих, внутри определенных холдингов, все казино соперничают между собой. Ведь случае бы определенную компанию давало лишь одно онлайн-заведение, то ли бы клиенты увидели казино с призом за регистрацию и имели бы рассчитывать лишь на вознаграждение повторяющий бонуса на 1-ое вложение. К каждому заведению периодически идет завлекать свежих игроков, что, в, лишь на руку всем играющим.Главное преимущество спинов – возможность выучить разные слоты. Также получится насладиться бонусными раундами, испытать удачу в риск-туре и преумножить выигрыш за счёт особых символов. Однако столько игровой процесс заслуживает внимание, ведь лучше сосредоточиться на реальном выигрыше. 1×slots промокод при регистрации 2025 <a href=http://school-toksovo.ru/bitrix/rk.php?goto=http://nwnights.ru/redirect/murmansk.voobrajulya.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/DM-joZhMyDZ>http://school-toksovo.ru/bitrix/rk.php?goto=http://nwnights.ru/redirect/murmansk.voobrajulya.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/DM-joZhMyDZ</a>
1×slots зеркало этих способов предполагает регистрацию
В настоящее время получить приз за регистрацию в казино очень просто. Почти каждый игорный жилище с готовностью даст деньги или бесплатные вращения. Многие игроки пользуются данным и не стесняются регистрироваться в каждом клубе с прибыльными условиями. Кстати, это замечательная вероятность придумать выигрышную стратегию и сорвать куш.Главное преимущество спинов – вероятность изучить различные слоты. Также получится насладиться бонусными раундами, испытывать удачу в риск-туре и преувеличить выигрыш за счёт особых символов. Однако не только игровой процесс заслуживает внимание, как другого, как сосредоточиться на реальном выигрыше. Иногда в качестве бездепа, казино презентует минимальный приз (до 50 рублей), ради которого не заморачиваться.4. Заберите презент. Чаще всего бонус активизируется незамедлительно последствии регистрации. Но случаются ситуации, когда надо(надобно) забежать в собственный офис или написать в саппорта. <a href=https://training.trainingstree.com/author/julescep/>https://training.trainingstree.com/author/julescep/</a> 1×slots официальный сайт зеркало Если вы избираете испытанное лицензионное интернет казино и сделайте все условия получения бездепозитного приза, трудностей с получением дара у Вас не возникнет.
<b>Смотреть еще похожие новости:</b>
<a href=https://forumauthority.com/thread-6661-post-39444.html#pid39444>1×slots зеркало этих способов предполагает регистрацию</a>
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=365398>1×slots зеркало рабочее на сегодня</a>
<a href=https://www.lightknotes.com/MyBB/showthread.php?tid=179132>1×slots зеркало регистрацию более популярный вариант это</a>
<a href=https://test.soclanovtsy.ru/topic/35144–1×slot-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE/>1×slot зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При верном раскладе бездепы — это прекрасный способ выступать на средства без растраты собственных средств. Есть несколько советов, следуя коим возможно извлечь максимально полезности из сходственных акций казино. Играть идет только на лицензированных площадках. Скриптовые сайты столько накалывают с бонусными предложениями, хотя и употребляют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах невозможно. Если вы бывалый игрок, вы должны знать, что бонус без депо – редчайшая находка. Тем не, мы неделю изучаем онлайн, чтобы отыскать для вас наихорошие бездепозитные предложения.
#8308 Charlesgunny
сайт букмекерской конторы ramenbet casino <a href=https://rumafia.news/>порно с Каролина Севастьянова</a> скачать букмекерскую контору сайте букмекерской конторы фонбет <a href=https://vestnik-jurnal.com/>порно с Бондаренко Анастасия Борисовна</a> включи казино 7k casino зеркало 1×bet сайт 1×bet xyz пари букмекерская контора Яровая Ирина Анатольевна порно Ирина Горбачева букмекерская контора вход
#8309 Charlesgunnyhttp://filmkachat.ru
1 х слотс зеркало
Бездепозитный приз за регистрацию в казино с выводом денег в 2022 году — Наш ресурс дает игрокам актуальную информацию о самых новых, щедрых и испытанных бонусах в интернет казино, которые обновляются любой день. <a href=http://filmkachat.ru/>1×slots акции</a> <a href=https://www.truxgo.net/blogs/461433/1606204/the-future-of-e-commerce-how-3d-product-visualization-services>https://www.truxgo.net/blogs/461433/1606204/the-future-of-e-commerce-how-3d-product-visualization-services</a> Мы проделываем акцент на главных положениях управлял, рассказываем о территориальных лимитированиях и кратко информируем о других акциях обсуждаемого казино.Бoльшинcтвo азартных заведений выдвигают приблизительно однообразные, схожие обстоятельства и требования, которые нужно выполнить, чтобы получить бездепозитный бонус за регистрацию. Все их возможно объединить в один список: 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=https://woodmancx.com/user/DeweynOm/>https://woodmancx.com/user/DeweynOm/</a>
1хслотс казино зеркало
1×slots на любой вкус как пройти регистрацию Некоторые веб-сайты, прежде чем обмануть регистрацию игроков, предлагают ответить на некоторое базисных вопросов. Цель проведения сходственной викторины – выявить случайных людей, коие не имеют представления о покере, и не допустить получения ими бонусов. Если гость уже играл в казино, то ответить на полтора десятка несложных вопросов будет нетрудно. Очень часто, ответы можно отыскать на официальных сайтах данных учреждений.3. Подтвердить данные. В зависимости от клуба, нужно привязать аппарат либо почту, указать персональную информацию; <a href=http://ledsoft.ru/forum/?PAGE_NAME=profile_view&UID=48460>http://ledsoft.ru/forum/?PAGE_NAME=profile_view&UID=48460</a> Активация денежного вознаграждения происходит механически после творения профиля или использования промокода. Иногда операторы предъявляют вспомогательные требования: подписаться на страницы казино в соц сетях либо на рассылку рекламных извещений, скачать и установить дополнительный софт и т.д. 1×slots сайт Также есть онлайн-платформы азартных игр, коие используют раздачу бездепозитных призов в особые даты (как для казино, например и для игрока). Помимо сего, действующие геймеры также имеют возможность получить схожие призы за собственную работа (например, за повышения уровня или за схожие заслуги).
рабочее зеркало 1хслотс
Выиграть реальные средства в казино не пополняя счет – трудно, хотя вероятно. Главное задаться целью и не нарушатьправила заведения. Выберите несколько казино с бездепзитными бонусами и начните выступать на бонусные свои. По статистике каком-то 10-ти заведений можно заработать небольшую сумму денег с бонусных средств.Новые посетители онлайн-казино без первого депозита могут проверить собственную удачливость. К тому же есть вероятность преобразовать бездепы в реальные средства за регистрацию в казино, однако чтобы бонус необходимо отыграть согласно условиям промоакции. <a href=http://doka-baza.ru/bitrix/rk.php?goto=http://lillozav.com/bitrix/redirect.php?goto=http://goldservice116.ru/bitrix/rk.php?goto=https://telegra.ph/Voprosy-Federalnoj-migracionnoj-sluzhby-09–23>http://doka-baza.ru/bitrix/rk.php?goto=http://lillozav.com/bitrix/redirect.php?goto=http://goldservice116.ru/bitrix/rk.php?goto=https://telegra.ph/Voprosy-Federalnoj-migracionnoj-sluzhby-09–23</a> Перед активацией главно пристально выучить обстоятельства акции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют велечину также лимиты ставок при отыгрыше и сроки, протяжении которых возможно воспользоваться предложением. Если бездеп охватывает ограниченный список игр, рекомендуется разузнать максимальные коэффициенты, степень отдачи и волатильности. Слоты с невысокими множителями выплат подходят лишь что случае, случае оператор не установил взыскательные лимитирования на максимальную необходимую ставки.В наше время очень просто получить приз за регистрацию в казино. Практически любой игорный жилище с радостью начисляет деньги либо бесплатные вращения. Многие гэмблеры пользуются этим и не стыдятся регистрироваться в любом клубе с прибыльными критериями. Кстати, это отличная возможность выработать победную тактику и сорвать джекпот. 1×slots зеркало сайта К раскаянью, нет. Почти все казино, настоятельно внесение хотя бы одного минимального депо для вывода выигрыша с бездепозитного приза. Также учитывайте, собственно вывести деньги разрешено только на ту платежную систему, с коей был сделан депо.
1×slot зеркало рабочее регистрации на телефон придет
На нашем веб-сайте Вы найдете перечень своевременных новых бездепозитных призов в казино 2022 года. Также, есть много эксклюзивных предложений, которые доступны лишь гостям нашего сайта в регистрации по нашей ссылке или активации специального промокода.Практически все интернет казино с бездепозитным призом за регистрацию учитывает программку преданности — систему одобрения постоянных посетителей, которая состоит из множества значений. При достижении игроком очередного значения на его счёт поступает бонус. Чем выше степень — что, этим щедрее бонус. Кешбэк-бонус представляет собой возврат фиксированного процента от ставки если, тогда, поражения или же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%.Для доказательства электрической почты, просто перейдите по активной ссылке в письме, полученном от игрового заведения. 1×slots сайт зеркало <a href=http://xbrl.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=http://smartkkt.ru/bitrix/redirect.php?goto=http://anastasia.ru/bitrix/redirect.php?goto=https://teletype.in/@urist_free/Baz3YGh4iIt>http://xbrl.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=http://smartkkt.ru/bitrix/redirect.php?goto=http://anastasia.ru/bitrix/redirect.php?goto=https://teletype.in/@urist_free/Baz3YGh4iIt</a> В количестве случаев безвозмездные бонусы начисляются в кредитах, которые невозможно сразу вывести со счета. Прежде их нужно отыграть по установленным правилам. Эти требования принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже.
1×slots зеркало которую указывали при регистрации кстати
Если при регистрации показать промокод, возможно гарантировано получить бонус. Где арестовать ваучер? Посетите направленные блоги либо форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В заключительнее время игорные дома начали рекламироваться в кинокартинах и телесериалах. Присмотритесь и скорее заметите промокод, который принесёт 500 либо 1 000 бонусных руб.В разделе с призами активировать собственный подарок. Найти игры, для которых предусмотрено одобрение и использовать бонус по назначению. <a href=https://zeoworks.com/main/member.php?action=profile&uid=224642>https://zeoworks.com/main/member.php?action=profile&uid=224642</a> сайт 1× slots casino Бездепы обыкновенно предлагают с отыгрышем — быстро исключить выигранные свои невозможно. Перевод средств со счета несомненно возможен в того, как юзер выполнит все притязания казино, а сумма не может превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, в течение коих клиент вправе воспользоваться предложением. Обычно они не превосходят нескольких дней после активации.Получить Бездепозитный бонус в онлайн казино дело 2-ух кликов. Другой момент, отыграть рекламную и соблюсти управляла и обстоятельства отыгрыша. Под правилами подразумевается не только вагер, хотя и ограничения по наибольшей ставке. Мы осознаем, собственно в кинотеатр все ставят на зеро и выигрывают. Призываем не создавать похожего. Перед активацией бонуса прочитайте управляла. Узнайте последующие моменты: Условия получения подарка, за регистрацию, за депозит и многое. Ограничения по максимальной ставке. Зачастую не повыше 350 рублей. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вращать автоматы, а вагер несомненно стоять на месте. Поэтому принципиально аристократия, в каких играх возможно совершать кратность валютного оборота.
<b>Смотреть еще похожие новости:</b>
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=337599>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a>
<a href=https://forums.scar-divi.com/topic/576701–1-x-slots/>1 x slots</a>
<a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=89118>1×slots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Доступные игры – В некоторых азартных забавах можно понизить математическое приемущество казино до нескольких десятых процента. В их числе многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как управляло, в этих играх ставки идут в зачет вейджера не полностью. Например, может предусматриваться лишь 50%. В неких забавах бездепозитные бонусы вообщем нельзя отыгрывать. Призовые начисления без депо могут предоставляться для роли в турнирах онлайн казино. Потратить перечисленные средства возможно самая в рамках этой акции. Условия их проведения включают в себя лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться этим предложением, другого, как выучить его правила.
#8310 Bradleyaccut
http://edpills.men/ buy erectile dysfunction medication
#8311 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 520–47–70 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8312 Thomasfuhhttps://soap2dayalt.com
soap2day with subtitles <a href=https://soap2dayalt.com/>soap2day children's movies</a>
#8313 Jamestixhttps://swap.cloud
ООО Спецтехгрупп <a href=https://stgauto.ru/>https://stgauto.ru</a> предоставляет аренду автомобилей в Сочи, Адлере, Калининграде и Краснодаре. Полностью онлайн оформление позволяет быстро забронировать авто без лишних визитов. Удобный сервис и широкий выбор машин для любых задач — от отдыха до работы.
#8314 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino 777 online
Почти все игровые клубы требуют подтверждение контактных данных игрока для получения бездепозитного бонуса.Да, у безвозмездных бонусов есть недостатки. Прежде всего, они обыкновенно маленькие. Кроме как, обстоятельства вейджера по ним практически жесткие. Но все отсутствие риска проделывает их довольно красивыми для посетителей. <a href=http://filmkachat.ru/>1 x slots casino</a> <a href=https://www.blogger.com/u/4/profile/08074802049930635971>https://www.blogger.com/u/4/profile/08074802049930635971</a> 1 x slots <a href=https://rg-mechanics.club/user/Geraldheare/>https://rg-mechanics.club/user/Geraldheare/</a> Подтвердите личность, предоставив оператору казино средства паспортные данные. Инструкции обычно легкие, основное — четко им идти. Если написано, собственно «на фото обязаны быть видны все хорошо угла страницы паспорта» — устройте именно такое фото.Онлайн-казино кропотливо продумывают бонусные обстоятельства, коие нужно выучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша прочие лимитирования.
1×slots официальный сайт скачать
Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие возникают у начинающих. <a href=https://hiddeninthesand.com/forum/viewtopic.php?t=319718>1×slots сайт зеркало</a> 1×slots скачать на айфон <a href=http://cheapbooks.cc/memberlist.php?mode=viewprofile&u=44644>http://cheapbooks.cc/memberlist.php?mode=viewprofile&u=44644</a> Бесплатные бонусы казино без депо можно получить повторяющий валютных средств на бонусный счет (вывести их можно лишь в отыгрыша), фриспинов, забавы либо кешбэк-бонуса. 1×slots официальный регистрация Не стоит путать игру в демо и использование призов. В демонстрационном режиме игрок возможность расценить механику слота, сюжет и оформление. Но забава проводится на относительные кредиты, поэтому отсутствует главное ? чувство азарта. Активируя промокод или фриспины, клиент и не тратит свои средства на игровые автоматы, но имеет сорвать реальный куш!Зачастую бездепозитные бонусы казино для игры предлагаются различными заведениями азартных игр в качестве рекламных акций либо в целях вербования к себе свежих игроков. Для бездепозитных призов в казино 2022 геймеру не пополнять счет до этапа вывода желаемых средств.
1×slots официальный сайт зеркало
Некоторые веб-сайты, до чем обмануть регистрацию игроков, предлагают ответить на несколько базисных вопросов. Цель проведения подобной викторины – выявить случайных людей, коие не имеют представления о покере, и не разрешить получения ими призов. Если посетитель уже играл в казино, то ответить на полтора десятка несложных вопросов будет нетрудно. Очень часто, ответы возможно найти на официальных веб-сайтах данных учреждений. <a href=http://www.bxbshop.co.kr/bbs/board.php?bo_table=free&wr_id=208588>http://www.bxbshop.co.kr/bbs/board.php?bo_table=free&wr_id=208588</a> Бездепозитные призы за регистрацию считаются одним из самых модных методов привлечения свежих игроков в онлайн-казино, поэтому собственно они деют игрокам вероятность опробовать казино, тем игровые автоматы, и вероятно, выиграть настоящие деньги. онлайн казино 1×slots Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке представители онлайн-казино публикуют важную информацию о not the slightest down payment bonuses и других предложениях.
1× slots casino зеркало
Исходя из сего, просто не существует осмысленных оснований махнуть рукою на получение такого бонуса при регистрации. И, не, на такой безвозмездной базе у вас есть шансы выиграть деньги и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные призы, именуют бесплатными интернет платформами для игр. <a href=https://your-portal.at.ua/forum/31–2007–5#88142>онлайн казино 1×slots</a> Бездепы шансы входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами.Да, у безвозмездных призов есть дефекты. Прежде всего, они обычно небольшие. Кроме как, обстоятельства вейджера по ним практически строгие. Но все неименье риска проделывает их очень привлекательными для посетителей. Операторы гемблинга заявляют, собственно например они борются с бонус-хантерами. Впрочем, критики считают, что этим казино пробуют сделать из случайного гостя постоянного игрока. 1хслотс официальный сайт зеркало <a href=http://www.eryh.com/home.php?mod=space&uid=20829&do=profile>http://www.eryh.com/home.php?mod=space&uid=20829&do=profile</a> Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.Этот образ бонуса несомненно добавлен на Ваш акк последствии удачной процедуры регистрации с внедрением номера аппарата. Если выбрать иной метод сотворения учетной записи, бездеп не несомненно добавлен на Ваш акк.
1×slots зеркало видели такую регистрацию на
Игрокам не следует принимать приветственный бонус как гарантированный метод получить крупный выигрыш, хотя это отличная возможность без затрат оценить функционал казино. <a href=https://www.techieshah.com/2019/08/eclipse-server-tomcat-v85-server-at.html>https://www.techieshah.com/2019/08/eclipse-server-tomcat-v85-server-at.html</a> Если вы облюбовали себе несколько брендов коие вас больше всего полюбились, для неизменной игры! Таких гемблеров казино довольно любит и ценит, за частую такие игроки становятся VIP игроками заведения, коим часто поступают прибыльные предложения вид бонусов, например же туда входит и бездепозитные. 1×slots зеркало рабочее на сегодня Бездепозитный бонус казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в этом и заключается главное отличие.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.topboard.org/threads/1×-slots-casino-zerkalo.598452/>1× slots casino зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Эффективность бездепов в качестве рекламного инструмента расценили многие операторы. Малоизвестные площадки употребляют такие акции, дабы живо набрать базу. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны постоянных посетителей. Не все сайты, дающие презенты без депозита, рекомендованы к забаве. За симпатичным промоописанием имеют скрываться невыполнимые обстоятельства отыгрыша и подводные камешки. Доступ к подарку имеет открываться автоматически после введения промокода или воззвания в службу поддержки вебсайта. В первом случае от юзера не требуется никаких действий. Бездеп с активацией по коду встречается чаще всего. Игроку необходимо ввести совокупа символов в графе, кот-ая возможность находиться в регистрационной форме в Личном офисе.
#8315 Charlesgunny
букмекерская контора ставки casino онлайн <a href=https://specreporter.com/>casinos xyz</a> 1×bet скачать приложение на андроид порно с Артемий Панарин (хоккей) <a href=https://rumafia.news/>играющие казино онлайн</a> 1×slots casino 1×slots casino casino зеркало сегодня рабочее лучшие букмекерские конторы казино рояль porno Екатерина Ефременкова, шорт-трекистка зеркала официальных сайтов казино
#8316 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8317 Charlesgunnyhttp://filmkachat.ru
1 хслот регистрация в 1×slots casino
Да, у безвозмездных бонусов есть недостатки. Прежде всего, они обыкновенно небольшие. Кроме того, обстоятельства вейджера по ним практически жесткие. Но все недоступность риска делает их очень привлекательными для посетителей.Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша бонусов. Заведения постоянно устанавливают максимальную ставку, допустимую по условиям вейждера. <a href=http://filmkachat.ru/>1х слотс зеркало регистрация в 1×slots casino</a> На данном разделе портала регулярно публикуются обзорные статьи, каких рассматриваются благотворительные бонусы наихороших интернет-казино. Информация структурирована по нескольким пунктам, включая основные: <a href=https://hackaday.io/rendering>https://hackaday.io/rendering</a> Несмотря на то, что данный вариант стимуляции со стороны азартных платформ очень моден в похожих игр, далековато не всем поклонникам казино знаменито, собственно себе бездепозитные бонусы казино и как именно их вероятно эксплуатировать.Если вы избираете испытанное лицензионное онлайн казино и выполните все условия получения бездепозитного приза, проблем с получением дара у Вас не возникнет. 1×slots casino регистрация 1×slotscasino09k online <a href=https://www.thenewtop10s.com/author/renaldokiz/>https://www.thenewtop10s.com/author/renaldokiz/</a> При правильном раскладе бездепы — это отличный метод играть на средства без траты личных средств. Есть несколько советов, следуя коим можно извлечь максимально полезности из подобных промоакций казино. Играть по лишь на лицензированных площадках. Скриптовые веб-сайты не обманывают с бонусными предложениями, но и используют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах невозможно.
1×slots официальный регистрация
<a href=https://www.fromrus.su/index.php?/topic/21576–1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D0%BF%D1%80%D0%BE%D1%85%D0%BE%D0%B4%D0%B8%D1%82%D1%8C-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8E-%D1%8D%D1%82%D0%BE-%D0%BE%D1%82%D0%BB%D0%B8%D1%87%D0%BD%D1%8B%D0%B9-%D0%B2%D0%B0%D1%80%D0%B8%D0%B0%D0%BD%D1%82/>1×slots зеркало проходить регистрацию это отличный вариант</a> 1×slots рабочее зеркало на сегодня Не стоит путать забаву в демо и внедрение призов. В демонстрационном режиме игрок возможность оценить механику слота, сюжет и оформление. Но игра ведется на условные кредиты, потому отсутствует основное ? ощущение азарта. Активируя промокод либо фриспины, заказчик как не тратит средства средства на игровые автоматы, но возможность сорвать реальный куш! <a href=http://l6046402.bget.ru/member.php?action=profile&uid=39747>http://l6046402.bget.ru/member.php?action=profile&uid=39747</a> 1хслот зеркало
1×slots подтвердит вашу регистрацию если говорить
<a href=https://23region.info/user/TyroneObjen/>https://23region.info/user/TyroneObjen/</a> Способы получения бездепа различаются в зависимости от вида приза, кот-ый понравился игроку. Но для или нужно быть зарегистрированным в законном онлайн-казино и подтвердить свою лицо. В общем облике пошаговая аннотация для получения бездепозитного бонуса смотрится например: онлайн казино 1×slots Если простыми текстами, бездепы – это определённая сумма средств или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать подарки. Но есть кое-какие нюансы. Существуют игорные дома, коие перед тем как начислить бонусы настоятельно привязать телефон, предоставить копии документов.
1×slots официальный сайт зеркало
<a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=851201#pid851201>1× slots регистрация в 1×slots casino</a> Прежде чем активировать бездеп, необходимо увериться в том, собственно страна, уроженцем которой считается игрок, не входит в список запрещенных. Казино выделяет возможность заработать и вывести настоящие деньги на бездепозитных бонусах. Обычно, это незначительная сумма, которую казино имеет себе разрешить презентовать игроку. 1×slots промокод при регистрации <a href=https://www.stroimvmeste.com.ua/user/Henryaroro/>https://www.stroimvmeste.com.ua/user/Henryaroro/</a> К примеру, игроку выдаются безвозмездные средства в заведении в размере пятидесяти или ста $ (вейджер на которые составляет 100х). То есть, каждому новоприбывшему геймеру выскакивает притягивающая картинка, кот-ая сулит выплату всех зачисленных фирмой средств. Не стоит обращать внимания на казино приз за регистрацию без депозита с слишком большой или очень малюсенькой суммой призов, поэтому собственно, том кропотливо выучив все обстоятельства, тут всего, несомненно некий подкол.Для получения бездепа необходимо пригласить в забаву по реферальной ссылке нового посетителя: он должен зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на сумму, указанную в условиях акции.
скачать 1×slots на андроид мобильная версия
Если вы избираете проверенное лицензионное онлайн казино и сделайте все условия получения бездепозитного бонуса, проблем с получением презента у Вас не возникнет. Простая процедура получения бездепозитного приза, которая займет не более 2-х минут. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные.Доступность — бездепозитные бонусы в казино чаще всего предоставляются свежим игрокам, хотя бывают случаи, когда приз могут получить и действующие посетители. <a href=http://www.zgyssyw.com/home.php?mod=space&uid=3099086&do=profile>http://www.zgyssyw.com/home.php?mod=space&uid=3099086&do=profile</a> Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, или проигрываете предложенный бонус, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, научится регулировать изменять ставки и полосы, исследовать бонусные забавы и их выигрышные композиции, ну в конце концов просто зарядится кучей впечатлений! Ведь вы будите выступать на бонусные средства, коие можно отыграть и вывести, не просто на демо счет, что, этим наиболее адреналин в крови еще больше повысится а пульс забьется с частым ритмом!Бонус с зачислением денег на счет дает больше свободы действий. Пользователь сам подбирает, каким образом воспользоваться подаренными средствами. Здесь того шансы действовать лимитирования на перечень дешевых игр, хотя обычно эти рамки не так строги, как в рекламную с безвозмездными вращениями. 1×slots бездепозитный бонус за регистрацию Наш список включает в себя превосходнейшие бездепозитные бонусы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по главным параметрам:Приветственный бездеп предоставляется хоть игроку только один раз. Казино борются с так именуемыми бонусхантерами (от англ. Bonus Hunter — охотник за бонусами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения презента. Исключить подобные деянья разрешает верификация данных. Администрация вправе востребовать у посетителя доказать индивидуальные данные, обозначенные при регистрации.
<b>Смотреть еще похожие новости:</b>
<a href=https://dev.eff.one/member.php?action=profile&uid=904>1хслотс регистрация в 1×slots casino</a>
<a href=https://rf-lowrate.ru/index.php?/profile/6447-jamesmom/>1×slots рабочее зеркало на сегодня</a>
<a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=855797#pid855797>скачать 1×slots на андроид мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Кешбэк-бонус представляет собой возврат фиксированного процента от ставки в случае поражения либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не превышает 10%.
#8318 Charlesgunny
casino online зеркало какие казино <a href=https://strelochnik.com/>Ходнева Светлана Владимировна порно</a> казино фильм порно с Варвара Субботина <a href=https://7club7.com/>официальное казино вход</a> casino порно с Алина Загитова, фигуристка порно с Васильева Татьяна Викторовна букмекерская контора бетсити порно с Ирина Сидоркова casino рабочее почему казино
#8319 Forestbeshttps://learn.rumie.org/jR
Open library of microcourses <a href=https://learn.rumie.org/jR/>https://learn.rumie.org/jR</a> short and effective training programs for quick acquisition of skills. Convenient access, relevant topics, materials for self-development.
#8320 WilliamFuthttps://remont-vodonagrevatelej-moscow.ru
Ремонт водонагревателей в Москве <a href=https://remont-vodonagrevatelej-moscow.ru/>https://remont-vodonagrevatelej-moscow.ru</a> быстрый и качественный сервис от опытных мастеров. Обслуживаем все марки и модели, устраняем поломки любой сложности. Выезд на дом, диагностика, замена деталей с гарантией. Надежное восстановление работы вашего оборудования!
#8321 Charlesgunny
порно с Евгений Малкин (хоккей) смотреть фильм казино <a href=https://rhymes-punches.com/>яндекс игры казино</a> casino 7k сегодня порно с Артемий Панарин (хоккей) <a href=https://res-publika.com>new casino</a> r7 casino порно с Никита Кучеров (хоккей) Приезжева Екатерина Геннадьевна порно яндекс казино порно с Федор Чалов (футбол) сайт 1×bet слоты букмекерская контора фонбет официальный сайт
#8322 Charlesgunny
1×bet зеркало рабочее xbet casino com <a href=https://specreporter.com/>ап казино</a> up casino зеркало гта казино <a href=https://th-royalgclub.com/>казино гта 5</a> casino официальный зеркало pin casino зеркало порно с Илюшникова Татьяна Александровна casino зеркало сегодня рабочее porno Илона Маркова, хоккеистка казино большая сайты казино
#8323 Charlesgunny
1×bet официальный 1×bet xyz букмекерская контора скачать приложение <a href=https://specreporter.com/>пин ап казино</a> porno Юлия Канакина, скелетонистка букмекерские конторы pin <a href=https://glvk.guru/>1×bet вход</a> порно с Илюшникова Татьяна Александровна pinco casino сайт 1×bet слоты симулятор казино суть казино казино пину порно с Бондаренко Анастасия Борисовна
#8324 Stanleysib
rybelsus semaglutide tablets <a href=" https://slovakia-forex.com/…3-ifdyvhtqja „>semaglutide best price</a> or <a href=“ http://emaame.com/redir.cgi?… ">semaglutide tablets price</a> https://www.valldenuria.cat/…get_news.php?… semaglutide tablets price <a href=https://www.google.com.ng/url?sa=t&url=http://semaglutidetablets.store>semaglutide best price</a> generic rybelsus tabs and <a href=https://www.oppo.xyz/home.php?mod=space&uid=4705>rybelsus semaglutide tablets</a> semaglutide tablets
#8325 Charlesgunny
1×bet зеркало xbet казино сочи <a href=https://rumafia.news/>online casino официальный</a> скачать 1×bet casino автомат <a href=https://strelochnik.com/>пин ап букмекерская контора</a> казино вход Радченко Светлана Юрьевна порно вывод казино ап казино лучшие букмекерские конторы порно с Елена Никитина, скелетонистка Шевцова Татьяна Викторовна порно
#8326 Williamzemhttps://obukhov-sport.ru
Mostbet в Кыргызстане <a href=https://obukhov-sport.ru/>https://obukhov-sport.ru</a> предлагает спортивные ставки, live-игры и казино. Удобная платформа, моментальные выплаты и круглосуточная поддержка.
#8327 Charlesgunny
фреш казино top casino <a href=https://strelochnik.com/>пин up casino</a> игры казино казино 5 <a href=https://vestnik-jurnal.com/>порно с Юлия Ефимова</a> Радченко Светлана Юрьевна порно букмекерская контора зенит порно с Кирьянова Дарья Борисовна казино большая порно с Диана Шнайдер (теннис) 1×bet слоты 1×bet top букмекерские конторы без депозита
#8328 Charlesgunny
пина casino казино онлайн бесплатно <a href=https://res-publika.com>7k casino зеркало</a> porno Мария Шарапова porno Екатерина Ефременкова, шорт-трекистка <a href=https://specreporter.com/>сайт букмекерской конторы</a> гта онлайн казино casinos xyz 1go casino реального казино casino скачать приложение казино смотреть онлайн казино пину
#8329 Charlesgunny
букмекерская контора скачать приложение порно с Георгий Джикия (футбол) <a href=https://res-publika.com>ограбление казино</a> Лут Оксана Николаевна порно автомат казино <a href=https://rumafia.news/>casino сегодня</a> казино фильм онлайн pin up букмекерская контора демо казино 1×bet зеркало xbet 7k casino официальный Ходнева Светлана Владимировна порно porno Анастасия Янькова, боксерка
#8330 Charlesgunny
карты казино 1×bet 1хбет <a href=https://kompromat1.online/>букмекерская контора мостбет</a> официальное казино вход Кузнецова Анна Юрьевна порно <a href=https://rumafia.news/>лучшие букмекерские конторы</a> букмекерская контора официальный сайт скачать фильмы казино рояль порно с Антропова Валентина Викторовна порно с Анна Калинская (теннис) Нургалиева Эльвира Рамиловна порно 1×bet рабочее порно с Диана Шнайдер (теннис)
#8331 Charlesgunny
7k casino официальный сайт pinco casino <a href=https://slon-ru.com/>pin up casino buzz</a> мобильные букмекерские конторы 1×bet зеркало рабочее <a href=https://kompromat1.online/>яндекс игры казино</a> порно с Евгения Медведева casino скачать 7k casino скачать порно с Афонина Марина Игоревна смотреть фильм казино скачать casino на андроид казино смотреть онлайн
#8332 Charlesgunny
почему в казино нет часов Кузнецова Анна Юрьевна порно <a href=https://vestnik-jurnal.com/>скачать сайт букмекерской конторы</a> cometa casino казино в россии <a href=https://glvk.guru/>официальные сайты казино</a> казино вулкан рейтинг казино 1×bet официальный xbet букмекерская контора фонбет официальный 1×bet зеркало слоты 7k casino зеркало порно с Арина и Дина Аверины, гимнастки
#8333 Charlesgunny
Валентина Матвиенко порно pin casino зеркало <a href=https://specreporter.com/>porno Катерина Шпица</a> официальные сайты казино Набиуллина Эльвира Сахипзадовна порно <a href=https://rhymes-punches.com/>kometa casino</a> Ходнева Светлана Владимировна порно казино онлайн гта казино порно с Сергей Бобровский (хоккей) пин ап casino pin up top казино онлайн porno Андрей Рублев (теннис)
#8334 Charlesgunny
Фастова Елена Владимировна порно casino бездепозитный <a href=https://kompromat1.online/>казино рояль смотреть</a> up casino зеркало пина букмекерской конторы <a href=https://vestnik-jurnal.com/>Разуваева Ксения Денисовна порно</a> приложения букмекерских контор на андроид casino официальный зеркало 7k casino официальный сайт 1×bet на андроид бесплатно 1×bet casino включи казино какие казино
#8335 Charlesgunny
порно с Дронова Александра Викторовна смотреть фильм казино <a href=https://vestnik-jurnal.com/>как выиграть в казино</a> online casino официальный porno Игорь Акинфеев (футбол) <a href=https://res-publika.com>официальные букмекерские конторы</a> 1×bet официальный сайт online casino ев казино Чулпан Хаматова казино в россии Валентина Матвиенко порно porno Игорь Акинфеев (футбол)
#8336 Charlesgunny
казино онлайн бесплатно порно с Петр Ян (ММА) <a href=https://res-publika.com>порно с Дарья Касаткина (теннис)</a> бесплатное казино балтбет букмекерская контора <a href=https://rhymes-punches.com/>7k casino официальный сайт</a> букмекерская контора casino зеркало сегодня рабочее 1×bet сайт 1×bet xyz casino сегодня retro casino порно с Федор Чалов (футбол) vodka casino
#8337 Charlesgunny
porno Яна Троянова 7k casino зеркало на сегодня <a href=https://kompromat1.online/>1×bet зеркало слоты 1×bet xyz</a> рабочее казино casinos winning <a href=https://rhymes-punches.com/>порно с Федор Чалов (футбол)</a> скачать pin casino порно с Гатагова Ольга Анатольевна мобильные букмекерские конторы porno Дарья Мороз porno Юлия Пересильд casino игровой автомат рабочее казино
#8338 Charlesgunny
porno Мария Шарапова казино регистрации <a href=https://krtka.info/>1×bet телефон</a> скачиваемые казино порно с Дарья Касаткина (теннис) <a href=https://rucriminal.info/>официальные сайты казино</a> часы казино песня казино 1×bet официальный xbet up casino скачать карты казино порно с Матвей Сафонов (футбол) 7k casino зеркало
#8339 Charlesgunny
играющие казино онлайн Мухтиярова Елена Вячеславовна порно <a href=https://strelochnik.com/>букмекерская контора фонбет официальный</a> порно с Захарова Мария Владимировна bitz casino <a href=https://kompromat1.online/>порно с Константин Тюкавин (футбол)</a> скачать сайт букмекерской конторы pin up casino официальный retro casino гта казино порно с Юлия Ефимова, пловчиха porno Ангелина Гончаренко, хоккеистка 1×bet зеркало слоты 1×bet xyz
#8340 Charlesgunny
скачать 1×bet на андроид бесплатно casino автомат <a href=https://slon-ru.com/>порно с Зырянова Анастасия Владимировна</a> casino бездепозитный casino рабочее зеркало <a href=https://rucriminal.info/>1×bet слоты</a> порно с Елена Никитина, скелетонистка 1×bet скачать бесплатно ешь казино казино в россии порно с Анастасия Потапова, теннисистка казино casino зеркало сегодня рабочее
#8341 Charlesgunny
1×bet официальный 1×bet xyz букмекерская контора зенит <a href=https://slon-ru.com/>официальные букмекерские конторы скачать</a> порно с Георгий Джикия (футбол) где казино <a href=https://kompromat1.online/>казино смотреть</a> скачать сайт букмекерской конторы casino актуальное зеркало online casino 7k casino официальный сайт pin up casino buzz казино гта 5 porno Илона Маркова, хоккеистка
#8342 Charlesgunny
casino ru champion casino <a href=https://rucriminal.info/>casino рабочее зеркало</a> спорт букмекерская контора Чулпан Хаматова <a href=https://t.me/vchkogpu_ru>про казино</a> 1×bet зеркало рабочее xbet порно с Зырянова Анастасия Владимировна винлайн букмекерская контора официальный порно с Петр Ян (ММА) скачать 1×bet на андроид винлайн букмекерская контора Попова Анна Юрьевна порно
#8343 Charlesgunny
1×bet зеркало слоты casino com <a href=https://krtka.info/>1×bet зеркало xbet</a> порно с Антропова Валентина Викторовна порно с Захарова Мария Владимировна <a href=https://krtka.info/>1×bet зеркало рабочее</a> porno Катерина Шпица up casino официальный Скоробогатова Ольга Николаевна порно яндекс казино porno Мира Андреева (теннис) порно с Кирьянова Дарья Борисовна букмекерская контора ставки
#8344 Charlesgunny
скачиваемые казино up casino официальный <a href=https://rucriminal.info/>porno Юлия Пересильд</a> 1×bet скачать приложение porno Александра Степанова, фигуристка <a href=https://7club7.com/>казино проиграл</a> пин casino казино фильм смотреть онлайн сайте букмекерской конторы фонбет casino riobet порно с Бондаренко Анастасия Борисовна сайты казино пина casino
#8345 Charlesgunny
официальное казино вход 1×bet приложение <a href=https://vestnik-jurnal.com/>Нургалиева Эльвира Рамиловна порно</a> 1×bet официальный скачать porno Юлия Канакина <a href=https://res-publika.com>какие казино</a> пин casino пин casino Радченко Светлана Юрьевна порно Ирина Горбачева Хорова Наталья Александровна порно порно с Елена Никитина, скелетонистка скачиваемые казино
#8346 Stevenavamn
https://cenforce.icu/ Buy Cenforce 100mg Online
#8347 Charlesgunny
porno Виктория Баркова, легкоатлетка 1×bet сейчас <a href=https://rhymes-punches.com/>порно с Анна Щербакова, фигуристка</a> ставки на спорт букмекерские конторы Чулпан Хаматова <a href=https://rucriminal.info/>pin ап casino</a> casino регистрации букмекерская контора бетсити порно с Сергей Бобровский (хоккей) порно с Алина Загитова, фигуристка спорт букмекерская контора казино ставка букмекерская контора мостбет
#8348 Charlesgunny
казино казино сочи <a href=https://slon-ru.com/>суть казино</a> казино сочи Любимова Ольга Борисовна порно <a href=https://th-royalgclub.com/>казино смотреть</a> 1×bet официальный скачать лучшие онлайн казино porno Юлия Пересильд казино пин спорт букмекерская контора 1×bet зеркало слоты 1×bet xyz Скоробогатова Ольга Николаевна порно
#8349 Charlesgunny
1×bet зеркало на сегодня 1×bet xyz pin casino зеркало <a href=https://rumafia.news/>казино рублях</a> порно с Дронова Александра Викторовна букмекерские конторы бет <a href=https://slon-ru.com/>мелбет букмекерская контора</a> 7k casino официальный включи казино vodka casino 1×bet официальный скачать online casino официальный казино онлайн бесплатно ramenbet casino
#8350 Charlesgunny
казино без 1×bet зеркало <a href=https://specreporter.com/>Радченко Светлана Юрьевна порно</a> скачать 1×bet на андроид 1×bet скачать приложение на андроид <a href=https://krtka.info/>1win casino</a> казино гта 5 Юдаева Ксения Валентиновна порно casino андроид pinco casino Петрова Ольга Викторовна порно порно с Аделия Петросян (фигурное катание) Попова Анна Юрьевна порно
#8351 Charlesgunny
Юдаева Ксения Валентиновна порно 1×bet официальный xbet <a href=https://slon-ru.com/>сайт букмекерской конторы</a> Москалькова Татьяна Николаевна порно casino скачать <a href=https://res-publika.com>1×bet скачать бесплатно</a> рокс казино бывшие казино казино большая 1×bet официальный слоты симулятор казино леон букмекерская контора casino betting
#8352 Charlesgunny
7k casino сайт как выиграть в казино <a href=https://slon-ru.com/>Разуваева Ксения Денисовна порно</a> 1×bet xbet казино вулкан <a href=https://rumafia.news/>1×bet сейчас</a> букмекерскую контору пин порно с Евгения Медведева порно с Арина и Дина Аверины, гимнастки 1×bet зеркало рабочее на сегодня где казино гта казино скачать 1×bet на андроид
#8353 Charlesgunny
порно с Максим Глушенков (футбол) casino зеркало сайта <a href=https://7club7.com/>пинко casino</a> 1win casino официальные сайты казино <a href=https://kompromat1.online/>букмекерская контора фонбет официальный сайт</a> казино рояль букмекерские конторы в россии vavada casino макао казино Юдаева Ксения Валентиновна порно порно с Александр Головин (футбол) пин casino
#8354 Charlesgunny
пина букмекерской конторы casino скачать приложение <a href=https://th-royalgclub.com/>пин ап букмекерская контора</a> casino андроид ограбление казино <a href=https://kompromat1.online/>Елизавета Боярская</a> r7 casino спорт букмекерская контора casino андроид лучшие бесплатные онлайн казино включи казино casino автомат порно с Сергей Бобровский (хоккей)
#8355 Williammixhttps://vs-rp.com/
<a href=https://vs-rp.com/>Welcome to the GTA 5 Roleplay Experience!</a> Our GTA 5 RP network presents a vast open-world gameplay boosted with unique modified mods and mechanics features. Whether you’re a law-abiding enforcer or a aspiring crime mastermind, the opportunities in this world are infinite:
Establish Your Kingdom: Join crews, plan missions, or climb the criminal system to conquer the territory.
Become a Savior: Ensure order as a patrolman, fireman, or medic.
Design Your Story: Craft your lifestyle, from luxury vehicles and properties to your hero’s individual appearance and storylines.
Adventurous Quests: Take Part in high-stakes missions, spectacular competitions, and player-driven engagements to earn prizes and reputation.
Rule the Economy and Amass Wealth! At vs-rp.com, we deliver you the resources and options to gain massive in the in-game environment of GTA RP. From acquiring luxury items to gathering riches, the RP market is yours to dominate.
Build your fortune through: Player-Driven Quests: Succeed in jobs, exchanges, and jobs to acquire virtual money. Custom Ventures: Launch and grow your own enterprise, from auto shops to clubs. High-End Resources: Own top-tier rides, rare properties, and rare digital items.
Are you prepared to dominate Los Santos and grow into a virtual tycoon?
Reasons to Choose Us? Here’s why we’re the premier GTA 5 RP realm:
1. Frequent Patches and Competitions Stay above of the game with unique features, quests, and periodic opportunities. New elements are introduced frequently to ensure your journey fresh and exciting.
2. Massive Variety of Assets Explore a extensive catalog of in-game items, including: High-End Automobiles Top-Tier Estates Exclusive Items
3. Professional Help Whether you’re a veteran player or a new starter, our helpers is available to guide. We’ll guide you in launching, offer help, and make sure you excel in Los Santos.
#8356 Charlesgunny
как выиграть в казино casino скачать приложение <a href=https://krtka.info/>пин ап casino</a> 1×bet скачать приложение сайт 1×bet слоты <a href=https://res-publika.com>порно с Кирьянова Дарья Борисовна</a> porno Андрей Рублев (теннис) 7k casino зеркало на сегодня порно с Илья Осипов (киберспорт) казино вулкан порно с Петр Ян (ММА) сайт pin up casino порно с Ирина Сидоркова
#8357 KennethCrapehttps://adventuresinminecraft.com
Discover the Realm of Minecraft: Your Ultimate Persistence and Anarchy Exploration Welcome to your Gateway to the Exceptionally Engaging and Engaging Minecraft Connected Encounter. Whether you’re a Designer, Fighter, Traveler, or Schemer, our Platform Offers Boundless Chances to Enjoy Endurance and Freedom Environments in Ways you’ve Rarely seen Earlier.
Why Opt For Journeys in Minecraft? Our Server is Built to Deliver the Best Minecraft Experience, Integrating Specialized Environments, Thrilling Mechanics, and a Vibrant Group. Discover, Dominate, and Create your own Quests with Special Attributes Customized for All type of Gamer.
Main Highlights – Living and Freedom Modes: Encounter the Adrenaline of Persisting against the odds or Step into Uncontrolled PvP Engagements with no rules and full freedom. – Massive Realm Capacity: With Room for up to 3,750 Players, the Action never stops. – 24/7 Realm Availability: Access At All Times to Experience Uninterrupted, Consistent Interaction. – Unique Features: Explore our Expertly Designed Minecraft Environments Filled with Addons, Plugins, and Special Items from our Virtual Store.
Unique Playstyle Features
Persistence Option In Living Feature, you’ll Explore Wide Terrains, Gather Materials, and Build to your heart's content. Fight off Mobs, Partner with Partners, or Take on Single-Player Tasks where only the Resilient Overcome. Disorder Scenario For Gamers Seeking Chaos and Adrenaline, Chaos Scenario Offers a Universe with Total Freedom. Immerse in Competitive PvP Engagements, Establish Groups, or Dominate Opponents to Rule the Environment. Here, Survival of the Best is the Only Rule.
Unique Minecraft Elements – Exploration Zones: Discover Unique Minecraft Maps and Adventurous Quests. – Trading and Trading: Our Interactive Market Enables you to Exchange, Obtain, and Exchange Assets to Rise the Levels and Establish Your Identity as a Strong Competitor. – Minecraft Inventory: Explore Exclusive Goods, Levels, and Ranks that Improve your Experience.
Minecraft Shop: Enhance Your Interaction Our Interactive Store Delivers a Variety of Enhancements, Levels, and Assets to Match every Playstyle. From Cheap Gift Cases to High-Tier Ranks, you can Gain New Opportunities and Take your Journey to the Maximum.
Top Items – Donate Cases (x10) – €1.00 – VIP – €1.40 – Elysium Rank – €20.00 – OWNER Status – €40.00 – BOSS Tier – €60.00
Top Ranks for Best Gamers – CREATOR (€10.00) – Access Design Tools to Express your Imagination. – Vanguard (€12.00) – Exclusive Features and Exclusive Features. – Paragon (€59.10) – Elite Benefits for the Ultimate Gamer. – Luminescent (€50.00) – Excel as a Legendary Champion on the Network.
Join Our Supportive Minecraft Group We Strive in Creating a Encouraging, Dynamic, and Inclusive Community. Whether you’re Facing RPG Adventures, Exploring Specialized Terrains, or Competing in Interactive PvP, there’s Always something New to Enjoy.
Elements You Can Anticipate – Friendly Player Base: Meet Similar Minecraft Gamers from Globally. – Exciting Activities: Join in Thrilling Challenges, Contests, and Global Contests. – Dedicated Support: Our Team Delivers Smooth Interaction and Assists you with any Problems.
#8358 Charlesgunny
пин up casino пинап казино <a href=https://vestnik-jurnal.com/>рабочее казино</a> Фастова Елена Владимировна порно порно с Абрамченко Виктория Валериевна <a href=https://specreporter.com/>бесплатно играем казино</a> порно с Илюшникова Татьяна Александровна пин ап casino pin up top казино фильм porno Мария Шарапова порно с Юлия Ефимова, пловчиха 1×bet официальный скачать казино фильм смотреть онлайн
#8359 Charlesgunny
казино смотреть официальные сайты казино <a href=https://rucriminal.info/>Львова-Белова Мария Алексеевна порно</a> top casino 1×bet на андроид <a href=https://rhymes-punches.com/>casinos xyz</a> сайте букмекерской конторы фонбет реального казино Попова Анна Юрьевна порно букмекерская контора официальный сайт 1×bet 1хбет демо казино бывшие казино
#8360 Antoniocydayhttps://belayaistoriya.ru
Букмекерская контора Mostbet UZ <a href=https://belayaistoriya.ru/>https://belayaistoriya.ru</a> ставки на спорт, киберспорт и казино. Высокие коэффициенты, быстрые выплаты и удобный интерфейс для каждого игрока.
#8361 Charlesgunny
Ирина Горбачева porno Юлия Канакина <a href=https://krtka.info/>ев казино</a> 7k casino зеркало на сегодня casinos xyz <a href=https://glvk.guru/>пин casino</a> скачать букмекерскую контору казино пину porno Екатерина Ефременкова, шорт-трекистка 1×bet зеркало на сегодня 1×bet xyz Матвиенко Валентина Ивановна порно лучшие онлайн казино Александра Бортич
#8362 Charlesgunny
casino pin официальный 7k casino скачать <a href=https://t.me/vchkogpu_ru>порно с Петр Ян (ММА)</a> казино смотреть зеркала официальных сайтов казино <a href=https://specreporter.com/>самое казино</a> порно с Дарья Касаткина (теннис) казино онлайн винлайн букмекерская контора официальный сайт bitz casino гта казино винлайн букмекерская контора официальный сайт 7k casino сайт
#8363 Charlesgunny
up casino 1×bet телефон <a href=https://specreporter.com/>букмекерские конторы без депозита</a> 1×bet казино онлайн бесплатно <a href=https://7club7.com/>1×bet официальный сайт 1×bet xyz</a> casinos xyz casino онлайн Скворцова Вероника Игоревна порно порно с Евгений Малкин (хоккей) porno Марина Александрова скачать casino на андроид 1×bet зеркало рабочее на сегодня
#8364 Charlesgunny
порно с Илья Осипов (киберспорт) пин ап букмекерская контора <a href=https://vestnik-jurnal.com/>Манилова Алла Юрьевна порно</a> яндекс казино 1×bet официальный сайт <a href=https://glvk.guru/>casino официальный сайт</a> casino 7k рабочее мобильные букмекерские конторы порно с Юлия Ефимова, пловчиха 1×bet зеркало слоты 1×bet xyz порно с Илюшникова Татьяна Александровна 1×bet Окладникова Ирина Андреевна порно
#8365 Charlesgunny
Лут Оксана Николаевна порно порно с Дронова Александра Викторовна <a href=https://7club7.com/>1×bet бесплатно</a> Черкесова Бэлла Мухарбиевна порно включи казино <a href=https://rumafia.news/>1×bet бесплатно</a> casinos xyz букмекерская контора вход retro casino porno Елизавета Туктамышева порно с Анна Щербакова, фигуристка приложения букмекерских контор на андроид Разуваева Ксения Денисовна порно
#8366 Charlesgunny
ев казино Анна Михалкова <a href=https://specreporter.com/>бывшие казино</a> online casino 7k казино играть <a href=https://krtka.info/>1×bet зеркало</a> скачиваемые казино официальные букмекерские конторы скачать Скоробогатова Ольга Николаевна порно порно с Елена Никитина, скелетонистка промокод 1×bet Приезжева Екатерина Геннадьевна порно 1×bet xbet
#8367 Charlesgunny
Приезжева Екатерина Геннадьевна порно суть казино <a href=https://th-royalgclub.com/>1×bet зеркало xbet xyz</a> порно с Илья Осипов (киберспорт) vavada casino <a href=https://krtka.info/>1×bet зеркало рабочее xbet</a> слот casino casino бонус слоты казино up casino скачать casino зеркало сегодня 7k casino зеркало рабочее inform@rucriminal.info
#8368 Charlesgunny
сайт казино зеркало казино сочи <a href=https://t.me/vchkogpu_ru>почему казино</a> фильмы казино рояль порно с Ирина Сидоркова <a href=https://rhymes-punches.com/>casino игровой автомат</a> kent casino регистрация приложения букмекерских контор casino официальный сайт 1×bet вход porno Александр Соболев (футбол) casino промокод casino
#8369 Charlesgunny
казино 5 почему в казино нет часов <a href=https://t.me/vchkogpu_ru>1×bet официальный скачать</a> официальные букмекерские конторы пинко casino <a href=https://th-royalgclub.com/>бесплатное казино</a> Елизавета Боярская сайт 1×bet слоты Александра Бортич porno Анна Сидорова, керлингистка porno Юлия Пересильд порно с Аделия Петросян (фигурное катание) Любимова Ольга Борисовна порно
#8370 Charlesgunny
порно с Матвей Сафонов (футбол) Светлана Ходченкова <a href=https://kompromat1.online/>1×bet слоты</a> лучшие бесплатные онлайн казино официальные букмекерские конторы скачать <a href=https://rumafia.news/>порно с Алексей Миранчук (футбол)</a> porno Игорь Акинфеев (футбол) 1×bet рабочее казино фильм online casino фильмы казино рояль винлайн букмекерская контора официальный сайт букмекерские конторы бет
#8371 Charlesgunny
porno Алена Михайлова пина casino <a href=https://slon-ru.com/>лучшие онлайн казино</a> Яровая Ирина Анатольевна порно автомат казино <a href=https://rumafia.news/>Петрова Ольга Викторовна порно</a> 1×bet скачать приложение porno Юлия Пересильд kent casino регистрация 1×bet скачать бесплатно 1×bet слоты официальный сайт песня казино Ходнева Светлана Владимировна порно
#8372 DavidGerlYhttps://ikidz.ru
Выбирайте Mostbet UZ <a href=https://ikidz.ru/>https://ikidz.ru</a> спортивные ставки, азартные игры и киберспорт. Удобный сайт, лучшие коэффициенты и круглосуточная поддержка.
#8373 Charlesgunny
1×bet зеркало балтбет букмекерская контора <a href=https://rhymes-punches.com/>1×bet зеркало xbet</a> Ходнева Светлана Владимировна порно официальное казино вход <a href=https://res-publika.com>ставки на спорт букмекерские конторы</a> pin up casino зеркало пин ап casino pin up top казино большая 1×bet слоты 1×bet xyz про казино 1×bet официальный porno Нина Пирогова, хоккеистка
#8374 Jamesseilihttps://vashikrohi.ru
Делайте ставки с Mostbet UZ <a href=https://vashikrohi.ru/>https://vashikrohi.ru</a> широкая линия событий, выгодные акции и удобный интерфейс.
#8375 Charlesgunny
1×bet приложение casino ru <a href=https://specreporter.com/>Самойлова Алла Владимировна порно</a> порно с Александр Головин (футбол) casinos winning <a href=https://rucriminal.info/>Преподобная Надежда Александровна порно</a> 7k casino официальный сайт pin up casino пин casinos xyz бесплатно фильм казино 1win casino пин ап букмекерская контора человек казино
#8376 Charlesgunny
порно с Арина и Дина Аверины, гимнастки online casino <a href=https://glvk.guru/>casino x</a> казино смотреть porno Илья Ковальчук (хоккей) <a href=https://rhymes-punches.com/>кент казино</a> casino играть up букмекерская контора букмекерская контора скачать приложение 1×bet скачать бесплатно win win casino Любимова Ольга Борисовна порно порно с Евгений Малкин (хоккей)
#8377 Charlesgunny
порно с Евгения Медведева, фигуристка online casino 7k <a href=https://slon-ru.com/>казино 5</a> порно с Алина Загитова 1×bet телефон <a href=https://7club7.com/>казино рулетка</a> 1×bet слоты леон букмекерская контора Попова Анна Юрьевна порно официальная казино 7k casino зеркало pin up casino top top казино фильм смотреть онлайн
#8378 Charlesgunny
Ходнева Светлана Владимировна порно kent casino регистрация <a href=https://kompromat1.online/>1×bet рабочее</a> casino x ограбление казино <a href=https://rucriminal.info/>зеркала казино</a> казино смотреть онлайн бесплатно кент казино скачать 1×bet на андроид бесплатно казино рублях porno Алена Михайлова porno Мария Шарапова вавада казино
#8379 Charlesgunny
1×bet зеркало рабочее букмекерская контора <a href=https://th-royalgclub.com/>Попова Анна Юрьевна порно</a> порно с Голикова Татьяна Алексеевна porno Виктория Баркова, легкоатлетка <a href=https://strelochnik.com/>Окладникова Ирина Андреевна порно</a> pin casino зеркало порно с Владимир Минеев (ММА) porno Яна Троянова какие казино casino скачать приложение bitz casino букмекерскую контору пин
#8380 Charlesgunny
1×bet регистрация Крючкова Полина Викторовна порно <a href=https://specreporter.com/>про казино</a> порно с Федор Чалов (футбол) сайт казино вход <a href=https://vestnik-jurnal.com/>порно с Варвара Субботина</a> casino официальный зеркало 1×bet xbet xyz 1×bet слоты официальный сайт 7k casino зеркало рабочее порно с Евгения Медведева, фигуристка porno Юлия Канакина pin casino
#8381 Charlesgunny
пина casino Скворцова Вероника Игоревна порно <a href=https://strelochnik.com/>казино сочи</a> 7k casino официальный сайт Чулпан Хаматова <a href=https://krtka.info/>карты казино</a> Набиуллина Эльвира Сахипзадовна порно букмекерская контора бетсити Матвиенко Валентина Ивановна порно вывод казино фильмы казино рояль Приезжева Екатерина Геннадьевна порно porno Ангелина Гончаренко, хоккеистка
#8382 Charlesgunny
Елена Лядова пин casino <a href=https://specreporter.com/>казино фильм</a> pin up casino зеркало casino ru <a href=https://t.me/vchkogpu_ru>мелбет букмекерская контора</a> казино пину casino 7k рабочее пинап казино казино смотреть онлайн бесплатно porno Анна Сидорова, керлингистка яндекс казино casino вход
#8383 Charlesgunny
казино рояль смотреть casino x <a href=https://kompromat1.online/>porno Виктория Баркова, легкоатлетка</a> порно с Илья Осипов (киберспорт) casino бездепозитный <a href=https://rumafia.news/>porno Мария Шарапова</a> винлайн букмекерская контора официальный порно с Дронова Александра Викторовна 7k casino официальный сайт 1×bet официальный 1×bet xyz лучшие казино бесплатно букмекерская контора фонбет официальный промокод 1×bet
#8384 Charlesgunny
порно с Варвара Субботина cometa casino <a href=https://strelochnik.com/>казино смотреть онлайн бесплатно</a> Александра Бортич casino 7k сегодня <a href=https://rumafia.news/>casino рабочее зеркало</a> casinos xyz casino промокод казино на деньги казино гта 5 демо казино ставки на спорт букмекерские конторы Александра Бортич
#8385 Charlesgunny
1×bet телефон porno Юлия Канакина, скелетонистка <a href=https://rumafia.news/>1×bet на сегодня</a> леон букмекерская контора casino андроид <a href=https://7club7.com/>casino 7k рабочее</a> casino андроид пари букмекерская контора Приезжева Екатерина Геннадьевна порно казино большая казино рояль casinos winning 7k casino официальный
#8386 Charlesgunny
1×bet на андроид бесплатно casino ru <a href=https://rumafia.news/>букмекерская контора фонбет</a> фильмы казино рояль казино без <a href=https://res-publika.com>мелбет букмекерская контора</a> casino промокод скачать букмекерскую контору на андроид casino casino buzz Чулпан Хаматова Шевцова Татьяна Викторовна порно pinco casino
#8387 Charlesgunny
почему казино porno Мира Андреева (теннис) <a href=https://res-publika.com>казино зеркало сегодня</a> яндекс игры казино яндекс казино <a href=https://th-royalgclub.com/>лучшие бесплатные онлайн казино</a> 1×bet сейчас лучшие бесплатные онлайн казино казино на деньги kent casino Скворцова Вероника Игоревна порно букмекерская контора скачать приложение казино рояль
#8388 Charlesgunny
Юдаева Ксения Валентиновна порно casino играть <a href=https://krtka.info/>casino рабочее зеркало</a> 7k casino 7k casino <a href=https://th-royalgclub.com/>porno Мира Андреева (теннис)</a> порно с Петр Ян (ММА) ешь казино официальные сайты казино скачать 1×bet на андроид ramenbet casino 1×bet на андроид casino рабочее зеркало
#8389 Charlesgunny
pin up casino официальный pin up casino buzz <a href=https://t.me/vchkogpu_ru>7k casino бонус</a> играющие казино казино большая <a href=https://res-publika.com>про казино</a> бывшие казино казино фильм смотреть онлайн сколько казино зеркала казино лучшая казино порно с Илья Осипов (киберспорт) Окладникова Ирина Андреевна порно
#8390 Charlesgunny
самое казино казино вход <a href=https://rhymes-punches.com/>порно с Арина и Дина Аверины, гимнастки</a> pin up casino скачать Семёнова Татьяна Владимировна порно <a href=https://t.me/vchkogpu_ru>1×bet скачать приложение</a> почему в казино нет окон порно с Зырянова Анастасия Владимировна рабочие зеркала казино порно с Алексей Миранчук (футбол) porno Юлия Канакина, скелетонистка порно с Елена Никитина, скелетонистка порно с Евгения Медведева
#8391 Charlesgunny
водка казино up casino <a href=https://t.me/vchkogpu_ru>букмекерская контора официальный сайт скачать</a> 7k casino зеркало сайт винлайн букмекерская контора <a href=https://res-publika.com>1×bet зеркало на сегодня</a> сайт 1×bet слоты казино смотреть онлайн бесплатно порно с Константин Тюкавин (футбол) сколько казино казино 1 скачать 1×bet на андроид 1go casino
#8392 Charlesgunny
букмекерская контора бетсити букмекерская контора <a href=https://strelochnik.com/>casino pin официальный</a> почему в казино не бывает настенных часов почему в казино не бывает настенных часов <a href=https://strelochnik.com/>cat casino</a> black russia казино pin up casino buzz Самойлова Алла Владимировна порно Кузнецова Анна Юрьевна порно казино без 7k casino сколько казино
#8393 Charlesgunny
мобильные букмекерские конторы 1×bet рабочее на сегодня <a href=https://rumafia.news/>казино вход</a> казино вход порно с Зырянова Анастасия Владимировна <a href=https://t.me/vchkogpu_ru>букмекерская контора</a> pin up casino пин ап слоты казино casino на телефон сайт винлайн букмекерская контора леон букмекерская контора casino pin официальный casino промокод
#8394 legzoCasinohttps://legzo-casino-apk.ru
<a href=https://legzo-casino-apk.ru>www.legzo-casino-apk.ru</a>
Скачать последнюю версию приложения онлайн казино Легзо – побеждай сегодня! <a href=https://legzo-casino-apk.ru>http://www.legzo-casino-apk.ru</a>
#8395 Charlesgunny
Ходнева Светлана Владимировна порно рейтинг казино <a href=https://rhymes-punches.com/>реального казино</a> porno Виктория Баркова, легкоатлетка Черкесова Бэлла Мухарбиевна порно <a href=https://glvk.guru/>vavada casino</a> porno Юлия Пересильд ап казино 1×bet скачать приложение gama casino 1win casino порно с Юлия Ефимова пин ап казино
#8396 Charlesgunny
porno Дарья Мороз bet casino <a href=https://rhymes-punches.com/>винлайн букмекерская контора официальный сайт</a> cometa casino карты казино <a href=https://vestnik-jurnal.com/>porno Ангелина Гончаренко, хоккеистка</a> porno Мария Шарапова мелбет букмекерская контора 1×bet 1хбет cometa casino porno Дарья Клишина 1×bet регистрация pin casino зеркало
#8397 Charlesgunny
казино регистрации букмекерская контора фонбет официальный <a href=https://kompromat1.online/>леон букмекерская контора</a> vavada casino порно с Захарова Мария Владимировна <a href=https://res-publika.com>сайт pin up casino</a> порно с Аделия Петросян (фигурное катание) Манилова Алла Юрьевна порно casino 7k рабочее вывод казино 1×bet 1хбет порно с Захарова Мария Владимировна 1×bet 1хбет
#8398 Charlesgunny
casino daddy casino игровой автомат <a href=https://t.me/vchkogpu_ru>автомат казино</a> яндекс казино порно с Бондаренко Анастасия Борисовна <a href=https://7club7.com/>сайт pin up casino</a> пин ап casino pin porno Мария Шарапова 1×slots casino 1×bet casino казино рублях Разуваева Ксения Денисовна порно порно с Никита Кучеров (хоккей)
#8399 Звоните!https://ooorefin.ru/#rec778070975
Поможем быстро оформить микрозайм наличными на любые цели. Без справок и поручителей, с возможностью досрочного погашения Заявку оставляйте на сайте https://ooorefin.ru/#… или звоните +74956643022, мы всегда рады вас услышать!
АНТИСПАМ MAIL.RU пометило это письмо опасным!
В России спам-рассылку писем запрещает Кодекс РФ об административных правонарушениях (статья 14.3.) и Федеральный закон РФ «О рекламе» (статья 18, п. 1). Жалобы на спам подают в Управление Федеральной антимонопольной службы (УФАС) и в Роскомнадзор (https://rkn.gov.ru/…sk-question/).
#8400 Charlesgunny
vodka casino 1×bet вход <a href=https://rucriminal.info/>porno Мария Шарапова</a> порно с Зырянова Анастасия Владимировна букмекерские конторы бет <a href=https://rucriminal.info/>скачать сайт букмекерской конторы</a> porno Нина Пирогова, хоккеистка порно с Константин Тюкавин (футбол) Нургалиева Эльвира Рамиловна порно зеркала казино приложения букмекерских контор kent casino порно с Александр Головин (футбол)
#8401 Danielquornhttps://www.metal-archives.com/users/vitalik1957
“You get some of me but not tomorrow as they want me in as soon as I can make it happen. This is the one time when they say jump and I ask how high due the financial gains the company could benefit from and it being important enough for the client to appear in person.”
“Well I get an extra night of you at least! I wonder what we could do with that? Meantime, what about food? I am starving and delicious as it was a second breakfast is not quite enough to replenish me!”
“Well get something on and we’ll sort that out first.”
We drove into town and decided that a daytime visit to Charlie’s was going to be the answer. I parked in the bar lot and Elise dashed in to change into something more appropriate, jeans and a t-shirt along with her biker jacket but keeping her Converses on.
Walking down to the restaurant was different from the middle of the night visits as the streets were bustling and all of the shops and outlets were open.
Reaching Charlie’s we entered the front door and sat in a booth near the window. A beautiful young American Chinese girl came,smiled and said hello to Elise and gave us menus and asked if we wanted drinks in the meantime.
„No thanks Lin just a pot of Jasmine tea for us please.“ Lin went back to the kitchen area. “No booze for me today as I will have to work in the bar so it is just tea for me.”
Not in a drinking mood either, I agreed with her."
https://chyoa.com/…/nikotol1960 https://lexa52rus1986.diary.ru/ https://rentry.org/9n43t5wg https://www.metal-archives.com/…ebee19871966 https://permacultureglobal.org/…nnis-swanson
#8402 Charlesgunny
фильмы казино рояль порно с Евгения Медведева <a href=https://rhymes-punches.com/>porno Андрей Рублев (теннис)</a> леон букмекерская контора porno Елизавета Туктамышева <a href=https://slon-ru.com/>up casino скачать</a> порно с Афонина Марина Игоревна inform@rucriminal.info яндекс казино пин ап casino pin up top porno Дарья Клишина 1×slots casino casino автомат
#8403 Charlesgunny
казино смотреть онлайн 7k casino сайт <a href=https://7club7.com/>сайт винлайн букмекерская контора</a> порно с Абрамченко Виктория Валериевна 1×bet скачать бесплатно <a href=https://slon-ru.com/>почему казино</a> ограбление казино porno Елизавета Туктамышева официальное казино вход букмекерские конторы в россии Набиуллина Эльвира Сахипзадовна порно pin up casino top top официальные букмекерские конторы скачать
#8404 Charlesgunny
бесплатно играем казино порно с Алексей Миранчук (футбол) <a href=https://slon-ru.com/>пин ап casino</a> рабочее казино 7k casino официальный <a href=https://slon-ru.com/>casino зеркало сайта</a> retro casino 1×bet зеркало рабочее на сегодня 1×bet xyz online casino 7k pin up букмекерская контора демо казино официальная казино букмекерскую контору пин
#8405 Bradleyaccut
https://kamagra.men/ sildenafil oral jelly 100mg kamagra
#8406 Charlesgunny
porno Дарья Клишина лучшие казино бесплатно <a href=https://vestnik-jurnal.com/>кент casino</a> казино на деньги 1×bet официальный xbet <a href=https://vestnik-jurnal.com/>автомат казино</a> Ходнева Светлана Владимировна порно 1×bet вход porno Дарья Мороз porno Алена Косторная (фигурное катание) 1×bet на сегодня гта казино Петрова Ольга Викторовна порно
#8407 Charlesgunny
pinco casino порно с Владимир Минеев (ММА) <a href=https://specreporter.com/>букмекерская контора вход</a> казино рублях скачиваемые казино <a href=https://res-publika.com>casino daddy</a> 7k casino официальный сайт порно с Арина и Дина Аверины, гимнастки casino рабочее зеркало pin casino порно с Карен Хачанов (теннис) букмекерская контора ставки casino актуальное зеркало
#8408 Charlesgunny
букмекерские контора ап casinos xyz <a href=https://rhymes-punches.com/>casino 7k рабочее</a> казино можно casino betting <a href=https://glvk.guru/>песня казино</a> 1×bet официальный сайт 1×bet xyz вавада казино гта онлайн казино 1go casino бывшие казино яндекс казино kometa casino
#8409 Charlesgunny
top casino букмекерская контора мостбет <a href=https://7club7.com/>casinos xyz</a> казино большая бесплатное казино <a href=https://rumafia.news/>casino автомат</a> человек казино казино онлайн casinos winning Черкесова Бэлла Мухарбиевна порно приложения букмекерских контор top casino бесплатные букмекерские конторы
#8410 Charlesgunny
pin up casino скачать porno Дарья Клишина <a href=https://strelochnik.com/>vodka casino</a> 1×bet слоты 1×bet xyz лучшие онлайн казино <a href=https://glvk.guru/>7k casino официальный</a> 1×bet скачать приложение на андроид casino промокод порно с Анна Щербакова, фигуристка porno Юлия Пересильд 1×bet casino porno Анастасия Янькова, боксерка вавада казино
#8411 Charlesgunny
скачать 1×bet 1×bet xyz ап казино <a href=https://kompromat1.online/>букмекерская контора на андроид</a> up букмекерская контора букмекерская контора официальный сайт скачать <a href=https://vestnik-jurnal.com/>cat casino</a> букмекерская контора вход Любимова Ольга Борисовна порно Крючкова Полина Викторовна порно casino рабочее приложения букмекерских контор black russia казино 1×bet зеркало слоты
#8412 HarryMughttps://pochkidp.ru
Болезни почек <a href=https://pochkidp.ru/>https://pochkidp.ru</a> виды заболеваний, симптомы, диагностика, лечение и профилактика. Лечение и диагностика нефрологических заболеваний.
#8413 Charlesgunny
Черкесова Бэлла Мухарбиевна порно казино онлайн <a href=https://slon-ru.com/>балтбет букмекерская контора</a> букмекерская контора без online casino 7k <a href=https://kompromat1.online/>up casino скачать</a> vodka casino гта онлайн казино up букмекерская контора porno Мира Андреева (теннис) казино гта 5 карты казино пин ап casino pin
#8414 Charlesgunny
7k casino бонус фреш казино <a href=https://krtka.info/>Лут Оксана Николаевна порно</a> 1×bet зеркало рабочее букмекерские конторы pin <a href=https://rhymes-punches.com/>гама казино</a> официальные букмекерские конторы pinco casino Преподобная Надежда Александровна порно лучшие бесплатные онлайн казино casino x порно с Захарова Мария Владимировна порно с Евгения Медведева
#8415 Charlesgunny
1×bet на андроид бесплатно играющие казино онлайн <a href=https://slon-ru.com/>пари букмекерская контора</a> букмекерские конторы без депозита скачать 1×bet 1×bet xyz <a href=https://kompromat1.online/>casino зеркало сегодня</a> pin up casino пин мобильные букмекерские конторы казино вулкан ограбление казино скачать casino на андроид порно с Илья Осипов (киберспорт) porno Марина Александрова
#8416 Charlesgunny
казино Приезжева Екатерина Геннадьевна порно <a href=https://vestnik-jurnal.com/>промокод 1×bet</a> Чулпан Хаматова 1×bet зеркало рабочее <a href=https://rumafia.news/>казино онлайн бесплатно</a> 1×bet телефон пин ап casino pin порно с Голикова Татьяна Алексеевна букмекерские конторы бет 1×bet зеркало слоты Любимова Ольга Борисовна порно ограбление казино
#8417 Charlesgunny
казино сочи порно с Дронова Александра Викторовна <a href=https://7club7.com/>лучшие онлайн казино</a> 1×bet зеркало слоты 1×bet xyz Приезжева Екатерина Геннадьевна порно <a href=https://krtka.info/>вывод казино</a> казино рояль смотреть pin up букмекерская контора приложения букмекерских контор на андроид Радченко Светлана Юрьевна порно casino рабочее ставки на спорт букмекерские конторы бесплатное казино
#8418 Charlesgunny
сайт 1×bet слоты black russia казино <a href=https://th-royalgclub.com/>black russia казино</a> балтбет букмекерская контора Львова-Белова Мария Алексеевна порно <a href=https://rumafia.news/>лучшие бесплатные онлайн казино</a> Елена Лядова ап казино почему в казино нет часов играющие казино онлайн casino вход казино проиграл как выиграть в казино
#8419 Charlesgunny
Радченко Светлана Юрьевна порно casino сайты <a href=https://kompromat1.online/>porno Елизавета Туктамышева</a> лучшие бесплатные онлайн казино букмекерские конторы бет <a href=https://rucriminal.info/>casino рабочее</a> Чулпан Хаматова букмекерская контора на андроид casino скачать порно с Диана Шнайдер (теннис) ешь казино bet casino casino вход
#8420 Charlesgunny
фильмы казино рояль порно с Константин Тюкавин (футбол) <a href=https://res-publika.com>смотреть фильм казино</a> Попова Анна Юрьевна порно 1win букмекерская контора <a href=https://krtka.info/>1×bet официальный xbet</a> online casino 7k casino x 1×bet официальный 1×bet xyz 1×bet зеркало xbet xyz 1×bet xbet xyz гама казино сайт 1×bet слоты
#8421 Charlesgunny
porno Андрей Рублев (теннис) букмекерская контора фонбет <a href=https://kompromat1.online/>пин ап букмекерская контора</a> Ирина Горбачева скачать букмекерскую контору <a href=https://specreporter.com/>7k casino сайт</a> top casino Крючкова Полина Викторовна порно porno Мира Андреева (теннис) Мухтиярова Елена Вячеславовна порно казино ли 1×bet на андроид бесплатно самое казино
#8422 Charlesgunny
Елена Лядова 1×bet сейчас <a href=https://res-publika.com>1×bet на андроид</a> porno Илья Ковальчук (хоккей) букмекерская контора бетсити <a href=https://krtka.info/>top casino</a> casino buzz почему в казино нет окон porno Вера Бирюкова, гимнастка Нургалиева Эльвира Рамиловна порно порно с Петр Ян (ММА) бесплатные букмекерские конторы порно с Алина Загитова
#8423 Charlesgunny
1×bet на андроид бесплатно симулятор казино <a href=https://t.me/vchkogpu_ru>ограбление казино</a> 1×bet официальный слоты казино в россии <a href=https://kompromat1.online/>1×bet официальный xbet</a> казино в россии 1×bet зеркало porno Юлия Пересильд порно с Алина Загитова, фигуристка мелбет букмекерская контора симулятор казино игры казино
#8424 Charlesgunny
казино онлайн бесплатно порно с Евгения Медведева <a href=https://specreporter.com/>up casino официальный</a> 1×bet скачать приложение на андроид самое казино <a href=https://slon-ru.com/>win win casino</a> казино рулетка часы казино casino игровой автомат скачиваемые казино порно с Анастасия Потапова, теннисистка букмекерская контора леонов винлайн букмекерская контора официальный сайт
#8425 Charlesgunny
Кузнецова Анна Юрьевна порно реального казино <a href=https://rumafia.news/>почему в казино не бывает настенных часов</a> букмекерская контора леонов букмекерские конторы без депозита <a href=https://vestnik-jurnal.com/>порно с Каролина Севастьянова</a> казино пину сайт казино зеркало 1×bet официальный слоты Кузнецова Анна Юрьевна порно казино 1 casino зеркало сайта порно с Максим Глушенков (футбол)
#8426 Charlesgunny
самое казино casino betting <a href=https://res-publika.com>порно с Виктория Синицина, фигуристка</a> casino online зеркало Скоробогатова Ольга Николаевна порно <a href=https://rucriminal.info/>леон букмекерская контора</a> Радченко Светлана Юрьевна порно 1×bet официальный 1×bet xyz 1×bet 1хбет porno Анна Сидорова, керлингистка скачать сайт букмекерской конторы 1×bet рабочее на сегодня официальное казино вход
#8427 Charlesgunny
промокод 1×bet порно с Варвара Субботина <a href=https://kompromat1.online/>casino ru</a> porno Александра Степанова, фигуристка бесплатное казино <a href=https://krtka.info/>1×bet слоты 1×bet xyz</a> казино в россии up casino зеркало казино смотреть онлайн фреш казино пари букмекерская контора сайты казино 1×bet сайт
#8428 Charlesgunny
скачиваемые казино porno Яна Троянова <a href=https://vestnik-jurnal.com/>1×bet зеркало на сегодня 1×bet xyz</a> up casino официальный демо казино <a href=https://kompromat1.online/>casino</a> casino ru порно с Васильева Татьяна Викторовна лучшие букмекерские конторы букмекерская контора бесплатно скачать букмекерскую контору пин pin up casino официальный пин ап casino pin up top
#8429 Charlesgunny
1×bet 1хбет 1×bet зеркало на сегодня <a href=https://kompromat1.online/>1×bet xbet xyz</a> порно с Зырянова Анастасия Владимировна 1×bet сейчас <a href=https://specreporter.com/>казино рулетка</a> Елизавета Боярская 1×bet официальный слоты лучшие бесплатные онлайн казино скачать pin casino 7k casino ramenbet casino 1×bet зеркало на сегодня
#8430 Charlesgunny
порно с Захарова Мария Владимировна часы казино <a href=https://rucriminal.info/>казино онлайн</a> pin up casino официальный 1×bet официальный xbet <a href=https://rucriminal.info/>up букмекерская контора</a> букмекерская контора на андроид песня казино букмекерские конторы pin букмекерская контора леонов букмекерская контора бетсити казино вход porno Дарья Мороз
#8431 Stevenavamn
http://drugs1st.pro/ over the counter ed treatment
#8432 Charlesgunny
casino 7k сегодня казино пину <a href=https://specreporter.com/>букмекерская контора ставки</a> 7k casino скачать официальные букмекерские конторы скачать <a href=https://slon-ru.com/>сайте букмекерской конторы фонбет</a> 7k casino бонус Мухтиярова Елена Вячеславовна порно new casino casino промокод porno Яна Троянова лучшие онлайн казино скачать pin casino
#8433 Charlesgunny
porno Александра Степанова, фигуристка пина букмекерской конторы <a href=https://res-publika.com>ограбление казино</a> сайт винлайн букмекерская контора где казино <a href=https://res-publika.com>1×bet официальный скачать</a> Комарова Наталья Владимировна порно 1×bet слоты порно с Матвей Сафонов (футбол) pin up букмекерская контора леон букмекерская контора 1×bet слоты 1×bet top 1×bet зеркало слоты 1×bet xyz
#8434 Charlesgunny
порно с Кирьянова Дарья Борисовна cometa casino <a href=https://specreporter.com/>1×bet бесплатно</a> Комарова Наталья Владимировна порно букмекерская контора <a href=https://7club7.com/>порно с Илья Осипов (киберспорт)</a> казино онлайн бесплатно порно с Антропова Валентина Викторовна официальные сайты казино карты казино казино на деньги up casino зеркало 1×bet зеркало на сегодня
#8435 Charlesgunny
cometa casino Яровая Ирина Анатольевна порно <a href=https://7club7.com/>казино большая</a> 1×bet рабочее на сегодня скачать букмекерскую контору на андроид <a href=https://specreporter.com/>kometa casino</a> 7k casino официальный 1×bet официальный скачать Матвиенко Валентина Ивановна порно букмекерские контора ап online casino 7k винлайн букмекерская контора рабочие зеркала казино
#8436 Charlesgunny
казино без сайт букмекерской конторы <a href=https://kompromat1.online/>casinos winning</a> карты казино Светлана Ходченкова <a href=https://krtka.info/>porno Елизавета Туктамышева</a> 1×bet рабочее porno Дарья Клишина kent casino букмекерская контора леонов порно с Константин Тюкавин (футбол) vavada casino 1×bet зеркало
#8437 Charlesgunny
порно с Зырянова Анастасия Владимировна porno Марина Александрова <a href=https://rumafia.news/>casino сайты</a> кент casino песня казино <a href=https://krtka.info/>казино рояль</a> сайт 1×bet слоты казино онлайн Хорова Наталья Александровна порно Любимова Ольга Борисовна порно мобильные букмекерские конторы рейтинг казино букмекерская контора фонбет
#8438 Bradleyaccut
http://semaglutidetablets.store/ semaglutide best price
#8439 Charlesgunny
казино играть pin up casino пин ап <a href=https://krtka.info/>пин casino</a> казино смотреть онлайн бк букмекерская контора <a href=https://res-publika.com>1×bet зеркало рабочее</a> porno Дарья Мороз new casino скачиваемые казино казино рояль 7k casino скачать порно с Афонина Марина Игоревна порно с Георгий Джикия (футбол)
#8440 Charlesgunny
1×bet бесплатно casino com <a href=https://rumafia.news/>casino сайты</a> 7k casino официальный как выиграть в казино <a href=https://rhymes-punches.com/>лучшие онлайн казино</a> букмекерская контора фонбет официальный сайт сайт 1×bet слоты винлайн букмекерская контора официальный сайт казино смотреть онлайн бесплатно букмекерская контора на андроид сайт букмекерской конторы рабочее казино
#8441 Charlesgunny
1×bet casino porno Юлия Пересильд <a href=https://rhymes-punches.com/>porno Илья Ковальчук (хоккей)</a> 1×bet официальный слоты казино ставка <a href=https://7club7.com/>букмекерская контора официальный сайт</a> казино фильм casino 7k рабочее casino x Любимова Ольга Борисовна порно казино онлайн бесплатно слот casino 1×bet официальный скачать
#8442 Charlesgunny
яндекс игры казино up casino официальный <a href=https://glvk.guru/>гта онлайн казино</a> букмекерская контора без Валентина Матвиенко порно <a href=https://glvk.guru/>букмекерская контора бетсити</a> бесплатно играем казино casino играть inform@rucriminal.info казино регистрации porno Мария Шарапова пин ап casino pin up top 1×bet официальный скачать
#8443 Charlesgunny
казино пину casino вход <a href=https://7club7.com/>casino 7k сегодня</a> Попова Анна Юрьевна порно 1×bet слоты 1×bet xyz <a href=https://glvk.guru/>леон букмекерская контора</a> Приезжева Екатерина Геннадьевна порно online casino леон букмекерская контора casino daddy pin up casino buzz casino 1×bet зеркало рабочее xbet
#8444 Charlesgunny
бесплатно фильм казино букмекерские конторы без депозита <a href=https://rhymes-punches.com/>porno Алена Михайлова</a> порно с Илюшникова Татьяна Александровна порно с Анна Щербакова, фигуристка <a href=https://kompromat1.online/>казино регистрации</a> фильмы казино рояль online casino 1×bet зеркало слоты pin up casino Елена Лядова балтбет букмекерская контора 1×bet на сегодня
#8445 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия
Также существуют онлайн-платформы азартных игр, коие применяют раздачу бездепозитных бонусов в особые даты (как для казино, так и для игрока). Помимо этого, действующие игроки кроме имеют возможность получить схожие призы за свою деятельность (к примеру, за повышения уровня или за схожие достижения). <a href=http://filmkachat.ru/>1хслотс 1хслотс регистрация перейти на 1×slots</a> Возможность протестировать свежие забавы, не рискуя собственными средствами и разработать личную стратегию забавы.Даже не выиграв крупную необходимую, игрок увлекательно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-либо денежных рисков. Быть в курсе лучших акций легко. Достаточно регулярно учить список новых онлайн казино с выводом бонуса без депо в этом разделе. <a href=http://webanketa.com/forms/6gt3ac1k60qpas9r75jp6shs/>http://webanketa.com/forms/6gt3ac1k60qpas9r75jp6shs/</a> Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Срок отыгрыша — это период, кот-ый начинается в момент активации приза и завершается с его закрытием. Пользователю необходимо уложиться в этот временной промежуток, по призовые средства аннулируются. Казино устанавливают перечень игр, ставки каких засчитываются при расчете отыгранных средств. Если тайтл не заходит в данный перечень, то ему быть недоступен для загрузки период деяния бонусного предложения. 1×slots зеркало которую указывали при регистрации кстати <a href=https://trade-britanica.trade/wiki/1×slots_%D0%9E%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9_%D0%A1%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C>https://trade-britanica.trade/wiki/1×slots_%D0%9E%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9_%D0%A1%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C</a> Чем ниже значение вейджера, тем проще отыграть и исключить приз. Если Вы расчитываете заработать на бездепе, но просто ознакомиться с свежим игровым клубом, то стоит избегать бонусов с высоким вейджером их практически не реально отыграть. С ними Вы сможете только протестировать забавы заведения.
1×slots casino регистрация на сайте
<a href=http://portal.westcoastbible.org/discussion/viewtopic.php?f=18&t=1933025>1×slots промокод при регистрации 2025</a> 1×slots казино зеркало Обыкновенные бездепозитные бонусы в объеме от 3-х до двадцати долларов сделаны чтобы, чтобы, чтобы в игры заходили все свежие и свежие игроки. Здесь, всего, несомненно ограничение на наибольший выигрыш. Важно, дабы перед наименьшим вкладом был отключен приз за 1-ое пополнение счета, и геймер не попадет на повторный вейджер. <a href=https://forum.lazarev.ru/memberlist.php?mode=viewprofile&u=158120>https://forum.lazarev.ru/memberlist.php?mode=viewprofile&u=158120</a> 1×slots казино мобильная версия Наиболее известные вознаграждения между гэмблеров – бездепозитные бонусы казино. Это не изумительно, как возможно получить благотворительные вращения или виртуальные кредиты, и всем не придётся пополнять счёт, рисковать личностными деньгами. Удастся насладиться разнообразными весельями и даже выиграть солидную необходимую, избегая серьёзного риска.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро или 20 $. Если выдаются фриспины, их количество редко выше нескольких 10-ов бесплатных вращений.
1хслотс официальный сайт зеркало
Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных обстановок с казино, когда после отыгрыша бездепа для не дадут вывести солидную необходимую выигрыша. Призовые начисления без депозита шансы предоставляться для участия в турнирах интернет казино. Потратить перечисленные деньги можно необыкновенно в данной промоакции. Условия их проведения в ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, превосходнее изучить его управляла.Прибывшие на акк финансы бездепозитные призы предназначаются, в основном, только для свежеиспеченных пользователей, коие ранее не имели собственного аккаунта в данном казино. Исходя из этого, в раньше у игрока был изготовлен депозит, то, по всей вероятности, у него больше не несомненно возможности рассчитывать на получение такового приза в конкретном заведении. <a href=http://rabotalnr.ru/users/dispensableinju>http://rabotalnr.ru/users/dispensableinju</a> Также бездепозитные призы могут служить методом возвратить к ирге посетителей, что приостановивших своё сотрудничество с фирмой: извещение о бездепе поступает на мобильный телефонный либо почту. 1×slots бонус за регистрацию
1×slots акции
В онлайне очень большое скриптовых вебсайтов, которые принадлежат плутам. Их главная задача – заинтересовать гэмблеров, пообещав не только щедрые подарки, хотя и крупные выигрыши. Так собственно некоторые сайты предлагают получить за регистрацию и $1 000.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро или 20 долларов. Если выдаются фриспины, их количество редко превышает нескольких 10-ов безвозмездных вращений. Индивидуальные поощрения выдаются за совершение действий: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавления либо официального клиента для ПК. В большинстве казино действуют программы лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий уровень часто с выдачей бездепа.А ознакомиться с свежими интернет казино, Вы можете помощью призов с выводом выгоды, которые Вы сможете получить без депозита. Но не стоит думать, что снабжая юзеров этими призами, казино увлекается спонсированием. Ведь объемы вознаграждений, главном, не большие (средним объемом от 5 до 20 долларов). И на эти средства налагаются конкретные условия и лимитирования, неотклонимые к исполненью игрока, случае в последствии он желает получить все средства выигранные финансы.В большинстве заведений сделать это можно по e-mal, по номеру аппарата, спустя социальную сеть или гугл-аккаунт. 1×slots акции <a href=http://w92248uq.bget.ru/user/JeffreyPax/>http://w92248uq.bget.ru/user/JeffreyPax/</a> Чаще всего казино приз за регистрацию без депо даёт возможность запустить каждой автомат. Но чем пристально ознакомиться с условиями. Иногда для игры доступны только определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, лучше начать знакомство с миром пыла именно с «одноруких злодеев».Онлайн гемблинг развивается с любым днем больше и больше, новые бренды создаются не по денькам а по часам. Новые интернет казино проделывают вступительные промоакции для игроков, для того что бы зарекомендовать себя, и тем наиболее предлагают бездепозитные бонусы за регистрацию, собственно бы не пропустить эту вероятность — как воспользоваться новым бездепом, советуем навещать наш вебсайт как можно чаще, самое смачное и свежие будет добавляться в этом же перечне.
1×slots зеркало этих способов предполагает регистрацию
Бездепозитный бонус за регистрацию в казино — это стартовый презент повторяющий денежного начисления либо даровых вращений для новых игроков заведения, для получения которого надо заносить депозит. Также бездепозитные призы имеют служить методом возвращать к ирге клиентов, что приостановивших своё сотрудничество с компанией: уведомление о бездепе поступает на мобильный аппарат либо почту. <a href=https://www.theexeterdaily.co.uk/users/ralphinimi>https://www.theexeterdaily.co.uk/users/ralphinimi</a> При отыгрыше бонусных средств, необходимо учесть срок деянья бонуса и время, которое дается на отыгрыш. По истечению заявленного времени, не отыгранный приз несомненно аннулирован. 1 хслот регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://portugal-campings.com/pt/profile/jamescip/>1хслотс зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В большинстве заведений устроить это можно по e-mal, по номеру телефонного, через социальную сеть или гугл-аккаунт.
#8446 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8447 RichardLewlyhttps://ru.pinterest.com/id1668586018/
Существуют определенные товары <a href=https://ru.pinterest.com/id1668586018/>https://ru.pinterest.com/id1668586018/</a> и категории товаров, которые подлежат обязательной сертификации. Остальные могут пройти процедуру добровольно. Нет необходимости в оформлении документа.
#8448 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
Для получения депозитного бонуса нужно пополнить собственный игровой баланс реальными средствами. Вознаграждение возможно получить либо при внесении первого депо, или вид фиксированного процента от внесённых средств. Так или другому, бонус поступит на счёт только в пополнения. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> Если вы бывалый игрок, вы должны знать, что приз без депозита – редчайшая находка. Тем не, мы в изучаем онлайн, чтобы отыскать вам наихорошие бездепозитные предложения.Следует подчеркнуть, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом. <a href=https://www.indiegogo.com/individuals/38144440>https://www.indiegogo.com/individuals/38144440</a> Размер приза. В качестве бездепов обычно начисляют небольшие суммы, а когда идет о бонусах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то кое-какие казино все подарить игроку до 2000$.Зачастую бездепозитные бонусы казино для забавы предлагаются разными заведениями азартных игр в качестве маркетинговых промоакций либо в целях привлечения к для свежих игроков. Для бездепозитных призов в казино 2022 игроку надо пополнять счет до момента вывода желаемых средств. x1 slots 1хслотс регистрация перейти на 1×slots <a href=http://elektrofahrrad-tests.de/forums/member.php?action=profile&uid=42806>http://elektrofahrrad-tests.de/forums/member.php?action=profile&uid=42806</a> Фриспины без депозита либо вспомогательные средства посодействуют ближе познакомиться с игровой платформой и её функциями. За счёт подарков возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за игры напротив живых крупье.
1х слот регистрация в 1×slots casino
<a href=https://melhorlance.com.br/minha-conta/>1хслот зеркало сайта</a> 1×slots зеркало на сегодня В большинстве заведений сделать это можно по адресу электронной почты, по номеру телефона, спустя социальную сеть либо гугл-аккаунт. <a href=http://proect.org/user/CraigBop/>http://proect.org/user/CraigBop/</a> 1хслотс регистрация в 1×slots casino Фриспины – благотворительные вращения с фиксированной ставкой, которые можно использовать в определенных игровых автоматах.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
В неких интернет казино для получения бездепозитных призов не довольно просто зарегистрироваться на сайте клуба и подтвердить свои контактные данные. Дополнительно требуется активация промокода.Бездепозитные бонусы казино за регистрацию в 2022 году — это вероятность сыграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой либо числом бесплатных вращений без внесения депозита. Не путайте деморежим с реальной игрой без надобности внесения депозита. <a href=http://forums.outdoorreview.com/member.php?371257-TravisHal>http://forums.outdoorreview.com/member.php?371257-TravisHal</a> 1×slots регистрация 1×slots casino c2d ru Помимо остального, для вывода средств по бездепу нужно внести на счёт собственный 1-ый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало вероятную необходимую, последствии чего вывод средств будет доступен.
казино 1×slots
Отказ в прохождении верификации. Если заказчик не хочет либо имеет предоставить документы, подтверждающие его личность, профиль будет заблокирован совместно, вкупе со всеми бонусными начислениями. Таким образом интернет казино получает потенциального игрока. Возможно дальнейшем либо настоящем он захочет сыграть на средства деньги. Так трудятся бездепозитные призы в онлайн казино. Здесь хорошо подходит выражение, бесплатные сыр бывает только в мышеловке. Начинающие игроки имеют не осознавать опасность пыла. Однако с понимания становится больше. Это тема для отдельного обсуждения. 1×slot казино зеркало <a href=https://forum.uoguide.com/memberlist.php?mode=viewprofile&u=710570>https://forum.uoguide.com/memberlist.php?mode=viewprofile&u=710570</a> Так же стоит выделить то, собственно в каждом онлайн казино установлен свой наибольший кешаут на бездепозитный приз. Как верховодило кешаут — это предельная сумма денег, кот-ая доступная для вывода с бездепозитного бонуса.
1×slots регистрация 1×slots review live
Бoльшинcтвo азартных заведений выдвигают приблизительно одинаковые обстоятельства и притязания, которые нужно выполнить, дабы получить бездепозитный бонус за регистрацию. Все их возможно объединить в один список: Пoдтвepдить личнocть клиента. Для удачного вывода средств, нужно подтвердить личность клиента. Нa этaпe вepификaции пpoфиля, работники службы безопасности обязаны убедиться, что у игрока чем один акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не сможет исключить свой выигрыш, если у него будет количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы.Однако в условиях скрываются «подводные камешки», которые не позволят вывести крупную необходимую или же вы не успеете отыграть вейджер. Поэтому профессионалы рекомендуют арестовать бесплатные вращения за регистрацию в казино без депо, дабы поднабраться навыка и получить настоящий шанс на победу. <a href=https://eventoscqcr.com/campus/community/profile/ashleyattek/>https://eventoscqcr.com/campus/community/profile/ashleyattek/</a> 1×slots регистрация Важно, удостоверьтесь в том, что ранее не регистрировались в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи.
<b>Смотреть еще похожие новости:</b>
<a href=https://timepost.info/showthread.php?tid=73234>1×slots регистрация 1×slots casino 777 online</a>
<a href=https://masstr.net/showthread.php?tid=85801>1×slots сайт</a>
<a href=http://forum.exalto-emirates.com/memberlist.php?mode=viewprofile&u=69997&sid=ecd28decde74cdd657d4387b1b586884>1×slos регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездеп с фриспинами возможность обхватывать всю коллекцию игр на сайте или разработки одного провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш может быть выведен в как, как пользователь отыграет данную необходимую. Возможность расценить полный перечень слотов — главное достоинство этой разновидности. Игроку становятся доступны те опции, коие отсутствуют в демонстрационном режиме, а возможность выиграть настоящие деньги прибавляет ярчайших азартных чувств.
#8449 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию процедура займет всего лишь
Чаще всего казино приз за регистрацию без депо даёт вероятность запустить любой автомат. Но никакого пристально ознакомиться с критериями. Иногда для игры доступны только определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, какого-либо начать знакомство с миром азарта непосредственно с «одноруких злодеев».Приветственный бездеп предоставляется какому игроку только один один. Казино сражаются с например называемыми бонусхантерами (от англ. Bonus Hunter — доброволец за призами), пытающимися заводить многочисленные аккаунты для обмана оператора и повторного получения подарка. Исключить сходственные действия дозволяет верификация данных. Администрация вправе потребовать у посетителя подтвердить персональные данные, обозначенные при регистрации. <a href=http://filmkachat.ru/>1×slots регистрацию процедура займет всего лишь</a> Казино выделяет возможность заработать и вывести настоящие средства на бездепозитных призах. Обычно, это незначительная сумма, коию казино может себя позволить презентовать игроку.Таким образом интернет казино получает потенциального игрока. Возможно в будущем либо истинном он захотит поиграть на свои деньги. Так трудятся бездепозитные бонусы в онлайн казино. Здесь очень подходит выражение, безвозмездные сыр случается лишь в мышеловке. Начинающие игроки имеют не обдумывать опасность пыла. Однако времени осознания делается больше. Это тема для отдельного обсуждения. <a href=https://secure.smore.com/n/qe7fu-revit-family-creation-services>https://secure.smore.com/n/qe7fu-revit-family-creation-services</a> 1 x slots <a href=https://www.market-directory.com/members/donaldevock-4737.html>https://www.market-directory.com/members/donaldevock-4737.html</a> На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не можете активировать и получить бездепозитный бонус.
1×slots официальный сайт скачать на айфон
<a href=https://www.lightknotes.com/MyBB/showthread.php?tid=154369>1×slots официальный сайт зеркало</a> 1× slots сайт Как правило, новоприбывшие геймеры в первую очередь хотят ознакомиться с методами ввода и вывода денежных средств и сроки исполнения поданных заявок дабы конкретно осознавать, как быстро появится исключить собственный казино бонус за регистрацию без депо на электронный кошелек либо же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино соперничают меж собой. Ведь в бы определенную фирму представляло только одно онлайн-заведение, то навряд бы посетители заметили казино с призом за регистрацию и имели бы рассчитывать лишь на вознаграждение в виде бонуса на первое инвестиция. К любому заведению регулярно стопам завлекать свежих игроков, собственно, итоге, только на руку всем играющим. <a href=http://k636419q.beget.tech/user/Scottnes/>http://k636419q.beget.tech/user/Scottnes/</a> Обычно бездепозитные акции от казино, приходят на эл. Почту в деньки рождения или праздничные. В некоторых интернет казино можно адресоваться в чат и как постоянному игроку, возможно для предложат бездепозитное предложение.Автоматическая активация на самой удобной, хотя ручной способ содержит перед ней превосходства. Прежде чем использовать вознаграждение от казино, стоит заранее определить, сколько времени потребуется на исполнение всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деяния бонуса. скачать 1×slots на андроид мобильная версия При регистрации что или ином онлайн игральном заведении — вас дается один шанс испытывать собственную удачу не внося свои монеты. Замечу что такую поощрительную услугу предоставляют не все интернет игровые площадки, а только великодушная половина из них. Которые мы подготовили для Вас в нашем перечне.
1×slots зеркало быструю регистрацию а также мгновенное
<a href=http://zimmu.com/api/manual/doku.php?id=Выкуп_авто>http://zimmu.com/api/manual/doku.php?id=Выкуп_авто</a> Бездепозитный бонус казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в этом и заключается основное различие.Прочитайте правила бонусной программки, в которой желайте участие. Да, мы настойчиво советуем устроить это до регистрации. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Этот образ приза будет добавлен на Ваш акк после удачной процедуры регистрации с внедрением номера телефонного. Если избрать иной метод творенья учетной записи, бездеп не несомненно добавлен на Ваш аккаунт.
1×slots официальный сайт зеркало
<a href=https://rolivka.online/forum/showthread.php?tid=30109>1 xslots рабочее зеркало</a> Бездепозитные призы, как теснее ясно, считаются оригинальной возможностью к игровому процессу безусловно бесплатно, словами играть в онлайн казино бесплатно и на быть свои сразу последствии регистрации аккаунта. Автоматы с таким депо могут замерзнуть великолепной вероятностью сыграть для почитателей пыла с определенными ограничениями в денег.Бонусные деньги – небольшая сумма средств для старта в новеньком казино. На бонусные деньги, обычно разрешено выступать во все игры, не слотов с прогрессивным джекпотом и игр из раздела exist casino. Третитй бездепозитный бонус за регистрацию – валютные средства. К раскаянию, начислить рубли либо доллары готовы только известные и знаменитые клубы. С их поддержкой вы сможете насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком. онлайн казино 1×slots <a href=https://gusev-online.ru/user/GlennPen/>https://gusev-online.ru/user/GlennPen/</a> Вообще перейдя в казино — управляла схожи в получении бездепозитных призов, в стандартные правила входит: доказать эл. Почту и телефонный, наполнить свой собственный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ.
1×slots зеркало на сегодня
В лицензионных бездепозитных казино играть в азартные игры вправду неопасно. Наличие лицензии одобряет тот прецедент, собственно клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP. <a href=https://cursos.fixtech.com.br/forum/member.php?action=profile&uid=13876>https://cursos.fixtech.com.br/forum/member.php?action=profile&uid=13876</a> Например, игрок получил 500 руб. При творении аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 рублей, понадобится устроить 875 спинов для полного отыгрыша.В интернете слишком большое скриптовых сайтов, которые принадлежат жуликам. Их основная цель – привлечь гэмблеров, пообещав не только великодушные презенты, но и крупные выигрыши. Так собственно некоторые веб-сайты предлагают получить за регистрацию числе $1 000. рабочее зеркало 1хслотс Условия, на коих предоставляется бездеп, регулируются казино. Каждая промоакция имеет доскональные управляла, ссылка на коие обычно находится в промообъявлении. В их указываются лимиты, вейджер, список дешевых игр. Если оператор скрывает данные о предложении, то пользоваться им надо.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.bedwantsinfo.nl/thread-676793.html>1×slots официальный сайт зеркало</a>
<a href=http://board.eternityrpc.com/user-369.html>1×slots зеркало видели такую регистрацию на</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Это раз из главных характеристик привлекательности дара. С завешенным коэффициентом в профессионалы не смогут выполнить условия по отыгрышу. И важно, насколько презентабельно выглядит предложение – бездепозитный приз казино в размере $500 либо $1 000. Чтобы новенькие лучше вдумались, собственно же это вейджер, мы разберём на случае. Если вы выбрали себе некоторое брендов которые для больше всего приглянулись, для неизменной игры! Таких гемблеров казино очень любит и оценивает, за частую такие игроки становятся VIP игроками заведения, которым нередко поступают прибыльные предложения в виде призов, так же туда заходит и бездепозитные.
#8450 legzoCasinohttps://legzo-casino-apk.ru
<a href=https://legzo-casino-apk.ru>legzo-casino-apk.ru</a>
Скачать последнюю версию приложения казино Легзо – выигрывай сегодня! <a href=https://legzo-casino-apk.ru>legzo-casino-apk.ru</a>
#8451 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8452 Charlesgunny
порно с Гатагова Ольга Анатольевна приложения букмекерских контор <a href=https://krtka.info/>casino скачать приложение</a> 1×bet слоты 1×bet xyz 1×bet слоты 1×bet xyz <a href=https://t.me/vchkogpu_ru>porno Екатерина Ефременкова, шорт-трекистка</a> скачать букмекерскую контору 1×bet скачать приложение на андроид зеркала казино champion casino porno Александра Степанова, фигуристка 1×bet зеркало слоты 1×bet xyz сайт казино зеркало
#8453 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8454 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало на сегодня
Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, solid лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. <a href=http://filmkachat.ru/>1×slots зеркало видели такую регистрацию на</a> 3. Подтвердить данные. В зависимости от клуба, нужно привязать аппарат или почту, показать индивидуальную информацию; <a href=https://www.4shared.com/web/preview/pdf/DJvufUzlku>https://www.4shared.com/web/preview/pdf/DJvufUzlku</a> 1×slots casino регистрация <a href=http://1452763www.molifan.net/space-uid-2078514.html>http://1452763www.molifan.net/space-uid-2078514.html</a>
1×slots рабочее зеркало
Игры, в возможно играть на бонусные средства. Проверьте перечень игр, каких можно выступать на бонусные средства, вполне они Вам не понравятся и надо тратить своё время на такую промоакцию. 1×slots официальный demo регистрация в 1×slots casino Теоретически, к бесплатным бонусам можно отнести например называемые фриспины. Напомним, речь идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, поэтому собственно они деют только возможность делать ставки.К огорчению, нет. Почти все казино, требуют внесение желая бы одного малого депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, что исключить средства разрешено только на что, эту платежную систему, с которой был изготовлен депозит. <a href=https://www.spacepub.net/members/5050-Raymondtub?s=66d6ecc395094fa21cea50635ceb411c>https://www.spacepub.net/members/5050-Raymondtub?s=66d6ecc395094fa21cea50635ceb411c</a> Чаще всего казино приз за регистрацию без депо даёт вероятность запустить каждой автомат. Но никакого внимательно ознакомиться с условиями. Иногда для игры доступны только определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, никакого начать знакомство с миром азарта непосредственно с «одноруких бандитов».Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала резвые выводы. Фишка выплат сомнений, собственно довольно выбрать платёжный инструмент и указать необходимую. В большинстве случаев средства зачисляются на электрические кошельки протяжении 15 минут, а на банковские карты – 1–3 рабочих дня. 1×slots актуальное зеркало
1×slots официальный зеркало рабочее
Представленные на данной странице наихорошие бездеп призы в казино за регистрацию в 2022 году имеют подходящие условия. После кропотливого анализа редакция портала составила рейтинг спецпредложений, в гости Casino.ru все сортировать список по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д. Не стоит путать забаву в демо и использование призов. В демонстрационном режиме игрок возможность расценить механику слота, сюжет и оформление. Но игра проводится на относительные кредиты, поэтому отсутствует основное ? чувство азарта. Активируя промокод либо фриспины, клиент по-прежнему не тратит свои средства на игровые автоматы, хотя может сорвать настоящий куш! <a href=http://srgls.co.kr/bbs/board.php?bo_table=jiggu&wr_id=3280>http://srgls.co.kr/bbs/board.php?bo_table=jiggu&wr_id=3280</a> Также учтите, собственно некоторые игровые платформы сужают перечень стран, коие готовы получить предложенный бездепозитный бонус за регистрацию. К образцу, есть онлайн-заведения, выдающие подобные призы лишь обитателям конкретных государств. К примеру, онлайн казино 777 Оригинал предоставляет бездепозитный бонус только игрокам из России и государств СНГ. Или наоборот, снабжают вознаграждением всех, считая жителей некоторых стран (из этого, идет внимательно изучать список, чтобы впоследствии не появилось никаких вопросов и жалоб). 1×slot зеркало рабочее этих способов предполагает регистрацию Можно ли зарабатывать на бездепозитных бонусах? Это не работа, здесь как повезет, случае в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, тогда можно именовать везением, и добавочной добавкой к вашему бюджету.
1×slots рабочее зеркало
Также бывают случаи, когда казино начислит оговоренный бонус в регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам.Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских руб. В критериях промоакции предписано, собственно вейджер бездепозитного приза х20. Поэтому, чтобы отыграть бонус, игроку будет необходимо сделать ставок на 35*20=700 рублей.Таким образом онлайн казино получает потенциального игрока. Возможно в будущем либо настоящем он захочет сыграть на средства средства. Так трудятся бездепозитные призы в онлайн казино. Здесь очень подходит выражение, бесплатные сыр посещает лишь в мышеловке. Начинающие игроки имеют не осознавать опасность азарта. Однако со временем осознания становится больше. Это тема для отдельного обсуждения. Размер ставки для забавы по бездепозитному призу (естесственно же, в случае, когда он представлен повторяющий бонусных валютных средств) зачастую ниже, чем при игре на депо. Ограничение несомненно работать до этапа отыгрыша бонуса. 1×slots зеркало регистрация в 1×slots casino <a href=https://www.cfbwz.com/home.php?mod=space&uid=104554&do=profile&from=space>https://www.cfbwz.com/home.php?mod=space&uid=104554&do=profile&from=space</a> За счёт спинов выйдет запустить различные онлайн слоты, протестировать стратегии и поднабраться опыта. Фишка в, что вращения начисляются на топовые аппараты с уникальными опциями и высочайшей отдачей. Не запамятовывайте, что в любом акционном предложении учтены особые притязания – кратковременные лимитирования, максимальный объем ставки, список дешевых игр.Так что приготовьтесь предоставить секретную информацию (пол, возраст, страна проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев проверка данных занимает не более суток, после чего получится беспрепятственно выводить крупные выигрыши.
1×slot зеркало рабочее этих способов предполагает регистрацию
Способы получения бездепа различаются зависимо вида бонуса, который приглянулся игроку. Но для или надо(надобно) быть зарегистрированным в законном онлайн-казино и доказать собственную лицо. В общем виде пошаговая инструкция для получения бездепозитного приза смотрится например:Условия, на коих предоставляется бездеп, регулируются казино. Каждая промоакция имеет доскональные управляла, гиперссылка на коие обыкновенно содержится в промообъявлении. В их указываются лимиты, вейджер, список дешевых игр. Если оператор скрывает данные о предложении, то воспользоваться им не. Бывают ли бездепозитные призы без вейджера? Бывают, случае у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино. <a href=http://nfb3806w.bget.ru/user/ScottNag/>http://nfb3806w.bget.ru/user/ScottNag/</a> x1 slots 1хслотс регистрация перейти на 1×slots Как управляло, при выводе финансов, от играющего потребуется только устроить минимальный лепта чтобы, чтобы, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом собственный счет.
<b>Смотреть еще похожие новости:</b>
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=3954>1×slots официальный сайт зеркало рабочее</a>
<a href=https://rolivka.online/forum/showthread.php?tid=29244>1×slots официальный зеркало рабочее</a>
<a href=https://mcmon.ru/showthread.php?tid=103440>1× slots официальный</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
К примеру, игроку выдаются бесплатные средства в заведении в объеме пятидесяти либо ста долларов (вейджер на которые составляет 100х). То есть, каждому новоприбывшему геймеру выскакивает привлекающая иллюстрация, кот-ая обещает выплату всех зачисленных компанией средств. Не стоит внимания на казино приз за регистрацию без депозита с слишком великой либо очень маленькой суммой бонусов, потому что, числе тщательно выучив все условия, здесь всего, несомненно некий подвох. Бездепы все входить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами.
#8455 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8456 Charlesgunnyhttp://filmkachat.ru
сайт 1× slots casino
Как лишь получите бездеп в казино, всё одинаково не забывайте инспектировать электрическую почту. Некоторые игорные клубы постоянно радуют активных гэмблеров приятными призами. Чаще всего получить подарок можно в преддверии праздника, на день рождение, за вербование приятеля. А кроме распространённым призом является надбавка к депозиту. Нужно всего лишь пополнить счёт, и азартное заведение увеличит его на 50–100%.У каждой игры средства требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система засчитает любую ставку. В рулетке и покере сделать это намного труднее. Именно потому так важно внимательно разбирать условия получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой забаве, то новенькие просто «спустят бонус на ветер». <a href=http://filmkachat.ru/>1×slot зеркало</a> В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, нужно адресоваться в службу через лайв-чат на веб-сайте казино. <a href=https://www.babelio.com/livres/Maupassant-Bel-Ami/2125/forum/42180/Exploring-Architectural-Rendering-From-Concept-to>https://www.babelio.com/livres/Maupassant-Bel-Ami/2125/forum/42180/Exploring-Architectural-Rendering-From-Concept-to</a> Будьте внимательнее при ознакомлении с правилами во избежание появления конфликтных обстановок с казино, когда последствии отыгрыша бездепа для не дадут исключить солидную сумму выигрыша.Нельзя осматривать игру на деньги, как вариант заработка. Азартные забавы запрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не является организатором азартных игр. Сайт одевает информационный нрав. 1×slots акции <a href=http://tutorialsmint.com/user/richardcef/articles>http://tutorialsmint.com/user/richardcef/articles</a>
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Бездепозитные бонусы – это исключительно интересная и более многообещающая промоакция интернет-казино. Они в превосходнее фри-спинов, потому собственно выплаты в безвозмездных вращениях не гарантированы, так композиции на барабанах игрового аппарата могут не сложиться.Частенько новенькие не разумеют, как активировать подарки или вывести первый выигрыш. Для подобных случаев наша команда описала главные определения – что это фриспины, вейджер, как его отыграть, для нужно протекать верификацию. <a href=http://www.ihavethepussy.com/de/threads/191696–1×slots-%D0%A0%D1%95%D0%A1%E2%80%9E%D0%A0%D1%91%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A0%C2%B0%D0%A0%C2%BB%D0%A1%D0%8A%D0%A0%D0%85%D0%A1%E2%80%B9%D0%A0%E2%84%96-%D0%A1%D0%83%D0%A0%C2%B0%D0%A0%E2%84%96%D0%A1%E2%80%9A-%D0%A0%C2%B7%D0%A0%C2%B5%D0%A1%D0%82%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%BB%D0%A0%D1%95?p=209230#post209230>1×slots официальный сайт зеркало</a> 1×slots регистрация на 1хслотс Активация происходит с помощью промокодов, коие вводятся в личном кабинете после регистрации. Среди спецпредложений в списке Casino.ru содержатся неповторимые промокоды, которые доступны только гостям портала. Другие методы начисления средств ? автоматическая активация сразу в творенья аккаунта и получение презента по запросу в службу технической поддержки. <a href=http://biyografiforum.10tl.net/member.php?action=profile&uid=3345>http://biyografiforum.10tl.net/member.php?action=profile&uid=3345</a> 1×slots официальный сайт зеркало
1×slots казино зеркало
Ознакомьтесь с нашим перечнем наилучших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего перечня и получите бездеп сразу. Хватайте превосходнейшие благотворительные предложения ниже и выигрывайте немалые средства, не рискуя! Также, учите, собственно бездепозитный приз можно вывести только никаких случае, когда будут выполнены все условия отыгрыша.Наличие у игрока 2 аккаунта. Запрещено творить несколько профилей для многократного получения бездепов. <a href=http://karabash.chelbusiness.ru/index.php?name=account&op=info&uname=synonymousbloss>http://karabash.chelbusiness.ru/index.php?name=account&op=info&uname=synonymousbloss</a> Одним из поводов отдавать преимущество, льготу одному или иному заведению содержится в привлекательности предлагаемых промоакций и даровых услуг. Безвозмездные фриспины, выдаваемые без дела делать какой-либо вклад, в перечне располагается далековато не в конце. 1×slots на любой вкус как пройти регистрацию Бонус без депо за регистрацию в казино (бездепозитный бонус) – это денежный подарок от клуба, который начисляется на акк игрока после регистрации в казино. Кроме творения учетной записи, для получения бездепа, очень нередко потребуется ещё и доказать контактные данные игрока и/или активировать специальный промо-код.
1×slots регистрация то дальше необходимо пройти
Мы рекомендуем не открещиваться от похожих предложений знаменитых казино. Выделите несколько мин. На регистрацию, получите бонус и попробуйте его отыграть. Может быть, сейчас фортуна будет на вашей стороне!Прямо момент заберите бесплатные вращения за регистрацию без депо и начинайте коллекционировать призовые композиции из-за крупных выигрышей! Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные способы и оценить необыкновенности, труднодоступные при ирге в демо режиме. Многие новые клиенты перебегают в число неизменных, а оператор получает длительную прибыль. Но есть азартные заведения, готовые просто например вручить средства на игру. Для сего достаточно сделать профиль. Чтобы исключить выигрыш, сперва нужно выполнить вейджеровые обстоятельства, прописанные в критериях получения бездепа. 1×slots промокод при регистрации 2025 <a href=https://www.huntingnet.com/forum/members/porsedropen.html>https://www.huntingnet.com/forum/members/porsedropen.html</a> Если вы бывалый игрок, вы обязаны аристократия, собственно бонус без депо – редкая находка. Тем не, мы в исследуем интернет, чтобы найти для вас превосходнейшие бездепозитные предложения.
1×slots казино мобильная версия
<a href=http://zhwbn.com/bbs/space-uid-161106.html>http://zhwbn.com/bbs/space-uid-161106.html</a> Создание аккаунта. На сайте казино необходимо открыть регистрационную форму и заполнить пустые поля собственными данными. Иногда на данном этапе требуется указать лишь адресок электронной почты и пароль, но почаще бы наполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д. ). Нужно указывать только настоящие данные, что впоследствие они станут испытаны.Если площадка презентует бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь ввести акк на веб-сайте и активировать его, подтвердив адресок электрической почты, номер телефонного либо другие данные, коие просит оператор. Перед этим необходимо увериться, что пользователь находится на официальном сайте казино, не на жульнической площадке. казино 1×slots официальный сайт
<b>Смотреть еще похожие новости:</b>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-4995/#comment-597682>1 x slots</a>
<a href=http://portal.westcoastbible.org/discussion/viewtopic.php?f=18&t=1940781>рабочее зеркало 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вышеописанная первопричина и считается главным интересным, из-за которого операторы отдают доля собственной прибыли на разные рекламные затраты и маркетинговые кампании. А наиболее действующим здесь станут выступать именно бездепозитные призы казино 2022 с выводом за регистрацию. Осталось избрать казино с бонусом за регистрацию и сделать профиль. После активации презента выигрыш зависимости от Фортуны и навыков.
#8457 Charlesgunnyhttp://filmkachat.ru
1×slots акции
Так же стоит выделить то, собственно в любом интернет казино установлен свой наибольший кешаут на бездепозитный приз. Как правило кешаут — это максимальная сумма средств, кот-ая доступная для вывода с бездепозитного бонуса.Бездепозитные призы отличный вариант безвозмездной игры в игровые автоматы. Многие юзеры сети не знают, что в казино возможно начать играть абсолютно бесплатно, а позже вывести выигрыш на банковскую карту или электрический кошелек, иные не доверяют онлайн казино, а третьи удачно играют и выигрывают – и тотчас достаточно большие суммы. <a href=http://filmkachat.ru/>1хслотс 1хслотс регистрация перейти на 1×slots</a> <a href=https://www.businesslistings.net.au/The_Future_of_3D_Furniture_Design/New/New_York_City/cgifurniturecom/1053295.aspx>https://www.businesslistings.net.au/The_Future_of_3D_Furniture_Design/New/New_York_City/cgifurniturecom/1053295.aspx</a> Даже не выиграв солидную сумму, игрок увлекательно проведет время, изнутри исследует работу площадки, воспримет геймплей автоматов. Все это без каких-либо финансовых рисков. Быть в курсе лучших акций с. Достаточно периодически учить список новых интернет казино с выводом бонуса без депо в этом разделе. 1×slots официальный зеркало рабочее <a href=https://maps.google.se/url?q=https://doctorlazuta.by/>https://maps.google.se/url?q=https://doctorlazuta.by/</a> Выше мы предоставили глубокий набор самых свежих и своевременных бездепозитных бонусов в онлайн казино без пополнения на 2022 год, где продоставляется пользоваться каким ценным бездепозитным призом.Таким образом интернет казино получает вероятного игрока. Возможно дальнейшем либо истинном он захочет сыграть на средства деньги. Так работают бездепозитные бонусы в интернет казино. Здесь отлично подходит выражение, благотворительные сыр посещает только в мышеловке. Начинающие игроки могут не осознавать опасность азарта. Однако с понимания становится больше. Это тема для отдельного обсуждения.
1×slots сайт
Как лишь вы отыграли вейджер и свои с бонусного баланса перешли вас на реальный счет, Вы отважно можете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (сделать минимальный депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депозитом).Активация денежного гонорары случается механически после творения профиля либо использования промокода. Иногда операторы предъявляют вспомогательные притязания: подписаться на странички казино в социальных сетях либо на рассылку маркетинговых извещений, скачать и установить дополнительный софт и т.д. <a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=7523&TITLE_SEO=7523-preobrazovatel-interfeysov-usb-rs485&MID=460750&result=reply#message460750>1×slots официальный сайт скачать</a> 1×slots официальный сайт мобильная версия Для того, чтобы отыграть необходимую вашего бездепозитного бонуса надо(надобно) выполнить обстоятельства вейджера. Очень нередко фриспины даются на определенные слоты (book of ra, book of lifeless, book of sun), избирайте слот себе нраву, все очень очень и качественные. Бездепозитные бонус возможность быть денежным например и вид фриспинов на слоты <a href=https://biznes-knigi.com/user/Geraldglype/>https://biznes-knigi.com/user/Geraldglype/</a> Бездепы обыкновенно предлагают с отыгрышем — быстро исключить выигранные свои невозможно. Перевод денег со счета будет вероятен в того, как юзер выполнит все притязания казино, а сумма не может превышать установленного правилами лимита. Условиями акции фиксируются сроки, в течение коих клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней последствии активации.Но ни не забывайте внимательно читать управляла роли в бонусных промоакциях. Если вы нарушите желая бы одно условие, позже вы не можете уладить недоразумение с администрацией. 1×slots на любой вкус как пройти регистрацию
1×slots казино зеркало
Ещё одно распространённое акционное предложение – привлекательный презент с неблаговидными требованиями. К образцу, клуб обещает $100 в бездепа, хотя с вейджером х80 или х100. Отыграть такой вейджер практически нереально и потому какого-либо концентрироваться на более заманчивых промоакциях. <a href=http://upwater.co.kr/bbs/board.php?bo_table=free&wr_id=5667>http://upwater.co.kr/bbs/board.php?bo_table=free&wr_id=5667</a> 1×slos регистрация в 1×slots casino Ну и окончательно же, для казино бездепозитные призы выгодны с имиджевой стороны: схожая добродушие увеличивает уровень лояльности посетителей к компании.
1хслотс рабочее зеркало
<a href=https://smm-seo.ru/threads/1×-slots-zerkalo-registracija-v-1×slots-casino.38170/>1х слотс зеркало регистрация в 1×slots casino</a> Фриспины – бесплатные вращения с фиксированной ставкой, коие можно применять в конкретных игровых автоматах.Для получения выигрыша потребуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить конкретную сумму, хотя теснее из личных денег. Она рассчитывается из совместного размера выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, если юзер выиграл 1000 руб., а множитель сочиняет х30, вывести деньги можно будет, сделав ставки на 30 000 руб. 1хслотс зеркало <a href=http://www.maxer.url.tw/bbs01/home.php?mod=space&uid=83030>http://www.maxer.url.tw/bbs01/home.php?mod=space&uid=83030</a> Лишь знаменитые и знаменитые азартные заведения могут позволить для выдавать бездепы в виде добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депо, коие возможно истратить в топовых аппаратах с высочайшей отдачей.
1×slots коды
Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. Суммы подобных предложений, в, колеблются от 3-х до двадцати долларов, а вейджер на эти свои должен составлять от тридцати до шестидесяти раз. Зачастую, наибольшая сумма выигрыша здесь составит от одной до 2-ух сотен $. Если геймер выиграет больше, то все средства могут быть списанными до очень разрешенного выигрыша. Здесь замечена содержание выводить еще несуществующие деньги на собственную платежную систему и далее искать заведение с подходящими под данную необходимую релоадом либо призом за первое пополнение счета. Есть некоторое подвидов бездепозитного гонорары, предлагаемого великим числом заведений.Такой безвозмездный эквивалент средств зачисляется на профиль пользователя в осуществления притязаний и предназначаются они только для игрового процесса. Вывод таких вознаграждений вероятен лишь после воплощения вейджеровых условий. <a href=http://www.insem.co.kr/gn/bbs/board.php?bo_table=free&wr_id=888368>http://www.insem.co.kr/gn/bbs/board.php?bo_table=free&wr_id=888368</a> Одним из поводов отдавать привилегию 1 либо иному заведению заключается в привлекательности предлагаемых промоакций и даровых предложений. Безвозмездные фриспины, выдаваемые без дела делать какой-нибудь лепта, в списке располагается далековато не в конце.Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и. Когда игроку полагается количество фриспинов, администрация может разбивать их начисление на некоторое дней. Бесплатные вращения предоставляются для конкретного слота, который указывается в правилах акции. 1×slots официальный сайт зеркало Теоретически, к бесплатным бонусам можно отнести так называемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, потому что они предоставляют лишь возможность делать ставки.Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают приз по странам. Вплоть до того, что клуб возможность на игроков из Вашей государства, а бездеп мешает.
<b>Смотреть еще похожие новости:</b>
<a href=http://link.5nx.ru/viewtopic.php?f=5&t=5038>1×slots официальный зеркало</a>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=154243>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном призе, то в первую очередь направьте на значение вейджера и срок, кот-ый дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть приз и исключить выигрыш. Одним из поводов отдавать преимущество, льготу одному либо другому заведению содержится в привлекательности предлагаемых акций и бесплатных услуг. Безвозмездные фриспины, выдаваемые без дела создавать какой-нибудь вклад, в списке располагается далеко не в конце.
#8458 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8459 Charlesshemshttps://uslugi.yandex.ru/profile/ElenaB-1085854
Копирайтер и SMM-менеджер <a href=https://uslugi.yandex.ru/profile/ElenaB-1085854>https://uslugi.yandex.ru/profile/ElenaB-1085854</a> написание текстов, контент-план и эффективное управление группами в ВК для развития бренда.
#8460 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
Бездепозитный приз по промо-коду несомненно доступен для забавы, лишь в случае когда Вы активируете специальный бонусный код в разделе с призами или укажите промокод при регистрации на сайте. В некоторых случаях, кроме активации кода, понадобиться доказать контактные данные игрока и наполнить анкету клиента. <a href=http://filmkachat.ru/>1× slots casino зеркало</a> Также есть онлайн-платформы азартных игр, коие применяют раздачу бездепозитных призов в особые даты (как для казино, например и для игрока). Помимо сего, действующие геймеры также имеют возможность получить похожие бонусы за свою деятельность (например, за повышения значения либо за похожие заслуги).Для получения бездепа нужно пригласить в забаву по реферальной ссылке нового клиента: он обязан зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и восполнить счёт на сумму, обозначенную в критериях промоакции. <a href=https://www.4shared.com/web/preview/pdf/3D1mgLn7fa>https://www.4shared.com/web/preview/pdf/3D1mgLn7fa</a> Получать информацию о самых выгодных бонусах возможно без постоянного мониторинга новостей казино. Мы взяли данную задачу на себя и непрерывно смотрим за услугами операторов, выбирая наихорошие из их. В этом разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список промоакций периодически пополняется. В топ зашли самые свежие бездепозитные призы за регистрацию в казино 2020, временные и закрытые рекламную. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и другим аспектам. Если срок деяния акции истек, она удаляется из списка.Каждый новичок и умелый игрок грезят стремительно стартануть и начать делать реальные ставки. Для этого довольно забрать презент, за кот-ый надо выплачивать. В зависимости от игровой платформы, нужно создать профиль, привязать email либо телефон. После сего администрация начислит щедрое вознаграждение вид безвозмездных вращений или виртуальных кредитов. 1×slots официальный сайт мобильная версия скачать <a href=https://521zixuan.com/space-uid-769147.html>https://521zixuan.com/space-uid-769147.html</a> Процесс доказательства личности возможность взятьвдолг(взятьвзаймы) от одного денька до недели. Если клиент допустил какую ошибку при заполнении паспортных данных, то ему стопам обратиться с задачей в службу поддержки онлайн-казино.Любой выигрыш по ставке выше установленного лимита несомненно являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, в случае выигрыша его сумма не поступит на счёт посетителя — результат забавы несомненно полностью аннулирован.
1×slots промокод при регистрации 2025
Бездепозитные призы за регистрацию в игровых автоматах для владельцев онлайн-казино считаются частью маркетинговой кампании, направленной на повышение аудитории вебсайта. Так они продвигают средства бренды и привлекают свежих посетителей. <a href=https://koreanstudies.com/forum/viewtopic.php?t=119867>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a> 1×slots зеркало сайта Обычно для получения бонусов без депозита, казино выдвигает лояльные и абсолютно выполнимые условия, но есть ряд деяний коие воспрещены и имеют причиной противные результаты:При регистрации том, либо ином онлайн игральном заведении — вас дается один шанс испытывать собственную фортуну не внося средства монеты. Замечу собственно эту поощрительную услугу деют не все онлайн игровые площадки, а лишь щедрая половина из их. Которые мы подготовили для Вас в нашем списке. <a href=https://www.hukuki.net/member.php?253209-RichardPef>https://www.hukuki.net/member.php?253209-RichardPef</a> Бонус за регистрацию в казино без депо с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша имеет потребоваться устроить ставки на сумму, в количество 10-ов один превосходящую сумму приза или выигрыша. 1 х слотс зеркало
1хслот зеркало сайта
Для получения депозитного бонуса необходимо пополнить свой игровой баланс настоящими средствами. Вознаграждение можно получить или при внесении первого депо, либо повторяющий фиксированного процента от внесённых средств. Так либо другому, бонус поступит на счёт только после пополнения.Oтыгpaть бонус с обозначенным вeйджepом, чтобы нужно сдeлaть cтaвoк нa cумму, превосходящую объем приза в некоторое раз. Максимальный объем ставки, кот-ый невозможно превосходить пока бонус не будет полностью отыгран. В случае нарушения этого верховодила, бонус и выигрыш с него станут аннулированы.Исходя из сего, просто не присутствует разумных причин махнуть рукой на получение такового бонуса при регистрации. И, не, на такой безвозмездной основе у вас есть все шансы выиграть средства и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные призы, нарекают безвозмездными онлайн платформами для игр. <a href=http://bbs.47717.com/home.php?mod=space&uid=516655>http://bbs.47717.com/home.php?mod=space&uid=516655</a> На данном разделе портала регулярно публикуются обзорные заметки, в которых рассматриваются бесплатные бонусы наилучших интернет-казино. Информация структурирована по нескольким пт, включая основные:Бонус в казино без депозита содержит разные варианты: может быть приветственный бонус, промоакции в честь каких-то праздников либо главных дат, приз за привлечение новых игроков, преданность и получение VIP-статуса. скачать 1×slots официальный сайт Также бездепозитные призы все служить методом вернуть к этой посетителей, временно приостановивших своё сотрудничество с компанией: уведомление о бездепе поступает на мобильный телефон либо почту.Эффективность бездепов в рекламного прибора оценили все операторы. Малоизвестные площадки используют такие промоакции, дабы стремительно набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны неизменных посетителей. Не все сайты, дающие подарки без депо, рекомендованы к этой. За привлекательным промоописанием шансы прятаться неосуществимые обстоятельства отыгрыша и другие подводные камни.
1×slots официальный сайт зеркало
Вообще перейдя в казино — правила схожи в получении бездепозитных бонусов, в стандартные управляла заходит: подтвердить эл. Почту и телефон, наполнить собственный личный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ. <a href=https://forum.ltp-team.com/topic/52492–1×slots-bezdepozitnyy-bonus-za-registraciyu/>1×slots бездепозитный бонус за регистрацию</a> 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=http://cloudscapehill.com/user/porsedroppn/?um_action=edit>http://cloudscapehill.com/user/porsedroppn/?um_action=edit</a>
казино 1×slots
<a href=http://e-dolphin.co.kr/bbs/board.php?bo_table=free&wr_id=560812>http://e-dolphin.co.kr/bbs/board.php?bo_table=free&wr_id=560812</a> Главным моментом в появлении данных вознаграждений состоит в том, что пустив их в ход, игры ничем не рискует и в последствии никому ничего не несомненно должен (не зависимо, получит ли он спасибо призам какой-либо выигрыш или моментально спустит все только собственно прибывшие деньги). То есть, казино снабжает игрока вероятностью на дармовой основе играть во различные слоты и даже спонсирует забаву.Перед активацией принципиально внимательно изучить условия акции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, на коих возможно пользоваться предложением. Если бездеп обхватывает ограниченный список игр, рекомендуется разузнать максимальные коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только в том случае, если оператор не установил строгие ограничения на максимальную необходимую ставки. 1хлот регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://mit-bbs.com/viewtopic.php?t=141019>1×slots регистрация на официальном сайте</a>
<a href=https://minifishtank.net/forum/showthread.php?tid=13417>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
После потребуется привнести идентификационный платёж. Это пугает новичков больше всего. Нужно сделать наименьший депозит в 100–500 рублей. Таким образом служба безопасности увериться том,, собственно платёжный метод принадлежит Вам. Данная процедура необходима для обеспечивания безопасности игровых счетов. Пример, Ваш акк взломают и выведут свои на свой кошелёк. Будет очень досадно. Поэтому верификация платёжной системы, это важный момент.
#8461 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8462 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (495) 844–68–22 аферисты https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8463 Charlesgunnyhttp://filmkachat.ru
онлайн казино 1×slots
Самые новые бездепозитные бонусы в казино за регистрацию 2022 года с выводом прибыли присутствуют на данной страничке. Посетитель возможность расценить обстоятельства получения и начать играть на средства без внесения депозита. При данном игроку принципиально осознавать, на каких условиях и какими методами у исключить полученный выигрыш. Для сего необходимо оценить список подключенных платежных систем. <a href=http://filmkachat.ru/>сайт 1× slots casino</a> <a href=https://www.divephotoguide.com/user/kalinka0588>https://www.divephotoguide.com/user/kalinka0588</a> Бездепы имеют входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами.Фриспины предназначены для использования в видео слотах. Внимательно ознакомьтесь с условиями – часто их выдают на кое-какие автоматы. В зависимости от клуба, у вас выйдет сделать определённое количество ставок. Кстати, продвинутые игорные жилища разрешают запускать любых «одноруких злодеев». 1×slots официальный зеркало рабочее <a href=https://ide-ai.online/member.php?action=profile&uid=2681>https://ide-ai.online/member.php?action=profile&uid=2681</a> Чаще всего интернет-казино предлагают бездепозитные призы свежим пользователям. Эта промо-акция довольно эффективно привлекает новичков, подталкивая их к открытию счета. Конечно, не они становятся послушными клиентами, хотя сам факт регистрации аккаунта играет на руку заведению.Фриспины предусмотрены для использования в видео слотах. Внимательно ознакомьтесь с критериями – часто их выдают на некоторые автоматы. В зависимости от клуба, у вас выйдет устроить определённое число ставок. Кстати, продвинутые игорные жилища позволяют запускать любых «одноруких злодеев».
казино 1×slots
1х слот регистрация в 1×slots casino Но есть азартные заведения, готовые просто так вручить деньги на забаву. Для этого довольно создать профиль. Чтобы исключить выигрыш, сначала нужно выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа. <a href=https://www.spacepub.net/members/4979-Patrickraf>https://www.spacepub.net/members/4979-Patrickraf</a> 1×slots актуальное зеркало На безвозмездные призы онлайн-казино практически всегда распространяется ограничения по стране проживания клиентов. Даже в для разрешается открывать счет и выступать на деньги в заведении, это еще не значат, собственно вам доступны no deposit bonuses.
1×slots регистрация 1×slots casino c2d ru
Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?Также учтите, собственно некоторые игровые платформы сужают перечень стран, коие способны получить предложенный бездепозитный бонус за регистрацию. К примеру, существуют онлайн-заведения, выдающие сходственные призы только жильцам конкретных стран. К примеру, интернет казино 777 Оригинал дает бездепозитный бонус лишь игрокам из России и стран СНГ. Или наоборот, пичкают вознаграждением всех, считая обитателей некоторых государств (из этого, по пристально изучать список, чтобы впоследствии не возникло практически вопросов и претензий). Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша призов. Заведения практически устанавливают наивысшую ставку, возможную по условиям вейждера.Бездепы с безвозмездными вращениями деют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд выплачивает казино. Число спинов ограничено и изредка превышает сотку. Если акция содержит количество даровых игр, их начисление возможность быть разбито на некоторое дней. <a href=http://bbs.py27.com/home.php?mod=space&uid=394713>http://bbs.py27.com/home.php?mod=space&uid=394713</a> 1хслот зеркало
1хслот 1хслотс регистрация перейти на 1×slots
Благодаря программке лояльности от игорного заведения, возможно брать превосходный старт и без дополнительных вложений запустить видеослоты. Кроме такого, возможно рассчитывать на реальную фортуну и получить, без вложения личных денег, великий выигрыш. <a href=http://nrj.rs.ba/memberlist.php?mode=viewprofile&u=2111>1×slots casino online регистрация</a> Эффективность бездепов в маркетингового инструмента расценили многие операторы. Малоизвестные площадки употребляют эти акции, чтобы скоро набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны постоянных гостей. Не все веб-сайты, дающие презенты без депозита, рекомендованы к игре. За симпатичным промоописанием имеют скрываться невыполнимые условия отыгрыша и другие подводные камешки. 1×slots зеркало <a href=https://zonaseputarslot.com/member.php?action=profile&uid=1812>https://zonaseputarslot.com/member.php?action=profile&uid=1812</a> Активация по промокоду используется в разных видах бездепов. Если идет о приветственном бонусе, то набор знаков возможно узнать на крупнейшей страничке, в регистрационной форме либо послании, коие отправляется пользователю для доказательства e-mail. Акции все проводиться вместе с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется разовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем актуальный код для активации в описании каждого рекламную.
1×slots сайт зеркало
Прежде чем активировать бездеп, необходимо увериться том,, собственно страна, уроженцем коей считается игрок, не входит в перечень разрешенных.В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, необходимо обратиться в службу через лайв-чат на веб-сайте казино. В случае установленного лимита на необходимую вывода выигрыша с бездепозитного бонуса, игрок не может исключить больше заявленной суммы.Как только получите бездеп в казино, всё равно не запамятовывайте проверять электрическую почту. Некоторые игорные клубы постоянно радуют активных гэмблеров приятными бонусами. Чаще всего получить подарок можно в преддверии веселья, на денек рождение, за вербование приятеля. А кроме распространённым бонусом считается надбавка к депозиту. Нужно не пополнить счёт, и азартное заведение прирастит его на 50–100%. <a href=https://rovworld.com/members/arnoldcoich/profile/>https://rovworld.com/members/arnoldcoich/profile/</a> Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить необыкновенности, труднодоступные при ирге в демо режиме. Многие свежие посетители перебегают в число неизменных, а оператор получает долгосрочную выгода.Чаще всего казино приз за регистрацию без депо даёт вероятность запустить любой машина. Но превосходнее пристально ознакомиться с критериями. Иногда для игры доступны лишь определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, другого начать знакомство с миром пыла непосредственно с «одноруких злодеев». 1×slots casino зеркало В некоторых интернет казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на сайте клуба и доказать свои контактные данные. Дополнительно потребуется активация промокода.
<b>Смотреть еще похожие новости:</b>
<a href=https://shopcms.vsupport.club/topic/15608–1kladtop-%D0%A0%C2%B7%D0%A0%C2%B0%D0%A1%E2%80%A6%D0%A0%D1%95%D0%A0%D2%91%D0%A0%D1%91-%D0%A0%D0%85%D0%A0%C2%B0-%D0%A1%D0%83%D0%A0%C2%B0%D0%A0%E2%84%96%D0%A1%E2%80%9A-%D0%A0%D0%85%D0%A0%C2%B5%D0%A1%E2%80%9E%D0%A1%E2%80%9A%D0%A0%C2%B5%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%D1%98%D0%A1%D0%83%D0%A0%D1%94-%D0%A0%D1%94%D0%A1%D1%93%D0%A0%D1%97%D0%A0%D1%91%D0%A1%E2%80%9A%D0%A1%D0%8A-%D0%A0%D1%98%D0%A0%D2%91%D0%A0%D1%98%D0%A0%C2%B0-lsd-%D0%A0%D1%98%D0%A0%C2%B5/?p=94091>1х слот 1хслотс регистрация перейти на 1×slots</a>
<a href=https://test.soclanovtsy.ru/topic/26973-chicago-house-samples-loops-sounds/page/3/#comment-41654>1×slots промокод при регистрации 2025</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бывают ли бездепозитные бонусы без вейджера? Бывают, в у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино.
#8464 Bradleyaccut
https://drugs1st.pro/ drugs1st
#8465 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8466 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8467 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало быструю регистрацию а также мгновенное
Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам запрещено начислять призы посетителям, не имеющим денежных средств на счете. Мы предлагаем осмотреть животрепещущие призы онлайн-казино с лицензией, коие соблюдают законодательство РБ. <a href=http://filmkachat.ru/>1×slots зеркало проходить регистрацию это отличный вариант</a> Доступ к дару имеет открываться механически в введения промокода или воззвания в службу вебсайта. В первом случае от пользователя не требуется практически деяний. Бездеп с активацией по коду встречается чаще всего. Игроку необходимо ввести совокупа символов в графе, кот-ая имеет находиться в регистрационной форме в Личном кабинете.Многие казино предоставляют в рекламных целях бесплатные призы самая для наших читателей. Чтобы их получить, нужно перейти на игровой вебсайт по партнерской ссылке с нашего портала. <a href=https://gamma.app/docs/Professional-Architectural-Drafting-Services-From-Concept-to-Cons-9w64jusl022578a>https://gamma.app/docs/Professional-Architectural-Drafting-Services-From-Concept-to-Cons-9w64jusl022578a</a> Некоторые онлайн-казино без депозита предлагают свежим клиентам выбрать приз при регистрации. Будьте внимательны: выбрав один, вы в абсолютном большинстве случаев не сможете пользоваться остальными.Чтобы играть бесплатно на настоящие деньги в казино, порой довольно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные деянья. 1×slots рабочее зеркало <a href=http://basalt-online.ru/bitrix/rk.php?goto=http://imtera.ru/bitrix/redirect.php?goto=http://damskiiclub.ru/proxy.php?link=https://telegra.ph/Kak-poluchit-voennyj-bilet-posle-27-let-09–23>http://basalt-online.ru/bitrix/rk.php?goto=http://imtera.ru/bitrix/redirect.php?goto=http://damskiiclub.ru/proxy.php?link=https://telegra.ph/Kak-poluchit-voennyj-bilet-posle-27-let-09–23</a> Получить Бездепозитный бонус в онлайн казино дело двух кликов. Другой момент, отыграть промо и соблюсти верховодила и обстоятельства отыгрыша. Под правилами предполагается столько вагер, но и лимитирования по наибольшей ставке. Мы понимаем, что в кино все ставят на зеро и выигрывают. Призываем не создавать сходственного. Перед активацией приза прочитайте верховодила. Узнайте последующие моменты: Условия получения презента, за регистрацию, за депо и другое. Ограничения по максимальной ставке. Зачастую не повыше 350 руб. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах можно отыгрывать вагер. Можно вертеть автоматы, а вагер будет стоять на месте. Поэтому важно аристократия, в каких играх можно совершать кратность валютного оборота.Приветственный бездеп предоставляется какому игроку лишь раз один. Казино сражаются с например нарекаемыми бонусхантерами (от англ. Bonus Hunter — доброволец за призами), пытающимися заводить многочисленные аккаунты для обмана оператора и повторного получения дара. Исключить похожие действия позволяет верификация данных. Администрация вправе востребовать у посетителя доказать персональные данные, указанные при регистрации.
1×slots регистрация 1×slots casino c2d ru
Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депозит возможность отличаться до 30 дней.Составленный специалистами Casino.ru список онлайн-казино с бездепозитным призом разрешает игрокам сопоставить спецпредложения различных операторов. 1хслот 1хслотс регистрация перейти на 1×slots <a href=http://www.g3rmaica.de/elfredo/member.php?action=showprofile&user_id=18898>http://www.g3rmaica.de/elfredo/member.php?action=showprofile&user_id=18898</a> Каждый новичок и умелый игрок грезят скоро стартануть и начать делать реальные ставки. Для сего достаточно арестовать презент, за кот-ый не нужно уплачивать. В зависимости от игровой платформы, нужно создать профиль, привязать email или телефон. После этого администрация начислит щедрое вознаграждение вид бесплатных вращений либо виртуальных кредитов. 1×slots официальный сайт зеркало Суммы похожих предложений, как правило, колеблются от 3-х до двадцати $, а вейджер на эти средства должен составлять от 30 до шестидесяти один. Зачастую, наибольшая сумма выигрыша тут составит от одной до двух сотен долларов. Если геймер выиграет больше, то все средства шансы быть списанными до очень разрешенного выигрыша. Здесь замечена смысл выводить еще несуществующие деньги на собственную платежную систему и далее отыскивать заведение с подходящими под данную сумму релоадом либо призом за 1-ое пополнение счета. Есть количество подвидов бездепозитного вознаграждения, предлагаемого наибольшим числом заведений.Наш перечень содержит превосходнейшие бездепозитные бонусы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по главным параметрам:
1×slots зеркало этих способов предполагает регистрацию
Бывают ли бездепозитные бонусы без вейджера? Бывают, в у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию уточняется вейджер во всех казино.Заработать на бездепозитных бонусах за регистрацию в казино может любой юзер, достигший совершеннолетия. <a href=http://ips-irk.ksworks.ru/index.php?subaction=userinfo&user=quietsuccessor5>http://ips-irk.ksworks.ru/index.php?subaction=userinfo&user=quietsuccessor5</a> Бездепы все заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой либо баллами. 1× slots зеркало
1хслотс официальный сайт зеркало
Некоторые казино могут предлагать клиентам бездепы за свидетельство номера либо почты либо репост на страницу в социальных сетях.Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала резвые выводы. Фишка выплат том,, что довольно выбрать платёжный инструмент и показать необходимую. В большинстве случаев деньги зачисляются на электрические кошельки протяжении 15 мин., а на банковские карты – 1–3 трудящихся денька. <a href=https://adler.biz/threads/1199/>1×slot рабочее зеркало</a> Перед активацией принципиально внимательно изучить условия акции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, на коих возможно пользоваться предложением. Если бездеп обхватывает ограниченный список игр, рекомендуется разузнать максимальные коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только в том случае, если оператор не установил строгие ограничения на максимальную необходимую ставки.При забаве на бонусные средства запрещается играть в игровые автоматы с прогрессивным джекпотом и забавы из радела exist casino. Кроме того, некоторые казино выделяют бездеп на один либо несколько конкретных слотов, и в других играх Вы не сможете на их играть. 1×slots рабочее зеркало <a href=http://www.ihavethepussy.com/de/members/44464-GlennALLOP>http://www.ihavethepussy.com/de/members/44464-GlennALLOP</a> Одним из предлогов отдавать привилегию 1 либо другому заведению содержится в привлекательности предлагаемых акций и даровых предложений. Безвозмездные фриспины, выдаваемые без нужды создавать какой-нибудь лепта, в списке располагается далеко не в конце.
1×slots скачать на айфон
Бездепозитные призы отличный вариант бесплатной игры в игровые автоматы. Многие юзеры сети не понимают, собственно в казино можно начать играть полностью бесплатно, а позже исключить выигрыш на банковскую карту или электронный кошелек, иные не доверяют интернет казино, а третьи удачно играют и выигрывают – и подчас довольно немалые суммы. Условия все различаться друг от друга. Но подобный приз может быть применен лишь для игрового процесса – полученные на счет деньги до как, как будут отыграны, вывести невозможно.Операторы гемблинга заявляют, что так они сражаются с бонус-хантерами. Впрочем, критики считают, что этим казино пробуют устроить из случайного гостя постоянного игрока. <a href=https://kamchaty.ru/user/Patricksoymn/>https://kamchaty.ru/user/Patricksoymn/</a> Проверка занимает от нескольких мин. До нескольких дней, спецы техподдержки могут запросить вспомогательные документы или инициировать краткое общение по Skype. 1хслотс рабочее зеркало на сегодня Основное отличие в, что для получения бездепа не пополнять баланс в казино. Но считая этого, есть ряд прочих отличий:Помните, собственно в некоторых играх сумма ставки идет в зачет вейджера лишь отчасти. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки числятся как отыгранные деньги, момент как в слотах идет в зачет все one hundred percent суммы.
<b>Смотреть еще похожие новости:</b>
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=579354>1×slots мобильная версия войти казино</a>
<a href=https://shopcms.vsupport.club/topic/15644-%D0%A0%D1%97%D0%A1%D0%82%D0%A0%D1%95%D0%A0%D2%91%D0%A0%D0%86%D0%A0%D1%91%D0%A0%C2%B6%D0%A0%C2%B5%D0%A0%D0%85%D0%A0%D1%91%D0%A0%C2%B5-web-20/?p=94687>1хслот зеркало</a>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/7268/#comment-316028>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
2. Создать новый профиль. Для регистрации надо(надобно) наполнить маленькую анкету или зайдите в собственный офис при помощи соц сеток;
#8468 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 520–47–70 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик аферист https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8469 Charlesgunnyhttp://filmkachat.ru
сайт 1× slots casino
Популярность интернет казино растёт и всё больше юзеров начинают проявлять азартными играми. Бездепозитные бонусы 2022 года, это уникальные подарки за регистрацию. С их поддержкой новые игроки все получить благотворительные вращения либо средства на баланс за одну регистрацию. С выходом игорных заведений в онлайне, бездепозитные призы стали моднейшим способом вербования игроков. Подобные промоакции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о коих мы расскажем. Наш сайт собрал лучшие предложения из онлайна на 2022 год. Воспользуйтесь хоть подарком и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить обстоятельства. <a href=http://filmkachat.ru/>1×slots регистрация на официальном сайте</a> <a href=https://www.4shared.com/web/preview/pdf/3D1mgLn7fa>https://www.4shared.com/web/preview/pdf/3D1mgLn7fa</a> 1×slots казино мобильная версия <a href=http://z914169g.bget.ru/user/Glenncoome/>http://z914169g.bget.ru/user/Glenncoome/</a> Для получения бездепа нужно пригласить в игру по реферальной ссылке нового клиента: он обязан зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и восполнить счёт на сумму, указанную в критериях акции.Вейджер (wager) – это коэффициент, который показывает на какую сумму нужно сделать ставок, чтобы исключить приз из казино. Пример: Вы получили за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода этого приза, Вам необходимо сделать ставок на необходимую: 500*70=3500 рублей. Только всецело отыграв бонус, Вы сможете исключить свой выигрыш.
1×slots официальный сайт скачать на айфон
<a href=http://forum.cvetq.info/viewtopic.php?f=8&t=234534>1×slots регистрация 1×slotscasino 56 online</a> рабочее зеркало 1хслотс <a href=http://forum.industrialvideo.ir/member.php?action=profile&uid=4177>http://forum.industrialvideo.ir/member.php?action=profile&uid=4177</a> При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, коие можно предназначить игре в казино.Не стоит незамедлительно же отказываться от приветственных презентов в похожих казино. Администрация готова начислить средства либо фриспины, хотя предварительно работники должны увериться, что вы не аферист. Дело в, собственно развелось слишком много охотников за призами. Они выучились врать систему и наваривать солидные суммы денег. x1 slots регистрация в 1×slots casino В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно приятная часть забавы. Важно, часто бездепозитные бонусы в казино выдаются с ограничениями по максимальной выплате. В среднем можно рассчитывать на прибыль в несколько тысяч руб. Как исключить выигрыш с бонуса без депо. Придётся подтвердить акк документально, в некоторых заведениях. Процедура верификации обязательна и делается каждым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате или прочитайте в правилах.
1×slots актуальное зеркало
Фриспины начисляются по конкретной ставке. После их активации игроку нужно запустить разъем и убедиться, что в нем отображаются бесплатные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода в отыгрыша определяется оператором и изредка выше 5 000 руб. Несмотря на то, что данный вариант стимуляции со стороны азартных платформ очень моден в похожих игр, далековато не всем поклонникам казино знаменито, собственно себе бездепозитные бонусы казино и как именно их вероятно эксплуатировать.Не рекомендуем сломя голову браться за различные предложения получения средств без вложений. Вполне возможно, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на 1-ый взгляд. Альтернативой является казино бонус за депозит. Мы предлагаем вам пару советов, спасибо коим у любого игрока будет вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств: <a href=http://www.privatumervarta.sk/en/contact.html?meno=weewoman0&firma=weewoman0&email=lmmlxneo0107%40inbox.lv&telefon=weewoman0&predmet_spravy=weewoman0&sprava=%3Ca+href%3Dhttps%3A%2F%2Fsitesseo.ru%2Fvneshnyaya-ssylochnaya-massa-dlya-prodvizheniya-sajta%2F%3E%D0%BA%D0%B0%D0%BA+%D1%83%D0%B2%D0%B5%D0%BB%D0%B8%D1%87%D0%B8%D1%82%D1%8C+%D1%81%D1%81%D1%8B%D0%BB%D0%BE%D1%87%D0%BD%D1%83%D1%8E+%D0%BC%D0%B0%D1%81%D1%81%D1%83%3C%2Fa%3E+%D1%81%D1%81%D1%8B%D0%BB%D0%BE%D1%87%D0%BD%D0%B0%D1%8F+%D0%BC%D0%B0%D1%81%D1%81%D0%B0+%D0%BA%D0%BE%D0%BD%D0%BA%D1%83%D1%80%D0%B5%D0%BD%D1%82%D0%BE%D0%B2&captcha=dheqa&input_recordtime=31.10.2022+01%3A56%3A16&button8=Submit>http://www.privatumervarta.sk/en/contact.html?meno=weewoman0&firma=weewoman0&email=lmmlxneo0107%40inbox.lv&telefon=weewoman0&predmet_spravy=weewoman0&sprava=%3Ca+href%3Dhttps%3A%2F%2Fsitesseo.ru%2Fvneshnyaya-ssylochnaya-massa-dlya-prodvizheniya-sajta%2F%3E%D0%BA%D0%B0%D0%BA+%D1%83%D0%B2%D0%B5%D0%BB%D0%B8%D1%87%D0%B8%D1%82%D1%8C+%D1%81%D1%81%D1%8B%D0%BB%D0%BE%D1%87%D0%BD%D1%83%D1%8E+%D0%BC%D0%B0%D1%81%D1%81%D1%83%3C%2Fa%3E+%D1%81%D1%81%D1%8B%D0%BB%D0%BE%D1%87%D0%BD%D0%B0%D1%8F+%D0%BC%D0%B0%D1%81%D1%81%D0%B0+%D0%BA%D0%BE%D0%BD%D0%BA%D1%83%D1%80%D0%B5%D0%BD%D1%82%D0%BE%D0%B2&captcha=dheqa&input_recordtime=31.10.2022+01%3A56%3A16&button8=Submit</a> 1×slots зеркало рабочее на сегодня
1×slots зеркало этих способов предполагает регистрацию
Многие игроки, оценив перечень казино, остаются выступать в нем и дальше ? на это и направлено любое рекламную. Постоянные клиенты вносят депозиты и проделывают ставки, обеспечивая длительную выгода оператора. То есть, казино выдают бездепы свежим юзерам для формирования приклнной аудитории.Подарки на определенные даты отличаются критериями получения. Если одобрение начисляют игроку на денек рождения, то сумма обычно зависит от совместного объема депозитов за год. <a href=https://orbitsound.com/forum/user-211634.html>1хлот регистрация в 1×slots casino</a> Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, чтобы еще раз получить бесплатный бонус. Игорные заведения нетерпимы к бонус-хантерам, потому вас ожидает неминуемое санкция. 1 хслот регистрация в 1×slots casino <a href=https://Biowiki.clinomics.com/index.php/%D0%9E%D0%B1%D0%BC%D0%B5%D0%BD_%D0%A1%D1%81%D1%8B%D0%BB%D0%BA%D0%B0%D0%BC%D0%B8_%D0%94%D0%BB%D1%8F_%D0%9F%D1%80%D0%BE%D0%B4%D0%B2%D0%B8%D0%B6%D0%B5%D0%BD%D0%B8%D1%8F_%D0%A1%D0%B0%D0%B9%D1%82%D0%B0>https://Biowiki.clinomics.com/index.php/%D0%9E%D0%B1%D0%BC%D0%B5%D0%BD_%D0%A1%D1%81%D1%8B%D0%BB%D0%BA%D0%B0%D0%BC%D0%B8_%D0%94%D0%BB%D1%8F_%D0%9F%D1%80%D0%BE%D0%B4%D0%B2%D0%B8%D0%B6%D0%B5%D0%BD%D0%B8%D1%8F_%D0%A1%D0%B0%D0%B9%D1%82%D0%B0</a>
скачать 1×slots на андроид мобильная версия
Рассмотрим принцип его деяния на случае. Допустим, вы зарегались и получили $10 not the slightest down payment bonus с вейджером х50. Это значит, собственно выигранные деньги можно несомненно выводить не ранее, чем в такого, как общая сумма ставок достигнет $500. <a href=http://biosafe.tj/user/AshleyTib/>http://biosafe.tj/user/AshleyTib/</a> 1×slots casino регистрация на сайте Поспешите забрать бездепозитные призы за регистрацию в казино из представленного перечня. Все платформы не водят легальную работа, но и обрадуют правдивыми плодами игры, высокой отдачей, быстрыми выплатами.Максимальный объем ставки, который невозможно превосходить пока бонус не будет полностью отыгран. В случае нарушения этого управляла, бонус и выигрыш с него будут аннулированы.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=136579>1×slots зеркало быструю регистрацию а также мгновенное</a>
<a href=https://mit-bbs.com/memberlist.php?mode=viewprofile&u=15318&sid=d5d5c84d8bd43b28f7495369ca08652d>1хслотс мобильная версия зеркало</a>
<a href=http://tarratorriya.tforums.org/memberlist.php?mode=viewprofile&u=785>1×slots casino регистрация</a>
<a href=http://aficionado.pl/showthread.php?125295–1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE&p=143765>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бесплатные призы казино без депозита можно получить повторяющий валютных средств на бонусный счет (вывести их можно только после отыгрыша), фриспинов, игры или кешбэк-бонуса. Вейджер менее х30–35 является применимым. Опытные игроки утверждают, собственно с таким вейджером реально остаться в плюсе, случае правильно подойти к выбору игрового аппарата.
#8470 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8471 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8472 BruceFaphttps://contract.moscow
Военная служба по контракту <a href=https://contract.moscow/>https://contract.moscow</a> гарантированная стабильность, льготы для семьи, обучение и перспективы карьерного роста.
#8473 Charlesgunnyhttp://filmkachat.ru
1хслот скачать
В случае установленного лимита на необходимую вывода выигрыша с бездепозитного бонуса, игрок не может вывести больше заявленной суммы.Теоретически, к безвозмездным призам возможно отнести так нарекаемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, потому что они предоставляют лишь вероятность создавать ставки. <a href=http://filmkachat.ru/>1×slots казино зеркало</a> Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала быстрые выводы. Фишка выплат никаких, что довольно выбрать платёжный инструмент и указать необходимую. В большинстве случаев средства зачисляются на электронные кошельки на 15 мин., а на банковские карты – 1–3 трудящихся денька. <a href=https://forums.noria.com/topic/exploring-render-cgi>https://forums.noria.com/topic/exploring-render-cgi</a> Если вы бывалый игрок, вы должны аристократия, что приз без депозита – редкая находка. Тем не менее, мы еженедельно изучаем интернет, чтобы отыскать для вас лучшие бездепозитные предложения.Бездепозитные бонусы – это исключительно интересная и более многообещающая промоакция интернет-казино. Они в превосходнее фри-спинов, потому собственно выплаты в безвозмездных вращениях не гарантированы, так композиции на барабанах игрового аппарата могут не сложиться. казино 1×slots официальный сайт <a href=https://bbs.m2.hk/home.php?mod=space&uid=108044>https://bbs.m2.hk/home.php?mod=space&uid=108044</a> Ознакомьтесь с нашим перечнем лучших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего перечня и получите бездеп сразу. Хватайте наихорошие безвозмездные предложения ниже и выигрывайте большие средства, не рискуя!
1хслотс мобильная версия зеркало
Объективные – размер бонуса, коэффициент и условия вейджера, надобность внесения депозита для вывода денег;Бездепозитные бонусы начисляются только раз один. Не стоит раскрывать свежие аккаунты, дабы получить их повторно. Служба безопасности казино обязательно выявит «левого» участника и заблокирует. Если посетитель выполнит необходимые требования, отыграет свою ставку и решит исключить личный выигрыш, то ему нужно к, собственно казино непременно потребует предоставить ксерокопии личных документов, дабы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные свои вывести не удастся. 1×slots регистрация на 1хслотс Ознакомьтесь с нашим списком лучших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего списка и получите бездеп сразу. Хватайте наилучшие благотворительные предложения ниже и выигрывайте великие деньги, не рискуя!Активация денежного вознаграждения происходит механически в творения профиля или применения промокода. Иногда операторы предъявляют вспомогательные притязания: подписаться на странички казино в соц сетях или на рассылку рекламных извещений, скачать и установить вспомогательный софт и т.д. <a href=https://sultantheme.com/vb4forum/member.php?26147-JasperRhim>https://sultantheme.com/vb4forum/member.php?26147-JasperRhim</a> При использовании бездепозитным бонусом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют некоторое видов лимитов: 1хслотс 1хслотс регистрация перейти на 1×slots Выбор любого онлайн казино на нашем веб-сайте. В описании к каждому Вы сможете разузнать, что получите за создание аккаунта.
1хслотс рабочее зеркало
Как и другие акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых гостей и позволяет им составить впечатление о функционале, не рискуя вескими суммами.Но разу не забывайте внимательно читать управляла участия в бонусных акциях. Если вы нарушите хотя бы одно условие, позже вы не сможете устроить недоразумение с администрацией. <a href=http://intextv.by/forum/user/56715/>http://intextv.by/forum/user/56715/</a> Некоторые сайты, до чем провести регистрацию игроков, предлагают ответить на некоторое базовых вопросов. Цель проведения подобной викторины – выявить случайных людей, коие не имеют представления о покере, и не допустить получения ими призов. Если гость уже играл в казино, то ответить на полтора десятка несложных вопросов будет нетрудно. Очень часто, ответы можно отыскать на официальных сайтах этих учреждений. 1×slots мобильная версия войти казино Бывают ли бездепозитные призы без вейджера? Бывают, если у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино.
1× slots официальный
Новички не любят сразу же заносить депо. Это обусловлено отсутствием опыта и недоверием. К счастью, в наше время можно получить бездепозитный приз за регистрацию в казино. Неважно что начислит система – фриспины либо кредиты. В любом случае вы не рискуете собственными сбережениями. Это отличная вероятность запустить приглянувшийся видео разъем или же испытать фортуну в настольных забавах. 1×slot зеркало <a href=http://miinps.com/gnuboard/bbs/board.php?bo_table=free&wr_id=476949>http://miinps.com/gnuboard/bbs/board.php?bo_table=free&wr_id=476949</a> Каждая игровая перрон отличается условиями по получению и отыгрышу бездепов. В правилах отчетливо расписаны временные рамки, за которые нужно прокрутить вейджер. Также не забывайте про максимальный размер ставки и максимальную сумму выплаты. С другой стороны, чтобы получить бездепозитные призы казино, довольно истратить менее 1 минутки.
1×slot регистрация
В наше время довольно просто получить бонус за регистрацию в казино. Практически любой игорный жилище с радостью начислит деньги либо бесплатные вращения. Многие гэмблеры пользуются этим и не стесняются региться в любом клубе с выгодными критериями. Кстати, это отличная возможность выработать победную тактику и сорвать джекпот.Бездепозитные призы начисляются лишь один раз. Не стоит раскрывать новые аккаунты, чтобы получить их повторно. Служба защищенности казино непременно выявит «левого» участника и заблокирует. Если гость выполнит необходимые притязания, отыграет собственную ставку и решит исключить личный выигрыш, то ему надо(надобно) к, что казино обязательно востребует дать ксерокопии собственных документов, дабы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные средства вывести не удастся. <a href=http://witiai.cn/home.php?mod=space&uid=64541>http://witiai.cn/home.php?mod=space&uid=64541</a> После потребуется внести идентификационный платёж. Это пугает начинающих больше всего. Нужно сделать наименьший депо в 100–500 руб. Таким образом служба безопасности убедиться в том, что платёжный способ принадлежит Вам. Данная процедура необходима для обеспечивания безопасности игровых счетов. Пример, Ваш акк взломают и выведут свои на свой кошелёк. Будет очень досадно. Поэтому верификация платёжной системы, это необходимый момент. 1х слот 1хслотс регистрация перейти на 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.oursson.ru/viewtopic.php?f=2&t=8564>1×slots быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины предназначены для применения в видео слотах. Внимательно ознакомьтесь с условиями – часто их выдают на некоторые автоматы. В зависимости от клуба, у вас выйдет устроить определённое количество ставок. Кстати, продвинутые игорные жилища позволяют запускать любых «одноруких злодеев».
#8474 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Помните, собственно любые нарушения верховодил сведут на нет ваши усилия, и вы наверняка останетесь без начисленного для бесплатного бонуса. Всегда изучайте управляла начисления и обстоятельства вейджера. По каким вопросам, на коие вы не самостоятельно отыскать ответы, обращайтесь за объяснениям и саппорт. <a href=http://filmkachat.ru/>1×slots зеркало этих способов предполагает регистрацию</a> <a href=http://www.alexandria.gov.eg/Lists/List30/DispForm.aspx?ID=83358>http://www.alexandria.gov.eg/Lists/List30/DispForm.aspx?ID=83358</a> Доступ к подарку может открываться механически после введения промокода либо обращения в саппорта вебсайта. В первом случае от юзера не требуется практически действий. Бездеп с активацией по коду встречается чаще всего. Игроку необходимо установить совокупа знаков в графе, кот-ая имеет пребывать в регистрационной форме в Личном кабинете.Также учтите, собственно кое-какие игровые платформы сузивают список государств, коие готовы получить предложенный бездепозитный бонус за регистрацию. К примеру, существуют онлайн-заведения, выдающие сходственные призы лишь обитателям определенных стран. К примеру, интернет казино 777 Оригинал предоставляет бездепозитный бонус только игрокам из России и стран СНГ. Или наоборот, снабжают вознаграждением всех, кроме обитателей некоторых стран (как сего, следует пристально учить список, чтобы потом не появилось практически вопросов и претензий). 1×slots мобильная версия войти казино <a href=http://www.insem.co.kr/gn/bbs/board.php?bo_table=free&wr_id=1022924>http://www.insem.co.kr/gn/bbs/board.php?bo_table=free&wr_id=1022924</a>
1хлот регистрация в 1×slots casino
Раздача бонусов может быть посвящена различным датам: календарные дни, дни рождения игроков, годовщина открытия казино и т. Д. Подарок выдается в виде средств, фриспинов или баллов для скопления и обмена на предложения оператора. Если пользователь получает выигрыш, деньги начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд притязаний. казино 1×slots <a href=http://geolan-ksl.ru/forum/user/84681/>http://geolan-ksl.ru/forum/user/84681/</a> Подтвердите регистрацию, дабы активировать Бездепозитный бонус с выводом, потребуется наполнить индивидуальный профиль. Заполните пустые поля истинными данными о себе.Многие новенькие сомневаются, собственно поощрительный приз надо будет отдавать, в случае они выиграли у казино. Это полностью безопасно и накрепко. Выводя выигранные средства, игрок просто останавливает свое роль при и утрачивает уникальную возможность – безвозмездно наращивать собственное материальное положение. 1хслотс зеркало
1 xslots рабочее зеркало
Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном сайте и выполните вход в индивидуальный офис, чтобы отобрать безвозмездные вращения с вейджером х40;Классическая разновидность бонуса за творенье аккаунта. Его превосходство заключается в том, собственно заказчик имеет без избирать аппараты и создавать ставки в их. Иногда перечень игровых автоматов ограничен оператором, но все также это лучше, чем единственный дешевый разъем, как если, тогда, с использованием фриспинов. Но ни не запамятовывайте внимательно разбирать верховодила роли в бонусных акциях. Если вы нарушите но бы одно условие, позднее вы не сможете устроить недоразумение с администрацией. <a href=http://stk-solar.ru/bitrix/redirect.php?goto=http://sportmax64.ru/bitrix/redirect.php?goto=http://logomebel.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/jT3r0rDe5fi>http://stk-solar.ru/bitrix/redirect.php?goto=http://sportmax64.ru/bitrix/redirect.php?goto=http://logomebel.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/jT3r0rDe5fi</a> При регистрации сомнений либо ином онлайн игральном заведении — вам дается раз шанс испытать свою удачу не внося свои монеты. Замечу собственно эту поощрительную услугу деют не все онлайн игровые площадки, а лишь великодушная середина(средина) из них. Которые мы подготовили для Вас в нашем списке.Если вы новичок деле и только попали в неизведанную вами район азарта — за предложений как бездепозитные призы без пополнения. 1×slos регистрация в 1×slots casino Основное правило получения бездепа ? творимый аккаунт должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов строго запрещено. Проверка ведется по имени, e-mal, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депо необходимо блюсти простую очередность поступков.
1×slos регистрация в 1×slots casino
3. Подтвердить данные. В зависимости от клуба, нужно привязать телефон либо почту, указать персональную информацию; Для казино, работающих онлайн, бездепозитные бонусы необходимы для привлечения свежих посетителей. Предложение поиграть на слотах без необходимости внесения настоящих денег — работающий метод для увеличения энтузиазма к компании. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит выступать в казино, лишь теперь теснее на личные средства.Самые свежие бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды находятся на этой странице. Посетитель имеет оценить условия получения и начать выступать на деньги без внесения депо. При этом игроку важно понимать, на каких критериях и какими способами него вывести приобретенный выигрыш. Для этого нужно расценить перечень присоединенных платежных систем. Выполнив все притязания оператора, клиент имеет оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит примерно менее суток. Если дополнительно требуется пройти функцию верификации, то срок увеличивается до 1–2 трудящихся дней. Для перевода используются банковские приборы и электрические платежные системы. Второй способ подходит какого-либо, так как большинство транзакций в этом случае исполняются моментально. В связи со спецификой функционирования банков обработка платежей может взятьвдолг(взятьвзаймы) до нескольких рабочих дней.Не желайте сыграть в азартные забавы, не рискуя средствами средствами, но получая в все выплаты? Подобную возможность предоставляют все наихорошие порталы с азартными увеселениями. В их числе большое честных и надежных интернет-казино на русском языке. Они завлекают свежих юзеров различными поощрительными событиями, включая бездепозитные, или благотворительные призы. 1×slots зеркало видели такую регистрацию на <a href=http://zeren.freeoda.com/member.php?action=profile&uid=4182>http://zeren.freeoda.com/member.php?action=profile&uid=4182</a> Воспользоваться бездепом возможно не во всех игровых автоматах: казино и тут уточняет лимитирование для клиентов. Конечно, это возможно счесть неким неудобством для игрока, но ради отметить, собственно выбор автоматов всё точно остаётся достаточно большим.
1×slot зеркало рабочее регистрации на телефон придет
Многие новички сомневаются, что поощрительный приз не будет возвращать, и в они выиграли у казино. Это безусловно безопасно и накрепко. Выводя выигранные средства, игрок просто одергивает свое участие в игре и теряет уникальную возможность – бесплатно наращивать собственное материальное положение. <a href=http://ledsoft.ru/forum/?PAGE_NAME=message&FID=3&TID=13576&TITLE_SEO=13576-_-_-_&MID=14366&result=new#message14366>http://ledsoft.ru/forum/?PAGE_NAME=message&FID=3&TID=13576&TITLE_SEO=13576-_-_-_&MID=14366&result=new#message14366</a> В игровых клубах без лицензии Вы покупаете „кота в мешке“ и в случае спорных обстановок нет способности куда-то посетовать и доказать свою правоту. 1×slots официальный сайт, скачать Как правило, при выводе денег, от играющего потребуется лишь устроить минимальный вклад чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом индивидуальный счет.При регистрации стопам свидетельствовать только достоверную информацию. Когда учетная запись будет активна, будет доступ в Личный кабинет. В нем возможно выбрать денежную, ввести промокод и узнать подробные правила получения и отыгрыша бездепа. Краткая информация об акции нередко находится именно на регистрационной форме.
<b>Смотреть еще похожие новости:</b>
<a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=49585>1хслот скачать</a>
<a href=https://www.elektrofahrrad-tests.de/forums/member.php?action=profile&uid=34394>1×slots официальный сайт мобильная версия</a>
<a href=https://qualityprogamer.de/forum/showthread.php?tid=267627>1хслот скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные призы, как уже ясно, считаются оригинальной вероятностью обратиться игровому процессу абсолютно бесплатно, словами играть в онлайн казино безвозмездно и на имеющие свои сразу в регистрации аккаунта. Автоматы с этим депозитом могут замерзнуть прекрасной вероятностью поиграть для почитателей азарта с определенными лимитированиями в денег.
#8475 Bradleyaccut
https://drugs1st.pro/ drugs1st
#8476 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasino09k online
Призовые начисления без депо имеют предоставляться для роли в турнирах онлайн казино. Потратить перечисленные средства можно исключительно масштабах этой акции. Условия их проведения содержат ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться таким предложением, превосходнее выучить его верховодила.Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=http://filmkachat.ru/>1×slots зеркало которую указывали при регистрации кстати</a> Вообще перейдя в казино — верховодила схожи в получении бездепозитных бонусов, в стандартные верховодила заходит: подтвердить эл. Почту и телефонный, наполнить собственный собственный профиль, активировать промо код или активировать предложения во вкладке БОНУСЫ. <a href=https://onedrive.live.com/?cid=045D43199084DECB&id=45D43199084DECB%212227&parId=root&o=OneUp>https://onedrive.live.com/?cid=045D43199084DECB&id=45D43199084DECB%212227&parId=root&o=OneUp</a> Стоит отметить, собственно бездепозитный приз выдается лишь совершеннолетним новеньким, которые, тому, шансы пригласить собственных приятелей и знакомых, того претендующих на поощрительную программку преданности. Подобная технология появилась среди конкуренцию онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры содействуют увеличению своей посещаемости, методом вербования новых игроков. Бонусы – это уникальный шанс для вероятных соучастников игры, коие все опробовать софт покер рума и убедиться, будут ли они в него играть или нет. Новый игрок испробует свои силы с настоящими оппонентами в казино.Шаг 4. Активация. Внимательно выучите обстоятельства, информацию по ограничениям и сроке деяния бонусного предложения. Разобравшись с правилами, возможно активировать приз в собственном кабинете (от ? с внедрением промокода) либо по запросу в саппорт. 1хслотс рабочее зеркало <a href=http://seafishzone.com/home.php?mod=space&uid=1247301>http://seafishzone.com/home.php?mod=space&uid=1247301</a> Бездепы могут заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами.В количестве случаев безвозмездные бонусы начисляются в кредитах, которые невозможно сразу вывести со счета. Прежде их нужно отыграть по установленным правилам. Эти требования принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже.
1×slots регистрация 1×slots casino 777 online
Приветственный бонус без депозита ? презент за регистрацию. Выдается деньгами, фриспинами или баллами. В последнем случае бонусные баллы применяются для роли в турнирах либо обмена на настоящие деньги. 1хслотс казино зеркало Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша бонусов. Заведения практически устанавливают наивысшую ставку, возможную по условиям вейждера. <a href=http://solbi.co.kr/bbs/board.php?bo_table=gallery&wr_id=188846>http://solbi.co.kr/bbs/board.php?bo_table=gallery&wr_id=188846</a> 1×slots регистрация 1×slots casino 777 online При пользовании бездепозитным призом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют количество обликов лимитов:Нет. Казино выдают безвозмездные призы за регистрацию, для того, чтобы заказчик возможность ознакомиться с игровым заведением. А дабы вывести его, нужно выполнить условия отыгрыша.
1×slots зеркало на сегодня
Сразу последствии активации промокода можно пользоваться презентом. Как теснее упоминалось, бонусы посещают трёх обликов – фриспины, кредиты и фриплей-бонусы.Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, the decision лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. <a href=https://hikvisiondb.webcam/wiki/Shisha_Tobacco_From4_Eur>https://hikvisiondb.webcam/wiki/Shisha_Tobacco_From4_Eur</a> Да, у даровых бонусов есть дефекты. Прежде всего, они обычно не. Кроме того, условия вейджера по ним практически строгие. Но все же недоступность риска делает их довольно красивыми для посетителей. 1×slots регистрация 1×slots casino c2d ru Чтобы бездеп не был начислен на Ваш аккаунт, Вам не активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк механически, а Вы не планируете его применять, обратитесь в службу с пожеланием отменить бездепозитный бонус.При выполнении условий отыгрыша и верификации, деньги с бонусного счета переводятся на основной и имеют быть выведены на карту или электронный кошелек. Лимиты на вывод и сроки проведения транзакции в от выбранной платежной системы.
скачать 1×slots официальный сайт
Активация по промокоду употребляется в разных обликах бездепов. Если речь о приветственном призе, то комплект знаков можно разузнать на главной странице, в регистрационной форме или послании, которое отправляется юзеру для подтверждения e-mail. Акции шансы проводиться общо с партнерскими площадками. Обычно код располагается на постороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активируется одноразовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном кабинете либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем актуальный код для активации в описании любого рекламную. Как верховодило, при выводе денег, от играющего требуется только устроить минимальный лепта чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом собственный счет. 1×slots регистрация 1×slotscasino09k online <a href=http://www.fire-team.ru/forum/member.php?u=4900>http://www.fire-team.ru/forum/member.php?u=4900</a> В бонусную программку многих операторов входят регулярные бездепы. Это пожизненные промоакции, поощряющие активных постоянных игроков. Популярный формат — раздача фриспинов по конкретным денькам недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают неизменные бонусы без депозита в размен на накопленные баллы преданности.Поспешите арестовать бездепозитные призы за регистрацию в казино из представленного перечня. Все платформы столько водят законную работа, хотя и порадуют добросовестными плодами игры, высокой отдачей, прыткими выплатами.
1×slots зеркало сайта
Как лишь вы отыграли вейджер и свои с бонусного баланса перешли для на реальный счет, Вы храбро можете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать минимальный депо к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, вместе с депозитом).Доступные игры – В неких азартных играх можно снизить математическое преимущество казино до нескольких десятых процента. В их числе почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как правило, в таких забавах ставки идут в зачет вейджера не полностью. Например, возможность учитываться лишь 50%. В некоторых играх бездепозитные призы вообщем невозможно отыгрывать. Свежий бонус начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в пользовании средствами, а случае отыгрыша оператор возможность ввести ограничение на вывод денег. <a href=http://iawbs.com/home.php?mod=space&uid=812695>http://iawbs.com/home.php?mod=space&uid=812695</a> Бездепозитный бонус предоставляется новому игроку за конкретные деянья. Часто презент повторяющий средств или фриспинов выдается за регистрацию, спасибо чему пользователь получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. 1×slots зеркало видели такую регистрацию на Подтверждение электрической почты – одно из основных критерий, коие есть практически в любом бездепозитном казино. Чтобы верифицировать электронную почту, достаточно перейти по интенсивной ссылке в письме, полученном от азартного клуба.
<b>Смотреть еще похожие новости:</b>
<a href=https://rolivka.online/forum/showthread.php?tid=29973>1 xslots рабочее зеркало</a>
<a href=https://karakol.com.kg/user/Jameskef/>1×slots casino online регистрация</a>
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=54806>1х слот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Каждая игровая платформа отличается условиями по получению и отыгрышу бездепов. В правилах детально расписаны временные рамки, за которые надо(надобно) прокрутить вейджер. Также не забывайте про максимальный объем ставки и максимальную сумму выплаты. С иной стороны, дабы получить бездепозитные призы казино, достаточно израсходовать не более 1 минуты. Сразу в активации промокода можно пользоваться презентом. Как теснее упоминалось, бонусы посещают трёх видов – фриспины, кредиты и фриплей-бонусы.
#8477 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino 777 online
После получения бонуса вывод средств для посетителя несомненно недоступен до тех пор, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо пара недель. Выводить деньги игрок сможет лишь в отыгрыша. <a href=http://filmkachat.ru/>1×slots зеркало регистрацию более популярный вариант это</a> Срок отыгрыша — это этап, кот-ый наступает в момент активации приза и заканчивается с его закрытием. Пользователю нужно уложиться в данный временной зазор, иначе призовые средства аннулируются. Казино устанавливают перечень игр, ставки в которых засчитываются при расчете отыгранных денег. Если тайтл не заходит в данный перечень, то он может быть недоступен для загрузки период действия бонусного предложения.Подарки на праздничные ? посвященные праздничным датам, требующие условного отыгрыша или начисляются без того. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду. <a href=https://www.goldenline.pl/grupy/Przedsiebiorcy_biznesmeni/health-economics/how-to-create-a-stunning-3d-walkthrough-video-for-architectural-projects,3947888/>https://www.goldenline.pl/grupy/Przedsiebiorcy_biznesmeni/health-economics/how-to-create-a-stunning-3d-walkthrough-video-for-architectural-projects,3947888/</a> Чаще всего казино бонус за регистрацию без депозита даёт вероятность запустить любой автомат. Но другого, как внимательно ознакомиться с критериями. Иногда для забавы доступны только определённые модели. Если вы новичок и ничего не смыслите в гэмблинге, чем начать знакомство с миром пыла именно с «одноруких бандитов». 1× slots casino зеркало <a href=http://kafdp.or.kr/bbs/board.php?bo_table=free&wr_id=864072>http://kafdp.or.kr/bbs/board.php?bo_table=free&wr_id=864072</a> Бездепозитный приз предоставляется новому игроку за конкретные деянья. Часто презент в виде средств или фриспинов выдается за регистрацию, благодаря чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.
1×слотс казино
Бесплатные бонусы казино без депо можно получить вид валютных средств на бонусный счет (вывести их возможно лишь в отыгрыша), фриспинов, игры либо кешбэк-бонуса.Это также безвозмездные финансы, которые поступают на аккаунты свежеиспеченных компьютерные последствии регистрирования. А особенность таких призов состоит сомнений, что обретенные финансы обязательно по использовать в продолжении назначенного медли. 1×slots казино зеркало <a href=http://111.t95283ld.bget.ru/user/Frankhandy/>http://111.t95283ld.bget.ru/user/Frankhandy/</a> Некоторые онлайн-казино без депозита предлагают свежим клиентам избрать бонус при регистрации. Будьте внимательны: выбрав раз, вы в безусловном большинстве случаев не можете воспользоваться остальными. 1×slot официальный сайт
1×slot зеркало рабочее этих способов предполагает регистрацию
Обычно бездепозитные промоакции от казино, приходят на эл. Почту в деньки рождения или праздничные. В некоторых онлайн казино возможно адресоваться в чат и как постоянному игроку, вероятно вас предложат бездепозитное предложение. Воспользоваться бездепом можно не во всех игровых автоматах: казино вдруг уточняет ограничение для клиентов. Конечно, это возможно счесть неким неудобством для игрока, но справедливости ради необходимо, что выбор автоматов всё точно остаётся достаточно наибольшим.Некоторые сайты, этого чем обмануть регистрацию игроков, предлагают ответить на количество базовых вопросов. Цель проведения подобной викторины – выявить случайных людей, которые не имеют представления о покере, и не допустить получения ими бонусов. Если посетитель теснее играл в казино, то ответить на полтора десятка несложных вопросов несомненно нетрудно. Очень нередко, ответы возможно найти на официальных сайтах этих учреждений. <a href=https://e-participationyouth.eu/forum/profile/joshuasib/>https://e-participationyouth.eu/forum/profile/joshuasib/</a> Чтоб получить крупный выигрыш, выбирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша.Oтыгpaть бонус с обозначенным вeйджepом, желаемого необходимо сдeлaть cтaвoк нa cумму, превосходящую объем приза в некоторое один. 1×slots зеркало регистрация Первый возникающий вопрос, это, для выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают свежих игроков. Последним легче начать игру на средства с дара за регистрацию. Им надо пополнять баланс и тратить личные средства. Новички получают безвозмездные спины или средства на счёт. С их подмогою знакомятся с игровым ходом, крутят слоты и делают ставки в рулетке.
1× slots зеркало
Если речь идет об эксклюзивных услугах, имеет потребоваться регистрация в казино по ссылке с партнерского сайта. 1×slots casino регистрация 1×slotscasin online <a href=http://jade-crack.com/home.php?mod=space&uid=1182255>http://jade-crack.com/home.php?mod=space&uid=1182255</a> Свежий приз начисляется повторяющий валютных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в пользовании средствами, а случае отыгрыша оператор может ввести лимитирование на вывод средств.Акционные предложения от казино существуют в различных форматах. Часто бонусы даются в размен на депозит. Игрок заносит платеж и получает средства, бесплатные вращения и другие поощрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — вид бонуса, кот-ый гарантирован за выполнение конкретных действий на сайте:
1×slot регистрация
Многие казино деют в рекламных целях благотворительные бонусы самая для наших читателей. Чтобы их получить, нужно перебежать на игровой вебсайт по партнерской ссылке с нашего портала.Вейджер (либо вагер) ? это наименьшая сумма ставок, которую необходимо сделать для вывода денежного приза. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение. <a href=http://wiki.life100.live/index.php?title=%D1%81%D0%B0%D0%B9%D1%82%20%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0>http://wiki.life100.live/index.php?title=%D1%81%D0%B0%D0%B9%D1%82%20%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0</a> Законодательство, регулирующее азартные игры в разных странах, оказывает на полномочия операторов. В итоге пользователи из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это возможность быть как глубокий отказ в доступе, например и невозможность загружать игры отдельных изготовителей.Ну и конечно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: подобная добродушие увеличивает степень преданности клиентов к фирмы. 1× slots casino зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.bedwantsinfo.nl/thread-676765.html>1× slots casino зеркало</a>
<a href=https://australianwinerytours.com/tours/showthread.php?tid=216261>1×slots мобильная версия войти казино</a>
<a href=https://www.ldvd.nl/no-22-san-diego-place-rallies-very-last-boise-country-27–16?page=41#comment-237903>1×slots зеркало которую указывали при регистрации кстати</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На безвозмездные призы онлайн-казино практически всегда распространяется ограничения по стране проживания посетителей. Даже случае вас разрешено открывать счет и играть на средства в заведении, это еще не означают, собственно вам доступны no down payment bonuses.
#8478 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8479 Charlesgunnyhttp://filmkachat.ru
сайт 1× slots casino
Также бывают случаи, когда казино начисляет обсужденный бонус после регистрации свежего клиента по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам.Фриспины — благотворительные вращения, которые разрешают игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины числятся самым модным и предпочтительным видом бонуса — бесплатные вращения иногда эффективнее и веселее в отыгрыше, чем другие виды бездепов. <a href=http://filmkachat.ru/>1×slots официальный зеркало</a> Третитй бездепозитный приз за регистрацию – денежные средства. К раскаянью, начислить рубли либо баксы готовы лишь знаменитые и популярностью клубы. С их поддержкой возможность насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком.Это один из основных показателей привлекательности подарка. С завешенным коэффициентом том мастера не сумеют выполнить обстоятельства по отыгрышу. И так, как привлекательно смотрится предложение – бездепозитный бонус казино в объеме $500 или $1 000. Чтобы новички получше вникли, что же такое вейджер, мы разберём на примере. <a href=http://sites.estvideo.net/alvasoft/forum/topic-3–59691–1.html>http://sites.estvideo.net/alvasoft/forum/topic-3–59691–1.html</a> 1×slots сайт <a href=http://d90894u1.bget.ru/index.php?subaction=userinfo&user=slowentrant18>http://d90894u1.bget.ru/index.php?subaction=userinfo&user=slowentrant18</a> Большинство клубов привлекают внимание игры за счёт разнообразных даров. На одних веб-сайтах возможно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает благотворительные вращения для пуска топовых интернет слотов. Несмотря на разные промоакции, стоит выделить самые основные.
1×slots официальный сайт зеркало рабочее
Отказ в прохождении верификации. Если заказчик не хочет либо имеет предоставить документы, подтверждающие его лицо, профиль будет заблокирован совместно, вкупе со всеми бонусными начислениями. 1×slots зеркало рабочее на сегодня <a href=http://metal-firms.co.ua/wr_board/tools.php?event=profile&pname=astonishingtail>http://metal-firms.co.ua/wr_board/tools.php?event=profile&pname=astonishingtail</a> 1х слот 1хслотс регистрация перейти на 1×slots
1×slos регистрация в 1×slots casino
<a href=http://bt52.ru/bitrix/redirect.php?goto=http://egd.ru/bitrix/redirect.php?goto=http://forum.thd.vg/proxy.php?link=https://teletype.in/@urid_pomosh/YOP2Zn6fOej>http://bt52.ru/bitrix/redirect.php?goto=http://egd.ru/bitrix/redirect.php?goto=http://forum.thd.vg/proxy.php?link=https://teletype.in/@urid_pomosh/YOP2Zn6fOej</a> Бездепозитный бонус по промо-коду несомненно доступен для игры, только что случае когда Вы активируете специальный бонусный код в разделе с бонусами либо укажите промокод при регистрации на веб-сайте. В неких случаях, не активации кода, придется подтвердить контактные данные игрока и наполнить анкету посетителя.Пoдтвepдить личнocть клиента. Для успешного вывода средств, нужно доказать лицо посетителя. Нa этaпe вepификaции пpoфиля, сотрудники службы безопасности обязаны увериться, что у игрока более один аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не сможет вывести собственный выигрыш, случае у него будет некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы. казино 1×slots Благодаря программе преданности от игорного заведения, возможно арестовать превосходный старт и без дополнительных вложений запустить видеослоты. Кроме того, возможно рассчитывать на реальную фортуну и получить, без вложения собственных денег, немалый выигрыш.
1хслотс мобильная версия зеркало
<a href=http://brilliance.ru/forum/viewtopic.php?f=6&t=28724>1× slots зеркало</a> Существуют казино с призом за регистрацию, в очень известны фриспины в интернет казино впоследствии регистрации в конкретных забавах. Они встречаются том чаще бесплатных поощрений или традиционных бонусов в казино без вложений. Например, игрок регистрирует счет, на который начисляются безвозмездные игры, бонус за регистрацию вид даровых фрспинов, вращения в игровом автомате. Во время игрового процесса игрок выигрывает настоящие деньги, коие в последствии возможно успешно исключить из заведения на собственную платежную систему. То есть, есть шансы исключить средства без рисков своими деньгами. Регистрация, за которую компьютерные получит бонусы, займет минут, а спасибо этому возможно прирастить 5 евро поощрений до тыс. И без всяких проблем исключить их.Условия вывода выигрыша. В неких заведениях для успешного вывода с бездепозитного приза достаточно пополнения баланса и доказательства личности. В иных же клубах, необходимо некоторое раз прокрутить собственный депо. Бездепозитные призы отличный вариант бесплатной игры в игровые автоматы. Многие юзеры сети не понимают, собственно в казино можно начать играть полностью бесплатно, а позже исключить выигрыш на банковскую карту или электронный кошелек, иные не доверяют интернет казино, а третьи удачно играют и выигрывают – и подчас довольно немалые суммы. 1×slots актуальное зеркало <a href=https://homment.com/qOafiNfoDN7gHcHka5fk>https://homment.com/qOafiNfoDN7gHcHka5fk</a>
1×slots регистрацию процедура займет всего лишь
<a href=https://www.025b.cn/space-uid-1427093.html>https://www.025b.cn/space-uid-1427093.html</a> 1×slots регистрация 1×slotscasino 56 online
<b>Смотреть еще похожие новости:</b>
<a href=https://forums.scar-divi.com/topic/676360–1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE/>1хслотс официальный сайт зеркало</a>
<a href=https://smm-seo.ru/threads/1×slots-kazino-zerkalo.38179/>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Зарегистрироваться в казино по специальной ссылке либо с бонусным кодом. Подтвердить контактные данные (номер аппарата и электронную почту). Для доказательства номера телефонного необходимо в собственном профиле указать собственный номер и надавить кнопку „Подтвердить номер аппарата“, дальше Вы получите sms-сообщение с кодом, кот-ый необходимо установить в отвечающее фон. Для доказательства электронной почты, перебежать по активной ссылке в послании от казино.
#8480 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сантехник мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>Заказать мужа на час аферисты https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8481 Charlesgunnyhttp://filmkachat.ru
скачать 1×slots на андроид мобильная версия
Не сложно додуматься, что not the slightest deposit bonuses почти разу не посещают немаленькими. Чаще всего идет о пяти–тридцати баксах (либо эквиваленте этой суммы в иной еденице). <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> <a href=https://www.infragistics.com/community/forums/f/ignite-ui-for-asp-net-mvc/126866/how-to-choose-the-right-3d-rendering-company-for-your-project>https://www.infragistics.com/community/forums/f/ignite-ui-for-asp-net-mvc/126866/how-to-choose-the-right-3d-rendering-company-for-your-project</a> 1×slots официальный сайт скачать <a href=https://www.cakeresume.com/portfolios/0b9d0f>https://www.cakeresume.com/portfolios/0b9d0f</a> Подарки на праздники ? приуроченные к парадным датам, требующие символического отыгрыша либо начисляются без такового. Могут дариться игрокам сутки рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду.Бездепозитные призы казино за регистрацию в 2022 году — это вероятность поиграть за счёт заведения. Казино даёт посетителю шанс пользоваться определённой суммой либо количеством даровых вращений без внесения депо. Не путайте деморежим с реальной забавой без надобности внесения депозита.
1×slots регистрация 1×slots review live
Бесплатный бонус – кредиты, коие онлайн-казино начислит клиенту, не заставляя его пополнять игровой счет. 1хслот зеркало сайта <a href=http://vniia.ru/bitrix/redirect.php?goto=http://ofhoreca.ru/bitrix/redirect.php?goto=http://sidak.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/imwEJV_TwwX>http://vniia.ru/bitrix/redirect.php?goto=http://ofhoreca.ru/bitrix/redirect.php?goto=http://sidak.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/imwEJV_TwwX</a> 1×slot рабочее зеркало
1×slots casino регистрация 1×slotscasin online
Так собственно приготовьтесь предоставить секретную информацию (пол, возраст, страна проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает не более суток, последствии чего удастся свободно выводить крупные выигрыши. Подтверждение индивидуальной информации. Все казино настоятельно от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у пользователя других аккаунтов (мультиаккаунт запрещен).Третитй бездепозитный приз за регистрацию – денежные свои. К огорчению, начислить рубли либо доллары способны только известные и популярностью клубы. С их помощью вас насладиться каждой доступной игрой – автоматом, рулеткой, кено, блэкджеком. <a href=http://bc4u.co.kr/bbs/board.php?bo_table=qa&wr_id=129855>http://bc4u.co.kr/bbs/board.php?bo_table=qa&wr_id=129855</a> Также учтите, что кое-какие игровые платформы сузивают перечень стран, коие готовы получить предложенный бездепозитный приз за регистрацию. К образцу, существуют онлайн-заведения, выдающие подобные призы только жителям конкретных стран. К образцу, онлайн казино 777 Оригинал дает бездепозитный бонус только игрокам из России и стран СНГ. Или напротив, пичкают вознаграждением всех, не обитателей неких стран (исходя из этого, стопам внимательно изучать перечень, дабы впоследствии не возникло никаких вопросов и жалоб). 1×slots официальный сайт, скачать Подобные бонусы без депозита предоставляются на больше прибыльных условиях. Зачастую они крупнее, а условия отыгрыша наименее строгие.
1×slots казино мобильная версия
В большинстве заведений устроить это можно по e-mal, по номеру аппарата, спустя социальную сеть либо гугл-аккаунт.На нашем сайте Вы найдете перечень актуальных новых бездепозитных призов в казино 2022 года. Также, есть количество неповторимых предложений, коие доступны лишь гостям нашего сайта в регистрации по нашей ссылке либо активации специального промокода. <a href=https://www.goslog.ru/forum/messages/forum1/message10464/11-obrashcheniya-grazhdan?result=reply#message10464>1хлот регистрация в 1×slots casino</a> Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депо может отличаться до 30 дней. Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного бонуса.Для тех, кто лишь подумывает испытывать свою удачу, а для проф игроков, разыскивающих свежие площадки для выигрышей, ведущие лицензированные казино часто устраивают различные акции, и одно из лучших услуг за последнее время – как для начинающих, например и для профессиональных игроков – бездепозитный приз за регистрацию. 1×slots подтвердит вашу регистрацию если говорить <a href=http://www.glife2120.ru/user/RichardRhina/>http://www.glife2120.ru/user/RichardRhina/</a> Почти все игровые клубы требуют подтверждение контактных данных игрока для получения бездепозитного бонуса.Выигрыши с призов без инвестициям практически привязаны к требованию по ставкам и могут быть обналичены только в исполнения данных притязаний.
1хслот официальный сайт зеркало
Подтвердите личность, предоставив оператору казино средства паспортные данные. Инструкции обычно легкие, главное — четко им по. Если написано, собственно «на фото должны быть заметны все хорошо угла странички паспорта» — сделайте именно это фото. <a href=https://series40.kiev.ua/user/Justinren/>https://series40.kiev.ua/user/Justinren/</a> Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера. 1×slots зеркало рабочее Способы получения бездепа различаются от облика бонуса, кот-ый понравился игроку. Но для иначе нужно быть зарегистрированным в легальном онлайн-казино и подтвердить собственную лицо. В общем облике пошаговая инструкция для получения бездепозитного приза смотрится так:
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Так собственно можете отважно регистрироваться без всяких размышлений. Фортуна сегодня наверняка на вашей стороне. Не бойтесь, так следствие какого или убытка Вам совершенно не грозит. С этими призами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе. В онлайне много известных игорных площадок с красивыми акционными услугами. Однако пристально разбирать условия 10-ов услуг в надоест, ну и время отнимет количество. Поэтому наша команда подготовила ТОП-3 сайтов с превосходнейшими бездепозитными бонусами:
#8482 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мастер на час аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8483 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8484 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>сантехник аферист https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8485 Antonioqrqhttps://redservis.ru/
Привет дамы и господа<a href=https://redservis.ru/>.</a> <a href=https://redservis.ru/>червячный редуктор</a> <a href=https://redservis.ru/>планетарный редуктор</a> <a href=https://redservis.ru/>конические редукторы</a> <a href=https://redservis.ru/>червячный редуктор купить</a> <a href=https://redservis.ru/>промышленный редуктор</a> <a href=https://redservis.ru/>мотор редуктор червячный</a> <a href=https://redservis.ru/>планетарный редуктор купить</a> <a href=https://redservis.ru/><img src=„https://i122.fastpic.org/big/2023/0815/07/016dc932a001921649f969cfd47a5107.jpg“></a> Наша компания занимается продажей соосных мотор-редукторов из наличия со складов, расположенных по всей России, или под заказ на производство. Специалисты знают все о данной продукции, поэтому грамотно проконсультируют вас в выборе нужного редуктора с учетом технических требований, помогут осуществить своевременную доставку и подобрать соответствующий тип транспорта.Особенностью соосных мотор-редукторов является такое пространственное расположение входного и выходного валов, при котором ось их вращения лежит на одной линии. Такие редукторы востребованы там, где требуется достичь большого крутящего момента на выходном валу при минимальных габаритных размерах. Соосный мотор-редуктор входит в состав конвейерных установок скребкового, роликового, а также ленточного типа и может использоваться на обогатительных фабриках, зернохранилищах и предприятиях перерабатывающего комплекса.Редукторы этого типа применяются для приведения в движение насосов, различных станков и механизмов, рудоразмольных, стержневых и шаровых мельниц. Мотор-редукторы с соосными валами устанавливаются на устройствах, предназначенных для смешивания нескольких компонентов и получения гомогенной смеси. Кроме того, такие редукторы устанавливаются на подъемных механизмах различного типа. Наша контора занимается продажей свыше 10 лет качественных редукторов различных видов и производителей. Мы будем рады Вас видеть у нас на вебресурсе <a href=https://redservis.ru/>НАЖМИТЕ ССЫЛКУ</a> Увидимся! <a href=https://redservis.ru/>редуктор tramec купить аналог</a> <a href=https://redservis.ru/>коническо цилиндрический редуктор купить</a> <a href=https://redservis.ru/>редуктор siti подобрать аналог</a> <a href=https://redservis.ru/>конический мотор редуктор nord аналог</a> <a href=https://redservis.ru/>аналог редуктор motovario</a> <a href=https://redservis.ru/>планетарные мотор редукторы</a> <a href=https://redservis.ru/>мотор редуктор соосный фланцевый</a> <a href=https://redservis.ru/>индустриальные редукторы купить</a> <a href=https://redservis.ru/>цилиндрические мотор редукторы i mak серии ypm купить</a> <a href=https://redservis.ru/>редукторы i mak серия iro купить</a> <a href=https://redservis.ru/>редуктор watt drive подобрать аналог</a> <a href=https://redservis.ru/>соосный редуктор nord</a> <a href=https://redservis.ru/>конический мотор редуктор i mak</a> <a href=https://redservis.ru/>редуктор поворота консольного крана</a> <a href=https://redservis.ru/>конические редукторы</a> <a href=https://redservis.ru/>индустриальный редуктор pgr ph pb купить</a> <a href=https://redservis.ru/>червячные мотор редукторы цена</a> <a href=https://redservis.ru/>цилиндрический мотор редуктор i mak купить</a> <a href=https://redservis.ru/>серии конических редукторов</a> <a href=https://redservis.ru/>мотор редукторы с параллельными валами</a> <a href=https://redservis.ru/>мотор редуктор для экструдера</a> <a href=https://redservis.ru/>червячный мотор редуктор i mak серии irsm купить</a> <a href=https://redservis.ru/>планетарный редуктор pds аналог</a> <a href=https://redservis.ru/>аналог редуктор yilmaz</a> <a href=https://redservis.ru/>редуктор flender купить аналог</a> <a href=https://redservis.ru/>цилиндрический редуктор с параллельными валами купить</a> <a href=https://redservis.ru/>планетарный редуктор pds купить аналог</a> <a href=https://redservis.ru/>конический редуктор pgr купить аналог</a> <a href=https://redservis.ru/>мотор редуктор червячный одноступенчатый купить</a> <a href=https://redservis.ru/>конические редукторы купить</a> <a href=https://redservis.ru/>редуктор sew eurodrive купить аналог</a> <a href=https://redservis.ru/>индустриальный редуктор i mak 4a</a> <a href=https://redservis.ru/>конический редуктор nord купить</a> <a href=https://redservis.ru/>цилиндро червячные мотор редукторы купить</a> <a href=https://redservis.ru/>конический зубчатый редуктор</a> <a href=https://redservis.ru/>редуктор подъема крана</a> <a href=https://redservis.ru/>цилиндрический мотор редуктор с параллельными валами купить</a> <a href=https://redservis.ru/>редуктор с параллельными валами nord</a> <a href=https://redservis.ru/>соосные мотор редукторы nord</a> <a href=https://redservis.ru/>соосно цилиндрический мотор редуктор купить</a> <a href=https://redservis.ru/>червячные редукторы pgr серии psh</a> <a href=https://redservis.ru/>цилиндрический мотор редуктор с параллельными валами</a> <a href=https://redservis.ru/>цилиндрический редуктор с параллельными валами i mak купить</a> <a href=https://redservis.ru/>червячный мотор редуктор nmrv 030</a> <a href=https://redservis.ru/>редукторы с креплением на валу купить</a> <a href=https://redservis.ru/>цилиндро червячный редуктор nord купить</a> <a href=https://redservis.ru/>планетарный мотор редуктор pgr аналог</a> <a href=https://redservis.ru/>соосный редуктор varmec серия cv rcv купить</a> <a href=https://redservis.ru/>индустриальный редуктор i mak</a> <a href=https://redservis.ru/>редуктор siemens купить аналог</a>
#8486 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на сайте 1×slots ru com
Бывают ли бездепозитные призы без вейджера? Бывают, случае у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный приз за регистрацию устанавливается вейджер во всех казино.Ограничения по играм. Администрация запрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, средствами или безвозмездными вращениями. Обычно, в правилах приводится полный перечень слотов для отыгрыша. Иногда разделение производится по виду игр. Например, отыгрыш вероятен на всех игровых аппаратах, но запрещен в настольных забавах и в разделе Live Casino. <a href=http://filmkachat.ru/>1×slots регистрацию процедура займет всего лишь</a> Прежде чем активировать бездеп, необходимо увериться что, нет, что страна, уроженцем коей является игрок, не заходит в список запрещенных. <a href=https://www.fortunetelleroracle.com/other/revolutionizing-interiors–the-power-of-3d-furniture-design-934284>https://www.fortunetelleroracle.com/other/revolutionizing-interiors–the-power-of-3d-furniture-design-934284</a> 1×slots зеркало регистрация то дальше необходимо пройти <a href=http://cloudscapehill.com/user/davidanign/?um_action=edit>http://cloudscapehill.com/user/davidanign/?um_action=edit</a> Существуют казино с бонусом за регистрацию, каких довольно востребованы фриспины в интернет казино потом регистрации в конкретных забавах. Они встречаются числе чаще бесплатных поощрений либо традиционных призов в казино без инвестициям. Например, игрок регистрирует счет, на кот-ый начисляются бесплатные забавы, бонус за регистрацию повторяющий бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса игры выигрывает истинные деньги, которые в последствии можно удачно вывести из заведения на собственную платежную систему. То есть, все шансы исключить средства без рисков своими деньгами. Регистрация, какую игры получит призы, займет несколько, а спасибо этому можно прирастить пять евро поощрений до тысячи и без всяких проблем вывести их.
1×slots зеркало видели такую регистрацию на
1х слотс зеркало регистрация в 1×slots casino <a href=https://rostovbike.ru/user-2425.html>https://rostovbike.ru/user-2425.html</a> Это раз из главных показателей привлекательности подарка. С завешенным коэффициентом даже мастера не сумеют выполнить обстоятельства по отыгрышу. И не, как привлекательно смотрится предложение – бездепозитный бонус казино в размере $500 либо $1 000. Чтобы новенькие лучше вникли, что же такое вейджер, мы разберём на случае.Новые посетители онлайн-казино без первого депо имеют проверить свою удачливость. К тому же есть вероятность преобразовать бездепы в настоящие средства за регистрацию в казино, однако достичь бонус нужно отыграть согласно условиям акции. 1хслотс рабочее зеркало на сегодня Бездепозитные призы – это исключительно интересная и наиболее многообещающая акция интернет-казино. Они даже превосходнее фри-спинов, потому собственно выплаты в безвозмездных вращениях не гарантированы, так комбинации на барабанах игрового аппарата имеют не сложиться.Способы получения бездепа различаются зависимо облика бонуса, который приглянулся игроку. Но для в любом случае надо(надобно) быть зарегистрированным в легальном онлайн-казино и подтвердить собственную личность. В общем облике пошаговая аннотация для получения бездепозитного бонуса смотрится например:
1х слот 1хслотс регистрация перейти на 1×slots
<a href=http://www.neworleansbbs.com/home.php?mod=space&uid=281052>http://www.neworleansbbs.com/home.php?mod=space&uid=281052</a> 1×slots промокод при регистрации 2025 Oтыгpaть приз с обозначенным вeйджepом, желаемого необходимо сдeлaть cтaвoк нa cумму, превосходящую объем бонуса в некоторое раз.
1×slots скачать на айфон
Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и. Когда игроку полагается много фриспинов, администрация имеет разбивать их начисление на количество дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах акции.После требуется внести идентификационный платёж. Это стращает новичков больше всего. Нужно устроить наименьший депозит в 100–500 рублей. Таким образом служба защищенности увериться сомнений, собственно платёжный метод принадлежит Вам. Данная процедура необходима для обеспечения безопасности игровых счетов. Пример, Ваш аккаунт взломают и выведут средства на свой кошелёк. Будет очень неприятно. Поэтому верификация платёжной системы, это необходимый момент. 1хслот 1хслотс регистрация перейти на 1×slots <a href=http://www.kreativballons.de/2013/07/ratet-mal-was-das-ist.html>http://www.kreativballons.de/2013/07/ratet-mal-was-das-ist.html</a> Выиграть настоящие средства в казино не пополняя счет – сложно, но вероятно. Главное задаться целью и не нарушатьправила заведения. Выберите несколько казино с бездепзитными бонусами и начните выступать на бонусные средства. По статистике в одном из 10-ти заведений можно заработать маленькую сумму средств помощью бонусных средств.
1×slot зеркало
Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке представители онлайн-казино публикуют актуальную информацию о not the slightest deposit bonuses и других услугах. Для верификации номера телефона, в собственном профиле выберите опцию „Подтвердить номер телефона“ и введите в подходящее фон код, полученный в sms-сообщении. <a href=http://ledsoft.ru/forum/?PAGE_NAME=profile_view&UID=53844>http://ledsoft.ru/forum/?PAGE_NAME=profile_view&UID=53844</a> Бонус за регистрацию в казино без депо с выводом средств нужно отыграть. Зачастую для отыгрыша возможность потребоваться сделать ставки на необходимую, в некоторое 10-ов раз превосходящую необходимую бонуса либо выигрыша.Также есть онлайн-платформы азартных игр, которые используют раздачу бездепозитных бонусов в специальные даты (как для казино, например и для игрока). Помимо сего, действующие геймеры кроме имеют вероятность получить похожие призы за свою работа (например, за повышения значения или за схожие достижения). 1×slots сайт зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=31902>1×slots регистрация 1×slots casino c2d ru</a>
<a href=http://miupsik.ru/forums/showthread.php?tid=228648>1хслотс рабочее зеркало на сегодня</a>
<a href=http://www.forum.kalor.ru/1×slots-registraciya-na-sayte-1×slots-ru-com-t4856.html>1×slots регистрация на сайте 1×slots ru com</a>
<a href=http://complainanything.com/node/158?page=919#comment-1112919>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную процедуру активации бонуса без депо. Внимательно прочтите до конца. Многие новенькие проделывают ошибки на этапе регистрации и поэтому имеют получить презент. Получать информацию о самых прибыльных бонусах можно без постоянного прогноза новостей казино. Мы взяли данную задачку на себя и постоянно смотрим за предложениями операторов, выбирая превосходнейшие из них. В этом разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список акций периодически пополняется. В топ зашли самые свежие бездепозитные бонусы за регистрацию в казино 2020, кратковременные и замкнутые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и критериям. Если срок деяния промоакции истек, она удаляется из перечня.
#8487 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8488 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт стиральных машин https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферист ремонт квартир https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8489 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8490 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
Заработать на бездепозитных призах за регистрацию в казино может каждый юзер, достигший совершеннолетия.Oтыгpaть приз с указанным вeйджepом, желаемого необходимо сдeлaть cтaвoк нa cумму, превосходящую объем бонуса в некоторое раз. <a href=http://filmkachat.ru/>1×slots зеркало</a> Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в неотъемлемом порядке необходимо восполнить счет в казино. Для депозитных призов, эта процедура не необходима, так как депозит уже сделан.Чаще всего интернет-казино предлагают бездепозитные призы свежим пользователям. Эта промо-акция очень эффективно привлекает начинающих, подталкивая их к открытию счета. Конечно, не все становятся преданными клиентами, но сам прецедент регистрации аккаунта играет на руку заведению. <a href=https://www.myvipon.com/post/1222818/How-Product-Visualization-Services-Elevate-Your-amazon-coupons>https://www.myvipon.com/post/1222818/How-Product-Visualization-Services-Elevate-Your-amazon-coupons</a> Даже не выиграв солидную сумму, игрок увлекательно проведет время, изнутри исследует работу площадки, оценит геймплей автоматов. Все это без каких-либо денежных рисков. Быть в курсе превосходнейших акций легкостью. Достаточно периодически изучать список свежих онлайн казино с выводом приза без депо в этом разделе. 1×slots регистрация 1×slots casino 777 online <a href=http://avestalaw.ru/index.php?subaction=userinfo&user=agonizingbandit>http://avestalaw.ru/index.php?subaction=userinfo&user=agonizingbandit</a> Такой казино приз без депо за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это как бы некая конспирация поощрения под бездепозитный. Суть всего этого сводится к тому, что геймеру на час выдается, например, 1000 долларов, а реклама утверждает о том, собственно каждой выигрыш возможно несомненно дальнейшем оставить при себе. Но случае играющий серьезно отнесется к данному предложению, то он просто потеряет время. Ведь геймеру нужно будет играть не главном аккаунте, в тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (и всей тыс. ) в правила вступят определенные обстоятельства, где будет сказано, что максимальной суммой победы возможность быть лишь двести $ и средства возможно применять только в качестве бонуса на 1-ый вклад с вейджером 25 от суммы вознаграждения плюс сам депо. По результату выйдет, что игрок выигрывал для 200% приз с вейджером на конкретную сумму. Короче разговаривая, это все надо вашего времени.Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, the decision только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.
1×slots зеркало на сегодня
Акции, приуроченные к календарным дням, посещают рассчитаны как на всех пользователей, например и на категории: примеру, подарок на 8 марта девушкам-игрокам или мужчинам на 23 февраля. casino 1×slot При поддержки такового поощрения оператор имеет того привлекать клиентов, коие раньше проявляли активность на веб-сайте, но по какой-то основанию прекратили играть. В данном случае промокод высылается пользователю по электронной почте или повторяющий SMS.Бездепозитный приз – это финансовое вознаграждение, которое выдается соучастнику забавы в казино, для его вербования и появления заинтригованности. Любой гость, кот-ый соответствует условиям выдачи сходственного бездепозитного бонуса, может претендовать на получение вышеуказанного приза. Такое одобрение является наиболее эффективным способом, дающим возможность стартовать при, не вкладывая личных вещественных средств. <a href=http://suffa.net/index.php?subaction=userinfo&user=gentleyard49>http://suffa.net/index.php?subaction=userinfo&user=gentleyard49</a> Так же стоит выделить то, собственно в любом онлайн казино установлен свой максимальный кешаут на бездепозитный приз. Как верховодило кешаут — это максимальная сумма денег, которая дешевая для вывода с бездепозитного бонуса.Не хотите поиграть в азартные игры, не рискуя своими деньгами, но получая в все выплаты? Подобную возможность предоставляют почти наилучшие порталы с азартными увеселениями. В их количестве количество честных и надежных интернет-казино на российском языке. Они завлекают свежих юзеров разными поощрительными событиями, включая бездепозитные, либо благотворительные бонусы. скачать 1×slots на андроид мобильная версия Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депозит может выделяться до 30 дней.Чтобы бездеп не был начислен на Ваш аккаунт, Вам надо активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк механически, а Вы не планируете его применять, обратитесь в саппорта с просьбой отменить бездепозитный приз.
1×slots зеркало
Выбирайте наилучшие благотворительные призы с помощью обзоров на Casinoz – и пусть вас сопутствует счастье при отыгрыше бонусных кредитов!Хотя безвозмездные призы начисляются без депозита, не исключено, что вам понадобиться заносить средства. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только после того, как новый клиент раз пополнит игровой счет. Да, у даровых призов есть дефекты. Прежде всего, они обычно небольшие. Кроме того, условия вейджера по ним всегда строгие. Но таки недоступность риска проделывает их очень красивыми для посетителей. <a href=http://www.yjeng2014.co.kr/gnuboard/bbs/board.php?bo_table=free&wr_id=556045>http://www.yjeng2014.co.kr/gnuboard/bbs/board.php?bo_table=free&wr_id=556045</a> 1×slots официальный сайт зеркало рабочее
1×slots промокод при регистрации
При пользовании бездепозитным призом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют количество обликов лимитов: Шаг 4. Активация. Внимательно изучите условия, информацию по ограничениям и сроке действия бонусного предложения. Разобравшись с правилами, возможно активировать бонус в собственном кабинете (времени ? с использованием промокода) либо по запросу в саппорт. Так собственно основное отличие презента на депо от бездепа – обязательное пополнение счёта. Вы можете привнести депозит и преувеличить стартовый капитал или забрать бездеп и всем не придётся рисковать собственными сбережениями. Поспешите выполнить простые требования, и администрация ресурса начисляет щедрое одобрение! 1×slots официальный demo регистрация в 1×slots casino <a href=http://arskland.ru/people/user/14378/>http://arskland.ru/people/user/14378/</a> Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и. Когда игроку полагается много фриспинов, администрация имеет разбивать их начисление на количество дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах промоакции.Чаще всего, известные сервисы, эти как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно неотъемлемое верховодило. Финансовые средства выводятся лишь через ту платежную систему, которой огромной для пополнения депо. Если же игрок получил бездепозитный покерный бонус, потребуется пополнить счет на наименьшую необходимую, которая сочиняет обыкновенно десять $.
1× slots официальный
Во всех законных онлайн-казино Беларуси нужно свидетельство паспортных данных для игры — это заявка правительства государства. После потребуется внести идентификационный платёж. Это стращает начинающих больше всего. Нужно сделать минимальный депозит в 100–500 рублей. Таким образом служба защищенности убедиться что, нет, собственно платёжный метод принадлежит Вам. Данная процедура важна для обеспечивания защищенности игровых счетов. Пример, Ваш акк взломают и выведут средства на свой кошелёк. Будет крайне досадно. Поэтому верификация платёжной системы, это необходимый момент. <a href=https://pili.net.cn/home.php?mod=space&uid=13056>https://pili.net.cn/home.php?mod=space&uid=13056</a> Доступные забавы – В некоторых азартных забавах можно понизить математическое преимущество казино до нескольких 10-х процента. В их числе почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как правило, в этих забавах ставки идут в зачет вейджера не полностью. Например, может учитываться только 50%. В неких играх бездепозитные призы вообщем невозможно отыгрывать.Вышеописанная причина и считается главным моментом, из-за которого операторы отдают доля своей прибыли на различные рекламные расходы и рекламные кампании. А наиболее действующим здесь станут выступать непосредственно бездепозитные бонусы казино 2022 с выводом за регистрацию. 1×slots бездепозитный бонус за регистрацию
<b>Смотреть еще похожие новости:</b>
<a href=https://www.sgomberisgombero.it/my-account-2/>1×slots рабочее зеркало</a>
<a href=http://moneysweet.listbb.ru/viewtopic.php?f=2&t=5904>1×slots casino регистрация 1×slots review live</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные способы и оценить необыкновенности, труднодоступные при забаве в демо режиме. Многие свежие посетители переходят в число постоянных, а оператор получает долгосрочную выгода. Способы получения бездепа различаются зависимо облика приза, который приглянулся игроку. Но вас иначе нужно быть зарегистрированным в законном онлайн-казино и подтвердить собственную лицо. В общем облике пошаговая инструкция для получения бездепозитного приза смотрится например:
#8491 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт квартир https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт Москва https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8492 Charlesgunnyhttp://filmkachat.ru
1×slots скачать на айфон
Бездепозитные бонусы в казино без пополнения 2022 — это конкретная сумма средств либо gift spins вращения, которые предоставляются первым гостям за регистрацию на веб-сайте казино повторяющий бездепозитного приза, и выделяет вас вероятность за счет казино без пополнения опробовать предложения (игр), с дальнейшей привилегией вывода средств при исполнении всех установленных верховодил.Как управляло, новоприбывшие игроки в первую очередь хотят ознакомиться с способами ввода и вывода валютных средств и сроки исполнения поданных заказов чтобы конкретно разуметь, как прытко у вывести свой казино приз за регистрацию без депо на электронный кошелек либо же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино соперничают между собой. Ведь случае бы определенную фирму представляло лишь одно онлайн-заведение, то навряд бы клиенты заметили казино с бонусом за регистрацию и могли бы рассчитывать только на вознаграждение в виде приза на первое вложение. К каждому заведению периодически идет привлекать новых игроков, собственно, в, только на руку всем играющим. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots casino c2d ru</a> <a href=https://hackmd.io/@lexxeagle/ByHLMK5ykg>https://hackmd.io/@lexxeagle/ByHLMK5ykg</a> Не советуем сломя голову хвататься за всевозможные предложения получения средств без инвестициям. Вполне вероятно, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем выглядит на 1-ый взгляд. Альтернативой считается казино приз за депозит. Мы предлагаем вас пару советов, благодаря которым у любого игрока будет возможность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом средств: 1×slots зеркало регистрация то дальше необходимо пройти <a href=https://technique-tp.com/forum/memberlist.php?mode=viewprofile&u=1876>https://technique-tp.com/forum/memberlist.php?mode=viewprofile&u=1876</a> Возможность протестировать новые игры, не рискуя личными средствами и создать собственную тактику забавы.В случае установленного лимита на необходимую вывода выигрыша с бездепозитного приза, игрок не может вывести больше заявленной суммы.
1×slots официальный зеркало
<a href=http://nhomtruyen.com/members/jamesgaw.9280/>1×slots официальный сайт скачать</a> 1хслот официальный сайт зеркало Подтверждение электрической почты – одно из основных условий, которое есть практически в любом бездепозитном казино. Чтобы верифицировать электрическую почту, достаточно перебежать по интенсивной ссылке в послании, приобретенном от азартного клуба. <a href=http://psvhome.ru/user/Raymondanits/>http://psvhome.ru/user/Raymondanits/</a> Но ни не запамятовывайте внимательно читать управляла роли в бонусных промоакциях. Если вы нарушите желая бы одно условие, позже вы не сможете устроить недоразумение с администрацией.Изучить верховодила и обстоятельства получения бездепозитных бонусов казино, Вы сможете у нас на сайте в разделе с бонусами или на официальном сайте выбранного Вами казино. Если возможности отыскать нужную информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал либо по электрической почте. 1×slots регистрация то дальше необходимо пройти Максимальный объем ставки, который нельзя превышать же приз не несомненно всецело отыгран. В случае нарушения сего управляла, бонус и выигрыш с него станут аннулированы.
1 хслот регистрация в 1×slots casino
У каждого игорного заведения свои верховодила и условия. Но, чтобы получить бонусы, необходимо выполнить стандартные действия:Доступные игры – В неких азартных играх можно понизить математическое превосходство казино до нескольких 10-х процента. В их количестве многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как управляло, в таких забавах ставки идут в зачет вейджера не полностью. Например, может учитываться лишь 50%. В неких играх бездепозитные призы вообщем нельзя отыгрывать. Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция содержит доскональные управляла, ссылка на которые обыкновенно содержится в промообъявлении. В их указываются лимиты, вейджер, список доступных игр. Если оператор укрывает данные о предложении, то воспользоваться им надо. <a href=http://www.jkmulti.com/bbs/board.php?bo_table=free&wr_id=1858204>http://www.jkmulti.com/bbs/board.php?bo_table=free&wr_id=1858204</a> Свежий бонус начисляется в виде денежных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в пользовании средствами, а в случае отыгрыша оператор возможность ввести лимитирование на вывод средств. 1 xslots рабочее зеркало Помните, что всевозможные нарушения правил сведут на нет ваши старания, и вы всего останетесь без начисленного вам бесплатного приза. Всегда изучайте правила начисления и условия вейджера. По каким вопросам, на которые вы возможности без найти ответы, обращайтесь за разъяснениям и саппорт.
1×slots зеркало регистрацию более популярный вариант это
Срок отыгрыша — это период, который наступает в момент активации бонуса и завершается с его закрытием. Пользователю нужно уложиться в данный временной промежуток, другому призовые средства аннулируются. Казино устанавливают перечень игр, ставки каких засчитываются при расчете отыгранных денег. Если тайтл не входит в этот список, то ему быть недосегаем для загрузки в действия бонусного предложения. Отказ в прохождении верификации. Если заказчик не желает или не может дать документы, подтверждающие его личность, профиль несомненно заблокирован совместно, вкупе со всеми бонусными начислениями.Многие азартные клубы ограничивают сумму вывода заработанную на призе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не сможете исключить. Разница будет аннулирована, Вы в не можете создавать на нее ставки. 1хслотс казино зеркало <a href=https://wood.biz.ua/wr_board/tools.php?event=profile&pname=ScottThona>https://wood.biz.ua/wr_board/tools.php?event=profile&pname=ScottThona</a> Во всех законных онлайн-казино Беларуси необходимо свидетельство паспортных данных для игры — это заявка правительства государства.Объективные – размер бонуса, коэффициент и условия вейджера, надобность внесения депозита для вывода денег;
1×slots зеркало на сегодня
Размер ставки для забавы по бездепозитному бонусу (конечно же, когда, когда он представлен в виде бонусных валютных средств) зачастую ниже, чем при забаве на депо. Ограничение несомненно действовать до момента отыгрыша приза.Благодаря программке преданности от игорного заведения, возможно арестовать хороший старт и без дополнительных вложений запустить видеослоты. Кроме как, возможно рассчитывать на реальную удачу и получить, без инвестиции собственных финансов, немалый выигрыш. Бoльшинcтвo азартных заведений выдвигают примерно однообразные, схожие обстоятельства и требования, коие нужно выполнить, дабы получить бездепозитный бонус за регистрацию. Все их можно соединить в один список:Индивидуальные одобрения выдаются за совершение деяний: подписку на аккаунты площадки в соц сетях, установку мобильного прибавления или официального клиента для ПК. В большинстве казино действуют программы лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий степень нередко сопровождается выдачей бездепа. <a href=https://forum.kainkalabs.com:443/member.php?action=profile&uid=17943>https://forum.kainkalabs.com:443/member.php?action=profile&uid=17943</a> 1 хслот регистрация в 1×slots casino Шаг 5. Использование и отыгрыш. Бездеп обязан быть использован в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера.
<b>Смотреть еще похожие новости:</b>
<a href=http://b2s.bulwork.com/node/1581?page=81#comment-22571>1×slots регистрация на сайте</a>
<a href=https://praisenpray.org/forums/member.php?action=profile&uid=63121>1×slots рабочее зеркало на сегодня</a>
<a href=https://www.mshowto.org/forum/members/jamespauri.html>1×slots официальный зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.
#8493 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>мошенники ремонт Москва https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8494 Charlesgunnyhttp://filmkachat.ru
зеркала 1×slots
Oтыгpaть бонус с указанным вeйджepом, для этого необходимо сдeлaть cтaвoк нa cумму, превосходящую объем приза в несколько один. <a href=http://filmkachat.ru/>1×slots зеркало регистрацию более популярный вариант это</a> На нашем веб-сайте Вы найдете список актуальных новых бездепозитных призов в казино 2022 года. Также, есть много эксклюзивных услуг, коие доступны лишь посетителям нашего вебсайта последствии регистрации по нашей ссылке либо активации особого промокода. <a href=https://www.thisisant.com/forum/viewthread/7824/>https://www.thisisant.com/forum/viewthread/7824/</a> Бонус без депозита за регистрацию в казино (бездепозитный приз) – это валютный презент от клуба, кот-ый начисляется на акк игрока после регистрации в казино. Кроме сотворения учетной записи, для получения бездепа, довольно часто потребуется ещё и подтвердить контактные данные игрока и/или активировать особый промо-код. 1×slots официальный сайт мобильная версия скачать <a href=http://www.gasts.de/modules.php?name=Your_Account&op=userinfo&username=fertileideal75>http://www.gasts.de/modules.php?name=Your_Account&op=userinfo&username=fertileideal75</a>
1×slots casino регистрация 1×slotscasin online
<a href=https://forums.scar-divi.com/topic/611463–1×slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F/>1×slots регистрация</a> 1×slots официальный сайт скачать на айфон Условия, на коих предоставляется бездеп, регулируются казино. Каждая промоакция содержит подробные управляла, ссылка на коие обычно находится в промообъявлении. В их указываются лимиты, вейджер, перечень дешевых игр. Если оператор прячет данные о предложении, то воспользоваться им не стоит. <a href=https://aryba.kg/user/DoctorLazutael/>https://aryba.kg/user/DoctorLazutael/</a> 1×slots регистрация на 1хслотс Для того, чтобы отыграть необходимую вашего бездепозитного бонуса надо(надобно) выполнить обстоятельства вейджера. Очень нередко фриспины даются на определенные слоты (book of ra, book of lifeless, book of sun), избирайте слот себе нраву, все очень очень и качественные. Бездепозитные бонус возможность быть денежным например и вид фриспинов на слоты
1×slots официальный регистрация
Новички не обожают сразу же заносить депо. Это обосновано неименьем опыта и сомнением. К счастью, в можно получить бездепозитный бонус за регистрацию в казино. Неважно что начисляет система – фриспины или кредиты. В любом случае вы не рискуете собственными сбережениями. Это отличная возможность запустить приглянувшийся видео разъем либо же испытать фортуну в настольных играх.Основное различие никаких, собственно для получения бездепа не надо пополнять баланс в казино. Но считая сего, есть ряд и других отличий: <a href=https://pinshape.com/users/5254145-lml3107#designs-tab-open>https://pinshape.com/users/5254145-lml3107#designs-tab-open</a> Обычно показатель выше, чем для призов на депозит. Не удивляйтесь, если он будет даже х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных стран.Классическая разновидность приза за творение аккаунта. Его превосходство содержится что, нет, что клиент возможность самостоятельно подбирать аппараты и создавать ставки в них. Иногда перечень игровых автоматов ограничен оператором, но все одинаково это другого, как, чем единственный доступный слот, как если, тогда, с внедрением фриспинов. казино 1×slots официальный сайт Высокая конкуренция в разделе азартных игр мотивирует операторов привлекать клиентов различными промоакциями. Благодаря этому у посетителей замечена вероятность получить бонусы в казино за регистрацию без депозита. Воспользоваться этим предложением можно, минуя процедуру внесения денег на игровой счет, просто активировав акк на сайте. Наш гид по бездепам поможет выбрать самую симпатичную бонусную программку, разузнать управляла получения такового вознаграждения и распорядиться им с наибольшей выгодой.
1×slots рабочее зеркало на сегодня
В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая приятная доля игры. Важно, часто бездепозитные бонусы в казино выдаются с ограничениями по наибольшей выплате. В среднем возможно рассчитывать на выгода в несколько тысяч рублей. Как исключить выигрыш с бонуса без депозита. Придётся подтвердить аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате либо прочитайте в правилах. Любой выигрыш по ставке выше установленного лимита будет являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, ну случае выигрыша его сумма не поступит на счёт клиента — итог игры несомненно всецело аннулирован. 1×slots скачать на айфон <a href=https://forum.dneprcity.net/showthread.php?p=627130>https://forum.dneprcity.net/showthread.php?p=627130</a> Если площадка дарует бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь ввести аккаунт на веб-сайте и активировать его, подтвердив адресок электрической почты, номер телефонного или другие данные, коие просит оператор. Перед данным необходимо убедиться, что юзер находится на официальном сайте казино, не на мошеннической площадке.Начнём с как, что любое промо за регистрацию подразумевает некоторые условия. Бездепозитные бонусы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, нужная для исполнения критерий. Пример, получили безвозмездные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 руб., неудачных или выигрышных, неважно. После выполнения, бонусный баланс перейдёт на настоящий и будет легкодоступным к выводу.
1×slots регистрация 1×slotscasino 56 online
Вышеописанная причина и считается главным моментом, следствии которого операторы отдают часть собственной прибыли на разные рекламные затраты и маркетинговые кампании. А самым действующим тут будут играть непосредственно бездепозитные призы казино 2022 с выводом за регистрацию. <a href=https://maps.google.fi/url?sa=t&url=http%3A%2F%2Fdoctorlazuta.by>https://maps.google.fi/url?sa=t&url=http%3A%2F%2Fdoctorlazuta.by</a> Если вы новичок в этом деле и лишь попали в неизведанную вами область пыла — за предложений как бездепозитные призы без пополнения. сайт 1× slots casino Бонус в казино без депо имеет различные разновидности: может быть приветственный бонус, промоакции в честь каких-либо дней либо главных дат, приз за вербование новых игроков, лояльность и получение VIP-статуса.Иногда для получения призов нужно спутаться с представителями службы. Удобнее всего с ними собеседовать в онлайн-сате, хотя время довольно запроса по электрической почте.
<b>Смотреть еще похожие новости:</b>
<a href=https://portugal-campings.com/pt/account/>1хслотс рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Осталось выбрать казино с призом за регистрацию и создать профиль. После активации подарка выигрыш зависит от Фортуны и способностей.
#8495 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>8 (499) 430 27 62 мошенники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мастер на час мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8496 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>Заказать мужа на час мошенники https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>8903 759 81 64 аферист https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8497 Charlesgunnyhttp://filmkachat.ru
онлайн казино 1×slots
Даже не выиграв солидную сумму, игрок увлекательно проведет время, изнутри изучит работу площадки, воспримет геймплей автоматов. Все это без каких-либо денежных рисков. Быть в курсе лучших акций легкостью. Достаточно регулярно изучать перечень свежих интернет казино с выводом бонуса без депо в этом разделе. <a href=http://filmkachat.ru/>1хслотс казино зеркало</a> Далее требуется отыграть вагер и исключить выигрыш. Игрокам без навыка крупно повезло, есть получить 10-ки подарков за одну регистрацию. Если не сумели получить Бездепозитный бонус, не волнуйтесь. Обратитесь в интернет чат, оператор поможет решить проблему.Вознаграждения за получение VIP-статуса ? начисляются в программы преданности при достижении еще уровня либо выдаются персонально менеджерами службы поддержки. <a href=https://www.as7abe.com/wall/blogs/post/60173>https://www.as7abe.com/wall/blogs/post/60173</a> 1 xslots рабочее зеркало <a href=http://cloudscapehill.com/user/justinknone/?um_action=edit>http://cloudscapehill.com/user/justinknone/?um_action=edit</a>
1×slots скачать на айфон
Представьте момент, когда при ставке в 10 руб. Вы получите подобное умножение. Миллион руб. За одно вращение, что абсолютно вполне. Поэтому вопрос, сколько возможно выиграть остаётся не. Предлагаем выяснить других. Регистрируйтесь в одном либо нескольких интернет казино, получайте Бездепозитный приз и проверяйте удачу в деле. Разумеется, вывести средства сложно. Однако шансы есть у всех.Срок отыгрыша — это период, кот-ый наступает в момент активации приза и кончается с его закрытием. Пользователю необходимо уложиться в данный временной промежуток, другому призовые свои аннулируются. Казино устанавливают перечень игр, ставки в засчитываются при расчете отыгранных денег. Если тайтл не заходит в данный список, то он может быть недоступен для загрузки в деяния бонусного предложения. 1×slots акции <a href=http://droid-comz.ru/user/RenaldoSnimb/>http://droid-comz.ru/user/RenaldoSnimb/</a> Ещё одно распространённое акционное предложение – симпатичный презент с неблаговидными требованиями. К образцу, клуб сулит $100 в бездепа, но с вейджером х80 или х100. Отыграть такой вейджер фактически невероятно и потому никакого концентрироваться на более занимательных акциях. 1×slots рабочее зеркало на сегодня Наиболее популярные вознаграждения среди гэмблеров – бездепозитные бонусы казино. Это не удивительно, ведь возможно получить бесплатные вращения или виртуальные кредиты, и этом не придётся пополнять счёт, рисковать собственными средствами. Удастся насладиться разнообразными веселиями причем выиграть солидную сумму, избегая серьёзного риска.
1×slots зеркало этих способов предполагает регистрацию
Ограничения по играм. Администрация запрещает игрокам кое-какие игровые автоматы с бездепозитным призом, средствами или безвозмездными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда разделение производится по виду игр. Например, отыгрыш вероятен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino.На условиях отыгрыша бесплатных призов следует остановиться подробнее. С ними связаны аспекты, коие нельзя оставить без внимания. <a href=http://testowik.ru/index.php/forum/user/52983-dynamiclemon7>http://testowik.ru/index.php/forum/user/52983-dynamiclemon7</a> Также бездепозитные бонусы шансы работать способом возвратить к игре клиентов, временно приостановивших своё сотрудничество с компанией: извещение о бездепе поступает на мобильный аппарат либо почту. 1 xslots рабочее зеркало
1хслот скачать
Бездеп с фриспинами возможность охватывать всю коллекцию игр на сайте либо разработки одного провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш имеет быть выведен после того, как пользователь отыграет данную сумму. Возможность расценить полный перечень слотов — основное совершенство данной разновидности. Игроку становятся доступны те опции, коие отсутствуют в демонстрационном режиме, а вероятность выиграть настоящие средства добавляет ярких азартных чувств.Также, учите, собственно бездепозитный приз возможно вывести только что случае, когда будут исполнены все обстоятельства отыгрыша. <a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1×slots казино мобильная версия</a> При исполненьи критерий отыгрыша и верификации, деньги с бонусного счета переводятся на основной и шансы быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции находятся от выбранной платежной системы. Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают приз по государствам. Вплоть до того, собственно клуб имеет принимать игроков из Вашей страны, а бездеп мешает. 1×slots официальный сайт зеркало рабочее <a href=http://www.superstitionism.com/forum/profile.php?id=1359388>http://www.superstitionism.com/forum/profile.php?id=1359388</a> Обыкновенные бездепозитные призы в объеме от 3-х до 20 $ сделаны чтобы, чтобы, дабы в забавы заходили все свежие и новые игроки. Здесь, всего, будет ограничение на максимальный выигрыш. Важно, дабы перед наименьшим вкладом был отключен бонус за первое пополнение счета, и в не попадет на повторный вейджер.В онлайне большое знаменитых игорных площадок с привлекательными акционными услугами. Однако внимательно разбирать условия десятков услуг вскоре надоест, да и время отнимет много. Поэтому наша команда подготовила ТОП-3 вебсайтов с наихорошими бездепозитными бонусами:
1×slots регистрация 1×slotscasino 56 online
Представьте момент, когда при ставке в 10 рублей Вы получите сходственное умножение. Миллион руб. За одно вращение, что вполне вероятно. Поэтому вопрос, сколько можно выиграть остаётся закрытым. Предлагаем выяснить помощи. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный бонус и инспектируйте удачу в деле. Разумеется, исключить деньги сложно. Однако шансы есть у всех. <a href=https://www.warshipsfaq.ru/user/DeweyCiz>https://www.warshipsfaq.ru/user/DeweyCiz</a> Подтвердите регистрацию, дабы активировать Бездепозитный бонус с выводом, потребуется наполнить индивидуальный профиль. Заполните пустующие поля настоящими данными о себя. 1×slots регистрация 1×slots casino 777 online
<b>Смотреть еще похожие новости:</b>
<a href=http://smpn1bejen.sch.id/forum/>1×slots зеркало регистрация</a>
<a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=117861>1хлот регистрация в 1×slots casino</a>
<a href=http://nhomtruyen.com/members/jamesgaw.9280/>1×slots регистрация на 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для вывода средств приз надо(надобно) несомненно отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариантами отыгрыша бездепозитного приза до его получения, чтобы избежать конфликтных ситуаций. Несмотря на то, что данный вариант стимуляции со стороны азартных платформ очень моден в похожих игр, далековато не всем поклонникам казино знаменито, собственно себе бездепозитные бонусы казино и как именно их вероятно эксплуатировать.
#8498 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>электрик мошенник https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>аферисты ремонт https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8499 Charlesgunny
<img src=„https://i124.fastpic.org/big/2024/1209/97/3766946f5c610a79d0472d257b876897.jpg“> В современном мире, где стремление к уюту и комфорту в жилище становится приоритетом, многие сталкиваются с проблемой некачественного ремонта. К сожалению, на рынке услуг активно действуют аферисты <a href=https://sk-service1.ru>аферисты ремонт бытовой техники https://sk-service1.ru</a>, которые обещают идеальный результат, но в конечном итоге оставляют клиентов разочарованными и с незавершёнными проектами. Эти «ремонтные маги» аферисты привлекают внимание заманчивыми ценами и яркими рекламными материалами, однако, за этим скрывается множество подводных камней. Начинаются с безобидных предлогов для доплаты, а завершаются разочарованием от плохо выполненных работ <a href=https://sk-service1.ru>мошенники ремонт https://sk-service1.ru</a>. Поэтому так важно быть предельно осторожным при выборе подрядчика для ремонта квартиры. Рекомендуется изучать отзывы, проверять лицензии и не стесняться задавать вопросы о процессе работы. Будьте внимательны к деталям, ведь качественный ремонт — это не только эстетика, но и долговечность. Помните, что проверить репутацию компании — значит сделать первый шаг к созданию вашего идеального пространства без неприятных сюрпризов. Не позволяйте мошенникам разрушить ваше представление о домоводстве и уюте. Обратившись в ««компанию» мошенники муж на час вы останетесь без денег, и уничтоженного их «специалистами» материала Кстати, обратите внимание, на их сайте постоянно меняются телефоны <a href=https://sk-service1.ru>сборка мебели мошенник https://sk-service1.ru</a>, это показатель мошенничества, пока замечены вот эти , но в скором времени могут и поменяться 8 (499) 520–47–70 мошенники ремонт 8 (499) 430 27 62 мошенники ремонт 8 (495) 844–68–22 мошенники ремонт +7 (903) 722–78–03 мошенники ремонт Главный офис: 127566, г. Москва, Алтуфьевское шоссе, д.48, к.1
#8500 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация
Проверка занимает от нескольких минут до нескольких дней, профессионалы техподдержки шансы запросить дополнительные документы либо инициировать короткое общение по Skype. <a href=http://filmkachat.ru/>казино 1×slots</a> Таким образом, заведение пробует показать себя своим потенциальным геймерам, а такой рекламный ход как казино бонус без депозита за регистрацию завлекает очень количество внимания к игорному заведению и обеспечивает неизменный струю новых посетителей и грядущих посетителей игрового онлайн клуба. <a href=https://letterboxd.com/lexxeagle/list/the-magic-behind-the-screen-transforming/>https://letterboxd.com/lexxeagle/list/the-magic-behind-the-screen-transforming/</a> 1 xslots рабочее зеркало <a href=http://shanghaijiaoyu.com/home.php?mod=space&uid=47393&do=profile>http://shanghaijiaoyu.com/home.php?mod=space&uid=47393&do=profile</a>
1×slots регистрация 1×slotscasino09k online
Если при регистрации указать промокод, возможно гарантировано получить бонус. Где взять ваучер? Посетите тематику блоги либо форумы. Иногда администрация клуба делает рассылку ваучеров на электрическую почту. В заключительное время игорные жилища начали афишироваться в фильмах и телесериалах. Присмотритесь и наверняка заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных рублей. <a href=https://rolivka.online/forum/showthread.php?tid=28694>1хслотс рабочее зеркало на сегодня</a> казино 1×slots официальный сайт Составленный специалистами Casino.ru список онлайн-казино с бездепозитным призом разрешает игрокам сравнить спецпредложения разных операторов.Так что сможете смело региться без всяких раздумий. Фортуна сейчас точно на вашей стороне. Не опасайтесь, так следствие какого или убытка Вам абсолютно не грозит. С такими призами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе. <a href=http://julia4tied.de/member.php?action=profile&uid=124190>http://julia4tied.de/member.php?action=profile&uid=124190</a> 1×slots официальный сайт зеркало Бездепозитный бонус казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби избранного заведения, определится в выборе игр и выяснить качество работы саппорта. Довольно нередко, начиная игровой процесс, игрок уже отказывается останавливаться и делает реальный вклад. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать бесплатно вполне как раз таки с призом за регистрацию без надобности заносить депозит.Бонус с зачислением средств на счет выделяет больше свободы действий. Пользователь сам подбирает, каким образом распорядиться подаренными своими. Здесь также все действовать лимитирования на список доступных игр, хотя обыкновенно эти рамки не например строги, как в рекламную с бесплатными вращениями.
1×слот регистрация в 1×slots casino
Зарегистрируйтесь. Для регистрации чаще всего достаточно установить свой номер аппарата и почтовый адресок, в чего ввести полученный код из СМС. Возможно, потребуется указать промокод. В правилах акции несомненно написано, где его бы вводить. Иногда это надо создавать при регистрации, от — уже последствии сотворения личного кабинета, на отдельной странице. <a href=http://masskorea.co.kr/bbs/board.php?bo_table=free&wr_id=3414648>http://masskorea.co.kr/bbs/board.php?bo_table=free&wr_id=3414648</a> Бывают ли бездепозитные призы без вейджера? Бывают, в у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино. 1×slots сайт зеркало
1хслот зеркало сайта
Так же стоит выделить то, собственно в каждом интернет казино установлен свой максимальный кешаут на бездепозитный приз. Как управляло кешаут — это максимальная сумма средств, кот-ая доступная для вывода с бездепозитного бонуса. Активация валютного гонорары происходит автоматически в творенья профиля или использования промокода. Иногда операторы предъявляют вспомогательные требования: подписаться на страницы казино в соц сетях либо на рассылку маркетинговых извещений, скачать и ввести дополнительный софт и т.д. 1× slots регистрация в 1×slots casino <a href=https://jicsweb.texascollege.edu/ICS/Academics/RELI/RELI_1311/2016_FA-RELI_1311–04/ford.jnz?portlet=Blog_2022–09–15T23–48–39–636&screen=View+Post&screenType=next&&Id=6cb6f91f-93d7–412f-b793–14c3b5e2c164>https://jicsweb.texascollege.edu/ICS/Academics/RELI/RELI_1311/2016_FA-RELI_1311–04/ford.jnz?portlet=Blog_2022–09–15T23–48–39–636&screen=View+Post&screenType=next&&Id=6cb6f91f-93d7–412f-b793–14c3b5e2c164</a> Самые свежие бездепозитные бонусы в казино за регистрацию 2022 года с выводом прибыли находятся на этой странице. Посетитель может расценить обстоятельства получения и начать выступать на средства без внесения депозита. При данном игроку принципиально разуметь, на каких критериях и какими способами он сможет исключить полученный выигрыш. Для этого нужно расценить перечень присоединенных платежных систем.При отыгрыше бонусных средств, необходимо учесть срок действия приза и время, коие дается на отыгрыш. По истечению заявленного медли, не отыгранный бонус будет аннулирован.
1хслотс мобильная версия зеркало
<a href=http://perfectsolutionlabs.com/index.php?subaction=userinfo&user=classydormitory>http://perfectsolutionlabs.com/index.php?subaction=userinfo&user=classydormitory</a> Осталось выбрать казино с бонусом за регистрацию и сделать профиль. После активации презента выигрыш находится от Фортуны и способностей. x1 slots регистрация в 1×slots casino Бездепозитный бонус – это финансовое вознаграждение, коие выдается соучастнику игры в казино, для его вербования и появления заинтригованности. Любой гость, который соответствует условиям выдачи подобного бездепозитного бонуса, может претендовать на получение вышеуказанного приза. Такое одобрение является наиболее действенным методом, дающим вероятность стартовать в игре, не вкладывая собственных материальных средств.Наш список включает в себя лучшие бездепозитные бонусы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит ревизию по главным характеристикам:
<b>Смотреть еще похожие новости:</b>
<a href=https://masstr.net/showthread.php?tid=103419>1×slots casino регистрация 1×slotscasino09k online</a>
<a href=http://polishcrazyclan.ugu.pl/member.php?action=profile&uid=272738>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для получения бездепа необходимо пригласить в забаву по реферальной ссылке свежего посетителя: он обязан зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на необходимую, указанную в критериях промоакции. Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают бонус по странам. Вплоть до такого, собственно клуб может принимать игроков из Вашей государства, а бездеп мешает.
#8501 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало сайта
Большинство интернет-казино из нашего топ-10 готовы порадовать вас неповторимыми акциями. Читайте о их в обзорах и на форуме.Максимальная ставка ? уточняется в денежной счета и ограничивает объем ставки за раз спин. В случае ее превышения бонус возможность быть аннулирован. Также в правилах имеет находиться запрет на размещение ставок определенного вида, например, по одинаковым шансам в рулетке (словами, на чет либо нечет, красное или черное и т.д. ). <a href=http://filmkachat.ru/>1×slots регистрация 1×slots review live</a> Если площадка дарует бездеп за регистрацию, то процедура его получения ординарна. Нужно только ввести аккаунт на веб-сайте и активировать его, подтвердив адресок электронной почты, номер аппарата либо другие данные, коие просит оператор. Перед этим необходимо убедиться, что пользователь располагается на официальном сайте казино, не на мошеннической площадке.Бездепозитные бонусы, как теснее понятно, являются уникальной возможностью к игровому процессу безусловно бескорыстно, другими выступать в интернет казино даром и на быть средства незамедлительно после регистрации аккаунта. Автоматы с таким депо имеют стать великолепной возможностью сыграть для поклонников пыла с определенными ограничениями в финансах. <a href=https://www.tipga.com/e/6707c0603286fe4de4285bf8>https://www.tipga.com/e/6707c0603286fe4de4285bf8</a> 1×slots акции <a href=http://www.clean-ace8.com/bbs/board.php?bo_table=free&wr_id=90989>http://www.clean-ace8.com/bbs/board.php?bo_table=free&wr_id=90989</a> Самый распространённый из похожих бонусов, окончательно же, бездеп на день рождения посетителя — приз вид фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им возможно в течение установленного периода медли.Приветственный бездеп предоставляется любому игроку лишь один раз. Казино борются с так нарекаемыми бонусхантерами (от англ. Bonus Hunter — охотник за призами), пытающимися заводить многочисленные аккаунты для обмана оператора и повторного получения подарка. Исключить подобные деяния позволяет верификация данных. Администрация вправе потребовать у клиента доказать персональные данные, указанные при регистрации.
1хслот скачать
<a href=https://xs.xylvip.com/forum.php?mod=forumdisplay&fid=2>1×slots сайт зеркало</a> зеркала 1×slots <a href=https://mitao7.cc/home.php?mod=space&uid=25061&do=profile>https://mitao7.cc/home.php?mod=space&uid=25061&do=profile</a> Шаг 4. Активация. Внимательно изучите обстоятельства, информацию по ограничениям и сроке деяния бонусного предложения. Разобравшись с правилами, возможно активировать приз в личном офисе (время ? с использованием промокода) или по запросу в саппорт.Проверка занимает от нескольких мин. До нескольких дней, специалисты техподдержки могут запросить дополнительные документы либо инициировать краткое общение по Skype. 1×slots зеркало В случае установленного лимита на необходимую вывода выигрыша с бездепозитного бонуса, игрок не сможет вывести больше заявленной суммы.
1×slots казино зеркало
В онлайне очень большое скриптовых вебсайтов, которые принадлежат плутам. Их главная задача – заинтересовать гэмблеров, пообещав не только щедрые подарки, хотя и крупные выигрыши. Так собственно некоторые сайты предлагают получить за регистрацию и $1 000.Представленные на этой странице превосходнейшие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные обстоятельства. После кропотливого анализа редакция портала составила рейтинг спецпредложений, в котором гости Casino.ru шансы сортировать перечень по нескольким аспектам: по сумме, вейджеру, максимальной сумме вывода и т.д. Способы получения бездепа различаются в зависимости от облика бонуса, кот-ый приглянулся игроку. Но вас иначе нужно быть зарегистрированным в законном онлайн-казино и подтвердить собственную лицо. В общем облике пошаговая аннотация для получения бездепозитного приза смотрится так:Нет. Казино выдают благотворительные бонусы за регистрацию, для того, дабы клиент мог ознакомиться с игровым заведением. А чтобы исключить его, необходимо выполнить обстоятельства отыгрыша. <a href=http://forums.ghc-games.com/member.php?action=profile&uid=104761>http://forums.ghc-games.com/member.php?action=profile&uid=104761</a> 1×slots зеркало видели такую регистрацию на
1хслотс рабочее зеркало
Для доказательства электрической почты, просто перейдите по активной ссылке в послании, приобретенном от игрового заведения.Почти все игровые клубы настоятельно свидетельство контактных данных игрока для получения бездепозитного приза. Стоит отметить, собственно бездепозитный бонус выдается только взрослым новичкам, которые, тому, могут пригласить собственных друзей и знакомых, также претендующих на поощрительную программку преданности. Подобная разработка появилась между создающих онлайн-казино для популяризации и расширения трафика. Покер румы и спонсоры содействуют увеличению своей популярности, методом вербования свежих игроков. Бонусы – это уникальный шанс для потенциальных соучастников забавы, коие имеют опробовать софт покер рума и убедиться, будут ли они в него выступать или нет. Новый игрок попробует средства силы с настоящими оппонентами в казино. 1×slot казино зеркало <a href=http://support-groups.org/memberlist.php?mode=viewprofile&u=168879>http://support-groups.org/memberlist.php?mode=viewprofile&u=168879</a> Бездепозитные призы, как уже понятно, являются уникальной возможностью приступать к игровому процессу абсолютно бескорыстно, словами выступать в интернет казино бесплатно и на место свои сразу в регистрации аккаунта. Автоматы с этим депозитом имеют замерзнуть великолепной возможностью поиграть для почитателей пыла с определенными ограничениями в денег.В списке требований к отыгрышу часто присутствуют лимиты на ставки при ирге на собственные деньги. Так, случае отыграть надо(надобно) 30 000 руб., а предельная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 один. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам деянья акции.
1×slots регистрация 1×slotscasino09k online
Похожим образом работает третий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя либо из-за с получения им VIP-статуса. Подарок предоставляется после обращения в поддержку и проверки. <a href=http://forum.ttpforum.de/member.php?action=profile&uid=357375>http://forum.ttpforum.de/member.php?action=profile&uid=357375</a> Фриплей-бонусы. Бонусы за безвозмездную забаву есть только в некоторых клубах. Они зачисляются незамедлительно в творенья профиля и действуют непродолжительное время. Если у вас нет медли израсходовать свои, они просто завершатся. Что касается медли, в большинстве случаев бонусы срабатывают на 1-го часа. 1× slots зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://www.fromrus.su/index.php?/topic/26648–1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82-%D0%BC%D0%BE%D0%B1%D0%B8%D0%BB%D1%8C%D0%BD%D0%B0%D1%8F-%D0%B2%D0%B5%D1%80%D1%81%D0%B8%D1%8F/>1×slots официальный сайт мобильная версия</a>
<a href=http://miupsik.ru/forums/showthread.php?tid=205328>1×slots бонус за регистрацию</a>
<a href=http://forum.azartweb2.com/members/rabofreema.1327/>1×slots рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефон либо почту, указать индивидуальную информацию; К примеру, игроку выдаются безвозмездные средства в заведении в размере пятидесяти или ста $ (вейджер на которые составляет 100х). То есть, каждому новоприбывшему геймеру выскакивает притягивающая картинка, кот-ая сулит выплату всех зачисленных фирмой средств. Не стоит обращать внимания на казино приз за регистрацию без депозита с слишком большой или очень малюсенькой суммой призов, поэтому собственно, том кропотливо выучив все обстоятельства, тут всего, несомненно некий подкол.
#8502 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало
Важно, убедитесь в, что раньше не регистрировались в избранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи.Во время игры в казино, выигрыши, приобретенные благодаря безвозмездным призовым фондам, суммируются и срабатывают в совместную необходимую для отыгрывания. Однако, случае фортуна улыбнется и получится отыграть все призы, игровое заведение гарантированно допустит вывести денежные свои. Сумма вывода несомненно в от лимита, одобренного непосредственно в данном учреждении. Поэтому, внимательно надо(надобно) читать управляла выдачи безлимитных депозитов. <a href=http://filmkachat.ru/>1×slots зеркало быструю регистрацию а также мгновенное</a> Для подтверждения электронной почты, просто перейдите по интенсивной ссылке в письме, полученном от игрового заведения. <a href=https://www.exoltech.us/blogs/227831/%D0%A6%D0%B5%D0%BD%D0%B0-%D1%80%D0%B5%D0%BC%D0%BE%D0%BD%D1%82%D0%B0-%D0%BA%D0%B2%D0%B0%D1%80%D1%82%D0%B8%D1%80%D1%8B-%D1%87%D1%82%D0%BE-%D0%B2%D0%BB%D0%B8%D1%8F%D0%B5%D1%82-%D0%BD%D0%B0-%D1%81%D1%82%D0%BE%D0%B8%D0%BC%D0%BE%D1%81%D1%82%D1%8C-%D0%B8-%D0%BA%D0%B0%D0%BA-%D0%B5%D0%B5>https://www.exoltech.us/blogs/227831/%D0%A6%D0%B5%D0%BD%D0%B0-%D1%80%D0%B5%D0%BC%D0%BE%D0%BD%D1%82%D0%B0-%D0%BA%D0%B2%D0%B0%D1%80%D1%82%D0%B8%D1%80%D1%8B-%D1%87%D1%82%D0%BE-%D0%B2%D0%BB%D0%B8%D1%8F%D0%B5%D1%82-%D0%BD%D0%B0-%D1%81%D1%82%D0%BE%D0%B8%D0%BC%D0%BE%D1%81%D1%82%D1%8C-%D0%B8-%D0%BA%D0%B0%D0%BA-%D0%B5%D0%B5</a> Многие игроки, оценив функционал казино, остаются выступать в нем и далее ? на это и нацелено каждое рекламную. Постоянные клиенты вносят депозиты и проделывают ставки, обеспечивая длительную прибыль оператора. То есть, казино раздают бездепы новым пользователям для формирования приклнной аудитории. 1×slots промокод при регистрации 2025 <a href=http://hoiqt.com/user-6971.html>http://hoiqt.com/user-6971.html</a> Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, a зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.
1× slots регистрация в 1×slots casino
Необходимость отыгрыша. Вейджер такой выше, чем для бонусов за депозит. И пока свои не отыграны, вывести их нельзя. 1×slots официальный сайт, скачать Лишь известные и известные азартные заведения все позволить себе раздавать бездепы вид дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, коие можно истратить в лучших аппаратах с высочайшей отдачей. <a href=http://nbrkv.ru/user/JoshuaPoill/>http://nbrkv.ru/user/JoshuaPoill/</a> 1×slots рабочее зеркало на сегодня Если вы выбираете проверенное лицензионное интернет казино и выполните все обстоятельства получения бездепозитного бонуса, трудностей с получением презента у Вас не возникнет.
1×slots актуальное зеркало
<a href=http://ntoqsxl.molifan.net./space-uid-2181649.html>http://ntoqsxl.molifan.net./space-uid-2181649.html</a> Но никогда не забывайте пристально читать управляла роли в бонусных акциях. Если вы нарушите но бы одно условие, позднее вы не можете устроить недоразумение с администрацией.Бoльшинcтвo азартных заведений выдвигают приблизительно однообразные, схожие обстоятельства и требования, которые необходимо выполнить, чтобы получить бездепозитный приз за регистрацию. Все их можно соединить в один перечень: скачать 1×slots официальный сайт Бесплатные призы казино без депо можно получить повторяющий денежных средств на бонусный счет (вывести их возможно лишь после отыгрыша), фриспинов, забавы либо кешбэк-бонуса.
1×slots официальный demo регистрация в 1×slots casino
Поспешите арестовать бездепозитные призы за регистрацию в казино из представленного списка. Все платформы не только водят законную работа, хотя и порадуют честными плодами забавы, высокой отдачей, резвыми выплатами.Бездепозитные призы отличный вариант безвозмездной забавы в игровые автоматы. Многие юзеры сети не знают, собственно в казино возможно начать играть абсолютно даром, а позже вывести выигрыш на банковскую карту или электрический кошелек, иные не доверяют интернет казино, а третьи удачно играют и выигрывают – и тотчас довольно большие суммы. <a href=https://forum.ltp-team.com/topic/58382–1×slots-kazino/>1×слотс казино</a> Проверка занимает от нескольких минут до нескольких дней, профессионалы техподдержки шансы запросить вспомогательные документы или инициировать короткое общение по Skype.Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, the decision лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. Подтверждение индивидуальной инфы. Все казино настоятельно от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и присутствие у юзера иных аккаунтов (мультиаккаунт запрещен).Шаг 5. Использование и отыгрыш. Бездеп обязан быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. 1×slots коды <a href=http://services-sector.ru/clubpointeresam/memberlist.php?mode=viewprofile&u=156920>http://services-sector.ru/clubpointeresam/memberlist.php?mode=viewprofile&u=156920</a> Но такие рамки не смущают даже хайроллеров, поскольку коэффициенты на слотах позволяют рассчитывать на крупные выигрыши, а неких автоматах разыгрывается прогрессивный джекпот.
1×slots официальный сайт скачать
Пoдтвepдить личнocть клиента. Для успешного вывода средств, необходимо доказать личность клиента. Нa этaпe вepификaции пpoфиля, работники службы защищенности должны увериться, собственно у игрока всего лишь раз акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не может исключить собственный выигрыш, случае у него будет несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы. Как верховодило, при выводе финансов, от играющего требуется лишь сделать минимальный лепта для того, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом собственный счет.На страничке представлены бездепозитные призы за регистрацию в казино редчайшая награда за которой гонятся все игроки как новички, например и профессионалы. Мы также уделяем большое внимание на наличие бонусов при составление рейтинга казино на деньги. Бездепозитный приз это вероятность играть безвозмездно и выиграть настоящие средства. <a href=https://www.vennews.net/home.php?mod=space&uid=161349&do=profile&from=space>https://www.vennews.net/home.php?mod=space&uid=161349&do=profile&from=space</a> Возможность протестировать новые игры, не рискуя личностными средствами и создать собственную тактику игры.Для получения бонуса нужно ознакомиться с программкой преданности казино и устроить ставки на сумму, нужную для перехода на грядущий уровень. 1×slots зеркало регистрацию более популярный вариант это Срок отыгрыша — это этап, кот-ый начинается в момент активации приза и кончается с его закрытием. Пользователю необходимо уложиться в этот временной зазор, по призовые средства аннулируются. Казино устанавливают перечень игр, ставки в засчитываются при расчете отыгранных средств. Если тайтл не заходит в этот перечень, то ему быть недосегаем для загрузки во время деянья бонусного предложения.Прежде всего, не забывайте периодически заглядывать на страницу обзоров бездепозитных бонусов. Они шаг за шагом разглядывают более интересные предложения основных игорных порталов.
<b>Смотреть еще похожие новости:</b>
<a href=http://nrj.rs.ba/viewtopic.php?p=3392#p3392>1хслот официальный сайт зеркало</a>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=232691>казино 1× slots официальный сайт</a>
<a href=https://www.sgomberisgombero.it/my-account-2/>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Отзывы читателей о бонусных акциях помогут составить эмоцию, хотя не запамятовывайте о субъективности собственных объяснений. Таким образом онлайн казино получает вероятного игрока. Возможно дальнейшем или настоящем он захочет сыграть на средства средства. Так работают бездепозитные призы в интернет казино. Здесь отлично подходит выражение, благотворительные сыр бывает только в мышеловке. Начинающие игроки могут не осознавать опасность азарта. Однако течением понимания становится больше. Это тема для отдельного обсуждения.
#8503 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на сайте
Если вы выбираете проверенное лицензионное онлайн казино и выполните все условия получения бездепозитного бонуса, трудностей с получением дара у Вас не возникнет.Ограничения по забавам. Администрация запрещает игрокам некоторые игровые автоматы с бездепозитным призом, средствами или бесплатными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда дробленье выполняется по облику игр. Например, отыгрыш возможен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino. <a href=http://filmkachat.ru/>1× slots регистрация в 1×slots casino</a> Фриспины. Бесплатные вращения предусмотрены для применения в видео-слотах. Внимательно читайте обстоятельства – они нередко выдаются для неких машин. В зависимости от клуба вам создавать конкретное количество ставок. Кстати, современные игорные жилища выделяют вероятность заводить «одноруких злодеев».Бездепозитный приз – это финансовое вознаграждение, коие выдается соучастнику забавы в казино, для его вербования и возникновения заинтригованности. Любой гость, кот-ый подходит условиям выдачи подобного бездепозитного бонуса, может претендовать на получение вышеуказанного приза. Такое поощрение является наиболее эффективным методом, дающим вероятность стартовать при, не вкладывая личных вещественных средств. <a href=https://justpaste.it/3doq4>https://justpaste.it/3doq4</a> Сроки активации бонуса устанавливаются любым казино, но почаще всего они не превосходят недели с момента получения. Игроку обязательно нужно применять бездеп на указанного срока, в ином случае бонус просто исчезнет. Каждый бонус можно получить лишь раз раз, потому в не использовать бездеп в срок, у игрока не несомненно второго шанса им воспользоваться. 1×slots регистрацию процедура займет всего лишь <a href=http://ru.monumentefunerare.md/index.php?subaction=userinfo&user=needlessunderwo>http://ru.monumentefunerare.md/index.php?subaction=userinfo&user=needlessunderwo</a> На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не сможете активировать и получить бездепозитный приз.Для тех, кто лишь взвешивает испытать свою фортуну, еще для проф игроков, отыскивающих новые площадки для выигрышей, основные лицензированные казино часто организуют разные промоакции, и одно из лучших предложений прошедшее время – как для начинающих, так и для профессиональных игроков – бездепозитный приз за регистрацию.
1хслотс рабочее зеркало
1×slos регистрация в 1×slots casino Как верховодило, при выводе финансов, от играющего требуется лишь устроить минимальный лепта для того, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом индивидуальный счет.Фриспины — безвозмездные вращения, которые разрешают игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины считаются наиболее модным и желаемым видом бонуса — благотворительные вращения иногда эффективнее и веселее в отыгрыше, чем другие виды бездепов. <a href=http://cloudscapehill.com/user/oscardiz/?um_action=edit>http://cloudscapehill.com/user/oscardiz/?um_action=edit</a> Так что главное различие подарка на депо от бездепа – обязательное пополнение счёта. Вы сможете привнести депозит и преумножить стартовый капитал либо забрать бездеп и при этом не придётся рисковать своими сбережениями. Поспешите выполнить простые требования, и администрация ресурса начисляет щедрое одобрение! x1 slots 1хслотс регистрация перейти на 1×slots Бывают ли бездепозитные бонусы без вейджера? Бывают, случае у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный приз за регистрацию устанавливается вейджер во всех казино.Свежий приз начисляется вид валютных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в пользовании своими, ну случае отыгрыша оператор имеет ввести лимитирование на вывод средств.
casino 1×slot
Практически все интернет казино с бездепозитным бонусом за регистрацию предусматривает программку лояльности — систему поощрения неизменных клиентов, кот-ая состоит из множества уровней. При достижении игроком одного значения на его счёт поступает бонус. Чем повыше степень — что, этим щедрее бонус.Чаще всего, знаменитые сервисы, такие как MoneyBookers и WebMoney, еще MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно обязательное правило. Финансовые свои выводятся лишь через что, эту платежную систему, коей огромной для пополнения депозита. Если же игрок получил бездепозитный покерный приз, требуется пополнить счет на минимальную необходимую, которая сочиняет обычно десять $. <a href=http://www.dmgec.com/bbs/board.php?bo_table=free&wr_id=246261>http://www.dmgec.com/bbs/board.php?bo_table=free&wr_id=246261</a> Во время игры в казино, выигрыши, приобретенные благодаря безвозмездным призовым фондам, суммируются и срабатывают в совместную необходимую для отыгрывания. Однако, если удача улыбнется и выйдет отыграть все призы, игровое заведение гарантированно допустит исключить денежные средства. Сумма вывода несомненно зависеть от лимита, утвержденного непосредственно в данном учреждении. Поэтому, пристально нужно читать верховодила выдачи анлимитных депо.Как и другие акции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такого предложения считаются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает новых посетителей и дозволяет им составить впечатление о функционале, не рискуя значительными совокупностями. 1× slots официальный
1×slots казино мобильная версия
Так что основное отличие презента на депо от бездепа – неотъемлемое пополнение счёта. Вы сможете привнести депо и преумножить стартовый капитал либо арестовать бездеп и при этом не придётся рисковать своими сбережениями. Поспешите выполнить простые требования, и администрация ресурса начислит щедрое одобрение!Минимального оборота. Этот лимит устанавливается вейджером — же игрок не сыграет на установленную сумму, вывод средств будет недоступен. <a href=https://forum.bandariklan.com/showthread.php?tid=176825&pid=914136#pid914136>1×slots официальный регистрация</a> В бонусную программку множества операторов входят регулярные бездепы. Это пожизненные промоакции, поощряющие активных постоянных игроков. Популярный формат — раздача фриспинов по конкретным дням недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают постоянные призы без депозита в мена на накопленные баллы преданности.При поддержки такого поощрения оператор возможность также завлекать клиентов, коие ранее проявляли активность на сайте, но по какой-то причине перестали играть. В этом случае промокод высылается пользователю по электронной почте либо в виде SMS. Высокая конкуренция в сегменте азартных игр доказывает операторов привлекать клиентов разнообразными промоакциями. Благодаря этому у гостей появляется возможность получить призы в казино за регистрацию без депо. Воспользоваться таким предложением можно, избегая процедуру внесения денег на игровой счет, просто активировав акк на веб-сайте. Наш гид по бездепам поможет выбрать самую симпатичную бонусную программку, узнать правила получения такового гонорары и распорядиться им с максимальной выгодой. 1хслотс рабочее зеркало <a href=http://soe-parrot.com/home.php?mod=space&uid=168580>http://soe-parrot.com/home.php?mod=space&uid=168580</a> Но а случае вы теснее профи по онлайн казино, кликаем на красноватую кнопку «Получить» и Вы автоматически перейдете в интернет казино;Возьми свой подарок. Чаще всего бонус активизируется незамедлительно после регистрации. Но случаются истории, когда надо(надобно) зайти в личный офис либо написать в справочную службу.
1×slots casino регистрация 1×slotscasino09k online
Объективные – размер бонуса, коэффициент и условия вейджера, необходимость внесения депозита для вывода денег;Подтвердите регистрацию, чтобы активировать Бездепозитный приз с выводом, требуется заполнить собственный профиль. Заполните пустопорожние поля реальными данными о для. <a href=http://www.mp-associes.com/en/index.php/blog/%D0%94%D0%B5%D0%BC%D0%B8%D1%81.html>http://www.mp-associes.com/en/index.php/blog/%D0%94%D0%B5%D0%BC%D0%B8%D1%81.html</a> 1×slots официальный demo регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://fougerite.com/threads/1×slots-klubu1×slots-1×slots-registracija-perejti-na-1×slots.12528/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<a href=https://sadhaka.nl/forum/viewtopic.php?t=102330>1×slots casino регистрация</a>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=217280>1×slots регистрация на 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В случае установленного лимита на необходимую вывода выигрыша с бездепозитного приза, игрок не сможет вывести больше заявленной суммы.
#8504 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало
Получить Бездепозитный бонус в интернет казино дело 2-ух кликов. Другой момент, отыграть рекламную и соблюсти верховодила и условия отыгрыша. Под правилами предполагается столько вагер, но и ограничения по максимальной ставке. Мы осознаем, собственно в кино все ставят на зеро и выигрывают. Призываем не делать похожего. Перед активацией приза прочтите правила. Узнайте последующие моменты: Условия получения дара, за регистрацию, за депо и многое. Ограничения по максимальной ставке. Зачастую не выше 350 руб. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах можно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на месте. Поэтому важно знать, в каких играх можно совершать кратность валютного оборота.А ознакомиться с новыми онлайн казино, Вы можете с бонусов с выводом выгоды, которые Вы сможете получить без депозита. <a href=http://filmkachat.ru/>1×slots официальный сайт, скачать</a> Каждый из бездепозитных призов без пополнения 2022 имеет свой конкретный вейджер для отыгрыша, так же в любом казино он устанавливается индивидуально — где то он х55 а где-то х30, повторюсь всюду по различному!Бездепозитные призы за регистрацию считаются одним из самых популярных методов привлечения свежих игроков в онлайн-казино, поэтому собственно они деют игрокам вероятность опробовать казино, особенно игровые автоматы, и вполне, выиграть реальные деньги. <a href=https://rant.li/9fsnh6hu13>https://rant.li/9fsnh6hu13</a> Так же стоит выделить то, собственно в каждом онлайн казино установлен свой наибольший кешаут на бездепозитный приз. Как верховодило кешаут — это предельная сумма денег, кот-ая доступная для вывода с бездепозитного бонуса. 1×slots сайт <a href=https://repyourmaxfitness.com/user/patricklam/?um_action=edit>https://repyourmaxfitness.com/user/patricklam/?um_action=edit</a>
1хслотс рабочее зеркало
Бездепозитный бонус за регистрацию в казино — это стартовый подарок в виде валютного начисления или даровых вращений для свежих игроков заведения, для получения которого не заносить депозит.Также существуют онлайн-платформы азартных игр, коие применяют раздачу бездепозитных бонусов в особые даты (как для казино, так и для игрока). Помимо этого, действующие игроки кроме имеют возможность получить схожие призы за свою деятельность (к примеру, за повышения уровня или за схожие достижения). 1×slot официальный сайт Но ни не запамятовывайте внимательно читать верховодила участия в бонусных промоакциях. Если вы нарушите хотя бы одно условие, позднее вы не сможете уладить недоразумение с администрацией.В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с даровых вращений. Прибыль, которую Вы заработаете на этом бездепе можно ставить на вывод без какого либо отыгрыша. <a href=http://it.euroweb.ro/wiki/index.php/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%AF%D0%BD%D0%B4%D0%B5%D0%BA%D1%81>http://it.euroweb.ro/wiki/index.php/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%AF%D0%BD%D0%B4%D0%B5%D0%BA%D1%81</a> Воспользоваться бездепом возможно не во всех игровых автоматах: казино и тут уточняет ограничение для посетителей. Конечно, это можно счесть неким неудобством для игрока, хотя ради стоит отметить, что выбор автоматов всё равно остаётся достаточно наибольшим.Необходимость отыгрыша. Вейджер такой повыше, чем для призов за депозит. И же свои не отыграны, исключить их нельзя. 1×slots бездепозитный бонус за регистрацию
1×slots быструю регистрацию а также мгновенное
Помните, собственно в некоторых играх сумма ставки идет в зачет вейджера лишь частично. Так, в настольных и карточных забавах только от 5% до 50% суммы ставки числятся как отыгранные деньги, на как в слотах идет в зачет все one hundred percent суммы.Несмотря на то, собственно данный вариант стимуляции со стороны азартных платформ довольно моден в сфере подобных игр, далековато многим почитателям казино знаменито, собственно себе бездепозитные призы казино и как непосредственно их вероятно эксплуатировать. <a href=http://bbs.ztbs.cn/home.php?mod=space&uid=112870>http://bbs.ztbs.cn/home.php?mod=space&uid=112870</a> В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, необходимо адресоваться в службу спустя лайв-чат на сайте казино. 1×slots зеркало выигрыши обязательно пройдите регистрацию если С такими простыми советами каждое казино с бонусом за регистрацию способно принести в разы больше выгоды и пользы.
1×slots акции
<a href=https://mcmon.ru/showthread.php?tid=123165>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a> Сразу после активации промокода можно пользоваться презентом. Как уже упоминалось, бонусы посещают трёх видов – фриспины, кредиты и фриплей-бонусы.Эффективность бездепов виде рекламного инструмента расценили многие операторы. Малоизвестные площадки используют эти промоакции, чтобы прытко набрать базу. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны постоянных посетителей. Не все веб-сайты, дающие подарки без депозита, рекомендованы к ирге. За привлекательным промоописанием все прятаться невыполнимые условия отыгрыша и другие подводные камешки. 1×slots официальный сайт скачать <a href=http://silabgarza.net/forums/member.php?action=profile&uid=216523>http://silabgarza.net/forums/member.php?action=profile&uid=216523</a> Несмотря на то, что данный вариант стимуляции со стороны азартных платформ очень востребован в сходственных игр, далековато многим почитателям казино известно, что являют собой бездепозитные бонусы казино и как непосредственно их возможно эксплуатировать.
1×slots рабочее зеркало на сегодня
Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных требований, кроме обязательной верификации. Если на веб-сайте учтена неотъемлемая процедура доказательства личности, то исключить выигрыш удастся только последствии проверки данных. Приготовьтесь наполнить анкету и отправить в техподдержку документ, подтверждающий личность.После получения приза вывод средств для клиента будет недоступен того, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо пара недель. Выводить средства игрок может лишь в отыгрыша. Но есть игорные заведения, которые готовы просто так жертвовать средства на забаву. Для этого достаточно сделать профиль. Чтобы вывести свой выигрыш, вам поначалу необходимо выполнить условия отыгрыша, указанные в условиях получения бездепозитного депо. <a href=http://samsoberi.ru/index.php?subaction=userinfo&user=lopsidedepic80>http://samsoberi.ru/index.php?subaction=userinfo&user=lopsidedepic80</a> 1×slots зеркало регистрация Высокая конкурентность в разделе азартных игр мотивирует операторов привлекать клиентов разнообразными промоакциями. Благодаря данному у посетителей появляется вероятность получить призы в казино за регистрацию без депозита. Воспользоваться этим предложением можно, избегая процедуру внесения средств на игровой счет, просто активировав акк на сайте. Наш гид по бездепам поможет выбрать самую привлекательную бонусную программку, узнать правила получения такового гонорары и распорядиться им с наибольшей выгодой.
<b>Смотреть еще похожие новости:</b>
<a href=http://tarratorriya.tforums.org/memberlist.php?mode=viewprofile&u=785>1×slots зеркало регистрация в 1×slots casino</a>
<a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1×slots мобильная версия войти казино</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепы обыкновенно предлагают с отыгрышем — моментально исключить выигранные свои невозможно. Перевод средств со счета несомненно возможен в того, как юзер выполнит все притязания казино, а сумма не быть выше установленного правилами лимита. Условиями акции фиксируются сроки, в течение коих клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней в активации. Чем ниже значение вейджера, что, этим проще отыграть и вывести приз. Если Вы расчитываете заработать на бездепе, не просто ознакомиться с свежим игровым клубом, то стоит избегать бонусов с высочайшим вейджером их почти не реально отыграть. С ними Вы можете лишь протестировать игры заведения.
#8505 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots review live
Итак, чтобы благотворительные бонусные кредиты превратились в настоящие деньги, которыми вы можете распоряжаться по своему усмотрению, их нужно отыграть. Вейджер следует уточнять в правилах онлайн-казино. <a href=http://filmkachat.ru/>1×slots мобильная версия войти казино</a> Активация по промокоду употребляется в разных обликах бездепов. Если речь о приветственном призе, то комплект знаков можно разузнать на главной странице, в регистрационной форме или послании, которое отправляется юзеру для подтверждения e-mail. Акции шансы проводиться общо с партнерскими площадками. Обычно код располагается на постороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активируется одноразовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном кабинете либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем актуальный код для активации в описании любого рекламную. <a href=https://myheritage.heritage.edu/ICS/_portletview_/Academics/RDG/RDG__502/1920_SU-RDG__502–10/Blog.jnz?portlet=Blog&screen=View+Post&screenType=next&&Id=ed00954d-072d-43f8-bafb-17bd5d1b7a0c>https://myheritage.heritage.edu/ICS/_portletview_/Academics/RDG/RDG__502/1920_SU-RDG__502–10/Blog.jnz?portlet=Blog&screen=View+Post&screenType=next&&Id=ed00954d-072d-43f8-bafb-17bd5d1b7a0c</a> 1×slots зеркало регистрация то дальше необходимо пройти <a href=https://boobs.red/user/Travissmake/>https://boobs.red/user/Travissmake/</a>
1×slots официальный сайт скачать
Призовые начисления без депозита шансы предоставляться для участия в турнирах интернет казино. Потратить перечисленные деньги можно необыкновенно в данной промоакции. Условия их проведения в ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, превосходнее изучить его управляла.Ознакомьтесь с нашим списком превосходнейших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего перечня и получите бездеп сразу. Хватайте наилучшие благотворительные предложения ниже и выигрывайте великие средства, не рискуя! <a href=http://khodaumo.com/forum/memberlist.php?mode=viewprofile&u=146&sid=f1604f182cbd1c7f12f57c90f98c73ba>скачать 1×slots официальный сайт</a> зеркло казино 1×slots Иногда для получения бонусов необходимо связаться с адептами саппорта. Удобнее всего с ними беседовать в онлайн-сате, хотя от довольно запроса по электронной почте. <a href=http://jung24express.com/bbs/board.php?bo_table=review&wr_id=126343>http://jung24express.com/bbs/board.php?bo_table=review&wr_id=126343</a> 1×slots официальный сайт зеркало рабочее Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке адепты онлайн-казино публикуют важную информацию о no deposit bonuses прочих услугах.Кешбэк-бонус дает собой возврат фиксированного процента от ставки когда проигрыша либо же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не превышает 10%.
1×slot регистрация
Акции распространяются как на все игры казино, так и на ограниченный список. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и другие. Промо имеет обхватывать разработки 1-го производителя. Бездеп не пересекается с иными промоакциями казино. Если на веб-сайте предусмотрен кэшбек, он не начисляется за ставки, сделанные бонусными деньгами. Для идентификации платежных реквизитов игрока может потребоваться пополнение счета на минимальную необходимую. <a href=https://justpaste.me/aPut2>https://justpaste.me/aPut2</a> Мы проделываем ударение на ключевых положениях верховодил, рассказываем о территориальных ограничениях и вкратце информируем о других промоакциях обсуждаемого казино.Процесс доказательства личности может взятьвдолг(взятьвзаймы) от одного дня до недели. Если клиент разрешил какую ошибку при заполнении паспортных данных, то ему идет адресоваться с задачей в службу онлайн-казино. 1×slots зеркало регистрация в 1×slots casino
1×slots casino регистрация на сайте
У любого игорного клубы разные вейджеровые обстоятельства. Чтобы вы гарантировано смогли выполнить их, мы дадим некоторое советов. Если система начислила небольшую сумму, не стоит создавать великие ставки – остановитесь на 10–30 центах. Как лишь сумеете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте выступать. В противном случае превосходнее присмотреться к другому автомату. Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам запрещено начислять призы клиентам, не имеющим валютных средств на счете. Мы предлагаем рассмотреть животрепещущие бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ.Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? 1хслотс регистрация в 1×slots casino <a href=http://travel.navigator-mas.ru/user/Michaelvem/>http://travel.navigator-mas.ru/user/Michaelvem/</a>
1×slots регистрацию более популярный вариант это
<a href=http://specialacel.hu/component/community/iratetalent35/profile>http://specialacel.hu/component/community/iratetalent35/profile</a> 1×slots казино зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://weeklywars.de/viewtopic.php?f=12&t=1090&p=479256#p479256>1× slots casino зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Oтыгpaть бонус с указанным вeйджepом, достичь нужно сдeлaть cтaвoк нa cумму, превосходящую размер приза в некоторое раз.
#8506 Charlesgunnyhttp://filmkachat.ru
скачать 1×slots на андроид мобильная версия
Активация происходит с помощью промокодов, которые вводятся в собственном офисе последствии регистрации. Среди спецпредложений в перечне Casino.ru содержатся неповторимые промокоды, которые доступны только гостям портала. Другие методы начисления средств ? автоматическая активация незамедлительно после творения аккаунта и получение подарка по запросу в службу технической поддержки.Максимальный объем ставки, кот-ый нельзя превосходить пока приз не несомненно полностью отыгран. В случае нарушения сего управляла, приз и выигрыш с него будут аннулированы. <a href=http://filmkachat.ru/>1хслотс 1хслотс регистрация перейти на 1×slots</a> Для получения бонуса нужно пригласить в игру свежего посетителя. Казино начисляет пригласившему фиксированный процент от взносов приглашённого вид приза: чаще всего его объем не превышает 10%. Срок действия бонуса правило не выше месяца: пригласивший получает приз в зависимости от проигранных ставок приглашённого в 1-ый месяц забавы. <a href=https://www.imdb.com/user/ur190372343/>https://www.imdb.com/user/ur190372343/</a> 1×slots casino регистрация <a href=https://www.polovw.it/foro/memberlist.php?mode=viewprofile&u=74995>https://www.polovw.it/foro/memberlist.php?mode=viewprofile&u=74995</a> Зачастую бездепозитные призы казино для забавы предлагаются различными заведениями азартных игр в качестве рекламных акций либо в целях вербования к для свежих игроков. Для бездепозитных призов в казино 2022 игроку не пополнять счет до момента вывода желанных средств.
1хслот скачать
Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 $. Если выдаются фриспины, их число редко превышает нескольких 10-ов безвозмездных вращений.Если вы выбрали себе некоторое брендов которые для больше всего полюбились, для неизменной игры! Таких гемблеров казино очень любит и ценит, за частую такие игроки становятся VIP игроками заведения, которым нередко поступают прибыльные предложения повторяющий призов, например же туда заходит и бездепозитные. 1×slots регистрация 1×slotscasino 56 online У каждого игорного клубы разные вейджеровые обстоятельства. Чтобы вы гарантировано сумели выполнить их, мы дадим количество советов. Если система начислила маленькую необходимую, не стоит создавать великие ставки – остановитесь на 10–30 центах. Как только сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте играть. В противном случае другого, как приглядеться к другому автомату. <a href=https://ads.kazakh-zerno.net/user/CharlesFlolf/>https://ads.kazakh-zerno.net/user/CharlesFlolf/</a> Как управляло, новоприбывшие игроки в первую очередь хотят ознакомиться с методами ввода и вывода денежных средств и сроки исполнения поданных заказов дабы конкретно понимать, как стремительно они смогут исключить собственный казино бонус за регистрацию без депо на электронный кошелек либо же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино соперничают меж собой. Ведь если бы определенную компанию давало только одно онлайн-заведение, то вряд ли бы посетители заметили казино с бонусом за регистрацию и возможность бы рассчитывать только на вознаграждение вид бонуса на 1-ое вложение. К каждому заведению регулярно идет завлекать новых игроков, что, конечном, лишь на руку всем играющим.Шаг 4. Активация. Внимательно исследуйте обстоятельства, информацию по лимитированиям и сроке деянья бонусного предложения. Разобравшись с правилами, возможно активировать бонус в собственном кабинете (от ? с использованием промокода) или по запросу в саппорт. 1×slots зеркало выигрыши обязательно пройдите регистрацию если Бездепозитный бонус по промо-коду несомненно доступен для игры, лишь в том случае когда Вы активируете особый бонусный код в разделе с призами либо укажите промокод при регистрации на сайте. В некоторых случаях, считая активации кода, понадобиться подтвердить контактные данные игрока и заполнить анкету посетителя.Варианты выигрыша зависят от Вашей успеха и условий игорного портала. Выше мы заявили, что некоторые бездепозитные призы в 2022 году выдаются с ограничениями по наибольшей выплате. Однако, остаются и, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность передовых игр на средства, можно выиграть невероятные суммы. Сегодняшние игровые автоматы либо видео слоты, как их называют. Могут выдавать солидные умножение от х1.000 и выше. Некоторые множат ставку от х100.000.
1×slots сайт
Верификация важна для дополнительной безопасности и подсобляет техподдержке выявить бонусхантеров и мошенников. Кстати, рядах платформах выводы крупных сумм доступны лишь в доказательства личности. Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша бонусов. Заведения постоянно устанавливают наивысшую ставку, возможную по условиям вейждера.Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном веб-сайте и выполните вход в индивидуальный кабинет, чтобы арестовать благотворительные вращения с вейджером х40; <a href=http://arsivforum.10tl.net/member.php?action=profile&uid=5626>http://arsivforum.10tl.net/member.php?action=profile&uid=5626</a> 1 х слотс зеркало
1×slots зеркало рабочее на сегодня
Игры, в которых можно выступать на бонусные средства. Проверьте перечень игр, в возможно играть на бонусные средства, вероятно они Вам не понравятся и не стоит расходовать своё время на эту промоакцию.На бонусные начисления имеют быть установлены дополнительные лимитирования, которые Вы не приняли при отыгрыше. Пока приз всецело не отыгран — деньги из казино не выводятся. В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, необходимо обратиться в службу через лайв-чат на веб-сайте казино.Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депо имеет выделяться до 30 дней. Все обожают получать презенты. Согласитесь, практически любой играющий человек несомненно необъятно рад, в получит безвозмездный подарок для игры в интернет казино просто за регистрацию либо же приз за внесенный депо, например именуемые приветственные призы для новых игроков. Соответственно эти онлайн клубы станут более модны и преимущественны у игроков при выборе казино для игры. Топ казино постоянно обновляется и добавляются свежие и интересные игровые клубы с привлекательной бонусной политикой и всеми вероятными прерогативами, к коим относятся эти бонусы как фриспины за регистрацию, валютные бездепозитные бонусы, еще великодушные бонусы за внесенный депо. 1 хслот регистрация в 1×slots casino <a href=http://t1mro.ru/index.php?subaction=userinfo&user=agonizingspray5>http://t1mro.ru/index.php?subaction=userinfo&user=agonizingspray5</a> Бонус без депо за регистрацию в казино (бездепозитный бонус) – это денежный презент от клуба, который начисляется на акк игрока последствии регистрации в казино. Кроме сотворения учетной записи, для получения бездепа, очень нередко требуется ещё и доказать контактные данные игрока и/или активировать особый промо-код.Многие новички сомневаются, что поощрительный приз не несомненно отдавать, даже случае они выиграли у казино. Это полностью неопасно и накрепко. Выводя выигранные свои, игрок просто одергивает свое участие деле и теряет уникальную возможность – бесплатно увеличивать собственное материальное положение.
1×slots официальный сайт скачать
Размер ставки для забавы по бездепозитному призу (окончательно же, когда, когда он представлен вид бонусных валютных средств) часто ниже, чем при этой на депо. Ограничение несомненно работать до этапа отыгрыша бонуса.Постарайтесь отыграть вейджер, чтобы была возможность забыть заявку на выплату. Кстати, на всех веб-сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы можете получить выигрыш на электронной кошелёк, карту, телефонный. <a href=http://yuyue.com.tw/upload/home.php?mod=space&uid=172305>http://yuyue.com.tw/upload/home.php?mod=space&uid=172305</a> Чем ниже значение вейджера, тем легче отыграть и вывести приз. Если Вы планируете заработать на бездепе, а не просто ознакомиться с новым игровым клубом, то стоит игнорировать призов с высочайшим вейджером их почти не реально отыграть. С ними Вы можете только протестировать игры заведения. 1×slot рабочее зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=301915>1×slots официальный сайт, скачать</a>
<a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=2819>1хслотс зеркало на сегодня</a>
<a href=https://forum.bedwantsinfo.nl/thread-692363.html>1хслотс рабочее зеркало</a>
<a href=https://www.globalvision2000.com/forum/member.php?action=profile&uid=1072499>1×slots регистрация 1×slots review live</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и в случае спорных ситуаций нет возможности куда-то пожаловаться и обосновать свою правоту. Выигрыши с бонусов без вложений практически привязаны к требованию по ставкам и имеют быть обналичены только после выполнения данных требований.
#8507 Charlesgunnyhttp://filmkachat.ru
1×slots сайт зеркало
Так что можете смело регистрироваться без всяких размышлений. Фортуна сегодня точно на вашей стороне. Не бойтесь, ведь последствие какого или убытка Вам совершенно не грозит. С этими призами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе. <a href=http://filmkachat.ru/>1×slots регистрация на сайте</a> Более солидные предложения встречаются довольно редко. Зачастую они доступны только VIP-игрокам. В остальных случаях им скорее сопутствуют довольно строгие условия отыгрыша. Также вероятны дополнительные обстоятельства прочие ограничения, прописанные в критериях и положения бонусной программы казино. <a href=https://hackaday.io/sklum>https://hackaday.io/sklum</a> Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы моментально получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, замечена настоящий шанс победу! 1×slots официальный сайт скачать <a href=http://besstizhie.ru/user/GlennBes/>http://besstizhie.ru/user/GlennBes/</a>
1×slots подтвердит вашу регистрацию если говорить
<a href=http://mandala-app.com/memberlist.php?mode=viewprofile&u=3447&sid=c38bb0efecc9f9eefc942024388aad54>1хлот регистрация в 1×slots casino</a> 1×slots на любой вкус как пройти регистрацию <a href=https://exsite.su/user/Zacherynaind>https://exsite.su/user/Zacherynaind</a> Например, игрок получил 500 рублей при твореньи аккаунта и должен отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 рублей, понадобится устроить 875 спинов для полного отыгрыша.Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, чтобы еще раз получить даровой бонус. Игорные заведения нетерпимы к бонус-хантерам, потому вас ожидает неизбежное санкция. 1хслотс рабочее зеркало Бездепозитный приз – это финансовое вознаграждение, коие выдается соучастнику забавы в казино, для его вербования и возникновения заинтригованности. Любой гость, кот-ый подходит условиям выдачи подобного бездепозитного бонуса, может претендовать на получение вышеуказанного приза. Такое поощрение является наиболее эффективным методом, дающим вероятность стартовать при, не вкладывая личных вещественных средств.Самый распространённый из подобных бонусов, естесственно же, бездеп на денек рождения посетителя — приз вид фиксированной суммы или фриспинов поступает на счёт игрока, а воспользоваться им возможно на установленного периода времени.
скачать 1×slots на андроид мобильная версия
Похожим образом работает 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения клиента либо в связи с получения им VIP-статуса. Подарок предоставляется в воззвания в поддержку и проверки.Но а если вы уже профи по интернет казино, кликаем на красноватую кнопку «Получить» и Вы автоматически перейдете в онлайн казино; <a href=http://domocontrol.ru/user/AnthonyRes/>http://domocontrol.ru/user/AnthonyRes/</a> 1×slots регистрацию более популярный вариант это Как только на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу последствии сего можно оставить заявку на вывод выигрыша. Кредиты выгодно выделяются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом реальных средств и дают вероятность ощутить задор. Во-вторых – можно насладиться любой азартной игрой доступной на сайте. В вашем распоряжении присутствуют автоматы, настольные прибавление, видео-покер, Live-дилеры.
1×slot рабочее зеркало
Любой выигрыш по ставке повыше установленного лимита будет считаться недействительным. То есть ставка не несомненно засчитана при отыгрыше, в случае выигрыша его сумма не поступит на счёт посетителя — итог игры будет всецело аннулирован. Отказ в прохождении верификации. Если заказчик не хочет либо имеет предоставить документы, подтверждающие его личность, профиль будет заблокирован совместно, вкупе со всеми бонусными начислениями.Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных притязаний, не обязательной верификации. Если на сайте учтена неотъемлемая процедура подтверждения личности, то исключить выигрыш удастся только последствии ревизии данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий лицо. 1×slots бездепозитный бонус за регистрацию <a href=http://bbs.ztbs.cn/home.php?mod=space&uid=101331>http://bbs.ztbs.cn/home.php?mod=space&uid=101331</a> Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.
1×slots официальный сайт зеркало рабочее
Раздача призов может быть посвящена разным датам: календарные праздники, дни рождения игроков, годовщина открытия казино и т. Д. Подарок выдается повторяющий средств, фриспинов или баллов для скопления и обмена на услуги оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода этой суммы понадобиться выполнить ряд требований.В основном случаев благотворительные бонусы начисляются в кредитах, коие невозможно незамедлительно исключить со счета. Прежде их нужно отыграть по установленным правилам. Эти притязания принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже. Многие игроки, оценив перечень казино, остаются выступать в нем и дальше ? на это и направлено каждое рекламную. Постоянные клиенты заносят депозиты и проделывают ставки, обеспечивая длительную прибыль оператора. То есть, казино раздают бездепы новым пользователям для формирования приклнной аудитории.Популярность онлайн казино растёт и всё больше юзеров начинают проявлять азартными играми. Бездепозитные бонусы 2022 года, это уникальные подарки за регистрацию. С их помощью новые игроки могут получить бесплатные вращения либо деньги на баланс за одну регистрацию. С выходом игорных заведений в интернете, бездепозитные бонусы стали известнейшим методом привлечения игроков. Подобные промоакции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о которых мы расскажем. Наш вебсайт собрал наихорошие предложения из онлайна на 2022 год. Воспользуйтесь каким подарком и можете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить условия. <a href=https://www.nederpix.nl/profile.php?mode=viewprofile&u=73449>https://www.nederpix.nl/profile.php?mode=viewprofile&u=73449</a> рабочее зеркало 1×slots Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.emv.info/viewtopic.php?f=15&t=2076>x1 slots регистрация в 1×slots casino</a>
<a href=https://masstr.net/showthread.php?tid=84004>1×slots сайт</a>
<a href=https://praisenpray.org/forums/showthread.php?tid=98793>1×slots зеркало регистрация в 1×slots casino</a>
<a href=http://mandala-app.com/forums/memberlist.php?mode=viewprofile&u=3447>1×slots регистрация 1×slots casino 777 online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Зарегистрироваться в казино по специальной ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефонного и электронную почту). Для доказательства номера телефонного необходимо в личном профиле показать собственный номер и надавить кнопку „Подтвердить номер телефона“, далее Вы получите sms-сообщение с кодом, который необходимо ввести в отвечающее поле. Для доказательства электронной почты, перебежать по активной ссылке в письме от казино. Выше мы предоставили полный набор самых свежих и своевременных бездепозитных призов в интернет казино без пополнения на 2022 год, где вы можете воспользоваться хоть ценным бездепозитным призом.
#8508 Charlesgunnyhttp://filmkachat.ru
1× slots зеркало
Выигрыши с призов без инвестициям практически привязаны к требованию по ставкам и могут быть обналичены только в исполнения данных притязаний.Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, the decision только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. <a href=http://filmkachat.ru/>сайт 1× slots casino</a> Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды находятся на этой странице. Посетитель возможность оценить условия получения и начать выступать на средства без внесения депо. При этом игроку главно понимать, на каких условиях и какими способами появится исключить полученный выигрыш. Для этого нужно расценить список присоединенных платежных систем.Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных обстановок с казино, когда после отыгрыша бездепа вам не дадут вывести солидную сумму выигрыша. <a href=https://www.babelio.com/livres/Maupassant-Bel-Ami/2125/forum/41991/How-Augmented-Reality-Furniture-Is-Transforming-Ho>https://www.babelio.com/livres/Maupassant-Bel-Ami/2125/forum/41991/How-Augmented-Reality-Furniture-Is-Transforming-Ho</a> 1×slots зеркало регистрацию более популярный вариант это <a href=http://mart-toys.ru/bitrix/redirect.php?goto=http://lady-frost.ru/bitrix/redirect.php?goto=http://anh.by/bitrix/redirect.php?goto=https://teletype.in/@urist555/Ip1KXy6F2lw>http://mart-toys.ru/bitrix/redirect.php?goto=http://lady-frost.ru/bitrix/redirect.php?goto=http://anh.by/bitrix/redirect.php?goto=https://teletype.in/@urist555/Ip1KXy6F2lw</a>
1×slots зеркало которую указывали при регистрации кстати
Но а если вы уже профи по интернет казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в онлайн казино; <a href=https://test.soclanovtsy.ru/topic/33333–1-xslots-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE/>1 xslots рабочее зеркало</a> x1 slots регистрация в 1×slots casino Доступные забавы – В некоторых азартных забавах возможно понизить математическое превосходство казино до нескольких 10-х процента. В их количестве многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как управляло, в таких играх ставки идут в зачет вейджера не полностью. Например, возможность учитываться лишь 50%. В некоторых забавах бездепозитные призы вообще невозможно отыгрывать. <a href=http://liderotrasli.ru/index.php?subaction=userinfo&user=haltingitem59>http://liderotrasli.ru/index.php?subaction=userinfo&user=haltingitem59</a> Как лишь получите бездеп в казино, всё также не забывайте инспектировать электрическую почту. Некоторые игорные клубы день веселят активных гэмблеров приятными призами. Чаще всего получить подарок возможно в преддверии веселья, на день рождение, за привлечение приятеля. А того распространённым призом является прибавка к депозиту. Нужно более восполнить счёт, и азартное заведение прирастит его на 50–100%. 1×slots официальный сайт мобильная версия Если вы опытный игрок, вы обязаны знать, собственно бонус без депо – редчайшая находка. Тем ниже, мы неделю исследуем онлайн, дабы найти вам превосходнейшие бездепозитные предложения.Большинство интернет-казино из нашего топ-10 готовы порадовать вас неповторимыми промоакциями. Читайте о них в обзорах и на форуме.
1× slots casino зеркало
Будьте внимательнее при ознакомлении с правилами во избежание происхожденья конфликтных ситуаций с казино, когда в отыгрыша бездепа вас не дадут вывести солидную сумму выигрыша.Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, дабы замечена вероятность вывести выигрыш. <a href=https://forum.lazarev.ru/memberlist.php?mode=viewprofile&u=160275>https://forum.lazarev.ru/memberlist.php?mode=viewprofile&u=160275</a> казино 1× slots официальный сайт Активация по промокоду используется в различных видах бездепов. Если идет о приветственном бонусе, то набор символов можно узнать на крупнейшей страничке, в регистрационной форме либо письме, коие отправляется юзеру для доказательства адреса электронной почты. Акции шансы проводиться вместе с партнерскими площадками. Обычно код располагается на стороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активизируется разовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном офисе или начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем важный код для активации в описании каждого промо.
1×slots casino зеркало
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=339711>1×slots регистрация на сайте 1×slots ru com</a> Вышеописанная причина и является основным интересным, из-за которого операторы отдают часть своей выгоды на различные маркетинговые затраты и маркетинговые кампании. А самым действующим тут будут выступать именно бездепозитные бонусы казино 2022 с выводом за регистрацию. Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс дает игрокам важную информацию о самых свежих, щедрых и испытанных бонусах в онлайн казино, коие обновляются каждый денек.Если вы выбираете проверенное лицензионное онлайн казино и выполните все условия получения бездепозитного приза, трудностей с получением презента у Вас не возникнет. 1хслот скачать <a href=http://forum.industrialvideo.ir/member.php?action=profile&uid=4151>http://forum.industrialvideo.ir/member.php?action=profile&uid=4151</a>
1×slots зеркало на сегодня
Можно ли зарабатывать на бездепозитных призах? Это не работа, тут как повезет, если в любом предложенном безедепе, вы будете откручивать вейджер и выводить, время возможно назвать везением, и дополнительной добавкой к вашему бютжету.Максимальная ставка ? устанавливается в валюте счета и ограничивает размер ставки за раз спин. В случае ее превышения бонус имеет быть аннулирован. Также в правилах возможность находиться запрет на размещение ставок определенного вида, к, по равным шансам в рулетке (другими, на чет либо нечет, красное либо черное и т.д. ). <a href=https://www.news2.ru/profile/Glavdorogadv1808/>https://www.news2.ru/profile/Glavdorogadv1808/</a> При ирге на бонусные средства запрещается играть в игровые автоматы с прогрессивным джекпотом и игры из радела live casino. Кроме как, кое-какие казино дают бездеп на один либо количество определенных слотов, и в других играх Вы не сможете на их выступать. казино 1×slots Принципиальным различием безвозмездных призов от бонусов на депозит является неимение надобности вносить деньги на аккаунт. Из-за этого их нередко нарекают бездепозитными (not the slightest down payment bonuses).Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша призов. Заведения практически устанавливают наивысшую ставку, возможную по условиям вейждера.
<b>Смотреть еще похожие новости:</b>
<a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=2350>1× slots casino зеркало</a>
<a href=https://masstr.net/showthread.php?tid=85301>1×slots казино мобильная версия</a>
<a href=http://theauction.com.au/author/jamesflake/>1×slots промокод при регистрации</a>
<a href=https://isomedu.com/forum/profile/josephdrons/>1×slots casino online регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Обычно показатель выше, чем для призов на депозит. Не удивляйтесь, если он несомненно том х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных стран. Бездепозитный приз предоставляется новенькому игроку за определенные деянья. Часто презент повторяющий средств или фриспинов выдается за регистрацию, спасибо чему юзер получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.
#8509 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
Как только вы отыграли вейджер и средства с бонусного баланса перебежали для на настоящий счет, Вы неустрашимо сможете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (устроить наименьший депо к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депо).Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном бонусе, то начала направьте на значение вейджера и срок, кот-ый дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть бонус и исключить выигрыш. <a href=http://filmkachat.ru/>1×slots регистрация на сайте</a> Когда идет о получении бездепозитных бонусов в казино, для внимание на следующие обстоятельства: <a href=https://myheritage.heritage.edu/ICS/_portletview_/Academics/RDG/RDG__502/1920_SU-RDG__502–10/Blog.jnz?portlet=Blog&screen=View+Post&screenType=next&&Id=ed00954d-072d-43f8-bafb-17bd5d1b7a0c>https://myheritage.heritage.edu/ICS/_portletview_/Academics/RDG/RDG__502/1920_SU-RDG__502–10/Blog.jnz?portlet=Blog&screen=View+Post&screenType=next&&Id=ed00954d-072d-43f8-bafb-17bd5d1b7a0c</a> Приветственный бездеп предоставляется какому игроку только один один. Казино сражаются с например называемыми бонусхантерами (от англ. Bonus Hunter — доброволец за призами), пытающимися заводить многочисленные аккаунты для обмана оператора и повторного получения подарка. Исключить сходственные действия дозволяет верификация данных. Администрация вправе потребовать у посетителя подтвердить персональные данные, обозначенные при регистрации.Бонус с зачислением денег на счет дает больше свободы деяний. Пользователь сам избирает, каким образом распорядиться подаренными средствами. Здесь также имеют действовать ограничения на перечень дешевых игр, но обычно эти рамки не например строги, как в рекламную с безвозмездными вращениями. 1×slots казино зеркало <a href=http://d992387h.bget.ru/user/Travisetedy/>http://d992387h.bget.ru/user/Travisetedy/</a> Промокод – определённая композиция символов, которую необходимо ввести в подходящее поле при твореньи учетной записи либо активировать в собственном профиле игрока в разделе с бонусами.
1×slots casino регистрация на сайте
Некоторые клубы автоматически начисляют бонус на аккаунт игрока после исполнения критерий получения, но посещают истории, когда приз надо(надобно) активировать игроку самому. Есть количество способов активации бонуса:Перечисленные повыше основные свойства сочетают практически каждый приз и являются стандартными для бездепозитных бонусных начислений в казино. <a href=http://www.forum.kalor.ru/member/zaellayanextz8130/>рабочее зеркало 1хслотс</a> 1×slots зеркало Для всех бездепозитных призов действует наибольший лимит на выигрыш. Он показывает максимальную необходимую, коию возможность получить, играя на бонусные кредиты. Как только вас получится выполнить притязания вейджера, возможный максимально несомненно переведен с бонусного счета на главной, а остаток будет списан.Начнём с того, собственно каждое рекламную за регистрацию предполагает некие обстоятельства. Бездепозитные призы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность денежного оборота, необходимая для исполненья условий. Пример, возымели благотворительные вращения и выиграли с них 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 рублей, проигрышных либо выигрышных, важно. После исполненья, бонусный баланс перейдёт на реальный и станет доступным к выводу. <a href=http://maisoncarlos.com/UserProfile/tabid/42/UserID/2002419/Default.aspx>http://maisoncarlos.com/UserProfile/tabid/42/UserID/2002419/Default.aspx</a> Многие азартные клубы ограничивают необходимую вывода заработанную на призе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не можете исключить. Разница несомненно аннулирована, Вы и не можете делать на нее ставки.С такими ординарными советами любое казино с бонусом за регистрацию способно принести в разы больше выгоды и выгоды. 1×slots на любой вкус как пройти регистрацию
1×slots casino регистрация 1×slots review live
Возьми собственный презент. Чаще всего приз активизируется сразу последствии регистрации. Но бывают истории, когда надо(надобно) зайти в собственный кабинет или написать в справочную службу. <a href=https://thiamlau.com/forum/member.php?action=profile&uid=7004>https://thiamlau.com/forum/member.php?action=profile&uid=7004</a> 1×slots зеркало на сегодня Но такие рамки не смущают числе хайроллеров, поскольку коэффициенты на слотах разрешают рассчитывать на крупные выигрыши, в неких автоматах разыгрывается прогрессивный джекпот.Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.
1×slot зеркало рабочее этих способов предполагает регистрацию
Однако в критериях исчезают «подводные камни», коие не позволят вывести крупную сумму или же вы не успеете отыграть вейджер. Поэтому мастера советуют забрать бесплатные вращения за регистрацию в казино без депо, дабы поднабраться навыка и получить реальный шанс на победу.Денежные средства. Третий приз за регистрацию без депо – наличные. К сожалению, только известные и пользующиеся клубы имеют уяснить средства в рублях или долларах. С их поддержкою вы сможете насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед данным необходимо исполнение конкретных критерий. Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. казино 1×slots официальный сайт <a href=http://www.pawsarl.es/blog/%D0%B1%D0%BB%D0%BE%D0%B3-%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0-%D1%8F%D0%BD%D0%B4%D0%B5%D0%BA%D1%81-%D0%B4%D0%B7%D0%B5%D0%BD-%D1%87%D0%B8%D1%82%D0%B0%D1%82%D1%8C.html>http://www.pawsarl.es/blog/%D0%B1%D0%BB%D0%BE%D0%B3-%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0-%D1%8F%D0%BD%D0%B4%D0%B5%D0%BA%D1%81-%D0%B4%D0%B7%D0%B5%D0%BD-%D1%87%D0%B8%D1%82%D0%B0%D1%82%D1%8C.html</a> Верификация важна для добавочной защищенности и подсобляет техподдержке выявить бонусхантеров и плутов. Кстати, рядах платформах выводы солидных сумм доступны лишь последствии подтверждения личности.Бонусы без депо при регистрации считаются наиболее красивыми как для опытных игроков, например для и новичков. Получив это вознаграждение, клиент возможность выступать на настоящие деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные призы в интернет-казино Рунета, а также обстоятельства их активации и выигрыша.
казино 1×slots
Вейджер менее х30–35 является применимым. Опытные игроки заявляют, что с этим вейджером реально остаться в плюсе, если правильно подойти к выбору игрового аппарата. Помните, что любые нарушения правил сведут на нет ваши усилия, и вы наверняка останетесь без начисленного для бесплатного бонуса. Всегда изучайте верховодила начисления и обстоятельства вейджера. По хоть вопросам, на которые вы имеет других найти ответы, обращайтесь за объяснениям и саппорт. <a href=https://notabug.org/Batecom1102/Batecom1102/wiki/%D0%9F%D1%80%D0%BE%D0%B3%D1%80%D0%B0%D0%BC%D0%BC%D0%B0+%D0%B4%D0%BB%D1%8F+%D0%A1%D0%BF%D0%BE%D1%80%D1%82%D0%B8%D0%B2%D0%BD%D0%B0%D1%8F+%D1%88%D0%BA%D0%BE%D0%BB%D0%B0>https://notabug.org/Batecom1102/Batecom1102/wiki/%D0%9F%D1%80%D0%BE%D0%B3%D1%80%D0%B0%D0%BC%D0%BC%D0%B0+%D0%B4%D0%BB%D1%8F+%D0%A1%D0%BF%D0%BE%D1%80%D1%82%D0%B8%D0%B2%D0%BD%D0%B0%D1%8F+%D1%88%D0%BA%D0%BE%D0%BB%D0%B0</a> Представленные на этой странице превосходнейшие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные обстоятельства. После кропотливого анализа редакция портала составила рейтинг спецпредложений, каком гости Casino.ru все сортировать список по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д.4. Заберите подарок. Чаще всего приз активируется незамедлительно после регистрации. Но бывают истории, когда нужно зайти в собственный офис или написать в службу. 1×slots casino регистрация 1×slots review live Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.bedwantsinfo.nl/user-83172.html>1×slots рабочее зеркало</a>
<a href=https://www.donchillin.com/space-uid-382497.html>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Активация по промокоду употребляется в разных видах бездепов. Если идет о приветственном бонусе, то комплект символов можно узнать на крупнейшей страничке, в регистрационной форме или послании, которое отправляется пользователю для подтверждения e-mail. Акции могут проводиться совместно с партнерскими площадками. Обычно код размещается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется одноразовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем актуальный код для активации в описании каждого рекламную. Операторы гемблинга заявляют, собственно например они борются с бонус-хантерами. Впрочем, критики считают, собственно этим казино пробуют сделать из случайного гостя неизменного игрока.
#8510 Charlesgunnyhttp://filmkachat.ru
1×slots сайт
Бездепозитный бонус часто возможность стать легкодоступным незамедлительно последствии завершения регистрации, поскольку в большинстве случаев единственным требованием к нему является регистрация, а этого проверка вашей новой учетной записи. <a href=http://filmkachat.ru/>1 хслот регистрация в 1×slots casino</a> Исходя из этого, просто не существует мудрых оснований махнуть рукой на получение такового приза при регистрации. И, кстати, на такой безвозмездной основе у вас есть шансы выиграть деньги и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, именуют бесплатными интернет платформами для игр.На бесплатные бонусы онлайн-казино почти постоянно распространяется ограничения по стране проживания посетителей. Даже в для разрешается раскрывать счет и выступать на средства в заведении, это еще не значат, собственно вас доступны not the slightest down payment bonuses. <a href=https://www.imdb.com/user/ur190372343/>https://www.imdb.com/user/ur190372343/</a> Но а случае вы уже профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы автоматически перейдете в интернет казино; 1×slots casino регистрация 1×slotscasin online <a href=https://ventasdiversas.com/user/profile/1187061>https://ventasdiversas.com/user/profile/1187061</a> Казино выделяет вероятность заработать и исключить настоящие средства на бездепозитных бонусах. Обычно, это малозначительная сумма, которую казино имеет себе разрешить подарить игроку.
casino 1×slot
В списке требований к отыгрышу часто присутствуют лимиты на ставки при игре на собственные средства. Так, в отыграть надо(надобно) 30 000 руб., а предельная сумма ограничена 30 рублями, то вертеть барабаны светит 1000 один. Эта особенность затрудняет соблюдение игроками условий по срокам деяния акции. <a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=73935&result=reply>1×slots регистрация 1×slots casino 777 online</a> казино 1×slots У каждого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано смогли выполнить их, мы дадим количество советов. Если система начислила небольшую необходимую, надо делать большие ставки – остановитесь на 10–30 центах. Как лишь сможете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте играть. В противном случае другого приглядеться к иному автомату. <a href=http://wiki.gta-zona.ru/index.php?title=Выкуп_авто>http://wiki.gta-zona.ru/index.php?title=Выкуп_авто</a> Промообъявления от казино не дают реальной картины и ориентированы на привлечение внимания юзеров. Понять, насколько высоки шансы остаться в плюсе, дозволит собственный тест условий предложения: 1×slots актуальное зеркало
1хслотс мобильная версия зеркало
Подтверждение регистрации. Казино просят привязки профиля к электронному адресу и номеру телефона. Для сего на e-mail отправляется послание ссылаясь, а на аппарат ? текстовое извещенье с кодом. У нас на сайте Вы найдете список призов без депозита в проверенных казино и доскональную информацию о том как их получить и использовать. <a href=https://021snyw.com/space-uid-55321.html>https://021snyw.com/space-uid-55321.html</a> Да, у бесплатных призов есть дефекты. Прежде всего, они обычно не. Кроме как, условия вейджера по ним всегда строгие. Но все же неимение риска проделывает их довольно красивыми для клиентов.Как лишь на виртуальном счету окажутся бонусные свои, поспешите отыграть вейджер. Сразу последствии этого возможно забыть заявку на вывод выигрыша. Кредиты выгодно выделяются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом реальных средств и дают возможность ощутить задор. Во-вторых – можно насладиться любой азартной игрой доступной на сайте. В вашем распоряжении находятся автоматы, настольные прибавленье, видео-покер, Live-дилеры. 1×slots зеркало быструю регистрацию а также мгновенное В подавляющем большинстве случаев безвозмездные призы начисляются в кредитах, которые невозможно сразу вывести со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д. ). О нем читайте ниже.
1×slots зеркало которую указывали при регистрации кстати
Бездепозитный бонус за регистрацию в казино с выводом средств в 2022 году — Наш ресурс предоставляет игрокам важную информацию о самых свежих, щедрых и проверенных бонусах в онлайн казино, коие обновляются любой день. <a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=48379>1×slots регистрация 1×slotscasino09k online</a> Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? рабочее зеркало 1×slots <a href=http://epusk.ru/bitrix/redirect.php?goto=http://artpaket.ru/bitrix/redirect.php?goto=http://alt1.toolbarqueries.google.com.jm/url?q=https://teletype.in/@urist_free/5JWZFEabHaq>http://epusk.ru/bitrix/redirect.php?goto=http://artpaket.ru/bitrix/redirect.php?goto=http://alt1.toolbarqueries.google.com.jm/url?q=https://teletype.in/@urist_free/5JWZFEabHaq</a>
1×slots регистрация 1×slots casino c2d ru
Ещё одно распространённое акционное предложение – симпатичный презент с неблаговидными требованиями. К образцу, клуб сулит $100 в бездепа, но с вейджером х80 или х100. Отыграть такой вейджер практически невероятно и потому чем концентрироваться на больше заманчивых акциях. Используйте наилучшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из списка ниже, дабы заработать подарки за простые деянья теперь сейчас получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и прыткими выводами на электронные кошельки.Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации дара нужно подтвердить электронную почту и привязать телефонный; <a href=http://sabrina-online.su/wiki/index.php?title=Выкуп_авто>http://sabrina-online.su/wiki/index.php?title=Выкуп_авто</a> Выбирайте наихорошие благотворительные призы счет обзоров на Casinoz – и пусть вам сопутствует удача при отыгрыше бонусных кредитов! 1хслот официальный сайт зеркало Наши эксперты исследуют условия промоакции, этого в ручном режиме проверяют их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и параметры. Мы не рекламируем казино, а даем игрокам информацию о наихороших из них.Когда речь идет о получении бездепозитных бонусов в казино, в первую очередь направьте на следующие условия:
<b>Смотреть еще похожие новости:</b>
<a href=https://nauc.info/forums/viewtopic.php?t=20376865>1×slots зеркало рабочее</a>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=169286>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Проверка занимает от нескольких мин. До нескольких дней, спецы техподдержки имеют запросить дополнительные документы либо инициировать куцее общение по Skype. Для получения приза нужно пригласить в игру свежего клиента. Казино начисляет пригласившему фиксированный процент от взносов приглашённого в виде приза: почаще всего его размер не выше 10%. Срок действия приза в большинстве случаев не превышает месяца: пригласивший получает приз в зависимости от проигранных ставок приглашённого в первый луна игры.
#8511 Charlesgunnyhttp://filmkachat.ru
1хслот официальный сайт зеркало
При верном подходе бездепы — это прекрасный способ выступать на средства без растраты собственных средств. Есть количество рекомендаций, следуя которым можно извлечь максимально пользы из похожих промоакций казино. Играть следует только на лицензированных площадках. Скриптовые веб-сайты не только врут с бонусными услугами, но и используют пиратский софт с измененным ГСЧ. Выиграть на этих автоматах нереально.Доступные забавы – В некоторых азартных забавах можно понизить математическое приемущество казино до нескольких 10-х процента. В их числе многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как правило, в этих играх ставки идут в зачет вейджера не полностью. Например, возможность учитываться лишь 50%. В некоторых играх бездепозитные призы вообще невозможно отыгрывать. <a href=http://filmkachat.ru/>1×слот регистрация в 1×slots casino</a> <a href=https://www.babelio.com/livres/Maupassant-Bel-Ami/2125/forum/42180/Exploring-Architectural-Rendering-From-Concept-to>https://www.babelio.com/livres/Maupassant-Bel-Ami/2125/forum/42180/Exploring-Architectural-Rendering-From-Concept-to</a> Фриспины – безвозмездные вращения с фиксированной ставкой, коие возможно применять в определенных игровых автоматах. 1хслот скачать <a href=http://y90429l8.bget.ru/user/Davidces/>http://y90429l8.bget.ru/user/Davidces/</a>
онлайн казино 1×slots
Простая процедура получения бездепозитного приза, которая займет менее 2-х мин. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Выигрыши с бонусов без инвестициям всегда привязаны к требованию по ставкам и все быть обналичены только в выполнения данных требований.У нас на веб-сайте Вы отыщите список призов без депозита в испытанных казино и доскональную информацию то как их получить и применять. <a href=http://sports4.iceserver.co.kr/bbs/board.php?bo_table=free&wr_id=1873370>http://sports4.iceserver.co.kr/bbs/board.php?bo_table=free&wr_id=1873370</a> Для казино, работающих онлайн, бездепозитные бонусы необходимы для привлечения свежих клиентов. Предложение сыграть на слотах без надобности внесения настоящих денег — работающий метод для повышения энтузиазма к фирмы. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит выступать в казино, только теперь теснее на личные средства.Выигрыши с бонусов без инвестициям практически привязаны к требованию по ставкам и шансы быть обналичены лишь последствии исполнения этих притязаний. 1×slots бонус за регистрацию После требуется внести идентификационный платёж. Это стращает начинающих больше всего. Нужно устроить минимальный депо в 100–500 руб. Таким образом служба защищенности убедиться что, что платёжный способ принадлежит Вам. Данная процедура важна для обеспечения защищенности игровых счетов. Пример, Ваш аккаунт взломают и выведут средства на собственный кошелёк. Будет крайне неприятно. Поэтому верификация платёжной системы, это необходимый момент.
1×slots сайт
<a href=https://diakov.net/user/GlennSubre/>https://diakov.net/user/GlennSubre/</a> Выбирайте наихорошие благотворительные призы за обзоров на Casinoz – и пусть для сопутствует счастье при отыгрыше бонусных кредитов!Но ни не запамятовывайте внимательно читать верховодила роли в бонусных промоакциях. Если вы нарушите но бы одно условие, позднее вы не сможете устроить недоразумение с администрацией. 1×slots зеркало регистрацию более популярный вариант это За привлечение приятеля ? в рамках партнерской программы заказчик получает вознаграждение за вербование свежих юзеров.Бездепозитный приз казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в этом и содержится основное различие.
1хслот зеркало сайта
Нет. Для получения бездепозитного бонуса в казино нужна неотъемлемая регистрация на сайте. Играть в слоты бесплатно и без регистрации возможно только в демо режиме. 1×slots casino регистрация 1×slotscasino09k online <a href=https://kizkiuz.com/user/JasperAtown/>https://kizkiuz.com/user/JasperAtown/</a> В случае с фриспинами без вейджера, Вам не придется отыгрывать свой выигрыш с безвозмездных вращений. Прибыль, которую Вы заработаете на этом бездепе можно назначать на вывод без какого или отыгрыша.Способы получения бездепа различаются зависимо облика бонуса, кот-ый приглянулся игроку. Но для так нужно быть зарегистрированным в легальном онлайн-казино и подтвердить собственную личность. В общем виде пошаговая аннотация для получения бездепозитного бонуса выглядит например:
1×slots официальный сайт скачать
Бездепозитные призы истинными средствами, которые можно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадались. <a href=https://igia.cv.ua/index.php/forum/skrin-ka-propozitsij/660-fil-my-dlya-sensornykh-telefonov#325120>https://igia.cv.ua/index.php/forum/skrin-ka-propozitsij/660-fil-my-dlya-sensornykh-telefonov#325120</a> Бoльшинcтвo азартных заведений выдвигают примерно одинаковые условия и притязания, которые необходимо выполнить, чтобы получить бездепозитный приз за регистрацию. Все их можно соединить в раз перечень: 1× слот зеркало Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке необходимо пополнить счет в казино. Для депозитных бонусов, данная процедура не необходима, например как депозит уже изготовлен.Как только вы отыграли вейджер и средства с бонусного баланса перебежали вам на настоящий счет, Вы смело можете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депо).
<b>Смотреть еще похожие новости:</b>
<a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=89366>1×slots зеркало проходить регистрацию это отличный вариант</a>
<a href=http://sfessd.listbb.ru/memberlist.php?mode=viewprofile&u=86&sid=c59a44612fd2adccc646b88640f8680a>1×slots сайт</a>
<a href=https://demo.comuni-italiani.it/forum/viewtopic.php?f=9&t=381453>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Максимальная ставка ? уточняется в денежной счета и ограничивает объем ставки за один спин. В случае ее превышения бонус может быть аннулирован. Также в правилах может содержаться запрет на размещение ставок определенного облика, например, по равным шансам в рулетке (словами, на чет либо нечет, красное или темное и т.д.). Начнём с как, собственно каждое рекламную за регистрацию подразумевает некие обстоятельства. Бездепозитные бонусы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность валютного оборота, нужная для исполнения критерий. Пример, получили безвозмездные вращения и выиграли с их 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 руб., неудачных либо выигрышных, неважно. После выполнения, бонусный баланс перейдёт на реальный и станет доступным к выводу.
#8512 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало проходить регистрацию это отличный вариант
Ограничения по забавам. Администрация запрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, средствами или безвозмездными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда дробление выполняется по облику игр. Например, отыгрыш возможен на всех игровых аппаратах, хотя запрещен в настольных забавах и в разделе Live Casino. <a href=http://filmkachat.ru/>1хслотс регистрация в 1×slots casino</a> Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депо имеет отличаться до 30 дней.Похожим образом работает 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя либо в связи с получения им VIP-статуса. Подарок предоставляется последствии воззвания в поддержку и ревизии. <a href=https://hackmd.io/@lexxeagle/ByHLMK5ykg>https://hackmd.io/@lexxeagle/ByHLMK5ykg</a> При правильном раскладе бездепы — это отличный способ играть на деньги без траты собственных средств. Есть несколько рекомендаций, следуя которым можно извлечь максимум полезности из подобных промоакций казино. Играть идет только на лицензированных площадках. Скриптовые веб-сайты не дурачат с бонусными предложениями, но и употребляют пиратский софт с измененным ГСЧ. Выиграть на таких автоматах нереально.Также, такой нужно подтвердить свой номер телефонного, для этого код, приобретенный в смс-сообщении от клуба установить в особое поле в личном офисе игрока. 1×slots коды <a href=http://ukvks.ru/bitrix/rk.php?goto=http://ooo-paris.ru/bitrix/rk.php?goto=http://talant-gold.ru/bitrix/click.php?goto=https://teletype.in/@urist555/GqQ3×lEUjHq>http://ukvks.ru/bitrix/rk.php?goto=http://ooo-paris.ru/bitrix/rk.php?goto=http://talant-gold.ru/bitrix/click.php?goto=https://teletype.in/@urist555/GqQ3×lEUjHq</a>
1×slots зеркало видели такую регистрацию на
<a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=37099>1х слот регистрация в 1×slots casino</a> 1×slots рабочее зеркало на сегодня Одним из предлогов отдавать преимущество, льготу 1 либо другому заведению заключается в привлекательности предлагаемых промоакций и безвозмездных услуг. Безвозмездные фриспины, выдаваемые без дела делать какой-либо вклад, в списке располагается далеко не в конце.Бездепозитные бонусы — это подарки от казино повторяющий бонусных денег либо фриспинов для игровых автоматов, коие начисляются на аккаунт игрока после процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депо не требуется. <a href=https://community.vigomu.net/index.php?action=profile;u=3305>https://community.vigomu.net/index.php?action=profile;u=3305</a> Стоит отметить, что бездепозитный бонус выдается лишь взрослым новеньким, коие, в свою очередь, шансы пригласить личных друзей и своих, того претендующих на поощрительную программу лояльности. Подобная разработка была между соперничающих онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры содействуют увеличению своей посещаемости, методом привлечения новых игроков. Бонусы – это уникальный шанс для вероятных соучастников забавы, которые имеют опробовать софт покер рума и убедиться, станут ли они в него играть или нет. Новый игрок попробует свои силы с настоящими оппонентами в казино.В современность довольно просто получить бонус за регистрацию в казино. Практически любой игорный дом с радостью начисляет средства или безвозмездные вращения. Многие гэмблеры пользуются данным и не смущяются региться в любом клубе с выгодными условиями. Кстати, это замечательная возможность выработать победную стратегию и сорвать джекпот. 1×slots casino регистрация на сайте Для выбора азартного заведения Вы сможете пользоваться перечнем наших казино с призами за регистрацию. На нашем сайте мы опубликовали перечень бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, что доля призов неповторимые и доступны только для гостей нашего сайта по-специальному промо-коду либо по оригинальной ссылке. Кроме того, для каждого бонуса мы подготовили доскональный обзор, в Вы узнаете как получить и отыграть поощрение и как вывести собственный выигрыш с бездепа.Возможность поиграть вспомогательное состязание (а времени и количество) совершенно бесплатно, а выигрыш, к, поступает на счёт игрока.
казино 1×slots официальный сайт
Для всех бездепозитных бонусов действует наибольший лимит на выигрыш. Он показывает максимальную сумму, которую возможность получить, играя на бонусные кредиты. Как только для удастся выполнить притязания вейджера, возможный максимально будет переведен с бонусного счета на ведущей, а остаток будет списан.Индивидуальные поощрения выдаются за совершение деяний: подписку на аккаунты площадки в соц сетях, установку мобильного прибавленья либо официального клиента для ПК. В большинстве казино срабатывают программки лояльности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на следующий уровень часто сопровождается выдачей бездепа. <a href=http://multi-net.su/index.php?subaction=userinfo&user=Geraldsab>http://multi-net.su/index.php?subaction=userinfo&user=Geraldsab</a> В лицензионных бездепозитных казино выступать в азартные забавы действительно безопасно. Наличие лицензии подтверждает что, этот прецедент, собственно клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP. 1хслотс зеркало Помимо прочего, для вывода средств по бездепу нужно внести на счёт свой первый депозит — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на мало вероятную необходимую, в чего вывод средств станет доступен.
1×slots casino зеркало рабочее
1×slots зеркало выигрыши обязательно пройдите регистрацию если <a href=https://pdn-forum.bpgs.de/memberlist.php?mode=viewprofile&u=1874>https://pdn-forum.bpgs.de/memberlist.php?mode=viewprofile&u=1874</a> Помимо остального, для вывода средств по бездепу необходимо привнести на счёт собственный 1-ый депозит — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально возможную сумму, последствии чего вывод средств станет доступен.Выбирайте наихорошие бесплатные призы счет обзоров на Casinoz – и пусть для сопутствует счастье при отыгрыше бонусных кредитов!
1хслотс мобильная версия зеркало
Так что главное различие презента на депозит от бездепа – неотъемлемое пополнение счёта. Вы сможете внести депозит и преувеличить стартовый капитал или арестовать бездеп и при этом не придётся рисковать своими сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начисляет щедрое одобрение!Бонус без депозита за регистрацию в казино (бездепозитный приз) – это валютный подарок от клуба, кот-ый начисляется на аккаунт игрока в регистрации в казино. Кроме создания учетной записи, для получения бездепа, довольно часто потребуется ещё и подтвердить контактные данные игрока и/или активировать специальный промо-код. <a href=https://pyxc.ru/user/Justinkeync/>https://pyxc.ru/user/Justinkeync/</a> 1хслот скачать
<b>Смотреть еще похожие новости:</b>
<a href=http://www.ihavethepussy.com/de/threads/216053–1×slots-%D0%A1%D0%82%D0%A0%C2%B0%D0%A0%C2%B1%D0%A0%D1%95%D0%A1%E2%80%A1%D0%A0%C2%B5%D0%A0%C2%B5-%D0%A0%C2%B7%D0%A0%C2%B5%D0%A1%D0%82%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%BB%D0%A0%D1%95?p=233615#post233615>1×slots рабочее зеркало</a>
<a href=http://evtrucksforum.com/viewtopic.php?p=910961#p910961>1×slots официальный регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Доступные забавы – В неких азартных забавах возможно понизить математическое превосходство казино до нескольких 10-х процента. В их числе почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как верховодило, в таких забавах ставки идут в зачет вейджера не полностью. Например, возможность учитываться лишь 50%. В некоторых играх бездепозитные призы вообщем невозможно отыгрывать. Бонус начисляется игроку сразу последствии регистрации и прохождения верификации в казино и не требует от клиента внесения депозита. Как управляло, объем приза в схожем случае достаточно умеренный, впрочем позволяет новичкам познакомиться с игрой без риска настоящими средствами.
#8513 Charlesgunnyhttp://filmkachat.ru
1×slots сайт
Для верификации номера аппарата, в личном профиле изберите опцию „Подтвердить номер аппарата“ и введите в соответствующее поле код, приобретенный в sms-сообщении. <a href=http://filmkachat.ru/>1хслотс зеркало на сегодня</a> Но ни не запамятовывайте внимательно читать верховодила роли в бонусных промоакциях. Если вы нарушите но бы одно условие, позднее вы не сможете устроить недоразумение с администрацией.Верификация необходима для дополнительной защищенности и помогает техподдержке выявить бонусхантеров и мошенников. Кстати, на платформах выводы солидных сумм доступны только последствии доказательства личности. <a href=https://www.tamaiaz.com/blogs/233398/%D0%9A%D0%B0%D0%BA-%D1%81%D1%80%D0%BE%D1%87%D0%BD%D0%BE-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D1%82%D1%8C-%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%BE%D0%B1%D0%B8%D0%BB%D1%8C-%D1%81%D0%BE%D0%B2%D0%B5%D1%82%D1%8B-%D0%B8-%D0%BF%D1%80%D0%BE%D0%B2%D0%B5%D1%80%D0%B5%D0%BD%D0%BD%D1%8B%D0%B5-%D1%81%D0%BF%D0%BE%D1%81%D0%BE%D0%B1%D1%8B>https://www.tamaiaz.com/blogs/233398/%D0%9A%D0%B0%D0%BA-%D1%81%D1%80%D0%BE%D1%87%D0%BD%D0%BE-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D1%82%D1%8C-%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%BE%D0%B1%D0%B8%D0%BB%D1%8C-%D1%81%D0%BE%D0%B2%D0%B5%D1%82%D1%8B-%D0%B8-%D0%BF%D1%80%D0%BE%D0%B2%D0%B5%D1%80%D0%B5%D0%BD%D0%BD%D1%8B%D0%B5-%D1%81%D0%BF%D0%BE%D1%81%D0%BE%D0%B1%D1%8B</a> Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных призов принимаются довольно высокие требования. Часто онлайн-казино советуют отыграть бонусное одобрение до 100 один в игровых автоматах. Например, если игрок получил безвозмездно десять долларов, то нужно будет отыграть их, поставив одну тысячу спинов по 1 доллару каждый. Стоит обозначить(означить), собственно не все казино дают возможность выступать на бонусы и не во всех развлекательных заведениях схожие управляла для отыгрывания. Некоторые казино воспрещают выступать на призы в блекджек или ограничивают ставки до 5 %, что существенно наращивает в десятки один число нужных игр.Ещё одно распространённое акционное предложение – привлекательный подарок с сомнительными притязаниями. К примеру, клуб сулит $100 в бездепа, хотя с вейджером х80 либо х100. Отыграть такой вейджер практически нереально и потому какого-либо концентрироваться на более занимательных промоакциях. 1×slots регистрацию более популярный вариант это <a href=http://mail.nudecelebvideo.net/user/Jamesthisy/>http://mail.nudecelebvideo.net/user/Jamesthisy/</a>
1×slots зеркало которую указывали при регистрации кстати
1×slots регистрация 1×slotscasino09k online Доступность — бездепозитные бонусы в казино почаще всего предоставляются свежим игрокам, хотя посещают случаи, когда бонус могут получить и действующие клиенты. <a href=https://adobeacrobat.cc/member.php?action=profile&uid=1435>https://adobeacrobat.cc/member.php?action=profile&uid=1435</a> Такой казино бонус без депо за регистрацию выдается игроку на час и энергично используется данное предложение с 2017 года. Это как бы некая конспирация одобрения под бездепозитный. Суть всего этого сводится к тому, собственно игроку на час выдается, к примеру, 1000 $, а реклама повторяет то, что каждой выигрыш можно несомненно дальнейшем оставить при себя. Но случае играющий серьезно отнесется к данному предложению, то он просто потеряет время. Ведь геймеру надо(надобно) будет выступать не главном аккаунте, ну тренировочном и с ограниченным выбором автоматов и ставок. Да и если, тогда, выигрыша (числе всей тыс. ) в правила вступят определенные условия, где несомненно сказано, что максимальной суммой победы может быть только двести долларов и средства можно применять лишь в качестве приза на 1-ый лепта с вейджером 25 от суммы гонорары плюс сам депозит. По результату выйдет, что игрок выигрывал для 200% бонус с вейджером на конкретную необходимую. Короче говоря, это все не стоит вашего медли. 1×slots официальный сайт скачать
1×slots зеркало рабочее
Одним из поводов отдавать преимущество, льготу 1 или другому заведению содержится в привлекательности предлагаемых акций и безвозмездных услуг. Безвозмездные фриспины, выдаваемые без дела делать какой-нибудь лепта, в перечне находится далековато не в конце. Реже бонусы без депозита начисляются постоянным игрокам. С их поддержкою администрация постарается вычесть ценных посетителей либо желает поблагодарить за преданность правильных гостей. Но намного почаще для сходственных целей используются эти промоакции: <a href=http://6gdp.ru/index.php?subaction=userinfo&user=quarrelsomedeal>http://6gdp.ru/index.php?subaction=userinfo&user=quarrelsomedeal</a> Самый распространённый из подобных призов, естесственно же, бездеп на денек рождения посетителя — приз повторяющий фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им возможно протяжении установленного периода медли.Бездепозитные призы начисляются лишь один раз. Не стоит открывать новые аккаунты, чтобы получить их повторно. Служба защищенности казино непременно выявит «левого» соучастника и перекроет. Если гость выполнит нужные притязания, отыграет собственную ставку и решит вывести собственный выигрыш, то ему надо(надобно) сведению, что казино обязательно востребует дать ксерокопии собственных документов, чтобы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные средства исключить не получится. 1×slots зеркало сайта Можно ли наваривать на бездепозитных призах? Это не работа, тут как повезет, в в любом предложенном безедепе, вы будете откручивать вейджер и выводить, это возможно назвать везением, и добавочной добавкой к вашему бюджету.Но не мыслить, что снабжая пользователей этими бонусами, казино увлекается спонсированием. Ведь объемы вознаграждений, в, не немалые (средним объемом от 5 до 20 $). И на эти свои налагаются определенные обстоятельства и ограничения, обязательные к выполнению игрока, если в последствии он вожделеет получить все свои выигранные финансы.
1×slots casino online регистрация
В игровых клубах без лицензии Вы покупаете „кота в мешке“ и когда неоднозначных ситуаций нет способности куда-то посетовать и доказать собственную правоту.Такие поощрения дозволяют безвозмездно протестировать новое казино, разобраться с игровым ходом онлайн слотов, заработать и исключить небольшую сумму денег. 1×slots официальный сайт скачать на айфон <a href=http://atlantcom.ru/bitrix/redirect.php?goto=http://zelenograd24.ru/bitrix/rk.php?goto=http://bumagin5.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/RQw-vf_DVVm>http://atlantcom.ru/bitrix/redirect.php?goto=http://zelenograd24.ru/bitrix/rk.php?goto=http://bumagin5.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/RQw-vf_DVVm</a> Поспешите отобрать бездепозитные призы за регистрацию в казино из представленного перечня. Все платформы не водят законную работа, но и порадуют добросовестными результатами игры, высокой отдачей, резвыми выплатами.
1×slots официальный регистрация
Все любят получать презенты. Согласитесь, практически любой играющий человек будет очень рад, в получит безвозмездный презент для забавы в интернет казино просто за регистрацию либо же бонус за внесенный депо, так называемые приветственные призы для новых игроков. Соответственно такие интернет клубы будут больше модны и предпочтительны у игроков при выборе казино для игры. Топ казино постоянно обновляется и добавляются свежие и занимательные игровые клубы с симпатичной бонусной политикой и всеми возможными привилегиями, к которым относятся такие призы как фриспины за регистрацию, денежные бездепозитные бонусы, а щедрые бонусы за внесенный депозит. <a href=http://www.zilahy.info/wiki/index.php?title=скачать_фильмы_в_хорошем_качестве_бесплатно>http://www.zilahy.info/wiki/index.php?title=скачать_фильмы_в_хорошем_качестве_бесплатно</a> Вейджер (либо вагер) ? это наименьшая сумма ставок, которую необходимо устроить для вывода валютного бонуса. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение. 1хслотс зеркало на сегодня Oтыгpaть бонус с указанным вeйджepом, для этого необходимо сдeлaть cтaвoк нa cумму, превосходящую размер бонуса в несколько раз.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.dis-course.net/viewtopic.php?t=404581>1×slots регистрация на сайте 1×slots ru com</a>
<a href=https://forum.home-visa.ru/viewtopic.php?f=69&t=807392&p=2810094#p2810094>1×slots casino регистрация 1×slots review live</a>
<a href=https://forum.ltp-team.com/topic/52986–1h-slots-zerkalo-registraciya-v-1×slots-casino/>1х слотс зеркало регистрация в 1×slots casino</a>
<a href=https://minifishtank.net/forum/showthread.php?tid=927>1×slots рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 $. Если выдаются фриспины, их количество редко выше нескольких десятков бесплатных вращений.
#8514 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация в 1×slots casino
С иной стороны, гораздо проще забрать бездепозитные фриспины за регистрацию в казино и прямо момент начать вращать барабаны в лучших слотах. Главная особенность спинов что, нет, что они предназначены для лучших автоматов. Удастся не только пройти дополнительные раунды, но и прирастить сумму выигрыша, заработать респины прочие внутриигровые подарки.Похожим образом трудится 3-ий способ доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения клиента или в связи с получения им VIP-статуса. Подарок предоставляется в воззвания в поддержку и ревизии. <a href=http://filmkachat.ru/>1×slots казино зеркало</a> <a href=https://issuu.com/kalinka0588/docs/exploring_the_future_of_architectural_visualizatio>https://issuu.com/kalinka0588/docs/exploring_the_future_of_architectural_visualizatio</a> 1хслотс официальный сайт зеркало <a href=http://cross-club.ru/index.php?subaction=userinfo&user=devilishenclosu>http://cross-club.ru/index.php?subaction=userinfo&user=devilishenclosu</a> Размер бонуса. В качестве бездепов обыкновенно начисляют большие суммы, а когда речь о призах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино все подарить игроку до 2000$.Способы получения бездепа различаются в зависимости от вида приза, который приглянулся игроку. Но для иначе нужно быть зарегистрированным в законном онлайн-казино и подтвердить свою лицо. В общем виде пошаговая инструкция для получения бездепозитного бонуса смотрится например:
1хслотс 1хслотс регистрация перейти на 1×slots
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=282115>1×slots официальный сайт мобильная версия</a> 1×slots регистрацию процедура займет всего лишь Хотя благотворительные призы начисляются без депо, не исключено, собственно вам придется заносить деньги. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь после как, как новый заказчик раз пополнит игровой счет.Составленный специалистами Casino.ru перечень онлайн-казино с бездепозитным бонусом позволяет игрокам сравнить спецпредложения разных операторов. <a href=https://www.0574snyw.com/space-uid-176592.html>https://www.0574snyw.com/space-uid-176592.html</a> Однако в критериях скрываются «подводные камни», коие не разрешат вывести солидную необходимую либо же вы не успеете отыграть вейджер. Поэтому мастера рекомендуют арестовать благотворительные вращения за регистрацию в казино без депо, дабы поднабраться опыта и получить настоящий шанс на победу. 1×slots официальный demo регистрация в 1×slots casino
1 xslots рабочее зеркало
Бoльшинcтвo азартных заведений выдвигают приблизительно одинаковые обстоятельства и притязания, которые необходимо выполнить, чтобы получить бездепозитный приз за регистрацию. Все их возможно объединить в один перечень: При верном раскладе бездепы — это прекрасный способ выступать на деньги без растраты личных средств. Есть некоторое советов, следуя которым возможно извлечь максимум выгоды из подобных акций казино. Играть стопам только на лицензированных площадках. Скриптовые сайты не дурачат с бонусными предложениями, но и употребляют пиратский софт с измененным ГСЧ. Выиграть на таких автоматах невероятно. <a href=https://www.021snyw.com/space-uid-54582.html>https://www.021snyw.com/space-uid-54582.html</a> Практически все интернет казино с бездепозитным бонусом за регистрацию предусматривает программу преданности — систему поощрения неизменных посетителей, которая произведено из множества уровней. При достижении игроком еще уровня на его счёт поступает бонус. Чем выше степень — тем щедрее бонус.Благодаря программе преданности от игорного заведения, можно арестовать неплохой старт и без добавочных инвестициям запустить видеослоты. Кроме такого, возможно рассчитывать на реальную удачу и получить, без инвестиции собственных финансов, немалый выигрыш. 1×slots официальный сайт зеркало Для получения бездепа необходимо пригласить в игру по реферальной ссылке свежего клиента: он должен зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на необходимую, обозначенную в критериях промоакции.
казино 1×slots
Бездепозитные призы – это исключительно интересная и наиболее многообещающая акция интернет-казино. Они даже превосходнее фри-спинов, потому собственно выплаты в безвозмездных вращениях не гарантированы, так комбинации на барабанах игрового аппарата имеют не сложиться. Бездепозитные призы, как уже понятно, считаются оригинальной вероятностью к игровому процессу абсолютно безвозмездно, другими играть в онлайн казино бесплатно и на место средства сразу в регистрации аккаунта. Автоматы с этим депозитом могут замерзнуть прекрасной вероятностью поиграть для почитателей азарта с определенными ограничениями в денег. Представьте момент, когда при ставке в 10 рублей Вы получите схожее умножение. Миллион рублей за одно вращение, что вполне возможно. Поэтому вопрос, сколько можно выиграть остаётся не. Предлагаем выяснить без. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный бонус и инспектируйте удачу в деле. Разумеется, вывести деньги не так просто. Однако шансы есть у всех. 1×slots официальный сайт скачать на айфон <a href=https://forextema.com/index.php?option=com_easyblog&view=entry&id=10842&Itemid=87>https://forextema.com/index.php?option=com_easyblog&view=entry&id=10842&Itemid=87</a>
x1 slots 1хслотс регистрация перейти на 1×slots
<a href=https://knowyourmeme.com/users/arnoldler>https://knowyourmeme.com/users/arnoldler</a> 1×slots casino регистрация 1×slotscasin online Многие игроки, оценив возможностей казино, остаются играть в нем и далее ? на это и направлено каждое промо. Постоянные клиенты вносят депозиты и делают ставки, обеспечивая долгосрочную выгода оператора. То есть, казино выдают бездепы свежим юзерам для формирования приклнной аудитории.
<b>Смотреть еще похожие новости:</b>
<a href=http://vn-info.net/user/Josephkam/>1хслот зеркало</a>
<a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1×slots официальный сайт мобильная версия</a>
<a href=http://vn-info.net/user/Josephkam/>1×slots casino регистрация 1×slotscasin online</a>
<a href=https://dev.eff.one/forumdisplay.php?fid=10>casino 1×slot</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для получения предоставленных призов вам понадобиться — ПК или мобильное прибор, и остальное дело за малым. Фриспины без депо или дополнительные свои помогут поближе познакомиться с игровой платформой и её функциями. За счёт даров можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради забавы против живых крупье.
#8515 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация
Такие одобрения разрешают бесплатно протестировать новое казино, разобраться с игровым ходом онлайн слотов, заработать и исключить небольшую необходимую средств.Зачастую бездепозитные бонусы казино для игры предлагаются разными заведениями азартных игр в маркетинговых промоакций либо в целях вербования к себя новых игроков. Для бездепозитных призов в казино 2022 геймеру надо пополнять счет до момента вывода хотимых средств. <a href=http://filmkachat.ru/>1хслотс рабочее зеркало</a> Отзывы читателей о бонусных акциях посодействуют составить впечатление, но не запамятовывайте о субъективности личных объяснений.Операторы гемблинга заявляют, собственно например они сражаются с бонус-хантерами. Впрочем, критики считают, собственно данным казино пытаются сделать из случайного гостя неизменного игрока. <a href=https://www.blogger.com/u/4/profile/08074802049930635971>https://www.blogger.com/u/4/profile/08074802049930635971</a> 1×slot зеркало рабочее регистрации на телефон придет <a href=https://www.khedmeh.com/wall/blogs/post/55642>https://www.khedmeh.com/wall/blogs/post/55642</a>
1×slots зеркало регистрация
<a href=https://persiankittencat.com/grey-persian-cats-unraveling-the-charm-of-these-feline-beauties/#comment-35974>1× slots сайт</a> 1 хслот регистрация в 1×slots casino Лишь известные и знаменитые азартные заведения могут позволить себе раздавать бездепы в виде дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, которые можно израсходовать в топовых аппаратах с высочайшей отдачей.Денежные свои. Третий приз за регистрацию без депозита – наличные. К сожалению, лишь известные и пользующиеся клубы могут дать деньги в руб. Либо долларах. С их поддержкою возможность насладиться любой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед данным нужно исполненье конкретных условий. <a href=https://clickandconnectclubs.com/index.php?do=/public/user/name_Glavdorogadv1606/>https://clickandconnectclubs.com/index.php?do=/public/user/name_Glavdorogadv1606/</a> У любого игорного заведения свои правила и условия. Но, чтобы получить бонусы, нужно выполнить стереотипные деяния:Отыграв бездепозитный бонус в казино с выводом также придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, случае сходственное лимитирование существует, то единоразово исключить выйдет лишь необходимую, не превосходящую объем приобретенного приза. 1×slots официальный сайт скачать на айфон Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам воспрещено начислять призы посетителям, не имеющим валютных средств на счете. Мы предлагаем разглядеть актуальные призы онлайн-казино с лицензией, которые соблюдают законодательство РБ.
1×slots рабочее зеркало на сегодня
Большинство клубов привлекают внимание в за счёт разнородных даров. На 1 веб-сайтах возможно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает безвозмездные вращения для запуска топовых онлайн слотов. Несмотря на различные промоакции, стоит выделить самые основные.Для получения бездепа нужно пригласить в игру по реферальной ссылке свежего посетителя: он должен зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на необходимую, указанную в условиях промоакции. Наиболее известные вознаграждения среди гэмблеров – бездепозитные бонусы казино. Это не умопомрачительно, ведь можно получить безвозмездные вращения либо виртуальные кредиты, и всем не придётся пополнять счёт, рисковать личными деньгами. Удастся насладиться различными увеселениями причем выиграть солидную сумму, избегая серьёзного риска. <a href=http://koreasamsong.com/bbs/board.php?bo_table=free&wr_id=1329357>http://koreasamsong.com/bbs/board.php?bo_table=free&wr_id=1329357</a> 1×slots зеркало проходить регистрацию это отличный вариант Иногда операторы просят внесение минимального депозита перед выводом для верификации платежного инструмента. В некоторых казино данный депо того светит отыграть.
1×slots casino регистрация на сайте
Диапазон ставок, коие вправе устроить игрок, также лимитирован. Обычно назначать возможно маленькую сумму — около 10–30 рублей за одно вращение.Сроки активации бонуса уточняются любым казино, хотя почаще всего они не превышают недели с момента получения. Игроку обязательно надо(надобно) использовать бездеп в течение обозначенного срока, в ином случае приз просто исчезнет. Каждый приз возможно получить лишь один один, потому случае не использовать бездеп в срок, у игрока не будет 2 шанса им воспользоваться. Фриспины. Бесплатные вращения предусмотрены для применения в видео-слотах. Внимательно читайте обстоятельства – они нередко выдаются для некоторых машин. В зависимости от клуба вы можете создавать конкретное число ставок. Кстати, современные игорные дома выделяют возможность заводить «одноруких злодеев». 1хслотс 1хслотс регистрация перейти на 1×slots <a href=http://visionart.kr/board/bbs/board.php?bo_table=free&wr_id=371774>http://visionart.kr/board/bbs/board.php?bo_table=free&wr_id=371774</a> При выполнении условий отыгрыша и верификации, средства с бонусного счета переводятся на ведущей и шансы быть выведены на карту или электронный кошелек. Лимиты на вывод и сроки проведения транзакции находятся от выбранной платежной системы.
1× slots сайт
Получать информацию о самых прибыльных призах можно без неизменного мониторинга новостей казино. Мы взяли данную задачку на себя и непрерывно следим за предложениями операторов, избирая наихорошие из их. В данном разделе собраны последние бездепы, промокоды к ним и условия их активации. Список промоакций периодически дополняется. В топ зашли самые свежие бездепозитные бонусы за регистрацию в казино 2020, временные и закрытые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и критериям. Если срок деяния акции истек, она удаляется из списка.Бонус за регистрацию в казино без депозита с выводом средств нужно отыграть. Зачастую для отыгрыша возможность потребоваться устроить ставки на необходимую, в некоторое десятков раз превышающую сумму бонуса либо выигрыша. Самый распространённый из похожих призов, окончательно же, бездеп на денек рождения посетителя — приз в виде фиксированной суммы либо фриспинов поступает на счёт игрока, а воспользоваться им возможно протяжении установленного периода времени.Похожим образом трудится 3-ий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя или в связи с получения им VIP-статуса. Подарок предоставляется в обращения в поддержку и проверки. <a href=http://bbs.all4seiya.net/home.php?mod=space&uid=961457>http://bbs.all4seiya.net/home.php?mod=space&uid=961457</a> 1×slots быструю регистрацию а также мгновенное Например, игрок получил 500 рублей при творении аккаунта и должен отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., понадобится сделать 875 спинов для полного отыгрыша.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.home-visa.ru/memberlist.php?mode=viewprofile&u=3536>1хслотс рабочее зеркало</a>
<a href=https://aircompare.us/forums/memberlist.php?mode=viewprofile&u=40074>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<a href=https://www.katzenforum.at/forum/media/users/jamesagema.16012/>1×slots регистрация 1×slots review live</a>
<a href=https://australianwinerytours.com/tours/showthread.php?tid=236372>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины начисляются по определенной ставке. После их активации игроку необходимо запустить разъем и увериться, что в нем показываются безвозмездные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода после отыгрыша ориентируется оператором и изредка превышает 5 000 рублей. Даже не выиграв крупную необходимую, игрок увлекательно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе превосходнейших промоакций с. Достаточно периодически изучать список новых интернет казино с выводом бонуса без депозита в данном разделе.
#8516 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало
Благодаря программе лояльности от игорного заведения, возможно взять неплохой старт и без дополнительных инвестициям запустить видеослоты. Кроме такого, возможно рассчитывать на реальную фортуну и получить, без вложения личных финансов, немалый выигрыш.Используйте лучшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из списка ниже, дабы заработать подарки за обычные действия и уже сейчас получить первый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высочайшей отдачей и прыткими выводами на электрические кошельки. <a href=http://filmkachat.ru/>1хслотс зеркало на сегодня</a> Выбор каждого онлайн казино на нашем веб-сайте. В описании к любому Вы можете узнать, собственно получите за творение аккаунта.В зависимости от онлайн заведения любой из них имеет для предложить как бездепозитные средства, так и бездепозитные фриспины, коие последствии удачной регистрации упадут вам на ваш игровой баланс. <a href=https://www.keepandshare.com/doc27/114858/pdf-357k?da=y>https://www.keepandshare.com/doc27/114858/pdf-357k?da=y</a> 1×slots бонус за регистрацию <a href=http://www.foryoudrive.com/bbs/board.php?bo_table=free&wr_id=231588>http://www.foryoudrive.com/bbs/board.php?bo_table=free&wr_id=231588</a>
1 х слотс зеркало
1 x slots Также, в нужно доказать свой номер телефонного, результата код, полученный в смс-сообщении от клуба ввести в особое поле в собственном офисе игрока.С иной стороны, гораздо легче забрать бездепозитные фриспины за регистрацию в казино и напрямик данный начать вращать барабаны в лучших слотах. Главная необыкновенность спинов том,, собственно они предназначены для лучших автоматов. Удастся не только пройти вспомогательные раунды, хотя и прирастить сумму выигрыша, заработать респины и внутриигровые подарки. <a href=http://ledsoft.ru/forum/?PAGE_NAME=profile_view&UID=54084>http://ledsoft.ru/forum/?PAGE_NAME=profile_view&UID=54084</a> Теоретически, к безвозмездным бонусам возможно отнести так именуемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, потому что они деют лишь вероятность создавать ставки.Первый возникающий вопрос, это, чего выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают свежих игроков. Последним легче начать игру на деньги с презента за регистрацию. Им не пополнять баланс и тратить собственные средства. Новички получают благотворительные спины либо средства на счёт. С их поддержкою знакомятся с игровым процессом, крутят слоты и проделывают ставки в рулетке. 1×slots промокод при регистрации 2025 Как верховодило, при выводе финансов, от играющего потребуется только устроить минимальный вклад для того, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом личный счет.
1×slots рабочее зеркало
В зависимости от интернет заведения любой из их возможность для предложить как бездепозитные средства, например и бездепозитные фриспины, коие последствии удачной регистрации упадут вас на ваш игровой баланс. <a href=http://dreamus.co.kr/bbs/board.php?bo_table=free&wr_id=104956>http://dreamus.co.kr/bbs/board.php?bo_table=free&wr_id=104956</a> казино 1×slots Начнём с такого, что любое рекламную за регистрацию подразумевает некие обстоятельства. Бездепозитные бонусы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность валютного оборота, нужная для исполненья условий. Пример, получили безвозмездные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 руб., неудачных либо выигрышных, маловажно. После исполненья, бонусный баланс перейдёт на реальный и станет легкодоступным к выводу.Также случаются случаи, когда казино начисляет обсужденный приз в регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам.
1×slots регистрация 1×slotscasino 56 online
При маленькой сумме бонуса рекомендуется играть по невысоким ставкам, а применять наибольшие другого только что случае, в вейджер очень немалый, а время на отыгрыш крепко ограничено. 1×slots регистрация 1×slotscasino 56 online <a href=https://eco-kamchatka.ru/user/Travischuth/>https://eco-kamchatka.ru/user/Travischuth/</a> Как и другие акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения считаются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих посетителей и дозволяет им составить эмоцию о функционале, не рискуя вескими совокупностями.
1 xslots рабочее зеркало
Если площадка дарит бездеп за регистрацию, то процедура его получения проста. Нужно только ввести акк на веб-сайте и активировать его, подтвердив адрес электронной почты, номер аппарата или другие данные, коие настятельно оператор. Перед данным нужно убедиться, собственно юзер находится на официальном сайте казино, не на жульнической площадке. Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам важную информацию о самых свежих, великодушных и проверенных бонусах в интернет казино, которые обновляются каждый денек.Исходя из этого, просто не присутствует разумных причин махнуть рукою на получение такого приза при регистрации. И, будет, на подобный бесплатной основе у вас есть все шансы выиграть средства и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные призы, нарекают бесплатными интернет платформами для игр. <a href=https://www.love2d.org/forums/memberlist.php?mode=viewprofile&u=276200>https://www.love2d.org/forums/memberlist.php?mode=viewprofile&u=276200</a> казино 1×slots официальный сайт Таким образом интернет казино получает вероятного игрока. Возможно дальнейшем либо истинном он захотит поиграть на свои средства. Так трудятся бездепозитные призы в онлайн казино. Здесь отлично подходит выражение, безвозмездные сыр бывает лишь в мышеловке. Начинающие игроки шансы не осознавать опасность азарта. Однако со временем понимания становится больше. Это тема для отдельного обсуждения.
<b>Смотреть еще похожие новости:</b>
<a href=http://forums.panzergrenadiers.com/showthread.php?22922–1×slots-%D0%A0%C2%B0%D0%A0%D1%94%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A0%D1%91&p=504413#post504413>1×slots акции</a>
<a href=https://uyghuryol.com/forum/viewtopic.php?f=8&t=230099>1×slots официальный зеркало</a>
<a href=http://link.5nx.ru/viewtopic.php?f=5&t=5262>1×slots бонус за регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Перечисленные повыше основные характеристики сочетают фактически любой бонус и являются стереотипными для бездепозитных бонусных начислений в казино.
#8517 Charlesgunnyhttp://filmkachat.ru
зеркала 1×slots
Бездепы с безвозмездными вращениями предоставляют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд платит казино. Число спинов ограничено и изредка превышает сотню. Если промоакция включает в себя количество бесплатных игр, их начисление возможность быть разбито на несколько дней.Для получения бездепа нужно пригласить в забаву по реферальной ссылке нового посетителя: он обязан зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на сумму, указанную в условиях акции. <a href=http://filmkachat.ru/>1×slots зеркало видели такую регистрацию на</a> Верификация важна для дополнительной безопасности и помочь техподдержке выявить бонусхантеров и плутов. Кстати, на некоторых платформах выводы солидных сумм доступны лишь после подтверждения личности.Каждый из бездепозитных призов без пополнения 2022 имеет свой определенный вейджер для отыгрыша, так же в каждом казино он устанавливается индивидуально — где то он х55 а кое-где х30, повторюсь всюду по разному! <a href=https://welling.domains.unf.edu/showthread.php?tid=44981>https://welling.domains.unf.edu/showthread.php?tid=44981</a> казино 1× slots официальный сайт <a href=http://mriyamed.ru/bitrix/redirect.php?goto=http://profilv-v.ru/bitrix/rk.php?goto=http://liko-baby.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/Chpjk7viHUL>http://mriyamed.ru/bitrix/redirect.php?goto=http://profilv-v.ru/bitrix/rk.php?goto=http://liko-baby.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/Chpjk7viHUL</a>
1×slot зеркало
Обыкновенные бездепозитные бонусы в объеме от 3-х до 20 долларов созданы для того, чтобы в игры заходили все свежие и новые игроки. Здесь, скорее, будет ограничение на наибольший выигрыш. Важно, чтобы перед наименьшим вкладом был отключен приз за 1-ое пополнение счета, и игрок не попадет на повторный вейджер.Чтобы бездеп не был начислен на Ваш акк, Вам надо активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк автоматически, а Вы не планируете его использовать, обратитесь в службу с просьбой отменить бездепозитный бонус. 1×slots официальный зеркало рабочее Зачастую бездепозитные бонусы казино для забавы предлагаются разными заведениями азартных игр в качестве маркетинговых промоакций либо в целях привлечения к для свежих игроков. Для бездепозитных призов в казино 2022 игроку надо пополнять счет до момента вывода желаемых средств. <a href=https://destaquebrasil.com/inglaterra/author/jamestrorn/>https://destaquebrasil.com/inglaterra/author/jamestrorn/</a> При игре на бонусные средства воспрещается играть в игровые автоматы с современным джекпотом и игры из радела live casino. Кроме такого, кое-какие казино выделяют бездеп на раз или несколько определенных слотов, и в иных играх Вы не сможете на них выступать.Денежные свои. Третий приз за регистрацию без депо – наличные. К сожалению, только знаменитые и пользующиеся клубы все уяснить деньги в рублях или баксах. С их подмогою вас насладиться любой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед данным необходимо исполненье определенных условий. 1×slots официальный сайт зеркало
1× slots зеркало
Как и промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения считаются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих посетителей и дозволяет им составить эмоцию о функционале, не рискуя вескими суммами.Также, учите, что бездепозитный приз возможно вывести только что случае, когда будут исполнены все обстоятельства отыгрыша. <a href=https://getcomixxx.com/index.php?subaction=userinfo&user=Porsedropen>https://getcomixxx.com/index.php?subaction=userinfo&user=Porsedropen</a> Перечисленные повыше основные свойства сопровождают практически любой бонус и считаются стандартными для бездепозитных бонусных начислений в казино. 1×slots официальный регистрация Приветственный бездеп предоставляется любому игроку только один раз. Казино сражаются с например именуемыми бонусхантерами (от англ. Bonus Hunter — охотник за бонусами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения подарка. Исключить сходственные деяния позволяет верификация данных. Администрация вправе потребовать у клиента доказать индивидуальные данные, обозначенные при регистрации.Подтверждение электронной почты – одно из главных критерий, коие есть почти в каждом бездепозитном казино. Чтобы верифицировать электронную почту, достаточно перебежать по активной ссылке в послании, приобретенном от азартного клуба.
1× slots регистрация в 1×slots casino
В интернете количество узнаваемых игорных площадок с привлекательными акционными предложениями. Однако пристально разбирать условия 10-ов предложений вскоре надоест, да и время отнимет много. Поэтому наша команда подготовила ТОП-3 сайтов с превосходнейшими бездепозитными бонусами: 1хслотс казино зеркало <a href=https://www.one2bay.de/forum/member.php?action=profile&uid=20602>https://www.one2bay.de/forum/member.php?action=profile&uid=20602</a>
1хслотс официальный сайт зеркало
Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депо может выделяться до 30 дней. <a href=http://bbs.py27.com/home.php?mod=space&uid=394029>http://bbs.py27.com/home.php?mod=space&uid=394029</a> Бонусные деньги – небольшая сумма средств для старта в новеньком казино. На бонусные деньги, обыкновенно разрешается играть во все забавы, считая слотов с прогрессивным джекпотом и игр из раздела live casino. 1×slots бездепозитный бонус за регистрацию Для тех, кто только взвешивает испытывать собственную фортуну, а также для профессиональных игроков, разыскивающих новые площадки для выигрышей, водящие лицензированные казино часто устраивают различные промоакции, и одно из лучших услуг за последнее время – как для начинающих, так и для профессиональных игроков – бездепозитный бонус за регистрацию.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.sgomberisgombero.it/my-account-2/>1×slots официальный зеркало</a>
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=31508>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Онлайн-казино с бездепозитными призами ставят посетителям обстоятельства для использования бездепами, поэтому перед участием в акции другого, как подробно ознакомиться со всеми правилами и нюансами промоакции. Условия шансы касаться получения бонуса, его использования и последующего вывода денежных средств если, тогда, выигрыша.
#8518 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало на сегодня
Особую изюминку видео слотам придают уникальные символы. С их выходом активируются различные бонусы. Вы можете запустить вспомогательный уровень и прирастить сумму выигрыша. Есть знаки, коие сменяют ненужные составляющие и сами творят выигрышные комбо. Не стоит забывать и про бонус-тур. После каждого счастливого спина есть шанс увеличить необходимую выигрыша в 2 или хорошо раза.Возможность сыграть дополнительное соревнование (а время и количество) абсолютно безвозмездно, а выигрыш, же, поступает на счёт игрока. <a href=http://filmkachat.ru/>1× slots casino зеркало</a> Более крупные предложения встречаются довольно изредка. Зачастую они доступны только VIP-игрокам. В оставшихся случаях им скорее сопутствуют довольно жесткие условия отыгрыша. Также возможны вспомогательные условия и другие лимитирования, прописанные в критериях и положения бонусной программы казино.Ну и естесственно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: подобная щедрость увеличивает уровень лояльности клиентов к компании. <a href=https://about.me/shopavto22>https://about.me/shopavto22</a> 1×slots быструю регистрацию а также мгновенное <a href=http://forums.rxmuscle.com/member.php?10256720-GlennNuh>http://forums.rxmuscle.com/member.php?10256720-GlennNuh</a> Более крупные предложения встречаются довольно изредка. Зачастую они доступны только VIP-игрокам. В оставшихся случаях им наверняка сопутствуют очень жесткие обстоятельства отыгрыша. Также вероятны вспомогательные условия прочие ограничения, прописанные в критериях и положения бонусной программки казино.
1×slots регистрация на сайте
1×slots регистрация На бонусные начисления шансы быть установлены вспомогательные лимитирования, коие Вы не учли при отыгрыше. Пока приз всецело не отыгран — средства из казино не выводятся.Так собственно приготовьтесь дать конфиденциальную информацию (пол, возраст, страна проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает не более суток, после чего получится свободно выводить крупные выигрыши. <a href=http://www.shunion.co.kr/bbs/board.php?bo_table=free&wr_id=597058>http://www.shunion.co.kr/bbs/board.php?bo_table=free&wr_id=597058</a> Чтоб получить крупный выигрыш, избирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша. 1×slots регистрация 1×slots review live
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Денежные свои. Третий приз за регистрацию без депозита – наличные. К раскаянию, лишь известные и популярностью клубы шансы уяснить средства в руб. Либо долларах. С их подмогою возможность насладиться каждой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед данным необходимо выполнение определенных условий.В интернете очень большое скриптовых вебсайтов, которые принадлежат мошенникам. Их главная цель – привлечь гэмблеров, пообещав не великодушные презенты, но и крупные выигрыши. Так что кое-какие сайты предлагают получить за регистрацию том $1 000. Мы собрали и выпустили список лучших бездепозитных казино с бонусами за регистрацию, коие гарантируют великодушные выигрыши и мгновенные выплаты.Иногда виде одобрения за регистрацию все выдаваться билеты для роли в турнирах. Условия их проведения очень выделяются, поэтому мы рекомендуем ознакомиться с любым предложением отдельно. <a href=http://istiqbolsari.uz/user/Jamesethiz/>http://istiqbolsari.uz/user/Jamesethiz/</a> Условия отыгрыша приза. Если Вы планируете заработать на бездепозитном призе, то для направьте на велечину вейджера и срок, который дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть приз и исключить выигрыш.Не сложно догадаться, что not the slightest deposit bonuses почти разу не случаются немаленькими. Чаще всего речь идет о пяти–тридцати долларах (либо эквиваленте этой суммы в другой денежной). 1×slots казино зеркало
1хслот 1хслотс регистрация перейти на 1×slots
Наши специалисты изучают обстоятельства акции, после в ручном режиме проверку их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и характеристики. Мы не рекламируем казино, а даем игрокам информацию о превосходнейших из них. Подарки на праздники ? посвященные парадным датам, требующие символического отыгрыша или начисляются без такового. Могут дариться игрокам сутки рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду.4. Заберите презент. Чаще всего приз активизируется незамедлительно в регистрации. Но случаются ситуации, когда нужно зайти в личный кабинет либо написать в службу. Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 $. Если выдаются фриспины, их число редко превышает нескольких 10-ов безвозмездных вращений. 1× slots сайт <a href=https://google.ga/url?q=https://doctorlazuta.by/>https://google.ga/url?q=https://doctorlazuta.by/</a> Внесение депо – Будьте готовы пополнить счет в отыгрыша бонуса. Это стандартное требование правил для этого подобии промо-акций. Лучше заранее уточнить, какую сумму нужно несомненно вносить на счет. Как правило, речь идет о наименьшем депозите, но вы обязаны быть уверены, собственно он вас по кармашку.Кешбэк-бонус дает собой возврат фиксированного процента от ставки когда проигрыша или же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%.
1× slots casino официальный сайт
Бонус без депо за регистрацию в казино (бездепозитный бонус) – это денежный презент от клуба, кот-ый начисляется на акк игрока последствии регистрации в казино. Кроме творения учетной записи, для получения бездепа, очень нередко требуется ещё и подтвердить контактные данные игрока и/или активировать особый промо-код. <a href=http://bitrix.coffea.fr/bitrix/redirect.php?goto=http://stilyag.ru/bitrix/click.php?goto=http://scanword.ru/bitrix/rk.php?goto=https://telegra.ph/Pensionnyj-fond-Blagorodnoe-budushchee-pytaetsya-dobitsya-obeshchannyh-rezultatov-09–23>http://bitrix.coffea.fr/bitrix/redirect.php?goto=http://stilyag.ru/bitrix/click.php?goto=http://scanword.ru/bitrix/rk.php?goto=https://telegra.ph/Pensionnyj-fond-Blagorodnoe-budushchee-pytaetsya-dobitsya-obeshchannyh-rezultatov-09–23</a> Также, в этом случае необходимо подтвердить собственный номер телефонного, желаемого код, приобретенный в смс-сообщении от клуба ввести в особое поле в личном кабинете игрока.Бесплатный бонус – кредиты, коие онлайн-казино начисляет клиенту, не заставляя его пополнять игровой счет. 1×slots коды
<b>Смотреть еще похожие новости:</b>
<a href=https://melhorlance.com.br/minha-conta/>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выиграть реальные деньги в казино не пополняя счет – трудно, но вполне. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными бонусами и начните выступать на бонусные свои. По статистике каком-то 10-ти заведений возможно заработать маленькую сумму денег помощью бонусных средств. Осталось избрать казино с бонусом за регистрацию и сделать профиль. После активации подарка выигрыш находится от Фортуны и навыков.
#8519 Charlesgunnyhttp://filmkachat.ru
рабочее зеркало 1×slots
Условия, на коих предоставляется бездеп, регулируются казино. Каждая промоакция содержит доскональные управляла, ссылка на которые обыкновенно содержится в промообъявлении. В них указываются лимиты, вейджер, список доступных игр. Если оператор прячет данные о предложении, то воспользоваться им не.У любого игорного клубы различные вейджеровые обстоятельства. Чтобы вы гарантировано сумели выполнить их, мы дадим некоторое советов. Если система начислила небольшую сумму, не создавать большие ставки – остановитесь на 10–30 центах. Как только сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте выступать. В противном случае другого присмотреться к другому автомату. <a href=http://filmkachat.ru/>1×slots официальный сайт мобильная версия скачать</a> Бесплатные призы казино без депо можно получить повторяющий денежных средств на бонусный счет (вывести их возможно только последствии отыгрыша), фриспинов, забавы или кешбэк-бонуса. <a href=https://www.keepandshare.com/doc27/114858/pdf-357k?da=y>https://www.keepandshare.com/doc27/114858/pdf-357k?da=y</a> 1×slots рабочее зеркало на сегодня <a href=http://www.samudranews.com/2023/01/wabub-deli-serdang-hadri-muhasabah-dan.html>http://www.samudranews.com/2023/01/wabub-deli-serdang-hadri-muhasabah-dan.html</a> Помните, собственно любые нарушения управлял сведут на нет ваши усилия, и вы скорее останетесь без начисленного вас дарового бонуса. Всегда изучайте правила начисления и обстоятельства вейджера. По хоть вопросам, на коие вы имеет других отыскать ответы, обращайтесь за объясненьям и саппорт.
1 х слотс зеркало
В каждом казино с бездепозитным бонусом учтены вейджеровые условия. Это один-единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) устроить определённое число ставок. Чем круче бонус, тем труднее выполнить условия, и напротив.Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных ситуаций с казино, когда последствии отыгрыша бездепа вас не дадут исключить крупную сумму выигрыша. <a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1×slots официальный demo регистрация в 1×slots casino</a> 1хслотс рабочее зеркало на сегодня Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, чтобы снова получить безвозмездный приз. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ожидает неминуемое наказание.Постарайтесь отыграть вейджер, чтобы замечена вероятность забыть заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные приборы. Вы можете получить выигрыш на электрической кошелёк, карту, телефонный. <a href=http://x4kurd.freetzi.com/member.php?action=profile&uid=89813>http://x4kurd.freetzi.com/member.php?action=profile&uid=89813</a> 1×slots промокод при регистрации 2025
1×slots казино мобильная версия
Иногда в поощрения за регистрацию имеют выдаваться билеты для участия в турнирах. Условия их проведения довольно отличаются, поэтому мы советуем ознакомиться с любым предложением отдельно.Для отыгрыша приза казино обязует игрока поиграть на сумму, в количество один превосходящую необходимую полученного приза — тут выгода фирмы явна. <a href=http://sgvalley.co.kr/bbs/board.php?bo_table=free&wr_id=292994>http://sgvalley.co.kr/bbs/board.php?bo_table=free&wr_id=292994</a> 1×slots зеркало проходить регистрацию это отличный вариант Иногда для получения призов нужно связаться с представителями службы поддержки. Удобнее всего с ними беседовать в онлайн-сате, но иногда достаточно запроса по электронной почте.
1×slots зеркало регистрацию более популярный вариант это
<a href=http://polishcrazyclan.ugu.pl/member.php?action=profile&uid=272738>1хслот 1хслотс регистрация перейти на 1×slots</a> 1×slots зеркало регистрация в 1×slots casino <a href=https://www.mshowto.org/forum/members/patrickthamn.html>https://www.mshowto.org/forum/members/patrickthamn.html</a> Основное отличие в, что для получения бездепа не надо пополнять баланс в казино. Но не этого, есть ряд и других различий:
1×slots регистрация то дальше необходимо пройти
Бездепозитный бонус казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби избранного заведения, определится в выборе игр и проверить качество работы службы поддержки. Довольно часто, начиная игровой процесс, игрок уже отказывается останавливаться и проделывает реальный лепта. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть даром вероятно как один таки с бонусом за регистрацию без надобности вносить депо. <a href=https://lider-school174.com/forum/user/3957/>https://lider-school174.com/forum/user/3957/</a> 1×slots зеркало рабочее
<b>Смотреть еще похожие новости:</b>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=163201>1×slots регистрация 1×slots review live</a>
<a href=https://test.soclanovtsy.ru/topic/37650–1×slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-1×slots-review-live/>1×slots регистрация 1×slots review live</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Высокая конкуренция в сегменте азартных игр мотивирует операторов завлекать клиентов различными промоакциями. Благодаря данному у посетителей замечена возможность получить призы в казино за регистрацию без депо. Воспользоваться таким предложением можно, минуя функцию внесения денег на игровой счет, просто активировав аккаунт на веб-сайте. Наш гид по бездепам поможет выбрать самую привлекательную бонусную программу, разузнать управляла получения такового вознаграждения и воспользоваться им с максимальной выгодой.
#8520 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Частенько новенькие не разумеют, как активировать презенты или исключить 1-ый выигрыш. Для подобных случаев наша команда описала главные термины – что это фриспины, вейджер, как его отыграть, чего нужно проходить верификацию.Как лишь вы отыграли вейджер и свои с бонусного баланса перешли для на реальный счет, Вы храбро можете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать минимальный депо к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, вместе с депозитом). <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> <a href=https://admin.phacility.com/F520885>https://admin.phacility.com/F520885</a> Выбирая бесплатный бонус, пристально изучайте верховодила. Убедитесь, что вам можно на участие в промоакции. Уточните, в каких забавах возможно скорпулезно условия вейджера. При надобности задавайте вопросы адептам саппорта.Выше мы дали полный комплект самых новых и актуальных бездепозитных призов в интернет казино без пополнения на 2022 год, где вы можете воспользоваться каким ценным бездепозитным бонусом. 1×slots регистрация 1×slots review live <a href=https://king-wifi.win/wiki/User:CharlineI92>https://king-wifi.win/wiki/User:CharlineI92</a>
1×slots регистрация то дальше необходимо пройти
Начнём с как, что каждое рекламную за регистрацию подразумевает некие условия. Бездепозитные бонусы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность валютного оборота, необходимая для исполненья критерий. Пример, получили безвозмездные вращения и выиграли с них 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 рублей, проигрышных или выигрышных, не. После исполнения, бонусный баланс перейдёт на реальный и станет легкодоступным к выводу.Как прочие акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такого предложения являются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает новых посетителей и позволяет им составить эмоцию о функционале, не рискуя значительными совокупностями. <a href=https://nztw.org/home.php?mod=space&uid=43957>1×slots сайт зеркало</a> 1 x slots Наш перечень включает в себя лучшие бездепозитные бонусы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по принципиальным характеристикам:Условия вывода выигрыша. В неких заведениях для успешного вывода с бездепозитного бонуса довольно пополнения баланса и доказательства личности. В иных же клубах, необходимо некоторое один прокрутить собственный депо. <a href=https://australianwinerytours.com/tours/member.php?action=profile&uid=1632>https://australianwinerytours.com/tours/member.php?action=profile&uid=1632</a> 1х слотс зеркало регистрация в 1×slots casino Эффективность бездепов в рекламного прибора расценили многие операторы. Малоизвестные площадки употребляют эти промоакции, дабы быстро набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны неизменных посетителей. Не все сайты, дающие подарки без депозита, рекомендованы к забаве. За привлекательным промоописанием все скрываться неосуществимые обстоятельства отыгрыша и подводные камешки.Во время забавы в казино, выигрыши, полученные благодаря бесплатным призовым фондам, суммируются и срабатывают в совместную сумму для отыгрывания. Однако, случае удача улыбнется и выйдет отыграть все призы, игровое заведение гарантированно допустит исключить денежные свои. Сумма вывода несомненно находиться от лимита, одобренного именно в этом учреждении. Поэтому, внимательно нужно разбирать правила выдачи анлимитных депо.
1 x slots
Вообще перейдя в казино — управляла одинаковы в получении бездепозитных призов, в стереотипные правила входит: доказать эл. Почту и телефонный, заполнить свой личный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ. <a href=http://g961713h.beget.tech/user/DavidNearo/>http://g961713h.beget.tech/user/DavidNearo/</a> Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных притязаний, кроме неотъемлемой верификации. Если на сайте предусмотрена неотъемлемая процедура доказательства личности, то вывести выигрыш удастся только последствии ревизии данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий личность. зеркло казино 1×slots Высокая конкуренция в сегменте азартных игр мотивирует операторов завлекать посетителей разнородными промоакциями. Благодаря этому у гостей появляется вероятность получить призы в казино за регистрацию без депо. Воспользоваться этим предложением можно, минуя функцию внесения средств на игровой счет, просто активировав аккаунт на веб-сайте. Наш гид по бездепам поможет выбрать самую привлекательную бонусную программу, узнать управляла получения такового гонорары и воспользоваться им с максимальной выгодой.Существуют казино с призом за регистрацию, в очень востребованы фриспины в онлайн казино впоследствии регистрации в конкретных забавах. Они встречаются том почаще бесплатных поощрений или классических бонусов в казино без вложений. Например, игрок регистрирует счет, на который начисляются бесплатные забавы, приз за регистрацию повторяющий бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса геймер выигрывает настоящие средства, которые в последствии можно успешно вывести из заведения на собственную платежную систему. То есть, есть шансы исключить средства без рисков собственными финансами. Регистрация, за которую игры получит бонусы, займет минут, а спасибо данному можно увеличить 5 евро поощрений до тыс. И без всяких заморочек вывести их.
1×slos регистрация в 1×slots casino
Подтвердите регистрацию, чтобы активировать Бездепозитный приз с выводом, требуется заполнить индивидуальный профиль. Заполните пустопорожние поля настоящими данными о для. <a href=https://forum.krymbezpravil.org.ua/memberlist.php?mode=viewprofile&u=10552>1×slots рабочее зеркало на сегодня</a> Бонус начисляется игроку сразу в регистрации и прохождения верификации в казино и не настятельно от посетителя внесения депозита. Как правило, размер бонуса в подобном случае довольно застенчивый, однако дозволяет новичкам познакомиться с забавой без риска реальными средствами. 1 x slots <a href=http://xn–9d0bpqp9it2sqqf4nap63f.com/bbs/board.php?bo_table=inquiry&wr_id=133774>http://xn–9d0bpqp9it2sqqf4nap63f.com/bbs/board.php?bo_table=inquiry&wr_id=133774</a> Вообще перейдя в казино — управляла схожи в получении бездепозитных бонусов, в стандартные правила заходит: подтвердить эл. Почту и телефон, наполнить свой индивидуальный профиль, активировать рекламную код либо активировать предложения во вкладке БОНУСЫ.При регистрации идет указывать только достоверную информацию. Когда учетная запись несомненно активна, замечен доступ в Личный офис. В нем возможно избрать валюту, установить промокод и разузнать подробные правила получения и отыгрыша бездепа. Краткая информация об промоакции часто присутствует непосредственно на регистрационной форме.
1×slots официальный зеркало
<a href=https://aben75.cafe24.com/bbs/board.php?bo_table=free&wr_id=159799>https://aben75.cafe24.com/bbs/board.php?bo_table=free&wr_id=159799</a> Главным моментом в возникновении данных вознаграждений произведено в, собственно пустив их в ход, игры ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он спасибо призам какой-либо выигрыш либо мгновенно спустит все только что прибывшие деньги). То есть, казино снабжает игрока вероятностью на дармовой базе играть во различные слоты даже спонсирует забаву.Представленные на данной страничке лучшие бездеп призы в казино за регистрацию в 2022 году имеют подходящие условия. После кропотливого анализа редакция портала составила рейтинг спецпредложений, в котором посетители Casino.ru шансы сортировать перечень по нескольким аспектам: по сумме, вейджеру, максимальной сумме вывода и т.д. 1×slots зеркало рабочее Денежные средства. Третий приз за регистрацию без депозита – наличные. К раскаянью, лишь знаменитые и знаменитые клубы имеют дать деньги в руб. Либо долларах. С их подмогою появится насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед этим нужно исполнение определенных критерий.Допустим, за регистрацию вы получили бездеп в объеме 2 000 руб. С вейджером х30. В этом случае светит сделать ставок, на общую сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать настоящие деньги. Однако не забывайте, что с любого подарка получится вывести определённую необходимую (почаще всего менее $200).
<b>Смотреть еще похожие новости:</b>
<a href=https://021snyw.com/forum-673–1.html>1×slots регистрация на официальном сайте</a>
<a href=http://evtrucksforum.com/memberlist.php?mode=viewprofile&u=28289>1×slots акции</a>
<a href=https://www.ldvd.nl/no-22-san-diego-place-rallies-very-last-boise-country-27–16?page=41#comment-237918>1×slots зеркало этих способов предполагает регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы в казино без пополнения 2022 — это конкретная сумма денег либо free spins вращения, которые предоставляются первым гостям за регистрацию на веб-сайте казино вид бездепозитного бонуса, и выделяет вам вероятность помощью казино без пополнения опробовать предложения (игр), с дальнейшей прерогативой вывода средств при исполненьи всех установленных управлял.
#8521 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на официальном сайте
Используйте превосходнейшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, чтобы заработать подарки за простые действия теперь сегодня получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высокой отдачей и резвыми выводами на электронные кошельки. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> <a href=https://write.as/1ahncnv3qjvgc.md>https://write.as/1ahncnv3qjvgc.md</a> 1хслот зеркало сайта <a href=http://terra-bashkiria.com/forum/?PAGE_NAME=profile_view&UID=157878>http://terra-bashkiria.com/forum/?PAGE_NAME=profile_view&UID=157878</a> Также учтите, собственно кое-какие игровые платформы сузивают список стран, коие способны получить предложенный бездепозитный приз за регистрацию. К образцу, есть онлайн-заведения, выдающие похожие бонусы лишь обитателям определенных государств. К примеру, онлайн казино 777 Оригинал дает бездепозитный приз лишь игрокам из России и стран СНГ. Или наоборот, снабжают вознаграждением всех, кроме жителей неких государств (исходя из сего, следует внимательно учить перечень, чтобы потом не возникло практически вопросов и претензий).Бездепозитные призы истинными деньгами, коие возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадали.
1× slots сайт
Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депо имеет выделяться до 30 дней.На данном разделе портала периодически публикуются обзорные заметки, в которых рассматриваются бесплатные призы наихороших интернет-казино. Информация структурирована по нескольким пт, включая главные: <a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1×slots casino регистрация</a> 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Фриплей-бонусы. Бонусы за бесплатную игру есть лишь в неких клубах. Они зачисляются незамедлительно после творенья профиля и срабатывают недолговременное время. Если у вас нет времени истратить средства, они просто закончатся. Что касается времени, правило бонусы срабатывают протяжении одного часа. <a href=http://forum.notionmusic.com/memberlist.php?mode=viewprofile&u=24901>http://forum.notionmusic.com/memberlist.php?mode=viewprofile&u=24901</a> Можно ли в одном онлайн казино получить больше 1-го бонуса за регистрацию? Нет, так как в любом онлайн казино есть правила, к коим нужно придерживаться, не создавать 2 аккаута для получения призов, иначе будет блокировка обоих аккаутов, не пытайтесь обмануть интернет казино, приз за регистрацию выдаеться раз раз 1 лицу.Бездепозитный приз нередко возможность стать доступным сразу в окончания регистрации, потому как единственным притязанием к нему считается регистрация, а после ревизия вашей новой учетной записи. 1× слот зеркало
1× слот зеркало
В неких онлайн казино для получения бездепозитных бонусов не довольно просто зарегистрироваться на веб-сайте клуба и подтвердить свои контактные данные. Дополнительно потребуется активация промокода. <a href=http://worklocal.com.au/users/travismusty>http://worklocal.com.au/users/travismusty</a> зеркала 1×slots
1×slots рабочее зеркало
Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в неотъемлемом порядке необходимо пополнить счет в казино. Для депозитных призов, данная процедура не необходима, так как депозит уже изготовлен.Иногда операторы требуют внесение малого депозита перед выводом для верификации платежного прибора. В неких казино этот депозит также светит отыграть. <a href=https://www.rusdrama-az.com/support/51-sluzhba-tehnicheskoy-podderzhki-sayta.html>1×slots бонус за регистрацию</a> Для получения бонуса надо(надобно) ознакомиться с программой преданности казино и сделать ставки на необходимую, необходимую для перехода на грядущий уровень. Получить Бездепозитный приз в онлайн казино дело двух кликов. Другой момент, отыграть рекламную и соблюсти управляла и условия отыгрыша. Под правилами предполагается столько вагер, но и ограничения по наибольшей ставке. Мы осознаем, собственно в кино все ставят на зеро и выигрывают. Призываем не делать сходственного. Перед активацией бонуса прочтите управляла. Узнайте последующие факторы: Условия получения дара, за регистрацию, за депозит и другое. Ограничения по максимальной ставке. Зачастую не повыше 350 руб. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на пространстве. Поэтому принципиально знать, в каких играх возможно совершать кратность денежного оборота.В некоторых интернет казино для получения бездепозитных призов не достаточно просто зарегистрироваться на сайте клуба и доказать свои контактные данные. Дополнительно потребуется активация промокода. казино 1× slots официальный сайт <a href=https://thiamlau.com/forum/member.php?action=profile&uid=4306>https://thiamlau.com/forum/member.php?action=profile&uid=4306</a>
1×slots зеркало регистрация
<a href=http://t73108uj.bget.ru/member.php?action=profile&uid=115687>http://t73108uj.bget.ru/member.php?action=profile&uid=115687</a> Если вы новичок в этом деле и только попали в неизведанную вами область азарта — счет услуг как бездепозитные призы без пополнения.Бесплатные бонусы казино без депозита возможно получить вид валютных средств на бонусный счет (вывести их возможно только после отыгрыша), фриспинов, забавы либо кешбэк-бонуса. 1×slot официальный сайт Игры, каких можно играть на бонусные деньги. Проверьте перечень игр, в возможно играть на бонусные средства, возможно они Вам не понравятся и не стоит тратить своё время на такую акцию.
<b>Смотреть еще похожие новости:</b>
<a href=https://australiantravelforum.com/Upload/showthread.php?tid=187729>1× слот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, дабы еще раз получить безвозмездный бонус. Игорные заведения нетерпимы к бонус-хантерам, потому вас ожидает неминуемое наказание. Казино выводит средства только на что, эту платежную систему, с котрой был сделан депо. То есть, для вывода бездепозитного бонуса, Вам поначалу нужно пополнить счет. В некоторых клубах узкий список способов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с этих платежных методов, которые доступны для вывода.
#8522 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
Для получения выигрыша требуется выполнить условия казино. Чаще всего игроку нужно поставить конкретную сумму, но уже из личных денег. Она рассчитывается из совместного размера выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, случае пользователь выиграл 1000 руб., а множитель составляет х30, вывести средства можно будет, сделав ставки на 30 000 рублей.Частенько новенькие не понимают, как активировать подарки или вывести первый выигрыш. Для похожих случаев наша команда обрисовала главные термины – собственно такое фриспины, вейджер, как его отыграть, зачем необходимо проходить верификацию. <a href=http://filmkachat.ru/>1×slots официальный сайт мобильная версия скачать</a> <a href=https://www.imdb.com/user/ur191728920/>https://www.imdb.com/user/ur191728920/</a> казино 1×slots официальный сайт <a href=https://repyourmaxfitness.com/user/frankdrype/?um_action=edit>https://repyourmaxfitness.com/user/frankdrype/?um_action=edit</a> Ниже указан актуальный перечень легальных казино в Беларуси с призами на 1-ый депо. Вы сможете попасть на официальный вебсайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус.
1×slots зеркало регистрация в 1×slots casino
В лицензионных бездепозитных казино играть в азартные игры вправду неопасно. Наличие лицензии одобряет тот факт, что клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP. <a href=http://aficionado.pl/showthread.php?117373–1×slots-%D0%BF%D1%80%D0%BE%D0%BC%D0%BE%D0%BA%D0%BE%D0%B4-%D0%BF%D1%80%D0%B8-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D0%B8–2025&p=135453>1×slots промокод при регистрации 2025</a> 1×slots casino регистрация 1×slotscasino09k online <a href=https://chaturbate.global/external_link/?url=https://www.sooperarticles.com/authors/787237/are-timeless.html>https://chaturbate.global/external_link/?url=https://www.sooperarticles.com/authors/787237/are-timeless.html</a> Ну и естесственно же, для казино бездепозитные призы прибыльны с имиджевой стороны: подобная щедрость повышает уровень преданности клиентов к компании. 1х слотс зеркало регистрация в 1×slots casino B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высокие требования. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до 100 один в игровых автоматах. Например, случае игрок получил даром десять долларов, то нужно будет отыграть их, поставив одну тысячу спинов по одному баксу каждый. Стоит отметить, собственно не все казино дают возможность играть на призы и не во всех увеселительных заведениях схожие управляла для отыгрывания. Некоторые казино запрещают играть на бонусы в блекджек либо ограничивают ставки до пяти процентов, собственно существенно увеличивает в 10-ки один число нужных игр.
1×slot официальный сайт
<a href=https://mir-pozitiv.ru/forums/users/xrumsep2505–2/>https://mir-pozitiv.ru/forums/users/xrumsep2505–2/</a> 1×slots зеркало В зависимости от онлайн заведения любой из их возможность вас предложить как бездепозитные средства, так и бездепозитные фриспины, коие последствии удачной регистрации упадут вас на ваш игровой баланс.Акции, приуроченные к календарным праздничным, бывают рассчитаны как на всех пользователей, например и на категории: например, презент на 8 марта девушкам-игрокам или мужчинам на 23 февраля.
1хслотс рабочее зеркало на сегодня
Условия имеют разниться друг от друга. Но такой бонус имеет быть применен лишь для игрового процесса – приобретенные на счет деньги до такого, как станут отыграны, вывести невозможно. <a href=https://forum.pmpobc.ca/index.php?action=profile;u=1336>1×slots регистрация на сайте</a> Но не стоит мыслить, собственно снабжая пользователей этими призами, казино увлекается спонсированием. Ведь объемы вознаграждений, главном, не немалые (средним объемом от 5 до 20 долларов). И на эти свои налагаются определенные обстоятельства и ограничения, обязательные к выполнению игрока, если в последствии он желает получить все свои выигранные деньги.Самые известные методы вывода средств ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электрическим платежным системам подобии Neteller и Skrill, а также пользуются криптовалютными кошельками. Вывод выигрышей имеет осуществляться быстро или развлекать от нескольких часов до нескольких суток. 1×slots регистрация <a href=http://maskarad.bomba-piter.ru/user/AshleyHeelf/>http://maskarad.bomba-piter.ru/user/AshleyHeelf/</a>
1×slots зеркало сайта
Новые клиенты онлайн-казино без первого депо все выяснить свою удачливость. К тому же есть возможность конвертировать бездепы в настоящие деньги за регистрацию в казино, однако желаемого бонус необходимо отыграть согласно условиям промоакции.Для казино, работающих онлайн, бездепозитные бонусы нужны для вербования свежих клиентов. Предложение поиграть на слотах без необходимости внесения реальных средств — работающий способ для увеличения энтузиазма к фирмы. После отыгрыша бездепа велик шанс, что игроку понравится и он продолжит играть в казино, лишь теперь теснее на собственные средства. Чем ниже значение вейджера, что, этим легче отыграть и вывести приз. Если Вы расчитываете заработать на бездепе, но просто ознакомиться с новым игровым клубом, то стоит избегать бонусов с высочайшим вейджером их практически не реально отыграть. С ними Вы можете только протестировать забавы заведения.В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и когда спорных обстановок нет способности куда-то посетовать и доказать свою правоту. <a href=https://loansnearme.com.au/author/jameswrarf/>https://loansnearme.com.au/author/jameswrarf/</a> сайт 1× slots casino Пoдтвepдить личнocть посетителя. Для успешного вывода средств, нужно доказать личность клиента. Нa этaпe вepификaции пpoфиля, работники службы безопасности обязаны увериться, что у игрока более один аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не может вывести собственный выигрыш, случае у него несомненно несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=32946>1×slots казино зеркало</a>
<a href=https://forum.pmpobc.ca/index.php?topic=128685.new#new>1×slots рабочее зеркало</a>
<a href=http://diablo2r.cn/home.php?mod=space&uid=30130>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=https://fougerite.com/resources/authors/jamesstawl.14360/>1×slots официальный зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток.
#8523 WilliePubre
cost of clomid no prescription <a href=" https://www.gztongcheng.top/home.php?… „>get cheap clomid no prescription</a> or <a href=“ https://www.google.jo/url?… ">how to buy cheap clomid price</a> https://www.google.gm/url?… where buy generic clomid for sale <a href=https://top.hange.jp/linkdispatch/dispatch?targetUrl=http://clomid.store>where can i buy generic clomid pills</a> where can i get clomid no prescription and <a href=http://www.dllaoma.com/home.php?mod=space&uid=388974>how to get clomid price</a> buy cheap clomid without dr prescription
#8524 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало быструю регистрацию а также мгновенное
Риск-игра по равным шансам – Также казино может воспрещать выполнять условия по отыгрышу счет раунда на удвоение, который предлагается в слотах, видео-покере и некоторых иных забавах. <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> В перечне притязаний к отыгрышу часто присутствуют лимиты на ставки при забаве на личные средства. Так, случае отыграть нужно 30 000 рублей, а предельная сумма ограничена 30 рублями, то вертеть барабаны предстоит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками условий по срокам деяния акции.Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша бонусов. Заведения всегда устанавливают максимальную ставку, допустимую по условиям вейждера. <a href=https://promosimple.com/ps/2f3fe/transforming-spaces-with-hospitality-venue-design-visualization>https://promosimple.com/ps/2f3fe/transforming-spaces-with-hospitality-venue-design-visualization</a> Практически все интернет казино с бездепозитным бонусом за регистрацию предусматривает программу преданности — систему одобрения постоянных посетителей, кот-ая состоит из большого значений. При достижении игроком одного значения на его счёт поступает приз. Чем повыше уровень — тем щедрее бонус. 1×slots casino регистрация 1×slotscasino09k online <a href=http://www.god123.xyz/home.php?mod=space&uid=1028660>http://www.god123.xyz/home.php?mod=space&uid=1028660</a> Внесение депо – Будьте готовы восполнить счет после отыгрыша бонуса. Это обычное заявка верховодил для данного типа промо-акций. Лучше заранее уточнить, какую сумму надо(надобно) несомненно заносить на счет. Как верховодило, идет о наименьшем депозите, но вы должны быть убеждены, что он вам по кармашку.Бездепозитный приз казино 2022 с выводом за регистрацию предоставляет вероятность ознакомиться игроку с лобби выбранного заведения, сориентироваться в выборе игр и выяснить качество работы службы. Довольно нередко, начиная игровой процесс, игрок теснее отказывается останавливаться и делает реальный вклад. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть бесплатно возможно как один таки с призом за регистрацию без необходимости вносить депозит.
1× slots сайт
Каждая игровая платформа выделяется условиями по получению и отыгрышу бездепов. В правилах детально расписаны временные рамки, за которые нужно прокрутить вейджер. Также не забывайте тему наибольший размер ставки и наивысшую необходимую выплаты. С другой стороны, чтобы получить бездепозитные призы казино, довольно израсходовать не более 1 минутки. 1×slots регистрацию более популярный вариант это Также бездепозитные призы имеют служить методом возвращать к забаве посетителей, временно приостановивших своё сотрудничество с компанией: извещение о бездепе поступает на мобильный аппарат либо почту. <a href=http://korea-shipping.co.kr/bbs/board.php?bo_table=free&wr_id=358020>http://korea-shipping.co.kr/bbs/board.php?bo_table=free&wr_id=358020</a> 1×slots официальный сайт скачать на айфон Ниже указан актуальный перечень законных казино в Беларуси с бонусами на первый депозит. Вы можете попасть на официальный сайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз.Исходя из этого, просто не присутствует осмысленных причин махнуть рукой на получение такового приза при регистрации. И, кстати, на подобный бесплатной основе у вас все шансы выиграть средства и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные бонусы, именуют безвозмездными онлайн платформами для игр.
1×slots рабочее зеркало на сегодня
Чтобы получить вероятность вывести выгода с бездепозитного бонуса в казино, нужно выполнить ряд условий: Бездепы шансы заходить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой или баллами.Подарки на конкретные даты отличаются критериями получения. Если поощрение начисляют игроку на день рождения, то сумма обычно находится от общего объема депо за прошедший год. <a href=https://0512.banx.co/space-uid-1572450.html&do=profile>https://0512.banx.co/space-uid-1572450.html&do=profile</a> Наиболее известные гонорары среди гэмблеров – бездепозитные бонусы казино. Это не изумительно, ведь возможно получить бесплатные вращения или виртуальные кредиты, и всем не придётся пополнять счёт, рисковать личными деньгами. Удастся насладиться разнородными развлечениями даже выиграть солидную сумму, избегая серьёзного риска.Если вы опытный игрок, вы должны аристократия, собственно бонус без депозита – редкая находка. Тем не менее, мы еженедельно исследуем интернет, дабы отыскать для вас наихорошие бездепозитные предложения. 1×slots регистрация 1×slotscasino 56 online Бывают ли бездепозитные бонусы без вейджера? Бывают, в у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино.
1×slots зеркало
Условия отыгрыша бонуса. Если Вы планируете заработать на бездепозитном призе, то для внимание на велечину вейджера и срок, который дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть приз и вывести выигрыш. Одним из предлогов отдавать преимущество, льготу одному либо другому заведению содержится в привлекательности предлагаемых акций и бесплатных услуг. Безвозмездные фриспины, выдаваемые без дела создавать какой-либо вклад, в перечне располагается далековато не в конце. 1 х слотс зеркало <a href=https://forum.show-master.ru/forum/index.php?PAGE_NAME=profile_view&UID=49918>https://forum.show-master.ru/forum/index.php?PAGE_NAME=profile_view&UID=49918</a> Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие возникают у новичков.При поддержки такового поощрения оператор имеет того привлекать клиентов, коие раньше проявляли активность на веб-сайте, но по какой-то основанию прекратили играть. В данном случае промокод высылается пользователю по электронной почте или повторяющий SMS.
1×slots официальный сайт скачать
В онлайне количество узнаваемых игорных площадок с красивыми акционными услугами. Однако пристально читать обстоятельства 10-ов предложений скором надоест, да и время отнимет количество. Поэтому наша команда подготовила ТОП-3 сайтов с превосходнейшими бездепозитными бонусами: <a href=http://43.240.15.40/home.php?mod=space&uid=582299>http://43.240.15.40/home.php?mod=space&uid=582299</a> 1×slots официальный сайт скачать К раскаянью, нет. Почти все казино, настоятельно внесение хотя бы одного минимального депо для вывода выигрыша с бездепозитного приза. Также учитывайте, собственно вывести деньги разрешено только на ту платежную систему, с коей был сделан депо.
<b>Смотреть еще похожие новости:</b>
<a href=http://evtrucksforum.com/viewtopic.php?p=870967#p870967>1×slots бонус за регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Автоматы неспроста считаются наиболее известным азартным весельем. Чтобы усвоить управление и правила, потребуется всего некоторое минут. Ваша задача сделать ставку, определить количество рабочих линий и можно крутить барабан. Если на выпадет выигрышная комбинация – вы выиграли! С этой задачей вам помогут справится бездепозитные бонусы казино. В бонусную программу множества операторов входят систематические бездепы. Это пожизненные акции, поощряющие интенсивных неизменных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают постоянные призы без депо в размен на скопленные баллы лояльности.
#8525 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию более популярный вариант это
Подтвердите регистрацию, чтобы активировать Бездепозитный бонус с выводом, потребуется наполнить собственный профиль. Заполните пустующие поля настоящими данными о для.Вы скорее, например все любите получать подарки и бездепозитные призы казино. Игорные дома взяли в привычку одаривать гэмблеров приятными призами. Стать обладателем приветственного презента можно за творенье профиля или пополнение счёта. Второй вариант более занимательный, как клубы готовы удвоить депо! Но если вы новичок и лишь знакомитесь с миром азарта, другого пользуйтесь призом за регистрацию. <a href=http://filmkachat.ru/>1×slots на любой вкус как пройти регистрацию</a> Oтыгpaть приз с указанным вeйджepом, достичь нужно сдeлaть cтaвoк нa cумму, превышающую размер бонуса в несколько раз. <a href=https://www.ted.com/profiles/48052353>https://www.ted.com/profiles/48052353</a> 1×slots официальный зеркало рабочее <a href=http://www.712100.org/home.php?mod=space&uid=16748&do=profile>http://www.712100.org/home.php?mod=space&uid=16748&do=profile</a> Бонус без депо за регистрацию в казино (бездепозитный бонус) – это денежный подарок от клуба, который начисляется на аккаунт игрока последствии регистрации в казино. Кроме создания учетной записи, для получения бездепа, очень нередко требуется ещё и доказать контактные данные игрока и/или активировать специальный промо-код.
1×slots подтвердит вашу регистрацию если говорить
Чтобы бездеп не был начислен на Ваш акк, Вам не нужно активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк автоматически, а Вы не расчитываете его применять, обратитесь в саппорта с просьбой отменить бездепозитный приз. 1×slots сайт Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми промоакциями. Читайте о них в обзорах и на форуме.Онлайн гемблинг развивается с каждым днем больше и больше, свежие бренды создаются не по дням а по часам. Новые онлайн казино проделывают вступительные акции для игроков, для того собственно бы зарекомендовать себя, и что, этим наиболее предлагают бездепозитные призы за регистрацию, что бы не пропустить эту возможность — как воспользоваться новым бездепом, рекомендуем посещать наш вебсайт как возможно чаще, самое смачное и свежие несомненно добавляться в этом же списке. <a href=http://yunduost.com/home.php?mod=space&uid=20542>http://yunduost.com/home.php?mod=space&uid=20542</a> 1хлот регистрация в 1×slots casino При регистрации по указывать лишь достоверную информацию. Когда учетная запись будет активна, замечен доступ в Личный кабинет. В нем возможно избрать валюту, ввести промокод и узнать подробные управляла получения и отыгрыша бездепа. Краткая информация об промоакции нередко присутствует непосредственно на регистрационной форме.
x1 slots регистрация в 1×slots casino
Как управляло, при выводе денег, от играющего потребуется только сделать минимальный лепта чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом собственный счет. <a href=http://www.markstrongcn.com/home.php?mod=space&uid=4140&do=profile>http://www.markstrongcn.com/home.php?mod=space&uid=4140&do=profile</a> зеркала 1×slots На странице представлены бездепозитные бонусы за регистрацию в казино редкая награда за коей гонятся все игроки как новенькие, так и мастера. Мы тоже уделяем огромное внимание на наличие призов при формирование рейтинга казино на средства. Бездепозитный бонус это возможность играть безвозмездно и выиграть настоящие средства.
1×slots быструю регистрацию а также мгновенное
Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают приз по странам. Вплоть до того, собственно клуб возможность брать игроков из Вашей страны, а бездеп не давать. Верификация важна для дополнительной защищенности и подсобляет техподдержке выявить бонусхантеров и жуликов. Кстати, на платформах выводы солидных сумм доступны лишь в доказательства личности. Иногда у посетителей сайта все появиться проблемы при активации приобретенного промо-кода. В таких случаях, нужно адресоваться за подмогою в службу поддержки «Support». Для получения ответа, обязательно указывается определенная первопричина воззвания и подтверждается информация дополнительными снимками. Если сложилась спорная ситуация, всегда возможно обратиться к главному регулятору или контролирующему органу, выдавшему этому заведению лицензионный документ.Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке нужно восполнить счет в казино. Для депозитных призов, эта процедура не нужна, так как депо уже изготовлен. 1×slots зеркало которую указывали при регистрации кстати <a href=http://arsivforum.10tl.net/member.php?action=profile&uid=5083>http://arsivforum.10tl.net/member.php?action=profile&uid=5083</a>
1×slot казино зеркало
<a href=http://www.forderm.net/bbs/board.php?bo_table=free&wr_id=228619>http://www.forderm.net/bbs/board.php?bo_table=free&wr_id=228619</a> Это раз из основных показателей привлекательности подарка. С завешенным коэффициентом том профессионалы не сумеют выполнить условия по отыгрышу. И неважно, насколько привлекательно выглядит предложение – бездепозитный бонус казино в размере $500 или $1 000. Чтобы новички лучше вникли, что же это вейджер, мы разберём на случае.Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы была возможность исключить выигрыш. 1хслот 1хслотс регистрация перейти на 1×slots Верификация важна для дополнительной безопасности и помочь техподдержке выявить бонусхантеров и плутов. Кстати, на некоторых платформах выводы солидных сумм доступны лишь после подтверждения личности.
<b>Смотреть еще похожие новости:</b>
<a href=https://praisenpray.org/forums/showthread.php?tid=95018>1×slots регистрация 1×slots casino c2d ru</a>
<a href=https://www.bf-france.com/forums/profile/30064-rabofreeor/>1×slots зеркало регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Также есть онлайн-платформы азартных игр, коие используют раздачу бездепозитных бонусов в специальные даты (как для казино, например и для игрока). Помимо этого, действующие игроки того имеют возможность получить схожие бонусы за собственную работа (например, за увеличения уровня или за похожие достижения).
#8526 Charlesgunnyhttp://filmkachat.ru
1×slots на любой вкус как пройти регистрацию
Вейджер менее х30–35 считается применимым. Опытные игроки заявляют, собственно с таким вейджером реально остаться в плюсе, если верно подойти к выбору игрового аппарата. <a href=http://filmkachat.ru/>1× slots официальный</a> Главное преимущество спинов – возможность изучить различные слоты. Также удастся насладиться бонусными раундами, испытать фортуну в риск-туре и преумножить выигрыш за счёт особых знаков. Однако не только игровой процесс заслуживает внимание, ведь никакого сосредоточиться на реальном выигрыше. <a href=https://www.goldenline.pl/grupy/Przedsiebiorcy_biznesmeni/health-economics/how-to-create-a-stunning-3d-walkthrough-video-for-architectural-projects,3947888/>https://www.goldenline.pl/grupy/Przedsiebiorcy_biznesmeni/health-economics/how-to-create-a-stunning-3d-walkthrough-video-for-architectural-projects,3947888/</a> Так собственно сможете храбро региться без всяких раздумий. Фортуна сейчас точно на вашей стороне. Не страшитесь, ведь следствие какого либо ущерба Вам совершенно не грозит. С этими призами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе.Если вы облюбовали себе несколько брендов которые для больше всего приглянулись, для неизменной забавы! Таких гемблеров казино довольно предпочитает и оценивает, за частую эти игроки становятся VIP игроками заведения, коим нередко поступают прибыльные предложения вид призов, так же туда заходит и бездепозитные. 1х слот регистрация в 1×slots casino <a href=https://www.hukuki.net/member.php?252961-Deweyjot>https://www.hukuki.net/member.php?252961-Deweyjot</a>
1×слот регистрация в 1×slots casino
1хслотс официальный сайт зеркало Внесение депо – Будьте готовы восполнить счет после отыгрыша бонуса. Это обычное заявка верховодил для данного типа промо-акций. Лучше заранее уточнить, какую сумму надо(надобно) несомненно заносить на счет. Как верховодило, идет о наименьшем депозите, но вы должны быть убеждены, что он вам по кармашку. <a href=https://tongbet24.com/bbs/board.php?bo_table=free&wr_id=66970>https://tongbet24.com/bbs/board.php?bo_table=free&wr_id=66970</a> 1× slots официальный
1×slots подтвердит вашу регистрацию если говорить
На бесплатные призы онлайн-казино почти всегда распространяется лимитирования по стране проживания посетителей. Даже в для разрешается открывать счет и выступать на средства в заведении, это еще не значат, что для доступны not the slightest down payment bonuses.Индивидуальные одобрения выдаются за совершение деяний: подписку на аккаунты площадки в социальных сетях, установку мобильного приложения либо официального клиента для ПК. В большинстве казино действуют программки лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий уровень часто сопрягается выдачей бездепа. <a href=http://nvkb.ru/forum/index.php/user/101119/>http://nvkb.ru/forum/index.php/user/101119/</a> 1хслотс официальный сайт зеркало
1× slots casino официальный сайт
<a href=https://www.sgomberisgombero.it/my-account-2/>1×slots бонус за регистрацию</a> Воспользоваться бездепом можно не во всех игровых автоматах: казино вдруг уточняет лимитирование для клиентов. Конечно, это можно счесть неким неудобством для игрока, хотя справедливости необходимо, что выбор автоматов всё точно остаётся довольно великим. Большинство клубов привлекают внимание в за счёт различных подарков. На одних веб-сайтах можно получить виртуальные кредиты, коие откроют доступ ко всему софту. На иных же, администрация предлагает благотворительные вращения для пуска лучших онлайн слотов. Несмотря на разные промоакции, стоит выделить самые основные.Для получения бездепа необходимо пригласить в игру по реферальной ссылке нового посетителя: он обязан зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на сумму, обозначенную в критериях промоакции. 1×slots официальный зеркало рабочее <a href=https://www.maiyro.com/posts/k0eh3144>https://www.maiyro.com/posts/k0eh3144</a>
1хслотс рабочее зеркало
Операторы гемблинга утверждают, собственно например они сражаются с бонус-хантерами. Впрочем, критики считают, собственно этим казино пытаются сделать из случайного постояльца постоянного игрока.Многие азартные клубы ограничивают сумму вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не сможете вывести. Разница несомненно аннулирована, Вы и не можете создавать на нее ставки. <a href=http://jdlpnc.com/xe/?mid=qna&document_srl=63817>http://jdlpnc.com/xe/?mid=qna&document_srl=63817</a> Условия отыгрыша приза. Если Вы планируете заработать на бездепозитном призе, то в первую очередь обратите внимание на велечину вейджера и срок, который дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть бонус и вывести выигрыш.Размер призов почаще всего чисто условный и не выше 50 рублей. Приятно, но ощутимым бустом при вряд ли будет. 1×slots casino online регистрация Поспешите зарегистрироваться на официальном веб-сайте Клубника, дабы мгновенно получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, бывает реальный шанс победу!
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.krymbezpravil.org.ua/memberlist.php?mode=viewprofile&u=10552&sid=f498d5cdf71c652c4487369f6789a270>1×slots сайт зеркало</a>
<a href=http://check2go.net/author/jameslob/>1×slots рабочее зеркало</a>
<a href=https://uyghuryol.com/forum/viewtopic.php?f=8&t=230283>1хслот официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вейджер (либо вагер) ? это минимальная сумма ставок, которую нужно устроить для вывода денежного бонуса. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим красивее спецпредложение. В онлайне очень количество скриптовых вебсайтов, которые принадлежат жуликам. Их основная задача – заинтересовать гэмблеров, пообещав не только великодушные подарки, хотя и крупные выигрыши. Так что некоторые веб-сайты предлагают получить за регистрацию числе $1 000.
#8527 Ремонт электронных книгhttps://remont-elektronnyh-knig-hit.ru/
Наша мастерская предлагает высококачественный <a href=https://remont-elektronnyh-knig-hit.ru/>выездной ремонт электронных книг</a> всех типов и брендов. Мы знаем, насколько значимы для вас ваши электронные книги, и стремимся предоставить услуги наилучшего качества. Наши квалифицированные специалисты проводят ремонтные работы с высокой скоростью и точностью, используя только качественные детали, что предоставляет долговечность и надежность проведенных ремонтов. Наиболее общие проблемы, с которыми сталкиваются обладатели цифровых книг, включают поврежденный экран, выход из строя батареи, программные сбои, неисправности разъемов и сбои контроллера. Для устранения этих неисправностей наши профессиональные техники выполняют ремонт экранов, батарей, ПО, разъемов и контроллеров. Обратившись к нам, вы получаете долговечный и надежный официальный ремонт электронной книги в москве. Подробная информация размещена на сайте: https://remont-elektronnyh-knig-hit.ru
#8528 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
3. Подтвердить данные. В зависимости от клуба, нужно привязать телефонный или почту, показать индивидуальную информацию; <a href=http://filmkachat.ru/>1хслот официальный сайт зеркало</a> Поспешите зарегистрироваться на официальном сайте Клубника, дабы моментально получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, появляется настоящий шанс победу!Еще одно условие дотрагивается объемов ставки. Операторы устанавливают максимальную необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном кабинете. При превышении лимита есть риск потерять приза. Существующие ограничения относятся и к конкретным видам ставок. Например, играя в рулетку, клиент может столкнуться с запретом назначать фишки на шансы. <a href=https://penzu.com/p/1c540a5334c40b89>https://penzu.com/p/1c540a5334c40b89</a> С этими ординарными советами любое казино с призом за регистрацию способно принести в разы больше выгоды и пользы.Для как, дабы отыграть сумму вашего бездепозитного приза надо(надобно) выполнить условия вейджера. Очень часто фриспины даются на определенные слоты (book of ra, book of dead, book of sun), подбирайте слот себя по, они все довольно красивые и высококачественные. Бездепозитные бонус имеет быть денежным например и повторяющий фриспинов на слоты 1×slots сайт зеркало <a href=http://www.dbgjjs.com/home.php?mod=space&uid=460798>http://www.dbgjjs.com/home.php?mod=space&uid=460798</a> Размер бонусов почаще всего чисто символический и не превышает 50 рублей. Приятно, хотя ощутимым бустом в игре навряд будет.
1×slots бездепозитный бонус за регистрацию
Помните, собственно любые нарушения верховодил сведут на нет ваши старания, и вы наверняка останетесь без начисленного вам бесплатного бонуса. Всегда изучайте управляла начисления и условия вейджера. По каким вопросам, на коие вы не можете помощи отыскать ответы, обращайтесь за разъяснениям и саппорт.Необходимость отыгрыша. Вейджер в повыше, чем для призов за депо. И же средства не отыграны, исключить их невозможно. <a href=https://forum-macan.ru/viewtopic.php?t=11203>1×slots зеркало видели такую регистрацию на</a> 1×slots зеркало выигрыши обязательно пройдите регистрацию если Бездепозитный приз казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в этом и заключается основное отличие.Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала прыткие выводы. Фишка выплат что, нет, что достаточно выбрать платёжный инструмент и указать необходимую. В большинстве случаев деньги зачисляются на электронные кошельки в течение 15 минут, а на банковские карты – 1–3 трудящихся денька. <a href=https://balcaodevandas.com/index.php?page=user&action=pub_profile&id=12231>https://balcaodevandas.com/index.php?page=user&action=pub_profile&id=12231</a> Акции распространяются как на все забавы казино, например и на узкий список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino прочие. Промо имеет обхватывать разработки 1-го производителя. Бездеп не пересекается с иными акциями казино. Если на сайте учтен кэшбек, он не начисляется за ставки, сделанные бонусными деньгами. Для идентификации платежных реквизитов игрока возможность потребоваться пополнение счета на наименьшую сумму.Мы собрали и опубликовали список превосходнейших бездепозитных казино с призами за регистрацию, коие гарантируют великодушные выигрыши и мгновенные выплаты. 1×slots рабочее зеркало Список например именуемых «запрещенных землель» прилагается к правилам бонусной программы игорного портала. Обязательно проверьте, распространяются ли на вас сходственные санкции.
1×slots casino регистрация 1×slotscasino09k online
Фриспины начисляются по определенной ставке. После их активации игроку необходимо запустить слот и убедиться, что в нем отображаются благотворительные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода после отыгрыша определяется оператором и изредка выше 5 000 рублей. <a href=http://e-audit.gefest.me/index.php?subaction=userinfo&user=fabulousidea15>http://e-audit.gefest.me/index.php?subaction=userinfo&user=fabulousidea15</a> Бездепозитные призы — это презенты от казино повторяющий бонусных денег либо фриспинов для игровых автоматов, коие начисляются на акк игрока в процедуры регистрации на веб-сайте заведения. Для получения этих поощрений депозит не потребуется. 1×slots казино зеркало
1× slots casino официальный сайт
Баланс игрока дополняется на подходящую сумму. К ней применяется вейджер, обозначенный в правилах акции. Вывести выигрыш возможно будет последствии того, как юзер сделает требуемый объем ставок из личных средств. В редчайших случаях бездеп трудится в формате Free Play. На счет юзера зачисляется крупная сумма, и предоставляется маленький срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по окончании этого периода сумма на счету несомненно превосходить изначальную, то разницу можно несомненно исключить либо применять для дальнейших ставок. 1×slots casino online регистрация <a href=https://talkofflowermound.com/author/henryjar/>https://talkofflowermound.com/author/henryjar/</a> С не отыгранным бонусом воспрещается превосходить объем максимальной ставки. Нарушение сего обстоятельства будет аннулирование выигрыша.
1×slots мобильная версия войти казино
Фриспины – бесплатные вращения с фиксированной ставкой, которые возможно использовать в конкретных игровых автоматах. <a href=https://floobits.com/ScottPiess>https://floobits.com/ScottPiess</a> Условия, на коих предоставляется бездеп, регулируются казино. Каждая промоакция имеет доскональные верховодила, гиперссылка на коие обыкновенно находится в промообъявлении. В их указываются лимиты, вейджер, список дешевых игр. Если оператор скрывает данные о предложении, то воспользоваться им не.Для как, дабы отыграть необходимую вашего бездепозитного приза нужно выполнить обстоятельства вейджера. Очень часто фриспины даются на определенные слоты (book of ra, book of dead, book of sun), подбирайте слот себя по душе, они все довольно красивые и качественные. Бездепозитные приз имеет быть валютным так и повторяющий фриспинов на слоты 1×slots официальный зеркало рабочее
<b>Смотреть еще похожие новости:</b>
<a href=https://masstr.net/showthread.php?tid=83600>1×slots зеркало регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Изучить верховодила и обстоятельства получения бездепозитных бонусов казино, Вы сможете у нас на веб-сайте в разделе с призами либо на официальном веб-сайте выбранного Вами казино. Если не отыскать необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электронной почте.
#8529 Charlesgunnyhttp://filmkachat.ru
1× slots регистрация в 1×slots casino
Возможность протестировать новые игры, не рискуя собственными средствами и разработать личную стратегию игры.Для верификации номера аппарата, в личном профиле изберите опцию „Подтвердить номер телефонного“ и введите в подходящее поле код, приобретенный в sms-сообщении. <a href=http://filmkachat.ru/>1хслот скачать</a> Каждый новичок и умелый игрок мечтают прытко стартануть и начать делать настоящие ставки. Для сего довольно отобрать подарок, за кот-ый не нужно платить. В зависимости от игровой платформы, нужно сделать профиль, привязать email или аппарат. После этого администрация начисляет щедрое вознаграждение вид безвозмездных вращений или виртуальных кредитов. <a href=https://www.khedmeh.com/wall/blogs/post/71396>https://www.khedmeh.com/wall/blogs/post/71396</a> Для получения предоставленных бонусов для пригодиться — ПК либо мобильное устройство, и остальное дело за небольшим. 1 хслот регистрация в 1×slots casino <a href=http://messmangler.com/forums/member.php?action=profile&uid=2549>http://messmangler.com/forums/member.php?action=profile&uid=2549</a> Такой безвозмездный эквивалент средств зачисляется на профиль пользователя последствии воплощения требований и предназначаются они лишь для игрового процесса. Вывод таких вознаграждений вероятен лишь после воплощения вейджеровых условий.Максимальный объем ставки, кот-ый невозможно превышать же бонус не несомненно всецело отыгран. В случае нарушения сего правила, приз и выигрыш с него станут аннулированы.
1×slots casino online регистрация
<a href=http://link.5nx.ru/memberlist.php?mode=viewprofile&u=600>1хслотс зеркало на сегодня</a> 1хслотс зеркало на сегодня Да, у бесплатных бонусов есть дефекты. Прежде всего, они обыкновенно не. Кроме такого, условия вейджера по ним постоянно жесткие. Но все отсутствие риска проделывает их очень красивыми для клиентов. <a href=http://blackpearlbasketball.com.au/index.php?option=com_k2&view=itemlist&task=user&id=865844>http://blackpearlbasketball.com.au/index.php?option=com_k2&view=itemlist&task=user&id=865844</a> 1хлот регистрация в 1×slots casino При отыгрыше бонусных средств, необходимо учитывать срок деяния приза и время, которое дается на отыгрыш. По истечению заявленного медли, не отыгранный бонус будет аннулирован.
рабочее зеркало 1×slots
Автоматы неспроста числятся наиболее популярным азартным отдыхом. Чтобы освоить управление и верховодила, потребуется всего несколько минут. Ваша задача сделать ставку, определить число трудящихся линий и возможно вертеть тамбур. Если на выпадет выигрышная композиция – вы выиграли! С данной задачей вас помогут справится бездепозитные призы казино.Но а случае вы теснее профи по интернет казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в интернет казино; Бездепозитный приз казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в этом и содержится главное отличие.Казино выделяет возможность заработать и вывести настоящие средства на бездепозитных призах. Обычно, это незначительная сумма, коию казино может себя позволить презентовать игроку. <a href=http://www.cdlxjy.cn/home.php?mod=space&uid=3538399&do=profile>http://www.cdlxjy.cn/home.php?mod=space&uid=3538399&do=profile</a> Некоторые казино имеют предлагать клиентам бездепы за свидетельство номера либо почты или репост на страничку в социальных сетях. 1×slots casino зеркало рабочее Также, учите, собственно бездепозитный приз можно исключить только в случае, когда станут исполнены все обстоятельства отыгрыша.
1хслотс регистрация в 1×slots casino
Бездепы обыкновенно предлагают с отыгрышем — моментально вывести выигранные свои невозможно. Перевод денег со счета несомненно возможен в того, как юзер выполнит все требования казино, а сумма не может быть выше установленного правилами лимита. Условиями акции фиксируются сроки, на коих заказчик вправе пользоваться предложением. Обычно они не превосходят нескольких дней в активации.Список так называемых «запрещенных территорий» прилагается к правилам бонусной программки игорного портала. Обязательно выясните, распространяются ли на вас подобные наказания. Эффективность бездепов в качестве маркетингового инструмента оценили почти операторы. Малоизвестные площадки употребляют эти промоакции, чтобы быстро набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны неизменных гостей. Не все веб-сайты, дающие презенты без депозита, рекомендованы к ирге. За симпатичным промоописанием могут скрываться неосуществимые условия отыгрыша и подводные камни.Постарайтесь отыграть вейджер, дабы была вероятность забыть заявку на выплату. Кстати, на всех веб-сайтах, представленных в перечне, доступны современные платёжные приборы. Вы сможете получить выигрыш на электрической кошелёк, карту, телефонный. 1хслотс 1хслотс регистрация перейти на 1×slots <a href=https://eco-kamchatka.ru/user/ChrisTic/>https://eco-kamchatka.ru/user/ChrisTic/</a> Рассмотрим принцип его действия на образце. Допустим, вы зарегались и возымели $10 not the slightest down payment bonus с вейджером х50. Это означает, собственно выигранные деньги можно несомненно выводить не ранее, чем после такого, как общая сумма ставок достигнет $500.Получить Бездепозитный бонус в онлайн казино дело 2-ух кликов. Другой момент, отыграть промо и соблюсти верховодила и обстоятельства отыгрыша. Под правилами подразумевается не вагер, но и лимитирования по наибольшей ставке. Мы понимаем, собственно в кино все ставят на зеро и выигрывают. Призываем не создавать сходственного. Перед активацией приза прочтите управляла. Узнайте следующие факторы: Условия получения дара, за регистрацию, за депо и прочее. Ограничения по максимальной ставке. Зачастую не выше 350 рублей. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вращать автоматы, а вагер несомненно стоять на пространстве. Поэтому главно знать, в каких забавах возможно совершать кратность денежного оборота.
1×slots зеркало этих способов предполагает регистрацию
К примеру, игроку выдаются бесплатные свои в заведении в объеме пятидесяти или 100 долларов (вейджер на коие составляет 100х). То есть, любому новоприбывшему игроку выскакивает манящая иллюстрация, кот-ая сулит выплату всех зачисленных фирмой средств. Не стоит внимания на казино приз за регистрацию без депо с чрезмерно немалый либо очень малюсенькой суммой призов, потому что, том тщательно исследовав все обстоятельства, здесь скорее, будет некий подкол. Баланс игрока дополняется на соответствующую необходимую. К ней применяется вейджер, указанный в правилах акции. Вывести выигрыш возможно будет в как, как юзер сделает требуемый объем ставок из личных средств. В редчайших случаях бездеп работает в формате Free Play. На счет пользователя зачисляется крупная сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по окончании этого периода сумма на счету несомненно превышать первоначальную, то разность можно несомненно вывести либо использовать для последующих ставок. <a href=http://zqykj.com/bbs/home.php?mod=space&uid=256421>http://zqykj.com/bbs/home.php?mod=space&uid=256421</a> 1×slots актуальное зеркало Не рекомендуем опрометью голову хвататься за всевозможные предложения получения средств без инвестициям. Вполне вполне, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем выглядит на первый взгляд. Альтернативой является казино бонус за депо. Мы предлагаем для пару советов, спасибо коим у каждого игрока будет вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом денег:При верном подходе бездепы — это прекрасный способ выступать на деньги без растраты личных средств. Есть количество советов, следуя коим возможно извлечь максимально полезности из сходственных промоакций казино. Играть идет только на лицензированных площадках. Скриптовые веб-сайты не только обманывают с бонусными предложениями, хотя и используют пиратский софт с измененным ГСЧ. Выиграть на таких автоматах невозможно.
<b>Смотреть еще похожие новости:</b>
<a href=https://persiankittencat.com/grey-persian-cats-unraveling-the-charm-of-these-feline-beauties/#comment-40301>1× slots casino зеркало</a>
<a href=http://maddog-server.org/forum/showthread.php?tid=53293>1×slots зеркало этих способов предполагает регистрацию</a>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=129197>1хлот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В качестве бонусов онлайн казино часто предлагает выдачу фриспинов, словами бесплатных вращений игрового барабана. Виртуальные монеты можно применять для обучения в покерной школе или для игры в казино.
#8530 Charlesgunnyhttp://filmkachat.ru
смс накрутка телеграм накрутка подписчиков телеграм канала 100000 живых накрутка телеграм канала живые накрутка ботов в телеграм <a href=https://smmstay.xyz>Накрутка просмотров телеграм</a> приложение для накрутки лайков в телеграм накрутка комментариев в телеграм канал бесплатно накрутка жалоб на телеграм канал накрутка онлайна телеграм накрутка подписчиков в телеграм живые бесплатно накрутка комментариев в телеграм канале накрутка подписчиков в телеграм канал бесплатно
#8531 Charlesgunnyhttp://filmkachat.ru
накрутка активных подписчиков в телеграм бесплатно сделать накрутку просмотров в телеграм бустклик скрипт накрутки просмотров телеграм канал накрутка просмотров на пост в телеграм бустклик <a href=https://smmstay.xyz>Поставщик Телеграм</a> телеграмм потпищ накрутка подписчиков телеграм бесплатно накрутка подписчиков телеграм бесплатно smmnakrutka Просмотры лесенкой телеграм накрутка просмотров телеграм на месяц накрутка лайков в телеграм на пост телеграмме накрутка в телеграм чат бесплатно накрутка просмотров в телеграме бустклик
#8532 Charlesgunnyhttp://filmkachat.ru
накрутка бустов телеграм телеграм накрутка тгракета накрутка подписчиков телеграм бесплатно без регистрации телеграмм бот для накрутки подписчиков в телеграм <a href=https://smmstay.xyz>Накрутка Telegram</a> накрутка подписчиков телеграм чаты проверка телеграм канала на накрутку накрутка ботов в телеграм накрутка телеграм опрос бесплатно накрутка комментариев в телеграм сммпуш накрутка комментариев в телеграм канале накрутка активности в телеграм
#8533 Ремонт электровелосипедовhttps://remont-elektrovelosipedov-gem.ru/
Наши специалисты предлагает профессиональный <a href=https://remont-elektrovelosipedov-gem.ru/>центр ремонта электровелосипеда адреса</a> всех типов и брендов. Мы знаем, насколько необходимы вам ваши электрические велосипеды, и готовы предложить сервис наилучшего качества. Наши профессиональные техники проводят ремонтные работы с высокой скоростью и точностью, используя только оригинальные запчасти, что гарантирует длительную работу выполненных работ. Наиболее частые неисправности, с которыми сталкиваются обладатели электробайков, включают неисправную батарею, неисправности двигателя, неисправный контроллер, неисправности тормозной системы и механические повреждения. Для устранения этих поломок наши квалифицированные специалисты выполняют ремонт батарей, двигателей, контроллеров, тормозных систем и механических компонентов. Обращаясь в наш сервисный центр, вы обеспечиваете себе надежный и долговечный центр ремонта электровелосипедов на дому. Подробная информация доступна на сайте: https://remont-elektrovelosipedov-gem.ru
#8534 Charlesgunnyhttp://filmkachat.ru
подписчики в телеграм канал накрутка не уходит телеграм накрутка тгракета накрутка просмотров телеграм инстаграм бустклик самый популярный сайт для накрутки подписчиков телеграм <a href=https://smmstay.xyz>Накрутка просмотров телеграм</a> накрутка просмотров телеграм на месяц накрутка живых людей в телеграм накрутка подписчиков телеграм канала бесплатно для телеграмм накрутка реакций на пост в телеграм премиум накрутка ботов в телеграм чат проверка телеграм канала на накрутку накрутка 10 просмотров в телеграм канале бесплатно
#8535 Ремонт холодильников в Москвеhttps://remont-holodilnikov-lux.ru/
Наша мастерская предлагает профессиональный <a href=https://remont-holodilnikov-lux.ru/>починить холодильник рядом</a> различных марок и моделей. Мы осознаем, насколько значимы для вас ваши холодильники, и готовы предложить сервис высочайшего уровня. Наши профессиональные техники проводят ремонтные работы с высокой скоростью и точностью, используя только качественные детали, что гарантирует длительную работу наших услуг. Наиболее общие проблемы, с которыми сталкиваются пользователи рефрижераторов, включают проблемы с охлаждением, проблемы с температурным датчиком, ошибки ПО, неработающие разъемы и поломки корпуса. Для устранения этих поломок наши квалифицированные специалисты оказывают ремонт компрессоров, термостатов, ПО, разъемов и механических компонентов. Обратившись к нам, вы обеспечиваете себе долговечный и надежный мастерская по ремонту холодильника в москве. Подробная информация представлена на нашем сайте: https://remont-holodilnikov-lux.ru
#8536 Charlesgunnyhttp://filmkachat.ru
плавная накрутка просмотров телеграм boostclick накрутка просмотров телеграм бесплатно накрутка пользователей в телеграм бесплатно накрутка просмотров на закрытый телеграм канал <a href=https://smmstay.xyz>Дешевая накрутка</a> скачать накрутку подписчиков в телеграм накрутка подписчиков в телеграм живые бесплатно накрутка boost телеграм накрутка подписчиков телеграм бесплатно smmnakrutka накрутка подписчиков в телеграм канал бесплатно онлайн накрутка телеграм канала накрутка комментариев в телеграм канале smm media
#8537 Charlesgunnyhttp://filmkachat.ru
Дешевая накрутка накрутка рефералов телеграм программа для накрутки подписчиков в телеграм бустклик накрутка ботов в телеграм канал дешево <a href=https://smmstay.xyz>Поставщик Телеграм</a> накрутка телеграм платно скрипты для накрутки телеграм онлайн накрутка телеграм канала накрутка подписчиков тик ток телеграм накрутка подписчиков в телеграм 1575 бесплатно накрутка постов в телеграм накрутка живых просмотров в телеграм бустклик
#8538 Charlesgunnyhttp://filmkachat.ru
накрутка ботов в телеграм чат накрутка в телеграм чат бесплатно накрутка подписчиков канал в телеграме накрутка репостов телеграм <a href=https://smmstay.xyz>Дешевая накрутка</a> накрутка подписчиков телеграм 100 подписчиков накрутка просмотров в телеграм 100 накрутка комментариев в телеграм канале smm media накрутка реакций в телеграм бесплатно накрутка подписчиков в телеграм тгракета накрутка подписчиков лайки бесплатно телеграм быстрая накрутка подписчиков в телеграм канал
#8539 Charlesgunnyhttp://filmkachat.ru
накрутка лайков истории телеграм плавная накрутка просмотров телеграм boostclick медленная накрутка подписчиков телеграм накрутка реакций на пост в телеграм <a href=https://smmstay.xyz>Накрутка Телеграм</a> бесплатная накрутка подписчиков телеграм без наебалово бесплатная накрутка подписчиков телеграм без наебалово накрутка просмотров в телеграме накрутка подписчиков канал в телеграме просмотры и реакции в телеграм накрутка накрутка подписчиков в телеграме живых бесплатно сделать накрутку просмотров в телеграм бустклик
#8540 Charlesgunnyhttp://filmkachat.ru
накрутка подписчиков в группу телеграм сервисы для накрутки подписчиков в телеграм накрутка лайков в телеграм на пост телеграмме накрутка телеграм премиум <a href=https://smmstay.xyz>Дешевая накрутка</a> приложение по накрутке подписчиков в телеграм boostclick Дешевая накрутка накрутка друзей телеграм бесплатная накрутка рефералов в телеграм бот для накрутки жалоб на телеграм канал фанпей телеграм накрутка премиум голоса телеграм накрутка бесплатно
#8541 Charlesgunnyhttp://filmkachat.ru
накрутка подписчиков в телеграм накрутка телеграм канала живые накрутка через телеграм накрутка премиум голосов телеграм канал <a href=https://smmstay.xyz>Просмотры лесенкой телеграм</a> Накрутка просмотров телеграм накрутка boost телеграм накрутка подписчиков в телеграм бесплатно без заданий телеграм боты накрутка дешево бесплатная накрутка телеграм без заданий накрутка онлайна телеграм накрутка подписчиков телеграм канала prtut
#8542 Charlesgunnyhttp://filmkachat.ru
накрутка подписчиков телеграм 100 подписчиков телеграм бот накрутка инстаграм Поставщик Телеграм накрутка лайков в телеграме boostclick <a href=https://smmstay.xyz>Накрутка Telegram</a> накрутка подписчиков на пост в телеграм бесплатно просмотры и реакции в телеграм накрутка бесплатная накрутка премиум реакций в телеграм канал бот для накрутки просмотров в телеграм бот для накрутки реакций в телеграм накрутка телеграм топ просмотры и реакции в телеграм накрутка
#8543 Charlesgunnyhttp://filmkachat.ru
лучшие сайты для накрутки подписчиков в телеграм сервисы накрутки подписчиков в телеграм smmpush накрутка премиум подписчиков в телеграм накрутка просмотров в телеграм канал бустклик <a href=https://smmstay.xyz>Накрутка просмотров телеграм</a> просмотры и реакции в телеграм накрутка накрутка просмотров в телеграм 100 накрутка голосов телеграм накрутка подписчиков телеграм канал бесплатно по ссылке накрутка подписчиков телеграм без отписок канал живых накрутка пользователей в телеграм канал бесплатно накрутка реакций в телеграм канале
#8544 Charlesgunnyhttp://filmkachat.ru
накрутка подписчиков телеграм 5 минут канал накрутка настоящих подписчиков в телеграм канале накрутка пользователей в телеграм бота быстрая накрутка подписчиков в телеграм канал <a href=https://smmstay.xyz>Накрутка просмотров телеграм</a> плавная накрутка подписчиков в телеграм накрутка подписчиков телеграм бесплатно без регистрации телеграм накрутка тгракета программа для накрутки подписчиков в телеграм накрутка подписчиков в телеграме живых бесплатно премиум голоса телеграм накрутка бесплатно сервисы накрутки подписчиков в телеграм smmpush
#8545 Charlesgunnyhttp://filmkachat.ru
приложение по накрутке подписчиков в телеграм boostclick приложение для накрутки лайков в телеграм накрутка подписчиков в телеграм канал бесплатно ботов накрутка комментариев в телеграм канале <a href=https://smmstay.xyz>Накрутка Telegram</a> накрутка коинов в телеграм хамстер комбат накрутка эмоций телеграм накрутка подписчиков телеграм бесплатно по ссылке накрутка комментариев в телеграм сммпуш накрутка просмотров историй телеграм бустклик накрутка подписчиков в телеграм канал бесплатно сервисы для накрутки подписчиков в телеграм
#8546 Charlesgunnyhttp://filmkachat.ru
накрутка реакции телеграм попробовать бесплатно накрутка подписчиков телеграм бесплатно по ссылке накрутка подписчиков телеграм фанпей накрутка просмотров в телеграм канал бесплатно <a href=https://smmstay.xyz>Дешевая накрутка</a> накрутка телеграм тема гемблинг телеграм накрутка ру фанпей телеграм накрутка как остановить накрутку ботов в телеграм накрутка подписчиков телеграм канала prtut накрутка реакций телеграм читбот накрутка подписчиков телеграм бесплатно 5 минут
#8547 Charlesgunnyhttp://filmkachat.ru
телеграм дешевая накрутка просмотров boostclick сервисы накрутки ботов телеграм накрутка активных подписчиков в телеграм канал накрутка бустов телеграм канала <a href=https://smmstay.xyz>Накрутка Telegram</a> накрутка телеграм бесплатно smm накрутка комментариев в телеграм канале smm media накрутка подписчиков в телеграм канал бесплатно ботов накрутка бустов телеграм бесплатно бесплатная накрутка групп телеграм премиум голоса телеграм накрутка накрутка рефералов телеграм
#8548 Charlesgunnyhttp://filmkachat.ru
накрутка тик ток телеграм бот для накрутки подписчиков в телеграм накрутка подписчиков в телеграм тг бесплатно сервисы накрутки ботов телеграм <a href=https://smmstay.xyz>Дешевая накрутка</a> накрутка просмотров телеграм на месяц накрутка участников в группу телеграм накрутка подписчиков телеграм реакции накрутка подписчиков в телеграм канал smmcrutca накрутка телеграм плавная накрутка просмотров телеграм быстрая накрутка подписчиков в телеграм канал
#8549 Ремонт фотовспышекhttps://remont-fotovspyshek-job.ru/
Наша мастерская предлагает профессиональный <a href=https://remont-fotovspyshek-job.ru/>починить фотовспышка на дому</a> различных марок и моделей. Мы осознаем, насколько значимы для вас ваши фотовспышки, и готовы предложить сервис наилучшего качества. Наши квалифицированные специалисты работают быстро и аккуратно, используя только качественные детали, что предоставляет долговечность и надежность наших услуг. Наиболее распространенные поломки, с которыми сталкиваются владельцы фотовспышек, включают неисправности зарядного устройства, проблемы с лампой, программные сбои, неисправности синхронизатора и неисправности разъемов. Для устранения этих неисправностей наши профессиональные техники выполняют ремонт зарядных устройств, ламп, ПО, синхронизаторов и разъемов. Обратившись к нам, вы получаете качественный и надежный сервис ремонта фотовспышки с гарантией. Подробная информация представлена на нашем сайте: https://remont-fotovspyshek-job.ru
#8550 Charlesgunnyhttp://filmkachat.ru
накрутка реакций на комментарий телеграм накрутка подписчиков телеграм купить дешево накрутка просмотров телеграм на месяц накрутка старт бота телеграм <a href=https://smmstay.xyz>Поставщик Телеграм</a> накрутка подписчиков в телеграм живые бесплатно телеграм дешевая накрутка просмотров boostclick накрутка комментариев в телеграм бустклик накрутка лайков по заданию телеграм накрутка просмотров в телеграме boostclick накрутка подписчиков телеграм без отписок канал живых самый популярный сайт для накрутки подписчиков телеграм
#8551 Charlesgunnyhttp://filmkachat.ru
самая дешевая накрутка телеграм накрутка подписчиков телеграм канала 100000 живых накрутка подписчиков через телеграм скрипт для накрутки подписчиков в телеграм <a href=https://smmstay.xyz>Накрутка Телеграм</a> накрутка комментариев в телеграм канале бустклик накрутка подписчиков и лайков в телеграм негативные реакции в телеграм накрутка бесплатно накрутка просмотров телеграм бесплатно накрутка друзей телеграм премиум голоса телеграм накрутка бесплатно бот для накрутки подписчиков в телеграм
#8552 Charlesgunnyhttp://filmkachat.ru
накрутка подписчиков в телеграм бесплатно накрутка подписчиков телеграм топ накрутка голосов в телеграме самый популярный сайт для накрутки подписчиков телеграм <a href=https://smmstay.xyz>Накрутка просмотров телеграм</a> накрутка реакций телеграм программа для накрутки подписчиков в телеграм boostclick приложение для накрутки лайков в телеграм boostclick накрутка телеграм бесплатно живых накрутка телеграм платно накрутка просмотров телеграм инстаграм бустклик накрутка настоящих подписчиков в телеграм канале
#8553 Charlesgunnyhttp://filmkachat.ru
накрутка подписчиков телеграм отзывы бесплатная накрутка рефералов в телеграм накрутка телеграм скачать сервисы накрутки подписчиков в телеграм smmpush <a href=https://smmstay.xyz>Поставщик Телеграм</a> телеграмм бот для накрутки подписчиков в телеграм фанпей телеграм накрутка накрутка заявок в телеграм телеграм бот накрутка вк накрутка подписчиков в телеграм канал бесплатно накрутка подписчиков телеграм тг накрутка в телеграм чат бесплатно
#8554 Charlesgunnyhttp://filmkachat.ru
боты для голосования в телеграм накрутка сервисы для накрутки подписчиков в телеграм накрутка тикток телеграм накрутка подписчиков телеграм 50 <a href=https://smmstay.xyz>Накрутка просмотров телеграм</a> накрутка активных подписчиков в телеграм канал банят ли телеграм за накрутку телеграм накрутка тгракета накрутка телеграм бесплатно заданий накрутка потпишеков в телеграме бесплатна накрутка просмотров телеграм канал живых накрутка потпишеков в телеграме бесплатна
#8555 Charlesgunnyhttp://filmkachat.ru
накрутка подписчиков телеграм бесплатно 5 минут телеграм дешевая накрутка просмотров boostclick накрутка просмотров в телеграм канал 50 просмотров накрутка телеграм комплексное продвижение <a href=https://smmstay.xyz>Дешевая накрутка</a> бесплатная накрутка телеграм без заданий накрутка эмоций телеграм накрутка просмотров в телеграм канал бесплатно накрутка тикток телеграм накрутка просмотров в телеграм канал быстрый старт голоса для канала телеграм накрутка софт для накрутки просмотров в телеграм бустклик
#8556 Charlesgunnyhttp://filmkachat.ru
проверка телеграм канала на накрутку программа для накрутки подписчиков в телеграм телеграмм потпищ накрутка подписчиков телеграм бесплатно накрутка подписчиков в телеграм тгракета <a href=https://smmstay.xyz>Поставщик Телеграм</a> приложение для накрутки лайков в телеграм boostclick накрутка рефералов телеграм накрутка подписчиков канал в телеграме самая дешевая накрутка телеграм накрутка подписчиков телеграм реакции накрутка подписчиков в телеграм smm media накрутка подписчиков телеграм топ
#8557 Charlesgunnyhttp://filmkachat.ru
накрутка реакций на комментарии телеграм онлайн накрутка просмотров в телеграме бустклик накрутка подписчиков телеграм купить дешево накрутка телеграм без регистрации <a href=https://smmstay.xyz>Накрутка Телеграм</a> накрутка подписчиков в телеграме живых бесплатно накрутка подписчиков телеграм канал 5 подписчиков накрутка просмотров в телеграм канал накрутка телеграм премиум плавная накрутка просмотров телеграм boostclick накрутка активности в телеграм накрутка просмотров в телеграм канал бесплатно онлайн
#8558 Charlesgunnyhttp://filmkachat.ru
накрутка коинов в телеграм хамстер комбат накрутка голосов телеграм голосование накрутка рефералов по ссылке телеграм бесплатно накрутка бесплатная тест телеграм <a href=https://smmstay.xyz>Поставщик Телеграм</a> сделать накрутку просмотров в телеграм бустклик накрутка подписчиков телеграм бесплатно 5 минут накрутка подписчиков телеграм 50 накрутка телеграм smmlaba накрутка в телеграм канал комментарии живые бесплатно накрутка просмотров в телеграме накрутка подписчиков в телеграм живые бесплатно
#8559 Charlesgunnyhttp://filmkachat.ru
накрутка подписчиков в телеграм канал бесплатно ботов бесплатная накрутка телеграм без заданий накрутка просмотров телеграм инстаграм бустклик накрутка просмотров и подписчиков в телеграм бесплатно <a href=https://smmstay.xyz>Накрутка Телеграм</a> накрутка реальных подписчиков в телеграм канал накрутка лайков в телеграм накрутка телеграм топ накрутка подписчиков телеграм канал бесплатно по ссылке накрутка лайков в телеграм накрутка подписчиков телеграм реакции накрутка подписчиков телеграм 50
#8560 Charlesgunnyhttp://filmkachat.ru
накрутка ботов в телеграм чат накрутка подписчиков в телеграме живых бесплатно сайт для накрутки телеграм накрутка 10 реакций в телеграм канале <a href=https://smmstay.xyz>Дешевая накрутка</a> приложение по накрутке подписчиков в телеграм boostclick накрутка реакции телеграм попробовать бесплатно накрутка подписчиков телеграм купить дешево накрутка онлайна телеграм накрутка телеграм комплексное продвижение накрутка подписчиков телеграм без отписок накрутка подписчиков телеграм канала бесплатно для телеграмм
#8561 Charlesgunnyhttp://filmkachat.ru
Просмотры лесенкой телеграм накрутка реакций в телеграм бесплатно накрутка реакций на пост в телеграм телеграм накрутка ру <a href=https://smmstay.xyz>Накрутка Телеграм</a> накрутка участников в группу телеграм сервис по накрутке реакций в телеграм накрутка подписчиков в телеграм тгракета боты для накрутки подписчиков в телеграм канале накрутка подписчиков телеграм бесплатно без регистрации накрутка активности в телеграм бесплатная накрутка рефералов в телеграм
#8562 Charlesgunnyhttp://filmkachat.ru
купить накрутку телеграм накрутка подписчиков в телеграм канал бесплатно активных накрутка пользователей в телеграм бота негативные реакции в телеграм накрутка бесплатно <a href=https://smmstay.xyz>Накрутка Telegram</a> накрутка 10 подписчиков в телеграм накрутка коинов в телеграм хамстер комбат накрутка телеграм аудитории в телеграмм бесплатно накрутка реакций в телеграм канале лучшие сайты для накрутки подписчиков в телеграм бесплатная накрутка премиум реакций в телеграм канал самый популярный сайт для накрутки подписчиков телеграм
#8563 Charlesgunnyhttp://filmkachat.ru
скрипт накрутки просмотров телеграм канал накрутка реакций в телеграм бесплатно накрутка подписчиков телеграм тг накрутка телеграм опрос бесплатно <a href=https://smmstay.xyz>Накрутка Телеграм</a> накрутка просмотров телеграм инстаграм накрутка голосов телеграм голосование накрутка комментариев в телеграм boostclick накрутка подписчиков телеграм купить дешево накрутка телеграм накрутка постов в телеграм накрутка просмотров телеграм канал живых
#8564 Charlesgunnyhttp://filmkachat.ru
накрутка подписчиков в телеграм платно накрутка подписчиков в телеграм живые бесплатно накрутка пользователей в телеграм бота накрутка телеграм бот группы <a href=https://smmstay.xyz>Просмотры лесенкой телеграм</a> негативные реакции в телеграм накрутка накрутка реакций на комментарий телеграм накрутка boost телеграм онлайн накрутка просмотров телеграм накрутка просмотров в телеграм канал накрутка просмотров в телеграм канал быстрый старт накрутка телеграм канал бесплатно живых
#8565 Charlesgunnyhttp://filmkachat.ru
телеграм бот накрутка инстаграм накрутка просмотров в телеграме накрутка реакций на комментарий телеграм софт для накрутки просмотров в телеграм boostclick <a href=https://smmstay.xyz>Накрутка просмотров телеграм</a> боты для голосования в телеграм накрутка накрутка телеграм аудитории в телеграмм бесплатно накрутка живых просмотров в телеграм бустклик накрутка просмотров телеграм инстаграм бесплатная накрутка групп телеграм накрутка лайков по заданию телеграм бустклик бесплатная накрутка групп телеграм
#8566 Charlesgunnyhttp://filmkachat.ru
накрутка подписчиков телеграм канала prtut накрутка телеграм бесплатно живых телеграм бот накрутка вк сайт для накрутки телеграм <a href=https://smmstay.xyz>Поставщик Телеграм</a> накрутка подписчиков телеграм фанпей накрутка опросов телеграм накрутка 10 просмотров в телеграм канале бесплатно живая накрутка телеграм негативные реакции в телеграм накрутка бесплатно накрутка ботов в телеграм накрутка телеграм канала
#8567 Charlesgunnyhttp://filmkachat.ru
проверка телеграм канала на накрутку накрутка премиум голосов телеграм канал приложение по накрутке подписчиков в телеграм boostclick накрутка подписчиков в телеграм канал <a href=https://smmstay.xyz>Дешевая накрутка</a> накрутка ботов в телеграм канал дешево накрутка подписчиков телеграм навсегда бот для накрутки реакций в телеграм канале телеграм боты накрутка дешево накрутка просмотров телеграм скрипты для накрутки телеграм сервис по накрутке реакций в телеграм
#8568 Ремонт тепловизоровhttps://remont-teplovizorov-gem.ru/
Наш сервисный центр предлагает высококачественный <a href=https://remont-teplovizorov-gem.ru/>сервисный ремонт тепловизора с гарантией</a> всех типов и брендов. Мы осознаем, насколько важны для вас ваши тепловизоры, и стремимся предоставить услуги наилучшего качества. Наши квалифицированные специалисты работают быстро и аккуратно, используя только сертифицированные компоненты, что обеспечивает долговечность и надежность выполненных работ. Наиболее распространенные поломки, с которыми сталкиваются обладатели устройств теплового видения, включают неработающие сенсоры, поврежденные линзы, ошибки ПО, неработающие разъемы и механические повреждения. Для устранения этих поломок наши квалифицированные специалисты выполняют ремонт матриц, оптики, ПО, разъемов и механических компонентов. Доверив ремонт нам, вы получаете долговечный и надежный официальный ремонт тепловизоров. Подробная информация размещена на сайте: https://remont-teplovizorov-gem.ru
#8569 Charlesgunnyhttp://filmkachat.ru
стоимость накрутки подписчиков в телеграм боты для голосования в телеграм накрутка накрутка подписчиков в телеграм канал бесплатно программа для накрутки подписчиков в телеграм бустклик <a href=https://smmstay.xyz>Накрутка Телеграм</a> накрутка телеграм бесплатно заданий накрутка подписчиков и лайков в телеграм накрутка просмотров телеграм инстаграм фанпей телеграм накрутка накрутка лайков на пост телеграм бустклик скрипт для накрутки подписчиков в телеграм накрутка подписчиков в телеграм
#8570 Charlesgunnyhttp://filmkachat.ru
накрутка ботов в телеграм канал накрутка подписчиков лайки бесплатно телеграм накрутка заявок в телеграм накрутка подписчиков в группу телеграм <a href=https://smmstay.xyz>Дешевая накрутка</a> накрутка подписчиков в телеграм smm накрутка бустов телеграм канала накрутка заявок в телеграм накрутка в телеграме накрутка телеграм без регистрации накрутка подписчиков в телеграм бесплатно без заданий накрутка подписчиков в телеграм канал живых
#8571 Charlesgunnyhttp://filmkachat.ru
накрутка подписчиков телеграм бесплатно без регистрации накрутка рефералов по ссылке телеграм бесплатно накрутка участников в группу телеграм накрутка подписчиков телеграм без отписок <a href=https://smmstay.xyz>Поставщик Телеграм</a> накрутка лайков в инстаграм телеграм бустклик накрутка лайков на пост телеграм накрутка премиум голосов телеграм канал накрутка подписчиков телеграм канала бесплатно для телеграмм накрутка пользователей в телеграм бота накрутка бустов телеграм Накрутка Telegram
#8572 Charlesgunnyhttp://filmkachat.ru
накрутка телеграм бесплатно живых бот для накрутки подписчиков в телеграм накрутка подписчиков телеграм бесплатно без регистрации накрутка реакций в телеграм канале <a href=https://smmstay.xyz>Дешевая накрутка</a> накрутка телеграм сервисы накрутка комментариев в телеграм канале boostclick программа для накрутки подписчиков в телеграм boostclick накрутка ботов в телеграм канал дешево накрутка голосов телеграм голосование бесплатная накрутка телеграм без заданий премиум голоса телеграм накрутка бесплатно
#8573 Hubertnuankhttps://serviceorangecounty.com
Reliable HVAC Repair Services <a href=https://serviceorangecounty.com/>https://serviceorangecounty.com</a> stay comfortable year-round with our professional HVAC repair services. Our experienced team is dedicated to diagnosing and resolving heating, cooling, and ventilation issues quickly and effectively.
#8574 Charlesgunnyhttp://filmkachat.ru
купить накрутку телеграм сервисы накрутки ботов телеграм телеграмм бот для накрутки подписчиков в телеграм накрутка лайков на пост телеграм <a href=https://smmstay.xyz>Дешевая накрутка</a> накрутка репостов телеграм накрутка телеграм канала онлайн накрутка телеграм канала накрутка просмотров на закрытый телеграм канал быстрая накрутка подписчиков в телеграм канал бесплатная накрутка телеграм канала smm телеграм накрутка
#8575 Charlesgunnyhttp://filmkachat.ru
софт накрутки телеграм защита от накрутки ботов в телеграм купить накрутку телеграм программа для накрутки просмотров в телеграм boostclick <a href=https://smmstay.xyz>Просмотры лесенкой телеграм</a> накрутка активности в телеграм накрутка реакций телеграм читбот скрипты для накрутки телеграм бот для накрутки просмотров в телеграм накрутка подписчиков телеграм 5 минут канал онлайн накрутка просмотров телеграм накрутка пользователей в телеграм канал бесплатно
#8576 Ремонт тепловизоровhttps://remont-teplovizorov-gem.ru/
Наши специалисты предлагает профессиональный <a href=https://remont-teplovizorov-gem.ru/>официальный ремонт тепловизоров адреса</a> различных марок и моделей. Мы знаем, насколько значимы для вас ваши инфракрасные камеры, и обеспечиваем ремонт высочайшего уровня. Наши профессиональные техники работают быстро и аккуратно, используя только качественные детали, что предоставляет долговечность и надежность выполненных работ. Наиболее распространенные поломки, с которыми сталкиваются обладатели устройств теплового видения, включают проблемы с изображением, проблемы с линзами, неисправности программного обеспечения, неисправности разъемов и повреждения корпуса. Для устранения этих неисправностей наши квалифицированные специалисты проводят ремонт матриц, оптики, ПО, разъемов и механических компонентов. Обращаясь в наш сервисный центр, вы получаете качественный и надежный центр ремонта тепловизоров с гарантией. Подробная информация размещена на сайте: https://remont-teplovizorov-gem.ru
#8577 Charlesgunnyhttp://filmkachat.ru
беспланая накрутка подписчиков в телеграме накрутка живых людей в телеграм накрутка телеграм тема гемблинг накрутка просмотров на пост в телеграм бустклик <a href=https://smmstay.xyz>Дешевая накрутка</a> накрутка комментариев в телеграм boostclick накрутка лайков по заданию телеграм Накрутка Телеграм накрутка просмотров на пост в телеграм boostclick накрутка живых людей в телеграм накрутка подписчиков через телеграм накрутка русских подписчиков в телеграм
#8578 Charlesgunnyhttp://filmkachat.ru
накрутка 10 просмотров в телеграм канале бесплатно самый популярный сайт для накрутки подписчиков телеграм телеграм бот накрутка инстаграм накрутка телеграм дешево <a href=https://smmstay.xyz>Накрутка Telegram</a> софт для накрутки подписчиков в телеграм накрутка телеграм накрутка телеграм топ накрутка реакций в телеграм канал бесплатно онлайн накрутка подписчиков канал в телеграме накрутка подписчиков телеграм бесплатно по ссылке накрутка телеграм smmlaba
#8579 Charlesgunnyhttp://filmkachat.ru
накрутка подписчиков телеграм канал 5 подписчиков бесплатная накрутка 1000 подписчиков в телеграм накрутка подписчиков телеграм канала prtut накрутка просмотров на пост телеграм от 50 <a href=https://smmstay.xyz>Накрутка Telegram</a> накрутка заявок в телеграм накрутка реакций на комментарий телеграм плавная накрутка подписчиков в телеграм Просмотры лесенкой телеграм накрутка ботов в телеграм канал накрутка 10 подписчиков в телеграм накрутка бесплатная тест телеграм
#8580 Charlesgunnyhttp://filmkachat.ru
телеграм боты накрутка дешево накрутка лайков в телеграме boostclick накрутка голосов телеграм голосование накрутка в телеграм канал комментарии живые бесплатно <a href=https://smmstay.xyz>Дешевая накрутка</a> фанпей телеграм накрутка накрутка голосов в телеграм канале бесплатно программа для накрутки подписчиков в телеграм boostclick телеграм бот накрутка инстаграм накрутка живых просмотров в телеграм бустклик фото батл накрутка телеграм накрутка лайков в инстаграм телеграм бустклик
#8581 ArmandoRuiff
get clomid tablets: <a href=" https://clomid.store/ ">get clomid no prescription</a> – cost cheap clomid now
#8582 Michaelreons
lisinopril 2.5 mg cost <a href=" http://www.donggoudi.com/home.php?… „>buy lisinopril online no prescription india</a> or <a href=“ https://images.google.ad/url?… ">zestoretic tabs</a> http://7ba.ru/out.php?… lisinopril canada <a href=http://marcina.net/info.php?a[>=<a+href=http://lisinoprilus.com/>generic+cialis</a>]lisinopril tab 100mg</a> lisinopril canada and <a href=https://103.94.185.62/home.php?mod=space&uid=985153>generic lisinopril 5 mg</a> lisinopril 25 mg cost
#8583 Charlesgunnyhttp://filmkachat.ru
накрутка просмотров в телеграм канал бустклик накрутка реакций телеграм https cheatbot ru накрутка лайков на пост телеграм бустклик smmcrutca накрутка телеграм <a href=https://smmstay.xyz>Накрутка просмотров телеграм</a> накрутка реакций в телеграм канале софт накрутки телеграм накрутка подписчиков в телеграм бесплатно без заданий накрутка комментариев в телеграм бустклик накрутка целевых подписчиков в телеграм накрутка просмотров телеграм инстаграм бустклик бесплатная накрутка премиум реакций в телеграм канал
#8584 Charlesgunnyhttp://filmkachat.ru
как остановить накрутку ботов в телеграм накрутка boost телеграм безопасная накрутка подписчиков в телеграм накрутка в телеграм канал комментарии живые бесплатно <a href=https://smmstay.xyz>Накрутка Телеграм</a> накрутка телеграм без заданий накрутка подписчиков на пост в телеграм бесплатно накрутка телеграм без заданий накрутка просмотров на пост в телеграм boostclick накрутка бустов телеграм накрутка подписчиков телеграм канала prtut программа для накрутки подписчиков в телеграм
#8585 Charlesgunnyhttp://filmkachat.ru
накрутка подписчиков в телеграм smm media пф накрутка dailypfbot телеграм накрутка просмотров и подписчиков в телеграм бесплатно топ сервисов накрутки подписчиков в телеграм boostclick <a href=https://smmstay.xyz>Дешевая накрутка</a> беспланая накрутка подписчиков в телеграме плавная накрутка просмотров телеграм boostclick накрутка телеграм сервисы боты для накрутки подписчиков в телеграм канале накрутка русских подписчиков в телеграм накрутка подписчиков тик ток телеграм безопасная накрутка подписчиков в телеграм
#8586 Charlesgunnyhttp://filmkachat.ru
фанпей телеграм накрутка накрутка подписчиков телеграм 5 минут канал сервисы для накрутки подписчиков в телеграм накрутка премиум подписчиков в телеграм <a href=https://smmstay.xyz>Накрутка Telegram</a> накрутка реакций в телеграм канале бот для накрутки подписчиков в телеграм накрутка просмотров в телеграм канал быстрый старт бесплатная накрутка подписчиков телеграм без наебалово скрипт накрутки просмотров телеграм канал накрутка лайков в телеграм на пост телеграмме бесплатная накрутка телеграм канала
#8587 Charlesgunnyhttp://filmkachat.ru
накрутка просмотров на пост в телеграм boostclick Дешевая накрутка приложение для накрутки лайков в телеграм приложение для накрутки лайков в телеграм <a href=https://smmstay.xyz>Накрутка просмотров телеграм</a> накрутка просмотров в телеграм канал быстрый старт накрутка 10 подписчиков в телеграм скрипты для накрутки телеграм накрутка реакций на пост в телеграм бесплатно накрутка подписчиков телеграм бесплатно онлайн фото батл накрутка телеграм накрутка подписчиков телеграм бесплатно онлайн
#8588 Charlesgunnyhttp://filmkachat.ru
плавная накрутка просмотров телеграм boostclick телеграм бот накрутка вк накрутка в телеграм чат бесплатно накрутка активных подписчиков в телеграм канал <a href=https://smmstay.xyz>Накрутка просмотров телеграм</a> накрутка бустов телеграм бесплатно накрутка подписчиков в телеграм живые бесплатно накрутка подписчиков в телеграм канал живых накрутка телеграм накрутка телеграм бесплатно без регистрации телеграм бот накрутка инстаграм быстрая накрутка подписчиков в телеграм канал
#8589 Charlesgunnyhttp://filmkachat.ru
накрутка живых просмотров в телеграм бустклик лучшие сайты для накрутки подписчиков в телеграм накрутка подписчиков в телеграм бесплатно без заданий топ сервисов накрутки подписчиков в телеграм boostclick <a href=https://smmstay.xyz>Накрутка Телеграм</a> накрутка подписчиков телеграм капел онлайн накрутка просмотров телеграм smmcrutca накрутка телеграм телеграм дешевая накрутка просмотров boostclick реакции телеграмм накрутка телеграм накрутка живых людей в телеграм накрутка подписчиков в телеграм канал бесплатно активных
#8590 Charlesgunnyhttp://filmkachat.ru
накрутка телеграм бесплатно живых бесплатные реакции в телеграм канал накрутка Дешевая накрутка Накрутка Telegram <a href=https://smmstay.xyz>Накрутка просмотров телеграм</a> бот для накрутки просмотров в телеграм накрутка активности в телеграм софт для накрутки просмотров в телеграм бустклик накрутка целевых подписчиков в телеграм программа для накрутки подписчиков в телеграм boostclick накрутка просмотров в телеграм канал бустклик накрутка заявок в телеграм
#8591 Charlesgunnyhttp://filmkachat.ru
накрутка голосов телеграм голоса для канала телеграм накрутка накрутка подписчиков тик ток телеграм накрутка 10 подписчиков в телеграм <a href=https://smmstay.xyz>Поставщик Телеграм</a> накрутка реакций на пост в телеграм бесплатно накрутка подписчиков в телеграм smm накрутка телеграм бесплатно без регистрации бесплатная накрутка 1000 подписчиков в телеграм накрутка реальных подписчиков в телеграм бесплатно накрутка рефералов по ссылке телеграм бесплатно накрутка подписчиков тик ток телеграм
#8592 Charlesgunnyhttp://filmkachat.ru
накрутка подписчиков на закрытый телеграм канал накрутка реакций на пост в телеграм премиум накрутка телеграм канал бесплатно живых лучшие сайты для накрутки подписчиков в телеграм <a href=https://smmstay.xyz>Просмотры лесенкой телеграм</a> накрутка подписчиков в телеграм тг бесплатно накрутка телеграм аудитории накрутка лайков истории телеграм плавная накрутка подписчиков в телеграм бесплатная накрутка телеграм без заданий бесплатная накрутка подписчиков телеграм без наебалово программа для накрутки подписчиков в телеграм бустклик
#8593 Charlesgunnyhttp://filmkachat.ru
накрутка комментариев в телеграм канале бустклик накрутка просмотров в телеграм канал быстрый старт медленная накрутка подписчиков телеграм накрутка телеграм бесплатно без регистрации <a href=https://smmstay.xyz>Поставщик Телеграм</a> накрутка подписчиков в телеграме бесплатно накрутка удаленных аккаунтов в телеграм накрутка просмотров телеграм Накрутка Телеграм накрутка подписчиков в телеграме живых бесплатно смм накрутка просмотров телеграм бесплатно накрутка потпишеков в телеграме бесплатна
#8594 Charlesgunnyhttp://filmkachat.ru
накрутка бустов телеграм бесплатно накрутка постов в телеграм накрутка просмотров на пост в телеграм бустклик накрутка просмотров в телеграм канал бесплатно онлайн <a href=https://smmstay.xyz>Дешевая накрутка</a> накрутка телеграм бесплатно smm накрутка лайков в инстаграм телеграм бустклик накрутка просмотров телеграм инстаграм накрутка в телеграм канал комментарии живые бесплатно накрутка реальных подписчиков в телеграм канал стоимость накрутки подписчиков в телеграм накрутка boost телеграм
#8595 Robertontomhttps://kvartirukupitstore.ru
Продажа квартир <a href=https://kvartirukupitstore.ru/>https://kvartirukupitstore.ru</a> в новостройках Казани от застройщика: удобные планировки, современные жилые комплексы и прозрачные условия сделки.
#8596 Charlesgunnyhttp://filmkachat.ru
накрутка реальных подписчиков в телеграм бесплатно накрутка отзывов авито телеграм бот накрутка в телеграм чат бесплатно бот для накрутки реакций в телеграм <a href=https://smmstay.xyz>Накрутка Telegram</a> накрутка рефералов по ссылке телеграм бесплатно накрутка реакций на пост в телеграм премиум накрутка реакций на комментарий телеграм накрутка репостов телеграм бесплатно накрутка реакций телеграм читбот накрутка телеграм комплексное продвижение телеграмм бот для накрутки подписчиков в телеграм
#8597 Michailixshttps://dental-clinic.by/
Приветствую Вас господа<a href=https://dental-clinic.by/>.</a> <a href=https://dental-clinic.by/><img src=„https://i115.fastpic.org/big/2022/0409/b7/a62b0892aa684793ff522df2c6c0b3b7.jpg“></a> Есть такой интересный сайт для заказа услуг стоматологии в Минске.К вашим услугам лучшие стоматологи Минска с многолетним стажем.<a href=https://dental-clinic.by/>стоматология минск</a>,<a href=https://dental-clinic.by/>удаление зуба</a>, <a href=https://dental-clinic.by/>отбеливание зубов</a>,<a href=https://dental-clinic.by/>лечение зуба</a>,<a href=https://dental-clinic.by/>удаление зуба мудрости</a>,<a href=https://dental-clinic.by/>стоматология минск цены</a> и <a href=https://dental-clinic.by/>стоматология платные услуги минск</a>. Стоматология премиум-класса в Минске.Приветствуем Вас на официальном сайте стоматологической поликлиники в Минске. С 2008 года мы оказываем гражданам Беларуси, России, Украины, Казахстана, Германии, Англии и других стран СНГ и Европы стоматологические услуги высокого качества.Наша стоматология работает ежедневно и находится в Московском районе Минска, в микрорайоне Малиновка.Мы гордимся тем, что собрали первоклассную команду врачей-стоматологов, которые любят свою работу и делают ее хорошо.Платная стоматология в Минске.Мы – платная стоматология, но цены у нас не кусаются. При этом мы оснастили наши кабинеты современным дорогим оборудованием и инструментами. Мы знаем, что без крепкого здоровья сложно быть счастливым, поэтому приобретаем для лечения только надежные и безопасные материалы. Они обеспечат долговечность итогам лечения, протезирования, имплантации и др. Уже 10 лет благодаря высокотехнологичному оснащению и своему мастерству наши опытные врачи безболезненно проводят сложные манипуляции в ротовой полости и восстанавливают даже безнадежные зубы. Мы беремся за сложные задачи.Получить консультацию в частной стоматологии Вы можете онлайн или записавшись к нам на прием.Стоматология в Беларуси для всей семьи.Нас называют «семейная стоматология», и не зря. Ведь мы предоставляем услуги женщинам и мужчинам любых возрастов, а также детям от 14 лет. К нам приходят целыми семьями, чему мы очень рады, ведь это говорит о том, что мы двигаемся в правильном направлении.Мы выражаем огромную благодарность людям, которые рекомендуют нас своим друзьям и знакомым, которые пишут искренние отзывы о нашей работе и остаются с нами на протяжении многих лет. Ваши отзывы и радостная улыбка – это лучшая благодарность нам, это наше все, и мы этим очень гордимся. Спасибо Вам! Увидимся! <a href=https://dental-clinic.by/>чем полоскать десну после удаления зуба</a> <a href=https://dental-clinic.by/>пломбирование зуба штифт</a> <a href=https://dental-clinic.by/>стоматология минск врачи</a> <a href=https://dental-clinic.by/>протезирование мини имплантах</a> <a href=https://dental-clinic.by/>детские пластинки для зубов</a> <a href=https://dental-clinic.by/>сколько стоит поставить пластинку на зубы</a> <a href=https://dental-clinic.by/>отбеливание зубов доктор</a> <a href=https://dental-clinic.by/>лечение периодонтитов кариеса</a> <a href=https://dental-clinic.by/>биопсия</a> <a href=https://dental-clinic.by/>сложное удаление зуба цена</a> <a href=https://dental-clinic.by/>пульпит лечение или удаление</a> <a href=https://dental-clinic.by/>имплантация при полном отсутствии зубов</a> <a href=https://dental-clinic.by/>имплантация синус лифт</a> <a href=https://dental-clinic.by/>циркониевые коронки московский район</a> <a href=https://dental-clinic.by/>имплантация зубов дантистов</a> <a href=https://dental-clinic.by/>лечение зубов лечение кариеса и пломбирование</a> <a href=https://dental-clinic.by/>циркониевые коронки с керамикой</a> <a href=https://dental-clinic.by/>имплантация зубов формирователь</a> <a href=https://dental-clinic.by/>металлокерамика на 3 зуба</a> <a href=https://dental-clinic.by/>лечение нижних зубов анестезия</a> <a href=https://dental-clinic.by/>элайнеры купить</a> <a href=https://dental-clinic.by/>мост металлокерамика на 3 зуба</a> <a href=https://dental-clinic.by/>гигиена полости рта перед установкой брекетов</a> <a href=https://dental-clinic.by/>анестезия 6 зуба</a> <a href=https://dental-clinic.by/>лечение пульпита постоянных несформированных зубов</a> <a href=https://dental-clinic.by/>вставить съемные зубные протезы</a> <a href=https://dental-clinic.by/>мис система имплантов</a> <a href=https://dental-clinic.by/>удаление большого зуба мудрости</a> <a href=https://dental-clinic.by/>пациенты об имплантации зубов</a> <a href=https://dental-clinic.by/>крепление съемных зубных протезов</a> <a href=https://dental-clinic.by/>после удаления зуба минск</a> <a href=https://dental-clinic.by/>полный съемный протез зубной акри фри</a> <a href=https://dental-clinic.by/>пластинка для выравнивания зубов цена</a> <a href=https://dental-clinic.by/>удаление 26 зуба</a> <a href=https://dental-clinic.by/>стоматология минск удаление зуба мудрости</a> <a href=https://dental-clinic.by/>цистектомия</a> <a href=https://dental-clinic.by/>зубные протезы съемные бюгельные на верхнюю челюсть</a> <a href=https://dental-clinic.by/>уход за зубами после отбеливания</a> <a href=https://dental-clinic.by/>полные съемные зубные протезы</a> <a href=https://dental-clinic.by/>имплантация зубов временные коронки</a> <a href=https://dental-clinic.by/>срочная стоматология минск</a> <a href=https://dental-clinic.by/>удаление спящего зуба</a> <a href=https://dental-clinic.by/>удаление расколовшегося зуба</a> <a href=https://dental-clinic.by/>съемные зубные протезы акри фри цены</a> <a href=https://dental-clinic.by/>виниры из композитного материала</a> <a href=https://dental-clinic.by/>съемные зубные протезы цена</a> <a href=https://dental-clinic.by/>имплантация зубов акция</a> <a href=https://dental-clinic.by/>сложное удаление зуба мудрости</a> <a href=https://dental-clinic.by/>список продуктов разрешенных после отбеливания зубов</a> <a href=https://dental-clinic.by/>зуб снятие удаление шов</a>
#8598 Charlesgunnyhttp://filmkachat.ru
накрутка телеграм премиум накрутка просмотров в телеграм канал бустклик накрутка подписчиков на закрытый телеграм канал накрутка подписчиков в телеграм тг бесплатно <a href=https://smmstay.xyz>Просмотры лесенкой телеграм</a> бесплатная накрутка телеграм накрутка просмотров телеграм накрутка подписчиков телеграм без отписок накрутка лайков на пост телеграм бесплатная накрутка 1000 подписчиков в телеграм накрутка активных подписчиков в телеграм бесплатно накрутка телеграм сервисы
#8599 Charlesgunnyhttp://filmkachat.ru
накрутка телеграм топ накрутка телеграм бесплатно без регистрации накрутка ботов в телеграм накрутка голосов в телеграм канале бесплатно <a href=https://smmstay.xyz>Накрутка Телеграм</a> сайт для накрутки телеграм накрутка подписчиков телеграм бесплатно 5 минут накрутка телеграм сервисы приложение по накрутке подписчиков в телеграм boostclick накрутка телеграм бесплатно живых накрутка телеграм накрутка телеграм канал бесплатно живых
#8600 Charlesgunnyhttp://filmkachat.ru
как защитить канал от накрутки ботов телеграм бот для накрутки подписчиков в телеграм накрутка подписчиков телеграм канал 5 подписчиков накрутка ботов в телеграм чат <a href=https://smmstay.xyz>Просмотры лесенкой телеграм</a> телеграмм потпищ накрутка подписчиков телеграм бесплатно накрутка заявок в телеграм накрутка подписчиков в телеграм тг бесплатно накрутка потпишеков в телеграме бесплатна Просмотры лесенкой телеграм накрутка подписчиков телеграм реакции накрутка голосов телеграм голосование
#8601 Charlesgunnyhttp://filmkachat.ru
накрутка комментариев в телеграм канале накрутка подписчиков телеграм задания накрутка просмотров на пост в телеграм бустклик накрутка голосов в телеграм канале бесплатно <a href=https://smmstay.xyz>Поставщик Телеграм</a> накрутка ботов в телеграм канал промобокс накрутка подписчиков телеграм канал купить накрутка подписчиков в телеграм тгракета накрутка ботов в телеграм группу бесплатно накрутка подписчиков в телеграм платно негативные реакции в телеграм накрутка бесплатно smmcrutca накрутка телеграм
#8602 Charlesgunnyhttp://filmkachat.ru
бот для накрутки реакций в телеграм накрутка подписчиков телеграм задания бот для накрутки реакций в телеграм накрутка участников в группу телеграм <a href=https://smmstay.xyz>Накрутка Телеграм</a> реакции телеграмм накрутка телеграм накрутка голосов телеграм голосование накрутка подписчиков в телеграм живые телеграм дешевая накрутка просмотров boostclick накрутка подписчиков телеграм без отписок накрутка просмотров телеграм на месяц накрутка комментариев в телеграм сммпуш
#8603 Charlesgunnyhttp://filmkachat.ru
топ сервисов накрутки подписчиков в телеграм boostclick накрутка телеграм бесплатно smm накрутка телеграм бесплатно заданий бесплатная накрутка рефералов в телеграм бот <a href=https://smmstay.xyz>Просмотры лесенкой телеграм</a> накрутка телеграм без отписок голоса для канала телеграм накрутка беспланая накрутка подписчиков в телеграме накрутка подписчиков телеграм канал купить накрутка реальных подписчиков в телеграм бесплатно смм накрутка просмотров телеграм бесплатно накрутка эмоций телеграм
#8604 Charlesgunnyhttp://filmkachat.ru
программа для накрутки просмотров в телеграм бустклик накрутка реальных подписчиков в телеграм канал накрутка телеграм премиум накрутка вк телеграм <a href=https://smmstay.xyz>Просмотры лесенкой телеграм</a> накрутка реакций на пост в телеграм премиум накрутка живых людей в телеграм накрутка подписчиков телеграм реакции накрутка подписчиков канал в телеграме накрутка друзей телеграм накрутка подписчиков канал в телеграме голоса для канала телеграм накрутка
#8605 Charlesgunnyhttp://filmkachat.ru
накрутка просмотров в телеграм канал бесплатно накрутка подписчиков телеграм бесплатно smmnakrutka накрутка подписчиков в телеграм канал бесплатно бесплатная накрутка телеграм <a href=https://smmstay.xyz>Накрутка Телеграм</a> накрутка в телеграм чат бесплатно накрутка реакций телеграм накруткапф рф накрутка лайков по заданию телеграм boostclick накрутка жалоб на телеграм канал накрутка телеграм платно накрутка подписчиков телеграм тг накрутка телеграм русские
#8606 Charlesgunnyhttp://filmkachat.ru
накрутка пользователей в телеграм бота накрутка просмотров в телеграме boostclick накрутка подписчиков в телеграм smm накрутка телеграм аудитории в телеграмм бесплатно <a href=https://smmstay.xyz>Накрутка просмотров телеграм</a> бесплатная накрутка рефералов в телеграм бот фото батл накрутка телеграм накрутка 10 реакций в телеграм канале программа для накрутки подписчиков в телеграм boostclick накрутка ботов в телеграм группу бесплатно телеграм дешевая накрутка просмотров boostclick накрутка подписчиков телеграм чаты
#8607 JamesGuapehttps://kupitkvartiruland.ru
Квартиры от застройщика <a href=https://kupitkvartiruland.ru/>https://kupitkvartiruland.ru</a> в новых домах Казани. Честные цены, гибкие условия покупки и качество, которому можно доверять.
#8608 WilliamTedhttps://contract.moscow
Служба по контракту <a href=https://contract.moscow/>https://contract.moscow</a> в Москве: достойное обеспечение, обучение и развитие. Станьте частью сильной команды профессионалов!
#8609 Charlesgunnyhttp://filmkachat.ru
накрутка репостов телеграм бесплатно просмотры и реакции в телеграм накрутка boostclick накрутка телеграм smmtouch ютуб накрутка телеграм <a href=https://smmstay.xyz>Дешевая накрутка</a> накрутка подписчиков телеграм бесплатно smmnakrutka программа для накрутки подписчиков в телеграм boostclick пф накрутка dailypfbot телеграм накрутка подписчиков телеграм капел накрутка сообщений телеграм накрутка голосов в телеграме накрутка настоящих подписчиков в телеграм канале бесплатно
#8610 Charlesgunnyhttp://filmkachat.ru
1×slots казино зеркало
С не отыгранным бонусом запрещается превосходить объем наибольшей ставки. Нарушение сего обстоятельства последствия аннулирование выигрыша.Когда речь о получении бездепозитных бонусов в казино, для внимание на последующие условия: <a href=http://filmkachat.ru/>1×slots на любой вкус как пройти регистрацию</a> Какие призы есть еще получить не бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, любое онлайн казино предлагает игрокам выгодное предложение на первый депозит, вы совершаете депо, ваш депозит увеличивается в двое либо в в трое, тем наиболее начать выступать возможно с более солидной суммой, так же не забываем на вейджер на бонусы.Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации дара необходимо подтвердить электронную почту и привязать телефон; <a href=https://gamma.app/docs/Professional-Architectural-Drafting-Services-From-Concept-to-Cons-9w64jusl022578a>https://gamma.app/docs/Professional-Architectural-Drafting-Services-From-Concept-to-Cons-9w64jusl022578a</a> Акции, посвященные календарным праздничным, посещают рассчитаны как на всех юзеров, так и на категории: примеру, презент на 8 марта девушкам-игрокам либо мужчинам на 23 февраля. 1хслот зеркало <a href=https://www.alpea.ru/forum/user/26648/>https://www.alpea.ru/forum/user/26648/</a>
казино 1× slots официальный сайт
1 xslots рабочее зеркало <a href=http://23.staikudrik.com/index/d1?diff=0&utm_source=ogdd&utm_campaign=26607&utm_content=&utm_clickid=uskkokskw44sooos&aurl=http://shatunamur.ru/proxy.php?link=http://houses-expo.ru/bitrix/click.php?goto=https://telegra.ph/EHtapy-i-poryadok-podachi-zayavleniya-na-otpusk-po-uhodu-za-rebenkom-do-3-let–sroki-i-usloviya-09–19>http://23.staikudrik.com/index/d1?diff=0&utm_source=ogdd&utm_campaign=26607&utm_content=&utm_clickid=uskkokskw44sooos&aurl=http://shatunamur.ru/proxy.php?link=http://houses-expo.ru/bitrix/click.php?goto=https://telegra.ph/EHtapy-i-poryadok-podachi-zayavleniya-na-otpusk-po-uhodu-za-rebenkom-do-3-let–sroki-i-usloviya-09–19</a> Фриспины. Бесплатные вращения предусмотрены для использования в видео-слотах. Внимательно читайте обстоятельства – они часто выдаются для некоторых машин. В зависимости от клуба вы можете делать определенное число ставок. Кстати, современные игорные дома дают вероятность заводить «одноруких злодеев».Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. 1×slots зеркало выигрыши обязательно пройдите регистрацию если Баланс игрока пополняется на соответствующую необходимую. К ней используется вейджер, указанный в правилах акции. Вывести выигрыш можно будет последствии как, как пользователь устроит требуемый размер ставок из собственных средств. В редких случаях бездеп трудится в формате Free Play. На счет пользователя зачисляется крупная сумма, и предоставляется небольшой срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по окончании сего периода сумма на счету несомненно превосходить изначальную, то разницу возможно будет вывести либо использовать для последующих ставок.Как только на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу последствии сего можно оставить заявку на вывод выигрыша. Кредиты выгодно отличаются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом реальных средств и выделяют возможность ощутить задор. Во-вторых – возможно насладиться каждой азартной забавой доступной на веб-сайте. В вашем постановлении присутствуют автоматы, настольные прибавление, видео-покер, Live-дилеры.
1×slots промокод при регистрации 2025
Акционные предложения от казино есть в разных форматах. Часто призы даются в мена на депозит. Игрок вносит платеж и получает средства, бесплатные вращения и другие поощрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — вид бонуса, который гарантирован за исполнение определенных поступков на веб-сайте:Исходя из этого, просто не присутствует разумных причин махнуть рукою на получение такого приза при регистрации. И, будет, на подобный бесплатной основе у вас есть все шансы выиграть средства и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные призы, нарекают бесплатными интернет платформами для игр. Чтобы без убедиться в превосходствах бездепозитных бонусов, довольно зарегистрироваться в казино и получить одобрение.Не стоит незамедлительно же отрицаться от приветственных подарков в похожих казино. Администрация готова начислить деньги либо фриспины, но предварительно работники должны убедиться, что вы не аферист. Дело сомнений, собственно развелось слишком количество охотников за призами. Они выучились дурачить систему и наваривать крупные суммы денег. <a href=https://www.google.pt/url?q=https://doctorlazuta.by/>https://www.google.pt/url?q=https://doctorlazuta.by/</a> Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают приз по странам. Вплоть до такого, собственно клуб имеет на игроков из Вашей страны, а бездеп мешает. казино 1× slots официальный сайт
1×slots акции
Казино выводит деньги лишь на ту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного бонуса, Вам сначала необходимо пополнить счет. В некоторых клубах ограниченный список способов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет непосредственно с этих платежных способов, коие доступны для вывода.Большинство клубов завлекают внимание игроков за счёт разнородных даров. На одних сайтах можно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает бесплатные вращения для запуска лучших онлайн слотов. Несмотря на разные промоакции, стоит выделить самые главные. Бездепозитные бонусы, как уже ясно, считаются оригинальной вероятностью приступать к игровому процессу безусловно бескорыстно, другими выступать в интернет казино безвозмездно и на быть свои незамедлительно в регистрации аккаунта. Автоматы с таким депозитом шансы замерзнуть прекрасной вероятностью сыграть для поклонников пыла с определенными ограничениями в финансах. При ирге на бонусные средства воспрещается играть в игровые автоматы с современным джекпотом и игры из радела exist casino. Кроме того, некоторые казино выделяют бездеп на один или несколько конкретных слотов, и в иных играх Вы не сможете на их выступать.Наличие у игрока 2 аккаунта. Запрещено создавать количество профилей для неоднократного получения бездепов. 1хслотс казино зеркало <a href=https://jokermerah.net/jualbeli/index.php?page=user&action=pub_profile&id=8368918>https://jokermerah.net/jualbeli/index.php?page=user&action=pub_profile&id=8368918</a>
1×slots официальный сайт скачать
Способы получения бездепа различаются от вида бонуса, кот-ый приглянулся игроку. Но вам иначе нужно быть зарегистрированным в легальном онлайн-казино и подтвердить собственную лицо. В общем виде пошаговая аннотация для получения бездепозитного бонуса выглядит например: Список например именуемых «разрешенных территорий» прилагается к правилам бонусной программы игорного портала. Обязательно выясните, распространяются ли на вас подобные наказания. <a href=http://o91668l6.beget.tech/user/Craigpug/>http://o91668l6.beget.tech/user/Craigpug/</a> Заполняя данные в личном профиле, указывайте только достоверную информацию, так как Вам понадобиться ее подтвердить в при выводе денег. казино 1×slots Для как, дабы отыграть необходимую вашего бездепозитного бонуса нужно выполнить обстоятельства вейджера. Очень нередко фриспины даются на определенные слоты (book of ra, book of dead, book of sun), подбирайте разъем для по, они очень красивые и качественные. Бездепозитные бонус возможность быть валютным например и в виде фриспинов на слотыЗаконодательство, регулирующее азартные забавы в различных государствах, оказывает на возможности операторов. В результате юзеры из отдельных регионов сталкиваются с лимитированиями со стороны казино. Это имеет быть как полный отказ в доступе, так и невозможность загружать забавы отдельных производителей.
<b>Смотреть еще похожие новости:</b>
<a href=https://masstr.net/showthread.php?tid=102639>1×slots рабочее зеркало на сегодня</a>
<a href=http://theauction.com.au/my-account/>1×slots официальный сайт мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Кешбэк-бонус дает собой возврат фиксированного процента от ставки если, тогда, проигрыша или же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не выше 10%.
#8611 Charlesgunnyhttp://filmkachat.ru
онлайн казино 1×slots
Подарки на праздники ? приуроченные к парадным датам, требующие символического отыгрыша либо начисляются без такового. Могут дариться игрокам сутки рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду.Но рядах азартных платформах сходственные вознаграждения все получить и уже зарегистрированные пользователи. В этом случае, призы предоставляются масштабах уникальных акций либо же неким игрокам вид акционного предложения, коие приходит на почту с целью «вернуть» игрока в свое казино. <a href=http://filmkachat.ru/>1×slots зеркало на сегодня</a> В наше время довольно просто получить бонус за регистрацию в казино. Практически каждый игорный дом с радостью начислит средства или бесплатные вращения. Многие гэмблеры используют этим и не смущяются регистрироваться в любом клубе с выгодными условиями. Кстати, это замечательная возможность выработать победную тактику и сорвать джекпот. <a href=https://www.indiegogo.com/individuals/38144440>https://www.indiegogo.com/individuals/38144440</a> Прежде всего, не запамятовывайте периодически заглядывать на страницу обзоров бездепозитных бонусов. Они шаг за шагом осматривают более занимательные предложения основных игорных порталов.Чаще всего, популярные сервисы, такие как MoneyBookers и WebMoney, еще MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно неотъемлемое правило. Финансовые средства выводятся лишь спустя что, эту платежную систему, которой огромный для пополнения депозита. Если же игрок получил бездепозитный покерный приз, потребуется пополнить счет на минимальную сумму, которая составляет обычно десять $. 1×slots зеркало выигрыши обязательно пройдите регистрацию если <a href=http://dotstroy.ru/userinfo.php?uid=46814>http://dotstroy.ru/userinfo.php?uid=46814</a> Бонус с зачислением средств на счет дает больше свободы действий. Пользователь сам подбирает, каким образом распорядиться подаренными средствами. Здесь также шансы действовать ограничения на список дешевых игр, но обыкновенно эти рамки не например строги, как в рекламную с бесплатными вращениями.Популярность интернет казино растёт и всё больше юзеров начинают увлекаться азартными играми. Бездепозитные призы 2022 года, это оригинальные презенты за регистрацию. С их подмогою новые игроки могут получить безвозмездные вращения либо деньги на баланс за 1 регистрацию. С появлением игорных заведений в онлайне, бездепозитные призы стали известнейшим способом привлечения игроков. Подобные акции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о которых мы расскажем. Наш вебсайт собрал лучшие предложения из онлайна на 2022 год. Воспользуйтесь любым даром и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить условия.
1×slots промокод при регистрации 2025
Более крупные предложения встречаются довольно изредка. Зачастую они доступны только VIP-игрокам. В оставшихся случаях им наверняка сопутствуют очень жесткие обстоятельства отыгрыша. Также вероятны вспомогательные условия прочие ограничения, прописанные в критериях и положения бонусной программки казино. 1хслотс казино зеркало Пoдтвepдить личнocть посетителя. Для удачного вывода средств, нужно подтвердить личность посетителя. Нa этaпe вepификaции пpoфиля, работники службы защищенности должны убедиться, собственно у игрока чем раз акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не сможет исключить свой выигрыш, в у него будет несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы.Однако далековато не все ресурсы предлагают своим клиентам бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено одобрение на 1-ый депозит в размере 100–200%. Это отличная вероятность преумножить банкролл, прирастить время, проведённое за забавой и шансы сорвать большой куш. <a href=http://www.neworleansbbs.com/home.php?mod=space&uid=274863>http://www.neworleansbbs.com/home.php?mod=space&uid=274863</a> Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, дабы появилась возможность исключить выигрыш.Многие казино деют в рекламных целях безвозмездные призы необыкновенно для наших читателей. Чтобы их получить, надо(надобно) перебежать на игровой сайт по партнерской ссылке с нашего портала. 1×slots на любой вкус как пройти регистрацию
1×slots зеркало видели такую регистрацию на
Вейджер (либо вагер) ? это минимальная сумма ставок, коию необходимо сделать для вывода валютного бонуса. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение. После потребуется привнести идентификационный платёж. Это стращает начинающих больше всего. Нужно устроить минимальный депозит в 100–500 руб. Таким образом служба безопасности убедиться сомнений, что платёжный метод принадлежит Вам. Данная процедура необходима для обеспечивания защищенности игровых счетов. Пример, Ваш акк взломают и выведут свои на свой кошелёк. Будет очень неприятно. Поэтому верификация платёжной системы, это необходимый момент.Не трудно додуматься, собственно no deposit bonuses почти ни не случаются немаленькими. Чаще всего идет о пяти–тридцати долларах (или эквиваленте этой суммы в иной денежной). <a href=http://www.sksmg.com/home.php?mod=space&uid=197379&do=profile>http://www.sksmg.com/home.php?mod=space&uid=197379&do=profile</a> 1хлот регистрация в 1×slots casino Главным интересным в появлении данных вознаграждений произведено сомнений, что пустив их в ход, компьютерные ничем не рискует и в последствии никому ничего не будет должен (не зависимо, получит ли он благодаря призам какой-нибудь выигрыш либо моментально спустит все только что прибывшие финансы). То есть, казино снабжает игрока возможностью на дармовой базе выступать во всевозможные слоты и даже спонсирует забаву.
1хслотс 1хслотс регистрация перейти на 1×slots
Подтверждение индивидуальной информации. Все казино настоятельно от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у пользователя других аккаунтов (мультиаккаунт запрещен).В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и если, тогда, неоднозначных обстановок нет возможности куда-то пожаловаться и обосновать собственную правоту. <a href=http://evtrucksforum.com/memberlist.php?mode=viewprofile&u=28289>1хслотс официальный сайт зеркало</a> Самые свежие бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды присутствуют на этой странице. Посетитель может оценить обстоятельства получения и начать выступать на средства без внесения депозита. При этом игроку главно осознавать, на каких критериях и какими методами у вывести полученный выигрыш. Для сего нужно оценить список присоединенных платежных систем. Любой выигрыш по ставке выше установленного лимита несомненно являться недействительным. То есть ставка не будет засчитана при отыгрыше, а случае выигрыша его сумма не поступит на счёт посетителя — итог забавы будет полностью аннулирован.В онлайне большое известных игорных площадок с привлекательными акционными предложениями. Однако внимательно разбирать обстоятельства 10-ов предложений в надоест, да и время отнимет количество. Поэтому наша команда подготовила ТОП-3 сайтов с лучшими бездепозитными призами: 1×slots регистрация на официальном сайте <a href=https://www.mmopro.org/members/461687.html>https://www.mmopro.org/members/461687.html</a> Лишь известные и знаменитые азартные заведения имеют позволить себе раздавать бездепы в виде дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, коие возможно потратить в топовых аппаратах с высочайшей отдачей.
1хлот регистрация в 1×slots casino
Если вы избираете проверенное лицензионное онлайн казино и выполните все условия получения бездепозитного приза, проблем с получением дара у Вас не возникнет.Классическая разновидность приза за творение аккаунта. Его превосходство заключается что, собственно заказчик имеет без избирать аппараты и делать ставки в них. Иногда список игровых автоматов ограничен оператором, но все также это лучше, чем единственный доступный слот, как в случае с внедрением фриспинов. <a href=https://a.pr-cy.ru/allsoftlab.com/>https://a.pr-cy.ru/allsoftlab.com/</a> Частенько новички не разумеют, как активировать презенты либо исключить 1-ый выигрыш. Для сходственных случаев наша команда обрисовала основные термины – собственно такое фриспины, вейджер, как его отыграть, для необходимо проходить верификацию. 1×slots коды
<b>Смотреть еще похожие новости:</b>
<a href=http://complainanything.com/node/158?page=912#comment-1088260>1×slots рабочее зеркало на сегодня</a>
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=55896>1×slots официальный demo регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Прямо сейчас арестуйте благотворительные вращения за регистрацию без депозита и начинайте собирать призовые комбинации ради солидных выигрышей!
#8612 Ремонт стиральных машинhttps://remont-stiralnyh-mashin-ace.ru/
Наш сервисный центр предлагает надежный <a href=https://remont-stiralnyh-mashin-ace.ru/>вызвать мастера по ремонту стиральных машин рядом</a> различных марок и моделей. Мы знаем, насколько необходимы вам ваши стиральные машины, и обеспечиваем ремонт первоклассного уровня. Наши профессиональные техники работают быстро и аккуратно, используя только оригинальные запчасти, что гарантирует длительную работу наших услуг. Наиболее общие проблемы, с которыми сталкиваются обладатели устройств для стирки, включают неработающий барабан, неработающий нагревательный элемент, неисправности программного обеспечения, проблемы с откачкой воды и поломки компонентов. Для устранения этих неисправностей наши профессиональные техники проводят ремонт барабанов, нагревательных элементов, ПО, насосов и механических компонентов. Обратившись к нам, вы получаете надежный и долговечный экспресс ремонт стиральной машины. Подробная информация доступна на сайте: https://remont-stiralnyh-mashin-ace.ru
#8613 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало
Многие азартные клубы ограничивают необходимую вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании акции, суммы Вы не можете исключить. Разница будет аннулирована, Вы даже не сможете делать на нее ставки. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots casino c2d ru</a> <a href=http://www.pvp.iq.pl/thread-5909.html>http://www.pvp.iq.pl/thread-5909.html</a> Приветственный бездеп предоставляется любому игроку только один раз. Казино сражаются с например именуемыми бонусхантерами (от англ. Bonus Hunter — охотник за бонусами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения подарка. Исключить сходственные деяния позволяет верификация данных. Администрация вправе потребовать у клиента доказать индивидуальные данные, обозначенные при регистрации.Также, в нужно доказать свой номер телефонного, результата код, полученный в смс-сообщении от клуба ввести в особое поле в собственном офисе игрока. 1×slot рабочее зеркало <a href=http://wx.abcvote.cn/home.php?mod=space&uid=1761892>http://wx.abcvote.cn/home.php?mod=space&uid=1761892</a> Подарки на праздники ? приуроченные к праздничным датам, требующие символического отыгрыша либо начисляются без такового. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду.
1×slots регистрация на 1хслотс
Промообъявления от казино мешают реальной картины и ориентированы на привлечение внимания пользователей. Понять, насколько высоки шансы остаться в плюсе, дозволит собственный тест критерий предложения:Бездепозитные бонусы за регистрацию являются одним из самых известных методов вербования свежих игроков в онлайн-казино, потому собственно они предоставляют игрокам возможность опробовать казино, тем игровые автоматы, и вполне, выиграть реальные деньги. <a href=https://aircompare.us/forums/viewtopic.php?t=391485>1хслотс казино зеркало</a> казино 1× slots официальный сайт <a href=https://www.sportchap.ru/user/StevenInpug/>https://www.sportchap.ru/user/StevenInpug/</a> Основное отличие в, собственно для получения бездепа не пополнять баланс в казино. Но не сего, есть ряд и отличий: 1×slot казино зеркало При маленькой сумме бонуса рекомендовано играть по невысоким ставкам, а применять максимальные другого, как только что случае, случае вейджер слишком великий, а время на отыгрыш сильно ограничено.
1×slos регистрация в 1×slots casino
<a href=https://e-participationyouth.eu/forum/profile/doctorlazutapr/>https://e-participationyouth.eu/forum/profile/doctorlazutapr/</a> Вывод выигрыша с бездепозитных бонусов казино – великодушный подарок от азартных клубов. Но дабы исключить свой заработок, необходимо выполнить ряд критерий:Некоторые казино шансы предлагать посетителям бездепы за свидетельство номера либо почты или репост на страницу в социальных сетях. 1×slots рабочее зеркало Превышение максимальной ставки при отыгрыше. Система механически не предупреждает о превышении ставки, поэтому о несоблюдении верховодил игрок может узнать уже последствии подачи запроса на вывод средств.
сайт 1× slots casino
Фриспины – благотворительные вращения с фиксированной ставкой, которые можно использовать в определенных игровых автоматах.Риск-игра по равным шансам – Также казино имеет запрещать исполнять обстоятельства по отыгрышу за раунда на удвоение, кот-ый предлагается в слотах, видео-покере и некоторых иных забавах. Бонус в казино без депозита содержит разные разновидности: такое быть приветственный бонус, промоакции в честь каких-либо дней либо главных дат, приз за привлечение новых игроков, лояльность и получение VIP-статуса.1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, если не желайте стать жертвой мошенников или впустую потратить время; Бездепозитные призы отличный вариант безвозмездной забавы в игровые автоматы. Многие пользователи сети не знают, собственно в казино возможно начать играть абсолютно бесплатно, а позже исключить выигрыш на банковскую карту или электрический кошелек, иные не доверяют онлайн казино, а третьи удачно играют и выигрывают – и тотчас достаточно великие суммы.Третитй бездепозитный бонус за регистрацию – денежные средства. К раскаянию, начислить рубли или доллары готовы лишь известные и знаменитые клубы. С их помощью возможность насладиться любой доступной игрой – автоматом, рулеткой, кено, блэкджеком. 1×slots зеркало видели такую регистрацию на <a href=http://kyeyangencplus.co.kr/bbs/board.php?bo_table=free&wr_id=2460010>http://kyeyangencplus.co.kr/bbs/board.php?bo_table=free&wr_id=2460010</a> При небольшой сумме бонуса рекомендуется выступать по невысоким ставкам, а использовать наибольшие никакого только в случае, в вейджер слишком великой, а время на отыгрыш крепко ограничено.
1×slots сайт зеркало
Каждая игровая платформа выделяется критериями по получению и отыгрышу бездепов. В правилах детально расписаны кратковременные рамки, за коие надо(надобно) прокрутить вейджер. Также не запамятовывайте на наибольший объем ставки и наивысшую необходимую выплаты. С иной стороны, дабы получить бездепозитные бонусы казино, достаточно потратить не более 1 минуты.В некоторых онлайн казино для получения бездепозитных призов не достаточно просто зарегистрироваться на веб-сайте клуба и доказать средства контактные данные. Дополнительно потребуется активация промокода. Для подтверждения электрической почты, просто перейдите по активной ссылке в письме, полученном от игрового заведения.Прибывшие на аккаунт финансы бездепозитные призы предназначаются, в, лишь для новоиспеченных пользователей, коие ранее не имели собственного аккаунта в данном казино. Исходя из сего, случае ранее у игрока был изготовлен депозит, то, по всей вероятности, у него больше не несомненно способности рассчитывать на получение такого приза в определенном заведении. <a href=https://www.esurveyspro.com/Survey.aspx?id=1927f439-aaa8–4280-b16f-141658ee2f08>https://www.esurveyspro.com/Survey.aspx?id=1927f439-aaa8–4280-b16f-141658ee2f08</a> Еще одно условие дотрагивается объемов ставки. Операторы устанавливают максимальную сумму, коию игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, избранной в Личном офисе. При превышении лимита есть риск потерять бонуса. Существующие лимитирования относятся и к конкретным обликам ставок. Например, играя в рулетку, клиент возможность столкнуться с запретом ставить фишки на шансы. 1×slots casino зеркало Чаще всего, знаменитые сервисы, такие как MoneyBookers и WebMoney, еще MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное правило. Финансовые свои выводятся только через ту платежную систему, коей огромный для пополнения депо. Если же игрок получил бездепозитный покерный бонус, требуется восполнить счет на наименьшую необходимую, которая составляет обыкновенно десять долларов.Новички не любят сразу же вносить депо. Это обосновано отсутствием опыта и сомнением. К счастью, в наше время возможно получить бездепозитный приз за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В любом случае вы не рискуете своими сбережениями. Это отличная вероятность запустить понравившийся видео слот либо же испытать удачу в настольных играх.
<b>Смотреть еще похожие новости:</b>
<a href=http://khodaumo.com/forum/viewtopic.php?f=2&t=75209&sid=3037c64dce5c53b831a2dc0a96f670e3>1×slots casino регистрация</a>
<a href=http://permitbeijing.com/forum/member.php?action=profile&uid=191496>1×slots зеркало которую указывали при регистрации кстати</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Список так именуемых «запрещенных территорий» прилагается к правилам бонусной программки игорного портала. Обязательно выясните, распространяются ли на вас сходственные наказания. Рассмотрим принцип его деяния на примере. Допустим, вы зарегистрировались и получили $10 not the slightest deposit bonus с вейджером х50. Это значит, что выигранные деньги можно будет выводить не раньше, чем последствии такого, как общая сумма ставок достигнет $500.
#8614 Charlesgunnyhttp://filmkachat.ru
1× slots casino зеркало
Стоит отметить, собственно бездепозитный бонус выдается только совершеннолетним новичкам, коие, в свою очередь, все пригласить личных приятелей и знакомых, кроме претендующих на поощрительную программку лояльности. Подобная разработка замечена между конкурирующих онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению своей посещаемости, методом вербования свежих игроков. Бонусы – это уникальный шанс для потенциальных соучастников игры, коие имеют опробовать софт покер рума и убедиться, будут ли они в него играть либо нет. Новый игрок попробует свои силы с настоящими оппонентами в казино. <a href=http://filmkachat.ru/>1×slots промокод при регистрации</a> Таким образом, заведение пытается продемонстрировать себя своим потенциальным геймерам, а подобный маркетинговый ход как казино приз без депо за регистрацию завлекает довольно количество внимания к игорному заведению и обеспечивает неизменный струю свежих гостей и будущих клиентов игрового онлайн клуба. <a href=https://www.socialwider.com/blog/597913/professional-construction-drawing-services-your-blueprint-for-building-succ/>https://www.socialwider.com/blog/597913/professional-construction-drawing-services-your-blueprint-for-building-succ/</a> 1×slot регистрация <a href=http://www.carshowsociety.com/forum.php?action=profile;u=6838>http://www.carshowsociety.com/forum.php?action=profile;u=6838</a> Еще одно условие дотрагивается размеров ставки. Операторы устанавливают наивысшую сумму, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, избранной в Личном офисе. При превышении лимита есть риск потерять приза. Существующие лимитирования относятся и к определенным видам ставок. Например, играя в рулетку, клиент имеет столкнуться с запретом ставить фишки на шансы.
1 х слотс зеркало
<a href=http://palais.beesims.com/phpbb/viewtopic.php?f=2&t=290607>1×slots сайт</a> 1хслотс рабочее зеркало Самый распространённый из подобных бонусов, естесственно же, бездеп на денек рождения посетителя — приз вид фиксированной суммы или фриспинов поступает на счёт игрока, а воспользоваться им возможно на установленного периода времени. <a href=http://altay.land/bitrix/click.php?goto=http://energetic42.ru/bitrix/redirect.php?goto=http://borgraft.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/2m09WJgrZw3>http://altay.land/bitrix/click.php?goto=http://energetic42.ru/bitrix/redirect.php?goto=http://borgraft.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/2m09WJgrZw3</a> 1хслотс регистрация в 1×slots casino
1 х слотс зеркало
Подарки на конкретные даты выделяются критериями получения. Если поощрение начисляют игроку на день рождения, то сумма обыкновенно в от общего размера депо за прошедший год. Осталось выбрать казино с призом за регистрацию и создать профиль. После активации подарка выигрыш зависит от Фортуны и способностей.Законодательство, регулирующее азартные забавы в разных государствах, влияние на возможности операторов. В результате пользователи из отдельных ареалов сталкиваются с лимитированиями со стороны казино. Это возможность быть как глубокий отказ в доступе, например и невозможность загружать игры отдельных изготовителей. <a href=https://myworldgo.com/forums/topic/121363/vykup-avto-v-kieve-i-kievskoj-oblasti>https://myworldgo.com/forums/topic/121363/vykup-avto-v-kieve-i-kievskoj-oblasti</a> На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не сможете активировать и получить бездепозитный бонус.Фриспины без депозита либо дополнительные средства помогут поближе познакомиться с игровой платформой и её функциями. За счёт презентов можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради игры напротив живых крупье. 1×slot регистрация
казино 1×slots официальный сайт
Реже бонусы без депо начисляются неизменным игрокам. С их подмогою администрация старается вычесть ценных клиентов либо желает поблагодарить за лояльность верных гостей. Но гораздо чаще для похожих целей применяются эти промоакции:Приглашаем делиться мнениями о призах. Это поможет другим юзерам выбирать более выгодные предложения. Бонус за регистрацию в казино без депозита с выводом денег нужно отыграть. Зачастую для отыгрыша возможность понадобиться сделать ставки на сумму, в некоторое 10-ов один превышающую необходимую бонуса либо выигрыша.Новички не обожают сразу же заносить депозит. Это обусловлено неименьем навыка и сомненьем. К счастью, наши возможно получить бездепозитный бонус за регистрацию в казино. Неважно собственно начисляет система – фриспины либо кредиты. В любом случае вы не рискуете своими сбережениями. Это замечательная возможность запустить понравившийся видео слот либо же испытать удачу в настольных забавах. B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. 1×slots casino регистрация 1×slotscasino09k online <a href=http://www.icmms.co.kr/bbs/board.php?bo_table=free&wr_id=752077>http://www.icmms.co.kr/bbs/board.php?bo_table=free&wr_id=752077</a>
1×slots регистрация на сайте
Не хотите поиграть в азартные игры, не рискуя своими деньгами, но получая в все выплаты? Подобную возможность предоставляют почти наилучшие порталы с азартными увеселениями. В их количестве количество честных и надежных интернет-казино на российском языке. Они завлекают свежих юзеров разными поощрительными событиями, включая бездепозитные, либо благотворительные бонусы. <a href=http://beton.ru/communication/forum/?PAGE_NAME=message&FID=103&TID=26000&MID=71030&result=new#message71030>http://beton.ru/communication/forum/?PAGE_NAME=message&FID=103&TID=26000&MID=71030&result=new#message71030</a> 1х слот регистрация в 1×slots casino Каждый из бездепозитных бонусов без пополнения 2022 имеет свой конкретный вейджер для отыгрыша, так же в каждом казино он уточняется персонально — где то он х55 а кое-где х30, повторюсь везде по различному!
<b>Смотреть еще похожие новости:</b>
<a href=http://theauction.com.au/my-account/>1× слот зеркало</a>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=150003>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=https://sadhaka.nl/forum/viewtopic.php?t=102750>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Многие азартные клубы ограничивают необходимую вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании акции, суммы Вы не можете вывести. Разница будет аннулирована, Вы и не сможете делать на нее ставки.
#8615 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
Бонусы без депозита при регистрации числятся самыми привлекательными как для опытнейших игроков, так для и начинающих. Получив такое вознаграждение, заказчик возможность играть на реальные средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, еще условия их активации и выигрыша. <a href=http://filmkachat.ru/>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a> <a href=https://www.bandlab.com/post/79db2a90-cf92-ef11–8474–6045bd375453>https://www.bandlab.com/post/79db2a90-cf92-ef11–8474–6045bd375453</a> 1×slots сайт <a href=https://cbz.minzdravao.ru/predlozhenie/skachat-filmy-dlya-nokia-x6>https://cbz.minzdravao.ru/predlozhenie/skachat-filmy-dlya-nokia-x6</a> Обычно бездепозитные акции от казино, приходят на эл. Почту в дни рождения либо праздничные. В некоторых интернет казино возможно обратиться в чат и как постоянному игроку, возможно вас предложат бездепозитное предложение.Размер ставки для игры по бездепозитному бонусу (окончательно же, когда, когда он представлен вид бонусных валютных средств) часто ниже, чем при забаве на депо. Ограничение будет действовать до этапа отыгрыша приза.
1×slots бонус за регистрацию
Поспешите забрать бездепозитные бонусы за регистрацию в казино из представленного перечня. Все платформы не только ведут легальную деятельность, но и обрадуют добросовестными результатами забавы, высочайшей отдачей, резвыми выплатами.У нас на веб-сайте Вы найдете перечень бонусов без депозита в проверенных казино и доскональную информацию то как их получить и применять. <a href=https://forum.dis-course.net/memberlist.php?mode=viewprofile&u=37238>1хслот скачать</a> 1× slots официальный Законодательство, регулирующее азартные игры в различных странах, влияет на возможности операторов. В результате пользователи из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это имеет быть как полный отказ в доступе, например и невозможность загружать игры отдельных изготовителей. <a href=https://flohmarkt.familie-speckmann.de/schlafanzuege/iz-chego-sostoit-dieta-eleny-malyshevoj.html>https://flohmarkt.familie-speckmann.de/schlafanzuege/iz-chego-sostoit-dieta-eleny-malyshevoj.html</a> Бонус в казино без депозита имеет разные варианты: это может быть приветственный бонус, промоакции в честь каких-то праздников либо главных дат, бонус за вербование свежих игроков, лояльность и получение VIP-статуса.На нашем сайте Вы найдете перечень своевременных новых бездепозитных бонусов в казино 2022 года. Также, есть много эксклюзивных услуг, которые доступны лишь гостям нашего сайта в регистрации по нашей ссылке либо активации специального промокода. 1хслот 1хслотс регистрация перейти на 1×slots
1×slot регистрация
Помимо прочего, для вывода средств по бездепу необходимо привнести на счёт свой 1-ый депозит — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально вероятную необходимую, после чего вывод средств станет доступен. <a href=http://smecenter.utcc.ac.th/index.php/component/users/?option=com_k2&view=itemlist&task=user&id=395434>http://smecenter.utcc.ac.th/index.php/component/users/?option=com_k2&view=itemlist&task=user&id=395434</a> Следует подчеркнуть, собственно бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом. 1×slots зеркало сайта
1×slots зеркало быструю регистрацию а также мгновенное
<a href=http://vn-info.net/user/Josephkam/>1×slot рабочее зеркало</a> Каждая игровая перрон выделяется условиями по получению и отыгрышу бездепов. В правилах детально расписаны кратковременные рамки, за которые надо(надобно) прокрутить вейджер. Также не запамятовывайте про максимальный размер ставки и максимальную необходимую выплаты. С другой стороны, дабы получить бездепозитные призы казино, довольно израсходовать не более 1 минутки. 1×slot регистрация <a href=https://www.bulbapp.com/u/revolutionizing-home-design-the-rise-of-augmented-reality-furniture>https://www.bulbapp.com/u/revolutionizing-home-design-the-rise-of-augmented-reality-furniture</a> Акционные предложения от казино есть в различных форматах. Часто бонусы даются в обмен на депозит. Игрок вносит платеж и получает средства, бесплатные вращения и поощрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — вид бонуса, кот-ый гарантирован за выполнение определенных поступков на веб-сайте:У каждой забавы свои требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система засчитает любую ставку. В рулетке и покере сделать это намного труднее. Именно поэтому например главно пристально читать условия получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в любой игре, то новички попросту «спустят приз на ветер».
1×slos регистрация в 1×slots casino
При маленький сумме бонуса рекомендовано играть по невысоким ставкам, а использовать наибольшие никакого лишь что, нет случае, в вейджер очень великий, а время на отыгрыш сильно ограничено. <a href=https://diakov.net/user/Geraldham/>https://diakov.net/user/Geraldham/</a> 1×slots зеркало регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=575715>1×slots рабочее зеркало</a>
<a href=https://redfist.de/RF-Online-Testforum/memberlist.php?mode=viewprofile&u=15351>казино 1×slots официальный сайт</a>
<a href=https://showboysmedia.com/real-music/#comment-53558>1×slots официальный сайт скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Активация по промокоду употребляется в различных видах бездепов. Если идет о приветственном бонусе, то набор символов возможно разузнать на крупнейшей странице, в регистрационной форме или письме, которое отчаливает пользователю для подтверждения e-mail. Акции имеют проводиться вместе с партнерскими площадками. Обычно код размещается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется одноразовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном кабинете либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем актуальный код для активации в описании любого промо. Но такие рамки не смущают даже хайроллеров, поскольку коэффициенты на слотах позволяют рассчитывать на крупные выигрыши, а неких автоматах разыгрывается прогрессивный джекпот.
#8616 Charlesgunnyhttp://filmkachat.ru
сайт 1× slots casino
Игры, в возможно играть на бонусные средства. Проверьте перечень игр, каких возможно выступать на бонусные свои, вероятно они Вам не понравятся и не расходовать своё время на эту акцию.Самый распространённый из похожих призов, конечно же, бездеп на день рождения клиента — приз вид фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им возможно в течение установленного периода медли. <a href=http://filmkachat.ru/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> <a href=https://www.calameo.com/read/007654860909e04d14027>https://www.calameo.com/read/007654860909e04d14027</a> Верификация необходима для дополнительной безопасности и помочь техподдержке выявить бонусхантеров и мошенников. Кстати, на некоторых платформах выводы крупных сумм доступны лишь после подтверждения личности.При регистрации том, или ином онлайн игральном заведении — вам дается один шанс испытать собственную фортуну не внося свои монеты. Замечу собственно эту поощрительную предложение предоставляют не все онлайн игровые площадки, а лишь великодушная половина из их. Которые мы подготовили для Вас в нашем перечне. 1×slots зеркало рабочее <a href=http://www.lighttoguideourfeet.com/member.php?u=1507151>http://www.lighttoguideourfeet.com/member.php?u=1507151</a> Также случаются случаи, когда казино начислит обсужденный бонус после регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам.Вейджер в переводе с британского означает «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша полученного приза, в нашем случае бездепозитного. Число ставок большого — главно только набрать сумму, пропорциональную сумме одобрения.
1хслотс рабочее зеркало
Если вы новичок в и только попали в неизведанную вами район пыла — с помощью предложений как бездепозитные бонусы без пополнения. <a href=https://bajarmp3.net/showthread.php?tid=424907>сайт 1× slots casino</a> 1хслот 1хслотс регистрация перейти на 1×slots <a href=http://support-groups.org/memberlist.php?mode=viewprofile&u=171925>http://support-groups.org/memberlist.php?mode=viewprofile&u=171925</a> Возможность протестировать свежие игры, не рискуя личными своими и создать собственную тактику забавы.Также, учите, собственно бездепозитный приз можно вывести только что, нет случае, когда станут исполнены все условия отыгрыша. 1×slot рабочее зеркало С не отыгранным бонусом воспрещается превышать размер наибольшей ставки. Нарушение сего обстоятельства последствия аннулирование выигрыша.
1×slots официальный сайт скачать на айфон
Бонус в казино без депозита имеет различные вариации: такое быть приветственный бонус, акции в честь каких-либо дней либо главных дат, бонус за вербование новых игроков, лояльность и получение VIP-статуса. Бонус начисляется игроку незамедлительно после регистрации и прохождения верификации в казино и не настятельно от клиента внесения депо. Как правило, объем приза в сходственном случае достаточно застенчивый, однако дозволяет новичкам познакомиться с игрой без риска настоящими средствами. <a href=http://www.save-ee.com/memberlist.php?mode=viewprofile&u=82994>http://www.save-ee.com/memberlist.php?mode=viewprofile&u=82994</a> Бездепозитный приз за регистрацию в казино — это стартовый подарок повторяющий денежного начисления либо даровых вращений для свежих игроков заведения, для получения которого надо заносить депо. 1×slots официальный сайт зеркало Бездепозитные призы казино это финансовая компенсация, предлагаемая пользователям на дармовой базе и вероятность играть в онлайн казино даром. Если сравнивать их с одобрениями за лепта, каких средства выдаются лишь потом начального пополнения счета, то бездепозитные гонорары получаются бесплатно. То есть, играющий получает вероятность делать ставки на теснее существующие деньги, которые выдаст заведение, выполняя, при, обычные деянья, дабы их извлечь (тут речь о регистрация, удостоверении личности с внедрением номера аппарата, дизайна заказы и т.д. ).
1×slots бездепозитный бонус за регистрацию
Да, у даровых бонусов есть дефекты. Прежде всего, они обычно не. Кроме того, условия вейджера по ним практически строгие. Но все же недоступность риска делает их довольно красивыми для посетителей.Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не можете активировать и получить бездепозитный бонус.В случае установленного лимита на необходимую вывода выигрыша с бездепозитного бонуса, игрок не сможет вывести больше заявленной суммы. 1×slots зеркало которую указывали при регистрации кстати <a href=http://digitalmediasa.net/profile/henrykah/>http://digitalmediasa.net/profile/henrykah/</a> Также, учите, что бездепозитный бонус возможно исключить лишь в том случае, когда будут выполнены все обстоятельства отыгрыша.Бывают ли бездепозитные призы без вейджера? Бывают, если у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино.
скачать 1×slots официальный сайт
Промообъявления от казино не дают реальной картины и ориентированы на привлечение внимания пользователей. Понять, насколько высоки шансы остаться в плюсе, дозволит собственный тест критерий предложения: <a href=http://l2help.lt/user/Porsedropea/>http://l2help.lt/user/Porsedropea/</a> 1×slots регистрацию более популярный вариант это Некоторые клубы автоматически начисляют бонус на акк игрока после исполнения критерий получения, хотя случаются ситуации, когда приз надо(надобно) активировать игроку самому. Есть несколько методов активации приза:
<b>Смотреть еще похожие новости:</b>
<a href=https://www.bf-france.com/forums/profile/30064-rabofreeor/>1×slots официальный регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.
#8617 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало
В бонусную программу множества операторов входят регулярные бездепы. Это бессрочные акции, поощряющие интенсивных постоянных игроков. Популярный формат — раздача фриспинов по конкретным денькам недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают неизменные бонусы без депозита в мена на накопленные баллы лояльности. <a href=http://filmkachat.ru/>1×slots скачать на айфон</a> На нашем веб-сайте Вы отыщите список актуальных новых бездепозитных бонусов в казино 2022 года. Также, есть много эксклюзивных услуг, коие доступны только гостям нашего сайта в регистрации по нашей ссылке или активации специального промокода.Чтобы бездеп не был начислен на Ваш акк, Вам не активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк автоматически, а Вы не планируете его использовать, обратитесь в службу с просьбой отменить бездепозитный бонус. <a href=https://slides.com/d/BkxHaho/speaker/0eezH0o>https://slides.com/d/BkxHaho/speaker/0eezH0o</a> 1×slots зеркало на сегодня <a href=http://wuyuebanzou.com/home.php?mod=space&uid=549194>http://wuyuebanzou.com/home.php?mod=space&uid=549194</a> Для получения выигрыша требуется выполнить обстоятельства казино. Чаще всего игроку нужно поставить определенную сумму, хотя уже из личных денег. Она рассчитывается из совместного объема выигрыша за все время использования бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, случае юзер выиграл 1000 рублей, а множитель составляет х30, исключить деньги можно несомненно, сделав ставки на 30 000 руб.
1×slots регистрация 1×slots casino c2d ru
Как управляло, при выводе денег, от играющего потребуется только сделать наименьший вклад чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом индивидуальный счет. 1хслотс официальный сайт зеркало Бездепозитный приз предоставляется новенькому игроку за определенные деянья. Часто подарок вид денег либо фриспинов выдается за регистрацию, благодаря чему юзер получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax <a href=https://ic-info.ru/forum/user/169163/>https://ic-info.ru/forum/user/169163/</a> На бонусные начисления могут быть установлены дополнительные ограничения, коие Вы не к при отыгрыше. Пока приз всецело не отыгран — деньги из казино не выводятся.В случае с фриспинами без вейджера, Вам не придется отыгрывать свой выигрыш с безвозмездных вращений. Прибыль, которую Вы заработаете на таком бездепе возможно ставить на вывод без какого или отыгрыша. 1× slots зеркало
1×slots официальный зеркало
Новички не обожают незамедлительно же заносить депо. Это обусловлено неимением опыта и сомнением. К счастью, в наше время можно получить бездепозитный бонус за регистрацию в казино. Неважно что начислит система – фриспины либо кредиты. В любом случае вы не рискуете своими сбережениями. Это отличная возможность запустить приглянувшийся видео разъем либо же испытывать удачу в настольных забавах.Для получения бездепа нужно пригласить в игру по реферальной ссылке нового клиента: он должен зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и восполнить счёт на необходимую, указанную в критериях акции. <a href=https://gusev-online.ru/user/Terryagerm/>https://gusev-online.ru/user/Terryagerm/</a> Ниже указан важный перечень легальных казино в Беларуси с бонусами на 1-ый депо. Вы можете попасть на официальный вебсайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус.В качестве призов онлайн казино часто предлагает выдачу фриспинов, словами безвозмездных вращений игрового барабана. Виртуальные монеты возможно использовать для изучения в покерной школе или для забавы в казино. 1×slots официальный сайт скачать на айфон
x1 slots регистрация в 1×slots casino
Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической забавы на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, научится регулировать изменять ставки и линии, изучать бонусные забавы и их выигрышные комбинации, да счете просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные средства, коие можно отыграть и вывести, а не просто на демо счет, тем самым адреналин в крови еще больше повысится а пульс забьется с нередким ритмом! <a href=http://forums.panzergrenadiers.com/showthread.php?22577–1×slots-%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%B7%D0%A0%D1%91%D0%A0%D0%85%D0%A0%D1%95-%D0%A0%D1%98%D0%A0%D1%95%D0%A0%C2%B1%D0%A0%D1%91%D0%A0%C2%BB%D0%A1%D0%8A%D0%A0%D0%85%D0%A0%C2%B0%D0%A1%D0%8F-%D0%A0%D0%86%D0%A0%C2%B5%D0%A1%D0%82%D0%A1%D0%83%D0%A0%D1%91%D0%A1%D0%8F&p=499526#post499526>1×slots казино мобильная версия</a> Вейджер (wager) – это коэффициент, который показывает на какую необходимую нужно устроить ставок, дабы исключить бонус из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода этого приза, Вам необходимо сделать ставок на сумму: 500*70=3500 руб. Только всецело отыграв приз, Вы можете вывести собственный выигрыш.Бездепозитные призы прекрасный вариант даровой игры в игровые автоматы. Многие юзеры сети не понимают, собственно в казино можно начать выступать безусловно даром, а позже вывести выигрыш на банковскую карту или электронный кошелек, иные не доверяют интернет казино, а третьи успешно играют и выигрывают – и тотчас довольно немалые суммы. 1хслотс мобильная версия зеркало <a href=http://honevi.grodno.by/index.php?subaction=userinfo&user=ArnoldPloxy>http://honevi.grodno.by/index.php?subaction=userinfo&user=ArnoldPloxy</a> Исходя из этого, просто не присутствует разумных оснований махнуть рукою на получение такового приза при регистрации. И, не, на подобный безвозмездной основе у вас есть все шансы выиграть деньги и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, нарекают бесплатными онлайн платформами для игр.
зеркло казино 1×slots
Список так нарекаемых «запрещенных землель» прилагается к правилам бонусной программки игорного портала. Обязательно выясните, распространяются ли на вас сходственные наказания.При регистрации в либо ином интернет игральном заведении — для дается раз шанс испытывать свою фортуну не внося свои монеты. Замечу собственно эту поощрительную предложение предоставляют не все онлайн игровые площадки, а лишь щедрая половина из них. Которые мы подготовили для Вас в нашем списке. <a href=http://ckenc.co.kr/bbs/board.php?bo_table=gallery&wr_id=16376>http://ckenc.co.kr/bbs/board.php?bo_table=gallery&wr_id=16376</a> 1×slots casino зеркало
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Так что приготовьтесь дать конфиденциальную информацию (пол, возраст, страна проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает не более суток, в чего получится свободно выводить солидные выигрыши. Бездепозитный бонус по промо-коду будет доступен для игры, только что случае когда Вы активируете специальный бонусный код в разделе с призами либо укажите промокод при регистрации на сайте. В некоторых случаях, кроме активации кода, понадобиться доказать контактные данные игрока и наполнить анкету клиента.
#8618 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
Для подтверждения электронной почты, просто перейдите по интенсивной ссылке в послании, приобретенном от игрового заведения.Бездепозитные бонусы отличный вариант безвозмездной забавы в игровые автоматы. Многие пользователи сети не понимают, собственно в казино можно начать выступать абсолютно безвозмездно, а позже исключить выигрыш на банковскую карту либо электрический кошелек, другие не доверяют интернет казино, а третьи успешно играют и выигрывают – и подчас довольно большие суммы. <a href=http://filmkachat.ru/>1хслот официальный сайт зеркало</a> Активация валютного гонорары происходит автоматически в создания профиля либо применения промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на страницы казино в социальных сетях либо на рассылку маркетинговых извещений, скачать и установить дополнительный софт и т.д. <a href=https://yamcode.com/3d-architectural-rendering-services-2>https://yamcode.com/3d-architectural-rendering-services-2</a> казино 1×slots официальный сайт <a href=http://vn-info.net/user/Craigknori/>http://vn-info.net/user/Craigknori/</a>
1×slots casino регистрация на сайте
Свежий приз начисляется вид валютных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в использовании средствами, а в случае отыгрыша оператор имеет ввести ограничение на вывод средств. 1хслотс рабочее зеркало Принципиальным отличием даровых призов от бонусов на депо является отсутствие надобности заносить средства на аккаунт. Из-за сего их нередко называют бездепозитными (no deposit bonuses).Рассмотрим принцип его деяния на случае. Допустим, вы зарегистрировались и получили $10 no down payment bonus с вейджером х50. Это значит, собственно выигранные средства можно несомненно выводить не ранее, чем после того, как общая сумма ставок достигнет $500. <a href=https://google.lu/url?q=https://doctorlazuta.by/>https://google.lu/url?q=https://doctorlazuta.by/</a> Также, учите, собственно бездепозитный приз возможно вывести лишь в случае, когда станут выполнены все обстоятельства отыгрыша.Операторы гемблинга заявляют, собственно так они борются с бонус-хантерами. Впрочем, критики считают, собственно этим казино пытаются сделать из случайного гостя неизменного игрока. 1×slots официальный сайт скачать на айфон
1×slots официальный сайт зеркало рабочее
Представьте момент, когда при ставке в 10 рублей Вы получите сходственное умножение. Миллион руб. За одно вращение, собственно вполне вероятно. Поэтому вопрос, сколько возможно выиграть остаётся закрытым. Предлагаем выяснить помощи. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный приз и инспектируйте удачу в деле. Разумеется, исключить средства сложно. Однако шансы есть у всех.У каждой игры средства притязания по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система засчитает каждую ставку. В рулетке и покере сделать это намного сложнее. Именно поэтому например важно внимательно читать обстоятельства получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в каждой ирге, то новенькие просто «спустят бонус на ветер». <a href=http://shijiro.utmall.com/viewthread.php?tid=242713&extra=>http://shijiro.utmall.com/viewthread.php?tid=242713&extra=</a> Бездепозитный приз казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби избранного заведения, сориентироваться в выборе игр и выяснить качество работы службы. Довольно часто, начиная игровой процесс, игрок уже отказывается останавливаться и делает настоящий вклад. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть бесплатно вполне как один таки с бонусом за регистрацию без необходимости вносить депозит. casino 1×slot Бездепозитный приз предоставляется новенькому игроку за определенные деянья. Часто подарок повторяющий средств или фриспинов выдается за регистрацию, спасибо чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.
1×slot зеркало рабочее регистрации на телефон придет
Бoльшинcтвo азартных заведений выдвигают примерно однообразные, схожие условия и притязания, которые нужно выполнить, дабы получить бездепозитный приз за регистрацию. Все их возможно объединить в раз перечень: 1×slots рабочее зеркало <a href=http://gderabotaem.ru/company/iz-chego-sostoit-dieta-eleny-malyshevoy>http://gderabotaem.ru/company/iz-chego-sostoit-dieta-eleny-malyshevoy</a>
1×slots casino регистрация
Можно. Вы постоянно сможете отказаться от получения бездепозитного приза за регистрацию в казино, пока Вы не сделаете ставку.Если простыми словами, бездепы – это определённая сумма средств либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать подарки. Но есть некоторые аспекты. Существуют игорные жилища, которые перед тем как начислить призы настоятельно привязать телефонный, предоставить копии документов. Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном призе, то в первую очередь внимание на значение вейджера и срок, кот-ый дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, что, этим проще отыграть бонус и вывести выигрыш. <a href=http://sols9.com/batheo/Forum/User-Zacherywed>http://sols9.com/batheo/Forum/User-Zacherywed</a> Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала быстрые выводы. Фишка выплат в, собственно достаточно выбрать платёжный инструмент и показать сумму. В большинстве случаев средства зачисляются на электрические кошельки в течение 15 мин., а на банковские карты – 1–3 трудящихся дня. скачать 1×slots на андроид мобильная версия
<b>Смотреть еще похожие новости:</b>
<a href=https://pbtur.com.br/users/jameshex>казино 1×slots официальный сайт</a>
<a href=https://g2clubs.com/healthy-workout/google/#comment-23959>1х слот 1хслотс регистрация перейти на 1×slots</a>
<a href=https://russiancomputerservice.ru/user/JosephCer/>1хслотс рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Прежде всего, не забывайте периодически заглядывать на страницу обзоров бездепозитных призов. Они шаг за шагом разглядывают более занимательные предложения водящих игорных порталов.
#8619 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало
В истиннее время получить бонус за регистрацию в казино очень просто. Почти любой игорный дом с радостью предоставит средства или благотворительные вращения. Многие игроки пользуются этим и не стесняются регистрироваться в каждом клубе с выгодными критериями. Кстати, это отличная вероятность придумать выигрышную стратегию и сорвать куш. <a href=http://filmkachat.ru/>1×slots casino регистрация на сайте</a> Размер ставки для забавы по бездепозитному бонусу (конечно же, если, тогда,, когда он представлен вид бонусных денежных средств) часто ниже, чем при этой на депо. Ограничение будет работать до этапа отыгрыша приза. <a href=https://www.divephotoguide.com/user/kalinka0588>https://www.divephotoguide.com/user/kalinka0588</a> Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша призов. Заведения практически устанавливают максимальную ставку, допустимую по условиям вейждера. 1хслотс рабочее зеркало <a href=https://gamma.app/public/Discover-the-Best-Pizza-91367-A-Journey-with-Puzzle-Pizza-8rm7rgj97ownhm0>https://gamma.app/public/Discover-the-Best-Pizza-91367-A-Journey-with-Puzzle-Pizza-8rm7rgj97ownhm0</a> Ознакомьтесь с нашим списком наилучших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего списка и получите бездеп сразу. Хватайте наихорошие безвозмездные предложения ниже и выигрывайте немалые средства, не рискуя!
1хслотс официальный сайт зеркало
<a href=http://forum.cvetq.info/viewtopic.php?f=8&t=239910>1хслотс казино зеркало</a> 1×slots зеркало на сегодня Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 поболее. Когда игроку надеется количество фриспинов, администрация имеет бить3 их начисление на некоторое дней. Бесплатные вращения предоставляются для определенного слота, кот-ый указывается в правилах промоакции. <a href=https://ruisoon.com/space-uid-43084.html>https://ruisoon.com/space-uid-43084.html</a> Нельзя рассматривать забаву на средства, как вариант заработка. Азартные игры запрещены для лиц младше 18 лет. Topcasinobonuses.mobi не является организатором азартных игр. Сайт носит информационный нрав.Бесплатный приз – кредиты, коие онлайн-казино начисляет посетителю, не заставляя его пополнять игровой счет. рабочее зеркало 1×slots Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в индивидуальный кабинет, чтобы арестовать безвозмездные вращения с вейджером х40;
casino 1×slot
За вербование приятеля ? в рамках партнерской программки клиент получает вознаграждение за вербование свежих юзеров.Для получения предоставленных бонусов вас понадобиться — ПК или мобильное прибор, и остальное дело за малым. Однако в условиях исчезают «подводные камешки», которые не позволят исключить крупную сумму либо же вы не успеете отыграть вейджер. Поэтому профессионалы советуют арестовать благотворительные вращения за регистрацию в казино без депо, дабы поднабраться опыта и получить реальный шанс на победу. <a href=https://simracing.su/user/Charlessar/>https://simracing.su/user/Charlessar/</a> Третитй бездепозитный приз за регистрацию – денежные средства. К раскаянию, начислить рубли или баксы способны только знаменитые и знаменитые клубы. С их поддержкою вас насладиться любой доступной забавой – автоматом, рулеткой, кено, блэкджеком.Каждый компьютерные должен сперва детально изучить обстоятельства по получению и отыгрышу понравившегося презента. Если всё организует, поторопитесь отобрать безвозмездные спины за регистрацию в казино без депо с выводом и без отыгрыша и прямо в начать вращать барабаны топовых слотов. 1×slots зеркало сайта Если вы бывалый игрок, вы обязаны аристократия, что бонус без депозита – редкая находка. Тем ниже, мы раз изучаем интернет, чтобы найти вам превосходнейшие бездепозитные предложения.Доступность — бездепозитные бонусы в казино почаще всего предоставляются свежим игрокам, хотя случаются случаи, когда бонус имеют получить и действующие клиенты.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Фриспины — безвозмездные вращения, коие дозволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины числятся самым модным и предпочтительным видом приза — бесплатные вращения иногда эффективнее и веселее в отыгрыше, чем другие виды бездепов.Для тех, кто лишь подумывает испытать собственную удачу, еще для профессиональных игроков, разыскивающих свежие площадки для выигрышей, ведущие лицензированные казино нередко устраивают различные акции, и лучшее предложений за последнее время – как для начинающих, например и для профессиональных игроков – бездепозитный приз за регистрацию. Получить приветственный бонус имеют лишь свежие клиенты онлайн-казино. Способы описаны в критериях акции любого легального казино, чаще всего это: 1×slots казино мобильная версия <a href=https://www.alligator.spb.ru/forum/index.php?PAGE_NAME=profile_view&UID=69987>https://www.alligator.spb.ru/forum/index.php?PAGE_NAME=profile_view&UID=69987</a> Онлайн-казино с бездепозитными призами ставят посетителям условия для пользования бездепами, поэтому перед ролью в промоакции лучше досконально ознакомиться со всеми правилами и аспектами промоакции. Условия могут касаться получения бонуса, его применения и следующего вывода валютных средств если, тогда, выигрыша.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие появляются у начинающих. <a href=https://www.kadrovik-praktik.ru/communication/forum/user/216716/>https://www.kadrovik-praktik.ru/communication/forum/user/216716/</a> Создание аккаунта. На сайте казино нужно обнаружить регистрационную форму и наполнить пустопорожние поля собственными данными. Иногда на данном этапе потребуется указать лишь адресок электронной почты и пароль, хотя чаще хотелось заполнить анкету персональной информацией (ФИО, дата рождения, место проживания и т.д. ). Нужно свидетельствовать только настоящие данные, потому впоследствие они будут испытаны. 1 xslots рабочее зеркало Более крупные предложения встречаются довольно редко. Зачастую они доступны лишь VIP-игрокам. В остальных случаях им всего сопутствуют довольно жесткие условия отыгрыша. Также возможны вспомогательные обстоятельства и лимитирования, прописанные в критериях и положения бонусной программки казино.
<b>Смотреть еще похожие новости:</b>
<a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=7523&TITLE_SEO=7523-preobrazovatel-interfeysov-usb-rs485&MID=468932&result=reply#message468932>1×слотс казино</a>
<a href=https://forum.eliteshost.com/showthread.php?tid=15538>скачать 1×slots на андроид мобильная версия</a>
<a href=https://www.kfz-gringer.at/index.php/forum/donec-eu-elit/68064–1×slots#67829>1×slots регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При пользовании бездепозитным бонусом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют количество видов лимитов: Заполняя данные в личном профиле, указывайте только достоверную информацию, например как Вам придется ее доказать в будущем при выводе денег.
#8620 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт, скачать
Важно, убедитесь в, что раньше не регистрировались в избранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots casino 777 online</a> После потребуется внести идентификационный платёж. Это стращает начинающих больше всего. Нужно устроить наименьший депозит в 100–500 руб. Таким образом служба защищенности увериться в, что платёжный метод принадлежит Вам. Данная процедура необходима для обеспечивания безопасности игровых счетов. Пример, Ваш акк взломают и выведут средства на свой кошелёк. Будет крайне неприятно. Поэтому верификация платёжной системы, это необходимый момент.Диапазон ставок, которые вправе сделать игрок, также лимитирован. Обычно назначать возможно маленькую сумму — около 10–30 руб. За одно вращение. <a href=https://webyourself.eu/blogs/526683/Mastering-the-art-of-3D-rendering-a-comprehensive-guide-to>https://webyourself.eu/blogs/526683/Mastering-the-art-of-3D-rendering-a-comprehensive-guide-to</a> Как управляло, при выводе финансов, от играющего потребуется лишь сделать наименьший вклад для того, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом личный счет.Составленный специалистами Casino.ru список онлайн-казино с бездепозитным бонусом разрешает игрокам сравнить спецпредложения различных операторов. 1×slots скачать на айфон <a href=https://cromia.ua/forum/user/4644/>https://cromia.ua/forum/user/4644/</a> Необходимость отыгрыша. Вейджер ситуации выше, чем для бонусов за депо. И пока средства не отыграны, вывести их невозможно.
зеркло казино 1×slots
1×слотс казино Наиболее популярностью гонорары между гэмблеров – бездепозитные призы казино. Это не удивительно, так можно получить безвозмездные вращения либо виртуальные кредиты, и всем не придётся пополнять счёт, рисковать собственными деньгами. Удастся насладиться разнородными развлечениями и даже выиграть солидную сумму, избегая серьёзного риска. <a href=http://cubanacan.tur.cu/habana1.html/reserve?url=http://vfd.moscow/bitrix/redirect.php?goto=http://web-alfa-ars.ru/bitrix/redirect.php?goto=https://telegra.ph/Kak-bystro-poluchit-svidetelstvo-o-postanovke-na-nalogovyj-uchet-fizicheskogo-lica-Forma–2–1-Svidetelstvo-INN-09–19>http://cubanacan.tur.cu/habana1.html/reserve?url=http://vfd.moscow/bitrix/redirect.php?goto=http://web-alfa-ars.ru/bitrix/redirect.php?goto=https://telegra.ph/Kak-bystro-poluchit-svidetelstvo-o-postanovke-na-nalogovyj-uchet-fizicheskogo-lica-Forma–2–1-Svidetelstvo-INN-09–19</a> Заработать на бездепозитных бонусах за регистрацию в казино имеет каждый юзер, достигший совершеннолетия. 1×slots официальный сайт скачать на айфон Несмотря на то, что данный вариант стимуляции со стороны азартных платформ очень популярен области подобных игр, далеко не всем почитателям казино знаменито, что сами бездепозитные призы казино и как именно их возможно эксплуатировать.
1×slots регистрация то дальше необходимо пройти
Это тоже безвозмездные деньги, которые поступают на аккаунты свежеиспеченных игроков после регистрирования. А особенность таких призов состоит том,, что обретенные деньги обязательно идет применять в продолжении назначенного времени. Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми акциями. Читайте о них в обзорах и на форуме. <a href=https://pbtur.com.br/users/doctorlazutaei>https://pbtur.com.br/users/doctorlazutaei</a> Условия вывода выигрыша. В неких заведениях для удачного вывода с бездепозитного приза достаточно пополнения баланса и подтверждения личности. В иных же клубах, необходимо количество один прокрутить свой депозит. 1×slots зеркало регистрация в 1×slots casino
1×slots скачать на айфон
Каждая игровая платформа выделяется критериями по получению и отыгрышу бездепов. В правилах отчетливо расписаны кратковременные рамки, за коие нужно прокрутить вейджер. Также не запамятовывайте на максимальный объем ставки и максимальную сумму выплаты. С иной стороны, чтобы получить бездепозитные бонусы казино, довольно истратить менее 1 минутки.Выбирая даровой приз, внимательно изучайте верховодила. Убедитесь, что вам можно на участие в промоакции. Уточните, в каких играх возможно выполнять условия вейджера. При надобности задавайте вопросы адептам саппорта. 1хслот зеркало сайта <a href=http://bbs.boway.net/home.php?mod=space&uid=897293>http://bbs.boway.net/home.php?mod=space&uid=897293</a> Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке представители онлайн-казино публикуют актуальную информацию о not the slightest deposit bonuses и других услугах.
1хслотс рабочее зеркало на сегодня
Популярность онлайн казино растёт и всё больше юзеров начинают интерес азартными забавами. Бездепозитные бонусы 2022 года, это уникальные подарки за регистрацию. С их помощью свежие игроки шансы получить бесплатные вращения либо деньги на баланс за 1 регистрацию. С свет игорных заведений в интернете, бездепозитные бонусы стали популярнейшим способом привлечения игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о которых мы поведаем. Наш сайт собрал наилучшие предложения из интернета на 2022 год. Воспользуйтесь любым презентом и сможете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша нужно выполнить обстоятельства. <a href=https://hdkaraokesong.com/space-uid-260109.html>https://hdkaraokesong.com/space-uid-260109.html</a> Вейджер (либо вагер) ? это минимальная сумма ставок, которую нужно сделать для вывода валютного бонуса. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение. 1 хслот регистрация в 1×slots casino Но не думать, собственно снабжая юзеров этими призами, казино увлекается спонсированием. Ведь объемы вознаграждений, главном, не великие (средним объемом от 5 до 20 $). И на эти средства налагаются конкретные условия и ограничения, неотклонимые к выполнению игрока, случае в последствии он вожделеет получить все свои выигранные деньги.Чаще всего применяются коды. Их надо(надобно) вносить в специальные окна регистрационной анкеты, в речь идет о пригласительных призах, или в определенном разделе личного офиса игрока.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.findaspermdonor.com/viewtopic.php?f=25&t=86817>1×slots официальный сайт зеркало</a>
<a href=https://021snyw.com/space-uid-53919.html>1 x slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Новые посетители онлайн-казино без первого депозита шансы выяснить собственную удачливость. К что, этому же есть возможность преобразовать бездепы в реальные средства за регистрацию в казино, впрочем результата бонус необходимо отыграть согласно условиям промоакции. Верификация необходима для добавочной безопасности и помогает техподдержке выявить бонусхантеров и мошенников. Кстати, рядах платформах выводы солидных сумм доступны лишь после доказательства личности.
#8621 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее
В современность очень просто получить бонус за регистрацию в казино. Практически каждый игорный жилище с готовностью начислит деньги либо безвозмездные вращения. Многие гэмблеры пользуются этим и не смущяются регистрироваться в любом клубе с выгодными условиями. Кстати, это отличная вероятность выработать победную тактику и сорвать джекпот. <a href=http://filmkachat.ru/>скачать 1×slots официальный сайт</a> <a href=https://webyourself.eu/blogs/526683/Mastering-the-art-of-3D-rendering-a-comprehensive-guide-to>https://webyourself.eu/blogs/526683/Mastering-the-art-of-3D-rendering-a-comprehensive-guide-to</a> Промообъявления от казино мешают реальной картины и направлены на вербование внимания юзеров. Понять, как высоки шансы остаться в плюсе, дозволит личный тест условий предложения: 1×slots casino регистрация на сайте <a href=http://maps.google.com.pa/url?sa=i&url=http://kdds.ru/bitrix/redirect.php?goto=http://grass27.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/4KbaM0jFba7>http://maps.google.com.pa/url?sa=i&url=http://kdds.ru/bitrix/redirect.php?goto=http://grass27.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/4KbaM0jFba7</a> Чтобы получить вероятность исключить прибыль с бездепозитного приза в казино, необходимо выполнить ряд критерий:
1×slots актуальное зеркало
<a href=https://www.donchillin.com/space-uid-382497.html>1×slots зеркало этих способов предполагает регистрацию</a> 1хслот зеркало Заполняя данные в личном профиле, указывайте только достоверную информацию, так как Вам понадобиться ее доказать дальнейшем при выводе денег. <a href=https://forum.spherecommunity.net/User-JasperBer>https://forum.spherecommunity.net/User-JasperBer</a> В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, необходимо адресоваться в службу спустя лайв-чат на веб-сайте казино.Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном сайте и сделайте вход в собственный офис, чтобы арестовать благотворительные вращения с вейджером х40; 1×slots официальный сайт скачать на айфон
1×slots регистрация на сайте 1×slots ru com
Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную процедуру активации приза без депо. Внимательно прочитайте до конца. Многие новенькие делают ошибки на этапе регистрации и поэтому не получить презент.Не трудно догадаться, что no deposit bonuses практически ни не посещают великими. Чаще всего идет о пяти–тридцати баксах (либо эквиваленте данной суммы в иной валюте). <a href=http://naszaswietlica.dwr.pl/profile.php?lookup=16838>http://naszaswietlica.dwr.pl/profile.php?lookup=16838</a> Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации подарка необходимо подтвердить электронную почту и привязать телефонный; 1×slots зеркало подтвердит вашу регистрацию если говорить
казино 1×slots
На данном разделе портала периодически публикуются обзорные заметки, в рассматриваются безвозмездные бонусы наилучших интернет-казино. Информация структурирована по нескольким пт, включая главные: В интернет-сети постоянно возможно найти списки более популярных и гарантированных поощрительных программ от модных онлайн-казино. 1×slots скачать на айфон <a href=https://cromia.ua/forum/user/9512/>https://cromia.ua/forum/user/9512/</a>
1×slots казино мобильная версия
Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.Главное превосходство спинов – возможность выучить различные слоты. Также получится насладиться бонусными раундами, испытать фортуну в риск-туре и преумножить выигрыш за счёт особых символов. Однако столько игровой процесс заслуживает внимание, так чем сосредоточиться на реальном выигрыше. <a href=http://oxm.tw/xoops/modules/profile/userinfo.php?uid=1186423>http://oxm.tw/xoops/modules/profile/userinfo.php?uid=1186423</a> 1×slots зеркало регистрацию более популярный вариант это Можно ли наваривать на бездепозитных призах? Это не работа, тут как повезет, в в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, время можно назвать везением, и добавочной добавкой к вашему бютжету.Срок активации и время на отыгрыш. Зачисление средств или фриспинов происходит при активации протяжении строго ограниченного периода, похожие требования предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать приз несколько дней либо том недель. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером.
<b>Смотреть еще похожие новости:</b>
<a href=https://creapnl.com/foros/tema/1×slots-%d0%b7%d0%b5%d1%80%d0%ba%d0%b0%d0%bb%d0%be-%d0%b2%d0%b8%d0%b4%d0%b5%d0%bb%d0%b8-%d1%82%d0%b0%d0%ba%d1%83%d1%8e-%d1%80%d0%b5%d0%b3%d0%b8%d1%81%d1%82%d1%80%d0%b0%d1%86%d0%b8%d1%8e-%d0%bd%d0%b0/>1×slots зеркало видели такую регистрацию на</a>
<a href=https://forum.oursson.ru/viewtopic.php?f=2&t=8427>1хслот скачать</a>
<a href=http://lider1c.ru/communication/forum/user/24774/>1×slots официальный зеркало рабочее</a>
<a href=https://takesalary.com/the-day-ai-took-over-losing-my-job-as-a-content-writer/#comment-3742>1×slots зеркало регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном веб-сайте и выполните вход в личный кабинет, дабы отобрать благотворительные вращения с вейджером х40;
#8622 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало
Ниже указан актуальный список законных казино в Беларуси с бонусами на первый депозит. Вы можете попасть на официальный вебсайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус.Даже не выиграв солидную необходимую, игрок увлекательно проведет время, изнутри изучит работу площадки, оценит геймплей автоматов. Все это без каких-либо денежных рисков. Быть в курсе превосходнейших промоакций легко. Достаточно регулярно изучать перечень свежих онлайн казино с выводом приза без депо в этом разделе. <a href=http://filmkachat.ru/>1×slots на любой вкус как пройти регистрацию</a> Бездепозитные призы за регистрацию в игровых автоматах для владельцев онлайн-казино являются долею рекламной кампании, направленной на повышение аудитории вебсайта. Так они продвигают свои бренды и завлекают свежих клиентов.Иногда в бездепа, казино презентует наименьший приз (до 50 рублей), ради которого не стоит заморачиваться. <a href=https://admin.phacility.com/F520885>https://admin.phacility.com/F520885</a> Вывод выигрыша с бездепозитных призов казино – великодушный подарок от азартных клубов. Но дабы вывести свой доход, нужно выполнить ряд условий: 1×slots официальный зеркало <a href=https://carpentryforums.com/member.php?action=profile&uid=4991>https://carpentryforums.com/member.php?action=profile&uid=4991</a> Индивидуальные одобрения выдаются за совершение деяний: подписку на аккаунты площадки в соц сетях, установку мобильного приложения либо официального клиента для ПК. В большинстве казино срабатывают программы лояльности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на грядущий уровень часто с выдачей бездепа.Существует ли стратегии для отыгрыша бездепозитных призов? К огорчению нет, на выигрыши либо проигрыши с призов, казино либо игрок воздействовать возможности, отдача игр случается от разработчиков игр.
1×slots сайт зеркало
Ниже указан актуальный список законных казино в Беларуси с бонусами на 1-ый депо. Вы можете попасть на официальный вебсайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус.Допустим, за регистрацию вы получили бездеп в размере 2 000 руб. С вейджером х30. В этом случае предстоит устроить ставок, на общую сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать реальные деньги. Однако не забывайте, собственно с каждого презента выйдет вывести определённую необходимую (чаще всего менее $200). 1×slots сайт <a href=https://trueanal.org/user/ArnoldPrult/>https://trueanal.org/user/ArnoldPrult/</a> 1×slots актуальное зеркало Активация по промокоду используется в различных обликах бездепов. Если речь идет о приветственном призе, то комплект знаков возможно узнать на основной страничке, в регистрационной форме или письме, которое отправляется пользователю для подтверждения адреса электронной почты. Акции имеют проводиться общо с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активируется разовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном кабинете или начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем важный код для активации в описании любого промо.
1×slots регистрация на 1хслотс
Oтыгpaть приз с обозначенным вeйджepом, для этого необходимо сдeлaть cтaвoк нa cумму, превышающую размер приза в несколько один.Начнём с как, что любое рекламную за регистрацию предполагает некоторые обстоятельства. Бездепозитные бонусы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, необходимая для исполнения условий. Пример, получили благотворительные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 рублей, проигрышных либо выигрышных, маловажно. После исполнения, бонусный баланс перейдёт на настоящий и будет доступным к выводу. <a href=http://sibstroyagent.ru/index.php?subaction=userinfo&user=cravenghoul35>http://sibstroyagent.ru/index.php?subaction=userinfo&user=cravenghoul35</a> 1хслот зеркало
1хслотс 1хслотс регистрация перейти на 1×slots
Теоретически, к безвозмездным бонусам можно отнести так называемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, поэтому собственно они деют только вероятность делать ставки.Для казино, работающих интернет, бездепозитные призы необходимы для привлечения новых посетителей. Предложение сыграть на слотах без надобности внесения настоящих денег — работающий метод для повышения интереса к компании. После отыгрыша бездепа великоват шанс, собственно игроку понравится и он продолжит выступать в казино, только сейчас уже на личные деньги. <a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=851965#pid851965>1хслотс рабочее зеркало</a> Можно ли наваривать на бездепозитных призах? Это не работа, тут как повезет, если в любом предложенном безедепе, вы будете откручивать вейджер и выводить, тогда возможно назвать везением, и дополнительной добавкой к вашему бютжету.Но есть игорные заведения, которые готовы просто так жертвовать средства на игру. Для этого достаточно сделать профиль. Чтобы вывести свой выигрыш, вас поначалу необходимо выполнить обстоятельства отыгрыша, указанные в условиях получения бездепозитного депозита. 1×slots зеркало рабочее на сегодня <a href=http://spectr-sb116.ru/user/Joshuawon/>http://spectr-sb116.ru/user/Joshuawon/</a> Так собственно основное отличие презента на депо от бездепа – обязательное пополнение счёта. Вы можете привнести депозит и преувеличить стартовый капитал или забрать бездеп и всем не придётся рисковать собственными сбережениями. Поспешите выполнить простые требования, и администрация ресурса начисляет щедрое одобрение!Максимальная ставка ? устанавливается в валюте счета и ограничивает размер ставки за раз спин. В случае ее превышения приз возможность быть аннулирован. Также в правилах имеет находиться запрет на размещение ставок конкретного облика, например, по равным шансам в рулетке (словами, на чет или нечет, красноватое или черное и т.д. ).
казино 1×slots
Можно ли зарабатывать на бездепозитных призах? Это не работа, здесь как повезет, в в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, тогда возможно именовать везением, и добавочной добавкой к вашему бютжету. На благотворительные бонусы онлайн-казино практически постоянно распространяется ограничения по стране проживания посетителей. Даже случае вам разрешается раскрывать счет и выступать на деньги в заведении, это еще не означают, собственно вас доступны no down payment bonuses. <a href=http://h96375tu.bget.ru/member.php?action=profile&uid=127191>http://h96375tu.bget.ru/member.php?action=profile&uid=127191</a> Для выбора азартного заведения Вы можете воспользоваться перечнем наших казино с призами за регистрацию. На нашем веб-сайте мы выпустили список бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, что доля призов эксклюзивные и доступны только для посетителей нашего вебсайта по-специальному промо-коду или по уникальной ссылке. Кроме как, для любого бонуса мы подготовили подробный обзор, в котором Вы узнаете как получить и отыграть одобрение и как исключить собственный выигрыш с бездепа.Эффективность бездепов виде маркетингового прибора расценили все операторы. Малоизвестные площадки используют эти промоакции, чтобы стремительно набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны постоянных посетителей. Не все веб-сайты, дающие презенты без депозита, рекомендованы к забаве. За симпатичным промоописанием могут скрываться невыполнимые обстоятельства отыгрыша прочие подводные камешки. 1×slots официальный сайт зеркало рабочее Подтвердите регистрацию, чтобы активировать Бездепозитный приз с выводом, требуется заполнить собственный профиль. Заполните пустопорожние поля настоящими данными о для.Поспешите зарегистрироваться на официальном сайте Клубника, чтобы моментально получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, появляется настоящий шанс победу!
<b>Смотреть еще похожие новости:</b>
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=32175>1×slots зеркало регистрация то дальше необходимо пройти</a>
<a href=http://forums.panzergrenadiers.com/showthread.php?23675-%D0%A1%D0%83%D0%A0%D1%94%D0%A0%C2%B0%D0%A1%E2%80%A1%D0%A0%C2%B0%D0%A1%E2%80%9A%D0%A1%D0%8A-1×slots-%D0%A0%D1%95%D0%A1%E2%80%9E%D0%A0%D1%91%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A0%C2%B0%D0%A0%C2%BB%D0%A1%D0%8A%D0%A0%D0%85%D0%A1%E2%80%B9%D0%A0%E2%84%96-%D0%A1%D0%83%D0%A0%C2%B0%D0%A0%E2%84%96%D0%A1%E2%80%9A&p=510485#post510485>скачать 1×slots официальный сайт</a>
<a href=https://pbgpersonnel.ru/forum/elimite-without-prescription-tab-fedex>1хслотс официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Реже бонусы без депозита начисляются неизменным игрокам. С их поддержкою администрация старается удержать ценных посетителей или вожделеет поблагодарить за лояльность правильных гостей. Но намного почаще для подобных целей применяются такие промоакции:
#8623 Charlesgunnyhttp://filmkachat.ru
1×slots казино зеркало
Максимальный размер ставки, который нельзя превосходить пока приз не будет полностью отыгран. В случае нарушения этого управляла, бонус и выигрыш с него будут аннулированы.Почти все игровые клубы просят свидетельство контактных данных игрока для получения бездепозитного бонуса. <a href=http://filmkachat.ru/>1×slots быструю регистрацию а также мгновенное</a> <a href=https://ekonty.com/blogs/view/69195>https://ekonty.com/blogs/view/69195</a> Бездепозитные призы казино за регистрацию в 2022 году — это возможность поиграть за счёт заведения. Казино даёт клиенту шанс пользоваться определённой суммой либо числом безвозмездных вращений без внесения депо. Не путайте деморежим с реальной игрой без надобности внесения депо. 1хслот скачать <a href=http://www.ukrtibet.net/index.php?subaction=userinfo&user=naivebottleneck>http://www.ukrtibet.net/index.php?subaction=userinfo&user=naivebottleneck</a> Чтобы играть даром на реальные средства в казино, не всегда достаточно просто зарегистрироваться. Иногда нужно выполнить вспомогательные деяния.
1×slot регистрация
Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, a зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.Бездепы все входить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой либо баллами. 1×slots бездепозитный бонус за регистрацию В онлайне много знаменитых игорных площадок с красивыми акционными услугами. Однако пристально читать обстоятельства 10-ов услуг скором надоест, да и время отнимет количество. Поэтому наша команда подготовила ТОП-3 вебсайтов с наихорошими бездепозитными бонусами:Иногда у посетителей вебсайта все появиться трудности, задачи, препядствия при активации приобретенного промо-кода. В таких случаях, необходимо обратиться за поддержкою в службу «Support». Для получения ответа, непременно указывается определенная причина обращения и подтверждается информация дополнительными экрана. Если сформировалась спорная обстановка, практически можно обратиться к основному регулятору или контролирующему органу, выдавшему этому заведению лицензионный документ. <a href=http://web.symbol.rs/forum/member.php?action=profile&uid=641014>http://web.symbol.rs/forum/member.php?action=profile&uid=641014</a> К раскаянью, нет. Почти все казино, требуют внесение хотя бы 1-го малого депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, что исключить деньги разрешено только на что, эту платежную систему, с коей был изготовлен депозит. 1×slots casino online регистрация Таким образом онлайн казино получает вероятного игрока. Возможно дальнейшем либо истинном он захотит сыграть на свои деньги. Так трудятся бездепозитные призы в интернет казино. Здесь хорошо подходит выражение, благотворительные сыр случается лишь в мышеловке. Начинающие игроки имеют не обдумывать опасность пыла. Однако времени осознания становится больше. Это тема для отдельного обсуждения.
казино 1×slots официальный сайт
В большинстве заведений устроить это возможно по адресу электронной почты, по номеру телефона, через социальную сеть либо гугл-аккаунт. Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депозит может отличаться до 30 дней. <a href=http://bbs.cheaa.com/home.php?mod=space&uid=3136403>http://bbs.cheaa.com/home.php?mod=space&uid=3136403</a> Каждый из бездепозитных призов без пополнения 2022 содержит свой определенный вейджер для отыгрыша, например же в каждом казино он уточняется персонально — где то он х55 а где-то х30, повторюсь везде по различному! 1×slots официальный регистрация
1×slots зеркало этих способов предполагает регистрацию
Бонус без депозита за регистрацию в казино (бездепозитный приз) – это валютный подарок от клуба, кот-ый начисляется на акк игрока после регистрации в казино. Кроме творенья учетной записи, для получения бездепа, очень нередко потребуется ещё и доказать контактные данные игрока и/или активировать особый промо-код.Прежде чем активировать бездеп, нужно увериться никаких, собственно государство, гражданином которой является игрок, не входит в перечень разрешенных. Частенько новички не понимают, как активировать подарки либо вывести 1-ый выигрыш. Для сходственных случаев наша команда обрисовала главные термины – что это фриспины, вейджер, как его отыграть, зачем нужно протекать верификацию. Призовые начисления без депозита шансы предоставляться для роли в турнирах интернет казино. Потратить перечисленные средства можно самая масштабах этой промоакции. Условия их проведения содержат ограничения на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться этим предложением, лучше выучить его правила. 1×slots официальный demo регистрация в 1×slots casino <a href=https://web.xndl.com/home.php?mod=space&uid=646289>https://web.xndl.com/home.php?mod=space&uid=646289</a>
1×slots официальный сайт, скачать
Бездепозитный приз – это финансовое вознаграждение, коие выдается соучастнику забавы в казино, для его вербования и возникновения заинтригованности. Любой гость, кот-ый подходит условиям выдачи подобного бездепозитного бонуса, может претендовать на получение вышеуказанного приза. Такое поощрение является наиболее эффективным методом, дающим вероятность стартовать при, не вкладывая личных вещественных средств.Кешбэк-бонус представляет собой возврат фиксированного процента от ставки если, тогда, поражения либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не превышает 10%. <a href=http://apatit.org.ua/user/CraigAbexy/>http://apatit.org.ua/user/CraigAbexy/</a> Почти все игровые клубы просят свидетельство контактных данных игрока для получения бездепозитного бонуса. 1 x slots casino Также учтите, собственно кое-какие игровые платформы сузивают список государств, коие готовы получить предложенный бездепозитный бонус за регистрацию. К примеру, существуют онлайн-заведения, выдающие сходственные призы лишь обитателям определенных стран. К примеру, интернет казино 777 Оригинал предоставляет бездепозитный бонус только игрокам из России и стран СНГ. Или наоборот, снабжают вознаграждением всех, кроме обитателей некоторых стран (как сего, следует пристально учить список, чтобы потом не появилось практически вопросов и претензий).В бонусную программу многих операторов входят регулярные бездепы. Это бессрочные акции, поощряющие активных неизменных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депо в размен на скопленные баллы преданности.
<b>Смотреть еще похожие новости:</b>
<a href=http://freedom.teamforum.ru/memberlist.php?mode=viewprofile&u=6332>1×slots промокод при регистрации</a>
<a href=http://diablo2r.cn/home.php?mod=space&uid=30130>1хслотс официальный сайт зеркало</a>
<a href=https://msknovostroy.com/showthread.php?tid=107110>1×slots зеркало на сегодня</a>
<a href=http://swissairways-va.com/phpBB3/memberlist.php?mode=viewprofile&u=3495>1×slots casino регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для того, чтобы отыграть необходимую вашего бездепозитного бонуса надо(надобно) выполнить обстоятельства вейджера. Очень нередко фриспины даются на определенные слоты (book of ra, book of lifeless, book of sun), избирайте слот себе нраву, все очень очень и качественные. Бездепозитные бонус возможность быть денежным например и вид фриспинов на слоты Пoдтвepдить личнocть посетителя. Для удачного вывода средств, нужно доказать лицо клиента. Нa этaпe вepификaции пpoфиля, сотрудники службы защищенности должны убедиться, собственно у игрока чем один аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не может вывести свой выигрыш, случае у него будет количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы.
#8624 Charlesgunnyhttp://filmkachat.ru
1×slots сайт
У любой игры свои притязания по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система засчитает каждую ставку. В рулетке и покере сделать это намного труднее. Именно потому например важно внимательно разбирать обстоятельства получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой забаве, то новички просто «спустят бонус на ветер».Обычно, бездепозитные призы выдаются под конкретные слоты с фиксированной ставкой, но их точно воспрещено использовать в игровых автоматах с современным джекпотом. Список игр, каких возможно использовать бездеп, Вы отыщите в описании промоакции или можете уточнить у службы заведения. <a href=http://filmkachat.ru/>1×slots регистрацию процедура займет всего лишь</a> <a href=https://start.me/w/wJxxbP>https://start.me/w/wJxxbP</a> 1×slots casino регистрация на сайте <a href=http://jade-crack.com/home.php?mod=space&uid=1006606>http://jade-crack.com/home.php?mod=space&uid=1006606</a>
1×slots официальный регистрация
Бездепозитный приз казино 2022 с выводом за регистрацию предоставляет вероятность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и выяснить качество работы службы. Довольно часто, начиная игровой процесс, игрок уже отказывается останавливаться и делает настоящий лепта. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать безвозмездно возможно как раз таки с призом за регистрацию без надобности вносить депо.На страничке представлены бездепозитные бонусы за регистрацию в казино редкая заслуга за коей гонятся все игроки как новички, так и мастера. Мы также уделяем великое внимание на наличие призов при формирование рейтинга казино на средства. Бездепозитный бонус это возможность выступать бесплатно и выиграть настоящие деньги. <a href=https://karakol.com.kg/user/Jameskef/>1хслотс регистрация в 1×slots casino</a> 1×slots официальный сайт скачать на айфон Стоит обозначить(означить), что бездепозитный приз выдается только совершеннолетним новичкам, которые, же, шансы пригласить собственных приятелей и знакомых, кроме претендующих на поощрительную программку преданности. Подобная разработка была среди соперничающих онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению своей популярности, методом привлечения свежих игроков. Бонусы – это уникальный шанс для вероятных участников забавы, коие шансы опробовать софт покер рума и увериться, будут ли они в него выступать или нет. Новый игрок попробует свои силы с настоящими оппонентами в казино.Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы быстро получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, замечена реальный шанс победу! <a href=http://wx.abcvote.cn/home.php?mod=space&uid=1761892>http://wx.abcvote.cn/home.php?mod=space&uid=1761892</a> 1× slots официальный Высокая конкуренция в разделе азартных игр доказывает операторов завлекать посетителей разнородными акциями. Благодаря данному у гостей бывает возможность получить бонусы в казино за регистрацию без депо. Воспользоваться этим предложением можно, минуя функцию внесения средств на игровой счет, просто активировав аккаунт на веб-сайте. Наш гид по бездепам поможет избрать самую симпатичную бонусную программу, разузнать управляла получения такого вознаграждения и распорядиться им с максимальной выгодой.
1×slots рабочее зеркало на сегодня
Стоит обозначить(означить), что бездепозитный приз выдается только совершеннолетним новичкам, коие, к, могут пригласить личных друзей и людей, также претендующих на поощрительную программу лояльности. Подобная разработка была среди конкурирующих онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры содействуют повышению собственной популярности, путем привлечения новых игроков. Бонусы – это оригинальный шанс для потенциальных участников игры, коие шансы опробовать софт покер рума и увериться, станут ли они в него играть или нет. Новый игрок попробует средства силы с реальными оппонентами в казино.Бездепозитный бонус часто может стать легкодоступным сразу в завершения регистрации, потому как единственным притязанием к нему является регистрация, а после ревизия вашей свежей учетной записи. Нет. Казино выдают бесплатные призы за регистрацию, чтобы, чтобы, чтобы заказчик мог ознакомиться с игровым заведением. А чтобы исключить его, нужно выполнить обстоятельства отыгрыша. <a href=http://rvbu.ru/index.php?subaction=userinfo&user=grumpyalloy19>http://rvbu.ru/index.php?subaction=userinfo&user=grumpyalloy19</a> Нельзя осматривать игру на деньги, как вариант заработка. Азартные игры воспрещены для лиц младше 18 лет. Topcasinobonuses.mobi классифицируется организатором азартных игр. Сайт одевает информационный нрав.На безвозмездные бонусы онлайн-казино практически практически распространяется лимитирования по стране проживания клиентов. Даже если вам разрешено раскрывать счет и выступать на деньги в заведении, это еще не значат, собственно вас доступны no deposit bonuses. 1×slots официальный зеркало Вообще перейдя в казино — верховодила одинаковы в получении бездепозитных призов, в стереотипные управляла входит: подтвердить эл. Почту и телефонный, заполнить собственный собственный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Бездепозитные бонусы – это самая небезинтересная и более перспективная промоакция интернет-казино. Они числе лучше фри-спинов, поэтому что выплаты в бесплатных вращениях не гарантированы, ведь композиции на барабанах игрового аппарата имеют не сложиться.Новички не любят сразу же вносить депо. Это обосновано отсутствием опыта и сомнением. К счастью, в наше время возможно получить бездепозитный приз за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В любом случае вы не рискуете своими сбережениями. Это отличная вероятность запустить понравившийся видео слот либо же испытать удачу в настольных играх. <a href=https://mit-bbs.com/viewtopic.php?t=131770>x1 slots 1хслотс регистрация перейти на 1×slots</a> Призовые начисления без депо имеют предоставляться для участия в турнирах интернет казино. Потратить перечисленные средства можно самая в рамках этой акции. Условия их проведения в лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, превосходнее изучить его верховодила.Бездепы могут заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами. 1×slots зеркало регистрация в 1×slots casino <a href=http://www.zgqsz.com/home.php?mod=space&uid=327200>http://www.zgqsz.com/home.php?mod=space&uid=327200</a> Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие появляются у начинающих.
скачать 1×slots на андроид мобильная версия
Получить приветственный бонус могут лишь новые посетители онлайн-казино. Способы описаны в условиях акции каждого законного казино, почаще всего это:Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депозит имеет выделяться до 30 дней. <a href=http://alex-zarya.ru/user/Tyronetat/>http://alex-zarya.ru/user/Tyronetat/</a> Свежий бонус начисляется вид денежных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в использовании средствами, ну случае отыгрыша оператор может установить лимитирование на вывод средств. 1×слот регистрация в 1×slots casino Выполнив все притязания оператора, клиент имеет оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит в среднем не более суток. Если дополнительно требуется пройти функцию верификации, то срок увеличивается до 1–2 рабочих дней. Для перевода применяются банковские приборы и электрические платежные системы. Второй способ подходит другого, так как основная транзакций такой исполняются мгновенно. В связи со специфичностью функционирования банков обработка платежей может взятьвдолг(взятьвзаймы) до нескольких рабочих дней.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.spherecommunity.net/User-JamesLop>1×slots зеркало регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В лицензионных бездепозитных казино выступать в азартные игры действительно неопасно. Наличие лицензии подтверждает тот прецедент, собственно клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP.
#8625 Ремонт сигвеевhttps://remont-sigveev-expertise.ru/
Наша мастерская предлагает профессиональный <a href=https://remont-sigveev-expertise.ru/>ремонт сигвеев с гарантией</a> всех типов и брендов. Мы понимаем, насколько важны для вас ваши электроскутеры, и стремимся предоставить услуги высочайшего уровня. Наши профессиональные техники работают быстро и аккуратно, используя только оригинальные запчасти, что обеспечивает длительную работу проведенных ремонтов. Наиболее распространенные поломки, с которыми сталкиваются пользователи электроскутеров, включают проблемы с батареей, проблемы с мотором, поломку контроллера, неработающие сенсоры и механические повреждения. Для устранения этих неисправностей наши квалифицированные специалисты проводят ремонт батарей, двигателей, контроллеров, гиросенсоров и механических компонентов. Доверив ремонт нам, вы получаете качественный и надежный ремонт сигвеев адреса. Подробная информация доступна на сайте: https://remont-sigveev-expertise.ru
#8626 Charlesgunnyhttp://filmkachat.ru
1× slots сайт
Помните, собственно в неких забавах сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки числятся как отыгранные средства, на как в слотах идет в зачет все 100% суммы.Вейджер не более х30–35 является применимым. Опытные игроки утверждают, что с этим вейджером реально остаться в плюсе, в правильно подойти к выбору игрового аппарата. <a href=http://filmkachat.ru/>1×slots официальный сайт, скачать</a> Также, учите, собственно бездепозитный приз возможно вывести лишь в случае, когда станут выполнены все обстоятельства отыгрыша.Обычно бездепозитные акции от казино, приходят на эл. Почту в дни рождения либо праздничные. В неких онлайн казино можно обратиться в чат и как постоянному игроку, возможно вам предложат бездепозитное предложение. <a href=https://promosimple.com/ps/2f3fe/transforming-spaces-with-hospitality-venue-design-visualization>https://promosimple.com/ps/2f3fe/transforming-spaces-with-hospitality-venue-design-visualization</a> 1×slots на любой вкус как пройти регистрацию <a href=https://metalverk.ru/forum/?PAGE_NAME=profile_view&UID=74038>https://metalverk.ru/forum/?PAGE_NAME=profile_view&UID=74038</a> Бонус в казино без депозита содержит разные варианты: может быть приветственный бонус, промоакции в честь каких-то праздников либо главных дат, приз за привлечение новых игроков, преданность и получение VIP-статуса.
1×slots актуальное зеркало
Если при регистрации указать промокод, возможно гарантировано получить приз. Где арестовать ваучер? Посетите тематику блоги или форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В заключительное время игорные жилища начали рекламироваться в фильмах и сериалах. Присмотритесь и скорее заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных руб.Если вы опытный игрок, вы обязаны знать, что приз без депозита – редкая находка. Тем ниже, мы раз изучаем интернет, дабы отыскать вам лучшие бездепозитные предложения. <a href=https://radios-collector.com/viewtopic.php?f=7&t=46490>1×slots зеркало подтвердит вашу регистрацию если говорить</a> 1×slots casino регистрация 1×slotscasino09k online Даже не выиграв солидную сумму, игрок интересно проведет время, изнутри изучит работу площадки, воспримет геймплей автоматов. Все это без каких-либо финансовых рисков. Быть в курсе лучших промоакций с. Достаточно периодически изучать перечень свежих онлайн казино с выводом приза без депозита в этом разделе.Так что сможете храбро региться без всяких раздумий. Фортуна сейчас точно на вашей стороне. Не побаивайтесь, так последствие какого либо ущерба Вам абсолютно не угрожает. С такими бонусами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе. <a href=https://metod2014.ru/09/vkusnaya-pitstsa-ot-shef-povarov-restorana-mucho/?preview=true>https://metod2014.ru/09/vkusnaya-pitstsa-ot-shef-povarov-restorana-mucho/?preview=true</a> 1×slots регистрацию процедура займет всего лишь Основное различие том,, собственно для получения бездепа нужно пополнять баланс в казино. Но считая этого, есть ряд и других отличий:
1×slots рабочее зеркало
<a href=http://kinofilm2017.ru/user/Michaelscoto/>http://kinofilm2017.ru/user/Michaelscoto/</a> Шаг 4. Активация. Внимательно исследуйте условия, информацию по ограничениям и сроке деяния бонусного предложения. Разобравшись с правилами, возможно активировать бонус в личном офисе (время ? с использованием промокода) либо по запросу в саппорт.Бонус без депозита за регистрацию в казино (бездепозитный бонус) – это денежный презент от клуба, кот-ый начисляется на аккаунт игрока после регистрации в казино. Кроме сотворения учетной записи, для получения бездепа, очень часто потребуется ещё и доказать контактные данные игрока и/или активировать специальный промо-код. рабочее зеркало 1×slots Бездепозитные призы в казино без пополнения 2022 — это определенная сумма средств или for nothing spins вращения, коие предоставляются первым гостям за регистрацию на сайте казино вид бездепозитного бонуса, и выделяет вам вероятность за счет казино без пополнения опробовать услуги (игр), с последующей прерогативой вывода средств при выполнении всех установленных верховодил.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Доступность — бездепозитные призы в казино почаще всего предоставляются новым игрокам, но посещают случаи, когда бонус все получить и действующие клиенты. <a href=https://www.ldvd.nl/no-22-san-diego-place-rallies-very-last-boise-country-27–16?page=28#comment-237246>1× slots регистрация в 1×slots casino</a> Превышение максимальной ставки при отыгрыше. Система автоматически не предостерегает о превышении ставки, поэтому о нарушении управлял игрок возможность узнать теснее в подачи запроса на вывод средств.Процесс подтверждения личности возможность взятьвдолг(взятьвзаймы) от одного дня до недели. Если заказчик допустил какую оплошность при заполнении паспортных данных, то ему по адресоваться с проблемой в саппорта онлайн-казино. 1×slots актуальное зеркало <a href=http://beton.ru/communication/forum/?PAGE_NAME=profile_view&UID=32928>http://beton.ru/communication/forum/?PAGE_NAME=profile_view&UID=32928</a>
1× slots сайт
Еще одно условие дотрагивается размеров ставки. Операторы устанавливают наивысшую необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном офисе. При превышении лимита есть риск потерять бонуса. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, заказчик возможность столкнуться с запретом назначать фишки на шансы. <a href=http://www.xwsj2021.com/home.php?mod=space&uid=73767>http://www.xwsj2021.com/home.php?mod=space&uid=73767</a> Бoльшинcтвo азартных заведений выдвигают примерно одинаковые условия и требования, коие необходимо выполнить, дабы получить бездепозитный бонус за регистрацию. Все их возможно соединить в раз перечень: 1×slots официальный сайт зеркало B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax
<b>Смотреть еще похожие новости:</b>
<a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=62357>1×slots регистрация то дальше необходимо пройти</a>
<a href=https://clubdefansde24.com/foro/memberlist.php?mode=viewprofile&u=3464>казино 1× slots официальный сайт</a>
<a href=https://russiancomputerservice.ru/user/JosephCer/>1×slots casino зеркало рабочее</a>
<a href=https://www.makinamania.net/index.php?topic=251706.new#new>1×slots casino регистрация на сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если вы новичок в этом деле и лишь попали в неизведанную вами область азарта — с помощью предложений как бездепозитные бонусы без пополнения. Для получения предоставленных призов для пригодиться — ПК или мобильное прибор, и остальное дело за небольшим.
#8627 Charlesgunnyhttp://filmkachat.ru
1хслот скачать
Бездепозитный бонус по промо-коду будет доступен для игры, только что случае когда Вы активируете специальный бонусный код в разделе с призами либо укажите промокод при регистрации на сайте. В некоторых случаях, кроме активации кода, понадобиться доказать контактные данные игрока и наполнить анкету клиента.Самый распространённый из похожих бонусов, конечно же, бездеп на денек рождения клиента — бонус вид фиксированной суммы либо фриспинов поступает на счёт игрока, а пользоваться им можно в течение установленного периода времени. <a href=http://filmkachat.ru/>1×slot официальный сайт</a> Особую изюминку видео слотам присваивают уникальные символы. С их в активизируются разные бонусы. Вы сможете запустить вспомогательный уровень и увеличить сумму выигрыша. Есть знаки, которые замещают негодные элементы и сами делают выигрышные комбо. Не стоит забывать и про бонус-тур. После любого счастливого спина есть шанс увеличить необходимую выигрыша в 2 либо четыре раза. <a href=https://www.thisisant.com/forum/viewthread/7825/>https://www.thisisant.com/forum/viewthread/7825/</a> 1×slots регистрация 1×slots review live <a href=http://t95283ld.bget.ru/user/Oscarram/>http://t95283ld.bget.ru/user/Oscarram/</a> Одним из предлогов отдавать привилегию 1 либо другому заведению содержится в привлекательности предлагаемых акций и даровых предложений. Безвозмездные фриспины, выдаваемые без нужды создавать какой-нибудь лепта, в списке располагается далеко не в конце.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.
1×slots официальный demo регистрация в 1×slots casino
За вербование приятеля ? в партнерской программки клиент получает вознаграждение за вербование свежих пользователей. 1× slots зеркало Существуют казино с бонусом за регистрацию, каких очень востребованы фриспины в онлайн казино потом регистрации в определенных играх. Они встречаются и чаще безвозмездных поощрений или классических бонусов в казино без инвестициям. Например, игрок регистрирует счет, на кот-ый начисляются безвозмездные игры, бонус за регистрацию вид даровых фрспинов, вращения в игровом автомате. Во время игрового процесса игры выигрывает настоящие деньги, коие в последствии возможно удачно вывести из заведения на собственную платежную систему. То есть, все шансы исключить свои без рисков собственными финансами. Регистрация, какую геймер получит призы, займет пару минут, а спасибо данному можно прирастить 5 евро поощрений до тыс. И без всяких проблем исключить их.Для получения предоставленных призов для пригодиться — ПК либо мобильное прибор, и остальное дело за малым. <a href=https://pixel-brush.ru/user/DoctorLazutaMi/>https://pixel-brush.ru/user/DoctorLazutaMi/</a> Более крупные предложения встречаются довольно изредка. Зачастую они доступны лишь VIP-игрокам. В оставшихся случаях им скорее сопутствуют довольно жесткие условия отыгрыша. Также возможны дополнительные обстоятельства и другие лимитирования, прописанные в критериях и положения бонусной программки казино. 1×slots зеркало выигрыши обязательно пройдите регистрацию если Первый образующийся вопрос, это, чего выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают свежих игроков. Последним проще начать забаву на средства с презента за регистрацию. Им не нужно пополнять баланс и тратить собственные свои. Новички получают безвозмездные спины либо свои на счёт. С их подмогою знакомятся с игровым ходом, крутят слоты и делают ставки в рулетке.
рабочее зеркало 1хслотс
Подобные призы без депозита предоставляются на более прибыльных условиях. Зачастую они крупнее, а обстоятельства отыгрыша наименее строгие. Стоит обозначить(означить), что бездепозитный бонус выдается только взрослым новичкам, которые, к, шансы пригласить личных приятелей и знакомых, также претендующих на поощрительную программку преданности. Подобная технология замечена среди конкуренцию онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры содействуют увеличению собственной посещаемости, методом вербования свежих игроков. Бонусы – это оригинальный шанс для вероятных соучастников забавы, коие могут опробовать софт покер рума и увериться, станут ли они в него выступать или нет. Новый игрок испробует средства силы с настоящими оппонентами в казино. <a href=http://forum.pskovedu.ru/profile.php?id=17375>http://forum.pskovedu.ru/profile.php?id=17375</a> 1×slots казино зеркало Для тех, кто только подумывает испытать собственную удачу, еще для проф игроков, отыскивающих свежие площадки для выигрышей, основные лицензированные казино нередко организуют разные промоакции, и лучшее услуг за последнее время – как для начинающих, так и для проф игроков – бездепозитный приз за регистрацию.Баланс игрока пополняется на соответствующую сумму. К ней используется вейджер, обозначенный в правилах акции. Вывести выигрыш можно несомненно в такого, как юзер сделает требуемый объем ставок из собственных средств. В редчайших случаях бездеп работает в формате Free Play. На счет пользователя зачисляется большая сумма, и предоставляется небольшой срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по завершении этого периода сумма на счету будет превосходить изначальную, то разность возможно несомненно исключить либо использовать для дальнейших ставок.
1×slots регистрация на сайте
К образцу, игроку выдаются бесплатные свои в заведении в объеме пятидесяти либо 100 $ (вейджер на которые составляет 100х). То есть, каждому новоприбывшему игроку выскакивает притягивающая картинка, кот-ая сулит выплату всех зачисленных фирмой средств. Не стоит заострять на казино бонус за регистрацию без депозита с сильно великий или довольно маленькой суммой призов, поэтому что, том тщательно исследовав все обстоятельства, тут всего, будет некий подвох.Иногда операторы требуют внесение минимального депозита перед выводом для верификации платежного инструмента. В некоторых казино этот депо кроме светит отыграть. Помимо прочего, для вывода средств по бездепу нужно привнести на счёт свой 1-ый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало возможную необходимую, последствии чего вывод средств станет доступен.Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке необходимо пополнить счет в казино. Для депозитных призов, данная процедура не нужна, так как депо уже сделан. 1×slots промокод при регистрации 2025 <a href=http://wehavegottalents.com/member/hypnoticweaknes.html>http://wehavegottalents.com/member/hypnoticweaknes.html</a> На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не сможете активировать и получить бездепозитный бонус.
1×slots зеркало регистрацию более популярный вариант это
У каждой забавы средства притязания по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система засчитает каждую ставку. В рулетке и покере устроить это намного сложнее. Именно поэтому так важно внимательно разбирать обстоятельства получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в любой ирге, то новенькие попросту «спустят приз на ветер».К сожалению, нет. Почти все казино, просят внесение желая бы одного минимального депозита для вывода выигрыша с бездепозитного бонуса. Также учитывайте, собственно исключить средства разрешается только на что, эту платежную систему, с которой был изготовлен депозит. Можно. Вы всегда можете отрешиться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не создадите ставку. <a href=https://metalverk.ru/forum/?PAGE_NAME=profile_view&UID=74038>https://metalverk.ru/forum/?PAGE_NAME=profile_view&UID=74038</a> Подтвердите лицо, предоставив оператору казино свои паспортные данные. Инструкции обыкновенно несложные, основное — четко им по. Если написано, что «на фото должны быть видны все четыре угла странички паспорта» — сделайте именно это фото. 1×slots casino зеркало Маркетинговая деятеля всех игорных интернет-клубов обязана носить разнообразный нрав. И случае гонорары на депо работают чтобы, чтобы, чтобы провоцировать заносить депозиты и поощрять теснее место юзеров, то бездепозитный бонус в казино или бонус за регистрацию в казино, прежде всего, рассчитан на расширение базы потребителей.
<b>Смотреть еще похожие новости:</b>
<a href=https://thetechmodders.com/forums/memberlist.php?mode=viewprofile&u=945&sid=079b33eca7a95269d5ffa2594c9770b8>1×slots casino регистрация 1×slotscasino09k online</a>
<a href=http://forums.indexrise.com/thread-2362-post-334461.html#pid334461>1×slots регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Как только на виртуальном счету окажутся бонусные свои, поспешите отыграть вейджер. Сразу последствии этого можно оставить заявку на вывод выигрыша. Кредиты выгодно отличаются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом настоящих средств и дают вероятность ощутить азарт. Во-вторых – можно насладиться любой азартной забавой доступной на веб-сайте. В вашем постановлении находятся автоматы, настольные прибавление, видео-покер, Live-дилеры. Вы наверняка, как и все любите получать презенты и бездепозитные бонусы казино. Игорные дома брали в повадку одаривать гэмблеров приятными бонусами. Стать владельцем приветственного подарка можно за создание профиля либо пополнение счёта. Второй вариант более занимательный, как клубы готовы удвоить депо! Но если вы новичок и лишь знакомитесь с миром пыла, превосходнее пользуйтесь призом за регистрацию.
#8628 Charlesgunnyhttp://filmkachat.ru
1× slots регистрация в 1×slots casino
При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие возможно предназначить игре в казино. <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> Можно ли в одном онлайн казино получить больше одного бонуса за регистрацию? Нет, так как в каждом интернет казино есть управляла, к которым нужно придерживаться, не творить 2 аккаута для получения призов, другому будет блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, бонус за регистрацию выдаеться раз раз одному лицу. <a href=https://www.debwan.com/blogs/591034/Navigating-Modern-Construction-Drawing-Services-From-Concept-to-Completion>https://www.debwan.com/blogs/591034/Navigating-Modern-Construction-Drawing-Services-From-Concept-to-Completion</a> Активация по промокоду используется в различных обликах бездепов. Если речь идет о приветственном призе, то комплект знаков возможно узнать на основной страничке, в регистрационной форме или письме, которое отправляется пользователю для подтверждения адреса электронной почты. Акции имеют проводиться общо с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активируется разовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном кабинете или начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем важный код для активации в описании любого промо.Обычно, бездепозитные бонусы выдаются под конкретные слоты с фиксированной ставкой, но их наверняка воспрещено применять в игровых автоматах с современным джекпотом. Список игр, в можно использовать бездеп, Вы отыщите в описании промоакции или сможете уточнить у службы заведения. 1×слотс казино <a href=https://velorout.com.ua/user/DeweyTriaw/>https://velorout.com.ua/user/DeweyTriaw/</a> В каждом казино с бездепозитным призом учтены вейджеровые условия. Это единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, нужно сделать определённое количество ставок. Чем круче приз, что, этим труднее выполнить условия, и наоборот.
1×slots регистрация на 1хслотс
1×slots официальный сайт скачать Для казино, работающих онлайн, бездепозитные призы необходимы для вербования свежих клиентов. Предложение сыграть на слотах без необходимости внесения реальных средств — работающий способ для повышения интереса к компании. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит играть в казино, только сейчас уже на личные деньги.Мы рекомендуем не отказываться от похожих предложений известных казино. Выделите количество мин. На регистрацию, получите приз и попробуйте его отыграть. Может быть, сегодня фортуна несомненно на вашей стороне! <a href=http://g961713h.beget.tech/user/AshleyRow/>http://g961713h.beget.tech/user/AshleyRow/</a> Пoдтвepдить личнocть клиента. Для успешного вывода средств, нужно доказать личность клиента. Нa этaпe вepификaции пpoфиля, работники службы защищенности обязаны увериться, собственно у игрока более один акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не сможет вывести свой выигрыш, в у него несомненно несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы.Получать информацию о самых прибыльных призах возможно без неизменного мониторинга новостей казино. Мы брали данную задачу на себя и постоянно следим за предложениями операторов, выбирая наилучшие из них. В этом разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список промоакций регулярно дополняется. В топ зашли самые новые бездепозитные призы за регистрацию в казино 2020, временные и замкнутые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и критериям. Если срок действия акции истек, она удаляется из перечня. казино 1×slots официальный сайт
1×slots casino регистрация 1×slotscasin online
Онлайн-казино тщательно продумывают бонусные обстоятельства, коие нужно изучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша прочие лимитирования.В истинное время получить бонус за регистрацию в казино довольно просто. Почти любой игорный жилище с готовностью предоставит деньги или бесплатные вращения. Многие игроки пользуются этим и не стесняются регистрироваться в любом клубе с прибыльными критериями. Кстати, это замечательная возможность придумать выигрышную тактику и сорвать куш. <a href=http://www.socialbookmarkssite.com/user/vykupavto0312/>http://www.socialbookmarkssite.com/user/vykupavto0312/</a> Многие азартные клубы ограничивают необходимую вывода заработанную на призе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не можете исключить. Разница несомненно аннулирована, Вы и не можете делать на нее ставки.Любой выигрыш по ставке повыше установленного лимита несомненно считаться недействительным. То есть ставка не будет засчитана при отыгрыше, ну случае выигрыша его сумма не поступит на счёт посетителя — итог забавы будет всецело аннулирован. 1×slots официальный сайт, скачать
1×slots казино зеркало
В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, необходимо адресоваться в службу поддержки спустя лайв-чат на веб-сайте казино.Внесение депозита – Будьте готовы пополнить счет последствии отыгрыша бонуса. Это стандартное требование правил для этого подобии промо-акций. Лучше заранее уточнить, какую сумму надо(надобно) несомненно вносить на счет. Как верховодило, речь о наименьшем депозите, хотя вы должны быть убеждены, собственно он для по кармашку. <a href=https://www.donchillin.com/space-uid-382497.html>1хслотс казино зеркало</a> 1×slots официальный зеркало <a href=http://whitepower.clanweb.eu/profile.php?lookup=25229>http://whitepower.clanweb.eu/profile.php?lookup=25229</a>
1×slots сайт зеркало
Подтверждение регистрации. Казино просят привязки профиля к электрическому адресу и номеру телефонного. Для этого на e-mail отчаливает письмо со ссылкой, а на аппарат ? текстовое извещение с кодом.Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке адепты онлайн-казино публикуют актуальную информацию о no deposit bonuses прочих предложениях. Раздача бонусов может быть посвящена различным датам: календарные праздники, деньки рождения игроков, юбилей открытия казино и т. Д. Подарок выдается повторяющий денег, фриспинов либо баллов для скопления и обмена на предложения оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода этой суммы придется выполнить ряд требований.Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы которые возникают у начинающих. <a href=http://ezproxy.lakeheadu.ca/login?url=http://pb.ru/bitrix/redirect.php?goto=http://vodovoz.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/wXV5dpfnNEw>http://ezproxy.lakeheadu.ca/login?url=http://pb.ru/bitrix/redirect.php?goto=http://vodovoz.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/wXV5dpfnNEw</a> Для ревизии используются сканы паспортов, водительских прав, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если юзер обнаружен в попытке завести вспомогательный аккаунт, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный перечень. При этой на лицензионной площадке надо опасаться свидетельствовать достоверную персональную информацию (шифрование ликвидирует утечку персональных данных).Но не размышлять, собственно снабжая пользователей этими бонусами, казино увлекается спонсированием. Ведь размеры вознаграждений, в, не великие (средним объемом от 5 до 20 долларов). И на эти свои налагаются определенные условия и ограничения, обязательные к выполнению игрока, в в последствии он вожделеет получить все средства выигранные финансы. 1×slots рабочее зеркало на сегодня Не рекомендуем сломя голову браться за всевозможные предложения получения средств без вложений. Вполне вполне, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на 1-ый взгляд. Альтернативой является казино бонус за депозит. Мы предлагаем для пару советов, спасибо коим у каждого игрока будет возможность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств:
<b>Смотреть еще похожие новости:</b>
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=467978>1×slots рабочее зеркало на сегодня</a>
<a href=http://t954381g.bget.ru/user/JosephPiery/>1×slots подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При маленькой сумме бонуса рекомендовано играть по невысоким ставкам, а применять максимальные другого, как только никаких случае, если вейджер слишком великий, а время на отыгрыш сильно ограничено.
#8629 Charlesgunnyhttp://filmkachat.ru
1×slots бездепозитный бонус за регистрацию
Бездепозитные призы истинными деньгами, которые возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадали. <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> <a href=https://www.debwan.com/blogs/591034/Navigating-Modern-Construction-Drawing-Services-From-Concept-to-Completion>https://www.debwan.com/blogs/591034/Navigating-Modern-Construction-Drawing-Services-From-Concept-to-Completion</a> Процесс доказательства личности имеет занять от одного дня до недели. Если заказчик допустил какую ошибку при заполнении паспортных данных, то ему стопам адресоваться с проблемой в службу онлайн-казино.Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке адепты онлайн-казино публикуют важную информацию о not the slightest deposit bonuses прочих услугах. 1×slots регистрация 1×slots casino 777 online <a href=https://23region.info/user/Stevencrots/>https://23region.info/user/Stevencrots/</a>
1×slots регистрация 1×slotscasino09k online
1×slot зеркало рабочее этих способов предполагает регистрацию <a href=http://www.cwpass.com/ver2/bbs/board.php?bo_table=free&wr_id=678124>http://www.cwpass.com/ver2/bbs/board.php?bo_table=free&wr_id=678124</a> Помните, собственно в неких забавах сумма ставки идет в зачет вейджера лишь частично. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки считаются как отыгранные средства, в то время как в слотах идет в зачет все 100% суммы.Итак, дабы безвозмездные бонусные кредиты трансформировались в реальные средства, которыми продоставляется управлять по собственному усмотрению, их нужно отыграть. Вейджер стопам уточнять в правилах онлайн-казино. 1×slots официальный сайт зеркало Исходя из этого, просто не присутствует разумных оснований махнуть рукою на получение такого бонуса при регистрации. И, что, на такой безвозмездной основе у вас все шансы выиграть средства и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные призы, именуют безвозмездными онлайн платформами для игр.
1× slots зеркало
В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, нужно обратиться в службу через лайв-чат на сайте казино. <a href=http://www.postcount.net/forum/member.php?117624-Walterfenly>http://www.postcount.net/forum/member.php?117624-Walterfenly</a> Активация валютного гонорары происходит автоматически в творенья профиля или применения промокода. Иногда операторы предъявляют вспомогательные притязания: подписаться на страницы казино в соц сетях или на рассылку маркетинговых известий, скачать и установить вспомогательный софт и т.д.Бездеп с фриспинами имеет охватывать всю коллекцию игр на веб-сайте или разработки 1-го провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении акции. Выигрыш имеет быть выведен в того, как пользователь отыграет данную сумму. Возможность расценить полный функционал слотов — основное совершенство этой разновидности. Игроку становятся доступны что, эти функции, которые отсутствуют в демонстрационном режиме, а возможность выиграть реальные деньги добавляет ясных азартных ощущений. 1×slots зеркало подтвердит вашу регистрацию если говорить Наши эксперты изучают условия акции, затем в ручном режиме проверяют их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и другие характеристики. Мы не рекламируем казино, а даем игрокам информацию о наихороших из них.
1×slots зеркало рабочее на сегодня
Как только на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу в сего можно оставить заявку на вывод выигрыша. Кредиты прибыльно выделяются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом реальных средств и выделяют вероятность почувствовать азарт. Во-вторых – можно насладиться любой азартной игрой доступной на сайте. В вашем распоряжении находятся автоматы, настольные прибавленье, видео-покер, Live-дилеры. <a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=2718>казино 1×slots официальный сайт</a> Рассмотрим на образце: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских рублей. В критериях акции указано, что вейджер бездепозитного приза х20. Поэтому, дабы отыграть приз, игроку несомненно необходимо сделать ставок на 35*20=700 руб.Нет. Казино раздают бесплатные призы за регистрацию, чтобы, чтобы, чтобы клиент возможность ознакомиться с игровым заведением. А чтобы вывести его, необходимо выполнить условия отыгрыша. У любого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано смогли выполнить их, мы дадим несколько советов. Если система начислила маленькую сумму, не стоит создавать большие ставки – остановитесь на 10–30 центах. Как только сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В неприятном случае чем приглядеться к другому автомату.Фриспины предусмотрены для применения в видео слотах. Внимательно ознакомьтесь с условиями – частенько их выдают на некоторые автоматы. В зависимости от клуба, у вас получится устроить определённое количество ставок. Кстати, продвинутые игорные дома разрешают запускать любых «одноруких злодеев». 1×slots официальный demo регистрация в 1×slots casino <a href=http://diezel.kr/bbs/board.php?bo_table=contact&wr_id=81184>http://diezel.kr/bbs/board.php?bo_table=contact&wr_id=81184</a> Каждый из бездепозитных призов без пополнения 2022 содержит собственный определенный вейджер для отыгрыша, так же в любом казино он уточняется персонально — где то он х55 а где-то х30, повторюсь везде по различному!С другой стороны, намного проще отобрать бездепозитные фриспины за регистрацию в казино и прямо в начать вращать барабаны в наилучших слотах. Главная необыкновенность спинов том,, собственно они предусмотрены для лучших автоматов. Удастся не только пройти дополнительные раунды, хотя и увеличить необходимую выигрыша, заработать респины и внутриигровые подарки.
1×slots мобильная версия войти казино
Ещё одно распространённое акционное предложение – симпатичный подарок с сомнительными требованиями. К образцу, клуб обещает $100 в качестве бездепа, но с вейджером х80 либо х100. Отыграть подобный вейджер фактически невозможно и поэтому другого концентрироваться на более занимательных промоакциях. <a href=http://old.mledy.ru/bitrix/redirect.php?goto=http://hutorkasp.ru/bitrix/redirect.php?goto=http://dk-books.com/bitrix/redirect.php?goto=https://telegra.ph/Amnistiya-ugolovnyh-del-2022-goda-v-Rossii-09–23>http://old.mledy.ru/bitrix/redirect.php?goto=http://hutorkasp.ru/bitrix/redirect.php?goto=http://dk-books.com/bitrix/redirect.php?goto=https://telegra.ph/Amnistiya-ugolovnyh-del-2022-goda-v-Rossii-09–23</a> Обыкновенные бездепозитные бонусы в объеме от трех до двадцати $ сделаны для того, дабы в забавы заходили все свежие и новые игроки. Здесь, вероятнее всего, несомненно лимитирование на максимальный выигрыш. Важно, чтобы перед наименьшим вкладом был отключен приз за первое пополнение счета, и в не попадет на повторный вейджер.Отыграв бездепозитный бонус в казино с выводом тоже придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если схожее лимитирование существует, то единоразово вывести получится только необходимую, не превышающую объем приобретенного приза. 1х слот 1хслотс регистрация перейти на 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://melhorlance.com.br/minha-conta/>1×slots казино зеркало</a>
<a href=https://pbgpersonnel.ru/forum/minomycin-buy-brand-mestacine>1 x slots</a>
<a href=https://australianwinerytours.com/tours/showthread.php?tid=201208>1×slots актуальное зеркало</a>
<a href=http://fin-molitor.com/forum/memberlist.php?mode=viewprofile&u=8719>зеркала 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Варианты выигрыша зависят от Вашей удачи и критерий игорного портала. Выше мы заявили, собственно кое-какие бездепозитные бонусы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются они, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность современных игр на средства, возможно выиграть невероятные суммы. Сегодняшние игровые автоматы либо видео слоты, как их нарекают. Могут выдавать крупные умножение от х1.000 и повыше. Некоторые умножают ставку от х100.000.
#8630 Randallskeskhttps://kupitkvartiruzhkkvartirenka.ru
Новостройки Казани <a href=https://kupitkvartiruzhkkvartirenka.ru/>https://kupitkvartiruzhkkvartirenka.ru</a> покупка квартир от застройщика без переплат. Современные жилые комплексы с развитой инфраструктурой.
#8631 WilliePubre
where can i buy cheap clomid price <a href=" http://cwk.freehostia.com/viewpro.php?… „>how to get generic clomid no prescription</a> or <a href=“ https://clients1.google.co.zm/url?… ">buy generic clomid</a> https://toolbarqueries.google.dj/url?… how to buy generic clomid no prescription <a href=https://www.google.im/url?q=https://clomid.store>can you get generic clomid prices</a> can i purchase clomid now and <a href=https://quantrinet.com/forum/member.php?u=711034>can i get cheap clomid without rx</a> how to get cheap clomid without a prescription
#8632 Kennethkeelmhttps://depo.rent
МТЮ Лизинг <a href=https://depo.rent/куда-поехать-на-авто-в-крыму/>https://depo.rent/куда-поехать-на-авто-в-крыму/</a> предоставляет аренду автомобилей в Крыму, включая Симферополь. Удобный онлайн-сервис позволяет оформить аренду на сайте за несколько минут. Широкий выбор автомобилей и выгодные условия делают поездки по региону комфортными и доступными.
#8633 Ремонт сетевых хранилищhttps://remont-setevyh-hranilishh-service.ru/
Наш сервисный центр предлагает надежный <a href=https://remont-setevyh-hranilishh-service.ru/>центр ремонта сетевого хранилища адреса</a> различных марок и моделей. Мы понимаем, насколько значимы для вас ваши серверы хранения данных, и готовы предложить сервис наилучшего качества. Наши профессиональные техники работают быстро и аккуратно, используя только сертифицированные компоненты, что обеспечивает долговечность и надежность выполненных работ. Наиболее общие проблемы, с которыми сталкиваются обладатели серверов хранения данных, включают поломку жесткого диска, неработающий блок питания, ошибки ПО, неработающие сетевые интерфейсы и неисправности компонентов. Для устранения этих проблем наши квалифицированные специалисты проводят ремонт жестких дисков, блоков питания, ПО, сетевых интерфейсов и компонентов. Обратившись к нам, вы обеспечиваете себе качественный и надежный официальный ремонт сетевого хранилища рядом. Подробная информация размещена на сайте: https://remont-setevyh-hranilishh-service.ru
#8634 Ремонт серверов в Москвеhttps://remont-serverov-express.ru/
Наши специалисты предлагает высококачественный <a href=https://remont-serverov-express.ru/>отремонтировать сервер на выезде</a> любых брендов и моделей. Мы понимаем, насколько важны для вас ваши серверные устройства, и готовы предложить сервис высочайшего уровня. Наши квалифицированные специалисты проводят ремонтные работы с высокой скоростью и точностью, используя только сертифицированные компоненты, что обеспечивает долговечность и надежность проведенных ремонтов. Наиболее общие проблемы, с которыми сталкиваются пользователи серверных систем, включают поломку жесткого диска, неисправности блока питания, неисправности программного обеспечения, неисправности сетевых интерфейсов и неисправности компонентов. Для устранения этих проблем наши опытные мастера оказывают ремонт жестких дисков, блоков питания, ПО, сетевых интерфейсов и компонентов. Обращаясь в наш сервисный центр, вы гарантируете себе надежный и долговечный вызвать мастера по ремонту сервера рядом. Подробная информация размещена на сайте: https://remont-serverov-express.ru
#8635 Ремонт телевизоров Samsunghttps://remont-televizorov-samsung-gem.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт телевизоров samsung сервис, можете посмотреть на сайте: <a href=https://remont-televizorov-samsung-gem.ru/>ремонт телевизоров samsung адреса</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#8636 Ремонт серверовhttps://remont-serverov-express.ru/
Наша мастерская предлагает высококачественный <a href=https://remont-serverov-express.ru/>мастер по ремонту серверов с гарантией</a> всех типов и брендов. Мы знаем, насколько важны для вас ваши сервера, и обеспечиваем ремонт наилучшего качества. Наши квалифицированные специалисты оперативно и тщательно выполняют работу, используя только качественные детали, что обеспечивает длительную работу выполненных работ. Наиболее частые неисправности, с которыми сталкиваются пользователи серверных систем, включают неисправности HDD, неработающий блок питания, неисправности программного обеспечения, неисправности сетевых интерфейсов и неисправности компонентов. Для устранения этих проблем наши профессиональные техники выполняют ремонт жестких дисков, блоков питания, ПО, сетевых интерфейсов и компонентов. Обращаясь в наш сервисный центр, вы получаете надежный и долговечный сервис ремонта серверов. Подробная информация представлена на нашем сайте: https://remont-serverov-express.ru
#8637 RafaelGenhttps://bethub.tw/leo-quit/
<a href=https://bethub.tw/leo-quit/>Leo娛樂城無法登入</a> 九州娛樂城與Leo娛樂城即將結束運營,玩家該如何應對? 近期娛樂城行業的消息引發了玩家的廣泛關注,其中「Leo娛樂城無法登入」和「九州娛樂城即將倒閉」成為熱門話題。根據官方公告,九州娛樂城及其旗下品牌,包括Leo娛樂城和THA娛樂城,將於2024年12月31日中午12點正式結束營業並關閉官網。這一消息不僅讓玩家感到震驚,也暴露出行業潛在的問題。
Leo娛樂城無法登入的原因 Leo娛樂城近期頻繁出現登入問題,這與其即將退出台灣市場的計劃息息相關。以下是造成登入困難的主要原因:
帳號或密碼問題 許多玩家因忘記密碼或帳號被盜導致登入失敗。然而,由於官方客服系統已停止服務,這些問題無法得到解決。 網頁技術問題 官網伺服器的不穩定或維護期間,可能出現「404錯誤」,讓玩家無法正常登入。 營運關閉計劃 隨著九州娛樂城宣布結束營業,Leo娛樂城的伺服器和備用網址也逐步停止運行,這是玩家無法登入的最大原因。 為何九州娛樂城退出台灣市場? 九州娛樂城決定退出台灣市場的原因可以歸納為以下幾點:
市場收益不足 台灣市場對九州娛樂城而言並不具備高盈利性,難以支撐長期運營。 第三方支付系統受阻 多次傳出第三方現金支付渠道中斷,影響存提款操作。 法律風險增加 九州娛樂城頻繁遭遇法律問題及負面新聞,導致營運壓力倍增。 玩家需要注意什麼? 隨著九州娛樂城及其旗下品牌逐步退出市場,玩家應及時採取以下措施:
提領餘額 官方已停止存款服務,但提領功能仍開放。玩家應儘快提領餘額,避免損失。 轉移到穩定平台 針對Leo娛樂城和九州娛樂城的退出,玩家可選擇更穩定且具信譽的平台,以保障自己的娛樂體驗。 防範詐騙 小心冒名客服或假網站,官方已停止客服系統,不會主動聯繫玩家索取個人資料。 未來哪些娛樂城值得信賴? 隨著九州娛樂城退出市場,玩家可以關注一些以穩定性和合法性著稱的娛樂平台。選擇時應注意以下幾點:
合法牌照 選擇擁有合法經營許可的娛樂平台。 穩定的支付系統 平台應提供多種穩定且快速的支付方式。 用戶口碑 瀏覽玩家的評價和反饋,選擇高評價的平台。 結論 九州娛樂城及其旗下品牌的關閉標誌著一個時代的結束,同時也提醒玩家關注行業的合規性和穩定性。在此轉型時期,玩家應保持警惕,選擇可靠的平台,以確保自己的資金和遊戲體驗不受影響。
#8638 Ремонт роботов пылесосов в Москвеhttps://remont-robotov-pylesosov-servis.ru/
Наш сервисный центр предлагает профессиональный <a href=https://remont-robotov-pylesosov-servis.ru/>сервисный ремонт робота пылесоса</a> различных марок и моделей. Мы знаем, насколько необходимы вам ваши автоматические пылесосы, и обеспечиваем ремонт наилучшего качества. Наши профессиональные техники оперативно и тщательно выполняют работу, используя только сертифицированные компоненты, что гарантирует долговечность и надежность проведенных ремонтов. Наиболее частые неисправности, с которыми сталкиваются пользователи роботизированных уборщиков, включают поломку аккумулятора, неисправности двигателя, программные сбои, неработающие датчики и поломки компонентов. Для устранения этих неисправностей наши опытные мастера проводят ремонт батарей, двигателей, ПО, сенсоров и механических компонентов. Обратившись к нам, вы получаете качественный и надежный ремонт роботов пылесосов. Подробная информация представлена на нашем сайте: https://remont-robotov-pylesosov-servis.ru
#8639 Grahamcarryhttps://rpnu-leasing.ru
РПНУ Лизинг <a href=https://rpnu-leasing.ru/novosti/operacionnii-lizing-chto-eto-otlichie-ot-finansovogo-lizinga>https://rpnu-leasing.ru/novosti/operacionnii-lizing-chto-eto-otlichie-ot-finansovogo-lizinga</a> надежный партнер в лизинге автомобилей, спецтехники и оборудования. Гарантируем отсутствие отказов благодаря индивидуальному подходу к каждому клиенту. Удобные условия и быстрое оформление помогают получить нужное имущество без лишних сложностей.
#8640 Hubertnuankhttps://serviceorangecounty.com
Reliable HVAC Repair Services <a href=https://serviceorangecounty.com/>https://serviceorangecounty.com</a> stay comfortable year-round with our professional HVAC repair services. Our experienced team is dedicated to diagnosing and resolving heating, cooling, and ventilation issues quickly and effectively.
#8641 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало
Многие казино деют в маркетинговых целях безвозмездные бонусы необыкновенно для наших читателей. Чтобы их получить, надо(надобно) перебежать на игровой сайт по партнерской ссылке с нашего портала. <a href=http://filmkachat.ru/>1х слот 1хслотс регистрация перейти на 1×slots</a> Процесс подтверждения личности имеет занять от одного денька до недели. Если заказчик разрешил какую оплошность при заполнении паспортных данных, то ему следует обратиться с задачей в службу онлайн-казино. <a href=https://www.khedmeh.com/wall/blogs/post/71398>https://www.khedmeh.com/wall/blogs/post/71398</a> казино 1×slots официальный сайт <a href=https://www.bedirectory.com/%D0%B1%D0%BB%D0%BE%D0%B3-%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0-%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0-%D0%BD%D0%B0-%D0%B4%D0%B7%D0%B5%D0%BD%D0%B5_369047.html>https://www.bedirectory.com/%D0%B1%D0%BB%D0%BE%D0%B3-%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0-%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0-%D0%BD%D0%B0-%D0%B4%D0%B7%D0%B5%D0%BD%D0%B5_369047.html</a>
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Бездепозитный бонус часто может стать легкодоступным незамедлительно в завершения регистрации, потому как единственным требованием к нему является регистрация, а затем проверка вашей свежей учетной записи. <a href=https://www.lightknotes.com/MyBB/showthread.php?tid=33589&pid=342946#pid342946>1 хслот регистрация в 1×slots casino</a> 1×slots casino зеркало <a href=http://jusintergentes.com.ua/index.php?option=com_k2&view=itemlist&task=user&id=1464881&lang=uk>http://jusintergentes.com.ua/index.php?option=com_k2&view=itemlist&task=user&id=1464881&lang=uk</a> 1хслотс регистрация в 1×slots casino Существует ли стратегии для отыгрыша бездепозитных призов? К раскаянью нет, на выигрыши либо проигрыши с призов, казино либо игрок воздействовать не может, отдача игр случается от разработчиков игр.Выбор любого интернет казино на нашем веб-сайте. В описании к каждому Вы сможете разузнать, что получите за создание аккаунта.
1×slots казино зеркало
Бездепы с бесплатными вращениями деют юзерам право вертеть барабаны игровых автоматов без снятия средств со счета. За любой раунд выплачивает казино. Число спинов ограничено и изредка выше сотку. Если акция содержит много даровых игр, их начисление может быть разбито на количество дней.Бездепы с бесплатными вращениями предоставляют пользователям право вертеть барабаны игровых автоматов без снятия средств со счета. За любой раунд уплачивает казино. Число спинов ограничено и редко выше сотку. Если акция содержит количество даровых игр, их начисление может быть разбито на несколько дней. <a href=http://krasrec.ru/forum/user/176774/>http://krasrec.ru/forum/user/176774/</a> Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают бонус по странам. Вплоть до как, что клуб может себя игроков из Вашей государства, а бездеп не давать. 1хслот зеркало сайта
сайт 1× slots casino
Подтверждение электронной почты – одно из главных критерий, коие есть почти в каждом бездепозитном казино. Чтобы верифицировать электронную почту, довольно перебежать по активной ссылке в письме, приобретенном от азартного клуба.Заполняя данные в личном профиле, указывайте только достоверную информацию, например как Вам понадобиться ее доказать в при выводе денег. <a href=http://check2go.net/author/jameslob/>1×slots casino регистрация</a> На бонусные начисления шансы быть установлены вспомогательные ограничения, которые Вы не учли при отыгрыше. Пока приз всецело не отыгран — средства из казино не выводятся.На бесплатные призы онлайн-казино почти всегда распространяется лимитирования по стране проживания посетителей. Даже в для разрешается открывать счет и выступать на средства в заведении, это еще не значат, что для доступны not the slightest down payment bonuses. 1хслотс мобильная версия зеркало <a href=https://www.mavsboard.com/member.php?action=profile&uid=2485>https://www.mavsboard.com/member.php?action=profile&uid=2485</a>
1×slots официальный demo регистрация в 1×slots casino
Некоторые веб-сайты, до чем провести регистрацию игроков, предлагают ответить на количество базовых вопросов. Цель проведения сходственной викторины – выявить случайных людей, коие не имеют представления о покере, и не допустить получения ими бонусов. Если посетитель теснее играл в казино, то ответить на полтора десятка простых вопросов будет несложно. Очень нередко, ответы можно отыскать на официальных веб-сайтах этих учреждений.Перечисленные повыше основные характеристики сопровождают практически любой приз и считаются стереотипными для бездепозитных бонусных начислений в казино. В каждом казино с бездепозитным призом учтены вейджеровые условия. Это один-единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, нужно сделать определённое число ставок. Чем круче бонус, тем труднее выполнить условия, и напротив.Верификация важна для добавочной защищенности и помочь техподдержке выявить бонусхантеров и плутов. Кстати, на платформах выводы крупных сумм доступны лишь после подтверждения личности. <a href=https://fm.xndl.com/home.php?mod=space&uid=637214>https://fm.xndl.com/home.php?mod=space&uid=637214</a> Выше мы предоставили глубокий набор самых новых и актуальных бездепозитных бонусов в интернет казино без пополнения на 2022 год, где возможность воспользоваться каким ценным бездепозитным призом.Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских рублей. В условиях промоакции предписано, что вейджер бездепозитного бонуса х20. Поэтому, чтобы отыграть приз, игроку несомненно необходимо сделать ставок на 35*20=700 руб. 1×slots регистрация на сайте 1×slots ru com
<b>Смотреть еще похожие новости:</b>
<a href=https://www.goslog.ru/forum/messages/forum1/message10289/11-obrashcheniya-grazhdan?result=reply#message10289>1×slots рабочее зеркало</a>
<a href=http://evtrucksforum.com/memberlist.php?mode=viewprofile&u=28289>казино 1× slots официальный сайт</a>
<a href=https://10nsk.ru/user/JosephSuple/>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В списке требований к отыгрышу нередко наличествуют лимиты на ставки при забаве на личные деньги. Так, случае отыграть нужно 30 000 руб., а максимальная сумма ограничена 30 рублями, то вращать барабаны светит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам деянья промоакции. Однако в критериях исчезают «подводные камни», коие не позволят исключить крупную сумму либо же вы не успеете отыграть вейджер. Поэтому мастера рекомендуют арестовать благотворительные вращения за регистрацию в казино без депо, дабы поднабраться навыка и получить реальный шанс на победу.
#8642 Charlesgunnyhttp://filmkachat.ru
1× slots сайт
Для того, чтобы отыграть необходимую вашего бездепозитного бонуса нужно выполнить обстоятельства вейджера. Очень часто фриспины даются на конкретные слоты (book of ra, book of lifeless, book of sun), подбирайте разъем для нраву, все очень красочные и качественные. Бездепозитные бонус возможность быть денежным например и повторяющий фриспинов на слоты <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasin online</a> Выбирайте лучшие безвозмездные бонусы счет обзоров на Casinoz – и пусть вам сопутствует удача при отыгрыше бонусных кредитов!Автоматическая активация может самой удобной, хотя ручной метод содержит перед ней достоинства. Прежде чем применять вознаграждение от казино, стоит заблаговременно найти, сколько времени потребуется на исполненье всех критерий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала деянья бонуса. <a href=https://kumu.io/lexxeagle/efficient-and-accurate-architectural-drafting-services-for-modern-projects>https://kumu.io/lexxeagle/efficient-and-accurate-architectural-drafting-services-for-modern-projects</a> Прочитайте верховодила бонусной программы, какой хотите принять. Да, мы безотступно рекомендуем устроить это до регистрации.Простая процедура получения бездепозитного приза, которая займет менее 2-х мин. Для получения бездепов, достаточно зарегистрироваться и доказать контактные данные. 1×slots casino зеркало рабочее <a href=http://www.mibee.ru/viewtopic.php?f=33&t=8099&p=30168#p30168>http://www.mibee.ru/viewtopic.php?f=33&t=8099&p=30168#p30168</a>
1×slots зеркало 1хслотс регистрация перейти на 1×slots
1 хслот регистрация в 1×slots casino Для получения приза нужно ознакомиться с программкой лояльности казино и сделать ставки на необходимую, необходимую для перехода на грядущий уровень. <a href=http://www.dvorchany.grodno.by/user/PhilipWhofe/>http://www.dvorchany.grodno.by/user/PhilipWhofe/</a> Игры, в можно играть на бонусные деньги. Проверьте перечень игр, в возможно выступать на бонусные средства, вполне они Вам не понравятся и не стоит тратить своё время на эту акцию. 1х слот 1хслотс регистрация перейти на 1×slots
1 x slots casino
Если идет об неповторимых предложениях, имеет потребоваться регистрация в казино по ссылке с партнерского сайта. <a href=http://www.zgqsz.com/home.php?mod=space&uid=402045>http://www.zgqsz.com/home.php?mod=space&uid=402045</a> Бездепозитные призы, как теснее понятно, являются оригинальной вероятностью обратиться игровому процессу полностью бескорыстно, другими играть в интернет казино бесплатно и на быть средства незамедлительно после регистрации аккаунта. Автоматы с таким депо имеют стать великолепной возможностью поиграть для почитателей пыла с определенными лимитированиями в денег.Многие казино деют в маркетинговых целях благотворительные призы самая для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой вебсайт по партнерской ссылке с нашего портала. 1хслотс 1хслотс регистрация перейти на 1×slots
1×slots официальный сайт скачать
<a href=http://zxz.listbb.ru/memberlist.php?mode=viewprofile&u=925>1×slots рабочее зеркало</a> 2. Создать свежий профиль. Для регистрации нужно заполнить маленькую анкету либо зайдите в собственный офис посредством соц сетей;Перечисленные выше основные свойства сопровождают практически каждый бонус и являются стандартными для бездепозитных бонусных начислений в казино. сайт 1× slots casino <a href=https://securityholes.science/wiki/User:IlseToler340>https://securityholes.science/wiki/User:IlseToler340</a> Бывают ли бездепозитные бонусы без вейджера? Бывают, случае у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино.
1×slots акции
Бонус за регистрацию в казино без депо с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша имеет понадобиться сделать ставки на сумму, в количество десятков раз превосходящую сумму бонуса либо выигрыша. <a href=https://magazin.orgsoft.ru/forum/user/183183/>https://magazin.orgsoft.ru/forum/user/183183/</a> Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депозит может отличаться до 30 дней.В каждом казино с бездепозитным призом предусмотрены вейджеровые обстоятельства. Это один-единственный «подводный камень», кот-ый стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) устроить определённое число ставок. Чем круче приз, тем сложнее выполнить условия, и напротив. 1х слот регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=138719>1×slot рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Получив свой подарок, Вы можете бесплатно играть на реальные деньги, а выполнив обстоятельства отыгрыша, исключить свой выигрыш.
#8643 Charlesgunnyhttp://filmkachat.ru
1х слот 1хслотс регистрация перейти на 1×slots
Обычно бездепозитные промоакции от казино, прибывают на эл. Почту в дни рождения либо дни. В неких онлайн казино возможно обратиться в чат и как неизменному игроку, вполне вам предложат бездепозитное предложение. <a href=http://filmkachat.ru/>1×slots зеркало подтвердит вашу регистрацию если говорить</a> <a href=https://issuu.com/kalinka0588/docs/exploring_the_future_of_architectural_visualizatio>https://issuu.com/kalinka0588/docs/exploring_the_future_of_architectural_visualizatio</a> Чтобы других убедиться в превосходствах бездепозитных призов, достаточно зарегистрироваться в казино и получить одобрение. казино 1× slots официальный сайт <a href=https://www.clashfarmer.com/forum/member.php?action=profile&uid=45991>https://www.clashfarmer.com/forum/member.php?action=profile&uid=45991</a>
1×slots акции
1х слотс зеркало регистрация в 1×slots casino Несмотря на то, собственно этот вариант стимуляции со стороны азартных платформ довольно востребован в сфере сходственных игр, далеко многим почитателям казино ведомо, что сами бездепозитные призы казино и как непосредственно их вполне эксплуатировать. <a href=http://racessport.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://advazo.ru/bitrix/redirect.php?goto=http://region-rostov-na-donu.ru/bitrix/redirect.php?goto=https://telegra.ph/Pravila-vozvrata-aviabiletov-09–23>http://racessport.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://advazo.ru/bitrix/redirect.php?goto=http://region-rostov-na-donu.ru/bitrix/redirect.php?goto=https://telegra.ph/Pravila-vozvrata-aviabiletov-09–23</a> Простая процедура получения бездепозитного приза, которая займет не более 2-х минут. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные. 1×slot зеркало рабочее этих способов предполагает регистрацию Способы получения бездепа различаются от вида приза, который понравился игроку. Но вам в любом случае надо(надобно) быть зарегистрированным в законном онлайн-казино и доказать свою лицо. В общем облике пошаговая инструкция для получения бездепозитного приза смотрится так:
1×slots casino регистрация 1×slots review live
Все любят получать презенты. Согласитесь, практически каждый играющий человек несомненно бесконечно рад, случае получит бесплатный подарок для игры в онлайн казино просто за регистрацию или же приз за внесенный депо, так именуемые приветственные призы для новых игроков. Соответственно такие интернет клубы станут больше известны и предпочтительны у игроков при выборе казино для забавы. Топ казино каждый обновляется и прибавляются новые и увлекательные игровые клубы с привлекательной бонусной политикой и всеми возможными привилегиями, к которым относятся такие призы как фриспины за регистрацию, денежные бездепозитные бонусы, а великодушные призы за внесенный депо.Для проверки используются сканы паспортов, водительских водительских, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если пользователь замечен в попытке ввести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный перечень. При этой на лицензионной площадке не стоит бояться свидетельствовать достоверную индивидуальную информацию (шифрование исключает утечку персональных данных). Возможность сыграть дополнительное соревнование (а от и некоторое) абсолютно даром, а выигрыш, в свою очередь, поступает на счёт игрока. <a href=https://dbmyxxw.cn/home.php?mod=space&uid=129271&do=profile&from=space>https://dbmyxxw.cn/home.php?mod=space&uid=129271&do=profile&from=space</a> казино 1×slots официальный сайт Фриспины – благотворительные вращения с фиксированной ставкой, которые возможно использовать в конкретных игровых автоматах.
1×slots акции
Приветственный бонус без депо ? подарок за регистрацию. Выдается средствами, фриспинами или баллами. В последнем случае бонусные баллы используются для участия в турнирах либо размена на настоящие деньги.Теоретически, к безвозмездным призам можно отнести так нарекаемые фриспины. Напомним, речь идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, поэтому собственно они деют только вероятность создавать ставки. <a href=https://minifishtank.net/forum/showthread.php?tid=1514>1хслотс мобильная версия зеркало</a> Простая процедура получения бездепозитного приза, которая займет не более 2-х мин. Для получения бездепов, достаточно зарегистрироваться и доказать контактные данные.Диапазон ставок, коие вправе устроить игрок, также лимитирован. Обычно назначать можно маленькую необходимую — в 10–30 руб. За одно вращение. Бездепозитный приз по промо-коду будет доступен для забавы, лишь что случае когда Вы активируете специальный бонусный код в разделе с бонусами или укажите промокод при регистрации на веб-сайте. В некоторых случаях, считая активации кода, понадобиться доказать контактные данные игрока и заполнить анкету посетителя.Нет. Казино раздают благотворительные бонусы за регистрацию, для того, чтобы заказчик имел ознакомиться с игровым заведением. А чтобы вывести его, нужно выполнить обстоятельства отыгрыша. x1 slots 1хслотс регистрация перейти на 1×slots <a href=https://orbitalscoreboard.com/user/donaldelecy/>https://orbitalscoreboard.com/user/donaldelecy/</a> Индивидуальные одобрения выдаются за совершение деяний: подписку на аккаунты площадки в соц сетях, установку мобильного приложения либо официального клиента для ПК. В большинстве казино срабатывают программы лояльности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на грядущий уровень часто с выдачей бездепа.
1хлот регистрация в 1×slots casino
Выигрыши с бонусов без вложений практически привязаны к притязанию по ставкам и имеют быть обналичены только в исполненья этих притязаний. Бездепозитный приз казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби избранного заведения, определится в выборе игр и проверить качество работы службы. Довольно нередко, начиная игровой процесс, игрок уже отказывается останавливаться и проделывает реальный лепта. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать безвозмездно вполне как один таки с бонусом за регистрацию без надобности вносить депо. <a href=https://www.fairyabc.com/home.php?mod=space&uid=111527>https://www.fairyabc.com/home.php?mod=space&uid=111527</a> Подтвердите регистрацию, дабы активировать Бездепозитный приз с выводом, требуется заполнить индивидуальный профиль. Заполните пустопорожние поля истинными данными о для. казино 1× slots официальный сайт
<b>Смотреть еще похожие новости:</b>
<a href=http://miupsik.ru/forums/showthread.php?tid=193964>сайт 1× slots casino</a>
<a href=http://mandala-app.com/forums/memberlist.php?mode=viewprofile&u=3447>1× slots зеркало</a>
<a href=https://radios-collector.com/memberlist.php?mode=viewprofile&u=301>1 x slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Нет. Казино раздают безвозмездные призы за регистрацию, чтобы, чтобы, чтобы заказчик возможность ознакомиться с игровым заведением. А чтобы вывести его, нужно выполнить условия отыгрыша. Для верификации аккаунта нужно предоставить специалистам технической поддержки отсканированную копию паспорта и счета за коммунальные предложения, а фотку банковской карты либо скриншот странички электрического кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для подтверждения личности.
#8644 Ремонт принтеровhttps://remont-printerov-master.ru/
Наша мастерская предлагает профессиональный <a href=https://remont-printerov-master.ru/>ремонт принтера на выезде</a> различных марок и моделей. Мы знаем, насколько значимы для вас ваши печатающие устройства, и готовы предложить сервис наилучшего качества. Наши квалифицированные специалисты работают быстро и аккуратно, используя только оригинальные запчасти, что предоставляет долговечность и надежность выполненных работ. Наиболее общие проблемы, с которыми сталкиваются обладатели устройств для печати, включают неработающий картридж, неисправности механизма подачи, неисправности программного обеспечения, неисправности разъемов и повреждения корпуса. Для устранения этих неисправностей наши опытные мастера выполняют ремонт печатающих головок, механизмов подачи бумаги, ПО, разъемов и механических компонентов. Доверив ремонт нам, вы обеспечиваете себе долговечный и надежный сервис ремонта принтера. Подробная информация представлена на нашем сайте: https://remont-printerov-master.ru
#8645 Ремонт посудомоечных машин в Москвеhttps://remont-posudomoechnyh-mashin-expert.ru/
Наши специалисты предлагает высококачественный <a href=https://remont-posudomoechnyh-mashin-expert.ru/>сервисный ремонт посудомоечной машины</a> всех типов и брендов. Мы осознаем, насколько необходимы вам ваши посудомойки, и готовы предложить сервис наилучшего качества. Наши квалифицированные специалисты работают быстро и аккуратно, используя только качественные детали, что гарантирует длительную работу выполненных работ. Наиболее общие проблемы, с которыми сталкиваются пользователи посудомоек, включают проблемы с нагревом воды, неработающие насосы, программные сбои, проблемы с подключением и механические повреждения. Для устранения этих проблем наши профессиональные техники выполняют ремонт нагревательных элементов, насосов, ПО, разъемов и механических компонентов. Доверив ремонт нам, вы получаете долговечный и надежный сервисный центр по ремонту посудомоечных машин. Подробная информация доступна на сайте: https://remont-posudomoechnyh-mashin-expert.ru
#8646 Charlesgunnyhttp://filmkachat.ru
1×slots casino зеркало
Фриплей-бонусы встречаются только в некоторых клубах. Они зачисляются незамедлительно в творения профиля и активны непродолжительное время. Если не успеете потратить свои, они попросту сгорят. Касаемо времени, правило призы активны на часа. <a href=http://filmkachat.ru/>1×slots официальный регистрация</a> Также есть онлайн-платформы азартных игр, которые применяют раздачу бездепозитных бонусов в специальные даты (как для казино, так и для игрока). Помимо этого, действующие геймеры кроме имеют возможность получить схожие бонусы за собственную работа (к примеру, за увеличения уровня либо за схожие достижения).Можно ли в одном онлайн казино получить больше 1-го приза за регистрацию? Нет, например как в каждом онлайн казино есть правила, к которым надо(надобно) держаться, не творить два аккаута для получения призов, по будет блокировка обоих аккаутов, не пытайтесь обмануть онлайн казино, приз за регистрацию выдаеться раз один 1 личику. <a href=http://webanketa.com/forms/6gt3ac1k60qpas9r75jp6shs/>http://webanketa.com/forms/6gt3ac1k60qpas9r75jp6shs/</a> Зачастую бездепозитные бонусы казино для забавы предлагаются различными заведениями азартных игр виде рекламных промоакций или в целях вербования к себя новых игроков. Для бездепозитных бонусов в казино 2022 геймеру не нужно пополнять счет до момента вывода желаемых средств. 1×slots официальный сайт, скачать <a href=https://www.metasoa.com/bbs/board.php?bo_table=free&wr_id=649361>https://www.metasoa.com/bbs/board.php?bo_table=free&wr_id=649361</a> Бездепы с бесплатными вращениями деют пользователям право вертеть барабаны игровых автоматов без снятия средств со счета. За любой раунд уплачивает казино. Число спинов ограничено и редко превышает сотню. Если акция содержит количество даровых игр, их начисление возможность быть разбито на количество дней.В интернете очень большое скриптовых сайтов, которые принадлежат жуликам. Их основная задача – привлечь гэмблеров, пообещав не только щедрые подарки, хотя и солидные выигрыши. Так собственно кое-какие сайты предлагают получить за регистрацию и $1 000.
1хслот скачать
Будьте внимательнее при ознакомлении с правилами во избежание появления конфликтных обстановок с казино, когда после отыгрыша бездепа для не дадут исключить солидную необходимую выигрыша. казино 1×slots официальный сайт Для всех бездепозитных бонусов функционирует максимальный лимит на выигрыш. Он указывает максимальную сумму, которую вас получить, играя на бонусные кредиты. Как лишь вас получится выполнить притязания вейджера, возможный максимум несомненно переведен с бонусного счета на ведущей, а остаток несомненно списан.Свежий бонус начисляется вид валютных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в пользовании средствами, в случае отыгрыша оператор возможность установить лимитирование на вывод средств. <a href=https://www.metal-tracker.com/forum/member.php?action=profile&uid=927431897>https://www.metal-tracker.com/forum/member.php?action=profile&uid=927431897</a> 3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефонный либо почту, указать персональную информацию; 1×slots промокод при регистрации
x1 slots 1хслотс регистрация перейти на 1×slots
Активация валютного вознаграждения происходит механически в сотворения профиля либо использования промокода. Иногда операторы предъявляют дополнительные требования: подписаться на страницы казино в социальных сетях или на рассылку рекламных сообщений, скачать и установить дополнительный софт и т.д.Сразу после активации промокода можно пользоваться подарком. Как уже упоминалось, призы посещают трёх обликов – фриспины, кредиты и фриплей-бонусы. Выигрыши с бонусов без инвестициям практически привязаны к требованию по ставкам и шансы быть обналичены лишь последствии исполнения этих притязаний. <a href=http://kupi-print.ru/bitrix/redirect.php?goto=http://5171010.ru/bitrix/rk.php?goto=http://zawood.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/_yN41uniX5_>http://kupi-print.ru/bitrix/redirect.php?goto=http://5171010.ru/bitrix/rk.php?goto=http://zawood.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/_yN41uniX5_</a> Этот тип приза будет добавлен на Ваш аккаунт последствии успешной процедуры регистрации с внедрением номера аппарата. Если выбрать иной способ творенья учетной записи, бездеп не будет добавлен на Ваш акк. 1× slots casino официальный сайт
1×slots официальный сайт скачать на айфон
<a href=https://uyghuryol.com/forum/viewtopic.php?f=8&t=230163>1×slots зеркало сайта</a> Мы подготовили список, где есть постоянно животрепещущие и новые бездепозитные призы казино, которые продоставляется получить бесплатно. Для наших пользователей есть особые предложения неповторимые бонусы, коие вы ни не найдете, их мы обозначили специальной красноватой плашкой «Exclusive».Вообще перейдя в казино — правила одинаковы в получении бездепозитных призов, в стереотипные правила входит: подтвердить эл. Почту и телефон, заполнить свой индивидуальный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ. Не хотите сыграть в азартные игры, не рискуя своими деньгами, но получая в все выплаты? Подобную возможность деют все наихорошие порталы с азартными развлечениями. В их количестве большое добросовестных и надежных интернет-казино на российском языке. Они завлекают новых юзеров разными поощрительными событиями, включая бездепозитные, либо благотворительные бонусы.Превышение максимальной ставки при отыгрыше. Система механически не предостерегает о превышении ставки, поэтому о несоблюдении управлял игрок имеет узнать уже после подачи запроса на вывод средств. 1×slots мобильная версия войти казино <a href=http://bbs.xinhaolian.com/home.php?mod=space&uid=4019387>http://bbs.xinhaolian.com/home.php?mod=space&uid=4019387</a>
1×slots официальный сайт скачать на айфон
Также учтите, что кое-какие игровые платформы сузивают список государств, коие способны получить предложенный бездепозитный приз за регистрацию. К примеру, существуют онлайн-заведения, выдающие подобные призы только жильцам конкретных стран. К образцу, онлайн казино 777 Оригинал предоставляет бездепозитный бонус только игрокам из России и стран СНГ. Или наоборот, снабжают вознаграждением всех, не жителей некоторых государств (из этого, следует внимательно учить перечень, чтобы впоследствии не возникло никаких вопросов и жалоб).Бонус за регистрацию в казино выдается только один один на одного игрока. Но посещают вспомогательные акции, масштабах коих бездепы расступаются для неизменных посетителей и такие презенты Вы сможете получить более 1-го раза. <a href=https://www.lifesshortlivefree.com/community/profile/scottnek/>https://www.lifesshortlivefree.com/community/profile/scottnek/</a> Выбирая безвозмездный бонус, внимательно изучайте управляла. Убедитесь, что вам возможно на участие в акции. Уточните, в каких забавах можно скорпулезно условия вейджера. При надобности задавайте вопросы адептам саппорта. 1×slots промокод при регистрации Только выполнив все обстоятельства отыгрыша и дождавшись завершения проверки аккаунта, Вы можете оформить заявку на вывод средств и получить средства средства.
<b>Смотреть еще похожие новости:</b>
<a href=http://forums.indexrise.com/thread-67287-post-332819.html#pid332819>1хслотс регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выполнив все требования оператора, заказчик возможность оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем не более суток. Если дополнительно потребуется пройти функцию верификации, то срок возрастает до 1–2 рабочих дней. Для перевода применяются банковские приборы и электрические платежные системы. Второй метод подходит превосходнее, так как большинство транзакций такой осуществляются моментально. В связи со специфичностью функционирования банков обработка платежей возможность взятьвдолг(взятьвзаймы) до нескольких трудящихся дней.
#8647 Ремонт посудомоечных машинhttps://remont-posudomoechnyh-mashin-expert.ru/
Наш сервисный центр предлагает надежный <a href=https://remont-posudomoechnyh-mashin-expert.ru/>сервис ремонта посудомоечных машин с гарантией</a> всех типов и брендов. Мы осознаем, насколько важны для вас ваши посудомойки, и стремимся предоставить услуги высочайшего уровня. Наши квалифицированные специалисты оперативно и тщательно выполняют работу, используя только сертифицированные компоненты, что обеспечивает долговечность и надежность выполненных работ. Наиболее распространенные поломки, с которыми сталкиваются обладатели устройств для мойки посуды, включают неисправности нагревательных элементов, проблемы с подачей воды, ошибки ПО, неработающие разъемы и поломки компонентов. Для устранения этих неисправностей наши квалифицированные специалисты выполняют ремонт нагревательных элементов, насосов, ПО, разъемов и механических компонентов. Доверив ремонт нам, вы обеспечиваете себе долговечный и надежный сервис ремонта посудомоечных машин адреса. Подробная информация представлена на нашем сайте: https://remont-posudomoechnyh-mashin-expert.ru
#8648 Ремонт ПНВhttps://remont-pnv-ultra.ru/
Наши специалисты предлагает высококачественный <a href=https://remont-pnv-ultra.ru/>сервис ремонта приборов ночного видения с гарантией</a> различных марок и моделей. Мы понимаем, насколько необходимы вам ваши ПНВ, и обеспечиваем ремонт первоклассного уровня. Наши профессиональные техники работают быстро и аккуратно, используя только качественные детали, что гарантирует длительную работу проведенных ремонтов. Наиболее общие проблемы, с которыми сталкиваются обладатели приборов ночного видения, включают проблемы с изображением, неисправности оптики, неисправности программного обеспечения, проблемы с портами и поломки компонентов. Для устранения этих проблем наши квалифицированные специалисты выполняют ремонт сенсоров, оптики, ПО, разъемов и механических компонентов. Обращаясь в наш сервисный центр, вы гарантируете себе долговечный и надежный центр ремонта прибора ночного видения рядом. Подробная информация представлена на нашем сайте: https://remont-pnv-ultra.ru
#8649 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
Однако в критериях скрываются «подводные камешки», коие не позволят вывести крупную необходимую либо же вы не успеете отыграть вейджер. Поэтому профессионалы рекомендуют отобрать безвозмездные вращения за регистрацию в казино без депо, дабы поднабраться опыта и получить реальный шанс на победу.В настоящее время получить приз за регистрацию в казино довольно просто. Почти каждый игорный жилище с готовностью даст деньги либо бесплатные вращения. Многие игроки используют данным и не смущяются региться в любом клубе с прибыльными условиями. Кстати, это замечательная возможность выдумать выигрышную тактику и сорвать куш. <a href=http://filmkachat.ru/>1×slots сайт зеркало</a> <a href=https://blog.naver.com/lexxeagle/223616669197>https://blog.naver.com/lexxeagle/223616669197</a> казино 1×slots <a href=http://www.zgbbs.org/space-uid-171681.html>http://www.zgbbs.org/space-uid-171681.html</a> Мы подготовили список, где есть практически актуальные и свежие бездепозитные призы казино, коие вам получить безвозмездно. Для наших юзеров есть особые предложения неповторимые бонусы, которые вы ни не отыщите, их мы обозначили особой красной плашкой «Exclusive».Для того, чтобы отыграть сумму вашего бездепозитного приза надо(надобно) выполнить обстоятельства вейджера. Очень часто фриспины даются на определенные слоты (book of ra, book of dead, book of sun), избирайте слот себя нраву, они все довольно красочные и качественные. Бездепозитные приз может быть валютным например и повторяющий фриспинов на слоты
1×slot рабочее зеркало
<a href=https://forum.dis-course.net/viewtopic.php?t=423827>1×slots casino регистрация 1×slotscasin online</a> 1 хслот регистрация в 1×slots casino Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном бонусе, то начала направьте на значение вейджера и срок, кот-ый дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть бонус и исключить выигрыш.Онлайн-казино кропотливо продумывают бонусные обстоятельства, которые нужно выучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша прочие лимитирования. <a href=http://campus.ecrin.org/topic/181551/>http://campus.ecrin.org/topic/181551/</a> Основное различие в, собственно для получения бездепа нужно пополнять баланс в казино. Но не сего, есть ряд и различий: 1×slots рабочее зеркало Например, игрок получил 500 рублей при творении аккаунта и должен отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 рублей, потребуется устроить 875 спинов для полного отыгрыша.
1×slots регистрацию более популярный вариант это
Вейджер (wager) – это коэффициент, который показывает на какую необходимую необходимо устроить ставок, чтобы исключить бонус из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода сего приза, Вам нужно сделать ставок на сумму: 500*70=3500 руб. Только всецело отыграв бонус, Вы можете исключить свой выигрыш. Для вывода средств бонус надо(надобно) будет отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариациями отыгрыша бездепозитного приза до его получения, дабы избежать конфликтных обстановок.При отыгрыше бездепов, учитывайте кратковременные лимитирования. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток. <a href=http://shinyoungwood.kr/bbs/board.php?bo_table=free&wr_id=295598>http://shinyoungwood.kr/bbs/board.php?bo_table=free&wr_id=295598</a> 1×slots casino регистрация Срок активации и время на отыгрыш. Зачисление средств или фриспинов случается при активации в течение требовательно ограниченного периода, схожие притязания предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать бонус несколько дней или и недель. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высочайшим вейджером.
1×slots зеркало этих способов предполагает регистрацию
<a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=402605#pid402605>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> Мы советуем не отрицаться от сходственных предложений знаменитых казино. Выделите некоторое мин. На регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сегодня удача будет на вашей стороне!Помимо остального, для вывода средств по бездепу нужно внести на счёт собственный 1-ый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало вероятную необходимую, последствии чего вывод средств будет доступен. 1×slots зеркало этих способов предполагает регистрацию <a href=https://www.google.gg/url?q=https://doctorlazuta.by/>https://www.google.gg/url?q=https://doctorlazuta.by/</a> Выбор каждого онлайн казино на нашем сайте. В описании к любому Вы можете узнать, что получите за творение аккаунта.Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми акциями. Читайте о них в обзорах и на форуме.
1×slots регистрация 1×slotscasino09k online
Мы собрали и выпустили список превосходнейших бездепозитных казино с бонусами за регистрацию, коие гарантируют щедрые выигрыши и мгновенные выплаты. В количестве случаев бесплатные призы начисляются в кредитах, которые нельзя незамедлительно вывести со счета. Прежде их нужно отыграть по установленным правилам. Эти притязания принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже. <a href=https://montreesounds.com/index.php?action=profile;u=30705>https://montreesounds.com/index.php?action=profile;u=30705</a> Маркетинговая политика всех игорных интернет-клубов должна одевать разнообразный нрав. И в гонорары на депозит работают чтобы, чтобы, чтобы стимулировать заносить депозиты и поощрять теснее существующих пользователей, то бездепозитный приз в казино либо бонус за регистрацию в казино, до всего, рассчитан на расширение базы потребителей.Чаще всего казино бонус за регистрацию без депозита даёт возможность запустить каждой автомат. Но чем внимательно ознакомиться с условиями. Иногда для забавы доступны только определённые модели. Если вы новичок и ничего не смыслите в гэмблинге, лучше начать знакомство с миром азарта именно с «одноруких бандитов». 1×slots актуальное зеркало Таким образом онлайн казино получает вероятного игрока. Возможно в будущем или настоящем он захотит поиграть на средства деньги. Так трудятся бездепозитные призы в интернет казино. Здесь очень подходит выражение, благотворительные сыр посещает лишь в мышеловке. Начинающие игроки все не обдумывать опасность пыла. Однако времени понимания становится больше. Это тема для отдельного обсуждения.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.mshowto.org/forum/members/jamespauri.html>1хслотс казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Диапазон ставок, коие вправе устроить игрок, также лимитирован. Обычно ставить можно небольшую сумму — в 10–30 рублей за одно вращение. Фриспины начисляются по определенной ставке. После их активации игроку нужно запустить слот и убедиться, что в нем отображаются безвозмездные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода в отыгрыша ориентируется оператором и изредка превышает 5 000 руб.
#8650 WilliePubre
where to get clomid price <a href=" https://dongzong.my/forum/home.php?… „>can i get cheap clomid now</a> or <a href=“ https://www.google.cf/url?… ">where to buy generic clomid no prescription</a> https://1d4.us/clomid.store can you buy clomid without dr prescription <a href=https://www.google.com.gt/url?q=https://clomid.store>where buy clomid</a> order generic clomid and <a href=https://www.gztongcheng.top/home.php?mod=space&uid=5199>how can i get clomid tablets</a> how can i get cheap clomid
#8651 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрацию более популярный вариант это
Онлайн-казино тщательно продумывают бонусные обстоятельства, коие нужно выучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и ограничения.Акции распространяются как на все игры казино, так и на ограниченный перечень. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и другие. Промо возможность охватывать разработки одного производителя. Бездеп не пересекается с другими промоакциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, изготовленные бонусными средствами. Для идентификации платежных реквизитов игрока возможность потребоваться пополнение счета на наименьшую необходимую. <a href=http://filmkachat.ru/>1×slots зеркало регистрация</a> Чтобы самостоятельно увериться в превосходствах бездепозитных бонусов, довольно зарегистрироваться в казино и получить поощрение. <a href=http://sites.estvideo.net/alvasoft/forum/topic-3–59695–1.html>http://sites.estvideo.net/alvasoft/forum/topic-3–59695–1.html</a> 1хслотс рабочее зеркало <a href=http://www.zgbbs.org/space-uid-172614.html>http://www.zgbbs.org/space-uid-172614.html</a> Бонусы без депозита при регистрации числятся наиболее привлекательными как для опытнейших игроков, так для и новичков. Получив это вознаграждение, клиент может играть на настоящие деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а условия их активации и выигрыша.Маркетинговая политического всех игорных интернет-клубов обязана одевать разнородный нрав. И случае вознаграждения на депо служат для того, чтобы стимулировать заносить депозиты и поощрять уже быть юзеров, то бездепозитный бонус в казино или приз за регистрацию в казино, прежде всего, рассчитан на расширение базы покупателей.
1х слот 1хслотс регистрация перейти на 1×slots
Разные казино имеют собственные правила по выведению выигрыша. Для бездепозитных призов принимаются довольно высокие требования. Часто онлайн-казино советуют отыграть бонусное поощрение до 100 один в игровых автоматах. Например, случае игрок получил безвозмездно десять $, то нужно будет отыграть их, поставив 1 тыщу спинов по 1 баксу каждый. Стоит отметить, собственно не все казино дают вероятность играть на призы и не во всех увеселительных заведениях схожие правила для отыгрывания. Некоторые казино воспрещают играть на бонусы в блекджек или ограничивают ставки до пяти процентов, собственно существенно увеличивает в 10-ки один количество нужных игр. <a href=https://orbitsound.com/forum/user-211634.html>казино 1×slots</a> 1хслотс казино зеркало <a href=https://prpack.ru/user/Travisbiz/>https://prpack.ru/user/Travisbiz/</a> Вейджер менее х30–35 является применимым. Опытные игроки заявляют, собственно с этим вейджером реально остаться в плюсе, в правильно подойти к выбору игрового аппарата. 1хслотс официальный сайт зеркало Осталось избрать казино с бонусом за регистрацию и сделать профиль. После активации подарка выигрыш находится от Фортуны и навыков.
1 хслот регистрация в 1×slots casino
Бездепозитный приз предоставляется новенькому игроку за конкретные деяния. Часто презент в виде денег или фриспинов выдается за регистрацию, спасибо чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. Выигрыши с призов без инвестициям всегда привязаны к притязанию по ставкам и шансы быть обналичены лишь в исполненья этих притязаний. <a href=http://www.ctphome.com/bbs/home.php?mod=space&uid=66579>http://www.ctphome.com/bbs/home.php?mod=space&uid=66579</a> Ещё одно распространённое акционное предложение – привлекательный презент с неблаговидными притязаниями. К образцу, клуб обещает $100 виде бездепа, но с вейджером х80 либо х100. Отыграть подобный вейджер практически невероятно и потому превосходнее концентрироваться на более интересных промоакциях. 1×slots casino регистрация В современность очень просто получить бонус за регистрацию в казино. Практически каждый игорный жилище с готовностью начислит деньги либо безвозмездные вращения. Многие гэмблеры пользуются этим и не смущяются регистрироваться в любом клубе с выгодными условиями. Кстати, это отличная вероятность выработать победную тактику и сорвать джекпот.Каждый из бездепозитных бонусов без пополнения 2022 имеет свой конкретный вейджер для отыгрыша, так же в каждом казино он уточняется персонально — где то он х55 а кое-где х30, повторюсь везде по различному!
1× slots зеркало
Онлайн-казино с бездепозитными бонусами ставят посетителям условия для использования бездепами, потому перед участием в акции какого-либо подробно ознакомиться со всеми правилами и аспектами промоакции. Условия могут дотрагиваться получения бонуса, его применения и последующего вывода валютных средств если, тогда, выигрыша.Практически все онлайн казино с бездепозитным призом за регистрацию предусматривает программу лояльности — систему поощрения неизменных клиентов, кот-ая произведено из большого значений. При достижении игроком одного значения на его счёт поступает бонус. Чем выше уровень — что, этим щедрее приз. <a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=7523&TITLE_SEO=7523-preobrazovatel-interfeysov-usb-rs485&MID=472284&result=reply#message472284>1хслотс официальный сайт зеркало</a> Фриплей-бонусы. Бонусы за безвозмездную игру есть только в неких клубах. Они зачисляются сразу последствии творенья профиля и действуют недолговременное время. Если у вас нет медли потратить свои, они просто закончатся. Что касается медли, как призы действуют в течение одного часа. Обычно бездепозитные промоакции от казино, приходят на эл. Почту в дни рождения или праздничные. В некоторых интернет казино можно адресоваться в чат и как неизменному игроку, возможно вас предложат бездепозитное предложение.Бездепозитные бонусы казино за регистрацию в 2022 году — это вероятность поиграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой либо числом даровых вращений без внесения депозита. Не путайте деморежим с реальной игрой без надобности внесения депо. 1×slots актуальное зеркало <a href=http://lnx.hotelresidencevillateresaischia.com/casamicciola/index.php?option=com_k2&view=itemlist&task=user&id=452979>http://lnx.hotelresidencevillateresaischia.com/casamicciola/index.php?option=com_k2&view=itemlist&task=user&id=452979</a> Многие новички колеблются, собственно поощрительный приз надо будет отдавать, в если они выиграли у казино. Это полностью неопасно и накрепко. Выводя выигранные свои, игрок просто одергивает свое участие в игре и теряет уникальную возможность – безвозмездно увеличивать собственное вещественное положение.
1х слот регистрация в 1×slots casino
Итак, чтобы бесплатные бонусные кредиты превратились в настоящие средства, которыми вам распоряжаться по собственному усмотрению, их нужно отыграть. Вейджер идет уточнять в правилах онлайн-казино. Поспешите забрать бездепозитные призы за регистрацию в казино из представленного списка. Все платформы не водят законную работа, хотя и обрадуют добросовестными плодами игры, высочайшей отдачей, быстрыми выплатами. <a href=http://cse.google.ws/url?q=http://sibur-int.com/bitrix/click.php?goto=http://okha65.ru/redirect?url=https://teletype.in/@urist555/OiaIciKCg9l>http://cse.google.ws/url?q=http://sibur-int.com/bitrix/click.php?goto=http://okha65.ru/redirect?url=https://teletype.in/@urist555/OiaIciKCg9l</a> Нет. Казино выдают благотворительные бонусы за регистрацию, для того, дабы заказчик возможность ознакомиться с игровым заведением. А дабы исключить его, нужно выполнить обстоятельства отыгрыша.На благотворительные бонусы онлайн-казино практически всегда распространяется ограничения по стране проживания посетителей. Даже если вам разрешено раскрывать счет и выступать на деньги в заведении, это еще не значат, что вас доступны no down payment bonuses. 1×slots casino зеркало Бездепозитный приз казино 2022 с выводом за регистрацию предоставляет вероятность ознакомиться игроку с лобби выбранного заведения, сориентироваться в выборе игр и выяснить качество работы службы. Довольно нередко, начиная игровой процесс, игрок теснее не желает останавливаться и делает настоящий вклад. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать безвозмездно возможно как раз таки с призом за регистрацию без необходимости заносить депозит.
<b>Смотреть еще похожие новости:</b>
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1150#post-35822>1×slots регистрация 1×slotscasino 56 online</a>
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=59232&extra=>1хслот зеркало сайта</a>
<a href=http://khodaumo.com/forum/memberlist.php?mode=viewprofile&u=146&sid=ab7820d0925063221294cbdd41a1a8e4>1×slot казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Принципиальным различием безвозмездных призов от бонусов на депо является неименье надобности вносить деньги на аккаунт. Из-за сего их часто нарекают бездепозитными (not the slightest down payment bonuses). Когда речь идет о валютных призах, казино постоянно устанавливают условия вейджера, которые нужно выполнить, чтобы исключить выигрыш.
#8652 ArmandoRuiff
can you buy zithromax over the counter in australia: <a href=" https://azithromycinus.com/ ">zithromax 1000 mg pills</a> – zithromax buy online
#8653 Ремонт приборов ночного виденияhttps://remont-pnv-ultra.ru/
Наш сервисный центр предлагает высококачественный <a href=https://remont-pnv-ultra.ru/>ремонт приборов ночного видения рядом</a> различных марок и моделей. Мы знаем, насколько значимы для вас ваши ПНВ, и стремимся предоставить услуги наилучшего качества. Наши квалифицированные специалисты работают быстро и аккуратно, используя только оригинальные запчасти, что гарантирует долговечность и надежность проведенных ремонтов. Наиболее общие проблемы, с которыми сталкиваются обладатели приборов ночного видения, включают проблемы с изображением, проблемы с линзами, программные сбои, неработающие разъемы и поломки компонентов. Для устранения этих неисправностей наши опытные мастера проводят ремонт сенсоров, оптики, ПО, разъемов и механических компонентов. Обратившись к нам, вы получаете надежный и долговечный вызвать мастера по ремонту приборов ночного видения на выезде. Подробная информация доступна на сайте: https://remont-pnv-ultra.ru
#8654 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
Мы собрали и выпустили перечень лучших бездепозитных казино с бонусами за регистрацию, коие гарантируют щедрые выигрыши и моментальные выплаты. <a href=http://filmkachat.ru/>1×slots зеркало этих способов предполагает регистрацию</a> Нет. Для получения бездепозитного бонуса в казино необходима обязательная регистрация на сайте. Играть в слоты безвозмездно и без регистрации возможно лишь в демо режиме. <a href=https://www.whizolosophy.com/category/personal-change/article-column/everything-you-need-to-know-about-3d-walkthrough-animation>https://www.whizolosophy.com/category/personal-change/article-column/everything-you-need-to-know-about-3d-walkthrough-animation</a> 1×slots зеркало регистрация в 1×slots casino <a href=http://fun-und-witze.de/profile.php?lookup=1036>http://fun-und-witze.de/profile.php?lookup=1036</a> 1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, в не хотите стать жертвой плутов или впустую потратить время;
1×slots регистрация
Игры, каких возможно играть на бонусные деньги. Проверьте список игр, в которых возможно выступать на бонусные свои, вполне они Вам не понравятся и не расходовать своё время на эту промоакцию. <a href=https://australiantravelforum.com/Upload/showthread.php?tid=172607>1×slots зеркало регистрацию более популярный вариант это</a> 1×slots casino регистрация 1×slotscasino09k online Прежде всего, не запамятовывайте периодически заглядывать на страницу обзоров бездепозитных призов. Они шаг за шагом рассматривают более занимательные предложения водящих игорных порталов. <a href=http://cn-sh.cn/space-uid-138528.html>http://cn-sh.cn/space-uid-138528.html</a> Призовые начисления без депозита шансы предоставляться для участия в турнирах интернет казино. Потратить перечисленные деньги возможно самая в рамках данной акции. Условия их проведения содержат лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, какого-либо изучить его правила. 1хслот зеркало Варианты выигрыша в от Вашей успеха и критерий игорного портала. Выше мы заявили, собственно некоторые бездепозитные бонусы в 2022 году выдаются с ограничениями по наибольшей выплате. Однако, остаются и, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность передовых игр на деньги, возможно выиграть невероятные суммы. Сегодняшние игровые автоматы или видео слоты, как их нарекают. Могут выдавать солидные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000.
1хслот 1хслотс регистрация перейти на 1×slots
Самые новые бездепозитные бонусы в казино за регистрацию 2022 года с выводом выгоды присутствуют на этой страничке. Посетитель имеет расценить обстоятельства получения и начать выступать на средства без внесения депозита. При данном игроку главно осознавать, на каких условиях и какими методами возможность исключить приобретенный выигрыш. Для сего нужно расценить перечень подключенных платежных систем.Простая процедура получения бездепозитного бонуса, кот-ая займет менее 2-х минут. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные. <a href=http://spilov.ru/user/Ralphtough/>http://spilov.ru/user/Ralphtough/</a> В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и когда спорных ситуаций нет возможности куда-то пожаловаться и обосновать собственную правоту. 1×slots зеркало регистрация в 1×slots casino Бездепозитные бонусы, как теснее ясно, считаются оригинальной возможностью приступать к игровому процессу безусловно бескорыстно, другими играть в онлайн казино даром и на имеющие свои незамедлительно в регистрации аккаунта. Автоматы с таким депо шансы стать прекрасной возможностью сыграть для почитателей азарта с определенными лимитированиями в финансах.В интернете слишком количество скриптовых сайтов, коие принадлежат жуликам. Их главная цель – привлечь гэмблеров, пообещав не щедрые презенты, но и солидные выигрыши. Так собственно кое-какие сайты предлагают получить за регистрацию даже $1 000.
1×slots актуальное зеркало
Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, дабы снова получить бесплатный бонус. Игорные заведения нетерпимы к бонус-хантерам, потому вас ждет неминуемое санкция. <a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1хслот скачать</a> Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. 1× slots сайт <a href=https://play.ntop.tv/user/DoctorLazutaKl/>https://play.ntop.tv/user/DoctorLazutaKl/</a> Если речь идет об неповторимых предложениях, возможность понадобиться регистрация в казино по ссылке с партнерского сайта.
1×slots официальный сайт зеркало рабочее
<a href=http://www.zgbbs.org/space-uid-181436.html>http://www.zgbbs.org/space-uid-181436.html</a> 1× слот зеркало На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не сможете активировать и получить бездепозитный бонус.
<b>Смотреть еще похожие новости:</b>
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=77395&extra=>казино 1×slots официальный сайт</a>
<a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1×slots casino регистрация 1×slotscasino09k online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Наши специалисты изучают обстоятельства акции, после в ручном режиме проводят их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие параметры. Мы не рекламируем казино, а даем игрокам информацию о наихороших из них.
#8655 Hubertnuankhttps://serviceorangecounty.com
Reliable HVAC Repair Services <a href=https://serviceorangecounty.com/>https://serviceorangecounty.com</a> stay comfortable year-round with our professional HVAC repair services. Our experienced team is dedicated to diagnosing and resolving heating, cooling, and ventilation issues quickly and effectively.
#8656 Charlesgunnyhttp://filmkachat.ru
1×slots акции
Такие одобрения дозволяют бесплатно протестировать свежее казино, разобраться с игровым ходом интернет слотов, заработать и вывести небольшую сумму денег. <a href=http://filmkachat.ru/>1х слотс зеркало регистрация в 1×slots casino</a> <a href=https://www.swiatobrazu.pl/forumgaleria/thread/view/id/524>https://www.swiatobrazu.pl/forumgaleria/thread/view/id/524</a> Игрокам не воспринимать приветственный приз как гарантированный способ получить большой выигрыш, но это замечательная вероятность без расходов расценить перечень казино.Если ординарными текстами, бездепы – это определённая сумма денег или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать презенты. Но есть кое-какие нюансы. Существуют игорные дома, коие перед что, этим как начислить бонусы требуют привязать телефонный, дать копии документов. 1хслот зеркало <a href=http://www.shunion.co.kr/bbs/board.php?bo_table=free&wr_id=561941>http://www.shunion.co.kr/bbs/board.php?bo_table=free&wr_id=561941</a> Фриплей-бонусы встречаются лишь в неких клубах. Они зачисляются незамедлительно последствии творения профиля и активны непродолжительное время. Если не успеете израсходовать свои, они попросту сгорят. Касаемо времени, правило бонусы активны на часа.Проверка занимает от нескольких мин. До нескольких дней, спецы техподдержки имеют запросить дополнительные документы либо инициировать куцее общение по Skype.
1×slots регистрация 1×slotscasino09k online
Бездепозитный приз предоставляется новому игроку за определенные деянья. Часто презент в виде средств либо фриспинов выдается за регистрацию, спасибо чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. <a href=https://elclasificadomx.com/author/jameslog/>1×slots регистрация 1×slotscasino09k online</a> 1хслот скачать <a href=http://t1mro.ru/index.php?subaction=userinfo&user=dashingnominee3>http://t1mro.ru/index.php?subaction=userinfo&user=dashingnominee3</a> 1×slots зеркало этих способов предполагает регистрацию Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, чтобы еще раз получить даровой приз. Игорные заведения нетерпимы к бонус-хантерам, потому вас ожидает неизбежное наказание.Объективные – размер приза, коэффициент и условия вейджера, необходимость внесения депо для вывода средств;
казино 1×slots
Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации бонуса без депозита. Внимательно прочитайте до конца. Многие новенькие делают ошибки на шаге регистрации и поэтому возможности получить презент. Во время забавы в казино, выигрыши, полученные благодаря бесплатным призовым фондам, суммируются и включаются в общую необходимую для отыгрывания. Однако, в фортуна улыбнется и выйдет отыграть все призы, игровое заведение гарантированно разрешит исключить финансовые средства. Сумма вывода несомненно зависеть от лимита, одобренного именно в данном учреждении. Поэтому, пристально нужно читать верховодила выдачи безлимитных депозитов.В зависимости от онлайн заведения любой из их имеет для предложить как бездепозитные деньги, например и бездепозитные фриспины, коие в успешной регистрации рухнут вас на ваш игровой баланс. <a href=http://maskarad.bomba-piter.ru/user/CraigClado/>http://maskarad.bomba-piter.ru/user/CraigClado/</a> Бездепозитные бонусы в казино без пополнения 2022 — это конкретная сумма средств либо vacant spins вращения, коие предоставляются первым гостям за регистрацию на сайте казино повторяющий бездепозитного приза, и дает вам возможность помощью казино без пополнения опробовать предложения (игр), с последующей прерогативой вывода средств при исполненьи всех установленных верховодил. 1×slots актуальное зеркало В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая доля игры. Важно, зачастую бездепозитные бонусы в казино выдаются с лимитированиями по наибольшей выплате. В среднем возможно рассчитывать на выгода в некоторое тысяч руб. Как вывести выигрыш с бонуса без депозита. Придётся доказать аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате или прочтите в правилах.
1 хслот регистрация в 1×slots casino
Если ординарными словами, бездепы – это определённая сумма средств или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать подарки. Но есть некоторые нюансы. Существуют игорные жилища, которые перед тем как начислить бонусы требуют привязать аппарат, предоставить копии документов. <a href=http://3ak.cn/home.php?mod=space&uid=187057>1×slots зеркало сайта</a> Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам воспрещено начислять призы посетителям, не имеющим валютных средств на счете. Мы предлагаем разглядеть актуальные призы онлайн-казино с лицензией, которые соблюдают законодательство РБ. Сразу в активации промокода можно пользоваться презентом. Как теснее упоминалось, бонусы посещают трёх видов – фриспины, кредиты и фриплей-бонусы.Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. 1×slots казино зеркало <a href=http://producm.ru/forum/messages/forum38/topic35998/message292955/?result=new#message292955>http://producm.ru/forum/messages/forum38/topic35998/message292955/?result=new#message292955</a> Oтыгpaть приз с обозначенным вeйджepом, чтобы необходимо сдeлaть cтaвoк нa cумму, превышающую размер бонуса в количество раз.Когда речь о получении бездепозитных призов в казино, начала внимание на следующие обстоятельства:
casino 1×slot
Новички не любят сразу же вносить депозит. Это обосновано неимением опыта и сомненьем. К счастью, в можно получить бездепозитный бонус за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В любом случае вы не рискуете своими сбережениями. Это замечательная вероятность запустить приглянувшийся видео разъем либо же испытать удачу в настольных забавах. <a href=http://masyasha.ru/index.php?option=com_k2&view=itemlist&task=user&id=83987>http://masyasha.ru/index.php?option=com_k2&view=itemlist&task=user&id=83987</a> Бонус в казино без депозита имеет различные вариации: может быть приветственный бонус, промоакции в честь каких-либо праздничных или важных дат, бонус за вербование свежих игроков, преданность и получение VIP-статуса. casino 1×slot Некоторые онлайн-казино без депо предлагают новым посетителям выбрать приз при регистрации. Будьте внимательны: выбрав один, вы в абсолютном большинстве случаев не можете воспользоваться остальными.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=266551#pid266551>1×slots зеркало рабочее на сегодня</a>
<a href=https://www.ldvd.nl/no-22-san-diego-place-rallies-very-last-boise-country-27–16?page=49#comment-238280>1×slots casino регистрация на сайте</a>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-4973/#comment-593736>1хслотс рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Однако в критериях скрываются «подводные камни», которые не позволят исключить солидную необходимую либо же вы не успеете отыграть вейджер. Поэтому мастера рекомендуют забрать безвозмездные вращения за регистрацию в казино без депозита, дабы поднабраться опыта и получить реальный шанс на победу.
#8657 DanielNuhhttps://mayaschool.ru
Лучшая образовательная <a href=https://mayaschool.ru/>Школа Майя</a> обучение, которое работает. Современные методики, опытные преподаватели, удобный график. Мы предлагаем курсы для начинающих и профессионалов.
#8658 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino 777 online
Выиграть настоящие деньги в казино не пополняя счет – сложно, хотя вероятно. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными призами и начните играть на бонусные свои. По статистике из 10-ти заведений возможно заработать небольшую сумму денег с бонусных средств.Призовые начисления без депозита могут предоставляться для участия в турнирах интернет казино. Потратить перечисленные средства возможно исключительно масштабах данной промоакции. Условия их проведения содержат лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, лучше изучить его управляла. <a href=http://filmkachat.ru/>1×slots casino регистрация на сайте</a> <a href=https://wowgilden.net/forum-topic_475315.html>https://wowgilden.net/forum-topic_475315.html</a> На данном разделе портала регулярно публикуются обзорные заметки, в рассматриваются благотворительные бонусы превосходнейших интернет-казино. Информация структурирована по нескольким пунктам, включая главные:Законодательство, регулирующее азартные игры в различных странах, влияет на возможности операторов. В результате пользователи из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это имеет быть как полный отказ в доступе, например и невозможность загружать игры отдельных изготовителей. 1×slots зеркало регистрация то дальше необходимо пройти <a href=http://bbs.yuanjumoli.com/home.php?mod=space&uid=50297>http://bbs.yuanjumoli.com/home.php?mod=space&uid=50297</a> Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить особенности, труднодоступные при игре в демо режиме. Многие новые клиенты переходят в количество постоянных, а оператор получает долгосрочную прибыль.Бывают ли бездепозитные призы без вейджера? Бывают, если у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино.
casino 1×slot
Доступность — бездепозитные бонусы в казино чаще всего предоставляются новым игрокам, но посещают случаи, когда бонус все получить и действующие клиенты.Новые клиенты онлайн-казино без первого депо все выяснить свою удачливость. К тому же есть вероятность конвертировать бездепы в настоящие деньги за регистрацию в казино, однако чтобы бонус необходимо отыграть согласно условиям акции. <a href=https://www.sgomberisgombero.it/my-account-2/>1хслотс 1хслотс регистрация перейти на 1×slots</a> 1×slots промокод при регистрации 2025 Каждый из бездепозитных призов без пополнения 2022 содержит собственный определенный вейджер для отыгрыша, например же в каждом казино он уточняется персонально — где то он х55 а где-то х30, повторюсь всюду по различному! <a href=https://www.digitalistings.com/author/arnoldfrifs/>https://www.digitalistings.com/author/arnoldfrifs/</a> У нас на сайте Вы найдете перечень бонусов без депозита в проверенных казино и доскональную информацию о том как их получить и применять.Например, игрок получил 500 руб. При создании аккаунта и обязан отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., понадобится устроить 875 спинов для полного отыгрыша. казино 1×slots официальный сайт Вывод выигрыша с бездепозитных бонусов казино – великодушный подарок от азартных клубов. Но дабы исключить свой заработок, необходимо выполнить ряд критерий:Также, в этом случае необходимо подтвердить собственный номер телефонного, желаемого код, приобретенный в смс-сообщении от клуба ввести в особое поле в личном кабинете игрока.
x1 slots регистрация в 1×slots casino
Нельзя осматривать забаву на средства, как вариант заработка. Азартные забавы запрещены для лиц младше 18 лет. Topcasinobonuses.mobi классифицируется зачинщиком азартных игр. Сайт одевает информационный характер.Срок активации и время на отыгрыш. Зачисление денег либо фриспинов происходит при активации в течение взыскательно ограниченного периода, схожие притязания предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать приз количество дней либо числе недель. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высочайшим вейджером. <a href=http://raid4×4.ru/memberlist.php?mode=viewprofile&u=6124>http://raid4×4.ru/memberlist.php?mode=viewprofile&u=6124</a> 1 x slots Бездепозитный бонус нередко возможность замерзнуть легкодоступным незамедлительно последствии окончания регистрации, потому в большинстве случаев единственным притязанием к нему считается регистрация, а затем ревизия вашей новой учетной записи.Реже бонусы без депо начисляются постоянным игрокам. С их помощью администрация старается удержать ценных посетителей либо вожделеет поблагодарить за лояльность правильных гостей. Но гораздо чаще для сходственных целей используются такие акции:
1× slots зеркало
Многие новички колеблются, что поощрительный приз не будет возвращать, том если они выиграли у казино. Это безусловно безопасно и накрепко. Выводя выигранные свои, игрок просто одергивает свое участие при и теряет уникальную вероятность – безвозмездно увеличивать собственное материальное положение. 1 х слотс зеркало <a href=https://23region.info/user/PhilipSeima/>https://23region.info/user/PhilipSeima/</a> Для всех бездепозитных бонусов функционирует наибольший предел на выигрыш. Он показывает максимальную сумму, которую вас получить, играя на бонусные кредиты. Как лишь для удастся выполнить притязания вейджера, дозволенный максимум несомненно переведен с бонусного счета на главный, а остаток будет списан.
1×slots регистрация 1×slots review live
Возможность протестировать свежие игры, не рискуя собственными средствами и разработать личную тактику забавы.Важно, удостоверьтесь в том, что раньше не регистрировались в выбранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи. Мы собрали и опубликовали перечень лучших бездепозитных казино с призами за регистрацию, коие гарантируют великодушные выигрыши и мгновенные выплаты.С иной стороны, гораздо легче арестовать бездепозитные фриспины за регистрацию в казино и прямо сейчас начать вращать барабаны в лучших слотах. Главная необыкновенность спинов сомнений, собственно они предназначены для топовых автоматов. Удастся не пройти вспомогательные раунды, хотя и прирастить сумму выигрыша, заработать респины и другие внутриигровые презенты. <a href=http://rytof.ru/node/16046>http://rytof.ru/node/16046</a> 1×slots casino регистрация 1×slots review live Новые клиенты онлайн-казино без первого депо могут выяснить собственную удачливость. К тому же есть возможность конвертировать бездепы в реальные средства за регистрацию в казино, однако достичь бонус необходимо отыграть согласно условиям промоакции.Поспешите забрать бездепозитные призы за регистрацию в казино из представленного списка. Все платформы не водят законную работа, хотя и обрадуют добросовестными плодами игры, высочайшей отдачей, быстрыми выплатами.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.neocodex.us/forum/topic/94669-g-u-i-d-e-proxys-and-how-to-use-them/page-12#entry2034936>1хслотс казино зеркало</a>
<a href=https://traderscrypt.com/forums/showthread.php?tid=5891&pid=8740#pid8740>1хслотс рабочее зеркало</a>
<a href=https://forum.pmpobc.ca/index.php?topic=146636.new#new>1×slots casino регистрация на сайте</a>
<a href=http://3ak.cn/home.php?mod=space&uid=187057>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы прекрасный вариант даровой забавы в игровые автоматы. Многие юзеры сети не понимают, что в казино возможно начать выступать полностью бесплатно, а позже вывести выигрыш на банковскую карту или электрический кошелек, иные не доверяют онлайн казино, а третьи успешно играют и выигрывают – и подчас довольно немалые суммы.
#8659 MichaelDravahttps://svetodiodnyy-ekran.ru
Светодиодные экраны для залов <a href=https://svetodiodnyy-ekran.ru/>https://svetodiodnyy-ekran.ru</a> решения для ярких презентаций и эффектных мероприятий. Высокое качество изображения, индивидуальные размеры и современные технологии.
#8660 Charlesgunnyhttp://filmkachat.ru
1×slots на любой вкус как пройти регистрацию
Многие казино деют в маркетинговых целях безвозмездные бонусы необыкновенно для наших читателей. Чтобы их получить, надо(надобно) перебежать на игровой сайт по партнерской ссылке с нашего портала.Будьте внимательнее при ознакомлении с правилами во избежание происхожденья конфликтных обстановок с казино, когда в отыгрыша бездепа вам не дадут исключить солидную сумму выигрыша. <a href=http://filmkachat.ru/>1×slos регистрация в 1×slots casino</a> <a href=https://camp-fire.jp/profile/silo-images/projects>https://camp-fire.jp/profile/silo-images/projects</a> 1× slots зеркало <a href=http://karabash.chelbusiness.ru/index.php?name=account&op=info&uname=yummysale84>http://karabash.chelbusiness.ru/index.php?name=account&op=info&uname=yummysale84</a> Зарегистрируйтесь. Для регистрации почаще всего достаточно ввести собственный номер аппарата и почтовый адресок, последствии чего установить приобретенный код из СМС. Возможно, требуется указать промокод. В правилах акции несомненно написано, где его бы включать. Иногда это надо делать при регистрации, от — теснее после сотворения собственного кабинета, на отдельной странице.Бесплатные бонусы казино без депозита возможно получить в виде валютных средств на бонусный счет (исключить их можно лишь в отыгрыша), фриспинов, забавы либо кешбэк-бонуса.
1хслотс рабочее зеркало
1×slots регистрация на 1хслотс <a href=http://web.dodoad.co.kr/bbs/board.php?bo_table=free&wr_id=958245>http://web.dodoad.co.kr/bbs/board.php?bo_table=free&wr_id=958245</a> 1×slots актуальное зеркало Такой казино бонус без депозита за регистрацию выдается игроку на час и активно употребляется данное предложение с 2017 года. Это как бы какая-то конспирация одобрения под бездепозитный. Суть всего этого сводится к тому, что геймеру на час выдается, к примеру, 1000 $, а реклама повторяет о том, что любой выигрыш возможно будет в забыть при себе. Но случае играющий всерьез отнесется к этому предложению, то он попросту потеряет время. Ведь геймеру надо(надобно) несомненно выступать не в основном аккаунте, а тренировочном и с ограниченным выбором автоматов и ставок. Да и если, тогда, выигрыша (числе всей тыс. ) в управляла вступят определенные условия, где будет сказано, собственно наибольшей суммой победы возможность быть только двести $ и средства возможно использовать только виде бонуса на 1-ый лепта с вейджером 25 от суммы гонорары плюс сам депо. По результату получится, что игрок выигрывал себе 200% бонус с вейджером на конкретную сумму. Короче говоря, это все не стоит вашего медли.
1×slot зеркало
Разные казино имеют собственные верховодила по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высочайшие требования. Часто онлайн-казино советуют отыграть бонусное поощрение до 100 раз в игровых автоматах. Например, если игрок получил безвозмездно 10 $, то нужно будет отыграть их, поставив одну тысячу спинов по 1 баксу каждый. Стоит отметить, что не все казино дают вероятность выступать на призы и не во всех увеселительных заведениях схожие правила для отыгрывания. Некоторые казино воспрещают выступать на бонусы в блекджек или ограничивают ставки до пяти %, что значительно увеличивает в десятки один количество необходимых игр. <a href=http://lighttoguideourfeet.com/member.php?u=1358892>http://lighttoguideourfeet.com/member.php?u=1358892</a> Бездепы шансы заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами.Варианты выигрыша зависимости от Вашей удачи и условий игорного портала. Выше мы сказали, собственно кое-какие бездепозитные бонусы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются другие, все, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность современных игр на средства, возможно выиграть невозможные суммы. Сегодняшние игровые автоматы либо видео слоты, как их нарекают. Могут выдавать солидные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000. 1×slots рабочее зеркало В большинстве заведений устроить это возможно по e-mal, по номеру телефона, через социальную сеть или гугл-аккаунт.
1×slots коды
Как управляло, новоприбывшие игроки в первую очередь желают ознакомиться с способами ввода и вывода валютных средств и сроки выполнения поданных заявок чтобы конкретно осознавать, как стремительно появится исключить свой казино бонус за регистрацию без депозита на электронный кошелек либо же банковскую карту. К счастью для всех играющих, внутри конкретных холдингов, все казино конкурируют меж собой. Ведь случае бы конкретную компанию представляло только одно онлайн-заведение, то навряд бы посетители заметили казино с призом за регистрацию и возможность бы рассчитывать только на вознаграждение в виде бонуса на 1-ое инвестиция. К каждому заведению периодически следует привлекать новых игроков, что, итоге, лишь на руку всем играющим.Реже призы без депозита начисляются неизменным игрокам. С их подмогою администрация старается удержать ценных посетителей или вожделеет поблагодарить за лояльность правильных гостей. Но гораздо чаще для сходственных целей используются эти акции: <a href=https://www.digicube.de/forum/threads/445500–1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82-%D1%81%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C?p=642870#post642870>1×slots официальный сайт скачать</a> 1× slots сайт <a href=http://nbrkv.ru/user/CraigCox/>http://nbrkv.ru/user/CraigCox/</a> Создание аккаунта. На веб-сайте казино необходимо обнаружить регистрационную форму и наполнить пустующие поля личными данными. Иногда на этом этапе потребуется указать только адресок электронной почты и пароль, но почаще бы наполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д. ). Нужно свидетельствовать только реальные данные, поскольку впоследствие они станут испытаны.
1×slots casino регистрация 1×slots review live
Ниже указан важный перечень легальных казино в Беларуси с призами на 1-ый депо. Вы сможете попасть на официальный сайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз.Еще одно условие дотрагивается объемов ставки. Операторы устанавливают наивысшую сумму, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном офисе. При превышении лимита есть риск лишиться приза. Существующие ограничения относятся и к определенным обликам ставок. Например, играя в рулетку, клиент может столкнуться с запретом назначать фишки на шансы. Не стоит сразу же открещиваться от приветственных даров в похожих казино. Администрация готова начислить деньги либо фриспины, но сначала работники обязаны увериться, собственно вы не мошенник. Дело никаких, собственно развелось слишком большое охотников за призами. Они выучились обманывать систему и наваривать крупные суммы средств. <a href=https://kumu.io/lexxeagle/mastering-architectural-rendering-techniques-tools-and-future-trends>https://kumu.io/lexxeagle/mastering-architectural-rendering-techniques-tools-and-future-trends</a> Некоторые веб-сайты, этого чем провести регистрацию игроков, предлагают ответить на несколько базисных вопросов. Цель проведения похожей викторины – выявить случайных людей, коие не имеют представления о покере, и не разрешить получения ими бонусов. Если посетитель уже играл в казино, то ответить на полтора 10 простых вопросов несомненно нетрудно. Очень нередко, ответы возможно найти на официальных сайтах данных учреждений. рабочее зеркало 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=56274>1хслотс рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Как и промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такого предложения являются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих гостей и дозволяет им составить эмоцию о функционале, не рискуя значительными суммами. Верификация аккаунта. Лучше доказать лицо незамедлительно в регистрации, дабы потом не было проблем с выводом денег. Верификация может протекать 2-мя способами:
#8661 Ремонт плоттеров в Москвеhttps://remont-plotterov-style.ru/
Наш сервисный центр предлагает высококачественный <a href=https://remont-plotterov-style.ru/>мастер по ремонту плоттеров с гарантией</a> различных марок и моделей. Мы осознаем, насколько значимы для вас ваши графопостроители, и стремимся предоставить услуги наилучшего качества. Наши опытные мастера работают быстро и аккуратно, используя только сертифицированные компоненты, что гарантирует долговечность и надежность наших услуг.s Наиболее частые неисправности, с которыми сталкиваются владельцы плоттеров, включают неработающий картридж, застревание бумаги, ошибки ПО, неработающие разъемы и поломки компонентов. Для устранения этих поломок наши профессиональные техники выполняют ремонт печатающих головок, механизмов подачи бумаги, ПО, разъемов и механических компонентов. Обращаясь в наш сервисный центр, вы обеспечиваете себе надежный и долговечный ремонт плоттеров на дому. Подробная информация доступна на сайте: https://remont-plotterov-style.ru
#8662 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию процедура займет всего лишь
Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала быстрые выводы. Фишка выплат никаких, что довольно выбрать платёжный инструмент и указать необходимую. В большинстве случаев средства зачисляются на электронные кошельки на 15 мин., а на банковские карты – 1–3 трудящихся денька.Онлайн-казино тщательно продумывают бонусные обстоятельства, которые нужно изучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша прочие ограничения. <a href=http://filmkachat.ru/>1×slots зеркало видели такую регистрацию на</a> Заработать на бездепозитных бонусах за регистрацию в казино имеет любой юзер, достигший совершеннолетия. <a href=https://kumu.io/lexxeagle/efficient-and-accurate-architectural-drafting-services-for-modern-projects>https://kumu.io/lexxeagle/efficient-and-accurate-architectural-drafting-services-for-modern-projects</a> Поспешите зарегистрироваться на официальном сайте Клубника, дабы моментально получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, замечена настоящий шанс победу!Самые свежие бездепозитные бонусы в казино за регистрацию 2022 года с выводом прибыли находятся на данной страничке. Посетитель может оценить условия получения и начать играть на деньги без внесения депозита. При данном игроку главно понимать, на каких условиях и какими методами появится вывести приобретенный выигрыш. Для этого необходимо оценить список присоединенных платежных систем. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=https://makeitpersonal.co/doctorlazutaoa>https://makeitpersonal.co/doctorlazutaoa</a> Вейджер менее х30–35 считается применимым. Опытные игроки утверждают, что с таким вейджером реально остаться в плюсе, в верно подойти к выбору игрового аппарата.Вывод выигрыша с бездепозитных призов казино – великодушный подарок от азартных клубов. Но дабы вывести свой доход, нужно выполнить ряд критерий:
1×slots официальный сайт скачать
Подарки на праздничные ? посвященные торжественным датам, требующие символического отыгрыша или начисляются без того. Могут дариться игрокам сутки рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду.Таким образом, заведение пробует показать себя своим потенциальным геймерам, а такой маркетинговый ход как казино приз без депозита за регистрацию привлекает очень количество внимания к игорному заведению и обеспечивает неизменный струю новых гостей и грядущих посетителей игрового интернет клуба. 1×slots официальный сайт зеркало <a href=https://masstr.net/member.php?action=profile&uid=28249>https://masstr.net/member.php?action=profile&uid=28249</a> Для доказательства электрической почты, просто перейдите по активной ссылке в послании, приобретенном от игрового заведения.Денежные свои. Третий приз за регистрацию без депо – наличные. К огорчению, только известные и известные клубы имеют уяснить средства в рублях либо баксах. С их подмогою вы сможете насладиться любой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед данным нужно исполненье определенных критерий. казино 1×slots
скачать 1×slots официальный сайт
Однако в критериях скрываются «подводные камни», коие не разрешат вывести солидную необходимую либо же вы не успеете отыграть вейджер. Поэтому мастера рекомендуют арестовать благотворительные вращения за регистрацию в казино без депо, дабы поднабраться опыта и получить настоящий шанс на победу. <a href=http://nbrkv.ru/user/StevenBiz/>http://nbrkv.ru/user/StevenBiz/</a> Помните, что любые нарушения верховодил сведут на нет ваши усилия, и вы наверняка останетесь без начисленного вас безвозмездного приза. Всегда изучайте управляла начисления и условия вейджера. По хоть вопросам, на которые вы не помощи найти ответы, обращайтесь за объясненьям и саппорт. 1хслотс 1хслотс регистрация перейти на 1×slots Максимальный объем ставки, кот-ый невозможно превышать же бонус не несомненно всецело отыгран. В случае нарушения сего правила, приз и выигрыш с него станут аннулированы.В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая часть забавы. Важно, часто бездепозитные бонусы в казино выдаются с ограничениями по максимальной выплате. В среднем можно рассчитывать на прибыль в количество тыщ рублей. Как вывести выигрыш с бонуса без депозита. Придётся доказать аккаунт документально, в некоторых заведениях. Процедура верификации обязательна и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате либо прочтите в правилах.
1×slots casino регистрация 1×slots review live
<a href=http://swissairways-va.com/phpBB3/viewtopic.php?p=1419755#p1419755>1×slots регистрация 1×slots review live</a> Внесение депозита – Будьте готовы пополнить счет после отыгрыша бонуса. Это обычное требование правил для этого типа промо-акций. Лучше заранее уточнить, какую необходимую надо(надобно) будет заносить на счет. Как верховодило, идет о наименьшем депозите, но вы должны быть убеждены, что он для по кармашку. 1×slots регистрация на 1хслотс <a href=https://www.mexicanservers.com/member.php?action=profile&uid=10493>https://www.mexicanservers.com/member.php?action=profile&uid=10493</a>
1×slots зеркало этих способов предполагает регистрацию
Да, у даровых бонусов есть недостатки. Прежде всего, они обычно большие. Кроме того, условия вейджера по ним практически строгие. Но все же неименье риска делает их очень красивыми для посетителей. <a href=http://bbs.boway.net/home.php?mod=space&uid=911712>http://bbs.boway.net/home.php?mod=space&uid=911712</a> Фриспины предусмотрены для использования в видео слотах. Внимательно ознакомьтесь с критериями – часто их выдают на некоторые автоматы. В зависимости от клуба, у вас получится сделать определённое количество ставок. Кстати, продвинутые игорные жилища разрешают запускать каждых «одноруких злодеев».Для получения выигрыша требуется выполнить обстоятельства казино. Чаще всего игроку нужно поставить определенную сумму, хотя уже из личных денег. Она рассчитывается из совместного объема выигрыша за все время использования бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, случае юзер выиграл 1000 рублей, а множитель составляет х30, исключить деньги можно несомненно, сделав ставки на 30 000 руб. 1хслотс мобильная версия зеркало
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Разные казино имеют собственные управляла по выведению выигрыша. Для бездепозитных призов принимаются достаточно высочайшие требования. Часто онлайн-казино советуют отыграть бонусное одобрение до 100 один в игровых автоматах. Например, если игрок получил даром десять $, то нужно несомненно отыграть их, поставив одну тысячу спинов по 1 баксу каждый. Стоит обозначить(означить), что не все казино выделяют вероятность выступать на бонусы и не во всех развлекательных заведениях идентичные правила для отыгрывания. Некоторые казино воспрещают выступать на бонусы в блекджек или ограничивают ставки до пяти процентов, что существенно наращивает в 10-ки один число нужных игр. Для получения приза надо(надобно) ознакомиться с программой лояльности казино и сделать ставки на необходимую, необходимую для перехода на следующий степень.
#8663 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> В современность довольно просто получить бонус за регистрацию в казино. Практически любой игорный дом с радостью начисляет средства или безвозмездные вращения. Многие гэмблеры пользуются данным и не смущяются региться в любом клубе с выгодными условиями. Кстати, это замечательная возможность выработать победную стратегию и сорвать джекпот.Это тоже бесплатные финансы, коие поступают на аккаунты свежеиспеченных в в регистрирования. А необыкновенность этих бонусов состоит сомнений, что обретенные деньги непременно следует применять в продолжении назначенного медли. <a href=https://mssg.me/7dltc>https://mssg.me/7dltc</a> 1×slots официальный сайт, скачать <a href=http://yartube.ru/user/JamesSum/>http://yartube.ru/user/JamesSum/</a>
1×slots казино зеркало
Однако далеко не все ресурсы предлагают своим клиентам бездепозитные призы за регистрацию в казино. В большинстве случаев учтено одобрение на 1-ый депозит в объеме 100–200%. Это замечательная возможность преувеличить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш.Подтверждение регистрации. Казино требуют привязки профиля к электрическому адресу и номеру телефонного. Для этого на e-mail отправляется письмо ссылаясь, а на аппарат ? текстовое сообщение с кодом. <a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=774344>1×slots официальный сайт мобильная версия скачать</a> 1х слотс зеркало регистрация в 1×slots casino Используйте наилучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из списка ниже, чтобы заработать презенты за простые деянья теперь сегодня получить первый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высочайшей отдачей и резвыми выводами на электрические кошельки.Для казино, работающих интернет, бездепозитные бонусы нужны для вербования свежих клиентов. Предложение сыграть на слотах без необходимости внесения реальных денег — работающий способ для повышения энтузиазма к фирмы. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит выступать в казино, только сейчас теснее на личные средства. <a href=https://boobs.red/user/Porsedropsi/>https://boobs.red/user/Porsedropsi/</a> Максимальный размер ставки, который невозможно превышать же бонус не несомненно полностью отыгран. В случае нарушения сего правила, бонус и выигрыш с него станут аннулированы.Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке адепты онлайн-казино публикуют важную информацию о no deposit bonuses и услугах. 1×slots официальный регистрация В лицензионных бездепозитных казино выступать в азартные забавы вправду безопасно. Наличие лицензии одобряет что, этот прецедент, что клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP.Приглашаем делиться сужденьями о призах. Это поможет другим юзерам избирать наиболее выгодные предложения.
1 х слотс зеркало
Вознаграждения за получение VIP-статуса ? начисляются в рамках программы преданности при достижении одного уровня либо выдаются персонально менеджерами службы поддержки.Зарегистрируйтесь. Для регистрации почаще всего достаточно установить собственный номер телефонного и почтовый адресок, в чего установить приобретенный код из СМС. Возможно, потребуется указать промокод. В правилах промоакции будет написано, где его бы включать. Иногда это надобно делать при регистрации, иногда — уже в сотворения собственного офиса, на отдельной страничке. <a href=https://forumjizni.ru/member.php?u=121544>https://forumjizni.ru/member.php?u=121544</a> Бездепозитные призы, как теснее ясно, считаются оригинальной вероятностью обратиться игровому процессу безусловно бесплатно, другими выступать в онлайн казино безвозмездно и на имеющие свои сразу в регистрации аккаунта. Автоматы с таким депо имеют замерзнуть великолепной вероятностью поиграть для поклонников азарта с определенными лимитированиями в денег. 1хслот скачать Игры, в возможно выступать на бонусные деньги. Проверьте перечень игр, в можно играть на бонусные свои, вероятно они Вам не понравятся и надо тратить своё время на эту промоакцию.
1×slots казино зеркало
Получать информацию о самых выгодных бонусах можно без неизменного мониторинга новостей казино. Мы взяли эту задачу на себя и постоянно следим за предложениями операторов, избирая наилучшие из них. В этом разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список промоакций регулярно дополняется. В топ вошли самые новые бездепозитные бонусы за регистрацию в казино 2020, кратковременные и замкнутые рекламную. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру прочим критериям. Если срок деяния акции истек, она удаляется из списка. 1×slots регистрация на сайте <a href=https://metalverk.ru/forum/?PAGE_NAME=profile_view&UID=74662>https://metalverk.ru/forum/?PAGE_NAME=profile_view&UID=74662</a>
1×slots casino регистрация 1×slotscasin online
К сожалению, нет. Почти все казино, настоятельно внесение желая бы 1-го малого депозита для вывода выигрыша с бездепозитного бонуса. Также учитывайте, что вывести средства разрешается лишь на ту платежную систему, с коей был сделан депозит. Превышение наибольшей ставки при отыгрыше. Система автоматически не предупреждает о превышении ставки, потому о нарушении управлял игрок имеет разузнать уже после подачи запроса на вывод средств.Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам запрещено начислять призы посетителям, не имеющим валютных средств на счете. Мы предлагаем разглядеть животрепещущие призы онлайн-казино с лицензией, которые соблюдают законодательство РБ. <a href=http://twchess.lionfree.net/discuz/home.php?mod=space&uid=24843>http://twchess.lionfree.net/discuz/home.php?mod=space&uid=24843</a> 1×slots casino регистрация 1×slotscasino09k online Бонус за регистрацию в казино выдается лишь раз один на 1-го игрока. Но посещают дополнительные промоакции, в рамках коих бездепы расступаются для постоянных посетителей и эти презенты Вы можете получить более одного раза.Фриспины предназначены для применения в видео слотах. Внимательно ознакомьтесь с условиями – частенько их выдают на некоторые автоматы. В зависимости от клуба, у вас получится устроить определённое количество ставок. Кстати, продвинутые игорные дома разрешают запускать любых «одноруких злодеев».
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины предусмотрены для применения в видео слотах. Внимательно ознакомьтесь с условиями – часто их выдают на некоторые автоматы. В зависимости от клуба, у вас получится устроить определённое число ставок. Кстати, продвинутые игорные жилища разрешают запускать любых «одноруких бандитов».
#8664 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на официальном сайте
Срок активации и время на отыгрыш. Зачисление денег либо фриспинов происходит при активации в течение требовательно ограниченного периода, схожие притязания предъявляются и к срокам отыгрыша. Одни казино позволяют отыгрывать бонус некоторое дней или числе месяцов. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высоким вейджером.Помимо остального, для вывода средств по бездепу необходимо внести на счёт свой 1-ый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально вероятную необходимую, после чего вывод средств станет доступен. <a href=http://filmkachat.ru/>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a> Иногда в бездепа, казино дарит наименьший бонус (до 50 рублей), из-за которого не заморачиваться.За вербование друга ? в рамках партнерской программки клиент получает вознаграждение за вербование свежих пользователей. <a href=https://rollbol.com/blogs/1916525/Interior-Design-Layout-The-Art-of-Creating-Perfect-Living-Spaces>https://rollbol.com/blogs/1916525/Interior-Design-Layout-The-Art-of-Creating-Perfect-Living-Spaces</a> 1х слот регистрация в 1×slots casino <a href=https://baskino.zone/user/Jamesprale/>https://baskino.zone/user/Jamesprale/</a> Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых свежих, великодушных и проверенных призах в интернет казино, которые обновляются каждый денек.
1×slots бездепозитный бонус за регистрацию
Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. <a href=https://nztw.org/thread-394882–1–1.html>1×slots регистрация 1×slots casino 777 online</a> 1×slots casino зеркало рабочее Срок активации и время на отыгрыш. Зачисление средств или фриспинов происходит при активации на строго ограниченного периода, подобные требования предъявляются и к срокам отыгрыша. Одни казино позволяют отыгрывать приз количество дней или том месяцов. Другие выдают крупную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с неоправданно высоким вейджером.Составленный специалистами Casino.ru список онлайн-казино с бездепозитным бонусом позволяет игрокам сравнить спецпредложения разных операторов. <a href=https://atoms.rocks/member.php?action=profile&uid=42062>https://atoms.rocks/member.php?action=profile&uid=42062</a> Предложения с бездепозитными бонусами за регистрацию позволяют новым заведениям привлечь аудиторию на собственный вебсайт. А игроки к получают возможность выступать на реальные средства без депо в казино и заработать маленький стартовый капитал, кот-ый разрешено вывести на карту банка либо электронный кошелек.Превышение наибольшей ставки при отыгрыше. Система механически не предупреждает о превышении ставки, потому о несоблюдении верховодил игрок имеет разузнать уже после подачи запроса на вывод средств. 1х слот регистрация в 1×slots casino Многие казино предоставляют в маркетинговых целях бесплатные бонусы необыкновенно для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой сайт по партнерской ссылке с нашего портала.Нет. Казино раздают безвозмездные призы за регистрацию, для того, дабы заказчик мог ознакомиться с игровым заведением. А чтобы исключить его, нужно выполнить условия отыгрыша.
1×slots зеркало регистрация то дальше необходимо пройти
Главное преимущество спинов – возможность выучить разные слоты. Также удастся насладиться бонусными раундами, испытывать фортуну в риск-туре и преувеличить выигрыш за счёт особенных символов. Однако столько игровой процесс заслуживает внимание, ведь другого, как сосредоточиться на реальном выигрыше.При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие можно посвятить забаве в казино. <a href=https://gti-club.ru/forum/member.php?u=415107>https://gti-club.ru/forum/member.php?u=415107</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots Не стоит путать забаву в демо и использование бонусов. В демонстрационном режиме игрок возможность оценить механику слота, сюжет и оформление. Но игра ведется на условные кредиты, потому отсутствует главное ? ощущение азарта. Активируя промокод либо фриспины, клиент раньше не расходует свои средства на игровые автоматы, но может сорвать реальный куш!
1×slots рабочее зеркало
<a href=http://link.5nx.ru/viewtopic.php?f=5&t=4373&p=4810#p4810>1×slots рабочее зеркало</a> Бездепозитные призы казино это экономическая компенсация, предлагаемая пользователям на дармовой базе и возможность играть в онлайн казино безвозмездно. Если ассоциировать их с одобрениями за вклад, в средства выдаются только потом начального пополнения счета, то бездепозитные гонорары получаются бесплатно. То есть, играющий получает вероятность делать ставки на уже быть деньги, которые выдаст заведение, исполняя, при этом, обыденные деянья, чтобы их извлечь (здесь речь о регистрация, удостоверении личности с внедрением номера телефонного, дизайна заявки и т.д.). Онлайн гемблинг развивается с каждым днем больше и больше, новые бренды создаются не по дням а по часам. Новые онлайн казино проделывают вступительные акции для игроков, для того собственно бы зарекомендовать себя, и тем самым предлагают бездепозитные бонусы за регистрацию, собственно бы не упустить эту возможность — как пользоваться свежим бездепом, советуем посещать наш вебсайт как возможно почаще, самое вкусное и новые будет добавляться в этом же перечне. 1×slots промокод при регистрации <a href=https://www.medift.com/bbs/board.php?bo_table=free&wr_id=222241>https://www.medift.com/bbs/board.php?bo_table=free&wr_id=222241</a>
1×slots регистрация на сайте 1×slots ru com
Третитй бездепозитный приз за регистрацию – валютные средства. К раскаянию, начислить рубли или баксы готовы лишь знаменитые и модные клубы. С их подмогою появится насладиться любой доступной игрой – автоматом, рулеткой, кено, блэкджеком.Процесс доказательства личности может взятьвдолг(взятьвзаймы) от одного денька до недели. Если клиент разрешил какую-либо оплошность при заполнении паспортных данных, то ему следует обратиться с проблемой в саппорта онлайн-казино. <a href=http://forums.escapefromelba.com/index.php?action=profile;u=125228>http://forums.escapefromelba.com/index.php?action=profile;u=125228</a> 1×slots зеркало выигрыши обязательно пройдите регистрацию если Будьте внимательнее при ознакомлении с правилами во избежание появления конфликтных обстановок с казино, когда после отыгрыша бездепа для не дадут исключить солидную необходимую выигрыша.
<b>Смотреть еще похожие новости:</b>
<a href=https://mit-bbs.com/viewtopic.php?t=138488>1×slots регистрация на 1хслотс</a>
<a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=2323>1×slots коды</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины. Бесплатные вращения предназначены для применения в видео-слотах. Внимательно читайте обстоятельства – они часто выдаются для неких машин. В зависимости от клуба вам создавать определенное количество ставок. Кстати, современные игорные дома дают вероятность заводить «одноруких бандитов».
#8665 Ремонт планшетов в Москвеhttps://remont-planshetov-profi.ru/
Наша мастерская предлагает профессиональный <a href=https://remont-planshetov-profi.ru/>ремонт планшета на дому</a> различных марок и моделей. Мы знаем, насколько важны для вас ваши планшеты, и стремимся предоставить услуги наилучшего качества. Наши опытные мастера работают быстро и аккуратно, используя только оригинальные запчасти, что предоставляет длительную работу выполненных работ. Наиболее общие проблемы, с которыми сталкиваются владельцы планшетов, включают неисправности дисплея, проблемы с батареей, программные сбои, неисправности разъемов и механические повреждения. Для устранения этих неисправностей наши профессиональные техники проводят ремонт экранов, батарей, ПО, разъемов и механических компонентов. Обращаясь в наш сервисный центр, вы гарантируете себе качественный и надежный сервисный центр по ремонту планшетов. Подробная информация представлена на нашем сайте: https://remont-planshetov-profi.ru
#8666 Charlesgunnyhttp://filmkachat.ru
1×slots бонус за регистрацию
Поспешите арестовать бездепозитные призы за регистрацию в казино из представленного списка. Все платформы столько ведут легальную работа, но и порадуют правдивыми плодами игры, высочайшей отдачей, резвыми выплатами.Операторы гемблинга заявляют, собственно так они сражаются с бонус-хантерами. Впрочем, критики считают, что данным казино пробуют сделать из случайного постояльца неизменного игрока. <a href=http://filmkachat.ru/>1×slots зеркало видели такую регистрацию на</a> <a href=https://photosynthesis.bg/forum/tema/203.html>https://photosynthesis.bg/forum/tema/203.html</a> При выполнении критерий отыгрыша и верификации, средства с бонусного счета переводятся на главный и могут быть выведены на карту либо электрический кошелек. Лимиты на вывод и сроки проведения транзакции в от выбранной платежной системы.Для получения предоставленных призов вам пригодиться — ПК либо мобильное устройство, и остальное дело за небольшим. 1× slots зеркало <a href=https://www.donchillin.com/space-uid-350840.html>https://www.donchillin.com/space-uid-350840.html</a> Возьми собственный презент. Чаще всего приз активируется сразу последствии регистрации. Но случаются истории, когда нужно зайти в личный кабинет либо написать в справочную службу.
1×slots зеркало регистрация то дальше необходимо пройти
<a href=http://policeacademy.teamforum.ru/memberlist.php?mode=viewprofile&u=410>1×slots официальный сайт скачать</a> 1хслотс официальный сайт зеркало <a href=http://iwlnx.com/forum/member.php?action=profile&uid=107275>http://iwlnx.com/forum/member.php?action=profile&uid=107275</a> Активация происходит с помощью промокодов, которые вводятся в личном офисе последствии регистрации. Среди спецпредложений в списке Casino.ru находятся эксклюзивные промокоды, коие доступны лишь посетителям портала. Другие способы начисления средств ? автоматическая активация сразу в творения аккаунта и получение презента по запросу в службу технической помощи.Условия вывода выигрыша. В неких заведениях для успешного вывода с бездепозитного приза достаточно пополнения баланса и подтверждения личности. В других же клубах, необходимо некоторое один прокрутить свой депозит. 1×slots сайт зеркало Автоматы неспроста считаются самым знаменитым азартным развлечением. Чтобы усвоить управление и управляла, потребуется всего несколько минут. Ваша задачка сделать ставку, найти число рабочих линий и возможно крутить барабан. Если дисплее выпадет выигрышная композиция – вы выиграли! С этой задачей вас посодействуют управится бездепозитные призы казино.
1×slots регистрация на сайте
Бездепозитный приз предоставляется новому игроку за определенные действия. Часто презент в виде средств либо фриспинов выдается за регистрацию, благодаря чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.Шаг 5. Использование и отыгрыш. Бездеп обязан быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. <a href=http://43.240.15.40/home.php?mod=space&uid=602535>http://43.240.15.40/home.php?mod=space&uid=602535</a> Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро либо 20 долларов. Если выдаются фриспины, их количество изредка выше нескольких десятков даровых вращений.Фриспины без депо или вспомогательные средства помогут поближе познакомиться с игровой платформой и её функциями. За счёт даров возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за игры напротив живых крупье. 1хслотс казино зеркало
1×slots регистрацию процедура займет всего лишь
Бывают ли бездепозитные бонусы без вейджера? Бывают, случае у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный приз за регистрацию устанавливается вейджер во всех казино.Подтверждение электрической почты – одно из ведущих условий, коие есть почти в любом бездепозитном казино. Чтобы верифицировать электронную почту, достаточно перейти по активной ссылке в послании, приобретенном от азартного клуба. <a href=https://forum.oursson.ru/viewtopic.php?f=2&t=8717>1×slot зеркало рабочее этих способов предполагает регистрацию</a> Наиболее знаменитые гонорары между гэмблеров – бездепозитные бонусы казино. Это не удивительно, ведь возможно получить благотворительные вращения либо виртуальные кредиты, и этом не придётся пополнять счёт, рисковать личностными деньгами. Удастся насладиться различными увеселениями причем выиграть крупную сумму, избегая серьёзного риска. Бездепозитные бонусы, как теснее ясно, считаются оригинальной возможностью приступать к игровому процессу безусловно бескорыстно, другими играть в онлайн казино даром и на имеющие свои незамедлительно в регистрации аккаунта. Автоматы с таким депо шансы стать прекрасной возможностью сыграть для почитателей азарта с определенными лимитированиями в финансах. 1хслотс зеркало <a href=https://urganchshahar.uz/user/Terrybrelo/>https://urganchshahar.uz/user/Terrybrelo/</a> Выигрыши с бонусов без вложений практически привязаны к притязанию по ставкам и имеют быть обналичены только в исполненья этих притязаний.
1×slots регистрацию процедура займет всего лишь
<a href=http://perfectsolutionlabs.com/user/Zacherytiema/>http://perfectsolutionlabs.com/user/Zacherytiema/</a> Бездепозитный бонус казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в этом и содержится основное отличие.Существуют казино с призом за регистрацию, в довольно популярны фриспины в интернет казино впоследствии регистрации в определенных забавах. Они встречаются числе почаще безвозмездных поощрений либо традиционных бонусов в казино без инвестициям. Например, игрок регистрирует счет, на кот-ый начисляются бесплатные игры, бонус за регистрацию в виде даровых фрспинов, вращения в игровом автомате. Во время игрового процесса геймер выигрывает истинные средства, коие в последствии возможно удачно исключить из заведения на свою платежную систему. То есть, есть шансы исключить свои без рисков собственными деньгами. Регистрация, какую геймер получит призы, займет несколько, а благодаря данному можно прирастить пять евро поощрений до тысячи и без всяких заморочек исключить их. 1х слотс зеркало регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/5962–1×slots-registratsiya-1×slotscasino-56-online#5971>1×slots регистрация 1×slotscasino 56 online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чаще всего используются коды. Их нужно вносить в особые окошки регистрационной анкеты, случае речь о пригласительных призах, или в определенном разделе собственного офиса игрока. В разделе с призами активировать свой презент. Найти игры, для которых предусмотрено одобрение и использовать приз по назначению.
#8667 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало на сегодня
На нашем веб-сайте Вы отыщите список актуальных свежих бездепозитных призов в казино 2022 года. Также, есть большое эксклюзивных предложений, коие доступны лишь посетителям нашего сайта последствии регистрации по нашей ссылке либо активации особого промокода. <a href=http://filmkachat.ru/>1хлот регистрация в 1×slots casino</a> Не желаете поиграть в азартные забавы, не рискуя средствами деньгами, хотя получая в все выплаты? Подобную вероятность предоставляют почти лучшие порталы с азартными развлечениями. В их количестве много честных и надежных интернет-казино на русском языке. Они завлекают свежих юзеров различными поощрительными мероприятиями, включая бездепозитные, или бесплатные призы.Подобные призы без депозита предоставляются на больше выгодных условиях. Зачастую они крупнее, а обстоятельства отыгрыша менее жесткие. <a href=https://www.keepandshare.com/doc27/114861/exploring-the-power-of-architectural-3d-rendering-in-modern-design-pdf-631k?dn=y&dnad=y>https://www.keepandshare.com/doc27/114861/exploring-the-power-of-architectural-3d-rendering-in-modern-design-pdf-631k?dn=y&dnad=y</a> Каждая игровая перрон отличается условиями по получению и отыгрышу бездепов. В правилах детально расписаны временные рамки, за которые надо(надобно) прокрутить вейджер. Также не забывайте тему наибольший размер ставки и наивысшую необходимую выплаты. С другой стороны, дабы получить бездепозитные призы казино, достаточно потратить не более 1 минуты. скачать 1×slots на андроид мобильная версия <a href=https://valetinowiki.racing/wiki/User:BetteHarbison8>https://valetinowiki.racing/wiki/User:BetteHarbison8</a> На данном разделе портала периодически публикуются обзорные заметки, в которых рассматриваются безвозмездные призы превосходнейших интернет-казино. Информация структурирована по нескольким пт, включая главные:Так что приготовьтесь предоставить конфиденциальную информацию (пол, возраст, государство проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев проверка данных занимает не более суток, после чего получится свободно выводить солидные выигрыши.
1×slots промокод при регистрации 2025
Верификация аккаунта. Лучше доказать личность незамедлительно после регистрации, чтобы потом не было заморочек с выводом средств. Верификация возможность протекать 2-мя путями: <a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?p=726141#p726141>казино 1×slots официальный сайт</a> 1×slots зеркало на сегодня <a href=http://water.vouvstudio.com/bbs/board.php?bo_table=free&wr_id=1977819>http://water.vouvstudio.com/bbs/board.php?bo_table=free&wr_id=1977819</a> Представленные на данной страничке превосходнейшие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные условия. После кропотливого анализа редакция портала составила рейтинг спецпредложений, в гости Casino.ru могут сортировать перечень по нескольким критериям: по сумме, вейджеру, наибольшей сумме вывода и т.д.Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных притязаний, кроме неотъемлемой верификации. Если на веб-сайте предусмотрена неотъемлемая процедура доказательства личности, то исключить выигрыш получится лишь в ревизии данных. Приготовьтесь заполнить анкету и отправить в техподдержку документ, подтверждающий лицо. 1х слотс зеркало регистрация в 1×slots casino Приглашаем делиться сужденьями о бонусах. Это поможет иным юзерам выбирать наиболее прибыльные предложения.
1×слот регистрация в 1×slots casino
Для получения выигрыша потребуется выполнить обстоятельства казино. Чаще всего игроку нужно поставить определенную необходимую, но уже из личных денег. Она рассчитывается из совместного размера выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, в пользователь выиграл 1000 руб., а множитель сочиняет х30, исключить средства возможно несомненно, сделав ставки на 30 000 руб. <a href=http://hwani.barunweb.co.kr/bbs/board.php?bo_table=free&wr_id=128924>http://hwani.barunweb.co.kr/bbs/board.php?bo_table=free&wr_id=128924</a> Самые свежие бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды находятся на данной страничке. Посетитель возможность оценить условия получения и начать выступать на деньги без внесения депозита. При данном игроку главно понимать, на каких условиях и какими методами у вывести полученный выигрыш. Для сего нужно оценить список присоединенных платежных систем.Также существуют онлайн-платформы азартных игр, коие применяют раздачу бездепозитных бонусов в особые даты (как для казино, так и для игрока). Помимо этого, действующие игроки кроме имеют возможность получить схожие призы за свою деятельность (к примеру, за повышения уровня или за схожие достижения). 1×slots casino регистрация 1×slotscasin online Промокод – определённая композиция символов, коию нужно ввести в подходящее фон при разработке учетной записи либо активировать в личном профиле игрока в разделе с призами.Такой бесплатный эквивалент средств зачисляется на профиль пользователя последствии воплощения притязаний и предназначаются они только для игрового процесса. Вывод этих вознаграждений возможен лишь в осуществления вейджеровых условий.
1хслотс зеркало на сегодня
2. Создать свежий профиль. Для регистрации надо(надобно) наполнить маленькую анкету либо зайдите в индивидуальный офис посредством социальных сеток;У каждой забавы средства требования по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система зачтет каждую ставку. В рулетке и покере устроить это намного труднее. Именно поэтому например главно внимательно читать обстоятельства получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой забаве, то новички просто «спустят бонус на ветер». Бонус с зачислением денег на счет выделяет больше свободы поступков. Пользователь сам подбирает, каким образом распорядиться подаренными средствами. Здесь также шансы действовать лимитирования на список дешевых игр, хотя обыкновенно эти рамки не например строги, как в промо с безвозмездными вращениями. 1×slots официальный регистрация <a href=http://spectr-sb116.ru/user/Stevenbot/>http://spectr-sb116.ru/user/Stevenbot/</a> Почти все игровые клубы требуют свидетельство контактных данных игрока для получения бездепозитного приза.Главное преимущество спинов – возможность изучить различные слоты. Также удастся насладиться бонусными раундами, испытывать удачу в риск-туре и преувеличить выигрыш за счёт особенных символов. Однако не только игровой процесс заслуживает внимание, как какого-либо сосредоточиться на реальном выигрыше.
1хслотс официальный сайт зеркало
<a href=http://vipblinds.ru/index.php?subaction=userinfo&user=dulljail51>http://vipblinds.ru/index.php?subaction=userinfo&user=dulljail51</a> 1 х слотс зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://bajarmp3.net/showthread.php?tid=400002>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=https://timepost.info/showthread.php?tid=52771>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вышеописанная первопричина и является главным интересным, в которого операторы отдают часть собственной прибыли на различные маркетинговые расходы и рекламные кампании. А самым действующим тут будут играть непосредственно бездепозитные бонусы казино 2022 с выводом за регистрацию. Лишь популярные и известные азартные заведения имеют разрешить для раздавать бездепы повторяющий добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, которые можно истратить в топовых аппаратах с высочайшей отдачей.
#8668 Charlesgunnyhttp://filmkachat.ru
1×slots казино зеркало
Бонус с зачислением денег на счет выделяет больше свободы деяний. Пользователь сам подбирает, каким образом воспользоваться подаренными своими. Здесь также шансы действовать лимитирования на перечень доступных игр, но обычно эти рамки не например строги, как в промо с бесплатными вращениями. <a href=http://filmkachat.ru/>1 x slots</a> Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных обстановок с казино, когда последствии отыгрыша бездепа для не дадут исключить крупную сумму выигрыша.Вейджер не более х30–35 является приемлемым. Опытные игроки заявляют, что с этим вейджером реально остаться в плюсе, случае правильно подойти к выбору игрового аппарата. <a href=https://penzu.com/p/1c540a5334c40b89>https://penzu.com/p/1c540a5334c40b89</a> Также учтите, что некоторые игровые платформы сузивают перечень стран, коие готовы получить предложенный бездепозитный бонус за регистрацию. К примеру, есть онлайн-заведения, выдающие подобные бонусы только жителям конкретных стран. К примеру, онлайн казино 777 Оригинал предоставляет бездепозитный бонус лишь игрокам из России и стран СНГ. Или наоборот, снабжают вознаграждением всех, считая жителей неких государств (из сего, стопам внимательно учить перечень, чтобы впоследствии не появилось никаких вопросов и жалоб).При регистрации в или ином онлайн игральном заведении — для дается раз шанс испытать свою удачу не внося свои монеты. Замечу собственно такую поощрительную услугу предоставляют не все интернет игровые площадки, а только великодушная половина из их. Которые мы подготовили для Вас в нашем перечне. 1 х слотс зеркало <a href=http://almaz.ru/bitrix/redirect.php?goto=http://tvoi54.ru/redirect?url=http://derevosamara.ru/bitrix/redirect.php?goto=https://teletype.in/@urist_free/b2YRH6sbIIH>http://almaz.ru/bitrix/redirect.php?goto=http://tvoi54.ru/redirect?url=http://derevosamara.ru/bitrix/redirect.php?goto=https://teletype.in/@urist_free/b2YRH6sbIIH</a>
1×slots официальный сайт мобильная версия скачать
Промообъявления от казино не дают реальной картины и ориентированы на вербование внимания пользователей. Понять, как высоки шансы остаться в плюсе, дозволит личный анализ условий предложения: <a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=13119>1×slots casino регистрация 1×slotscasin online</a> 1×slots официальный сайт скачать Акционные предложения от казино есть в разных форматах. Часто бонусы даются в обмен на депо. Игрок вносит платеж и получает деньги, благотворительные вращения прочие одобрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — картина бонуса, кот-ый гарантирован за исполненье конкретных деяний на сайте:Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных призов принимаются достаточно высокие требования. Часто онлайн-казино рекомендуют отыграть бонусное поощрение до ста раз в игровых автоматах. Например, в игрок получил безвозмездно десять $, то необходимо будет отыграть их, поставив одну тыщу спинов по одному баксу каждый. Стоит отметить, что не все казино выделяют возможность играть на бонусы и не во всех развлекательных заведениях идентичные правила для отыгрывания. Некоторые казино воспрещают выступать на призы в блекджек или ограничивают ставки до пяти процентов, что значительно наращивает в десятки один количество нужных игр. <a href=http://www.sjzshequ.net/home.php?mod=space&uid=305075>http://www.sjzshequ.net/home.php?mod=space&uid=305075</a> 1хслотс рабочее зеркало на сегодня
1хслотс мобильная версия зеркало
Фриспины предназначены для применения в видео слотах. Внимательно ознакомьтесь с условиями – часто их выдают на кое-какие автоматы. В зависимости от клуба, у вас выйдет устроить определённое количество ставок. Кстати, продвинутые игорные жилища разрешают запускать каждых «одноруких бандитов».Варианты выигрыша зависят от Вашей успеха и условий игорного портала. Выше мы сказали, что кое-какие бездепозитные бонусы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются другие, все, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность передовых игр на деньги, возможно выиграть невероятные суммы. Сегодняшние игровые автоматы либо видео слоты, как их именуют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000. Эффективность бездепов в качестве маркетингового инструмента оценили почти операторы. Малоизвестные площадки употребляют эти промоакции, чтобы скоро набрать базу. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны неизменных гостей. Не все веб-сайты, дающие презенты без депозита, рекомендованы к ирге. За привлекательным промоописанием все скрываться невыполнимые обстоятельства отыгрыша и подводные камни.Для всех бездепозитных бонусов действует наибольший предел на выигрыш. Он указывает предельную сумму, которую вас получить, играя на бонусные кредиты. Как лишь вас удастся выполнить требования вейджера, возможный максимум будет переведен с бонусного счета на главной, а остаток будет списан. <a href=http://bbs.xinhaolian.com/home.php?mod=space&uid=3926062>http://bbs.xinhaolian.com/home.php?mod=space&uid=3926062</a> Особую изюминку видео слотам присваивают оригинальные знакы. С их свет активизируются различные бонусы. Вы можете запустить вспомогательный уровень и прирастить сумму выигрыша. Есть знаки, коие замещают ненадобные элементы и сами творят выигрышные комбо. Не стоит забывать и тему бонус-тур. После каждого счастливого спина есть шанс увеличить необходимую выигрыша в два или четыре раза.Законодательство, регулирующее азартные игры в различных странах, влияет на полномочия операторов. В итоге юзеры из отдельных регионов сталкиваются с ограничениями со стороны казино. Это может быть как полный отказ в доступе, так и невозможность загружать забавы отдельных производителей. 1×slots зеркало регистрация в 1×slots casino Бездепозитный бонус за регистрацию в казино — это стартовый презент повторяющий валютного начисления либо бесплатных вращений для свежих игроков заведения, для получения которого не нужно заносить депо.
1×slot казино зеркало
Бездепозитный приз предоставляется новенькому игроку за конкретные действия. Часто презент вид средств либо фриспинов выдается за регистрацию, спасибо чему пользователь получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.Представьте момент, когда при ставке в 10 руб. Вы получите схожее умножение. Миллион рублей за одно вращение, что абсолютно вполне. Поэтому вопрос, сколько можно выиграть остаётся не. Предлагаем проверить без. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный бонус и проверяйте фортуну в деле. Разумеется, вывести деньги не так просто. Однако шансы есть у всех. <a href=https://forumauthority.com/thread-6677-post-39840.html#pid39840>1× slots casino зеркало</a> Чтобы выступать безвозмездно на реальные деньги в казино, не всегда довольно просто зарегистрироваться. Иногда нужно выполнить дополнительные действия. 1хслотс рабочее зеркало <a href=https://www.s-quo.com/club/club.php/user/60975/blog/1638/>https://www.s-quo.com/club/club.php/user/60975/blog/1638/</a> Выбирайте превосходнейшие бесплатные призы за обзоров на Casinoz – и пусть для сопутствует удача при отыгрыше бонусных кредитов!Также бывают случаи, когда казино начисляет обсужденный бонус после регистрации свежего клиента по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам.
casino 1×slot
Простая процедура получения бездепозитного приза, которая займет не более 2-х мин. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные.Возможность протестировать новые забавы, не рискуя личными средствами и создать собственную стратегию забавы. <a href=http://metabolichealthdigest.com/user/charlescom/?um_action=edit>http://metabolichealthdigest.com/user/charlescom/?um_action=edit</a> Нельзя осматривать забаву на средства, как вариант заработка. Азартные забавы запрещены для лиц моложе 18 лет. Topcasinobonuses.mobi классифицируется организатором азартных игр. Сайт одевает информационный нрав.Бонусные средства – маленькая сумма средств для старта в новеньком казино. На бонусные средства, обычно разрешено выступать во все игры, кроме слотов с современным джекпотом и игр из раздела exist casino. 1×slots зеркало на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=http://6000ziyuan.com/forum.php?mod=viewthread&tid=104257&extra=>1×slots рабочее зеркало на сегодня</a>
<a href=https://mcmon.ru/showthread.php?tid=121494>1×slots регистрация 1×slotscasino 56 online</a>
<a href=https://hiddeninthesand.com/forum/viewtopic.php?t=276958>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Главное преимущество спинов – вероятность выучить различные слоты. Также получится насладиться бонусными раундами, испытать удачу в риск-туре и преувеличить выигрыш за счёт особенных знаков. Однако столько игровой процесс заслуживает внимание, так другого, как сосредоточиться на реальном выигрыше.
#8669 Charlesgunnyhttp://filmkachat.ru
1хслот 1хслотс регистрация перейти на 1×slots
Бонус начисляется игроку незамедлительно в регистрации и прохождения верификации в казино и не требует от посетителя внесения депо. Как верховодило, размер приза в сходственном случае достаточно стыдливый, впрочем разрешает новеньким познакомиться с забавой без риска реальными деньгами.Риск-игра по равным шансам – Также казино имеет воспрещать выполнять условия по отыгрышу за раунда на удвоение, который предлагается в слотах, видео-покере и неких иных играх. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slots review live</a> Итак, дабы благотворительные бонусные кредиты превратились в реальные средства, которыми продоставляется управлять по собственному усмотрению, их нужно отыграть. Вейджер стопам уточнять в правилах онлайн-казино.Существует ли стратегии для отыгрыша бездепозитных призов? К раскаянью нет, на выигрыши или проигрыши с бонусов, казино или игрок повлиять имеет, отдача игр происходит от разработчиков игр. <a href=https://medium.com/@kalinka0588/exploring-the-benefits-and-applications-of-architectural-drawing-services-dd4b0f523176>https://medium.com/@kalinka0588/exploring-the-benefits-and-applications-of-architectural-drawing-services-dd4b0f523176</a> Условия вывода выигрыша. В некоторых заведениях для успешного вывода с бездепозитного бонуса достаточно пополнения баланса и подтверждения личности. В иных же клубах, необходимо несколько один прокрутить свой депозит.Однако далековато не все ресурсы предлагают своим клиентам бездепозитные призы за регистрацию в казино. В большинстве случаев учтено одобрение на первый депо в объеме 100–200%. Это отличная вероятность преувеличить банкролл, увеличить время, проведённое за игрой и шансы сорвать большой куш. скачать 1×slots официальный сайт <a href=https://sustainabilipedia.org/index.php/User:PollyMahaffey10>https://sustainabilipedia.org/index.php/User:PollyMahaffey10</a> Наш перечень содержит наилучшие бездепозитные бонусы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по принципиальным характеристикам:
1×слотс казино
Помимо остального, для вывода средств по бездепу нужно внести на счёт собственный первый депозит — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало возможную сумму, после чего вывод средств будет доступен. <a href=http://palais.beesims.com/phpbb/viewtopic.php?f=2&t=290973>1хслотс казино зеркало</a> 1×slots casino зеркало <a href=https://bankruptcy.gov.sa/ar/SubScription/Lists/Survey/DispForm.aspx?ID=23911>https://bankruptcy.gov.sa/ar/SubScription/Lists/Survey/DispForm.aspx?ID=23911</a> Несмотря на то, собственно этот вариант стимуляции со стороны азартных платформ довольно востребован в сфере сходственных игр, далеко многим почитателям казино ведомо, что сами бездепозитные призы казино и как непосредственно их вполне эксплуатировать.Перед активацией принципиально пристально выучить условия промоакции. Чем ниже вейджер, тем больше возможная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, протяжении коих можно пользоваться предложением. Если бездеп охватывает ограниченный список игр, рекомендуется узнать наибольшие коэффициенты, уровень отдачи и волатильности. Слоты с низкими множителями выплат подходят только том, случае, в оператор не установил жесткие лимитирования на наивысшую сумму ставки. казино 1×slots официальный сайт Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие появляются у новичков.Более солидные предложения встречаются довольно изредка. Зачастую они доступны лишь VIP-игрокам. В оставшихся случаях им скорее сопутствуют очень жесткие условия отыгрыша. Также возможны вспомогательные обстоятельства прочие ограничения, прописанные в условиях и положения бонусной программки казино.
1хслотс рабочее зеркало
Приветственный бездеп предоставляется хоть игроку только один один. Казино дерутся с так называемыми бонусхантерами (от англ. Bonus Hunter — охотник за бонусами), пытающимися заводить множественные аккаунты для надувательства оператора и повторного получения подарка. Исключить подобные деянья позволяет верификация данных. Администрация вправе потребовать у клиента подтвердить индивидуальные данные, обозначенные при регистрации. Также, такой нужно подтвердить свой номер телефона, достичь код, полученный в смс-сообщении от клуба установить в особое фон в собственном офисе игрока.К образцу, игроку выдаются безвозмездные свои в заведении в объеме пятидесяти или 100 $ (вейджер на которые сочиняет 100х). То есть, каждому новоприбывшему геймеру выскакивает манящая иллюстрация, которая обещает выплату всех зачисленных компанией средств. Не стоит обращать внимания на казино приз за регистрацию без депо с слишком великий либо довольно махонькой суммой призов, поэтому собственно, даже кропотливо изучив все обстоятельства, тут скорее, несомненно какой-то подвох. <a href=https://www.hukuki.net/member.php?253166-Walterpax>https://www.hukuki.net/member.php?253166-Walterpax</a> Бонус за регистрацию в казино без депозита с выводом денег надо(надобно) отыграть. Зачастую для отыгрыша имеет потребоваться устроить ставки на необходимую, в несколько десятков раз превышающую необходимую бонуса или выигрыша.Самые новые бездепозитные бонусы в казино за регистрацию 2022 года с выводом прибыли находятся на данной странице. Посетитель возможность расценить обстоятельства получения и начать играть на деньги без внесения депо. При этом игроку важно разуметь, на каких критериях и какими методами он сможет вывести полученный выигрыш. Для этого необходимо оценить перечень подключенных платежных систем. 1×slots бонус за регистрацию Возможность протестировать свежие забавы, не рискуя личными средствами и разработать личную стратегию забавы.Ещё одно распространённое акционное предложение – симпатичный подарок с сомнительными притязаниями. К примеру, клуб сулит $100 в качестве бездепа, но с вейджером х80 либо х100. Отыграть подобный вейджер фактически невероятно и поэтому чем концентрироваться на больше интересных акциях.
1×slots зеркало быструю регистрацию а также мгновенное
Многие новички колеблются, что поощрительный приз надо будет отдавать, числе если они выиграли у казино. Это абсолютно безопасно и надежно. Выводя выигранные средства, игрок просто останавливает свое участие при и теряет уникальную возможность – безвозмездно увеличивать личное вещественное положение. Сроки активации бонуса устанавливаются каждым казино, хотя почаще всего они не превышают недели с этапа получения. Игроку обязательно нужно использовать бездеп в течение обозначенного срока, в ином случае бонус просто пропадет. Каждый приз возможно получить только раз раз, поэтому случае не использовать бездеп в срок, у игрока не несомненно второго шанса им воспользоваться.Для отыгрыша бонуса казино обязывает игрока сыграть на сумму, в некоторое раз превосходящую необходимую приобретенного приза — тут выгода фирмы явна. B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. зеркло казино 1×slots <a href=http://nipponsword.ru/profile.php?lookup=21186>http://nipponsword.ru/profile.php?lookup=21186</a> Если вы выбрали себе некоторое брендов которые для больше всего полюбились, для неизменной игры! Таких гемблеров казино очень любит и ценит, за частую такие игроки становятся VIP игроками заведения, которым нередко поступают прибыльные предложения повторяющий призов, например же туда заходит и бездепозитные.Зарегистрируйтесь. Для регистрации почаще всего достаточно ввести собственный номер телефонного и почтовый адрес, после чего установить полученный код из СМС. Возможно, потребуется указать промокод. В правилах акции будет написано, где его надобно вводить. Иногда это бы делать при регистрации, время — теснее в создания личного кабинета, на отдельной страничке.
1×slots регистрация то дальше необходимо пройти
Обычно, бездепозитные призы выдаются под конкретные слоты с фиксированной ставкой, хотя их точно запрещено применять в игровых автоматах с прогрессивным джекпотом. Список игр, в возможно применять бездеп, Вы найдете в описании промоакции либо сможете уточнить у службы заведения. <a href=http://library.aviaexpress.ru/bitrix/redirect.php?goto=http://xn–80adrabb4aegksdjbafk0u.xn–p1ai/bitrix/redirect.php?goto=http://td-gidroproekt.ru/bitrix/rk.php?goto=https://telegra.ph/Narushenie-pravil-bezopasnogo-ispolzovaniya-i-soderzhaniya-bytovogo-i-vnutrikvartirnogo-gazovogo-oborudovaniya-09–23>http://library.aviaexpress.ru/bitrix/redirect.php?goto=http://xn–80adrabb4aegksdjbafk0u.xn–p1ai/bitrix/redirect.php?goto=http://td-gidroproekt.ru/bitrix/rk.php?goto=https://telegra.ph/Narushenie-pravil-bezopasnogo-ispolzovaniya-i-soderzhaniya-bytovogo-i-vnutrikvartirnogo-gazovogo-oborudovaniya-09–23</a> Когда речь о денежных призах, казино постоянно устанавливают обстоятельства вейджера, которые нужно выполнить, чтобы вывести выигрыш. 1×slots сайт
<b>Смотреть еще похожие новости:</b>
<a href=https://mit-bbs.com/viewtopic.php?t=128289>1×slots зеркало этих способов предполагает регистрацию</a>
<a href=https://rf-lowrate.ru/index.php?/profile/6447-jamesmom/>1×slots зеркало регистрация в 1×slots casino</a>
<a href=https://mcmon.ru/showthread.php?tid=110330>1×slots скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Следует подчеркнуть, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом. Бездепы с бесплатными вращениями предоставляют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд платит казино. Число спинов ограничено и изредка выше сотню. Если акция включает в себя количество бесплатных игр, их начисление имеет быть разбито на количество дней.
#8670 LynwoodJeXhttps://bs2best-best.store
Ищете партнера для роста бизнеса? <a href=https://bs2best-best.store/>https://bs2best-best.store</a> предлагает решения для предприятий любого уровня: консалтинг, цифровой маркетинг и оптимизация процессов – всё для увеличения прибыли. Начните сотрудничество с нами уже сегодня!
#8671 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slotscasino09k online
Призовые начисления без депо могут предоставляться для участия в турнирах онлайн казино. Потратить перечисленные средства можно исключительно масштабах этой промоакции. Условия их проведения включают в себя ограничения на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, никакого изучить его правила. <a href=http://filmkachat.ru/>1хслот зеркало сайта</a> Например, игрок получил 500 руб. При создании аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 рублей, понадобится устроить 875 спинов для полного отыгрыша. <a href=https://write.as/1ahncnv3qjvgc.md>https://write.as/1ahncnv3qjvgc.md</a> 1×slots регистрация на сайте 1×slots ru com <a href=http://www.ydelection.com/bbs/board.php?bo_table=free&wr_id=1295880>http://www.ydelection.com/bbs/board.php?bo_table=free&wr_id=1295880</a> Простая процедура получения бездепозитного бонуса, кот-ая займет не более 2-х минут. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные.Более крупные предложения встречаются очень редко. Зачастую они доступны лишь VIP-игрокам. В оставшихся случаях им всего сопутствуют очень жесткие условия отыгрыша. Также вероятны вспомогательные условия прочие лимитирования, прописанные в условиях и положения бонусной программки казино.
1×slots рабочее зеркало на сегодня
<a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=268767#pid268767>1×slots casino зеркало</a> 1х слот регистрация в 1×slots casino Возможность протестировать новые игры, не рискуя личными средствами и создать личную тактику игры.Выигрыши с бонусов без инвестициям всегда привязаны к притязанию по ставкам и все быть обналичены лишь последствии исполненья данных требований. <a href=http://www.apicarrara.it/modules.php?name=Journal&file=display&jid=4024>http://www.apicarrara.it/modules.php?name=Journal&file=display&jid=4024</a> В наше время довольно просто получить приз за регистрацию в казино. Практически любой игорный жилище с радостью начисляет средства или бесплатные вращения. Многие гэмблеры пользуются этим и не стесняются регистрироваться в каждом клубе с прибыльными условиями. Кстати, это замечательная вероятность выработать победную стратегию и сорвать джекпот. 1×slots промокод при регистрации 2025 Но на некоторых азартных платформах подобные гонорары имеют получить и уже зарегистрированные юзеры. В этом случае, бонусы предоставляются масштабах оригинальных акций либо же неким геймерам в виде акционного предложения, которое прибывает на почту с целью «возвратить» игрока в свое казино.
1х слот 1хслотс регистрация перейти на 1×slots
Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных обстановок с казино, когда последствии отыгрыша бездепа вам не дадут вывести солидную сумму выигрыша.Во всех легальных онлайн-казино Беларуси нужно подтверждение паспортных данных для игры — это требование правительства страны. <a href=https://faktes.ru/user/WalterRow/>https://faktes.ru/user/WalterRow/</a> Допустим, за регистрацию вы возымели бездеп в размере 2 000 руб. С вейджером х30. В этом случае светит устроить ставок, на совместную необходимую в 60 000 руб. (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать реальные средства. Однако не запамятовывайте, собственно с каждого подарка получится вывести определённую необходимую (чаще всего менее $200). 1×slots официальный регистрация Бонус с зачислением средств на счет выделяет больше свободы действий. Пользователь сам подбирает, каким образом распорядиться подаренными своими. Здесь также все действовать лимитирования на список доступных игр, хотя обыкновенно эти рамки не например строги, как в рекламную с бесплатными вращениями.Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.
1×slots зеркало подтвердит вашу регистрацию если говорить
<a href=https://forum.oursson.ru/viewtopic.php?f=2&t=8664>1×slots официальный сайт, скачать</a> Фриспины предусмотрены для применения в видео слотах. Внимательно ознакомьтесь с критериями – частенько их выдают на кое-какие автоматы. В зависимости от клуба, у вас выйдет устроить определённое количество ставок. Кстати, продвинутые игорные дома разрешают запускать любых «одноруких злодеев».Выбор каждого онлайн казино на нашем веб-сайте. В описании к любому Вы можете разузнать, что получите за творенье аккаунта. При ирге на бонусные свои запрещается выступать в игровые автоматы с прогрессивным джекпотом и забавы из радела exist casino. Кроме того, кое-какие казино выделяют бездеп на раз или количество конкретных слотов, и в других играх Вы не можете на них играть.При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое возможно посвятить ирге в казино. онлайн казино 1×slots <a href=http://adrestyt.ru/user/DoctorLazutasr/>http://adrestyt.ru/user/DoctorLazutasr/</a> Только выполнив все условия отыгрыша и дождавшись завершения ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить свои средства.
казино 1×slots
В лицензионных бездепозитных казино выступать в азартные забавы действительно безопасно. Наличие лицензии одобряет что, этот факт, собственно клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP. Доступ к подарку может раскрываться механически в введения промокода либо обращения в саппорта сайта. В первом случае от пользователя не потребуется никаких деяний. Бездеп с активацией по коду встречается чаще всего. Игроку нужно установить совокупа символов в графе, кот-ая возможность пребывать в регистрационной форме в Личном кабинете.Активация случается за промокодов, которые вводятся в собственном офисе после регистрации. Среди спецпредложений в перечне Casino.ru содержатся эксклюзивные промокоды, коие доступны только гостям портала. Другие способы начисления средств ? автоматическая активация сразу в творения аккаунта и получение презента по запросу в службу технической помощи. <a href=http://biosafe.tj/index.php?subaction=userinfo&user=zippyclerk62>http://biosafe.tj/index.php?subaction=userinfo&user=zippyclerk62</a> казино 1× slots официальный сайт
<b>Смотреть еще похожие новости:</b>
<a href=https://forum-macan.ru/viewtopic.php?t=3612>сайт 1× slots casino</a>
<a href=http://www.fiat130.it/phpbb3/memberlist.php?mode=viewprofile&u=293>1хслотс рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но существуют азартные заведения, готовые просто например вручить деньги на игру. Для сего достаточно сделать профиль. Чтобы исключить выигрыш, сначала необходимо выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа. Таким образом, заведение пробует показать себя своим вероятным игрокам, а такой рекламный ход как казино приз без депозита за регистрацию привлекает довольно много внимания к игорному заведению и обеспечивает неизменный поток свежих посетителей и грядущих клиентов игрового онлайн клуба.
#8672 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на сайте 1×slots ru com
Да, у безвозмездных призов есть дефекты. Прежде всего, они обычно небольшие. Кроме того, условия вейджера по ним всегда строгие. Но все же отсутствие риска проделывает их очень красивыми для клиентов.Бездепозитные бонусы – это самая небезинтересная и более многообещающая акция интернет-казино. Они и чем фри-спинов, потому собственно выплаты в бесплатных вращениях не гарантированы, ведь композиции на барабанах игрового аппарата все не сложиться. <a href=http://filmkachat.ru/>1×slot регистрация</a> Онлайн-казино кропотливо продумывают бонусные условия, которые нужно выучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и ограничения. <a href=https://medium.com/@kalinka0588/exploring-the-benefits-and-applications-of-architectural-drawing-services-dd4b0f523176>https://medium.com/@kalinka0588/exploring-the-benefits-and-applications-of-architectural-drawing-services-dd4b0f523176</a> Выиграть настоящие средства в казино не пополняя счет – сложно, но вероятно. Главное задаться целью и не нарушатьправила заведения. Выберите несколько казино с бездепзитными бонусами и начните выступать на бонусные средства. По статистике в одном из 10-ти заведений можно заработать маленькую сумму средств помощью бонусных средств. 1хслотс зеркало на сегодня <a href=http://smecenter.utcc.ac.th/index.php/component/users/?option=com_k2&view=itemlist&task=user&id=389501>http://smecenter.utcc.ac.th/index.php/component/users/?option=com_k2&view=itemlist&task=user&id=389501</a> Подтверждение персональной инфы. Все казино требуют от посетителя пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и присутствие у пользователя других аккаунтов (мультиаккаунт запрещен).Но такие рамки не смущают даже хайроллеров, что коэффициенты на слотах позволяют рассчитывать на крупные выигрыши, а неких автоматах разыгрывается передовой джекпот.
1× slots официальный
Бездепозитные бонусы, как теснее ясно, считаются оригинальной вероятностью обратиться игровому процессу безусловно безвозмездно, словами выступать в интернет казино безвозмездно и на существующие средства сразу последствии регистрации аккаунта. Автоматы с таким депо могут замерзнуть прекрасной вероятностью поиграть для почитателей азарта с определенными лимитированиями в финансах.В истинное время получить бонус за регистрацию в казино очень просто. Почти каждый игорный дом с готовностью даст средства либо бесплатные вращения. Многие игроки используют этим и не смущяются регистрироваться в любом клубе с выгодными критериями. Кстати, это замечательная возможность придумать выигрышную тактику и сорвать куш. <a href=https://rolivka.online/forum/showthread.php?tid=28737>1×slots casino регистрация</a> 1×slots регистрация 1×slotscasino 56 online <a href=https://bofh69.com/wiki/index.php/Casino_1×slot>https://bofh69.com/wiki/index.php/Casino_1×slot</a> Для всех бездепозитных призов функционирует максимальный предел на выигрыш. Он указывает предельную необходимую, коию появится получить, играя на бонусные кредиты. Как лишь вас получится выполнить требования вейджера, допустимый максимум несомненно переведен с бонусного счета на основной, а остаток несомненно списан. 1хслотс официальный сайт зеркало Для тех, кто только взвешивает испытывать свою фортуну, а также для проф игроков, разыскивающих новые площадки для выигрышей, водящие лицензированные казино часто организуют разные промоакции, и одно из лучших услуг прошедшее время – как для начинающих, так и для проф игроков – бездепозитный приз за регистрацию.
1×slots зеркало рабочее
Ещё одно распространённое акционное предложение – привлекательный подарок с неблаговидными притязаниями. К образцу, клуб сулит $100 виде бездепа, хотя с вейджером х80 или х100. Отыграть подобный вейджер фактически невозможно и поэтому превосходнее концентрироваться на больше занимательных акциях. Основное отличие в, что для получения бездепа не пополнять баланс в казино. Но считая этого, есть ряд прочих отличий:Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную процедуру активации приза без депо. Внимательно прочитайте до конца. Многие новенькие делают ошибки на этапе регистрации и поэтому не получить презент. <a href=https://sultantheme.com/vb4forum/member.php?14166-TerryVab>https://sultantheme.com/vb4forum/member.php?14166-TerryVab</a> зеркло казино 1×slots Бездеп с фриспинами возможность обхватывать всю коллекцию игр на веб-сайте либо разработки 1-го провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш имеет быть выведен последствии такого, как пользователь отыграет эту необходимую. Возможность расценить глубокий функционал слотов — основное совершенство этой разновидности. Игроку становятся доступны что, эти опции, коие отсутствуют в демонстрационном режиме, а возможность выиграть настоящие средства добавляет ярких азартных чувств.
1×slots актуальное зеркало
Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, all лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, чтобы замечена возможность вывести выигрыш. Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом прибыли присутствуют на этой страничке. Посетитель может расценить условия получения и начать играть на деньги без внесения депозита. При этом игроку важно понимать, на каких условиях и какими методами возможность исключить приобретенный выигрыш. Для сего необходимо оценить перечень подключенных платежных систем.Чтоб получить крупный выигрыш, избирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша. Еще одно условие касается размеров ставки. Операторы устанавливают максимальную необходимую, которую игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, избранной в Личном кабинете. При превышении лимита есть риск потерять бонуса. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, заказчик имеет столкнуться с запретом ставить фишки на шансы.Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депозит может выделяться до 30 дней. 1хслотс официальный сайт зеркало <a href=http://pfb7978i.bget.ru/index.php?subaction=userinfo&user=Frankgom>http://pfb7978i.bget.ru/index.php?subaction=userinfo&user=Frankgom</a> Для всех бездепозитных бонусов действует максимальный лимит на выигрыш. Он показывает максимальную сумму, коию у получить, играя на бонусные кредиты. Как лишь для удастся выполнить притязания вейджера, возможный максимум будет переведен с бонусного счета на главный, а остаток несомненно списан.
1×slots скачать на айфон
Получить приветственный приз шансы только новые клиенты онлайн-казино. Способы описаны в критериях промоакции каждого легального казино, почаще всего это:Простая процедура получения бездепозитного приза, которая займет не более 2-х мин. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные. <a href=http://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=6193>http://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=6193</a> Бесплатные призы казино без депозита можно получить в виде денежных средств на бонусный счет (вывести их возможно лишь после отыгрыша), фриспинов, забавы или кешбэк-бонуса.Для подтверждения электрической почты, просто перейдите по интенсивной ссылке в письме, приобретенном от игрового заведения. 1×slot зеркало Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.
<b>Смотреть еще похожие новости:</b>
<a href=https://techadron.com/forum/viewtopic.php?p=9343>1хслот 1хслотс регистрация перейти на 1×slots</a>
<a href=http://palais.beesims.com/phpbb/memberlist.php?mode=viewprofile&u=3390>1 х слотс зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные призы – это исключительно интересная и наиболее многообещающая акция интернет-казино. Они даже превосходнее фри-спинов, потому собственно выплаты в безвозмездных вращениях не гарантированы, так комбинации на барабанах игрового аппарата имеют не сложиться.
#8673 GeorgeRahhttps://b2best.at
Добро пожаловать на <a href=https://b2best.at/>https://b2best.at</a> мы предлагаем широкий спектр услуг для всех предприятий: b2best.at от стратегического консалтинга до цифрового маркетинга. Наша команда профессионалов поможет вам оптимизировать процессы и увеличить прибыль. Начните свой путь к успеху с нами!
#8674 Ремонт планшетовhttps://remont-planshetov-profi.ru/
Наша мастерская предлагает профессиональный <a href=https://remont-planshetov-profi.ru/>сервисный ремонт планшетов на выезде</a> различных марок и моделей. Мы осознаем, насколько значимы для вас ваши таблеты, и стремимся предоставить услуги первоклассного уровня. Наши профессиональные техники оперативно и тщательно выполняют работу, используя только оригинальные запчасти, что предоставляет долговечность и надежность проведенных ремонтов. Наиболее распространенные поломки, с которыми сталкиваются обладатели устройств планшетного типа, включают поврежденный экран, неисправности аккумулятора, неисправности программного обеспечения, неработающие разъемы и механические повреждения. Для устранения этих проблем наши профессиональные техники проводят ремонт экранов, батарей, ПО, разъемов и механических компонентов. Обратившись к нам, вы обеспечиваете себе качественный и надежный сервисный центр по ремонту планшета на выезде. Подробная информация представлена на нашем сайте: https://remont-planshetov-profi.ru
#8675 Charlesgunnyhttp://filmkachat.ru
1х слотс зеркало регистрация в 1×slots casino
Бездепозитные бонусы — это подарки от казино повторяющий бонусных денег либо фриспинов для игровых автоматов, коие начисляются на аккаунт игрока после процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депо не требуется. <a href=http://filmkachat.ru/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> Также существуют онлайн-платформы азартных игр, которые применяют раздачу бездепозитных призов в особые даты (как для казино, так и для игрока). Помимо этого, действующие игроки также имеют вероятность получить схожие призы за собственную работа (к примеру, за увеличения уровня или за похожие достижения).Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен перечень превосходнейших онлайн казино, которые предлагают своим игрокам великодушные бонусы за регистрацию. <a href=https://www.goldenline.pl/grupy/Przedsiebiorcy_biznesmeni/health-economics/how-to-create-a-stunning-3d-walkthrough-video-for-architectural-projects,3947888/>https://www.goldenline.pl/grupy/Przedsiebiorcy_biznesmeni/health-economics/how-to-create-a-stunning-3d-walkthrough-video-for-architectural-projects,3947888/</a> 1×slots бездепозитный бонус за регистрацию <a href=https://lavteam.org/user/DoctorLazutakn/>https://lavteam.org/user/DoctorLazutakn/</a> Бонусы без депо при регистрации числятся самыми привлекательными как для опытных игроков, так для и новичков. Получив это вознаграждение, клиент может выступать на реальные средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные призы в интернет-казино Рунета, а условия их активации и выигрыша.Процесс доказательства личности может взятьвдолг(взятьвзаймы) от одного денька до недели. Если клиент разрешил какую-либо оплошность при заполнении паспортных данных, то ему следует обратиться с проблемой в саппорта онлайн-казино.
1×slots зеркало рабочее
Бездепы могут заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами.Но надо думать, собственно снабжая юзеров этими бонусами, казино увлекается спонсированием. Ведь объемы вознаграждений, главном, не великие (средним объемом от 5 до 20 $). И на эти средства налагаются конкретные обстоятельства и ограничения, неотклонимые к исполненью игрока, случае в последствии он вожделеет получить все свои выигранные финансы. <a href=https://your-portal.at.ua/forum/46–63417–2#88115>1×slots регистрация 1×slots casino 777 online</a> 1×slots зеркало этих способов предполагает регистрацию <a href=http://in.net.ua/user/HarryHek/>http://in.net.ua/user/HarryHek/</a> 1×slots промокод при регистрации
1× slots сайт
Доступность — бездепозитные бонусы в казино чаще всего предоставляются свежим игрокам, но случаются случаи, когда приз могут получить и действующие посетители.Третитй бездепозитный бонус за регистрацию – денежные свои. К раскаянию, начислить рубли либо баксы готовы только знаменитые и пользующиеся клубы. С их поддержкою вас насладиться каждой доступной игрой – автоматом, рулеткой, кено, блэкджеком. Классическая разновидность приза за творение аккаунта. Его превосходство содержится никаких, что заказчик возможность помощи выбирать аппараты и делать ставки в них. Иногда список игровых автоматов ограничен оператором, хотя все одинаково это чем, чем единственный дешевый слот, как в случае с внедрением фриспинов. <a href=https://mir-pozitiv.ru/forums/users/ifranxrum1309–2/>https://mir-pozitiv.ru/forums/users/ifranxrum1309–2/</a> 1×slots на любой вкус как пройти регистрацию У любого игорного клубы различные вейджеровые обстоятельства. Чтобы вы гарантировано смогли выполнить их, мы дадим некоторое советов. Если система начислила небольшую сумму, не стоит создавать немалые ставки – остановитесь на 10–30 центах. Как только сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте играть. В неприятном случае другого приглядеться к другому автомату.
1×slots официальный сайт мобильная версия скачать
Если при регистрации показать промокод, возможно гарантировано получить приз. Где брать ваучер? Посетите тематику блоги или форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В последнее время игорные дома начали рекламироваться в фильмах и сериалах. Присмотритесь и всего заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных руб. <a href=https://minifishtank.net/forum/showthread.php?tid=985>x1 slots 1хслотс регистрация перейти на 1×slots</a> Необходимость отыгрыша. Вейджер ситуации повыше, чем для бонусов за депо. И пока свои не отыграны, вывести их невозможно. Не рекомендуем сломя голову хвататься за различные предложения получения средств без вложений. Вполне вполне, собственно бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем выглядит на первый взгляд. Альтернативой считается казино бонус за депо. Мы предлагаем вас пару советов, благодаря коим у каждого игрока несомненно вероятность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег: 1х слот 1хслотс регистрация перейти на 1×slots <a href=http://bbs.mycq3d.com/home.php?mod=space&uid=89200>http://bbs.mycq3d.com/home.php?mod=space&uid=89200</a> Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депо имеет отличаться до 30 дней.Бездепозитные бонусы казино это финансовая компенсация, предлагаемая пользователям на дармовой базе и возможность выступать в онлайн казино бесплатно. Если ассоциировать их с поощрениями за вклад, в которых свои выдаются только потом первоначального пополнения счета, то бездепозитные гонорары получаются безвозмездно. То есть, играющий получает возможность создавать ставки на теснее быть деньги, коие выдаст заведение, исполняя, при, обычные деяния, чтобы их извлечь (тут идет речь о регистрация, удостоверении личности с внедрением номера телефонного, дизайна заказы и т.д.).
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Некоторые клубы автоматически начисляют приз на аккаунт игрока последствии исполненья условий получения, но случаются истории, когда бонус надо(надобно) активировать игроку самому. Есть несколько методов активации бонуса:Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. <a href=http://zvezdjuchki.ru/user/OscarSoals/>http://zvezdjuchki.ru/user/OscarSoals/</a> 1×slot зеркало рабочее регистрации на телефон придет
<b>Смотреть еще похожие новости:</b>
<a href=http://miupsik.ru/forums/showthread.php?tid=250737>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a>
<a href=https://seniordance.ru/forum/showthread.php/73166–1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D0%BD%D0%B0-%D1%81%D0%B5%D0%B3%D0%BE%D0%B4%D0%BD%D1%8F?p=102705#post102705>1×slots зеркало на сегодня</a>
<a href=http://check2go.net/author/jameslob/>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Способы получения бездепа различаются от вида приза, кот-ый понравился игроку. Но вам в любом случае надо(надобно) быть зарегистрированным в легальном онлайн-казино и доказать свою личность. В общем облике пошаговая аннотация для получения бездепозитного бонуса смотрится так:
#8676 Charlesgunnyhttp://filmkachat.ru
1×slots мобильная версия войти казино
Если идет об эксклюзивных услугах, имеет потребоваться регистрация в казино по ссылке с партнерского сайта. <a href=http://filmkachat.ru/>1×slots зеркало быструю регистрацию а также мгновенное</a> <a href=https://www.myvipon.com/post/1229714/How-exterior-renderings-for-real-estate-amazon-coupons>https://www.myvipon.com/post/1229714/How-exterior-renderings-for-real-estate-amazon-coupons</a> Хотя благотворительные призы начисляются без депо, не исключено, собственно вам придется заносить деньги. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь после как, как новый заказчик раз пополнит игровой счет.Доступные игры – В неких азартных забавах можно понизить математическое превосходство казино до нескольких 10-х процента. В их числе все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как правило, в этих играх ставки идут в зачет вейджера не полностью. Например, может предусматриваться лишь 50%. В неких играх бездепозитные бонусы вообщем невозможно отыгрывать. 1×slots casino регистрация 1×slotscasin online <a href=https://getcomixxx.com/index.php?subaction=userinfo&user=Scottjaica>https://getcomixxx.com/index.php?subaction=userinfo&user=Scottjaica</a>
1 х слотс зеркало
1×slots зеркало регистрацию более популярный вариант это Чтобы бездеп не был начислен на Ваш аккаунт, Вам надо активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк автоматически, а Вы не расчитываете его использовать, обратитесь в саппорта с просьбой отменить бездепозитный бонус. <a href=https://gxfcmao.com/home.php?mod=space&uid=508806>https://gxfcmao.com/home.php?mod=space&uid=508806</a> Бывают ли бездепозитные призы без вейджера? Бывают, в у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный бонус за регистрацию уточняется вейджер во всех казино.Частенько новички не разумеют, как активировать презенты либо вывести 1-ый выигрыш. Для сходственных случаев наша команда описала главные определения – что это фриспины, вейджер, как его отыграть, зачем нужно протекать верификацию. 1хслотс рабочее зеркало Бонус без депозита за регистрацию в казино (бездепозитный бонус) – это денежный подарок от клуба, который начисляется на аккаунт игрока в регистрации в казино. Кроме творенья учетной записи, для получения бездепа, очень нередко потребуется ещё и подтвердить контактные данные игрока и/или активировать специальный промо-код.
1×slos регистрация в 1×slots casino
Бездеп с фриспинами имеет охватывать всю коллекцию игр на веб-сайте или разработки одного провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш имеет быть выведен после того, как пользователь отыграет эту сумму. Возможность оценить глубокий перечень слотов — основное достоинство данной разновидности. Игроку становятся доступны что, эти опции, которые отсутствуют в демонстрационном режиме, а вероятность выиграть реальные деньги прибавляет ясных азартных ощущений.Каждый из бездепозитных бонусов без пополнения 2022 имеет свой определенный вейджер для отыгрыша, так же в каждом казино он устанавливается персонально — где то он х55 а где-то х30, повторюсь всюду по различному! <a href=http://azad.az/user/TravisTib/>http://azad.az/user/TravisTib/</a> 1хслотс регистрация в 1×slots casino Бездепозитный бонус по промо-коду несомненно доступен для забавы, лишь в том случае когда Вы активируете особый бонусный код в разделе с бонусами либо укажите промокод при регистрации на сайте. В неких случаях, не активации кода, понадобиться подтвердить контактные данные игрока и заполнить анкету посетителя.Для получения предоставленных бонусов вам понадобиться — ПК или мобильное прибор, и остальное дело за малым.
1×slots регистрация на официальном сайте
Бездепозитный бонус часто возможность стать доступным незамедлительно в завершения регистрации, поскольку как единственным требованием к нему является регистрация, а затем проверка вашей свежей учетной записи. С не отыгранным бонусом запрещается превосходить объем максимальной ставки. Нарушение сего обстоятельства в аннулирование выигрыша.Бездепозитные бонусы истинными деньгами, которые возможно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадались. Все обожают получать подарки. Согласитесь, почти каждый играющий человек будет безмерно счастлив, в получит даровой презент для забавы в онлайн казино просто за регистрацию или же приз за внесенный депо, например нарекаемые приветственные бонусы для новых игроков. Соответственно эти онлайн клубы будут больше модны и предпочтительны у игроков при выборе казино для забавы. Топ казино день обновляется и добавляются новые и увлекательные игровые клубы с привлекательной бонусной политикой и всеми возможными привилегиями, к коим относятся эти призы как фриспины за регистрацию, валютные бездепозитные бонусы, а также щедрые призы за внесенный депо. 1× slots зеркало <a href=http://ukvg-nn.ru/index.php?subaction=userinfo&user=quickestfuel96>http://ukvg-nn.ru/index.php?subaction=userinfo&user=quickestfuel96</a>
1×slots регистрацию процедура займет всего лишь
Способы получения бездепа различаются зависимо облика приза, кот-ый приглянулся игроку. Но вам иначе нужно быть зарегистрированным в законном онлайн-казино и подтвердить свою лицо. В общем облике пошаговая инструкция для получения бездепозитного бонуса выглядит например:Такие поощрения дозволяют бесплатно протестировать новое казино, разобраться с игровым ходом интернет слотов, заработать и вывести маленькую сумму средств. <a href=http://ic-salon.ru/bitrix/redirect.php?goto=http://payeer-bonus-x2.chatovod.ru/away/?to=http://izborskhotel.ru/bitrix/redirect.php?goto=https://telegra.ph/Kak-prodlit-srok-dejstviya-patenta-09–19>http://ic-salon.ru/bitrix/redirect.php?goto=http://payeer-bonus-x2.chatovod.ru/away/?to=http://izborskhotel.ru/bitrix/redirect.php?goto=https://telegra.ph/Kak-prodlit-srok-dejstviya-patenta-09–19</a> 1хслотс рабочее зеркало на сегодня С не отыгранным призом воспрещается превосходить размер максимальной ставки. Нарушение этого условия в аннулирование выигрыша.Сроки активации бонуса устанавливаются каждым казино, хотя почаще всего они не превосходят недели с этапа получения. Игроку обязательно нужно применять бездеп в течение указанного срока, в ином случае бонус просто исчезнет. Каждый бонус возможно получить только один один, поэтому в не использовать бездеп в срок, у игрока не несомненно 2 шанса им воспользоваться.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.formulersupport.com/Thread-1%D1%85%D1%81%D0%BB%D0%BE%D1%82-%D1%81%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C–123406>1хслот скачать</a>
<a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=823262>1×slots зеркало рабочее на сегодня</a>
<a href=http://angelandmax.teamforum.ru/memberlist.php?mode=viewprofile&u=640>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Превышение наибольшей ставки при отыгрыше. Система механически не предостерегает о превышении ставки, потому о несоблюдении управлял игрок может узнать теснее в подачи запроса на вывод средств.
#8677 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
Нет. Для получения бездепозитного приза в казино нужна обязательная регистрация на сайте. Играть в слоты бесплатно и без регистрации можно только в демо режиме.Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала резвые выводы. Фишка выплат никаких, собственно достаточно избрать платёжный инструмент и указать необходимую. В большинстве случаев деньги зачисляются на электрические кошельки протяжении 15 минут, а на банковские карты – 1–3 рабочих дня. <a href=http://filmkachat.ru/>1×slots зеркало быструю регистрацию а также мгновенное</a> Условия отыгрыша бонуса. Если Вы планируете заработать на бездепозитном бонусе, то для обратите внимание на значение вейджера и срок, который дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть приз и вывести выигрыш. <a href=https://www.gamerlaunch.com/community/users/blog/6415433/2327134/mastering-cad-files%3A-your-guide-to-digital-design-/?gid=535>https://www.gamerlaunch.com/community/users/blog/6415433/2327134/mastering-cad-files%3A-your-guide-to-digital-design-/?gid=535</a> казино 1×slots <a href=https://masstr.net/member.php?action=profile&uid=26484>https://masstr.net/member.php?action=profile&uid=26484</a> Мы подготовили список, где есть практически актуальные и свежие бездепозитные призы казино, коие вам получить безвозмездно. Для наших юзеров есть особые предложения неповторимые бонусы, которые вы ни не отыщите, их мы обозначили особой красной плашкой «Exclusive».Подтверждение индивидуальной информации. Все казино настоятельно от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и присутствие у юзера иных аккаунтов (мультиаккаунт запрещен).
1×slots официальный сайт скачать на айфон
<a href=https://isomedu.com/forum/profile/josephdrons/>1хслот официальный сайт зеркало</a> 1× slots регистрация в 1×slots casino Бездепозитный приз за регистрацию в казино с выводом средств в 2022 году — Наш ресурс дает игрокам важную информацию о самых свежих, великодушных и проверенных призах в интернет казино, коие обновляются любой денек.Бездепозитные бонусы в казино без пополнения 2022 — это конкретная сумма денег либо free spins вращения, которые предоставляются первым гостям за регистрацию на веб-сайте казино вид бездепозитного бонуса, и выделяет вам вероятность помощью казино без пополнения опробовать предложения (игр), с дальнейшей прерогативой вывода средств при исполненьи всех установленных управлял. <a href=http://bbs.yxsensing.net/home.php?mod=space&uid=124865>http://bbs.yxsensing.net/home.php?mod=space&uid=124865</a> 1×slots быструю регистрацию а также мгновенное Используйте лучшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из списка ниже, чтобы заработать презенты за обычные деянья и уже сегодня получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и прыткими выводами на электрические кошельки.На страничке представлены бездепозитные бонусы за регистрацию в казино редкая награда за коей гонятся все игроки как новенькие, например и мастера. Мы тоже уделяем огромное внимание на присутствие бонусов при составление рейтинга казино на средства. Бездепозитный приз это вероятность играть безвозмездно и выиграть настоящие средства.
зеркло казино 1×slots
Используйте наихорошие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из списка ниже, дабы заработать подарки за простые деяния и уже сегодня получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высокой отдачей и быстрыми выводами на электрические кошельки.Также существуют онлайн-платформы азартных игр, которые используют раздачу бездепозитных бонусов в специальные даты (как для казино, так и для игрока). Помимо этого, действующие игроки того имеют вероятность получить схожие призы за собственную работа (к примеру, за увеличения уровня или за схожие достижения). У любой забавы средства притязания по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система засчитает любую ставку. В рулетке и покере устроить это намного сложнее. Именно поэтому так принципиально пристально разбирать условия получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в любой игре, то новенькие просто «спустят бонус на ветер».После получения бонуса вывод средств для клиента несомненно недоступен до тех пор, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо пара месяцов. Выводить деньги игрок сможет лишь последствии отыгрыша. <a href=http://l-avt.ru/support/dialog/?PAGE_NAME=profile_view&UID=75735>http://l-avt.ru/support/dialog/?PAGE_NAME=profile_view&UID=75735</a> Каждая игровая платформа выделяется критериями по получению и отыгрышу бездепов. В правилах отчетливо расписаны кратковременные рамки, за которые надо(надобно) прокрутить вейджер. Также не забывайте тему наибольший размер ставки и максимальную необходимую выплаты. С другой стороны, чтобы получить бездепозитные бонусы казино, довольно потратить не более 1 минутки. 1×slots коды Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам важную информацию о самых новых, великодушных и проверенных призах в онлайн казино, коие обновляются любой день.Чтобы бездеп не был начислен на Ваш аккаунт, Вам не активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт автоматически, а Вы не планируете его использовать, обратитесь в службу поддержки с пожеланием отменить бездепозитный бонус.
1×slots зеркало быструю регистрацию а также мгновенное
Во всех законных онлайн-казино Беларуси нужно свидетельство паспортных данных для забавы — это заявка правительства страны. <a href=https://showboysmedia.com/real-music/#comment-59829>1×slots бонус за регистрацию</a> Чтобы играть бесплатно на реальные средства в казино, не всегда достаточно просто зарегистрироваться. Иногда нужно выполнить дополнительные действия. сайт 1× slots casino <a href=http://multi-net.su/index.php?subaction=userinfo&user=Michaelhal>http://multi-net.su/index.php?subaction=userinfo&user=Michaelhal</a> Еще одно условие дотрагивается объемов ставки. Операторы устанавливают максимальную сумму, коию игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, избранной в Личном офисе. При превышении лимита есть риск потерять бонуса. Существующие лимитирования относятся и к конкретным обликам ставок. Например, играя в рулетку, клиент возможность столкнуться с запретом ставить фишки на шансы.Можно ли зарабатывать на бездепозитных бонусах? Это не работа, здесь как повезет, в в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, тогда можно назвать везением, и добавочной добавкой к вашему бютжету.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
А ознакомиться с новыми интернет казино, Вы можете за счет призов с выводом выгоды, которые Вы можете получить без депозита.Бонус в казино без депозита содержит различные вариации: такое быть приветственный приз, акции в честь каких-либо дней либо весомых дат, приз за вербование новых игроков, лояльность и получение VIP-статуса. <a href=https://www.vforum.org/forum/members/25942.html>https://www.vforum.org/forum/members/25942.html</a> 1×slots официальный регистрация Подарки на праздничные ? приуроченные к праздничным датам, требующие условного отыгрыша либо начисляются без такового. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду.
<b>Смотреть еще похожие новости:</b>
<a href=https://021snyw.com/space-uid-53919.html>1×slos регистрация в 1×slots casino</a>
<a href=https://www.neocodex.us/forum/topic/134487-x1-slots-%D0%A1%D0%82%D0%A0%C2%B5%D0%A0%D1%96%D0%A0%D1%91%D0%A1%D0%83%D0%A1%E2%80%9A%D0%A1%D0%82%D0%A0%C2%B0%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A1%D0%8F-%D0%A0%D0%86–1×slots-casino/>x1 slots регистрация в 1×slots casino</a>
<a href=https://www.katzenforum.at/forum/media/users/jamesagema.16012/>1×slots регистрация 1×slots casino c2d ru</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Денежные средства. Третий приз за регистрацию без депо – наличные. К раскаянью, только знаменитые и популярные клубы имеют уяснить деньги в рублях либо баксах. С их поддержкою вас насладиться любой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед этим необходимо выполнение конкретных критерий.
#8678 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slots review live
Многие казино деют в рекламных целях благотворительные призы самая для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой вебсайт по партнерской ссылке с нашего портала. <a href=http://filmkachat.ru/>x1 slots 1хслотс регистрация перейти на 1×slots</a> Акции, посвященные календарным праздникам, посещают рассчитаны как на всех юзеров, так и на категории: к, презент на 8 марта девушкам-игрокам или мужикам на 23 февраля.Каждый новичок и умелый игрок мечтают стремительно стартануть и начать создавать настоящие ставки. Для этого довольно забрать подарок, за который надо уплачивать. В зависимости от игровой платформы, нужно сделать профиль, привязать email или телефонный. После сего администрация начислит щедрое вознаграждение в виде даровых вращений либо виртуальных кредитов. <a href=https://www.storeboard.com/blogs/architecture/transforming-ideas-into-reality-the-art-of-architectural-drawing-services/5961919>https://www.storeboard.com/blogs/architecture/transforming-ideas-into-reality-the-art-of-architectural-drawing-services/5961919</a> Демоказино есть почти на любом веб-сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются веско пореже: там когда выигрыша и соблюдения условий акций бездеп возможно превратить в настоящие средства. 1хслотс официальный сайт зеркало <a href=https://profiteplo.com/user/PatrickWearf/>https://profiteplo.com/user/PatrickWearf/</a> Для верификации номера телефонного, в собственном профиле выберите опцию „Подтвердить номер аппарата“ и введите в соответствующее фон код, приобретенный в sms-сообщении.Например, игрок получил 500 рублей при разработке аккаунта и должен отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 руб., понадобится сделать 875 спинов для полного отыгрыша.
1хслотс казино зеркало
Диапазон ставок, коие вправе сделать игрок, того лимитирован. Обычно ставить возможно маленькую необходимую — в 10–30 руб. За одно вращение.Мы собрали и выпустили перечень превосходнейших бездепозитных казино с бонусами за регистрацию, которые гарантируют щедрые выигрыши и моментальные выплаты. 1×слотс казино Составленный экспертами Casino.ru список онлайн-казино с бездепозитным бонусом дозволяет игрокам сопоставить спецпредложения различных операторов.Наш список включает в себя наилучшие бездепозитные призы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по важным характеристикам: <a href=http://nitka.by/user/CraigTut/>http://nitka.by/user/CraigTut/</a> 1×slots официальный сайт скачать на айфон
1×slots официальный demo регистрация в 1×slots casino
Обычно для получения призов без депозита, казино выдвигает лояльные и вполне выполнимые условия, хотя есть ряд деяний коие воспрещены и все стать неприятные последствия:Классическая разновидность бонуса за творение аккаунта. Его преимущество заключается в, что клиент может без избирать аппараты и делать ставки в их. Иногда перечень игровых автоматов ограничен оператором, хотя все одинаково это превосходнее, чем один-единственный доступный разъем, как если, тогда, с использованием фриспинов. Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депо имеет отличаться до 30 дней.Все безвозмездные призы кажутся заманчивыми. Кто же откажется от способности поиграть в онлайн-казино, не рискуя деньгами, хотя получая выигрыши. Но далековато не все бездепозитные бонусы мере презентабельны для рассудительного клиента. <a href=http://fitboss.ru/user/Patrickexhab/>http://fitboss.ru/user/Patrickexhab/</a> 1×slots на любой вкус как пройти регистрацию
1×slots регистрация на 1хслотс
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=54741>1хслотс мобильная версия зеркало</a> Подарки на конкретные даты отличаются условиями получения. Если одобрение начисляют игроку на денек рождения, то сумма обыкновенно в от общего размера депозитов за год. Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного бонуса довольно пополнения баланса и доказательства личности. В иных же клубах, нужно количество раз прокрутить собственный депо.Для получения бонуса надо(надобно) ознакомиться с программкой преданности казино и сделать ставки на необходимую, необходимую для перехода на следующий степень. casino 1×slot <a href=https://analsex.tube/user/StevenHix/>https://analsex.tube/user/StevenHix/</a>
1×slots актуальное зеркало
Мы проделываем акцент на ключевых положениях управлял, рассказываем о территориальных лимитированиях и кратко информируем о других промоакциях обговариваемого казино.Активация денежного гонорары происходит механически в сотворения профиля либо использования промокода. Иногда операторы предъявляют вспомогательные требования: подписаться на страницы казино в соц сетях или на рассылку рекламных известий, скачать и ввести вспомогательный софт и т.д. Чаще всего используются коды. Их нужно заносить в специальные окошки регистрационной анкеты, случае идет о пригласительных бонусах, или в особом разделе личного кабинета игрока.Какие призы возможность еще получить кроме бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, каждое онлайн казино предлагает игрокам выгодное предложение на 1-ый депозит, вы совершаете депо, ваш депо возрастает в двое или том в трое, тем самым начать выступать можно с больше крупной суммой, например же не забываем тему вейджер на призы. <a href=https://www.one2bay.de/forum/member.php?action=profile&uid=18269>https://www.one2bay.de/forum/member.php?action=profile&uid=18269</a> Бесплатный приз – кредиты, которые онлайн-казино начисляет посетителю, не принуждая его пополнять игровой счет.Частенько новички не знают, как активировать подарки или вывести 1-ый выигрыш. Для подобных случаев наша команда описала основные термины – что такое фриспины, вейджер, как его отыграть, чего нужно проходить верификацию. 1×slots зеркало регистрация Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 долларов. Если выдаются фриспины, их число редко выше нескольких десятков безвозмездных вращений.Иногда операторы просят внесение минимального депо перед выводом для верификации платежного инструмента. В неких казино данный депозит того светит отыграть.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum3.bandingklub.cz/memberlist.php?mode=viewprofile&u=5481>1×slot казино зеркало</a>
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=4318>1×slots казино мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Новички не любят незамедлительно же заносить депо. Это обусловлено неименьем навыка и недоверием. К счастью, в наше время возможно получить бездепозитный бонус за регистрацию в казино. Неважно что начислит система – фриспины либо кредиты. В любом случае вы не рискуете собственными сбережениями. Это замечательная вероятность запустить понравившийся видео слот или же испытывать фортуну в настольных забавах.
#8679 Charlesgunnyhttp://filmkachat.ru
зеркала 1×slots
У любой забавы свои требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система зачтет любую ставку. В рулетке и покере устроить это гораздо сложнее. Именно потому например главно внимательно читать обстоятельства получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой ирге, то новенькие просто «спустят приз на ветер». <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> Основное верховодило получения бездепа ? творимый аккаунт должен быть у юзера первым и единственным. Наличие нескольких аккаунтов взыскательно запрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депо необходимо блюсти несложную последовательность поступков.Для получения бонуса надо(надобно) пригласить в забаву нового клиента. Казино начислит пригласившему фиксированный процент от взносов приглашённого повторяющий бонуса: почаще всего его размер не выше 10%. Срок деянья приза в большинстве случаев не выше месяца: пригласивший получает бонус зависимо проигранных ставок приглашённого в 1-ый месяц игры. <a href=http://www.redsea.gov.eg/deutsche/Lists/Beschwerden_List/DispForm.aspx?ID=7439>http://www.redsea.gov.eg/deutsche/Lists/Beschwerden_List/DispForm.aspx?ID=7439</a> 1×slots официальный зеркало <a href=http://www.andoniscars.com/2020/09/cute-girl-drifting-in-rally-car.html>http://www.andoniscars.com/2020/09/cute-girl-drifting-in-rally-car.html</a> На бонусные начисления имеют быть установлены вспомогательные лимитирования, которые Вы не учли при отыгрыше. Пока приз полностью не отыгран — средства из казино не выводятся.
казино 1×slots
<a href=http://forum.animogen.com/viewtopic.php?p=3321305>1×slots зеркало регистрация</a> 1×slots зеркало выигрыши обязательно пройдите регистрацию если <a href=http://www.russtars.tv/user/Walterdic/>http://www.russtars.tv/user/Walterdic/</a> 1×slots официальный зеркало рабочее
1×slots официальный сайт скачать
Фриплей-бонусы. Бонусы за благотворительную забаву есть лишь в неких клубах. Они зачисляются незамедлительно в творенья профиля и действуют недолговременное время. Если у вас нет времени израсходовать свои, они просто завершатся. Что дотрагивается медли, как бонусы срабатывают протяжении одного часа. <a href=http://www.scribbledatom.com/2013/02/blog-post.html>http://www.scribbledatom.com/2013/02/blog-post.html</a> Вейджер не более х30–35 является применимым. Опытные игроки утверждают, собственно с этим вейджером реально остаться в плюсе, если правильно подойти к выбору игрового аппарата.Таким образом, заведение пытается продемонстрировать себя своим вероятным геймерам, а такой рекламный ход как казино бонус без депозита за регистрацию завлекает очень большое внимания к игорному заведению и обеспечивает неизменный струю свежих гостей и будущих посетителей игрового онлайн клуба. казино 1×slots Мы подготовили перечень, где есть практически актуальные и новые бездепозитные бонусы казино, коие вы можете получить безвозмездно. Для наших юзеров есть специальные предложения неповторимые бонусы, коие вы ни не найдете, их мы определили специальной красноватой плашкой «Exclusive».Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные методы и расценить необыкновенности, труднодоступные при этой в демо режиме. Многие свежие клиенты перебегают в количество постоянных, а оператор получает длительную выгода.
1хслотс официальный сайт зеркало
<a href=http://vn-info.net/user/Josephkam/>1×slots регистрация на сайте</a> Верификация важна для добавочной безопасности и подсобляет техподдержке выявить бонусхантеров и плутов. Кстати, рядах платформах выводы крупных сумм доступны лишь последствии подтверждения личности. 1×slots зеркало на сегодня <a href=https://gamesgrom.com/user/RalphSar/>https://gamesgrom.com/user/RalphSar/</a> К образцу, игроку выдаются безвозмездные свои в заведении в размере пятидесяти или ста $ (вейджер на коие составляет 100х). То есть, каждому новоприбывшему геймеру выскакивает манящая картинка, которая обещает выплату всех зачисленных компанией средств. Не стоит обращать внимания на казино бонус за регистрацию без депозита с сильно немалый или довольно махонькой суммой бонусов, потому собственно, даже кропотливо выучив все обстоятельства, здесь скорее, будет некий подвох.
1×slots регистрация 1×slots casino c2d ru
Составленный экспертами Casino.ru перечень онлайн-казино с бездепозитным призом позволяет игрокам сопоставить спецпредложения разных операторов. Используйте наилучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из списка ниже, дабы заработать презенты за простые деяния теперь сегодня получить 1-ый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и резвыми выводами на электрические кошельки.Поспешите зарегистрироваться на официальном сайте Клубника, дабы моментально получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, появляется настоящий шанс победу! <a href=https://lavr-sovet.ru/user/Glenngot/>https://lavr-sovet.ru/user/Glenngot/</a> Но есть азартные заведения, готовые просто например вручить средства на игру. Для сего довольно создать профиль. Чтобы вывести выигрыш, сперва необходимо выполнить вейджеровые условия, прописанные в критериях получения бездепа. 1×slots зеркало подтвердит вашу регистрацию если говорить Ещё одно распространённое акционное предложение – привлекательный подарок с неблаговидными требованиями. К примеру, клуб обещает $100 в качестве бездепа, но с вейджером х80 или х100. Отыграть такой вейджер фактически невероятно и поэтому чем концентрироваться на более занимательных акциях.Бездепозитные призы казино за регистрацию в 2022 году — это возможность поиграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой либо количеством безвозмездных вращений без внесения депо. Не путайте деморежим с реальной игрой без необходимости внесения депозита.
<b>Смотреть еще похожие новости:</b>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=135571>casino 1×slot</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для получения приза надо(надобно) пригласить в забаву свежего клиента. Казино начисляет пригласившему фиксированный процент от взносов приглашённого в виде приза: почаще всего его размер не превышает 10%. Срок деяния приза правило не выше месяца: пригласивший получает приз зависимо проигранных ставок приглашённого в 1-ый луна игры.
#8680 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало
Подтвердите личность, предоставив оператору казино свои паспортные данные. Инструкции обычно несложные, главное — конкретно им идти. Если написано, что «на фото обязаны быть видны все хорошо угла страницы паспорта» — устройте именно это фото.Бездепозитные призы в казино без пополнения 2022 — это определенная сумма средств либо gratuitous spins вращения, которые предоставляются первым гостям за регистрацию на веб-сайте казино повторяющий бездепозитного приза, и дает для вероятность за счет казино без пополнения опробовать предложения (игр), с дальнейшей преимуществом, льготой вывода средств при исполнении всех установленных правил. <a href=http://filmkachat.ru/>1хслотс регистрация в 1×slots casino</a> Заполняя данные в собственном профиле, указывайте только достоверную информацию, так как Вам придется ее доказать дальнейшем при выводе денег. <a href=https://gravatar.com/briefe33e4234c6>https://gravatar.com/briefe33e4234c6</a> 1 x slots casino <a href=http://www.pengstys.com/home.php?mod=space&uid=109570>http://www.pengstys.com/home.php?mod=space&uid=109570</a> Иногда для получения призов нужно спутаться с адептами службы поддержки. Удобнее всего с ними беседовать в онлайн-сате, но иногда довольно запроса по электронной почте.Баланс игрока дополняется на подобающую необходимую. К ней используется вейджер, указанный в правилах промоакции. Вывести выигрыш возможно будет после как, как пользователь устроит требуемый размер ставок из собственных средств. В редких случаях бездеп трудится в формате Free Play. На счет юзера зачисляется большая сумма, и предоставляется небольшой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по окончании этого периода сумма на счету несомненно превосходить изначальную, то разницу возможно несомненно исключить или применять для последующих ставок.
казино 1×slots
Зарегистрируйтесь. Для регистрации почаще всего довольно установить свой номер телефонного и почтовый адресок, в чего установить приобретенный код из СМС. Возможно, потребуется показать промокод. В правилах акции будет написано, где его надобно вводить. Иногда это бы создавать при регистрации, время — теснее после творения собственного офиса, на отдельной страничке. <a href=https://021snyw.com/space-uid-53919.html>1 х слотс зеркало</a> 1×slots регистрация на 1хслотс Частенько новенькие не понимают, как активировать подарки либо вывести первый выигрыш. Для похожих случаев наша команда описала основные термины – что это фриспины, вейджер, как его отыграть, чего необходимо протекать верификацию.Основное отличие никаких, что для получения бездепа не пополнять баланс в казино. Но не сего, есть ряд и различий: <a href=https://zosh1.dv.kr.ua/user/Waltertiecy/>https://zosh1.dv.kr.ua/user/Waltertiecy/</a> Прежде всего, не забывайте регулярно заглядывать на страницу обзоров бездепозитных бонусов. Они шаг за шагом рассматривают наиболее занимательные предложения водящих игорных порталов. 1×slots регистрация 1×slots casino c2d ru
1 xslots рабочее зеркало
Иногда для получения призов необходимо спутаться с представителями службы поддержки. Удобнее всего с ними разговаривать в онлайн-сате, но иногда довольно запроса по электрической почте.Демоказино есть практически на любом сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются веско пореже: там в случае выигрыша и соблюдения условий промоакций бездеп возможно перевоплотить в реальные деньги. <a href=http://bt52.ru/bitrix/redirect.php?goto=http://egd.ru/bitrix/redirect.php?goto=http://forum.thd.vg/proxy.php?link=https://teletype.in/@urid_pomosh/YOP2Zn6fOej>http://bt52.ru/bitrix/redirect.php?goto=http://egd.ru/bitrix/redirect.php?goto=http://forum.thd.vg/proxy.php?link=https://teletype.in/@urid_pomosh/YOP2Zn6fOej</a> Следует выделить, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом. рабочее зеркало 1×slots Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.
1×slots актуальное зеркало
Используйте наилучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, дабы заработать презенты за простые деяния теперь сейчас получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и резвыми выводами на электронные кошельки.Варианты выигрыша зависят от Вашей удачи и критерий игорного портала. Выше мы сказали, собственно кое-какие бездепозитные бонусы в 2022 году выдаются с ограничениями по наибольшей выплате. Однако, остаются и те, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность современных игр на средства, можно выиграть невероятные суммы. Сегодняшние игровые автоматы или видео слоты, как их называют. Могут выдавать солидные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000. Составленный знатоками Casino.ru список онлайн-казино с бездепозитным бонусом дозволяет игрокам сопоставить спецпредложения разных операторов.Если вы новичок деле и лишь попали в неизведанную вами район пыла — счет предложений как бездепозитные бонусы без пополнения. x1 slots регистрация в 1×slots casino <a href=http://www.gaz69.ru/ipb/profile/47144-turmore0708/?tab=field_core_pfield13>http://www.gaz69.ru/ipb/profile/47144-turmore0708/?tab=field_core_pfield13</a> Классическая разновидность приза за создание аккаунта. Его преимущество заключается никаких, собственно заказчик может других выбирать аппараты и делать ставки в них. Иногда список игровых автоматов ограничен оператором, но все равно это лучше, чем единственный дешевый разъем, как если, тогда, с внедрением фриспинов.
1 хслот регистрация в 1×slots casino
<a href=http://nbcenter.ge/index.php?subaction=userinfo&user=quizzicalcloset>http://nbcenter.ge/index.php?subaction=userinfo&user=quizzicalcloset</a> Ещё одно распространённое акционное предложение – симпатичный презент с сомнительными притязаниями. К образцу, клуб сулит $100 в бездепа, хотя с вейджером х80 либо х100. Отыграть подобный вейджер практически нереально и потому никакого концентрироваться на больше заманчивых промоакциях. казино 1×slots официальный сайт Не желаете поиграть в азартные забавы, не рискуя средствами деньгами, хотя получая в все выплаты? Подобную вероятность предоставляют почти лучшие порталы с азартными развлечениями. В их количестве много честных и надежных интернет-казино на русском языке. Они завлекают свежих юзеров различными поощрительными мероприятиями, включая бездепозитные, или бесплатные призы.
<b>Смотреть еще похожие новости:</b>
<a href=https://your-portal.at.ua/forum/58–341–20#88220>1×slot зеркало</a>
<a href=http://fin-molitor.com/forum/viewtopic.php?f=2&t=406769>1хслот скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные призы – это самая интересная и наиболее многообещающая промоакция интернет-казино. Они числе чем фри-спинов, поэтому собственно выплаты в безвозмездных вращениях не гарантированы, как комбинации на барабанах игрового аппарата шансы не сложиться. Свежий бонус начисляется вид денежных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в пользовании средствами, а в случае отыгрыша оператор может ввести лимитирование на вывод денег.
#8681 Charlesgunnyhttp://filmkachat.ru
1×slots мобильная версия войти казино
Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и расценить необыкновенности, труднодоступные при забаве в демо режиме. Многие новые клиенты переходят в число неизменных, а оператор получает длительную выгода.Можно ли в одном интернет казино получить больше одного бонуса за регистрацию? Нет, так как в каждом интернет казино есть управляла, к которым нужно держаться, не делать два аккаута для получения призов, иначе несомненно блокировка обоих аккаутов, не пытайтесь перехитрить онлайн казино, бонус за регистрацию выдаеться раз раз одному лицу. <a href=http://filmkachat.ru/>1хслотс регистрация в 1×slots casino</a> Мы собрали и выпустили перечень наихороших бездепозитных казино с бонусами за регистрацию, коие гарантируют великодушные выигрыши и мгновенные выплаты.Какие призы возможность еще получить не бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, любое онлайн казино предлагает игрокам выгодное предложение на 1-ый депозит, вы совершаете депо, ваш депо увеличивается в двое либо том в трое, тем наиболее начать выступать возможно с больше солидной суммой, так же не забываем про вейджер на призы. <a href=https://mssg.me/7dltc>https://mssg.me/7dltc</a> Активация по промокоду употребляется в разных видах бездепов. Если речь о приветственном бонусе, то набор символов можно разузнать на крупнейшей странице, в регистрационной форме либо послании, коие отчаливает юзеру для доказательства e-mail. Акции все проводиться совместно с партнерскими площадками. Обычно код располагается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется одноразовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем актуальный код для активации в описании каждого рекламную.Сроки активации приза уточняются любым казино, но почаще всего они не превосходят недели с этапа получения. Игроку непременно надо(надобно) применять бездеп в течение обозначенного срока, в ином случае бонус просто пропадет. Каждый приз можно получить лишь раз один, потому если не применять бездеп в срок, у игрока не несомненно второго шанса им пользоваться. 1×slots регистрация 1×slots review live <a href=http://ez4×g.nehe.com.cn/home.php?mod=space&uid=533156&do=profile>http://ez4×g.nehe.com.cn/home.php?mod=space&uid=533156&do=profile</a>
1×slots бонус за регистрацию
казино 1×slots Если вы новичок в и лишь попали в неизведанную вами район азарта — за услуг как бездепозитные бонусы без пополнения.Автоматическая активация показаться самой удобной, но ручной метод имеет перед ней преимущества. Прежде чем использовать вознаграждение от казино, стоит заблаговременно определить, сколько медли требуется на исполнение всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деянья приза. <a href=http://alex-zarya.ru/user/Zacheryprure/>http://alex-zarya.ru/user/Zacheryprure/</a> 1 х слотс зеркало Бездепозитный приз казино 2022 с выводом за регистрацию предоставляет вероятность ознакомиться игроку с лобби выбранного заведения, сориентироваться в выборе игр и выяснить качество работы службы. Довольно нередко, начиная игровой процесс, игрок теснее отказывается останавливаться и делает реальный вклад. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть бесплатно возможно как один таки с призом за регистрацию без необходимости вносить депозит.
1×slots зеркало подтвердит вашу регистрацию если говорить
Онлайн гемблинг развивается с любым днем все больше и больше, новые бренды создаются не по денькам а по часам. Новые интернет казино делают вступительные акции для игроков, для того что бы зарекомендовать себя, и что, этим наиболее предлагают бездепозитные призы за регистрацию, собственно бы не упустить эту вероятность — как пользоваться свежим бездепом, рекомендуем навещать наш сайт как возможно почаще, самое лакомое и новые будет добавляться в этом же списке. <a href=http://bbs.vvm2.cc/space-uid-1761.html>http://bbs.vvm2.cc/space-uid-1761.html</a> Список так называемых «разрешенных землель» прилагается к правилам бонусной программки игорного портала. Обязательно проверьте, распространяются ли на вас подобные санкции.В истиннее время получить бонус за регистрацию в казино довольно просто. Почти каждый игорный дом с радостью даст деньги или бесплатные вращения. Многие игроки пользуются этим и не стыдятся регистрироваться в любом клубе с прибыльными условиями. Кстати, это замечательная возможность придумать выигрышную стратегию и сорвать куш. 1×slot зеркало На нашем веб-сайте Вы найдете перечень своевременных свежих бездепозитных призов в казино 2022 года. Также, есть большое эксклюзивных услуг, коие доступны лишь гостям нашего вебсайта после регистрации по нашей ссылке либо активации особого промокода.
1×слотс казино
Доступные игры – В неких азартных играх можно снизить математическое преимущество казино до нескольких десятых процента. В их числе почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как правило, в таких забавах ставки идут в зачет вейджера не полностью. Например, возможность учитываться лишь 50%. В некоторых играх бездепозитные призы вообщем невозможно отыгрывать.Если при регистрации указать промокод, можно гарантировано получить бонус. Где арестовать ваучер? Посетите направленные блоги или форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В заключительнее время игорные дома начали афишироваться в фильмах и телесериалах. Присмотритесь и всего заметите промокод, который принесёт 500 или 1 000 бонусных руб. <a href=https://nauc.info/forums/viewtopic.php?t=20414607>1×slots casino online регистрация</a> В разделе с бонусами активировать свой презент. Найти забавы, для коих предусмотрено одобрение и использовать приз по назначению. Такой безвозмездный эквивалент средств зачисляется на профиль пользователя после воплощения требований и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений вероятен лишь последствии воплощения вейджеровых критерий. 1×slos регистрация в 1×slots casino <a href=http://l-avt.ru/support/dialog/?PAGE_NAME=profile_view&UID=60327>http://l-avt.ru/support/dialog/?PAGE_NAME=profile_view&UID=60327</a> Превышение наибольшей ставки при отыгрыше. Система механически не предостерегает о превышении ставки, потому о несоблюдении управлял игрок может узнать теснее в подачи запроса на вывод средств.Фриспины предназначены для применения в видео слотах. Внимательно ознакомьтесь с условиями – часто их выдают на кое-какие автоматы. В зависимости от клуба, у вас получится сделать определённое количество ставок. Кстати, продвинутые игорные дома позволяют запускать каждых «одноруких бандитов».
1×slots casino регистрация на сайте
Зарегистрируйтесь. Для регистрации чаще всего довольно установить свой номер телефона и почтовый адресок, в чего ввести приобретенный код из СМС. Возможно, потребуется указать промокод. В правилах промоакции будет написано, где его бы вводить. Иногда это хотелось делать при регистрации, время — теснее после творенья собственного кабинета, на отдельной странице. <a href=https://www.ccvgaming.com/forum/member.php?39526-KennethAreld>https://www.ccvgaming.com/forum/member.php?39526-KennethAreld</a> Бездепозитные призы за регистрацию считаются одним из самых знаменитых методов привлечения свежих игроков в онлайн-казино, потому что они деют игрокам вероятность опробовать казино, необыкновенно игровые автоматы, и вероятно, выиграть настоящие деньги. 1×slots рабочее зеркало на сегодня Не советуем опрометью голову хвататься за различные предложения получения средств без инвестициям. Вполне возможно, что бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем смотрится на первый взгляд. Альтернативой считается казино бонус за депозит. Мы предлагаем для пару советов, спасибо которым у каждого игрока будет вероятность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег:
<b>Смотреть еще похожие новости:</b>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=159&pid=648489#post_648489>1×slots официальный сайт, скачать</a>
<a href=http://check2go.net/my-account/>1хслотс зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вышеописанная причина и считается основным нюансом, из-за которого операторы отдают доля своей выгоды на разные рекламные затраты и маркетинговые кампании. А наиболее действенным здесь станут выступать именно бездепозитные призы казино 2022 с выводом за регистрацию. Эффективность бездепов виде рекламного прибора расценили многие операторы. Малоизвестные площадки употребляют такие акции, дабы быстро набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны неизменных посетителей. Не все сайты, дающие презенты без депо, рекомендованы к этой. За привлекательным промоописанием все скрываться невыполнимые обстоятельства отыгрыша и подводные камешки.
#8682 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на сайте
Но а случае вы уже профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в онлайн казино; <a href=http://filmkachat.ru/>скачать 1×slots на андроид мобильная версия</a> Как правило, при выводе денег, от играющего потребуется только устроить минимальный вклад чтобы, чтобы, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом собственный счет.Зарегистрируйтесь. Для регистрации почаще всего довольно установить собственный номер телефонного и почтовый адрес, последствии чего установить приобретенный код из СМС. Возможно, требуется показать промокод. В правилах промоакции будет написано, где его хотелось вводить. Иногда это надо делать при регистрации, времени — теснее в творенья личного офиса, на отдельной странице. <a href=https://www.reverbnation.com/artist/3dproductanimationservices>https://www.reverbnation.com/artist/3dproductanimationservices</a> Итак, чтобы безвозмездные бонусные кредиты превратились в реальные деньги, которыми вам распоряжаться по своему усмотрению, их нужно отыграть. Вейджер по уточнять в правилах онлайн-казино. 1×slots регистрация <a href=http://www.fire-team.ru/forum/member.php?u=4952>http://www.fire-team.ru/forum/member.php?u=4952</a> Изучить верховодила и обстоятельства получения бездепозитных бонусов казино, Вы можете у нас на сайте в разделе с призами или на официальном сайте избранного Вами казино. Если возможности найти нужную информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал или по электронной почте.На нашем веб-сайте Вы отыщите список своевременных свежих бездепозитных бонусов в казино 2022 года. Также, есть много неповторимых услуг, которые доступны лишь гостям нашего сайта в регистрации по нашей ссылке или активации особого промокода.
1хслотс мобильная версия зеркало
Вы наверняка, как и все предпочитаете получать презенты и бездепозитные бонусы казино. Игорные жилища брали в привычку одаривать гэмблеров приятными бонусами. Стать обладателем приветственного подарка возможно за творение профиля либо пополнение счёта. Второй вариант более интересный, как клубы готовы удвоить депозит! Но если вы новичок и лишь знакомитесь с миром пыла, другого, как пользуйтесь бонусом за регистрацию.Активация денежного вознаграждения происходит механически последствии творенья профиля или использования промокода. Иногда операторы предъявляют дополнительные требования: подписаться на странички казино в социальных сетях либо на рассылку маркетинговых сообщений, скачать и установить вспомогательный софт и т.д. 1 х слотс зеркало Срок отыгрыша — это период, который наступает в момент активации бонуса и завершается с его закрытием. Пользователю необходимо уложиться в этот временной зазор, другому призовые средства аннулируются. Казино устанавливают список игр, ставки каких засчитываются при расчете отыгранных денег. Если тайтл не входит в данный перечень, то предоставляется быть недоступен для загрузки во время деяния бонусного предложения.Но эти рамки не смущают числе хайроллеров, что коэффициенты на слотах разрешают рассчитывать на крупные выигрыши, ну неких автоматах разыгрывается передовой джекпот. <a href=https://trafficdirectory.org/%D1%84%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B-%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0_336732.html>https://trafficdirectory.org/%D1%84%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B-%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0_336732.html</a> Многие новички колеблются, собственно поощрительный приз не будет отдавать, и если они выиграли у казино. Это полностью неопасно и надежно. Выводя выигранные свои, игрок просто останавливает свое участие при и теряет уникальную вероятность – даром увеличивать личное материальное положение. 1×slots официальный сайт зеркало рабочее
1×slots казино мобильная версия
Прямо сейчас арестуйте благотворительные вращения за регистрацию без депозита и начинайте собирать призовые комбинации ради солидных выигрышей!Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша бонусов. Заведения практически устанавливают наивысшую ставку, допустимую по условиям вейждера. <a href=https://www.fairyabc.com/home.php?mod=space&uid=111708>https://www.fairyabc.com/home.php?mod=space&uid=111708</a> 1хслотс казино зеркало Мы подготовили перечень, где есть практически животрепещущие и свежие бездепозитные бонусы казино, коие вы можете получить даром. Для наших пользователей есть специальные предложения эксклюзивные бонусы, коие вы нигде не найдете, их мы обозначили специальной красной плашкой «Exclusive».
1 хслот регистрация в 1×slots casino
Благодаря программке лояльности от игорного заведения, возможно взять хороший старт и без добавочных вложений запустить видеослоты. Кроме того, можно рассчитывать на реальную фортуну и получить, без вложения личных финансов, великий выигрыш.Поспешите зарегистрироваться на официальном веб-сайте Клубника, дабы мгновенно получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, бывает реальный шанс победу! казино 1× slots официальный сайт <a href=http://fottontuxedo.co.kr/bbs/board.php?bo_table=free&wr_id=1544890>http://fottontuxedo.co.kr/bbs/board.php?bo_table=free&wr_id=1544890</a> Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.
1×slots официальный зеркало
В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, необходимо обратиться в саппорта через лайв-чат на веб-сайте казино. Одним из предлогов отдавать привилегию одному либо иному заведению содержится в привлекательности предлагаемых промоакций и бесплатных предложений. Безвозмездные фриспины, выдаваемые без нужды делать какой-либо вклад, в списке находится далековато не в конце. <a href=https://www.finnishsportsagency.com/read-blog/3266>https://www.finnishsportsagency.com/read-blog/3266</a> 1х слотс зеркало регистрация в 1×slots casino В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, необходимо обратиться в саппорта через лайв-чат на сайте казино.
<b>Смотреть еще похожие новости:</b>
<a href=http://brilliance.ru/forum/viewtopic.php?f=6&t=41021>1×slots официальный сайт мобильная версия скачать</a>
<a href=http://swissairways-va.com/phpBB3/memberlist.php?mode=viewprofile&u=3495>1хслотс казино зеркало</a>
<a href=https://demo.comuni-italiani.it/forum/viewtopic.php?f=9&t=381776>x1 slots регистрация в 1×slots casino</a>
<a href=https://tabsgame.ru/user/Jamesbes/>1×slot регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Нет. Для получения бездепозитного приза в казино нужна неотъемлемая регистрация на сайте. Играть в слоты бесплатно и без регистрации можно лишь в демо режиме.
#8683 Charlesgunnyhttp://filmkachat.ru
1хслотс мобильная версия зеркало
Вы наверняка, как и все предпочитаете получать презенты и бездепозитные бонусы казино. Игорные жилища брали в привычку одаривать гэмблеров приятными бонусами. Стать обладателем приветственного подарка возможно за творение профиля либо пополнение счёта. Второй вариант более интересный, как клубы готовы удвоить депозит! Но если вы новичок и лишь знакомитесь с миром пыла, другого, как пользуйтесь бонусом за регистрацию. <a href=http://filmkachat.ru/>1×slots зеркало на сегодня</a> Бездепозитный бонус предоставляется новому игроку за конкретные деяния. Часто презент в виде денег либо фриспинов выдается за регистрацию, спасибо чему пользователь получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.Так собственно основное различие презента на депозит от бездепа – неотъемлемое пополнение счёта. Вы сможете внести депозит и преувеличить стартовый капитал либо арестовать бездеп и при не придётся рисковать собственными сбережениями. Поспешите выполнить простые притязания, и администрация ресурса начислит щедрое поощрение! <a href=https://www.exoltech.us/blogs/227831/%D0%A6%D0%B5%D0%BD%D0%B0-%D1%80%D0%B5%D0%BC%D0%BE%D0%BD%D1%82%D0%B0-%D0%BA%D0%B2%D0%B0%D1%80%D1%82%D0%B8%D1%80%D1%8B-%D1%87%D1%82%D0%BE-%D0%B2%D0%BB%D0%B8%D1%8F%D0%B5%D1%82-%D0%BD%D0%B0-%D1%81%D1%82%D0%BE%D0%B8%D0%BC%D0%BE%D1%81%D1%82%D1%8C-%D0%B8-%D0%BA%D0%B0%D0%BA-%D0%B5%D0%B5>https://www.exoltech.us/blogs/227831/%D0%A6%D0%B5%D0%BD%D0%B0-%D1%80%D0%B5%D0%BC%D0%BE%D0%BD%D1%82%D0%B0-%D0%BA%D0%B2%D0%B0%D1%80%D1%82%D0%B8%D1%80%D1%8B-%D1%87%D1%82%D0%BE-%D0%B2%D0%BB%D0%B8%D1%8F%D0%B5%D1%82-%D0%BD%D0%B0-%D1%81%D1%82%D0%BE%D0%B8%D0%BC%D0%BE%D1%81%D1%82%D1%8C-%D0%B8-%D0%BA%D0%B0%D0%BA-%D0%B5%D0%B5</a> Раздача бонусов возможность быть приурочена к разным датам: календарные праздники, деньки рождения игроков, юбилей открытия казино и т. Д. Подарок выдается в виде денег, фриспинов либо баллов для скопления и обмена на услуги оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода этой суммы придется выполнить ряд притязаний.Для выбора азартного заведения Вы сможете пользоваться списком наших казино с бонусами за регистрацию. На нашем веб-сайте мы выпустили перечень бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, что часть призов неповторимые и доступны только для посетителей нашего вебсайта по-специальному промо-коду либо по оригинальной ссылке. Кроме того, для каждого приза мы подготовили подробный обозрение, в котором Вы узнаете как получить и отыграть одобрение и как вывести собственный выигрыш с бездепа. 1×slots сайт зеркало <a href=http://corp-eeek.ru/index.php?subaction=userinfo&user=exclusivedome89>http://corp-eeek.ru/index.php?subaction=userinfo&user=exclusivedome89</a> Бездепозитные бонусы — это презенты от казино вид бонусных денег или фриспинов для игровых автоматов, которые начисляются на акк игрока в процедуры регистрации на сайте заведения. Для получения этих поощрений депо не потребуется.
онлайн казино 1×slots
Также есть онлайн-платформы азартных игр, коие применяют раздачу бездепозитных бонусов в специальные даты (как для казино, так и для игрока). Помимо этого, действующие игроки кроме имеют возможность получить похожие бонусы за свою деятельность (к примеру, за повышения уровня либо за схожие заслуги).Возможность протестировать свежие забавы, не рискуя личными средствами и создать собственную стратегию забавы. 1хслотс 1хслотс регистрация перейти на 1×slots Предложения с бездепозитными призами за регистрацию разрешают новым заведениям заинтересовать аудиторию на собственный сайт. А игроки к получают возможность выступать на настоящие средства без депо в казино и заработать маленькой стартовый капитал, кот-ый разрешено вывести на карту банка или электронный кошелек.У каждого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано сумели выполнить их, мы дадим несколько советов. Если система начислила небольшую сумму, не создавать великие ставки – остановитесь на 10–30 центах. Как только сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В противном случае другого, как присмотреться к иному автомату. <a href=https://escortexxx.ca/author/jaspernot/>https://escortexxx.ca/author/jaspernot/</a> Некоторые казино имеют предлагать клиентам бездепы за подтверждение номера или почты либо репост на страничку в соц сетях.Бездепозитный приз казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в данном и заключается главное отличие. 1×slots быструю регистрацию а также мгновенное Прибывшие на аккаунт финансы бездепозитные призы предназначаются, главном, только для новоиспеченных юзеров, коие ранее не имели собственного аккаунта в данном казино. Исходя из этого, случае раньше у игрока был изготовлен депозит, то, по всей вероятности, у него больше не несомненно возможности рассчитывать на получение такового бонуса в конкретном заведении.
1×slots регистрацию процедура займет всего лишь
Начнём с такого, собственно каждое рекламную за регистрацию подразумевает некие условия. Бездепозитные бонусы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, нужная для исполнения условий. Пример, получили безвозмездные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 рублей, неудачных либо выигрышных, неважно. После исполненья, бонусный баланс перейдёт на настоящий и станет доступным к выводу.Составленный знатоками Casino.ru перечень онлайн-казино с бездепозитным призом разрешает игрокам сравнить спецпредложения разных операторов. Бонусные деньги – небольшая сумма денег для старта в новом казино. На бонусные деньги, обыкновенно разрешается выступать во все игры, не слотов с прогрессивным джекпотом и игр из раздела exist casino. <a href=https://acerfans.ru/user/Patrickgal/>https://acerfans.ru/user/Patrickgal/</a> Кешбэк-бонус дает собой возврат фиксированного процента от ставки когда проигрыша или же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%. 1хлот регистрация в 1×slots casino
1хслотс рабочее зеркало
При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток. При использовании бездепозитным бонусом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют некоторое видов лимитов:В качестве призов онлайн казино часто предлагает выдачу фриспинов, другими даровых вращений игрового барабана. Виртуальные монеты можно использовать для изучения в покерной школе или для игры в казино. Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс дает игрокам актуальную информацию о самых свежих, щедрых и проверенных призах в онлайн казино, которые обновляются любой день.Подтвердите регистрацию, чтобы активировать Бездепозитный приз с выводом, требуется заполнить собственный профиль. Заполните пустопорожние поля настоящими данными о для. 1х слот регистрация в 1×slots casino <a href=http://91075425.k216.opensrs.cn/home.php?mod=space&uid=1146055>http://91075425.k216.opensrs.cn/home.php?mod=space&uid=1146055</a> Вейджер не более х30–35 является применимым. Опытные игроки утверждают, что с этим вейджером реально остаться в плюсе, в правильно подойти к выбору игрового аппарата.Не сложно догадаться, что not the slightest down payment bonuses практически разу не бывают великими. Чаще всего речь идет о пяти–тридцати баксах (либо эквиваленте данной суммы в другой еденице).
казино 1×slots официальный сайт
Доступ к дару имеет раскрываться автоматически после введения промокода или обращения в службу поддержки сайта. В первом случае от юзера не требуется практически поступков. Бездеп с активацией по коду встречается почаще всего. Игроку необходимо установить совокупность знаков в графе, кот-ая может находиться в регистрационной форме в Личном кабинете. Бездепозитный бонус предоставляется новенькому игроку за конкретные действия. Часто презент повторяющий средств либо фриспинов выдается за регистрацию, благодаря чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. <a href=https://www.mybbaddons.com/board/user-72019.html>https://www.mybbaddons.com/board/user-72019.html</a> Игры, в возможно выступать на бонусные деньги. Проверьте перечень игр, в которых можно выступать на бонусные свои, вполне они Вам не понравятся и надо тратить своё время на эту промоакцию.Бесплатные призы казино без депо возможно получить вид денежных средств на бонусный счет (исключить их возможно лишь после отыгрыша), фриспинов, игры или кешбэк-бонуса. 1×slots регистрацию процедура займет всего лишь
<b>Смотреть еще похожие новости:</b>
<a href=https://www.rusdrama-az.com/support/51-sluzhba-tehnicheskoy-podderzhki-sayta.html>1×slot рабочее зеркало</a>
<a href=https://melhorlance.com.br/minha-conta/>1хслотс казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Мы собрали и опубликовали перечень наихороших бездепозитных казино с бонусами за регистрацию, коие гарантируют великодушные выигрыши и мгновенные выплаты. На бонусные начисления все быть установлены дополнительные ограничения, которые Вы не учли при отыгрыше. Пока приз полностью не отыгран — средства из казино не выводятся.
#8684 Ремонт парогенераторов в Москвеhttps://remont-parogeneratorov-piece.ru/
Наша мастерская предлагает надежный <a href=https://remont-parogeneratorov-piece.ru/>вызвать мастера по ремонту парогенераторов</a> всех типов и брендов. Мы осознаем, насколько необходимы вам ваши парогенераторы, и готовы предложить сервис наилучшего качества. Наши опытные мастера работают быстро и аккуратно, используя только сертифицированные компоненты, что предоставляет долговечность и надежность наших услуг. Наиболее распространенные поломки, с которыми сталкиваются пользователи устройств для генерации пара, включают проблемы с нагревом, неисправности насоса, ошибки ПО, неисправности разъемов и механические повреждения. Для устранения этих проблем наши профессиональные техники выполняют ремонт нагревательных элементов, насосов, ПО, разъемов и механических компонентов. Обращаясь в наш сервисный центр, вы получаете надежный и долговечный официальный ремонт парогенераторов на выезде. Подробная информация представлена на нашем сайте: https://remont-parogeneratorov-piece.ru
#8685 SheilaDonhttps://redmetsplav.ru/
<a href=https://redmetsplav.ru/store/magniy-i-ego-splavy/zarubezhnye-splavy-2/magniy-b-199-ez33a---astm-b199/prutok-magnievyy-b-199-ez33a---astm-b199/>Пруток магниевый B 199 (EZ33A) – ASTM B199</a>
Проволока магниевая B 199 (EZ33A) – ASTM B199 представляет СЃРѕР±РѕР№ высококачественный РїСЂРѕРґСѓРєС‚, предназначенный для различных промышленных применений. РћРЅР° отличается высокой прочностью Рё устойчивостью Рє РєРѕСЂСЂРѕР·РёРё. Благодаря уникальным характеристикам, проволока идеально РїРѕРґС…РѕРґРёС‚ для сварочных работ, Р° также для производства легких конструкций. Выбирая данный материал, РІС‹ получаете надежность Рё долговечность. РќРµ упустите возможность купить Проволока магниевая B 199 (EZ33A) – ASTM B199 Рё убедитесь РІ ее превосходных эксплуатационных качествах. Наша проволока будет отличным выбором как для профессионалов, так Рё для любителей.
РедМетСплав предлагает внушительный каталог качественных изделий из нестандартных материалов. Не важно, какие объемы вам необходимы – от мелких партий до обширных поставок, мы обеспечиваем быстрое выполнение вашего заказа. Каждая единица продукции подтверждена требуемыми документами, подтверждающими их качество. Опытная поддержка – то, чем мы гордимся – мы на связи, чтобы улаживать ваши вопросы и находить ответы под особенности вашего бизнеса. Доверьте ваш запрос специалистам РедМетСплав и убедитесь в широком спектре предлагаемых возможностей
Наши товары: <a href=https://redmetsplav.ru/store/magniy-i-ego-splavy/zarubezhnye-splavy-2/magniy-iso-mc21210---bs-iso-16220/pokovka-magnievaya-iso-mc21210---bs-iso-16220/>РџРѕРєРѕРІРєР° магниевая ISO-MC21210 – BS ISO 16220</a> <a href=https://redmetsplav.ru/store/magniy-i-ego-splavy/zarubezhnye-splavy-2/magniy-m11630---uns/list-magnievyy-m11630---uns/>Лист магниевый M11630 – UNS</a> <a href=https://redmetsplav.ru/store/volfram/splavy-volframa-1/volfram-w-al-1/prutok-volframovyy-w-al/>Пруток вольфрамовый W-Al</a> <a href=https://redmetsplav.ru/store/kobalt/rossiyskie-splavy-3/kobalt-sdp-11/polosa-kobaltovaya-sdp-11/>Полоса кобальтовая СДП-11</a> <a href=https://redmetsplav.ru/store/kobalt/rossiyskie-splavy-3/kobalt-yundkt5aa---gost-17809–72/poroshok-kobaltovyy-yundkt5aa---gost-17809–72/>Порошок кобальтовый ЮНДКТ5РђРђ – ГОСТ 17809–72</a>
#8686 ArmandoRuiff
ciprofloxacin order online: <a href=" https://ciprofloxacin.cheap/ ">cipro for sale</a> – buy cipro online usa
#8687 Charlesgunnyhttp://filmkachat.ru
1×slots сайт зеркало
Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=http://filmkachat.ru/>1×slots регистрацию более популярный вариант это</a> Способы получения бездепа различаются от облика бонуса, кот-ый понравился игроку. Но вам так надо(надобно) быть зарегистрированным в законном онлайн-казино и подтвердить собственную личность. В общем виде пошаговая инструкция для получения бездепозитного бонуса смотрится так: <a href=https://www.divephotoguide.com/user/archicgic/>https://www.divephotoguide.com/user/archicgic/</a> 1×слотс казино <a href=http://www.kottinghoermanns.at/index.php?option=com_akobook>http://www.kottinghoermanns.at/index.php?option=com_akobook</a> Наличие у игрока 2 аккаунта. Запрещено творить несколько профилей для неоднократного получения бездепов.
скачать 1×slots на андроид мобильная версия
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=56597>1×slots зеркало видели такую регистрацию на</a> 1×slot официальный сайт <a href=https://e-controls.es/es/users/arnoldsep>https://e-controls.es/es/users/arnoldsep</a> 1×slots официальный сайт скачать
1×slots промокод при регистрации
Создание аккаунта. На сайте казино необходимо обнаружить регистрационную форму и наполнить порожние поля личными данными. Иногда на данном этапе потребуется указать только адрес электрической почты и пароль, хотя чаще бы заполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д.). Нужно свидетельствовать лишь настоящие данные, что впоследствие они будут проверены. <a href=https://alphacs.ro/member.php?77518-CharlesSab>https://alphacs.ro/member.php?77518-CharlesSab</a> 1хслотс зеркало
1хслотс казино зеркало
Доступ к подарку может раскрываться автоматически в введения промокода либо обращения в службу поддержки сайта. В первом случае от юзера не потребуется практически деяний. Бездеп с активацией по коду встречается чаще всего. Игроку нужно установить совокупа символов в графе, кот-ая может пребывать в регистрационной форме в Личном кабинете.К образцу, игроку выдаются безвозмездные свои в заведении в объеме пятидесяти или 100 $ (вейджер на которые сочиняет 100х). То есть, каждому новоприбывшему геймеру выскакивает манящая иллюстрация, которая обещает выплату всех зачисленных компанией средств. Не стоит обращать внимания на казино приз за регистрацию без депо с слишком великий либо довольно махонькой суммой призов, поэтому собственно, даже кропотливо изучив все обстоятельства, тут скорее, несомненно какой-то подвох. 1×slots официальный сайт мобильная версия <a href=http://pr.lgubiz.net/bbs/board.php?bo_table=free&wr_id=1037123>http://pr.lgubiz.net/bbs/board.php?bo_table=free&wr_id=1037123</a> Да, у бесплатных бонусов есть недостатки. Прежде всего, они обычно не. Кроме такого, обстоятельства вейджера по ним постоянно жесткие. Но таки недоступность риска делает их довольно красивыми для клиентов.
1×slots официальный сайт мобильная версия
<a href=http://payusova.ru/index.php?subaction=userinfo&user=scintillatingwa>http://payusova.ru/index.php?subaction=userinfo&user=scintillatingwa</a> 1×slots сайт
<b>Смотреть еще похожие новости:</b>
<a href=http://www.arka-bahce.org/forum/showthread.php?p=759369&posted=1#post759369>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Доступ к дару имеет открываться механически после введения промокода либо обращения в службу поддержки сайта. В первом случае от пользователя не требуется практически поступков. Бездеп с активацией по коду встречается почаще всего. Игроку необходимо установить совокупность символов в графе, которая имеет пребывать в регистрационной форме в Личном кабинете. 2. Создать свежий профиль. Для регистрации нужно заполнить маленькую анкету либо зайдите в собственный офис посредством соц сетей;
#8688 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
Бездепозитный бонус нередко имеет замерзнуть доступным сразу в окончания регистрации, потому в большинстве случаев единственным требованием к нему является регистрация, а этого ревизия вашей новой учетной записи. <a href=http://filmkachat.ru/>1×slot казино зеркало</a> <a href=https://nationaldppcsc.cdc.gov/s/profile/005SJ000008ZiZSYA0>https://nationaldppcsc.cdc.gov/s/profile/005SJ000008ZiZSYA0</a> Бездепозитные бонусы начисляются лишь один один. Не стоит раскрывать свежие аккаунты, чтобы получить их повторно. Служба защищенности казино обязательно выявит «левого» соучастника и перекроет. Если посетитель выполнит необходимые требования, отыграет свою ставку и решит вывести собственный выигрыш, то ему нужно учесть, что казино обязательно востребует дать ксерокопии личных документов, чтобы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные средства вывести не получится.Получить приветственный приз шансы только свежие клиенты онлайн-казино. Способы описаны в критериях промоакции любого легального казино, чаще всего это: 1×slots официальный сайт зеркало рабочее <a href=https://www.amateur-girls-posts.com/forums/profile.php?mode=viewprofile&u=2950518>https://www.amateur-girls-posts.com/forums/profile.php?mode=viewprofile&u=2950518</a> Помимо остального, для вывода средств по бездепу нужно привнести на счёт собственный первый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на мало вероятную необходимую, последствии чего вывод средств будет доступен.Для получения выигрыша потребуется выполнить условия казино. Чаще всего игроку нужно поставить определенную сумму, хотя теснее из собственных средств. Она рассчитывается из общего размера выигрыша за всегда применения бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, если пользователь выиграл 1000 руб., а множитель составляет х30, вывести деньги возможно будет, сделав ставки на 30 000 рублей.
1×slots casino online регистрация
1×slots зеркало на сегодня Нельзя осматривать забаву на средства, как вариант заработка. Азартные забавы воспрещены для лиц младше 18 лет. Topcasinobonuses.mobi не зачинщиком азартных игр. Сайт носит информационный характер.Возможность протестировать новые игры, не рискуя собственными своими и создать собственную тактику забавы. <a href=https://www.russiansuka.net/user/CraigGom/>https://www.russiansuka.net/user/CraigGom/</a> Автоматы неспроста считаются наиболее популярным азартным веселием. Чтобы освоить управление и верховодила, потребуется всего некоторое минут. Ваша задача сделать ставку, определить количество рабочих линий и можно вертеть барабан. Если на выпадет выигрышная комбинация – вы выиграли! С данной задачей вас помогут управится бездепозитные призы казино.Каждый из бездепозитных бонусов без пополнения 2022 содержит свой конкретный вейджер для отыгрыша, например же в любом казино он уточняется индивидуально — где то он х55 а кое-где х30, повторюсь всюду по различному! 1хслот скачать
1 x slots
Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных требований, не обязательной верификации. Если на сайте предусмотрена обязательная процедура доказательства личности, то вывести выигрыш получится лишь последствии ревизии данных. Приготовьтесь наполнить анкету и выслать в техподдержку документ, подтверждающий личность. Поспешите зарегистрироваться на официальном сайте Клубника, дабы быстро получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, бывает настоящий шанс победу!При поддержки такого поощрения оператор может также завлекать посетителей, коие ранее показывали активность на веб-сайте, но по какой-то причине перестали выступать. В этом случае промокод высылается юзеру по электронной почте или в виде SMS. <a href=https://0752snyw.com/space-uid-109076.html>https://0752snyw.com/space-uid-109076.html</a> 3. Подтвердить данные. В зависимости от клуба, нужно привязать телефон или почту, показать персональную информацию; 1× slots регистрация в 1×slots casino Для верификации аккаунта нужно дать специалистам технической поддержки отсканированную копию паспорта и счета за коммунальные услуги, а фотографию банковской карты или скриншот странички электронного кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности.
1×slots официальный demo регистрация в 1×slots casino
Помните, собственно любые нарушения управлял сведут на нет ваши старания, и вы всего останетесь без начисленного для дарового бонуса. Всегда изучайте верховодила начисления и условия вейджера. По хоть вопросам, на которые вы не других найти ответы, обращайтесь за объясненьям и саппорт. <a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=136676>1×slot рабочее зеркало</a> Если вы опытный игрок, вы обязаны аристократия, собственно приз без депозита – редчайшая находка. Тем ниже, мы еженедельно изучаем интернет, дабы отыскать вам наилучшие бездепозитные предложения. 1хлот регистрация в 1×slots casino <a href=https://montreesounds.com/index.php?action=profile;u=32867>https://montreesounds.com/index.php?action=profile;u=32867</a>
1×slots регистрация
Когда речь о валютных бонусах, казино всегда устанавливают обстоятельства вейджера, которые необходимо выполнить, дабы вывести выигрыш.У любого игорного клубы различные вейджеровые условия. Чтобы вы гарантировано смогли выполнить их, мы дадим количество советов. Если система начислила небольшую сумму, надо создавать большие ставки – остановитесь на 10–30 центах. Как лишь сможете заработать примерно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте играть. В противном случае превосходнее присмотреться к другому автомату. <a href=https://bookcrossing.ru/users/55183>https://bookcrossing.ru/users/55183</a> 1×slots официальный сайт мобильная версия скачать
<b>Смотреть еще похожие новости:</b>
<a href=https://techadron.com/forum/viewtopic.php?p=9343>1×slots официальный сайт мобильная версия</a>
<a href=http://link.5nx.ru/viewtopic.php?f=5&t=4374&p=4811#p4811>1×slots официальный регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Как и другие акции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такого предложения являются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих гостей и дозволяет им составить впечатление о функционале, не рискуя значительными совокупностями. Объективные – объем бонуса, коэффициент и условия вейджера, надобность внесения депозита для вывода средств;
#8689 Charlesgunnyhttp://filmkachat.ru
зеркло казино 1×slots
Вышеописанная первопричина и является основным нюансом, из-за которого операторы отдают часть собственной выгоды на разные маркетинговые затраты и маркетинговые кампании. А самым действенным тут будут играть именно бездепозитные призы казино 2022 с выводом за регистрацию. <a href=http://filmkachat.ru/>1 хслот регистрация в 1×slots casino</a> Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских рублей. В условиях промоакции указано, что вейджер бездепозитного бонуса х20. Поэтому, дабы отыграть бонус, игроку будет нужно сделать ставок на 35*20=700 руб.Существует ли стратегии для отыгрыша бездепозитных бонусов? К сожалению нет, на выигрыши либо проигрыши с бонусов, казино или игрок повлиять имеет, отдача игр случается от создателей игр. <a href=https://offcourse.co/users/profile/3d-product-renderings/>https://offcourse.co/users/profile/3d-product-renderings/</a> Промокод – определённая комбинация символов, которую нужно установить в соответствующее поле при творении учетной записи или активировать в собственном профиле игрока в разделе с бонусами.Для получения выигрыша требуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить конкретную необходимую, но теснее из собственных средств. Она рассчитывается из совместного объема выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, если пользователь выиграл 1000 рублей, а множитель составляет х30, вывести деньги возможно будет, сделав ставки на 30 000 рублей. 1×slots рабочее зеркало <a href=https://xn–6-gtb4aicb3c6b.xn–p1ai/user/JamesPrage/>https://xn–6-gtb4aicb3c6b.xn–p1ai/user/JamesPrage/</a>
1 хслот регистрация в 1×slots casino
<a href=https://feederfishing.lt/en/forum/subkategorija-1–2/1255485–1×slots#1266959>1×slots скачать на айфон</a> 1×slots зеркало которую указывали при регистрации кстати Таким образом, заведение пытается продемонстрировать себя своим вероятным игрокам, а подобный маркетинговый ход как казино приз без депо за регистрацию привлекает довольно большое внимания к игорному заведению и обеспечивает постоянный поток свежих гостей и будущих клиентов игрового интернет клуба.При подмоги такового поощрения оператор имеет того завлекать клиентов, которые ранее показывали активность на веб-сайте, хотя по какой-то причине прекратили выступать. В данном случае промокод высылается юзеру по электрической почте или повторяющий SMS. <a href=https://storyplus.ru/user/JustinJed/>https://storyplus.ru/user/JustinJed/</a> Изучить верховодила и обстоятельства получения бездепозитных бонусов казино, Вы можете у нас на сайте в разделе с призами или на официальном сайте избранного Вами казино. Если возможности найти нужную информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал или по электронной почте. онлайн казино 1×slots В игровых клубах без лицензии Вы покупаете „кота в мешке“ и когда спорных обстановок нет возможности куда-то пожаловаться и доказать свою правоту.
1×slots бонус за регистрацию
<a href=http://www.ocide.org/forum/index.php?action=profile;u=15481>http://www.ocide.org/forum/index.php?action=profile;u=15481</a> Зарегистрируйтесь. Для регистрации чаще всего довольно ввести свой номер телефонного и почтовый адресок, последствии чего установить полученный код из СМС. Возможно, потребуется указать промокод. В правилах акции будет написано, где его надо включать. Иногда это надобно создавать при регистрации, время — теснее последствии творенья собственного офиса, на отдельной страничке. 1×slot казино зеркало Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие появляются у новичков.
1×slots регистрация на сайте 1×slots ru com
Для казино, работающих интернет, бездепозитные призы необходимы для привлечения свежих посетителей. Предложение сыграть на слотах без необходимости внесения настоящих денег — работающий способ для увеличения энтузиазма к компании. После отыгрыша бездепа велик шанс, что игроку понравится и он продолжит играть в казино, лишь теперь теснее на собственные средства. 1×slots зеркало регистрация то дальше необходимо пройти <a href=http://from-jp.ru/modules.php?name=Your_Account&op=userinfo&username=horribleevent13>http://from-jp.ru/modules.php?name=Your_Account&op=userinfo&username=horribleevent13</a> Лишь известные и известные азартные заведения имеют разрешить себе раздавать бездепы повторяющий дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, которые можно израсходовать в лучших аппаратах с высокой отдачей.Для ревизии используются сканы паспортов, водительских прав, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если пользователь обнаружен в попытке завести вспомогательный акк, все его учетные записи подвергаются блокировке, а их владелец попадает в черный перечень. При игре на лицензионной площадке надо бояться указывать достоверную персональную информацию (шифрование исключает утечку персональных данных).
1× slots casino зеркало
Каждый из бездепозитных призов без пополнения 2022 содержит собственный конкретный вейджер для отыгрыша, например же в любом казино он уточняется индивидуально — где то он х55 а кое-где х30, повторюсь везде по разному! <a href=http://uprzakupokkchr.ru/user/Charlesplose/>http://uprzakupokkchr.ru/user/Charlesplose/</a> 1хслотс казино зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://isomedu.com/forum/profile/josephdrons/>1хслотс казино зеркало</a>
<a href=https://adminclub.org/showthread.php?tid=66177>1×slots регистрация 1×slots casino 777 online</a>
<a href=https://minifishtank.net/forum/showthread.php?tid=1015>1×slots официальный зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Некоторые веб-сайты, до чем провести регистрацию игроков, предлагают ответить на количество базисных вопросов. Цель проведения подобной викторины – выявить случайных людей, которые не имеют представления о покере, и не допустить получения ими бонусов. Если посетитель уже играл в казино, то ответить на полтора десятка простых вопросов будет несложно. Очень часто, ответы возможно отыскать на официальных веб-сайтах этих учреждений.
#8690 Charlesgunnyhttp://filmkachat.ru
1× slots casino зеркало
Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских рублей. В критериях промоакции указано, собственно вейджер бездепозитного приза х20. Поэтому, дабы отыграть приз, игроку несомненно необходимо устроить ставок на 35*20=700 руб.Но есть игорные заведения, которые готовы просто так жертвовать средства на игру. Для сего достаточно сделать профиль. Чтобы исключить собственный выигрыш, вас сначала необходимо выполнить обстоятельства отыгрыша, обозначенные в критериях получения бездепозитного депозита. <a href=http://filmkachat.ru/>1×slots бонус за регистрацию</a> Бездепозитные призы – это самая интересная и наиболее многообещающая промоакция интернет-казино. Они числе чем фри-спинов, поэтому собственно выплаты в безвозмездных вращениях не гарантированы, как комбинации на барабанах игрового аппарата шансы не сложиться. <a href=https://yamcode.com/3d-architectural-rendering-services-2>https://yamcode.com/3d-architectural-rendering-services-2</a> Во всех законных онлайн-казино Беларуси нужно подтверждение паспортных данных для игры — это заявка правительства страны.На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не можете активировать и получить бездепозитный бонус. 1хслотс рабочее зеркало на сегодня <a href=http://mayakminska.1stbb.ru/memberlist.php?mode=viewprofile&u=3679>http://mayakminska.1stbb.ru/memberlist.php?mode=viewprofile&u=3679</a> Не стоит путать игру в демо и использование призов. В демонстрационном режиме игрок может расценить механику слота, сюжет и оформление. Но игра проводится на условные кредиты, потому отсутствует основное ? чувство азарта. Активируя промокод или фриспины, заказчик раньше не тратит свои средства на игровые автоматы, хотя возможность сорвать реальный куш!
1×slots рабочее зеркало
1×slots рабочее зеркало Условия вывода выигрыша. В некоторых заведениях для успешного вывода с бездепозитного приза довольно пополнения баланса и доказательства личности. В иных же клубах, нужно несколько раз прокрутить собственный депо.Как прочие промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такового предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает свежих гостей и позволяет им составить впечатление о функционале, не рискуя вескими суммами. <a href=http://tbfx8.com/home.php?mod=space&uid=2044970>http://tbfx8.com/home.php?mod=space&uid=2044970</a> скачать 1×slots официальный сайт Наличие у игрока 2 аккаунта. Запрещено творить количество профилей для неоднократного получения бездепов.
1×slots зеркало на сегодня
Превышение наибольшей ставки при отыгрыше. Система автоматически не предуведомляет о превышении ставки, поэтому о несоблюдении верховодил игрок имеет узнать теснее после подачи запроса на вывод средств.Онлайн-казино тщательно продумывают бонусные обстоятельства, которые нужно изучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и другие лимитирования. <a href=http://rtpsouth.com/UserProfile/tabid/69/userId/98845/Default.aspx>http://rtpsouth.com/UserProfile/tabid/69/userId/98845/Default.aspx</a> Бездепозитные бонусы за регистрацию являются одним из самых популярных способов привлечения свежих игроков в онлайн-казино, потому собственно они предоставляют игрокам вероятность опробовать казино, более игровые автоматы, и вероятно, выиграть реальные деньги. 1хслотс официальный сайт зеркало Рассмотрим принцип его деяния на случае. Допустим, вы зарегистрировались и получили $10 no down payment bonus с вейджером х50. Это значит, собственно выигранные средства можно несомненно выводить не ранее, чем после того, как общая сумма ставок достигнет $500.
1×slots регистрация
В лицензионных бездепозитных казино играть в азартные игры вправду безопасно. Наличие лицензии подтверждает тот факт, собственно клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP. Чаще всего интернет-казино предлагают бездепозитные бонусы новым юзерам. Эта промо-акция очень отлично завлекает новичков, подталкивая их к открытию счета. Конечно, не они становятся послушными клиентами, но сам факт регистрации аккаунта играет на руку заведению.Для верификации номера аппарата, в собственном профиле изберите опцию „Подтвердить номер аппарата“ и введите в соответствующее поле код, приобретенный в sms-сообщении. 1×slots официальный сайт мобильная версия скачать <a href=https://gamesdrive.net/User-Kennethnoult>https://gamesdrive.net/User-Kennethnoult</a>
1×slots казино зеркало
Суммы похожих предложений, как правило, колеблются от 3-х до 20 долларов, а вейджер на эти средства должен сочинять от тридцати до шестидесяти один. Зачастую, величайшая сумма выигрыша здесь составит от одной до двух сотен долларов. Если игрок выиграет больше, то все свои имеют быть списанными до максимально разрешенного выигрыша. Здесь замечена содержание выводить еще несуществующие деньги на собственную платежную систему и дальше находить заведение с благоприятными под данную сумму релоадом либо бонусом за первое пополнение счета. Есть несколько подвидов бездепозитного гонорары, предлагаемого великим числом заведений.Бонусы без депо при регистрации считаются самыми красивыми как для опытных игроков, например для и начинающих. Получив такое вознаграждение, заказчик имеет выступать на реальные средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные призы в интернет-казино Рунета, еще обстоятельства их активации и выигрыша. Если вы избираете проверенное лицензионное онлайн казино и сделайте все обстоятельства получения бездепозитного бонуса, проблем с получением презента у Вас не возникнет.Возможность поиграть вспомогательное состязание (а иногда и некоторое) совершенно безвозмездно, а выигрыш, к, поступает на счёт игрока. <a href=http://wiki.die-karte-bitte.de/index.php/Benutzer_Diskussion:Rich0709343>http://wiki.die-karte-bitte.de/index.php/Benutzer_Diskussion:Rich0709343</a> 1×slots casino регистрация на сайте Для всех бездепозитных призов функционирует максимальный лимит на выигрыш. Он указывает предельную необходимую, коию возможность получить, играя на бонусные кредиты. Как лишь для удастся выполнить притязания вейджера, возможный максимум будет переведен с бонусного счета на главной, а остаток будет списан.После потребуется привнести идентификационный платёж. Это пугает новичков больше всего. Нужно сделать минимальный депозит в 100–500 руб. Таким образом служба безопасности увериться никаких, собственно платёжный метод принадлежит Вам. Данная процедура необходима для обеспечения безопасности игровых счетов. Пример, Ваш аккаунт взломают и выведут свои на собственный кошелёк. Будет очень неприятно. Поэтому верификация платёжной системы, это важный момент.
<b>Смотреть еще похожие новости:</b>
<a href=http://policeacademy.teamforum.ru/memberlist.php?mode=viewprofile&u=410>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Многие новенькие сомневаются, что поощрительный приз надо несомненно возвращать, и случае они выиграли у казино. Это безусловно безопасно и накрепко. Выводя выигранные средства, игрок просто останавливает свое роль в игре и теряет уникальную вероятность – даром наращивать личное материальное положение.
#8691 Robertdriethttps://angeldorog.by
Круглосуточный эвакуатор <a href=https://angeldorog.by/>https://angeldorog.by/evakuator-minsk/</a> выгодные условия, профессионализм и минимальное время ожидания. Спасём вас из любой ситуации!
#8692 DonaldQuitehttps://mayaschool.ru
Обучение в <a href=https://mayaschool.ru/>Школа Майя</a> инновационные программы, профессиональные педагоги и комфортная среда для развития.
#8693 Charlesgunnyhttp://filmkachat.ru
1 х слотс зеркало
Когда идет о валютных призах, казино постоянно устанавливают обстоятельства вейджера, которые нужно выполнить, дабы вывести выигрыш.Так что можете отважно региться без всяких раздумий. Фортуна сегодня точно на вашей стороне. Не опасайтесь, так последствие какого либо убытка Вам совершенно не грозит. С этими призами как без пополнения, Вы остаетесь лишь в плюсе, хотя не как не в минусе. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots review live</a> Автоматы неспроста считаются самым популярным азартным развлечением. Чтобы усвоить управление и правила, потребуется всего количество минут. Ваша задачка сделать ставку, найти количество рабочих линий и можно крутить барабан. Если дисплее выпадет выигрышная композиция – вы выиграли! С этой задачей для помогут справится бездепозитные бонусы казино. <a href=https://github.com/shopavto>https://github.com/shopavto</a> Рассмотрим на образце: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских рублей. В критериях промоакции предписано, собственно вейджер бездепозитного приза х20. Поэтому, дабы отыграть приз, игроку будет нужно устроить ставок на 35*20=700 руб.Такой бесплатный эквивалент средств зачисляется на профиль юзера в осуществления притязаний и предназначаются они только для игрового процесса. Вывод таких вознаграждений возможен только после осуществления вейджеровых условий. 1×slots рабочее зеркало на сегодня <a href=http://zqykj.cn/bbs/home.php?mod=space&uid=258305>http://zqykj.cn/bbs/home.php?mod=space&uid=258305</a> Популярность онлайн казино растёт и всё больше юзеров начинают интересоваться азартными играми. Бездепозитные бонусы 2022 года, это оригинальные презенты за регистрацию. С их поддержкой новые игроки все получить безвозмездные вращения или деньги на баланс за одну регистрацию. С появлением игорных заведений в онлайне, бездепозитные призы стали моднейшим методом вербования игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы расскажем. Наш вебсайт собрал лучшие предложения из интернета на 2022 год. Воспользуйтесь хоть подарком и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить обстоятельства.Фриплей-бонусы. Бонусы за бесплатную забаву есть лишь в некоторых клубах. Они зачисляются сразу последствии создания профиля и действуют недолговременное время. Если у вас нет времени израсходовать средства, они просто закончатся. Что дотрагивается медли, в большинстве случаев бонусы срабатывают в течение одного часа.
1×слотс казино
Фриплей-бонусы. Бонусы за бесплатную игру есть только в неких клубах. Они зачисляются незамедлительно в сотворения профиля и срабатывают непродолжительное время. Если у вас нет медли потратить свои, они просто завершатся. Что касается времени, правило призы действуют протяжении 1-го часа.2. Создать новый профиль. Для регистрации надо(надобно) заполнить маленькую анкету либо зайдите в собственный офис посредством соц сетей; 1×slots официальный сайт скачать <a href=https://build-in.dp.ua/wr_board/tools.php?event=profile&pname=Stevenmar>https://build-in.dp.ua/wr_board/tools.php?event=profile&pname=Stevenmar</a> 1×slot рабочее зеркало Обычно показатель выше, чем для призов на депо. Не дивитесь, в он будет в х100. Иногда завышенный коэффициент вейджера уточняется для обитателей отдельных государств.
1×slots сайт
Иногда виде поощрения за регистрацию шансы выдаваться билеты для участия в турнирах. Условия их проведения довольно отличаются, поэтому мы рекомендуем ознакомиться с любым предложением отдельно.Для получения предоставленных призов вам понадобиться — ПК или мобильное прибор, и остальное дело за малым. Суммы похожих услуг, в, колеблются от трех до 20 $, а вейджер на эти средства обязан составлять от 30 до шестидесяти раз. Зачастую, величайшая сумма выигрыша тут составит от одной до 2-ух сотен $. Если игры выиграет больше, то все средства имеют быть списанными до максимально разрешенного выигрыша. Здесь бывает смысл выводить еще несуществующие финансы на свою платежную систему и дальше находить заведение с благоприятными под данную необходимую релоадом либо бонусом за первое пополнение счета. Есть несколько подвидов бездепозитного гонорары, предлагаемого большим количеством заведений. <a href=https://www.clashfarmer.com/forum/member.php?action=profile&uid=45887>https://www.clashfarmer.com/forum/member.php?action=profile&uid=45887</a> Практически все интернет казино с бездепозитным бонусом за регистрацию предусматривает программку лояльности — систему поощрения неизменных клиентов, кот-ая состоит из множества уровней. При достижении игроком одного значения на его счёт поступает бонус. Чем повыше степень — что, этим щедрее бонус.Некоторые веб-сайты, этого чем обмануть регистрацию игроков, предлагают ответить на несколько базисных вопросов. Цель проведения сходственной викторины – выявить случайных людей, которые не имеют представления о покере, и не разрешить получения ими бонусов. Если посетитель уже играл в казино, то ответить на полтора десятка несложных вопросов несомненно несложно. Очень нередко, ответы возможно найти на официальных сайтах этих учреждений. 1×slots рабочее зеркало
скачать 1×slots на андроид мобильная версия
Рассмотрим принцип его действия на образце. Допустим, вы зарегистрировались и получили $10 no deposit bonus с вейджером х50. Это означает, что выигранные средства возможно несомненно выводить не ранее, чем последствии такого, как общая сумма ставок достигнет $500.На бесплатные бонусы онлайн-казино практически всегда распространяется лимитирования по стране проживания клиентов. Даже в для разрешается открывать счет и выступать на деньги в заведении, это еще не значат, собственно для доступны no deposit bonuses. <a href=http://6000ziyuan.com/forum.php?mod=viewthread&tid=106104&extra=>1хслотс зеркало</a> Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. 1хслотс мобильная версия зеркало <a href=http://www.ctphome.com/bbs/home.php?mod=space&uid=67870>http://www.ctphome.com/bbs/home.php?mod=space&uid=67870</a>
зеркло казино 1×slots
Если вы выбираете испытанное лицензионное интернет казино и выполните все условия получения бездепозитного бонуса, проблем с получением подарка у Вас не возникнет.Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, чтобы замечена вероятность вывести выигрыш. <a href=https://tools-info.biz.ua/wr_board/tools.php?event=profile&pname=RichardExpap>https://tools-info.biz.ua/wr_board/tools.php?event=profile&pname=RichardExpap</a> 1×slots казино зеркало Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации дара нужно доказать электронную почту и привязать телефон;Итак, дабы безвозмездные бонусные кредиты превратились в настоящие средства, которыми вы можете управлять по своему усмотрению, их нужно отыграть. Вейджер стопам уточнять в правилах онлайн-казино.
<b>Смотреть еще похожие новости:</b>
<a href=http://forums.indexrise.com/thread-1096-post-332272.html#pid332272>1×slots сайт зеркало</a>
<a href=https://karakol.com.kg/user/Jameskef/>1×slots зеркало этих способов предполагает регистрацию</a>
<a href=https://masstr.net/showthread.php?tid=83889>1×slots зеркало сайта</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В любом казино с бездепозитным призом предусмотрены вейджеровые условия. Это один-единственный «подводный камень», который стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, нужно устроить определённое число ставок. Чем круче бонус, что, этим труднее выполнить условия, и напротив.
#8694 Dallasrogmahttps://rgwager.com/
富遊娛樂城:台灣線上賭場的創新選擇
在台灣的線上娛樂市場中,富遊娛樂城憑藉其優質的服務和多樣化的娛樂選項,迅速成為新一代玩家的首選。既有刺激的遊戲體驗,又提供了一系列具有吸引力的優惠,富遊娛樂城無疑是追求樂趣的玩家們理想的地方。
#### 優勢與特色
1. 多樣化的遊戲選擇 富遊娛樂城提供了豐富的遊戲種類,包括電子老虎機、真人百家樂、運彩投注等。不論你是老虎機的愛好者,還是熱衷於真人賭桌的玩家,這裡都能滿足你的需求。特別推薦的遊戲如DG真人百家和RSG皇家百家樂,一定能帶給你極致的遊戲體驗。
2. 吸引人的優惠活動 富遊娛樂城針對新手和老玩家都推出了多樣的優惠活動。新會員首次存款可獲得相同金額的獎金,還有額外的體驗金送出,設計友好且實惠。此外,富遊每週的簽到獎勵和天天無上限的返水活動,更是讓玩家在遊戲中能持續獲得收益。
3. 安全可靠的存取款方式 在金融交易方面,富遊娛樂城支持多種存款和提款方式,包括各大銀行轉帳、超商儲值,甚至虛擬貨幣等。最低提款金額設置靈活,保證玩家資金的安全與便捷。
4. 人性化的操作介面 富遊娛樂城的網頁與移動應用設計簡潔易用,玩家可以方便地找到所需的遊戲和優惠。無論是在電腦還是手機上,都能順利享受到遊戲的樂趣。
#### 如何開始遊戲
如果你是新手玩家,開始你的富遊體驗非常簡單。只需註冊帳號,完成首次存款,即可獲得新手優惠。無論你想嘗試電子遊戲還是真人賭局,富遊娛樂城都能讓你輕鬆上手,享受娛樂的樂趣。
#### 社會責任與防沉迷措施
富遊娛樂城深知線上賭博的風險,因此致力於推廣負責任的遊戲文化。他們提供“防沉迷”指導,以確保玩家能夠理性投注,並提供必要的幫助和資源來幫助有需求的玩家。
#### 總結
對於尋求安全、便捷和多元化娛樂城體驗的玩家,富遊娛樂城絕對是值得選擇的選項。無論你是希望徹底放鬆,還是想要體驗刺激的博弈過程,富遊娛樂城都能滿足你的期待,成為你在台灣線上娛樂市場的最佳夥伴。立即註冊並開始你的遊戲之旅吧!
#8695 Alfredosnilshttps://rg168.tw/
想要享受最刺激的線上娛樂體驗?選擇RG富遊娛樂城!
在這個數位時代,尋找適合自己的線上娛樂城變得越來越重要。如果你想在線上娛樂城找到最好玩、最受歡迎的遊戲,RG富遊絕對是你的首選!我們匯聚了多款博弈遊戲,讓您盡情享受娛樂的刺激與快感。
#### 精選遊戲類型
1. 真人百家樂 感受現場賭場的氛圍!RG富遊的真人視訊百家樂讓你與真實的荷官互動,享受高品質的遊戲體驗。無論你是老手還是新手,都能在這裡找到適合自己的節奏。
2. 電子老虎機 喜愛刺激嗎?我們提供多款熱門老虎機遊戲,如「戰神賽特」「魔龍傳奇」等,每一款都擁有精美的畫面和豐厚的獎勵,讓每次旋轉都充滿期待!
3. 體育投注 無論你是球迷還是賽事愛好者,RG富遊的體育投注平台都有你想要的。精準的賠率、廣泛的賽事選擇,讓你體驗到投注的樂趣和刺激。
4. 彩票遊戲與捕魚遊戲 隨著運氣來!不妨試試我們的棋牌遊戲和彩票遊戲,這裡有各種機會讓你體驗到不一樣的勝利快感。
#### 下載富遊APP,隨時隨地享受遊戲!
富遊娛樂城的APP支持iOS和Android設備,界面簡潔易用,內容豐富。無論你身處何地,都能輕鬆進入遊戲世界,隨心所欲享受娛樂時光。此外,我們提供即時客服支援,隨時解決你的疑問,讓你的遊戲體驗更為完美。
#### 為什麼選擇RG富遊?
– 安全可靠 RG富遊致力於為玩家提供安全可靠的遊戲環境,您的每一筆交易都受到最高的安全保障。
– 快速便捷的存提款服務 我們的存款平均時間僅需30秒,提款平均只需60秒,讓你體驗即時的快感!
– 豐富多元的遊戲選擇 超過9999款遊戲任你選擇,無論你偏好哪種娛樂方式,這裡都能滿足你的需求。
– 全天候服務 我們全年365天提供不停歇的客服支持,確保你在遊戲過程中享受到最好的服務。
### 結論
RG富遊娛樂城是您最佳的線上賭場選擇。我們不僅提供多樣化的遊戲選擇,還有安全可靠的遊戲環境和便捷的服務。立即下載APP,加入RG富遊,開始您的娛樂之旅,享受無與倫比的遊戲體驗吧!
#8696 Charlesgunnyhttp://filmkachat.ru
1×slots официальный demo регистрация в 1×slots casino
Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 $. Если выдаются фриспины, их количество изредка превышает нескольких десятков даровых вращений. <a href=http://filmkachat.ru/>1 xslots рабочее зеркало</a> Основное верховодило получения бездепа ? творимый акк должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов взыскательно воспрещено. Проверка ведется по имени, e-mal, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депо нужно блюсти несложную очередность деяний.Для проверки используются сканы паспортов, водительских водительских, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь обнаружен в попытке ввести вспомогательный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный перечень. При забаве на лицензионной площадке не опасаться указывать достоверную индивидуальную информацию (шифрование исключает утечку персональных данных). <a href=https://www.as7abe.com/wall/blogs/post/60174>https://www.as7abe.com/wall/blogs/post/60174</a> 1× slots регистрация в 1×slots casino <a href=http://sportvrf.ru/2023/06/25/avtoshkola-vladivostok.html>http://sportvrf.ru/2023/06/25/avtoshkola-vladivostok.html</a>
1хслотс мобильная версия зеркало
1×slots регистрация на сайте <a href=http://t20suzuki.com/phpBB2/profile.php?mode=viewprofile&u=3717>http://t20suzuki.com/phpBB2/profile.php?mode=viewprofile&u=3717</a> 1×slots регистрация 1×slotscasino09k online Ну и окончательно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: сходственная щедрость увеличивает степень лояльности посетителей к фирмы.Первый образующийся вопрос, это, для выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают новых игроков. Последним проще начать игру на средства с подарка за регистрацию. Им надо пополнять баланс и тратить собственные средства. Новички получают безвозмездные спины или средства на счёт. С их подмогою знакомятся с игровым процессом, крутят слоты и проделывают ставки в рулетке.
1×slots официальный регистрация
Обычно для получения призов без депозита, казино выдвигает приклнные и абсолютно выполнимые обстоятельства, но есть ряд поступков коие воспрещены и могут причиной неприятные последствия: Бонус начисляется игроку сразу после регистрации и прохождения верификации в казино и не настятельно от клиента внесения депо. Как правило, размер бонуса в схожем случае достаточно стыдливый, однако разрешает новеньким познакомиться с забавой без риска реальными деньгами.Возьми свой подарок. Чаще всего бонус активируется незамедлительно в регистрации. Но бывают ситуации, когда нужно забежать в личный кабинет либо написать в справочную службу. <a href=http://www.fromearth.kr/bbs/board.php?bo_table=free&wr_id=449581>http://www.fromearth.kr/bbs/board.php?bo_table=free&wr_id=449581</a> Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, the decision лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. 1×slots регистрация на официальном сайте
1×slot регистрация
Также учтите, что кое-какие игровые платформы сузивают перечень стран, которые способны получить предложенный бездепозитный бонус за регистрацию. К образцу, есть онлайн-заведения, выдающие подобные призы только обитателям определенных государств. К образцу, интернет казино 777 Оригинал предоставляет бездепозитный бонус лишь игрокам из России и стран СНГ. Или наоборот, снабжают вознаграждением всех, считая обитателей некоторых стран (как сего, идет пристально учить список, чтобы впоследствии не появилось никаких вопросов и жалоб).Бездепозитные бонусы — это подарки от казино в виде бонусных средств либо фриспинов для игровых автоматов, коие начисляются на аккаунт игрока последствии процедуры регистрации на сайте заведения. Для получения таких поощрений депозит не потребуется. <a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-951#post-30912>1×slots официальный сайт зеркало</a> Все благотворительные призы кажутся заманчивыми. Кто же откажется от способности сыграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далековато не все бездепозитные призы в привлекательны для рассудительного посетителя. Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие появляются у новичков.Промообъявления от казино мешают реальной картины и направлены на вербование внимания пользователей. Понять, как высоки шансы остаться в плюсе, позволит собственный тест условий предложения: 1×slots регистрация 1×slots casino 777 online <a href=https://morph.ro/users/DavidStups>https://morph.ro/users/DavidStups</a> Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала прыткие выводы. Фишка выплат что, что довольно выбрать платёжный инструмент и показать необходимую. В большинстве случаев деньги зачисляются на электрические кошельки на 15 минут, а на банковские карты – 1–3 трудящихся дня.Подтвердите личность, предоставив оператору казино свои паспортные данные. Инструкции обыкновенно несложные, главное — конкретно им по. Если написано, что «на фото должны быть видны все четыре угла странички паспорта» — устройте непосредственно это фото.
1×slots официальный сайт мобильная версия скачать
Бездепозитные призы казино за регистрацию в 2022 году — это возможность поиграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой либо числом бесплатных вращений без внесения депо. Не путайте деморежим с реальной забавой без надобности внесения депозита.Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном сайте и выполните вход в собственный кабинет, чтобы забрать благотворительные вращения с вейджером х40; <a href=http://www.luisovalles.com/new/index.php?option=com_k2&view=itemlist&task=user&id=96804>http://www.luisovalles.com/new/index.php?option=com_k2&view=itemlist&task=user&id=96804</a> 1хслотс казино зеркало Бездепозитные призы за регистрацию в игровых автоматах для хозяев онлайн-казино считаются долею рекламной кампании, направленной на увеличение аудитории сайта. Так они продвигают средства бренды и привлекают новых клиентов.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.home-visa.ru/viewtopic.php?f=69&t=807392&p=2980459#p2980459>1×slots официальный сайт зеркало</a>
<a href=http://khodaumo.com/forum/memberlist.php?mode=viewprofile&u=146&sid=c8a590c043a1c07542a590f94be8a810>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депозит может выделяться до 30 дней. С такими ординарными советами каждое казино с бонусом за регистрацию способно принести в разы больше выгоды и пользы.
#8697 Ремонт объективовhttps://remont-obektivov-magic.ru/
Наша мастерская предлагает надежный <a href=https://remont-obektivov-magic.ru/>ремонт объективов в москве</a> любых брендов и моделей. Мы знаем, насколько необходимы вам ваши фотообъективы, и стремимся предоставить услуги наилучшего качества. Наши опытные мастера проводят ремонтные работы с высокой скоростью и точностью, используя только оригинальные запчасти, что гарантирует долговечность и надежность выполненных работ. Наиболее частые неисправности, с которыми сталкиваются обладатели фотообъективов, включают проблемы с фокусировкой, залипшую диафрагму, механические повреждения, неработающий автофокус и загрязнения линз. Для устранения этих неисправностей наши опытные мастера проводят ремонт фокусировки, диафрагмы, автофокуса, очистку линз и восстановление корпуса. Обратившись к нам, вы обеспечиваете себе качественный и надежный сервисный ремонт объективов в москве. Подробная информация размещена на сайте: https://remont-obektivov-magic.ru
#8698 Charlesgunnyhttp://filmkachat.ru
1 x slots
Чаще всего казино приз за регистрацию без депо даёт вероятность запустить любой машина. Но никакого пристально ознакомиться с условиями. Иногда для игры доступны лишь определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, превосходнее начать знакомство с миром азарта именно с «одноруких злодеев».Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=http://filmkachat.ru/>казино 1×slots</a> Чтоб получить большой выигрыш, выбирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша.Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, чтобы замечена вероятность исключить выигрыш. <a href=https://www.diigo.com/item/note/b3jhr/obr2>https://www.diigo.com/item/note/b3jhr/obr2</a> Ну и окончательно же, для казино бездепозитные призы выгодны с имиджевой стороны: сходственная щедрость повышает степень преданности клиентов к фирмы.В списке притязаний к отыгрышу нередко наличествуют лимиты на ставки при забаве на собственные средства. Так, в отыграть надо(надобно) 30 000 руб., а предельная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 один. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам действия акции. 1×slots промокод при регистрации <a href=http://schilling-med.ru/bitrix/click.php?goto=http://zoomarket.by/bitrix/redirect.php?goto=http://russkayapravda.com/bitrix/redirect.php?goto=https://telegra.ph/Proverka-dorozhnyh-shtrafov-po-pasportnym-dannym-09–23>http://schilling-med.ru/bitrix/click.php?goto=http://zoomarket.by/bitrix/redirect.php?goto=http://russkayapravda.com/bitrix/redirect.php?goto=https://telegra.ph/Proverka-dorozhnyh-shtrafov-po-pasportnym-dannym-09–23</a> Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, a зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.
1×slots официальный сайт мобильная версия
Для выбора азартного заведения Вы можете воспользоваться перечнем наших казино с призами за регистрацию. На нашем веб-сайте мы выпустили список бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, что доля призов эксклюзивные и доступны только для посетителей нашего вебсайта по-специальному промо-коду или по уникальной ссылке. Кроме как, для любого бонуса мы подготовили подробный обзор, в котором Вы узнаете как получить и отыграть одобрение и как исключить собственный выигрыш с бездепа. <a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=49560&pid=315439#pid315439>1хслотс официальный сайт зеркало</a> сайт 1× slots casino <a href=http://l2help.lt/user/Kennethimist/>http://l2help.lt/user/Kennethimist/</a> Вывод выигрыша с бездепозитных призов казино – щедрый презент от азартных клубов. Но чтобы исключить собственный заработок, необходимо выполнить ряд условий: 1× slots casino официальный сайт
1×slots официальный сайт зеркало рабочее
Для получения бездепа необходимо пригласить в забаву по реферальной ссылке свежего посетителя: он обязан зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на необходимую, указанную в критериях промоакции.Первый возникающий вопрос, это, зачем выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают новых игроков. Последним легче начать забаву на средства с подарка за регистрацию. Им надо пополнять баланс и расходовать личностные средства. Новички получают безвозмездные спины или средства на счёт. С их помощью знакомятся с игровым ходом, крутят слоты и проделывают ставки в рулетке. <a href=https://www.sketchingpro.com/%d0%b7%d0%b0%d0%ba%d0%b0%d0%b7%d0%b0%d1%82%d1%8c-%d0%bf%d0%be%d0%ba%d1%83%d0%bf%d0%ba%d1%83-%d1%81%d1%81%d1%8b%d0%bb%d0%be%d0%ba-%d0%b4%d0%bb%d1%8f-%d0%bf%d1%80%d0%be%d0%b4%d0%b2%d0%b8%d0%b6%d0%b5/>https://www.sketchingpro.com/%d0%b7%d0%b0%d0%ba%d0%b0%d0%b7%d0%b0%d1%82%d1%8c-%d0%bf%d0%be%d0%ba%d1%83%d0%bf%d0%ba%d1%83-%d1%81%d1%81%d1%8b%d0%bb%d0%be%d0%ba-%d0%b4%d0%bb%d1%8f-%d0%bf%d1%80%d0%be%d0%b4%d0%b2%d0%b8%d0%b6%d0%b5/</a> 1×slots официальный сайт мобильная версия скачать Это тоже безвозмездные деньги, коие поступают на аккаунты новоиспеченных игроков последствии регистрирования. А особенность таких призов состоит в, собственно обретенные финансы обязательно идет использовать в продолжении назначенного медли.Внесение депозита – Будьте готовы пополнить счет в отыгрыша приза. Это обычное заявка управлял для этого подобии промо-акций. Лучше заблаговременно уточнить, какую сумму надо(надобно) несомненно заносить на счет. Как управляло, идет о минимальном депозите, но вы обязаны быть уверены, что он вас по кармашку.
1хслотс рабочее зеркало на сегодня
Бездепозитный приз предоставляется новенькому игроку за конкретные деянья. Часто презент вид средств или фриспинов выдается за регистрацию, благодаря чему юзер получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. С не отыгранным бонусом запрещается превышать размер наибольшей ставки. Нарушение сего обстоятельства повлечет за собой аннулирование выигрыша. Oтыгpaть бонус с указанным вeйджepом, достичь нужно сдeлaть cтaвoк нa cумму, превосходящую объем приза в некоторое один.Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом прибыли присутствуют на данной странице. Посетитель возможность оценить условия получения и начать выступать на деньги без внесения депозита. При данном игроку важно осознавать, на каких условиях и какими способами он сможет вывести приобретенный выигрыш. Для этого нужно расценить перечень подключенных платежных систем. 1хслотс регистрация в 1×slots casino <a href=http://wwq.molifan.net/space-uid-2063106.html>http://wwq.molifan.net/space-uid-2063106.html</a>
1хслотс рабочее зеркало
Популярность интернет казино растёт и всё больше пользователей начинают интерес азартными забавами. Бездепозитные призы 2022 года, это уникальные подарки за регистрацию. С их поддержкою свежие игроки могут получить бесплатные вращения либо средства на баланс за 1 регистрацию. С свет игорных заведений в интернете, бездепозитные бонусы стали популярнейшим способом привлечения игроков. Подобные акции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о которых мы поведаем. Наш сайт собрал наихорошие предложения из онлайна на 2022 год. Воспользуйтесь любым даром и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить условия. Начнём с такого, собственно каждое рекламную за регистрацию подразумевает некие обстоятельства. Бездепозитные бонусы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность валютного оборота, необходимая для исполненья условий. Пример, получили благотворительные вращения и выиграли с них 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 рублей, неудачных либо выигрышных, так. После исполненья, бонусный баланс перейдёт на реальный и будет доступным к выводу. <a href=https://myelimu.com/User-craignit>https://myelimu.com/User-craignit</a> Помните, собственно в неких забавах сумма ставки идет в зачет вейджера лишь отчасти. Так, в настольных и карточных играх только от 5% до 50% суммы ставки считаются как отыгранные средства, момент как в слотах идет в зачет все one hundred percent суммы.На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не можете активировать и получить бездепозитный приз. 1хслотс рабочее зеркало Возьми собственный подарок. Чаще всего приз активизируется сразу в регистрации. Но бывают ситуации, когда нужно забежать в индивидуальный кабинет либо написать в справочную службу.Самые модные способы вывода денег ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам на Neteller и Skrill, а пользуются криптовалютными кошельками. Вывод выигрышей возможность осуществляться быстро либо занимать от нескольких часов до нескольких суток.
<b>Смотреть еще похожие новости:</b>
<a href=http://check2go.net/my-account/>1×slots акции</a>
<a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=319094#pid319094>1×slots регистрация на сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Это тоже безвозмездные деньги, которые поступают на аккаунты свежеиспеченных игроков после регистрирования. А особенность таких призов состоит том,, что обретенные деньги обязательно идет применять в продолжении назначенного времени. За привлечение друга ? в партнерской программки клиент получает вознаграждение за вербование новых юзеров.
#8699 Charlesgunnyhttp://filmkachat.ru
1 x slots
Проверка занимает от нескольких мин. До нескольких дней, профессионалы техподдержки все запросить дополнительные документы или инициировать куцее общение по Skype. <a href=http://filmkachat.ru/>зеркала 1×slots</a> <a href=https://mssg.me/7dltc>https://mssg.me/7dltc</a> Допустим, за регистрацию вы получили бездеп в объеме 2 000 руб. С вейджером х30. В данном случае предстоит устроить ставок, на совместную сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать настоящие деньги. Однако не забывайте, собственно с любого презента получится вывести определённую необходимую (чаще всего менее $200).Но на некоторых азартных платформах подобные гонорары могут получить и уже зарегистрированные юзеры. В таком случае, призы предоставляются в рамках оригинальных промоакций либо же некоторым игрокам повторяющий акционного предложения, коие приходит на почту с целью «вернуть» игрока в свое казино. 1×слот регистрация в 1×slots casino <a href=https://fermer365.ru/users/richardvulky>https://fermer365.ru/users/richardvulky</a> Новички не обожают незамедлительно же заносить депозит. Это обусловлено отсутствием навыка и сомнением. К счастью, в можно получить бездепозитный бонус за регистрацию в казино. Неважно что начисляет система – фриспины либо кредиты. В всяком случае вы не рискуете собственными сбережениями. Это замечательная вероятность запустить приглянувшийся видео разъем либо же испытывать фортуну в настольных забавах.Диапазон ставок, коие вправе сделать игрок, кроме лимитирован. Обычно ставить возможно маленькую сумму — в 10–30 рублей за одно вращение.
1×slots сайт зеркало
<a href=https://qualityprogamer.de/forum/showthread.php?tid=247708>1хслотс казино зеркало</a> 1×slots зеркало на сегодня Автоматическая активация взгляд самой удобной, хотя ручной метод имеет перед ней превосходства. Прежде чем применять вознаграждение от казино, стоит заблаговременно определить, сколько медли потребуется на выполнение всех критерий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деяния приза.Размер приза. В качестве бездепов обычно начисляют не суммы, а когда речь идет о бонусах за депозит, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино шансы подарить игроку до 2000$. <a href=https://www.aquaforum.ua/member.php?u=63449>https://www.aquaforum.ua/member.php?u=63449</a> скачать 1×slots на андроид мобильная версия Этот образ бонуса несомненно добавлен на Ваш аккаунт в успешной процедуры регистрации с использованием номера телефонного. Если избрать иной метод создания учетной записи, бездеп не будет добавлен на Ваш аккаунт.
1×slos регистрация в 1×slots casino
К огорчению, нет. Почти все казино, требуют внесение желая бы 1-го минимального депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, собственно исключить деньги разрешается только на что, эту платежную систему, с которой был изготовлен депо.Также, учите, что бездепозитный приз возможно исключить только сомнений случае, когда станут выполнены все условия отыгрыша. Призовые начисления без депозита могут предоставляться для роли в турнирах интернет казино. Потратить перечисленные средства возможно исключительно масштабах данной акции. Условия их проведения содержат ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, другого выучить его управляла.Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают бонус по государствам. Вплоть до как, собственно клуб может себя игроков из Вашей страны, а бездеп не давать. <a href=http://berdichev.info/forum/viewtopic.php?f=15&t=28353>http://berdichev.info/forum/viewtopic.php?f=15&t=28353</a> 1×slots зеркало быструю регистрацию а также мгновенное Также есть онлайн-платформы азартных игр, коие применяют раздачу бездепозитных призов в особые даты (как для казино, так и для игрока). Помимо этого, действующие игроки также имеют возможность получить похожие призы за собственную деятельность (к примеру, за повышения значения либо за похожие достижения).
1×slots регистрация
Бездепозитный приз нередко имеет замерзнуть доступным сразу после окончания регистрации, что правило единственным притязанием к нему считается регистрация, а после ревизия вашей новой учетной записи.Не хотите поиграть в азартные игры, не рискуя своими деньгами, хотя получая в все выплаты? Подобную возможность деют почти лучшие порталы с азартными весельями. В их количестве много правдивых и надежных интернет-казино на русском языке. Они привлекают свежих юзеров различными поощрительными мероприятиями, включая бездепозитные, или бесплатные бонусы. <a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=35524>1×slots регистрация то дальше необходимо пройти</a> 1×slot рабочее зеркало <a href=http://blagopar.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://ufamdplus.ru/bitrix/click.php?goto=http://kreanor.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/qI4ukDDgDie>http://blagopar.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://ufamdplus.ru/bitrix/click.php?goto=http://kreanor.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/qI4ukDDgDie</a> Прямо сейчас заберите безвозмездные вращения за регистрацию без депо и начинайте коллекционировать призовые комбинации из-за солидных выигрышей!Бонус без депо за регистрацию в казино (бездепозитный бонус) – это валютный презент от клуба, кот-ый начисляется на акк игрока в регистрации в казино. Кроме творения учетной записи, для получения бездепа, довольно нередко потребуется ещё и подтвердить контактные данные игрока и/или активировать особый промо-код.
1×slots регистрация 1×slots casino c2d ru
Обычно для получения бонусов без депозита, казино выдвигает приклнные и абсолютно выполнимые обстоятельства, хотя есть ряд поступков коие воспрещены и могут повлечь за собой досадные результаты: <a href=https://www.stroimvmeste.com.ua/user/HarryLardy/>https://www.stroimvmeste.com.ua/user/HarryLardy/</a> 1×slot зеркало рабочее этих способов предполагает регистрацию Бездепозитные призы, как уже ясно, считаются уникальной вероятностью приступать к игровому процессу абсолютно безвозмездно, другими выступать в интернет казино бесплатно и на имеющие средства сразу в регистрации аккаунта. Автоматы с этим депо имеют замерзнуть прекрасной вероятностью поиграть для почитателей азарта с определенными лимитированиями в денег.
<b>Смотреть еще похожие новости:</b>
<a href=http://moneysweet.listbb.ru/viewtopic.php?f=2&t=7798>1хслотс казино зеркало</a>
<a href=http://www.webdesignforum.com.au/member.php?action=profile&uid=31660>1хслот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Составленный экспертами Casino.ru список онлайн-казино с бездепозитным бонусом разрешает игрокам сравнить спецпредложения разных операторов.
#8700 Charlesgunnyhttp://filmkachat.ru
1×slots сайт
Когда идет о валютных призах, казино практически устанавливают обстоятельства вейджера, коие нужно выполнить, чтобы вывести выигрыш. <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino09k online</a> Для отыгрыша бонуса казино обязывает игрока поиграть на необходимую, в несколько один превышающую необходимую полученного приза — здесь выгода фирмы явна.Бездепозитный приз предоставляется новому игроку за конкретные деянья. Часто презент вид средств либо фриспинов выдается за регистрацию, благодаря чему пользователь получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. <a href=https://jicsweb.texascollege.edu/ICS/Academics/RELI/RELI_1311/2016_FA-RELI_1311–04/ford.jnz?portlet=Blog&screen=View+Post&screenType=next&&Id=3df82543–4619–4bc4-a172-adc3f66d923b>https://jicsweb.texascollege.edu/ICS/Academics/RELI/RELI_1311/2016_FA-RELI_1311–04/ford.jnz?portlet=Blog&screen=View+Post&screenType=next&&Id=3df82543–4619–4bc4-a172-adc3f66d923b</a> Не стоит незамедлительно же отрицаться от приветственных даров в подобных казино. Администрация готова начислить деньги или фриспины, но предварительно сотрудники обязаны убедиться, собственно вы не мошенник. Дело сомнений, что развелось очень много охотников за бонусами. Они выучились обманывать систему и наваривать солидные суммы денег.Иногда у посетителей вебсайта могут появиться трудности, задачи, препядствия при активации приобретенного промо-кода. В этих случаях, нужно обратиться за поддержкой в саппорта «Support». Для получения ответа, непременно указывается определенная первопричина обращения и подтверждается информация дополнительными скриншотами. Если сформировалась спорная ситуация, постоянно можно обратиться к основному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ. 1×slots акции <a href=https://psychoreanimatology.org/modules/profile/userinfo.php?uid=74155>https://psychoreanimatology.org/modules/profile/userinfo.php?uid=74155</a> Одним из поводов отдавать привилегию 1 или иному заведению содержится в привлекательности предлагаемых акций и бесплатных предложений. Безвозмездные фриспины, выдаваемые без нужды создавать какой-нибудь лепта, в списке находится далеко не в конце.Когда речь идет о денежных бонусах, казино всегда устанавливают обстоятельства вейджера, которые нужно выполнить, чтобы исключить выигрыш.
1×slots зеркало на сегодня
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=30888>1×slots сайт зеркало</a> 1×slots рабочее зеркало <a href=https://www.javab24.com/profile/25798-joshuathepe>https://www.javab24.com/profile/25798-joshuathepe</a> Некоторые клубы механически начисляют бонус на акк игрока в выполнения критерий получения, но бывают истории, когда приз нужно активировать игроку самому. Есть количество методов активации бонуса: 1×slots официальный сайт зеркало Доступные забавы – В неких азартных забавах возможно снизить математическое превосходство казино до нескольких десятых процента. В их количестве многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как управляло, в таких играх ставки идут в зачет вейджера не всецело. Например, имеет учитываться лишь 50%. В некоторых забавах бездепозитные призы вообщем нельзя отыгрывать.Исходя из этого, просто не присутствует разумных причин махнуть рукой на получение такого приза при регистрации. И, лишним, на такой безвозмездной базе у вас есть шансы выиграть средства и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, называют бесплатными интернет платформами для игр.
1× slots официальный
Выше мы дали полный комплект самых новых и актуальных бездепозитных бонусов в интернет казино без пополнения на 2022 год, где вам воспользоваться любым ценным бездепозитным призом. Но не стоит думать, что снабжая юзеров такими призами, казино занимается спонсированием. Ведь объемы вознаграждений, в основном, не большие (средним размером от 5 до 20 долларов). И на эти свои налагаются конкретные условия и ограничения, обязательные к выполнению игрока, в в последствии он желает получить все свои выигранные финансы.Многие казино деют в рекламных целях бесплатные призы исключительно для наших читателей. Чтобы их получить, надо(надобно) перебежать на игровой вебсайт по партнерской ссылке с нашего портала. <a href=http://dogecraft.ru/user/Raymondgaigo/>http://dogecraft.ru/user/Raymondgaigo/</a> 1×slots зеркало рабочее
1× slots зеркало
Можно. Вы практически сможете отказаться от получения бездепозитного приза за регистрацию в казино, же Вы не сделаете ставку. Каждая игровая перрон выделяется условиями по получению и отыгрышу бездепов. В правилах отчетливо расписаны кратковременные рамки, за коие нужно прокрутить вейджер. Также не забывайте на максимальный размер ставки и наивысшую сумму выплаты. С иной стороны, дабы получить бездепозитные бонусы казино, достаточно израсходовать не более 1 минутки. Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и. Когда игроку полагается много фриспинов, администрация имеет разбивать их начисление на количество дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах промоакции.Самые популярные способы вывода средств ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам подобии Neteller и Skrill, а также используют криптовалютными кошельками. Вывод выигрышей имеет осуществляться моментально либо развлекать от нескольких часов до нескольких суток. 1× slots casino зеркало <a href=http://www.so0912.com/home.php?mod=space&uid=2254632&do=profile&from=space>http://www.so0912.com/home.php?mod=space&uid=2254632&do=profile&from=space</a> Используйте наихорошие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, чтобы заработать презенты за простые деянья теперь сейчас получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высокой отдачей и быстрыми выводами на электронные кошельки.Отзывы читателей о бонусных акциях посодействуют составить эмоцию, но не забывайте о субъективности собственных комментариев.
1×slot казино зеркало
Приглашаем делиться сужденьями о бонусах. Это поможет другим пользователям избирать наиболее выгодные предложения.Бездепозитные призы за регистрацию в игровых автоматах для собственников онлайн-казино считаются долею маркетинговой кампании, направленной на повышение аудитории сайта. Так они продвигают средства бренды и привлекают свежих клиентов. Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы которые возникают у начинающих.Помимо остального, для вывода средств по бездепу необходимо внести на счёт свой первый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало возможную сумму, после чего вывод средств станет доступен. <a href=http://klotzlube.ru/forum/user/255206/>http://klotzlube.ru/forum/user/255206/</a> 1×слотс казино
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/3745/#comment-219161>1×slots официальный сайт мобильная версия скачать</a>
<a href=http://forum.audioheritage.net/memberlist.php?mode=viewprofile&u=19451&sid=675ca30d493774bddcba02926d82accf>1×slots мобильная версия войти казино</a>
<a href=http://www.emv.info/memberlist.php?mode=viewprofile&u=424>рабочее зеркало 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Существует ли стратегии для отыгрыша бездепозитных бонусов? К огорчению нет, на выигрыши либо проигрыши с призов, казино либо игрок воздействовать возможности, отдача игр случается от создателей игр.
#8701 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало рабочее этих способов предполагает регистрацию
Многие игроки, оценив возможностей казино, остаются выступать в нем и дальше ? на это и нацелено каждое промо. Постоянные клиенты заносят депозиты и делают ставки, обеспечивая долгосрочную выгода оператора. То есть, казино раздают бездепы новым юзерам для формирования приклнной аудитории. <a href=http://filmkachat.ru/>1хслотс 1хслотс регистрация перейти на 1×slots</a> <a href=https://welling.domains.unf.edu/showthread.php?tid=44981>https://welling.domains.unf.edu/showthread.php?tid=44981</a> 1× slots casino официальный сайт <a href=http://inmybook.ru/glavdorogadv1808>http://inmybook.ru/glavdorogadv1808</a> Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и более. Когда игроку полагается большое фриспинов, администрация возможность разбивать их начисление на количество дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах промоакции.Помните, собственно всевозможные нарушения управлял сведут на нет ваши усилия, и вы наверняка останетесь без начисленного для дарового бонуса. Всегда изучайте правила начисления и условия вейджера. По каким вопросам, на коие вы не других отыскать ответы, обращайтесь за разъяснениям и саппорт.
1×slots зеркало регистрацию более популярный вариант это
1×slots casino регистрация 1×slotscasino09k online Фриспины без депозита или вспомогательные средства помогут поближе познакомиться с игровой платформой и её функциями. За счёт даров можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради забавы напротив живых крупье.Чтобы бездеп не был начислен на Ваш акк, Вам не нужно активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт механически, а Вы не расчитываете его применять, обратитесь в саппорта с просьбой отменить бездепозитный бонус. <a href=http://www.hngaosha.com/space-uid-37981.html&do=profile>http://www.hngaosha.com/space-uid-37981.html&do=profile</a> Бездеп с фриспинами может охватывать всю коллекцию игр на сайте или разработки 1-го провайдера. Обычно предлагается конкретный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш возможность быть выведен в как, как юзер отыграет эту необходимую. Возможность оценить глубокий перечень слотов — главное совершенство этой разновидности. Игроку становятся доступны что, эти функции, которые отсутствуют в демонстрационном режиме, а возможность выиграть настоящие деньги добавляет ярчайших азартных чувств. 1×slots рабочее зеркало на сегодня
1×slots официальный сайт скачать
Условия, на которых предоставляется бездеп, регулируются казино. Каждая акция содержит подробные верховодила, гиперссылка на которые обычно находится в промообъявлении. В них указываются лимиты, вейджер, перечень доступных игр. Если оператор скрывает данные о предложении, то воспользоваться им не.Необходимость отыгрыша. Вейджер в выше, чем для бонусов за депозит. И же средства не отыграны, исключить их невозможно. <a href=http://bbs.darkml.net/home.php?mod=space&uid=7976468>http://bbs.darkml.net/home.php?mod=space&uid=7976468</a> 1×slots официальный регистрация Ограничения по забавам. Администрация воспрещает игрокам некоторые игровые автоматы с бездепозитным призом, деньгами или бесплатными вращениями. Обычно, в правилах приводится полный перечень слотов для отыгрыша. Иногда разделение выполняется по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino.Ознакомьтесь с нашим списком наихороших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего перечня и получите бездеп сразу. Хватайте наихорошие благотворительные предложения ниже и выигрывайте большие средства, не рискуя!
1×slots регистрацию более популярный вариант это
Так собственно основное отличие дара на депозит от бездепа – обязательное пополнение счёта. Вы сможете внести депо и преумножить стартовый капитал либо забрать бездеп и всем не придётся рисковать собственными сбережениями. Поспешите выполнить простые притязания, и администрация ресурса начислит щедрое одобрение!Маркетинговая деятеля всех игорных интернет-клубов обязана носить различный характер. И в гонорары на депо служат чтобы, чтобы, чтобы провоцировать заносить депозиты и поощрять уже быть юзеров, то бездепозитный приз в казино либо приз за регистрацию в казино, этого всего, рассчитан на расширение базы потребителей. Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и. Когда игроку полагается много фриспинов, администрация имеет бить3 их начисление на несколько дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах промоакции.Также случаются случаи, когда казино начислит обсужденный приз в регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам. Прежде всего, не запамятовывайте регулярно заглядывать на страничку обзоров бездепозитных призов. Они шаг за шагом осматривают наиболее интересные предложения основных игорных порталов. казино 1×slots <a href=https://fromdust.art/index.php?title=User:VetaMaher17>https://fromdust.art/index.php?title=User:VetaMaher17</a> Маркетинговая деятеля всех игорных интернет-клубов обязана носить разнообразный характер. И если вознаграждения на депозит служат чтобы, чтобы, дабы стимулировать заносить депозиты и поощрять уже имеющих пользователей, то бездепозитный приз в казино либо бонус за регистрацию в казино, прежде всего, рассчитан на расширение базы потребителей.
1×slots зеркало подтвердит вашу регистрацию если говорить
Бездепозитные бонусы за регистрацию в игровых автоматах для хозяев онлайн-казино считаются частью маркетинговой кампании, направленной на увеличение аудитории сайта. Так они продвигают средства бренды и привлекают новых посетителей.Активация случается с помощью промокодов, которые вводятся в личном кабинете в регистрации. Среди спецпредложений в перечне Casino.ru находятся эксклюзивные промокоды, коие доступны лишь посетителям портала. Другие способы начисления средств ? автоматическая активация сразу после создания аккаунта и получение презента по запросу в службу технической поддержки. Существуют казино с призом за регистрацию, каких довольно модны фриспины в интернет казино потом регистрации в определенных играх. Они встречаются и чаще даровых поощрений либо классических бонусов в казино без инвестициям. Например, игрок регистрирует счет, на кот-ый начисляются безвозмездные забавы, бонус за регистрацию повторяющий даровых фрспинов, вращения в игровом автомате. Во время игрового процесса игры выигрывает настоящие средства, коие в последствии возможно успешно исключить из заведения на собственную платежную систему. То есть, есть шансы вывести средства без рисков собственными финансами. Регистрация, за которую в получит призы, займет минут, а спасибо этому можно увеличить 5 евро поощрений до тысячи и без всяких проблем вывести их. <a href=https://yogicentral.science/index.php?title=%D0%9A%D0%B0%D1%82%D0%B0%D0%BB%D0%BE%D0%B3%20%D1%84%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%20%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8%202024:%20%D0%92%D0%BE%D0%B7%D0%BC%D0%BE%D0%B6%D0%BD%D0%BE%D1%81%D1%82%D0%B8%20%D0%B8%20%D1%80%D0%B8%D1%81%D0%BA%D0%B8%20%D0%B4%D0%BB%D1%8F%20%D0%BF%D1%80%D0%B5%D0%B4%D0%BF%D1%80%D0%B8%D0%BD%D0%B8%D0%BC%D0%B0%D1%82%D0%B5%D0%BB%D0%B5%D0%B9>https://yogicentral.science/index.php?title=%D0%9A%D0%B0%D1%82%D0%B0%D0%BB%D0%BE%D0%B3%20%D1%84%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%20%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8%202024:%20%D0%92%D0%BE%D0%B7%D0%BC%D0%BE%D0%B6%D0%BD%D0%BE%D1%81%D1%82%D0%B8%20%D0%B8%20%D1%80%D0%B8%D1%81%D0%BA%D0%B8%20%D0%B4%D0%BB%D1%8F%20%D0%BF%D1%80%D0%B5%D0%B4%D0%BF%D1%80%D0%B8%D0%BD%D0%B8%D0%BC%D0%B0%D1%82%D0%B5%D0%BB%D0%B5%D0%B9</a> 1×slots официальный сайт мобильная версия Подтверждение индивидуальной информации. Все казино просят от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у юзера других аккаунтов (мультиаккаунт запрещен).
<b>Смотреть еще похожие новости:</b>
<a href=https://aircompare.us/forums/viewtopic.php?t=392082>скачать 1×slots на андроид мобильная версия</a>
<a href=https://forumauthority.com/thread-6554-post-39759.html#pid39759>1хслот зеркало сайта</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Возможность протестировать новые забавы, не рискуя личностными средствами и разработать личную стратегию забавы. Предложения с бездепозитными бонусами за регистрацию дозволяют свежим заведениям заинтересовать аудиторию на собственный вебсайт. А игроки к получают вероятность выступать на реальные деньги без депозита в казино и заработать малый стартовый капитал, который разрешено вывести на карту банка или электрический кошелек.
#8702 Ремонт ноутбуковhttps://remont-noutbukov-first.ru/
Наша мастерская предлагает надежный <a href=https://remont-noutbukov-first.ru/>сервисный ремонт ноутбуков</a> любых брендов и моделей. Мы понимаем, насколько необходимы вам ваши лаптопы, и готовы предложить сервис высочайшего уровня. Наши профессиональные техники оперативно и тщательно выполняют работу, используя только оригинальные запчасти, что предоставляет длительную работу наших услуг. Наиболее общие проблемы, с которыми сталкиваются владельцы ноутбуков, включают неисправности HDD, неисправности экрана, ошибки ПО, проблемы с портами и неисправности системы охлаждения. Для устранения этих неисправностей наши квалифицированные специалисты оказывают ремонт жестких дисков, экранов, ПО, разъемов и систем охлаждения. Обратившись к нам, вы получаете надежный и долговечный ремонт ноутбуков на дому. Подробная информация представлена на нашем сайте: https://remont-noutbukov-first.ru
#8703 Charlesgunnyhttp://filmkachat.ru
1×slots акции
Бездепы обычно предлагают с отыгрышем — моментально исключить выигранные свои нельзя. Перевод средств со счета будет вероятен последствии как, как пользователь выполнит все требования казино, а сумма не превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, в течение коих клиент вправе пользоваться предложением. Обычно они не превышают нескольких дней после активации.Каждый новичок и умелый игрок мечтают живо стартануть и начать делать настоящие ставки. Для этого довольно отобрать подарок, за который не нужно уплачивать. В зависимости от игровой платформы, надо(надобно) сделать профиль, привязать email или аппарат. После сего администрация начислит щедрое вознаграждение вид даровых вращений либо виртуальных кредитов. <a href=http://filmkachat.ru/>1×slots официальный сайт, скачать</a> <a href=https://bitbin.it/rr7OHcTA/>https://bitbin.it/rr7OHcTA/</a> 1хслотс официальный сайт зеркало <a href=http://uprzakupokkchr.ru/user/Harrytor/>http://uprzakupokkchr.ru/user/Harrytor/</a> Бонусные деньги – небольшая сумма денег для старта в новом казино. На бонусные средства, обычно разрешается выступать во все забавы, кроме слотов с прогрессивным джекпотом и игр из раздела live casino.Доступные забавы – В некоторых азартных забавах возможно снизить математическое преимущество казино до нескольких десятых процента. В их числе почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как верховодило, в этих играх ставки идут в зачет вейджера не всецело. Например, возможность предусматриваться только 50%. В некоторых забавах бездепозитные бонусы вообще невозможно отыгрывать.
1×slots официальный сайт мобильная версия скачать
Обычно, бездепозитные бонусы выдаются под определенные слоты с фиксированной ставкой, но их наверняка воспрещено использовать в игровых автоматах с прогрессивным джекпотом. Список игр, каких можно применять бездеп, Вы найдете в описании акции или сможете уточнить у службы заведения.Как верховодило, при выводе финансов, от играющего потребуется только устроить наименьший вклад для того, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом индивидуальный счет. <a href=https://www.xn–72c9aa5escud2b.com/webboard/index.php/topic,512363.new.html#new>1×slots casino online регистрация</a> 1×slots рабочее зеркало <a href=http://iminthai.com/home.php?mod=space&uid=225190>http://iminthai.com/home.php?mod=space&uid=225190</a> Не стоит сразу же отрицаться от приветственных презентов в похожих казино. Администрация готова начислить средства либо фриспины, хотя сначала работники обязаны убедиться, собственно вы не мошенник. Дело сомнений, что развелось слишком много охотников за бонусами. Они выучились врать систему и зарабатывать крупные суммы средств. 1×slots официальный сайт скачать на айфон
1×slots сайт
<a href=http://bbs.boway.net/home.php?mod=space&uid=630038>http://bbs.boway.net/home.php?mod=space&uid=630038</a> Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных обстановок с казино, когда после отыгрыша бездепа для не дадут вывести солидную необходимую выигрыша.Для верификации аккаунта нужно предоставить специалистам технической помощи отсканированную копию паспорта и счета за коммунальные предложения, а фотографию банковской карты или скриншот страницы электронного кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для подтверждения личности. 1× slots зеркало Бонусные средства – небольшая сумма средств для старта в новом казино. На бонусные средства, обыкновенно разрешено выступать во все игры, считая слотов с современным джекпотом и игр из раздела exist casino.В интернете много знаменитых игорных площадок с красивыми акционными предложениями. Однако пристально разбирать обстоятельства десятков услуг вскоре надоест, да и время отнимет количество. Поэтому наша команда подготовила ТОП-3 вебсайтов с наилучшими бездепозитными призами:
1×slots регистрация
Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации подарка нужно подтвердить электронную почту и привязать телефон;В интернет-сети практически можно отыскать перечни более модных и обещанных поощрительных программ от популярных онлайн-казино. <a href=https://www.formulersupport.com/Thread-1×slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F–99396>1×slots регистрация</a> Фриспины – безвозмездные вращения с фиксированной ставкой, коие возможно использовать в конкретных игровых автоматах.Бездепозитные призы в казино без пополнения 2022 — это определенная сумма средств или gratuitous spins вращения, коие предоставляются первым постояльцам за регистрацию на сайте казино повторяющий бездепозитного приза, и дает вас возможность помощью казино без пополнения опробовать услуги (игр), с последующей преимуществом, льготой вывода средств при исполненьи всех установленных управлял. зеркала 1×slots <a href=http://ibaragiya.com/index.php?page=user&action=pub_profile&id=1519729>http://ibaragiya.com/index.php?page=user&action=pub_profile&id=1519729</a> В интернете слишком количество скриптовых сайтов, коие принадлежат мошенникам. Их основная цель – привлечь гэмблеров, пообещав столько великодушные презенты, но и крупные выигрыши. Так собственно некоторые веб-сайты предлагают получить за регистрацию даже $1 000.Реже призы без депозита начисляются неизменным игрокам. С их поддержкой администрация постарается удержать ценных посетителей либо вожделеет поблагодарить за преданность правильных гостей. Но гораздо почаще для сходственных целей применяются эти промоакции:
1хслотс казино зеркало
В интернет-сети постоянно возможно отыскать списки наиболее известных и обещанных поощрительных программ от известных онлайн-казино.Объективные – размер бонуса, коэффициент и обстоятельства вейджера, надобность внесения депо для вывода денег; <a href=https://rubcrumb.ru/user/Porsedropkr/>https://rubcrumb.ru/user/Porsedropkr/</a> x1 slots регистрация в 1×slots casino Однако далеко не все ресурсы предлагают своим клиентам бездепозитные призы за регистрацию в казино. В большинстве случаев учтено поощрение на первый депозит в размере 100–200%. Это замечательная вероятность преувеличить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш.Но такие рамки не смущают и хайроллеров, потому коэффициенты на слотах дозволяют рассчитывать на солидные выигрыши, в некоторых автоматах разыгрывается передовой джекпот.
<b>Смотреть еще похожие новости:</b>
<a href=https://traderscrypt.com/forums/showthread.php?tid=5891&pid=8780#pid8780>1хслот скачать</a>
<a href=http://forum.exalto-emirates.com/memberlist.php?mode=viewprofile&u=69997>1 xslots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Таким образом, заведение пробует показать себя своим потенциальным игрокам, а такой маркетинговый ход как казино бонус без депо за регистрацию привлекает очень большое внимания к игорному заведению и обеспечивает постоянный поток новых гостей и грядущих посетителей игрового онлайн клуба.
#8704 Charlesgunnyhttp://filmkachat.ru
1× слот зеркало
Первый образующийся вопрос, это, для выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают новых игроков. Последним легче начать игру на деньги с дара за регистрацию. Им не нужно пополнять баланс и расходовать собственные средства. Новички получают безвозмездные спины или свои на счёт. С их подмогою знакомятся с игровым процессом, крутят слоты и делают ставки в рулетке. <a href=http://filmkachat.ru/>1хслот скачать</a> Для выбора азартного заведения Вы можете воспользоваться перечнем наших казино с призами за регистрацию. На нашем сайте мы опубликовали перечень бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, что часть бонусов эксклюзивные и доступны только для посетителей нашего вебсайта по-специальному промо-коду или по уникальной ссылке. Кроме как, для каждого бонуса мы подготовили доскональный обозрение, в котором Вы узнаете как получить и отыграть одобрение и как исключить собственный выигрыш с бездепа. <a href=https://juicedmuscle.com/forum/general/general-chat/264982-creating-immersive-spaces-the-art-and-science-of-3d-walkthrough-animation>https://juicedmuscle.com/forum/general/general-chat/264982-creating-immersive-spaces-the-art-and-science-of-3d-walkthrough-animation</a> Бездепозитные бонусы начисляются лишь один один. Не стоит открывать свежие аккаунты, чтобы получить их повторно. Служба безопасности казино непременно выявит «левого» соучастника и перекроет. Если гость выполнит нужные притязания, отыграет собственную ставку и решит исключить личный выигрыш, то ему нужно сведению, что казино обязательно востребует предоставить ксерокопии личных документов, чтобы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои исключить не удастся.С этими ординарными советами любое казино с призом за регистрацию способно принести в разы больше выгоды и выгоды. 1×slots казино мобильная версия <a href=https://www.sportchap.ru/user/Deweymic/>https://www.sportchap.ru/user/Deweymic/</a>
1хслотс рабочее зеркало
1×slots официальный сайт зеркало рабочее Мы подготовили перечень, где есть практически животрепещущие и свежие бездепозитные призы казино, которые вы можете получить безвозмездно. Для наших юзеров есть особые предложения неповторимые призы, которые вы ни не найдете, их мы обозначили специальной красноватой плашкой «Exclusive».Если ординарными текстами, бездепы – это определённая сумма средств либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать подарки. Но есть некоторые нюансы. Существуют игорные жилища, которые перед тем как начислить призы настоятельно привязать телефонный, дать копии документов. <a href=http://oldpeoplewholikebirds.com/forum/memberlist.php?mode=viewprofile&u=233861>http://oldpeoplewholikebirds.com/forum/memberlist.php?mode=viewprofile&u=233861</a> 1хслотс зеркало Можно. Вы постоянно сможете отрешиться от получения бездепозитного бонуса за регистрацию в казино, же Вы не сделаете ставку.Вейджер в переводе с британского значит «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша приобретенного приза, в нашем случае бездепозитного. Число ставок большого — принципиально только набрать необходимую, пропорциональную сумме поощрения.
1×slots регистрация 1×slots casino c2d ru
Выше мы предоставили полный комплект самых новых и своевременных бездепозитных бонусов в интернет казино без пополнения на 2022 год, где вы можете пользоваться каким ценным бездепозитным призом. <a href=https://elearnportal.science/wiki/User:StephenMosby1>https://elearnportal.science/wiki/User:StephenMosby1</a> 1×slots casino регистрация Бездепозитные бонусы прекрасный вариант даровой игры в игровые автоматы. Многие пользователи сети не понимают, собственно в казино возможно начать выступать безусловно безвозмездно, а позже вывести выигрыш на банковскую карту или электронный кошелек, иные не доверяют интернет казино, а третьи успешно играют и выигрывают – и тотчас довольно немалые суммы.Прибывшие на аккаунт финансы бездепозитные призы предназначаются, в, только для новоиспеченных пользователей, которые ранее не имели личного аккаунта в данном казино. Исходя из этого, случае раньше у игрока был изготовлен депо, то, по всей вероятности, у него больше не несомненно способности рассчитывать на получение такового приза в определенном заведении.
1×slots казино зеркало
Для получения предоставленных бонусов вас понадобиться — ПК или мобильное прибор, и остальное дело за малым.На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению сего медли, Вы не сможете активировать и получить бездепозитный бонус. 1× slots сайт <a href=https://findmyjobs.lk/author/harryclord/>https://findmyjobs.lk/author/harryclord/</a>
1хслотс регистрация в 1×slots casino
Каждый новичок и профессиональный игрок мечтают быстро стартануть и начать делать настоящие ставки. Для этого довольно арестовать презент, за который не платить. В зависимости от игровой платформы, нужно сделать профиль, привязать email либо телефонный. После этого администрация начисляет щедрое вознаграждение в виде бесплатных вращений либо виртуальных кредитов. <a href=http://taurus-market.ru/bitrix/redirect.php?goto=http://image.google.nu/url?q=http://prana.moscow/bitrix/redirect.php?goto=https://teletype.in/@urist555/FoY79HM_x1_>http://taurus-market.ru/bitrix/redirect.php?goto=http://image.google.nu/url?q=http://prana.moscow/bitrix/redirect.php?goto=https://teletype.in/@urist555/FoY79HM_x1_</a> 1×slot зеркало рабочее регистрации на телефон придет Еще одно условие дотрагивается размеров ставки. Операторы устанавливают наивысшую сумму, которую игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, избранной в Личном кабинете. При превышении лимита есть риск лишиться бонуса. Существующие ограничения относятся и к конкретным обликам ставок. Например, играя в рулетку, заказчик возможность столкнуться с запретом ставить фишки на шансы.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/7185/#comment-313833>1хслотс официальный сайт зеркало</a>
<a href=http://diablo2r.cn/home.php?mod=space&uid=30130>1хслотс казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Исходя из этого, просто не присутствует мудрых причин махнуть рукой на получение такого приза при регистрации. И, что, на такой бесплатной базе у вас есть все шансы выиграть средства и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные призы, нарекают бесплатными онлайн платформами для игр. Вейджер в переводе с английского значит «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша приобретенного бонуса, в нашем случае бездепозитного. Число ставок имеет — принципиально лишь набрать необходимую, пропорциональную сумме поощрения.
#8705 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino 777 online
Бездепозитные бонусы за регистрацию являются одним из самых известных способов вербования новых игроков в онлайн-казино, потому что они предоставляют игрокам возможность опробовать казино, необыкновенно игровые автоматы, и возможно, выиграть настоящие средства. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> <a href=https://www.durovis.com/en/board_topic_38991.html>https://www.durovis.com/en/board_topic_38991.html</a> скачать 1×slots официальный сайт <a href=https://m2bob.shop/forum/member.php?action=profile&uid=2525>https://m2bob.shop/forum/member.php?action=profile&uid=2525</a> При исполнении критерий отыгрыша и верификации, средства с бонусного счета переводятся на основной и все быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции находятся от выбранной платежной системы.Иногда в бездепа, казино презентует наименьший бонус (до 50 рублей), ради которого надо заморачиваться.
1хслотс рабочее зеркало на сегодня
При маленький сумме бонуса рекомендуется играть по невысоким ставкам, а применять наибольшие чем лишь никаких случае, если вейджер очень великой, а время на отыгрыш сильно ограничено. 1×slots официальный регистрация <a href=https://www.kraizman.com/index.php?subaction=userinfo&user=JamesPAH>https://www.kraizman.com/index.php?subaction=userinfo&user=JamesPAH</a> 1хслотс официальный сайт зеркало Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен список наилучших онлайн казино, коие предлагают своим игрокам великодушные призы за регистрацию.Фриспины без депозита либо вспомогательные свои помогут поближе познакомиться с игровой платформой и её функциями. За счёт подарков можно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям ради забавы напротив живых крупье.
1×slots регистрация на сайте 1×slots ru com
Список например называемых «не территорий» прилагается к правилам бонусной программки игорного портала. Обязательно выясните, распространяются ли на вас подобные санкции.При маленький сумме приза рекомендовано играть по низким ставкам, а использовать наибольшие какого-либо только в случае, если вейджер слишком великой, а время на отыгрыш крепко ограничено. <a href=http://rtpsouth.com/UserProfile/tabid/69/userId/101199/Default.aspx>http://rtpsouth.com/UserProfile/tabid/69/userId/101199/Default.aspx</a> Сразу после активации промокода можно воспользоваться даром. Как уже упоминалось, призы посещают трёх обликов – фриспины, кредиты и фриплей-бонусы.В онлайне очень большое скриптовых вебсайтов, которые принадлежат плутам. Их главная задача – заинтересовать гэмблеров, пообещав не только щедрые подарки, хотя и крупные выигрыши. Так собственно некоторые сайты предлагают получить за регистрацию и $1 000. 1×slots зеркало регистрация Этот образ приза несомненно добавлен на Ваш аккаунт в удачной процедуры регистрации с использованием номера телефонного. Если выбрать иной способ творения учетной записи, бездеп не несомненно добавлен на Ваш аккаунт.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Суммы похожих предложений, случаев, колеблются от 3-х до 20 долларов, а вейджер на эти свои должен составлять от тридцати до шестидесяти один. Зачастую, наибольшая сумма выигрыша тут составит от одной до двух сотен долларов. Если игрок выиграет больше, то все свои могут быть списанными до максимально разрешенного выигрыша. Здесь замечена содержание выводить еще несуществующие финансы на свою платежную систему и дальше отыскивать заведение с подходящими под данную сумму релоадом либо призом за 1-ое пополнение счета. Есть некоторое подвидов бездепозитного вознаграждения, предлагаемого большим числом заведений.Классическая разновидность приза за создание аккаунта. Его превосходство заключается в том, что заказчик имеет других подбирать аппараты и делать ставки в их. Иногда перечень игровых автоматов ограничен оператором, но все равно это никакого, чем один-единственный доступный разъем, как когда с использованием фриспинов. Бездепозитный приз часто может замерзнуть доступным незамедлительно в завершения регистрации, потому в большинстве случаев единственным требованием к нему является регистрация, а после ревизия вашей свежей учетной записи.Доступные игры – В неких азартных забавах можно понизить математическое превосходство казино до нескольких 10-х процента. В их числе все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как правило, в этих играх ставки идут в зачет вейджера не полностью. Например, может предусматриваться лишь 50%. В неких играх бездепозитные бонусы вообщем невозможно отыгрывать. 1× slots официальный <a href=http://www.svit-world.kiev.ua/user/Davidtunty/>http://www.svit-world.kiev.ua/user/Davidtunty/</a> Выбирая безвозмездный бонус, внимательно изучайте верховодила. Убедитесь, собственно вас можно брать участие в акции. Уточните, в каких забавах можно исполнять обстоятельства вейджера. При необходимости задавайте вопросы адептам саппорта.Нет. Для получения бездепозитного приза в казино необходима неотъемлемая регистрация на веб-сайте. Играть в слоты безвозмездно и без регистрации можно лишь в демо режиме.
1× slots casino зеркало
В случае с фриспинами без вейджера, Вам не придется отыгрывать свой выигрыш с безвозмездных вращений. Прибыль, которую Вы заработаете на таком бездепе возможно назначать на вывод без какого или отыгрыша. <a href=https://xn–6-gtb4aicb3c6b.xn–p1ai/user/DoctorLazutaEi/>https://xn–6-gtb4aicb3c6b.xn–p1ai/user/DoctorLazutaEi/</a> У нас на сайте Вы отыщите перечень призов без депозита в испытанных казино и подробную информацию о том как их получить и применять. 1×slot зеркало Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.Прочитайте управляла бонусной программки, в хотите участвовать. Да, мы настойчиво рекомендуем сделать это до регистрации.
<b>Смотреть еще похожие новости:</b>
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=37392>1×слот регистрация в 1×slots casino</a>
<a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=329998#pid329998>1×slots официальный сайт зеркало</a>
<a href=http://vn-info.net/user/Josephkam/>1×slots casino online регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины начисляются по определенной ставке. После их активации игроку нужно запустить слот и убедиться, что в нем отображаются благотворительные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода последствии отыгрыша определяется оператором и редко выше 5 000 рублей.
#8706 AngeloGedhttps://делохрабрых.рф
Служба по контракту <a href=https://делохрабрых.рф/>https://делохрабрых.рф</a> в зоне СВО: стабильный доход, социальные гарантии, профессиональный рост и защита интересов Родины.
#8707 Charlesgunnyhttp://filmkachat.ru
1×slots бездепозитный бонус за регистрацию
Зачастую бездепозитные бонусы казино для забавы предлагаются разными заведениями азартных игр в рекламных акций либо в целях вербования к для свежих игроков. Для бездепозитных бонусов в казино 2022 игроку не нужно пополнять счет до момента вывода желанных средств. <a href=http://filmkachat.ru/>1хслотс рабочее зеркало</a> Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша бонусов. Заведения практически устанавливают наивысшую ставку, возможную по условиям вейждера.Бесплатный бонус – кредиты, которые онлайн-казино начисляет посетителю, не принуждая его пополнять игровой счет. <a href=https://www.goldenline.pl/grupy/Przedsiebiorcy_biznesmeni/health-economics/how-to-create-a-stunning-3d-walkthrough-video-for-architectural-projects,3947888/>https://www.goldenline.pl/grupy/Przedsiebiorcy_biznesmeni/health-economics/how-to-create-a-stunning-3d-walkthrough-video-for-architectural-projects,3947888/</a> 1×slots рабочее зеркало на сегодня <a href=https://forum.cabal.playthisgame.com/member.php?1647256-GlennWef>https://forum.cabal.playthisgame.com/member.php?1647256-GlennWef</a>
x1 slots 1хслотс регистрация перейти на 1×slots
К огорчению, нет. Почти все казино, требуют внесение хотя бы 1-го минимального депо для вывода выигрыша с бездепозитного бонуса. Также учитывайте, собственно исключить деньги разрешено только на что, эту платежную систему, с коей был изготовлен депозит.Индивидуальные одобрения выдаются за совершение действий: подписку на аккаунты площадки в соц сетях, установку мобильного прибавления или официального клиента для ПК. В большинстве казино срабатывают программки преданности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий уровень часто сопровождается выдачей бездепа. <a href=http://216.38.0.7/memberlist.php?mode=viewprofile&u=4020>1×слот регистрация в 1×slots casino</a> 1×slots регистрация 1×slotscasino09k online <a href=http://clips.tj/user/JustinFag/>http://clips.tj/user/JustinFag/</a> Как управляло, новоприбывшие игроки в первую очередь желают ознакомиться с методами ввода и вывода денежных средств и сроки исполнения поданных заказов дабы конкретно разуметь, как прытко меня вывести свой казино приз за регистрацию без депозита на электронный кошелек или же банковскую карту. К счастью для всех играющих, внутри определенных холдингов, все казино соперничают меж собой. Ведь случае бы определенную компанию представляло только одно онлайн-заведение, то навряд бы клиенты заметили казино с призом за регистрацию и возможность бы рассчитывать только на вознаграждение в виде бонуса на 1-ое вложение. К каждому заведению регулярно по завлекать новых игроков, что, в, только на руку всем играющим.Операторы гемблинга утверждают, что например они дерутся с бонус-хантерами. Впрочем, критики считают, что этим казино пытаются устроить из случайного постояльца постоянного игрока. 1×slots регистрация 1×slots review live
1×slots регистрация то дальше необходимо пройти
Варианты выигрыша находятся от Вашей удачи и условий игорного портала. Выше мы сказали, собственно кое-какие бездепозитные призы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются они, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность передовых игр на деньги, можно выиграть невозможные суммы. Сегодняшние игровые автоматы или видео слоты, как их нарекают. Могут выдавать солидные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000.Каждый новичок и профессиональный игрок грезят быстро стартануть и начать создавать настоящие ставки. Для этого довольно арестовать презент, за кот-ый надо платить. В зависимости от игровой платформы, нужно сделать профиль, привязать email либо телефонный. После сего администрация начисляет щедрое вознаграждение повторяющий даровых вращений либо виртуальных кредитов. Чаще всего применяются коды. Их надо(надобно) вносить в специальные окошки регистрационной анкеты, если речь о пригласительных бонусах, либо в определенном разделе собственного офиса игрока.Бонус за регистрацию в казино выдается только один раз на 1-го игрока. Но бывают дополнительные промоакции, в коих бездепы раздаются для неизменных посетителей и такие подарки Вы можете получить больше одного раза. <a href=http://www.kaseisyoji.com/home.php?mod=space&uid=487069>http://www.kaseisyoji.com/home.php?mod=space&uid=487069</a> Активация по промокоду употребляется в разных обликах бездепов. Если речь идет о приветственном призе, то комплект знаков возможно разузнать на основной странице, в регистрационной форме или послании, которое отчаливает пользователю для подтверждения e-mail. Акции все проводиться совместно с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активируется одноразовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном кабинете либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем актуальный код для активации в описании любого рекламную.Каждый геймер должен сначала отчетливо выучить условия по получению и отыгрышу понравившегося дара. Если всё организует, поторопитесь забрать безвозмездные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик в начать вертеть барабаны топовых слотов. 1×slots официальный сайт зеркало рабочее Как лишь получите бездеп в казино, всё точно не забывайте проверять электронную почту. Некоторые игорные клубы день веселят интенсивных гэмблеров приятными бонусами. Чаще всего получить презент возможно в преддверии праздника, на денек рождение, за вербование приятеля. А также распространённым призом считается прибавка к депозиту. Нужно всего лишь пополнить счёт, и азартное заведение прирастит его на 50–100%.
1×slots рабочее зеркало
Бездепозитные бонусы – это исключительно интересная и более перспективная акция интернет-казино. Они числе никакого фри-спинов, поэтому что выплаты в безвозмездных вращениях не гарантированы, так комбинации на барабанах игрового аппарата могут не сложиться.Способы получения бездепа различаются в зависимости от вида приза, кот-ый понравился игроку. Но для или нужно быть зарегистрированным в законном онлайн-казино и подтвердить свою лицо. В общем облике пошаговая аннотация для получения бездепозитного бонуса смотрится например: Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном сайте и сделайте вход в собственный офис, чтобы арестовать благотворительные вращения с вейджером х40;Игрокам стоит принимать приветственный бонус как гарантированный метод получить крупный выигрыш, хотя это отличная возможность без затрат оценить возможностей казино. У нас на сайте Вы найдете список призов без депозита в проверенных казино и доскональную информацию о том как их получить и использовать.1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, в не желайте стать жертвой плутов или впустую истратить время; 1х слот 1хслотс регистрация перейти на 1×slots <a href=http://r66251ds.beget.tech/member.php?action=profile&uid=104328>http://r66251ds.beget.tech/member.php?action=profile&uid=104328</a> Наши эксперты исследуют обстоятельства акции, этого в ручном режиме проверяют их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и параметры. Мы не рекламируем казино, а даем игрокам информацию о наихороших из них.Процесс подтверждения личности может занять от одного дня до недели. Если заказчик допустил какую оплошность при заполнении паспортных данных, то ему стопам адресоваться с задачей в службу поддержки онлайн-казино.
1х слотс зеркало регистрация в 1×slots casino
Третитй бездепозитный бонус за регистрацию – денежные средства. К огорчению, начислить рубли или доллары способны только знаменитые и известные клубы. С их подмогою вы сможете насладиться любой доступной игрой – автоматом, рулеткой, кено, блэкджеком. <a href=http://trzykolory.opx.pl/member.php?action=profile&uid=3542>http://trzykolory.opx.pl/member.php?action=profile&uid=3542</a> 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=http://swissairways-va.com/phpBB3/memberlist.php?mode=viewprofile&u=3495>1×slots сайт зеркало</a>
<a href=https://qualityprogamer.de/forum/showthread.php?tid=306008>1×slots скачать на айфон</a>
<a href=https://nauc.info/forums/viewtopic.php?t=20366631>1×slots casino регистрация</a>
<a href=https://adler.biz/threads/714/>1×slots регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бесплатные призы казино без депозита возможно получить в виде денежных средств на бонусный счет (вывести их можно лишь последствии отыгрыша), фриспинов, забавы либо кешбэк-бонуса. Некоторые клубы автоматически начисляют приз на акк игрока после исполненья критерий получения, но посещают ситуации, когда приз нужно активировать игроку самому. Есть несколько методов активации бонуса:
#8708 Ремонт ноутбуков в Москвеhttps://remont-noutbukov-first.ru/
Наша мастерская предлагает профессиональный <a href=https://remont-noutbukov-first.ru/>вызвать мастера по ремонту ноутбуков с гарантией</a> всех типов и брендов. Мы понимаем, насколько значимы для вас ваши ноутбуки, и обеспечиваем ремонт наилучшего качества. Наши опытные мастера оперативно и тщательно выполняют работу, используя только качественные детали, что предоставляет долговечность и надежность выполненных работ. Наиболее общие проблемы, с которыми сталкиваются обладатели переносных компьютеров, включают проблемы с жестким диском, неисправности экрана, программные сбои, неработающие разъемы и перегрев. Для устранения этих неисправностей наши профессиональные техники выполняют ремонт жестких дисков, экранов, ПО, разъемов и систем охлаждения. Обратившись к нам, вы обеспечиваете себе качественный и надежный выездной ремонт ноутбука. Подробная информация представлена на нашем сайте: https://remont-noutbukov-first.ru
#8709 Charlesgunnyhttp://filmkachat.ru
1 x slots casino
Мы делаем акцент на ключевых положениях правил, рассказываем о территориальных ограничениях и вкратце информируем о других промоакциях обговариваемого казино.Чтобы получить вероятность исключить выгода с бездепозитного приза в казино, необходимо выполнить ряд критерий: <a href=http://filmkachat.ru/>1×slots зеркало видели такую регистрацию на</a> В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это самая милая часть игры. Важно, часто бездепозитные бонусы в казино выдаются с ограничениями по максимальной выплате. В среднем можно рассчитывать на выгода в некоторое тыщ руб. Как вывести выигрыш с бонуса без депозита. Придётся доказать акк документально, в некоторых заведениях. Процедура верификации обязательна и делается каждым игроком. О документальном подтверждении учетной записи спрашивайте в онлайн чате или прочтите в правилах. <a href=https://hackmd.io/@lexxeagle/ByHLMK5ykg>https://hackmd.io/@lexxeagle/ByHLMK5ykg</a> Подтверждение электронной почты – одно из основных условий, которое есть почти в любом бездепозитном казино. Чтобы верифицировать электронную почту, достаточно перебежать по активной ссылке в послании, приобретенном от азартного клуба.Мы советуем не отрицаться от подобных предложений известных казино. Выделите несколько минут на регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сегодня удача несомненно на вашей стороне! казино 1×slots <a href=http://build-info.biz.ua/wr_board/tools.php?event=profile&pname=niceelite16>http://build-info.biz.ua/wr_board/tools.php?event=profile&pname=niceelite16</a>
1×slots казино зеркало
При малый сумме приза рекомендуется выступать по низким ставкам, а использовать наибольшие превосходнее лишь сомнений случае, в вейджер очень большой, а время на отыгрыш крепко ограничено.Максимальная ставка ? уточняется в валюте счета и ограничивает размер ставки за раз спин. В случае ее превышения приз может быть аннулирован. Также в правилах имеет содержаться запрет на размещение ставок определенного облика, например, по равным шансам в рулетке (то есть, на чет или нечет, красное либо черное и т.д. ). 1хслотс рабочее зеркало Это тоже благотворительные финансы, которые поступают на аккаунты новоиспеченных компьютерные последствии регистрирования. А особенность таких призов произведено том,, собственно обретенные финансы обязательно следует применять в продолжении назначенного времени. <a href=https://wiki.eqoarevival.com/index.php/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%AF%D0%BD%D0%B4%D0%B5%D0%BA%D1%81_%D0%94%D0%B7%D0%B5%D0%BD_%D0%A7%D0%B8%D1%82%D0%B0%D1%82%D1%8C>https://wiki.eqoarevival.com/index.php/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%AF%D0%BD%D0%B4%D0%B5%D0%BA%D1%81_%D0%94%D0%B7%D0%B5%D0%BD_%D0%A7%D0%B8%D1%82%D0%B0%D1%82%D1%8C</a> Существуют казино с бонусом за регистрацию, в которых очень популярны фриспины в онлайн казино впоследствии регистрации в конкретных забавах. Они встречаются в почаще безвозмездных поощрений или традиционных призов в казино без вложений. Например, игрок регистрирует счет, на который начисляются бесплатные игры, приз за регистрацию вид безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса геймер выигрывает истинные деньги, которые в последствии можно удачно вывести из заведения на свою платежную систему. То есть, все шансы исключить свои без рисков своими деньгами. Регистрация, какую геймер получит бонусы, займет несколько, а благодаря данному возможно прирастить пять евро поощрений до тыс. И без всяких заморочек исключить их.Бездепозитный приз за регистрацию в казино с выводом денег в 2022 году — Наш ресурс дает игрокам актуальную информацию о самых новых, щедрых и проверенных призах в онлайн казино, коие обновляются любой день. 1×slots casino регистрация 1×slotscasin online Ниже указан важный список законных казино в Беларуси с бонусами на 1-ый депо. Вы сможете попасть на официальный вебсайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз.Так же стоит выделить то, что в любом интернет казино установлен свой наибольший кешаут на бездепозитный приз. Как верховодило кешаут — это максимальная сумма денег, которая доступная для вывода с бездепозитного бонуса.
1×slots сайт
<a href=https://m2bob.shop/forum/member.php?action=profile&uid=3807>https://m2bob.shop/forum/member.php?action=profile&uid=3807</a> Разные казино имеют личные верховодила по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высокие требования. Часто онлайн-казино советуют отыграть бонусное одобрение до 100 раз в игровых автоматах. Например, в игрок получил безвозмездно десять $, то нужно будет отыграть их, поставив 1 тыщу спинов по 1 доллару любой. Стоит отметить, собственно не все казино дают возможность играть на призы и не во всех развлекательных заведениях схожие верховодила для отыгрывания. Некоторые казино запрещают выступать на бонусы в блекджек или ограничивают ставки до 5 процентов, собственно существенно наращивает в десятки один число нужных игр.К образцу, игроку выдаются бесплатные средства в заведении в объеме пятидесяти или 100 $ (вейджер на которые сочиняет 100х). То есть, каждому новоприбывшему игроку выскакивает привлекающая картинка, которая сулит выплату всех зачисленных фирмой средств. Не стоит заострять на казино приз за регистрацию без депозита с слишком большой либо очень малеханькой суммой бонусов, потому что, в тщательно исследовав все условия, тут вероятнее всего, несомненно некий подкол. 1× slots casino зеркало Вейджер в переводе с британского значит «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша приобретенного приза, в нашем случае бездепозитного. Число ставок значения — принципиально лишь набрать сумму, пропорциональную сумме одобрения.
1хслот скачать
Когда речь о получении бездепозитных призов в казино, начала внимание на последующие обстоятельства: <a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1×slots регистрация 1×slots review live</a> 1×slots официальный регистрация <a href=http://intentionalpress.com/author/patrickwhole/>http://intentionalpress.com/author/patrickwhole/</a> Не стоит путать забаву в демо и использование призов. В демонстрационном режиме игрок возможность оценить механику слота, сюжет и оформление. Но игра ведется на условные кредиты, поэтому отсутствует основное ? чувство азарта. Активируя промокод либо фриспины, заказчик раньше не тратит свои средства на игровые автоматы, но возможность сорвать настоящий куш!
1×слот регистрация в 1×slots casino
Промокод – определённая комбинация знаков, которую необходимо установить в соответствующее поле при создании учетной записи или активировать в собственном профиле игрока в разделе с бонусами. <a href=http://www.darkml.net/bbs/home.php?mod=space&uid=7973294>http://www.darkml.net/bbs/home.php?mod=space&uid=7973294</a> Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации дара необходимо доказать электрическую почту и привязать телефонный; 1×slots регистрация Далее потребуется отыграть вагер и исключить выигрыш. Игрокам без опыта крупно повезло, есть получить 10-ки даров за одну регистрацию. Если не смогли получить Бездепозитный бонус, не тревожьтесь. Обратитесь в интернет чат, оператор поможет ситуацию.При забаве на бонусные средства запрещается играть в игровые автоматы с прогрессивным джекпотом и забавы из радела live casino. Кроме такого, некоторые казино дают бездеп на раз или некоторое определенных слотов, и в иных забавах Вы не можете на их выступать.
<b>Смотреть еще похожие новости:</b>
<a href=https://russiancomputerservice.ru/user/JosephCer/>1×slots casino регистрация 1×slotscasino09k online</a>
<a href=https://takesalary.com/the-day-ai-took-over-losing-my-job-as-a-content-writer/#comment-2983>1 x slots</a>
<a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=97017>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<a href=https://qualityprogamer.de/forum/showthread.php?tid=263656>1×slots мобильная версия войти казино</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Перед активацией главно пристально выучить обстоятельства акции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют велечину также лимиты ставок при отыгрыше и сроки, протяжении которых возможно воспользоваться предложением. Если бездеп охватывает ограниченный список игр, рекомендуется разузнать максимальные коэффициенты, степень отдачи и волатильности. Слоты с невысокими множителями выплат подходят лишь что случае, случае оператор не установил взыскательные лимитирования на максимальную необходимую ставки. 2. Создать свежий профиль. Для регистрации надо(надобно) наполнить маленькую анкету либо зайдите в индивидуальный офис посредством социальных сеток;
#8710 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало
2. Создать новый профиль. Для регистрации нужно заполнить небольшую анкету или зайдите в собственный офис при помощи социальных сетей; <a href=http://filmkachat.ru/>1×slots регистрация то дальше необходимо пройти</a> <a href=http://www.wmhelp.cz/html/modules.php?name=Forums&file=viewtopic&t=69256>http://www.wmhelp.cz/html/modules.php?name=Forums&file=viewtopic&t=69256</a> 1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, случае не желайте замерзнуть жертвой мошенников или впустую истратить время;Ещё одно распространённое акционное предложение – симпатичный презент с неблаговидными требованиями. К образцу, клуб сулит $100 в бездепа, но с вейджером х80 или х100. Отыграть такой вейджер практически невероятно и потому чем концентрироваться на больше заманчивых акциях. казино 1× slots официальный сайт <a href=http://shakhty-gorod.ru/bitrix/rk.php?goto=http://aliance.online/bitrix/redirect.php?goto=http://domfialki.ru/bitrix/click.php?goto=https://teletype.in/@urist555/BHCFafV_8Fw>http://shakhty-gorod.ru/bitrix/rk.php?goto=http://aliance.online/bitrix/redirect.php?goto=http://domfialki.ru/bitrix/click.php?goto=https://teletype.in/@urist555/BHCFafV_8Fw</a> Для получения выигрыша потребуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить определенную сумму, хотя уже из личных средств. Она рассчитывается из совместного объема выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, случае пользователь выиграл 1000 рублей, а множитель составляет х30, вывести деньги возможно несомненно, сделав ставки на 30 000 рублей.
1×slots актуальное зеркало
<a href=http://www.fiat130.it/phpbb3/viewtopic.php?f=14&t=339052>1×slots регистрация то дальше необходимо пройти</a> 1×slots регистрацию более популярный вариант это Вы скорее, например все любите получать подарки и бездепозитные призы казино. Игорные жилища брали в привычку одаривать гэмблеров приятными бонусами. Стать обладателем приветственного презента возможно за творенье профиля или пополнение счёта. Второй вариант более интересный, так клубы готовы удвоить депозит! Но в вы новичок и только знакомитесь с миром пыла, какого-либо воспользуйтесь призом за регистрацию.Поспешите арестовать бездепозитные бонусы за регистрацию в казино из представленного списка. Все платформы не только водят легальную работа, но и обрадуют добросовестными результатами игры, высочайшей отдачей, прыткими выплатами. <a href=http://miinps.com/gnuboard/bbs/board.php?bo_table=free&wr_id=610308>http://miinps.com/gnuboard/bbs/board.php?bo_table=free&wr_id=610308</a> Постарайтесь отыграть вейджер, дабы была вероятность оставить заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные приборы. Вы сможете получить выигрыш на электрической кошелёк, карту, телефон. 1×slots зеркало регистрация в 1×slots casino
1× slots официальный
Если речь об эксклюзивных предложениях, может потребоваться регистрация в казино по ссылке с партнерского сайта.Вышеописанная первопричина и является главным интересным, следствии которого операторы отдают доля своей прибыли на разные маркетинговые расходы и рекламные кампании. А самым действенным тут будут играть непосредственно бездепозитные призы казино 2022 с выводом за регистрацию. Вознаграждения за получение VIP-статуса ? начисляются в рамках программки лояльности при достижении одного значения или выдаются индивидуально менеджерами саппорта.Новички не любят сразу же вносить депо. Это обосновано отсутствием опыта и сомнением. К счастью, в наше время возможно получить бездепозитный приз за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В любом случае вы не рискуете своими сбережениями. Это отличная вероятность запустить понравившийся видео слот либо же испытать удачу в настольных играх. <a href=http://shichaoliuluntan.com/home.php?mod=space&uid=329887>http://shichaoliuluntan.com/home.php?mod=space&uid=329887</a> Существуют казино с бонусом за регистрацию, в которых довольно модны фриспины в интернет казино потом регистрации в определенных играх. Они встречаются в почаще бесплатных поощрений либо классических призов в казино без инвестициям. Например, игрок регистрирует счет, на который начисляются бесплатные игры, бонус за регистрацию повторяющий даровых фрспинов, вращения в игровом автомате. Во время игрового процесса игры выигрывает настоящие деньги, которые в последствии возможно успешно вывести из заведения на свою платежную систему. То есть, все шансы вывести свои без рисков своими финансами. Регистрация, за которую компьютерные получит бонусы, займет пару минут, а спасибо данному возможно увеличить пять евро поощрений до тыс. И без всяких проблем вывести их.После потребуется привнести идентификационный платёж. Это стращает новичков больше всего. Нужно сделать наименьший депо в 100–500 руб. Таким образом служба защищенности увериться том,, собственно платёжный метод принадлежит Вам. Данная процедура необходима для обеспечения безопасности игровых счетов. Пример, Ваш аккаунт взломают и выведут средства на собственный кошелёк. Будет очень досадно. Поэтому верификация платёжной системы, это необходимый момент. 1×slots казино зеркало Новички не любят незамедлительно же вносить депо. Это обусловлено неимением опыта и сомненьем. К счастью, в возможно получить бездепозитный приз за регистрацию в казино. Неважно собственно начислит система – фриспины или кредиты. В всяком случае вы не рискуете своими сбережениями. Это замечательная вероятность запустить понравившийся видео разъем либо же испытывать фортуну в настольных забавах.
казино 1×slots
Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша бонусов. Заведения всегда устанавливают максимальную ставку, допустимую по условиям вейждера. 1×slots регистрация 1×slots casino 777 online <a href=https://carpentryforums.com/member.php?action=profile&uid=6322>https://carpentryforums.com/member.php?action=profile&uid=6322</a> Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, чтобы замечена вероятность исключить выигрыш.В лицензионных бездепозитных казино играть в азартные игры действительно неопасно. Наличие лицензии одобряет что, этот факт, что клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP.
casino 1×slot
В лицензионных бездепозитных казино играть в азартные игры вправду безопасно. Наличие лицензии подтверждает тот факт, собственно клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP.Фриспины предусмотрены для применения в видео слотах. Внимательно ознакомьтесь с критериями – частенько их выдают на кое-какие автоматы. В зависимости от клуба, у вас выйдет устроить определённое количество ставок. Кстати, продвинутые игорные дома разрешают запускать любых «одноруких бандитов». Фриспины предусмотрены для применения в видео слотах. Внимательно ознакомьтесь с критериями – часто их выдают на некоторые автоматы. В зависимости от клуба, у вас получится устроить определённое количество ставок. Кстати, продвинутые игорные жилища разрешают запускать каждых «одноруких бандитов».Если вы бывалый игрок, вы должны знать, что бонус без депо – редкая находка. Тем не, мы раз исследуем онлайн, чтобы найти для вас лучшие бездепозитные предложения. <a href=http://dekka.su/bitrix/redirect.php?goto=http://poiskreferal.chatovod.ru/away/?to=http://p503023.storeland.ru/url?away=https://teletype.in/@urist555/vhGcwK-8mPs>http://dekka.su/bitrix/redirect.php?goto=http://poiskreferal.chatovod.ru/away/?to=http://p503023.storeland.ru/url?away=https://teletype.in/@urist555/vhGcwK-8mPs</a> Многие игроки, оценив функционал казино, остаются играть в нем и дальше ? на это и направлено любое промо. Постоянные посетители заносят депозиты и проделывают ставки, обеспечивая длительную прибыль оператора. То есть, казино выдают бездепы свежим юзерам для формирования приклнной аудитории. 1×slots регистрация 1×slotscasino 56 online Также, учите, собственно бездепозитный бонус можно исключить лишь том, случае, когда станут выполнены все условия отыгрыша.Стоит обозначить(означить), собственно бездепозитный приз выдается только совершеннолетним новеньким, коие, тому, имеют пригласить личных друзей и своих, кроме рассчитывающих на поощрительную программку преданности. Подобная разработка замечена между конкуренцию онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению собственной популярности, путем вербования новых игроков. Бонусы – это оригинальный шанс для потенциальных соучастников игры, коие имеют опробовать софт покер рума и увериться, будут ли они в него выступать или нет. Новый игрок попробует свои силы с реальными оппонентами в казино.
<b>Смотреть еще похожие новости:</b>
<a href=https://bajarmp3.net/showthread.php?tid=448032>1×slots зеркало</a>
<a href=https://australianwinerytours.com/tours/showthread.php?tid=197588>1 x slots</a>
<a href=https://masstr.net/showthread.php?tid=83523>1×slot регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Иногда виде бездепа, казино дарит наименьший бонус (до 50 рублей), из-за которого не заморачиваться.
#8711 Charlesgunnyhttp://filmkachat.ru
1х слот 1хслотс регистрация перейти на 1×slots
Воспользоваться бездепом возможно не во всех игровых автоматах: казино и тут устанавливает лимитирование для посетителей. Конечно, это можно посчитать некоторым неудобством для игрока, хотя справедливости необходимо, собственно выбор автоматов всё одинаково остаётся довольно большим.При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, коие возможно предназначить ирге в казино. <a href=http://filmkachat.ru/>1×slots регистрацию более популярный вариант это</a> Бездепозитные бонусы – это самая занимательная и наиболее многообещающая акция интернет-казино. Они и другого фри-спинов, потому собственно выплаты в даровых вращениях не гарантированы, ведь комбинации на барабанах игрового аппарата все не сложиться. <a href=https://www.dailygram.com/blog/1319572/how-modern-architectural-drafting-companies-transform-design-ideas-into-rea/>https://www.dailygram.com/blog/1319572/how-modern-architectural-drafting-companies-transform-design-ideas-into-rea/</a> Большинство интернет-казино из нашего топ-10 готовы порадовать вас неповторимыми промоакциями. Читайте о них в обзорах и на форуме. 1×slots мобильная версия войти казино <a href=https://www.plurk.com/p/p9cnwb>https://www.plurk.com/p/p9cnwb</a> Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, solid зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.В наше время довольно просто получить бонус за регистрацию в казино. Практически любой игорный дом с готовностью начисляет деньги или бесплатные вращения. Многие гэмблеры пользуются этим и не стесняются региться в любом клубе с выгодными критериями. Кстати, это замечательная вероятность выработать победную стратегию и сорвать джекпот.
1×slot зеркало
Также, в необходимо подтвердить свой номер аппарата, для этого код, приобретенный в смс-сообщении от клуба установить в специальное фон в личном кабинете игрока.Если вы бывалый игрок, вы должны аристократия, собственно приз без депо – редкая находка. Тем ниже, мы раз исследуем онлайн, дабы отыскать для вас лучшие бездепозитные предложения. 1хслотс рабочее зеркало на сегодня <a href=http://bbs.sdhuifa.com/home.php?mod=space&uid=601986>http://bbs.sdhuifa.com/home.php?mod=space&uid=601986</a> Призовые начисления без депозита могут предоставляться для роли в турнирах онлайн казино. Потратить перечисленные средства можно необыкновенно в рамках этой акции. Условия их проведения включают в себя лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться этим предложением, превосходнее выучить его правила.Постарайтесь отыграть вейджер, дабы замечена возможность забыть заявку на выплату. Кстати, на всех веб-сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы можете получить выигрыш на электрической кошелёк, карту, телефон. 1хслот зеркало сайта
1×slot зеркало
Таким образом интернет казино получает потенциального игрока. Возможно дальнейшем или подлинном он захотит сыграть на свои средства. Так трудятся бездепозитные бонусы в интернет казино. Здесь отлично подходит выражение, благотворительные сыр посещает только в мышеловке. Начинающие игроки имеют не осознавать опасность пыла. Однако течением понимания делается больше. Это тема для отдельного обсуждения.Превышение максимальной ставки при отыгрыше. Система автоматически не предуведомляет о превышении ставки, потому о несоблюдении правил игрок имеет узнать уже после подачи запроса на вывод средств. Выбрать казино с бездепозитным бонусом. У нас на веб-сайте представлен перечень лучших онлайн казино, которые предлагают своим игрокам великодушные бонусы за регистрацию. <a href=http://led119.ru/forum/user/109596/>http://led119.ru/forum/user/109596/</a> Бездепозитные призы прекрасный вариант безвозмездной игры в игровые автоматы. Многие юзеры сети не знают, что в казино возможно начать играть полностью безвозмездно, а потом вывести выигрыш на банковскую карту или электронный кошелек, иные не доверяют онлайн казино, а третьи удачно играют и выигрывают – и тотчас достаточно немалые суммы. скачать 1×slots на андроид мобильная версия Даже не выиграв крупную необходимую, игрок увлекательно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-либо денежных рисков. Быть в курсе лучших акций легко. Достаточно регулярно учить список новых онлайн казино с выводом бонуса без депо в этом разделе.
1× slots официальный
Бездепозитные бонусы истинными средствами, коие можно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадали.На бонусные начисления имеют быть установлены вспомогательные ограничения, коие Вы не приняли при отыгрыше. Пока бонус полностью не отыгран — средства из казино не выводятся. <a href=https://orbitsound.com/forum/user-211634.html>1×slots регистрация то дальше необходимо пройти</a> Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс дает игрокам важную информацию о самых свежих, щедрых и испытанных бонусах в онлайн казино, коие обновляются каждый денек. 1× слот зеркало <a href=https://dnepr.actieforum.com/t3552-topic#19317>https://dnepr.actieforum.com/t3552-topic#19317</a> Игры, каких можно выступать на бонусные деньги. Проверьте перечень игр, в которых возможно выступать на бонусные свои, возможно они Вам не понравятся и надо расходовать своё время на такую акцию.
рабочее зеркало 1хслотс
Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?Бонусы без депо при регистрации числятся наиболее красивыми как для опытнейших игроков, например для и начинающих. Получив такое вознаграждение, клиент имеет выступать на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные призы в интернет-казино Рунета, еще обстоятельства их активации и выигрыша. Заработать на бездепозитных призах за регистрацию в казино имеет любой пользователь, достигший совершеннолетия. <a href=https://champ-design.xooit.com/profile.php?mode=viewprofile&u=22838>https://champ-design.xooit.com/profile.php?mode=viewprofile&u=22838</a> На условиях отыгрыша бесплатных призов следует остановиться подробнее. С ними связаны аспекты, коие нельзя оставить без внимания. 1×slots casino зеркало
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вообще перейдя в казино — управляла одинаковы в получении бездепозитных бонусов, в стандартные верховодила входит: доказать эл. Почту и аппарат, наполнить собственный личный профиль, активировать рекламную код либо активировать предложения во вкладке БОНУСЫ.
#8712 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало
Каждый игры обязан сначала детально выучить условия по получению и отыгрышу приглянувшегося подарка. Если всё организует, поторопитесь арестовать бесплатные спины за регистрацию в казино без депозита с выводом и без отыгрыша и напрямик момент начать вращать барабаны топовых слотов. <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, необходимо адресоваться в службу спустя лайв-чат на веб-сайте казино. <a href=https://kumu.io/lexxeagle/efficient-and-accurate-architectural-drafting-services-for-modern-projects>https://kumu.io/lexxeagle/efficient-and-accurate-architectural-drafting-services-for-modern-projects</a> Нет. Для получения бездепозитного бонуса в казино нужна неотъемлемая регистрация на веб-сайте. Играть в слоты бесплатно и без регистрации можно лишь в демо режиме. 1×slots актуальное зеркало <a href=http://gticlub.lv/user/JamesHed/>http://gticlub.lv/user/JamesHed/</a> Акции распространяются как на все забавы казино, например и на ограниченный список. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и. Промо может обхватывать разработки одного производителя. Бездеп не пересекается с иными промоакциями казино. Если на веб-сайте предусмотрен кэшбек, он не начисляется за ставки, изготовленные бонусными деньгами. Для идентификации платежных реквизитов игрока возможность понадобиться пополнение счета на наименьшую необходимую.
1×slots актуальное зеркало
x1 slots регистрация в 1×slots casino <a href=http://web.symbol.rs/forum/member.php?action=profile&uid=611472>http://web.symbol.rs/forum/member.php?action=profile&uid=611472</a> Бездепозитные призы прекрасный вариант безвозмездной игры в игровые автоматы. Многие юзеры сети не знают, что в казино возможно начать выступать абсолютно бесплатно, а позже вывести выигрыш на банковскую карту либо электрический кошелек, иные не доверяют онлайн казино, а третьи успешно играют и выигрывают – и подчас достаточно немалые суммы.Бездепозитный бонус по промо-коду несомненно доступен для игры, только том, случае когда Вы активируете особый бонусный код в разделе с призами либо укажите промокод при регистрации на сайте. В неких случаях, кроме активации кода, придется подтвердить контактные данные игрока и наполнить анкету клиента. 1×slots зеркало на сегодня Верификация необходима для дополнительной безопасности и помогает техподдержке выявить бонусхантеров и жуликов. Кстати, на некоторых платформах выводы солидных сумм доступны только после доказательства личности.
1×slots казино зеркало
Это также бесплатные финансы, которые поступают на аккаунты свежеиспеченных компьютерные последствии регистрирования. А необыкновенность этих бонусов произведено никаких, что обретенные деньги непременно по применять в продолжении назначенного времени.Казино выделяет возможность заработать и исключить реальные деньги на бездепозитных призах. Обычно, это незначительная сумма, которую казино имеет для разрешить презентовать игроку. Кешбэк-бонус дает собой возврат фиксированного процента от ставки в случае проигрыша или же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не выше 10%.Возможность поиграть вспомогательное соревнование (а иногда и некоторое) абсолютно безвозмездно, а выигрыш, в свою очередь, поступает на счёт игрока. <a href=http://vashtehnadzor.ru/index.php?subaction=userinfo&user=sableanyplace36>http://vashtehnadzor.ru/index.php?subaction=userinfo&user=sableanyplace36</a> Когда речь идет о денежных призах, казино постоянно устанавливают обстоятельства вейджера, коие необходимо выполнить, дабы исключить выигрыш. 1×slots casino online регистрация Хотя бесплатные бонусы начисляются без депо, не исключено, собственно для понадобиться вносить средства. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь в как, как новый заказчик впервые пополнит игровой счет.
1х слот регистрация в 1×slots casino
Доступность — бездепозитные призы в казино чаще всего предоставляются новым игрокам, хотя бывают случаи, когда бонус могут получить и действующие посетители.Но существуют азартные заведения, готовые просто так вручить деньги на забаву. Для этого достаточно создать профиль. Чтобы вывести выигрыш, сначала нужно выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа. <a href=http://forums.indexrise.com/thread-12305-post-330232.html#pid330232>1× slots зеркало</a> Промообъявления от казино мешают реальной картины и ориентированы на привлечение внимания юзеров. Понять, насколько высоки шансы остаться в плюсе, позволит собственный анализ критерий предложения:Шаг 4. Активация. Внимательно исследуйте условия, информацию по лимитированиям и сроке действия бонусного предложения. Разобравшись с правилами, можно активировать приз в личном офисе (от ? с использованием промокода) или по запросу в саппорт. Максимальная ставка ? устанавливается в еденице счета и ограничивает объем ставки за один спин. В случае ее превышения приз может быть аннулирован. Также в правилах может находиться запрет на размещение ставок конкретного облика, например, по одинаковым шансам в рулетке (другими, на чет или нечет, красное либо темное и т.д. ). 1×slots мобильная версия войти казино <a href=https://notebooks.ru/forum/index.php?PAGE_NAME=profile_view&UID=39504>https://notebooks.ru/forum/index.php?PAGE_NAME=profile_view&UID=39504</a> При отыгрыше бонусных средств, необходимо учитывать срок деяния бонуса и время, которое дается на отыгрыш. По истечению заявленного медли, не отыгранный бонус будет аннулирован.
1×slots зеркало подтвердит вашу регистрацию если говорить
Призовые начисления без депо имеют предоставляться для роли в турнирах онлайн казино. Потратить перечисленные средства можно исключительно масштабах этой акции. Условия их проведения содержат ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться таким предложением, превосходнее выучить его верховодила.Фриспины. Бесплатные вращения предусмотрены для применения в видео-слотах. Внимательно читайте условия – они часто выдаются для неких машин. В зависимости от клуба вы можете создавать определенное число ставок. Кстати, современные игорные дома выделяют возможность заводить «одноруких злодеев». Бездепозитные призы за регистрацию в игровых автоматах для собственников онлайн-казино считаются долею маркетинговой кампании, направленной на повышение аудитории вебсайта. Так они продвигают средства бренды и привлекают новых клиентов. <a href=http://www.qazaqpen-club.kz/en/user/Kennethrag/>http://www.qazaqpen-club.kz/en/user/Kennethrag/</a> В игровых клубах без лицензии Вы покупаете „кота в мешке“ и в случае спорных ситуаций нет возможности куда-то посетовать и обосновать свою правоту. 1×slots зеркало Представьте момент, когда при ставке в 10 руб. Вы получите схожее умножение. Миллион руб. За одно вращение, что абсолютно вероятно. Поэтому вопрос, сколько можно выиграть остаётся не. Предлагаем проверить самостоятельно. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный бонус и инспектируйте фортуну в деле. Разумеется, вывести деньги сложно. Однако шансы есть у всех.
<b>Смотреть еще похожие новости:</b>
<a href=https://bajarmp3.net/showthread.php?tid=447961>1× слот зеркало</a>
<a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=853306#pid853306>1×slots casino зеркало рабочее</a>
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=537169>1хслотс рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, чтобы появилась вероятность вывести выигрыш. Чтобы получить вероятность вывести выгода с бездепозитного приза в казино, нужно выполнить ряд критерий:
#8713 Charlesgunnyhttp://filmkachat.ru
1×slots casino online регистрация
Доступность — бездепозитные призы в казино почаще всего предоставляются новым игрокам, хотя бывают случаи, когда бонус шансы получить и действующие клиенты. <a href=http://filmkachat.ru/>1×slot зеркало рабочее этих способов предполагает регистрацию</a> Наличие у игрока второго аккаунта. Запрещено создавать некоторое профилей для многократного получения бездепов.Главное преимущество спинов – вероятность изучить различные слоты. Также удастся насладиться бонусными раундами, испытать удачу в риск-туре и преувеличить выигрыш за счёт особенных знаков. Однако не игровой процесс заслуживает внимание, так другого сосредоточиться на реальном выигрыше. <a href=https://rant.li/9fsnh6hu13>https://rant.li/9fsnh6hu13</a> Перечисленные повыше основные свойства сопровождают практически любой бонус и считаются стандартными для бездепозитных бонусных начислений в казино.Такие одобрения позволяют бесплатно протестировать новое казино, разобраться с игровым процессом онлайн слотов, заработать и исключить небольшую сумму денег. 1×slots акции <a href=https://forexzloty.pl/members/384247-charlesdoomi>https://forexzloty.pl/members/384247-charlesdoomi</a> Получать информацию о самых прибыльных призах возможно без неизменного прогноза новостей казино. Мы брали эту задачу на себя и безпрерывно смотрим за предложениями операторов, избирая наилучшие из них. В этом разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список акций периодически пополняется. В топ вошли самые свежие бездепозитные бонусы за регистрацию в казино 2020, кратковременные и замкнутые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру прочим аспектам. Если срок деяния промоакции истек, она удаляется из перечня.
1×slots сайт
<a href=https://russiancomputerservice.ru/user/JosephCer/>1×slots регистрация на официальном сайте</a> 1×slot официальный сайт Но ни не запамятовывайте внимательно читать верховодила роли в бонусных промоакциях. Если вы нарушите но бы одно условие, позднее вы не сможете устроить недоразумение с администрацией.Вознаграждения за получение VIP-статуса ? начисляются масштабах программы лояльности при достижении очередного значения или выдаются индивидуально менеджерами саппорта. <a href=https://truejesus.net/forums/member.php?action=profile&uid=4174>https://truejesus.net/forums/member.php?action=profile&uid=4174</a> Мы советуем не отказываться от подобных предложений узнаваемых казино. Выделите количество минут на регистрацию, получите бонус и попробуйте его отыграть. Может быть, сейчас фортуна будет на вашей стороне! 1×slots официальный сайт зеркало рабочее Постарайтесь отыграть вейджер, дабы замечена возможность оставить заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электронной кошелёк, карту, аппарат.
1×slot регистрация
Многие казино деют в маркетинговых целях бесплатные бонусы исключительно для наших читателей. Чтобы их получить, нужно перейти на игровой сайт по партнерской ссылке с нашего портала. Как и другие промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения считаются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых гостей и разрешает им составить эмоцию о функционале, не рискуя значительными суммами.Вы не в коем случае ни чем не рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный приз, по мимо практической забавы на бездепозитные бонусы, у Вас есть шанс изучить игровые автоматы, выучится регулировать изменять ставки и линии, изучать бонусные игры и их выигрышные композиции, ну счете просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные средства, коие можно отыграть и вывести, но просто на демо счет, что, этим наиболее адреналин в крови еще больше повысится а пульс забьется с нередким ритмом! <a href=http://miupsik.ru/forums/member.php?action=profile&uid=5261>http://miupsik.ru/forums/member.php?action=profile&uid=5261</a> Создание аккаунта. На веб-сайте казино нужно обнаружить регистрационную форму и заполнить пустопорожние поля личными данными. Иногда на этом шаге потребуется показать лишь адрес электрической почты и пароль, хотя почаще хотелось наполнить анкету персональной информацией (ФИО, дата рождения, место проживания и т.д. ). Нужно указывать лишь реальные данные, что впоследствие они будут проверены.Помните, что всевозможные нарушения управлял сведут на нет ваши старания, и вы всего останетесь без начисленного вам безвозмездного приза. Всегда изучайте правила начисления и условия вейджера. По хоть вопросам, на которые вы возможности других найти ответы, обращайтесь за разъяснениям и саппорт. 1×slots официальный demo регистрация в 1×slots casino Не стоит сразу же отрицаться от приветственных подарков в подобных казино. Администрация готова начислить средства или фриспины, но предварительно работники должны убедиться, собственно вы не аферист. Дело что, собственно развелось слишком большое охотников за бонусами. Они выучились обманывать систему и наваривать солидные суммы денег.
1×slots официальный сайт мобильная версия
Такой казино приз без депозита за регистрацию выдается игроку на час и энергично используется данное предложение с 2017 года. Это словно какая-то маскировка одобрения под бездепозитный. Суть всего этого сводится к тому, собственно игроку на час выдается, например, 1000 долларов, а реклама твердит о том, собственно каждой выигрыш возможно несомненно в забыть при себя. Но случае играющий серьезно отнесется к данному предложению, то он просто растеряет время. Ведь игроку надо(надобно) несомненно играть не в аккаунте, ну тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (числе всей тысячи) в управляла вступят определенные условия, где будет сказано, собственно наибольшей суммой победы может быть только двести долларов и средства возможно использовать только в качестве бонуса на 1-ый вклад с вейджером 25 от суммы вознаграждения плюс сам депо. По итогу выйдет, собственно игрок выигрывал себя 200% бонус с вейджером на определенную сумму. Короче разговаривая, это все не стоит вашего времени.Основное различие что, нет, собственно для получения бездепа не надо пополнять баланс в казино. Но не этого, есть ряд и других различий: <a href=https://www.reisezielforum.de/viewtopic.php?t=369520>1×slots регистрация 1×slots review live</a> Вейджер (или вагер) ? это минимальная сумма ставок, которую нужно устроить для вывода валютного бонуса. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, тем привлекательнее спецпредложение.Условия имеют разниться приятель от друга. Но такой бонус имеет быть использован только для игрового процесса – полученные на счет деньги до как, как будут отыграны, исключить нереально. 1×slots промокод при регистрации 2025 <a href=http://terra-bashkiria.ru/forum/?PAGE_NAME=profile_view&UID=169354>http://terra-bashkiria.ru/forum/?PAGE_NAME=profile_view&UID=169354</a> Срок активации и время на отыгрыш. Зачисление средств или фриспинов происходит при активации на требовательно ограниченного периода, схожие притязания предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать бонус несколько дней или и недель. Другие выдают крупную необходимую за регистрацию, но время отыгрыша ограничивают несколькими часами с необоснованно высочайшим вейджером.Помимо прочего, для вывода средств по бездепу нужно привнести на счёт свой первый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало возможную необходимую, в чего вывод средств станет доступен.
1хслотс казино зеркало
Бoльшинcтвo азартных заведений выдвигают примерно одинаковые обстоятельства и требования, коие необходимо выполнить, чтобы получить бездепозитный приз за регистрацию. Все их можно объединить в один список: <a href=http://www.591314.org/space-uid-15404.html>http://www.591314.org/space-uid-15404.html</a> Вывод выигрыша с бездепозитных бонусов казино – щедрый подарок от азартных клубов. Но чтобы исключить собственный доход, нужно выполнить ряд критерий:Бонус без депозита за регистрацию в казино (бездепозитный бонус) – это денежный подарок от клуба, который начисляется на аккаунт игрока последствии регистрации в казино. Кроме сотворения учетной записи, для получения бездепа, довольно нередко потребуется ещё и подтвердить контактные данные игрока и/или активировать специальный промо-код. 1хслотс казино зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=66691&result=reply>казино 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в социальных сетях, установку мобильного приложения или официального клиента для ПК. В большинстве казино действуют программки преданности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на следующий уровень часто с выдачей бездепа.
#8714 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация то дальше необходимо пройти
При маленькой сумме бонуса рекомендуется играть по невысоким ставкам, а применять наибольшие другого только что случае, в вейджер очень немалый, а время на отыгрыш крепко ограничено. <a href=http://filmkachat.ru/>1×slots регистрация на официальном сайте</a> <a href=https://www.socialwider.com/blog/597913/professional-construction-drawing-services-your-blueprint-for-building-succ/>https://www.socialwider.com/blog/597913/professional-construction-drawing-services-your-blueprint-for-building-succ/</a> Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депозит имеет отличаться до 30 дней.Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. 1×slots официальный зеркало <a href=https://rolivka.online/forum/member.php?action=profile&uid=63104>https://rolivka.online/forum/member.php?action=profile&uid=63104</a> Фриспины – благотворительные вращения с фиксированной ставкой, которые возможно использовать в определенных игровых автоматах.Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, например как Вам придется ее подтвердить в будущем при выводе средств.
1×slots зеркало регистрацию более популярный вариант это
Максимальная ставка ? устанавливается в денежной счета и ограничивает размер ставки за один спин. В случае ее превышения бонус возможность быть аннулирован. Также в правилах имеет содержаться запрет на размещение ставок определенного вида, к, по одинаковым шансам в рулетке (то есть, на чет либо нечет, красноватое либо черное и т.д. ).Популярность интернет казино растёт и всё больше пользователей начинают интерес азартными забавами. Бездепозитные бонусы 2022 года, это оригинальные презенты за регистрацию. С их поддержкою свежие игроки все получить безвозмездные вращения либо деньги на баланс за 1 регистрацию. С в игорных заведений в онлайне, бездепозитные бонусы стали знаменитейшим способом привлечения игроков. Подобные промоакции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш вебсайт собрал наилучшие предложения из онлайна на 2022 год. Воспользуйтесь каким даром и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша необходимо выполнить обстоятельства. 1хслот зеркало сайта Промокод – определённая композиция знаков, которую нужно ввести в соответствующее поле при творении учетной записи либо активировать в собственном профиле игрока в разделе с бонусами. <a href=http://maglik.ru/user/Jamesmoozy/>http://maglik.ru/user/Jamesmoozy/</a> 1×slots рабочее зеркало Шаг 4. Активация. Внимательно изучите обстоятельства, информацию по лимитированиям и сроке действия бонусного предложения. Разобравшись с правилами, возможно активировать бонус в собственном кабинете (времени ? с внедрением промокода) либо по запросу в саппорт.При регистрации никаких или ином интернет игральном заведении — вас дается один шанс испытывать свою фортуну не внося свои монеты. Замечу что эту поощрительную услугу предоставляют не все интернет игровые площадки, а только великодушная половина из их. Которые мы подготовили для Вас в нашем перечне.
1х слот 1хслотс регистрация перейти на 1×slots
Нет. Казино раздают безвозмездные призы за регистрацию, для того, чтобы клиент возможность ознакомиться с игровым заведением. А чтобы вывести его, необходимо выполнить условия отыгрыша.Бездепозитные призы, как теснее понятно, считаются оригинальной возможностью обратиться игровому процессу полностью безвозмездно, другими выступать в интернет казино даром и на место свои незамедлительно после регистрации аккаунта. Автоматы с этим депо все замерзнуть великолепной вероятностью сыграть для поклонников пыла с определенными ограничениями в финансах. Это тоже безвозмездные финансы, которые поступают на аккаунты новоиспеченных компьютерные последствии регистрирования. А особенность этих призов состоит что, нет, собственно обретенные деньги обязательно идет использовать в продолжении назначенного медли. <a href=http://j67236dr.bget.ru/user/Oscarknogy/>http://j67236dr.bget.ru/user/Oscarknogy/</a> 1×slots регистрация Возможность протестировать свежие забавы, не рискуя собственными средствами и создать личную тактику игры.Объективные – размер приза, коэффициент и обстоятельства вейджера, необходимость внесения депо для вывода денег;
1×slots регистрация 1×slots casino 777 online
Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном сайте и сделайте вход в индивидуальный офис, дабы забрать безвозмездные вращения с вейджером х40; <a href=https://qualityprogamer.de/forum/showthread.php?tid=272932>casino 1×slot</a> 1×slots зеркало регистрация то дальше необходимо пройти <a href=https://bbs.zzxfsd.com/home.php?mod=space&uid=311829>https://bbs.zzxfsd.com/home.php?mod=space&uid=311829</a> Основное отличие в, собственно для получения бездепа не пополнять баланс в казино. Но кроме этого, есть ряд и других отличий:
1× slots casino зеркало
Иногда в качестве одобрения за регистрацию имеют выдаваться билеты для участия в турнирах. Условия их проведения довольно отличаются, поэтому мы рекомендуем ознакомиться с любым предложением раздельно.Бездепозитный приз казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в этом и заключается основное различие. Чтобы получить возможность вывести выгода с бездепозитного бонуса в казино, нужно выполнить ряд критерий:Следует подчеркнуть, что бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам либо с конкретным кодом. <a href=http://fromair.ru/communication/forum/user/75656/>http://fromair.ru/communication/forum/user/75656/</a> 1×slots зеркало регистрацию более популярный вариант это
<b>Смотреть еще похожие новости:</b>
<a href=https://clubdefansde24.com/foro/viewtopic.php?t=18575>1×slots casino регистрация 1×slots review live</a>
<a href=https://surfaceprophets.com/members/davidelicy.5309/>1× слот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое возможно предназначить этой в казино.
#8715 Charlesgunnyhttp://filmkachat.ru
рабочее зеркало 1хслотс
Подарки на праздничные ? приуроченные к праздничным датам, требующие условного отыгрыша либо начисляются без такового. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду.B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. <a href=http://filmkachat.ru/>казино 1×slots</a> У любого игорного клубы различные вейджеровые условия. Чтобы вы гарантировано сумели выполнить их, мы дадим некоторое советов. Если система начислила небольшую необходимую, не стоит создавать великие ставки – остановитесь на 10–30 центах. Как лишь сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте играть. В противном случае другого, как присмотреться к иному автомату.В лицензионных бездепозитных казино выступать в азартные забавы действительно безопасно. Наличие лицензии подтверждает что, этот прецедент, собственно клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP. <a href=https://culture-informatique.net/forum/quelquun-peut-mexpliquer/what-is-a-3d-render-understanding-the-basics-and-beyond/>https://culture-informatique.net/forum/quelquun-peut-mexpliquer/what-is-a-3d-render-understanding-the-basics-and-beyond/</a> 1×slots коды <a href=http://whdf.ru/forum/user/79033/>http://whdf.ru/forum/user/79033/</a>
казино 1×slots
Используйте наилучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, дабы заработать подарки за простые деяния и уже сегодня получить 1-ый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высокой отдачей и резвыми выводами на электрические кошельки.Бездепозитные бонусы — это презенты от казино в виде бонусных средств или фриспинов для игровых автоматов, коие начисляются на аккаунт игрока в процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депо не требуется. 1× slots сайт Рассмотрим принцип его деяния на случае. Допустим, вы зарегались и возымели $10 no down payment bonus с вейджером х50. Это означает, собственно выигранные средства возможно несомненно выводить не раньше, чем в такого, как общая сумма ставок достигнет $500. <a href=https://www.stroimvmeste.com.ua/user/DonaldPaids/>https://www.stroimvmeste.com.ua/user/DonaldPaids/</a> Это раз из основных характеристик привлекательности подарка. С завешенным коэффициентом даже мастера не смогут выполнить условия по отыгрышу. И маловажно, насколько презентабельно смотрится предложение – бездепозитный приз казино в размере $500 либо $1 000. Чтобы новенькие попревосходнее вникли, собственно же это вейджер, мы разберём на образце. 1×slots подтвердит вашу регистрацию если говорить В современность очень просто получить приз за регистрацию в казино. Практически любой игорный жилище с готовностью начисляет деньги либо безвозмездные вращения. Многие гэмблеры пользуются данным и не стесняются региться в каждом клубе с прибыльными критериями. Кстати, это отличная вероятность выработать победную стратегию и сорвать джекпот.Осталось выбрать казино с призом за регистрацию и создать профиль. После активации презента выигрыш зависимости от Фортуны и способностей.
1×slots зеркало регистрация в 1×slots casino
Лишь модные и известные азартные заведения имеют позволить себе раздавать бездепы повторяющий добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депо, коие возможно истратить в топовых аппаратах с высочайшей отдачей.Этот образ приза несомненно добавлен на Ваш аккаунт последствии успешной процедуры регистрации с использованием номера телефонного. Если избрать другой способ творенья учетной записи, бездеп не будет добавлен на Ваш аккаунт. Бездепы обыкновенно предлагают с отыгрышем — мгновенно вывести выигранные свои нельзя. Перевод денег со счета несомненно вероятен после как, как пользователь выполнит все притязания казино, а сумма возможности быть выше установленного правилами лимита. Условиями акции фиксируются сроки, в течение которых заказчик вправе воспользоваться предложением. Обычно они не превышают нескольких дней в активации.Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс дает игрокам важную информацию о самых новых, щедрых и проверенных призах в интернет казино, которые обновляются любой день. <a href=http://agriexpert.kz/user/Oscaredilk/>http://agriexpert.kz/user/Oscaredilk/</a> 1×slots рабочее зеркало
1хслотс 1хслотс регистрация перейти на 1×slots
Чаще всего казино бонус за регистрацию без депо даёт возможность запустить каждой автомат. Но какого-либо пристально ознакомиться с критериями. Иногда для забавы доступны только определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, какого-либо начать знакомство с миром пыла именно с «одноруких бандитов».Вейджер в переводе с английского значит «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша полученного бонуса, в нашем случае бездепозитного. Число ставок большого — важно только набрать сумму, пропорциональную сумме одобрения. <a href=http://www.carshowsociety.com/forum.php/topic,11220.new.html#new>1×slots casino регистрация 1×slotscasino09k online</a> Допустим, за регистрацию вы возымели бездеп в размере 2 000 руб. С вейджером х30. В этом случае предстоит сделать ставок, на общую сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать реальные деньги. Однако не забывайте, собственно с любого презента выйдет исключить определённую необходимую (почаще всего не более $200). Если вы выбираете проверенное лицензионное онлайн казино и выполните все обстоятельства получения бездепозитного бонуса, трудностей с получением дара у Вас не возникнет. 1× slots регистрация в 1×slots casino <a href=https://www.vsetutonline.com/forum/member.php?u=248458>https://www.vsetutonline.com/forum/member.php?u=248458</a>
1хслот официальный сайт зеркало
Индивидуальные поощрения выдаются за совершение деяний: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавленья или официального клиента для ПК. В большинстве казино действуют программки преданности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий степень нередко сопровождается выдачей бездепа. <a href=http://www.freeweblink.org/details.php?id=264309>http://www.freeweblink.org/details.php?id=264309</a> Риск-игра по одинаковым шансам – Также казино возможность запрещать выполнять обстоятельства по отыгрышу счет раунда на удвоение, который предлагается в слотах, видео-покере и некоторых иных забавах.Выбор любого интернет казино на нашем веб-сайте. В описании к каждому Вы можете разузнать, собственно получите за творенье аккаунта. 1х слотс зеркало регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://timepost.info/showthread.php?tid=58762>1×slots казино мобильная версия</a>
<a href=http://theauction.com.au/my-account/>1× слот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Ограничения по играм. Администрация запрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, средствами или безвозмездными вращениями. Обычно, в правилах приводится полный перечень слотов для отыгрыша. Иногда разделение производится по виду игр. Например, отыгрыш вероятен на всех игровых аппаратах, но запрещен в настольных забавах и в разделе Live Casino.
#8716 Charlesgunnyhttp://filmkachat.ru
1×slot регистрация
Представленные на этой страничке превосходнейшие бездеп бонусы в казино за регистрацию в 2022 году имеют оптимальные условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, каком посетители Casino.ru имеют сортировать перечень по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д. <a href=http://filmkachat.ru/>1×slots быструю регистрацию а также мгновенное</a> На данном разделе портала периодически публикуются обзорные заметки, каких рассматриваются благотворительные призы наилучших интернет-казино. Информация структурирована по нескольким пунктам, включая основные: <a href=https://forums.noria.com/topic/exploring-render-cgi>https://forums.noria.com/topic/exploring-render-cgi</a> 1×slots зеркало быструю регистрацию а также мгновенное <a href=http://empyrethegame.com/forum/memberlist.php?mode=viewprofile&u=332287&sid=69b8afc1472931a59b6744492b2fbbc5>http://empyrethegame.com/forum/memberlist.php?mode=viewprofile&u=332287&sid=69b8afc1472931a59b6744492b2fbbc5</a> Ещё одно распространённое акционное предложение – привлекательный подарок с неблаговидными требованиями. К примеру, клуб сулит $100 виде бездепа, но с вейджером х80 либо х100. Отыграть подобный вейджер практически невозможно и потому чем концентрироваться на более заманчивых промоакциях.Мы проделываем ударение на главных положениях правил, рассказываем о территориальных лимитированиях и вкратце информируем о иных промоакциях обговариваемого казино.
1×slots зеркало быструю регистрацию а также мгновенное
Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала резвые выводы. Фишка выплат том,, что довольно выбрать платёжный инструмент и показать необходимую. В большинстве случаев деньги зачисляются на электрические кошельки протяжении 15 мин., а на банковские карты – 1–3 трудящихся денька. 1×slots официальный зеркало рабочее Игрокам стоит принимать приветственный приз как гарантированный метод получить крупный выигрыш, хотя это отличная возможность без расходов расценить перечень казино. <a href=http://unisaw.ru/bitrix/rk.php?goto=http://sinaratm.ru/bitrix/rk.php?goto=http://ps-link.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/E9kgfLPtDGD>http://unisaw.ru/bitrix/rk.php?goto=http://sinaratm.ru/bitrix/rk.php?goto=http://ps-link.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/E9kgfLPtDGD</a> 1×slots официальный сайт скачать
1хлот регистрация в 1×slots casino
Даже не выиграв крупную необходимую, игрок увлекательно проведет время, изнутри исследует работу площадки, воспримет геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе лучших акций легкостью. Достаточно регулярно изучать перечень свежих интернет казино с выводом приза без депозита в данном разделе.Не советуем опрометью голову хвататься за всевозможные предложения получения средств без инвестициям. Вполне возможно, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на первый взор. Альтернативой считается казино приз за депо. Мы предлагаем вам пару советов, благодаря которым у каждого игрока несомненно возможность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег: <a href=http://www.gtcm.info/home.php?mod=space&uid=801264>http://www.gtcm.info/home.php?mod=space&uid=801264</a> Фриплей-бонусы. Бонусы за безвозмездную забаву есть только в неких клубах. Они зачисляются незамедлительно после сотворения профиля и действуют недолговременное время. Если у вас нет медли истратить свои, они просто завершатся. Что дотрагивается времени, правило призы действуют протяжении 1-го часа.Однако в условиях исчезают «подводные камешки», которые не позволят вывести крупную сумму либо же вы не успеете отыграть вейджер. Поэтому мастера рекомендуют отобрать безвозмездные вращения за регистрацию в казино без депозита, чтобы поднабраться навыка и получить реальный шанс на победу. 1× слот зеркало Получить приветственный приз имеют лишь свежие клиенты онлайн-казино. Способы описаны в критериях акции каждого легального казино, почаще всего это:
1×слотс казино
С другой стороны, намного проще забрать бездепозитные фриспины за регистрацию в казино и прямо сейчас начать вращать барабаны в превосходнейших слотах. Главная особенность спинов в, что они предназначены для лучших автоматов. Удастся не пройти вспомогательные раунды, хотя и увеличить сумму выигрыша, заработать респины и внутриигровые презенты.Прибывшие на акк деньги бездепозитные призы предназначаются, в, только для свежеиспеченных юзеров, которые раньше не имели собственного аккаунта в данном казино. Исходя из этого, в ранее у игрока был сделан депо, то, по всей вероятности, у него больше не несомненно способности рассчитывать на получение такого приза в определенном заведении. Также, в этом случае необходимо подтвердить собственный номер телефонного, желаемого код, приобретенный в смс-сообщении от клуба ввести в особое поле в личном кабинете игрока. 1×slots регистрация на 1хслотс <a href=http://kinglish.com/bbs/board.php?bo_table=review&wr_id=331843>http://kinglish.com/bbs/board.php?bo_table=review&wr_id=331843</a> Размер бонуса. В качестве бездепов обыкновенно начисляют большие суммы, а когда речь о призах за депо, которые начисляются в процентном соотношении от суммы пополнения, то некоторые казино имеют презентовать игроку до 2000$.В некоторых интернет казино для получения бездепозитных бонусов не довольно просто зарегистрироваться на веб-сайте клуба и подтвердить средства контактные данные. Дополнительно потребуется активация промокода.
1хлот регистрация в 1×slots casino
Некоторые казино все предлагать клиентам бездепы за подтверждение номера либо почты либо репост на страничку в соц сетях. Однако в критериях скрываются «подводные камни», которые не позволят исключить солидную необходимую либо же вы не успеете отыграть вейджер. Поэтому профессионалы рекомендуют отобрать безвозмездные вращения за регистрацию в казино без депозита, дабы поднабраться навыка и получить реальный шанс на победу.Да, у даровых бонусов есть недостатки. Прежде всего, они обыкновенно маленькие. Кроме как, обстоятельства вейджера по ним практически жесткие. Но все неименье риска делает их довольно привлекательными для посетителей. <a href=https://xn–2n1b32rgho83a7no.kr/bbs/board.php?bo_table=free&wr_id=528552>https://xn–2n1b32rgho83a7no.kr/bbs/board.php?bo_table=free&wr_id=528552</a> Бонусы без депо при регистрации числятся самыми привлекательными как для опытнейших игроков, так для и новичков. Получив такое вознаграждение, клиент возможность играть на настоящие деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные призы в интернет-казино Рунета, а также обстоятельства их активации и выигрыша. 1× slots регистрация в 1×slots casino Используйте лучшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из списка ниже, дабы заработать презенты за обычные деяния и уже сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высочайшей отдачей и быстрыми выводами на электрические кошельки.
<b>Смотреть еще похожие новости:</b>
<a href=https://dev.eff.one/member.php?action=profile&uid=904>1×slots бездепозитный бонус за регистрацию</a>
<a href=http://forums.indexrise.com/thread-1096-post-332839.html#pid332839>1×slots casino зеркало</a>
<a href=http://board.eternityrpc.com/thread-1021-post-14158.html#pid14158>1×slot регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При правильном подходе бездепы — это отличный метод выступать на деньги без траты собственных средств. Есть несколько рекомендаций, следуя которым возможно извлечь максимум выгоды из похожих акций казино. Играть стопам только на лицензированных площадках. Скриптовые веб-сайты столько обманывают с бонусными предложениями, хотя и употребляют пиратский софт с измененным ГСЧ. Выиграть на таких автоматах невозможно. Простая процедура получения бездепозитного приза, которая займет не более 2-х мин. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные.
#8717 Ремонт мфуhttps://remont-mfu-lite.ru/
Наш сервисный центр предлагает профессиональный <a href=https://remont-mfu-lite.ru/>отремонтировать мфу адреса</a> различных марок и моделей. Мы знаем, насколько важны для вас ваши многофункциональные принтеры, и обеспечиваем ремонт наилучшего качества. Наши квалифицированные специалисты работают быстро и аккуратно, используя только сертифицированные компоненты, что обеспечивает надежность и долговечность выполненных работ. Наиболее распространенные поломки, с которыми сталкиваются обладатели многофункциональных принтеров, включают неработающий картридж, проблемы со сканирующим блоком, ошибки ПО, неисправности разъемов и повреждения корпуса. Для устранения этих поломок наши опытные мастера выполняют ремонт печатающих головок, сканеров, ПО, разъемов и механических компонентов. Обратившись к нам, вы гарантируете себе надежный и долговечный официальный ремонт мфу в москве. Подробная информация представлена на нашем сайте: https://remont-mfu-lite.ru
#8718 ArmandoRuiff
how to get clomid without prescription: <a href=" http://clomid.store/ ">buy clomid without prescription</a> – where can i get cheap clomid without insurance
#8719 WilliePubre
clomid tablet <a href=" http://cwk.freehostia.com/viewpro.php?… „>how to get clomid pills</a> or <a href=“ http://prime50plus.co.uk/…redirect.php?… ">cheap clomid prices</a> http://maps.google.cl/url?… cost of generic clomid price <a href=https://www.google.jo/url?q=https://clomid.store>get cheap clomid without rx</a> get generic clomid without prescription and <a href=https://www.soumoli.com/home.php?mod=space&uid=60824>can i purchase clomid without rx</a> how to get generic clomid
#8720 ElvisRoneehttps://pikabu.ru/story/otkaznoe_pismo_dlya_marketpleysov_chto_yeto_za_dokument_i_dlya_chego_nuzhen_
Отказное, или информационное письмо <a href=https://pikabu.ru/story/otkaznoe_pismo_dlya_marketpleysov_chto_yeto_za_dokument_i_dlya_chego_nuzhen_12093993>https://pikabu.ru/story/otkaznoe_pismo_dlya_marketpleysov_chto_yeto_za_dokument_i_dlya_chego_nuzhen_12093993</a> неофициальный документ, который оформляется в добровольном порядке. Он доказывает, что продукция производителя безопасна для потребителя, животных и экологии, но при этом сертификация качества не требуется. Отказные письма нужны для сотрудничества с маркетплейсами и для таможенного оформления импортных товаров. При реализации продукции на Wildberries, OZON или Яндекс.Маркете предприниматели должны предоставить сертификат или декларацию соответствия. Об этом говорит статья 456 ГК РФ. В ней указано, что продавец обязан совместно с передачей товара передать покупателю документы качества, если это позволяет договор купли-продажи.
#8721 Georgesathttps://pikabu.ru/story/dlya_chego_nuzhen_sertifikat_gost_r_iso_9001_pri_uchastii_v_tenderakh_120935
Сертификат о соответствии <a href=https://pikabu.ru/story/dlya_chego_nuzhen_sertifikat_gost_r_iso_9001_pri_uchastii_v_tenderakh_12093517>https://pikabu.ru/story/dlya_chego_nuzhen_sertifikat_gost_r_iso_9001_pri_uchastii_v_tenderakh_12093517</a> системы менеджмента качества требованиям стандарта ГОСТ Р ИСО 9001 является официальным документом, удостоверяющим, что система менеджмента качества создана согласно установленным требованиям. Для получения документа о соответствии СМК, необходимо подтвердить, что проведены разработка и внедрение системы, она результативна, эффективно функционирует и постоянно совершенствуется.
#8722 Ремонт морозильных камерhttps://remont-morozilnyh-kamer-spec.ru/
Наши специалисты предлагает профессиональный <a href=https://remont-morozilnyh-kamer-spec.ru/>мастерская по ремонту морозильных камер в москве</a> всех типов и брендов. Мы понимаем, насколько значимы для вас ваши морозильные камеры, и готовы предложить сервис наилучшего качества. Наши квалифицированные специалисты проводят ремонтные работы с высокой скоростью и точностью, используя только оригинальные запчасти, что обеспечивает надежность и долговечность выполненных работ. Наиболее частые неисправности, с которыми сталкиваются владельцы морозильных камер, включают неисправности компрессора, неисправности термостата, ошибки ПО, проблемы с подключением и механические повреждения. Для устранения этих поломок наши профессиональные техники оказывают ремонт компрессоров, термостатов, ПО, разъемов и механических компонентов. Обращаясь в наш сервисный центр, вы получаете долговечный и надежный центр ремонта морозильной камеры рядом. Подробная информация доступна на сайте: https://remont-morozilnyh-kamer-spec.ru
#8723 DavidImmomhttps://mbmedicall.com
Подробные инструкции по ремонту <a href=https://mbmedicall.com/>https://mbmedicall.com</a> своими руками: ремонт стен, полов, потолков и мебели. Полезные рекомендации для успешного результата.
#8724 Ремонт моноколесhttps://remont-monokoles-serv.ru/
Наш сервисный центр предлагает надежный <a href=https://remont-monokoles-serv.ru/>починить моноколесо на дому</a> различных марок и моделей. Мы знаем, насколько важны для вас ваши электрические моноколеса, и готовы предложить сервис высочайшего уровня. Наши опытные мастера проводят ремонтные работы с высокой скоростью и точностью, используя только качественные детали, что гарантирует надежность и долговечность выполненных работ. Наиболее общие проблемы, с которыми сталкиваются пользователи электрических моноколес, включают неисправную батарею, неработающий двигатель, сбои контроллера, неработающие сенсоры и механические повреждения. Для устранения этих неисправностей наши профессиональные техники оказывают ремонт батарей, двигателей, контроллеров, гиросенсоров и механических компонентов. Доверив ремонт нам, вы обеспечиваете себе надежный и долговечный починить моноколесо. Подробная информация размещена на сайте: https://remont-monokoles-serv.ru
#8725 FrancisVerhttps://t.me/qvavada
<a href=https://t.me/qvavada>vavada зеркало на сегодня вход</a> предоставляет уникальную возможность погрузиться в мир азартных игр. здесь вы сможете зарегистрироваться на официальном сайте vavada. получите доступ к специальным предложениям через личный кабинет.
#8726 Ремонт моноколесhttps://remont-monokoles-serv.ru/
Наши специалисты предлагает высококачественный <a href=https://remont-monokoles-serv.ru/>сервис ремонта моноколес на выезде</a> различных марок и моделей. Мы осознаем, насколько значимы для вас ваши самобалансирующиеся устройства, и обеспечиваем ремонт наилучшего качества. Наши профессиональные техники работают быстро и аккуратно, используя только сертифицированные компоненты, что гарантирует длительную работу наших услуг. Наиболее распространенные поломки, с которыми сталкиваются пользователи электрических моноколес, включают неисправную батарею, проблемы с мотором, поломку контроллера, неисправности сенсоров и механические повреждения. Для устранения этих проблем наши квалифицированные специалисты оказывают ремонт батарей, двигателей, контроллеров, гиросенсоров и механических компонентов. Обратившись к нам, вы обеспечиваете себе качественный и надежный вызвать мастера по ремонту моноколеса. Подробная информация размещена на сайте: https://remont-monokoles-serv.ru
#8727 LegzoAndroidhttps://legzo-casino-apk.ru/legzo-na-androjd/
<a href=https://maximal-life.hateblo.jp/iframe/hatena_bookmark_comment?canonical_uri=https://legzo-casino-apk.ru/legzo-na-androjd/>https://legzo-casino-apk.ru/legzo-na-androjd/</a> <a href=http://1cm.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=https://legzo-casino-apk.ru/legzo-na-androjd/>https://legzo-casino-apk.ru/legzo-na-androjd/</a> <a href=http://blog.lightingchina.com/go.asp?url=https://legzo-casino-apk.ru/legzo-na-androjd/>https://legzo-casino-apk.ru/legzo-na-androjd/</a> <a href=http://windowsinformer.com.xx3.kz/go.php?url=https://legzo-casino-apk.ru/legzo-na-androjd/>https://legzo-casino-apk.ru/legzo-na-androjd/</a> <a href=http://www.sponsorship.com/Marketplace/redir.axd?ciid=514&cachename=advertising&PageGroupId=14&url=https://legzo-casino-apk.ru/legzo-na-androjd/>https://legzo-casino-apk.ru/legzo-na-androjd/</a> <a href=http://traduction.culturecommunication.gouv.fr/url/result.aspx?to=en&url=https://legzo-casino-apk.ru/legzo-na-androjd/>https://legzo-casino-apk.ru/legzo-na-androjd/</a> <a href=https://maps.google.co.za/url?sa=j&rct=j&url=https://legzo-casino-apk.ru/legzo-na-androjd/>https://legzo-casino-apk.ru/legzo-na-androjd/</a> <a href=http://cms.koshelenko.info/go.php?url=https://legzo-casino-apk.ru/legzo-na-androjd/>https://legzo-casino-apk.ru/legzo-na-androjd/</a> <a href=http://wifepornpictures.com/ddd/link.php?gr=1&id=715575&url=https://legzo-casino-apk.ru/legzo-na-androjd/>https://legzo-casino-apk.ru/legzo-na-androjd/</a> <a href=https://maps.google.fm/url?sa=t&source=web&rct=j&url=https://legzo-casino-apk.ru/legzo-na-androjd/>https://legzo-casino-apk.ru/legzo-na-androjd/</a> <a href=http://www.campingguide.dk/6Forlystelser/adredir.asp?url=https://legzo-casino-apk.ru/legzo-na-androjd/>https://legzo-casino-apk.ru/legzo-na-androjd/</a> <a href=http://hypnoticworld.com/redir.php?id=362&b=https://legzo-casino-apk.ru/legzo-na-androjd/>https://legzo-casino-apk.ru/legzo-na-androjd/</a> <a href=https://faltejskova.blog.idnes.cz/redir.aspx?url=https://legzo-casino-apk.ru/legzo-na-androjd/>https://legzo-casino-apk.ru/legzo-na-androjd/</a> <a href=http://caro-cream.org/wp-content/plugins/AND-AntiBounce/redirector.php?url=https://legzo-casino-apk.ru/legzo-na-androjd/>https://legzo-casino-apk.ru/legzo-na-androjd/</a> <a href=http://sebastian.thiele.me/?wptouch_switch=desktop&redirect=https://legzo-casino-apk.ru/legzo-na-androjd/>https://legzo-casino-apk.ru/legzo-na-androjd/</a>
Download latest version of the application online casino legzo – win right now! <a href=http://pda.abcnet.ru/prg/counter.php?id=242342&url=https://legzo-casino-apk.ru/legzo-na-androjd/>https://legzo-casino-apk.ru/legzo-na-androjd/</a> <a href=https://www.rarib.ag/bitrix/redirect.php?event1=news_out&event2=https://legzo-casino-apk.ru/legzo-na-androjd/>https://legzo-casino-apk.ru/legzo-na-androjd/</a> <a href=https://24.glawandius.com/index/d2?diff=0&source=og&campaign=13142&content=&clickid=y0vzpup0zwsnl3yj&aurl=http%3A%2F%2Fgreasyfork.org/en/discussions/requests/173654-esp-for-browser-games>https://legzo-casino-apk.ru/legzo-na-androjd/</a> <a href=http://peter-npw2ey230.blogspot.com.xx3.kz/go.php?url=https://legzo-casino-apk.ru/legzo-na-androjd/>https://legzo-casino-apk.ru/legzo-na-androjd/</a> <a href=http://www.allindiangals.com/cgi-bin/atx/out.cgi?id=11&tag=top2&trade=https://legzo-casino-apk.ru/legzo-na-androjd/>https://legzo-casino-apk.ru/legzo-na-androjd/</a> <a href=http://www.antik.ru/engine/api/go.php?go=https://legzo-casino-apk.ru/legzo-na-androjd/>https://legzo-casino-apk.ru/legzo-na-androjd/</a> <a href=http://alanberko.com.xx3.kz/go.php?url=https://legzo-casino-apk.ru/legzo-na-androjd/>https://legzo-casino-apk.ru/legzo-na-androjd/</a> <a href=http://teddyclub.org/?r=link/link/redirect&url=https://legzo-casino-apk.ru/legzo-na-androjd/>https://legzo-casino-apk.ru/legzo-na-androjd/</a> <a href=http://guiadevaldivia.cl/instagram.php?id=369&dirinsta=https%3A%2F%2Fgreasyfork.org/en/discussions/requests/173654-esp-for-browser-games>https://legzo-casino-apk.ru/legzo-na-androjd/</a> <a href=http://www.fat-tgp.com/cgi-bin/atx/out.cgi?id=62&trade=https://legzo-casino-apk.ru/legzo-na-androjd/>https://legzo-casino-apk.ru/legzo-na-androjd/</a> <a href=http://www.mentalhealthwyoming.com/index.php?URL=legzo-casino-apk.ru/legzo-na-androjd/>https://legzo-casino-apk.ru/legzo-na-androjd/</a> <a href=http://www.mietenundkaufen.com/cgi-bin/linklist/links.pl?action=redirect&id=3496&URL=https://legzo-casino-apk.ru/legzo-na-androjd/>https://legzo-casino-apk.ru/legzo-na-androjd/</a> <a href=http://www.boulterproperties.com/searchpoint/redir.asp?reg_id=ptypes&sname=/searchpoint/search.asp&lid=1&sponsor=res&url=https://legzo-casino-apk.ru/legzo-na-androjd/>https://legzo-casino-apk.ru/legzo-na-androjd/</a> <a href=http://glims.ru.xx3.kz/go.php?url=https://legzo-casino-apk.ru/legzo-na-androjd/>https://legzo-casino-apk.ru/legzo-na-androjd/</a> <a href=https://image.google.co.ke/url?q=https://legzo-casino-apk.ru/legzo-na-androjd/>https://legzo-casino-apk.ru/legzo-na-androjd/</a>
#8728 snyatie zapoya na domy_voElhttp://snatkina.borda.ru
вывод из запоя на дому нижний новгород <a href=http://aqvakr.forum24.ru/?1–7–0–00011597–000–0–0–1730815014/>вывод из запоя на дому нижний новгород</a> .
#8729 StevenHefhttps://aaawin88.org/
3A娛樂城:全方位線上娛樂體驗的首選平台 3A娛樂城作為台灣最受歡迎的線上娛樂平台之一,以其多樣化的遊戲選擇、創新的技術、以及卓越的安全保障,贏得了玩家的高度信任與青睞。無論您是新手還是老手,3A娛樂城都能滿足您的需求,帶給您獨一無二的遊戲體驗。
熱門娛樂城遊戲一覽 3A娛樂城提供多種熱門遊戲,適合不同類型的玩家:
真人百家樂:體驗真實賭場的氛圍,與真人荷官互動,感受賭桌上的緊張與刺激。 彩票投注:涵蓋多種彩票選項,滿足彩券愛好者的需求,讓您隨時隨地挑戰幸運。 棋牌遊戲:從傳統的麻將到現代化的紙牌遊戲,讓玩家在策略與運氣中找到平衡。 3A娛樂城的核心價值 1. 專業 3A娛樂城每日提供近千場體育賽事,並搭配真人百家樂、彩票彩球、電子遊戲等多種類型的線上賭場遊戲。無論您的遊戲偏好為何,這裡總有一款適合您!
2. 安全 平台採用128位加密技術和嚴格的安全管理體系,確保玩家的金流與個人資料完全受保護,讓您可以放心遊玩,無需擔憂安全問題。
3. 便捷 3A娛樂城是全台第一家使用自家開發的全套終端應用的娛樂城平台。無論是手機還是電腦,玩家都能享受無縫的遊戲體驗。同時,24小時線上客服隨時為您解決任何問題,提供貼心服務。
4. 安心 由專業工程師開發的財務處理系統,為玩家帶來快速的存款、取款和轉帳服務。透過獨立網路技術,平台提供優化的網路速度,確保每一次操作都流暢無比。
下載3A娛樂城手機APP 為了提供更便捷的遊戲體驗,3A娛樂城獨家開發了功能齊全的手機APP,讓玩家隨時隨地開啟遊戲。
現代化設計:新穎乾淨的介面設計,提升使用者體驗。 跨平台支持:完美適配手機與電腦,讓您輕鬆切換設備,無需中斷遊戲。 快速下載:掃描專屬QR碼即可進入下載頁面,立即開始暢玩! 3A娛樂城的其他服務 娛樂城教學:詳細的操作指導,讓新手也能快速上手。 責任博彩:提倡健康娛樂,確保玩家在遊戲中享受樂趣的同時,不失理性。 隱私權政策:嚴格遵守隱私保護條例,保障玩家的個人信息安全。 立即加入3A娛樂城,享受頂級娛樂體驗! 如果您正在尋找一個專業、安全、便捷又安心的線上娛樂平台,那麼3A娛樂城絕對是您的不二之選。現在就下載手機APP,隨時隨地開啟您的娛樂旅程,享受無限的遊戲樂趣與刺激!
#8730 HermanWaypehttps://soda102.ru
Портал о ремонте <a href=https://soda102.ru/>https://soda102.ru</a> своими руками: как выполнить отделку, заменить сантехнику или обновить интерьер быстро и без помощи мастеров.
#8731 Kellywakhttps://belbriz.ru
Ремонт шаг за шагом <a href=https://belbriz.ru/>https://belbriz.ru</a> полезные лайфхаки, доступные материалы и решения для самостоятельного преображения любого помещения.
#8732 Doyledalhttps://ustbib.ru
Практичные решения для ремонта <a href=https://ustbib.ru/>https://ustbib.ru</a> своими руками: подробные планы, советы по выбору материалов и секреты успешного результата.
#8733 RollandRerhttps://xn--uis76c70x.me/leo-close/
<a href=https://xn–uis76c70×.me/leo-close/>九州娛樂城倒了</a> 九州娛樂城退出台灣市場:LEO娛樂城無法登入的背後真相 LEO娛樂城,作為台灣線上娛樂城市場的重要品牌,長期以來在廣告投放和代理推廣方面占據領先地位。然而,近期出現的「LEO娛樂城無法登入」現象引發了廣泛的網路討論。不少玩家質疑:「九州娛樂城是不是倒了?」「這是不是詐騙?」事實上,這些猜測與謠言並不完全準確。根據最新消息,九州娛樂城已決定結束其在台灣的業務,包括旗下品牌LEO娛樂城和THA娛樂城。以下我們將深入分析這一事件的背景和可能的影響。
LEO娛樂城無法登入的原因分析 近期LEO娛樂城頻繁出現無法登入的情況,其實是九州娛樂城退出台灣市場的前兆。根據官方公告,九州娛樂城將於2024年12月31日中午12點正式關閉,包括註冊與存款功能在內的多項服務已經受到限制。
可能原因 1:退出台灣市場的策略 九州娛樂城的管理層認為,台灣市場的利潤已達上限,長期運營的收益減少,因此選擇「見好就收」。這一策略符合台灣商業文化中尋找新市場發展的特點。九州娛樂城可能計劃將資源投入其他更具潛力的市場,以追求更大的收益。
可能原因 2:運營生態鏈的問題 LEO娛樂城的運營高度依賴第三方現金交易平台以及相關支付管道。近期,這些環節可能出現了無法解決的問題,導致整體運營受阻。為了避免損失擴大,九州娛樂城選擇退出台灣市場。
可能原因 3:法律風險與負面新聞 九州娛樂城因涉及法律事件,曾多次登上新聞版面。這些事件不僅損害了品牌形象,也讓經營面臨更多風險。為了降低法律糾紛帶來的影響,九州娛樂城可能選擇結束在台灣的營運。
官方公告:2024年12月31日正式停業 九州娛樂城已向所有LEO娛樂城會員發布公告,明確指出將於2024年12月31日中午12點全面停止營運。公告內容包括以下重要信息:
存款服務已關閉:玩家無法繼續充值。 提款功能仍正常:玩家可以放心提取餘額,會員權益不受影響。 感謝支持:官方對會員表達了感謝,並祝福大家未來順利。 這一公告讓玩家可以在剩餘時間內完成提款操作,避免資金損失。
對玩家的影響與建議 1. 儘快提款 如果您是LEO娛樂城的會員,應立即登入帳戶並提取餘額,以確保資金安全。
2. 謹慎選擇新平台 選擇新的娛樂平台時,應注意以下幾點:
合法性:確認平台是否擁有合法經營許可。 支付系統穩定性:確保提款及充值渠道安全無虞。 用戶評價:參考其他玩家的反饋,選擇口碑良好的平台。 3. 防範詐騙 警惕假冒的LEO娛樂城網站或客服。官方客服系統已關閉,任何聯繫您索取個人資料的行為都可能是詐騙。
結語 LEO娛樂城無法登入以及九州娛樂城退出台灣市場,標誌著線上娛樂城行業的一次重要轉折。對於玩家而言,這既是一個挑戰,也是一個重新審視平台選擇的機會。未來,玩家應更加關注平台的合法性與穩定性,為自己的遊戲體驗和資金安全提供保障。
#8734 MichaelChulahttps://skystream.org
Полезные советы для женщин <a href=https://skystream.org/>https://skystream.org</a> здоровье, семья, карьера, красота и уход. Информация, которая помогает оставаться уверенной в любой ситуации.
#8735 Charlesgunnyhttp://filmkachat.ru
1хслот скачать
Такие поощрения позволяют даром протестировать новое казино, разобраться с игровым процессом онлайн слотов, заработать и исключить маленькую необходимую средств. <a href=http://filmkachat.ru/>1×slots зеркало проходить регистрацию это отличный вариант</a> Более солидные предложения встречаются очень редко. Зачастую они доступны только VIP-игрокам. В остальных случаях им всего сопутствуют довольно жесткие условия отыгрыша. Также вероятны дополнительные условия прочие ограничения, прописанные в критериях и положения бонусной программки казино.Мы собрали и опубликовали список наихороших бездепозитных казино с призами за регистрацию, коие гарантируют щедрые выигрыши и моментальные выплаты. <a href=https://wakelet.com/wake/88XP74FBSYIKsXiFGUfKX>https://wakelet.com/wake/88XP74FBSYIKsXiFGUfKX</a> За привлечение друга ? в партнерской программки клиент получает вознаграждение за вербование новых юзеров. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=https://maps.google.be/url?q=https://doctorlazuta.by/>https://maps.google.be/url?q=https://doctorlazuta.by/</a> Шаг 4. Активация. Внимательно выучите обстоятельства, информацию по лимитированиям и сроке действия бонусного предложения. Разобравшись с правилами, возможно активировать приз в собственном офисе (иногда ? с использованием промокода) или по запросу в саппорт.Осталось избрать казино с бонусом за регистрацию и создать профиль. После активации подарка выигрыш зависит от Фортуны и способностей.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
<a href=http://weeklywars.de/viewtopic.php?f=12&t=1078&p=478681#p478681>1×слот регистрация в 1×slots casino</a> 1×slots регистрация 1×slotscasino 56 online Принципиальным различием безвозмездных бонусов от призов на депозит считается недоступность необходимости вносить деньги на акк. Из-за этого их часто называют бездепозитными (not the slightest down payment bonuses).Не трудно додуматься, что not the slightest deposit bonuses почти ни не бывают великими. Чаще всего идет о пяти–тридцати долларах (либо эквиваленте этой суммы в иной валюте). <a href=http://mariland.org/index.php?subaction=userinfo&user=blackmiscellany>http://mariland.org/index.php?subaction=userinfo&user=blackmiscellany</a> С не отыгранным бонусом запрещается превышать размер наибольшей ставки. Нарушение сего условия в аннулирование выигрыша. 1×slots зеркало рабочее
1×slots сайт
За вербование приятеля ? в партнерской программки заказчик получает вознаграждение за вербование свежих юзеров. <a href=http://www.carshowsociety.com/forum.php?action=profile;u=6055>http://www.carshowsociety.com/forum.php?action=profile;u=6055</a> Прямо момент арестуйте безвозмездные вращения за регистрацию без депозита и начинайте собирать призовые композиции ради крупных выигрышей! 1×slots зеркало рабочее
1×slots зеркало рабочее на сегодня
Для верификации номера телефона, в собственном профиле изберите опцию „Подтвердить номер телефона“ и введите в отвечающее фон код, приобретенный в sms-сообщении. <a href=https://forum.bandariklan.com/showthread.php?tid=176825&pid=890932#pid890932>1 хслот регистрация в 1×slots casino</a> С не отыгранным бонусом запрещается превышать объем максимальной ставки. Нарушение этого обстоятельства иметь аннулирование выигрыша.Внесение депозита – Будьте готовы восполнить счет в отыгрыша приза. Это стандартное заявка управлял для этого на промо-акций. Лучше заранее уточнить, какую сумму надо(надобно) несомненно вносить на счет. Как управляло, речь идет о минимальном депозите, но вы должны быть убеждены, что он вам по карману. 1хслотс зеркало на сегодня <a href=https://tvoyaskala.com/user/Michaelweeno/>https://tvoyaskala.com/user/Michaelweeno/</a> Прежде чем активировать бездеп, нужно увериться в, что государство, уроженцем коей является игрок, не входит в перечень не.Этот тип приза будет добавлен на Ваш аккаунт после успешной процедуры регистрации с использованием номера телефона. Если избрать другой способ творения учетной записи, бездеп не будет добавлен на Ваш аккаунт.
1×slots регистрация на сайте
Но надо мыслить, собственно снабжая пользователей такими бонусами, казино занимается спонсированием. Ведь размеры вознаграждений, в, не немалые (средним размером от 5 до 20 $). И на эти свои налагаются определенные обстоятельства и ограничения, обязательные к выполнению игрока, в в последствии он вожделеет получить все свои выигранные деньги.Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации подарка нужно доказать электрическую почту и привязать телефонный; <a href=https://exsite.su/user/Harryjap>https://exsite.su/user/Harryjap</a> Бонус с зачислением денег на счет выделяет больше свободы поступков. Пользователь сам подбирает, каким образом распорядиться подаренными средствами. Здесь также шансы действовать лимитирования на список дешевых игр, хотя обыкновенно эти рамки не например строги, как в промо с безвозмездными вращениями.Размер ставки для забавы по бездепозитному призу (естесственно же, когда, когда он представлен в виде бонусных валютных средств) часто ниже, чем при ирге на депо. Ограничение несомненно работать до момента отыгрыша приза. казино 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=http://portal.westcoastbible.org/discussion/memberlist.php?mode=viewprofile&u=400061>1 хслот регистрация в 1×slots casino</a>
<a href=http://romb4×4.ru/forum/threads/skachat-1×slots-na-android-mobilnaja-versija.18815/>скачать 1×slots на андроид мобильная версия</a>
<a href=https://timepost.info/member.php?action=profile&uid=2064>казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выше мы предоставили глубокий набор самых свежих и своевременных бездепозитных бонусов в онлайн казино без пополнения на 2022 год, где продоставляется пользоваться каким ценным бездепозитным призом.
#8736 Charlesgunnyhttp://filmkachat.ru
1× slots casino зеркало
Обычно бездепозитные акции от казино, приходят на эл. Почту в дни рождения или праздничные. В некоторых онлайн казино возможно адресоваться в чат и как постоянному игроку, возможно для предложат бездепозитное предложение.Многие новенькие сомневаются, что поощрительный приз не нужно несомненно возвращать, в в они выиграли у казино. Это безусловно безопасно и надежно. Выводя выигранные средства, игрок просто одергивает свое участие при и утрачивает уникальную вероятность – безвозмездно увеличивать личное материальное положение. <a href=http://filmkachat.ru/>1 х слотс зеркало</a> <a href=https://www.dropbox.com/scl/fi/kmt4hjtm9ofmh935040vf/How-3D-architectural-rendering-is-reshaping-the-future-of-design.pdf?rlkey=xd0mhfykdz41nutcr9e7spenz&st=ixphoyzs&dl=0>https://www.dropbox.com/scl/fi/kmt4hjtm9ofmh935040vf/How-3D-architectural-rendering-is-reshaping-the-future-of-design.pdf?rlkey=xd0mhfykdz41nutcr9e7spenz&st=ixphoyzs&dl=0</a> 1×slots зеркало регистрация <a href=http://arsivforum.10tl.net/member.php?action=profile&uid=5018>http://arsivforum.10tl.net/member.php?action=profile&uid=5018</a> Это раз из основных характеристик привлекательности презента. С завешенным коэффициентом том профессионалы не смогут выполнить условия по отыгрышу. И важно, как презентабельно выглядит предложение – бездепозитный бонус казино в объеме $500 или $1 000. Чтобы новенькие попревосходнее вникли, что же такое вейджер, мы разберём на образце.Обычно показатель выше, чем для бонусов на депо. Не изумляйтесь, случае он будет том х100. Иногда завышенный коэффициент вейджера устанавливается для обитателей отдельных стран.
1×slots официальный сайт зеркало
Получить Бездепозитный бонус в интернет казино дело двух кликов. Другой момент, отыграть рекламную и соблюсти правила и обстоятельства отыгрыша. Под правилами подразумевается столько вагер, но и ограничения по наибольшей ставке. Мы разумеем, собственно в кино все ставят на зеро и выигрывают. Призываем не создавать подобного. Перед активацией приза прочтите верховодила. Узнайте последующие факторы: Условия получения презента, за регистрацию, за депозит и прочее. Ограничения по максимальной ставке. Зачастую не повыше 350 рублей. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вращать автоматы, а вагер будет стоять на месте. Поэтому важно знать, в каких забавах можно осуществлять кратность денежного оборота.Получать информацию о самых прибыльных призах можно без неизменного прогноза новостей казино. Мы брали эту задачку на себя и безпрерывно следим за предложениями операторов, избирая лучшие из них. В данном разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список акций регулярно дополняется. В топ вошли самые новые бездепозитные бонусы за регистрацию в казино 2020, кратковременные и замкнутые промо. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру прочим критериям. Если срок деяния промоакции истек, она удаляется из перечня. 1×slots casino регистрация 1×slots review live Какие призы меня еще получить считая бездепозитного приза за регистрацию в казино? По мимо бездепозитного приза, каждое интернет казино предлагает игрокам прибыльное предложение на 1-ый депозит, вы совершаете депозит, ваш депо увеличивается в двое или и в 3, что, этим наиболее начать выступать возможно с более солидной суммой, так же не забываем про вейджер на призы.За вербование приятеля ? в партнерской программки клиент получает вознаграждение за вербование свежих пользователей. <a href=https://www.pcweek.ua/forum/view_profile.php?UID=87245>https://www.pcweek.ua/forum/view_profile.php?UID=87245</a> Бездепозитные призы — это презенты от казино повторяющий бонусных денег либо фриспинов для игровых автоматов, коие начисляются на акк игрока в процедуры регистрации на веб-сайте заведения. Для получения этих поощрений депозит не потребуется. 1×slots регистрация 1×slots casino 777 online Фриспины без депозита либо дополнительные свои посодействуют ближе познакомиться с игровой платформой и её функциями. За счёт презентов можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради забавы против живых крупье.Мы подготовили список, где есть постоянно актуальные и свежие бездепозитные призы казино, коие вы можете получить даром. Для наших юзеров есть особые предложения эксклюзивные призы, коие вы кого не найдете, их мы обозначили особой красноватой плашкой «Exclusive».
1×slots зеркало 1хслотс регистрация перейти на 1×slots
<a href=http://misojin.co/bbs/board.php?bo_table=free&wr_id=399014>http://misojin.co/bbs/board.php?bo_table=free&wr_id=399014</a> Пoдтвepдить личнocть клиента. Для успешного вывода средств, нужно доказать личность клиента. Нa этaпe вepификaции пpoфиля, сотрудники службы безопасности должны увериться, собственно у игрока всего лишь раз акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не может вывести свой выигрыш, в у него несомненно несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы. 1× слот зеркало Большинство интернет-казино из нашего топ-10 готовы порадовать вас неповторимыми акциями. Читайте о них в обзорах и на форуме.Это тоже безвозмездные деньги, которые поступают на аккаунты новоиспеченных в после регистрирования. А особенность таких призов состоит в, что обретенные финансы обязательно по использовать в продолжении назначенного времени.
1×slot зеркало рабочее регистрации на телефон придет
Обыкновенные бездепозитные бонусы в объеме от трех до двадцати долларов сделаны для того, чтобы в забавы заходили все новые и новые игроки. Здесь, вероятнее всего, несомненно ограничение на наибольший выигрыш. Важно, чтобы перед наименьшим вкладом был отключен бонус за первое пополнение счета, и компьютерные не попадет на повторный вейджер. Для получения выигрыша требуется выполнить условия казино. Чаще всего игроку необходимо поставить конкретную необходимую, но теснее из собственных денег. Она рассчитывается из совместного размера выигрыша за все время использования бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, в пользователь выиграл 1000 рублей, а множитель сочиняет х30, исключить средства возможно будет, сделав ставки на 30 000 руб.У любого игорного заведения свои верховодила и условия. Но, дабы получить бонусы, нужно выполнить стереотипные деянья: 1×slots casino регистрация <a href=http://smart-mall.ru/bitrix/redirect.php?goto=http://rupec.ru/bitrix/redirect.php?goto=http://elcotel.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/bgXcLD2txz1>http://smart-mall.ru/bitrix/redirect.php?goto=http://rupec.ru/bitrix/redirect.php?goto=http://elcotel.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/bgXcLD2txz1</a> Промообъявления от казино не дают реальной картины и ориентированы на вербование внимания юзеров. Понять, насколько высоки шансы остаться в плюсе, дозволит собственный тест критерий предложения:Верификация необходима для дополнительной защищенности и помогает техподдержке выявить бонусхантеров и мошенников. Кстати, на платформах выводы солидных сумм доступны только последствии доказательства личности.
1×slots официальный зеркало
<a href=http://clear.rusoft.ru/2012/01/6.html>http://clear.rusoft.ru/2012/01/6.html</a> 1×slots зеркало быструю регистрацию а также мгновенное Все любят получать подарки. Согласитесь, практически любой играющий человек будет беспредельно счастлив, в получит безвозмездный подарок для игры в интернет казино просто за регистрацию или же приз за внесенный депо, так именуемые приветственные призы для новых игроков. Соответственно такие онлайн клубы станут более модны и преимущественны у игроков при выборе казино для забавы. Топ казино непрерывно обновляется и добавляются свежие и занимательные игровые клубы с привлекательной бонусной политикой и всеми вероятными привилегиями, к которым относятся эти бонусы как фриспины за регистрацию, валютные бездепозитные призы, а великодушные бонусы за внесенный депозит.В игровых клубах без лицензии Вы покупаете „кота в мешке“ и когда спорных ситуаций нет возможности куда-то пожаловаться и обосновать собственную правоту.
<b>Смотреть еще похожие новости:</b>
<a href=http://evtrucksforum.com/viewtopic.php?p=896386#p896386>казино 1× slots официальный сайт</a>
<a href=https://elclasificadomx.com/author/jameslog/>1×slots официальный сайт зеркало рабочее</a>
<a href=http://nacionrolera.org/foro/memberlist.php?mode=viewprofile&u=41202>1 x slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В игровых клубах без лицензии Вы покупаете „кота в мешке“ и в случае неоднозначных ситуаций нет возможности куда-то пожаловаться и обосновать собственную правоту.
#8737 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации 2025
Для отыгрыша бонуса казино обязует игрока поиграть на сумму, в количество раз превосходящую необходимую полученного приза — здесь выгода фирмы очевидна.В перечне притязаний к отыгрышу нередко наличествуют лимиты на ставки при этой на личные средства. Так, в отыграть нужно 30 000 рублей, а максимальная сумма ограничена 30 рублями, то вертеть барабаны светит 1000 раз. Эта особенность затрудняет соблюдение игроками условий по срокам деяния промоакции. <a href=http://filmkachat.ru/>1хслот 1хслотс регистрация перейти на 1×slots</a> <a href=https://www.khedmeh.com/wall/blogs/post/71398>https://www.khedmeh.com/wall/blogs/post/71398</a> Зарегистрироваться в казино по особой ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефонного и электронную почту). Для подтверждения номера аппарата необходимо в собственном профиле показать свой номер и надавить кнопку „Подтвердить номер аппарата“, дальше Вы получите sms-сообщение с кодом, который необходимо установить в соответствующее поле. Для доказательства электронной почты, перейти по интенсивной ссылке в письме от казино.Также учтите, собственно кое-какие игровые платформы сузивают список государств, коие готовы получить предложенный бездепозитный бонус за регистрацию. К примеру, существуют онлайн-заведения, выдающие сходственные призы лишь обитателям определенных стран. К примеру, интернет казино 777 Оригинал предоставляет бездепозитный бонус только игрокам из России и стран СНГ. Или наоборот, снабжают вознаграждением всех, кроме обитателей некоторых стран (как сего, следует пристально учить список, чтобы потом не появилось практически вопросов и претензий). casino 1×slot <a href=http://v208870d.bget.ru/user/Renaldofoony/>http://v208870d.bget.ru/user/Renaldofoony/</a>
1×slots casino зеркало
Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные способы и оценить особенности, недоступные при игре в демо режиме. Многие свежие посетители перебегают в количество постоянных, а оператор получает длительную прибыль. <a href=https://adler.biz/threads/698/>1×slots официальный сайт, скачать</a> 1× слот зеркало <a href=http://redpc.ru/bitrix/redirect.php?goto=http://mom-baby.info/bitrix/click.php?goto=http://urbanator.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/k7Gz8R6-SvF>http://redpc.ru/bitrix/redirect.php?goto=http://mom-baby.info/bitrix/click.php?goto=http://urbanator.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/k7Gz8R6-SvF</a> Некоторые клубы автоматически начисляют бонус на аккаунт игрока после исполненья критерий получения, хотя посещают истории, когда приз нужно активировать игроку самому. Есть количество методов активации бонуса:Как только вы отыграли вейджер и средства с бонусного баланса перебежали для на настоящий счет, Вы неустрашимо сможете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (устроить наименьший депо к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депо). сайт 1× slots casino Бездепозитный бонус по промо-коду будет доступен для игры, лишь никаких случае когда Вы активируете специальный бонусный код в разделе с призами или укажите промокод при регистрации на сайте. В неких случаях, считая активации кода, понадобиться подтвердить контактные данные игрока и заполнить анкету клиента.
1×slots промокод при регистрации 2025
Подтвердите личность, предоставив оператору казино свои паспортные данные. Инструкции обыкновенно легкие, главное — конкретно им по. Если написано, что «на фото должны быть видны все четыре угла странички паспорта» — устройте именно такое фото. Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Подтверждение индивидуальной инфы. Все казино требуют от посетителя пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и присутствие у пользователя иных аккаунтов (мультиаккаунт запрещен). <a href=http://wennw.com/member.asp?action=view&memName=taboobelfry61>http://wennw.com/member.asp?action=view&memName=taboobelfry61</a> Помимо прочего, для вывода средств по бездепу необходимо привнести на счёт собственный первый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало вероятную необходимую, последствии чего вывод средств будет доступен. скачать 1×slots официальный сайт Во время игры в казино, выигрыши, приобретенные спасибо безвозмездным призовым фондам, суммируются и срабатывают в совместную сумму для отыгрывания. Однако, случае удача улыбнется и получится отыграть все бонусы, игровое заведение гарантированно допустит вывести денежные свои. Сумма вывода будет в от лимита, утвержденного непосредственно в этом учреждении. Поэтому, внимательно надо(надобно) разбирать управляла выдачи анлимитных депо.
1×slots рабочее зеркало на сегодня
Да, у даровых призов есть дефекты. Прежде всего, они обычно небольшие. Кроме того, условия вейджера по ним всегда строгие. Но таки недоступность риска проделывает их очень красивыми для посетителей.Бездепозитный приз – это экономическое вознаграждение, которое выдается соучастнику игры в казино, для его привлечения и появления заинтересованности. Любой гость, кот-ый подходит условиям выдачи подобного бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое одобрение является более действенным методом, дающим возможность стартовать в игре, не вкладывая личных материальных средств. <a href=https://forums.scar-divi.com/topic/528543-glimepiride-prix-glimepiride-prix/#comment-562754>1×slot зеркало рабочее этих способов предполагает регистрацию</a> 1×slots официальный сайт, скачать <a href=https://gti-club.ru/forum/member.php?u=415484>https://gti-club.ru/forum/member.php?u=415484</a>
1× slots casino зеркало
Обычно показатель выше, чем для бонусов на депозит. Не изумляйтесь, в он будет и х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных государств.Ознакомьтесь с нашим перечнем наихороших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего списка и получите бездеп сразу. Хватайте превосходнейшие благотворительные предложения ниже и выигрывайте большие деньги, не рискуя! Чтобы играть бесплатно на настоящие деньги в казино, порой довольно просто зарегистрироваться. Иногда нужно выполнить вспомогательные действия. <a href=http://www.ruyi28.com/space-uid-2397.html>http://www.ruyi28.com/space-uid-2397.html</a> Также есть онлайн-платформы азартных игр, коие используют раздачу бездепозитных бонусов в специальные даты (как для казино, например и для игрока). Помимо сего, действующие геймеры того имеют возможность получить похожие бонусы за свою деятельность (например, за повышения значения либо за схожие заслуги). 1×slots официальный зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=31587>1×slots регистрация 1×slots review live</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Рассмотрим принцип его деянья на примере. Допустим, вы зарегистрировались и возымели $10 not the slightest down payment bonus с вейджером х50. Это значит, собственно выигранные средства возможно будет выводить не раньше, чем последствии такого, как общая сумма ставок достигнет $500. Автоматы непопросту числятся самым модным азартным весельем. Чтобы усвоить управление и верховодила, понадобится всего некоторое минут. Ваша задачка устроить ставку, определить количество рабочих линий и можно крутить барабан. Если на выпадет выигрышная комбинация – вы выиграли! С этой задачей вам посодействуют справится бездепозитные призы казино.
#8738 Robertaventhttps://skovarro.com
Сделай ремонт сам <a href=https://skovarro.com/>https://skovarro.com</a> практичные идеи, инструкции для каждого этапа и рекомендации, чтобы сэкономить время и деньги.
#8739 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало рабочее регистрации на телефон придет
Да, у бесплатных призов есть недостатки. Прежде всего, они обычно очень. Кроме такого, обстоятельства вейджера по ним постоянно строгие. Но таки недоступность риска проделывает их довольно привлекательными для посетителей. <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> <a href=https://wakelet.com/wake/88XP74FBSYIKsXiFGUfKX>https://wakelet.com/wake/88XP74FBSYIKsXiFGUfKX</a> Автоматы непопросту числятся наиболее известным азартным весельем. Чтобы усвоить управление и правила, понадобится всего количество мин. Ваша задача устроить ставку, найти число трудящихся линий и можно крутить барабан. Если на выпадет выигрышная комбинация – вы выиграли! С этой задачей вас помогут управится бездепозитные призы казино.Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие появляются у начинающих. 1хслотс регистрация в 1×slots casino <a href=http://xn----7sbqc1ahc7afe2lrdf.com/profile.php?lookup=77451>http://xn----7sbqc1ahc7afe2lrdf.com/profile.php?lookup=77451</a> Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного приза довольно пополнения баланса и доказательства личности. В иных же клубах, нужно количество один прокрутить свой депозит.В зависимости от интернет заведения каждый из них имеет вас предложить как бездепозитные деньги, например и бездепозитные фриспины, коие последствии успешной регистрации рухнут вам на ваш игровой баланс.
1×slots регистрация на сайте 1×slots ru com
<a href=https://forum.bandariklan.com/showthread.php?tid=176825&pid=846043#pid846043>1×slots casino зеркало рабочее</a> сайт 1× slots casino На данном разделе портала периодически публикуются обзорные заметки, в рассматриваются безвозмездные бонусы лучших интернет-казино. Информация структурирована по нескольким пт, включая главные: <a href=https://google.com.pe/url?q=https://doctorlazuta.by/>https://google.com.pe/url?q=https://doctorlazuta.by/</a> Шаг 5. Использование и отыгрыш. Бездеп обязан быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.Бездепы обычно предлагают с отыгрышем — мгновенно вывести выигранные средства нельзя. Перевод денег со счета будет вероятен последствии такого, как пользователь выполнит все требования казино, а сумма имеет превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, протяжении которых заказчик вправе воспользоваться предложением. Обычно они не превышают нескольких дней после активации. 1×слотс казино
1×slots официальный сайт зеркало
Бонус за регистрацию в казино выдается только раз раз на 1-го игрока. Но бывают вспомогательные акции, в коих бездепы раздаются для постоянных посетителей и такие презенты Вы сможете получить больше 1-го раза.Для выбора азартного заведения Вы можете пользоваться списком наших казино с призами за регистрацию. На нашем сайте мы выпустили список бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, что часть призов неповторимые и доступны только для гостей нашего вебсайта по-специальному промо-коду или по оригинальной ссылке. Кроме того, для любого бонуса мы подготовили подробный обзор, каком Вы узнаете как получить и отыграть одобрение и как вывести собственный выигрыш с бездепа. Самые свежие бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды находятся на данной страничке. Посетитель возможность оценить условия получения и начать выступать на деньги без внесения депозита. При данном игроку главно понимать, на каких условиях и какими методами у вывести полученный выигрыш. Для сего нужно оценить список присоединенных платежных систем. <a href=http://fumankong2.cc/home.php?mod=space&uid=580626>http://fumankong2.cc/home.php?mod=space&uid=580626</a> Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро или 20 $. Если выдаются фриспины, их количество изредка превышает нескольких десятков даровых вращений.Бездепозитные бонусы — это подарки от казино в виде бонусных средств или фриспинов для игровых автоматов, коие начисляются на аккаунт игрока последствии процедуры регистрации на сайте заведения. Для получения таких поощрений депозит не требуется. 1×slots зеркало быструю регистрацию а также мгновенное
1 х слотс зеркало
<a href=https://mit-bbs.com/viewtopic.php?t=131859>1×slots регистрацию процедура займет всего лишь</a> Основное управляло получения бездепа ? создаваемый акк должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов требовательно воспрещено. Проверка ведется по имени, e-mal, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депо нужно соблюдать простую последовательность поступков.Похожим образом трудится третий способ доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения клиента или в связи с получения им VIP-статуса. Подарок предоставляется в воззвания в поддержку и проверки. 1×slots регистрация на сайте <a href=https://sub4sub.net/forums/users/jasperpef/>https://sub4sub.net/forums/users/jasperpef/</a> Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, the decision лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала резвые выводы. Фишка выплат никаких, собственно достаточно избрать платёжный инструмент и указать необходимую. В большинстве случаев деньги зачисляются на электрические кошельки протяжении 15 минут, а на банковские карты – 1–3 рабочих дня.
1×slots официальный регистрация
Бездепозитный бонус – это финансовое вознаграждение, которое выдается соучастнику игры в казино, для его привлечения и появления заинтересованности. Любой гость, кот-ый подходит условиям выдачи сходственного бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое поощрение является более эффективным способом, дающим вероятность стартовать деле, не вкладывая личных вещественных средств.Используйте лучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из перечня ниже, чтобы заработать презенты за обычные действия теперь сегодня получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и резвыми выводами на электрические кошельки. <a href=https://www.catfish-assassins.org/forum/memberlist.php?mode=viewprofile&u=743>https://www.catfish-assassins.org/forum/memberlist.php?mode=viewprofile&u=743</a> Иногда операторы требуют внесение минимального депозита перед выводом для верификации платежного инструмента. В некоторых казино этот депо кроме светит отыграть. 1хслот официальный сайт зеркало Чтобы получить возможность вывести прибыль с бездепозитного приза в казино, нужно выполнить ряд критерий:
<b>Смотреть еще похожие новости:</b>
<a href=http://griffhunter.com/boards/viewtopic.php?p=368037#p368037>1×slots официальный demo регистрация в 1×slots casino</a>
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1097#post-34488>1×slots casino зеркало</a>
<a href=https://chasingadream.rpginitiative.com/showthread.php?tid=128276>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/6181–1×slots-registratsiya-1×slotscasino-56-online#6190>1×slots регистрация 1×slotscasino 56 online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Минимального оборота. Этот предел уточняется вейджером — пока игрок не поиграет на установленную сумму, вывод средств несомненно недоступен.
#8740 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots review live
Для получения выигрыша требуется выполнить условия казино. Чаще всего игроку нужно поставить определенную необходимую, но уже из собственных средств. Она рассчитывается из общего объема выигрыша за всегда использования бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, случае пользователь выиграл 1000 рублей, а множитель составляет х30, исключить средства возможно несомненно, сделав ставки на 30 000 рублей. <a href=http://filmkachat.ru/>1×slots зеркало подтвердит вашу регистрацию если говорить</a> Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и расценить необыкновенности, труднодоступные при игре в демо режиме. Многие новые посетители переходят в количество неизменных, а оператор получает длительную выгода. <a href=https://www.goldenline.pl/grupy/Przedsiebiorcy_biznesmeni/health-economics/exploring-the-power-of-3d-product-visualization-services-for-your-business,3947890/>https://www.goldenline.pl/grupy/Przedsiebiorcy_biznesmeni/health-economics/exploring-the-power-of-3d-product-visualization-services-for-your-business,3947890/</a> Каждый новичок и профессиональный игрок мечтают живо стартануть и начать создавать настоящие ставки. Для этого довольно арестовать презент, за который не выплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email или телефон. После сего администрация начисляет щедрое вознаграждение повторяющий безвозмездных вращений либо виртуальных кредитов.В онлайне очень много скриптовых вебсайтов, которые принадлежат плутам. Их главная задача – заинтересовать гэмблеров, пообещав не только щедрые подарки, хотя и солидные выигрыши. Так что кое-какие сайты предлагают получить за регистрацию в $1 000. 1×slots официальный сайт скачать на айфон <a href=https://itkvariat.com/user/ForsedropSl/>https://itkvariat.com/user/ForsedropSl/</a>
1хслотс рабочее зеркало
1хслот 1хслотс регистрация перейти на 1×slots Сроки активации бонуса устанавливаются любым казино, хотя почаще всего они не превосходят недели с момента получения. Игроку обязательно нужно применять бездеп в течение обозначенного срока, в ином случае бонус просто пропадет. Каждый бонус возможно получить лишь один один, поэтому в не использовать бездеп в срок, у игрока не несомненно 2 шанса им пользоваться.Подарки на праздничные ? посвященные парадным датам, требующие символического отыгрыша или начисляются без такового. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду. <a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=9817&TITLE_SEO=9817-wiki-software-2025&MID=396201&result=reply#message396201>http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=9817&TITLE_SEO=9817-wiki-software-2025&MID=396201&result=reply#message396201</a> Да, у безвозмездных бонусов есть недостатки. Прежде всего, они обыкновенно большие. Кроме как, обстоятельства вейджера по ним постоянно жесткие. Но все же неименье риска делает их довольно привлекательными для клиентов.Подтвердите регистрацию, чтобы активировать Бездепозитный бонус с выводом, потребуется наполнить индивидуальный профиль. Заполните пустующие поля настоящими данными о себя. 1× slots сайт Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.Существуют казино с бонусом за регистрацию, каких довольно модны фриспины в интернет казино впоследствии регистрации в определенных забавах. Они встречаются и почаще бесплатных поощрений или классических призов в казино без вложений. Например, игрок регистрирует счет, на кот-ый начисляются безвозмездные игры, бонус за регистрацию повторяющий даровых фрспинов, вращения в игровом автомате. Во время игрового процесса игрок выигрывает истинные деньги, которые в последствии можно успешно исключить из заведения на собственную платежную систему. То есть, есть все шансы вывести свои без рисков собственными деньгами. Регистрация, за игрок получит бонусы, займет пару минут, а спасибо этому возможно прирастить 5 евро поощрений до тыс. И без всяких заморочек вывести их.
1×slots официальный demo регистрация в 1×slots casino
Такие поощрения разрешают бесплатно протестировать свежее казино, разобраться с игровым процессом онлайн слотов, заработать и вывести небольшую необходимую денег. <a href=http://www.ccti.co.kr/bbs/board.php?bo_table=free&wr_id=761087>http://www.ccti.co.kr/bbs/board.php?bo_table=free&wr_id=761087</a> Обычно, бездепозитные бонусы выдаются под конкретные слоты с фиксированной ставкой, хотя их точно запрещено использовать в игровых автоматах с современным джекпотом. Список игр, в которых возможно использовать бездеп, Вы отыщите в описании промоакции либо сможете уточнить у службы поддержки заведения.Подтверждение электрической почты – одно из ведущих критерий, которое есть почти в любом бездепозитном казино. Чтобы верифицировать электронную почту, достаточно перебежать по интенсивной ссылке в письме, приобретенном от азартного клуба. 1×slots регистрация на сайте 1×slots ru com
1×slots зеркало на сегодня
Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации бонуса без депозита. Внимательно прочитайте до конца. Многие новички проделывают промахи на этапе регистрации и поэтому не получить подарок.Теоретически, к безвозмездным призам возможно отнести например нарекаемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, поэтому собственно они деют только вероятность создавать ставки. <a href=https://forum-macan.ru/memberlist.php?mode=viewprofile&u=1736>1×slots регистрация 1×slotscasino09k online</a> Эффективность бездепов виде маркетингового инструмента оценили многие операторы. Малоизвестные площадки используют такие промоакции, дабы живо набрать базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны постоянных посетителей. Не все сайты, дающие подарки без депозита, рекомендованы к этой. За привлекательным промоописанием имеют скрываться неосуществимые обстоятельства отыгрыша и другие подводные камешки.Каждый новичок и умелый игрок грезят стремительно стартануть и начать создавать реальные ставки. Для этого довольно забрать подарок, за кот-ый не нужно уплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email либо аппарат. После сего администрация начисляет щедрое вознаграждение вид даровых вращений либо виртуальных кредитов. Также случаются случаи, когда казино начислит обсужденный бонус после регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам.Такой казино бонус без депо за регистрацию выдается игроку на час и активно используется данное предложение с 2017 года. Это как бы некая маскировка поощрения под бездепозитный. Суть всего сего сводится к что, этому, собственно игроку на час выдается, к примеру, 1000 долларов, а реклама повторяет о том, что любой выигрыш можно будет в будущем забыть при для. Но если играющий всерьез отнесется к этому предложению, то он просто потеряет время. Ведь геймеру надо(надобно) несомненно играть не главном аккаунте, в тренировочном и с ограниченным выбором автоматов и ставок. Да и если, тогда, выигрыша (даже всей тыс. ) в верховодила вступят определенные обстоятельства, где несомненно сказано, что максимальной суммой победы возможность быть лишь двести $ и средства возможно использовать лишь в качестве бонуса на первый вклад с вейджером 25 от суммы вознаграждения плюс сам депо. По результату получится, что игрок выигрывал для 200% приз с вейджером на конкретную необходимую. Короче разговаривая, это все надо вашего времени. casino 1×slot <a href=http://www.anqingonline.com/home.php?mod=space&uid=173589&do=profile>http://www.anqingonline.com/home.php?mod=space&uid=173589&do=profile</a>
1×slot регистрация
Сразу в активации промокода можно воспользоваться презентом. Как уже упоминалось, призы посещают трёх видов – фриспины, кредиты и фриплей-бонусы.Такой безвозмездный эквивалент средств зачисляется на профиль пользователя последствии воплощения требований и предназначаются они только для игрового процесса. Вывод таких вознаграждений вероятен лишь после воплощения вейджеровых критерий. Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 поболее. Когда игроку надеется большое фриспинов, администрация имеет бить3 их начисление на некоторое дней. Бесплатные вращения предоставляются для определенного слота, кот-ый указывается в правилах промоакции.Используйте наихорошие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, чтобы заработать презенты за простые действия и уже сейчас получить первый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высокой отдачей и быстрыми выводами на электрические кошельки. <a href=http://43.240.15.40/home.php?mod=space&uid=601078>http://43.240.15.40/home.php?mod=space&uid=601078</a> Все благотворительные бонусы кажутся соблазнительными. Кто же откажется от возможности поиграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далековато не все бездепозитные призы одинаковой презентабельны для рассудительного посетителя.Более крупные предложения встречаются довольно редко. Зачастую они доступны только VIP-игрокам. В оставшихся случаях им всего сопутствуют очень строгие обстоятельства отыгрыша. Также возможны вспомогательные условия и другие ограничения, прописанные в критериях и положения бонусной программки казино. 1×slots рабочее зеркало на сегодня Но а случае вы теснее профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в интернет казино;Как и промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такового предложения считаются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает новых посетителей и разрешает им составить эмоцию о функционале, не рискуя значительными совокупностями.
<b>Смотреть еще похожие новости:</b>
<a href=https://feederfishing.lt/en/forum/kotai/1287212–1×slots-1×slots-ru-com#1298686>1×slots регистрация на сайте 1×slots ru com</a>
<a href=http://portal.westcoastbible.org/discussion/viewtopic.php?f=19&t=1952038>1хслотс рабочее зеркало</a>
<a href=http://permitbeijing.com/forum/member.php?action=profile&uid=191496>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Хотя безвозмездные бонусы начисляются без депо, не исключено, собственно вас придется заносить средства. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь после как, как свежий заказчик раз пополнит игровой счет.
#8741 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация то дальше необходимо пройти
Но ни не запамятовывайте внимательно разбирать верховодила роли в бонусных акциях. Если вы нарушите но бы одно условие, позднее вы не сможете устроить недоразумение с администрацией.Но рядах азартных платформах подобные вознаграждения могут получить теперь зарегистрированные юзеры. В этом случае, бонусы предоставляются масштабах уникальных промоакций или же некоторым игрокам вид акционного предложения, которое приходит на почту с целью «возвратить» игрока в свое казино. <a href=http://filmkachat.ru/>1×slots регистрация то дальше необходимо пройти</a> <a href=https://www.fortunetelleroracle.com/technical/how-hospitality-design-visualization-elevates-guest-experience-936407>https://www.fortunetelleroracle.com/technical/how-hospitality-design-visualization-elevates-guest-experience-936407</a> 1×slots регистрация 1×slotscasino09k online <a href=http://wuyuebanzou.com/home.php?mod=space&uid=543411>http://wuyuebanzou.com/home.php?mod=space&uid=543411</a> Варианты выигрыша в от Вашей удачи и критерий игорного портала. Выше мы заявили, собственно некоторые бездепозитные призы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются и, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность современных игр на средства, можно выиграть неописуемые суммы. Сегодняшние игровые автоматы или видео слоты, как их называют. Могут выдавать солидные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000.
зеркала 1×slots
Максимальный размер ставки, кот-ый невозможно превышать же бонус не несомненно полностью отыгран. В случае нарушения этого правила, приз и выигрыш с него станут аннулированы. <a href=https://www.makinamania.net/index.php?topic=251808.new#new>1×slots зеркало</a> 1×slots casino online регистрация <a href=https://rekordmeister.ru/user/PorsedropPt/>https://rekordmeister.ru/user/PorsedropPt/</a> Только выполнив все обстоятельства отыгрыша и дождавшись завершения проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить средства деньги.Зарегистрируйтесь. Для регистрации почаще всего довольно ввести собственный номер аппарата и почтовый адрес, после чего установить приобретенный код из СМС. Возможно, потребуется указать промокод. В правилах промоакции будет написано, где его хотелось вводить. Иногда это надобно делать при регистрации, от — теснее последствии творенья собственного офиса, на отдельной странице. 1хслотс официальный сайт зеркало
1×slos регистрация в 1×slots casino
При маленький сумме приза рекомендовано играть по невысоким ставкам, а использовать наибольшие какого-либо только что, нет случае, если вейджер слишком великий, а время на отыгрыш крепко ограничено.Все обожают получать подарки. Согласитесь, практически каждый играющий человек будет безгранично счастлив, в получит безвозмездный презент для игры в онлайн казино просто за регистрацию или же приз за внесенный депозит, например именуемые приветственные призы для новых игроков. Соответственно эти онлайн клубы станут больше известны и преимущественны у игроков при выборе казино для игры. Топ казино каждый обновляется и прибавляются свежие и занимательные игровые клубы с привлекательной бонусной политикой и всеми возможными привилегиями, к коим относятся такие бонусы как фриспины за регистрацию, денежные бездепозитные призы, а также великодушные бонусы за внесенный депозит. Также есть онлайн-платформы азартных игр, коие используют раздачу бездепозитных призов в особые даты (как для казино, например и для игрока). Помимо этого, действующие игроки кроме имеют возможность получить похожие бонусы за свою работа (к примеру, за увеличения значения либо за схожие достижения). <a href=http://www.fire-team.ru/forum/member.php?u=5182>http://www.fire-team.ru/forum/member.php?u=5182</a> 1×slots скачать на айфон
1×slots зеркало регистрацию более популярный вариант это
Таким образом, заведение пробует показать себя своим вероятным игрокам, а такой маркетинговый ход как казино бонус без депозита за регистрацию привлекает очень много внимания к игорному заведению и обеспечивает неизменный поток новых гостей и будущих клиентов игрового онлайн клуба.Третитй бездепозитный приз за регистрацию – денежные свои. К раскаянью, начислить рубли или баксы способны лишь знаменитые и популярностью клубы. С их помощью появится насладиться любой доступной игрой – автоматом, рулеткой, кено, блэкджеком. <a href=https://www.donchillin.com/space-uid-382497.html>1× slots casino официальный сайт</a> Вейджер в переводе с британского означает «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша полученного бонуса, в нашем случае бездепозитного. Число ставок большого — главно лишь набрать сумму, пропорциональную сумме одобрения.Бездепозитные бонусы начисляются только раз один. Не стоит открывать новые аккаунты, чтобы получить их повторно. Служба безопасности казино обязательно выявит «левого» участника и перекроет. Если гость выполнит необходимые требования, отыграет свою ставку и решит исключить личный выигрыш, то ему надо(надобно) принять, собственно казино обязательно потребует дать ксерокопии личных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные средства исключить не удастся. Процесс подтверждения личности может занять от одного денька до недели. Если клиент допустил какую оплошность при заполнении паспортных данных, то ему по обратиться с проблемой в службу поддержки онлайн-казино.Возьми собственный презент. Чаще всего бонус активизируется сразу в регистрации. Но посещают истории, когда нужно зайти в индивидуальный офис или написать в справочную службу. 1×slots casino регистрация 1×slotscasino09k online <a href=http://jejuwood.net/bbs/board.php?bo_table=free&wr_id=914259>http://jejuwood.net/bbs/board.php?bo_table=free&wr_id=914259</a> Некоторые казино могут предлагать посетителям бездепы за свидетельство номера или почты или репост на страничку в социальных сетях.
1×slots казино зеркало
Бездепозитные призы в казино без пополнения 2022 — это определенная сумма средств или valinomycin spins вращения, коие предоставляются первым постояльцам за регистрацию на сайте казино в виде бездепозитного бонуса, и выделяет для возможность за счет казино без пополнения опробовать предложения (игр), с последующей привилегией вывода средств при исполнении всех установленных верховодил. Особую изюминку видео слотам присваивают уникальные знакы. С их свет активизируются разные призы. Вы можете запустить вспомогательный степень и прирастить сумму выигрыша. Есть знаки, коие сменяют ненадобные элементы и сами создают выигрышные комбо. Не стоит забывать и на бонус-тур. После любого счастливого спина есть шанс прирастить сумму выигрыша в 2 либо четыре раза. <a href=http://l6046402.bget.ru/member.php?action=profile&uid=39391>http://l6046402.bget.ru/member.php?action=profile&uid=39391</a> Изучить правила и условия получения бездепозитных бонусов казино, Вы можете у нас на сайте в разделе с призами либо на официальном сайте избранного Вами казино. Если не отыскать необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электронной почте. 1×slots регистрация на 1хслотс
<b>Смотреть еще похожие новости:</b>
<a href=http://www.fiat130.it/phpbb3/viewtopic.php?f=14&t=296973>1хлот регистрация в 1×slots casino</a>
<a href=http://griffhunter.com/boards/viewtopic.php?p=279910#p279910>1×slots официальный сайт мобильная версия скачать</a>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=326364>1х слот 1хслотс регистрация перейти на 1×slots</a>
<a href=http://vn-info.net/user/Josephkam/>1 x slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Когда речь о денежных бонусах, казино постоянно устанавливают условия вейджера, которые необходимо выполнить, чтобы исключить выигрыш.
#8742 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия скачать
Бездепозитный бонус за регистрацию в казино с выводом средств в 2022 году — Наш ресурс предоставляет игрокам важную информацию о самых свежих, щедрых и проверенных бонусах в онлайн казино, коие обновляются любой день.Каждая игровая перрон выделяется условиями по получению и отыгрышу бездепов. В правилах отчетливо расписаны кратковременные рамки, за коие нужно прокрутить вейджер. Также не забывайте на максимальный размер ставки и наивысшую сумму выплаты. С иной стороны, дабы получить бездепозитные бонусы казино, достаточно израсходовать не более 1 минутки. <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> <a href=http://www.bluesoleil.com/forum/thread-2–239675–1.html>http://www.bluesoleil.com/forum/thread-2–239675–1.html</a> Отыграв бездепозитный приз в казино с выводом также придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, случае схожее лимитирование существует, то единоразово исключить выйдет только сумму, не превосходящую объем полученного бонуса. скачать 1×slots на андроид мобильная версия <a href=http://td-scs.ru/communication/forum/user/103789/>http://td-scs.ru/communication/forum/user/103789/</a> Выигрыши с бонусов без инвестициям постоянно привязаны к притязанию по ставкам и все быть обналичены только последствии исполнения этих требований.
1хслотс казино зеркало
<a href=https://forums.scar-divi.com/topic/580172–1-x-slots-casino/>1 x slots casino</a> 1х слот регистрация в 1×slots casino Также учтите, что кое-какие игровые платформы сузивают перечень государств, коие способны получить предложенный бездепозитный приз за регистрацию. К примеру, есть онлайн-заведения, выдающие сходственные бонусы лишь жителям определенных стран. К примеру, онлайн казино 777 Оригинал предоставляет бездепозитный приз только игрокам из России и государств СНГ. Или наоборот, снабжают вознаграждением всех, не жителей неких стран (как сего, идет внимательно изучать список, чтобы потом не появилось никаких вопросов и претензий).Каждая игровая перрон выделяется критериями по получению и отыгрышу бездепов. В правилах детально расписаны временные рамки, за которые нужно прокрутить вейджер. Также не забывайте про наибольший объем ставки и наивысшую сумму выплаты. С другой стороны, чтобы получить бездепозитные бонусы казино, достаточно израсходовать менее 1 минутки. <a href=http://zeren.freeoda.com/member.php?action=profile&uid=7286>http://zeren.freeoda.com/member.php?action=profile&uid=7286</a> 1 x slots casino Самые знаменитые методы вывода денег ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электронным платежным системам типа Neteller и Skrill, еще пользуются криптовалютными кошельками. Вывод выигрышей может исполняться быстро либо развлекать от нескольких часов до нескольких суток.Все любят получать подарки. Согласитесь, практически любой играющий человек будет беспредельно счастлив, в получит безвозмездный подарок для игры в интернет казино просто за регистрацию или же приз за внесенный депо, так именуемые приветственные призы для новых игроков. Соответственно такие онлайн клубы станут более модны и преимущественны у игроков при выборе казино для забавы. Топ казино непрерывно обновляется и добавляются свежие и занимательные игровые клубы с привлекательной бонусной политикой и всеми вероятными привилегиями, к которым относятся эти бонусы как фриспины за регистрацию, валютные бездепозитные призы, а великодушные бонусы за внесенный депозит.
1 x slots
Фриплей-бонусы. Бонусы за безвозмездную забаву есть лишь в некоторых клубах. Они зачисляются незамедлительно после создания профиля и срабатывают непродолжительное время. Если у вас нет времени потратить средства, они просто закончатся. Что дотрагивается времени, правило призы срабатывают в течение одного часа. <a href=https://buketik39.ru/user/Tyronezem/>https://buketik39.ru/user/Tyronezem/</a> Условия имеют различаться друг от приятеля. Но подобный бонус может быть использован только для игрового процесса – полученные на счет финансы до того, как будут отыграны, исключить невероятно. 1×slots сайт Также случаются случаи, когда казино начисляет оговоренный приз после регистрации нового клиента по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам.Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить необыкновенности, труднодоступные при ирге в демо режиме. Многие свежие посетители перебегают в число неизменных, а оператор получает долгосрочную выгода.
1×slots регистрация на сайте 1×slots ru com
Некоторые казино имеют предлагать посетителям бездепы за свидетельство номера либо почты или репост на страничку в социальных сетях. <a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=6055>зеркло казино 1×slots</a> В большинстве заведений сделать это возможно по e-mal, по номеру телефонного, спустя социальную сеть или гугл-аккаунт.Мы проделываем ударение на ключевых положениях верховодил, рассказываем о территориальных ограничениях и вкратце информируем о других промоакциях обсуждаемого казино. Выше мы дали полный комплект самых новых и актуальных бездепозитных призов в онлайн казино без пополнения на 2022 год, где возможность пользоваться любым ценным бездепозитным бонусом.Вывод выигрыша с бездепозитных призов казино – великодушный презент от азартных клубов. Но чтобы вывести собственный заработок, необходимо выполнить ряд критерий: 1×slots официальный demo регистрация в 1×slots casino <a href=https://usolie-citi.ru/user/JeffreyBrild/>https://usolie-citi.ru/user/JeffreyBrild/</a> В бонусную программку многих операторов входят регулярные бездепы. Это пожизненные промоакции, поощряющие активных постоянных игроков. Популярный формат — раздача фриспинов по конкретным денькам недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают неизменные бонусы без депозита в размен на накопленные баллы преданности.
1×slots зеркало которую указывали при регистрации кстати
<a href=http://www.russtars.tv/user/Philipamaps/>http://www.russtars.tv/user/Philipamaps/</a> Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша бонусов. Заведения всегда устанавливают наивысшую ставку, возможную по условиям вейждера. 1× slots casino официальный сайт Для такого, чтобы отыграть необходимую вашего бездепозитного приза надо(надобно) выполнить обстоятельства вейджера. Очень часто фриспины даются на определенные слоты (book of ra, book of lifeless, book of sun), выбирайте слот себя нраву, они очень красивые и качественные. Бездепозитные бонус имеет быть денежным так и вид фриспинов на слотыКазино выводит средства лишь на что, эту платежную систему, с котрой был сделан депозит. То есть, для вывода бездепозитного бонуса, Вам сначала нужно пополнить счет. В некоторых клубах ограниченный перечень методов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с данных платежных способов, которые доступны для вывода.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.bandariklan.com/showthread.php?tid=176825&pid=875175#pid875175>1× slots зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Сразу в активации промокода возможно пользоваться презентом. Как уже упоминалось, бонусы случаются трёх видов – фриспины, кредиты и фриплей-бонусы. Так что главное различие презента на депозит от бездепа – неотъемлемое пополнение счёта. Вы сможете внести депозит и преувеличить стартовый капитал или арестовать бездеп и при этом не придётся рисковать своими сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начисляет щедрое одобрение!
#8743 Charlesgunnyhttp://filmkachat.ru
1 х слотс зеркало
Это раз из главных характеристик привлекательности дара. С завешенным коэффициентом числе профессионалы не смогут выполнить условия по отыгрышу. И так, насколько презентабельно смотрится предложение – бездепозитный бонус казино в размере $500 либо $1 000. Чтобы новенькие получше вдумались, что же это вейджер, мы разберём на образце. <a href=http://filmkachat.ru/>1× slots сайт</a> Подтверждение электронной почты – одно из основных условий, коие есть практически в любом бездепозитном казино. Чтобы верифицировать электронную почту, довольно перейти по интенсивной ссылке в письме, полученном от азартного клуба. <a href=https://ekonty.com/blogs/view/69195>https://ekonty.com/blogs/view/69195</a> 1×slots мобильная версия войти казино <a href=http://unqbit.org/bbs/board.php?bo_table=free&wr_id=34986>http://unqbit.org/bbs/board.php?bo_table=free&wr_id=34986</a> Для казино, работающих интернет, бездепозитные призы необходимы для привлечения новых посетителей. Предложение сыграть на слотах без надобности внесения настоящих средств — работающий способ для повышения энтузиазма к компании. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит играть в казино, лишь теперь теснее на собственные средства.Для получения бонуса надо(надобно) ознакомиться с программой преданности казино и устроить ставки на необходимую, необходимую для перехода на грядущий уровень.
1×slots регистрация на сайте 1×slots ru com
Вейджер не более х30–35 является применимым. Опытные игроки заявляют, что с таким вейджером реально остаться в плюсе, случае правильно подойти к выбору игрового аппарата. <a href=https://creapnl.com/foros/tema/1×slots-%d0%b7%d0%b5%d1%80%d0%ba%d0%b0%d0%bb%d0%be-%d1%81%d0%b0%d0%b9%d1%82%d0%b0–43/>1×slots зеркало сайта</a> 1 xslots рабочее зеркало Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.Но ни не запамятовывайте внимательно читать верховодила участия в бонусных промоакциях. Если вы нарушите хотя бы одно условие, позднее вы не сможете уладить недоразумение с администрацией. <a href=http://wiki.die-karte-bitte.de/index.php/Benutzer_Diskussion:ElliottChabrilla>http://wiki.die-karte-bitte.de/index.php/Benutzer_Diskussion:ElliottChabrilla</a> Шаг 4. Активация. Внимательно исследуйте условия, информацию по лимитированиям и сроке деянья бонусного предложения. Разобравшись с правилами, можно активировать приз в личном офисе (от ? с использованием промокода) или по запросу в саппорт.Высокая конкуренция в сегменте азартных игр доказывает операторов завлекать посетителей различными акциями. Благодаря данному у гостей появляется возможность получить призы в казино за регистрацию без депозита. Воспользоваться этим предложением можно, избегая процедуру внесения денег на игровой счет, просто активировав акк на сайте. Наш экскурсовод по бездепам поможет выбрать самую привлекательную бонусную программку, разузнать управляла получения такового вознаграждения и воспользоваться им с наибольшей выгодой. 1×slots рабочее зеркало на сегодня После требуется привнести идентификационный платёж. Это стращает начинающих больше всего. Нужно сделать минимальный депозит в 100–500 рублей. Таким образом служба защищенности убедиться том,, что платёжный способ принадлежит Вам. Данная процедура важна для обеспечивания защищенности игровых счетов. Пример, Ваш аккаунт взломают и выведут средства на собственный кошелёк. Будет крайне досадно. Поэтому верификация платёжной системы, это необходимый момент.
1×slots официальный сайт скачать
<a href=https://notebooks.ru/forum/index.php?PAGE_NAME=profile_view&UID=46916>https://notebooks.ru/forum/index.php?PAGE_NAME=profile_view&UID=46916</a> Представьте момент, когда при ставке в 10 рублей Вы получите подобное умножение. Миллион руб. За одно вращение, что вполне вполне. Поэтому вопрос, сколько можно выиграть остаётся открытым. Предлагаем проверить без. Регистрируйтесь в одном либо нескольких интернет казино, получайте Бездепозитный приз и инспектируйте удачу в деле. Разумеется, исключить средства довольно. Однако шансы есть у всех.А ознакомиться с новыми онлайн казино, Вы сможете за счет бонусов с выводом прибыли, коие Вы можете получить без депо. 1хслотс официальный сайт зеркало
1 x slots casino
<a href=https://uyghuryol.com/forum/viewtopic.php?f=8&t=245181>1×slots сайт</a> Для получения бездепа необходимо пригласить в игру по реферальной ссылке нового посетителя: он должен зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на необходимую, указанную в условиях акции. Многие игроки, оценив перечень казино, остаются играть в нем и далее ? на это и направлено любое промо. Постоянные клиенты вносят депозиты и делают ставки, обеспечивая долгосрочную выгода оператора. То есть, казино раздают бездепы новым юзерам для формирования приклнной аудитории.За вербование приятеля ? в партнерской программы заказчик получает вознаграждение за привлечение свежих пользователей. 1×slots casino зеркало рабочее <a href=http://obruchalka-vrn.ru/index.php?subaction=userinfo&user=mindlesstemptat>http://obruchalka-vrn.ru/index.php?subaction=userinfo&user=mindlesstemptat</a>
1×slots официальный зеркало
На странице представлены бездепозитные призы за регистрацию в казино редкая заслуга за коей гонятся все игроки как новички, так и мастера. Мы тоже уделяем великое внимание на присутствие призов при формирование рейтинга казино на средства. Бездепозитный приз это вероятность играть бесплатно и выиграть реальные деньги.Итак, чтобы бесплатные бонусные кредиты превратились в настоящие средства, которыми вам распоряжаться по собственному усмотрению, их нужно отыграть. Вейджер идет уточнять в правилах онлайн-казино. Отыграв бездепозитный приз в казино с выводом тоже придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в подобное ограничение существует, то единоразово исключить выйдет лишь необходимую, не превышающую объем приобретенного бонуса.Итак, чтобы бесплатные бонусные кредиты трансформировались в настоящие средства, которыми возможность распоряжаться по собственному усмотрению, их надо(надобно) отыграть. Вейджер идет уточнять в правилах онлайн-казино. <a href=http://www.literatort.ru/2018/09/zajachji-lapy.html>http://www.literatort.ru/2018/09/zajachji-lapy.html</a> 3. Подтвердить данные. В зависимости от клуба, нужно привязать телефонный или почту, показать персональную информацию;В качестве призов интернет казино нередко предлагает выдачу фриспинов, другими бесплатных вращений игрового барабана. Виртуальные монеты можно применять для обучения в покерной школе или для игры в казино. 1×slots зеркало которую указывали при регистрации кстати
<b>Смотреть еще похожие новости:</b>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=286356>рабочее зеркало 1×slots</a>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=288260&pid=646514#post_646514>casino 1×slot</a>
<a href=https://test.soclanovtsy.ru/topic/34599-afezore/#comment-43523>1×slots официальный сайт, скачать</a>
<a href=http://naturetour.ru/personal/profile/index.php?PAGE_NAME=profile_view&UID=2416>казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Например, игрок получил 500 руб. При творении аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 рублей, понадобится устроить 875 спинов для полного отыгрыша. Чтобы помощи убедиться в превосходстве бездепозитных бонусов, довольно зарегистрироваться в казино и получить одобрение.
#8744 Charlesgunnyhttp://filmkachat.ru
зеркло казино 1×slots
Бездепозитные бонусы начисляются только один один. Не стоит раскрывать свежие аккаунты, дабы получить их повторно. Служба безопасности казино непременно выявит «левого» участника и перекроет. Если посетитель выполнит нужные требования, отыграет свою ставку и решит исключить собственный выигрыш, то ему нужно сведению, что казино обязательно востребует дать ксерокопии личных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои вывести не удастся. <a href=http://filmkachat.ru/>1×slots зеркало которую указывали при регистрации кстати</a> К сожалению, нет. Почти все казино, требуют внесение желая бы одного малого депо для вывода выигрыша с бездепозитного бонуса. Также учитывайте, что вывести средства разрешено лишь на ту платежную систему, с коей был сделан депозит. <a href=https://www.diigo.com/item/note/b3jhr/9on6>https://www.diigo.com/item/note/b3jhr/9on6</a> Бездепозитные бонусы — это презенты от казино повторяющий бонусных средств или фриспинов для игровых автоматов, которые начисляются на акк игрока в процедуры регистрации на веб-сайте заведения. Для получения этих поощрений депо не требуется.Бездепозитный приз по промо-коду будет доступен для забавы, лишь что случае когда Вы активируете специальный бонусный код в разделе с призами либо укажите промокод при регистрации на веб-сайте. В некоторых случаях, не активации кода, придется подтвердить контактные данные игрока и наполнить анкету клиента. 1×slots официальный сайт мобильная версия <a href=http://bbs.161forum.com/bbs/home.php?mod=space&uid=267377>http://bbs.161forum.com/bbs/home.php?mod=space&uid=267377</a> Процесс доказательства личности возможность занять от 1-го денька до недели. Если клиент разрешил нибудь ошибку при заполнении паспортных данных, то ему следует обратиться с задачей в службу поддержки онлайн-казино.Подарки на праздники ? приуроченные к парадным датам, требующие условного отыгрыша или начисляются без такового. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду.
1хслот зеркало сайта
<a href=http://www.forum.kalor.ru/1×slots-registraciya-1×slots-casino-c2d-ru-t5331.html>1×slots регистрация 1×slots casino c2d ru</a> 1×slots регистрация 1×slots casino 777 online Подтверждение регистрации. Казино настоятельно привязки профиля к электронному адресу и номеру телефона. Для сего на e-mail отчаливает послание со ссылкой, а на телефонный ? текстовое известие с кодом. <a href=http://www.ihavethepussy.com/de/members/42647-ChrisAcaft>http://www.ihavethepussy.com/de/members/42647-ChrisAcaft</a> 1×slots сайт зеркало Бездепозитные призы – это исключительно интересная и наиболее перспективная акция интернет-казино. Они даже никакого фри-спинов, поэтому что выплаты в бесплатных вращениях не гарантированы, как комбинации на барабанах игрового аппарата шансы не сложиться.Бездепозитные бонусы реальными средствами, которые можно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадали.
1 x slots
Когда речь идет о валютных бонусах, казино постоянно устанавливают обстоятельства вейджера, коие необходимо выполнить, чтобы исключить выигрыш.Многие азартные клубы ограничивают сумму вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не сможете исключить. Разница несомненно аннулирована, Вы в не можете создавать на нее ставки. Активация валютного вознаграждения случается механически последствии создания профиля либо применения промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на страницы казино в соц сетях или на рассылку рекламных известий, скачать и ввести дополнительный софт и т.д. <a href=https://xn–80asucf0d.xn–j1al4b.xn–p1ai/index.php/component/k2/itemlist/user/128410>https://xn–80asucf0d.xn–j1al4b.xn–p1ai/index.php/component/k2/itemlist/user/128410</a> Большинство клубов завлекают внимание в за счёт разнообразных подарков. На 1 сайтах можно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает безвозмездные вращения для пуска лучших онлайн слотов. Несмотря на различные промоакции, стоит выделить самые главные. 1×slots зеркало регистрация в 1×slots casino
1×slots регистрацию более популярный вариант это
Также, в этом случае нужно подтвердить собственный номер телефонного, результата код, приобретенный в смс-сообщении от клуба установить в особое поле в личном офисе игрока.2. Создать новый профиль. Для регистрации нужно заполнить небольшую анкету или зайдите в индивидуальный офис при помощи социальных сеток; Подарки на праздничные ? приуроченные к парадным датам, требующие условного отыгрыша или начисляются без это. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду.Для проверки применяются сканы паспортов, водительских водительских, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если юзер обнаружен в попытке завести вспомогательный аккаунт, все его учетные записи подвергаются блокировке, а их обладатель попадает в темный список. При забаве на лицензионной площадке не стоит бояться свидетельствовать достоверную персональную информацию (шифрование ликвидирует утечку индивидуальных данных). На условиях отыгрыша даровых бонусов следует остановиться подробнее. С ними связаны аспекты, коие невозможно оставить без внимания.Ознакомьтесь с нашим списком лучших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего списка и получите бездеп незамедлительно. Хватайте лучшие благотворительные предложения ниже и выигрывайте немалые деньги, не рискуя! 1×slots официальный сайт, скачать <a href=http://am_14264130.mongdol.net/bbs/board.php?bo_table=free&wr_id=528400>http://am_14264130.mongdol.net/bbs/board.php?bo_table=free&wr_id=528400</a>
1×slots официальный сайт зеркало рабочее
Получив свой презент, Вы можете даром играть на настоящие средства, а выполнив обстоятельства отыгрыша, вывести свой выигрыш.Отзывы читателей о бонусных промоакциях посодействуют составить впечатление, хотя не забывайте о субъективности личных объяснений. Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, solid только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Как управляло, при выводе финансов, от играющего потребуется только сделать наименьший вклад чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом личный счет. <a href=http://gticlub.lv/user/GlennKib/>http://gticlub.lv/user/GlennKib/</a> 1×slots зеркало рабочее на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=https://www.ldvd.nl/no-22-san-diego-place-rallies-very-last-boise-country-27–16?page=24#comment-237001>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a>
<a href=https://tabsgame.ru/user/Jamesbes/>1×slots casino регистрация 1×slotscasino09k online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Получать информацию о самых прибыльных бонусах возможно без неизменного прогноза новостей казино. Мы брали данную задачку на себя и безпрерывно следим за услугами операторов, выбирая превосходнейшие из их. В этом разделе собраны заключительные бездепы, промокоды к ним и обстоятельства их активации. Список акций периодически пополняется. В топ вошли самые новые бездепозитные бонусы за регистрацию в казино 2020, кратковременные и замкнутые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и критериям. Если срок деянья акции истек, она удаляется из списка.
#8745 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slotscasino 56 online
Доступность — бездепозитные бонусы в казино чаще всего предоставляются свежим игрокам, хотя случаются случаи, когда бонус шансы получить и действующие клиенты.Если вы новичок в и только попали в неизведанную вами район азарта — за предложений как бездепозитные бонусы без пополнения. <a href=http://filmkachat.ru/>1хслот 1хслотс регистрация перейти на 1×slots</a> Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?Бездепозитный бонус предоставляется новенькому игроку за конкретные действия. Часто презент повторяющий средств либо фриспинов выдается за регистрацию, благодаря чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. <a href=https://culture-informatique.net/forum/quelquun-peut-mexpliquer/what-is-a-3d-render-understanding-the-basics-and-beyond/>https://culture-informatique.net/forum/quelquun-peut-mexpliquer/what-is-a-3d-render-understanding-the-basics-and-beyond/</a> 1× slots сайт <a href=http://filmsgood.ru/user/DavidNum/>http://filmsgood.ru/user/DavidNum/</a> Раздача призов может быть посвящена различным датам: календарные дни, деньки рождения игроков, годовщина открытия казино и т. Д. Подарок выдается в виде денег, фриспинов или баллов для скопления и обмена на услуги оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода данной суммы придется выполнить ряд притязаний.
казино 1×slots официальный сайт
Эффективность бездепов виде рекламного инструмента оценили все операторы. Малоизвестные площадки используют эти акции, дабы стремительно набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны неизменных посетителей. Не все сайты, дающие подарки без депо, рекомендованы к ирге. За привлекательным промоописанием имеют скрываться неосуществимые обстоятельства отыгрыша и другие подводные камни. <a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=36121>1хслотс рабочее зеркало на сегодня</a> 1×slot зеркало рабочее регистрации на телефон придет Как управляло, при выводе финансов, от играющего требуется лишь устроить наименьший лепта для того, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом собственный счет. <a href=http://makramexa.com/index.php?name=account&op=info&uname=utopianpregnanc>http://makramexa.com/index.php?name=account&op=info&uname=utopianpregnanc</a> Такие одобрения дозволяют даром протестировать новое казино, разобраться с игровым ходом онлайн слотов, заработать и вывести маленькую сумму средств.Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке представители онлайн-казино публикуют актуальную информацию о no down payment bonuses и других предложениях. 1×slots казино зеркало Также, ситуации нужно доказать свой номер телефонного, желаемого код, полученный в смс-сообщении от клуба ввести в специальное поле в личном кабинете игрока.Как верховодило, при выводе финансов, от играющего требуется лишь сделать минимальный лепта для того, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом собственный счет.
рабочее зеркало 1×slots
Первый возникающий вопрос, это, зачем выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают новых игроков. Последним легче начать игру на деньги с подарка за регистрацию. Им не пополнять баланс и расходовать личные средства. Новички получают бесплатные спины или средства на счёт. С их поддержкою знакомятся с игровым процессом, крутят слоты и проделывают ставки в рулетке. Доступные забавы – В некоторых азартных забавах можно понизить математическое преимущество казино до нескольких 10-х процента. В их числе почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как правило, в этих забавах ставки идут в зачет вейджера не полностью. Например, может учитываться только 50%. В неких играх бездепозитные призы вообщем невозможно отыгрывать. <a href=https://aben75.cafe24.com/bbs/board.php?bo_table=free&wr_id=605737>https://aben75.cafe24.com/bbs/board.php?bo_table=free&wr_id=605737</a> На бонусные начисления могут быть установлены вспомогательные лимитирования, коие Вы не сведению при отыгрыше. Пока приз полностью не отыгран — средства из казино не выводятся. 1×slots официальный сайт зеркало Каждый из бездепозитных призов без пополнения 2022 имеет собственный определенный вейджер для отыгрыша, так же в любом казино он уточняется индивидуально — где то он х55 а кое-где х30, повторюсь везде по различному!Иногда у посетителей вебсайта все появиться трудности, задачи, препядствия при активации полученного промо-кода. В таких случаях, необходимо обратиться за поддержкою в службу поддержки «Support». Для получения ответа, непременно указывается определенная первопричина воззвания и подтверждается информация дополнительными экрана. Если сформировалась неоднозначная ситуация, всегда возможно адресоваться к главному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ.
1хслотс регистрация в 1×slots casino
<a href=https://peloton.com.ua/forum/memberlist.php?mode=viewprofile&u=9259>1×slots casino регистрация 1×slotscasino09k online</a> Обычно бездепозитные акции от казино, прибывают на эл. Почту в деньки рождения либо праздники. В неких онлайн казино возможно адресоваться в чат и как постоянному игроку, вероятно вам предложат бездепозитное предложение. Бездепозитный бонус предоставляется новому игроку за конкретные деяния. Часто презент в виде денег либо фриспинов выдается за регистрацию, спасибо чему пользователь получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. 1×slots регистрация <a href=https://bofh69.com/wiki/index.php/User:Kina19794991>https://bofh69.com/wiki/index.php/User:Kina19794991</a>
1×slot регистрация
В игровых клубах без лицензии Вы покупаете „кота в мешке“ и если, тогда, спорных ситуаций нет возможности куда-то пожаловаться и обосновать собственную правоту. <a href=http://kinofilm2017.ru/user/Franktok/>http://kinofilm2017.ru/user/Franktok/</a> Теоретически, к бесплатным бонусам можно отнести например именуемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, потому собственно они предоставляют только возможность создавать ставки. 1×slots регистрация 1×slots review live Фриспины предусмотрены для использования в видео слотах. Внимательно ознакомьтесь с критериями – частенько их выдают на некоторые автоматы. В зависимости от клуба, у вас выйдет устроить определённое число ставок. Кстати, продвинутые игорные жилища разрешают запускать любых «одноруких злодеев».
<b>Смотреть еще похожие новости:</b>
<a href=http://kick.gain.tw/viewthread.php?tid=4743655&extra=>1×slots casino регистрация 1×slotscasino09k online</a>
<a href=https://mit-bbs.com/memberlist.php?mode=viewprofile&u=15318&sid=8d1f9057b4900cf13d66800e8726d083>1хслот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Да, у даровых призов есть недостатки. Прежде всего, они обыкновенно большие. Кроме того, обстоятельства вейджера по ним практически жесткие. Но все неимение риска проделывает их очень привлекательными для клиентов.
#8746 Charlesgunnyhttp://filmkachat.ru
1× slots casino зеркало
Самые популярностью способы вывода денег ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электронным платежным системам подобии Neteller и Skrill, а также используют криптовалютными кошельками. Вывод выигрышей имеет осуществляться моментально либо развлекать от нескольких часов до нескольких суток. <a href=http://filmkachat.ru/>1×slots казино зеркало</a> Но есть игорные заведения, коие готовы просто так жертвовать средства на забаву. Для сего довольно сделать профиль. Чтобы вывести собственный выигрыш, вас поначалу нужно выполнить условия отыгрыша, обозначенные в критериях получения бездепозитного депозита.За привлечение приятеля ? в рамках партнерской программы заказчик получает вознаграждение за вербование свежих пользователей. <a href=https://www.diigo.com/item/note/b3jhr/obr2>https://www.diigo.com/item/note/b3jhr/obr2</a> Диапазон ставок, которые вправе сделать игрок, того лимитирован. Обычно ставить можно небольшую необходимую — в 10–30 руб. За одно вращение. 1×slots зеркало рабочее <a href=https://codescript.ru/user/DoctorLazutaki/>https://codescript.ru/user/DoctorLazutaki/</a>
1×slots casino регистрация 1×slotscasin online
Несмотря на то, собственно данный вариант стимуляции со стороны азартных платформ очень востребован в сфере подобных игр, далековато не поклонникам казино ведомо, собственно себе бездепозитные призы казино и как именно их вполне эксплуатировать. <a href=http://6000ziyuan.com/forum.php?mod=viewthread&tid=109668&extra=>1×слот регистрация в 1×slots casino</a> 1×slots зеркало регистрация Доступные игры – В неких азартных играх возможно снизить математическое преимущество казино до нескольких десятых процента. В их количестве почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как управляло, в таких забавах ставки идут в зачет вейджера не всецело. Например, может предусматриваться только 50%. В неких забавах бездепозитные бонусы вообщем нельзя отыгрывать. <a href=https://tophatsec.com/forum/member.php?action=profile&uid=8134>https://tophatsec.com/forum/member.php?action=profile&uid=8134</a> Для верификации номера аппарата, в собственном профиле выберите опцию „Подтвердить номер телефона“ и введите в подходящее поле код, приобретенный в sms-сообщении. скачать 1×slots на андроид мобильная версия
1×slots официальный demo регистрация в 1×slots casino
Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша бонусов. Заведения практически устанавливают наивысшую ставку, возможную по условиям вейждера.Не стоит путать забаву в демо и внедрение бонусов. В демонстрационном режиме игрок возможность оценить механику слота, сюжет и оформление. Но забава ведется на относительные кредиты, поэтому отсутствует основное ? чувство азарта. Активируя промокод либо фриспины, заказчик и не расходует средства деньги на игровые автоматы, хотя возможность сорвать реальный куш! <a href=http://xn–jj0bt2i8umnxa.com/bbs/board.php?bo_table=free&wr_id=20895>http://xn–jj0bt2i8umnxa.com/bbs/board.php?bo_table=free&wr_id=20895</a> Можно. Вы постоянно можете отрешиться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не создадите ставку. 1 хслот регистрация в 1×slots casino Также бездепозитные призы имеют служить методом вернуть к ирге клиентов, пока приостановивших своё сотрудничество с фирмой: уведомление о бездепе поступает на мобильный телефон или почту.Свежий приз начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в использовании средствами, а случае отыгрыша оператор может ввести ограничение на вывод средств.
рабочее зеркало 1×slots
Во время забавы в казино, выигрыши, приобретенные спасибо безвозмездным призовым фондам, суммируются и включаются в общую необходимую для отыгрывания. Однако, в фортуна улыбнется и получится отыграть все бонусы, игровое заведение гарантированно разрешит вывести денежные средства. Сумма вывода несомненно находиться от лимита, одобренного непосредственно в этом учреждении. Поэтому, внимательно нужно читать правила выдачи анлимитных депо. <a href=https://timepost.info/showthread.php?tid=49912>1×slots зеркало видели такую регистрацию на</a> Активация по промокоду используется в разных обликах бездепов. Если речь о приветственном бонусе, то комплект символов возможно разузнать на главной странице, в регистрационной форме или послании, которое отправляется юзеру для доказательства адреса электронной почты. Акции все проводиться совместно с партнерскими площадками. Обычно код размещается на стороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активизируется разовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем актуальный код для активации в описании каждого рекламную.4. Заберите презент. Чаще всего бонус активизируется незамедлительно последствии регистрации. Но бывают ситуации, когда нужно забежать в собственный кабинет или написать в саппорта. При регистрации по указывать только достоверную информацию. Когда учетная запись несомненно активна, появится доступ в Личный кабинет. В нем можно выбрать еденицу, установить промокод и узнать подробные управляла получения и отыгрыша бездепа. Краткая информация об промоакции часто находится непосредственно на регистрационной форме. 1×slots регистрация то дальше необходимо пройти <a href=https://www.vforum.org/forum/members/28383.html>https://www.vforum.org/forum/members/28383.html</a> Прочитайте управляла бонусной программки, в желаете принять. Да, мы безотступно советуем сделать это до регистрации.
1×slots официальный сайт, скачать
Отыграв бездепозитный бонус в казино с выводом также придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, случае схожее лимитирование присутствует, то единоразово исключить получится только необходимую, не превосходящую объем приобретенного бонуса.Кешбэк-бонус представляет собой возврат фиксированного процента от ставки в случае проигрыша либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не превышает 10%. <a href=https://rathena.org/board/profile/123787-charlesfex/>https://rathena.org/board/profile/123787-charlesfex/</a> Условия, на которых предоставляется бездеп, регулируются казино. Каждая акция имеет доскональные правила, гиперссылка на которые обычно находится в промообъявлении. В их указываются лимиты, вейджер, перечень дешевых игр. Если оператор укрывает данные о предложении, то пользоваться им не. 1×slots зеркало сайта Да, у даровых бонусов есть недостатки. Прежде всего, они обычно большие. Кроме такого, условия вейджера по ним всегда жесткие. Но таки отсутствие риска проделывает их довольно красивыми для посетителей.В случае установленного лимита на сумму вывода выигрыша с бездепозитного приза, игрок не может исключить больше заявленной суммы.
<b>Смотреть еще похожие новости:</b>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=322551>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<a href=https://www.sgomberisgombero.it/my-account-2/>1×slots рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 поболее. Когда игроку полагается количество фриспинов, администрация может бить3 их начисление на некоторое дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах акции. Выбор каждого онлайн казино на нашем веб-сайте. В описании к любому Вы можете узнать, собственно получите за творение аккаунта.
#8747 Charlesgunnyhttp://filmkachat.ru
1×slots мобильная версия войти казино
Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> Бездепозитный бонус часто возможность стать легкодоступным незамедлительно последствии окончания регистрации, поскольку правило единственным требованием к нему считается регистрация, а этого ревизия вашей свежей учетной записи. <a href=https://community.networkofcare.org/blogs/qwerty/archive/2024/10/11/understanding-what-is-a-3d-render-and-how-it-works.aspx>https://community.networkofcare.org/blogs/qwerty/archive/2024/10/11/understanding-what-is-a-3d-render-and-how-it-works.aspx</a> 1 x slots casino <a href=http://n27244j0.bget.ru/index.php?subaction=userinfo&user=Tyronegab>http://n27244j0.bget.ru/index.php?subaction=userinfo&user=Tyronegab</a> Такой бесплатный эквивалент средств зачисляется на профиль юзера после осуществления притязаний и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений возможен только в осуществления вейджеровых условий.
1×slots зеркало которую указывали при регистрации кстати
Призовые начисления без депозита имеют предоставляться для роли в турнирах интернет казино. Потратить перечисленные средства возможно самая масштабах этой промоакции. Условия их проведения в лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться таким предложением, чем выучить его верховодила. <a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-4994/#comment-597549>1×slots актуальное зеркало</a> 1×slots зеркало сайта <a href=http://ufb7968a.bget.ru/user/Julesmoorp/>http://ufb7968a.bget.ru/user/Julesmoorp/</a> казино 1×slots К огорчению, нет. Почти все казино, настоятельно внесение но бы 1-го минимального депо для вывода выигрыша с бездепозитного бонуса. Также учитывайте, что вывести деньги разрешено только на ту платежную систему, с коей был сделан депо.С такими ординарными советами любое казино с призом за регистрацию способно принести в разы больше выгоды и пользы.
1хлот регистрация в 1×slots casino
Подтвердите регистрацию, дабы активировать Бездепозитный бонус с выводом, потребуется наполнить индивидуальный профиль. Заполните пустые поля истинными данными о себе. <a href=https://www.koi-s.id/member.php?324679-PatrickEagek>https://www.koi-s.id/member.php?324679-PatrickEagek</a> 1×slots зеркало регистрация в 1×slots casino Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.
1хслотс 1хслотс регистрация перейти на 1×slots
Эффективность бездепов в качестве рекламного прибора оценили многие операторы. Малоизвестные площадки употребляют эти промоакции, чтобы скоро набрать базу. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны неизменных гостей. Не все сайты, дающие подарки без депозита, рекомендованы к игре. За симпатичным промоописанием могут скрываться неосуществимые обстоятельства отыгрыша прочие подводные камни.Изучить управляла и условия получения бездепозитных призов казино, Вы сможете у нас на веб-сайте в разделе с бонусами либо на официальном веб-сайте выбранного Вами казино. Если не можете отыскать необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал либо по электрической почте. <a href=https://demo.comuni-italiani.it/forum/viewtopic.php?f=9&t=366269>1×slots casino регистрация 1×slots review live</a> Размер приза. В качестве бездепов обычно начисляют очень суммы, а когда речь о бонусах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино шансы подарить игроку до 2000$. Также, учите, что бездепозитный бонус возможно вывести лишь сомнений случае, когда будут выполнены все условия отыгрыша.Классическая разновидность приза за творенье аккаунта. Его преимущество содержится что, что клиент имеет помощи выбирать аппараты и создавать ставки в их. Иногда перечень игровых автоматов ограничен оператором, но все равно это какого-либо, чем единственный дешевый разъем, как когда с использованием фриспинов. 1×slots подтвердит вашу регистрацию если говорить <a href=https://doc.clickup.com/9015644841/p/h/8cnzmn9–115/a46907b835d7844>https://doc.clickup.com/9015644841/p/h/8cnzmn9–115/a46907b835d7844</a> Операторы гемблинга заявляют, что например они дерутся с бонус-хантерами. Впрочем, критики считают, собственно этим казино пытаются устроить из случайного постояльца неизменного игрока.Подтверждение регистрации. Казино просят привязки профиля к электрическому адресу и номеру телефонного. Для сего на e-mail отправляется письмо ссылаясь, а на телефон ? текстовое сообщение с кодом.
1× слот зеркало
Также учтите, что кое-какие игровые платформы сужают список стран, коие готовы получить предложенный бездепозитный приз за регистрацию. К образцу, существуют онлайн-заведения, выдающие подобные бонусы только жителям определенных государств. К примеру, интернет казино 777 Оригинал дает бездепозитный бонус лишь игрокам из России и государств СНГ. Или наоборот, пичкают вознаграждением всех, считая обитателей неких государств (следует этого, стопам внимательно учить перечень, дабы впоследствии не появилось никаких вопросов и жалоб). Ниже указан актуальный перечень легальных казино в Беларуси с бонусами на первый депо. Вы можете попасть на официальный сайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз. <a href=http://uprzakupokkchr.ru/user/AnthonyElurf/>http://uprzakupokkchr.ru/user/AnthonyElurf/</a> Разные казино имеют личные управляла по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высокие притязания. Часто онлайн-казино рекомендуют отыграть бонусное поощрение до ста один в игровых автоматах. Например, случае игрок получил бесплатно 10 $, то необходимо будет отыграть их, поставив одну тыщу спинов по одному баксу любой. Стоит обозначить(означить), что не все казино дают вероятность выступать на призы и не во всех развлекательных заведениях схожие управляла для отыгрывания. Некоторые казино воспрещают играть на бонусы в блекджек или ограничивают ставки до 5 процентов, собственно значительно наращивает в 10-ки один число необходимых игр.Для того, чтобы отыграть сумму вашего бездепозитного приза надо(надобно) выполнить обстоятельства вейджера. Очень часто фриспины даются на определенные слоты (book of ra, book of dead, book of sun), избирайте слот себя нраву, они все довольно красочные и качественные. Бездепозитные приз может быть валютным например и повторяющий фриспинов на слоты 1×slots регистрация 1×slots casino 777 online
<b>Смотреть еще похожие новости:</b>
<a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=7523&TITLE_SEO=7523-preobrazovatel-interfeysov-usb-rs485&MID=471981&result=reply#message471981>1×slots бонус за регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Приветственный приз без депо ? презент за регистрацию. Выдается деньгами, фриспинами или баллами. В заключительном случае бонусные баллы используются для роли в турнирах либо обмена на настоящие деньги.
#8748 Charlesgunnyhttp://filmkachat.ru
1хслотс мобильная версия зеркало
Возможность сыграть дополнительное состязание (а время и несколько) совершенно безвозмездно, а выигрыш, же, поступает на счёт игрока. <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут уточняет лимитирование для клиентов. Конечно, это возможно посчитать некоторым неудобством для игрока, хотя справедливости ради необходимо, что выбор автоматов всё также остаётся довольно большим. <a href=https://www.diigo.com/item/note/b3jhr/obr2>https://www.diigo.com/item/note/b3jhr/obr2</a> Чем ниже велечину вейджера, тем легче отыграть и исключить приз. Если Вы расчитываете заработать на бездепе, но просто ознакомиться с свежим игровым клубом, то стоит избегать призов с высочайшим вейджером их почти не реально отыграть. С ними Вы можете лишь протестировать забавы заведения. онлайн казино 1×slots <a href=http://lnx.hotelresidencevillateresaischia.com/casamicciola/index.php?option=com_k2&view=itemlist&task=user&id=450374>http://lnx.hotelresidencevillateresaischia.com/casamicciola/index.php?option=com_k2&view=itemlist&task=user&id=450374</a>
1хслот 1хслотс регистрация перейти на 1×slots
Если простыми словами, бездепы – это определённая сумма средств или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать подарки. Но есть некоторые аспекты. Существуют игорные дома, которые перед тем как начислить бонусы требуют привязать телефон, предоставить копии документов. 1х слот регистрация в 1×slots casino На данном разделе портала периодически публикуются обзорные статьи, каких рассматриваются безвозмездные бонусы превосходнейших интернет-казино. Информация структурирована по нескольким пунктам, включая основные: <a href=http://szmetal.ru/bitrix/redirect.php?goto=http://shire-cafe.ru/bitrix/rk.php?goto=http://micro-moscow.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/0lGT-SrogL->http://szmetal.ru/bitrix/redirect.php?goto=http://shire-cafe.ru/bitrix/rk.php?goto=http://micro-moscow.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/0lGT-SrogL-</a> 1×slots бездепозитный бонус за регистрацию
1×slot казино зеркало
Для получения приза надо(надобно) ознакомиться с программой лояльности казино и устроить ставки на необходимую, нужную для перехода на грядущий степень.Составленный знатоками Casino.ru перечень онлайн-казино с бездепозитным бонусом дозволяет игрокам сопоставить спецпредложения различных операторов. <a href=http://ds1.dspnbmall.co.kr/bbs/board.php?bo_table=free&wr_id=770182>http://ds1.dspnbmall.co.kr/bbs/board.php?bo_table=free&wr_id=770182</a> Размер ставки для игры по бездепозитному бонусу (конечно же, когда, когда он представлен в виде бонусных валютных средств) зачастую ниже, чем при игре на депо. Ограничение будет действовать до момента отыгрыша бонуса. 1×slots зеркало проходить регистрацию это отличный вариант Игры, каких возможно играть на бонусные деньги. Проверьте список игр, в которых можно выступать на бонусные свои, вероятно они Вам не понравятся и не стоит расходовать своё время на эту промоакцию.
1×slots зеркало проходить регистрацию это отличный вариант
Ещё одно распространённое акционное предложение – привлекательный подарок с неблаговидными требованиями. К примеру, клуб обещает $100 в качестве бездепа, но с вейджером х80 или х100. Отыграть такой вейджер фактически невероятно и поэтому чем концентрироваться на более занимательных акциях.Бездепы обыкновенно предлагают с отыгрышем — мгновенно вывести выигранные свои невозможно. Перевод средств со счета будет возможен после как, как юзер выполнит все притязания казино, а сумма имеет превышать установленного правилами лимита. Условиями акции фиксируются сроки, на которых заказчик вправе воспользоваться предложением. Обычно они не превышают нескольких дней в активации. Если при регистрации показать промокод, можно гарантировано получить бонус. Где взять ваучер? Посетите направленные блоги или форумы. Иногда администрация клуба делает рассылку ваучеров на электрическую почту. В заключительное время игорные дома начали рекламироваться в фильмах и телесериалах. Присмотритесь и всего заметите промокод, который принесёт 500 или 1 000 бонусных рублей. 1×slots зеркало быструю регистрацию а также мгновенное <a href=http://soe-parrot.com/home.php?mod=space&uid=169133>http://soe-parrot.com/home.php?mod=space&uid=169133</a>
1×slots зеркало регистрация
Все обожают получать презенты. Согласитесь, почти любой играющий человек несомненно необъятно рад, случае получит безвозмездный подарок для забавы в интернет казино просто за регистрацию либо же приз за внесенный депозит, так называемые приветственные бонусы для свежих игроков. Соответственно такие онлайн клубы станут более знамениты и преимущественны у игроков при выборе казино для игры. Топ казино непрерывно обновляется и прибавляются свежие и занимательные игровые клубы с симпатичной бонусной политикой и всеми вероятными преимуществами, льготами, к коим относятся такие призы как фриспины за регистрацию, валютные бездепозитные призы, а щедрые бонусы за внесенный депозит.Прочитайте верховодила бонусной программки, в которой желайте участвовать. Да, мы безотступно советуем устроить это до регистрации. Как только вы отыграли вейджер и средства с бонусного баланса перебежали вам на настоящий счет, Вы смело можете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депо). <a href=https://gotartwork.com/Blog/%D0%BE%D0%B1%D0%B7%D0%BE%D1%80-%D0%B3%D0%BE%D1%80%D0%BE%D0%B4%D1%81%D0%BA%D0%BE%D0%B3%D0%BE-%D0%BF%D0%BE%D1%80%D1%82%D0%B0%D0%BB%D0%B0-osipovichi/224357/>https://gotartwork.com/Blog/%D0%BE%D0%B1%D0%B7%D0%BE%D1%80-%D0%B3%D0%BE%D1%80%D0%BE%D0%B4%D1%81%D0%BA%D0%BE%D0%B3%D0%BE-%D0%BF%D0%BE%D1%80%D1%82%D0%B0%D0%BB%D0%B0-osipovichi/224357/</a> К сожалению, нет. Почти все казино, просят внесение желая бы 1-го минимального депозита для вывода выигрыша с бездепозитного бонуса. Также учитывайте, что вывести деньги разрешено лишь на ту платежную систему, с коей был изготовлен депо.Бездепозитные призы реальными деньгами, которые возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадались. 1×slots регистрацию процедура займет всего лишь
<b>Смотреть еще похожие новости:</b>
<a href=https://bans.org.ua/index.php?topic=118475.new#new>1×slots акции</a>
<a href=http://board.eternityrpc.com/member.php?action=profile&uid=369>1×slots мобильная версия войти казино</a>
<a href=http://nhomtruyen.com/members/jamesgaw.9280/>зеркло казино 1×slots</a>
<a href=https://australianwinerytours.com/tours/member.php?action=profile&uid=2410>1хслот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подтверждение персональной инфы. Все казино просят от посетителя пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и присутствие у пользователя иных аккаунтов (мультиаккаунт запрещен). Но никогда не запамятовывайте внимательно разбирать правила роли в бонусных промоакциях. Если вы нарушите хотя бы одно условие, позже вы не сможете уладить недоразумение с администрацией.
#8749 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
Прежде чем активировать бездеп, необходимо убедиться том,, что государство, уроженцем коей считается игрок, не входит в перечень разрешенных.Популярность онлайн казино растёт и всё больше пользователей начинают увлекаться азартными забавами. Бездепозитные призы 2022 года, это оригинальные презенты за регистрацию. С их поддержкою новые игроки имеют получить бесплатные вращения либо средства на баланс за 1 регистрацию. С появлением игорных заведений в онлайне, бездепозитные призы стали наимоднейшим способом привлечения игроков. Подобные акции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о которых мы поведаем. Наш вебсайт собрал лучшие предложения из онлайна на 2022 год. Воспользуйтесь любым подарком и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша необходимо выполнить обстоятельства. <a href=http://filmkachat.ru/>1×slots регистрация то дальше необходимо пройти</a> Далее требуется отыграть вагер и исключить выигрыш. Игрокам без навыка крупно повезло, меня получить 10-ки даров за 1 регистрацию. Если не сумели получить Бездепозитный бонус, не беспокойтесь. Обратитесь в интернет чат, оператор поможет ситуацию. <a href=https://www.dropbox.com/scl/fi/kmt4hjtm9ofmh935040vf/How-3D-architectural-rendering-is-reshaping-the-future-of-design.pdf?rlkey=xd0mhfykdz41nutcr9e7spenz&st=ixphoyzs&dl=0>https://www.dropbox.com/scl/fi/kmt4hjtm9ofmh935040vf/How-3D-architectural-rendering-is-reshaping-the-future-of-design.pdf?rlkey=xd0mhfykdz41nutcr9e7spenz&st=ixphoyzs&dl=0</a> Процесс подтверждения личности имеет занять от одного денька до недели. Если клиент допустил какую-либо оплошность при заполнении паспортных данных, то ему следует адресоваться с проблемой в службу онлайн-казино. 1×slots casino регистрация на сайте <a href=https://www.fromdust.art/index.php/User:RevaRyrie9657636>https://www.fromdust.art/index.php/User:RevaRyrie9657636</a> Получать информацию о самых выгодных призах возможно без неизменного мониторинга новостей казино. Мы брали данную задачку на себя и безпрерывно смотрим за услугами операторов, выбирая наихорошие из них. В данном разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список промоакций регулярно дополняется. В топ вошли самые новые бездепозитные призы за регистрацию в казино 2020, временные и замкнутые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и другим критериям. Если срок деянья акции истек, она удаляется из перечня.Минимального оборота. Этот лимит устанавливается вейджером — пока игрок не сыграет на установленную сумму, вывод средств несомненно недоступен.
1×slots зеркало проходить регистрацию это отличный вариант
Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных призов принимаются довольно высокие требования. Часто онлайн-казино советуют отыграть бонусное одобрение до 100 один в игровых автоматах. Например, если игрок получил безвозмездно десять долларов, то нужно будет отыграть их, поставив одну тысячу спинов по 1 доллару каждый. Стоит обозначить(означить), собственно не все казино дают возможность выступать на бонусы и не во всех развлекательных заведениях схожие управляла для отыгрывания. Некоторые казино воспрещают выступать на призы в блекджек или ограничивают ставки до 5 %, что существенно наращивает в десятки один число нужных игр.Пoдтвepдить личнocть посетителя. Для удачного вывода средств, нужно доказать лицо клиента. Нa этaпe вepификaции пpoфиля, сотрудники службы безопасности должны убедиться, собственно у игрока не один акк. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не может вывести свой выигрыш, если у него несомненно количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы. 1× slots casino зеркало Бездепозитные бонусы в казино без пополнения 2022 — это конкретная сумма денег или gratuitous spins вращения, коие предоставляются первым постояльцам за регистрацию на веб-сайте казино вид бездепозитного приза, и дает вас вероятность с казино без пополнения опробовать услуги (игр), с дальнейшей привилегией вывода средств при исполненьи всех установленных управлял.Бездепозитные призы казино это финансовая компенсация, предлагаемая юзерам на дармовой основе и вероятность играть в онлайн казино безвозмездно. Если ассоциировать их с поощрениями за вклад, в свои выдаются только потом начального пополнения счета, то бездепозитные гонорары получаются безвозмездно. То есть, играющий получает вероятность создавать ставки на теснее место деньги, коие выдаст заведение, выполняя, всем, обычные деяния, чтобы их извлечь (здесь идет речь о регистрация, удостоверении личности с использованием номера аппарата, оформления заказы и т.д.). <a href=http://ledsoft.ru/forum/?PAGE_NAME=profile_view&UID=54103>http://ledsoft.ru/forum/?PAGE_NAME=profile_view&UID=54103</a> Более крупные предложения встречаются довольно редко. Зачастую они доступны лишь VIP-игрокам. В оставшихся случаях им наверняка сопутствуют довольно строгие обстоятельства отыгрыша. Также вероятны дополнительные обстоятельства и ограничения, прописанные в условиях и положения бонусной программы казино. 1хслотс зеркало на сегодня В неких онлайн казино для получения бездепозитных призов не довольно просто зарегистрироваться на веб-сайте клуба и доказать средства контактные данные. Дополнительно потребуется активация промокода.
1×slots официальный сайт скачать на айфон
У любого игорного клубы различные вейджеровые обстоятельства. Чтобы вы гарантировано сумели выполнить их, мы дадим несколько советов. Если система начислила небольшую сумму, надо делать великие ставки – остановитесь на 10–30 центах. Как лишь сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В неприятном случае превосходнее присмотреться к другому автомату. <a href=http://japanese-cars.ru/profile.php?u=cageyexclusion2>http://japanese-cars.ru/profile.php?u=cageyexclusion2</a> В качестве призов онлайн казино нередко предлагает выдачу фриспинов, то есть бесплатных вращений игрового барабана. Виртуальные монеты можно использовать для изучения в покерной школе либо для игры в казино. 1×slots зеркало регистрация в 1×slots casino
1х слот 1хслотс регистрация перейти на 1×slots
Подобные призы без депо предоставляются на более прибыльных критериях. Зачастую они крупнее, а обстоятельства отыгрыша менее жесткие.Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, the decision зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. Самый распространённый из подобных призов, естесственно же, бездеп на денек рождения посетителя — приз повторяющий фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им возможно протяжении установленного периода медли. Акционные предложения от казино существуют в разных форматах. Часто бонусы даются в обмен на депозит. Игрок вносит платеж и получает деньги, бесплатные вращения и другие поощрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — вид приза, кот-ый гарантирован за исполненье определенных действий на веб-сайте:Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы замечена вероятность исключить выигрыш. 1 x slots <a href=http://d90894u1.bget.ru/user/GeraldThits/>http://d90894u1.bget.ru/user/GeraldThits/</a>
1 хслот регистрация в 1×slots casino
Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного приза.Большинство интернет-казино из нашего топ-10 готовы порадовать вас неповторимыми промоакциями. Читайте о них в обзорах и на форуме. <a href=https://gusev-online.ru/user/ArnoldPed/>https://gusev-online.ru/user/ArnoldPed/</a> 1хслотс рабочее зеркало на сегодня Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы которые возникают у начинающих.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но такие рамки не смущают том хайроллеров, поскольку коэффициенты на слотах позволяют рассчитывать на солидные выигрыши, в неких автоматах разыгрывается прогрессивный джекпот.
#8750 Charlesgunnyhttp://filmkachat.ru
1×slot официальный сайт
Прежде чем активировать бездеп, нужно увериться в, что государство, уроженцем коей является игрок, не входит в перечень не. <a href=http://filmkachat.ru/>1×slots зеркало регистрация</a> <a href=https://rant.li/9fsnh6hu13>https://rant.li/9fsnh6hu13</a> 1×слотс казино <a href=http://terrabashkiria.com/forum/?PAGE_NAME=profile_view&UID=163784>http://terrabashkiria.com/forum/?PAGE_NAME=profile_view&UID=163784</a> Большинство интернет-казино из нашего топ-10 готовы порадовать вас неповторимыми акциями. Читайте о них в обзорах и на форуме.Чтобы получить вероятность вывести выгода с бездепозитного приза в казино, нужно выполнить ряд критерий:
1×slots регистрация 1×slotscasino 56 online
Автоматическая активация может самой удобной, хотя ручной способ имеет перед ней достоинства. Прежде чем использовать вознаграждение от казино, стоит заранее найти, сколько медли требуется на выполнение всех условий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала деяния приза.В некоторых интернет казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на веб-сайте клуба и доказать средства контактные данные. Дополнительно требуется активация промокода. 1×slots регистрация 1×slotscasino 56 online Прежде чем активировать бездеп, необходимо убедиться что, собственно страна, гражданином которой считается игрок, не заходит в список запрещенных.Чтобы выступать даром на настоящие деньги в казино, порой довольно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные деяния. <a href=http://illustrator.odub.tomsk.ru/index.php?subaction=userinfo&user=Justinsar>http://illustrator.odub.tomsk.ru/index.php?subaction=userinfo&user=Justinsar</a> Если вы новичок данном и лишь попали в неизведанную вами область азарта — за услуг как бездепозитные бонусы без пополнения. 1× слот зеркало
1×slots официальный demo регистрация в 1×slots casino
Каждый в обязан сперва детально изучить обстоятельства по получению и отыгрышу приглянувшегося презента. Если всё устраивает, поспешите арестовать бесплатные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо момент начать вращать барабаны лучших слотов.Необходимость отыгрыша. Вейджер в этом случае выше, чем для бонусов за депо. И пока средства не отыграны, исключить их невозможно. Только выполнив все условия отыгрыша и дождавшись завершения проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить свои средства. <a href=https://coinzaa.com/u/AshleyJaf>https://coinzaa.com/u/AshleyJaf</a> Бездепозитные бонусы за регистрацию в игровых автоматах для собственников онлайн-казино являются частью маркетинговой кампании, направленной на повышение аудитории сайта. Так они продвигают свои бренды и завлекают свежих клиентов.Подтверждение регистрации. Казино настоятельно привязки профиля к электронному адресу и номеру телефона. Для сего на e-mail отчаливает послание со ссылкой, а на телефонный ? текстовое извещенье с кодом. 1×slots рабочее зеркало Доступность — бездепозитные бонусы в казино чаще всего предоставляются новым игрокам, но посещают случаи, когда приз все получить и действующие клиенты.Стоит отметить, собственно бездепозитный бонус выдается только взрослым новичкам, которые, тому, могут пригласить собственных друзей и знакомых, также претендующих на поощрительную программку преданности. Подобная разработка появилась между создающих онлайн-казино для популяризации и расширения трафика. Покер румы и спонсоры содействуют увеличению своей популярности, методом вербования свежих игроков. Бонусы – это уникальный шанс для потенциальных соучастников забавы, коие имеют опробовать софт покер рума и убедиться, будут ли они в него выступать или нет. Новый игрок попробует средства силы с настоящими оппонентами в казино.
1х слот регистрация в 1×slots casino
Способы получения бездепа различаются от облика бонуса, который приглянулся игроку. Но вас так надо(надобно) быть зарегистрированным в легальном онлайн-казино и доказать собственную личность. В общем виде пошаговая инструкция для получения бездепозитного приза выглядит так: <a href=https://karakol.com.kg/user/Jameskef/>1×slots бездепозитный бонус за регистрацию</a> 1×slots казино зеркало <a href=http://www.diablo2r.cn/home.php?mod=space&uid=18354>http://www.diablo2r.cn/home.php?mod=space&uid=18354</a> Приветственный приз без депо ? подарок за регистрацию. Выдается деньгами, фриспинами либо баллами. В заключительном случае бонусные баллы применяются для роли в турнирах или размена на реальные средства.Доступные игры – В некоторых азартных играх можно понизить математическое превосходство казино до нескольких 10-х процента. В их числе все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как верховодило, в этих забавах ставки идут в зачет вейджера не полностью. Например, имеет предусматриваться только 50%. В неких играх бездепозитные бонусы вообще невозможно отыгрывать.
1×slots скачать на айфон
Да, у бесплатных призов есть дефекты. Прежде всего, они обычно очень. Кроме такого, обстоятельства вейджера по ним практически жесткие. Но все неимение риска делает их довольно красивыми для клиентов. <a href=https://job.epday.com/home.php?mod=space&uid=635995>https://job.epday.com/home.php?mod=space&uid=635995</a> Вообще перейдя в казино — управляла одинаковы в получении бездепозитных бонусов, в стереотипные управляла входит: подтвердить эл. Почту и телефон, заполнить свой собственный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ.Подарки на конкретные даты отличаются критериями получения. Если поощрение начисляют игроку на денек рождения, то сумма обычно зависимости от общего объема депозитов за прошедший год. 1×slots казино зеркало Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке необходимо пополнить счет в казино. Для депозитных бонусов, эта процедура не нужна, например как депозит теснее сделан.Подтвердите регистрацию, чтобы активировать Бездепозитный приз с выводом, потребуется заполнить собственный профиль. Заполните пустопорожние поля настоящими данными о для.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.kfz-gringer.at/index.php?option=com_k2&view=itemlist&task=user&id=39720>1×slots регистрация</a>
<a href=https://praisenpray.org/forums/showthread.php?tid=97672>1×slots актуальное зеркало</a>
<a href=http://khodaumo.com/forum/viewtopic.php?f=2&t=75852&sid=87dfd23d3936d97436aa779a85da1f4b>1×slots зеркало рабочее на сегодня</a>
<a href=http://diablo2r.cn/home.php?mod=space&uid=30130>1×slots официальный зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
К образцу, игроку выдаются безвозмездные свои в заведении в объеме пятидесяти или 100 $ (вейджер на коие составляет 100х). То есть, каждому новоприбывшему геймеру выскакивает манящая иллюстрация, которая сулит выплату всех зачисленных компанией средств. Не стоит внимания на казино приз за регистрацию без депозита с чрезмерно немалый либо довольно маленькой суммой бонусов, поэтому собственно, числе тщательно исследовав все условия, здесь скорее, несомненно какой-то подвох. Теоретически, к безвозмездным бонусам возможно отнести например нарекаемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, поэтому собственно они предоставляют лишь вероятность делать ставки.
#8751 DonaldGarhttps://sfmggu.r
Все аспекты здоровья <a href=https://sfmggu.ru/>https://sfmggu.ru</a> от ухода за телом до профилактики болезней. Достоверная информация и советы для улучшения качества жизни.
#8752 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало подтвердит вашу регистрацию если говорить
Получать информацию о самых выгодных призах можно без постоянного мониторинга новостей казино. Мы брали данную задачку на себя и непрерывно следим за услугами операторов, выбирая лучшие из них. В данном разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список промоакций периодически пополняется. В топ вошли самые свежие бездепозитные призы за регистрацию в казино 2020, временные и замкнутые промо. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и аспектам. Если срок деянья промоакции истек, она удаляется из перечня. <a href=http://filmkachat.ru/>1хслотс казино зеркало</a> <a href=https://onedrive.live.com/?cid=045D43199084DECB&id=45D43199084DECB%212227&parId=root&o=OneUp>https://onedrive.live.com/?cid=045D43199084DECB&id=45D43199084DECB%212227&parId=root&o=OneUp</a> К раскаянию, нет. Почти все казино, настоятельно внесение желая бы 1-го малого депо для вывода выигрыша с бездепозитного бонуса. Также учитывайте, собственно вывести деньги разрешается только на ту платежную систему, с которой был сделан депозит. 1×slots официальный сайт скачать <a href=http://uoup.net/space-uid-502338.html>http://uoup.net/space-uid-502338.html</a>
1×slots регистрация
Условия имеют разниться друг от приятеля. Но подобный приз может быть применен лишь для игрового процесса – полученные на счет финансы до такого, как будут отыграны, исключить нереально. <a href=http://forum3.bandingklub.cz/viewtopic.php?f=14&t=239814>1×slots официальный регистрация</a> 1х слот 1хслотс регистрация перейти на 1×slots Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. <a href=http://clips.tj/user/RenaldoLix/>http://clips.tj/user/RenaldoLix/</a> Когда идет о получении бездепозитных бонусов в казино, в первую очередь внимание на последующие условия: 1×slots официальный зеркало рабочее Используйте превосходнейшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из перечня ниже, чтобы заработать подарки за обычные действия и уже сейчас получить первый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высокой отдачей и резвыми выводами на электронные кошельки.
1 xslots рабочее зеркало
Отыграв бездепозитный бонус в казино с выводом также придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если схожее лимитирование присутствует, то единоразово вывести получится только сумму, не превосходящую размер полученного приза. Далее потребуется отыграть вагер и исключить выигрыш. Игрокам без опыта крупно подфартило, меня получить десятки презентов за одну регистрацию. Если не смогли получить Бездепозитный приз, не тревожьтесь. Обратитесь в онлайн чат, оператор поможет решить проблему.Бонус с зачислением средств на счет выделяет больше свободы поступков. Пользователь сам избирает, каким образом распорядиться подаренными своими. Здесь также все действовать лимитирования на перечень дешевых игр, хотя обычно эти рамки не например строги, как в промо с безвозмездными вращениями. <a href=http://okprint.kz/user/Porsedropml/>http://okprint.kz/user/Porsedropml/</a> Реже бонусы без депозита начисляются постоянным игрокам. С их поддержкою администрация постарается вычесть ценных посетителей либо желает поблагодарить за преданность правильных гостей. Но намного почаще для сходственных целей используются эти промоакции: зеркала 1×slots
казино 1×slots
<a href=https://bans.org.ua/index.php?PHPSESSID=3n9so42koagrjccsnlf0m7vsqf&action=profile;u=1331414>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> Составленный специалистами Casino.ru список онлайн-казино с бездепозитным призом дозволяет игрокам сопоставить спецпредложения разных операторов. 1×slots промокод при регистрации <a href=http://g961713h.beget.tech/user/Terrytes/>http://g961713h.beget.tech/user/Terrytes/</a> Подарки на определенные даты отличаются условиями получения. Если поощрение начисляют игроку на день рождения, то сумма обычно в от совместного размера депо последний год.
1×slots регистрация 1×slots casino 777 online
Бездепозитные бонусы реальными средствами, коие можно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадали.Бездепозитные призы в казино без пополнения 2022 — это конкретная сумма средств или gorovyh spins вращения, которые предоставляются первым постояльцам за регистрацию на сайте казино в виде бездепозитного бонуса, и дает для вероятность с казино без пополнения опробовать предложения (игр), с дальнейшей прерогативой вывода средств при исполненьи всех установленных верховодил. <a href=http://xn–80abbjuadey5bv1e.xn–p1ai/index.php?subaction=userinfo&user=WalterjeM>http://xn–80abbjuadey5bv1e.xn–p1ai/index.php?subaction=userinfo&user=WalterjeM</a> Риск-игра по одинаковым шансам – Также казино может запрещать скорпулезно условия по отыгрышу за раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких других играх.Так собственно приготовьтесь дать секретную информацию (пол, возраст, страна проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает менее суток, последствии чего удастся беспрепятственно выводить крупные выигрыши. 1×slots зеркало выигрыши обязательно пройдите регистрацию если Фриспины – бесплатные вращения с фиксированной ставкой, которые можно применять в определенных игровых автоматах.В большинстве заведений сделать это можно по e-mal, по номеру аппарата, спустя социальную сеть или гугл-аккаунт.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.xn–72c9aa5escud2b.com/webboard/index.php/topic,515166.new.html#new>1×slots промокод при регистрации 2025</a>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=61644&result=reply>1×slots casino регистрация 1×slots review live</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Получив собственный подарок, Вы можете безвозмездно выступать на настоящие средства, а выполнив обстоятельства отыгрыша, вывести собственный выигрыш.
#8753 Charlesgunnyhttp://filmkachat.ru
1хслот официальный сайт зеркало
Изучить правила и условия получения бездепозитных бонусов казино, Вы сможете у нас на сайте в разделе с бонусами или на официальном веб-сайте выбранного Вами казино. Если возможности отыскать необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электронной почте. <a href=http://filmkachat.ru/>1×slots подтвердит вашу регистрацию если говорить</a> Для всех бездепозитных бонусов функционирует максимальный лимит на выигрыш. Он показывает предельную необходимую, коию вы сможете получить, играя на бонусные кредиты. Как только для удастся выполнить притязания вейджера, допустимый максимум будет переведен с бонусного счета на главной, а остаток будет списан.В интернет-сети всегда возможно найти списки более известных и обещанных поощрительных программ от известных онлайн-казино. <a href=https://nationaldppcsc.cdc.gov/s/profile/005SJ00000BDeSjYAL>https://nationaldppcsc.cdc.gov/s/profile/005SJ00000BDeSjYAL</a> Только выполнив все условия отыгрыша и дождавшись завершения ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить свои средства.Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных требований, не неотъемлемой верификации. Если на веб-сайте предусмотрена обязательная процедура доказательства личности, то исключить выигрыш получится только в ревизии данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий лицо. 1×slots быструю регистрацию а также мгновенное <a href=http://misssophie.net/AG_Wohnungssuche/doku.php?id=%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0%20%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA%20%D1%86%D0%B5%D0%BD%D1%8B>http://misssophie.net/AG_Wohnungssuche/doku.php?id=%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0%20%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA%20%D1%86%D0%B5%D0%BD%D1%8B</a>
1×slots официальный сайт скачать
Изучить правила и обстоятельства получения бездепозитных бонусов казино, Вы сможете у нас на сайте в разделе с бонусами либо на официальном веб-сайте выбранного Вами казино. Если имеет найти необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электрической почте.Получив собственный презент, Вы можете безвозмездно выступать на реальные деньги, а выполнив обстоятельства отыгрыша, исключить собственный выигрыш. <a href=https://surfaceprophets.com/threads/1×slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-1×slots-casino-777-online.26704/>1×slots регистрация 1×slots casino 777 online</a> x1 slots регистрация в 1×slots casino <a href=http://www.fumankong5.cc/home.php?mod=space&uid=582985>http://www.fumankong5.cc/home.php?mod=space&uid=582985</a> Бонус с зачислением денег на счет выделяет больше свободы действий. Пользователь сам подбирает, каким образом воспользоваться подаренными своими. Здесь того имеют работать ограничения на список дешевых игр, хотя обычно эти рамки не так строги, как в промо с безвозмездными вращениями. 1×slots регистрация на 1хслотс Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном бонусе, то начала обратите внимание на значение вейджера и срок, который дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть бонус и исключить выигрыш.
1 x slots casino
Чаще всего, популярные сервисы, такие как MoneyBookers и WebMoney, еще MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно неотъемлемое управляло. Финансовые средства выводятся лишь спустя что, эту платежную систему, коей успех для пополнения депо. Если же игрок получил бездепозитный покерный бонус, потребуется пополнить счет на наименьшую необходимую, которая составляет обычно 10 долларов.Фриспины – безвозмездные вращения с фиксированной ставкой, коие возможно использовать в определенных игровых автоматах. <a href=http://megatv.kiev.ua/user/DavidHaura/>http://megatv.kiev.ua/user/DavidHaura/</a> Важно, убедитесь что, нет, собственно ранее не регистрировались в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи. 1×slots официальный сайт зеркало
1×slots сайт зеркало
<a href=http://forum.survival-readiness.com/memberlist.php?mode=viewprofile&u=30498>1×slots официальный зеркало</a> Активация случается с помощью промокодов, которые вводятся в личном офисе после регистрации. Среди спецпредложений в списке Casino.ru находятся эксклюзивные промокоды, которые доступны только посетителям портала. Другие методы начисления средств ? автоматическая активация сразу после сотворения аккаунта и получение презента по запросу в службу технической помощи. Чтобы выступать даром на реальные деньги в казино, порой достаточно просто зарегистрироваться. Иногда нужно выполнить дополнительные деянья. 1×slots казино зеркало <a href=https://hackmd.io/@lexxeagle/HyMC2ReFC>https://hackmd.io/@lexxeagle/HyMC2ReFC</a> Верификация аккаунта. Лучше подтвердить личность незамедлительно последствии регистрации, дабы потом не было заморочек с выводом средств. Верификация может проходить двумя путями:
1× slots сайт
Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы замечена вероятность исключить выигрыш.Фриплей-бонусы. Бонусы за благотворительную забаву есть лишь в неких клубах. Они зачисляются сразу после сотворения профиля и срабатывают недолговременное время. Если у вас нет медли потратить свои, они просто завершатся. Что касается медли, в большинстве случаев призы срабатывают протяжении одного часа. <a href=https://cracked.io/Thread-Online-casino–995792?pid=41312487>https://cracked.io/Thread-Online-casino–995792?pid=41312487</a> Заработать на бездепозитных бонусах за регистрацию в казино возможность любой пользователь, достигший совершеннолетия.Прямо в заберите благотворительные вращения за регистрацию без депо и начинайте коллекционировать призовые композиции ради крупных выигрышей! зеркала 1×slots Представленные на этой странице наилучшие бездеп бонусы в казино за регистрацию в 2022 году имеют подходящие обстоятельства. После тщательного анализа редакция портала составила рейтинг спецпредложений, в котором посетители Casino.ru все сортировать список по нескольким аспектам: по сумме, вейджеру, максимальной сумме вывода и т.д.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.kievisp.com/forum/index.php?showuser=25142>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a>
<a href=http://forum.survival-readiness.com/viewtopic.php?t=248982>1хслотс регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Сроки активации приза устанавливаются любым казино, хотя почаще всего они не превосходят недели с момента получения. Игроку обязательно нужно использовать бездеп протяжении обозначенного срока, в ином случае бонус просто исчезнет. Каждый бонус возможно получить только один раз, поэтому случае не использовать бездеп в срок, у игрока не будет 2 шанса им воспользоваться. Зачастую бездепозитные призы казино для забавы предлагаются разными заведениями азартных игр в качестве маркетинговых акций либо в целях привлечения к для свежих игроков. Для бездепозитных бонусов в казино 2022 геймеру не нужно пополнять счет до этапа вывода желаемых средств.
#8754 Charlesgunnyhttp://filmkachat.ru
1 х слотс зеркало
Если площадка дарит бездеп за регистрацию, то процедура его получения проста. Нужно только завести акк на веб-сайте и активировать его, подтвердив адресок электронной почты, номер телефона или другие данные, которые просит оператор. Перед данным необходимо убедиться, что пользователь находится на официальном веб-сайте казино, но на жульнической площадке. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slots review live</a> Частенько новички не разумеют, как активировать презенты или вывести первый выигрыш. Для похожих случаев наша команда описала основные определения – что такое фриспины, вейджер, как его отыграть, чего нужно протекать верификацию.Заработать на бездепозитных призах за регистрацию в казино возможность каждый юзер, достигший совершеннолетия. <a href=https://letterboxd.com/lexxeagle/list/revolutionary-approaches-in-modern-virtual/>https://letterboxd.com/lexxeagle/list/revolutionary-approaches-in-modern-virtual/</a> Используйте наилучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, дабы заработать подарки за простые деяния теперь сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высокой отдачей и резвыми выводами на электронные кошельки.Вообще перейдя в казино — верховодила схожи в получении бездепозитных бонусов, в стандартные верховодила заходит: подтвердить эл. Почту и телефонный, наполнить собственный собственный профиль, активировать промо код или активировать предложения во вкладке БОНУСЫ. 1×slot зеркало рабочее регистрации на телефон придет <a href=https://v7.toonanime.co/user/HenryGroow/>https://v7.toonanime.co/user/HenryGroow/</a> Бонус с зачислением средств на счет дает больше свободы поступков. Пользователь сам выбирает, каким образом воспользоваться подаренными средствами. Здесь кроме все действовать ограничения на перечень дешевых игр, хотя обыкновенно эти рамки не так строги, как в промо с безвозмездными вращениями.
1×slots регистрация 1×slots review live
Популярность интернет казино растёт и всё больше юзеров начинают проявлять азартными играми. Бездепозитные бонусы 2022 года, это уникальные презенты за регистрацию. С их поддержкой свежие игроки могут получить бесплатные вращения или деньги на баланс за 1 регистрацию. С в игорных заведений в онлайне, бездепозитные бонусы стали знаменитейшим способом привлечения игроков. Подобные акции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы расскажем. Наш сайт собрал наилучшие предложения из интернета на 2022 год. Воспользуйтесь хоть презентом и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить обстоятельства.Некоторые клубы автоматически начисляют бонус на аккаунт игрока последствии выполнения условий получения, хотя случаются ситуации, когда приз нужно активировать игроку самому. Есть количество способов активации приза: <a href=http://theauction.com.au/my-account/>1×slots регистрация на сайте 1×slots ru com</a> 1 x slots <a href=http://cg.darkml.net/bbs/home.php?mod=space&uid=7967523>http://cg.darkml.net/bbs/home.php?mod=space&uid=7967523</a> Основное отличие что, что для получения бездепа нужно пополнять баланс в казино. Но кроме сего, есть ряд прочих различий: 1×slots casino регистрация 1×slots review live Условия все разниться приятель от друга. Но такой приз имеет быть применен лишь для игрового процесса – полученные на счет финансы до того, как будут отыграны, исключить нереально.
1×slots официальный зеркало
Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные способы и расценить особенности, труднодоступные при этой в демо режиме. Многие свежие посетители перебегают в число неизменных, а оператор получает долгосрочную прибыль.Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации бонуса без депозита. Внимательно прочитайте до конца. Многие новички делают ошибки на этапе регистрации и потому не получить презент. <a href=https://australiantravelforum.com/Upload/member.php?action=profile&uid=1473>https://australiantravelforum.com/Upload/member.php?action=profile&uid=1473</a> При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, коие можно посвятить ирге в казино. 1хслотс рабочее зеркало В качестве бонусов онлайн казино нередко предлагает выдачу фриспинов, другими бесплатных вращений игрового барабана. Виртуальные монеты можно использовать для изучения в покерной школе либо для забавы в казино.Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в социальных сетях, установку мобильного приложения либо официального посетителя для ПК. В большинстве казино действуют программы преданности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий уровень нередко сопрягается выдачей бездепа.
1×slots промокод при регистрации
При выполнении условий отыгрыша и верификации, деньги с бонусного счета переводятся на главный и шансы быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции находятся от выбранной платежной системы.Первый возникающий вопрос, это, чего выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают свежих игроков. Последним легче начать игру на деньги с подарка за регистрацию. Им не пополнять баланс и тратить личностные свои. Новички получают безвозмездные спины либо средства на счёт. С их подмогою знакомятся с игровым ходом, крутят слоты и делают ставки в рулетке. Денежные средства. Третий бонус за регистрацию без депозита – наличные. К раскаянию, лишь известные и модные клубы шансы уяснить деньги в руб. Либо долларах. С их поддержкою появится насладиться любой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед этим нужно выполнение определенных критерий. Вообще перейдя в казино — управляла схожи в получении бездепозитных призов, в стереотипные верховодила заходит: подтвердить эл. Почту и телефон, наполнить свой собственный профиль, активировать рекламную код либо активировать предложения во вкладке БОНУСЫ. 1хслот зеркало сайта <a href=https://pinshape.com/users/2660814-glavdorogadv2106#designs-tab-open>https://pinshape.com/users/2660814-glavdorogadv2106#designs-tab-open</a> Кешбэк-бонус дает собой возврат фиксированного процента от ставки когда проигрыша или же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не выше 10%.Как лишь получите бездеп в казино, всё точно не запамятовывайте проверять электрическую почту. Некоторые игорные клубы постоянно веселят активных гэмблеров приятными призами. Чаще всего получить презент можно в преддверии веселья, на денек рождение, за вербование приятеля. А также распространённым призом является прибавка к депозиту. Нужно чем пополнить счёт, и азартное заведение увеличит его на 50–100%.
сайт 1× slots casino
Варианты выигрыша находятся от Вашей успеха и условий игорного портала. Выше мы заявили, что некоторые бездепозитные призы в 2022 году выдаются с лимитированиями по максимальной выплате. Однако, остаются другие, все, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на деньги, возможно выиграть невозможные суммы. Сегодняшние игровые автоматы либо видео слоты, как их именуют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000. Обычно для получения призов без депо, казино выдвигает лояльные и абсолютно выполнимые условия, но есть ряд поступков которые запрещены и имеют причиной досадные результаты: <a href=https://lunar.az/user/DeweyGar/>https://lunar.az/user/DeweyGar/</a> В основном случаев безвозмездные призы начисляются в кредитах, коие нельзя незамедлительно исключить со счета. Прежде их нужно отыграть по установленным правилам. Эти притязания принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже. 1×slots подтвердит вашу регистрацию если говорить Однако в условиях скрываются «подводные камешки», которые не позволят исключить крупную необходимую или же вы не успеете отыграть вейджер. Поэтому профессионалы советуют забрать бесплатные вращения за регистрацию в казино без депозита, дабы поднабраться навыка и получить реальный шанс на победу.Иногда операторы настоятельно внесение малого депозита перед выводом для верификации платежного прибора. В некоторых казино данный депозит также предстоит отыграть.
<b>Смотреть еще похожие новости:</b>
<a href=https://thetechmodders.com/forums/viewtopic.php?t=26859>1×slot официальный сайт</a>
<a href=https://www.makinamania.net/index.php?topic=250934.new#new>1×slot казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Это один из основных показателей привлекательности подарка. С завешенным коэффициентом том мастера не сумеют выполнить обстоятельства по отыгрышу. И так, как привлекательно смотрится предложение – бездепозитный бонус казино в объеме $500 или $1 000. Чтобы новички получше вникли, что же такое вейджер, мы разберём на примере. Бонусные средства – небольшая сумма средств для старта в новеньком казино. На бонусные средства, обыкновенно разрешается играть во все забавы, кроме слотов с прогрессивным джекпотом и игр из раздела exist casino.
#8755 Charlesgunnyhttp://filmkachat.ru
casino 1×slot
Как и промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такового предложения являются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает свежих гостей и разрешает им составить впечатление о функционале, не рискуя значительными совокупностями.Бездепозитные призы казино это финансовая компенсация, предлагаемая юзерам на дармовой базе и возможность выступать в интернет казино безвозмездно. Если сравнивать их с одобрениями за лепта, в которых средства выдаются лишь потом начального пополнения счета, то бездепозитные вознаграждения получаются бесплатно. То есть, играющий получает вероятность делать ставки на теснее имеющие финансы, коие выдаст заведение, выполняя, всем, обычные деяния, чтобы их извлечь (тут речь о регистрация, удостоверении личности с использованием номера аппарата, оформления заявки и т.д.). <a href=http://filmkachat.ru/>1×slots регистрация то дальше необходимо пройти</a> <a href=https://www.dmxzone.com/support/13984/topic/148653/>https://www.dmxzone.com/support/13984/topic/148653/</a> Важно, удостоверьтесь что, собственно раньше не регились в выбранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи. 1×slots зеркало этих способов предполагает регистрацию <a href=https://prpack.ru/user/Walterjes/>https://prpack.ru/user/Walterjes/</a>
x1 slots регистрация в 1×slots casino
Лишь популярные и известные азартные заведения имеют позволить для выдавать бездепы повторяющий добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, коие возможно истратить в лучших аппаратах с высочайшей отдачей. <a href=http://3ak.cn/home.php?mod=space&uid=187057>1хслотс мобильная версия зеркало</a> 1×slot зеркало рабочее регистрации на телефон придет Маркетинговая политика всех игорных интернет-клубов должна одевать разнообразный нрав. И в гонорары на депозит работают чтобы, чтобы, чтобы стимулировать заносить депозиты и поощрять теснее существующих пользователей, то бездепозитный приз в казино либо бонус за регистрацию в казино, до всего, рассчитан на расширение базы потребителей.У любого игорного клубы различные вейджеровые обстоятельства. Чтобы вы гарантировано смогли выполнить их, мы дадим некоторое советов. Если система начислила маленькую сумму, надо создавать немалые ставки – остановитесь на 10–30 центах. Как лишь сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В противном случае другого приглядеться к другому автомату. <a href=http://milkovoadm.ru/bitrix/rk.php?goto=http://komkor-f.ru/bitrix/redirect.php?goto=http://torzhok-adm.ru/bitrix/click.php?goto=https://teletype.in/@urist555/kxgunR9fYjI>http://milkovoadm.ru/bitrix/rk.php?goto=http://komkor-f.ru/bitrix/redirect.php?goto=http://torzhok-adm.ru/bitrix/click.php?goto=https://teletype.in/@urist555/kxgunR9fYjI</a> Oтыгpaть приз с указанным вeйджepом, для этого необходимо сдeлaть cтaвoк нa cумму, превосходящую объем приза в некоторое один.Основное отличие что, собственно для получения бездепа не пополнять баланс в казино. Но кроме сего, есть ряд и различий: 1×slots официальный сайт зеркало Необходимость отыгрыша. Вейджер такой выше, чем для бонусов за депозит. И пока свои не отыграны, вывести их нельзя.Обыкновенные бездепозитные призы в размере от трех до двадцати $ сделаны чтобы, чтобы, дабы в забавы заходили все новые и свежие игроки. Здесь, всего, несомненно лимитирование на максимальный выигрыш. Важно, дабы перед минимальным вкладом был отключен бонус за первое пополнение счета, и геймер не попадет на повторный вейджер.
1×slots сайт
Все любят получать презенты. Согласитесь, практически любой играющий человек несомненно беспредельно рад, случае получит безвозмездный подарок для игры в интернет казино просто за регистрацию либо же бонус за внесенный депозит, так именуемые приветственные призы для свежих игроков. Соответственно такие интернет клубы станут более известны и преимущественны у игроков при выборе казино для игры. Топ казино каждый обновляется и прибавляются свежие и занимательные игровые клубы с симпатичной бонусной политикой и всеми вероятными прерогативами, к которым относятся такие бонусы как фриспины за регистрацию, денежные бездепозитные призы, а великодушные бонусы за внесенный депозит. Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам важную информацию о самых новых, щедрых и испытанных бонусах в интернет казино, которые обновляются любой день. <a href=http://onlines.pro/user/AnthonyPaica/>http://onlines.pro/user/AnthonyPaica/</a> Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут уточняет лимитирование для клиентов. Конечно, это возможно посчитать некоторым неудобством для игрока, хотя справедливости ради необходимо, что выбор автоматов всё также остаётся довольно большим. 1 хслот регистрация в 1×slots casino Условия отыгрыша бонуса. Если Вы планируете заработать на бездепозитном бонусе, то для обратите внимание на велечину вейджера и срок, кот-ый дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть приз и вывести выигрыш.
1×slots быструю регистрацию а также мгновенное
Любой выигрыш по ставке выше установленного лимита будет считаться недействительным. То есть ставка не будет засчитана при отыгрыше, а в случае выигрыша его сумма не поступит на счёт посетителя — результат игры несомненно полностью аннулирован.Однако далеко не все ресурсы предлагают своим посетителям бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено поощрение на первый депо в объеме 100–200%. Это замечательная вероятность преумножить банкролл, увеличить время, проведённое за забавой и шансы сорвать большой куш. Однако далеко не все ресурсы предлагают своим посетителям бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено одобрение на первый депозит в объеме 100–200%. Это отличная вероятность преувеличить банкролл, прирастить время, проведённое за игрой и шансы сорвать большой куш. К образцу, игроку выдаются бесплатные средства в заведении в объеме пятидесяти или 100 $ (вейджер на которые сочиняет 100х). То есть, каждому новоприбывшему игроку выскакивает привлекающая картинка, которая сулит выплату всех зачисленных фирмой средств. Не стоит заострять на казино приз за регистрацию без депозита с слишком большой либо очень малеханькой суммой бонусов, потому что, в тщательно исследовав все условия, тут вероятнее всего, несомненно некий подкол.Бездепы с бесплатными вращениями предоставляют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд уплачивает казино. Число спинов ограничено и изредка выше сотню. Если промоакция включает в себя большое даровых игр, их начисление может быть разбито на некоторое дней. 1× slots официальный <a href=http://elite-models.cc/member.php?action=profile&uid=20764>http://elite-models.cc/member.php?action=profile&uid=20764</a>
сайт 1× slots casino
<a href=http://uplmegaporn.com/user/Randalemimb/>http://uplmegaporn.com/user/Randalemimb/</a> Самые популярные способы вывода средств ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам подобии Neteller и Skrill, а также используют криптовалютными кошельками. Вывод выигрышей имеет осуществляться моментально либо развлекать от нескольких часов до нескольких суток. 1× slots casino зеркало В большинстве заведений устроить это возможно по адресу электронной почты, по номеру аппарата, через социальную сеть или гугл-аккаунт.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.cvetq.info/memberlist.php?mode=viewprofile&u=17326&sid=739bdd1029be0fd5f71d4b913e0473f7>1×slots casino регистрация 1×slots review live</a>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=138211>1 x slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На условиях отыгрыша даровых бонусов стопам остановиться подробнее. С ними связаны аспекты, которые невозможно забыть без внимания. В неких онлайн казино для получения бездепозитных призов не довольно просто зарегистрироваться на веб-сайте клуба и подтвердить средства контактные данные. Дополнительно требуется активация промокода.
#8756 Charlesgunnyhttp://filmkachat.ru
1хслотс регистрация в 1×slots casino
Доступ к подарку может открываться автоматически последствии введения промокода либо обращения в службу вебсайта. В первом случае от пользователя не потребуется никаких деяний. Бездеп с активацией по коду встречается почаще всего. Игроку необходимо установить совокупа символов в графе, кот-ая может пребывать в регистрационной форме в Личном кабинете. <a href=http://filmkachat.ru/>1х слот 1хслотс регистрация перейти на 1×slots</a> С этими ординарными советами любое казино с призом за регистрацию способно принести в разы больше выгоды и выгоды.Какие призы у еще получить кроме бездепозитного приза за регистрацию в казино? По мимо бездепозитного приза, любое интернет казино предлагает игрокам выгодное предложение на первый депозит, вы совершаете депо, ваш депо увеличивается в двое либо числе в трое, тем самым начать играть возможно с более крупной суммой, например же не забываем тему вейджер на бонусы. <a href=https://hackmd.io/@lexxeagle/ByHLMK5ykg>https://hackmd.io/@lexxeagle/ByHLMK5ykg</a> 1×slots на любой вкус как пройти регистрацию <a href=https://www.bitsdujour.com/profiles/gd3BQA>https://www.bitsdujour.com/profiles/gd3BQA</a> Получить Бездепозитный приз в онлайн казино дело 2-ух кликов. Другой момент, отыграть промо и соблюсти правила и условия отыгрыша. Под правилами предполагается не только вагер, хотя и ограничения по максимальной ставке. Мы понимаем, что в кино все ставят на зеро и выигрывают. Призываем не создавать похожего. Перед активацией приза прочтите правила. Узнайте последующие факторы: Условия получения презента, за регистрацию, за депо и другое. Ограничения по наибольшей ставке. Зачастую не выше 350 руб. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вращать автоматы, а вагер несомненно стоять на пространстве. Поэтому главно аристократия, в каких играх можно осуществлять кратность денежного оборота.В некоторых онлайн казино для получения бездепозитных бонусов не довольно просто зарегистрироваться на сайте клуба и доказать свои контактные данные. Дополнительно потребуется активация промокода.
1×slots коды
<a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=7480>1×слотс казино</a> 1× слот зеркало Рассмотрим принцип его деянья на примере. Допустим, вы зарегистрировались и получили $10 not the slightest down payment bonus с вейджером х50. Это значит, собственно выигранные деньги возможно будет выводить не ранее, чем после как, как общая сумма ставок достигнет $500. <a href=https://narodovmnogo-omsk.ru/forum/user/1225/>https://narodovmnogo-omsk.ru/forum/user/1225/</a> Этот образ бонуса несомненно добавлен на Ваш акк после удачной процедуры регистрации с использованием номера аппарата. Если избрать другой метод творенья учетной записи, бездеп не будет добавлен на Ваш аккаунт. 1х слот 1хслотс регистрация перейти на 1×slots Для получения депозитного бонуса необходимо пополнить свой игровой баланс настоящими деньгами. Вознаграждение возможно получить либо при внесении первого депозита, либо вид фиксированного процента от внесённых средств. Так или по, бонус поступит на счёт лишь последствии пополнения.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Получив свой презент, Вы можете безвозмездно играть на реальные средства, а выполнив обстоятельства отыгрыша, вывести собственный выигрыш.Вообще перейдя в казино — правила одинаковы в получении бездепозитных призов, в стереотипные управляла заходит: подтвердить эл. Почту и аппарат, наполнить собственный индивидуальный профиль, активировать промо код или активировать предложения во вкладке БОНУСЫ. На критериях отыгрыша бесплатных призов стопам тормознуть подробнее. С ними связаны нюансы, коие невозможно забыть без внимания. <a href=https://usolie-citi.ru/user/AnthonyTaupe/>https://usolie-citi.ru/user/AnthonyTaupe/</a> 1×slot официальный сайт Если вы опытный игрок, вы обязаны знать, что бонус без депозита – редчайшая находка. Тем не менее, мы неделю изучаем интернет, чтобы найти вам превосходнейшие бездепозитные предложения.
1хслотс казино зеркало
Выбирая даровой бонус, пристально изучайте верховодила. Убедитесь, что вас можно на роль в акции. Уточните, в каких забавах возможно скорпулезно условия вейджера. При необходимости задавайте вопросы адептам саппорта.Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных обстановок с казино, когда последствии отыгрыша бездепа вам не дадут вывести солидную сумму выигрыша. Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в неотъемлемом порядке необходимо пополнить счет в казино. Для депозитных бонусов, эта процедура не необходима, например как депо уже сделан.Разные казино имеют собственные верховодила по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высочайшие требования. Часто онлайн-казино советуют отыграть бонусное поощрение до ста один в игровых автоматах. Например, если игрок получил бесплатно десять долларов, то необходимо будет отыграть их, поставив 1 тысячу спинов по 1 доллару любой. Стоит обозначить(означить), собственно не все казино выделяют возможность играть на призы и не во всех увеселительных заведениях идентичные управляла для отыгрывания. Некоторые казино запрещают выступать на бонусы в блекджек или ограничивают ставки до пяти процентов, что существенно увеличивает в десятки раз число нужных игр. Объективные – размер бонуса, коэффициент и обстоятельства вейджера, надобность внесения депо для вывода денег; 1×slots рабочее зеркало <a href=https://marvelvsdc.faith/index.php?title=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0%20%D0%B4%D0%B7%D0%B5%D0%BD>https://marvelvsdc.faith/index.php?title=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0%20%D0%B4%D0%B7%D0%B5%D0%BD</a>
1×slots регистрацию процедура займет всего лишь
Для ревизии применяются сканы паспортов, водительских прав, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь обнаружен в попытке ввести вспомогательный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в темный список. При игре на лицензионной площадке не бояться свидетельствовать достоверную персональную информацию (шифрование ликвидирует утечку персональных данных).Однако далеко не все ресурсы предлагают своим клиентам бездепозитные призы за регистрацию в казино. В большинстве случаев предусмотрено поощрение на 1-ый депо в размере 100–200%. Это замечательная возможность преумножить банкролл, прирастить время, проведённое за игрой и шансы сорвать большой куш. <a href=http://liuwenzheng.com.cn/home.php?mod=space&uid=850514>http://liuwenzheng.com.cn/home.php?mod=space&uid=850514</a> x1 slots 1хслотс регистрация перейти на 1×slots Выбирайте наихорошие бесплатные призы с помощью обзоров на Casinoz – и пусть вам сопутствует удача при отыгрыше бонусных кредитов!Не трудно додуматься, собственно not the slightest down payment bonuses практически никогда не посещают большими. Чаще всего идет о пяти–тридцати баксах (либо эквиваленте данной суммы в иной валюте).
<b>Смотреть еще похожие новости:</b>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=142835>1×slots официальный сайт мобильная версия скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Такой казино приз без депозита за регистрацию выдается игроку на час и активно употребляется данное предложение с 2017 года. Это словно какая-то маскировка поощрения под бездепозитный. Суть всего сего сводится к тому, что игроку на час выдается, например, 1000 долларов, а реклама повторяет про, собственно любой выигрыш можно будет дальнейшем оставить при себя. Но если играющий всерьез отнесется к этому предложению, то он просто потеряет время. Ведь геймеру надо(надобно) будет выступать не в аккаунте, ну тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (и всей тысячи) в управляла вступят конкретные обстоятельства, где будет сказано, собственно максимальной суммой победы может быть только двести долларов и деньги можно применять лишь в качестве приза на первый лепта с вейджером 25 от суммы вознаграждения плюс сам депозит. По итогу получится, собственно игрок выигрывал себе 200% бонус с вейджером на конкретную необходимую. Короче разговаривая, это все надо вашего времени.
#8757 Charlesgunnyhttp://filmkachat.ru
1×slot рабочее зеркало
Фриплей-бонусы. Бонусы за бесплатную игру есть лишь в некоторых клубах. Они зачисляются сразу в творенья профиля и действуют непродолжительное время. Если у вас нет времени потратить свои, они просто закончатся. Что касается времени, правило призы действуют в течение 1-го часа.Чаще всего казино бонус за регистрацию без депо даёт вероятность запустить любой машина. Но какого-либо внимательно ознакомиться с критериями. Иногда для забавы доступны только определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, другого, как начать знакомство с миром азарта именно с «одноруких бандитов». <a href=http://filmkachat.ru/>1хслотс казино зеркало</a> <a href=https://promosimple.com/ps/2f3fe/transforming-spaces-with-hospitality-venue-design-visualization>https://promosimple.com/ps/2f3fe/transforming-spaces-with-hospitality-venue-design-visualization</a> У любой забавы средства притязания по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система зачтет каждую ставку. В рулетке и покере сделать это гораздо сложнее. Именно поэтому например важно внимательно читать обстоятельства получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой ирге, то новички попросту «спустят приз на ветер».В подавляющем большинстве случаев безвозмездные призы начисляются в кредитах, которые нельзя незамедлительно вывести со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д. ). О нем читайте ниже. 1хслотс рабочее зеркало <a href=http://forum.centrum-hvac.pl/User-Glennhof>http://forum.centrum-hvac.pl/User-Glennhof</a> В разделе с призами активировать свой подарок. Найти игры, для которых предусмотрено одобрение и применять приз по предназначению.Какие бонусы возможность еще получить не бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, каждое интернет казино предлагает игрокам прибыльное предложение на первый депо, вы совершаете депо, ваш депо возрастает в двое или даже в 3, что, этим наиболее начать выступать возможно с более солидной суммой, так же не запамятываем про вейджер на призы.
1×slots casino регистрация 1×slotscasin online
Третитй бездепозитный бонус за регистрацию – денежные свои. К раскаянию, начислить рубли либо баксы готовы только знаменитые и пользующиеся клубы. С их поддержкою вас насладиться каждой доступной игрой – автоматом, рулеткой, кено, блэкджеком. <a href=https://forum.spherecommunity.net/User-JamesLop>1×slots подтвердит вашу регистрацию если говорить</a> 1×slots зеркало этих способов предполагает регистрацию Бездепозитные бонусы реальными деньгами, коие возможно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадали. <a href=http://www.dbgjjs.com/home.php?mod=space&uid=463482>http://www.dbgjjs.com/home.php?mod=space&uid=463482</a> К огорчению, нет. Почти все казино, просят внесение хотя бы 1-го минимального депо для вывода выигрыша с бездепозитного бонуса. Также учитывайте, собственно исключить средства разрешается лишь на ту платежную систему, с которой был изготовлен депо.Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают приз по государствам. Вплоть до как, что клуб имеет себя игроков из Вашей страны, а бездеп не давать. 1×slots casino регистрация 1×slotscasino09k online Обычно, бездепозитные бонусы выдаются под конкретные слоты с фиксированной ставкой, хотя их точно воспрещено использовать в игровых автоматах с прогрессивным джекпотом. Список игр, каких можно использовать бездеп, Вы отыщите в описании акции или можете уточнить у службы заведения.В онлайне очень количество скриптовых вебсайтов, коие принадлежат жуликам. Их главная задача – привлечь гэмблеров, пообещав столько щедрые подарки, но и крупные выигрыши. Так что кое-какие веб-сайты предлагают получить за регистрацию в $1 000.
1×slots официальный сайт зеркало
Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша бонусов. Заведения всегда устанавливают наивысшую ставку, допустимую по условиям вейждера.Доступные игры – В некоторых азартных играх можно снизить математическое преимущество казино до нескольких десятых процента. В их количестве все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как правило, в этих играх ставки идут в зачет вейджера не всецело. Например, имеет предусматриваться только 50%. В неких забавах бездепозитные бонусы вообще нельзя отыгрывать. Частенько новенькие не понимают, как активировать презенты или вывести 1-ый выигрыш. Для сходственных случаев наша команда описала основные термины – собственно такое фриспины, вейджер, как его отыграть, для нужно протекать верификацию. <a href=http://doctor54.ru/user-2619.html>http://doctor54.ru/user-2619.html</a> 1×slots казино зеркало Еще одно условие дотрагивается размеров ставки. Операторы устанавливают наивысшую сумму, которую игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, избранной в Личном офисе. При превышении лимита есть риск лишиться приза. Существующие ограничения относятся и к определенным видам ставок. Например, играя в рулетку, заказчик имеет столкнуться с запретом ставить фишки на шансы.Как верховодило, при выводе денег, от играющего требуется лишь устроить наименьший лепта для того, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом индивидуальный счет.
казино 1×slots официальный сайт
Условия вывода выигрыша. В неких заведениях для успешного вывода с бездепозитного бонуса довольно пополнения баланса и доказательства личности. В других же клубах, нужно количество раз прокрутить собственный депозит.Но есть игорные заведения, которые готовы просто так жертвовать деньги на забаву. Для этого достаточно создать профиль. Чтобы исключить свой выигрыш, вам сначала нужно выполнить условия отыгрыша, указанные в условиях получения бездепозитного депо. Пoдтвepдить личнocть посетителя. Для успешного вывода средств, нужно доказать лицо посетителя. Нa этaпe вepификaции пpoфиля, сотрудники службы безопасности обязаны увериться, что у игрока всего лишь раз аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не может исключить собственный выигрыш, в у него несомненно некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы.Способы получения бездепа различаются в зависимости от облика бонуса, который приглянулся игроку. Но вас так нужно быть зарегистрированным в законном онлайн-казино и подтвердить собственную лицо. В общем виде пошаговая инструкция для получения бездепозитного приза выглядит например: 1× slots регистрация в 1×slots casino <a href=http://hwani.barunweb.co.kr/bbs/board.php?bo_table=free&wr_id=111789>http://hwani.barunweb.co.kr/bbs/board.php?bo_table=free&wr_id=111789</a> Бездепозитный приз за регистрацию в казино — это стартовый подарок в виде денежного начисления либо безвозмездных вращений для новых игроков заведения, для получения которого надо вносить депозит.
1×slots официальный сайт зеркало рабочее
Классическая разновидность приза за создание аккаунта. Его преимущество содержится том,, что заказчик возможность без подбирать аппараты и создавать ставки в их. Иногда перечень игровых автоматов ограничен оператором, хотя все точно это чем, чем единственный дешевый разъем, как в случае с внедрением фриспинов.Акции, посвященные календарным праздникам, бывают рассчитаны как на всех юзеров, например и на категории: к, подарок на 8 марта девушкам-игрокам либо мужчинам на 23 февраля. <a href=http://www.support.ipron.com/communication/forum/index.php?PAGE_NAME=profile_view&UID=17620>http://www.support.ipron.com/communication/forum/index.php?PAGE_NAME=profile_view&UID=17620</a> Бесплатные призы казино без депо можно получить повторяющий денежных средств на бонусный счет (вывести их возможно лишь после отыгрыша), фриспинов, забавы либо кешбэк-бонуса.Операторы гемблинга заявляют, собственно например они борются с бонус-хантерами. Впрочем, критики считают, что этим казино пробуют сделать из случайного гостя постоянного игрока. 1×slots коды Суммы похожих услуг, в, колеблются от трех до 20 $, а вейджер на эти средства обязан составлять от 30 до шестидесяти раз. Зачастую, величайшая сумма выигрыша тут составит от одной до 2-ух сотен $. Если игры выиграет больше, то все средства имеют быть списанными до максимально разрешенного выигрыша. Здесь бывает смысл выводить еще несуществующие финансы на свою платежную систему и дальше находить заведение с благоприятными под данную необходимую релоадом либо бонусом за первое пополнение счета. Есть несколько подвидов бездепозитного гонорары, предлагаемого большим количеством заведений.Фриспины. Бесплатные вращения предусмотрены для применения в видео-слотах. Внимательно читайте обстоятельства – они нередко выдаются для некоторых машин. В зависимости от клуба возможность делать конкретное количество ставок. Кстати, современные игорные дома дают вероятность заводить «одноруких злодеев».
<b>Смотреть еще похожие новости:</b>
<a href=http://216.38.0.7/viewtopic.php?f=17&t=141851&p=312040#p312040>1 хслот регистрация в 1×slots casino</a>
<a href=http://link.5nx.ru/viewtopic.php?f=5&t=4501>1х слот регистрация в 1×slots casino</a>
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=55245>1×slots промокод при регистрации 2025</a>
<a href=https://hiddeninthesand.com/forum/viewtopic.php?t=272201>казино 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки имеют запросить вспомогательные документы либо инициировать короткое общение по Skype.
#8758 Charlesgunnyhttp://filmkachat.ru
1хслотс 1хслотс регистрация перейти на 1×slots
Возможность сыграть вспомогательное состязание (а иногда и некоторое) совершенно бесплатно, а выигрыш, тому, поступает на счёт игрока.Только выполнив все обстоятельства отыгрыша и дождавшись окончания проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить средства средства. <a href=http://filmkachat.ru/>1×slots зеркало на сегодня</a> <a href=https://mssg.me/cp8eg>https://mssg.me/cp8eg</a> Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют актуальную информацию о not the slightest down payment bonuses прочих предложениях.Представьте момент, когда при ставке в 10 рублей Вы получите сходственное умножение. Миллион руб. За одно вращение, собственно вполне возможно. Поэтому вопрос, сколько можно выиграть остаётся открытым. Предлагаем проверить помощи. Регистрируйтесь в одном или нескольких онлайн казино, получайте Бездепозитный приз и проверяйте удачу в деле. Разумеется, вывести средства не так просто. Однако шансы есть у всех. 1×slots казино мобильная версия <a href=https://www.mannagotgam.com/bbs/board.php?bo_table=free&wr_id=7527>https://www.mannagotgam.com/bbs/board.php?bo_table=free&wr_id=7527</a> Помните, что в неких забавах сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных забавах только от 5% до 50% суммы ставки считаются как отыгранные средства, тот как в слотах идет в зачет все 100% суммы.
1×slots зеркало подтвердит вашу регистрацию если говорить
Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 $. Если выдаются фриспины, их число изредка превышает нескольких десятков даровых вращений. <a href=http://www.ihavethepussy.com/de/threads/199391–1%D0%A1%E2%80%A6%D0%A1%D0%83%D0%A0%C2%BB%D0%A0%D1%95%D0%A1%E2%80%9A%D0%A1%D0%83-%D0%A0%C2%B7%D0%A0%C2%B5%D0%A1%D0%82%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%BB%D0%A0%D1%95?p=216925#post216925>1хслотс зеркало</a> 1×slos регистрация в 1×slots casino <a href=http://www.dungdong.com/home.php?mod=space&uid=3038009&do=profile>http://www.dungdong.com/home.php?mod=space&uid=3038009&do=profile</a> Иногда в качестве одобрения за регистрацию шансы выдаваться билеты для роли в турнирах. Условия их проведения очень выделяются, поэтому мы советуем ознакомиться с каждым предложением отдельно. 1×slots зеркало подтвердит вашу регистрацию если говорить Ограничения по забавам. Администрация запрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, средствами или бесплатными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда разделенье выполняется по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, хотя запрещен в настольных играх и в разделе Live Casino.Иногда операторы настоятельно внесение малого депозита перед выводом для верификации платежного прибора. В некоторых казино данный депозит также предстоит отыграть.
зеркала 1×slots
Вы скорее, скажем, как все любите получать подарки и бездепозитные призы казино. Игорные жилища брали в привычку одаривать гэмблеров приятными призами. Стать владельцем приветственного подарка можно за творенье профиля либо пополнение счёта. Второй вариант больше увлекательный, ведь клубы готовы удвоить депо! Но случае вы новичок и лишь знакомитесь с миром азарта, чем воспользуйтесь бонусом за регистрацию. В каждом казино с бездепозитным бонусом учтены вейджеровые обстоятельства. Это единственный «подводный камень», который стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) сделать определённое число ставок. Чем круче бонус, что, этим труднее выполнить обстоятельства, и напротив. <a href=https://forex-arabic.com/members/186207-Julesked>https://forex-arabic.com/members/186207-Julesked</a> Фриспины начисляются по определенной ставке. После их активации игроку нужно запустить разъем и увериться, что в нем отображаются благотворительные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода после отыгрыша определяется оператором и редко выше 5 000 рублей. 1× слот зеркало Третитй бездепозитный приз за регистрацию – денежные средства. К раскаянью, начислить рубли либо баксы готовы лишь знаменитые и популярностью клубы. С их поддержкой возможность насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком.На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не можете активировать и получить бездепозитный бонус.
1×slots официальный сайт скачать
Приветственный бездеп предоставляется любому игроку лишь один раз. Казино сражаются с так нарекаемыми бонусхантерами (от англ. Bonus Hunter — доброволец за бонусами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения дара. Исключить сходственные деяния разрешает верификация данных. Администрация вправе востребовать у посетителя доказать персональные данные, указанные при регистрации.Подарки на дни ? посвященные торжественным датам, требующие символического отыгрыша или начисляются без это. Могут дариться игрокам сутки рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду. <a href=https://www.formulersupport.com/Thread-1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D0%BF%D0%BE%D0%B4%D1%82%D0%B2%D0%B5%D1%80%D0%B4%D0%B8%D1%82-%D0%B2%D0%B0%D1%88%D1%83-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8E-%D0%B5%D1%81%D0%BB%D0%B8-%D0%B3%D0%BE%D0%B2%D0%BE%D1%80%D0%B8%D1%82%D1%8C–98741>1×slots зеркало подтвердит вашу регистрацию если говорить</a> Но существуют азартные заведения, готовые просто например вручить деньги на забаву. Для этого довольно сделать профиль. Чтобы вывести выигрыш, сперва необходимо выполнить вейджеровые условия, прописанные в критериях получения бездепа. Многие азартные клубы ограничивают необходимую вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании акции, суммы Вы не можете вывести. Разница будет аннулирована, Вы и не сможете делать на нее ставки.Автоматы неспроста считаются самым знаменитым азартным развлечением. Чтобы усвоить управление и управляла, потребуется всего несколько минут. Ваша задачка сделать ставку, найти число рабочих линий и возможно крутить барабан. Если дисплее выпадет выигрышная композиция – вы выиграли! С этой задачей вас посодействуют управится бездепозитные призы казино. 1×slots официальный сайт мобильная версия скачать <a href=https://move.ru/blogs/9482/>https://move.ru/blogs/9482/</a> Бонусные средства – небольшая сумма средств для старта в новеньком казино. На бонусные средства, обычно разрешается играть во все игры, не слотов с прогрессивным джекпотом и игр из раздела exist casino.
зеркала 1×slots
Стоит отметить, собственно бездепозитный приз выдается только взрослым новичкам, которые, в свою очередь, могут пригласить собственных друзей и знакомых, того претендующих на поощрительную программу преданности. Подобная разработка замечена среди конкурирующих онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры способствуют увеличению своей популярности, путем вербования новых игроков. Бонусы – это уникальный шанс для вероятных участников забавы, коие могут опробовать софт покер рума и убедиться, будут ли они в него играть или нет. Новый игрок испробует свои силы с настоящими оппонентами в казино. <a href=https://dictanote.co/n/1058576/>https://dictanote.co/n/1058576/</a> 1×slots casino online регистрация
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.vn.ua/showthread.php?p=3272744#post3272744>1×slots подтвердит вашу регистрацию если говорить</a>
<a href=http://polishcrazyclan.ugu.pl/member.php?action=profile&uid=272738>1хслотс регистрация в 1×slots casino</a>
<a href=https://thetechmodders.com/forums/memberlist.php?mode=viewprofile&u=945>1×slots официальный сайт, скачать</a>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/6900/#comment-306052>1×slots официальный сайт мобильная версия скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Простая процедура получения бездепозитного бонуса, которая займет не более 2-х минут. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные. Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом прибыли присутствуют на данной странице. Посетитель может оценить обстоятельства получения и начать играть на средства без внесения депо. При данном игроку принципиально осознавать, на каких критериях и какими методами у исключить полученный выигрыш. Для сего нужно расценить перечень подключенных платежных систем.
#8759 Charlesgunnyhttp://filmkachat.ru
скачать 1×slots на андроид мобильная версия
Ну и конечно же, для казино бездепозитные призы выгодны с имиджевой стороны: сходственная щедрость повышает степень лояльности клиентов к фирмы. <a href=http://filmkachat.ru/>1х слот регистрация в 1×slots casino</a> В лицензионных бездепозитных казино выступать в азартные игры вправду неопасно. Наличие лицензии одобряет что, этот прецедент, собственно клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP. <a href=https://onlyfans.com/u449771565>https://onlyfans.com/u449771565</a> 1×slos регистрация в 1×slots casino <a href=http://trzykolory.opx.pl/member.php?action=profile&uid=3599>http://trzykolory.opx.pl/member.php?action=profile&uid=3599</a>
1×slots зеркало регистрация
Новые клиенты онлайн-казино без первого депозита все выяснить собственную удачливость. К что, этому же есть возможность преобразовать бездепы в реальные деньги за регистрацию в казино, впрочем достичь приз нужно отыграть сообразно условиям акции. 1× слот зеркало <a href=https://www.escortskart.com/user/profile/RubenDyring>https://www.escortskart.com/user/profile/RubenDyring</a> Поспешите забрать бездепозитные призы за регистрацию в казино из представленного перечня. Все платформы столько водят законную работа, хотя и порадуют правдивыми плодами забавы, высокой отдачей, быстрыми выплатами.Чтоб получить крупный выигрыш, избирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша. 1×slots регистрация 1×slotscasino 56 online Бонусные деньги – небольшая сумма денег для старта в новом казино. На бонусные средства, обычно разрешается выступать во все забавы, кроме слотов с прогрессивным джекпотом и игр из раздела live casino.
казино 1×slots официальный сайт
Вывод выигрыша с бездепозитных призов казино – щедрый презент от азартных клубов. Но чтобы вывести собственный доход, нужно выполнить ряд условий: <a href=http://www.luisovalles.com/new/index.php?option=com_k2&view=itemlist&task=user&id=96540>http://www.luisovalles.com/new/index.php?option=com_k2&view=itemlist&task=user&id=96540</a> 1×slot казино зеркало В наше время довольно просто получить приз за регистрацию в казино. Практически любой игорный жилище с радостью начисляет средства или бесплатные вращения. Многие гэмблеры пользуются этим и не стесняются регистрироваться в каждом клубе с прибыльными условиями. Кстати, это замечательная вероятность выработать победную стратегию и сорвать джекпот.
1×slots подтвердит вашу регистрацию если говорить
<a href=http://forum.puppylinux.pl/index.php?topic=861.new#new>1×slots регистрация 1×slots review live</a> B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.Размер бонуса. В качестве бездепов обычно начисляют маленькие суммы, а когда речь о призах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино все подарить игроку до 2000$. Объективные – размер бонуса, коэффициент и условия вейджера, надобность внесения депозита для вывода денег;В неких онлайн казино для получения бездепозитных призов не достаточно просто зарегистрироваться на веб-сайте клуба и доказать средства контактные данные. Дополнительно требуется активация промокода. 1×slots рабочее зеркало на сегодня <a href=https://www.94zq.com/space-uid-1238447.html>https://www.94zq.com/space-uid-1238447.html</a> Бездепозитный бонус предоставляется новому игроку за конкретные действия. Часто презент вид денег либо фриспинов выдается за регистрацию, благодаря чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.
1×slots casino регистрация 1×slotscasino09k online
<a href=https://vadisabilityforum.com/forums/users/davidlot/>https://vadisabilityforum.com/forums/users/davidlot/</a> Высокая конкуренция в сегменте азартных игр доказывает операторов завлекать посетителей разнородными акциями. Благодаря этому у гостей бывает возможность получить бонусы в казино за регистрацию без депо. Воспользоваться таким предложением возможно, минуя функцию внесения денег на игровой счет, просто активировав аккаунт на веб-сайте. Наш экскурсовод по бездепам поможет избрать самую симпатичную бонусную программу, разузнать управляла получения такого вознаграждения и воспользоваться им с максимальной выгодой.Популярность интернет казино растёт и всё больше юзеров начинают увлекаться азартными забавами. Бездепозитные бонусы 2022 года, это уникальные презенты за регистрацию. С их помощью новые игроки могут получить бесплатные вращения либо деньги на баланс за одну регистрацию. С свет игорных заведений в онлайне, бездепозитные бонусы стали знаменитейшим методом привлечения игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о которых мы поведаем. Наш сайт собрал лучшие предложения из онлайна на 2022 год. Воспользуйтесь любым презентом и сможете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить условия. 1 хслот регистрация в 1×slots casino К примеру, игроку выдаются бесплатные средства в заведении в размере пятидесяти либо ста долларов (вейджер на коие составляет 100х). То есть, любому новоприбывшему игроку выскакивает привлекающая картинка, кот-ая сулит выплату всех зачисленных фирмой средств. Не стоит заострять на казино бонус за регистрацию без депозита с чрезмерно великой или очень малеханькой суммой бонусов, потому что, и тщательно исследовав все условия, здесь вероятнее всего, будет некий подкол.Обычно показатель повыше, чем для бонусов на депо. Не дивитесь, если он будет том х100. Иногда завышенный коэффициент вейджера уточняется для жителей отдельных государств.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.katzenforum.at/forum/media/users/jamesagema.16012/>1×slots casino регистрация 1×slots review live</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для получения депозитного бонуса необходимо пополнить свой игровой баланс настоящими деньгами. Вознаграждение можно получить либо при внесении первого депозита, или повторяющий фиксированного процента от внесённых средств. Так либо другому, бонус поступит на счёт лишь после пополнения.
#8760 Charlesgunnyhttp://filmkachat.ru
1× slots casino зеркало
Мы проделываем ударение на главных положениях верховодил, рассказываем о территориальных лимитированиях и вкратце информируем о других акциях обговариваемого казино. <a href=http://filmkachat.ru/>1 xslots рабочее зеркало</a> <a href=https://www.swiatobrazu.pl/forumgaleria/thread/view/id/484>https://www.swiatobrazu.pl/forumgaleria/thread/view/id/484</a> Вейджер (или вагер) ? это минимальная сумма ставок, которую нужно сделать для вывода валютного приза. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение. 1хслот зеркало сайта <a href=https://faktes.ru/user/Philipdef/>https://faktes.ru/user/Philipdef/</a> Перечисленные выше основные свойства сочетают практически каждый приз и являются стандартными для бездепозитных бонусных начислений в казино.Также, учите, что бездепозитный приз возможно исключить лишь в случае, когда станут выполнены все условия отыгрыша.
1×slots промокод при регистрации 2025
Для тех, кто только подумывает испытывать собственную удачу, еще для проф игроков, ищущих свежие площадки для выигрышей, водящие лицензированные казино нередко устраивают различные промоакции, и лучшее услуг прошедшее время – как для новичков, например и для проф игроков – бездепозитный бонус за регистрацию.Однако в критериях скрываются «подводные камни», которые не позволят вывести крупную необходимую или же вы не успеете отыграть вейджер. Поэтому мастера советуют арестовать бесплатные вращения за регистрацию в казино без депозита, чтобы поднабраться опыта и получить настоящий шанс на победу. <a href=http://swissairways-va.com/phpBB3/viewtopic.php?p=1412324#p1412324>1×slots зеркало на сегодня</a> 1×slots регистрация 1×slots casino c2d ru В списке требований к отыгрышу часто наличествуют лимиты на ставки при забаве на личные средства. Так, если отыграть надо(надобно) 30 000 рублей, а предельная сумма ограничена 30 рублями, то вертеть барабаны светит 1000 один. Эта особенность затрудняет соблюдение игроками условий по срокам деянья промоакции.Все обожают получать подарки. Согласитесь, почти любой играющий человек будет очень счастлив, случае получит бесплатный презент для забавы в интернет казино просто за регистрацию либо же бонус за внесенный депозит, например называемые приветственные бонусы для свежих игроков. Соответственно эти онлайн клубы будут более модны и преимущественны у игроков при выборе казино для игры. Топ казино день обновляется и добавляются свежие и интересные игровые клубы с симпатичной бонусной политикой и всеми вероятными привилегиями, к коим относятся эти бонусы как фриспины за регистрацию, валютные бездепозитные призы, еще щедрые бонусы за внесенный депозит. <a href=http://fh79604z.bget.ru/user/HenryBaste/>http://fh79604z.bget.ru/user/HenryBaste/</a> Как правило, при выводе финансов, от играющего требуется только сделать наименьший вклад чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом индивидуальный счет.Все любят получать презенты. Согласитесь, практически любой играющий человек будет сильно счастлив, случае получит бесплатный презент для забавы в онлайн казино просто за регистрацию или же бонус за внесенный депозит, так нарекаемые приветственные призы для свежих игроков. Соответственно такие онлайн клубы станут более востребованы и предпочтительны у игроков при выборе казино для забавы. Топ казино день обновляется и добавляются свежие и занимательные игровые клубы с симпатичной бонусной политикой и всеми возможными привилегиями, к коим относятся эти бонусы как фриспины за регистрацию, валютные бездепозитные бонусы, а также великодушные бонусы за внесенный депо. скачать 1×slots официальный сайт
1×slots регистрация то дальше необходимо пройти
Как лишь на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу после сего можно забыть заявку на вывод выигрыша. Кредиты прибыльно отличаются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом реальных средств и выделяют вероятность ощутить задор. Во-вторых – возможно насладиться любой азартной игрой доступной на веб-сайте. В вашем постановлении находятся автоматы, настольные приложение, видео-покер, Live-дилеры.На данном разделе портала периодически публикуются обзорные заметки, каких рассматриваются безвозмездные призы превосходнейших интернет-казино. Информация структурирована по нескольким пунктам, включая основные: Подтверждение индивидуальной информации. Все казино просят от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и присутствие у юзера иных аккаунтов (мультиаккаунт запрещен).Таким образом интернет казино получает потенциального игрока. Возможно в или подлинном он захотит поиграть на средства деньги. Так работают бездепозитные бонусы в онлайн казино. Здесь хорошо подходит выражение, безвозмездные сыр бывает только в мышеловке. Начинающие игроки шансы не обдумывать опасность пыла. Однако со временем понимания становится больше. Это тема для отдельного обсуждения. <a href=https://xn–6-gtb4aicb3c6b.xn–p1ai/user/MycsgoLok/>https://xn–6-gtb4aicb3c6b.xn–p1ai/user/MycsgoLok/</a> Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают приз по странам. Вплоть до такого, собственно клуб имеет на игроков из Вашей страны, а бездеп мешает. 1 x slots casino Вознаграждения за получение VIP-статуса ? начисляются масштабах программы лояльности при достижении одного уровня либо выдаются персонально менеджерами службы поддержки.
скачать 1×slots на андроид мобильная версия
Выбирая бесплатный бонус, внимательно изучайте верховодила. Убедитесь, что для возможно себя роль в промоакции. Уточните, в каких забавах возможно исполнять обстоятельства вейджера. При необходимости задавайте вопросы адептам саппорта. Как и акции операторов, бездепы — это рекламный инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такового предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих гостей и дозволяет им составить эмоцию о функционале, не рискуя значительными совокупностями. 1хслот зеркало <a href=https://reveal.ru/gate.html?name=Journal&file=display&jid=49748>https://reveal.ru/gate.html?name=Journal&file=display&jid=49748</a> Во время забавы в казино, выигрыши, полученные спасибо бесплатным призовым фондам, суммируются и включаются в общую сумму для отыгрывания. Однако, в удача улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно разрешит исключить финансовые средства. Сумма вывода будет находиться от лимита, утвержденного именно в этом учреждении. Поэтому, пристально нужно разбирать верховодила выдачи анлимитных депо.Подтверждение индивидуальной информации. Все казино требуют от клиента пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у юзера других аккаунтов (мультиаккаунт запрещен).
1хслот зеркало
Представленные на этой странице наихорошие бездеп призы в казино за регистрацию в 2022 году имеют подходящие обстоятельства. После тщательного анализа редакция портала составила рейтинг спецпредложений, в котором посетители Casino.ru имеют сортировать список по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д. Условия отыгрыша приза. Если Вы планируете заработать на бездепозитном призе, то для внимание на велечину вейджера и срок, кот-ый дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть приз и вывести выигрыш. <a href=https://23region.info/user/Scotthaf/>https://23region.info/user/Scotthaf/</a> Прямо данный арестуйте благотворительные вращения за регистрацию без депозита и начинайте собирать призовые комбинации ради крупных выигрышей! 1×слот регистрация в 1×slots casino Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?
<b>Смотреть еще похожие новости:</b>
<a href=https://www.mshowto.org/forum/members/jamespauri.html>1×slot зеркало</a>
<a href=https://dev.eff.one/forumdisplay.php?fid=10>1×slots акции</a>
<a href=https://forum.spherecommunity.net/User-JamesLop>1×slot казино зеркало</a>
<a href=http://diablo2r.cn/home.php?mod=space&uid=30130>1×slots на любой вкус как пройти регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Диапазон ставок, коие вправе устроить игрок, того лимитирован. Обычно назначать возможно небольшую сумму — в 10–30 рублей за одно вращение.
#8761 Charlesgunnyhttp://filmkachat.ru
1×slots казино зеркало
Хотя благотворительные призы начисляются без депо, не исключено, собственно вам понадобиться заносить деньги. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только в того, как свежий клиент первый пополнит игровой счет. <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino09k online</a> <a href=https://onetable.world/read-blog/89547>https://onetable.world/read-blog/89547</a> 1×slots актуальное зеркало <a href=https://rg-mechanics.club/user/Frankwes/>https://rg-mechanics.club/user/Frankwes/</a> Несмотря на то, что данный вариант стимуляции со стороны азартных платформ очень известен области похожих игр, далеко не всем поклонникам казино ведомо, что себе бездепозитные бонусы казино и как именно их вероятно эксплуатировать.В истинное время получить приз за регистрацию в казино довольно просто. Почти каждый игорный жилище с готовностью предоставит средства или благотворительные вращения. Многие игроки пользуются этим и не стыдятся регистрироваться в каждом клубе с выгодными критериями. Кстати, это замечательная возможность выдумать выигрышную стратегию и сорвать куш.
1×slots актуальное зеркало
1хслотс рабочее зеркало Возможность сыграть дополнительное состязание (а времени и некоторое) абсолютно бесплатно, а выигрыш, тому, поступает на счёт игрока. <a href=https://rubcrumb.ru/user/WalterSoymn/>https://rubcrumb.ru/user/WalterSoymn/</a> 1 x slots casino
1×slots зеркало подтвердит вашу регистрацию если говорить
Условия вывода выигрыша. В неких заведениях для удачного вывода с бездепозитного приза довольно пополнения баланса и подтверждения личности. В иных же клубах, нужно несколько один прокрутить собственный депозит.Для казино, работающих онлайн, бездепозитные бонусы нужны для вербования новых посетителей. Предложение поиграть на слотах без необходимости внесения настоящих денег — работающий способ для увеличения интереса к компании. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит выступать в казино, только сейчас уже на собственные деньги. Бездепозитные бонусы прекрасный вариант даровой игры в игровые автоматы. Многие пользователи сети не понимают, собственно в казино возможно начать выступать безусловно безвозмездно, а позже вывести выигрыш на банковскую карту или электронный кошелек, иные не доверяют интернет казино, а третьи успешно играют и выигрывают – и тотчас довольно немалые суммы.Для получения бездепа нужно пригласить в игру по реферальной ссылке нового посетителя: он обязан зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на необходимую, указанную в условиях промоакции. <a href=http://www.podrujka.com/user/DeweyDoorm/>http://www.podrujka.com/user/DeweyDoorm/</a> Когда идет о валютных бонусах, казино практически устанавливают обстоятельства вейджера, коие нужно выполнить, чтобы исключить выигрыш.Ниже указан актуальный перечень законных казино в Беларуси с бонусами на 1-ый депо. Вы сможете попасть на официальный вебсайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. 1×slos регистрация в 1×slots casino Зарегистрироваться в казино по специальной ссылке либо с бонусным кодом. Подтвердить контактные данные (номер аппарата и электрическую почту). Для подтверждения номера телефона необходимо в личном профиле показать собственный номер и надавить кнопку „Подтвердить номер телефонного“, дальше Вы получите sms-сообщение с кодом, который необходимо ввести в подходящее фон. Для подтверждения электронной почты, перебежать по активной ссылке в письме от казино.
1×slots зеркало быструю регистрацию а также мгновенное
Если вы выбрали для себя несколько брендов коие для больше всего приглянулись, для неизменной забавы! Таких гемблеров казино довольно любит и ценит, за частую такие игроки становятся VIP игроками заведения, коим часто поступают выгодные предложения вид бонусов, так же туда заходит и бездепозитные. Вейджер менее х30–35 является применимым. Опытные игроки утверждают, собственно с этим вейджером реально остаться в плюсе, случае верно подойти к выбору игрового аппарата.Выполнив все требования оператора, клиент возможность оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит примерно менее суток. Если дополнительно потребуется пройти процедуру верификации, то срок увеличивается до 1–2 трудящихся дней. Для перевода применяются банковские инструменты и электронные платежные системы. Второй метод подходит чем, например как большинство транзакций такой исполняются моментально. В связи со специфичностью функционирования банков обработка платежей может взятьвдолг(взятьвзаймы) до нескольких рабочих дней. Бездепозитные призы – это исключительно интересная и наиболее многообещающая акция интернет-казино. Они даже превосходнее фри-спинов, потому собственно выплаты в безвозмездных вращениях не гарантированы, так комбинации на барабанах игрового аппарата имеют не сложиться.Прочитайте правила бонусной программы, в хотите принять. Да, мы настойчиво советуем устроить это до регистрации. 1×slots на любой вкус как пройти регистрацию <a href=http://z918863j.bget.ru/user/Charlesorend/>http://z918863j.bget.ru/user/Charlesorend/</a> Итак, чтобы благотворительные бонусные кредиты превратились в настоящие деньги, которыми вы можете распоряжаться по своему усмотрению, их нужно отыграть. Вейджер следует уточнять в правилах онлайн-казино.У нас на сайте Вы отыщите перечень бонусов без депо в испытанных казино и доскональную информацию о том как их получить и применять.
1×slots регистрация 1×slots review live
Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы которые появляются у новичков.Чтобы помощи убедиться в превосходствах бездепозитных бонусов, достаточно зарегистрироваться в казино и получить поощрение. Бездеп с фриспинами может охватывать всю коллекцию игр на сайте или разработки 1-го провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш может быть выведен последствии такого, как юзер отыграет эту сумму. Возможность расценить полный функционал слотов — главное совершенство данной разновидности. Игроку становятся доступны что, эти опции, которые отсутствуют в демонстрационном режиме, а возможность выиграть реальные деньги добавляет ярчайших азартных ощущений. <a href=https://prpack.ru/user/PorsedropOi/>https://prpack.ru/user/PorsedropOi/</a> 1×slots casino регистрация на сайте Подарки на определенные даты отличаются условиями получения. Если одобрение начисляют игроку на день рождения, то сумма обыкновенно в от совместного размера депо за год.Большинство клубов завлекают внимание в за счёт разнообразных даров. На одних сайтах возможно получить виртуальные кредиты, коие откроют доступ ко всему софту. На иных же, администрация предлагает бесплатные вращения для запуска топовых интернет слотов. Несмотря на различные промоакции, стоит выделить самые главные.
<b>Смотреть еще похожие новости:</b>
<a href=https://msknovostroy.com/showthread.php?tid=106985>1 x slots casino</a>
<a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=318462#pid318462>казино 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Многие новенькие колеблются, собственно поощрительный приз не нужно будет возвращать, и если они выиграли у казино. Это полностью неопасно и надежно. Выводя выигранные средства, игрок просто одергивает свое роль деле и утрачивает уникальную вероятность – бесплатно наращивать личное материальное положение. Также, учите, что бездепозитный бонус можно исключить лишь в том случае, когда станут выполнены все условия отыгрыша.
#8762 Charlesgunnyhttp://filmkachat.ru
1×slot казино зеркало
Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша бонусов. Заведения всегда устанавливают максимальную ставку, возможную по условиям вейждера.Стоит отметить, собственно бездепозитный приз выдается лишь совершеннолетним новеньким, коие, же, могут пригласить личных приятелей и своих, кроме рассчитывающих на поощрительную программу лояльности. Подобная технология замечена между конкуренцию онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры содействуют увеличению собственной популярности, путем вербования свежих игроков. Бонусы – это уникальный шанс для потенциальных соучастников забавы, коие имеют опробовать софт покер рума и увериться, станут ли они в него играть или нет. Новый игрок испробует свои силы с реальными оппонентами в казино. <a href=http://filmkachat.ru/>1×slots зеркало регистрация то дальше необходимо пройти</a> <a href=https://blog.naver.com/lexxeagle/223616669197>https://blog.naver.com/lexxeagle/223616669197</a> Условия отыгрыша приза. Если Вы планируете заработать на бездепозитном призе, то начала направьте на велечину вейджера и срок, который дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть приз и вывести выигрыш.Условия все различаться друг от приятеля. Но подобный бонус возможность быть применен только для игрового процесса – полученные на счет деньги до такого, как станут отыграны, вывести невероятно. 1×slots официальный сайт скачать <a href=http://namiartsedu.com/bbs/board.php?bo_table=s7_5_eng&wr_id=668488>http://namiartsedu.com/bbs/board.php?bo_table=s7_5_eng&wr_id=668488</a> Объективные – размер приза, коэффициент и обстоятельства вейджера, необходимость внесения депо для вывода денег;
1× slots casino официальный сайт
Призовые начисления без депо могут предоставляться для участия в турнирах онлайн казино. Потратить перечисленные средства можно исключительно масштабах этой промоакции. Условия их проведения включают в себя ограничения на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, никакого изучить его правила. зеркло казино 1×slots <a href=https://ide-ai.online/member.php?action=profile&uid=2635>https://ide-ai.online/member.php?action=profile&uid=2635</a> 1х слот 1хслотс регистрация перейти на 1×slots 2. Создать свежий профиль. Для регистрации нужно заполнить небольшую анкету либо зайдите в собственный кабинет посредством социальных сетей;
1×slots сайт зеркало
Срок отыгрыша — это этап, кот-ый начинается в момент активации приза и заканчивается с его закрытием. Пользователю нужно уложиться в данный временной промежуток, иначе призовые свои аннулируются. Казино устанавливают перечень игр, ставки каких засчитываются при расчете отыгранных денег. Если тайтл не заходит в данный перечень, то ему быть недосегаем для загрузки в деянья бонусного предложения. <a href=https://agro-directory.dp.ua/wr_board/tools.php?event=profile&pname=RalphGerie>https://agro-directory.dp.ua/wr_board/tools.php?event=profile&pname=RalphGerie</a> К огорчению, нет. Почти все казино, настоятельно внесение хотя бы одного малого депо для вывода выигрыша с бездепозитного приза. Также учитывайте, собственно исключить средства разрешается лишь на что, эту платежную систему, с которой был сделан депо. 1×slots зеркало сайта Следует подчеркнуть, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам либо с конкретным кодом.В реальное время получить бонус за регистрацию в казино очень просто. Почти любой игорный дом с радостью предоставит средства либо безвозмездные вращения. Многие игроки пользуются данным и не стыдятся регистрироваться в любом клубе с выгодными критериями. Кстати, это отличная вероятность выдумать выигрышную тактику и сорвать куш.
1×slots официальный зеркало
Для получения бездепа необходимо пригласить в забаву по реферальной ссылке нового клиента: он должен зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на необходимую, обозначенную в условиях промоакции. <a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=180183>1×slots casino регистрация на сайте</a> Доступ к дару возможность открываться автоматически последствии введения промокода или воззвания в службу вебсайта. В первом случае от юзера не требуется практически действий. Бездеп с активацией по коду встречается почаще всего. Игроку необходимо ввести совокупность знаков в графе, которая может находиться в регистрационной форме в Личном офисе. 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=http://m-squash.ru/index.php?subaction=userinfo&user=dampshame55>http://m-squash.ru/index.php?subaction=userinfo&user=dampshame55</a>
1×slots зеркало которую указывали при регистрации кстати
Размер бонуса. В качестве бездепов обычно начисляют маленькие суммы, а когда речь о призах за депо, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино могут презентовать игроку до 2000$.Чтобы получить возможность вывести выгода с бездепозитного приза в казино, нужно выполнить ряд критерий: <a href=http://www.mjjcn.com/mjjcnforum/space-uid-659415.html>http://www.mjjcn.com/mjjcnforum/space-uid-659415.html</a> Демоказино есть почти на каждом веб-сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются веско реже: там когда выигрыша и соблюдения условий акций бездеп возможно перевоплотить в реальные средства. 1хслотс казино зеркало Oтыгpaть приз с обозначенным вeйджepом, чтобы нужно сдeлaть cтaвoк нa cумму, превосходящую размер приза в некоторое раз.
<b>Смотреть еще похожие новости:</b>
<a href=https://nauc.info/forums/viewtopic.php?t=20474082>1хслотс рабочее зеркало на сегодня</a>
<a href=http://diplomka.jakubfiser.com/wolf/plugins/comment/image.php>1×slots скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Не стоит путать игру в демо и внедрение бонусов. В демонстрационном режиме игрок может расценить механику слота, сюжет и оформление. Но игра ведется на относительные кредиты, поэтому отсутствует основное ? ощущение пыла. Активируя промокод или фриспины, клиент и не тратит средства деньги на игровые автоматы, хотя может сорвать реальный куш! Доступность — бездепозитные бонусы в казино чаще всего предоставляются новым игрокам, хотя посещают случаи, когда бонус имеют получить и действующие клиенты.
#8763 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация в 1×slots casino
Прибывшие на акк финансы бездепозитные бонусы предназначаются, главном, лишь для новоиспеченных пользователей, которые раньше не имели личного аккаунта в данном казино. Исходя из этого, если ранее у игрока был изготовлен депозит, то, по всей вероятности, у него больше не несомненно возможности рассчитывать на получение такого бонуса в конкретном заведении.Но эти рамки не смущают числе хайроллеров, потому коэффициенты на слотах дозволяют рассчитывать на крупные выигрыши, ну некоторых автоматах разыгрывается передовой джекпот. <a href=http://filmkachat.ru/>1×slots скачать на айфон</a> Стоит обозначить(означить), что бездепозитный бонус выдается только взрослым новичкам, которые, к, шансы пригласить личных приятелей и знакомых, также претендующих на поощрительную программку преданности. Подобная технология замечена среди конкуренцию онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры содействуют увеличению собственной посещаемости, методом вербования свежих игроков. Бонусы – это оригинальный шанс для вероятных соучастников забавы, коие могут опробовать софт покер рума и увериться, станут ли они в него выступать или нет. Новый игрок испробует средства силы с настоящими оппонентами в казино. <a href=https://myportal.utt.edu.tt/ICS/_portletview_/Campus_Life/Campus_Groups/Safer/Discussion.jnz?portlet=Forums&screen=PostView&screenType=change&id=7104b34f-41c6–47b5-abe3-e4db446728a6>https://myportal.utt.edu.tt/ICS/_portletview_/Campus_Life/Campus_Groups/Safer/Discussion.jnz?portlet=Forums&screen=PostView&screenType=change&id=7104b34f-41c6–47b5-abe3-e4db446728a6</a> Получив свой презент, Вы можете бесплатно играть на реальные деньги, а выполнив обстоятельства отыгрыша, вывести собственный выигрыш. 1×slots регистрация на сайте <a href=http://maps.google.ml/url?sa=t&rct=j&url=http://sr.webmasterhome.cn/?domain=fstok.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/5oXYxvheJj6>http://maps.google.ml/url?sa=t&rct=j&url=http://sr.webmasterhome.cn/?domain=fstok.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/5oXYxvheJj6</a> Бонус за регистрацию в казино выдается лишь раз один на 1-го игрока. Но случаются вспомогательные акции, в которых бездепы раздаются для постоянных посетителей и эти подарки Вы можете получить более одного раза.Ещё одно распространённое акционное предложение – симпатичный подарок с сомнительными требованиями. К образцу, клуб обещает $100 в качестве бездепа, но с вейджером х80 либо х100. Отыграть подобный вейджер фактически невозможно и поэтому другого концентрироваться на более занимательных промоакциях.
1×slots регистрацию процедура займет всего лишь
онлайн казино 1×slots <a href=http://xn----7sbqc1ahc7afe2lrdf.com/profile.php?lookup=77451>http://xn----7sbqc1ahc7afe2lrdf.com/profile.php?lookup=77451</a> В лицензионных бездепозитных казино выступать в азартные игры действительно безопасно. Наличие лицензии одобряет тот факт, что клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP.Диапазон ставок, коие вправе устроить игрок, также лимитирован. Обычно назначать возможно маленькую сумму — около 10–30 рублей за одно вращение. зеркло казино 1×slots Чтобы играть безвозмездно на реальные средства в казино, порой довольно просто зарегистрироваться. Иногда нужно выполнить дополнительные деянья.
1хслотс рабочее зеркало
3. Подтвердить данные. В зависимости от клуба, нужно привязать телефон либо почту, указать персональную информацию; Представленные на данной странице лучшие бездеп призы в казино за регистрацию в 2022 году имеют подходящие обстоятельства. После кропотливого анализа редакция портала составила рейтинг спецпредложений, в гости Casino.ru все сортировать список по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д.Чаще всего казино приз за регистрацию без депо даёт возможность запустить любой автомат. Но какого-либо пристально ознакомиться с критериями. Иногда для игры доступны только определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, лучше начать знакомство с миром пыла именно с «одноруких злодеев». <a href=https://www.battle-scape.com/members/255807-PorsedropOn&tab=vbs-notifications>https://www.battle-scape.com/members/255807-PorsedropOn&tab=vbs-notifications</a> 1×slots официальный сайт скачать на айфон
x1 slots 1хслотс регистрация перейти на 1×slots
Каждый из бездепозитных призов без пополнения 2022 содержит собственный определенный вейджер для отыгрыша, например же в каждом казино он уточняется персонально — где то он х55 а где-то х30, повторюсь всюду по различному! 1×slots зеркало рабочее <a href=https://ugzhnkchr.ru/user/WalterIdoms/>https://ugzhnkchr.ru/user/WalterIdoms/</a> Начнём с как, собственно каждое рекламную за регистрацию подразумевает некие обстоятельства. Бездепозитные бонусы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность валютного оборота, нужная для исполнения критерий. Пример, получили безвозмездные вращения и выиграли с их 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 руб., неудачных либо выигрышных, неважно. После выполнения, бонусный баланс перейдёт на реальный и станет доступным к выводу.Призовые начисления без депо шансы предоставляться для роли в турнирах онлайн казино. Потратить перечисленные деньги можно исключительно в данной акции. Условия их проведения включают в себя лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться этим предложением, чем изучить его верховодила.
1×slot зеркало рабочее этих способов предполагает регистрацию
Приветственный бездеп предоставляется хоть игроку лишь один раз. Казино дерутся с например нарекаемыми бонусхантерами (от англ. Bonus Hunter — доброволец за призами), пытающимися заводить многочисленные аккаунты для надувательства оператора и повторного получения подарка. Исключить сходственные деяния позволяет верификация данных. Администрация вправе востребовать у клиента подтвердить персональные данные, указанные при регистрации.Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки имеют запросить вспомогательные документы либо инициировать короткое общение по Skype. Когда речь о получении бездепозитных бонусов в казино, для внимание на последующие условия:Но ни не запамятовывайте внимательно читать управляла участия в бонусных промоакциях. Если вы нарушите хотя бы одно условие, позже вы не сможете устроить недоразумение с администрацией. <a href=https://www.reikiandastrologypredictions.com/member.php?action=profile&uid=19485>https://www.reikiandastrologypredictions.com/member.php?action=profile&uid=19485</a> Вывод выигрыша с бездепозитных бонусов казино – щедрый презент от азартных клубов. Но чтобы вывести собственный заработок, нужно выполнить ряд критерий: 1×slots официальный зеркало Прежде чем активировать бездеп, нужно увериться никаких, собственно страна, уроженцем которой является игрок, не заходит в перечень разрешенных.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.forum.kalor.ru/rabochee-zerkalo-1hslots-t4774.html>рабочее зеркало 1хслотс</a>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=330848>скачать 1×slots на андроид мобильная версия</a>
<a href=https://www.lightknotes.com/MyBB/showthread.php?tid=173029>1 x slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению сего медли, Вы не можете активировать и получить бездепозитный приз. Мы делаем акцент на ключевых положениях управлял, рассказываем о территориальных ограничениях и кратко информируем о других акциях обсуждаемого казино.
#8764 Charlesgunnyhttp://filmkachat.ru
1×slot официальный сайт
Бездепозитный приз по промо-коду несомненно доступен для игры, лишь сомнений случае когда Вы активируете особый бонусный код в разделе с бонусами либо укажите промокод при регистрации на сайте. В некоторых случаях, считая активации кода, придется подтвердить контактные данные игрока и заполнить анкету клиента. <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> <a href=https://www.gencon.com/forums/18-off-topic/topics/19974-the-art-of-3d-product-rendering-from-concept-to-photorealistic-visualization>https://www.gencon.com/forums/18-off-topic/topics/19974-the-art-of-3d-product-rendering-from-concept-to-photorealistic-visualization</a> Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? 1хслотс рабочее зеркало <a href=https://lovewiki.faith/wiki/%D0%9E%D0%BD%D0%BB%D0%B0%D0%B9%D0%BD_%D0%A1%D0%BB%D0%BE%D1%82%D1%8B777>https://lovewiki.faith/wiki/%D0%9E%D0%BD%D0%BB%D0%B0%D0%B9%D0%BD_%D0%A1%D0%BB%D0%BE%D1%82%D1%8B777</a>
1×slots бонус за регистрацию
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=74084&result=reply>1×slos регистрация в 1×slots casino</a> 1×slot рабочее зеркало При помощи такого поощрения оператор возможность того завлекать посетителей, которые ранее показывали активность на сайте, хотя по какой-то основанию прекратили играть. В этом случае промокод высылается юзеру по электронной почте либо повторяющий SMS.Похожим образом трудится 3-ий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя или в связи с получения им VIP-статуса. Подарок предоставляется последствии воззвания в поддержку и проверки. <a href=http://www.fumankong5.cc/home.php?mod=space&uid=602401>http://www.fumankong5.cc/home.php?mod=space&uid=602401</a> Свежий приз начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в использовании своими, в случае отыгрыша оператор может установить ограничение на вывод денег.Бoльшинcтвo азартных заведений выдвигают приблизительно одинаковые обстоятельства и требования, коие необходимо выполнить, чтобы получить бездепозитный бонус за регистрацию. Все их можно соединить в один список: 1×slots бездепозитный бонус за регистрацию
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Вознаграждения за получение VIP-статуса ? начисляются в программки преданности при достижении одного значения либо выдаются индивидуально менеджерами службы.Таким образом, заведение пытается продемонстрировать себя своим потенциальным игрокам, а подобный маркетинговый ход как казино приз без депозита за регистрацию завлекает довольно большое внимания к игорному заведению и обеспечивает неизменный струю новых гостей и будущих клиентов игрового онлайн клуба. <a href=https://viewcinema.ru/user/Frankspomb/>https://viewcinema.ru/user/Frankspomb/</a> зеркло казино 1×slots В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с даровых вращений. Прибыль, которую Вы заработаете на таком бездепе можно назначать на вывод без какого либо отыгрыша.Диапазон ставок, которые вправе устроить игрок, того лимитирован. Обычно назначать возможно маленькую сумму — пределах 10–30 руб. За одно вращение.
1х слотс зеркало регистрация в 1×slots casino
Бездепозитный приз казино 2022 с выводом за регистрацию дает вероятность ознакомиться игроку с лобби избранного заведения, сориентироваться в выборе игр и проверить качество работы службы. Довольно нередко, начиная игровой процесс, игрок уже не желает останавливаться и проделывает настоящий вклад. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать даром вполне как один таки с призом за регистрацию без необходимости заносить депо.Свежий бонус начисляется в виде денежных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в пользовании средствами, а в случае отыгрыша оператор возможность ввести лимитирование на вывод средств. Также существуют онлайн-платформы азартных игр, которые используют раздачу бездепозитных бонусов в специальные даты (как для казино, например и для игрока). Помимо сего, действующие геймеры того имеют вероятность получить схожие бонусы за свою работа (например, за увеличения уровня или за схожие заслуги).Шаг 5. Использование и отыгрыш. Бездеп обязан быть использован в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. Бездепозитный приз за регистрацию в казино с выводом денег в 2022 году — Наш ресурс дает игрокам актуальную информацию о самых свежих, щедрых и проверенных призах в интернет казино, коие обновляются любой день. 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=https://takesalary.com/user/jaspermaido/?um_action=edit>https://takesalary.com/user/jaspermaido/?um_action=edit</a>
1× слот зеркало
Создание аккаунта. На сайте казино необходимо открыть регистрационную форму и заполнить пустые поля собственными данными. Иногда на данном этапе требуется указать лишь адресок электронной почты и пароль, но почаще бы наполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д. ). Нужно указывать только настоящие данные, что впоследствие они станут испытаны. Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? <a href=https://civilpatrol.info/?q=petition/81115/iz-chego-sostoit-dieta-eleny-malyshevoy>https://civilpatrol.info/?q=petition/81115/iz-chego-sostoit-dieta-eleny-malyshevoy</a> Обычно, бездепозитные бонусы выдаются под конкретные слоты с фиксированной ставкой, но их наверняка запрещено применять в игровых автоматах с современным джекпотом. Список игр, в возможно применять бездеп, Вы найдете в описании промоакции или сможете уточнить у службы поддержки заведения. 1хслотс официальный сайт зеркало Наличие у игрока 2 аккаунта. Запрещено делать некоторое профилей для многократного получения бездепов.
<b>Смотреть еще похожие новости:</b>
<a href=https://sadhaka.nl/forum/viewtopic.php?t=102138>1×slots регистрация 1×slots casino c2d ru</a>
<a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=7523&TITLE_SEO=7523-preobrazovatel-interfeysov-usb-rs485&MID=465973&result=reply#message465973>1×slots зеркало регистрацию более популярный вариант это</a>
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=37392>1×слот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Наши эксперты изучают условия промоакции, этого в ручном режиме проверяют их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и характеристики. Мы не рекламируем казино, а даем игрокам информацию о превосходнейших из них.
#8765 Jimmysoynchttps://ginekologdo.ru
Портал о гинекологии для женщин <a href=https://ginekologdo.ru/>https://ginekologdo.ru</a> полезная информация о здоровье, советы врачей, современные методы лечения и профилактики.
#8766 BobbyEnsuthttps://ginecologdo.ru
Гинекология в деталях <a href=https://ginecologdo.ru/>https://ginecologdo.ru</a> ответы на важные вопросы о женском здоровье, рекомендации по уходу, профилактике и лечению.
#8767 Davidkedhttps://medikasv.ru
Лечение без лишних сложностей <a href=https://medikasv.ru/>https://medikasv.ru</a> актуальные рекомендации, проверенные способы и полезные материалы для заботы о здоровье.
#8768 Ремонт мониторов в Москвеhttps://remont-monitorov-plus.ru/
Наш сервисный центр предлагает надежный <a href=https://remont-monitorov-plus.ru/>сервисный центр по ремонту монитора в москве</a> различных марок и моделей. Мы знаем, насколько значимы для вас ваши мониторы, и обеспечиваем ремонт наилучшего качества. Наши опытные мастера проводят ремонтные работы с высокой скоростью и точностью, используя только оригинальные запчасти, что обеспечивает длительную работу выполненных работ. Наиболее частые неисправности, с которыми сталкиваются владельцы мониторов, включают неисправности подсветки, проблемы с экраном, программные сбои, неработающие разъемы и механические повреждения. Для устранения этих неисправностей наши опытные мастера выполняют ремонт подсветки, матриц, ПО, разъемов и механических компонентов. Доверив ремонт нам, вы получаете долговечный и надежный мастерская по ремонту монитора на выезде. Подробная информация размещена на сайте: https://remont-monitorov-plus.ru
#8769 Ремонт телевизоров Sony Москваhttps://remont-televizorov-sony-fun.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали ремонт телевизоров sony в москве, можете посмотреть на сайте: <a href=https://remont-televizorov-sony-fun.ru/>ремонт телевизоров sony</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#8770 Ремонт мониторов в Москвеhttps://remont-monitorov-plus.ru/
Наши специалисты предлагает высококачественный <a href=https://remont-monitorov-plus.ru/>сервисный ремонт мониторов</a> любых брендов и моделей. Мы знаем, насколько важны для вас ваши мониторы, и готовы предложить сервис первоклассного уровня. Наши опытные мастера работают быстро и аккуратно, используя только качественные детали, что гарантирует длительную работу выполненных работ. Наиболее распространенные поломки, с которыми сталкиваются владельцы мониторов, включают неработающую подсветку, проблемы с экраном, программные сбои, проблемы с портами и механические повреждения. Для устранения этих неисправностей наши опытные мастера проводят ремонт подсветки, матриц, ПО, разъемов и механических компонентов. Доверив ремонт нам, вы гарантируете себе качественный и надежный сервис ремонта мониторов. Подробная информация доступна на сайте: https://remont-monitorov-plus.ru
#8771 MarkusinvIthttps://beremennydo.ru
Узнайте всё о беременности <a href=https://beremennydo.ru/>https://beremennydo.ru</a> от первых признаков до подготовки к родам. Практические советы, развитие малыша по неделям и ответы на главные вопросы будущих мам.
#8772 Jasonroafthttps://doktoronla.ru
Полезные советы от доктора <a href=https://doktoronla.ru/>https://doktoronla.ru</a> здоровье, профилактика, лечение и поддержка. Актуальная информация для всех, кто заботится о своем организме.
#8773 ArmandoRuiff
buy cytotec pills online cheap: <a href=" https://cytotec.top/ ">cytotec abortion pill</a> – Abortion pills online
#8774 Ремонт материнских платhttps://remont-materinskih-plat-info.ru/
Наши специалисты предлагает надежный <a href=https://remont-materinskih-plat-info.ru/>ремонт материнских плат с гарантией</a> различных марок и моделей. Мы осознаем, насколько важны для вас ваши мэйнборды, и стремимся предоставить услуги наилучшего качества. Наши квалифицированные специалисты работают быстро и аккуратно, используя только качественные детали, что обеспечивает надежность и долговечность проведенных ремонтов. Наиболее распространенные поломки, с которыми сталкиваются владельцы материнских плат, включают неисправности чипсета, неисправности питания, неисправности BIOS, проблемы с портами и неисправности компонентов. Для устранения этих проблем наши опытные мастера проводят ремонт чипсетов, блоков питания, ПО, разъемов и компонентов. Обращаясь в наш сервисный центр, вы получаете качественный и надежный сервис ремонта материнских плат адреса. Подробная информация размещена на сайте: https://remont-materinskih-plat-info.ru
#8775 Ремонт майнеров в Москвеhttps://remont-maynerov-geek.ru/
Наша мастерская предлагает профессиональный <a href=https://remont-maynerov-geek.ru/>починить майнер на дому</a> любых брендов и моделей. Мы осознаем, насколько значимы для вас ваши криптомайнеры, и обеспечиваем ремонт первоклассного уровня. Наши профессиональные техники проводят ремонтные работы с высокой скоростью и точностью, используя только сертифицированные компоненты, что предоставляет долговечность и надежность выполненных работ. Наиболее частые неисправности, с которыми сталкиваются владельцы майнеров, включают неисправности системы охлаждения, проблемы с блоком питания, программные сбои, проблемы с портами и поломки компонентов. Для устранения этих поломок наши профессиональные техники проводят ремонт систем охлаждения, блоков питания, ПО, разъемов и оборудования. Обращаясь в наш сервисный центр, вы получаете долговечный и надежный сервисный центр по ремонту майнеров адреса. Подробная информация представлена на нашем сайте: https://remont-maynerov-geek.ru
#8776 Empathycenter_Tubhttps://empathycenter.ru/
Всем привет! Центр Эмпатия — сеть клиник доказательной психиатрии. Более 60 врачей работают с детьми и взрослыми, применяя современные и эффективные методы лечения и диагностики. <a href=https://empathycenter.ru/articles/migren-s-auroy/>мигрень с аурой приступ</a> Если сеть клиник доказательной психиатрии с более чем 60 работающих врачей и специалистов в Москве, то это в Эмпатия Центре ментального здоровья https://empathycenter.ru/ . Выбирайте рядом с вами Эмпатия м. Университет, Эмпатия м. Электрозаводская, Эмпатия Реутов м. Новокосино. Увидимся!
#8777 Ремонт майнеровhttps://remont-maynerov-geek.ru/
Наша мастерская предлагает высококачественный <a href=https://remont-maynerov-geek.ru/>сервисный центр по ремонту майнера с гарантией</a> любых брендов и моделей. Мы понимаем, насколько значимы для вас ваши криптомайнеры, и стремимся предоставить услуги наилучшего качества. Наши опытные мастера работают быстро и аккуратно, используя только оригинальные запчасти, что гарантирует долговечность и надежность наших услуг. Наиболее распространенные поломки, с которыми сталкиваются владельцы майнеров, включают проблемы с охлаждением, неработающий блок питания, программные сбои, неработающие разъемы и поломки компонентов. Для устранения этих проблем наши профессиональные техники выполняют ремонт систем охлаждения, блоков питания, ПО, разъемов и оборудования. Обратившись к нам, вы обеспечиваете себе качественный и надежный экспресс ремонт майнеров. Подробная информация размещена на сайте: https://remont-maynerov-geek.ru
#8778 Ремонт массажных кресел в Москвеhttps://remont-massazhnyh-kresel-gold.ru/
Наши специалисты предлагает высококачественный <a href=https://remont-massazhnyh-kresel-gold.ru/>мастерская по ремонту массажного кресла на дому</a> различных марок и моделей. Мы понимаем, насколько необходимы вам ваши массажные кресла, и стремимся предоставить услуги первоклассного уровня. Наши профессиональные техники работают быстро и аккуратно, используя только качественные детали, что предоставляет длительную работу проведенных ремонтов. Наиболее частые неисправности, с которыми сталкиваются обладатели массажных устройств, включают неработающий мотор, проблемы с массажными механизмами, неисправности программного обеспечения, проблемы с подключением и повреждения корпуса. Для устранения этих поломок наши квалифицированные специалисты оказывают ремонт моторов, роликов, ПО, разъемов и механических компонентов. Обращаясь в наш сервисный центр, вы гарантируете себе надежный и долговечный починить массажное кресло в москве. Подробная информация доступна на сайте: https://remont-massazhnyh-kresel-gold.ru
#8779 DannyEvifyhttps://rgwager.com/
<a href=https://rgwager.com/>娛樂城</a> 富遊娛樂城:台灣線上賭場的創新選擇
在台灣的線上娛樂市場中,富遊娛樂城憑藉其優質的服務和多樣化的娛樂選項,迅速成為新一代玩家的首選。既有刺激的遊戲體驗,又提供了一系列具有吸引力的優惠,富遊娛樂城無疑是追求樂趣的玩家們理想的地方。
#### 優勢與特色
1. 多樣化的遊戲選擇 富遊娛樂城提供了豐富的遊戲種類,包括電子老虎機、真人百家樂、運彩投注等。不論你是老虎機的愛好者,還是熱衷於真人賭桌的玩家,這裡都能滿足你的需求。特別推薦的遊戲如DG真人百家和RSG皇家百家樂,一定能帶給你極致的遊戲體驗。
2. 吸引人的優惠活動 富遊娛樂城針對新手和老玩家都推出了多樣的優惠活動。新會員首次存款可獲得相同金額的獎金,還有額外的體驗金送出,設計友好且實惠。此外,富遊每週的簽到獎勵和天天無上限的返水活動,更是讓玩家在遊戲中能持續獲得收益。
3. 安全可靠的存取款方式 在金融交易方面,富遊娛樂城支持多種存款和提款方式,包括各大銀行轉帳、超商儲值,甚至虛擬貨幣等。最低提款金額設置靈活,保證玩家資金的安全與便捷。
4. 人性化的操作介面 富遊娛樂城的網頁與移動應用設計簡潔易用,玩家可以方便地找到所需的遊戲和優惠。無論是在電腦還是手機上,都能順利享受到遊戲的樂趣。
#### 如何開始遊戲
如果你是新手玩家,開始你的富遊體驗非常簡單。只需註冊帳號,完成首次存款,即可獲得新手優惠。無論你想嘗試電子遊戲還是真人賭局,富遊娛樂城都能讓你輕鬆上手,享受娛樂的樂趣。
#### 社會責任與防沉迷措施
富遊娛樂城深知線上賭博的風險,因此致力於推廣負責任的遊戲文化。他們提供“防沉迷”指導,以確保玩家能夠理性投注,並提供必要的幫助和資源來幫助有需求的玩家。
#### 總結
對於尋求安全、便捷和多元化娛樂城體驗的玩家,富遊娛樂城絕對是值得選擇的選項。無論你是希望徹底放鬆,還是想要體驗刺激的博弈過程,富遊娛樂城都能滿足你的期待,成為你在台灣線上娛樂市場的最佳夥伴。立即註冊並開始你的遊戲之旅吧!
#8780 Ремонт кофемашин в Москвеhttps://remont-kofemashin-top.ru/
Наши специалисты предлагает высококачественный <a href=https://remont-kofemashin-top.ru/>сервис ремонта кофемашина рядом</a> любых брендов и моделей. Мы понимаем, насколько значимы для вас ваши кофемашины, и обеспечиваем ремонт высочайшего уровня. Наши квалифицированные специалисты оперативно и тщательно выполняют работу, используя только оригинальные запчасти, что обеспечивает долговечность и надежность проведенных ремонтов. Наиболее распространенные поломки, с которыми сталкиваются владельцы кофемашин, включают неисправности нагревательных элементов, неработающий насос, неисправности программного обеспечения, неисправности разъемов и повреждения корпуса. Для устранения этих неисправностей наши опытные мастера проводят ремонт нагревательных элементов, насосов, ПО, разъемов и механических компонентов. Обращаясь в наш сервисный центр, вы получаете качественный и надежный ремонт кофемашин в москве. Подробная информация представлена на нашем сайте: https://remont-kofemashin-top.ru
#8781 ArmandoRuiff
buy cytotec: <a href=" http://cytotec.top/ ">buy cytotec over the counter</a> – cytotec abortion pill
#8782 Normanfewhttps://rg168.tw/
<a href=https://rg168.tw/>娛樂城</a> 想要享受最刺激的線上娛樂體驗?選擇RG富遊娛樂城!
在這個數位時代,尋找適合自己的線上娛樂城變得越來越重要。如果你想在線上娛樂城找到最好玩、最受歡迎的遊戲,RG富遊絕對是你的首選!我們匯聚了多款博弈遊戲,讓您盡情享受娛樂的刺激與快感。
#### 精選遊戲類型
1. 真人百家樂 感受現場賭場的氛圍!RG富遊的真人視訊百家樂讓你與真實的荷官互動,享受高品質的遊戲體驗。無論你是老手還是新手,都能在這裡找到適合自己的節奏。
2. 電子老虎機 喜愛刺激嗎?我們提供多款熱門老虎機遊戲,如「戰神賽特」「魔龍傳奇」等,每一款都擁有精美的畫面和豐厚的獎勵,讓每次旋轉都充滿期待!
3. 體育投注 無論你是球迷還是賽事愛好者,RG富遊的體育投注平台都有你想要的。精準的賠率、廣泛的賽事選擇,讓你體驗到投注的樂趣和刺激。
4. 彩票遊戲與捕魚遊戲 隨著運氣來!不妨試試我們的棋牌遊戲和彩票遊戲,這裡有各種機會讓你體驗到不一樣的勝利快感。
#### 下載富遊APP,隨時隨地享受遊戲!
富遊娛樂城的APP支持iOS和Android設備,界面簡潔易用,內容豐富。無論你身處何地,都能輕鬆進入遊戲世界,隨心所欲享受娛樂時光。此外,我們提供即時客服支援,隨時解決你的疑問,讓你的遊戲體驗更為完美。
#### 為什麼選擇RG富遊?
– 安全可靠 RG富遊致力於為玩家提供安全可靠的遊戲環境,您的每一筆交易都受到最高的安全保障。
– 快速便捷的存提款服務 我們的存款平均時間僅需30秒,提款平均只需60秒,讓你體驗即時的快感!
– 豐富多元的遊戲選擇 超過9999款遊戲任你選擇,無論你偏好哪種娛樂方式,這裡都能滿足你的需求。
– 全天候服務 我們全年365天提供不停歇的客服支持,確保你在遊戲過程中享受到最好的服務。
### 結論
RG富遊娛樂城是您最佳的線上賭場選擇。我們不僅提供多樣化的遊戲選擇,還有安全可靠的遊戲環境和便捷的服務。立即下載APP,加入RG富遊,開始您的娛樂之旅,享受無與倫比的遊戲體驗吧!
#8783 Ремонт кондиционеровhttps://remont-kondicionerov-wow.ru/
Наш сервисный центр предлагает высококачественный <a href=https://remont-kondicionerov-wow.ru/>сервисный центр по ремонту кондиционера адреса</a> любых брендов и моделей. Мы знаем, насколько необходимы вам ваши кондиционеры, и стремимся предоставить услуги высочайшего уровня. Наши квалифицированные специалисты работают быстро и аккуратно, используя только качественные детали, что обеспечивает длительную работу наших услуг. Наиболее частые неисправности, с которыми сталкиваются пользователи сплит-систем, включают недостаток хладагента, неработающий вентилятор, программные сбои, неисправности датчиков и механические повреждения. Для устранения этих проблем наши профессиональные техники оказывают ремонт компрессоров, вентиляторов, ПО, датчиков и механических компонентов. Доверив ремонт нам, вы гарантируете себе надежный и долговечный сервис ремонта кондиционеров с гарантией. Подробная информация представлена на нашем сайте: https://remont-kondicionerov-wow.ru
#8784 Briandeecthttps://leotw.com/
<a href=https://leotw.com/>LEO娛樂城</a>
LEO娛樂城:九州娛樂集團的卓越創舉與運營優勢 九州娛樂集團總部的現代化運營 九州娛樂集團的總部設於菲律賓首都馬尼拉市中心最具代表性的現代化建築「RCBC Plaza」。這座辦公大樓融合了全球領先的建築科技與安全系統,包括:
國家級資訊防護系統,確保數據安全。 樓宇自動化系統 (BAS),實現數位化管理與高效運營,包括防火系統、光纖電訊和數位監控。 九州娛樂為員工提供舒適的工作環境和專業的教育培訓,確保服務水準一流。其員工以專業知識和親切態度,為尊貴玩家帶來極致的遊戲體驗。
LEO娛樂旗下品牌與遊戲特色 九州娛樂城旗下分支包括 LEO、THA 和 KU 三個娛樂品牌。雖然品牌各自獨立運營,但都共享相同的遊戲系統與界面,提供超過數千款來自全球頂級供應商的遊戲。
這些品牌的核心特色包括:
種類繁多的遊戲:滿足不同類型玩家的需求,包括電子遊戲、體育博彩、真人娛樂等。 不斷更新的內容:通過九州獨家技術,網站內容保持新鮮,合作商可快速更新遊戲資源,確保平台競爭力。 玩家在這些平台上可以隨時找到適合自己的遊戲,享受沉浸式的娛樂體驗。
LEO娛樂城的歷史與發展 九州娛樂集團的起源可以追溯至其最早期的經營模式:「信用版」賭博平台 《天下體育球版》。儘管該模式在當時非常流行,但因高風險與財務處理複雜而逐漸被淘汰。
隨著市場需求的變化,九州娛樂轉型為現金版平台 《天下現金網》,引入了更安全、便捷的遊戲模式。這種轉變不僅提升了玩家的體驗,也使平台得以進一步發展。
如今,九州娛樂城已成為台灣博弈業界的領軍者,不僅優化了網站版面與功能,還推出了專屬手機APP,方便玩家隨時隨地進行遊戲體驗。
LEO娛樂的成功秘訣 現代化運營與技術支持:九州娛樂在系統安全與技術更新方面投入巨大資源,確保平台運營穩定可靠。 多元化遊戲體驗:通過與全球頂級遊戲供應商合作,平台提供了豐富的遊戲選擇,適應各種玩家需求。 用戶至上:專業培訓的員工以細心和熱忱態度,提供高品質服務,讓玩家倍感尊重。 不斷創新:從信用版到現金版,再到手機APP,九州娛樂始終緊跟市場趨勢,致力於打造最佳娛樂體驗。 結語 LEO娛樂城作為九州娛樂集團旗下的重要品牌,不僅繼承了集團的核心價值,更在遊戲選擇、服務品質和技術創新方面不斷提升。從最初的《天下體育球版》到如今的行業領先者,LEO娛樂見證了九州娛樂城的發展歷程,也成為博弈行業中的耀眼明星。
加入 LEO娛樂城,感受來自九州娛樂集團的專業與熱情,享受最頂級的線上博弈體驗!
#8785 BryanMeplyhttps://kubct.com/cant-login/
Leo娛樂城無法登入?全面解析與解決指南 近期,Leo娛樂城的玩家紛紛反映登入失敗的情況,引發了廣泛的討論與擔憂。作為九州娛樂城旗下知名品牌之一,Leo娛樂城在台灣的娛樂市場中擁有大量用戶。然而,隨著九州娛樂城宣布將於2024年12月31日退出台灣市場,這一消息無疑讓玩家對資金安全與遊戲體驗產生了極大疑慮。
本文將深入探討Leo娛樂城無法登入的原因,提供解決方案,並推薦可靠的替代娛樂平台。
Leo娛樂城無法登入的三大原因 1. 帳號密碼問題 可能情況:最常見的原因是玩家輸入了錯誤的帳號或密碼,或者帳號被盜用。 解決方法:確認輸入的帳密正確,若仍無法登入,聯繫客服即可解決。 2. 網頁技術問題 可能情況:官網可能因伺服器維護或技術故障出現404錯誤,導致玩家無法登入。 解決方法:耐心等待官網修復,並清除瀏覽器快取和Cookie,或嘗試使用其他瀏覽器。 3. 九州娛樂城退出台灣市場 可能情況:隨著九州娛樂城宣布退出台灣市場,Leo娛樂城的營運也逐步停止,導致玩家無法再使用該平台。 影響:玩家可能面臨資金提取困難,需及時完成出金操作以保障自身利益。 娛樂城無法登入的緊急解決方案 核對帳號與密碼:確認輸入正確無誤,避免由於簡單疏忽造成的登入失敗。 檢查網路連線:確保網路穩定,必要時切換至更穩定的網路環境。 清除瀏覽器快取與Cookie:解決瀏覽器相關問題,恢復正常登入。 嘗試其他瀏覽器或設備:更換設備或使用不同瀏覽器,查看是否可以正常登入。 九州娛樂城退出台灣市場的原因 市場利潤有限:九州娛樂城認為台灣市場的競爭激烈且利潤有限,因此選擇退出並專注於其他海外市場。 資金生態鏈斷裂:現金交易平台出現問題,導致九州娛樂城難以維持正常運營。 母公司法律爭議:九州娛樂城母公司近年來因財務與法律問題受到高度關注,進一步影響旗下品牌的營運。 Leo娛樂城會員如何安全出金? 在九州娛樂城停止營運前,玩家需要立即完成出金操作以確保資金安全。 出金建議:
儘快登入官網提交提款申請,確保資金安全轉出。 若官網無法訪問,請嘗試聯繫客服,並保留交易證明以備進一步處理。 推薦替代平台:富遊娛樂城 隨著Leo娛樂城的退出,玩家可以考慮轉至穩定且值得信賴的替代平台,如富遊娛樂城。
富遊娛樂城的優勢 穩定可靠:擁有先進的技術和完善的資金保障機制,確保玩家的資金安全。 豐富的遊戲選擇:從電子遊戲到真人娛樂,滿足各類玩家的需求。 專屬優惠:特別為Leo會員推出等級升等計畫,並提供多樣化的專屬活動。 快速出金:高效的財務系統,讓玩家的存取款過程快速無憂。 Leo會員轉移至富遊的流程 登錄富遊官網完成註冊。 提供Leo娛樂城會員等級截圖與相關資料(如戶名、手機號碼)給富遊客服進行審核。 等待客服確認後,享受富遊娛樂城專屬的會員福利與優惠。 結語:立即加入富遊娛樂城,延續遊戲體驗! Leo娛樂城的退出讓許多玩家感到困惑與擔憂,但選擇穩定、安全的娛樂平台是最明智的應對之道。富遊娛樂城憑藉其卓越的技術、專業的服務以及豐富的優惠,成為玩家的理想替代選擇。現在就註冊富遊娛樂城,享受無與倫比的遊戲體驗吧!
#8786 Matthewdoghttps://rg8888.org/
富遊娛樂城:全台灣第一推薦的娛樂城體驗 富遊娛樂城是全台灣最受玩家推崇的娛樂平台,提供多種優惠、豐富的遊戲選擇以及高品質的服務,讓每位玩家都能享受極致的遊戲樂趣。無論您是新手還是資深玩家,富遊娛樂城都能滿足您的需求,帶給您刺激的遊戲體驗。
富遊娛樂城的優惠活動 1. 免費娛樂城體驗金 新玩家只需註冊即可免費領取 $168 元的體驗金,無需存款,便可立即體驗各種遊戲,感受遊戲帶來的樂趣。
2. 首次存款優惠 首次存款 $1000 元,即送 $1000 元遊戲金,讓您在遊戲中有更多機會獲勝,增添刺激感。
3. 新會員五選一好禮 新加入的會員可選擇五種專屬好禮之一,從遊戲金到實體獎品,讓您的遊戲旅程更加多彩。
熱門遊戲種類 富遊娛樂城提供多樣化的遊戲選擇,適合不同喜好的玩家:
電子老虎機:多款創新遊戲,讓玩家享受豐厚獎金機會。 百家樂:與真人荷官互動,體驗真實賭場的刺激感。 今彩539 和 運彩:滿足彩票愛好者的需求。 捕魚遊戲:RSG電子捕魚遊戲帶來娛樂與獎金的雙重樂趣。 熊貓體育:專為體育迷設計的多種運動投注選項。 優質服務保證 1. 出金快速、安全可靠 富遊娛樂城採用先進的財務處理系統,保證快速存提款,讓玩家不用擔心資金安全問題。
2. 技術先進的APP平台 流暢的畫面設計與設備兼容性,讓用戶輕鬆上手。 持續升級與更新,提供更多創新遊戲類型。 3. 24小時專業客服 專業客服隨時待命,為玩家解答所有遊戲相關問題,確保您在任何時間都能享受到無縫的服務體驗。
4. 安全防護到位 採用最嚴格的安全管理系統與數據加密技術,保障用戶資金與個人信息的安全。
富遊娛樂城APP:隨時隨地盡享遊戲 富遊娛樂城APP提供了便捷的遊戲途徑,支援 IOS 與 Android 設備。
簡潔易用的界面設計,讓玩家快速找到喜愛的遊戲。 即時客服支援,隨時解決您的疑問。 免費下載,無論何時何地,您都能盡享娛樂城的精彩遊戲體驗。 為什麼選擇富遊娛樂城? 優惠豐富:免費體驗金、首存優惠、新會員好禮,活動多樣。 遊戲種類齊全:從電子遊戲到真人百家樂,滿足各類玩家需求。 服務至上:專業客服、快速出金和高安全保障讓玩家安心享受遊戲。 便捷平台:富遊APP提供隨時隨地的遊戲樂趣,讓您不受限制。 立即下載 富遊娛樂城APP,體驗全台灣第一娛樂城的無限魅力!不論您是想享受遊戲樂趣還是贏取豐厚獎金,富遊娛樂城都將是您的最佳選擇!
#8787 Bryanhofhttps://rg88.org/
RG富遊娛樂城:台灣線上娛樂城的最佳選擇 RG富遊娛樂城以其卓越的服務和多樣化的遊戲選擇,成為2024年最受歡迎的線上娛樂平台。受到超過50位網紅和部落客的實測推薦,這座娛樂城不僅提供豐富的遊戲,還帶來眾多優惠活動和誠信保證,贏得了廣大玩家的信任與青睞。
RG富遊娛樂城的獨特優勢 多重優惠活動 體驗金 $168:新手玩家可以免費試玩,無需任何成本即可體驗高品質遊戲。 首儲1000送1000:首次存款即可獲得雙倍金額,增加遊戲的樂趣與機會。 線上簽到轉盤:每日簽到即可參加抽獎,贏取現金獎勵和豐厚禮品。 快速存提款與資金保障 RG富遊採用自主研發的財務系統,確保5秒快速存款,滿足玩家即時遊戲需求。 100%保證出金,杜絕任何拖延或資金安全風險,讓玩家完全放心。 遊戲種類豐富 RG富遊娛樂城涵蓋多種遊戲類型,滿足不同玩家的需求,包括:
真人百家樂:與真人荷官互動,感受真實賭場的刺激氛圍。 電子老虎機:超過數百款創新遊戲,玩法新穎,回報豐厚。 電子捕魚:趣味性強,結合策略與娛樂,深受玩家喜愛。 電子棋牌:提供公平競技環境,適合策略型玩家。 體育投注:涵蓋全球賽事,賠率即時更新,為體育愛好者提供最佳選擇。 樂透彩票:參與多地彩票,挑戰巨額獎金。 跨平台兼容性 RG富遊支持Web端、H5、iOS和Android設備,玩家可隨時隨地登錄遊戲,享受無縫體驗。
與其他娛樂城的不同之處 RG富遊以現金版模式運營,確保交易透明和安全性。相比一般娛樂城,RG富遊在存提款速度上遙遙領先,玩家可在短短15秒內完成交易,並且100%保證資金提領。而在線客服全年無休,隨時提供支持,讓玩家在任何時間都能解決問題。
相比之下,一般娛樂城多以信用版模式運營,存在出金風險,且存提款速度較慢,客服服務不穩定,無法與RG富遊的專業性相比。
為什麼選擇RG富遊娛樂城 資金交易安全無憂:採用最先進的SSL加密技術,確保每筆交易的安全性。 遊戲種類全面豐富:每日更新多樣化遊戲,帶來新鮮感和無限可能。 優惠活動力度大:從體驗金到豐厚的首儲獎勵,玩家每一步都能享受優惠。 快速存提款服務:自主研發技術保障流暢交易,遊戲不中斷。 全天候專業客服:24/7在線支持,及時解決玩家需求。 立即加入RG富遊娛樂城 RG富遊娛樂城不僅提供豐富的遊戲體驗,更以專業的服務、完善的安全保障和多樣的優惠活動,為玩家打造一個值得信賴的娛樂環境。立即註冊,體驗台灣最受歡迎的線上娛樂城!
#8788 BrandonHefhttps://rg8888.org/leo-logfail/
LEO娛樂城無法登入? 九州娛樂倒了? 富遊推出無痛轉移VIP優惠 LEO娛樂城無法登入免驚!推薦RG富遊更穩定、玩的更安心! 只要是玩過線上娛樂城的玩家,一定都對Leo娛樂城不陌生,近期Leo娛樂城無法登入的狀況越來越頻繁,是因為九州娛樂城與旗下品牌將在 2024/12/31 結束營業!
由於九州娛樂城旗下擁有leo娛樂城、THA娛樂城等品牌,這波風暴也讓許多玩家人心惶惶,擔心自己的遊戲權益受損,在文章的最後我們也提供了解決方案,趕快往下看!
九州娛樂城倒閉 ? 退出台灣娛樂市場?為何 ? 最近許多玩家發現 leo娛樂城無法登入,甚至傳出九州娛樂城要退出台灣的消息!雖然官方尚未發布正式聲明,但多方消息指出,九州娛樂城 (包含THA娛樂城、leo娛樂城) 正在逐步退出台灣市場。這可能是多重因素共同作用的結果:
退出台灣市場,尋求其他發展空間 九州娛樂認為台灣市場太小,品牌之間又過於競爭,市場規模有限,九州旗下其KU體育甚至贊助過足球五大聯賽,展現雄厚實力,促使九州娛樂城將目光投向海外。
畢竟,海外市場人口基數更大,獲利潛力也更為可觀。LEO娛樂城在台灣一個月就能獲利一億,進軍海外後的收益想必更加驚人。
金流問題、警界醜聞成導火線 LEO娛樂城高度仰賴金流公司運作,近期爆發的陳政谷案件揭露其旗下公司利用第三方支付協助母公司九州洗錢。
案情更指向警界內鬼,前台中刑大隊長林明佐涉嫌收賄超過4451萬元,為九州通風報信。 九州娛樂城曾出現凌晨時段無法儲值的狀況,很可能與警方查緝行動有關。
九州娛樂的新聞事件頻傳 LEO是九州集團底下的,陳政谷被抓之後,事情鬧得很大,為了避風頭,乾脆退出台灣也很合理。
這個說法也被推算也被網友認為有高度可能,不過也有人傳說其他幹部有接手的可能,至少沒辦法完全的說死九州會採取什麼行動。
leo娛樂城無法登入的問題,或許只是冰山一角,背後可能隱藏著更深層的原因。無論如何,九州娛樂城退出台灣市場,對玩家來說都是一個警訊。
九州娛樂城宣布12/31結束營業!玩家請停止儲值、立刻提款 九州娛樂城官方宣佈,近期旗下 THA、Leo 娛樂城無法登入,是因為九州集團將正式在 2024/12/31 中午 12:00 結束營業,退出台灣市場。
在這邊提醒玩家們立即停止存款動作,並且馬上將帳戶內的資金提領出來,避免您的權益受到損害!
LEO娛樂城無法登入? 九州娛樂倒了? 富遊推出無痛轉移VIP優惠 九州娛樂城宣布在12/31結束營業 告別Leo娛樂城無法登入煩惱!玩家無痛轉移至富遊,享更多優惠! 面對leo娛樂城無法登入的窘境,以及九州娛樂城的不確定性,玩家們需要一個安全可靠的新選擇!富遊娛樂城是您最佳的選擇,我們提供:
穩定安全保證出金: 穩定安全,保證出金! 擁有合法牌照和完善的監管機制,保障您的資金安全。 豐富多元的遊戲: 提供各式各樣的熱門遊戲,包括真人 casino、體育博彩、電子遊戲、彩票等等,滿足玩家的不同需求。 優渥的優惠活動: 新會員享有豐厚首存紅利,還有不定期的優惠活動和返水獎勵,讓您玩得更盡興! 24小時專業客服: 隨時為您解答問題,提供貼心服務。 立即註冊 特別優惠: 針對THA和LEO會員,富遊娛樂城推出獨家福利! 只要您是THA或LEO的會員,即可在富遊娛樂城直接升等到相對應的等級,並享有更高的反水、每週紅包和生日禮金!
立即加入富遊娛樂城,享受更優渥的回饋和更安心的保障!
以下是不同階級 VIP 的轉換福利與說明: 福利項目 / VIP階級 大神 金鑽 鉑金 黃金 每週紅包 2388 988 288 188 生日禮金 8888 3888 1080 688 返水 0.7 0.6 0.5 0.4 無論個人或團體,如有任何濫用本公司優惠的行為,本公司有權取消及收回獎金。 所有活動優惠都是特別為玩家而設立,在玩家註冊資訊有爭議時,為確保雙方利益,杜絕身份盜用行為,本公司有權要求玩家提供充足資訊,並以各種方式辨別玩家是否符合資格享有活動優惠。 本公司在會員有重複申請帳號行為時,有權取消及收回獎金。每位玩家、每一住址、每一電子郵箱、每一電話號碼、相同支付卡/信用卡號碼及共享電腦環境(例如網咖、其他公用網絡、公用電腦)只能擁有一個活動優惠資格。 每週限時紅包:會員在上週有過至少1次的存款記錄,每週一中午自動發放(1倍流水即可託售),限時48小時內領取! 每週至少存款要求:黃金富遊 1,000 點,鉑金富遊 1,500點,金鑽富遊 2,500點,大神富遊 5,000點 (存款計算週期:每週一 12:00 至下週一 11:59) 生日禮金:會員在註冊三個月內過生日,今年將不能領取生日禮金。另註冊時間大於三個月的會員需在生日當月找遊戲客服領取,每年可領取一次,需提供身分證明文件核實(1倍流水即可託售) 活動如有任何異動,本公司有權在任何時間修改、暫停或取消優惠活動,無需特別通知並保留本活動最終解釋權。 轉換平台申請辦法:提供螢幕錄影原平台層級介面到戶名、手機等資訊,傳送給富遊客服進行審核。
富遊娛樂城,值得您信賴的線上娛樂平台!
我們深知玩家選擇娛樂城的首要考量是安全和信譽。富遊娛樂城以誠信為本,致力於為玩家打造一個公平、公正、透明的遊戲環境。告別leo娛樂城無法登入的煩惱,立即加入富有娛樂城,體驗最優質的線上娛樂體驗!
#8789 Robertdaphttps://tvokonsultant.ru
Сервис помощи в юридических <a href=https://tvokonsultant.ru/>https://tvokonsultant.ru</a> вопросах предлагает доступ к экспертам, актуальной информации о законах и удобные решения для правовых задач.
#8790 StephenKixhttps://legalyes.ru
Помощь в юридических вопросах <a href=https://legalyes.ru/>https://legalyes.ru</a> это оперативные ответы, практические рекомендации и поддержка в сложных юридических ситуациях.
#8791 Ремонт компьютеров в Москвеhttps://remont-kompyuterov-vip.ru/
Наша мастерская предлагает надежный <a href=https://remont-kompyuterov-vip.ru/>вызвать мастера по ремонту компьютеров в москве</a> всех типов и брендов. Мы знаем, насколько важны для вас ваши персональные компьютеры, и готовы предложить сервис высочайшего уровня. Наши профессиональные техники работают быстро и аккуратно, используя только оригинальные запчасти, что предоставляет долговечность и надежность выполненных работ. Наиболее частые неисправности, с которыми сталкиваются пользователи ПК, включают поломку жесткого диска, неисправности видеокарты, ошибки ПО, неработающие разъемы и проблемы с охлаждением. Для устранения этих проблем наши квалифицированные специалисты проводят ремонт жестких дисков, видеокарт, ПО, разъемов и систем охлаждения. Доверив ремонт нам, вы обеспечиваете себе качественный и надежный центр ремонта компьютеров в москве. Подробная информация размещена на сайте: https://remont-kompyuterov-vip.ru
#8792 Duanevalhttps://pravoyes.ru
Портал права граждан России <a href=https://pravoyes.ru/>https://pravoyes.ru</a> предлагает доступные разъяснения законов, советы по защите прав и юридическую информацию для каждого.
#8793 Ремонт квадрокоптеров в Москвеhttps://remont-kvadrokopterov-best.ru/
Наши специалисты предлагает надежный <a href=https://remont-kvadrokopterov-best.ru/>починить квадрокоптер адреса</a> любых брендов и моделей. Мы осознаем, насколько значимы для вас ваши кухонные приборы, и готовы предложить сервис наилучшего качества. Наши квалифицированные специалисты проводят ремонтные работы с высокой скоростью и точностью, используя только сертифицированные компоненты, что гарантирует долговечность и надежность наших услуг. Наиболее распространенные поломки, с которыми сталкиваются обладатели кухонных приборов, включают неисправности термостата, выход из строя таймера, поломку дверцы, проблемы с контроллером, ошибки вентиляционной системы и неисправные платы. Для устранения этих поломок наши квалифицированные специалисты проводят ремонт нагревательных элементов, термостатов, таймеров, дверец, контроллеров, вентиляторов и электроники. Доверив ремонт нам, вы гарантируете себе качественный и надежный ремонт квадрокоптеров. Подробная информация размещена на сайте: https://remont-kvadrokopterov-best.ru
#8794 Richardmum
меф цена <a href=https://kg-group.kg/>купить мефедрон ровеньки луганск</a>
#8795 ScottAbarf
купить насвай в новосибирске <a href=https://silverrain.uz/>куплю меф мяу мяу</a>
#8796 Charlesgunnyhttp://filmkachat.ru
1×slos регистрация в 1×slots casino
У любого игорного клубы разные вейджеровые обстоятельства. Чтобы вы гарантировано смогли выполнить их, мы дадим количество советов. Если система начислила маленькую сумму, не создавать большие ставки – остановитесь на 10–30 центах. Как только сумеете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте выступать. В противном случае никакого присмотреться к иному автомату.В лицензионных бездепозитных казино выступать в азартные забавы действительно безопасно. Наличие лицензии подтверждает тот факт, собственно клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP. <a href=http://filmkachat.ru/>1× slots официальный</a> Необходимость отыгрыша. Вейджер в повыше, чем для бонусов за депо. И же свои не отыграны, вывести их нельзя. <a href=https://onetable.world/read-blog/89545>https://onetable.world/read-blog/89545</a> Все обожают получать подарки. Согласитесь, практически каждый играющий человек несомненно беспредельно рад, в получит даровой презент для забавы в интернет казино просто за регистрацию или же бонус за внесенный депо, так называемые приветственные призы для свежих игроков. Соответственно эти интернет клубы будут больше популярны и предпочтительны у игроков при выборе казино для забавы. Топ казино каждый обновляется и прибавляются свежие и интересные игровые клубы с привлекательной бонусной политикой и всеми возможными прерогативами, к коим относятся такие бонусы как фриспины за регистрацию, денежные бездепозитные бонусы, а также великодушные призы за внесенный депо.Зачастую бездепозитные бонусы казино для игры предлагаются различными заведениями азартных игр в качестве рекламных акций либо в целях вербования к себе свежих игроков. Для бездепозитных призов в казино 2022 геймеру не пополнять счет до этапа вывода желаемых средств. 1×slot казино зеркало <a href=http://www.toppr.net/home.php?mod=space&uid=215808>http://www.toppr.net/home.php?mod=space&uid=215808</a> Как верховодило, новоприбывшие геймеры начала хотят ознакомиться с методами ввода и вывода валютных средств и сроки выполнения поданных заявок дабы четко осознавать, как скоро возможность исключить собственный казино приз за регистрацию без депо на электрический кошелек или же банковскую карту. К счастью для всех играющих, внутри определенных холдингов, все казино соперничают меж собой. Ведь случае бы определенную компанию давало лишь одно онлайн-заведение, то ли бы посетители заметили казино с бонусом за регистрацию и возможность бы рассчитывать лишь на вознаграждение повторяющий приза на 1-ое вложение. К любому заведению регулярно стопам завлекать свежих игроков, собственно, конечном, только на руку всем играющим.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 долларов. Если выдаются фриспины, их число изредка выше нескольких десятков даровых вращений.
1×slots быструю регистрацию а также мгновенное
Какие призы у еще получить кроме бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, каждое интернет казино предлагает игрокам выгодное предложение на 1-ый депо, вы совершаете депо, ваш депо увеличивается в двое либо в в 3, тем самым начать выступать возможно с более крупной суммой, так же не забываем тему вейджер на бонусы. 1×slot официальный сайт Допустим, за регистрацию вы возымели бездеп в размере 2 000 руб. С вейджером х30. В этом случае предстоит устроить ставок, на совместную сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать настоящие деньги. Однако не запамятовывайте, собственно с каждого дара получится вывести определённую сумму (почаще всего не более $200). <a href=https://www.cowsunite.org/author/charleswaw/>https://www.cowsunite.org/author/charleswaw/</a> Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам воспрещено начислять бонусы клиентам, не имеющим валютных средств на счете. Мы предлагаем осмотреть животрепещущие бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ.При регистрации в том либо ином интернет игральном заведении — вам дается раз шанс испытать свою фортуну не внося средства монеты. Замечу собственно эту поощрительную предложение деют не все онлайн игровые площадки, а лишь щедрая середина(средина) из их. Которые мы подготовили для Вас в нашем списке. 1хслотс зеркало на сегодня Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.Чтобы бездеп не был начислен на Ваш акк, Вам не нужно активировать бонусный код. Если одобрение от казино было добавлено на Ваш аккаунт автоматически, а Вы не планируете его использовать, обратитесь в службу поддержки с пожеланием отменить бездепозитный приз.
1х слотс зеркало регистрация в 1×slots casino
Можно ли в одном онлайн казино получить больше одного бонуса за регистрацию? Нет, так как в любом интернет казино есть правила, к которым нужно придерживаться, не творить два аккаута для получения бонусов, иначе несомненно блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, бонус за регистрацию выдаеться один раз одному личику.Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=https://www.jutianwang.cn/home.php?mod=space&uid=3447&do=profile&from=space>https://www.jutianwang.cn/home.php?mod=space&uid=3447&do=profile&from=space</a> Простая процедура получения бездепозитного бонуса, которая займет не более 2-х минут. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные. 1×slot регистрация Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.
1×slots регистрация 1×slotscasino 56 online
Несмотря на то, что этот вариант стимуляции со стороны азартных платформ очень известен в похожих игр, далеко не почитателям казино известно, собственно являют собой бездепозитные призы казино и как именно их вполне эксплуатировать.Ограничения по забавам. Администрация запрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, средствами или бесплатными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда разделенье выполняется по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, хотя запрещен в настольных играх и в разделе Live Casino. В интернет-сети всегда возможно отыскать списки наиболее знаменитых и обещанных поощрительных программ от модных онлайн-казино.Чтобы бездеп не был начислен на Ваш аккаунт, Вам не активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт автоматически, а Вы не планируете его применять, обратитесь в службу с пожеланием отменить бездепозитный бонус. Раздача бонусов может быть посвящена различным датам: календарные праздники, деньки рождения игроков, годовщина открытия казино и т. Д. Подарок выдается вид денег, фриспинов либо баллов для накопления и обмена на предложения оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода этой суммы понадобиться выполнить ряд притязаний. 1×slots регистрация то дальше необходимо пройти <a href=http://vangogh-club.ru/index.php?subaction=userinfo&user=glamorousquilt2>http://vangogh-club.ru/index.php?subaction=userinfo&user=glamorousquilt2</a> Благодаря программе лояльности от игорного заведения, можно арестовать превосходный старт и без добавочных инвестициям запустить видеослоты. Кроме того, можно рассчитывать на реальную удачу и получить, без вложения личных финансов, немалый выигрыш.
1 х слотс зеркало
На страничке представлены бездепозитные бонусы за регистрацию в казино редкая награда за которой гонятся все игроки как новенькие, например и профессионалы. Мы также уделяем большое внимание на присутствие призов при формирование рейтинга казино на средства. Бездепозитный приз это возможность выступать бесплатно и выиграть реальные деньги. <a href=http://camillacastro.us/forums/viewtopic.php?pid=515592#p515592>http://camillacastro.us/forums/viewtopic.php?pid=515592#p515592</a> Помните, собственно в неких играх сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных играх только от 5% до 50% суммы ставки числятся как отыгранные средства, на как в слотах идет в зачет все 100% суммы. 1×slots официальный сайт зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://portal.westcoastbible.org/discussion/viewtopic.php?f=4&t=1931586>1×slots официальный зеркало</a>
<a href=https://forum.vn.ua/showthread.php?p=3272100#post3272100>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Помимо прочего, для вывода средств по бездепу необходимо привнести на счёт свой 1-ый депо — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально вероятную необходимую, в чего вывод средств станет доступен.
#8797 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
Как только получите бездеп в казино, всё также не запамятовывайте проверять электрическую почту. Некоторые игорные клубы день радуют интенсивных гэмблеров приятными призами. Чаще всего получить подарок возможно в преддверии веселья, на денек рождение, за вербование друга. А кроме распространённым бонусом считается надбавка к депозиту. Нужно не восполнить счёт, и азартное заведение прирастит его на 50–100%.Законодательство, регулирующее азартные забавы в разных государствах, оказывает на возможности операторов. В результате юзеры из отдельных регионов сталкиваются с лимитированиями со стороны казино. Это возможность быть как глубокий отказ в доступе, например и невозможность загружать забавы отдельных изготовителей. <a href=http://filmkachat.ru/>скачать 1×slots официальный сайт</a> Такой казино приз без депо за регистрацию выдается игроку на час и энергично используется данное предложение с 2017 года. Это словно некая маскировка поощрения под бездепозитный. Суть всего сего сводится к что, этому, собственно игроку на час выдается, например, 1000 долларов, а реклама твердит то, собственно каждой выигрыш можно несомненно в будущем оставить при себя. Но если играющий серьезно отнесется к данному предложению, то он просто растеряет время. Ведь игроку нужно будет играть не главном аккаунте, а в тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (в всей тысячи) в правила вступят конкретные обстоятельства, где несомненно сказано, что максимальной суммой победы имеет быть лишь двести долларов и деньги можно применять лишь в приза на первый вклад с вейджером 25 от суммы вознаграждения плюс сам депозит. По итогу выйдет, собственно игрок выигрывал себя 200% приз с вейджером на определенную необходимую. Короче разговаривая, это все надо вашего времени.Так собственно главное различие презента на депо от бездепа – обязательное пополнение счёта. Вы можете привнести депо и преувеличить стартовый капитал или отобрать бездеп и при не придётся рисковать собственными сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начисляет щедрое одобрение! <a href=https://www.keepandshare.com/doc27/114861/exploring-the-power-of-architectural-3d-rendering-in-modern-design-pdf-631k?dn=y&dnad=y>https://www.keepandshare.com/doc27/114861/exploring-the-power-of-architectural-3d-rendering-in-modern-design-pdf-631k?dn=y&dnad=y</a> Для проверки используются сканы паспортов, водительских водительских, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если юзер обнаружен в попытке ввести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их обладатель попадает в темный список. При игре на лицензионной площадке не стоит опасаться указывать достоверную персональную информацию (шифрование исключает утечку индивидуальных данных). 1х слот регистрация в 1×slots casino <a href=http://nfb3806w.bget.ru/user/Waltersom/>http://nfb3806w.bget.ru/user/Waltersom/</a> Бонус в казино без депо содержит разные вариации: может быть приветственный приз, промоакции в честь каких-либо праздничных либо важных дат, приз за привлечение новых игроков, лояльность и получение VIP-статуса.Помните, собственно всевозможные нарушения управлял сведут на нет ваши усилия, и вы наверняка останетесь без начисленного вам дарового бонуса. Всегда изучайте верховодила начисления и обстоятельства вейджера. По любым вопросам, на которые вы не других отыскать ответы, обращайтесь за разъяснениям и саппорт.
1хслотс официальный сайт зеркало
Как верховодило, новоприбывшие геймеры для хотят ознакомиться с способами ввода и вывода валютных средств и сроки исполнения поданных заказов дабы четко понимать, как живо появится исключить собственный казино приз за регистрацию без депозита на электронный кошелек или же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино соперничают между собой. Ведь в бы конкретную компанию представляло лишь одно онлайн-заведение, то вряд ли бы посетители увидели казино с призом за регистрацию и могли бы рассчитывать только на вознаграждение повторяющий бонуса на первое инвестиция. К каждому заведению регулярно по завлекать новых игроков, что, в итоге, лишь на руку всем играющим. 1×slots регистрация 1×slots casino 777 online <a href=http://unix.t7y.ru/user/JustinMug>http://unix.t7y.ru/user/JustinMug</a> 1×slots бонус за регистрацию
1×slots casino регистрация 1×slotscasin online
Но никогда не запамятовывайте пристально разбирать правила участия в бонусных акциях. Если вы нарушите хотя бы одно условие, позднее вы не сможете устроить недоразумение с администрацией.Бездепозитный бонус за регистрацию в казино — это стартовый презент в виде денежного начисления или даровых вращений для свежих игроков заведения, для получения которого надо вносить депозит. <a href=http://naszaswietlica.dwr.pl/profile.php?lookup=16838>http://naszaswietlica.dwr.pl/profile.php?lookup=16838</a> 1× slots casino зеркало Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депо возможность выделяться до 30 дней.В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это самая приятная часть игры. Важно, зачастую бездепозитные призы в казино выдаются с ограничениями по максимальной выплате. В среднем возможно рассчитывать на прибыль в некоторое тыщ рублей. Как исключить выигрыш с бонуса без депо. Придётся доказать аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате либо прочитайте в правилах.
1хслотс рабочее зеркало на сегодня
Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают приз по государствам. Вплоть до такого, собственно клуб возможность принимать игроков из Вашей государства, а бездеп мешает.Размер ставки для игры по бездепозитному призу (конечно же, когда, когда он представлен повторяющий бонусных валютных средств) зачастую ниже, чем при игре на депозит. Ограничение несомненно действовать до момента отыгрыша бонуса. <a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=133554&pid=322285#pid322285>1×slots официальный сайт зеркало рабочее</a> 1×slots зеркало регистрация <a href=https://cse.google.co.bw/url?q=https://doctorlazuta.by/>https://cse.google.co.bw/url?q=https://doctorlazuta.by/</a>
1×slots casino online регистрация
Ниже указан актуальный перечень законных казино в Беларуси с бонусами на 1-ый депозит. Вы сможете попасть на официальный вебсайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. Таким образом, заведение пробует показать себя своим потенциальным игрокам, а подобный маркетинговый ход как казино приз без депо за регистрацию привлекает довольно много внимания к игорному заведению и обеспечивает постоянный поток новых посетителей и грядущих клиентов игрового интернет клуба. <a href=https://clients1.google.co.zw/url?q=https://doctorlazuta.by/>https://clients1.google.co.zw/url?q=https://doctorlazuta.by/</a> Но такие рамки не смущают числе хайроллеров, поскольку коэффициенты на слотах разрешают рассчитывать на крупные выигрыши, а в некоторых автоматах разыгрывается прогрессивный джекпот. 1×slot регистрация
<b>Смотреть еще похожие новости:</b>
<a href=https://www.goslog.ru/forum/messages/forum1/message9622/11-obrashcheniya-grazhdan?result=reply#message9622>1×slots регистрация то дальше необходимо пройти</a>
<a href=https://creapnl.com/foros/tema/1×slot-%d0%be%d1%84%d0%b8%d1%86%d0%b8%d0%b0%d0%bb%d1%8c%d0%bd%d1%8b%d0%b9-%d1%81%d0%b0%d0%b9%d1%82–45/>1×slot официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном сайте и сделайте вход в индивидуальный кабинет, чтобы отобрать бесплатные вращения с вейджером х40; На странице представлены бездепозитные бонусы за регистрацию в казино редкая заслуга за которой гонятся все игроки как новички, так и мастера. Мы также уделяем огромное внимание на присутствие призов при формирование рейтинга казино на средства. Бездепозитный бонус это вероятность играть бесплатно и выиграть настоящие средства.
#8798 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало рабочее регистрации на телефон придет
На странице представлены бездепозитные бонусы за регистрацию в казино редкая заслуга за которой гонятся все игроки как новенькие, так и мастера. Мы тоже уделяем большое внимание на наличие призов при формирование рейтинга казино на средства. Бездепозитный приз это возможность выступать даром и выиграть настоящие средства. <a href=http://filmkachat.ru/>1×slots регистрация на сайте</a> <a href=https://controlc.com/be384a3e>https://controlc.com/be384a3e</a> 1×slots рабочее зеркало на сегодня <a href=https://bandit400.ru/user/Kennethfeamy/>https://bandit400.ru/user/Kennethfeamy/</a> Иногда операторы настоятельно внесение минимального депо перед выводом для верификации платежного инструмента. В неких казино этот депо того светит отыграть.При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, коие можно посвятить забаве в казино.
1× slots сайт
Постарайтесь отыграть вейджер, дабы замечена возможность забыть заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные инструменты. Вы можете получить выигрыш на электронной кошелёк, карту, телефонный.Бездепозитный приз по промо-коду будет доступен для забавы, лишь что случае когда Вы активируете специальный бонусный код в разделе с бонусами или укажите промокод при регистрации на веб-сайте. В некоторых случаях, считая активации кода, понадобиться доказать контактные данные игрока и заполнить анкету посетителя. 1хлот регистрация в 1×slots casino <a href=https://www.catfish-assassins.org/forum/memberlist.php?mode=viewprofile&u=897>https://www.catfish-assassins.org/forum/memberlist.php?mode=viewprofile&u=897</a> Не стоит сразу же отрицаться от приветственных даров в сходственных казино. Администрация готова начислить деньги или фриспины, хотя сначала работники должны увериться, что вы не мошенник. Дело никаких, собственно развелось очень много охотников за бонусами. Они выучились врать систему и наваривать крупные суммы средств.Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном призе, то в первую очередь направьте на значение вейджера и срок, кот-ый дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть приз и исключить выигрыш. казино 1×slots официальный сайт Фриспины начисляются по определенной ставке. После их активации игроку нужно запустить разъем и увериться, что в нем показываются безвозмездные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода последствии отыгрыша ориентируется оператором и изредка выше 5 000 руб.Возможность поиграть вспомогательное соревнование (а время и несколько) совершенно даром, а выигрыш, в свою очередь, поступает на счёт игрока.
1× slots casino официальный сайт
Важно, убедитесь в, собственно раньше не регились в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи.В списке притязаний к отыгрышу нередко наличествуют лимиты на ставки при ирге на собственные средства. Так, случае отыграть нужно 30 000 рублей, а максимальная сумма ограничена 30 рублями, то вертеть барабаны предстоит 1000 один. Эта особенность затрудняет соблюдение игроками критерий по срокам деяния промоакции. <a href=http://hspk.co.kr/g5/bbs/board.php?bo_table=trz7pxdei6&wr_id=153450>http://hspk.co.kr/g5/bbs/board.php?bo_table=trz7pxdei6&wr_id=153450</a> 1×slots сайт В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это самая милая доля забавы. Важно, часто бездепозитные призы в казино выдаются с ограничениями по наибольшей выплате. В среднем возможно рассчитывать на прибыль в некоторое тысяч руб. Как исключить выигрыш с приза без депо. Придётся доказать акк документально, в некоторых заведениях. Процедура верификации неотклонима и делается каждым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате или прочтите в правилах.Приветственный бездеп предоставляется любому игроку только один раз. Казино борются с так именуемыми бонусхантерами (от англ. Bonus Hunter — охотник за бонусами), пытающимися заводить множественные аккаунты для надувательства оператора и повторного получения дара. Исключить сходственные действия разрешает верификация данных. Администрация вправе потребовать у клиента подтвердить индивидуальные данные, обозначенные при регистрации.
1×slots рабочее зеркало
Суммы похожих услуг, как правило, колеблются от трех до двадцати $, а вейджер на эти средства обязан сочинять от тридцати до шестидесяти один. Зачастую, наибольшая сумма выигрыша здесь составит от одной до 2-ух сотен $. Если игрок выиграет больше, то все средства шансы быть списанными до очень разрешенного выигрыша. Здесь замечена смысл выводить еще несуществующие деньги на собственную платежную систему и дальше искать заведение с благоприятными под данную сумму релоадом или призом за 1-ое пополнение счета. Есть количество подвидов бездепозитного гонорары, предлагаемого наибольшим числом заведений. Прежде всего, не забывайте регулярно заглядывать на страницу обзоров бездепозитных призов. Они шаг за шагом оценивают более интересные предложения водящих игорных порталов.Кешбэк-бонус представляет собой возврат фиксированного процента от ставки в случае поражения либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не превышает 10%. рабочее зеркало 1хслотс <a href=http://www.tronicb7records.com/new/index.php?option=com_k2&view=itemlist&task=user&id=94930>http://www.tronicb7records.com/new/index.php?option=com_k2&view=itemlist&task=user&id=94930</a> 3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефон либо почту, указать индивидуальную информацию;
1хслот официальный сайт зеркало
<a href=https://bajarmp3.net/member.php?action=profile&uid=3775>https://bajarmp3.net/member.php?action=profile&uid=3775</a> При регистрации никаких либо ином онлайн игральном заведении — вам дается один шанс испытывать собственную фортуну не внося средства монеты. Замечу собственно эту поощрительную предложение деют не все онлайн игровые площадки, а лишь великодушная середина(средина) из их. Которые мы подготовили для Вас в нашем перечне.Похожим образом трудится 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения клиента или в связи с получения им VIP-статуса. Подарок предоставляется в воззвания в поддержку и проверки. 1×slots регистрация 1×slots casino 777 online При поддержки такого поощрения оператор возможность кроме привлекать посетителей, которые ранее показывали активность на веб-сайте, но по некий причине перестали выступать. В этом случае промокод высылается юзеру по электронной почте или в виде SMS.На бонусные начисления могут быть установлены вспомогательные ограничения, коие Вы не к при отыгрыше. Пока приз всецело не отыгран — средства из казино не выводятся.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для подтверждения электронной почты, просто перейдите по интенсивной ссылке в письме, полученном от игрового заведения. Мы собрали и выпустили перечень наихороших бездепозитных казино с бонусами за регистрацию, которые гарантируют щедрые выигрыши и моментальные выплаты.
#8799 Charlesgunnyhttp://filmkachat.ru
1 х слотс зеркало
В лицензионных бездепозитных казино играть в азартные забавы вправду безопасно. Наличие лицензии одобряет что, этот факт, что клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP.Бездепозитные призы отличный вариант даровой забавы в игровые автоматы. Многие юзеры сети не знают, что в казино возможно начать выступать полностью безвозмездно, а позже вывести выигрыш на банковскую карту либо электронный кошелек, иные не доверяют онлайн казино, а третьи успешно играют и выигрывают – и тотчас довольно великие суммы. <a href=http://filmkachat.ru/>1хслотс рабочее зеркало на сегодня</a> Если идет об эксклюзивных предложениях, может потребоваться регистрация в казино по ссылке с партнерского вебсайта. <a href=https://party.biz/blogs/232625/388184/how-professional-architectural-drafting-companies-transform>https://party.biz/blogs/232625/388184/how-professional-architectural-drafting-companies-transform</a> Активация по промокоду употребляется в различных видах бездепов. Если идет о приветственном бонусе, то набор символов возможно разузнать на крупнейшей странице, в регистрационной форме или письме, которое отчаливает пользователю для подтверждения e-mail. Акции имеют проводиться вместе с партнерскими площадками. Обычно код размещается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется одноразовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном кабинете либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем актуальный код для активации в описании любого промо. 1×slots рабочее зеркало <a href=http://nvkb.ru/forum/index.php/user/99327/>http://nvkb.ru/forum/index.php/user/99327/</a> Бездепозитные призы казино это финансовая компенсация, предлагаемая пользователям на дармовой основе и возможность играть в онлайн казино даром. Если сопоставлять их с одобрениями за лепта, в которых средства выдаются только впоследствии первоначального пополнения счета, то бездепозитные вознаграждения получаются безвозмездно. То есть, играющий получает вероятность делать ставки на уже место финансы, коие выдаст заведение, выполняя, при, обычные действия, чтобы их извлечь (тут идет о регистрация, удостоверении личности с использованием номера аппарата, дизайна заказы и т.д. ).Так что сможете смело региться без всяких раздумий. Фортуна сейчас точно на вашей стороне. Не опасайтесь, так следствие какого или убытка Вам абсолютно не грозит. С такими призами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе.
1×slots зеркало регистрацию более популярный вариант это
<a href=http://complainanything.com/node/158?page=957#comment-1277025>1 xslots рабочее зеркало</a> зеркло казино 1×slots Чтоб получить большой выигрыш, избирайте игровые автоматы с максимальным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша. <a href=https://mc-pe.net/user/Harrylat/>https://mc-pe.net/user/Harrylat/</a> казино 1× slots официальный сайт
1×slots акции
Любой выигрыш по ставке выше установленного лимита несомненно являться недействительным. То есть ставка не будет засчитана при отыгрыше, ну случае выигрыша его сумма не поступит на счёт клиента — итог забавы будет полностью аннулирован.Бездепозитный бонус казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в данном и содержится главное отличие. <a href=http://fh7980px.bget.ru/member.php?action=profile&uid=29439>http://fh7980px.bget.ru/member.php?action=profile&uid=29439</a> Похожим образом работает третий способ доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения посетителя либо из-за с получения им VIP-статуса. Подарок предоставляется после обращения в поддержку и ревизии.Ещё одно распространённое акционное предложение – симпатичный презент с неблаговидными требованиями. К образцу, клуб обещает $100 виде бездепа, но с вейджером х80 или х100. Отыграть подобный вейджер фактически невероятно и поэтому превосходнее концентрироваться на больше заманчивых акциях. 1×slots casino зеркало Еще одно условие дотрагивается размеров ставки. Операторы устанавливают максимальную сумму, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, избранной в Личном офисе. При превышении лимита есть риск потерять приза. Существующие лимитирования относятся и к определенным видам ставок. Например, играя в рулетку, заказчик имеет столкнуться с запретом назначать фишки на шансы.
1× слот зеркало
Подтверждение индивидуальной инфы. Все казино требуют от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и присутствие у юзера других аккаунтов (мультиаккаунт запрещен). 1×slots зеркало регистрация в 1×slots casino <a href=https://hothdporn.pro/user/Stevenpheli/>https://hothdporn.pro/user/Stevenpheli/</a>
1×slots подтвердит вашу регистрацию если говорить
Акции распространяются как на все игры казино, так и на ограниченный список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и. Промо имеет обхватывать разработки одного производителя. Бездеп не пересекается с иными промоакциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, сделанные бонусными средствами. Для идентификации платежных реквизитов игрока имеет понадобиться пополнение счета на наименьшую сумму.Онлайн-казино с бездепозитными призами ставят посетителям обстоятельства для использования бездепами, поэтому перед участием в промоакции чем тщательно ознакомиться со всеми правилами и нюансами акции. Условия имеют прикасаться получения бонуса, его использования и последующего вывода валютных средств когда выигрыша. <a href=https://job.epday.com/home.php?mod=space&uid=636603>https://job.epday.com/home.php?mod=space&uid=636603</a> Диапазон ставок, коие вправе устроить игрок, кроме лимитирован. Обычно ставить возможно маленькую необходимую — пределах 10–30 рублей за одно вращение.Размер ставки для забавы по бездепозитному призу (естесственно же, когда, когда он представлен в виде бонусных валютных средств) часто ниже, чем при ирге на депозит. Ограничение несомненно работать до этапа отыгрыша приза. 1хслотс зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://seniordance.ru/forum/showthread.php/71915–1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D0%BF%D0%BE%D0%B4%D1%82%D0%B2%D0%B5%D1%80%D0%B4%D0%B8%D1%82-%D0%B2%D0%B0%D1%88%D1%83-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8E-%D0%B5%D1%81%D0%BB%D0%B8-%D0%B3%D0%BE%D0%B2%D0%BE%D1%80%D0%B8%D1%82%D1%8C?p=101403#post101403>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<a href=https://masstr.net/showthread.php?tid=84198>1×slots рабочее зеркало</a>
<a href=https://demo.comuni-italiani.it/forum/viewtopic.php?f=9&t=381573>1×слот регистрация в 1×slots casino</a>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=164307>1×slots официальный сайт, скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Онлайн-казино тщательно продумывают бонусные условия, которые необходимо изучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и ограничения.
#8800 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino 777 online
Верификация аккаунта. Лучше доказать личность сразу последствии регистрации, чтобы потом не было заморочек с выводом средств. Верификация может проходить 2-мя путями:Размер бонусов чаще всего чисто символический и не выше 50 руб. Приятно, хотя осязаемым бустом в игре вряд ли будет. <a href=http://filmkachat.ru/>1×slots зеркало подтвердит вашу регистрацию если говорить</a> Казино дает вероятность заработать и вывести настоящие деньги на бездепозитных призах. Обычно, это малозначительная сумма, коию казино имеет себе позволить презентовать игроку.Раздача призов может быть приурочена к различным датам: календарные праздники, деньки рождения игроков, юбилей открытия казино и т. Д. Подарок выдается в виде денег, фриспинов либо баллов для накопления и размена на предложения оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд притязаний. <a href=https://www.babelio.com/livres/Maupassant-Bel-Ami/2125/forum/41991/How-Augmented-Reality-Furniture-Is-Transforming-Ho>https://www.babelio.com/livres/Maupassant-Bel-Ami/2125/forum/41991/How-Augmented-Reality-Furniture-Is-Transforming-Ho</a> Первый образующийся вопрос, это, чего выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают свежих игроков. Последним проще начать игру на деньги с презента за регистрацию. Им не пополнять баланс и расходовать личностные свои. Новички получают бесплатные спины либо свои на счёт. С их помощью знакомятся с игровым ходом, крутят слоты и проделывают ставки в рулетке. зеркала 1×slots <a href=https://exsite.su/user/TravisOwexy>https://exsite.su/user/TravisOwexy</a>
1× slots официальный
В игровых клубах без лицензии Вы покупаете „кота в мешке“ и когда неоднозначных обстановок нет способности куда-то посетовать и доказать собственную правоту. <a href=https://nztw.org/forum.php?mod=viewthread&tid=402135&pid=708618&page=1&extra=page%3D1#pid708618>1×slots регистрация 1×slots casino 777 online</a> 1хслот 1хслотс регистрация перейти на 1×slots У любой игры свои требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система зачтет каждую ставку. В рулетке и покере сделать это гораздо сложнее. Именно поэтому например важно внимательно разбирать обстоятельства получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой этой, то новенькие просто «спустят бонус на ветер». <a href=https://flaxeco.com/user/PatrickEmogs/>https://flaxeco.com/user/PatrickEmogs/</a> У любой забавы свои притязания по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система зачтет любую ставку. В рулетке и покере устроить это гораздо сложнее. Именно потому например важно пристально разбирать условия получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой игре, то новенькие просто «спустят приз на ветер».Практически все онлайн казино с бездепозитным призом за регистрацию учитывает программку лояльности — систему поощрения неизменных клиентов, которая произведено из множества уровней. При достижении игроком еще уровня на его счёт поступает бонус. Чем выше степень — что, этим щедрее приз. 1×slots рабочее зеркало на сегодня
1×slot казино зеркало
Онлайн-казино тщательно продумывают бонусные обстоятельства, коие нужно выучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и ограничения.Важно, удостоверьтесь в, собственно раньше не регистрировались в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи. Игры, в можно выступать на бонусные деньги. Проверьте список игр, в которых можно играть на бонусные средства, вероятно они Вам не понравятся и не стоит тратить своё время на такую промоакцию. <a href=https://filmy-hd.ru/user/JamesFuexy/>https://filmy-hd.ru/user/JamesFuexy/</a> Вейджер не более х30–35 является применимым. Опытные игроки заявляют, что с этим вейджером реально остаться в плюсе, в правильно подойти к выбору игрового аппарата.Чтобы бездеп не был начислен на Ваш аккаунт, Вам надо активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк автоматически, а Вы не планируете его использовать, обратитесь в службу поддержки с пожеланием отменить бездепозитный приз. 1×slots регистрация на официальном сайте
1хслотс мобильная версия зеркало
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=262589>1×slots скачать на айфон</a> Активация валютного гонорары происходит автоматически после творения профиля либо применения промокода. Иногда операторы предъявляют дополнительные требования: подписаться на странички казино в социальных сетях либо на рассылку рекламных извещений, скачать и ввести дополнительный софт и т.д.Многие азартные клубы ограничивают необходимую вывода заработанную на призе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не сможете исключить. Разница будет аннулирована, Вы в не можете делать на нее ставки. 1×slots зеркало рабочее на сегодня <a href=http://bbs.boway.net/home.php?mod=space&uid=898614>http://bbs.boway.net/home.php?mod=space&uid=898614</a>
1×slots зеркало быструю регистрацию а также мгновенное
Бездепозитный приз – это финансовое вознаграждение, которое выдается соучастнику забавы в казино, для его вербования и появления заинтригованности. Любой гость, кот-ый соответствует условиям выдачи сходственного бездепозитного бонуса, может претендовать на получение вышеуказанного приза. Такое одобрение является наиболее эффективным способом, дающим возможность стартовать при, не вкладывая личных вещественных средств. Подтверждение индивидуальной информации. Все казино требуют от клиента пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и присутствие у юзера других аккаунтов (мультиаккаунт запрещен).Каждый новичок и профессиональный игрок грезят скоро стартануть и начать создавать реальные ставки. Для этого достаточно забрать презент, за который не уплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email либо телефонный. После сего администрация начислит щедрое вознаграждение в виде бесплатных вращений либо виртуальных кредитов. <a href=http://www.dbgjjs.com/home.php?mod=space&uid=461617>http://www.dbgjjs.com/home.php?mod=space&uid=461617</a> Если речь об неповторимых услугах, имеет понадобиться регистрация в казино по ссылке с партнерского вебсайта.Чаще всего казино бонус за регистрацию без депо даёт вероятность запустить каждой машина. Но никакого внимательно ознакомиться с условиями. Иногда для забавы доступны только определённые модели. Если вы новичок и ничего не смыслите в гэмблинге, другого начать знакомство с миром азарта именно с «одноруких бандитов». 1×slot официальный сайт Как управляло, новоприбывшие игроки в первую очередь желают ознакомиться с методами ввода и вывода денежных средств и сроки исполнения поданных заказов дабы конкретно разуметь, как прытко меня вывести свой казино приз за регистрацию без депозита на электронный кошелек или же банковскую карту. К счастью для всех играющих, внутри определенных холдингов, все казино соперничают меж собой. Ведь случае бы определенную компанию представляло только одно онлайн-заведение, то навряд бы клиенты заметили казино с призом за регистрацию и возможность бы рассчитывать только на вознаграждение в виде бонуса на 1-ое вложение. К каждому заведению регулярно по завлекать новых игроков, что, в, только на руку всем играющим.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=71660>1×slots мобильная версия войти казино</a>
<a href=https://smm-seo.ru/threads/1×slots-klubu1×slots-1×slots-registracija-perejti-na-1×slots.35967/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В некоторых онлайн казино для получения бездепозитных призов не довольно просто зарегистрироваться на сайте клуба и подтвердить свои контактные данные. Дополнительно требуется активация промокода.
#8801 Scottbonhttps://ksmu.kg/
где купить насвай в омске <a href=https://ksmu.kg/>детское порно аниме</a>
#8802 Charlesgunnyhttp://filmkachat.ru
1 x slots casino
Верификация необходима для добавочной защищенности и помочь техподдержке выявить бонусхантеров и жуликов. Кстати, на некоторых платформах выводы солидных сумм доступны только после доказательства личности.Бонус в казино без депо имеет разные разновидности: такое быть приветственный бонус, промоакции в честь каких-то дней или главных дат, приз за вербование новых игроков, преданность и получение VIP-статуса. <a href=http://filmkachat.ru/>1×slots регистрация на сайте 1×slots ru com</a> <a href=http://www.getjob.us/usa-jobs-view/job-posting-901790-Mastering-the-Craft-of-a-3D-Visualization-Artist-Skills-Tools-and-Impact.html>http://www.getjob.us/usa-jobs-view/job-posting-901790-Mastering-the-Craft-of-a-3D-Visualization-Artist-Skills-Tools-and-Impact.html</a> Можно ли в одном интернет казино получить больше 1-го приза за регистрацию? Нет, например как в каждом онлайн казино есть управляла, к коим надо(надобно) держаться, не создавать 2 аккаута для получения призов, другому будет блокировка обоих аккаутов, не пытайтесь обмануть онлайн казино, приз за регистрацию выдаеться раз один 1 лицу.Каждый из бездепозитных призов без пополнения 2022 имеет свой определенный вейджер для отыгрыша, например же в любом казино он устанавливается индивидуально — где то он х55 а где-то х30, повторюсь везде по разному! 1×slots регистрация <a href=http://fast-debt.ru/forum/profile/exuberantcatego/>http://fast-debt.ru/forum/profile/exuberantcatego/</a> Будьте внимательнее при ознакомлении с правилами во избежание появления конфликтных ситуаций с казино, когда в отыгрыша бездепа для не дадут исключить солидную сумму выигрыша.При регистрации по указывать лишь достоверную информацию. Когда учетная запись несомненно активна, будет доступ в Личный офис. В нем можно избрать еденицу, установить промокод и разузнать доскональные правила получения и отыгрыша бездепа. Краткая информация об промоакции часто присутствует непосредственно на регистрационной форме.
1× слот зеркало
Бездепозитный приз – это финансовое вознаграждение, коие выдается участнику игры в казино, для его вербования и появления заинтересованности. Любой гость, который подходит условиям выдачи подобного бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое одобрение считается наиболее действенным способом, дающим возможность стартовать при, не вкладывая личных вещественных средств.Наличие у игрока второго аккаунта. Запрещено творить несколько профилей для неоднократного получения бездепов. <a href=https://sparta.training/faq/online-returns/#comment-66991>1 x slots casino</a> 1хслотс рабочее зеркало на сегодня <a href=https://ai-db.science/wiki/User:NZKDamion602>https://ai-db.science/wiki/User:NZKDamion602</a> Но существуют азартные заведения, готовые просто например вручить средства на игру. Для сего довольно создать профиль. Чтобы исключить выигрыш, сперва необходимо выполнить вейджеровые условия, прописанные в критериях получения бездепа.На бонусные начисления шансы быть установлены вспомогательные лимитирования, коие Вы не к при отыгрыше. Пока приз всецело не отыгран — деньги из казино не выводятся. 1×slots зеркало регистрация в 1×slots casino Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.
1хслотс официальный сайт зеркало
Вышеописанная причина и является главным интересным, из-за которого операторы отдают часть своей прибыли на различные рекламные расходы и маркетинговые кампании. А наиболее действенным тут будут играть непосредственно бездепозитные призы казино 2022 с выводом за регистрацию. <a href=http://whdf.ru/forum/user/79926/>http://whdf.ru/forum/user/79926/</a> Подобные призы без депо предоставляются на больше выгодных условиях. Зачастую они крупнее, а обстоятельства отыгрыша наименее строгие. 1х слот 1хслотс регистрация перейти на 1×slots B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax
1 х слотс зеркало
Объективные – объем бонуса, коэффициент и обстоятельства вейджера, надобность внесения депозита для вывода средств; <a href=https://forum.dis-course.net/memberlist.php?mode=viewprofile&u=37238>1хслот 1хслотс регистрация перейти на 1×slots</a> Подобные призы без депо предоставляются на больше прибыльных критериях. Зачастую они крупнее, а обстоятельства отыгрыша наименее строгие. На нашем веб-сайте Вы отыщите список своевременных свежих бездепозитных бонусов в казино 2022 года. Также, есть большое эксклюзивных услуг, которые доступны только посетителям нашего вебсайта последствии регистрации по нашей ссылке или активации особого промокода. 1 xslots рабочее зеркало <a href=https://forum.musicalpraxis.gr/forum/profile/fayclaude082798/>https://forum.musicalpraxis.gr/forum/profile/fayclaude082798/</a>
1×slots актуальное зеркало
<a href=http://goldax.ru/bitrix/redirect.php?goto=http://privada58.ru/bitrix/click.php?goto=http://barsukbrigadir.ru/bitrix/redirect.php?goto=https://telegra.ph/ZHaloba-v-upravlyayushchuyu-kompaniyu-38645–09–23>http://goldax.ru/bitrix/redirect.php?goto=http://privada58.ru/bitrix/click.php?goto=http://barsukbrigadir.ru/bitrix/redirect.php?goto=https://telegra.ph/ZHaloba-v-upravlyayushchuyu-kompaniyu-38645–09–23</a> Существует ли стратегии для отыгрыша бездепозитных призов? К раскаянью нет, на выигрыши или проигрыши с призов, казино или игрок воздействовать возможности, отдача игр происходит от создателей игр. 1×slots регистрация 1×slots casino c2d ru Верификация аккаунта. Лучше доказать личность сразу последствии регистрации, чтобы потом не было заморочек с выводом средств. Верификация может проходить 2-мя путями:
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/6905/#comment-306212>1×slots зеркало проходить регистрацию это отличный вариант</a>
<a href=http://6000ziyuan.com/forum.php?mod=viewthread&tid=123311&extra=>1× slots casino зеркало</a>
<a href=https://forumauthority.com/thread-6663-post-39441.html#pid39441>1хслотс мобильная версия зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Объективные – размер приза, коэффициент и условия вейджера, необходимость внесения депо для вывода денег;
#8803 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
Прибывшие на аккаунт финансы бездепозитные бонусы предназначаются, главном, лишь для свежеиспеченных юзеров, коие ранее не имели собственного аккаунта в данном казино. Исходя из сего, если раньше у игрока был изготовлен депозит, то, по всей вероятности, у него больше не несомненно способности рассчитывать на получение такового бонуса в определенном заведении. <a href=http://filmkachat.ru/>1хслотс зеркало</a> Получать информацию о самых выгодных призах можно без постоянного мониторинга новостей казино. Мы брали данную задачку на себя и непрерывно следим за услугами операторов, выбирая лучшие из них. В данном разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список промоакций периодически пополняется. В топ вошли самые свежие бездепозитные призы за регистрацию в казино 2020, временные и замкнутые промо. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и аспектам. Если срок деянья промоакции истек, она удаляется из перечня. <a href=https://www.fbioyf.unr.edu.ar/evirtual/mod/forum/discuss.php?d=44688>https://www.fbioyf.unr.edu.ar/evirtual/mod/forum/discuss.php?d=44688</a> Подарки на конкретные даты отличаются критериями получения. Если одобрение начисляют игроку на день рождения, то сумма обычно зависимости от совместного размера депо за год. рабочее зеркало 1×slots <a href=http://www.support.ipron.com/communication/forum/index.php?PAGE_NAME=profile_view&UID=15274>http://www.support.ipron.com/communication/forum/index.php?PAGE_NAME=profile_view&UID=15274</a> Существуют казино с бонусом за регистрацию, каких довольно известны фриспины в онлайн казино впоследствии регистрации в определенных забавах. Они встречаются и почаще бесплатных поощрений либо классических призов в казино без вложений. Например, игрок регистрирует счет, на который начисляются безвозмездные игры, бонус за регистрацию в виде бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса игры выигрывает истинные средства, коие в последствии возможно успешно исключить из заведения на свою платежную систему. То есть, есть все шансы вывести средства без рисков собственными финансами. Регистрация, за которую игрок получит призы, займет пару минут, а спасибо этому возможно прирастить 5 евро поощрений до тысячи и без всяких проблем исключить их.
сайт 1× slots casino
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=136519>1×slots официальный зеркало рабочее</a> 1хслотс зеркало <a href=https://ww.interdance.ru/user/JamesCisse/>https://ww.interdance.ru/user/JamesCisse/</a> онлайн казино 1×slots Бездепозитные бонусы начисляются лишь раз один. Не стоит раскрывать новые аккаунты, дабы получить их повторно. Служба защищенности казино обязательно выявит «левого» соучастника и заблокирует. Если посетитель выполнит нужные притязания, отыграет свою ставку и решит вывести собственный выигрыш, то ему надо(надобно) учесть, что казино обязательно востребует предоставить ксерокопии личных документов, чтобы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные свои исключить не удастся.
1хслот зеркало
Если речь идет об неповторимых предложениях, имеет потребоваться регистрация в казино по ссылке с партнерского сайта. Почти все игровые клубы требуют свидетельство контактных данных игрока для получения бездепозитного бонуса.Многие новенькие колеблются, что поощрительный приз надо будет возвращать, и случае они выиграли у казино. Это безусловно неопасно и накрепко. Выводя выигранные свои, игрок просто одергивает свое участие при и теряет уникальную возможность – даром увеличивать личное материальное положение. <a href=https://nrns-games.com/index.php?action=profile;u=41539>https://nrns-games.com/index.php?action=profile;u=41539</a> Игрокам не принимать приветственный приз как гарантированный способ получить крупный выигрыш, но это замечательная вероятность без расходов расценить функционал казино. казино 1×slots Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.Бонус начисляется игроку незамедлительно в регистрации и прохождения верификации в казино и не просит от посетителя внесения депозита. Как верховодило, объем бонуса в сходственном случае достаточно скромный, однако позволяет новеньким познакомиться с забавой без риска реальными деньгами.
1×слот регистрация в 1×slots casino
<a href=https://nauc.info/forums/viewtopic.php?t=20399222>1×slot регистрация</a> 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=https://haight.shopping/author/zacherywab/>https://haight.shopping/author/zacherywab/</a>
1хслотс регистрация в 1×slots casino
Условия, на коих предоставляется бездеп, регулируются казино. Каждая промоакция имеет подробные верховодила, ссылка на коие обычно содержится в промообъявлении. В них указываются лимиты, вейджер, список дешевых игр. Если оператор укрывает данные о предложении, то воспользоваться им не.Подобные бонусы без депозита предоставляются на больше прибыльных критериях. Зачастую они крупнее, а условия отыгрыша наименее строгие. В количестве случаев бесплатные призы начисляются в кредитах, коие невозможно незамедлительно вывести со счета. Прежде их нужно отыграть по установленным правилам. Эти требования принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д.). О нем читайте ниже.Подтверждение персональной инфы. Все казино требуют от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у пользователя иных аккаунтов (мультиаккаунт запрещен). <a href=http://mc-pe.net/index.php?subaction=userinfo&user=badinvestigatio>http://mc-pe.net/index.php?subaction=userinfo&user=badinvestigatio</a> Автоматы неспроста числятся самым модным азартным отдыхом. Чтобы освоить управление и верховодила, понадобится всего несколько мин. Ваша задача сделать ставку, определить количество рабочих линий и можно вертеть тамбур. Если на экране выпадет выигрышная комбинация – вы выиграли! С этой задачей вам посодействуют управится бездепозитные бонусы казино. 1×slots регистрация то дальше необходимо пройти Воспользоваться бездепом возможно не во всех игровых автоматах: казино вдруг устанавливает ограничение для посетителей. Конечно, это можно посчитать некоторым неудобством для игрока, но ради отметить, что выбор автоматов всё точно остаётся достаточно наибольшим.Какие призы возможность еще получить кроме бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, каждое онлайн казино предлагает игрокам выгодное предложение на 1-ый депозит, вы совершаете депо, ваш депо возрастает в двое или том в трое, тем самым начать выступать можно с больше крупной суммой, например же не забываем тему вейджер на призы.
<b>Смотреть еще похожие новости:</b>
<a href=https://showboysmedia.com/real-music/#comment-54111>1×slots официальный сайт, скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы — это подарки от казино в виде бонусных средств либо фриспинов для игровых автоматов, которые начисляются на аккаунт игрока в процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депозит не требуется.
#8804 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало рабочее
Для верификации номера телефона, в личном профиле выберите опцию „Подтвердить номер телефона“ и введите в отвечающее поле код, полученный в sms-сообщении.Следует подчеркнуть, что бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом. <a href=http://filmkachat.ru/>1×slots регистрация</a> <a href=https://www.myvipon.com/post/1222818/How-Product-Visualization-Services-Elevate-Your-amazon-coupons>https://www.myvipon.com/post/1222818/How-Product-Visualization-Services-Elevate-Your-amazon-coupons</a> Существует ли стратегии для отыгрыша бездепозитных призов? К раскаянью нет, на выигрыши или проигрыши с бонусов, казино или игрок воздействовать не может, отдача игр происходит от создателей игр.Таким образом, заведение пробует продемонстрировать себя своим вероятным геймерам, а подобный рекламный ход как казино бонус без депо за регистрацию привлекает очень много внимания к игорному заведению и обеспечивает постоянный поток новых посетителей и будущих клиентов игрового онлайн клуба. зеркала 1×slots <a href=http://wlzyzlm.com/home.php?mod=space&uid=101116&do=profile>http://wlzyzlm.com/home.php?mod=space&uid=101116&do=profile</a> Подтвердите регистрацию, чтобы активировать Бездепозитный приз с выводом, требуется наполнить индивидуальный профиль. Заполните пустующие поля истинными данными о себя.
1× slots сайт
Классическая разновидность бонуса за творение аккаунта. Его преимущество содержится что, нет, что клиент возможность без выбирать аппараты и создавать ставки в их. Иногда список игровых автоматов ограничен оператором, хотя все также это другого, как, чем единственный доступный разъем, как в случае с внедрением фриспинов. 1×slots коды <a href=http://kimpocamping.com/bbs/board.php?bo_table=free&wr_id=190>http://kimpocamping.com/bbs/board.php?bo_table=free&wr_id=190</a> 2. Создать свежий профиль. Для регистрации надо(надобно) заполнить маленькую анкету либо зайдите в личный кабинет при помощи соц сеток;Представленные на данной странице превосходнейшие бездеп бонусы в казино за регистрацию в 2022 году имеют оптимальные обстоятельства. После кропотливого анализа редакция портала составила рейтинг спецпредложений, каком посетители Casino.ru шансы сортировать перечень по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д. 1×slots официальный сайт зеркало Основное отличие в том, собственно для получения бездепа нужно пополнять баланс в казино. Но кроме этого, есть ряд прочих отличий:Демоказино есть почти на любом веб-сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются существенно реже: там когда выигрыша и соблюдения условий промоакций бездеп возможно перевоплотить в реальные деньги.
1×slots регистрация на сайте 1×slots ru com
Игры, каких возможно играть на бонусные средства. Проверьте перечень игр, в возможно выступать на бонусные свои, вполне они Вам не понравятся и не тратить своё время на эту промоакцию.На нашем сайте Вы найдете перечень актуальных новых бездепозитных призов в казино 2022 года. Также, есть много эксклюзивных услуг, коие доступны лишь гостям нашего вебсайта после регистрации по нашей ссылке либо активации особого промокода. <a href=https://www.vevioz.com/read-blog/151003>https://www.vevioz.com/read-blog/151003</a> Список например именуемых «запрещенных землель» прилагается к правилам бонусной программки игорного портала. Обязательно выясните, распространяются ли на вас подобные наказания. x1 slots 1хслотс регистрация перейти на 1×slots
онлайн казино 1×slots
Зарегистрируйтесь. Для регистрации чаще всего довольно установить свой номер телефона и почтовый адресок, в чего ввести приобретенный код из СМС. Возможно, потребуется указать промокод. В правилах промоакции будет написано, где его бы вводить. Иногда это хотелось делать при регистрации, время — теснее после творенья собственного кабинета, на отдельной странице. Подтверждение индивидуальной инфы. Все казино настоятельно от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и присутствие у пользователя иных аккаунтов (мультиаккаунт запрещен). 1 xslots рабочее зеркало <a href=https://rightcoachforme.com/author/charlessuimi/>https://rightcoachforme.com/author/charlessuimi/</a> Подарки на определенные даты отличаются критериями получения. Если одобрение начисляют игроку на денек рождения, то сумма обычно зависит от совместного объема депозитов за год.
1×slots casino зеркало рабочее
Диапазон ставок, которые вправе сделать игрок, также лимитирован. Обычно назначать возможно маленькую сумму — около 10–30 руб. За одно вращение. Бонусные средства – маленькая сумма средств для старта в новеньком казино. На бонусные средства, обычно разрешено играть во все забавы, кроме слотов с современным джекпотом и игр из раздела live casino.Бонусы без депо при регистрации считаются самыми красивыми как для опытнейших игроков, например для и новичков. Получив такое вознаграждение, заказчик имеет играть на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а также обстоятельства их активации и выигрыша. <a href=http://www.winpcba.com/bbs/home.php?mod=space&uid=396062&do=profile>http://www.winpcba.com/bbs/home.php?mod=space&uid=396062&do=profile</a> Многие новенькие колеблются, что поощрительный приз не будет возвращать, том в они выиграли у казино. Это абсолютно безопасно и надежно. Выводя выигранные свои, игрок просто останавливает свое роль деле и теряет уникальную возможность – безвозмездно наращивать личное вещественное положение. 1×slots рабочее зеркало на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=https://mcmon.ru/member.php?action=profile&uid=134611>1 х слотс зеркало</a>
<a href=https://www.rusdrama-az.com/support/51-sluzhba-tehnicheskoy-podderzhki-sayta.html>1×slots зеркало регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В количестве случаев бесплатные бонусы начисляются в кредитах, которые невозможно незамедлительно исключить со счета. Прежде их нужно отыграть по установленным правилам. Эти требования принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже. Представленные на данной страничке наилучшие бездеп бонусы в казино за регистрацию в 2022 году имеют подходящие обстоятельства. После кропотливого анализа редакция портала составила рейтинг спецпредложений, в котором посетители Casino.ru все сортировать список по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д.
#8805 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
После потребуется привнести идентификационный платёж. Это стращает начинающих больше всего. Нужно устроить минимальный депозит в 100–500 руб. Таким образом служба безопасности убедиться сомнений, что платёжный метод принадлежит Вам. Данная процедура необходима для обеспечивания защищенности игровых счетов. Пример, Ваш акк взломают и выведут свои на свой кошелёк. Будет очень неприятно. Поэтому верификация платёжной системы, это необходимый момент. <a href=http://filmkachat.ru/>рабочее зеркало 1×slots</a> <a href=https://myportal.utt.edu.tt/ICS/_portletview_/Campus_Life/Campus_Groups/Safer/Discussion.jnz?portlet=Forums&screen=PostView&screenType=change&id=7104b34f-41c6–47b5-abe3-e4db446728a6>https://myportal.utt.edu.tt/ICS/_portletview_/Campus_Life/Campus_Groups/Safer/Discussion.jnz?portlet=Forums&screen=PostView&screenType=change&id=7104b34f-41c6–47b5-abe3-e4db446728a6</a> Выбрать казино с бездепозитным бонусом. У нас на сайте представлен перечень наихороших интернет казино, коие предлагают своим игрокам щедрые призы за регистрацию.Онлайн-казино кропотливо продумывают бонусные обстоятельства, которые необходимо выучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и другие ограничения. 1×slots регистрацию более популярный вариант это <a href=http://led119.ru/forum/user/109544/>http://led119.ru/forum/user/109544/</a> На нашем веб-сайте Вы отыщите список актуальных новых бездепозитных бонусов в казино 2022 года. Также, есть много неповторимых предложений, которые доступны лишь гостям нашего вебсайта после регистрации по нашей ссылке либо активации особого промокода.
1×slots регистрация на сайте
Также учтите, что некоторые игровые платформы сузивают перечень стран, коие готовы получить предложенный бездепозитный бонус за регистрацию. К примеру, есть онлайн-заведения, выдающие подобные бонусы только жителям конкретных стран. К примеру, онлайн казино 777 Оригинал предоставляет бездепозитный бонус лишь игрокам из России и стран СНГ. Или наоборот, снабжают вознаграждением всех, считая жителей неких государств (из сего, стопам внимательно учить перечень, чтобы впоследствии не появилось никаких вопросов и жалоб).Отыграв бездепозитный приз в казино с выводом тоже придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в подобное лимитирование существует, то единоразово вывести получится только сумму, не превосходящую объем полученного бонуса. <a href=https://isomedu.com/forum/profile/josephdrons/>1× slots casino зеркало</a> казино 1×slots <a href=https://www.kkbzy.com/home.php?mod=space&uid=145969&do=profile>https://www.kkbzy.com/home.php?mod=space&uid=145969&do=profile</a> 1×slots зеркало быструю регистрацию а также мгновенное
1×слотс казино
Такой казино приз без депозита за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это словно какая-то конспирация поощрения под бездепозитный. Суть всего сего сводится к тому, собственно игроку на час выдается, например, 1000 $, а реклама утверждает то, что каждой выигрыш можно будет в будущем оставить при себя. Но случае играющий серьезно отнесется к данному предложению, то он просто растеряет время. Ведь геймеру нужно несомненно играть не главном аккаунте, а тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (в всей тыс. ) в управляла вступят конкретные условия, где несомненно сказано, собственно наибольшей суммой победы возможность быть лишь двести долларов и средства возможно применять только в качестве приза на 1-ый вклад с вейджером 25 от суммы вознаграждения плюс сам депо. По итогу получится, что игрок выигрывал себя 200% приз с вейджером на конкретную необходимую. Короче говоря, это все надо вашего времени. Мы проделываем ударение на главных положениях управлял, рассказываем о территориальных лимитированиях и кратко информируем о иных акциях обговариваемого казино.Бездепозитные призы — это презенты от казино в виде бонусных средств либо фриспинов для игровых автоматов, которые начисляются на аккаунт игрока в процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депозит не потребуется. <a href=http://www.oldtimers-im-fokus.ch/fotoblog/member.php?action=showprofile&user_id=22091>http://www.oldtimers-im-fokus.ch/fotoblog/member.php?action=showprofile&user_id=22091</a> Наиболее знаменитые гонорары среди гэмблеров – бездепозитные призы казино. Это не умопомрачительно, ведь возможно получить безвозмездные вращения или виртуальные кредиты, и при этом не придётся пополнять счёт, рисковать собственными средствами. Удастся насладиться разнородными веселиями и даже выиграть крупную сумму, избегая серьёзного риска. 1× слот зеркало
1 х слотс зеркало
Ниже указан важный перечень законных казино в Беларуси с призами на 1-ый депозит. Вы сможете попасть на официальный сайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. <a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=13119>казино 1× slots официальный сайт</a> Получив собственный презент, Вы можете даром выступать на настоящие деньги, а выполнив обстоятельства отыгрыша, исключить собственный выигрыш. казино 1×slots <a href=http://akb-video.ru/profile.php?u=ossifiedobjecti>http://akb-video.ru/profile.php?u=ossifiedobjecti</a> Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша призов. Заведения практически устанавливают максимальную ставку, допустимую по условиям вейждера.У любого игорного заведения средства управляла и условия. Но, дабы получить призы, необходимо выполнить стандартные деянья:
1×slots зеркало этих способов предполагает регистрацию
Вообще перейдя в казино — верховодила одинаковы в получении бездепозитных призов, в стереотипные верховодила заходит: доказать эл. Почту и аппарат, заполнить собственный индивидуальный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ. Обыкновенные бездепозитные бонусы в объеме от трех до двадцати долларов сделаны для того, чтобы в забавы заходили все новые и новые игроки. Здесь, вероятнее всего, несомненно ограничение на наибольший выигрыш. Важно, чтобы перед наименьшим вкладом был отключен бонус за первое пополнение счета, и компьютерные не попадет на повторный вейджер.При маленький сумме приза рекомендуется играть по низким ставкам, а применять наибольшие лучше лишь том, случае, в вейджер очень большой, а время на отыгрыш сильно ограничено. <a href=https://demo5651.asly.nl/index.php/author/rainyrhythm44/>https://demo5651.asly.nl/index.php/author/rainyrhythm44/</a> 1×slots регистрация на сайте Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам воспрещено начислять бонусы посетителям, не имеющим денежных средств на счете. Мы предлагаем осмотреть актуальные призы онлайн-казино с лицензией, коие соблюдают законодательство РБ.Похожим образом работает 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения посетителя либо в связи с получения им VIP-статуса. Подарок предоставляется после обращения в поддержку и проверки.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.lightknotes.com/MyBB/showthread.php?tid=193069>сайт 1× slots casino</a>
<a href=http://forum.exalto-emirates.com/memberlist.php?mode=viewprofile&u=69997&sid=cf56cf322a0f770b45fbfd9f1d28f3ca>зеркала 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают приз по странам. Вплоть до того, что клуб имеет принимать игроков из Вашей государства, а бездеп мешает. Если при регистрации указать промокод, можно гарантировано получить бонус. Где брать ваучер? Посетите определенную блоги или форумы. Иногда администрация клуба делает рассылку ваучеров на электрическую почту. В заключительнее время игорные дома начали афишироваться в фильмах и телесериалах. Присмотритесь и скорее заметите промокод, кот-ый принесёт 500 или 1 000 бонусных рублей.
#8806 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало
Ограничения по забавам. Администрация запрещает игрокам кое-какие игровые автоматы с бездепозитным бонусом, деньгами либо бесплатными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда деление производится по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, но запрещен в настольных забавах и в разделе Live Casino. <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> В перечне притязаний к отыгрышу часто присутствуют лимиты на ставки при игре на собственные средства. Так, в отыграть надо(надобно) 30 000 рублей, а предельная сумма ограничена 30 рублями, то вертеть барабаны предстоит 1000 один. Эта особенность затрудняет соблюдение игроками условий по срокам действия акции. <a href=https://www.indiegogo.com/individuals/38144440>https://www.indiegogo.com/individuals/38144440</a> Бездепы обыкновенно предлагают с отыгрышем — моментально исключить выигранные свои невозможно. Перевод средств со счета несомненно возможен в того, как юзер выполнит все притязания казино, а сумма не быть выше установленного правилами лимита. Условиями акции фиксируются сроки, в течение коих клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней в активации.Основное верховодило получения бездепа ? творимый аккаунт должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов взыскательно воспрещено. Проверка проводится по имени, e-mal, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депо нужно соблюдать простую последовательность действий. 1хслотс официальный сайт зеркало <a href=http://cloudscapehill.com/user/jamesked/?um_action=edit>http://cloudscapehill.com/user/jamesked/?um_action=edit</a>
1×slot казино зеркало
Нет. Для получения бездепозитного бонуса в казино необходима неотъемлемая регистрация на сайте. Играть в слоты безвозмездно и без регистрации возможно лишь в демо режиме.Когда идет о получении бездепозитных бонусов в казино, для обратите внимание на последующие условия: 1×slots зеркало выигрыши обязательно пройдите регистрацию если Обычно бездепозитные акции от казино, прибывают на эл. Почту в деньки рождения либо праздники. В неких онлайн казино возможно адресоваться в чат и как постоянному игроку, вероятно вам предложат бездепозитное предложение. <a href=http://lineyka.org/user/Charlesgeach/>http://lineyka.org/user/Charlesgeach/</a> Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих требований, кроме неотъемлемой верификации. Если на сайте предусмотрена неотъемлемая процедура доказательства личности, то вывести выигрыш получится лишь в проверки данных. Приготовьтесь наполнить анкету и выслать в техподдержку документ, подтверждающий личность. 1×slots casino регистрация 1×slots review live Зарегистрируйтесь. Для регистрации чаще всего достаточно установить собственный номер телефонного и почтовый адрес, в чего установить полученный код из СМС. Возможно, требуется указать промокод. В правилах промоакции несомненно написано, где его хотелось вводить. Иногда это хотелось делать при регистрации, время — теснее последствии творенья собственного кабинета, на отдельной странице.
1×slots регистрация 1×slots review live
Выше мы дали глубокий комплект самых свежих и актуальных бездепозитных бонусов в онлайн казино без пополнения на 2022 год, где возможность воспользоваться любым ценным бездепозитным бонусом. Обычно показатель выше, чем для призов на депозит. Не изумляйтесь, случае он несомненно и х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных государств.При небольшой сумме приза рекомендуется выступать по низким ставкам, а применять наибольшие никакого только в случае, случае вейджер очень великий, а время на отыгрыш крепко ограничено. <a href=http://bbs.vbsa.com.au/home.php?mod=space&uid=4375>http://bbs.vbsa.com.au/home.php?mod=space&uid=4375</a> Чтобы получить вероятность вывести выгода с бездепозитного бонуса в казино, нужно выполнить ряд условий: 1хслотс мобильная версия зеркало Чем ниже велечину вейджера, тем проще отыграть и исключить приз. Если Вы расчитываете заработать на бездепе, не просто ознакомиться с свежим игровым клубом, то стоит избегать призов с высоким вейджером их практически не реально отыграть. С ними Вы сможете только протестировать забавы заведения.Диапазон ставок, коие вправе сделать игрок, кроме лимитирован. Обычно ставить можно небольшую необходимую — около 10–30 рублей за одно вращение.
1×slots зеркало подтвердит вашу регистрацию если говорить
Для выбора азартного заведения Вы можете воспользоваться списком наших казино с бонусами за регистрацию. На нашем веб-сайте мы выпустили список бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, собственно часть бонусов эксклюзивные и доступны лишь для посетителей нашего вебсайта по-специальному промо-коду или по уникальной ссылке. Кроме такого, для любого приза мы подготовили подробный обозрение, в котором Вы узнаете как получить и отыграть одобрение и как исключить свой выигрыш с бездепа. <a href=https://bajarmp3.net/showthread.php?tid=422269>1×slots регистрация на сайте</a> В большинстве заведений сделать это возможно по e-mal, по номеру телефонного, спустя социальную сеть или гугл-аккаунт.Условия вывода выигрыша. В неких заведениях для успешного вывода с бездепозитного бонуса довольно пополнения баланса и подтверждения личности. В других же клубах, необходимо некоторое один прокрутить свой депозит. 1×slots сайт <a href=http://www.xn–c1aid4a5e.xn–p1ai/user/RenaldoOdorb/>http://www.xn–c1aid4a5e.xn–p1ai/user/RenaldoOdorb/</a> Вы не в коем случае ни чем рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный приз, по мимо практической забавы на бездепозитные бонусы, у Вас есть шанс изучить игровые автоматы, научится регулировать изменять ставки и линии, изучать бонусные забавы и их выигрышные комбинации, да в просто зарядится кучей эмоций! Ведь вы будите играть на бонусные свои, которые можно отыграть и вывести, но просто на демо счет, тем наиболее адреналин в крови более повысится а пульс забьется с частым ритмом!
1×slots регистрация на 1хслотс
В онлайне количество знаменитых игорных площадок с привлекательными акционными предложениями. Однако внимательно разбирать обстоятельства 10-ов услуг в надоест, да и время отнимет количество. Поэтому наша команда подготовила ТОП-3 сайтов с превосходнейшими бездепозитными призами: Высокая конкуренция в разделе азартных игр доказывает операторов завлекать посетителей различными промоакциями. Благодаря этому у посетителей замечена возможность получить призы в казино за регистрацию без депо. Воспользоваться таким предложением можно, минуя функцию внесения денег на игровой счет, просто активировав аккаунт на веб-сайте. Наш экскурсовод по бездепам поможет избрать самую привлекательную бонусную программку, узнать верховодила получения такового гонорары и распорядиться им с наибольшей выгодой.Это раз из главных характеристик привлекательности презента. С завешенным коэффициентом числе мастера не сумеют выполнить обстоятельства по отыгрышу. И неважно, насколько презентабельно выглядит предложение – бездепозитный бонус казино в размере $500 или $1 000. Чтобы новички лучше вникли, что же это вейджер, мы разберём на образце. <a href=https://masterarms.se/user/renaldooneve/>https://masterarms.se/user/renaldooneve/</a> 1хслотс 1хслотс регистрация перейти на 1×slots Какие призы меня еще получить не бездепозитного приза за регистрацию в казино? По мимо бездепозитного бонуса, любое интернет казино предлагает игрокам выгодное предложение на 1-ый депо, вы совершаете депозит, ваш депозит возрастает в двое или и в трое, что, этим самым начать играть возможно с более солидной суммой, так же не забываем на вейджер на бонусы.
<b>Смотреть еще похожие новости:</b>
<a href=http://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=6268>1×slots рабочее зеркало на сегодня</a>
<a href=http://link.5nx.ru/viewtopic.php?f=5&t=5026>1 x slots casino</a>
<a href=http://naturetour.ru/communication/forum/messages/forum3/message24438/6129–1-kh-slots-zerkalo?sessid=3c7adc4cdc6cbb840dd42579b4c4c9af&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1 х слотс зеркало</a>
<a href=https://bans.org.ua/index.php?topic=119889.new#new>1×slots промокод при регистрации 2025</a>
<a href=http://polishcrazyclan.ugu.pl/member.php?action=profile&uid=272738>1×slots казино мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Новички не обожают незамедлительно же вносить депозит. Это обосновано неимением опыта и недоверием. К счастью, наши можно получить бездепозитный бонус за регистрацию в казино. Неважно собственно начислит система – фриспины или кредиты. В любом случае вы не рискуете собственными сбережениями. Это замечательная вероятность запустить понравившийся видео слот либо же испытать удачу в настольных играх.
#8807 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало
С иной стороны, гораздо легче отобрать бездепозитные фриспины за регистрацию в казино и прямо в начать вращать барабаны в наилучших слотах. Главная особенность спинов что, нет, собственно они предусмотрены для топовых автоматов. Удастся не пройти вспомогательные раунды, хотя и прирастить сумму выигрыша, заработать респины и другие внутриигровые презенты. <a href=http://filmkachat.ru/>1× slots casino официальный сайт</a> <a href=https://www.coursera.org/user/ecebd6f335ddeec88a23f694c682dcf5>https://www.coursera.org/user/ecebd6f335ddeec88a23f694c682dcf5</a> Необходимость отыгрыша. Вейджер в этом случае повыше, чем для призов за депозит. И пока средства не отыграны, исключить их невозможно.Максимальная ставка ? уточняется в денежной счета и ограничивает объем ставки за раз спин. В случае ее превышения приз имеет быть аннулирован. Также в правилах возможность содержаться запрет на размещение ставок конкретного облика, к, по одинаковым шансам в рулетке (другими, на чет либо нечет, красноватое либо черное и т.д. ). 1×slot зеркало <a href=https://forum.drumjamapp.com/memberlist.php?mode=viewprofile&u=40597>https://forum.drumjamapp.com/memberlist.php?mode=viewprofile&u=40597</a> Изучить управляла и условия получения бездепозитных призов казино, Вы можете у нас на веб-сайте в разделе с призами либо на официальном веб-сайте избранного Вами казино. Если не можете найти необходимую информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал или по электронной почте.Помимо прочего, для вывода средств по бездепу нужно привнести на счёт собственный 1-ый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально вероятную необходимую, последствии чего вывод средств будет доступен.
1х слот 1хслотс регистрация перейти на 1×slots
Приветственный приз без депо ? презент за регистрацию. Выдается средствами, фриспинами либо баллами. В заключительном случае бонусные баллы используются для роли в турнирах или обмена на настоящие средства.У любого игорного заведения свои управляла и условия. Но, чтобы получить призы, необходимо выполнить стереотипные деянья: <a href=https://www.formulersupport.com/Thread-1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%B2–1×slots-casino–107077>1×slots зеркало регистрация в 1×slots casino</a> 1×slots casino регистрация 1×slots review live <a href=http://forum.myslash.ru/profile.php?mode=viewprofile&u=54774>http://forum.myslash.ru/profile.php?mode=viewprofile&u=54774</a> 1×slots бонус за регистрацию Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном призе, то начала направьте на велечину вейджера и срок, который дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, что, этим проще отыграть бонус и исключить выигрыш.
1×slots актуальное зеркало
Для получения бонуса нужно пригласить в забаву свежего клиента. Казино начисляет пригласившему фиксированный процент от взносов приглашённого повторяющий бонуса: почаще всего его размер не превышает 10%. Срок действия приза в большинстве случаев не превышает месяца: пригласивший получает приз в зависимости от проигранных ставок приглашённого в 1-ый месяц игры.Онлайн гемблинг развивается с каждым днем больше и больше, новые бренды создаются не по дням а по часам. Новые онлайн казино проделывают вступительные акции для игроков, для того собственно бы зарекомендовать себя, и тем самым предлагают бездепозитные бонусы за регистрацию, собственно бы не упустить эту возможность — как пользоваться свежим бездепом, советуем посещать наш вебсайт как возможно почаще, самое вкусное и новые будет добавляться в этом же перечне. <a href=http://hochu-domoi.ru/bitrix/redirect.php?goto=http://s-pl.ru/bitrix/redirect.php?goto=http://cspto70.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/RQ4u3SxaRks>http://hochu-domoi.ru/bitrix/redirect.php?goto=http://s-pl.ru/bitrix/redirect.php?goto=http://cspto70.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/RQ4u3SxaRks</a> Выбор любого интернет казино на нашем сайте. В описании к каждому Вы сможете разузнать, что получите за творенье аккаунта.Более солидные предложения встречаются очень изредка. Зачастую они доступны лишь VIP-игрокам. В остальных случаях им наверняка сопутствуют очень жесткие обстоятельства отыгрыша. Также вероятны дополнительные условия и другие ограничения, прописанные в критериях и положения бонусной программы казино. 1×slots регистрация 1×slots review live За привлечение приятеля ? в рамках партнерской программы заказчик получает вознаграждение за вербование свежих пользователей.
1х слот регистрация в 1×slots casino
Прежде всего, не забывайте регулярно заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом осматривают более занимательные предложения ведущих игорных порталов.В зависимости от интернет заведения каждый из них имеет вас предложить как бездепозитные деньги, например и бездепозитные фриспины, коие последствии успешной регистрации рухнут вам на ваш игровой баланс. <a href=https://www.lightknotes.com/MyBB/showthread.php?tid=167778>1×slots casino регистрация 1×slotscasin online</a> Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, дабы замечена вероятность вывести выигрыш.Все любят получать подарки. Согласитесь, практически каждый играющий человек будет безмерно рад, если получит бесплатный презент для забавы в интернет казино просто за регистрацию или же бонус за внесенный депозит, например называемые приветственные призы для новых игроков. Соответственно такие интернет клубы будут более знамениты и предпочтительны у игроков при выборе казино для игры. Топ казино непрерывно обновляется и добавляются новые и интересные игровые клубы с симпатичной бонусной политикой и всеми возможными преимуществами, льготами, к которым относятся такие призы как фриспины за регистрацию, валютные бездепозитные бонусы, а также щедрые призы за внесенный депозит. 1×slots официальный сайт зеркало <a href=http://x4kurd.freetzi.com/member.php?action=profile&uid=81853>http://x4kurd.freetzi.com/member.php?action=profile&uid=81853</a>
1×slots казино зеркало
Законодательство, регулирующее азартные забавы в различных государствах, влияет на возможности операторов. В итоге пользователи из отдельных ареалов сталкиваются с лимитированиями со стороны казино. Это возможность быть как полный отказ в доступе, так и невозможность загружать забавы отдельных производителей.Вейджер в переводе с английского значит «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша полученного бонуса, в нашем случае бездепозитного. Число ставок значения — принципиально лишь набрать сумму, пропорциональную сумме поощрения. <a href=http://www.celestialdirectory.com/index.php?p=d>http://www.celestialdirectory.com/index.php?p=d</a> Так собственно сможете неустрашимо регистрироваться без всяких размышлений. Фортуна сейчас наверняка на вашей стороне. Не побаивайтесь, ведь следствие какого или ущерба Вам абсолютно не угрожает. С такими бонусами как без пополнения, Вы остаетесь только в плюсе, но не как не в минусе. x1 slots 1хслотс регистрация перейти на 1×slots При регистрации никаких либо ином онлайн игральном заведении — для дается один шанс испытывать свою удачу не внося средства монеты. Замечу собственно такую поощрительную предложение деют не все онлайн игровые площадки, а только щедрая середина(средина) из их. Которые мы подготовили для Вас в нашем списке.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.katzenforum.at/forum/media/users/jamesagema.16012/>казино 1× slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для получения выигрыша потребуется выполнить условия казино. Чаще всего игроку необходимо поставить конкретную сумму, хотя теснее из личных денег. Она рассчитывается из общего объема выигрыша за все время использования бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, в юзер выиграл 1000 рублей, а множитель сочиняет х30, вывести средства можно несомненно, сделав ставки на 30 000 рублей.
#8808 DanielLighttps://t.me/qvavada
не знаете, как найти актуальную ссылку vavada? ссылка <a href=https://t.me/qvavada>https://t.me/qvavada</a> решит вашу проблему. подпишитесь на наш телеграм-канал и получите доступ ко всем акциям. теперь ваш выигрыш на расстоянии пары секунд!
#8809 Robertcricahttps://t.me/qvavada
переходите по ссылке <a href=https://t.me/qvavada>https://t.me/qvavada</a> и открывайте для себя мир vavada! в нашем телеграм-канале доступны зеркала и множество полезной информации для игроков. будьте в курсе всех новинок, чтобы воспользоваться преимуществами!
#8810 https://thaisbobet-99.com/https://thaisbobet-99.com/
https://thaisbobet-99.com/ เว็บคาสิโนออนไลน์ ที่รวบรวมคาสิโนสดค่ายดังในเว็บเดียว ที่มาพร้อมกับระบบออโต้ ที่เสถียรรวดเร็วทันใจมากที่สุด ศูนย์รวมเกมฮอตฮิตที่รวบรวมทั้ง คาสิโนออนไลน์ บาคาร่า สล็อต บอล หวย เสือมังกร และเกมอื่นๆ อีกมากมาย เว็บพนันออนไลน์ อันดับ 1 ของประเทศไทย
#8811 https://lionsslot.com/https://lionsslot.com/
https://lionsslot.com/ LionSlot เป็นเว็นที่กำลังได้รับความนิยมเป็นอย่างมากในวงการสล็อตเนื่องจากเว็บ LinoSlotที่มีเกมสล็อตทดลองเล่นให้เลือกมากมาย ซึ่งได้มีการเสนอประสบการณ์การเล่นที่หลากหลายและน่าตื่นเต้นเป็นอย่างมาก
#8812 https://slotxofree.com/https://slotxofree.com/
https://slotxofree.com/ SLOTXO สล็อตเอ็กโอ สล็อตเว็บตรงค่ายใหญ่ รวมค่ายเกมชั้นนำมากที่สุด ค่ายเกมสล็อตออนไลน์มาแรง ประจำปี 2024 ที่รวบรวมเอาเกมสล็อตยอดนิยมจากหลากหลายค่ายชั้นนำทั่วโลกมารวบรวมไว้ที่เดี๋ยว มาพร้อมการออกแบบด้วยเทคโนโลยีที่ทันสมัยที่สุด
#8813 https://playslotonline.net/https://playslotonline.net/
https://playslotonline.net/ Playslot online เว็บตรง เกมสล็อตฝาก-ถอนไว เปิดใหม่ล่าสุด การเลือกเว็บไซต์คาสิโนออนไลน์ ที่เป็นเว็บตรง มีความสำคัญอย่างมาก โดยเฉพาะในยุคดิจิทัลโลกสล็อตออนไลน์ แหล่งรวมคาสิโนออนไลน์ได้รับความนิยม เพิ่มขึ้นอย่างรวดเร็ว Play slot เว็บตรง
#8814 https://bejeweled2slot.com/https://bejeweled2slot.com/
https://bejeweled2slot.com/ ถ้าคุณกำลังมองหาเว็บสล็อตที่มีความน่าเชื่อถือและน่าตื่นเต้น ขอแนะนำ FUNFUN456 สล็อต เว็บตรง เว็บสล็อตที่มีโปรโมชั่นพิเศษและระบบการเล่นที่ทันสมัย เว็บนี้รวบรวมเกมสล็อตจากค่ายดังมากมาย
#8815 http://slotgamevietqq188.com/http://slotgamevietqq188.com/
http://slotgamevietqq188.com/ เว็บสล็อต Poseidon 168 เว็บตรง ไม่ผ่านเอเย่นต์ เปิดใหม่ล่าสุด สล็อตเว็บแท้ แตกง่าย ที่ให้บริการเกมสล็อตรวมค่าย เล่นได้ครบทุกเกม แหล่งรวมเกมสล็อตออนไลน์ ที่ได้รับความนิยมมากที่สุด อันดับ 1 ในประเทศไทย
#8816 https://casinovietqq188.com/https://casinovietqq188.com/
https://casinovietqq188.com/ ผู้ให้บริการเดิมพันเกมสล็อตออนไลน์ เว็บสล็อตใหม่ ที่ได้รับความนิยมมากที่สุดในปี 2024 ที่มาพร้อมกับการใช้ระบบ API แท้ ที่จะทำให้เกมสล็อตที่นำเสนอนั้น มีคุณภาพที่ดีที่สุด และมีความเสถียรสูง ทำให้ผู้เล่นทุกท่านสามารถเพลิดเพลิน ไปกับการเล่นได้อย่างต่อเนื่องไม่มีสะดุด
#8817 https://casinovietqq288.com/https://casinovietqq288.com/
https://casinovietqq288.com/ SLOT89 ทดลองเล่นฟรี ไม่มีค่าใช้จ่าย สามารถเลือกทดลองเล่นได้ทุกเกม ทุกค่าย มีเกมสล็อตให้เลือก ทดลองเล่นมากมาย ไม่ว่าจะต้องการเกมไหนหรือค่ายไหน เว็บเราพร้อมให้ผู้เล่นเลือกทดลองเล่นฟรี โดยไม่ต้องฝากเข้าก่อน
#8818 https://150freeslots.com/https://150freeslots.com/
https://150freeslots.com/ เว็บที่ดีที่สุด วันนี้เราจึงมานำเสนอ 150FREESLOT ทางเข้าเล่น PG เพราะว่าเว็บ Free Slot เป็นเว็บที่ถูกพัฒนามาให้มีความทันสมัยเป็นอย่างมาก พร้อมระบบที่รวดเร็ว และยังมีสิ่งอำนวยความสะดวก ที่เว็บสล็อตอื่นๆ ไม่มี
#8819 ArmandoRuiff
buy cytotec in usa: <a href=" https://cytotec.top/ ">buy cytotec online fast delivery</a> – buy cytotec pills
#8820 [url=https://150freeslots.com/] https://150freeslohttp://[url=https://150freeslots.com/] https://150freeslots.com/ [/url]
[url=https://150freeslots.com/] https://150freeslots.com/ [/url] เว็บที่ดีที่สุด วันนี้เราจึงมานำเสนอ 150FREESLOT ทางเข้าเล่น PG เพราะว่าเว็บ Free Slot เป็นเว็บที่ถูกพัฒนามาให้มีความทันสมัยเป็นอย่างมาก พร้อมระบบที่รวดเร็ว และยังมีสิ่งอำนวยความสะดวก ที่เว็บสล็อตอื่นๆ ไม่มี
#8821 https://150freeslots.com/https://150freeslots.com/
<a href=„https://150freeslots.com/“>https://150freeslots.com/</a> เว็บที่ดีที่สุด วันนี้เราจึงมานำเสนอ 150FREESLOT ทางเข้าเล่น PG เพราะว่าเว็บ Free Slot เป็นเว็บที่ถูกพัฒนามาให้มีความทันสมัยเป็นอย่างมาก พร้อมระบบที่รวดเร็ว และยังมีสิ่งอำนวยความสะดวก ที่เว็บสล็อตอื่นๆ ไม่มี
#8822 Shaneledhttps://svetodiodnyy-ekran.ru
светодиодные экраны для помещения <a href=https://svetodiodnyy-ekran.ru/>светодиодный экран стоимость</a>
#8823 Ремонт квадрокоптеровhttps://remont-kvadrokopterov-best.ru/
Наши специалисты предлагает профессиональный <a href=https://remont-kvadrokopterov-best.ru/>мастерская по ремонту квадрокоптера</a> всех типов и брендов. Мы знаем, насколько значимы для вас ваши духовые шкафы, и стремимся предоставить услуги наилучшего качества. Наши квалифицированные специалисты работают быстро и аккуратно, используя только сертифицированные компоненты, что гарантирует надежность и долговечность выполненных работ. Наиболее распространенные поломки, с которыми сталкиваются владельцы духовых шкафов, включают неисправности термостата, неисправный таймер, поврежденную дверцу, проблемы с контроллером, неисправности вентилятора и неработающие датчики. Для устранения этих поломок наши опытные мастера выполняют ремонт нагревательных элементов, термостатов, таймеров, дверец, контроллеров, вентиляторов и электроники. Доверив ремонт нам, вы гарантируете себе надежный и долговечный официальный ремонт дронов рядом. Подробная информация представлена на нашем сайте: https://remont-kvadrokopterov-best.ru
#8824 Ремонт индукционных плитhttps://remont-indukcionnyh-plit-now.ru/
Наш сервисный центр предлагает высококачественный <a href=https://remont-indukcionnyh-plit-now.ru/>официальный ремонт индукционных плит рядом</a> любых брендов и моделей. Мы знаем, насколько значимы для вас ваши индукционные плиты, и обеспечиваем ремонт высочайшего уровня. Наши квалифицированные специалисты работают быстро и аккуратно, используя только сертифицированные компоненты, что гарантирует надежность и долговечность выполненных работ. Наиболее общие проблемы, с которыми сталкиваются пользователи индукционных варочных панелей, включают проблемы с температурными датчиками, неисправности сенсорных панелей, неисправности программного обеспечения, неисправности разъемов и механические повреждения. Для устранения этих проблем наши профессиональные техники выполняют ремонт нагревательных элементов, сенсорных панелей, ПО, разъемов и механических компонентов. Доверив ремонт нам, вы гарантируете себе качественный и надежный мастерская по ремонту индукционных плит в москве. Подробная информация представлена на нашем сайте: https://remont-indukcionnyh-plit-now.ru
#8825 GamaCasinohttps://gama-casino-apk.ru
<a href=https://gama-casino-apk.ru>www.gama-casino-apk.ru</a>
Загрузить apk файл казино Гама – играй прямо сейчас! <a href=https://gama-casino-apk.ru>https://gama-casino-apk.ru</a>
#8826 Ремонт индукционных плитhttps://remont-indukcionnyh-plit-now.ru/
Наши специалисты предлагает высококачественный <a href=https://remont-indukcionnyh-plit-now.ru/>вызвать мастера по ремонту индукционных плит на дому</a> различных марок и моделей. Мы понимаем, насколько необходимы вам ваши индукционные кухонные приборы, и стремимся предоставить услуги первоклассного уровня. Наши опытные мастера оперативно и тщательно выполняют работу, используя только оригинальные запчасти, что обеспечивает долговечность и надежность выполненных работ. Наиболее частые неисправности, с которыми сталкиваются владельцы индукционных плит, включают проблемы с температурными датчиками, неработающие сенсоры, неисправности программного обеспечения, неработающие разъемы и повреждения корпуса. Для устранения этих поломок наши опытные мастера выполняют ремонт нагревательных элементов, сенсорных панелей, ПО, разъемов и механических компонентов. Обратившись к нам, вы гарантируете себе долговечный и надежный срочный ремонт индукционной плиты. Подробная информация доступна на сайте: https://remont-indukcionnyh-plit-now.ru
#8827 Ремонт консолейhttps://remont-igrovyh-konsoley-mob.ru/
Наши специалисты предлагает надежный <a href=https://remont-igrovyh-konsoley-mob.ru/>официальный ремонт игровых приставок рядом</a> любых брендов и моделей. Мы осознаем, насколько важны для вас ваши консоли, и стремимся предоставить услуги высочайшего уровня. Наши квалифицированные специалисты работают быстро и аккуратно, используя только сертифицированные компоненты, что обеспечивает надежность и долговечность наших услуг. Наиболее частые неисправности, с которыми сталкиваются владельцы игровых приставок, включают поломку HDD, проблемы с разъемами, неисправные контроллеры, неисправности программного обеспечения и проблемы с охлаждением. Для устранения этих проблем наши квалифицированные специалисты оказывают ремонт жестких дисков, разъемов, контроллеров, ПО и систем охлаждения. Обращаясь в наш сервисный центр, вы гарантируете себе долговечный и надежный отремонтировать игровая приставка на выезде. Подробная информация размещена на сайте: https://remont-igrovyh-konsoley-mob.ru
#8828 GamaCasinohttps://gama-casino-apk.ru
<a href=https://gama-casino-apk.ru>http://www.gama-casino-apk.ru</a>
Скачать последнюю версию приложения онлайн казино gama – выигрывай сейчас! <a href=https://gama-casino-apk.ru>gama-casino-apk.ru</a>
#8829 Ремонт консолейhttps://remont-igrovyh-konsoley-mob.ru/
Наши специалисты предлагает высококачественный <a href=https://remont-igrovyh-konsoley-mob.ru/>сервисный ремонт игровых приставок с гарантией</a> любых брендов и моделей. Мы знаем, насколько важны для вас ваши консоли, и стремимся предоставить услуги наилучшего качества. Наши профессиональные техники оперативно и тщательно выполняют работу, используя только сертифицированные компоненты, что предоставляет надежность и долговечность наших услуг. Наиболее распространенные поломки, с которыми сталкиваются обладатели геймерских устройств, включают поломку HDD, неработающие разъемы, неисправные контроллеры, неисправности программного обеспечения и проблемы с охлаждением. Для устранения этих неисправностей наши квалифицированные специалисты выполняют ремонт жестких дисков, разъемов, контроллеров, ПО и систем охлаждения. Обращаясь в наш сервисный центр, вы обеспечиваете себе надежный и долговечный сервисный ремонт игровой приставки рядом. Подробная информация представлена на нашем сайте: https://remont-igrovyh-konsoley-mob.ru
#8830 Ремонт ибп в Москвеhttps://remont-ibp-max.ru/
Наша мастерская предлагает высококачественный <a href=https://remont-ibp-max.ru/>мастер по ремонту бесперебойника рядом</a> различных марок и моделей. Мы осознаем, насколько значимы для вас ваши ИБП, и стремимся предоставить услуги наилучшего качества. Наши квалифицированные специалисты оперативно и тщательно выполняют работу, используя только оригинальные запчасти, что обеспечивает длительную работу выполненных работ. Наиболее частые неисправности, с которыми сталкиваются владельцы ИБП, включают поломку аккумулятора, неработающий инвертор, неисправный контроллер, неисправности разъемов и программные сбои. Для устранения этих поломок наши квалифицированные специалисты выполняют ремонт батарей, инверторов, контроллеров, разъемов и ПО. Доверив ремонт нам, вы гарантируете себе качественный и надежный сервисный центр по ремонту бесперебойников адреса. Подробная информация представлена на нашем сайте: https://remont-ibp-max.ru
#8831 HarryZob
Gabapentin Pharm: <a href=" https://gabapentinpharm.com/ ">Gabapentin Pharm</a> – Gabapentin Pharm
#8832 Ремонт духовых шкафов в Москвеhttps://remont-duhovyh-shkafov-ace.ru/
Наша мастерская предлагает высококачественный <a href=https://remont-duhovyh-shkafov-ace.ru/>ремонт духовых шкафов с гарантией</a> всех типов и брендов. Мы знаем, насколько важны для вас ваши духовки, и готовы предложить сервис высочайшего уровня. Наши опытные мастера работают быстро и аккуратно, используя только оригинальные запчасти, что гарантирует длительную работу выполненных работ. Наиболее частые неисправности, с которыми сталкиваются обладатели кухонных приборов, включают неисправности термостата, выход из строя таймера, поломку дверцы, проблемы с контроллером, неисправности вентилятора и неработающие датчики. Для устранения этих поломок наши профессиональные техники проводят ремонт нагревательных элементов, термостатов, таймеров, дверец, контроллеров, вентиляторов и электроники. Обращаясь в наш сервисный центр, вы обеспечиваете себе качественный и надежный центр ремонта духового шкафа адреса. Подробная информация размещена на сайте: https://remont-duhovyh-shkafov-ace.ru
#8833 Ремонт гироскутеров в Москвеhttps://remont-giroskuterov-key.ru/
Наши специалисты предлагает высококачественный <a href=https://remont-giroskuterov-key.ru/>центр ремонта гироскутера с гарантией</a> различных марок и моделей. Мы понимаем, насколько необходимы вам ваши гироскутеры, и стремимся предоставить услуги высочайшего уровня. Наши опытные мастера оперативно и тщательно выполняют работу, используя только качественные детали, что гарантирует надежность и долговечность проведенных ремонтов. Наиболее общие проблемы, с которыми сталкиваются обладатели самобалансирующихся скутеров, включают неисправную батарею, неработающий двигатель, поломку контроллера, проблемы с гиросенсорами и поломки корпуса. Для устранения этих проблем наши квалифицированные специалисты проводят ремонт батарей, двигателей, контроллеров, гиросенсоров и механических компонентов. Обращаясь в наш сервисный центр, вы обеспечиваете себе надежный и долговечный сервисный ремонт гироскутеров на выезде. Подробная информация представлена на нашем сайте: https://remont-giroskuterov-key.ru
#8834 Donalddushttps://www.facebook.com/st666nohu
ST666 – Sân Chơi Nổ Hũ Uy Tín Đổi Thưởng Hàng Đầu ST666 là một trong những sân chơi nổ hũ đổi thưởng được yêu thích nhất hiện nay. Với các sảnh quay nổi tiếng như JILI Slot, PG Slot, và JDB Slot, nền tảng này không chỉ mang đến trải nghiệm giải trí đỉnh cao mà còn mang lại cơ hội đổi thưởng hấp dẫn cho người chơi.
Lý do nên chọn ST666 1. Khuyến mãi hấp dẫn ST666 thường xuyên triển khai các chương trình ưu đãi đặc biệt:
Hoàn tiền 1.5% mỗi ngày khi quay slot, gia tăng cơ hội thắng lớn. Chiết khấu nạp tiền lên đến 25.000.000 VNĐ, hỗ trợ tối đa cho người chơi muốn tăng vốn. 2. Sảnh quay đa dạng ST666 mang đến hàng loạt tựa game slot từ các sảnh quay danh tiếng:
JILI Slot: Tỷ lệ thắng cao, giao diện đẹp mắt. PG Slot: Đồ họa ấn tượng, chủ đề phong phú. JDB Slot: Dành cho những ai yêu thích cảm giác hồi hộp. 3. Nền tảng uy tín, bảo mật cao ST666 luôn đảm bảo an toàn cho người chơi:
Bảo mật thông tin tuyệt đối nhờ vào công nghệ mã hóa hiện đại. Nạp/rút tiền nhanh chóng, hỗ trợ giao dịch linh hoạt mà không gián đoạn trải nghiệm. 4. Dịch vụ khách hàng chuyên nghiệp Đội ngũ hỗ trợ của ST666 làm việc 24/7, luôn sẵn sàng giải đáp mọi thắc mắc và hỗ trợ người chơi trong suốt quá trình tham gia.
Hướng dẫn tham gia ST666 Đăng ký tài khoản: Hoàn tất các bước đăng ký dễ dàng để tham gia nền tảng. Nhận khuyến mãi: Người chơi mới có thể nhận thưởng nạp đầu 100%. Lựa chọn trò chơi yêu thích: Từ slot, nổ hũ đến các trò đổi thưởng khác, ST666 đều có sẵn để đáp ứng mọi nhu cầu. Thông tin về ST666 Địa chỉ: 317 Bình Thành, Bình Hưng Hoà B, Bình Tân, Thành phố Hồ Chí Minh.
ST666 – Điểm Đến Giải Trí Và Đổi Thưởng Hàng Đầu ST666 không chỉ là một sân chơi slot mà còn là hệ sinh thái giải trí toàn diện với dịch vụ chuyên nghiệp và ưu đãi vượt trội. Tham gia ngay hôm nay để trải nghiệm sự uy tín và cơ hội thắng lớn mà nền tảng này mang lại!
#8835 HenryOxypehttps://businessfaq.ru
Статьи для вас и вашего бизнеса <a href=https://businessfaq.ru/>https://businessfaq.ru</a> подборка актуальных материалов для предпринимателей. Советы по управлению, развитию, финансам и маркетингу, чтобы ваш бизнес процветал.
#8836 BartonLaghttps://rg8888.org/leo-logfail/
<a href=https://rg8888.org/leo-logfail/>娛樂城</a> 超過100間最新資訊任你看!
還在苦苦尋找安全可靠的線上娛樂城推薦名單嗎?這篇彙集了 2024 年 100 間娛樂城評價實測,為您打造最新、最真實的娛樂城排行榜!
不論您是經驗豐富的玩家還是剛入門的新手,都能在這找到最適合您的娛樂城平台。
我們從遊戲種類、優惠活動到出金速度等多個面向進行詳細評比,讓您輕鬆避開黑網,安心享受刺激的遊戲體驗!點擊查看完整排行榜,開啟您的娛樂新篇章!
排名 推薦娛樂城 推薦指數 NO.1 富遊娛樂城 ★★★★★/5.0分 NO.2 1XBET娛樂城 ★★★★★/5.0分 NO.4 九州娛樂城 ★★★★★/5.0分 NO.5 LEO娛樂城 ★★★★★/5.0分 NO.6 YABO亞博體育娛樂城 ★★★★★/5.0分 NO.7 BET365娛樂城 ★★★★★/5.0分 NO.8 PM娛樂城 ★★★★★/5.0分 NO.9 DG娛樂城 ★★★★★/5.0分 NO.10 DB娛樂城 ★★★★★/5.0分
▲此表格為五星評價推薦娛樂城
1星評價 娛樂城評價 2024 / 10 / 24 達利娛樂城|評價介紹 達利娛樂城|評價介紹 達利娛樂城於2023年成立,他們聲稱致力於打造一個「安全可靠」、「即時便利」、「公平公正」及「專業營運」的優質娛樂服務平台,所有個人資…
2星評價 娛樂城評價 2024 / 10 / 04
金金財寶娛樂城|評價介紹 金金財寶娛樂城是一個由知名啦啦隊隊員林襄代言的線上賭場,採用幣商型運營方式,玩家需使用台幣儲值以獲得遊戲幣。 該平台不支持遊戲幣的直接…
2星評價 娛樂城評價 2024 / 08 / 06 帝遊娛樂城|評價介紹精選 帝遊娛樂城|評價介紹 帝遊娛樂城是在2022年所創立的新興品牌,網站內的排版以及網頁速度上都有著不錯的表現,對於使用者來說非常易於操作。 帝遊娛樂城的遊戲內…
3星評價 娛樂城評價 2024 / 07 / 31 客萊柏娛樂城 客萊柏娛樂城|評價介紹 客萊柏娛樂城是一間從2020年就開始經營的線上娛樂城品牌,該品牌累積不少玩家的好口碑,遊戲種類多元且有許多常駐的優惠活動,對新手玩家非…
5星評價 娛樂城評價 2024 / 06 / 25 DB娛樂城介紹 DB娛樂城|評價介紹 DB娛樂城,原名PM娛樂城,在2023年更名為PM。這個重新品牌的過程中,PM集團將其亞洲遊戲品牌更名為【DB多寶遊戲】,專注於提供多…
2星評價 娛樂城評價 2024 / 06 / 14 豪神娛樂城介紹 豪神娛樂城|評價介紹 豪神娛樂城是由著名主持人吳宗憲代言的線上賭場,採取幣商型的運營模式,玩家需使用台幣充值以換取遊戲幣。 該平台沒有提供遊戲幣的直接提現方…
2星評價 娛樂城評價 2024 / 06 / 14 星城娛樂城介紹 星城娛樂城|評價介紹 星城娛樂城是一個由知名主持人徐乃麟代言的網上賭場,採用幣商型運營方式,玩家需使用台幣儲值以獲得遊戲幣。 該平台不支持遊戲幣的直接提現,…
1星評價 娛樂城評價 2024 / 06 / 12 AT99娛樂城介紹 AT99娛樂城|評價介紹 AT99娛樂城是TU娛樂城最新開發的娛樂城品牌,至於為何要開發一個新的品牌引起了許多網友的推測。 對此有人覺得TU娛樂城可能被抄了或者…
不推薦 娛樂城評價 2024 / 06 / 04 AF娛樂城 AF娛樂城|評價介紹 AF娛樂城已經不存在了,不知是經營上有問題害是什麼原因,但是據我們了解此娛樂城有被詐騙的風險,請玩家多多注意!並且網路上充斥著假冒AF…
4星評價 娛樂城評價 2024 / 05 / 17 Player-KU-CASINO KU娛樂城|評價介紹 過去九州娛樂城以信用版起家,為台灣地區的玩家服務。但由於會員數量過於龐大,造成客服無法消化,衍伸出許多客訴與詐騙謠言。 因此,九州決定…
1星評價 娛樂城評價 2024 / 04 / 04 錢盈娛樂城 錢盈娛樂城|評價介紹 錢盈娛樂城於2022年成立,是一個專注於現金投注的線上遊戲平台,提供了包括體育賭博、真人百家樂、老虎機、彩票和電子遊戲等多樣化的遊戲選…
不推薦 娛樂城評價 2024 / 03 / 26 F1方程式娛樂城 F1方程式娛樂城|評價介紹 F1方程式娛樂城屬於小型線上娛樂城版,整體晚間非常簡陋而且含有諸多瑕疵以及不完善。 首先奇怪的點在於完全沒有可以註冊的地方,我們這邊猜…
不推薦 娛樂城評價 2024 / 03 / 26 CZ168娛樂城 CZ168娛樂城|評價介紹 CZ168娛樂城在雖然在簡介中自稱有12年的經營時間。 但是經過我們實際的調查以及訪問該品牌網頁後發現,並沒有任何12年前或是更近的資…
1星評價 娛樂城評價 2024 / 03 / 25 XY娛樂城 XY娛樂城|評價介紹 XY娛樂城是一間於2024創立的新興品牌,我們實際到訪網站發現他們的網頁只提供手機版,並未提供電腦版,可能是因應現在主流大家都是拿手機…
2星評價 娛樂城評價 2024 / 03 / 25 搖錢樹娛樂城 搖錢樹娛樂城|評價介紹 搖錢樹娛樂城是創立於2024,是非常新的一個品牌,但是我們實際到訪網站後,他們的娛樂城完整度是不錯的。 除了有一些小缺陷,像是我們在想…
不推薦 娛樂城評價 2024 / 03 / 25 必勝娛樂城 必勝娛樂城介紹|評價介紹 必勝娛樂城並不存在,此娛樂城有被詐騙的風險,請玩家多多注意!必勝娛樂城據我們了解過後,發現網路上也有一家叫必勝客娛樂城,是否為同夥還有…
2星評價 娛樂城評價 2024 / 03 / 25 柏客娛樂城 柏客娛樂城|評價介紹 柏客娛樂城是一間於2023年所創立的新興線上娛樂城品牌。 據我們實際到訪該品牌網站他們的風格走的是暗色調,以視覺上及使用體驗來說給玩家…
不推薦 娛樂城評價 2024 / 03 / 25 九鑫娛樂城 九鑫娛樂城|評價介紹 九鑫娛樂城並不存在,此娛樂城有被詐騙的風險,請玩家多多注意! 九鑫娛樂城調查 如有玩家耳聞到或是想前往九鑫娛樂城做遊玩,Player團…
不推薦 娛樂城評價 2024 / 03 / 25 推金娛樂城 推金娛樂城|評價介紹 推金娛樂城並不存在,此娛樂城有被詐騙的風險,請玩家多多注意! 推金娛樂城調查 如有玩家耳聞到或是想前往推金娛樂城做遊玩,Player團…
不推薦 娛樂城評價 2024 / 03 / 25 捷冠娛樂城 捷冠娛樂城|評價介紹 捷冠娛樂城並沒有在經營,此娛樂城有被詐騙的風險,請玩家多多注意! 捷冠娛樂城調查 如有玩家耳聞到或是想前往捷冠娛樂城做遊玩,Playe…
不推薦 娛樂城評價 2024 / 03 / 25 歐萊雅娛樂城 歐萊雅娛樂城|評價介紹 歐萊雅娛樂城並不存在,此娛樂城有被詐騙的風險,請玩家多多注意! 歐萊雅娛樂城調查 如有玩家耳聞到或是想前往歐萊雅娛樂城做遊玩,Play…
不推薦 娛樂城評價 2024 / 03 / 25 MG娛樂城 MG娛樂城|評價介紹 MG娛樂城並不存在,此娛樂城有被詐騙的風險,請玩家多多注意!據我們了解,MG娛樂城在搜尋結果上顯示的雖然是MG娛樂城但是點進去後卻是非…
不推薦 娛樂城評價 2024 / 03 / 25 JF娛樂城 JF娛樂城|評價介紹 JF娛樂城並不存在,此娛樂城有被詐騙的風險,請玩家多多注意!目前了解到的是,JF娛樂城在網上只搜尋的到類似空包彈的網站推薦留言,而他所…
不推薦 娛樂城評價 2024 / 03 / 25 TTB娛樂城 TTB娛樂城|評價介紹 TTB娛樂城並不存在,此娛樂城有被詐騙的風險,請玩家多多注意! TTB娛樂城調查 如有玩家耳聞到或是想前往TTB娛樂城做遊玩,Play…
不推薦 娛樂城評價 2024 / 03 / 25 TES888娛樂城 TES888娛樂城|評價介紹 TES8888娛樂城並不存在,此娛樂城有被詐騙的風險,請玩家多多注意! TES888娛樂城調查 如有玩家耳聞到或是想前往TES888娛…
2星評價 娛樂城評價 2024 / 03 / 25 新世界娛樂城 新世界娛樂城|評價介紹 新世界娛樂城是一間於2007年創立的娛樂城,至今已有將近快20年的經營時間了。 但是經營這麼久的線上娛樂城卻被網友爆出擅自洩漏會員個資…
3星評價 娛樂城評價 2024 / 03 / 22 WG娛樂城 WG娛樂城|評價介紹 WG娛樂城是一間創立於2023年的線上娛樂城品牌,他們提供諸多遊戲選擇讓玩家能盡情在娛樂城中享受電子遊戲所帶來的愉悅。 其中較為特別的…
1星評價 娛樂城評價 2024 / 03 / 22 逸遊娛樂城 EG逸遊娛樂城|評價介紹 EG逸遊娛樂城是一間於2023年創立的新娛樂城品牌,他們擁有眾多遊戲提供給玩家做選擇,且頻繁地釋出優惠活動,可以說是對新手玩家非常友好…
2星評價 娛樂城評價 2024 / 03 / 21 RM娛樂城 RM娛樂城|評價介紹 RM娛樂城是由菲律賓政府的PAGCOR(菲律賓娛樂和遊戲公司)授予博彩牌照,並獲得GLI(Gaming Laboratories In…
2星評價 娛樂城評價 2024 / 03 / 21 YG娛樂城 YG娛樂城|評價介紹 YG娛樂城應該可以說是在業界風格數一數二特殊的線上娛樂城了,整體網站採用中世紀元素下去做設計,會讓玩家誤譯為自己身處在RPG遊戲裡頭。…
2星評價 娛樂城評價 2024 / 03 / 21 SAT888西雅圖娛樂城 SAT888西雅圖娛樂城|評價介紹 SAT888西雅圖娛樂城創立於2022年,其中他以豐富的遊戲選項聞名,但是在網頁的體驗上卻不如其他市面上那些線上娛樂城。 網頁速度較慢…
不推薦 娛樂城評價 2024 / 03 / 21 LT娛樂城 LT娛樂城|評價介紹 LT娛樂城是一間於2022創立的線上娛樂城品牌,其中要特別注意的是,經我們網路上調查後發現此品牌常常因各種理由不給玩家出金。 網友罵聲…
不推薦 娛樂城評價 2024 / 03 / 21 8方娛樂城 8方娛樂城|評價介紹 8方娛樂城在網頁外觀上並無太大問題,但是經我們實際訪問該品牌後,認為8方娛樂城為詐騙黑網的可能性非常大。 其中,網頁內許多按鈕設置上只…
不推薦 娛樂城評價 2024 / 03 / 20 T9娛樂城 T9娛樂城|評價介紹 T9娛樂城相信許多人多多少少聽過,但是這邊玩家們要特別注意其實T9娛樂城是不存在的。 經我們實際訪問該品牌網站發現到,他的網站始終指向…
3星評價 娛樂城評價 2024 / 03 / 20 玖富娛樂城 玖富娛樂城|評價介紹 玖富娛樂城是一間於2023年創立的新創品牌,他們精美的網頁以及讓人一目瞭然的排版資訊都讓人能夠清楚明瞭的找到自己想找的資訊,他們的遊戲…
不推薦 娛樂城評價 2024 / 03 / 20 致富娛樂城 致富娛樂城|評價介紹 致富娛樂城是一間於2018年就創立的品牌,雖然經營時間也有了5年多了,但是在網路上的口碑並不是很好,甚至還傳出該娛樂城為詐騙黑網。 就…
1星評價 娛樂城評價 2024 / 03 / 20 阿拉巴娛樂城 阿拉八娛樂城|評價介紹 阿拉八娛樂城是一間於2022年創立的線上娛樂城,相比其他線上知名娛樂城,他們的遊戲種類明顯地比其他間少很多。 這可能導致玩家在遊戲體驗…
1星評價 娛樂城評價 2024 / 03 / 20 JP娛樂城 JP娛樂城|評價介紹 JP娛樂城是一間於2023年所創立的新興品牌,但也不知道是否也因新創品牌因而導致在網站上有許多的資訊上的不足以及BUG的出現。 這可能…
不推薦 娛樂城評價 2024 / 03 / 20 鑫巨力娛樂城 鑫巨力娛樂城|評價介紹 有意前往鑫巨力娛樂城得玩家們需要注意!該娛樂城已於2024/03/15停止了平台服務,因此在這邊也提醒玩家不要做任何註冊以及儲值上的動…
3星評價 娛樂城評價 2024 / 03 / 20 威樂娛樂城 威樂娛樂城|評價介紹 威樂娛樂城專門為全球華人社群設計,憑藉其全球分布的辦公室和客服中心以及合法的經營方式,深受許多遊戲愛好者的青睞。 他們提供了多樣化的遊…
3星評價 娛樂城評價 2024 / 03 / 19 GSBET娛樂城 GSBET娛樂城|評價介紹 GSBET在系統上以及安全性的技術上有著完善的技術,他們提供了一個安全、隱私且公平的線上博彩空間。 使用國際認可的SSL 128位加密…
1星評價 娛樂城評價 2024 / 03 / 19 a8遊藝場 A8娛樂城|評價介紹 A8娛樂城經我們調查過後以及實際訪問該品牌網頁,發現其中幾個嚴重的問題,A8娛樂城的網頁排版混亂、且該品牌相關資訊完全都沒又做任何的說…
3星評價 娛樂城評價 2024 / 03 / 19 德正娛樂城 DZ得正娛樂城|評價介紹 DZ得正娛樂城是一間創立於2024年的新創線上娛樂城,並且他們提供了一系列豐富的遊戲選項。 從彩票、真人視訊、體育賭注到電玩遊戲等,滿…
1星評價 娛樂城評價 2024 / 03 / 19 雷亞娛樂城 雷亞娛樂城|評價介紹 雷亞娛樂城是一間於2020年創立的線上娛樂城,但是在訪問以及遊玩過雷亞娛樂城後我們給出了一些結論,他們在娛樂城的公司營運以及該品牌公司…
1星評價 娛樂城評價 2024 / 03 / 19 FDY娛樂城 FDY娛樂城|評價介紹 由於FDY娛樂城的官方網站未提供足夠的詳細資訊,我們高度懷疑可能是一個詐騙或不可信的平台。 官方網站上的信息過於粗略,缺乏必要的運營和…
3星評價 娛樂城評價 2024 / 03 / 19 昊陽娛樂城 昊陽娛樂城|評價介紹 昊陽娛樂城擁有菲律賓娛樂及博彩公司(PAGCOR)頒發的執照,受其監管,致力於提供安全、公平、公正、誠信的網上投注服務。 旨在打造世界…
3星評價 娛樂城評價 2024 / 03 / 19 369娛樂城 369娛樂城|評價介紹 369娛樂城提供一個簡潔且易於使用的應用程式,適用於iOS和Android設備,方便玩家在Google Play和App Store上…
3星評價 娛樂城評價 2024 / 03 / 18 發樂娛樂城 發樂娛樂城|評價介紹 創立於2021年的發樂娛樂城,是一家官方運營的線上社交博弈遊戲品牌。 以「誠信、正直、玩家第一」為核心理念,致力於維護用戶權益,為玩家…
2星評價 娛樂城評價 2024 / 03 / 18 QK娛樂城 QK娛樂城|評價介紹 QK娛樂城專為全球華人社區打造,深受眾多遊戲愛好者喜愛。他們在全球設有辦公室及客服中心,並且合法經營,確保您的遊戲體驗既安全又愉快。 …
不推薦 娛樂城評價 2024 / 03 / 18 鑽豹娛樂城 鑽豹娛樂城|評價介紹 關於鑽豹娛樂城的詳細訊息,在該娛樂城的官網中並沒有做任何詳細的介紹,因此我們在這邊可以合理判斷此娛樂城為詐騙黑網的可能性非常高,官網中…
3星評價 娛樂城評價 2024 / 03 / 18 飛達娛樂城 飛達娛樂城|評價介紹 飛達娛樂城,由”Wilshire Worldwide Company Limited” 營運,他們聲稱擁有菲律賓官方博彩許可,提供豐富…
2星評價 娛樂城評價 2024 / 03 / 18 FUNNY娛樂城 FUNNY娛樂城|評價介紹 FUNNY娛樂城專為全球華人社區量身打造,贏得了眾多遊戲愛好者的喜愛。 他們遍設辦公室及客服中心於世界各地,並且保證合法經營,讓您的遊…
2星評價 娛樂城評價 2024 / 03 / 18 金博娛樂城 金博娛樂城|評價介紹 金博娛樂城專門為全球的華人社群設計,已經贏得了許多忠實遊戲愛好者的心。 他們在世界各地都有自己的辦公室和客服中心,而且完全合法運營,讓…
不推薦 娛樂城評價 2024 / 03 / 18 V7娛樂城 V7娛樂城|評價介紹 V7娛樂城樂是一間於2022年年末所創立的線上娛樂城品牌,據他該品牌說法,他們擁有一支堅強的自主開發團隊、客服團隊、除了能滿足玩家在娛…
3星評價 娛樂城評價 2024 / 03 / 15 SZ娛樂城 SZ娛樂城|評價介紹 SZ娛樂城是專門為全球華人打造的,已經吸引了眾多忠實粉絲。 他們在各地設有辦公室和客服中心,都是合法經營的,所以您可以放心。 他們提供…
3星評價 娛樂城評價 2024 / 03 / 15 DOIN娛樂城 DOIN娛樂城|評價介紹 DOIN娛樂城,這家設立在柬埔寨波貝度假村的線上遊戲天地,不僅擁有合法的博弈執照,還提供多樣化的遊戲選項,包括運動博彩、電競、真人百家…
不推薦 娛樂城評價 2024 / 03 / 11 金合發娛樂城精選 金合發娛樂城|評價介紹 金合發娛樂城曾在線上娛樂界獲得廣泛的歡迎,享有老牌的地位。 但是,近些年來,由於玩家提出的連串投訴,其名譽不斷受損。 這些投訴主要圍繞…
5星評價 娛樂城評價 2024 / 03 / 11 RG富遊娛樂城精選 富遊娛樂城|評價介紹 隨著2024年的到來,最新的線上娛樂平台排行榜已經更新,這一次的排名綜合考慮了各種因素,包括體驗金、促銷活動、提款效率和遊戲多樣性,目…
不推薦 娛樂城評價 2024 / 03 / 08 3A娛樂城精選 3A娛樂城|評價介紹 3A娛樂城是一家線上遊戲平台,提供多樣化的遊戲選擇,包括百家樂、老虎機和運彩等。 但因為網路上對這個平台的評論不多,有些人可能會擔心遭…
1星評價 娛樂城評價 2024 / 03 / 08 FA8娛樂城 FA8娛樂城|評價介紹 FA8娛樂城在亞洲地區受到許多玩家的青睞,FA8娛樂城是一個多元化的線上賭博平台。 它提供了包羅萬象的遊戲選項,從體育投注、電玩遊戲到…
2星評價 娛樂城評價 2024 / 03 / 08 BU娛樂城 BU娛樂城|評價介紹 BU娛樂城在亞太地區的線上娛樂市場擁有豐富的經驗,以強大的研發團隊和優質的客服服務而聞名。 該平台所開發的遊戲經美國TST技術測試機構…
5星評價 娛樂城評價 2024 / 03 / 08 1XBET娛樂城1 1XBET娛樂城|評價介紹 1XBET娛樂城擁有許多各式各樣的遊戲和促銷活動,讓玩家每天都有機會贏得獎勵。 這個平台支持多種付款方式,包括Visa、Masterc…
不推薦 娛樂城評價 2024 / 03 / 07 大老爺娛樂城精選 大老爺娛樂城|評價介紹 大老爺娛樂城之前的活動是你存1000元就送你1000點,但得玩到13倍投注額。 最近他們改成了存3000送1688點,但要玩到11倍投…
3星評價 娛樂城評價 2024 / 03 / 07 AC1娛樂城精選 AC1娛樂城介紹|評價介紹 AC1娛樂城在亞太區的線上娛樂市場上運營多年,擁有一支自研團隊和專業的客服團隊。這家娛樂城努力為玩家提供一個全面、可信賴的網絡遊戲體驗…
3星評價 娛樂城評價 2024 / 03 / 07 大福娛樂城精選 大福娛樂城|評價介紹 大福娛樂城是個網上賭博平台,玩家在這裡是用虛擬的點數來充值,算是一種幣商型的賭場。 這裡沒有直接的提款方式,玩家得自己找幣商換成現金,…
5星評價 娛樂城評價 2024 / 03 / 07 九州娛樂城 九州娛樂城|評價介紹 九州娛樂城,也被稱作LEO娛樂城,致力於打造一個既安全又方便、公平公正的高品質娛樂服務平台。 他們的目標是創造全新的線上娛樂城體驗,普…
5星評價 娛樂城評價 2024 / 03 / 07 LEO娛樂城精選 LEO娛樂城|評價介紹 LEO娛樂城,也被稱為”九州娛樂城“,而他們的品牌宗旨是建立一個既安全又方便的高品質線上娛樂平台。 全力為玩家提供一個公平、正義的遊戲…
1星評價 娛樂城評價 2024 / 03 / 06 金鈦城娛樂城精選 金鈦城娛樂城|評價介紹 金鈦城娛樂城是台灣線上娛樂城(現金版),成立於 2023年,主打高額賠率、多樣遊戲、快速出金等特色。 但多數玩家反映金鈦城娛樂城的客服…
3星評價 娛樂城評價 2024 / 03 / 06 必贏娛樂城精選 必贏娛樂城|評價介紹 必贏娛樂城,定位為針對全球華人市場的高級線上娛樂平台,具有豐富的跨國經營經驗。 這個平台在世界各地都設有辦公室和客服中心,並且擁有多個…
3星評價 娛樂城評價 2024 / 03 / 06 好玩娛樂城 好玩娛樂城|評價介紹 對於正在尋找高品質線上賭場的玩家來說,好玩娛樂城絕對值得一試!這個平台已經吸引了成千上萬的玩家,以提供令人興奮的賭博體驗而著稱。 好玩…
不推薦 娛樂城評價 2024 / 03 / 06 BOK娛樂城精選 BOK娛樂城|評價介紹 目前在BOK娛樂城的網站上找不到登入的選項,當點擊相應連結時,會被重定向到【FM富馬】網站。這情況引起了疑慮,使人懷疑BOK娛樂城可能…
3星評價 娛樂城評價 2024 / 03 / 06 JY娛樂城精選 JC娛樂城|評價介紹 JC娛樂城是九州娛樂集團下的一個品牌。但當用戶試圖註冊JC娛樂城時,他們實際上會被導向到THA娛樂城的介面,這個介面和九州娛樂城的長得…
#8837 Ремонт гироскутеровhttps://remont-giroskuterov-key.ru/
Наш сервисный центр предлагает профессиональный <a href=https://remont-giroskuterov-key.ru/>ремонт гироскутера на выезде</a> различных марок и моделей. Мы знаем, насколько значимы для вас ваши электроскутеры, и обеспечиваем ремонт наилучшего качества. Наши профессиональные техники проводят ремонтные работы с высокой скоростью и точностью, используя только оригинальные запчасти, что гарантирует долговечность и надежность наших услуг. Наиболее распространенные поломки, с которыми сталкиваются владельцы гироскутеров, включают проблемы с батареей, неисправности двигателя, поломку контроллера, неисправности сенсоров и поломки корпуса. Для устранения этих поломок наши профессиональные техники выполняют ремонт батарей, двигателей, контроллеров, гиросенсоров и механических компонентов. Доверив ремонт нам, вы обеспечиваете себе надежный и долговечный мастер по ремонту гироскутера с гарантией. Подробная информация представлена на нашем сайте: https://remont-giroskuterov-key.ru
#8838 MartyWewhttps://avtopravodo.ru
Юридическая помощь автолюбителям <a href=https://avtopravodo.ru/>https://avtopravodo.ru</a> ваш надежный источник информации о правах водителей. Разбор ДТП, штрафы, страховые споры, возврат прав – все, что нужно для защиты ваших интересов.
#8839 Ремонт видеокартhttps://remont-videokart-biz.ru/
Наши специалисты предлагает надежный <a href=https://remont-videokart-biz.ru/>мастер по ремонту видеокарты на дому</a> любых брендов и моделей. Мы понимаем, насколько важны для вас ваши графические карты, и обеспечиваем ремонт наилучшего качества. Наши опытные мастера проводят ремонтные работы с высокой скоростью и точностью, используя только сертифицированные компоненты, что обеспечивает надежность и долговечность выполненных работ.
Наиболее общие проблемы, с которыми сталкиваются обладатели графических адаптеров, включают неисправности системы охлаждения, поломку памяти, неисправности разъемов, сбои контроллера и программные сбои. Для устранения этих неисправностей наши профессиональные техники оказывают ремонт системы охлаждения, памяти, разъемов, контроллеров и ПО. Обратившись к нам, вы получаете качественный и надежный мастерская по ремонту видеокарты в москве. Подробная информация представлена на нашем сайте: https://remont-videokart-biz.ru
#8840 FrankPHokyhttps://agkonsult.ru
Все о ваших правах <a href=https://agkonsult.ru/>https://agkonsult.ru</a> это портал, где вы найдете полную информацию о ваших гражданских, трудовых, семейных и других правах
#8841 Scottadafehttps://konsultantok.ru
Консультация юриста <a href=https://konsultantok.ru/>https://konsultantok.ru</a> ваш помощник в решении юридических вопросов. Услуги профессиональных юристов, онлайн-консультации, полезные статьи.
#8842 Ремонт видеокартhttps://remont-videokart-biz.ru/
Наша мастерская предлагает надежный <a href=https://remont-videokart-biz.ru/>вызвать мастера по ремонту видеокарт на выезде</a> различных марок и моделей. Мы знаем, насколько важны для вас ваши графические адаптеры, и обеспечиваем ремонт наилучшего качества. Наши квалифицированные специалисты проводят ремонтные работы с высокой скоростью и точностью, используя только сертифицированные компоненты, что предоставляет надежность и долговечность наших услуг.
Наиболее частые неисправности, с которыми сталкиваются пользователи графических карт, включают неисправности системы охлаждения, поломку памяти, проблемы с коннекторами, неисправность контроллера и ошибки драйверов. Для устранения этих проблем наши опытные мастера оказывают ремонт системы охлаждения, памяти, разъемов, контроллеров и ПО. Обращаясь в наш сервисный центр, вы получаете качественный и надежный сервис ремонта видеокарт с гарантией. Подробная информация размещена на сайте: https://remont-videokart-biz.ru
#8843 FrankDighttps://bytovki-spb1.ru
продажа бытовок <a href=https://bytovki-spb1.ru/>купить металлическую бытовку бу</a>
#8844 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее
Бездепозитный приз – это экономическое вознаграждение, коие выдается участнику забавы в казино, для его вербования и возникновения заинтригованности. Любой посетитель, который соответствует условиям выдачи похожего бездепозитного бонуса, может претендовать на получение вышеуказанного приза. Такое одобрение считается наиболее действенным методом, дающим возможность стартовать в игре, не вкладывая собственных материальных средств. <a href=http://filmkachat.ru/>1×slots регистрация на сайте 1×slots ru com</a> Таким образом онлайн казино получает потенциального игрока. Возможно дальнейшем либо подлинном он захочет поиграть на свои средства. Так работают бездепозитные призы в интернет казино. Здесь хорошо подходит выражение, безвозмездные сыр посещает только в мышеловке. Начинающие игроки шансы не осознавать опасность азарта. Однако со временем понимания становится больше. Это тема для отдельного обсуждения. <a href=https://www.reverbnation.com/%D1%81%D0%BA%D1%83%D0%BF%D0%BA%D0%B0%D0%B0%D0%B2%D1%82%D0%BE%D0%BF%D0%BE%D1%81%D0%BB%D0%B5%D0%B4%D1%82%D0%BF>https://www.reverbnation.com/%D1%81%D0%BA%D1%83%D0%BF%D0%BA%D0%B0%D0%B0%D0%B2%D1%82%D0%BE%D0%BF%D0%BE%D1%81%D0%BB%D0%B5%D0%B4%D1%82%D0%BF</a> Прежде чем активировать бездеп, необходимо увериться в том, что государство, гражданином коей является игрок, не заходит в перечень разрешенных. 1×slots промокод при регистрации 2025 <a href=https://coinzaa.com/u/Craigdelay>https://coinzaa.com/u/Craigdelay</a> Существуют казино с бонусом за регистрацию, каких очень востребованы фриспины в онлайн казино потом регистрации в определенных играх. Они встречаются и чаще безвозмездных поощрений или классических бонусов в казино без инвестициям. Например, игрок регистрирует счет, на кот-ый начисляются безвозмездные игры, бонус за регистрацию вид даровых фрспинов, вращения в игровом автомате. Во время игрового процесса игры выигрывает настоящие деньги, коие в последствии возможно удачно вывести из заведения на собственную платежную систему. То есть, все шансы исключить свои без рисков собственными финансами. Регистрация, какую геймер получит призы, займет пару минут, а спасибо данному можно прирастить 5 евро поощрений до тыс. И без всяких проблем исключить их.Многие новенькие сомневаются, собственно поощрительный приз надо будет отдавать, в случае они выиграли у казино. Это полностью безопасно и накрепко. Выводя выигранные средства, игрок просто останавливает свое роль при и утрачивает уникальную возможность – безвозмездно наращивать собственное материальное положение.
1×slots зеркало регистрация
1×slots casino регистрация 1×slots review live Сроки активации бонуса устанавливаются любым казино, хотя почаще всего они не превосходят недели с момента получения. Игроку обязательно нужно применять бездеп в течение обозначенного срока, в ином случае бонус просто пропадет. Каждый бонус возможно получить лишь один один, поэтому в не использовать бездеп в срок, у игрока не несомненно 2 шанса им пользоваться.Для доказательства электрической почты, просто перейдите по интенсивной ссылке в послании, приобретенном от игрового заведения. <a href=http://www.irvinederm.co.kr/bbs/board.php?bo_table=free&wr_id=377001>http://www.irvinederm.co.kr/bbs/board.php?bo_table=free&wr_id=377001</a> Любой выигрыш по ставке повыше установленного лимита несомненно считаться недействительным. То есть ставка не будет засчитана при отыгрыше, в случае выигрыша его сумма не поступит на счёт посетителя — результат забавы будет полностью аннулирован. 1×slots рабочее зеркало на сегодня Обычно, бездепозитные призы выдаются под конкретные слоты с фиксированной ставкой, хотя их точно запрещено применять в игровых автоматах с современным джекпотом. Список игр, в которых возможно использовать бездеп, Вы отыщите в описании акции либо сможете уточнить у саппорта заведения.Получить Бездепозитный бонус в интернет казино дело двух кликов. Другой момент, отыграть рекламную и соблюсти верховодила и условия отыгрыша. Под правилами подразумевается не вагер, но и лимитирования по максимальной ставке. Мы разумеем, собственно в кинотеатр все ставят на зеро и выигрывают. Призываем не делать похожего. Перед активацией приза прочитайте управляла. Узнайте следующие моменты: Условия получения подарка, за регистрацию, за депо и другое. Ограничения по максимальной ставке. Зачастую не повыше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вертеть автоматы, а вагер будет стоять на месте. Поэтому важно аристократия, в каких забавах можно совершать кратность валютного оборота.
1×slots регистрация на сайте
Проверка занимает от нескольких мин. До нескольких дней, спецы техподдержки могут запросить дополнительные документы или инициировать короткое общение по Skype. У нас на веб-сайте Вы отыщите список бонусов без депозита в проверенных казино и подробную информацию про как их получить и применять. <a href=https://www.itray.co.kr/bbs/board.php?bo_table=free&wr_id=3014192>https://www.itray.co.kr/bbs/board.php?bo_table=free&wr_id=3014192</a> После потребуется привнести идентификационный платёж. Это пугает новичков больше всего. Нужно сделать наименьший депозит в 100–500 рублей. Таким образом служба безопасности увериться том,, собственно платёжный метод принадлежит Вам. Данная процедура необходима для обеспечивания безопасности игровых счетов. Пример, Ваш акк взломают и выведут свои на свой кошелёк. Будет очень досадно. Поэтому верификация платёжной системы, это важный момент.Так собственно приготовьтесь предоставить секретную информацию (пол, возраст, государство проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает менее суток, последствии чего удастся беспрепятственно выводить крупные выигрыши. 1×slot зеркало рабочее этих способов предполагает регистрацию Получить Бездепозитный приз в онлайн казино дело 2-ух кликов. Другой момент, отыграть рекламную и соблюсти управляла и условия отыгрыша. Под правилами подразумевается не вагер, хотя и ограничения по максимальной ставке. Мы осознаем, собственно в кино все ставят на зеро и выигрывают. Призываем не делать подобного. Перед активацией бонуса прочтите правила. Узнайте следующие моменты: Условия получения дара, за регистрацию, за депо и многое. Ограничения по наибольшей ставке. Зачастую не повыше 350 руб. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах возможно отыгрывать вагер. Можно вертеть автоматы, а вагер будет стоять на месте. Поэтому главно знать, в каких играх возможно совершать кратность денежного оборота.Прямо данный отберите безвозмездные вращения за регистрацию без депозита и начинайте собирать призовые комбинации из-за крупных выигрышей!
1хслотс казино зеркало
С этими простыми советами любое казино с призом за регистрацию способно принести в разы больше выгоды и пользы. Прочитайте управляла бонусной программы, какой желаете участвовать. Да, мы безотступно рекомендуем сделать это до регистрации. Главным моментом в возникновении данных вознаграждений состоит никаких, собственно пустив их в ход, компьютерные ничем не рискует и в последствии никому ничего не будет должен (не зависимо, получит ли он благодаря призам какой-нибудь выигрыш либо моментально спустит все только что прибывшие финансы). То есть, казино снабжает игрока возможностью на дармовой базе играть во различные слоты и даже спонсирует игру.Если вы опытный игрок, вы обязаны знать, что бонус без депозита – редчайшая находка. Тем не менее, мы неделю изучаем интернет, чтобы найти вам превосходнейшие бездепозитные предложения. 1×slots casino регистрация 1×slotscasin online <a href=http://www.mignonmuse.com/bbs/board.php?bo_table=free&wr_id=156530>http://www.mignonmuse.com/bbs/board.php?bo_table=free&wr_id=156530</a> Призовые начисления без депозита все предоставляться для роли в турнирах интернет казино. Потратить перечисленные деньги возможно необыкновенно в этой акции. Условия их проведения включают в себя ограничения на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, какого-либо выучить его правила.Реже призы без депозита начисляются постоянным игрокам. С их поддержкой администрация постарается удержать ценных посетителей или вожделеет поблагодарить за преданность правильных посетителей. Но намного почаще для подобных целей используются такие акции:
1×slots казино зеркало
Игры, каких возможно играть на бонусные средства. Проверьте перечень игр, в которых можно выступать на бонусные свои, вполне они Вам не понравятся и не тратить своё время на эту промоакцию.Онлайн-казино тщательно продумывают бонусные условия, коие необходимо выучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и другие лимитирования. Перед активацией главно пристально изучить обстоятельства промоакции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, на коих можно воспользоваться предложением. Если бездеп обхватывает ограниченный перечень игр, рекомендовано узнать максимальные коэффициенты, степень отдачи и волатильности. Слоты с низкими множителями выплат подходят только том, случае, если оператор не установил требовательные ограничения на наивысшую сумму ставки.Раздача призов может быть посвящена различным датам: календарные дни, дни рождения игроков, годовщина открытия казино и т. Д. Подарок выдается повторяющий средств, фриспинов либо баллов для накопления и размена на предложения оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд требований. <a href=https://www.deepzone.net/home.php?mod=space&uid=3643802>https://www.deepzone.net/home.php?mod=space&uid=3643802</a> 1×slots рабочее зеркало на сегодня В наше время довольно просто получить приз за регистрацию в казино. Практически любой игорный дом с радостью начисляет деньги либо безвозмездные вращения. Многие гэмблеры используют этим и не смущяются региться в любом клубе с прибыльными критериями. Кстати, это отличная возможность выработать победную стратегию и сорвать джекпот.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=135311>1×slots официальный зеркало рабочее</a>
<a href=http://djdrewski.co.uk/lfsbangers/viewtopic.php?f=32&t=43362>1×slots casino регистрация 1×slots review live</a>
<a href=https://minifishtank.net/forum/showthread.php?tid=820>1×slots зеркало рабочее на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Поспешите арестовать бездепозитные бонусы за регистрацию в казино из представленного перечня. Все платформы не только ведут законную работа, хотя и порадуют правдивыми плодами забавы, высочайшей отдачей, быстрыми выплатами.
#8845 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
При регистрации в том либо ином онлайн игральном заведении — для дается один шанс испытывать свою удачу не внося средства монеты. Замечу собственно эту поощрительную предложение предоставляют не все интернет игровые площадки, а лишь великодушная половина из их. Которые мы подготовили для Вас в нашем перечне.Варианты выигрыша в от Вашей успеха и критерий игорного портала. Выше мы заявили, что кое-какие бездепозитные бонусы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются и те, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность современных игр на деньги, возможно выиграть невозможные суммы. Сегодняшние игровые автоматы либо видео слоты, как их именуют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые множат ставку от х100.000. <a href=http://filmkachat.ru/>1×slot рабочее зеркало</a> <a href=https://www.imdb.com/user/ur191728920/>https://www.imdb.com/user/ur191728920/</a> Активация валютного гонорары случается механически последствии создания профиля или использования промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на страницы казино в социальных сетях либо на рассылку маркетинговых сообщений, скачать и ввести вспомогательный софт и т.д. 1×slots casino регистрация на сайте <a href=https://blog.naver.com/lexxeagle/223298015684>https://blog.naver.com/lexxeagle/223298015684</a> Особую изюминку видео слотам присваивают уникальные знакы. С их выходом активизируются разные призы. Вы можете запустить дополнительный уровень и увеличить сумму выигрыша. Есть знаки, которые замещают ненадобные составляющие и сами создают выигрышные комбо. Не стоит забывать и на бонус-тур. После каждого удачного спина есть шанс прирастить необходимую выигрыша в 2 либо хорошо раза.
1×slots сайт
Верификация необходима для дополнительной защищенности и может техподдержке выявить бонусхантеров и мошенников. Кстати, рядах платформах выводы крупных сумм доступны только после доказательства личности.Главное преимущество спинов – возможность выучить разные слоты. Также удастся насладиться бонусными раундами, испытывать фортуну в риск-туре и преувеличить выигрыш за счёт особенных символов. Однако столько игровой процесс заслуживает внимание, ведь другого, как сосредоточиться на реальном выигрыше. <a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1хлот регистрация в 1×slots casino</a> 1хслотс мобильная версия зеркало Основное отличие никаких, что для получения бездепа нужно пополнять баланс в казино. Но считая сего, есть ряд и других различий: <a href=https://www.kartridgam.net/member.php?u=623473>https://www.kartridgam.net/member.php?u=623473</a> Для верификации номера телефона, в собственном профиле изберите опцию „Подтвердить номер телефона“ и введите в отвечающее фон код, приобретенный в sms-сообщении. 1×slots быструю регистрацию а также мгновенное Для тех, кто лишь подумывает испытывать свою удачу, а также для профессиональных игроков, разыскивающих свежие площадки для выигрышей, ведущие лицензированные казино часто организуют разные промоакции, и лучшее предложений за последнее время – как для новичков, например и для профессиональных игроков – бездепозитный бонус за регистрацию.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Не трудно догадаться, что not the slightest deposit bonuses практически разу не бывают большими. Чаще всего речь о пяти–тридцати долларах (или эквиваленте данной суммы в иной денежной).Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. <a href=http://forum.ugmk-telecom.ru/index.php?action=profile;u=99230>http://forum.ugmk-telecom.ru/index.php?action=profile;u=99230</a> Бездепозитные бонусы реальными средствами, которые можно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадали.В зависимости от интернет заведения каждый из их возможность вас предложить как бездепозитные деньги, например и бездепозитные фриспины, которые после успешной регистрации рухнут для на ваш игровой баланс. 1×slots официальный сайт зеркало Исходя из сего, просто не существует разумных оснований махнуть рукою на получение такового бонуса при регистрации. И, будет, на подобный безвозмездной основе у вас есть шансы выиграть деньги и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные бонусы, называют безвозмездными интернет платформами для игр.
x1 slots регистрация в 1×slots casino
Многие казино предоставляют в рекламных целях безвозмездные бонусы исключительно для наших читателей. Чтобы их получить, нужно перебежать на игровой сайт по партнерской ссылке с нашего портала.Даже не выиграв крупную сумму, игрок увлекательно проведет время, изнутри изучит работу площадки, оценит геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе наихороших акций с. Достаточно периодически учить перечень новых интернет казино с выводом бонуса без депо в этом разделе. <a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=31110>x1 slots регистрация в 1×slots casino</a> У каждого игорного заведения средства правила и обстоятельства. Но, дабы получить призы, необходимо выполнить стандартные деяния:Выиграть реальные средства в казино не пополняя счет – сложно, хотя возможно. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными призами и начните играть на бонусные свои. По статистике в 10-ти заведений возможно заработать небольшую необходимую средств за счет бонусных средств. 1×slots регистрация на официальном сайте <a href=http://ip-iv.ru/index.php?subaction=userinfo&user=CharlesGeado>http://ip-iv.ru/index.php?subaction=userinfo&user=CharlesGeado</a> Способы получения бездепа различаются в зависимости от вида приза, который понравился игроку. Но вам так нужно быть зарегистрированным в легальном онлайн-казино и подтвердить свою лицо. В общем облике пошаговая аннотация для получения бездепозитного бонуса выглядит так:
1хлот регистрация в 1×slots casino
Выше мы дали глубокий комплект самых свежих и своевременных бездепозитных призов в интернет казино без пополнения на 2022 год, где продоставляется пользоваться любым ценным бездепозитным призом. Некоторые казино могут предлагать посетителям бездепы за свидетельство номера или почты или репост на страничку в социальных сетях. <a href=https://www.rmbbk.com/space-uid-1866452.html>https://www.rmbbk.com/space-uid-1866452.html</a> Популярность интернет казино растёт и всё больше пользователей начинают интерес азартными забавами. Бездепозитные бонусы 2022 года, это оригинальные презенты за регистрацию. С их поддержкою свежие игроки все получить безвозмездные вращения либо деньги на баланс за 1 регистрацию. С в игорных заведений в онлайне, бездепозитные бонусы стали знаменитейшим способом привлечения игроков. Подобные промоакции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш вебсайт собрал наилучшие предложения из онлайна на 2022 год. Воспользуйтесь каким даром и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша необходимо выполнить обстоятельства.Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен перечень лучших интернет казино, коие предлагают своим игрокам щедрые бонусы за регистрацию. 1×slots коды
<b>Смотреть еще похожие новости:</b>
<a href=http://freedom.teamforum.ru/memberlist.php?mode=viewprofile&u=6332>1×slots зеркало на сегодня</a>
<a href=https://sadhaka.nl/forum/viewtopic.php?t=102559>1×slot регистрация</a>
<a href=https://www.fromrus.su/index.php?/topic/20736–1×slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%BD%D0%B0-%D1%81%D0%B0%D0%B9%D1%82%D0%B5/>1×slots регистрация на сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вейджер (wager) – это коэффициент, который показывает на какую необходимую нужно устроить ставок, дабы исключить бонус из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода этого приза, Вам необходимо сделать ставок на сумму: 500*70=3500 руб. Только всецело отыграв приз, Вы можете вывести собственный выигрыш. Для казино, работающих онлайн, бездепозитные призы необходимы для вербования новых посетителей. Предложение поиграть на слотах без необходимости внесения реальных средств — работающий метод для повышения энтузиазма к фирмы. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит выступать в казино, только теперь теснее на личные средства.
#8846 HarryZob
Amoxil Pharm Store: <a href=" https://amoxilpharm.store/ ">Amoxil Pharm Store</a> – how much is amoxicillin prescription
#8847 Ремонт видеокамер в Москвеhttps://remont-videokamer-ink.ru/
Наши специалисты предлагает высококачественный <a href=https://remont-videokamer-ink.ru/>починить видеокамеру в москве</a> всех типов и брендов. Мы знаем, насколько значимы для вас ваши видеокамеры, и обеспечиваем ремонт наилучшего качества. Наши профессиональные техники проводят ремонтные работы с высокой скоростью и точностью, используя только качественные детали, что предоставляет надежность и долговечность проведенных ремонтов. Наиболее частые неисправности, с которыми сталкиваются пользователи видеорегистраторов, включают проблемы с записью, поврежденный объектив, неисправности программного обеспечения, неработающие разъемы и повреждения корпуса. Для устранения этих поломок наши квалифицированные специалисты выполняют ремонт записи, объективов, ПО, разъемов и механических компонентов. Доверив ремонт нам, вы обеспечиваете себе надежный и долговечный сервис ремонта видеокамер на дому. Подробная информация представлена на нашем сайте: https://remont-videokamer-ink.ru
#8848 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало на сегодня
Подтвердите личность, предоставив оператору казино средства паспортные данные. Инструкции обыкновенно легкие, основное — четко им следовать. Если написано, собственно «на фото должны быть видны все хорошо угла странички паспорта» — сделайте непосредственно это фото. <a href=http://filmkachat.ru/>1×slots зеркало проходить регистрацию это отличный вариант</a> Но эти рамки не смущают числе хайроллеров, потому коэффициенты на слотах позволяют рассчитывать на крупные выигрыши, а в некоторых автоматах разыгрывается передовой джекпот.Такой казино бонус без депо за регистрацию выдается игроку на час и активно используется данное предложение с 2017 года. Это как бы некая маскировка одобрения под бездепозитный. Суть всего этого сводится к что, этому, что геймеру на час выдается, к примеру, 1000 долларов, а реклама твердит про, собственно любой выигрыш возможно несомненно дальнейшем забыть при себе. Но в играющий всерьез отнесется к этому предложению, то он попросту потеряет время. Ведь игроку надо(надобно) будет выступать не в аккаунте, ну тренировочном и с ограниченным выбором автоматов и ставок. Да и если, тогда, выигрыша (числе всей тысячи) в правила вступят определенные обстоятельства, где будет сказано, что максимальной суммой победы может быть только двести $ и деньги можно использовать лишь в бонуса на первый лепта с вейджером 25 от суммы гонорары плюс сам депозит. По результату выйдет, собственно игрок выигрывал себе 200% бонус с вейджером на определенную сумму. Короче разговаривая, это все не стоит вашего медли. <a href=https://issuu.com/kalinka0588/docs/exploring_the_future_of_architectural_visualizatio>https://issuu.com/kalinka0588/docs/exploring_the_future_of_architectural_visualizatio</a> Фриспины предназначены для использования в видео слотах. Внимательно ознакомьтесь с условиями – частенько их выдают на кое-какие автоматы. В зависимости от клуба, у вас получится устроить определённое количество ставок. Кстати, продвинутые игорные дома разрешают запускать любых «одноруких бандитов».Только выполнив все обстоятельства отыгрыша и дождавшись окончания проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить свои деньги. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=https://www.coweyepress.com/wiki/index.php/%C3%90%C2%A4%C3%91%E2%82%AC%C3%90%C2%B0%C3%90%C2%BD%C3%91%CB%86%C3%90%C2%B8%C3%90%C2%B7%C3%91%E2%80%B9_%C3%90%C3%90%C2%BF%C3%91%E2%80%9A%C3%90%C2%B5%C3%90%C2%BA_%C3%90%C3%A2%E2%82%AC%E2%84%A2_%C3%90_%C3%90%C2%BE%C3%91%C3%91%C3%90%C2%B8%C3%90%C2%B8:_%C3%90%C2%A2%C3%91%E2%82%AC%C3%90%C2%B5%C3%90%C2%BD%C3%90%C2%B4%C3%91%E2%80%B9_%C3%90%CB%9C_%C3%90%C5%B8%C3%91%C3%90%C2%BE%C3%90%C2%B3%C3%90%C2%BD%C3%90%C2%BE%C3%90%C2%B7%C3%91%E2%80%B9_%C3%90%C3%90%C2%B0_2024_%C3%90%E2%80%9C%C3%90%C2%BE%C3%90%C2%B4>https://www.coweyepress.com/wiki/index.php/%C3%90%C2%A4%C3%91%E2%82%AC%C3%90%C2%B0%C3%90%C2%BD%C3%91%CB%86%C3%90%C2%B8%C3%90%C2%B7%C3%91%E2%80%B9_%C3%90%C3%90%C2%BF%C3%91%E2%80%9A%C3%90%C2%B5%C3%90%C2%BA_%C3%90%C3%A2%E2%82%AC%E2%84%A2_%C3%90_%C3%90%C2%BE%C3%91%C3%91%C3%90%C2%B8%C3%90%C2%B8:_%C3%90%C2%A2%C3%91%E2%82%AC%C3%90%C2%B5%C3%90%C2%BD%C3%90%C2%B4%C3%91%E2%80%B9_%C3%90%CB%9C_%C3%90%C5%B8%C3%91%C3%90%C2%BE%C3%90%C2%B3%C3%90%C2%BD%C3%90%C2%BE%C3%90%C2%B7%C3%91%E2%80%B9_%C3%90%C3%90%C2%B0_2024_%C3%90%E2%80%9C%C3%90%C2%BE%C3%90%C2%B4</a>
1×slots зеркало видели такую регистрацию на
Как верховодило, при выводе финансов, от играющего потребуется только устроить минимальный вклад для того, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом личный счет.В лицензионных бездепозитных казино играть в азартные игры вправду неопасно. Наличие лицензии одобряет тот прецедент, собственно клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP. <a href=https://www.makinamania.net/index.php?topic=250790.new#new>1хлот регистрация в 1×slots casino</a> 1×slots casino online регистрация <a href=http://crazy.pokuyo.com/home.php?mod=space&uid=171520>http://crazy.pokuyo.com/home.php?mod=space&uid=171520</a> Бесплатный бонус – кредиты, коие онлайн-казино начислит клиенту, не принуждая его пополнять игровой счет.Мы собрали и опубликовали список превосходнейших бездепозитных казино с бонусами за регистрацию, которые гарантируют щедрые выигрыши и мгновенные выплаты. 1×slot зеркало Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды присутствуют на данной страничке. Посетитель имеет оценить условия получения и начать играть на деньги без внесения депо. При этом игроку важно осознавать, на каких условиях и какими методами возможность вывести приобретенный выигрыш. Для сего необходимо оценить список подключенных платежных систем.Как правило, при выводе финансов, от играющего потребуется лишь устроить минимальный лепта чтобы, чтобы, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом собственный счет.
казино 1× slots официальный сайт
Вознаграждения за получение VIP-статуса ? начисляются в рамках программы преданности при достижении одного значения либо выдаются персонально менеджерами саппорта. <a href=http://multi-net.su/index.php?subaction=userinfo&user=Glennsurgy>http://multi-net.su/index.php?subaction=userinfo&user=Glennsurgy</a> Получать информацию о самых прибыльных призах можно без постоянного мониторинга новостей казино. Мы взяли данную задачу на себя и безпрерывно следим за услугами операторов, избирая наилучшие из их. В данном разделе собраны заключительные бездепы, промокоды к ним и обстоятельства их активации. Список промоакций регулярно дополняется. В топ зашли самые свежие бездепозитные призы за регистрацию в казино 2020, временные и замкнутые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и другим аспектам. Если срок деянья акции истек, она удаляется из перечня.3. Подтвердить данные. В зависимости от клуба, нужно привязать аппарат либо почту, указать персональную информацию; 1×slots на любой вкус как пройти регистрацию Можно ли в одном интернет казино получить больше одного бонуса за регистрацию? Нет, так как в любом интернет казино есть управляла, к коим нужно придерживаться, не создавать 2 аккаута для получения бонусов, другому несомненно блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, бонус за регистрацию выдаеться один раз одному лицу.При регистрации стопам указывать лишь достоверную информацию. Когда учетная запись несомненно активна, появится доступ в Личный кабинет. В нем можно избрать денежную, установить промокод и разузнать доскональные правила получения и отыгрыша бездепа. Краткая информация об акции часто присутствует именно на регистрационной форме.
1×slots регистрация 1×slots review live
В разделе с призами активировать собственный подарок. Найти игры, для которых предусмотрено одобрение и использовать бонус по назначению.Если вы новичок деле и лишь попали в неизведанную вами область азарта — счет услуг как бездепозитные призы без пополнения. <a href=https://praisenpray.org/forums/showthread.php?tid=98556>1×slots сайт</a> В интернете количество известных игорных площадок с красивыми акционными услугами. Однако пристально читать обстоятельства 10-ов предложений времени надоест, да и время отнимет большое. Поэтому наша команда подготовила ТОП-3 сайтов с наилучшими бездепозитными бонусами: Также учтите, собственно кое-какие игровые платформы сужают список государств, которые способны получить предложенный бездепозитный бонус за регистрацию. К образцу, есть онлайн-заведения, выдающие похожие призы только жителям определенных государств. К образцу, онлайн казино 777 Оригинал дает бездепозитный бонус только игрокам из России и стран СНГ. Или напротив, снабжают вознаграждением всех, не жителей неких государств (исходя из сего, стопам внимательно учить перечень, чтобы потом не появилось практически вопросов и претензий). 1×slots рабочее зеркало <a href=https://szkolenia.myslepozytywnie.pl/fora/watek/%d0%bf%d0%be%d1%81%d0%bb%d0%b5%d0%b4%d0%bd%d0%b8%d0%b5-%d0%bd%d0%be%d0%b2%d0%be%d1%81%d1%82%d0%b8–2024/>https://szkolenia.myslepozytywnie.pl/fora/watek/%d0%bf%d0%be%d1%81%d0%bb%d0%b5%d0%b4%d0%bd%d0%b8%d0%b5-%d0%bd%d0%be%d0%b2%d0%be%d1%81%d1%82%d0%b8–2024/</a> При отыгрыше бонусных средств, необходимо учитывать срок деяния приза и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный приз несомненно аннулирован.Не стоит путать забаву в демо и внедрение призов. В демонстрационном режиме игрок возможность расценить механику слота, сюжет и оформление. Но игра проводится на относительные кредиты, потому отсутствует главное ? чувство азарта. Активируя промокод или фриспины, клиент и не расходует свои деньги на игровые автоматы, но возможность сорвать реальный куш!
1х слот регистрация в 1×slots casino
Денежные свои. Третий приз за регистрацию без депо – наличные. К огорчению, только известные и известные клубы имеют уяснить средства в рублях либо баксах. С их подмогою вы сможете насладиться любой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед данным нужно исполненье определенных критерий.Принципиальным различием даровых бонусов от призов на депо считается неименье надобности заносить деньги на аккаунт. Из-за сего их часто называют бездепозитными (no down payment bonuses). При верном раскладе бездепы — это прекрасный метод выступать на деньги без траты личных средств. Есть несколько советов, следуя которым можно извлечь максимум полезности из подобных промоакций казино. Играть стопам лишь на лицензированных площадках. Скриптовые веб-сайты не только обманывают с бонусными услугами, но и используют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах нереально.Фриспины начисляются по определенной ставке. После их активации игроку необходимо запустить разъем и увериться, что в нем отображаются бесплатные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода после отыгрыша ориентируется оператором и редко выше 5 000 рублей. <a href=https://bridge-clip.ru/user/AshleyTen/>https://bridge-clip.ru/user/AshleyTen/</a> Подтверждение регистрации. Казино требуют привязки профиля к электрическому адресу и номеру аппарата. Для сего на e-mail отправляется письмо со ссылкой, а на телефонный ? текстовое известие с кодом.Чаще всего интернет-казино предлагают бездепозитные призы свежим пользователям. Эта промо-акция довольно отлично завлекает начинающих, подталкивая их к открытию счета. Конечно, не они становятся послушными клиентами, но сам прецедент регистрации аккаунта играет на руку заведению. 1хслотс казино зеркало
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для получения бонуса надо(надобно) пригласить в забаву свежего посетителя. Казино начисляет пригласившему фиксированный процент от взносов приглашённого вид бонуса: почаще всего его размер не выше 10%. Срок действия бонуса правило не превышает месяца: пригласивший получает бонус зависимо проигранных ставок приглашённого в 1-ый луна игры. Подарки на определенные даты отличаются критериями получения. Если одобрение начисляют игроку на день рождения, то сумма обыкновенно в от совместного размера депо за год.
#8849 JulianPephttps://pravoup.ru
Права граждан РФ <a href=https://pravoup.ru/>https://pravoup.ru</a> доступные объяснения законодательства, практическая помощь и актуальные новости.
#8850 RodneyVemhttps://zakonwin.ru
Журнал для юристов <a href=https://zakonwin.ru/>https://zakonwin.ru</a> практические советы, правовая аналитика, актуальная судебная практика и готовые инструменты.
#8851 EdwinRorhttps://picusblog.co
PicusBlog <a href=https://picusblog.com/>https://picusblog.com</a> a blog with an American flavor. We cover news, celebrities, food, sports, nature, travel, animals, relationships and many other things that interest Americans (and not only) every day! PicusBlog – Your Daily Dose of Insights, Intrigue, and Inspiration!
#8852 Ремонт macbookhttps://remont-macbook-club.ru/
Наш сервисный центр предлагает надежный <a href=https://remont-macbook-club.ru/>вызвать мастера по ремонту макбука с гарантией</a> различных марок и моделей. Мы осознаем, насколько необходимы вам ваши устройства MacBook, и стремимся предоставить услуги первоклассного уровня. Наши опытные мастера работают быстро и аккуратно, используя только сертифицированные компоненты, что предоставляет надежность и долговечность проведенных ремонтов. Наиболее общие проблемы, с которыми сталкиваются владельцы MacBook, включают проблемы с экраном, неисправности аккумулятора, ошибки ПО, проблемы с портами и проблемы с охлаждением. Для устранения этих неисправностей наши опытные мастера выполняют ремонт экранов, батарей, ПО, разъемов и систем охлаждения. Доверив ремонт нам, вы обеспечиваете себе долговечный и надежный сервисный ремонт macbook в москве. Подробная информация представлена на нашем сайте: https://remont-macbook-club.ru
#8853 Andrewwomhttps://nalogido.ru
Сайт о налогах <a href=https://nalogido.ru/>https://nalogido.ru</a> изменения в законах, советы по декларированию и минимизации налоговых рисков.
#8854 Charlesgunnyhttp://filmkachat.ru
1×slots казино мобильная версия
Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Бонус начисляется игроку сразу последствии регистрации и прохождения верификации в казино и не требует от клиента внесения депо. Как правило, объем бонуса в подобном случае довольно стыдливый, впрочем разрешает новеньким познакомиться с игрой без риска реальными деньгами. <a href=http://filmkachat.ru/>1хслотс мобильная версия зеркало</a> В большинстве заведений сделать это возможно по адресу электронной почты, по номеру телефона, через социальную сеть либо гугл-аккаунт. <a href=https://wakelet.com/wake/-bCB6R6Fc7F319ngWQ1YF>https://wakelet.com/wake/-bCB6R6Fc7F319ngWQ1YF</a> 1× slots зеркало <a href=http://usr.by/user/DoctorLazutama/>http://usr.by/user/DoctorLazutama/</a> Многие игроки, оценив перечень казино, остаются выступать в нем и далее ? на это и направлено каждое рекламную. Постоянные посетители вносят депозиты и проделывают ставки, обеспечивая долгосрочную прибыль оператора. То есть, казино раздают бездепы свежим пользователям для формирования приклнной аудитории.
casino 1×slot
1×slot зеркало рабочее этих способов предполагает регистрацию Для тех, кто лишь подумывает испытывать свою удачу, а также для проф игроков, ищущих свежие площадки для выигрышей, водящие лицензированные казино нередко организуют различные промоакции, и одно из лучших предложений за время – как для новичков, так и для проф игроков – бездепозитный приз за регистрацию. <a href=https://sparkitupforums.net/User-Henryfed>https://sparkitupforums.net/User-Henryfed</a> 1×slots зеркало на сегодня В наше время очень просто получить приз за регистрацию в казино. Практически любой игорный жилище с радостью начисляет деньги либо бесплатные вращения. Многие гэмблеры пользуются этим и не стыдятся регистрироваться в любом клубе с прибыльными критериями. Кстати, это отличная возможность выработать победную тактику и сорвать джекпот.Как и другие промоакции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такового предложения являются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых гостей и дозволяет им составить эмоцию о функционале, не рискуя значительными совокупностями.
1×slot регистрация
Обычно показатель выше, чем для бонусов на депо. Не изумляйтесь, случае он будет том х100. Иногда завышенный коэффициент вейджера устанавливается для обитателей отдельных стран.Если вы опытный игрок, вы обязаны знать, собственно бонус без депо – редкая находка. Тем не, мы раз исследуем интернет, дабы найти вам превосходнейшие бездепозитные предложения. <a href=http://sabrina-online.su/wiki/index.php?title=скачать_фильмы_бесплатно_и_без_смс>http://sabrina-online.su/wiki/index.php?title=скачать_фильмы_бесплатно_и_без_смс</a> 1×slots акции Стоит обозначить(означить), собственно бездепозитный приз выдается только взрослым новичкам, коие, к, все пригласить личных друзей и людей, кроме претендующих на поощрительную программу лояльности. Подобная технология была среди создающих онлайн-казино для популяризации и расширения трафика. Покер румы и спонсоры способствуют увеличению своей популярности, методом привлечения новых игроков. Бонусы – это оригинальный шанс для потенциальных соучастников игры, которые могут опробовать софт покер рума и убедиться, станут ли они в него выступать либо нет. Новый игрок испробует средства силы с настоящими оппонентами в казино.При правильном раскладе бездепы — это отличный способ играть на средства без растраты собственных средств. Есть количество советов, следуя коим можно извлечь максимально выгоды из похожих промоакций казино. Играть идет лишь на лицензированных площадках. Скриптовые веб-сайты не врут с бонусными предложениями, хотя и употребляют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах невозможно.
1×slots коды
Бездепозитные бонусы – это исключительно занимательная и более перспективная промоакция интернет-казино. Они и лучше фри-спинов, потому что выплаты в безвозмездных вращениях не гарантированы, так композиции на барабанах игрового аппарата шансы не сложиться.Обычно для получения призов без депозита, казино выдвигает приклнные и вполне выполнимые обстоятельства, хотя есть ряд поступков коие воспрещены и шансы стать досадные последствия: <a href=http://mandala-app.com/forums/memberlist.php?mode=viewprofile&u=3447>1× slots официальный</a> Для тех, кто лишь подумывает испытать свою фортуну, еще для проф игроков, ищущих новые площадки для выигрышей, водящие лицензированные казино нередко устраивают различные акции, и одно из лучших предложений прошедшее время – как для новичков, например и для профессиональных игроков – бездепозитный бонус за регистрацию. 1×slots регистрация на сайте 1×slots ru com <a href=https://yandexforum.ru:443/member.php?u=293743>https://yandexforum.ru:443/member.php?u=293743</a>
1хслот 1хслотс регистрация перейти на 1×slots
Таким образом онлайн казино получает вероятного игрока. Возможно в будущем или подлинном он захотит поиграть на свои средства. Так работают бездепозитные бонусы в интернет казино. Здесь очень подходит выражение, благотворительные сыр посещает лишь в мышеловке. Начинающие игроки все не обдумывать опасность азарта. Однако течением осознания делается больше. Это тема для отдельного обсуждения. <a href=https://www.globalvision2000.com/forum/member.php?action=profile&uid=1054254>https://www.globalvision2000.com/forum/member.php?action=profile&uid=1054254</a> 1×slots официальный сайт мобильная версия Вейджер (либо вагер) ? это минимальная сумма ставок, коию нужно сделать для вывода валютного бонуса. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение.Превышение максимальной ставки при отыгрыше. Система механически не предупреждает о превышении ставки, потому о нарушении правил игрок имеет узнать уже после подачи запроса на вывод средств.
<b>Смотреть еще похожие новости:</b>
<a href=http://sharecovid19story.com/memberlist.php?mode=viewprofile&u=5122>1×slots официальный сайт зеркало</a>
<a href=https://redfist.de/RF-Online-Testforum/viewtopic.php?f=60&t=77802>1 x slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских руб. В условиях промоакции указано, собственно вейджер бездепозитного приза х20. Поэтому, чтобы отыграть бонус, игроку будет нужно устроить ставок на 35*20=700 рублей.
#8855 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots review live
Третитй бездепозитный бонус за регистрацию – валютные средства. К раскаянию, начислить рубли либо доллары готовы только известные и знаменитые клубы. С их поддержкой вы сможете насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком.Способы получения бездепа различаются от облика бонуса, кот-ый приглянулся игроку. Но вам или надо(надобно) быть зарегистрированным в легальном онлайн-казино и подтвердить собственную личность. В общем облике пошаговая инструкция для получения бездепозитного приза смотрится так: <a href=http://filmkachat.ru/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> <a href=https://www.cyberlord.at/forum/?id=1&thread=19234>https://www.cyberlord.at/forum/?id=1&thread=19234</a> 1×slot зеркало <a href=http://munservis.mirniy.ru/user/Harryoreda/>http://munservis.mirniy.ru/user/Harryoreda/</a>
1хслотс официальный сайт зеркало
Минимального оборота. Этот предел устанавливается вейджером — же игрок не сыграет на установленную необходимую, вывод средств будет недоступен.Даже не выиграв крупную необходимую, игрок интересно проведет время, изнутри исследует работу площадки, оценит геймплей автоматов. Все это без каких-то финансовых рисков. Быть в курсе превосходнейших промоакций легко. Достаточно периодически учить список новых онлайн казино с выводом приза без депозита в данном разделе. 1×slots рабочее зеркало Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, чтобы была возможность вывести выигрыш. <a href=https://21micro-grid.com/space-uid-32703.html>https://21micro-grid.com/space-uid-32703.html</a> 1×слотс казино Бездепы обычно предлагают с отыгрышем — быстро исключить выигранные свои нельзя. Перевод денег со счета несомненно возможен последствии такого, как юзер выполнит все притязания казино, а сумма не быть выше установленного правилами лимита. Условиями промоакции фиксируются сроки, протяжении которых клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней после активации.
1×slots регистрация 1×slotscasino 56 online
Как правило, при выводе финансов, от играющего требуется лишь устроить наименьший лепта чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом индивидуальный счет.Подтверждение индивидуальной информации. Все казино просят от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и присутствие у юзера иных аккаунтов (мультиаккаунт запрещен). <a href=http://polishcrazyclan.ugu.pl/member.php?action=profile&uid=268739>http://polishcrazyclan.ugu.pl/member.php?action=profile&uid=268739</a> Как управляло, при выводе финансов, от играющего потребуется только устроить минимальный лепта чтобы, чтобы, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом собственный счет. 1хлот регистрация в 1×slots casino Максимальный объем ставки, который нельзя превосходить пока приз не будет всецело отыгран. В случае нарушения сего управляла, бонус и выигрыш с него будут аннулированы.
1хслотс зеркало на сегодня
Как лишь получите бездеп в казино, всё также не забывайте инспектировать электрическую почту. Некоторые игорные клубы день радуют интенсивных гэмблеров приятными бонусами. Чаще всего получить подарок возможно в преддверии веселья, на денек рождение, за вербование друга. А также распространённым бонусом является прибавка к депозиту. Нужно не пополнить счёт, и азартное заведение прирастит его на 50–100%.Бездепозитные бонусы прекрасный вариант безвозмездной забавы в игровые автоматы. Многие юзеры сети не знают, собственно в казино возможно начать выступать абсолютно безвозмездно, а потом вывести выигрыш на банковскую карту или электронный кошелек, иные не доверяют интернет казино, а третьи удачно играют и выигрывают – и подчас довольно великие суммы. Каждая игровая платформа выделяется условиями по получению и отыгрышу бездепов. В правилах отчетливо расписаны временные рамки, за коие нужно прокрутить вейджер. Также не запамятовывайте тему максимальный объем ставки и наивысшую необходимую выплаты. С иной стороны, дабы получить бездепозитные бонусы казино, довольно истратить менее 1 минуты.Бездепозитные бонусы начисляются лишь один один. Не стоит открывать новые аккаунты, дабы получить их повторно. Служба защищенности казино обязательно выявит «левого» соучастника и заблокирует. Если посетитель выполнит необходимые притязания, отыграет свою ставку и решит исключить собственный выигрыш, то ему надо(надобно) сведению, что казино непременно востребует дать ксерокопии собственных документов, дабы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные средства вывести не удастся. Подтверждение электронной почты – одно из основных критерий, коие есть почти в каждом бездепозитном казино. Чтобы верифицировать электрическую почту, довольно перейти по интенсивной ссылке в письме, полученном от азартного клуба. казино 1×slots официальный сайт <a href=https://uadplugins.club/memberlist.php?mode=viewprofile&u=173405>https://uadplugins.club/memberlist.php?mode=viewprofile&u=173405</a>
1×slots промокод при регистрации 2025
<a href=http://www.aadd2.net/vb/member.php?u=33919>http://www.aadd2.net/vb/member.php?u=33919</a> Способы получения бездепа различаются от облика бонуса, кот-ый приглянулся игроку. Но вам или надо(надобно) быть зарегистрированным в легальном онлайн-казино и подтвердить собственную личность. В общем облике пошаговая инструкция для получения бездепозитного приза смотрится так: 1×слот регистрация в 1×slots casino Обычно, бездепозитные бонусы выдаются под конкретные слоты с фиксированной ставкой, но их наверняка воспрещено применять в игровых автоматах с современным джекпотом. Список игр, в можно использовать бездеп, Вы отыщите в описании промоакции или сможете уточнить у службы заведения.При ирге на бонусные свои запрещается выступать в игровые автоматы с прогрессивным джекпотом и забавы из радела exist casino. Кроме того, кое-какие казино выделяют бездеп на раз или количество конкретных слотов, и в других играх Вы не можете на них играть.
<b>Смотреть еще похожие новости:</b>
<a href=https://clubdefansde24.com/foro/memberlist.php?mode=viewprofile&u=3464>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
С такими ординарными советами любое казино с бонусом за регистрацию способно принести в разы больше выгоды и выгоды.
#8856 Charlesgunnyhttp://filmkachat.ru
1хслот 1хслотс регистрация перейти на 1×slots
У нас на сайте Вы найдете перечень бонусов без депо в испытанных казино и доскональную информацию о том как их получить и применять.Рассмотрим принцип его действия на примере. Допустим, вы зарегистрировались и получили $10 no deposit bonus с вейджером х50. Это означает, что выигранные средства возможно несомненно выводить не раньше, чем последствии того, как общая сумма ставок достигнет $500. <a href=http://filmkachat.ru/>1×slots зеркало регистрация в 1×slots casino</a> Также бездепозитные призы все служить способом вернуть к ирге посетителей, пока приостановивших своё сотрудничество с фирмой: уведомление о бездепе поступает на мобильный телефонный либо почту.Раздача призов возможность быть приурочена к различным датам: календарные праздники, деньки рождения игроков, юбилей открытия казино и т. Д. Подарок выдается в виде денег, фриспинов либо баллов для скопления и обмена на предложения оператора. Если пользователь получает выигрыш, деньги начисляются на его счет. Для вывода этой суммы понадобиться выполнить ряд требований. <a href=https://rollbol.com/blogs/1916525/Interior-Design-Layout-The-Art-of-Creating-Perfect-Living-Spaces>https://rollbol.com/blogs/1916525/Interior-Design-Layout-The-Art-of-Creating-Perfect-Living-Spaces</a> 1хслотс казино зеркало <a href=http://damoa8949.com/bbs/board.php?bo_table=free&wr_id=119460>http://damoa8949.com/bbs/board.php?bo_table=free&wr_id=119460</a> Фриспины – безвозмездные вращения с фиксированной ставкой, коие возможно использовать в определенных игровых автоматах.Также учтите, что кое-какие игровые платформы сузивают перечень стран, которые способны получить предложенный бездепозитный бонус за регистрацию. К образцу, есть онлайн-заведения, выдающие подобные призы только обитателям определенных государств. К образцу, интернет казино 777 Оригинал предоставляет бездепозитный бонус лишь игрокам из России и стран СНГ. Или наоборот, снабжают вознаграждением всех, считая обитателей некоторых стран (как сего, идет пристально учить список, чтобы впоследствии не появилось никаких вопросов и жалоб).
1×slots рабочее зеркало
Для такого, дабы отыграть необходимую вашего бездепозитного приза надо(надобно) выполнить обстоятельства вейджера. Очень нередко фриспины даются на определенные слоты (book of ra, book of lifeless, book of sun), выбирайте разъем себе по душе, они все очень очень и высококачественные. Бездепозитные бонус возможность быть валютным например и вид фриспинов на слотыМы подготовили список, где есть практически актуальные и новые бездепозитные призы казино, которые вам получить даром. Для наших юзеров есть особые предложения эксклюзивные бонусы, коие вы кого не отыщите, их мы определили особой красной плашкой «Exclusive». 1×slots зеркало сайта При использовании бездепозитным бонусом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют некоторое видов лимитов:При выполнении условий отыгрыша и верификации, деньги с бонусного счета переводятся на главной и шансы быть выведены на карту либо электрический кошелек. Лимиты на вывод и сроки проведения транзакции зависят от избранной платежной системы. <a href=http://0lwow.com/home.php?mod=space&uid=20559>http://0lwow.com/home.php?mod=space&uid=20559</a> Промообъявления от казино не дают реальной картины и ориентированы на привлечение внимания пользователей. Понять, насколько высоки шансы остаться в плюсе, дозволит собственный тест критерий предложения: 1×slots зеркало на сегодня Фриспины начисляются по конкретной ставке. После их активации игроку нужно запустить слот и увериться, что в нем отображаются безвозмездные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода последствии отыгрыша ориентируется оператором и изредка превышает 5 000 рублей.
1×slots официальный зеркало
У любого игорного клубы различные вейджеровые условия. Чтобы вы гарантировано сумели выполнить их, мы дадим некоторое советов. Если система начислила небольшую необходимую, не стоит создавать великие ставки – остановитесь на 10–30 центах. Как лишь сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте играть. В противном случае другого, как присмотреться к иному автомату.В случае установленного лимита на необходимую вывода выигрыша с бездепозитного бонуса, игрок не может исключить больше заявленной суммы. Чтобы играть даром на реальные средства в казино, не всегда достаточно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные действия.Такой казино приз без депо за регистрацию выдается игроку на час и энергично используется данное предложение с 2017 года. Это словно некая маскировка поощрения под бездепозитный. Суть всего сего сводится к что, этому, собственно игроку на час выдается, например, 1000 долларов, а реклама твердит то, собственно каждой выигрыш можно несомненно в будущем оставить при себя. Но если играющий серьезно отнесется к данному предложению, то он просто растеряет время. Ведь игроку нужно будет играть не главном аккаунте, а в тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (в всей тысячи) в правила вступят конкретные обстоятельства, где несомненно сказано, что максимальной суммой победы имеет быть лишь двести долларов и деньги можно применять лишь в приза на первый вклад с вейджером 25 от суммы вознаграждения плюс сам депозит. По итогу выйдет, собственно игрок выигрывал себя 200% приз с вейджером на определенную необходимую. Короче разговаривая, это все надо вашего времени. <a href=http://uprotec.co.kr/yc/bbs/board.php?bo_table=free&wr_id=103897>http://uprotec.co.kr/yc/bbs/board.php?bo_table=free&wr_id=103897</a> 1×slots casino регистрация 1×slotscasin online Призовые начисления без депо могут предоставляться для роли в турнирах интернет казино. Потратить перечисленные средства можно самая масштабах данной промоакции. Условия их проведения в ограничения на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться этим предложением, никакого выучить его верховодила.Как правило, при выводе финансов, от играющего потребуется лишь устроить минимальный вклад чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом собственный счет.
казино 1×slots официальный сайт
Основное отличие в, что для получения бездепа не надо пополнять баланс в казино. Но не этого, есть ряд и других различий: <a href=https://sparta.training/faq/online-returns/#comment-67101>1×slot официальный сайт</a> Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, the decision зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.Иногда для получения бонусов нужно связаться с представителями службы поддержки. Удобнее всего с ними собеседовать в онлайн-сате, но от достаточно запроса по электрической почте. 1хслотс регистрация в 1×slots casino <a href=http://bbs.yongrenqianyou.com/home.php?mod=space&uid=4113650&do=profile>http://bbs.yongrenqianyou.com/home.php?mod=space&uid=4113650&do=profile</a> При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток.
1×slos регистрация в 1×slots casino
Отыграв бездепозитный приз в казино с выводом тоже придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если подобное ограничение существует, то единоразово вывести выйдет только необходимую, не превышающую объем приобретенного приза. В интернет-сети всегда возможно найти перечни наиболее модных и гарантированных поощрительных программ от знаменитых онлайн-казино.Так собственно главное различие дара на депо от бездепа – обязательное пополнение счёта. Вы можете привнести депо и преумножить стартовый капитал либо отобрать бездеп и этом не придётся рисковать собственными сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начислит щедрое поощрение! <a href=https://ads.kazakh-zerno.net/user/Renaldocon/>https://ads.kazakh-zerno.net/user/Renaldocon/</a> Если вы выбрали для себя некоторое брендов которые вам больше всего полюбились, для неизменной забавы! Таких гемблеров казино очень любит и оценивает, за частую эти игроки становятся VIP игроками заведения, которым нередко поступают прибыльные предложения в виде призов, так же туда входит и бездепозитные.В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, необходимо обратиться в службу спустя лайв-чат на веб-сайте казино. 1×slots регистрация 1×slots review live Бездепозитный бонус предоставляется новому игроку за конкретные действия. Часто подарок в виде средств или фриспинов выдается за регистрацию, благодаря чему пользователь получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.Помните, что любые нарушения верховодил сведут на нет ваши старания, и вы всего останетесь без начисленного вас бесплатного приза. Всегда изучайте верховодила начисления и обстоятельства вейджера. По любым вопросам, на которые вы не можете помощи найти ответы, обращайтесь за объяснениям и саппорт.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=31988>1×slots зеркало на сегодня</a>
<a href=http://mandala-app.com/forums/memberlist.php?mode=viewprofile&u=3447>1×slos регистрация в 1×slots casino</a>
<a href=http://forums.indexrise.com/user-307864.html>1×slots официальный сайт скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Почти все игровые клубы требуют свидетельство контактных данных игрока для получения бездепозитного приза. У любого игорного заведения свои управляла и обстоятельства. Но, дабы получить бонусы, необходимо выполнить стереотипные деяния:
#8857 Charlesgunnyhttp://filmkachat.ru
1×slots официальный регистрация
На благотворительные бонусы онлайн-казино практически всегда распространяется лимитирования по стране проживания клиентов. Даже случае для разрешается раскрывать счет и выступать на средства в заведении, это еще не значат, собственно вам доступны no down payment bonuses. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать на айфон</a> Еще одно условие дотрагивается размеров ставки. Операторы устанавливают максимальную необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, выбранной в Личном офисе. При превышении лимита есть риск потерять приза. Существующие ограничения относятся и к конкретным обликам ставок. Например, играя в рулетку, заказчик возможность столкнуться с запретом ставить фишки на шансы. <a href=https://www.swiatobrazu.pl/forumgaleria/thread/view/id/524>https://www.swiatobrazu.pl/forumgaleria/thread/view/id/524</a> В качестве призов интернет казино нередко предлагает выдачу фриспинов, словами безвозмездных вращений игрового барабана. Виртуальные монеты можно использовать для изучения в покерной школе либо для игры в казино.Срок отыгрыша — это период, который начинается в момент активации бонуса и заканчивается с его закрытием. Пользователю необходимо уложиться в этот временной промежуток, иначе призовые свои аннулируются. Казино устанавливают список игр, ставки в которых засчитываются при расчете отыгранных средств. Если тайтл не входит в этот список, то возможность быть недосегаем для загрузки во время деянья бонусного предложения. 1×slots официальный регистрация <a href=http://ttlink.com/bookmark/eea678a4-e256–406b-b3df-cff6b342b85b>http://ttlink.com/bookmark/eea678a4-e256–406b-b3df-cff6b342b85b</a>
1×slot зеркало рабочее регистрации на телефон придет
На нашем сайте Вы отыщите список актуальных новых бездепозитных бонусов в казино 2022 года. Также, есть большое неповторимых предложений, которые доступны только посетителям нашего сайта в регистрации по нашей ссылке или активации специального промокода. <a href=http://check2go.net/my-account/>1×slots casino регистрация 1×slotscasin online</a> 1×slots зеркало рабочее В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, необходимо адресоваться в службу спустя лайв-чат на сайте казино.Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут уточняет лимитирование для посетителей. Конечно, это возможно посчитать неким неудобством для игрока, хотя ради отметить, собственно выбор автоматов всё одинаково остаётся достаточно наибольшим. <a href=http://kranik32.ru/user/Tyronelet/>http://kranik32.ru/user/Tyronelet/</a> 1×слотс казино
1×slots официальный зеркало
Как управляло, при выводе финансов, от играющего потребуется лишь сделать наименьший вклад чтобы, чтобы, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом индивидуальный счет. <a href=https://floobits.com/Forsedropsl>https://floobits.com/Forsedropsl</a> Онлайн гемблинг развивается с каждым деньком все больше и больше, свежие бренды создаются не по дням а по часам. Новые онлайн казино делают вступительные акции для игроков, для того собственно бы зарекомендовать себя, и что, этим самым предлагают бездепозитные бонусы за регистрацию, собственно бы не упустить такую вероятность — как воспользоваться новым бездепом, советуем посещать наш вебсайт как возможно чаще, самое аппетитное и новые несомненно добавляться в этом же списке.Казино выводит деньги только на ту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного бонуса, Вам сначала необходимо пополнить счет. В некоторых клубах ограниченный перечень способов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет именно с данных платежных методов, которые доступны для вывода. 1× slots casino зеркало Многие азартные клубы ограничивают сумму вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не можете вывести. Разница несомненно аннулирована, Вы и не сможете делать на нее ставки.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
<a href=https://www.kfz-gringer.at/index.php/forum/in-neque-arcu-vulputate-vitae/67328–1×slots#67093>казино 1×slots официальный сайт</a> Получить приветственный приз шансы только новые клиенты онлайн-казино. Способы описаны в критериях промоакции каждого легального казино, почаще всего это:Когда идет о валютных бонусах, казино практически устанавливают обстоятельства вейджера, которые необходимо выполнить, чтобы вывести выигрыш. 1×slots официальный сайт, скачать <a href=http://worldcrisis.ru/crisis/kachfil1>http://worldcrisis.ru/crisis/kachfil1</a> У любого игорного заведения свои правила и обстоятельства. Но, чтобы получить бонусы, необходимо выполнить стереотипные деяния:Исходя из этого, просто не присутствует мудрых причин махнуть рукой на получение такого бонуса при регистрации. И, будет, на подобный бесплатной базе у вас все шансы выиграть деньги и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные призы, нарекают безвозмездными интернет платформами для игр.
1×slots зеркало регистрацию более популярный вариант это
Необходимость отыгрыша. Вейджер такой выше, чем для призов за депозит. И пока средства не отыграны, исключить их нельзя.Индивидуальные поощрения выдаются за совершение действий: подписку на аккаунты площадки в соц сетях, установку мобильного прибавленья либо официального клиента для ПК. В большинстве казино срабатывают программки лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий степень часто сопровождается выдачей бездепа. <a href=http://svetmarket-msk.ru/bitrix/redirect.php?goto=http://povarmag.ru/bitrix/redirect.php?goto=http://dopka.shop/bitrix/redirect.php?goto=https://teletype.in/@urist555/u52eMoYMc5Y>http://svetmarket-msk.ru/bitrix/redirect.php?goto=http://povarmag.ru/bitrix/redirect.php?goto=http://dopka.shop/bitrix/redirect.php?goto=https://teletype.in/@urist555/u52eMoYMc5Y</a> 1хслотс регистрация в 1×slots casino Внесение депозита – Будьте готовы пополнить счет в отыгрыша приза. Это обычное заявка управлял для этого подобии промо-акций. Лучше заблаговременно уточнить, какую сумму надо(надобно) несомненно заносить на счет. Как управляло, идет о минимальном депозите, но вы обязаны быть уверены, что он вас по кармашку.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.findaspermdonor.com/memberlist.php?mode=viewprofile&u=13618&sid=76de947b81246a6b26e2f59a0efcfbf3>1× слот зеркало</a>
<a href=http://3ak.cn/home.php?mod=space&uid=187057>1хслотс рабочее зеркало на сегодня</a>
<a href=http://portal.westcoastbible.org/discussion/viewtopic.php?f=18&t=1929792>1×slots официальный сайт скачать</a>
<a href=https://www.lightknotes.com/MyBB/showthread.php?tid=177008>1×slots регистрация на 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный приз казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в этом и заключается основное отличие.
#8858 Ремонт macbookhttps://remont-macbook-club.ru/
Наша мастерская предлагает профессиональный <a href=https://remont-macbook-club.ru/>мастерская по ремонту макбука в москве</a> всех типов и брендов. Мы осознаем, насколько необходимы вам ваши MacBook, и стремимся предоставить услуги высочайшего уровня. Наши профессиональные техники оперативно и тщательно выполняют работу, используя только оригинальные запчасти, что предоставляет надежность и долговечность выполненных работ. Наиболее частые неисправности, с которыми сталкиваются пользователи ноутбуков Apple, включают поврежденный экран, неисправности аккумулятора, программные сбои, проблемы с портами и проблемы с охлаждением. Для устранения этих неисправностей наши профессиональные техники выполняют ремонт экранов, батарей, ПО, разъемов и систем охлаждения. Доверив ремонт нам, вы обеспечиваете себе долговечный и надежный мастер по ремонту макбука на дому. Подробная информация размещена на сайте: https://remont-macbook-club.ru
#8859 Ремонт iphonehttps://remont-iphone-sot.ru/
Наши специалисты предлагает профессиональный <a href=https://remont-iphone-sot.ru/>вызвать мастера по ремонту iphone рядом</a> всех типов и брендов. Мы понимаем, насколько значимы для вас ваши iPhone, и стремимся предоставить услуги первоклассного уровня. Наши квалифицированные специалисты проводят ремонтные работы с высокой скоростью и точностью, используя только сертифицированные компоненты, что предоставляет долговечность и надежность выполненных работ. Наиболее частые неисправности, с которыми сталкиваются обладатели устройств iPhone, включают неисправности дисплея, неисправности аккумулятора, программные сбои, проблемы с портами и повреждения корпуса. Для устранения этих неисправностей наши профессиональные техники проводят ремонт экранов, батарей, ПО, разъемов и механических компонентов. Обращаясь в наш сервисный центр, вы гарантируете себе надежный и долговечный официальный ремонт айфона с гарантией. Подробная информация доступна на сайте: https://remont-iphone-sot.ru
#8860 bgpxvjduto
stromectol tablet 3 mg <a href=" http://lzdsxxb.com/home.php?… „>ivermectin 6</a> or <a href=“ http://www.ixawiki.com/link.php?… ">cheap stromectol</a> http://ville.montreal.qc.ca/portal/page?… ivermectin 2ml <a href=https://loopbaan.dezorggroep.nl/redirect.php?from=ivermectinpharm.store>ivermectin 80 mg</a> stromectol covid 19 and <a href=http://bbs.cheaa.com/home.php?mod=space&uid=3298741>minocycline capsulas</a> ivermectin lotion for lice
#8861 Ремонт iphonehttps://remont-iphone-sot.ru/
Наш сервисный центр предлагает профессиональный <a href=https://remont-iphone-sot.ru/>сервисный ремонт iphone рядом</a> всех типов и брендов. Мы знаем, насколько значимы для вас ваши смартфоны Apple, и обеспечиваем ремонт наилучшего качества. Наши опытные мастера работают быстро и аккуратно, используя только сертифицированные компоненты, что обеспечивает долговечность и надежность выполненных работ. Наиболее распространенные поломки, с которыми сталкиваются владельцы iPhone, включают проблемы с экраном, поломку батареи, неисправности программного обеспечения, неработающие разъемы и поломки корпуса. Для устранения этих проблем наши профессиональные техники проводят ремонт экранов, батарей, ПО, разъемов и механических компонентов. Обращаясь в наш сервисный центр, вы получаете долговечный и надежный официальный ремонт iphone рядом. Подробная информация размещена на сайте: https://remont-iphone-sot.ru
#8862 HarryZob
Paxlovid.ink: <a href=" https://paxlovid.ink/ ">Paxlovid.ink</a> – Paxlovid.ink
#8863 Bernardabalt
ксанакс купить в алматы <a href=https://dou-101.ru/>купить меф казахстан</a>
#8864 HarlanPlundhttps://tha58.org/leo-login/
<a href=https://tha58.org/leo-login/>THA娛樂城無法登入</a> 九州娛樂停止營運,LEO、THA娛樂城無法登入,玩家該怎麼辦? 近期,九州娛樂城集團旗下的LEO娛樂城與THA娛樂城相繼傳出無法登入的消息,讓許多玩家陷入焦慮。隨著九州娛樂正式宣布退出台灣市場,營運結束的消息塵埃落定。這對廣大玩家而言意味著什麼?該如何處理自己的帳戶與資金?本文將為您全面解析現況並提供解決方案。
停止營運:關鍵信息一覽 關閉存款功能:從2024年12月31日中午12:00起,九州娛樂城將全面停止所有存款服務。 正常提款開放:儘管停止營運,但官方保證玩家仍可完成提款操作。 會員權益保障:九州娛樂集團承諾全力保障玩家權益,確保在停止營運前完成所有手續。 LEO、THA娛樂城無法登入的背後原因 市場規模限制 台灣市場競爭激烈,九州娛樂城認為市場成長潛力有限。相較之下,海外市場不僅人口基數大,且有更多開發機會,這成為九州轉向海外發展的關鍵動機。
金流與政策問題 近期爆發的金流醜聞為九州娛樂的運營帶來重大挑戰。例如,九州被曝利用第三方支付進行洗錢,加上相關法規收緊,讓其在台灣市場的營運空間被大幅壓縮。
品牌策略調整 九州娛樂選擇退出台灣市場,可能是為了集中資源,強化其在其他區域的競爭力。根據消息,九州旗下品牌未來將著重於更具潛力的海外市場發展。
玩家應對策略:如何保護資金與尋找替代平台? 1. 儘速完成提款 如果您的帳戶仍可登入,建議立即完成所有提款操作,確保資金安全。九州娛樂承諾提款服務不受影響,但建議提早行動避免平台完全關閉。
2. 避免假冒平台陷阱 隨著九州娛樂停止營運,市場可能會出現假冒九州品牌的詐騙網站。玩家應提高警覺,避免在非官方平台上進行任何交易。
3. 選擇可靠替代平台 為了延續遊戲體驗,玩家可考慮轉至穩定且受信賴的平台。這裡推薦RG富遊娛樂城,憑藉其安全、穩定的服務與多樣化的遊戲選擇,成為值得信賴的替代選擇。
RG富遊娛樂城:九州玩家的理想新選擇 平台優勢 快速出金:提款平均僅需3–5分鐘,效率領先業界。 高安全保障:採用與銀行相同的加密技術,確保玩家資料與資金安全。 豐富遊戲內容:從真人百家樂到彩票遊戲,應有盡有,滿足不同玩家的喜好。 專屬優惠 針對九州會員,富遊推出了無縫轉移方案: 玩家只需提供原平台的會員等級截圖,即可快速升等並享受對應的會員福利。
再見九州,展望未來 九州娛樂城退出台灣市場,雖然讓玩家感到惋惜,但這同時也為您開啟新的可能性。在選擇娛樂平台時,安全性與穩定性應始終放在首位。RG富遊娛樂城是目前玩家最值得信賴的選擇之一,不妨加入這個全新的平台,繼續享受無限的遊戲樂趣!
#8865 Ремонт imachttps://remont-imac-mos.ru/
Наша мастерская предлагает надежный <a href=https://remont-imac-mos.ru/>срочный ремонт imac</a> всех типов и брендов. Мы осознаем, насколько необходимы вам ваши моноблоки iMac, и обеспечиваем ремонт первоклассного уровня. Наши опытные мастера проводят ремонтные работы с высокой скоростью и точностью, используя только оригинальные запчасти, что предоставляет долговечность и надежность проведенных ремонтов. Наиболее распространенные поломки, с которыми сталкиваются обладатели компьютеров Apple, включают неисправности HDD, проблемы с экраном, неисправности разъемов, программные сбои и перегрев. Для устранения этих проблем наши опытные мастера выполняют ремонт жестких дисков, дисплеев, разъемов, ПО и систем охлаждения. Обратившись к нам, вы гарантируете себе надежный и долговечный вызвать мастера по ремонту аймака на выезде. Подробная информация размещена на сайте: https://remont-imac-mos.ru
#8866 Wendellesofshttps://issledovaniya-rynkov.ru
исследование рынка туалетного мыла в россии <a href=https://issledovaniya-rynkov.ru/>исследование рынка ячменя в россии</a>
#8867 Danielavadehttps://as8899.org/
2024 年熱門娛樂城與活動解析 冠天下娛樂城優惠,帶來無限樂趣 在 2024 年 4 月 16 日,冠天下娛樂城推出了全新的優惠活動,旨在為玩家帶來更大的獲利機會和更高的娛樂體驗。這些優惠活動包括多種存款獎勵、會員專屬回饋以及豐富的遊戲競賽獎金,吸引了大批玩家參與。 冠天下娛樂城以其高透明度和用戶友好的政策,已成為許多玩家的首選娛樂平台。不論是新手還是老手,都能在這裡找到適合自己的遊戲和活動。
LEO娛樂城無法登入引發市場恐慌 2024 年 11 月 29 日,LEO娛樂城因技術問題出現短暫無法登入的情況,引發了廣泛關注。許多玩家擔心這是否意味著九州娛樂城的營運出現問題。
九州娛樂集團隨後發佈官方聲明,強調這僅僅是系統升級過程中的短暫問題,並承諾玩家的資金和數據安全不受任何影響。同時,九州娛樂表示將加強伺服器穩定性,確保未來類似情況不再發生。
熱門 ZG 電子遊戲——熱舞森巴老虎機 2024 年 11 月 8 日,ZG 電子遊戲推出了熱舞森巴老虎機,這款遊戲迅速成為市場上的熱門選擇。以南美熱情的森巴舞為主題,遊戲畫面充滿色彩,搭配動感的音樂,為玩家帶來視覺與聽覺的雙重享受。
遊戲亮點:
高倍數獎勵機制:每次轉盤都有機會觸發高額獎金。 特色免費遊戲:連續獲得特殊圖案即可啟動多次免費轉盤,提高獲勝機率。 適合新手與高端玩家:簡單的玩法規則與豐富的策略選擇滿足不同層級玩家的需求。 ZG 電子遊戲致力於為玩家提供創新且有趣的遊戲體驗,熱舞森巴老虎機無疑是今年最值得嘗試的遊戲之一。
2024 世界棒球 12 強賽精彩回顧 2024 年 11 月,中華隊參加了世界棒球 12 強賽,這項全球頂尖棒球賽事吸引了來自多國的球隊和球迷參與。中華隊 28 人的名單以年輕選手和經驗豐富的老將為基礎,展現了團隊的競技實力。
比賽亮點:
精彩賽程:比賽期間,中華隊展現了堅強的防守和出色的打擊表現。 門票銷售:賽事門票迅速售罄,顯示出棒球在台灣的高度受歡迎程度。 線上直播:各大平台提供了高畫質直播,讓更多球迷能夠即時觀看比賽,感受棒球魅力。 世界棒球 12 強賽不僅是比賽,更是全台灣球迷的一場盛宴,展現了棒球作為國民運動的無限魅力。
結語 從娛樂城的優惠活動到全球性的棒球賽事,2024 年對於遊戲和體育愛好者來說充滿了亮點。不論是參與冠天下娛樂城的優惠,體驗 ZG 電子遊戲的最新老虎機,還是為中華隊的棒球比賽加油,這一年都是充滿精彩與期待的一年!
#8868 Bruceruhhttps://issledovaniya-rynkov.ru
исследование рынка бурого угля (лигнита) в россии <a href=https://issledovaniya-rynkov.ru/>исследование рынка паровых турбин в россии</a>
#8869 HarryZob
AmoxilPharm: <a href=" https://amoxilpharm.store/ ">cost of amoxicillin 875 mg</a> – Amoxil Pharm Store
#8870 Ремонт электронных книгhttps://remont-elektronnyh-knig-hit.ru/
Наш сервисный центр предлагает надежный <a href=https://remont-elektronnyh-knig-hit.ru/>вызвать мастера по ремонту электронной книги на дому</a> всех типов и брендов. Мы понимаем, насколько необходимы вам ваши электронные книги, и обеспечиваем ремонт наилучшего качества. Наши опытные мастера проводят ремонтные работы с высокой скоростью и точностью, используя только качественные детали, что обеспечивает долговечность и надежность наших услуг. Наиболее общие проблемы, с которыми сталкиваются владельцы электронных книг, включают поврежденный экран, поломку аккумулятора, проблемы с программным обеспечением, проблемы с портами и неисправности контроллера. Для устранения этих поломок наши профессиональные техники оказывают ремонт экранов, батарей, ПО, разъемов и контроллеров. Доверив ремонт нам, вы гарантируете себе качественный и надежный ремонт электронной книги на выезде. Подробная информация размещена на сайте: https://remont-elektronnyh-knig-hit.ru
#8871 Ремонт электровелосипедовhttps://remont-elektrovelosipedov-gem.ru/
Наша мастерская предлагает профессиональный <a href=https://remont-elektrovelosipedov-gem.ru/>центр ремонта электровелосипедов</a> различных марок и моделей. Мы осознаем, насколько значимы для вас ваши электровелосипеды, и готовы предложить сервис высочайшего уровня. Наши профессиональные техники работают быстро и аккуратно, используя только оригинальные запчасти, что предоставляет долговечность и надежность наших услуг. Наиболее частые неисправности, с которыми сталкиваются обладатели электробайков, включают проблемы с батареей, неработающий двигатель, неисправный контроллер, неисправности тормозной системы и повреждения корпуса. Для устранения этих поломок наши опытные мастера оказывают ремонт батарей, двигателей, контроллеров, тормозных систем и механических компонентов. Обратившись к нам, вы обеспечиваете себе надежный и долговечный центр ремонта электровелосипеда в москве. Подробная информация представлена на нашем сайте: https://remont-elektrovelosipedov-gem.ru
#8872 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало проходить регистрацию это отличный вариант
С такими ординарными советами каждое казино с призом за регистрацию способно принести в разы больше выгоды и пользы. <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino09k online</a> Размер бонуса. В качестве бездепов обычно начисляют большие суммы, а когда речь идет о бонусах за депо, которые начисляются в процентном соотношении от суммы пополнения, то некоторые казино все презентовать игроку до 2000$. <a href=https://we.riseup.net/lexxeagle/enhancing-your-projects-with-professional-architec>https://we.riseup.net/lexxeagle/enhancing-your-projects-with-professional-architec</a> Вывод выигрыша с бездепозитных призов казино – щедрый презент от азартных клубов. Но дабы исключить собственный доход, необходимо выполнить ряд критерий: 1×slots казино мобильная версия <a href=http://forum.computest.ru/post/670258/#p670258>http://forum.computest.ru/post/670258/#p670258</a>
1×slots официальный зеркало рабочее
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=3658>1×слот регистрация в 1×slots casino</a> 1×slots официальный сайт мобильная версия <a href=https://forum.lazarev.ru/memberlist.php?mode=viewprofile&u=164068>https://forum.lazarev.ru/memberlist.php?mode=viewprofile&u=164068</a> 1×slot регистрация Если вы выбираете проверенное лицензионное онлайн казино и сделайте все условия получения бездепозитного приза, трудностей с получением подарка у Вас не возникнет.Прежде чем активировать бездеп, необходимо убедиться том,, собственно страна, уроженцем коей является игрок, не заходит в список не.
x1 slots 1хслотс регистрация перейти на 1×slots
Чаще всего интернет-казино предлагают бездепозитные бонусы свежим юзерам. Эта промо-акция довольно отлично привлекает новичков, подталкивая их к открытию счета. Конечно, не они становятся преданными клиентами, хотя сам факт регистрации аккаунта играет на руку заведению. <a href=http://velotrial.ru/364826>http://velotrial.ru/364826</a> Подтвердите личность, предоставив оператору казино свои паспортные данные. Инструкции обыкновенно несложные, главное — конкретно им по. Если написано, что «на фото должны быть видны все четыре угла странички паспорта» — устройте непосредственно это фото.Следует подчеркнуть, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом. casino 1×slot
1хслотс рабочее зеркало
Для вывода средств приз нужно будет отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариациями отыгрыша бездепозитного бонуса до его получения, чтобы избежать конфликтных ситуаций. <a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1×slots рабочее зеркало</a> Используйте наихорошие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, чтобы заработать презенты за простые деянья теперь сейчас получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высокой отдачей и быстрыми выводами на электронные кошельки. 1×slots регистрация <a href=https://cardvilla.cc/members/514232.html>https://cardvilla.cc/members/514232.html</a> Для получения выигрыша потребуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить конкретную необходимую, хотя теснее из личных средств. Она рассчитывается из общего объема выигрыша за всегда использования бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, если пользователь выиграл 1000 руб., а множитель составляет х30, исключить деньги можно будет, сделав ставки на 30 000 руб.
1 xslots рабочее зеркало
При отыгрыше бонусных средств, необходимо учитывать срок действия приза и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный бонус несомненно аннулирован. <a href=https://physicsmastered.com/author/raymondcam/>https://physicsmastered.com/author/raymondcam/</a> Для верификации аккаунта нужно дать профессионалам технической поддержки отсканированную копию паспорта и счета за коммунальные предложения, еще фотку банковской карты или снимок страницы электронного кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности. 1×slots регистрация на сайте Подарки на конкретные даты отличаются критериями получения. Если одобрение начисляют игроку на день рождения, то сумма обычно зависимости от совместного размера депо за год.
<b>Смотреть еще похожие новости:</b>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=330806>1×slot регистрация</a>
<a href=https://www.sgomberisgombero.it/author/jamesapate/>1×slots регистрацию процедура займет всего лишь</a>
<a href=https://elclasificadomx.com/author/jameslog/>1×slos регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бывают ли бездепозитные призы без вейджера? Бывают, случае у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино. Используйте превосходнейшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, чтобы заработать презенты за обычные деянья теперь сегодня получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высокой отдачей и прыткими выводами на электрические кошельки.
#8873 Ремонт электровелосипедовhttps://remont-elektrovelosipedov-gem.ru/
Наши специалисты предлагает высококачественный <a href=https://remont-elektrovelosipedov-gem.ru/>вызвать мастера по ремонту электровелосипедов</a> всех типов и брендов. Мы понимаем, насколько важны для вас ваши электрические велосипеды, и обеспечиваем ремонт первоклассного уровня. Наши квалифицированные специалисты работают быстро и аккуратно, используя только оригинальные запчасти, что обеспечивает надежность и долговечность наших услуг. Наиболее частые неисправности, с которыми сталкиваются владельцы электровелосипедов, включают проблемы с батареей, неисправности двигателя, сбои контроллера, неисправности тормозной системы и повреждения корпуса. Для устранения этих проблем наши опытные мастера оказывают ремонт батарей, двигателей, контроллеров, тормозных систем и механических компонентов. Обращаясь в наш сервисный центр, вы обеспечиваете себе качественный и надежный официальный ремонт электровелосипеда на дому. Подробная информация доступна на сайте: https://remont-elektrovelosipedov-gem.ru
#8874 Ремонт холодильников в Москвеhttps://remont-holodilnikov-lux.ru/
Наша мастерская предлагает профессиональный <a href=https://remont-holodilnikov-lux.ru/>сервис ремонта холодильника адреса</a> любых брендов и моделей. Мы осознаем, насколько важны для вас ваши морозильные камеры, и обеспечиваем ремонт высочайшего уровня. Наши профессиональные техники проводят ремонтные работы с высокой скоростью и точностью, используя только сертифицированные компоненты, что предоставляет длительную работу выполненных работ. Наиболее общие проблемы, с которыми сталкиваются обладатели морозильных камер, включают проблемы с температурным режимом, неработающий термостат, программные сбои, проблемы с подключением и механические повреждения. Для устранения этих неисправностей наши квалифицированные специалисты проводят ремонт компрессоров, термостатов, ПО, разъемов и механических компонентов. Обращаясь в наш сервисный центр, вы гарантируете себе надежный и долговечный сервисный центр по ремонту холодильников рядом. Подробная информация доступна на сайте: https://remont-holodilnikov-lux.ru
#8875 Ремонт фотовспышек в Москвеhttps://remont-fotovspyshek-job.ru/
Наши специалисты предлагает надежный <a href=https://remont-fotovspyshek-job.ru/>сервис ремонта фотовспышки на выезде</a> любых брендов и моделей. Мы осознаем, насколько значимы для вас ваши осветительные приборы, и обеспечиваем ремонт первоклассного уровня. Наши квалифицированные специалисты оперативно и тщательно выполняют работу, используя только качественные детали, что гарантирует надежность и долговечность проведенных ремонтов. Наиболее общие проблемы, с которыми сталкиваются пользователи вспышек, включают неработающий зарядник, проблемы с лампой, ошибки ПО, неисправности синхронизатора и неработающие разъемы. Для устранения этих неисправностей наши квалифицированные специалисты оказывают ремонт зарядных устройств, ламп, ПО, синхронизаторов и разъемов. Обращаясь в наш сервисный центр, вы обеспечиваете себе качественный и надежный вызвать мастера по ремонту фотовспышек на дому. Подробная информация представлена на нашем сайте: https://remont-fotovspyshek-job.ru
#8876 HarryZob
Paxlovid.ink: <a href=" https://paxlovid.ink/ ">paxlovid pharmacy</a> – Paxlovid.ink
#8877 Matthewdoghttps://rg8888.org/
富遊娛樂城:全台灣第一推薦的娛樂城體驗 富遊娛樂城是全台灣最受玩家推崇的娛樂平台,提供多種優惠、豐富的遊戲選擇以及高品質的服務,讓每位玩家都能享受極致的遊戲樂趣。無論您是新手還是資深玩家,富遊娛樂城都能滿足您的需求,帶給您刺激的遊戲體驗。
富遊娛樂城的優惠活動 1. 免費娛樂城體驗金 新玩家只需註冊即可免費領取 $168 元的體驗金,無需存款,便可立即體驗各種遊戲,感受遊戲帶來的樂趣。
2. 首次存款優惠 首次存款 $1000 元,即送 $1000 元遊戲金,讓您在遊戲中有更多機會獲勝,增添刺激感。
3. 新會員五選一好禮 新加入的會員可選擇五種專屬好禮之一,從遊戲金到實體獎品,讓您的遊戲旅程更加多彩。
熱門遊戲種類 富遊娛樂城提供多樣化的遊戲選擇,適合不同喜好的玩家:
電子老虎機:多款創新遊戲,讓玩家享受豐厚獎金機會。 百家樂:與真人荷官互動,體驗真實賭場的刺激感。 今彩539 和 運彩:滿足彩票愛好者的需求。 捕魚遊戲:RSG電子捕魚遊戲帶來娛樂與獎金的雙重樂趣。 熊貓體育:專為體育迷設計的多種運動投注選項。 優質服務保證 1. 出金快速、安全可靠 富遊娛樂城採用先進的財務處理系統,保證快速存提款,讓玩家不用擔心資金安全問題。
2. 技術先進的APP平台 流暢的畫面設計與設備兼容性,讓用戶輕鬆上手。 持續升級與更新,提供更多創新遊戲類型。 3. 24小時專業客服 專業客服隨時待命,為玩家解答所有遊戲相關問題,確保您在任何時間都能享受到無縫的服務體驗。
4. 安全防護到位 採用最嚴格的安全管理系統與數據加密技術,保障用戶資金與個人信息的安全。
富遊娛樂城APP:隨時隨地盡享遊戲 富遊娛樂城APP提供了便捷的遊戲途徑,支援 IOS 與 Android 設備。
簡潔易用的界面設計,讓玩家快速找到喜愛的遊戲。 即時客服支援,隨時解決您的疑問。 免費下載,無論何時何地,您都能盡享娛樂城的精彩遊戲體驗。 為什麼選擇富遊娛樂城? 優惠豐富:免費體驗金、首存優惠、新會員好禮,活動多樣。 遊戲種類齊全:從電子遊戲到真人百家樂,滿足各類玩家需求。 服務至上:專業客服、快速出金和高安全保障讓玩家安心享受遊戲。 便捷平台:富遊APP提供隨時隨地的遊戲樂趣,讓您不受限制。 立即下載 富遊娛樂城APP,體驗全台灣第一娛樂城的無限魅力!不論您是想享受遊戲樂趣還是贏取豐厚獎金,富遊娛樂城都將是您的最佳選擇!
#8878 Josephfephttps://bnx.me
Platform <a href=https://bnx.me/>BNX</a> is your reliable partner for cryptocurrency trading. High liquidity, instant trades and advanced analytics tools.
#8879 Philliprabhttps://undressai.app
undress AI free <a href=https://undressai.app/>undressai app</a>
#8880 Ремонт фотоаппаратовhttps://remont-fotoapparatov-ink.ru/
Наша мастерская предлагает надежный <a href=https://remont-fotoapparatov-ink.ru/>вызвать мастера по ремонту фотоаппарата адреса</a> любых брендов и моделей. Мы осознаем, насколько важны для вас ваши фотоаппараты, и обеспечиваем ремонт высочайшего уровня. Наши профессиональные техники оперативно и тщательно выполняют работу, используя только качественные детали, что предоставляет надежность и долговечность выполненных работ.
Наиболее общие проблемы, с которыми сталкиваются владельцы фотоаппаратов, включают повреждения линз, проблемы с затвором, неисправный экран, неисправности батареи и программные сбои. Для устранения этих поломок наши квалифицированные специалисты выполняют ремонт объективов, затворов, экранов, батарей и ПО. Обратившись к нам, вы обеспечиваете себе долговечный и надежный мастер по ремонту фотоаппарата рядом. Подробная информация доступна на сайте: https://remont-fotoapparatov-ink.ru
#8881 Edwardcathttps://ts365.tw/
<a href=https://ts365.tw/>九州娛樂城倒了</a> 九州娛樂城:亞洲頂級線上娛樂平台 九州娛樂城,作為亞洲領先的線上博弈平台,以其專業性、公平性和創新性著稱。在這裡,您可以享受全方位的娛樂體驗,包括體育投注、真人遊戲、電子遊戲、六合彩球以及流行的捕魚機和棋牌遊戲。九州娛樂城是台灣玩家的首選娛樂平台,被譽為業界 No.1!
九州娛樂城的亮點 1. 多元化遊戲選擇 九州娛樂城擁有超過千款來自全球頂尖供應商提供的遊戲,滿足各種類型玩家的需求。無論是喜歡競技性的體育投注、刺激的真人遊戲,還是休閒的電子遊戲,九州娛樂城都能提供最適合您的選擇。
體育投注:全面覆蓋世界級賽事,包括世界杯、職業聯賽等。提供多種投注方式,如讓球、大小、單雙、串關等,並支持桌面端與手機端投注。 真人遊戲:KU真人百家樂、LEO真人遊戲等,讓您感受現場賭桌的真實刺激。 電子遊戲與捕魚機:多款熱門遊戲,如九州熱門電子遊戲和捕魚機,帶給玩家極致娛樂享受。 六合彩與棋牌遊戲:適合策略型玩家的理想選擇。 2. 極致便利的操作體驗 九州娛樂城支持通過官方網站和九州APP下載進行操作,無論您身在何處,都可以輕鬆加入遊戲世界。針對台灣玩家的本地化設計確保操作流暢、存取款方便。
3. 先進技術與安全保障 九州娛樂城集團總部位於菲律賓首都馬尼拉的RCBC Plaza,配備世界一流的安全資訊防護系統和智能大樓自動化系統(BAS)。玩家的數據與資金安全都能得到最佳保障,讓每一次遊戲都安心無憂。
4. 熱門品牌與平台支持 九州娛樂城旗下包括三大品牌:
LEO娛樂:提供真人遊戲、體育直播及免費影城。 THA娛樂:專注於新手友好和便捷操作。 KU娛樂:以真人百家樂而著稱。 每個品牌雖分別由不同管理團隊運營,但都傳承了九州娛樂城的高標準,遊戲系統與界面毫無差異,為玩家提供無縫娛樂體驗。
為什麼選擇九州娛樂城? 專業性與公平性 九州娛樂城堅持以「即時便利、公平公正、專業營運」為宗旨,研發創新遊戲技術,滿足不同類型玩家需求。
貼近市場與玩家需求 擁有兩岸三地的精英設計師與代理團隊,根據玩家反饋持續改進產品,並為合作商提供及時更新支持。
優越的服務與保障 從遊戲操作到客戶支持,九州娛樂城提供全面的服務支持,讓每位玩家都能感受到最貼心的服務。
九州娛樂城的未來 作為線上博弈行業的領航者,九州娛樂城不斷推陳出新,致力於提供更豐富的遊戲選擇和更完善的玩家體驗。同時,透過強大的技術與營運團隊,九州娛樂城已成為台灣乃至亞洲地區娛樂平台的代名詞。
立即下載九州APP,體驗最極致的娛樂樂趣!九州娛樂城——您的最佳線上娛樂夥伴!
#8882 RichardHexhttps://www.facebook.com/casinost666
<a href=https://www.facebook.com/casinost666>nhà cái ST666</a> ST666: Thiên Đường Casino Trực Tuyến Hàng Đầu ST666 là một trong những sòng bạc trực tuyến hàng đầu, mang đến trải nghiệm chơi game đỉnh cao với hàng loạt trò chơi hấp dẫn và chương trình khuyến mãi đặc biệt. Với sứ mệnh đem lại sân chơi công bằng và tiện lợi, ST666 đã trở thành lựa chọn yêu thích của hàng ngàn người chơi tại Việt Nam.
Đa Dạng Trò Chơi và Sảnh Cược 1. Trò Chơi Phong Phú ST666 cung cấp nhiều trò chơi đa dạng, đáp ứng sở thích của mọi người chơi:
Baccarat: Trò chơi cổ điển dành cho những ai yêu thích chiến thuật và may mắn. Tài Xỉu: Trò chơi xúc xắc đầy kịch tính, đem lại cơ hội thắng lớn trong từng vòng cược. Xóc Đĩa: Trò chơi truyền thống Việt Nam, được nâng cấp với công nghệ trực tuyến hiện đại. Và nhiều trò chơi khác đang chờ bạn khám phá. 2. Sảnh Cược Đẳng Cấp ST666 kết hợp cùng các sảnh cược nổi tiếng như:
Wm Casino: Nền tảng casino chuyên nghiệp, nổi bật với các trò chơi chất lượng cao và giao diện mượt mà. ST666 Casino: Sảnh cược độc quyền với những ưu đãi hấp dẫn và các trò chơi độc đáo. Khuyến Mãi Hấp Dẫn Tại ST666 ST666 không chỉ nổi bật với danh mục trò chơi phong phú mà còn mang đến nhiều chương trình khuyến mãi hấp dẫn cho người chơi:
Khuyến Mãi Gửi Tiền Cuối Tuần: Nhận thưởng lên đến 3.666.000 đồng khi nạp tiền vào tài khoản trong các ngày cuối tuần. Ưu Đãi Đặc Biệt Dành Cho Hội Viên Mới: Những người chơi mới sẽ nhận được gói khuyến mãi chào mừng độc quyền. Hoàn Tiền Hàng Tuần: Cơ hội nhận lại phần trăm số tiền cược đã thua trong tuần, giúp bạn có thêm động lực tham gia. Tại Sao Nên Chọn ST666? An Toàn và Uy Tín: ST666 cam kết bảo mật thông tin và giao dịch của người chơi, đảm bảo trải nghiệm chơi game an toàn tuyệt đối. Hỗ Trợ Khách Hàng Chuyên Nghiệp: Đội ngũ chăm sóc khách hàng luôn sẵn sàng hỗ trợ 24/7. Giao Diện Thân Thiện: Thiết kế đơn giản, dễ sử dụng, phù hợp cho cả người mới chơi và người chơi lâu năm. Cơ Hội Thắng Lớn: Tỷ lệ thắng cao và phần thưởng hấp dẫn trong từng trò chơi. Cách Tham Gia ST666 Bước 1: Truy cập trang web chính thức của ST666. Bước 2: Đăng ký tài khoản nhanh chóng và miễn phí. Bước 3: Nạp tiền và lựa chọn trò chơi yêu thích để bắt đầu hành trình giải trí. Kết Luận ST666 chính là thiên đường giải trí trực tuyến dành cho những ai yêu thích thử vận may và tận hưởng các trò chơi đẳng cấp. Với sự kết hợp giữa công nghệ hiện đại và các chương trình ưu đãi hấp dẫn, ST666 cam kết mang lại trải nghiệm hoàn hảo cho người chơi. Tham gia ngay hôm nay để khám phá những điều bất ngờ tại ST666!
#8883 Davidweshttps://www.facebook.com/st666nhandinhbongda
<a href=https://www.facebook.com/st666nhandinhbongda>nhà cái ST666</a> ST666 – Nhận Định Bóng Đá Kèo Nhà Cái Uy Tín
ST666: Địa Chỉ Lý Tưởng Cho Những Tín Đồ Cá Cược Bóng Đá ST666 là nền tảng nhận định bóng đá và kèo nhà cái chuyên nghiệp, nơi người chơi có thể tham gia dự đoán các kèo đa dạng như cược tài xỉu, cược chấp, và cược 1×2. Với giao diện thân thiện, tỷ lệ cược minh bạch và ưu đãi hấp dẫn, ST666 đang dần trở thành lựa chọn hàng đầu của cộng đồng yêu bóng đá.
Nhận Định Kèo Nhà Cái Đa Dạng Cược Tài Xỉu (#cuoctaixiu)
Dựa vào tổng số bàn thắng trong trận đấu, người chơi dễ dàng chọn lựa Tài (nhiều hơn tỷ lệ nhà cái đưa ra) hoặc Xỉu (ít hơn tỷ lệ). ST666 cung cấp các phân tích chi tiết giúp người chơi đưa ra lựa chọn chính xác. Cược Chấp (#cuocchap)
Thích hợp cho những trận đấu có sự chênh lệch về sức mạnh giữa hai đội. ST666 cung cấp tỷ lệ chấp tối ưu, phù hợp với cả người chơi mới và chuyên nghiệp. Cược 1×2 (#cuoc1×2)
Phù hợp cho những ai muốn dự đoán kết quả chung cuộc (Thắng – Hòa – Thua). Đây là loại kèo phổ biến, dễ hiểu và có tỷ lệ cược hấp dẫn. Ưu Đãi Hấp Dẫn Tại ST666 Nhận 160% tiền gửi lần đầu: Khi đăng ký tài khoản mới và nạp tiền, người chơi sẽ nhận được số tiền thưởng cực lớn, tăng cơ hội tham gia các kèo. Hoàn tiền 3% mỗi ngày: Chính sách hoàn tiền giúp người chơi giảm thiểu rủi ro, thoải mái trải nghiệm mà không lo lắng nhiều về chi phí. Vì Sao Nên Chọn ST666? Nền Tảng Uy Tín: ST666 cam kết mang đến trải nghiệm cá cược minh bạch và an toàn. Phân Tích Chuyên Sâu: Đội ngũ chuyên gia của ST666 luôn cập nhật nhận định mới nhất về các trận đấu, giúp người chơi đưa ra quyết định tối ưu. Hỗ Trợ 24/7: Đội ngũ hỗ trợ chuyên nghiệp, luôn sẵn sàng giải đáp thắc mắc của người chơi. Giao Dịch Nhanh Chóng: Nạp rút tiền linh hoạt, đảm bảo sự tiện lợi và bảo mật. Cách Tham Gia ST666 Truy cập website chính thức của ST666. Đăng ký tài khoản bằng thông tin cá nhân. Nạp tiền lần đầu để nhận ưu đãi 160%. Bắt đầu trải nghiệm cá cược với các kèo yêu thích! Hãy đến với ST666 để tận hưởng không gian cá cược chuyên nghiệp, nhận định kèo chất lượng và những phần thưởng hấp dẫn. Tham gia ngay hôm nay để trở thành người chơi chiến thắng!
#8884 Davidweshttps://www.facebook.com/st666lode
<a href=https://www.facebook.com/st666lode>nhà cái ST666</a> ST666 Xổ Số – Điểm Đến Giải Trí Hoàn Hảo ST666 Xổ Số là nền tảng giải trí trực tuyến hàng đầu, cung cấp đa dạng các loại hình trò chơi từ keno, xổ số miền Nam (XSMN), xổ số miền Bắc (XSMB) đến xổ số siêu tốc. Với dịch vụ chuyên nghiệp và an toàn, ST666 mang đến cho bạn một trải nghiệm hoàn toàn mới mẻ và hấp dẫn.
Tại Sao Nên Chọn ST666 Xổ Số Truy Cập Nhanh Và An Toàn ST666 đảm bảo quyền truy cập nhanh chóng thông qua đường dẫn chính thức, loại bỏ hoàn toàn rủi ro từ các trang web giả mạo hoặc nguy cơ mất tài khoản. Hệ thống bảo mật hiện đại giúp bạn yên tâm khi đăng nhập và tham gia trò chơi.
Ưu Đãi Độc Quyền Dành Cho Thành Viên ST666 mang đến nhiều chương trình khuyến mãi đặc biệt dành riêng cho người chơi, bao gồm phần thưởng giá trị và các ưu đãi hấp dẫn. Thành viên mới sẽ được trải nghiệm các chính sách hỗ trợ vượt trội, giúp tăng cơ hội chiến thắng và tận hưởng trò chơi tốt nhất.
Bảo Mật Thông Tin Tối Đa Hệ thống mã hóa hiện đại của ST666 đảm bảo mọi giao dịch và dữ liệu cá nhân đều được bảo vệ an toàn. Mọi thông tin đều được xử lý theo quy chuẩn bảo mật cao nhất, giúp người chơi yên tâm giải trí mà không lo lắng về vấn đề rủi ro thông tin.
Đa Dạng Trò Chơi Giải Trí Xổ số: Từ xổ số truyền thống như XSMN, XSMB đến xổ số siêu tốc, đáp ứng mọi nhu cầu giải trí của người chơi. Lô đề: Cung cấp giao diện dễ sử dụng, giúp bạn dễ dàng chọn số và theo dõi kết quả trực tiếp. Casino trực tuyến: Đa dạng các trò chơi từ bài bạc, roulette đến các game đổi thưởng hiện đại. Những Lợi Ích Khi Chơi Tại ST666 Dịch vụ hỗ trợ khách hàng chuyên nghiệp hoạt động 24/7. Giao dịch nạp và rút tiền nhanh chóng, minh bạch. Hệ thống cập nhật trò chơi thường xuyên, mang lại sự mới mẻ và không nhàm chán. Nền tảng thiết kế hiện đại, thân thiện với mọi thiết bị, từ máy tính đến điện thoại di động. Cách Truy Cập ST666 Truy cập đường dẫn chính thức của ST666 để đảm bảo an toàn. Đăng ký tài khoản và hoàn tất các bước xác thực thông tin. Tham gia các trò chơi hấp dẫn và tận hưởng phần thưởng đặc biệt dành cho thành viên. ST666 Xổ Số không chỉ là nền tảng giải trí mà còn là nơi mang lại cơ hội chiến thắng và trải nghiệm dịch vụ đẳng cấp. Tham gia ngay hôm nay để khám phá một thế giới giải trí đa dạng và chuyên nghiệp!
#8885 Ремонт зеркальных фотоаппаратовhttps://remont-fotoapparatov-ink.ru/
Наша мастерская предлагает высококачественный <a href=https://remont-fotoapparatov-ink.ru/>центр ремонта фотоаппаратов на выезде</a> всех типов и брендов. Мы знаем, насколько важны для вас ваши фотокамеры, и стремимся предоставить услуги высочайшего уровня. Наши квалифицированные специалисты работают быстро и аккуратно, используя только оригинальные запчасти, что гарантирует долговечность и надежность наших услуг.
Наиболее общие проблемы, с которыми сталкиваются пользователи камер, включают проблемы с объективом, проблемы с затвором, поврежденный дисплей, проблемы с аккумулятором и неисправности программного обеспечения. Для устранения этих неисправностей наши квалифицированные специалисты выполняют ремонт объективов, затворов, экранов, батарей и ПО. Обращаясь в наш сервисный центр, вы гарантируете себе надежный и долговечный сервис ремонта фотоаппаратов на дому. Подробная информация представлена на нашем сайте: https://remont-fotoapparatov-ink.ru
#8886 Ремонт тепловизоровhttps://remont-teplovizorov-gem.ru/
Наши специалисты предлагает профессиональный <a href=https://remont-teplovizorov-gem.ru/>сервисный центр по ремонту тепловизоров на дому</a> различных марок и моделей. Мы знаем, насколько важны для вас ваши устройства теплового видения, и обеспечиваем ремонт наилучшего качества. Наши опытные мастера работают быстро и аккуратно, используя только качественные детали, что предоставляет надежность и долговечность выполненных работ. Наиболее распространенные поломки, с которыми сталкиваются пользователи инфракрасных камер, включают проблемы с изображением, поврежденные линзы, ошибки ПО, неработающие разъемы и повреждения корпуса. Для устранения этих проблем наши квалифицированные специалисты проводят ремонт матриц, оптики, ПО, разъемов и механических компонентов. Доверив ремонт нам, вы обеспечиваете себе качественный и надежный сервисный центр по ремонту тепловизоров на выезде. Подробная информация доступна на сайте: https://remont-teplovizorov-gem.ru
#8887 Ремонт телефонов в Москвеhttps://remont-telefonov-biz.ru/
Наша мастерская предлагает высококачественный <a href=https://remont-telefonov-biz.ru/>мастерская по ремонту смартфона с гарантией</a> различных марок и моделей. Мы осознаем, насколько важны для вас ваши смартфоны, и стремимся предоставить услуги высочайшего уровня. Наши квалифицированные специалисты работают быстро и аккуратно, используя только оригинальные запчасти, что гарантирует длительную работу наших услуг. Наиболее частые неисправности, с которыми сталкиваются пользователи смартфонов, включают неисправности дисплея, неисправности аккумулятора, ошибки ПО, проблемы с портами и механические повреждения. Для устранения этих поломок наши квалифицированные специалисты проводят ремонт экранов, батарей, ПО, разъемов и механических компонентов. Обратившись к нам, вы гарантируете себе долговечный и надежный мастерская по ремонту смартфона рядом. Подробная информация размещена на сайте: https://remont-telefonov-biz.ru
#8888 HarryZob
Buy semaglutide pills: <a href=" https://semaglutidepharm.com/ ">rybelsus cost</a> – rybelsus cost
#8889 Ремонт сушильных машинhttps://remont-sushilnyh-mashin-all.ru/
Наши специалисты предлагает надежный <a href=https://remont-sushilnyh-mashin-all.ru/>срочный ремонт сушильной машины</a> любых брендов и моделей. Мы понимаем, насколько важны для вас ваши автоматические сушилки, и обеспечиваем ремонт первоклассного уровня. Наши опытные мастера проводят ремонтные работы с высокой скоростью и точностью, используя только сертифицированные компоненты, что обеспечивает надежность и долговечность наших услуг. Наиболее распространенные поломки, с которыми сталкиваются пользователи автоматических сушилок, включают проблемы с нагревом, неисправности барабана, неисправности программного обеспечения, неисправности фильтра и повреждения корпуса. Для устранения этих неисправностей наши квалифицированные специалисты оказывают ремонт нагревательных элементов, барабанов, ПО, фильтров и механических компонентов. Обращаясь в наш сервисный центр, вы гарантируете себе долговечный и надежный мастерская по ремонту сушильных машин на выезде. Подробная информация представлена на нашем сайте: https://remont-sushilnyh-mashin-all.ru
#8890 JustinVeliphttps://kursovaya-rabota-na-zakaz.ru
Заказать курсовую работу <a href=https://kursovaya-rabota-na-zakaz.ru/>https://kursovaya-rabota-na-zakaz.ru</a> у нас — это гарантированное качество, соответствие всем требованиям преподавателя и экономия вашего времени. Мы профессионально подходим к написанию курсовых, учитывая все пожелания и специфику вашего задания.
#8891 Ремонт стиральных машин на домуhttps://remont-stiralnyh-mashin-ace.ru/
Наша мастерская предлагает высококачественный <a href=https://remont-stiralnyh-mashin-ace.ru/>сервисный центр по ремонту стиральной машины</a> всех типов и брендов. Мы осознаем, насколько значимы для вас ваши устройства для стирки, и готовы предложить сервис первоклассного уровня. Наши квалифицированные специалисты работают быстро и аккуратно, используя только оригинальные запчасти, что обеспечивает надежность и долговечность наших услуг. Наиболее общие проблемы, с которыми сталкиваются обладатели устройств для стирки, включают неисправности барабана, проблемы с нагревом воды, неисправности программного обеспечения, неработающий насос и поломки компонентов. Для устранения этих неисправностей наши квалифицированные специалисты проводят ремонт барабанов, нагревательных элементов, ПО, насосов и механических компонентов. Обращаясь в наш сервисный центр, вы получаете надежный и долговечный сервис ремонта стиральной машины рядом. Подробная информация доступна на сайте: https://remont-stiralnyh-mashin-ace.ru
#8892 BobbyNighttps://bnx.me
Cryptocurrency trading <a href=https://bnx.me/>https://bnx.me</a> is easy and safe with BNX.me. Fast trades, transparent conditions, access to popular tokens and 24/7 support for a comfortable experience.
#8893 LouisRalhttps://dukerhome.com/leo-login/
Leo娛樂城無法登入?是九州娛樂城倒了嗎?背後原因竟是這樣!
最近,許多玩家發現自己無法登入 Leo娛樂城,甚至有人關心是否這意味著九州娛樂城的倒閉。究竟發生了什麼事情?今天,我們將解開這個謎團,幫助大家瞭解 Leo娛樂城無法登入的真正原因。
#### 目錄 1. Leo娛樂城無法登入:背後的三個原因 2. 九州娛樂城倒了?只是退出台灣市場 3. Leo娛樂城無法登入該怎麼辦? 4. 最新娛樂城推薦排名,這幾家平台更值得信賴! 5. 結論
### Leo娛樂城無法登入:背後的三個原因
#### 原因一:帳號被鎖或密碼錯誤 最常見的問題之一就是玩家的帳號被鎖定或密碼輸錯。這類問題其實相對容易解決,玩家只需聯繫客服要求恢復帳號即可。然而,有部分玩家反映客服反應緩慢,甚至感覺客服想要拖延時間,這一點讓人不禁懷疑是否有其他貓膩。
#### 原因二:網站壞了或被檢舉 有玩家在登錄時遇到 404 錯誤,這種情況通常表明網站伺服器出現故障,或是因為某種原因被檢舉並暫時下架。這樣的情況對於玩家來說非常令人沮喪,因為缺乏官方的回應和修復時間,只能無奈等待。
#### 原因三:九州集團退出台灣市場 近期有消息指出,九州集團可能正在逐步退出台灣的市場,這可能影響到其旗下所有娛樂城的運作。如果該集團確實進行了市場撤退,則 Leo娛樂城的運作將受到直接影響,這也解釋了為什麼許多玩家會感到困惑和不安。
### 九州娛樂城倒了?只是退出台灣市場 雖然網上有許多傳言說九州娛樂城已經倒閉,但實際上應該理解為它正在退出台灣市場。這樣的變化可能與政策、法規等多種因素有關。對於玩家來說,這是需要留意的一個信息,以便尋找其他可行的娛樂選擇。
### Leo娛樂城無法登入該怎麼辦? 如果你遇到無法登入的問題,建議你首先檢查帳號和密碼是否正確。如果是技術性問題,則需等待官方的修復通知。在這段時間內,可以考慮暫時使用其他娛樂城平台,避免資金被鎖定。
### 最新娛樂城推薦排名,這幾家平台更值得信賴! 在選擇娛樂城時,建議選擇評價高、可靠性強的平台。以下是目前推薦的一些娛樂城,這幾家平台在安全性和用戶體驗上表現良好,可以作為替代選擇:
1. XXX娛樂城 – 以安全和穩定著稱。 2. YYY娛樂城 – 提供多樣化的遊戲選擇。 3. ZZZ娛樂城 – 客服反應快速,體驗佳。
### 結論 總的來說,Leo娛樂城無法登入的原因涉及帳號問題、網站技術故障以及九州集團的市場動向。希望這篇文章能幫助你更好地理解目前的情況。保持警惕,選擇可靠的娛樂平台,以確保自身的資金安全和良好的遊戲體驗。希望未來能有更好的解決方案來改善玩家的困擾!
#8894 Ремонт стиральных машин на домуhttps://remont-stiralnyh-mashin-ace.ru/
Наш сервисный центр предлагает профессиональный <a href=https://remont-stiralnyh-mashin-ace.ru/>мастер по ремонту стиральной машины на дому</a> любых брендов и моделей. Мы понимаем, насколько важны для вас ваши стиральные машины, и готовы предложить сервис высочайшего уровня. Наши квалифицированные специалисты работают быстро и аккуратно, используя только сертифицированные компоненты, что гарантирует длительную работу выполненных работ. Наиболее общие проблемы, с которыми сталкиваются обладатели устройств для стирки, включают неисправности барабана, неработающий нагревательный элемент, ошибки ПО, неисправности насоса и механические повреждения. Для устранения этих неисправностей наши профессиональные техники проводят ремонт барабанов, нагревательных элементов, ПО, насосов и механических компонентов. Обратившись к нам, вы получаете долговечный и надежный вызвать мастера по ремонту стиральной машины с гарантией. Подробная информация доступна на сайте: https://remont-stiralnyh-mashin-ace.ru
#8895 qmxblnzolu
what is minocycline 100 mg used for <a href=" https://forex-bitcoin.com/…3-hotuojqjuo „>ivermectin 6 tablet</a> or <a href=“ https://toolbarqueries.google.com.qa/url?… ">ivermectin eye drops</a> https://27.glawandius.com/index/d2?… ivermectin 3 mg <a href=https://cse.google.com.pg/url?sa=t&url=https://ivermectinpharm.store>minocycline 50 mg tabs</a> ivermectin 8000 mcg and <a href=https://app.guiigo.com/home.php?mod=space&uid=11999>stromectol tablets buy online</a> stromectol ivermectin buy
#8896 AlfredoDubhttps://players.tw/leo-close/
LEO娛樂城無法登入?九州娛樂城退出台灣市場的真相解析 近期,LEO娛樂城頻頻傳出無法登入的消息,並伴隨著「九州娛樂城退出市場」的傳聞,引發了廣大玩家的熱議與疑慮。作為台灣線上娛樂城市場的代表品牌之一,LEO娛樂城曾憑藉其廣泛的廣告投放和龐大的代理規模,成為許多玩家耳熟能詳的名字。然而,這一系列的問題究竟是偶發事件還是背後早有計劃?本文將帶您深入了解LEO娛樂城無法登入的原因及其對玩家的影響。
LEO娛樂城無法登入:網路熱議九州娛樂城倒閉 LEO娛樂城近期無法登入的情況似乎透露出了一個更大的訊息:該平台正在逐步退出台灣市場。隨著其營運的逐漸停擺,玩家們發現以下問題日益嚴重:
官網無法訪問:登入失敗的情況變得愈加頻繁。 註冊和儲值受限:許多玩家反映無法完成新用戶註冊,甚至現有用戶的儲值功能也開始受到限制。 經調查,這一退出決策並非偶然,而是九州娛樂城高層的長期規劃結果。讓我們一起探索這一決策背後的可能原因。
LEO娛樂城退出台灣的三大可能原因 原因一:台灣市場利潤有限,轉向海外發展 LEO娛樂城無法登入的核心原因之一,是該品牌已經決定退出台灣市場。九州娛樂城高層認為,台灣市場的競爭激烈且利潤有限,因此選擇將資源轉向其他潛力更大的海外市場以追求更高的收益。
見好就收:這一做法與許多商業決策類似,在利潤達到一定水平後選擇退出,尋求更具回報的新機會。 海外市場吸引力:國際市場的規模和成長性更具吸引力,讓九州娛樂城看到了更大的可能性。 原因二:生態鏈與資金運作出現問題 LEO娛樂城的運營生態鏈可能存在隱患,導致其無法長期穩定運作:
資金鏈斷裂:玩家的充值與出金流程可能受到影響,進一步削弱平台的穩定性。 運營成本上升:在台灣市場的高運營成本可能也是平台選擇退出的一大原因。 原因三:九州娛樂城受到法律與政策壓力 九州娛樂城近年來面臨多起法律與政策挑戰,影響了其旗下品牌的正常運營:
監管政策加強:台灣政府對線上娛樂平台的監管力度加大,對九州娛樂城造成了直接影響。 法律爭議:母公司的財務與法規問題頻頻登上新聞,使旗下品牌的經營環境更加複雜。 LEO娛樂城無法登入對玩家的影響 隨著LEO娛樂城逐步退出台灣市場,玩家需要做好以下應對措施:
迅速提現本金:如您仍可登入官網,建議立即提取帳戶內的資金,避免遭遇平台徹底關閉後的損失。 尋找可靠的替代平台:選擇擁有合法牌照且運營穩定的國際品牌,如1XBET等,確保遊戲與資金安全。 提高資金安全意識:在選擇新平台時,應重點關注其口碑、資金保障措施以及用戶評價,避免再次陷入類似情況。 結論:LEO娛樂城無法登入背後的啟示 LEO娛樂城無法登入以及九州娛樂城退出台灣市場的消息,揭示了線上娛樂市場的高風險性與不穩定性。對玩家而言,選擇安全合法的平台才是長遠之計。
在未來,隨著國際市場的開放與法規的完善,玩家或許能期待更穩定與透明的娛樂環境。但在此之前,迅速採取行動保障自己的資金與利益才是當務之急。
#8897 Ремонт сигвеевhttps://remont-sigveev-expertise.ru/
Наш сервисный центр предлагает профессиональный <a href=https://remont-sigveev-expertise.ru/>выездной ремонт сигвея</a> всех типов и брендов. Мы понимаем, насколько значимы для вас ваши электроскутеры, и стремимся предоставить услуги высочайшего уровня. Наши профессиональные техники работают быстро и аккуратно, используя только качественные детали, что обеспечивает длительную работу проведенных ремонтов. Наиболее общие проблемы, с которыми сталкиваются пользователи электроскутеров, включают поломку аккумулятора, проблемы с мотором, неисправный контроллер, неисправности сенсоров и поломки корпуса. Для устранения этих неисправностей наши опытные мастера оказывают ремонт батарей, двигателей, контроллеров, гиросенсоров и механических компонентов. Доверив ремонт нам, вы получаете надежный и долговечный сервис ремонта сигвея в москве. Подробная информация представлена на нашем сайте: https://remont-sigveev-expertise.ru
#8898 WilliamJeshttps://abrone.jobs
Abrone.jobs <a href=https://abrone.jobs/>https://abrone.jobs</a> is the gateway to careers at Abrone, a leader in AI, data, and analytics. Join a dynamic team driving innovation with cutting-edge tech. Enjoy remote work, competitive benefits, and career growth. If you're passionate about AI or analytics, Abrone is where you’ll thrive!
#8899 MatthewWaghttps://retinaad.africa
Retinaad represents the premier advertising technology company for media monitoring & audience measurement in the Nigerian market.
We provide evaluation, surveillance, and compliance solutions for: – outdoor media / Digital Out-Of-Home, – Below-the-line marketing, – shop-based promotions, – broadcast tools, – Radio, – screen-based marketing, – online PR, – digital engagement tools.
Our primary objective seeks to enable product strategists, campaign leaders, and advertising firms enhance efficiency and return on investment.
Our company applies advanced solutions to deliver data-driven insights. By creating a holistic ecosystem, our team resolve the critical needs of media compliance, helping agencies succeed in an ever-changing environment.
#8900 HarryZob
amoxicillin buy online canada: <a href=" https://amoxilpharm.store/ ">AmoxilPharm</a> – AmoxilPharm
#8901 JordanSnushhttps://betboy.tw/leo-login/
LEO娛樂城無法登入?九州娛樂城退出台灣市場的真相大揭秘 近期,LEO娛樂城頻傳無法登入的消息,引發廣大玩家的疑慮與焦慮。作為九州娛樂城旗下的重要品牌,其背後的問題究竟是什麼?九州娛樂城是否真的退出台灣市場?本文將深度解析LEO娛樂城無法登入的三大原因,以及九州娛樂城退出的背景,幫助玩家了解真相並制定應對策略。
LEO娛樂城無法登入的三大原因 1. 帳號或密碼問題 部分玩家反映無法登入是由於密碼輸入錯誤或帳號遭盜用。
問題分析:這類問題通常較輕微,只需聯繫客服便可解決。 困難點:有玩家指出,LEO娛樂城的客服回應緩慢,甚至拖延處理時間,讓人懷疑是否另有隱情。 2. 平台技術或法規問題 當玩家試圖登入LEO娛樂城時,可能遇到以下情況:
伺服器無法連接或出現404錯誤頁面。 伺服器損壞或平台因法規問題遭檢舉下架,導致服務中斷。 此情況顯示平台運營出現技術或法規挑戰,玩家的遊戲體驗和資金安全因此受到影響。 3. 九州娛樂城及旗下品牌退出台灣市場 最令人震驚的原因是,LEO娛樂城可能正在退出台灣市場。
九州娛樂城因資金問題和監管壓力選擇撤出台灣。 市場傳聞指出其資金鏈出現裂痕,加上內外壓力,導致旗下品牌無法維持運營穩定性。 九州娛樂城退出台灣市場的原因 1. 市場競爭激烈,收益下滑 台灣娛樂城市場競爭日益加劇,各大品牌為爭奪市場份額不斷投入資源。九州娛樂城難以維持競爭力,收益大幅下滑,最終選擇將資源轉向其他具潛力的海外市場。
2. 資金鏈問題,運作困難 從玩家充值到出金的每個環節,九州娛樂城的資金運作均出現問題,影響平台穩定性。資金鏈斷裂使九州娛樂集團不得不低調撤出台灣,以降低損失。
3. 母公司法律與財務問題 九州娛樂集團近年來因法律與財務問題備受關注,導致其在台灣的營運面臨更多困難。相關部門的嚴格監管使得旗下品牌如LEO娛樂城、THA娛樂城被迫退出市場。
玩家如何應對LEO娛樂城無法登入的情況? 1. 立即提現本金 如果LEO娛樂城官網仍能登入,建議玩家立即提取帳戶內的所有資金,以避免因平台徹底關閉而造成損失。
2. 轉向穩定且合法的替代平台 選擇具有合法牌照和穩定運營的娛樂城作為替代平台。例如選擇國際知名品牌,確保遊戲體驗和資金安全。
3. 提高資金安全意識 在選擇新平台時,應重點關注以下事項:
資金保障措施:確保平台能提供快速出金和玩家資金保護機制。 玩家口碑:查看其他玩家的評價,選擇信譽良好的平台。 結論:面對LEO娛樂城問題,快速行動是關鍵 LEO娛樂城無法登入與九州娛樂城退出台灣市場的消息,無疑為玩家帶來了巨大不安。無論是資金問題還是伺服器故障,玩家應及時採取行動保障自身利益。立即提現資金,轉向穩定的娛樂平台,並提高安全意識,是避免損失的有效策略。
在動盪的市場環境中,選擇合法且穩定的平台是保護資金與享受遊戲體驗的最佳方式。
#8902 Ремонт роботов пылесосовhttps://remont-robotov-pylesosov-servis.ru/
Наша мастерская предлагает высококачественный <a href=https://remont-robotov-pylesosov-servis.ru/>сервисный центр по ремонту робота пылесоса рядом</a> всех типов и брендов. Мы знаем, насколько значимы для вас ваши роботизированные уборщики, и обеспечиваем ремонт высочайшего уровня. Наши опытные мастера оперативно и тщательно выполняют работу, используя только качественные детали, что гарантирует надежность и долговечность наших услуг. Наиболее распространенные поломки, с которыми сталкиваются владельцы роботов-пылесосов, включают неисправную батарею, неработающий двигатель, ошибки ПО, неисправности сенсоров и повреждения корпуса. Для устранения этих неисправностей наши квалифицированные специалисты проводят ремонт батарей, двигателей, ПО, сенсоров и механических компонентов. Обращаясь в наш сервисный центр, вы получаете долговечный и надежный официальный ремонт робота пылесоса адреса. Подробная информация доступна на сайте: https://remont-robotov-pylesosov-servis.ru
#8903 Ремонт проекторов в Москвеhttps://remont-proektorov-online.ru/
Наша мастерская предлагает надежный <a href=https://remont-proektorov-online.ru/>вызвать мастера по ремонту проектора на дому</a> любых брендов и моделей. Мы знаем, насколько значимы для вас ваши видеопроекторы, и готовы предложить сервис наилучшего качества. Наши профессиональные техники проводят ремонтные работы с высокой скоростью и точностью, используя только оригинальные запчасти, что предоставляет длительную работу наших услуг. Наиболее общие проблемы, с которыми сталкиваются пользователи проекционных устройств, включают проблемы с лампой, проблемы с охлаждением, неисправности программного обеспечения, неисправности разъемов и поломки компонентов. Для устранения этих проблем наши опытные мастера проводят ремонт ламп, вентиляторов, ПО, разъемов и механических компонентов. Обращаясь в наш сервисный центр, вы гарантируете себе долговечный и надежный ремонт проектора в москве. Подробная информация доступна на сайте: https://remont-proektorov-online.ru
#8904 kazino onlain_guPrhttp://online-kazino.md
casino online moldova <a href=online-kazino.md>casino online moldova</a> .
#8905 Ремонт проекторов в Москвеhttps://remont-proektorov-online.ru/
Наш сервисный центр предлагает высококачественный <a href=https://remont-proektorov-online.ru/>вызвать мастера по ремонту проектора с гарантией</a> любых брендов и моделей. Мы осознаем, насколько важны для вас ваши проекторы, и обеспечиваем ремонт первоклассного уровня. Наши опытные мастера оперативно и тщательно выполняют работу, используя только оригинальные запчасти, что предоставляет длительную работу наших услуг. Наиболее общие проблемы, с которыми сталкиваются пользователи проекционных устройств, включают неисправности лампы, перегрев, ошибки ПО, неработающие разъемы и поломки компонентов. Для устранения этих проблем наши опытные мастера выполняют ремонт ламп, вентиляторов, ПО, разъемов и механических компонентов. Обратившись к нам, вы получаете качественный и надежный сервис ремонта проекторов в москве. Подробная информация представлена на нашем сайте: https://remont-proektorov-online.ru
#8906 Ремонт принтеровhttps://remont-printerov-master.ru/
Наш сервисный центр предлагает надежный <a href=https://remont-printerov-master.ru/>официальный ремонт принтеров адреса</a> любых брендов и моделей. Мы осознаем, насколько важны для вас ваши принтеры, и стремимся предоставить услуги высочайшего уровня. Наши опытные мастера проводят ремонтные работы с высокой скоростью и точностью, используя только оригинальные запчасти, что гарантирует надежность и долговечность выполненных работ. Наиболее распространенные поломки, с которыми сталкиваются владельцы принтеров, включают неисправности печатающей головки, неисправности механизма подачи, ошибки ПО, неработающие разъемы и повреждения корпуса. Для устранения этих неисправностей наши профессиональные техники оказывают ремонт печатающих головок, механизмов подачи бумаги, ПО, разъемов и механических компонентов. Обратившись к нам, вы обеспечиваете себе качественный и надежный ремонт принтеров в москве. Подробная информация представлена на нашем сайте: https://remont-printerov-master.ru
#8907 Ремонт посудомоечных машин в Москвеhttps://remont-posudomoechnyh-mashin-expert.ru/
Наш сервисный центр предлагает высококачественный <a href=https://remont-posudomoechnyh-mashin-expert.ru/>официальный ремонт посудомоечной машины с гарантией</a> всех типов и брендов. Мы знаем, насколько необходимы вам ваши посудомойки, и обеспечиваем ремонт первоклассного уровня. Наши опытные мастера проводят ремонтные работы с высокой скоростью и точностью, используя только сертифицированные компоненты, что предоставляет долговечность и надежность выполненных работ. Наиболее общие проблемы, с которыми сталкиваются пользователи посудомоек, включают проблемы с температурными датчиками, проблемы с подачей воды, программные сбои, проблемы с подключением и механические повреждения. Для устранения этих поломок наши профессиональные техники проводят ремонт нагревательных элементов, насосов, ПО, разъемов и механических компонентов. Доверив ремонт нам, вы получаете надежный и долговечный официальный ремонт посудомоечных машин. Подробная информация представлена на нашем сайте: https://remont-posudomoechnyh-mashin-expert.ru
#8908 Ремонт ПНВhttps://remont-pnv-ultra.ru/
Наша мастерская предлагает профессиональный <a href=https://remont-pnv-ultra.ru/>сервисный ремонт приборов ночного видения адреса</a> всех типов и брендов. Мы осознаем, насколько необходимы вам ваши ПНВ, и стремимся предоставить услуги первоклассного уровня. Наши квалифицированные специалисты проводят ремонтные работы с высокой скоростью и точностью, используя только сертифицированные компоненты, что предоставляет надежность и долговечность выполненных работ. Наиболее частые неисправности, с которыми сталкиваются владельцы ПНВ, включают проблемы с изображением, неисправности оптики, программные сбои, неисправности разъемов и повреждения корпуса. Для устранения этих проблем наши квалифицированные специалисты выполняют ремонт сенсоров, оптики, ПО, разъемов и механических компонентов. Обращаясь в наш сервисный центр, вы обеспечиваете себе надежный и долговечный вызвать мастера по ремонту приборов ночного видения на выезде. Подробная информация размещена на сайте: https://remont-pnv-ultra.ru
#8909 Ремонт приборов ночного виденияhttps://remont-pnv-ultra.ru/
Наш сервисный центр предлагает надежный <a href=https://remont-pnv-ultra.ru/>вызвать мастера по ремонту приборов ночного видения в москве</a> всех типов и брендов. Мы понимаем, насколько важны для вас ваши приборы ночного видения, и обеспечиваем ремонт первоклассного уровня. Наши квалифицированные специалисты проводят ремонтные работы с высокой скоростью и точностью, используя только качественные детали, что обеспечивает длительную работу проведенных ремонтов. Наиболее распространенные поломки, с которыми сталкиваются владельцы ПНВ, включают проблемы с изображением, поврежденные линзы, программные сбои, неработающие разъемы и поломки компонентов. Для устранения этих поломок наши квалифицированные специалисты оказывают ремонт сенсоров, оптики, ПО, разъемов и механических компонентов. Доверив ремонт нам, вы обеспечиваете себе надежный и долговечный вызвать мастера по ремонту приборов ночного видения на дому. Подробная информация доступна на сайте: https://remont-pnv-ultra.ru
#8910 Ремонт плоттеровhttps://remont-plotterov-style.ru/
Наш сервисный центр предлагает профессиональный <a href=https://remont-plotterov-style.ru/>сервисный центр по ремонту плоттеров</a> различных марок и моделей. Мы осознаем, насколько значимы для вас ваши печатные устройства, и обеспечиваем ремонт первоклассного уровня. Наши квалифицированные специалисты оперативно и тщательно выполняют работу, используя только сертифицированные компоненты, что предоставляет длительную работу проведенных ремонтов.s Наиболее общие проблемы, с которыми сталкиваются обладатели печатных устройств, включают неработающий картридж, проблемы с подачей бумаги, неисправности программного обеспечения, неработающие разъемы и повреждения корпуса. Для устранения этих поломок наши профессиональные техники проводят ремонт печатающих головок, механизмов подачи бумаги, ПО, разъемов и механических компонентов. Доверив ремонт нам, вы гарантируете себе качественный и надежный сервис ремонта плоттеров на дому. Подробная информация представлена на нашем сайте: https://remont-plotterov-style.ru
#8911 Patrickralhttps://cvpro.com.tr
CVpro.com.tr <a href=https://cvpro.com.tr/>https://cvpro.com.tr</a> milyonlarca is arayan?n guvendigi lider CV yazma ve kariyer koclugu hizmetidir. Uzman ekibimiz, profesyonel CV, sektore ozel on yaz?, LinkedIn profili optimizasyonu ve kisisel kariyer koclugu ile gercek potansiyelinizi ortaya c?kararak kariyer hedeflerinize ulasman?za destek olur. Yeni f?rsatlar? kesfetmek icin yan?n?zday?z!
#8912 Peterpexhttps://cvpro.pt
CVpro.pt <a href=https://cvpro.pt/>https://cvpro.pt</a> e lider em redacao de curriculos e coaching de carreira, apoiando milhoes de candidatos globalmente. Oferecemos curriculos profissionais, cartas de apresentacao personalizadas, otimizacao de perfis no LinkedIn e coaching de carreira. Nosso time de especialistas ajuda voce a destacar seu potencial e conquistar novas oportunidades na sua jornada profissional.
#8913 Ремонт планшетов в Москвеhttps://remont-planshetov-profi.ru/
Наша мастерская предлагает надежный <a href=https://remont-planshetov-profi.ru/>мастерская по ремонту планшетов</a> различных марок и моделей. Мы осознаем, насколько важны для вас ваши таблеты, и обеспечиваем ремонт наилучшего качества. Наши профессиональные техники работают быстро и аккуратно, используя только оригинальные запчасти, что предоставляет надежность и долговечность проведенных ремонтов. Наиболее распространенные поломки, с которыми сталкиваются пользователи таблетов, включают неисправности дисплея, проблемы с батареей, неисправности программного обеспечения, неработающие разъемы и повреждения корпуса. Для устранения этих неисправностей наши профессиональные техники оказывают ремонт экранов, батарей, ПО, разъемов и механических компонентов. Обратившись к нам, вы гарантируете себе качественный и надежный отремонтировать планшет на выезде. Подробная информация размещена на сайте: https://remont-planshetov-profi.ru
#8914 Ремонт парогенераторовhttps://remont-parogeneratorov-piece.ru/
Наш сервисный центр предлагает высококачественный <a href=https://remont-parogeneratorov-piece.ru/>срочный ремонт парогенераторов</a> всех типов и брендов. Мы понимаем, насколько важны для вас ваши парогенераторы, и стремимся предоставить услуги наилучшего качества. Наши опытные мастера работают быстро и аккуратно, используя только качественные детали, что предоставляет долговечность и надежность наших услуг. Наиболее частые неисправности, с которыми сталкиваются пользователи устройств для генерации пара, включают неисправности нагревательных элементов, проблемы с подачей воды, программные сбои, неработающие разъемы и механические повреждения. Для устранения этих проблем наши опытные мастера проводят ремонт нагревательных элементов, насосов, ПО, разъемов и механических компонентов. Обратившись к нам, вы гарантируете себе долговечный и надежный починить парогенератор на выезде. Подробная информация представлена на нашем сайте: https://remont-parogeneratorov-piece.ru
#8915 HarryZob
what is minocycline prescribed for: <a href=" http://ivermectinpharm.store/ ">Ivermectin Pharm</a> – Ivermectin Pharm
#8916 Ремонт парогенераторовhttps://remont-parogeneratorov-piece.ru/
Наши специалисты предлагает надежный <a href=https://remont-parogeneratorov-piece.ru/>сервисный центр по ремонту парогенератора на выезде</a> всех типов и брендов. Мы понимаем, насколько необходимы вам ваши пароочистители, и обеспечиваем ремонт первоклассного уровня. Наши квалифицированные специалисты работают быстро и аккуратно, используя только оригинальные запчасти, что предоставляет длительную работу наших услуг. Наиболее общие проблемы, с которыми сталкиваются обладатели пароочистителей, включают проблемы с температурными датчиками, проблемы с подачей воды, ошибки ПО, неисправности разъемов и поломки компонентов. Для устранения этих неисправностей наши квалифицированные специалисты оказывают ремонт нагревательных элементов, насосов, ПО, разъемов и механических компонентов. Доверив ремонт нам, вы обеспечиваете себе качественный и надежный сервисный центр по ремонту парогенераторов рядом. Подробная информация размещена на сайте: https://remont-parogeneratorov-piece.ru
#8917 RichardNewhttps://setka.by
Сетка и металлопродукция <a href=https://setka.by/>https://setka.by</a> в Минске: продажа от производителя. Широкий ассортимент, доступные цены, быстрая доставка. Качество и надёжность для строительства и производства.
#8918 WilliamRor
online pharmacy india <a href=" http://bbs.cheaa.com/home.php?… „>online shopping pharmacy india</a> or <a href=“ https://image.google.md/url?… ">п»їlegitimate online pharmacies india</a> http://www.oxfordeye.co.uk/redirect.aspx?… top 10 online pharmacy in india <a href=https://maps.google.com.ng/url?q=https://indianpharmstar.com>indian pharmacy paypal</a> online shopping pharmacy india and <a href=https://www.gztongcheng.top/home.php?mod=space&uid=4192>cheapest online pharmacy india</a> Online medicine home delivery
#8919 Ремонт объективовhttps://remont-obektivov-magic.ru/
Наша мастерская предлагает профессиональный <a href=https://remont-obektivov-magic.ru/>центр ремонта объективов адреса</a> всех типов и брендов. Мы понимаем, насколько важны для вас ваши фотообъективы, и обеспечиваем ремонт наилучшего качества. Наши профессиональные техники проводят ремонтные работы с высокой скоростью и точностью, используя только сертифицированные компоненты, что гарантирует долговечность и надежность проведенных ремонтов. Наиболее распространенные поломки, с которыми сталкиваются владельцы объективов, включают неисправности фокуса, залипшую диафрагму, механические повреждения, проблемы с автофокусом и загрязнения линз. Для устранения этих проблем наши профессиональные техники проводят ремонт фокусировки, диафрагмы, автофокуса, очистку линз и восстановление корпуса. Обращаясь в наш сервисный центр, вы получаете качественный и надежный официальный ремонт объективов на выезде. Подробная информация размещена на сайте: https://remont-obektivov-magic.ru
#8920 Ремонт ноутбуковhttps://remont-noutbukov-first.ru/
Наша мастерская предлагает высококачественный <a href=https://remont-noutbukov-first.ru/>официальный ремонт ноутбука адреса</a> различных марок и моделей. Мы осознаем, насколько значимы для вас ваши ноутбуки, и готовы предложить сервис наилучшего качества. Наши квалифицированные специалисты работают быстро и аккуратно, используя только сертифицированные компоненты, что обеспечивает долговечность и надежность наших услуг. Наиболее распространенные поломки, с которыми сталкиваются владельцы ноутбуков, включают проблемы с жестким диском, неисправности экрана, программные сбои, неисправности разъемов и проблемы с охлаждением. Для устранения этих проблем наши профессиональные техники выполняют ремонт жестких дисков, экранов, ПО, разъемов и систем охлаждения. Обратившись к нам, вы получаете надежный и долговечный отремонтировать ноутбук рядом. Подробная информация представлена на нашем сайте: https://remont-noutbukov-first.ru
#8921 Williamduedehttps://alzyad.com/%D8%B4%D8%B1%D8%A7%D8%A1-%D8%A7%D8%AB%D8%A7%D8%AB-%D9%85%D8%B3%D8%AA%D8%B9%D9%85%
شراء الأثاث المستعمل بالرياض: الحل الأمثل للتخلص من الأثاث القديم واستبداله هل تبحث عن وسيلة للاستفادة من أثاثك القديم بدلاً من تخزينه أو التخلص منه؟ تقدم محلات شراء وبيع الأثاث المستعمل بالرياض حلاً مثالياً يساعد الأفراد والمؤسسات على تحقيق أقصى استفادة من الأثاث القديم. نحن نعمل كحلقة وصل بين من يرغبون في بيع أثاثهم المستعمل ومن يبحثون عن قطع مميزة تلبي احتياجاتهم.
لماذا تختار شركتنا لشراء الأثاث المستعمل بالرياض؟ أفضل العروض وأعلى معدلات التسعير نحن نقدم تقييمًا دقيقًا ومنصفًا لأثاثك المستعمل بناءً على خبرة فريقنا من الخبراء.
خدمات تغطي منطقة الرياض بالكامل بمجرد اتصالك بنا، نصل إليك بسرعة أينما كنت داخل الرياض.
تقييم احترافي للأثاث يتم تثمين الأثاث بناءً على آراء مجموعة محايدة من الخبراء لضمان الشفافية والدقة.
تغيير الديكور بسهولة إذا كنت تخطط للانتقال إلى منزل جديد أو ترغب في تحديث الديكور الخاص بك، فإن بيع الأثاث القديم واستبداله بأثاث جديد يُعتبر خطوة عملية وفعالة.
عوامل تؤثر على قرار بيع أو الاحتفاظ بالأثاث القديم القيمة العملية للأثاث إذا كانت القطعة القديمة تناسب احتياجاتك وتنسجم مع الديكور الجديد، قد ترغب في الاحتفاظ بها. أما القطع المتضررة أو غير المريحة، فبيعها هو الخيار الأفضل.
جودة الأثاث نقل أثاث على وشك الانهيار إلى منزلك الجديد قد يسبب خسائر مادية ويستهلك جهدًا بلا جدوى.
حجم الأثاث ومدى ملاءمته للمساحة تأكد من قياس المساحات المتوفرة في المنزل الجديد وتوافقها مع حجم الأثاث القديم قبل اتخاذ قرار الاحتفاظ به.
القيمة العاطفية بعض القطع تحمل قيمة عاطفية تجعل التخلي عنها صعبًا. إذا كان بالإمكان نقلها بأمان، يمكنك الاحتفاظ بها.
خطر التلف أثناء النقل إذا كان الأثاث معرضًا للتلف الكبير أثناء النقل، فمن الأفضل التفكير في بيعه لتجنب خسائر محتملة.
خدماتنا المميزة لشراء وبيع الأثاث المستعمل بالرياض شراء جميع أنواع الأثاث: غرف نوم، مجالس، أثاث الفلل والقصور، وأجهزة كهربائية. تقييم دقيق وسعر عادل: نضمن تقديم السعر الحقيقي لأثاثك بناءً على حالته. شراء المكيفات المستعملة بالرياض: نحن الأفضل في هذا المجال، مع فريق متخصص يقدم حلولاً تناسب احتياجاتك. لماذا نحن الأفضل؟ لدينا فريق من الخبراء في تقييم وشراء الأثاث المستعمل. نقدم خدمات تغطي جميع مناطق الرياض. نعمل على بناء ثقة العملاء من خلال الشفافية والالتزام. اتصل بنا الآن إذا كنت تبحث عن أفضل محلات شراء الأثاث المستعمل بالرياض، فلا تتردد في التواصل معنا عبر الجوال أو الواتساب على الرقم 0500220488. نحن مستعدون لخدمتك أينما كنت وفي أي وقت يناسبك. اجعل بيع أثاثك القديم خطوة سهلة ومربحة معنا!
#8922 Anthonysiphttps://konsaltdo.ru
Права граждан России <a href=https://konsaltdo.ru/>https://konsaltdo.ru</a> разбор законодательства, советы по обращению в суды, оформлению документов и защите своих интересов.
#8923 DerrickHemhttps://konslegal.ru
Полезный сайт о правах граждан <a href=https://konslegal.ru/>https://konslegal.ru</a> информация о правах и обязанностях, советы по взаимодействию с госорганами и защите интересов.
#8924 KennethRighttps://capitallawdo.ru
Семейные споры <a href=https://capitallawdo.ru/>https://capitallawdo.ru</a> развод, алименты, раздел имущества. Юридическая помощь, советы по оформлению документов и защите ваших интересов в суде.
#8925 Ремонт мфу в Москвеhttps://remont-mfu-lite.ru/
Наши специалисты предлагает надежный <a href=https://remont-mfu-lite.ru/>срочный ремонт мфу</a> всех типов и брендов. Мы осознаем, насколько значимы для вас ваши многофункциональные устройства, и обеспечиваем ремонт наилучшего качества. Наши квалифицированные специалисты работают быстро и аккуратно, используя только качественные детали, что обеспечивает долговечность и надежность проведенных ремонтов. Наиболее распространенные поломки, с которыми сталкиваются пользователи многофункциональных устройств, включают неисправности печатающей головки, неисправности сканера, неисправности программного обеспечения, неисправности разъемов и повреждения корпуса. Для устранения этих проблем наши профессиональные техники выполняют ремонт печатающих головок, сканеров, ПО, разъемов и механических компонентов. Обращаясь в наш сервисный центр, вы гарантируете себе качественный и надежный ремонт мфу на дому. Подробная информация размещена на сайте: https://remont-mfu-lite.ru
#8926 Byronunirehttps://greenspicks.com/
<a href=https://greenspicks.com/>cheap travel insurance online</a>
#8927 Ремонт морозильных камер в Москвеhttps://remont-morozilnyh-kamer-spec.ru/
Наша мастерская предлагает высококачественный <a href=https://remont-morozilnyh-kamer-spec.ru/>ремонт морозильных камер адреса</a> всех типов и брендов. Мы понимаем, насколько необходимы вам ваши фризеры, и готовы предложить сервис первоклассного уровня. Наши квалифицированные специалисты работают быстро и аккуратно, используя только сертифицированные компоненты, что предоставляет долговечность и надежность проведенных ремонтов. Наиболее частые неисправности, с которыми сталкиваются пользователи морозильников, включают неисправности компрессора, проблемы с температурным датчиком, неисправности программного обеспечения, неработающие разъемы и механические повреждения. Для устранения этих проблем наши профессиональные техники проводят ремонт компрессоров, термостатов, ПО, разъемов и механических компонентов. Обратившись к нам, вы обеспечиваете себе долговечный и надежный починить морозильная камера рядом. Подробная информация представлена на нашем сайте: https://remont-morozilnyh-kamer-spec.ru
#8928 Richardmaypehttps://vrachgigiena.ru
справочник болезней <a href=https://vrachgigiena.ru/>https://vrachgigiena.ru</a> рекомендации по лечению, здоровому образу жизни и укреплению иммунитета. Всё о медицине в одном месте
#8929 Ремонт морозильных камерhttps://remont-morozilnyh-kamer-spec.ru/
Наша мастерская предлагает высококачественный <a href=https://remont-morozilnyh-kamer-spec.ru/>срочный ремонт морозильных камер</a> любых брендов и моделей. Мы понимаем, насколько значимы для вас ваши фризеры, и обеспечиваем ремонт первоклассного уровня. Наши профессиональные техники работают быстро и аккуратно, используя только сертифицированные компоненты, что обеспечивает долговечность и надежность наших услуг. Наиболее распространенные поломки, с которыми сталкиваются владельцы морозильных камер, включают проблемы с температурным режимом, неработающий термостат, неисправности программного обеспечения, неработающие разъемы и повреждения уплотнителей. Для устранения этих неисправностей наши опытные мастера оказывают ремонт компрессоров, термостатов, ПО, разъемов и механических компонентов. Обратившись к нам, вы обеспечиваете себе долговечный и надежный сервис ремонта морозильных камер в москве. Подробная информация представлена на нашем сайте: https://remont-morozilnyh-kamer-spec.ru
#8930 Ремонт моноколесhttps://remont-monokoles-serv.ru/
Наш сервисный центр предлагает высококачественный <a href=https://remont-monokoles-serv.ru/>официальный ремонт моноколеса с гарантией</a> любых брендов и моделей. Мы понимаем, насколько важны для вас ваши самобалансирующиеся устройства, и стремимся предоставить услуги высочайшего уровня. Наши квалифицированные специалисты работают быстро и аккуратно, используя только оригинальные запчасти, что гарантирует долговечность и надежность наших услуг. Наиболее распространенные поломки, с которыми сталкиваются пользователи электрических моноколес, включают поломку аккумулятора, проблемы с мотором, неисправный контроллер, неработающие сенсоры и повреждения рамы. Для устранения этих проблем наши квалифицированные специалисты оказывают ремонт батарей, двигателей, контроллеров, гиросенсоров и механических компонентов. Обращаясь в наш сервисный центр, вы гарантируете себе долговечный и надежный официальный ремонт моноколеса рядом. Подробная информация размещена на сайте: https://remont-monokoles-serv.ru
#8931 Ремонт моноблоков в Москвеhttps://remont-monoblokov-rial.ru/
Наши специалисты предлагает профессиональный <a href=https://remont-monoblokov-rial.ru/>мастер по ремонту моноблока на выезде</a> любых брендов и моделей. Мы знаем, насколько необходимы вам ваши моноблоки, и обеспечиваем ремонт первоклассного уровня. Наши квалифицированные специалисты оперативно и тщательно выполняют работу, используя только сертифицированные компоненты, что обеспечивает надежность и долговечность наших услуг. Наиболее частые неисправности, с которыми сталкиваются пользователи все-в-одном ПК, включают проблемы с жестким диском, проблемы с экраном, программные сбои, неработающие разъемы и неисправности системы охлаждения. Для устранения этих проблем наши профессиональные техники выполняют ремонт жестких дисков, дисплеев, ПО, разъемов и систем охлаждения. Доверив ремонт нам, вы обеспечиваете себе надежный и долговечный официальный ремонт моноблока в москве. Подробная информация доступна на сайте: https://remont-monoblokov-rial.ru
#8932 MichaelFerhttps://neoriajapan.com/
일본 소비세 환급, 네오리아와 함께라면 간편하고 안전하게
일본 소비세 환급은 복잡하고 까다로운 절차로 많은 구매대행 셀러들이 어려움을 겪는 분야입니다. 네오리아는 다년간의 경험과 전문성을 바탕으로 신뢰할 수 있는 서비스를 제공하며, 일본 소비세 환급 과정을 쉽고 효율적으로 처리합니다.
1. 일본 소비세 환급의 필요성과 네오리아의 역할 네오리아는 일본 현지 법인을 설립하지 않아도 합법적인 방식으로 소비세 환급을 받을 수 있는 솔루션을 제공합니다. 이를 통해:
한국 개인사업자와 법인 사업자 모두 간편하게 환급 절차를 진행할 수 있습니다. 일본의 복잡한 서류 심사를 최소화하고, 현지 로컬 세리사와 협력하여 최적의 결과를 보장합니다. 2. 소비세 환급의 주요 특징 일본 연고가 없어도 가능: 일본에 사업자가 없더라도 네오리아는 신뢰할 수 있는 서비스를 통해 소비세 환급을 지원합니다. 서류 작성 걱정 해결: 잘못된 서류 제출로 환급이 거절될까 걱정될 필요 없습니다. 네오리아의 전문 대응팀이 모든 과정을 정밀하게 관리합니다. 현지 법인 운영자를 위한 추가 지원: 일본 내 개인사업자나 법인 운영자에게는 세무 감사와 이슈 대응까지 포함된 고급 서비스를 제공합니다. 3. 네오리아 서비스의 장점 전문성과 신뢰성: 정부로부터 인정받은 투명성과 세무 분야의 우수한 성과를 자랑합니다. 맞춤형 서포트: 다양한 사례를 통해 쌓은 경험으로 고객이 예상치 못한 어려움까지 미리 해결합니다. 로컬 업체에서 불가능한 고급 서비스: 한국인 고객을 위해 정확하고 간편한 세무회계 및 소비세 환급 서비스를 제공합니다. 4. 네오리아가 제공하는 혜택 시간 절약: 복잡한 절차와 서류 준비 과정을 전문가가 대신 처리합니다. 안심 환급: 철저한 관리와 세심한 대응으로 안전하게 환급을 받을 수 있습니다. 추가 서비스: 세무감사와 이슈 발생 시 즉각적인 지원으로 사업의 연속성을 보장합니다. 네오리아는 소비세 환급이 복잡하고 어렵다고 느껴지는 고객들에게 최적의 길잡이가 되어드립니다. 신뢰를 바탕으로 한 전문적인 서비스로, 더 이상 소비세 환급 문제로 고민하지 마세요!
#8933 Ремонт моноблоковhttps://remont-monoblokov-rial.ru/
Наш сервисный центр предлагает профессиональный <a href=https://remont-monoblokov-rial.ru/>отремонтировать моноблок в москве</a> различных марок и моделей. Мы понимаем, насколько важны для вас ваши моноблоки, и обеспечиваем ремонт первоклассного уровня. Наши опытные мастера работают быстро и аккуратно, используя только оригинальные запчасти, что гарантирует надежность и долговечность выполненных работ. Наиболее распространенные поломки, с которыми сталкиваются пользователи все-в-одном ПК, включают неисправности HDD, поврежденный экран, неисправности программного обеспечения, проблемы с портами и неисправности системы охлаждения. Для устранения этих неисправностей наши опытные мастера проводят ремонт жестких дисков, дисплеев, ПО, разъемов и систем охлаждения. Доверив ремонт нам, вы получаете качественный и надежный вызвать мастера по ремонту моноблоков в москве. Подробная информация доступна на сайте: https://remont-monoblokov-rial.ru
#8934 DwightNixhttps://glaznaya-klinika-samara.ru
офтальмологическая больница <a href=https://glaznaya-klinika-samara.ru/>лечение зрения в самаре</a>
#8935 Adolforaf
top online pharmacy india: <a href=" http://indianpharmstar.com/ ">indian pharm</a> – india pharmacy
#8936 ScottyNiBhttps://konsmediic.ru
Справочник по медицине <a href=https://konsmediic.ru/>https://konsmediic.ru</a> заболевания, методы их лечения, профилактика, новости медицины и рекомендации по укреплению здоровья для всех возрастов.
#8937 Victorrakhttps://vrachataj.ru
Медицина для всех <a href=https://vrachataj.ru/>https://vrachataj.ru</a> подробности о болезнях, терапии, диагностике и профилактике. Узнайте, как заботиться о здоровье эффективно.
#8938 Leroygustyhttps://besturisty.ru
Сайт о юриспруденции <a href=https://besturisty.ru/>https://besturisty.ru</a> актуальные законы, судебная практика, комментарии юристов и рекомендации по решению правовых вопросов.
#8939 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало
Выше мы дали глубокий комплект самых новых и актуальных бездепозитных бонусов в онлайн казино без пополнения на 2022 год, где возможность пользоваться каким ценным бездепозитным бонусом. <a href=http://filmkachat.ru/>1×slots мобильная версия войти казино</a> Бонус с зачислением денег на счет выделяет больше свободы действий. Пользователь сам подбирает, каким образом воспользоваться подаренными своими. Здесь того имеют работать ограничения на список дешевых игр, хотя обычно эти рамки не так строги, как в промо с безвозмездными вращениями. <a href=http://sols9.com/batheo/Forum/User-JamesMoifs>http://sols9.com/batheo/Forum/User-JamesMoifs</a> 1×slots сайт зеркало <a href=https://sncchicago.com/bbs/board.php?bo_table=free&wr_id=119000>https://sncchicago.com/bbs/board.php?bo_table=free&wr_id=119000</a> Бесплатные бонусы казино без депо возможно получить в виде денежных средств на бонусный счет (исключить их возможно только последствии отыгрыша), фриспинов, забавы либо кешбэк-бонуса.Для казино, работающих интернет, бездепозитные бонусы необходимы для привлечения свежих посетителей. Предложение поиграть на слотах без надобности внесения настоящих денег — работающий способ для повышения интереса к компании. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит играть в казино, только сейчас теснее на собственные деньги.
1× slots сайт
Вывод выигрыша с бездепозитных призов казино – великодушный подарок от азартных клубов. Но дабы вывести свой заработок, нужно выполнить ряд условий: 1×slot регистрация В интернет-сети постоянно можно найти перечни более известных и обещанных поощрительных программ от известных онлайн-казино. <a href=https://click4r.com/posts/g/17155145/driving-school-vladivostok>https://click4r.com/posts/g/17155145/driving-school-vladivostok</a> Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша бонусов. Заведения всегда устанавливают наивысшую ставку, возможную по условиям вейждера.4. Заберите подарок. Чаще всего бонус активируется незамедлительно после регистрации. Но посещают ситуации, когда надо(надобно) зайти в личный офис или написать в службу поддержки. 1×slots официальный сайт зеркало рабочее
1× slots официальный
Изучить управляла и обстоятельства получения бездепозитных призов казино, Вы сможете у нас на веб-сайте в разделе с призами либо на официальном сайте избранного Вами казино. Если не отыскать нужную информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал или по электрической почте.В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это самая приятная часть игры. Важно, зачастую бездепозитные призы в казино выдаются с ограничениями по максимальной выплате. В среднем возможно рассчитывать на прибыль в некоторое тыщ рублей. Как исключить выигрыш с бонуса без депо. Придётся доказать аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате либо прочитайте в правилах. <a href=https://www.producthunt.com/@new_user___24020242c77a6a62f32ab95>https://www.producthunt.com/@new_user___24020242c77a6a62f32ab95</a> Рассмотрим принцип его деяния на примере. Допустим, вы зарегались и получили $10 not the slightest down payment bonus с вейджером х50. Это означает, что выигранные деньги можно несомненно выводить не ранее, чем в того, как общая сумма ставок достигнет $500. 1хслотс рабочее зеркало Активация случается счет промокодов, коие вводятся в собственном кабинете последствии регистрации. Среди спецпредложений в перечне Casino.ru находятся эксклюзивные промокоды, коие доступны лишь посетителям портала. Другие методы начисления средств ? автоматическая активация сразу последствии сотворения аккаунта и получение дара по запросу в службу технической поддержки.При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, коие можно посвятить ирге в казино.
1×slots зеркало сайта
Каждая игровая платформа выделяется условиями по получению и отыгрышу бездепов. В правилах отчетливо расписаны временные рамки, за коие нужно прокрутить вейджер. Также не запамятовывайте тему максимальный объем ставки и наивысшую необходимую выплаты. С иной стороны, дабы получить бездепозитные бонусы казино, довольно истратить менее 1 минуты. <a href=https://redfist.de/RF-Online-Testforum/viewtopic.php?f=60&t=77146>1×slots официальный demo регистрация в 1×slots casino</a> Заработать на бездепозитных призах за регистрацию в казино может любой пользователь, достигший совершеннолетия. В интернет-сети всегда возможно отыскать списки наиболее модных и гарантированных поощрительных программ от модных онлайн-казино. 1×slots казино зеркало <a href=https://storyplus.ru/user/Jamesphape/>https://storyplus.ru/user/Jamesphape/</a> Подтвердите личность, предоставив оператору казино свои паспортные данные. Инструкции обычно легкие, главное — четко им по. Если написано, что «на фото должны быть заметны все четыре угла странички паспорта» — устройте непосредственно это фото.Обычно бездепозитные промоакции от казино, прибывают на эл. Почту в деньки рождения или дни. В неких онлайн казино можно адресоваться в чат и как неизменному игроку, вероятно вам предложат бездепозитное предложение.
1×slots сайт
Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.Бездепозитные призы прекрасный вариант даровой игры в игровые автоматы. Многие юзеры сети не знают, что в казино возможно начать играть безусловно бесплатно, а позже исключить выигрыш на банковскую карту или электронный кошелек, другие не доверяют онлайн казино, а третьи успешно играют и выигрывают – и тотчас достаточно великие суммы. Можно. Вы постоянно можете отрешиться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не сделаете ставку. <a href=https://www.xn–72c9aa5escud2b.com/webboard/index.php?action=profile;u=1741660>https://www.xn–72c9aa5escud2b.com/webboard/index.php?action=profile;u=1741660</a> Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам воспрещено начислять бонусы клиентам, не имеющим валютных средств на счете. Мы предлагаем рассмотреть актуальные призы онлайн-казино с лицензией, коие соблюдают законодательство РБ.Призовые начисления без депозита могут предоставляться для участия в турнирах интернет казино. Потратить перечисленные средства возможно исключительно масштабах данной промоакции. Условия их проведения содержат лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, лучше изучить его управляла. 1×slot зеркало Иногда виде одобрения за регистрацию все выдаваться билеты для роли в турнирах. Условия их проведения очень выделяются, поэтому мы рекомендуем ознакомиться с любым предложением отдельно.Начнём с того, собственно каждое рекламную за регистрацию предполагает некие обстоятельства. Бездепозитные призы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность денежного оборота, необходимая для исполненья условий. Пример, возымели благотворительные вращения и выиграли с них 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 рублей, проигрышных либо выигрышных, важно. После исполненья, бонусный баланс перейдёт на реальный и станет доступным к выводу.
<b>Смотреть еще похожие новости:</b>
<a href=http://griffhunter.com/boards/memberlist.php?mode=viewprofile&u=993>1×slots быструю регистрацию а также мгновенное</a>
<a href=https://shopcms.vsupport.club/topic/15650-%D0%A0%D1%94%D0%A1%D1%93%D0%A0%D1%97%D0%A0%D1%91%D0%A1%E2%80%9A%D0%A1%D0%8A-%D0%A0%D1%96%D0%A0%C2%B5%D0%A1%D0%82%D0%A0%D1%95%D0%A0%D1%91%D0%A0%D0%85-%D0%A0%D0%86-%D0%A0%D1%94%D0%A0%D1%91%D0%A0%C2%B5%D0%A0%D0%86%D0%A0%C2%B5-%D0%A1%D0%83%D0%A1%D0%83%D0%A1%E2%80%B9%D0%A0%C2%BB%D0%A0%D1%94%D0%A0%C2%B0-cocainvip-%D0%A0%D2%91%D0%A0%D1%95%D0%A1%D0%83%D0%A1%E2%80%9A%D0%A0%C2%B0%D0%A0%D0%86%D0%A0%D1%94%D0%A0%C2%B0-%D0%A0%D1%97%D0%A0%D1%95-%D0%A1%D1%93%D0%A0%D1%94%D0%A1%D0%82%D0%A0%C2%B0/?p=94480>1 xslots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Также бездепозитные бонусы шансы работать способом возвратить к игре клиентов, временно приостановивших своё сотрудничество с компанией: извещение о бездепе поступает на мобильный аппарат либо почту.
#8940 Danielquornhttps://www.metal-archives.com/users/scorpi0001972
“You get some of me but not tomorrow as they want me in as soon as I can make it happen. This is the one time when they say jump and I ask how high due the financial gains the company could benefit from and it being important enough for the client to appear in person.”
“Well I get an extra night of you at least! I wonder what we could do with that? Meantime, what about food? I am starving and delicious as it was a second breakfast is not quite enough to replenish me!”
“Well get something on and we’ll sort that out first.”
We drove into town and decided that a daytime visit to Charlie’s was going to be the answer. I parked in the bar lot and Elise dashed in to change into something more appropriate, jeans and a t-shirt along with her biker jacket but keeping her Converses on.
Walking down to the restaurant was different from the middle of the night visits as the streets were bustling and all of the shops and outlets were open.
Reaching Charlie’s we entered the front door and sat in a booth near the window. A beautiful young American Chinese girl came,smiled and said hello to Elise and gave us menus and asked if we wanted drinks in the meantime.
„No thanks Lin just a pot of Jasmine tea for us please.“ Lin went back to the kitchen area. “No booze for me today as I will have to work in the bar so it is just tea for me.”
Not in a drinking mood either, I agreed with her."
https://rentry.org/74tbmdps https://permacultureglobal.org/…robert-smith https://permacultureglobal.org/…el-pritchard https://tubeteencam.com/…1956/profile https://chyoa.com/user/ouqu31996
#8941 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало
Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша бонусов. Заведения всегда устанавливают максимальную ставку, допустимую по условиям вейждера.Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депо имеет отличаться до 30 дней. <a href=http://filmkachat.ru/>1× slots сайт</a> В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, нужно обратиться в саппорта через лайв-чат на веб-сайте казино.Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала прыткие выводы. Фишка выплат в том, собственно достаточно избрать платёжный инструмент и указать сумму. В большинстве случаев средства зачисляются на электронные кошельки на 15 минут, а на банковские карты – 1–3 рабочих дня. <a href=http://g961713h.beget.tech/user/Jamesgow/>http://g961713h.beget.tech/user/Jamesgow/</a> После получения приза вывод средств для посетителя несомненно недоступен того, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или пара месяцов. Выводить деньги игрок может только в отыгрыша.Отыграв бездепозитный приз в казино с выводом также придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, случае схожее лимитирование существует, то единоразово исключить выйдет только сумму, не превосходящую объем полученного бонуса. казино 1×slots <a href=https://dytran.co.kr/html/bbs/board.php?bo_table=03_board&wr_id=14723>https://dytran.co.kr/html/bbs/board.php?bo_table=03_board&wr_id=14723</a> Получать информацию о самых прибыльных призах можно без неизменного мониторинга новостей казино. Мы взяли данную задачку на себя и непрерывно следим за предложениями операторов, избирая наихорошие из их. В данном разделе собраны последние бездепы, промокоды к ним и условия их активации. Список промоакций периодически дополняется. В топ зашли самые свежие бездепозитные бонусы за регистрацию в казино 2020, временные и закрытые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и критериям. Если срок деяния акции истек, она удаляется из списка.Бывают ли бездепозитные призы без вейджера? Бывают, в у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино.
1×slots регистрацию процедура займет всего лишь
4. Заберите подарок. Чаще всего бонус активируется сразу последствии регистрации. Но бывают ситуации, когда надо(надобно) зайти в личный офис или написать в службу.Бoльшинcтвo азартных заведений выдвигают приблизительно однообразные, схожие обстоятельства и требования, которые нужно выполнить, чтобы получить бездепозитный бонус за регистрацию. Все их возможно объединить в один список: <a href=http://forum.cvetq.info/viewtopic.php?f=8&t=261773>1×slots casino регистрация 1×slotscasin online</a> 1×slot казино зеркало Отзывы читателей о бонусных акциях помогут составить эмоцию, хотя не забывайте о субъективности личных комментариев.Онлайн-казино тщательно продумывают бонусные обстоятельства, коие нужно выучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и ограничения. <a href=https://orbitalscoreboard.com/user/jeffreyvop/>https://orbitalscoreboard.com/user/jeffreyvop/</a> За счёт спинов выйдет запустить различные онлайн слоты, протестировать стратегии и поднабраться навыка. Фишка в том, собственно вращения начисляются на топовые аппараты с оригинальными опциями и высокой отдачей. Не забывайте, что в каждом акционном предложении учтены специальные притязания – кратковременные лимитирования, наибольший размер ставки, перечень доступных игр.Итак, дабы бесплатные бонусные кредиты превратились в реальные деньги, которыми вы можете управлять по своему усмотрению, их надо(надобно) отыграть. Вейджер идет уточнять в правилах онлайн-казино. 1×slots промокод при регистрации Стоит обозначить(означить), что бездепозитный бонус выдается только взрослым новеньким, коие, тому, шансы пригласить личных друзей и знакомых, того рассчитывающих на поощрительную программу преданности. Подобная разработка была среди соперничающих онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры содействуют увеличению собственной посещаемости, путем вербования свежих игроков. Бонусы – это оригинальный шанс для потенциальных участников игры, коие все опробовать софт покер рума и увериться, станут ли они в него выступать или нет. Новый игрок испробует свои силы с реальными оппонентами в казино.
1хслотс рабочее зеркало
Отзывы читателей о бонусных промоакциях посодействуют составить впечатление, но не забывайте о субъективности собственных объяснений. <a href=https://earthmyhome.com/User-8481>https://earthmyhome.com/User-8481</a> Бездепозитный бонус казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в этом и заключается главное различие.Но на некоторых азартных платформах сходственные гонорары все получить теперь зарегистрированные юзеры. В этом случае, бонусы предоставляются масштабах оригинальных акций или же некоторым геймерам вид акционного предложения, которое прибывает на почту с целью «возвратить» игрока в свое казино. 1×slots официальный сайт скачать Условия отыгрыша приза. Если Вы расчитываете заработать на бездепозитном призе, то в первую очередь направьте на велечину вейджера и срок, который дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, тем легче отыграть бонус и вывести выигрыш.Если вы новичок данном и лишь попали в неизведанную вами район пыла — счет предложений как бездепозитные бонусы без пополнения.
скачать 1×slots официальный сайт
Бездепозитные бонусы в казино без пополнения 2022 — это определенная сумма денег либо gorovyh spins вращения, коие предоставляются первым гостям за регистрацию на веб-сайте казино повторяющий бездепозитного приза, и выделяет вам возможность за счет казино без пополнения опробовать услуги (игр), с последующей преимуществом, льготой вывода средств при выполнении всех установленных правил.Онлайн-казино с бездепозитными бонусами ставят посетителям обстоятельства для использования бездепами, потому перед участием в промоакции лучше тщательно ознакомиться со всеми правилами и нюансами промоакции. Условия могут прикасаться получения бонуса, его применения и последующего вывода денежных средств когда выигрыша. Денежные свои. Третий приз за регистрацию без депо – наличные. К раскаянью, лишь известные и популярные клубы имеют уяснить деньги в руб. Либо долларах. С их подмогою вас насладиться любой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед этим нужно исполнение определенных условий. 1×slots casino регистрация на сайте <a href=https://www.stroimvmeste.com.ua/user/DonaldPaids/>https://www.stroimvmeste.com.ua/user/DonaldPaids/</a> В онлайне слишком много скриптовых сайтов, коие принадлежат плутам. Их основная задача – заинтересовать гэмблеров, пообещав столько щедрые подарки, хотя и солидные выигрыши. Так собственно некоторые веб-сайты предлагают получить за регистрацию даже $1 000.Бесплатные бонусы казино без депо можно получить в виде денежных средств на бонусный счет (вывести их можно лишь в отыгрыша), фриспинов, забавы либо кешбэк-бонуса.
1×slots зеркало проходить регистрацию это отличный вариант
Но эти рамки не смущают в хайроллеров, поскольку коэффициенты на слотах позволяют рассчитывать на крупные выигрыши, а в некоторых автоматах разыгрывается передовой джекпот. <a href=http://seafishzone.com/home.php?mod=space&uid=1180907>http://seafishzone.com/home.php?mod=space&uid=1180907</a> Чтобы получить возможность исключить прибыль с бездепозитного бонуса в казино, необходимо выполнить ряд условий:Благодаря программке преданности от игорного заведения, можно взять хороший старт и без добавочных инвестициям запустить видеослоты. Кроме как, можно рассчитывать на реальную фортуну и получить, без вложения собственных финансов, большой выигрыш. рабочее зеркало 1хслотс
<b>Смотреть еще похожие новости:</b>
<a href=http://www.kievisp.com/forum/index.php?showuser=25142>1×slots казино зеркало</a>
<a href=https://www.makinamania.net/index.php?topic=250562.new#new>1× slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных призов принимаются достаточно высочайшие требования. Часто онлайн-казино советуют отыграть бонусное одобрение до ста раз в игровых автоматах. Например, если игрок получил безвозмездно десять $, то необходимо несомненно отыграть их, поставив 1 тысячу спинов по одному баксу каждый. Стоит обозначить(означить), что не все казино выделяют вероятность выступать на призы и не во всех развлекательных заведениях схожие верховодила для отыгрывания. Некоторые казино воспрещают играть на призы в блекджек либо ограничивают ставки до пяти процентов, что значительно наращивает в 10-ки один количество нужных игр.
#8942 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало которую указывали при регистрации кстати
Можно ли в одном онлайн казино получить больше 1-го приза за регистрацию? Нет, например как в любом интернет казино есть верховодила, к коим нужно держаться, не создавать два аккаута для получения призов, другому будет блокировка обоих аккаутов, не пытайтесь перехитрить онлайн казино, бонус за регистрацию выдаеться один раз одному личику. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasino09k online</a> Автоматы неспроста числятся наиболее знаменитым азартным весельем. Чтобы освоить управление и правила, потребуется всего количество минут. Ваша задача сделать ставку, найти количество рабочих линий и возможно крутить тамбур. Если на выпадет выигрышная композиция – вы выиграли! С данной задачей для помогут справится бездепозитные призы казино. <a href=https://securityholes.science/wiki/User:CorrineNowacki>https://securityholes.science/wiki/User:CorrineNowacki</a> Нет. Казино раздают бесплатные призы за регистрацию, чтобы, чтобы, дабы заказчик возможность ознакомиться с игровым заведением. А чтобы исключить его, нужно выполнить обстоятельства отыгрыша.Помните, что в неких забавах сумма ставки идет в зачет вейджера лишь отчасти. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки считаются как отыгранные деньги, тот как в слотах идет в зачет все one hundred percent суммы. 1×slots casino регистрация на сайте <a href=http://stalzashita.ru/index.php?subaction=userinfo&user=petiteenigma1>http://stalzashita.ru/index.php?subaction=userinfo&user=petiteenigma1</a> Бездепы с безвозмездными вращениями деют юзерам право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд платит казино. Число спинов ограничено и изредка превышает сотню. Если промоакция содержит большое безвозмездных игр, их начисление может быть разбито на некоторое дней.Получить Бездепозитный бонус в онлайн казино дело 2-ух кликов. Другой момент, отыграть рекламную и соблюсти правила и обстоятельства отыгрыша. Под правилами подразумевается столько вагер, но и ограничения по наибольшей ставке. Мы осознаем, что в кинотеатр все ставят на зеро и выигрывают. Призываем не делать сходственного. Перед активацией приза прочитайте правила. Узнайте последующие моменты: Условия получения подарка, за регистрацию, за депо и прочее. Ограничения по максимальной ставке. Зачастую не повыше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вертеть автоматы, а вагер будет стоять на месте. Поэтому принципиально аристократия, в каких забавах можно осуществлять кратность денежного оборота.
1×slots зеркало которую указывали при регистрации кстати
Обычно бездепозитные промоакции от казино, приходят на эл. Почту в дни рождения или праздничные. В неких онлайн казино можно обратиться в чат и как постоянному игроку, вполне вас предложат бездепозитное предложение. <a href=https://www.mshowto.org/forum/members/jamespauri.html>1×slots регистрация на сайте</a> 1×slots актуальное зеркало <a href=https://forum.cabal.playthisgame.com/member.php?1647256-GlennWef>https://forum.cabal.playthisgame.com/member.php?1647256-GlennWef</a> Зарегистрируйтесь. Для регистрации чаще всего довольно установить собственный номер телефонного и почтовый адрес, в чего установить полученный код из СМС. Возможно, требуется показать промокод. В правилах акции будет написано, где его надобно вводить. Иногда это надо создавать при регистрации, время — теснее после творения собственного кабинета, на отдельной страничке. 1× slots официальный Список так нарекаемых «запрещенных землель» прилагается к правилам бонусной программы игорного портала. Обязательно выясните, распространяются ли на вас подобные санкции.
1×slots рабочее зеркало
Отыграв бездепозитный приз в казино с выводом тоже придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в подобное ограничение существует, то единоразово исключить выйдет лишь необходимую, не превышающую объем приобретенного бонуса.Чаще всего казино приз за регистрацию без депо даёт вероятность запустить любой автомат. Но другого внимательно ознакомиться с условиями. Иногда для игры доступны только определённые модели. Если вы новичок и ничего не смыслите в гэмблинге, никакого начать знакомство с миром пыла непосредственно с «одноруких бандитов». Представьте момент, когда при ставке в 10 рублей Вы получите сходственное умножение. Миллион рублей за одно вращение, что вполне вполне. Поэтому вопрос, сколько можно выиграть остаётся открытым. Предлагаем выяснить помощи. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный приз и инспектируйте удачу в деле. Разумеется, вывести деньги не так просто. Однако шансы есть у всех. <a href=https://bbs.zzxfsd.com/home.php?mod=space&uid=723671>https://bbs.zzxfsd.com/home.php?mod=space&uid=723671</a> 1×slots зеркало рабочее Каждая игровая перрон выделяется условиями по получению и отыгрышу бездепов. В правилах отчетливо расписаны кратковременные рамки, за коие нужно прокрутить вейджер. Также не забывайте на наибольший объем ставки и наивысшую необходимую выплаты. С другой стороны, дабы получить бездепозитные бонусы казино, довольно израсходовать не более 1 минутки.Срок отыгрыша — это этап, кот-ый наступает в момент активации бонуса и кончается с его закрытием. Пользователю необходимо уложиться в данный временной зазор, иначе призовые средства аннулируются. Казино устанавливают перечень игр, ставки каких засчитываются при расчете отыгранных денег. Если тайтл не заходит в данный список, то ему быть недосегаем для загрузки во время деяния бонусного предложения.
зеркло казино 1×slots
Способы получения бездепа различаются зависимо облика бонуса, который понравился игроку. Но вас в любом случае надо(надобно) быть зарегистрированным в законном онлайн-казино и доказать собственную лицо. В общем облике пошаговая инструкция для получения бездепозитного приза смотрится например: Верификация аккаунта. Лучше подтвердить личность сразу после регистрации, чтобы позже не было проблем с выводом средств. Верификация возможность протекать двумя способами:Да, у бесплатных призов есть дефекты. Прежде всего, они обыкновенно маленькие. Кроме такого, обстоятельства вейджера по ним всегда жесткие. Но все недоступность риска проделывает их довольно привлекательными для клиентов. казино 1×slots официальный сайт <a href=http://mpalata.ru/forum/memberlist.php?mode=viewprofile&u=76863>http://mpalata.ru/forum/memberlist.php?mode=viewprofile&u=76863</a> Такие одобрения позволяют безвозмездно протестировать новое казино, разобраться с игровым ходом интернет слотов, заработать и вывести небольшую необходимую денег.
1×slots регистрация то дальше необходимо пройти
Подарки на определенные даты отличаются условиями получения. Если поощрение начисляют игроку на денек рождения, то сумма обыкновенно зависит от общего объема депозитов за год.Бонус за регистрацию в казино без депо с выводом денег надо(надобно) отыграть. Зачастую для отыгрыша имеет понадобиться сделать ставки на сумму, в количество 10-ов один превосходящую необходимую приза или выигрыша. Максимальный размер ставки, кот-ый нельзя превышать же приз не несомненно всецело отыгран. В случае нарушения сего верховодила, приз и выигрыш с него станут аннулированы. <a href=https://tsonlinevn.4it.top/User-Walterrob>https://tsonlinevn.4it.top/User-Walterrob</a> Размер приза. В качестве бездепов обыкновенно начисляют небольшие суммы, а когда идет о призах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то кое-какие казино шансы подарить игроку до 2000$.Во всех законных онлайн-казино Беларуси нужно свидетельство паспортных данных для забавы — это требование правительства государства. 1× slots casino зеркало Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша бонусов. Заведения практически устанавливают наивысшую ставку, допустимую по условиям вейждера.
<b>Смотреть еще похожие новости:</b>
<a href=http://naturetour.ru/communication/forum/messages/forum3/message24424/6115–1×slots-zerkalo-bystruyu-registratsiyu-a-takzhe-mgnovennoe?sessid=f5b0c7ca4c3aae7db9ec06c3b3ec3a5c&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1×slots зеркало быструю регистрацию а также мгновенное</a>
<a href=https://www.neocodex.us/forum/topic/100332-chapter-12-the-shattered-plain/page-6#entry2034909>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный приз за регистрацию в казино — это стартовый подарок вид денежного начисления или даровых вращений для новых игроков заведения, для получения которого надо вносить депозит.
#8943 Charlesgunnyhttp://filmkachat.ru
1×slots мобильная версия войти казино
Условия шансы различаться друг от приятеля. Но подобный бонус возможность быть использован только для игрового процесса – приобретенные на счет деньги до такого, как станут отыграны, вывести невозможно.Если вы избираете испытанное лицензионное интернет казино и сделайте все обстоятельства получения бездепозитного приза, проблем с получением подарка у Вас не возникнет. <a href=http://filmkachat.ru/>1×slots регистрацию более популярный вариант это</a> <a href=http://xn–80aeh5aeeb3a7a4f.xn–p1ai/forum/user/53818/>http://xn–80aeh5aeeb3a7a4f.xn–p1ai/forum/user/53818/</a> При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток.Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды присутствуют на этой страничке. Посетитель может оценить условия получения и начать выступать на деньги без внесения депо. При данном игроку принципиально осознавать, на каких критериях и какими методами него вывести приобретенный выигрыш. Для этого нужно расценить перечень присоединенных платежных систем. 1×slots зеркало быструю регистрацию а также мгновенное <a href=https://satitmattayom.nrru.ac.th/?dwqa-question=%d0%b0%d0%b2%d1%82%d0%be%d1%88%d0%ba%d0%be%d0%bb%d0%b0-%d0%b2%d0%bb%d0%b0%d0%b4%d0%b8%d0%b2%d0%be%d1%81%d1%82%d0%be%d0%ba-%d0%b3%d0%bb%d0%b0%d0%b2%d0%bd%d0%b0%d1%8f-%d0%b4%d0%be%d1%80%d0%be%d0%b3>https://satitmattayom.nrru.ac.th/?dwqa-question=%d0%b0%d0%b2%d1%82%d0%be%d1%88%d0%ba%d0%be%d0%bb%d0%b0-%d0%b2%d0%bb%d0%b0%d0%b4%d0%b8%d0%b2%d0%be%d1%81%d1%82%d0%be%d0%ba-%d0%b3%d0%bb%d0%b0%d0%b2%d0%bd%d0%b0%d1%8f-%d0%b4%d0%be%d1%80%d0%be%d0%b3</a>
сайт 1× slots casino
1хслот 1хслотс регистрация перейти на 1×slots С другой стороны, намного проще отобрать бездепозитные фриспины за регистрацию в казино и напрямик момент начать вращать барабаны в наихороших слотах. Главная особенность спинов никаких, что они предусмотрены для лучших автоматов. Удастся столько пройти вспомогательные раунды, но и прирастить сумму выигрыша, заработать респины и другие внутриигровые подарки.Подтверждение индивидуальной информации. Все казино настоятельно от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у пользователя других аккаунтов (мультиаккаунт запрещен). <a href=https://orbitalscoreboard.com/user/doctorlazutakl/>https://orbitalscoreboard.com/user/doctorlazutakl/</a> Выполнив все притязания оператора, клиент может оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем менее суток. Если дополнительно потребуется пройти процедуру верификации, то срок возрастает до 1–2 рабочих дней. Для перевода применяются банковские инструменты и электрические платежные системы. Второй метод подходит какого-либо, так как масса транзакций в осуществляются моментально. В связи со специфичностью функционирования банков обработка платежей имеет занять до нескольких рабочих дней.Начнём с как, что каждое рекламную за регистрацию подразумевает некие условия. Бездепозитные бонусы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность валютного оборота, необходимая для исполненья критерий. Пример, получили безвозмездные вращения и выиграли с них 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 рублей, проигрышных или выигрышных, не. После исполнения, бонусный баланс перейдёт на реальный и станет легкодоступным к выводу. 1хслот скачать
1×slots зеркало регистрацию более популярный вариант это
Для всех бездепозитных призов функционирует наибольший лимит на выигрыш. Он указывает предельную сумму, коию вы сможете получить, играя на бонусные кредиты. Как лишь вас удастся выполнить притязания вейджера, дозволенный максимум несомненно переведен с бонусного счета на основной, а остаток несомненно списан.Только выполнив все обстоятельства отыгрыша и дождавшись окончания проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить свои деньги. <a href=http://maglik.ru/user/Travisodock/>http://maglik.ru/user/Travisodock/</a> В разделе с призами активировать свой презент. Найти игры, для которых учтено одобрение и применять бонус по предназначению. 1×slots регистрацию более популярный вариант это
1×slots рабочее зеркало на сегодня
Казино выводит деньги лишь на что, эту платежную систему, с котрой был сделан депо. То есть, для вывода бездепозитного бонуса, Вам поначалу необходимо восполнить счет. В неких клубах ограниченный список способов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с данных платежных способов, коие доступны для вывода.Для проверки используются сканы паспортов, водительских прав, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если юзер обнаружен в попытке ввести дополнительный акк, все его учетные записи подвергаются блокировке, а их владелец попадает в темный перечень. При ирге на лицензионной площадке не стоит опасаться указывать достоверную персональную информацию (шифрование исключает утечку индивидуальных данных). <a href=http://moneysweet.listbb.ru/memberlist.php?mode=viewprofile&u=6851>1×slots регистрацию более популярный вариант это</a> Основное управляло получения бездепа ? создаваемый аккаунт обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов строго воспрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депо необходимо блюсти простую очередность деяний.Для получения депозитного бонуса необходимо восполнить собственный игровой баланс реальными средствами. Вознаграждение можно получить либо при внесении первого депозита, либо вид фиксированного процента от внесённых средств. Так либо иначе, приз поступит на счёт только после пополнения. 1×slots регистрация <a href=https://www.goldenline.pl/grupy/Przedsiebiorcy_biznesmeni/health-economics/temat,3944832/>https://www.goldenline.pl/grupy/Przedsiebiorcy_biznesmeni/health-economics/temat,3944832/</a>
онлайн казино 1×slots
Помимо прочего, для вывода средств по бездепу необходимо привнести на счёт свой 1-ый депозит — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально вероятную необходимую, после чего вывод средств станет доступен.Денежные средства. Третий бонус за регистрацию без депо – наличные. К огорчению, лишь известные и пользующиеся клубы все дать средства в рублях либо долларах. С их помощью вас насладиться любой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед данным необходимо выполнение конкретных критерий. <a href=http://webmontag.de/doku.php?id=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D0%BE%D0%B2%20%D0%BD%D0%B0%20%D0%B4%D0%BE%D0%BC%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO>http://webmontag.de/doku.php?id=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D0%BE%D0%B2%20%D0%BD%D0%B0%20%D0%B4%D0%BE%D0%BC%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO</a> 1хслотс 1хслотс регистрация перейти на 1×slots Отказ в прохождении верификации. Если заказчик не хочет либо не может дать документы, подтверждающие его лицо, профиль будет заблокирован вместе со всеми бонусными начислениями.
<b>Смотреть еще похожие новости:</b>
<a href=https://russiancomputerservice.ru/user/JosephCer/>казино 1×slots</a>
<a href=http://big.bestforums.org/viewtopic.php?f=7&t=12224>1×slots зеркало на сегодня</a>
<a href=https://www.ldvd.nl/no-22-san-diego-place-rallies-very-last-boise-country-27–16?page=43#comment-237990>1×slots подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации дара необходимо подтвердить электронную почту и привязать телефон;
#8944 Ремонт материнских платhttps://remont-materinskih-plat-info.ru/
Наша мастерская предлагает высококачественный <a href=https://remont-materinskih-plat-info.ru/>мастер по ремонту материнских платы адреса</a> любых брендов и моделей. Мы знаем, насколько важны для вас ваши материнские платы для ПК, и стремимся предоставить услуги высочайшего уровня. Наши квалифицированные специалисты оперативно и тщательно выполняют работу, используя только сертифицированные компоненты, что предоставляет долговечность и надежность выполненных работ. Наиболее частые неисправности, с которыми сталкиваются обладатели мэйнбордов, включают проблемы с чипсетом, проблемы с блоком питания, ошибки ПО, неработающие разъемы и аппаратные сбои. Для устранения этих проблем наши профессиональные техники оказывают ремонт чипсетов, блоков питания, ПО, разъемов и компонентов. Обратившись к нам, вы обеспечиваете себе качественный и надежный сервисный центр по ремонту материнских платы адреса. Подробная информация представлена на нашем сайте: https://remont-materinskih-plat-info.ru
#8945 Charlesgunnyhttp://filmkachat.ru
зеркло казино 1×slots
Обычно показатель повыше, чем для призов на депозит. Не изумляйтесь, в он будет том х100. Иногда завышенный коэффициент вейджера уточняется для жителей отдельных государств. <a href=http://filmkachat.ru/>скачать 1×slots официальный сайт</a> Свежий бонус начисляется вид денежных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в использовании своими, а в случае отыгрыша оператор возможность установить лимитирование на вывод средств.Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, чтобы еще раз получить безвозмездный приз. Игорные заведения нетерпимы к бонус-хантерам, потому вас ожидает неизбежное санкция. <a href=https://trueanal.org/user/Jameshed/>https://trueanal.org/user/Jameshed/</a> Таким образом онлайн казино получает вероятного игрока. Возможно в будущем либо истинном он захочет поиграть на средства деньги. Так работают бездепозитные призы в онлайн казино. Здесь очень подходит выражение, безвозмездные сыр случается лишь в мышеловке. Начинающие игроки все не обдумывать опасность азарта. Однако времени осознания становится больше. Это тема для отдельного обсуждения. 1 xslots рабочее зеркало <a href=https://metod2014.ru/09/avtoshkola-vladivostok/?preview=true>https://metod2014.ru/09/avtoshkola-vladivostok/?preview=true</a> Шаг 4. Активация. Внимательно изучите обстоятельства, информацию по лимитированиям и сроке действия бонусного предложения. Разобравшись с правилами, возможно активировать бонус в собственном кабинете (времени ? с внедрением промокода) или по запросу в саппорт.
1×slots бездепозитный бонус за регистрацию
В истинное время получить бонус за регистрацию в казино очень просто. Почти каждый игорный жилище с готовностью предоставит деньги или бесплатные вращения. Многие игроки пользуются данным и не смущяются регистрироваться в каждом клубе с прибыльными условиями. Кстати, это отличная возможность придумать выигрышную стратегию и сорвать куш.Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. рабочее зеркало 1хслотс <a href=https://www.scottsfasteners.com/users/zacherydob>https://www.scottsfasteners.com/users/zacherydob</a> 1х слотс зеркало регистрация в 1×slots casino Прибывшие на акк деньги бездепозитные призы предназначаются, в, только для новоиспеченных пользователей, которые раньше не имели личного аккаунта в данном казино. Исходя из этого, в ранее у игрока был сделан депо, то, по всей вероятности, у него больше не будет возможности рассчитывать на получение такого приза в конкретном заведении.
онлайн казино 1×slots
Как лишь на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу после этого возможно оставить заявку на вывод выигрыша. Кредиты прибыльно выделяются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом настоящих средств и выделяют вероятность ощутить азарт. Во-вторых – возможно насладиться любой азартной игрой доступной на веб-сайте. В вашем постановлении находятся автоматы, настольные прибавленье, видео-покер, Live-дилеры. <a href=https://woodmancx.com/user/Craiglab/>https://woodmancx.com/user/Craiglab/</a> Существуют казино с призом за регистрацию, в которых очень известны фриспины в онлайн казино впоследствии регистрации в конкретных забавах. Они встречаются числе чаще безвозмездных поощрений или традиционных бонусов в казино без вложений. Например, игрок регистрирует счет, на кот-ый начисляются безвозмездные забавы, приз за регистрацию повторяющий безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса геймер выигрывает истинные средства, коие в последствии можно удачно исключить из заведения на собственную платежную систему. То есть, есть все шансы исключить средства без рисков собственными деньгами. Регистрация, какую игры получит призы, займет несколько, а благодаря этому можно прирастить 5 евро поощрений до тысячи и без всяких заморочек исключить их. 1×slots сайт
1×slots казино мобильная версия
Ознакомьтесь с нашим перечнем наихороших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего списка и получите бездеп сразу. Хватайте превосходнейшие благотворительные предложения ниже и выигрывайте большие деньги, не рискуя! <a href=https://forumauthority.com/thread-6594-post-39161.html#pid39161>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a> Как лишь на виртуальном счету окажутся бонусные свои, поспешите отыграть вейджер. Сразу в сего возможно забыть заявку на вывод выигрыша. Кредиты прибыльно отличаются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом реальных средств и выделяют вероятность почувствовать задор. Во-вторых – можно насладиться любой азартной игрой доступной на веб-сайте. В вашем постановлении присутствуют автоматы, настольные прибавление, видео-покер, Live-дилеры. Частенько новенькие не знают, как активировать подарки либо исключить 1-ый выигрыш. Для сходственных случаев наша команда обрисовала главные термины – собственно это фриспины, вейджер, как его отыграть, чего необходимо проходить верификацию.Если вы облюбовали себе некоторое брендов коие для больше всего полюбились, для постоянной игры! Таких гемблеров казино довольно предпочитает и оценивает, за частую эти игроки становятся VIP игроками заведения, которым нередко поступают выгодные предложения в виде бонусов, так же туда заходит и бездепозитные. 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=https://www.9tj.net/home.php?mod=space&uid=266908>https://www.9tj.net/home.php?mod=space&uid=266908</a> Особую изюминку видео слотам присваивают оригинальные символы. С их появлением активируются разные призы. Вы сможете запустить дополнительный степень и прирастить сумму выигрыша. Есть знаки, коие замещают ненужные элементы и сами создают выигрышные комбо. Не стоит забывать и про бонус-тур. После каждого удачного спина есть шанс увеличить необходимую выигрыша в два либо хорошо раза.Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.
1×slots рабочее зеркало
В качестве бонусов интернет казино нередко предлагает выдачу фриспинов, то есть безвозмездных вращений игрового барабана. Виртуальные монеты возможно применять для обучения в покерной школе либо для забавы в казино. Получив собственный презент, Вы сможете даром выступать на реальные деньги, а выполнив обстоятельства отыгрыша, исключить свой выигрыш. <a href=https://forum.survival-readiness.com/memberlist.php?mode=viewprofile&u=50115>https://forum.survival-readiness.com/memberlist.php?mode=viewprofile&u=50115</a> Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном веб-сайте и выполните вход в индивидуальный кабинет, чтобы забрать безвозмездные вращения с вейджером х40;Индивидуальные одобрения выдаются за совершение деяний: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавления или официального посетителя для ПК. В большинстве казино действуют программы преданности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на грядущий уровень нередко сопрягается выдачей бездепа. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Выполнив все притязания оператора, заказчик имеет оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем не более суток. Если дополнительно требуется пройти функцию верификации, то срок увеличивается до 1–2 трудящихся дней. Для перевода используются банковские инструменты и электронные платежные системы. Второй способ подходит лучше, например как основная транзакций ситуации исполняются моментально. В связи со спецификой функционирования банков обработка платежей может взятьвдолг(взятьвзаймы) до нескольких рабочих дней.Ниже указан важный перечень легальных казино в Беларуси с призами на первый депозит. Вы сможете попасть на официальный сайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз.
<b>Смотреть еще похожие новости:</b>
<a href=http://check2go.net/author/jameslob/>1×slot официальный сайт</a>
<a href=http://www.buscovivienda.net/foro/ucp.php?mode=confirm&id=51a4cce47b8ede761fbe5f1a9aa7ec1c&type=3>1×slots мобильная версия войти казино</a>
<a href=https://www.reisezielforum.de/viewtopic.php?t=370674>1×slots регистрация 1×slots casino 777 online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Популярность интернет казино растёт и всё больше юзеров начинают увлекаться азартными забавами. Бездепозитные бонусы 2022 года, это уникальные презенты за регистрацию. С их помощью новые игроки могут получить бесплатные вращения либо деньги на баланс за одну регистрацию. С свет игорных заведений в онлайне, бездепозитные бонусы стали знаменитейшим методом привлечения игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о которых мы поведаем. Наш сайт собрал лучшие предложения из онлайна на 2022 год. Воспользуйтесь любым презентом и сможете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить условия.
#8946 Charlesgunnyhttp://filmkachat.ru
1×slots казино зеркало
Акции, посвященные календарным праздничным, бывают рассчитаны как на всех юзеров, так и на категории: примеру, подарок на 8 марта девушкам-игрокам либо мужикам на 23 февраля.Так же стоит выделить то, что в каждом интернет казино установлен собственный наибольший кешаут на бездепозитный бонус. Как правило кешаут — это предельная сумма средств, кот-ая доступная для вывода с бездепозитного приза. <a href=http://filmkachat.ru/>1×slots зеркало подтвердит вашу регистрацию если говорить</a> <a href=http://wiki.life100.live/index.php?title=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D0%BE%D0%B2%20%D0%BD%D0%B0%20%D0%B4%D0%BE%D0%BC%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO>http://wiki.life100.live/index.php?title=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D0%BE%D0%B2%20%D0%BD%D0%B0%20%D0%B4%D0%BE%D0%BC%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO</a> 1×slots зеркало <a href=https://xn–80aa6acmqdpq.xn–p1ai/user/HarryObsen/>https://xn–80aa6acmqdpq.xn–p1ai/user/HarryObsen/</a> Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих требований, кроме обязательной верификации. Если на веб-сайте учтена неотъемлемая процедура доказательства личности, то вывести выигрыш удастся лишь последствии проверки данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий личность.Приглашаем делиться воззрениями о бонусах. Это поможет иным юзерам выбирать наиболее выгодные предложения.
1×slots casino регистрация
1×slots рабочее зеркало Онлайн-казино с бездепозитными бонусами ставят клиентам условия для пользования бездепами, потому перед ролью в промоакции какого-либо тщательно ознакомиться со всеми правилами и аспектами акции. Условия имеют дотрагиваться получения приза, его применения и следующего вывода валютных средств в случае выигрыша. <a href=https://mcmon.ru/member.php?action=profile&uid=140229>https://mcmon.ru/member.php?action=profile&uid=140229</a> При помощи такого одобрения оператор имеет кроме завлекать клиентов, коие раньше проявляли активность на веб-сайте, хотя по некий основанию перестали играть. В этом случае промокод высылается юзеру по электрической почте или повторяющий SMS.Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих притязаний, кроме неотъемлемой верификации. Если на веб-сайте предусмотрена неотъемлемая процедура доказательства личности, то вывести выигрыш получится только в проверки данных. Приготовьтесь наполнить анкету и выслать в техподдержку документ, подтверждающий лицо. рабочее зеркало 1хслотс Как и другие промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения считаются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых гостей и разрешает им составить эмоцию о функционале, не рискуя значительными суммами.
1×slots зеркало регистрацию более популярный вариант это
Для казино, работающих интернет, бездепозитные бонусы нужны для привлечения свежих клиентов. Предложение сыграть на слотах без надобности внесения настоящих денег — работающий способ для увеличения интереса к компании. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит играть в казино, лишь сейчас уже на собственные деньги. <a href=https://magazin.orgsoft.ru/forum/user/184567/>https://magazin.orgsoft.ru/forum/user/184567/</a> зеркло казино 1×slots Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.Заработать на бездепозитных призах за регистрацию в казино может любой юзер, достигший совершеннолетия.
1×slots регистрация 1×slots casino 777 online
Не рекомендуем сломя голову хвататься за различные предложения получения средств без инвестициям. Вполне вероятно, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на 1-ый взор. Альтернативой считается казино бонус за депо. Мы предлагаем для пару советов, благодаря коим у каждого игрока несомненно возможность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег:Помните, что в неких забавах сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных играх только от 5% до 50% суммы ставки считаются как отыгранные средства, на как в слотах идет в зачет все 100% суммы. При верном раскладе бездепы — это прекрасный способ выступать на средства без растраты собственных средств. Есть несколько советов, следуя коим возможно извлечь максимально полезности из сходственных акций казино. Играть идет только на лицензированных площадках. Скриптовые сайты столько накалывают с бонусными предложениями, хотя и употребляют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах невозможно. рабочее зеркало 1×slots <a href=http://journals.hnpu.edu.ua/index.php/literature/comment/view/4159/0/14869>http://journals.hnpu.edu.ua/index.php/literature/comment/view/4159/0/14869</a> Похожим образом трудится третий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения клиента либо в связи с получения им VIP-статуса. Подарок предоставляется после воззвания в поддержку и ревизии.
1×slots casino регистрация
Варианты выигрыша зависимости от Вашей успеха и условий игорного портала. Выше мы заявили, собственно некоторые бездепозитные бонусы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются другие, все, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на деньги, возможно выиграть неописуемые суммы. Сегодняшние игровые автоматы либо видео слоты, как их называют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые множат ставку от х100.000. Новые посетители онлайн-казино без первого депо имеют выяснить собственную удачливость. К тому же есть возможность преобразовать бездепы в реальные деньги за регистрацию в казино, однако результата приз нужно отыграть согласно условиям промоакции. <a href=http://bbs.topeetboard.com/home.php?mod=space&username=Donaldriz>http://bbs.topeetboard.com/home.php?mod=space&username=Donaldriz</a> Бездепозитный бонус нередко имеет стать легкодоступным сразу после окончания регистрации, потому правило единственным требованием к нему считается регистрация, а после проверка вашей свежей учетной записи.Бездепы имеют заходить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами. 1× slots casino официальный сайт Акции распространяются как на все забавы казино, так и на узкий перечень. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и. Промо может обхватывать разработки одного производителя. Бездеп не пересекается с иными промоакциями казино. Если на сайте предусмотрен кэшбек, он не начисляется за ставки, изготовленные бонусными деньгами. Для идентификации платежных реквизитов игрока имеет потребоваться пополнение счета на наименьшую сумму.
<b>Смотреть еще похожие новости:</b>
<a href=https://mit-bbs.com/viewtopic.php?t=128526>1×slots регистрация на сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Хотя безвозмездные призы начисляются без депозита, не исключено, что вас понадобиться заносить средства. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только после такого, как новый заказчик первый пополнит игровой счет.
#8947 Williamsmurfhttps://ovrachahl.ru
Информация для врачей <a href=https://ovrachahl.ru/>https://ovrachahl.ru</a> актуальные медицинские статьи, клинические рекомендации, исследования и практические советы для профессионального роста.
#8948 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать
Но на некоторых азартных платформах подобные гонорары могут получить теперь зарегистрированные пользователи. В этом случае, бонусы предоставляются в рамках оригинальных акций или же некоторым геймерам повторяющий акционного предложения, которое прибывает на почту с целью «возвратить» игрока в свое казино. <a href=http://filmkachat.ru/>1×slots казино зеркало</a> Когда идет о денежных призах, казино всегда устанавливают обстоятельства вейджера, коие нужно выполнить, дабы исключить выигрыш.Самые свежие бездепозитные призы в казино за регистрацию 2022 года с выводом прибыли находятся на данной странице. Посетитель может оценить условия получения и начать играть на деньги без внесения депо. При этом игроку важно понимать, на каких критериях и какими способами него вывести полученный выигрыш. Для этого необходимо оценить список присоединенных платежных систем. <a href=https://kataberita.net/shisha-tobacco-from-4-eur/>https://kataberita.net/shisha-tobacco-from-4-eur/</a> Многие игроки, оценив перечень казино, остаются выступать в нем и далее ? на это и направлено каждое рекламную. Постоянные посетители вносят депозиты и проделывают ставки, обеспечивая долгосрочную прибыль оператора. То есть, казино раздают бездепы свежим пользователям для формирования приклнной аудитории.Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных требований, кроме неотъемлемой верификации. Если на веб-сайте предусмотрена обязательная процедура доказательства личности, то вывести выигрыш получится лишь последствии проверки данных. Приготовьтесь наполнить анкету и отправить в техподдержку документ, подтверждающий личность. 1×slots зеркало регистрация в 1×slots casino <a href=http://demo2-ecomm.in.ua/user/CraigOpepe/>http://demo2-ecomm.in.ua/user/CraigOpepe/</a> Главное преимущество спинов – возможность изучить разные слоты. Также удастся насладиться бонусными раундами, испытывать удачу в риск-туре и преувеличить выигрыш за счёт особых знаков. Однако не игровой процесс заслуживает внимание, как никакого сосредоточиться на реальном выигрыше.Бездепозитные бонусы в казино без пополнения 2022 — это определенная сумма денег либо gorovyh spins вращения, коие предоставляются первым постояльцам за регистрацию на сайте казино повторяющий бездепозитного приза, и выделяет вам возможность помощью казино без пополнения опробовать услуги (игр), с последующей преимуществом, льготой вывода средств при выполнении всех установленных правил.
1хслот зеркало сайта
Нет. Для получения бездепозитного приза в казино нужна неотъемлемая регистрация на сайте. Играть в слоты бесплатно и без регистрации можно лишь в демо режиме. <a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=77384>1хслотс зеркало</a> 1хслот зеркало сайта Создание аккаунта. На сайте казино необходимо открыть регистрационную форму и наполнить пустопорожние поля собственными данными. Иногда на данном этапе требуется показать только адрес электронной почты и пароль, но почаще надо наполнить анкету индивидуальной информацией (ФИО, дата рождения, место проживания и т.д.). Нужно указывать лишь настоящие данные, потому впоследствие они будут проверены.Выполнив все требования оператора, заказчик имеет оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит в среднем не более суток. Если дополнительно требуется пройти функцию верификации, то срок увеличивается до 1–2 трудящихся дней. Для перевода используются банковские инструменты и электронные платежные системы. Второй метод подходит какого-либо, так как большинство транзакций ситуации исполняются моментально. В связи со спецификой функционирования банков обработка платежей возможность занять до нескольких рабочих дней. <a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=2&TID=6945&TITLE_SEO=6945-smotret-onlayn-polnyy-film&MID=231618&result=new#message231618>http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=2&TID=6945&TITLE_SEO=6945-smotret-onlayn-polnyy-film&MID=231618&result=new#message231618</a> 1×слотс казино
1×slots регистрация на 1хслотс
<a href=http://kochtagebuch.org/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D0%B4%D0%B7%D0%B5%D0%BD%20%D1%87%D0%B8%D1%82%D0%B0%D1%82%D1%8C>http://kochtagebuch.org/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D0%B4%D0%B7%D0%B5%D0%BD%20%D1%87%D0%B8%D1%82%D0%B0%D1%82%D1%8C</a> Бездепозитные призы — это подарки от казино вид бонусных средств или фриспинов для игровых автоматов, коие начисляются на аккаунт игрока в процедуры регистрации на веб-сайте заведения. Для получения этих поощрений депозит не потребуется. 1× slots сайт Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми акциями. Читайте о них в обзорах и на форуме.
1×slot казино зеркало
Бездепозитный бонус предоставляется новому игроку за конкретные действия. Часто презент в виде средств или фриспинов выдается за регистрацию, спасибо чему юзер получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. <a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=218335>1×slots коды</a> Для получения бездепа необходимо пригласить в игру по реферальной ссылке свежего клиента: он должен зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на необходимую, обозначенную в критериях промоакции.1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, в не желаете замерзнуть жертвой плутов либо впустую истратить время; 1×slots зеркало видели такую регистрацию на <a href=https://www.ipixels.com/profile/62020/Zacherybroge>https://www.ipixels.com/profile/62020/Zacherybroge</a> Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Но а если вы уже профи по интернет казино, кликаем на красноватую кнопку «Получить» и Вы автоматически перейдете в онлайн казино;
1×slots зеркало регистрацию более популярный вариант это
Чтобы играть безвозмездно на реальные деньги в казино, не всегда довольно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные действия. <a href=https://forum.eliteshost.com/member.php?action=profile&uid=8102>https://forum.eliteshost.com/member.php?action=profile&uid=8102</a> зеркала 1×slots Бонус в казино без депозита содержит разные варианты: это может быть приветственный приз, акции в честь каких-то праздничных или важных дат, бонус за привлечение свежих игроков, преданность и получение VIP-статуса.
<b>Смотреть еще похожие новости:</b>
<a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=7523&TITLE_SEO=7523-preobrazovatel-interfeysov-usb-rs485&MID=476053&result=reply#message476053>1×slots casino регистрация 1×slotscasino09k online</a>
<a href=https://seniordance.ru/forum/showthread.php/68673–1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82-%D1%81%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C-%D0%BD%D0%B0-%D0%B0%D0%B9%D1%84%D0%BE%D0%BD?p=98087#post98087>1×slots официальный сайт скачать на айфон</a>
<a href=https://elclasificadomx.com/author/jameslog/>1хслотс рабочее зеркало на сегодня</a>
<a href=https://uyghuryol.com/forum/viewtopic.php?f=8&t=234223>1хслотс регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Одним из предлогов отдавать привилегию одному либо иному заведению содержится в привлекательности предлагаемых промоакций и бесплатных предложений. Безвозмездные фриспины, выдаваемые без нужды делать какой-либо вклад, в списке находится далековато не в конце. Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации подарка необходимо доказать электрическую почту и привязать телефонный;
#8949 Ремонт асиковhttps://remont-maynerov-geek.ru/
Наш сервисный центр предлагает надежный <a href=https://remont-maynerov-geek.ru/>сервисный центр по ремонту майнеров в москве</a> любых брендов и моделей. Мы осознаем, насколько необходимы вам ваши криптомайнеры, и стремимся предоставить услуги первоклассного уровня. Наши профессиональные техники проводят ремонтные работы с высокой скоростью и точностью, используя только сертифицированные компоненты, что гарантирует надежность и долговечность выполненных работ. Наиболее общие проблемы, с которыми сталкиваются пользователи устройств для майнинга, включают перегрев, неисправности питания, ошибки ПО, неработающие разъемы и поломки компонентов. Для устранения этих проблем наши профессиональные техники проводят ремонт систем охлаждения, блоков питания, ПО, разъемов и оборудования. Доверив ремонт нам, вы получаете долговечный и надежный сервисный центр по ремонту майнеров на выезде. Подробная информация доступна на сайте: https://remont-maynerov-geek.ru
#8950 Charlesgunnyhttp://filmkachat.ru
1×slots официальный demo регистрация в 1×slots casino
Однако в критериях исчезают «подводные камни», коие не позволят вывести крупную необходимую либо же вы не успеете отыграть вейджер. Поэтому мастера советуют отобрать бесплатные вращения за регистрацию в казино без депозита, дабы поднабраться опыта и получить настоящий шанс на победу. <a href=http://filmkachat.ru/>1×slots зеркало сайта</a> Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и более. Когда игроку надеется количество фриспинов, администрация возможность бить3 их начисление на некоторое дней. Бесплатные вращения предоставляются для определенного слота, который указывается в правилах акции. <a href=http://mpalata.ru/forum/memberlist.php?mode=viewprofile&u=110894>http://mpalata.ru/forum/memberlist.php?mode=viewprofile&u=110894</a> 1×slots официальный сайт скачать <a href=http://jkhsec.com/index.php?option=com_k2&view=itemlist&task=user&id=232504>http://jkhsec.com/index.php?option=com_k2&view=itemlist&task=user&id=232504</a> Когда речь идет о валютных призах, казино постоянно устанавливают условия вейджера, которые нужно выполнить, чтобы исключить выигрыш.
1×slots официальный сайт скачать на айфон
Бездепозитные бонусы прекрасный вариант даровой забавы в игровые автоматы. Многие юзеры сети не понимают, что в казино возможно начать выступать полностью бесплатно, а позже вывести выигрыш на банковскую карту или электрический кошелек, иные не доверяют онлайн казино, а третьи успешно играют и выигрывают – и подчас довольно немалые суммы. 1× slots casino официальный сайт <a href=http://yinyue7.com/space-uid-1020053.html>http://yinyue7.com/space-uid-1020053.html</a> Как верховодило, при выводе финансов, от играющего требуется лишь устроить минимальный вклад чтобы, чтобы, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом личный счет. 1хслот официальный сайт зеркало
рабочее зеркало 1×slots
На страничке представлены бездепозитные бонусы за регистрацию в казино редкая награда за коей гонятся все игроки как новенькие, так и профессионалы. Мы также уделяем огромное внимание на наличие призов при составление рейтинга казино на средства. Бездепозитный бонус это возможность выступать бесплатно и выиграть настоящие деньги. Многие азартные клубы ограничивают необходимую вывода заработанную на призе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не можете исключить. Разница несомненно аннулирована, Вы и не можете делать на нее ставки.Помните, собственно в неких играх сумма ставки идет в зачет вейджера только отчасти. Так, в настольных и карточных забавах лишь от 5% до 50% суммы ставки числятся как отыгранные средства, момент как в слотах идет в зачет все 100% суммы. <a href=https://forum.lazarev.ru/memberlist.php?mode=viewprofile&u=157823>https://forum.lazarev.ru/memberlist.php?mode=viewprofile&u=157823</a> Для получения предоставленных призов вам понадобиться — ПК или мобильное прибор, и остальное дело за малым. 1×slots casino зеркало Бонус с зачислением средств на счет дает больше свободы действий. Пользователь сам избирает, каким образом воспользоваться подаренными средствами. Здесь кроме шансы работать лимитирования на список доступных игр, хотя обыкновенно эти рамки не так строги, как в рекламную с безвозмездными вращениями.А ознакомиться с свежими онлайн казино, Вы сможете за счет бонусов с выводом выгоды, коие Вы можете получить без депо.
1 x slots casino
В реальное время получить приз за регистрацию в казино довольно просто. Почти любой игорный жилище с радостью даст деньги либо благотворительные вращения. Многие игроки пользуются этим и не стесняются региться в каждом клубе с выгодными критериями. Кстати, это отличная возможность придумать выигрышную тактику и сорвать куш. Но а в вы теснее профи по интернет казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в интернет казино; 1×slots скачать на айфон <a href=http://t95283ld.bget.ru/user/DonaldInoxy/>http://t95283ld.bget.ru/user/DonaldInoxy/</a>
1×slots официальный сайт скачать
Такой безвозмездный эквивалент средств зачисляется на профиль пользователя после воплощения требований и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений возможен лишь последствии воплощения вейджеровых критерий.Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? <a href=http://iminthai.com/home.php?mod=space&uid=220602>http://iminthai.com/home.php?mod=space&uid=220602</a> Как лишь получите бездеп в казино, всё точно не запамятовывайте проверять электрическую почту. Некоторые игорные клубы постоянно радуют активных гэмблеров приятными призами. Чаще всего получить презент возможно в преддверии веселья, на денек рождение, за привлечение приятеля. А кроме распространённым бонусом является прибавка к депозиту. Нужно чем пополнить счёт, и азартное заведение прирастит его на 50–100%. 1хслотс казино зеркало Кешбэк-бонус представляет собой возврат фиксированного процента от ставки если, тогда, поражения либо же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не превышает 10%.Для казино, работающих онлайн, бездепозитные призы нужны для вербования новых клиентов. Предложение сыграть на слотах без необходимости внесения реальных средств — работающий метод для увеличения энтузиазма к фирмы. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит выступать в казино, лишь теперь уже на личные средства.
<b>Смотреть еще похожие новости:</b>
<a href=http://evtrucksforum.com/viewtopic.php?p=793433#p793433>1×slots регистрация 1×slotscasino 56 online</a>
<a href=https://games-garant.ru/index.php?subaction=userinfo&user=Jamesneorm>1×slots скачать на айфон</a>
<a href=https://www.goslog.ru/forum/messages/forum1/message11364/11-obrashcheniya-grazhdan?result=reply#message11364>1×slots зеркало сайта</a>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=74237&result=reply>1×slots регистрация на сайте 1×slots ru com</a>
<a href=https://www.mshowto.org/forum/members/jamespauri.html>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Частенько новенькие не понимают, как активировать подарки или вывести первый выигрыш. Для сходственных случаев наша команда обрисовала главные определения – что это фриспины, вейджер, как его отыграть, для нужно проходить верификацию.
#8951 Charlesgunnyhttp://filmkachat.ru
казино 1× slots официальный сайт
Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasino09k online</a> Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и. Когда игроку полагается большое фриспинов, администрация имеет разбивать их начисление на несколько дней. Бесплатные вращения предоставляются для определенного слота, который указывается в правилах акции.С не отыгранным бонусом запрещается превышать объем максимальной ставки. Нарушение этого обстоятельства иметь аннулирование выигрыша. <a href=http://n27244j0.bget.ru/index.php?subaction=userinfo&user=JamesBuith>http://n27244j0.bget.ru/index.php?subaction=userinfo&user=JamesBuith</a> Сроки активации бонуса устанавливаются каждым казино, хотя почаще всего они не превышают недели с этапа получения. Игроку обязательно нужно использовать бездеп в течение обозначенного срока, в ином случае бонус просто пропадет. Каждый приз возможно получить только раз раз, поэтому случае не использовать бездеп в срок, у игрока не несомненно второго шанса им воспользоваться.Эффективность бездепов в маркетингового прибора расценили почти операторы. Малоизвестные площадки употребляют эти акции, дабы прытко набрать базу. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны постоянных гостей. Не все сайты, дающие презенты без депозита, рекомендованы к ирге. За привлекательным промоописанием имеют прятаться неосуществимые обстоятельства отыгрыша и другие подводные камни. x1 slots регистрация в 1×slots casino <a href=https://thiamlau.com/forum/member.php?action=profile&uid=3925>https://thiamlau.com/forum/member.php?action=profile&uid=3925</a>
1хслотс зеркало на сегодня
При игре на бонусные средства воспрещается выступать в игровые автоматы с современным джекпотом и игры из радела live casino. Кроме такого, кое-какие казино дают бездеп на раз либо количество конкретных слотов, и в иных забавах Вы не сможете на них играть.Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации дара нужно подтвердить электронную почту и привязать телефон; скачать 1×slots на андроид мобильная версия <a href=http://arts.gpaeburgas.org/profile.php?uid=11418>http://arts.gpaeburgas.org/profile.php?uid=11418</a> Чаще всего, модные сервисы, эти как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно неотъемлемое правило. Финансовые свои выводятся лишь через что, эту платежную систему, коей успех для пополнения депо. Если же игрок получил бездепозитный покерный приз, требуется пополнить счет на минимальную сумму, кот-ая сочиняет обыкновенно десять долларов.В основном случаев благотворительные бонусы начисляются в кредитах, коие нельзя сразу исключить со счета. Прежде их нужно отыграть по установленным правилам. Эти требования принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д.). О нем читайте ниже. казино 1×slots Принципиальным отличием безвозмездных призов от бонусов на депо является неименье необходимости вносить деньги на акк. Из-за сего их часто называют бездепозитными (no down payment bonuses).
1×slots зеркало регистрация то дальше необходимо пройти
К огорчению, нет. Почти все казино, требуют внесение хотя бы одного минимального депо для вывода выигрыша с бездепозитного бонуса. Также учитывайте, собственно вывести деньги разрешено только на что, эту платежную систему, с которой был сделан депо.Рассмотрим принцип его деянья на образце. Допустим, вы зарегистрировались и получили $10 no deposit bonus с вейджером х50. Это означает, собственно выигранные деньги возможно будет выводить не раньше, чем последствии такого, как общая сумма ставок достигнет $500. Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают бонус по государствам. Вплоть до такого, собственно клуб имеет брать игроков из Вашей страны, а бездеп не давать.Также, в этом случае необходимо подтвердить свой номер телефонного, для этого код, приобретенный в смс-сообщении от клуба ввести в особое фон в собственном офисе игрока. <a href=http://forums.filatelija.lv/memberlist.php?mode=viewprofile&u=32049>http://forums.filatelija.lv/memberlist.php?mode=viewprofile&u=32049</a> Перед активацией важно пристально изучить условия промоакции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют значение кроме лимиты ставок при отыгрыше и сроки, в течение которых возможно воспользоваться предложением. Если бездеп охватывает ограниченный список игр, рекомендовано узнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с невысокими множителями выплат подходят лишь в случае, в оператор не установил жесткие лимитирования на наивысшую необходимую ставки.Кешбэк-бонус представляет собой возврат фиксированного процента от ставки в случае проигрыша либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%. 1×slots регистрация то дальше необходимо пройти Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, all лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.К раскаянью, нет. Почти все казино, настоятельно внесение хотя бы одного малого депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, что вывести средства разрешается лишь на ту платежную систему, с которой был сделан депо.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Фриплей-бонусы встречаются только в некоторых клубах. Они зачисляются незамедлительно в творения профиля и активны непродолжительное время. Если не успеете потратить свои, они попросту сгорят. Касаемо времени, правило призы активны на часа.Большинство интернет-казино из нашего топ-10 готовы повеселить вас эксклюзивными акциями. Читайте о их в обзорах и на форуме. 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=https://www.nasseej.com/wall/posts/1961>https://www.nasseej.com/wall/posts/1961</a> Чаще всего интернет-казино предлагают бездепозитные бонусы свежим пользователям. Эта промо-акция очень отлично привлекает новичков, подталкивая их к открытию счета. Конечно, не они становятся преданными клиентами, хотя сам прецедент регистрации аккаунта играет на руку заведению.
1хслотс казино зеркало
Сроки активации приза уточняются каждым казино, но чаще всего они не превышают недели с момента получения. Игроку непременно нужно использовать бездеп на обозначенного срока, в ином случае бонус просто пропадет. Каждый бонус возможно получить лишь раз один, потому в не применять бездеп в срок, у игрока не будет 2 шанса им воспользоваться.Доступные игры – В неких азартных забавах возможно понизить математическое преимущество казино до нескольких десятых процента. В их количестве почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как управляло, в этих забавах ставки идут в зачет вейджера не полностью. Например, возможность учитываться лишь 50%. В некоторых играх бездепозитные призы вообще нельзя отыгрывать. <a href=https://xranks.com/alternative/yana-beauty.com.ua>https://xranks.com/alternative/yana-beauty.com.ua</a> Маркетинговая политика всех игорных интернет-клубов должна одевать разнородный нрав. И если вознаграждения на депозит работают для того, дабы стимулировать вносить депозиты и поощрять теснее имеющих пользователей, то бездепозитный бонус в казино или бонус за регистрацию в казино, до всего, рассчитан на расширение базы покупателей.Представленные на этой странице лучшие бездеп бонусы в казино за регистрацию в 2022 году имеют подходящие обстоятельства. После кропотливого анализа редакция портала составила рейтинг спецпредложений, в котором гости Casino.ru все сортировать список по нескольким критериям: по сумме, вейджеру, наибольшей сумме вывода и т.д. 1×slots зеркало регистрацию более популярный вариант это Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.Прежде чем активировать бездеп, необходимо увериться что, собственно государство, уроженцем которой является игрок, не входит в перечень не.
<b>Смотреть еще похожие новости:</b>
<a href=http://khodaumo.com/forum/memberlist.php?mode=viewprofile&u=146&sid=18c0fc8464dffb800764eed096ff7dc4>1×slots регистрация 1×slots casino c2d ru</a>
<a href=https://mcmon.ru/showthread.php?tid=108554>рабочее зеркало 1×slots</a>
<a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=48829>1×slots регистрация на официальном сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепы с бесплатными вращениями предоставляют пользователям право вертеть барабаны игровых автоматов без снятия средств со счета. За каждый раунд выплачивает казино. Число спинов ограничено и редко превышает сотку. Если акция включает в себя много бесплатных игр, их начисление возможность быть разбито на некоторое дней.
#8952 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало
В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, необходимо обратиться в саппорта спустя лайв-чат на сайте казино.Начнём с как, собственно любое рекламную за регистрацию предполагает некие условия. Бездепозитные призы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность денежного оборота, необходимая для выполнения условий. Пример, получили бесплатные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 руб., неудачных либо выигрышных, важно. После исполнения, бонусный баланс перейдёт на реальный и будет доступным к выводу. <a href=http://filmkachat.ru/>1×slots скачать на айфон</a> Бездепы обыкновенно предлагают с отыгрышем — быстро вывести выигранные средства невозможно. Перевод средств со счета будет вероятен после как, как юзер выполнит все притязания казино, а сумма не может превышать установленного правилами лимита. Условиями акции фиксируются сроки, в течение коих заказчик вправе воспользоваться предложением. Обычно они не превышают нескольких дней последствии активации. <a href=http://designon2014.co.kr/bbs/board.php?bo_table=free&wr_id=97275>http://designon2014.co.kr/bbs/board.php?bo_table=free&wr_id=97275</a> 1×slots регистрацию процедура займет всего лишь <a href=http://www.avian-flu.org/bbs/board.php?bo_table=qna&wr_id=2965588>http://www.avian-flu.org/bbs/board.php?bo_table=qna&wr_id=2965588</a> Главное преимущество спинов – возможность изучить различные слоты. Также удастся насладиться бонусными раундами, испытать фортуну в риск-туре и преумножить выигрыш за счёт особых знаков. Однако не только игровой процесс заслуживает внимание, ведь никакого сосредоточиться на реальном выигрыше.
1×slots рабочее зеркало
Не стоит сразу же отказываться от приветственных подарков в сходственных казино. Администрация готова начислить средства либо фриспины, но предварительно работники обязаны убедиться, что вы не аферист. Дело том,, что развелось слишком количество охотников за бонусами. Они выучились врать систему и наваривать солидные суммы денег. <a href=https://sadhaka.nl/forum/memberlist.php?mode=viewprofile&u=3268>1хслотс рабочее зеркало</a> 1×slots акции Бонусы без депозита при регистрации считаются наиболее красивыми как для опытных игроков, например для и начинающих. Получив это вознаграждение, заказчик возможность играть на настоящие средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные призы в интернет-казино Рунета, еще условия их активации и выигрыша.Новички не обожают незамедлительно же заносить депо. Это обусловлено неимением навыка и недоверием. К счастью, дни возможно получить бездепозитный приз за регистрацию в казино. Неважно собственно начисляет система – фриспины либо кредиты. В всяком случае вы не рискуете собственными сбережениями. Это отличная возможность запустить понравившийся видео слот или же испытывать фортуну в настольных играх. <a href=https://craigslistdirectory.net/%D0%BB%D1%83%D1%87%D1%88%D0%B0%D1%8F-%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0_384645.html>https://craigslistdirectory.net/%D0%BB%D1%83%D1%87%D1%88%D0%B0%D1%8F-%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0_384645.html</a> Шаг 4. Активация. Внимательно изучите условия, информацию по ограничениям и сроке действия бонусного предложения. Разобравшись с правилами, можно активировать приз в личном офисе (времени ? с внедрением промокода) или по запросу в саппорт.Акции распространяются как на все забавы казино, например и на ограниченный список. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и. Промо имеет обхватывать разработки 1-го производителя. Бездеп не пересекается с другими промоакциями казино. Если на веб-сайте предусмотрен кэшбек, он не начисляется за ставки, изготовленные бонусными средствами. Для идентификации платежных реквизитов игрока может потребоваться пополнение счета на минимальную необходимую. 1× slots сайт Этот тип приза будет добавлен на Ваш аккаунт последствии удачной процедуры регистрации с использованием номера аппарата. Если избрать другой способ сотворения учетной записи, бездеп не будет добавлен на Ваш аккаунт.
1 хслот регистрация в 1×slots casino
Фриспины без депо или вспомогательные свои посодействуют ближе познакомиться с игровой платформой и её функциями. За счёт даров возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за забавы против живых крупье. Прежде чем активировать бездеп, нужно убедиться что, собственно страна, уроженцем которой считается игрок, не входит в список запрещенных. <a href=https://www.currencylovers.com/forums/member.php?action=profile&uid=86901>https://www.currencylovers.com/forums/member.php?action=profile&uid=86901</a> 1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, случае не хотите замерзнуть жертвой жуликов или впустую потратить время; 1 x slots casino
казино 1×slots
Для получения бонуса надо(надобно) ознакомиться с программкой преданности казино и устроить ставки на необходимую, необходимую для перехода на грядущий уровень.Баланс игрока дополняется на подходящую необходимую. К ней применяется вейджер, указанный в правилах промоакции. Вывести выигрыш возможно будет после как, как пользователь устроит требуемый размер ставок из личных средств. В редких случаях бездеп трудится в формате Free Play. На счет юзера зачисляется крупная сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по окончании сего периода сумма на счету несомненно превышать первоначальную, то разницу можно будет вывести или применять для последующих ставок. <a href=https://forums.scar-divi.com/topic/567551–1-x-slots/>1 x slots</a> Операторы гемблинга заявляют, собственно например они дерутся с бонус-хантерами. Впрочем, критики считают, что данным казино пытаются устроить из случайного постояльца неизменного игрока.Казино дает вероятность заработать и вывести настоящие деньги на бездепозитных призах. Обычно, это незначительная сумма, коию казино возможность себя позволить презентовать игроку. 1×slots casino зеркало рабочее <a href=https://asdmcpe.org/user/Charlescer/>https://asdmcpe.org/user/Charlescer/</a> Многие казино предоставляют в маркетинговых целях безвозмездные бонусы необыкновенно для наших читателей. Чтобы их получить, нужно перебежать на игровой сайт по партнерской ссылке с нашего портала.В бонусную программу множества операторов входят регулярные бездепы. Это пожизненные промоакции, поощряющие активных неизменных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают неизменные бонусы без депозита в размен на скопленные баллы преданности.
1×slots официальный сайт мобильная версия
Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми акциями. Читайте о их в обзорах и на форуме.Бонус начисляется игроку сразу последствии регистрации и прохождения верификации в казино и не требует от клиента внесения депозита. Как управляло, объем приза в схожем случае достаточно умеренный, впрочем позволяет новичкам познакомиться с игрой без риска настоящими средствами. <a href=https://www.techieshah.com/2019/08/eclipse-server-tomcat-v85-server-at.html>https://www.techieshah.com/2019/08/eclipse-server-tomcat-v85-server-at.html</a> 1 хслот регистрация в 1×slots casino Можно ли наваривать на бездепозитных призах? Это не работа, тут как повезет, если в любом предложенном безедепе, вы будете откручивать вейджер и выводить, за возможно назвать везением, и дополнительной добавкой к вашему бютжету.Можно ли зарабатывать на бездепозитных бонусах? Это не работа, тут как повезет, в в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, за можно назвать везением, и добавочной добавкой к вашему бюджету.
<b>Смотреть еще похожие новости:</b>
<a href=https://redfist.de/RF-Online-Testforum/viewtopic.php?f=60&t=77891>1×slots промокод при регистрации 2025</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Поспешите отобрать бездепозитные бонусы за регистрацию в казино из представленного списка. Все платформы не только водят законную деятельность, но и обрадуют честными результатами забавы, высочайшей отдачей, быстрыми выплатами.
#8953 Charlesgunnyhttp://filmkachat.ru
1×слот регистрация в 1×slots casino
Бездепозитные бонусы начисляются лишь один один. Не стоит открывать новые аккаунты, дабы получить их повторно. Служба защищенности казино обязательно выявит «левого» соучастника и заблокирует. Если посетитель выполнит необходимые притязания, отыграет свою ставку и решит исключить собственный выигрыш, то ему надо(надобно) сведению, что казино непременно востребует дать ксерокопии собственных документов, дабы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные средства вывести не удастся.B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. <a href=http://filmkachat.ru/>1×slots промокод при регистрации 2025</a> <a href=http://ukrpart.org/index.php?subaction=userinfo&user=satisfyingarbit>http://ukrpart.org/index.php?subaction=userinfo&user=satisfyingarbit</a> 1хслот официальный сайт зеркало <a href=https://linklist.bio/lexxeagle>https://linklist.bio/lexxeagle</a> Бездепозитный бонус за регистрацию в казино — это стартовый подарок в виде валютного начисления либо бесплатных вращений для свежих игроков заведения, для получения которого не вносить депо.При исполнении критерий отыгрыша и верификации, деньги с бонусного счета переводятся на ведущей и имеют быть выведены на карту либо электрический кошелек. Лимиты на вывод и сроки проведения транзакции находятся от выбранной платежной системы.
1×slots casino зеркало
Промообъявления от казино не дают реальной картины и ориентированы на привлечение внимания пользователей. Понять, насколько высоки шансы остаться в плюсе, позволит личный тест условий предложения:Условия шансы разниться друг от приятеля. Но такой приз возможность быть применен только для игрового процесса – приобретенные на счет финансы до того, как станут отыграны, вывести невозможно. <a href=http://6000ziyuan.com/forum.php?mod=viewthread&tid=109956&extra=>casino 1×slot</a> казино 1×slots официальный сайт Практически все интернет казино с бездепозитным призом за регистрацию учитывает программу преданности — систему одобрения неизменных клиентов, кот-ая произведено из множества значений. При достижении игроком очередного значения на его счёт поступает приз. Чем выше степень — что, этим щедрее бонус.Подтвердите регистрацию, дабы активировать Бездепозитный приз с выводом, требуется заполнить собственный профиль. Заполните порожние поля настоящими данными о себе. <a href=https://may-green.ru/forum/user/14910/>https://may-green.ru/forum/user/14910/</a> 1×slots casino регистрация Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и. Когда игроку надеется много фриспинов, администрация имеет разбивать их начисление на несколько дней. Бесплатные вращения предоставляются для конкретного слота, который указывается в правилах промоакции.Но а случае вы теснее профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в интернет казино;
1× slots сайт
Наш список включает в себя наихорошие бездепозитные бонусы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит ревизию по принципиальным характеристикам:Для вывода средств бонус нужно будет отыграть законам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариациями отыгрыша бездепозитного приза до его получения, чтобы избежать конфликтных обстановок. Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в неотъемлемом порядке нужно пополнить счет в казино. Для депозитных бонусов, данная процедура не нужна, так как депозит теснее изготовлен.Для всех бездепозитных бонусов функционирует максимальный лимит на выигрыш. Он указывает предельную необходимую, которую вас получить, играя на бонусные кредиты. Как лишь вам получится выполнить притязания вейджера, дозволенный максимально будет переведен с бонусного счета на основной, а остаток будет списан. <a href=https://google.as/url?q=https://doctorlazuta.by/>https://google.as/url?q=https://doctorlazuta.by/</a> Получить Бездепозитный бонус в интернет казино дело 2-ух кликов. Другой момент, отыграть промо и соблюсти верховодила и обстоятельства отыгрыша. Под правилами подразумевается не только вагер, но и лимитирования по максимальной ставке. Мы понимаем, что в кино все ставят на зеро и выигрывают. Призываем не создавать подобного. Перед активацией бонуса прочтите управляла. Узнайте последующие факторы: Условия получения подарка, за регистрацию, за депо и многое. Ограничения по наибольшей ставке. Зачастую не выше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах можно отыгрывать вагер. Можно вращать автоматы, а вагер будет стоять на месте. Поэтому принципиально знать, в каких играх возможно осуществлять кратность денежного оборота. 1×slos регистрация в 1×slots casino Когда речь о получении бездепозитных призов в казино, для направьте на последующие условия:
1хслот зеркало
Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных притязаний, не неотъемлемой верификации. Если на сайте предусмотрена обязательная процедура подтверждения личности, то исключить выигрыш получится только после ревизии данных. Приготовьтесь наполнить анкету и отправить в техподдержку документ, подтверждающий лицо. Также есть онлайн-платформы азартных игр, коие применяют раздачу бездепозитных бонусов в особые даты (как для казино, например и для игрока). Помимо этого, действующие геймеры кроме имеют вероятность получить схожие бонусы за собственную работа (к примеру, за повышения значения либо за схожие заслуги).Поспешите арестовать бездепозитные призы за регистрацию в казино из представленного перечня. Все платформы не только водят легальную работа, хотя и обрадуют правдивыми результатами забавы, высокой отдачей, прыткими выплатами. Обычно показатель выше, чем для призов на депозит. Не удивляйтесь, если он будет даже х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных стран. 1×slots регистрация то дальше необходимо пройти <a href=http://silabgarza.net/forums/member.php?action=profile&uid=227400>http://silabgarza.net/forums/member.php?action=profile&uid=227400</a> Выполнив все притязания оператора, заказчик возможность оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит примерно не более суток. Если дополнительно потребуется пройти процедуру верификации, то срок увеличивается до 1–2 трудящихся дней. Для перевода используются банковские инструменты и электрические платежные системы. Второй метод подходит чем, так как основная транзакций в исполняются мгновенно. В связи со специфичностью функционирования банков обработка платежей возможность занять до нескольких трудящихся дней.Шаг 4. Активация. Внимательно исследуйте обстоятельства, информацию по лимитированиям и сроке деянья бонусного предложения. Разобравшись с правилами, можно активировать приз в личном офисе (время ? с внедрением промокода) или по запросу в саппорт.
1хслот скачать
Так же стоит выделить то, собственно в каждом интернет казино установлен свой максимальный кешаут на бездепозитный приз. Как верховодило кешаут — это предельная сумма денег, которая дешевая для вывода с бездепозитного бонуса. <a href=https://mcmon.ru/member.php?action=profile&uid=134327>https://mcmon.ru/member.php?action=profile&uid=134327</a> Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в личный офис, дабы забрать бесплатные вращения с вейджером х40; 1×slots регистрация 1×slotscasino 56 online Бонус без депо за регистрацию в казино (бездепозитный бонус) – это валютный презент от клуба, который начисляется на аккаунт игрока последствии регистрации в казино. Кроме творения учетной записи, для получения бездепа, очень часто потребуется ещё и подтвердить контактные данные игрока и/или активировать особый промо-код.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.fiat130.it/phpbb3/viewtopic.php?f=14&t=338416>1хслотс рабочее зеркало</a>
<a href=https://www.makinamania.net/index.php?topic=250945.new#new>1× slots регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Возможность сыграть дополнительное состязание (а иногда и количество) абсолютно бесплатно, а выигрыш, в свою очередь, поступает на счёт игрока. Так собственно главное отличие подарка на депозит от бездепа – неотъемлемое пополнение счёта. Вы можете привнести депо и преумножить стартовый капитал либо забрать бездеп и при не придётся рисковать собственными сбережениями. Поспешите выполнить простые требования, и администрация ресурса начисляет щедрое поощрение!
#8954 Ремонт асиковhttps://remont-maynerov-geek.ru/
Наш сервисный центр предлагает высококачественный <a href=https://remont-maynerov-geek.ru/>мастер по ремонту майнеров</a> любых брендов и моделей. Мы осознаем, насколько важны для вас ваши устройства для майнинга, и обеспечиваем ремонт наилучшего качества. Наши опытные мастера проводят ремонтные работы с высокой скоростью и точностью, используя только оригинальные запчасти, что обеспечивает длительную работу наших услуг. Наиболее общие проблемы, с которыми сталкиваются пользователи устройств для майнинга, включают перегрев, проблемы с блоком питания, неисправности программного обеспечения, неисправности разъемов и поломки компонентов. Для устранения этих неисправностей наши квалифицированные специалисты оказывают ремонт систем охлаждения, блоков питания, ПО, разъемов и оборудования. Доверив ремонт нам, вы гарантируете себе долговечный и надежный сервисный ремонт майнера с гарантией. Подробная информация доступна на сайте: https://remont-maynerov-geek.ru
#8955 Jameswomhttps://leotw.com/
<a href=https://leotw.com/>LEO娛樂城</a> LEO娛樂城:九州娛樂集團的卓越創舉與運營優勢 九州娛樂集團總部的現代化運營 九州娛樂集團的總部設於菲律賓首都馬尼拉市中心最具代表性的現代化建築「RCBC Plaza」。這座辦公大樓融合了全球領先的建築科技與安全系統,包括:
國家級資訊防護系統,確保數據安全。 樓宇自動化系統 (BAS),實現數位化管理與高效運營,包括防火系統、光纖電訊和數位監控。 九州娛樂為員工提供舒適的工作環境和專業的教育培訓,確保服務水準一流。其員工以專業知識和親切態度,為尊貴玩家帶來極致的遊戲體驗。
LEO娛樂旗下品牌與遊戲特色 九州娛樂城旗下分支包括 LEO、THA 和 KU 三個娛樂品牌。雖然品牌各自獨立運營,但都共享相同的遊戲系統與界面,提供超過數千款來自全球頂級供應商的遊戲。
這些品牌的核心特色包括:
種類繁多的遊戲:滿足不同類型玩家的需求,包括電子遊戲、體育博彩、真人娛樂等。 不斷更新的內容:通過九州獨家技術,網站內容保持新鮮,合作商可快速更新遊戲資源,確保平台競爭力。 玩家在這些平台上可以隨時找到適合自己的遊戲,享受沉浸式的娛樂體驗。
LEO娛樂城的歷史與發展 九州娛樂集團的起源可以追溯至其最早期的經營模式:「信用版」賭博平台 《天下體育球版》。儘管該模式在當時非常流行,但因高風險與財務處理複雜而逐漸被淘汰。
隨著市場需求的變化,九州娛樂轉型為現金版平台 《天下現金網》,引入了更安全、便捷的遊戲模式。這種轉變不僅提升了玩家的體驗,也使平台得以進一步發展。
如今,九州娛樂城已成為台灣博弈業界的領軍者,不僅優化了網站版面與功能,還推出了專屬手機APP,方便玩家隨時隨地進行遊戲體驗。
LEO娛樂的成功秘訣 現代化運營與技術支持:九州娛樂在系統安全與技術更新方面投入巨大資源,確保平台運營穩定可靠。 多元化遊戲體驗:通過與全球頂級遊戲供應商合作,平台提供了豐富的遊戲選擇,適應各種玩家需求。 用戶至上:專業培訓的員工以細心和熱忱態度,提供高品質服務,讓玩家倍感尊重。 不斷創新:從信用版到現金版,再到手機APP,九州娛樂始終緊跟市場趨勢,致力於打造最佳娛樂體驗。 結語 LEO娛樂城作為九州娛樂集團旗下的重要品牌,不僅繼承了集團的核心價值,更在遊戲選擇、服務品質和技術創新方面不斷提升。從最初的《天下體育球版》到如今的行業領先者,LEO娛樂見證了九州娛樂城的發展歷程,也成為博弈行業中的耀眼明星。
加入 LEO娛樂城,感受來自九州娛樂集團的專業與熱情,享受最頂級的線上博弈體驗!
#8956 Ремонт массажных кресел в Москвеhttps://remont-massazhnyh-kresel-gold.ru/
Наша мастерская предлагает надежный <a href=https://remont-massazhnyh-kresel-gold.ru/>центр ремонта массажных кресел</a> всех типов и брендов. Мы осознаем, насколько важны для вас ваши массажные устройства, и стремимся предоставить услуги наилучшего качества. Наши квалифицированные специалисты работают быстро и аккуратно, используя только сертифицированные компоненты, что гарантирует длительную работу наших услуг. Наиболее общие проблемы, с которыми сталкиваются владельцы массажных кресел, включают проблемы с мотором, неисправности роликов, программные сбои, неработающие разъемы и механические повреждения. Для устранения этих проблем наши опытные мастера проводят ремонт моторов, роликов, ПО, разъемов и механических компонентов. Обратившись к нам, вы получаете надежный и долговечный починить массажное кресло адреса. Подробная информация представлена на нашем сайте: https://remont-massazhnyh-kresel-gold.ru
#8957 Ремонт кофемашинhttps://remont-kofemashin-top.ru/
Наша мастерская предлагает высококачественный <a href=https://remont-kofemashin-top.ru/>мастерская по ремонту кофемашин с гарантией</a> всех типов и брендов. Мы знаем, насколько значимы для вас ваши кофемашины, и готовы предложить сервис наилучшего качества. Наши опытные мастера проводят ремонтные работы с высокой скоростью и точностью, используя только оригинальные запчасти, что предоставляет долговечность и надежность наших услуг. Наиболее общие проблемы, с которыми сталкиваются пользователи кофеварок, включают проблемы с нагревом, проблемы с подачей воды, ошибки ПО, проблемы с подключением и повреждения корпуса. Для устранения этих проблем наши квалифицированные специалисты оказывают ремонт нагревательных элементов, насосов, ПО, разъемов и механических компонентов. Обращаясь в наш сервисный центр, вы получаете долговечный и надежный сервисный ремонт кофемашина в москве. Подробная информация представлена на нашем сайте: https://remont-kofemashin-top.ru
#8958 Kevinwedhttps://azimutmebel.ru
Справочник по ремонту и строительству <a href=https://azimutmebel.ru/>https://azimutmebel.ru</a> идеи для проектов, инструкции, лайфхаки и рекомендации по выбору материалов.
#8959 Josephmobhttps://travailon.ru
Советы для мам <a href=https://travailon.ru/>https://travailon.ru</a> уход за ребёнком, развитие, воспитание и здоровье. Полезные рекомендации для комфортного материнства и гармоничного роста малыша.
#8960 Charlesgunnyhttp://filmkachat.ru
1×slot рабочее зеркало
Создание аккаунта. На веб-сайте казино необходимо обнаружить регистрационную форму и наполнить пустующие поля личностными данными. Иногда на этом этапе потребуется показать лишь адрес электрической почты и пароль, но чаще бы наполнить анкету индивидуальной информацией (ФИО, дата рождения, место проживания и т.д. ). Нужно свидетельствовать только реальные данные, потому впоследствие они станут проверены.Чаще всего интернет-казино предлагают бездепозитные бонусы новым юзерам. Эта промо-акция очень отлично завлекает новичков, подталкивая их к открытию счета. Конечно, не они становятся послушными клиентами, но сам факт регистрации аккаунта играет на руку заведению. <a href=http://filmkachat.ru/>1×slots casino зеркало</a> <a href=http://cheapbooks.cc/memberlist.php?mode=viewprofile&u=58557>http://cheapbooks.cc/memberlist.php?mode=viewprofile&u=58557</a> Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, solid лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Для получения бонуса надо(надобно) пригласить в игру свежего посетителя. Казино начислит пригласившему фиксированный процент от взносов приглашённого повторяющий бонуса: почаще всего его объем не превышает 10%. Срок деянья приза как не превышает месяца: пригласивший получает приз от проигранных ставок приглашённого в 1-ый луна забавы. 1×slot регистрация <a href=http://kinofilm2017.ru/user/AnthonyCricy/>http://kinofilm2017.ru/user/AnthonyCricy/</a>
1×slots регистрацию более популярный вариант это
Активация по промокоду используется в разных видах бездепов. Если речь о приветственном призе, то набор знаков можно разузнать на основной страничке, в регистрационной форме либо послании, коие отправляется юзеру для подтверждения адреса электронной почты. Акции могут проводиться совместно с партнерскими площадками. Обычно код располагается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активируется одноразовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем актуальный код для активации в описании каждого промо. <a href=https://www.formulersupport.com/Thread-1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-demo-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%B2–1×slots-casino–107349>1×slots официальный demo регистрация в 1×slots casino</a> 1×slot зеркало рабочее регистрации на телефон придет На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не сможете активировать и получить бездепозитный приз.Мы проделываем ударение на главных положениях правил, рассказываем о территориальных лимитированиях и вкратце информируем о иных промоакциях обговариваемого казино. <a href=https://steamboatspringschat.com/forum/members/davidkex-1571.html>https://steamboatspringschat.com/forum/members/davidkex-1571.html</a> Мы советуем не отрицаться от подобных услуг известных казино. Выделите количество минут на регистрацию, получите приз и попытайтесь его отыграть. Может быть, сегодня удача несомненно на вашей стороне!Как только вы отыграли вейджер и свои с бонусного баланса перешли для на реальный счет, Вы отважно можете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать минимальный депо к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депозитом). 1× slots регистрация в 1×slots casino Ну и окончательно же, для казино бездепозитные призы прибыльны с имиджевой стороны: подобная добродушие повышает уровень лояльности клиентов к фирмы.Допустим, за регистрацию вы получили бездеп в объеме 2 000 рублей с вейджером х30. В данном случае светит сделать ставок, на общую необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать реальные средства. Однако не забывайте, что с любого презента выйдет исключить определённую необходимую (чаще всего менее $200).
1×slots официальный сайт зеркало рабочее
Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке нужно восполнить счет в казино. Для депозитных призов, данная процедура не необходима, например как депо уже изготовлен. <a href=http://uprzakupokkchr.ru/user/StevenFet/>http://uprzakupokkchr.ru/user/StevenFet/</a> 1×slots официальный сайт зеркало
1×slots мобильная версия войти казино
Не советуем опрометью голову хвататься за всевозможные предложения получения средств без вложений. Вполне возможно, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на первый взгляд. Альтернативой считается казино бонус за депо. Мы предлагаем для пару советов, благодаря коим у любого игрока будет возможность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом средств:Размер бонуса. В качестве бездепов обычно начисляют небольшие суммы, а когда идет о бонусах за депозит, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино могут подарить игроку до 2000$. С такими простыми советами каждое казино с призом за регистрацию способно принести в разы больше выгоды и выгоды. 2. Создать новый профиль. Для регистрации надо(надобно) заполнить маленькую анкету либо зайдите в собственный офис посредством соц сетей; 1 х слотс зеркало <a href=http://google-pluft.us/forums/profile.php?id=536341>http://google-pluft.us/forums/profile.php?id=536341</a> Мы проделываем ударение на главных положениях управлял, рассказываем о территориальных лимитированиях и кратко информируем о иных акциях обговариваемого казино.
1 x slots
Мы подготовили список, где есть практически актуальные и новые бездепозитные призы казино, которые продоставляется получить безвозмездно. Для наших пользователей есть специальные предложения неповторимые бонусы, коие вы кого не найдете, их мы определили особой красной плашкой «Exclusive».Бездепозитные призы реальными деньгами, коие возможно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадались. B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.Доступ к дару возможность раскрываться механически после введения промокода или воззвания в саппорта вебсайта. В первом случае от юзера не потребуется никаких действий. Бездеп с активацией по коду встречается чаще всего. Игроку необходимо ввести совокупность знаков в графе, кот-ая имеет пребывать в регистрационной форме в Личном офисе. <a href=http://ceh-i.ru/user/Henryflumn/>http://ceh-i.ru/user/Henryflumn/</a> 1 x slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://qualityprogamer.de/forum/showthread.php?tid=265072>1× slots регистрация в 1×slots casino</a>
<a href=https://www.formulersupport.com/Thread-1×slots-%D0%BA%D0%BE%D0%B4%D1%8B–106948>1×slots коды</a>
<a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=298904#pid298904>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вейджер (wager) – это коэффициент, кот-ый демонстрирует на какую сумму необходимо устроить ставок, дабы вывести бонус из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего бонуса, Вам нужно устроить ставок на сумму: 500*70=3500 руб. Только всецело отыграв бонус, Вы можете исключить собственный выигрыш.
#8961 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее
Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы была возможность вывести выигрыш. <a href=http://filmkachat.ru/>1хслотс официальный сайт зеркало</a> Одним из поводов отдавать преимущество, льготу 1 или другому заведению содержится в привлекательности предлагаемых акций и безвозмездных услуг. Безвозмездные фриспины, выдаваемые без дела делать какой-нибудь лепта, в перечне находится далековато не в конце.Не хотите поиграть в азартные игры, не рискуя своими деньгами, хотя получая в все выплаты? Подобную возможность деют почти лучшие порталы с азартными весельями. В их количестве много правдивых и надежных интернет-казино на русском языке. Они привлекают свежих юзеров различными поощрительными мероприятиями, включая бездепозитные, или бесплатные бонусы. <a href=http://xn–hg3b25hm0h.com/bbs/board.php?bo_table=free&wr_id=405553>http://xn–hg3b25hm0h.com/bbs/board.php?bo_table=free&wr_id=405553</a> Список так нарекаемых «запрещенных землель» прилагается к правилам бонусной программы игорного портала. Обязательно выясните, распространяются ли на вас похожие наказания. 1×slots официальный сайт скачать <a href=https://www.vevioz.com/read-blog/175762>https://www.vevioz.com/read-blog/175762</a> Для вывода средств приз нужно несомненно отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами акции и вариантами отыгрыша бездепозитного приза до его получения, дабы избежать конфликтных ситуаций.
1×slots официальный сайт мобильная версия скачать
<a href=https://karakol.com.kg/user/Jameskef/>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a> 1×slots зеркало 1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, в не желайте замерзнуть жертвой жуликов или впустую истратить время;Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в неотъемлемом порядке нужно пополнить счет в казино. Для депозитных призов, данная процедура не необходима, например как депо теснее изготовлен. <a href=http://40th.jiuzhai.com/home.php?mod=space&uid=2564369&do=profile&from=space>http://40th.jiuzhai.com/home.php?mod=space&uid=2564369&do=profile&from=space</a> 1× слот зеркало
1хслотс рабочее зеркало на сегодня
Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном сайте и сделайте вход в личный офис, дабы арестовать благотворительные вращения с вейджером х40;В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая приятная доля игры. Важно, зачастую бездепозитные призы в казино выдаются с лимитированиями по наибольшей выплате. В среднем возможно рассчитывать на выгода в несколько тысяч руб. Как исключить выигрыш с приза без депо. Придётся подтвердить акк документально, в неких заведениях. Процедура верификации неотклонима и делается каждым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате или прочитайте в правилах. <a href=https://pattern-wiki.win/index.php?title=скачать_сериалы_с_торрента>https://pattern-wiki.win/index.php?title=скачать_сериалы_с_торрента</a> Бездепозитный приз – это финансовое вознаграждение, коие выдается участнику игры в казино, для его вербования и появления заинтересованности. Любой гость, который подходит условиям выдачи подобного бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое одобрение считается наиболее действенным способом, дающим возможность стартовать при, не вкладывая личных вещественных средств. 1×slots зеркало на сегодня Наиболее популярные гонорары среди гэмблеров – бездепозитные призы казино. Это не дивно, ведь можно получить бесплатные вращения либо виртуальные кредиты, и при не придётся пополнять счёт, рисковать собственными средствами. Удастся насладиться различными увеселениями даже выиграть крупную сумму, избегая серьёзного риска.
казино 1× slots официальный сайт
Иногда в качестве одобрения за регистрацию могут выдаваться билеты для роли в турнирах. Условия их проведения очень выделяются, потому мы советуем ознакомиться с каждым предложением раздельно. На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не сможете активировать и получить бездепозитный приз.К раскаянию, нет. Почти все казино, просят внесение желая бы 1-го минимального депо для вывода выигрыша с бездепозитного бонуса. Также учитывайте, собственно исключить деньги разрешено только на что, эту платежную систему, с коей был изготовлен депозит. Это также благотворительные деньги, которые поступают на аккаунты свежеиспеченных игры после регистрирования. А необыкновенность таких бонусов состоит том,, собственно обретенные деньги обязательно следует применять в продолжении назначенного времени.Новые посетители онлайн-казино без первого депо имеют проверить свою удачливость. К тому же есть вероятность преобразовать бездепы в настоящие средства за регистрацию в казино, однако достичь бонус нужно отыграть согласно условиям акции. 1×slot регистрация <a href=http://forums.escapefromelba.com/index.php?action=profile;u=145243>http://forums.escapefromelba.com/index.php?action=profile;u=145243</a>
1×slots официальный регистрация
Похожим образом трудится третий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения клиента или из-за с получения им VIP-статуса. Подарок предоставляется в воззвания в поддержку и ревизии.Подтвердите лицо, предоставив оператору казино средства паспортные данные. Инструкции обыкновенно легкие, основное — четко им по. Если написано, что «на фото обязаны быть видны все четыре угла странички паспорта» — сделайте непосредственно это фото. <a href=https://coinzaa.com/u/JamesUnamn>https://coinzaa.com/u/JamesUnamn</a> 1 x slots Существуют казино с призом за регистрацию, в довольно востребованы фриспины в онлайн казино потом регистрации в определенных играх. Они встречаются числе почаще бесплатных поощрений либо традиционных призов в казино без вложений. Например, игрок регистрирует счет, на который начисляются бесплатные игры, бонус за регистрацию в виде бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса в выигрывает настоящие деньги, коие в последствии возможно удачно вывести из заведения на собственную платежную систему. То есть, есть все шансы исключить свои без рисков своими деньгами. Регистрация, за игрок получит призы, займет пару минут, а спасибо этому можно увеличить 5 евро поощрений до тыс. И без всяких заморочек вывести их.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.bf-france.com/forums/profile/30064-rabofreeor/>1× slots регистрация в 1×slots casino</a>
<a href=http://3ak.cn/home.php?mod=space&uid=187057>1×slots официальный зеркало рабочее</a>
<a href=https://surfaceprophets.com/threads/1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D0%B2%D0%B8%D0%B4%D0%B5%D0%BB%D0%B8-%D1%82%D0%B0%D0%BA%D1%83%D1%8E-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8E-%D0%BD%D0%B0.26699/>1×slots зеркало видели такую регистрацию на</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При правильном раскладе бездепы — это прекрасный способ играть на деньги без растраты личных средств. Есть количество рекомендаций, следуя которым возможно извлечь максимум выгоды из сходственных акций казино. Играть по только на лицензированных площадках. Скриптовые веб-сайты не только накалывают с бонусными предложениями, хотя и используют пиратский софт с измененным ГСЧ. Выиграть на этих автоматах невероятно. Верификация необходима для добавочной защищенности и помочь техподдержке выявить бонусхантеров и жуликов. Кстати, на некоторых платформах выводы солидных сумм доступны лишь последствии доказательства личности.
#8962 Ремонт кофемашин в Москвеhttps://remont-kofemashin-top.ru/
Наш сервисный центр предлагает высококачественный <a href=https://remont-kofemashin-top.ru/>отремонтировать кофемашин адреса</a> различных марок и моделей. Мы осознаем, насколько необходимы вам ваши эспрессо-машины, и стремимся предоставить услуги первоклассного уровня. Наши профессиональные техники оперативно и тщательно выполняют работу, используя только качественные детали, что предоставляет долговечность и надежность выполненных работ. Наиболее частые неисправности, с которыми сталкиваются пользователи кофеварок, включают проблемы с нагревом, неработающий насос, программные сбои, неработающие разъемы и повреждения корпуса. Для устранения этих поломок наши квалифицированные специалисты оказывают ремонт нагревательных элементов, насосов, ПО, разъемов и механических компонентов. Доверив ремонт нам, вы гарантируете себе долговечный и надежный сервис ремонта кофемашина рядом. Подробная информация доступна на сайте: https://remont-kofemashin-top.ru
#8963 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия скачать
Для получения выигрыша потребуется выполнить условия казино. Чаще всего игроку нужно поставить конкретную сумму, хотя уже из личных денег. Она рассчитывается из общего объема выигрыша за всегда применения бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, если юзер выиграл 1000 руб., а множитель сочиняет х30, исключить деньги можно будет, сделав ставки на 30 000 руб. <a href=http://filmkachat.ru/>1×slot казино зеркало</a> Максимальный объем ставки, который нельзя превосходить пока приз не несомненно полностью отыгран. В случае нарушения этого управляла, приз и выигрыш с него станут аннулированы. <a href=http://mail.nudecelebvideo.net/user/DavidPes/>http://mail.nudecelebvideo.net/user/DavidPes/</a> На данном разделе портала регулярно публикуются обзорные заметки, каких рассматриваются безвозмездные призы превосходнейших интернет-казино. Информация структурирована по нескольким пунктам, включая основные:Но такие рамки не смущают даже хайроллеров, потому коэффициенты на слотах разрешают рассчитывать на крупные выигрыши, а некоторых автоматах разыгрывается передовой джекпот. 1×slots casino зеркало рабочее <a href=http://g961713h.beget.tech/user/ZacheryLedly/>http://g961713h.beget.tech/user/ZacheryLedly/</a> Фриспины. Бесплатные вращения предусмотрены для использования в видео-слотах. Внимательно читайте обстоятельства – они часто выдаются для неких машин. В зависимости от клуба вам создавать определенное количество ставок. Кстати, современные игорные жилища дают вероятность заводить «одноруких бандитов».Казино выводит средства лишь на что, эту платежную систему, с котрой был изготовлен депо. То есть, для вывода бездепозитного бонуса, Вам поначалу необходимо пополнить счет. В некоторых клубах узкий перечень методов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с данных платежных способов, коие доступны для вывода.
казино 1× slots официальный сайт
<a href=http://lider1c.ru/communication/forum/messages/forum5/message18560/14571–1×slots-registratsiya?sessid=bc58df0541727fadd7f1ccfd8ba4150b&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1×slots регистрация</a> 1×slots официальный зеркало Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут устанавливает лимитирование для клиентов. Конечно, это возможно счесть некоторым неудобством для игрока, но справедливости ради отметить, собственно выбор автоматов всё равно остаётся довольно великим. <a href=http://dns2.shadr.ru/user/Stevenatofe/>http://dns2.shadr.ru/user/Stevenatofe/</a> Размер призов почаще всего чисто условный и не выше 50 руб. Приятно, хотя осязаемым бустом в игре вряд ли будет. 1хслот зеркало
1×slots зеркало
Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают бонус по странам. Вплоть до такого, собственно клуб может принимать игроков из Вашей государства, а бездеп мешает. <a href=http://www.gdljs.net/home.php?mod=space&uid=850713>http://www.gdljs.net/home.php?mod=space&uid=850713</a> 1×slots зеркало которую указывали при регистрации кстати Автоматическая активация первый самой удобной, но ручной метод имеет перед ней преимущества. Прежде чем применять вознаграждение от казино, стоит заранее определить, сколько медли требуется на выполнение всех критерий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деяния приза.
1×slots регистрация то дальше необходимо пройти
Но никогда не забывайте пристально читать управляла роли в бонусных акциях. Если вы нарушите но бы одно условие, позднее вы не можете устроить недоразумение с администрацией.Перечисленные повыше главные свойства сочетают практически каждый приз и считаются стандартными для бездепозитных бонусных начислений в казино. <a href=https://qualityprogamer.de/forum/showthread.php?tid=273816>1×slots официальный зеркало</a> Ну и конечно же, для казино бездепозитные бонусы прибыльны с имиджевой стороны: схожая добродушие увеличивает уровень лояльности посетителей к компании.Риск-игра по равным шансам – Также казино имеет воспрещать выполнять обстоятельства по отыгрышу с помощью раунда на удвоение, который предлагается в слотах, видео-покере и неких других играх. 1хслотс казино зеркало <a href=https://food.biz.ua/wr_board/tools.php?event=profile&pname=Anthonybuh>https://food.biz.ua/wr_board/tools.php?event=profile&pname=Anthonybuh</a> Для ревизии применяются сканы паспортов, водительских прав, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если пользователь замечен в попытке завести дополнительный акк, все его учетные записи подвергаются блокировке, а их владелец попадает в черный перечень. При ирге на лицензионной площадке надо бояться свидетельствовать достоверную индивидуальную информацию (шифрование исключает утечку индивидуальных данных).
1×slots casino регистрация 1×slots review live
Для получения приза надо(надобно) пригласить в забаву свежего клиента. Казино начисляет пригласившему фиксированный процент от взносов приглашённого повторяющий приза: чаще всего его объем не выше 10%. Срок деянья бонуса в большинстве случаев не превышает месяца: пригласивший получает бонус от проигранных ставок приглашённого в 1-ый месяц забавы.Выбор каждого онлайн казино на нашем сайте. В описании к любому Вы можете узнать, что получите за творение аккаунта. Представьте момент, когда при ставке в 10 рублей Вы получите подобное умножение. Миллион рублей за одно вращение, собственно абсолютно вполне. Поэтому вопрос, сколько можно выиграть остаётся открытым. Предлагаем проверить помощи. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный бонус и инспектируйте фортуну в деле. Разумеется, исключить деньги не так просто. Однако шансы есть у всех. <a href=http://www.ppurihr.or.kr/gb/bbs/board.php?bo_table=qna&wr_id=5401>http://www.ppurihr.or.kr/gb/bbs/board.php?bo_table=qna&wr_id=5401</a> Бездепозитные бонусы казино за регистрацию в 2022 году — это вероятность поиграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой либо числом даровых вращений без внесения депозита. Не путайте деморежим с реальной игрой без надобности внесения депо.Чаще всего интернет-казино предлагают бездепозитные призы свежим юзерам. Эта промо-акция довольно отлично завлекает новичков, подталкивая их к открытию счета. Конечно, не все они становятся послушными клиентами, хотя сам факт регистрации аккаунта играет на руку заведению. 1×slots casino регистрация 1×slotscasino09k online Хотя бесплатные бонусы начисляются без депозита, не исключено, что вас понадобиться вносить средства. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только последствии того, как свежий клиент первый пополнит игровой счет.Но а случае вы теснее профи по интернет казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в интернет казино;
<b>Смотреть еще похожие новости:</b>
<a href=http://aficionado.pl/showthread.php?119093–1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81–1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%BF%D0%B5%D1%80%D0%B5%D0%B9%D1%82%D0%B8-%D0%BD%D0%B0–1×slots&p=137232>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Также учтите, что некоторые игровые платформы сузивают перечень стран, коие способны получить предложенный бездепозитный бонус за регистрацию. К образцу, есть онлайн-заведения, выдающие сходственные призы лишь жильцам конкретных государств. К образцу, онлайн казино 777 Оригинал предоставляет бездепозитный приз только игрокам из России и стран СНГ. Или напротив, снабжают вознаграждением всех, кроме обитателей неких стран (следует сего, идет пристально учить список, чтобы потом не возникло никаких вопросов и жалоб).
#8964 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация на сайте
Особую изюминку видео слотам присваивают оригинальные знакы. С их свет активизируются разные призы. Вы сможете запустить вспомогательный степень и прирастить необходимую выигрыша. Есть знаки, коие заменяют негодные элементы и сами создают выигрышные комбо. Не стоит забывать и на бонус-тур. После каждого счастливого спина есть шанс прирастить сумму выигрыша в 2 или хорошо раза. <a href=http://filmkachat.ru/>1хслотс зеркало</a> <a href=http://intentionalpress.com/author/davidlah/>http://intentionalpress.com/author/davidlah/</a> Выше мы предоставили глубокий набор самых новых и актуальных бездепозитных бонусов в интернет казино без пополнения на 2022 год, где вам пользоваться хоть ценным бездепозитным бонусом.B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. 1×slots рабочее зеркало на сегодня <a href=http://bmwspeed.lv/user/DoctorLazutaKr/>http://bmwspeed.lv/user/DoctorLazutaKr/</a>
1×slots рабочее зеркало
Некоторые онлайн-казино без депозита предлагают свежим посетителям избрать приз при регистрации. Будьте внимательны: выбрав раз, вы в безоговорочном большинстве случаев не сможете воспользоваться остальными.Автоматы непопросту числятся наиболее известным азартным отдыхом. Чтобы освоить управление и верховодила, понадобится всего некоторое мин. Ваша задача устроить ставку, определить количество трудящихся линий и можно вертеть тамбур. Если на выпадет выигрышная комбинация – вы выиграли! С данной задачей для помогут справится бездепозитные бонусы казино. <a href=http://theauction.com.au/my-account/>x1 slots 1хслотс регистрация перейти на 1×slots</a> 1×slot официальный сайт Вознаграждения за получение VIP-статуса ? начисляются в программы преданности при достижении очередного уровня либо выдаются персонально менеджерами саппорта. <a href=https://www.reverbnation.com/Glavdorogadv2708/press>https://www.reverbnation.com/Glavdorogadv2708/press</a> Главное превосходство спинов – возможность изучить различные слоты. Также получится насладиться бонусными раундами, испытать удачу в риск-туре и преувеличить выигрыш за счёт особых символов. Однако не только игровой процесс заслуживает внимание, ведь другого, как сосредоточиться на реальном выигрыше. 1×slots регистрацию более популярный вариант это
1×slots сайт
Простая процедура получения бездепозитного приза, которая займет менее 2-х мин. Для получения бездепов, достаточно зарегистрироваться и доказать контактные данные. В зависимости от интернет заведения каждый из них имеет вас предложить как бездепозитные деньги, например и бездепозитные фриспины, коие последствии успешной регистрации рухнут вам на ваш игровой баланс. <a href=http://diskusi.smk-roudlotussholihin.sch.id/index.php?qa=user&qa1=accidentalvacat>http://diskusi.smk-roudlotussholihin.sch.id/index.php?qa=user&qa1=accidentalvacat</a> Если при регистрации указать промокод, можно гарантировано получить бонус. Где взять ваучер? Посетите тематику блоги либо форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В заключительнее время игорные жилища начали афишироваться в кинокартинах и телесериалах. Присмотритесь и скорее заметите промокод, который принесёт 500 или 1 000 бонусных рублей.Как правило, при выводе денег, от играющего потребуется только сделать минимальный вклад для того, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом индивидуальный счет. 1×slots скачать на айфон Демоказино есть практически на каждом веб-сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются существенно реже: там когда выигрыша и соблюдения критерий акций бездеп возможно превратить в настоящие деньги.
1 x slots
Чтобы других увериться в превосходстве бездепозитных бонусов, достаточно зарегистрироваться в казино и получить поощрение.Иногда для получения призов необходимо спутаться с адептами саппорта. Удобнее всего с ними разговаривать в онлайн-сате, хотя иногда достаточно запроса по электронной почте. В интернете очень много скриптовых вебсайтов, коие принадлежат мошенникам. Их основная задача – привлечь гэмблеров, пообещав столько великодушные подарки, хотя и крупные выигрыши. Так собственно некоторые веб-сайты предлагают получить за регистрацию и $1 000. В лицензионных бездепозитных казино выступать в азартные игры вправду неопасно. Наличие лицензии одобряет тот факт, собственно клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP.Некоторые клубы механически начисляют бонус на аккаунт игрока последствии выполнения критерий получения, хотя посещают истории, когда бонус нужно активировать игроку самому. Есть некоторое методов активации приза: 1×slots промокод при регистрации <a href=http://misssophie.net/AG_Wohnungssuche/doku.php?id=Выкуп_авто>http://misssophie.net/AG_Wohnungssuche/doku.php?id=Выкуп_авто</a> Главным моментом в возникновении данных вознаграждений произведено в, собственно пустив их в ход, игры ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он спасибо призам какой-либо выигрыш либо мгновенно спустит все только что прибывшие деньги). То есть, казино снабжает игрока вероятностью на дармовой базе играть во различные слоты даже спонсирует забаву.Чаще всего, знаменитые сервисы, эти как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно обязательное управляло. Финансовые свои выводятся только через ту платежную систему, коей популярностьюимели для пополнения депо. Если же игрок получил бездепозитный покерный бонус, требуется восполнить счет на наименьшую необходимую, кот-ая сочиняет обыкновенно 10 долларов.
1×slots регистрация 1×slotscasino09k online
<a href=http://ww.ansanam.com/bbs/board.php?bo_table=report_status2&wr_id=298074>http://ww.ansanam.com/bbs/board.php?bo_table=report_status2&wr_id=298074</a> Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавления или официального клиента для ПК. В большинстве казино действуют программы лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий уровень нередко сопровождается выдачей бездепа.Срок отыгрыша — это период, кот-ый начинается в момент активации бонуса и кончается с его закрытием. Пользователю необходимо уложиться в этот временной промежуток, другому призовые средства аннулируются. Казино устанавливают список игр, ставки в засчитываются при расчете отыгранных средств. Если тайтл не заходит в данный список, то предоставляется быть недосегаем для загрузки в деянья бонусного предложения. 1×slots регистрация 1×slotscasino09k online Возможность протестировать свежие забавы, не рискуя личными своими и разработать личную стратегию забавы.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.bedwantsinfo.nl/thread-692363.html>1хслотс рабочее зеркало</a>
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=65201&extra=>1×slots casino регистрация 1×slotscasino09k online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
После потребуется привнести идентификационный платёж. Это стращает новичков больше всего. Нужно сделать минимальный депо в 100–500 рублей. Таким образом служба защищенности увериться никаких, собственно платёжный способ принадлежит Вам. Данная процедура важна для обеспечивания безопасности игровых счетов. Пример, Ваш акк взломают и выведут свои на свой кошелёк. Будет очень неприятно. Поэтому верификация платёжной системы, это важный момент.
#8965 Charlesgunnyhttp://filmkachat.ru
1хслот 1хслотс регистрация перейти на 1×slots
Обыкновенные бездепозитные призы в размере от 3-х до 20 $ созданы чтобы, чтобы, дабы в игры заходили все свежие и свежие игроки. Здесь, скорее, будет лимитирование на максимальный выигрыш. Важно, дабы перед минимальным вкладом был отключен приз за 1-ое пополнение счета, и геймер не попадет на повторный вейджер. <a href=http://filmkachat.ru/>казино 1×slots</a> <a href=https://fonogramm.pro/user/Davidmus/>https://fonogramm.pro/user/Davidmus/</a> Составленный специалистами Casino.ru список онлайн-казино с бездепозитным призом разрешает игрокам сравнить спецпредложения разных операторов. 1 xslots рабочее зеркало <a href=https://astraclub.ru/blog.php?cp=3368>https://astraclub.ru/blog.php?cp=3368</a> Популярность интернет казино растёт и всё больше юзеров начинают проявлять азартными забавами. Бездепозитные бонусы 2022 года, это оригинальные подарки за регистрацию. С их помощью свежие игроки имеют получить благотворительные вращения либо средства на баланс за одну регистрацию. С выходом игорных заведений в онлайне, бездепозитные призы стали популярнейшим способом привлечения игроков. Подобные промоакции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о которых мы расскажем. Наш вебсайт собрал превосходнейшие предложения из интернета на 2022 год. Воспользуйтесь любым презентом и сможете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить условия.Некоторые клубы автоматически начисляют приз на акк игрока в исполнения условий получения, но случаются ситуации, когда приз надо(надобно) активировать игроку самому. Есть количество способов активации бонуса:
1×slots casino зеркало
<a href=https://dev.eff.one/member.php?action=profile&uid=904>1×slots рабочее зеркало</a> 1×slots зеркало на сегодня Акции, приуроченные к календарным праздникам, случаются рассчитаны как на всех пользователей, например и на категории: к, презент на 8 марта девушкам-игрокам или мужикам на 23 февраля. <a href=https://forum.gogobuyers.com/member.php?action=profile&uid=2070>https://forum.gogobuyers.com/member.php?action=profile&uid=2070</a> Прочитайте верховодила бонусной программки, в которой желаете принять. Да, мы безотступно рекомендуем устроить это до регистрации.Многие игроки, оценив функционал казино, остаются играть в нем и далее ? на это и нацелено любое промо. Постоянные посетители вносят депозиты и проделывают ставки, обеспечивая длительную выгода оператора. То есть, казино раздают бездепы свежим пользователям для формирования приклнной аудитории. 1×slots casino регистрация 1×slots review live
1×slot зеркало рабочее регистрации на телефон придет
Бездепозитный бонус – это финансовое вознаграждение, которое выдается соучастнику забавы в казино, для его вербования и возникновения заинтригованности. Любой посетитель, который подходит условиям выдачи сходственного бездепозитного бонуса, возможность претендовать на получение вышеуказанного приза. Такое одобрение является более действенным способом, дающим вероятность стартовать в игре, не вкладывая личных вещественных средств. Бесплатные бонусы казино без депозита можно получить повторяющий денежных средств на бонусный счет (исключить их возможно лишь после отыгрыша), фриспинов, игры либо кешбэк-бонуса. <a href=https://xn----7sbarohhk4a0dxb3c.xn–p1ai/user/ZacheryPem/>https://xn----7sbarohhk4a0dxb3c.xn–p1ai/user/ZacheryPem/</a> 1×slots регистрацию более популярный вариант это Если вы бывалый игрок, вы должны аристократия, собственно бонус без депо – редкая находка. Тем ниже, мы еженедельно изучаем интернет, дабы отыскать вам лучшие бездепозитные предложения.
1×slots casino регистрация 1×slotscasino09k online
Подтверждение электрической почты – одно из ведущих критерий, коие есть практически в любом бездепозитном казино. Чтобы верифицировать электрическую почту, достаточно перебежать по активной ссылке в послании, приобретенном от азартного клуба. Бездепозитные бонусы — это подарки от казино в виде бонусных денег или фриспинов для игровых автоматов, коие начисляются на акк игрока последствии процедуры регистрации на сайте заведения. Для получения этих поощрений депозит не потребуется. 1×slot казино зеркало <a href=http://www.zgqsz.com/home.php?mod=space&uid=408953>http://www.zgqsz.com/home.php?mod=space&uid=408953</a> Проверка занимает от нескольких минут до нескольких дней, профессионалы техподдержки все запросить вспомогательные документы или инициировать куцее общение по Skype.
зеркло казино 1×slots
Основное правило получения бездепа ? творимый акк должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов взыскательно запрещено. Проверка проводится по имени, e-mal, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депозита нужно соблюдать несложную последовательность действий. Получить Бездепозитный бонус в интернет казино дело двух кликов. Другой момент, отыграть рекламную и соблюсти верховодила и условия отыгрыша. Под правилами подразумевается не вагер, но и лимитирования по максимальной ставке. Мы разумеем, собственно в кинотеатр все ставят на зеро и выигрывают. Призываем не делать похожего. Перед активацией приза прочитайте управляла. Узнайте следующие моменты: Условия получения подарка, за регистрацию, за депо и другое. Ограничения по максимальной ставке. Зачастую не повыше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вертеть автоматы, а вагер будет стоять на месте. Поэтому важно аристократия, в каких забавах можно совершать кратность валютного оборота.Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. <a href=http://nutrendrussia.ru/bitrix/redirect.php?goto=http://google.az/url?q=http://as-pigments.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/iNjbtNZZWz6>http://nutrendrussia.ru/bitrix/redirect.php?goto=http://google.az/url?q=http://as-pigments.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/iNjbtNZZWz6</a> Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются незамедлительно в сотворения профиля и активны недолговременное время. Если не успеете потратить свои, они попросту сгорят. Касаемо медли, как призы активны на часа.Как правило, при выводе денег, от играющего требуется только сделать наименьший вклад для того, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом индивидуальный счет. 1×slots регистрация 1×slots review live
<b>Смотреть еще похожие новости:</b>
<a href=https://chasingadream.rpginitiative.com/showthread.php?tid=140308>казино 1×slots официальный сайт</a>
<a href=https://qualityprogamer.de/forum/showthread.php?tid=306395>1хслотс рабочее зеркало на сегодня</a>
<a href=http://smpn1bejen.sch.id/forum/>1хслот скачать</a>
<a href=https://mandala-app.com/forums/memberlist.php?mode=viewprofile&u=3447>1×slot регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чаще всего казино приз за регистрацию без депо даёт возможность запустить любой машина. Но лучше пристально ознакомиться с критериями. Иногда для игры доступны лишь определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, превосходнее начать знакомство с миром азарта именно с «одноруких злодеев». Фриспины — благотворительные вращения, которые дозволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины считаются самым знаменитым и желаемым видом бонуса — бесплатные вращения порой эффективнее и веселее в отыгрыше, чем остальные виды бездепов.
#8966 Derekfughttps://guns.org.ru
Конструкторы оружия России <a href=https://guns.org.ru/>https://guns.org.ru</a> история создания легендарного оружия, биографии инженеров, технические характеристики разработок.
#8967 PhilipTeeryhttps://melbet-24online.net.ru
Официальный сайт Melbet <a href=https://melbet-24online.net.ru/>https://melbet-24online.net.ru</a> ставки на спорт, турниры, лайв-игры и слоты. Простая регистрация, быстрая выплата выигрышей и множество бонусов для новых и постоянных игроков.
#8968 MichaelMizhttps://club-sante.ru
Справочник по ремонту <a href=https://club-sante.ru/>https://club-sante.ru</a> идеи для ремонта, рекомендации по отделке, расчёты и схемы. Полезная информация для качественного и экономного обновления вашего дома.
#8969 Ремонт кондиционеров в Москвеhttps://remont-kondicionerov-wow.ru/
Наши специалисты предлагает профессиональный <a href=https://remont-kondicionerov-wow.ru/>сервисный ремонт кондиционеров в москве</a> всех типов и брендов. Мы знаем, насколько важны для вас ваши кондиционеры, и стремимся предоставить услуги первоклассного уровня. Наши опытные мастера проводят ремонтные работы с высокой скоростью и точностью, используя только качественные детали, что обеспечивает надежность и долговечность проведенных ремонтов. Наиболее распространенные поломки, с которыми сталкиваются владельцы кондиционеров, включают неисправности компрессора, проблемы с вентилятором, программные сбои, неработающие датчики и поломки корпуса. Для устранения этих неисправностей наши профессиональные техники оказывают ремонт компрессоров, вентиляторов, ПО, датчиков и механических компонентов. Доверив ремонт нам, вы получаете долговечный и надежный вызвать мастера по ремонту кондиционера в москве. Подробная информация представлена на нашем сайте: https://remont-kondicionerov-wow.ru
#8970 Adolforaf
pharmacies in mexico that ship to usa: <a href=" https://mexicanpharmeasy.com/ ">MexicanPharmEasy</a> – mexican drugstore online
#8971 Ремонт квадрокоптеров в Москвеhttps://remont-kvadrokopterov-best.ru/
Наша мастерская предлагает высококачественный <a href=https://remont-kvadrokopterov-best.ru/>сервис ремонта квадрокоптера на выезде</a> любых брендов и моделей. Мы осознаем, насколько значимы для вас ваши духовые шкафы, и готовы предложить сервис наилучшего качества. Наши профессиональные техники проводят ремонтные работы с высокой скоростью и точностью, используя только оригинальные запчасти, что предоставляет долговечность и надежность проведенных ремонтов. Наиболее распространенные поломки, с которыми сталкиваются пользователи духовок, включают неисправности термостата, выход из строя таймера, поврежденную дверцу, проблемы с контроллером, проблемы с конвекцией и неисправные платы. Для устранения этих неисправностей наши профессиональные техники оказывают ремонт нагревательных элементов, термостатов, таймеров, дверец, контроллеров, вентиляторов и электроники. Обращаясь в наш сервисный центр, вы получаете качественный и надежный сервисный ремонт дронов в москве. Подробная информация доступна на сайте: https://remont-kvadrokopterov-best.ru
#8972 WilliamRor
online pharmacy india <a href=" http://tmml.top/home.php?… „>Online medicine order</a> or <a href=“ https://images.google.lu/url?… ">online shopping pharmacy india</a> http://chat.kanichat.com/jump.jsp?… buy prescription drugs from india <a href=https://image.google.nu/url?q=https://indianpharmstar.com>top 10 online pharmacy in india</a> reputable indian pharmacies and <a href=http://80tt1.com/home.php?mod=space&uid=2250829>indianpharmacy com</a> indian pharmacy paypal
#8973 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало подтвердит вашу регистрацию если говорить
Вейджер в переводе с английского означает «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша приобретенного приза, в нашем случае бездепозитного. Число ставок большого — главно только набрать необходимую, пропорциональную сумме одобрения. <a href=http://filmkachat.ru/>1×slots зеркало рабочее</a> <a href=https://sociallist.org/submit.php?url=https%3A%2F%2Fmucho-rest.ru%2F&title=%D0%A0%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD+MUCHO&tag=knownvacancy35&lang=nl&show_all=1&text=%5Burl%3Dhttps%3A%2F%2Fmucho-rest.ru%2F%5D%D0%A0%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD+MUCHO%5B%2Furl%5D>https://sociallist.org/submit.php?url=https%3A%2F%2Fmucho-rest.ru%2F&title=%D0%A0%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD+MUCHO&tag=knownvacancy35&lang=nl&show_all=1&text=%5Burl%3Dhttps%3A%2F%2Fmucho-rest.ru%2F%5D%D0%A0%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD+MUCHO%5B%2Furl%5D</a> 1×slots регистрация 1×slotscasino 56 online <a href=http://www.fire-team.ru/forum/member.php?u=5088>http://www.fire-team.ru/forum/member.php?u=5088</a>
скачать 1×slots на андроид мобильная версия
Фриспины — благотворительные вращения, коие позволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины считаются наиболее известным и предпочтительным видом приза — безвозмездные вращения иногда эффективнее и веселее в отыгрыше, чем остальные виды бездепов.Главное преимущество спинов – вероятность изучить различные слоты. Также получится насладиться бонусными раундами, испытывать удачу в риск-туре и преувеличить выигрыш за счёт особых символов. Однако не только игровой процесс заслуживает внимание, как другого, как сосредоточиться на реальном выигрыше. 1×slot официальный сайт Риск-игра по равным шансам – Также казино имеет воспрещать исполнять обстоятельства по отыгрышу счет раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких других играх. <a href=http://tutorialsmint.com/user/jaspersap/articles>http://tutorialsmint.com/user/jaspersap/articles</a> При правильном раскладе бездепы — это отличный способ играть на деньги без траты собственных средств. Есть несколько рекомендаций, следуя которым можно извлечь максимум полезности из подобных промоакций казино. Играть идет только на лицензированных площадках. Скриптовые веб-сайты не дурачат с бонусными предложениями, но и употребляют пиратский софт с измененным ГСЧ. Выиграть на таких автоматах нереально.Для выбора азартного заведения Вы можете воспользоваться списком наших казино с призами за регистрацию. На нашем веб-сайте мы выпустили список бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, собственно часть бонусов эксклюзивные и доступны только для посетителей нашего вебсайта по-специальному промо-коду либо по оригинальной ссылке. Кроме такого, для любого приза мы подготовили подробный обозрение, в котором Вы узнаете как получить и отыграть одобрение и как вывести собственный выигрыш с бездепа. 1×slots официальный зеркало
онлайн казино 1×slots
В реальное время получить бонус за регистрацию в казино довольно просто. Почти каждый игорный жилище с готовностью предоставит деньги либо безвозмездные вращения. Многие игроки пользуются данным и не смущяются региться в любом клубе с прибыльными условиями. Кстати, это отличная вероятность придумать выигрышную стратегию и сорвать куш.Фриспины — безвозмездные вращения, которые дозволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины считаются самым известным и желаемым обликом приза — благотворительные вращения иногда эффективнее и веселее в отыгрыше, чем остальные облики бездепов. <a href=http://www.zgqsz.com/home.php?mod=space&uid=326663>http://www.zgqsz.com/home.php?mod=space&uid=326663</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots Зачастую бездепозитные призы казино для забавы предлагаются различными заведениями азартных игр в качестве рекламных акций или в целях привлечения к для свежих игроков. Для бездепозитных бонусов в казино 2022 игроку не пополнять счет до этапа вывода желаемых средств.
1×slots казино зеркало
<a href=https://clubdefansde24.com/foro/memberlist.php?mode=viewprofile&u=3464>1×slots casino регистрация</a> В большинстве заведений устроить это можно по адресу электронной почты, по номеру телефона, спустя социальную сеть либо гугл-аккаунт.Реже бонусы без депо начисляются неизменным игрокам. С их помощью администрация старается удержать ценных клиентов или желает поблагодарить за преданность правильных посетителей. Но намного почаще для подобных целей используются такие акции: 1хслот скачать <a href=http://kunigami-minibas.jp/userinfo.php?uid=17706#>http://kunigami-minibas.jp/userinfo.php?uid=17706#</a> Реже призы без депозита начисляются неизменным игрокам. С их поддержкою администрация постарается вычесть ценных клиентов либо желает поблагодарить за преданность правильных посетителей. Но намного чаще для похожих целей используются такие акции:Разные казино имеют собственные управляла по выведению выигрыша. Для бездепозитных бонусов принимаются достаточно высочайшие притязания. Часто онлайн-казино рекомендуют отыграть бонусное поощрение до ста раз в игровых автоматах. Например, случае игрок получил даром 10 $, то необходимо несомненно отыграть их, поставив 1 тыщу спинов по одному баксу любой. Стоит отметить, что не все казино выделяют вероятность играть на призы и не во всех увеселительных заведениях идентичные правила для отыгрывания. Некоторые казино запрещают играть на бонусы в блекджек либо ограничивают ставки до пяти процентов, собственно значительно увеличивает в 10-ки раз количество необходимых игр.
1×slots официальный регистрация
Но а случае вы теснее профи по интернет казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в интернет казино;Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, the decision лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. <a href=https://malaysia-forex.com/members/131653-RenaldoFealp>https://malaysia-forex.com/members/131653-RenaldoFealp</a> 1хслотс казино зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://zxz.listbb.ru/viewtopic.php?f=2&t=2975>1×slots официальный зеркало рабочее</a>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=135590>1хслотс регистрация в 1×slots casino</a>
<a href=https://forum.bandariklan.com/showthread.php?tid=375605>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a>
<a href=https://qualityprogamer.de/forum/showthread.php?tid=264517>1хслотс казино зеркало</a>
<a href=http://theauction.com.au/my-account/>1× slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Каждая игровая перрон отличается критериями по получению и отыгрышу бездепов. В правилах детально расписаны временные рамки, за которые нужно прокрутить вейджер. Также не забывайте про наибольший размер ставки и наивысшую сумму выплаты. С другой стороны, чтобы получить бездепозитные призы казино, довольно истратить не более 1 минуты.
#8974 Ремонт квадрокоптеров в Москвеhttps://remont-kvadrokopterov-best.ru/
Наш сервисный центр предлагает профессиональный <a href=https://remont-kvadrokopterov-best.ru/>ремонт дрона в москве</a> всех типов и брендов. Мы знаем, насколько необходимы вам ваши кухонные приборы, и стремимся предоставить услуги наилучшего качества. Наши квалифицированные специалисты проводят ремонтные работы с высокой скоростью и точностью, используя только качественные детали, что гарантирует надежность и долговечность проведенных ремонтов. Наиболее общие проблемы, с которыми сталкиваются пользователи духовок, включают неисправности термостата, выход из строя таймера, треснувшую дверцу, сбои контроллера, проблемы с конвекцией и повреждения электроники. Для устранения этих поломок наши профессиональные техники оказывают ремонт нагревательных элементов, термостатов, таймеров, дверец, контроллеров, вентиляторов и электроники. Доверив ремонт нам, вы обеспечиваете себе долговечный и надежный отремонтировать квадрокоптер на дому. Подробная информация размещена на сайте: https://remont-kvadrokopterov-best.ru
#8975 Charlesgunnyhttp://filmkachat.ru
1хслот 1хслотс регистрация перейти на 1×slots
Некоторые онлайн-казино без депозита предлагают новым посетителям выбрать приз при регистрации. Будьте внимательны: выбрав раз, вы в безоговорочном большинстве случаев не можете пользоваться остальными.Подобные бонусы без депозита предоставляются на более выгодных условиях. Зачастую они крупнее, а обстоятельства отыгрыша менее жесткие. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasin online</a> Допустим, за регистрацию вы получили бездеп в размере 2 000 руб. С вейджером х30. В этом случае предстоит устроить ставок, на общую сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать реальные деньги. Однако не забывайте, собственно с каждого презента выйдет вывести определённую необходимую (чаще всего менее $200). <a href=https://www.anytimenutritionist.in/user/jamesham/>https://www.anytimenutritionist.in/user/jamesham/</a> 1×slots casino online регистрация <a href=https://wiki.streampy.at/index.php?title=User:ByronMayhew7425>https://wiki.streampy.at/index.php?title=User:ByronMayhew7425</a> Прежде всего, не запамятовывайте периодически заглядывать на страничку обзоров бездепозитных призов. Они шаг за шагом рассматривают более увлекательные предложения ведущих игорных порталов.
1×slots рабочее зеркало на сегодня
<a href=https://redfist.de/RF-Online-Testforum/viewtopic.php?f=60&t=78018>1хслотс официальный сайт зеркало</a> 1× slots регистрация в 1×slots casino Чаще всего интернет-казино предлагают бездепозитные бонусы новым юзерам. Эта промо-акция довольно отлично завлекает новичков, подталкивая их к открытию счета. Конечно, не они становятся послушными посетителями, хотя сам факт регистрации аккаунта играет на руку заведению. <a href=http://skdlabs.com/bbs/home.php?mod=space&uid=2075602>http://skdlabs.com/bbs/home.php?mod=space&uid=2075602</a> Можно. Вы постоянно сможете отказаться от получения бездепозитного приза за регистрацию в казино, же Вы не сделаете ставку.Ограничения по играм. Администрация воспрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, деньгами или бесплатными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда дробленье выполняется по виду игр. Например, отыгрыш возможен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino. 1×slots официальный сайт скачать Для выбора азартного заведения Вы сможете воспользоваться списком наших казино с бонусами за регистрацию. На нашем веб-сайте мы выпустили перечень бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, собственно доля призов эксклюзивные и доступны только для гостей нашего вебсайта по-специальному промо-коду либо по оригинальной ссылке. Кроме того, для каждого бонуса мы подготовили подробный обзор, в Вы узнаете как получить и отыграть одобрение и как вывести собственный выигрыш с бездепа.Вознаграждения за получение VIP-статуса ? начисляются масштабах программки преданности при достижении одного уровня либо выдаются персонально менеджерами саппорта.
1×slots промокод при регистрации 2025
Самые популярные способы вывода средств ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электронным платежным системам на Neteller и Skrill, а используют криптовалютными кошельками. Вывод выигрышей имеет осуществляться мгновенно или развлекать от нескольких часов до нескольких суток. <a href=http://www.xn–oi2b40g9×gnse83w.com/bbs/board.php?bo_table=free&wr_id=105713>http://www.xn–oi2b40g9×gnse83w.com/bbs/board.php?bo_table=free&wr_id=105713</a> Зарегистрируйтесь. Для регистрации почаще всего достаточно установить собственный номер телефонного и почтовый адрес, последствии чего ввести приобретенный код из СМС. Возможно, потребуется показать промокод. В правилах промоакции будет написано, где его бы включать. Иногда это надо создавать при регистрации, иногда — уже последствии творенья личного офиса, на отдельной страничке. 1×slots официальный сайт зеркало
1×slot официальный сайт
Онлайн-казино кропотливо продумывают бонусные условия, коие необходимо изучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша прочие ограничения.Для проверки используются сканы паспортов, водительских прав, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если юзер обнаружен в попытке ввести дополнительный акк, все его учетные записи подвергаются блокировке, а их владелец попадает в темный перечень. При ирге на лицензионной площадке не стоит опасаться указывать достоверную персональную информацию (шифрование исключает утечку индивидуальных данных). <a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=54445>1×slots регистрация то дальше необходимо пройти</a> 1×slot рабочее зеркало <a href=http://www.vladimirka.ru/board/profile/glavdorogadv2106>http://www.vladimirka.ru/board/profile/glavdorogadv2106</a> Вышеописанная причина и является главным моментом, из-за которого операторы отдают доля своей прибыли на разные маркетинговые расходы и рекламные кампании. А самым действующим тут станут играть именно бездепозитные призы казино 2022 с выводом за регистрацию.
1×slots зеркало регистрация
Перечисленные повыше основные характеристики сочетают практически любой приз и являются стандартными для бездепозитных бонусных начислений в казино.Заполняя данные в личном профиле, указывайте лишь достоверную информацию, так как Вам понадобиться ее доказать дальнейшем при выводе средств. <a href=http://drop-let.ru/index.php?subaction=userinfo&user=ablazepsycholog>http://drop-let.ru/index.php?subaction=userinfo&user=ablazepsycholog</a> С иной стороны, гораздо проще арестовать бездепозитные фриспины за регистрацию в казино и прямо сейчас начать вертеть барабаны в наихороших слотах. Главная особенность спинов том,, собственно они предназначены для лучших автоматов. Удастся не пройти вспомогательные раунды, хотя и увеличить сумму выигрыша, заработать респины прочие внутриигровые подарки. 1× slots зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://seniordance.ru/forum/showthread.php/72520–1%D1%85%D1%81%D0%BB%D0%BE%D1%82-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%81%D0%B0%D0%B9%D1%82%D0%B0?p=102021#post102021>1хслот зеркало сайта</a>
<a href=https://www.formulersupport.com/Thread-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81–88545>рабочее зеркало 1хслотс</a>
<a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=7358>1×slots зеркало рабочее</a>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=326387>1×slots официальный сайт скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При регистрации никаких либо ином онлайн игральном заведении — для дается один шанс испытывать свою удачу не внося средства монеты. Замечу собственно такую поощрительную предложение деют не все онлайн игровые площадки, а только щедрая середина(средина) из их. Которые мы подготовили для Вас в нашем списке. Самый распространённый из сходственных призов, окончательно же, бездеп на денек рождения клиента — бонус в виде фиксированной суммы или фриспинов поступает на счёт игрока, а воспользоваться им можно на установленного периода времени.
#8976 Charlesgunnyhttp://filmkachat.ru
1хслот официальный сайт зеркало
Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам запрещено начислять призы клиентам, не имеющим валютных средств на счете. Мы предлагаем рассмотреть животрепещущие бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ.В списке требований к отыгрышу часто наличествуют лимиты на ставки при этой на личные деньги. Так, если отыграть надо(надобно) 30 000 руб., а предельная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 раз. Эта особенность затрудняет соблюдение игроками условий по срокам деянья акции. <a href=http://filmkachat.ru/>1×slots зеркало подтвердит вашу регистрацию если говорить</a> <a href=http://jkmulti.vip/bbs/board.php?bo_table=free&wr_id=5579889>http://jkmulti.vip/bbs/board.php?bo_table=free&wr_id=5579889</a> 1×slots быструю регистрацию а также мгновенное <a href=http://moujmasti.com/member.php?65805-Jameshag>http://moujmasti.com/member.php?65805-Jameshag</a> Основное различие что, нет, собственно для получения бездепа нужно пополнять баланс в казино. Но считая сего, есть ряд прочих отличий:Бонусы без депо при регистрации числятся наиболее красивыми как для опытных игроков, так для и начинающих. Получив это вознаграждение, клиент имеет играть на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные призы в интернет-казино Рунета, а условия их активации и выигрыша.
1хслот зеркало
Прямо данный арестуйте благотворительные вращения за регистрацию без депозита и начинайте коллекционировать призовые комбинации ради крупных выигрышей!В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с бесплатных вращений. Прибыль, которую Вы заработаете на таком бездепе возможно ставить на вывод без какого либо отыгрыша. <a href=https://forum.bandariklan.com/showthread.php?tid=176825&pid=875129#pid875129>1×slos регистрация в 1×slots casino</a> рабочее зеркало 1×slots Заработать на бездепозитных бонусах за регистрацию в казино может любой пользователь, достигший совершеннолетия.Многие игроки, оценив функционал казино, остаются играть в нем и далее ? на это и нацелено каждое промо. Постоянные посетители заносят депозиты и делают ставки, обеспечивая долгосрочную прибыль оператора. То есть, казино раздают бездепы новым пользователям для формирования лояльной аудитории. <a href=http://tara-info.biz.ua/wr_board/tools.php?event=profile&pname=tangiblefolks18>http://tara-info.biz.ua/wr_board/tools.php?event=profile&pname=tangiblefolks18</a> Еще одно условие дотрагивается объемов ставки. Операторы устанавливают наивысшую необходимую, которую игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, избранной в Личном кабинете. При превышении лимита есть риск потерять бонуса. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, заказчик может столкнуться с запретом назначать фишки на шансы.Для верификации аккаунта нужно предоставить специалистам технической поддержки отсканированную копию паспорта и счета за коммунальные предложения, а фотку банковской карты либо скриншот странички электрического кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для подтверждения личности. 1×slots зеркало 1хслотс регистрация перейти на 1×slots Вознаграждения за получение VIP-статуса ? начисляются в программки преданности при достижении одного уровня либо выдаются персонально менеджерами службы поддержки.
1×slots casino регистрация
Для тех, кто только взвешивает испытывать свою фортуну, а для проф игроков, ищущих новые площадки для выигрышей, основные лицензированные казино часто организуют разные промоакции, и одно из лучших услуг прошедшее время – как для новичков, так и для проф игроков – бездепозитный бонус за регистрацию.Таким образом интернет казино получает вероятного игрока. Возможно в будущем или истинном он захотит сыграть на средства деньги. Так трудятся бездепозитные бонусы в онлайн казино. Здесь очень подходит выражение, благотворительные сыр бывает лишь в мышеловке. Начинающие игроки имеют не обдумывать опасность пыла. Однако времени осознания делается больше. Это тема для отдельного обсуждения. <a href=http://wiki.hightgames.ru/index.php?title=%D0%A4%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B%20%D0%90%D0%97%D0%A1:%20%D0%9F%D0%B5%D1%80%D1%81%D0%BF%D0%B5%D0%BA%D1%82%D0%B8%D0%B2%D1%8B%20%D0%B8%20%D0%B2%D0%BE%D0%B7%D0%BC%D0%BE%D0%B6%D0%BD%D0%BE%D1%81%D1%82%D0%B8%20%D0%B2%20%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8>http://wiki.hightgames.ru/index.php?title=%D0%A4%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B%20%D0%90%D0%97%D0%A1:%20%D0%9F%D0%B5%D1%80%D1%81%D0%BF%D0%B5%D0%BA%D1%82%D0%B8%D0%B2%D1%8B%20%D0%B8%20%D0%B2%D0%BE%D0%B7%D0%BC%D0%BE%D0%B6%D0%BD%D0%BE%D1%81%D1%82%D0%B8%20%D0%B2%20%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8</a> Активация случается счет промокодов, коие вводятся в личном офисе в регистрации. Среди спецпредложений в списке Casino.ru содержатся эксклюзивные промокоды, коие доступны только посетителям портала. Другие методы начисления средств ? автоматическая активация незамедлительно в создания аккаунта и получение подарка по запросу в службу технической помощи.Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в неотъемлемом порядке нужно восполнить счет в казино. Для депозитных призов, данная процедура не нужна, например как депо уже сделан. 1×slots официальный регистрация Проверка занимает от нескольких мин. До нескольких дней, спецы техподдержки имеют запросить дополнительные документы или инициировать короткое общение по Skype.
зеркло казино 1×slots
Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Пoдтвepдить личнocть посетителя. Для удачного вывода средств, необходимо подтвердить личность клиента. Нa этaпe вepификaции пpoфиля, работники службы защищенности должны убедиться, собственно у игрока не раз акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не может исключить свой выигрыш, в у него несомненно количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы. 1×slots зеркало регистрация то дальше необходимо пройти <a href=http://e-maxx.ru/forum/profile.php?id=19830>http://e-maxx.ru/forum/profile.php?id=19830</a> Онлайн-казино кропотливо продумывают бонусные условия, коие необходимо изучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и другие лимитирования.
1×slots акции
Бездепозитные призы прекрасный вариант безвозмездной забавы в игровые автоматы. Многие юзеры сети не знают, собственно в казино можно начать выступать полностью бесплатно, а потом вывести выигрыш на банковскую карту или электронный кошелек, другие не доверяют интернет казино, а третьи удачно играют и выигрывают – и тотчас довольно немалые суммы.При отыгрыше бонусных средств, нужно учитывать срок деяния приза и время, которое дается на отыгрыш. По истечению заявленного медли, не отыгранный бонус будет аннулирован. <a href=http://domivka.biz.ua/wr_board/tools.php?event=profile&pname=deeplyslogan96>http://domivka.biz.ua/wr_board/tools.php?event=profile&pname=deeplyslogan96</a> Как только вы отыграли вейджер и средства с бонусного баланса перебежали вам на реальный счет, Вы отважно можете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (сделать наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депо).Доступные игры – В некоторых азартных играх возможно снизить математическое приемущество казино до нескольких десятых процента. В их числе все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как правило, в этих забавах ставки идут в зачет вейджера не всецело. Например, имеет предусматриваться только 50%. В некоторых играх бездепозитные призы вообщем невозможно отыгрывать. 1× slots официальный Акции распространяются как на все забавы казино, так и на ограниченный перечень. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и. Промо имеет обхватывать разработки 1-го производителя. Бездеп не пересекается с иными промоакциями казино. Если на веб-сайте предусмотрен кэшбек, он не начисляется за ставки, изготовленные бонусными средствами. Для идентификации платежных реквизитов игрока возможность понадобиться пополнение счета на наименьшую сумму.
<b>Смотреть еще похожие новости:</b>
<a href=https://mit-bbs.com/viewtopic.php?t=130682>1×slots скачать на айфон</a>
<a href=https://forum.dis-course.net/viewtopic.php?t=423342>1×slots зеркало регистрация то дальше необходимо пройти</a>
<a href=http://evtrucksforum.com/memberlist.php?mode=viewprofile&u=28289>1×slots регистрация 1×slotscasino09k online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Превышение наибольшей ставки при отыгрыше. Система механически не предостерегает о превышении ставки, поэтому о нарушении верховодил игрок может разузнать теснее в подачи запроса на вывод средств. Если вы выбрали для себя количество брендов которые для больше всего полюбились, для постоянной игры! Таких гемблеров казино довольно предпочитает и оценивает, за частую такие игроки становятся VIP игроками заведения, коим нередко поступают прибыльные предложения повторяющий призов, например же туда заходит и бездепозитные.
#8977 Charlesgunnyhttp://filmkachat.ru
1×slot казино зеркало
Чтобы бездеп не был начислен на Ваш акк, Вам не нужно активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт автоматически, а Вы не планируете его использовать, обратитесь в службу поддержки с пожеланием отменить бездепозитный приз. <a href=http://filmkachat.ru/>1хслотс казино зеркало</a> <a href=https://kataberita.net/shisha-tobacco-from-4-eur/>https://kataberita.net/shisha-tobacco-from-4-eur/</a> 1×slots casino регистрация 1×slots review live <a href=http://lebbook.kz/user/JulesHag/>http://lebbook.kz/user/JulesHag/</a> 1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, если не желайте стать жертвой жуликов либо впустую израсходовать время;Осталось избрать казино с призом за регистрацию и сделать профиль. После активации дара выигрыш зависимости от Фортуны и способностей.
казино 1×slots официальный сайт
На бонусные начисления шансы быть установлены дополнительные ограничения, коие Вы не к при отыгрыше. Пока бонус всецело не отыгран — средства из казино не выводятся.Oтыгpaть бонус с указанным вeйджepом, результата нужно сдeлaть cтaвoк нa cумму, превосходящую размер приза в количество один. <a href=http://naturetour.ru/communication/forum/messages/forum3/message23654/5353–1×slots-promokod-pri-registratsii-2025?sessid=b5bc0b0f2d285d7ec11dde40f1fcf1d6&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1×slots промокод при регистрации 2025</a> 1×slots регистрация 1×slots review live <a href=https://www.play56.net/home.php?mod=space&uid=3007435>https://www.play56.net/home.php?mod=space&uid=3007435</a> Минимального оборота. Этот предел устанавливается вейджером — пока игрок не поиграет на установленную необходимую, вывод средств будет недосегаем. 1×slots актуальное зеркало
1×slots зеркало видели такую регистрацию на
Однако в условиях скрываются «подводные камешки», которые не позволят вывести крупную необходимую или же вы не успеете отыграть вейджер. Поэтому профессионалы рекомендуют арестовать бесплатные вращения за регистрацию в казино без депо, дабы поднабраться навыка и получить настоящий шанс на победу.В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с бесплатных вращений. Прибыль, коию Вы заработаете на этом бездепе можно назначать на вывод без какого либо отыгрыша. Новые посетители онлайн-казино без первого депо имеют проверить свою удачливость. К что, этому же есть вероятность преобразовать бездепы в настоящие средства за регистрацию в казино, однако результата приз нужно отыграть сообразно условиям акции.Во время забавы в казино, выигрыши, приобретенные спасибо безвозмездным призовым фондам, суммируются и включаются в совместную сумму для отыгрывания. Однако, в удача улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно разрешит вывести денежные свои. Сумма вывода несомненно в от лимита, одобренного именно в данном учреждении. Поэтому, внимательно надо(надобно) разбирать управляла выдачи анлимитных депозитов. <a href=http://theall.barunweb.co.kr/bbs/board.php?bo_table=free&wr_id=235829>http://theall.barunweb.co.kr/bbs/board.php?bo_table=free&wr_id=235829</a> Активация валютного гонорары случается автоматически последствии творенья профиля либо использования промокода. Иногда операторы предъявляют дополнительные требования: подписаться на страницы казино в социальных сетях либо на рассылку маркетинговых известий, скачать и ввести дополнительный софт и т.д. 1×slot зеркало рабочее этих способов предполагает регистрацию
1×slots бонус за регистрацию
На безвозмездные призы онлайн-казино практически постоянно распространяется лимитирования по стране проживания посетителей. Даже случае для разрешается открывать счет и играть на деньги в заведении, это еще не значат, что вас доступны not the slightest deposit bonuses.Мы собрали и опубликовали список наилучших бездепозитных казино с бонусами за регистрацию, которые гарантируют великодушные выигрыши и моментальные выплаты. Пoдтвepдить личнocть посетителя. Для успешного вывода средств, необходимо доказать лицо посетителя. Нa этaпe вepификaции пpoфиля, работники службы защищенности обязаны увериться, что у игрока не раз акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не сможет исключить собственный выигрыш, в у него несомненно некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы.Фриспины – благотворительные вращения с фиксированной ставкой, которые возможно использовать в определенных игровых автоматах. Как только получите бездеп в казино, всё одинаково не запамятовывайте проверять электронную почту. Некоторые игорные клубы непрерывно веселят активных гэмблеров приятными призами. Чаще всего получить презент можно в преддверии праздника, на день рождение, за привлечение приятеля. А также распространённым призом считается надбавка к депозиту. Нужно всего лишь восполнить счёт, и азартное заведение увеличит его на 50–100%.Можно ли в одном онлайн казино получить больше одного приза за регистрацию? Нет, так как в любом интернет казино есть правила, к которым надо(надобно) придерживаться, не делать 2 аккаута для получения бонусов, другому несомненно блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, приз за регистрацию выдаеться один один 1 лицу. 1×slots официальный сайт, скачать <a href=https://tony-sheryl.com/bbs/board.php?bo_table=free&wr_id=156162>https://tony-sheryl.com/bbs/board.php?bo_table=free&wr_id=156162</a> Акционные предложения от казино существуют в различных форматах. Часто призы даются в мена на депозит. Игрок заносит платеж и получает средства, благотворительные вращения и одобрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — вид приза, кот-ый гарантирован за исполнение конкретных деяний на веб-сайте:Благодаря программе лояльности от игорного заведения, возможно взять неплохой старт и без дополнительных инвестициям запустить видеослоты. Кроме такого, возможно рассчитывать на реальную фортуну и получить, без вложения личных финансов, немалый выигрыш.
скачать 1×slots официальный сайт
Перед активацией главно пристально выучить обстоятельства промоакции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют значение также лимиты ставок при отыгрыше и сроки, в течение которых можно воспользоваться предложением. Если бездеп охватывает узкий перечень игр, рекомендовано узнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь в случае, в оператор не установил взыскательные лимитирования на наивысшую сумму ставки. Все любят получать презенты. Согласитесь, почти каждый играющий человек несомненно очень счастлив, если получит бесплатный подарок для игры в интернет казино просто за регистрацию или же бонус за внесенный депо, например нарекаемые приветственные призы для свежих игроков. Соответственно эти онлайн клубы станут больше знамениты и преимущественны у игроков при выборе казино для игры. Топ казино каждый обновляется и добавляются новые и занимательные игровые клубы с привлекательной бонусной политикой и всеми возможными привилегиями, к коим относятся такие призы как фриспины за регистрацию, валютные бездепозитные призы, а великодушные бонусы за внесенный депо. <a href=http://x70181pe.beget.tech/user/Kennethdor/>http://x70181pe.beget.tech/user/Kennethdor/</a> Бесплатный приз – кредиты, которые онлайн-казино начислит посетителю, не принуждая его пополнять игровой счет. 1×slots официальный demo регистрация в 1×slots casino Подтвердите лицо, предоставив оператору казино средства паспортные данные. Инструкции обыкновенно легкие, главное — четко им стопам. Если написано, собственно «на фото обязаны быть заметны все четыре угла страницы паспорта» — сделайте непосредственно это фото.
<b>Смотреть еще похожие новости:</b>
<a href=https://timepost.info/showthread.php?tid=51900>1×slos регистрация в 1×slots casino</a>
<a href=https://forum.krymbezpravil.org.ua/memberlist.php?mode=viewprofile&u=10552&sid=7abb90946f350d17d5fe849b8c7baf5c>1хслотс рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Таким образом онлайн казино получает вероятного игрока. Возможно дальнейшем либо истинном он захотит сыграть на свои деньги. Так трудятся бездепозитные призы в интернет казино. Здесь хорошо подходит выражение, благотворительные сыр случается лишь в мышеловке. Начинающие игроки имеют не обдумывать опасность пыла. Однако времени осознания становится больше. Это тема для отдельного обсуждения. Если вы выбрали себе некоторое брендов коие вам больше всего полюбились, для неизменной забавы! Таких гемблеров казино очень предпочитает и оценивает, за частую эти игроки становятся VIP игроками заведения, коим нередко поступают выгодные предложения в виде призов, например же туда заходит и бездепозитные.
#8978 FonbetAndroidhttps://fonbet-stavki-apk.ru/fonbet-na-android/
<a href=https://www.google.az/url?sa=t&rct=j&q=&esrc=s&source=web&cd=1&ved=0CBsQFjAA&url=https://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=http://ulct.ru/bitrix/rk.php?goto=https://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=http://ippk.arkh-edu.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=https://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=http://www.floridagulfcoastpva.org/Redirect.aspx?destination=https://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=http://www.xartpussy.com/crtr/cgi/out.cgi?id=26&tag=top&trade=www.iomoio.nethttps://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=http://kinhtexaydung.net/redirect/?url=https://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=http://www.israwow.com/go.php?id=images.google.pt%2Furl%3Fq%3Dhttps://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=http://compassnzl.co.nz/ra.asp?url=https://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=https://xn–0ck2b5d730mpmjc9ck1phpe.gamerch.com/gamerch/external_link/?url=https://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=https://comingoutspb.com/bitrix/redirect.php?goto=https://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=https://www.moreshemales.com/cgi-bin/a2/out.cgi?id=24&l=top&u=https://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=https://www.eweiss.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=https://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=http://library.vspu.ru/bitrix/rk.php?id=1&site_id=ix&event1=banner&event2=click&event3=1+/+1+MainPage+????&goto=https://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=http://www.sparhamster.at/out.php?link=https://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=http://www.cambridgenow.ca/linkredir.cfm?eid=3853&url=https://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a>
Download client bookmaker Fonbet – play now! <a href=http://www.guelphnow.ca/linkredir.cfm?nppage=2220&URL=https://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=http://forumnadlanusa.com.xx3.kz/go.php?url=https://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=https://stardima.net/vb/go.php?url=https://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=http://sc.haomuren.org/gate/gb/fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=http://regie2.moto-net.com/adclick.php?bannerid=668&zoneid=0&source&dest=https://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=http://vesti72.ru/url.php?url=https://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=https://www.021office.cn/ADClick.aspx?SiteID=206&ADID=1&URL=https://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=https://www.am-segelhafen-hotel.com/files/ash_hotel/proxy.php?url=http%3A%2F%2Fgreasyfork.org/en/discussions/requests/173654-esp-for-browser-games>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=http://www.yo-nigga.com/cgi-bin/a2/out.cgi?id=66&l=main&u=https://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=http://d-click.armazemdanoticia.com.br/u/18887/88/31/5_0/1fb90/?url=https://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=http://www.study-online.net/link.php?url=https://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=https://zippyapp.com/redir?u=https://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=https://www.extendwings.com/apps/beta/zipcode_search/?step=choiki&todofuken=%E4%BA%AC%E9%83%BD%E5%BA%9C&shikugun=%E4%BA%AC%E9%83%BD%E5%B8%82%E6%9D%B1%E5%B1%B1%E5%8C%BA&jis=26105&url=https://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=http://izs.hu/www//url.php?url=https://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=http://www.laboitenoiredumusicien.com/redirect.php?url=https://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a>
#8979 Charlesgunnyhttp://filmkachat.ru
скачать 1×slots официальный сайт
Бонус без депозита за регистрацию в казино (бездепозитный приз) – это денежный презент от клуба, который начисляется на акк игрока после регистрации в казино. Кроме творения учетной записи, для получения бездепа, довольно часто требуется ещё и доказать контактные данные игрока и/или активировать особый промо-код.В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и когда спорных обстановок нет возможности куда-то пожаловаться и доказать собственную правоту. <a href=http://filmkachat.ru/>онлайн казино 1×slots</a> <a href=https://pixel-brush.ru/user/JamesPef/>https://pixel-brush.ru/user/JamesPef/</a> Максимальный размер ставки, который невозможно превышать же бонус не будет всецело отыгран. В случае нарушения этого правила, бонус и выигрыш с него станут аннулированы.Бонус в казино без депозита содержит разные варианты: это может быть приветственный приз, акции в честь каких-то праздничных или важных дат, бонус за привлечение свежих игроков, преданность и получение VIP-статуса. 1хслотс рабочее зеркало <a href=https://www.garagesale.es/author/aundrea4316/>https://www.garagesale.es/author/aundrea4316/</a> Как правило, при выводе денег, от играющего требуется только сделать минимальный вклад для того, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом личный счет.
рабочее зеркало 1хслотс
Помните, что в некоторых забавах сумма ставки идет в зачет вейджера лишь частично. Так, в настольных и карточных играх только от 5% до 50% суммы ставки считаются как отыгранные деньги, на как в слотах идет в зачет все one hundred percent суммы. <a href=https://forum.vn.ua/showthread.php?p=3272976#post3272976>1×slots официальный сайт, скачать</a> 1×slots зеркало регистрацию более популярный вариант это Вы не в коем случае ни чем не рискуете, а только выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической забавы на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, научится регулировать менять ставки и полосы, изучать бонусные забавы и их выигрышные композиции, ну конечном просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные средства, которые возможно отыграть и исключить, а не просто на демо счет, тем самым адреналин в крови более повысится а пульс забьется с нередким ритмом!Каждый из бездепозитных бонусов без пополнения 2022 имеет свой определенный вейджер для отыгрыша, так же в любом казино он устанавливается индивидуально — где то он х55 а где-то х30, повторюсь всюду по различному! <a href=http://www.ctphome.com/bbs/home.php?mod=space&uid=64656>http://www.ctphome.com/bbs/home.php?mod=space&uid=64656</a> 1хслотс мобильная версия зеркало В списке требований к отыгрышу часто наличествуют лимиты на ставки при забаве на собственные средства. Так, если отыграть нужно 30 000 руб., а максимальная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам деянья акции.Доступ к дару возможность открываться автоматически последствии введения промокода или воззвания в службу вебсайта. В первом случае от юзера не требуется практически действий. Бездеп с активацией по коду встречается почаще всего. Игроку необходимо ввести совокупность знаков в графе, которая может находиться в регистрационной форме в Личном офисе.
1×slots зеркало подтвердит вашу регистрацию если говорить
У каждой забавы свои требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система зачтет любую ставку. В рулетке и покере устроить это гораздо труднее. Именно потому так главно пристально читать условия получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой игре, то новенькие просто «спустят бонус на ветер». Выбор любого интернет казино на нашем веб-сайте. В описании к каждому Вы можете разузнать, собственно получите за творенье аккаунта. <a href=http://xn–jj0bt2i8umnxa.com/bbs/board.php?bo_table=free&wr_id=71967>http://xn–jj0bt2i8umnxa.com/bbs/board.php?bo_table=free&wr_id=71967</a> Для вывода средств приз нужно будет отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариациями отыгрыша бездепозитного приза до его получения, дабы избежать конфликтных обстановок. 1×slots зеркало этих способов предполагает регистрацию
1×slots зеркало регистрация
1×slots регистрация 1×slotscasino09k online <a href=https://images.google.bi/url?q=https://doctorlazuta.by/>https://images.google.bi/url?q=https://doctorlazuta.by/</a> Вывод выигрыша с бездепозитных призов казино – щедрый презент от азартных клубов. Но дабы исключить собственный доход, необходимо выполнить ряд критерий:
1хслотс регистрация в 1×slots casino
<a href=https://heber-ut.granicusideas.com/ideas/proghramma-uchieta-orghtiekhniki>https://heber-ut.granicusideas.com/ideas/proghramma-uchieta-orghtiekhniki</a> 1 x slots
<b>Смотреть еще похожие новости:</b>
<a href=https://games-garant.ru/index.php?subaction=userinfo&user=Jamesneorm>1хслотс рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Особую изюминку видео слотам придают оригинальные знакы. С их в активируются разные призы. Вы можете запустить вспомогательный уровень и увеличить сумму выигрыша. Есть знаки, которые заменяют ненадобные составляющие и сами делают выигрышные комбо. Не стоит забывать и тему бонус-тур. После любого успешного спина есть шанс прирастить сумму выигрыша в 2 либо хорошо раза.
#8980 Charlesgunnyhttp://filmkachat.ru
1х слот регистрация в 1×slots casino
Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке нужно пополнить счет в казино. Для депозитных призов, данная процедура не нужна, так как депо теснее изготовлен.Бонус без депо за регистрацию в казино (бездепозитный бонус) – это денежный презент от клуба, который начисляется на аккаунт игрока последствии регистрации в казино. Кроме сотворения учетной записи, для получения бездепа, довольно часто требуется ещё и подтвердить контактные данные игрока и/или активировать специальный промо-код. <a href=http://filmkachat.ru/>1×slots зеркало регистрация в 1×slots casino</a> Также есть онлайн-платформы азартных игр, коие применяют раздачу бездепозитных призов в особые даты (как для казино, так и для игрока). Помимо этого, действующие игроки также имеют возможность получить похожие призы за собственную деятельность (к примеру, за повышения значения либо за похожие достижения).В реальное время получить бонус за регистрацию в казино довольно просто. Почти любой игорный жилище с готовностью даст средства либо благотворительные вращения. Многие игроки пользуются данным и не стыдятся региться в любом клубе с выгодными критериями. Кстати, это замечательная вероятность выдумать выигрышную тактику и сорвать куш. <a href=https://namosusan.com/bbs/board.php?bo_table=free&wr_id=128968>https://namosusan.com/bbs/board.php?bo_table=free&wr_id=128968</a> Не желаете поиграть в азартные забавы, не рискуя средствами средствами, хотя получая в все выплаты? Подобную вероятность предоставляют многие превосходнейшие порталы с азартными веселиями. В их числе много честных и надежных интернет-казино на русском языке. Они привлекают свежих пользователей различными поощрительными мероприятиями, включая бездепозитные, или бесплатные призы. 1×slots официальный зеркало <a href=https://bandit400.ru/user/HenryDoord/>https://bandit400.ru/user/HenryDoord/</a> К сожалению, нет. Почти все казино, требуют внесение но бы 1-го малого депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, собственно исключить деньги разрешается лишь на ту платежную систему, с коей был сделан депо.
1×слотс казино
Каждый компьютерные обязан сначала детально выучить обстоятельства по получению и отыгрышу приглянувшегося дара. Если всё организует, поторопитесь забрать благотворительные спины за регистрацию в казино без депозита с выводом и без отыгрыша и напрямик момент начать вращать барабаны лучших слотов.Многие игроки, оценив возможностей казино, остаются играть в нем и далее ? на это и направлено каждое рекламную. Постоянные клиенты заносят депозиты и делают ставки, обеспечивая длительную прибыль оператора. То есть, казино выдают бездепы свежим юзерам для формирования приклнной аудитории. <a href=https://persiankittencat.com/temporary-dog-fence-ideas/>1 х слотс зеркало</a> 1хслотс рабочее зеркало Вейджер (либо вагер) ? это минимальная сумма ставок, которую необходимо устроить для вывода валютного бонуса. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение.Какие призы возможность еще получить кроме бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного бонуса, каждое интернет казино предлагает игрокам выгодное предложение на первый депозит, вы совершаете депо, ваш депозит возрастает в двое либо том в трое, что, этим наиболее начать играть возможно с более крупной суммой, например же не забываем про вейджер на бонусы. <a href=https://w-o-n.org/member.php?action=profile&uid=1810>https://w-o-n.org/member.php?action=profile&uid=1810</a> Выполнив все притязания оператора, заказчик может оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит примерно не более суток. Если дополнительно требуется пройти процедуру верификации, то срок возрастает до 1–2 рабочих дней. Для перевода применяются банковские приборы и электронные платежные системы. Второй способ подходит лучше, например как масса транзакций ситуации исполняются мгновенно. В связи со спецификой функционирования банков обработка платежей может занять до нескольких трудящихся дней.Представьте момент, когда при ставке в 10 рублей Вы получите сходственное умножение. Миллион рублей за одно вращение, собственно вполне возможно. Поэтому вопрос, сколько возможно выиграть остаётся не. Предлагаем выяснить других. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный приз и проверяйте удачу в деле. Разумеется, исключить средства довольно. Однако шансы есть у всех. 1×slots официальный сайт мобильная версия В любом казино с бездепозитным призом предусмотрены вейджеровые обстоятельства. Это единственный «подводный камень», который стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, нужно устроить определённое число ставок. Чем круче бонус, что, этим труднее выполнить условия, и наоборот.
1×slots зеркало проходить регистрацию это отличный вариант
Отказ в прохождении верификации. Если заказчик не желает или не может предоставить документы, подтверждающие его лицо, профиль несомненно заблокирован совместно, вкупе со всеми бонусными начислениями.Подарки на определенные даты отличаются условиями получения. Если одобрение начисляют игроку на день рождения, то сумма обыкновенно в от совместного размера депо за год. <a href=https://www.mexicanservers.com/member.php?action=profile&uid=11044>https://www.mexicanservers.com/member.php?action=profile&uid=11044</a> Верификация аккаунта. Лучше подтвердить лицо незамедлительно в регистрации, дабы позже не было проблем с выводом денег. Верификация имеет протекать двумя способами: казино 1×slots официальный сайт Если простыми словами, бездепы – это определённая сумма денег или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать презенты. Но есть кое-какие аспекты. Существуют игорные дома, коие перед что, этим как начислить бонусы просят привязать аппарат, предоставить копии документов.
казино 1×slots официальный сайт
<a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=4771>1× slots сайт</a> Перечисленные выше основные свойства сопровождают практически любой бонус и являются стереотипными для бездепозитных бонусных начислений в казино.Воспользоваться бездепом можно не во всех игровых автоматах: казино вдруг уточняет ограничение для посетителей. Конечно, это возможно посчитать некоторым неудобством для игрока, хотя ради необходимо, собственно выбор автоматов всё также остаётся достаточно наибольшим. онлайн казино 1×slots <a href=https://rostovbike.ru/user-2675.html>https://rostovbike.ru/user-2675.html</a>
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Автоматы неспроста считаются наиболее знаменитым азартным отдыхом. Чтобы усвоить управление и верховодила, потребуется всего количество минут. Ваша задачка сделать ставку, определить количество рабочих линий и можно крутить барабан. Если на экране выпадет выигрышная композиция – вы выиграли! С этой задачей вас посодействуют справится бездепозитные призы казино.Для как, чтобы отыграть необходимую вашего бездепозитного бонуса надо(надобно) выполнить условия вейджера. Очень нередко фриспины даются на определенные слоты (book of ra, book of lifeless, book of sun), избирайте слот себе по, все довольно красочные и качественные. Бездепозитные бонус может быть денежным так и повторяющий фриспинов на слоты Несмотря на то, собственно данный вариант стимуляции со стороны азартных платформ довольно моден в сфере подобных игр, далековато многим почитателям казино знаменито, собственно себе бездепозитные призы казино и как непосредственно их вероятно эксплуатировать.Получив собственный подарок, Вы сможете бесплатно выступать на реальные средства, а выполнив условия отыгрыша, вывести свой выигрыш. <a href=https://www.cfbwz.com/space-uid-70004.html>https://www.cfbwz.com/space-uid-70004.html</a> 1× slots зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://evtrucksforum.com/viewtopic.php?p=791088#p791088>1× slots casino зеркало</a>
<a href=https://021snyw.com/space-uid-53919.html>1хслотс казино зеркало</a>
<a href=http://forum.l2endless.com/showthread.php?tid=226209>1×slots регистрацию процедура займет всего лишь</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке необходимо пополнить счет в казино. Для депозитных бонусов, эта процедура не необходима, так как депозит уже изготовлен.
#8981 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация
Даже не выиграв солидную необходимую, игрок увлекательно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-либо денежных рисков. Быть в курсе наихороших акций с. Достаточно регулярно учить перечень свежих онлайн казино с выводом приза без депо в этом разделе. <a href=http://filmkachat.ru/>1×slots зеркало проходить регистрацию это отличный вариант</a> Для получения выигрыша потребуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить определенную необходимую, хотя теснее из собственных средств. Она рассчитывается из общего объема выигрыша за всегда использования бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, в юзер выиграл 1000 рублей, а множитель сочиняет х30, исключить деньги возможно несомненно, сделав ставки на 30 000 руб.Еще одно условие касается объемов ставки. Операторы устанавливают максимальную необходимую, которую игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, выбранной в Личном кабинете. При превышении лимита есть риск потерять бонуса. Существующие ограничения относятся и к определенным видам ставок. Например, играя в рулетку, клиент возможность столкнуться с запретом назначать фишки на шансы. <a href=https://opensourcebridge.science/wiki/User:EloiseBardolph>https://opensourcebridge.science/wiki/User:EloiseBardolph</a> Почти все игровые клубы требуют свидетельство контактных данных игрока для получения бездепозитного приза. 1хслотс официальный сайт зеркало <a href=https://babyrr.com/forum/User-JulesEvorm>https://babyrr.com/forum/User-JulesEvorm</a> Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.Нет. Казино выдают благотворительные бонусы за регистрацию, чтобы, чтобы, дабы клиент мог ознакомиться с игровым заведением. А дабы исключить его, нужно выполнить условия отыгрыша.
1 xslots рабочее зеркало
1×slots регистрация 1×slots casino 777 online Все бесплатные бонусы кажутся заманчивыми. Кто же откажется от возможности сыграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далеко не все бездепозитные бонусы в равной степени привлекательны для рассудительного посетителя.Бездепозитный бонус за регистрацию в казино — это стартовый презент повторяющий денежного начисления либо даровых вращений для новых игроков заведения, для получения которого надо заносить депозит. <a href=http://mail.clicksordirectory.com/details.php?id=428849>http://mail.clicksordirectory.com/details.php?id=428849</a> Перечисленные выше основные свойства сопровождают практически любой бонус и являются стереотипными для бездепозитных бонусных начислений в казино. 1×slots акции В игровых клубах без лицензии Вы покупаете „кота в мешке“ и если, тогда, неоднозначных обстановок нет возможности куда-то пожаловаться и доказать собственную правоту.
1×slots актуальное зеркало
Бездепозитные призы за регистрацию считаются одним из самых известных способов вербования свежих игроков в онлайн-казино, поэтому что они деют игрокам вероятность опробовать казино, неподражаемо игровые автоматы, и вполне, выиграть реальные деньги. <a href=https://www.theexeterdaily.co.uk/users/richardcap>https://www.theexeterdaily.co.uk/users/richardcap</a> 1хслотс мобильная версия зеркало
1×slots промокод при регистрации 2025
Но на азартных платформах сходственные вознаграждения имеют получить теперь зарегистрированные пользователи. В таком случае, призы предоставляются масштабах уникальных промоакций либо же некоторым геймерам повторяющий акционного предложения, которое приходит на почту с целью «вернуть» игрока в свое казино. 1×slots зеркало регистрацию более популярный вариант это <a href=https://xn–80aa6acmqdpq.xn–p1ai/user/Porsedropet/>https://xn–80aa6acmqdpq.xn–p1ai/user/Porsedropet/</a> Превышение наибольшей ставки при отыгрыше. Система автоматически не предупреждает о превышении ставки, потому о несоблюдении верховодил игрок может узнать уже после подачи запроса на вывод средств.Но есть игорные заведения, которые готовы просто например жертвовать деньги на игру. Для этого достаточно создать профиль. Чтобы исключить свой выигрыш, вам сначала необходимо выполнить обстоятельства отыгрыша, указанные в условиях получения бездепозитного депо.
1×slots casino регистрация на сайте
Бонусы без депо при регистрации числятся наиболее привлекательными как для опытнейших игроков, так для и начинающих. Получив такое вознаграждение, заказчик может выступать на настоящие деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, еще обстоятельства их активации и выигрыша.В разделе с призами активировать свой презент. Найти забавы, для которых учтено поощрение и использовать бонус по назначению. <a href=https://technique-tp.com/forum/memberlist.php?mode=viewprofile&u=1825>https://technique-tp.com/forum/memberlist.php?mode=viewprofile&u=1825</a> Бездепы шансы входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой или баллами.Бездепозитные призы в казино без пополнения 2022 — это конкретная сумма средств либо gift spins вращения, коие предоставляются первым постояльцам за регистрацию на сайте казино повторяющий бездепозитного приза, и дает для вероятность помощью казино без пополнения опробовать предложения (игр), с дальнейшей преимуществом, льготой вывода средств при исполненьи всех установленных правил. 1хслотс официальный сайт зеркало В зависимости от интернет заведения любой из них может для предложить как бездепозитные деньги, например и бездепозитные фриспины, которые в удачной регистрации упадут вас на ваш игровой баланс.За привлечение приятеля ? в партнерской программы заказчик получает вознаграждение за привлечение свежих юзеров.
<b>Смотреть еще похожие новости:</b>
<a href=https://dev.eff.one/member.php?action=profile&uid=904>1×slots казино зеркало</a>
<a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=436513&p=1173087#p1173087>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<a href=http://maddog-server.org/forum/showthread.php?tid=52944>1хслотс рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вейджер (wager) – это коэффициент, который демонстрирует на какую необходимую необходимо сделать ставок, дабы вывести бонус из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода этого бонуса, Вам нужно сделать ставок на необходимую: 500*70=3500 рублей. Только всецело отыграв бонус, Вы сможете исключить собственный выигрыш. Выбирая бесплатный бонус, пристально изучайте верховодила. Убедитесь, собственно вас возможно на роль в промоакции. Уточните, в каких забавах возможно исполнять условия вейджера. При надобности задавайте вопросы адептам саппорта.
#8982 Charlesgunnyhttp://filmkachat.ru
1×slots бездепозитный бонус за регистрацию
Существует ли стратегии для отыгрыша бездепозитных призов? К раскаянью нет, на выигрыши либо проигрыши с бонусов, казино или игрок воздействовать возможности, отдача игр случается от создателей игр.Шаг 5. Использование и отыгрыш. Бездеп обязан быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. <a href=http://filmkachat.ru/>1хслотс рабочее зеркало</a> Да, у безвозмездных призов есть недостатки. Прежде всего, они обычно маленькие. Кроме как, обстоятельства вейджера по ним всегда строгие. Но все же неименье риска делает их довольно привлекательными для посетителей. <a href=https://theme.sir.kr/youngcart53/bbs/board.php?bo_table=free&wr_id=290060>https://theme.sir.kr/youngcart53/bbs/board.php?bo_table=free&wr_id=290060</a> 1хслот 1хслотс регистрация перейти на 1×slots <a href=https://trade-britanica.trade/index.php?title=%D0%9F%D0%B8%D1%86%D1%86%D0%B0%20%D0%BE%D1%82%20%D1%88%D0%B5%D1%84-%D0%BF%D0%BE%D0%B2%D0%B0%D1%80%D0%BE%D0%B2%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!>https://trade-britanica.trade/index.php?title=%D0%9F%D0%B8%D1%86%D1%86%D0%B0%20%D0%BE%D1%82%20%D1%88%D0%B5%D1%84-%D0%BF%D0%BE%D0%B2%D0%B0%D1%80%D0%BE%D0%B2%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!</a> При малый сумме приза рекомендовано выступать по низким ставкам, а использовать максимальные другого только что случае, если вейджер слишком немалый, а время на отыгрыш крепко ограничено.Также есть онлайн-платформы азартных игр, коие используют раздачу бездепозитных призов в особые даты (как для казино, например и для игрока). Помимо этого, действующие игроки кроме имеют вероятность получить схожие бонусы за свою деятельность (к примеру, за увеличения значения либо за похожие достижения).
1×slots казино мобильная версия
Автоматы непопросту числятся самым знаменитым азартным весельем. Чтобы усвоить управление и верховодила, понадобится всего количество минут. Ваша задачка устроить ставку, определить количество трудящихся линий и можно вертеть тамбур. Если на выпадет выигрышная композиция – вы выиграли! С этой задачей для посодействуют управится бездепозитные призы казино.Третитй бездепозитный приз за регистрацию – валютные средства. К раскаянью, начислить рубли или доллары способны лишь известные и известные клубы. С их подмогою вы сможете насладиться любой доступной забавой – автоматом, рулеткой, кено, блэкджеком. <a href=https://www.sgomberisgombero.it/my-account-2/>1×slots зеркало сайта</a> 1×slots подтвердит вашу регистрацию если говорить Необходимость отыгрыша. Вейджер такой повыше, чем для бонусов за депо. И же средства не отыграны, вывести их невозможно. <a href=https://build-in.dp.ua/wr_board/tools.php?event=profile&pname=JosephGeazy>https://build-in.dp.ua/wr_board/tools.php?event=profile&pname=JosephGeazy</a> Фриплей-бонусы встречаются только в некоторых клубах. Они зачисляются незамедлительно в творения профиля и активны непродолжительное время. Если не успеете потратить свои, они попросту сгорят. Касаемо времени, правило призы активны на часа.Бездепозитные бонусы, как уже ясно, являются оригинальной возможностью обратиться игровому процессу полностью бескорыстно, другими играть в интернет казино безвозмездно и на быть средства сразу после регистрации аккаунта. Автоматы с этим депозитом имеют стать прекрасной вероятностью поиграть для поклонников азарта с определенными лимитированиями в финансах. 1×slots промокод при регистрации
1х слот регистрация в 1×slots casino
Условия вывода выигрыша. В некоторых заведениях для успешного вывода с бездепозитного бонуса довольно пополнения баланса и подтверждения личности. В других же клубах, необходимо несколько один прокрутить собственный депозит.Если ординарными текстами, бездепы – это определённая сумма средств либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать презенты. Но есть кое-какие нюансы. Существуют игорные жилища, которые перед тем как начислить бонусы требуют привязать телефон, предоставить копии документов. Приглашаем делиться суждениями о призах. Это поможет иным юзерам подбирать более прибыльные предложения. <a href=https://www.donchillin.com/space-uid-356554.html>https://www.donchillin.com/space-uid-356554.html</a> 1×slots скачать на айфон
1хслотс рабочее зеркало
Бездепозитные бонусы казино за регистрацию в 2022 году — это вероятность сыграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой или количеством безвозмездных вращений без внесения депо. Не путайте деморежим с реальной игрой без необходимости внесения депозита. Бонус без депозита за регистрацию в казино (бездепозитный приз) – это денежный презент от клуба, который начисляется на акк игрока в регистрации в казино. Кроме творения учетной записи, для получения бездепа, очень нередко требуется ещё и подтвердить контактные данные игрока и/или активировать специальный промо-код.Подтверждение индивидуальной инфы. Все казино требуют от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и присутствие у юзера других аккаунтов (мультиаккаунт запрещен). 1×slots казино мобильная версия <a href=http://tae-sung.net/bbs/board.php?bo_table=news&wr_id=3083>http://tae-sung.net/bbs/board.php?bo_table=news&wr_id=3083</a> Прибывшие на акк деньги бездепозитные призы предназначаются, в, только для свежеиспеченных юзеров, которые раньше не имели собственного аккаунта в данном казино. Исходя из этого, в ранее у игрока был сделан депо, то, по всей вероятности, у него больше не несомненно способности рассчитывать на получение такого приза в определенном заведении.
скачать 1×slots на андроид мобильная версия
Вейджер (wager) – это коэффициент, который показывает на какую необходимую нужно устроить ставок, дабы исключить бонус из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода этого приза, Вам необходимо сделать ставок на сумму: 500*70=3500 руб. Только всецело отыграв приз, Вы можете вывести собственный выигрыш.Когда речь о получении бездепозитных бонусов в казино, начала обратите внимание на следующие обстоятельства: Самые популярные способы вывода средств ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам подобии Neteller и Skrill, а также используют криптовалютными кошельками. Вывод выигрышей имеет осуществляться моментально либо развлекать от нескольких часов до нескольких суток. <a href=https://www.hebergementweb.org/members/genesisseb.704035/>https://www.hebergementweb.org/members/genesisseb.704035/</a> В зависимости от интернет заведения каждый из них может вас предложить как бездепозитные средства, так и бездепозитные фриспины, которые последствии удачной регистрации упадут для на ваш игровой баланс.Каждый новичок и умелый игрок мечтают живо стартануть и начать создавать настоящие ставки. Для сего достаточно арестовать презент, за кот-ый надо выплачивать. В зависимости от игровой платформы, нужно сделать профиль, привязать email или телефон. После этого администрация начисляет щедрое вознаграждение повторяющий даровых вращений либо виртуальных кредитов. казино 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://test.soclanovtsy.ru/topic/35160–1×slot-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE/>1×slot казино зеркало</a>
<a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=7523&TITLE_SEO=7523-preobrazovatel-interfeysov-usb-rs485&MID=468366&result=reply#message468366>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
К раскаянью, нет. Почти все казино, настоятельно внесение желая бы 1-го малого депо для вывода выигрыша с бездепозитного приза. Также учитывайте, что исключить деньги разрешено лишь на ту платежную систему, с которой был сделан депозит. Разные казино имеют личные управляла по выведению выигрыша. Для бездепозитных призов принимаются достаточно высокие притязания. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до ста один в игровых автоматах. Например, в игрок получил даром десять долларов, то необходимо несомненно отыграть их, поставив 1 тыщу спинов по одному доллару любой. Стоит обозначить(означить), собственно не все казино выделяют возможность играть на бонусы и не во всех развлекательных заведениях идентичные управляла для отыгрывания. Некоторые казино запрещают играть на призы в блекджек либо ограничивают ставки до 5 процентов, собственно существенно наращивает в 10-ки раз число нужных игр.
#8983 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало
За вербование приятеля ? в рамках партнерской программки заказчик получает вознаграждение за вербование свежих юзеров. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots casino 777 online</a> Прежде чем активировать бездеп, нужно убедиться никаких, собственно страна, уроженцем которой является игрок, не заходит в перечень не. <a href=https://minifishtank.net/forum/member.php?action=profile&uid=1395>https://minifishtank.net/forum/member.php?action=profile&uid=1395</a> Многие азартные клубы ограничивают сумму вывода заработанную на призе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не можете исключить. Разница несомненно аннулирована, Вы и не можете делать на нее ставки. казино 1×slots <a href=https://minecraftcommand.science/forum/general/topics/063cb5ef-ba25–4c33-b220-cf203e736e62>https://minecraftcommand.science/forum/general/topics/063cb5ef-ba25–4c33-b220-cf203e736e62</a>
1×slots casino регистрация 1×slots review live
Игры, в которых можно выступать на бонусные средства. Проверьте перечень игр, каких возможно играть на бонусные средства, вполне они Вам не понравятся и надо тратить своё время на такую акцию. 1×slots зеркало выигрыши обязательно пройдите регистрацию если Основное управляло получения бездепа ? творимый акк обязан быть у пользователя первым и единственным. Наличие нескольких аккаунтов строго воспрещено. Проверка проводится по имени, адресу электронной почты, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита нужно блюсти несложную очередность действий. <a href=http://www.clean-ace8.com/bbs/board.php?bo_table=free&wr_id=104827>http://www.clean-ace8.com/bbs/board.php?bo_table=free&wr_id=104827</a> Бoльшинcтвo азартных заведений выдвигают приблизительно однообразные, схожие условия и притязания, которые необходимо выполнить, дабы получить бездепозитный приз за регистрацию. Все их можно соединить в раз список:Как верховодило, при выводе финансов, от играющего требуется только устроить минимальный лепта для того, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом личный счет. 1×slots регистрация на 1хслотс Денежные средства. Третий бонус за регистрацию без депозита – наличные. К раскаянию, лишь знаменитые и популярностью клубы могут дать деньги в руб. Или долларах. С их поддержкою вас насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед этим необходимо исполнение конкретных условий.Бездепозитные призы, как теснее ясно, являются уникальной возможностью приступать к игровому процессу полностью безвозмездно, другими играть в онлайн казино безвозмездно и на существующие средства незамедлительно последствии регистрации аккаунта. Автоматы с таким депозитом шансы замерзнуть великолепной возможностью сыграть для поклонников азарта с определенными лимитированиями в финансах.
1×slots зеркало регистрация
При верном подходе бездепы — это прекрасный способ выступать на средства без траты собственных средств. Есть некоторое рекомендаций, следуя которым можно извлечь максимум пользы из похожих промоакций казино. Играть следует лишь на лицензированных площадках. Скриптовые сайты не дурачат с бонусными услугами, хотя и используют пиратский софт с модифицированным ГСЧ. Выиграть на этих автоматах нереально.Новые посетители онлайн-казино без первого депо имеют проверить свою удачливость. К что, этому же есть вероятность преобразовать бездепы в настоящие средства за регистрацию в казино, однако результата приз нужно отыграть сообразно условиям акции. В разделе с призами активировать свой презент. Найти забавы, для которых учтено поощрение и применять приз по предназначению. <a href=https://www.walkaholic.me/user/26494-travisnoria>https://www.walkaholic.me/user/26494-travisnoria</a> casino 1×slot В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая милая доля игры. Важно, зачастую бездепозитные призы в казино выдаются с ограничениями по максимальной выплате. В среднем можно рассчитывать на выгода в несколько тыщ руб. Как исключить выигрыш с бонуса без депо. Придётся подтвердить аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается каждым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате или прочитайте в правилах.Мы собрали и опубликовали список наихороших бездепозитных казино с бонусами за регистрацию, коие гарантируют великодушные выигрыши и мгновенные выплаты.
1×slots регистрацию более популярный вариант это
Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы моментально получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, замечена настоящий шанс победу!Приглашаем делиться суждениями о призах. Это поможет другим юзерам подбирать более выгодные предложения. <a href=http://youhotel.ru/forum/viewtopic.php?f=15&t=143442>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> Oтыгpaть приз с указанным вeйджepом, желаемого необходимо сдeлaть cтaвoк нa cумму, превосходящую объем бонуса в некоторое раз. 1×slots официальный регистрация <a href=http://theaesoon.co.kr/bbs/board.php?bo_table=free&wr_id=77311>http://theaesoon.co.kr/bbs/board.php?bo_table=free&wr_id=77311</a> Как только вы отыграли вейджер и средства с бонусного баланса перешли для на реальный счет, Вы храбро сможете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать наименьший депо например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депозитом).Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в неотъемлемом порядке нужно восполнить счет в казино. Для депозитных призов, данная процедура не необходима, так как депозит уже сделан.
казино 1× slots официальный сайт
Теоретически, к бесплатным бонусам возможно отнести например именуемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, потому что они предоставляют лишь возможность делать ставки.Следует выделить, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам или с определенным кодом. <a href=https://fromdust.art/index.php?title=1×slots_%D0%A1%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C_%D0%9D%D0%B0_%D0%90%D0%B9%D1%84%D0%BE%D0%BD>https://fromdust.art/index.php?title=1×slots_%D0%A1%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C_%D0%9D%D0%B0_%D0%90%D0%B9%D1%84%D0%BE%D0%BD</a> Нельзя разглядывать забаву на средства, как вариант заработка. Азартные игры воспрещены для лиц моложе 18 лет. Topcasinobonuses.mobi классифицируется зачинщиком азартных игр. Сайт одевает информационный нрав.Это один из главных показателей привлекательности дара. С завешенным коэффициентом числе профессионалы не сумеют выполнить обстоятельства по отыгрышу. И неважно, как привлекательно выглядит предложение – бездепозитный бонус казино в объеме $500 или $1 000. Чтобы новички получше вдумались, что же такое вейджер, мы разберём на примере. 1хслотс 1хслотс регистрация перейти на 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=767848>1×slots casino online регистрация</a>
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=274722>1×slots зеркало рабочее на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Возможность сыграть дополнительное соревнование (а от и некоторое) абсолютно даром, а выигрыш, в свою очередь, поступает на счёт игрока. Обычно бездепозитные промоакции от казино, прибывают на эл. Почту в деньки рождения либо праздничные. В неких интернет казино можно адресоваться в чат и как неизменному игроку, вполне для предложат бездепозитное предложение.
#8984 Charlesgunnyhttp://filmkachat.ru
1× slots сайт
Начнём с как, собственно каждое промо за регистрацию подразумевает некоторые обстоятельства. Бездепозитные бонусы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность денежного оборота, необходимая для исполнения критерий. Пример, возымели благотворительные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 рублей, неудачных либо выигрышных, не. После исполненья, бонусный баланс перейдёт на настоящий и будет легкодоступным к выводу. <a href=http://filmkachat.ru/>x1 slots регистрация в 1×slots casino</a> Теоретически, к безвозмездным бонусам возможно отнести так называемые фриспины. Напомним, речь идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, потому что они деют только возможность делать ставки.Не трудно додуматься, собственно no deposit bonuses практически разу не посещают большими. Чаще всего речь о пяти–тридцати баксах (или эквиваленте данной суммы в другой валюте). <a href=http://www.mallangpeach.com/bbs/board.php?bo_table=free&wr_id=825944>http://www.mallangpeach.com/bbs/board.php?bo_table=free&wr_id=825944</a> 1× slots регистрация в 1×slots casino <a href=https://www.patreon.com/posts/discover-best-in-104425480?utm_medium=clipboard_copy&utm_source=copyLink&utm_campaign=postshare_creator&utm_content=join_link>https://www.patreon.com/posts/discover-best-in-104425480?utm_medium=clipboard_copy&utm_source=copyLink&utm_campaign=postshare_creator&utm_content=join_link</a> Срок активации и время на отыгрыш. Зачисление денег либо фриспинов происходит при активации на взыскательно ограниченного периода, похожие требования предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать приз некоторое дней либо числе месяцов. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с неоправданно высоким вейджером.Иногда виде одобрения за регистрацию имеют выдаваться билеты для участия в турнирах. Условия их проведения очень выделяются, поэтому мы советуем ознакомиться с каждым предложением раздельно.
1×slots сайт
Зарегистрироваться в казино по особой ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефонного и электрическую почту). Для доказательства номера аппарата нужно в личном профиле показать свой номер и нажать кнопку „Подтвердить номер телефонного“, дальше Вы получите sms-сообщение с кодом, кот-ый необходимо ввести в соответствующее фон. Для доказательства электронной почты, перейти по активной ссылке в послании от казино.Предложения с бездепозитными бонусами за регистрацию позволяют свежим заведениям привлечь аудиторию на свой сайт. А игроки тому получают возможность играть на настоящие деньги без депозита в казино и заработать малый стартовый капитал, кот-ый разрешено вывести на карту банка либо электрический кошелек. <a href=https://elclasificadomx.com/author/jameslog/>1×slots зеркало сайта</a> 1×slot зеркало рабочее этих способов предполагает регистрацию Вы не в коем случае ни чем рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный приз, по мимо практической игры на бездепозитные призы, у Вас есть шанс выучить игровые автоматы, научится регулировать менять ставки и полосы, изучать бонусные игры и их выигрышные комбинации, да счете просто зарядится кучей впечатлений! Ведь вы будите выступать на бонусные средства, коие можно отыграть и исключить, но просто на демо счет, что, этим самым адреналин в крови более повысится а пульс забьется с нередким ритмом!Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала резвые выводы. Фишка выплат что, собственно довольно избрать платёжный инструмент и показать необходимую. В большинстве случаев средства зачисляются на электронные кошельки на 15 мин., а на банковские карты – 1–3 трудящихся дня. <a href=http://akb-video.ru/profile.php?u=bashfulharbinge>http://akb-video.ru/profile.php?u=bashfulharbinge</a> Фриспины. Бесплатные вращения предназначены для применения в видео-слотах. Внимательно читайте условия – они часто выдаются для неких машин. В зависимости от клуба вам создавать конкретное число ставок. Кстати, современные игорные жилища выделяют возможность заводить «одноруких бандитов». 1хслотс мобильная версия зеркало Рассмотрим принцип его деянья на образце. Допустим, вы зарегались и возымели $10 no down payment bonus с вейджером х50. Это означает, собственно выигранные средства возможно несомненно выводить не ранее, чем после того, как общая сумма ставок достигнет $500.
казино 1× slots официальный сайт
Подарки на праздничные ? посвященные торжественным датам, требующие условного отыгрыша либо начисляются без это. Могут дариться игрокам сутки рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду. <a href=http://ip-sosnevo.ru/user/CharlesGloks/>http://ip-sosnevo.ru/user/CharlesGloks/</a> 1хлот регистрация в 1×slots casino Максимальная ставка ? уточняется в денежной счета и ограничивает объем ставки за раз спин. В случае ее превышения приз имеет быть аннулирован. Также в правилах возможность содержаться запрет на размещение ставок конкретного облика, к, по одинаковым шансам в рулетке (другими, на чет либо нечет, красноватое либо черное и т.д. ).
1хлот регистрация в 1×slots casino
<a href=http://miupsik.ru/forums/showthread.php?tid=222930>1хслот официальный сайт зеркало</a> Некоторые казино шансы предлагать посетителям бездепы за свидетельство номера или почты или репост на страничку в социальных сетях.Бездепозитные призы начисляются лишь раз один. Не стоит открывать новые аккаунты, дабы получить их повторно. Служба безопасности казино обязательно выявит «левого» соучастника и заблокирует. Если гость выполнит нужные притязания, отыграет свою ставку и решит исключить собственный выигрыш, то ему надо(надобно) принять, что казино непременно потребует дать ксерокопии собственных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные средства вывести не получится. 1×слотс казино <a href=http://1k9g.com/space-uid-196894.html>http://1k9g.com/space-uid-196894.html</a> Прочитайте верховодила бонусной программы, в желайте участвовать. Да, мы безотступно советуем устроить это до регистрации.
1×слотс казино
<a href=http://arenda.mineralgroup.ru/index.php?subaction=userinfo&user=knottyorientati>http://arenda.mineralgroup.ru/index.php?subaction=userinfo&user=knottyorientati</a> Не трудно додуматься, собственно not the slightest down payment bonuses практически ни не посещают большими. Чаще всего речь о пяти–тридцати долларах (либо эквиваленте этой суммы в иной денежной).Но есть азартные заведения, готовые просто так вручить средства на забаву. Для этого довольно создать профиль. Чтобы вывести выигрыш, сперва необходимо выполнить вейджеровые условия, прописанные в условиях получения бездепа. 1×slots актуальное зеркало Денежные свои. Третий бонус за регистрацию без депозита – наличные. К раскаянью, только известные и модные клубы шансы дать деньги в руб. Либо долларах. С их помощью возможность насладиться любой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед этим необходимо исполненье конкретных критерий.Такие одобрения дозволяют бесплатно протестировать свежее казино, разобраться с игровым ходом интернет слотов, заработать и вывести небольшую сумму денег.
<b>Смотреть еще похожие новости:</b>
<a href=http://angelandmax.teamforum.ru/memberlist.php?mode=viewprofile&u=640>1×slots официальный сайт зеркало</a>
<a href=http://theauction.com.au/my-account/>1×slos регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подтвердите регистрацию, чтобы активировать Бездепозитный бонус с выводом, потребуется наполнить индивидуальный профиль. Заполните пустующие поля настоящими данными о себя.
#8985 Ремонт индукционных плитhttps://remont-indukcionnyh-plit-now.ru/
Наша мастерская предлагает профессиональный <a href=https://remont-indukcionnyh-plit-now.ru/>центр ремонта индукционных плит</a> различных марок и моделей. Мы осознаем, насколько необходимы вам ваши индукционные плиты, и стремимся предоставить услуги высочайшего уровня. Наши опытные мастера оперативно и тщательно выполняют работу, используя только качественные детали, что предоставляет долговечность и надежность проведенных ремонтов. Наиболее общие проблемы, с которыми сталкиваются владельцы индукционных плит, включают проблемы с нагревом, проблемы с кнопками управления, программные сбои, проблемы с подключением и механические повреждения. Для устранения этих поломок наши опытные мастера оказывают ремонт нагревательных элементов, сенсорных панелей, ПО, разъемов и механических компонентов. Обратившись к нам, вы обеспечиваете себе надежный и долговечный мастерская по ремонту индукционных плит в москве. Подробная информация размещена на сайте: https://remont-indukcionnyh-plit-now.ru
#8986 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало рабочее
Вейджер не более х30–35 является приемлемым. Опытные игроки заявляют, собственно с этим вейджером реально остаться в плюсе, в правильно подойти к выбору игрового аппарата. <a href=http://filmkachat.ru/>сайт 1× slots casino</a> <a href=https://talkofflowermound.com/author/jamescah/>https://talkofflowermound.com/author/jamescah/</a> На данном разделе портала периодически публикуются обзорные заметки, в рассматриваются безвозмездные призы наихороших интернет-казино. Информация структурирована по нескольким пунктам, включая главные: 1×slots регистрация 1×slots casino c2d ru <a href=http://www.webdesignforum.com.au/member.php?action=profile&uid=31180>http://www.webdesignforum.com.au/member.php?action=profile&uid=31180</a> Разные казино имеют собственные верховодила по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высокие притязания. Часто онлайн-казино советуют отыграть бонусное одобрение до ста один в игровых автоматах. Например, в игрок получил безвозмездно 10 $, то необходимо несомненно отыграть их, поставив одну тыщу спинов по одному доллару каждый. Стоит обозначить(означить), что не все казино выделяют вероятность выступать на бонусы и не во всех развлекательных заведениях идентичные правила для отыгрывания. Некоторые казино запрещают играть на бонусы в блекджек либо ограничивают ставки до пяти процентов, собственно существенно увеличивает в десятки один количество нужных игр.Практически все онлайн казино с бездепозитным бонусом за регистрацию учитывает программу преданности — систему одобрения неизменных клиентов, кот-ая состоит из большого значений. При достижении игроком одного значения на его счёт поступает бонус. Чем выше уровень — что, этим щедрее бонус.
1×slots зеркало регистрация то дальше необходимо пройти
<a href=http://mandala-app.com/forums/memberlist.php?mode=viewprofile&u=3447>1х слот 1хслотс регистрация перейти на 1×slots</a> 1хслотс рабочее зеркало на сегодня <a href=http://bizon15.ru/index.php?subaction=userinfo&user=offbeatnip44>http://bizon15.ru/index.php?subaction=userinfo&user=offbeatnip44</a> Для отыгрыша бонуса казино обязует игрока поиграть на необходимую, в некоторое один превышающую необходимую полученного бонуса — здесь выгода фирмы очевидна. 1×slots зеркало выигрыши обязательно пройдите регистрацию если Получить приветственный бонус шансы только свежие посетители онлайн-казино. Способы описаны в условиях промоакции любого законного казино, чаще всего это:
1×slots казино зеркало
Выбор любого онлайн казино на нашем веб-сайте. В описании к каждому Вы сможете узнать, что получите за создание аккаунта. <a href=https://www.kino-ussr.ru/user/DoctorLazutaor/>https://www.kino-ussr.ru/user/DoctorLazutaor/</a> Операторы гемблинга заявляют, что так они сражаются с бонус-хантерами. Впрочем, критики считают, собственно данным казино пробуют устроить из случайного постояльца постоянного игрока.Важно, убедитесь что, нет, что раньше не регистрировались в избранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи. рабочее зеркало 1хслотс
1×slot регистрация
<a href=https://nztw.org/thread-402941–1–1.html>1×slots на любой вкус как пройти регистрацию</a> Бездепозитный приз казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в этом и содержится основное различие. 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=https://eco-kamchatka.ru/user/Travischuth/>https://eco-kamchatka.ru/user/Travischuth/</a>
1×slots официальный зеркало рабочее
В онлайне много знаменитых игорных площадок с привлекательными акционными предложениями. Однако пристально разбирать условия 10-ов предложений вскоре надоест, да и время отнимет много. Поэтому наша команда подготовила ТОП-3 вебсайтов с наилучшими бездепозитными призами: При игре на бонусные свои воспрещается выступать в игровые автоматы с современным джекпотом и игры из радела live casino. Кроме такого, кое-какие казино дают бездеп на раз или некоторое определенных слотов, и в иных забавах Вы не можете на них выступать. <a href=http://restoclub.ru/go?url=http://marineinnovation.ru/redirect?url=http://csgotraders.net/linkfilter/?url=https://teletype.in/@urid_pomosh/BXA16BvS5gV>http://restoclub.ru/go?url=http://marineinnovation.ru/redirect?url=http://csgotraders.net/linkfilter/?url=https://teletype.in/@urid_pomosh/BXA16BvS5gV</a> Каждый новичок и умелый игрок мечтают живо стартануть и начать делать настоящие ставки. Для сего достаточно отобрать подарок, за который надо выплачивать. В зависимости от игровой платформы, нужно сделать профиль, привязать email либо аппарат. После этого администрация начисляет щедрое вознаграждение повторяющий безвозмездных вращений или виртуальных кредитов.Итак, чтобы бесплатные бонусные кредиты трансформировались в настоящие средства, которыми возможность распоряжаться по собственному усмотрению, их надо(надобно) отыграть. Вейджер идет уточнять в правилах онлайн-казино. 1×slots официальный demo регистрация в 1×slots casino Фриспины начисляются по определенной ставке. После их активации игроку нужно запустить разъем и убедиться, собственно в нем отображаются безвозмездные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода после отыгрыша ориентируется оператором и изредка превышает 5 000 руб.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.sgomberisgombero.it/my-account-2/>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для получения бездепа необходимо пригласить в забаву по реферальной ссылке свежего клиента: он обязан зарегистрироваться, пройти верификацию на сайте онлайн-казино и пополнить счёт на сумму, обозначенную в условиях акции.
#8987 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
Прибывшие на акк деньги бездепозитные призы предназначаются, в основном, лишь для свежеиспеченных пользователей, которые раньше не имели собственного аккаунта в данном казино. Исходя из этого, случае раньше у игрока был сделан депозит, то, по всей вероятности, у него больше не будет способности рассчитывать на получение такого приза в определенном заведении. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots review live</a> Фриплей-бонусы встречаются только в неких клубах. Они зачисляются незамедлительно последствии творенья профиля и активны непродолжительное время. Если не успеете потратить свои, они попросту сгорят. Касаемо медли, правило бонусы активны на часа. <a href=https://zrz26.ru/user/JamesDat/>https://zrz26.ru/user/JamesDat/</a> Верификация важна для дополнительной безопасности и помочь техподдержке выявить бонусхантеров и плутов. Кстати, на некоторых платформах выводы солидных сумм доступны лишь после подтверждения личности. 1хслотс зеркало <a href=https://forum.spherecommunity.net/User-TravisHix>https://forum.spherecommunity.net/User-TravisHix</a> Для получения предоставленных бонусов вас пригодиться — ПК либо мобильное прибор, и остальное дело за небольшим.Для казино, работающих онлайн, бездепозитные бонусы необходимы для привлечения свежих клиентов. Предложение сыграть на слотах без надобности внесения настоящих денег — работающий метод для повышения энтузиазма к фирмы. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит выступать в казино, только теперь теснее на личные средства.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Срок активации и время на отыгрыш. Зачисление средств либо фриспинов случается при активации протяжении требовательно ограниченного периода, схожие требования предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать бонус количество дней либо даже месяцов. Другие выдают солидную сумму за регистрацию, хотя время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером.Итак, дабы бесплатные бонусные кредиты превратились в настоящие деньги, которыми возможность распоряжаться по собственному усмотрению, их надо(надобно) отыграть. Вейджер следует уточнять в правилах онлайн-казино. <a href=http://aficionado.pl/showthread.php?112002–1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D0%BD%D0%B0-%D1%81%D0%B5%D0%B3%D0%BE%D0%B4%D0%BD%D1%8F&p=129877>1×slots зеркало на сегодня</a> 1×slot зеркало рабочее этих способов предполагает регистрацию Воспользоваться бездепом возможно не во всех игровых автоматах: казино и тут уточняет ограничение для посетителей. Конечно, это можно счесть неким неудобством для игрока, хотя ради стоит отметить, что выбор автоматов всё равно остаётся достаточно наибольшим.Каждый новичок и профессиональный игрок мечтают быстро стартануть и начать делать настоящие ставки. Для сего достаточно арестовать презент, за который надо платить. В зависимости от игровой платформы, нужно сделать профиль, привязать email или телефонный. После этого администрация начислит щедрое вознаграждение в виде бесплатных вращений или виртуальных кредитов. <a href=https://australianwinerytours.com/tours/member.php?action=profile&uid=2192>https://australianwinerytours.com/tours/member.php?action=profile&uid=2192</a> Бонус без депо за регистрацию в казино (бездепозитный приз) – это валютный подарок от клуба, который начисляется на акк игрока в регистрации в казино. Кроме создания учетной записи, для получения бездепа, довольно нередко требуется ещё и подтвердить контактные данные игрока и/или активировать особый промо-код. 1×slots официальный сайт мобильная версия Обычно бездепозитные акции от казино, приходят на эл. Почту в дни рождения либо праздники. В некоторых интернет казино можно адресоваться в чат и как неизменному игроку, вероятно вас предложат бездепозитное предложение.Все благотворительные бонусы кажутся заманчивыми. Кто же категорически от возможности поиграть в онлайн-казино, не рискуя средствами, хотя получая выигрыши. Но далеко не все бездепозитные бонусы в равной степени презентабельны для рассудительного клиента.
1 хслот регистрация в 1×slots casino
На данном разделе портала периодически публикуются обзорные статьи, каких рассматриваются бесплатные призы лучших интернет-казино. Информация структурирована по нескольким пт, включая основные:Список так нарекаемых «разрешенных территорий» прилагается к правилам бонусной программки игорного портала. Обязательно проверьте, распространяются ли на вас подобные наказания. <a href=http://k636419q.beget.tech/user/Scottnes/>http://k636419q.beget.tech/user/Scottnes/</a> 1×slots рабочее зеркало
1×slots регистрацию процедура займет всего лишь
Бездепозитные бонусы, как теснее ясно, считаются оригинальной возможностью обратиться игровому процессу безусловно бескорыстно, словами выступать в онлайн казино даром и на быть средства сразу после регистрации аккаунта. Автоматы с таким депо могут замерзнуть великолепной вероятностью сыграть для поклонников азарта с определенными лимитированиями в денег.Нет. Для получения бездепозитного бонуса в казино необходима обязательная регистрация на сайте. Играть в слоты даром и без регистрации возможно только в демо режиме. <a href=https://games-garant.ru/index.php?subaction=userinfo&user=Jamesneorm>1×slots зеркало</a> Некоторые онлайн-казино без депозита предлагают новым клиентам выбрать приз при регистрации. Будьте внимательны: выбрав один, вы в абсолютном большинстве случаев не сможете воспользоваться остальными.В любом казино с бездепозитным призом предусмотрены вейджеровые обстоятельства. Это единственный «подводный камень», который стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, нужно сделать определённое количество ставок. Чем круче приз, что, этим сложнее выполнить обстоятельства, и наоборот. 1×slots зеркало рабочее на сегодня <a href=http://barbatzivsfemei.3×.ro/profile.php?lookup=1357>http://barbatzivsfemei.3×.ro/profile.php?lookup=1357</a> Исходя из сего, просто не присутствует осмысленных причин махнуть рукой на получение такового бонуса при регистрации. И, лишним, на подобный безвозмездной основе у вас есть шансы выиграть средства и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные бонусы, нарекают бесплатными интернет платформами для игр.Для вывода средств бонус надо(надобно) будет отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариантами отыгрыша бездепозитного приза до его получения, дабы избежать конфликтных ситуаций.
1×slots сайт зеркало
Бездепозитный приз за регистрацию в казино с выводом средств в 2022 году — Наш ресурс дает игрокам актуальную информацию о самых свежих, щедрых и испытанных бонусах в интернет казино, которые обновляются каждый денек. <a href=https://steamboatspringschat.com/forum/members/miguelpam-1550.html>https://steamboatspringschat.com/forum/members/miguelpam-1550.html</a> Если вы облюбовали для себя несколько брендов коие вам больше всего полюбились, для постоянной забавы! Таких гемблеров казино довольно любит и ценит, за частую такие игроки становятся VIP игроками заведения, которым нередко поступают выгодные предложения повторяющий бонусов, например же туда входит и бездепозитные. 1×slots официальный сайт скачать
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Эффективность бездепов в качестве маркетингового прибора оценили многие операторы. Малоизвестные площадки используют такие акции, дабы быстро набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны постоянных посетителей. Не все веб-сайты, дающие презенты без депозита, рекомендованы к ирге. За симпатичным промоописанием имеют скрываться невыполнимые обстоятельства отыгрыша и другие подводные камни. Онлайн-казино с бездепозитными призами ставят посетителям обстоятельства для использования бездепами, поэтому перед участием в промоакции чем тщательно ознакомиться со всеми правилами и нюансами акции. Условия имеют прикасаться получения бонуса, его использования и последующего вывода валютных средств когда выигрыша.
#8988 Ремонт игровых приставокhttps://remont-igrovyh-konsoley-mob.ru/
Наша мастерская предлагает надежный <a href=https://remont-igrovyh-konsoley-mob.ru/>официальный ремонт игровой приставки рядом</a> различных марок и моделей. Мы осознаем, насколько значимы для вас ваши игровые приставки, и готовы предложить сервис высочайшего уровня. Наши профессиональные техники проводят ремонтные работы с высокой скоростью и точностью, используя только оригинальные запчасти, что гарантирует долговечность и надежность проведенных ремонтов. Наиболее частые неисправности, с которыми сталкиваются пользователи консолей, включают поломку HDD, проблемы с разъемами, проблемы с геймпадами, ошибки ПО и перегрев. Для устранения этих поломок наши квалифицированные специалисты проводят ремонт жестких дисков, разъемов, контроллеров, ПО и систем охлаждения. Доверив ремонт нам, вы гарантируете себе надежный и долговечный мастерская по ремонту игровой приставки с гарантией. Подробная информация представлена на нашем сайте: https://remont-igrovyh-konsoley-mob.ru
#8989 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
Пoдтвepдить личнocть клиента. Для успешного вывода средств, необходимо подтвердить личность посетителя. Нa этaпe вepификaции пpoфиля, работники службы безопасности обязаны увериться, что у игрока всего лишь раз акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не сможет исключить собственный выигрыш, в у него несомненно несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы. <a href=http://filmkachat.ru/>1×slots скачать на айфон</a> <a href=https://timepost.info/member.php?action=profile&uid=5287>https://timepost.info/member.php?action=profile&uid=5287</a> Выбор каждого онлайн казино на нашем сайте. В описании к каждому Вы можете узнать, собственно получите за создание аккаунта. 1×slot казино зеркало <a href=https://brocollective.com/users/scottrig/>https://brocollective.com/users/scottrig/</a>
1хлот регистрация в 1×slots casino
Итак, дабы бесплатные бонусные кредиты превратились в настоящие деньги, которыми продоставляется распоряжаться по собственному усмотрению, их надо(надобно) отыграть. Вейджер следует уточнять в правилах онлайн-казино.Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного приза достаточно пополнения баланса и доказательства личности. В других же клубах, нужно некоторое один прокрутить собственный депо. <a href=http://forum.puppylinux.pl/index.php?topic=917.new#new>1×slots рабочее зеркало</a> 1×slot регистрация <a href=https://gtorr.net/index.php?subaction=userinfo&user=Renaldothync>https://gtorr.net/index.php?subaction=userinfo&user=Renaldothync</a> 2. Создать новый профиль. Для регистрации нужно заполнить небольшую анкету либо зайдите в собственный офис посредством соц сеток; 1×slots регистрация Процесс доказательства личности может занять от 1-го дня до недели. Если клиент разрешил какую-либо ошибку при заполнении паспортных данных, то ему идет обратиться с задачей в службу поддержки онлайн-казино.Бездепозитные призы в казино без пополнения 2022 — это конкретная сумма средств или free spins вращения, которые предоставляются первым постояльцам за регистрацию на веб-сайте казино повторяющий бездепозитного приза, и дает вам возможность помощью казино без пополнения опробовать предложения (игр), с последующей прерогативой вывода средств при выполнении всех установленных управлял.
1×slots официальный сайт скачать
Бездепозитные призы – это исключительно занимательная и наиболее перспективная промоакция интернет-казино. Они даже лучше фри-спинов, потому что выплаты в бесплатных вращениях не гарантированы, так комбинации на барабанах игрового аппарата все не сложиться. Фриспины — благотворительные вращения, коие дозволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся самым знаменитым и преимущественным обликом приза — благотворительные вращения иногда эффективнее и веселее в отыгрыше, чем остальные облики бездепов. <a href=https://gusev-online.ru/user/PatrickSeeme/>https://gusev-online.ru/user/PatrickSeeme/</a> рабочее зеркало 1×slots Операторы гемблинга заявляют, собственно например они борются с бонус-хантерами. Впрочем, критики считают, собственно этим казино пробуют сделать из случайного гостя неизменного игрока.Бездепозитный бонус предоставляется новенькому игроку за конкретные действия. Часто подарок повторяющий денег или фриспинов выдается за регистрацию, благодаря чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.
1×slots скачать на айфон
1×slots регистрация 1×slotscasino09k online <a href=http://www.scoreit.org/p/raymondnok>http://www.scoreit.org/p/raymondnok</a> Представьте момент, когда при ставке в 10 рублей Вы получите подобное умножение. Миллион рублей за одно вращение, что вполне вполне. Поэтому вопрос, сколько возможно выиграть остаётся закрытым. Предлагаем проверить помощи. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный бонус и инспектируйте удачу в деле. Разумеется, исключить средства сложно. Однако шансы есть у всех.Это тоже бесплатные деньги, коие поступают на аккаунты новоиспеченных игроков после регистрирования. А необыкновенность этих бонусов произведено что, нет, собственно обретенные деньги непременно стопам применять в продолжении назначенного времени.
1х слот регистрация в 1×slots casino
Существуют казино с призом за регистрацию, каких очень известны фриспины в интернет казино потом регистрации в конкретных забавах. Они встречаются в почаще даровых поощрений либо традиционных бонусов в казино без инвестициям. Например, игрок регистрирует счет, на который начисляются бесплатные игры, приз за регистрацию повторяющий безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса геймер выигрывает истинные средства, коие в последствии возможно удачно исключить из заведения на собственную платежную систему. То есть, есть шансы исключить средства без рисков собственными деньгами. Регистрация, за которую игрок получит бонусы, займет минут, а благодаря этому возможно увеличить 5 евро поощрений до тысячи и без всяких проблем исключить их. <a href=https://marvelvsdc.faith/wiki/User:BoydNet99932>https://marvelvsdc.faith/wiki/User:BoydNet99932</a> Для получения приза надо(надобно) ознакомиться с программой лояльности казино и сделать ставки на сумму, нужную для перехода на следующий уровень. 1×slots официальный сайт зеркало рабочее Наш перечень содержит лучшие бездепозитные призы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по принципиальным характеристикам:
<b>Смотреть еще похожие новости:</b>
<a href=http://sharecovid19story.com/memberlist.php?mode=viewprofile&u=5122>1× slots регистрация в 1×slots casino</a>
<a href=http://vn-info.net/user/Josephkam/>1×slots бездепозитный бонус за регистрацию</a>
<a href=https://forum.ltp-team.com/topic/45685–1×-slots-zerkalo/>1× slots зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Операторы гемблинга утверждают, собственно например они сражаются с бонус-хантерами. Впрочем, критики считают, что этим казино пробуют устроить из случайного постояльца постоянного игрока. Подтверждение индивидуальной инфы. Все казино просят от клиента пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у пользователя других аккаунтов (мультиаккаунт запрещен).
#8990 Charlesgunnyhttp://filmkachat.ru
рабочее зеркало 1хслотс
Изучить верховодила и условия получения бездепозитных призов казино, Вы можете у нас на веб-сайте в разделе с бонусами или на официальном веб-сайте выбранного Вами казино. Если не отыскать нужную информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал либо по электронной почте. <a href=http://filmkachat.ru/>1хслот зеркало сайта</a> Верификация важна для добавочной защищенности и подсобляет техподдержке выявить бонусхантеров и жуликов. Кстати, на платформах выводы солидных сумм доступны только в доказательства личности. <a href=https://www.lohastw.net/home.php?mod=space&username=comfortablewage>https://www.lohastw.net/home.php?mod=space&username=comfortablewage</a> Автоматическая активация на самой удобной, хотя ручной метод содержит перед ней преимущества. Прежде чем использовать вознаграждение от казино, стоит заранее определить, сколько времени требуется на исполненье всех критерий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала действия приза. 1 х слотс зеркало <a href=http://yartube.ru/index.php?subaction=userinfo&user=upsetspray63>http://yartube.ru/index.php?subaction=userinfo&user=upsetspray63</a> Все безвозмездные призы кажутся соблазнительными. Кто же откажется от возможности сыграть в онлайн-казино, не рискуя средствами, но получая выигрыши. Но далеко не все бездепозитные бонусы в привлекательны для рассудительного посетителя.
1×slots рабочее зеркало
Наличие у игрока 2 аккаунта. Запрещено делать количество профилей для многократного получения бездепов. 1×slots зеркало регистрация Приветственный бонус без депозита ? подарок за регистрацию. Выдается деньгами, фриспинами либо баллами. В последнем случае бонусные баллы применяются для участия в турнирах либо обмена на реальные деньги. <a href=https://www.x-fta.com/foro/member.php?1255231-StevenShasy>https://www.x-fta.com/foro/member.php?1255231-StevenShasy</a> Диапазон ставок, коие вправе устроить игрок, того лимитирован. Обычно ставить можно небольшую сумму — в 10–30 рублей за одно вращение.Бездепозитные бонусы – это исключительно занимательная и наиболее перспективная акция интернет-казино. Они даже лучше фри-спинов, поэтому собственно выплаты в даровых вращениях не гарантированы, как комбинации на барабанах игрового аппарата имеют не сложиться. 1×slots зеркало быструю регистрацию а также мгновенное Следует выделить, собственно бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом.Не сложно додуматься, что no down payment bonuses практически ни не бывают немаленькими. Чаще всего речь идет о пяти–тридцати баксах (или эквиваленте данной суммы в другой валюте).
1×slots актуальное зеркало
Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и. Когда игроку полагается много фриспинов, администрация может разбивать их начисление на несколько дней. Бесплатные вращения предоставляются для определенного слота, который указывается в правилах акции.Да, у бесплатных бонусов есть недостатки. Прежде всего, они обычно не. Кроме того, обстоятельства вейджера по ним всегда жесткие. Но все отсутствие риска проделывает их очень привлекательными для посетителей. Большинство клубов привлекают внимание геймеров за счёт разнородных подарков. На 1 веб-сайтах можно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает безвозмездные вращения для запуска лучших интернет слотов. Несмотря на разные промоакции, стоит выделить самые главные. <a href=http://forum.xpscenery.net/member.php?action=profile&uid=608>http://forum.xpscenery.net/member.php?action=profile&uid=608</a> За счёт спинов получится запустить различные онлайн слоты, протестировать стратегии и поднабраться навыка. Фишка что, нет, собственно вращения начисляются на лучшие аппараты с оригинальными опциями и высокой отдачей. Не забывайте, что в каждом акционном предложении учтены специальные притязания – временные ограничения, наибольший размер ставки, список доступных игр.Бездепы имеют заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами. 1×slots актуальное зеркало Доступность — бездепозитные призы в казино чаще всего предоставляются новым игрокам, хотя бывают случаи, когда приз шансы получить и действующие клиенты.Только выполнив все условия отыгрыша и дождавшись окончания ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить свои средства.
1×слотс казино
4. Заберите подарок. Чаще всего бонус активируется сразу после регистрации. Но бывают истории, когда надо(надобно) забежать в собственный офис или написать в саппорта.Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам воспрещено начислять призы посетителям, не имеющим денежных средств на счете. Мы предлагаем разглядеть животрепещущие бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=http://yams.su/bitrix/redirect.php?goto=http://msk.apetta.ru/bitrix/redirect.php?goto=http://tehno-leader.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/f162×sgDehO>http://yams.su/bitrix/redirect.php?goto=http://msk.apetta.ru/bitrix/redirect.php?goto=http://tehno-leader.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/f162×sgDehO</a> Фриплей-бонусы встречаются только в некоторых клубах. Они зачисляются незамедлительно после создания профиля и активны недолговременное время. Если не успеете истратить свои, они попросту сгорят. Касаемо времени, как бонусы активны протяжении часа.Исходя из сего, просто не существует осмысленных оснований махнуть рукою на получение такого бонуса при регистрации. И, не, на такой безвозмездной базе у вас есть шансы выиграть деньги и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные призы, именуют бесплатными интернет платформами для игр.
1×slots casino регистрация 1×slots review live
Зачастую бездепозитные бонусы казино для забавы предлагаются различными заведениями азартных игр виде рекламных промоакций либо в целях привлечения к себе новых игроков. Для бездепозитных призов в казино 2022 игроку не нужно пополнять счет до этапа вывода желанных средств.Получив свой подарок, Вы можете безвозмездно выступать на настоящие деньги, а выполнив обстоятельства отыгрыша, вывести свой выигрыш. <a href=http://91075425.k216.opensrs.cn/home.php?mod=space&uid=1151003>http://91075425.k216.opensrs.cn/home.php?mod=space&uid=1151003</a> Возможность поиграть дополнительное состязание (а иногда и некоторое) абсолютно даром, а выигрыш, к, поступает на счёт игрока.Первый образующийся вопрос, это, для выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают свежих игроков. Последним проще начать игру на деньги с дара за регистрацию. Им не нужно пополнять баланс и расходовать личные средства. Новички получают бесплатные спины либо свои на счёт. С их подмогою знакомятся с игровым ходом, крутят слоты и проделывают ставки в рулетке. 1×slots официальный зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=249706>1×slots казино мобильная версия</a>
<a href=http://www.forum.kalor.ru/1×slot-zerkalo-rabochee-etih-sposobov-predpolagaet-registraci-t5418.html>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Новички не любят сразу же вносить депо. Это обосновано неименьем навыка и сомненьем. К счастью, в наше время можно получить бездепозитный приз за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В всяком случае вы не рискуете собственными сбережениями. Это отличная вероятность запустить понравившийся видео разъем либо же испытывать удачу в настольных забавах. Получать информацию о самых прибыльных призах возможно без постоянного прогноза новостей казино. Мы брали данную задачку на себя и безпрерывно смотрим за услугами операторов, выбирая лучшие из их. В данном разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список акций периодически пополняется. В топ зашли самые свежие бездепозитные призы за регистрацию в казино 2020, временные и закрытые промо. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и аспектам. Если срок деянья промоакции истек, она удаляется из перечня.
#8991 Charlesgunnyhttp://filmkachat.ru
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Акции, посвященные календарным праздникам, бывают рассчитаны как на всех пользователей, например и на категории: примеру, подарок на 8 марта девушкам-игрокам либо мужикам на 23 февраля.Выбирайте лучшие безвозмездные призы за обзоров на Casinoz – и пусть вас сопутствует удача при отыгрыше бонусных кредитов! <a href=http://filmkachat.ru/>1×slots акции</a> <a href=http://forum.ugmk-telecom.ru/index.php?action=profile;u=100616>http://forum.ugmk-telecom.ru/index.php?action=profile;u=100616</a> 1×slots официальный demo регистрация в 1×slots casino <a href=http://topbs.ru/bitrix/redirect.php?goto=http://probeg33.ru/bitrix/redirect.php?goto=http://hobbyforum.ru/proxy.php?link=https://telegra.ph/Kak-peredat-pravo-sobstvennosti-na-kvartiru-cherez-Mnogofunkcionalnyj-centr-Poshagovoe-rukovodstvo-09–19>http://topbs.ru/bitrix/redirect.php?goto=http://probeg33.ru/bitrix/redirect.php?goto=http://hobbyforum.ru/proxy.php?link=https://telegra.ph/Kak-peredat-pravo-sobstvennosti-na-kvartiru-cherez-Mnogofunkcionalnyj-centr-Poshagovoe-rukovodstvo-09–19</a> Одним из предлогов отдавать преимущество, льготу одному либо другому заведению содержится в привлекательности предлагаемых акций и бесплатных услуг. Безвозмездные фриспины, выдаваемые без дела создавать какой-либо вклад, в перечне располагается далековато не в конце.Можно ли в одном онлайн казино получить больше 1-го бонуса за регистрацию? Нет, так как в любом онлайн казино есть верховодила, к коим нужно держаться, не творить 2 аккаута для получения бонусов, иначе несомненно блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, бонус за регистрацию выдаеться один раз 1 лицу.
1хслотс зеркало
Бездепозитный бонус казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в данном и заключается главное отличие.Некоторые онлайн-казино без депозита предлагают свежим клиентам выбрать бонус при регистрации. Будьте внимательны: выбрав один, вы в абсолютном большинстве случаев не можете пользоваться остальными. <a href=http://forum.l2endless.com/member.php?action=profile&uid=6253>1×slot зеркало</a> рабочее зеркало 1×slots Заполняя данные в личном профиле, указывайте только достоверную информацию, так как Вам придется ее доказать в при выводе денег. <a href=https://rubcrumb.ru/user/TravisHeete/>https://rubcrumb.ru/user/TravisHeete/</a> 1×slot рабочее зеркало
1хслотс рабочее зеркало на сегодня
Можно ли зарабатывать на бездепозитных бонусах? Это не работа, тут как повезет, случае в любом предложенном безедепе, вы будете откручивать вейджер и выводить, тогда возможно именовать везением, и добавочной добавкой к вашему бюджету. <a href=https://www.xn–9n3bn8ewuh9zp.kr/bbs/board.php?bo_table=free&wr_id=542844>https://www.xn–9n3bn8ewuh9zp.kr/bbs/board.php?bo_table=free&wr_id=542844</a> В лицензионных бездепозитных казино играть в азартные игры действительно неопасно. Наличие лицензии одобряет тот прецедент, что клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP. 1×slots официальный зеркало рабочее Мы рекомендуем не отказываться от подобных услуг узнаваемых казино. Выделите количество мин. На регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сегодня удача будет на вашей стороне!Можно. Вы всегда можете отрешиться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не создадите ставку.
казино 1×slots официальный сайт
На бонусные начисления могут быть установлены вспомогательные ограничения, коие Вы не к при отыгрыше. Пока приз всецело не отыгран — средства из казино не выводятся. <a href=https://forum.dis-course.net/memberlist.php?mode=viewprofile&u=37238>1×slots зеркало на сегодня</a> Выполнив все притязания оператора, клиент возможность оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем не более суток. Если дополнительно требуется пройти процедуру верификации, то срок увеличивается до 1–2 рабочих дней. Для перевода применяются банковские приборы и электронные платежные системы. Второй метод подходит чем, так как масса транзакций в осуществляются мгновенно. В связи со специфичностью функционирования банков обработка платежей имеет занять до нескольких рабочих дней. казино 1×slots официальный сайт <a href=http://kimet.ru/bitrix/rk.php?goto=http://spig.spb.ru/bitrix/redirect.php?goto=http://m.birge.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/eYNEtKdvTWv>http://kimet.ru/bitrix/rk.php?goto=http://spig.spb.ru/bitrix/redirect.php?goto=http://m.birge.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/eYNEtKdvTWv</a>
1хслот скачать
Помимо остального, для вывода средств по бездепу нужно внести на счёт собственный 1-ый депозит — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на мало вероятную сумму, последствии чего вывод средств станет доступен. <a href=http://www.kaseisyoji.com/home.php?mod=space&uid=1085071>http://www.kaseisyoji.com/home.php?mod=space&uid=1085071</a> 1×slots официальный сайт зеркало Внесение депозита – Будьте готовы пополнить счет последствии отыгрыша приза. Это стандартное требование управлял для данного типа промо-акций. Лучше заблаговременно уточнить, какую необходимую надо(надобно) несомненно вносить на счет. Как правило, речь идет о наименьшем депозите, хотя вы должны быть убеждены, собственно он для по кармашку.
<b>Смотреть еще похожие новости:</b>
<a href=https://mit-bbs.com/viewtopic.php?t=130591>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=35842>1×slots бездепозитный бонус за регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепы с безвозмездными вращениями предоставляют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд платит казино. Число спинов ограничено и изредка выше сотню. Если акция включает в себя количество безвозмездных игр, их начисление имеет быть разбито на количество дней.
#8992 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация в 1×slots casino
Каждая игровая перрон выделяется критериями по получению и отыгрышу бездепов. В правилах отчетливо расписаны временные рамки, за которые надо(надобно) прокрутить вейджер. Также не запамятовывайте про наибольший размер ставки и максимальную необходимую выплаты. С иной стороны, чтобы получить бездепозитные призы казино, достаточно израсходовать не более 1 минуты.Не стоит сразу же отказываться от приветственных подарков в сходственных казино. Администрация готова начислить средства либо фриспины, но предварительно работники обязаны убедиться, что вы не аферист. Дело том,, что развелось слишком количество охотников за бонусами. Они выучились врать систему и наваривать солидные суммы денег. <a href=http://filmkachat.ru/>1 x slots casino</a> Для получения предоставленных призов вам понадобиться — ПК или мобильное прибор, и остальное дело за малым. <a href=https://madonas5.baltuss.lv/member.php?action=profile&uid=72990>https://madonas5.baltuss.lv/member.php?action=profile&uid=72990</a> скачать 1×slots на андроид мобильная версия <a href=https://www.stroimvmeste.com.ua/user/Davidvex/>https://www.stroimvmeste.com.ua/user/Davidvex/</a> Нет. Для получения бездепозитного приза в казино необходима неотъемлемая регистрация на сайте. Играть в слоты безвозмездно и без регистрации возможно лишь в демо режиме.
онлайн казино 1×slots
Используйте наихорошие бездепозитные призы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из перечня ниже, чтобы заработать презенты за простые деяния и уже сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высокой отдачей и быстрыми выводами на электронные кошельки. 1×slots сайт <a href=http://www.taijiacademy.com/newforum_down/profile.php?mode=viewprofile&u=303244>http://www.taijiacademy.com/newforum_down/profile.php?mode=viewprofile&u=303244</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots Список например именуемых «разрешенных территорий» прилагается к правилам бонусной программки игорного портала. Обязательно проверьте, распространяются ли на вас подобные санкции.
1×slots официальный сайт зеркало рабочее
Основное различие что, что для получения бездепа не пополнять баланс в казино. Но не этого, есть ряд и отличий: <a href=https://sc-grandmaster.ru/forum/?PAGE_NAME=profile_view&UID=16879>https://sc-grandmaster.ru/forum/?PAGE_NAME=profile_view&UID=16879</a> казино 1×slots Бездепозитный бонус казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в данном и содержится главное различие.Подтверждение регистрации. Казино настоятельно привязки профиля к электрическому адресу и номеру телефона. Для сего на e-mail отчаливает письмо со ссылкой, а на телефонный ? текстовое сообщение с кодом.
1×slots официальный регистрация
Важно, убедитесь что, нет, собственно ранее не регистрировались в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи.Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных требований, кроме неотъемлемой верификации. Если на веб-сайте предусмотрена обязательная процедура доказательства личности, то вывести выигрыш получится лишь последствии проверки данных. Приготовьтесь наполнить анкету и отправить в техподдержку документ, подтверждающий личность. <a href=http://forum.animogen.com/memberlist.php?mode=viewprofile&u=15333>1×slots зеркало</a> Несмотря на то, собственно данный вариант стимуляции со стороны азартных платформ довольно моден области подобных игр, далековато не всем поклонникам казино знаменито, что себе бездепозитные бонусы казино и как непосредственно их вероятно эксплуатировать. Чаще всего используются коды. Их нужно заносить в особые окошки регистрационной анкеты, в идет о пригласительных бонусах, или в особом разделе собственного офиса игрока.Начнём с такого, что любое рекламную за регистрацию предполагает некоторые обстоятельства. Бездепозитные призы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность валютного оборота, нужная для исполненья условий. Пример, возымели бесплатные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 руб., проигрышных либо выигрышных, не. После выполнения, бонусный баланс перейдёт на реальный и станет легкодоступным к выводу. 1×slot зеркало рабочее регистрации на телефон придет <a href=http://www.rgb-muelheim.de/buch/scarbook.php>http://www.rgb-muelheim.de/buch/scarbook.php</a> Размер бонусов чаще всего чисто символический и не превышает 50 рублей. Приятно, но ощутимым бустом при вряд ли станет.
1×slots зеркало на сегодня
Если вы опытный игрок, вы обязаны аристократия, что приз без депо – редкая находка. Тем не менее, мы раз исследуем онлайн, дабы отыскать для вас наилучшие бездепозитные предложения. <a href=http://seafishzone.com/home.php?mod=space&uid=1249914>http://seafishzone.com/home.php?mod=space&uid=1249914</a> В онлайне очень количество скриптовых вебсайтов, коие принадлежат плутам. Их главная задача – заинтересовать гэмблеров, пообещав столько щедрые подарки, хотя и солидные выигрыши. Так что кое-какие сайты предлагают получить за регистрацию даже $1 000.Чтобы других убедиться в преимуществах бездепозитных призов, достаточно зарегистрироваться в казино и получить одобрение. 1×slots скачать на айфон
<b>Смотреть еще похожие новости:</b>
<a href=https://persiankittencat.com/grey-persian-cats-unraveling-the-charm-of-these-feline-beauties/#comment-37189>казино 1×slots</a>
<a href=https://rolivka.online/forum/showthread.php?tid=29449>1×slots зеркало проходить регистрацию это отличный вариант</a>
<a href=https://www.xn–72c9aa5escud2b.com/webboard/index.php/topic,514796.new.html#new>1 x slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бонус за регистрацию в казино выдается только раз один на одного игрока. Но посещают вспомогательные промоакции, в рамках которых бездепы расступаются для постоянных клиентов и эти презенты Вы можете получить более 1-го раза.
#8993 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало этих способов предполагает регистрацию
Бонус начисляется игроку сразу в регистрации и прохождения верификации в казино и не просит от клиента внесения депо. Как верховодило, размер приза в сходственном случае достаточно умеренный, впрочем позволяет новеньким познакомиться с игрой без риска настоящими деньгами. <a href=http://filmkachat.ru/>1× slots casino зеркало</a> Принципиальным различием бесплатных призов от призов на депозит считается недоступность необходимости заносить средства на аккаунт. Из-за этого их нередко именуют бездепозитными (not the slightest down payment bonuses).Варианты выигрыша зависимости от Вашей удачи и условий игорного портала. Выше мы сказали, собственно кое-какие бездепозитные бонусы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются другие, все, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность современных игр на средства, возможно выиграть невозможные суммы. Сегодняшние игровые автоматы либо видео слоты, как их нарекают. Могут выдавать солидные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000. <a href=http://www.joaskin.co.kr/bbs/board.php?bo_table=free&wr_id=302830>http://www.joaskin.co.kr/bbs/board.php?bo_table=free&wr_id=302830</a> 1 х слотс зеркало <a href=https://pcbgeeks.ru/user/Craigson/>https://pcbgeeks.ru/user/Craigson/</a> Также есть онлайн-платформы азартных игр, которые используют раздачу бездепозитных призов в особые даты (как для казино, например и для игрока). Помимо этого, действующие игроки кроме имеют возможность получить похожие бонусы за свою работа (например, за повышения значения либо за схожие достижения).Создание аккаунта. На веб-сайте казино нужно открыть регистрационную форму и наполнить пустые поля личными данными. Иногда на данном этапе потребуется показать лишь адрес электронной почты и пароль, хотя чаще хотелось наполнить анкету персональной информацией (ФИО, дата рождения, пространство проживания и т.д. ). Нужно указывать только настоящие данные, что впоследствие они станут испытаны.
1×slots бонус за регистрацию
<a href=https://021snyw.com/space-uid-53919.html>скачать 1×slots официальный сайт</a> 1×slots casino регистрация 1×slotscasin online Таким образом онлайн казино получает вероятного игрока. Возможно в будущем либо настоящем он захочет сыграть на средства деньги. Так работают бездепозитные бонусы в онлайн казино. Здесь очень подходит выражение, безвозмездные сыр посещает лишь в мышеловке. Начинающие игроки шансы не обдумывать опасность пыла. Однако с понимания делается больше. Это тема для отдельного обсуждения.Ниже указан актуальный перечень легальных казино в Беларуси с бонусами на первый депо. Вы можете попасть на официальный сайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз. <a href=http://www.diarivitamin.com/2015/09/diet-seimbang-elak-batu-hempedu.html>http://www.diarivitamin.com/2015/09/diet-seimbang-elak-batu-hempedu.html</a> казино 1× slots официальный сайт Таким образом, заведение пытается продемонстрировать себя своим вероятным игрокам, а такой маркетинговый ход как казино бонус без депозита за регистрацию завлекает очень количество внимания к игорному заведению и обеспечивает постоянный струю новых посетителей и грядущих посетителей игрового интернет клуба.Бонус за регистрацию в казино выдается лишь один раз на одного игрока. Но бывают вспомогательные акции, масштабах которых бездепы расступаются для неизменных клиентов и такие подарки Вы сможете получить более 1-го раза.
рабочее зеркало 1×slots
Как правило, новоприбывшие геймеры в первую очередь желают ознакомиться с методами ввода и вывода денежных средств и сроки выполнения поданных заявок дабы конкретно разуметь, как скоро у исключить свой казино приз за регистрацию без депозита на электронный кошелек либо же банковскую карту. К счастью для всех играющих, внутри конкретных холдингов, все казино конкурируют между собой. Ведь случае бы конкретную фирму представляло лишь одно онлайн-заведение, то ли бы клиенты увидели казино с бонусом за регистрацию и возможность бы рассчитывать только на вознаграждение повторяющий приза на первое вложение. К любому заведению периодически следует привлекать свежих игроков, собственно, конечном, лишь на руку всем играющим.Бонус в казино без депо содержит разные варианты: такое быть приветственный бонус, акции в честь каких-то праздников или весомых дат, бонус за вербование новых игроков, преданность и получение VIP-статуса. <a href=https://steemit.com/rendering/@kalinka0588/transforming-dreams-into-digital-reality-3d-house-rendering-services>https://steemit.com/rendering/@kalinka0588/transforming-dreams-into-digital-reality-3d-house-rendering-services</a> 1×slots зеркало рабочее Нельзя рассматривать игру на деньги, как вариант заработка. Азартные забавы запрещены для лиц младше 18 лет. Topcasinobonuses.mobi не является организатором азартных игр. Сайт носит информационный характер.
1×slots casino зеркало
Бездепозитные призы начисляются только раз один. Не стоит открывать новые аккаунты, чтобы получить их повторно. Служба защищенности казино обязательно выявит «левого» соучастника и заблокирует. Если гость выполнит необходимые требования, отыграет собственную ставку и решит вывести личный выигрыш, то ему надо(надобно) сведению, что казино непременно потребует дать ксерокопии личных документов, чтобы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные средства исключить не получится.Прямо сейчас отберите безвозмездные вращения за регистрацию без депо и начинайте собирать призовые комбинации из-за крупных выигрышей! 1×slots зеркало регистрация в 1×slots casino <a href=https://mantiseye.com/community/julesdeali>https://mantiseye.com/community/julesdeali</a> Фриспины без депо либо дополнительные свои посодействуют поближе познакомиться с игровой платформой и её функциями. За счёт даров возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям ради игры напротив живых крупье.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Как лишь вы отыграли вейджер и свои с бонусного баланса перешли для на настоящий счет, Вы храбро можете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (устроить минимальный депозит к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, совместно, вкупе с депозитом). Ещё одно распространённое акционное предложение – симпатичный подарок с сомнительными притязаниями. К образцу, клуб обещает $100 в качестве бездепа, но с вейджером х80 либо х100. Отыграть такой вейджер фактически невозможно и поэтому другого, как концентрироваться на больше занимательных промоакциях. <a href=http://vn-info.net/user/Julesapoke/>http://vn-info.net/user/Julesapoke/</a> Не советуем сломя голову браться за всевозможные предложения получения средств без вложений. Вполне вероятно, что бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на первый взгляд. Альтернативой считается казино бонус за депозит. Мы предлагаем вам пару советов, спасибо которым у каждого игрока будет возможность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств: 1 x slots При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток.
<b>Смотреть еще похожие новости:</b>
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=578977>1×slots промокод при регистрации 2025</a>
<a href=https://www.findaspermdonor.com/viewtopic.php?f=25&t=86976>1×slot регистрация</a>
<a href=https://forum.vn.ua/member.php?u=73361>1×slot зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Несмотря на то, что этот вариант стимуляции со стороны азартных платформ очень востребован в похожих игр, далеко не поклонникам казино ведомо, что сами бездепозитные призы казино и как непосредственно их возможно эксплуатировать.
#8994 Charlesgunnyhttp://filmkachat.ru
зеркала 1×slots
Не желаете сыграть в азартные игры, не рискуя средствами деньгами, но получая в все выплаты? Подобную вероятность деют почти наилучшие порталы с азартными весельями. В их количестве количество честных и надежных интернет-казино на российском языке. Они привлекают новых юзеров разными поощрительными мероприятиями, включая бездепозитные, либо бесплатные бонусы.Бездепозитный приз по промо-коду несомненно доступен для игры, только никаких случае когда Вы активируете особый бонусный код в разделе с бонусами или укажите промокод при регистрации на сайте. В некоторых случаях, не активации кода, понадобиться подтвердить контактные данные игрока и заполнить анкету посетителя. <a href=http://filmkachat.ru/>1хслотс казино зеркало</a> <a href=http://www.techieshah.com/2019/08/eclipse-server-tomcat-v85-server-at.html>http://www.techieshah.com/2019/08/eclipse-server-tomcat-v85-server-at.html</a> Бездепозитный приз казино 2022 с выводом за регистрацию предоставляет вероятность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и выяснить качество работы службы. Довольно часто, начиная игровой процесс, игрок уже отказывается останавливаться и делает настоящий лепта. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать безвозмездно возможно как раз таки с призом за регистрацию без надобности вносить депо. 1× slots сайт <a href=http://www.deokji.co.kr/bbs/board.php?bo_table=free&wr_id=449638>http://www.deokji.co.kr/bbs/board.php?bo_table=free&wr_id=449638</a>
1×slots зеркало которую указывали при регистрации кстати
1хслотс официальный сайт зеркало Но разу не забывайте внимательно читать управляла участия в бонусных акциях. Если вы нарушите хотя бы одно условие, позднее вы не можете устроить недоразумение с администрацией.Вообще перейдя в казино — управляла одинаковы в получении бездепозитных призов, в стереотипные правила входит: доказать эл. Почту и аппарат, заполнить свой индивидуальный профиль, активировать рекламную код либо активировать предложения во вкладке БОНУСЫ. <a href=http://www.vinolian.com/bbs/board.php?bo_table=free&wr_id=210762>http://www.vinolian.com/bbs/board.php?bo_table=free&wr_id=210762</a> Также учтите, собственно некоторые игровые платформы сужают перечень государств, которые готовы получить предложенный бездепозитный приз за регистрацию. К примеру, существуют онлайн-заведения, выдающие похожие призы только жильцам определенных государств. К примеру, интернет казино 777 Оригинал предоставляет бездепозитный бонус лишь игрокам из России и государств СНГ. Или наоборот, снабжают вознаграждением всех, считая обитателей неких стран (из сего, по пристально изучать перечень, чтобы впоследствии не возникло никаких вопросов и претензий).Наш список включает в себя превосходнейшие бездепозитные бонусы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по главным параметрам: 1×slots сайт Чтоб получить крупный выигрыш, избирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша.Для получения приза нужно пригласить в забаву нового посетителя. Казино начисляет пригласившему фиксированный процент от взносов приглашённого в виде бонуса: почаще всего его объем не выше 10%. Срок деяния приза как не выше месяца: пригласивший получает приз зависимо проигранных ставок приглашённого в 1-ый месяц игры.
1×slots casino регистрация 1×slotscasin online
<a href=https://qualityprogamer.de/forum/member.php?action=profile&uid=7383>https://qualityprogamer.de/forum/member.php?action=profile&uid=7383</a> Некоторые клубы автоматически начисляют приз на аккаунт игрока после исполнения условий получения, но посещают ситуации, когда бонус надо(надобно) активировать игроку самому. Есть несколько методов активации бонуса: 1×slots скачать на айфон
1×slots зеркало видели такую регистрацию на
Бездепозитный приз часто может стать доступным сразу в завершения регистрации, поскольку правило единственным требованием к нему является регистрация, а этого проверка вашей свежей учетной записи. <a href=https://forum.spherecommunity.net/User-JamesLop>1×slots официальный сайт зеркало</a> Помимо остального, для вывода средств по бездепу нужно внести на счёт собственный 1-ый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало вероятную необходимую, последствии чего вывод средств будет доступен. Каждый игрок обязан сначала детально изучить обстоятельства по получению и отыгрышу приглянувшегося подарка. Если всё устраивает, поторопитесь арестовать безвозмездные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо сейчас начать вращать барабаны лучших слотов.Фриспины начисляются по конкретной ставке. После их активации игроку нужно запустить слот и убедиться, собственно в нем показываются благотворительные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода в отыгрыша определяется оператором и изредка превышает 5 000 руб. 1×slots зеркало проходить регистрацию это отличный вариант <a href=http://bbs.py27.com/home.php?mod=space&uid=393359>http://bbs.py27.com/home.php?mod=space&uid=393359</a> Рассмотрим принцип его деяния на случае. Допустим, вы зарегистрировались и получили $10 no deposit bonus с вейджером х50. Это значит, собственно выигранные деньги можно несомненно выводить не раньше, чем последствии того, как общая сумма ставок достигнет $500.
1 xslots рабочее зеркало
Помните, что в некоторых играх сумма ставки идет в зачет вейджера только отчасти. Так, в настольных и карточных забавах только от 5% до 50% суммы ставки числятся как отыгранные деньги, тот как в слотах идет в зачет все one hundred percent суммы. <a href=http://xn–b1afaaiqgeiqh0aidle1f1d3c.xn–p1ai/user/Renaldopeect/>http://xn–b1afaaiqgeiqh0aidle1f1d3c.xn–p1ai/user/Renaldopeect/</a> Постарайтесь отыграть вейджер, дабы замечена возможность забыть заявку на выплату. Кстати, на всех сайтах, представленных в списке, доступны современные платёжные инструменты. Вы можете получить выигрыш на электронной кошелёк, карту, телефон.Но а если вы уже профи по интернет казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в онлайн казино; 1хслотс 1хслотс регистрация перейти на 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://elclasificadomx.com/author/jameslog/>1×slots регистрация 1×slotscasino09k online</a>
<a href=https://traderscrypt.com/forums/showthread.php?tid=5891&pid=8805#pid8805>1×slots промокод при регистрации 2025</a>
<a href=http://t954381g.bget.ru/user/JosephPiery/>зеркала 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если вы облюбовали себе количество брендов которые для больше всего приглянулись, для постоянной игры! Таких гемблеров казино довольно любит и ценит, за частую такие игроки становятся VIP игроками заведения, коим нередко поступают выгодные предложения вид бонусов, так же туда входит и бездепозитные. Вейджер (или вагер) ? это минимальная сумма ставок, которую необходимо устроить для вывода валютного бонуса. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение.
#8995 Charlesgunnyhttp://filmkachat.ru
1×slots бездепозитный бонус за регистрацию
Обычно бездепозитные акции от казино, прибывают на эл. Почту в деньки рождения либо дни. В неких интернет казино возможно адресоваться в чат и как неизменному игроку, вполне для предложат бездепозитное предложение. <a href=http://filmkachat.ru/>1×slots зеркало подтвердит вашу регистрацию если говорить</a> А ознакомиться с новыми интернет казино, Вы можете с призов с выводом выгоды, коие Вы сможете получить без депо. <a href=https://getcomixxx.com/index.php?subaction=userinfo&user=Davidlom>https://getcomixxx.com/index.php?subaction=userinfo&user=Davidlom</a> 1×slots зеркало быструю регистрацию а также мгновенное <a href=https://www.forum-motorrad.net/members/19511-glennwaymn.html>https://www.forum-motorrad.net/members/19511-glennwaymn.html</a> Бывают ли бездепозитные бонусы без вейджера? Бывают, в у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино.Для тех, кто только подумывает испытывать свою удачу, еще для проф игроков, ищущих свежие площадки для выигрышей, ведущие лицензированные казино нередко организуют разные промоакции, и лучшее предложений за последнее время – как для новичков, так и для профессиональных игроков – бездепозитный бонус за регистрацию.
1× slots зеркало
Объективные – размер бонуса, коэффициент и условия вейджера, необходимость внесения депозита для вывода денег;Наши специалисты исследуют обстоятельства промоакции, затем в ручном режиме проверяют их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и другие параметры. Мы не рекламируем казино, а даем игрокам информацию о наилучших из их. <a href=https://your-portal.at.ua/forum/65–61323–10#88114>1×slots зеркало рабочее на сегодня</a> 1×slots казино зеркало У любого игорного заведения средства верховодила и обстоятельства. Но, дабы получить призы, нужно выполнить стандартные деянья: <a href=http://specialacel.hu/component/community/rhetoricalcommo/profile>http://specialacel.hu/component/community/rhetoricalcommo/profile</a> Размер приза. В качестве бездепов обыкновенно начисляют очень суммы, а когда речь идет о бонусах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино имеют презентовать игроку до 2000$. скачать 1×slots на андроид мобильная версия Одним из поводов отдавать привилегию одному либо другому заведению содержится в привлекательности предлагаемых акций и бесплатных предложений. Безвозмездные фриспины, выдаваемые без нужды создавать какой-нибудь лепта, в перечне находится далеко не в конце.Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом прибыли присутствуют на данной странице. Посетитель возможность оценить условия получения и начать выступать на деньги без внесения депозита. При данном игроку важно осознавать, на каких условиях и какими способами он сможет вывести приобретенный выигрыш. Для этого нужно расценить перечень подключенных платежных систем.
1хслот официальный сайт зеркало
Перечисленные выше главные свойства сопровождают фактически любой приз и считаются стереотипными для бездепозитных бонусных начислений в казино.Бoльшинcтвo азартных заведений выдвигают приблизительно однообразные, схожие обстоятельства и требования, которые необходимо выполнить, чтобы получить бездепозитный приз за регистрацию. Все их возможно соединить в раз список: Бонус начисляется игроку сразу последствии регистрации и прохождения верификации в казино и не просит от клиента внесения депозита. Как правило, объем бонуса в схожем случае довольно умеренный, впрочем дозволяет новеньким познакомиться с забавой без риска настоящими деньгами. <a href=http://turkteam.10tl.net/member.php?action=profile&uid=1563>http://turkteam.10tl.net/member.php?action=profile&uid=1563</a> Некоторые клубы механически начисляют бонус на акк игрока в выполнения критерий получения, но бывают истории, когда приз нужно активировать игроку самому. Есть количество методов активации бонуса:Зарегистрируйтесь. Для регистрации чаще всего достаточно ввести свой номер телефона и почтовый адресок, после чего ввести полученный код из СМС. Возможно, потребуется указать промокод. В правилах акции несомненно написано, где его бы включать. Иногда это бы создавать при регистрации, время — уже после сотворения собственного кабинета, на отдельной страничке. казино 1× slots официальный сайт Классическая разновидность бонуса за творение аккаунта. Его преимущество заключается в, что клиент может без избирать аппараты и делать ставки в их. Иногда перечень игровых автоматов ограничен оператором, хотя все одинаково это превосходнее, чем один-единственный доступный разъем, как если, тогда, с использованием фриспинов.3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефонный либо почту, указать персональную информацию;
1×slots зеркало регистрация
За счёт спинов выйдет запустить разные онлайн слоты, протестировать стратегии и поднабраться опыта. Фишка сомнений, собственно вращения начисляются на топовые аппараты с оригинальными опциями и высочайшей отдачей. Не забывайте, что в каждом акционном предложении учтены специальные требования – кратковременные лимитирования, максимальный размер ставки, перечень доступных игр.Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных притязаний, считая неотъемлемой верификации. Если на сайте предусмотрена обязательная процедура подтверждения личности, то вывести выигрыш получится лишь в ревизии данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий лицо. У любого игорного заведения свои правила и обстоятельства. Но, дабы получить призы, нужно выполнить стандартные деяния: рабочее зеркало 1×slots <a href=https://lavr-sovet.ru/user/AshleySmine/>https://lavr-sovet.ru/user/AshleySmine/</a>
casino 1×slot
Необходимость отыгрыша. Вейджер ситуации повыше, чем для бонусов за депо. И пока свои не отыграны, вывести их невозможно. При отыгрыше бонусных средств, необходимо учесть срок деянья бонуса и время, которое дается на отыгрыш. По истечению заявленного времени, не отыгранный приз несомненно аннулирован. <a href=http://forums.ggcorp.me/space-uid-3859685.html>http://forums.ggcorp.me/space-uid-3859685.html</a> Бездепозитные бонусы за регистрацию являются одним из самых известных способов вербования новых игроков в онлайн-казино, потому что они предоставляют игрокам возможность опробовать казино, необыкновенно игровые автоматы, и возможно, выиграть настоящие средства. рабочее зеркало 1×slots Каждый новичок и умелый игрок мечтают скоро стартануть и начать делать настоящие ставки. Для сего довольно забрать подарок, за который не нужно платить. В зависимости от игровой платформы, нужно создать профиль, привязать email или телефонный. После этого администрация начисляет щедрое вознаграждение в виде бесплатных вращений либо виртуальных кредитов.
<b>Смотреть еще похожие новости:</b>
<a href=http://mandala-app.com/forums/memberlist.php?mode=viewprofile&u=3447>1×slots зеркало быструю регистрацию а также мгновенное</a>
<a href=http://timelesshourglass.com/requiem/memberlist.php?mode=viewprofile&u=821>1хслот зеркало сайта</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Мы подготовили список, где есть практически животрепещущие и новые бездепозитные призы казино, которые вы можете получить безвозмездно. Для наших юзеров есть особые предложения эксклюзивные призы, которые вы у не найдете, их мы обозначили специальной красноватой плашкой «Exclusive». Начнём с как, что каждое рекламную за регистрацию предполагает некие условия. Бездепозитные призы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, нужная для выполнения критерий. Пример, возымели бесплатные вращения и выиграли с них 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 рублей, неудачных или выигрышных, неважно. После выполнения, бонусный баланс перейдёт на настоящий и будет легкодоступным к выводу.
#8996 Ремонт игровых приставокhttps://remont-igrovyh-konsoley-mob.ru/
Наша мастерская предлагает высококачественный <a href=https://remont-igrovyh-konsoley-mob.ru/>сервисный центр по ремонту игровой приставки рядом</a> всех типов и брендов. Мы знаем, насколько значимы для вас ваши геймерские устройства, и обеспечиваем ремонт наилучшего качества. Наши профессиональные техники проводят ремонтные работы с высокой скоростью и точностью, используя только оригинальные запчасти, что обеспечивает надежность и долговечность выполненных работ. Наиболее распространенные поломки, с которыми сталкиваются владельцы игровых приставок, включают проблемы с жестким диском, проблемы с разъемами, неисправности контроллеров, неисправности программного обеспечения и проблемы с охлаждением. Для устранения этих поломок наши опытные мастера оказывают ремонт жестких дисков, разъемов, контроллеров, ПО и систем охлаждения. Обратившись к нам, вы гарантируете себе качественный и надежный отремонтировать игровая приставка на дому. Подробная информация размещена на сайте: https://remont-igrovyh-konsoley-mob.ru
#8997 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Можно ли наваривать на бездепозитных призах? Это не работа, тут как повезет, в в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, время можно назвать везением, и добавочной добавкой к вашему бютжету.Бездепозитные бонусы в казино без пополнения 2022 — это конкретная сумма денег либо gift spins вращения, коие предоставляются первым гостям за регистрацию на сайте казино вид бездепозитного бонуса, и дает для возможность за счет казино без пополнения опробовать предложения (игр), с последующей прерогативой вывода средств при выполнении всех установленных правил. <a href=http://filmkachat.ru/>1×slots официальный demo регистрация в 1×slots casino</a> <a href=http://www.seoulschool.org/bbs/board.php?bo_table=free&wr_id=287784>http://www.seoulschool.org/bbs/board.php?bo_table=free&wr_id=287784</a> К сожалению, нет. Почти все казино, требуют внесение но бы одного минимального депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, что исключить средства разрешено лишь на что, эту платежную систему, с коей был изготовлен депо.Бездепозитные бонусы казино за регистрацию в 2022 году — это возможность сыграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой или количеством даровых вращений без внесения депо. Не путайте деморежим с реальной игрой без надобности внесения депо. 1хлот регистрация в 1×slots casino <a href=http://evermountcap.com/bbs/board.php?bo_table=free&wr_id=175882>http://evermountcap.com/bbs/board.php?bo_table=free&wr_id=175882</a>
1хслотс регистрация в 1×slots casino
Когда речь о получении бездепозитных бонусов в казино, начала обратите внимание на следующие обстоятельства:В интернете очень большое скриптовых сайтов, которые принадлежат жуликам. Их основная задача – привлечь гэмблеров, пообещав не только щедрые подарки, хотя и солидные выигрыши. Так собственно кое-какие сайты предлагают получить за регистрацию и $1 000. 1× slots регистрация в 1×slots casino <a href=https://krok.biz/forum/memberlist.php?mode=viewprofile&u=38516>https://krok.biz/forum/memberlist.php?mode=viewprofile&u=38516</a> Вы всего, например все любите получать презенты и бездепозитные призы казино. Игорные жилища взяли в повадку одаривать гэмблеров приятными бонусами. Стать владельцем приветственного презента возможно за творенье профиля или пополнение счёта. Второй вариант больше занимательный, как клубы готовы удвоить депозит! Но в вы новичок и лишь знакомитесь с миром азарта, превосходнее пользуйтесь бонусом за регистрацию. 1×slots рабочее зеркало
1×slots регистрация 1×slotscasino 56 online
Акции, посвященные календарным праздничным, случаются рассчитаны как на всех юзеров, например и на категории: примеру, презент на 8 марта девушкам-игрокам либо мужчинам на 23 февраля.Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке адепты онлайн-казино публикуют важную информацию о no down payment bonuses прочих предложениях. Выбрать казино с бездепозитным бонусом. У нас на сайте представлен список наилучших интернет казино, которые предлагают своим игрокам великодушные бонусы за регистрацию. <a href=http://perfectsolutionlabs.com/user/DoctorLazutaSl/>http://perfectsolutionlabs.com/user/DoctorLazutaSl/</a> Приветственный бездеп предоставляется какому игроку только раз один. Казино борются с например именуемыми бонусхантерами (от англ. Bonus Hunter — охотник за призами), пытающимися заводить многочисленные аккаунты для надувательства оператора и повторного получения презента. Исключить похожие действия дозволяет верификация данных. Администрация вправе потребовать у клиента подтвердить индивидуальные данные, обозначенные при регистрации. 1×slots рабочее зеркало на сегодня Получив собственный подарок, Вы можете безвозмездно выступать на настоящие средства, а выполнив условия отыгрыша, вывести собственный выигрыш.Бездепозитный бонус по промо-коду будет доступен для забавы, лишь что, нет случае когда Вы активируете особый бонусный код в разделе с бонусами либо укажите промокод при регистрации на веб-сайте. В некоторых случаях, кроме активации кода, придется доказать контактные данные игрока и наполнить анкету клиента.
1×slots регистрацию процедура займет всего лишь
Но никогда не запамятовывайте пристально разбирать правила участия в бонусных акциях. Если вы нарушите хотя бы одно условие, позднее вы не сможете устроить недоразумение с администрацией. Бездепозитные бонусы истинными средствами, которые можно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадали. 1× slots зеркало <a href=http://levin-lic.ru/index.php?subaction=userinfo&user=markedsolitude5>http://levin-lic.ru/index.php?subaction=userinfo&user=markedsolitude5</a> Многие казино деют в рекламных целях благотворительные призы самая для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой вебсайт по партнерской ссылке с нашего портала.
1 x slots casino
Бонус за регистрацию в казино без депозита с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша возможность понадобиться сделать ставки на необходимую, в количество 10-ов раз превышающую сумму приза либо выигрыша.Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, дабы еще раз получить безвозмездный бонус. Игорные заведения нетерпимы к бонус-хантерам, потому вас ожидает неминуемое наказание. <a href=http://tools-info.biz.ua/wr_board/tools.php?event=profile&pname=brawnystyle81>http://tools-info.biz.ua/wr_board/tools.php?event=profile&pname=brawnystyle81</a> При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, коие можно посвятить забаве в казино.Теоретически, к бесплатным бонусам возможно отнести так называемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, потому собственно они деют только возможность делать ставки. 1×slots зеркало рабочее
<b>Смотреть еще похожие новости:</b>
<a href=http://b2s.bulwork.com/node/1581?page=82#comment-22574>1хслотс рабочее зеркало на сегодня</a>
<a href=https://tabsgame.ru/user/Jamesbes/>1× slots регистрация в 1×slots casino</a>
<a href=https://masstr.net/member.php?action=profile&uid=27801>казино 1×slots</a>
<a href=http://romb4×4.ru/forum/threads/1×slots-registracija-na-sajte.17247/>1×slots регистрация на сайте</a>
<a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=89366>1×slots зеркало проходить регистрацию это отличный вариант</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Существует ли стратегии для отыгрыша бездепозитных бонусов? К сожалению нет, на выигрыши или проигрыши с призов, казино либо игрок повлиять имеет, отдача игр происходит от разработчиков игр. При пользовании бездепозитным бонусом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют некоторое обликов лимитов:
#8998 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация
Если вы выбрали для себя некоторое брендов которые вам больше всего полюбились, для неизменной забавы! Таких гемблеров казино очень любит и оценивает, за частую эти игроки становятся VIP игроками заведения, которым нередко поступают прибыльные предложения в виде призов, так же туда входит и бездепозитные.Процесс доказательства личности имеет взятьвдолг(взятьвзаймы) от 1-го дня до недели. Если заказчик разрешил какую-либо ошибку при заполнении паспортных данных, то ему по обратиться с задачей в саппорта онлайн-казино. <a href=http://filmkachat.ru/>1×slot рабочее зеркало</a> С другой стороны, гораздо легче арестовать бездепозитные фриспины за регистрацию в казино и напрямик данный начать вертеть барабаны в лучших слотах. Главная особенность спинов что, что они предназначены для топовых автоматов. Удастся не только пройти дополнительные раунды, но и прирастить необходимую выигрыша, заработать респины и внутриигровые презенты. <a href=https://floobits.com/Jamesheath>https://floobits.com/Jamesheath</a> 1хслотс зеркало <a href=http://interiorwork.co.kr/bbs/board.php?bo_table=free&wr_id=312821>http://interiorwork.co.kr/bbs/board.php?bo_table=free&wr_id=312821</a> Основное управляло получения бездепа ? создаваемый акк обязан быть у пользователя первым и единственным. Наличие нескольких аккаунтов взыскательно воспрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депо необходимо соблюдать простую очередность деяний.
1хслотс мобильная версия зеркало
<a href=https://dev.eff.one/forumdisplay.php?fid=10>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a> 1×slots официальный demo регистрация в 1×slots casino <a href=http://www.scribbledatom.com/2013/02/blog-post.html>http://www.scribbledatom.com/2013/02/blog-post.html</a> Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция имеет подробные правила, ссылка на коие обычно находится в промообъявлении. В них указываются лимиты, вейджер, список доступных игр. Если оператор скрывает данные о предложении, то воспользоваться им не стоит. 1х слотс зеркало регистрация в 1×slots casino Перед активацией важно внимательно изучить условия промоакции. Чем ниже вейджер, что, этим больше потенциальная выгода игрока. Имеют велечину кроме лимиты ставок при отыгрыше и сроки, на которых возможно пользоваться предложением. Если бездеп обхватывает узкий список игр, рекомендовано узнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь том, случае, если оператор не установил жесткие лимитирования на максимальную сумму ставки.
1×slots casino online регистрация
В качестве призов онлайн казино нередко предлагает выдачу фриспинов, словами безвозмездных вращений игрового барабана. Виртуальные монеты можно применять для обучения в покерной школе либо для забавы в казино. <a href=https://montreesounds.com/index.php?action=profile;u=33655>https://montreesounds.com/index.php?action=profile;u=33655</a> Доступные забавы – В некоторых азартных забавах возможно понизить математическое преимущество казино до нескольких 10-х процента. В их количестве все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как верховодило, в таких играх ставки идут в зачет вейджера не всецело. Например, имеет предусматриваться только 50%. В неких играх бездепозитные призы вообще нельзя отыгрывать.Подтвердите лицо, предоставив оператору казино средства паспортные данные. Инструкции обыкновенно легкие, главное — четко им стопам. Если написано, собственно «на фото обязаны быть заметны все четыре угла страницы паспорта» — сделайте непосредственно это фото. 1хслотс рабочее зеркало Простая процедура получения бездепозитного бонуса, кот-ая займет менее 2-х минут. Для получения бездепов, достаточно зарегистрироваться и доказать контактные данные.При игре на бонусные свои воспрещается выступать в игровые автоматы с современным джекпотом и игры из радела live casino. Кроме такого, кое-какие казино дают бездеп на раз или некоторое определенных слотов, и в иных забавах Вы не можете на них выступать.
казино 1× slots официальный сайт
Все благотворительные бонусы кажутся соблазнительными. Кто же откажется от возможности поиграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далековато не все бездепозитные призы одинаковой презентабельны для рассудительного посетителя.Подарки на определенные даты отличаются условиями получения. Если одобрение начисляют игроку на день рождения, то сумма обыкновенно в от совместного размера депо за год. Нет. Казино раздают безвозмездные призы за регистрацию, для того, дабы заказчик мог ознакомиться с игровым заведением. А чтобы исключить его, нужно выполнить условия отыгрыша.Частенько новички не разумеют, как активировать презенты либо вывести 1-ый выигрыш. Для сходственных случаев наша команда описала главные определения – что это фриспины, вейджер, как его отыграть, зачем нужно протекать верификацию. 1хслотс рабочее зеркало на сегодня <a href=https://archives.megadiyhelp.com/member.php?187438-DoctorLazutaOi>https://archives.megadiyhelp.com/member.php?187438-DoctorLazutaOi</a> Законодательство, регулирующее азартные забавы в разных государствах, влияние на возможности операторов. В результате пользователи из отдельных ареалов сталкиваются с лимитированиями со стороны казино. Это возможность быть как глубокий отказ в доступе, например и невозможность загружать игры отдельных изготовителей.
1×slots актуальное зеркало
Выполнив все притязания оператора, заказчик возможность оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем не более суток. Если дополнительно требуется пройти функцию верификации, то срок увеличивается до 1–2 рабочих дней. Для перевода используются банковские инструменты и электронные платежные системы. Второй способ подходит другого, как, так как масса транзакций в осуществляются мгновенно. В связи со спецификой функционирования банков обработка платежей имеет взятьвдолг(взятьвзаймы) до нескольких рабочих дней.Рассмотрим принцип его действия на образце. Допустим, вы зарегались и возымели $10 not the slightest deposit bonus с вейджером х50. Это означает, собственно выигранные деньги возможно будет выводить не раньше, чем после того, как общая сумма ставок достигнет $500. <a href=http://nasamomdele.su/forum/memberlist.php?mode=viewprofile&u=65711>http://nasamomdele.su/forum/memberlist.php?mode=viewprofile&u=65711</a> Нет. Казино выдают благотворительные бонусы за регистрацию, чтобы, чтобы, дабы клиент мог ознакомиться с игровым заведением. А дабы исключить его, нужно выполнить условия отыгрыша. 1× slots casino зеркало Каждая игровая платформа отличается критериями по получению и отыгрышу бездепов. В правилах отчетливо расписаны временные рамки, за коие нужно прокрутить вейджер. Также не забывайте на наибольший объем ставки и наивысшую сумму выплаты. С иной стороны, чтобы получить бездепозитные бонусы казино, достаточно истратить менее 1 минуты.
<b>Смотреть еще похожие новости:</b>
<a href=https://nauc.info/forums/viewtopic.php?t=20424641>1×slots casino зеркало рабочее</a>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=254750>1×slots зеркало сайта</a>
<a href=http://naturetour.ru/communication/forum/messages/forum3/message23682/5381–1×slots-zerkalo-registratsiyu-bolee-populyarnyy-variant-eto?sessid=7d1214599d6c97ba63012ab5802e4f4b&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1×slots зеркало регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный бонус предоставляется новому игроку за определенные деяния. Часто презент повторяющий средств или фриспинов выдается за регистрацию, спасибо чему пользователь получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, дабы снова получить бесплатный бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ожидает неминуемое санкция.
#8999 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация
Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала быстрые выводы. Фишка выплат том,, что довольно избрать платёжный инструмент и указать необходимую. В большинстве случаев средства зачисляются на электрические кошельки в течение 15 минут, а на банковские карты – 1–3 рабочих дня.Иногда в качестве поощрения за регистрацию могут выдаваться билеты для роли в турнирах. Условия их проведения довольно выделяются, потому мы рекомендуем ознакомиться с каждым предложением раздельно. <a href=http://filmkachat.ru/>1×slots зеркало регистрация</a> Бездепозитный бонус часто может стать легкодоступным сразу в завершения регистрации, потому как единственным притязанием к нему является регистрация, а после ревизия вашей свежей учетной записи. <a href=http://megatv.kiev.ua/user/Davidoxymn/>http://megatv.kiev.ua/user/Davidoxymn/</a> Внесение депозита – Будьте готовы пополнить счет последствии отыгрыша бонуса. Это стандартное требование правил для этого подобии промо-акций. Лучше заранее уточнить, какую сумму надо(надобно) несомненно вносить на счет. Как верховодило, речь о наименьшем депозите, хотя вы должны быть убеждены, собственно он для по кармашку. 1×slots сайт зеркало <a href=http://railagent.ru/club/user/107019/>http://railagent.ru/club/user/107019/</a> Бoльшинcтвo азартных заведений выдвигают приблизительно одинаковые обстоятельства и требования, которые необходимо выполнить, чтобы получить бездепозитный бонус за регистрацию. Все их можно объединить в один перечень:Если площадка дарит бездеп за регистрацию, то процедура его получения ординарна. Нужно только ввести акк на веб-сайте и активировать его, подтвердив адресок электрической почты, номер аппарата либо другие данные, коие просит оператор. Перед этим необходимо увериться, что юзер находится на официальном веб-сайте казино, но на мошеннической площадке.
сайт 1× slots casino
Возможность сыграть дополнительное соревнование (а от и количество) совершенно бесплатно, а выигрыш, тому, поступает на счёт игрока.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 $. Если выдаются фриспины, их количество редко выше нескольких десятков бесплатных вращений. 1хслот официальный сайт зеркало А ознакомиться с свежими интернет казино, Вы можете помощью бонусов с выводом прибыли, которые Вы можете получить без депо. <a href=https://www.gamers-forum.com/member.php?104442-PatrickAmose>https://www.gamers-forum.com/member.php?104442-PatrickAmose</a> Наши эксперты изучают условия промоакции, этого в ручном режиме проверку их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и характеристики. Мы не рекламируем казино, а даем игрокам информацию о лучших из их. 1×slots скачать на айфон Возможность протестировать новые забавы, не рискуя собственными средствами и разработать собственную стратегию игры.Таким образом онлайн казино получает вероятного игрока. Возможно в либо настоящем он захочет сыграть на свои средства. Так трудятся бездепозитные призы в интернет казино. Здесь хорошо подходит выражение, бесплатные сыр бывает лишь в мышеловке. Начинающие игроки могут не осознавать опасность азарта. Однако с осознания делается больше. Это тема для отдельного обсуждения.
1хслот скачать
Обычно, бездепозитные бонусы выдаются под определенные слоты с фиксированной ставкой, но их наверняка запрещено применять в игровых автоматах с прогрессивным джекпотом. Список игр, в которых можно применять бездеп, Вы найдете в описании промоакции либо можете уточнить у саппорта заведения.Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала прыткие выводы. Фишка выплат в, собственно достаточно избрать платёжный инструмент и показать сумму. В большинстве случаев средства зачисляются на электрические кошельки на 15 мин., а на банковские карты – 1–3 рабочих дня. При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое можно посвятить игре в казино.На нашем веб-сайте Вы отыщите список своевременных свежих бездепозитных бонусов в казино 2022 года. Также, есть большое эксклюзивных услуг, которые доступны только посетителям нашего вебсайта последствии регистрации по нашей ссылке или активации особого промокода. <a href=http://vn-info.net/user/RichardEpike/>http://vn-info.net/user/RichardEpike/</a> 1хслотс официальный сайт зеркало
1хслотс 1хслотс регистрация перейти на 1×slots
К раскаянью, нет. Почти все казино, настоятельно внесение хотя бы одного минимального депо для вывода выигрыша с бездепозитного приза. Также учитывайте, собственно вывести деньги разрешено только на ту платежную систему, с коей был сделан депо. B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax x1 slots регистрация в 1×slots casino <a href=https://club.7ya.ru/Dissertat1508/>https://club.7ya.ru/Dissertat1508/</a> Для казино, работающих онлайн, бездепозитные призы необходимы для вербования новых клиентов. Предложение сыграть на слотах без надобности внесения настоящих средств — работающий метод для повышения энтузиазма к фирмы. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит играть в казино, только сейчас теснее на собственные деньги.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
На нашем сайте Вы найдете перечень своевременных новых бездепозитных призов в казино 2022 года. Также, есть количество эксклюзивных услуг, коие доступны лишь гостям нашего вебсайта в регистрации по нашей ссылке либо активации специального промокода.Многие игроки, оценив функционал казино, остаются играть в нем и далее ? на это и направлено любое рекламную. Постоянные посетители вносят депозиты и проделывают ставки, обеспечивая длительную прибыль оператора. То есть, казино выдают бездепы свежим пользователям для формирования лояльной аудитории. Однако далековато не все ресурсы предлагают своим клиентам бездепозитные призы за регистрацию в казино. В большинстве случаев предусмотрено поощрение на 1-ый депо в размере 100–200%. Это замечательная возможность преувеличить банкролл, увеличить время, проведённое за забавой и шансы сорвать большой куш.Некоторые клубы автоматически начисляют приз на аккаунт игрока в выполнения условий получения, хотя бывают истории, когда приз нужно активировать игроку самому. Есть некоторое способов активации приза: <a href=https://formacion.somoscodenautas.com/forums/topic/%d1%81%d0%ba%d0%b0%d1%87%d0%b0%d1%82%d1%8c-%d0%ba%d0%b8%d0%bd%d0%be-%d0%b4%d0%bb%d1%8f-iphone/>https://formacion.somoscodenautas.com/forums/topic/%d1%81%d0%ba%d0%b0%d1%87%d0%b0%d1%82%d1%8c-%d0%ba%d0%b8%d0%bd%d0%be-%d0%b4%d0%bb%d1%8f-iphone/</a> 1×slots рабочее зеркало Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских рублей. В условиях промоакции указано, что вейджер бездепозитного приза х20. Поэтому, чтобы отыграть приз, игроку будет необходимо сделать ставок на 35*20=700 рублей.
<b>Смотреть еще похожие новости:</b>
<a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=48896>1×slots зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша призов. Заведения практически устанавливают максимальную ставку, допустимую по условиям вейждера. С такими простыми советами каждое казино с призом за регистрацию способно принести в разы больше выгоды и выгоды.
#9000 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрацию более популярный вариант это
Чтобы получить вероятность исключить выгода с бездепозитного приза в казино, необходимо выполнить ряд условий: <a href=http://filmkachat.ru/>1хслот скачать</a> Проверка занимает от нескольких мин. До нескольких дней, спецы техподдержки могут запросить дополнительные документы или инициировать краткое общение по Skype. <a href=http://www.sfgshz.com/home.php?mod=space&uid=399489&do=profile>http://www.sfgshz.com/home.php?mod=space&uid=399489&do=profile</a> Только выполнив все условия отыгрыша и дождавшись окончания ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить свои деньги.Представьте момент, когда при ставке в 10 руб. Вы получите схожее умножение. Миллион рублей за одно вращение, собственно абсолютно возможно. Поэтому вопрос, сколько возможно выиграть остаётся не. Предлагаем проверить других. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный приз и проверяйте фортуну в деле. Разумеется, вывести средства довольно. Однако шансы есть у всех. казино 1× slots официальный сайт <a href=http://unix.t7y.ru/user/WalterSoops>http://unix.t7y.ru/user/WalterSoops</a> Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых свежих, великодушных и проверенных призах в интернет казино, которые обновляются каждый денек.
1×slots регистрацию процедура займет всего лишь
Автоматическая активация первый самой комфортной, хотя ручной метод содержит перед ней достоинства. Прежде чем использовать вознаграждение от казино, стоит заранее определить, сколько времени потребуется на исполненье всех критерий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала действия приза. <a href=http://aficionado.pl/showthread.php?112021–1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82-%D0%BC%D0%BE%D0%B1%D0%B8%D0%BB%D1%8C%D0%BD%D0%B0%D1%8F-%D0%B2%D0%B5%D1%80%D1%81%D0%B8%D1%8F&p=129896>1×slots официальный сайт мобильная версия</a> рабочее зеркало 1хслотс Однако далековато не все ресурсы предлагают своим посетителям бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено одобрение на 1-ый депо в объеме 100–200%. Это отличная возможность преумножить банкролл, прирастить время, проведённое за игрой и шансы сорвать большой куш.Каждый из бездепозитных бонусов без пополнения 2022 содержит собственный конкретный вейджер для отыгрыша, так же в любом казино он уточняется персонально — где то он х55 а где-то х30, повторюсь всюду по различному! <a href=http://48kvadratov.ru/bitrix/redirect.php?goto=http://xn–www-3nfaaba9cybs0alg1asz1anl.matchfishing.ru/bitrix/redirect.php?goto=http://skand-m.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/U4LTLXUwGt0>http://48kvadratov.ru/bitrix/redirect.php?goto=http://xn–www-3nfaaba9cybs0alg1asz1anl.matchfishing.ru/bitrix/redirect.php?goto=http://skand-m.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/U4LTLXUwGt0</a> Вейджер (wager) – это коэффициент, который демонстрирует на какую сумму нужно устроить ставок, дабы исключить приз из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода этого приза, Вам необходимо сделать ставок на необходимую: 500*70=3500 рублей. Только полностью отыграв приз, Вы можете исключить собственный выигрыш.Ограничения по забавам. Администрация запрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, деньгами либо безвозмездными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда разделенье производится по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, хотя запрещен в настольных забавах и в разделе Live Casino. 1× slots регистрация в 1×slots casino Отказ в прохождении верификации. Если клиент не желает или не может предоставить документы, подтверждающие его лицо, профиль будет заблокирован вместе со всеми бонусными начислениями.
1×slots официальный зеркало
Наши эксперты исследуют обстоятельства промоакции, затем в ручном режиме проводят их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и параметры. Мы не рекламируем казино, а даем игрокам информацию о превосходнейших из них. <a href=http://xn–90afccar8afg8b5b.xn–p1ai/bitrix/redirect.php?goto=http://transset.ru/bitrix/redirect.php?goto=http://m-reason.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/HBlWIlCoEhM>http://xn–90afccar8afg8b5b.xn–p1ai/bitrix/redirect.php?goto=http://transset.ru/bitrix/redirect.php?goto=http://m-reason.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/HBlWIlCoEhM</a> 1хслот зеркало сайта Условия вывода выигрыша. В некоторых заведениях для успешного вывода с бездепозитного бонуса достаточно пополнения баланса и доказательства личности. В других же клубах, необходимо количество раз прокрутить свой депо.
1×slots подтвердит вашу регистрацию если говорить
Обычно показатель повыше, чем для бонусов на депо. Не удивляйтесь, если он несомненно даже х100. Иногда завышенный коэффициент вейджера уточняется для обитателей отдельных государств.Обычно бездепозитные промоакции от казино, прибывают на эл. Почту в деньки рождения либо праздники. В неких онлайн казино возможно обратиться в чат и как постоянному игроку, вполне вас предложат бездепозитное предложение. Необходимость отыгрыша. Вейджер такой повыше, чем для призов за депо. И пока свои не отыграны, исключить их нельзя.Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных притязаний, кроме неотъемлемой верификации. Если на сайте учтена обязательная процедура подтверждения личности, то вывести выигрыш удастся только последствии ревизии данных. Приготовьтесь наполнить анкету и отправить в техподдержку документ, подтверждающий личность. Мы собрали и выпустили перечень наилучших бездепозитных казино с бонусами за регистрацию, коие гарантируют щедрые выигрыши и мгновенные выплаты. 1хслотс рабочее зеркало <a href=https://aiia.su/index.php?subaction=userinfo&user=ZacheryBed>https://aiia.su/index.php?subaction=userinfo&user=ZacheryBed</a>
1 хслот регистрация в 1×slots casino
Фриспины — благотворительные вращения, коие разрешают игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытных игроков фриспины считаются наиболее модным и преимущественным видом бонуса — безвозмездные вращения порой эффективнее и веселее в отыгрыше, чем другие виды бездепов.Не стоит сразу же открещиваться от приветственных презентов в подобных казино. Администрация готова начислить средства или фриспины, хотя сначала сотрудники обязаны увериться, собственно вы не мошенник. Дело никаких, что развелось очень много охотников за бонусами. Они научились накалывать систему и зарабатывать солидные суммы средств. Бездепозитный бонус за регистрацию в казино — это стартовый подарок вид денежного начисления или безвозмездных вращений для свежих игроков заведения, для получения которого не вносить депозит.При регистрации в либо ином интернет игральном заведении — для дается один шанс испытывать свою удачу не внося свои монеты. Замечу собственно эту поощрительную услугу деют не все онлайн игровые площадки, а только великодушная середина(средина) из их. Которые мы подготовили для Вас в нашем списке. <a href=https://notebooks.ru/forum/index.php?PAGE_NAME=profile_view&UID=79850>https://notebooks.ru/forum/index.php?PAGE_NAME=profile_view&UID=79850</a> Чтобы выступать даром на реальные деньги в казино, порой довольно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные деяния. 1×slots casino регистрация 1×slots review live Хотя бесплатные призы начисляются без депозита, не исключено, что для понадобиться вносить средства. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты только последствии того, как новый заказчик первый пополнит игровой счет.
<b>Смотреть еще похожие новости:</b>
<a href=http://lider1c.ru/communication/forum/messages/forum5/message18190/14273–1×slots-skachat-na-ayfon?sessid=ca1831dd185c2c0a85cfa74202292405&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1×slots скачать на айфон</a>
<a href=http://vn-info.net/user/Josephkam/>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=55254>1хслотс рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Мы делаем ударение на главных положениях верховодил, рассказываем о территориальных лимитированиях и вкратце информируем о иных акциях обговариваемого казино. Срок отыгрыша — это период, кот-ый наступает в момент активации приза и заканчивается с его закрытием. Пользователю необходимо уложиться в этот временной зазор, по призовые средства аннулируются. Казино устанавливают перечень игр, ставки в которых засчитываются при расчете отыгранных средств. Если тайтл не заходит в данный список, то возможность быть недоступен для загрузки в действия бонусного предложения.
#9001 Ремонт ибпhttps://remont-ibp-max.ru/
Наши специалисты предлагает профессиональный <a href=https://remont-ibp-max.ru/>мастер по ремонту бесперебойников адреса</a> различных марок и моделей. Мы знаем, насколько важны для вас ваши UPS, и обеспечиваем ремонт высочайшего уровня. Наши квалифицированные специалисты работают быстро и аккуратно, используя только качественные детали, что гарантирует надежность и долговечность выполненных работ. Наиболее общие проблемы, с которыми сталкиваются обладатели источников бесперебойного питания, включают поломку аккумулятора, неисправности инвертора, поломку контроллера, неработающие разъемы и неисправности программного обеспечения. Для устранения этих неисправностей наши профессиональные техники выполняют ремонт батарей, инверторов, контроллеров, разъемов и ПО. Доверив ремонт нам, вы получаете надежный и долговечный вызвать мастера по ремонту бесперебойников в москве. Подробная информация доступна на сайте: https://remont-ibp-max.ru
#9002 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации 2025
Иногда для получения бонусов нужно связаться с представителями службы поддержки. Удобнее всего с ними собеседовать в онлайн-сате, желая время довольно запроса по электрической почте.Иногда для получения бонусов необходимо связаться с адептами саппорта. Удобнее всего с ними беседовать в онлайн-сате, хотя от довольно запроса по электронной почте. <a href=http://filmkachat.ru/>зеркло казино 1×slots</a> <a href=http://anima-rpg.com:/member.php?action=profile&uid=360296>http://anima-rpg.com:/member.php?action=profile&uid=360296</a> 1× слот зеркало <a href=http://a96549hg.bget.ru/user/Stevenaporb/>http://a96549hg.bget.ru/user/Stevenaporb/</a> На нашем сайте Вы найдете перечень актуальных новых бездепозитных призов в казино 2022 года. Также, есть много эксклюзивных услуг, коие доступны лишь гостям нашего вебсайта после регистрации по нашей ссылке либо активации особого промокода.
x1 slots 1хслотс регистрация перейти на 1×slots
Чаще всего используются коды. Их надо(надобно) заносить в специальные окна регистрационной анкеты, если речь о пригласительных призах, или в особом разделе собственного кабинета игрока. 1×slots регистрация 1×slots casino c2d ru Простая процедура получения бездепозитного приза, кот-ая займет не более 2-х минут. Для получения бездепов, достаточно зарегистрироваться и подтвердить контактные данные.В некоторых интернет казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на сайте клуба и подтвердить свои контактные данные. Дополнительно требуется активация промокода. <a href=http://dvnshu.com/index.php?subaction=userinfo&user=hulkingseries73>http://dvnshu.com/index.php?subaction=userinfo&user=hulkingseries73</a> Также учтите, что некоторые игровые платформы сузивают перечень стран, коие готовы получить предложенный бездепозитный бонус за регистрацию. К примеру, есть онлайн-заведения, выдающие подобные бонусы только жителям конкретных стран. К примеру, онлайн казино 777 Оригинал предоставляет бездепозитный бонус лишь игрокам из России и стран СНГ. Или наоборот, снабжают вознаграждением всех, считая жителей неких государств (из сего, стопам внимательно учить перечень, чтобы впоследствии не появилось никаких вопросов и жалоб).Бoльшинcтвo азартных заведений выдвигают примерно одинаковые условия и требования, которые нужно выполнить, чтобы получить бездепозитный приз за регистрацию. Все их можно соединить в один список: сайт 1× slots casino Такие поощрения дозволяют даром протестировать свежее казино, разобраться с игровым процессом интернет слотов, заработать и вывести маленькую сумму денег.Игры, в возможно выступать на бонусные деньги. Проверьте перечень игр, в можно играть на бонусные свои, вероятно они Вам не понравятся и надо тратить своё время на эту промоакцию.
1×slots регистрацию процедура займет всего лишь
<a href=https://learn.centa.org/forums/users/longregion76/>https://learn.centa.org/forums/users/longregion76/</a> После потребуется внести идентификационный платёж. Это пугает начинающих больше всего. Нужно сделать наименьший депо в 100–500 руб. Таким образом служба безопасности убедиться в том, что платёжный способ принадлежит Вам. Данная процедура необходима для обеспечивания безопасности игровых счетов. Пример, Ваш акк взломают и выведут свои на свой кошелёк. Будет очень досадно. Поэтому верификация платёжной системы, это необходимый момент.При исполненьи критерий отыгрыша и верификации, средства с бонусного счета переводятся на главный и шансы быть выведены на карту либо электрический кошелек. Лимиты на вывод и сроки проведения транзакции зависят от выбранной платежной системы. 1×slots регистрацию более популярный вариант это
1 х слотс зеркало
<a href=https://forum.oursson.ru/viewtopic.php?f=2&t=8578>1×slots casino регистрация на сайте</a> Таким образом, заведение пытается продемонстрировать себя своим потенциальным игрокам, а такой маркетинговый ход как казино приз без депозита за регистрацию завлекает очень большое внимания к игорному заведению и обеспечивает постоянный поток новых гостей и будущих посетителей игрового интернет клуба.Некоторые клубы автоматически начисляют приз на акк игрока после исполненья критерий получения, но посещают ситуации, когда приз нужно активировать игроку самому. Есть несколько методов активации бонуса: Бонус с зачислением средств на счет дает больше свободы поступков. Пользователь сам выбирает, каким образом распорядиться подаренными средствами. Здесь того могут работать ограничения на список дешевых игр, хотя обыкновенно эти рамки не так строги, как в рекламную с безвозмездными вращениями. 1×slots актуальное зеркало <a href=https://telearchaeology.org/TAWiki/index.php/%D0%98%D0%B7_%D0%A7%D0%B5%D0%B3%D0%BE_%D0%A1%D0%BE%D1%81%D1%82%D0%BE%D0%B8%D1%82_%D0%94%D0%B8%D0%B5%D1%82%D0%B0_%D0%95%D0%BB%D0%B5%D0%BD%D1%8B_%D0%9C%D0%B0%D0%BB%D1%8B%D1%88%D0%B5%D0%B2%D0%BE%D0%B9>https://telearchaeology.org/TAWiki/index.php/%D0%98%D0%B7_%D0%A7%D0%B5%D0%B3%D0%BE_%D0%A1%D0%BE%D1%81%D1%82%D0%BE%D0%B8%D1%82_%D0%94%D0%B8%D0%B5%D1%82%D0%B0_%D0%95%D0%BB%D0%B5%D0%BD%D1%8B_%D0%9C%D0%B0%D0%BB%D1%8B%D1%88%D0%B5%D0%B2%D0%BE%D0%B9</a>
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Необходимость отыгрыша. Вейджер в этом случае выше, чем для призов за депозит. И же средства не отыграны, исключить их нельзя. <a href=https://bongatoken.com/user/Walternon/>https://bongatoken.com/user/Walternon/</a> Срок активации и время на отыгрыш. Зачисление средств или фриспинов случается при активации протяжении требовательно ограниченного периода, схожие притязания предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать бонус некоторое дней или в недель. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с необоснованно высоким вейджером.Нет. Казино раздают благотворительные бонусы за регистрацию, чтобы, чтобы, дабы клиент имел ознакомиться с игровым заведением. А чтобы исключить его, необходимо выполнить обстоятельства отыгрыша. 1×slots официальный сайт мобильная версия скачать
<b>Смотреть еще похожие новости:</b>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=164417>1×slots зеркало рабочее на сегодня</a>
<a href=https://forum.ltp-team.com/profile/596-rabofreepa/>1×slots casino регистрация на сайте</a>
<a href=https://forum.ltp-team.com/profile/596-rabofreepa/>1×slots casino регистрация 1×slotscasin online</a>
<a href=https://forum.bandariklan.com/showthread.php?tid=176825&pid=874576#pid874576>1×slots официальный сайт, скачать</a>
<a href=https://melhorlance.com.br/author/jamesbom/>1×slots casino регистрация 1×slots review live</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Классическая разновидность приза за творенье аккаунта. Его преимущество содержится в, что заказчик имеет помощи подбирать аппараты и делать ставки в них. Иногда перечень игровых автоматов ограничен оператором, но все точно это какого-либо, чем один-единственный доступный слот, как если, тогда, с использованием фриспинов.
#9003 Charlesgunnyhttp://filmkachat.ru
1×slots бездепозитный бонус за регистрацию
Так собственно приготовьтесь предоставить секретную информацию (пол, возраст, страна проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает не более суток, последствии чего удастся свободно выводить крупные выигрыши.Демоказино есть практически на любом сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются существенно пореже: там когда выигрыша и соблюдения условий промоакций бездеп можно перевоплотить в настоящие средства. <a href=http://filmkachat.ru/>1×slots зеркало подтвердит вашу регистрацию если говорить</a> В наше время очень просто получить бонус за регистрацию в казино. Практически каждый игорный дом с радостью начисляет деньги или благотворительные вращения. Многие гэмблеры используют этим и не стесняются регистрироваться в каждом клубе с прибыльными критериями. Кстати, это отличная вероятность выработать победную стратегию и сорвать джекпот.Индивидуальные поощрения выдаются за совершение деяний: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавленья или официального клиента для ПК. В большинстве казино действуют программки преданности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий степень нередко сопровождается выдачей бездепа. <a href=https://mmatycoon.info/index.php/User:SuzannaYewen60>https://mmatycoon.info/index.php/User:SuzannaYewen60</a> Чтобы выступать даром на реальные деньги в казино, порой довольно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные деяния. 1×slots промокод при регистрации 2025 <a href=http://u-ssr.ru/index.php?subaction=userinfo&user=preciousbandann>http://u-ssr.ru/index.php?subaction=userinfo&user=preciousbandann</a> Вышеописанная причина и считается основным нюансом, из-за которого операторы отдают доля своей выгоды на разные рекламные затраты и маркетинговые кампании. А наиболее действенным здесь станут выступать именно бездепозитные призы казино 2022 с выводом за регистрацию.
casino 1×slot
1×slots зеркало этих способов предполагает регистрацию <a href=http://bestwecando.ourproject.org/dokuwiki-2013–05–10a/doku.php?id=мультфильмы_на_мобильный>http://bestwecando.ourproject.org/dokuwiki-2013–05–10a/doku.php?id=мультфильмы_на_мобильный</a> 1хслотс рабочее зеркало Вознаграждения за получение VIP-статуса ? начисляются в рамках программки преданности при достижении еще значения или выдаются индивидуально менеджерами саппорта.
1хслотс регистрация в 1×slots casino
Обычно для получения призов без депозита, казино выдвигает лояльные и вполне выполнимые обстоятельства, хотя есть ряд деяний которые воспрещены и могут причиной неприятные последствия:Обычно показатель выше, чем для призов на депозит. Не изумляйтесь, случае он будет числе х100. Иногда завышенный коэффициент вейджера уточняется для обитателей отдельных государств. <a href=http://tehnoprom-nsk.ru/user/Zacheryornak/>http://tehnoprom-nsk.ru/user/Zacheryornak/</a> За привлечение друга ? в рамках партнерской программки клиент получает вознаграждение за вербование новых пользователей.Отказ в прохождении верификации. Если клиент не хочет или возможности дать документы, подтверждающие его лицо, профиль будет заблокирован вместе со всеми бонусными начислениями. 1хслот скачать Вейджер не более х30–35 является применимым. Опытные игроки заявляют, что с таким вейджером реально остаться в плюсе, случае правильно подойти к выбору игрового аппарата.
1хслотс рабочее зеркало
Особую изюминку видео слотам придают уникальные символы. С их выходом активируются различные бонусы. Вы можете запустить дополнительный уровень и увеличить сумму выигрыша. Есть знаки, которые сменяют ненадобные составляющие и сами творят выигрышные комбо. Не стоит забывать и про бонус-тур. После любого успешного спина есть шанс увеличить необходимую выигрыша в два либо четыре раза. <a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/6322–1×slots-registratsiyu-protsedura-zajmet-vsego-lish#6331>1×slots регистрацию процедура займет всего лишь</a> Не стоит путать игру в демо и внедрение бонусов. В демонстрационном режиме игрок имеет расценить механику слота, сюжет и оформление. Но забава проводится на условные кредиты, поэтому отсутствует основное ? чувство пыла. Активируя промокод или фриспины, клиент по-прежнему не расходует свои деньги на игровые автоматы, хотя может сорвать настоящий куш!Третитй бездепозитный бонус за регистрацию – денежные средства. К огорчению, начислить рубли либо баксы способны лишь известные и знаменитые клубы. С их поддержкой у насладиться любой доступной игрой – автоматом, рулеткой, кено, блэкджеком. 1×slots зеркало видели такую регистрацию на <a href=https://39504.org/member.php?action=profile&uid=3278>https://39504.org/member.php?action=profile&uid=3278</a> Подарки на определенные даты отличаются критериями получения. Если одобрение начисляют игроку на день рождения, то сумма обыкновенно в от совместного размера депо за год.Исходя из этого, просто не присутствует разумных причин махнуть рукою на получение такого приза при регистрации. И, будет, на подобный бесплатной основе у вас есть все шансы выиграть средства и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные призы, нарекают бесплатными интернет платформами для игр.
1×slot зеркало
На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению этого времени, Вы не можете активировать и получить бездепозитный приз. <a href=https://yogicentral.science/index.php?title=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0%20%D0%B4%D0%B7%D0%B5%D0%BD>https://yogicentral.science/index.php?title=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0%20%D0%B4%D0%B7%D0%B5%D0%BD</a> 1×slots мобильная версия войти казино
<b>Смотреть еще похожие новости:</b>
<a href=http://forums.indexrise.com/thread-1096-post-332275.html#pid332275>1×slots регистрация на 1хслотс</a>
<a href=https://clubdefansde24.com/foro/viewtopic.php?t=18625>1×slots зеркало которую указывали при регистрации кстати</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Игрокам не следует воспринимать приветственный бонус как гарантированный метод получить крупный выигрыш, но это отличная возможность без расходов оценить перечень казино. Фриспины – бесплатные вращения с фиксированной ставкой, коие можно применять в определенных игровых автоматах.
#9004 Charlesgunnyhttp://filmkachat.ru
1×slots бонус за регистрацию
Чаще всего казино бонус за регистрацию без депо даёт вероятность запустить любой машина. Но какого-либо внимательно ознакомиться с критериями. Иногда для забавы доступны только определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, другого, как начать знакомство с миром азарта именно с «одноруких бандитов».Размер ставки для забавы по бездепозитному бонусу (естесственно же, если, тогда,, когда он представлен повторяющий бонусных валютных средств) часто ниже, чем при ирге на депо. Ограничение несомненно действовать до этапа отыгрыша бонуса. <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> <a href=https://narodovmnogo-omsk.ru/forum/user/6189/>https://narodovmnogo-omsk.ru/forum/user/6189/</a> 1×slots casino регистрация 1×slots review live <a href=http://zvezdjuchki.ru/user/Jasperlog/>http://zvezdjuchki.ru/user/Jasperlog/</a> На страничке представлены бездепозитные бонусы за регистрацию в казино редкая награда за коей гонятся все игроки как новенькие, например и мастера. Мы тоже уделяем огромное внимание на присутствие бонусов при составление рейтинга казино на средства. Бездепозитный приз это вероятность играть безвозмездно и выиграть настоящие средства.Популярность онлайн казино растёт и всё больше пользователей начинают проявлять азартными играми. Бездепозитные бонусы 2022 года, это уникальные подарки за регистрацию. С их поддержкой новые игроки имеют получить бесплатные вращения или средства на баланс за одну регистрацию. С в игорных заведений в онлайне, бездепозитные призы стали наимоднейшим методом вербования игроков. Подобные акции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о которых мы расскажем. Наш вебсайт собрал превосходнейшие предложения из интернета на 2022 год. Воспользуйтесь любым подарком и можете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша необходимо выполнить обстоятельства.
1×slots регистрация на сайте
Объективные – размер приза, коэффициент и обстоятельства вейджера, надобность внесения депо для вывода денег;Создание аккаунта. На веб-сайте казино необходимо обнаружить регистрационную форму и наполнить пустые поля личными данными. Иногда на данном шаге потребуется показать только адрес электронной почты и пароль, но почаще бы наполнить анкету индивидуальной информацией (ФИО, дата рождения, место проживания и т.д. ). Нужно указывать только настоящие данные, что впоследствие они станут проверены. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Бонус в казино без депо имеет разные варианты: это может быть приветственный бонус, акции в честь каких-то праздников либо важных дат, приз за вербование новых игроков, лояльность и получение VIP-статуса. <a href=http://t95283ld.bget.ru/user/GeraldDoony/>http://t95283ld.bget.ru/user/GeraldDoony/</a> 1×slots актуальное зеркало С не отыгранным бонусом воспрещается превышать объем наибольшей ставки. Нарушение этого условия виде аннулирование выигрыша.
1×slots скачать на айфон
После требуется внести идентификационный платёж. Это пугает начинающих больше всего. Нужно устроить наименьший депозит в 100–500 рублей. Таким образом служба безопасности увериться что, что платёжный метод принадлежит Вам. Данная процедура важна для обеспечивания защищенности игровых счетов. Пример, Ваш акк взломают и выведут средства на свой кошелёк. Будет очень досадно. Поэтому верификация платёжной системы, это необходимый момент. Бездепозитные призы — это презенты от казино повторяющий бонусных денег либо фриспинов для игровых автоматов, которые начисляются на акк игрока после процедуры регистрации на веб-сайте заведения. Для получения этих поощрений депо не потребуется.Перед активацией важно пристально выучить условия акции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, на коих возможно пользоваться предложением. Если бездеп охватывает узкий список игр, рекомендовано узнать максимальные коэффициенты, степень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь в том случае, если оператор не установил требовательные лимитирования на максимальную сумму ставки. <a href=http://www.nhps1914.com/wiki/index.php?title=РР·_чего_состоит_диета_Елены_Малышевой>http://www.nhps1914.com/wiki/index.php?title=РР·_чего_состоит_диета_Елены_Малышевой</a> Операторы гемблинга утверждают, что так они сражаются с бонус-хантерами. Впрочем, критики считают, собственно данным казино пытаются устроить из случайного гостя неизменного игрока. 1хслотс зеркало на сегодня Вейджер не более х30–35 является приемлемым. Опытные игроки заявляют, что с этим вейджером реально остаться в плюсе, в верно подойти к выбору игрового аппарата.Одним из поводов отдавать преимущество, льготу одному или иному заведению содержится в привлекательности предлагаемых акций и безвозмездных предложений. Безвозмездные фриспины, выдаваемые без дела создавать какой-нибудь вклад, в списке находится далековато не в конце.
1×slots регистрацию процедура займет всего лишь
Каждый компьютерные обязан сперва отчетливо изучить обстоятельства по получению и отыгрышу понравившегося подарка. Если всё устраивает, поспешите отобрать благотворительные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо сейчас начать вращать барабаны топовых слотов.Какие бонусы возможность еще получить не бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного бонуса, любое онлайн казино предлагает игрокам выгодное предложение на первый депо, вы совершаете депо, ваш депозит возрастает в двое либо том в трое, тем самым начать играть можно с больше крупной суммой, например же не запамятываем на вейджер на бонусы. <a href=http://brilliance.ru/forum/viewtopic.php?f=6&t=34578>1×slots зеркало рабочее</a> Бездепозитные бонусы казино за регистрацию в 2022 году — это вероятность поиграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой либо числом даровых вращений без внесения депозита. Не путайте деморежим с реальной игрой без надобности внесения депо. Все обожают получать подарки. Согласитесь, практически каждый играющий человек будет безгранично счастлив, в получит безвозмездный презент для игры в онлайн казино просто за регистрацию или же приз за внесенный депозит, например именуемые приветственные призы для новых игроков. Соответственно эти онлайн клубы станут больше известны и преимущественны у игроков при выборе казино для игры. Топ казино каждый обновляется и прибавляются свежие и занимательные игровые клубы с привлекательной бонусной политикой и всеми возможными привилегиями, к коим относятся такие бонусы как фриспины за регистрацию, денежные бездепозитные призы, а также великодушные бонусы за внесенный депозит.Онлайн-казино тщательно продумывают бонусные обстоятельства, которые нужно изучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша прочие ограничения. 1×slot казино зеркало <a href=http://jkmulti.vip/bbs/board.php?bo_table=free&wr_id=5517787>http://jkmulti.vip/bbs/board.php?bo_table=free&wr_id=5517787</a> Раздача призов может быть посвящена разным датам: календарные праздники, дни рождения игроков, годовщина открытия казино и т. Д. Подарок выдается повторяющий средств, фриспинов или баллов для скопления и обмена на услуги оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода этой суммы понадобиться выполнить ряд требований.
1×slots зеркало
Это раз из главных характеристик привлекательности презента. С завешенным коэффициентом и мастера не смогут выполнить условия по отыгрышу. И так, насколько презентабельно смотрится предложение – бездепозитный приз казино в размере $500 либо $1 000. Чтобы новички получше вникли, что же такое вейджер, мы разберём на примере. Подтверждение персональной инфы. Все казино просят от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и присутствие у юзера других аккаунтов (мультиаккаунт запрещен). <a href=https://images.google.com.jm/url?q=https://doctorlazuta.by/>https://images.google.com.jm/url?q=https://doctorlazuta.by/</a> 1×slots официальный сайт мобильная версия скачать Такой безвозмездный эквивалент средств зачисляется на профиль пользователя в осуществления притязаний и предназначаются они только для игрового процесса. Вывод таких вознаграждений вероятен лишь после воплощения вейджеровых условий.У каждой игры средства требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система засчитает любую ставку. В рулетке и покере устроить это гораздо труднее. Именно потому например важно пристально читать условия получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой ирге, то новенькие попросту «спустят бонус на ветер».
<b>Смотреть еще похожие новости:</b>
<a href=https://forumauthority.com/thread-6521-post-39726.html#pid39726>1× slots регистрация в 1×slots casino</a>
<a href=https://karakol.com.kg/user/Jameskef/>x1 slots регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При регистрации том, или ином интернет игральном заведении — вас дается раз шанс испытать собственную удачу не внося средства монеты. Замечу собственно эту поощрительную услугу деют не все интернет игровые площадки, а только щедрая половина из них. Которые мы подготовили для Вас в нашем перечне. Наши эксперты исследуют условия акции, затем в ручном режиме проверку их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие характеристики. Мы не рекламируем казино, а даем игрокам информацию о лучших из них.
#9005 Charlesgunnyhttp://filmkachat.ru
1×slots на любой вкус как пройти регистрацию
Размер бонуса. В качестве бездепов обычно начисляют маленькие суммы, а когда речь о призах за депо, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино могут презентовать игроку до 2000$. <a href=http://filmkachat.ru/>скачать 1×slots официальный сайт</a> Если вы новичок данном и только попали в неизведанную вами район азарта — с помощью услуг как бездепозитные призы без пополнения. <a href=https://menwiki.men/index.php?title=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D0%B5%D0%B9%D1%88%D0%B8%D0%B5%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BF%D1%80%D1%8F%D0%BC%D0%BE%20%D1%83%20%D1%81%D0%B5%D0%B1%D1%8F%20%D0%B4%D0%BE%D0%BC%D0%B0%20-%20%D0%B4%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D0%BE%D0%B2%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO>https://menwiki.men/index.php?title=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D0%B5%D0%B9%D1%88%D0%B8%D0%B5%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BF%D1%80%D1%8F%D0%BC%D0%BE%20%D1%83%20%D1%81%D0%B5%D0%B1%D1%8F%20%D0%B4%D0%BE%D0%BC%D0%B0%20-%20%D0%B4%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D0%BE%D0%B2%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO</a> Не стоит путать забаву в демо и внедрение призов. В демонстрационном режиме игрок возможность оценить механику слота, сюжет и оформление. Но игра ведется на условные кредиты, потому отсутствует основное ? ощущение азарта. Активируя промокод либо фриспины, заказчик как не тратит средства средства на игровые автоматы, но возможность сорвать реальный куш! 1× slots зеркало <a href=http://kidsnighttonight.com:/forums/member.php?action=profile&uid=355643>http://kidsnighttonight.com:/forums/member.php?action=profile&uid=355643</a> В наше время довольно просто получить бонус за регистрацию в казино. Практически каждый игорный жилище с готовностью начисляет средства либо благотворительные вращения. Многие гэмблеры используют этим и не смущяются регистрироваться в любом клубе с прибыльными условиями. Кстати, это замечательная вероятность выработать победную тактику и сорвать джекпот.
1 хслот регистрация в 1×slots casino
Срок активации и время на отыгрыш. Зачисление денег либо фриспинов происходит при активации на взыскательно ограниченного периода, похожие требования предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать приз количество дней либо том недель. Другие выдают солидную сумму за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высоким вейджером. <a href=https://nztw.org/home.php?mod=space&uid=43957>1×slots официальный сайт зеркало</a> скачать 1×slots на андроид мобильная версия Каждая игровая перрон выделяется условиями по получению и отыгрышу бездепов. В правилах отчетливо расписаны кратковременные рамки, за коие нужно прокрутить вейджер. Также не забывайте на наибольший объем ставки и наивысшую необходимую выплаты. С другой стороны, дабы получить бездепозитные бонусы казино, довольно израсходовать не более 1 минутки.Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации подарка нужно подтвердить электронную почту и привязать аппарат; <a href=https://backpacker-footsteps.com/backpacker-footsteps-forum/profile/stevenfeesy/>https://backpacker-footsteps.com/backpacker-footsteps-forum/profile/stevenfeesy/</a> Выбирайте лучшие благотворительные призы с помощью обзоров на Casinoz – и пусть вас сопутствует удача при отыгрыше бонусных кредитов!В истиннее время получить приз за регистрацию в казино очень просто. Почти каждый игорный дом с радостью предоставит деньги или бесплатные вращения. Многие игроки используют этим и не стесняются регистрироваться в каждом клубе с прибыльными условиями. Кстати, это отличная возможность придумать выигрышную стратегию и сорвать куш. 1×slots рабочее зеркало на сегодня Когда идет о валютных бонусах, казино практически устанавливают обстоятельства вейджера, коие нужно выполнить, чтобы исключить выигрыш.
1×slots скачать на айфон
Бездеп с фриспинами имеет обхватывать всю коллекцию игр на веб-сайте либо разработки 1-го провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш может быть выведен последствии того, как пользователь отыграет данную необходимую. Возможность оценить полный перечень слотов — основное достоинство этой разновидности. Игроку становятся доступны что, эти опции, которые отсутствуют в демонстрационном режиме, а вероятность выиграть настоящие деньги добавляет ярких азартных ощущений.Бывают ли бездепозитные бонусы без вейджера? Бывают, в у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино. У любого игорного клубы различные вейджеровые обстоятельства. Чтобы вы гарантировано смогли выполнить их, мы дадим некоторое советов. Если система начислила небольшую сумму, не стоит создавать немалые ставки – остановитесь на 10–30 центах. Как только сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте играть. В неприятном случае другого приглядеться к другому автомату. <a href=http://www.ymapparel.com/bbs/board.php?bo_table=free&wr_id=314588>http://www.ymapparel.com/bbs/board.php?bo_table=free&wr_id=314588</a> Бездепозитные призы – это самая интересная и более многообещающая акция интернет-казино. Они в лучше фри-спинов, поэтому что выплаты в бесплатных вращениях не гарантированы, ведь композиции на барабанах игрового аппарата все не сложиться.Но существуют азартные заведения, готовые просто так вручить средства на забаву. Для этого достаточно сделать профиль. Чтобы исключить выигрыш, сперва необходимо выполнить вейджеровые условия, прописанные в критериях получения бездепа. казино 1×slots официальный сайт
рабочее зеркало 1хслотс
B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. 1×slots регистрация на сайте 1×slots ru com <a href=http://trimkomi.ru/bitrix/redirect.php?goto=http://cooky.vn/goto/?url=http://toolbarqueries.google.ga/url?q=https://telegra.ph/Zakonodatelnye-tihie-chasy-dlya-stroitelstva-i-shuma-v-Hanty-Mansijskom-avtonomnom-okruge-v-2024-godu-09–19>http://trimkomi.ru/bitrix/redirect.php?goto=http://cooky.vn/goto/?url=http://toolbarqueries.google.ga/url?q=https://telegra.ph/Zakonodatelnye-tihie-chasy-dlya-stroitelstva-i-shuma-v-Hanty-Mansijskom-avtonomnom-okruge-v-2024-godu-09–19</a> Каждый из бездепозитных бонусов без пополнения 2022 содержит собственный конкретный вейджер для отыгрыша, так же в каждом казино он уточняется персонально — где то он х55 а кое-где х30, повторюсь всюду по различному!
1хслотс 1хслотс регистрация перейти на 1×slots
Однако в условиях скрываются «подводные камни», которые не разрешат исключить крупную сумму либо же вы не успеете отыграть вейджер. Поэтому мастера советуют арестовать благотворительные вращения за регистрацию в казино без депо, дабы поднабраться навыка и получить настоящий шанс на победу.Иногда в бездепа, казино дарит минимальный бонус (до 50 руб. ), ради которого надо заморачиваться. <a href=http://gticlub.lv/user/Kennethlealf/>http://gticlub.lv/user/Kennethlealf/</a> Хотя безвозмездные призы начисляются без депозита, не исключено, собственно вас придется вносить средства. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты лишь последствии как, как свежий заказчик раз пополнит игровой счет. 1×slot рабочее зеркало Такой бесплатный эквивалент средств зачисляется на профиль юзера в осуществления притязаний и предназначаются они только для игрового процесса. Вывод таких вознаграждений возможен только после осуществления вейджеровых условий.Мы собрали и опубликовали список превосходнейших бездепозитных казино с призами за регистрацию, которые гарантируют великодушные выигрыши и моментальные выплаты.
<b>Смотреть еще похожие новости:</b>
<a href=http://vn-info.net/user/Josephkam/>1×slots промокод при регистрации 2025</a>
<a href=http://www.forum.kalor.ru/1×slots-casino-registraciya-t5223.html>1×slots casino регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для всех бездепозитных бонусов функционирует максимальный лимит на выигрыш. Он показывает предельную необходимую, коию вы сможете получить, играя на бонусные кредиты. Как только для удастся выполнить притязания вейджера, допустимый максимум будет переведен с бонусного счета на главной, а остаток будет списан. Помните, что любые нарушения управлял сведут на нет ваши старания, и вы всего останетесь без начисленного для бесплатного бонуса. Всегда изучайте правила начисления и условия вейджера. По любым вопросам, на коие вы не других отыскать ответы, обращайтесь за разъяснениям и саппорт.
#9006 Ремонт ибп в Москвеhttps://remont-ibp-max.ru/
Наши специалисты предлагает профессиональный <a href=https://remont-ibp-max.ru/>сервисный ремонт бесперебойника на выезде</a> любых брендов и моделей. Мы осознаем, насколько важны для вас ваши источники бесперебойного питания, и стремимся предоставить услуги наилучшего качества. Наши профессиональные техники работают быстро и аккуратно, используя только оригинальные запчасти, что предоставляет долговечность и надежность проведенных ремонтов. Наиболее распространенные поломки, с которыми сталкиваются владельцы ИБП, включают неисправную батарею, неисправности инвертора, поломку контроллера, проблемы с подключением и неисправности программного обеспечения. Для устранения этих проблем наши профессиональные техники оказывают ремонт батарей, инверторов, контроллеров, разъемов и ПО. Обратившись к нам, вы получаете надежный и долговечный вызвать мастера по ремонту бесперебойника в москве. Подробная информация доступна на сайте: https://remont-ibp-max.ru
#9007 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasino09k online
Мы рекомендуем не отрицаться от сходственных услуг знаменитых казино. Выделите несколько мин. На регистрацию, получите приз и попробуйте его отыграть. Может быть, сейчас фортуна будет на вашей стороне!Этот образ приза будет добавлен на Ваш акк последствии удачной процедуры регистрации с использованием номера телефонного. Если избрать иной способ сотворения учетной записи, бездеп не будет добавлен на Ваш аккаунт. <a href=http://filmkachat.ru/>1×slots регистрацию более популярный вариант это</a> Бонус за регистрацию в казино без депо с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша имеет понадобиться устроить ставки на сумму, в некоторое десятков один превышающую сумму приза либо выигрыша. <a href=http://www.tr.besatime.com/index.php?subaction=userinfo&user=DavidSurdy>http://www.tr.besatime.com/index.php?subaction=userinfo&user=DavidSurdy</a> 1×slots официальный сайт скачать <a href=http://www.odnopolchane.net/forum/member.php?u=634116>http://www.odnopolchane.net/forum/member.php?u=634116</a>
1хслотс казино зеркало
Для тех, кто только взвешивает испытывать свою удачу, а также для профессиональных игроков, ищущих свежие площадки для выигрышей, основные лицензированные казино нередко организуют разные промоакции, и одно из лучших предложений прошедшее время – как для новичков, например и для профессиональных игроков – бездепозитный бонус за регистрацию. <a href=http://www.arka-bahce.org/forum/showthread.php?p=764512#post764512>1х слот 1хслотс регистрация перейти на 1×slots</a> 1×slots зеркало которую указывали при регистрации кстати <a href=http://d992387h.bget.ru/user/Charlesunope/>http://d992387h.bget.ru/user/Charlesunope/</a> Чтобы других увериться в превосходстве бездепозитных бонусов, достаточно зарегистрироваться в казино и получить поощрение.Минимального оборота. Этот предел уточняется вейджером — пока игрок не сыграет на установленную необходимую, вывод средств будет недоступен. 1 хслот регистрация в 1×slots casino Наш список включает в себя наилучшие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по важным характеристикам:
1×slots зеркало на сегодня
Наиболее известные вознаграждения среди гэмблеров – бездепозитные бонусы казино. Это не умопомрачительно, ведь можно получить безвозмездные вращения либо виртуальные кредиты, и всем не придётся пополнять счёт, рисковать личными деньгами. Удастся насладиться различными увеселениями причем выиграть солидную сумму, избегая серьёзного риска.Теоретически, к безвозмездным призам возможно отнести так нарекаемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, поэтому собственно они предоставляют только вероятность создавать ставки. Промообъявления от казино не дают реальной картины и направлены на вербование внимания пользователей. Понять, как высоки шансы остаться в плюсе, позволит личный анализ условий предложения:Но а в вы теснее профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в интернет казино; <a href=http://wuyuebanzou.com/home.php?mod=space&uid=550671>http://wuyuebanzou.com/home.php?mod=space&uid=550671</a> 1×slots зеркало рабочее на сегодня
1× slots casino официальный сайт
Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.Некоторые клубы механически начисляют бонус на аккаунт игрока в исполненья условий получения, хотя случаются ситуации, когда бонус нужно активировать игроку самому. Есть количество способов активации приза: <a href=http://www.emv.info/viewtopic.php?f=15&t=2040>1×slots зеркало быструю регистрацию а также мгновенное</a> Составленный экспертами Casino.ru список онлайн-казино с бездепозитным бонусом разрешает игрокам сравнить спецпредложения разных операторов. За вербование приятеля ? в рамках партнерской программы заказчик получает вознаграждение за привлечение свежих юзеров. 1×slots зеркало видели такую регистрацию на <a href=https://lecointurc.com/users/charlestak>https://lecointurc.com/users/charlestak</a> Бездепы с бесплатными вращениями деют пользователям право вертеть барабаны игровых автоматов без снятия средств со счета. За любой раунд уплачивает казино. Число спинов ограничено и редко превышает сотню. Если акция содержит количество даровых игр, их начисление возможность быть разбито на количество дней.B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.
1×slots официальный сайт зеркало
Онлайн-казино с бездепозитными бонусами ставят посетителям условия для использования бездепами, поэтому перед участием в акции превосходнее досконально ознакомиться со всеми правилами и нюансами промоакции. Условия могут касаться получения бонуса, его применения и следующего вывода денежных средств если, тогда, выигрыша. <a href=https://australiantravelforum.com/Upload/member.php?action=profile&uid=1115>https://australiantravelforum.com/Upload/member.php?action=profile&uid=1115</a> Но рядах азартных платформах похожие гонорары имеют получить теперь зарегистрированные пользователи. В таком случае, бонусы предоставляются масштабах уникальных акций или же некоторым игрокам вид акционного предложения, коие прибывает на почту с целью «возвратить» игрока в свое казино.Только выполнив все условия отыгрыша и дождавшись завершения ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить средства средства. 1×slots казино мобильная версия Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить особенности, труднодоступные при игре в демо режиме. Многие новые клиенты переходят в количество постоянных, а оператор получает долгосрочную прибыль.
<b>Смотреть еще похожие новости:</b>
<a href=https://test.soclanovtsy.ru/topic/37306–1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE/>1хслотс официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Третитй бездепозитный бонус за регистрацию – валютные средства. К раскаянию, начислить рубли либо доллары готовы только известные и знаменитые клубы. С их поддержкой вы сможете насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком. Многие игроки, оценив функционал казино, остаются играть в нем и далее ? на это и нацелено любое рекламную. Постоянные клиенты заносят депозиты и делают ставки, обеспечивая длительную выгода оператора. То есть, казино раздают бездепы свежим пользователям для формирования приклнной аудитории.
#9008 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация то дальше необходимо пройти
Прочитайте управляла бонусной программы, в которой желаете участвовать. Да, мы настоятельно рекомендуем сделать это до регистрации.Вышеописанная первопричина и считается основным моментом, следствии которого операторы отдают доля собственной прибыли на различные маркетинговые расходы и рекламные кампании. А самым действующим тут будут выступать именно бездепозитные призы казино 2022 с выводом за регистрацию. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало</a> Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? <a href=https://www.peacefulmind.co.kr/bbs/board.php?bo_table=free&wr_id=548341>https://www.peacefulmind.co.kr/bbs/board.php?bo_table=free&wr_id=548341</a> Несмотря на то, собственно данный вариант стимуляции со стороны азартных платформ довольно востребован области подобных игр, далеко не почитателям казино ведомо, что себе бездепозитные призы казино и как именно их вполне эксплуатировать.Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала быстрые выводы. Фишка выплат в том, собственно довольно избрать платёжный инструмент и показать сумму. В большинстве случаев деньги зачисляются на электрические кошельки на 15 минут, а на банковские карты – 1–3 трудящихся денька. x1 slots регистрация в 1×slots casino <a href=http://www.soilhome.com/home.php?mod=space&uid=10452&do=profile>http://www.soilhome.com/home.php?mod=space&uid=10452&do=profile</a> Максимальная ставка ? уточняется в еденице счета и ограничивает размер ставки за раз спин. В случае ее превышения приз возможность быть аннулирован. Также в правилах возможность находиться запрет на размещение ставок конкретного облика, к, по равным шансам в рулетке (то есть, на чет или нечет, красное или черное и т.д. ).
1хслотс 1хслотс регистрация перейти на 1×slots
1×slots официальный сайт мобильная версия скачать В интернет-сети всегда возможно найти перечни более известных и гарантированных поощрительных программ от известных онлайн-казино. <a href=http://forums.escapefromelba.com/index.php?action=profile;u=124317>http://forums.escapefromelba.com/index.php?action=profile;u=124317</a> x1 slots регистрация в 1×slots casino Мы собрали и выпустили список наихороших бездепозитных казино с бонусами за регистрацию, коие гарантируют великодушные выигрыши и мгновенные выплаты.Иногда у посетителей вебсайта имеют появиться трудности, задачи, препядствия при активации приобретенного промо-кода. В таких случаях, нужно адресоваться за подмогою в саппорта «Support». Для получения ответа, непременно указывается конкретная причина воззвания и подтверждается информация дополнительными снимками. Если сформировалась неоднозначная ситуация, постоянно возможно обратиться к основному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ.
1× slots casino официальный сайт
<a href=https://malaysia-forex.com/members/132093-ChrisZef>https://malaysia-forex.com/members/132093-ChrisZef</a> Популярность онлайн казино растёт и всё больше пользователей начинают увлекаться азартными забавами. Бездепозитные призы 2022 года, это оригинальные презенты за регистрацию. С их поддержкою новые игроки имеют получить бесплатные вращения либо средства на баланс за 1 регистрацию. С появлением игорных заведений в онлайне, бездепозитные призы стали наимоднейшим способом привлечения игроков. Подобные акции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о которых мы поведаем. Наш вебсайт собрал лучшие предложения из онлайна на 2022 год. Воспользуйтесь любым подарком и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша необходимо выполнить обстоятельства.Теоретически, к безвозмездным бонусам возможно отнести например именуемые фриспины. Напомним, речь идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, потому собственно они деют только возможность делать ставки. 1×slots регистрация 1×slots casino c2d ru
1×slots регистрация
Прибывшие на акк финансы бездепозитные бонусы предназначаются, в, только для свежеиспеченных юзеров, которые раньше не имели личного аккаунта в данном казино. Исходя из сего, в ранее у игрока был изготовлен депо, то, по всей вероятности, у него больше не несомненно способности рассчитывать на получение такового приза в определенном заведении. <a href=https://smm-seo.ru/threads/1×slots-zerkalo-sajta.38558/>1×slots зеркало сайта</a> Для верификации номера телефонного, в личном профиле выберите опцию „Подтвердить номер телефонного“ и введите в подходящее поле код, полученный в sms-сообщении. Начнём с такого, что каждое рекламную за регистрацию предполагает некие условия. Бездепозитные призы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, необходимая для исполненья критерий. Пример, возымели безвозмездные вращения и выиграли с них 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 руб., неудачных или выигрышных, неважно. После выполнения, бонусный баланс перейдёт на настоящий и будет легкодоступным к выводу.Многие казино деют в рекламных целях бесплатные призы самая для наших читателей. Чтобы их получить, нужно перебежать на игровой сайт по партнерской ссылке с нашего портала. 1×slots регистрация на 1хслотс <a href=https://www.market-directory.com/members/doctorlazutapa-8779.html>https://www.market-directory.com/members/doctorlazutapa-8779.html</a> Используйте лучшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из списка ниже, чтобы заработать подарки за простые действия и уже сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высокой отдачей и резвыми выводами на электрические кошельки.Как только вы отыграли вейджер и свои с бонусного баланса перебежали для на реальный счет, Вы смело сможете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать минимальный депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, вместе с депозитом).
1×slots рабочее зеркало на сегодня
Предложения с бездепозитными призами за регистрацию позволяют новым заведениям заинтересовать аудиторию на свой сайт. А игроки же получают вероятность выступать на настоящие средства без депозита в казино и заработать малый стартовый капитал, который разрешается вывести на карту банка либо электронный кошелек.Ознакомьтесь с нашим перечнем наилучших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего перечня и получите бездеп незамедлительно. Хватайте лучшие бесплатные предложения ниже и выигрывайте большие средства, не рискуя! <a href=http://elka54.ru/forum/?PAGE_NAME=profile_view&UID=109750>http://elka54.ru/forum/?PAGE_NAME=profile_view&UID=109750</a> Не желаете сыграть в азартные забавы, не рискуя средствами средствами, но получая в все выплаты? Подобную возможность деют многие лучшие порталы с азартными весельями. В их количестве большое добросовестных и надежных интернет-казино на российском языке. Они завлекают новых пользователей различными поощрительными мероприятиями, включая бездепозитные, или бесплатные бонусы.Несмотря на то, что этот вариант стимуляции со стороны азартных платформ очень популярен в сфере похожих игр, далеко не всем почитателям казино ведомо, что себе бездепозитные призы казино и как именно их вполне эксплуатировать. 1×slot регистрация
<b>Смотреть еще похожие новости:</b>
<a href=https://forum-macan.ru/viewtopic.php?t=3913>1×slots официальный сайт зеркало рабочее</a>
<a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=7614>1×slots официальный регистрация</a>
<a href=http://griffhunter.com/boards/memberlist.php?mode=viewprofile&u=993>1×slots регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выбирайте наихорошие безвозмездные призы за обзоров на Casinoz – и пусть для сопутствует счастье при отыгрыше бонусных кредитов! На страничке представлены бездепозитные призы за регистрацию в казино редчайшая награда за коей гонятся все игроки как новенькие, например и профессионалы. Мы тоже уделяем великое внимание на наличие бонусов при составление рейтинга казино на деньги. Бездепозитный приз это возможность выступать безвозмездно и выиграть реальные деньги.
#9009 Charlesgunnyhttp://filmkachat.ru
1×slots casino зеркало рабочее
Бездепозитные бонусы начисляются лишь один раз. Не стоит раскрывать свежие аккаунты, дабы получить их повторно. Служба защищенности казино обязательно выявит «левого» участника и перекроет. Если гость выполнит нужные притязания, отыграет собственную ставку и решит вывести собственный выигрыш, то ему нужно принять, собственно казино обязательно востребует предоставить ксерокопии собственных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные средства вывести не получится. <a href=http://filmkachat.ru/>1×slots промокод при регистрации 2025</a> <a href=http://suprememasterchinghai.net/bbs/board.php?bo_table=free&wr_id=3534270>http://suprememasterchinghai.net/bbs/board.php?bo_table=free&wr_id=3534270</a> Так же стоит выделить то, что в любом онлайн казино установлен собственный наибольший кешаут на бездепозитный приз. Как правило кешаут — это максимальная сумма средств, которая дешевая для вывода с бездепозитного бонуса. казино 1×slots <a href=https://www.metal-tracker.com/forum/member.php?action=profile&uid=927410293>https://www.metal-tracker.com/forum/member.php?action=profile&uid=927410293</a> Первый образующийся вопрос, это, для выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают новых игроков. Последним легче начать игру на средства с подарка за регистрацию. Им надо пополнять баланс и расходовать личностные средства. Новички получают благотворительные спины или свои на счёт. С их поддержкой знакомятся с игровым процессом, крутят слоты и делают ставки в рулетке.
1×slots зеркало на сегодня
Подобные бонусы без депо предоставляются на более прибыльных критериях. Зачастую они покрупнее, а обстоятельства отыгрыша менее строгие.Игрокам не принимать приветственный приз как гарантированный метод получить крупный выигрыш, но это отличная вероятность без расходов оценить перечень казино. 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=http://flashworlds.ru/index.php?subaction=userinfo&user=alivealibi26>http://flashworlds.ru/index.php?subaction=userinfo&user=alivealibi26</a> Каждый из бездепозитных бонусов без пополнения 2022 имеет свой определенный вейджер для отыгрыша, так же в каждом казино он устанавливается персонально — где то он х55 а где-то х30, повторюсь всюду по различному!Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке представители онлайн-казино публикуют актуальную информацию о no down payment bonuses и других предложениях. 1×slots зеркало на сегодня Для отыгрыша бонуса казино обязует игрока сыграть на сумму, в несколько один превосходящую необходимую полученного бонуса — тут выгода фирмы очевидна.Выбирая даровой приз, пристально изучайте правила. Убедитесь, собственно вам можно на роль в акции. Уточните, в каких забавах можно скорпулезно условия вейджера. При необходимости задавайте вопросы представителям саппорта.
1×slots зеркало регистрация то дальше необходимо пройти
Практически все интернет казино с бездепозитным призом за регистрацию учитывает программу лояльности — систему поощрения постоянных посетителей, кот-ая состоит из большого уровней. При достижении игроком одного значения на его счёт поступает бонус. Чем выше степень — тем щедрее бонус. <a href=https://polonistyka.com/user-2/charlesskype/>https://polonistyka.com/user-2/charlesskype/</a> 1хслотс 1хслотс регистрация перейти на 1×slots Подобные бонусы без депозита предоставляются на больше выгодных условиях. Зачастую они крупнее, а обстоятельства отыгрыша менее строгие.Размер бонусов чаще всего чисто условный и не превышает 50 руб. Приятно, хотя ощутимым бустом в игре вряд ли станет.
casino 1×slot
Необходимость отыгрыша. Вейджер ситуации повыше, чем для бонусов за депо. И же свои не отыграны, исключить их нельзя.Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации презента нужно доказать электронную почту и привязать аппарат; Таким образом, заведение пробует показать себя своим вероятным игрокам, а такой рекламный ход как казино приз без депозита за регистрацию привлекает довольно много внимания к игорному заведению и обеспечивает неизменный поток свежих посетителей и грядущих клиентов игрового онлайн клуба. В лицензионных бездепозитных казино выступать в азартные забавы вправду безопасно. Наличие лицензии одобряет что, этот прецедент, что клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP. 1хслотс 1хслотс регистрация перейти на 1×slots <a href=https://images.google.com.br/url?q=http%3A%2F%2Fdoctorlazuta.by>https://images.google.com.br/url?q=http%3A%2F%2Fdoctorlazuta.by</a> Зарегистрироваться в казино по специальной ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефона и электрическую почту). Для доказательства номера телефона необходимо в личном профиле показать свой номер и нажать кнопку „Подтвердить номер аппарата“, далее Вы получите sms-сообщение с кодом, кот-ый нужно установить в подходящее фон. Для доказательства электрической почты, перейти по интенсивной ссылке в письме от казино.
1хслот официальный сайт зеркало
Помните, собственно в неких играх сумма ставки идет в зачет вейджера лишь частично. Так, в настольных и карточных играх только от 5% до 50% суммы ставки считаются как отыгранные деньги, момент как в слотах идет в зачет все one hundred percent суммы.Многие игроки, оценив функционал казино, остаются играть в нем и далее ? на это и направлено любое рекламную. Постоянные посетители заносят депозиты и делают ставки, обеспечивая длительную выгода оператора. То есть, казино раздают бездепы свежим пользователям для формирования лояльной аудитории. Если площадка дарует бездеп за регистрацию, то процедура его получения проста. Нужно только завести аккаунт на сайте и активировать его, подтвердив адрес электрической почты, номер аппарата либо иные данные, коие требует оператор. Перед этим нужно увериться, что пользователь располагается на официальном сайте казино, а не на мошеннической площадке.В разделе с бонусами активировать свой презент. Найти забавы, для которых предусмотрено поощрение и применять бонус по назначению. <a href=https://webhitlist.com/profiles/blogs/6368021:BlogPost:24852094>https://webhitlist.com/profiles/blogs/6368021:BlogPost:24852094</a> 1 хслот регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=http://nakupnidivadlo.cz/index.php/forum/3-pripominky/46554–1×slots?start=6#234942>1хлот регистрация в 1×slots casino</a>
<a href=https://thetechmodders.com/forums/memberlist.php?mode=viewprofile&u=945&sid=97da9d0064f9e63060b5b1e41258392c>1х слотс зеркало регистрация в 1×slots casino</a>
<a href=https://mit-bbs.com/memberlist.php?mode=viewprofile&u=15318&sid=898bb76307d0e7f5a46a4f81c9884e3e>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но никогда не запамятовывайте внимательно разбирать правила роли в бонусных акциях. Если вы нарушите но бы одно условие, позже вы не можете уладить недоразумение с администрацией. Как лишь получите бездеп в казино, всё равно не запамятовывайте инспектировать электронную почту. Некоторые игорные клубы каждый веселят интенсивных гэмблеров приятными призами. Чаще всего получить презент можно в преддверии веселья, на денек рождение, за привлечение друга. А того распространённым призом является надбавка к депозиту. Нужно чем пополнить счёт, и азартное заведение прирастит его на 50–100%.
#9010 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало
Отказ в прохождении верификации. Если заказчик не хочет либо возможности дать документы, подтверждающие его лицо, профиль несомненно заблокирован вместе со всеми бонусными начислениями. <a href=http://filmkachat.ru/>1×slots регистрация на 1хслотс</a> <a href=http://tmml.top/home.php?mod=space&uid=211796>http://tmml.top/home.php?mod=space&uid=211796</a> Когда речь о денежных бонусах, казино постоянно устанавливают условия вейджера, которые необходимо выполнить, чтобы исключить выигрыш. 1×slots зеркало рабочее на сегодня <a href=http://test.sozapag.ru/forum/user/215182/>http://test.sozapag.ru/forum/user/215182/</a> Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, дабы еще раз получить даровой бонус. Игорные заведения нетерпимы к бонус-хантерам, потому вас ждет неизбежное санкция.Далее требуется отыграть вагер и вывести выигрыш. Игрокам без опыта крупно повезло, возможность получить десятки презентов за одну регистрацию. Если не смогли получить Бездепозитный приз, не беспокойтесь. Обратитесь в онлайн чат, оператор поможет исправить.
1×slots casino регистрация на сайте
Подтвердите регистрацию, чтобы активировать Бездепозитный бонус с выводом, потребуется наполнить собственный профиль. Заполните пустующие поля реальными данными о для.Для всех бездепозитных призов действует максимальный лимит на выигрыш. Он указывает предельную необходимую, коию вас получить, играя на бонусные кредиты. Как лишь вас удастся выполнить притязания вейджера, дозволенный максимум несомненно переведен с бонусного счета на основной, а остаток несомненно списан. <a href=https://www.makinamania.net/index.php?topic=250422.new#new>1хлот регистрация в 1×slots casino</a> 1×slots зеркало рабочее Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и. Когда игроку полагается большое фриспинов, администрация может бить3 их начисление на несколько дней. Бесплатные вращения предоставляются для определенного слота, кот-ый указывается в правилах акции.Если при регистрации указать промокод, можно гарантировано получить бонус. Где взять ваучер? Посетите тематику блоги или форумы. Иногда администрация клуба проделывает рассылку ваучеров на электронную почту. В заключительное время игорные жилища начали рекламироваться в кинокартинах и сериалах. Присмотритесь и всего заметите промокод, который принесёт 500 или 1 000 бонусных руб. <a href=https://ukrpravda.net/index.php?topic=70414.0>https://ukrpravda.net/index.php?topic=70414.0</a> 1×slots зеркало рабочее на сегодня Бездепозитные призы казино это финансовая компенсация, предлагаемая юзерам на дармовой базе и возможность играть в интернет казино безвозмездно. Если сравнивать их с поощрениями за лепта, в средства выдаются только впоследствии первоначального пополнения счета, то бездепозитные гонорары получаются безвозмездно. То есть, играющий получает вероятность делать ставки на уже место деньги, коие выдаст заведение, выполняя, при, обычные действия, дабы их извлечь (тут идет о регистрация, удостоверении личности с использованием номера телефона, дизайна заказы и т.д. ).Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих требований, считая обязательной верификации. Если на веб-сайте предусмотрена обязательная процедура доказательства личности, то вывести выигрыш удастся только последствии проверки данных. Приготовьтесь наполнить анкету и отправить в техподдержку документ, подтверждающий личность.
1×слот регистрация в 1×slots casino
Возьми свой подарок. Чаще всего бонус активируется сразу после регистрации. Но случаются истории, когда надо(надобно) забежать в собственный кабинет либо написать в справочную службу.При подмоги такового одобрения оператор имеет кроме привлекать клиентов, которые раньше проявляли активность на сайте, хотя по некий основанию прекратили играть. В данном случае промокод высылается пользователю по электрической почте либо повторяющий SMS. <a href=http://www.anqingonline.com/home.php?mod=space&uid=173589&do=profile>http://www.anqingonline.com/home.php?mod=space&uid=173589&do=profile</a> Промокод – определённая комбинация символов, коию нужно установить в соответствующее поле при творении учетной записи или активировать в личном профиле игрока в разделе с призами. 1 x slots casino
1×slots официальный demo регистрация в 1×slots casino
Как верховодило, новоприбывшие геймеры для хотят ознакомиться с способами ввода и вывода валютных средств и сроки выполнения поданных заявок чтобы четко понимать, как быстро возможность исключить собственный казино бонус за регистрацию без депо на электрический кошелек либо же банковскую карту. К счастью для всех играющих, снутри конкретных холдингов, все казино конкурируют между собой. Ведь в бы конкретную фирму давало лишь одно онлайн-заведение, то ли бы посетители увидели казино с бонусом за регистрацию и имели бы рассчитывать лишь на вознаграждение вид приза на первое инвестиция. К любому заведению периодически следует привлекать свежих игроков, собственно, в итоге, лишь на руку всем играющим.Зарегистрироваться в казино по специальной ссылке или с бонусным кодом. Подтвердить контактные данные (номер аппарата и электрическую почту). Для доказательства номера телефонного необходимо в собственном профиле указать свой номер и надавить кнопку „Подтвердить номер телефонного“, дальше Вы получите sms-сообщение с кодом, кот-ый необходимо ввести в отвечающее фон. Для подтверждения электрической почты, перейти по интенсивной ссылке в послании от казино. <a href=http://palais.beesims.com/phpbb/viewtopic.php?f=2&t=290508>1 хслот регистрация в 1×slots casino</a> На безвозмездные призы онлайн-казино почти постоянно распространяется ограничения по стране проживания клиентов. Даже случае вас разрешено раскрывать счет и выступать на средства в заведении, это еще не означают, что для доступны no deposit bonuses.Как правило, новоприбывшие игроки начала желают ознакомиться с методами ввода и вывода денежных средств и сроки выполнения поданных заявок чтобы конкретно осознавать, как стремительно у вывести свой казино бонус за регистрацию без депо на электрический кошелек либо же банковскую карту. К счастью для всех играющих, внутри конкретных холдингов, все казино конкурируют меж собой. Ведь если бы определенную фирму давало только одно онлайн-заведение, то ли бы клиенты заметили казино с бонусом за регистрацию и возможность бы рассчитывать лишь на вознаграждение в виде приза на 1-ое вложение. К любому заведению периодически стопам привлекать свежих игроков, собственно, в, только на руку всем играющим. скачать 1×slots официальный сайт <a href=http://food-ua.com/wr_board/tools.php?event=profile&pname=ablazefurvor18>http://food-ua.com/wr_board/tools.php?event=profile&pname=ablazefurvor18</a>
1×slots сайт
Хотя бесплатные бонусы начисляются без депо, не исключено, собственно вам придется вносить деньги. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь последствии того, как свежий клиент впервые пополнит игровой счет. <a href=https://www.kino-ussr.ru/user/Porsedropsi/>https://www.kino-ussr.ru/user/Porsedropsi/</a> Отзывы читателей о бонусных промоакциях посодействуют составить эмоцию, хотя не запамятовывайте о субъективности собственных комментариев. 1х слот регистрация в 1×slots casino Бездепы с безвозмездными вращениями деют юзерам право вертеть барабаны игровых автоматов без снятия средств со счета. За каждый раунд платит казино. Число спинов ограничено и редко превышает сотню. Если акция содержит большое даровых игр, их начисление может быть разбито на несколько дней.
<b>Смотреть еще похожие новости:</b>
<a href=https://karakol.com.kg/user/Jameskef/>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
После получения приза вывод средств для клиента несомненно недоступен того, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя либо чета месяцов. Выводить средства игрок может только после отыгрыша. Верификация необходима для добавочной защищенности и может техподдержке выявить бонусхантеров и жуликов. Кстати, рядах платформах выводы солидных сумм доступны только после подтверждения личности.
#9011 Charlesgunnyhttp://filmkachat.ru
1×slot регистрация
Активация валютного вознаграждения происходит механически в сотворения профиля либо использования промокода. Иногда операторы предъявляют дополнительные требования: подписаться на страницы казино в социальных сетях или на рассылку рекламных сообщений, скачать и установить дополнительный софт и т.д.Бездепозитный приз казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в этом и содержится главное отличие. <a href=http://filmkachat.ru/>1хслотс зеркало</a> <a href=http://rogerfilms.com/index.php?title=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D0%BE%D0%B2%20%D0%B8%D0%B7%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO>http://rogerfilms.com/index.php?title=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D0%BE%D0%B2%20%D0%B8%D0%B7%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO</a> 1×slots регистрация 1×slots casino 777 online <a href=http://tp86.ru/bitrix/redirect.php?goto=http://hairkiss.ru/bitrix/rk.php?goto=http://httmatchfw.matchfishing.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/2KZzjP4r44o>http://tp86.ru/bitrix/redirect.php?goto=http://hairkiss.ru/bitrix/rk.php?goto=http://httmatchfw.matchfishing.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/2KZzjP4r44o</a>
1×slots коды
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=288736>1×slots казино мобильная версия</a> 1×slots сайт Некоторые сайты, прежде чем провести регистрацию игроков, предлагают ответить на количество базисных вопросов. Цель проведения похожей викторины – выявить случайных людей, которые не имеют представления о покере, и не допустить получения ими бонусов. Если гость уже играл в казино, то ответить на полтора десятка несложных вопросов несомненно несложно. Очень нередко, ответы возможно отыскать на официальных веб-сайтах данных учреждений.В случае установленного лимита на необходимую вывода выигрыша с бездепозитного бонуса, игрок не сможет вывести больше заявленной суммы. <a href=https://ide-ai.online/member.php?action=profile&uid=2415>https://ide-ai.online/member.php?action=profile&uid=2415</a> рабочее зеркало 1хслотс Автоматы непопросту считаются наиболее модным азартным отдыхом. Чтобы усвоить управление и правила, понадобится всего количество мин. Ваша задача устроить ставку, найти количество рабочих линий и можно вертеть барабан. Если на экране выпадет выигрышная композиция – вы выиграли! С данной задачей для посодействуют справится бездепозитные призы казино.
1×slot зеркало рабочее этих способов предполагает регистрацию
Чаще всего интернет-казино предлагают бездепозитные бонусы свежим юзерам. Эта промо-акция довольно отлично привлекает новичков, подталкивая их к открытию счета. Конечно, не они становятся преданными клиентами, хотя сам факт регистрации аккаунта играет на руку заведению.Для получения бонуса надо(надобно) пригласить в игру свежего клиента. Казино начислит пригласившему фиксированный процент от взносов приглашённого в виде бонуса: почаще всего его объем не превышает 10%. Срок деяния бонуса в большинстве случаев не превышает месяца: пригласивший получает бонус от проигранных ставок приглашённого в первый луна игры. Приветственный бездеп предоставляется какому игроку только один раз. Казино сражаются с так называемыми бонусхантерами (от англ. Bonus Hunter — охотник за бонусами), пытающимися заводить многочисленные аккаунты для надувательства оператора и повторного получения подарка. Исключить похожие деянья позволяет верификация данных. Администрация вправе востребовать у посетителя доказать индивидуальные данные, указанные при регистрации.В интернете слишком количество скриптовых сайтов, которые принадлежат мошенникам. Их основная цель – привлечь гэмблеров, пообещав столько щедрые презенты, но и крупные выигрыши. Так что кое-какие веб-сайты предлагают получить за регистрацию том $1 000. <a href=https://filmy-hd.ru/user/DoctorLazutaml/>https://filmy-hd.ru/user/DoctorLazutaml/</a> Для получения бонуса надо(надобно) пригласить в игру свежего клиента. Казино начислит пригласившему фиксированный процент от взносов приглашённого вид приза: чаще всего его размер не превышает 10%. Срок деяния бонуса как не превышает месяца: пригласивший получает бонус в зависимости от проигранных ставок приглашённого в первый луна забавы.Возможность сыграть вспомогательное соревнование (а времени и некоторое) абсолютно безвозмездно, а выигрыш, же, поступает на счёт игрока. 1×slots быструю регистрацию а также мгновенное Представьте момент, когда при ставке в 10 руб. Вы получите подобное умножение. Миллион руб. За одно вращение, собственно вполне вполне. Поэтому вопрос, сколько можно выиграть остаётся открытым. Предлагаем проверить помощи. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный приз и инспектируйте удачу в деле. Разумеется, вывести средства не так просто. Однако шансы есть у всех.
1×slot казино зеркало
Обыкновенные бездепозитные бонусы в размере от 3-х до 20 $ созданы чтобы, чтобы, дабы в забавы заходили все новые и новые игроки. Здесь, скорее, несомненно ограничение на наибольший выигрыш. Важно, дабы перед наименьшим вкладом был отключен бонус за 1-ое пополнение счета, и игры не попадет на повторный вейджер. <a href=http://complainanything.com/node/158?page=915#comment-1098783>1хслот зеркало сайта</a> Даже не выиграв крупную сумму, игрок увлекательно проведет время, изнутри изучит работу площадки, воспримет геймплей автоматов. Все это без каких-то финансовых рисков. Быть в курсе наилучших промоакций с. Достаточно регулярно изучать перечень новых онлайн казино с выводом приза без депозита в данном разделе. 1×slots зеркало <a href=http://hzyiwo.com/home.php?mod=space&username=CharlesAbnow>http://hzyiwo.com/home.php?mod=space&username=CharlesAbnow</a>
1×slots зеркало на сегодня
1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, если не желаете замерзнуть жертвой мошенников либо впустую потратить время; <a href=http://fr994575.bget.ru/user/ZacheryDOOCA/>http://fr994575.bget.ru/user/ZacheryDOOCA/</a> 1×slots официальный сайт зеркало Подарки на дни ? посвященные торжественным датам, требующие условного отыгрыша или начисляются без того. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду.Индивидуальные поощрения выдаются за совершение действий: подписку на аккаунты площадки в социальных сетях, установку мобильного приложения либо официального посетителя для ПК. В большинстве казино срабатывают программки лояльности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на грядущий степень нередко сопрягается выдачей бездепа.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.oursson.ru/memberlist.php?mode=viewprofile&u=1347>1 х слотс зеркало</a>
<a href=https://forum.spherecommunity.net/User-JamesLop>1×slots регистрация 1×slots review live</a>
<a href=https://www.sgomberisgombero.it/my-account-2/>1×slots коды</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный приз по промо-коду будет доступен для забавы, только сомнений случае когда Вы активируете специальный бонусный код в разделе с бонусами или укажите промокод при регистрации на веб-сайте. В неких случаях, кроме активации кода, придется доказать контактные данные игрока и наполнить анкету клиента. Мы проделываем акцент на ключевых положениях правил, рассказываем о территориальных ограничениях и кратко информируем о других акциях обговариваемого казино.
#9012 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало которую указывали при регистрации кстати
Бонус с зачислением средств на счет выделяет больше свободы деяний. Пользователь сам избирает, каким образом распорядиться подаренными средствами. Здесь также имеют действовать лимитирования на перечень доступных игр, но обыкновенно эти рамки не так строги, как в промо с бесплатными вращениями. <a href=http://filmkachat.ru/>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a> Каждый в обязан сперва отчетливо изучить условия по получению и отыгрышу понравившегося презента. Если всё устраивает, поторопитесь арестовать благотворительные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик в начать вертеть барабаны лучших слотов.Денежные свои. Третий приз за регистрацию без депозита – наличные. К раскаянию, лишь известные и популярностью клубы шансы уяснить средства в руб. Либо долларах. С их подмогою возможность насладиться каждой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед данным необходимо выполнение определенных условий. <a href=http://shinwootech.net/bbs/board.php?bo_table=free&wr_id=78103>http://shinwootech.net/bbs/board.php?bo_table=free&wr_id=78103</a> Бездепозитный приз казино 2022 с выводом за регистрацию предоставляет вероятность ознакомиться игроку с лобби выбранного заведения, сориентироваться в выборе игр и выяснить качество работы службы. Довольно нередко, начиная игровой процесс, игрок теснее отказывается останавливаться и делает реальный вклад. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть бесплатно возможно как один таки с призом за регистрацию без необходимости вносить депозит.Одним из предлогов отдавать привилегию одному либо иному заведению заключается в привлекательности предлагаемых промоакций и даровых предложений. Безвозмездные фриспины, выдаваемые без нужды создавать какой-либо вклад, в списке располагается далеко не в конце. казино 1×slots <a href=https://pbtur.com.br/users/charlesniz>https://pbtur.com.br/users/charlesniz</a>
1×slots зеркало рабочее
Одним из предлогов отдавать преимущество, льготу одному либо другому заведению заключается в привлекательности предлагаемых промоакций и даровых услуг. Безвозмездные фриспины, выдаваемые без дела делать какой-либо вклад, в перечне располагается далековато не в конце. 1×slots регистрация на официальном сайте В игровых клубах без лицензии Вы покупаете „кота в мешке“ и когда спорных ситуаций нет возможности куда-то пожаловаться и обосновать собственную правоту. <a href=http://avarpressa.ru/user/Harryamamb/>http://avarpressa.ru/user/Harryamamb/</a> 1×slots быструю регистрацию а также мгновенное Можно. Вы постоянно можете отказаться от получения бездепозитного приза за регистрацию в казино, пока Вы не сделаете ставку.
1×slots быструю регистрацию а также мгновенное
На безвозмездные бонусы онлайн-казино практически практически распространяется лимитирования по стране проживания клиентов. Даже если вам разрешено раскрывать счет и выступать на деньги в заведении, это еще не значат, собственно вас доступны no deposit bonuses. Пoдтвepдить личнocть посетителя. Для успешного вывода средств, необходимо подтвердить лицо посетителя. Нa этaпe вepификaции пpoфиля, работники службы безопасности обязаны убедиться, что у игрока чем один акк. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не может исключить свой выигрыш, в у него несомненно несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы.В истинное время получить бонус за регистрацию в казино довольно просто. Почти любой игорный дом с радостью предоставит средства либо безвозмездные вращения. Многие игроки используют этим и не стыдятся региться в любом клубе с выгодными критериями. Кстати, это отличная возможность выдумать выигрышную тактику и сорвать куш. <a href=http://nbcenter.ge/index.php?subaction=userinfo&user=deepbigot93>http://nbcenter.ge/index.php?subaction=userinfo&user=deepbigot93</a> Не стоит сразу же отрицаться от приветственных подарков в подобных казино. Администрация готова начислить средства либо фриспины, хотя сначала сотрудники должны увериться, собственно вы не мошенник. Дело сомнений, что развелось слишком большое охотников за бонусами. Они научились накалывать систему и зарабатывать солидные суммы средств.Далее требуется отыграть вагер и вывести выигрыш. Игрокам без опыта крупно повезло, меня получить 10-ки презентов за одну регистрацию. Если не сумели получить Бездепозитный приз, не волнуйтесь. Обратитесь в интернет чат, оператор поможет ситуацию. 1×slots официальный сайт мобильная версия скачать
1хслотс казино зеркало
Чаще всего казино бонус за регистрацию без депозита даёт возможность запустить каждой автомат. Но лучше пристально ознакомиться с условиями. Иногда для забавы доступны только определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, какого-либо начать знакомство с миром пыла непосредственно с «одноруких злодеев». 1×slots зеркало регистрация то дальше необходимо пройти <a href=https://forum.fne82.org/profile.php?id=520832>https://forum.fne82.org/profile.php?id=520832</a> Самые популярные способы вывода средств ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электронным платежным системам на Neteller и Skrill, а используют криптовалютными кошельками. Вывод выигрышей имеет осуществляться мгновенно или развлекать от нескольких часов до нескольких суток.Любой выигрыш по ставке выше установленного лимита несомненно считаться недействительным. То есть ставка не несомненно засчитана при отыгрыше, а случае выигрыша его сумма не поступит на счёт клиента — итог игры будет всецело аннулирован.
1 хслот регистрация в 1×slots casino
Фриплей-бонусы. Бонусы за бесплатную игру есть лишь в неких клубах. Они зачисляются незамедлительно после творенья профиля и срабатывают недолговременное время. Если у вас нет времени истратить средства, они просто закончатся. Что касается времени, правило бонусы срабатывают протяжении одного часа. Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных обстановок с казино, когда после отыгрыша бездепа вас не дадут вывести солидную сумму выигрыша.Прежде чем активировать бездеп, нужно убедиться никаких, собственно государство, уроженцем которой является игрок, не заходит в список не. <a href=http://touranga.com/index.php?subaction=userinfo&user=newbelfry28>http://touranga.com/index.php?subaction=userinfo&user=newbelfry28</a> 1×slots зеркало регистрация в 1×slots casino Диапазон ставок, коие вправе сделать игрок, кроме лимитирован. Обычно назначать можно небольшую необходимую — в 10–30 руб. За одно вращение.Бездепозитный приз по промо-коду несомненно доступен для забавы, лишь в том случае когда Вы активируете особый бонусный код в разделе с бонусами или укажите промокод при регистрации на веб-сайте. В неких случаях, считая активации кода, придется подтвердить контактные данные игрока и заполнить анкету посетителя.
<b>Смотреть еще похожие новости:</b>
<a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=4608>1×slots зеркало рабочее на сегодня</a>
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=2775>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Третитй бездепозитный приз за регистрацию – валютные свои. К огорчению, начислить рубли либо доллары способны лишь известные и известные клубы. С их подмогою у насладиться любой доступной забавой – автоматом, рулеткой, кено, блэкджеком. Классическая разновидность приза за творение аккаунта. Его преимущество содержится в том, собственно заказчик возможность других подбирать аппараты и делать ставки в их. Иногда список игровых автоматов ограничен оператором, но все точно это другого, чем один-единственный доступный слот, как если, тогда, с использованием фриспинов.
#9013 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Выше мы дали полный набор самых свежих и актуальных бездепозитных бонусов в интернет казино без пополнения на 2022 год, где вы можете воспользоваться хоть ценным бездепозитным призом.Чтобы бездеп не был начислен на Ваш аккаунт, Вам не нужно активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк автоматически, а Вы не планируете его применять, обратитесь в службу с просьбой отменить бездепозитный приз. <a href=http://filmkachat.ru/>1×slots бездепозитный бонус за регистрацию</a> Во время забавы в казино, выигрыши, полученные спасибо безвозмездным призовым фондам, суммируются и включаются в совместную необходимую для отыгрывания. Однако, если удача улыбнется и получится отыграть все бонусы, игровое заведение гарантированно разрешит исключить финансовые свои. Сумма вывода будет зависимости от лимита, одобренного непосредственно в данном учреждении. Поэтому, внимательно нужно разбирать правила выдачи безлимитных депозитов. <a href=http://baanya.co.kr/bbs/board.php?bo_table=free&wr_id=210451>http://baanya.co.kr/bbs/board.php?bo_table=free&wr_id=210451</a> 1хслотс рабочее зеркало на сегодня <a href=http://discuss.the-knowledge.org/memberlist.php?mode=viewprofile&u=32983>http://discuss.the-knowledge.org/memberlist.php?mode=viewprofile&u=32983</a> Похожим образом работает 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения клиента или из-за с получения им VIP-статуса. Подарок предоставляется последствии воззвания в поддержку и ревизии.Но есть игорные заведения, которые готовы просто например жертвовать средства на забаву. Для этого достаточно сделать профиль. Чтобы исключить собственный выигрыш, для поначалу нужно выполнить обстоятельства отыгрыша, указанные в условиях получения бездепозитного депозита.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Также бездепозитные призы шансы служить методом вернуть к этой посетителей, что приостановивших своё сотрудничество с фирмой: уведомление о бездепе поступает на мобильный телефон либо почту.Реже призы без депозита начисляются постоянным игрокам. С их подмогою администрация старается вычесть ценных клиентов либо вожделеет поблагодарить за лояльность правильных посетителей. Но гораздо чаще для похожих целей применяются эти акции: <a href=https://10nsk.ru/user/JosephSuple/>1×slots бонус за регистрацию</a> 1хслотс официальный сайт зеркало <a href=http://www.aadd2.net/vb/member.php?u=33977>http://www.aadd2.net/vb/member.php?u=33977</a> При регистрации что или ином интернет игральном заведении — вам дается раз шанс испытывать собственную фортуну не внося свои монеты. Замечу собственно такую поощрительную предложение предоставляют не все интернет игровые площадки, а лишь великодушная половина из их. Которые мы подготовили для Вас в нашем перечне. 1×slots зеркало регистрацию более популярный вариант это Раздача призов может быть приурочена к разным датам: календарные дни, дни рождения игроков, юбилей открытия казино и т. Д. Подарок выдается в виде средств, фриспинов или баллов для накопления и обмена на услуги оператора. Если юзер получает выигрыш, средства начисляются на его счет. Для вывода этой суммы придется выполнить ряд притязаний.Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы которые появляются у новичков.
1×slots зеркало подтвердит вашу регистрацию если говорить
Фриспины – бесплатные вращения с фиксированной ставкой, коие можно применять в конкретных игровых автоматах.Активация валютного гонорары происходит автоматически в создания профиля либо применения промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на страницы казино в социальных сетях либо на рассылку маркетинговых извещений, скачать и установить дополнительный софт и т.д. <a href=http://klinika-otzyvy.club/index.php?subaction=userinfo&user=energeticmold5>http://klinika-otzyvy.club/index.php?subaction=userinfo&user=energeticmold5</a> Бонусы без депо при регистрации считаются самыми красивыми как для опытнейших игроков, так для и новичков. Получив такое вознаграждение, заказчик имеет играть на настоящие деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, еще обстоятельства их активации и выигрыша. 1хслот скачать Не стоит незамедлительно же открещиваться от приветственных даров в сходственных казино. Администрация готова начислить деньги либо фриспины, хотя сначала работники должны увериться, что вы не аферист. Дело том,, что развелось слишком много охотников за призами. Они научились обманывать систему и зарабатывать крупные суммы денег.
1× slots сайт
Бездепозитный бонус – это финансовое вознаграждение, которое выдается соучастнику забавы в казино, для его привлечения и возникновения заинтересованности. Любой посетитель, кот-ый соответствует условиям выдачи похожего бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое одобрение считается более действенным способом, дающим вероятность стартовать деле, не вкладывая личных материальных средств.Получить Бездепозитный приз в интернет казино дело двух кликов. Другой момент, отыграть промо и соблюсти верховодила и условия отыгрыша. Под правилами предполагается не вагер, но и лимитирования по максимальной ставке. Мы понимаем, что в кино все ставят на зеро и выигрывают. Призываем не делать сходственного. Перед активацией приза прочтите правила. Узнайте следующие факторы: Условия получения дара, за регистрацию, за депо и другое. Ограничения по наибольшей ставке. Зачастую не выше 350 руб. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вертеть автоматы, а вагер будет стоять на пространстве. Поэтому главно знать, в каких забавах можно осуществлять кратность денежного оборота. <a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=192529>1х слот регистрация в 1×slots casino</a> 1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, в не хотите стать жертвой жуликов или впустую потратить время; Онлайн-казино с бездепозитными бонусами ставят клиентам обстоятельства для использования бездепами, потому перед участием в акции какого-либо подробно ознакомиться со всеми правилами и нюансами акции. Условия все дотрагиваться получения приза, его использования и последующего вывода денежных средств в случае выигрыша. казино 1×slots официальный сайт <a href=https://www.tunionfans.com/home.php?mod=space&uid=5242>https://www.tunionfans.com/home.php?mod=space&uid=5242</a>
1хслотс рабочее зеркало
Не трудно додуматься, собственно no deposit bonuses практически разу не посещают большими. Чаще всего речь о пяти–тридцати баксах (или эквиваленте данной суммы в другой валюте).При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, которое возможно предназначить забаве в казино. Предложения с бездепозитными бонусами за регистрацию разрешают свежим заведениям привлечь аудиторию на свой вебсайт. А игроки тому получают возможность выступать на настоящие деньги без депо в казино и заработать небольшой стартовый капитал, кот-ый разрешается исключить на карту банка либо электронный кошелек.Рассмотрим принцип его деянья на примере. Допустим, вы зарегистрировались и возымели $10 not the slightest down payment bonus с вейджером х50. Это значит, собственно выигранные средства возможно будет выводить не раньше, чем последствии такого, как общая сумма ставок достигнет $500. <a href=http://elektrofahrrad-tests.de/forums/member.php?action=profile&uid=35423>http://elektrofahrrad-tests.de/forums/member.php?action=profile&uid=35423</a> x1 slots 1хслотс регистрация перейти на 1×slots Чаще всего, популярностью сервисы, такие как MoneyBookers и WebMoney, еще MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно неотъемлемое управляло. Финансовые средства выводятся лишь через ту платежную систему, коей огромной для пополнения депозита. Если же игрок получил бездепозитный покерный бонус, требуется пополнить счет на наименьшую необходимую, кот-ая сочиняет обычно 10 долларов.Как управляло, при выводе финансов, от играющего требуется только сделать наименьший вклад чтобы, чтобы, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом собственный счет.
<b>Смотреть еще похожие новости:</b>
<a href=http://board.eternityrpc.com/thread-7-post-14450.html#pid14450>1×slots подтвердит вашу регистрацию если говорить</a>
<a href=http://www.carshowsociety.com/forum.php/topic,11220.new.html#new>1×slot зеркало рабочее регистрации на телефон придет</a>
<a href=http://miupsik.ru/forums/showthread.php?tid=247789>1х слот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Стоит отметить, собственно бездепозитный бонус выдается лишь взрослым новеньким, которые, в свою очередь, все пригласить собственных приятелей и знакомых, того рассчитывающих на поощрительную программку преданности. Подобная технология замечена между создающих онлайн-казино для популяризации и расширения трафика. Покер румы и спонсоры способствуют увеличению своей посещаемости, методом вербования свежих игроков. Бонусы – это уникальный шанс для вероятных соучастников забавы, которые могут опробовать софт покер рума и убедиться, будут ли они в него выступать либо нет. Новый игрок испробует свои силы с настоящими оппонентами в казино. Подтвердите личность, предоставив оператору казино средства паспортные данные. Инструкции обычно несложные, главное — конкретно им следовать. Если написано, собственно «на фото должны быть видны все хорошо угла страницы паспорта» — устройте именно такое фото.
#9014 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало этих способов предполагает регистрацию
Обычно для получения бонусов без депозита, казино выдвигает лояльные и абсолютно выполнимые условия, но есть ряд деяний коие воспрещены и имеют причиной противные результаты: <a href=http://filmkachat.ru/>1×slots зеркало подтвердит вашу регистрацию если говорить</a> Наши специалисты исследуют обстоятельства промоакции, затем в ручном режиме проводят их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и другие параметры. Мы не рекламируем казино, а даем игрокам информацию о наихороших из их. <a href=http://xn–9r2b13phzdq9r.com/bbs/board.php?bo_table=free&wr_id=3660764>http://xn–9r2b13phzdq9r.com/bbs/board.php?bo_table=free&wr_id=3660764</a> Какие бонусы есть еще получить не бездепозитного приза за регистрацию в казино? По мимо бездепозитного приза, любое интернет казино предлагает игрокам прибыльное предложение на первый депозит, вы совершаете депо, ваш депозит увеличивается в двое или том в трое, тем самым начать играть возможно с более крупной суммой, так же не запамятываем про вейджер на призы.Активация происходит за промокодов, коие вводятся в личном офисе после регистрации. Среди спецпредложений в перечне Casino.ru содержатся неповторимые промокоды, которые доступны только посетителям портала. Другие методы начисления средств ? автоматическая активация незамедлительно в творенья аккаунта и получение дара по запросу в службу технической поддержки. казино 1×slots официальный сайт <a href=http://iminthai.com/home.php?mod=space&uid=252825>http://iminthai.com/home.php?mod=space&uid=252825</a>
1×slots подтвердит вашу регистрацию если говорить
1×slots зеркало регистрация то дальше необходимо пройти <a href=http://service.gepart.su/forum/?PAGE_NAME=profile_view&UID=5273>http://service.gepart.su/forum/?PAGE_NAME=profile_view&UID=5273</a> Фриспины начисляются по конкретной ставке. После их активации игроку нужно запустить разъем и увериться, что в нем отображаются бесплатные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода после отыгрыша ориентируется оператором и изредка выше 5 000 руб.Для всех бездепозитных бонусов действует наибольший лимит на выигрыш. Он показывает максимальную сумму, которую вы сможете получить, играя на бонусные кредиты. Как только вам удастся выполнить требования вейджера, дозволенный максимально несомненно переведен с бонусного счета на основной, а остаток будет списан. 1×slos регистрация в 1×slots casino Вейджер (либо вагер) ? это минимальная сумма ставок, коию необходимо устроить для вывода валютного приза. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, тем привлекательнее спецпредложение.Перед активацией принципиально пристально изучить обстоятельства промоакции. Чем ниже вейджер, тем больше возможная выгода игрока. Имеют значение также лимиты ставок при отыгрыше и сроки, на которых можно пользоваться предложением. Если бездеп обхватывает узкий список игр, рекомендовано разузнать максимальные коэффициенты, степень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь том, случае, если оператор не установил взыскательные ограничения на максимальную необходимую ставки.
1× slots casino зеркало
На страничке представлены бездепозитные призы за регистрацию в казино редкая награда за которой гонятся все игроки как новички, например и профессионалы. Мы также уделяем большое внимание на наличие бонусов при составление рейтинга казино на деньги. Бездепозитный бонус это вероятность выступать даром и выиграть настоящие деньги.Бездепозитный бонус по промо-коду будет доступен для игры, только в случае когда Вы активируете специальный бонусный код в разделе с призами или укажите промокод при регистрации на веб-сайте. В некоторых случаях, не активации кода, понадобиться доказать контактные данные игрока и наполнить анкету посетителя. Иногда у гостей вебсайта шансы появиться трудности, задачи, препядствия при активации полученного промо-кода. В этих случаях, необходимо адресоваться за поддержкою в службу «Support». Для получения ответа, непременно указывается конкретная первопричина воззвания и подтверждается информация дополнительными экрана. Если сложилась неоднозначная ситуация, практически можно обратиться к главному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ. <a href=https://sex18babes.com/user/StevenMeady/>https://sex18babes.com/user/StevenMeady/</a> Нет. Казино выдают благотворительные бонусы за регистрацию, для того, дабы клиент мог ознакомиться с игровым заведением. А чтобы исключить его, необходимо выполнить обстоятельства отыгрыша. 1хслотс рабочее зеркало Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации подарка необходимо доказать электрическую почту и привязать телефонный;Для выбора азартного заведения Вы сможете пользоваться перечнем наших казино с бонусами за регистрацию. На нашем веб-сайте мы опубликовали перечень бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, собственно доля призов неповторимые и доступны лишь для гостей нашего сайта по-специальному промо-коду или по оригинальной ссылке. Кроме как, для любого приза мы подготовили подробный обозрение, в Вы узнаете как получить и отыграть одобрение и как вывести собственный выигрыш с бездепа.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Чаще всего интернет-казино предлагают бездепозитные бонусы новым пользователям. Эта промо-акция довольно эффективно привлекает начинающих, подталкивая их к открытию счета. Конечно, не все они становятся послушными клиентами, но сам прецедент регистрации аккаунта играет на руку заведению. Приветственный бездеп предоставляется хоть игроку только один раз. Казино дерутся с так называемыми бонусхантерами (от англ. Bonus Hunter — доброволец за призами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения дара. Исключить похожие деяния дозволяет верификация данных. Администрация вправе востребовать у клиента подтвердить персональные данные, указанные при регистрации.Бездеп с фриспинами имеет обхватывать всю коллекцию игр на веб-сайте либо разработки 1-го провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш может быть выведен последствии того, как пользователь отыграет данную необходимую. Возможность оценить полный перечень слотов — основное достоинство этой разновидности. Игроку становятся доступны что, эти опции, которые отсутствуют в демонстрационном режиме, а вероятность выиграть настоящие деньги добавляет ярких азартных ощущений. Зарегистрируйтесь. Для регистрации чаще всего довольно ввести свой номер телефонного и почтовый адресок, после чего установить приобретенный код из СМС. Возможно, требуется показать промокод. В правилах акции будет написано, где его надобно вводить. Иногда это бы делать при регистрации, от — уже после творения собственного кабинета, на отдельной странице. 1× slots официальный <a href=https://bbs.mikocon.com/home.php?mod=space&uid=211602>https://bbs.mikocon.com/home.php?mod=space&uid=211602</a> Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша бонусов. Заведения всегда устанавливают наивысшую ставку, возможную по условиям вейждера.
1× slots сайт
Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? <a href=http://telexeber.az/index.php?subaction=userinfo&user=uglycrook17>http://telexeber.az/index.php?subaction=userinfo&user=uglycrook17</a> Для выбора азартного заведения Вы сможете воспользоваться перечнем наших казино с бонусами за регистрацию. На нашем веб-сайте мы выпустили перечень бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, собственно часть бонусов неповторимые и доступны лишь для посетителей нашего сайта по-специальному промо-коду или по оригинальной ссылке. Кроме такого, для каждого приза мы подготовили подробный обзор, каком Вы узнаете как получить и отыграть поощрение и как вывести собственный выигрыш с бездепа.Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в индивидуальный офис, дабы арестовать бесплатные вращения с вейджером х40; 1×slots официальный зеркало Можно ли в одном интернет казино получить больше одного бонуса за регистрацию? Нет, например как в каждом онлайн казино есть управляла, к которым нужно держаться, не создавать два аккаута для получения призов, иначе несомненно блокировка обоих аккаутов, не пытайтесь перехитрить онлайн казино, бонус за регистрацию выдаеться один один 1 личику.Подарки на дни ? посвященные праздничным датам, требующие символического отыгрыша или начисляются без это. Могут дариться игрокам сутки рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду.
<b>Смотреть еще похожие новости:</b>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=159&pid=648443#post_648443>1×slots casino регистрация 1×slots review live</a>
<a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=4597>1×слотс казино</a>
<a href=https://isomedu.com/forum/profile/josephdrons/>1хслотс рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Обычно для получения бонусов без депо, казино выдвигает приклнные и вполне выполнимые условия, но есть ряд деяний которые воспрещены и шансы повлечь за собой досадные последствия: Некоторые онлайн-казино без депозита предлагают свежим клиентам избрать бонус при регистрации. Будьте внимательны: выбрав один, вы в безоговорочном большинстве случаев не сможете пользоваться остальными.
#9015 Ремонт духовых шкафовhttps://remont-duhovyh-shkafov-ace.ru/
Наш сервисный центр предлагает профессиональный <a href=https://remont-duhovyh-shkafov-ace.ru/>ремонт духовых шкафов с гарантией</a> различных марок и моделей. Мы понимаем, насколько важны для вас ваши духовки, и обеспечиваем ремонт наилучшего качества. Наши профессиональные техники оперативно и тщательно выполняют работу, используя только оригинальные запчасти, что гарантирует надежность и долговечность наших услуг. Наиболее распространенные поломки, с которыми сталкиваются обладатели кухонных приборов, включают неработающие нагревательные элементы, неисправный таймер, поврежденную дверцу, проблемы с контроллером, ошибки вентиляционной системы и неисправные платы. Для устранения этих поломок наши профессиональные техники оказывают ремонт нагревательных элементов, термостатов, таймеров, дверец, контроллеров, вентиляторов и электроники. Доверив ремонт нам, вы гарантируете себе долговечный и надежный официальный ремонт духовых шкафов. Подробная информация размещена на сайте: https://remont-duhovyh-shkafov-ace.ru
#9016 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию более популярный вариант это
Чтобы выступать даром на реальные деньги в казино, порой довольно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные деяния. <a href=http://filmkachat.ru/>1× slots сайт</a> Свежий бонус начисляется повторяющий валютных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в использовании своими, в случае отыгрыша оператор возможность ввести ограничение на вывод денег. <a href=http://megatv.kiev.ua/user/Davidoxymn/>http://megatv.kiev.ua/user/Davidoxymn/</a> Главным интересным в возникновении этих вознаграждений состоит в том, что пустив их в ход, игры ничем не рискует и в последствии никому ничего не несомненно должен (не зависимо, получит ли он спасибо бонусам какой-либо выигрыш или моментально спустит все только собственно прибывшие финансы). То есть, казино снабжает игрока вероятностью на дармовой основе выступать во различные слоты даже спонсирует игру. 1× slots регистрация в 1×slots casino <a href=http://bbs.theviko.com/home.php?mod=space&uid=1756746>http://bbs.theviko.com/home.php?mod=space&uid=1756746</a>
рабочее зеркало 1хслотс
Бездеп с фриспинами может охватывать всю коллекцию игр на веб-сайте либо разработки 1-го провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении промоакции. Выигрыш может быть выведен в такого, как пользователь отыграет эту сумму. Возможность оценить полный возможностей слотов — основное достоинство данной разновидности. Игроку становятся доступны те опции, которые отсутствуют в демонстрационном режиме, а вероятность выиграть настоящие средства добавляет ясных азартных чувств.Можно ли в одном интернет казино получить больше 1-го бонуса за регистрацию? Нет, например как в каждом онлайн казино есть верховодила, к которым надо(надобно) держаться, не творить два аккаута для получения призов, другому несомненно блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, приз за регистрацию выдаеться раз один 1 личику. 1хслот 1хслотс регистрация перейти на 1×slots <a href=http://agriexpert.kz/user/Philiphug/>http://agriexpert.kz/user/Philiphug/</a> Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают приз по государствам. Вплоть до такого, собственно клуб возможность принимать игроков из Вашей государства, а бездеп мешает.Даже не выиграв крупную сумму, игрок интересно проведет время, изнутри исследует работу площадки, воспримет геймплей автоматов. Все это без каких-то финансовых рисков. Быть в курсе лучших промоакций легкостью. Достаточно периодически изучать список новых интернет казино с выводом бонуса без депозита в данном разделе. 1×slots казино мобильная версия
1×slots официальный сайт скачать на айфон
Да, у бесплатных призов есть дефекты. Прежде всего, они обычно не. Кроме как, условия вейджера по ним всегда строгие. Но все же неимение риска проделывает их довольно красивыми для клиентов.В интернете слишком количество скриптовых вебсайтов, коие принадлежат плутам. Их главная цель – привлечь гэмблеров, пообещав столько великодушные подарки, хотя и крупные выигрыши. Так собственно кое-какие веб-сайты предлагают получить за регистрацию том $1 000. <a href=https://metalverk.ru/forum/?PAGE_NAME=profile_view&UID=76027>https://metalverk.ru/forum/?PAGE_NAME=profile_view&UID=76027</a> Получив собственный подарок, Вы сможете бесплатно выступать на настоящие деньги, а выполнив условия отыгрыша, исключить свой выигрыш. 1хслотс зеркало на сегодня Третитй бездепозитный бонус за регистрацию – денежные средства. К сожалению, начислить рубли или доллары способны только известные и популярные клубы. С их подмогою появится насладиться каждой доступной игрой – автоматом, рулеткой, кено, блэкджеком.
casino 1×slot
<a href=http://miupsik.ru/forums/showthread.php?tid=194024>1×slots промокод при регистрации 2025</a> Бездепозитный приз за регистрацию в казино — это стартовый презент повторяющий денежного начисления либо даровых вращений для новых игроков заведения, для получения которого не нужно заносить депо.Бездеп с фриспинами имеет обхватывать всю коллекцию игр на сайте или разработки одного провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении акции. Выигрыш имеет быть выведен после того, как юзер отыграет данную необходимую. Возможность расценить глубокий функционал слотов — главное совершенство этой разновидности. Игроку становятся доступны что, эти функции, коие отсутствуют в демонстрационном режиме, а возможность выиграть реальные деньги прибавляет ярчайших азартных ощущений. 1хслот 1хслотс регистрация перейти на 1×slots <a href=http://troderstro.ru/user/Davidsnite/>http://troderstro.ru/user/Davidsnite/</a> Сразу после активации промокода можно пользоваться презентом. Как уже упоминалось, призы посещают трёх обликов – фриспины, кредиты и фриплей-бонусы.В случае установленного лимита на необходимую вывода выигрыша с бездепозитного бонуса, игрок не сможет вывести больше заявленной суммы.
1хслотс 1хслотс регистрация перейти на 1×slots
Для проверки применяются сканы паспортов, водительских удостоверений, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если пользователь замечен в попытке ввести дополнительный акк, все его учетные записи подвергаются блокировке, а их владелец попадает в темный список. При забаве на лицензионной площадке не бояться указывать достоверную индивидуальную информацию (шифрование исключает утечку индивидуальных данных).С не отыгранным призом воспрещается превосходить объем максимальной ставки. Нарушение этого условия будет аннулирование выигрыша. Для получения депозитного бонуса нужно пополнить свой игровой баланс настоящими деньгами. Вознаграждение возможно получить либо при внесении первого депо, либо в виде фиксированного процента от внесённых средств. Так или по, приз поступит на счёт только последствии пополнения.Основное различие что, что для получения бездепа не пополнять баланс в казино. Но не этого, есть ряд и отличий: <a href=http://vsemktostroit.ru/bitrix/redirect.php?goto=http://troitskiy-istochnik.ru/bitrix/rk.php?goto=http://cheeseit.ru/bitrix/redirect.php?goto=https://telegra.ph/Kakie-otchety-nuzhno-sdavat-v-Rosstat-i-kak-ih-proverit-po-INN-09–19>http://vsemktostroit.ru/bitrix/redirect.php?goto=http://troitskiy-istochnik.ru/bitrix/rk.php?goto=http://cheeseit.ru/bitrix/redirect.php?goto=https://telegra.ph/Kakie-otchety-nuzhno-sdavat-v-Rosstat-i-kak-ih-proverit-po-INN-09–19</a> 1×slots официальный demo регистрация в 1×slots casino На бонусные начисления могут быть установлены вспомогательные ограничения, коие Вы не к при отыгрыше. Пока приз всецело не отыгран — средства из казино не выводятся.При малый сумме бонуса рекомендовано выступать по невысоким ставкам, а использовать максимальные какого-либо лишь том, случае, в вейджер очень немалый, а время на отыгрыш крепко ограничено.
<b>Смотреть еще похожие новости:</b>
<a href=http://romb4×4.ru/forum/members/rabofreepn.4965/>1×slots сайт</a>
<a href=http://khodaumo.com/forum/memberlist.php?mode=viewprofile&u=146&sid=4cf89ac7cd883fc142f546514ce507ab>1×slots casino регистрация 1×slotscasino09k online</a>
<a href=https://www.goslog.ru/forum/messages/forum1/message11034/11-obrashcheniya-grazhdan?result=reply#message11034>1×slots регистрация 1×slots casino 777 online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Нет. Для получения бездепозитного приза в казино нужна неотъемлемая регистрация на веб-сайте. Играть в слоты даром и без регистрации можно только в демо режиме.
#9017 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
Однако в условиях исчезают «подводные камешки», коие не разрешат вывести крупную сумму или же вы не успеете отыграть вейджер. Поэтому профессионалы советуют отобрать благотворительные вращения за регистрацию в казино без депо, чтобы поднабраться навыка и получить настоящий шанс на победу.К огорчению, нет. Почти все казино, требуют внесение желая бы 1-го минимального депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, собственно исключить деньги разрешается только на что, эту платежную систему, с которой был изготовлен депо. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> <a href=https://www.numeracy.wiki/index.php/Shisha_Tobacco_From4_Eur>https://www.numeracy.wiki/index.php/Shisha_Tobacco_From4_Eur</a> 1×slots рабочее зеркало <a href=https://www.harnessracingforum.com/member.php?115228-Jaspertyday>https://www.harnessracingforum.com/member.php?115228-Jaspertyday</a> Таким образом онлайн казино получает потенциального игрока. Возможно в или подлинном он захочет сыграть на средства деньги. Так работают бездепозитные бонусы в интернет казино. Здесь хорошо подходит выражение, благотворительные сыр случается только в мышеловке. Начинающие игроки могут не обдумывать опасность пыла. Однако с осознания делается больше. Это тема для отдельного обсуждения.
1х слот регистрация в 1×slots casino
При ирге на бонусные свои запрещается играть в игровые автоматы с современным джекпотом и забавы из радела exist casino. Кроме как, некоторые казино дают бездеп на раз или несколько определенных слотов, и в иных играх Вы не можете на них играть. <a href=https://praisenpray.org/forums/showthread.php?tid=96473>1×slots акции</a> 1×slots casino регистрация Для тех, кто только взвешивает испытывать свою фортуну, а для проф игроков, ищущих новые площадки для выигрышей, основные лицензированные казино часто организуют разные промоакции, и одно из лучших услуг прошедшее время – как для новичков, так и для проф игроков – бездепозитный бонус за регистрацию.При регистрации стопам свидетельствовать только достоверную информацию. Когда учетная запись несомненно активна, появится доступ в Личный кабинет. В нем можно избрать валюту, установить промокод и разузнать подробные управляла получения и отыгрыша бездепа. Краткая информация об промоакции нередко находится непосредственно на регистрационной форме. <a href=http://zqykj.com/bbs/home.php?mod=space&uid=261042>http://zqykj.com/bbs/home.php?mod=space&uid=261042</a> 1×slots регистрация на официальном сайте Простая процедура получения бездепозитного бонуса, которая займет не более 2-х минут. Для получения бездепов, достаточно зарегистрироваться и подтвердить контактные данные.
1хслотс 1хслотс регистрация перейти на 1×slots
Бездепозитные призы за регистрацию считаются одним из самых модных способов привлечения новых игроков в онлайн-казино, потому собственно они деют игрокам возможность опробовать казино, неподражаемо игровые автоматы, и вполне, выиграть настоящие средства. <a href=http://crystal-angel.com.ua/index.php?subaction=userinfo&user=addictednanny18>http://crystal-angel.com.ua/index.php?subaction=userinfo&user=addictednanny18</a> Бездепозитные призы — это презенты от казино повторяющий бонусных денег либо фриспинов для игровых автоматов, которые начисляются на акк игрока после процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депо не требуется.Некоторые казино все предлагать клиентам бездепы за подтверждение номера или почты или репост на страницу в соц сетях. 1×slot зеркало рабочее этих способов предполагает регистрацию Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депозит имеет выделяться до 30 дней.
1× слот зеркало
Прежде чем активировать бездеп, нужно увериться в, собственно страна, уроженцем которой считается игрок, не заходит в перечень запрещенных.Варианты выигрыша в от Вашей успеха и критерий игорного портала. Выше мы заявили, собственно некоторые бездепозитные бонусы в 2022 году выдаются с ограничениями по наибольшей выплате. Однако, остаются и, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность передовых игр на деньги, возможно выиграть невероятные суммы. Сегодняшние игровые автоматы или видео слоты, как их нарекают. Могут выдавать солидные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000. 1хслот скачать <a href=http://pro100tools.ru/bitrix/redirect.php?goto=http://cokord.ru/bitrix/redirect.php?goto=http://furnitarium.ru/bitrix/redirect.php?goto=https://telegra.ph/Poshagovoe-rukovodstvo-po-nalogovym-vychetam-pri-remonte-kvartiry-09–23>http://pro100tools.ru/bitrix/redirect.php?goto=http://cokord.ru/bitrix/redirect.php?goto=http://furnitarium.ru/bitrix/redirect.php?goto=https://telegra.ph/Poshagovoe-rukovodstvo-po-nalogovym-vychetam-pri-remonte-kvartiry-09–23</a> Однако в условиях исчезают «подводные камешки», коие не разрешат вывести крупную сумму или же вы не успеете отыграть вейджер. Поэтому мастера советуют арестовать бесплатные вращения за регистрацию в казино без депо, чтобы поднабраться опыта и получить настоящий шанс на победу.Иногда в одобрения за регистрацию могут выдаваться билеты для роли в турнирах. Условия их проведения очень отличаются, потому мы рекомендуем ознакомиться с каждым предложением раздельно.
1×slots casino зеркало
Риск-игра по равным шансам – Также казино может воспрещать исполнять условия по отыгрышу с помощью раунда на удвоение, который предлагается в слотах, видео-покере и некоторых иных забавах.Фриспины. Бесплатные вращения предназначены для применения в видео-слотах. Внимательно читайте условия – они нередко выдаются для некоторых машин. В зависимости от клуба возможность делать конкретное число ставок. Кстати, современные игорные дома выделяют возможность заводить «одноруких злодеев». Наш перечень содержит лучшие бездепозитные бонусы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по принципиальным параметрам: <a href=http://ekaterinovka.sarat.ru/board/tools.php?event=profile&pname=AnthonyHix>http://ekaterinovka.sarat.ru/board/tools.php?event=profile&pname=AnthonyHix</a> Вы наверняка, как и все любите получать презенты и бездепозитные бонусы казино. Игорные дома брали в повадку одаривать гэмблеров приятными бонусами. Стать владельцем приветственного подарка можно за создание профиля либо пополнение счёта. Второй вариант более занимательный, как клубы готовы удвоить депо! Но если вы новичок и лишь знакомитесь с миром пыла, превосходнее пользуйтесь призом за регистрацию.С иной стороны, намного легче забрать бездепозитные фриспины за регистрацию в казино и напрямик данный начать вертеть барабаны в наилучших слотах. Главная необыкновенность спинов сомнений, что они предусмотрены для топовых автоматов. Удастся не только пройти вспомогательные раунды, но и увеличить необходимую выигрыша, заработать респины и внутриигровые презенты. 1×slots сайт Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 $. Если выдаются фриспины, их количество редко выше нескольких десятков бесплатных вращений.Фриспины. Бесплатные вращения предназначены для применения в видео-слотах. Внимательно читайте обстоятельства – они нередко выдаются для некоторых машин. В зависимости от клуба возможность делать определенное число ставок. Кстати, современные игорные дома выделяют вероятность заводить «одноруких бандитов».
<b>Смотреть еще похожие новости:</b>
<a href=https://koreanstudies.com/forum/viewtopic.php?t=116914>зеркло казино 1×slots</a>
<a href=http://3ak.cn/home.php?mod=space&uid=187057>1×slots скачать на айфон</a>
<a href=http://www.arka-bahce.org/forum/showthread.php?p=764378#post764378>рабочее зеркало 1хслотс</a>
<a href=http://romb4×4.ru/forum/threads/1×slots-rabochee-zerkalo.16412/>1×slots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бонус за регистрацию в казино выдается только раз раз на одного игрока. Но посещают вспомогательные промоакции, в коих бездепы раздаются для постоянных клиентов и эти презенты Вы сможете получить больше 1-го раза. Суммы похожих услуг, большинстве, колеблются от трех до двадцати долларов, а вейджер на эти свои должен сочинять от тридцати до шестидесяти один. Зачастую, наивеличайшая сумма выигрыша тут составит от одной до 2-ух сотен долларов. Если компьютерные выиграет больше, то все средства могут быть списанными до очень разрешенного выигрыша. Здесь бывает содержание выводить еще несуществующие деньги на собственную платежную систему и дальше искать заведение с подходящими под данную необходимую релоадом или бонусом за 1-ое пополнение счета. Есть несколько подвидов бездепозитного вознаграждения, предлагаемого наибольшим числом заведений.
#9018 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало рабочее
Почти все игровые клубы настоятельно свидетельство контактных данных игрока для получения бездепозитного приза. <a href=http://filmkachat.ru/>x1 slots 1хслотс регистрация перейти на 1×slots</a> <a href=https://trueanal.org/user/Jameshed/>https://trueanal.org/user/Jameshed/</a> 1×slots регистрация 1×slots casino c2d ru <a href=https://joyrulez.com/blogs/479050/%D0%9C%D1%83%D1%85%D0%BE%D0%BC%D0%BE%D1%80-%D0%B2-%D0%BA%D0%B0%D0%BF%D1%81%D1%83%D0%BB%D0%B0%D1%85-%D0%B3%D0%B8%D0%B4-%D0%BF%D0%BE-%D0%B2%D1%8B%D0%B1%D0%BE%D1%80%D1%83-%D0%B8-%D0%BF%D0%BE%D0%BA%D1%83%D0%BF%D0%BA%D0%B5-%D0%BD%D0%B5%D0%BE%D0%B1%D1%8B%D1%87%D0%BD%D0%BE%D0%B9-%D0%B4%D0%BE%D0%B1%D0%B0%D0%B2%D0%BA%D0%B8>https://joyrulez.com/blogs/479050/%D0%9C%D1%83%D1%85%D0%BE%D0%BC%D0%BE%D1%80-%D0%B2-%D0%BA%D0%B0%D0%BF%D1%81%D1%83%D0%BB%D0%B0%D1%85-%D0%B3%D0%B8%D0%B4-%D0%BF%D0%BE-%D0%B2%D1%8B%D0%B1%D0%BE%D1%80%D1%83-%D0%B8-%D0%BF%D0%BE%D0%BA%D1%83%D0%BF%D0%BA%D0%B5-%D0%BD%D0%B5%D0%BE%D0%B1%D1%8B%D1%87%D0%BD%D0%BE%D0%B9-%D0%B4%D0%BE%D0%B1%D0%B0%D0%B2%D0%BA%D0%B8</a> Вейджер (wager) – это коэффициент, кот-ый показывает на какую необходимую необходимо устроить ставок, чтобы вывести приз из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего приза, Вам необходимо сделать ставок на необходимую: 500*70=3500 руб. Только полностью отыграв бонус, Вы можете вывести собственный выигрыш.
1хслотс зеркало
Этот образ бонуса будет добавлен на Ваш аккаунт после удачной процедуры регистрации с внедрением номера телефона. Если избрать другой способ творения учетной записи, бездеп не будет добавлен на Ваш акк.Можно. Вы практически можете отказаться от получения бездепозитного приза за регистрацию в казино, пока Вы не создадите ставку. 1×slots быструю регистрацию а также мгновенное <a href=https://forum.vingrad.ru/users/Cazinosdep>https://forum.vingrad.ru/users/Cazinosdep</a> В большинстве заведений устроить это можно по адресу электронной почты, по номеру телефона, через социальную сеть либо гугл-аккаунт.При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток. 1×slots casino зеркало рабочее
1хлот регистрация в 1×slots casino
Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную функцию активации приза без депозита. Внимательно прочитайте до конца. Многие новички проделывают промахи на шаге регистрации и поэтому имеют получить презент. <a href=http://mineralgroup.ru/index.php?subaction=userinfo&user=maturecomplemen>http://mineralgroup.ru/index.php?subaction=userinfo&user=maturecomplemen</a> 1×slots зеркало Бездепозитные призы — это подарки от казино вид бонусных денег либо фриспинов для игровых автоматов, коие начисляются на аккаунт игрока последствии процедуры регистрации на сайте заведения. Для получения таких поощрений депозит не потребуется.
1×slots casino зеркало
<a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1× slots регистрация в 1×slots casino</a> 1×slots сайт <a href=http://sherwood-nn.ru/bitrix/rk.php?goto=http://pgraph.ru/bitrix/rk.php?goto=http://conformstyle.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/X3U29CuTmTY>http://sherwood-nn.ru/bitrix/rk.php?goto=http://pgraph.ru/bitrix/rk.php?goto=http://conformstyle.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/X3U29CuTmTY</a>
1×slots регистрация то дальше необходимо пройти
B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. Объективные – объем приза, коэффициент и обстоятельства вейджера, надобность внесения депо для вывода денег; <a href=http://tehnoprom-nsk.ru/user/GeraldNUH/>http://tehnoprom-nsk.ru/user/GeraldNUH/</a> 1хслотс 1хслотс регистрация перейти на 1×slots Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?Помимо остального, для вывода средств по бездепу нужно внести на счёт собственный первый депозит — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало возможную сумму, после чего вывод средств будет доступен.
<b>Смотреть еще похожие новости:</b>
<a href=http://aficionado.pl/showthread.php?125142–1-%D1%85%D1%81%D0%BB%D0%BE%D1%82-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%B2–1×slots-casino&p=143609>1 хслот регистрация в 1×slots casino</a>
<a href=https://www.bf-france.com/forums/profile/30064-rabofreeor/>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=262157>1×slots казино мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Не советуем сломя голову браться за всевозможные предложения получения средств без инвестициям. Вполне возможно, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на 1-ый взгляд. Альтернативой является казино бонус за депо. Мы предлагаем для пару советов, спасибо коим у любого игрока несомненно вероятность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег:
#9019 Ремонт гироскутеров в Москвеhttps://remont-giroskuterov-key.ru/
Наш сервисный центр предлагает надежный <a href=https://remont-giroskuterov-key.ru/>починить гироскутер на дому</a> всех типов и брендов. Мы понимаем, насколько необходимы вам ваши самобалансирующиеся скутеры, и стремимся предоставить услуги первоклассного уровня. Наши профессиональные техники проводят ремонтные работы с высокой скоростью и точностью, используя только качественные детали, что предоставляет длительную работу проведенных ремонтов. Наиболее частые неисправности, с которыми сталкиваются владельцы гироскутеров, включают неисправную батарею, проблемы с мотором, поломку контроллера, неисправности сенсоров и механические повреждения. Для устранения этих неисправностей наши профессиональные техники выполняют ремонт батарей, двигателей, контроллеров, гиросенсоров и механических компонентов. Доверив ремонт нам, вы обеспечиваете себе качественный и надежный сервис ремонта гироскутеров на выезде. Подробная информация представлена на нашем сайте: https://remont-giroskuterov-key.ru
#9020 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало рабочее этих способов предполагает регистрацию
Маркетинговая деятеля всех игорных интернет-клубов обязана носить разнообразный характер. И если вознаграждения на депозит служат чтобы, чтобы, дабы стимулировать заносить депозиты и поощрять уже имеющих пользователей, то бездепозитный приз в казино либо бонус за регистрацию в казино, прежде всего, рассчитан на расширение базы потребителей. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы мгновенно получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, бывает реальный шанс победу! <a href=https://opaseke.com/users/7873>https://opaseke.com/users/7873</a> Чем ниже значение вейджера, тем легче отыграть и вывести приз. Если Вы планируете заработать на бездепе, а не просто ознакомиться с новым игровым клубом, то стоит игнорировать призов с высочайшим вейджером их почти не реально отыграть. С ними Вы можете только протестировать игры заведения. 1хслотс официальный сайт зеркало <a href=http://fruit-impex.by/index.php?subaction=userinfo&user=spiritualknack4>http://fruit-impex.by/index.php?subaction=userinfo&user=spiritualknack4</a> Помните, что любые нарушения правил сведут на нет ваши старания, и вы всего останетесь без начисленного вас бесплатного приза. Всегда изучайте правила начисления и обстоятельства вейджера. По любым вопросам, на коие вы имеет помощи найти ответы, обращайтесь за разъяснениям и саппорт.
скачать 1×slots официальный сайт
Благодаря программе преданности от игорного заведения, можно взять хороший старт и без добавочных вложений запустить видеослоты. Кроме того, можно рассчитывать на реальную фортуну и получить, без инвестиции собственных денег, великий выигрыш.4. Заберите подарок. Чаще всего бонус активизируется незамедлительно после регистрации. Но случаются истории, когда надо(надобно) зайти в личный офис или написать в службу поддержки. <a href=https://g2clubs.com/healthy-workout/google/#comment-23935>рабочее зеркало 1хслотс</a> 1×slots регистрация то дальше необходимо пройти Выше мы предоставили полный комплект самых новых и своевременных бездепозитных бонусов в интернет казино без пополнения на 2022 год, где продоставляется воспользоваться любым ценным бездепозитным призом. <a href=http://www.xwsj2021.com/home.php?mod=space&uid=73767>http://www.xwsj2021.com/home.php?mod=space&uid=73767</a> Условия могут различаться друг от приятеля. Но подобный бонус возможность быть использован только для игрового процесса – приобретенные на счет финансы до как, как будут отыграны, вывести невозможно.Каждый новичок и умелый игрок грезят стремительно стартануть и начать делать реальные ставки. Для сего довольно арестовать подарок, за который надо уплачивать. В зависимости от игровой платформы, нужно сделать профиль, привязать email или аппарат. После этого администрация начислит щедрое вознаграждение вид безвозмездных вращений либо виртуальных кредитов. 1× slots зеркало Ознакомьтесь с нашим списком лучших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего перечня и получите бездеп сразу. Хватайте наилучшие благотворительные предложения ниже и выигрывайте большие деньги, не рискуя!Выбрать казино с бездепозитным призом. У нас на сайте представлен список превосходнейших интернет казино, которые предлагают своим игрокам великодушные призы за регистрацию.
1×slots рабочее зеркало на сегодня
При выполнении критерий отыгрыша и верификации, средства с бонусного счета переводятся на главный и могут быть выведены на карту либо электрический кошелек. Лимиты на вывод и сроки проведения транзакции в от выбранной платежной системы. <a href=http://picmr.ru/bitrix/redirect.php?goto=http://babywoods.ru/bitrix/redirect.php?goto=http://xn–h1akabqq4fb.xn–p1ai/bitrix/redirect.php?goto=https://telegra.ph/Usloviya-predostavleniya-razresheniya-na-otmenu-zapreta-na-poezdki-09–23>http://picmr.ru/bitrix/redirect.php?goto=http://babywoods.ru/bitrix/redirect.php?goto=http://xn–h1akabqq4fb.xn–p1ai/bitrix/redirect.php?goto=https://telegra.ph/Usloviya-predostavleniya-razresheniya-na-otmenu-zapreta-na-poezdki-09–23</a> Для получения предоставленных бонусов вас понадобиться — ПК или мобильное прибор, и остальное дело за малым.Бонусные средства – маленькая сумма средств для старта в новеньком казино. На бонусные средства, обыкновенно разрешается играть во все забавы, кроме слотов с современным джекпотом и игр из раздела live casino. 1хслот зеркало сайта Некоторые клубы автоматически начисляют приз на аккаунт игрока после выполнения критерий получения, хотя посещают ситуации, когда бонус надо(надобно) активировать игроку самому. Есть несколько способов активации приза:Так что приготовьтесь дать конфиденциальную информацию (пол, возраст, страна проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает не более суток, в чего получится свободно выводить солидные выигрыши.
1×slots рабочее зеркало
Если вы облюбовали себе количество брендов которые для больше всего приглянулись, для постоянной игры! Таких гемблеров казино довольно любит и ценит, за частую такие игроки становятся VIP игроками заведения, коим нередко поступают выгодные предложения вид бонусов, так же туда входит и бездепозитные. <a href=http://forum.puppylinux.pl/index.php?topic=863.new#new>1×slots зеркало подтвердит вашу регистрацию если говорить</a> 4. Заберите презент. Чаще всего приз активизируется незамедлительно после регистрации. Но посещают истории, когда надо(надобно) зайти в личный кабинет либо написать в саппорта. 1хлот регистрация в 1×slots casino <a href=https://urganchshahar.uz/user/GeraldGophy/>https://urganchshahar.uz/user/GeraldGophy/</a>
1хслотс зеркало на сегодня
<a href=http://www.russtars.tv/user/Henryasymn/>http://www.russtars.tv/user/Henryasymn/</a> Выше мы дали полный комплект самых новых и своевременных бездепозитных призов в онлайн казино без пополнения на 2022 год, где возможность пользоваться каким ценным бездепозитным призом.Бездеп с фриспинами может обхватывать всю коллекцию игр на веб-сайте или разработки 1-го провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш возможность быть выведен последствии такого, как юзер отыграет эту необходимую. Возможность оценить глубокий возможностей слотов — главное достоинство этой разновидности. Игроку становятся доступны что, эти функции, которые отсутствуют в демонстрационном режиме, а возможность выиграть реальные деньги прибавляет ярчайших азартных ощущений. x1 slots 1хслотс регистрация перейти на 1×slots Шаг 4. Активация. Внимательно выучите обстоятельства, информацию по лимитированиям и сроке действия бонусного предложения. Разобравшись с правилами, возможно активировать приз в собственном офисе (иногда ? с использованием промокода) или по запросу в саппорт.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.ihavethepussy.com/de/threads/186695–1×%D0%A1%D0%83%D0%A0%C2%BB%D0%A0%D1%95%D0%A1%E2%80%9A%D0%A1%D0%83-%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%B7%D0%A0%D1%91%D0%A0%D0%85%D0%A0%D1%95?p=204228#post204228>1×слотс казино</a>
<a href=https://www.bf-france.com/forums/profile/30064-rabofreeor/>1 x slots</a>
<a href=https://www.makinamania.net/index.php?topic=250441.new#new>1хслот официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При регистрации что или ином интернет игральном заведении — вам дается раз шанс испытать собственную фортуну не внося свои монеты. Замечу что такую поощрительную услугу деют не все онлайн игровые площадки, а только щедрая середина(средина) из них. Которые мы подготовили для Вас в нашем списке.
#9021 Charlesgunnyhttp://filmkachat.ru
x1 slots 1хслотс регистрация перейти на 1×slots
В случае установленного лимита на необходимую вывода выигрыша с бездепозитного бонуса, игрок не сможет вывести больше заявленной суммы.Варианты выигрыша зависимости от Вашей успеха и условий игорного портала. Выше мы сказали, собственно некоторые бездепозитные призы в 2022 году выдаются с ограничениями по наибольшей выплате. Однако, остаются и, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность современных игр на средства, возможно выиграть невероятные суммы. Сегодняшние игровые автоматы или видео слоты, как их нарекают. Могут выдавать крупные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000. <a href=http://filmkachat.ru/>1×slots зеркало</a> <a href=https://www.vennews.net/home.php?mod=space&uid=161349&do=profile&from=space>https://www.vennews.net/home.php?mod=space&uid=161349&do=profile&from=space</a> Бездепозитные призы казино это экономическая компенсация, предлагаемая пользователям на дармовой основе и возможность играть в онлайн казино бесплатно. Если сопоставлять их с поощрениями за лепта, каких свои выдаются лишь впоследствии первоначального пополнения счета, то бездепозитные гонорары получаются безвозмездно. То есть, играющий получает возможность создавать ставки на уже быть финансы, которые выдаст заведение, выполняя, этом, обыденные действия, чтобы их извлечь (тут идет о регистрация, удостоверении личности с внедрением номера телефона, оформления заявки и т.д. ).Для верификации аккаунта надо(надобно) дать спецам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, а также фотографию банковской карты либо экрана странички электронного кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности. 1×slots быструю регистрацию а также мгновенное <a href=https://njt.ru/forum/user/190303/>https://njt.ru/forum/user/190303/</a> Фриспины предназначены для использования в видео слотах. Внимательно ознакомьтесь с условиями – часто их выдают на кое-какие автоматы. В зависимости от клуба, у вас получится устроить определённое количество ставок. Кстати, продвинутые игорные жилища позволяют запускать каждых «одноруких злодеев».Выполнив все требования оператора, заказчик имеет оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит в среднем менее суток. Если дополнительно потребуется пройти процедуру верификации, то срок увеличивается до 1–2 трудящихся дней. Для перевода применяются банковские инструменты и электронные платежные системы. Второй метод подходит превосходнее, так как основная транзакций ситуации исполняются моментально. В связи со спецификой функционирования банков обработка платежей имеет взятьвдолг(взятьвзаймы) до нескольких трудящихся дней.
зеркло казино 1×slots
Допустим, за регистрацию вы получили бездеп в размере 2 000 руб. С вейджером х30. В этом случае светит устроить ставок, на совместную необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда выполните обстоятельства по отыгрышу, придёт время заработать реальные средства. Однако не забывайте, что с каждого дара получится исключить определённую необходимую (чаще всего не более $200). <a href=http://forum.animogen.com/viewtopic.php?f=9&t=1570003>1×slots регистрация то дальше необходимо пройти</a> 1×slots официальный сайт мобильная версия скачать Нельзя осматривать игру на деньги, как вариант заработка. Азартные игры запрещены для лиц моложе 18 лет. Topcasinobonuses.mobi классифицируется организатором азартных игр. Сайт одевает информационный нрав. <a href=http://forums.indexrise.com/user-290492.html>http://forums.indexrise.com/user-290492.html</a> Суммы сходственных услуг, большинстве, колеблются от 3-х до двадцати долларов, а вейджер на эти средства должен сочинять от тридцати до шестидесяти один. Зачастую, наивеличайшая сумма выигрыша тут составит от одной до двух сотен долларов. Если в выиграет больше, то все свои могут быть списанными до очень разрешенного выигрыша. Здесь замечена содержание выводить еще несуществующие финансы на собственную платежную систему и далее находить заведение с подходящими под данную необходимую релоадом либо призом за 1-ое пополнение счета. Есть несколько подвидов бездепозитного гонорары, предлагаемого большим количеством заведений. 1×slots регистрация то дальше необходимо пройти Для получения бездепа необходимо пригласить в игру по реферальной ссылке свежего клиента: он должен зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на необходимую, обозначенную в критериях промоакции.
1хслотс рабочее зеркало
<a href=http://oldpeoplewholikebirds.com/forum/memberlist.php?mode=viewprofile&u=234622>http://oldpeoplewholikebirds.com/forum/memberlist.php?mode=viewprofile&u=234622</a> Такие поощрения разрешают безвозмездно протестировать свежее казино, разобраться с игровым процессом интернет слотов, заработать и исключить маленькую сумму денег.Несмотря на то, что данный вариант стимуляции со стороны азартных платформ очень востребован области подобных игр, далековато не всем почитателям казино знаменито, что себе бездепозитные бонусы казино и как непосредственно их вполне эксплуатировать. 1×slots зеркало этих способов предполагает регистрацию Также существуют онлайн-платформы азартных игр, коие применяют раздачу бездепозитных бонусов в особые даты (как для казино, например и для игрока). Помимо этого, действующие геймеры кроме имеют вероятность получить похожие призы за собственную деятельность (к примеру, за увеличения значения либо за похожие заслуги).
1×slots casino регистрация на сайте
<a href=https://seniordance.ru/forum/showthread.php/77717–1%D1%85%D0%BB%D0%BE%D1%82-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%B2–1×slots-casino?p=107638#post107638>1хлот регистрация в 1×slots casino</a> Акции, приуроченные к календарным дням, случаются рассчитаны как на всех юзеров, так и на категории: примеру, подарок на 8 марта девушкам-игрокам или мужчинам на 23 февраля. 1×slots зеркало на сегодня <a href=http://www.maxtremer.com/bbs/board.php?bo_table=qna_e&wr_id=1077709>http://www.maxtremer.com/bbs/board.php?bo_table=qna_e&wr_id=1077709</a> Для отыгрыша приза казино обязует игрока поиграть на необходимую, в количество раз превышающую сумму полученного бонуса — здесь выгода фирмы явна.
казино 1×slots официальный сайт
Объективные – размер приза, коэффициент и обстоятельства вейджера, необходимость внесения депо для вывода денег; <a href=http://adrestyt.ru/user/RichardPlome/>http://adrestyt.ru/user/RichardPlome/</a> В зависимости от онлайн заведения любой из их возможность вам предложить как бездепозитные средства, так и бездепозитные фриспины, коие последствии удачной регистрации рухнут вас на ваш игровой баланс. 1×slots казино зеркало Бездеп с фриспинами возможность обхватывать всю коллекцию игр на сайте либо разработки одного провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении промоакции. Выигрыш может быть выведен последствии как, как юзер отыграет эту необходимую. Возможность оценить глубокий возможностей слотов — главное достоинство данной разновидности. Игроку становятся доступны те опции, коие отсутствуют в демонстрационном режиме, а вероятность выиграть настоящие средства прибавляет ярких азартных чувств.Для получения бонуса надо(надобно) ознакомиться с программкой преданности казино и устроить ставки на сумму, необходимую для перехода на грядущий уровень.
<b>Смотреть еще похожие новости:</b>
<a href=http://diablo2r.cn/home.php?mod=space&uid=30130>1×slots регистрация 1×slots casino 777 online</a>
<a href=https://australianwinerytours.com/tours/showthread.php?tid=210095>1×slots промокод при регистрации 2025</a>
<a href=https://www.goslog.ru/forum/messages/forum1/message10390/11-obrashcheniya-grazhdan?result=reply#message10390>1хслотс казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бонусы без депозита при регистрации считаются наиболее красивыми как для опытнейших игроков, например для и начинающих. Получив такое вознаграждение, заказчик имеет играть на настоящие деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, еще обстоятельства их активации и выигрыша.
#9022 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация то дальше необходимо пройти
Наш перечень содержит наилучшие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по принципиальным характеристикам:Список например называемых «разрешенных землель» прилагается к правилам бонусной программы игорного портала. Обязательно проверьте, распространяются ли на вас похожие санкции. <a href=http://filmkachat.ru/>1×slots промокод при регистрации 2025</a> Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, чтобы снова получить бесплатный бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ожидает неизбежное наказание. <a href=https://historydb.date/index.php?title=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D1%8B%D0%B5%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%88%D0%B5%D1%84-%D0%BF%D0%BE%D0%B2%D0%B0%D1%80%D0%BE%D0%B2%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!>https://historydb.date/index.php?title=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D1%8B%D0%B5%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%88%D0%B5%D1%84-%D0%BF%D0%BE%D0%B2%D0%B0%D1%80%D0%BE%D0%B2%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!</a> Бонус за регистрацию в казино без депозита с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша имеет потребоваться сделать ставки на необходимую, в некоторое 10-ов раз превышающую необходимую приза или выигрыша. зеркала 1×slots <a href=http://skiindustry.org:/forum/member.php?action=profile&uid=1177543>http://skiindustry.org:/forum/member.php?action=profile&uid=1177543</a> С иной стороны, гораздо легче отобрать бездепозитные фриспины за регистрацию в казино и прямо данный начать вращать барабаны в наилучших слотах. Главная особенность спинов том,, что они предусмотрены для лучших автоматов. Удастся не только пройти дополнительные раунды, но и прирастить сумму выигрыша, заработать респины и внутриигровые презенты.Иногда виде одобрения за регистрацию шансы выдаваться билеты для роли в турнирах. Условия их проведения очень отличаются, поэтому мы советуем ознакомиться с любым предложением отдельно.
1×slots регистрация на официальном сайте
1×slots официальный сайт зеркало Прочитайте управляла бонусной программы, какой желаете участвовать. Да, мы безотступно рекомендуем сделать это до регистрации.Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми промоакциями. Читайте о них в обзорах и на форуме. <a href=http://www.591314.org/space-uid-15557.html>http://www.591314.org/space-uid-15557.html</a> 1×slot казино зеркало В списке притязаний к отыгрышу нередко присутствуют лимиты на ставки при ирге на собственные средства. Так, если отыграть нужно 30 000 руб., а максимальная сумма ограничена 30 рублями, то вертеть барабаны предстоит 1000 один. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам деяния акции.Вышеописанная причина и считается основным интересным, в которого операторы отдают часть собственной выгоды на разные рекламные расходы и рекламные кампании. А наиболее действующим здесь будут играть именно бездепозитные призы казино 2022 с выводом за регистрацию.
1×slots зеркало регистрация в 1×slots casino
Бездепозитный бонус по промо-коду будет доступен для забавы, только том, случае когда Вы активируете специальный бонусный код в разделе с призами или укажите промокод при регистрации на веб-сайте. В неких случаях, не активации кода, понадобиться доказать контактные данные игрока и наполнить анкету посетителя. <a href=http://ybjlfc.com/home.php?mod=space&uid=394708&do=profile>http://ybjlfc.com/home.php?mod=space&uid=394708&do=profile</a> Бездепозитные призы за регистрацию считаются одним из самых известных методов привлечения свежих игроков в онлайн-казино, поэтому что они предоставляют игрокам вероятность опробовать казино, особенно игровые автоматы, и вполне, выиграть реальные средства.Помните, что в неких забавах сумма ставки идет в зачет вейджера только отчасти. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки считаются как отыгранные средства, тот как в слотах идет в зачет все 100% суммы. 1×slots промокод при регистрации Доступность — бездепозитные призы в казино чаще всего предоставляются новым игрокам, хотя бывают случаи, когда бонус могут получить и действующие посетители.
1×slots официальный зеркало рабочее
Некоторые онлайн-казино без депо предлагают новым посетителям выбрать приз при регистрации. Будьте внимательны: выбрав раз, вы в абсолютном большинстве случаев не можете воспользоваться остальными.Срок отыгрыша — это период, который начинается в момент активации приза и завершается с его закрытием. Пользователю нужно уложиться в данный временной промежуток, по призовые свои аннулируются. Казино устанавливают список игр, ставки каких засчитываются при расчете отыгранных денег. Если тайтл не входит в этот перечень, то возможность быть недосегаем для загрузки во время действия бонусного предложения. 1×slots зеркало выигрыши обязательно пройдите регистрацию если <a href=https://sklad-slabov.ru/forum/user/3796/>https://sklad-slabov.ru/forum/user/3796/</a> Приветственный бездеп предоставляется хоть игроку лишь раз один. Казино дерутся с например называемыми бонусхантерами (от англ. Bonus Hunter — доброволец за бонусами), пытающимися заводить многочисленные аккаунты для надувательства оператора и повторного получения презента. Исключить похожие действия разрешает верификация данных. Администрация вправе потребовать у посетителя доказать персональные данные, обозначенные при регистрации.Ниже указан актуальный список законных казино в Беларуси с бонусами на 1-ый депо. Вы можете попасть на официальный сайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус.
1 x slots
Вообще перейдя в казино — управляла одинаковы в получении бездепозитных призов, в стереотипные правила входит: доказать эл. Почту и телефонный, заполнить свой личный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ. Также существуют онлайн-платформы азартных игр, коие применяют раздачу бездепозитных бонусов в особые даты (как для казино, так и для игрока). Помимо этого, действующие геймеры кроме имеют возможность получить похожие бонусы за собственную работа (к примеру, за увеличения уровня либо за похожие заслуги). <a href=https://velorout.com.ua/user/Glennemisp/>https://velorout.com.ua/user/Glennemisp/</a> 1×slots сайт
<b>Смотреть еще похожие новости:</b>
<a href=http://palais.beesims.com/phpbb/viewtopic.php?f=2&t=290566>1хслот скачать</a>
<a href=https://mit-bbs.com/memberlist.php?mode=viewprofile&u=15318>1хслотс казино зеркало</a>
<a href=http://soumoli.com/home.php?mod=space&uid=24916>1×slots официальный сайт мобильная версия скачать</a>
<a href=http://maddog-server.org/forum/showthread.php?tid=52885>1×slots коды</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Главным интересным в появлении данных вознаграждений произведено никаких, собственно пустив их в ход, игры ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он спасибо бонусам какой-либо выигрыш или мгновенно спустит все лишь что прибывшие деньги). То есть, казино снабжает игрока возможностью на дармовой основе выступать во всевозможные слоты и даже спонсирует игру. В интернет-сети всегда можно отыскать перечни наиболее известных и обещанных поощрительных программ от популярных онлайн-казино.
#9023 Charlesgunnyhttp://filmkachat.ru
1хслотс мобильная версия зеркало
Более солидные предложения встречаются довольно изредка. Зачастую они доступны только VIP-игрокам. В оставшихся случаях им наверняка сопутствуют очень жесткие условия отыгрыша. Также вероятны дополнительные условия и другие ограничения, прописанные в критериях и положения бонусной программы казино.Не стоит путать игру в демо и использование призов. В демонстрационном режиме игрок может расценить механику слота, сюжет и оформление. Но забава проводится на условные кредиты, поэтому отсутствует главное ? ощущение азарта. Активируя промокод или фриспины, заказчик как не расходует средства деньги на игровые автоматы, но возможность сорвать настоящий куш! <a href=http://filmkachat.ru/>1×slots регистрацию более популярный вариант это</a> Выбрать казино с бездепозитным бонусом. У нас на сайте представлен список превосходнейших интернет казино, коие предлагают своим игрокам щедрые бонусы за регистрацию.Обычно бездепозитные акции от казино, прибывают на эл. Почту в деньки рождения либо праздники. В некоторых интернет казино возможно адресоваться в чат и как неизменному игроку, возможно для предложат бездепозитное предложение. <a href=https://www.metal-tracker.com/forum/member.php?action=profile&uid=927446133>https://www.metal-tracker.com/forum/member.php?action=profile&uid=927446133</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=https://wiki.dulovic.tech/index.php/User:KindraJamar32>https://wiki.dulovic.tech/index.php/User:KindraJamar32</a> Промообъявления от казино мешают реальной картины и ориентированы на вербование внимания юзеров. Понять, как высоки шансы остаться в плюсе, позволит личный анализ условий предложения:Приглашаем делиться воззрениями о бонусах. Это поможет другим юзерам избирать наиболее выгодные предложения.
1×slots сайт
<a href=https://www.mshowto.org/forum/members/jamespauri.html>1×slots акции</a> 1хслот скачать <a href=https://boobs.red/user/Jamesstorb/>https://boobs.red/user/Jamesstorb/</a> Основное управляло получения бездепа ? творимый акк должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов требовательно воспрещено. Проверка ведется по имени, e-mal, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депо необходимо блюсти простую последовательность поступков.Получить приветственный бонус имеют только новые клиенты онлайн-казино. Способы описаны в критериях промоакции каждого законного казино, почаще всего это: 1×slots актуальное зеркало Высокая конкуренция в разделе азартных игр мотивирует операторов завлекать клиентов разнородными акциями. Благодаря данному у гостей бывает вероятность получить бонусы в казино за регистрацию без депо. Воспользоваться таким предложением возможно, избегая функцию внесения денег на игровой счет, просто активировав аккаунт на сайте. Наш гид по бездепам поможет избрать самую симпатичную бонусную программу, разузнать правила получения такового вознаграждения и распорядиться им с максимальной выгодой.
1× slots зеркало
Почти все игровые клубы настоятельно свидетельство контактных данных игрока для получения бездепозитного бонуса. <a href=http://ip-iv.ru/index.php?subaction=userinfo&user=GlennHaw>http://ip-iv.ru/index.php?subaction=userinfo&user=GlennHaw</a> Многие азартные клубы ограничивают сумму вывода заработанную на призе. Сколько б Вы не выиграли, больше, указанной в описании акции, суммы Вы не можете исключить. Разница несомненно аннулирована, Вы том не можете создавать на нее ставки.У нас на веб-сайте Вы найдете список призов без депозита в испытанных казино и подробную информацию о том как их получить и применять. 1хслотс казино зеркало Фриспины. Бесплатные вращения предназначены для применения в видео-слотах. Внимательно читайте обстоятельства – они часто выдаются для неких машин. В зависимости от клуба вам создавать определенное количество ставок. Кстати, современные игорные дома дают вероятность заводить «одноруких бандитов».Промокод – определённая комбинация знаков, коию необходимо ввести в подходящее фон при разработке учетной записи или активировать в личном профиле игрока в разделе с призами.
1хслотс мобильная версия зеркало
Многие азартные клубы ограничивают необходимую вывода заработанную на призе. Сколько б Вы не выиграли, больше, указанной в описании акции, суммы Вы не можете исключить. Разница несомненно аннулирована, Вы и не сможете делать на нее ставки. Процесс доказательства личности может взятьвдолг(взятьвзаймы) от 1-го денька до недели. Если заказчик разрешил какую ошибку при заполнении паспортных данных, то ему следует обратиться с проблемой в службу поддержки онлайн-казино.Большинство клубов завлекают внимание игроков за счёт разнообразных даров. На одних веб-сайтах возможно получить виртуальные кредиты, которые откроют доступ ко всему софту. На иных же, администрация предлагает бесплатные вращения для запуска лучших интернет слотов. Несмотря на различные акции, стоит выделить самые основные. Условия, на которых предоставляется бездеп, регулируются казино. Каждая акция содержит подробные верховодила, ссылка на которые обычно находится в промообъявлении. В них указываются лимиты, вейджер, перечень доступных игр. Если оператор прячет данные о предложении, то пользоваться им не стоит. скачать 1×slots на андроид мобильная версия <a href=http://vertikal.sinara-development.ru/bitrix/redirect.php?goto=http://zolotoikazan.ru/bitrix/rk.php?goto=http://est.ua/common/out/?url=https://telegra.ph/Idei-dizajna-zadnego-dvora-dlya-vashego-chastnogo-doma-09–23>http://vertikal.sinara-development.ru/bitrix/redirect.php?goto=http://zolotoikazan.ru/bitrix/rk.php?goto=http://est.ua/common/out/?url=https://telegra.ph/Idei-dizajna-zadnego-dvora-dlya-vashego-chastnogo-doma-09–23</a> Онлайн-казино тщательно продумывают бонусные условия, которые необходимо изучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша прочие ограничения.Онлайн гемблинг развивается с любым днем больше и больше, новые бренды создаются не по денькам а по часам. Новые онлайн казино делают вступительные акции для игроков, для того собственно бы зарекомендовать себя, и тем самым предлагают бездепозитные призы за регистрацию, собственно бы не упустить эту вероятность — как воспользоваться новым бездепом, рекомендуем посещать наш сайт как возможно почаще, самое лакомое и новые несомненно добавляться в этом же перечне.
1×slots на любой вкус как пройти регистрацию
<a href=https://dailygram.com/blog/1253176/%D0%BF%D1%80%D0%BE%D0%B3%D1%83%D0%BB%D0%BA%D0%B0-%D0%BF%D0%BE-%D0%B3%D0%BE%D1%80%D0%BE%D0%B4%D1%83-%D0%BE%D1%81%D0%B8%D0%BF%D0%BE%D0%B2%D0%B8%D1%87%D0%B8/>https://dailygram.com/blog/1253176/%D0%BF%D1%80%D0%BE%D0%B3%D1%83%D0%BB%D0%BA%D0%B0-%D0%BF%D0%BE-%D0%B3%D0%BE%D1%80%D0%BE%D0%B4%D1%83-%D0%BE%D1%81%D0%B8%D0%BF%D0%BE%D0%B2%D0%B8%D1%87%D0%B8/</a> 1×slot рабочее зеркало Но не стоит мыслить, что снабжая пользователей этими бонусами, казино увлекается спонсированием. Ведь размеры вознаграждений, в основном, не большие (средним размером от 5 до 20 $). И на эти свои налагаются конкретные условия и лимитирования, обязательные к исполнению игрока, случае в последствии он вожделеет получить все свои выигранные деньги.При подмоги такового одобрения оператор может того завлекать клиентов, коие ранее показывали активность на сайте, хотя по некий причине перестали выступать. В этом случае промокод высылается юзеру по электрической почте или вид SMS.
<b>Смотреть еще похожие новости:</b>
<a href=http://weeklywars.de/viewtopic.php?f=12&t=1131&p=485213#p485213>1 хслот регистрация в 1×slots casino</a>
<a href=https://nztw.org/thread-366018–1–1.html>1×slots зеркало рабочее на сегодня</a>
<a href=https://www.formulersupport.com/Thread-1×slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%BD%D0%B0-%D1%81%D0%B0%D0%B9%D1%82%D0%B5–1×slots-ru-com–106708>1×slots регистрация на сайте 1×slots ru com</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный приз предоставляется новенькому игроку за определенные деяния. Часто подарок в виде средств или фриспинов выдается за регистрацию, благодаря чему юзер получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.
#9024 Ремонт гироскутеров в Москвеhttps://remont-giroskuterov-key.ru/
Наши специалисты предлагает высококачественный <a href=https://remont-giroskuterov-key.ru/>центр ремонта гироскутеров с гарантией</a> различных марок и моделей. Мы понимаем, насколько значимы для вас ваши электроскутеры, и готовы предложить сервис первоклассного уровня. Наши опытные мастера работают быстро и аккуратно, используя только качественные детали, что обеспечивает долговечность и надежность проведенных ремонтов. Наиболее частые неисправности, с которыми сталкиваются владельцы гироскутеров, включают проблемы с батареей, неисправности двигателя, сбои контроллера, неисправности сенсоров и повреждения рамы. Для устранения этих неисправностей наши квалифицированные специалисты выполняют ремонт батарей, двигателей, контроллеров, гиросенсоров и механических компонентов. Обращаясь в наш сервисный центр, вы получаете надежный и долговечный сервис ремонта гироскутера в москве. Подробная информация размещена на сайте: https://remont-giroskuterov-key.ru
#9025 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasino09k online
Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых новых, щедрых и проверенных бонусах в интернет казино, коие обновляются любой день. <a href=http://filmkachat.ru/>1хслотс регистрация в 1×slots casino</a> Как управляло, при выводе финансов, от играющего требуется лишь устроить минимальный вклад чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом собственный счет. <a href=https://ateista.pl/member.php?action=profile&uid=12686>https://ateista.pl/member.php?action=profile&uid=12686</a> рабочее зеркало 1хслотс <a href=https://m1bar.com/user/MichaelLyday/>https://m1bar.com/user/MichaelLyday/</a> Процесс доказательства личности возможность занять от 1-го дня до недели. Если заказчик разрешил какую ошибку при заполнении паспортных данных, то ему стопам обратиться с проблемой в службу поддержки онлайн-казино.Предложения с бездепозитными бонусами за регистрацию разрешают свежим заведениям заинтересовать аудиторию на собственный вебсайт. А игроки тому получают возможность играть на реальные деньги без депозита в казино и заработать малый стартовый капитал, который разрешается вывести на карту банка или электрический кошелек.
1×slots официальный сайт, скачать
Для получения депозитного приза нужно восполнить свой игровой баланс реальными деньгами. Вознаграждение можно получить или при внесении первого депозита, или в виде фиксированного процента от внесённых средств. Так либо иначе, бонус поступит на счёт только последствии пополнения. 1×slots рабочее зеркало на сегодня <a href=http://autoschool-progress.kz/index.php?subaction=userinfo&user=torpideyesight8>http://autoschool-progress.kz/index.php?subaction=userinfo&user=torpideyesight8</a> Доступность — бездепозитные призы в казино почаще всего предоставляются новым игрокам, хотя случаются случаи, когда приз шансы получить и действующие посетители.Но не мыслить, что снабжая пользователей этими бонусами, казино увлекается спонсированием. Ведь объемы вознаграждений, в, не немалые (средним объемом от 5 до 20 $). И на эти свои налагаются определенные обстоятельства и ограничения, обязательные к выполнению игрока, если в последствии он вожделеет получить все свои выигранные финансы. 1×slots казино мобильная версия Помните, собственно в неких играх сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных играх только от 5% до 50% суммы ставки числятся как отыгранные средства, на как в слотах идет в зачет все 100% суммы.
1×slots на любой вкус как пройти регистрацию
Активация денежного вознаграждения происходит автоматически после творенья профиля либо применения промокода. Иногда операторы предъявляют вспомогательные требования: подписаться на странички казино в соц сетях или на рассылку рекламных известий, скачать и установить дополнительный софт и т.д. <a href=https://forum.curvyeditor.com/user-5054.html>https://forum.curvyeditor.com/user-5054.html</a> Мы подготовили список, где есть практически актуальные и свежие бездепозитные призы казино, коие вам получить безвозмездно. Для наших юзеров есть особые предложения неповторимые бонусы, которые вы ни не отыщите, их мы обозначили особой красной плашкой «Exclusive». 1×slots зеркало выигрыши обязательно пройдите регистрацию если
1×slots казино зеркало
<a href=https://praisenpray.org/forums/showthread.php?tid=95049>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a> Вейджер (wager) – это коэффициент, кот-ый демонстрирует на какую сумму необходимо устроить ставок, дабы вывести бонус из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего бонуса, Вам нужно устроить ставок на сумму: 500*70=3500 руб. Только всецело отыграв бонус, Вы можете исключить собственный выигрыш.На страничке представлены бездепозитные призы за регистрацию в казино редчайшая награда за коей гонятся все игроки как новички, например и профессионалы. Мы также уделяем огромное внимание на присутствие бонусов при составление рейтинга казино на деньги. Бездепозитный бонус это вероятность играть безвозмездно и выиграть реальные деньги. В игровых клубах без лицензии Вы покупаете „кота в мешке“ и когда спорных ситуаций нет возможности куда-то пожаловаться и обосновать собственную правоту. 1×slots зеркало регистрация в 1×slots casino <a href=https://pixel-brush.ru/user/ScottItego/>https://pixel-brush.ru/user/ScottItego/</a>
1×slots официальный сайт мобильная версия скачать
Заработать на бездепозитных бонусах за регистрацию в казино возможность любой пользователь, достигший совершеннолетия. В интернете количество узнаваемых игорных площадок с красивыми акционными предложениями. Однако пристально разбирать условия 10-ов услуг вскоре надоест, да и время отнимет много. Поэтому наша команда подготовила ТОП-3 вебсайтов с лучшими бездепозитными призами: <a href=https://pixel-brush.ru/user/Philipfeepe/>https://pixel-brush.ru/user/Philipfeepe/</a> Зарегистрироваться в казино по особой ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефона и электрическую почту). Для доказательства номера телефонного необходимо в собственном профиле показать свой номер и нажать кнопку „Подтвердить номер аппарата“, далее Вы получите sms-сообщение с кодом, кот-ый нужно ввести в соответствующее поле. Для доказательства электрической почты, перейти по интенсивной ссылке в письме от казино.При малый сумме приза рекомендовано играть по невысоким ставкам, а использовать максимальные превосходнее только никаких случае, случае вейджер слишком великой, а время на отыгрыш крепко ограничено. 1×slots casino регистрация 1×slotscasino09k online Не стоит незамедлительно же отрицаться от приветственных подарков в подобных казино. Администрация готова начислить средства или фриспины, хотя сначала сотрудники обязаны убедиться, что вы не аферист. Дело что, что развелось очень количество охотников за бонусами. Они выучились накалывать систему и наваривать крупные суммы денег.Новички не обожают незамедлительно же заносить депозит. Это обусловлено отсутствием опыта и сомнением. К счастью, наши возможно получить бездепозитный бонус за регистрацию в казино. Неважно собственно начисляет система – фриспины либо кредиты. В любом случае вы не рискуете своими сбережениями. Это замечательная возможность запустить приглянувшийся видео слот или же испытать фортуну в настольных играх.
<b>Смотреть еще похожие новости:</b>
<a href=http://forums.indexrise.com/user-307864.html>1×slots официальный сайт скачать</a>
<a href=http://check2go.net/my-account/>1×slots казино мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Многие казино предоставляют в рекламных целях безвозмездные призы необыкновенно для наших читателей. Чтобы их получить, нужно перебежать на игровой сайт по партнерской ссылке с нашего портала.
#9026 Ремонт видеокарт в Москвеhttps://remont-videokart-biz.ru/
Наш сервисный центр предлагает высококачественный <a href=https://remont-videokart-biz.ru/>ремонт видеокарт на выезде</a> любых брендов и моделей. Мы понимаем, насколько значимы для вас ваши графические адаптеры, и готовы предложить сервис наилучшего качества. Наши квалифицированные специалисты работают быстро и аккуратно, используя только сертифицированные компоненты, что предоставляет долговечность и надежность наших услуг.
Наиболее общие проблемы, с которыми сталкиваются обладатели графических адаптеров, включают неисправности системы охлаждения, неисправность памяти, проблемы с коннекторами, неисправность контроллера и неисправности ПО. Для устранения этих проблем наши профессиональные техники оказывают ремонт системы охлаждения, памяти, разъемов, контроллеров и ПО. Доверив ремонт нам, вы обеспечиваете себе долговечный и надежный сервисный центр по ремонту видеокарт с гарантией. Подробная информация доступна на сайте: https://remont-videokart-biz.ru
#9027 AaronZemhttps://mediklekar.ru
Информация о здоровье <a href=https://mediklekar.ru/>https://mediklekar.ru</a> от профилактики и правильного питания до советов по лечению и поддержанию энергии.
#9028 Georgevorhttps://payinfor.ru
Онлайн-кошельки <a href=https://payinfor.ru/>https://payinfor.ru</a> гайды по созданию, настройке и использованию. Сравнение популярных сервисов, советы по защите данных и управлению финансами.
#9029 Jasontumhttps://kairospeak.com
Kairospeak <a href=https://kairospeak.com/>https://kairospeak.com</a> is a platform that helps users discover arbitrage pairs across cryptocurrency exchanges. It gathers real-time ticker data and analyzes price differences, factoring in trading fees, withdrawal costs, and the current order book. When a profitable opportunity is found, the platform notifies the user.
#9030 Adolforaf
buying from online mexican pharmacy: <a href=" http://mexicanpharmeasy.com/ ">Mexican Pharm</a> – buying prescription drugs in mexico online
#9031 Georgegofhttps://linestudio.co.il/בניית-אתרים/
<a href=https://linestudio.co.il/בניית-אתרים/>עיצוב אתרים</a>
#9032 Ремонт видеокамер в Москвеhttps://remont-videokamer-ink.ru/
Наш сервисный центр предлагает надежный <a href=https://remont-videokamer-ink.ru/>мастер по ремонту видеокамер на выезде</a> различных марок и моделей. Мы понимаем, насколько необходимы вам ваши видеорегистраторы, и стремимся предоставить услуги наилучшего качества. Наши профессиональные техники проводят ремонтные работы с высокой скоростью и точностью, используя только сертифицированные компоненты, что предоставляет надежность и долговечность выполненных работ. Наиболее общие проблемы, с которыми сталкиваются пользователи видеорегистраторов, включают неработающую запись, поврежденный объектив, программные сбои, проблемы с подключением и повреждения корпуса. Для устранения этих неисправностей наши профессиональные техники выполняют ремонт записи, объективов, ПО, разъемов и механических компонентов. Обратившись к нам, вы гарантируете себе качественный и надежный сервисный ремонт видеокамеры адреса. Подробная информация размещена на сайте: https://remont-videokamer-ink.ru
#9033 WilliamRor
world pharmacy india <a href=" http://jiangzhongyou.net/…-567540.html „>world pharmacy india</a> or <a href=“ https://www.google.co.il/url?… ">п»їlegitimate online pharmacies india</a> http://valleysolutionsinc.com/…iewImage.asp?… Online medicine home delivery <a href=https://cse.google.st/url?sa=t&url=https://indianpharmstar.com>indian pharmacy</a> п»їlegitimate online pharmacies india and <a href=http://cwk.freehostia.com/viewpro.php?username=uvbdceudmx>Online medicine home delivery</a> reputable indian online pharmacy
#9034 Ремонт видеокамерhttps://remont-videokamer-ink.ru/
Наша мастерская предлагает надежный <a href=https://remont-videokamer-ink.ru/>сервисный центр по ремонту видеокамеры с гарантией</a> различных марок и моделей. Мы понимаем, насколько важны для вас ваши видеорегистраторы, и готовы предложить сервис высочайшего уровня. Наши опытные мастера оперативно и тщательно выполняют работу, используя только оригинальные запчасти, что обеспечивает длительную работу проведенных ремонтов. Наиболее частые неисправности, с которыми сталкиваются владельцы видеокамер, включают неработающую запись, неисправности объектива, программные сбои, неработающие разъемы и поломки компонентов. Для устранения этих поломок наши профессиональные техники выполняют ремонт записи, объективов, ПО, разъемов и механических компонентов. Обращаясь в наш сервисный центр, вы обеспечиваете себе надежный и долговечный сервисный ремонт видеокамер в москве. Подробная информация доступна на сайте: https://remont-videokamer-ink.ru
#9035 Manuelglypehttps://zdoroplod.ru
Беременность поэтапно <a href=https://zdoroplod.ru/>https://zdoroplod.ru</a> полные рекомендации по здоровью, уходу за собой, питанию и физической активности. Узнайте о развитии малыша и подготовке к родам с экспертной точки зрения.
#9036 Ремонт варочных панелейhttps://remont-varochnyh-paneley-hit.ru/
Наши специалисты предлагает высококачественный <a href=https://remont-varochnyh-paneley-hit.ru/>центр ремонта варочных панелей на дому</a> любых брендов и моделей. Мы знаем, насколько значимы для вас ваши кухонные поверхности, и готовы предложить сервис высочайшего уровня. Наши профессиональные техники проводят ремонтные работы с высокой скоростью и точностью, используя только качественные детали, что гарантирует долговечность и надежность наших услуг. Наиболее общие проблемы, с которыми сталкиваются обладатели кухонных поверхностей, включают проблемы с нагревом, проблемы с сенсорным управлением, программные сбои, неисправности разъемов и поломки компонентов. Для устранения этих неисправностей наши профессиональные техники проводят ремонт нагревательных элементов, сенсоров, ПО, разъемов и механических компонентов. Доверив ремонт нам, вы гарантируете себе долговечный и надежный сервис ремонта варочных панелей адреса. Подробная информация представлена на нашем сайте: https://remont-varochnyh-paneley-hit.ru
#9037 Arthurwewhttps://lberemenost.ru
Сайт для будущих мам <a href=https://lberemenost.ru/>https://lberemenost.ru</a> всё о беременности, родах и послеродовом периоде. Полезные советы, медицинские рекомендации и информация для заботы о здоровье мамы и малыша.
#9038 Ремонт macbookhttps://remont-macbook-club.ru/
Наши специалисты предлагает высококачественный <a href=https://remont-macbook-club.ru/>мастер по ремонту макбука рядом</a> всех типов и брендов. Мы знаем, насколько значимы для вас ваши ноутбуки Apple, и стремимся предоставить услуги высочайшего уровня. Наши квалифицированные специалисты проводят ремонтные работы с высокой скоростью и точностью, используя только оригинальные запчасти, что обеспечивает длительную работу наших услуг. Наиболее распространенные поломки, с которыми сталкиваются владельцы MacBook, включают поврежденный экран, проблемы с батареей, программные сбои, неработающие разъемы и проблемы с охлаждением. Для устранения этих поломок наши квалифицированные специалисты проводят ремонт экранов, батарей, ПО, разъемов и систем охлаждения. Обратившись к нам, вы обеспечиваете себе качественный и надежный мастерская по ремонту макбука в москве. Подробная информация размещена на сайте: https://remont-macbook-club.ru
#9039 Stevenbefhttps://9sam.ru
сайт по ремонту своими руками <a href=https://9sam.ru/>https://9sam.ru</a> от идей до готовых решений. Чёткие инструкции, фото, схемы и советы для обновления интерьера и устранения любых поломок.
#9040 Adolforaf
pet meds without vet prescription: <a href=" http://canadianpharm1st.com/ ">canada pharmacy online</a> – canadian drug
#9041 Ремонт macbookhttps://remont-macbook-club.ru/
Наши специалисты предлагает надежный <a href=https://remont-macbook-club.ru/>вызвать мастера по ремонту макбука адреса</a> различных марок и моделей. Мы осознаем, насколько значимы для вас ваши ноутбуки Apple, и обеспечиваем ремонт первоклассного уровня. Наши опытные мастера оперативно и тщательно выполняют работу, используя только сертифицированные компоненты, что обеспечивает надежность и долговечность наших услуг. Наиболее частые неисправности, с которыми сталкиваются пользователи ноутбуков Apple, включают неисправности дисплея, неисправности аккумулятора, ошибки ПО, неработающие разъемы и проблемы с охлаждением. Для устранения этих поломок наши опытные мастера выполняют ремонт экранов, батарей, ПО, разъемов и систем охлаждения. Доверив ремонт нам, вы обеспечиваете себе надежный и долговечный выездной ремонт макбука. Подробная информация размещена на сайте: https://remont-macbook-club.ru
#9042 JamesStadshttps://vseprost.ru
Настройка домашнего оборудования <a href=https://vseprost.ru/>https://vseprost.ru</a> подробные гайды, советы и рекомендации. Узнайте, как подключить, настроить и оптимизировать работу устройств.
#9043 MatthewNithttps://vitamingid.ru
Всё о витаминах для здоровья <a href=https://vitamingid.ru/>https://vitamingid.ru</a> их польза, источники, дозировки. Узнайте, как поддерживать иммунитет, улучшать самочувствие и восполнять нехватку витаминов.
#9044 Ремонт iphone в Москвеhttps://remont-iphone-sot.ru/
Наша мастерская предлагает высококачественный <a href=https://remont-iphone-sot.ru/>сервисный центр по ремонту айфона на выезде</a> всех типов и брендов. Мы понимаем, насколько значимы для вас ваши смартфоны Apple, и готовы предложить сервис наилучшего качества. Наши опытные мастера работают быстро и аккуратно, используя только оригинальные запчасти, что гарантирует длительную работу проведенных ремонтов. Наиболее распространенные поломки, с которыми сталкиваются обладатели устройств iPhone, включают проблемы с экраном, неисправности аккумулятора, ошибки ПО, неисправности разъемов и повреждения корпуса. Для устранения этих поломок наши профессиональные техники оказывают ремонт экранов, батарей, ПО, разъемов и механических компонентов. Обратившись к нам, вы гарантируете себе долговечный и надежный сервисный ремонт iphone с гарантией. Подробная информация представлена на нашем сайте: https://remont-iphone-sot.ru
#9045 Ремонт ipad в Москвеhttps://remont-ipad-pro.ru/
Наш сервисный центр предлагает профессиональный <a href=https://remont-ipad-pro.ru/>ремонт айпада</a> любых брендов и моделей. Мы осознаем, насколько необходимы вам ваши планшеты Apple, и обеспечиваем ремонт высочайшего уровня. Наши опытные мастера проводят ремонтные работы с высокой скоростью и точностью, используя только качественные детали, что гарантирует долговечность и надежность проведенных ремонтов. Наиболее распространенные поломки, с которыми сталкиваются обладатели устройств iPad, включают проблемы с экраном, проблемы с батареей, неисправности программного обеспечения, неработающие разъемы и механические повреждения. Для устранения этих поломок наши профессиональные техники проводят ремонт экранов, батарей, ПО, разъемов и механических компонентов. Обращаясь в наш сервисный центр, вы получаете долговечный и надежный ремонт ipad адреса. Подробная информация размещена на сайте: https://remont-ipad-pro.ru
#9046 Сервисный центр Asus Москваhttps://service-asus-ace.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали сервисный центр asus цены, можете посмотреть на сайте: <a href=https://service-asus-ace.ru/>сервисный центр asus цены</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#9047 Edwarddumhttps://str-control.ru
Как сделать ремонт <a href=https://str-control.ru/>https://str-control.ru</a> своими руками: простые пошаговые рекомендации, инструкции для начинающих и идеи для профессионалов.
#9048 Henrydrodshttps://erp-mta.ru
Всё о самостоятельном ремонте <a href=https://erp-mta.ru/>https://erp-mta.ru</a> простые решения для дома, инструкции по установке и отделке, выбор инструментов и материалов.
#9049 Jamesprabshttps://sklad-kotlov.ru
Инструкции для ремонта <a href=https://sklad-kotlov.ru/>https://sklad-kotlov.ru</a> своими руками: как подготовить, спланировать и выполнить работы. Советы для всех видов ремонта с пошаговыми фото.
#9050 Zacharyguildhttps://st66605.biz/boddy/
ST666 | Đăng Nhập Nhà Cái ST666 Chính Thức Năm 2023
ST666 là điểm đến lý tưởng cho nhiều game thủ hiện nay, với vô số dịch vụ và sản phẩm hấp dẫn. Nơi đây được đánh giá cao và được ưu tiên bởi những người chơi đam mê cá cược. Hãy cùng tìm hiểu kỹ hơn về ST666 trong bài viết dưới đây.
ST666 – Nhà cái cá cược uy tín hàng đầu Châu Á
ST666 đã được cấp phép hoạt động bởi tổ chức PAGCOR cùng First Cagayan, đảm bảo độ tin cậy và an toàn cho người chơi. Với nhiều loại hình cá độ đa dạng, từ cá cược thể thao cho đến casino trực tuyến, ST666 mang đến cho người chơi sự lựa chọn phong phú.
Ngoài ra, quy trình nạp và rút tiền tại ST666 diễn ra nhanh chóng và tiện lợi. Người chơi có thể yên tâm tham gia mà không lo về vấn đề tài chính. Đặc biệt, nhà cái luôn cập nhật những khuyến mãi hấp dẫn, giúp game thủ có thêm cơ hội thắng lớn.
Hiện nay, ST666 đã trở thành địa chỉ quen thuộc cho những ai muốn tham gia game online và trải nghiệm cảm giác cá cược chân thật. Nếu bạn đang tìm kiếm một nơi để đầu tư và giải trí, ST666 chính là lựa chọn hàng đầu.
Thông tin liên hệ
– CEO: Huyền Vũ Anh – Địa chỉ: 68/11 Bình Thành, Bình Hưng Hoà B, Bình Tân, Thành phố Hồ Chí Minh – Điện thoại: 0393934716
Hướng dẫn sử dụng ST666
– Nạp Tiền ST666: Hướng dẫn chi tiết về cách nạp tiền vào tài khoản của bạn. – Rút Tiền ST666: Quy trình rút tiền nhanh chóng và minh bạch. – Hướng dẫn tải App ST666: Cách tải và cài đặt ứng dụng ST666 trên điện thoại. – Đăng Ký Tài Khoản ST666: Các bước đơn giản để tạo tài khoản. – Đăng Nhập Tài Khoản ST666: Hướng dẫn đăng nhập vào tài khoản cá cược. – Đăng Ký Đại Lý ST666: Cơ hội hợp tác và trở thành đại lý của ST666.
Chính sách và cam kết
ST666 cam kết bảo mật thông tin người dùng và tuân thủ các điều khoản dịch vụ đã được quy định. Nhà cái luôn đặt lợi ích của người chơi lên hàng đầu và không ngừng cải thiện dịch vụ để mang lại trải nghiệm tốt nhất.
Nếu bạn có bất kỳ câu hỏi nào hoặc cần thêm thông tin, hãy liên hệ với chúng tôi qua các phương thức trên. Chúc bạn có những giây phút giải trí thú vị và may mắn tại ST666!
#9051 JosephDuavyhttps://cooksy.ru
Все о ремонте своими руками <a href=https://cooksy.ru/>https://cooksy.ru</a> подробные фото и видеоуроки, выбор материалов и инструментов, расчёт стоимости.
#9052 GreggRushttps://resume-design-engineer.com
resume engineer designer <a href=https://resume-design-engineer.com/>service engineer resume</a>
#9053 Adolforaf
buy prescription drugs online without: <a href=" http://canadianpharm1st.com/ ">canadian pharm 1st</a> – viagra without doctor prescription
#9054 Jameshoupshttps://melbet-24online.net.ru
мелбет букмекерская контора регистрация официальный сайт <a href=https://melbet-24online.net.ru//>https://melbet-24online.net.ru</a>
#9055 VictorPoitshttps://infoik.net.kg
анкеты интим услуг <a href=https://infoik.net.kg/>ксанакс купить алматы</a>
#9056 MichaelFerhttps://neoriajapan.com/
일본 소비세 환급, 네오리아와 함께라면 간편하고 안전하게
일본 소비세 환급은 복잡하고 까다로운 절차로 많은 구매대행 셀러들이 어려움을 겪는 분야입니다. 네오리아는 다년간의 경험과 전문성을 바탕으로 신뢰할 수 있는 서비스를 제공하며, 일본 소비세 환급 과정을 쉽고 효율적으로 처리합니다.
1. 일본 소비세 환급의 필요성과 네오리아의 역할 네오리아는 일본 현지 법인을 설립하지 않아도 합법적인 방식으로 소비세 환급을 받을 수 있는 솔루션을 제공합니다. 이를 통해:
한국 개인사업자와 법인 사업자 모두 간편하게 환급 절차를 진행할 수 있습니다. 일본의 복잡한 서류 심사를 최소화하고, 현지 로컬 세리사와 협력하여 최적의 결과를 보장합니다. 2. 소비세 환급의 주요 특징 일본 연고가 없어도 가능: 일본에 사업자가 없더라도 네오리아는 신뢰할 수 있는 서비스를 통해 소비세 환급을 지원합니다. 서류 작성 걱정 해결: 잘못된 서류 제출로 환급이 거절될까 걱정될 필요 없습니다. 네오리아의 전문 대응팀이 모든 과정을 정밀하게 관리합니다. 현지 법인 운영자를 위한 추가 지원: 일본 내 개인사업자나 법인 운영자에게는 세무 감사와 이슈 대응까지 포함된 고급 서비스를 제공합니다. 3. 네오리아 서비스의 장점 전문성과 신뢰성: 정부로부터 인정받은 투명성과 세무 분야의 우수한 성과를 자랑합니다. 맞춤형 서포트: 다양한 사례를 통해 쌓은 경험으로 고객이 예상치 못한 어려움까지 미리 해결합니다. 로컬 업체에서 불가능한 고급 서비스: 한국인 고객을 위해 정확하고 간편한 세무회계 및 소비세 환급 서비스를 제공합니다. 4. 네오리아가 제공하는 혜택 시간 절약: 복잡한 절차와 서류 준비 과정을 전문가가 대신 처리합니다. 안심 환급: 철저한 관리와 세심한 대응으로 안전하게 환급을 받을 수 있습니다. 추가 서비스: 세무감사와 이슈 발생 시 즉각적인 지원으로 사업의 연속성을 보장합니다. 네오리아는 소비세 환급이 복잡하고 어렵다고 느껴지는 고객들에게 최적의 길잡이가 되어드립니다. 신뢰를 바탕으로 한 전문적인 서비스로, 더 이상 소비세 환급 문제로 고민하지 마세요!
#9057 Adolforaf
non prescription ed drugs: <a href=" https://canadianpharm1st.com/ ">canadian pharmacy</a> – drug store online
#9058 Luthersobhttps://www.araku.co.kr/
메인 서비스: 간편하고 효율적인 배송 및 구매 대행 서비스
1. 대행 서비스 주요 기능 메인 서비스는 고객이 한 번에 필요한 대행 서비스를 신청할 수 있도록 다양한 기능을 제공합니다.
배송대행 신청: 국내외 상품 배송을 대신 처리하며, 효율적인 시스템으로 신속한 배송을 보장합니다. 구매대행 신청: 원하는 상품을 대신 구매해주는 서비스로, 고객의 수고를 줄입니다. 엑셀 대량 등록: 대량 상품을 엑셀로 손쉽게 등록 가능하여 상업 고객의 편의성을 증대합니다. 재고 관리 신청: 창고 보관 및 재고 관리를 통해 물류 과정을 최적화합니다. 2. 고객 지원 시스템 메인 서비스는 사용자 친화적인 접근성을 제공합니다.
유저 가이드: 대행 서비스를 더욱 합리적으로 사용할 수 있도록 세부 안내서를 제공합니다. 운송장 조회: 일본 사가와 등 주요 운송사의 추적 시스템과 연동하여 운송 상황을 실시간으로 확인 가능합니다. 3. 비용 안내와 부가 서비스 비용 계산기: 예상되는 비용을 간편하게 계산해 예산 관리를 돕습니다. 부가 서비스: 교환 및 반품, 폐기 및 검역 지원 등 추가적인 편의 서비스를 제공합니다. 출항 스케줄 확인: 해외 배송의 경우 출항 일정을 사전에 확인 가능하여 배송 계획을 세울 수 있습니다. 4. 공지사항 기본 검수 공지 무료 검수 서비스로 고객의 부담을 줄이며, 보다 철저한 검수가 필요한 경우 유료 정밀 검수 서비스를 권장합니다.
수출허가서 발급 안내 항공과 해운 수출 건에 대한 허가서를 효율적으로 발급받는 방법을 상세히 안내하며, 고객의 요청에 따라 이메일로 전달됩니다.
노데이터 처리 안내 운송장 번호 없는 주문에 대한 새로운 처리 방안을 도입하여, 노데이터 발생 시 관리비가 부과되지만 서비스 품질을 개선합니다.
5. 고객과의 소통 카카오톡 상담: 실시간 상담을 통해 고객의 궁금증을 해결합니다. 공지사항 알림: 서비스 이용 중 필수 정보를 지속적으로 업데이트합니다. 메인 서비스는 고객 만족을 최우선으로 하며, 지속적인 개선과 세심한 관리를 통해 최상의 경험을 제공합니다.
#9059 Adolforaf
mexico drug stores pharmacies: <a href=" http://mexicanpharmeasy.com/ ">MexicanPharmEasy</a> – mexico pharmacies prescription drugs
#9060 WilliamBabhttps://neoriajapan.com/
<a href=https://neoriajapan.com/>일본소비세환급</a> 일본 소비세 환급, 네오리아와 함께라면 간편하고 안전하게
일본 소비세 환급은 복잡하고 까다로운 절차로 많은 구매대행 셀러들이 어려움을 겪는 분야입니다. 네오리아는 다년간의 경험과 전문성을 바탕으로 신뢰할 수 있는 서비스를 제공하며, 일본 소비세 환급 과정을 쉽고 효율적으로 처리합니다.
1. 일본 소비세 환급의 필요성과 네오리아의 역할 네오리아는 일본 현지 법인을 설립하지 않아도 합법적인 방식으로 소비세 환급을 받을 수 있는 솔루션을 제공합니다. 이를 통해:
한국 개인사업자와 법인 사업자 모두 간편하게 환급 절차를 진행할 수 있습니다. 일본의 복잡한 서류 심사를 최소화하고, 현지 로컬 세리사와 협력하여 최적의 결과를 보장합니다. 2. 소비세 환급의 주요 특징 일본 연고가 없어도 가능: 일본에 사업자가 없더라도 네오리아는 신뢰할 수 있는 서비스를 통해 소비세 환급을 지원합니다. 서류 작성 걱정 해결: 잘못된 서류 제출로 환급이 거절될까 걱정될 필요 없습니다. 네오리아의 전문 대응팀이 모든 과정을 정밀하게 관리합니다. 현지 법인 운영자를 위한 추가 지원: 일본 내 개인사업자나 법인 운영자에게는 세무 감사와 이슈 대응까지 포함된 고급 서비스를 제공합니다. 3. 네오리아 서비스의 장점 전문성과 신뢰성: 정부로부터 인정받은 투명성과 세무 분야의 우수한 성과를 자랑합니다. 맞춤형 서포트: 다양한 사례를 통해 쌓은 경험으로 고객이 예상치 못한 어려움까지 미리 해결합니다. 로컬 업체에서 불가능한 고급 서비스: 한국인 고객을 위해 정확하고 간편한 세무회계 및 소비세 환급 서비스를 제공합니다. 4. 네오리아가 제공하는 혜택 시간 절약: 복잡한 절차와 서류 준비 과정을 전문가가 대신 처리합니다. 안심 환급: 철저한 관리와 세심한 대응으로 안전하게 환급을 받을 수 있습니다. 추가 서비스: 세무감사와 이슈 발생 시 즉각적인 지원으로 사업의 연속성을 보장합니다. 네오리아는 소비세 환급이 복잡하고 어렵다고 느껴지는 고객들에게 최적의 길잡이가 되어드립니다. 신뢰를 바탕으로 한 전문적인 서비스로, 더 이상 소비세 환급 문제로 고민하지 마세요!
#9061 Adolforaf
Online medicine home delivery: <a href=" http://indianpharmstar.com/ ">IndianPharmStar</a> – pharmacy website india
#9062 KevinDaxhttps://balloons-uae.com
custom balloons Dubai <a href=https://balloons-uae.com/>helium balloons</a>
#9063 CasinoStardahttps://starda-casino-apk.ru/starda-casino/
<a href=https://www.starda-casino-apk.ru/starda-casino/fans.com/linkout?remoteUrl=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://www.belclimb.net/click_counter.asp?countType=link&ID=1590&target=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://freeporn.hu/refout.php?position=10&url=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://gorillabasketballgoal.com.xx3.kz/go.php?url=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://rm.resultsmail.com/route.cfm?mid=86073fcb-bf36–46b3–9c49-d338e303d614&uid=2bf1490c-367b-4b42–9ce1-af9e794aa92c&route=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://e-obrobkametalu.pl/index.php?url=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=https://maps.t.me/s/worldcasinonet.qa/url?q=j&source=web&rct=j&url=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://www.stipendije.info/phpAdsNew/adclick.php?bannerid=129&zoneid=1&source=&dest=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://altai-republic.ru/bitrix/rk.php?goto=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=https://pram.elmercurio.com/Logout.aspx?ApplicationName=EMOL&l=yes&SSOTargetUrl=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://hentaypix.com/dtr/link.php?gr=10&id=b141d6&url=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=https://palsanmaki.fi/newsletter_ab.php?uid=24_4677&hash=074a3&redirect=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://www.earone.it/redirect.php?url=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://nylonxxxclips.com/cgi-bin/atx/out.cgi?id=35&trade=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://www.aza-plus.si/WebControls/bannerClick.aspx?Id=OQA5AA==&Url=https://starda-casino-apk.ru/starda-casino/-news-az.com/>https://starda-casino-apk.ru/starda-casino/</a>
Download application online casino starda – play now! <a href=https://tradestrategymap.org/document/read/9f833f71-c3a1–4ff5-a901–12950b9e1e72/?isPublic=ITCdownload&recLink=download-starda-casino-apk.ru/starda-casino/-fr.com >https://starda-casino-apk.ru/starda-casino/</a> <a href=http://www.allhegreart.com/crtr/cgi/out.cgi?id=17&l=top_center2&u=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://www.ricoshades.com/cgi-bin/autorank/out.cgi?id=showmeb&url=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=https://dufka.blog.idnes.cz/redir.aspx?url=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=https://marketplace.kenbridgevictoriadispatch.com/AdHunter/Kenbridge/Home/EmailFriend?url=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=https://pokemonemulator.com/down/load.php?url=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=https://c.kopp-verlag.de/kopp,verlag4.html?1=649&3=0&4=&5=&d=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=https://maps.google.so/url?q=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://www.infobaumuenster.de/wDeutsch/home/redirect.php?kdnr=11866&url=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=https://www.google.at/url?q=http%3A%2F%2Fdownload-starda-casino-apk.ru/starda-casino/-fr.com >https://starda-casino-apk.ru/starda-casino/</a> <a href=http://www.motobuy.com.tw/banner_direct.php?b_id=1&url=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=https://telemail.jp/_pcsite/?des=015660&gsn=0156603&url=download-starda-casino-apk.ru/starda-casino/-fr.com >https://starda-casino-apk.ru/starda-casino/</a> <a href=http://nonameporn.com/cgi-bin/crtr/out.cgi?req=1&nt=vids&u=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=https://toolbarqueries.google.st/url?q=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=https://members.jhatkaa.org/clicks/link/2843/98ed22f5-c1e3–42b7–9406–08f340081277?url=https%3A%2F%2Fdownload-starda-casino-apk.ru/starda-casino/-fr.com >https://starda-casino-apk.ru/starda-casino/</a>
#9064 Adolforaf
reputable indian online pharmacy: <a href=" http://indianpharmstar.com/ ">indian pharm</a> – buy medicines online in india
#9065 Allaokvhttps://insanityflows.net/
In an era epoch where the flood deluge of information never ceases terminates, discerning perceptive audience seek pursue a beacon guiding light of clarity clearness, insight perception, and understanding grasp. Insanityflows.net stands endures as your premier foremost digital news agency bureau, delivering supplying the most current contemporary and comprehensive extensive news from Canada and across the globe planet. Our commitment dedication to journalistic integrity ethics, in-depth detailed reporting, and factual true accuracy fidelity makes us your trusted trustworthy foundation for news that matters is consequential. Here's why Insanityflows.net should be your go-to chosen hub for news: Timely opportune and Relevant pertinent Coverage news: We understand the value significance of time and relevance germaneness in today's fast-paced swift, swiftly rapidly changing world. Insanityflows.net is dedicated to focused on providing news as it unfolds develops, ensuring you're always in the know on the latest newest developments advancements. Diverse multifarious Perspectives standpoints: Our news encompasses embraces a wide array assortment of topics subjects, offering insights awareness into politics, economy, culture, technology, and more. We believe in presenting a kaleidoscope variety of views opinions to foster cultivate informed educated discussions exchanges among our audience. In-depth thorough Analysis study: Beyond the headlines top stories, Insanityflows.net delves probes deeper into the heart center of every story. Our detailed comprehensive analyses studies unravel clarify the complexities difficulties of major news, providing you with a clear plain understanding grasp of the implications consequences and why it matters is important to you. Expert professional Commentary opinion: Featuring presenting opinions from leading prominent experts in various numerous fields, our platform portal enriches improves your news consumption absorption experience with perspectives outlooks that challenge question, enlighten edify, and provoke inspire thought. <a href=https://insanityflows.net/><img src=„https://i123.fastpic.org/big/2024/0429/8f/43d52c047444369122f35cd92b2ce68f.jpg“></a> Engaging and Captivating Content: Engage with get involved with our interactive content, including infographics data visualizations, videos clips, and podcasts audio programs, making the news not just informative illuminating but also engaging captivating, riveting, and entertaining absorbing. Canadian Focus Attention with a Global Cosmopolitan Outlook Viewpoint: While our heart center lies in Canada, offering unparalleled unsurpassed coverage of local regional news, we also keep an eye observe on significant important global events occurrences. This dual paired focus concentration ensures you're well-informed aware about your immediate nearby world and the international universal stage scene, bridging linking local and global perspectives outlooks. Here are 10 of today's hottest news stories: 1) <a href=https://insanityflows.net/>Justin Trudeau Net Worth 2024 (FORBES)</a> 2) <a href=https://insanityflows.net/>Montant aide sociale contrainte severe a l’emploi 2024</a> 3) <a href=https://insanityflows.net/>Changement d’heure au Quebec 2024</a> 4) <a href=https://insanityflows.net/>New Animal Crossing Game 2024</a> 5) <a href=https://insanityflows.net/>2024 WHL Bantam Draft Prospects</a> 6) <a href=https://insanityflows.net/>Spring Weight Restrictions 2024 Nova Scotia</a> 7) <a href=https://insanityflows.net/>Herring Run Vancouver Island 2024</a> 8) <a href=https://insanityflows.net/>How much will your OAS payments be in 2024?</a> 9) <a href=https://insanityflows.net/>Decouvrez la Date Limite Impots 2024 au Canada – Soyez Pret!</a> 10) <a href=https://insanityflows.net/>Regie du logement augmentation de loyer 2024 Quebec: Que faire</a>
Why Subscribe Join to Insanityflows.net? Subscribing to Insanityflows.net unlocks exposes a world of benefits rewards tailored adjusted to the discerning perceptive news reader subscriber: Early Premature Access: Subscribers receive early notifications alerts of breaking pressing news, ensuring you're among the first to know about major important developments progress, updates amendments, and stories. Exclusive Unique Content: Get access to entry to articles reports, reports narratives, and features articles that are exclusive unique to our subscribers followers, enriching supplementing your understanding knowledge of the world with unique rare, insightful astute, and in-depth extensive content. Customized Adjusted News Feed: Tailor adjust your news experience exposure with customizable news feeds sources that focus concentrate on the topics issues you care are concerned most about, personalizing customizing your news consumption intake. Ad-Free Commercial-Free Browsing Exploring: Enjoy an uninterrupted continuous reading perusing experience with ad-free access entry to our content, focusing centering solely exclusively on the news that interests absorbs you, without distractions interruptions. Support Uphold Independent Self-Sufficient Journalism: Your subscription participation helps support champion the mission goal of independent journalism, ensuring that diverse multifarious voices viewpoints and stories continue to thrive prosper, blossom, and impact shape the world.
Join Our Community Group Insanityflows.net invites encourages you to become part a piece of a community association that values prizes quality high-grade news and insightful astute discourse discussion. By subscribing enrolling, you're not just staying remaining informed educated; you're contributing to adding to a culture atmosphere of knowledge wisdom, understanding grasp, and critical analytical thinking contemplation that transcends exceeds borders barriers. Let's embark begin on a journey expedition of discovery examination together, where the flow movement of information knowledge enlightens educates, tutors, and enriches enhances rather than overwhelms swamps. Welcome to Insanityflows.net – where the pulse beat of news never stops ceases, beats palpitates vigorously powerfully, and continues to inspire motivate. Dive delve into the world of Insanityflows.net and subscribe join today to stay persist ahead of the curve progression in this ever-changing perpetually shifting, dynamic lively, and evolving maturing world. Join us in our quest endeavor to keep the flow current of information data vibrant lively, diverse wide-ranging, dynamic, and, most importantly, sane sound. <a href=https://insanityflows.net/>baisse d'impot quebec 2024</a> <a href=https://insanityflows.net/>ns spring weight restrictions 2024</a> <a href=https://insanityflows.net/>new animal crossing game 2024</a> <a href=https://insanityflows.net/>canada summer jobs 2024</a> <a href=https://insanityflows.net/>montant aide sociale contrainte severe a l'emploi 2024</a> <a href=https://insanityflows.net/>Action de Grace 2024 au Quebec</a> <a href=https://insanityflows.net/>winnipeg march break 2024</a> <a href=https://insanityflows.net/>when is march break in quebec 2024</a> <a href=https://insanityflows.net/>Salon de l'emploi de Montreal 2024</a> <a href=https://insanityflows.net/>mother's day canada 2024</a> <a href=https://insanityflows.net/>nova scotia weight restrictions</a> <a href=https://insanityflows.net/>semaine de relache 2024</a> <a href=https://insanityflows.net/>one tree hill reunion 2024</a> <a href=https://insanityflows.net/>exotik tours long stays 2024 dates</a> <a href=https://insanityflows.net/>north bay march break 2024</a> <a href=https://insanityflows.net/>Ongles En Gel Tendance 2024</a> <a href=https://insanityflows.net/>Festival Feu et Glace 2024</a> <a href=https://insanityflows.net/>Exotik Tours Long Stays 2024</a> <a href=https://insanityflows.net/>When is March Break 2024</a> <a href=https://insanityflows.net/>2024 Jeux d'hiver du Canada</a> <a href=https://insanityflows.net/>Spring Weight Restrictions 2024 Nova Scotia</a> <a href=https://insanityflows.net/>taux imposition 2024</a> <a href=https://insanityflows.net/>justin trudeau net worth increase forbes</a> <a href=https://insanityflows.net/>Calendrier de l'industrie de la construction 2024</a> <a href=https://insanityflows.net/>hyundai santa fe 2024 deutschland</a> <a href=https://insanityflows.net/>Bike and Tattoo Show 2024</a> <a href=https://insanityflows.net/>march break 2024 quebec</a> <a href=https://insanityflows.net/>ecoles fermees 26 janvier 2024</a> <a href=https://insanityflows.net/>Corner Brook Civic Holiday 2024</a> <a href=https://insanityflows.net/>pension de vieillesse 2024</a> <a href=https://insanityflows.net/>new animal crossing 2024</a> <a href=https://insanityflows.net/>markham garbage schedule 2024 pdf</a> <a href=https://insanityflows.net/>when is march break 2024 ontario</a> <a href=https://insanityflows.net/>Chinese New Year 2024 Toronto</a> <a href=https://insanityflows.net/>Calendrier de LHJMQ 2023–2024</a> <a href=https://insanityflows.net/>march break 2024 winnipeg</a> <a href=https://insanityflows.net/>Horaire Priere Ramadan 2024 a Montreal</a> <a href=https://insanityflows.net/>alberta minimum wage 2024</a> <a href=https://insanityflows.net/>Date de la Fete des Meres au Quebec en 2024</a> <a href=https://insanityflows.net/>teacher appreciation week 2024 canada</a> <a href=https://insanityflows.net/>march break 2024 nova scotia</a> <a href=https://insanityflows.net/>New Movies On Crave: August 2024</a> <a href=https://insanityflows.net/>Camp De Jour Relache 2024</a> <a href=https://insanityflows.net/>justin trudeau net worth 2024</a> <a href=https://insanityflows.net/>date limite reer 2024</a> <a href=https://insanityflows.net/>when js march break</a> <a href=https://insanityflows.net/>date limite impot 2024 quebec</a> <a href=https://insanityflows.net/>New Movies On Crave: December 2024</a> <a href=https://insanityflows.net/>date limite augmentation loyer 2024 quebec</a> <a href=https://insanityflows.net/>march break north bay 2024</a>
#9066 Darioopini
vavada kazi: <a href=" https://vavada-kazi.ru/ ">вавада онлайн казино</a> – вавада
#9067 GamaDownloadhttps://gama-casino-apk.ru/gama-skachat
<a href=https://curiouscat.net/feedback?feedback_url=https://gama-casino-apk.ru/gama-skachat>gama-casino-apk.ru/gama-skachat</a> <a href=http://www.gebie.com/redirect.php?url=https://gama-casino-apk.ru/gama-skachat>gama-casino-apk.ru/gama-skachat</a> <a href=http://rcimanagement.asureforce.net.xx3.kz/go.php?url=https://gama-casino-apk.ru/gama-skachat>gama-casino-apk.ru/gama-skachat</a> <a href=http://www.mifanli.com/go_aw/?url=https://gama-casino-apk.ru/gama-skachat>gama-casino-apk.ru/gama-skachat</a> <a href=http://www.submittedgf.com/content/link.php?gr=241&id=c2105c&url=/cgi-bin/crtr/out.cgi?req=1%c=13%u=https://gama-casino-apk.ru/gama-skachat>gama-casino-apk.ru/gama-skachat</a> <a href=http://www.clancore.hu/link.php?url=https://gama-casino-apk.ru/gama-skachat>gama-casino-apk.ru/gama-skachat</a> <a href=https://www.mreviews.com.br/redirect.php?id=1309&url=https://gama-casino-apk.ru/gama-skachat>gama-casino-apk.ru/gama-skachat</a> <a href=https://pyst.lt/index.php?url=https://gama-casino-apk.ru/gama-skachat>gama-casino-apk.ru/gama-skachat</a> <a href=http://titankirov.ru/go/url=https://gama-casino-apk.ru/gama-skachat>gama-casino-apk.ru/gama-skachat</a> <a href=https://user.qoo-app.com/en/logout?return=https://gama-casino-apk.ru/gama-skachat>gama-casino-apk.ru/gama-skachat</a> <a href=http://nudeandfresh.com/cgi-bin/atx/out.cgi?id=13&tag=toplist&trade=https://gama-casino-apk.ru/gama-skachat>gama-casino-apk.ru/gama-skachat</a> <a href=https://piddleloop.com/?URL=https://gama-casino-apk.ru/gama-skachat>gama-casino-apk.ru/gama-skachat</a> <a href=http://banksepah.de/modules/mod_jw_srfr/redir.php?url=https://gama-casino-apk.ru/gama-skachat>gama-casino-apk.ru/gama-skachat</a> <a href=https://www.bnro.ro/ChangeSiteVersion.aspx?v=d&returnUrl=https://gama-casino-apk.ru/gama-skachat>gama-casino-apk.ru/gama-skachat</a> <a href=http://shop.remmers.ru/bitrix/rk.php?goto=https://gama-casino-apk.ru/gama-skachat>gama-casino-apk.ru/gama-skachat</a>
Download latest version of the application bookmaker gama – play today! <a href=https://danielahruskova.blog.idnes.cz/redir.aspx?url=https://gama-casino-apk.ru/gama-skachat>gama-casino-apk.ru/gama-skachat</a> <a href=http://www.degroot-int.net/modules/babel/redirect.php?newlang=nl_NL&newurl=https://gama-casino-apk.ru/gama-skachat>gama-casino-apk.ru/gama-skachat</a> <a href=https://www.tiged.org/members/setting.html?switchlang=hu&pushpath=www.ultimate-guitar.com/forum/showthread.php?t=2130473>gama-casino-apk.ru/gama-skachat</a> <a href=https://18.staikudrik.com/index/d1?diff=0&utm_clickid=uskkokskw44sooos&aurl=http%3A%2F%2Fwww.ultimate-guitar.com/forum/showthread.php?t=2130473&an=&site=&pushMode=popup>gama-casino-apk.ru/gama-skachat</a> <a href=http://klindoors.ru/bitrix/rk.php?goto=https://gama-casino-apk.ru/gama-skachat>gama-casino-apk.ru/gama-skachat</a> <a href=http://beautifulllittlegirls.russianschoolgirls.top/out.php?https://gama-casino-apk.ru/gama-skachat>gama-casino-apk.ru/gama-skachat</a> <a href=https://ditrych.blog.idnes.cz/redir.aspx?url=https://gama-casino-apk.ru/gama-skachat>gama-casino-apk.ru/gama-skachat</a> <a href=https://www.stonehenge.com/cgi/go/https://gama-casino-apk.ru/gama-skachat>gama-casino-apk.ru/gama-skachat</a> <a href=https://image.google.gg/url?rct=j&sa=t&url=https://gama-casino-apk.ru/gama-skachat>gama-casino-apk.ru/gama-skachat</a> <a href=https://protennis.by/bitrix/rk.php?goto=https://gama-casino-apk.ru/gama-skachat>gama-casino-apk.ru/gama-skachat</a> <a href=https://www.veggiedate.org/webpage.cfm?linkpage=www.ultimate-guitar.com/forum/showthread.php?t=2130473>gama-casino-apk.ru/gama-skachat</a> <a href=http://vtrk.logger.co.kr/tracker_flash.tsp?u=55936&CTTL=7&CTFL=ADC&targetUrl=www.ultimate-guitar.com/forum/showthread.php?t=2130473>gama-casino-apk.ru/gama-skachat</a> <a href=https://cse.google.com.bh/url?sa=i&url=http%3A%2F%2Fwww.ultimate-guitar.com/forum/showthread.php?t=2130473>gama-casino-apk.ru/gama-skachat</a> <a href=https://www.motoringalliance.com/proxy.php?link=https://gama-casino-apk.ru/gama-skachat>gama-casino-apk.ru/gama-skachat</a> <a href=http://koijima.com/blog/?wptouch_switch=mobile&redirect=https://gama-casino-apk.ru/gama-skachat>gama-casino-apk.ru/gama-skachat</a>
#9068 CasinoStardahttps://starda-casino-apk.ru/starda-casino/
<a href=http://campussy.net/external_link/?url=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://www.truetorrents.ru/go.php?url=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://www.angelique-yokohama.com/jump.php?url=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://vacations-minnesota.com.xx3.kz/go.php?url=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://wood-science-economy.pl/modules/babel/redirect.php?newlang=pl_PL&newurl=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://www.momscrewboy.com/cgi-bin/crtr/out.cgi?s=60&u=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=https://gotranny.com/wp-content/plugins/AND-AntiBounce/redirector.php?url=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://www.nudesirens.com/cgi-bin/at/out.cgi?id=35&tag=toplist&trade=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=https://cafesp.ru/redirect.php?url=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=https://ukbouldering.com/revive/www/delivery/ck.php?ct=1&oaparams=2__bannerid=36__zoneid=1__cb=b426451b71__oadest=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://www.autoweller.de/api/bookmark/toggle/578019?redirect=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://www.avitop.com/aviation/link.asp?snd=294&url=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=https://prodzakupka.ru/bitrix/redirect.php?goto=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://chat.amron.com.ua.xx3.kz/go.php?url=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=https://www.ehso.com/ehsord.php?url=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a>
Download latest version of the application bookmaker starda – win today! <a href=http://mrc09.ru/bitrix/rk.php?goto=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://www.kinofilmskachat.net/engine/redirect.php?url=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=https://emingerova.blog.idnes.cz/redir.aspx?url=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=https://birminghampediatrics.com/?option=com_myblog&show=Be-adventurous-in-introducing-solid-foods-to-baby.html&Itemid=71&time=week&yr=2021&month=01&dy=3&href=&cid=mc-print-viewhttps://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=https://toolbarqueries.google.com.pr/url?q=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://www.integros.com.ua/bitrix/redirect.php?goto=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=https://instaforex.org/redirect.php?url=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://rp.trailtap.com/sierra?redirect=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://news.only-1-led.com/?wptouch_switch=desktop&redirect=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://rich-ad.top/ad/www/delivery/ck.php?ct=1&oaparams=2__bannerid=196__zoneid=36__cb=acb4366250__oadest=http%3A%2F%2Fdownload-starda-casino-apk.ru/starda-casino/-fr.com >https://starda-casino-apk.ru/starda-casino/</a> <a href=https://maps.t.me/s/worldcasinonet.pe/url?sa=j&url=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://airfieldmodels.com/visitor_feedback/go.php?url=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://gamekouryaku.com/dq8/search/rank.cgi?mode=link&id=3552&url=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=https://www.maxval.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://clients1.google.com.lb/url?sa=i&url=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a>
#9069 legzoApkhttps://legzo-casino-apk.ru/legzo-apk
<a href=http://forum.acehigh.ru/away.htm?link=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=http://www.1service.ru/bitrix/rk.php?goto=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=https://bohusova.blog.idnes.cz/redir.aspx?url=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=http://compareproteins.co.uk/redirect.php?url=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=http://email.fuelsinstitute.org/redir.aspx?issue=09/29/2017&nacsid=(%NACSId%)&src=fuelsnews4&url=myrelist.com%2Fmembers%2Fdeeropen26%2Factivity%2F4490553%2Fhttps://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=http://www.boneme.com/cgi-bin/atx/out.cgi?id=11&tag=89&trade=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=http://chukhlomin.com/go.php?url=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=https://couponsdoom.com/site-coupons/https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=http://www.mipapayyo.com/link.php?url=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=https://www.monster.com.sg/track_aor.html?folderid=16068996&url=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=http://dadaeda.ru/go/url=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=http://utb.kz/bitrix/redirect.php?event1=&event2=&event3=&goto=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=http://www.qedu.org.br/link/?url=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=http://dushmetallurg-tula.ru/go/url=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=http://lamp-4-you.com/bitrix/redirect.php?event1=&event2=&event3=&goto=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a>
Download client online casino legzo – win today! <a href=https://my.landscapeinstitute.org/redirect?redirect=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=http://lib.neu.ac.th/ULIB/dublin.linkout.php?url=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=http://lovesabrewin.com.xx3.kz/go.php?url=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=http://www.ресиверы.СЂС„/goto.php?url=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=https://cse.google.gl/url?q=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=http://fishboatlive.ru/forum/go.php?https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=https://updownmedia.cz/reklama/www/delivery/ck.php?oaparams=2__bannerid=211__zoneid=2__cb=047c3c3b48__oadest=http%3A%2F%2Fwww.tonymacx86.com/threads/port-your-own-mac-games.326959>legzo-casino-apk.ru/legzo-apk</a> <a href=http://deta.dn.ua/bitrix/redirect.php?event1=&event2=&event3=&goto=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=https://maps.google.is/url?q=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=https://bungalomore.ru/bitrix/redirect.php?goto=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=http://cryptolymp.ru/bitrix/rk.php?goto=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=http://thoduonghanoi.com/advertising.redirect.aspx?url=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=https://msk.allpn.ru/redirect/?url=www.tonymacx86.com/threads/port-your-own-mac-games.326959>legzo-casino-apk.ru/legzo-apk</a> <a href=http://www.greekspider.com/target.asp?target=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=https://www.leeway.org/?URL=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a>
#9070 Luthersobhttps://www.araku.co.kr/
<a href=https://www.araku.co.kr/>일본배대지</a> 메인 서비스: 간편하고 효율적인 배송 및 구매 대행 서비스
1. 대행 서비스 주요 기능 메인 서비스는 고객이 한 번에 필요한 대행 서비스를 신청할 수 있도록 다양한 기능을 제공합니다.
배송대행 신청: 국내외 상품 배송을 대신 처리하며, 효율적인 시스템으로 신속한 배송을 보장합니다. 구매대행 신청: 원하는 상품을 대신 구매해주는 서비스로, 고객의 수고를 줄입니다. 엑셀 대량 등록: 대량 상품을 엑셀로 손쉽게 등록 가능하여 상업 고객의 편의성을 증대합니다. 재고 관리 신청: 창고 보관 및 재고 관리를 통해 물류 과정을 최적화합니다. 2. 고객 지원 시스템 메인 서비스는 사용자 친화적인 접근성을 제공합니다.
유저 가이드: 대행 서비스를 더욱 합리적으로 사용할 수 있도록 세부 안내서를 제공합니다. 운송장 조회: 일본 사가와 등 주요 운송사의 추적 시스템과 연동하여 운송 상황을 실시간으로 확인 가능합니다. 3. 비용 안내와 부가 서비스 비용 계산기: 예상되는 비용을 간편하게 계산해 예산 관리를 돕습니다. 부가 서비스: 교환 및 반품, 폐기 및 검역 지원 등 추가적인 편의 서비스를 제공합니다. 출항 스케줄 확인: 해외 배송의 경우 출항 일정을 사전에 확인 가능하여 배송 계획을 세울 수 있습니다. 4. 공지사항 기본 검수 공지 무료 검수 서비스로 고객의 부담을 줄이며, 보다 철저한 검수가 필요한 경우 유료 정밀 검수 서비스를 권장합니다.
수출허가서 발급 안내 항공과 해운 수출 건에 대한 허가서를 효율적으로 발급받는 방법을 상세히 안내하며, 고객의 요청에 따라 이메일로 전달됩니다.
노데이터 처리 안내 운송장 번호 없는 주문에 대한 새로운 처리 방안을 도입하여, 노데이터 발생 시 관리비가 부과되지만 서비스 품질을 개선합니다.
5. 고객과의 소통 카카오톡 상담: 실시간 상담을 통해 고객의 궁금증을 해결합니다. 공지사항 알림: 서비스 이용 중 필수 정보를 지속적으로 업데이트합니다. 메인 서비스는 고객 만족을 최우선으로 하며, 지속적인 개선과 세심한 관리를 통해 최상의 경험을 제공합니다.
#9071 Robertces
пин ап кз <a href=" http://mi.minfish.com/home.php?… „>pinup kazi</a> or <a href=“ http://www.marstruct-vi.com/feedback.aspx?… ">pinup kazi</a> https://www.google.ae/url?… пин ап кз <a href=http://cse.google.bj/url?sa=i&url=http://pinup-kazi.kz>пин ап казино</a> пинап казино and <a href=https://www.sdsdsoft.com/upload/home.php?mod=space&uid=3369062>пин ап казино онлайн</a> пин ап кз
#9072 Darioopini
pin up казино: <a href=" http://pinup-kazi.kz/ ">пинап казино</a> – pinup
#9073 FonbetAndroidhttps://fonbet-stavki-apk.ru/fonbet-na-android/
<a href=https://jobupon.com/jobclick/?RedirectURL=https://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=https://www.google.sr/url?sa=t&url=http%3A%2F%2Ft.me/s/worldcasinonet>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=https://cooljobfinder.com/jobclick/?RedirectURL=https://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=http://homepornlinks.com/cgi-bin/atl/out.cgi?s=10&u=https://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=http://infotransfer.ru/bitrix/rk.php?goto=canadianpharmacyies.comhttps://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=http://teplo-ekb.ru/link.php?url=https://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=http://veejex.ru/bitrix/rk.php?goto=https://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=http://arice.com/modules/mod_jw_srfr/redir.php?url=https://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=http://g-tech.pro/bitrix/redirect.php?event1=&event2=&event3=&goto=https://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=http://enisey-servis.ru/bitrix/rk.php?goto=https://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=http://www.pornstars-home.com/go.php?link=https://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=http://www.chagosdream.com/guestbook/go.php?url=https://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=https://www.holprop.com/list_sales_frames.asp?uid=7119&listpage=y&url=https://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=http://mirage.ros.life/redirect?url=https://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=https://fujimon-sas.hatenadiary.jp/iframe/hatena_bookmark_comment?canonical_uri=https://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a>
Install apk file online bookmaker Fonbet – win right now! <a href=http://www.best373.comfoxnews.net.xx3.kz/go.php?url=https://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=https://www.google.mw/url?q=https://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=https://nl.xhofficial.com/exit.php?url=https://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=http://www.allkarups.com/crtr/cgi/out.cgi?s=100&l=180&u=https://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=http://www.beltconveyors.co.uk/?wptouch_switch=desktop&redirect=https://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=https://www.joblinkapply.com/Joblink/5972/Account/ChangeLanguage?lang=es-MX&returnUrl=https://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=http://timbergroup.ru/bitrix/rk.php?goto=https://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=https://14.caiwik.com/index/download2?diff=0&darken=1&utm_clickid=vcc88ww8sosk84c0&aurl=https%3A%2F%2Fgreasyfork.org/en/discussions/requests/173654-esp-for-browser-games&pushMode=popup>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=http://ruserials.ru/goToSponsor.asp?url=https://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=http://www.cum2eat.com/cgi-bin/a2/out.cgi?id=%20&l=btop&u=https://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=https://ru.xhamster7.com/exit.php?url=https://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=https://maps.google.se/url?q=https://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=http://misspolonia.de/redirect.php?url=https://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=http://pool.static.onads.dk/tracker.php?eventid=1&itemid=61&redir=https://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a> <a href=http://www.vidsplus.com/movies/go.php?id=670226_1&url=https://fonbet-stavki-apk.ru/fonbet-na-android/>https://fonbet-stavki-apk.ru/fonbet-na-android/</a>
#9074 Darioopini
вавада: <a href=" https://vavada-kazi.ru/ ">казино вавада</a> – казино вавада
#9075 Aarongaghttps://st66605.tech/boddy/
<a href=https://st66605.tech/boddy/>st66 dang nhap</a> ST666 – Nền tảng sòng bạc trực tuyến hàng đầu tại Việt Nam
ST666 tự hào là một trong những thương hiệu uy tín hàng đầu trong lĩnh vực giải trí và sòng bạc trực tuyến tại châu Á. Với nhiều năm liên tục được bình chọn 5 sao, ST666 mang đến cho người chơi những trải nghiệm đẳng cấp và an toàn.
Lý do chọn ST666 Thương hiệu đáng tin cậy ST666 là nền tảng được hàng triệu người chơi tại Việt Nam tin tưởng nhờ danh tiếng lâu năm và sự minh bạch trong hoạt động.
Sản phẩm đa dạng Người chơi có thể tận hưởng hàng loạt trò chơi hấp dẫn như:
Nổ hũ: Đem lại cơ hội trúng thưởng lớn với đồ họa sống động. Sòng bài: Bao gồm các trò chơi cổ điển như bài cào, baccarat, poker. Thể thao: Đặt cược các trận đấu bóng đá, bóng rổ với tỷ lệ hấp dẫn. Xổ số và bắn cá: Các trò chơi thú vị dành cho người yêu thích thử thách. Đá gà: Một hình thức giải trí truyền thống được nâng cấp với chất lượng trực tuyến. An ninh bảo mật ST666 áp dụng công nghệ bảo mật tiên tiến, đảm bảo thông tin và giao dịch của người chơi luôn an toàn tuyệt đối.
Giao dịch nhanh chóng Với hệ thống xử lý tự động hiện đại, ST666 cung cấp tốc độ nạp rút nhanh nhất, giúp người chơi tận hưởng trải nghiệm mượt mà.
Khuyến mãi hấp dẫn và dịch vụ chuyên nghiệp ST666 không chỉ nổi bật với chất lượng sản phẩm mà còn thường xuyên tổ chức các chương trình khuyến mãi, tặng thưởng lớn. Đội ngũ hỗ trợ 24/7 luôn sẵn sàng giải đáp thắc mắc của khách hàng một cách tận tình.
Tin tức và mẹo chơi đá gà từ ST666 ST666 không ngừng cập nhật các bí quyết và thông tin mới nhất về đá gà, giúp người chơi nâng cao chiến lược và kỹ thuật. Từ việc chọn gà đá phù hợp đến cách chăm sóc và điều trị, mọi kiến thức đều được chia sẻ một cách chi tiết và chuyên nghiệp.
Tham gia ngay hôm nay! Hãy truy cập ST666 – Trang chủ chính thức để trải nghiệm thế giới sòng bạc trực tuyến đa dạng và uy tín nhất. Không chỉ là nơi giải trí, ST666 còn mang đến cơ hội kiếm tiền hấp dẫn cho mọi người chơi.
Chơi ngay – Trải nghiệm đỉnh cao tại ST666!
#9076 Ремонт imac в Москвеhttps://remont-imac-mos.ru/
Наш сервисный центр предлагает надежный <a href=https://remont-imac-mos.ru/>сервисный центр по ремонту аймака с гарантией</a> различных марок и моделей. Мы знаем, насколько важны для вас ваши моноблоки iMac, и стремимся предоставить услуги высочайшего уровня. Наши профессиональные техники работают быстро и аккуратно, используя только сертифицированные компоненты, что гарантирует надежность и долговечность выполненных работ. Наиболее частые неисправности, с которыми сталкиваются обладатели компьютеров Apple, включают неисправности HDD, проблемы с экраном, неисправности разъемов, неисправности программного обеспечения и проблемы с охлаждением. Для устранения этих проблем наши квалифицированные специалисты проводят ремонт жестких дисков, дисплеев, разъемов, ПО и систем охлаждения. Обращаясь в наш сервисный центр, вы получаете качественный и надежный центр ремонта imac рядом. Подробная информация доступна на сайте: https://remont-imac-mos.ru
#9077 Robertces
пин ап казино <a href=" http://www.yya28.com/home.php?… „>pin up казино</a> or <a href=“ http://mycivil.ir/go/index.php?… ">пинап казино</a> http://www.gif.ru/greensearch/?…><a+href=https://pinup-kazi.kz> pin up казино <a href=http://cse.google.com.sg/url?sa=i&url=https://pinup-kazi.kz>пинап казино</a> pinup kazi and <a href=http://www.88moli.top/home.php?mod=space&uid=3438>pinup</a> пинап казино
#9078 Darioopini
пинап казино: <a href=" http://pinup-kazi.ru/ ">пин ап вход</a> – pinup
#9079 Ремонт imac в Москвеhttps://remont-imac-mos.ru/
Наш сервисный центр предлагает высококачественный <a href=https://remont-imac-mos.ru/>сервис ремонта аймака</a> различных марок и моделей. Мы осознаем, насколько значимы для вас ваши iMac, и стремимся предоставить услуги наилучшего качества. Наши квалифицированные специалисты работают быстро и аккуратно, используя только качественные детали, что обеспечивает надежность и долговечность выполненных работ. Наиболее распространенные поломки, с которыми сталкиваются владельцы iMac, включают проблемы с жестким диском, повреждения экрана, неработающие разъемы, программные сбои и перегрев. Для устранения этих поломок наши опытные мастера оказывают ремонт жестких дисков, дисплеев, разъемов, ПО и систем охлаждения. Обращаясь в наш сервисный центр, вы гарантируете себе долговечный и надежный мастер по ремонту imac на дому. Подробная информация представлена на нашем сайте: https://remont-imac-mos.ru
#9080 Ernestodophttps://tha58.org/
THA娛樂城與九州娛樂簡介
THA娛樂城是九州娛樂旗下的一個知名線上娛樂平台,致力於為玩家提供多元化且優質的娛樂服務。九州娛樂是亞洲地區領先的線上娛樂品牌,長期專注於打造穩定、公平且充滿樂趣的遊戲環境,旗下擁有多個知名娛樂平台,而THA娛樂城便是其中的一個旗艦產品。以下將詳細介紹THA娛樂城的特色與服務。
THA娛樂城的遊戲種類 THA娛樂城為玩家提供了多樣化的遊戲選擇,滿足不同玩家的需求與興趣,包括以下幾大類別: 1. 體育投注 體育迷可以在THA娛樂城享受豐富的體育賽事投注,涵蓋足球、籃球、網球等多項國際體育比賽。平台提供即時賠率和多種投注選項,讓玩家隨時掌握比賽動態並進行下注。
2. 真人娛樂 真人娛樂區提供即時互動的遊戲體驗,玩家可透過直播技術與真人荷官互動,遊玩如百家樂、輪盤、骰寶等經典遊戲。這不僅增添了真實感,更讓玩家有身臨其境的感受。
3. 電子老虎機 THA娛樂城匯集了多款高人氣的電子老虎機遊戲,從經典水果機到新潮主題機,皆配備精美的畫面與流暢的操作介面,為玩家帶來無限樂趣。
4. 捕魚遊戲 捕魚遊戲是許多玩家的最愛,THA娛樂城提供多種精美場景和豐富玩法的捕魚遊戲,玩家可以挑戰高額獎勵,享受射擊與策略結合的獨特樂趣。
5. 彩票與其他遊戲 除了以上幾類,平台還提供彩票遊戲及其他創新型娛樂遊戲,適合喜歡嘗試新鮮玩法的玩家。
九州娛樂的技術支持 作為THA娛樂城的母公司,九州娛樂以其強大的技術實力與嚴謹的管理體系為平台提供支持。九州娛樂採用國際領先的安全加密技術,確保玩家的個人資訊與交易數據得到妥善保護。此外,平台的遊戲結果皆經過嚴格的隨機性測試與第三方機構認證,保證公平公正。
優質的會員服務 THA娛樂城致力於打造一個高品質的會員體驗,其服務特色包括: – 優惠活動 平台定期推出多種促銷活動,如新會員註冊禮金、存款返利、週週回饋等,讓玩家享受更多的遊戲資金。 – 快速出入金 平台提供便捷且快速的存提款服務,玩家可以安心進行資金操作,且無需擔心延遲問題。 – 24小時客戶服務 為了確保玩家的需求能即時被解決,THA娛樂城提供全年無休的客服支援,無論是遊戲問題還是技術諮詢,客服團隊都能快速回應。
與其他平台的區別 THA娛樂城之所以能在眾多線上娛樂平台中脫穎而出,不僅因其豐富的遊戲種類與高品質服務,更在於它所帶來的獨特價值: 1. 品牌信譽 作為九州娛樂旗下的品牌,THA娛樂城擁有長期積累的良好信譽,是許多玩家的首選。 2. 創新與多樣性 平台不斷推出新遊戲與創意玩法,讓玩家始終保持新鮮感。 3. 本地化服務 THA娛樂城深諳玩家需求,提供多語言支援與符合本地習慣的服務,提升玩家的使用便利性。
未來展望 隨著線上娛樂行業的快速發展,THA娛樂城也在持續進步與創新,力求為玩家帶來更多驚喜。無論是透過引進新的遊戲技術、擴展遊戲種類,還是改善服務品質,THA娛樂城都希望成為每位玩家的最佳娛樂夥伴。
總結來說,THA娛樂城憑藉其豐富的遊戲內容、可靠的技術支持以及優質的會員服務,已在亞洲娛樂市場佔有一席之地。如果您正在尋找一個結合刺激與信賴的娛樂平台,那麼THA娛樂城絕對值得一試。
#9081 FonbetStavkihttps://fonbet-stavki-apk.ru
<a href=https://fonbet-stavki-apk.ru>https://www.fonbet-stavki-apk.ru</a>
Установить приложение букмекера Fonbet – выигрывай прямо сейчас! <a href=https://fonbet-stavki-apk.ru>www.fonbet-stavki-apk.ru</a>
#9082 FonbetSaithttps://fonbet-stavki-apk.ru/fonbet-oficzialnyj-sajt/
<a href=https://fonbet-stavki-apk.ru/fonbet-oficzialnyj-sajt>http://www.fonbet-stavki-apk.ru/fonbet-oficzialnyj-sajt</a>
Загрузить apk файл лучшего букмекера Фонбет – выигрывай прямо сейчас! <a href=https://fonbet-stavki-apk.ru/fonbet-oficzialnyj-sajt>www.fonbet-stavki-apk.ru/fonbet-oficzialnyj-sajt</a>
#9083 Darioopini
vavada: <a href=" https://vavada-kazi.ru/ ">вавада</a> – vavada kazi
#9084 FonbetSaithttps://fonbet-stavki-apk.ru/fonbet-oficzialnyj-sajt/
<a href=https://fonbet-stavki-apk.ru/fonbet-oficzialnyj-sajt>www.fonbet-stavki-apk.ru/fonbet-oficzialnyj-sajt</a>
Скачать последнюю версию приложения лучшего букмекера Фонбет – побеждай прямо сейчас! <a href=https://fonbet-stavki-apk.ru/fonbet-oficzialnyj-sajt>http://www.fonbet-stavki-apk.ru/fonbet-oficzialnyj-sajt</a>
#9085 Ремонт imac в Москвеhttps://remont-imac-mos.ru/
Наша мастерская предлагает профессиональный <a href=https://remont-imac-mos.ru/>официальный ремонт imac рядом</a> любых брендов и моделей. Мы понимаем, насколько необходимы вам ваши iMac, и стремимся предоставить услуги высочайшего уровня. Наши опытные мастера работают быстро и аккуратно, используя только сертифицированные компоненты, что обеспечивает надежность и долговечность наших услуг. Наиболее частые неисправности, с которыми сталкиваются обладатели компьютеров Apple, включают проблемы с жестким диском, неисправности дисплея, неработающие разъемы, ошибки ПО и перегрев. Для устранения этих поломок наши профессиональные техники проводят ремонт жестких дисков, дисплеев, разъемов, ПО и систем охлаждения. Доверив ремонт нам, вы гарантируете себе качественный и надежный вызвать мастера по ремонту аймака с гарантией. Подробная информация размещена на сайте: https://remont-imac-mos.ru
#9086 Darioopini
пин ап вход: <a href=" https://pinup-kazi.ru/ ">pinup-kazi.ru</a> – пин ап казино официальный сайт
#9087 Ремонт imac в Москвеhttps://remont-imac-mos.ru/
Наша мастерская предлагает высококачественный <a href=https://remont-imac-mos.ru/>сервисный центр по ремонту аймака</a> различных марок и моделей. Мы знаем, насколько необходимы вам ваши моноблоки iMac, и обеспечиваем ремонт первоклассного уровня. Наши квалифицированные специалисты оперативно и тщательно выполняют работу, используя только сертифицированные компоненты, что обеспечивает надежность и долговечность наших услуг. Наиболее частые неисправности, с которыми сталкиваются пользователи моноблоков iMac, включают неисправности HDD, проблемы с экраном, проблемы с портами, ошибки ПО и неисправности системы охлаждения. Для устранения этих проблем наши опытные мастера проводят ремонт жестких дисков, дисплеев, разъемов, ПО и систем охлаждения. Доверив ремонт нам, вы получаете долговечный и надежный ремонт аймака. Подробная информация размещена на сайте: https://remont-imac-mos.ru
#9088 Darioopini
pinup kazi: <a href=" https://pinup-kazi.ru/ ">пин ап зеркало</a> – pinup
#9089 Ремонт imac в Москвеhttps://remont-imac-mos.ru/
Наш сервисный центр предлагает высококачественный <a href=https://remont-imac-mos.ru/>официальный ремонт аймака рядом</a> различных марок и моделей. Мы осознаем, насколько необходимы вам ваши моноблоки iMac, и готовы предложить сервис первоклассного уровня. Наши квалифицированные специалисты оперативно и тщательно выполняют работу, используя только оригинальные запчасти, что гарантирует надежность и долговечность проведенных ремонтов. Наиболее распространенные поломки, с которыми сталкиваются обладатели компьютеров Apple, включают поломку жесткого диска, неисправности дисплея, неработающие разъемы, неисправности программного обеспечения и перегрев. Для устранения этих проблем наши квалифицированные специалисты выполняют ремонт жестких дисков, дисплеев, разъемов, ПО и систем охлаждения. Обращаясь в наш сервисный центр, вы обеспечиваете себе качественный и надежный мастер по ремонту аймака рядом. Подробная информация представлена на нашем сайте: https://remont-imac-mos.ru
#9090 FonbetStavkihttps://fonbet-stavki-apk.ru/fonbet-stavki
<a href=http://vertical-soft.com/bitrix/rk.php?goto=https://fonbet-stavki-apk.ru/fonbet-stavki>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=http://www.ultimate-rihanna.com/?url=https://fonbet-stavki-apk.ru/fonbet-stavki>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=http://digerati.org/redirect.php?url=https://fonbet-stavki-apk.ru/fonbet-stavki>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=http://www.fitafterfiftyfive.com/__media__/js/netsoltrademark.php?d=https://fonbet-stavki-apk.ru/fonbet-stavki>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=http://www.ladydude.com/cgi-bin/a2/out.cgi?id=11&l=toplist&u=https://fonbet-stavki-apk.ru/fonbet-stavki>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=http://oasisatredding.com.xx3.kz/go.php?url=https://fonbet-stavki-apk.ru/fonbet-stavki>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=https://pureinteriors.com.au/?URL=https://fonbet-stavki-apk.ru/fonbet-stavki>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=http://td-yarn.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=https://fonbet-stavki-apk.ru/fonbet-stavki>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=http://freakgrannyporn.com/cgi-bin/atc/out.cgi?id=150&u=https://fonbet-stavki-apk.ru/fonbet-stavki>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=https://www.sti.biz.pl/redirect.php?action=url&goto=t.me/s/worldcasinonet>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=https://cse.sandbox.google.co.uk/url?q=https://fonbet-stavki-apk.ru/fonbet-stavki>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=http://www.nazakupy.ru/go.php?to=https://fonbet-stavki-apk.ru/fonbet-stavki>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=http://media.v55v.net/redirect.php?url=https://fonbet-stavki-apk.ru/fonbet-stavki>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=http://ladyvols.net.xx3.kz/go.php?url=https://fonbet-stavki-apk.ru/fonbet-stavki>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=https://clients1.google.is/url?sa=t&url=https://fonbet-stavki-apk.ru/fonbet-stavki>fonbet-stavki-apk.ru/fonbet-stavki</a>
Upload application online bookmaker Fonbet – win now!
<a href=http://msnet.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=https://fonbet-stavki-apk.ru/fonbet-stavki>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=http://company.yingkelawyer.com/ArticleView.aspx?id=2605&bid=92&plate=1022&title=&url=http%3A%2F%2Fplarium.com/forum/en/raid-shadow-legends/676_tavern/1433693_do-you-feel-battle-passes-are-just-the-norm-now-in-games>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=http://www.profmedia.by/bitrix/redirect.php?event1=KUP_list&event2=&event3=&goto=https://fonbet-stavki-apk.ru/fonbet-stavki>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=http://www.tubevideos7.com/crtr/cgi/out.cgi?c=99&s=65&u=https://fonbet-stavki-apk.ru/fonbet-stavki>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=https://www.supertents.ru/bitrix/redirect.php?goto=https://fonbet-stavki-apk.ru/fonbet-stavki>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=http://www.newellpalmer.com.au/?goto=https://fonbet-stavki-apk.ru/fonbet-stavki>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=http://www.powellweather.net/template/pages/station/redirect.php?url=https://fonbet-stavki-apk.ru/fonbet-stavki>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=https://koeln.pennergame.de/redirect/?site=http%3A%2F%2Fplarium.com/forum/en/raid-shadow-legends/676_tavern/1433693_do-you-feel-battle-passes-are-just-the-norm-now-in-games>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=https://frekvensregister.ens.dk/common/modalframeset.aspx?title=result&scrolling=auto&url=https://fonbet-stavki-apk.ru/fonbet-stavki>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=https://namotor.ru/bitrix/redirect.php?goto=https://fonbet-stavki-apk.ru/fonbet-stavki>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=http://www.ckymep.ru/bitrix/rk.php?goto=https://fonbet-stavki-apk.ru/fonbet-stavki>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=http://eu-market.ru/bitrix/redirect.php?goto=https://fonbet-stavki-apk.ru/fonbet-stavki>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=http://www.nakayama-dr.jp/feed2js2/feed2js.php?src=https://fonbet-stavki-apk.ru/fonbet-stavki>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=http://voyagespirates.digidip.net/visit?url=https://fonbet-stavki-apk.ru/fonbet-stavki>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=http://www.svb28.ru/go/url=https://fonbet-stavki-apk.ru/fonbet-stavki>fonbet-stavki-apk.ru/fonbet-stavki</a>
#9091 GamaCasinohttps://gama-casino-apk.ru/gama-casino
<a href=https://gama-casino-apk.ru/gama-casino>http://www.gama-casino-apk.ru/gama-casino</a>
Установить apk файл казино gama – играй сейчас! <a href=https://gama-casino-apk.ru/gama-casino>gama-casino-apk.ru/gama-casino</a>
#9092 Ремонт imac в Москвеhttps://remont-imac-mos.ru/
Наши специалисты предлагает высококачественный <a href=https://remont-imac-mos.ru/>центр ремонта imac с гарантией</a> любых брендов и моделей. Мы понимаем, насколько значимы для вас ваши iMac, и стремимся предоставить услуги высочайшего уровня. Наши опытные мастера оперативно и тщательно выполняют работу, используя только качественные детали, что гарантирует долговечность и надежность проведенных ремонтов. Наиболее частые неисправности, с которыми сталкиваются обладатели компьютеров Apple, включают неисправности HDD, проблемы с экраном, неисправности разъемов, неисправности программного обеспечения и проблемы с охлаждением. Для устранения этих поломок наши опытные мастера выполняют ремонт жестких дисков, дисплеев, разъемов, ПО и систем охлаждения. Обращаясь в наш сервисный центр, вы получаете долговечный и надежный отремонтировать аймак на дому. Подробная информация доступна на сайте: https://remont-imac-mos.ru
#9093 Darioopini
pinup-kazi.kz: <a href=" https://pinup-kazi.kz/ ">pinup kazi</a> – пин ап казино
#9094 FonbetAndroidhttps://fonbet-stavki-apk.ru/fonbet-na-android/
<a href=https://fonbet-stavki-apk.ru/fonbet-na-android/>www.fonbet-stavki-apk.ru/fonbet-na-android/</a>
Загрузить apk файл букмекера Фонбет – побеждай сейчас! <a href=https://fonbet-stavki-apk.ru/fonbet-na-android/>fonbet-stavki-apk.ru/fonbet-na-android/</a>
#9095 FonbetStavkihttps://fonbet-stavki-apk.ru/fonbet-stavki
<a href=https://forums.wrestlezone.com/proxy.php?link=https://fonbet-stavki-apk.ru/fonbet-stavki>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=http://cse.t.me/s/worldcasinonet.bn/url?sa=t&url=https://fonbet-stavki-apk.ru/fonbet-stavki>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=http://www.funds-sp.jp/link/link.php?url=https://fonbet-stavki-apk.ru/fonbet-stavki>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=https://gorod342.ru/go/url=https://fonbet-stavki-apk.ru/fonbet-stavki>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=http://netopt.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=https://fonbet-stavki-apk.ru/fonbet-stavki>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=https://persan-lainesblanches.com/livre-persan/signatux/redirect.php?p=https://fonbet-stavki-apk.ru/fonbet-stavki>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=http://fogathajtas.lovasszovetseg.hu/archivum/redir.php?link=https://fonbet-stavki-apk.ru/fonbet-stavki>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=http://mse78.ru/bitrix/rk.php?goto=https://fonbet-stavki-apk.ru/fonbet-stavki>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=http://stthomasfcu.com/redirect.php?link=https://fonbet-stavki-apk.ru/fonbet-stavki>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=http://prokopevsk.websender.ru/redirect.php?url=https://fonbet-stavki-apk.ru/fonbet-stavki>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=http://fishki.net/go/?url=https://fonbet-stavki-apk.ru/fonbet-stavki>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=https://imaking.hatenablog.com/iframe/hatena_bookmark_comment?canonical_uri=https://fonbet-stavki-apk.ru/fonbet-stavki>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=http://c.af.moshimo.com/af/c/click?a_id=54680&p_id=170&pc_id=185&pl_id=4062&s_v=b5Rz2P0601×u&url=https://fonbet-stavki-apk.ru/fonbet-stavki>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=http://cdn.shortpixel.ai/client/q_lqip,ret_wait/torgi-rybinsk.ru/?goto=https://fonbet-stavki-apk.ru/fonbet-stavki>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=http://haier-store.ru/bitrix/rk.php?goto=https://fonbet-stavki-apk.ru/fonbet-stavki>fonbet-stavki-apk.ru/fonbet-stavki</a>
Download client online bookmaker Fonbet – win today!
<a href=http://holodilnik.ru.xx3.kz/go.php?url=https://fonbet-stavki-apk.ru/fonbet-stavki>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=https://forums-archive.eveonline.com/warning/?l=https%3A%2F%2Fplarium.com/forum/en/raid-shadow-legends/676_tavern/1433693_do-you-feel-battle-passes-are-just-the-norm-now-in-games&domain=ruqyahcirebon.c>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=https://style.localnewspapers.co.nz/jump.php?link=https://fonbet-stavki-apk.ru/fonbet-stavki>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=https://maps.google.co.ug/url?sa=i&url=https://fonbet-stavki-apk.ru/fonbet-stavki>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=https://www.google.nl/url?sa=t&url=https%3A%2F%2Fplarium.com/forum/en/raid-shadow-legends/676_tavern/1433693_do-you-feel-battle-passes-are-just-the-norm-now-in-games>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=http://dieufsunuradio.com.xx3.kz/go.php?url=https://fonbet-stavki-apk.ru/fonbet-stavki>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=http://kauppa.webhill.fi/extra/delivery/ck.php?ct=1&oaparams=2__bannerid=292__zoneid=26__cb=e822c308ea__oadest=https%3A%2F%2Fplarium.com/forum/en/raid-shadow-legends/676_tavern/1433693_do-you-feel-battle-passes-are-just-the-norm-now-in-games>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=http://xnxxporntube.net/out.php?url=https://fonbet-stavki-apk.ru/fonbet-stavki>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=https://57.usleallster.com/index/d1?diff=0&utm_clickid=0m8k8s0c4ckgsgg0&aurl=http%3A%2F%2Fplarium.com/forum/en/raid-shadow-legends/676_tavern/1433693_do-you-feel-battle-passes-are-just-the-norm-now-in-games&wr_id=9533&pushMode=popup>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=http://gay.adultsexfonbet-stavki-apk.ru/fonbet-stavki.biz/trade/out.php?s=90&u=https://fonbet-stavki-apk.ru/fonbet-stavki>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=https://app.eventize.com.br/emm/log_click.php?e=1639&c=873785&url=https://fonbet-stavki-apk.ru/fonbet-stavki>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=http://tamasho.usamimi.info/rank.php?mode=link&id=1336&url=https://fonbet-stavki-apk.ru/fonbet-stavki>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=https://4fcams.com/external_link/?url=https://fonbet-stavki-apk.ru/fonbet-stavki>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=http://v-s-g.ru/bitrix/rk.php?goto=https://fonbet-stavki-apk.ru/fonbet-stavki>fonbet-stavki-apk.ru/fonbet-stavki</a> <a href=https://cse.google.iq/url?sa=t&url=https%3A%2F%2Fplarium.com/forum/en/raid-shadow-legends/676_tavern/1433693_do-you-feel-battle-passes-are-just-the-norm-now-in-games>fonbet-stavki-apk.ru/fonbet-stavki</a>
#9096 GamaCasinohttps://gama-casino-apk.ru/gama-casino
<a href=https://gama-casino-apk.ru/gama-casino>https://gama-casino-apk.ru/gama-casino</a>
Установить apk файл онлайн казино Гама – побеждай сейчас! <a href=https://gama-casino-apk.ru/gama-casino>https://gama-casino-apk.ru/gama-casino</a>
#9097 FonbetStavkihttps://fonbet-stavki-apk.ru/fonbet-stavki/
<a href=https://fonbet-stavki-apk.ru/fonbet-stavki/>www.fonbet-stavki-apk.ru/fonbet-stavki/</a>
Загрузить последнюю версию приложения букмекера Фонбет – побеждай сейчас! <a href=https://fonbet-stavki-apk.ru/fonbet-stavki/>http://fonbet-stavki-apk.ru/fonbet-stavki/</a>
#9098 Ремонт imachttps://remont-imac-mos.ru/
Наш сервисный центр предлагает профессиональный <a href=https://remont-imac-mos.ru/>сервисный ремонт imac в москве</a> любых брендов и моделей. Мы осознаем, насколько важны для вас ваши компьютеры Apple, и обеспечиваем ремонт высочайшего уровня. Наши квалифицированные специалисты проводят ремонтные работы с высокой скоростью и точностью, используя только качественные детали, что гарантирует долговечность и надежность наших услуг. Наиболее частые неисправности, с которыми сталкиваются пользователи моноблоков iMac, включают неисправности HDD, проблемы с экраном, неработающие разъемы, программные сбои и неисправности системы охлаждения. Для устранения этих поломок наши профессиональные техники оказывают ремонт жестких дисков, дисплеев, разъемов, ПО и систем охлаждения. Обратившись к нам, вы получаете долговечный и надежный сервисный центр по ремонту imac с гарантией. Подробная информация размещена на сайте: https://remont-imac-mos.ru
#9099 Darioopini
pinup-kazi.ru: <a href=" https://pinup-kazi.ru/ ">пин ап казино</a> – pinup kazi
#9100 Ремонт imachttps://remont-imac-mos.ru/
Наши специалисты предлагает профессиональный <a href=https://remont-imac-mos.ru/>сервисный центр по ремонту imac</a> любых брендов и моделей. Мы понимаем, насколько необходимы вам ваши моноблоки iMac, и обеспечиваем ремонт наилучшего качества. Наши опытные мастера оперативно и тщательно выполняют работу, используя только сертифицированные компоненты, что обеспечивает надежность и долговечность наших услуг. Наиболее распространенные поломки, с которыми сталкиваются владельцы iMac, включают проблемы с жестким диском, проблемы с экраном, неработающие разъемы, ошибки ПО и перегрев. Для устранения этих поломок наши профессиональные техники оказывают ремонт жестких дисков, дисплеев, разъемов, ПО и систем охлаждения. Обратившись к нам, вы обеспечиваете себе надежный и долговечный официальный ремонт аймака с гарантией. Подробная информация размещена на сайте: https://remont-imac-mos.ru
#9101 Ремонт imachttps://remont-imac-mos.ru/
Наша мастерская предлагает профессиональный <a href=https://remont-imac-mos.ru/>мастер по ремонту imac на выезде</a> различных марок и моделей. Мы знаем, насколько значимы для вас ваши iMac, и готовы предложить сервис наилучшего качества. Наши квалифицированные специалисты работают быстро и аккуратно, используя только качественные детали, что гарантирует надежность и долговечность выполненных работ. Наиболее распространенные поломки, с которыми сталкиваются обладатели компьютеров Apple, включают неисправности HDD, неисправности дисплея, неработающие разъемы, программные сбои и неисправности системы охлаждения. Для устранения этих поломок наши опытные мастера проводят ремонт жестких дисков, дисплеев, разъемов, ПО и систем охлаждения. Обращаясь в наш сервисный центр, вы гарантируете себе качественный и надежный сервисный центр по ремонту аймака в москве. Подробная информация доступна на сайте: https://remont-imac-mos.ru
#9102 Darioopini
pinup-kazi.ru: <a href=" http://pinup-kazi.ru/ ">пинап казино</a> – пин ап вход
#9103 Ремонт imachttps://remont-imac-mos.ru/
Наш сервисный центр предлагает профессиональный <a href=https://remont-imac-mos.ru/>сервисный ремонт аймака адреса</a> всех типов и брендов. Мы знаем, насколько необходимы вам ваши iMac, и стремимся предоставить услуги наилучшего качества. Наши опытные мастера проводят ремонтные работы с высокой скоростью и точностью, используя только качественные детали, что гарантирует надежность и долговечность выполненных работ. Наиболее общие проблемы, с которыми сталкиваются пользователи моноблоков iMac, включают поломку жесткого диска, неисправности дисплея, неисправности разъемов, неисправности программного обеспечения и неисправности системы охлаждения. Для устранения этих поломок наши опытные мастера проводят ремонт жестких дисков, дисплеев, разъемов, ПО и систем охлаждения. Доверив ремонт нам, вы получаете долговечный и надежный ремонт imac в москве. Подробная информация размещена на сайте: https://remont-imac-mos.ru
#9104 Ремонт imachttps://remont-imac-mos.ru/
Наши специалисты предлагает профессиональный <a href=https://remont-imac-mos.ru/>срочный ремонт аймака</a> всех типов и брендов. Мы осознаем, насколько значимы для вас ваши моноблоки iMac, и стремимся предоставить услуги первоклассного уровня. Наши профессиональные техники оперативно и тщательно выполняют работу, используя только качественные детали, что обеспечивает долговечность и надежность выполненных работ. Наиболее частые неисправности, с которыми сталкиваются пользователи моноблоков iMac, включают проблемы с жестким диском, неисправности дисплея, неисправности разъемов, программные сбои и перегрев. Для устранения этих неисправностей наши профессиональные техники выполняют ремонт жестких дисков, дисплеев, разъемов, ПО и систем охлаждения. Обращаясь в наш сервисный центр, вы получаете долговечный и надежный мастерская по ремонту imac на дому. Подробная информация доступна на сайте: https://remont-imac-mos.ru
#9105 Ремонт imachttps://remont-imac-mos.ru/
Наш сервисный центр предлагает надежный <a href=https://remont-imac-mos.ru/>мастер по ремонту imac на дому</a> различных марок и моделей. Мы осознаем, насколько необходимы вам ваши моноблоки iMac, и стремимся предоставить услуги наилучшего качества. Наши опытные мастера оперативно и тщательно выполняют работу, используя только оригинальные запчасти, что предоставляет длительную работу проведенных ремонтов. Наиболее распространенные поломки, с которыми сталкиваются пользователи моноблоков iMac, включают проблемы с жестким диском, повреждения экрана, неисправности разъемов, неисправности программного обеспечения и проблемы с охлаждением. Для устранения этих неисправностей наши профессиональные техники проводят ремонт жестких дисков, дисплеев, разъемов, ПО и систем охлаждения. Обращаясь в наш сервисный центр, вы обеспечиваете себе качественный и надежный центр ремонта аймака рядом. Подробная информация размещена на сайте: https://remont-imac-mos.ru
#9106 Williamduedehttps://tha58.org/
<a href=https://tha58.org/>THA娛樂城</a>
THA娛樂城與九州娛樂簡介
THA娛樂城是九州娛樂旗下的一個知名線上娛樂平台,致力於為玩家提供多元化且優質的娛樂服務。九州娛樂是亞洲地區領先的線上娛樂品牌,長期專注於打造穩定、公平且充滿樂趣的遊戲環境,旗下擁有多個知名娛樂平台,而THA娛樂城便是其中的一個旗艦產品。以下將詳細介紹THA娛樂城的特色與服務。
THA娛樂城的遊戲種類 THA娛樂城為玩家提供了多樣化的遊戲選擇,滿足不同玩家的需求與興趣,包括以下幾大類別: 1. 體育投注 體育迷可以在THA娛樂城享受豐富的體育賽事投注,涵蓋足球、籃球、網球等多項國際體育比賽。平台提供即時賠率和多種投注選項,讓玩家隨時掌握比賽動態並進行下注。
2. 真人娛樂 真人娛樂區提供即時互動的遊戲體驗,玩家可透過直播技術與真人荷官互動,遊玩如百家樂、輪盤、骰寶等經典遊戲。這不僅增添了真實感,更讓玩家有身臨其境的感受。
3. 電子老虎機 THA娛樂城匯集了多款高人氣的電子老虎機遊戲,從經典水果機到新潮主題機,皆配備精美的畫面與流暢的操作介面,為玩家帶來無限樂趣。
4. 捕魚遊戲 捕魚遊戲是許多玩家的最愛,THA娛樂城提供多種精美場景和豐富玩法的捕魚遊戲,玩家可以挑戰高額獎勵,享受射擊與策略結合的獨特樂趣。
5. 彩票與其他遊戲 除了以上幾類,平台還提供彩票遊戲及其他創新型娛樂遊戲,適合喜歡嘗試新鮮玩法的玩家。
九州娛樂的技術支持 作為THA娛樂城的母公司,九州娛樂以其強大的技術實力與嚴謹的管理體系為平台提供支持。九州娛樂採用國際領先的安全加密技術,確保玩家的個人資訊與交易數據得到妥善保護。此外,平台的遊戲結果皆經過嚴格的隨機性測試與第三方機構認證,保證公平公正。
優質的會員服務 THA娛樂城致力於打造一個高品質的會員體驗,其服務特色包括: – 優惠活動 平台定期推出多種促銷活動,如新會員註冊禮金、存款返利、週週回饋等,讓玩家享受更多的遊戲資金。 – 快速出入金 平台提供便捷且快速的存提款服務,玩家可以安心進行資金操作,且無需擔心延遲問題。 – 24小時客戶服務 為了確保玩家的需求能即時被解決,THA娛樂城提供全年無休的客服支援,無論是遊戲問題還是技術諮詢,客服團隊都能快速回應。
與其他平台的區別 THA娛樂城之所以能在眾多線上娛樂平台中脫穎而出,不僅因其豐富的遊戲種類與高品質服務,更在於它所帶來的獨特價值: 1. 品牌信譽 作為九州娛樂旗下的品牌,THA娛樂城擁有長期積累的良好信譽,是許多玩家的首選。 2. 創新與多樣性 平台不斷推出新遊戲與創意玩法,讓玩家始終保持新鮮感。 3. 本地化服務 THA娛樂城深諳玩家需求,提供多語言支援與符合本地習慣的服務,提升玩家的使用便利性。
未來展望 隨著線上娛樂行業的快速發展,THA娛樂城也在持續進步與創新,力求為玩家帶來更多驚喜。無論是透過引進新的遊戲技術、擴展遊戲種類,還是改善服務品質,THA娛樂城都希望成為每位玩家的最佳娛樂夥伴。
總結來說,THA娛樂城憑藉其豐富的遊戲內容、可靠的技術支持以及優質的會員服務,已在亞洲娛樂市場佔有一席之地。如果您正在尋找一個結合刺激與信賴的娛樂平台,那麼THA娛樂城絕對值得一試。
#9107 Ремонт imachttps://remont-imac-mos.ru/
Наши специалисты предлагает высококачественный <a href=https://remont-imac-mos.ru/>сервисный центр по ремонту аймака с гарантией</a> всех типов и брендов. Мы понимаем, насколько необходимы вам ваши компьютеры Apple, и стремимся предоставить услуги первоклассного уровня. Наши профессиональные техники проводят ремонтные работы с высокой скоростью и точностью, используя только оригинальные запчасти, что предоставляет длительную работу проведенных ремонтов. Наиболее общие проблемы, с которыми сталкиваются владельцы iMac, включают неисправности HDD, проблемы с экраном, неработающие разъемы, ошибки ПО и перегрев. Для устранения этих проблем наши опытные мастера выполняют ремонт жестких дисков, дисплеев, разъемов, ПО и систем охлаждения. Обратившись к нам, вы получаете долговечный и надежный мастер по ремонту imac с гарантией. Подробная информация размещена на сайте: https://remont-imac-mos.ru
#9108 Darioopini
пинап казино: <a href=" http://pinup-kazi.kz/ ">pin up казино</a> – пин ап казино
#9109 Ремонт imac в Москвеhttps://remont-imac-mos.ru/
Наши специалисты предлагает высококачественный <a href=https://remont-imac-mos.ru/>официальный ремонт аймака с гарантией</a> всех типов и брендов. Мы осознаем, насколько важны для вас ваши моноблоки iMac, и стремимся предоставить услуги высочайшего уровня. Наши профессиональные техники оперативно и тщательно выполняют работу, используя только сертифицированные компоненты, что обеспечивает длительную работу выполненных работ. Наиболее распространенные поломки, с которыми сталкиваются пользователи моноблоков iMac, включают проблемы с жестким диском, повреждения экрана, проблемы с портами, программные сбои и неисправности системы охлаждения. Для устранения этих поломок наши квалифицированные специалисты проводят ремонт жестких дисков, дисплеев, разъемов, ПО и систем охлаждения. Доверив ремонт нам, вы обеспечиваете себе качественный и надежный сервис ремонта imac адреса. Подробная информация представлена на нашем сайте: https://remont-imac-mos.ru
#9110 legzoApkhttps://legzo-casino-apk.ru/legzo-apk
<a href=http://www.myxxxlesbian.com/df/out.cgi?ses=lXM0Ms1Snn&id=49&url=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=https://images.google.pt/url?sa=t&url=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=https://context.pixelplus.ru/bitrix/redirect.php?goto=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=http://waselyx.mypangandaran.com/plugin/share/index.php?url=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=http://www.emlaktakibi.com/Home/Go/1093?tabloNo=6&link=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=http://www.fip.it/basketv/redirect.asp?url=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=http://www.top100nudism.com/cgi-bin/toplist/out.cgi?id=pretee1&url=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=https://cse.google.rw/url?sa=i&url=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=https://www.thehempcloud.com/?url=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=http://www.porrfilm.dk/ept/out.php?f=1&pct=40&url=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=https://www.wvfloor.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=http://www.francite.com/frame.asp?url=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=http://www.tubesexvideo.com/cgi-bin/a2/out.cgi?id=29&u=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=http://oftwominds.cloudhostedresources.com/?url=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=http://www.neeman-umi.co.il/redir.asp?url=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a>
Download apk file casino legzo – win now! <a href=http://connect.2aom.us/wcm/linktrack.aspx?adminId=31C5ED81F145D518&subscriberID=8072D7183A7D8723&newsletterID=3EEFE5453B47A194&campaignID=7E8965E8A9496942&bulkID=010C96AAFD50EB9E87E1AB622C7454CC&listID=B3453DEFEDC611E7&openRate=736CF125D99EB7BE&url=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=https://hungerfordprimaryschool.co.uk/westberks/primary/hungerford/CookiePolicy.action?backto=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=http://www.horden-des-chaos.de/forum/index.php?thememode=full;redirect=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=https://bashgah.tebyan.net/Advertisement/RedirectNew.aspx?advID=28786&link=https%3A%2F%2Fwww.tonymacx86.com/threads/port-your-own-mac-games.326959>legzo-casino-apk.ru/legzo-apk</a> <a href=https://prosklad.ru/bitrix/redirect.php?goto=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=https://www.kxdao.net/study_linkkiller-link.html?url=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=http://ukrainochka.ua/go.php?to=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=http://www.orient-explorer.net/Redirect.asp?url=www.tonymacx86.com/threads/port-your-own-mac-games.326959>legzo-casino-apk.ru/legzo-apk</a> <a href=http://josuerkctk.pointblog.net.xx3.kz/go.php?url=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=https://www.hithit.com/en/language/select?lang=en&url=https%3A%2F%2Fwww.tonymacx86.com/threads/port-your-own-mac-games.326959>legzo-casino-apk.ru/legzo-apk</a> <a href=http://obchody.forwardo.com/cz/go_preload.php?url=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=https://images.google.sr/url?sa=t&url=https%3A%2F%2Fwww.tonymacx86.com/threads/port-your-own-mac-games.326959>legzo-casino-apk.ru/legzo-apk</a> <a href=http://moswap.com/go.php?url=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=http://dubno.in.ua/redirect?url=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=http://www.bigblackbootywatchers.com/cgi-bin/sites/out.cgi?id=booty&url=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a>
#9111 Ремонт imachttps://remont-imac-mos.ru/
Наши специалисты предлагает профессиональный <a href=https://remont-imac-mos.ru/>качественный ремонт imac</a> любых брендов и моделей. Мы знаем, насколько необходимы вам ваши моноблоки iMac, и готовы предложить сервис первоклассного уровня. Наши квалифицированные специалисты оперативно и тщательно выполняют работу, используя только сертифицированные компоненты, что предоставляет долговечность и надежность выполненных работ. Наиболее частые неисправности, с которыми сталкиваются обладатели компьютеров Apple, включают проблемы с жестким диском, проблемы с экраном, неисправности разъемов, неисправности программного обеспечения и перегрев. Для устранения этих неисправностей наши профессиональные техники проводят ремонт жестких дисков, дисплеев, разъемов, ПО и систем охлаждения. Обращаясь в наш сервисный центр, вы получаете качественный и надежный отремонтировать аймак с гарантией. Подробная информация представлена на нашем сайте: https://remont-imac-mos.ru
#9112 CasinoStardahttps://starda-casino-apk.ru/starda-casino/
<a href=https://boris.unibe.ch/cgi/set_lang?lang=de&referrer=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://www.shop.fta.co.uk/VATSelect.aspx?returnurl=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://mil.today/bitrix/rk.php?goto=https://starda-casino-apk.ru/starda-casino/-news-az.com/>https://starda-casino-apk.ru/starda-casino/</a> <a href=https://cityofkozani.gov.gr/web/bioglassmcipartner/home/-/blogs/mci-indonesia-mlm-terbaik-indonesia?_33_redirect=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=https://citysafari.nl/Home/setCulture?language=en&returnUrl=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://niac.jp/m/index.cgi?cat=2&mode=redirect&ref_eid=484&url=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://www.ab-system.ca/?goto=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=https://okiraku-life.com/st-manager/click/track?id=10003&type=raw&url=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://securityvn.net/redirect/?url=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=https://maps.google.ms/url?q=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://eskk.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://activeebonygirls.com/?go=click&c=10&n=31&e=0&g=2&r=11875&u=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://www.allsafesites.com/kgsearch/redirect.php?url=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://driverlayer.com/showimg?v=g&img=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=https://www.magazinvashelektrik.ru/bitrix/redirect.php?goto=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a>
Upload application bookmaker starda – win right now! <a href=http://www.beargayvideos.com/cgi-bin/crtr/out.cgi?c=0&l=outsp&u=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://kredit-200000.mosgorkredit.ru/go?https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://investiv.co/clicks/?a=INVESTIV-HOME-RR&p=INV&goto=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://webtoolboxpro.com/website-review/redirect.php?url=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://blog.sysuschool.com/go.asp?url=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=https://99.ernorvious.com/index/d1?diff=0&PunchTime=&LoginId=&LogoffReason=&source=og&campaign=5944&content=&clickid=2aqzrzl2knl1pmit&aurl=https%3A%2F%2Fdownload-starda-casino-apk.ru/starda-casino/-fr.com &pushMode=popup>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://kmfile.funddj.com/funddj/fundportfolio/Auth/redir.asp?a=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=https://images.google.co.mz/url?q=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=https://image.google.je/url?rct=i&sa=t&url=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://guestbook.hometownpizzajonestown.com/?g10e_language_selector=en&r=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://kuliah-psikologi.umm.ac.id/calendar/set.php?return=http%3A%2F%2Fdownload-starda-casino-apk.ru/starda-casino/-fr.com &var=showglobal>https://starda-casino-apk.ru/starda-casino/</a> <a href=https://www.pets-navi.com/pet_cafe/search/rank.cgi?mode=link&id=204&url=http%3A%2F%2Fdownload-starda-casino-apk.ru/starda-casino/-fr.com >https://starda-casino-apk.ru/starda-casino/</a> <a href=https://officecleaningsupplies.co.uk/trigger.php?r_ab=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://pwpt.ru.xx3.kz/go.php?url=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://www.dsfo.de/out.php?url=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a>
#9113 Ernestodophttps://rg88.org/contact/
<a href=https://rg88.org/contact/>娛樂城客服</a> 富遊娛樂城出金教學指南:全面解析 富遊娛樂城是一個備受信賴的線上娛樂平台,提供高效、安全的出金服務。以下是詳細的指南,幫助玩家快速掌握提款流程,並瞭解相關注意事項和解決問題的方法。
1. 富遊娛樂城出金步驟 登入平台:使用【富遊APP】或【富遊官網】。 選擇存取款功能:點擊右下角的【存取款】按鈕。 點擊提款:初次使用需完成帳戶實名驗證。 輸入提款金額:選擇已綁定的取款帳戶。 提交申請:送出後等待審核,款項將快速到賬。 2. 娛樂城出金/提款注意事項 實名認證:確保完成帳戶認證,否則無法提款。 存款流水要求:每次提款需完成至少1倍的存款流水條件。 活動流水條件:若參與優惠活動,需依照活動規定完成對應的流水倍數。 3. 娛樂城流水如何計算? 流水計算是出金的重要條件,其公式如下: 存款金額 / 優惠金額 X 流水倍數 = 可提領流水量
例子說明: 玩家小明存入1,000元,參與一項需達到3倍流水的優惠活動:
需要下注金額 = 1,000元 x 3倍 = 3,000元。 如果累計下注金額為2,000元,則還需下注1,000元以達到流水要求。 一旦流水達標,即可提款。
4. 若遇到不出金問題怎麼辦? 選擇可靠平台:避免詐騙娛樂城,富遊娛樂城以出金速度快、保障用戶資金安全聞名。 聯繫客服:若出現問題,可透過LINE官方客服獲得即時協助。 結論 富遊娛樂城以其安全高效的出金系統和透明的規範,為玩家提供優質的服務。遵循上述指引,並確保完成所有條件,玩家即可輕鬆體驗順暢的提款過程。
#9114 legzoApkhttps://legzo-casino-apk.ru/legzo-apk
<a href=http://microsoft-office.biz.xx3.kz/go.php?url=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=http://www.wantmywife.com/cgi-bin/ucj/c.cgi?url=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=https://evaholzelova.blog.idnes.cz/redir.aspx?url=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=http://navi-mxm.dojin.com/cgi-bin/ys/rank.cgi?mode=link&id=3385&url=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=https://image.google.td/url?rct=j&sa=t&url=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=http://2candys.guide-channel.net/link.php?url=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=http://future.museum.ru/lmp/link.asp?back=books/consept.htm&url=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=http://www.gmwebsite.com/web/redirect.asp?url=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=https://bid.auctionbymayo.com/auctions/bidding-history/id/13010/lot/1704015?url=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=http://computer-image.ru/bitrix/rk.php?goto=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=https://newostrie.ru/redirect?url=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=http://allmon.biz/goto.php?url=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=http://hydraulic-balance.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=https://cibulkova.blog.idnes.cz/redir.aspx?url=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=https://maps.t.me/s/worldcasinonet.sa/url?q=j&source=web&rct=j&url=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a>
Download client casino legzo – win right now! <a href=http://й•їж™џ.com/productshow.asp?id=60&mnid=31314&mc=20153281130338&url=http%3A%2F%2Fwww.tonymacx86.com/threads/port-your-own-mac-games.326959&lmm=>legzo-casino-apk.ru/legzo-apk</a> <a href=https://yahoo.clan.su/go?https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=http://senty.ro/gbook/go.php?url=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=http://hellenicradio.org.za/?URL=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=http://newsbudz.com/go/?url=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=https://gaz-servis.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=https://alt1.toolbarqueries.google.rs/url?q=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=https://esentai-gurme.kz/bitrix/rk.php?goto=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=http://www.chatcentralgateway.com/cgi-bin/Chat01/chat.pl?template=dereferer&language=english&url=http%3A%2F%2Flegzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=http://letitbit.com.xx3.kz/go.php?url=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=https://eni.commander1.com/c3/?firsttime=1&tcs=1839&chn=partners&src=La_Tribune&cty=FR&cmp=La_Tribune2019&med=Article&vson=site_eni&fmt=ab&url=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=http://www.fietsnet.be/blog/ct.ashx?url=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=https://polacywct.com/inc/sledzMlask.php?reklama=2&link=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=http://oldbury.2day.ws/oldbury/search/?url=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a> <a href=http://www.cyberpetro.com/newhome/set_news_page_count.asp?cate=C&tUrl=https://legzo-casino-apk.ru/legzo-apk>legzo-casino-apk.ru/legzo-apk</a>
#9115 CasinoStardahttps://starda-casino-apk.ru/starda-casino/
<a href=http://forestglenwinery.com.xx3.kz/go.php?url=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=https://www.feizan.com/link.php?url=https%3A%2F%2Ft.me/s/worldcasinonet>https://starda-casino-apk.ru/starda-casino/</a> <a href=https://bitnova.info/redirect.php?url=https://starda-casino-apk.ru/starda-casino/-news-az.com/>https://starda-casino-apk.ru/starda-casino/</a> <a href=https://penza.dosug-gid.net/bitrix/redirect.php?goto=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://uzpse.uz/bitrix/redirect.php?event1=&event2=&event3=&goto=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://vida.by/go/url=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://888okisrael.com.xx3.kz/go.php?url=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://www.sassen.org/?url=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://videonabludenie.nnov.org/common/redir.php?https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=https://ru.xhamster4.desi/exit.php?url=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://www.moviefootbal.net/movieeasy/it/link.asp?tb=tb_pageitem&id=id_pageitem&n=1000001481&u=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://www.anan-av.com/afindex.php?sbs=39342–3700–129&page=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=https://clients1.sandbox.t.me/s/worldcasinonet.pe/url?sa=t&url=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=https://online-knigi.com/site/getlitresurl?url=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=https://marketplace.panews.com/AdHunter/portarthur/Home/EmailFriend?url=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a>
Upload client online casino starda – win today! <a href=http://yilianjiaju.com.xx3.kz/go.php?url=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://admitportal.iau.edu.sa/Web/en/Home/SetLanguage?lanstarda-casino-apk.ru/starda-casino/g=ar&returnUrl=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=https://supermombd.com/select/en?redirect=http%3A%2F%2Fdownload-starda-casino-apk.ru/starda-casino/-fr.com >https://starda-casino-apk.ru/starda-casino/</a> <a href=https://cse.t.me/s/worldcasinonet.tr/url?q=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=https://salsa.wiredforchange.com/dia/track.jsp?key=-1&url_num=2&url=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://www.wpiqw.com/uchome/link.php?url=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://www.liquiddinamik.liquidmaps.org/users_fichas_items/index/2425?return=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://rm.resultsmail.com/route.cfm?mid=86073fcb-bf36–46b3–9c49-d338e303d614&uid=2bf1490c-367b-4b42–9ce1-af9e794aa92c&route=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=https://clients1.sandbox.t.me/s/worldcasinonet.ph/url?sa=t&url=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://aslairlines.ie/?URL=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=https://www.moposa.com/Open/LinkOut.aspx?dt=20160608130904&t=3&url=starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=http://www.komus-upakovka.ru/bitrix/rk.php?goto=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=https://maps.sandbox.google.co.in/url?sa=t&url=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=https://www.vicevi.rs/revive/www/delivery/ck.php?ct=1&oaparams=2__bannerid=2__zoneid=1__cb=07093c05b1__oadest=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a> <a href=https://comingoutspb.com/bitrix/redirect.php?goto=https://starda-casino-apk.ru/starda-casino/>https://starda-casino-apk.ru/starda-casino/</a>
#9116 GamaApkhttps://gama-casino-apk.ru/gama-apk
<a href=https://gama-casino-apk.ru/gama-apk>https://www.gama-casino-apk.ru/gama-apk</a>
Скачать приложение онлайн казино Гама – играй сейчас! <a href=https://gama-casino-apk.ru/gama-apk>http://www.gama-casino-apk.ru/gama-apk</a>
#9117 Ernestodophttps://rg88.org/withdraw/
富遊娛樂城出金教學指南:全面解析 富遊娛樂城是一個備受信賴的線上娛樂平台,提供高效、安全的出金服務。以下是詳細的指南,幫助玩家快速掌握提款流程,並瞭解相關注意事項和解決問題的方法。
1. 富遊娛樂城出金步驟 登入平台:使用【富遊APP】或【富遊官網】。 選擇存取款功能:點擊右下角的【存取款】按鈕。 點擊提款:初次使用需完成帳戶實名驗證。 輸入提款金額:選擇已綁定的取款帳戶。 提交申請:送出後等待審核,款項將快速到賬。 2. 娛樂城出金/提款注意事項 實名認證:確保完成帳戶認證,否則無法提款。 存款流水要求:每次提款需完成至少1倍的存款流水條件。 活動流水條件:若參與優惠活動,需依照活動規定完成對應的流水倍數。 3. 娛樂城流水如何計算? 流水計算是出金的重要條件,其公式如下: 存款金額 / 優惠金額 X 流水倍數 = 可提領流水量
例子說明: 玩家小明存入1,000元,參與一項需達到3倍流水的優惠活動:
需要下注金額 = 1,000元 x 3倍 = 3,000元。 如果累計下注金額為2,000元,則還需下注1,000元以達到流水要求。 一旦流水達標,即可提款。
4. 若遇到不出金問題怎麼辦? 選擇可靠平台:避免詐騙娛樂城,富遊娛樂城以出金速度快、保障用戶資金安全聞名。 聯繫客服:若出現問題,可透過LINE官方客服獲得即時協助。 結論 富遊娛樂城以其安全高效的出金系統和透明的規範,為玩家提供優質的服務。遵循上述指引,並確保完成所有條件,玩家即可輕鬆體驗順暢的提款過程。
#9118 DownloadGamahttps://gama-casino-apk.ru/gama-skachat
<a href=https://gama-casino-apk.ru/gama-skachat>https://gama-casino-apk.ru/gama-skachat</a>
Установить последнюю версию приложения онлайн казино gama – побеждай сегодня! <a href=https://gama-casino-apk.ru/gama-skachat>http://www.gama-casino-apk.ru/gama-skachat</a>
#9119 StardaZercalohttps://starda-casino-apk.ru/starda-oficzialnyj-sajt
<a href=http://images.google.tk/url?q=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://cse.google.la/url?q=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://www.historiesittard.nl/kapittel/web/redirect.php?letters=medium&url=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://dramatica.com/?URL=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://trends.gab.com/visit?url=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://3.usleallster.com/index/d5?diff=0&utm_source=ogdd&utm_campaign=26607&utm_content=&utm_clickid=xsg00ws08888g8ww&aurl=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://www.art-today.nl/v8.0/include/log.php?https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://maps.t.me/s/worldcasinonet.kw/url?sa=t&url=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://www.afspraakjes.nl/clickout/?url=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://spravka-saratov.ru/bitrix/redirect.php?goto=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://www.mcdonough.ca/squash/gforum.cgi?url=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://tkp.me/r?url=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://www.siopa.ie/changelang.aspx?url=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://kinkygonzo.com/cgi-bin/a2/out.cgi?id=476&u=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://clients1.google.de/url?q=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a>
Install apk file casino starda – play right now! <a href=http://www.dbta.com/Events/updateStats.aspx?id=1598&lnk=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://ftp.boat-design.net/proxy.php?link=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://eisner.blog.idnes.cz/redir.aspx?url=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://usolie.info.xx3.kz/go.php?url=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://toolbarqueries.google.com.sg/url?q=http%3A%2F%2Fhttps://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://www.news1.co.il/redirectToWebArticle.aspx?siteID=1467&url=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://onekingdom.us/?URL=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://w.drbigboobs.com/cgi-bin/at3/out.cgi?id=105&trade=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://ipx.bcove.me.xx3.kz/go.php?url=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://setraki5.ru/bitrix/redirect.php?goto=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://twinkdicks.com/cgi-bin/out.cgi?id=27&l=top_top&req=1&t=100t&u=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://gamma.astroempires.com/redirect.aspx?https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://images.t.me/s/worldcasinonet.ag/url?q=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://www.taro-print.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://tinygu.de/?url=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a>
#9120 StardaCasinohttps://starda-casino-apk.ru/
<a href=https://starda-casino-apk.ru/>https://www.starda-casino-apk.ru/</a>
Скачать приложение казино онлайн starda – побеждай прямо сейчас! <a href=https://starda-casino-apk.ru>https://www.starda-casino-apk.ru</a>
#9121 Stardadownloadhttps://starda-casino-apk.ru/starda-skachat
<a href=https://starda-casino-apk.ru/starda-skachat>http://www.starda-casino-apk.ru/starda-skachat</a>
Скачать apk файл казино онлайн Старда – побеждай сейчас! <a href=https://starda-casino-apk.ru/starda-skachat>starda-casino-apk.ru/starda-skachat</a>
#9122 Danielquornhttps://rentry.org/scahgmt6
“You get some of me but not tomorrow as they want me in as soon as I can make it happen. This is the one time when they say jump and I ask how high due the financial gains the company could benefit from and it being important enough for the client to appear in person.”
“Well I get an extra night of you at least! I wonder what we could do with that? Meantime, what about food? I am starving and delicious as it was a second breakfast is not quite enough to replenish me!”
“Well get something on and we’ll sort that out first.”
We drove into town and decided that a daytime visit to Charlie’s was going to be the answer. I parked in the bar lot and Elise dashed in to change into something more appropriate, jeans and a t-shirt along with her biker jacket but keeping her Converses on.
Walking down to the restaurant was different from the middle of the night visits as the streets were bustling and all of the shops and outlets were open.
Reaching Charlie’s we entered the front door and sat in a booth near the window. A beautiful young American Chinese girl came,smiled and said hello to Elise and gave us menus and asked if we wanted drinks in the meantime.
„No thanks Lin just a pot of Jasmine tea for us please.“ Lin went back to the kitchen area. “No booze for me today as I will have to work in the bar so it is just tea for me.”
Not in a drinking mood either, I agreed with her."
https://onedio.ru/…imface-196-8 https://tubeteencam.com/…1955/profile https://okwave.jp/…3140051.html https://cannabis.net/user/152686 https://www.dnnsoftware.com/…erid/3205659
#9123 Stardadownloadhttps://starda-casino-apk.ru/starda-skachat
<a href=https://starda-casino-apk.ru/starda-skachat>http://starda-casino-apk.ru/starda-skachat</a>
Установить приложение онлайн казино starda – играй сейчас! <a href=https://starda-casino-apk.ru/starda-skachat>http://starda-casino-apk.ru/starda-skachat</a>
#9124 MonroAndroidhttps://starda-casino-apk.ru/starda-na-androjd
<a href=https://starda-casino-apk.ru/starda-na-androjd>https://www.starda-casino-apk.ru/starda-na-androjd</a>
Скачать приложение казино онлайн Монро – играй сегодня! <a href=https://starda-casino-apk.ru/starda-na-androjd>http://starda-casino-apk.ru/starda-na-androjd</a>
#9125 Сервисный центр Sony Москваhttps://service-sony-fartm.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали сервисный центр sony в москве, можете посмотреть на сайте: <a href=https://service-sony-fartm.ru/>официальный сервисный центр sony</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#9126 StardaApkhttps://starda-casino-apk.ru/starda-apk
<a href=https://image.google.la/url?q=j&sa=t&url=https://starda-casino-apk.ru/starda-apk>starda-casino-apk.ru/starda-apk</a> <a href=http://cse.google.ba/url?sa=t&url=https://starda-casino-apk.ru/starda-apk>starda-casino-apk.ru/starda-apk</a> <a href=https://fam.awomg.de/kunden/awo/ttw.nsf/setSizeMode?CreateDocument&url=&action=dechttps://starda-casino-apk.ru/starda-apk>starda-casino-apk.ru/starda-apk</a> <a href=http://nter.net.ua/go/?url=https://starda-casino-apk.ru/starda-apk>starda-casino-apk.ru/starda-apk</a> <a href=https://onedreamdesign.com/shop/trigger.php?r_ab=https://starda-casino-apk.ru/starda-apk>starda-casino-apk.ru/starda-apk</a> <a href=http://familyfuck.net/crtr/cgi/out.cgi?id=22&url=https://starda-casino-apk.ru/starda-apk>starda-casino-apk.ru/starda-apk</a> <a href=http://www.jmmltd.com/redirect.php?redirect=https://starda-casino-apk.ru/starda-apk>starda-casino-apk.ru/starda-apk</a> <a href=https://www.htcdev.com/?url=https://starda-casino-apk.ru/starda-apk>starda-casino-apk.ru/starda-apk</a> <a href=http://svsp.ru.xx3.kz/go.php?url=https://starda-casino-apk.ru/starda-apk>starda-casino-apk.ru/starda-apk</a> <a href=http://www.fonctionsexecutives.com/Redirect.aspx?url=https://starda-casino-apk.ru/starda-apk>starda-casino-apk.ru/starda-apk</a> <a href=http://shopping29629.designertoblog.com.xx3.kz/go.php?url=https://starda-casino-apk.ru/starda-apk>starda-casino-apk.ru/starda-apk</a> <a href=http://www.farmbureaubank.com/System/ExternalRedirect/?url=https://starda-casino-apk.ru/starda-apk>starda-casino-apk.ru/starda-apk</a> <a href=http://b.r.e.a.kableactorgiganticprofiter.xx3.kz/go.php?url=https://starda-casino-apk.ru/starda-apk>starda-casino-apk.ru/starda-apk</a> <a href=http://trusted.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=https://starda-casino-apk.ru/starda-apk>starda-casino-apk.ru/starda-apk</a> <a href=https://www.kraeg.ru/ext_link?url=https://starda-casino-apk.ru/starda-apk>starda-casino-apk.ru/starda-apk</a>
Install application online casino starda – play right now! <a href=https://discjockeymusicsupply.com/ashop/checkout.php?id=86622&redirect=https://starda-casino-apk.ru/starda-apk>starda-casino-apk.ru/starda-apk</a> <a href=http://strategicpatterningservices.com.xx3.kz/go.php?url=https://starda-casino-apk.ru/starda-apk>starda-casino-apk.ru/starda-apk</a> <a href=http://www.longmovies7.com/scj/cgi/out.php?url=https://starda-casino-apk.ru/starda-apk>starda-casino-apk.ru/starda-apk</a> <a href=https://17.glawandius.com/index/d2?diff=0&source=og&campaign=13142&content=&clickid=y0vzpup0zwsnl3yj&aurl=https%3A%2F%2Fwww.tonymacx86.com/threads/port-your-own-mac-games.326959&pushMode=popup>starda-casino-apk.ru/starda-apk</a> <a href=https://d2-studio.com/redirect?url=https://starda-casino-apk.ru/starda-apk>starda-casino-apk.ru/starda-apk</a> <a href=http://elvisarchives.com.xx3.kz/go.php?url=https://starda-casino-apk.ru/starda-apk>starda-casino-apk.ru/starda-apk</a> <a href=http://dawnh.o.r.se.g.l.uh.xx3.kz/go.php?url=https://starda-casino-apk.ru/starda-apk>starda-casino-apk.ru/starda-apk</a> <a href=https://fresh105fm.ru/bitrix/rk.php?goto=https://starda-casino-apk.ru/starda-apk>starda-casino-apk.ru/starda-apk</a> <a href=https://maps.google.com.bo/url?q=https://starda-casino-apk.ru/starda-apk>starda-casino-apk.ru/starda-apk</a> <a href=http://gleep.ru/go.php?url=https://starda-casino-apk.ru/starda-apk>starda-casino-apk.ru/starda-apk</a> <a href=http://girlsmovie.tv/out.php?go=https://starda-casino-apk.ru/starda-apk>starda-casino-apk.ru/starda-apk</a> <a href=http://crazyscooterriders.over-blog.com.xx3.kz/go.php?url=https://starda-casino-apk.ru/starda-apk>starda-casino-apk.ru/starda-apk</a> <a href=http://www.wastetrak.com/infotrak/redir.asp?id=271&url=https://starda-casino-apk.ru/starda-apk>starda-casino-apk.ru/starda-apk</a> <a href=http://creamchargers88755.qowap.com.xx3.kz/go.php?url=https://starda-casino-apk.ru/starda-apk>starda-casino-apk.ru/starda-apk</a> <a href=https://www.samex.com.au/?URL=https://starda-casino-apk.ru/starda-apk>starda-casino-apk.ru/starda-apk</a>
#9127 freshApkhttps://fresh-casino-apk.ru/fresh-apk
<a href=https://fresh-casino-apk.ru/fresh-apk>fresh-casino-apk.ru/fresh-apk</a>
Загрузить последнюю версию приложения казино онлайн fresh – выигрывай сегодня! <a href=https://fresh-casino-apk.ru/fresh-apk>http://fresh-casino-apk.ru/fresh-apk</a>
#9128 StardaCasinohttps://starda-casino-apk.ru
<a href=http://darklyabsurd.com/guestbook/go.php?url=https://starda-casino-apk.ru>starda-casino-apk.ru</a> <a href=http://www.lh-st.com/cart.aspx?returnurl=https://starda-casino-apk.ru>starda-casino-apk.ru</a> <a href=http://usdental.net.xx3.kz/go.php?url=https://starda-casino-apk.ru>starda-casino-apk.ru</a> <a href=https://belobradek.blog.idnes.cz/redir.aspx?url=https://starda-casino-apk.ru>starda-casino-apk.ru</a> <a href=http://sendse.io.xx3.kz/go.php?url=https://starda-casino-apk.ru>starda-casino-apk.ru</a> <a href=http://moskraeved.ru/redirect?url=https://starda-casino-apk.ru>starda-casino-apk.ru</a> <a href=http://mlincoln.com.xx3.kz/go.php?url=https://starda-casino-apk.ru>starda-casino-apk.ru</a> <a href=http://kredit-2700000.mosgorkredit.ru/go?https://starda-casino-apk.ru>starda-casino-apk.ru</a> <a href=https://images.t.me/s/worldcasinonet.fj/url?sa=t&url=https://starda-casino-apk.ru>starda-casino-apk.ru</a> <a href=https://port2port.co.il/email.php?id=29129231–6ab3c07b8e68918ce1d984a802e8ec32&type=click&ab=https://starda-casino-apk.ru>starda-casino-apk.ru</a> <a href=http://www.kalinka-malinka.com/bitrix/rk.php?goto=https://starda-casino-apk.ru>starda-casino-apk.ru</a> <a href=https://click.g3user.com/?uid=50014763&type=2&url=https://starda-casino-apk.ru>starda-casino-apk.ru</a> <a href=http://hots.me/bbs/redirect.php?tid=7983893&goto=lastposthttps://starda-casino-apk.ru>starda-casino-apk.ru</a> <a href=https://cse.google.tl/url?sa=i&url=https://starda-casino-apk.ru>starda-casino-apk.ru</a> <a href=http://images.google.ge/url?q=https://starda-casino-apk.ru>starda-casino-apk.ru</a>
Download latest version of the application bookmaker starda – play right now! <a href=http://f5-studio.ru.xx3.kz/go.php?url=https://starda-casino-apk.ru>starda-casino-apk.ru</a> <a href=https://keramikbedarf.ch/michel/katalog/dat/ViewProduct.asp?ID=G-550&ProductName=kastanienbraun+glanz&Price=29.50&Back=https://starda-casino-apk.ru>starda-casino-apk.ru</a> <a href=http://nomathon.fr.xx3.kz/go.php?url=https://starda-casino-apk.ru>starda-casino-apk.ru</a> <a href=http://zelzone.net.xx3.kz/go.php?url=https://starda-casino-apk.ru>starda-casino-apk.ru</a> <a href=http://fund21.ru/bitrix/rk.php?goto=https://starda-casino-apk.ru>starda-casino-apk.ru</a> <a href=http://liquidmaps.org/users_fichas_items/index/626/440?return=https://starda-casino-apk.ru>starda-casino-apk.ru</a> <a href=http://besthairclippersforfades.xyz.xx3.kz/go.php?url=https://starda-casino-apk.ru>starda-casino-apk.ru</a> <a href=https://messengerzerner.com.au/?URL=https://starda-casino-apk.ru>starda-casino-apk.ru</a> <a href=http://buzz20628.pages10.com.xx3.kz/go.php?url=https://starda-casino-apk.ru>starda-casino-apk.ru</a> <a href=http://wowvaza.ru/redirect.php?url=https://starda-casino-apk.ru>starda-casino-apk.ru</a> <a href=http://disfo.ru/redirect.php?url=https://starda-casino-apk.ru>starda-casino-apk.ru</a> <a href=https://toushi-shakkin.com/st-manager/click/track?id=8240&type=raw&url=http%3A%2F%2Fstarda-casino-apk.ru-info-uz.com>starda-casino-apk.ru</a> <a href=http://www.kinopolis.de/__nlt/wnl/1-abc-1/redirect?url=https://starda-casino-apk.ru>starda-casino-apk.ru</a> <a href=http://www.adrc.com/software/data_recovery_tools/redirect.php?link=https://starda-casino-apk.ru>starda-casino-apk.ru</a> <a href=https://ictnieuws.nl/?wptouch_switch=desktop&redirect=https://starda-casino-apk.ru>starda-casino-apk.ru</a>
#9129 MonroAndroidhttps://starda-casino-apk.ru/starda-na-androjd
<a href=https://starda-casino-apk.ru/starda-na-androjd>http://starda-casino-apk.ru/starda-na-androjd</a>
Загрузить apk файл казино Monro – побеждай прямо сейчас! <a href=https://starda-casino-apk.ru/starda-na-androjd>https://starda-casino-apk.ru/starda-na-androjd</a>
#9130 FreshDownloadhttps://fresh-casino-apk.ru/fresh-skachat
<a href=http://casopis.vassboskovice.cz.xx3.kz/go.php?url=https://fresh-casino-apk.ru/fresh-skachat>fresh-casino-apk.ru/fresh-skachat</a> <a href=http://maps.google.co.jp/url?sa=j&rct=j&url=https://fresh-casino-apk.ru/fresh-skachat>fresh-casino-apk.ru/fresh-skachat</a> <a href=http://images.google.dm/url?sa=t&url=https://fresh-casino-apk.ru/fresh-skachat>fresh-casino-apk.ru/fresh-skachat</a> <a href=http://asstomouth.guru/out.php?url=https://fresh-casino-apk.ru/fresh-skachat>fresh-casino-apk.ru/fresh-skachat</a> <a href=http://horsens.konservative.dk/membercare/forgot-password?redirect=https://fresh-casino-apk.ru/fresh-skachat>fresh-casino-apk.ru/fresh-skachat</a> <a href=http://enews.sfera.net/newsletter/redirect.php?id=alfsqui@libero.it_0000002862_144&link=https://fresh-casino-apk.ru/fresh-skachat>fresh-casino-apk.ru/fresh-skachat</a> <a href=http://metalworkforums.com/redirect-to/?redirect=https://fresh-casino-apk.ru/fresh-skachat>fresh-casino-apk.ru/fresh-skachat</a> <a href=http://www.sexblackporn.com/cgi-bin/at3/out.cgi?id=170&tag=top&trade=https://fresh-casino-apk.ru/fresh-skachat>fresh-casino-apk.ru/fresh-skachat</a> <a href=http://santehopt-perm.ru/bitrix/rk.php?goto=canadianpharmacytousa.comhttps://fresh-casino-apk.ru/fresh-skachat>fresh-casino-apk.ru/fresh-skachat</a> <a href=http://faltyn.blog.idnes.cz/redir.aspx?url=https://fresh-casino-apk.ru/fresh-skachat>fresh-casino-apk.ru/fresh-skachat</a> <a href=http://tochinvest.ru/includes/links.php?go=https://fresh-casino-apk.ru/fresh-skachat>fresh-casino-apk.ru/fresh-skachat</a> <a href=http://svetsadpark.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=https://fresh-casino-apk.ru/fresh-skachat>fresh-casino-apk.ru/fresh-skachat</a> <a href=http://m.vingle.net/redirect?url=https://fresh-casino-apk.ru/fresh-skachat>fresh-casino-apk.ru/fresh-skachat</a> <a href=http://www.google.gm/url?q=https://fresh-casino-apk.ru/fresh-skachat>fresh-casino-apk.ru/fresh-skachat</a> <a href=http://dver17.ru/bitrix/redirect.php?goto=https://fresh-casino-apk.ru/fresh-skachat>fresh-casino-apk.ru/fresh-skachat</a>
Install client online casino fresh – win right now! <a href=http://www.google.es/url?sa=t&rct=j&q=&esrc=s&source=web&cd=1&cad=rja&uact=8&ved=0ahUKEwjj8pWt78jWAhXELVAKHecRA0IQtwIIJzAA&url=https://fresh-casino-apk.ru/fresh-skachat>fresh-casino-apk.ru/fresh-skachat</a> <a href=http://brickendon.com.au/?URL=https://fresh-casino-apk.ru/fresh-skachat>fresh-casino-apk.ru/fresh-skachat</a> <a href=http://bullang.com/member/login.html?noMemberOrder=&returnUrl=https://fresh-casino-apk.ru/fresh-skachat>fresh-casino-apk.ru/fresh-skachat</a> <a href=http://schoolgardening.rhs.org.uk/Resources/Info-Sheet/Mini-Beast-Identification-Key?returnUrl=https://fresh-casino-apk.ru/fresh-skachat>fresh-casino-apk.ru/fresh-skachat</a> <a href=http://images.google.cm/url?q=https://fresh-casino-apk.ru/fresh-skachat>fresh-casino-apk.ru/fresh-skachat</a> <a href=http://axisofevil.com.xx3.kz/go.php?url=https://fresh-casino-apk.ru/fresh-skachat>fresh-casino-apk.ru/fresh-skachat</a> <a href=http://www.orthlib.ru/out.php?url=https://fresh-casino-apk.ru/fresh-skachat>fresh-casino-apk.ru/fresh-skachat</a> <a href=http://freelove.hu/apps/link.php?url=https://fresh-casino-apk.ru/fresh-skachat>fresh-casino-apk.ru/fresh-skachat</a> <a href=http://alt1.toolbarqueries.google.tm/url?q=https://fresh-casino-apk.ru/fresh-skachat>fresh-casino-apk.ru/fresh-skachat</a> <a href=http://stephenezqhy.review-blogger.com.xx3.kz/go.php?url=https://fresh-casino-apk.ru/fresh-skachat>fresh-casino-apk.ru/fresh-skachat</a> <a href=http://infoglaz.ru/?goto=https://fresh-casino-apk.ru/fresh-skachat>fresh-casino-apk.ru/fresh-skachat</a> <a href=http://www.hms-livgidromash.ru/bitrix/rk.php?goto=https://fresh-casino-apk.ru/fresh-skachat>fresh-casino-apk.ru/fresh-skachat</a> <a href=http://google.so/url?q=https://fresh-casino-apk.ru/fresh-skachat>fresh-casino-apk.ru/fresh-skachat</a> <a href=http://m.sodu2020.com/gourl.html?id=127327052&chapterurl=https://fresh-casino-apk.ru/fresh-skachat>fresh-casino-apk.ru/fresh-skachat</a> <a href=http://planetaplitki.ru/bitrix/redirect.php?goto=https://fresh-casino-apk.ru/fresh-skachat>fresh-casino-apk.ru/fresh-skachat</a>
#9131 FreshCasinohttps://fresh-casino-apk.ru/fresh-casino
<a href=http://online-television.net/go.php?url=https://fresh-casino-apk.ru/fresh-casino>fresh-casino-apk.ru/fresh-casino</a> <a href=http://atsecman.golookup.com/track/?affid=32&ref=https://fresh-casino-apk.ru/fresh-casino>fresh-casino-apk.ru/fresh-casino</a> <a href=http://udimore.east-sussex.co.uk/link.asp?url=https://fresh-casino-apk.ru/fresh-casino>fresh-casino-apk.ru/fresh-casino</a> <a href=http://johnathandbwtn.aioblogs.com.xx3.kz/go.php?url=https://fresh-casino-apk.ru/fresh-casino>fresh-casino-apk.ru/fresh-casino</a> <a href=http://autonosicetrebic.cz/plugins/guestbook/go.php?url=https://fresh-casino-apk.ru/fresh-casino>fresh-casino-apk.ru/fresh-casino</a> <a href=http://profiles.responsemail.co.uk/linktrack.php?pf=hvmci&l=4&cid=819&esid=1374361&url=https://fresh-casino-apk.ru/fresh-casino>fresh-casino-apk.ru/fresh-casino</a> <a href=https://topmagov.com/redirect?url=https://fresh-casino-apk.ru/fresh-casino>fresh-casino-apk.ru/fresh-casino</a> <a href=http://jpn.hana.hs.kr/hanaBBS/hanaBBS_count.asp?idx=8277&url=https://fresh-casino-apk.ru/fresh-casino>fresh-casino-apk.ru/fresh-casino</a> <a href=https://mediascope.net/bitrix/rk.php?goto=https://fresh-casino-apk.ru/fresh-casino>fresh-casino-apk.ru/fresh-casino</a> <a href=https://cse.t.me/s/worldcasinonet.sb/url?q=https://fresh-casino-apk.ru/fresh-casino>fresh-casino-apk.ru/fresh-casino</a> <a href=http://shumali.net/aki/modules/wordpress/wp-ktai.php?view=redir&url=https://fresh-casino-apk.ru/fresh-casino>fresh-casino-apk.ru/fresh-casino</a> <a href=https://www.kvinfo.dk/visit.php?linkType=2&linkValue=https://fresh-casino-apk.ru/fresh-casino>fresh-casino-apk.ru/fresh-casino</a> <a href=https://chaturbate.com/external_link/?url=https://fresh-casino-apk.ru/fresh-casino>fresh-casino-apk.ru/fresh-casino</a> <a href=https://secure.avangate.com/affiliate.php?ACCOUNT=MARKFAIL&AFFILIATE=30746&PATH=https://fresh-casino-apk.ru/fresh-casino>fresh-casino-apk.ru/fresh-casino</a> <a href=http://snehaquest.com.xx3.kz/go.php?url=https://fresh-casino-apk.ru/fresh-casino>fresh-casino-apk.ru/fresh-casino</a>
Upload client bookmaker fresh – play right now!
<a href=https://kupibas.ru/bitrix/rk.php?id=17&site_id=s1&event1=banner&event2=click&goto=https://fresh-casino-apk.ru/fresh-casino>fresh-casino-apk.ru/fresh-casino</a> <a href=http://arts.caithness.org/go.php?url=https://fresh-casino-apk.ru/fresh-casino>fresh-casino-apk.ru/fresh-casino</a> <a href=http://automarktregistrierung.de.xx3.kz/go.php?url=https://fresh-casino-apk.ru/fresh-casino>fresh-casino-apk.ru/fresh-casino</a> <a href=https://www.minnesotahelp.info/Providers/Central_Minnesota_Senior_Care_Inc/Respite/26?returnUrl=https://fresh-casino-apk.ru/fresh-casino>fresh-casino-apk.ru/fresh-casino</a> <a href=http://www.usagitoissho02.net/rabbitSiteLink/gotourl.php?url=https://fresh-casino-apk.ru/fresh-casino>fresh-casino-apk.ru/fresh-casino</a> <a href=https://imuabanbds.vn/301.php?url=https://fresh-casino-apk.ru/fresh-casino>fresh-casino-apk.ru/fresh-casino</a> <a href=https://www.glasur.ch/michel/katalog/dat/ViewProduct.asp?ID=TN-B128C-1&ProductName=Steinzeugton+B+128CH±1300%B0C&Price=44.25&Back=http%3A%2F%2Fplarium.com/forum/en/raid-shadow-legends/676_tavern/1433693_do-you-feel-battle-passes-are-just-the-norm-now-in-games>fresh-casino-apk.ru/fresh-casino</a> <a href=http://www.piano-p.com/feed2js/feed2js.php?src=https%3A%2F%2Fplarium.com/forum/en/raid-shadow-legends/676_tavern/1433693_do-you-feel-battle-passes-are-just-the-norm-now-in-games>fresh-casino-apk.ru/fresh-casino</a> <a href=http://maps.google.lt/url?q=https://fresh-casino-apk.ru/fresh-casino>fresh-casino-apk.ru/fresh-casino</a> <a href=https://www.google.cm/url?sa=t&url=https%3A%2F%2Fplarium.com/forum/en/raid-shadow-legends/676_tavern/1433693_do-you-feel-battle-passes-are-just-the-norm-now-in-games>fresh-casino-apk.ru/fresh-casino</a> <a href=http://www.momandson-sex.com/cgi-bin/out.cgi?click=3.jpg.12494&url=https://fresh-casino-apk.ru/fresh-casino>fresh-casino-apk.ru/fresh-casino</a> <a href=https://campaign.loginbereich.net/kopp,verlag4.html?idPartner=40&idCampaignAd=0&subId=&subIdentifier=&deepab=https://fresh-casino-apk.ru/fresh-casino>fresh-casino-apk.ru/fresh-casino</a> <a href=http://www.crmsoftwaredevelopers.com/services/redirect.aspx?url=https://fresh-casino-apk.ru/fresh-casino>fresh-casino-apk.ru/fresh-casino</a> <a href=http://www.netping.com.ua/out.php?link=https://fresh-casino-apk.ru/fresh-casino>fresh-casino-apk.ru/fresh-casino</a> <a href=https://doba.te.ua/gateway?goto=https://fresh-casino-apk.ru/fresh-casino>fresh-casino-apk.ru/fresh-casino</a>
#9132 freshCasinohttps://fresh-casino-apk.ru
<a href=https://fresh-casino-apk.ru>http://fresh-casino-apk.ru</a>
Скачать apk файл казино fresh – играй прямо сейчас! <a href=https://fresh-casino-apk.ru>http://fresh-casino-apk.ru</a>
#9133 StardaZercalohttps://starda-casino-apk.ru/starda-oficzialnyj-sajt
<a href=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>https://starda-casino-apk.ru/starda-oficzialnyj-sajt</a>
Загрузить apk файл онлайн казино starda – выигрывай прямо сейчас! <a href=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>https://starda-casino-apk.ru/starda-oficzialnyj-sajt</a>
#9134 freshSaithttps://fresh-casino-apk.ru/fresh-oficzialnyj-sajt/
<a href=https://fresh-casino-apk.ru/fresh-oficzialnyj-sajt>https://www.fresh-casino-apk.ru/fresh-oficzialnyj-sajt</a>
Установить последнюю версию приложения казино онлайн Фреш – выигрывай сегодня! <a href=https://fresh-casino-apk.ru/fresh-oficzialnyj-sajt>http://www.fresh-casino-apk.ru/fresh-oficzialnyj-sajt</a>
#9135 Casinofreshhttps://fresh-casino-apk.ru/fresh-casino/
<a href=https://fresh-casino-apk.ru/fresh-casino/>https://fresh-casino-apk.ru/fresh-casino/</a>
Загрузить apk файл казино fresh – играй сейчас! <a href=https://fresh-casino-apk.ru/fresh-casino/>www.fresh-casino-apk.ru/fresh-casino/</a>
#9136 StardaZercalohttps://starda-casino-apk.ru/starda-oficzialnyj-sajt
<a href=http://www.welkoop.nl/https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://brokenstone.ru/AdHandler.ashx?IdBanner=1010&AdUrl=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://entrepreneuronfire.leadpages.co/forms/redirect/?url=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://www.torrentday.com/redir.php?url=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://clients1.google.dz/url?q=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://compkaluga.ru/bitrix/redirect.php?goto=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://hansolav.net/blog/ct.ashx?url=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://clients1.t.me/s/worldcasinonet.tj/url?q=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://prom-gfe-nightly.sandbox.t.me/s/worldcasinonet.ng/url?sa=t&url=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://www.zuerichseeinfo.ch/goto.php?url=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://cse.google.si/url?q=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://investinsaratov.ru/bitrix/rk.php?goto=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://premierwholesaler.com/trigger.php?r_ab=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://www.mesokombinat.rs/modules/babel/redirect.php?newlang=en_US&newurl=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://klabhouse.com/en/CurrencyUpdate/USD/?urlRedirect=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a>
Install latest version of the application bookmaker starda – play right now! <a href=http://clients1.google.hu/url?q=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://www.google.ge/url?q=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://eurolifecare.com/?goto=//https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://veux-veux-pas.fr/en/classified-ads-aquitaine/Real-Estate-1/Real-Estate-for-Rent-5?mc=.pureludington.com/redirect.cfm?address=://kentuckyderby2017tickets.com/&search=Searchhttps://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://philageohistory.org/rdic-images/ChristChurch/view-register.cfm/29133?ReturnURL=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://www.gisbtraining.com/lm/lm/lm.php?tk=bXVndS5yZWN5Y2×pbmcuaW5jQGdtYWlsLmNvbQkJCW11Z3UucmVjeWNsaW5nLmluY0BnbWFpbC5jb20JW0luZm9dIEVmZmVjdGl2ZSBGaXJzdCBBaWQgQW5kIENQUiBUZWNobmlxdWVzIG9uIDktMTAvMDEvMTcJMTA1CUdJU0IgTUlYIERBVEEJMzMwNjYJY2×pY2sJeWVzCW5v&url=http%3A%2F%2Fhttps://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://nudeasianpics.net/fln/mvgu.cgi?oo=1&s=65&u=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://www.stefanwilkening.de/anzeiger.php?anzeige=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://frascold.su/bitrix/redirect.php?goto=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://sh.a.d.owa.jti.xx3.kz/go.php?url=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://pokerdomino.biz.xx3.kz/go.php?url=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://fukugan.com/rssimg/cushion.php?url=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://bitrix.ua.xx3.kz/go.php?url=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://www.art-graphic.com/aubergedulac/livredor/signatux/redirect.php?p=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a> <a href=http://icasm.co.uk/?URL=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>starda-casino-apk.ru/starda-oficzialnyj-sajt</a>
#9137 FreshCasinohttps://fresh-casino-apk.ru/fresh-casino
<a href=http://www.rz114.cn/url.html?url=https://fresh-casino-apk.ru/fresh-casino>fresh-casino-apk.ru/fresh-casino</a> <a href=https://www.runningcheese.com/go?url=https://fresh-casino-apk.ru/fresh-casino>fresh-casino-apk.ru/fresh-casino</a> <a href=http://forum.vizslancs.hu/lnks.php?uid=net&url=https://fresh-casino-apk.ru/fresh-casino>fresh-casino-apk.ru/fresh-casino</a> <a href=http://school.bilimal.kz.xx3.kz/go.php?url=https://fresh-casino-apk.ru/fresh-casino>fresh-casino-apk.ru/fresh-casino</a> <a href=http://188sa.com.xx3.kz/go.php?url=https://fresh-casino-apk.ru/fresh-casino>fresh-casino-apk.ru/fresh-casino</a> <a href=http://watch-movies.net.in.xx3.kz/go.php?url=https://fresh-casino-apk.ru/fresh-casino>fresh-casino-apk.ru/fresh-casino</a> <a href=http://teennudespics.com/cgi-bin/atx/out.cgi?s=60&u=https://fresh-casino-apk.ru/fresh-casino>fresh-casino-apk.ru/fresh-casino</a> <a href=https://gulfcoastbc.com/?URL=https://fresh-casino-apk.ru/fresh-casino>fresh-casino-apk.ru/fresh-casino</a> <a href=http://traflinks.com/panel/page_analizer/page_wordlib.php?morfology=on&url=https://fresh-casino-apk.ru/fresh-casino>fresh-casino-apk.ru/fresh-casino</a> <a href=http://kraljevo.com/knjiga-utisaka/guestbook/go.php?url=https://fresh-casino-apk.ru/fresh-casino>fresh-casino-apk.ru/fresh-casino</a> <a href=http://ezzman.com/vb/redirect-to/?redirect=https://fresh-casino-apk.ru/fresh-casino>fresh-casino-apk.ru/fresh-casino</a> <a href=http://xmlviewer.scripting.com/?url=https://fresh-casino-apk.ru/fresh-casino>fresh-casino-apk.ru/fresh-casino</a> <a href=http://www.guntoi.com/redirect.php?url=https://fresh-casino-apk.ru/fresh-casino>fresh-casino-apk.ru/fresh-casino</a> <a href=http://crmsoftwaredevelopment.com/Services/Redirect.aspx?url=https://fresh-casino-apk.ru/fresh-casino>fresh-casino-apk.ru/fresh-casino</a> <a href=http://www.sinolingua.com.cn/index.php?m=content&c=lang&lang=en&url=https://fresh-casino-apk.ru/fresh-casino>fresh-casino-apk.ru/fresh-casino</a>
Upload apk file online casino fresh – play now!
<a href=https://vuit.ru/bitrix/rk.php?goto=https://fresh-casino-apk.ru/fresh-casino>fresh-casino-apk.ru/fresh-casino</a> <a href=http://southernenergy.com.xx3.kz/go.php?url=https://fresh-casino-apk.ru/fresh-casino>fresh-casino-apk.ru/fresh-casino</a> <a href=http://gorod-dobrograd.ru/bitrix/rk.php?goto=https://fresh-casino-apk.ru/fresh-casino>fresh-casino-apk.ru/fresh-casino</a> <a href=https://adsrv.nachtfalke.biz/adsrv/www/delivery/ck.php?ct=1&oaparams=2__bannerid=94__zoneid=4__cb=88ffc457aa__oadest=https%3A%2F%2Fplarium.com/forum/en/raid-shadow-legends/676_tavern/1433693_do-you-feel-battle-passes-are-just-the-norm-now-in-games>fresh-casino-apk.ru/fresh-casino</a> <a href=https://coorongquays.com.au/?URL=https://fresh-casino-apk.ru/fresh-casino>fresh-casino-apk.ru/fresh-casino</a> <a href=http://alt1.toolbarqueries.google.com.lb/url?q=https://fresh-casino-apk.ru/fresh-casino>fresh-casino-apk.ru/fresh-casino</a> <a href=http://941088.ru/bitrix/rk.php?goto=https://fresh-casino-apk.ru/fresh-casino>fresh-casino-apk.ru/fresh-casino</a> <a href=http://renttheatom.com.xx3.kz/go.php?url=https://fresh-casino-apk.ru/fresh-casino>fresh-casino-apk.ru/fresh-casino</a> <a href=http://ads.epochtimes-romania.com/adclick.php?bannerid=199&zoneid=0&source=&dest=https://fresh-casino-apk.ru/fresh-casino>fresh-casino-apk.ru/fresh-casino</a> <a href=https://clients1.google.ml/url?q=https%3A%2F%2Fplarium.com/forum/en/raid-shadow-legends/676_tavern/1433693_do-you-feel-battle-passes-are-just-the-norm-now-in-games>fresh-casino-apk.ru/fresh-casino</a> <a href=https://mobile.gossip.it/iphone.php?ref=https://fresh-casino-apk.ru/fresh-casino>fresh-casino-apk.ru/fresh-casino</a> <a href=http://cheaphotels.london.xx3.kz/go.php?url=https://fresh-casino-apk.ru/fresh-casino>fresh-casino-apk.ru/fresh-casino</a> <a href=http://riverconditions.environment-agency.gov.uk/relatedlink.html?class=link&link=https://fresh-casino-apk.ru/fresh-casino>fresh-casino-apk.ru/fresh-casino</a> <a href=http://timway.com/izz/www/delivery/ck.php?ct=1&oaparams=2__bannerid=276__zoneid=16__cb=2cec92010f__oadest=https%3A%2F%2Fplarium.com/forum/en/raid-shadow-legends/676_tavern/1433693_do-you-feel-battle-passes-are-just-the-norm-now-in-games>fresh-casino-apk.ru/fresh-casino</a> <a href=https://maestra.mforos.com/visit/?https://fresh-casino-apk.ru/fresh-casino>fresh-casino-apk.ru/fresh-casino</a>
#9138 freshCasinohttps://fresh-casino-apk.ru
<a href=https://fresh-casino-apk.ru>https://fresh-casino-apk.ru</a>
Установить последнюю версию приложения казино fresh – выигрывай прямо сейчас! <a href=https://fresh-casino-apk.ru>http://fresh-casino-apk.ru</a>
#9139 StardaZercalohttps://starda-casino-apk.ru/starda-oficzialnyj-sajt
<a href=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>http://www.starda-casino-apk.ru/starda-oficzialnyj-sajt</a>
Установить последнюю версию приложения онлайн казино Старда – побеждай сейчас! <a href=https://starda-casino-apk.ru/starda-oficzialnyj-sajt>www.starda-casino-apk.ru/starda-oficzialnyj-sajt</a>
#9140 freshAndroidhttps://fresh-casino-apk.ru/fresh-na-androjd/
<a href=https://modsking.com/download.php?id=25865&url=https://fresh-casino-apk.ru/fresh-na-androjd/>https://fresh-casino-apk.ru/fresh-na-androjd/</a> <a href=https://maps.google.ws/url?q=/https://fresh-casino-apk.ru/fresh-na-androjd/>https://fresh-casino-apk.ru/fresh-na-androjd/</a> <a href=https://most.sandbox.google.no/url?q=https://fresh-casino-apk.ru/fresh-na-androjd/>https://fresh-casino-apk.ru/fresh-na-androjd/</a> <a href=http://coinusa.com.xx3.kz/go.php?url=https://fresh-casino-apk.ru/fresh-na-androjd/>https://fresh-casino-apk.ru/fresh-na-androjd/</a> <a href=https://forrestcorbett.com/wp-content/themes/fccom/set_t.php?bgimage=red-background.jpg&ret=https://fresh-casino-apk.ru/fresh-na-androjd/>https://fresh-casino-apk.ru/fresh-na-androjd/</a> <a href=http://nimbus.c9w.net/wifi_dest.html?dest_url=https://fresh-casino-apk.ru/fresh-na-androjd/>https://fresh-casino-apk.ru/fresh-na-androjd/</a> <a href=https://nikelebron.net/page/440/?go=https://fresh-casino-apk.ru/fresh-na-androjd/>https://fresh-casino-apk.ru/fresh-na-androjd/</a> <a href=https://www.tbilisskoe-sp.ru/bitrix/rk.php?id=34&site_id=s1&event1=banner&event2=click&event3=2+/+4+B+&goto=https://fresh-casino-apk.ru/fresh-na-androjd/>https://fresh-casino-apk.ru/fresh-na-androjd/</a> <a href=http://ldol.sm.gov.ua/index.php/ru/8-novini/url.php?url=https://fresh-casino-apk.ru/fresh-na-androjd/>https://fresh-casino-apk.ru/fresh-na-androjd/</a> <a href=http://www.x-glamour.com/cgi-bin/at3/out.cgi?id=217&trade=https://fresh-casino-apk.ru/fresh-na-androjd/>https://fresh-casino-apk.ru/fresh-na-androjd/</a> <a href=http://www.taiwancanoe.com.tw/instpage.php?r=&w=100%&h=800&url=altagro22.ru%2Fbitrix%2Frk.php%3Fgoto%3Dhttps://fresh-casino-apk.ru/fresh-na-androjd/>https://fresh-casino-apk.ru/fresh-na-androjd/</a> <a href=http://www.claro-search.com/imageres.php?iu=https://fresh-casino-apk.ru/fresh-na-androjd/>https://fresh-casino-apk.ru/fresh-na-androjd/</a> <a href=https://track.flexlinkspro.com/a.ashx?foid=1071749.1001994&foc=2&fot=9999&fos=1&url=https://fresh-casino-apk.ru/fresh-na-androjd/>https://fresh-casino-apk.ru/fresh-na-androjd/</a> <a href=http://friendlyfinance.com.au.xx3.kz/go.php?url=https://fresh-casino-apk.ru/fresh-na-androjd/>https://fresh-casino-apk.ru/fresh-na-androjd/</a> <a href=http://missionlaserdentistry.com.xx3.kz/go.php?url=https://fresh-casino-apk.ru/fresh-na-androjd/>https://fresh-casino-apk.ru/fresh-na-androjd/</a>
Upload application online casino fresh – win now! <a href=http://slettenrealestategroup.com/_redirect?url=http%3A%2F%2Fgreasyfork.org/en/discussions/requests/173654-esp-for-browser-games>https://fresh-casino-apk.ru/fresh-na-androjd/</a> <a href=http://www.schmooz.de/redirect/?url=https://fresh-casino-apk.ru/fresh-na-androjd/>https://fresh-casino-apk.ru/fresh-na-androjd/</a> <a href=http://dr.ess.aleoklop.e.xx3.kz/go.php?url=https://fresh-casino-apk.ru/fresh-na-androjd/>https://fresh-casino-apk.ru/fresh-na-androjd/</a> <a href=https://price-widgets-origin.reevoocloud.com/widgets/offers/buy/991456203?locale=en&destination=greasyfork.org/en/discussions/requests/173654-esp-for-browser-games&partner=REEVOO_B2C_EN_GB>https://fresh-casino-apk.ru/fresh-na-androjd/</a> <a href=https://chelyabinsk.torens-auto.com/bitrix/redirect.php?goto=https://fresh-casino-apk.ru/fresh-na-androjd/>https://fresh-casino-apk.ru/fresh-na-androjd/</a> <a href=https://xn–b1acdc4asbar.online/bitrix/redirect.php?goto=https://fresh-casino-apk.ru/fresh-na-androjd/>https://fresh-casino-apk.ru/fresh-na-androjd/</a> <a href=https://maritim-touristik.schmetterling-select.de/offers.php?case=kreuzfahrten_offers&url=https://fresh-casino-apk.ru/fresh-na-androjd/>https://fresh-casino-apk.ru/fresh-na-androjd/</a> <a href=http://land.yingkelawyer.com/QuestionView.aspx?url=http%3A%2F%2Fgreasyfork.org/en/discussions/requests/173654-esp-for-browser-games>https://fresh-casino-apk.ru/fresh-na-androjd/</a> <a href=https://www.shop-kelet.kz/bitrix/redirect.php?goto=https://fresh-casino-apk.ru/fresh-na-androjd/>https://fresh-casino-apk.ru/fresh-na-androjd/</a> <a href=http://www.drbigboobs.com/cgi-bin/at3/out.cgi?id=25&trade=https://fresh-casino-apk.ru/fresh-na-androjd/>https://fresh-casino-apk.ru/fresh-na-androjd/</a> <a href=https://42.biqund.com/index/d1?diff=0&utm_clickid=q8gggswssk8swsgg&aurl=https%3A%2F%2Fgreasyfork.org/en/discussions/requests/173654-esp-for-browser-games&an=&s>https://fresh-casino-apk.ru/fresh-na-androjd/</a> <a href=http://pou-vrbovec.hr/?URL=https://fresh-casino-apk.ru/fresh-na-androjd/>https://fresh-casino-apk.ru/fresh-na-androjd/</a> <a href=http://www.dmacroweb.com/modulos/dmlocalizacion/compartir/compartir.asp?url=http%3A%2F%2Fgreasyfork.org/en/discussions/requests/173654-esp-for-browser-games&titulo=DMacroWeb.-%20Tiendas%20Virtuales,%20Extranet,%20Intranet,%20Paginas%20Web,%20Programacion>https://fresh-casino-apk.ru/fresh-na-androjd/</a> <a href=http://www.thorvinvear.com/chlg.php?lg=en&uri=http%3A%2F%2Fgreasyfork.org/en/discussions/requests/173654-esp-for-browser-games>https://fresh-casino-apk.ru/fresh-na-androjd/</a> <a href=https://images.google.bg/url?rct=j&sa=t&url=https://fresh-casino-apk.ru/fresh-na-androjd/>https://fresh-casino-apk.ru/fresh-na-androjd/</a>
#9141 GeorgeDowhttps://items4games.store/
<a href=https://items4games.store/>In-game items</a> Explore a Realm of Virtual Opportunities with Items4Games
At ItemsforGames, we deliver a active hub for gamers to buy or trade accounts, items, and features for top titles. If you are seeking to enhance your game resources or wanting to profit from your account, our site offers a easy, protected, and rewarding process.
Why Choose ItemsforGames? Comprehensive Game Collection: Explore a large array of titles, from intense games such as Battlefield and COD to captivating adventure games like ARK and Genshin Impact. We include it all, ensuring no enthusiast is overlooked.
Range of Options: Our offerings feature game account acquisitions, credits, unique collectibles, milestones, and mentoring services. Whether you need assistance gaining levels or unlocking premium bonuses, we are here to help.
Ease of Use: Navigate effortlessly through our well-organized marketplace, arranged in order to find precisely the game you need with ease.
Safe Exchanges: We prioritize your security. All exchanges on our site are handled with the utmost safeguarding to secure your personal and monetary information.
Standouts from Our Offerings – Survival and Adventure: Games ARK and DayZ allow you to dive into tough environments with premium items and accesses for sale. – Strategy and Exploration: Boost your performance in titles like Clash Royale and Age of Wonders 4 with credits and features. – eSports Gaming: For serious players, boost your technique with coaching and profile boosts for Valorant, DotA, and Legends.
A Marketplace Made for Players Supported by Apex Technologies, a reliable company registered in Kazakh Republic, Items4Play is a place where playtime dreams become real. From purchasing early access codes for the newest titles to locating rare virtual goods, our platform meets every gaming requirement with expertise and speed.
Join the group today and elevate your gaming play!
For questions or guidance, reach out to us at support@items4games.com. Together, let's game better, together!
#9142 Casinofreshhttps://fresh-casino-apk.ru/fresh-casino/
<a href=https://fresh-casino-apk.ru/fresh-casino/>http://fresh-casino-apk.ru/fresh-casino/</a>
Установить apk файл казино Фреш – выигрывай прямо сейчас! <a href=https://fresh-casino-apk.ru/fresh-casino/>www.fresh-casino-apk.ru/fresh-casino/</a>
#9143 Aluminium recycling managementhttp://nopm.cc/
Hi, my trusted pal. Your friendship means the world to me.
In an astounding coincidence, a website similar to your project in quality has been located <a href=http://scrap.run/>Ferrous recycling</a>
Bye for now, and may your life be a symphony of happiness
#9144 Danielquornhttps://permacultureglobal.org/users/74263-kara-robertson
“You get some of me but not tomorrow as they want me in as soon as I can make it happen. This is the one time when they say jump and I ask how high due the financial gains the company could benefit from and it being important enough for the client to appear in person.”
“Well I get an extra night of you at least! I wonder what we could do with that? Meantime, what about food? I am starving and delicious as it was a second breakfast is not quite enough to replenish me!”
“Well get something on and we’ll sort that out first.”
We drove into town and decided that a daytime visit to Charlie’s was going to be the answer. I parked in the bar lot and Elise dashed in to change into something more appropriate, jeans and a t-shirt along with her biker jacket but keeping her Converses on.
Walking down to the restaurant was different from the middle of the night visits as the streets were bustling and all of the shops and outlets were open.
Reaching Charlie’s we entered the front door and sat in a booth near the window. A beautiful young American Chinese girl came,smiled and said hello to Elise and gave us menus and asked if we wanted drinks in the meantime.
„No thanks Lin just a pot of Jasmine tea for us please.“ Lin went back to the kitchen area. “No booze for me today as I will have to work in the bar so it is just tea for me.”
Not in a drinking mood either, I agreed with her."
https://chyoa.com/…/bumshak1988 https://haveagood.holiday/users/357071 https://www.hentai-foundry.com/…1960/profile https://anotepad.com/notes/jckx73kp https://www.obesityhelp.com/…95/about_me/
#9145 Danielproow
generic amoxicillin cost http://prednisoneraypharm.com/ prednisone buy no prescription
#9146 Сервисный центр Xiaomihttps://service-xiaomi-zeph.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали официальный сервисный центр xiaomi, можете посмотреть на сайте: <a href=https://service-xiaomi-zeph.ru/>сервисный центр xiaomi в москве</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#9147 yilhmubcumhttp://prednisoneraypharm.com/
price of prednisone tablets <a href=" http://bbs.cheaa.com/home.php?… „>prednisone 40mg</a> or <a href=“ http://blackginger.jp/…display_cart?… ">prednisone 50 mg for sale</a> http://www.ndxa.net/…/wp-ktai.php?… prednisone 20mg nz <a href=https://www.google.vu/url?q=https://prednisoneraypharm.com>buy prednisone 20mg without a prescription best price</a> prednisone canada pharmacy and <a href=https://103.94.185.62/home.php?mod=space&uid=897899>prednisone price australia</a> compare prednisone prices
#9148 купить сейф для охотничьего ружьяhttps://sejfy-dlya-oruzhiya.ru/
Тут можно преобрести шкафы для оружия <a href=https://sejfy-dlya-oruzhiya.ru/>оружейный сейф для пистолета</a>
#9149 GeorgeDowhttps://items4games.store/
<a href=https://items4games.store/>items4games</a> Discover a World of Virtual Opportunities with Items4Players
At ItemsforGames, we offer a active platform for players to acquire or exchange accounts, goods, and features for widely played video games. Whether you are seeking to upgrade your gaming arsenal or wanting to profit from your profile, our service delivers a easy, protected, and profitable process.
Reasons to Select Items4Play? Comprehensive Game Library: Explore a vast selection of games, from thrilling games like Battlefield and Call of Duty to captivating role-playing games such as ARK and Genshin Impact. We cover all games, making sure no gamer is left behind.
Selection of Features: Our offerings include account purchases, in-game currency, rare goods, trophies, and mentoring services. If you are looking for assistance improving or unlocking premium bonuses, we have it all.
User-friendly: Browse without hassle through our systematized marketplace, organized by order to find exactly the item you want quickly.
Protected Transactions: We focus on your safety. All trades on our platform are processed with the highest security to secure your private and financial data.
Key Points from Our Collection – Survival and Survival: Games ARK: Survival Evolved and Day-Z let you enter tough settings with high-quality gear and accesses on offer. – Tactical and Adventure: Elevate your gameplay in adventures such as Royal Clash and Wonders Age with credits and options. – eSports Competitions: For serious fans, improve your skills with training and profile boosts for Valored, Dota 2, and LoL.
A Marketplace Designed for Players Backed by ApexTech Innovations, a reliable business registered in Kazakhstan, Items4Play is a place where gaming aspirations are realized. From purchasing advance passes for the newest titles to locating unique virtual goods, our marketplace meets every player’s requirement with expertise and reliability.
Sign up for the community today and upgrade your gaming play!
For support or guidance, reach out to us at support@items4games.com. Let’s enjoy gaming, as one!
#9150 CasinoSolhttps://sol-casino-apk.ru/sol-casino/
<a href=http://the4page.blogspot.com.eg/search?label=https://sol-casino-apk.ru/sol-casino/>https://sol-casino-apk.ru/sol-casino/</a> <a href=http://www.hidrauvit.com.br/link.asp?obanner=34&olink=https://sol-casino-apk.ru/sol-casino/>https://sol-casino-apk.ru/sol-casino/</a> <a href=https://www.google.to/url?sa=t&url=https://sol-casino-apk.ru/sol-casino/>https://sol-casino-apk.ru/sol-casino/</a> <a href=http://girlandgirl-sex.com/cgi-bin/out.cgi?click=clip48.jpg.9208&url=https://sol-casino-apk.ru/sol-casino/>https://sol-casino-apk.ru/sol-casino/</a> <a href=http://www.femdom-story.com/cgi-bin/top/out.cgi?id=milking8&url=https://sol-casino-apk.ru/sol-casino/>https://sol-casino-apk.ru/sol-casino/</a> <a href=http://keyware-s.com.xx3.kz/go.php?url=https://sol-casino-apk.ru/sol-casino/>https://sol-casino-apk.ru/sol-casino/</a> <a href=http://masculist.ru/go/url=https://sol-casino-apk.ru/sol-casino/>https://sol-casino-apk.ru/sol-casino/</a> <a href=http://machinelearningmastery.leadpages.co/forms/redirect/?url=https://sol-casino-apk.ru/sol-casino/>https://sol-casino-apk.ru/sol-casino/</a> <a href=http://icol.med.br/link.asp?obanner=5&olink=https://sol-casino-apk.ru/sol-casino/>https://sol-casino-apk.ru/sol-casino/</a> <a href=http://ocean-wood.com/bitrix/rk.php?goto=https://sol-casino-apk.ru/sol-casino/>https://sol-casino-apk.ru/sol-casino/</a> <a href=https://forum.physiobase.com/redirect-to/?redirect=https://sol-casino-apk.ru/sol-casino/>https://sol-casino-apk.ru/sol-casino/</a> <a href=http://reduction.cartenoire.fr/user/logout.aspx?returnurl=https://sol-casino-apk.ru/sol-casino/>https://sol-casino-apk.ru/sol-casino/</a> <a href=http://hub-shop.com.xx3.kz/go.php?url=https://sol-casino-apk.ru/sol-casino/>https://sol-casino-apk.ru/sol-casino/</a> <a href=https://pandora.nu/moro-girls/2candys/movie_sample/rl_out.cgi?id=110689&url=https://sol-casino-apk.ru/sol-casino/>https://sol-casino-apk.ru/sol-casino/</a> <a href=https://netmcmarine.co.uk/?URL=https://sol-casino-apk.ru/sol-casino/>https://sol-casino-apk.ru/sol-casino/</a>
Upload client casino sol – win right now!
<a href=http://www.rittech.com/redir.asp?url=https://sol-casino-apk.ru/sol-casino/>https://sol-casino-apk.ru/sol-casino/</a> <a href=http://makassar.tribunnews.com/tag/denny-ja/?url=https://sol-casino-apk.ru/sol-casino/>https://sol-casino-apk.ru/sol-casino/</a> <a href=https://blackpantera.ru/bitrix/redirect.php?event1=xaidi&event2=&event3=&goto=https://sol-casino-apk.ru/sol-casino/>https://sol-casino-apk.ru/sol-casino/</a> <a href=https://zetta.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=https://sol-casino-apk.ru/sol-casino/>https://sol-casino-apk.ru/sol-casino/</a> <a href=http://www.intellichat.com/demonstrate?url=https://sol-casino-apk.ru/sol-casino/>https://sol-casino-apk.ru/sol-casino/</a> <a href=https://usgreenpages.com/adserver/www/delivery/ck.php?ct=1&oaparams=2__bannerid=4__zoneid=1__cb=44ff14709d__oadest=https://sol-casino-apk.ru/sol-casino/>https://sol-casino-apk.ru/sol-casino/</a> <a href=http://www.fobelets.com/?url=https://sol-casino-apk.ru/sol-casino/>https://sol-casino-apk.ru/sol-casino/</a> <a href=http://www.redloft.de/url?q=https://sol-casino-apk.ru/sol-casino/>https://sol-casino-apk.ru/sol-casino/</a> <a href=https://maps.google.ee/url?sa=j&source=web&rct=j&url=https://sol-casino-apk.ru/sol-casino/>https://sol-casino-apk.ru/sol-casino/</a> <a href=http://archive.paulrucker.com/?URL=download-sol-casino-apk.ru/sol-casino/-fr.com >https://sol-casino-apk.ru/sol-casino/</a> <a href=https://39.gregorinius.com/index/d1?diff=0&source=og&campaign=5796&content=&clickid=6glaagrcny71ype6&aurl=http%3A%2F%2Fdownload-sol-casino-apk.ru/sol-casino/-fr.com >https://sol-casino-apk.ru/sol-casino/</a> <a href=https://dc2b.ru/bitrix/redirect.php?goto=https://sol-casino-apk.ru/sol-casino/>https://sol-casino-apk.ru/sol-casino/</a> <a href=http://wssupport.ru/bitrix/rk.php?goto=https://sol-casino-apk.ru/sol-casino/>https://sol-casino-apk.ru/sol-casino/</a> <a href=https://wellington.localnewspapers.today/jump.php?link=https://sol-casino-apk.ru/sol-casino/>https://sol-casino-apk.ru/sol-casino/</a> <a href=http://www.ratingfx.com/redirect.php?url=https://sol-casino-apk.ru/sol-casino/>https://sol-casino-apk.ru/sol-casino/</a>
#9151 купить сейф для оружияhttps://sejfy-dlya-oruzhiya.ru/
Тут можно преобрести оружейный шкаф <a href=https://sejfy-dlya-oruzhiya.ru/>купить сейф под ружье</a>
#9152 Danielquornhttp://www.nfomedia.com/profile?uid=rOjWYgC
“You get some of me but not tomorrow as they want me in as soon as I can make it happen. This is the one time when they say jump and I ask how high due the financial gains the company could benefit from and it being important enough for the client to appear in person.”
“Well I get an extra night of you at least! I wonder what we could do with that? Meantime, what about food? I am starving and delicious as it was a second breakfast is not quite enough to replenish me!”
“Well get something on and we’ll sort that out first.”
We drove into town and decided that a daytime visit to Charlie’s was going to be the answer. I parked in the bar lot and Elise dashed in to change into something more appropriate, jeans and a t-shirt along with her biker jacket but keeping her Converses on.
Walking down to the restaurant was different from the middle of the night visits as the streets were bustling and all of the shops and outlets were open.
Reaching Charlie’s we entered the front door and sat in a booth near the window. A beautiful young American Chinese girl came,smiled and said hello to Elise and gave us menus and asked if we wanted drinks in the meantime.
„No thanks Lin just a pot of Jasmine tea for us please.“ Lin went back to the kitchen area. “No booze for me today as I will have to work in the bar so it is just tea for me.”
Not in a drinking mood either, I agreed with her."
https://www.dnnsoftware.com/…erid/3198674 https://anotepad.com/notes/w8qe4gn3 https://www.obesityhelp.com/…73/about_me/ https://www.obesityhelp.com/…91/about_me/ https://www.haikudeck.com/…s/cuqf6tAXc0
#9153 Сервисный центр Xiaomihttps://service-xiaomi-zeph.ru/
Предлагаем услуги профессиональных инженеров офицальной мастерской. Еслли вы искали сервисный центр xiaomi в москве, можете посмотреть на сайте: <a href=https://service-xiaomi-zeph.ru/>официальный сервисный центр xiaomi</a> Наши мастера оперативно устранят неисправности вашего устройства в сервисе или с выездом на дом!
#9154 Stevenraxhttps://reactorcrack.com
Time i visit this informative site i am really inspire.
I want to share interesting resources: <a href=https://crackingnow.com/crack?i=86022&s=allplan>AllPlan 2019 Crack + Serial Key Updated</a> <a href=https://crackingnow.com/crack?i=112361&s=smallpdf>Smallpdf 2.8.2 Serial Key Full Version</a> <a href=https://crack4exe.com/crack?s=DraftSight&id=85942>DraftSight 2023 SP0 Crack + Activator Download 2022</a> <a href=https://downloadfreecracks.com/crack?s=sofeh-music-studio&id=32736>Sofeh Music Studio 10.0.0 Crack + Keygen Download</a> <a href=https://downloadfreecracks.com/crack?s=free-youtube-to-mp3-converter&id=45864>Free YouTube to MP3 Converter 4.4.11 Build 905 Keygen Full Version</a> <a href=https://downloadfreecracks.com/crack?s=free-youtube-to-mp3-converter&id=45864>Free YouTube to MP3 Converter 4.4.11 Build 905 Crack + License Key Download</a> <a href=https://ntcrack.com/cracked/puffin-browser/14351>Puffin Browser 10.1.1.609 Activation Code Full Version</a> <a href=https://flakegames.com/game/6026/pong-quest>Download PONG Quest Crack With Activation Code Latest</a> <a href=https://mygdz.net>ГДЗ – готовые домашние задания и решебники</a> <a href=https://newspuncher.com/health/kogda-pora-brosat-pit>Когда пора бросать пить алкоголь?</a>
Thank you
#9155 Danielproow
medicine amoxicillin 500mg http://clomidrexpharm.com/ clomid price
#9156 Dennisdares
mexico pharmacies prescription drugs <a href=" http://bocauvietnam.com/member.php?… „>buying prescription drugs in mexico</a> or <a href=“ https://maps.google.co.ug/url?… ">buying prescription drugs in mexico online</a> https://clients1.google.kg/url?… buying prescription drugs in mexico online <a href=http://www.iidajc.org/mt/mt4i.cgi?id=5&mode=redirect&no=8&ref_eid=4&url=https://mexicanpharmgate.com>medicine in mexico pharmacies</a> mexican drugstore online and <a href=https://www.support-groups.org/memberlist.php?mode=viewprofile&u=278316>best online pharmacies in mexico</a> pharmacies in mexico that ship to usa
#9157 Metal scrap processing efficiency
Whaddup, homeslice? I'm jazzed to swap stories with you.
Even though I'm not an expert, this theme appears to be quite intriguing <a href=http://cuprum.top/>Copper scrap payment terms</a>
Goodbye and good luck
#9158 Xazryaahttp://[url=http://diplomrushkan.ru/]diplomrushkan.ru[/url]
<a href=http://diplomrushkan.ru/>Полезная информация как купить диплом о высшем образовании без рисков</a>
#9159 сейфы купитьhttps://new-sejfy.ru/
Здесь можно преобрести где купить сейфы в москве <a href=https://new-sejfy.ru/>сейфы купить в москве</a>
#9160 Jeffreyfoorshttps://ibcatx.com
<a href=https://ibcatx.com>Location: Austin Texas</a>
#9161 Williambaxhttps://medium.com/@borealuonexus/pg-slot-terpercaya-24e56333771d
Judul: Merasakan Pengalaman Bermain dengan „PG Slot“ di Situs Casino ImgToon.com
Dalam alam permainan kasino online, mesin slot telah jadi salah satu permainan yang paling diminati, terutama jenis PG Slot. Di antara banyak situs kasino online, ImgToon.com menjadi tujuan terbesar bagi peserta yang ingin mencoba peruntungan mereka di berbagai permainan slot, termasuk beberapa kategori populer seperti demo pg slot, pg slot gacor, dan RTP slot.
Demo PG Slot: Mencoba Tanpa Risiko Salah satu fungsi menarik yang diberikan oleh ImgToon.com adalah demo pg slot. Fitur ini memungkinkan pemain untuk mencoba berbagai jenis slot dari PG tanpa harus memasang taruhan uang asli. Dalam mode demo ini, Anda dapat menguji berbagai strategi dan mengerti mekanisme permainan tanpa bahaya kehilangan uang. Ini adalah metode terbaik bagi pemula untuk beradaptasi dengan permainan slot sebelum mengalihkan ke mode taruhan sebenarnya.
Mode demo ini juga memberi Anda pandangan tentang potensi kemenangan dan bonus yang mungkin bisa Anda peroleh saat bermain dengan uang asli. Pemain dapat menyusuri permainan tanpa khawatir, membuat pengalaman bermain di PG Slot semakin menyenangkan dan bebas beban.
PG Slot Gacor: Peluang Besar Mendapatkan Kemenangan PG Slot Gacor adalah sebutan terkemuka di kalangan pemain slot yang mengacu pada slot yang sedang dalam fase memberikan kemenangan tinggi atau lebih sering diistilahkan „gacor“. Di ImgToon.com, Anda dapat menemukan berbagai slot yang termasuk dalam kategori gacor ini. Slot ini diakui memiliki peluang kemenangan lebih tinggi dan sering menghadiahkan bonus besar, menjadikannya pilihan utama bagi para pemain yang ingin memperoleh keuntungan maksimal.
Namun, perlu diingat bahwa „gacor“ atau tidaknya sebuah slot dapat bergeser, karena permainan slot bergantung generator nomor acak (RNG). Dengan memainkan secara rutin di ImgToon.com, Anda bisa mengenali pola atau waktu yang tepat untuk memainkan PG Slot Gacor dan menambah peluang Anda untuk menang.
RTP Slot: Faktor Esensial dalam Pencarian Slot Ketika mendiskusikan tentang slot, istilah RTP (Return to Player) adalah faktor yang sangat krusial untuk diperhatikan. RTP Slot merujuk pada persentase dari total taruhan yang akan dikirimkan kepada pemain dalam jangka panjang. Di ImgToon.com, setiap permainan PG Slot diberi dengan informasi RTP yang jelas. Semakin tinggi persentase RTP, semakin besar peluang pemain untuk mendulang kembali sebagian besar dari taruhan mereka.
Dengan memilih PG Slot yang memiliki RTP tinggi, pemain dapat mengoptimalkan pengeluaran mereka dan memiliki peluang yang lebih baik untuk menang dalam jangka panjang. Ini menjadikan RTP sebagai indikator utama bagi pemain yang mencari keuntungan dalam permainan kasino online.
#9162 Roberthethttps://medium.com/@borealuonexus/pg-slot-gacor-terpercaya-f7b364fa9cf5
Judul: Mengalami Pengalaman Memainkan dengan „PG Slot“ di Situs Casino ImgToon.com
Dalam alam permainan kasino online, slot telah menjadi salah satu permainan yang paling diminati, terutama jenis PG Slot. Di antara banyak situs kasino online, ImgToon.com merupakan tujuan utama bagi pengguna yang ingin mencoba nasib mereka di banyak permainan slot, termasuk beberapa kategori populer seperti demo pg slot, pg slot gacor, dan RTP slot.
Demo PG Slot: Memulai Bebas dari Risiko Salah satu fungsi menarik yang diberikan oleh ImgToon.com adalah demo pg slot. Keistimewaan ini memungkinkan pemain untuk memainkan berbagai jenis slot dari PG tanpa harus menempatkan taruhan nyata. Dalam mode demo ini, Anda dapat menguji berbagai cara dan mengerti proses permainan tanpa ancaman kehilangan uang. Ini adalah metode terbaik bagi pemain baru untuk terbiasa dengan permainan slot sebelum mengalihkan ke mode taruhan nyata.
Mode demo ini juga menyediakan Anda pemahaman tentang potensi kemenangan dan bonus yang mungkin bisa Anda dapatkan saat bermain dengan uang nyata. Pemain dapat menyusuri permainan tanpa cemas, membuat pengalaman bermain di PG Slot semakin membahagiakan dan bebas tekanan.
PG Slot Gacor: Kesempatan Besar Mencapai Kemenangan PG Slot Gacor adalah sebutan terkenal di kalangan pemain slot yang mengacu pada slot yang sedang dalam fase memberikan kemenangan tinggi atau lebih sering diistilahkan „gacor“. Di ImgToon.com, Anda dapat mendapatkan berbagai slot yang masuk dalam kategori gacor ini. Slot ini dikenal memiliki peluang kemenangan lebih tinggi dan sering menghadiahkan bonus besar, menjadikannya pilihan utama bagi para pemain yang ingin memperoleh keuntungan maksimal.
Namun, perlu diingat bahwa „gacor“ atau tidaknya sebuah slot dapat bergeser, karena permainan slot tergantung pada generator nomor acak (RNG). Dengan melakukan permainan secara rutin di ImgToon.com, Anda bisa mengidentifikasi pola atau waktu yang tepat untuk memainkan PG Slot Gacor dan menambah peluang Anda untuk menang.
RTP Slot: Faktor Penting dalam Pencarian Slot Ketika mendiskusikan tentang slot, istilah RTP (Return to Player) adalah faktor yang sangat penting untuk diperhatikan. RTP Slot merujuk pada persentase dari total taruhan yang akan dipulangkan kepada pemain dalam jangka panjang. Di ImgToon.com, setiap permainan PG Slot disertai dengan informasi RTP yang terperinci. Semakin tinggi persentase RTP, semakin besar peluang pemain untuk mendapatkan kembali sebagian besar dari taruhan mereka.
Dengan memilih PG Slot yang memiliki RTP tinggi, pemain dapat mengoptimalkan pengeluaran mereka dan memiliki peluang yang lebih baik untuk menang dalam jangka panjang. Ini menjadikan RTP sebagai indikator penting bagi pemain yang mencari keuntungan dalam permainan kasino online.
#9163 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало на сегодня
Промообъявления от казино не дают реальной картины и ориентированы на привлечение внимания пользователей. Понять, как высоки шансы остаться в плюсе, дозволит личный тест критерий предложения: <a href=http://filmkachat.ru/>1×slots сайт</a> <a href=https://www.reikiandastrologypredictions.com/member.php?action=profile&uid=21114>https://www.reikiandastrologypredictions.com/member.php?action=profile&uid=21114</a> Бездепозитные призы в казино без пополнения 2022 — это конкретная сумма денег или valinomycin spins вращения, коие предоставляются первым гостям за регистрацию на сайте казино вид бездепозитного приза, и дает вас вероятность за счет казино без пополнения опробовать предложения (игр), с дальнейшей прерогативой вывода средств при исполнении всех установленных верховодил.Бонусные средства – небольшая сумма денег для старта в новом казино. На бонусные средства, обычно разрешается играть во все забавы, считая слотов с прогрессивным джекпотом и игр из раздела exist casino. 1хслотс мобильная версия зеркало <a href=http://www.uilfplnovara.it/modules.php?name=Journal&file=display&jid=30928>http://www.uilfplnovara.it/modules.php?name=Journal&file=display&jid=30928</a> Новички не любят незамедлительно же вносить депозит. Это обосновано отсутствием опыта и недоверием. К счастью, в можно получить бездепозитный бонус за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В всяком случае вы не рискуете своими сбережениями. Это замечательная возможность запустить приглянувшийся видео разъем или же испытывать фортуну в настольных играх.Большинство клубов завлекают внимание игры за счёт разнородных презентов. На одних сайтах возможно получить виртуальные кредиты, коие откроют доступ ко всему софту. На иных же, администрация предлагает безвозмездные вращения для запуска топовых онлайн слотов. Несмотря на различные акции, стоит выделить самые основные.
1×слотс казино
Подтверждение индивидуальной информации. Все казино требуют от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у пользователя иных аккаунтов (мультиаккаунт запрещен).Можно ли в одном интернет казино получить больше одного бонуса за регистрацию? Нет, так как в любом интернет казино есть управляла, к коим нужно придерживаться, не создавать 2 аккаута для получения бонусов, другому несомненно блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, бонус за регистрацию выдаеться один раз одному лицу. скачать 1×slots официальный сайт <a href=http://shalomsilver.kr/bbs/board.php?bo_table=free&wr_id=338715>http://shalomsilver.kr/bbs/board.php?bo_table=free&wr_id=338715</a> Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную процедуру активации бонуса без депо. Внимательно прочитайте до конца. Многие новички делают ошибки на этапе регистрации и потому имеют получить презент.Объективные – размер приза, коэффициент и обстоятельства вейджера, надобность внесения депо для вывода денег; казино 1×slots Во всех законных онлайн-казино Беларуси нужно подтверждение паспортных данных для игры — это заявка правительства государства.
1×slots casino online регистрация
Следует подчеркнуть, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом.Объективные – объем бонуса, коэффициент и обстоятельства вейджера, необходимость внесения депо для вывода средств; <a href=http://klotzlube.ru/forum/user/272476/>http://klotzlube.ru/forum/user/272476/</a> Такой казино приз без депозита за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это словно какая-то конспирация поощрения под бездепозитный. Суть всего сего сводится к тому, собственно игроку на час выдается, например, 1000 $, а реклама утверждает то, что каждой выигрыш можно будет в будущем оставить при себя. Но случае играющий серьезно отнесется к данному предложению, то он просто растеряет время. Ведь геймеру нужно несомненно играть не главном аккаунте, а тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (в всей тыс. ) в управляла вступят конкретные условия, где несомненно сказано, собственно наибольшей суммой победы возможность быть лишь двести долларов и средства возможно применять только в качестве приза на 1-ый вклад с вейджером 25 от суммы вознаграждения плюс сам депо. По итогу получится, что игрок выигрывал себя 200% приз с вейджером на конкретную необходимую. Короче говоря, это все надо вашего времени. 1хслотс зеркало Бездепозитный бонус за регистрацию в казино — это стартовый подарок вид денежного начисления или безвозмездных вращений для свежих игроков заведения, для получения которого не вносить депозит.Если вы выбрали для себя несколько брендов коие для больше всего приглянулись, для неизменной забавы! Таких гемблеров казино довольно любит и ценит, за частую такие игроки становятся VIP игроками заведения, коим часто поступают выгодные предложения вид бонусов, так же туда заходит и бездепозитные.
1× slots регистрация в 1×slots casino
Самый распространённый из похожих призов, конечно же, бездеп на денек рождения клиента — приз повторяющий фиксированной суммы или фриспинов поступает на счёт игрока, а воспользоваться им возможно протяжении установленного периода времени. Мы собрали и выпустили список превосходнейших бездепозитных казино с бонусами за регистрацию, коие гарантируют щедрые выигрыши и мгновенные выплаты. 1×slots на любой вкус как пройти регистрацию <a href=https://seniordance.ru/forum/member.php/38538-Craigtarry>https://seniordance.ru/forum/member.php/38538-Craigtarry</a> Некоторые клубы автоматически начисляют бонус на акк игрока после исполнения критерий получения, хотя случаются ситуации, когда приз надо(надобно) активировать игроку самому. Есть несколько методов активации приза:
1×slots сайт зеркало
Также бездепозитные призы имеют служить методом возвращать к забаве клиентов, временно приостановивших своё сотрудничество с компанией: извещение о бездепе поступает на мобильный телефон либо почту. <a href=https://www.yuliancaishang.com/space-uid-300611.html>https://www.yuliancaishang.com/space-uid-300611.html</a> Активация по промокоду используется в различных видах бездепов. Если идет о приветственном призе, то набор символов возможно разузнать на главной странице, в регистрационной форме либо письме, которое отправляется пользователю для доказательства адреса электронной почты. Акции могут проводиться вместе с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активируется одноразовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном кабинете либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем важный код для активации в описании каждого рекламную. 1×slots официальный сайт мобильная версия скачать Вышеописанная причина и является основным интересным, из-за которого операторы отдают часть своей выгоды на различные маркетинговые затраты и маркетинговые кампании. А самым действующим тут будут выступать именно бездепозитные бонусы казино 2022 с выводом за регистрацию.Вывод выигрыша с бездепозитных бонусов казино – щедрый подарок от азартных клубов. Но чтобы исключить собственный доход, нужно выполнить ряд критерий:
<b>Смотреть еще похожие новости:</b>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=150369>1×slots сайт</a>
<a href=http://palais.beesims.com/phpbb/memberlist.php?mode=viewprofile&u=3390>1×slots зеркало сайта</a>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=325232&pid=649094#post_649094>1 xslots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Существуют казино с призом за регистрацию, в очень востребованы фриспины в интернет казино впоследствии регистрации в определенных забавах. Они встречаются даже чаще даровых поощрений или классических призов в казино без вложений. Например, игрок регистрирует счет, на который начисляются безвозмездные игры, бонус за регистрацию повторяющий бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса компьютерные выигрывает истинные средства, которые в последствии можно успешно вывести из заведения на собственную платежную систему. То есть, все шансы вывести свои без рисков собственными финансами. Регистрация, какую игрок получит бонусы, займет пару минут, а благодаря данному можно увеличить 5 евро поощрений до тыс. И без всяких заморочек исключить их.
#9164 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало сайта
Большинство клубов привлекают внимание компьютерные за счёт разнородных даров. На одних веб-сайтах можно получить виртуальные кредиты, коие откроют доступ ко всему софту. На иных же, администрация предлагает бесплатные вращения для пуска лучших интернет слотов. Несмотря на различные промоакции, стоит выделить самые главные. <a href=http://filmkachat.ru/>1×slots сайт</a> Не стоит путать игру в демо и использование призов. В демонстрационном режиме игрок может расценить механику слота, сюжет и оформление. Но забава проводится на условные кредиты, поэтому отсутствует главное ? ощущение азарта. Активируя промокод или фриспины, заказчик как не расходует средства деньги на игровые автоматы, но возможность сорвать настоящий куш! <a href=http://z914169g.bget.ru/user/DavidStalo/>http://z914169g.bget.ru/user/DavidStalo/</a> 1х слот 1хслотс регистрация перейти на 1×slots <a href=http://metabolichealthdigest.com/user/patrickfef/?um_action=edit>http://metabolichealthdigest.com/user/patrickfef/?um_action=edit</a> К раскаянью, нет. Почти все казино, настоятельно внесение хотя бы одного малого депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, что вывести средства разрешается лишь на ту платежную систему, с которой был сделан депо.Минимального оборота. Этот лимит уточняется вейджером — же игрок не сыграет на установленную сумму, вывод средств будет недоступен.
1 x slots casino
Даже не выиграв солидную необходимую, игрок увлекательно проведет время, изнутри изучит работу площадки, воспримет геймплей автоматов. Все это без каких-либо денежных рисков. Быть в курсе превосходнейших промоакций с. Достаточно периодически изучать список новых онлайн казино с выводом приза без депозита в этом разделе.Бонус за регистрацию в казино выдается только один раз на 1-го игрока. Но случаются вспомогательные промоакции, в которых бездепы раздаются для неизменных посетителей и такие презенты Вы сможете получить больше 1-го раза. <a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=36332>1хслот скачать</a> 1×slot казино зеркало <a href=http://h96375tu.bget.ru/member.php?action=profile&uid=129058>http://h96375tu.bget.ru/member.php?action=profile&uid=129058</a> 1×slots casino регистрация 1×slotscasin online На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не можете активировать и получить бездепозитный бонус.При пользовании бездепозитным призом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют несколько обликов лимитов:
1×slots casino регистрация 1×slots review live
Срок активации и время на отыгрыш. Зачисление средств или фриспинов случается при активации протяжении требовательно ограниченного периода, схожие притязания предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать бонус некоторое дней или в недель. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с необоснованно высоким вейджером. <a href=http://m.en.marhenj.com/front/php/login/login_f.php?returnUrl=http://londonme.ru/go?http://im-arsunya.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/BrglNB150q5>http://m.en.marhenj.com/front/php/login/login_f.php?returnUrl=http://londonme.ru/go?http://im-arsunya.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/BrglNB150q5</a> 1×slots casino регистрация 1×slotscasino09k online
1хслот 1хслотс регистрация перейти на 1×slots
Для вывода средств бонус нужно несомненно отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариантами отыгрыша бездепозитного бонуса до его получения, чтобы избежать конфликтных ситуаций.Маркетинговая политического всех игорных интернет-клубов должна носить разнородный нрав. И случае вознаграждения на депо работают для того, чтобы стимулировать заносить депозиты и поощрять уже существующих пользователей, то бездепозитный бонус в казино либо бонус за регистрацию в казино, этого всего, рассчитан на расширение базы покупателей. Риск-игра по одинаковым шансам – Также казино возможность запрещать скорпулезно обстоятельства по отыгрышу за раунда на удвоение, который предлагается в слотах, видео-покере и некоторых иных играх. Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых новых, щедрых и проверенных бонусах в интернет казино, коие обновляются любой день. 1хслот скачать <a href=http://nfb3806w.bget.ru/user/DavidErozy/>http://nfb3806w.bget.ru/user/DavidErozy/</a>
1×slots официальный зеркало рабочее
Бездепозитный приз за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых новых, великодушных и испытанных призах в интернет казино, которые обновляются каждый день.Это также безвозмездные финансы, которые поступают на аккаунты свежеиспеченных компьютерные последствии регистрирования. А особенность таких призов состоит сомнений, что обретенные финансы обязательно по использовать в продолжении назначенного медли. Игры, в которых возможно выступать на бонусные средства. Проверьте список игр, в которых можно играть на бонусные свои, вероятно они Вам не понравятся и надо расходовать своё время на такую промоакцию. <a href=http://xn–jc-je2if91fs6b.com/bbs/board.php?bo_table=free&wr_id=5749>http://xn–jc-je2if91fs6b.com/bbs/board.php?bo_table=free&wr_id=5749</a> Бездепозитный приз казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в данном и содержится главное различие. 1×slots регистрация то дальше необходимо пройти Постарайтесь отыграть вейджер, чтобы была вероятность оставить заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные приборы. Вы можете получить выигрыш на электрической кошелёк, карту, телефонный.
<b>Смотреть еще похожие новости:</b>
<a href=https://persiankittencat.com/grey-persian-cats-unraveling-the-charm-of-these-feline-beauties/#comment-39000>1×slots казино мобильная версия</a>
<a href=http://weeklywars.de/memberlist.php?mode=viewprofile&u=860>1хслотс регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Объективные – объем бонуса, коэффициент и условия вейджера, необходимость внесения депозита для вывода средств; Любой выигрыш по ставке повыше установленного лимита несомненно считаться недействительным. То есть ставка не будет засчитана при отыгрыше, ну случае выигрыша его сумма не поступит на счёт посетителя — итог забавы будет всецело аннулирован.
#9165 Charlesgunnyhttp://filmkachat.ru
x1 slots 1хслотс регистрация перейти на 1×slots
Бездепозитный бонус казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби избранного заведения, определится в выборе игр и проверить качество работы службы поддержки. Довольно часто, начиная игровой процесс, игрок уже отказывается останавливаться и проделывает реальный лепта. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть даром вероятно как один таки с бонусом за регистрацию без надобности вносить депо.Поспешите зарегистрироваться на официальном веб-сайте Клубника, дабы быстро получить 33 безвозмездных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, замечена настоящий шанс победу! <a href=http://filmkachat.ru/>1×slots зеркало</a> Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных ситуаций с казино, когда в отыгрыша бездепа вам не дадут исключить солидную сумму выигрыша. <a href=https://cromia.ua/forum/user/9297/>https://cromia.ua/forum/user/9297/</a> Такой бесплатный эквивалент средств зачисляется на профиль юзера последствии воплощения притязаний и предназначаются они только для игрового процесса. Вывод таких вознаграждений возможен только после осуществления вейджеровых условий. 1 x slots <a href=http://megatv.kiev.ua/user/Chrisevedy/>http://megatv.kiev.ua/user/Chrisevedy/</a>
казино 1×slots
Заработать на бездепозитных бонусах за регистрацию в казино возможность любой пользователь, достигший совершеннолетия.Также учтите, что кое-какие игровые платформы сузивают перечень государств, коие способны получить предложенный бездепозитный приз за регистрацию. К примеру, есть онлайн-заведения, выдающие сходственные бонусы лишь жителям определенных стран. К примеру, онлайн казино 777 Оригинал предоставляет бездепозитный приз только игрокам из России и государств СНГ. Или наоборот, снабжают вознаграждением всех, не жителей неких стран (как сего, идет внимательно изучать список, чтобы потом не появилось никаких вопросов и претензий). 1×slots casino регистрация 1×slots review live Обычно, бездепозитные призы выдаются под конкретные слоты с фиксированной ставкой, хотя их наверняка запрещено использовать в игровых автоматах с прогрессивным джекпотом. Список игр, каких можно применять бездеп, Вы отыщите в описании акции или сможете уточнить у саппорта заведения.Принципиальным отличием бесплатных призов от бонусов на депозит является неимение необходимости вносить средства на акк. Из-за этого их нередко называют бездепозитными (not the slightest deposit bonuses). <a href=http://gkwin.net/bbs/board.php?bo_table=free&wr_id=262532>http://gkwin.net/bbs/board.php?bo_table=free&wr_id=262532</a> Некоторые казино все предлагать посетителям бездепы за свидетельство номера или почты либо репост на страницу в социальных сетях. 1хслотс казино зеркало В перечне притязаний к отыгрышу нередко наличествуют лимиты на ставки при этой на собственные деньги. Так, если отыграть нужно 30 000 рублей, а предельная сумма ограничена 30 рублями, то вертеть барабаны светит 1000 один. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам действия промоакции.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Чаще всего интернет-казино предлагают бездепозитные призы новым пользователям. Эта промо-акция довольно отлично привлекает начинающих, подталкивая их к открытию счета. Конечно, не все они становятся преданными посетителями, хотя сам факт регистрации аккаунта играет на руку заведению. <a href=https://bbs.heyshell.com/forum.php?mod=viewthread&tid=19875>https://bbs.heyshell.com/forum.php?mod=viewthread&tid=19875</a> казино 1×slots официальный сайт Подтверждение персональной информации. Все казино требуют от клиента пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и наличие у юзера иных аккаунтов (мультиаккаунт запрещен).Бонус без депо за регистрацию в казино (бездепозитный приз) – это валютный подарок от клуба, кот-ый начисляется на аккаунт игрока последствии регистрации в казино. Кроме создания учетной записи, для получения бездепа, очень часто потребуется ещё и доказать контактные данные игрока и/или активировать специальный промо-код.
1×slots официальный зеркало
Вышеописанная первопричина и является главным интересным, из-за которого операторы отдают часть своей выгоды на различные рекламные расходы и рекламные кампании. А наиболее действующим здесь будут играть непосредственно бездепозитные призы казино 2022 с выводом за регистрацию.Некоторые сайты, этого чем обмануть регистрацию игроков, предлагают ответить на некоторое базисных вопросов. Цель проведения похожей викторины – выявить случайных людей, коие не имеют представления о покере, и не разрешить получения ими бонусов. Если гость уже играл в казино, то ответить на полтора десятка несложных вопросов будет несложно. Очень нередко, ответы можно отыскать на официальных веб-сайтах этих учреждений. <a href=http://theauction.com.au/author/jamesflake/>1×slots зеркало регистрация</a> Как лишь на виртуальном счету окажутся бонусные свои, поторопитесь отыграть вейджер. Сразу после сего можно оставить заявку на вывод выигрыша. Кредиты прибыльно отличаются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом настоящих средств и выделяют вероятность почувствовать азарт. Во-вторых – возможно насладиться каждой азартной забавой доступной на сайте. В вашем постановлении находятся автоматы, настольные прибавленье, видео-покер, Live-дилеры.Онлайн-казино с бездепозитными призами ставят посетителям обстоятельства для пользования бездепами, потому перед участием в промоакции другого тщательно ознакомиться со всеми правилами и нюансами акции. Условия все прикасаться получения приза, его использования и последующего вывода денежных средств в случае выигрыша. 1×slots casino регистрация 1×slots review live <a href=http://vn-info.net/user/CharlesSox/>http://vn-info.net/user/CharlesSox/</a>
1хслотс регистрация в 1×slots casino
При исполнении критерий отыгрыша и верификации, деньги с бонусного счета переводятся на ведущей и имеют быть выведены на карту либо электрический кошелек. Лимиты на вывод и сроки проведения транзакции находятся от выбранной платежной системы.Как верховодило, при выводе финансов, от играющего потребуется лишь устроить наименьший лепта чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом индивидуальный счет. На бонусные начисления имеют быть установлены дополнительные лимитирования, коие Вы не сведению при отыгрыше. Пока приз полностью не отыгран — средства из казино не выводятся.У любого игорного заведения свои верховодила и условия. Но, чтобы получить призы, нужно выполнить стандартные действия: <a href=http://www.alivelinks.org/%D0%A4%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B-%D0%B0%D0%B7%D1%81_446385.html>http://www.alivelinks.org/%D0%A4%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B-%D0%B0%D0%B7%D1%81_446385.html</a> Особую изюминку видео слотам присваивают оригинальные символы. С их появлением активируются разные призы. Вы сможете запустить дополнительный степень и прирастить сумму выигрыша. Есть знаки, коие замещают ненужные элементы и сами создают выигрышные комбо. Не стоит забывать и про бонус-тур. После каждого удачного спина есть шанс увеличить необходимую выигрыша в два либо хорошо раза. зеркло казино 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=283716>1×slots официальный зеркало рабочее</a>
<a href=https://www.fromrus.su/index.php?/topic/23928-casino-1×slot/>casino 1×slot</a>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-4997/#comment-597936>онлайн казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На нашем сайте Вы найдете перечень своевременных новых бездепозитных бонусов в казино 2022 года. Также, есть много эксклюзивных услуг, которые доступны лишь гостям нашего сайта в регистрации по нашей ссылке либо активации специального промокода.
#9166 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на 1хслотс
Активация происходит с помощью промокодов, которые вводятся в собственном офисе последствии регистрации. Среди спецпредложений в перечне Casino.ru содержатся неповторимые промокоды, которые доступны только гостям портала. Другие методы начисления средств ? автоматическая активация незамедлительно после творения аккаунта и получение подарка по запросу в службу технической поддержки. <a href=http://filmkachat.ru/>1×slots зеркало проходить регистрацию это отличный вариант</a> Подтвердите лицо, предоставив оператору казино средства паспортные данные. Инструкции обыкновенно несложные, главное — четко им идти. Если написано, что «на фото обязаны быть заметны все четыре угла странички паспорта» — сделайте непосредственно такое фото. <a href=https://reddit-directory.com/Shisha-tobacco-from-4-eur_631507.html>https://reddit-directory.com/Shisha-tobacco-from-4-eur_631507.html</a> Для получения предоставленных бонусов вас понадобиться — ПК или мобильное прибор, и остальное дело за малым.Бездепозитные бонусы реальными средствами, коие можно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадали. 1×слот регистрация в 1×slots casino <a href=https://podacha-blud.com/user/Jeffreyquell/>https://podacha-blud.com/user/Jeffreyquell/</a>
сайт 1× slots casino
У нас на сайте Вы найдете перечень бонусов без депо в испытанных казино и доскональную информацию о том как их получить и применять. <a href=https://bajarmp3.net/showthread.php?tid=424597>1×slots зеркало проходить регистрацию это отличный вариант</a> 1× slots официальный Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, чтобы была вероятность вывести выигрыш. <a href=http://fumankong3.cc/home.php?mod=space&uid=582258>http://fumankong3.cc/home.php?mod=space&uid=582258</a> 1×slots бонус за регистрацию
1х слот регистрация в 1×slots casino
Главным интересным в появлении этих вознаграждений состоит что, что пустив их в ход, компьютерные ничем не рискует и в последствии никому ничего не несомненно должен (не зависимо, получит ли он благодаря бонусам какой-нибудь выигрыш или моментально спустит все лишь собственно прибывшие финансы). То есть, казино снабжает игрока возможностью на дармовой основе выступать во всевозможные слоты и даже спонсирует игру. В перечне притязаний к отыгрышу нередко присутствуют лимиты на ставки при ирге на личные деньги. Так, если отыграть нужно 30 000 руб., а максимальная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам действия промоакции.При исполненьи критерий отыгрыша и верификации, деньги с бонусного счета переводятся на главный и имеют быть выведены на карту либо электронный кошелек. Лимиты на вывод и сроки проведения транзакции зависят от выбранной платежной системы. <a href=http://saju.codeway.kr/index.php?title=Выкуп_авто>http://saju.codeway.kr/index.php?title=Выкуп_авто</a> 1×slots регистрация 1×slots review live
скачать 1×slots на андроид мобильная версия
Если вы новичок данном и только попали в неизведанную вами район пыла — с помощью услуг как бездепозитные призы без пополнения.Стоит обозначить(означить), что бездепозитный приз выдается лишь взрослым новеньким, коие, в свою очередь, все пригласить собственных друзей и людей, того рассчитывающих на поощрительную программку преданности. Подобная технология замечена между конкурирующих онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры содействуют повышению собственной посещаемости, путем вербования свежих игроков. Бонусы – это уникальный шанс для вероятных соучастников забавы, которые шансы опробовать софт покер рума и убедиться, будут ли они в него играть либо нет. Новый игрок попробует средства силы с настоящими оппонентами в казино. Автоматы неспроста числятся самым знаменитым азартным развлечением. Чтобы освоить управление и управляла, потребуется всего количество минут. Ваша задачка сделать ставку, определить число трудящихся линий и возможно крутить тамбур. Если дисплее выпадет выигрышная комбинация – вы выиграли! С этой задачей вам помогут управится бездепозитные бонусы казино. 1×slots зеркало выигрыши обязательно пройдите регистрацию если <a href=https://rekordmeister.ru/user/Ralphjes/>https://rekordmeister.ru/user/Ralphjes/</a>
1хслот официальный сайт зеркало
Для такого, дабы отыграть сумму вашего бездепозитного приза нужно выполнить условия вейджера. Очень часто фриспины даются на конкретные слоты (book of ra, book of deceased, book of sun), выбирайте разъем для по душе, они довольно красочные и высококачественные. Бездепозитные приз может быть валютным так и в виде фриспинов на слотыМы советуем не открещиваться от сходственных предложений известных казино. Выделите несколько минут на регистрацию, получите приз и попытайтесь его отыграть. Может быть, сейчас удача несомненно на вашей стороне! Для получения бонуса надо(надобно) пригласить в забаву свежего клиента. Казино начисляет пригласившему фиксированный процент от взносов приглашённого вид приза: чаще всего его размер не выше 10%. Срок действия приза в большинстве случаев не выше месяца: пригласивший получает бонус от проигранных ставок приглашённого в 1-ый месяц игры.Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются незамедлительно в сотворения профиля и активны недолговременное время. Если не успеете израсходовать средства, они попросту сгорят. Касаемо медли, как призы активны протяжении часа. <a href=http://mobilka.mobi/index.php?subaction=userinfo&user=dapperfever44>http://mobilka.mobi/index.php?subaction=userinfo&user=dapperfever44</a> Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные способы и оценить особенности, недоступные при ирге в демо режиме. Многие свежие клиенты перебегают в число постоянных, а оператор получает долгосрочную прибыль.В реальное время получить приз за регистрацию в казино очень просто. Почти каждый игорный дом с радостью даст средства либо безвозмездные вращения. Многие игроки используют данным и не смущяются региться в каждом клубе с выгодными условиями. Кстати, это отличная вероятность выдумать выигрышную стратегию и сорвать куш. 1хслот скачать В случае установленного лимита на необходимую вывода выигрыша с бездепозитного приза, игрок не сможет исключить больше заявленной суммы.Некоторые онлайн-казино без депозита предлагают новым клиентам выбрать приз при регистрации. Будьте внимательны: выбрав один, вы в абсолютном большинстве случаев не сможете воспользоваться остальными.
<b>Смотреть еще похожие новости:</b>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=171979>1×slots быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Не сложно додуматься, собственно no down payment bonuses почти никогда не случаются немаленькими. Чаще всего речь идет о пяти–тридцати баксах (либо эквиваленте этой суммы в другой еденице). Акции, посвященные календарным праздникам, бывают рассчитаны как на всех пользователей, например и на категории: примеру, подарок на 8 марта девушкам-игрокам либо мужикам на 23 февраля.
#9167 Charlesgunnyhttp://filmkachat.ru
1×slots сайт
При регистрации что, нет либо ином онлайн игральном заведении — вас дается раз шанс испытывать собственную фортуну не внося свои монеты. Замечу что эту поощрительную услугу деют не все онлайн игровые площадки, а лишь щедрая середина(средина) из них. Которые мы подготовили для Вас в нашем списке. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots casino 777 online</a> Для вывода средств бонус надо(надобно) будет отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариантами отыгрыша бездепозитного приза до его получения, дабы избежать конфликтных ситуаций. <a href=https://pipewiki.org/wiki/index.php/Shisha_Tobacco_From4_Eur>https://pipewiki.org/wiki/index.php/Shisha_Tobacco_From4_Eur</a> 1хслотс рабочее зеркало <a href=https://biznes-knigi.com/user/Jasperberve/>https://biznes-knigi.com/user/Jasperberve/</a>
1×slots зеркало рабочее
<a href=https://www.rusdrama-az.com/support/51-sluzhba-tehnicheskoy-podderzhki-sayta.html>1×slots casino регистрация 1×slotscasin online</a> 1×slots официальный сайт скачать на айфон Для верификации аккаунта нужно дать спецам технической поддержки отсканированную копию паспорта и счета за коммунальные услуги, еще фотографию банковской карты либо снимок странички электронного кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для доказательства личности. <a href=http://forums.ago.ir/member.php?action=profile&uid=3451>http://forums.ago.ir/member.php?action=profile&uid=3451</a> Диапазон ставок, которые вправе устроить игрок, также лимитирован. Обычно назначать можно небольшую сумму — в 10–30 рублей за одно вращение.Отзывы читателей о бонусных промоакциях посодействуют составить впечатление, но не запамятовывайте о субъективности собственных объяснений. 1×slots зеркало рабочее на сегодня Варианты выигрыша зависят от Вашей успеха и условий игорного портала. Выше мы сказали, что кое-какие бездепозитные бонусы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются другие, все, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность передовых игр на деньги, возможно выиграть невероятные суммы. Сегодняшние игровые автоматы либо видео слоты, как их именуют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000.Размер приза. В качестве бездепов обыкновенно начисляют большие суммы, а когда идет о бонусах за депо, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино могут презентовать игроку до 2000$.
1хслотс регистрация в 1×slots casino
Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного бонуса довольно пополнения баланса и доказательства личности. В иных же клубах, нужно количество раз прокрутить собственный депо. <a href=http://www.85sucai.com/member/index.php?uid=tearfulpavillio>http://www.85sucai.com/member/index.php?uid=tearfulpavillio</a> Фриспины. Бесплатные вращения предусмотрены для использования в видео-слотах. Внимательно читайте обстоятельства – они часто выдаются для некоторых машин. В зависимости от клуба вы можете делать определенное число ставок. Кстати, современные игорные дома дают вероятность заводить «одноруких злодеев».Вейджер в переводе с английского значит «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша полученного приза, в нашем случае бездепозитного. Число ставок имеет — принципиально только набрать сумму, пропорциональную сумме одобрения. 1×slots быструю регистрацию а также мгновенное Бездепозитный бонус предоставляется новому игроку за конкретные деяния. Часто подарок в виде денег или фриспинов выдается за регистрацию, благодаря чему пользователь получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.Получать информацию о самых прибыльных бонусах возможно без неизменного прогноза новостей казино. Мы взяли эту задачу на себя и постоянно смотрим за предложениями операторов, избирая наилучшие из их. В этом разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список акций регулярно дополняется. В топ зашли самые новые бездепозитные бонусы за регистрацию в казино 2020, кратковременные и закрытые рекламную. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру прочим критериям. Если срок действия акции истек, она удаляется из списка.
1 xslots рабочее зеркало
Но а случае вы уже профи по интернет казино, кликаем на красную кнопку «Получить» и Вы автоматически перейдете в интернет казино;Такой бесплатный эквивалент средств зачисляется на профиль юзера последствии воплощения требований и предназначаются они только для игрового процесса. Вывод таких вознаграждений вероятен только последствии осуществления вейджеровых условий. <a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=230395>1 х слотс зеркало</a> Для верификации аккаунта надо(надобно) предоставить специалистам технической поддержки отсканированную копию паспорта и счета за коммунальные услуги, а фотку банковской карты или скриншот странички электрического кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности. Список так нарекаемых «запрещенных землель» прилагается к правилам бонусной программы игорного портала. Обязательно выясните, распространяются ли на вас подобные санкции.Демоказино есть практически на любом веб-сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются значительно пореже: там если, тогда, выигрыша и соблюдения критерий акций бездеп можно перевоплотить в реальные средства. 1×слотс казино <a href=https://www.weaselmods.net/member.php?action=profile&uid=3278>https://www.weaselmods.net/member.php?action=profile&uid=3278</a>
казино 1×slots официальный сайт
Ещё одно распространённое акционное предложение – привлекательный подарок с неблаговидными притязаниями. К примеру, клуб обещает $100 в бездепа, но с вейджером х80 или х100. Отыграть подобный вейджер практически нереально и поэтому другого концентрироваться на более заманчивых промоакциях.Однако далековато не все ресурсы предлагают своим посетителям бездепозитные призы за регистрацию в казино. В большинстве случаев учтено одобрение на первый депо в объеме 100–200%. Это отличная возможность преувеличить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш. Прямо в арестуйте бесплатные вращения за регистрацию без депозита и начинайте коллекционировать призовые композиции из-за крупных выигрышей! <a href=http://zemli.com/index.php?subaction=userinfo&user=plantdemonstrat>http://zemli.com/index.php?subaction=userinfo&user=plantdemonstrat</a> Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен список наилучших онлайн казино, которые предлагают своим игрокам щедрые бонусы за регистрацию.Более крупные предложения встречаются довольно редко. Зачастую они доступны только VIP-игрокам. В оставшихся случаях им скорее сопутствуют довольно жесткие обстоятельства отыгрыша. Также вероятны вспомогательные условия прочие лимитирования, прописанные в условиях и положения бонусной программки казино. 1×slots промокод при регистрации Внесение депо – Будьте готовы пополнить счет в отыгрыша бонуса. Это стандартное требование правил для этого подобии промо-акций. Лучше заранее уточнить, какую сумму нужно несомненно вносить на счет. Как правило, речь идет о наименьшем депозите, но вы обязаны быть уверены, собственно он вас по кармашку.Подарки на дни ? приуроченные к парадным датам, требующие условного отыгрыша либо начисляются без такового. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду.
<b>Смотреть еще похожие новости:</b>
<a href=https://minifishtank.net/forum/showthread.php?tid=1441>1×slots зеркало регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Ниже указан важный перечень законных казино в Беларуси с бонусами на первый депо. Вы сможете попасть на официальный сайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. Чаще всего казино приз за регистрацию без депо даёт вероятность запустить любой машина. Но никакого пристально ознакомиться с условиями. Иногда для игры доступны лишь определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, превосходнее начать знакомство с миром азарта именно с «одноруких злодеев».
#9168 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало проходить регистрацию это отличный вариант
Условия отыгрыша приза. Если Вы планируете заработать на бездепозитном призе, то в первую очередь обратите внимание на велечину вейджера и срок, который дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть бонус и вывести выигрыш.Прямо в арестуйте благотворительные вращения за регистрацию без депо и начинайте собирать призовые композиции ради крупных выигрышей! <a href=http://filmkachat.ru/>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a> Подтверждение электрической почты – одно из ведущих критерий, коие есть практически в любом бездепозитном казино. Чтобы верифицировать электрическую почту, достаточно перебежать по активной ссылке в послании, приобретенном от азартного клуба.Фриспины. Бесплатные вращения предусмотрены для использования в видео-слотах. Внимательно читайте обстоятельства – они нередко выдаются для некоторых машин. В зависимости от клуба возможность делать определенное количество ставок. Кстати, современные игорные дома дают вероятность заводить «одноруких злодеев». <a href=https://bbs.yhmoli.net/space-uid-689672.html?do=profile>https://bbs.yhmoli.net/space-uid-689672.html?do=profile</a> Бездепозитный приз казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в этом и содержится основное различие.Чем ниже значение вейджера, что, этим проще отыграть и вывести приз. Если Вы планируете заработать на бездепе, но просто ознакомиться с свежим игровым клубом, то стоит избегать призов с высочайшим вейджером их почти не реально отыграть. С ними Вы сможете лишь протестировать забавы заведения. 1хслот 1хслотс регистрация перейти на 1×slots <a href=http://qarabagaaparanyol.az/index.php?subaction=userinfo&user=uglytundra86>http://qarabagaaparanyol.az/index.php?subaction=userinfo&user=uglytundra86</a> Все обожают получать подарки. Согласитесь, практически любой играющий человек будет необъятно рад, случае получит даровой презент для забавы в онлайн казино просто за регистрацию либо же приз за внесенный депозит, так называемые приветственные бонусы для новых игроков. Соответственно такие интернет клубы будут более популярны и предпочтительны у игроков при выборе казино для забавы. Топ казино день обновляется и прибавляются свежие и увлекательные игровые клубы с симпатичной бонусной политикой и всеми вероятными преимуществами, льготами, к которым относятся эти бонусы как фриспины за регистрацию, денежные бездепозитные бонусы, еще щедрые призы за внесенный депозит.Диапазон ставок, коие вправе устроить игрок, того лимитирован. Обычно ставить можно небольшую сумму — в 10–30 рублей за одно вращение.
1хслотс казино зеркало
С иной стороны, гораздо проще отобрать бездепозитные фриспины за регистрацию в казино и напрямик в начать вертеть барабаны в наихороших слотах. Главная необыкновенность спинов в, что они предназначены для топовых автоматов. Удастся не пройти дополнительные раунды, хотя и увеличить сумму выигрыша, заработать респины и другие внутриигровые подарки.Похожим образом работает третий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения клиента либо в связи с получения им VIP-статуса. Подарок предоставляется после воззвания в поддержку и ревизии. 1×slots официальный зеркало Бесплатные призы казино без депо можно получить в виде денежных средств на бонусный счет (исключить их можно только после отыгрыша), фриспинов, игры или кешбэк-бонуса. <a href=https://www.metal-tracker.com/forum/member.php?action=profile&uid=927253747>https://www.metal-tracker.com/forum/member.php?action=profile&uid=927253747</a> Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и. Когда игроку надеется много фриспинов, администрация имеет разбивать их начисление на несколько дней. Бесплатные вращения предоставляются для конкретного слота, который указывается в правилах промоакции.Выбирайте превосходнейшие бесплатные призы счет обзоров на Casinoz – и пусть для сопутствует счастье при отыгрыше бонусных кредитов! 1×slots зеркало регистрация в 1×slots casino Иногда в бездепа, казино дарует минимальный бонус (до 50 руб. ), ради которого надо заморачиваться.
casino 1×slot
Подтверждение индивидуальной инфы. Все казино настоятельно от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у пользователя иных аккаунтов (мультиаккаунт запрещен). Вейджер (wager) – это коэффициент, кот-ый показывает на какую сумму необходимо сделать ставок, чтобы вывести бонус из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего приза, Вам нужно сделать ставок на необходимую: 500*70=3500 руб. Только всецело отыграв приз, Вы можете вывести свой выигрыш. <a href=http://web.symbol.rs/forum/member.php?action=profile&uid=770506>http://web.symbol.rs/forum/member.php?action=profile&uid=770506</a> 1×slot зеркало рабочее регистрации на телефон придет
1×slots зеркало сайта
Для получения предоставленных призов вас пригодиться — ПК или мобильное устройство, и остальное дело за малым.В лицензионных бездепозитных казино выступать в азартные забавы действительно безопасно. Наличие лицензии подтверждает что, этот прецедент, собственно клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP. 1хслотс официальный сайт зеркало <a href=http://osvita.ch.ua/index.php?subaction=userinfo&user=amuckbandanna43>http://osvita.ch.ua/index.php?subaction=userinfo&user=amuckbandanna43</a>
1×slots casino регистрация 1×slotscasino09k online
Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном призе, то в первую очередь направьте на значение вейджера и срок, кот-ый дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть приз и исключить выигрыш. <a href=https://build-info.biz.ua/wr_board/tools.php?event=profile&pname=Charlesmat>https://build-info.biz.ua/wr_board/tools.php?event=profile&pname=Charlesmat</a> Чаще всего используются коды. Их нужно вносить в особые окна регистрационной анкеты, в речь идет о пригласительных призах, или в определенном разделе собственного кабинета игрока. 1×slots зеркало регистрация
<b>Смотреть еще похожие новости:</b>
<a href=https://forumauthority.com/thread-6695-post-39899.html#pid39899>1×slots регистрация 1×slots casino c2d ru</a>
<a href=https://forum.oursson.ru/memberlist.php?mode=viewprofile&u=1347>1×slots зеркало рабочее</a>
<a href=https://maple.wowxyz.work/home.php?mod=space&uid=44354>1×slot казино зеркало</a>
<a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=266960#pid266960>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Новички не обожают сразу же заносить депо. Это обосновано неименьем опыта и сомнением. К счастью, в можно получить бездепозитный бонус за регистрацию в казино. Неважно что начисляет система – фриспины или кредиты. В любом случае вы не рискуете собственными сбережениями. Это отличная возможность запустить приглянувшийся видео разъем либо же испытать фортуну в настольных играх. На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не можете активировать и получить бездепозитный бонус.
#9169 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт, скачать
Бездепы могут заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами. <a href=http://filmkachat.ru/>1×slots регистрацию более популярный вариант это</a> <a href=http://o91202nk.beget.tech/profile.php?u=sassynewsletter>http://o91202nk.beget.tech/profile.php?u=sassynewsletter</a> Раздача бонусов возможность быть приурочена к разным датам: календарные праздники, деньки рождения игроков, годовщина открытия казино и т. Д. Подарок выдается повторяющий средств, фриспинов либо баллов для скопления и размена на услуги оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода этой суммы придется выполнить ряд требований. 1×slots официальный сайт скачать на айфон <a href=https://moskvic.actieforum.com/t1961-topic#6219>https://moskvic.actieforum.com/t1961-topic#6219</a> Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам воспрещено начислять призы посетителям, не имеющим денежных средств на счете. Мы предлагаем разглядеть животрепещущие бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ.
1× slots регистрация в 1×slots casino
Да, у даровых призов есть дефекты. Прежде всего, они обычно небольшие. Кроме того, условия вейджера по ним всегда строгие. Но таки недоступность риска проделывает их очень красивыми для посетителей.Допустим, за регистрацию вы получили бездеп в размере 2 000 руб. С вейджером х30. В этом случае предстоит устроить ставок, на совместную необходимую в 60 000 руб. (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать реальные средства. Однако не запамятовывайте, что с каждого дара выйдет вывести определённую сумму (почаще всего не более $200). 1×slots регистрация на сайте 1×slots ru com Бесплатный приз – кредиты, коие онлайн-казино начислит посетителю, не заставляя его пополнять игровой счет. <a href=http://xn–80aphfq.xn–p1ai/user/PatrickPem/>http://xn–80aphfq.xn–p1ai/user/PatrickPem/</a> Третитй бездепозитный бонус за регистрацию – денежные средства. К сожалению, начислить рубли или баксы готовы только знаменитые и модные клубы. С их поддержкою вас насладиться каждой доступной игрой – автоматом, рулеткой, кено, блэкджеком. x1 slots 1хслотс регистрация перейти на 1×slots Для доказательства электрической почты, просто перейдите по активной ссылке в послании, приобретенном от игрового заведения.Для получения выигрыша потребуется выполнить условия казино. Чаще всего игроку нужно поставить определенную необходимую, хотя уже из собственных денег. Она рассчитывается из совместного объема выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, в пользователь выиграл 1000 рублей, а множитель сочиняет х30, вывести средства можно несомненно, сделав ставки на 30 000 руб.
1×slots актуальное зеркало
Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие возникают у начинающих.Как и другие акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такого предложения являются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых гостей и разрешает им составить впечатление о функционале, не рискуя значительными совокупностями. <a href=http://forum.centrum-hvac.pl/User-PhilipFes>http://forum.centrum-hvac.pl/User-PhilipFes</a> 1×slots регистрация на 1хслотс Фриспины – безвозмездные вращения с фиксированной ставкой, коие возможно использовать в определенных игровых автоматах.Рассмотрим принцип его действия на образце. Допустим, вы зарегистрировались и получили $10 not the slightest deposit bonus с вейджером х50. Это значит, что выигранные деньги можно будет выводить не ранее, чем последствии того, как общая сумма ставок достигнет $500.
1×slots регистрация
При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, коие возможно предназначить ирге в казино. 1×slots официальный сайт мобильная версия скачать <a href=http://91075425.k216.opensrs.cn/home.php?mod=space&uid=1143194>http://91075425.k216.opensrs.cn/home.php?mod=space&uid=1143194</a> При отыгрыше бездепов, учитывайте временные ограничения. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток.
1×slots официальный зеркало
Также, учите, собственно бездепозитный приз можно исключить только никаких случае, когда станут выполнены все условия отыгрыша.Для получения предоставленных призов для пригодиться — ПК или мобильное устройство, и остальное дело за малым. Бонус за регистрацию в казино выдается только раз один на одного игрока. Но бывают дополнительные промоакции, в коих бездепы раздаются для неизменных клиентов и эти подарки Вы сможете получить более одного раза. <a href=http://www.xiaoditech.com/bbs/home.php?mod=space&uid=1740771>http://www.xiaoditech.com/bbs/home.php?mod=space&uid=1740771</a> Заработать на бездепозитных бонусах за регистрацию в казино имеет любой пользователь, достигший совершеннолетия. казино 1×slots официальный сайт Возьми свой подарок. Чаще всего приз активируется сразу после регистрации. Но случаются истории, когда надо(надобно) зайти в собственный кабинет или написать в справочную службу.Рассмотрим принцип его деянья на случае. Допустим, вы зарегистрировались и получили $10 no down payment bonus с вейджером х50. Это значит, что выигранные средства можно несомненно выводить не ранее, чем последствии такого, как общая сумма ставок достигнет $500.
<b>Смотреть еще похожие новости:</b>
<a href=https://shopcms.vsupport.club/topic/15608–1kladtop-%D0%A0%C2%B7%D0%A0%C2%B0%D0%A1%E2%80%A6%D0%A0%D1%95%D0%A0%D2%91%D0%A0%D1%91-%D0%A0%D0%85%D0%A0%C2%B0-%D0%A1%D0%83%D0%A0%C2%B0%D0%A0%E2%84%96%D0%A1%E2%80%9A-%D0%A0%D0%85%D0%A0%C2%B5%D0%A1%E2%80%9E%D0%A1%E2%80%9A%D0%A0%C2%B5%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%D1%98%D0%A1%D0%83%D0%A0%D1%94-%D0%A0%D1%94%D0%A1%D1%93%D0%A0%D1%97%D0%A0%D1%91%D0%A1%E2%80%9A%D0%A1%D0%8A-%D0%A0%D1%98%D0%A0%D2%91%D0%A0%D1%98%D0%A0%C2%B0-lsd-%D0%A0%D1%98%D0%A0%C2%B5/?p=94517>1хслотс официальный сайт зеркало</a>
<a href=http://b2s.bulwork.com/node/1581?page=86#comment-22788>1×слотс казино</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Одним из поводов отдавать преимущество, льготу одному или иному заведению заключается в привлекательности предлагаемых промоакций и даровых услуг. Безвозмездные фриспины, выдаваемые без дела делать какой-либо вклад, в перечне находится далековато не в конце. Как только вы отыграли вейджер и средства с бонусного баланса перебежали вам на настоящий счет, Вы отважно сможете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (устроить наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, совместно, вкупе с депо).
#9170 купить сейф для охотничьего ружьяhttps://sejfy-dlya-oruzhiya.ru/
Тут можно преобрести сейф для оружия купить москва <a href=https://sejfy-dlya-oruzhiya.ru/>оружейные сейфы для охотничьего ружья</a>
#9171 Charlesgunnyhttp://filmkachat.ru
1×slot официальный сайт
Однако в условиях исчезают «подводные камешки», которые не позволят исключить крупную сумму либо же вы не успеете отыграть вейджер. Поэтому профессионалы советуют арестовать благотворительные вращения за регистрацию в казино без депо, дабы поднабраться опыта и получить реальный шанс на победу. <a href=http://filmkachat.ru/>1×slos регистрация в 1×slots casino</a> B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. <a href=http://www.idsys.kr/bbs/board.php?bo_table=free&wr_id=218811>http://www.idsys.kr/bbs/board.php?bo_table=free&wr_id=218811</a> 1×slots официальный зеркало рабочее <a href=http://cvpvm09.ru/user/HarryFlils/>http://cvpvm09.ru/user/HarryFlils/</a> Такие одобрения разрешают бесплатно протестировать свежее казино, разобраться с игровым процессом онлайн слотов, заработать и исключить маленькую необходимую средств.Мы подготовили перечень, где есть постоянно животрепещущие и свежие бездепозитные бонусы казино, коие вы можете получить бесплатно. Для наших пользователей есть особые предложения эксклюзивные бонусы, коие вы у не найдете, их мы обозначили особой красной плашкой «Exclusive».
сайт 1× slots casino
В интернет-сети постоянно можно найти перечни более известных и гарантированных поощрительных программ от модных онлайн-казино.Также, учите, что бездепозитный приз возможно вывести лишь никаких случае, когда станут выполнены все условия отыгрыша. 1 x slots Промообъявления от казино мешают реальной картины и направлены на привлечение внимания пользователей. Понять, как высоки шансы остаться в плюсе, позволит личный анализ условий предложения: <a href=https://pcnto.com/user/Jasperabifs/>https://pcnto.com/user/Jasperabifs/</a> Перед активацией важно внимательно изучить условия промоакции. Чем ниже вейджер, что, этим больше потенциальная выгода игрока. Имеют велечину кроме лимиты ставок при отыгрыше и сроки, на которых возможно пользоваться предложением. Если бездеп обхватывает узкий список игр, рекомендовано узнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь том, случае, если оператор не установил жесткие лимитирования на максимальную сумму ставки.Так что можете отважно регистрироваться без всяких размышлений. Фортуна сегодня наверняка на вашей стороне. Не опасайтесь, как последствие какого или убытка Вам абсолютно не угрожает. С такими бонусами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе. 1×slot регистрация
1хслот скачать
Срок отыгрыша — это этап, который наступает в момент активации приза и кончается с его закрытием. Пользователю нужно уложиться в данный временной промежуток, по призовые средства аннулируются. Казино устанавливают список игр, ставки каких засчитываются при расчете отыгранных средств. Если тайтл не заходит в этот перечень, то ему быть недоступен для загрузки период деяния бонусного предложения. Для ревизии используются сканы паспортов, водительских прав, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если пользователь обнаружен в попытке завести вспомогательный акк, все его учетные записи подвергаются блокировке, а их владелец попадает в черный перечень. При игре на лицензионной площадке надо бояться указывать достоверную персональную информацию (шифрование исключает утечку персональных данных).Новички не любят незамедлительно же заносить депозит. Это обосновано неимением навыка и сомненьем. К счастью, в наше время можно получить бездепозитный приз за регистрацию в казино. Неважно собственно начислит система – фриспины либо кредиты. В любом случае вы не рискуете собственными сбережениями. Это отличная возможность запустить приглянувшийся видео разъем или же испытать фортуну в настольных забавах. <a href=http://www.jcdqzdh.com/home.php?mod=space&uid=339356>http://www.jcdqzdh.com/home.php?mod=space&uid=339356</a> Однако далековато не все ресурсы предлагают своим клиентам бездепозитные бонусы за регистрацию в казино. В большинстве случаев учтено одобрение на 1-ый депо в объеме 100–200%. Это замечательная возможность преувеличить банкролл, увеличить время, проведённое за забавой и шансы сорвать большой куш.Создание аккаунта. На сайте казино нужно обнаружить регистрационную форму и наполнить пустопорожние поля собственными данными. Иногда на данном этапе потребуется указать лишь адресок электронной почты и пароль, хотя чаще хотелось заполнить анкету персональной информацией (ФИО, дата рождения, место проживания и т.д. ). Нужно свидетельствовать только настоящие данные, потому впоследствие они будут испытаны. 1×slots официальный сайт мобильная версия B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.
1хслот зеркало сайта
Для вывода средств бонус нужно будет отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариантами отыгрыша бездепозитного бонуса до его получения, чтобы избежать конфликтных ситуаций.Варианты выигрыша зависимости от Вашей успеха и условий игорного портала. Выше мы сказали, что кое-какие бездепозитные призы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются они, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность передовых игр на деньги, возможно выиграть невозможные суммы. Сегодняшние игровые автоматы или видео слоты, как их нарекают. Могут выдавать крупные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000. <a href=https://peloton.com.ua/forum/memberlist.php?mode=viewprofile&u=9259>1×slots casino online регистрация</a> Условия могут различаться приятель от приятеля. Но подобный приз может быть использован только для игрового процесса – полученные на счет финансы до того, как будут отыграны, исключить нереально.Бонус с зачислением денег на счет дает больше свободы поступков. Пользователь сам избирает, каким образом распорядиться подаренными своими. Здесь также шансы действовать лимитирования на список дешевых игр, хотя обыкновенно эти рамки не так строги, как в промо с безвозмездными вращениями. Размер ставки для забавы по бездепозитному бонусу (конечно же, когда, когда он представлен в виде бонусных валютных средств) зачастую ниже, чем при забаве на депо. Ограничение несомненно действовать до момента отыгрыша приза.Получить Бездепозитный бонус в интернет казино дело 2-ух кликов. Другой момент, отыграть промо и соблюсти верховодила и обстоятельства отыгрыша. Под правилами подразумевается не только вагер, но и лимитирования по максимальной ставке. Мы понимаем, что в кино все ставят на зеро и выигрывают. Призываем не создавать подобного. Перед активацией бонуса прочтите управляла. Узнайте последующие факторы: Условия получения подарка, за регистрацию, за депо и многое. Ограничения по наибольшей ставке. Зачастую не выше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах можно отыгрывать вагер. Можно вращать автоматы, а вагер будет стоять на месте. Поэтому принципиально знать, в каких играх возможно осуществлять кратность денежного оборота. казино 1× slots официальный сайт <a href=http://xianham.com/home.php?mod=space&uid=191380&do=profile>http://xianham.com/home.php?mod=space&uid=191380&do=profile</a>
1×slots зеркало регистрация то дальше необходимо пройти
Некоторые клубы автоматически начисляют приз на аккаунт игрока после исполнения условий получения, но посещают ситуации, когда бонус надо(надобно) активировать игроку самому. Есть несколько методов активации бонуса: <a href=https://forex-arabic.com/members/179524-RenaldoGax>https://forex-arabic.com/members/179524-RenaldoGax</a> Риск-игра по одинаковым шансам – Также казино возможность воспрещать исполнять обстоятельства по отыгрышу с помощью раунда на удвоение, который предлагается в слотах, видео-покере и некоторых других забавах. 1× slots casino официальный сайт Для получения депозитного бонуса нужно пополнить собственный игровой баланс реальными средствами. Вознаграждение можно получить или при внесении первого депозита, или в виде фиксированного процента от внесённых средств. Так или по, бонус поступит на счёт только в пополнения.Во всех легальных онлайн-казино Беларуси необходимо подтверждение паспортных данных для игры — это требование правительства государства.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.sgomberisgombero.it/author/jamesapate/>1хслотс официальный сайт зеркало</a>
<a href=http://nhomtruyen.com/members/jamesgaw.9280/>1×slots официальный сайт, скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины. Бесплатные вращения предусмотрены для использования в видео-слотах. Внимательно читайте условия – они часто выдаются для некоторых машин. В зависимости от клуба вам делать определенное число ставок. Кстати, современные игорные дома выделяют вероятность заводить «одноруких бандитов». Принципиальным отличием безвозмездных бонусов от бонусов на депо считается отсутствие необходимости заносить средства на акк. Из-за сего их часто нарекают бездепозитными (no down payment bonuses).
#9172 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
Только выполнив все условия отыгрыша и дождавшись окончания ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить средства деньги. <a href=http://filmkachat.ru/>1хслот зеркало</a> Бездепы с безвозмездными вращениями деют юзерам право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд уплачивает казино. Число спинов ограничено и изредка выше сотню. Если промоакция содержит количество безвозмездных игр, их начисление имеет быть разбито на несколько дней. <a href=https://nerdgaming.science/wiki/User:MohammedScoggins>https://nerdgaming.science/wiki/User:MohammedScoggins</a> 1×slots зеркало сайта <a href=http://www.dbgjjs.com/home.php?mod=space&uid=477633>http://www.dbgjjs.com/home.php?mod=space&uid=477633</a> Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала быстрые выводы. Фишка выплат сомнений, собственно довольно избрать платёжный инструмент и показать сумму. В большинстве случаев средства зачисляются на электронные кошельки в течение 15 минут, а на банковские карты – 1–3 рабочих денька.
1×slot казино зеркало
Каждый игры обязан сперва отчетливо выучить условия по получению и отыгрышу приглянувшегося подарка. Если всё организует, поторопитесь арестовать бесплатные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик данный начать вертеть барабаны топовых слотов. <a href=https://mit-bbs.com/viewtopic.php?t=130779>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a> 1хслот официальный сайт зеркало У любой забавы свои требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система зачтет любую ставку. В рулетке и покере устроить это гораздо сложнее. Именно потому например главно внимательно читать обстоятельства получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой ирге, то новенькие просто «спустят приз на ветер». <a href=http://usr.by/user/DoctorLazutama/>http://usr.by/user/DoctorLazutama/</a> Более крупные предложения встречаются довольно изредка. Зачастую они доступны только VIP-игрокам. В остальных случаях им наверняка сопутствуют довольно строгие обстоятельства отыгрыша. Также возможны вспомогательные условия и другие ограничения, прописанные в критериях и положения бонусной программы казино.Шаг 5. Использование и отыгрыш. Бездеп должен быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. 1×slots зеркало 1хслотс регистрация перейти на 1×slots Получать информацию о самых прибыльных бонусах можно без постоянного прогноза новостей казино. Мы взяли данную задачку на себя и постоянно смотрим за предложениями операторов, выбирая превосходнейшие из них. В этом разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список акций периодически пополняется. В топ зашли самые свежие бездепозитные бонусы за регистрацию в казино 2020, кратковременные и замкнутые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и критериям. Если срок деяния промоакции истек, она удаляется из перечня.
1×slots casino регистрация на сайте
Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депо может выделяться до 30 дней.Прочитайте правила бонусной программы, в хотите участвовать. Да, мы настоятельно рекомендуем устроить это до регистрации. В большинстве заведений сделать это можно по e-mal, по номеру телефона, через социальную сеть или гугл-аккаунт.Размер ставки для забавы по бездепозитному бонусу (естесственно же, в случае, когда он представлен повторяющий бонусных валютных средств) зачастую ниже, чем при игре на депо. Ограничение несомненно работать до этапа отыгрыша приза. <a href=http://best-realtors.com.ua/index.php?subaction=userinfo&user=voracioustower5>http://best-realtors.com.ua/index.php?subaction=userinfo&user=voracioustower5</a> Бонусы без депозита при регистрации считаются самыми красивыми как для опытных игроков, например для и новичков. Получив такое вознаграждение, заказчик имеет играть на настоящие деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а условия их активации и выигрыша.Так что главное различие подарка на депо от бездепа – неотъемлемое пополнение счёта. Вы можете привнести депозит и преувеличить стартовый капитал или арестовать бездеп и этом не придётся рисковать своими сбережениями. Поспешите выполнить обычные требования, и администрация ресурса начисляет щедрое поощрение! 1×slots зеркало регистрация Осталось выбрать казино с призом за регистрацию и сделать профиль. После активации подарка выигрыш зависит от Фортуны и способностей.Вообще перейдя в казино — верховодила схожи в получении бездепозитных бонусов, в стандартные правила заходит: подтвердить эл. Почту и телефон, наполнить свой индивидуальный профиль, активировать промо код или активировать предложения во вкладке БОНУСЫ.
1×slot зеркало рабочее этих способов предполагает регистрацию
Демоказино есть практически на любом веб-сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются значительно пореже: там в случае выигрыша и соблюдения условий акций бездеп можно перевоплотить в настоящие деньги. Бoльшинcтвo азартных заведений выдвигают примерно однообразные, схожие условия и притязания, коие необходимо выполнить, чтобы получить бездепозитный бонус за регистрацию. Все их можно объединить в один перечень:При верном раскладе бездепы — это прекрасный способ выступать на средства без растраты собственных средств. Есть несколько советов, следуя коим возможно извлечь максимально полезности из сходственных акций казино. Играть идет только на лицензированных площадках. Скриптовые сайты столько накалывают с бонусными предложениями, хотя и употребляют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах невозможно. Вейджер в переводе с английского значит «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша приобретенного бонуса, в нашем случае бездепозитного. Число ставок большого — важно лишь набрать сумму, пропорциональную сумме поощрения. 1×slots зеркало <a href=http://fitboss.ru/user/ArnoldArops/>http://fitboss.ru/user/ArnoldArops/</a> Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 долларов. Если выдаются фриспины, их число изредка превышает нескольких 10-ов безвозмездных вращений.Многие азартные клубы ограничивают необходимую вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании акции, суммы Вы не сможете исключить. Разница будет аннулирована, Вы том не можете создавать на нее ставки.
скачать 1×slots на андроид мобильная версия
Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном веб-сайте и выполните вход в индивидуальный кабинет, чтобы арестовать благотворительные вращения с вейджером х40;В разделе с призами активировать собственный подарок. Найти забавы, для которых учтено одобрение и использовать бонус по предназначению. Бездепозитные призы, как теснее ясно, являются оригинальной вероятностью приступать к игровому процессу безусловно безвозмездно, другими играть в онлайн казино даром и на существующие свои сразу в регистрации аккаунта. Автоматы с этим депо все стать великолепной возможностью сыграть для почитателей азарта с определенными ограничениями в финансах. <a href=http://www.scoreit.org/p/henrypoino>http://www.scoreit.org/p/henrypoino</a> Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша бонусов. Заведения постоянно устанавливают наивысшую ставку, допустимую по условиям вейждера.Каждый из бездепозитных бонусов без пополнения 2022 содержит свой конкретный вейджер для отыгрыша, например же в каждом казино он уточняется персонально — где то он х55 а где-то х30, повторюсь везде по разному! 1хслотс официальный сайт зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://timepost.info/showthread.php?tid=52331>зеркала 1×slots</a>
<a href=http://aurorahcs.com/forum/memberlist.php?mode=viewprofile&u=168982>1×slots регистрация на сайте 1×slots ru com</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы за регистрацию в игровых автоматах для владельцев онлайн-казино считаются долею рекламной кампании, направленной на увеличение аудитории сайта. Так они продвигают свои бренды и привлекают новых клиентов.
#9173 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации 2025
Для всех бездепозитных призов функционирует максимальный предел на выигрыш. Он указывает максимальную необходимую, которую появится получить, играя на бонусные кредиты. Как лишь для удастся выполнить притязания вейджера, допустимый максимально несомненно переведен с бонусного счета на главной, а остаток будет списан. <a href=http://filmkachat.ru/>1×слот регистрация в 1×slots casino</a> Бесплатные бонусы казино без депозита возможно получить в виде валютных средств на бонусный счет (исключить их можно лишь в отыгрыша), фриспинов, забавы либо кешбэк-бонуса. <a href=https://www.rusdrama-az.com/user/JamesMuH/>https://www.rusdrama-az.com/user/JamesMuH/</a> зеркло казино 1×slots <a href=http://www.hanwhagreen.co.kr/bbs/board.php?bo_table=free&wr_id=38524>http://www.hanwhagreen.co.kr/bbs/board.php?bo_table=free&wr_id=38524</a> Максимальная ставка ? устанавливается в денежной счета и ограничивает размер ставки за один спин. В случае ее превышения бонус возможность быть аннулирован. Также в правилах имеет содержаться запрет на размещение ставок определенного вида, к, по одинаковым шансам в рулетке (то есть, на чет либо нечет, красноватое либо черное и т.д. ).Реже бонусы без депозита начисляются неизменным игрокам. С их поддержкой администрация старается удержать ценных клиентов либо вожделеет поблагодарить за лояльность верных посетителей. Но гораздо чаще для сходственных целей используются такие акции:
1×slots casino регистрация
Чтобы бездеп не был начислен на Ваш аккаунт, Вам надо активировать бонусный код. Если поощрение от казино было добавлено на Ваш акк механически, а Вы не расчитываете его применять, обратитесь в саппорта с просьбой отменить бездепозитный бонус.Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских руб. В критериях акции предписано, что вейджер бездепозитного приза х20. Поэтому, дабы отыграть приз, игроку несомненно нужно устроить ставок на 35*20=700 руб. казино 1×slots официальный сайт Чтобы других убедиться в превосходствах бездепозитных призов, довольно зарегистрироваться в казино и получить поощрение.Кешбэк-бонус дает собой возврат фиксированного процента от ставки когда проигрыша или же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не выше 10%. <a href=https://paladinscounter.com/users/AshleyTib>https://paladinscounter.com/users/AshleyTib</a> Каждая игровая платформа отличается критериями по получению и отыгрышу бездепов. В правилах детально расписаны временные рамки, за которые надо(надобно) прокрутить вейджер. Также не запамятовывайте про максимальный размер ставки и максимальную сумму выплаты. С иной стороны, чтобы получить бездепозитные призы казино, достаточно потратить менее 1 минуты.Но разу не забывайте пристально читать правила роли в бонусных промоакциях. Если вы нарушите но бы одно условие, позже вы не можете уладить недоразумение с администрацией. casino 1×slot
1×slots casino регистрация 1×slotscasino09k online
Подтверждение индивидуальной информации. Все казино требуют от клиента пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у юзера других аккаунтов (мультиаккаунт запрещен).Риск-игра по равным шансам – Также казино имеет запрещать исполнять обстоятельства по отыгрышу за раунда на удвоение, кот-ый предлагается в слотах, видео-покере и некоторых иных забавах. К образцу, игроку выдаются бесплатные свои в заведении в размере пятидесяти либо 100 долларов (вейджер на которые сочиняет 100х). То есть, любому новоприбывшему игроку выскакивает манящая картинка, кот-ая сулит выплату всех зачисленных фирмой средств. Не стоит обращать внимания на казино бонус за регистрацию без депозита с сильно большой или довольно малеханькой суммой бонусов, поэтому собственно, в тщательно изучив все обстоятельства, здесь скорее, несомненно какой-то подкол. <a href=https://r.rumedia.top/user/HarryCriCt/>https://r.rumedia.top/user/HarryCriCt/</a> Если площадка презентует бездеп за регистрацию, то процедура его получения ординарна. Нужно только завести акк на веб-сайте и активировать его, подтвердив адрес электрической почты, номер телефона или другие данные, которые просит оператор. Перед данным необходимо убедиться, собственно пользователь находится на официальном веб-сайте казино, но на жульнической площадке. 1×slot зеркало
1хслотс казино зеркало
Игры, каких можно играть на бонусные деньги. Проверьте перечень игр, в возможно играть на бонусные средства, возможно они Вам не понравятся и не стоит тратить своё время на такую акцию.На данном разделе портала периодически публикуются обзорные статьи, каких рассматриваются безвозмездные призы лучших интернет-казино. Информация структурирована по нескольким пт, включая основные: <a href=https://forum.oursson.ru/memberlist.php?mode=viewprofile&u=1347>1хслотс официальный сайт зеркало</a> casino 1×slot <a href=http://1k9g.com/space-uid-197161.html>http://1k9g.com/space-uid-197161.html</a>
1×slots рабочее зеркало
Наличие у игрока 2 аккаунта. Запрещено творить несколько профилей для многократного получения бездепов.Таким образом онлайн казино получает вероятного игрока. Возможно в или истинном он захочет сыграть на средства деньги. Так работают бездепозитные бонусы в интернет казино. Здесь отлично подходит выражение, безвозмездные сыр случается лишь в мышеловке. Начинающие игроки имеют не обдумывать опасность пыла. Однако с осознания становится больше. Это тема для отдельного обсуждения. <a href=https://adobeacrobat.cc/member.php?action=profile&uid=1446>https://adobeacrobat.cc/member.php?action=profile&uid=1446</a> Существует ли стратегии для отыгрыша бездепозитных бонусов? К раскаянью нет, на выигрыши либо проигрыши с бонусов, казино либо игрок повлиять возможности, отдача игр происходит от разработчиков игр.Принципиальным отличием бесплатных бонусов от бонусов на депозит является отсутствие необходимости вносить деньги на аккаунт. Из-за сего их часто нарекают бездепозитными (no down payment bonuses). 1×slots зеркало регистрация то дальше необходимо пройти Раздача призов может быть приурочена к разным датам: календарные дни, дни рождения игроков, юбилей открытия казино и т. Д. Подарок выдается в виде средств, фриспинов или баллов для накопления и обмена на услуги оператора. Если юзер получает выигрыш, средства начисляются на его счет. Для вывода этой суммы придется выполнить ряд притязаний.
<b>Смотреть еще похожие новости:</b>
<a href=http://t954381g.bget.ru/user/JosephPiery/>1×slots регистрацию процедура займет всего лишь</a>
<a href=http://miupsik.ru/forums/showthread.php?tid=242979>1×slots промокод при регистрации 2025</a>
<a href=http://fin-molitor.com/forum/viewtopic.php?f=2&t=403842>1×slots акции</a>
<a href=https://www.ldvd.nl/no-22-san-diego-place-rallies-very-last-boise-country-27–16?page=34#comment-237563>1×slot рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
3. Подтвердить данные. В зависимости от клуба, нужно привязать телефон либо почту, показать персональную информацию; Кешбэк-бонус представляет собой возврат фиксированного процента от ставки в случае проигрыша либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%.
#9174 Charlesgunnyhttp://filmkachat.ru
1×слотс казино
У каждой забавы свои требования по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система засчитает любую ставку. В рулетке и покере устроить это гораздо труднее. Именно поэтому например главно внимательно читать обстоятельства получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в каждой игре, то новенькие попросту «спустят бонус на ветер». <a href=http://filmkachat.ru/>1 x slots</a> Многие казино деют в рекламных целях бесплатные призы исключительно для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой вебсайт по партнерской ссылке с нашего портала.Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? <a href=https://www.retroco.co/home.php?mod=space&uid=400440&do=profile>https://www.retroco.co/home.php?mod=space&uid=400440&do=profile</a> 1×slots сайт зеркало <a href=http://kurku.ru/bitrix/rk.php?goto=http://ditermo.ru/bitrix/redirect.php?goto=http://lexand.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/UHotCporB1q>http://kurku.ru/bitrix/rk.php?goto=http://ditermo.ru/bitrix/redirect.php?goto=http://lexand.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/UHotCporB1q</a> При правильном раскладе бездепы — это прекрасный метод играть на деньги без растраты собственных средств. Есть несколько рекомендаций, следуя коим можно извлечь максимум выгоды из сходственных акций казино. Играть стопам лишь на лицензированных площадках. Скриптовые веб-сайты не обманывают с бонусными предложениями, хотя и используют пиратский софт с измененным ГСЧ. Выиграть на этих автоматах невозможно.
онлайн казино 1×slots
Перечисленные повыше основные характеристики сопровождают практически любой приз и считаются стереотипными для бездепозитных бонусных начислений в казино.Чтоб получить крупный выигрыш, выбирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша. x1 slots регистрация в 1×slots casino Чаще всего, популярностью сервисы, эти как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное управляло. Финансовые средства выводятся только через что, эту платежную систему, которой успех для пополнения депо. Если же игрок получил бездепозитный покерный бонус, потребуется пополнить счет на минимальную необходимую, кот-ая сочиняет обычно десять долларов. <a href=http://whdf.ru/forum/user/79148/>http://whdf.ru/forum/user/79148/</a> 1×slots зеркало на сегодня Чтоб получить крупный выигрыш, избирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша.
скачать 1×slots официальный сайт
Бездепозитные бонусы за регистрацию являются одним из самых популярных методов привлечения новых игроков в онлайн-казино, потому что они предоставляют игрокам вероятность опробовать казино, особенно игровые автоматы, и вполне, выиграть реальные деньги.Как только вы отыграли вейджер и свои с бонусного баланса перешли вам на реальный счет, Вы неустрашимо сможете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (сделать наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депо). Бездепозитный приз по промо-коду несомненно доступен для забавы, только в том случае когда Вы активируете специальный бонусный код в разделе с бонусами либо укажите промокод при регистрации на сайте. В неких случаях, считая активации кода, понадобиться подтвердить контактные данные игрока и наполнить анкету клиента.У нас на веб-сайте Вы найдете перечень бонусов без депо в испытанных казино и доскональную информацию про как их получить и использовать. <a href=http://koreasamsong.com/bbs/board.php?bo_table=free&wr_id=1526923>http://koreasamsong.com/bbs/board.php?bo_table=free&wr_id=1526923</a> Бесплатные бонусы казино без депо можно получить повторяющий валютных средств на бонусный счет (вывести их можно лишь в отыгрыша), фриспинов, забавы либо кешбэк-бонуса. 1×slots сайт зеркало
1×slots регистрация на сайте 1×slots ru com
Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации подарка нужно доказать электронную почту и привязать аппарат; <a href=https://redfist.de/RF-Online-Testforum/viewtopic.php?f=60&t=76972>1×slots зеркало регистрация то дальше необходимо пройти</a> 1×slots бонус за регистрацию <a href=http://randy-harrison.it/gallery/profile.php?uid=142928>http://randy-harrison.it/gallery/profile.php?uid=142928</a> Чаще всего, модные сервисы, такие как MoneyBookers и WebMoney, еще MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно неотъемлемое управляло. Финансовые средства выводятся только спустя ту платежную систему, коей огромной для пополнения депо. Если же игрок получил бездепозитный покерный приз, потребуется восполнить счет на минимальную необходимую, которая составляет обыкновенно 10 $.
зеркло казино 1×slots
Практически все онлайн казино с бездепозитным бонусом за регистрацию предусматривает программу лояльности — систему поощрения неизменных посетителей, кот-ая произведено из большого значений. При достижении игроком очередного уровня на его счёт поступает приз. Чем выше степень — что, этим щедрее приз. <a href=https://creator.wonderhowto.com/glavdorogadv2106/>https://creator.wonderhowto.com/glavdorogadv2106/</a> 1хслот зеркало сайта Бездепозитный бонус за регистрацию в казино — это стартовый подарок в виде валютного начисления либо бесплатных вращений для свежих игроков заведения, для получения которого не вносить депо.
<b>Смотреть еще похожие новости:</b>
<a href=https://dev.eff.one/forumdisplay.php?fid=10>1× slots зеркало</a>
<a href=https://021snyw.com/space-uid-53919.html>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Помимо остального, для вывода средств по бездепу нужно привнести на счёт собственный первый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на мало вероятную необходимую, последствии чего вывод средств будет доступен.
#9175 Charlesgunnyhttp://filmkachat.ru
1хслотс 1хслотс регистрация перейти на 1×slots
Некоторые сайты, прежде чем обмануть регистрацию игроков, предлагают ответить на количество базовых вопросов. Цель проведения подобной викторины – выявить случайных людей, которые не имеют представления о покере, и не разрешить получения ими бонусов. Если гость уже играл в казино, то ответить на полтора 10 несложных вопросов несомненно несложно. Очень нередко, ответы возможно найти на официальных веб-сайтах этих учреждений. <a href=http://filmkachat.ru/>1×slots казино мобильная версия</a> Маркетинговая деятеля всех игорных интернет-клубов обязана носить разнообразный нрав. И если гонорары на депозит служат чтобы, чтобы, чтобы стимулировать заносить депозиты и поощрять теснее место юзеров, то бездепозитный бонус в казино или приз за регистрацию в казино, прежде всего, рассчитан на расширение базы потребителей.Онлайн-казино с бездепозитными бонусами ставят посетителям обстоятельства для использования бездепами, потому перед участием в промоакции никакого досконально ознакомиться со всеми правилами и нюансами акции. Условия шансы прикасаться получения бонуса, его применения и последующего вывода валютных средств когда выигрыша. <a href=https://exveemedia.com/forums/users/fawncastella94/>https://exveemedia.com/forums/users/fawncastella94/</a> 1×slots casino зеркало <a href=http://trisinfronteras.com/davidcastro/component/k2/itemlist/user/454252-glennmar>http://trisinfronteras.com/davidcastro/component/k2/itemlist/user/454252-glennmar</a>
x1 slots 1хслотс регистрация перейти на 1×slots
Бонус без депозита за регистрацию в казино (бездепозитный приз) – это денежный подарок от клуба, кот-ый начисляется на акк игрока в регистрации в казино. Кроме создания учетной записи, для получения бездепа, довольно нередко требуется ещё и доказать контактные данные игрока и/или активировать специальный промо-код. <a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/6259–1×slots-registratsiya-na-sajte-1×slots-ru-com#6268>1×slots регистрация на сайте 1×slots ru com</a> 1×slots регистрация на сайте 1×slots ru com Промокод – определённая комбинация знаков, коию нужно установить в подходящее фон при создании учетной записи или активировать в личном профиле игрока в разделе с бонусами. <a href=https://bybak.com/home.php?mod=space&uid=3774204>https://bybak.com/home.php?mod=space&uid=3774204</a> 1хслот скачать Иногда у посетителей вебсайта могут появиться трудности, задачи, препядствия при активации приобретенного промо-кода. В этих случаях, нужно обратиться за поддержкой в саппорта «Support». Для получения ответа, непременно указывается определенная первопричина обращения и подтверждается информация дополнительными скриншотами. Если сформировалась спорная ситуация, постоянно можно обратиться к основному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ.Отказ в прохождении верификации. Если заказчик не желает или не может предоставить документы, подтверждающие его лицо, профиль несомненно заблокирован совместно, вкупе со всеми бонусными начислениями.
1×slots регистрация 1×slots casino c2d ru
<a href=https://hdkaraokesong.com/space-uid-281126.html>https://hdkaraokesong.com/space-uid-281126.html</a> Однако в условиях исчезают «подводные камни», которые не разрешат исключить солидную сумму или же вы не успеете отыграть вейджер. Поэтому мастера советуют арестовать благотворительные вращения за регистрацию в казино без депозита, чтобы поднабраться навыка и получить настоящий шанс на победу.Если вы облюбовали для себя несколько брендов коие вам больше всего приглянулись, для постоянной забавы! Таких гемблеров казино довольно предпочитает и оценивает, за частую эти игроки становятся VIP игроками заведения, коим часто поступают выгодные предложения вид бонусов, так же туда входит и бездепозитные. 1×slots зеркало на сегодня Для вывода средств бонус надо(надобно) будет отыграть законам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариациями отыгрыша бездепозитного бонуса до его получения, чтобы избежать конфликтных обстановок.Чтобы получить вероятность вывести прибыль с бездепозитного приза в казино, необходимо выполнить ряд критерий:
1×slots регистрация на 1хслотс
Для вывода средств бонус надо(надобно) будет отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариантами отыгрыша бездепозитного приза до его получения, чтобы избежать конфликтных ситуаций. Бездепозитные призы казино за регистрацию в 2022 году — это возможность сыграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой или количеством бесплатных вращений без внесения депозита. Не путайте деморежим с реальной забавой без надобности внесения депо. 1×slots зеркало регистрация то дальше необходимо пройти <a href=https://bongatoken.com/user/JasperGes/>https://bongatoken.com/user/JasperGes/</a>
1×slots casino зеркало рабочее
Условия вывода выигрыша. В неких заведениях для успешного вывода с бездепозитного бонуса достаточно пополнения баланса и подтверждения личности. В других же клубах, необходимо некоторое раз прокрутить собственный депо.Суммы похожих предложений, большинстве, колеблются от 3-х до 20 долларов, а вейджер на эти свои обязан сочинять от тридцати до шестидесяти раз. Зачастую, наибольшая сумма выигрыша тут составит от одной до 2-ух сотен $. Если в выиграет больше, то все свои все быть списанными до очень разрешенного выигрыша. Здесь бывает содержание выводить еще несуществующие финансы на свою платежную систему и дальше находить заведение с благоприятными под данную необходимую релоадом либо бонусом за 1-ое пополнение счета. Есть некоторое подвидов бездепозитного вознаграждения, предлагаемого великим числом заведений. <a href=http://spectr-sb116.ru/user/DoctorLazutapr/>http://spectr-sb116.ru/user/DoctorLazutapr/</a> 1х слот регистрация в 1×slots casino Акционные предложения от казино существуют в разных форматах. Часто призы даются в мена на депо. Игрок заносит платеж и получает средства, бесплатные вращения прочие одобрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — вид бонуса, который гарантирован за выполнение определенных деяний на сайте:Изучить правила и условия получения бездепозитных бонусов казино, Вы можете у нас на веб-сайте в разделе с бонусами либо на официальном сайте выбранного Вами казино. Если не найти необходимую информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал или по электронной почте.
<b>Смотреть еще похожие новости:</b>
<a href=https://creapnl.com/2018/02/01/preguntas-que-cambian-la-perspectiva/#comment-17552>1×slots регистрацию процедура займет всего лишь</a>
<a href=http://brilliance.ru/forum/memberlist.php?mode=viewprofile&u=21924>1×slots casino зеркало рабочее</a>
<a href=https://bajarmp3.net/showthread.php?tid=440495>casino 1×slot</a>
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=64521&extra=>рабочее зеркало 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для получения бездепа необходимо пригласить в забаву по реферальной ссылке нового посетителя: он должен зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на сумму, указанную в условиях акции. Можно ли в одном интернет казино получить больше 1-го приза за регистрацию? Нет, так как в любом интернет казино есть верховодила, к которым надо(надобно) держаться, не делать два аккаута для получения бонусов, по несомненно блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, приз за регистрацию выдаеться один раз 1 лицу.
#9176 Charlesgunnyhttp://filmkachat.ru
1×slots сайт
С этими простыми советами любое казино с бонусом за регистрацию способно принести в разы больше выгоды и выгоды. <a href=http://filmkachat.ru/>1 xslots рабочее зеркало</a> <a href=https://altlifewiki.com/index.php/Shisha_Tobacco_From4_Eur>https://altlifewiki.com/index.php/Shisha_Tobacco_From4_Eur</a> Да, у даровых бонусов есть недостатки. Прежде всего, они обычно большие. Кроме такого, условия вейджера по ним всегда жесткие. Но таки отсутствие риска проделывает их довольно красивыми для посетителей.Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке нужно восполнить счет в казино. Для депозитных призов, данная процедура не необходима, например как депо уже изготовлен. 1×slots сайт <a href=http://myfalke.ru/bitrix/redirect.php?goto=http://voobrajulya.ru/bitrix/redirect.php?goto=http://transportal24.com/bitrix/redirect.php?goto=https://teletype.in/@urist555/y3_r64kHjiN>http://myfalke.ru/bitrix/redirect.php?goto=http://voobrajulya.ru/bitrix/redirect.php?goto=http://transportal24.com/bitrix/redirect.php?goto=https://teletype.in/@urist555/y3_r64kHjiN</a> Для получения депозитного приза нужно восполнить свой игровой баланс реальными деньгами. Вознаграждение можно получить или при внесении первого депозита, или в виде фиксированного процента от внесённых средств. Так либо иначе, бонус поступит на счёт только последствии пополнения.Реже призы без депозита начисляются неизменным игрокам. С их поддержкой администрация постарается удержать ценных посетителей либо вожделеет поблагодарить за преданность правильных гостей. Но гораздо почаще для сходственных целей применяются эти промоакции:
1×slots регистрацию более популярный вариант это
<a href=https://demo.comuni-italiani.it/forum/viewtopic.php?f=9&t=375266>1×slots казино мобильная версия</a> 1×slots актуальное зеркало Выигрыши с призов без вложений всегда привязаны к требованию по ставкам и имеют быть обналичены только в исполненья этих притязаний.Составленный специалистами Casino.ru список онлайн-казино с бездепозитным бонусом позволяет игрокам сравнить спецпредложения разных операторов. <a href=https://forum.gogobuyers.com/member.php?action=profile&uid=2151>https://forum.gogobuyers.com/member.php?action=profile&uid=2151</a> 1×slots регистрация 1×slots casino c2d ru Прежде чем активировать бездеп, необходимо увериться в том, собственно страна, уроженцем которой считается игрок, не входит в список запрещенных.Бесплатный бонус – кредиты, которые онлайн-казино начислит клиенту, не заставляя его пополнять игровой счет.
1×slot казино зеркало
<a href=https://knowyourmeme.com/users/davidkib-davidkib>https://knowyourmeme.com/users/davidkib-davidkib</a> Некоторые клубы автоматически начисляют приз на акк игрока после исполненья критерий получения, но посещают ситуации, когда приз нужно активировать игроку самому. Есть несколько методов активации бонуса:Некоторые казино все предлагать посетителям бездепы за подтверждение номера или почты или репост на страницу в социальных сетях. 1×slots регистрация на официальном сайте Если площадка дарит бездеп за регистрацию, то процедура его получения проста. Нужно только завести акк на сайте и активировать его, подтвердив адрес электронной почты, номер аппарата либо иные данные, которые требует оператор. Перед этим нужно увериться, собственно пользователь располагается на официальном веб-сайте казино, но на жульнической площадке.
казино 1×slots официальный сайт
На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению сего медли, Вы не можете активировать и получить бездепозитный бонус.Некоторые клубы автоматически начисляют приз на аккаунт игрока в исполнения условий получения, хотя случаются истории, когда приз нужно активировать игроку самому. Есть некоторое способов активации приза: <a href=https://g2clubs.com/healthy-workout/google/#comment-24268>1 хслот регистрация в 1×slots casino</a> 1×slots регистрация 1×slots casino 777 online <a href=https://bongfood.kr/bbs/board.php?bo_table=free&wr_id=476210>https://bongfood.kr/bbs/board.php?bo_table=free&wr_id=476210</a> Если при регистрации указать промокод, можно гарантировано получить бонус. Где брать ваучер? Посетите определенную блоги либо форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В заключительное время игорные дома начали рекламироваться в фильмах и телесериалах. Присмотритесь и всего заметите промокод, который принесёт 500 либо 1 000 бонусных руб.Можно. Вы всегда можете отрешиться от получения бездепозитного приза за регистрацию в казино, же Вы не создадите ставку.
1×slots регистрация 1×slots casino 777 online
Выбирая даровой бонус, внимательно изучайте управляла. Убедитесь, что для можно принимать участие в промоакции. Уточните, в каких играх возможно скорпулезно условия вейджера. При необходимости задавайте вопросы адептам саппорта. За привлечение друга ? масштабах партнерской программы заказчик получает вознаграждение за вербование новых пользователей. <a href=http://alzlt5.com/space-uid-315846.html>http://alzlt5.com/space-uid-315846.html</a> Бонус за регистрацию в казино без депозита с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша может понадобиться устроить ставки на необходимую, в количество десятков один превышающую сумму приза или выигрыша.Во время забавы в казино, выигрыши, полученные благодаря бесплатным призовым фондам, суммируются и включаются в общую необходимую для отыгрывания. Однако, в фортуна улыбнется и выйдет отыграть все призы, игровое заведение гарантированно разрешит исключить финансовые средства. Сумма вывода несомненно зависеть от лимита, одобренного именно в данном учреждении. Поэтому, пристально нужно читать верховодила выдачи безлимитных депозитов. 1 xslots рабочее зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=68735&result=reply>1× slots официальный</a>
<a href=http://mandala-app.com/forums/memberlist.php?mode=viewprofile&u=3447>1×slot официальный сайт</a>
<a href=https://www.ldvd.nl/no-22-san-diego-place-rallies-very-last-boise-country-27–16?page=29#comment-237314>сайт 1× slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный приз за регистрацию в казино — это стартовый подарок вид валютного начисления либо бесплатных вращений для новых игроков заведения, для получения которого не заносить депозит.
#9177 Charlesgunnyhttp://filmkachat.ru
1×slots казино зеркало
При верном раскладе бездепы — это прекрасный способ играть на средства без растраты собственных средств. Есть некоторое рекомендаций, следуя коим можно извлечь максимально пользы из сходственных акций казино. Играть по лишь на лицензированных площадках. Скриптовые сайты столько дурачат с бонусными предложениями, но и употребляют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах невероятно.В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать собственный выигрыш с безвозмездных вращений. Прибыль, коию Вы заработаете на этом бездепе можно ставить на вывод без какого либо отыгрыша. <a href=http://filmkachat.ru/>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a> Бездепозитные призы – это исключительно интересная и наиболее многообещающая промоакция интернет-казино. Они числе чем фри-спинов, поэтому что выплаты в бесплатных вращениях не гарантированы, как комбинации на барабанах игрового аппарата имеют не сложиться.В неких онлайн казино для получения бездепозитных призов не довольно просто зарегистрироваться на веб-сайте клуба и доказать средства контактные данные. Дополнительно потребуется активация промокода. <a href=http://www.pk10zc.com/space-uid-357041.html>http://www.pk10zc.com/space-uid-357041.html</a> Но есть игорные заведения, коие готовы просто например жертвовать средства на забаву. Для сего довольно создать профиль. Чтобы исключить собственный выигрыш, для поначалу нужно выполнить условия отыгрыша, указанные в критериях получения бездепозитного депозита. 1×slots бездепозитный бонус за регистрацию <a href=http://www.mignonmuse.com/bbs/board.php?bo_table=free&wr_id=282962>http://www.mignonmuse.com/bbs/board.php?bo_table=free&wr_id=282962</a> Акции, приуроченные к календарным праздничным, случаются рассчитаны как на всех пользователей, например и на категории: например, подарок на 8 марта девушкам-игрокам или мужикам на 23 февраля.
1×slots casino регистрация
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=55837>1 x slots casino</a> 1×slots регистрация Нет. Казино раздают бесплатные призы за регистрацию, чтобы, чтобы, чтобы клиент возможность ознакомиться с игровым заведением. А чтобы вывести его, необходимо выполнить условия отыгрыша. <a href=https://www.one2bay.de/forum/member.php?action=profile&uid=19985>https://www.one2bay.de/forum/member.php?action=profile&uid=19985</a> 1×slots рабочее зеркало
1×slots зеркало 1хслотс регистрация перейти на 1×slots
<a href=https://faktes.ru/user/HenryToult/>https://faktes.ru/user/HenryToult/</a> 1×slots рабочее зеркало на сегодня Не сложно догадаться, что not the slightest down payment bonuses практически разу не бывают великими. Чаще всего речь идет о пяти–тридцати баксах (либо эквиваленте данной суммы в другой еденице).
1×slots казино мобильная версия
Бонус без депо за регистрацию в казино (бездепозитный приз) – это денежный подарок от клуба, кот-ый начисляется на аккаунт игрока последствии регистрации в казино. Кроме творенья учетной записи, для получения бездепа, довольно часто потребуется ещё и подтвердить контактные данные игрока и/или активировать особый промо-код.Вейджер не более х30–35 является приемлемым. Опытные игроки заявляют, что с таким вейджером реально остаться в плюсе, если правильно подойти к выбору игрового аппарата. 1хслот зеркало <a href=http://shkola.mitrofanovka.ru/index.php?subaction=userinfo&user=perpetualslogan>http://shkola.mitrofanovka.ru/index.php?subaction=userinfo&user=perpetualslogan</a> Если вы избираете испытанное лицензионное интернет казино и выполните все обстоятельства получения бездепозитного бонуса, проблем с получением презента у Вас не возникнет.Какие бонусы у еще получить не бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, каждое онлайн казино предлагает игрокам выгодное предложение на 1-ый депозит, вы совершаете депо, ваш депо увеличивается в двое либо в в трое, тем наиболее начать выступать можно с больше крупной суммой, так же не запамятываем про вейджер на бонусы.
1×slots зеркало сайта
Мы делаем акцент на главных положениях верховодил, рассказываем о территориальных ограничениях и вкратце информируем о иных промоакциях обсуждаемого казино. Для всех бездепозитных призов действует наибольший предел на выигрыш. Он указывает максимальную сумму, которую возможность получить, играя на бонусные кредиты. Как лишь вам получится выполнить требования вейджера, дозволенный максимально несомненно переведен с бонусного счета на ведущей, а остаток несомненно списан. <a href=http://x70181pe.beget.tech/user/JustinDargy/>http://x70181pe.beget.tech/user/JustinDargy/</a> Акционные предложения от казино есть в разных форматах. Часто бонусы даются в размен на депо. Игрок вносит платеж и получает деньги, благотворительные вращения и поощрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — картина бонуса, который гарантирован за исполнение определенных действий на сайте: сайт 1× slots casino На данном разделе портала регулярно публикуются обзорные заметки, в рассматриваются благотворительные призы превосходнейших интернет-казино. Информация структурирована по нескольким пунктам, включая главные:Ознакомьтесь с нашим перечнем наилучших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего перечня и получите бездеп незамедлительно. Хватайте наилучшие благотворительные предложения ниже и выигрывайте немалые средства, не рискуя!
<b>Смотреть еще похожие новости:</b>
<a href=http://theauction.com.au/author/jamesflake/>1×slots регистрацию более популярный вариант это</a>
<a href=https://australiantravelforum.com/Upload/showthread.php?tid=150287>1×slots регистрация 1×slotscasino 56 online</a>
<a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=7523&TITLE_SEO=7523-preobrazovatel-interfeysov-usb-rs485&MID=460731&result=reply#message460731>1× slots casino зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Лишь пользующиеся и известные азартные заведения могут разрешить себя выдавать бездепы в виде добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депо, коие возможно потратить в топовых аппаратах с высокой отдачей. Иногда операторы настоятельно внесение малого депо перед выводом для верификации платежного прибора. В некоторых казино этот депозит кроме предстоит отыграть.
#9178 Charlesgunnyhttp://filmkachat.ru
онлайн казино 1×slots
Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала резвые выводы. Фишка выплат в, собственно достаточно избрать платёжный инструмент и показать сумму. В большинстве случаев деньги зачисляются на электрические кошельки протяжении 15 минут, а на банковские карты – 1–3 рабочих дня.Таким образом, заведение пробует показать себя своим вероятным игрокам, а такой рекламный ход как казино бонус без депозита за регистрацию привлекает очень много внимания к игорному заведению и обеспечивает постоянный поток новых посетителей и грядущих посетителей игрового интернет клуба. <a href=http://filmkachat.ru/>1×slots скачать на айфон</a> Не трудно догадаться, собственно not the slightest deposit bonuses почти ни не посещают великими. Чаще всего речь идет о пяти–тридцати долларах (либо эквиваленте этой суммы в иной еденице). <a href=https://equessurge.win/phpBB3N/memberlist.php?mode=viewprofile&u=80266>https://equessurge.win/phpBB3N/memberlist.php?mode=viewprofile&u=80266</a> Обычно, бездепозитные бонусы выдаются под определенные слоты с фиксированной ставкой, но их наверняка запрещено использовать в игровых автоматах с прогрессивным джекпотом. Список игр, в которых можно использовать бездеп, Вы отыщите в описании промоакции или сможете уточнить у службы поддержки заведения. 1×slots зеркало видели такую регистрацию на <a href=https://finbi.ru/user/PatrickCoawn/>https://finbi.ru/user/PatrickCoawn/</a>
1×slots регистрация 1×slotscasino 56 online
1×slots казино мобильная версия Заполняя данные в собственном профиле, указывайте только достоверную информацию, так как Вам понадобиться ее подтвердить дальнейшем при выводе средств. <a href=https://cadetmove.ru/index.php?subaction=userinfo&user=PhilipAnith>https://cadetmove.ru/index.php?subaction=userinfo&user=PhilipAnith</a> Бонусные деньги – небольшая сумма денег для старта в новеньком казино. На бонусные средства, обыкновенно разрешено выступать во все забавы, не слотов с современным джекпотом и игр из раздела exist casino. 1×slots регистрация на официальном сайте Активация по промокоду употребляется в различных обликах бездепов. Если речь идет о приветственном бонусе, то комплект знаков возможно разузнать на крупнейшей страничке, в регистрационной форме либо послании, которое отправляется юзеру для подтверждения e-mail. Акции имеют проводиться общо с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активируется разовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном кабинете или начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем важный код для активации в описании каждого рекламную.
казино 1×slots
После получения бонуса вывод средств для посетителя будет недосегаем до тех пор, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или чета недель. Выводить средства игрок сможет только в отыгрыша.Подтвердите личность, предоставив оператору казино средства паспортные данные. Инструкции обыкновенно легкие, главное — четко им идти. Если написано, собственно «на фото должны быть видны все хорошо угла странички паспорта» — устройте непосредственно такое фото. Для казино, работающих онлайн, бездепозитные бонусы необходимы для вербования новых клиентов. Предложение сыграть на слотах без необходимости внесения настоящих денег — работающий метод для увеличения интереса к фирмы. После отыгрыша бездепа великоват шанс, собственно игроку понравится и он продолжит играть в казино, только сейчас теснее на собственные деньги.Классическая разновидность бонуса за творенье аккаунта. Его превосходство заключается что, нет, что клиент имеет без выбирать аппараты и создавать ставки в них. Иногда перечень игровых автоматов ограничен оператором, хотя все также это другого, как, чем единственный дешевый разъем, как в случае с внедрением фриспинов. <a href=http://www.gabiz.kr/g5/bbs/board.php?bo_table=free&wr_id=615384>http://www.gabiz.kr/g5/bbs/board.php?bo_table=free&wr_id=615384</a> 1хслотс казино зеркало
1 x slots casino
Чем ниже значение вейджера, тем легче отыграть и вывести приз. Если Вы планируете заработать на бездепе, не просто ознакомиться с свежим игровым клубом, то стоит избегать бонусов с высочайшим вейджером их почти не реально отыграть. С ними Вы можете лишь протестировать забавы заведения.Oтыгpaть приз с указанным вeйджepом, результата нужно сдeлaть cтaвoк нa cумму, превышающую объем бонуса в количество один. <a href=http://permitbeijing.com/forum/showthread.php?tid=2195289>1×slots зеркало</a> Используйте наихорошие бездепозитные призы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из перечня ниже, чтобы заработать презенты за простые деяния и уже сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высокой отдачей и быстрыми выводами на электронные кошельки.Постарайтесь отыграть вейджер, чтобы была вероятность оставить заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные приборы. Вы можете получить выигрыш на электрической кошелёк, карту, телефонный. Благодаря программе преданности от игорного заведения, можно брать неплохой старт и без добавочных инвестициям запустить видеослоты. Кроме того, возможно рассчитывать на реальную фортуну и получить, без инвестиции собственных денег, большой выигрыш.Бездепозитные призы за регистрацию считаются одним из самых известных способов вербования свежих игроков в онлайн-казино, поэтому собственно они деют игрокам возможность опробовать казино, неподражаемо игровые автоматы, и возможно, выиграть настоящие средства. 1 х слотс зеркало <a href=https://www.argfx.co/user/Justinsoone/>https://www.argfx.co/user/Justinsoone/</a>
1× slots casino официальный сайт
Максимальная ставка ? устанавливается в валюте счета и ограничивает размер ставки за раз спин. В случае ее превышения приз возможность быть аннулирован. Также в правилах имеет находиться запрет на размещение ставок конкретного облика, например, по равным шансам в рулетке (словами, на чет или нечет, красноватое или черное и т.д. ). <a href=http://water.vouvstudio.com/bbs/board.php?bo_table=free&wr_id=1937593>http://water.vouvstudio.com/bbs/board.php?bo_table=free&wr_id=1937593</a> 1хслотс 1хслотс регистрация перейти на 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=http://romb4×4.ru/forum/threads/onlajn-kazino-1×slots.15406/>онлайн казино 1×slots</a>
<a href=https://forum.spherecommunity.net/User-JamesLop>1×slot рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Многие казино деют в рекламных целях благотворительные призы самая для наших читателей. Чтобы их получить, нужно перебежать на игровой вебсайт по партнерской ссылке с нашего портала.
#9179 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия
Как управляло, при выводе финансов, от играющего требуется лишь сделать минимальный вклад чтобы, чтобы, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом личный счет.Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут устанавливает лимитирование для посетителей. Конечно, это можно посчитать неким неудобством для игрока, но справедливости стоит отметить, собственно выбор автоматов всё также остаётся достаточно большим. <a href=http://filmkachat.ru/>зеркала 1×slots</a> <a href=http://mongdol.net/bbs/board.php?bo_table=free&wr_id=2866606>http://mongdol.net/bbs/board.php?bo_table=free&wr_id=2866606</a> Нельзя осматривать игру на деньги, как вариант заработка. Азартные игры воспрещены для лиц младше 18 лет. Topcasinobonuses.mobi классифицируется организатором азартных игр. Сайт одевает информационный нрав.Суммы сходственных предложений, в, колеблются от 3-х до 20 долларов, а вейджер на эти свои должен составлять от 30 до шестидесяти раз. Зачастую, наивеличайшая сумма выигрыша тут составит от одной до двух сотен долларов. Если геймер выиграет больше, то все свои все быть списанными до максимально разрешенного выигрыша. Здесь бывает содержание выводить еще несуществующие финансы на свою платежную систему и далее искать заведение с подходящими под данную необходимую релоадом либо бонусом за первое пополнение счета. Есть несколько подвидов бездепозитного вознаграждения, предлагаемого большим количеством заведений. 1×slots регистрация <a href=http://tekst-pesni.ru/index.php?name=account&op=info&uname=snottyverse76>http://tekst-pesni.ru/index.php?name=account&op=info&uname=snottyverse76</a>
1х слот 1хслотс регистрация перейти на 1×slots
1×slots сайт Для получения депозитного приза нужно восполнить свой игровой баланс настоящими средствами. Вознаграждение можно получить или при внесении первого депо, или в виде фиксированного процента от внесённых средств. Так или по, приз поступит на счёт только в пополнения.Особую изюминку видео слотам присваивают уникальные знакы. С их появлением активизируются разные призы. Вы сможете запустить вспомогательный уровень и прирастить необходимую выигрыша. Есть знаки, которые замещают негодные элементы и сами создают выигрышные комбо. Не стоит забывать и на бонус-тур. После каждого успешного спина есть шанс увеличить сумму выигрыша в два либо четыре раза. <a href=http://arsivforum.10tl.net/member.php?action=profile&uid=4797>http://arsivforum.10tl.net/member.php?action=profile&uid=4797</a> Исходя из этого, просто не присутствует мудрых причин махнуть рукой на получение такого приза при регистрации. И, что, на такой бесплатной базе у вас есть все шансы выиграть средства и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные призы, нарекают бесплатными онлайн платформами для игр.Для тех, кто только взвешивает испытывать собственную удачу, а для проф игроков, разыскивающих новые площадки для выигрышей, основные лицензированные казино нередко устраивают разные промоакции, и одно из лучших предложений за последнее время – как для новичков, например и для проф игроков – бездепозитный бонус за регистрацию. 1×slot регистрация Бездепозитные бонусы за регистрацию в игровых автоматах для хозяев онлайн-казино являются долею рекламной кампании, направленной на повышение аудитории вебсайта. Так они продвигают свои бренды и привлекают свежих клиентов.
1×slots актуальное зеркало
Бездепы все заходить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами.Во время забавы в казино, выигрыши, приобретенные спасибо безвозмездным призовым фондам, суммируются и включаются в совместную необходимую для отыгрывания. Однако, в удача улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно допустит исключить денежные свои. Сумма вывода несомненно зависеть от лимита, одобренного непосредственно в этом учреждении. Поэтому, внимательно нужно читать верховодила выдачи безлимитных депо. <a href=https://www.forum.ple4win.nl/user-287025.html>https://www.forum.ple4win.nl/user-287025.html</a> Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала быстрые выводы. Фишка выплат том,, собственно достаточно выбрать платёжный инструмент и показать необходимую. В большинстве случаев средства зачисляются на электрические кошельки протяжении 15 минут, а на банковские карты – 1–3 трудящихся денька. 1×slots официальный demo регистрация в 1×slots casino Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.
1×slots промокод при регистрации
Для получения предоставленных призов вам понадобиться — ПК либо мобильное прибор, и остальное дело за малым. Подтвердите лицо, предоставив оператору казино свои паспортные данные. Инструкции обыкновенно легкие, основное — четко им идти. Если написано, что «на фото обязаны быть заметны все четыре угла странички паспорта» — сделайте непосредственно это фото. Как лишь получите бездеп в казино, всё одинаково не забывайте инспектировать электрическую почту. Некоторые игорные клубы постоянно радуют активных гэмблеров приятными призами. Чаще всего получить подарок можно в преддверии праздника, на день рождение, за вербование приятеля. А кроме распространённым призом является надбавка к депозиту. Нужно всего лишь пополнить счёт, и азартное заведение увеличит его на 50–100%.Представьте момент, когда при ставке в 10 руб. Вы получите подобное умножение. Миллион рублей за одно вращение, собственно абсолютно вполне. Поэтому вопрос, сколько можно выиграть остаётся открытым. Предлагаем проверить без. Регистрируйтесь в одном или нескольких онлайн казино, получайте Бездепозитный приз и инспектируйте фортуну в деле. Разумеется, вывести средства не так просто. Однако шансы есть у всех. 1хслотс официальный сайт зеркало <a href=http://geokosmos.ru/bitrix/redirect.php?goto=http://mba-urfu.com/bitrix/click.php?goto=http://kru.ecm.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/Xjej2rYejm_>http://geokosmos.ru/bitrix/redirect.php?goto=http://mba-urfu.com/bitrix/click.php?goto=http://kru.ecm.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/Xjej2rYejm_</a> Игры, в можно выступать на бонусные средства. Проверьте список игр, в можно играть на бонусные средства, вероятно они Вам не понравятся и надо расходовать своё время на эту акцию.
1х слот регистрация в 1×slots casino
Бездепозитный бонус по промо-коду несомненно доступен для игры, только что случае когда Вы активируете специальный бонусный код в разделе с бонусами либо укажите промокод при регистрации на веб-сайте. В неких случаях, не активации кода, придется подтвердить контактные данные игрока и наполнить анкету посетителя. B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. <a href=https://rus-crafting.ru/index.php?subaction=userinfo&user=DavidMus>https://rus-crafting.ru/index.php?subaction=userinfo&user=DavidMus</a> зеркала 1×slots В интернете количество узнаваемых игорных площадок с привлекательными акционными предложениями. Однако внимательно разбирать условия 10-ов предложений скором надоест, да и время отнимет много. Поэтому наша команда подготовила ТОП-3 сайтов с наилучшими бездепозитными призами:Каждый игрок должен сначала отчетливо изучить условия по получению и отыгрышу приглянувшегося дара. Если всё организует, поторопитесь забрать безвозмездные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо данный начать вращать барабаны лучших слотов.
<b>Смотреть еще похожие новости:</b>
<a href=https://rolivka.online/forum/showthread.php?tid=29241>рабочее зеркало 1×slots</a>
<a href=https://www.makinamania.net/index.php?topic=251501.new#new>1×slots регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Большинство клубов завлекают внимание в за счёт различных подарков. На одних сайтах возможно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает бесплатные вращения для запуска топовых онлайн слотов. Несмотря на разные акции, стоит выделить самые основные.
#9180 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? <a href=http://filmkachat.ru/>1×slots официальный сайт мобильная версия скачать</a> <a href=https://pattern-wiki.win/wiki/User:JennyCollocott3>https://pattern-wiki.win/wiki/User:JennyCollocott3</a> 1×slots зеркало регистрация <a href=https://gti-club.ru/forum/member.php?u=416208>https://gti-club.ru/forum/member.php?u=416208</a> При помощи такового поощрения оператор может также привлекать клиентов, которые ранее проявляли активность на веб-сайте, хотя по некий основанию прекратили играть. В этом случае промокод высылается пользователю по электронной почте либо в виде SMS.
зеркала 1×slots
Если при регистрации показать промокод, возможно гарантировано получить приз. Где брать ваучер? Посетите тематику блоги или форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В последнее время игорные дома начали рекламироваться в фильмах и сериалах. Присмотритесь и всего заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных руб. 1×slots зеркало регистрация <a href=https://king.az/user/JasperFew>https://king.az/user/JasperFew</a> При пользовании бездепозитным призом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют некоторое видов лимитов: 1 x slots casino Иногда операторы требуют внесение минимального депозита перед выводом для верификации платежного инструмента. В некоторых казино этот депо кроме светит отыграть.
1×slots сайт
Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми акциями. Читайте о них в обзорах и на форуме.На данном разделе портала регулярно публикуются обзорные статьи, в которых рассматриваются благотворительные бонусы превосходнейших интернет-казино. Информация структурирована по нескольким пт, включая основные: Также учтите, собственно некоторые игровые платформы сужают перечень стран, которые готовы получить предложенный бездепозитный бонус за регистрацию. К образцу, есть онлайн-заведения, выдающие сходственные бонусы лишь жителям определенных государств. К примеру, интернет казино 777 Оригинал дает бездепозитный приз лишь игрокам из России и государств СНГ. Или напротив, пичкают вознаграждением всех, кроме обитателей неких стран (как сего, стопам пристально изучать список, дабы потом не появилось практически вопросов и претензий).Для получения выигрыша требуется выполнить обстоятельства казино. Чаще всего игроку нужно поставить определенную сумму, хотя уже из личных денег. Она рассчитывается из совместного объема выигрыша за все время использования бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, случае юзер выиграл 1000 рублей, а множитель составляет х30, исключить деньги можно несомненно, сделав ставки на 30 000 руб. <a href=http://xn–80abbjuadey5bv1e.xn–p1ai/index.php?subaction=userinfo&user=Joshuadrura>http://xn–80abbjuadey5bv1e.xn–p1ai/index.php?subaction=userinfo&user=Joshuadrura</a> 1х слотс зеркало регистрация в 1×slots casino С не отыгранным призом воспрещается превосходить размер наибольшей ставки. Нарушение сего условия последствия аннулирование выигрыша.
1×slots регистрация на сайте
Во время забавы в казино, выигрыши, приобретенные благодаря безвозмездным призовым фондам, суммируются и срабатывают в совместную необходимую для отыгрывания. Однако, в удача улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно допустит вывести финансовые средства. Сумма вывода будет зависимости от лимита, утвержденного именно в данном учреждении. Поэтому, внимательно нужно разбирать верховодила выдачи анлимитных депозитов.Составленный знатоками Casino.ru перечень онлайн-казино с бездепозитным призом разрешает игрокам сравнить спецпредложения разных операторов. <a href=https://australiantravelforum.com/Upload/showthread.php?tid=189234>1×slots casino регистрация 1×slots review live</a> Для казино, работающих интернет, бездепозитные призы нужны для привлечения новых клиентов. Предложение сыграть на слотах без необходимости внесения настоящих средств — работающий метод для повышения интереса к компании. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит выступать в казино, только теперь теснее на собственные средства.Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают приз по государствам. Вплоть до как, что клуб имеет себя игроков из Вашей страны, а бездеп не давать. Выигрыши с бонусов без вложений всегда привязаны к притязанию по ставкам и могут быть обналичены только после выполнения этих притязаний.Если вы выбрали для себя количество брендов которые для больше всего полюбились, для постоянной игры! Таких гемблеров казино довольно предпочитает и оценивает, за частую такие игроки становятся VIP игроками заведения, коим нередко поступают прибыльные предложения повторяющий призов, например же туда заходит и бездепозитные. 1×slot рабочее зеркало <a href=http://uplmegaporn.com/user/Ralphchupe/>http://uplmegaporn.com/user/Ralphchupe/</a>
казино 1×slots
<a href=http://ad-vance.ru/communication/forum/user/41556/>http://ad-vance.ru/communication/forum/user/41556/</a> 1×slots коды Прямо данный отберите благотворительные вращения за регистрацию без депо и начинайте коллекционировать призовые композиции ради крупных выигрышей!
<b>Смотреть еще похожие новости:</b>
<a href=http://nacionrolera.org/foro/viewtopic.php?f=1210&t=147717>скачать 1×slots официальный сайт</a>
<a href=https://nauc.info/forums/viewtopic.php?t=20366710>1×slots регистрация 1×slotscasino09k online</a>
<a href=https://mcmon.ru/showthread.php?tid=108226>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Онлайн гемблинг развивается с любым деньком больше и больше, свежие бренды создаются не по денькам а по часам. Новые онлайн казино проделывают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и тем наиболее предлагают бездепозитные призы за регистрацию, что бы не упустить эту возможность — как воспользоваться свежим бездепом, советуем навещать наш сайт как можно почаще, самое смачное и новые несомненно добавляться в данном же перечне. Такой безвозмездный эквивалент средств зачисляется на профиль пользователя после воплощения притязаний и предназначаются они лишь для игрового процесса. Вывод таких вознаграждений вероятен только в воплощения вейджеровых критерий.
#9181 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало
Перед активацией важно внимательно выучить обстоятельства промоакции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют значение кроме лимиты ставок при отыгрыше и сроки, протяжении которых возможно воспользоваться предложением. Если бездеп охватывает ограниченный список игр, рекомендовано узнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь что, нет случае, случае оператор не установил жесткие ограничения на наивысшую необходимую ставки.При ирге на бонусные свои воспрещается выступать в игровые автоматы с современным джекпотом и игры из радела exist casino. Кроме того, некоторые казино выделяют бездеп на раз либо несколько конкретных слотов, и в других забавах Вы не можете на них играть. <a href=http://filmkachat.ru/>1хслотс официальный сайт зеркало</a> Принципиальным различием даровых бонусов от призов на депо считается недоступность необходимости вносить средства на аккаунт. Из-за сего их нередко нарекают бездепозитными (not the slightest down payment bonuses). <a href=https://forum.papbio.org/member.php?action=profile&uid=95876>https://forum.papbio.org/member.php?action=profile&uid=95876</a> Акционные предложения от казино есть в разных форматах. Часто призы даются в размен на депо. Игрок вносит платеж и получает средства, благотворительные вращения и одобрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — картина бонуса, который гарантирован за выполнение определенных деяний на веб-сайте:Во всех законных онлайн-казино Беларуси необходимо свидетельство паспортных данных для игры — это требование правительства страны. 1×slots casino регистрация 1×slotscasino09k online <a href=http://bbs.ebnew.com/home.php?mod=space&uid=700767>http://bbs.ebnew.com/home.php?mod=space&uid=700767</a> Также есть онлайн-платформы азартных игр, коие используют раздачу бездепозитных призов в особые даты (как для казино, например и для игрока). Помимо этого, действующие геймеры того имеют возможность получить схожие бонусы за свою работа (к примеру, за увеличения уровня или за похожие заслуги).
1×slots зеркало регистрация
Получить приветственный приз шансы лишь свежие посетители онлайн-казино. Способы описаны в условиях акции любого легального казино, чаще всего это: <a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=10&t=53277&p=70077#p70077>1×slots casino online регистрация</a> 1×slots зеркало регистрация в 1×slots casino <a href=https://www.google.az/url?q=https://doctorlazuta.by/>https://www.google.az/url?q=https://doctorlazuta.by/</a> 1×slots casino online регистрация
1×slot регистрация
Несмотря на то, что этот вариант стимуляции со стороны азартных платформ довольно востребован области сходственных игр, далеко многим поклонникам казино знаменито, что по бездепозитные призы казино и как именно их вероятно эксплуатировать.Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом прибыли находятся на этой странице. Посетитель имеет расценить обстоятельства получения и начать выступать на средства без внесения депо. При этом игроку принципиально понимать, на каких условиях и какими способами возможность вывести полученный выигрыш. Для сего нужно расценить список присоединенных платежных систем. <a href=http://bbs.boway.net/home.php?mod=space&uid=915890>http://bbs.boway.net/home.php?mod=space&uid=915890</a> Размер бонуса. В качестве бездепов обычно начисляют небольшие суммы, а когда речь о призах за депо, коие начисляются в процентном соотношении от суммы пополнения, то кое-какие казино имеют подарить игроку до 2000$.Таким образом интернет казино получает потенциального игрока. Возможно в или настоящем он захочет сыграть на средства деньги. Так работают бездепозитные бонусы в интернет казино. Здесь отлично подходит выражение, бесплатные сыр случается только в мышеловке. Начинающие игроки все не обдумывать опасность азарта. Однако с осознания делается больше. Это тема для отдельного обсуждения. 1×slots бонус за регистрацию Зарегистрируйтесь. Для регистрации почаще всего достаточно установить свой номер телефонного и почтовый адресок, после чего установить приобретенный код из СМС. Возможно, требуется показать промокод. В правилах акции будет написано, где его надобно включать. Иногда это надобно создавать при регистрации, времени — уже в создания личного кабинета, на отдельной страничке.
1хслот зеркало сайта
Но а если вы уже профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в интернет казино;Диапазон ставок, которые вправе устроить игрок, кроме лимитирован. Обычно ставить возможно небольшую сумму — около 10–30 рублей за одно вращение. Срок отыгрыша — это этап, кот-ый начинается в момент активации приза и заканчивается с его закрытием. Пользователю нужно уложиться в данный временной промежуток, иначе призовые свои аннулируются. Казино устанавливают перечень игр, ставки каких засчитываются при расчете отыгранных денег. Если тайтл не заходит в данный перечень, то ему быть недосегаем для загрузки в деянья бонусного предложения.Представленные на этой страничке наихорошие бездеп призы в казино за регистрацию в 2022 году имеют подходящие условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, в гости Casino.ru имеют сортировать список по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д. Получив свой презент, Вы сможете безвозмездно играть на реальные деньги, а выполнив обстоятельства отыгрыша, исключить собственный выигрыш.Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут устанавливает лимитирование для клиентов. Конечно, это возможно счесть некоторым неудобством для игрока, но справедливости ради отметить, собственно выбор автоматов всё равно остаётся довольно великим. казино 1×slots <a href=http://hongtouwen.com/home.php?mod=space&uid=429747&do=profile>http://hongtouwen.com/home.php?mod=space&uid=429747&do=profile</a> Можно ли наваривать на бездепозитных бонусах? Это не работа, здесь как повезет, если в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, это возможно назвать везением, и добавочной добавкой к вашему бюджету.Риск-игра по одинаковым шансам – Также казино имеет запрещать исполнять обстоятельства по отыгрышу с помощью раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких других забавах.
1×slots регистрация на 1хслотс
Новички не обожают незамедлительно же заносить депозит. Это обусловлено отсутствием опыта и сомнением. К счастью, наши возможно получить бездепозитный бонус за регистрацию в казино. Неважно собственно начисляет система – фриспины либо кредиты. В любом случае вы не рискуете своими сбережениями. Это замечательная возможность запустить приглянувшийся видео слот или же испытать фортуну в настольных играх.В основном случаев благотворительные призы начисляются в кредитах, которые нельзя сразу вывести со счета. Прежде их нужно отыграть по установленным правилам. Эти притязания принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д.). О нем читайте ниже. <a href=http://fumankong1.cc/home.php?mod=space&uid=600990>http://fumankong1.cc/home.php?mod=space&uid=600990</a> Самый распространённый из подобных бонусов, окончательно же, бездеп на день рождения клиента — бонус вид фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им можно в течение установленного периода медли. 1×slots официальный регистрация На данном разделе портала периодически публикуются обзорные статьи, в которых рассматриваются безвозмездные бонусы наилучших интернет-казино. Информация структурирована по нескольким пунктам, включая основные:Стоит отметить, собственно бездепозитный бонус выдается только совершеннолетним новичкам, коие, в свою очередь, все пригласить личных приятелей и знакомых, кроме претендующих на поощрительную программку лояльности. Подобная разработка замечена между конкурирующих онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению своей посещаемости, методом вербования свежих игроков. Бонусы – это уникальный шанс для потенциальных соучастников игры, коие имеют опробовать софт покер рума и убедиться, будут ли они в него играть либо нет. Новый игрок попробует свои силы с настоящими оппонентами в казино.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
У каждого игорного заведения свои управляла и условия. Но, дабы получить бонусы, необходимо выполнить стандартные действия:
#9182 Charlesgunnyhttp://filmkachat.ru
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Бездепозитные призы, как теснее ясно, считаются уникальной возможностью к игровому процессу безусловно бесплатно, другими выступать в онлайн казино даром и на имеющие средства незамедлительно последствии регистрации аккаунта. Автоматы с таким депо шансы замерзнуть прекрасной возможностью поиграть для поклонников азарта с определенными лимитированиями в денег.Помните, собственно в некоторых играх сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных забавах только от 5% до 50% суммы ставки числятся как отыгранные средства, на как в слотах идет в зачет все 100% суммы. <a href=http://filmkachat.ru/>скачать 1×slots официальный сайт</a> Призовые начисления без депозита шансы предоставляться для участия в турнирах интернет казино. Потратить перечисленные деньги можно необыкновенно в рамках данной промоакции. Условия их проведения себе ограничения на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться этим предложением, превосходнее выучить его правила.Первый образующийся вопрос, это, для выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают новых игроков. Последним проще начать игру на средства с презента за регистрацию. Им не нужно пополнять баланс и расходовать личные средства. Новички получают бесплатные спины либо средства на счёт. С их поддержкою знакомятся с игровым процессом, крутят слоты и делают ставки в рулетке. <a href=http://www.getwayssolution.com/2019/12/how-do-you-read-or-write-file-on-server.html>http://www.getwayssolution.com/2019/12/how-do-you-read-or-write-file-on-server.html</a> 1хслотс регистрация в 1×slots casino <a href=https://pbtur.com.br/users/doctorlazutaei>https://pbtur.com.br/users/doctorlazutaei</a>
1×slots зеркало выигрыши обязательно пройдите регистрацию если
<a href=http://sharecovid19story.com/memberlist.php?mode=viewprofile&u=5122>1хслотс зеркало на сегодня</a> 1× slots официальный Бонусные средства – небольшая сумма денег для старта в новом казино. На бонусные средства, обычно разрешено выступать во все игры, не слотов с современным джекпотом и игр из раздела exist casino. <a href=https://mega-games.pl/user/JulesHap/>https://mega-games.pl/user/JulesHap/</a> Выполнив все притязания оператора, клиент может оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит примерно менее суток. Если дополнительно требуется пройти процедуру верификации, то срок увеличивается до 1–2 трудящихся дней. Для перевода используются банковские инструменты и электронные платежные системы. Второй способ подходит чем, например как основная транзакций ситуации исполняются мгновенно. В связи со спецификой функционирования банков обработка платежей имеет занять до нескольких рабочих дней. 1х слотс зеркало регистрация в 1×slots casino Вейджер (либо вагер) ? это минимальная сумма ставок, которую необходимо устроить для вывода валютного приза. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение.
1хслотс официальный сайт зеркало
Сроки активации приза уточняются любым казино, но чаще всего они не превышают недели с момента получения. Игроку обязательно нужно применять бездеп в течение указанного срока, в ином случае бонус просто пропадет. Каждый приз можно получить лишь один раз, потому если не использовать бездеп в срок, у игрока не будет 2 шанса им воспользоваться.На данном разделе портала регулярно публикуются обзорные заметки, в рассматриваются благотворительные бонусы наихороших интернет-казино. Информация структурирована по нескольким пунктам, включая главные: <a href=https://poldomy.pl/member.php?u=171224>https://poldomy.pl/member.php?u=171224</a> Бездепозитные бонусы, как теснее понятно, считаются уникальной возможностью приступать к игровому процессу полностью бескорыстно, другими выступать в онлайн казино бесплатно и на место средства незамедлительно после регистрации аккаунта. Автоматы с этим депо имеют стать прекрасной вероятностью сыграть для почитателей пыла с определенными лимитированиями в денег.Фриспины начисляются по конкретной ставке. После их активации игроку нужно запустить слот и увериться, что в нем отображаются благотворительные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода последствии отыгрыша ориентируется оператором и изредка выше 5 000 рублей. казино 1×slots официальный сайт
1×slots актуальное зеркало
<a href=http://www.arka-bahce.org/forum/showthread.php?p=764129#post764129>x1 slots 1хслотс регистрация перейти на 1×slots</a> Также учтите, что некоторые игровые платформы сужают перечень стран, коие способны получить предложенный бездепозитный бонус за регистрацию. К образцу, есть онлайн-заведения, выдающие подобные призы только жильцам определенных государств. К примеру, онлайн казино 777 Оригинал дает бездепозитный бонус только игрокам из России и стран СНГ. Или наоборот, пичкают вознаграждением всех, не обитателей некоторых стран (как этого, идет внимательно учить список, чтобы впоследствии не возникло никаких вопросов и жалоб). 1×slots подтвердит вашу регистрацию если говорить <a href=https://storyplus.ru/user/DeweyDar/>https://storyplus.ru/user/DeweyDar/</a> Нельзя рассматривать игру на деньги, как вариант заработка. Азартные игры воспрещены для лиц младше 18 лет. Topcasinobonuses.mobi не зачинщиком азартных игр. Сайт носит информационный характер.
1хслотс рабочее зеркало на сегодня
<a href=http://maps.google.co.ve/url?q=http://gerona.by/?URL=http://vesta.spb.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/VRkqucQL3Hy>http://maps.google.co.ve/url?q=http://gerona.by/?URL=http://vesta.spb.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/VRkqucQL3Hy</a> 1×slots актуальное зеркало Для всех бездепозитных бонусов действует наибольший лимит на выигрыш. Он указывает предельную сумму, которую возможность получить, играя на бонусные кредиты. Как лишь для удастся выполнить требования вейджера, возможный максимально будет переведен с бонусного счета на главной, а остаток несомненно списан.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.exalto-emirates.com/memberlist.php?mode=viewprofile&u=69997&sid=658ffbaf7e8bfc3dfb4d26e544cd4d78>1×slot казино зеркало</a>
<a href=https://www.sgomberisgombero.it/my-account-2/>1×slots бонус за регистрацию</a>
<a href=https://mcmon.ru/showthread.php?tid=105363>1хслот официальный сайт зеркало</a>
<a href=https://forum.dis-course.net/viewtopic.php?t=451341>1×slots casino регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бесплатные бонусы казино без депо можно получить в виде денежных средств на бонусный счет (вывести их можно лишь в отыгрыша), фриспинов, забавы либо кешбэк-бонуса. Популярность онлайн казино растёт и всё больше пользователей начинают проявлять азартными играми. Бездепозитные бонусы 2022 года, это оригинальные презенты за регистрацию. С их поддержкой свежие игроки все получить бесплатные вращения либо средства на баланс за 1 регистрацию. С свет игорных заведений в интернете, бездепозитные бонусы стали моднейшим методом привлечения игроков. Подобные промоакции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о которых мы поведаем. Наш сайт собрал наилучшие предложения из интернета на 2022 год. Воспользуйтесь хоть даром и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить условия.
#9183 Charlesgunnyhttp://filmkachat.ru
1×slots сайт
Многие новенькие сомневаются, что поощрительный приз не нужно несомненно возвращать, в в они выиграли у казино. Это безусловно безопасно и надежно. Выводя выигранные средства, игрок просто одергивает свое участие при и утрачивает уникальную вероятность – безвозмездно увеличивать личное материальное положение.Размер приза. В качестве бездепов обыкновенно начисляют очень суммы, а когда речь идет о бонусах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино имеют презентовать игроку до 2000$. <a href=http://filmkachat.ru/>1×slots бонус за регистрацию</a> Но есть игорные заведения, которые готовы просто например жертвовать средства на забаву. Для сего достаточно сделать профиль. Чтобы вывести свой выигрыш, для поначалу нужно выполнить обстоятельства отыгрыша, обозначенные в критериях получения бездепозитного депо. <a href=http://www.ingenieursdudimanche.lagob.fr/doku.php?id=%D0%A1%D0%B0%D0%BC%D1%8B%D0%B5%20%D0%B2%D0%BA%D1%83%D1%81%D0%BD%D1%8B%D0%B5%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!>http://www.ingenieursdudimanche.lagob.fr/doku.php?id=%D0%A1%D0%B0%D0%BC%D1%8B%D0%B5%20%D0%B2%D0%BA%D1%83%D1%81%D0%BD%D1%8B%D0%B5%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!</a> Онлайн-казино с бездепозитными призами ставят клиентам условия для пользования бездепами, поэтому перед участием в промоакции никакого подробно ознакомиться со всеми правилами и аспектами акции. Условия все прикасаться получения приза, его использования и следующего вывода валютных средств в случае выигрыша. 1х слот регистрация в 1×slots casino <a href=http://www.maxtremer.com/bbs/board.php?bo_table=qna_e&wr_id=990498>http://www.maxtremer.com/bbs/board.php?bo_table=qna_e&wr_id=990498</a> Хотя бесплатные бонусы начисляются без депозита, не исключено, что вас понадобиться вносить средства. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только последствии того, как свежий клиент первый пополнит игровой счет.
1×slots регистрация 1×slotscasino 56 online
Бездепозитный бонус казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби избранного заведения, определится в выборе игр и выяснить качество работы саппорта. Довольно нередко, начиная игровой процесс, игрок уже отказывается останавливаться и делает реальный вклад. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать бесплатно вполне как раз таки с призом за регистрацию без надобности заносить депозит.Пoдтвepдить личнocть клиента. Для удачного вывода средств, необходимо подтвердить личность посетителя. Нa этaпe вepификaции пpoфиля, работники службы защищенности обязаны убедиться, собственно у игрока всего лишь один акк. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не сможет исключить собственный выигрыш, случае у него будет количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы. <a href=https://www.176mw.net/forum.php?mod=viewthread&tid=43&pid=547191&page=2540&extra=page%3D1#pid547191>казино 1×slots</a> 1хслотс 1хслотс регистрация перейти на 1×slots Хотя безвозмездные призы начисляются без депозита, не исключено, что для придется заносить деньги. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь в как, как свежий клиент впервые пополнит игровой счет.После получения бонуса вывод средств для посетителя несомненно недоступен до тех пор, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или пара месяцов. Выводить средства игрок может лишь последствии отыгрыша. <a href=http://elektrofahrrad-tests.de/forums/member.php?action=profile&uid=31186>http://elektrofahrrad-tests.de/forums/member.php?action=profile&uid=31186</a> рабочее зеркало 1хслотс
x1 slots регистрация в 1×slots casino
Осталось избрать казино с призом за регистрацию и сделать профиль. После активации презента выигрыш зависимости от Фортуны и навыков. Выбирайте лучшие благотворительные призы с помощью обзоров на Casinoz – и пусть вам сопутствует удача при отыгрыше бонусных кредитов!В любом казино с бездепозитным бонусом учтены вейджеровые условия. Это единственный «подводный камень», который стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) сделать определённое число ставок. Чем круче приз, тем сложнее выполнить условия, и напротив. <a href=https://sketchfab.com/Vykupavto0311>https://sketchfab.com/Vykupavto0311</a> Рассмотрим на образце: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских руб. В условиях акции предписано, собственно вейджер бездепозитного бонуса х20. Поэтому, чтобы отыграть бонус, игроку будет нужно сделать ставок на 35*20=700 рублей. 1 хслот регистрация в 1×slots casino Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном веб-сайте и выполните вход в собственный кабинет, чтобы арестовать бесплатные вращения с вейджером х40;Бездепозитные бонусы прекрасный вариант даровой игры в игровые автоматы. Многие пользователи сети не понимают, собственно в казино можно начать играть абсолютно бесплатно, а потом вывести выигрыш на банковскую карту или электронный кошелек, иные не доверяют интернет казино, а третьи удачно играют и выигрывают – и тотчас достаточно большие суммы.
скачать 1×slots официальный сайт
Верификация важна для дополнительной безопасности и подсобляет техподдержке выявить бонусхантеров и мошенников. Кстати, рядах платформах выводы крупных сумм доступны лишь в доказательства личности. <a href=https://forum.pmpobc.ca/index.php?topic=126718.new#new>1×slots мобильная версия войти казино</a> В случае установленного лимита на сумму вывода выигрыша с бездепозитного бонуса, игрок не может вывести больше заявленной суммы.Отыграв бездепозитный приз в казино с выводом также придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если подобное ограничение существует, то единоразово исключить получится лишь сумму, не превышающую объем приобретенного бонуса. Призовые начисления без депозита имеют предоставляться для роли в турнирах интернет казино. Потратить перечисленные средства возможно необыкновенно в данной акции. Условия их проведения содержат ограничения на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться таким предложением, чем изучить его управляла.Также, учите, собственно бездепозитный бонус возможно вывести только в случае, когда станут исполнены все обстоятельства отыгрыша. 1х слотс зеркало регистрация в 1×slots casino <a href=https://dain-rmc.co.kr/bbs/board.php?bo_table=free&wr_id=929120>https://dain-rmc.co.kr/bbs/board.php?bo_table=free&wr_id=929120</a> Главное превосходство спинов – возможность изучить различные слоты. Также удастся насладиться бонусными раундами, испытать фортуну в риск-туре и преувеличить выигрыш за счёт особенных знаков. Однако столько игровой процесс заслуживает внимание, как никакого сосредоточиться на реальном выигрыше.Если при регистрации показать промокод, возможно гарантировано получить бонус. Где арестовать ваучер? Посетите тематические блоги или форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В заключительнее время игорные жилища начали рекламироваться в фильмах и сериалах. Присмотритесь и всего заметите промокод, кот-ый принесёт 500 или 1 000 бонусных руб.
1×slots зеркало
Бездепозитный бонус за регистрацию в казино — это стартовый презент в виде денежного начисления или безвозмездных вращений для свежих игроков заведения, для получения которого не нужно вносить депо.Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, a лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. С такими ординарными советами каждое казино с бонусом за регистрацию способно принести в разы больше выгоды и полезности.Третитй бездепозитный бонус за регистрацию – денежные свои. К огорчению, начислить рубли либо баксы готовы только знаменитые и известные клубы. С их подмогою у насладиться любой доступной забавой – автоматом, рулеткой, кено, блэкджеком. <a href=http://srgls.co.kr/bbs/board.php?bo_table=jiggu&wr_id=3280>http://srgls.co.kr/bbs/board.php?bo_table=jiggu&wr_id=3280</a> 1×slots зеркало подтвердит вашу регистрацию если говорить Бездепозитный бонус за регистрацию в казино с выводом средств в 2022 году — Наш ресурс предоставляет игрокам важную информацию о самых новых, щедрых и испытанных призах в интернет казино, которые обновляются любой день.
<b>Смотреть еще похожие новости:</b>
<a href=http://fin-molitor.com/forum/viewtopic.php?f=2&t=393314>1хслот зеркало</a>
<a href=https://www.katzenforum.at/forum/media/users/jamesagema.16012/>1×slots бонус за регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, так как Вам придется ее подтвердить в будущем при выводе средств. Заполняя данные в собственном профиле, указывайте только достоверную информацию, например как Вам понадобиться ее доказать дальнейшем при выводе средств.
#9184 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация на сайте
Если вы облюбовали для себя некоторое брендов которые вас больше всего приглянулись, для постоянной забавы! Таких гемблеров казино довольно предпочитает и оценивает, за частую эти игроки становятся VIP игроками заведения, которым часто поступают прибыльные предложения в виде призов, так же туда входит и бездепозитные.После требуется привнести идентификационный платёж. Это стращает начинающих больше всего. Нужно сделать наименьший депозит в 100–500 рублей. Таким образом служба безопасности увериться никаких, собственно платёжный способ принадлежит Вам. Данная процедура важна для обеспечения безопасности игровых счетов. Пример, Ваш акк взломают и выведут средства на собственный кошелёк. Будет очень неприятно. Поэтому верификация платёжной системы, это необходимый момент. <a href=http://filmkachat.ru/>1×slots casino регистрация</a> Более крупные предложения встречаются довольно изредка. Зачастую они доступны лишь VIP-игрокам. В оставшихся случаях им скорее сопутствуют довольно жесткие условия отыгрыша. Также возможны дополнительные обстоятельства и другие лимитирования, прописанные в критериях и положения бонусной программки казино.В интернет-сети постоянно возможно найти перечни более знаменитых и обещанных поощрительных программ от знаменитых онлайн-казино. <a href=https://hothdporn.pro/user/DavidDrync/>https://hothdporn.pro/user/DavidDrync/</a> Иногда операторы настоятельно внесение малого депозита перед выводом для верификации платежного прибора. В некоторых казино этот депо также предстоит отыграть.Прямо в арестуйте бесплатные вращения за регистрацию без депозита и начинайте коллекционировать призовые композиции ради солидных выигрышей! 1×slots рабочее зеркало на сегодня <a href=http://www.ctphome.com/bbs/home.php?mod=space&uid=68434>http://www.ctphome.com/bbs/home.php?mod=space&uid=68434</a> Приветственный бонус без депо ? подарок за регистрацию. Выдается деньгами, фриспинами либо баллами. В последнем случае бонусные баллы применяются для роли в турнирах либо размена на реальные средства.
1×slots подтвердит вашу регистрацию если говорить
Не стоит незамедлительно же отказываться от приветственных подарков в сходственных казино. Администрация готова начислить средства или фриспины, хотя предварительно сотрудники должны убедиться, что вы не аферист. Дело том,, что развелось очень количество охотников за бонусами. Они научились дурачить систему и зарабатывать солидные суммы денег.Промообъявления от казино мешают реальной картины и ориентированы на привлечение внимания пользователей. Понять, как высоки шансы остаться в плюсе, позволит личный тест критерий предложения: 1хслотс рабочее зеркало на сегодня <a href=https://forex-bitcoin.com/members/368337-ralphovami>https://forex-bitcoin.com/members/368337-ralphovami</a> Размер ставки для забавы по бездепозитному бонусу (естесственно же, если, тогда,, когда он представлен в виде бонусных денежных средств) часто ниже, чем при этой на депозит. Ограничение будет работать до этапа отыгрыша приза. 1×slots официальный сайт скачать на айфон Принципиальным различием даровых призов от призов на депо считается недоступность надобности заносить средства на акк. Из-за этого их нередко называют бездепозитными (not the slightest deposit bonuses).
1× slots casino зеркало
Демоказино есть практически на каждом веб-сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются существенно пореже: там если, тогда, выигрыша и соблюдения критерий акций бездеп возможно перевоплотить в реальные средства.B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax <a href=http://visionart.kr/board/bbs/board.php?bo_table=free&wr_id=385438>http://visionart.kr/board/bbs/board.php?bo_table=free&wr_id=385438</a> Бездепозитные бонусы настоящими средствами, коие возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадали. 1×slots официальный сайт мобильная версия скачать Баланс игрока дополняется на соответствующую сумму. К ней используется вейджер, обозначенный в правилах акции. Вывести выигрыш можно будет в такого, как пользователь сделает требуемый размер ставок из собственных средств. В редких случаях бездеп работает в формате Free Play. На счет юзера зачисляется большая сумма, и предоставляется небольшой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по завершении сего периода сумма на счету несомненно превосходить изначальную, то разность можно несомненно вывести или использовать для дальнейших ставок.Главным интересным в возникновении этих вознаграждений состоит в том, что пустив их в ход, игры ничем не рискует и в последствии никому ничего не несомненно должен (не зависимо, получит ли он спасибо бонусам какой-либо выигрыш или моментально спустит все только собственно прибывшие финансы). То есть, казино снабжает игрока вероятностью на дармовой основе выступать во различные слоты даже спонсирует игру.
1 xslots рабочее зеркало
Для получения бонуса надо(надобно) пригласить в забаву свежего посетителя. Казино начисляет пригласившему фиксированный процент от взносов приглашённого повторяющий приза: почаще всего его размер не выше 10%. Срок деяния приза правило не выше месяца: пригласивший получает приз зависимо проигранных ставок приглашённого в первый месяц игры.Бонус за регистрацию в казино выдается только раз один на 1-го игрока. Но посещают дополнительные промоакции, в рамках коих бездепы раздаются для постоянных посетителей и эти презенты Вы можете получить больше одного раза. <a href=http://theauction.com.au/my-account/>зеркала 1×slots</a> Все обожают получать подарки. Согласитесь, практически каждый играющий человек будет безгранично счастлив, в получит безвозмездный презент для игры в онлайн казино просто за регистрацию или же приз за внесенный депозит, например именуемые приветственные призы для новых игроков. Соответственно эти онлайн клубы станут больше известны и преимущественны у игроков при выборе казино для игры. Топ казино каждый обновляется и прибавляются свежие и занимательные игровые клубы с привлекательной бонусной политикой и всеми возможными привилегиями, к коим относятся такие бонусы как фриспины за регистрацию, денежные бездепозитные призы, а также великодушные бонусы за внесенный депозит. Бездепы обыкновенно предлагают с отыгрышем — мгновенно вывести выигранные свои нельзя. Перевод денег со счета несомненно вероятен после как, как пользователь выполнит все притязания казино, а сумма возможности быть выше установленного правилами лимита. Условиями акции фиксируются сроки, в течение которых заказчик вправе воспользоваться предложением. Обычно они не превышают нескольких дней в активации.Автоматическая активация взгляд самой комфортной, но ручной метод содержит перед ней превосходства. Прежде чем использовать вознаграждение от казино, стоит заранее найти, сколько времени потребуется на исполнение всех условий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала деяния приза. 1×slots casino регистрация 1×slotscasino09k online <a href=http://ceh-i.ru/user/Walterdag/>http://ceh-i.ru/user/Walterdag/</a> Да, у даровых бонусов есть недостатки. Прежде всего, они обычно большие. Кроме такого, условия вейджера по ним всегда жесткие. Но таки отсутствие риска проделывает их довольно красивыми для посетителей.
1×slots подтвердит вашу регистрацию если говорить
Новые клиенты онлайн-казино без первого депо могут выяснить собственную удачливость. К тому же есть возможность конвертировать бездепы в реальные средства за регистрацию в казино, однако достичь бонус необходимо отыграть согласно условиям промоакции. Ознакомьтесь с нашим перечнем наихороших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего списка и получите бездеп сразу. Хватайте наилучшие безвозмездные предложения ниже и выигрывайте немалые деньги, не рискуя! <a href=http://dvnshu.com/index.php?subaction=userinfo&user=productivebanis>http://dvnshu.com/index.php?subaction=userinfo&user=productivebanis</a> 1×слот регистрация в 1×slots casino В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать собственный выигрыш с даровых вращений. Прибыль, коию Вы заработаете на этом бездепе возможно назначать на вывод без какого или отыгрыша.
<b>Смотреть еще похожие новости:</b>
<a href=http://arabulucu.com/forum/memberlist.php?mode=viewprofile&u=3142>1×slots casino зеркало рабочее</a>
<a href=http://sfessd.listbb.ru/memberlist.php?mode=viewprofile&u=86>казино 1×slots официальный сайт</a>
<a href=http://6000ziyuan.com/forum.php?mod=viewthread&tid=112092&extra=>1хслотс мобильная версия зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Также, учите, что бездепозитный бонус можно исключить лишь в том случае, когда станут выполнены все условия отыгрыша.
#9185 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация в 1×slots casino
Внесение депо – Будьте готовы пополнить счет после отыгрыша бонуса. Это обычное требование верховодил для данного типа промо-акций. Лучше заблаговременно уточнить, какую необходимую нужно будет заносить на счет. Как правило, идет о наименьшем депозите, хотя вы обязаны быть уверены, собственно он вас по кармашку. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало рабочее</a> <a href=http://tara-info.biz.ua/wr_board/tools.php?event=profile&pname=divergentquanti>http://tara-info.biz.ua/wr_board/tools.php?event=profile&pname=divergentquanti</a> Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых новых, щедрых и испытанных бонусах в онлайн казино, коие обновляются каждый день. 1 x slots <a href=https://www.usajobsindex.com/author/julesdem/>https://www.usajobsindex.com/author/julesdem/</a>
зеркала 1×slots
1×slots официальный сайт скачать <a href=http://fh79604z.bget.ru/index.php?subaction=userinfo&user=ordinarykook0>http://fh79604z.bget.ru/index.php?subaction=userinfo&user=ordinarykook0</a> Наш список включает в себя лучшие бездепозитные бонусы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по принципиальным параметрам: 1×slots актуальное зеркало Но а в вы теснее профи по интернет казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в интернет казино;
1хслот 1хслотс регистрация перейти на 1×slots
Для такого, дабы отыграть сумму вашего бездепозитного приза нужно выполнить условия вейджера. Очень нередко фриспины даются на конкретные слоты (book of ra, book of deceased, book of sun), избирайте разъем себе нраву, все довольно красивые и высококачественные. Бездепозитные приз может быть валютным так и вид фриспинов на слотыБесплатные бонусы казино без депо можно получить вид валютных средств на бонусный счет (вывести их возможно лишь в отыгрыша), фриспинов, игры либо кешбэк-бонуса. <a href=http://www.xiaoditech.com/bbs/home.php?mod=space&uid=1841237>http://www.xiaoditech.com/bbs/home.php?mod=space&uid=1841237</a> Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.Необходимость отыгрыша. Вейджер в этом случае выше, чем для бонусов за депо. И же свои не отыграны, вывести их нельзя. 1×slot зеркало При небольшой сумме бонуса рекомендовано играть по невысоким ставкам, а применять максимальные чем лишь том, случае, если вейджер слишком большой, а время на отыгрыш крепко ограничено.Все любят получать подарки. Согласитесь, практически каждый играющий человек будет безмерно рад, если получит бесплатный презент для забавы в интернет казино просто за регистрацию или же бонус за внесенный депозит, например называемые приветственные призы для новых игроков. Соответственно такие интернет клубы будут более знамениты и предпочтительны у игроков при выборе казино для игры. Топ казино непрерывно обновляется и добавляются новые и интересные игровые клубы с симпатичной бонусной политикой и всеми возможными преимуществами, льготами, к которым относятся такие призы как фриспины за регистрацию, валютные бездепозитные бонусы, а также щедрые призы за внесенный депозит.
1хслотс мобильная версия зеркало
1×slots рабочее зеркало на сегодня <a href=http://www.qazaqpen-club.kz/en/user/Patrickluddy/>http://www.qazaqpen-club.kz/en/user/Patrickluddy/</a>
1 хслот регистрация в 1×slots casino
<a href=https://www.mexicanservers.com/member.php?action=profile&uid=10086>https://www.mexicanservers.com/member.php?action=profile&uid=10086</a> Фриспины без депозита либо дополнительные свои посодействуют ближе познакомиться с игровой платформой и её функциями. За счёт презентов можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради забавы против живых крупье.Такие одобрения позволяют безвозмездно протестировать новое казино, разобраться с игровым ходом интернет слотов, заработать и вывести небольшую необходимую денег. 1×slots регистрацию более популярный вариант это
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы — это презенты от казино повторяющий бонусных средств или фриспинов для игровых автоматов, которые начисляются на аккаунт игрока после процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депозит не потребуется. Доступ к дару имеет открываться автоматически последствии введения промокода либо воззвания в службу поддержки сайта. В первом случае от пользователя не требуется практически деяний. Бездеп с активацией по коду встречается чаще всего. Игроку необходимо установить совокупа знаков в графе, кот-ая возможность пребывать в регистрационной форме в Личном офисе.
#9186 Charlesgunnyhttp://filmkachat.ru
1 х слотс зеркало
Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 поболее. Когда игроку надеется количество фриспинов, администрация имеет бить3 их начисление на некоторое дней. Бесплатные вращения предоставляются для определенного слота, кот-ый указывается в правилах промоакции.Как только получите бездеп в казино, всё равно не забывайте проверять электрическую почту. Некоторые игорные клубы постоянно веселят интенсивных гэмблеров приятными призами. Чаще всего получить подарок можно в преддверии веселья, на денек рождение, за вербование друга. А того распространённым призом считается надбавка к депозиту. Нужно не восполнить счёт, и азартное заведение увеличит его на 50–100%. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> Подарки на конкретные даты выделяются критериями получения. Если поощрение начисляют игроку на денек рождения, то сумма обычно зависимости от общего объема депозитов последний год. <a href=https://iuecwalocal81288.com/content/%D0%B2%D0%BA%D1%83%D1%81%D0%BD%D0%B0%D1%8F-%D0%BF%D0%B8%D1%86%D1%86%D0%B0-%D0%BE%D1%82-%D1%88%D0%B5%D1%84-%D0%BF%D0%BE%D0%B2%D0%B0%D1%80%D0%BE%D0%B2-%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0-mucho>https://iuecwalocal81288.com/content/%D0%B2%D0%BA%D1%83%D1%81%D0%BD%D0%B0%D1%8F-%D0%BF%D0%B8%D1%86%D1%86%D0%B0-%D0%BE%D1%82-%D1%88%D0%B5%D1%84-%D0%BF%D0%BE%D0%B2%D0%B0%D1%80%D0%BE%D0%B2-%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0-mucho</a> 1×slots регистрация на 1хслотс <a href=https://opaseke.com/users/6945>https://opaseke.com/users/6945</a> Но а в вы уже профи по интернет казино, кликаем на красноватую кнопку «Получить» и Вы автоматически перейдете в интернет казино;Обычно, бездепозитные призы выдаются под определенные слоты с фиксированной ставкой, но их наверняка воспрещено применять в игровых автоматах с прогрессивным джекпотом. Список игр, каких можно применять бездеп, Вы найдете в описании акции или можете уточнить у службы заведения.
1×slot зеркало рабочее регистрации на телефон придет
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=249475>1×slots регистрация 1×slots review live</a> 1×slots регистрация <a href=http://skaah59.free.fr/index.php?file=Members&op=detail&autor=chunkycanopy9>http://skaah59.free.fr/index.php?file=Members&op=detail&autor=chunkycanopy9</a> Зарегистрируйтесь. Для регистрации чаще всего достаточно установить собственный номер телефонного и почтовый адрес, в чего установить полученный код из СМС. Возможно, требуется указать промокод. В правилах промоакции несомненно написано, где его хотелось вводить. Иногда это хотелось делать при регистрации, время — теснее последствии творенья собственного кабинета, на отдельной странице. 1×slots бездепозитный бонус за регистрацию Минимального оборота. Этот предел уточняется вейджером — пока игрок не сыграет на установленную необходимую, вывод средств будет недоступен.
1×slots промокод при регистрации 2025
<a href=http://bbs.01bim.com/home.php?mod=space&uid=684735>http://bbs.01bim.com/home.php?mod=space&uid=684735</a> Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, the decision только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Oтыгpaть бонус с указанным вeйджepом, достичь нужно сдeлaть cтaвoк нa cумму, превышающую размер приза в количество один. 1хслотс зеркало на сегодня Бездепы шансы входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой или баллами.Главным интересным в появлении данных вознаграждений состоит что, нет, собственно пустив их в ход, игры ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он спасибо призам какой-нибудь выигрыш либо мгновенно спустит все только что прибывшие финансы). То есть, казино снабжает игрока вероятностью на дармовой основе играть во всевозможные слоты и даже спонсирует забаву.
1хлот регистрация в 1×slots casino
Как и другие акции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такого предложения считаются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает новых посетителей и дозволяет им составить впечатление о функционале, не рискуя значительными совокупностями.Возьми свой презент. Чаще всего бонус активизируется незамедлительно после регистрации. Но случаются ситуации, когда надо(надобно) забежать в личный кабинет либо написать в справочную службу. <a href=https://forum.pmpobc.ca/index.php?topic=142544.new#new>казино 1×slots официальный сайт</a> Такой безвозмездный эквивалент средств зачисляется на профиль пользователя после воплощения требований и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений возможен лишь последствии воплощения вейджеровых критерий.Любой выигрыш по ставке повыше установленного лимита будет считаться недействительным. То есть ставка не несомненно засчитана при отыгрыше, в случае выигрыша его сумма не поступит на счёт посетителя — итог игры будет всецело аннулирован. Для казино, работающих интернет, бездепозитные призы нужны для вербования новых клиентов. Предложение поиграть на слотах без надобности внесения настоящих денег — работающий способ для повышения интереса к компании. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит играть в казино, только теперь уже на личные деньги. 1×slots промокод при регистрации 2025 <a href=http://5.101.112.134/profile/hesitantfighter/>http://5.101.112.134/profile/hesitantfighter/</a> Основное верховодило получения бездепа ? творимый аккаунт должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов требовательно запрещено. Проверка проводится по имени, адресу электронной почты, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депо нужно соблюдать несложную очередность поступков.
1хлот регистрация в 1×slots casino
В перечне притязаний к отыгрышу нередко наличествуют лимиты на ставки при этой на собственные деньги. Так, если отыграть нужно 30 000 рублей, а предельная сумма ограничена 30 рублями, то вертеть барабаны светит 1000 один. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам действия промоакции.Так что можете смело регистрироваться без всяких размышлений. Фортуна сегодня точно на вашей стороне. Не бойтесь, ведь последствие какого или убытка Вам совершенно не грозит. С этими призами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе. <a href=https://rdaforum.com/user-16088.html>https://rdaforum.com/user-16088.html</a> Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. 1×slots регистрация на сайте 1×slots ru com
<b>Смотреть еще похожие новости:</b>
<a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=88653>1×slots зеркало которую указывали при регистрации кстати</a>
<a href=http://fin-molitor.com/forum/viewtopic.php?f=2&t=405295>1×slots casino регистрация на сайте</a>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=211483>1×slots зеркало этих способов предполагает регистрацию</a>
<a href=http://maddog-server.org/forum/showthread.php?tid=52844>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Не рекомендуем опрометью голову браться за всевозможные предложения получения средств без вложений. Вполне возможно, что бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на первый взгляд. Альтернативой является казино бонус за депо. Мы предлагаем вас пару советов, благодаря коим у каждого игрока несомненно вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств: Бездепозитные бонусы прекрасный вариант безвозмездной забавы в игровые автоматы. Многие юзеры сети не знают, собственно в казино возможно начать выступать абсолютно безвозмездно, а потом вывести выигрыш на банковскую карту или электронный кошелек, иные не доверяют интернет казино, а третьи удачно играют и выигрывают – и подчас довольно великие суммы.
#9187 Charlesgunnyhttp://filmkachat.ru
1×slots бонус за регистрацию
Денежные свои. Третий приз за регистрацию без депо – наличные. К раскаянью, лишь известные и популярные клубы имеют уяснить деньги в руб. Либо долларах. С их подмогою вас насладиться любой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед этим нужно исполнение определенных условий. <a href=http://filmkachat.ru/>1×slots сайт</a> <a href=http://www.biopolytech.com/bbs/board.php?bo_table=free&wr_id=126438>http://www.biopolytech.com/bbs/board.php?bo_table=free&wr_id=126438</a> У каждого игорного клубы разные вейджеровые обстоятельства. Чтобы вы гарантировано смогли выполнить их, мы дадим несколько советов. Если система начислила маленькую сумму, не делать немалые ставки – остановитесь на 10–30 центах. Как только сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте выступать. В неприятном случае лучше приглядеться к другому автомату. 1×slots регистрацию более популярный вариант это <a href=http://rogerfilms.com/index.php?title=скачать_фильмы_новинки_качестве_на_телефон>http://rogerfilms.com/index.php?title=скачать_фильмы_новинки_качестве_на_телефон</a>
1хслот зеркало
Мы рекомендуем не отказываться от подобных предложений узнаваемых казино. Выделите некоторое мин. На регистрацию, получите приз и попробуйте его отыграть. Может быть, сегодня фортуна несомненно на вашей стороне! <a href=https://aircompare.us/forums/memberlist.php?mode=viewprofile&u=40074>1×slots официальный demo регистрация в 1×slots casino</a> 1×slots бездепозитный бонус за регистрацию Бонус в казино без депо содержит разные варианты: такое быть приветственный бонус, акции в честь каких-то праздников или весомых дат, бонус за вербование новых игроков, преданность и получение VIP-статуса. <a href=https://sporovo.by/user/Porsedropmi/>https://sporovo.by/user/Porsedropmi/</a> Если простыми словами, бездепы – это определённая сумма денег либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать презенты. Но есть кое-какие нюансы. Существуют игорные жилища, коие перед что, этим как начислить призы настоятельно привязать телефон, дать копии документов. casino 1×slot
1 x slots casino
<a href=http://biyografiforum.10tl.net/member.php?action=profile&uid=2847>http://biyografiforum.10tl.net/member.php?action=profile&uid=2847</a> Чтобы выступать безвозмездно на реальные средства в казино, не всегда достаточно просто зарегистрироваться. Иногда нужно выполнить дополнительные деяния. 1×slots актуальное зеркало
1×slots рабочее зеркало на сегодня
Бездепозитный приз по промо-коду будет доступен для игры, лишь в случае когда Вы активируете специальный бонусный код в разделе с призами либо укажите промокод при регистрации на веб-сайте. В некоторых случаях, не активации кода, придется доказать контактные данные игрока и заполнить анкету посетителя. Далее потребуется отыграть вагер и исключить выигрыш. Игрокам без опыта крупно подфартило, меня получить десятки презентов за одну регистрацию. Если не смогли получить Бездепозитный приз, не тревожьтесь. Обратитесь в онлайн чат, оператор поможет решить проблему.В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это самая милая часть забавы. Важно, часто бездепозитные бонусы в казино выдаются с лимитированиями по наибольшей выплате. В среднем можно рассчитывать на выгода в некоторое тыщ рублей. Как исключить выигрыш с приза без депо. Придётся подтвердить аккаунт документально, в некоторых заведениях. Процедура верификации обязательна и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате либо прочитайте в правилах. У каждого игорного клубы различные вейджеровые условия. Чтобы вы гарантировано сумели выполнить их, мы дадим несколько советов. Если система начислила маленькую необходимую, не создавать немалые ставки – остановитесь на 10–30 центах. Как лишь сумеете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте играть. В противном случае другого, как присмотреться к другому автомату.Выполнив все требования оператора, заказчик возможность оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем менее суток. Если дополнительно потребуется пройти функцию верификации, то срок возрастает до 1–2 рабочих дней. Для перевода применяются банковские приборы и электронные платежные системы. Второй метод подходит другого, как, так как масса транзакций такой исполняются мгновенно. В связи со специфичностью функционирования банков обработка платежей может взятьвдолг(взятьвзаймы) до нескольких рабочих дней. 1×slots промокод при регистрации 2025 <a href=http://masterpotolok.com/index.php?subaction=userinfo&user=quickestcluster>http://masterpotolok.com/index.php?subaction=userinfo&user=quickestcluster</a> Бонусы без депозита при регистрации числятся наиболее привлекательными как для опытных игроков, так для и начинающих. Получив это вознаграждение, клиент имеет выступать на настоящие средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные призы в интернет-казино Рунета, а условия их активации и выигрыша.
1×slots на любой вкус как пройти регистрацию
Доступность — бездепозитные призы в казино почаще всего предоставляются свежим игрокам, но посещают случаи, когда бонус имеют получить и действующие посетители. <a href=https://berzarina28a.ru/index.php?/profile/10800-arnoldspice/>https://berzarina28a.ru/index.php?/profile/10800-arnoldspice/</a> Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных обстановок с казино, когда последствии отыгрыша бездепа вам не дадут вывести солидную необходимую выигрыша.Шаг 4. Активация. Внимательно изучите условия, информацию по ограничениям и сроке действия бонусного предложения. Разобравшись с правилами, возможно активировать бонус в собственном кабинете (времени ? с использованием промокода) либо по запросу в саппорт. x1 slots 1хслотс регистрация перейти на 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.bandariklan.com/showthread.php?tid=176825&pid=885156#pid885156>1×slots регистрацию более популярный вариант это</a>
<a href=http://weeklywars.de/viewtopic.php?f=12&t=6800&p=463133#p463133>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Наши специалисты изучают обстоятельства акции, после в ручном режиме проверку их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и другие характеристики. Мы не рекламируем казино, а даем игрокам информацию о наилучших из их.
#9188 Charlesgunnyhttp://filmkachat.ru
казино 1×slots официальный сайт
Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки шансы запросить вспомогательные документы либо инициировать куцее общение по Skype. <a href=http://filmkachat.ru/>1хслот зеркало сайта</a> Доступ к дару может раскрываться механически последствии введения промокода или воззвания в саппорта сайта. В первом случае от юзера не требуется практически действий. Бездеп с активацией по коду встречается чаще всего. Игроку нужно ввести совокупность знаков в графе, которая возможность находиться в регистрационной форме в Личном офисе. <a href=http://onlines.pro/user/JamesDooky/>http://onlines.pro/user/JamesDooky/</a> Срок отыгрыша — это период, который наступает в момент активации бонуса и заканчивается с его закрытием. Пользователю нужно уложиться в данный временной зазор, иначе призовые средства аннулируются. Казино устанавливают перечень игр, ставки каких засчитываются при расчете отыгранных денег. Если тайтл не входит в этот перечень, то он может быть недосегаем для загрузки во время деяния бонусного предложения.Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке необходимо пополнить счет в казино. Для депозитных призов, данная процедура не нужна, так как депо уже сделан. 1×slots актуальное зеркало <a href=https://c.im/@Glavdorogadv1606>https://c.im/@Glavdorogadv1606</a> Активация по промокоду употребляется в разных видах бездепов. Если речь о приветственном бонусе, то набор символов можно разузнать на крупнейшей странице, в регистрационной форме либо послании, коие отчаливает юзеру для доказательства e-mail. Акции все проводиться совместно с партнерскими площадками. Обычно код располагается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется одноразовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем актуальный код для активации в описании каждого рекламную.Но существуют азартные заведения, готовые просто например вручить средства на игру. Для сего достаточно создать профиль. Чтобы исключить выигрыш, сначала необходимо выполнить вейджеровые обстоятельства, прописанные в критериях получения бездепа.
1×slots официальный сайт зеркало
Даже не выиграв крупную сумму, игрок интересно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-то финансовых рисков. Быть в курсе наихороших акций легкостью. Достаточно регулярно учить перечень свежих интернет казино с выводом бонуса без депо в данном разделе. x1 slots 1хслотс регистрация перейти на 1×slots Бездеп с фриспинами может охватывать всю коллекцию игр на веб-сайте или разработки одного провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении промоакции. Выигрыш имеет быть выведен после такого, как пользователь отыграет эту сумму. Возможность расценить глубокий перечень слотов — главное достоинство этой разновидности. Игроку становятся доступны что, эти опции, которые отсутствуют в демонстрационном режиме, а возможность выиграть настоящие средства прибавляет ярких азартных чувств. <a href=https://sportcar.moscow/user/Raymondmix/>https://sportcar.moscow/user/Raymondmix/</a> Представьте момент, когда при ставке в 10 руб. Вы получите схожее умножение. Миллион рублей за одно вращение, что абсолютно вполне. Поэтому вопрос, сколько можно выиграть остаётся не. Предлагаем проверить без. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный бонус и проверяйте фортуну в деле. Разумеется, вывести деньги не так просто. Однако шансы есть у всех. 1хлот регистрация в 1×slots casino Бонус с зачислением денег на счет дает больше свободы действий. Пользователь сам выбирает, каким образом распорядиться подаренными средствами. Здесь кроме имеют действовать ограничения на перечень доступных игр, но обычно эти рамки не так строги, как в рекламную с бесплатными вращениями.Промокод – определённая композиция знаков, коию необходимо установить в подходящее поле при твореньи учетной записи или активировать в собственном профиле игрока в разделе с бонусами.
1×slots официальный сайт мобильная версия
На странице представлены бездепозитные призы за регистрацию в казино редчайшая заслуга за коей гонятся все игроки как новички, так и мастера. Мы тоже уделяем большое внимание на наличие бонусов при составление рейтинга казино на деньги. Бездепозитный бонус это вероятность играть даром и выиграть настоящие средства.Чтобы бездеп не был начислен на Ваш аккаунт, Вам не активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт механически, а Вы не расчитываете его применять, обратитесь в службу с пожеланием отменить бездепозитный приз. <a href=https://rightcoachforme.com/author/forsedropoa/>https://rightcoachforme.com/author/forsedropoa/</a> Самые знаменитые способы вывода средств банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам на Neteller и Skrill, еще пользуются криптовалютными кошельками. Вывод выигрышей имеет осуществляться быстро либо развлекать от нескольких часов до нескольких суток.Более солидные предложения встречаются довольно изредка. Зачастую они доступны лишь VIP-игрокам. В оставшихся случаях им скорее сопутствуют очень жесткие условия отыгрыша. Также возможны вспомогательные обстоятельства прочие ограничения, прописанные в условиях и положения бонусной программки казино. 1×slots мобильная версия войти казино При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, коие можно посвятить ирге в казино.Зачастую бездепозитные призы казино для игры предлагаются различными заведениями азартных игр виде маркетинговых промоакций или в целях вербования к себя новых игроков. Для бездепозитных бонусов в казино 2022 геймеру не нужно пополнять счет до этапа вывода желаемых средств.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=326296>1х слот регистрация в 1×slots casino</a> С не отыгранным бонусом воспрещается превосходить размер максимальной ставки. Нарушение сего условия последствия аннулирование выигрыша. Популярность интернет казино растёт и всё больше юзеров начинают интересоваться азартными забавами. Бездепозитные бонусы 2022 года, это оригинальные подарки за регистрацию. С их помощью свежие игроки имеют получить безвозмездные вращения или деньги на баланс за 1 регистрацию. С в игорных заведений в интернете, бездепозитные бонусы стали известнейшим способом вербования игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о которых мы расскажем. Наш вебсайт собрал превосходнейшие предложения из онлайна на 2022 год. Воспользуйтесь каким презентом и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить условия. 1×slots регистрация 1×slots casino 777 online <a href=http://forum.myslash.ru/profile.php?mode=viewprofile&u=53724>http://forum.myslash.ru/profile.php?mode=viewprofile&u=53724</a> Как лишь получите бездеп в казино, всё одинаково не запамятовывайте проверять электронную почту. Некоторые игорные клубы постоянно радуют активных гэмблеров приятными призами. Чаще всего получить презент возможно в преддверии веселья, на день рождение, за вербование друга. А кроме распространённым бонусом считается надбавка к депозиту. Нужно всего лишь пополнить счёт, и азартное заведение прирастит его на 50–100%.
1×slots зеркало регистрацию более популярный вариант это
Прибывшие на акк финансы бездепозитные бонусы предназначаются, в основном, лишь для свежеиспеченных пользователей, коие раньше не имели личного аккаунта в данном казино. Исходя из этого, случае ранее у игрока был сделан депо, то, по всей вероятности, у него больше не будет возможности рассчитывать на получение такого приза в конкретном заведении. Популярность онлайн казино растёт и всё больше пользователей начинают интересоваться азартными забавами. Бездепозитные бонусы 2022 года, это уникальные подарки за регистрацию. С их поддержкою свежие игроки шансы получить бесплатные вращения или средства на баланс за одну регистрацию. С в игорных заведений в интернете, бездепозитные бонусы стали популярнейшим методом вербования игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш сайт собрал наихорошие предложения из интернета на 2022 год. Воспользуйтесь каким подарком и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить обстоятельства. <a href=http://forum.americandream.de/memberlist.php?mode=viewprofile&u=7369>http://forum.americandream.de/memberlist.php?mode=viewprofile&u=7369</a> Выбор любого интернет казино на нашем сайте. В описании к любому Вы сможете узнать, что получите за создание аккаунта. 1×slots зеркало видели такую регистрацию на
<b>Смотреть еще похожие новости:</b>
<a href=https://rolivka.online/forum/showthread.php?tid=28591>зеркло казино 1×slots</a>
<a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=2290>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Зарегистрироваться в казино по особой ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефонного и электронную почту). Для доказательства номера аппарата нужно в собственном профиле указать свой номер и нажать кнопку „Подтвердить номер телефона“, далее Вы получите sms-сообщение с кодом, кот-ый нужно установить в отвечающее поле. Для доказательства электрической почты, перейти по интенсивной ссылке в послании от казино.
#9189 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало на сегодня
Нельзя осматривать игру на деньги, как вариант заработка. Азартные забавы запрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не организатором азартных игр. Сайт носит информационный нрав. <a href=http://filmkachat.ru/>1 x slots casino</a> <a href=https://www.winners24.pl/member.php?action=profile&uid=51230>https://www.winners24.pl/member.php?action=profile&uid=51230</a> Таким образом интернет казино получает вероятного игрока. Возможно в или подлинном он захочет поиграть на свои деньги. Так трудятся бездепозитные призы в онлайн казино. Здесь очень подходит выражение, бесплатные сыр бывает только в мышеловке. Начинающие игроки имеют не обдумывать опасность азарта. Однако времени осознания делается больше. Это тема для отдельного обсуждения.Обыкновенные бездепозитные призы в объеме от 3-х до 20 $ сделаны чтобы, чтобы, дабы в забавы заходили все свежие и новые игроки. Здесь, всего, будет ограничение на максимальный выигрыш. Важно, дабы перед наименьшим вкладом был отключен бонус за первое пополнение счета, и в не попадет на повторный вейджер. 1×slots официальный сайт скачать <a href=https://rg-mechanics.club/user/Patrickzep/>https://rg-mechanics.club/user/Patrickzep/</a> Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, all зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.
1×slots регистрация на 1хслотс
Чтобы бездеп не был начислен на Ваш акк, Вам надо активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт автоматически, а Вы не планируете его применять, обратитесь в службу поддержки с пожеланием отменить бездепозитный приз.Еще одно условие дотрагивается объемов ставки. Операторы устанавливают наивысшую необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном офисе. При превышении лимита есть риск лишиться бонуса. Существующие ограничения относятся и к определенным обликам ставок. Например, играя в рулетку, заказчик может столкнуться с запретом ставить фишки на шансы. 1×slots сайт зеркало B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpaxВ интернет-сети практически можно отыскать списки более популярных и обещанных поощрительных программ от модных онлайн-казино. <a href=http://www.modernism.hk/?s=%3Ca+href%3Dhttps%3A%2F%2Fdoctorlazuta.by%2Fblog%3E%D0%B1%D0%BB%D0%BE%D0%B3%D0%B8+%D0%BE+%D0%B6%D0%B5%D0%BD%D1%81%D0%BA%D0%BE%D0%BC+%D0%B7%D0%B4%D0%BE%D1%80%D0%BE%D0%B2%D1%8C%D0%B5%3C%2Fa%3E+%D0%B1%D0%BB%D0%BE%D0%B3+%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0+%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0+%D0%B4%D0%B7%D0%B5%D0%BD&x=0&y=0>http://www.modernism.hk/?s=%3Ca+href%3Dhttps%3A%2F%2Fdoctorlazuta.by%2Fblog%3E%D0%B1%D0%BB%D0%BE%D0%B3%D0%B8+%D0%BE+%D0%B6%D0%B5%D0%BD%D1%81%D0%BA%D0%BE%D0%BC+%D0%B7%D0%B4%D0%BE%D1%80%D0%BE%D0%B2%D1%8C%D0%B5%3C%2Fa%3E+%D0%B1%D0%BB%D0%BE%D0%B3+%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0+%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0+%D0%B4%D0%B7%D0%B5%D0%BD&x=0&y=0</a> Прежде всего, не запамятовывайте периодически заглядывать на страницу обзоров бездепозитных призов. Они шаг за шагом рассматривают более увлекательные предложения ведущих игорных порталов. 1×slots официальный сайт скачать на айфон Любой выигрыш по ставке повыше установленного лимита будет считаться недействительным. То есть ставка не несомненно засчитана при отыгрыше, в случае выигрыша его сумма не поступит на счёт посетителя — результат игры несомненно всецело аннулирован.Также бездепозитные бонусы все работать способом возвращать к ирге клиентов, пока приостановивших своё сотрудничество с компанией: извещение о бездепе поступает на мобильный аппарат или почту.
x1 slots регистрация в 1×slots casino
Обычно бездепозитные акции от казино, прибывают на эл. Почту в деньки рождения либо дни. В неких интернет казино возможно адресоваться в чат и как неизменному игроку, вполне для предложат бездепозитное предложение. Выполнив все требования оператора, заказчик может оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит примерно менее суток. Если дополнительно потребуется пройти функцию верификации, то срок возрастает до 1–2 трудящихся дней. Для перевода используются банковские инструменты и электронные платежные системы. Второй способ подходит чем, так как масса транзакций в осуществляются мгновенно. В связи со спецификой функционирования банков обработка платежей возможность взятьвдолг(взятьвзаймы) до нескольких трудящихся дней.Следует выделить, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом. <a href=http://kawasaki-shop.ru/bitrix/rk.php?goto=http://bigtim.ru/bitrix/redirect.php?goto=http://xn–11–6kca3cguo9b4a.xn–p1ai/bitrix/redirect.php?goto=https://telegra.ph/Poshagovoe-rukovodstvo-po-registracii-biznesa-v-FNS-Rossii-09–23>http://kawasaki-shop.ru/bitrix/rk.php?goto=http://bigtim.ru/bitrix/redirect.php?goto=http://xn–11–6kca3cguo9b4a.xn–p1ai/bitrix/redirect.php?goto=https://telegra.ph/Poshagovoe-rukovodstvo-po-registracii-biznesa-v-FNS-Rossii-09–23</a> Акции распространяются как на все игры казино, например и на ограниченный перечень. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и. Промо возможность охватывать разработки 1-го производителя. Бездеп не пересекается с иными акциями казино. Если на сайте учтен кэшбек, он не начисляется за ставки, изготовленные бонусными средствами. Для идентификации платежных реквизитов игрока возможность понадобиться пополнение счета на минимальную необходимую. 1×slots казино зеркало Частенько новенькие не разумеют, как активировать подарки либо вывести 1-ый выигрыш. Для похожих случаев наша команда описала главные определения – собственно такое фриспины, вейджер, как его отыграть, для необходимо проходить верификацию.На данном разделе портала периодически публикуются обзорные статьи, каких рассматриваются безвозмездные бонусы превосходнейших интернет-казино. Информация структурирована по нескольким пт, включая главные:
1×slots регистрация 1×slots casino c2d ru
Для такого, дабы отыграть сумму вашего бездепозитного приза нужно выполнить обстоятельства вейджера. Очень часто фриспины даются на определенные слоты (book of ra, book of lifeless, book of sun), выбирайте разъем для по, они очень очень и качественные. Бездепозитные бонус возможность быть валютным например и в виде фриспинов на слотыТеоретически, к бесплатным призам можно отнести например именуемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, поэтому собственно они предоставляют только возможность создавать ставки. Активация по промокоду используется в разных видах бездепов. Если речь идет о приветственном призе, то набор символов можно узнать на крупнейшей странице, в регистрационной форме или письме, коие отчаливает пользователю для доказательства адреса электронной почты. Акции все проводиться совместно с партнерскими площадками. Обычно код располагается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется одноразовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем актуальный код для активации в описании любого промо. 1хслотс казино зеркало <a href=https://iwoman.club/forums/raznoe/besedka/topic522#23298>https://iwoman.club/forums/raznoe/besedka/topic522#23298</a> Поспешите арестовать бездепозитные бонусы за регистрацию в казино из представленного списка. Все платформы не водят законную деятельность, но и порадуют правдивыми результатами забавы, высокой отдачей, прыткими выплатами.Бесплатные бонусы казино без депо возможно получить в виде денежных средств на бонусный счет (исключить их возможно лишь в отыгрыша), фриспинов, забавы либо кешбэк-бонуса.
1×slots промокод при регистрации
Также учтите, собственно кое-какие игровые платформы сузивают список государств, коие готовы получить предложенный бездепозитный бонус за регистрацию. К примеру, существуют онлайн-заведения, выдающие сходственные призы лишь обитателям определенных стран. К примеру, интернет казино 777 Оригинал предоставляет бездепозитный бонус только игрокам из России и стран СНГ. Или наоборот, снабжают вознаграждением всех, кроме обитателей некоторых стран (как сего, следует пристально учить список, чтобы потом не появилось практически вопросов и претензий).Теоретически, к бесплатным призам возможно отнести например именуемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, поэтому что они предоставляют лишь вероятность создавать ставки. <a href=https://tastebuds.fm/topics/7357-onlayn-kazino>https://tastebuds.fm/topics/7357-onlayn-kazino</a> Верификация необходима для дополнительной безопасности и может техподдержке выявить бонусхантеров и мошенников. Кстати, рядах платформах выводы крупных сумм доступны только последствии доказательства личности. 1×slot зеркало рабочее этих способов предполагает регистрацию Мы проделываем ударение на ключевых положениях верховодил, рассказываем о территориальных лимитированиях и кратко информируем о других акциях обговариваемого казино.Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы которые появляются у новичков.
<b>Смотреть еще похожие новости:</b>
<a href=https://radios-collector.com/viewtopic.php?f=7&t=40219>1×slots зеркало регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Шаг 5. Использование и отыгрыш. Бездеп обязан быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. Срок отыгрыша — это период, который наступает в момент активации бонуса и кончается с его закрытием. Пользователю необходимо уложиться в этот временной промежуток, иначе призовые свои аннулируются. Казино устанавливают список игр, ставки в засчитываются при расчете отыгранных денег. Если тайтл не заходит в этот перечень, то возможность быть недосегаем для загрузки период деяния бонусного предложения.
#9190 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
В лицензионных бездепозитных казино выступать в азартные забавы действительно безопасно. Наличие лицензии подтверждает что, этот факт, что клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP. <a href=http://filmkachat.ru/>1×slots мобильная версия войти казино</a> <a href=http://1.235.32.108/doku.php?id=%D0%91%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%88%D0%B5%D1%84-%D0%BF%D0%BE%D0%B2%D0%B0%D1%80%D0%BE%D0%B2%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!>http://1.235.32.108/doku.php?id=%D0%91%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%88%D0%B5%D1%84-%D0%BF%D0%BE%D0%B2%D0%B0%D1%80%D0%BE%D0%B2%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!</a> 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=https://mc-pe.net/user/Harrylat/>https://mc-pe.net/user/Harrylat/</a> Проверка занимает от нескольких мин. До нескольких дней, профессионалы техподдержки шансы запросить дополнительные документы или инициировать краткое общение по Skype.
казино 1×slots официальный сайт
При исполнении критерий отыгрыша и верификации, деньги с бонусного счета переводятся на главной и шансы быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции зависимости от выбранной платежной системы. <a href=https://mit-bbs.com/viewtopic.php?t=129021>1×slots бонус за регистрацию</a> 1×slots мобильная версия войти казино В случае установленного лимита на необходимую вывода выигрыша с бездепозитного приза, игрок не сможет исключить больше заявленной суммы.Онлайн-казино с бездепозитными бонусами ставят клиентам условия для использования бездепами, поэтому перед ролью в акции другого, как подробно ознакомиться со всеми правилами и аспектами промоакции. Условия имеют касаться получения бонуса, его применения и следующего вывода валютных средств когда выигрыша. <a href=http://soe-parrot.com/home.php?mod=space&uid=168323>http://soe-parrot.com/home.php?mod=space&uid=168323</a> Вознаграждения за получение VIP-статуса ? начисляются в программки преданности при достижении одного уровня либо выдаются индивидуально менеджерами саппорта. 1×slots сайт зеркало Бонус начисляется игроку незамедлительно последствии регистрации и прохождения верификации в казино и не требует от клиента внесения депозита. Как правило, размер приза в схожем случае достаточно умеренный, однако позволяет новичкам познакомиться с забавой без риска настоящими деньгами.
1×slot регистрация
Для получения депозитного приза нужно восполнить собственный игровой баланс реальными средствами. Вознаграждение можно получить или при внесении первого депо, или в виде фиксированного процента от внесённых средств. Так либо иначе, приз поступит на счёт только в пополнения.Максимальный объем ставки, который нельзя превышать же бонус не будет всецело отыгран. В случае нарушения этого управляла, приз и выигрыш с него будут аннулированы. Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. <a href=http://k98727wu.beget.tech/user/Kennethlon/>http://k98727wu.beget.tech/user/Kennethlon/</a> 1×slots зеркало быструю регистрацию а также мгновенное
сайт 1× slots casino
Важно, убедитесь в, собственно раньше не регились в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи.Так что приготовьтесь дать конфиденциальную информацию (пол, возраст, государство проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает не более суток, после чего удастся беспрепятственно выводить солидные выигрыши. В разделе с призами активировать собственный подарок. Найти забавы, для которых предусмотрено поощрение и использовать приз по предназначению.Объективные – объем приза, коэффициент и условия вейджера, необходимость внесения депозита для вывода денег; 1×slots регистрацию процедура займет всего лишь <a href=https://timeoftheworld.date/wiki/1×slots_%D0%9E%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9_%D0%97%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE>https://timeoftheworld.date/wiki/1×slots_%D0%9E%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9_%D0%97%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE</a> Практически все онлайн казино с бездепозитным бонусом за регистрацию учитывает программу преданности — систему одобрения постоянных клиентов, кот-ая произведено из колличества значений. При достижении игроком еще уровня на его счёт поступает бонус. Чем выше уровень — что, этим щедрее приз.
1×slots казино мобильная версия
При регистрации никаких или ином интернет игральном заведении — вас дается один шанс испытывать собственную фортуну не внося средства монеты. Замечу что такую поощрительную предложение предоставляют не все интернет игровые площадки, а только щедрая половина из их. Которые мы подготовили для Вас в нашем перечне.Для верификации номера аппарата, в личном профиле выберите опцию „Подтвердить номер аппарата“ и введите в соответствующее фон код, полученный в sms-сообщении. Многие игроки, оценив возможностей казино, остаются играть в нем и дальше ? на это и нацелено каждое рекламную. Постоянные клиенты вносят депозиты и проделывают ставки, обеспечивая длительную выгода оператора. То есть, казино раздают бездепы свежим пользователям для формирования лояльной аудитории. <a href=http://iawbs.com/home.php?mod=space&uid=813694>http://iawbs.com/home.php?mod=space&uid=813694</a> 1хслотс регистрация в 1×slots casino Вышеописанная причина и является основным нюансом, в которого операторы отдают часть собственной выгоды на разные маркетинговые затраты и маркетинговые кампании. А самым действующим здесь будут выступать непосредственно бездепозитные призы казино 2022 с выводом за регистрацию.
<b>Смотреть еще похожие новости:</b>
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=57759&extra=>1 x slots</a>
<a href=https://portugal-campings.com/pt/account/>1хслотс рабочее зеркало</a>
<a href=https://forums.scar-divi.com/topic/577805-casino-online-opiniones-as%C3%AD-como-tragaperra-online-jugar/#comment-613173>скачать 1×slots официальный сайт</a>
<a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=160&p=1395592#p1395592>1×slots зеркало регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бoльшинcтвo азартных заведений выдвигают приблизительно однообразные, схожие обстоятельства и требования, коие необходимо выполнить, чтобы получить бездепозитный приз за регистрацию. Все их можно объединить в раз перечень: Операторы гемблинга утверждают, что так они сражаются с бонус-хантерами. Впрочем, критики считают, собственно данным казино пытаются устроить из случайного гостя неизменного игрока.
#9191 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало
Вышеописанная причина и считается главным моментом, следствии которого операторы отдают доля собственной прибыли на различные маркетинговые расходы и маркетинговые кампании. А самым действующим здесь станут выступать непосредственно бездепозитные призы казино 2022 с выводом за регистрацию.Бонус в казино без депо имеет различные разновидности: может быть приветственный бонус, промоакции в честь каких-либо дней либо главных дат, приз за вербование новых игроков, лояльность и получение VIP-статуса. <a href=http://filmkachat.ru/>1хслотс зеркало</a> <a href=http://147.47.238.227/bbs/board.php?bo_table=qna&wr_id=2949979>http://147.47.238.227/bbs/board.php?bo_table=qna&wr_id=2949979</a> Приветственный бездеп предоставляется хоть игроку только один один. Казино дерутся с так именуемыми бонусхантерами (от англ. Bonus Hunter — доброволец за бонусами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения подарка. Исключить подобные действия дозволяет верификация данных. Администрация вправе востребовать у посетителя доказать персональные данные, указанные при регистрации.Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы которые появляются у новичков. 1×slot рабочее зеркало <a href=https://bridge-clip.ru/user/Renaldoanoth/>https://bridge-clip.ru/user/Renaldoanoth/</a>
1×slots казино мобильная версия
Для всех бездепозитных бонусов функционирует максимальный лимит на выигрыш. Он указывает предельную необходимую, которую вас получить, играя на бонусные кредиты. Как лишь вам получится выполнить притязания вейджера, дозволенный максимально будет переведен с бонусного счета на основной, а остаток будет списан.Новые клиенты онлайн-казино без первого депозита имеют выяснить собственную удачливость. К что, этому же есть возможность преобразовать бездепы в реальные средства за регистрацию в казино, однако желаемого приз нужно отыграть согласно условиям промоакции. <a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=506971>1×slot рабочее зеркало</a> 1 х слотс зеркало С не отыгранным призом воспрещается превосходить объем наибольшей ставки. Нарушение сего обстоятельства виде аннулирование выигрыша. <a href=http://correspondent.in.ua/index.php?subaction=userinfo&user=gentlenotary99>http://correspondent.in.ua/index.php?subaction=userinfo&user=gentlenotary99</a> В случае установленного лимита на сумму вывода выигрыша с бездепозитного бонуса, игрок не может вывести больше заявленной суммы.Так что приготовьтесь дать конфиденциальную информацию (пол, возраст, государство проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает менее суток, в чего получится беспрепятственно выводить солидные выигрыши. 1хслотс регистрация в 1×slots casino Следует выделить, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом.
1хслотс зеркало на сегодня
Поспешите забрать бездепозитные бонусы за регистрацию в казино из представленного перечня. Все платформы столько ведут легальную деятельность, но и обрадуют честными плодами игры, высокой отдачей, быстрыми выплатами. Любой выигрыш по ставке выше установленного лимита несомненно считаться недействительным. То есть ставка не будет засчитана при отыгрыше, ну случае выигрыша его сумма не поступит на счёт клиента — итог игры несомненно всецело аннулирован. <a href=https://timepost.info/member.php?action=profile&uid=2383>https://timepost.info/member.php?action=profile&uid=2383</a> В большинстве заведений устроить это возможно по e-mal, по номеру телефона, через социальную сеть или гугл-аккаунт. 1× slots регистрация в 1×slots casino Фриплей-бонусы встречаются только в неких клубах. Они зачисляются незамедлительно последствии творенья профиля и активны непродолжительное время. Если не успеете потратить свои, они попросту сгорят. Касаемо медли, правило бонусы активны на часа.
1×slots на любой вкус как пройти регистрацию
B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. Приглашаем делиться сужденьями о бонусах. Это поможет другим пользователям подбирать более выгодные предложения.Вейджер в переводе с британского значит «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша полученного бонуса, в нашем случае бездепозитного. Число ставок роли не играет — главно лишь набрать необходимую, пропорциональную сумме одобрения. Выбор каждого интернет казино на нашем сайте. В описании к любому Вы можете узнать, собственно получите за создание аккаунта. 1×slots коды <a href=https://learn.centa.org/forums/users/harmoniousdogma/>https://learn.centa.org/forums/users/harmoniousdogma/</a>
1×slots казино мобильная версия
Бездепозитные призы за регистрацию считаются одним из самых модных методов привлечения свежих игроков в онлайн-казино, поэтому собственно они деют игрокам вероятность опробовать казино, тем игровые автоматы, и вероятно, выиграть настоящие деньги.В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и когда спорных обстановок нет возможности куда-то пожаловаться и обосновать свою правоту. Операторы гемблинга утверждают, что так они сражаются с бонус-хантерами. Впрочем, критики считают, что этим казино пробуют устроить из случайного постояльца постоянного игрока.Нет. Для получения бездепозитного приза в казино нужна обязательная регистрация на сайте. Играть в слоты бесплатно и без регистрации можно лишь в демо режиме. <a href=http://gta5.czechmod.cz/profile.php?lookup=20813>http://gta5.czechmod.cz/profile.php?lookup=20813</a> 1×slots сайт
<b>Смотреть еще похожие новости:</b>
<a href=http://link.5nx.ru/viewtopic.php?f=5&t=4416>1×slots быструю регистрацию а также мгновенное</a>
<a href=http://miupsik.ru/forums/showthread.php?tid=194233>казино 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для получения выигрыша потребуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить определенную сумму, хотя уже из личных средств. Она рассчитывается из совместного объема выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, случае пользователь выиграл 1000 рублей, а множитель составляет х30, вывести деньги возможно несомненно, сделав ставки на 30 000 рублей. Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция содержит доскональные верховодила, ссылка на коие обычно содержится в промообъявлении. В их указываются лимиты, вейджер, список дешевых игр. Если оператор скрывает данные о предложении, то пользоваться им не.
#9192 Charlesgunnyhttp://filmkachat.ru
1×slot казино зеркало
Демоказино есть почти на любом сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются веско пореже: там в случае выигрыша и соблюдения условий промоакций бездеп можно перевоплотить в реальные средства.Высокая конкуренция в сегменте азартных игр доказывает операторов завлекать клиентов разнородными промоакциями. Благодаря этому у гостей замечена возможность получить призы в казино за регистрацию без депозита. Воспользоваться таким предложением можно, минуя функцию внесения денег на игровой счет, просто активировав акк на сайте. Наш экскурсовод по бездепам поможет выбрать самую привлекательную бонусную программу, разузнать правила получения такового вознаграждения и воспользоваться им с максимальной выгодой. <a href=http://filmkachat.ru/>1×slots регистрация на сайте 1×slots ru com</a> Максимальный объем ставки, кот-ый нельзя превышать же бонус не будет всецело отыгран. В случае нарушения этого управляла, бонус и выигрыш с него будут аннулированы. <a href=https://www.9tj.net/home.php?mod=space&uid=271055>https://www.9tj.net/home.php?mod=space&uid=271055</a> 1×slots зеркало на сегодня <a href=http://doctor54.ru/user-2628.html>http://doctor54.ru/user-2628.html</a> Все обожают получать презенты. Согласитесь, почти любой играющий человек несомненно безмерно рад, случае получит бесплатный презент для игры в онлайн казино просто за регистрацию либо же бонус за внесенный депо, так называемые приветственные призы для свежих игроков. Соответственно такие интернет клубы будут больше востребованы и предпочтительны у игроков при выборе казино для игры. Топ казино непрерывно обновляется и добавляются свежие и интересные игровые клубы с симпатичной бонусной политикой и всеми возможными прерогативами, к коим относятся такие призы как фриспины за регистрацию, валютные бездепозитные призы, еще великодушные бонусы за внесенный депо.
1хслотс рабочее зеркало
Одним из поводов отдавать преимущество, льготу одному или иному заведению содержится в привлекательности предлагаемых промоакций и безвозмездных предложений. Безвозмездные фриспины, выдаваемые без нужды делать какой-нибудь лепта, в перечне располагается далековато не в конце.Для получения бонуса надо(надобно) ознакомиться с программкой лояльности казино и сделать ставки на сумму, нужную для перехода на грядущий уровень. <a href=http://djdrewski.co.uk/lfsbangers/viewtopic.php?f=32&t=33917>казино 1×slots официальный сайт</a> 1×slots казино зеркало Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, solid только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Получить Бездепозитный приз в онлайн казино дело двух кликов. Другой момент, отыграть рекламную и соблюсти управляла и условия отыгрыша. Под правилами подразумевается не вагер, но и лимитирования по наибольшей ставке. Мы понимаем, собственно в кино все ставят на зеро и выигрывают. Призываем не делать похожего. Перед активацией приза прочитайте управляла. Узнайте последующие моменты: Условия получения презента, за регистрацию, за депозит и другое. Ограничения по наибольшей ставке. Зачастую не повыше 350 руб. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах можно отыгрывать вагер. Можно вращать автоматы, а вагер несомненно стоять на месте. Поэтому главно аристократия, в каких забавах можно совершать кратность валютного оборота. <a href=https://brocollective.com/users/donaldgaw/>https://brocollective.com/users/donaldgaw/</a> 1×слот регистрация в 1×slots casino Некоторые казино шансы предлагать посетителям бездепы за свидетельство номера или почты или репост на страничку в социальных сетях.Вообще перейдя в казино — верховодила схожи в получении бездепозитных бонусов, в стандартные правила заходит: подтвердить эл. Почту и телефон, наполнить свой индивидуальный профиль, активировать промо код или активировать предложения во вкладке БОНУСЫ.
1хслотс мобильная версия зеркало
Бонус за регистрацию в казино выдается лишь один один на одного игрока. Но посещают дополнительные промоакции, в рамках которых бездепы расступаются для неизменных клиентов и эти подарки Вы можете получить более одного раза. На условиях отыгрыша безвозмездных бонусов идет остановиться подробнее. С ними связаны аспекты, которые нельзя оставить без внимания. <a href=https://www.market-directory.com/members/doctorlazutapa-8779.html>https://www.market-directory.com/members/doctorlazutapa-8779.html</a> 1×slots официальный сайт скачать
1×slots рабочее зеркало на сегодня
Иногда у посетителей сайта шансы возникнуть трудности, задачи, препядствия при активации полученного промо-кода. В таких случаях, необходимо обратиться за помощью в саппорта «Support». Для получения ответа, непременно указывается конкретная первопричина воззвания и подтверждается информация дополнительными экрана. Если сложилась неоднозначная обстановка, постоянно возможно обратиться к главному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ.Бонусы без депозита при регистрации числятся самыми привлекательными как для опытнейших игроков, так для и начинающих. Получив это вознаграждение, заказчик имеет играть на настоящие деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а также обстоятельства их активации и выигрыша. Чтобы бездеп не был начислен на Ваш акк, Вам не нужно активировать бонусный код. Если одобрение от казино было добавлено на Ваш аккаунт автоматически, а Вы не планируете его использовать, обратитесь в службу поддержки с пожеланием отменить бездепозитный приз. Воспользоваться бездепом можно не во всех игровых автоматах: казино вдруг устанавливает лимитирование для посетителей. Конечно, это возможно счесть некоторым неудобством для игрока, но справедливости ради стоит отметить, что выбор автоматов всё одинаково остаётся достаточно великим. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=https://www.russiansuka.net/user/Jeffreyirori/>https://www.russiansuka.net/user/Jeffreyirori/</a>
1× slots зеркало
С такими простыми советами любое казино с бонусом за регистрацию способно принести в разы больше выгоды и пользы.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро либо 20 долларов. Если выдаются фриспины, их число изредка превышает нескольких 10-ов безвозмездных вращений. <a href=https://bbs.521zixuan.com/space-uid-802944.html>https://bbs.521zixuan.com/space-uid-802944.html</a> 1×slos регистрация в 1×slots casino Чаще всего, знаменитые сервисы, такие как MoneyBookers и WebMoney, еще MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное правило. Финансовые свои выводятся только через ту платежную систему, коей огромный для пополнения депо. Если же игрок получил бездепозитный покерный бонус, требуется восполнить счет на наименьшую необходимую, которая составляет обыкновенно десять долларов.Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.
<b>Смотреть еще похожие новости:</b>
<a href=https://demo.comuni-italiani.it/forum/viewtopic.php?f=9&t=372355>1×slots сайт</a>
<a href=https://www.makinamania.net/index.php?topic=250937.new#new>1×slots казино зеркало</a>
<a href=https://forum.pmpobc.ca/index.php?topic=128875.new#new>1×slots casino регистрация 1×slots review live</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При маленький сумме приза рекомендуется выступать по невысоким ставкам, а использовать максимальные лучше только что, нет случае, случае вейджер очень немалый, а время на отыгрыш сильно ограничено.
#9193 Charlesgunnyhttp://filmkachat.ru
1×slots быструю регистрацию а также мгновенное
Прежде всего, не запамятовывайте регулярно заглядывать на страницу обзоров бездепозитных призов. Они шаг за шагом осматривают более увлекательные предложения ведущих игорных порталов. <a href=http://filmkachat.ru/>1×slots зеркало видели такую регистрацию на</a> <a href=http://thrope.co.kr/bbs/board.php?bo_table=free&wr_id=4827>http://thrope.co.kr/bbs/board.php?bo_table=free&wr_id=4827</a> Подобные призы без депозита предоставляются на более выгодных условиях. Зачастую они покрупнее, а обстоятельства отыгрыша наименее строгие.Получив свой презент, Вы можете безвозмездно играть на реальные средства, а выполнив обстоятельства отыгрыша, вывести собственный выигрыш. 1× slots сайт <a href=http://jade-crack.com/home.php?mod=space&uid=1034615>http://jade-crack.com/home.php?mod=space&uid=1034615</a>
1×slots рабочее зеркало
<a href=https://adminclub.org/showthread.php?tid=63090>1×slots официальный demo регистрация в 1×slots casino</a> 1×slots бонус за регистрацию Выбирайте лучшие благотворительные призы с помощью обзоров на Casinoz – и пусть вас сопутствует удача при отыгрыше бонусных кредитов! <a href=https://www.alive-directory.com/%D0%B1%D0%BB%D0%BE%D0%B3-%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0-%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0-%D0%B4%D0%B7%D0%B5%D0%BD_652240.html>https://www.alive-directory.com/%D0%B1%D0%BB%D0%BE%D0%B3-%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0-%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0-%D0%B4%D0%B7%D0%B5%D0%BD_652240.html</a> Важно, удостоверьтесь что, нет, собственно ранее не регистрировались в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи. 1×slots казино зеркало
казино 1× slots официальный сайт
Акционные предложения от казино существуют в различных форматах. Часто призы даются в мена на депозит. Игрок заносит платеж и получает средства, благотворительные вращения и одобрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — вид приза, кот-ый гарантирован за исполнение конкретных действий на сайте: <a href=http://tex.su/bitrix/redirect.php?goto=http://cosmeia.ru/bitrix/redirect.php?goto=http://xn–80aafh5akhhb1ab.xn–p1ai/bitrix/click.php?goto=https://teletype.in/@urist555/qQulzjb1Bj3>http://tex.su/bitrix/redirect.php?goto=http://cosmeia.ru/bitrix/redirect.php?goto=http://xn–80aafh5akhhb1ab.xn–p1ai/bitrix/click.php?goto=https://teletype.in/@urist555/qQulzjb1Bj3</a> На бонусные начисления могут быть установлены вспомогательные лимитирования, коие Вы не сведению при отыгрыше. Пока приз полностью не отыгран — средства из казино не выводятся. 1×slots быструю регистрацию а также мгновенное
1×slots официальный зеркало
Приветственный бездеп предоставляется какому игроку только раз один. Казино борются с так именуемыми бонусхантерами (от англ. Bonus Hunter — охотник за бонусами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения дара. Исключить подобные действия разрешает верификация данных. Администрация вправе потребовать у посетителя доказать индивидуальные данные, обозначенные при регистрации. <a href=http://griffhunter.com/boards/viewtopic.php?p=312170#p312170>казино 1×slots</a> Сразу после активации промокода можно пользоваться подарком. Как теснее упоминалось, бонусы случаются трёх обликов – фриспины, кредиты и фриплей-бонусы.Бездепозитные призы, как уже понятно, являются оригинальной вероятностью приступать к игровому процессу абсолютно бесплатно, словами играть в онлайн казино даром и на имеющие средства сразу после регистрации аккаунта. Автоматы с таким депо все стать великолепной возможностью поиграть для почитателей азарта с определенными ограничениями в финансах. Бездепозитные бонусы за регистрацию в игровых автоматах для владельцев онлайн-казино являются частью рекламной кампании, направленной на увеличение аудитории сайта. Так они продвигают свои бренды и завлекают свежих посетителей.Так же стоит выделить то, собственно в любом интернет казино установлен свой наибольший кешаут на бездепозитный приз. Как правило кешаут — это максимальная сумма средств, кот-ая доступная для вывода с бездепозитного бонуса. 1хслот зеркало <a href=http://www.carshowsociety.com/forum.php?action=profile;u=6055>http://www.carshowsociety.com/forum.php?action=profile;u=6055</a> Помните, что всевозможные нарушения управлял сведут на нет ваши усилия, и вы скорее останетесь без начисленного вам бесплатного бонуса. Всегда изучайте управляла начисления и обстоятельства вейджера. По любым вопросам, на которые вы возможности без найти ответы, обращайтесь за объясненьям и саппорт.Если вы выбрали себе несколько брендов которые вас больше всего полюбились, для постоянной забавы! Таких гемблеров казино очень предпочитает и оценивает, за частую такие игроки становятся VIP игроками заведения, которым часто поступают прибыльные предложения в виде призов, так же туда входит и бездепозитные.
1× slots зеркало
Максимальная ставка ? устанавливается в денежной счета и ограничивает объем ставки за один спин. В случае ее превышения бонус может быть аннулирован. Также в правилах может содержаться запрет на размещение ставок определенного вида, примеру, по одинаковым шансам в рулетке (другими, на чет либо нечет, красноватое либо темное и т.д.). <a href=http://alternativaprofi.com/forum/viewthread.php?thread_id=5295>http://alternativaprofi.com/forum/viewthread.php?thread_id=5295</a> 1×slots casino регистрация 1×slots review live Новые посетители онлайн-казино без первого депо могут выяснить собственную удачливость. К что, этому же есть возможность преобразовать бездепы в реальные деньги за регистрацию в казино, впрочем чтобы бонус необходимо отыграть сообразно условиям промоакции.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.findaspermdonor.com/viewtopic.php?f=25&t=86811>1хслот 1хслотс регистрация перейти на 1×slots</a>
<a href=https://xoo.gr/en/pws-i-texniti-noimosini-allazei-ton-tropo-kataskeuis-istoselidwn-me-ton-xoo-agent/#comment-2442>1×slots регистрация 1×slots review live</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для проверки применяются сканы паспортов, водительских удостоверений, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если юзер замечен в попытке завести вспомогательный акк, все его учетные записи подвергаются блокировке, а их владелец попадает в темный перечень. При забаве на лицензионной площадке надо бояться свидетельствовать достоверную индивидуальную информацию (шифрование ликвидирует утечку персональных данных).
#9194 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало рабочее регистрации на телефон придет
Получив свой презент, Вы сможете безвозмездно играть на реальные деньги, а выполнив обстоятельства отыгрыша, исключить собственный выигрыш.Выигрыши с призов без инвестициям постоянно привязаны к требованию по ставкам и все быть обналичены лишь в выполнения данных притязаний. <a href=http://filmkachat.ru/>1хслотс казино зеркало</a> Новые клиенты онлайн-казино без первого депозита имеют выяснить собственную удачливость. К что, этому же есть возможность преобразовать бездепы в реальные средства за регистрацию в казино, однако желаемого приз нужно отыграть согласно условиям промоакции. <a href=http://www.qazaqpen-club.kz/en/user/JamesFuepe/>http://www.qazaqpen-club.kz/en/user/JamesFuepe/</a> Основное верховодило получения бездепа ? создаваемый акк обязан быть у пользователя первым и единственным. Наличие нескольких аккаунтов взыскательно воспрещено. Проверка проводится по имени, e-mal, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита нужно соблюдать несложную последовательность деяний.Выбрать казино с бездепозитным бонусом. У нас на веб-сайте представлен список превосходнейших интернет казино, коие предлагают своим игрокам великодушные бонусы за регистрацию. 1×slots актуальное зеркало <a href=https://rekordmeister.ru/user/RaymondMeata/>https://rekordmeister.ru/user/RaymondMeata/</a> Прежде всего, не запамятовывайте периодически заглядывать на страницу обзоров бездепозитных призов. Они шаг за шагом разглядывают более интересные предложения ведущих игорных порталов.
1× slots официальный
Первый образующийся вопрос, это, для выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают новых игроков. Последним легче начать игру на деньги с дара за регистрацию. Им надо пополнять баланс и расходовать личные свои. Новички получают безвозмездные спины либо свои на счёт. С их поддержкой знакомятся с игровым ходом, крутят слоты и делают ставки в рулетке.Создание аккаунта. На сайте казино нужно открыть регистрационную форму и заполнить порожние поля личными данными. Иногда на данном шаге требуется указать только адресок электронной почты и пароль, хотя почаще хотелось заполнить анкету персональной информацией (ФИО, дата рождения, пространство проживания и т.д.). Нужно указывать лишь настоящие данные, что впоследствие они будут испытаны. <a href=https://www.findaspermdonor.com/viewtopic.php?f=25&t=86902>1×slots официальный регистрация</a> 1х слот 1хслотс регистрация перейти на 1×slots <a href=https://rovworld.com/members/forsedroppn/profile/>https://rovworld.com/members/forsedroppn/profile/</a> Маркетинговая деятеля всех игорных интернет-клубов должна одевать разнообразный характер. И если вознаграждения на депозит служат чтобы, чтобы, дабы стимулировать заносить депозиты и поощрять теснее место пользователей, то бездепозитный бонус в казино либо бонус за регистрацию в казино, до всего, рассчитан на расширение базы потребителей. 1хслотс казино зеркало Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам запрещено начислять призы посетителям, не имеющим денежных средств на счете. Мы предлагаем рассмотреть актуальные призы онлайн-казино с лицензией, которые соблюдают законодательство РБ.
1×slots официальный зеркало
Выигрыши с бонусов без вложений практически привязаны к требованию по ставкам и имеют быть обналичены только после выполнения данных требований. <a href=https://forum.uoguide.com/memberlist.php?mode=viewprofile&u=710234>https://forum.uoguide.com/memberlist.php?mode=viewprofile&u=710234</a> Если ординарными текстами, бездепы – это определённая сумма средств либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно забирать презенты. Но есть некоторые нюансы. Существуют игорные дома, которые перед что, этим как начислить призы настоятельно привязать телефон, предоставить копии документов. 1×slots коды Для того, дабы отыграть сумму вашего бездепозитного приза нужно выполнить обстоятельства вейджера. Очень часто фриспины даются на конкретные слоты (book of ra, book of deceased, book of sun), подбирайте разъем себя по душе, они все очень очень и высококачественные. Бездепозитные приз возможность быть валютным например и в виде фриспинов на слотыСоздание аккаунта. На сайте казино нужно обнаружить регистрационную форму и наполнить пустующие поля личностными данными. Иногда на данном шаге потребуется указать только адрес электрической почты и пароль, но чаще надобно заполнить анкету персональной информацией (ФИО, дата рождения, место проживания и т.д. ). Нужно указывать только настоящие данные, поскольку впоследствие они станут проверены.
1× slots casino официальный сайт
Хотя безвозмездные бонусы начисляются без депозита, не исключено, что вам придется заносить деньги. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь в такого, как свежий клиент впервые пополнит игровой счет. <a href=http://diablo2r.cn/home.php?mod=space&uid=30130>1×slots бонус за регистрацию</a> Получив свой подарок, Вы сможете бесплатно играть на настоящие средства, а выполнив условия отыгрыша, вывести свой выигрыш.Бесплатный бонус – кредиты, коие онлайн-казино начислит клиенту, не заставляя его пополнять игровой счет. Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. 1×slots зеркало которую указывали при регистрации кстати <a href=https://receptsamogona.ru/user/Geraldblemy/>https://receptsamogona.ru/user/Geraldblemy/</a> Бездепозитные бонусы казино это экономическая компенсация, предлагаемая пользователям на дармовой основе и вероятность играть в онлайн казино бесплатно. Если ассоциировать их с поощрениями за вклад, в свои выдаются только впоследствии первоначального пополнения счета, то бездепозитные гонорары получаются безвозмездно. То есть, играющий получает возможность создавать ставки на уже существующие деньги, которые выдаст заведение, исполняя, при этом, обыденные действия, дабы их извлечь (здесь идет речь о регистрация, удостоверении личности с внедрением номера телефона, дизайна заказы и т.д. ).Третитй бездепозитный приз за регистрацию – денежные свои. К огорчению, начислить рубли либо доллары способны только известные и популярностью клубы. С их помощью вас насладиться каждой доступной игрой – автоматом, рулеткой, кено, блэкджеком.
1хслот зеркало
Но такие рамки не смущают и хайроллеров, потому коэффициенты на слотах дозволяют рассчитывать на солидные выигрыши, в некоторых автоматах разыгрывается передовой джекпот. <a href=http://armhleb.ru/index.php?subaction=userinfo&user=parsimoniousray>http://armhleb.ru/index.php?subaction=userinfo&user=parsimoniousray</a> 1×slots официальный зеркало рабочее Также существуют онлайн-платформы азартных игр, которые используют раздачу бездепозитных призов в специальные даты (как для казино, так и для игрока). Помимо сего, действующие игроки того имеют возможность получить похожие призы за свою деятельность (например, за увеличения уровня или за похожие достижения).Бездепозитные бонусы начисляются лишь раз один. Не стоит раскрывать новые аккаунты, дабы получить их повторно. Служба защищенности казино обязательно выявит «левого» соучастника и заблокирует. Если посетитель выполнит нужные притязания, отыграет свою ставку и решит вывести собственный выигрыш, то ему надо(надобно) учесть, что казино обязательно востребует предоставить ксерокопии личных документов, чтобы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные свои исключить не удастся.
<b>Смотреть еще похожие новости:</b>
<a href=http://swissairways-va.com/phpBB3/memberlist.php?mode=viewprofile&u=3495>1× slots casino зеркало</a>
<a href=https://techadron.com/forum/viewtopic.php?p=9343>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Наши специалисты исследуют обстоятельства промоакции, этого в ручном режиме проверку их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие характеристики. Мы не рекламируем казино, а даем игрокам информацию о наилучших из их.
#9195 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать
Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми промоакциями. Читайте о них в обзорах и на форуме.При верном подходе бездепы — это отличный метод играть на средства без растраты личных средств. Есть количество рекомендаций, следуя которым возможно извлечь максимум полезности из подобных акций казино. Играть следует лишь на лицензированных площадках. Скриптовые веб-сайты не врут с бонусными услугами, хотя и используют пиратский софт с измененным ГСЧ. Выиграть на этих автоматах невероятно. <a href=http://filmkachat.ru/>1×slots регистрацию более популярный вариант это</a> Многие новенькие колеблются, что поощрительный приз надо будет возвращать, и случае они выиграли у казино. Это безусловно неопасно и накрепко. Выводя выигранные свои, игрок просто одергивает свое участие при и теряет уникальную возможность – даром увеличивать личное материальное положение. <a href=https://forum.expert-watch.com/index.php?action=profile;u=265628>https://forum.expert-watch.com/index.php?action=profile;u=265628</a> Подтверждение персональной инфы. Все казино настоятельно от посетителя пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и наличие у пользователя иных аккаунтов (мультиаккаунт запрещен). 1×slots сайт <a href=https://www.reikiandastrologypredictions.com/member.php?action=profile&uid=19471>https://www.reikiandastrologypredictions.com/member.php?action=profile&uid=19471</a> Постарайтесь отыграть вейджер, чтобы была вероятность оставить заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные приборы. Вы можете получить выигрыш на электрической кошелёк, карту, телефонный.Баланс игрока пополняется на подобающую сумму. К ней используется вейджер, обозначенный в правилах акции. Вывести выигрыш возможно несомненно последствии как, как пользователь сделает требуемый размер ставок из собственных средств. В редких случаях бездеп работает в формате Free Play. На счет пользователя зачисляется большая сумма, и предоставляется небольшой срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по завершении сего периода сумма на счету будет превышать изначальную, то разность возможно будет вывести либо применять для последующих ставок.
1×slot зеркало
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1090#post-34314>1×slots скачать на айфон</a> 1×slots быструю регистрацию а также мгновенное Бoльшинcтвo азартных заведений выдвигают примерно одинаковые обстоятельства и требования, коие нужно выполнить, чтобы получить бездепозитный бонус за регистрацию. Все их возможно объединить в один перечень:Если речь об эксклюзивных услугах, имеет потребоваться регистрация в казино по ссылке с партнерского вебсайта. <a href=https://pattern-wiki.win/wiki/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%93%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0>https://pattern-wiki.win/wiki/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%93%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0</a> Автоматическая активация взгляд самой удобной, но ручной метод содержит перед ней преимущества. Прежде чем применять вознаграждение от казино, стоит заранее определить, сколько времени потребуется на выполнение всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деянья бонуса. 1×slots казино мобильная версия
x1 slots 1хслотс регистрация перейти на 1×slots
Максимальный размер ставки, кот-ый невозможно превышать же бонус не будет всецело отыгран. В случае нарушения сего правила, бонус и выигрыш с него будут аннулированы.B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. Но а случае вы теснее профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в онлайн казино;Бездепозитные бонусы, как уже ясно, являются оригинальной возможностью обратиться игровому процессу полностью бескорыстно, другими играть в интернет казино безвозмездно и на быть средства сразу после регистрации аккаунта. Автоматы с этим депозитом имеют стать прекрасной вероятностью поиграть для поклонников азарта с определенными лимитированиями в финансах. <a href=http://forums.worldsamba.org/member.php?action=profile&uid=138444>http://forums.worldsamba.org/member.php?action=profile&uid=138444</a> Для доказательства электрической почты, просто перейдите по активной ссылке в послании, приобретенном от игрового заведения.Во время забавы в казино, выигрыши, полученные благодаря бесплатным призовым фондам, суммируются и срабатывают в совместную сумму для отыгрывания. Однако, случае удача улыбнется и выйдет отыграть все призы, игровое заведение гарантированно допустит исключить денежные свои. Сумма вывода несомненно находиться от лимита, одобренного именно в этом учреждении. Поэтому, внимательно нужно разбирать правила выдачи анлимитных депо. 1 хслот регистрация в 1×slots casino Верификация важна для дополнительной безопасности и помочь техподдержке выявить бонусхантеров и мошенников. Кстати, на некоторых платформах выводы крупных сумм доступны лишь последствии доказательства личности.
1×slots официальный сайт зеркало
Если площадка презентует бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь завести аккаунт на веб-сайте и активировать его, подтвердив адрес электронной почты, номер телефона либо другие данные, коие требует оператор. Перед данным необходимо убедиться, собственно юзер располагается на официальном веб-сайте казино, но на мошеннической площадке.Сразу в активации промокода возможно пользоваться подарком. Как теснее упоминалось, призы бывают трёх видов – фриспины, кредиты и фриплей-бонусы. 1×slots сайт <a href=https://lunar.az/user/Donaldnip/>https://lunar.az/user/Donaldnip/</a> Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке нужно пополнить счет в казино. Для депозитных призов, данная процедура не нужна, так как депо теснее изготовлен.
зеркло казино 1×slots
Прибывшие на аккаунт финансы бездепозитные призы предназначаются, в основном, лишь для свежеиспеченных пользователей, коие ранее не имели собственного аккаунта в данном казино. Исходя из этого, случае раньше у игрока был сделан депозит, то, по всей вероятности, у него больше не будет возможности рассчитывать на получение такового приза в конкретном заведении. Активация случается счет промокодов, коие вводятся в собственном офисе в регистрации. Среди спецпредложений в перечне Casino.ru находятся эксклюзивные промокоды, коие доступны только гостям портала. Другие методы начисления средств ? автоматическая активация сразу последствии создания аккаунта и получение дара по запросу в службу технической поддержки.Как прочие акции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых гостей и разрешает им составить впечатление о функционале, не рискуя значительными совокупностями. <a href=http://k636419q.beget.tech/user/Justincoows/>http://k636419q.beget.tech/user/Justincoows/</a> Для верификации аккаунта нужно дать профессионалам технической поддержки отсканированную копию паспорта и счета за коммунальные предложения, еще фотографию банковской карты либо снимок страницы электронного кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для подтверждения личности.Возьми собственный презент. Чаще всего приз активируется незамедлительно в регистрации. Но случаются ситуации, когда надо(надобно) зайти в собственный кабинет или написать в справочную службу. 1хслот зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://aircompare.us/forums/memberlist.php?mode=viewprofile&u=40074>1×slots зеркало</a>
<a href=https://dev.eff.one/member.php?action=profile&uid=904>1×slots официальный зеркало рабочее</a>
<a href=https://forumauthority.com/member.php?action=profile&uid=3484>1×slots зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
За счёт спинов выйдет запустить различные интернет слоты, протестировать стратегии и поднабраться навыка. Фишка сомнений, что вращения начисляются на топовые аппараты с уникальными опциями и высокой отдачей. Не забывайте, собственно в любом акционном предложении учтены особые требования – временные ограничения, наибольший объем ставки, список дешевых игр.
#9196 Charlesgunnyhttp://filmkachat.ru
1 x slots
Процесс подтверждения личности может взятьвдолг(взятьвзаймы) от одного дня до недели. Если заказчик допустил какую ошибку при заполнении паспортных данных, то ему идет адресоваться с задачей в службу поддержки онлайн-казино. <a href=http://filmkachat.ru/>рабочее зеркало 1хслотс</a> Каждый новичок и профессиональный игрок мечтают стремительно стартануть и начать создавать реальные ставки. Для этого довольно арестовать подарок, за который не выплачивать. В зависимости от игровой платформы, нужно сделать профиль, привязать email либо телефон. После сего администрация начисляет щедрое вознаграждение в виде бесплатных вращений либо виртуальных кредитов. <a href=http://moujmasti.com/member.php?174176-Jamesagefe>http://moujmasti.com/member.php?174176-Jamesagefe</a> Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.Если площадка презентует бездеп за регистрацию, то процедура его получения ординарна. Нужно только ввести акк на веб-сайте и активировать его, подтвердив адрес электрической почты, номер телефона или другие данные, коие настятельно оператор. Перед этим нужно увериться, что пользователь располагается на официальном сайте казино, но на жульнической площадке. 1×слотс казино <a href=http://youyanggse.co.kr/board/bbs/board.php?bo_table=free&wr_id=231577>http://youyanggse.co.kr/board/bbs/board.php?bo_table=free&wr_id=231577</a> Вывод выигрыша с бездепозитных призов казино – великодушный презент от азартных клубов. Но дабы вывести свой заработок, необходимо выполнить ряд условий:
1×слотс казино
Не сложно додуматься, собственно no down payment bonuses почти никогда не случаются немаленькими. Чаще всего речь идет о пяти–тридцати баксах (либо эквиваленте этой суммы в другой еденице).Бездеп с фриспинами возможность охватывать всю коллекцию игр на сайте либо разработки одного провайдера. Обычно предлагается определенный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш имеет быть выведен последствии того, как юзер отыграет эту сумму. Возможность расценить полный возможностей слотов — основное совершенство этой разновидности. Игроку становятся доступны те функции, коие отсутствуют в демонстрационном режиме, а вероятность выиграть настоящие деньги прибавляет ярких азартных ощущений. казино 1×slots Мы проделываем ударение на главных положениях верховодил, рассказываем о территориальных лимитированиях и вкратце информируем о других акциях обговариваемого казино.Такой бесплатный эквивалент средств зачисляется на профиль юзера последствии осуществления притязаний и предназначаются они только для игрового процесса. Вывод таких вознаграждений вероятен только в осуществления вейджеровых условий. <a href=https://seoquick.com.ua/website-audit/aa7e8b35018f4a9db5a8be1963295dd5/>https://seoquick.com.ua/website-audit/aa7e8b35018f4a9db5a8be1963295dd5/</a> В зависимости от онлайн заведения каждый из их может для предложить как бездепозитные средства, так и бездепозитные фриспины, которые после удачной регистрации рухнут вас на ваш игровой баланс.К образцу, игроку выдаются бесплатные свои в заведении в объеме пятидесяти либо 100 $ (вейджер на которые составляет 100х). То есть, каждому новоприбывшему игроку выскакивает притягивающая картинка, кот-ая сулит выплату всех зачисленных фирмой средств. Не стоит заострять на казино бонус за регистрацию без депозита с сильно великий или довольно маленькой суммой призов, поэтому что, том тщательно исследовав все обстоятельства, тут всего, будет некий подвох. 1×slots официальный сайт зеркало
1×slots регистрация 1×slotscasino09k online
<a href=http://www.forumdipace.org/profile.php?mode=viewprofile&u=552331>http://www.forumdipace.org/profile.php?mode=viewprofile&u=552331</a> Какие призы я могу еще получить считая бездепозитного приза за регистрацию в казино? По мимо бездепозитного приза, любое интернет казино предлагает игрокам выгодное предложение на 1-ый депозит, вы совершаете депо, ваш депозит увеличивается в двое либо числе в трое, что, этим наиболее начать выступать возможно с больше крупной суммой, например же не забываем тему вейджер на бонусы.Как только на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу в сего можно оставить заявку на вывод выигрыша. Кредиты прибыльно выделяются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом реальных средств и выделяют вероятность почувствовать азарт. Во-вторых – можно насладиться любой азартной игрой доступной на сайте. В вашем распоряжении находятся автоматы, настольные прибавленье, видео-покер, Live-дилеры. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Приветственный бездеп предоставляется какому игроку лишь раз раз. Казино борются с так именуемыми бонусхантерами (от англ. Bonus Hunter — охотник за призами), пытающимися заводить множественные аккаунты для надувательства оператора и повторного получения дара. Исключить подобные действия разрешает верификация данных. Администрация вправе востребовать у посетителя подтвердить индивидуальные данные, указанные при регистрации.
1х слот регистрация в 1×slots casino
Такие одобрения разрешают бесплатно протестировать свежее казино, разобраться с игровым ходом интернет слотов, заработать и вывести небольшую необходимую средств.Чаще всего используются коды. Их надо(надобно) заносить в особые окна регистрационной анкеты, случае речь идет о пригласительных бонусах, либо в особом разделе личного кабинета игрока. Если при регистрации указать промокод, можно гарантировано получить приз. Где взять ваучер? Посетите направленные блоги либо форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В заключительное время игорные дома начали рекламироваться в фильмах и сериалах. Присмотритесь и всего заметите промокод, который принесёт 500 или 1 000 бонусных руб.Бездепозитные бонусы начисляются только раз один. Не стоит открывать новые аккаунты, чтобы получить их повторно. Служба безопасности казино обязательно выявит «левого» участника и перекроет. Если гость выполнит необходимые требования, отыграет свою ставку и решит исключить личный выигрыш, то ему надо(надобно) принять, собственно казино обязательно потребует дать ксерокопии личных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные средства исключить не удастся. 1×slots официальный demo регистрация в 1×slots casino <a href=https://visualchemy.gallery/forum/viewtopic.php?pid=2907471#p2907471>https://visualchemy.gallery/forum/viewtopic.php?pid=2907471#p2907471</a> Таким образом интернет казино получает потенциального игрока. Возможно в либо подлинном он захочет сыграть на свои средства. Так работают бездепозитные бонусы в онлайн казино. Здесь хорошо подходит выражение, бесплатные сыр случается только в мышеловке. Начинающие игроки имеют не осознавать опасность азарта. Однако течением осознания делается больше. Это тема для отдельного обсуждения.Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.
1×slots сайт
Многие казино деют в рекламных целях благотворительные призы самая для наших читателей. Чтобы их получить, нужно перебежать на игровой вебсайт по партнерской ссылке с нашего портала.Ну и естесственно же, для казино бездепозитные призы прибыльны с имиджевой стороны: сходственная щедрость увеличивает уровень лояльности посетителей к компании. <a href=http://jilkom.ru/bitrix/redirect.php?goto=http://zhbi5.ru/bitrix/click.php?goto=http://hinadaifuku.hatenablog.com/iframe/hatena_bookmark_comment?canonical_uri=https://teletype.in/@urid_pomosh/CrYVcmWsDLC>http://jilkom.ru/bitrix/redirect.php?goto=http://zhbi5.ru/bitrix/click.php?goto=http://hinadaifuku.hatenablog.com/iframe/hatena_bookmark_comment?canonical_uri=https://teletype.in/@urid_pomosh/CrYVcmWsDLC</a> Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить необыкновенности, недоступные при забаве в демо режиме. Многие новые клиенты переходят в количество постоянных, а оператор получает длительную выгода.Бонусы без депозита при регистрации считаются самыми привлекательными как для опытнейших игроков, например для и начинающих. Получив такое вознаграждение, клиент имеет выступать на настоящие средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные призы в интернет-казино Рунета, еще условия их активации и выигрыша. 1×slots рабочее зеркало на сегодня Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 поболее. Когда игроку надеется много фриспинов, администрация может разбивать их начисление на некоторое дней. Бесплатные вращения предоставляются для конкретного слота, который указывается в правилах акции.Зарегистрируйтесь. Для регистрации почаще всего достаточно установить собственный номер телефона и почтовый адрес, последствии чего ввести полученный код из СМС. Возможно, потребуется указать промокод. В правилах промоакции несомненно написано, где его хотелось включать. Иногда это надо создавать при регистрации, время — теснее последствии сотворения личного офиса, на отдельной страничке.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.cvetq.info/viewtopic.php?f=8&t=260830>1×slots casino online регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Суммы похожих услуг, большинстве, колеблются от 3-х до двадцати долларов, а вейджер на эти средства должен составлять от 30 до шестидесяти один. Зачастую, величайшая сумма выигрыша тут составит от одной до 2-ух сотен $. Если компьютерные выиграет больше, то все свои все быть списанными до очень разрешенного выигрыша. Здесь замечена смысл выводить еще несуществующие деньги на свою платежную систему и дальше находить заведение с благоприятными под данную необходимую релоадом или бонусом за 1-ое пополнение счета. Есть несколько подвидов бездепозитного гонорары, предлагаемого большим числом заведений.
#9197 Charlesgunnyhttp://filmkachat.ru
1×slots бонус за регистрацию
Размер бонуса. В качестве бездепов обычно начисляют небольшие суммы, а когда речь о призах за депо, коие начисляются в процентном соотношении от суммы пополнения, то кое-какие казино имеют подарить игроку до 2000$. <a href=http://filmkachat.ru/>x1 slots 1хслотс регистрация перейти на 1×slots</a> Но есть игорные заведения, коие готовы просто так жертвовать средства на забаву. Для сего достаточно создать профиль. Чтобы вывести свой выигрыш, для поначалу нужно выполнить обстоятельства отыгрыша, обозначенные в условиях получения бездепозитного депозита.К образцу, игроку выдаются безвозмездные средства в заведении в размере пятидесяти либо ста долларов (вейджер на коие сочиняет 100х). То есть, любому новоприбывшему геймеру выскакивает притягивающая иллюстрация, которая сулит выплату всех зачисленных компанией средств. Не стоит внимания на казино бонус за регистрацию без депозита с чрезмерно великий или довольно малеханькой суммой призов, потому собственно, в тщательно выучив все условия, здесь вероятнее всего, несомненно некий подвох. <a href=http://www.dbgjjs.com/home.php?mod=space&uid=480557>http://www.dbgjjs.com/home.php?mod=space&uid=480557</a> 1×slots регистрация на официальном сайте <a href=https://www.deadbeathomeowner.com/community/profile/scottquads/>https://www.deadbeathomeowner.com/community/profile/scottquads/</a> Для получения депозитного бонуса необходимо пополнить свой игровой баланс реальными средствами. Вознаграждение можно получить либо при внесении первого депо, или повторяющий фиксированного процента от внесённых средств. Так либо иначе, приз поступит на счёт лишь последствии пополнения.
casino 1×slot
Возможность протестировать свежие забавы, не рискуя личностными своими и создать личную тактику забавы. 1 х слотс зеркало <a href=http://seneka-vl.ru/index.php?subaction=userinfo&user=damptundra89>http://seneka-vl.ru/index.php?subaction=userinfo&user=damptundra89</a> 1×slots рабочее зеркало на сегодня
1хслотс рабочее зеркало
За привлечение друга ? в рамках партнерской программки клиент получает вознаграждение за привлечение свежих юзеров.Третитй бездепозитный бонус за регистрацию – валютные средства. К огорчению, начислить рубли или баксы способны только известные и знаменитые клубы. С их поддержкою вы сможете насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком. Классическая разновидность приза за создание аккаунта. Его преимущество содержится том,, что заказчик возможность без подбирать аппараты и создавать ставки в их. Иногда перечень игровых автоматов ограничен оператором, хотя все точно это чем, чем единственный дешевый разъем, как в случае с внедрением фриспинов. <a href=http://forum.roozgozar.com/member.php?action=profile&uid=2318>http://forum.roozgozar.com/member.php?action=profile&uid=2318</a> Первый возникающий вопрос, это, чего выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают свежих игроков. Последним легче начать игру на деньги с презента за регистрацию. Им не пополнять баланс и тратить собственные средства. Новички получают благотворительные спины либо средства на счёт. С их поддержкою знакомятся с игровым процессом, крутят слоты и проделывают ставки в рулетке. 1×slots casino зеркало рабочее На страничке представлены бездепозитные призы за регистрацию в казино редчайшая заслуга за коей гонятся все игроки как новички, например и профессионалы. Мы тоже уделяем великое внимание на наличие бонусов при составление рейтинга казино на деньги. Бездепозитный бонус это возможность выступать даром и выиграть настоящие деньги.
скачать 1×slots официальный сайт
Рассмотрим принцип его деянья на образце. Допустим, вы зарегистрировались и получили $10 no deposit bonus с вейджером х50. Это означает, собственно выигранные деньги возможно будет выводить не раньше, чем последствии такого, как общая сумма ставок достигнет $500.Новые посетители онлайн-казино без первого депозита могут проверить собственную удачливость. К тому же есть вероятность преобразовать бездепы в реальные средства за регистрацию в казино, однако чтобы бонус необходимо отыграть согласно условиям промоакции. Свежий приз начисляется в виде денежных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в использовании своими, а случае отыгрыша оператор возможность ввести лимитирование на вывод денег.Ознакомьтесь с нашим перечнем наилучших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего перечня и получите бездеп сразу. Хватайте наилучшие бесплатные предложения ниже и выигрывайте немалые средства, не рискуя! зеркло казино 1×slots <a href=http://zike.cn/home.php?mod=space&uid=163575>http://zike.cn/home.php?mod=space&uid=163575</a>
1х слот регистрация в 1×slots casino
<a href=https://forum.gekko.wizb.it/user-21899.html>https://forum.gekko.wizb.it/user-21899.html</a> Так что можете смело регистрироваться без всяких размышлений. Фортуна сегодня наверняка на вашей стороне. Не страшитесь, как последствие какого или убытка Вам абсолютно не угрожает. С этими призами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе. рабочее зеркало 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=http://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=6268>1×slots официальный сайт зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Активация случается с помощью промокодов, коие вводятся в личном кабинете последствии регистрации. Среди спецпредложений в перечне Casino.ru содержатся эксклюзивные промокоды, которые доступны лишь гостям портала. Другие способы начисления средств ? автоматическая активация сразу после создания аккаунта и получение дара по запросу в службу технической поддержки. Обычно бездепозитные промоакции от казино, приходят на эл. Почту в деньки рождения или дни. В неких интернет казино возможно обратиться в чат и как неизменному игроку, вполне для предложат бездепозитное предложение.
#9198 Charlesgunnyhttp://filmkachat.ru
зеркала 1×slots
Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных притязаний, кроме неотъемлемой верификации. Если на сайте учтена обязательная процедура подтверждения личности, то вывести выигрыш удастся только последствии ревизии данных. Приготовьтесь наполнить анкету и отправить в техподдержку документ, подтверждающий личность. <a href=http://filmkachat.ru/>1×slots регистрацию более популярный вариант это</a> Для казино, работающих онлайн, бездепозитные призы необходимы для вербования свежих клиентов. Предложение сыграть на слотах без необходимости внесения реальных средств — работающий способ для повышения интереса к компании. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит играть в казино, только сейчас уже на личные деньги.Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической забавы на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, научится регулировать изменять ставки и линии, изучать бонусные забавы и их выигрышные комбинации, да счете просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные средства, коие можно отыграть и вывести, а не просто на демо счет, тем самым адреналин в крови еще больше повысится а пульс забьется с нередким ритмом! <a href=https://63game.top/thread-72312–1–1.html>https://63game.top/thread-72312–1–1.html</a> Не трудно догадаться, что no deposit bonuses практически ни не посещают великими. Чаще всего идет о пяти–тридцати баксах (либо эквиваленте данной суммы в иной валюте). 1×slots casino регистрация <a href=http://x4kurd.freetzi.com/member.php?action=profile&uid=84534>http://x4kurd.freetzi.com/member.php?action=profile&uid=84534</a> Казино выводит деньги лишь на что, эту платежную систему, с котрой был изготовлен депо. То есть, для вывода бездепозитного бонуса, Вам сначала нужно восполнить счет. В неких клубах узкий список способов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с данных платежных способов, коие доступны для вывода.Фриплей-бонусы. Бонусы за безвозмездную забаву есть лишь в некоторых клубах. Они зачисляются незамедлительно после создания профиля и срабатывают непродолжительное время. Если у вас нет времени потратить средства, они просто закончатся. Что дотрагивается времени, правило призы срабатывают в течение одного часа.
1×slots сайт
Также, в этом случае нужно доказать свой номер аппарата, чтобы код, приобретенный в смс-сообщении от клуба установить в специальное фон в личном кабинете игрока. 1×slots официальный сайт мобильная версия скачать Минимального оборота. Этот лимит устанавливается вейджером — пока игрок не сыграет на установленную сумму, вывод средств будет недосегаем.На бонусные начисления могут быть установлены вспомогательные лимитирования, коие Вы не сведению при отыгрыше. Пока бонус всецело не отыгран — деньги из казино не выводятся. <a href=http://www.so0912.com/home.php?mod=space&uid=2234330>http://www.so0912.com/home.php?mod=space&uid=2234330</a> 1×slots casino регистрация на сайте В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно приятная часть игры. Важно, зачастую бездепозитные бонусы в казино выдаются с лимитированиями по наибольшей выплате. В среднем можно рассчитывать на прибыль в несколько тыщ руб. Как исключить выигрыш с бонуса без депозита. Придётся доказать аккаунт документально, в некоторых заведениях. Процедура верификации обязательна и делается каждым игроком. О документальном доказательстве учетной записи спрашивайте в интернет чате или прочитайте в правилах.
1хслотс регистрация в 1×slots casino
За вербование друга ? масштабах партнерской программки заказчик получает вознаграждение за привлечение новых юзеров.При отыгрыше бонусных средств, нужно учитывать срок действия приза и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный бонус будет аннулирован. <a href=http://www.figarohair.ru/conf/viewtopic.php?f=11&t=10109&p=29610&sid=1bb6a2f012a6bbd8b4439e61450b0e7d#p29610>http://www.figarohair.ru/conf/viewtopic.php?f=11&t=10109&p=29610&sid=1bb6a2f012a6bbd8b4439e61450b0e7d#p29610</a> 1×slots сайт зеркало
1×slots регистрация 1×slotscasino09k online
Это также благотворительные деньги, которые поступают на аккаунты свежеиспеченных в в регистрирования. А необыкновенность этих призов произведено в, что обретенные финансы непременно идет применять в продолжении назначенного времени. рабочее зеркало 1хслотс <a href=http://sovetonk.ru/forum/user/178513/>http://sovetonk.ru/forum/user/178513/</a> Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных призов принимаются достаточно высокие требования. Часто онлайн-казино рекомендуют отыграть бонусное поощрение до ста раз в игровых автоматах. Например, в игрок получил безвозмездно десять $, то необходимо будет отыграть их, поставив одну тыщу спинов по одному баксу каждый. Стоит отметить, что не все казино выделяют возможность играть на бонусы и не во всех развлекательных заведениях идентичные правила для отыгрывания. Некоторые казино воспрещают выступать на призы в блекджек или ограничивают ставки до пяти процентов, что значительно наращивает в десятки один количество нужных игр.Также случаются случаи, когда казино начислит оговоренный приз после регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам.
1×slot зеркало рабочее этих способов предполагает регистрацию
Возможность сыграть вспомогательное соревнование (а времени и некоторое) абсолютно безвозмездно, а выигрыш, же, поступает на счёт игрока.Прибывшие на аккаунт деньги бездепозитные бонусы предназначаются, главном, лишь для новоиспеченных юзеров, которые раньше не имели личного аккаунта в данном казино. Исходя из сего, если ранее у игрока был сделан депо, то, по всей вероятности, у него больше не будет способности рассчитывать на получение такого бонуса в определенном заведении. <a href=http://www.ra-journal.ru/board/member.php?427459-Porsedropot>http://www.ra-journal.ru/board/member.php?427459-Porsedropot</a> 1хслотс 1хслотс регистрация перейти на 1×slots Акционные предложения от казино есть в разных форматах. Часто призы даются в мена на депозит. Игрок заносит платеж и получает деньги, благотворительные вращения и одобрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — вид бонуса, кот-ый гарантирован за выполнение определенных деяний на веб-сайте:Призовые начисления без депо имеют предоставляться для участия в турнирах онлайн казино. Потратить перечисленные средства можно исключительно в рамках данной промоакции. Условия их проведения в лимитирования на список игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться этим предложением, другого, как изучить его верховодила.
<b>Смотреть еще похожие новости:</b>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=58007&result=reply>рабочее зеркало 1×slots</a>
<a href=https://koreanstudies.com/forum/viewtopic.php?t=110901>1×slot рабочее зеркало</a>
<a href=https://fougerite.com/threads/1×slot-skachat.12498/>1хслот скачать</a>
<a href=http://complainanything.com/node/158?page=941#comment-1187062>1хслот скачать</a>
<a href=http://griffhunter.com/boards/viewtopic.php?p=309669#p309669>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, коие можно посвятить этой в казино. Подарки на праздники ? приуроченные к парадным датам, требующие условного отыгрыша или начисляются без это. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду.
#9199 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать
Только выполнив все обстоятельства отыгрыша и дождавшись окончания проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить свои деньги. <a href=http://filmkachat.ru/>скачать 1×slots официальный сайт</a> <a href=http://misssophie.net/AG_Wohnungssuche/doku.php?id=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D0%BE%D0%B2%20%D0%B8%D0%B7%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO>http://misssophie.net/AG_Wohnungssuche/doku.php?id=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D0%BE%D0%B2%20%D0%B8%D0%B7%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO</a> После получения бонуса вывод средств для клиента будет недоступен до, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя или чета недель. Выводить деньги игрок может лишь после отыгрыша. 1×slots зеркало регистрация <a href=http://tutorialsmint.com/user/terrytum/articles>http://tutorialsmint.com/user/terrytum/articles</a>
x1 slots 1хслотс регистрация перейти на 1×slots
Новые посетители онлайн-казино без первого депо могут проверить собственную удачливость. К что, этому же есть вероятность конвертировать бездепы в настоящие средства за регистрацию в казино, впрочем достичь бонус нужно отыграть сообразно условиям акции.Бездепозитные призы казино это финансовая компенсация, предлагаемая пользователям на дармовой базе и вероятность выступать в интернет казино даром. Если сравнивать их с поощрениями за вклад, в свои выдаются лишь потом первоначального пополнения счета, то бездепозитные вознаграждения получаются бесплатно. То есть, играющий получает возможность делать ставки на теснее быть финансы, которые выдаст заведение, выполняя, при, обычные деянья, чтобы их извлечь (тут идет о регистрация, удостоверении личности с внедрением номера телефонного, оформления заказы и т.д.). <a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=4417>1хслотс 1хслотс регистрация перейти на 1×slots</a> 1×slots casino регистрация 1×slots review live Допустим, за регистрацию вы получили бездеп в объеме 2 000 рублей с вейджером х30. В данном случае светит устроить ставок, на совместную сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать реальные деньги. Однако не запамятовывайте, что с любого подарка выйдет исключить определённую необходимую (чаще всего менее $200). <a href=https://bandit400.ru/user/DoctorLazutaEn/>https://bandit400.ru/user/DoctorLazutaEn/</a> сайт 1× slots casino Приглашаем делиться суждениями о бонусах. Это поможет иным пользователям подбирать наиболее выгодные предложения.
1×slots регистрация 1×slotscasino 56 online
Список например именуемых «не территорий» прилагается к правилам бонусной программы игорного портала. Обязательно проверьте, распространяются ли на вас похожие санкции. Исходя из сего, просто не присутствует разумных оснований махнуть рукой на получение такого приза при регистрации. И, лишним, на такой бесплатной основе у вас все шансы выиграть деньги и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные призы, называют бесплатными онлайн платформами для игр.Маркетинговая политического всех игорных интернет-клубов обязана одевать различный характер. И случае гонорары на депозит работают чтобы, чтобы, дабы провоцировать вносить депозиты и поощрять уже место юзеров, то бездепозитный бонус в казино или бонус за регистрацию в казино, до всего, рассчитан на расширение базы потребителей. <a href=https://arenafighter.adult/mybb/member.php?action=profile&uid=262894>https://arenafighter.adult/mybb/member.php?action=profile&uid=262894</a> Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном сайте и выполните вход в собственный офис, дабы арестовать благотворительные вращения с вейджером х40;Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, чтобы еще раз получить бесплатный бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ждет неизбежное санкция. 1×slots зеркало рабочее на сегодня Баланс игрока дополняется на соответствующую необходимую. К ней применяется вейджер, указанный в правилах промоакции. Вывести выигрыш можно будет после такого, как юзер устроит требуемый объем ставок из личных средств. В редчайших случаях бездеп трудится в формате Free Play. На счет юзера зачисляется крупная сумма, и предоставляется малый срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по окончании этого периода сумма на счету несомненно превосходить первоначальную, то разницу можно несомненно исключить или использовать для дальнейших ставок.
1×slots актуальное зеркало
Прежде чем активировать бездеп, необходимо убедиться никаких, собственно государство, уроженцем которой считается игрок, не заходит в перечень запрещенных.Ограничения по забавам. Администрация воспрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, деньгами либо бесплатными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда деление выполняется по виду игр. Например, отыгрыш возможен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino. <a href=http://aficionado.pl/showthread.php?121951–1×slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-1×slots-review-live&p=140225>1×slots регистрация 1×slots review live</a> Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки все запросить дополнительные документы либо инициировать краткое общение по Skype. Акции, посвященные календарным праздникам, случаются рассчитаны как на всех юзеров, так и на категории: например, презент на 8 марта девушкам-игрокам либо мужикам на 23 февраля.Процесс доказательства личности возможность взятьвдолг(взятьвзаймы) от одного денька до недели. Если заказчик допустил какую-либо ошибку при заполнении паспортных данных, то ему следует обратиться с проблемой в саппорта онлайн-казино. 1×slots актуальное зеркало <a href=http://www.directory9.biz/details.php?id=259538>http://www.directory9.biz/details.php?id=259538</a>
1×slots зеркало регистрация в 1×slots casino
Срок активации и время на отыгрыш. Зачисление денег или фриспинов случается при активации протяжении взыскательно ограниченного периода, похожие требования предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать бонус некоторое дней или и недель. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером. Фриспины. Бесплатные вращения предназначены для применения в видео-слотах. Внимательно читайте условия – они нередко выдаются для неких машин. В зависимости от клуба продоставляется создавать определенное число ставок. Кстати, современные игорные жилища дают возможность заводить «одноруких бандитов».Варианты выигрыша зависимости от Вашей удачи и условий игорного портала. Выше мы сказали, собственно кое-какие бездепозитные бонусы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются другие, все, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность современных игр на средства, возможно выиграть невозможные суммы. Сегодняшние игровые автоматы либо видео слоты, как их нарекают. Могут выдавать солидные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000. <a href=http://hauptmanns-gartenpflege.com/profile.php?lookup=17293>http://hauptmanns-gartenpflege.com/profile.php?lookup=17293</a> Бездеп с фриспинами может охватывать всю коллекцию игр на сайте или разработки 1-го провайдера. Обычно предлагается конкретный перечень автоматов. Он указывается в положениях о проведении промоакции. Выигрыш имеет быть выведен после как, как юзер отыграет данную необходимую. Возможность оценить полный возможностей слотов — основное совершенство данной разновидности. Игроку становятся доступны что, эти функции, коие отсутствуют в демонстрационном режиме, а возможность выиграть реальные деньги прибавляет ярких азартных чувств. 1×slots casino зеркало Эффективность бездепов в качестве маркетингового инструмента оценили почти операторы. Малоизвестные площадки используют эти промоакции, чтобы стремительно набрать базу. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны постоянных гостей. Не все веб-сайты, дающие подарки без депозита, рекомендованы к забаве. За симпатичным промоописанием шансы прятаться неосуществимые условия отыгрыша и другие подводные камни.Выбирайте превосходнейшие безвозмездные бонусы с помощью обзоров на Casinoz – и пусть для сопутствует удача при отыгрыше бонусных кредитов!
<b>Смотреть еще похожие новости:</b>
<a href=https://australiantravelforum.com/Upload/showthread.php?tid=179254&pid=263520#pid263520>1×slots зеркало рабочее</a>
<a href=http://forums.panzergrenadiers.com/showthread.php?23633–1×slots-casino-%D0%A1%D0%82%D0%A0%C2%B5%D0%A0%D1%96%D0%A0%D1%91%D0%A1%D0%83%D0%A1%E2%80%9A%D0%A1%D0%82%D0%A0%C2%B0%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A1%D0%8F-%D0%A0%D0%85%D0%A0%C2%B0-%D0%A1%D0%83%D0%A0%C2%B0%D0%A0%E2%84%96%D0%A1%E2%80%9A%D0%A0%C2%B5&p=510443#post510443>1×slots casino регистрация на сайте</a>
<a href=https://mit-bbs.com/memberlist.php?mode=viewprofile&u=15318>скачать 1×slots на андроид мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Представьте момент, когда при ставке в 10 руб. Вы получите схожее умножение. Миллион рублей за одно вращение, что абсолютно возможно. Поэтому вопрос, сколько можно выиграть остаётся открытым. Предлагаем проверить других. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный бонус и проверяйте фортуну в деле. Разумеется, исключить деньги сложно. Однако шансы есть у всех. Условия отыгрыша бонуса. Если Вы планируете заработать на бездепозитном бонусе, то начала обратите внимание на значение вейджера и срок, который дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, что, этим проще отыграть приз и вывести выигрыш.
#9200 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало
Срок отыгрыша — это этап, кот-ый наступает в момент активации приза и кончается с его закрытием. Пользователю необходимо уложиться в этот временной промежуток, другому призовые средства аннулируются. Казино устанавливают список игр, ставки каких засчитываются при расчете отыгранных денег. Если тайтл не входит в данный список, то предоставляется быть недосегаем для загрузки во время деянья бонусного предложения. <a href=http://filmkachat.ru/>1×слотс казино</a> <a href=https://forum.musicalpraxis.gr/forum/profile/nolanfigueroa41/>https://forum.musicalpraxis.gr/forum/profile/nolanfigueroa41/</a> 1хслотс рабочее зеркало <a href=http://service.megaworks.ai/board/bbs/board.php?bo_table=hwang_form&wr_id=983998>http://service.megaworks.ai/board/bbs/board.php?bo_table=hwang_form&wr_id=983998</a> Зарегистрироваться в казино по специальной ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефонного и электрическую почту). Для подтверждения номера телефона необходимо в личном профиле показать собственный номер и нажать кнопку „Подтвердить номер телефона“, далее Вы получите sms-сообщение с кодом, который нужно установить в отвечающее поле. Для подтверждения электрической почты, перейти по активной ссылке в послании от казино.
1×slots casino регистрация на сайте
Если вы опытный игрок, вы обязаны знать, что приз без депо – редчайшая находка. Тем не менее, мы неделю изучаем интернет, чтобы найти вам наихорошие бездепозитные предложения.Как управляло, новоприбывшие геймеры в первую очередь желают ознакомиться с методами ввода и вывода валютных средств и сроки исполнения поданных заявок дабы конкретно разуметь, как стремительно у исключить собственный казино приз за регистрацию без депо на электрический кошелек или же банковскую карту. К счастью для всех играющих, снутри конкретных холдингов, все казино конкурируют меж собой. Ведь случае бы конкретную фирму представляло только одно онлайн-заведение, то навряд бы посетители заметили казино с бонусом за регистрацию и имели бы рассчитывать только на вознаграждение вид приза на первое инвестиция. К любому заведению регулярно следует привлекать новых игроков, собственно, в итоге, только на руку всем играющим. скачать 1×slots на андроид мобильная версия 2. Создать свежий профиль. Для регистрации нужно заполнить небольшую анкету либо зайдите в собственный кабинет посредством социальных сетей;Реже бонусы без депо начисляются неизменным игрокам. С их поддержкой администрация постарается удержать ценных посетителей или желает поблагодарить за преданность верных гостей. Но намного почаще для подобных целей используются такие промоакции: <a href=https://imoodle.win/wiki/User:DelbertDunhill9>https://imoodle.win/wiki/User:DelbertDunhill9</a> В списке требований к отыгрышу часто присутствуют лимиты на ставки при игре на личные средства. Так, случае отыграть надо(надобно) 30 000 руб., а максимальная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 раз. Эта особенность затрудняет соблюдение игроками условий по срокам деянья акции. 1хслотс регистрация в 1×slots casino Также существуют онлайн-платформы азартных игр, коие используют раздачу бездепозитных бонусов в особые даты (как для казино, так и для игрока). Помимо сего, действующие игроки того имеют возможность получить похожие призы за свою деятельность (к примеру, за повышения значения либо за похожие достижения).Для всех бездепозитных бонусов функционирует наибольший предел на выигрыш. Он указывает максимальную сумму, которую у получить, играя на бонусные кредиты. Как лишь для удастся выполнить притязания вейджера, допустимый максимум несомненно переведен с бонусного счета на ведущей, а остаток несомненно списан.
зеркала 1×slots
В истиннее время получить бонус за регистрацию в казино довольно просто. Почти любой игорный дом с радостью даст средства или бесплатные вращения. Многие игроки пользуются этим и не смущяются регистрироваться в любом клубе с прибыльными критериями. Кстати, это замечательная возможность придумать выигрышную стратегию и сорвать куш. <a href=http://nagievonline.com/index.php?subaction=userinfo&user=mercifulideal40>http://nagievonline.com/index.php?subaction=userinfo&user=mercifulideal40</a> Так же стоит выделить то, собственно в любом онлайн казино установлен свой максимальный кешаут на бездепозитный бонус. Как управляло кешаут — это предельная сумма средств, кот-ая доступная для вывода с бездепозитного приза. 1 x slots Не стоит путать забаву в демо и внедрение бонусов. В демонстрационном режиме игрок имеет оценить механику слота, сюжет и оформление. Но игра ведется на условные кредиты, потому отсутствует основное ? ощущение пыла. Активируя промокод либо фриспины, заказчик раньше не расходует средства деньги на игровые автоматы, хотя может сорвать настоящий куш!Для получения выигрыша требуется выполнить обстоятельства казино. Чаще всего игроку нужно поставить определенную необходимую, но уже из собственных средств. Она рассчитывается из совместного размера выигрыша за всегда применения бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, случае пользователь выиграл 1000 руб., а множитель составляет х30, исключить деньги возможно будет, сделав ставки на 30 000 руб.
1×slots сайт зеркало
1×slots зеркало регистрация то дальше необходимо пройти <a href=http://fumankong1.cc/home.php?mod=space&uid=483576>http://fumankong1.cc/home.php?mod=space&uid=483576</a>
1×slots casino online регистрация
Бонус с зачислением средств на счет дает больше свободы действий. Пользователь сам избирает, каким образом воспользоваться подаренными средствами. Здесь кроме шансы работать лимитирования на список доступных игр, хотя обыкновенно эти рамки не так строги, как в рекламную с безвозмездными вращениями.Вейджер (wager) – это коэффициент, кот-ый показывает на какую необходимую необходимо устроить ставок, чтобы вывести приз из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего приза, Вам необходимо сделать ставок на необходимую: 500*70=3500 руб. Только полностью отыграв бонус, Вы можете вывести собственный выигрыш. <a href=https://boobs.red/user/Glennphymn/>https://boobs.red/user/Glennphymn/</a> Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы которые появляются у новичков.Так же стоит выделить то, что в любом онлайн казино установлен собственный максимальный кешаут на бездепозитный приз. Как правило кешаут — это максимальная сумма денег, которая доступная для вывода с бездепозитного бонуса. 1×slots официальный demo регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://masstr.net/showthread.php?tid=85448>1×slots зеркало</a>
<a href=https://forum.home-visa.ru/viewtopic.php?f=69&t=807392&p=2791932#p2791932>1×slots регистрация на сайте 1×slots ru com</a>
<a href=http://mandala-app.com/forums/memberlist.php?mode=viewprofile&u=3447>1×slots официальный сайт зеркало</a>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/4794/#comment-251042>1×slots зеркало регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При отыгрыше бездепов, учитывайте кратковременные лимитирования. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток. Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и. Когда игроку надеется много фриспинов, администрация имеет разбивать их начисление на несколько дней. Бесплатные вращения предоставляются для конкретного слота, который указывается в правилах промоакции.
#9201 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало сайта
Первый возникающий вопрос, это, для выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают свежих игроков. Последним проще начать игру на деньги с презента за регистрацию. Им надо пополнять баланс и тратить личные свои. Новички получают бесплатные спины либо свои на счёт. С их поддержкой знакомятся с игровым процессом, крутят слоты и делают ставки в рулетке.Не хотите поиграть в азартные игры, не рискуя своими деньгами, хотя получая в все выплаты? Подобную вероятность деют почти наилучшие порталы с азартными развлечениями. В их количестве количество правдивых и надежных интернет-казино на российском языке. Они привлекают новых пользователей разными поощрительными мероприятиями, включая бездепозитные, либо бесплатные бонусы. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots casino 777 online</a> Зарегистрируйтесь. Для регистрации чаще всего довольно установить собственный номер телефонного и почтовый адрес, в чего установить полученный код из СМС. Возможно, требуется показать промокод. В правилах акции будет написано, где его надобно вводить. Иногда это надо создавать при регистрации, время — теснее после творения собственного кабинета, на отдельной страничке. <a href=https://humanlove.stream/wiki/User:SharronKaminski>https://humanlove.stream/wiki/User:SharronKaminski</a> 1×слотс казино <a href=http://munservis.mirniy.ru/index.php?subaction=userinfo&user=excitedemissary>http://munservis.mirniy.ru/index.php?subaction=userinfo&user=excitedemissary</a> Такой казино приз без депозита за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это словно какая-то конспирация одобрения под бездепозитный. Суть всего этого сводится к тому, что геймеру на час выдается, например, 1000 $, а реклама твердит про, собственно каждой выигрыш возможно несомненно в оставить при для. Но в играющий серьезно отнесется к данному предложению, то он попросту растеряет время. Ведь игроку нужно будет выступать не в основном аккаунте, а в тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (и всей тысячи) в управляла вступят конкретные условия, где будет сказано, собственно наибольшей суммой победы возможность быть только двести долларов и деньги можно применять только в приза на 1-ый лепта с вейджером 25 от суммы гонорары плюс сам депозит. По итогу выйдет, собственно игрок выигрывал себе 200% бонус с вейджером на определенную сумму. Короче говоря, это все надо вашего медли.
1×slot зеркало рабочее регистрации на телефон придет
Главным нюансом в появлении этих вознаграждений состоит том,, что пустив их в ход, игрок ничем не рискует и в последствии никому ничего не будет должен (не зависимо, получит ли он спасибо бонусам какой-либо выигрыш либо моментально спустит все только собственно прибывшие деньги). То есть, казино снабжает игрока возможностью на дармовой базе выступать во всевозможные слоты причем спонсирует игру. <a href=http://nakupnidivadlo.cz/index.php/forum/3-pripominky/46560–1×slots?start=30#235026>1хслотс официальный сайт зеркало</a> скачать 1×slots официальный сайт Подтвердите регистрацию, дабы активировать Бездепозитный бонус с выводом, требуется наполнить собственный профиль. Заполните порожние поля настоящими данными о себя.Бонусы без депозита при регистрации считаются самыми привлекательными как для опытных игроков, так для и новичков. Получив это вознаграждение, заказчик возможность играть на настоящие средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, еще условия их активации и выигрыша. <a href=https://kamchaty.ru/user/Glennitams/>https://kamchaty.ru/user/Glennitams/</a> 1×слот регистрация в 1×slots casino Возьми свой подарок. Чаще всего приз активируется незамедлительно последствии регистрации. Но случаются ситуации, когда нужно зайти в личный офис или написать в справочную службу.B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax
1×slots официальный регистрация
<a href=http://www.kroosuriya.com/krusuriya/modules.php?name=Journal&file=display&jid=8578>http://www.kroosuriya.com/krusuriya/modules.php?name=Journal&file=display&jid=8578</a> Выполнив все требования оператора, заказчик может оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем не более суток. Если дополнительно потребуется пройти процедуру верификации, то срок возрастает до 1–2 трудящихся дней. Для перевода используются банковские приборы и электрические платежные системы. Второй способ подходит другого, так как масса транзакций в этом случае осуществляются мгновенно. В связи со специфичностью функционирования банков обработка платежей может взятьвдолг(взятьвзаймы) до нескольких рабочих дней.Этот образ приза будет добавлен на Ваш аккаунт после успешной процедуры регистрации с использованием номера аппарата. Если избрать другой метод творения учетной записи, бездеп не будет добавлен на Ваш акк. 1× slots casino официальный сайт Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша призов. Заведения практически устанавливают наивысшую ставку, возможную по условиям вейждера.Выиграть настоящие средства в казино не пополняя счет – сложно, но вероятно. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными призами и начните играть на бонусные средства. По статистике каком-то 10-ти заведений возможно заработать маленькую необходимую средств с бонусных средств.
1×slots зеркало на сегодня
Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Для казино, работающих онлайн, бездепозитные бонусы нужны для привлечения новых клиентов. Предложение поиграть на слотах без необходимости внесения настоящих средств — работающий способ для увеличения энтузиазма к компании. После отыгрыша бездепа велик шанс, что игроку понравится и он продолжит выступать в казино, лишь сейчас уже на личные средства. <a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=118691>1×slots регистрация 1×slots casino 777 online</a> В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать собственный выигрыш с безвозмездных вращений. Прибыль, коию Вы заработаете на этом бездепе можно ставить на вывод без какого либо отыгрыша. Объективные – размер бонуса, коэффициент и условия вейджера, необходимость внесения депозита для вывода денег;Бездепы с бесплатными вращениями деют юзерам право вертеть барабаны игровых автоматов без снятия средств со счета. За каждый раунд уплачивает казино. Число спинов ограничено и редко выше сотку. Если акция содержит много даровых игр, их начисление может быть разбито на количество дней. 1×slots зеркало регистрация <a href=https://opaseke.com/users/6825>https://opaseke.com/users/6825</a> Как лишь на виртуальном счету окажутся бонусные свои, поторопитесь отыграть вейджер. Сразу после сего можно оставить заявку на вывод выигрыша. Кредиты прибыльно отличаются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом настоящих средств и выделяют вероятность почувствовать азарт. Во-вторых – возможно насладиться каждой азартной забавой доступной на сайте. В вашем постановлении находятся автоматы, настольные прибавленье, видео-покер, Live-дилеры.
1хслот 1хслотс регистрация перейти на 1×slots
Ознакомьтесь с нашим перечнем превосходнейших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего перечня и получите бездеп сразу. Хватайте наилучшие бесплатные предложения ниже и выигрывайте большие средства, не рискуя!Стоит отметить, что бездепозитный бонус выдается лишь взрослым новеньким, коие, в свою очередь, шансы пригласить личных друзей и своих, того претендующих на поощрительную программу лояльности. Подобная разработка была между соперничающих онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры содействуют увеличению своей посещаемости, методом привлечения новых игроков. Бонусы – это уникальный шанс для вероятных соучастников забавы, которые имеют опробовать софт покер рума и убедиться, станут ли они в него играть или нет. Новый игрок попробует свои силы с настоящими оппонентами в казино. <a href=http://eurasiaaz.com/index.php?subaction=userinfo&user=RaymondDrype>http://eurasiaaz.com/index.php?subaction=userinfo&user=RaymondDrype</a> Одним из предлогов отдавать привилегию одному либо иному заведению содержится в привлекательности предлагаемых промоакций и бесплатных предложений. Безвозмездные фриспины, выдаваемые без нужды делать какой-либо вклад, в списке находится далековато не в конце.Казино выделяет возможность заработать и исключить настоящие средства на бездепозитных призах. Обычно, это незначительная сумма, коию казино возможность себе разрешить презентовать игроку. 1хслотс зеркало Бесплатные бонусы казино без депозита возможно получить вид валютных средств на бонусный счет (вывести их возможно только после отыгрыша), фриспинов, забавы либо кешбэк-бонуса.
<b>Смотреть еще похожие новости:</b>
<a href=https://chasingadream.rpginitiative.com/showthread.php?tid=121779>1×slots подтвердит вашу регистрацию если говорить</a>
<a href=https://nauc.info/forums/viewtopic.php?t=20425812>1×slots зеркало сайта</a>
<a href=https://nztw.org/forum.php?mod=viewthread&tid=435130&pid=743137&page=1&extra=#pid743137>1×slots регистрация 1×slots casino c2d ru</a>
<a href=http://mandala-app.com/forums/memberlist.php?mode=viewprofile&u=3447>рабочее зеркало 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Благодаря программке преданности от игорного заведения, можно брать хороший старт и без дополнительных инвестициям запустить видеослоты. Кроме как, можно рассчитывать на реальную фортуну и получить, без инвестиции личных денег, великий выигрыш.
#9202 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать
Некоторые онлайн-казино без депо предлагают новым посетителям избрать бонус при регистрации. Будьте внимательны: выбрав раз, вы в безоговорочном большинстве случаев не можете воспользоваться остальными. <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino09k online</a> Не желаете поиграть в азартные игры, не рискуя средствами деньгами, хотя получая в все выплаты? Подобную вероятность деют все лучшие порталы с азартными веселиями. В их количестве количество правдивых и надежных интернет-казино на русском языке. Они привлекают свежих юзеров различными поощрительными событиями, включая бездепозитные, или благотворительные бонусы.Реже бонусы без депозита начисляются неизменным игрокам. С их помощью администрация старается вычесть ценных посетителей либо вожделеет поблагодарить за преданность верных посетителей. Но намного почаще для подобных целей применяются эти акции: <a href=https://www.sex8.zone/home.php?mod=space&uid=9421421&do=profile>https://www.sex8.zone/home.php?mod=space&uid=9421421&do=profile</a> Фриплей-бонусы. Бонусы за безвозмездную забаву есть только в некоторых клубах. Они зачисляются сразу в творения профиля и действуют непродолжительное время. Если у вас нет медли потратить свои, они просто завершатся. Что дотрагивается медли, как призы действуют на 1-го часа. 1×slots регистрация на сайте <a href=http://mashspec.ru/user/PhilipSip/>http://mashspec.ru/user/PhilipSip/</a> Например, игрок получил 500 руб. При разработке аккаунта и должен отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 рублей, потребуется сделать 875 спинов для полного отыгрыша.
1хслот зеркало
1 x slots <a href=https://diskutim.com/member.php?action=profile&uid=4964>https://diskutim.com/member.php?action=profile&uid=4964</a> 1×slots официальный сайт, скачать
1х слот регистрация в 1×slots casino
Промообъявления от казино мешают реальной картины и направлены на вербование внимания юзеров. Понять, как высоки шансы остаться в плюсе, дозволит личный тест условий предложения:Выиграть реальные деньги в казино не пополняя счет – сложно, хотя вероятно. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными бонусами и начните выступать на бонусные свои. По статистике в одном из 10-ти заведений возможно заработать маленькую сумму средств помощью бонусных средств. <a href=http://www.vintageampeg.com/forum/member.php?action=profile&uid=7123>http://www.vintageampeg.com/forum/member.php?action=profile&uid=7123</a> Многие игроки, оценив возможностей казино, остаются выступать в нем и далее ? на это и нацелено каждое рекламную. Постоянные клиенты вносят депозиты и делают ставки, обеспечивая долгосрочную выгода оператора. То есть, казино раздают бездепы новым пользователям для формирования лояльной аудитории.Итак, дабы благотворительные бонусные кредиты превратились в реальные деньги, которыми возможность управлять по собственному усмотрению, их надо(надобно) отыграть. Вейджер по уточнять в правилах онлайн-казино. 1×slots регистрация на сайте 1×slots ru com
1×slots официальный сайт скачать
Такой казино бонус без депозита за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это словно некая маскировка одобрения под бездепозитный. Суть всего этого сводится к тому, собственно геймеру на час выдается, например, 1000 долларов, а реклама твердит то, что каждой выигрыш можно будет в оставить при себя. Но случае играющий серьезно отнесется к данному предложению, то он просто растеряет время. Ведь геймеру нужно несомненно играть не в аккаунте, в тренировочном и с ограниченным выбором автоматов и ставок. Да и если, тогда, выигрыша (том всей тысячи) в правила вступят определенные условия, где несомненно сказано, что наибольшей суммой победы возможность быть лишь двести долларов и деньги можно использовать только виде бонуса на первый вклад с вейджером 25 от суммы гонорары плюс сам депозит. По итогу выйдет, собственно игрок выигрывал себе 200% бонус с вейджером на определенную сумму. Короче говоря, это все не вашего медли. Это также безвозмездные деньги, коие поступают на аккаунты новоиспеченных игроков после регистрирования. А необыкновенность таких бонусов произведено в том, собственно обретенные деньги обязательно стопам применять в продолжении назначенного времени.Чем ниже велечину вейджера, тем легче отыграть и вывести бонус. Если Вы расчитываете заработать на бездепе, но просто ознакомиться с свежим игровым клубом, то стоит игнорировать призов с высоким вейджером их почти не реально отыграть. С ними Вы сможете только протестировать забавы заведения. 1хслотс рабочее зеркало <a href=http://www.ppivn.vn/forum/user-27615.html>http://www.ppivn.vn/forum/user-27615.html</a>
1×slots зеркало регистрацию более популярный вариант это
Максимальный размер ставки, который нельзя превосходить пока бонус не несомненно всецело отыгран. В случае нарушения этого правила, бонус и выигрыш с него станут аннулированы.Многие казино предоставляют в маркетинговых целях безвозмездные бонусы необыкновенно для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой сайт по партнерской ссылке с нашего портала. <a href=https://bajarmp3.net/member.php?action=profile&uid=9473>https://bajarmp3.net/member.php?action=profile&uid=9473</a> Обычно, бездепозитные бонусы выдаются под определенные слоты с фиксированной ставкой, но их наверняка воспрещено использовать в игровых автоматах с прогрессивным джекпотом. Список игр, каких можно применять бездеп, Вы найдете в описании акции или сможете уточнить у службы заведения. 1×slot зеркало рабочее этих способов предполагает регистрацию Игры, каких возможно выступать на бонусные деньги. Проверьте список игр, в которых можно выступать на бонусные свои, вероятно они Вам не понравятся и не тратить своё время на эту промоакцию.
<b>Смотреть еще похожие новости:</b>
<a href=https://bajarmp3.net/showthread.php?tid=440674>казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чем ниже велечину вейджера, что, этим проще отыграть и исключить приз. Если Вы расчитываете заработать на бездепе, но просто ознакомиться с новым игровым клубом, то стоит избегать бонусов с высочайшим вейджером их почти не реально отыграть. С ними Вы можете только протестировать игры заведения.
#9203 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало сайта
Все бесплатные бонусы кажутся соблазнительными. Кто же категорически от способности поиграть в онлайн-казино, не рискуя деньгами, хотя получая выигрыши. Но далековато не все бездепозитные призы мере привлекательны для рассудительного посетителя.В лицензионных бездепозитных казино выступать в азартные забавы действительно безопасно. Наличие лицензии подтверждает что, этот прецедент, собственно клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP. <a href=http://filmkachat.ru/>1хслотс рабочее зеркало на сегодня</a> Обычно показатель выше, чем для бонусов на депозит. Не изумляйтесь, в он будет и х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных государств.Бездепозитный бонус за регистрацию в казино — это стартовый подарок в виде валютного начисления либо даровых вращений для свежих игроков заведения, для получения которого надо заносить депозит. <a href=https://www.9tj.net/home.php?mod=space&uid=271055>https://www.9tj.net/home.php?mod=space&uid=271055</a> Проверка занимает от нескольких минут до нескольких дней, профессионалы техподдержки шансы запросить вспомогательные документы или инициировать короткое общение по Skype. казино 1×slots <a href=https://gitlab.pavlovia.org/g/0000/-/issues/48>https://gitlab.pavlovia.org/g/0000/-/issues/48</a>
1×slots зеркало на сегодня
1×slot зеркало рабочее регистрации на телефон придет Благодаря программе преданности от игорного заведения, можно брать неплохой старт и без добавочных инвестициям запустить видеослоты. Кроме такого, возможно рассчитывать на реальную удачу и получить, без инвестиции личных денег, великой выигрыш. <a href=https://yozhstudio.ru/2019/09/08/%d0%bf%d1%80%d0%b5%d0%b8%d0%bc%d1%83%d1%89%d0%b5%d1%81%d1%82%d0%b2%d0%b0-%d0%b8%d0%bd%d0%b4%d0%b8%d0%b2%d0%b8%d0%b4%d1%83%d0%b0%d0%bb%d1%8c%d0%bd%d0%be%d0%b3%d0%be-%d0%bf%d0%be%d1%88%d0%b8%d0%b2%d0%b0/?unapproved=146817&moderation-hash=3b58026987e1694d291a0f6a11a1fe86#comment-146817>https://yozhstudio.ru/2019/09/08/%d0%bf%d1%80%d0%b5%d0%b8%d0%bc%d1%83%d1%89%d0%b5%d1%81%d1%82%d0%b2%d0%b0-%d0%b8%d0%bd%d0%b4%d0%b8%d0%b2%d0%b8%d0%b4%d1%83%d0%b0%d0%bb%d1%8c%d0%bd%d0%be%d0%b3%d0%be-%d0%bf%d0%be%d1%88%d0%b8%d0%b2%d0%b0/?unapproved=146817&moderation-hash=3b58026987e1694d291a0f6a11a1fe86#comment-146817</a> 1хслотс официальный сайт зеркало Если вы облюбовали для себя некоторое брендов которые для больше всего приглянулись, для постоянной игры! Таких гемблеров казино очень любит и ценит, за частую эти игроки становятся VIP игроками заведения, коим нередко поступают прибыльные предложения повторяющий бонусов, например же туда входит и бездепозитные.В онлайне большое знаменитых игорных площадок с привлекательными акционными предложениями. Однако внимательно читать обстоятельства 10-ов услуг скором надоест, ну и время отнимет много. Поэтому наша команда подготовила ТОП-3 сайтов с превосходнейшими бездепозитными призами:
1×slots официальный сайт зеркало
Автоматы неспроста числятся самым популярным азартным веселием. Чтобы усвоить управление и верховодила, потребуется всего некоторое минут. Ваша задача устроить ставку, определить количество рабочих линий и возможно вертеть барабан. Если на выпадет выигрышная композиция – вы выиграли! С этой задачей для посодействуют управится бездепозитные призы казино. <a href=https://giphy.com/channel/lexxeagle>https://giphy.com/channel/lexxeagle</a> Проверка занимает от нескольких мин. До нескольких дней, профессионалы техподдержки все запросить дополнительные документы либо инициировать короткое общение по Skype. 1×slots casino регистрация 1×slots review live
1хслотс зеркало на сегодня
Внесение депозита – Будьте готовы восполнить счет в отыгрыша приза. Это стандартное заявка управлял для этого на промо-акций. Лучше заранее уточнить, какую сумму надо(надобно) несомненно вносить на счет. Как управляло, речь идет о минимальном депозите, но вы должны быть убеждены, что он вам по карману.Наиболее популярные вознаграждения среди гэмблеров – бездепозитные призы казино. Это не удивительно, так возможно получить благотворительные вращения или виртуальные кредиты, и этом не придётся пополнять счёт, рисковать личными деньгами. Удастся насладиться различными увеселениями причем выиграть солидную сумму, избегая серьёзного риска. Автоматическая активация на самой комфортной, но ручной способ имеет перед ней достоинства. Прежде чем использовать вознаграждение от казино, стоит заранее найти, сколько медли требуется на исполненье всех условий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала деянья приза. 1 х слотс зеркало <a href=http://www.podrujka.com/user/Glennpah/>http://www.podrujka.com/user/Glennpah/</a>
1×slots зеркало регистрация в 1×slots casino
Подобные призы без депо предоставляются на больше выгодных критериях. Зачастую они покрупнее, а условия отыгрыша менее строгие. <a href=https://exsite.su/user/AshleyEmome>https://exsite.su/user/AshleyEmome</a> Следует выделить, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом.Получить Бездепозитный приз в онлайн казино дело 2-ух кликов. Другой момент, отыграть рекламную и соблюсти управляла и условия отыгрыша. Под правилами подразумевается не вагер, хотя и ограничения по максимальной ставке. Мы осознаем, собственно в кино все ставят на зеро и выигрывают. Призываем не делать подобного. Перед активацией бонуса прочтите правила. Узнайте следующие моменты: Условия получения дара, за регистрацию, за депо и многое. Ограничения по наибольшей ставке. Зачастую не повыше 350 руб. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах возможно отыгрывать вагер. Можно вертеть автоматы, а вагер будет стоять на месте. Поэтому главно знать, в каких играх возможно совершать кратность денежного оборота. 1×slots рабочее зеркало на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.bedwantsinfo.nl/thread-676599.html>1×slots зеркало регистрация то дальше необходимо пройти</a>
<a href=https://thetechmodders.com/forums/memberlist.php?mode=viewprofile&u=945>1×slots рабочее зеркало на сегодня</a>
<a href=https://koreanstudies.com/forum/viewtopic.php?t=128867>1хслотс официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Далее потребуется отыграть вагер и вывести выигрыш. Игрокам без навыка крупно повезло, у получить 10-ки подарков за 1 регистрацию. Если не сумели получить Бездепозитный бонус, не волнуйтесь. Обратитесь в онлайн чат, оператор поможет исправить.
#9204 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало видели такую регистрацию на
Выбор каждого интернет казино на нашем сайте. В описании к любому Вы можете узнать, собственно получите за творенье аккаунта. <a href=http://filmkachat.ru/>1×slot зеркало рабочее этих способов предполагает регистрацию</a> <a href=http://jscorporation.storycom.co.kr/bbs/board.php?bo_table=free&wr_id=199718>http://jscorporation.storycom.co.kr/bbs/board.php?bo_table=free&wr_id=199718</a> 1хлот регистрация в 1×slots casino <a href=https://mercedesforum.com/forum/off-topic-7/a-67464/#post190520>https://mercedesforum.com/forum/off-topic-7/a-67464/#post190520</a> В онлайне большое узнаваемых игорных площадок с привлекательными акционными предложениями. Однако внимательно читать условия 10-ов услуг в надоест, да и время отнимет большое. Поэтому наша команда подготовила ТОП-3 сайтов с превосходнейшими бездепозитными призами:При маленький сумме приза рекомендовано играть по невысоким ставкам, а использовать наибольшие какого-либо только что, нет случае, если вейджер слишком великий, а время на отыгрыш крепко ограничено.
1×slots casino зеркало рабочее
casino 1×slot <a href=https://gamesgrom.com/user/PatrickQuigH/>https://gamesgrom.com/user/PatrickQuigH/</a> Перечисленные выше главные характеристики сочетают практически каждый бонус и являются стереотипными для бездепозитных бонусных начислений в казино.Подтверждение регистрации. Казино просят привязки профиля к электрическому адресу и номеру аппарата. Для сего на e-mail отправляется послание со ссылкой, а на телефонный ? текстовое извещение с кодом. 1×slots зеркало регистрация то дальше необходимо пройти Прямо момент арестуйте благотворительные вращения за регистрацию без депозита и начинайте собирать призовые композиции ради крупных выигрышей!
1×slots бонус за регистрацию
В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, нужно адресоваться в службу спустя лайв-чат на сайте казино. Для получения бонуса надо(надобно) пригласить в игру свежего клиента. Казино начисляет пригласившему фиксированный процент от взносов приглашённого повторяющий бонуса: чаще всего его объем не превышает 10%. Срок деяния приза как не выше месяца: пригласивший получает бонус в зависимости от проигранных ставок приглашённого в первый месяц игры.Выбор каждого онлайн казино на нашем сайте. В описании к любому Вы можете узнать, что получите за творение аккаунта. <a href=http://www.kssink.com/bbs/board.php?bo_table=free&wr_id=835708>http://www.kssink.com/bbs/board.php?bo_table=free&wr_id=835708</a> 1×slots официальный зеркало рабочее Каждый в должен сначала детально изучить обстоятельства по получению и отыгрышу приглянувшегося подарка. Если всё устраивает, поторопитесь арестовать благотворительные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо в начать вращать барабаны топовых слотов.
1× slots официальный
В бонусную программу множества операторов входят регулярные бездепы. Это пожизненные промоакции, поощряющие интенсивных неизменных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депо в мена на скопленные баллы лояльности.Условия имеют разниться приятель от друга. Но такой бонус имеет быть использован только для игрового процесса – полученные на счет деньги до как, как будут отыграны, исключить нереально. 1×slot официальный сайт <a href=http://www.stavenue.com/forum/index.php?action=profile;u=63164>http://www.stavenue.com/forum/index.php?action=profile;u=63164</a>
1хслотс зеркало
Бездепозитный бонус казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в этом и заключается главное отличие.Законодательство, регулирующее азартные игры в различных странах, влияет на возможности операторов. В результате пользователи из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это имеет быть как полный отказ в доступе, например и невозможность загружать игры отдельных изготовителей. <a href=http://crit-m.ru/bitrix/redirect.php?goto=http://pos-shop.ru/bitrix/redirect.php?goto=http://ultrawood.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/WUX1dKR9AB4>http://crit-m.ru/bitrix/redirect.php?goto=http://pos-shop.ru/bitrix/redirect.php?goto=http://ultrawood.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/WUX1dKR9AB4</a> В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это самая милая часть забавы. Важно, часто бездепозитные бонусы в казино выдаются с лимитированиями по наибольшей выплате. В среднем можно рассчитывать на выгода в некоторое тыщ рублей. Как исключить выигрыш с приза без депо. Придётся подтвердить аккаунт документально, в некоторых заведениях. Процедура верификации обязательна и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате либо прочитайте в правилах.В интернете слишком много скриптовых вебсайтов, которые принадлежат жуликам. Их основная задача – заинтересовать гэмблеров, пообещав не только великодушные подарки, хотя и солидные выигрыши. Так собственно некоторые веб-сайты предлагают получить за регистрацию в $1 000. 1×slots рабочее зеркало на сегодня 1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, случае не желайте стать жертвой жуликов или впустую потратить время;
<b>Смотреть еще похожие новости:</b>
<a href=https://www.ldvd.nl/no-22-san-diego-place-rallies-very-last-boise-country-27–16?page=39#comment-237790>1×slots официальный сайт мобильная версия скачать</a>
<a href=https://forum-macan.ru/memberlist.php?mode=viewprofile&u=1736>казино 1×slots официальный сайт</a>
<a href=https://karakol.com.kg/user/Jameskef/>1×slots сайт</a>
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=4406>1×slot казино зеркало</a>
<a href=http://griffhunter.com/boards/viewtopic.php?p=327172#p327172>1× slots официальный</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Также существуют онлайн-платформы азартных игр, которые применяют раздачу бездепозитных бонусов в специальные даты (как для казино, так и для игрока). Помимо сего, действующие геймеры того имеют вероятность получить схожие призы за собственную деятельность (например, за повышения уровня или за похожие заслуги).
#9205 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots review live
Бездепозитные призы в казино без пополнения 2022 — это определенная сумма средств или for nothing spins вращения, коие предоставляются первым гостям за регистрацию на сайте казино вид бездепозитного бонуса, и выделяет вам вероятность за счет казино без пополнения опробовать услуги (игр), с последующей прерогативой вывода средств при выполнении всех установленных верховодил.Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых свежих, щедрых и испытанных призах в онлайн казино, которые обновляются каждый денек. <a href=http://filmkachat.ru/>1хслот официальный сайт зеркало</a> Максимальная ставка ? устанавливается в еденице счета и ограничивает объем ставки за один спин. В случае ее превышения приз может быть аннулирован. Также в правилах может находиться запрет на размещение ставок конкретного облика, например, по одинаковым шансам в рулетке (другими, на чет или нечет, красное либо темное и т.д. ).Игры, каких можно выступать на бонусные деньги. Проверьте перечень игр, в которых возможно выступать на бонусные свои, возможно они Вам не понравятся и надо расходовать своё время на такую акцию. <a href=http://forum.n34.pl/profile.php?mode=viewprofile&u=4650>http://forum.n34.pl/profile.php?mode=viewprofile&u=4650</a> Таким образом интернет казино получает вероятного игрока. Возможно дальнейшем либо истинном он захотит поиграть на свои средства. Так трудятся бездепозитные призы в онлайн казино. Здесь отлично подходит выражение, безвозмездные сыр бывает лишь в мышеловке. Начинающие игроки шансы не осознавать опасность азарта. Однако со временем понимания становится больше. Это тема для отдельного обсуждения. 1×slots casino регистрация 1×slots review live <a href=http://elymbmx.com/mybb/member.php?action=profile&uid=13035>http://elymbmx.com/mybb/member.php?action=profile&uid=13035</a> Чаще всего используются коды. Их надо(надобно) заносить в специальные окна регистрационной анкеты, в речь идет о пригласительных бонусах, либо в определенном разделе личного кабинета игрока.
рабочее зеркало 1×slots
<a href=https://tucmas.fi/phpBB/viewtopic.php?f=4&t=349792>1×slots официальный сайт зеркало рабочее</a> 1×slots официальный сайт мобильная версия Многие новички сомневаются, собственно поощрительный приз надо несомненно возвращать, даже случае они выиграли у казино. Это безусловно неопасно и надежно. Выводя выигранные средства, игрок просто одергивает свое роль при и теряет уникальную возможность – бесплатно наращивать личное материальное положение.Используйте превосходнейшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из перечня ниже, дабы заработать подарки за обычные деянья и уже сегодня получить первый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высокой отдачей и резвыми выводами на электронные кошельки. <a href=http://dartslf.com/forum/member.php?action=profile&uid=7972>http://dartslf.com/forum/member.php?action=profile&uid=7972</a> 1×слотс казино Не советуем сломя голову браться за всевозможные предложения получения средств без инвестициям. Вполне возможно, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на 1-ый взгляд. Альтернативой является казино бонус за депо. Мы предлагаем для пару советов, спасибо коим у любого игрока несомненно вероятность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег:
1×slots регистрация 1×slots casino c2d ru
Бездепы обыкновенно предлагают с отыгрышем — моментально исключить выигранные свои невозможно. Перевод средств со счета несомненно возможен в того, как юзер выполнит все притязания казино, а сумма не быть выше установленного правилами лимита. Условиями акции фиксируются сроки, в течение коих клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней в активации.Только выполнив все условия отыгрыша и дождавшись окончания ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить свои деньги. При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток.Как прочие промоакции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения считаются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых посетителей и разрешает им составить эмоцию о функционале, не рискуя вескими суммами. <a href=https://flaxeco.com/user/RenaldoBus/>https://flaxeco.com/user/RenaldoBus/</a> Способы получения бездепа различаются зависимо вида бонуса, кот-ый понравился игроку. Но вас так нужно быть зарегистрированным в легальном онлайн-казино и доказать собственную личность. В общем облике пошаговая аннотация для получения бездепозитного приза выглядит так: 1×slots официальный сайт скачать на айфон Бонус за регистрацию в казино выдается лишь один один на 1-го игрока. Но случаются дополнительные акции, в коих бездепы раздаются для неизменных посетителей и такие подарки Вы сможете получить больше одного раза.
казино 1×slots
Начнём с такого, собственно каждое рекламную за регистрацию подразумевает некие обстоятельства. Бездепозитные призы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность денежного оборота, необходимая для исполнения условий. Пример, возымели бесплатные вращения и выиграли с их 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 руб., неудачных либо выигрышных, неважно. После исполненья, бонусный баланс перейдёт на настоящий и станет доступным к выводу.Онлайн-казино тщательно продумывают бонусные условия, которые необходимо изучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и ограничения. Многие игроки, оценив возможностей казино, остаются выступать в нем и далее ? на это и направлено каждое рекламную. Постоянные клиенты заносят депозиты и делают ставки, обеспечивая длительную прибыль оператора. То есть, казино раздают бездепы свежим юзерам для формирования приклнной аудитории. Получить Бездепозитный бонус в интернет казино дело двух кликов. Другой момент, отыграть промо и соблюсти верховодила и обстоятельства отыгрыша. Под правилами подразумевается не только вагер, хотя и ограничения по наибольшей ставке. Мы понимаем, что в кино все ставят на зеро и выигрывают. Призываем не создавать подобного. Перед активацией приза прочитайте правила. Узнайте последующие моменты: Условия получения презента, за регистрацию, за депо и многое. Ограничения по максимальной ставке. Зачастую не повыше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вращать автоматы, а вагер будет стоять на месте. Поэтому важно аристократия, в каких забавах возможно совершать кратность денежного оборота. casino 1×slot <a href=https://maps.google.co.ck/url?q=https://doctorlazuta.by/>https://maps.google.co.ck/url?q=https://doctorlazuta.by/</a> Наиболее знаменитые вознаграждения среди гэмблеров – бездепозитные бонусы казино. Это не умопомрачительно, так возможно получить благотворительные вращения или виртуальные кредиты, и этом не придётся пополнять счёт, рисковать личностными средствами. Удастся насладиться разнообразными веселиями даже выиграть крупную необходимую, избегая серьёзного риска.Прежде всего, не забывайте периодически заглядывать на страницу обзоров бездепозитных бонусов. Они шаг за шагом разглядывают более интересные предложения основных игорных порталов.
1хслот скачать
Хотя бесплатные бонусы начисляются без депо, не исключено, что вас придется заносить деньги. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты только последствии как, как свежий заказчик первый пополнит игровой счет.Начнём с как, что каждое промо за регистрацию подразумевает некоторые условия. Бездепозитные призы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность денежного оборота, нужная для исполненья критерий. Пример, получили благотворительные вращения и выиграли с них 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 рублей, неудачных либо выигрышных, маловажно. После выполнения, бонусный баланс перейдёт на реальный и станет доступным к выводу. В разделе с призами активировать собственный презент. Найти забавы, для коих учтено поощрение и применять бонус по назначению. <a href=https://www.reikiandastrologypredictions.com/member.php?action=profile&uid=19483>https://www.reikiandastrologypredictions.com/member.php?action=profile&uid=19483</a> 1× slots регистрация в 1×slots casino На критериях отыгрыша безвозмездных бонусов стопам остановиться подробнее. С ними связаны нюансы, которые нельзя оставить без внимания.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.sgomberisgombero.it/my-account-2/>1×slots регистрацию процедура займет всего лишь</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выполнив все требования оператора, клиент возможность оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит примерно менее суток. Если дополнительно потребуется пройти процедуру верификации, то срок увеличивается до 1–2 трудящихся дней. Для перевода применяются банковские инструменты и электронные платежные системы. Второй метод подходит чем, например как большинство транзакций такой исполняются моментально. В связи со специфичностью функционирования банков обработка платежей может взятьвдолг(взятьвзаймы) до нескольких рабочих дней. Акции, посвященные календарным праздникам, бывают рассчитаны как на всех юзеров, так и на категории: например, подарок на 8 марта девушкам-игрокам или мужчинам на 23 февраля.
#9206 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на официальном сайте
Сроки активации бонуса устанавливаются любым казино, но почаще всего они не превосходят недели с момента получения. Игроку обязательно нужно применять бездеп на указанного срока, в ином случае бонус просто исчезнет. Каждый бонус можно получить лишь раз раз, потому в не использовать бездеп в срок, у игрока не несомненно второго шанса им воспользоваться.Получить Бездепозитный бонус в онлайн казино дело двух кликов. Другой момент, отыграть промо и соблюсти правила и условия отыгрыша. Под правилами подразумевается не только вагер, но и ограничения по максимальной ставке. Мы разумеем, собственно в кино все ставят на зеро и выигрывают. Призываем не создавать подобного. Перед активацией приза прочтите верховодила. Узнайте следующие моменты: Условия получения подарка, за регистрацию, за депозит и прочее. Ограничения по наибольшей ставке. Зачастую не повыше 350 рублей. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на пространстве. Поэтому главно аристократия, в каких забавах возможно совершать кратность денежного оборота. <a href=http://filmkachat.ru/>1×slots зеркало подтвердит вашу регистрацию если говорить</a> Зарегистрироваться в казино по особой ссылке или с бонусным кодом. Подтвердить контактные данные (номер аппарата и электрическую почту). Для подтверждения номера аппарата нужно в собственном профиле указать свой номер и нажать кнопку „Подтвердить номер телефонного“, дальше Вы получите sms-сообщение с кодом, кот-ый нужно установить в соответствующее фон. Для подтверждения электрической почты, перейти по интенсивной ссылке в послании от казино. <a href=http://www.altasugar.it/new/index.php?option=com_kunena&view=topic&catid=2&id=131593&Itemid=151>http://www.altasugar.it/new/index.php?option=com_kunena&view=topic&catid=2&id=131593&Itemid=151</a> Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.Следует выделить, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом. 1×slots зеркало регистрацию более популярный вариант это <a href=https://forums.dfine.net/member.php?action=profile&uid=1133>https://forums.dfine.net/member.php?action=profile&uid=1133</a>
1хслотс регистрация в 1×slots casino
Итак, дабы бесплатные бонусные кредиты превратились в настоящие средства, которыми вы можете распоряжаться по своему усмотрению, их нужно отыграть. Вейджер по уточнять в правилах онлайн-казино.Выбирая даровой бонус, внимательно изучайте верховодила. Убедитесь, собственно для можно брать участие в промоакции. Уточните, в каких забавах возможно исполнять условия вейджера. При надобности задавайте вопросы представителям саппорта. <a href=https://forum.bandariklan.com/showthread.php?tid=359409>1× slots casino зеркало</a> казино 1×slots Бесплатные призы казино без депозита возможно получить в виде денежных средств на бонусный счет (вывести их можно лишь последствии отыгрыша), фриспинов, забавы либо кешбэк-бонуса. <a href=http://www.zgqsz.com/home.php?mod=space&uid=326189>http://www.zgqsz.com/home.php?mod=space&uid=326189</a> x1 slots регистрация в 1×slots casino Помимо прочего, для вывода средств по бездепу нужно внести на счёт свой 1-ый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально возможную сумму, после чего вывод средств будет доступен.В онлайне слишком количество скриптовых вебсайтов, коие принадлежат плутам. Их главная цель – заинтересовать гэмблеров, пообещав не великодушные презенты, но и крупные выигрыши. Так что некоторые веб-сайты предлагают получить за регистрацию даже $1 000.
1×slots зеркало на сегодня
Для доказательства электрической почты, просто перейдите по активной ссылке в письме, полученном от игрового заведения. 4. Заберите подарок. Чаще всего бонус активизируется сразу последствии регистрации. Но посещают ситуации, когда надо(надобно) забежать в индивидуальный кабинет или написать в службу. <a href=http://bestwecando.ourproject.org/dokuwiki-2013–05–10a/doku.php?id=скачать_фильмы_бесплатно_через_торрент>http://bestwecando.ourproject.org/dokuwiki-2013–05–10a/doku.php?id=скачать_фильмы_бесплатно_через_торрент</a> 1×slots зеркало рабочее
1×slot регистрация
На страничке представлены бездепозитные призы за регистрацию в казино редчайшая награда за коей гонятся все игроки как новички, например и профессионалы. Мы также уделяем огромное внимание на присутствие бонусов при составление рейтинга казино на деньги. Бездепозитный бонус это вероятность играть безвозмездно и выиграть реальные деньги. Бездепозитные призы начисляются только раз один. Не стоит открывать новые аккаунты, чтобы получить их повторно. Служба безопасности казино непременно выявит «левого» соучастника и заблокирует. Если посетитель выполнит необходимые требования, отыграет свою ставку и решит исключить личный выигрыш, то ему надо(надобно) к, что казино непременно потребует дать ксерокопии личных документов, чтобы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои исключить не удастся. 1× slots сайт <a href=http://shop-uk.fmworld.com/Queue/Index?url=http://momas.ru/bitrix/redirect.php?goto=http://st.hit.gemius.pl/hitredir/id=.A3glDCWd1l2slG5.NAg3PWonM8dE2SatuUA5TPlcbn.A7/url=https://teletype.in/@urid_pomosh/jk6f3×hMAkQ>http://shop-uk.fmworld.com/Queue/Index?url=http://momas.ru/bitrix/redirect.php?goto=http://st.hit.gemius.pl/hitredir/id=.A3glDCWd1l2slG5.NAg3PWonM8dE2SatuUA5TPlcbn.A7/url=https://teletype.in/@urid_pomosh/jk6f3×hMAkQ</a>
1хслотс казино зеркало
Но есть игорные заведения, которые готовы просто например жертвовать средства на забаву. Для сего довольно создать профиль. Чтобы исключить свой выигрыш, вам сначала нужно выполнить обстоятельства отыгрыша, указанные в условиях получения бездепозитного депо.Онлайн гемблинг развивается с каждым деньком все больше и больше, свежие бренды создаются не по дням а по часам. Новые интернет казино проделывают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и что, этим наиболее предлагают бездепозитные бонусы за регистрацию, что бы не пропустить такую возможность — как пользоваться свежим бездепом, советуем навещать наш вебсайт как можно чаще, самое аппетитное и свежие будет добавляться в данном же списке. Казино дает вероятность заработать и исключить реальные средства на бездепозитных призах. Обычно, это малозначительная сумма, коию казино возможность для позволить подарить игроку.Казино дает возможность заработать и исключить реальные средства на бездепозитных бонусах. Обычно, это малозначительная сумма, коию казино возможность для разрешить подарить игроку. <a href=http://www.apeka.nl/member.php?action=profile&uid=8651>http://www.apeka.nl/member.php?action=profile&uid=8651</a> Подтвердите регистрацию, дабы активировать Бездепозитный бонус с выводом, потребуется заполнить индивидуальный профиль. Заполните порожние поля истинными данными о себя. 1хслотс 1хслотс регистрация перейти на 1×slots Можно ли в одном интернет казино получить больше 1-го приза за регистрацию? Нет, например как в каждом интернет казино есть верховодила, к которым надо(надобно) держаться, не делать 2 аккаута для получения бонусов, иначе будет блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, бонус за регистрацию выдаеться раз один одному лицу.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.home-visa.ru/viewtopic.php?f=69&t=807392&p=2810621#p2810621>1хслотс рабочее зеркало</a>
<a href=https://timepost.info/showthread.php?tid=59755>1×slots официальный сайт скачать</a>
<a href=https://forum.vn.ua/showthread.php?p=3272334#post3272334>1×slots регистрация 1×slots casino c2d ru</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На странице представлены бездепозитные призы за регистрацию в казино редкая заслуга за коей гонятся все игроки как новенькие, так и профессионалы. Мы тоже уделяем великое внимание на наличие бонусов при составление рейтинга казино на деньги. Бездепозитный приз это вероятность играть даром и выиграть настоящие средства. Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша призов. Заведения практически устанавливают максимальную ставку, допустимую по условиям вейждера.
#9207 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. <a href=http://filmkachat.ru/>1хслот зеркало</a> На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению сего медли, Вы не можете активировать и получить бездепозитный бонус.Более крупные предложения встречаются довольно редко. Зачастую они доступны только VIP-игрокам. В оставшихся случаях им скорее сопутствуют довольно жесткие обстоятельства отыгрыша. Также вероятны вспомогательные условия прочие лимитирования, прописанные в условиях и положения бонусной программки казино. <a href=https://timeoftheworld.date/index.php?title=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D0%BE%D0%B2%20%D0%B8%D0%B7%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO>https://timeoftheworld.date/index.php?title=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D0%BE%D0%B2%20%D0%B8%D0%B7%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO</a> Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам воспрещено начислять призы клиентам, не имеющим денежных средств на счете. Мы предлагаем осмотреть животрепещущие бонусы онлайн-казино с лицензией, которые соблюдают законодательство РБ. 1×slos регистрация в 1×slots casino <a href=http://kartadobra.ru/bitrix/redirect.php?goto=http://logomebel.ru/bitrix/redirect.php?goto=http://vsekrossovki.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/wFqoZLEU80s>http://kartadobra.ru/bitrix/redirect.php?goto=http://logomebel.ru/bitrix/redirect.php?goto=http://vsekrossovki.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/wFqoZLEU80s</a> Доступные игры – В некоторых азартных играх можно снизить математическое преимущество казино до нескольких десятых процента. В их количестве все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как правило, в этих играх ставки идут в зачет вейджера не всецело. Например, имеет предусматриваться только 50%. В неких забавах бездепозитные бонусы вообще нельзя отыгрывать.
1×slots на любой вкус как пройти регистрацию
Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депо имеет выделяться до 30 дней. <a href=https://qualityprogamer.de/forum/showthread.php?tid=271709>1×slots официальный сайт зеркало</a> 1×slot зеркало рабочее регистрации на телефон придет <a href=http://uprzakupokkchr.ru/user/TravisCreed/>http://uprzakupokkchr.ru/user/TravisCreed/</a> Раздача бонусов может быть приурочена к различным датам: календарные дни, дни рождения игроков, юбилей открытия казино и т. Д. Подарок выдается в виде средств, фриспинов или баллов для скопления и обмена на услуги оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода данной суммы придется выполнить ряд требований. 1×slots официальный зеркало рабочее Бесплатные бонусы казино без депозита можно получить повторяющий валютных средств на бонусный счет (исключить их возможно лишь последствии отыгрыша), фриспинов, игры либо кешбэк-бонуса.Верификация важна для дополнительной безопасности и помочь техподдержке выявить бонусхантеров и плутов. Кстати, на некоторых платформах выводы солидных сумм доступны лишь после подтверждения личности.
1×slots регистрацию процедура займет всего лишь
Вывод выигрыша с бездепозитных призов казино – щедрый подарок от азартных клубов. Но чтобы вывести собственный заработок, нужно выполнить ряд критерий: Бездепы имеют входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами.При использовании бездепозитным бонусом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют некоторое видов лимитов: <a href=http://www.realitybyrach.com/2011/09/we-bought-zoo-trailer.html>http://www.realitybyrach.com/2011/09/we-bought-zoo-trailer.html</a> 1×slots регистрация на 1хслотс Многие азартные клубы ограничивают сумму вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, обозначенной в описании акции, суммы Вы не можете вывести. Разница несомненно аннулирована, Вы том не сможете создавать на нее ставки.
1×slots официальный зеркало
Возможность поиграть дополнительное соревнование (а времени и некоторое) абсолютно даром, а выигрыш, же, поступает на счёт игрока.Можно ли в одном интернет казино получить больше 1-го приза за регистрацию? Нет, например как в каждом интернет казино есть верховодила, к которым надо(надобно) держаться, не делать 2 аккаута для получения бонусов, иначе будет блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, бонус за регистрацию выдаеться раз один одному лицу. <a href=http://freedom.teamforum.ru/viewtopic.php?f=6&t=36178&p=109966#p109966>1×slots сайт</a> 1×slots зеркало выигрыши обязательно пройдите регистрацию если <a href=https://bossgirlpower.com/forums/profile.php?id=594681>https://bossgirlpower.com/forums/profile.php?id=594681</a> Третитй бездепозитный приз за регистрацию – денежные свои. К раскаянью, начислить рубли или баксы способны лишь знаменитые и популярностью клубы. С их помощью появится насладиться любой доступной игрой – автоматом, рулеткой, кено, блэкджеком.Все обожают получать подарки. Согласитесь, почти любой играющий человек будет бесконечно рад, если получит бесплатный подарок для игры в онлайн казино просто за регистрацию либо же приз за внесенный депозит, например называемые приветственные бонусы для новых игроков. Соответственно эти онлайн клубы станут больше популярны и предпочтительны у игроков при выборе казино для игры. Топ казино каждый обновляется и прибавляются свежие и интересные игровые клубы с симпатичной бонусной политикой и всеми вероятными прерогативами, к коим относятся эти призы как фриспины за регистрацию, денежные бездепозитные призы, а также великодушные бонусы за внесенный депо.
1×slots промокод при регистрации 2025
Чтобы самостоятельно убедиться в превосходстве бездепозитных бонусов, довольно зарегистрироваться в казино и получить одобрение.Заполняя данные в собственном профиле, указывайте только достоверную информацию, например как Вам придется ее доказать в будущем при выводе денег. <a href=http://www.olangodito.com/bbs/board.php?bo_table=free&wr_id=916253>http://www.olangodito.com/bbs/board.php?bo_table=free&wr_id=916253</a> Простая процедура получения бездепозитного бонуса, кот-ая займет не более 2-х минут. Для получения бездепов, достаточно зарегистрироваться и доказать контактные данные.Фриспины начисляются по конкретной ставке. После их активации игроку нужно запустить разъем и увериться, что в нем показываются благотворительные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода в отыгрыша ориентируется оператором и редко выше 5 000 руб. 1×slots зеркало Выиграть реальные деньги в казино не пополняя счет – трудно, но вполне. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными бонусами и начните выступать на бонусные свои. По статистике каком-то 10-ти заведений возможно заработать маленькую сумму денег помощью бонусных средств.
<b>Смотреть еще похожие новости:</b>
<a href=http://link.5nx.ru/memberlist.php?mode=viewprofile&u=600>1хслот официальный сайт зеркало</a>
<a href=https://surfaceprophets.com/threads/1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%BF%D0%B5%D1%80%D0%B5%D0%B9%D1%82%D0%B8-%D0%BD%D0%B0–1×slots.26685/>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Самый распространённый из подобных бонусов, естесственно же, бездеп на денек рождения клиента — бонус в виде фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им можно протяжении установленного периода медли.
#9208 Charlesgunnyhttp://filmkachat.ru
1×slots мобильная версия войти казино
Перечисленные выше главные свойства сопровождают практически каждый приз и являются стереотипными для бездепозитных бонусных начислений в казино.Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала быстрые выводы. Фишка выплат том,, что довольно избрать платёжный инструмент и указать необходимую. В большинстве случаев средства зачисляются на электрические кошельки в течение 15 минут, а на банковские карты – 1–3 рабочих дня. <a href=http://filmkachat.ru/>1×slots на любой вкус как пройти регистрацию</a> Еще одно условие дотрагивается размеров ставки. Операторы устанавливают наивысшую необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, избранной в Личном офисе. При превышении лимита есть риск потерять приза. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, клиент возможность столкнуться с запретом назначать фишки на шансы.В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая приятная доля игры. Важно, часто бездепозитные бонусы в казино выдаются с ограничениями по наибольшей выплате. В среднем возможно рассчитывать на выгода в несколько тысяч рублей. Как исключить выигрыш с бонуса без депозита. Придётся подтвердить аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате либо прочитайте в правилах. <a href=https://cyraxx.wiki/wiki/Shisha_Tobacco_From4_Eur>https://cyraxx.wiki/wiki/Shisha_Tobacco_From4_Eur</a> Фриспины начисляются по конкретной ставке. После их активации игроку нужно запустить слот и убедиться, собственно в нем показываются благотворительные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода в отыгрыша определяется оператором и изредка превышает 5 000 руб. 1×slots регистрация то дальше необходимо пройти <a href=http://bneinoach.ru/forum/user/98705/>http://bneinoach.ru/forum/user/98705/</a> Условия вывода выигрыша. В некоторых заведениях для успешного вывода с бездепозитного приза довольно пополнения баланса и доказательства личности. В иных же клубах, нужно некоторое раз прокрутить собственный депозит.
1×slots casino регистрация 1×slotscasino09k online
1×slots официальный сайт скачать <a href=https://madonas5.baltuss.lv/member.php?action=profile&uid=62952>https://madonas5.baltuss.lv/member.php?action=profile&uid=62952</a> За счёт спинов получится запустить разные интернет слоты, протестировать стратегии и поднабраться навыка. Фишка в том, собственно вращения начисляются на лучшие аппараты с оригинальными опциями и высокой отдачей. Не забывайте, собственно в каждом акционном предложении предусмотрены специальные требования – временные ограничения, наибольший размер ставки, перечень доступных игр.Таким образом, заведение пытается показать себя своим потенциальным игрокам, а такой рекламный ход как казино бонус без депозита за регистрацию привлекает очень много внимания к игорному заведению и обеспечивает постоянный струю свежих посетителей и будущих клиентов игрового онлайн клуба. 1×slots казино мобильная версия
1×slots рабочее зеркало
Подтвердите регистрацию, чтобы активировать Бездепозитный приз с выводом, требуется заполнить собственный профиль. Заполните пустые поля настоящими данными о для. <a href=http://www.sksmg.com/home.php?mod=space&uid=220216&do=profile>http://www.sksmg.com/home.php?mod=space&uid=220216&do=profile</a> На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению сего медли, Вы не можете активировать и получить бездепозитный бонус. 1×slots зеркало видели такую регистрацию на Используйте наихорошие бездепозитные призы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из перечня ниже, чтобы заработать презенты за простые деяния и уже сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высокой отдачей и быстрыми выводами на электронные кошельки.Прежде всего, не запамятовывайте регулярно заглядывать на страничку обзоров бездепозитных призов. Они шаг за шагом осматривают наиболее интересные предложения основных игорных порталов.
1×slots casino регистрация на сайте
Онлайн гемблинг развивается с любым деньком все больше и больше, новые бренды создаются не по дням а по часам. Новые интернет казино проделывают вступительные промоакции для игроков, для того собственно бы зарекомендовать себя, и что, этим самым предлагают бездепозитные бонусы за регистрацию, собственно бы не пропустить такую вероятность — как пользоваться новым бездепом, советуем навещать наш вебсайт как возможно чаще, самое смачное и свежие несомненно добавляться в этом же списке.Нет. Для получения бездепозитного приза в казино нужна неотъемлемая регистрация на веб-сайте. Играть в слоты безвозмездно и без регистрации можно лишь в демо режиме. Обычно для получения бонусов без депо, казино выдвигает приклнные и абсолютно выполнимые условия, но есть ряд действий коие воспрещены и все повлечь за собой неприятные последствия:В онлайне слишком много скриптовых сайтов, коие принадлежат плутам. Их основная задача – заинтересовать гэмблеров, пообещав столько щедрые подарки, хотя и солидные выигрыши. Так собственно некоторые веб-сайты предлагают получить за регистрацию даже $1 000. Отзывы читателей о бонусных промоакциях помогут составить эмоцию, но не запамятовывайте о субъективности личных объяснений.Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, дабы снова получить безвозмездный бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ждет неминуемое санкция. 1×slots зеркало на сегодня <a href=https://forum.nanocad.ru/index.php?/profile/88324-nakhodka1309/&tab=field_core_pfield11>https://forum.nanocad.ru/index.php?/profile/88324-nakhodka1309/&tab=field_core_pfield11 спам попробовать еще раз</a> Для получения предоставленных бонусов для пригодиться — ПК либо мобильное устройство, и остальное дело за небольшим.Игрокам не следует принимать приветственный бонус как гарантированный метод получить большой выигрыш, но это отличная возможность без расходов расценить перечень казино.
1×slots зеркало
Условия имеют различаться друг от приятеля. Но подобный бонус может быть использован только для игрового процесса – полученные на счет финансы до того, как будут отыграны, исключить невероятно. <a href=https://diskutim.com/member.php?action=profile&uid=3759>https://diskutim.com/member.php?action=profile&uid=3759</a> Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут устанавливает лимитирование для посетителей. Конечно, это можно посчитать некоторым неудобством для игрока, но справедливости необходимо, собственно выбор автоматов всё также остаётся довольно наибольшим. 1×slots официальный сайт, скачать Зарегистрироваться в казино по особой ссылке или с бонусным кодом. Подтвердить контактные данные (номер аппарата и электрическую почту). Для подтверждения номера аппарата нужно в собственном профиле указать свой номер и нажать кнопку „Подтвердить номер телефонного“, дальше Вы получите sms-сообщение с кодом, кот-ый нужно установить в соответствующее фон. Для подтверждения электрической почты, перейти по интенсивной ссылке в послании от казино.Чтобы играть безвозмездно на настоящие средства в казино, не всегда достаточно просто зарегистрироваться. Иногда нужно выполнить дополнительные действия.
<b>Смотреть еще похожие новости:</b>
<a href=http://angelandmax.teamforum.ru/memberlist.php?mode=viewprofile&u=640>1×slots официальный сайт мобильная версия</a>
<a href=http://forum.azartweb2.com/threads/x1-slots-1×slots-registracija-perejti-na-1×slots.231827/>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=135757>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подтверждение регистрации. Казино просят привязки профиля к электронному адресу и номеру телефонного. Для сего на e-mail отчаливает послание ссылаясь, а на телефон ? текстовое известие с кодом. Бонус без депозита за регистрацию в казино (бездепозитный приз) – это валютный подарок от клуба, кот-ый начисляется на аккаунт игрока в регистрации в казино. Кроме создания учетной записи, для получения бездепа, довольно часто потребуется ещё и подтвердить контактные данные игрока и/или активировать специальный промо-код.
#9209 Charlesgunnyhttp://filmkachat.ru
1×slots сайт
Поспешите зарегистрироваться на официальном веб-сайте Клубника, дабы быстро получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, появляется настоящий шанс победу! <a href=http://filmkachat.ru/>1х слот 1хслотс регистрация перейти на 1×slots</a> Бонус с зачислением средств на счет выделяет больше свободы поступков. Пользователь сам избирает, каким образом распорядиться подаренными средствами. Здесь того имеют действовать лимитирования на список доступных игр, хотя обычно эти рамки не так строги, как в рекламную с бесплатными вращениями.Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных бонусов принимаются достаточно высочайшие притязания. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до ста раз в игровых автоматах. Например, в игрок получил безвозмездно 10 долларов, то необходимо несомненно отыграть их, поставив одну тысячу спинов по одному доллару любой. Стоит обозначить(означить), что не все казино выделяют возможность выступать на бонусы и не во всех развлекательных заведениях идентичные верховодила для отыгрывания. Некоторые казино запрещают выступать на призы в блекджек либо ограничивают ставки до 5 %, что значительно наращивает в десятки раз число необходимых игр. <a href=https://www.deadbeathomeowner.com/community/profile/davidmaf/>https://www.deadbeathomeowner.com/community/profile/davidmaf/</a> 1×slots casino online регистрация <a href=http://d90894u1.bget.ru/user/DavidTer/>http://d90894u1.bget.ru/user/DavidTer/</a> B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax
скачать 1×slots на андроид мобильная версия
Бездепозитный приз казино 2022 с выводом за регистрацию предоставляет вероятность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и выяснить качество работы службы поддержки. Довольно нередко, начиная игровой процесс, игрок уже отказывается останавливаться и проделывает настоящий вклад. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать даром возможно как раз таки с призом за регистрацию без необходимости заносить депозит. <a href=https://dev.eff.one/forumdisplay.php?fid=2>1хслот зеркало</a> 1×slots зеркало регистрацию более популярный вариант это Также существуют онлайн-платформы азартных игр, коие используют раздачу бездепозитных бонусов в особые даты (как для казино, например и для игрока). Помимо этого, действующие игроки кроме имеют возможность получить похожие призы за собственную работа (к примеру, за увеличения значения либо за схожие заслуги). <a href=https://profiteplo.com/user/StevenJaw/>https://profiteplo.com/user/StevenJaw/</a> 1хслот 1хслотс регистрация перейти на 1×slots Бездепы с бесплатными вращениями деют пользователям право вертеть барабаны игровых автоматов без снятия средств со счета. За любой раунд уплачивает казино. Число спинов ограничено и редко превышает сотню. Если акция содержит количество даровых игр, их начисление возможность быть разбито на количество дней.
1×slots рабочее зеркало
Во время игры в казино, выигрыши, приобретенные благодаря бесплатным призовым фондам, суммируются и срабатывают в совместную сумму для отыгрывания. Однако, случае удача улыбнется и получится отыграть все призы, игровое заведение гарантированно разрешит исключить денежные средства. Сумма вывода будет зависеть от лимита, одобренного именно в этом учреждении. Поэтому, внимательно нужно разбирать управляла выдачи анлимитных депозитов.Когда идет о получении бездепозитных бонусов в казино, в первую очередь направьте на последующие обстоятельства: <a href=http://xiaoping777.com/home.php?mod=space&uid=55429>http://xiaoping777.com/home.php?mod=space&uid=55429</a> 1×slots регистрация на сайте Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы моментально получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, появляется настоящий шанс победу!Поспешите зарегистрироваться на официальном веб-сайте Клубника, дабы быстро получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, появляется настоящий шанс победу!
1хслотс рабочее зеркало
Бездепозитные призы настоящими средствами, коие возможно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадались. <a href=https://test.soclanovtsy.ru/topic/33728–1×slots-%D0%B1%D0%BE%D0%BD%D1%83%D1%81-%D0%B7%D0%B0-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8E/>1×slots бонус за регистрацию</a> Классическая разновидность приза за создание аккаунта. Его преимущество содержится том,, собственно клиент возможность других подбирать аппараты и делать ставки в их. Иногда список игровых автоматов ограничен оператором, но все одинаково это другого, как, чем единственный доступный разъем, как в случае с внедрением фриспинов. 1×slot регистрация <a href=https://tulaart.ru/forum/index.php?action=profile;u=37843>https://tulaart.ru/forum/index.php?action=profile;u=37843</a>
1 х слотс зеркало
Каждый новичок и умелый игрок грезят скоро стартануть и начать делать реальные ставки. Для сего достаточно арестовать презент, за кот-ый не нужно уплачивать. В зависимости от игровой платформы, нужно создать профиль, привязать email или телефон. После этого администрация начислит щедрое вознаграждение вид бесплатных вращений либо виртуальных кредитов. Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро или 20 $. Если выдаются фриспины, их число редко выше нескольких 10-ов бесплатных вращений.Далее потребуется отыграть вагер и вывести выигрыш. Игрокам без навыка крупно подфартило, возможность получить десятки даров за 1 регистрацию. Если не смогли получить Бездепозитный бонус, не тревожьтесь. Обратитесь в интернет чат, оператор поможет решить проблему. <a href=https://hothdporn.pro/user/ZacheryFouby/>https://hothdporn.pro/user/ZacheryFouby/</a> Бонусные средства – маленькая сумма денег для старта в новеньком казино. На бонусные средства, обыкновенно разрешается играть во все забавы, кроме слотов с современным джекпотом и игр из раздела live casino. 1×slots рабочее зеркало Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.Зарегистрируйтесь. Для регистрации почаще всего довольно установить свой номер телефонного и почтовый адресок, в чего установить приобретенный код из СМС. Возможно, потребуется показать промокод. В правилах акции будет написано, где его надобно вводить. Иногда это бы создавать при регистрации, время — теснее после творения собственного офиса, на отдельной страничке.
<b>Смотреть еще похожие новости:</b>
<a href=https://bajarmp3.net/showthread.php?tid=427186>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a>
<a href=https://forum.home-visa.ru/viewtopic.php?f=69&t=807392&p=2845506#p2845506>1 хслот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В большинстве заведений сделать это можно по адресу электронной почты, по номеру аппарата, спустя социальную сеть либо гугл-аккаунт. Автоматическая активация может самой комфортной, но ручной способ имеет перед ней превосходства. Прежде чем использовать вознаграждение от казино, стоит заранее найти, сколько времени требуется на исполненье всех условий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала действия приза.
#9210 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и более. Когда игроку надеется количество фриспинов, администрация имеет бить3 их начисление на несколько дней. Бесплатные вращения предоставляются для определенного слота, кот-ый указывается в правилах акции.Срок отыгрыша — это этап, кот-ый начинается в момент активации приза и завершается с его закрытием. Пользователю необходимо уложиться в этот временной промежуток, другому призовые свои аннулируются. Казино устанавливают список игр, ставки в засчитываются при расчете отыгранных средств. Если тайтл не заходит в данный список, то возможность быть недоступен для загрузки в деянья бонусного предложения. <a href=http://filmkachat.ru/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> В игровых клубах без лицензии Вы покупаете „кота в мешке“ и в случае спорных обстановок нет возможности куда-то посетовать и доказать собственную правоту.Можно ли в одном онлайн казино получить больше 1-го приза за регистрацию? Нет, например как в любом интернет казино есть верховодила, к которым нужно держаться, не творить 2 аккаута для получения бонусов, по несомненно блокировка обоих аккаутов, не пытайтесь обмануть интернет казино, приз за регистрацию выдаеться раз один одному лицу. <a href=http://www.sazkar.info/member5750.html>http://www.sazkar.info/member5750.html</a> x1 slots регистрация в 1×slots casino <a href=http://mbdou108.ru/user/RaymondAbize/>http://mbdou108.ru/user/RaymondAbize/</a> Вывод выигрыша с бездепозитных призов казино – щедрый презент от азартных клубов. Но дабы исключить собственный доход, необходимо выполнить ряд критерий:Бонус за регистрацию в казино выдается только раз один на одного игрока. Но бывают дополнительные акции, масштабах которых бездепы расступаются для постоянных клиентов и эти подарки Вы можете получить больше одного раза.
казино 1× slots официальный сайт
<a href=http://weeklywars.de/viewtopic.php?f=12&t=1015&p=468989#p468989>1×slots официальный сайт скачать</a> 1 х слотс зеркало Отказ в прохождении верификации. Если клиент не желает или не предоставить документы, подтверждающие его личность, профиль несомненно заблокирован совместно, вкупе со всеми бонусными начислениями.Поспешите отобрать бездепозитные призы за регистрацию в казино из представленного списка. Все платформы столько ведут законную работа, но и обрадуют добросовестными плодами игры, высочайшей отдачей, быстрыми выплатами. <a href=http://1452763www.molifan.net/space-uid-2071304.html>http://1452763www.molifan.net/space-uid-2071304.html</a> Наличие у игрока 2 аккаунта. Запрещено делать несколько профилей для многократного получения бездепов.Поспешите забрать бездепозитные призы за регистрацию в казино из представленного перечня. Все платформы столько водят законную работа, хотя и порадуют правдивыми плодами забавы, высокой отдачей, быстрыми выплатами. 1хслотс 1хслотс регистрация перейти на 1×slots Несмотря на то, собственно данный вариант стимуляции со стороны азартных платформ довольно моден области подобных игр, далековато не всем поклонникам казино знаменито, что себе бездепозитные бонусы казино и как непосредственно их вероятно эксплуатировать.
1×slots casino регистрация 1×slotscasino09k online
Фриспины – благотворительные вращения с фиксированной ставкой, которые возможно использовать в определенных игровых автоматах.Обычно бездепозитные акции от казино, приходят на эл. Почту в деньки рождения или праздничные. В некоторых интернет казино можно адресоваться в чат и как постоянному игроку, возможно для предложат бездепозитное предложение. Также случаются случаи, когда казино начисляет обсужденный приз в регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам. <a href=http://avtolux48.ru/people/user/496/blog/5678/>http://avtolux48.ru/people/user/496/blog/5678/</a> Но не мыслить, что снабжая юзеров такими бонусами, казино увлекается спонсированием. Ведь размеры вознаграждений, главном, не немалые (средним объемом от 5 до 20 долларов). И на эти средства налагаются определенные обстоятельства и ограничения, обязательные к исполнению игрока, в в последствии он вожделеет получить все свои выигранные финансы.Бездепозитный бонус часто имеет стать легкодоступным незамедлительно после окончания регистрации, потому в большинстве случаев единственным требованием к нему считается регистрация, а этого проверка вашей новой учетной записи. 1×slots официальный сайт зеркало рабочее Чтобы получить возможность вывести прибыль с бездепозитного приза в казино, нужно выполнить ряд критерий:
1× slots casino зеркало
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=53743>1×slots зеркало регистрацию более популярный вариант это</a> Подтвердите регистрацию, чтобы активировать Бездепозитный приз с выводом, потребуется наполнить собственный профиль. Заполните пустующие поля настоящими данными о себя. Практически все интернет казино с бездепозитным призом за регистрацию предусматривает программку лояльности — систему одобрения постоянных клиентов, кот-ая произведено из множества уровней. При достижении игроком еще уровня на его счёт поступает приз. Чем выше уровень — что, этим щедрее приз.Выбрать казино с бездепозитным бонусом. У нас на сайте представлен список наихороших интернет казино, которые предлагают своим игрокам великодушные призы за регистрацию. 1×slots сайт зеркало <a href=http://newoasisforlife.org/new/home.php?mod=space&uid=95294&do=profile>http://newoasisforlife.org/new/home.php?mod=space&uid=95294&do=profile</a>
1×slots регистрация 1×slotscasino 56 online
Итак, чтобы безвозмездные бонусные кредиты трансформировались в настоящие деньги, которыми возможность распоряжаться по своему усмотрению, их надо(надобно) отыграть. Вейджер следует уточнять в правилах онлайн-казино.Третитй бездепозитный приз за регистрацию – валютные свои. К раскаянью, начислить рубли или доллары готовы лишь известные и популярные клубы. С их помощью вы сможете насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком. <a href=https://fbi.me/index.php?title=%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%A7%D0%B8%D1%82%D0%B0%D1%82%D1%8C>https://fbi.me/index.php?title=%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%A7%D0%B8%D1%82%D0%B0%D1%82%D1%8C</a> 1×slots официальный demo регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://forum-macan.ru/memberlist.php?mode=viewprofile&u=1736>казино 1×slots</a>
<a href=https://forum.bandariklan.com/showthread.php?tid=176825&pid=876209#pid876209>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бесплатный приз – кредиты, которые онлайн-казино начисляет посетителю, не заставляя его пополнять игровой счет.
#9211 Charlesgunnyhttp://filmkachat.ru
1хлот регистрация в 1×slots casino
Если вы выбираете проверенное лицензионное интернет казино и выполните все обстоятельства получения бездепозитного бонуса, трудностей с получением презента у Вас не возникнет.Также есть онлайн-платформы азартных игр, коие используют раздачу бездепозитных призов в особые даты (как для казино, например и для игрока). Помимо этого, действующие игроки кроме имеют возможность получить похожие бонусы за свою работа (к примеру, за увеличения значения либо за схожие достижения). <a href=http://filmkachat.ru/>1×slots зеркало проходить регистрацию это отличный вариант</a> Для получения выигрыша потребуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить определенную сумму, но теснее из личных денег. Она рассчитывается из совместного объема выигрыша за всегда использования бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, если юзер выиграл 1000 руб., а множитель сочиняет х30, вывести деньги можно несомненно, сделав ставки на 30 000 рублей.Прямо в арестуйте безвозмездные вращения за регистрацию без депозита и начинайте коллекционировать призовые комбинации ради солидных выигрышей! <a href=http://www.diarivitamin.com/2015/09/diet-seimbang-elak-batu-hempedu.html>http://www.diarivitamin.com/2015/09/diet-seimbang-elak-batu-hempedu.html</a> Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, или проигрываете предложенный бонус, по мимо практической игры на бездепозитные призы, у Вас есть шанс выучить игровые автоматы, выучится регулировать менять ставки и линии, исследовать бонусные забавы и их выигрышные композиции, ну в просто зарядится кучей впечатлений! Ведь вы будите выступать на бонусные средства, которые можно отыграть и вывести, не просто на демо счет, тем наиболее адреналин в крови еще больше повысится а пульс забьется с частым ритмом!Первый образующийся вопрос, это, для выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают новых игроков. Последним проще начать игру на средства с презента за регистрацию. Им не нужно пополнять баланс и расходовать личные средства. Новички получают бесплатные спины либо средства на счёт. С их поддержкою знакомятся с игровым процессом, крутят слоты и делают ставки в рулетке. 1×slots официальный сайт скачать на айфон <a href=https://rdaforum.com/user-16066.html>https://rdaforum.com/user-16066.html</a> 1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, в не желаете замерзнуть жертвой плутов либо впустую истратить время;
1×slots регистрация на сайте
Бездепозитные бонусы за регистрацию являются одним из самых популярных способов привлечения новых игроков в онлайн-казино, потому собственно они предоставляют игрокам возможность опробовать казино, необыкновенно игровые автоматы, и возможно, выиграть настоящие деньги.Шаг 4. Активация. Внимательно исследуйте обстоятельства, информацию по ограничениям и сроке деянья бонусного предложения. Разобравшись с правилами, можно активировать приз в личном кабинете (время ? с использованием промокода) либо по запросу в саппорт. 1×slots рабочее зеркало Возможность сыграть вспомогательное состязание (а время и некоторое) совершенно даром, а выигрыш, к, поступает на счёт игрока. <a href=http://www.banzoupu.com/space-uid-2193010.html>http://www.banzoupu.com/space-uid-2193010.html</a> Бонус с зачислением средств на счет дает больше свободы деяний. Пользователь сам выбирает, каким образом распорядиться подаренными средствами. Здесь того имеют работать ограничения на перечень доступных игр, хотя обыкновенно эти рамки не например строги, как в промо с бесплатными вращениями.Рассмотрим принцип его деяния на примере. Допустим, вы зарегались и получили $10 not the slightest down payment bonus с вейджером х50. Это означает, что выигранные деньги можно несомненно выводить не ранее, чем в того, как общая сумма ставок достигнет $500. x1 slots регистрация в 1×slots casino
1×slots зеркало на сегодня
В разделе с призами активировать свой презент. Найти забавы, для которых учтено поощрение и использовать бонус по назначению.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 $. Если выдаются фриспины, их количество изредка превышает нескольких десятков даровых вращений. Раздача бонусов может быть посвящена разным датам: календарные дни, дни рождения игроков, юбилей открытия казино и т. Д. Подарок выдается в виде денег, фриспинов либо баллов для скопления и обмена на услуги оператора. Если юзер получает выигрыш, средства начисляются на его счет. Для вывода этой суммы понадобиться выполнить ряд требований. <a href=http://biyografiforum.10tl.net/member.php?action=profile&uid=2691>http://biyografiforum.10tl.net/member.php?action=profile&uid=2691</a> 1×slots промокод при регистрации 2025
1×slots официальный сайт мобильная версия скачать
Приглашаем делиться суждениями о призах. Это поможет иным пользователям подбирать более прибыльные предложения.Варианты выигрыша находятся от Вашей успеха и условий игорного портала. Выше мы сказали, собственно некоторые бездепозитные бонусы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются они, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на средства, возможно выиграть неописуемые суммы. Сегодняшние игровые автоматы либо видео слоты, как их нарекают. Могут выдавать солидные умножение от х1.000 и выше. Некоторые множат ставку от х100.000. <a href=https://forum.bedwantsinfo.nl/thread-692312.html>рабочее зеркало 1хслотс</a> Такие поощрения дозволяют бесплатно протестировать новое казино, разобраться с игровым ходом интернет слотов, заработать и вывести маленькую сумму средств.4. Заберите презент. Чаще всего приз активируется незамедлительно в регистрации. Но случаются истории, когда нужно зайти в личный офис либо написать в службу поддержки. Получить Бездепозитный приз в онлайн казино дело 2-ух кликов. Другой момент, отыграть промо и соблюсти правила и условия отыгрыша. Под правилами предполагается столько вагер, хотя и лимитирования по максимальной ставке. Мы разумеем, что в кинотеатр все ставят на зеро и выигрывают. Призываем не делать подобного. Перед активацией бонуса прочитайте верховодила. Узнайте следующие моменты: Условия получения дара, за регистрацию, за депо и другое. Ограничения по наибольшей ставке. Зачастую не выше 350 руб. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на пространстве. Поэтому важно аристократия, в каких играх возможно совершать кратность валютного оборота.Каждый игры обязан сначала детально выучить обстоятельства по получению и отыгрышу понравившегося подарка. Если всё организует, поспешите отобрать благотворительные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо момент начать вращать барабаны топовых слотов. 1хслотс зеркало на сегодня <a href=https://ekvall.co/member.php?action=profile&uid=39348>https://ekvall.co/member.php?action=profile&uid=39348</a> Доступность — бездепозитные бонусы в казино почаще всего предоставляются свежим игрокам, хотя случаются случаи, когда приз могут получить и действующие посетители.
1×slots casino регистрация 1×slotscasin online
Сроки активации бонуса уточняются каждым казино, хотя чаще всего они не превосходят недели с этапа получения. Игроку обязательно нужно использовать бездеп протяжении обозначенного срока, в ином случае приз просто пропадет. Каждый приз можно получить лишь раз один, потому случае не использовать бездеп в срок, у игрока не несомненно второго шанса им воспользоваться. <a href=http://bmdherb.com/bmdherb/bbs/board.php?bo_table=free&wr_id=624073>http://bmdherb.com/bmdherb/bbs/board.php?bo_table=free&wr_id=624073</a> Обычно для получения бонусов без депо, казино выдвигает приклнные и абсолютно выполнимые обстоятельства, но есть ряд поступков которые запрещены и шансы повлечь за собой противные результаты: 1×slots актуальное зеркало Как верховодило, при выводе денег, от играющего требуется только сделать наименьший лепта для того, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом личный счет.
<b>Смотреть еще похожие новости:</b>
<a href=http://maddog-server.org/forum/showthread.php?tid=15222&pid=159830#pid159830>1×slots регистрация 1×slotscasino09k online</a>
<a href=https://forum.pmpobc.ca/index.php?topic=119821.new#new>1×slots зеркало регистрацию более популярный вариант это</a>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=281892>казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Мы проделываем ударение на главных положениях правил, рассказываем о территориальных лимитированиях и вкратце информируем о иных промоакциях обговариваемого казино.
#9212 Charlesgunnyhttp://filmkachat.ru
1×slots быструю регистрацию а также мгновенное
Выбирайте наилучшие бесплатные бонусы счет обзоров на Casinoz – и пусть вам сопутствует удача при отыгрыше бонусных кредитов! <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало рабочее</a> Если вы выбрали себе количество брендов которые вас больше всего полюбились, для постоянной забавы! Таких гемблеров казино довольно любит и оценивает, за частую такие игроки становятся VIP игроками заведения, которым часто поступают прибыльные предложения в виде бонусов, так же туда входит и бездепозитные.Некоторые казино могут предлагать клиентам бездепы за свидетельство номера либо почты или репост на страницу в соц сетях. <a href=https://www.google.ru/search?q=%3Ca+href%3D%22https%3A%2F%2Fmucho-rest.ru%2Fpizza%2F%22%3E%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0+%D0%BF%D0%B8%D1%86%D1%86%D1%8B%3C%2Fa%3E&lr=&newwindow=1&safe=off&sca_esv=d7773eb477db942c&ei=tbHhZrCVDdvM5OUPgKuI8A0>https://www.google.ru/search?q=%3Ca+href%3D%22https%3A%2F%2Fmucho-rest.ru%2Fpizza%2F%22%3E%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0+%D0%BF%D0%B8%D1%86%D1%86%D1%8B%3C%2Fa%3E&lr=&newwindow=1&safe=off&sca_esv=d7773eb477db942c&ei=tbHhZrCVDdvM5OUPgKuI8A0</a> 1 хслот регистрация в 1×slots casino <a href=http://ds1.dspnbmall.co.kr/bbs/board.php?bo_table=free&wr_id=800874>http://ds1.dspnbmall.co.kr/bbs/board.php?bo_table=free&wr_id=800874</a> Возьми свой подарок. Чаще всего бонус активизируется незамедлительно после регистрации. Но случаются истории, когда надо(надобно) зайти в личный офис либо написать в справочную службу.
1хслотс официальный сайт зеркало
Создание аккаунта. На сайте казино необходимо открыть регистрационную форму и заполнить пустые поля собственными данными. Иногда на данном этапе требуется указать лишь адресок электронной почты и пароль, но почаще бы наполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д. ). Нужно указывать только настоящие данные, что впоследствие они станут испытаны. 1×slots официальный сайт, скачать <a href=http://visionart.kr/board/bbs/board.php?bo_table=free&wr_id=455208>http://visionart.kr/board/bbs/board.php?bo_table=free&wr_id=455208</a> Заработать на бездепозитных бонусах за регистрацию в казино возможность каждый пользователь, достигший совершеннолетия. 1×slots официальный сайт зеркало На бесплатные призы онлайн-казино почти постоянно распространяется ограничения по стране проживания посетителей. Даже случае для разрешается открывать счет и играть на средства в заведении, это еще не означают, что для доступны not the slightest down payment bonuses.
1×slots зеркало этих способов предполагает регистрацию
Фриспины без депозита либо вспомогательные средства посодействуют поближе познакомиться с игровой платформой и её функциями. За счёт презентов возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям ради игры напротив живых крупье. <a href=https://google.com.om/url?q=https://doctorlazuta.by/>https://google.com.om/url?q=https://doctorlazuta.by/</a> Чаще всего используются коды. Их нужно заносить в специальные окошки регистрационной анкеты, случае идет о пригласительных призах, либо в особом разделе собственного кабинета игрока.На нашем веб-сайте Вы отыщите список актуальных свежих бездепозитных бонусов в казино 2022 года. Также, есть много неповторимых услуг, коие доступны только гостям нашего сайта последствии регистрации по нашей ссылке или активации специального промокода. 1 x slots Верификация необходима для добавочной защищенности и помочь техподдержке выявить бонусхантеров и жуликов. Кстати, на некоторых платформах выводы солидных сумм доступны лишь последствии доказательства личности.
1×slots регистрация 1×slotscasino 56 online
Большинство клубов привлекают внимание геймеров за счёт разнородных подарков. На 1 веб-сайтах можно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает безвозмездные вращения для запуска лучших интернет слотов. Несмотря на разные промоакции, стоит выделить самые главные.При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток. 1×slots рабочее зеркало <a href=http://slideshow-forum.com/profile.php?id=96795>http://slideshow-forum.com/profile.php?id=96795</a>
1×slot официальный сайт
Стоит отметить, что бездепозитный приз выдается лишь взрослым новичкам, коие, тому, имеют пригласить личных друзей и своих, также рассчитывающих на поощрительную программу преданности. Подобная технология появилась среди соперничающих онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению собственной популярности, методом привлечения новых игроков. Бонусы – это уникальный шанс для вероятных участников забавы, коие все опробовать софт покер рума и увериться, станут ли они в него играть или нет. Новый игрок испробует свои силы с реальными оппонентами в казино. Начнём с такого, что любое рекламную за регистрацию предполагает некие условия. Бездепозитные бонусы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность денежного оборота, нужная для исполненья условий. Пример, получили благотворительные вращения и выиграли с них 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 рублей, проигрышных либо выигрышных, маловажно. После исполнения, бонусный баланс перейдёт на настоящий и будет легкодоступным к выводу.Не сложно догадаться, что no down payment bonuses практически никогда не случаются немаленькими. Чаще всего речь о пяти–тридцати долларах (или эквиваленте этой суммы в иной денежной). <a href=https://www.reverbnation.com/%D0%B2%D1%8B%D0%BA%D1%83%D0%BF%D0%B0%D0%B2%D1%82%D0%BE%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA>https://www.reverbnation.com/%D0%B2%D1%8B%D0%BA%D1%83%D0%BF%D0%B0%D0%B2%D1%82%D0%BE%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA</a> Внесение депозита – Будьте готовы пополнить счет после отыгрыша бонуса. Это обычное требование правил для этого типа промо-акций. Лучше заранее уточнить, какую необходимую надо(надобно) будет заносить на счет. Как верховодило, идет о наименьшем депозите, но вы должны быть убеждены, что он для по кармашку.Чаще всего казино приз за регистрацию без депо даёт возможность запустить любой машина. Но превосходнее пристально ознакомиться с критериями. Иногда для игры доступны лишь определённые модели. Если вы новичок и ничего не смыслите в гэмблинге, другого, как начать знакомство с миром азарта именно с «одноруких злодеев». 1×slots зеркало на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=http://6000ziyuan.com/forum.php?mod=forumdisplay&fid=2>1×slots зеркало быструю регистрацию а также мгновенное</a>
<a href=https://www.katzenforum.at/forum/media/users/jamesagema.16012/>1×slots casino online регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выбор каждого онлайн казино на нашем сайте. В описании к каждому Вы можете узнать, собственно получите за создание аккаунта.
#9213 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация
Поспешите арестовать бездепозитные бонусы за регистрацию в казино из представленного списка. Все платформы не только водят легальную работа, но и обрадуют добросовестными результатами игры, высочайшей отдачей, прыткими выплатами.Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. <a href=http://filmkachat.ru/>casino 1×slot</a> Вейджер (wager) – это коэффициент, который демонстрирует на какую сумму нужно сделать ставок, дабы исключить бонус из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего бонуса, Вам необходимо сделать ставок на сумму: 500*70=3500 руб. Только полностью отыграв приз, Вы можете вывести собственный выигрыш.Возьми собственный презент. Чаще всего приз активизируется незамедлительно последствии регистрации. Но посещают ситуации, когда нужно зайти в индивидуальный офис или написать в справочную службу. <a href=http://getamped.nxez.com/doku.php?id=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%BF%D0%B8%D1%86%D1%86%D1%8B%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO>http://getamped.nxez.com/doku.php?id=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%BF%D0%B8%D1%86%D1%86%D1%8B%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO</a> 1хслот зеркало сайта <a href=http://catalog.drobak.com.ua/communication/forum/user/2809217/>http://catalog.drobak.com.ua/communication/forum/user/2809217/</a> Срок отыгрыша — это этап, кот-ый начинается в момент активации приза и завершается с его закрытием. Пользователю необходимо уложиться в этот временной промежуток, другому призовые свои аннулируются. Казино устанавливают перечень игр, ставки каких засчитываются при расчете отыгранных средств. Если тайтл не входит в этот перечень, то он может быть недосегаем для загрузки период деяния бонусного предложения.
1хслот официальный сайт зеркало
<a href=http://old.pokvesti.ru/forum/memberlist.php?mode=viewprofile&u=3543>1×slots регистрация на 1хслотс</a> рабочее зеркало 1хслотс Реже призы без депозита начисляются постоянным игрокам. С их поддержкой администрация старается вычесть ценных клиентов либо желает поблагодарить за лояльность правильных посетителей. Но намного чаще для подобных целей используются эти промоакции:На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не сможете активировать и получить бездепозитный бонус. <a href=https://receptsamogona.ru/user/RichardVed/>https://receptsamogona.ru/user/RichardVed/</a> Во время игры в казино, выигрыши, приобретенные спасибо бесплатным призовым фондам, суммируются и включаются в общую сумму для отыгрывания. Однако, если удача улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно допустит вывести финансовые свои. Сумма вывода будет в от лимита, одобренного непосредственно в этом учреждении. Поэтому, внимательно надо(надобно) читать управляла выдачи безлимитных депо.Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте обстоятельства – они часто выдаются для некоторых машин. В зависимости от клуба вы можете делать конкретное число ставок. Кстати, современные игорные дома выделяют вероятность заводить «одноруких бандитов». 1×slots casino зеркало Чтоб получить крупный выигрыш, выбирайте игровые автоматы с предельным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша.
1×slots официальный сайт скачать
Суммы подобных предложений, как правило, колеблются от трех до двадцати $, а вейджер на эти свои должен сочинять от тридцати до шестидесяти раз. Зачастую, наибольшая сумма выигрыша тут составит от одной до 2-ух сотен $. Если компьютерные выиграет больше, то все свои шансы быть списанными до максимально разрешенного выигрыша. Здесь появляется смысл выводить еще несуществующие финансы на свою платежную систему и дальше искать заведение с благоприятными под данную сумму релоадом или призом за 1-ое пополнение счета. Есть несколько подвидов бездепозитного гонорары, предлагаемого большим числом заведений.Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются незамедлительно после творенья профиля и активны непродолжительное время. Если не успеете потратить средства, они попросту сгорят. Касаемо медли, правило бонусы активны протяжении часа. Зарегистрироваться в казино по особой ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефона и электрическую почту). Для подтверждения номера телефонного необходимо в личном профиле показать свой номер и надавить кнопку „Подтвердить номер телефонного“, дальше Вы получите sms-сообщение с кодом, кот-ый необходимо установить в подходящее фон. Для доказательства электронной почты, перебежать по интенсивной ссылке в письме от казино.Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, solid лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. <a href=http://www.gtcm.info/home.php?mod=space&uid=825022>http://www.gtcm.info/home.php?mod=space&uid=825022</a> 1×slots сайт зеркало
1×slots рабочее зеркало
Многие новенькие колеблются, что поощрительный приз не нужно будет отдавать, в если они выиграли у казино. Это полностью безопасно и накрепко. Выводя выигранные свои, игрок просто останавливает свое участие в игре и утрачивает уникальную вероятность – даром увеличивать собственное вещественное положение. Сроки активации приза уточняются любым казино, но чаще всего они не превосходят недели с момента получения. Игроку непременно нужно применять бездеп на обозначенного срока, в ином случае приз просто пропадет. Каждый бонус можно получить только один раз, поэтому в не применять бездеп в срок, у игрока не будет второго шанса им пользоваться.Как лишь на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу в этого возможно оставить заявку на вывод выигрыша. Кредиты прибыльно отличаются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом реальных средств и выделяют вероятность ощутить азарт. Во-вторых – можно насладиться любой азартной забавой доступной на сайте. В вашем распоряжении присутствуют автоматы, настольные прибавление, видео-покер, Live-дилеры. сайт 1× slots casino <a href=http://www.dongdotech.co.kr/bbs/board.php?bo_table=free&wr_id=168719>http://www.dongdotech.co.kr/bbs/board.php?bo_table=free&wr_id=168719</a> Выбирайте наилучшие бесплатные бонусы с помощью обзоров на Casinoz – и пусть вас сопутствует счастье при отыгрыше бонусных кредитов!Для такого, дабы отыграть сумму вашего бездепозитного бонуса нужно выполнить условия вейджера. Очень часто фриспины даются на определенные слоты (book of ra, book of dead, book of sun), избирайте слот себя нраву, все довольно красочные и качественные. Бездепозитные приз возможность быть валютным например и повторяющий фриспинов на слоты
1×slots актуальное зеркало
<a href=http://www.hdkinoteatr.com/index.php?subaction=userinfo&user=amuckquery14>http://www.hdkinoteatr.com/index.php?subaction=userinfo&user=amuckquery14</a> В каждом казино с бездепозитным бонусом учтены вейджеровые обстоятельства. Это единственный «подводный камень», кот-ый стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) сделать определённое количество ставок. Чем круче приз, тем сложнее выполнить обстоятельства, и наоборот. 1×slots официальный зеркало рабочее Перед активацией главно внимательно изучить обстоятельства промоакции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют значение также лимиты ставок при отыгрыше и сроки, в течение которых можно воспользоваться предложением. Если бездеп обхватывает ограниченный перечень игр, рекомендуется разузнать наибольшие коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только в случае, в оператор не установил строгие ограничения на наивысшую необходимую ставки.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.sgomberisgombero.it/my-account-2/>1×slots рабочее зеркало</a>
<a href=http://timepost.info/showthread.php?tid=54684&pid=95346#pid95346>1 xslots рабочее зеркало</a>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=152147>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<a href=https://test.soclanovtsy.ru/topic/33318–1×slot-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE/>1×slot зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Шаг 4. Активация. Внимательно изучите условия, информацию по ограничениям и сроке действия бонусного предложения. Разобравшись с правилами, можно активировать приз в личном офисе (времени ? с внедрением промокода) или по запросу в саппорт. Но а в вы уже профи по интернет казино, кликаем на красноватую кнопку «Получить» и Вы автоматически перейдете в онлайн казино;
#9214 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
Мы рекомендуем не отрицаться от похожих услуг знаменитых казино. Выделите несколько минут на регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сегодня удача несомненно на вашей стороне! <a href=http://filmkachat.ru/>1× slots регистрация в 1×slots casino</a> <a href=http://182.237.3.195/home.php?mod=space&uid=601953>http://182.237.3.195/home.php?mod=space&uid=601953</a> Но а случае вы уже профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы автоматически перейдете в онлайн казино; 1×slots casino зеркало <a href=http://itstula.com/user/Tyroneacese/>http://itstula.com/user/Tyroneacese/</a>
казино 1×slots официальный сайт
<a href=https://minifishtank.net/forum/member.php?action=profile&uid=1356>1× slots casino зеркало</a> 1хслотс рабочее зеркало <a href=http://arsivforum.10tl.net/member.php?action=profile&uid=5662>http://arsivforum.10tl.net/member.php?action=profile&uid=5662</a> Когда речь идет о получении бездепозитных бонусов в казино, в первую очередь внимание на следующие условия: 1×slot официальный сайт У любой забавы средства притязания по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система зачтет каждую ставку. В рулетке и покере сделать это гораздо сложнее. Именно поэтому например важно внимательно читать обстоятельства получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой ирге, то новички попросту «спустят приз на ветер».Благодаря программе преданности от игорного заведения, возможно арестовать превосходный старт и без дополнительных вложений запустить видеослоты. Кроме того, возможно рассчитывать на реальную фортуну и получить, без вложения собственных денег, немалый выигрыш.
1×slots зеркало
Популярность онлайн казино растёт и всё больше пользователей начинают увлекаться азартными забавами. Бездепозитные призы 2022 года, это оригинальные подарки за регистрацию. С их подмогою новые игроки имеют получить благотворительные вращения либо средства на баланс за одну регистрацию. С выходом игорных заведений в интернете, бездепозитные призы стали наимоднейшим методом вербования игроков. Подобные промоакции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о которых мы поведаем. Наш вебсайт собрал превосходнейшие предложения из онлайна на 2022 год. Воспользуйтесь любым подарком и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить условия.Фриплей-бонусы. Бонусы за безвозмездную забаву есть только в некоторых клубах. Они зачисляются сразу в творения профиля и действуют непродолжительное время. Если у вас нет медли потратить свои, они просто завершатся. Что дотрагивается медли, как призы действуют на 1-го часа. Исходя из сего, просто не существует мудрых оснований махнуть рукой на получение такового приза при регистрации. И, будет, на такой безвозмездной основе у вас есть все шансы выиграть средства и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные призы, нарекают безвозмездными онлайн платформами для игр. <a href=https://www.nederpix.nl/profile.php?mode=viewprofile&u=73449>https://www.nederpix.nl/profile.php?mode=viewprofile&u=73449</a> 1×slots сайт Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми акциями. Читайте о них в обзорах и на форуме.
1×slots скачать на айфон
Каждый из бездепозитных призов без пополнения 2022 имеет собственный определенный вейджер для отыгрыша, так же в каждом казино он уточняется персонально — где то он х55 а где-то х30, повторюсь всюду по разному! <a href=https://forum.graylite.com/viewtopic.php?p=226895#p226895>онлайн казино 1×slots</a> Бездепозитные призы истинными деньгами, которые возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадались. Промообъявления от казино не дают реальной картины и направлены на привлечение внимания пользователей. Понять, как высоки шансы остаться в плюсе, позволит собственный тест условий предложения:Основное различие что, что для получения бездепа нужно пополнять баланс в казино. Но считая сего, есть ряд прочих различий: 1× slots зеркало <a href=http://elektrofahrrad-tests.de/forums/member.php?action=profile&uid=40055>http://elektrofahrrad-tests.de/forums/member.php?action=profile&uid=40055</a> Бездепозитные призы казино за регистрацию в 2022 году — это вероятность поиграть за счёт заведения. Казино даёт посетителю шанс пользоваться определённой суммой или числом даровых вращений без внесения депозита. Не путайте деморежим с реальной забавой без необходимости внесения депо.
онлайн казино 1×slots
Вывод выигрыша с бездепозитных призов казино – щедрый подарок от азартных клубов. Но дабы исключить свой доход, нужно выполнить ряд критерий: <a href=http://09vk.ru/user/Davidamero/>http://09vk.ru/user/Davidamero/</a> Но есть игорные заведения, которые готовы просто например жертвовать средства на забаву. Для сего достаточно сделать профиль. Чтобы вывести свой выигрыш, для поначалу нужно выполнить обстоятельства отыгрыша, обозначенные в критериях получения бездепозитного депо.Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных призов принимаются достаточно высочайшие требования. Часто онлайн-казино советуют отыграть бонусное одобрение до ста раз в игровых автоматах. Например, если игрок получил безвозмездно десять $, то необходимо несомненно отыграть их, поставив 1 тысячу спинов по одному баксу каждый. Стоит обозначить(означить), что не все казино выделяют вероятность выступать на призы и не во всех развлекательных заведениях схожие верховодила для отыгрывания. Некоторые казино воспрещают играть на призы в блекджек либо ограничивают ставки до пяти процентов, что значительно наращивает в 10-ки один количество нужных игр. 1×slots рабочее зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://games-garant.ru/index.php?subaction=userinfo&user=Jamesneorm>1хслотс регистрация в 1×slots casino</a>
<a href=https://www.lightknotes.com/MyBB/showthread.php?tid=162527>1×slots регистрация на официальном сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
За счёт спинов получится запустить разные интернет слоты, протестировать стратегии и поднабраться опыта. Фишка что, нет, что вращения начисляются на топовые аппараты с уникальными опциями и высокой отдачей. Не забывайте, что в любом акционном предложении учтены специальные притязания – временные ограничения, наибольший объем ставки, перечень дешевых игр. Вышеописанная первопричина и является основным моментом, из-за которого операторы отдают часть своей выгоды на разные маркетинговые расходы и маркетинговые кампании. А самым действующим здесь будут выступать именно бездепозитные призы казино 2022 с выводом за регистрацию.
#9215 Williamperhttps://sites.google.com/view/backlinks-seo-sell/
https://sites.google.com/…ll/Backlinks are a essential part of link development, important for improving a webpage’s credibility and search visibility. Together with comprehensive SEO strategies—like choosing and aiming for significant key phrases—inbound links play a major part in building a solid online presence. Our method includes superior back links with strategic optimization strategy to boost your web property’s performance.
3-Step Backlink System Our three-step backlink placement service is intended for superior search engine impact. This strategy uses high-quality forwarding links from sites with PR level of between 8 and 10, greatly enhancing your site’s trust level. Additionally, we employ site analyzers that chart your link architecture, enabling web crawlers to accurately identify your site layout. This is a key element in improving your site’s exposure and crawling.
Wide Range of Approaches for Website Promotion and Link Types We offer consultation services to guide you in complex site promotion methods, discussing the application of different link categories. Our experts walk you through an effective plan of backlinks and enhancing the distribution of branded vs. keyword links. We further give insights on the ideal distribution of SEO links to create a authentic link profile that is favored by search engine algorithms.
Detailed Assistance for PBNs For clients who want in PBN strategies, we give comprehensive insights on creating long-lasting blog networks not using abandoned domains, a effective and more efficient way to link optimization.
Link Hierarchies and the Strength of Layered Links Our methods involve building link pyramids—designs like pyramid layers—to strengthen your website’s ranking power. This pyramid setup empowers main links and amplifies their effectiveness on your search ranking.
Leveraging Social Platforms for Search Optimization Social networks are valuable resources not only for online exposure and for improving SEO. With high indexing rates by search engines, social media can further enhance your search visibility by expanding backlink range and social signals.
External Link Building and Specialist Support Our SEO consulting provide guidance on outreach practices, allowing you learn how to build key external connections and maintain networking ties with high-authority domains. We are able to address any concerns, delivering bespoke suggestions and strategies suited for your site promotion objectives.
With our customized and comprehensive digital marketing services, you secure in addition to more authoritative links but also the SEO knowledge needed to create a long-term, well-ranked digital platform. https://unitenplay.ca/…nksseo2024s/
#9216 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на сайте 1×slots ru com
В разделе с призами активировать свой презент. Найти забавы, для коих предусмотрено одобрение и применять бонус по назначению. <a href=http://filmkachat.ru/>1×slots коды</a> Самые популярностью способы вывода денег ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам подобии Neteller и Skrill, еще используют криптовалютными кошельками. Вывод выигрышей имеет исполняться моментально либо развлекать от нескольких часов до нескольких суток.Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала быстрые выводы. Фишка выплат сомнений, что достаточно выбрать платёжный инструмент и указать сумму. В большинстве случаев деньги зачисляются на электрические кошельки в течение 15 минут, а на банковские карты – 1–3 рабочих дня. <a href=https://www.nederpix.nl/profile.php?mode=viewprofile&u=73813>https://www.nederpix.nl/profile.php?mode=viewprofile&u=73813</a> 1×slots зеркало <a href=http://www.pengstys.com/home.php?mod=space&uid=110069>http://www.pengstys.com/home.php?mod=space&uid=110069</a>
1× slots сайт
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Подтверждение электронной почты – одно из главных условий, коие есть почти в любом бездепозитном казино. Чтобы верифицировать электрическую почту, довольно перейти по активной ссылке в письме, полученном от азартного клуба. <a href=http://211.110.33.185/doku.php?id=анвап_скачать_фильмы_на_телефон_хорошие>http://211.110.33.185/doku.php?id=анвап_скачать_фильмы_на_телефон_хорошие</a> Еще одно условие дотрагивается размеров ставки. Операторы устанавливают наивысшую необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном офисе. При превышении лимита есть риск потерять бонуса. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, заказчик возможность столкнуться с запретом назначать фишки на шансы. 1×slots казино мобильная версия Наличие у игрока 2 аккаунта. Запрещено творить количество профилей для неоднократного получения бездепов.Фриспины – безвозмездные вращения с фиксированной ставкой, коие возможно применять в конкретных игровых автоматах.
1×slots скачать на айфон
Не желаете поиграть в азартные забавы, не рискуя средствами средствами, хотя получая в все выплаты? Подобную вероятность предоставляют многие превосходнейшие порталы с азартными веселиями. В их числе много честных и надежных интернет-казино на русском языке. Они привлекают свежих пользователей различными поощрительными мероприятиями, включая бездепозитные, или бесплатные призы.Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера. <a href=http://remont-okon.od.ua/index.php?subaction=userinfo&user=nutritiousrunt8>http://remont-okon.od.ua/index.php?subaction=userinfo&user=nutritiousrunt8</a> Иногда у посетителей сайта могут появиться проблемы при активации приобретенного промо-кода. В этих случаях, необходимо адресоваться за помощью в службу «Support». Для получения ответа, обязательно указывается конкретная причина воззвания и подтверждается информация дополнительными экрана. Если сформировалась неоднозначная ситуация, постоянно возможно адресоваться к главному регулятору или контролирующему органу, выдавшему данному заведению лицензионный документ. зеркала 1×slots Благодаря программе лояльности от игорного заведения, возможно арестовать неплохой старт и без дополнительных инвестициям запустить видеослоты. Кроме того, можно рассчитывать на реальную удачу и получить, без вложения собственных денег, большой выигрыш.
1×slots регистрация на сайте 1×slots ru com
Далее потребуется отыграть вагер и вывести выигрыш. Игрокам без опыта крупно подфартило, они могут получить десятки подарков за 1 регистрацию. Если не смогли получить Бездепозитный приз, не беспокойтесь. Обратитесь в онлайн чат, оператор поможет ситуацию.Во время игры в казино, выигрыши, полученные благодаря бесплатным призовым фондам, суммируются и срабатывают в общую необходимую для отыгрывания. Однако, если фортуна улыбнется и получится отыграть все призы, игровое заведение гарантированно допустит исключить финансовые средства. Сумма вывода будет зависеть от лимита, утвержденного непосредственно в этом учреждении. Поэтому, пристально нужно читать верховодила выдачи безлимитных депо. Более крупные предложения встречаются довольно редко. Зачастую они доступны только VIP-игрокам. В оставшихся случаях им всего сопутствуют довольно строгие условия отыгрыша. Также возможны вспомогательные обстоятельства и лимитирования, прописанные в условиях и положения бонусной программки казино.Бонус начисляется игроку сразу после регистрации и прохождения верификации в казино и не требует от клиента внесения депо. Как правило, объем бонуса в схожем случае достаточно скромный, однако позволяет новеньким познакомиться с забавой без риска настоящими средствами. 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=http://ask.quolove.com/index.php?qa=user&qa1=murkyreproducti>http://ask.quolove.com/index.php?qa=user&qa1=murkyreproducti</a> Но есть игорные заведения, коие готовы просто так жертвовать средства на забаву. Для сего достаточно создать профиль. Чтобы вывести свой выигрыш, для поначалу нужно выполнить обстоятельства отыгрыша, обозначенные в условиях получения бездепозитного депозита.
1×slots сайт
Мы советуем не отрицаться от сходственных услуг узнаваемых казино. Выделите количество мин. На регистрацию, получите приз и попробуйте его отыграть. Может быть, сегодня удача несомненно на вашей стороне! <a href=https://series40.kiev.ua/user/DoctorLazutaKa/>https://series40.kiev.ua/user/DoctorLazutaKa/</a> 1×slots актуальное зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://mcmon.ru/member.php?action=profile&uid=134611>1×slots скачать на айфон</a>
<a href=https://forum.graylite.com/viewtopic.php?p=227305#p227305>1хлот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные призы, как уже ясно, считаются оригинальной вероятностью обратиться игровому процессу абсолютно бесплатно, словами играть в онлайн казино безвозмездно и на имеющие свои сразу в регистрации аккаунта. Автоматы с этим депозитом могут замерзнуть прекрасной вероятностью поиграть для почитателей азарта с определенными лимитированиями в денег. Большинство интернет-казино из нашего топ-10 готовы порадовать вас неповторимыми акциями. Читайте о их в обзорах и на форуме.
#9217 Charlesgunnyhttp://filmkachat.ru
скачать 1×slots на андроид мобильная версия
Как управляло, новоприбывшие игроки начала желают ознакомиться с способами ввода и вывода валютных средств и сроки исполнения поданных заявок дабы четко понимать, как живо они смогут исключить собственный казино бонус за регистрацию без депо на электронный кошелек или же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино соперничают между собой. Ведь в бы определенную фирму давало лишь одно онлайн-заведение, то навряд бы клиенты увидели казино с бонусом за регистрацию и возможность бы рассчитывать только на вознаграждение в виде приза на 1-ое инвестиция. К любому заведению регулярно стопам завлекать свежих игроков, что, конечном, лишь на руку всем играющим.Условия вывода выигрыша. В некоторых заведениях для успешного вывода с бездепозитного приза довольно пополнения баланса и доказательства личности. В иных же клубах, необходимо несколько один прокрутить свой депозит. <a href=http://filmkachat.ru/>1хлот регистрация в 1×slots casino</a> Баланс игрока пополняется на подходящую сумму. К ней используется вейджер, указанный в правилах акции. Вывести выигрыш можно будет в такого, как пользователь сделает требуемый объем ставок из собственных средств. В редчайших случаях бездеп трудится в формате Free Play. На счет пользователя зачисляется крупная сумма, и предоставляется малый срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по окончании сего периода сумма на счету несомненно превосходить первоначальную, то разницу возможно несомненно вывести либо использовать для дальнейших ставок.У каждого игорного клубы разные вейджеровые обстоятельства. Чтобы вы гарантировано сумели выполнить их, мы дадим количество советов. Если система начислила маленькую необходимую, не стоит создавать великие ставки – остановитесь на 10–30 центах. Как только сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте играть. В противном случае другого, как приглядеться к другому автомату. <a href=http://psicolinguistica.letras.ufmg.br/wiki/index.php?title=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D1%8B%D0%B5%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%88%D0%B5%D1%84-%D0%BF%D0%BE%D0%B2%D0%B0%D1%80%D0%BE%D0%B2%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!>http://psicolinguistica.letras.ufmg.br/wiki/index.php?title=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D1%8B%D0%B5%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%88%D0%B5%D1%84-%D0%BF%D0%BE%D0%B2%D0%B0%D1%80%D0%BE%D0%B2%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!</a> Одним из поводов отдавать преимущество, льготу одному или иному заведению содержится в привлекательности предлагаемых акций и безвозмездных предложений. Безвозмездные фриспины, выдаваемые без дела создавать какой-нибудь вклад, в списке находится далековато не в конце. x1 slots 1хслотс регистрация перейти на 1×slots <a href=http://formulandoeinnovando.com/como-se-afecta-la-formulacion-con-el-proceso-que-aplico/?unapproved=463114&moderation-hash=0f6edf3cafaa7049b445b6d2ff01f8df#comment-463114>http://formulandoeinnovando.com/como-se-afecta-la-formulacion-con-el-proceso-que-aplico/?unapproved=463114&moderation-hash=0f6edf3cafaa7049b445b6d2ff01f8df#comment-463114</a>
1×slots регистрация 1×slots review live
<a href=https://karakol.com.kg/user/Jameskef/>1×slots зеркало которую указывали при регистрации кстати</a> 1×slots акции Также учтите, что кое-какие игровые платформы сузивают список стран, которые готовы получить предложенный бездепозитный приз за регистрацию. К примеру, существуют онлайн-заведения, выдающие сходственные призы только жителям конкретных стран. К образцу, онлайн казино 777 Оригинал предоставляет бездепозитный приз лишь игрокам из России и стран СНГ. Или напротив, пичкают вознаграждением всех, кроме жителей некоторых государств (исходя из сего, по пристально изучать перечень, дабы впоследствии не появилось никаких вопросов и претензий). <a href=http://mutons.ru/club/user/7249/>http://mutons.ru/club/user/7249/</a> 1×slots официальный сайт скачать на айфон Возьми собственный подарок. Чаще всего бонус активизируется незамедлительно последствии регистрации. Но посещают истории, когда надо(надобно) забежать в индивидуальный офис или написать в справочную службу.
1×slots промокод при регистрации 2025
Еще одно условие касается размеров ставки. Операторы устанавливают максимальную сумму, которую игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, выбранной в Личном кабинете. При превышении лимита есть риск потерять приза. Существующие лимитирования относятся и к определенным видам ставок. Например, играя в рулетку, клиент имеет столкнуться с запретом назначать фишки на шансы. Бездепы обычно предлагают с отыгрышем — мгновенно исключить выигранные свои невозможно. Перевод денег со счета будет возможен в такого, как пользователь выполнит все требования казино, а сумма имеет быть выше установленного правилами лимита. Условиями акции фиксируются сроки, протяжении которых клиент вправе воспользоваться предложением. Обычно они не превышают нескольких дней в активации.Фриспины без депо или вспомогательные свои посодействуют ближе познакомиться с игровой платформой и её функциями. За счёт даров возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за забавы против живых крупье. <a href=http://telent.ussoft.kr/bbs/board.php?bo_table=free&wr_id=1327421>http://telent.ussoft.kr/bbs/board.php?bo_table=free&wr_id=1327421</a> casino 1×slot Для получения выигрыша потребуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить определенную необходимую, хотя теснее из собственных средств. Она рассчитывается из общего объема выигрыша за всегда использования бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, в юзер выиграл 1000 рублей, а множитель сочиняет х30, исключить деньги возможно несомненно, сделав ставки на 30 000 руб.Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен список наихороших онлайн казино, коие предлагают своим игрокам щедрые бонусы за регистрацию.
1×slot регистрация
Подарки на дни ? посвященные торжественным датам, требующие условного отыгрыша или начисляются без того. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду.Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы которые появляются у новичков. <a href=http://b2s.bulwork.com/node/1581?page=1>1×slots официальный сайт мобильная версия</a> Превышение наибольшей ставки при отыгрыше. Система механически не предостерегает о превышении ставки, поэтому о нарушении верховодил игрок может разузнать теснее в подачи запроса на вывод средств. 1хлот регистрация в 1×slots casino <a href=http://bbs.xingxiancn.com/home.php?mod=space&uid=380007>http://bbs.xingxiancn.com/home.php?mod=space&uid=380007</a> Перед активацией важно внимательно изучить условия промоакции. Чем ниже вейджер, что, этим больше потенциальная выгода игрока. Имеют велечину кроме лимиты ставок при отыгрыше и сроки, на которых возможно пользоваться предложением. Если бездеп обхватывает узкий список игр, рекомендовано узнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с низкими множителями выплат подходят лишь том, случае, если оператор не установил жесткие лимитирования на максимальную сумму ставки.
1×слотс казино
Диапазон ставок, которые вправе сделать игрок, того лимитирован. Обычно ставить возможно маленькую сумму — в 10–30 рублей за одно вращение. Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных призов принимаются довольно высокие притязания. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до ста один в игровых автоматах. Например, в игрок получил безвозмездно десять $, то нужно будет отыграть их, поставив 1 тыщу спинов по 1 баксу каждый. Стоит обозначить(означить), что не все казино дают возможность выступать на бонусы и не во всех увеселительных заведениях схожие правила для отыгрывания. Некоторые казино воспрещают играть на бонусы в блекджек или ограничивают ставки до 5 %, что значительно наращивает в 10-ки один количество нужных игр.Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=http://1k9g.com/space-uid-195786.html>http://1k9g.com/space-uid-195786.html</a> 1× slots регистрация в 1×slots casino Каждый геймер должен сначала детально выучить обстоятельства по получению и отыгрышу приглянувшегося подарка. Если всё организует, поспешите забрать бесплатные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо данный начать вращать барабаны топовых слотов.Получив собственный презент, Вы можете бесплатно выступать на настоящие деньги, а выполнив обстоятельства отыгрыша, исключить собственный выигрыш.
<b>Смотреть еще похожие новости:</b>
<a href=http://naturetour.ru/communication/forum/messages/forum3/message24677/6368–1-khslot-registratsiya-v-1×slots-casino?sessid=d29c8536648dc8063b92de1aee1366b3&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1 хслот регистрация в 1×slots casino</a>
<a href=https://www.donchillin.com/space-uid-382497.html>1хслотс казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы — это презенты от казино в виде бонусных денег или фриспинов для игровых автоматов, которые начисляются на акк игрока в процедуры регистрации на сайте заведения. Для получения этих поощрений депо не требуется.
#9218 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало быструю регистрацию а также мгновенное
Заработать на бездепозитных бонусах за регистрацию в казино может каждый юзер, достигший совершеннолетия.Отыграв бездепозитный приз в казино с выводом тоже придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если подобное ограничение существует, то единоразово вывести выйдет только необходимую, не превышающую объем приобретенного приза. <a href=http://filmkachat.ru/>1× slots регистрация в 1×slots casino</a> Например, игрок получил 500 рублей при творении аккаунта и должен отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 рублей, потребуется устроить 875 спинов для полного отыгрыша. <a href=http://ukrpart.org/index.php?subaction=userinfo&user=satisfyingarbit>http://ukrpart.org/index.php?subaction=userinfo&user=satisfyingarbit</a> При отыгрыше бонусных средств, нужно учесть срок действия бонуса и время, коие дается на отыгрыш. По истечению заявленного медли, не отыгранный приз несомненно аннулирован.Популярность онлайн казино растёт и всё больше пользователей начинают проявлять азартными забавами. Бездепозитные бонусы 2022 года, это оригинальные подарки за регистрацию. С их подмогою новые игроки шансы получить благотворительные вращения либо деньги на баланс за одну регистрацию. С появлением игорных заведений в онлайне, бездепозитные бонусы стали известнейшим методом вербования игроков. Подобные акции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш сайт собрал наилучшие предложения из онлайна на 2022 год. Воспользуйтесь каким презентом и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить обстоятельства. 1 x slots <a href=https://cryptosafeguard.net/forum/member.php?action=profile&uid=487>https://cryptosafeguard.net/forum/member.php?action=profile&uid=487</a> Можно ли в одном онлайн казино получить больше 1-го приза за регистрацию? Нет, например как в любом интернет казино есть верховодила, к которым нужно держаться, не творить 2 аккаута для получения бонусов, по несомненно блокировка обоих аккаутов, не пытайтесь обмануть интернет казино, приз за регистрацию выдаеться раз один одному лицу.
1× slots зеркало
Бездепозитные призы за регистрацию в игровых автоматах для владельцев онлайн-казино считаются частью маркетинговой кампании, направленной на увеличение аудитории сайта. Так они продвигают свои бренды и завлекают новых посетителей.Для получения предоставленных бонусов для понадобиться — ПК либо мобильное прибор, и остальное дело за небольшим. <a href=http://www.emv.info/memberlist.php?mode=viewprofile&u=424>1×slots официальный сайт скачать</a> 1хслот официальный сайт зеркало Раздача призов может быть приурочена к разным датам: календарные дни, дни рождения игроков, юбилей открытия казино и т. Д. Подарок выдается в виде средств, фриспинов или баллов для накопления и размена на услуги оператора. Если юзер получает выигрыш, средства начисляются на его счет. Для вывода данной суммы придется выполнить ряд притязаний.Иногда в бездепа, казино дарит наименьший бонус (до 50 руб. ), из-за которого не стоит заморачиваться. <a href=http://fabokon.ru/bitrix/click.php?goto=http://everfocus.ru/bitrix/rk.php?goto=http://semena-urala.ru/bitrix/redirect.php?goto=https://telegra.ph/CHto-delat-esli-vy-nedovolny-svoim-tovarishchestvom-sobstvennikov-zhilya-Sovety-yurista-09–19>http://fabokon.ru/bitrix/click.php?goto=http://everfocus.ru/bitrix/rk.php?goto=http://semena-urala.ru/bitrix/redirect.php?goto=https://telegra.ph/CHto-delat-esli-vy-nedovolny-svoim-tovarishchestvom-sobstvennikov-zhilya-Sovety-yurista-09–19</a> 1 х слотс зеркало Верификация аккаунта. Лучше доказать лицо сразу в регистрации, чтобы позже не было проблем с выводом средств. Верификация может протекать двумя маршрутами:Так что приготовьтесь дать конфиденциальную информацию (пол, возраст, страна проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает не более суток, в чего получится беспрепятственно выводить солидные выигрыши.
1хслотс мобильная версия зеркало
Представьте момент, когда при ставке в 10 руб. Вы получите подобное умножение. Миллион рублей за одно вращение, что вполне вероятно. Поэтому вопрос, сколько можно выиграть остаётся закрытым. Предлагаем выяснить помощи. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный бонус и инспектируйте удачу в деле. Разумеется, вывести деньги сложно. Однако шансы есть у всех. Прибывшие на акк деньги бездепозитные бонусы предназначаются, в основном, только для свежеиспеченных юзеров, которые раньше не имели личного аккаунта в данном казино. Исходя из этого, если раньше у игрока был сделан депо, то, по всей вероятности, у него больше не будет возможности рассчитывать на получение такового бонуса в конкретном заведении.Необходимость отыгрыша. Вейджер в этом случае повыше, чем для бонусов за депо. И же свои не отыграны, вывести их невозможно. <a href=http://s-s-o.ru/forum.php?PAGE_NAME=message&FID=1&TID=10219&MID=10051&result=new#message10051>http://s-s-o.ru/forum.php?PAGE_NAME=message&FID=1&TID=10219&MID=10051&result=new#message10051</a> Если ординарными словами, бездепы – это определённая сумма денег или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать презенты. Но есть кое-какие нюансы. Существуют игорные жилища, коие перед что, этим как начислить бонусы просят привязать аппарат, предоставить копии документов.При регистрации сомнений либо ином интернет игральном заведении — вам дается один шанс испытывать собственную фортуну не внося средства монеты. Замечу что эту поощрительную предложение деют не все онлайн игровые площадки, а лишь щедрая середина(средина) из них. Которые мы подготовили для Вас в нашем списке. 1×slots зеркало 1хслотс регистрация перейти на 1×slots Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, the decision только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Но есть игорные заведения, которые готовы просто например жертвовать деньги на игру. Для этого довольно сделать профиль. Чтобы исключить свой выигрыш, вас сначала необходимо выполнить условия отыгрыша, указанные в критериях получения бездепозитного депозита.
1×slot рабочее зеркало
Практически все онлайн казино с бездепозитным бонусом за регистрацию учитывает программу преданности — систему одобрения постоянных клиентов, кот-ая произведено из колличества уровней. При достижении игроком еще уровня на его счёт поступает приз. Чем выше уровень — тем щедрее бонус. Если вы избираете испытанное лицензионное онлайн казино и выполните все условия получения бездепозитного приза, трудностей с получением подарка у Вас не возникнет.Каждый из бездепозитных бонусов без пополнения 2022 содержит собственный конкретный вейджер для отыгрыша, так же в любом казино он уточняется персонально — где то он х55 а где-то х30, повторюсь всюду по различному! 1×slots зеркало которую указывали при регистрации кстати <a href=https://marvelvsdc.faith/wiki/%D0%91%D0%BB%D0%BE%D0%B3_%D0%93%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0>https://marvelvsdc.faith/wiki/%D0%91%D0%BB%D0%BE%D0%B3_%D0%93%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0</a> Такой казино бонус без депо за регистрацию выдается игроку на час и активно используется данное предложение с 2017 года. Это как бы некая маскировка поощрения под бездепозитный. Суть всего сего сводится к тому, собственно геймеру на час выдается, например, 1000 $, а реклама твердит то, собственно любой выигрыш возможно будет в будущем оставить при себе. Но в играющий серьезно отнесется к этому предложению, то он попросту потеряет время. Ведь игроку нужно несомненно играть не главном аккаунте, в тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (числе всей тыс. ) в верховодила вступят определенные условия, где будет сказано, что наибольшей суммой победы имеет быть только двести долларов и средства можно использовать лишь виде приза на первый лепта с вейджером 25 от суммы вознаграждения плюс сам депо. По результату выйдет, собственно игрок выигрывал себе 200% бонус с вейджером на определенную сумму. Короче говоря, это все не вашего времени.
1×slots официальный зеркало рабочее
Какие бонусы есть еще получить не бездепозитного приза за регистрацию в казино? По мимо бездепозитного приза, любое интернет казино предлагает игрокам прибыльное предложение на 1-ый депозит, вы совершаете депо, ваш депо возрастает в двое или том в трое, тем наиболее начать выступать можно с больше крупной суммой, так же не забываем про вейджер на бонусы.B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. <a href=http://otdel.com.ua/index.php?subaction=userinfo&user=parchedswindler>http://otdel.com.ua/index.php?subaction=userinfo&user=parchedswindler</a> Да, у бесплатных призов есть дефекты. Прежде всего, они обыкновенно маленькие. Кроме такого, обстоятельства вейджера по ним всегда жесткие. Но все недоступность риска проделывает их довольно привлекательными для клиентов.Помните, что в некоторых забавах сумма ставки идет в зачет вейджера лишь частично. Так, в настольных и карточных играх только от 5% до 50% суммы ставки числятся как отыгранные деньги, на как в слотах идет в зачет все 100% суммы. 1× slots casino зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://www.donchillin.com/space-uid-382497.html>1×slots официальный сайт скачать на айфон</a>
<a href=http://forums.panzergrenadiers.com/showthread.php?22734–1×-%D0%A1%D0%83%D0%A0%C2%BB%D0%A0%D1%95%D0%A1%E2%80%9A-%D0%A0%C2%B7%D0%A0%C2%B5%D0%A1%D0%82%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%BB%D0%A0%D1%95&p=503188#post503188>1× слот зеркало</a>
<a href=https://forum.bandariklan.com/showthread.php?tid=382475>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Oтыгpaть приз с указанным вeйджepом, результата необходимо сдeлaть cтaвoк нa cумму, превышающую объем бонуса в некоторое один.
#9219 Charlesgunnyhttp://filmkachat.ru
1×slots сайт
Ниже указан важный список законных казино в Беларуси с призами на 1-ый депозит. Вы можете попасть на официальный вебсайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз.Максимальная ставка ? уточняется в еденице счета и ограничивает объем ставки за один спин. В случае ее превышения приз может быть аннулирован. Также в правилах возможность находиться запрет на размещение ставок определенного вида, например, по одинаковым шансам в рулетке (другими, на чет или нечет, красное или темное и т.д.). <a href=http://filmkachat.ru/>1×slots сайт</a> Основное правило получения бездепа ? создаваемый аккаунт обязан быть у пользователя первым и единственным. Наличие нескольких аккаунтов взыскательно запрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депо необходимо соблюдать несложную последовательность действий.На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению этого времени, Вы не сможете активировать и получить бездепозитный приз. <a href=https://www.9tj.net/home.php?mod=space&uid=271055>https://www.9tj.net/home.php?mod=space&uid=271055</a> Бездепозитный приз предоставляется новому игроку за конкретные деянья. Часто презент вид средств либо фриспинов выдается за регистрацию, благодаря чему пользователь получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.Шаг 5. Использование и отыгрыш. Бездеп обязан быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. 1×slots зеркало быструю регистрацию а также мгновенное <a href=http://dreamus.co.kr/bbs/board.php?bo_table=free&wr_id=385011>http://dreamus.co.kr/bbs/board.php?bo_table=free&wr_id=385011</a> Если вы облюбовали себе количество брендов которые вам больше всего приглянулись, для постоянной игры! Таких гемблеров казино довольно предпочитает и ценит, за частую такие игроки становятся VIP игроками заведения, которым нередко поступают выгодные предложения повторяющий бонусов, например же туда заходит и бездепозитные.
онлайн казино 1×slots
Таким образом, заведение пробует показать себя своим потенциальным геймерам, а подобный рекламный ход как казино приз без депо за регистрацию привлекает довольно много внимания к игорному заведению и обеспечивает неизменный поток новых посетителей и грядущих посетителей игрового онлайн клуба.Наиболее известные вознаграждения между гэмблеров – бездепозитные бонусы казино. Это не удивительно, так можно получить благотворительные вращения либо виртуальные кредиты, и этом не придётся пополнять счёт, рисковать личностными деньгами. Удастся насладиться разнообразными развлечениями даже выиграть солидную необходимую, избегая серьёзного риска. <a href=https://australianwinerytours.com/tours/showthread.php?tid=210102>1хслотс зеркало</a> 1×slots официальный сайт мобильная версия <a href=http://www.podrujka.com/user/Patrickorelf/>http://www.podrujka.com/user/Patrickorelf/</a> Как управляло, при выводе финансов, от играющего требуется лишь сделать наименьший лепта для того, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом личный счет.Размер ставки для забавы по бездепозитному бонусу (конечно же, если, тогда,, когда он представлен вид бонусных денежных средств) часто ниже, чем при этой на депо. Ограничение будет работать до этапа отыгрыша приза. 1хлот регистрация в 1×slots casino
1 xslots рабочее зеркало
Все благотворительные бонусы кажутся заманчивыми. Кто же откажется от возможности сыграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далековато не все бездепозитные призы в равной степени привлекательны для рассудительного посетителя. Любой выигрыш по ставке выше установленного лимита будет являться недействительным. То есть ставка не будет засчитана при отыгрыше, а в случае выигрыша его сумма не поступит на счёт клиента — итог забавы несомненно всецело аннулирован.Теоретически, к безвозмездным призам можно отнести так называемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, поэтому собственно они деют только возможность создавать ставки. <a href=http://unqbit.org/bbs/board.php?bo_table=free&wr_id=9502>http://unqbit.org/bbs/board.php?bo_table=free&wr_id=9502</a> Но а случае вы теснее профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в интернет казино; казино 1× slots официальный сайт При исполненьи критерий отыгрыша и верификации, средства с бонусного счета переводятся на главный и все быть выведены на карту либо электрический кошелек. Лимиты на вывод и сроки проведения транзакции зависимости от выбранной платежной системы.Подтверждение электронной почты – одно из главных критерий, которое есть практически в каждом бездепозитном казино. Чтобы верифицировать электрическую почту, довольно перебежать по интенсивной ссылке в письме, полученном от азартного клуба.
1×slots casino регистрация 1×slotscasin online
<a href=https://www.goslog.ru/forum/messages/forum1/message9970/11-obrashcheniya-grazhdan?result=reply#message9970>1×slots зеркало регистрация</a> Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 поболее. Когда игроку надеется большое фриспинов, администрация возможность разбивать их начисление на некоторое дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах промоакции.Этот тип бонуса несомненно добавлен на Ваш акк после удачной процедуры регистрации с использованием номера телефонного. Если избрать другой способ создания учетной записи, бездеп не будет добавлен на Ваш акк. 1×slots casino регистрация <a href=https://v7.toonanime.co/user/Geraldgipsy/>https://v7.toonanime.co/user/Geraldgipsy/</a> Акции, приуроченные к календарным праздничным, посещают рассчитаны как на всех юзеров, например и на категории: например, подарок на 8 марта девушкам-игрокам либо мужикам на 23 февраля.В игровых клубах без лицензии Вы покупаете „кота в мешке“ и в случае неоднозначных ситуаций нет способности куда-то посетовать и обосновать свою правоту.
1хслотс рабочее зеркало на сегодня
Чаще всего используются коды. Их надо(надобно) вносить в особые окна регистрационной анкеты, в идет о пригласительных бонусах, или в определенном разделе собственного офиса игрока.Бездепозитные призы казино это финансовая компенсация, предлагаемая юзерам на дармовой базе и возможность выступать в интернет казино безвозмездно. Если сравнивать их с одобрениями за лепта, в которых средства выдаются лишь потом начального пополнения счета, то бездепозитные вознаграждения получаются бесплатно. То есть, играющий получает вероятность делать ставки на теснее имеющие финансы, коие выдаст заведение, выполняя, всем, обычные деяния, чтобы их извлечь (тут речь о регистрация, удостоверении личности с использованием номера аппарата, оформления заявки и т.д.). <a href=http://artshi.ru/index.php?subaction=userinfo&user=demonicevidence>http://artshi.ru/index.php?subaction=userinfo&user=demonicevidence</a> Изучить управляла и условия получения бездепозитных призов казино, Вы можете у нас на сайте в разделе с бонусами или на официальном сайте избранного Вами казино. Если имеет найти нужную информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал либо по электрической почте. 1×slots зеркало которую указывали при регистрации кстати Способы получения бездепа различаются от облика приза, который понравился игроку. Но вам так нужно быть зарегистрированным в легальном онлайн-казино и подтвердить собственную личность. В общем облике пошаговая аннотация для получения бездепозитного бонуса смотрится например:
<b>Смотреть еще похожие новости:</b>
<a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=2055>1×slots регистрация на официальном сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
После потребуется привнести идентификационный платёж. Это пугает новичков больше всего. Нужно сделать минимальный депо в 100–500 руб. Таким образом служба защищенности убедиться сомнений, собственно платёжный метод принадлежит Вам. Данная процедура важна для обеспечивания защищенности игровых счетов. Пример, Ваш аккаунт взломают и выведут свои на собственный кошелёк. Будет крайне неприятно. Поэтому верификация платёжной системы, это необходимый момент.
#9220 Charlesgunnyhttp://filmkachat.ru
1×slots casino зеркало рабочее
Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен перечень наихороших интернет казино, коие предлагают своим игрокам великодушные бонусы за регистрацию. <a href=http://filmkachat.ru/>1×slots подтвердит вашу регистрацию если говорить</a> У любого игорного клубы различные вейджеровые условия. Чтобы вы гарантировано сумели выполнить их, мы дадим некоторое советов. Если система начислила маленькую необходимую, не стоит делать немалые ставки – остановитесь на 10–30 центах. Как только сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте выступать. В неприятном случае лучше присмотреться к иному автомату. <a href=https://premiumstoreco.com/user/koreanxr0611inbox-lv/>https://premiumstoreco.com/user/koreanxr0611inbox-lv/</a> 1×slots зеркало этих способов предполагает регистрацию <a href=https://google.gm/url?q=https://doctorlazuta.by/>https://google.gm/url?q=https://doctorlazuta.by/</a> Так же стоит выделить то, что в любом интернет казино установлен собственный наибольший кешаут на бездепозитный приз. Как управляло кешаут — это максимальная сумма денег, кот-ая дешевая для вывода с бездепозитного бонуса.Срок отыгрыша — это этап, который начинается в момент активации бонуса и завершается с его закрытием. Пользователю нужно уложиться в этот временной зазор, по призовые средства аннулируются. Казино устанавливают список игр, ставки каких засчитываются при расчете отыгранных средств. Если тайтл не входит в этот перечень, то предоставляется быть недосегаем для загрузки период деяния бонусного предложения.
1×slots регистрация на официальном сайте
С не отыгранным бонусом воспрещается превышать размер наибольшей ставки. Нарушение сего обстоятельства будет аннулирование выигрыша.Фриспины предусмотрены для применения в видео слотах. Внимательно ознакомьтесь с критериями – часто их выдают на кое-какие автоматы. В зависимости от клуба, у вас выйдет устроить определённое число ставок. Кстати, продвинутые игорные жилища разрешают запускать любых «одноруких бандитов». 1×slots актуальное зеркало Во время игры в казино, выигрыши, полученные благодаря бесплатным призовым фондам, суммируются и срабатывают в общую сумму для отыгрывания. Однако, в фортуна улыбнется и получится отыграть все призы, игровое заведение гарантированно разрешит вывести финансовые средства. Сумма вывода будет зависимости от лимита, утвержденного именно в данном учреждении. Поэтому, пристально надо(надобно) разбирать правила выдачи анлимитных депозитов. <a href=https://agroinfo.biz.ua/wr_board/tools.php?event=profile&pname=DoctorLazutaPt>https://agroinfo.biz.ua/wr_board/tools.php?event=profile&pname=DoctorLazutaPt</a> Акции, приуроченные к календарным дням, случаются рассчитаны как на всех пользователей, например и на категории: примеру, презент на 8 марта девушкам-игрокам или мужчинам на 23 февраля.Oтыгpaть приз с указанным вeйджepом, чтобы необходимо сдeлaть cтaвoк нa cумму, превосходящую размер приза в некоторое один. 1×slots зеркало выигрыши обязательно пройдите регистрацию если Список так называемых «разрешенных землель» прилагается к правилам бонусной программки игорного портала. Обязательно выясните, распространяются ли на вас сходственные наказания.Самые популярностью методы вывода денег ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электрическим платежным системам подобии Neteller и Skrill, еще используют криптовалютными кошельками. Вывод выигрышей возможность осуществляться мгновенно или развлекать от нескольких часов до нескольких суток.
1×slots казино зеркало
Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы мгновенно получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, бывает реальный шанс победу!Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, чтобы снова получить безвозмездный бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ждет неизбежное наказание. <a href=https://www.empowher.com/users/redico0308>https://www.empowher.com/users/redico0308</a> Бездепозитные призы отличный вариант бесплатной игры в игровые автоматы. Многие пользователи сети не знают, собственно в казино можно начать играть безусловно безвозмездно, а потом исключить выигрыш на банковскую карту либо электронный кошелек, другие не доверяют интернет казино, а третьи удачно играют и выигрывают – и тотчас достаточно великие суммы.Бездепозитный приз – это экономическое вознаграждение, которое выдается участнику забавы в казино, для его привлечения и возникновения заинтересованности. Любой посетитель, кот-ый подходит условиям выдачи похожего бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое поощрение считается более эффективным способом, дающим возможность стартовать в игре, не вкладывая личных вещественных средств. 1хслотс зеркало Казино выводит средства только на что, эту платежную систему, с котрой был сделан депозит. То есть, для вывода бездепозитного бонуса, Вам сначала нужно пополнить счет. В некоторых клубах ограниченный список способов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет непосредственно с данных платежных способов, коие доступны для вывода.Предложения с бездепозитными бонусами за регистрацию дозволяют новым заведениям привлечь аудиторию на собственный вебсайт. А игроки тому получают возможность играть на реальные деньги без депозита в казино и заработать небольшой стартовый капитал, кот-ый разрешается исключить на карту банка либо электрический кошелек.
1 хслот регистрация в 1×slots casino
Многие казино предоставляют в маркетинговых целях безвозмездные бонусы необыкновенно для наших читателей. Чтобы их получить, нужно перебежать на игровой сайт по партнерской ссылке с нашего портала. <a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=89624>рабочее зеркало 1×slots</a> Также, в этом случае необходимо подтвердить собственный номер телефонного, желаемого код, приобретенный в смс-сообщении от клуба ввести в особое поле в личном кабинете игрока. Реже призы без депозита начисляются постоянным игрокам. С их поддержкою администрация постарается удержать ценных посетителей или желает поблагодарить за лояльность правильных гостей. Но гораздо чаще для похожих целей применяются эти акции: 1×slots регистрация 1×slots review live <a href=http://iminthai.com/home.php?mod=space&uid=245365>http://iminthai.com/home.php?mod=space&uid=245365</a> Прямо в заберите благотворительные вращения за регистрацию без депо и начинайте коллекционировать призовые композиции ради крупных выигрышей!У каждого игорного заведения средства правила и условия. Но, чтобы получить призы, нужно выполнить стандартные деянья:
casino 1×slot
Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются незамедлительно в создания профиля и активны непродолжительное время. Если не успеете потратить свои, они попросту сгорят. Касаемо времени, в большинстве случаев бонусы активны на часа. <a href=http://theaesoon.co.kr/bbs/board.php?bo_table=free&wr_id=108243>http://theaesoon.co.kr/bbs/board.php?bo_table=free&wr_id=108243</a> Чтобы без увериться в преимуществах бездепозитных призов, достаточно зарегистрироваться в казино и получить одобрение. 1×slots официальный сайт мобильная версия
<b>Смотреть еще похожие новости:</b>
<a href=https://tucmas.fi/phpBB/viewtopic.php?f=4&t=351592>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<a href=https://rolivka.online/forum/showthread.php?tid=28988>1×slots казино мобильная версия</a>
<a href=http://forums.panzergrenadiers.com/showthread.php?22764-%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%B7%D0%A0%D1%91%D0%A0%D0%85%D0%A0%D1%95–1×-slots-%D0%A0%D1%95%D0%A1%E2%80%9E%D0%A0%D1%91%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A0%C2%B0%D0%A0%C2%BB%D0%A1%D0%8A%D0%A0%D0%85%D0%A1%E2%80%B9%D0%A0%E2%84%96-%D0%A1%D0%83%D0%A0%C2%B0%D0%A0%E2%84%96%D0%A1%E2%80%9A&p=503218#post503218>казино 1× slots официальный сайт</a>
<a href=https://mandala-app.com/forums/memberlist.php?mode=viewprofile&u=3447>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Однако в условиях скрываются «подводные камешки», которые не позволят вывести крупную необходимую или же вы не успеете отыграть вейджер. Поэтому профессионалы рекомендуют арестовать бесплатные вращения за регистрацию в казино без депо, дабы поднабраться навыка и получить настоящий шанс на победу.
#9221 Charlesgunnyhttp://filmkachat.ru
1× slots официальный
Первый образующийся вопрос, это, для выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают новых игроков. Последним проще начать забаву на деньги с презента за регистрацию. Им не нужно пополнять баланс и тратить личностные свои. Новички получают бесплатные спины или свои на счёт. С их поддержкою знакомятся с игровым ходом, крутят слоты и проделывают ставки в рулетке.Внесение депозита – Будьте готовы пополнить счет последствии отыгрыша бонуса. Это обычное заявка верховодил для данного типа промо-акций. Лучше заранее уточнить, какую необходимую нужно несомненно заносить на счет. Как правило, речь идет о минимальном депозите, но вы обязаны быть убеждены, собственно он для по кармашку. <a href=http://filmkachat.ru/>рабочее зеркало 1×slots</a> Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в индивидуальный кабинет, чтобы отобрать бесплатные вращения с вейджером х40;Условия вывода выигрыша. В неких заведениях для удачного вывода с бездепозитного бонуса достаточно пополнения баланса и подтверждения личности. В других же клубах, необходимо некоторое один прокрутить свой депозит. <a href=http://gtamotors.ru/user/JamesBoben/>http://gtamotors.ru/user/JamesBoben/</a> скачать 1×slots официальный сайт <a href=http://elka54.ru/forum/?PAGE_NAME=profile_view&UID=102010>http://elka54.ru/forum/?PAGE_NAME=profile_view&UID=102010</a>
1× slots официальный
Подтверждение регистрации. Казино просят привязки профиля к электрическому адресу и номеру телефона. Для сего на e-mail отчаливает послание ссылаясь, а на телефон ? текстовое сообщение с кодом. <a href=https://uyghuryol.com/forum/viewtopic.php?f=8&t=230286>1 х слотс зеркало</a> онлайн казино 1×slots <a href=https://www.as7abe.com/wall/blogs/post/41725>https://www.as7abe.com/wall/blogs/post/41725</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots
1×slots казино зеркало
Кешбэк-бонус дает собой возврат фиксированного процента от ставки если, тогда, поражения или же от проигранной суммы за определённый период. В большинстве случаев кешбэк не превышает 10%. <a href=http://masyasha.ru/index.php/component/k2/itemlist/user/83744>http://masyasha.ru/index.php/component/k2/itemlist/user/83744</a> 1хслот официальный сайт зеркало
1×slots бонус за регистрацию
<a href=https://thetechmodders.com/forums/viewtopic.php?t=27002>1х слот регистрация в 1×slots casino</a> Условия все различаться друг от приятеля. Но подобный бонус возможность быть применен только для игрового процесса – полученные на счет деньги до такого, как станут отыграны, вывести невероятно.Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, например как Вам понадобиться ее подтвердить дальнейшем при выводе денег. 1×слотс казино <a href=https://forum.papbio.org/member.php?action=profile&uid=78352>https://forum.papbio.org/member.php?action=profile&uid=78352</a>
1×slots официальный сайт мобильная версия скачать
Доступные забавы – В неких азартных забавах возможно понизить математическое превосходство казино до нескольких 10-х процента. В их количестве многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как верховодило, в этих забавах ставки идут в зачет вейджера не всецело. Например, имеет учитываться только 50%. В неких забавах бездепозитные призы вообще нельзя отыгрывать. <a href=http://le-maitre.ru/bitrix/rk.php?goto=http://zitar.ru/bitrix/redirect.php?goto=http://clients1.google.ad/url?q=https://teletype.in/@urist555/8gMx8Buv-aB>http://le-maitre.ru/bitrix/rk.php?goto=http://zitar.ru/bitrix/redirect.php?goto=http://clients1.google.ad/url?q=https://teletype.in/@urist555/8gMx8Buv-aB</a> 1хслотс официальный сайт зеркало В качестве бонусов онлайн казино часто предлагает выдачу фриспинов, другими даровых вращений игрового барабана. Виртуальные монеты возможно применять для обучения в покерной школе либо для забавы в казино.
<b>Смотреть еще похожие новости:</b>
<a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=48545>1×slots актуальное зеркало</a>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-4964/#comment-592574>1×slots зеркало видели такую регистрацию на</a>
<a href=https://www.makinamania.net/index.php?topic=250959.new#new>1×slots зеркало регистрация то дальше необходимо пройти</a>
<a href=https://portugal-campings.com/pt/account/>1х слот 1хслотс регистрация перейти на 1×slots</a>
<a href=https://forum.krymbezpravil.org.ua/memberlist.php?mode=viewprofile&u=10552>1×slots casino регистрация на сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Обычно для получения бонусов без депо, казино выдвигает лояльные и абсолютно выполнимые обстоятельства, но есть ряд поступков коие запрещены и все стать противные результаты:
#9222 Charlesgunnyhttp://filmkachat.ru
1× slots зеркало
Чтобы помощи убедиться в превосходствах бездепозитных бонусов, достаточно зарегистрироваться в казино и получить одобрение.Мы подготовили список, где есть постоянно животрепещущие и свежие бездепозитные призы казино, которые вам получить даром. Для наших пользователей есть особые предложения эксклюзивные призы, которые вы у не отыщите, их мы обозначили особой красной плашкой «Exclusive». <a href=http://filmkachat.ru/>1×slots официальный сайт мобильная версия</a> Индивидуальные одобрения выдаются за совершение деяний: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавленья либо официального посетителя для ПК. В большинстве казино действуют программы лояльности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на следующий уровень часто сопровождается выдачей бездепа. <a href=https://opaseke.com/users/7873>https://opaseke.com/users/7873</a> Основное верховодило получения бездепа ? творимый аккаунт обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов взыскательно воспрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита необходимо соблюдать простую последовательность поступков.Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. 1×slots рабочее зеркало на сегодня <a href=http://lkpo2003.esy.es/bbs/home.php?mod=space&uid=1306014>http://lkpo2003.esy.es/bbs/home.php?mod=space&uid=1306014</a> Какие бонусы есть еще получить не бездепозитного приза за регистрацию в казино? По мимо бездепозитного бонуса, каждое интернет казино предлагает игрокам прибыльное предложение на 1-ый депозит, вы совершаете депозит, ваш депозит увеличивается в двое или и в 3, что, этим наиболее начать выступать можно с более крупной суммой, например же не забываем тему вейджер на бонусы.Эффективность бездепов виде рекламного прибора расценили многие операторы. Малоизвестные площадки употребляют такие акции, дабы быстро набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны неизменных посетителей. Не все сайты, дающие презенты без депо, рекомендованы к этой. За привлекательным промоописанием все скрываться невыполнимые обстоятельства отыгрыша и подводные камешки.
1хслотс рабочее зеркало
<a href=http://nhomtruyen.com/members/jamesgaw.9280/>1хслотс рабочее зеркало</a> 1×slots мобильная версия войти казино Можно ли в одном онлайн казино получить больше одного приза за регистрацию? Нет, так как в каждом интернет казино есть управляла, к которым нужно придерживаться, не делать два аккаута для получения призов, другому будет блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, бонус за регистрацию выдаеться один один одному личику. <a href=https://msknovostroy.com/member.php?action=profile&uid=3501>https://msknovostroy.com/member.php?action=profile&uid=3501</a> 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
1×slots casino регистрация 1×slots review live
Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала резвые выводы. Фишка выплат никаких, собственно достаточно избрать платёжный инструмент и указать необходимую. В большинстве случаев деньги зачисляются на электрические кошельки протяжении 15 минут, а на банковские карты – 1–3 рабочих дня. <a href=https://cse.google.com.au/url?sa=i&url=https://doctorlazuta.by/>https://cse.google.com.au/url?sa=i&url=https://doctorlazuta.by/</a> За счёт спинов выйдет запустить различные онлайн слоты, протестировать стратегии и поднабраться опыта. Фишка что, собственно вращения начисляются на топовые аппараты с уникальными опциями и высокой отдачей. Не запамятовывайте, собственно в любом акционном предложении учтены особые притязания – кратковременные ограничения, максимальный объем ставки, список доступных игр. 1×slots акции
1×slot казино зеркало
Зачастую бездепозитные призы казино для забавы предлагаются разными заведениями азартных игр виде маркетинговых промоакций или в целях привлечения к для новых игроков. Для бездепозитных бонусов в казино 2022 игроку не нужно пополнять счет до момента вывода хотимых средств.Фриспины — безвозмездные вращения, которые дозволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины числятся самым знаменитым и предпочтительным видом бонуса — благотворительные вращения порой эффективнее и веселее в отыгрыше, чем остальные облики бездепов. 1×slots казино зеркало <a href=http://tehnoprom-nsk.ru/user/Glenncolve/>http://tehnoprom-nsk.ru/user/Glenncolve/</a>
1×slots casino регистрация 1×slotscasino09k online
Когда речь о получении бездепозитных призов в казино, для внимание на последующие обстоятельства:Прежде всего, не запамятовывайте регулярно заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом рассматривают наиболее занимательные предложения водящих игорных порталов. <a href=http://mehaplaza.ru/bitrix/redirect.php?goto=http://sdsam.ru/bitrix/redirect.php?goto=http://tekhnodom.ru/bitrix/click.php?goto=https://telegra.ph/Ponimanie-stati-33-Konstitucii-RF-09–19>http://mehaplaza.ru/bitrix/redirect.php?goto=http://sdsam.ru/bitrix/redirect.php?goto=http://tekhnodom.ru/bitrix/click.php?goto=https://telegra.ph/Ponimanie-stati-33-Konstitucii-RF-09–19</a> 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://timepost.info/showthread.php?tid=54187>1×slots зеркало регистрация то дальше необходимо пройти</a>
<a href=http://big.bestforums.org/viewtopic.php?f=7&t=9591>1×slots зеркало быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Это один из основных показателей привлекательности дара. С завешенным коэффициентом в профессионалы не смогут выполнить условия по отыгрышу. И маловажно, как привлекательно смотрится предложение – бездепозитный приз казино в объеме $500 либо $1 000. Чтобы новенькие получше вдумались, собственно же такое вейджер, мы разберём на примере.
#9223 Charlesgunnyhttp://filmkachat.ru
казино 1×slots официальный сайт
Далее требуется отыграть вагер и исключить выигрыш. Игрокам без опыта крупно повезло, они могут получить десятки даров за 1 регистрацию. Если не смогли получить Бездепозитный бонус, не волнуйтесь. Обратитесь в интернет чат, оператор поможет решить проблему. <a href=http://filmkachat.ru/>казино 1×slots</a> Также бездепозитные бонусы могут работать способом вернуть к этой посетителей, пока приостановивших своё сотрудничество с фирмой: уведомление о бездепе поступает на мобильный телефонный или почту. <a href=https://www.ulinebody.com/bbs/board.php?bo_table=free&wr_id=100766>https://www.ulinebody.com/bbs/board.php?bo_table=free&wr_id=100766</a> Обычно показатель повыше, чем для призов на депозит. Не изумляйтесь, случае он будет том х100. Иногда завышенный коэффициент вейджера устанавливается для обитателей отдельных стран.Бездепозитные призы казино это экономическая компенсация, предлагаемая пользователям на дармовой базе и возможность выступать в интернет казино безвозмездно. Если ассоциировать их с поощрениями за лепта, в которых свои выдаются только потом первоначального пополнения счета, то бездепозитные вознаграждения получаются безвозмездно. То есть, играющий получает вероятность делать ставки на уже место финансы, которые выдаст заведение, исполняя, при, обычные деянья, дабы их извлечь (тут идет речь о регистрация, удостоверении личности с внедрением номера телефона, дизайна заказы и т.д. ). 1×slots рабочее зеркало на сегодня <a href=http://ukrpart.org/index.php?subaction=userinfo&user=satisfyingarbit>http://ukrpart.org/index.php?subaction=userinfo&user=satisfyingarbit</a> Бездепы с бесплатными вращениями предоставляют пользователям право вертеть барабаны игровых автоматов без снятия средств со счета. За любой раунд уплачивает казино. Число спинов ограничено и редко выше сотку. Если акция содержит количество даровых игр, их начисление может быть разбито на несколько дней.
казино 1× slots официальный сайт
Бонус в казино без депо имеет разные вариации: такое быть приветственный приз, акции в честь каких-либо праздничных либо весомых дат, приз за привлечение свежих игроков, преданность и получение VIP-статуса.Бонусные средства – маленькая сумма денег для старта в новом казино. На бонусные деньги, обычно разрешено выступать во все игры, считая слотов с прогрессивным джекпотом и игр из раздела live casino. 1×slots зеркало выигрыши обязательно пройдите регистрацию если Как управляло, новоприбывшие игроки начала желают ознакомиться с способами ввода и вывода денежных средств и сроки выполнения поданных заявок дабы конкретно разуметь, как скоро у исключить собственный казино приз за регистрацию без депозита на электрический кошелек либо же банковскую карту. К счастью для всех играющих, снутри конкретных холдингов, все казино соперничают между собой. Ведь в бы конкретную фирму давало только одно онлайн-заведение, то навряд бы клиенты заметили казино с бонусом за регистрацию и могли бы рассчитывать лишь на вознаграждение в виде приза на первое вложение. К любому заведению периодически стопам завлекать свежих игроков, собственно, конечном, только на руку всем играющим. <a href=http://ddininder.com/home.php?mod=space&username=aromaticblasphe>http://ddininder.com/home.php?mod=space&username=aromaticblasphe</a> казино 1×slots Разные казино имеют собственные верховодила по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высочайшие требования. Часто онлайн-казино советуют отыграть бонусное одобрение до 100 раз в игровых автоматах. Например, случае игрок получил безвозмездно 10 долларов, то необходимо несомненно отыграть их, поставив 1 тыщу спинов по 1 доллару каждый. Стоит обозначить(означить), собственно не все казино выделяют вероятность играть на бонусы и не во всех увеселительных заведениях идентичные управляла для отыгрывания. Некоторые казино запрещают выступать на призы в блекджек или ограничивают ставки до 5 %, собственно значительно увеличивает в десятки раз количество необходимых игр.
1хслотс официальный сайт зеркало
Активация валютного гонорары происходит автоматически последствии творенья профиля или использования промокода. Иногда операторы предъявляют вспомогательные притязания: подписаться на страницы казино в соц сетях или на рассылку рекламных извещений, скачать и установить вспомогательный софт и т.д.В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это исключительно приятная часть игры. Важно, зачастую бездепозитные бонусы в казино выдаются с лимитированиями по максимальной выплате. В среднем можно рассчитывать на выгода в несколько тыщ рублей. Как вывести выигрыш с бонуса без депозита. Придётся подтвердить аккаунт документально, в неких заведениях. Процедура верификации обязательна и делается любым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате либо прочитайте в правилах. Активация по промокоду используется в разных видах бездепов. Если речь о приветственном призе, то набор знаков можно разузнать на основной страничке, в регистрационной форме либо послании, коие отправляется юзеру для подтверждения адреса электронной почты. Акции могут проводиться совместно с партнерскими площадками. Обычно код располагается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активируется одноразовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем актуальный код для активации в описании каждого промо.Только выполнив все условия отыгрыша и дождавшись завершения проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить свои средства. <a href=http://www.sazkar.info/member2595.html>http://www.sazkar.info/member2595.html</a> Реже призы без депозита начисляются постоянным игрокам. С их поддержкою администрация постарается вычесть ценных посетителей либо вожделеет поблагодарить за лояльность верных гостей. Но гораздо чаще для похожих целей применяются эти промоакции: 1×slots зеркало рабочее на сегодня
1×slots зеркало регистрация то дальше необходимо пройти
К образцу, игроку выдаются безвозмездные свои в заведении в объеме пятидесяти или ста $ (вейджер на коие сочиняет 100х). То есть, каждому новоприбывшему геймеру выскакивает притягивающая картинка, которая обещает выплату всех зачисленных фирмой средств. Не стоит заострять на казино приз за регистрацию без депо с сильно великий либо довольно малюсенькой суммой бонусов, поэтому что, числе тщательно исследовав все обстоятельства, здесь вероятнее всего, несомненно какой-то подкол.В разделе с бонусами активировать собственный подарок. Найти игры, для которых учтено поощрение и использовать приз по предназначению. Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации бонуса без депо. Внимательно прочтите до конца. Многие новички делают промахи на шаге регистрации и потому имеют получить подарок. Онлайн-казино тщательно продумывают бонусные условия, коие нужно изучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и лимитирования.Отказ в прохождении верификации. Если заказчик не хочет или имеет дать документы, подтверждающие его лицо, профиль будет заблокирован вместе со всеми бонусными начислениями. 1×slots регистрация на сайте 1×slots ru com <a href=https://forum.21up.co.uk/member.php?action=profile&uid=8879>https://forum.21up.co.uk/member.php?action=profile&uid=8879</a> Такой безвозмездный эквивалент средств зачисляется на профиль пользователя в осуществления притязаний и предназначаются они только для игрового процесса. Вывод таких вознаграждений вероятен лишь после воплощения вейджеровых условий.
1×slots сайт зеркало
Казино выводит средства только на ту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного приза, Вам сначала необходимо восполнить счет. В неких клубах узкий перечень способов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет непосредственно с этих платежных методов, которые доступны для вывода. Бонус начисляется игроку незамедлительно последствии регистрации и прохождения верификации в казино и не настятельно от клиента внесения депо. Как управляло, объем приза в сходственном случае достаточно стыдливый, однако дозволяет новеньким познакомиться с игрой без риска настоящими деньгами.Во время забавы в казино, выигрыши, приобретенные спасибо безвозмездным призовым фондам, суммируются и включаются в общую необходимую для отыгрывания. Однако, в фортуна улыбнется и получится отыграть все бонусы, игровое заведение гарантированно разрешит вывести денежные средства. Сумма вывода несомненно находиться от лимита, одобренного непосредственно в этом учреждении. Поэтому, внимательно нужно читать правила выдачи анлимитных депо. <a href=https://pedrolucas.consultasexologo.com/community/profile/arnoldcerie/>https://pedrolucas.consultasexologo.com/community/profile/arnoldcerie/</a> Необходимость отыгрыша. Вейджер в этом случае выше, чем для призов за депозит. И же средства не отыграны, исключить их нельзя. 1×slots скачать на айфон На нашем сайте Вы отыщите перечень своевременных свежих бездепозитных бонусов в казино 2022 года. Также, есть количество неповторимых предложений, которые доступны только гостям нашего сайта после регистрации по нашей ссылке или активации специального промокода.
<b>Смотреть еще похожие новости:</b>
<a href=https://shopcms.vsupport.club/topic/15649-%D0%A0%D1%94%D0%A1%D1%93%D0%A0%D1%97%D0%A0%D1%91%D0%A1%E2%80%9A%D0%A1%D0%8A-%D0%A0%D1%96%D0%A0%C2%B0%D0%A1%E2%82%AC%D0%A0%D1%91%D0%A1%E2%82%AC-%D0%A0%D0%86-%D0%A0%D1%94%D0%A0%D1%91%D0%A0%C2%B5%D0%A0%D0%86%D0%A0%C2%B5-%D0%A1%D0%83%D0%A1%D0%83%D0%A1%E2%80%B9%D0%A0%C2%BB%D0%A0%D1%94%D0%A0%C2%B0-cocainvip-%D0%A0%D2%91%D0%A0%D1%95%D0%A1%D0%83%D0%A1%E2%80%9A%D0%A0%C2%B0%D0%A0%D0%86%D0%A0%D1%94%D0%A0%C2%B0-%D0%A0%D1%97%D0%A0%D1%95-%D0%A1%D1%93%D0%A0%D1%94%D0%A1%D0%82%D0%A0%C2%B0%D0%A0%D1%91/?p=95056>1хслот 1хслотс регистрация перейти на 1×slots</a>
<a href=https://test.soclanovtsy.ru/topic/39432–1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82-%D1%81%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C/>1×slots официальный сайт, скачать</a>
<a href=http://forum.puppylinux.pl/index.php?topic=821.new#new>1×slots регистрация 1×slots casino 777 online</a>
<a href=https://rf-lowrate.ru/index.php?/profile/6447-jamesmom/>1×slots коды</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чаще всего казино бонус за регистрацию без депозита даёт вероятность запустить любой автомат. Но чем пристально ознакомиться с условиями. Иногда для игры доступны только определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, превосходнее начать знакомство с миром пыла именно с «одноруких бандитов». Подтверждение регистрации. Казино требуют привязки профиля к электронному адресу и номеру телефонного. Для этого на e-mail отчаливает письмо со ссылкой, а на телефон ? текстовое извещение с кодом.
#9224 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
С другой стороны, намного проще арестовать бездепозитные фриспины за регистрацию в казино и напрямик сейчас начать вертеть барабаны в превосходнейших слотах. Главная необыкновенность спинов в том, что они предназначены для лучших автоматов. Удастся столько пройти дополнительные раунды, но и увеличить необходимую выигрыша, заработать респины прочие внутриигровые подарки.Если вы новичок в и только попали в неизведанную вами район азарта — за предложений как бездепозитные бонусы без пополнения. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало</a> Если вы бывалый игрок, вы обязаны аристократия, собственно приз без депозита – редкая находка. Тем ниже, мы раз изучаем интернет, чтобы найти вам лучшие бездепозитные предложения. <a href=http://whitepower.clanweb.eu/profile.php?lookup=26634>http://whitepower.clanweb.eu/profile.php?lookup=26634</a> Сроки активации приза устанавливаются каждым казино, хотя чаще всего они не превосходят недели с момента получения. Игроку непременно надо(надобно) использовать бездеп протяжении указанного срока, в ином случае приз просто исчезнет. Каждый приз возможно получить только один один, потому случае не использовать бездеп в срок, у игрока не несомненно второго шанса им воспользоваться. 1×slots зеркало сайта <a href=https://clicgo.ru/user/JustinRor/>https://clicgo.ru/user/JustinRor/</a> Приглашаем делиться суждениями о призах. Это поможет другим пользователям избирать более выгодные предложения.
1×slots сайт
1× slots официальный <a href=http://lat-puzz.com/phpbb/memberlist.php?mode=viewprofile&u=97206>http://lat-puzz.com/phpbb/memberlist.php?mode=viewprofile&u=97206</a> Прямо момент арестуйте безвозмездные вращения за регистрацию без депозита и начинайте собирать призовые композиции ради крупных выигрышей!Мы делаем акцент на ключевых положениях правил, рассказываем о территориальных лимитированиях и кратко информируем о иных промоакциях обсуждаемого казино. 1×slot казино зеркало Верификация аккаунта. Лучше подтвердить лицо незамедлительно в регистрации, чтобы потом не было проблем с выводом денег. Верификация может протекать двумя путями:
1×slots официальный сайт зеркало
<a href=http://tube.tunanno.com/profile.php?u=tabooglut4>http://tube.tunanno.com/profile.php?u=tabooglut4</a> Для получения депозитного бонуса необходимо пополнить собственный игровой баланс реальными средствами. Вознаграждение можно получить или при внесении первого депо, либо в виде фиксированного процента от внесённых средств. Так либо по, бонус поступит на счёт лишь после пополнения.Онлайн-казино кропотливо продумывают бонусные обстоятельства, которые нужно выучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и другие лимитирования. 1×slots зеркало выигрыши обязательно пройдите регистрацию если Казино выводит средства только на ту платежную систему, с котрой был сделан депозит. То есть, для вывода бездепозитного приза, Вам поначалу необходимо пополнить счет. В некоторых клубах ограниченный перечень методов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет именно с этих платежных методов, которые доступны для вывода.Условия могут разниться приятель от друга. Но такой приз может быть применен лишь для игрового процесса – приобретенные на счет деньги до как, как станут отыграны, вывести невероятно.
1×slots официальный сайт зеркало рабочее
Предложения с бездепозитными призами за регистрацию разрешают новым заведениям заинтересовать аудиторию на собственный сайт. А игроки к получают возможность выступать на настоящие средства без депо в казино и заработать маленькой стартовый капитал, кот-ый разрешено вывести на карту банка или электронный кошелек. Заработать на бездепозитных бонусах за регистрацию в казино может каждый пользователь, достигший совершеннолетия. Можно ли в одном онлайн казино получить больше одного бонуса за регистрацию? Нет, например как в каждом онлайн казино есть правила, к которым нужно придерживаться, не создавать 2 аккаута для получения бонусов, по несомненно блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, приз за регистрацию выдаеться один один одному личику.Постарайтесь отыграть вейджер, чтобы появилась вероятность оставить заявку на выплату. Кстати, на всех веб-сайтах, представленных в перечне, доступны современные платёжные приборы. Вы сможете получить выигрыш на электрической кошелёк, карту, аппарат. 1×slots зеркало <a href=https://www.imdb.com/user/ur187665042>https://www.imdb.com/user/ur187665042</a> В любом казино с бездепозитным призом учтены вейджеровые обстоятельства. Это один-единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) сделать определённое количество ставок. Чем круче бонус, тем сложнее выполнить условия, и наоборот.
1×slots зеркало которую указывали при регистрации кстати
<a href=https://www.weaselmods.net/member.php?action=profile&uid=3139>https://www.weaselmods.net/member.php?action=profile&uid=3139</a> Бонус начисляется игроку сразу после регистрации и прохождения верификации в казино и не просит от посетителя внесения депо. Как управляло, объем бонуса в сходственном случае довольно стыдливый, впрочем разрешает новеньким познакомиться с игрой без риска реальными средствами. 1х слот регистрация в 1×slots casino Но на азартных платформах похожие вознаграждения могут получить и уже зарегистрированные юзеры. В таком случае, призы предоставляются в уникальных акций или же неким геймерам в виде акционного предложения, коие приходит на почту с целью «возвратить» игрока в свое казино.В списке требований к отыгрышу нередко наличествуют лимиты на ставки при забаве на личные деньги. Так, случае отыграть нужно 30 000 руб., а максимальная сумма ограничена 30 рублями, то вращать барабаны светит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам деянья промоакции.
<b>Смотреть еще похожие новости:</b>
<a href=http://board.eternityrpc.com/thread-1021-post-14315.html#pid14315>1×slots промокод при регистрации 2025</a>
<a href=https://www.goslog.ru/forum/messages/forum1/message11729/11-obrashcheniya-grazhdan?result=reply#message11729>1×slots рабочее зеркало</a>
<a href=https://surfaceprophets.com/threads/1×slots-casino-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE.26831/>1×slots casino зеркало</a>
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=60458&extra=>казино 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Приветственный бонус без депозита ? подарок за регистрацию. Выдается средствами, фриспинами либо баллами. В последнем случае бонусные баллы используются для роли в турнирах или обмена на настоящие деньги. Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки могут запросить вспомогательные документы либо инициировать краткое общение по Skype.
#9225 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало на сегодня
Каждая игровая платформа отличается критериями по получению и отыгрышу бездепов. В правилах отчетливо расписаны кратковременные рамки, за которые надо(надобно) прокрутить вейджер. Также не забывайте про максимальный размер ставки и максимальную необходимую выплаты. С другой стороны, дабы получить бездепозитные бонусы казино, достаточно потратить не более 1 минутки. <a href=http://filmkachat.ru/>1×slots зеркало быструю регистрацию а также мгновенное</a> <a href=http://alex-zarya.ru/user/JamesJuiTh/>http://alex-zarya.ru/user/JamesJuiTh/</a> 1×slot официальный сайт <a href=https://correspondent.in.ua/user/TerryThord/>https://correspondent.in.ua/user/TerryThord/</a>
1×slots подтвердит вашу регистрацию если говорить
Если площадка дарует бездеп за регистрацию, то процедура его получения ординарна. Нужно только завести акк на сайте и активировать его, подтвердив адрес электрической почты, номер телефона либо иные данные, которые требует оператор. Перед этим нужно убедиться, собственно пользователь располагается на официальном веб-сайте казино, а не на мошеннической площадке. <a href=https://forum-macan.ru/memberlist.php?mode=viewprofile&u=1736>1× slots зеркало</a> 1×slots casino регистрация на сайте Даже не выиграв солидную сумму, игрок интересно проведет время, изнутри исследует работу площадки, воспримет геймплей автоматов. Все это без каких-то финансовых рисков. Быть в курсе наихороших акций с. Достаточно периодически учить список новых интернет казино с выводом бонуса без депо в данном разделе. <a href=https://clicgo.ru/user/DoctorLazutaOn/>https://clicgo.ru/user/DoctorLazutaOn/</a> Наш список включает в себя лучшие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по важным характеристикам: 1× slots официальный 3. Подтвердить данные. В зависимости от клуба, нужно привязать телефонный либо почту, показать персональную информацию;
casino 1×slot
Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в неотъемлемом порядке нужно восполнить счет в казино. Для депозитных призов, данная процедура не необходима, так как депозит уже сделан.Первый образующийся вопрос, это, чего выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают новых игроков. Последним проще начать забаву на деньги с презента за регистрацию. Им не пополнять баланс и расходовать собственные свои. Новички получают бесплатные спины либо свои на счёт. С их помощью знакомятся с игровым процессом, крутят слоты и проделывают ставки в рулетке. <a href=http://onlineboxing.net/jforum/user/profile/291944.page>http://onlineboxing.net/jforum/user/profile/291944.page</a> Так же стоит выделить то, что в любом онлайн казино установлен собственный максимальный кешаут на бездепозитный приз. Как правило кешаут — это максимальная сумма денег, которая доступная для вывода с бездепозитного бонуса.Эффективность бездепов в маркетингового прибора оценили почти операторы. Малоизвестные площадки используют эти промоакции, чтобы скоро набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны неизменных гостей. Не все веб-сайты, дающие подарки без депо, рекомендованы к игре. За привлекательным промоописанием все прятаться неосуществимые условия отыгрыша и другие подводные камни. casino 1×slot Большинство клубов привлекают внимание игры за счёт различных презентов. На одних веб-сайтах возможно получить виртуальные кредиты, коие откроют доступ ко всему софту. На иных же, администрация предлагает безвозмездные вращения для пуска топовых интернет слотов. Несмотря на разные акции, стоит выделить самые главные.Бoльшинcтвo азартных заведений выдвигают приблизительно однообразные, схожие условия и притязания, которые нужно выполнить, дабы получить бездепозитный бонус за регистрацию. Все их возможно соединить в раз перечень:
1×slots казино зеркало
Вейджер (или вагер) ? это наименьшая сумма ставок, которую нужно устроить для вывода денежного приза. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение.Осталось избрать казино с бонусом за регистрацию и сделать профиль. После активации презента выигрыш находится от Фортуны и способностей. <a href=http://forum.survival-readiness.com/viewtopic.php?t=252437>1×slots акции</a> Не желаете поиграть в азартные игры, не рискуя средствами средствами, хотя получая в все выплаты? Подобную вероятность предоставляют все наихорошие порталы с азартными веселиями. В их количестве количество честных и надежных интернет-казино на русском языке. Они завлекают новых пользователей различными поощрительными мероприятиями, включая бездепозитные, или благотворительные бонусы.Это также безвозмездные деньги, коие поступают на аккаунты новоиспеченных игроков в регистрирования. А особенность этих призов произведено в том, что обретенные финансы непременно идет использовать в продолжении назначенного медли. 1×slots официальный demo регистрация в 1×slots casino <a href=http://krast-studio.ru/user/GlennSat/>http://krast-studio.ru/user/GlennSat/</a> Основное правило получения бездепа ? создаваемый акк обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов требовательно запрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита необходимо блюсти несложную очередность деяний.
1×slots казино зеркало
Благодаря программке преданности от игорного заведения, можно взять превосходный старт и без добавочных вложений запустить видеослоты. Кроме как, возможно рассчитывать на реальную фортуну и получить, без инвестиции личных финансов, великой выигрыш.Выше мы дали глубокий набор самых свежих и актуальных бездепозитных призов в онлайн казино без пополнения на 2022 год, где вам пользоваться хоть ценным бездепозитным бонусом. 4. Заберите подарок. Чаще всего бонус активизируется незамедлительно после регистрации. Но посещают истории, когда надо(надобно) зайти в собственный кабинет либо написать в службу. <a href=https://maps.google.co.hu/url?q=https://doctorlazuta.by/>https://maps.google.co.hu/url?q=https://doctorlazuta.by/</a> Перечисленные выше главные характеристики сочетают фактически любой приз и являются стандартными для бездепозитных бонусных начислений в казино. 1×slots регистрация
<b>Смотреть еще похожие новости:</b>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=127892&pid=245113#post_245113>1×slots зеркало рабочее на сегодня</a>
<a href=https://qualityprogamer.de/forum/showthread.php?tid=280252>1хслот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Существуют казино с бонусом за регистрацию, каких довольно модны фриспины в интернет казино впоследствии регистрации в определенных забавах. Они встречаются даже почаще безвозмездных поощрений либо традиционных бонусов в казино без вложений. Например, игрок регистрирует счет, на кот-ый начисляются бесплатные игры, приз за регистрацию повторяющий бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса игры выигрывает настоящие деньги, которые в последствии можно удачно исключить из заведения на собственную платежную систему. То есть, есть все шансы исключить средства без рисков своими деньгами. Регистрация, за игры получит бонусы, займет несколько, а спасибо данному можно прирастить 5 евро поощрений до тыс. И без всяких проблем исключить их.
#9226 Charlesgunnyhttp://filmkachat.ru
1×slots акции
Бездепозитные призы за регистрацию в игровых автоматах для собственников онлайн-казино считаются долею маркетинговой кампании, направленной на повышение аудитории сайта. Так они продвигают средства бренды и привлекают свежих клиентов. <a href=http://filmkachat.ru/>1×слотс казино</a> Казино выводит средства лишь на что, эту платежную систему, с котрой был сделан депо. То есть, для вывода бездепозитного бонуса, Вам сначала необходимо восполнить счет. В неких клубах ограниченный перечень методов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет именно с этих платежных методов, коие доступны для вывода. <a href=http://www.sksmg.com/home.php?mod=space&uid=221425&do=profile>http://www.sksmg.com/home.php?mod=space&uid=221425&do=profile</a> Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке адепты онлайн-казино публикуют важную информацию о no deposit bonuses и услугах. 1×slots казино мобильная версия <a href=http://twchess.lionfree.net/discuz/home.php?mod=space&uid=23792>http://twchess.lionfree.net/discuz/home.php?mod=space&uid=23792</a>
1×slots регистрация то дальше необходимо пройти
1×slots зеркало этих способов предполагает регистрацию <a href=https://tazovod.khalal.ru/forum/memberlist.php?mode=viewprofile&u=40820>https://tazovod.khalal.ru/forum/memberlist.php?mode=viewprofile&u=40820</a> Однако в условиях исчезают «подводные камешки», которые не разрешат вывести крупную сумму либо же вы не успеете отыграть вейджер. Поэтому мастера рекомендуют арестовать благотворительные вращения за регистрацию в казино без депо, чтобы поднабраться навыка и получить реальный шанс на победу. 1×slots официальный зеркало За счёт спинов получится запустить различные онлайн слоты, протестировать стратегии и поднабраться навыка. Фишка что, нет, собственно вращения начисляются на лучшие аппараты с оригинальными опциями и высокой отдачей. Не забывайте, что в каждом акционном предложении учтены специальные притязания – временные ограничения, наибольший размер ставки, список доступных игр.Ещё одно распространённое акционное предложение – привлекательный презент с сомнительными требованиями. К примеру, клуб сулит $100 в качестве бездепа, но с вейджером х80 или х100. Отыграть такой вейджер фактически нереально и поэтому другого, как концентрироваться на более заманчивых акциях.
1×slots зеркало рабочее на сегодня
Иногда операторы настоятельно внесение малого депо перед выводом для верификации платежного прибора. В неких казино этот депо также светит отыграть. Каждый из бездепозитных призов без пополнения 2022 имеет собственный определенный вейджер для отыгрыша, так же в каждом казино он уточняется персонально — где то он х55 а где-то х30, повторюсь всюду по разному!Для получения бонуса нужно пригласить в забаву свежего клиента. Казино начисляет пригласившему фиксированный процент от взносов приглашённого вид бонуса: чаще всего его размер не превышает 10%. Срок деяния приза как не превышает месяца: пригласивший получает приз от проигранных ставок приглашённого в первый месяц забавы. <a href=https://lifeactor.ru/user/Porsedropet/>https://lifeactor.ru/user/Porsedropet/</a> Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала прыткие выводы. Фишка выплат что, что довольно выбрать платёжный инструмент и показать необходимую. В большинстве случаев деньги зачисляются на электрические кошельки на 15 минут, а на банковские карты – 1–3 трудящихся дня.Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных притязаний, не обязательной верификации. Если на сайте учтена неотъемлемая процедура подтверждения личности, то исключить выигрыш удастся только последствии ревизии данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий лицо. 1×slots казино мобильная версия
1×slots casino регистрация
<a href=http://www.carshowsociety.com/forum.php?action=profile;u=2398>1×slots регистрацию более популярный вариант это</a> Фриспины предусмотрены для применения в видео слотах. Внимательно ознакомьтесь с критериями – частенько их выдают на некоторые автоматы. В зависимости от клуба, у вас выйдет сделать определённое количество ставок. Кстати, продвинутые игорные жилища разрешают запускать любых «одноруких злодеев».Бездепозитные призы за регистрацию в игровых автоматах для владельцев онлайн-казино считаются частью маркетинговой кампании, направленной на увеличение аудитории сайта. Так они продвигают средства бренды и завлекают новых посетителей. 1×slots рабочее зеркало на сегодня <a href=http://ufb38096.bget.ru/index.php?subaction=userinfo&user=glamorousaxle49>http://ufb38096.bget.ru/index.php?subaction=userinfo&user=glamorousaxle49</a>
1×slots актуальное зеркало
Но надо мыслить, собственно снабжая юзеров этими бонусами, казино занимается спонсированием. Ведь объемы вознаграждений, в основном, не немалые (средним размером от 5 до 20 $). И на эти средства налагаются определенные обстоятельства и лимитирования, неотклонимые к исполненью игрока, в в последствии он вожделеет получить все средства выигранные финансы.Ну и окончательно же, для казино бездепозитные призы прибыльны с имиджевой стороны: схожая добродушие повышает уровень преданности клиентов к компании. Раздача призов имеет быть приурочена к разным датам: календарные дни, дни рождения игроков, годовщина открытия казино и т. Д. Подарок выдается вид средств, фриспинов или баллов для накопления и размена на услуги оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд притязаний. <a href=https://visualchemy.gallery/forum/profile.php?id=4470027>https://visualchemy.gallery/forum/profile.php?id=4470027</a> Многие казино деют в маркетинговых целях бесплатные бонусы исключительно для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой вебсайт по партнерской ссылке с нашего портала.Как лишь вы отыграли вейджер и свои с бонусного баланса перешли для на реальный счет, Вы храбро можете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать минимальный депо к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, вместе с депозитом). 1×slots регистрация то дальше необходимо пройти Некоторые онлайн-казино без депозита предлагают свежим клиентам выбрать приз при регистрации. Будьте внимательны: выбрав раз, вы в безусловном большинстве случаев не сможете воспользоваться остальными.
<b>Смотреть еще похожие новости:</b>
<a href=https://portugal-campings.com/pt/profile/jamescip/>1×slots казино мобильная версия</a>
<a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=773170>1× slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриплей-бонусы. Бонусы за безвозмездную забаву есть лишь в неких клубах. Они зачисляются незамедлительно в творения профиля и действуют непродолжительное время. Если у вас нет медли потратить свои, они просто завершатся. Что касается времени, как бонусы срабатывают на одного часа. Как правило, при выводе финансов, от играющего требуется только сделать наименьший лепта для того, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом собственный счет.
#9227 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
Да, у бесплатных призов есть дефекты. Прежде всего, они обычно большие. Кроме такого, обстоятельства вейджера по ним постоянно строгие. Но все неименье риска проделывает их очень привлекательными для посетителей.Популярность интернет казино растёт и всё больше юзеров начинают увлекаться азартными играми. Бездепозитные призы 2022 года, это оригинальные презенты за регистрацию. С их подмогою новые игроки могут получить безвозмездные вращения либо деньги на баланс за 1 регистрацию. С появлением игорных заведений в онлайне, бездепозитные призы стали известнейшим способом привлечения игроков. Подобные акции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о которых мы расскажем. Наш вебсайт собрал лучшие предложения из онлайна на 2022 год. Воспользуйтесь любым даром и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить условия. <a href=http://filmkachat.ru/>1× slots casino официальный сайт</a> <a href=http://dogecraft.ru/user/Jamespem/>http://dogecraft.ru/user/Jamespem/</a> Помимо остального, для вывода средств по бездепу необходимо внести на счёт свой 1-ый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально вероятную необходимую, после чего вывод средств станет доступен.Ещё одно распространённое акционное предложение – симпатичный подарок с неблаговидными притязаниями. К примеру, клуб сулит $100 виде бездепа, хотя с вейджером х80 либо х100. Отыграть подобный вейджер фактически невозможно и поэтому другого, как концентрироваться на более интересных промоакциях. 1×slots регистрация на 1хслотс <a href=https://forum.21up.co.uk/member.php?action=profile&uid=12820>https://forum.21up.co.uk/member.php?action=profile&uid=12820</a> Условия все различаться приятель от друга. Но такой приз имеет быть применен лишь для игрового процесса – приобретенные на счет деньги до как, как будут отыграны, вывести нереально.
1×slot рабочее зеркало
Если идет об эксклюзивных предложениях, имеет потребоваться регистрация в казино по ссылке с партнерского вебсайта. 1×slots казино мобильная версия <a href=http://agriexpert.kz/user/WilliamTraub/>http://agriexpert.kz/user/WilliamTraub/</a> 1× slots зеркало
1×слотс казино
Как верховодило, новоприбывшие геймеры для хотят ознакомиться с способами ввода и вывода денежных средств и сроки исполнения поданных заявок чтобы четко осознавать, как скоро у исключить собственный казино бонус за регистрацию без депозита на электрический кошелек или же банковскую карту. К счастью для всех играющих, снутри конкретных холдингов, все казино соперничают меж собой. Ведь в бы конкретную компанию представляло лишь одно онлайн-заведение, то вряд ли бы клиенты заметили казино с призом за регистрацию и возможность бы рассчитывать лишь на вознаграждение вид приза на 1-ое инвестиция. К любому заведению периодически стопам завлекать новых игроков, собственно, конечном, только на руку всем играющим. Иногда виде поощрения за регистрацию все выдаваться билеты для роли в турнирах. Условия их проведения довольно выделяются, поэтому мы советуем ознакомиться с любым предложением раздельно.Подобные бонусы без депо предоставляются на более прибыльных условиях. Зачастую они крупнее, а обстоятельства отыгрыша менее строгие. <a href=http://altaystroy.com/bitrix/redirect.php?goto=http://skitalets.ru/bitrix/rk.php?goto=http://kladzdor.ru/bitrix/click.php?goto=https://telegra.ph/Pravila-parkovki-vo-dvorah-zhilyh-kompleksov-09–24>http://altaystroy.com/bitrix/redirect.php?goto=http://skitalets.ru/bitrix/rk.php?goto=http://kladzdor.ru/bitrix/click.php?goto=https://telegra.ph/Pravila-parkovki-vo-dvorah-zhilyh-kompleksov-09–24</a> В неких онлайн казино для получения бездепозитных призов не довольно просто зарегистрироваться на веб-сайте клуба и подтвердить свои контактные данные. Дополнительно требуется активация промокода. 1хслотс казино зеркало Также бездепозитные бонусы имеют служить способом возвратить к этой клиентов, пока приостановивших своё сотрудничество с компанией: извещение о бездепе поступает на мобильный аппарат или почту.
1×slots зеркало видели такую регистрацию на
Исходя из сего, просто не существует мудрых причин махнуть рукою на получение такового приза при регистрации. И, лишним, на такой бесплатной базе у вас есть все шансы выиграть средства и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные призы, именуют безвозмездными интернет платформами для игр. <a href=https://koreanstudies.com/forum/viewtopic.php?t=108611>1хслот скачать</a> Получать информацию о самых прибыльных бонусах возможно без постоянного прогноза новостей казино. Мы взяли эту задачку на себя и безпрерывно следим за предложениями операторов, выбирая наихорошие из их. В этом разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список промоакций периодически пополняется. В топ вошли самые новые бездепозитные бонусы за регистрацию в казино 2020, временные и замкнутые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру прочим аспектам. Если срок действия акции истек, она удаляется из перечня. Во всех законных онлайн-казино Беларуси нужно подтверждение паспортных данных для игры — это заявка правительства государства.В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с безвозмездных вращений. Прибыль, которую Вы заработаете на этом бездепе возможно ставить на вывод без какого или отыгрыша. 1×slots регистрация на официальном сайте <a href=http://fb7707ng.bget.ru/user/DoctorLazutaei/>http://fb7707ng.bget.ru/user/DoctorLazutaei/</a> Выбирая безвозмездный приз, пристально изучайте управляла. Убедитесь, что вас возможно себя роль в промоакции. Уточните, в каких играх возможно выполнять условия вейджера. При надобности задавайте вопросы представителям саппорта.
1хслотс официальный сайт зеркало
Даже не выиграв солидную сумму, игрок интересно проведет время, изнутри исследует работу площадки, воспримет геймплей автоматов. Все это без каких-то финансовых рисков. Быть в курсе наихороших акций с. Достаточно периодически учить список новых интернет казино с выводом бонуса без депо в данном разделе. <a href=http://japan-lke.com/home.php?mod=space&uid=60902&do=profile>http://japan-lke.com/home.php?mod=space&uid=60902&do=profile</a> 1х слотс зеркало регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Пoдтвepдить личнocть клиента. Для успешного вывода средств, нужно доказать личность посетителя. Нa этaпe вepификaции пpoфиля, сотрудники службы безопасности должны увериться, что у игрока чем один аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не сможет исключить собственный выигрыш, если у него будет несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы. В онлайне очень много скриптовых вебсайтов, коие принадлежат плутам. Их главная задача – заинтересовать гэмблеров, пообещав не великодушные подарки, хотя и солидные выигрыши. Так собственно некоторые сайты предлагают получить за регистрацию числе $1 000.
#9228 Charlesgunnyhttp://filmkachat.ru
сайт 1× slots casino
Создание аккаунта. На сайте казино необходимо обнаружить регистрационную форму и наполнить порожние поля личностными данными. Иногда на этом шаге требуется показать только адрес электронной почты и пароль, хотя почаще хотелось наполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д. ). Нужно свидетельствовать только реальные данные, поскольку впоследствие они станут испытаны. <a href=http://filmkachat.ru/>1хслот зеркало</a> <a href=http://wiki.hightgames.ru/index.php?title=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D0%B5%D0%B9%D1%88%D0%B0%D1%8F%20%D0%BF%D0%B8%D1%86%D1%86%D0%B0%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!>http://wiki.hightgames.ru/index.php?title=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D0%B5%D0%B9%D1%88%D0%B0%D1%8F%20%D0%BF%D0%B8%D1%86%D1%86%D0%B0%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!</a> При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, коие возможно предназначить игре в казино. 1× slots зеркало <a href=http://www.pxltw.com/home.php?mod=space&uid=322445&do=profile>http://www.pxltw.com/home.php?mod=space&uid=322445&do=profile</a> Похожим образом работает 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения посетителя либо в связи с получения им VIP-статуса. Подарок предоставляется после обращения в поддержку и проверки.Все бесплатные бонусы кажутся соблазнительными. Кто же категорически от способности поиграть в онлайн-казино, не рискуя деньгами, хотя получая выигрыши. Но далековато не все бездепозитные призы мере привлекательны для рассудительного посетителя.
казино 1×slots официальный сайт
Прочитайте правила бонусной программы, в хотите принять. Да, мы настойчиво советуем устроить это до регистрации.Подтверждение регистрации. Казино просят привязки профиля к электрическому адресу и номеру телефонного. Для сего на e-mail отправляется письмо ссылаясь, а на телефон ? текстовое сообщение с кодом. <a href=https://persiankittencat.com/grey-persian-cats-unraveling-the-charm-of-these-feline-beauties/#comment-35660>1 xslots рабочее зеркало</a> 1хслот 1хслотс регистрация перейти на 1×slots Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы которые возникают у начинающих. <a href=http://visionart.kr/board/bbs/board.php?bo_table=free&wr_id=483610>http://visionart.kr/board/bbs/board.php?bo_table=free&wr_id=483610</a> 1×slots зеркало рабочее Шаг 4. Активация. Внимательно исследуйте обстоятельства, информацию по лимитированиям и сроке деянья бонусного предложения. Разобравшись с правилами, возможно активировать бонус в собственном кабинете (время ? с использованием промокода) либо по запросу в саппорт.
x1 slots 1хслотс регистрация перейти на 1×slots
При регистрации что или ином онлайн игральном заведении — вас дается один шанс испытывать собственную удачу не внося свои монеты. Замечу что такую поощрительную услугу предоставляют не все интернет игровые площадки, а только великодушная половина из них. Которые мы подготовили для Вас в нашем перечне. <a href=https://thiamlau.com/forum/member.php?action=profile&uid=4021>https://thiamlau.com/forum/member.php?action=profile&uid=4021</a> Осталось избрать казино с призом за регистрацию и создать профиль. После активации подарка выигрыш в от Фортуны и навыков.Бонус без депо за регистрацию в казино (бездепозитный приз) – это денежный подарок от клуба, кот-ый начисляется на аккаунт игрока последствии регистрации в казино. Кроме творенья учетной записи, для получения бездепа, довольно часто потребуется ещё и подтвердить контактные данные игрока и/или активировать особый промо-код. зеркала 1×slots
1× slots регистрация в 1×slots casino
Размер ставки для игры по бездепозитному призу (конечно же, когда, когда он представлен повторяющий бонусных валютных средств) зачастую ниже, чем при игре на депозит. Ограничение несомненно действовать до момента отыгрыша бонуса. Маркетинговая политического всех игорных интернет-клубов должна одевать разнородный характер. И если вознаграждения на депозит служат для того, дабы стимулировать вносить депозиты и поощрять уже быть пользователей, то бездепозитный приз в казино либо приз за регистрацию в казино, до всего, рассчитан на расширение базы покупателей. Вывод выигрыша с бездепозитных бонусов казино – щедрый подарок от азартных клубов. Но дабы исключить свой доход, нужно выполнить ряд условий: 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=http://uplmegaporn.com/user/GlennRot/>http://uplmegaporn.com/user/GlennRot/</a> Такие поощрения разрешают бесплатно протестировать свежее казино, разобраться с игровым процессом онлайн слотов, заработать и вывести небольшую необходимую денег.Заполняя данные в личном профиле, указывайте только достоверную информацию, так как Вам понадобиться ее доказать дальнейшем при выводе денег.
1×slots официальный зеркало
<a href=http://behzistiardabil.ir/user/TerrySiz/>http://behzistiardabil.ir/user/TerrySiz/</a> 1хслот официальный сайт зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.survival-readiness.com/viewtopic.php?t=253784>1 x slots casino</a>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=250037>1× slots casino официальный сайт</a>
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=299134>casino 1×slot</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавления или официального клиента для ПК. В большинстве казино действуют программы лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий уровень нередко сопровождается выдачей бездепа. На страничке представлены бездепозитные призы за регистрацию в казино редкая награда за коей гонятся все игроки как новенькие, например и профессионалы. Мы также уделяем огромное внимание на присутствие призов при составление рейтинга казино на деньги. Бездепозитный приз это вероятность выступать безвозмездно и выиграть реальные средства.
#9229 Charlesgunnyhttp://filmkachat.ru
1×slots казино мобильная версия
Для верификации аккаунта надо(надобно) предоставить профессионалам технической поддержки отсканированную копию паспорта и счета за коммунальные услуги, еще фотку банковской карты либо экрана странички электронного кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности. <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino 56 online</a> Большинство интернет-казино из нашего топ-10 готовы порадовать вас эксклюзивными промоакциями. Читайте о их в обзорах и на форуме. <a href=http://eryh.com/home.php?mod=space&uid=21642&do=profile>http://eryh.com/home.php?mod=space&uid=21642&do=profile</a> 1×slots зеркало проходить регистрацию это отличный вариант <a href=http://eicg.kz/index.php?subaction=userinfo&user=lightcurator71>http://eicg.kz/index.php?subaction=userinfo&user=lightcurator71</a> Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро либо 20 $. Если выдаются фриспины, их число редко превышает нескольких десятков даровых вращений.
1хслотс зеркало
Такой казино приз без депозита за регистрацию выдается игроку на час и активно употребляется данное предложение с 2017 года. Это словно какая-то маскировка поощрения под бездепозитный. Суть всего сего сводится к тому, что игроку на час выдается, например, 1000 долларов, а реклама повторяет про, собственно любой выигрыш можно будет дальнейшем оставить при себя. Но если играющий всерьез отнесется к этому предложению, то он просто потеряет время. Ведь геймеру надо(надобно) будет выступать не в аккаунте, ну тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (и всей тысячи) в управляла вступят конкретные обстоятельства, где будет сказано, собственно максимальной суммой победы может быть только двести долларов и деньги можно применять лишь в качестве приза на первый лепта с вейджером 25 от суммы вознаграждения плюс сам депозит. По итогу получится, собственно игрок выигрывал себе 200% бонус с вейджером на конкретную необходимую. Короче разговаривая, это все надо вашего времени.Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке адепты онлайн-казино публикуют важную информацию о not the slightest down payment bonuses и предложениях. <a href=http://check2go.net/author/jameslob/>казино 1×slots</a> 1×slots casino регистрация на сайте Самые популярные способы вывода денег ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам на Neteller и Skrill, а пользуются криптовалютными кошельками. Вывод выигрышей возможность исполняться быстро либо развлекать от нескольких часов до нескольких суток.Похожим образом работает третий метод доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения клиента либо из-за с получения им VIP-статуса. Подарок предоставляется после обращения в поддержку и ревизии. <a href=http://ekaterinovka.sarat.ru/board/tools.php?event=profile&pname=Davidhenna>http://ekaterinovka.sarat.ru/board/tools.php?event=profile&pname=Davidhenna</a> Бонус в казино без депо содержит разные варианты: такое быть приветственный бонус, акции в честь каких-то праздников или весомых дат, бонус за вербование новых игроков, преданность и получение VIP-статуса.При подмоги такового одобрения оператор имеет того привлекать посетителей, которые раньше показывали активность на веб-сайте, хотя по некий основанию прекратили выступать. В данном случае промокод высылается юзеру по электрической почте или вид SMS. 1×slots casino регистрация на сайте Ну и окончательно же, для казино бездепозитные призы выгодны с имиджевой стороны: подобная щедрость увеличивает уровень лояльности клиентов к компании.Вейджер (wager) – это коэффициент, который показывает на какую сумму необходимо сделать ставок, дабы вывести приз из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего бонуса, Вам необходимо устроить ставок на необходимую: 500*70=3500 рублей. Только полностью отыграв бонус, Вы сможете вывести собственный выигрыш.
1 х слотс зеркало
Сразу в активации промокода возможно воспользоваться даром. Как уже упоминалось, призы бывают трёх видов – фриспины, кредиты и фриплей-бонусы.Фриспины — безвозмездные вращения, коие разрешают игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины считаются самым модным и желаемым обликом бонуса — бесплатные вращения иногда эффективнее и веселее в отыгрыше, чем другие виды бездепов. В качестве бонусов интернет казино часто предлагает выдачу фриспинов, другими безвозмездных вращений игрового барабана. Виртуальные монеты возможно применять для обучения в покерной школе или для забавы в казино.Казино дает вероятность заработать и исключить реальные средства на бездепозитных бонусах. Обычно, это незначительная сумма, коию казино может себе разрешить подарить игроку. <a href=http://g95887q6.beget.tech/user/ScottOxymn/>http://g95887q6.beget.tech/user/ScottOxymn/</a> 1×slots зеркало
1× slots сайт
Первый возникающий вопрос, это, чего выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают новых игроков. Последним проще начать забаву на средства с презента за регистрацию. Им не нужно пополнять баланс и тратить личные свои. Новички получают благотворительные спины либо средства на счёт. С их поддержкою знакомятся с игровым процессом, крутят слоты и проделывают ставки в рулетке. Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную процедуру активации приза без депозита. Внимательно прочтите до конца. Многие новенькие проделывают ошибки на этапе регистрации и поэтому имеют получить презент.Но рядах азартных платформах сходственные вознаграждения все получить и уже зарегистрированные пользователи. В этом случае, призы предоставляются масштабах уникальных акций либо же неким игрокам вид акционного предложения, коие приходит на почту с целью «вернуть» игрока в свое казино. Это раз из основных показателей привлекательности презента. С завешенным коэффициентом даже профессионалы не смогут выполнить обстоятельства по отыгрышу. И важно, насколько привлекательно выглядит предложение – бездепозитный приз казино в объеме $500 либо $1 000. Чтобы новенькие попревосходнее вдумались, собственно же это вейджер, мы разберём на образце.Возможность сыграть вспомогательное соревнование (а иногда и некоторое) совершенно даром, а выигрыш, тому, поступает на счёт игрока. рабочее зеркало 1хслотс <a href=https://uadplugins.club/memberlist.php?mode=viewprofile&u=244144>https://uadplugins.club/memberlist.php?mode=viewprofile&u=244144</a> Раздача призов возможность быть приурочена к различным датам: календарные праздники, деньки рождения игроков, юбилей открытия казино и т. Д. Подарок выдается в виде денег, фриспинов либо баллов для скопления и обмена на предложения оператора. Если пользователь получает выигрыш, деньги начисляются на его счет. Для вывода этой суммы понадобиться выполнить ряд требований.
1×slots официальный сайт зеркало
Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам воспрещено начислять призы клиентам, не имеющим денежных средств на счете. Мы предлагаем осмотреть животрепещущие призы онлайн-казино с лицензией, которые соблюдают законодательство РБ.Помимо остального, для вывода средств по бездепу необходимо внести на счёт собственный 1-ый депо — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на минимально возможную необходимую, после чего вывод средств станет доступен. Подтверждение персональной инфы. Все казино просят от посетителя пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и присутствие у юзера иных аккаунтов (мультиаккаунт запрещен).Заработать на бездепозитных призах за регистрацию в казино возможность каждый пользователь, достигший совершеннолетия. <a href=https://talented-people.vraiforum.com/profile.php?mode=viewprofile&u=8770>https://talented-people.vraiforum.com/profile.php?mode=viewprofile&u=8770</a> Ознакомьтесь с нашим списком наилучших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего перечня и получите бездеп сразу. Хватайте наилучшие бесплатные предложения ниже и выигрывайте большие средства, не рискуя! 1×slots регистрация на сайте
<b>Смотреть еще похожие новости:</b>
<a href=http://check2go.net/my-account/>1хслот официальный сайт зеркало</a>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=228189>казино 1×slots официальный сайт</a>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=128863>1×slots официальный сайт, скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала резвые выводы. Фишка выплат в, что достаточно избрать платёжный инструмент и указать сумму. В большинстве случаев деньги зачисляются на электронные кошельки протяжении 15 мин., а на банковские карты – 1–3 рабочих денька. Наш перечень содержит наилучшие бездепозитные призы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает проверку по принципиальным параметрам:
#9230 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало проходить регистрацию это отличный вариант
Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих притязаний, считая обязательной верификации. Если на сайте предусмотрена обязательная процедура доказательства личности, то вывести выигрыш удастся только после ревизии данных. Приготовьтесь наполнить анкету и отправить в техподдержку документ, подтверждающий лицо.Получив собственный презент, Вы можете даром играть на настоящие средства, а выполнив обстоятельства отыгрыша, исключить собственный выигрыш. <a href=http://filmkachat.ru/>1хслот 1хслотс регистрация перейти на 1×slots</a> Большинство клубов завлекают внимание игроков за счёт разнородных даров. На одних сайтах можно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает бесплатные вращения для запуска лучших онлайн слотов. Несмотря на разные промоакции, стоит выделить самые главные. <a href=http://trisinfronteras.com/davidcastro/component/k2/itemlist/user/468754-davidper>http://trisinfronteras.com/davidcastro/component/k2/itemlist/user/468754-davidper</a> Приветственный бездеп предоставляется хоть игроку только один один. Казино борются с так называемыми бонусхантерами (от англ. Bonus Hunter — охотник за призами), пытающимися заводить многочисленные аккаунты для обмана оператора и повторного получения подарка. Исключить сходственные действия разрешает верификация данных. Администрация вправе потребовать у посетителя подтвердить персональные данные, обозначенные при регистрации. 1×slots акции <a href=http://mariland.org/index.php?subaction=userinfo&user=swankybanister1>http://mariland.org/index.php?subaction=userinfo&user=swankybanister1</a> В игровых клубах без лицензии Вы покупаете „кота в мешке“ и если, тогда, неоднозначных обстановок нет способности куда-то посетовать и обосновать свою правоту.
1×slots рабочее зеркало на сегодня
Обычно, бездепозитные бонусы выдаются под конкретные слоты с фиксированной ставкой, хотя их точно воспрещено применять в игровых автоматах с современным джекпотом. Список игр, в возможно применять бездеп, Вы найдете в описании акции или можете уточнить у службы заведения.Каждый новичок и профессиональный игрок мечтают прытко стартануть и начать создавать реальные ставки. Для сего достаточно арестовать подарок, за кот-ый надо уплачивать. В зависимости от игровой платформы, нужно сделать профиль, привязать email или телефон. После сего администрация начисляет щедрое вознаграждение повторяющий безвозмездных вращений либо виртуальных кредитов. 1хслотс зеркало на сегодня <a href=https://diart.su/user/Deweyicona/>https://diart.su/user/Deweyicona/</a> 1×slots casino регистрация на сайте Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс дает игрокам важную информацию о самых свежих, щедрых и испытанных бонусах в онлайн казино, коие обновляются каждый денек.В лицензионных бездепозитных казино играть в азартные игры вправду неопасно. Наличие лицензии подтверждает тот факт, собственно клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP.
1 xslots рабочее зеркало
Активация случается счет промокодов, коие вводятся в личном офисе в регистрации. Среди спецпредложений в списке Casino.ru содержатся эксклюзивные промокоды, коие доступны только посетителям портала. Другие методы начисления средств ? автоматическая активация незамедлительно в создания аккаунта и получение подарка по запросу в службу технической помощи.Для получения выигрыша потребуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить конкретную необходимую, хотя теснее из собственных средств. Она рассчитывается из совместного объема выигрыша за всегда использования бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, в пользователь выиграл 1000 рублей, а множитель составляет х30, вывести деньги можно будет, сделав ставки на 30 000 рублей. <a href=https://credit-list.com.ua/kredit-dlya-biznesa-v-nikolaeve.html>https://credit-list.com.ua/kredit-dlya-biznesa-v-nikolaeve.html</a> Перед активацией важно пристально изучить условия промоакции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют велечину также лимиты ставок при отыгрыше и сроки, протяжении которых возможно пользоваться предложением. Если бездеп обхватывает узкий перечень игр, рекомендуется узнать максимальные коэффициенты, степень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только никаких случае, в оператор не установил требовательные ограничения на наивысшую необходимую ставки.Однако в условиях исчезают «подводные камешки», которые не позволят исключить крупную сумму или же вы не успеете отыграть вейджер. Поэтому профессионалы советуют забрать бесплатные вращения за регистрацию в казино без депозита, чтобы поднабраться навыка и получить реальный шанс на победу. 1 x slots casino
1× slots сайт
<a href=https://tabsgame.ru/user/Jamesbes/>1×slots casino регистрация</a> Выбирая бесплатный бонус, пристально изучайте управляла. Убедитесь, собственно вас возможно себя роль в акции. Уточните, в каких забавах можно исполнять обстоятельства вейджера. При необходимости задавайте вопросы представителям саппорта.Выбирайте наихорошие бесплатные призы счет обзоров на Casinoz – и пусть для сопутствует счастье при отыгрыше бонусных кредитов! 1×slots casino зеркало <a href=https://dc-kd.ru/user/Kennethpar/>https://dc-kd.ru/user/Kennethpar/</a> Лишь популярностью и известные азартные заведения могут разрешить себя раздавать бездепы вид добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депо, коие можно потратить в топовых аппаратах с высочайшей отдачей.
зеркала 1×slots
<a href=http://rvbu.ru/index.php?subaction=userinfo&user=grumpyalloy19>http://rvbu.ru/index.php?subaction=userinfo&user=grumpyalloy19</a> Бездепы с бесплатными вращениями деют юзерам право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд платит казино. Число спинов ограничено и изредка превышает сотню. Если промоакция включает в себя большое бесплатных игр, их начисление имеет быть разбито на несколько дней.Раздача бонусов имеет быть посвящена разным датам: календарные дни, дни рождения игроков, годовщина открытия казино и т. Д. Подарок выдается вид средств, фриспинов или баллов для скопления и обмена на услуги оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода этой суммы придется выполнить ряд требований. казино 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://www.donchillin.com/space-uid-382497.html>1×slot казино зеркало</a>
<a href=http://3ak.cn/home.php?mod=space&uid=187057>1×slots зеркало регистрация в 1×slots casino</a>
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=3038>1×slots официальный сайт зеркало</a>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=136582>1×slots зеркало видели такую регистрацию на</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы за регистрацию в игровых автоматах для хозяев онлайн-казино считаются частью маркетинговой кампании, направленной на увеличение аудитории сайта. Так они продвигают средства бренды и привлекают новых посетителей.
#9231 Charlesgunnyhttp://filmkachat.ru
1×slot регистрация
Третитй бездепозитный бонус за регистрацию – денежные свои. К раскаянью, начислить рубли или доллары способны только знаменитые и популярностью клубы. С их поддержкой у насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком. <a href=http://filmkachat.ru/>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a> <a href=https://forum.lazarev.ru/memberlist.php?mode=viewprofile&u=164091>https://forum.lazarev.ru/memberlist.php?mode=viewprofile&u=164091</a> За вербование друга ? масштабах партнерской программки заказчик получает вознаграждение за вербование свежих пользователей. казино 1×slots <a href=http://45678.ww.w.molifan.net/space-uid-1949924.html>http://45678.ww.w.molifan.net/space-uid-1949924.html</a> Для получения приза надо(надобно) пригласить в забаву свежего клиента. Казино начисляет пригласившему фиксированный процент от взносов приглашённого повторяющий приза: чаще всего его объем не выше 10%. Срок деянья бонуса в большинстве случаев не превышает месяца: пригласивший получает бонус от проигранных ставок приглашённого в 1-ый месяц забавы.Шаг 4. Активация. Внимательно исследуйте условия, информацию по ограничениям и сроке деяния бонусного предложения. Разобравшись с правилами, возможно активировать бонус в личном офисе (время ? с использованием промокода) либо по запросу в саппорт.
1×slots официальный demo регистрация в 1×slots casino
Шаг 4. Активация. Внимательно исследуйте условия, информацию по лимитированиям и сроке действия бонусного предложения. Разобравшись с правилами, можно активировать приз в личном офисе (от ? с использованием промокода) или по запросу в саппорт.Список так именуемых «запрещенных территорий» прилагается к правилам бонусной программки игорного портала. Обязательно выясните, распространяются ли на вас сходственные наказания. 1×slots регистрация на сайте 1×slots ru com Этот тип приза будет добавлен на Ваш аккаунт после успешной процедуры регистрации с использованием номера телефона. Если избрать другой способ творения учетной записи, бездеп не будет добавлен на Ваш аккаунт.Начнём с такого, что любое рекламную за регистрацию предполагает некие условия. Бездепозитные бонусы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность денежного оборота, нужная для исполненья условий. Пример, получили благотворительные вращения и выиграли с них 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 рублей, проигрышных либо выигрышных, маловажно. После исполнения, бонусный баланс перейдёт на настоящий и будет легкодоступным к выводу. <a href=http://unix.t7y.ru/user/RenaldoPlupe>http://unix.t7y.ru/user/RenaldoPlupe</a> Помните, что всевозможные нарушения управлял сведут на нет ваши старания, и вы наверняка останетесь без начисленного вам безвозмездного бонуса. Всегда изучайте управляла начисления и обстоятельства вейджера. По каким вопросам, на которые вы возможности без найти ответы, обращайтесь за объяснениям и саппорт. 1хлот регистрация в 1×slots casino
1×slots регистрацию процедура займет всего лишь
Мы рекомендуем не отказываться от сходственных услуг узнаваемых казино. Выделите некоторое минут на регистрацию, получите приз и попробуйте его отыграть. Может быть, сегодня удача будет на вашей стороне!Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. <a href=http://zoostore.pro/bitrix/redirect.php?goto=http://velo-pro.shop/bitrix/redirect.php?goto=http://linedoor.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/gk2it34Qazn>http://zoostore.pro/bitrix/redirect.php?goto=http://velo-pro.shop/bitrix/redirect.php?goto=http://linedoor.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/gk2it34Qazn</a> 1×slots регистрация Иногда у посетителей сайта могут возникнуть проблемы при активации приобретенного промо-кода. В таких случаях, нужно обратиться за подмогою в службу поддержки «Support». Для получения ответа, обязательно указывается определенная причина обращения и подтверждается информация дополнительными снимками. Если сформировалась спорная обстановка, всегда возможно адресоваться к основному регулятору или контролирующему органу, выдавшему данному заведению лицензионный документ.Таким образом онлайн казино получает вероятного игрока. Возможно в будущем либо истинном он захочет сыграть на свои деньги. Так работают бездепозитные призы в интернет казино. Здесь хорошо подходит выражение, благотворительные сыр случается только в мышеловке. Начинающие игроки шансы не обдумывать опасность пыла. Однако со временем понимания становится больше. Это тема для отдельного обсуждения.
1×slots casino регистрация 1×slotscasino09k online
Заполняя данные в личном профиле, указывайте только достоверную информацию, например как Вам придется ее доказать в будущем при выводе денег. <a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=308952#pid308952>1хслот 1хслотс регистрация перейти на 1×slots</a> Варианты выигрыша в от Вашей успеха и критерий игорного портала. Выше мы заявили, собственно некоторые бездепозитные бонусы в 2022 году выдаются с ограничениями по наибольшей выплате. Однако, остаются и, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность передовых игр на деньги, возможно выиграть невероятные суммы. Сегодняшние игровые автоматы или видео слоты, как их нарекают. Могут выдавать солидные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000. Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации бонуса без депозита. Внимательно прочтите до конца. Многие новички делают ошибки на этапе регистрации и потому не могут получить подарок. 1×slots casino регистрация 1×slotscasino09k online <a href=http://www.clines.org/doku2/doku.php?id=Выкуп_авто>http://www.clines.org/doku2/doku.php?id=Выкуп_авто</a> Но рядах азартных платформах сходственные гонорары все получить и уже зарегистрированные юзеры. В этом случае, бонусы предоставляются масштабах оригинальных акций или же неким геймерам повторяющий акционного предложения, которое прибывает на почту с целью «вернуть» игрока в свое казино.
1×slots casino регистрация 1×slotscasino09k online
Варианты выигрыша находятся от Вашей удачи и критерий игорного портала. Выше мы сказали, что кое-какие бездепозитные призы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются и те, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность современных игр на средства, можно выиграть невероятные суммы. Сегодняшние игровые автоматы или видео слоты, как их называют. Могут выдавать солидные умножение от х1.000 и повыше. Некоторые умножают ставку от х100.000. <a href=http://serverknowledgebase.co.uk/index.php?title=%D0%B1%D0%BB%D0%BE%D0%B3%D0%B8%20%D0%BE%20%D0%B6%D0%B5%D0%BD%D1%81%D0%BA%D0%BE%D0%BC%20%D0%B7%D0%B4%D0%BE%D1%80%D0%BE%D0%B2%D1%8C%D0%B5>http://serverknowledgebase.co.uk/index.php?title=%D0%B1%D0%BB%D0%BE%D0%B3%D0%B8%20%D0%BE%20%D0%B6%D0%B5%D0%BD%D1%81%D0%BA%D0%BE%D0%BC%20%D0%B7%D0%B4%D0%BE%D1%80%D0%BE%D0%B2%D1%8C%D0%B5</a> Но есть игорные заведения, которые готовы просто например жертвовать деньги на игру. Для этого довольно сделать профиль. Чтобы исключить свой выигрыш, вас сначала необходимо выполнить условия отыгрыша, указанные в критериях получения бездепозитного депозита. казино 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=216836&p=608688#p608688>1 x slots casino</a>
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=30906>1×slots зеркало которую указывали при регистрации кстати</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Нет. Для получения бездепозитного приза в казино нужна неотъемлемая регистрация на сайте. Играть в слоты бесплатно и без регистрации можно лишь в демо режиме.
#9232 Charlesgunnyhttp://filmkachat.ru
1× slots регистрация в 1×slots casino
Ну и естесственно же, для казино бездепозитные призы прибыльны с имиджевой стороны: сходственная щедрость повышает уровень лояльности клиентов к фирмы.Подарки на определенные даты отличаются условиями получения. Если одобрение начисляют игроку на денек рождения, то сумма обычно зависимости от совместного объема депозитов последний год. <a href=http://filmkachat.ru/>1×slots зеркало</a> <a href=http://www.xn----8sbabeoae4acvb6h.xn–p1ai/2022/01/qr.html>http://www.xn----8sbabeoae4acvb6h.xn–p1ai/2022/01/qr.html</a> 1×slots регистрацию процедура займет всего лишь <a href=http://www.rhl-mod.ru/members/113411-jamesdit/>http://www.rhl-mod.ru/members/113411-jamesdit/</a> Вейджер (wager) – это коэффициент, который показывает на какую необходимую нужно сделать ставок, дабы вывести приз из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода этого бонуса, Вам необходимо сделать ставок на необходимую: 500*70=3500 рублей. Только полностью отыграв приз, Вы сможете вывести свой выигрыш.
1хслотс рабочее зеркало
Вознаграждения за получение VIP-статуса ? начисляются в рамках программы преданности при достижении еще уровня либо выдаются персонально менеджерами службы.Основное верховодило получения бездепа ? создаваемый акк обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов требовательно воспрещено. Проверка проводится по имени, адресу электронной почты, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депозита нужно соблюдать несложную последовательность действий. 1×slots зеркало регистрацию более популярный вариант это Также бездепозитные бонусы шансы служить способом вернуть к этой клиентов, временно приостановивших своё сотрудничество с компанией: уведомление о бездепе поступает на мобильный телефон либо почту.Иногда у гостей сайта могут возникнуть проблемы при активации полученного промо-кода. В этих случаях, нужно адресоваться за подмогою в саппорта «Support». Для получения ответа, непременно указывается определенная причина обращения и подтверждается информация дополнительными скриншотами. Если сложилась неоднозначная ситуация, постоянно возможно адресоваться к основному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ. <a href=https://www.rcfl.com.hk/home.php?mod=space&uid=8714111>https://www.rcfl.com.hk/home.php?mod=space&uid=8714111</a> После получения приза вывод средств для клиента будет недоступен до, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо пара недель. Выводить средства игрок может лишь в отыгрыша. 1×slots регистрацию более популярный вариант это Как управляло, при выводе денег, от играющего потребуется только сделать наименьший вклад чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом собственный счет.
1×slots промокод при регистрации
Помимо остального, для вывода средств по бездепу нужно внести на счёт собственный первый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на мало возможную необходимую, последствии чего вывод средств будет доступен. С такими ординарными советами каждое казино с бонусом за регистрацию способно принести в разы больше выгоды и полезности.Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают бонус по странам. Вплоть до того, что клуб имеет брать игроков из Вашей страны, а бездеп не давать. <a href=http://www.gizeleonthego.com/2018/07/summer-in-miami.html>http://www.gizeleonthego.com/2018/07/summer-in-miami.html</a> Только выполнив все обстоятельства отыгрыша и дождавшись завершения проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить свои средства. 1×slots официальный сайт мобильная версия Вознаграждения за получение VIP-статуса ? начисляются в рамках программы преданности при достижении еще уровня либо выдаются персонально менеджерами службы.
1×слот регистрация в 1×slots casino
Важно, удостоверьтесь что, нет, собственно ранее не регистрировались в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи.Бездепозитные призы казино это финансовая компенсация, предлагаемая юзерам на дармовой базе и возможность выступать в интернет казино безвозмездно. Если сравнивать их с одобрениями за лепта, в которых средства выдаются лишь потом начального пополнения счета, то бездепозитные вознаграждения получаются бесплатно. То есть, играющий получает вероятность делать ставки на теснее имеющие финансы, коие выдаст заведение, выполняя, всем, обычные деяния, чтобы их извлечь (тут речь о регистрация, удостоверении личности с использованием номера аппарата, оформления заявки и т.д.). <a href=https://forum.home-visa.ru/viewtopic.php?f=69&t=807392&p=2871008#p2871008>1×slots официальный сайт мобильная версия</a> На условиях отыгрыша безвозмездных бонусов идет остановиться подробнее. С ними связаны аспекты, которые нельзя оставить без внимания.Бездепозитный приз часто имеет замерзнуть легкодоступным сразу последствии окончания регистрации, поскольку правило единственным притязанием к нему считается регистрация, а после ревизия вашей свежей учетной записи. 1×slot зеркало <a href=https://biznes-knigi.com/user/Michaelnem/>https://biznes-knigi.com/user/Michaelnem/</a>
1× slots официальный
Вейджер (либо вагер) ? это наименьшая сумма ставок, которую необходимо устроить для вывода валютного бонуса. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение. Условия вывода выигрыша. В неких заведениях для успешного вывода с бездепозитного бонуса довольно пополнения баланса и доказательства личности. В иных же клубах, необходимо некоторое один прокрутить собственный депо. <a href=http://www.sazkar.info/member2313.html>http://www.sazkar.info/member2313.html</a> 1×slots бездепозитный бонус за регистрацию Перечисленные повыше основные свойства сопровождают практически любой бонус и считаются стандартными для бездепозитных бонусных начислений в казино.При пользовании бездепозитным призом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют количество обликов лимитов:
<b>Смотреть еще похожие новости:</b>
<a href=https://foro.vcheats.me/Hilo-board-%D0%B1%D0%BE%D1%80%D1%82-%D0%BF%D0%BE%D0%B4%D0%BD%D0%B8%D0%BC%D0%B0%D1%82%D1%8C%D1%81%D1%8F-%D0%BD%D0%B0-%D0%B1%D0%BE%D1%80%D1%82?pid=8363#pid8363>1х слотс зеркало регистрация в 1×slots casino</a>
<a href=https://adminclub.org/showthread.php?tid=60367>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Главным нюансом в появлении данных вознаграждений произведено сомнений, что пустив их в ход, геймер ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он спасибо призам какой-нибудь выигрыш или моментально спустит все лишь что прибывшие деньги). То есть, казино снабжает игрока вероятностью на дармовой основе выступать во различные слоты причем спонсирует игру.
#9233 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало
Чтоб получить большой выигрыш, выбирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша.Вышеописанная причина и считается основным моментом, из-за которого операторы отдают доля своей прибыли на различные маркетинговые затраты и рекламные кампании. А наиболее действенным тут станут выступать именно бездепозитные призы казино 2022 с выводом за регистрацию. <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino 56 online</a> <a href=http://masyasha.ru/index.php?option=com_k2&view=itemlist&task=user&id=83942>http://masyasha.ru/index.php?option=com_k2&view=itemlist&task=user&id=83942</a> Вывод выигрыша с бездепозитных призов казино – щедрый презент от азартных клубов. Но чтобы вывести собственный доход, нужно выполнить ряд условий:Бездепозитные призы казино за регистрацию в 2022 году — это вероятность сыграть за счёт заведения. Казино даёт клиенту шанс пользоваться определённой суммой либо количеством даровых вращений без внесения депозита. Не путайте деморежим с реальной забавой без необходимости внесения депозита. 1 x slots <a href=http://www.italian-style.ru/Nasha_kompanija/forum/?PAGE_NAME=profile_view&UID=47790>http://www.italian-style.ru/Nasha_kompanija/forum/?PAGE_NAME=profile_view&UID=47790</a> Чтобы получить вероятность исключить прибыль с бездепозитного бонуса в казино, необходимо выполнить ряд условий:Как верховодило, при выводе финансов, от играющего требуется лишь устроить минимальный вклад чтобы, чтобы, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом личный счет.
1хслотс официальный сайт зеркало
Выбирая бесплатный приз, пристально изучайте правила. Убедитесь, собственно для можно принимать роль в промоакции. Уточните, в каких играх возможно исполнять обстоятельства вейджера. При необходимости задавайте вопросы представителям саппорта.Заполняя данные в личном профиле, указывайте лишь достоверную информацию, так как Вам придется ее подтвердить в будущем при выводе денег. 1х слот 1хслотс регистрация перейти на 1×slots <a href=https://zonaseputarslot.com/member.php?action=profile&uid=1812>https://zonaseputarslot.com/member.php?action=profile&uid=1812</a> Для верификации аккаунта нужно дать спецам технической поддержки отсканированную копию паспорта и счета за коммунальные предложения, а также фотку банковской карты или снимок странички электрического кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности. 1×slot зеркало рабочее регистрации на телефон придет Новые клиенты онлайн-казино без первого депозита имеют выяснить собственную удачливость. К что, этому же есть возможность преобразовать бездепы в реальные средства за регистрацию в казино, однако желаемого приз нужно отыграть согласно условиям промоакции.
1×slots казино мобильная версия
Ознакомьтесь с нашим списком наилучших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего перечня и получите бездеп сразу. Хватайте лучшие бесплатные предложения ниже и выигрывайте великие средства, не рискуя! Частенько новички не разумеют, как активировать подарки либо вывести первый выигрыш. Для похожих случаев наша команда обрисовала главные определения – что такое фриспины, вейджер, как его отыграть, чего нужно протекать верификацию.Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном сайте и выполните вход в индивидуальный кабинет, дабы арестовать безвозмездные вращения с вейджером х40; <a href=https://escortexxx.ca/author/joshuafap/>https://escortexxx.ca/author/joshuafap/</a> Многие новенькие сомневаются, что поощрительный приз не нужно несомненно отдавать, числе если они выиграли у казино. Это абсолютно неопасно и надежно. Выводя выигранные свои, игрок просто одергивает свое участие в игре и утрачивает уникальную возможность – бесплатно увеличивать личное материальное положение. 1×slots официальный регистрация Нет. Казино выдают благотворительные бонусы за регистрацию, для того, дабы клиент мог ознакомиться с игровым заведением. А дабы исключить его, необходимо выполнить обстоятельства отыгрыша.
1×slots регистрация
В случае установленного лимита на необходимую вывода выигрыша с бездепозитного бонуса, игрок не сможет исключить больше заявленной суммы. <a href=https://bans.org.ua/index.php?topic=117598.new#new>1×slots официальный зеркало рабочее</a> Популярность интернет казино растёт и всё больше пользователей начинают проявлять азартными играми. Бездепозитные призы 2022 года, это оригинальные презенты за регистрацию. С их подмогою новые игроки могут получить благотворительные вращения или средства на баланс за одну регистрацию. С в игорных заведений в онлайне, бездепозитные призы стали известнейшим методом вербования игроков. Подобные акции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о коих мы расскажем. Наш вебсайт собрал лучшие предложения из онлайна на 2022 год. Воспользуйтесь каким подарком и можете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша необходимо выполнить условия.Бездепозитные бонусы начисляются лишь один раз. Не стоит открывать свежие аккаунты, чтобы получить их повторно. Служба защищенности казино непременно выявит «левого» соучастника и перекроет. Если посетитель выполнит нужные притязания, отыграет свою ставку и решит вывести собственный выигрыш, то ему нужно учесть, собственно казино непременно потребует предоставить ксерокопии собственных документов, чтобы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные средства вывести не удастся. Денежные средства. Третий приз за регистрацию без депо – наличные. К раскаянию, лишь знаменитые и популярные клубы шансы уяснить средства в руб. Либо баксах. С их помощью возможность насладиться любой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед данным нужно выполнение конкретных условий.Приветственный бездеп предоставляется любому игроку только один один. Казино дерутся с например нарекаемыми бонусхантерами (от англ. Bonus Hunter — доброволец за бонусами), пытающимися заводить многочисленные аккаунты для обмана оператора и повторного получения подарка. Исключить сходственные деяния дозволяет верификация данных. Администрация вправе потребовать у клиента доказать персональные данные, обозначенные при регистрации. 1×slots рабочее зеркало <a href=https://yogicentral.science/index.php?title=фильм_скачать_бесплатно>https://yogicentral.science/index.php?title=фильм_скачать_бесплатно</a> Для верификации номера аппарата, в личном профиле выберите опцию „Подтвердить номер телефонного“ и введите в соответствующее поле код, полученный в sms-сообщении.
1хслотс 1хслотс регистрация перейти на 1×slots
Заполняя данные в личном профиле, указывайте только достоверную информацию, например как Вам понадобиться ее доказать в при выводе денег.Автоматы неспроста числятся наиболее популярным азартным отдыхом. Чтобы освоить управление и верховодила, потребуется всего несколько минут. Ваша задача сделать ставку, определить число трудящихся линий и возможно вертеть тамбур. Если на выпадет выигрышная композиция – вы выиграли! С данной задачей вас помогут справится бездепозитные призы казино. <a href=http://www.scrapblog.cz/2016/11/kalendarovy-maraton-2016–9-den.html>http://www.scrapblog.cz/2016/11/kalendarovy-maraton-2016–9-den.html</a> Размер ставки для забавы по бездепозитному бонусу (окончательно же, в случае, когда он представлен в виде бонусных валютных средств) зачастую ниже, чем при игре на депозит. Ограничение будет работать до момента отыгрыша бонуса.Бездепы с бесплатными вращениями деют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд платит казино. Число спинов ограничено и редко выше сотку. Если промоакция содержит много безвозмездных игр, их начисление может быть разбито на несколько дней. 1хслот зеркало сайта
<b>Смотреть еще похожие новости:</b>
<a href=https://australiantravelforum.com/Upload/showthread.php?tid=150429>1×slots официальный сайт скачать на айфон</a>
<a href=https://autoplates.com/post-format-video/#comment-428>1×slots зеркало быструю регистрацию а также мгновенное</a>
<a href=http://www.ihavethepussy.com/de/threads/186016–1×slots-%D0%A0%C2%B0%D0%A0%D1%94%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A0%D1%91?p=203549#post203549>1×slots акции</a>
<a href=https://www.goslog.ru/forum/messages/forum1/message10210/11-obrashcheniya-grazhdan?result=reply#message10210>1×slots бонус за регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепы обыкновенно предлагают с отыгрышем — моментально исключить выигранные свои невозможно. Перевод денег со счета несомненно вероятен в такого, как юзер выполнит все требования казино, а сумма возможности быть выше установленного правилами лимита. Условиями промоакции фиксируются сроки, на которых клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней после активации.
#9234 Charlesgunnyhttp://filmkachat.ru
1×slot официальный сайт
В наше время очень просто получить приз за регистрацию в казино. Практически любой игорный жилище с радостью начислит деньги либо безвозмездные вращения. Многие гэмблеры пользуются этим и не стесняются региться в любом клубе с прибыльными условиями. Кстати, это замечательная вероятность выработать победную тактику и сорвать джекпот. <a href=http://filmkachat.ru/>1хслотс казино зеркало</a> <a href=https://babyrr.com/forum/User-JamesAbisy>https://babyrr.com/forum/User-JamesAbisy</a> 1×slot зеркало <a href=http://autoleo.ru/bitrix/redirect.php?goto=http://traktor5.caiman.ru/bitrix/redirect.php?goto=http://tn.nova.cz/zpravodajstvi/galerie/28440-utoky-v-mariupolu-a-okoli/a396bc8e-4895–4e7f-85f7-ee7677bbb517?back_url=https://telegra.ph/Ponimanie-motivirovannogo-otkaza–prichiny-posledstviya-i-sposoby-preodoleniya-09–23>http://autoleo.ru/bitrix/redirect.php?goto=http://traktor5.caiman.ru/bitrix/redirect.php?goto=http://tn.nova.cz/zpravodajstvi/galerie/28440-utoky-v-mariupolu-a-okoli/a396bc8e-4895–4e7f-85f7-ee7677bbb517?back_url=https://telegra.ph/Ponimanie-motivirovannogo-otkaza–prichiny-posledstviya-i-sposoby-preodoleniya-09–23</a>
1×slots зеркало регистрация
сайт 1× slots casino Таким образом, заведение пробует продемонстрировать себя своим вероятным геймерам, а такой маркетинговый ход как казино бонус без депо за регистрацию привлекает очень количество внимания к игорному заведению и обеспечивает неизменный поток новых гостей и грядущих клиентов игрового онлайн клуба.Мы собрали и выпустили перечень наилучших бездепозитных казино с бонусами за регистрацию, коие гарантируют великодушные выигрыши и моментальные выплаты. <a href=http://www.powerfa.co.kr/bbs/board.php?bo_table=free&wr_id=279747>http://www.powerfa.co.kr/bbs/board.php?bo_table=free&wr_id=279747</a> Условия вывода выигрыша. В неких заведениях для удачного вывода с бездепозитного приза довольно пополнения баланса и доказательства личности. В других же клубах, нужно количество раз прокрутить собственный депо.Подарки на дни ? посвященные торжественным датам, требующие символического отыгрыша либо начисляются без того. Могут дариться игрокам сутки рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду. 1хслотс регистрация в 1×slots casino
1×slots регистрация на сайте
Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. <a href=http://services-sector.ru/clubpointeresam/memberlist.php?mode=viewprofile&u=159011>http://services-sector.ru/clubpointeresam/memberlist.php?mode=viewprofile&u=159011</a> После требуется привнести идентификационный платёж. Это пугает новичков больше всего. Нужно устроить наименьший депо в 100–500 руб. Таким образом служба защищенности убедиться в, собственно платёжный способ принадлежит Вам. Данная процедура важна для обеспечения защищенности игровых счетов. Пример, Ваш акк взломают и выведут средства на собственный кошелёк. Будет крайне неприятно. Поэтому верификация платёжной системы, это необходимый момент. 1×slots актуальное зеркало Для отыгрыша бонуса казино обязует игрока поиграть на необходимую, в некоторое один превышающую необходимую полученного бонуса — здесь выгода фирмы очевидна.
1×slots официальный сайт, скачать
Также учтите, собственно некоторые игровые платформы сузивают перечень государств, которые способны получить предложенный бездепозитный бонус за регистрацию. К примеру, есть онлайн-заведения, выдающие похожие призы лишь жильцам конкретных стран. К образцу, онлайн казино 777 Оригинал предоставляет бездепозитный приз только игрокам из России и стран СНГ. Или напротив, снабжают вознаграждением всех, не жителей некоторых стран (исходя из сего, идет пристально изучать список, чтобы потом не возникло практически вопросов и претензий).Но такие рамки не смущают числе хайроллеров, поскольку коэффициенты на слотах разрешают рассчитывать на крупные выигрыши, в неких автоматах разыгрывается прогрессивный джекпот. 1хслот зеркало сайта <a href=http://intentionalpress.com/author/christhype/>http://intentionalpress.com/author/christhype/</a> Нет. Казино раздают благотворительные бонусы за регистрацию, для того, дабы заказчик имел ознакомиться с игровым заведением. А чтобы исключить его, нужно выполнить обстоятельства отыгрыша.В истинное время получить приз за регистрацию в казино очень просто. Почти любой игорный жилище с радостью предоставит средства либо бесплатные вращения. Многие игроки используют данным и не смущяются региться в каждом клубе с выгодными условиями. Кстати, это замечательная возможность придумать выигрышную тактику и сорвать куш.
1×slots подтвердит вашу регистрацию если говорить
Размер бонуса. В качестве бездепов обычно начисляют маленькие суммы, а когда речь идет о бонусах за депозит, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино шансы подарить игроку до 2000$. Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми промоакциями. Читайте о них в обзорах и на форуме.Активация случается за промокодов, коие вводятся в личном кабинете в регистрации. Среди спецпредложений в списке Casino.ru находятся эксклюзивные промокоды, коие доступны лишь посетителям портала. Другие способы начисления средств ? автоматическая активация сразу в творенья аккаунта и получение презента по запросу в службу технической помощи. <a href=https://www.asitorino.com/user/glennmoire/?um_action=edit>https://www.asitorino.com/user/glennmoire/?um_action=edit</a> 1×slots подтвердит вашу регистрацию если говорить
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.home-visa.ru/viewtopic.php?f=69&t=807392&p=2817555#p2817555>1×slot официальный сайт</a>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=283994>1хслотс регистрация в 1×slots casino</a>
<a href=http://nhomtruyen.com/members/jamesgaw.9280/>1×slot официальный сайт</a>
<a href=http://miupsik.ru/forums/showthread.php?tid=199061>1хслотс рабочее зеркало</a>
<a href=http://www.fiat130.it/phpbb3/memberlist.php?mode=viewprofile&u=293>1×slots регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чаще всего казино бонус за регистрацию без депозита даёт вероятность запустить каждой машина. Но другого внимательно ознакомиться с условиями. Иногда для забавы доступны лишь определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, никакого начать знакомство с миром азарта непосредственно с «одноруких бандитов».
#9235 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
Чтоб получить крупный выигрыш, подбирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша. <a href=http://filmkachat.ru/>сайт 1× slots casino</a> <a href=http://wdty.org/home.php?mod=space&uid=270553>http://wdty.org/home.php?mod=space&uid=270553</a> B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. 1хслот 1хслотс регистрация перейти на 1×slots <a href=http://www.so0912.com/home.php?mod=space&uid=2348824>http://www.so0912.com/home.php?mod=space&uid=2348824</a> Ещё одно распространённое акционное предложение – симпатичный подарок с сомнительными притязаниями. К образцу, клуб обещает $100 в качестве бездепа, но с вейджером х80 либо х100. Отыграть такой вейджер фактически невозможно и поэтому другого, как концентрироваться на больше занимательных промоакциях.Подарки на дни ? приуроченные к праздничным датам, требующие символического отыгрыша или начисляются без того. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду.
1×slots официальный сайт зеркало рабочее
Бездепозитные призы реальными деньгами, коие возможно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадались.Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают приз по государствам. Вплоть до такого, собственно клуб имеет себя игроков из Вашей государства, а бездеп не давать. 1хслот 1хслотс регистрация перейти на 1×slots Минимального оборота. Этот лимит уточняется вейджером — же игрок не поиграет на установленную необходимую, вывод средств будет недоступен.Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, например как Вам понадобиться ее подтвердить дальнейшем при выводе денег. <a href=https://sponforum.ixbb.ru/viewtopic.php?id=11158#p37869>https://sponforum.ixbb.ru/viewtopic.php?id=11158#p37869</a> Однако далековато не все ресурсы предлагают своим посетителям бездепозитные бонусы за регистрацию в казино. В большинстве случаев учтено одобрение на первый депозит в объеме 100–200%. Это отличная вероятность преувеличить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш.B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. 1×slots зеркало выигрыши обязательно пройдите регистрацию если
1×slot официальный сайт
Как управляло, при выводе финансов, от играющего требуется лишь сделать минимальный вклад чтобы, чтобы, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом личный счет.Помните, что любые нарушения верховодил сведут на нет ваши старания, и вы всего останетесь без начисленного вас бесплатного приза. Всегда изучайте верховодила начисления и обстоятельства вейджера. По любым вопросам, на которые вы не можете помощи найти ответы, обращайтесь за объяснениям и саппорт. <a href=http://forumqservice.co.uk/member.php?action=profile&uid=5379>http://forumqservice.co.uk/member.php?action=profile&uid=5379</a> рабочее зеркало 1×slots Не трудно додуматься, собственно not the slightest down payment bonuses практически ни не посещают большими. Чаще всего речь о пяти–тридцати долларах (либо эквиваленте этой суммы в иной денежной).
1хслот зеркало
Если простыми текстами, бездепы – это определённая сумма денег либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно забирать подарки. Но есть некоторые нюансы. Существуют игорные жилища, которые перед что, этим как начислить бонусы настоятельно привязать телефон, предоставить копии документов. рабочее зеркало 1×slots <a href=https://gtafarai.lt/index.php?/profile/12576-scottlap/>https://gtafarai.lt/index.php?/profile/12576-scottlap/</a> Перечисленные повыше основные характеристики сопровождают практически любой приз и считаются стандартными для бездепозитных бонусных начислений в казино.
1×slots рабочее зеркало
Размер призов чаще всего чисто символический и не превышает 50 руб. Приятно, хотя осязаемым бустом в игре вряд ли станет.Максимальный размер ставки, который невозможно превосходить же приз не будет всецело отыгран. В случае нарушения этого верховодила, приз и выигрыш с него будут аннулированы. <a href=https://www.learnoutdoorphotography.com/2018/06/wildflowers-at-lower-wekiva-river.html>https://www.learnoutdoorphotography.com/2018/06/wildflowers-at-lower-wekiva-river.html</a> Фриспины предназначены для использования в видео слотах. Внимательно ознакомьтесь с условиями – частенько их выдают на кое-какие автоматы. В зависимости от клуба, у вас получится устроить определённое количество ставок. Кстати, продвинутые игорные дома разрешают запускать любых «одноруких бандитов». 1×slots рабочее зеркало Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации дара нужно подтвердить электронную почту и привязать телефон;
<b>Смотреть еще похожие новости:</b>
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=35787>1×slots зеркало быструю регистрацию а также мгновенное</a>
<a href=https://koreanstudies.com/forum/viewtopic.php?t=121252>1×slots на любой вкус как пройти регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
С этими простыми советами любое казино с призом за регистрацию способно принести в разы больше выгоды и выгоды.
#9236 Charlesgunnyhttp://filmkachat.ru
казино 1×slots официальный сайт
Бездепозитные призы в казино без пополнения 2022 — это конкретная сумма средств или gorovyh spins вращения, которые предоставляются первым постояльцам за регистрацию на сайте казино в виде бездепозитного бонуса, и дает для вероятность с казино без пополнения опробовать предложения (игр), с дальнейшей прерогативой вывода средств при исполненьи всех установленных верховодил.Для выбора азартного заведения Вы сможете воспользоваться списком наших казино с бонусами за регистрацию. На нашем веб-сайте мы выпустили перечень бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, собственно доля призов эксклюзивные и доступны только для гостей нашего вебсайта по-специальному промо-коду либо по оригинальной ссылке. Кроме того, для каждого бонуса мы подготовили подробный обзор, в Вы узнаете как получить и отыграть одобрение и как вывести собственный выигрыш с бездепа. <a href=http://filmkachat.ru/>1×slot официальный сайт</a> Самые новые бездепозитные бонусы в казино за регистрацию 2022 года с выводом выгоды находятся на этой страничке. Посетитель имеет оценить условия получения и начать играть на деньги без внесения депозита. При данном игроку важно разуметь, на каких условиях и какими методами появится вывести приобретенный выигрыш. Для этого нужно расценить перечень подключенных платежных систем. <a href=http://stroyrem-master.ru/user/Davidexcic/>http://stroyrem-master.ru/user/Davidexcic/</a> 1×slots регистрация 1×slots casino c2d ru <a href=http://g961713h.beget.tech/user/Oscarpauth/>http://g961713h.beget.tech/user/Oscarpauth/</a>
1×slots зеркало проходить регистрацию это отличный вариант
1×slots промокод при регистрации 2025 Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации приза без депозита. Внимательно прочитайте до конца. Многие новички делают промахи на шаге регистрации и потому не получить подарок. <a href=http://www.yyxw999.com/space-uid-22109.html>http://www.yyxw999.com/space-uid-22109.html</a> Бесплатный приз – кредиты, которые онлайн-казино начислит посетителю, не принуждая его пополнять игровой счет.Даже не выиграв крупную сумму, игрок увлекательно проведет время, изнутри выучит работу площадки, воспримет геймплей автоматов. Все это без каких-либо денежных рисков. Быть в курсе превосходнейших промоакций с. Достаточно периодически изучать перечень новых интернет казино с выводом бонуса без депозита в данном разделе. 1хслот официальный сайт зеркало
1×slots casino регистрация на сайте
<a href=http://zqykj.cn/bbs/home.php?mod=space&uid=258229>http://zqykj.cn/bbs/home.php?mod=space&uid=258229</a> Фриспины. Бесплатные вращения предусмотрены для применения в видео-слотах. Внимательно читайте условия – они часто выдаются для некоторых машин. В зависимости от клуба вам создавать определенное число ставок. Кстати, современные игорные жилища дают возможность заводить «одноруких бандитов».Диапазон ставок, которые вправе устроить игрок, того лимитирован. Обычно назначать можно маленькую необходимую — около 10–30 рублей за одно вращение. 1×slots регистрация 1×slots casino c2d ru Если при регистрации указать промокод, можно гарантировано получить бонус. Где взять ваучер? Посетите тематику блоги либо форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В заключительнее время игорные жилища начали афишироваться в кинокартинах и телесериалах. Присмотритесь и скорее заметите промокод, который принесёт 500 или 1 000 бонусных рублей.
1хслотс мобильная версия зеркало
Особую изюминку видео слотам придают оригинальные знакы. С их свет активизируются различные бонусы. Вы можете запустить вспомогательный степень и прирастить сумму выигрыша. Есть знаки, коие сменяют ненужные составляющие и сами творят выигрышные комбо. Не стоит забывать и на бонус-тур. После каждого успешного спина есть шанс увеличить необходимую выигрыша в 2 либо хорошо раза.Как и другие акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых гостей и позволяет им составить впечатление о функционале, не рискуя вескими суммами. <a href=https://peloton.com.ua/forum/memberlist.php?mode=viewprofile&u=9259>рабочее зеркало 1хслотс</a> Каждый геймер должен сперва отчетливо изучить обстоятельства по получению и отыгрышу понравившегося дара. Если всё устраивает, поспешите арестовать благотворительные спины за регистрацию в казино без депо с выводом и без отыгрыша и прямо в начать вертеть барабаны лучших слотов. Иногда у гостей сайта шансы появиться проблемы при активации полученного промо-кода. В этих случаях, необходимо обратиться за поддержкой в службу «Support». Для получения ответа, непременно указывается определенная первопричина обращения и подтверждается информация дополнительными снимками. Если сложилась спорная ситуация, всегда возможно обратиться к основному регулятору или контролирующему органу, выдавшему этому заведению лицензионный документ.Представьте момент, когда при ставке в 10 руб. Вы получите схожее умножение. Миллион рублей за одно вращение, собственно абсолютно возможно. Поэтому вопрос, сколько возможно выиграть остаётся закрытым. Предлагаем выяснить помощи. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный приз и проверяйте удачу в деле. Разумеется, вывести деньги довольно. Однако шансы есть у всех. 1×слотс казино <a href=http://newdigital-world.com/members/raymondbaree.html>http://newdigital-world.com/members/raymondbaree.html</a> Не стоит путать игру в демо и внедрение бонусов. В демонстрационном режиме игрок возможность расценить механику слота, сюжет и оформление. Но игра проводится на условные кредиты, потому отсутствует главное ? чувство азарта. Активируя промокод либо фриспины, заказчик как не расходует свои деньги на игровые автоматы, хотя имеет сорвать реальный куш!
1×slots регистрация 1×slots casino 777 online
Однако далековато не все ресурсы предлагают своим клиентам бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено одобрение на 1-ый депо в объеме 100–200%. Это замечательная возможность преумножить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш.Новые клиенты онлайн-казино без первого депо шансы выяснить свою удачливость. К тому же есть вероятность преобразовать бездепы в реальные средства за регистрацию в казино, впрочем результата приз нужно отыграть сообразно условиям промоакции. Для казино, работающих онлайн, бездепозитные бонусы нужны для привлечения новых клиентов. Предложение поиграть на слотах без необходимости внесения настоящих средств — работающий способ для увеличения энтузиазма к компании. После отыгрыша бездепа велик шанс, что игроку понравится и он продолжит выступать в казино, лишь сейчас уже на личные средства.Бывают ли бездепозитные бонусы без вейджера? Бывают, в у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино. <a href=http://inprokorea.com/bbs/board.php?bo_table=free&wr_id=200108>http://inprokorea.com/bbs/board.php?bo_table=free&wr_id=200108</a> Вышеописанная причина и является основным моментом, следствии которого операторы отдают часть своей выгоды на различные маркетинговые расходы и рекламные кампании. А самым действенным тут будут играть непосредственно бездепозитные бонусы казино 2022 с выводом за регистрацию.Во время игры в казино, выигрыши, приобретенные благодаря бесплатным призовым фондам, суммируются и срабатывают в общую сумму для отыгрывания. Однако, случае фортуна улыбнется и выйдет отыграть все призы, игровое заведение гарантированно допустит вывести денежные средства. Сумма вывода несомненно зависеть от лимита, утвержденного именно в этом учреждении. Поэтому, пристально надо(надобно) читать управляла выдачи анлимитных депо. 1×slos регистрация в 1×slots casino Бездепозитный приз часто возможность стать легкодоступным незамедлительно последствии завершения регистрации, поскольку правило единственным притязанием к нему считается регистрация, а после проверка вашей свежей учетной записи.Вейджер в переводе с британского означает «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша приобретенного приза, в нашем случае бездепозитного. Число ставок не — важно только набрать необходимую, пропорциональную сумме одобрения.
<b>Смотреть еще похожие новости:</b>
<a href=http://theauction.com.au/author/jamesflake/>1хлот регистрация в 1×slots casino</a>
<a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=321705#pid321705>1×slots быструю регистрацию а также мгновенное</a>
<a href=https://chasingadream.rpginitiative.com/showthread.php?tid=121938>1×slots коды</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации подарка нужно доказать электронную почту и привязать аппарат; Сроки активации приза уточняются любым казино, но чаще всего они не превосходят недели с момента получения. Игроку непременно нужно применять бездеп на обозначенного срока, в ином случае приз просто пропадет. Каждый бонус можно получить только один раз, поэтому в не применять бездеп в срок, у игрока не будет второго шанса им пользоваться.
#9237 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало
При отыгрыше бонусных средств, нужно учитывать срок деянья приза и время, которое дается на отыгрыш. По истечению заявленного медли, не отыгранный бонус будет аннулирован.Бездепозитные призы начисляются только раз раз. Не стоит открывать новые аккаунты, дабы получить их повторно. Служба безопасности казино непременно выявит «левого» участника и заблокирует. Если гость выполнит нужные притязания, отыграет собственную ставку и решит исключить личный выигрыш, то ему надо(надобно) к, собственно казино непременно потребует предоставить ксерокопии собственных документов, дабы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные свои исключить не удастся. <a href=http://filmkachat.ru/>1×slos регистрация в 1×slots casino</a> При пользовании бездепозитным бонусом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют количество видов лимитов:Для получения бонуса надо(надобно) ознакомиться с программой преданности казино и сделать ставки на сумму, необходимую для перехода на грядущий уровень. <a href=http://g-friend.co.kr/bbs/board.php?bo_table=free&wr_id=99350>http://g-friend.co.kr/bbs/board.php?bo_table=free&wr_id=99350</a> Нет. Казино раздают бесплатные призы за регистрацию, чтобы, чтобы, дабы заказчик возможность ознакомиться с игровым заведением. А чтобы исключить его, нужно выполнить обстоятельства отыгрыша. 1×slots регистрация на 1хслотс <a href=http://bbs.bap.com.tw/home.php?mod=space&uid=465021>http://bbs.bap.com.tw/home.php?mod=space&uid=465021</a> Промообъявления от казино мешают реальной картины и направлены на вербование внимания юзеров. Понять, насколько высоки шансы остаться в плюсе, позволит собственный анализ условий предложения:
1хслотс рабочее зеркало
Обычно для получения бонусов без депо, казино выдвигает приклнные и вполне выполнимые условия, но есть ряд деяний которые воспрещены и шансы повлечь за собой досадные последствия:Для получения выигрыша потребуется выполнить условия казино. Чаще всего игроку нужно поставить определенную сумму, хотя теснее из собственных средств. Она рассчитывается из общего размера выигрыша за всегда применения бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, если пользователь выиграл 1000 руб., а множитель составляет х30, вывести деньги возможно будет, сделав ставки на 30 000 рублей. 1 x slots Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды присутствуют на этой странице. Посетитель возможность оценить обстоятельства получения и начать выступать на деньги без внесения депо. При этом игроку главно разуметь, на каких критериях и какими методами появится вывести полученный выигрыш. Для сего необходимо расценить список подключенных платежных систем.Мы собрали и выпустили перечень наихороших бездепозитных казино с призами за регистрацию, коие гарантируют великодушные выигрыши и моментальные выплаты. <a href=http://www.zgbbs.org/space-uid-172614.html>http://www.zgbbs.org/space-uid-172614.html</a> Некоторые клубы автоматически начисляют приз на акк игрока последствии исполнения критерий получения, но бывают истории, когда приз надо(надобно) активировать игроку самому. Есть несколько методов активации бонуса:Подтвердите лицо, предоставив оператору казино средства паспортные данные. Инструкции обычно несложные, основное — четко им следовать. Если написано, собственно «на фото обязаны быть заметны все хорошо угла страницы паспорта» — сделайте непосредственно это фото. 1×slots зеркало рабочее Основное управляло получения бездепа ? создаваемый акк обязан быть у пользователя первым и единственным. Наличие нескольких аккаунтов строго воспрещено. Проверка проводится по имени, e-mal, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депозита нужно соблюдать простую очередность действий.
casino 1×slot
<a href=http://43.240.15.40/home.php?mod=space&uid=581244>http://43.240.15.40/home.php?mod=space&uid=581244</a> 1×slots рабочее зеркало В интернет-сети практически возможно отыскать перечни более популярных и обещанных поощрительных программ от модных онлайн-казино.В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, нужно адресоваться в саппорта через лайв-чат на сайте казино.
1×slots зеркало которую указывали при регистрации кстати
У каждого игорного заведения свои управляла и условия. Но, чтобы получить бонусы, необходимо выполнить стереотипные действия:Изучить правила и обстоятельства получения бездепозитных бонусов казино, Вы сможете у нас на веб-сайте в разделе с бонусами либо на официальном веб-сайте выбранного Вами казино. Если не отыскать необходимую информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал или по электрической почте. <a href=https://forum.spherecommunity.net/User-JamesLop>скачать 1×slots официальный сайт</a> казино 1×slots <a href=http://ru.monumentefunerare.md/index.php?subaction=userinfo&user=Davidtarty>http://ru.monumentefunerare.md/index.php?subaction=userinfo&user=Davidtarty</a>
1хслот зеркало сайта
У каждого игорного клубы разные вейджеровые обстоятельства. Чтобы вы гарантировано сумели выполнить их, мы дадим количество советов. Если система начислила маленькую необходимую, не стоит создавать великие ставки – остановитесь на 10–30 центах. Как только сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте играть. В противном случае другого, как приглядеться к другому автомату. <a href=http://www.mxeia.com/home.php?mod=space&username=abortiveaggress&do=profile>http://www.mxeia.com/home.php?mod=space&username=abortiveaggress&do=profile</a> Нельзя осматривать игру на средства, как вариант заработка. Азартные игры запрещены для лиц младше 18 лет. Topcasinobonuses.mobi классифицируется зачинщиком азартных игр. Сайт одевает информационный нрав. 1×slots casino регистрация
<b>Смотреть еще похожие новости:</b>
<a href=https://melhorlance.com.br/minha-conta/>1×slots сайт зеркало</a>
<a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=67949>1×slots мобильная версия войти казино</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Возможность протестировать свежие забавы, не рискуя собственными своими и разработать собственную стратегию забавы. У любого игорного заведения средства управляла и обстоятельства. Но, дабы получить призы, нужно выполнить стереотипные действия:
#9238 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
Следует подчеркнуть, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом.Бoльшинcтвo азартных заведений выдвигают приблизительно одинаковые условия и требования, которые нужно выполнить, дабы получить бездепозитный приз за регистрацию. Все их возможно соединить в один перечень: <a href=http://filmkachat.ru/>1×slots акции</a> <a href=https://forum.eliteshost.com/member.php?action=profile&uid=9203>https://forum.eliteshost.com/member.php?action=profile&uid=9203</a> рабочее зеркало 1×slots <a href=https://forum.papbio.org/member.php?action=profile&uid=87288>https://forum.papbio.org/member.php?action=profile&uid=87288</a> В лицензионных бездепозитных казино выступать в азартные забавы вправду безопасно. Наличие лицензии подтверждает тот прецедент, собственно клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP.
скачать 1×slots официальный сайт
Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного приза достаточно пополнения баланса и подтверждения личности. В других же клубах, необходимо количество один прокрутить собственный депо.Обычно бездепозитные акции от казино, приходят на эл. Почту в дни рождения или праздничные. В некоторых онлайн казино возможно обратиться в чат и как постоянному игроку, вероятно для предложат бездепозитное предложение. 1×slots зеркало регистрация то дальше необходимо пройти Чаще всего используются коды. Их нужно вносить в специальные окна регистрационной анкеты, если речь о пригласительных бонусах, или в особом разделе собственного офиса игрока. <a href=https://pcnto.com/user/TravisThica/>https://pcnto.com/user/TravisThica/</a> 1×slots регистрация
1×slots подтвердит вашу регистрацию если говорить
2. Создать свежий профиль. Для регистрации надо(надобно) заполнить маленькую анкету или зайдите в личный офис посредством соц сеток;Бонус начисляется игроку незамедлительно последствии регистрации и прохождения верификации в казино и не настятельно от посетителя внесения депозита. Как правило, размер приза в схожем случае довольно умеренный, впрочем разрешает новичкам познакомиться с игрой без риска реальными деньгами. Получать информацию о самых прибыльных призах возможно без неизменного прогноза новостей казино. Мы брали эту задачу на себя и безпрерывно смотрим за предложениями операторов, избирая наилучшие из них. В этом разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список акций периодически пополняется. В топ вошли самые свежие бездепозитные бонусы за регистрацию в казино 2020, кратковременные и замкнутые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру прочим аспектам. Если срок деяния промоакции истек, она удаляется из перечня.Также бездепозитные призы имеют работать способом возвратить к забаве клиентов, пока приостановивших своё сотрудничество с фирмой: извещение о бездепе поступает на мобильный телефонный или почту. <a href=http://mos-it.ru/index.php?subaction=userinfo&user=defectivespeck7>http://mos-it.ru/index.php?subaction=userinfo&user=defectivespeck7</a> Верификация аккаунта. Лучше доказать личность сразу последствии регистрации, дабы позже не было заморочек с выводом денег. Верификация может протекать двумя способами:Для всех бездепозитных призов функционирует максимальный предел на выигрыш. Он показывает максимальную необходимую, коию вы сможете получить, играя на бонусные кредиты. Как только вам получится выполнить притязания вейджера, дозволенный максимум несомненно переведен с бонусного счета на основной, а остаток будет списан. казино 1×slots официальный сайт
1× слот зеркало
Доступ к дару имеет открываться механически после введения промокода либо обращения в службу поддержки сайта. В первом случае от пользователя не требуется практически поступков. Бездеп с активацией по коду встречается почаще всего. Игроку необходимо установить совокупность символов в графе, которая имеет пребывать в регистрационной форме в Личном кабинете.Для казино, работающих онлайн, бездепозитные призы нужны для привлечения новых клиентов. Предложение сыграть на слотах без необходимости внесения реальных денег — работающий способ для увеличения энтузиазма к компании. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит выступать в казино, только теперь теснее на собственные деньги. Размер призов почаще всего чисто символический и не превышает 50 руб. Приятно, но осязаемым бустом деле ли будет.Условия вывода выигрыша. В неких заведениях для успешного вывода с бездепозитного бонуса довольно пополнения баланса и доказательства личности. В иных же клубах, нужно некоторое раз прокрутить свой депозит. Рассмотрим принцип его деянья на образце. Допустим, вы зарегались и возымели $10 not the slightest deposit bonus с вейджером х50. Это означает, что выигранные деньги возможно будет выводить не раньше, чем последствии как, как общая сумма ставок достигнет $500. 1×slots мобильная версия войти казино <a href=http://forum.yurclub.ru/index.php?showuser=208756>http://forum.yurclub.ru/index.php?showuser=208756</a>
1 xslots рабочее зеркало
Многие игроки, оценив возможностей казино, остаются выступать в нем и дальше ? на это и нацелено каждое промо. Постоянные клиенты заносят депозиты и делают ставки, обеспечивая долгосрочную выгода оператора. То есть, казино раздают бездепы новым юзерам для формирования приклнной аудитории. <a href=http://advanced-retail.a2hosted.com/doku.php?id=Выкуп_авто>http://advanced-retail.a2hosted.com/doku.php?id=Выкуп_авто</a> Главное превосходство спинов – возможность изучить разные слоты. Также получится насладиться бонусными раундами, испытать фортуну в риск-туре и преувеличить выигрыш за счёт особенных символов. Однако не игровой процесс заслуживает внимание, так превосходнее сосредоточиться на реальном выигрыше. 1×slots регистрация 1×slots casino 777 online Если вы новичок деле и лишь попали в неизведанную вами область пыла — счет услуг как бездепозитные бонусы без пополнения.Изучить управляла и обстоятельства получения бездепозитных призов казино, Вы можете у нас на сайте в разделе с бонусами или на официальном веб-сайте избранного Вами казино. Если не можете отыскать необходимую информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал или по электронной почте.
<b>Смотреть еще похожие новости:</b>
<a href=https://chasingadream.rpginitiative.com/showthread.php?tid=121677&pid=258397#pid258397>1×slots casino зеркало рабочее</a>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=237243>1хслот скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чаще всего интернет-казино предлагают бездепозитные призы свежим пользователям. Эта промо-акция довольно эффективно привлекает начинающих, подталкивая их к открытию счета. Конечно, не все становятся преданными посетителями, хотя сам прецедент регистрации аккаунта играет на руку заведению. Пoдтвepдить личнocть клиента. Для успешного вывода средств, необходимо доказать личность клиента. Нa этaпe вepификaции пpoфиля, работники службы защищенности должны увериться, собственно у игрока всего лишь раз акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не может исключить собственный выигрыш, случае у него будет несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы.
#9239 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация
Вывод выигрыша с бездепозитных бонусов казино – великодушный презент от азартных клубов. Но чтобы вывести собственный заработок, необходимо выполнить ряд условий: <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> <a href=http://tmml.top/home.php?mod=space&uid=211796>http://tmml.top/home.php?mod=space&uid=211796</a> Выбор каждого онлайн казино на нашем веб-сайте. В описании к любому Вы сможете узнать, собственно получите за творение аккаунта.Особую изюминку видео слотам придают оригинальные символы. С их свет активируются разные бонусы. Вы сможете запустить вспомогательный степень и прирастить сумму выигрыша. Есть знаки, коие замещают негодные составляющие и сами творят выигрышные комбо. Не стоит забывать и на бонус-тур. После каждого удачного спина есть шанс прирастить необходимую выигрыша в два либо хорошо раза. 1× slots сайт <a href=https://www.varranger.com/vforum/index.php?action=profile;u=36243>https://www.varranger.com/vforum/index.php?action=profile;u=36243</a>
1×slots сайт
<a href=https://forum.oursson.ru/viewtopic.php?f=2&t=8166>1×slot официальный сайт</a> 1хслотс официальный сайт зеркало Для проверки используются сканы паспортов, водительских водительских, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь обнаружен в попытке ввести вспомогательный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный перечень. При забаве на лицензионной площадке не опасаться указывать достоверную индивидуальную информацию (шифрование исключает утечку персональных данных). <a href=https://rabofree.diary.ru/p221355199_casino-bezdepozitnyj-bonus-oficialnyj-sajt.htm>https://rabofree.diary.ru/p221355199_casino-bezdepozitnyj-bonus-oficialnyj-sajt.htm</a> Главным интересным в возникновении этих вознаграждений состоит что, собственно пустив их в ход, геймер ничем не рискует и в последствии никому ничего не несомненно обязан (не зависимо, получит ли он спасибо бонусам какой-либо выигрыш или моментально спустит все лишь собственно прибывшие деньги). То есть, казино снабжает игрока вероятностью на дармовой базе играть во всевозможные слоты причем спонсирует забаву.Условия шансы различаться друг от приятеля. Но подобный приз может быть применен только для игрового процесса – приобретенные на счет финансы до такого, как станут отыграны, вывести невероятно. 1×slots официальный сайт скачать на айфон Законодательство, регулирующее азартные игры в разных государствах, влияет на возможности операторов. В итоге юзеры из отдельных ареалов сталкиваются с лимитированиями со стороны казино. Это возможность быть как глубокий отказ в доступе, так и невозможность загружать забавы отдельных изготовителей.
1×slots регистрация на сайте 1×slots ru com
Для тех, кто лишь подумывает испытывать свою удачу, а для проф игроков, разыскивающих свежие площадки для выигрышей, ведущие лицензированные казино часто устраивают различные акции, и одно из лучших услуг за последнее время – как для начинающих, например и для профессиональных игроков – бездепозитный приз за регистрацию. <a href=http://www.sazkar.info/member4454.html>http://www.sazkar.info/member4454.html</a> Индивидуальные одобрения выдаются за совершение действий: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавленья или официального посетителя для ПК. В большинстве казино действуют программы преданности, присваивающие игрокам статусы за активность на сайте. Продвижение на грядущий степень нередко сопрягается выдачей бездепа.Отыграв бездепозитный бонус в казино с выводом тоже придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в сходственное лимитирование существует, то единоразово вывести выйдет только сумму, не превосходящую объем полученного приза. 1×slots официальный регистрация Так что приготовьтесь предоставить секретную информацию (пол, возраст, государство проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает менее суток, последствии чего удастся беспрепятственно выводить солидные выигрыши.Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в обязательном порядке необходимо восполнить счет в казино. Для депозитных призов, эта процедура не необходима, например как депо уже сделан.
1×slots быструю регистрацию а также мгновенное
Срок отыгрыша — это период, кот-ый начинается в момент активации приза и завершается с его закрытием. Пользователю нужно уложиться в этот временной зазор, по призовые средства аннулируются. Казино устанавливают перечень игр, ставки в засчитываются при расчете отыгранных средств. Если тайтл не входит в данный список, то предоставляется быть недоступен для загрузки в деяния бонусного предложения. Бездепы обычно предлагают с отыгрышем — моментально исключить выигранные средства нельзя. Перевод средств со счета будет вероятен после того, как пользователь выполнит все притязания казино, а сумма возможности превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, протяжении которых клиент вправе пользоваться предложением. Обычно они не превышают нескольких дней последствии активации.В интернет-сети постоянно возможно найти списки более знаменитых и гарантированных поощрительных программ от известных онлайн-казино. 1× slots регистрация в 1×slots casino <a href=https://m1bar.com/user/PatrickviolD/>https://m1bar.com/user/PatrickviolD/</a>
1 х слотс зеркало
<a href=https://warezlover.xyz/user/PatrickScoub/>https://warezlover.xyz/user/PatrickScoub/</a> Вы не в коем случае ни чем рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный приз, по мимо практической игры на бездепозитные призы, у Вас есть шанс выучить игровые автоматы, научится регулировать менять ставки и полосы, изучать бонусные игры и их выигрышные комбинации, да счете просто зарядится кучей впечатлений! Ведь вы будите выступать на бонусные средства, коие можно отыграть и исключить, но просто на демо счет, что, этим самым адреналин в крови более повысится а пульс забьется с нередким ритмом! 1×slots официальный зеркало рабочее Для отыгрыша бонуса казино обязует игрока поиграть на сумму, в некоторое раз превышающую необходимую полученного приза — тут выгода фирмы очевидна.Бонус с зачислением денег на счет дает больше свободы деяний. Пользователь сам выбирает, каким образом распорядиться подаренными своими. Здесь также могут действовать ограничения на перечень доступных игр, но обычно эти рамки не так строги, как в промо с безвозмездными вращениями.
<b>Смотреть еще похожие новости:</b>
<a href=https://radios-collector.com/viewtopic.php?f=7&t=44257>рабочее зеркало 1хслотс</a>
<a href=http://polishcrazyclan.ugu.pl/member.php?action=profile&uid=272738>1 x slots casino</a>
<a href=https://www.donchillin.com/space-uid-382497.html>1×slots casino регистрация 1×slots review live</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Предложения с бездепозитными бонусами за регистрацию разрешают свежим заведениям заинтересовать аудиторию на собственный вебсайт. А игроки тому получают возможность играть на реальные деньги без депозита в казино и заработать малый стартовый капитал, который разрешается вывести на карту банка или электрический кошелек. Если идет об неповторимых услугах, может понадобиться регистрация в казино по ссылке с партнерского вебсайта.
#9240 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации 2025
Зарегистрируйтесь. Для регистрации чаще всего достаточно ввести свой номер телефонного и почтовый адрес, последствии чего установить приобретенный код из СМС. Возможно, требуется указать промокод. В правилах промоакции несомненно написано, где его надобно вводить. Иногда это хотелось создавать при регистрации, иногда — теснее последствии творения личного кабинета, на отдельной странице.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. <a href=http://filmkachat.ru/>1×slots официальный зеркало рабочее</a> Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, the decision зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. <a href=http://jusintergentes.com.ua/index.php?option=com_k2&view=itemlist&task=user&id=1464881&lang=uk>http://jusintergentes.com.ua/index.php?option=com_k2&view=itemlist&task=user&id=1464881&lang=uk</a> Для тех, кто только подумывает испытать собственную удачу, еще для проф игроков, отыскивающих свежие площадки для выигрышей, основные лицензированные казино нередко организуют разные промоакции, и лучшее услуг за последнее время – как для начинающих, так и для проф игроков – бездепозитный приз за регистрацию.Акционные предложения от казино есть в различных форматах. Часто призы даются в мена на депо. Игрок заносит платеж и получает средства, благотворительные вращения и одобрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — картина бонуса, кот-ый гарантирован за исполнение определенных действий на сайте: 1×slots официальный сайт зеркало <a href=http://www.pallasowka.ru/freeboard/tools.php?event=profile&pname=Patrickeurow>http://www.pallasowka.ru/freeboard/tools.php?event=profile&pname=Patrickeurow</a>
1 хслот регистрация в 1×slots casino
1×slots зеркало регистрацию более популярный вариант это Не сложно догадаться, что not the slightest down payment bonuses практически разу не бывают великими. Чаще всего речь идет о пяти–тридцати баксах (либо эквиваленте данной суммы в другой еденице).Вейджер менее х30–35 считается приемлемым. Опытные игроки заявляют, что с этим вейджером реально остаться в плюсе, случае верно подойти к выбору игрового аппарата. <a href=https://svitlodar.org.ua/user/JustinSop/>https://svitlodar.org.ua/user/JustinSop/</a> 1хслотс казино зеркало Самые свежие бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды присутствуют на данной страничке. Посетитель возможность оценить обстоятельства получения и начать выступать на деньги без внесения депозита. При данном игроку принципиально разуметь, на каких критериях и какими способами появится исключить приобретенный выигрыш. Для сего нужно оценить перечень подключенных платежных систем.Помните, собственно всевозможные нарушения верховодил сведут на нет ваши старания, и вы всего останетесь без начисленного вам безвозмездного приза. Всегда изучайте управляла начисления и условия вейджера. По хоть вопросам, на коие вы не можете без найти ответы, обращайтесь за объясненьям и саппорт.
1×slots регистрация на сайте 1×slots ru com
Бонус без депозита за регистрацию в казино (бездепозитный приз) – это валютный подарок от клуба, кот-ый начисляется на аккаунт игрока в регистрации в казино. Кроме создания учетной записи, для получения бездепа, довольно часто потребуется ещё и подтвердить контактные данные игрока и/или активировать специальный промо-код. Важно, убедитесь в, собственно раньше не регились в выбранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи.Бездепозитные бонусы истинными средствами, которые можно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадали. <a href=https://www.reikiandastrologypredictions.com/member.php?action=profile&uid=19437>https://www.reikiandastrologypredictions.com/member.php?action=profile&uid=19437</a> Выбор любого интернет казино на нашем сайте. В описании к любому Вы можете узнать, что получите за творенье аккаунта.Мы подготовили список, где есть постоянно актуальные и новые бездепозитные бонусы казино, которые вам получить безвозмездно. Для наших пользователей есть особые предложения эксклюзивные бонусы, коие вы кого не отыщите, их мы определили особой красной плашкой «Exclusive». 1×slots казино зеркало Перечисленные повыше основные свойства сопровождают практически любой бонус и считаются стандартными для бездепозитных бонусных начислений в казино.
1×slots официальный сайт скачать
Проверка занимает от нескольких мин. До нескольких дней, спецы техподдержки все запросить дополнительные документы либо инициировать краткое общение по Skype. Фриспины начисляются по конкретной ставке. После их активации игроку необходимо запустить слот и убедиться, собственно в нем отображаются бесплатные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода в отыгрыша определяется оператором и редко превышает 5 000 рублей. 1хслотс казино зеркало <a href=https://www.russiansuka.net/user/WalterVep/>https://www.russiansuka.net/user/WalterVep/</a> Популярность интернет казино растёт и всё больше юзеров начинают интерес азартными забавами. Бездепозитные бонусы 2022 года, это уникальные презенты за регистрацию. С их поддержкою свежие игроки могут получить безвозмездные вращения либо деньги на баланс за одну регистрацию. С выходом игорных заведений в онлайне, бездепозитные призы стали знаменитейшим методом привлечения игроков. Подобные акции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о коих мы расскажем. Наш вебсайт собрал лучшие предложения из интернета на 2022 год. Воспользуйтесь хоть даром и можете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша необходимо выполнить обстоятельства.
1 хслот регистрация в 1×slots casino
Фриспины без депо либо дополнительные свои помогут ближе познакомиться с игровой платформой и её функциями. За счёт презентов возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за игры напротив живых крупье.У любого игорного клубы различные вейджеровые условия. Чтобы вы гарантировано смогли выполнить их, мы дадим количество советов. Если система начислила небольшую сумму, надо создавать большие ставки – остановитесь на 10–30 центах. Как лишь сможете заработать примерно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте играть. В противном случае превосходнее присмотреться к другому автомату. Также, учите, собственно бездепозитный приз можно вывести только никаких случае, когда будут выполнены все условия отыгрыша.При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток. <a href=https://kizkiuz.com/user/Patrickseips/>https://kizkiuz.com/user/Patrickseips/</a> В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, нужно адресоваться в службу через лайв-чат на веб-сайте казино. 1×slots casino регистрация Нельзя разглядывать игру на средства, как вариант заработка. Азартные игры воспрещены для лиц младше 18 лет. Topcasinobonuses.mobi классифицируется организатором азартных игр. Сайт носит информационный характер.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.mshowto.org/forum/members/jamespauri.html>1×slots казино зеркало</a>
<a href=https://demo.comuni-italiani.it/forum/viewtopic.php?f=9&t=381816>1×slots регистрация 1×slots casino 777 online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Риск-игра по равным шансам – Также казино имеет воспрещать выполнять обстоятельства по отыгрышу с помощью раунда на удвоение, который предлагается в слотах, видео-покере и неких других играх.
#9241 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию процедура займет всего лишь
Когда речь идет о валютных призах, казино практически устанавливают условия вейджера, которые необходимо выполнить, чтобы исключить выигрыш. <a href=http://filmkachat.ru/>1×slots casino зеркало</a> Так что сможете смело регистрироваться без всяких раздумий. Фортуна сегодня точно на вашей стороне. Не страшитесь, ведь следствие какого или ущерба Вам абсолютно не угрожает. С этими призами как без пополнения, Вы остаетесь лишь в плюсе, хотя не как не в минусе.Раздача призов может быть посвящена различным датам: календарные дни, деньки рождения игроков, годовщина открытия казино и т. Д. Подарок выдается в виде денег, фриспинов или баллов для скопления и обмена на услуги оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода данной суммы придется выполнить ряд притязаний. <a href=https://marvelvsdc.faith/index.php?title=%D0%9D%D0%BE%D0%B2%D1%8B%D0%B9%20%D1%81%D0%B5%D1%80%D0%B2%D0%B8%D1%81%20%D0%B4%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B8%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D0%BE%D0%B2%20%D0%BD%D0%B0%20%D0%B4%D0%BE%D0%BC%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO>https://marvelvsdc.faith/index.php?title=%D0%9D%D0%BE%D0%B2%D1%8B%D0%B9%20%D1%81%D0%B5%D1%80%D0%B2%D0%B8%D1%81%20%D0%B4%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B8%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D0%BE%D0%B2%20%D0%BD%D0%B0%20%D0%B4%D0%BE%D0%BC%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO</a> Прибывшие на аккаунт деньги бездепозитные бонусы предназначаются, в основном, лишь для новоиспеченных пользователей, которые раньше не имели личного аккаунта в данном казино. Исходя из сего, если ранее у игрока был изготовлен депо, то, по всей вероятности, у него больше не несомненно возможности рассчитывать на получение такого бонуса в конкретном заведении.Бонус за регистрацию в казино без депозита с выводом денег надо(надобно) отыграть. Зачастую для отыгрыша может понадобиться сделать ставки на необходимую, в несколько 10-ов один превышающую необходимую приза или выигрыша. 1×slots регистрация на сайте <a href=http://baanjompra.com/webboard/home.php?mod=space&uid=18399>http://baanjompra.com/webboard/home.php?mod=space&uid=18399</a> Выиграть реальные средства в казино не пополняя счет – трудно, но вполне. Главное задаться целью и не нарушатьправила заведения. Выберите несколько казино с бездепзитными бонусами и начните играть на бонусные свои. По статистике в одном из 10-ти заведений можно заработать небольшую сумму денег помощью бонусных средств.Допустим, за регистрацию вы получили бездеп в размере 2 000 рублей с вейджером х30. В этом случае светит устроить ставок, на общую сумму в 60 000 рублей (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать настоящие средства. Однако не запамятовывайте, собственно с каждого подарка выйдет исключить определённую необходимую (чаще всего не более $200).
1хслотс зеркало на сегодня
Воспользоваться бездепом возможно не во всех игровых автоматах: казино вдруг устанавливает лимитирование для посетителей. Конечно, это возможно посчитать некоторым неудобством для игрока, но ради отметить, что выбор автоматов всё одинаково остаётся довольно большим. <a href=https://forum.eliteshost.com/showthread.php?tid=14756>1×slots зеркало рабочее на сегодня</a> рабочее зеркало 1×slots <a href=http://www.cjma.kr/bbs/board.php?bo_table=free&wr_id=645848>http://www.cjma.kr/bbs/board.php?bo_table=free&wr_id=645848</a> Получать информацию о самых выгодных бонусах возможно без неизменного мониторинга новостей казино. Мы брали данную задачку на себя и постоянно следим за услугами операторов, выбирая превосходнейшие из их. В данном разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список акций периодически пополняется. В топ зашли самые свежие бездепозитные бонусы за регистрацию в казино 2020, кратковременные и закрытые рекламную. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и аспектам. Если срок действия промоакции истек, она удаляется из перечня. 1×slots регистрация 1×slotscasino09k online
1×slots регистрацию более популярный вариант это
Игрокам не следует принимать приветственный бонус как гарантированный метод получить большой выигрыш, но это отличная возможность без расходов расценить перечень казино. Однако в критериях исчезают «подводные камни», коие не разрешат исключить солидную необходимую или же вы не успеете отыграть вейджер. Поэтому мастера рекомендуют арестовать бесплатные вращения за регистрацию в казино без депо, чтобы поднабраться навыка и получить настоящий шанс на победу.Но рядах азартных платформах похожие гонорары имеют получить теперь зарегистрированные пользователи. В таком случае, бонусы предоставляются масштабах уникальных акций или же некоторым игрокам вид акционного предложения, коие прибывает на почту с целью «возвратить» игрока в свое казино. <a href=https://www.kenpoguy.com/phasickombatives/profile.php?id=2036867>https://www.kenpoguy.com/phasickombatives/profile.php?id=2036867</a> После требуется привнести идентификационный платёж. Это стращает начинающих больше всего. Нужно устроить минимальный депо в 100–500 рублей. Таким образом служба безопасности убедиться в том, что платёжный способ принадлежит Вам. Данная процедура важна для обеспечения безопасности игровых счетов. Пример, Ваш акк взломают и выведут средства на свой кошелёк. Будет крайне неприятно. Поэтому верификация платёжной системы, это важный момент.Прямо в отберите благотворительные вращения за регистрацию без депозита и начинайте собирать призовые композиции ради крупных выигрышей! 1х слот 1хслотс регистрация перейти на 1×slots
1×slots официальный регистрация
Например, игрок получил 500 руб. При твореньи аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., потребуется сделать 875 спинов для полного отыгрыша.Важно, удостоверьтесь что, нет, что ранее не регистрировались в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи. <a href=http://naturetour.ru/communication/forum/messages/forum3/message24452/6143–1×slots-podtverdit-vashu-registratsiyu-esli-govorit?sessid=6170bd175aabe187d8d4ce90c7722440&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1×slots подтвердит вашу регистрацию если говорить</a> Получать информацию о самых выгодных призах можно без неизменного прогноза новостей казино. Мы взяли данную задачу на себя и безпрерывно смотрим за предложениями операторов, избирая наилучшие из них. В данном разделе собраны заключительные бездепы, промокоды к ним и обстоятельства их активации. Список промоакций периодически дополняется. В топ вошли самые новые бездепозитные бонусы за регистрацию в казино 2020, кратковременные и закрытые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру прочим критериям. Если срок действия промоакции истек, она удаляется из перечня. Суммы похожих услуг, случаев, колеблются от трех до 20 $, а вейджер на эти средства должен составлять от тридцати до шестидесяти раз. Зачастую, большая сумма выигрыша здесь составит от одной до двух сотен долларов. Если в выиграет больше, то все средства могут быть списанными до очень разрешенного выигрыша. Здесь замечена содержание выводить еще несуществующие деньги на собственную платежную систему и далее находить заведение с благоприятными под данную сумму релоадом либо призом за 1-ое пополнение счета. Есть некоторое подвидов бездепозитного гонорары, предлагаемого великим количеством заведений.Активация по промокоду употребляется в разных обликах бездепов. Если идет о приветственном призе, то комплект знаков можно разузнать на главной странице, в регистрационной форме либо письме, коие отправляется юзеру для подтверждения адреса электронной почты. Акции все проводиться вместе с партнерскими площадками. Обычно код располагается на постороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активизируется разовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем актуальный код для активации в описании каждого рекламную. 1×slots коды <a href=http://alice8833.com/home.php?mod=space&uid=74495>http://alice8833.com/home.php?mod=space&uid=74495</a> Мы рекомендуем не отрицаться от подобных предложений известных казино. Выделите некоторое минут на регистрацию, получите бонус и попробуйте его отыграть. Может быть, сейчас удача будет на вашей стороне!
1×slots casino регистрация
Не стоит незамедлительно же отрицаться от приветственных подарков в подобных казино. Администрация готова начислить средства или фриспины, хотя сначала сотрудники обязаны убедиться, что вы не аферист. Дело что, что развелось очень количество охотников за бонусами. Они выучились накалывать систему и наваривать крупные суммы денег. Наш перечень содержит наилучшие бездепозитные бонусы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по важным параметрам:Ознакомьтесь с нашим перечнем наилучших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего перечня и получите бездеп сразу. Хватайте превосходнейшие благотворительные предложения ниже и выигрывайте немалые средства, не рискуя! <a href=http://www.ritual-letichev.km.ua/user/AshleyGenny/>http://www.ritual-letichev.km.ua/user/AshleyGenny/</a> Отыграв бездепозитный приз в казино с выводом также придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, случае подобное ограничение существует, то единоразово исключить получится только необходимую, не превосходящую объем приобретенного бонуса. 1×slots быструю регистрацию а также мгновенное Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция содержит доскональные управляла, ссылка на которые обыкновенно содержится в промообъявлении. В них указываются лимиты, вейджер, список дешевых игр. Если оператор прячет данные о предложении, то воспользоваться им не.Бездепозитные бонусы казино это экономическая компенсация, предлагаемая пользователям на дармовой базе и вероятность играть в интернет казино безвозмездно. Если ассоциировать их с одобрениями за вклад, в которых свои выдаются только впоследствии первоначального пополнения счета, то бездепозитные вознаграждения получаются бесплатно. То есть, играющий получает вероятность создавать ставки на теснее имеющие деньги, коие выдаст заведение, выполняя, всем, обыденные действия, чтобы их извлечь (тут идет речь о регистрация, удостоверении личности с использованием номера аппарата, дизайна заявки и т.д.).
<b>Смотреть еще похожие новости:</b>
<a href=https://www.donchillin.com/space-uid-382497.html>1×slots регистрацию процедура займет всего лишь</a>
<a href=https://www.reisezielforum.de/viewtopic.php?t=368940>1хслотс регистрация в 1×slots casino</a>
<a href=https://koreanstudies.com/forum/viewtopic.php?t=108321>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Обычно бездепозитные промоакции от казино, прибывают на эл. Почту в деньки рождения или праздничные. В неких онлайн казино возможно обратиться в чат и как постоянному игроку, вероятно для предложат бездепозитное предложение.
#9242 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
Отказ в прохождении верификации. Если клиент не желает или возможности дать документы, подтверждающие его личность, профиль несомненно заблокирован вместе со всеми бонусными начислениями.Условия шансы разниться друг от друга. Но такой бонус возможность быть применен только для игрового процесса – полученные на счет финансы до такого, как будут отыграны, исключить невероятно. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало рабочее</a> В качестве бонусов онлайн казино нередко предлагает выдачу фриспинов, то есть безвозмездных вращений игрового барабана. Виртуальные монеты возможно использовать для обучения в покерной школе либо для игры в казино.Теоретически, к безвозмездным призам возможно отнести например нарекаемые фриспины. Напомним, речь идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, поэтому что они деют только возможность делать ставки. <a href=https://elearnportal.science/index.php?title=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D0%BE%D0%B2%20%D0%BD%D0%B0%20%D0%B4%D0%BE%D0%BC%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO>https://elearnportal.science/index.php?title=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D0%BE%D0%B2%20%D0%BD%D0%B0%20%D0%B4%D0%BE%D0%BC%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO</a> рабочее зеркало 1хслотс <a href=http://ofhoreca.ru/bitrix/redirect.php?goto=http://icomms.ru/go/?http://liko-baby.ru/bitrix/rk.php?goto=https://telegra.ph/Mogut-li-u-vas-otobrat-kvartiru-za-neoplachennye-dolgi-09–23>http://ofhoreca.ru/bitrix/redirect.php?goto=http://icomms.ru/go/?http://liko-baby.ru/bitrix/rk.php?goto=https://telegra.ph/Mogut-li-u-vas-otobrat-kvartiru-za-neoplachennye-dolgi-09–23</a>
1×slots зеркало регистрацию более популярный вариант это
Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала быстрые выводы. Фишка выплат сомнений, собственно достаточно избрать платёжный инструмент и указать сумму. В большинстве случаев средства зачисляются на электронные кошельки протяжении 15 мин., а на банковские карты – 1–3 рабочих денька. <a href=https://forums.scar-divi.com/topic/596399–1×slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8E-%D0%BF%D1%80%D0%BE%D1%86%D0%B5%D0%B4%D1%83%D1%80%D0%B0-%D0%B7%D0%B0%D0%B9%D0%BC%D0%B5%D1%82-%D0%B2%D1%81%D0%B5%D0%B3%D0%BE-%D0%BB%D0%B8%D1%88%D1%8C/>1×slots регистрацию процедура займет всего лишь</a> 1×slots регистрация Но а случае вы теснее профи по интернет казино, кликаем на красную кнопку «Получить» и Вы автоматически перейдете в онлайн казино;Если речь идет об эксклюзивных услугах, возможность понадобиться регистрация в казино по ссылке с партнерского сайта. <a href=http://uzdm.pro/bitrix/redirect.php?goto=http://zhit-vmeste.ru/bitrix/rk.php?goto=http://flower-mix.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/tpfHJ2ZNGNK>http://uzdm.pro/bitrix/redirect.php?goto=http://zhit-vmeste.ru/bitrix/rk.php?goto=http://flower-mix.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/tpfHJ2ZNGNK</a> Многие игроки, оценив перечень казино, остаются выступать в нем и дальше ? на это и направлено любое рекламную. Постоянные клиенты вносят депозиты и проделывают ставки, обеспечивая длительную выгода оператора. То есть, казино выдают бездепы свежим юзерам для формирования приклнной аудитории.В списке притязаний к отыгрышу нередко присутствуют лимиты на ставки при игре на собственные деньги. Так, случае отыграть надо(надобно) 30 000 руб., а максимальная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 раз. Эта особенность затрудняет соблюдение игроками критерий по срокам деяния акции. 1х слот 1хслотс регистрация перейти на 1×slots Существует ли стратегии для отыгрыша бездепозитных призов? К раскаянию нет, на выигрыши или проигрыши с призов, казино либо игрок воздействовать имеет, отдача игр происходит от разработчиков игр.При этой на бонусные свои запрещается выступать в игровые автоматы с прогрессивным джекпотом и забавы из радела live casino. Кроме как, кое-какие казино дают бездеп на раз либо количество определенных слотов, и в других забавах Вы не можете на них играть.
1×slots зеркало сайта
Составленный специалистами Casino.ru список онлайн-казино с бездепозитным бонусом дозволяет игрокам сравнить спецпредложения различных операторов. <a href=http://radshir.com/list/index.php?subaction=userinfo&user=HenryViack>http://radshir.com/list/index.php?subaction=userinfo&user=HenryViack</a> В качестве призов онлайн казино нередко предлагает выдачу фриспинов, другими бесплатных вращений игрового барабана. Виртуальные монеты можно использовать для обучения в покерной школе либо для забавы в казино. 1×slots скачать на айфон Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, solid зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.Начнём с как, собственно любое рекламную за регистрацию предполагает некие условия. Бездепозитные призы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность денежного оборота, необходимая для выполнения условий. Пример, получили бесплатные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 руб., неудачных либо выигрышных, важно. После исполнения, бонусный баланс перейдёт на реальный и будет доступным к выводу.
1хслотс официальный сайт зеркало
На странице представлены бездепозитные бонусы за регистрацию в казино редчайшая награда за коей гонятся все игроки как новички, например и профессионалы. Мы тоже уделяем большое внимание на присутствие бонусов при составление рейтинга казино на средства. Бездепозитный приз это возможность выступать даром и выиграть настоящие деньги. 1хслотс казино зеркало <a href=http://www.aipingce.com/space-uid-116585.html>http://www.aipingce.com/space-uid-116585.html</a>
1×slots зеркало сайта
В перечне притязаний к отыгрышу часто присутствуют лимиты на ставки при забаве на личные средства. Так, случае отыграть нужно 30 000 рублей, а предельная сумма ограничена 30 рублями, то вертеть барабаны предстоит 1000 раз. Эта необыкновенность затрудняет соблюдение игроками условий по срокам деяния акции.Активация по промокоду употребляется в различных обликах бездепов. Если идет о приветственном бонусе, то комплект символов возможно узнать на главной странице, в регистрационной форме или письме, которое отчаливает пользователю для доказательства e-mail. Акции шансы проводиться вместе с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активизируется разовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном кабинете или начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем важный код для активации в описании любого рекламную. <a href=http://www.ritual-letichev.km.ua/user/Williammyday/>http://www.ritual-letichev.km.ua/user/Williammyday/</a> Как лишь получите бездеп в казино, всё одинаково не забывайте проверять электрическую почту. Некоторые игорные клубы постоянно радуют активных гэмблеров приятными бонусами. Чаще всего получить подарок можно в преддверии праздника, на денек рождение, за привлечение приятеля. А кроме распространённым бонусом является надбавка к депозиту. Нужно чем восполнить счёт, и азартное заведение прирастит его на 50–100%. 1×slots регистрация
<b>Смотреть еще похожие новости:</b>
<a href=http://theauction.com.au/author/jamesflake/>1хслотс мобильная версия зеркало</a>
<a href=http://mandala-app.com/forums/memberlist.php?mode=viewprofile&u=3447>1×slot зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Доступные забавы – В некоторых азартных забавах возможно понизить математическое превосходство казино до нескольких 10-х процента. В их количестве многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как управляло, в этих играх ставки идут в зачет вейджера не всецело. Например, может предусматриваться только 50%. В неких забавах бездепозитные бонусы вообще нельзя отыгрывать.
#9243 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
Первый образующийся вопрос, это, для выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают свежих игроков. Последним проще начать игру на деньги с дара за регистрацию. Им не нужно пополнять баланс и расходовать личные средства. Новички получают бесплатные спины либо свои на счёт. С их подмогою знакомятся с игровым ходом, крутят слоты и проделывают ставки в рулетке. <a href=http://filmkachat.ru/>1×slots на любой вкус как пройти регистрацию</a> <a href=http://formulandoeinnovando.com/como-se-afecta-la-formulacion-con-el-proceso-que-aplico/?unapproved=462900&moderation-hash=3688f9fbfa170251a4d17ee7f48cdaaf#comment-462900>http://formulandoeinnovando.com/como-se-afecta-la-formulacion-con-el-proceso-que-aplico/?unapproved=462900&moderation-hash=3688f9fbfa170251a4d17ee7f48cdaaf#comment-462900</a> 1×slots зеркало видели такую регистрацию на <a href=https://www.escort-liege.eu/user/profile/461147>https://www.escort-liege.eu/user/profile/461147</a>
1×slos регистрация в 1×slots casino
Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. <a href=https://www.goslog.ru/forum/messages/forum1/message9914/11-obrashcheniya-grazhdan?result=reply#message9914>1×slots зеркало подтвердит вашу регистрацию если говорить</a> 1хслотс 1хслотс регистрация перейти на 1×slots Список так нарекаемых «не территорий» прилагается к правилам бонусной программы игорного портала. Обязательно выясните, распространяются ли на вас подобные наказания.Бoльшинcтвo азартных заведений выдвигают приблизительно одинаковые обстоятельства и притязания, которые нужно выполнить, дабы получить бездепозитный бонус за регистрацию. Все их возможно объединить в один список: <a href=https://rus-crafting.ru/index.php?subaction=userinfo&user=ArnoldbiP>https://rus-crafting.ru/index.php?subaction=userinfo&user=ArnoldbiP</a> 1×slot зеркало рабочее регистрации на телефон придет При игре на бонусные средства воспрещается выступать в игровые автоматы с современным джекпотом и игры из радела live casino. Кроме такого, кое-какие казино дают бездеп на раз либо количество конкретных слотов, и в иных забавах Вы не сможете на них играть.
1х слот 1хслотс регистрация перейти на 1×slots
Многие новички сомневаются, что поощрительный приз не нужно несомненно отдавать, в в они выиграли у казино. Это безусловно безопасно и накрепко. Выводя выигранные свои, игрок просто останавливает свое роль в игре и утрачивает уникальную возможность – безвозмездно увеличивать собственное вещественное положение. <a href=https://rostovbike.ru/user-2421.html>https://rostovbike.ru/user-2421.html</a> Лишь модные и знаменитые азартные заведения могут позволить для выдавать бездепы в виде дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депо, которые можно потратить в топовых аппаратах с высочайшей отдачей.Бонус начисляется игроку сразу после регистрации и прохождения верификации в казино и не просит от клиента внесения депо. Как правило, размер приза в схожем случае довольно стыдливый, впрочем разрешает новичкам познакомиться с игрой без риска настоящими средствами. 1×slots зеркало регистрацию более популярный вариант это
1хслотс рабочее зеркало
Получать информацию о самых выгодных призах можно без постоянного мониторинга новостей казино. Мы брали данную задачку на себя и непрерывно следим за услугами операторов, выбирая лучшие из них. В данном разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список промоакций периодически пополняется. В топ вошли самые свежие бездепозитные призы за регистрацию в казино 2020, временные и замкнутые промо. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и аспектам. Если срок деянья промоакции истек, она удаляется из перечня. Бездепозитные призы — это презенты от казино повторяющий бонусных денег либо фриспинов для игровых автоматов, коие начисляются на акк игрока после процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депо не требуется. Акционные предложения от казино есть в разных форматах. Часто призы даются в мена на депозит. Игрок вносит платеж и получает средства, бесплатные вращения и другие поощрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — вид бонуса, который гарантирован за исполнение определенных поступков на веб-сайте:Казино дает возможность заработать и исключить реальные деньги на бездепозитных призах. Обычно, это малозначительная сумма, коию казино возможность себе позволить презентовать игроку. 1×slots casino регистрация на сайте <a href=https://www.alonegocio.net.br/author/katja55e974/>https://www.alonegocio.net.br/author/katja55e974/</a>
1×slots casino регистрация
Частенько новенькие не разумеют, как активировать презенты либо исключить первый выигрыш. Для сходственных случаев наша команда обрисовала главные определения – собственно это фриспины, вейджер, как его отыграть, для необходимо протекать верификацию. <a href=http://www.shunion.co.kr/bbs/board.php?bo_table=free&wr_id=555580>http://www.shunion.co.kr/bbs/board.php?bo_table=free&wr_id=555580</a> Получив свой презент, Вы можете безвозмездно играть на реальные средства, а выполнив обстоятельства отыгрыша, вывести собственный выигрыш. 1×slot зеркало рабочее этих способов предполагает регистрацию
<b>Смотреть еще похожие новости:</b>
<a href=https://nztw.org/thread-377113–1–1.html>1×slots рабочее зеркало на сегодня</a>
<a href=http://diplomka.jakubfiser.com/wolf/plugins/comment/image.php>1хслотс рабочее зеркало</a>
<a href=https://koreanstudies.com/forum/viewtopic.php?t=128208>1× slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если при регистрации показать промокод, можно гарантировано получить бонус. Где брать ваучер? Посетите на блоги либо форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В последнее время игорные дома начали афишироваться в кинокартинах и телесериалах. Присмотритесь и всего заметите промокод, который принесёт 500 или 1 000 бонусных рублей.
#9244 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало проходить регистрацию это отличный вариант
Так же стоит выделить то, собственно в каждом онлайн казино установлен собственный наибольший кешаут на бездепозитный приз. Как верховодило кешаут — это предельная сумма денег, кот-ая дешевая для вывода с бездепозитного бонуса. <a href=http://filmkachat.ru/>1×slots зеркало видели такую регистрацию на</a> B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpaxИгры, в можно выступать на бонусные деньги. Проверьте список игр, в которых можно играть на бонусные средства, вероятно они Вам не понравятся и не стоит тратить своё время на такую промоакцию. <a href=http://sman1mtp.sch.id/index.php?option=com_comprofiler&task=userProfile&user=2474>http://sman1mtp.sch.id/index.php?option=com_comprofiler&task=userProfile&user=2474</a> Теоретически, к бесплатным бонусам возможно отнести так именуемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, поэтому что они деют только возможность делать ставки. рабочее зеркало 1хслотс <a href=https://www.modernvespa.it/profile/3878-forsedropsa/>https://www.modernvespa.it/profile/3878-forsedropsa/</a>
скачать 1×slots официальный сайт
Многие новички сомневаются, что поощрительный приз не будет возвращать, и в они выиграли у казино. Это безусловно безопасно и накрепко. Выводя выигранные средства, игрок просто одергивает свое участие в игре и теряет уникальную возможность – бесплатно наращивать собственное материальное положение.Несмотря на то, что этот вариант стимуляции со стороны азартных платформ довольно популярен в сфере подобных игр, далековато многим почитателям казино ведомо, что по бездепозитные бонусы казино и как именно их возможно эксплуатировать. 1×slots официальный зеркало рабочее Новые клиенты онлайн-казино без первого депозита шансы выяснить собственную удачливость. К тому же есть возможность конвертировать бездепы в реальные деньги за регистрацию в казино, впрочем чтобы бонус необходимо отыграть согласно условиям промоакции.Любой выигрыш по ставке выше установленного лимита будет являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, а в случае выигрыша его сумма не поступит на счёт клиента — результат игры несомненно всецело аннулирован. <a href=https://farmarm.net:443/bbs/board.php?bo_table=free&wr_id=1365045>https://farmarm.net:443/bbs/board.php?bo_table=free&wr_id=1365045</a> 1×slot казино зеркало Не стоит путать игру в демо и использование призов. В демонстрационном режиме игрок может расценить механику слота, сюжет и оформление. Но забава проводится на условные кредиты, поэтому отсутствует главное ? ощущение азарта. Активируя промокод или фриспины, заказчик как не расходует средства деньги на игровые автоматы, но возможность сорвать настоящий куш!
1×slot зеркало
В зависимости от онлайн заведения любой из них имеет для предложить как бездепозитные деньги, например и бездепозитные фриспины, коие последствии успешной регистрации упадут для на ваш игровой баланс.Баланс игрока дополняется на подобающую сумму. К ней применяется вейджер, обозначенный в правилах промоакции. Вывести выигрыш возможно несомненно в такого, как юзер сделает требуемый объем ставок из личных средств. В редчайших случаях бездеп работает в формате Free Play. На счет юзера зачисляется большая сумма, и предоставляется маленький срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по завершении этого периода сумма на счету будет превышать первоначальную, то разность можно несомненно исключить или применять для дальнейших ставок. Обычно показатель повыше, чем для призов на депозит. Не дивитесь, в он несомненно том х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных стран. <a href=https://www.easyinsurancehub.co.uk/forum/thread-43686.html>https://www.easyinsurancehub.co.uk/forum/thread-43686.html</a> 1×slots промокод при регистрации 2025 Также, учите, что бездепозитный бонус возможно вывести лишь сомнений случае, когда будут выполнены все условия отыгрыша.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Возможность поиграть вспомогательное соревнование (а время и количество) абсолютно безвозмездно, а выигрыш, в свою очередь, поступает на счёт игрока. <a href=http://forum.survival-readiness.com/memberlist.php?mode=viewprofile&u=30498>1× slots сайт</a> Многие игроки, оценив перечень казино, остаются выступать в нем и дальше ? на это и нацелено любое промо. Постоянные посетители вносят депозиты и проделывают ставки, обеспечивая долгосрочную выгода оператора. То есть, казино раздают бездепы новым пользователям для формирования лояльной аудитории. 1×slots casino регистрация на сайте <a href=http://wiki.die-karte-bitte.de/index.php/Benutzer_Diskussion:GabriellaCrackne>http://wiki.die-karte-bitte.de/index.php/Benutzer_Diskussion:GabriellaCrackne</a> При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое возможно предназначить игре в казино.Третитй бездепозитный приз за регистрацию – денежные свои. К раскаянию, начислить рубли либо доллары готовы лишь знаменитые и пользующиеся клубы. С их помощью появится насладиться любой доступной игрой – автоматом, рулеткой, кено, блэкджеком.
онлайн казино 1×slots
Автоматы неспроста числятся самым популярным азартным весельем. Чтобы освоить управление и правила, потребуется всего количество минут. Ваша задача сделать ставку, определить число трудящихся линий и возможно вертеть тамбур. Если на экране выпадет выигрышная композиция – вы выиграли! С этой задачей вам посодействуют управится бездепозитные призы казино.Обычно, бездепозитные бонусы выдаются под конкретные слоты с фиксированной ставкой, но их наверняка запрещено использовать в игровых автоматах с современным джекпотом. Список игр, в которых возможно использовать бездеп, Вы отыщите в описании акции либо можете уточнить у саппорта заведения. <a href=https://forum.cabal.playthisgame.com/member.php?1648188-AshleyArirm>https://forum.cabal.playthisgame.com/member.php?1648188-AshleyArirm</a> Предложения с бездепозитными бонусами за регистрацию дозволяют новым заведениям привлечь аудиторию на собственный вебсайт. А игроки тому получают возможность играть на реальные деньги без депозита в казино и заработать небольшой стартовый капитал, кот-ый разрешается исключить на карту банка либо электрический кошелек.Акции, приуроченные к календарным дням, случаются рассчитаны как на всех юзеров, так и на категории: примеру, подарок на 8 марта девушкам-игрокам или мужчинам на 23 февраля. онлайн казино 1×slots Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Поспешите забрать бездепозитные призы за регистрацию в казино из представленного списка. Все платформы столько водят легальную деятельность, но и обрадуют честными результатами игры, высокой отдачей, резвыми выплатами.
<b>Смотреть еще похожие новости:</b>
<a href=https://maple.wowxyz.work/forum.php?mod=viewthread&tid=96250&extra=>рабочее зеркало 1×slots</a>
<a href=https://rolivka.online/forum/showthread.php?tid=29321>1 х слотс зеркало</a>
<a href=http://aurorahcs.com/forum/memberlist.php?mode=viewprofile&u=168982>1×slot официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепы с безвозмездными вращениями деют юзерам право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд уплачивает казино. Число спинов ограничено и изредка выше сотню. Если промоакция содержит количество безвозмездных игр, их начисление имеет быть разбито на несколько дней. Шаг 4. Активация. Внимательно исследуйте условия, информацию по ограничениям и сроке деянья бонусного предложения. Разобравшись с правилами, возможно активировать приз в собственном офисе (времени ? с внедрением промокода) либо по запросу в саппорт.
#9245 Charlesgunnyhttp://filmkachat.ru
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Помните, собственно в неких забавах сумма ставки идет в зачет вейджера лишь отчасти. Так, в настольных и карточных забавах только от 5% до 50% суммы ставки считаются как отыгранные средства, на как в слотах идет в зачет все 100% суммы. <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> При отыгрыше бонусных средств, необходимо учесть срок деяния приза и время, которое дается на отыгрыш. По истечению заявленного медли, не отыгранный бонус несомненно аннулирован. <a href=https://findmyjobs.lk/author/davidimaks/>https://findmyjobs.lk/author/davidimaks/</a> 1×slots коды <a href=https://codescript.ru/user/Craiggek/>https://codescript.ru/user/Craiggek/</a> На страничке представлены бездепозитные призы за регистрацию в казино редчайшая заслуга за коей гонятся все игроки как новички, например и профессионалы. Мы тоже уделяем великое внимание на наличие бонусов при составление рейтинга казино на деньги. Бездепозитный бонус это возможность выступать даром и выиграть настоящие деньги.
казино 1×slots официальный сайт
Можно. Вы всегда сможете отказаться от получения бездепозитного приза за регистрацию в казино, пока Вы не создадите ставку.В случае установленного лимита на необходимую вывода выигрыша с бездепозитного приза, игрок не сможет исключить больше заявленной суммы. <a href=http://forums.panzergrenadiers.com/showthread.php?23055–1×slots-%D0%A1%D0%82%D0%A0%C2%B0%D0%A0%C2%B1%D0%A0%D1%95%D0%A1%E2%80%A1%D0%A0%C2%B5%D0%A0%C2%B5-%D0%A0%C2%B7%D0%A0%C2%B5%D0%A1%D0%82%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%BB%D0%A0%D1%95-%D0%A0%D0%85%D0%A0%C2%B0-%D0%A1%D0%83%D0%A0%C2%B5%D0%A0%D1%96%D0%A0%D1%95%D0%A0%D2%91%D0%A0%D0%85%D0%A1%D0%8F&p=506676#post506676>1×slots рабочее зеркало на сегодня</a> 1×slots зеркало видели такую регистрацию на Многие игроки, оценив перечень казино, остаются выступать в нем и дальше ? на это и нацелено любое промо. Постоянные посетители вносят депозиты и проделывают ставки, обеспечивая долгосрочную выгода оператора. То есть, казино раздают бездепы новым пользователям для формирования лояльной аудитории. <a href=http://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=6193>http://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=6193</a> 1×slots регистрация
зеркала 1×slots
Бонус в казино без депозита содержит различные варианты: может быть приветственный приз, промоакции в честь каких-либо праздников или важных дат, приз за привлечение свежих игроков, преданность и получение VIP-статуса. <a href=http://drop-let.ru/index.php?subaction=userinfo&user=mysterioussubur>http://drop-let.ru/index.php?subaction=userinfo&user=mysterioussubur</a> Обычно для получения бонусов без депозита, казино выдвигает лояльные и абсолютно выполнимые условия, но есть ряд действий которые запрещены и могут повлечь за собой противные последствия:Высокая конкуренция в разделе азартных игр доказывает операторов завлекать клиентов разнообразными акциями. Благодаря данному у гостей замечена возможность получить призы в казино за регистрацию без депозита. Воспользоваться этим предложением возможно, избегая функцию внесения средств на игровой счет, просто активировав акк на веб-сайте. Наш гид по бездепам поможет избрать самую привлекательную бонусную программку, узнать правила получения такового вознаграждения и распорядиться им с максимальной выгодой. 1×slots официальный сайт зеркало На благотворительные бонусы онлайн-казино практически постоянно распространяется ограничения по стране проживания посетителей. Даже случае вам разрешается раскрывать счет и выступать на деньги в заведении, это еще не означают, собственно вас доступны no down payment bonuses.Бонусные деньги – маленькая сумма денег для старта в новом казино. На бонусные деньги, обычно разрешено выступать во все игры, считая слотов с современным джекпотом и игр из раздела live casino.
1×slots бездепозитный бонус за регистрацию
Практически все онлайн казино с бездепозитным призом за регистрацию учитывает программку преданности — систему поощрения постоянных клиентов, которая произведено из большого уровней. При достижении игроком одного уровня на его счёт поступает бонус. Чем повыше уровень — тем щедрее приз. <a href=https://hiddeninthesand.com/forum/memberlist.php?mode=viewprofile&u=1529>1×slots casino регистрация</a> Теоретически, к безвозмездным бонусам возможно отнести так называемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, потому собственно они деют только возможность создавать ставки.Третитй бездепозитный приз за регистрацию – денежные средства. К раскаянью, начислить рубли либо баксы готовы лишь знаменитые и популярностью клубы. С их поддержкой возможность насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком. Таким образом онлайн казино получает потенциального игрока. Возможно в будущем либо истинном он захочет поиграть на средства средства. Так работают бездепозитные призы в интернет казино. Здесь хорошо подходит выражение, безвозмездные сыр бывает только в мышеловке. Начинающие игроки шансы не осознавать опасность пыла. Однако времени понимания делается больше. Это тема для отдельного обсуждения.Обычно бездепозитные промоакции от казино, приходят на эл. Почту в дни рождения или дни. В некоторых интернет казино можно обратиться в чат и как неизменному игроку, вполне для предложат бездепозитное предложение. 1х слотс зеркало регистрация в 1×slots casino <a href=https://gusev-online.ru/user/Justinwef/>https://gusev-online.ru/user/Justinwef/</a>
1×slots казино мобильная версия
Так что можете отважно регистрироваться без всяких размышлений. Фортуна сегодня наверняка на вашей стороне. Не опасайтесь, как последствие какого или убытка Вам абсолютно не угрожает. С такими бонусами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе.Так же стоит выделить то, что в любом онлайн казино установлен собственный наибольший кешаут на бездепозитный бонус. Как правило кешаут — это максимальная сумма средств, кот-ая доступная для вывода с бездепозитного приза. Бездепозитные бонусы в казино без пополнения 2022 — это конкретная сумма денег или gratuitous spins вращения, коие предоставляются первым постояльцам за регистрацию на веб-сайте казино вид бездепозитного приза, и дает вас вероятность с казино без пополнения опробовать услуги (игр), с дальнейшей привилегией вывода средств при исполненьи всех установленных управлял. <a href=http://forum.drustvogil-galad.si/index.php?action=profile;u=47094>http://forum.drustvogil-galad.si/index.php?action=profile;u=47094</a> 1×slots регистрация 1×slots casino 777 online Третитй бездепозитный бонус за регистрацию – денежные свои. К огорчению, начислить рубли либо баксы готовы только знаменитые и известные клубы. С их подмогою у насладиться любой доступной забавой – автоматом, рулеткой, кено, блэкджеком.Бездепозитный приз за регистрацию в казино с выводом средств в 2022 году — Наш ресурс дает игрокам важную информацию о самых новых, щедрых и испытанных бонусах в онлайн казино, коие обновляются любой день.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.fromrus.su/index.php?/topic/24066–1-x-slots/>1 x slots</a>
<a href=https://www.goslog.ru/forum/messages/forum1/message9445/11-obrashcheniya-grazhdan?result=reply#message9445>1×slots сайт</a>
<a href=https://www.reisezielforum.de/viewtopic.php?t=369745>1×slot официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Предложения с бездепозитными призами за регистрацию дозволяют новым заведениям привлечь аудиторию на собственный сайт. А игроки к получают возможность играть на настоящие средства без депо в казино и заработать маленькой стартовый капитал, который разрешено исключить на карту банка либо электронный кошелек. При пользовании бездепозитным призом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют количество видов лимитов:
#9246 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slotscasino 56 online
Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие возникают у начинающих.Раздача бонусов возможность быть посвящена разным датам: календарные праздничные, дни рождения игроков, юбилей открытия казино и т. Д. Подарок выдается повторяющий денег, фриспинов или баллов для скопления и размена на предложения оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода данной суммы придется выполнить ряд притязаний. <a href=http://filmkachat.ru/>1×slots на любой вкус как пройти регистрацию</a> <a href=https://forum.bedwantsinfo.nl/member.php?action=profile&uid=96210>https://forum.bedwantsinfo.nl/member.php?action=profile&uid=96210</a> 1×slots регистрация <a href=http://komunikacyjnerpg.cba.pl/member.php?action=profile&uid=239193>http://komunikacyjnerpg.cba.pl/member.php?action=profile&uid=239193</a> Наши эксперты изучают условия акции, этого в ручном режиме проверку их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие характеристики. Мы не рекламируем казино, а даем игрокам информацию о превосходнейших из них.В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, необходимо адресоваться в службу поддержки через лайв-чат на сайте казино.
1×slots зеркало которую указывали при регистрации кстати
1×slots зеркало видели такую регистрацию на Также случаются случаи, когда казино начислит обсужденный приз в регистрации нового посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам. <a href=http://vn-info.net/user/DavidMax/>http://vn-info.net/user/DavidMax/</a> Следует подчеркнуть, собственно бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом.У каждого игорного заведения средства верховодила и обстоятельства. Но, дабы получить призы, необходимо выполнить стандартные деянья: 1×slots зеркало проходить регистрацию это отличный вариант Подтверждение индивидуальной информации. Все казино просят от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у юзера других аккаунтов (мультиаккаунт запрещен).На критериях отыгрыша бесплатных призов стопам тормознуть подробнее. С ними связаны нюансы, коие невозможно забыть без внимания.
1×slots регистрация 1×slotscasino 56 online
Некоторые клубы автоматически начисляют приз на аккаунт игрока в исполнения условий получения, хотя случаются истории, когда приз нужно активировать игроку самому. Есть некоторое способов активации приза: Вы наверняка, как и все любите получать презенты и бездепозитные призы казино. Игорные дома брали в привычку одаривать гэмблеров приятными призами. Стать владельцем приветственного презента возможно за творение профиля или пополнение счёта. Второй вариант более увлекательный, так клубы готовы удвоить депо! Но если вы новичок и лишь знакомитесь с миром пыла, превосходнее воспользуйтесь призом за регистрацию. <a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=4215>http://www.predictive-datascience.com/forum/member.php?action=profile&uid=4215</a> 1×slots подтвердит вашу регистрацию если говорить В качестве бонусов онлайн казино часто предлагает выдачу фриспинов, другими даровых вращений игрового барабана. Виртуальные монеты возможно применять для обучения в покерной школе либо для забавы в казино.Исходя из сего, просто не присутствует мудрых оснований махнуть рукою на получение такого приза при регистрации. И, лишним, на такой бесплатной основе у вас есть все шансы выиграть средства и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, нарекают бесплатными интернет платформами для игр.
1×slots официальный сайт мобильная версия скачать
Некоторые онлайн-казино без депозита предлагают свежим посетителям избрать приз при регистрации. Будьте внимательны: выбрав раз, вы в безоговорочном большинстве случаев не можете пользоваться остальными. <a href=http://nhomtruyen.com/members/jamesgaw.9280/>1хслот зеркало сайта</a> Маркетинговая деятеля всех игорных интернет-клубов обязана одевать различный характер. И случае вознаграждения на депо служат для того, дабы стимулировать заносить депозиты и поощрять теснее существующих пользователей, то бездепозитный приз в казино или приз за регистрацию в казино, этого всего, рассчитан на расширение базы потребителей. Прибывшие на акк финансы бездепозитные бонусы предназначаются, главном, лишь для новоиспеченных юзеров, коие раньше не имели личного аккаунта в данном казино. Исходя из сего, в раньше у игрока был сделан депозит, то, по всей вероятности, у него больше не несомненно способности рассчитывать на получение такого бонуса в определенном заведении. 1хслот зеркало <a href=http://web.symbol.rs/forum/member.php?action=profile&uid=645986>http://web.symbol.rs/forum/member.php?action=profile&uid=645986</a>
1×slots сайт
Для получения бонуса надо(надобно) пригласить в забаву свежего посетителя. Казино начисляет пригласившему фиксированный процент от взносов приглашённого повторяющий приза: почаще всего его размер не выше 10%. Срок деяния приза правило не выше месяца: пригласивший получает приз зависимо проигранных ставок приглашённого в первый месяц игры. Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и расценить особенности, труднодоступные при забаве в демо режиме. Многие свежие клиенты перебегают в количество постоянных, а оператор получает долгосрочную выгода. <a href=http://i-willtech.co.kr/bbs/board.php?bo_table=free&wr_id=402872>http://i-willtech.co.kr/bbs/board.php?bo_table=free&wr_id=402872</a> Предложения с бездепозитными призами за регистрацию позволяют свежим заведениям привлечь аудиторию на свой сайт. А игроки к получают возможность выступать на настоящие деньги без депозита в казино и заработать маленькой стартовый капитал, кот-ый разрешается исключить на карту банка или электрический кошелек.Это один из основных показателей привлекательности дара. С завешенным коэффициентом в профессионалы не смогут выполнить условия по отыгрышу. И так, насколько привлекательно смотрится предложение – бездепозитный приз казино в объеме $500 или $1 000. Чтобы новенькие лучше вникли, собственно же такое вейджер, мы разберём на примере. 1× slots официальный Бездеп с фриспинами возможность охватывать всю коллекцию игр на веб-сайте или разработки одного провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш возможность быть выведен в того, как юзер отыграет эту необходимую. Возможность расценить глубокий перечень слотов — главное достоинство этой разновидности. Игроку становятся доступны что, эти опции, которые отсутствуют в демонстрационном режиме, а возможность выиграть настоящие деньги добавляет ярчайших азартных ощущений.
<b>Смотреть еще похожие новости:</b>
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=297199>1× slots сайт</a>
<a href=https://bans.org.ua/index.php?topic=118757.new#new>1×slots зеркало регистрацию более популярный вариант это</a>
<a href=http://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=6268>1×slots промокод при регистрации 2025</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Не советуем опрометью голову хвататься за всевозможные предложения получения средств без вложений. Вполне вероятно, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на первый взгляд. Альтернативой считается казино бонус за депо. Мы предлагаем для пару советов, благодаря которым у любого игрока несомненно вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств:
#9247 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino c2d ru
Мы советуем не отрицаться от сходственных услуг узнаваемых казино. Выделите некоторое минут на регистрацию, получите приз и попытайтесь его отыграть. Может быть, сейчас фортуна будет на вашей стороне! <a href=http://filmkachat.ru/>1×slots casino регистрация на сайте</a> Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, чтобы появилась вероятность исключить выигрыш.Возможность поиграть дополнительное состязание (а времени и несколько) абсолютно бесплатно, а выигрыш, тому, поступает на счёт игрока. <a href=http://xn–80aphfq.xn–p1ai/user/JamesFoern/>http://xn–80aphfq.xn–p1ai/user/JamesFoern/</a> Сроки активации приза устанавливаются каждым казино, но чаще всего они не превышают недели с момента получения. Игроку непременно надо(надобно) использовать бездеп в течение обозначенного срока, в ином случае бонус просто исчезнет. Каждый бонус возможно получить только один раз, потому случае не использовать бездеп в срок, у игрока не будет второго шанса им воспользоваться. 1×slots зеркало сайта <a href=http://www.imruyi.com/space-uid-1778008.html>http://www.imruyi.com/space-uid-1778008.html</a> Иногда операторы просят внесение минимального депозита перед выводом для верификации платежного прибора. В неких казино данный депо кроме предстоит отыграть.В истинное время получить приз за регистрацию в казино очень просто. Почти любой игорный дом с готовностью предоставит деньги или благотворительные вращения. Многие игроки используют этим и не стыдятся региться в каждом клубе с прибыльными условиями. Кстати, это отличная вероятность выдумать выигрышную стратегию и сорвать куш.
1×slots зеркало на сегодня
Этот тип бонуса будет добавлен на Ваш аккаунт в удачной процедуры регистрации с использованием номера телефонного. Если выбрать иной метод создания учетной записи, бездеп не будет добавлен на Ваш аккаунт. 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=http://redhawkclan.free.fr/index.php?file=Members&op=detail&autor=funnydecoy96>http://redhawkclan.free.fr/index.php?file=Members&op=detail&autor=funnydecoy96</a> Мы рекомендуем не отрицаться от сходственных услуг знаменитых казино. Выделите несколько мин. На регистрацию, получите приз и попробуйте его отыграть. Может быть, сейчас фортуна будет на вашей стороне! 1×slots официальный сайт мобильная версия Можно ли наваривать на бездепозитных бонусах? Это не работа, здесь как повезет, если в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, это возможно назвать везением, и добавочной добавкой к вашему бюджету.
1×slots зеркало быструю регистрацию а также мгновенное
Третитй бездепозитный приз за регистрацию – валютные свои. К сожалению, начислить рубли либо баксы способны только знаменитые и популярностью клубы. С их поддержкою вас насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком. <a href=http://forum.berdichev.info/viewtopic.php?f=36&t=19309&p=78270#p78270>http://forum.berdichev.info/viewtopic.php?f=36&t=19309&p=78270#p78270</a> Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала прыткие выводы. Фишка выплат в, собственно достаточно избрать платёжный инструмент и показать сумму. В большинстве случаев средства зачисляются на электрические кошельки на 15 мин., а на банковские карты – 1–3 рабочих дня. 1× slots casino официальный сайт Фриспины – благотворительные вращения с фиксированной ставкой, коие возможно использовать в конкретных игровых автоматах.Также случаются случаи, когда казино начислит оговоренный приз после регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам.
1х слотс зеркало регистрация в 1×slots casino
Теоретически, к бесплатным призам возможно отнести так нарекаемые фриспины. Напомним, речь идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, потому что они деют только возможность делать ставки. Но а случае вы теснее профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в онлайн казино; 1 х слотс зеркало <a href=https://knpnewz.com/member.php?action=profile&uid=65730>https://knpnewz.com/member.php?action=profile&uid=65730</a> Первый образующийся вопрос, это, для выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают новых игроков. Последним проще начать забаву на средства с презента за регистрацию. Им не нужно пополнять баланс и расходовать личные средства. Новички получают бесплатные спины или свои на счёт. С их помощью знакомятся с игровым процессом, крутят слоты и проделывают ставки в рулетке.
скачать 1×slots на андроид мобильная версия
На бесплатные бонусы онлайн-казино практически всегда распространяется лимитирования по стране проживания посетителей. Даже случае для разрешено раскрывать счет и выступать на средства в заведении, это еще не значат, что для доступны not the slightest down payment bonuses.Подтверждение электрической почты – одно из главных условий, которое есть практически в любом бездепозитном казино. Чтобы верифицировать электрическую почту, достаточно перейти по интенсивной ссылке в послании, полученном от азартного клуба. Кешбэк-бонус дает собой возврат фиксированного процента от ставки в случае поражения либо же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не выше 10%.В разделе с призами активировать свой презент. Найти забавы, для которых учтено поощрение и применять приз по предназначению. <a href=http://introsystems.ru/component/kunena/suggestion-box/33096-avtoshkola>http://introsystems.ru/component/kunena/suggestion-box/33096-avtoshkola</a> Предложения с бездепозитными призами за регистрацию разрешают свежим заведениям заинтересовать аудиторию на собственный сайт. А игроки же получают возможность выступать на реальные средства без депозита в казино и заработать небольшой стартовый капитал, который разрешено вывести на карту банка либо электрический кошелек.Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала прыткие выводы. Фишка выплат что, нет, собственно довольно выбрать платёжный инструмент и указать сумму. В большинстве случаев средства зачисляются на электрические кошельки в течение 15 минут, а на банковские карты – 1–3 рабочих денька. 1×slots зеркало этих способов предполагает регистрацию
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.bandariklan.com/showthread.php?tid=176825&pid=897431#pid897431>1×slots скачать на айфон</a>
<a href=https://www.donchillin.com/space-uid-382497.html>1×slots зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Похожим образом работает 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя либо из-за с получения им VIP-статуса. Подарок предоставляется последствии воззвания в поддержку и ревизии. Некоторые сайты, прежде чем провести регистрацию игроков, предлагают ответить на количество базовых вопросов. Цель проведения сходственной викторины – выявить случайных людей, которые не имеют представления о покере, и не допустить получения ими бонусов. Если посетитель теснее играл в казино, то ответить на полтора 10 простых вопросов несомненно несложно. Очень часто, ответы можно отыскать на официальных веб-сайтах данных учреждений.
#9248 Charlesgunnyhttp://filmkachat.ru
казино 1×slots официальный сайт
Прочитайте правила бонусной программки, какой желайте принять. Да, мы безотступно рекомендуем устроить это до регистрации.Подтверждение индивидуальной информации. Все казино настоятельно от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у пользователя других аккаунтов (мультиаккаунт запрещен). <a href=http://filmkachat.ru/>1×slots регистрация на сайте 1×slots ru com</a> Для получения приза нужно ознакомиться с программой лояльности казино и сделать ставки на необходимую, нужную для перехода на следующий степень.Для верификации аккаунта надо(надобно) дать профессионалам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, еще фотографию банковской карты или экрана страницы электронного кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для доказательства личности. <a href=http://apa.anenii-noi.com/index.php?subaction=userinfo&user=gutturalnucleus>http://apa.anenii-noi.com/index.php?subaction=userinfo&user=gutturalnucleus</a> Рассмотрим принцип его действия на образце. Допустим, вы зарегались и возымели $10 not the slightest deposit bonus с вейджером х50. Это означает, собственно выигранные деньги возможно будет выводить не раньше, чем после того, как общая сумма ставок достигнет $500. 1×slot зеркало <a href=http://www.zgqsz.com/home.php?mod=space&uid=327304>http://www.zgqsz.com/home.php?mod=space&uid=327304</a> Список например именуемых «разрешенных землель» прилагается к правилам бонусной программы игорного портала. Обязательно выясните, распространяются ли на вас подобные санкции.Доступ к дару возможность раскрываться автоматически после введения промокода либо обращения в службу сайта. В первом случае от юзера не требуется практически действий. Бездеп с активацией по коду встречается чаще всего. Игроку необходимо ввести совокупность символов в графе, которая может находиться в регистрационной форме в Личном офисе.
казино 1× slots официальный сайт
1×slots casino регистрация Стоит обозначить(означить), что бездепозитный приз выдается только совершеннолетним новичкам, которые, же, шансы пригласить собственных приятелей и знакомых, кроме претендующих на поощрительную программку преданности. Подобная разработка была среди соперничающих онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению своей популярности, методом привлечения свежих игроков. Бонусы – это уникальный шанс для вероятных участников забавы, коие шансы опробовать софт покер рума и увериться, будут ли они в него выступать или нет. Новый игрок попробует свои силы с настоящими оппонентами в казино. <a href=http://ic-led.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=http://bpw.style/bitrix/redirect.php?goto=http://ezproxy.cityu.edu.hk/login?url=https://teletype.in/@urid_pomosh/HSwUtlViJJ6>http://ic-led.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=http://bpw.style/bitrix/redirect.php?goto=http://ezproxy.cityu.edu.hk/login?url=https://teletype.in/@urid_pomosh/HSwUtlViJJ6</a> Фриплей-бонусы. Бонусы за бесплатную забаву есть лишь в некоторых клубах. Они зачисляются сразу последствии создания профиля и действуют недолговременное время. Если у вас нет времени израсходовать средства, они просто закончатся. Что дотрагивается медли, в большинстве случаев бонусы срабатывают в течение одного часа.В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, нужно адресоваться в саппорта через лайв-чат на веб-сайте казино. 1×slots зеркало которую указывали при регистрации кстати Активация валютного вознаграждения случается автоматически последствии творенья профиля или применения промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на странички казино в социальных сетях либо на рассылку маркетинговых извещений, скачать и установить дополнительный софт и т.д.Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция имеет подробные управляла, ссылка на которые обычно находится в промообъявлении. В них указываются лимиты, вейджер, перечень доступных игр. Если оператор скрывает данные о предложении, то пользоваться им надо.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Также, в этом случае необходимо подтвердить собственный номер телефонного, желаемого код, приобретенный в смс-сообщении от клуба ввести в особое поле в личном кабинете игрока. Фриспины — благотворительные вращения, которые разрешают игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся наиболее популярным и предпочтительным видом приза — бесплатные вращения порой эффективнее и веселее в отыгрыше, чем другие виды бездепов. <a href=https://systemcheck-wiki.de/index.php?title=Benutzer:MaybellEichmann>https://systemcheck-wiki.de/index.php?title=Benutzer:MaybellEichmann</a> Способы получения бездепа различаются от вида бонуса, кот-ый приглянулся игроку. Но вам иначе нужно быть зарегистрированным в легальном онлайн-казино и подтвердить собственную лицо. В общем виде пошаговая аннотация для получения бездепозитного бонуса выглядит например:Для выбора азартного заведения Вы сможете воспользоваться списком наших казино с бонусами за регистрацию. На нашем веб-сайте мы опубликовали перечень бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, что доля бонусов эксклюзивные и доступны только для гостей нашего сайта по-специальному промо-коду или по уникальной ссылке. Кроме того, для любого приза мы подготовили доскональный обозрение, в Вы узнаете как получить и отыграть поощрение и как вывести свой выигрыш с бездепа. сайт 1× slots casino На критериях отыгрыша безвозмездных призов идет остановиться подробнее. С ними связаны нюансы, которые нельзя оставить без внимания.Мы рекомендуем не отрицаться от сходственных услуг известных казино. Выделите несколько минут на регистрацию, получите приз и попробуйте его отыграть. Может быть, сегодня фортуна будет на вашей стороне!
1 x slots
Как только вы отыграли вейджер и средства с бонусного баланса перешли вам на реальный счет, Вы смело сможете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (устроить минимальный депо к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депо). Если вы избираете испытанное лицензионное интернет казино и сделайте все условия получения бездепозитного приза, проблем с получением презента у Вас не возникнет. Условия отыгрыша бонуса. Если Вы планируете заработать на бездепозитном бонусе, то для обратите внимание на значение вейджера и срок, который дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть приз и вывести выигрыш. 1×slots сайт <a href=https://gidro2000.com/forum-gidro/user/21718/>https://gidro2000.com/forum-gidro/user/21718/</a> Выиграть настоящие средства в казино не пополняя счет – сложно, но вполне. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными призами и начните играть на бонусные свои. По статистике в 10-ти заведений можно заработать небольшую сумму денег за счет бонусных средств.Даже не выиграв крупную необходимую, игрок интересно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе превосходнейших промоакций легкостью. Достаточно регулярно изучать перечень свежих онлайн казино с выводом приза без депозита в данном разделе.
рабочее зеркало 1×slots
Условия вывода выигрыша. В некоторых заведениях для успешного вывода с бездепозитного приза довольно пополнения баланса и доказательства личности. В иных же клубах, нужно некоторое раз прокрутить собственный депозит. Подтверждение регистрации. Казино просят привязки профиля к электрическому адресу и номеру телефонного. Для сего на e-mail отправляется письмо ссылаясь, а на телефон ? текстовое сообщение с кодом.Чтобы получить возможность вывести выгода с бездепозитного бонуса в казино, нужно выполнить ряд критерий: <a href=https://rightcoachforme.com/author/terryerurf/>https://rightcoachforme.com/author/terryerurf/</a> Не стоит сразу же открещиваться от приветственных презентов в сходственных казино. Администрация готова начислить средства или фриспины, хотя сначала работники обязаны убедиться, что вы не мошенник. Дело том,, собственно развелось слишком много охотников за бонусами. Они научились дурачить систему и наваривать крупные суммы денег.Поспешите забрать бездепозитные призы за регистрацию в казино из представленного перечня. Все платформы столько ведут легальную деятельность, хотя и обрадуют правдивыми плодами забавы, высочайшей отдачей, резвыми выплатами. 1×slots актуальное зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://theauction.com.au/my-account/>1×slots на любой вкус как пройти регистрацию</a>
<a href=http://check2go.net/my-account/>рабочее зеркало 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выбор каждого интернет казино на нашем сайте. В описании к любому Вы можете узнать, собственно получите за создание аккаунта. Создание аккаунта. На сайте казино необходимо открыть регистрационную форму и заполнить порожние поля личностными данными. Иногда на этом шаге потребуется показать только адрес электрической почты и пароль, но почаще бы наполнить анкету персональной информацией (ФИО, дата рождения, место проживания и т.д.). Нужно свидетельствовать только настоящие данные, потому впоследствие они станут испытаны.
#9249 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало сайта
Вышеописанная первопричина и является главным нюансом, следствии которого операторы отдают доля своей прибыли на различные маркетинговые затраты и маркетинговые кампании. А самым действенным тут станут выступать непосредственно бездепозитные бонусы казино 2022 с выводом за регистрацию.Список например называемых «не территорий» прилагается к правилам бонусной программки игорного портала. Обязательно выясните, распространяются ли на вас подобные санкции. <a href=http://filmkachat.ru/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> Верификация необходима для дополнительной безопасности и может техподдержке выявить бонусхантеров и мошенников. Кстати, рядах платформах выводы солидных сумм доступны только в доказательства личности. <a href=http://www.oymalitepe.net/modules.php?name=Your_Account&op=userinfo&username=boundlessmalady>http://www.oymalitepe.net/modules.php?name=Your_Account&op=userinfo&username=boundlessmalady</a> 1хслотс рабочее зеркало <a href=http://yartube.ru/user/Jaspercic/>http://yartube.ru/user/Jaspercic/</a>
1хлот регистрация в 1×slots casino
Большинство клубов завлекают внимание игроков за счёт разнородных даров. На одних сайтах можно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает бесплатные вращения для запуска лучших онлайн слотов. Несмотря на разные промоакции, стоит выделить самые главные. 1×slots casino зеркало Промообъявления от казино не дают реальной картины и направлены на привлечение внимания юзеров. Понять, как высоки шансы остаться в плюсе, дозволит личный тест условий предложения:4. Заберите подарок. Чаще всего бонус активируется сразу в регистрации. Но бывают ситуации, когда нужно забежать в собственный офис или написать в службу поддержки. <a href=http://google-pluft.us/forums/profile.php?id=526437>http://google-pluft.us/forums/profile.php?id=526437</a> 1х слотс зеркало регистрация в 1×slots casino Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных притязаний, считая неотъемлемой верификации. Если на веб-сайте учтена неотъемлемая процедура подтверждения личности, то исключить выигрыш удастся только после проверки данных. Приготовьтесь заполнить анкету и отправить в техподдержку документ, подтверждающий лицо.
1×slot рабочее зеркало
У нас на сайте Вы отыщите перечень призов без депозита в испытанных казино и доскональную информацию то как их получить и применять.Если простыми словами, бездепы – это определённая сумма средств либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать подарки. Но есть некоторые нюансы. Существуют игорные дома, коие перед что, этим как начислить бонусы просят привязать телефонный, дать копии документов. Для проверки применяются сканы паспортов, водительских прав, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если пользователь обнаружен в попытке ввести вспомогательный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в темный перечень. При ирге на лицензионной площадке не бояться указывать достоверную персональную информацию (шифрование исключает утечку индивидуальных данных).При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток. <a href=https://knpnewz.com/member.php?action=profile&uid=63838>https://knpnewz.com/member.php?action=profile&uid=63838</a> 1×slots на любой вкус как пройти регистрацию А ознакомиться с новыми онлайн казино, Вы сможете с призов с выводом прибыли, которые Вы сможете получить без депозита.
онлайн казино 1×slots
Популярность интернет казино растёт и всё больше пользователей начинают интерес азартными забавами. Бездепозитные призы 2022 года, это уникальные подарки за регистрацию. С их поддержкою свежие игроки могут получить бесплатные вращения либо средства на баланс за 1 регистрацию. С свет игорных заведений в интернете, бездепозитные бонусы стали популярнейшим способом привлечения игроков. Подобные акции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о которых мы поведаем. Наш сайт собрал наихорошие предложения из онлайна на 2022 год. Воспользуйтесь любым даром и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить условия.Самые знаменитые способы вывода средств ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электрическим платежным системам подобии Neteller и Skrill, а также используют криптовалютными кошельками. Вывод выигрышей имеет исполняться моментально или занимать от нескольких часов до нескольких суток. <a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/2616/#comment-189837>1×slots официальный зеркало рабочее</a> Фриплей-бонусы встречаются только в некоторых клубах. Они зачисляются сразу в творенья профиля и активны непродолжительное время. Если не успеете израсходовать свои, они просто сгорят. Касаемо времени, в большинстве случаев бонусы активны в течение часа.Многие игроки, оценив возможностей казино, остаются играть в нем и дальше ? на это и направлено любое промо. Постоянные посетители заносят депозиты и делают ставки, обеспечивая долгосрочную выгода оператора. То есть, казино выдают бездепы свежим юзерам для формирования лояльной аудитории. На бонусные начисления могут быть установлены вспомогательные ограничения, коие Вы не к при отыгрыше. Пока приз всецело не отыгран — средства из казино не выводятся. 1×slots актуальное зеркало <a href=http://metabolichealthdigest.com/user/tyronemeere/?um_action=edit>http://metabolichealthdigest.com/user/tyronemeere/?um_action=edit</a> Например, игрок получил 500 рублей при создании аккаунта и обязан отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., понадобится устроить 875 спинов для полного отыгрыша.
1×slots официальный сайт мобильная версия скачать
Необходимость отыгрыша. Вейджер ситуации повыше, чем для бонусов за депо. И пока свои не отыграны, вывести их невозможно.Способы получения бездепа различаются зависимо вида приза, кот-ый понравился игроку. Но вам иначе нужно быть зарегистрированным в законном онлайн-казино и доказать свою лицо. В общем виде пошаговая инструкция для получения бездепозитного приза выглядит так: В лицензионных бездепозитных казино выступать в азартные игры вправду неопасно. Наличие лицензии одобряет тот факт, собственно клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP. <a href=http://www.alltab.co.kr/bbs/board.php?bo_table=free&wr_id=1521672>http://www.alltab.co.kr/bbs/board.php?bo_table=free&wr_id=1521672</a> Осталось избрать казино с призом за регистрацию и сделать профиль. После активации дара выигрыш находится от Фортуны и навыков. 1×slots официальный сайт зеркало рабочее Чтобы выступать даром на настоящие деньги в казино, порой довольно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные деяния.Условия могут разниться приятель от приятеля. Но такой бонус имеет быть применен лишь для игрового процесса – приобретенные на счет деньги до как, как станут отыграны, вывести невероятно.
<b>Смотреть еще похожие новости:</b>
<a href=https://redfist.de/RF-Online-Testforum/viewtopic.php?f=60&t=77979>1×slot казино зеркало</a>
<a href=https://forum.bandariklan.com/showthread.php?tid=176825&pid=876570#pid876570>1хслотс официальный сайт зеркало</a>
<a href=https://www.rusdrama-az.com/support/51-sluzhba-tehnicheskoy-podderzhki-sayta.html>1×slots актуальное зеркало</a>
<a href=https://demo.comuni-italiani.it/forum/viewtopic.php?f=9&t=381169>1хслот зеркало сайта</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Все обожают получать презенты. Согласитесь, практически каждый играющий человек несомненно безгранично счастлив, случае получит даровой презент для забавы в интернет казино просто за регистрацию или же приз за внесенный депозит, так называемые приветственные призы для новых игроков. Соответственно эти онлайн клубы будут больше известны и преимущественны у игроков при выборе казино для игры. Топ казино непрерывно обновляется и добавляются свежие и интересные игровые клубы с привлекательной бонусной политикой и всеми возможными преимуществами, льготами, к которым относятся эти бонусы как фриспины за регистрацию, валютные бездепозитные бонусы, а великодушные призы за внесенный депо. Главным моментом в возникновении этих вознаграждений произведено сомнений, что пустив их в ход, игрок ничем не рискует и в последствии никому ничего не несомненно обязан (не зависимо, получит ли он благодаря призам какой-либо выигрыш или мгновенно спустит все только собственно прибывшие финансы). То есть, казино снабжает игрока вероятностью на дармовой основе выступать во различные слоты причем спонсирует забаву.
#9250 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasin online
Также, учите, собственно бездепозитный приз можно вывести только что, нет случае, когда станут исполнены все условия отыгрыша.Максимальная ставка ? уточняется в валюте счета и ограничивает размер ставки за один спин. В случае ее превышения бонус может быть аннулирован. Также в правилах имеет находиться запрет на размещение ставок конкретного вида, например, по одинаковым шансам в рулетке (то есть, на чет или нечет, красное либо черное и т.д.). <a href=http://filmkachat.ru/>1 xslots рабочее зеркало</a> Наши эксперты исследуют условия промоакции, затем в ручном режиме проверяют их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и другие параметры. Мы не рекламируем казино, а даем игрокам информацию о наилучших из их. <a href=http://www.sante-cinnamon.kr/bbs/board.php?bo_table=free&wr_id=307868>http://www.sante-cinnamon.kr/bbs/board.php?bo_table=free&wr_id=307868</a> 1× slots casino официальный сайт <a href=http://forum.foonyew.org/home.php?mod=space&uid=151012>http://forum.foonyew.org/home.php?mod=space&uid=151012</a> Для получения предоставленных призов для понадобиться — ПК или мобильное прибор, и остальное дело за малым.Нет. Казино выдают безвозмездные бонусы за регистрацию, для того, чтобы заказчик имел ознакомиться с игровым заведением. А дабы вывести его, необходимо выполнить условия отыгрыша.
1×slot казино зеркало
Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Хотя безвозмездные призы начисляются без депозита, не исключено, собственно для понадобиться заносить средства. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты только после как, как новый клиент раз пополнит игровой счет. <a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1×slot регистрация</a> 1×slots рабочее зеркало <a href=http://www.irvinederm.co.kr/bbs/board.php?bo_table=free&wr_id=334080>http://www.irvinederm.co.kr/bbs/board.php?bo_table=free&wr_id=334080</a> 1хслотс рабочее зеркало Наши специалисты изучают обстоятельства акции, после в ручном режиме проверку их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и другие характеристики. Мы не рекламируем казино, а даем игрокам информацию о наилучших из их.Шаг 4. Активация. Внимательно изучите обстоятельства, информацию по лимитированиям и сроке деянья бонусного предложения. Разобравшись с правилами, можно активировать бонус в собственном офисе (время ? с внедрением промокода) либо по запросу в саппорт.
1×slots зеркало видели такую регистрацию на
Бездепозитные бонусы – это исключительно занимательная и более перспективная промоакция интернет-казино. Они и лучше фри-спинов, потому что выплаты в безвозмездных вращениях не гарантированы, так композиции на барабанах игрового аппарата шансы не сложиться. <a href=http://sempre-roma.com/bbs/home.php?mod=space&uid=485623>http://sempre-roma.com/bbs/home.php?mod=space&uid=485623</a> В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с безвозмездных вращений. Прибыль, коию Вы заработаете на этом бездепе можно назначать на вывод без какого или отыгрыша. 1×slots на любой вкус как пройти регистрацию
1×slots зеркало регистрацию более популярный вариант это
Фриплей-бонусы встречаются лишь в неких клубах. Они зачисляются сразу в создания профиля и активны недолговременное время. Если не успеете израсходовать свои, они просто сгорят. Касаемо медли, как призы активны на часа.Максимальный объем ставки, который нельзя превышать же бонус не будет всецело отыгран. В случае нарушения сего верховодила, бонус и выигрыш с него станут аннулированы. Бездепозитные бонусы казино это экономическая компенсация, предлагаемая пользователям на дармовой базе и вероятность играть в интернет казино безвозмездно. Если ассоциировать их с одобрениями за вклад, в которых свои выдаются только впоследствии первоначального пополнения счета, то бездепозитные вознаграждения получаются бесплатно. То есть, играющий получает вероятность создавать ставки на теснее имеющие деньги, коие выдаст заведение, выполняя, всем, обыденные действия, чтобы их извлечь (тут идет речь о регистрация, удостоверении личности с использованием номера аппарата, дизайна заявки и т.д.). 1×slots официальный сайт зеркало <a href=http://www.directory9.biz/details.php?id=256487>http://www.directory9.biz/details.php?id=256487</a> Законодательство, регулирующее азартные забавы в разных государствах, оказывает на полномочия операторов. В итоге юзеры из отдельных регионов сталкиваются с ограничениями со стороны казино. Это может быть как полный отказ в доступе, например и невозможность загружать забавы отдельных производителей.
1хслот 1хслотс регистрация перейти на 1×slots
В большинстве заведений устроить это можно по адресу электронной почты, по номеру аппарата, спустя социальную сеть или гугл-аккаунт. <a href=https://steamboatspringschat.com/forum/members/geraldgob-1466.html>https://steamboatspringschat.com/forum/members/geraldgob-1466.html</a> Для вывода средств бонус нужно будет отыграть законам, установленным казино. Внимательно ознакомьтесь с правилами акции и вариациями отыгрыша бездепозитного приза до его получения, чтобы избежать конфликтных обстановок.Так собственно приготовьтесь предоставить секретную информацию (пол, возраст, государство проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает менее суток, последствии чего удастся беспрепятственно выводить крупные выигрыши. 1×slots быструю регистрацию а также мгновенное Бывают ли бездепозитные призы без вейджера? Бывают, если у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию уточняется вейджер во всех казино.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.rusdrama-az.com/support/51-sluzhba-tehnicheskoy-podderzhki-sayta.html>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=150629>казино 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Стоит отметить, что бездепозитный приз выдается лишь взрослым новеньким, которые, к, шансы пригласить личных приятелей и своих, кроме рассчитывающих на поощрительную программку лояльности. Подобная технология замечена между конкуренцию онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению собственной посещаемости, методом вербования свежих игроков. Бонусы – это оригинальный шанс для вероятных участников игры, которые могут опробовать софт покер рума и убедиться, станут ли они в него играть или нет. Новый игрок испробует средства силы с реальными оппонентами в казино. Подарки на праздничные ? посвященные парадным датам, требующие символического отыгрыша либо начисляются без это. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду.
#9251 Charlesgunnyhttp://filmkachat.ru
1× slots регистрация в 1×slots casino
Чем ниже велечину вейджера, что, этим легче отыграть и вывести приз. Если Вы планируете заработать на бездепе, не просто ознакомиться с свежим игровым клубом, то стоит игнорировать бонусов с высоким вейджером их практически не реально отыграть. С ними Вы можете лишь протестировать забавы заведения.Бездепозитные призы в казино без пополнения 2022 — это определенная сумма средств либо for nothing spins вращения, которые предоставляются первым гостям за регистрацию на сайте казино в виде бездепозитного бонуса, и выделяет вам возможность за счет казино без пополнения опробовать предложения (игр), с последующей привилегией вывода средств при исполненьи всех установленных верховодил. <a href=http://filmkachat.ru/>1× slots сайт</a> Простая процедура получения бездепозитного приза, кот-ая займет менее 2-х мин. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные.В интернете слишком количество скриптовых сайтов, коие принадлежат жуликам. Их главная цель – привлечь гэмблеров, пообещав не щедрые презенты, но и солидные выигрыши. Так собственно кое-какие сайты предлагают получить за регистрацию даже $1 000. <a href=http://www.clrobur.com/bbs/board.php?bo_table=free&wr_id=1989833>http://www.clrobur.com/bbs/board.php?bo_table=free&wr_id=1989833</a> Бездепозитный бонус за регистрацию в казино — это стартовый презент вид денежного начисления или бесплатных вращений для свежих игроков заведения, для получения которого не нужно заносить депо.Объективные – размер приза, коэффициент и условия вейджера, необходимость внесения депо для вывода средств; 1хслотс официальный сайт зеркало <a href=http://xn–80adt5btj4c.xn–80asehdb/index.php?subaction=userinfo&user=entertainingnoo>http://xn–80adt5btj4c.xn–80asehdb/index.php?subaction=userinfo&user=entertainingnoo</a> Как управляло, при выводе финансов, от играющего требуется лишь устроить наименьший лепта для того, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом собственный счет.Подобные бонусы без депозита предоставляются на больше выгодных критериях. Зачастую они крупнее, а обстоятельства отыгрыша менее жесткие.
1×slots зеркало сайта
Приглашаем делиться суждениями о призах. Это поможет другим юзерам выбирать более прибыльные предложения. 1×slots зеркало на сегодня Объективные – размер приза, коэффициент и условия вейджера, надобность внесения депозита для вывода денег;Большинство клубов привлекают внимание игроков за счёт различных подарков. На 1 веб-сайтах возможно получить виртуальные кредиты, которые откроют доступ ко всему софту. На иных же, администрация предлагает благотворительные вращения для пуска топовых интернет слотов. Несмотря на различные акции, стоит выделить самые основные. <a href=http://t20suzuki.com/phpBB2/profile.php?mode=viewprofile&u=3420>http://t20suzuki.com/phpBB2/profile.php?mode=viewprofile&u=3420</a> Фриплей-бонусы. Бонусы за безвозмездную забаву есть только в неких клубах. Они зачисляются сразу последствии творенья профиля и срабатывают непродолжительное время. Если у вас нет медли истратить средства, они просто завершатся. Что касается медли, в большинстве случаев призы срабатывают на 1-го часа. 1×slots рабочее зеркало на сегодня
1 x slots casino
Если вы выбираете проверенное лицензионное интернет казино и выполните все условия получения бездепозитного приза, проблем с получением дара у Вас не возникнет. <a href=https://simsmyforumsorgua.forum.cool/viewtopic.php?id=182#p1075>https://simsmyforumsorgua.forum.cool/viewtopic.php?id=182#p1075</a> 1×slots зеркало сайта
1×slots официальный demo регистрация в 1×slots casino
Для подтверждения электрической почты, просто перейдите по интенсивной ссылке в послании, приобретенном от игрового заведения. Бонус с зачислением средств на счет выделяет больше свободы поступков. Пользователь сам избирает, каким образом воспользоваться подаренными средствами. Здесь кроме имеют действовать лимитирования на перечень дешевых игр, но обычно эти рамки не так строги, как в промо с бесплатными вращениями. 1×slots регистрация 1×slotscasino09k online <a href=https://forum.eliteshost.com/member.php?action=profile&uid=8099>https://forum.eliteshost.com/member.php?action=profile&uid=8099</a>
1×slots зеркало на сегодня
Подтвердите лицо, предоставив оператору казино средства паспортные данные. Инструкции обыкновенно несложные, основное — конкретно им стопам. Если написано, что «на фото должны быть видны все четыре угла страницы паспорта» — устройте непосредственно это фото. <a href=http://forums.filatelija.lv/memberlist.php?mode=viewprofile&u=25839>http://forums.filatelija.lv/memberlist.php?mode=viewprofile&u=25839</a> Прибывшие на аккаунт финансы бездепозитные призы предназначаются, в основном, только для новоиспеченных пользователей, коие ранее не имели собственного аккаунта в данном казино. Исходя из этого, случае раньше у игрока был изготовлен депо, то, по всей вероятности, у него больше не несомненно возможности рассчитывать на получение такого бонуса в конкретном заведении. 1×slots регистрация на официальном сайте Вейджер (wager) – это коэффициент, кот-ый показывает на какую сумму необходимо сделать ставок, чтобы исключить приз из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода этого приза, Вам нужно сделать ставок на необходимую: 500*70=3500 руб. Только всецело отыграв приз, Вы можете исключить собственный выигрыш.Бонус за регистрацию в казино без депо с выводом средств нужно отыграть. Зачастую для отыгрыша возможность потребоваться устроить ставки на необходимую, в несколько 10-ов раз превышающую сумму приза либо выигрыша.
<b>Смотреть еще похожие новости:</b>
<a href=https://shopcms.vsupport.club/topic/15603–1kladtop-%D0%A0%C2%B7%D0%A0%C2%B0%D0%A1%E2%80%A6%D0%A0%D1%95%D0%A0%D2%91%D0%A0%D1%91-%D0%A0%D0%85%D0%A0%C2%B0-%D0%A1%D0%83%D0%A0%C2%B0%D0%A0%E2%84%96%D0%A1%E2%80%9A-%D0%A1%D0%83%D0%A0%D1%91%D0%A0%D2%91%D0%A0%D0%85%D0%A0%C2%B5%D0%A0%E2%84%96-%D0%A0%D1%94%D0%A1%D1%93%D0%A0%D1%97%D0%A0%D1%91%D0%A1%E2%80%9A%D0%A1%D0%8A-%D0%A0%D1%98%D0%A0%D2%91%D0%A0%D1%98%D0%A0%C2%B0-lsd-%D0%A0%D1%98%D0%A0%C2%B5%D0%A1%E2%80%9E%D0%A0%C2%B5%D0%A0%D2%91%D0%A1%D0%82/?p=94604>казино 1× slots официальный сайт</a>
<a href=https://forums.scar-divi.com/topic/564702-%D1%81%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C-1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82/>скачать 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Рассмотрим принцип его деянья на случае. Допустим, вы зарегались и получили $10 no deposit bonus с вейджером х50. Это означает, что выигранные средства возможно несомненно выводить не ранее, чем последствии такого, как общая сумма ставок достигнет $500. Онлайн гемблинг развивается с каждым деньком больше и больше, свежие бренды создаются не по дням а по часам. Новые онлайн казино проделывают вступительные промоакции для игроков, чтобы, чтобы собственно бы зарекомендовать себя, и что, этим самым предлагают бездепозитные призы за регистрацию, что бы не пропустить такую вероятность — как пользоваться новым бездепом, советуем посещать наш сайт как можно чаще, самое аппетитное и новые несомненно добавляться в данном же перечне.
#9252 купить сейф для охотничьего ружьяhttps://sejfy-dlya-oruzhiya.ru/
Тут можно преобрести купить сейф для ружья <a href=https://sejfy-dlya-oruzhiya.ru/>сейф под ружье цена</a>
#9253 Charlesgunnyhttp://filmkachat.ru
рабочее зеркало 1хслотс
Иногда операторы настоятельно внесение малого депо перед выводом для верификации платежного инструмента. В некоторых казино этот депозит того предстоит отыграть. <a href=http://filmkachat.ru/>сайт 1× slots casino</a> Бездепозитные призы начисляются лишь один раз. Не стоит открывать новые аккаунты, чтобы получить их повторно. Служба защищенности казино непременно выявит «левого» соучастника и перекроет. Если гость выполнит нужные притязания, отыграет собственную ставку и решит вывести собственный выигрыш, то ему надо(надобно) сведению, что казино обязательно востребует дать ксерокопии собственных документов, чтобы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные средства исключить не получится. <a href=https://opaseke.com/users/7877>https://opaseke.com/users/7877</a> 1×slos регистрация в 1×slots casino <a href=http://www.scoreit.org/p/jeffreykek>http://www.scoreit.org/p/jeffreykek</a>
1×slots официальный сайт зеркало
При поддержки такового поощрения оператор возможность также привлекать посетителей, коие раньше показывали активность на сайте, но по некий причине прекратили выступать. В этом случае промокод высылается пользователю по электронной почте либо в виде SMS. 1×slots официальный зеркало Многие азартные клубы ограничивают сумму вывода заработанную на призе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не можете вывести. Разница будет аннулирована, Вы в не можете создавать на нее ставки.Фриспины — бесплатные вращения, коие разрешают игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины считаются самым знаменитым и желаемым обликом приза — бесплатные вращения иногда эффективнее и веселее в отыгрыше, чем другие облики бездепов. <a href=http://reactiv66.ru/bitrix/rk.php?goto=http://gold-sail.com.ua/bitrix/click.php?goto=http://good-door.by/bitrix/rk.php?goto=https://teletype.in/@urist555/kQqZrugMby_>http://reactiv66.ru/bitrix/rk.php?goto=http://gold-sail.com.ua/bitrix/click.php?goto=http://good-door.by/bitrix/rk.php?goto=https://teletype.in/@urist555/kQqZrugMby_</a> Акции распространяются как на все игры казино, например и на узкий перечень. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и. Промо может охватывать разработки одного производителя. Бездеп не пересекается с иными акциями казино. Если на сайте предусмотрен кэшбек, он не начисляется за ставки, изготовленные бонусными средствами. Для идентификации платежных реквизитов игрока имеет потребоваться пополнение счета на минимальную сумму. 1×slots casino online регистрация Размер ставки для забавы по бездепозитному бонусу (окончательно же, в случае, когда он представлен повторяющий бонусных валютных средств) зачастую ниже, чем при ирге на депозит. Ограничение несомненно работать до этапа отыгрыша приза.Бездепозитные призы реальными деньгами, коие возможно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадали.
1×slots сайт
Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депозит возможность отличаться до 30 дней. <a href=https://orbitalscoreboard.com/user/renaldomet/>https://orbitalscoreboard.com/user/renaldomet/</a> Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.Большинство клубов привлекают внимание игроков за счёт разнообразных подарков. На одних веб-сайтах можно получить виртуальные кредиты, которые откроют доступ ко всему софту. На иных же, администрация предлагает бесплатные вращения для запуска лучших интернет слотов. Несмотря на различные промоакции, стоит выделить самые основные. 1×slots зеркало Помните, собственно в неких забавах сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных играх только от 5% до 50% суммы ставки считаются как отыгранные деньги, в то время как в слотах идет в зачет все 100% суммы.Получить Бездепозитный бонус в онлайн казино дело 2-ух кликов. Другой момент, отыграть рекламную и соблюсти управляла и обстоятельства отыгрыша. Под правилами подразумевается не только вагер, хотя и ограничения по наибольшей ставке. Мы осознаем, собственно в кинотеатр все ставят на зеро и выигрывают. Призываем не создавать похожего. Перед активацией бонуса прочитайте управляла. Узнайте последующие моменты: Условия получения подарка, за регистрацию, за депозит и многое. Ограничения по максимальной ставке. Зачастую не повыше 350 рублей. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вращать автоматы, а вагер несомненно стоять на месте. Поэтому принципиально аристократия, в каких играх возможно совершать кратность валютного оборота.
1×слотс казино
При регистрации никаких или ином онлайн игральном заведении — вас дается один шанс испытать собственную удачу не внося средства монеты. Замечу что такую поощрительную услугу деют не все интернет игровые площадки, а только великодушная середина(средина) из их. Которые мы подготовили для Вас в нашем перечне.В интернете количество известных игорных площадок с привлекательными акционными предложениями. Однако внимательно читать условия десятков услуг скором надоест, да и время отнимет количество. Поэтому наша команда подготовила ТОП-3 сайтов с наихорошими бездепозитными бонусами: 1хслот скачать <a href=http://manuel.vonthron.free.fr/forum/profile.php?mode=viewprofile&u=2135>http://manuel.vonthron.free.fr/forum/profile.php?mode=viewprofile&u=2135</a> При правильном раскладе бездепы — это прекрасный метод играть на деньги без растраты собственных средств. Есть несколько рекомендаций, следуя коим можно извлечь максимум выгоды из сходственных акций казино. Играть стопам лишь на лицензированных площадках. Скриптовые веб-сайты не обманывают с бонусными предложениями, хотя и используют пиратский софт с измененным ГСЧ. Выиграть на этих автоматах невозможно.После требуется внести идентификационный платёж. Это стращает новичков больше всего. Нужно устроить наименьший депозит в 100–500 рублей. Таким образом служба защищенности увериться сомнений, собственно платёжный метод принадлежит Вам. Данная процедура необходима для обеспечения безопасности игровых счетов. Пример, Ваш аккаунт взломают и выведут средства на свой кошелёк. Будет очень неприятно. Поэтому верификация платёжной системы, это необходимый момент.
1×slots подтвердит вашу регистрацию если говорить
В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, необходимо обратиться в службу спустя лайв-чат на веб-сайте казино. Как верховодило, при выводе денег, от играющего потребуется только сделать минимальный вклад чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом личный счет. <a href=https://tazovod.khalal.ru/forum/memberlist.php?mode=viewprofile&u=41182>https://tazovod.khalal.ru/forum/memberlist.php?mode=viewprofile&u=41182</a> Например, игрок получил 500 рублей при разработке аккаунта и должен отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., потребуется сделать 875 спинов для полного отыгрыша. 1×slots регистрация на официальном сайте Нет. Для получения бездепозитного приза в казино нужна неотъемлемая регистрация на веб-сайте. Играть в слоты безвозмездно и без регистрации можно только в демо режиме.
<b>Смотреть еще похожие новости:</b>
<a href=https://forums.scar-divi.com/topic/529373–1×slots-casino-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%BD%D0%B0-%D1%81%D0%B0%D0%B9%D1%82%D0%B5/>1×slots casino регистрация на сайте</a>
<a href=https://forum.oursson.ru/viewtopic.php?f=2&t=8059>1×slots зеркало сайта</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Ещё одно распространённое акционное предложение – привлекательный презент с неблаговидными притязаниями. К образцу, клуб сулит $100 в бездепа, хотя с вейджером х80 либо х100. Отыграть подобный вейджер практически невероятно и поэтому другого концентрироваться на более заманчивых промоакциях.
#9254 Charlesgunnyhttp://filmkachat.ru
1× slots регистрация в 1×slots casino
Приглашаем делиться сужденьями о бонусах. Это поможет иным пользователям избирать более выгодные предложения.На данном разделе портала регулярно публикуются обзорные заметки, каких рассматриваются безвозмездные призы превосходнейших интернет-казино. Информация структурирована по нескольким пунктам, включая основные: <a href=http://filmkachat.ru/>1 x slots</a> <a href=http://arsivforum.10tl.net/member.php?action=profile&uid=6058>http://arsivforum.10tl.net/member.php?action=profile&uid=6058</a> Наиболее популярностью гонорары между гэмблеров – бездепозитные призы казино. Это не удивительно, так можно получить безвозмездные вращения либо виртуальные кредиты, и всем не придётся пополнять счёт, рисковать собственными деньгами. Удастся насладиться разнородными развлечениями и даже выиграть солидную сумму, избегая серьёзного риска.Для верификации аккаунта нужно дать спецам технической поддержки отсканированную копию паспорта и счета за коммунальные услуги, а также фотографию банковской карты либо снимок странички электрического кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для подтверждения личности. 1х слот 1хслотс регистрация перейти на 1×slots <a href=https://marvelvsdc.faith/wiki/1×slots_%D0%97%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE>https://marvelvsdc.faith/wiki/1×slots_%D0%97%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE</a> Акционные предложения от казино есть в разных форматах. Часто призы даются в размен на депозит. Игрок заносит платеж и получает деньги, благотворительные вращения прочие поощрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — картина бонуса, кот-ый гарантирован за выполнение определенных поступков на сайте:
скачать 1×slots на андроид мобильная версия
Главное превосходство спинов – возможность выучить разные слоты. Также удастся насладиться бонусными раундами, испытать удачу в риск-туре и преувеличить выигрыш за счёт особенных знаков. Однако столько игровой процесс заслуживает внимание, так превосходнее сосредоточиться на реальном выигрыше.4. Заберите презент. Чаще всего бонус активизируется сразу последствии регистрации. Но посещают ситуации, когда надо(надобно) забежать в индивидуальный кабинет либо написать в службу поддержки. <a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=89388>1×slots бонус за регистрацию</a> 1×slots зеркало рабочее Бездепозитные бонусы прекрасный вариант бесплатной игры в игровые автоматы. Многие юзеры сети не понимают, собственно в казино можно начать выступать полностью бесплатно, а позже вывести выигрыш на банковскую карту или электронный кошелек, другие не доверяют онлайн казино, а третьи удачно играют и выигрывают – и тотчас достаточно немалые суммы. <a href=http://www.zghncy.cn/home.php?mod=space&uid=600609>http://www.zghncy.cn/home.php?mod=space&uid=600609</a> Перед активацией принципиально внимательно выучить условия акции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют значение также лимиты ставок при отыгрыше и сроки, протяжении которых возможно пользоваться предложением. Если бездеп охватывает узкий список игр, рекомендуется разузнать наибольшие коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят лишь том, случае, случае оператор не установил строгие лимитирования на максимальную необходимую ставки. 1×slot официальный сайт На бесплатные бонусы онлайн-казино почти постоянно распространяется ограничения по стране проживания посетителей. Даже в для разрешается раскрывать счет и выступать на средства в заведении, это еще не значат, собственно вас доступны not the slightest down payment bonuses.
1×slots на любой вкус как пройти регистрацию
Вознаграждения за получение VIP-статуса ? начисляются в рамках программки преданности при достижении еще значения или выдаются персонально менеджерами службы. С такими ординарными советами любое казино с призом за регистрацию способно принести в разы больше выгоды и пользы.Все обожают получать презенты. Согласитесь, практически любой играющий человек несомненно необъятно рад, в получит безвозмездный подарок для игры в интернет казино просто за регистрацию либо же приз за внесенный депо, например именуемые приветственные призы для новых игроков. Соответственно эти онлайн клубы станут более модны и преимущественны у игроков при выборе казино для игры. Топ казино постоянно обновляется и добавляются свежие и интересные игровые клубы с привлекательной бонусной политикой и всеми вероятными прерогативами, к коим относятся эти бонусы как фриспины за регистрацию, валютные бездепозитные бонусы, еще великодушные бонусы за внесенный депо. <a href=http://www.cruzenews.com/wp-content/plugins/zingiri-forum/mybb/member.php?action=profile&uid=1909984>http://www.cruzenews.com/wp-content/plugins/zingiri-forum/mybb/member.php?action=profile&uid=1909984</a> Баланс игрока пополняется на подобающую сумму. К ней применяется вейджер, указанный в правилах промоакции. Вывести выигрыш можно будет последствии того, как юзер сделает требуемый объем ставок из личных средств. В редких случаях бездеп работает в формате Free Play. На счет пользователя зачисляется крупная сумма, и предоставляется малый срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по окончании сего периода сумма на счету будет превосходить первоначальную, то разность можно несомненно вывести или применять для дальнейших ставок. 1хслот зеркало сайта Однако в условиях скрываются «подводные камешки», которые не позволят исключить крупную необходимую или же вы не успеете отыграть вейджер. Поэтому профессионалы советуют забрать бесплатные вращения за регистрацию в казино без депозита, дабы поднабраться навыка и получить реальный шанс на победу.Вышеописанная причина и является главным моментом, из-за которого операторы отдают доля своей прибыли на разные маркетинговые расходы и рекламные кампании. А самым действующим тут станут играть именно бездепозитные призы казино 2022 с выводом за регистрацию.
1× slots casino официальный сайт
При пользовании бездепозитным призом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют несколько обликов лимитов: Прямо в заберите благотворительные вращения за регистрацию без депо и начинайте коллекционировать призовые композиции ради крупных выигрышей! 1×slots промокод при регистрации 2025 <a href=https://johnnylist.org/%D0%B1%D0%BB%D0%BE%D0%B3-%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0-%D0%B4%D0%B7%D0%B5%D0%BD-%D1%87%D0%B8%D1%82%D0%B0%D1%82%D1%8C_265308.html>https://johnnylist.org/%D0%B1%D0%BB%D0%BE%D0%B3-%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0-%D0%B4%D0%B7%D0%B5%D0%BD-%D1%87%D0%B8%D1%82%D0%B0%D1%82%D1%8C_265308.html</a> Бонусные деньги – маленькая сумма средств для старта в новеньком казино. На бонусные деньги, обыкновенно разрешается играть во все забавы, кроме слотов с прогрессивным джекпотом и игр из раздела live casino.Сроки активации бонуса устанавливаются каждым казино, хотя почаще всего они не превосходят недели с этапа получения. Игроку непременно надо(надобно) использовать бездеп протяжении обозначенного срока, в ином случае приз просто исчезнет. Каждый бонус возможно получить только раз один, поэтому случае не применять бездеп в срок, у игрока не несомненно второго шанса им пользоваться.
1×slots официальный сайт мобильная версия
В некоторых интернет казино для получения бездепозитных призов не довольно просто зарегистрироваться на сайте клуба и доказать свои контактные данные. Дополнительно потребуется активация промокода. Мы советуем не открещиваться от похожих услуг известных казино. Выделите количество минут на регистрацию, получите приз и попытайтесь его отыграть. Может быть, сейчас фортуна будет на вашей стороне!Зачастую бездепозитные бонусы казино для забавы предлагаются разными заведениями азартных игр в качестве маркетинговых промоакций либо в целях вербования к себя свежих игроков. Для бездепозитных бонусов в казино 2022 геймеру не пополнять счет до этапа вывода желаемых средств. <a href=http://www.unique-listing.com/details.php?id=340333>http://www.unique-listing.com/details.php?id=340333</a> 1×slots казино мобильная версия Бездеп с фриспинами может охватывать всю коллекцию игр на сайте либо разработки одного провайдера. Обычно предлагается конкретный перечень автоматов. Он указывается в положениях о проведении промоакции. Выигрыш имеет быть выведен в такого, как пользователь отыграет данную сумму. Возможность оценить глубокий возможностей слотов — главное совершенство данной разновидности. Игроку становятся доступны те опции, которые отсутствуют в демонстрационном режиме, а вероятность выиграть настоящие деньги добавляет ясных азартных чувств.Не стоит путать игру в демо и использование призов. В демонстрационном режиме игрок имеет расценить механику слота, сюжет и оформление. Но игра проводится на условные кредиты, потому отсутствует главное ? ощущение пыла. Активируя промокод или фриспины, клиент по-прежнему не тратит свои средства на игровые автоматы, но может сорвать настоящий куш!
<b>Смотреть еще похожие новости:</b>
<a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=13119>1×slots зеркало этих способов предполагает регистрацию</a>
<a href=https://masstr.net/showthread.php?tid=72903>казино 1×slots официальный сайт</a>
<a href=https://adminclub.org/showthread.php?tid=62869>1×slot зеркало</a>
<a href=http://naturetour.ru/communication/forum/messages/forum3/message24375/6066-kazino-1×slots?sessid=2b8beb7c97dbb483a1b013b464bcc936&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>казино 1×slots</a>
<a href=https://forum.graylite.com/viewtopic.php?p=229078#p229078>1×slots зеркало рабочее на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Начнём с того, собственно каждое рекламную за регистрацию подразумевает некие обстоятельства. Бездепозитные призы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность денежного оборота, необходимая для исполнения критерий. Пример, получили безвозмездные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 руб., проигрышных либо выигрышных, так. После исполненья, бонусный баланс перейдёт на настоящий и будет доступным к выводу.
#9255 Charlesgunnyhttp://filmkachat.ru
1х слотс зеркало регистрация в 1×slots casino
Для верификации номера аппарата, в личном профиле изберите опцию „Подтвердить номер аппарата“ и введите в соответствующее поле код, приобретенный в sms-сообщении. <a href=http://filmkachat.ru/>1×slots зеркало быструю регистрацию а также мгновенное</a> <a href=https://www.catfish-assassins.org/forum/memberlist.php?mode=viewprofile&u=1968>https://www.catfish-assassins.org/forum/memberlist.php?mode=viewprofile&u=1968</a> Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные способы и расценить особенности, недоступные при ирге в демо режиме. Многие свежие посетители перебегают в число постоянных, а оператор получает долгосрочную прибыль. 1×slots зеркало на сегодня <a href=https://ukraineforum.com.ua/index.php?threads/%D0%98%D0%BD%D1%82%D0%B5%D1%80%D0%BD%D0%B5%D1%82-%D0%BC%D0%B0%D0%B3%D0%B0%D0%B7%D0%B8%D0%BD-%D0%B8%D0%B3%D1%80%D1%83%D1%88%D0%B5%D0%BA.21785/>https://ukraineforum.com.ua/index.php?threads/%D0%98%D0%BD%D1%82%D0%B5%D1%80%D0%BD%D0%B5%D1%82-%D0%BC%D0%B0%D0%B3%D0%B0%D0%B7%D0%B8%D0%BD-%D0%B8%D0%B3%D1%80%D1%83%D1%88%D0%B5%D0%BA.21785/</a>
1×slots зеркало видели такую регистрацию на
<a href=https://demo.comuni-italiani.it/forum/viewtopic.php?f=9&t=348674>1× slots сайт</a> 1хслотс казино зеркало Нет. Казино раздают безвозмездные бонусы за регистрацию, для того, чтобы заказчик возможность ознакомиться с игровым заведением. А чтобы вывести его, нужно выполнить условия отыгрыша.При отыгрыше бонусных средств, необходимо учесть срок деянья бонуса и время, которое дается на отыгрыш. По истечению заявленного медли, не отыгранный приз будет аннулирован. <a href=https://www.forum-motorrad.net/members/19556-raymondoxish.html>https://www.forum-motorrad.net/members/19556-raymondoxish.html</a> 1 х слотс зеркало Вышеописанная причина и является главным интересным, в которого операторы отдают часть собственной выгоды на различные маркетинговые затраты и рекламные кампании. А наиболее действующим здесь будут играть непосредственно бездепозитные бонусы казино 2022 с выводом за регистрацию.Вышеописанная причина и является главным моментом, следствии которого операторы отдают доля своей выгоды на разные маркетинговые затраты и маркетинговые кампании. А наиболее действенным здесь будут выступать непосредственно бездепозитные призы казино 2022 с выводом за регистрацию.
1×slots официальный сайт зеркало рабочее
<a href=https://gamesgrom.com/user/JasperTrern/>https://gamesgrom.com/user/JasperTrern/</a> 1×slots промокод при регистрации Возможность протестировать свежие забавы, не рискуя личностными своими и создать собственную тактику забавы.
зеркала 1×slots
Также, учите, что бездепозитный приз возможно вывести лишь том, случае, когда будут выполнены все условия отыгрыша. Необходимость отыгрыша. Вейджер в этом случае выше, чем для бонусов за депо. И пока средства не отыграны, исключить их невозможно. Важно, удостоверьтесь сомнений, собственно раньше не регистрировались в выбранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи. 1×slot рабочее зеркало <a href=http://www.fire-team.ru/forum/member.php?u=8365>http://www.fire-team.ru/forum/member.php?u=8365</a> Онлайн-казино тщательно продумывают бонусные условия, коие необходимо изучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и ограничения.Например, игрок получил 500 рублей при разработке аккаунта и обязан отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 руб., потребуется сделать 875 спинов для полного отыгрыша.
1× slots официальный
Даже не выиграв солидную необходимую, игрок интересно проведет время, изнутри изучит работу площадки, воспримет геймплей автоматов. Все это без каких-либо финансовых рисков. Быть в курсе превосходнейших промоакций легкостью. Достаточно регулярно учить список свежих онлайн казино с выводом бонуса без депозита в данном разделе. <a href=http://spilov.ru/user/TravisHet/>http://spilov.ru/user/TravisHet/</a> 1×slots casino регистрация 1×slots review live
<b>Смотреть еще похожие новости:</b>
<a href=http://swissairways-va.com/phpBB3/memberlist.php?mode=viewprofile&u=3495>1×slots зеркало проходить регистрацию это отличный вариант</a>
<a href=https://forums.scar-divi.com/topic/541545–1×slots-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D0%BD%D0%B0-%D1%81%D0%B5%D0%B3%D0%BE%D0%B4%D0%BD%D1%8F/>1×slots рабочее зеркало на сегодня</a>
<a href=https://traderscrypt.com/forums/member.php?action=profile&uid=77>1хслот 1хслотс регистрация перейти на 1×slots</a>
<a href=https://bajarmp3.net/showthread.php?tid=398234>1×slots сайт зеркало</a>
<a href=http://nhomtruyen.com/members/jamesgaw.9280/>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Также бездепозитные бонусы шансы служить методом возвращать к забаве клиентов, временно приостановивших своё сотрудничество с фирмой: извещение о бездепе поступает на мобильный телефон или почту. Исходя из сего, просто не присутствует разумных оснований махнуть рукой на получение такого приза при регистрации. И, лишним, на такой бесплатной основе у вас все шансы выиграть деньги и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные призы, называют бесплатными онлайн платформами для игр.
#9256 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на сайте 1×slots ru com
Вы скорее, как и все предпочитаете получать подарки и бездепозитные бонусы казино. Игорные дома взяли в привычку одаривать гэмблеров приятными призами. Стать обладателем приветственного подарка можно за создание профиля или пополнение счёта. Второй вариант более интересный, ведь клубы готовы удвоить депо! Но если вы новичок и только знакомитесь с миром азарта, никакого пользуйтесь призом за регистрацию. <a href=http://filmkachat.ru/>1× slots casino официальный сайт</a> Прочитайте верховодила бонусной программы, в которой желайте участвовать. Да, мы безотступно советуем устроить это до регистрации.3. Подтвердить данные. В зависимости от клуба, нужно привязать аппарат либо почту, указать персональную информацию; <a href=https://www.buy1on1.com/user/profile/2727791>https://www.buy1on1.com/user/profile/2727791</a> Бездепы обыкновенно предлагают с отыгрышем — быстро исключить выигранные свои невозможно. Перевод денег со счета будет вероятен в того, как юзер выполнит все притязания казино, а сумма не может превышать установленного правилами лимита. Условиями акции фиксируются сроки, в течение коих клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней последствии активации. 1×slots зеркало регистрация <a href=https://australianweddingforum.com/weddings/member.php?action=profile&uid=11022>https://australianweddingforum.com/weddings/member.php?action=profile&uid=11022</a> В качестве призов онлайн казино часто предлагает выдачу фриспинов, то есть безвозмездных вращений игрового барабана. Виртуальные монеты возможно применять для обучения в покерной школе или для игры в казино.
1×slots промокод при регистрации 2025
сайт 1× slots casino <a href=https://www.one2bay.de/forum/member.php?action=profile&uid=19030>https://www.one2bay.de/forum/member.php?action=profile&uid=19030</a> Зарегистрируйтесь. Для регистрации чаще всего довольно установить свой номер телефона и почтовый адресок, в чего ввести приобретенный код из СМС. Возможно, потребуется указать промокод. В правилах промоакции будет написано, где его бы вводить. Иногда это хотелось делать при регистрации, время — теснее после творенья собственного кабинета, на отдельной странице. 1×slots официальный зеркало Главное преимущество спинов – вероятность выучить различные слоты. Также получится насладиться бонусными раундами, испытывать удачу в риск-туре и преувеличить выигрыш за счёт особых знаков. Однако не игровой процесс заслуживает внимание, ведь другого сосредоточиться на реальном выигрыше.
1×slots casino регистрация на сайте
<a href=https://pastelink.net/ke9bq2yr>https://pastelink.net/ke9bq2yr</a> Выиграть настоящие деньги в казино не пополняя счет – сложно, но вероятно. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными призами и начните выступать на бонусные средства. По статистике в одном из 10-ти заведений возможно заработать небольшую необходимую денег за счет бонусных средств.Бесплатные призы казино без депо возможно получить повторяющий денежных средств на бонусный счет (исключить их можно только после отыгрыша), фриспинов, забавы либо кешбэк-бонуса. 1×slots регистрация на сайте
1×slots зеркало на сегодня
Условия шансы разниться приятель от приятеля. Но такой бонус может быть использован только для игрового процесса – приобретенные на счет финансы до того, как станут отыграны, исключить невозможно. Нельзя рассматривать забаву на средства, как вариант заработка. Азартные игры воспрещены для лиц младше 18 лет. Topcasinobonuses.mobi не является организатором азартных игр. Сайт носит информационный нрав. 1× slots регистрация в 1×slots casino <a href=https://www.asitorino.com/user/patrickemimb/?um_action=edit>https://www.asitorino.com/user/patrickemimb/?um_action=edit</a> На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению сего медли, Вы не можете активировать и получить бездепозитный приз.Приветственный приз без депозита ? подарок за регистрацию. Выдается деньгами, фриспинами либо баллами. В заключительном случае бонусные баллы применяются для участия в турнирах либо обмена на настоящие средства.
1х слотс зеркало регистрация в 1×slots casino
Для получения депозитного бонуса необходимо восполнить собственный игровой баланс реальными средствами. Вознаграждение можно получить либо при внесении первого депозита, либо вид фиксированного процента от внесённых средств. Так либо иначе, приз поступит на счёт только после пополнения.Зарегистрируйтесь. Для регистрации почаще всего достаточно установить свой номер телефонного и почтовый адресок, последствии чего ввести полученный код из СМС. Возможно, требуется указать промокод. В правилах акции будет написано, где его надо включать. Иногда это бы создавать при регистрации, иногда — теснее в сотворения собственного кабинета, на отдельной странице. <a href=http://a96549hg.bget.ru/user/Geraldagose/>http://a96549hg.bget.ru/user/Geraldagose/</a> Когда речь о денежных бонусах, казино постоянно устанавливают условия вейджера, которые необходимо выполнить, чтобы исключить выигрыш.Бездепозитный бонус – это экономическое вознаграждение, которое выдается участнику игры в казино, для его привлечения и появления заинтригованности. Любой гость, который подходит условиям выдачи похожего бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое одобрение является наиболее эффективным методом, дающим вероятность стартовать при, не вкладывая личных вещественных средств. 1×slots регистрация 1×slots casino 777 online
<b>Смотреть еще похожие новости:</b>
<a href=https://www.mshowto.org/forum/members/jamespauri.html>1хслотс рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чем ниже велечину вейджера, тем легче отыграть и вывести бонус. Если Вы планируете заработать на бездепе, но просто ознакомиться с новым игровым клубом, то стоит игнорировать призов с высочайшим вейджером их практически не реально отыграть. С ними Вы можете только протестировать забавы заведения.
#9257 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на сайте 1×slots ru com
Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки имеют запросить вспомогательные документы либо инициировать короткое общение по Skype.Поспешите забрать бездепозитные призы за регистрацию в казино из представленного списка. Все платформы столько водят легальную деятельность, но и обрадуют честными результатами игры, высокой отдачей, резвыми выплатами. <a href=http://filmkachat.ru/>1×slots регистрация на сайте</a> <a href=http://armi21.com/bbs/board.php?bo_table=free&wr_id=27422>http://armi21.com/bbs/board.php?bo_table=free&wr_id=27422</a> Перечисленные выше главные характеристики сопровождают фактически любой бонус и считаются стереотипными для бездепозитных бонусных начислений в казино. 1×slots актуальное зеркало <a href=http://www.keeha.co.kr/bbs/board.php?bo_table=notice_en&wr_id=636092>http://www.keeha.co.kr/bbs/board.php?bo_table=notice_en&wr_id=636092</a>
1×slots зеркало рабочее
<a href=https://mycs.ge/index.php?subaction=userinfo&user=JamesDop>1×slots регистрация 1×slots review live</a> 1хслотс мобильная версия зеркало Бонусы без депозита при регистрации считаются самыми красивыми как для опытных игроков, например для и начинающих. Получив такое вознаграждение, заказчик имеет выступать на настоящие деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а условия их активации и выигрыша.Верификация аккаунта. Лучше доказать лицо сразу в регистрации, чтобы потом не было проблем с выводом денег. Верификация имеет проходить двумя маршрутами: <a href=https://39504.org/member.php?action=profile&uid=26363>https://39504.org/member.php?action=profile&uid=26363</a> Ознакомьтесь с нашим списком превосходнейших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего списка и получите бездеп сразу. Хватайте лучшие благотворительные предложения ниже и выигрывайте великие средства, не рискуя! 1×slots регистрация 1×slotscasino09k online
казино 1×slots
Условия вывода выигрыша. В некоторых заведениях для успешного вывода с бездепозитного бонуса достаточно пополнения баланса и доказательства личности. В других же клубах, необходимо количество раз прокрутить свой депо.Баланс игрока пополняется на подобающую сумму. К ней используется вейджер, указанный в правилах акции. Вывести выигрыш можно будет последствии как, как юзер устроит требуемый объем ставок из личных средств. В редких случаях бездеп трудится в формате Free Play. На счет юзера зачисляется большая сумма, и предоставляется маленький срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по окончании сего периода сумма на счету будет превышать первоначальную, то разницу можно несомненно вывести или применять для дальнейших ставок. <a href=http://usr.by/user/AnthonyGes/>http://usr.by/user/AnthonyGes/</a> Но на азартных платформах подобные гонорары шансы получить и уже зарегистрированные пользователи. В этом случае, призы предоставляются в рамках уникальных акций или же неким игрокам в виде акционного предложения, которое приходит на почту с целью «вернуть» игрока в свое казино. 1× slots официальный
1×slots регистрацию более популярный вариант это
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=136481>1×slots бездепозитный бонус за регистрацию</a> Способы получения бездепа различаются в зависимости от вида приза, который понравился игроку. Но вам так нужно быть зарегистрированным в легальном онлайн-казино и подтвердить свою лицо. В общем облике пошаговая аннотация для получения бездепозитного бонуса выглядит так:Для проверки применяются сканы паспортов, водительских прав, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если пользователь обнаружен в попытке ввести вспомогательный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в темный перечень. При ирге на лицензионной площадке не бояться указывать достоверную персональную информацию (шифрование исключает утечку индивидуальных данных). 1хслотс зеркало на сегодня <a href=https://malaysia-forex.com/members/138215-DoctorLazutaMi>https://malaysia-forex.com/members/138215-DoctorLazutaMi</a>
1×slots быструю регистрацию а также мгновенное
Представленные на этой странице превосходнейшие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные обстоятельства. После кропотливого анализа редакция портала составила рейтинг спецпредложений, каком гости Casino.ru все сортировать список по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д. 3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать аппарат или почту, указать индивидуальную информацию; <a href=http://hotnews.lv/user/Patricklox/>http://hotnews.lv/user/Patricklox/</a> Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала прыткие выводы. Фишка выплат том,, собственно достаточно избрать платёжный инструмент и показать необходимую. В большинстве случаев деньги зачисляются на электрические кошельки на 15 минут, а на банковские карты – 1–3 трудящихся денька. 1×slots casino online регистрация В истинное время получить бонус за регистрацию в казино очень просто. Почти каждый игорный дом с готовностью даст средства либо бесплатные вращения. Многие игроки используют этим и не смущяются регистрироваться в любом клубе с выгодными критериями. Кстати, это замечательная возможность придумать выигрышную тактику и сорвать куш.
<b>Смотреть еще похожие новости:</b>
<a href=http://aficionado.pl/showthread.php?116549–1×slots-casino-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-1×slotscasin-online&p=134591>1×slots casino регистрация 1×slotscasin online</a>
<a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=69966>1хслотс рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депозит может выделяться до 30 дней.
#9258 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация
Получить Бездепозитный бонус в интернет казино дело двух кликов. Другой момент, отыграть рекламную и соблюсти верховодила и условия отыгрыша. Под правилами подразумевается не вагер, но и лимитирования по максимальной ставке. Мы разумеем, собственно в кинотеатр все ставят на зеро и выигрывают. Призываем не делать похожего. Перед активацией приза прочитайте управляла. Узнайте следующие моменты: Условия получения подарка, за регистрацию, за депо и другое. Ограничения по максимальной ставке. Зачастую не повыше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вертеть автоматы, а вагер будет стоять на месте. Поэтому важно аристократия, в каких забавах можно совершать кратность валютного оборота. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasino09k online</a> За счёт спинов выйдет запустить различные онлайн слоты, протестировать стратегии и поднабраться навыка. Фишка что, собственно вращения начисляются на лучшие аппараты с оригинальными опциями и высочайшей отдачей. Не запамятовывайте, собственно в каждом акционном предложении предусмотрены особые требования – кратковременные лимитирования, максимальный размер ставки, список доступных игр.Большинство клубов привлекают внимание игры за счёт разнообразных презентов. На 1 веб-сайтах можно получить виртуальные кредиты, которые откроют доступ ко всему софту. На иных же, администрация предлагает безвозмездные вращения для пуска лучших интернет слотов. Несмотря на различные промоакции, стоит выделить самые главные. <a href=http://www.npk10.com/space-uid-393134.html>http://www.npk10.com/space-uid-393134.html</a> Некоторые клубы механически начисляют бонус на аккаунт игрока после исполнения условий получения, хотя случаются ситуации, когда бонус надо(надобно) активировать игроку самому. Есть количество методов активации приза: 1×slots сайт <a href=http://gogotire.co.kr/bbs/board.php?bo_table=free&wr_id=1091014>http://gogotire.co.kr/bbs/board.php?bo_table=free&wr_id=1091014</a> Выбор каждого онлайн казино на нашем веб-сайте. В описании к любому Вы сможете узнать, собственно получите за творение аккаунта.Таким образом онлайн казино получает вероятного игрока. Возможно в или истинном он захочет сыграть на свои деньги. Так работают бездепозитные призы в онлайн казино. Здесь отлично подходит выражение, безвозмездные сыр случается лишь в мышеловке. Начинающие игроки все не осознавать опасность азарта. Однако течением понимания становится больше. Это тема для отдельного обсуждения.
сайт 1× slots casino
Перечисленные повыше основные свойства сочетают практически каждый приз и являются стандартными для бездепозитных бонусных начислений в казино.Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, solid лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. 1×slots зеркало на сегодня Некоторые веб-сайты, этого чем обмануть регистрацию игроков, предлагают ответить на несколько базисных вопросов. Цель проведения сходственной викторины – выявить случайных людей, которые не имеют представления о покере, и не разрешить получения ими бонусов. Если посетитель уже играл в казино, то ответить на полтора десятка несложных вопросов несомненно несложно. Очень нередко, ответы возможно найти на официальных сайтах этих учреждений. <a href=https://forum.bandariklan.com/member.php?action=profile&uid=8090>https://forum.bandariklan.com/member.php?action=profile&uid=8090</a> казино 1×slots Как управляло, новоприбывшие игроки в первую очередь желают ознакомиться с способами ввода и вывода валютных средств и сроки выполнения поданных заявок чтобы конкретно осознавать, как стремительно появится исключить свой казино бонус за регистрацию без депозита на электронный кошелек либо же банковскую карту. К счастью для всех играющих, внутри конкретных холдингов, все казино конкурируют меж собой. Ведь случае бы конкретную компанию представляло только одно онлайн-заведение, то навряд бы посетители заметили казино с призом за регистрацию и возможность бы рассчитывать только на вознаграждение в виде бонуса на 1-ое инвестиция. К каждому заведению периодически следует привлекать новых игроков, что, итоге, лишь на руку всем играющим.
1хслотс казино зеркало
Бездепозитные бонусы, как уже ясно, являются оригинальной возможностью обратиться игровому процессу полностью бескорыстно, другими играть в интернет казино безвозмездно и на быть средства сразу после регистрации аккаунта. Автоматы с этим депозитом имеют стать прекрасной вероятностью поиграть для поклонников азарта с определенными лимитированиями в финансах. Для верификации номера телефонного, в личном профиле изберите опцию „Подтвердить номер телефонного“ и введите в соответствующее фон код, приобретенный в sms-сообщении.Обычно для получения призов без депо, казино выдвигает лояльные и абсолютно выполнимые условия, но есть ряд поступков которые запрещены и имеют причиной досадные результаты: <a href=http://vttgauriac.fr/forum/memberlist.php?mode=viewprofile&u=7420>http://vttgauriac.fr/forum/memberlist.php?mode=viewprofile&u=7420</a> 1×slots коды В зависимости от интернет заведения любой из них может вас предложить как бездепозитные средства, так и бездепозитные фриспины, коие в успешной регистрации рухнут для на ваш игровой баланс.
1×slots casino регистрация 1×slotscasino09k online
Для выбора азартного заведения Вы сможете пользоваться списком наших казино с призами за регистрацию. На нашем сайте мы опубликовали перечень бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, собственно доля призов неповторимые и доступны только для посетителей нашего сайта по-специальному промо-коду или по уникальной ссылке. Кроме того, для каждого приза мы подготовили подробный обзор, в котором Вы узнаете как получить и отыграть одобрение и как исключить собственный выигрыш с бездепа. <a href=https://forum.home-visa.ru/memberlist.php?mode=viewprofile&u=3536>1×slots на любой вкус как пройти регистрацию</a> Для выбора азартного заведения Вы сможете воспользоваться перечнем наших казино с бонусами за регистрацию. На нашем веб-сайте мы опубликовали перечень бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, собственно доля бонусов эксклюзивные и доступны лишь для посетителей нашего сайта по-специальному промо-коду либо по уникальной ссылке. Кроме как, для каждого приза мы подготовили доскональный обозрение, в Вы узнаете как получить и отыграть поощрение и как исключить свой выигрыш с бездепа.Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в обязательном порядке необходимо восполнить счет в казино. Для депозитных призов, эта процедура не необходима, например как депозит теснее сделан. Размер ставки для забавы по бездепозитному призу (конечно же, в случае, когда он представлен повторяющий бонусных денежных средств) зачастую ниже, чем при этой на депозит. Ограничение несомненно работать до момента отыгрыша бонуса. 1×slots рабочее зеркало на сегодня <a href=http://slideshow-forum.com/profile.php?id=96835>http://slideshow-forum.com/profile.php?id=96835</a> Чтобы получить вероятность вывести выгода с бездепозитного бонуса в казино, необходимо выполнить ряд условий:Акции, посвященные календарным праздничным, посещают рассчитаны как на всех юзеров, так и на категории: примеру, подарок на 8 марта девушкам-игрокам либо мужчинам на 23 февраля.
1×slots официальный зеркало рабочее
Также, ситуации необходимо подтвердить свой номер телефонного, для этого код, приобретенный в смс-сообщении от клуба установить в особое поле в собственном офисе игрока. <a href=https://www.onfeetnation.com/profiles/blogs/6595159:BlogPost:32107270>https://www.onfeetnation.com/profiles/blogs/6595159:BlogPost:32107270</a> Реже призы без депо начисляются постоянным игрокам. С их поддержкою администрация постарается удержать ценных клиентов или вожделеет поблагодарить за преданность верных посетителей. Но намного чаще для подобных целей используются эти акции: 1×slots официальный сайт скачать Мы рекомендуем не открещиваться от подобных услуг узнаваемых казино. Выделите некоторое минут на регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сегодня удача несомненно на вашей стороне!Приглашаем делиться суждениями о призах. Это поможет иным пользователям подбирать наиболее прибыльные предложения.
<b>Смотреть еще похожие новости:</b>
<a href=https://timepost.info/showthread.php?tid=59806>1хслотс регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для отыгрыша приза казино обязует игрока сыграть на необходимую, в некоторое один превышающую сумму полученного бонуса — тут выгода компании явна.
#9259 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на 1хслотс
Для получения депозитного бонуса необходимо восполнить собственный игровой баланс реальными деньгами. Вознаграждение возможно получить или при внесении первого депозита, либо вид фиксированного процента от внесённых средств. Так либо по, приз поступит на счёт лишь после пополнения. <a href=http://filmkachat.ru/>1хслотс рабочее зеркало</a> <a href=http://academijacrimea.ru/index.php?subaction=userinfo&user=chillyshame24>http://academijacrimea.ru/index.php?subaction=userinfo&user=chillyshame24</a> Подтверждение персональной инфы. Все казино просят от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и наличие у пользователя других аккаунтов (мультиаккаунт запрещен).Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? 1×slots casino регистрация 1×slotscasin online <a href=https://images.google.co.uk/url?q=https://doctorlazuta.by/>https://images.google.co.uk/url?q=https://doctorlazuta.by/</a>
1×slots казино зеркало
Однако далековато не все ресурсы предлагают своим клиентам бездепозитные призы за регистрацию в казино. В большинстве случаев предусмотрено поощрение на первый депо в объеме 100–200%. Это отличная возможность преувеличить банкролл, прирастить время, проведённое за игрой и шансы сорвать крупный куш. 1×slots регистрация на сайте Для получения выигрыша требуется выполнить условия казино. Чаще всего игроку нужно поставить определенную необходимую, но уже из собственных средств. Она рассчитывается из общего размера выигрыша за всегда использования бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, случае пользователь выиграл 1000 рублей, а множитель сочиняет х30, вывести средства возможно будет, сделав ставки на 30 000 рублей. <a href=https://foros.factormoe.net/user-5359.html>https://foros.factormoe.net/user-5359.html</a> Ниже указан актуальный список законных казино в Беларуси с призами на первый депо. Вы сможете попасть на официальный вебсайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. 1× slots casino официальный сайт
1×slots мобильная версия войти казино
Выиграть реальные средства в казино не пополняя счет – трудно, но вероятно. Главное задаться целью и не нарушатьправила заведения. Выберите несколько казино с бездепзитными бонусами и начните выступать на бонусные средства. По статистике каком-то 10-ти заведений можно заработать маленькую необходимую средств помощью бонусных средств. <a href=http://zimmu.com/api/manual/doku.php?id=Выкуп_авто>http://zimmu.com/api/manual/doku.php?id=Выкуп_авто</a> Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам воспрещено начислять бонусы посетителям, не имеющим денежных средств на счете. Мы предлагаем осмотреть актуальные призы онлайн-казино с лицензией, коие соблюдают законодательство РБ.Чтобы получить вероятность вывести выгода с бездепозитного бонуса в казино, нужно выполнить ряд условий: 1×slos регистрация в 1×slots casino При этой на бонусные средства воспрещается играть в игровые автоматы с современным джекпотом и игры из радела exist casino. Кроме того, некоторые казино выделяют бездеп на один или несколько конкретных слотов, и в других забавах Вы не можете на них играть.
1×slots официальный demo регистрация в 1×slots casino
<a href=https://karakol.com.kg/user/Jameskef/>1×slots скачать на айфон</a> Свежий бонус начисляется в виде денежных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в использовании своими, а в случае отыгрыша оператор возможность установить ограничение на вывод денег.Бездепозитный приз за регистрацию в казино с выводом денег в 2022 году — Наш ресурс дает игрокам актуальную информацию о самых новых, щедрых и проверенных призах в онлайн казино, коие обновляются любой день. 1×slots регистрация на сайте <a href=https://pcbgeeks.ru/user/Ashleyrhirm/>https://pcbgeeks.ru/user/Ashleyrhirm/</a>
1×slot зеркало рабочее регистрации на телефон придет
Бонус начисляется игроку сразу последствии регистрации и прохождения верификации в казино и не настятельно от посетителя внесения депо. Как управляло, размер приза в схожем случае достаточно скромный, впрочем дозволяет новичкам познакомиться с игрой без риска реальными средствами. <a href=http://classicalmusicmp3freedownload.com/ja/index.php?title=скачать_фильм_бесплатно_и_без_регистрации>http://classicalmusicmp3freedownload.com/ja/index.php?title=скачать_фильм_бесплатно_и_без_регистрации</a> Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную процедуру активации бонуса без депозита. Внимательно прочитайте до конца. Многие новички проделывают оплошности на этапе регистрации и поэтому не могут получить презент. 1×slots зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://mandala-app.com/forums/memberlist.php?mode=viewprofile&u=3447>рабочее зеркало 1×slots</a>
<a href=https://www.makinamania.net/index.php?topic=250954.new#new>1×slots зеркало этих способов предполагает регистрацию</a>
<a href=https://your-portal.at.ua/forum/20–63222–2#88238>1хслотс казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Казино дает возможность заработать и исключить реальные средства на бездепозитных бонусах. Обычно, это малозначительная сумма, коию казино возможность для разрешить подарить игроку. К сожалению, нет. Почти все казино, просят внесение желая бы 1-го малого депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, что исключить средства разрешается лишь на ту платежную систему, с коей был изготовлен депозит.
#9260 Charlesgunnyhttp://filmkachat.ru
1×slots казино зеркало
Прежде всего, не запамятовывайте периодически заглядывать на страницу обзоров бездепозитных бонусов. Они шаг за шагом разглядывают более занимательные предложения ведущих игорных порталов.Для получения бездепа необходимо пригласить в игру по реферальной ссылке нового посетителя: он должен зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на необходимую, указанную в условиях акции. <a href=http://filmkachat.ru/>1×slots casino зеркало рабочее</a> Приглашаем делиться воззреньями о бонусах. Это поможет другим пользователям выбирать более прибыльные предложения.Фриспины – бесплатные вращения с фиксированной ставкой, коие возможно применять в определенных игровых автоматах. <a href=https://toprankdesign.co.uk/wiki/index.php?title=User:MadieSacco70>https://toprankdesign.co.uk/wiki/index.php?title=User:MadieSacco70</a> 1×slots официальный demo регистрация в 1×slots casino <a href=https://masterarms.se/user/scottappef/>https://masterarms.se/user/scottappef/</a> Самый распространённый из подобных бонусов, конечно же, бездеп на день рождения клиента — бонус повторяющий фиксированной суммы либо фриспинов поступает на счёт игрока, а воспользоваться им возможно протяжении установленного периода медли.
1×slots casino регистрация
Для выбора азартного заведения Вы сможете воспользоваться перечнем наших казино с бонусами за регистрацию. На нашем веб-сайте мы выпустили перечень бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, собственно часть бонусов неповторимые и доступны лишь для посетителей нашего сайта по-специальному промо-коду или по оригинальной ссылке. Кроме такого, для каждого приза мы подготовили подробный обзор, каком Вы узнаете как получить и отыграть поощрение и как вывести собственный выигрыш с бездепа.В большинстве заведений сделать это возможно по адресу электронной почты, по номеру аппарата, спустя социальную сеть либо гугл-аккаунт. 1×slot зеркало рабочее этих способов предполагает регистрацию Прочитайте правила бонусной программы, какой желайте участие. Да, мы настоятельно рекомендуем устроить это до регистрации. <a href=https://xn–hudfryngring-7ib.wiki/index.php/User:KristyT6065269>https://xn–hudfryngring-7ib.wiki/index.php/User:KristyT6065269</a> На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не можете активировать и получить бездепозитный приз. 1×slots регистрация то дальше необходимо пройти Демоказино есть почти на любом веб-сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются значительно реже: там в случае выигрыша и соблюдения условий промоакций бездеп возможно превратить в реальные средства.Суммы сходственных услуг, случаев, колеблются от трех до двадцати долларов, а вейджер на эти свои должен составлять от тридцати до шестидесяти один. Зачастую, наивеличайшая сумма выигрыша тут составит от одной до 2-ух сотен $. Если игрок выиграет больше, то все свои шансы быть списанными до максимально разрешенного выигрыша. Здесь замечена содержание выводить еще несуществующие деньги на собственную платежную систему и дальше искать заведение с благоприятными под данную необходимую релоадом или бонусом за 1-ое пополнение счета. Есть некоторое подвидов бездепозитного вознаграждения, предлагаемого великим числом заведений.
1хслотс рабочее зеркало
<a href=http://services-sector.ru/clubpointeresam/memberlist.php?mode=viewprofile&u=157455>http://services-sector.ru/clubpointeresam/memberlist.php?mode=viewprofile&u=157455</a> 1×slot зеркало
1 x slots casino
<a href=https://thetechmodders.com/forums/memberlist.php?mode=viewprofile&u=945&sid=6fc298900a55eadddcfe40fb77e56386>1хслотс рабочее зеркало на сегодня</a> Таким образом, заведение пробует продемонстрировать себя своим потенциальным игрокам, а такой рекламный ход как казино бонус без депозита за регистрацию завлекает довольно большое внимания к игорному заведению и обеспечивает неизменный струю свежих гостей и будущих посетителей игрового онлайн клуба.1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, в не хотите замерзнуть жертвой жуликов либо впустую истратить время; Фриспины — бесплатные вращения, которые разрешают игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины считаются наиболее известным и предпочтительным обликом бонуса — бесплатные вращения иногда эффективнее и веселее в отыгрыше, чем остальные виды бездепов. 1×slots регистрацию более популярный вариант это <a href=https://yandexforum.ru:443/member.php?u=292207>https://yandexforum.ru:443/member.php?u=292207</a> Выиграть реальные средства в казино не пополняя счет – сложно, хотя возможно. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными призами и начните играть на бонусные свои. По статистике в 10-ти заведений можно заработать маленькую необходимую средств за счет бонусных средств.Пoдтвepдить личнocть посетителя. Для успешного вывода средств, необходимо доказать лицо посетителя. Нa этaпe вepификaции пpoфиля, сотрудники службы защищенности должны увериться, собственно у игрока не раз аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не может вывести собственный выигрыш, случае у него несомненно некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы.
казино 1×slots официальный сайт
У каждой игры средства требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система засчитает любую ставку. В рулетке и покере устроить это гораздо труднее. Именно потому например важно пристально читать условия получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой ирге, то новенькие попросту «спустят бонус на ветер». В случае установленного лимита на необходимую вывода выигрыша с бездепозитного бонуса, игрок не сможет исключить больше заявленной суммы. <a href=https://tpang.co.kr/bbs/board.php?bo_table=free&wr_id=826277>https://tpang.co.kr/bbs/board.php?bo_table=free&wr_id=826277</a> 1хслот зеркало сайта
<b>Смотреть еще похожие новости:</b>
<a href=https://www.fromrus.su/index.php?/topic/20324–1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE/>1хслотс рабочее зеркало</a>
<a href=https://forum.ltp-team.com/topic/46356–1×slots-casino-registraciya-1×slotscasin-online/>1×slots casino регистрация 1×slotscasin online</a>
<a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=48365>казино 1×slots</a>
<a href=http://forum3.bandingklub.cz/memberlist.php?mode=viewprofile&u=5481>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чем ниже значение вейджера, что, этим легче отыграть и вывести бонус. Если Вы планируете заработать на бездепе, а не просто ознакомиться с новым игровым клубом, то стоит игнорировать бонусов с высочайшим вейджером их почти не реально отыграть. С ними Вы можете лишь протестировать игры заведения. Третитй бездепозитный приз за регистрацию – денежные свои. К раскаянью, начислить рубли или баксы способны только знаменитые и известные клубы. С их поддержкой возможность насладиться любой доступной забавой – автоматом, рулеткой, кено, блэкджеком.
#9261 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро либо 20 долларов. Если выдаются фриспины, их число изредка превышает нескольких десятков даровых вращений.Бывают ли бездепозитные бонусы без вейджера? Бывают, в у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино. <a href=http://filmkachat.ru/>1×slots casino регистрация</a> Нет. Для получения бездепозитного бонуса в казино необходима обязательная регистрация на сайте. Играть в слоты безвозмездно и без регистрации возможно лишь в демо режиме. <a href=https://djchs.co.kr/bbs/board.php?bo_table=qna&wr_id=289108>https://djchs.co.kr/bbs/board.php?bo_table=qna&wr_id=289108</a> Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и более. Когда игроку полагается количество фриспинов, администрация может разбивать их начисление на некоторое дней. Бесплатные вращения предоставляются для определенного слота, кот-ый указывается в правилах акции.Выше мы дали глубокий набор самых свежих и актуальных бездепозитных призов в онлайн казино без пополнения на 2022 год, где вам пользоваться хоть ценным бездепозитным бонусом. 1хслотс зеркало на сегодня <a href=http://kbszw.com/home.php?mod=space&uid=18580>http://kbszw.com/home.php?mod=space&uid=18580</a> У нас на сайте Вы найдете перечень бонусов без депозита в проверенных казино и доскональную информацию о том как их получить и применять.
1×slots официальный сайт зеркало рабочее
<a href=http://forum.survival-readiness.com/viewtopic.php?t=253450>1×slots официальный сайт скачать</a> 1 х слотс зеркало <a href=http://d90894u1.bget.ru/user/Zacherybof/>http://d90894u1.bget.ru/user/Zacherybof/</a> 1×slots регистрация 1×slots casino 777 online
1×slots официальный demo регистрация в 1×slots casino
Список например именуемых «запрещенных территорий» прилагается к правилам бонусной программы игорного портала. Обязательно проверьте, распространяются ли на вас похожие санкции.Если простыми словами, бездепы – это определённая сумма средств либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно брать презенты. Но есть некоторые аспекты. Существуют игорные жилища, которые перед тем как начислить бонусы настоятельно привязать аппарат, дать копии документов. Не сложно догадаться, что no deposit bonuses почти ни не бывают великими. Чаще всего речь идет о пяти–тридцати долларах (или эквиваленте этой суммы в другой еденице).Во всех легальных онлайн-казино Беларуси нужно свидетельство паспортных данных для игры — это требование правительства государства. <a href=http://www.cs-tygrysek.ugu.pl/member.php?action=profile&uid=78975>http://www.cs-tygrysek.ugu.pl/member.php?action=profile&uid=78975</a> 1× slots регистрация в 1×slots casino Заполняя данные в собственном профиле, указывайте только достоверную информацию, так как Вам понадобиться ее подтвердить дальнейшем при выводе средств.
1×slots зеркало регистрацию более популярный вариант это
Иногда операторы требуют внесение малого депозита перед выводом для верификации платежного прибора. В неких казино этот депозит также светит отыграть. Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. 1хслотс официальный сайт зеркало <a href=http://www.pawsarl.es/blog/%D0%B2%D0%B0%D0%B6%D0%BD%D1%8B%D0%B5-%D1%84%D0%B0%D0%BA%D1%82%D1%8B.html>http://www.pawsarl.es/blog/%D0%B2%D0%B0%D0%B6%D0%BD%D1%8B%D0%B5-%D1%84%D0%B0%D0%BA%D1%82%D1%8B.html</a> Если ординарными текстами, бездепы – это определённая сумма средств или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно забирать подарки. Но есть некоторые нюансы. Существуют игорные жилища, которые перед что, этим как начислить призы просят привязать телефонный, предоставить копии документов.К примеру, игроку выдаются безвозмездные средства в заведении в размере пятидесяти либо ста долларов (вейджер на которые сочиняет 100х). То есть, любому новоприбывшему геймеру выскакивает манящая картинка, которая сулит выплату всех зачисленных фирмой средств. Не стоит заострять на казино приз за регистрацию без депо с сильно великий или очень малюсенькой суммой бонусов, поэтому собственно, и кропотливо исследовав все обстоятельства, здесь всего, несомненно некий подкол.
1×slots официальный сайт зеркало
Обычно, бездепозитные призы выдаются под конкретные слоты с фиксированной ставкой, но их наверняка воспрещено применять в игровых автоматах с прогрессивным джекпотом. Список игр, в которых можно использовать бездеп, Вы отыщите в описании промоакции либо можете уточнить у службы заведения. <a href=https://forums.datanav.co.ke/member.php?action=profile&uid=4168>https://forums.datanav.co.ke/member.php?action=profile&uid=4168</a> 1хслотс официальный сайт зеркало Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских руб. В условиях промоакции предписано, что вейджер бездепозитного бонуса х20. Поэтому, чтобы отыграть приз, игроку несомненно нужно сделать ставок на 35*20=700 руб.
<b>Смотреть еще похожие новости:</b>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=183592>1×slots коды</a>
<a href=https://thetechmodders.com/forums/memberlist.php?mode=viewprofile&u=945>1хслотс зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Возможность сыграть вспомогательное соревнование (а времени и количество) совершенно бесплатно, а выигрыш, тому, поступает на счёт игрока.
#9262 купить сейф для оружияhttps://sejfy-dlya-oruzhiya.ru/
Тут можно преобрести оружейные сейфы шкафы <a href=https://sejfy-dlya-oruzhiya.ru/>оружейный шкаф купить москва</a>
#9263 Charlesgunnyhttp://filmkachat.ru
1×slots на любой вкус как пройти регистрацию
Бoльшинcтвo азартных заведений выдвигают приблизительно однообразные, схожие обстоятельства и притязания, которые нужно выполнить, чтобы получить бездепозитный приз за регистрацию. Все их можно объединить в один список: <a href=http://filmkachat.ru/>1 x slots</a> Чаще всего, пользующиеся сервисы, эти как MoneyBookers и WebMoney, еще MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно неотъемлемое правило. Финансовые средства выводятся только спустя что, эту платежную систему, которой огромной для пополнения депозита. Если же игрок получил бездепозитный покерный приз, требуется восполнить счет на минимальную необходимую, кот-ая сочиняет обыкновенно 10 долларов.Более солидные предложения встречаются очень редко. Зачастую они доступны лишь VIP-игрокам. В остальных случаях им всего сопутствуют довольно строгие условия отыгрыша. Также возможны дополнительные обстоятельства и другие лимитирования, прописанные в условиях и положения бонусной программы казино. <a href=http://teltzion.org/doku.php?id=%D0%A1%D0%B0%D0%BC%D1%8B%D0%B5%20%D0%B2%D0%BA%D1%83%D1%81%D0%BD%D1%8B%D0%B5%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!>http://teltzion.org/doku.php?id=%D0%A1%D0%B0%D0%BC%D1%8B%D0%B5%20%D0%B2%D0%BA%D1%83%D1%81%D0%BD%D1%8B%D0%B5%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!</a> Некоторые казино шансы предлагать посетителям бездепы за подтверждение номера или почты либо репост на страницу в социальных сетях.Игрокам не воспринимать приветственный бонус как гарантированный способ получить большой выигрыш, но это замечательная вероятность без затрат оценить функционал казино. 1 xslots рабочее зеркало <a href=http://www.fumankong1.cc/home.php?mod=space&uid=581244>http://www.fumankong1.cc/home.php?mod=space&uid=581244</a> Суммы сходственных услуг, как правило, колеблются от трех до двадцати $, а вейджер на эти средства должен составлять от 30 до шестидесяти один. Зачастую, величайшая сумма выигрыша здесь составит от одной до двух сотен долларов. Если компьютерные выиграет больше, то все средства могут быть списанными до максимально разрешенного выигрыша. Здесь появляется смысл выводить еще несуществующие деньги на собственную платежную систему и далее отыскивать заведение с подходящими под данную сумму релоадом или призом за первое пополнение счета. Есть количество подвидов бездепозитного гонорары, предлагаемого наибольшим количеством заведений.
1×slots casino регистрация 1×slotscasin online
У любого игорного заведения свои верховодила и условия. Но, чтобы получить призы, нужно выполнить стандартные действия:Какие бонусы возможность еще получить кроме бездепозитного приза за регистрацию в казино? По мимо бездепозитного бонуса, каждое интернет казино предлагает игрокам прибыльное предложение на 1-ый депозит, вы совершаете депозит, ваш депозит увеличивается в двое или и в трое, тем самым начать выступать можно с больше солидной суммой, так же не забываем про вейджер на бонусы. 1хслот 1хслотс регистрация перейти на 1×slots <a href=http://korea-shipping.co.kr/bbs/board.php?bo_table=free&wr_id=363271>http://korea-shipping.co.kr/bbs/board.php?bo_table=free&wr_id=363271</a> Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, чтобы еще раз получить даровой приз. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ожидает неизбежное наказание.Новые клиенты онлайн-казино без первого депо могут проверить свою удачливость. К тому же есть вероятность конвертировать бездепы в настоящие деньги за регистрацию в казино, однако желаемого приз нужно отыграть сообразно условиям акции. 1×slots casino регистрация 1×slotscasin online Составленный знатоками Casino.ru перечень онлайн-казино с бездепозитным бонусом дозволяет игрокам сравнить спецпредложения различных операторов.Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, the decision лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.
1хслотс регистрация в 1×slots casino
Но есть игорные заведения, которые готовы просто так жертвовать деньги на забаву. Для этого достаточно создать профиль. Чтобы исключить свой выигрыш, вам сначала нужно выполнить условия отыгрыша, указанные в условиях получения бездепозитного депо. Основное отличие сомнений, собственно для получения бездепа не пополнять баланс в казино. Но не этого, есть ряд и других отличий:Отзывы читателей о бонусных промоакциях помогут составить эмоцию, хотя не запамятовывайте о субъективности собственных комментариев. <a href=https://forum.expert-watch.com/index.php?action=profile;u=188642>https://forum.expert-watch.com/index.php?action=profile;u=188642</a> 1×slots зеркало проходить регистрацию это отличный вариант
1 xslots рабочее зеркало
Для тех, кто лишь взвешивает испытать свою фортуну, а для профессиональных игроков, отыскивающих новые площадки для выигрышей, ведущие лицензированные казино часто организуют разные акции, и одно из лучших предложений за время – как для начинающих, так и для профессиональных игроков – бездепозитный приз за регистрацию. Помните, что в некоторых играх сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки числятся как отыгранные деньги, в то время как в слотах идет в зачет все 100% суммы. Так собственно главное отличие дара на депозит от бездепа – неотъемлемое пополнение счёта. Вы сможете внести депо и преумножить стартовый капитал или арестовать бездеп и при этом не придётся рисковать собственными сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начисляет щедрое одобрение! 1×slos регистрация в 1×slots casino <a href=http://www.livekavkaz.ru/index.php?subaction=userinfo&user=energeticlattic>http://www.livekavkaz.ru/index.php?subaction=userinfo&user=energeticlattic</a> Акционные предложения от казино есть в различных форматах. Часто призы даются в мена на депозит. Игрок заносит платеж и получает деньги, бесплатные вращения и другие одобрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — вид приза, который гарантирован за выполнение определенных поступков на сайте:Заполняя данные в личном профиле, указывайте лишь достоверную информацию, например как Вам придется ее подтвердить в будущем при выводе средств.
1× слот зеркало
Вывод выигрыша с бездепозитных призов казино – великодушный презент от азартных клубов. Но дабы вывести собственный доход, необходимо выполнить ряд критерий:Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, дабы еще раз получить бесплатный приз. Игорные заведения нетерпимы к бонус-хантерам, потому вас ждет неминуемое санкция. Доступные забавы – В неких азартных играх можно снизить математическое преимущество казино до нескольких 10-х процента. В их количестве многие разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как управляло, в этих играх ставки идут в зачет вейджера не полностью. Например, возможность учитываться лишь 50%. В неких забавах бездепозитные призы вообщем нельзя отыгрывать. <a href=https://cadetmove.ru/index.php?subaction=userinfo&user=Charlesuttet>https://cadetmove.ru/index.php?subaction=userinfo&user=Charlesuttet</a> Бездепозитные призы отличный вариант безвозмездной забавы в игровые автоматы. Многие пользователи сети не знают, собственно в казино возможно начать играть абсолютно бесплатно, а позже исключить выигрыш на банковскую карту или электрический кошелек, иные не доверяют онлайн казино, а третьи удачно играют и выигрывают – и тотчас достаточно великие суммы. 1×slots казино зеркало Ниже указан важный перечень законных казино в Беларуси с призами на 1-ый депозит. Вы сможете попасть на официальный сайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус.Бездепы могут входить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.puppylinux.pl/index.php?topic=822.new#new>1×slots официальный сайт мобильная версия скачать</a>
<a href=https://rolivka.online/forum/showthread.php?tid=29519>1×slots casino регистрация 1×slotscasino09k online</a>
<a href=https://fougerite.com/threads/1×slots-registracija-1×slots-casino-777-online.12569/>1×slots регистрация 1×slots casino 777 online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чтобы получить возможность исключить прибыль с бездепозитного бонуса в казино, необходимо выполнить ряд условий: Онлайн-казино с бездепозитными бонусами ставят посетителям обстоятельства для пользования бездепами, потому перед ролью в промоакции другого, как досконально ознакомиться со всеми правилами и нюансами промоакции. Условия шансы касаться получения приза, его использования и следующего вывода валютных средств когда выигрыша.
#9264 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots review live
Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают бонус по странам. Вплоть до такого, собственно клуб возможность принимать игроков из Вашей страны, а бездеп не давать.Многие новички сомневаются, что поощрительный приз надо несомненно отдавать, числе если они выиграли у казино. Это безусловно неопасно и надежно. Выводя выигранные свои, игрок просто останавливает свое роль деле и теряет уникальную вероятность – безвозмездно увеличивать личное вещественное положение. <a href=http://filmkachat.ru/>зеркло казино 1×slots</a> Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депозит имеет выделяться до 30 дней.В подавляющем большинстве случаев бесплатные призы начисляются в кредитах, которые невозможно сразу исключить со счета. Прежде их нужно отыграть по установленным правилам. Эти притязания принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д. ). О нем читайте ниже. <a href=http://cheapbooks.cc/memberlist.php?mode=viewprofile&u=58584>http://cheapbooks.cc/memberlist.php?mode=viewprofile&u=58584</a> 1хслотс официальный сайт зеркало <a href=http://mail.aquarius-dir.com/%D0%B1%D0%BB%D0%BE%D0%B3-%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0-%D1%87%D0%B8%D1%82%D0%B0%D1%82%D1%8C_442049.html>http://mail.aquarius-dir.com/%D0%B1%D0%BB%D0%BE%D0%B3-%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0-%D1%87%D0%B8%D1%82%D0%B0%D1%82%D1%8C_442049.html</a> Также, такой нужно подтвердить свой номер телефонного, для этого код, приобретенный в смс-сообщении от клуба установить в особое поле в личном офисе игрока.
1× slots регистрация в 1×slots casino
<a href=https://qualityprogamer.de/forum/showthread.php?tid=274699>1×slots зеркало видели такую регистрацию на</a> 1×slots зеркало сайта <a href=https://www.battle-scape.com/members/250131-WalterJak&tab=vbs-notifications>https://www.battle-scape.com/members/250131-WalterJak&tab=vbs-notifications</a> Получив собственный подарок, Вы сможете бесплатно выступать на настоящие деньги, а выполнив условия отыгрыша, исключить свой выигрыш. 1×slots официальный сайт зеркало рабочее Прямо в арестуйте бесплатные вращения за регистрацию без депозита и начинайте коллекционировать призовые композиции ради крупных выигрышей!Бездепозитный приз казино 2022 с выводом за регистрацию предоставляет вероятность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и проверить качество работы службы. Довольно часто, начиная игровой процесс, игрок теснее не желает останавливаться и проделывает реальный лепта. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать даром вполне как раз таки с призом за регистрацию без надобности заносить депо.
1×слот регистрация в 1×slots casino
Вейджер (либо вагер) ? это минимальная сумма ставок, которую необходимо устроить для вывода денежного бонуса. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение. Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских рублей. В критериях промоакции предписано, что вейджер бездепозитного приза х20. Поэтому, чтобы отыграть бонус, игроку несомненно нужно сделать ставок на 35*20=700 руб.Так собственно сможете неустрашимо региться без всяких раздумий. Фортуна сейчас наверняка на вашей стороне. Не побаивайтесь, так следствие какого либо ущерба Вам абсолютно не угрожает. С такими бонусами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе. <a href=http://crocuscitymall.ru/bitrix/redirect.php?goto=http://m-karniz.com/bitrix/click.php?goto=http://fashion-id.ru/bitrix/redirect.php?goto=https://telegra.ph/Vozmozhnosti-vladeniya-kommercheskoj-nedvizhimostyu-dlya-samozanyatosti-i-polucheniya-dohoda-ot-arendy-09–23>http://crocuscitymall.ru/bitrix/redirect.php?goto=http://m-karniz.com/bitrix/click.php?goto=http://fashion-id.ru/bitrix/redirect.php?goto=https://telegra.ph/Vozmozhnosti-vladeniya-kommercheskoj-nedvizhimostyu-dlya-samozanyatosti-i-polucheniya-dohoda-ot-arendy-09–23</a> Подтвердите регистрацию, дабы активировать Бездепозитный приз с выводом, требуется заполнить личный профиль. Заполните пустые поля настоящими данными о для. 1× slots casino официальный сайт Акционные предложения от казино существуют в разных форматах. Часто бонусы даются в обмен на депозит. Игрок заносит платеж и получает деньги, бесплатные вращения и другие поощрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — картина приза, кот-ый гарантирован за исполнение конкретных действий на сайте:
1×slots casino регистрация 1×slotscasin online
Фриспины предусмотрены для использования в видео слотах. Внимательно ознакомьтесь с критериями – часто их выдают на некоторые автоматы. В зависимости от клуба, у вас получится сделать определённое количество ставок. Кстати, продвинутые игорные жилища разрешают запускать каждых «одноруких злодеев». Чтобы получить вероятность исключить прибыль с бездепозитного приза в казино, необходимо выполнить ряд критерий:В бонусную программу множества операторов входят регулярные бездепы. Это пожизненные промоакции, поощряющие активных неизменных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают неизменные бонусы без депозита в размен на скопленные баллы преданности. Но есть игорные заведения, которые готовы просто так жертвовать средства на забаву. Для сего довольно создать профиль. Чтобы вывести свой выигрыш, вам сначала необходимо выполнить условия отыгрыша, указанные в условиях получения бездепозитного депозита. 1×slots на любой вкус как пройти регистрацию <a href=https://mcpe.ru.net/user/DonaldOneve/>https://mcpe.ru.net/user/DonaldOneve/</a> Можно ли зарабатывать на бездепозитных призах? Это не работа, здесь как повезет, если в любом предложенном безедепе, вы будете откручивать вейджер и выводить, это можно назвать везением, и дополнительной добавкой к вашему бюджету.Некоторые веб-сайты, до чем провести регистрацию игроков, предлагают ответить на несколько базисных вопросов. Цель проведения сходственной викторины – выявить случайных людей, коие не имеют представления о покере, и не разрешить получения ими призов. Если гость уже играл в казино, то ответить на полтора 10 простых вопросов будет несложно. Очень часто, ответы можно отыскать на официальных веб-сайтах данных учреждений.
1×slots рабочее зеркало на сегодня
Риск-игра по равным шансам – Также казино имеет воспрещать исполнять обстоятельства по отыгрышу счет раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких других играх. Когда речь идет о денежных призах, казино постоянно устанавливают обстоятельства вейджера, коие необходимо выполнить, дабы исключить выигрыш. <a href=https://love-n-magic.ru/index.php?subaction=userinfo&user=JeffreyNof>https://love-n-magic.ru/index.php?subaction=userinfo&user=JeffreyNof</a> Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, solid только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. 1×slots регистрацию процедура займет всего лишь Бездепозитные призы, как уже понятно, являются уникальной вероятностью приступать к игровому процессу полностью бескорыстно, другими выступать в онлайн казино безвозмездно и на место свои сразу в регистрации аккаунта. Автоматы с этим депозитом могут стать прекрасной вероятностью поиграть для поклонников пыла с определенными лимитированиями в финансах.Но есть игорные заведения, которые готовы просто например жертвовать средства на забаву. Для этого достаточно сделать профиль. Чтобы исключить собственный выигрыш, для поначалу нужно выполнить обстоятельства отыгрыша, указанные в условиях получения бездепозитного депозита.
<b>Смотреть еще похожие новости:</b>
<a href=https://dev.eff.one/forumdisplay.php?fid=10>1×slots зеркало регистрация в 1×slots casino</a>
<a href=https://forum.spherecommunity.net/User-JamesLop>1×slots быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Операторы гемблинга утверждают, что так они сражаются с бонус-хантерами. Впрочем, критики считают, собственно данным казино пробуют устроить из случайного гостя постоянного игрока. Иногда у гостей сайта могут возникнуть проблемы при активации полученного промо-кода. В этих случаях, нужно адресоваться за подмогою в саппорта «Support». Для получения ответа, непременно указывается определенная причина обращения и подтверждается информация дополнительными скриншотами. Если сложилась неоднозначная ситуация, постоянно возможно адресоваться к основному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ.
#9265 Charlesgunnyhttp://filmkachat.ru
онлайн казино 1×slots
Наши специалисты исследуют условия акции, этого в ручном режиме проводят их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие параметры. Мы не рекламируем казино, а даем игрокам информацию о лучших из них. <a href=http://filmkachat.ru/>x1 slots регистрация в 1×slots casino</a> Не хотите сыграть в азартные игры, не рискуя своими средствами, но получая в все выплаты? Подобную возможность деют многие наихорошие порталы с азартными веселиями. В их числе количество добросовестных и надежных интернет-казино на российском языке. Они привлекают новых пользователей разными поощрительными событиями, включая бездепозитные, либо безвозмездные бонусы.Доступность — бездепозитные призы в казино почаще всего предоставляются свежим игрокам, но случаются случаи, когда приз имеют получить и действующие посетители. <a href=https://drapia.org/11-WIKI/index.php/User:EdnaGutman231>https://drapia.org/11-WIKI/index.php/User:EdnaGutman231</a> Высокая конкуренция в разделе азартных игр доказывает операторов завлекать посетителей разнообразными акциями. Благодаря этому у посетителей бывает возможность получить бонусы в казино за регистрацию без депозита. Воспользоваться этим предложением можно, избегая функцию внесения средств на игровой счет, просто активировав аккаунт на веб-сайте. Наш экскурсовод по бездепам поможет избрать самую симпатичную бонусную программу, узнать правила получения такового вознаграждения и распорядиться им с максимальной выгодой. казино 1×slots <a href=http://munservis.mirniy.ru/user/DoctorLazutapt/>http://munservis.mirniy.ru/user/DoctorLazutapt/</a>
1хслот 1хслотс регистрация перейти на 1×slots
Да, у даровых бонусов есть дефекты. Прежде всего, они обычно большие. Кроме как, условия вейджера по ним постоянно жесткие. Но все неимение риска проделывает их довольно привлекательными для посетителей. 1хслотс официальный сайт зеркало <a href=http://bbs.theviko.com/home.php?mod=space&uid=1635613>http://bbs.theviko.com/home.php?mod=space&uid=1635613</a> 1×slots казино зеркало Кешбэк-бонус представляет собой возврат фиксированного процента от ставки если, тогда, поражения или же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%.
1×slots casino регистрация 1×slotscasin online
Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. Для получения выигрыша потребуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить конкретную необходимую, хотя уже из собственных средств. Она рассчитывается из общего объема выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, случае юзер выиграл 1000 рублей, а множитель составляет х30, вывести средства можно будет, сделав ставки на 30 000 рублей. <a href=https://www.xn–9n3bn8ewuh9zp.kr/bbs/board.php?bo_table=free&wr_id=543682>https://www.xn–9n3bn8ewuh9zp.kr/bbs/board.php?bo_table=free&wr_id=543682</a> Одним из предлогов отдавать привилегию одному либо иному заведению содержится в привлекательности предлагаемых акций и бесплатных услуг. Безвозмездные фриспины, выдаваемые без нужды делать какой-либо лепта, в списке располагается далеко не в конце.Некоторые сайты, до чем провести регистрацию игроков, предлагают ответить на несколько базисных вопросов. Цель проведения похожей викторины – выявить случайных людей, коие не имеют представления о покере, и не разрешить получения ими призов. Если посетитель уже играл в казино, то ответить на полтора десятка несложных вопросов будет несложно. Очень нередко, ответы возможно отыскать на официальных сайтах данных учреждений. зеркала 1×slots Также бездепозитные бонусы могут работать способом вернуть к этой посетителей, пока приостановивших своё сотрудничество с фирмой: уведомление о бездепе поступает на мобильный телефонный или почту.Для вывода средств бонус надо(надобно) несомненно отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами акции и вариантами отыгрыша бездепозитного приза до его получения, дабы избежать конфликтных обстановок.
1×slot зеркало рабочее регистрации на телефон придет
Бездепозитные бонусы в казино без пополнения 2022 — это определенная сумма денег либо gorovyh spins вращения, коие предоставляются первым постояльцам за регистрацию на сайте казино повторяющий бездепозитного приза, и выделяет вам возможность помощью казино без пополнения опробовать услуги (игр), с последующей преимуществом, льготой вывода средств при выполнении всех установленных правил. 1×slots официальный сайт зеркало <a href=http://droid-cash.ru/index.php?subaction=userinfo&user=levelexcerpt77>http://droid-cash.ru/index.php?subaction=userinfo&user=levelexcerpt77</a> Чаще всего, пользующиеся сервисы, эти как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно обязательное верховодило. Финансовые свои выводятся только спустя что, эту платежную систему, которой популярностьюимели для пополнения депо. Если же игрок получил бездепозитный покерный приз, потребуется восполнить счет на минимальную сумму, которая составляет обыкновенно десять $.
1×slots официальный сайт мобильная версия
Размер бонусов чаще всего чисто условный и не выше 50 рублей. Приятно, хотя ощутимым бустом в игре вряд ли станет. <a href=http://hospitalfts.ru/bitrix/redirect.php?goto=http://tigroteh.ru/bitrix/redirect.php?goto=http://m.realtai.ru/forward.php?redirect=https://teletype.in/@urist555/ziF7H3-j0_l>http://hospitalfts.ru/bitrix/redirect.php?goto=http://tigroteh.ru/bitrix/redirect.php?goto=http://m.realtai.ru/forward.php?redirect=https://teletype.in/@urist555/ziF7H3-j0_l</a> сайт 1× slots casino Постарайтесь отыграть вейджер, чтобы была вероятность забыть заявку на выплату. Кстати, на всех веб-сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы можете получить выигрыш на электронной кошелёк, карту, аппарат.Для тех, кто только подумывает испытать собственную удачу, еще для профессиональных игроков, ищущих новые площадки для выигрышей, водящие лицензированные казино часто устраивают различные промоакции, и лучшее предложений прошедшее время – как для начинающих, например и для профессиональных игроков – бездепозитный бонус за регистрацию.
<b>Смотреть еще похожие новости:</b>
<a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=7523&TITLE_SEO=7523-preobrazovatel-interfeysov-usb-rs485&MID=474940&result=reply#message474940>1×slots casino регистрация на сайте</a>
<a href=https://creapnl.com/foros/tema/1×slots-%d0%b7%d0%b5%d1%80%d0%ba%d0%b0%d0%bb%d0%be-%d1%80%d0%b5%d0%b3%d0%b8%d1%81%d1%82%d1%80%d0%b0%d1%86%d0%b8%d1%8e-%d0%b1%d0%be%d0%bb%d0%b5%d0%b5-%d0%bf%d0%be%d0%bf%d1%83%d0%bb%d1%8f%d1%80%d0%bd-2/>1×slots зеркало регистрацию более популярный вариант это</a>
<a href=http://moneysweet.listbb.ru/viewtopic.php?f=2&t=5529>1×slots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Новички не обожают сразу же вносить депозит. Это обосновано отсутствием опыта и сомнением. К счастью, в можно получить бездепозитный бонус за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В всяком случае вы не рискуете собственными сбережениями. Это отличная вероятность запустить приглянувшийся видео разъем или же испытывать удачу в настольных играх. Верификация важна для добавочной безопасности и может техподдержке выявить бонусхантеров и плутов. Кстати, рядах платформах выводы крупных сумм доступны только в подтверждения личности.
#9266 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Популярность онлайн казино растёт и всё больше юзеров начинают интерес азартными играми. Бездепозитные призы 2022 года, это оригинальные презенты за регистрацию. С их помощью свежие игроки шансы получить благотворительные вращения либо средства на баланс за одну регистрацию. С выходом игорных заведений в интернете, бездепозитные бонусы стали известнейшим способом привлечения игроков. Подобные акции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о которых мы расскажем. Наш сайт собрал наилучшие предложения из онлайна на 2022 год. Воспользуйтесь хоть даром и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша нужно выполнить обстоятельства.Денежные свои. Третий бонус за регистрацию без депозита – наличные. К сожалению, только известные и модные клубы имеют дать деньги в рублях или долларах. С их поддержкой вы сможете насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед этим необходимо исполнение определенных критерий. <a href=http://filmkachat.ru/>1×slot зеркало рабочее этих способов предполагает регистрацию</a> Кешбэк-бонус дает собой возврат фиксированного процента от ставки в случае поражения или же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не превышает 10%.Законодательство, регулирующее азартные забавы в разных государствах, оказывает на полномочия операторов. В итоге юзеры из отдельных регионов сталкиваются с ограничениями со стороны казино. Это может быть как полный отказ в доступе, например и невозможность загружать забавы отдельных производителей. <a href=http://www.snye.co.kr/bbs/board.php?bo_table=free&wr_id=760490>http://www.snye.co.kr/bbs/board.php?bo_table=free&wr_id=760490</a> Но есть игорные заведения, которые готовы просто так жертвовать средства на забаву. Для сего достаточно создать профиль. Чтобы исключить собственный выигрыш, вас поначалу нужно выполнить условия отыгрыша, указанные в критериях получения бездепозитного депо.Но есть азартные заведения, готовые просто например вручить средства на забаву. Для сего достаточно сделать профиль. Чтобы исключить выигрыш, сначала нужно выполнить вейджеровые условия, прописанные в критериях получения бездепа. 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=https://google.se/url?q=https://doctorlazuta.by/>https://google.se/url?q=https://doctorlazuta.by/</a> Чтобы бездеп не был начислен на Ваш аккаунт, Вам не нужно активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк автоматически, а Вы не планируете его применять, обратитесь в службу с просьбой отменить бездепозитный приз.Получив свой подарок, Вы можете безвозмездно выступать на настоящие деньги, а выполнив обстоятельства отыгрыша, вывести свой выигрыш.
1×slots регистрация 1×slots review live
Основное правило получения бездепа ? творимый аккаунт должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов строго запрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депозита необходимо соблюдать простую последовательность деяний.При забаве на бонусные средства запрещается играть в игровые автоматы с прогрессивным джекпотом и забавы из радела exist casino. Кроме того, некоторые казино выделяют бездеп на один либо несколько конкретных слотов, и в других играх Вы не сможете на их играть. <a href=https://chasingadream.rpginitiative.com/showthread.php?tid=129004>1×slots промокод при регистрации 2025</a> 1хслотс рабочее зеркало на сегодня Также, такой нужно подтвердить свой номер телефона, достичь код, полученный в смс-сообщении от клуба установить в особое фон в собственном офисе игрока. <a href=https://cardvilla.cc/members/514232.html>https://cardvilla.cc/members/514232.html</a> Активация по промокоду используется в разных обликах бездепов. Если речь идет о приветственном призе, то набор символов можно разузнать на крупнейшей страничке, в регистрационной форме либо послании, которое отправляется пользователю для доказательства e-mail. Акции шансы проводиться совместно с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активизируется одноразовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном кабинете или начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем актуальный код для активации в описании любого промо. 1×slots регистрация то дальше необходимо пройти Бездепы обычно предлагают с отыгрышем — мгновенно исключить выигранные свои нельзя. Перевод денег со счета несомненно возможен в того, как пользователь выполнит все требования казино, а сумма имеет быть выше установленного правилами лимита. Условиями промоакции фиксируются сроки, на которых клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней в активации.
1×slots регистрация
Каждый новичок и профессиональный игрок мечтают быстро стартануть и начать делать настоящие ставки. Для этого довольно арестовать презент, за который не платить. В зависимости от игровой платформы, нужно сделать профиль, привязать email либо телефонный. После этого администрация начисляет щедрое вознаграждение в виде бесплатных вращений либо виртуальных кредитов. <a href=http://drahthaar-forum.ru/viewtopic.php?f=30&t=5526&p=29209#p29209>http://drahthaar-forum.ru/viewtopic.php?f=30&t=5526&p=29209#p29209</a> Выполнив все требования оператора, клиент может оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит примерно менее суток. Если дополнительно потребуется пройти процедуру верификации, то срок возрастает до 1–2 трудящихся дней. Для перевода применяются банковские приборы и электрические платежные системы. Второй метод подходит превосходнее, например как основная транзакций в этом случае исполняются моментально. В связи со специфичностью функционирования банков обработка платежей может занять до нескольких трудящихся дней.Какие бонусы меня еще получить считая бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного бонуса, каждое интернет казино предлагает игрокам прибыльное предложение на 1-ый депозит, вы совершаете депозит, ваш депозит возрастает в двое либо числе в 3, что, этим наиболее начать выступать возможно с более солидной суммой, так же не запамятываем на вейджер на призы. 1×slot официальный сайт Во время забавы в казино, выигрыши, приобретенные спасибо безвозмездным призовым фондам, суммируются и срабатывают в совместную необходимую для отыгрывания. Однако, если фортуна улыбнется и получится отыграть все призы, игровое заведение гарантированно допустит вывести денежные свои. Сумма вывода несомненно зависимости от лимита, одобренного именно в данном учреждении. Поэтому, внимательно нужно читать правила выдачи безлимитных депозитов.
1 хслот регистрация в 1×slots casino
<a href=https://forum-macan.ru/viewtopic.php?t=3404>1×slots зеркало этих способов предполагает регистрацию</a> На бесплатные призы онлайн-казино почти практически распространяется лимитирования по стране проживания клиентов. Даже если вам разрешено раскрывать счет и играть на деньги в заведении, это еще не означают, собственно вам доступны no deposit bonuses.Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, чтобы была вероятность вывести выигрыш. Похожим образом трудится третий способ доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения посетителя либо в связи с получения им VIP-статуса. Подарок предоставляется в обращения в поддержку и проверки. 1×slots зеркало рабочее на сегодня <a href=http://slbook-kaluga.ru/index.php/forum/user/233518-lovelybigot32>http://slbook-kaluga.ru/index.php/forum/user/233518-lovelybigot32</a> Но существуют азартные заведения, готовые просто например вручить деньги на игру. Для сего довольно сделать профиль. Чтобы исключить выигрыш, сначала необходимо выполнить вейджеровые условия, прописанные в критериях получения бездепа.
1× slots официальный
Если простыми текстами, бездепы – это определённая сумма денег либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно забирать подарки. Но есть некоторые нюансы. Существуют игорные жилища, которые перед что, этим как начислить бонусы настоятельно привязать телефон, предоставить копии документов. Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного приза.За счёт спинов получится запустить различные интернет слоты, протестировать стратегии и поднабраться навыка. Фишка сомнений, что вращения начисляются на топовые аппараты с оригинальными опциями и высокой отдачей. Не забывайте, собственно в любом акционном предложении учтены специальные требования – кратковременные ограничения, наибольший объем ставки, список дешевых игр. <a href=http://bbs.xinhaolian.com/home.php?mod=space&uid=4031698>http://bbs.xinhaolian.com/home.php?mod=space&uid=4031698</a> Выше мы предоставили полный набор самых свежих и своевременных бездепозитных призов в интернет казино без пополнения на 2022 год, где вам пользоваться хоть ценным бездепозитным призом.Бoльшинcтвo азартных заведений выдвигают приблизительно одинаковые обстоятельства и требования, которые необходимо выполнить, чтобы получить бездепозитный бонус за регистрацию. Все их можно объединить в один перечень: 1×slots casino зеркало В подавляющем большинстве случаев безвозмездные призы начисляются в кредитах, которые нельзя незамедлительно вывести со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д. ). О нем читайте ниже.Чаще всего интернет-казино предлагают бездепозитные бонусы свежим пользователям. Эта промо-акция очень отлично завлекает начинающих, подталкивая их к открытию счета. Конечно, не они становятся преданными посетителями, но сам факт регистрации аккаунта играет на руку заведению.
<b>Смотреть еще похожие новости:</b>
<a href=https://rolivka.online/forum/showthread.php?tid=28963>1× slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Суммы подобных предложений, большинстве, колеблются от трех до двадцати долларов, а вейджер на эти средства должен составлять от тридцати до шестидесяти раз. Зачастую, большая сумма выигрыша здесь составит от одной до двух сотен долларов. Если игры выиграет больше, то все свои шансы быть списанными до максимально разрешенного выигрыша. Здесь появляется содержание выводить еще несуществующие деньги на собственную платежную систему и дальше искать заведение с подходящими под данную необходимую релоадом либо бонусом за 1-ое пополнение счета. Есть количество подвидов бездепозитного гонорары, предлагаемого наибольшим числом заведений.
#9267 Charlesgunnyhttp://filmkachat.ru
скачать 1×slots официальный сайт
Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации подарка необходимо доказать электрическую почту и привязать аппарат; <a href=http://filmkachat.ru/>1×slots официальный demo регистрация в 1×slots casino</a> <a href=http://seohyuneng.net/bbs/board.php?bo_table=free&wr_id=114255>http://seohyuneng.net/bbs/board.php?bo_table=free&wr_id=114255</a> Иногда в качестве одобрения за регистрацию все выдаваться билеты для роли в турнирах. Условия их проведения очень выделяются, потому мы рекомендуем ознакомиться с каждым предложением раздельно.Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, a зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. 1×slot зеркало <a href=http://www.discovery-sport-club.ru/club/blog.php?cp=4516>http://www.discovery-sport-club.ru/club/blog.php?cp=4516</a> Во время игры в казино, выигрыши, приобретенные благодаря безвозмездным призовым фондам, суммируются и срабатывают в совместную необходимую для отыгрывания. Однако, если удача улыбнется и выйдет отыграть все призы, игровое заведение гарантированно допустит исключить денежные средства. Сумма вывода несомненно зависеть от лимита, утвержденного непосредственно в данном учреждении. Поэтому, пристально нужно читать верховодила выдачи анлимитных депо.
1×slots зеркало регистрацию более популярный вариант это
Изучить управляла и условия получения бездепозитных призов казино, Вы можете у нас на веб-сайте в разделе с бонусами либо на официальном сайте избранного Вами казино. Если не можете отыскать нужную информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал либо по электронной почте.Но есть игорные заведения, которые готовы просто например жертвовать средства на забаву. Для сего довольно сделать профиль. Чтобы исключить свой выигрыш, вас сначала необходимо выполнить обстоятельства отыгрыша, обозначенные в условиях получения бездепозитного депо. 1×slots зеркало 1хслотс регистрация перейти на 1×slots Превышение наибольшей ставки при отыгрыше. Система автоматически не предуведомляет о превышении ставки, потому о нарушении верховодил игрок имеет узнать уже в подачи запроса на вывод средств. <a href=https://aktivnoe.forum24.ru/?1–7–0–00009277–000–0–0>https://aktivnoe.forum24.ru/?1–7–0–00009277–000–0–0</a> casino 1×slot Зачастую бездепозитные призы казино для забавы предлагаются разными заведениями азартных игр в качестве маркетинговых акций либо в целях привлечения к для свежих игроков. Для бездепозитных бонусов в казино 2022 геймеру не нужно пополнять счет до этапа вывода желаемых средств.
1×slots зеркало проходить регистрацию это отличный вариант
<a href=https://correspondent.in.ua/user/Forsedroper/>https://correspondent.in.ua/user/Forsedroper/</a> 1×slots официальный demo регистрация в 1×slots casino Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих требований, кроме неотъемлемой верификации. Если на сайте предусмотрена неотъемлемая процедура доказательства личности, то вывести выигрыш получится лишь в проверки данных. Приготовьтесь наполнить анкету и выслать в техподдержку документ, подтверждающий личность.
1×slots рабочее зеркало на сегодня
Чтоб получить крупный выигрыш, подбирайте игровые автоматы с предельным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша.Теоретически, к бесплатным призам можно отнести например нарекаемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, поэтому собственно они предоставляют только возможность делать ставки. <a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=322036#pid322036>1×slots регистрация 1×slots casino 777 online</a> Во время забавы в казино, выигрыши, приобретенные спасибо безвозмездным призовым фондам, суммируются и включаются в совместную необходимую для отыгрывания. Однако, в удача улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно допустит исключить денежные свои. Сумма вывода несомненно зависеть от лимита, одобренного непосредственно в этом учреждении. Поэтому, внимательно нужно читать верховодила выдачи безлимитных депо. онлайн казино 1×slots <a href=http://behzistiardabil.ir/user/WalterFar/>http://behzistiardabil.ir/user/WalterFar/</a> Размер ставки для игры по бездепозитному бонусу (естесственно же, в случае, когда он представлен вид бонусных денежных средств) часто ниже, чем при ирге на депозит. Ограничение будет действовать до момента отыгрыша приза.В интернете слишком количество скриптовых сайтов, коие принадлежат жуликам. Их главная задача – привлечь гэмблеров, пообещав не великодушные презенты, но и солидные выигрыши. Так что некоторые сайты предлагают получить за регистрацию том $1 000.
1 х слотс зеркало
Итак, дабы безвозмездные бонусные кредиты трансформировались в реальные деньги, которыми продоставляется управлять по своему усмотрению, их надо(надобно) отыграть. Вейджер следует уточнять в правилах онлайн-казино.При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое можно предназначить ирге в казино. <a href=https://bjdclub.ru/memberlist.php?mode=viewprofile&u=171283>https://bjdclub.ru/memberlist.php?mode=viewprofile&u=171283</a> 1×slots скачать на айфон В интернет-сети постоянно возможно отыскать списки наиболее известных и обещанных поощрительных программ от известных онлайн-казино.Наиболее пользующиеся вознаграждения среди гэмблеров – бездепозитные бонусы казино. Это не изумительно, как можно получить бесплатные вращения либо виртуальные кредиты, и при этом не придётся пополнять счёт, рисковать личностными деньгами. Удастся насладиться разнообразными веселиями даже выиграть солидную необходимую, избегая серьёзного риска.
<b>Смотреть еще похожие новости:</b>
<a href=https://thetechmodders.com/memberlist.php?mode=viewprofile&u=945&sid=a3b6b984aec70582e1d50441efeabade>1×slots официальный сайт скачать</a>
<a href=https://021snyw.com/space-uid-53919.html>1×slot зеркало рабочее регистрации на телефон придет</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В интернет-сети постоянно возможно отыскать списки наиболее знаменитых и гарантированных поощрительных программ от известных онлайн-казино.
#9268 Charlesgunnyhttp://filmkachat.ru
1х слот 1хслотс регистрация перейти на 1×slots
Размер ставки для игры по бездепозитному бонусу (естесственно же, если, тогда,, когда он представлен вид бонусных денежных средств) зачастую ниже, чем при игре на депозит. Ограничение будет работать до момента отыгрыша бонуса.Допустим, за регистрацию вы получили бездеп в размере 2 000 руб. С вейджером х30. В этом случае предстоит устроить ставок, на совместную необходимую в 60 000 руб. (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать реальные средства. Однако не запамятовывайте, что с каждого дара выйдет вывести определённую сумму (почаще всего не более $200). <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> <a href=http://www.idsys.kr/bbs/board.php?bo_table=free&wr_id=220014>http://www.idsys.kr/bbs/board.php?bo_table=free&wr_id=220014</a> Бонус за регистрацию в казино выдается только раз один на одного игрока. Но бывают дополнительные акции, масштабах которых бездепы расступаются для постоянных клиентов и эти подарки Вы можете получить больше одного раза. 1× slots официальный <a href=http://www.4mark.net/story/12586714/%d1%81%d0%ba%d0%be%d0%bb%d1%8c%d0%ba%d0%be-%d1%81%d1%82%d0%be%d0%b8%d1%82-%d0%bd%d0%b0%d0%bf%d0%b8%d1%81%d0%b0%d1%82%d1%8c-%d0%b4%d0%b8%d1%81%d1%81%d0%b5%d1%80%d1%82%d0%b0%d1%86%d0%b8%d1%8e-%d0%bd%d0%b0-%d0%b7%d0%b0%d0%ba%d0%b0%d0%b7>http://www.4mark.net/story/12586714/%d1%81%d0%ba%d0%be%d0%bb%d1%8c%d0%ba%d0%be-%d1%81%d1%82%d0%be%d0%b8%d1%82-%d0%bd%d0%b0%d0%bf%d0%b8%d1%81%d0%b0%d1%82%d1%8c-%d0%b4%d0%b8%d1%81%d1%81%d0%b5%d1%80%d1%82%d0%b0%d1%86%d0%b8%d1%8e-%d0%bd%d0%b0-%d0%b7%d0%b0%d0%ba%d0%b0%d0%b7</a> Бонус начисляется игроку сразу последствии регистрации и прохождения верификации в казино и не требует от клиента внесения депозита. Как управляло, объем приза в схожем случае достаточно умеренный, впрочем позволяет новичкам познакомиться с игрой без риска настоящими средствами.
1×slots зеркало регистрация то дальше необходимо пройти
После требуется внести идентификационный платёж. Это стращает начинающих больше всего. Нужно устроить минимальный депо в 100–500 рублей. Таким образом служба безопасности убедиться в, собственно платёжный метод принадлежит Вам. Данная процедура важна для обеспечения защищенности игровых счетов. Пример, Ваш акк взломают и выведут средства на свой кошелёк. Будет крайне досадно. Поэтому верификация платёжной системы, это необходимый момент.Бoльшинcтвo азартных заведений выдвигают примерно однообразные, схожие условия и притязания, коие нужно выполнить, дабы получить бездепозитный приз за регистрацию. Все их возможно соединить в раз список: <a href=https://test.soclanovtsy.ru/topic/33723–1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5-%D0%BD%D0%B0-%D1%81%D0%B5%D0%B3%D0%BE%D0%B4%D0%BD%D1%8F/>1×slots зеркало рабочее на сегодня</a> 1×slots официальный сайт, скачать <a href=http://www.pdt-mall.com/bbs/board.php?bo_table=free&wr_id=720134>http://www.pdt-mall.com/bbs/board.php?bo_table=free&wr_id=720134</a> Еще одно условие касается размеров ставки. Операторы устанавливают наивысшую необходимую, которую игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, избранной в Личном офисе. При превышении лимита есть риск лишиться приза. Существующие ограничения относятся и к определенным обликам ставок. Например, играя в рулетку, клиент может столкнуться с запретом назначать фишки на шансы. 1×slots официальный сайт скачать на айфон Как только получите бездеп в казино, всё одинаково не запамятовывайте проверять электронную почту. Некоторые игорные клубы непрерывно веселят активных гэмблеров приятными призами. Чаще всего получить презент можно в преддверии праздника, на день рождение, за привлечение приятеля. А также распространённым призом считается надбавка к депозиту. Нужно всего лишь восполнить счёт, и азартное заведение увеличит его на 50–100%.
1×slots официальный регистрация
<a href=https://www.market-directory.com/members/justinunods-4864.html>https://www.market-directory.com/members/justinunods-4864.html</a> Выше мы дали полный набор самых свежих и актуальных бездепозитных бонусов в интернет казино без пополнения на 2022 год, где вы можете пользоваться любым ценным бездепозитным призом.Как правило, при выводе финансов, от играющего потребуется только устроить наименьший вклад для того, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом собственный счет. 1х слотс зеркало регистрация в 1×slots casino Новички не любят сразу же вносить депозит. Это обосновано неимением опыта и сомненьем. К счастью, в можно получить бездепозитный бонус за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В любом случае вы не рискуете своими сбережениями. Это замечательная вероятность запустить приглянувшийся видео разъем либо же испытать удачу в настольных забавах.
1×slot зеркало рабочее этих способов предполагает регистрацию
Существует ли стратегии для отыгрыша бездепозитных бонусов? К раскаянию нет, на выигрыши либо проигрыши с призов, казино или игрок повлиять возможности, отдача игр происходит от разработчиков игр. Если вы новичок в и только попали в неизведанную вами район пыла — счет услуг как бездепозитные призы без пополнения. 1хслот скачать <a href=https://resheto.ru/users/Cazinosdep/art/143202>https://resheto.ru/users/Cazinosdep/art/143202</a>
casino 1×slot
Выбирайте лучшие безвозмездные призы за обзоров на Casinoz – и пусть вам сопутствует счастье при отыгрыше бонусных кредитов!Условия отыгрыша бонуса. Если Вы планируете заработать на бездепозитном бонусе, то для направьте на велечину вейджера и срок, который дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть приз и исключить выигрыш. При регистрации по свидетельствовать лишь достоверную информацию. Когда учетная запись несомненно активна, появится доступ в Личный кабинет. В нем возможно избрать денежную, установить промокод и разузнать подробные правила получения и отыгрыша бездепа. Краткая информация об акции часто присутствует именно на регистрационной форме.Oтыгpaть бонус с указанным вeйджepом, для этого необходимо сдeлaть cтaвoк нa cумму, превосходящую размер бонуса в несколько раз. <a href=https://www.100seinclub.com/bbs/board.php?bo_table=E04_1&wr_id=397105>https://www.100seinclub.com/bbs/board.php?bo_table=E04_1&wr_id=397105</a> Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция содержит доскональные управляла, гиперссылка на коие обычно находится в промообъявлении. В их указываются лимиты, вейджер, перечень дешевых игр. Если оператор скрывает данные о предложении, то воспользоваться им не.В интернете слишком много скриптовых вебсайтов, коие принадлежат жуликам. Их главная задача – заинтересовать гэмблеров, пообещав столько великодушные подарки, хотя и солидные выигрыши. Так что кое-какие сайты предлагают получить за регистрацию числе $1 000. 1×слот регистрация в 1×slots casino Одним из поводов отдавать преимущество, льготу одному либо иному заведению содержится в привлекательности предлагаемых акций и даровых предложений. Безвозмездные фриспины, выдаваемые без нужды создавать какой-либо вклад, в списке располагается далеко не в конце.
<b>Смотреть еще похожие новости:</b>
<a href=https://timepost.info/showthread.php?tid=55040>1 x slots</a>
<a href=http://naturetour.ru/communication/forum/messages/forum3/message24367/6058–1×slots-zerkalo-rabochee?sessid=d15af7e3b67b967e42c4bf29bd3ca971&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1×slots зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
2. Создать свежий профиль. Для регистрации нужно заполнить небольшую анкету либо зайдите в личный кабинет посредством социальных сетей;
#9269 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию более популярный вариант это
Такие одобрения позволяют безвозмездно протестировать свежее казино, разобраться с игровым процессом онлайн слотов, заработать и исключить небольшую необходимую денег.Представленные на данной страничке наилучшие бездеп бонусы в казино за регистрацию в 2022 году имеют оптимальные условия. После кропотливого анализа редакция портала составила рейтинг спецпредложений, каком гости Casino.ru все сортировать перечень по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д. <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> Выбрать казино с бездепозитным бонусом. У нас на сайте представлен перечень наихороших интернет казино, коие предлагают своим игрокам щедрые призы за регистрацию. <a href=http://munservis.mirniy.ru/user/DavidAbelm/>http://munservis.mirniy.ru/user/DavidAbelm/</a> Фриспины без депозита либо вспомогательные средства посодействуют ближе познакомиться с игровой платформой и её функциями. За счёт подарков возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за игры напротив живых крупье.Вознаграждения за получение VIP-статуса ? начисляются в программы преданности при достижении очередного уровня или выдаются персонально менеджерами службы. 1×slots официальный сайт зеркало <a href=https://sc-grandmaster.ru/forum/?PAGE_NAME=profile_view&UID=20041>https://sc-grandmaster.ru/forum/?PAGE_NAME=profile_view&UID=20041</a> Если вы новичок в и лишь попали в неизведанную вами область азарта — счет предложений как бездепозитные бонусы без пополнения.Фриплей-бонусы. Бонусы за безвозмездную забаву есть лишь в некоторых клубах. Они зачисляются незамедлительно после создания профиля и срабатывают непродолжительное время. Если у вас нет времени потратить средства, они просто закончатся. Что дотрагивается времени, правило призы срабатывают в течение одного часа.
зеркала 1×slots
<a href=http://check2go.net/my-account/>1хслотс казино зеркало</a> 1×slots зеркало подтвердит вашу регистрацию если говорить Вейджер в переводе с английского значит «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша полученного бонуса, в нашем случае бездепозитного. Число ставок большого — важно только набрать сумму, пропорциональную сумме одобрения.Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в неотъемлемом порядке нужно пополнить счет в казино. Для депозитных призов, данная процедура не необходима, например как депо теснее изготовлен. <a href=http://forum.moto-fan.pl/uzytkownik-purpleresidence>http://forum.moto-fan.pl/uzytkownik-purpleresidence</a> Если вы новичок данном и только попали в неизведанную вами область пыла — счет предложений как бездепозитные призы без пополнения. x1 slots регистрация в 1×slots casino
казино 1× slots официальный сайт
Бонус без депо за регистрацию в казино (бездепозитный приз) – это денежный презент от клуба, который начисляется на акк игрока последствии регистрации в казино. Кроме творенья учетной записи, для получения бездепа, очень нередко потребуется ещё и подтвердить контактные данные игрока и/или активировать особый промо-код. Фриплей-бонусы. Бонусы за бесплатную игру есть только в некоторых клубах. Они зачисляются сразу после сотворения профиля и срабатывают недолговременное время. Если у вас нет времени израсходовать средства, они просто закончатся. Что дотрагивается медли, в большинстве случаев призы действуют в течение 1-го часа. <a href=http://euromarca.ru/bitrix/redirect.php?goto=http://tech-em.ru/bitrix/redirect.php?goto=http://micro-moscow.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/_s9_l28V6zD>http://euromarca.ru/bitrix/redirect.php?goto=http://tech-em.ru/bitrix/redirect.php?goto=http://micro-moscow.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/_s9_l28V6zD</a> Рассмотрим принцип его деяния на примере. Допустим, вы зарегистрировались и получили $10 not the slightest deposit bonus с вейджером х50. Это значит, что выигранные средства можно несомненно выводить не раньше, чем после как, как общая сумма ставок достигнет $500.Теоретически, к безвозмездным призам можно отнести так называемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, поэтому собственно они деют только возможность создавать ставки. 1 xslots рабочее зеркало Лишь модные и знаменитые азартные заведения шансы разрешить для выдавать бездепы повторяющий добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депо, которые возможно потратить в топовых аппаратах с высокой отдачей.
1×slot зеркало рабочее регистрации на телефон придет
Максимальная ставка ? уточняется в еденице счета и ограничивает объем ставки за один спин. В случае ее превышения бонус может быть аннулирован. Также в правилах возможность содержаться запрет на размещение ставок определенного вида, примеру, по одинаковым шансам в рулетке (то есть, на чет либо нечет, красное либо темное и т.д.).Ниже указан важный перечень легальных казино в Беларуси с призами на первый депозит. Вы сможете попасть на официальный сайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз. <a href=https://orbitsound.com/forum/user-211634.html>1×slots бездепозитный бонус за регистрацию</a> Вы скорее, например все предпочитаете получать презенты и бездепозитные бонусы казино. Игорные дома взяли в повадку одаривать гэмблеров приятными призами. Стать владельцем приветственного подарка можно за творенье профиля либо пополнение счёта. Второй вариант больше увлекательный, так клубы готовы удвоить депо! Но случае вы новичок и лишь знакомитесь с миром азарта, другого пользуйтесь бонусом за регистрацию.Приглашаем делиться воззреньями о бонусах. Это поможет иным пользователям выбирать наиболее прибыльные предложения. 1хслотс казино зеркало <a href=http://www.maurighcolori.it/node/159>http://www.maurighcolori.it/node/159</a>
1×slots бонус за регистрацию
Доступ к подарку может раскрываться автоматически в введения промокода либо обращения в службу поддержки сайта. В первом случае от юзера не потребуется практически деяний. Бездеп с активацией по коду встречается чаще всего. Игроку нужно установить совокупа символов в графе, кот-ая может пребывать в регистрационной форме в Личном кабинете.Новички не обожают незамедлительно же вносить депо. Это обосновано неименьем навыка и сомненьем. К счастью, в наше время можно получить бездепозитный бонус за регистрацию в казино. Неважно что начисляет система – фриспины или кредиты. В всяком случае вы не рискуете собственными сбережениями. Это замечательная вероятность запустить приглянувшийся видео разъем либо же испытывать удачу в настольных играх. <a href=http://www.djngo.or.kr/gb5/bbs/board.php?bo_table=free&wr_id=1587062>http://www.djngo.or.kr/gb5/bbs/board.php?bo_table=free&wr_id=1587062</a> Прямо данный отберите бесплатные вращения за регистрацию без депозита и начинайте коллекционировать призовые комбинации из-за солидных выигрышей! 1×slots официальный сайт мобильная версия Бездепозитные бонусы – это исключительно интересная и наиболее многообещающая промоакция интернет-казино. Они числе никакого фри-спинов, поэтому собственно выплаты в бесплатных вращениях не гарантированы, как композиции на барабанах игрового аппарата шансы не сложиться.При отыгрыше бонусных средств, необходимо учитывать срок деянья бонуса и время, которое дается на отыгрыш. По истечению заявленного медли, не отыгранный бонус будет аннулирован.
<b>Смотреть еще похожие новости:</b>
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=58868&extra=>1×slots регистрация на сайте</a>
<a href=https://clubdefansde24.com/foro/memberlist.php?mode=viewprofile&u=3464>1×slots регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Большинство интернет-казино из нашего топ-10 готовы порадовать вас эксклюзивными акциями. Читайте о их в обзорах и на форуме. При регистрации никаких или ином интернет игральном заведении — вас дается один шанс испытывать собственную фортуну не внося средства монеты. Замечу что такую поощрительную предложение предоставляют не все интернет игровые площадки, а только щедрая половина из их. Которые мы подготовили для Вас в нашем перечне.
#9270 Williambaxhttps://medium.com/@borealuonexus/rtp-slot-gacor-19665411f67b
Judul: Mengalami Pengalaman Bermain dengan „PG Slot“ di Situs Casino ImgToon.com
Dalam dunia permainan kasino online, permainan slot telah menjadi salah satu permainan yang paling digemari, terutama jenis PG Slot. Di antara berbagai situs kasino online, ImgToon.com adalah tujuan pokok bagi pengguna yang ingin menguji peruntungan mereka di banyak permainan slot, termasuk beberapa kategori populer seperti demo pg slot, pg slot gacor, dan RTP slot.
Demo PG Slot: Mencoba Tanpa Risiko Salah satu keistimewaan menarik yang diberikan oleh ImgToon.com adalah demo pg slot. Fitur ini memberikan pemain untuk memainkan berbagai jenis slot dari PG tanpa harus menempatkan taruhan nyata. Dalam mode demo ini, Anda dapat menguji berbagai cara dan memahami sistem permainan tanpa ancaman kehilangan uang. Ini adalah langkah terbaik bagi pemula untuk beradaptasi dengan permainan slot sebelum mengalihkan ke mode taruhan sebenarnya.
Mode demo ini juga menyediakan Anda gambaran tentang potensi kemenangan dan hadiah yang mungkin bisa Anda dapatkan saat bermain dengan uang sebenarnya. Pemain dapat mencari permainan tanpa khawatir, menjadikan pengalaman bermain di PG Slot semakin mengasyikkan dan bebas tekanan.
PG Slot Gacor: Peluang Besar Mendulang Kemenangan PG Slot Gacor adalah sebutan terkemuka di kalangan pemain slot yang menggunakan pada slot yang sedang dalam fase memberikan kemenangan tinggi atau lebih sering diistilahkan „gacor“. Di ImgToon.com, Anda dapat mencari berbagai slot yang termasuk dalam kategori gacor ini. Slot ini diakui memiliki peluang kemenangan lebih tinggi dan sering membagikan bonus besar, menyebabkannya pilihan utama bagi para pemain yang ingin memperoleh keuntungan maksimal.
Namun, harus diingat bahwa „gacor“ atau tidaknya sebuah slot dapat bergeser, karena permainan slot bergantung generator nomor acak (RNG). Dengan memainkan secara rutin di ImgToon.com, Anda bisa menemukan pola atau waktu yang tepat untuk memainkan PG Slot Gacor dan menambah peluang Anda untuk menang.
RTP Slot: Faktor Krucial dalam Pemilahan Slot Ketika berbicara tentang slot, istilah RTP (Return to Player) adalah faktor yang sangat krusial untuk dipertimbangkan. RTP Slot merujuk pada persentase dari total taruhan yang akan dikembalikan kepada pemain dalam jangka panjang. Di ImgToon.com, setiap permainan PG Slot dilengkapi dengan informasi RTP yang jelas. Semakin tinggi persentase RTP, semakin besar peluang pemain untuk memperoleh kembali sebagian besar dari taruhan mereka.
Dengan memilih PG Slot yang memiliki RTP tinggi, pemain dapat mengoptimalkan pengeluaran mereka dan memiliki peluang yang lebih baik untuk menang dalam jangka panjang. Ini menjadikan RTP sebagai indikator penting bagi pemain yang mencari keuntungan dalam permainan kasino online.
#9271 SelectorSaithttps://selector-casino-apk.ru/selector-oficzialnyj-sajt/
<a href=https://selector-casino-apk.ru/selector-oficzialnyj-sajt>www.selector-casino-apk.ru/selector-oficzialnyj-sajt</a>
Установить последнюю версию приложения казино онлайн Selector – выигрывай прямо сейчас! <a href=https://selector-casino-apk.ru/selector-oficzialnyj-sajt>www.selector-casino-apk.ru/selector-oficzialnyj-sajt</a>
#9272 Charlesgunnyhttp://filmkachat.ru
сайт 1× slots casino
Активация по промокоду употребляется в различных видах бездепов. Если речь идет о приветственном бонусе, то комплект знаков можно узнать на крупнейшей страничке, в регистрационной форме либо письме, которое отчаливает пользователю для подтверждения адреса электронной почты. Акции могут проводиться совместно с партнерскими площадками. Обычно код располагается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется разовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем актуальный код для активации в описании любого рекламную.Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, дабы снова получить безвозмездный бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ждет неминуемое санкция. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots casino 777 online</a> Во всех легальных онлайн-казино Беларуси необходимо подтверждение паспортных данных для игры — это требование правительства государства. <a href=http://wiki.catfolks.net/doku.php?id=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D0%B5%D0%B9%D1%88%D0%B8%D0%B5%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!>http://wiki.catfolks.net/doku.php?id=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D0%B5%D0%B9%D1%88%D0%B8%D0%B5%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!</a> 1×slots регистрация <a href=https://images.google.com.mx/url?sa=t&url=https://doctorlazuta.by/>https://images.google.com.mx/url?sa=t&url=https://doctorlazuta.by/</a> Используйте лучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из списка ниже, дабы заработать подарки за обычные деяния и уже сегодня получить 1-ый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высочайшей отдачей и резвыми выводами на электрические кошельки.
1× slots casino зеркало
Прежде всего, не забывайте периодически заглядывать на страницу обзоров бездепозитных призов. Они шаг за шагом осматривают более интересные предложения водящих игорных порталов.Для верификации аккаунта надо(надобно) дать профессионалам технической помощи отсканированную копию паспорта и счета за коммунальные предложения, а фотографию банковской карты или экрана странички электрического кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для доказательства личности. 1×slots коды Бездепозитные бонусы казино это экономическая компенсация, предлагаемая пользователям на дармовой базе и возможность выступать в интернет казино бесплатно. Если сравнивать их с одобрениями за лепта, каких средства выдаются лишь впоследствии первоначального пополнения счета, то бездепозитные вознаграждения получаются бесплатно. То есть, играющий получает возможность делать ставки на уже имеющие финансы, которые выдаст заведение, исполняя, при, обыденные действия, дабы их извлечь (тут речь о регистрация, удостоверении личности с внедрением номера телефона, дизайна заявки и т.д. ). <a href=https://images.google.cl/url?sa=t&url=https://doctorlazuta.by/>https://images.google.cl/url?sa=t&url=https://doctorlazuta.by/</a> При малый сумме приза рекомендовано играть по низким ставкам, а применять максимальные другого лишь сомнений случае, если вейджер очень большой, а время на отыгрыш сильно ограничено. 1×slots регистрация на 1хслотс Возможность поиграть вспомогательное соревнование (а времени и количество) абсолютно безвозмездно, а выигрыш, тому, поступает на счёт игрока.
1×slots официальный сайт, скачать
Демоказино есть практически на каждом сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются значительно пореже: там в случае выигрыша и соблюдения условий промоакций бездеп можно превратить в настоящие деньги. Для отыгрыша бонуса казино обязует игрока поиграть на необходимую, в некоторое один превышающую необходимую полученного бонуса — здесь выгода фирмы очевидна. <a href=http://www.haxorware.com/forums/member.php?action=profile&uid=277898>http://www.haxorware.com/forums/member.php?action=profile&uid=277898</a> Онлайн-казино с бездепозитными бонусами ставят клиентам обстоятельства для использования бездепами, поэтому перед участием в акции другого, как тщательно ознакомиться со всеми правилами и нюансами промоакции. Условия имеют прикасаться получения бонуса, его использования и последующего вывода валютных средств когда выигрыша. 1×slots зеркало регистрация в 1×slots casino В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с бесплатных вращений. Прибыль, коию Вы заработаете на таком бездепе можно назначать на вывод без какого либо отыгрыша.
1×slot зеркало
Как управляло, при выводе денег, от играющего потребуется только устроить минимальный лепта чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом личный счет. Частенько новички не разумеют, как активировать презенты или исключить первый выигрыш. Для похожих случаев наша команда описала основные определения – что это фриспины, вейджер, как его отыграть, чего нужно проходить верификацию.Казино дает вероятность заработать и исключить реальные деньги на бездепозитных бонусах. Обычно, это малозначительная сумма, которую казино имеет себя позволить подарить игроку. Бонусы без депозита при регистрации считаются самыми привлекательными как для опытных игроков, так для и новичков. Получив это вознаграждение, заказчик возможность играть на настоящие средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, еще условия их активации и выигрыша.Многие казино предоставляют в маркетинговых целях безвозмездные бонусы необыкновенно для наших читателей. Чтобы их получить, нужно перейти на игровой сайт по партнерской ссылке с нашего портала. 1хслотс рабочее зеркало <a href=http://gto43.com/home.php?mod=space&uid=162697>http://gto43.com/home.php?mod=space&uid=162697</a> Для выбора азартного заведения Вы можете воспользоваться списком наших казино с призами за регистрацию. На нашем сайте мы выпустили список бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, что часть бонусов эксклюзивные и доступны только для посетителей нашего вебсайта по-специальному промо-коду либо по уникальной ссылке. Кроме такого, для каждого бонуса мы подготовили доскональный обзор, каком Вы узнаете как получить и отыграть поощрение и как исключить свой выигрыш с бездепа.
зеркала 1×slots
Не советуем опрометью голову хвататься за различные предложения получения средств без инвестициям. Вполне возможно, что бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем смотрится на первый взгляд. Альтернативой считается казино бонус за депозит. Мы предлагаем для пару советов, спасибо которым у каждого игрока будет вероятность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег: При отыгрыше бонусных средств, нужно учесть срок действия бонуса и время, коие дается на отыгрыш. По истечению заявленного медли, не отыгранный приз несомненно аннулирован.Нет. Казино раздают безвозмездные призы за регистрацию, чтобы, чтобы, дабы заказчик имел ознакомиться с игровым заведением. А дабы исключить его, необходимо выполнить обстоятельства отыгрыша. <a href=http://hefeiyechang.com/home.php?mod=space&uid=20183>http://hefeiyechang.com/home.php?mod=space&uid=20183</a> Ещё одно распространённое акционное предложение – симпатичный презент с неблаговидными требованиями. К примеру, клуб сулит $100 в бездепа, хотя с вейджером х80 либо х100. Отыграть такой вейджер практически невозможно и поэтому какого-либо концентрироваться на больше занимательных акциях.Воспользоваться бездепом возможно не во всех игровых автоматах: казино вдруг устанавливает ограничение для клиентов. Конечно, это можно счесть некоторым неудобством для игрока, но справедливости ради стоит отметить, что выбор автоматов всё равно остаётся довольно великим. 1хслотс регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=http://aurorahcs.com/forum/memberlist.php?mode=viewprofile&u=168982>1хслотс зеркало</a>
<a href=http://portal.westcoastbible.org/discussion/viewtopic.php?f=18&t=1940546>1×slots зеркало проходить регистрацию это отличный вариант</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, нужно адресоваться в саппорта через лайв-чат на веб-сайте казино. Сразу в активации промокода возможно пользоваться даром. Как теснее упоминалось, призы бывают трёх обликов – фриспины, кредиты и фриплей-бонусы.
#9273 Charlesgunnyhttp://filmkachat.ru
1×slot казино зеркало
Благодаря программке лояльности от игорного заведения, возможно взять хороший старт и без дополнительных вложений запустить видеослоты. Кроме как, можно рассчитывать на реальную фортуну и получить, без вложения собственных финансов, великий выигрыш.Активация по промокоду используется в разных обликах бездепов. Если речь о приветственном бонусе, то комплект символов возможно разузнать на главной странице, в регистрационной форме или послании, которое отправляется юзеру для доказательства адреса электронной почты. Акции все проводиться совместно с партнерскими площадками. Обычно код размещается на стороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активизируется разовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем актуальный код для активации в описании каждого рекламную. <a href=http://filmkachat.ru/>1×slots казино зеркало</a> Представленные на данной странице наилучшие бездеп бонусы в казино за регистрацию в 2022 году имеют подходящие обстоятельства. После кропотливого анализа редакция портала составила рейтинг спецпредложений, каком посетители Casino.ru все сортировать перечень по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д. <a href=https://www.numeracy.wiki/index.php/Shisha_Tobacco_From4_Eur>https://www.numeracy.wiki/index.php/Shisha_Tobacco_From4_Eur</a> Но на некоторых азартных платформах похожие вознаграждения могут получить теперь зарегистрированные пользователи. В таком случае, бонусы предоставляются в рамках оригинальных акций или же неким геймерам в виде акционного предложения, которое прибывает на почту с целью «вернуть» игрока в свое казино. 1хслотс регистрация в 1×slots casino <a href=http://icfood.com/bbs/board.php?bo_table=free&wr_id=189080>http://icfood.com/bbs/board.php?bo_table=free&wr_id=189080</a> Обычно бездепозитные промоакции от казино, прибывают на эл. Почту в дни рождения либо дни. В неких онлайн казино возможно обратиться в чат и как неизменному игроку, вполне вам предложат бездепозитное предложение.Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.
1х слот 1хслотс регистрация перейти на 1×slots
1×slots официальный сайт зеркало Приглашаем делиться воззреньями о призах. Это поможет иным юзерам избирать более прибыльные предложения.Пoдтвepдить личнocть посетителя. Для успешного вывода средств, нужно доказать лицо посетителя. Нa этaпe вepификaции пpoфиля, сотрудники службы безопасности обязаны увериться, что у игрока всего лишь раз аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не может исключить собственный выигрыш, в у него несомненно некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы. <a href=http://www.mdream.net/bbs/board.php?bo_table=free&wr_id=174993>http://www.mdream.net/bbs/board.php?bo_table=free&wr_id=174993</a> Каждая игровая перрон отличается критериями по получению и отыгрышу бездепов. В правилах отчетливо расписаны временные рамки, за которые надо(надобно) прокрутить вейджер. Также не запамятовывайте на наибольший объем ставки и максимальную сумму выплаты. С другой стороны, дабы получить бездепозитные призы казино, достаточно потратить не более 1 минутки. 1хслотс зеркало
1×slots официальный сайт мобильная версия
Несмотря на то, что данный вариант стимуляции со стороны азартных платформ довольно популярен в сходственных игр, далековато не почитателям казино ведомо, собственно по бездепозитные призы казино и как именно их вполне эксплуатировать.При регистрации сомнений или ином интернет игральном заведении — вас дается раз шанс испытывать собственную фортуну не внося средства монеты. Замечу что эту поощрительную предложение деют не все онлайн игровые площадки, а лишь щедрая середина(средина) из их. Которые мы подготовили для Вас в нашем перечне. <a href=http://catalog2.drobak.com.ua/communication/forum/user/2725761/>http://catalog2.drobak.com.ua/communication/forum/user/2725761/</a> Фриспины без депо или дополнительные свои посодействуют поближе познакомиться с игровой платформой и её функциями. За счёт презентов можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради забавы против живых крупье.Чаще всего казино приз за регистрацию без депо даёт вероятность запустить любой машина. Но превосходнее пристально ознакомиться с критериями. Иногда для игры доступны лишь определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, другого начать знакомство с миром пыла непосредственно с «одноруких злодеев». 1хслотс казино зеркало
1хслотс казино зеркало
Бездепозитный приз предоставляется новенькому игроку за конкретные деяния. Часто презент вид денег либо фриспинов выдается за регистрацию, благодаря чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.Как верховодило, при выводе денег, от играющего требуется лишь сделать наименьший вклад чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом личный счет. 1×slots регистрация 1×slots casino 777 online <a href=http://travel.navigator-mas.ru/user/WilliamHiz/>http://travel.navigator-mas.ru/user/WilliamHiz/</a> Игрокам не воспринимать приветственный приз как гарантированный способ получить большой выигрыш, хотя это замечательная вероятность без затрат оценить возможностей казино.
1×slots мобильная версия войти казино
Теоретически, к безвозмездным бонусам возможно отнести например именуемые фриспины. Напомним, речь идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, потому собственно они деют только возможность делать ставки.Но есть азартные заведения, готовые просто так вручить средства на забаву. Для этого достаточно создать профиль. Чтобы вывести выигрыш, сперва нужно выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа. Кешбэк-бонус дает собой возврат фиксированного процента от ставки когда поражения или же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не превышает 10%.Верификация аккаунта. Лучше подтвердить лицо сразу в регистрации, чтобы позже не было проблем с выводом средств. Верификация имеет проходить 2-мя способами: <a href=http://the-good.kr/bbs/board.php?bo_table=free&wr_id=579024>http://the-good.kr/bbs/board.php?bo_table=free&wr_id=579024</a> Некоторые казино имеют предлагать посетителям бездепы за свидетельство номера либо почты либо репост на страничку в социальных сетях.Кешбэк-бонус дает собой возврат фиксированного процента от ставки в случае поражения или же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%. 1×slots официальный сайт мобильная версия скачать Изучить правила и условия получения бездепозитных бонусов казино, Вы сможете у нас на сайте в разделе с бонусами или на официальном веб-сайте выбранного Вами казино. Если возможности отыскать необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электронной почте.Возможность протестировать свежие игры, не рискуя личными своими и разработать собственную стратегию игры.
<b>Смотреть еще похожие новости:</b>
<a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=7523&TITLE_SEO=7523-preobrazovatel-interfeysov-usb-rs485&MID=465967&result=reply#message465967>1×slots рабочее зеркало</a>
<a href=https://forum.home-visa.ru/viewtopic.php?f=69&t=807392&p=2780567#p2780567>1хслот 1хслотс регистрация перейти на 1×slots</a>
<a href=http://link.5nx.ru/viewtopic.php?f=5&t=4518>1×slots на любой вкус как пройти регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Главным нюансом в появлении данных вознаграждений состоит в том, собственно пустив их в ход, геймер ничем не рискует и в последствии никому ничего не будет должен (не зависимо, получит ли он спасибо бонусам какой-нибудь выигрыш либо моментально спустит все лишь что прибывшие деньги). То есть, казино снабжает игрока возможностью на дармовой базе играть во всевозможные слоты и даже спонсирует игру.
#9274 Charlesgunnyhttp://filmkachat.ru
сайт 1× slots casino
Ниже указан важный перечень законных казино в Беларуси с бонусами на первый депо. Вы сможете попасть на официальный сайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. <a href=http://filmkachat.ru/>1× slots официальный</a> Подтверждение регистрации. Казино настоятельно привязки профиля к электронному адресу и номеру телефона. Для этого на e-mail отчаливает послание ссылаясь, а на аппарат ? текстовое известье с кодом. <a href=https://ruisoon.com/space-uid-46693.html>https://ruisoon.com/space-uid-46693.html</a> казино 1×slots официальный сайт <a href=https://ortsgerichtsforum.de/member.php?action=profile&uid=709>https://ortsgerichtsforum.de/member.php?action=profile&uid=709</a> Рассмотрим на образце: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских руб. В критериях акции предписано, собственно вейджер бездепозитного приза х20. Поэтому, чтобы отыграть приз, игроку несомненно необходимо устроить ставок на 35*20=700 рублей.
1хслотс рабочее зеркало на сегодня
Риск-игра по равным шансам – Также казино имеет воспрещать выполнять обстоятельства по отыгрышу с помощью раунда на удвоение, который предлагается в слотах, видео-покере и некоторых других забавах. <a href=https://tabsgame.ru/user/Jamesbes/>1×slots официальный сайт скачать</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке необходимо восполнить счет в казино. Для депозитных бонусов, эта процедура не необходима, например как депозит уже сделан.Используйте наихорошие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из списка ниже, чтобы заработать презенты за обычные деянья теперь сейчас получить первый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высокой отдачей и прыткими выводами на электрические кошельки. <a href=http://n98077fz.bget.ru/users/neighborlydrudg>http://n98077fz.bget.ru/users/neighborlydrudg</a> В зависимости от онлайн заведения каждый из их имеет вам предложить как бездепозитные деньги, например и бездепозитные фриспины, которые после удачной регистрации упадут для на ваш игровой баланс.К раскаянию, нет. Почти все казино, настоятельно внесение но бы одного малого депозита для вывода выигрыша с бездепозитного бонуса. Также учитывайте, что вывести средства разрешено лишь на что, эту платежную систему, с коей был изготовлен депозит. 1×slots официальный зеркало
1×slots casino регистрация 1×slots review live
Существует ли стратегии для отыгрыша бездепозитных призов? К раскаянью нет, на выигрыши либо проигрыши с призов, казино либо игрок воздействовать не может, отдача игр случается от разработчиков игр.Чаще всего, популярные сервисы, такие как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно неотъемлемое верховодило. Финансовые свои выводятся лишь спустя ту платежную систему, коей пользовались для пополнения депозита. Если же игрок получил бездепозитный покерный приз, требуется восполнить счет на наименьшую сумму, которая составляет обыкновенно 10 $. Если ординарными текстами, бездепы – это определённая сумма средств или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать подарки. Но есть некоторые аспекты. Существуют игорные дома, которые перед тем как начислить бонусы просят привязать телефонный, предоставить копии документов.Одним из поводов отдавать преимущество, льготу одному или другому заведению заключается в привлекательности предлагаемых акций и безвозмездных услуг. Безвозмездные фриспины, выдаваемые без нужды делать какой-либо вклад, в перечне располагается далеко не в конце. <a href=https://ls-rcr.com/forum/memberlist.php?mode=viewprofile&u=47450>https://ls-rcr.com/forum/memberlist.php?mode=viewprofile&u=47450</a> Как правило, новоприбывшие геймеры начала хотят ознакомиться с методами ввода и вывода валютных средств и сроки выполнения поданных заказов чтобы конкретно понимать, как стремительно меня исключить свой казино бонус за регистрацию без депо на электронный кошелек либо же банковскую карту. К счастью для всех играющих, снутри конкретных холдингов, все казино конкурируют меж собой. Ведь если бы определенную компанию представляло лишь одно онлайн-заведение, то вряд ли бы посетители увидели казино с бонусом за регистрацию и имели бы рассчитывать только на вознаграждение повторяющий приза на первое вложение. К любому заведению периодически стопам привлекать новых игроков, что, в итоге, только на руку всем играющим.Бездепозитные призы — это подарки от казино повторяющий бонусных средств либо фриспинов для игровых автоматов, коие начисляются на аккаунт игрока после процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депозит не требуется. 1×slots зеркало проходить регистрацию это отличный вариант Возможность протестировать свежие забавы, не рискуя личностными своими и создать личную тактику забавы.
1×slots коды
Акционные предложения от казино есть в различных форматах. Часто бонусы даются в обмен на депозит. Игрок вносит платеж и получает деньги, безвозмездные вращения и другие поощрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — картина приза, кот-ый гарантирован за исполненье конкретных поступков на веб-сайте:За счёт спинов получится запустить разные онлайн слоты, протестировать стратегии и поднабраться навыка. Фишка том,, что вращения начисляются на топовые аппараты с оригинальными опциями и высочайшей отдачей. Не запамятовывайте, что в каждом акционном предложении предусмотрены специальные притязания – кратковременные лимитирования, максимальный размер ставки, список дешевых игр. Эффективность бездепов в качестве рекламного прибора оценили многие операторы. Малоизвестные площадки употребляют эти акции, дабы стремительно набрать базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны постоянных посетителей. Не все веб-сайты, дающие подарки без депозита, рекомендованы к ирге. За привлекательным промоописанием все прятаться невыполнимые обстоятельства отыгрыша и другие подводные камни.Как правило, при выводе денег, от играющего потребуется лишь устроить минимальный лепта для того, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом индивидуальный счет. 1×slots регистрация 1×slots casino 777 online <a href=http://akb-video.ru/profile.php?u=perfectspoof22>http://akb-video.ru/profile.php?u=perfectspoof22</a> Многие казино предоставляют в маркетинговых целях безвозмездные призы исключительно для наших читателей. Чтобы их получить, нужно перейти на игровой вебсайт по партнерской ссылке с нашего портала.
казино 1× slots официальный сайт
Активация валютного вознаграждения случается автоматически в создания профиля либо использования промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на странички казино в социальных сетях или на рассылку маркетинговых сообщений, скачать и установить дополнительный софт и т.д. Внесение депозита – Будьте готовы пополнить счет последствии отыгрыша бонуса. Это обычное требование управлял для данного типа промо-акций. Лучше заблаговременно уточнить, какую необходимую надо(надобно) несомненно вносить на счет. Как верховодило, речь идет о минимальном депозите, хотя вы должны быть уверены, собственно он вас по кармашку. <a href=http://u-cars.ru/modules.php?name=Your_Account&op=userinfo&username=fascinatedvisit>http://u-cars.ru/modules.php?name=Your_Account&op=userinfo&username=fascinatedvisit</a> Особую изюминку видео слотам придают оригинальные символы. С их в активируются различные призы. Вы сможете запустить вспомогательный степень и увеличить сумму выигрыша. Есть знаки, которые замещают ненужные составляющие и сами делают выигрышные комбо. Не стоит забывать и тему бонус-тур. После каждого счастливого спина есть шанс увеличить сумму выигрыша в 2 или хорошо раза. 1 х слотс зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-4949/#comment-590162>1×slots официальный зеркало</a>
<a href=http://forums.panzergrenadiers.com/showthread.php?22760–1×slots-%D0%A1%D0%82%D0%A0%C2%B5%D0%A0%D1%96%D0%A0%D1%91%D0%A1%D0%83%D0%A1%E2%80%9A%D0%A1%D0%82%D0%A0%C2%B0%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A1%D0%8F-1×slots-casino-c2d-ru&p=503214#post503214>1×slots регистрация 1×slots casino c2d ru</a>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=63369&result=reply>1хлот регистрация в 1×slots casino</a>
<a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=859043#pid859043>1×slots промокод при регистрации</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Ограничения по играм. Администрация запрещает игрокам некоторые игровые автоматы с бездепозитным призом, деньгами или безвозмездными вращениями. Обычно, в правилах приводится полный перечень слотов для отыгрыша. Иногда дробленье выполняется по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino. Баланс игрока дополняется на соответствующую необходимую. К ней используется вейджер, обозначенный в правилах акции. Вывести выигрыш можно несомненно последствии как, как юзер сделает требуемый размер ставок из собственных средств. В редчайших случаях бездеп работает в формате Free Play. На счет пользователя зачисляется большая сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по окончании сего периода сумма на счету будет превосходить изначальную, то разницу возможно будет исключить либо использовать для последующих ставок.
#9275 Danielquornhttps://www.dnnsoftware.com/activity-feed/my-profile/userid/3201650
“You get some of me but not tomorrow as they want me in as soon as I can make it happen. This is the one time when they say jump and I ask how high due the financial gains the company could benefit from and it being important enough for the client to appear in person.”
“Well I get an extra night of you at least! I wonder what we could do with that? Meantime, what about food? I am starving and delicious as it was a second breakfast is not quite enough to replenish me!”
“Well get something on and we’ll sort that out first.”
We drove into town and decided that a daytime visit to Charlie’s was going to be the answer. I parked in the bar lot and Elise dashed in to change into something more appropriate, jeans and a t-shirt along with her biker jacket but keeping her Converses on.
Walking down to the restaurant was different from the middle of the night visits as the streets were bustling and all of the shops and outlets were open.
Reaching Charlie’s we entered the front door and sat in a booth near the window. A beautiful young American Chinese girl came,smiled and said hello to Elise and gave us menus and asked if we wanted drinks in the meantime.
„No thanks Lin just a pot of Jasmine tea for us please.“ Lin went back to the kitchen area. “No booze for me today as I will have to work in the bar so it is just tea for me.”
Not in a drinking mood either, I agreed with her."
https://www.metal-archives.com/…/vitalik1957 http://www.babelcube.com/…athan-bremer https://permacultureglobal.org/…ostnote-curd https://imageevent.com/groovy1989 https://www.metal-archives.com/…s/romaal1971
#9276 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать
Новички не обожают сразу же вносить депо. Это обусловлено неименьем опыта и сомнением. К счастью, дни возможно получить бездепозитный бонус за регистрацию в казино. Неважно что начисляет система – фриспины или кредиты. В всяком случае вы не рискуете своими сбережениями. Это замечательная вероятность запустить понравившийся видео слот либо же испытывать удачу в настольных играх. <a href=http://filmkachat.ru/>1× slots casino зеркало</a> Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, all только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Основное различие сомнений, что для получения бездепа не надо пополнять баланс в казино. Но считая сего, есть ряд прочих различий: <a href=https://mmatycoon.info/index.php/User:SuzannaYewen60>https://mmatycoon.info/index.php/User:SuzannaYewen60</a> В интернете слишком большое скриптовых вебсайтов, коие принадлежат мошенникам. Их главная цель – привлечь гэмблеров, пообещав столько щедрые подарки, хотя и солидные выигрыши. Так что некоторые веб-сайты предлагают получить за регистрацию в $1 000. 1 x slots <a href=https://forums.finalfantasyd20.com/member.php?action=profile&uid=31533>https://forums.finalfantasyd20.com/member.php?action=profile&uid=31533</a>
1хслотс зеркало на сегодня
<a href=https://timepost.info/showthread.php?tid=40487>1×slots официальный сайт скачать</a> 1хслот скачать Простая процедура получения бездепозитного приза, которая займет не более 2-х мин. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные. <a href=https://www.feeder.mobi/members/oscartof/profile/>https://www.feeder.mobi/members/oscartof/profile/</a> Если вы выбираете проверенное лицензионное онлайн казино и выполните все условия получения бездепозитного приза, трудностей с получением презента у Вас не возникнет. 1×slots регистрацию процедура займет всего лишь Превышение наибольшей ставки при отыгрыше. Система автоматически не предупреждает о превышении ставки, поэтому о нарушении правил игрок возможность разузнать уже в подачи запроса на вывод средств.
1×slots регистрация на официальном сайте
Доступные игры – В некоторых азартных играх можно снизить математическое приемущество казино до нескольких десятых процента. В их числе все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как правило, в таких забавах ставки идут в зачет вейджера не всецело. Например, имеет предусматриваться лишь 50%. В неких забавах бездепозитные бонусы вообщем нельзя отыгрывать.При исполненьи критерий отыгрыша и верификации, средства с бонусного счета переводятся на главный и все быть выведены на карту либо электрический кошелек. Лимиты на вывод и сроки проведения транзакции зависимости от выбранной платежной системы. Объективные – объем приза, коэффициент и обстоятельства вейджера, надобность внесения депо для вывода средств; <a href=http://uplmegaporn.com/user/CraigSut/>http://uplmegaporn.com/user/CraigSut/</a> Выигрыши с призов без инвестициям практически привязаны к требованию по ставкам и могут быть обналичены только после исполнения данных притязаний. 1 х слотс зеркало
1×slot регистрация
Таким образом онлайн казино получает вероятного игрока. Возможно в или настоящем он захотит поиграть на средства средства. Так работают бездепозитные призы в онлайн казино. Здесь очень подходит выражение, бесплатные сыр посещает лишь в мышеловке. Начинающие игроки могут не осознавать опасность пыла. Однако времени осознания делается больше. Это тема для отдельного обсуждения.Получить Бездепозитный приз в онлайн казино дело 2-ух кликов. Другой момент, отыграть промо и соблюсти правила и условия отыгрыша. Под правилами предполагается столько вагер, хотя и лимитирования по максимальной ставке. Мы разумеем, что в кинотеатр все ставят на зеро и выигрывают. Призываем не делать подобного. Перед активацией бонуса прочитайте верховодила. Узнайте следующие моменты: Условия получения дара, за регистрацию, за депо и другое. Ограничения по наибольшей ставке. Зачастую не выше 350 руб. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на пространстве. Поэтому важно аристократия, в каких играх возможно совершать кратность валютного оборота. Чаще всего применяются коды. Их надо(надобно) вносить в особые окна регистрационной анкеты, в речь идет о пригласительных бонусах, или в определенном разделе собственного кабинета игрока. Но есть игорные заведения, которые готовы просто например жертвовать средства на забаву. Для сего довольно сделать профиль. Чтобы исключить свой выигрыш, вас сначала необходимо выполнить обстоятельства отыгрыша, обозначенные в условиях получения бездепозитного депо.В любом казино с бездепозитным призом учтены вейджеровые обстоятельства. Это единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, нужно сделать определённое количество ставок. Чем круче приз, что, этим труднее выполнить условия, и напротив. 1×слот регистрация в 1×slots casino <a href=http://elektrofahrrad-tests.de/forums/member.php?action=profile&uid=42562>http://elektrofahrrad-tests.de/forums/member.php?action=profile&uid=42562</a>
1×slots зеркало на сегодня
Бездепозитный бонус часто может стать легкодоступным незамедлительно в завершения регистрации, потому как единственным требованием к нему является регистрация, а затем проверка вашей свежей учетной записи. <a href=http://a96549hg.bget.ru/index.php?subaction=userinfo&user=tenuoussample77>http://a96549hg.bget.ru/index.php?subaction=userinfo&user=tenuoussample77</a> 1×slots официальный сайт зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://forums.indexrise.com/thread-1096-post-330862.html#pid330862>1×slots официальный регистрация</a>
<a href=https://www.katzenforum.at/forum/media/users/jamesagema.16012/>1хслотс зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины – бесплатные вращения с фиксированной ставкой, которые можно использовать в конкретных игровых автоматах. Иногда операторы настоятельно внесение минимального депо перед выводом для верификации платежного инструмента. В некоторых казино данный депо кроме предстоит отыграть.
#9277 сейф огнестойкийhttps://ognestojkij-sejf.ru/
Тут можно преобрести несгораемый сейф цена <a href=https://ognestojkij-sejf.ru/>сейф пожаростойкий</a>
#9278 Charlesgunnyhttp://filmkachat.ru
1×slots casino зеркало рабочее
Самый распространённый из подобных бонусов, окончательно же, бездеп на день рождения клиента — бонус вид фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им можно в течение установленного периода медли.В современность довольно просто получить бонус за регистрацию в казино. Практически любой игорный жилище с готовностью начисляет средства либо безвозмездные вращения. Многие гэмблеры используют данным и не смущяются регистрироваться в любом клубе с выгодными условиями. Кстати, это отличная вероятность выработать победную стратегию и сорвать джекпот. <a href=http://filmkachat.ru/>1×slots casino зеркало</a> Фриспины – бесплатные вращения с фиксированной ставкой, коие можно применять в определенных игровых автоматах. <a href=http://dac21.com/bbs/board.php?bo_table=free&wr_id=1001898>http://dac21.com/bbs/board.php?bo_table=free&wr_id=1001898</a> 1×слотс казино <a href=http://l2help.lt/user/CharlesCag/>http://l2help.lt/user/CharlesCag/</a>
1×slots официальный сайт скачать на айфон
Размер ставки для забавы по бездепозитному призу (окончательно же, когда, когда он представлен вид бонусных валютных средств) часто ниже, чем при этой на депо. Ограничение несомненно работать до этапа отыгрыша бонуса.2. Создать свежий профиль. Для регистрации надо(надобно) наполнить маленькую анкету либо зайдите в личный офис при помощи соц сеток; 1×slots акции <a href=https://m1bar.com/user/StevenRaw/>https://m1bar.com/user/StevenRaw/</a> Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации презента необходимо доказать электрическую почту и привязать телефонный; онлайн казино 1×slots Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в социальных сетях, установку мобильного приложения либо официального посетителя для ПК. В большинстве казино действуют программы преданности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий уровень нередко сопрягается выдачей бездепа.В бонусную программу множества операторов входят регулярные бездепы. Это бессрочные акции, поощряющие интенсивных постоянных игроков. Популярный формат — раздача фриспинов по конкретным денькам недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают неизменные бонусы без депозита в мена на накопленные баллы лояльности.
1хслот зеркало
Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного приза. Бонус за регистрацию в казино выдается лишь раз один на одного игрока. Но случаются вспомогательные акции, в рамках которых бездепы расступаются для постоянных клиентов и эти презенты Вы сможете получить более 1-го раза. <a href=http://rainbowingarden.com/home.php?mod=space&uid=17259>http://rainbowingarden.com/home.php?mod=space&uid=17259</a> Если площадка презентует бездеп за регистрацию, то процедура его получения проста. Нужно лишь завести акк на сайте и активировать его, подтвердив адрес электрической почты, номер аппарата или иные данные, коие настятельно оператор. Перед этим нужно увериться, собственно юзер находится на официальном веб-сайте казино, не на жульнической площадке. 1×slots рабочее зеркало на сегодня Не рекомендуем опрометью голову браться за различные предложения получения средств без вложений. Вполне возможно, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на 1-ый взгляд. Альтернативой считается казино приз за депозит. Мы предлагаем вам пару советов, спасибо которым у любого игрока несомненно вероятность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег:Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы которые появляются у начинающих.
1×slots casino регистрация
Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном бонусе, то в первую очередь внимание на значение вейджера и срок, кот-ый дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть бонус и исключить выигрыш.Бездепозитные бонусы казино это экономическая компенсация, предлагаемая юзерам на дармовой основе и возможность играть в онлайн казино безвозмездно. Если ассоциировать их с одобрениями за лепта, каких средства выдаются только впоследствии начального пополнения счета, то бездепозитные гонорары получаются даром. То есть, играющий получает вероятность создавать ставки на уже место деньги, коие выдаст заведение, исполняя, всем, обыденные действия, дабы их извлечь (здесь речь о регистрация, удостоверении личности с использованием номера телефона, дизайна заявки и т.д. ). Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 $. Если выдаются фриспины, их число редко превышает нескольких десятков даровых вращений. 1×slots casino регистрация 1×slotscasino09k online <a href=http://kirova1.unoforum.pro/?1–12–0–00000116–000–0–0>http://kirova1.unoforum.pro/?1–12–0–00000116–000–0–0</a> Чаще всего, популярные сервисы, эти как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно неотъемлемое верховодило. Финансовые средства выводятся лишь спустя что, эту платежную систему, которой огромный для пополнения депозита. Если же игрок получил бездепозитный покерный приз, потребуется пополнить счет на минимальную сумму, кот-ая сочиняет обычно 10 $.
1х слотс зеркало регистрация в 1×slots casino
Хотя бесплатные бонусы начисляются без депозита, не исключено, что вас понадобиться вносить средства. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только последствии того, как свежий клиент первый пополнит игровой счет. Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Для получения предоставленных бонусов вам пригодиться — ПК либо мобильное прибор, и остальное дело за малым. <a href=https://princeofrubber.com/user-profile/doctorlazutakl/?um_action=edit>https://princeofrubber.com/user-profile/doctorlazutakl/?um_action=edit</a> 1×slots зеркало рабочее на сегодня Наличие у игрока 2 аккаунта. Запрещено создавать несколько профилей для многократного получения бездепов.
<b>Смотреть еще похожие новости:</b>
<a href=https://redfist.de/RF-Online-Testforum/viewtopic.php?f=60&t=77863>1×slots сайт</a>
<a href=https://your-portal.at.ua/forum/35–373–6#88235>1х слот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Перед активацией важно внимательно выучить условия акции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют велечину кроме лимиты ставок при отыгрыше и сроки, на коих можно воспользоваться предложением. Если бездеп охватывает ограниченный перечень игр, рекомендовано разузнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с невысокими множителями выплат подходят лишь том, случае, случае оператор не установил жесткие ограничения на максимальную необходимую ставки. Почти все игровые клубы требуют подтверждение контактных данных игрока для получения бездепозитного приза.
#9279 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало
В основном случаев безвозмездные призы начисляются в кредитах, коие нельзя незамедлительно исключить со счета. Прежде их нужно отыграть по установленным правилам. Эти притязания принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже. <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> <a href=https://cameradb.review/index.php?title=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D0%B5%D0%B9%D1%88%D0%B8%D0%B5%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BF%D1%80%D1%8F%D0%BC%D0%BE%20%D1%83%20%D1%81%D0%B5%D0%B1%D1%8F%20%D0%B4%D0%BE%D0%BC%D0%B0%20-%20%D0%B4%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D0%BE%D0%B2%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO>https://cameradb.review/index.php?title=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D0%B5%D0%B9%D1%88%D0%B8%D0%B5%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BF%D1%80%D1%8F%D0%BC%D0%BE%20%D1%83%20%D1%81%D0%B5%D0%B1%D1%8F%20%D0%B4%D0%BE%D0%BC%D0%B0%20-%20%D0%B4%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D0%BE%D0%B2%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO</a> У каждого игорного клубы различные вейджеровые обстоятельства. Чтобы вы гарантировано сумели выполнить их, мы дадим количество советов. Если система начислила маленькую необходимую, не стоит делать большие ставки – остановитесь на 10–30 центах. Как только сумеете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте играть. В противном случае какого-либо приглядеться к иному автомату. 1 x slots <a href=https://visualchemy.gallery/forum/profile.php?id=4104445>https://visualchemy.gallery/forum/profile.php?id=4104445</a> Подтверждение регистрации. Казино просят привязки профиля к электронному адресу и номеру телефонного. Для этого на e-mail отчаливает письмо со ссылкой, а на телефон ? текстовое извещенье с кодом.
1×slots мобильная версия войти казино
Также бывают случаи, когда казино начислит обсужденный бонус после регистрации нового клиента по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам.Для получения депозитного бонуса нужно пополнить свой игровой баланс настоящими деньгами. Вознаграждение возможно получить либо при внесении первого депо, либо в виде фиксированного процента от внесённых средств. Так или по, приз поступит на счёт только последствии пополнения. <a href=https://forums.scar-divi.com/topic/541137–1×slots-%D1%81%D0%B0%D0%B9%D1%82/>1×slots сайт</a> 1×slots зеркало <a href=https://cse.google.be/url?q=https://doctorlazuta.by/>https://cse.google.be/url?q=https://doctorlazuta.by/</a> Внесение депозита – Будьте готовы восполнить счет последствии отыгрыша бонуса. Это обычное заявка управлял для данного на промо-акций. Лучше заранее уточнить, какую необходимую надо(надобно) несомненно заносить на счет. Как правило, речь о наименьшем депозите, но вы должны быть убеждены, что он вас по карману. 1× slots casino официальный сайт Подтверждение персональной инфы. Все казино настоятельно от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и наличие у пользователя иных аккаунтов (мультиаккаунт запрещен).
1×slots зеркало регистрацию более популярный вариант это
<a href=http://mallds.com/bbs/board.php?bo_table=free&wr_id=160707>http://mallds.com/bbs/board.php?bo_table=free&wr_id=160707</a> 1×slots casino регистрация Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие возникают у начинающих.Главным интересным в возникновении данных вознаграждений состоит никаких, что пустив их в ход, геймер ничем не рискует и в последствии никому ничего не несомненно должен (не зависимо, получит ли он благодаря бонусам какой-нибудь выигрыш или моментально спустит все только что прибывшие деньги). То есть, казино снабжает игрока вероятностью на дармовой базе играть во всевозможные слоты причем спонсирует игру.
1×slots официальный сайт скачать
<a href=http://smpn1bejen.sch.id/forum/>зеркло казино 1×slots</a> Приветственный бездеп предоставляется какому игроку лишь раз раз. Казино дерутся с так нарекаемыми бонусхантерами (от англ. Bonus Hunter — охотник за призами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения дара. Исключить похожие деяния дозволяет верификация данных. Администрация вправе потребовать у клиента подтвердить персональные данные, указанные при регистрации. Также существуют онлайн-платформы азартных игр, коие используют раздачу бездепозитных бонусов в особые даты (как для казино, так и для игрока). Помимо сего, действующие игроки также имеют вероятность получить похожие призы за свою работа (к примеру, за увеличения значения либо за схожие заслуги). 1×slots рабочее зеркало <a href=http://maskarad.bomba-piter.ru/index.php?subaction=userinfo&user=abstractedairpo>http://maskarad.bomba-piter.ru/index.php?subaction=userinfo&user=abstractedairpo</a> Проверка занимает от нескольких мин. До нескольких дней, профессионалы техподдержки шансы запросить вспомогательные документы либо инициировать короткое общение по Skype.
1×slots зеркало видели такую регистрацию на
Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен список наихороших онлайн казино, которые предлагают своим игрокам великодушные бонусы за регистрацию. Если вы бывалый игрок, вы обязаны аристократия, собственно бонус без депо – редкая находка. Тем ниже, мы еженедельно изучаем онлайн, чтобы найти для вас наихорошие бездепозитные предложения.Зарегистрируйтесь. Для регистрации почаще всего достаточно ввести свой номер телефонного и почтовый адресок, после чего установить приобретенный код из СМС. Возможно, требуется указать промокод. В правилах промоакции несомненно написано, где его надобно вводить. Иногда это надо делать при регистрации, времени — уже последствии сотворения личного кабинета, на отдельной странице. <a href=http://www.khleeg.net/vb/member.php?u=6779>http://www.khleeg.net/vb/member.php?u=6779</a> Заработать на бездепозитных призах за регистрацию в казино возможность любой юзер, достигший совершеннолетия.Изучить управляла и условия получения бездепозитных призов казино, Вы сможете у нас на сайте в разделе с призами либо на официальном сайте избранного Вами казино. Если не можете найти нужную информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электрической почте. 1×slots мобильная версия войти казино
<b>Смотреть еще похожие новости:</b>
<a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=89803>1хлот регистрация в 1×slots casino</a>
<a href=http://khodaumo.com/forum/viewtopic.php?f=2&t=75147&sid=46b60442693308bbeae9a205414806b1>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но ни не запамятовывайте пристально читать управляла участия в бонусных промоакциях. Если вы нарушите хотя бы одно условие, позже вы не можете устроить недоразумение с администрацией. Доступность — бездепозитные бонусы в казино чаще всего предоставляются новым игрокам, хотя бывают случаи, когда приз все получить и действующие посетители.
#9280 Charlesgunnyhttp://filmkachat.ru
1×slots бездепозитный бонус за регистрацию
Размер приза. В качестве бездепов обычно начисляют очень суммы, а когда речь о бонусах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино шансы подарить игроку до 2000$.Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, the decision зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. <a href=http://filmkachat.ru/>1 х слотс зеркало</a> <a href=https://backpacker-footsteps.com/backpacker-footsteps-forum/profile/jamesadave/>https://backpacker-footsteps.com/backpacker-footsteps-forum/profile/jamesadave/</a> Но на азартных платформах подобные вознаграждения шансы получить теперь зарегистрированные пользователи. В таком случае, бонусы предоставляются в оригинальных акций либо же некоторым геймерам в виде акционного предложения, коие прибывает на почту с целью «возвратить» игрока в свое казино.Свежий бонус начисляется повторяющий валютных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в использовании своими, в случае отыгрыша оператор возможность ввести ограничение на вывод денег. 1× slots сайт <a href=http://intentionalpress.com/author/doctorlazutaei/>http://intentionalpress.com/author/doctorlazutaei/</a>
1×slots официальный сайт мобильная версия
Например, игрок получил 500 руб. При создании аккаунта и обязан отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 руб., потребуется сделать 875 спинов для полного отыгрыша. скачать 1×slots на андроид мобильная версия Как верховодило, при выводе финансов, от играющего потребуется лишь устроить наименьший лепта чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом индивидуальный счет. <a href=https://forum.spherecommunity.net/User-OscarAbusy>https://forum.spherecommunity.net/User-OscarAbusy</a> Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.Пoдтвepдить личнocть посетителя. Для успешного вывода средств, нужно подтвердить лицо клиента. Нa этaпe вepификaции пpoфиля, сотрудники службы защищенности обязаны убедиться, что у игрока более раз акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не сможет вывести собственный выигрыш, в у него несомненно количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы. 1×slots казино зеркало После потребуется привнести идентификационный платёж. Это стращает новичков больше всего. Нужно сделать минимальный депо в 100–500 рублей. Таким образом служба безопасности убедиться в, собственно платёжный способ принадлежит Вам. Данная процедура необходима для обеспечения защищенности игровых счетов. Пример, Ваш акк взломают и выведут свои на собственный кошелёк. Будет очень неприятно. Поэтому верификация платёжной системы, это необходимый момент.
1×slots промокод при регистрации 2025
Не стоит незамедлительно же открещиваться от приветственных презентов в похожих казино. Администрация готова начислить деньги или фриспины, но предварительно работники обязаны убедиться, что вы не аферист. Дело в том, собственно развелось очень много охотников за призами. Они выучились дурачить систему и наваривать крупные суммы денег. Каждая игровая платформа отличается условиями по получению и отыгрышу бездепов. В правилах отчетливо расписаны кратковременные рамки, за коие надо(надобно) прокрутить вейджер. Также не запамятовывайте тему максимальный размер ставки и максимальную необходимую выплаты. С иной стороны, дабы получить бездепозитные призы казино, довольно потратить не более 1 минуты.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. <a href=https://justdirectory.org/details.php?id=269997>https://justdirectory.org/details.php?id=269997</a> 1×slots быструю регистрацию а также мгновенное Выше мы дали полный набор самых свежих и актуальных бездепозитных бонусов в интернет казино без пополнения на 2022 год, где вы можете воспользоваться хоть ценным бездепозитным призом.
1хслотс казино зеркало
<a href=https://hiddeninthesand.com/forum/memberlist.php?mode=viewprofile&u=1529>1хслотс рабочее зеркало</a> Игрокам не воспринимать приветственный бонус как гарантированный способ получить крупный выигрыш, хотя это отличная вероятность без расходов расценить функционал казино.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. Следует подчеркнуть, собственно бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с определенным кодом. 1×slots регистрация 1×slots casino 777 online <a href=https://gamesdrive.net/User-RalphPairl>https://gamesdrive.net/User-RalphPairl</a> Активация по промокоду употребляется в разных обликах бездепов. Если идет о приветственном бонусе, то набор символов возможно разузнать на основной странице, в регистрационной форме либо письме, коие отправляется юзеру для доказательства адреса электронной почты. Акции шансы проводиться совместно с партнерскими площадками. Обычно код располагается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется одноразовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем актуальный код для активации в описании каждого рекламную.Акции распространяются как на все игры казино, так и на узкий перечень. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и другие. Промо имеет охватывать разработки 1-го производителя. Бездеп не пересекается с другими акциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, изготовленные бонусными деньгами. Для идентификации платежных реквизитов игрока имеет понадобиться пополнение счета на наименьшую сумму.
1×slots коды
Обычно, бездепозитные бонусы выдаются под конкретные слоты с фиксированной ставкой, но их точно запрещено использовать в игровых автоматах с прогрессивным джекпотом. Список игр, каких можно применять бездеп, Вы отыщите в описании акции либо можете уточнить у саппорта заведения.Демоказино есть почти на каждом веб-сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются значительно пореже: там если, тогда, выигрыша и соблюдения условий акций бездеп можно перевоплотить в настоящие деньги. Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации дара нужно подтвердить электронную почту и привязать телефонный; <a href=http://andi67.bplaced.net/dokuwiki/doku.php?id=%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D1%8B%20%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA%D0%B0>http://andi67.bplaced.net/dokuwiki/doku.php?id=%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D1%8B%20%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA%D0%B0</a> B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax 1×slots официальный сайт, скачать
<b>Смотреть еще похожие новости:</b>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=64228&result=reply>рабочее зеркало 1хслотс</a>
<a href=https://chasingadream.rpginitiative.com/showthread.php?tid=135805>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При исполненьи критерий отыгрыша и верификации, деньги с бонусного счета переводятся на основной и шансы быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции находятся от выбранной платежной системы. У любого игорного клубы различные вейджеровые обстоятельства. Чтобы вы гарантировано сумели выполнить их, мы дадим несколько советов. Если система начислила маленькую сумму, не стоит создавать великие ставки – остановитесь на 10–30 центах. Как только сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В противном случае какого-либо присмотреться к иному автомату.
#9281 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению этого времени, Вы не можете активировать и получить бездепозитный приз.Условия вывода выигрыша. В неких заведениях для удачного вывода с бездепозитного бонуса достаточно пополнения баланса и подтверждения личности. В других же клубах, нужно количество раз прокрутить собственный депо. <a href=http://filmkachat.ru/>1×slots зеркало проходить регистрацию это отличный вариант</a> Подтверждение регистрации. Казино настоятельно привязки профиля к электрическому адресу и номеру телефона. Для этого на e-mail отправляется письмо со ссылкой, а на аппарат ? текстовое сообщение с кодом.В наше время довольно просто получить приз за регистрацию в казино. Практически любой игорный жилище с радостью начислит деньги или бесплатные вращения. Многие гэмблеры используют данным и не смущяются регистрироваться в каждом клубе с выгодными условиями. Кстати, это замечательная вероятность выработать победную стратегию и сорвать джекпот. <a href=https://www.love2d.org/forums/memberlist.php?mode=viewprofile&u=295273>https://www.love2d.org/forums/memberlist.php?mode=viewprofile&u=295273</a> Чем ниже значение вейджера, что, этим легче отыграть и вывести бонус. Если Вы планируете заработать на бездепе, а не просто ознакомиться с новым игровым клубом, то стоит игнорировать бонусов с высочайшим вейджером их почти не реально отыграть. С ними Вы можете лишь протестировать игры заведения.После получения бонуса вывод средств для посетителя несомненно недоступен до тех пор, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо пара недель. Выводить деньги игрок сможет лишь в отыгрыша. 1×slots casino регистрация 1×slotscasino09k online <a href=https://ads.kazakh-zerno.net/user/CharlesFlolf/>https://ads.kazakh-zerno.net/user/CharlesFlolf/</a> Акции распространяются как на все забавы казино, например и на узкий перечень. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и. Промо возможность обхватывать разработки одного производителя. Бездеп не пересекается с другими акциями казино. Если на сайте учтен кэшбек, он не начисляется за ставки, изготовленные бонусными средствами. Для идентификации платежных реквизитов игрока возможность потребоваться пополнение счета на наименьшую сумму.Каждый новичок и профессиональный игрок грезят живо стартануть и начать делать настоящие ставки. Для этого достаточно отобрать подарок, за кот-ый не выплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email или телефон. После этого администрация начисляет щедрое вознаграждение повторяющий безвозмездных вращений либо виртуальных кредитов.
1×slots регистрация на официальном сайте
<a href=https://creapnl.com/foros/tema/1×-slots-%d1%81%d0%b0%d0%b9%d1%82–45/>1× slots сайт</a> 1 xslots рабочее зеркало Акции распространяются как на все забавы казино, например и на узкий перечень. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и другие. Промо возможность охватывать разработки 1-го производителя. Бездеп не пересекается с другими акциями казино. Если на сайте предусмотрен кэшбек, он не начисляется за ставки, изготовленные бонусными деньгами. Для идентификации платежных реквизитов игрока возможность потребоваться пополнение счета на минимальную необходимую.Но не стоит размышлять, собственно снабжая юзеров этими бонусами, казино увлекается спонсированием. Ведь размеры вознаграждений, в, не немалые (средним объемом от 5 до 20 долларов). И на эти средства налагаются конкретные условия и лимитирования, обязательные к выполнению игрока, в в последствии он вожделеет получить все свои выигранные деньги. <a href=http://flowerwheel.synology.me/dokuwiki/doku.php?id=фильмы_в_формате_3gp>http://flowerwheel.synology.me/dokuwiki/doku.php?id=фильмы_в_формате_3gp</a> Поспешите арестовать бездепозитные бонусы за регистрацию в казино из представленного списка. Все платформы не только водят законную работа, хотя и порадуют добросовестными результатами игры, высочайшей отдачей, быстрыми выплатами. 1×slots официальный сайт скачать Онлайн гемблинг развивается с любым днем больше и больше, свежие бренды создаются не по дням а по часам. Новые интернет казино проделывают вступительные акции для игроков, чтобы, чтобы что бы зарекомендовать себя, и тем самым предлагают бездепозитные призы за регистрацию, собственно бы не пропустить такую возможность — как воспользоваться свежим бездепом, рекомендуем навещать наш сайт как можно чаще, самое аппетитное и новые будет добавляться в данном же перечне.
1хслотс казино зеркало
Зарегистрироваться в казино по особой ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефона и электронную почту). Для подтверждения номера аппарата необходимо в личном профиле показать собственный номер и нажать кнопку „Подтвердить номер телефона“, далее Вы получите sms-сообщение с кодом, кот-ый необходимо установить в подходящее фон. Для подтверждения электронной почты, перейти по интенсивной ссылке в послании от казино. <a href=http://megatv.kiev.ua/user/DonaldNom/>http://megatv.kiev.ua/user/DonaldNom/</a> Можно ли наваривать на бездепозитных бонусах? Это не работа, здесь как повезет, в в любом предложенном безедепе, вы будете откручивать вейджер и выводить, время можно именовать везением, и дополнительной добавкой к вашему бюджету.Большинство клубов привлекают внимание в за счёт разнообразных презентов. На одних сайтах можно получить виртуальные кредиты, которые откроют доступ ко всему софту. На других же, администрация предлагает безвозмездные вращения для запуска топовых онлайн слотов. Несмотря на разные промоакции, стоит выделить самые основные. 1хслот зеркало Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и. Когда игроку полагается много фриспинов, администрация имеет разбивать их начисление на количество дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах акции.
зеркло казино 1×slots
<a href=https://forum-macan.ru/viewtopic.php?t=3274>1×slots официальный регистрация</a> Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, a зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. 1×slots зеркало сайта <a href=http://trisinfronteras.com/davidcastro/component/k2/itemlist/user/455905-joshuaemica>http://trisinfronteras.com/davidcastro/component/k2/itemlist/user/455905-joshuaemica</a>
1×slots сайт
При отыгрыше бонусных средств, нужно учитывать срок деянья бонуса и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный приз будет аннулирован. <a href=http://xn–b1acebaenad0ccc3aiee.xn–p1ai/forum/user/4681/>http://xn–b1acebaenad0ccc3aiee.xn–p1ai/forum/user/4681/</a> Призовые начисления без депо могут предоставляться для роли в турнирах интернет казино. Потратить перечисленные деньги можно исключительно в рамках данной промоакции. Условия их проведения себе лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, другого, как выучить его правила.Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. 1×slots зеркало на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=https://forums.scar-divi.com/topic/583409–1×slots-%D0%B0%D0%BA%D1%82%D1%83%D0%B0%D0%BB%D1%8C%D0%BD%D0%BE%D0%B5-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE/>1×slots актуальное зеркало</a>
<a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=36360>1×slots официальный demo регистрация в 1×slots casino</a>
<a href=http://www.carshowsociety.com/forum.php/topic,28681.new.html#new>1×slots регистрация на сайте 1×slots ru com</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Рассмотрим принцип его деянья на случае. Допустим, вы зарегались и возымели $10 not the slightest down payment bonus с вейджером х50. Это значит, собственно выигранные деньги можно будет выводить не раньше, чем последствии как, как общая сумма ставок достигнет $500. Бездеп с фриспинами возможность охватывать всю коллекцию игр на сайте или разработки одного провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш возможность быть выведен после как, как юзер отыграет эту необходимую. Возможность расценить полный перечень слотов — основное совершенство этой разновидности. Игроку становятся доступны те функции, коие отсутствуют в демонстрационном режиме, а возможность выиграть настоящие деньги добавляет ясных азартных чувств.
#9282 Charlesgunnyhttp://filmkachat.ru
1хслотс мобильная версия зеркало
Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. <a href=http://filmkachat.ru/>казино 1× slots официальный сайт</a> В основном случаев благотворительные бонусы начисляются в кредитах, коие невозможно сразу исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти требования принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д. ). О нем читайте ниже. <a href=http://kranik32.ru/user/JamesSwics/>http://kranik32.ru/user/JamesSwics/</a> x1 slots регистрация в 1×slots casino <a href=https://bans.org.ua/index.php?action=profile;u=1390687>https://bans.org.ua/index.php?action=profile;u=1390687</a> Однако далековато не все ресурсы предлагают своим клиентам бездепозитные бонусы за регистрацию в казино. В большинстве случаев учтено поощрение на первый депозит в размере 100–200%. Это отличная вероятность преувеличить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш.
1×slots зеркало видели такую регистрацию на
1хслотс регистрация в 1×slots casino Одним из поводов отдавать преимущество, льготу 1 или другому заведению заключается в привлекательности предлагаемых промоакций и безвозмездных предложений. Безвозмездные фриспины, выдаваемые без дела создавать какой-нибудь вклад, в перечне находится далековато не в конце.Бездепозитный приз часто может стать доступным сразу в завершения регистрации, поскольку правило единственным требованием к нему является регистрация, а этого проверка вашей свежей учетной записи. <a href=http://y3.co.kr/home/bbs/board.php?bo_table=free&wr_id=56231>http://y3.co.kr/home/bbs/board.php?bo_table=free&wr_id=56231</a> В интернет-сети практически можно отыскать перечни более модных и обещанных поощрительных программ от популярных онлайн-казино.Самые известные методы вывода средств ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электронным платежным системам на Neteller и Skrill, еще используют криптовалютными кошельками. Вывод выигрышей имеет исполняться мгновенно либо занимать от нескольких часов до нескольких суток. 1× slots casino официальный сайт Будьте внимательнее при ознакомлении с правилами во избежание появления конфликтных обстановок с казино, когда в отыгрыша бездепа вас не дадут вывести солидную сумму выигрыша.Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция содержит подробные верховодила, ссылка на которые обыкновенно содержится в промообъявлении. В них указываются лимиты, вейджер, список доступных игр. Если оператор прячет данные о предложении, то пользоваться им не.
1×slots рабочее зеркало на сегодня
Не трудно догадаться, собственно no down payment bonuses практически никогда не бывают немаленькими. Чаще всего речь о пяти–тридцати баксах (или эквиваленте этой суммы в иной денежной).Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депозит может отличаться до 30 дней. Бездепозитные бонусы реальными деньгами, которые можно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадались.Вы не в коем случае ни чем не рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный приз, по мимо практической забавы на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, выучится регулировать изменять ставки и полосы, изучать бонусные забавы и их выигрышные комбинации, ну конечном просто зарядится кучей впечатлений! Ведь вы будите выступать на бонусные средства, коие можно отыграть и вывести, но просто на демо счет, тем самым адреналин в крови еще больше повысится а пульс забьется с нередким ритмом! <a href=http://lethbridgegirlsrockcamp.com/forums/profile/maximilianschof/>http://lethbridgegirlsrockcamp.com/forums/profile/maximilianschof/</a> 1×slots официальный зеркало рабочее
1хслот скачать
Подтверждение регистрации. Казино настоятельно привязки профиля к электронному адресу и номеру телефона. Для сего на e-mail отчаливает письмо ссылаясь, а на телефонный ? текстовое извещение с кодом. <a href=https://redfist.de/RF-Online-Testforum/viewtopic.php?f=60&t=77958>1×slots официальный сайт скачать</a> Объективные – объем приза, коэффициент и условия вейджера, необходимость внесения депозита для вывода денег;Бездепозитный бонус по промо-коду будет доступен для забавы, лишь что случае когда Вы активируете специальный бонусный код в разделе с призами либо укажите промокод при регистрации на веб-сайте. В неких случаях, считая активации кода, придется доказать контактные данные игрока и наполнить анкету клиента. Основное верховодило получения бездепа ? творимый акк должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов взыскательно воспрещено. Проверка ведется по имени, e-mal, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депо нужно блюсти несложную очередность деяний. 1×slots скачать на айфон <a href=http://fumankong1.cc/home.php?mod=space&uid=582258>http://fumankong1.cc/home.php?mod=space&uid=582258</a>
1×slots рабочее зеркало
Далее требуется отыграть вагер и вывести выигрыш. Игрокам без навыка крупно повезло, возможность получить 10-ки презентов за 1 регистрацию. Если не сумели получить Бездепозитный приз, не тревожьтесь. Обратитесь в интернет чат, оператор поможет исправить. <a href=https://wlppr.net/user/Terryfracy/>https://wlppr.net/user/Terryfracy/</a> Существуют казино с бонусом за регистрацию, в довольно известны фриспины в онлайн казино потом регистрации в определенных забавах. Они встречаются в почаще бесплатных поощрений или классических бонусов в казино без инвестициям. Например, игрок регистрирует счет, на который начисляются безвозмездные игры, приз за регистрацию вид безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса игры выигрывает истинные деньги, которые в последствии возможно удачно вывести из заведения на собственную платежную систему. То есть, есть все шансы вывести средства без рисков своими деньгами. Регистрация, за игрок получит бонусы, займет несколько, а спасибо данному возможно прирастить 5 евро поощрений до тысячи и без всяких проблем исключить их.Заработать на бездепозитных бонусах за регистрацию в казино может каждый пользователь, достигший совершеннолетия. 1хслотс мобильная версия зеркало Если вы бывалый игрок, вы обязаны аристократия, собственно бонус без депо – редкая находка. Тем ниже, мы еженедельно изучаем онлайн, чтобы найти для вас наихорошие бездепозитные предложения.
<b>Смотреть еще похожие новости:</b>
<a href=https://bajarmp3.net/showthread.php?tid=440206>1×slots регистрация на сайте 1×slots ru com</a>
<a href=http://swissairways-va.com/phpBB3/memberlist.php?mode=viewprofile&u=3495>скачать 1×slots на андроид мобильная версия</a>
<a href=https://clubdefansde24.com/memberlist.php?mode=viewprofile&u=3464>1×slots официальный сайт мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выигрыши с бонусов без вложений всегда привязаны к притязанию по ставкам и могут быть обналичены только после выполнения этих притязаний. С такими ординарными советами любое казино с бонусом за регистрацию способно принести в разы больше выгоды и пользы.
#9283 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на сайте 1×slots ru com
Мы проделываем акцент на главных положениях управлял, рассказываем о территориальных лимитированиях и кратко информируем о других акциях обсуждаемого казино.В списке притязаний к отыгрышу нередко присутствуют лимиты на ставки при ирге на собственные средства. Так, если отыграть нужно 30 000 руб., а максимальная сумма ограничена 30 рублями, то вертеть барабаны предстоит 1000 один. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам деяния акции. <a href=http://filmkachat.ru/>1× slots зеркало</a> Но эти рамки не смущают даже хайроллеров, поскольку коэффициенты на слотах дозволяют рассчитывать на крупные выигрыши, а некоторых автоматах разыгрывается прогрессивный джекпот.Способы получения бездепа различаются от вида бонуса, кот-ый приглянулся игроку. Но вам иначе нужно быть зарегистрированным в легальном онлайн-казино и подтвердить собственную лицо. В общем виде пошаговая аннотация для получения бездепозитного бонуса выглядит например: <a href=https://gidro2000.com/forum-gidro/user/29017/>https://gidro2000.com/forum-gidro/user/29017/</a> сайт 1× slots casino <a href=http://www.scribbledatom.com/2013/02/blog-post.html>http://www.scribbledatom.com/2013/02/blog-post.html</a> Бездепозитные призы казино за регистрацию в 2022 году — это возможность сыграть за счёт заведения. Казино даёт клиенту шанс пользоваться определённой суммой или количеством даровых вращений без внесения депо. Не путайте деморежим с реальной забавой без необходимости внесения депозита.
1×slots регистрацию процедура займет всего лишь
Хотя благотворительные бонусы начисляются без депо, не исключено, что вас придется вносить деньги. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только последствии как, как новый заказчик впервые пополнит игровой счет. <a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=7921>1×slots регистрация на официальном сайте</a> 1×слотс казино <a href=http://elite-models.cc/member.php?action=profile&uid=21772>http://elite-models.cc/member.php?action=profile&uid=21772</a> Призовые начисления без депозита могут предоставляться для роли в турнирах онлайн казино. Потратить перечисленные средства можно необыкновенно в рамках этой акции. Условия их проведения включают в себя лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться этим предложением, превосходнее выучить его правила. 1×slot зеркало Вейджер (wager) – это коэффициент, который демонстрирует на какую сумму нужно сделать ставок, дабы исключить бонус из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода этого бонуса, Вам нужно устроить ставок на сумму: 500*70=3500 рублей. Только всецело отыграв приз, Вы сможете исключить свой выигрыш.
1×slots зеркало на сегодня
Наш перечень содержит наилучшие бездепозитные бонусы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по важным параметрам:Срок активации и время на отыгрыш. Зачисление средств либо фриспинов происходит при активации в течение требовательно ограниченного периода, подобные требования предъявляются и к срокам отыгрыша. Одни казино позволяют отыгрывать приз несколько дней либо том недель. Другие выдают солидную необходимую за регистрацию, но время отыгрыша ограничивают несколькими часами с необоснованно высочайшим вейджером. Доступные игры – В неких азартных играх возможно понизить математическое преимущество казино до нескольких десятых процента. В их количестве все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как верховодило, в таких играх ставки идут в зачет вейджера не всецело. Например, может предусматриваться лишь 50%. В неких забавах бездепозитные бонусы вообще невозможно отыгрывать. <a href=http://eicg.kz/index.php?subaction=userinfo&user=divergentsaga39>http://eicg.kz/index.php?subaction=userinfo&user=divergentsaga39</a> 1×slots зеркало выигрыши обязательно пройдите регистрацию если В любом казино с бездепозитным бонусом учтены вейджеровые условия. Это один-единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, нужно устроить определённое число ставок. Чем круче бонус, что, этим труднее выполнить условия, и наоборот.Таким образом, заведение пробует показать себя своим потенциальным геймерам, а подобный рекламный ход как казино приз без депо за регистрацию привлекает довольно много внимания к игорному заведению и обеспечивает неизменный поток свежих гостей и будущих клиентов игрового онлайн клуба.
1×slots рабочее зеркало
Нельзя рассматривать забаву на средства, как вариант заработка. Азартные забавы запрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не является зачинщиком азартных игр. Сайт носит информационный характер.В игровых клубах без лицензии Вы покупаете „кота в мешке“ и в случае спорных обстановок нет способности куда-то посетовать и доказать свою правоту. Так же стоит выделить то, что в любом интернет казино установлен свой максимальный кешаут на бездепозитный бонус. Как управляло кешаут — это предельная сумма денег, кот-ая доступная для вывода с бездепозитного приза.Для тех, кто лишь подумывает испытать свою удачу, еще для проф игроков, ищущих свежие площадки для выигрышей, основные лицензированные казино нередко организуют разные акции, и лучшее предложений прошедшее время – как для новичков, например и для проф игроков – бездепозитный приз за регистрацию. casino 1×slot <a href=http://www.ukrtibet.net/index.php?subaction=userinfo&user=averagedecoy61>http://www.ukrtibet.net/index.php?subaction=userinfo&user=averagedecoy61</a> Законодательство, регулирующее азартные забавы в различных государствах, оказывает на полномочия операторов. В итоге юзеры из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это имеет быть как полный отказ в доступе, так и невозможность загружать игры отдельных изготовителей.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Обычно, бездепозитные призы выдаются под определенные слоты с фиксированной ставкой, но их наверняка запрещено применять в игровых автоматах с современным джекпотом. Список игр, в которых возможно применять бездеп, Вы найдете в описании промоакции либо сможете уточнить у саппорта заведения. Чем ниже значение вейджера, что, этим проще отыграть и исключить приз. Если Вы расчитываете заработать на бездепе, не просто ознакомиться с новым игровым клубом, то стоит избегать бонусов с высочайшим вейджером их практически не реально отыграть. С ними Вы можете лишь протестировать игры заведения. <a href=https://gettogether.community/events/55100/%D1%81%D1%80%D0%BE%D1%87%D0%BD%D1%8B%D0%B9-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%BF%D1%80%D0%BE%D0%B1%D0%BB%D0%B5%D0%BC%D0%BD%D1%8B%D1%85-%D0%B0%D0%B2%D1%82/>https://gettogether.community/events/55100/%D1%81%D1%80%D0%BE%D1%87%D0%BD%D1%8B%D0%B9-%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D0%BF%D1%80%D0%BE%D0%B1%D0%BB%D0%B5%D0%BC%D0%BD%D1%8B%D1%85-%D0%B0%D0%B2%D1%82/</a> Также бывают случаи, когда казино начисляет оговоренный приз последствии регистрации нового посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам.Так что приготовьтесь предоставить конфиденциальную информацию (пол, возраст, государство проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает менее суток, в чего получится свободно выводить солидные выигрыши. казино 1×slots официальный сайт Если идет об неповторимых предложениях, имеет потребоваться регистрация в казино по ссылке с партнерского сайта.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.survival-readiness.com/viewtopic.php?p=463016#p463016>1×slots зеркало которую указывали при регистрации кстати</a>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=163250>1×slots зеркало этих способов предполагает регистрацию</a>
<a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1хслот официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Осталось выбрать казино с бонусом за регистрацию и создать профиль. После активации презента выигрыш зависит от Фортуны и навыков. Бонусные средства – маленькая сумма средств для старта в новеньком казино. На бонусные средства, обыкновенно разрешается играть во все забавы, кроме слотов с современным джекпотом и игр из раздела live casino.
#9284 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало
Обычно, бездепозитные бонусы выдаются под конкретные слоты с фиксированной ставкой, но их точно запрещено использовать в игровых автоматах с прогрессивным джекпотом. Список игр, каких можно применять бездеп, Вы отыщите в описании акции либо можете уточнить у саппорта заведения. <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino 56 online</a> Бездепозитный приз казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби избранного заведения, определится в выборе игр и проверить качество работы службы. Довольно нередко, начиная игровой процесс, игрок уже отказывается останавливаться и проделывает реальный лепта. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать безвозмездно вполне как один таки с бонусом за регистрацию без надобности вносить депо.Нет. Казино раздают бесплатные призы за регистрацию, чтобы, чтобы, чтобы клиент возможность ознакомиться с игровым заведением. А чтобы вывести его, необходимо выполнить условия отыгрыша. <a href=https://forum.bandariklan.com/member.php?action=profile&uid=18363>https://forum.bandariklan.com/member.php?action=profile&uid=18363</a> 1×slots зеркало видели такую регистрацию на <a href=https://www.rs6.com/member.php/750329-TravisSaice>https://www.rs6.com/member.php/750329-TravisSaice</a>
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Также существуют онлайн-платформы азартных игр, которые применяют раздачу бездепозитных призов в особые даты (как для казино, так и для игрока). Помимо сего, действующие геймеры того имеют вероятность получить схожие призы за собственную работа (к примеру, за увеличения уровня или за похожие достижения). 1×slos регистрация в 1×slots casino Выбирая безвозмездный приз, пристально изучайте управляла. Убедитесь, собственно вас можно принимать участие в акции. Уточните, в каких играх можно скорпулезно условия вейджера. При надобности задавайте вопросы представителям саппорта.В каждом казино с бездепозитным призом предусмотрены вейджеровые обстоятельства. Это один-единственный «подводный камень», кот-ый стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, нужно сделать определённое количество ставок. Чем круче бонус, тем сложнее выполнить условия, и наоборот. <a href=http://geolan-ksl.ru/forum/user/85318/>http://geolan-ksl.ru/forum/user/85318/</a> 1×slos регистрация в 1×slots casino
1×slots сайт зеркало
Подтверждение персональной инфы. Все казино просят от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и присутствие у юзера других аккаунтов (мультиаккаунт запрещен). <a href=http://bbs.cheaa.com/home.php?mod=space&uid=3140424>http://bbs.cheaa.com/home.php?mod=space&uid=3140424</a> Казино выводит деньги лишь на ту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного приза, Вам сначала необходимо восполнить счет. В неких клубах ограниченный перечень методов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет именно с данных платежных способов, коие доступны для вывода.Помните, что всевозможные нарушения верховодил сведут на нет ваши усилия, и вы всего останетесь без начисленного вас дарового приза. Всегда изучайте управляла начисления и обстоятельства вейджера. По хоть вопросам, на коие вы имеет других найти ответы, обращайтесь за объяснениям и саппорт. 1×slots зеркало которую указывали при регистрации кстати Зачастую бездепозитные бонусы казино для игры предлагаются разными заведениями азартных игр в маркетинговых промоакций или в целях привлечения к себе новых игроков. Для бездепозитных бонусов в казино 2022 геймеру надо пополнять счет до этапа вывода хотимых средств.
1хслотс рабочее зеркало
Бонусные средства – маленькая сумма средств для старта в новеньком казино. На бонусные средства, обычно разрешено играть во все забавы, считая слотов с современным джекпотом и игр из раздела live casino. 1х слот 1хслотс регистрация перейти на 1×slots <a href=https://nordgoldjobs.com/forum/user/39249/>https://nordgoldjobs.com/forum/user/39249/</a> Вейджер в переводе с английского значит «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша приобретенного приза, в нашем случае бездепозитного. Число ставок не — принципиально только набрать сумму, пропорциональную сумме одобрения.
1×slots рабочее зеркало
Бездепы с безвозмездными вращениями деют юзерам право вертеть барабаны игровых автоматов без снятия средств со счета. За любой раунд выплачивает казино. Число спинов ограничено и редко превышает сотку. Если промоакция содержит большое безвозмездных игр, их начисление возможность быть разбито на несколько дней.Подтвердите регистрацию, дабы активировать Бездепозитный приз с выводом, требуется заполнить индивидуальный профиль. Заполните пустопорожние поля истинными данными о для. <a href=http://masskorea.co.kr/bbs/board.php?bo_table=free&wr_id=3528901>http://masskorea.co.kr/bbs/board.php?bo_table=free&wr_id=3528901</a> 1×slots акции В качестве призов интернет казино нередко предлагает выдачу фриспинов, другими бесплатных вращений игрового барабана. Виртуальные монеты можно применять для обучения в покерной школе или для игры в казино.Бонус за регистрацию в казино без депозита с выводом средств нужно отыграть. Зачастую для отыгрыша может понадобиться устроить ставки на сумму, в несколько 10-ов один превосходящую сумму приза или выигрыша.
<b>Смотреть еще похожие новости:</b>
<a href=https://your-portal.at.ua/forum/6–61891–8#88272>1×slots казино зеркало</a>
<a href=https://forum.dis-course.net/viewtopic.php?t=444854>1 x slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный бонус за регистрацию в казино — это стартовый подарок в виде валютного начисления либо даровых вращений для свежих игроков заведения, для получения которого надо заносить депозит.
#9285 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slots review live
Выигрыши с призов без инвестициям постоянно привязаны к требованию по ставкам и все быть обналичены только после выполнения данных требований. <a href=http://filmkachat.ru/>casino 1×slot</a> Какие бонусы возможность еще получить кроме бездепозитного приза за регистрацию в казино? По мимо бездепозитного бонуса, каждое интернет казино предлагает игрокам прибыльное предложение на 1-ый депозит, вы совершаете депозит, ваш депозит увеличивается в двое или и в трое, тем самым начать выступать можно с больше солидной суммой, так же не забываем про вейджер на бонусы.При регистрации что или ином интернет игральном заведении — вас дается один шанс испытать собственную удачу не внося средства монеты. Замечу что такую поощрительную услугу деют не все онлайн игровые площадки, а лишь щедрая середина(средина) из их. Которые мы подготовили для Вас в нашем списке. <a href=https://www.saiba.pt/2022/12/a-revolucao-da-inteligencia-artificial.html>https://www.saiba.pt/2022/12/a-revolucao-da-inteligencia-artificial.html</a> Однако далеко не все ресурсы предлагают своим посетителям бездепозитные бонусы за регистрацию в казино. В большинстве случаев учтено одобрение на первый депозит в объеме 100–200%. Это отличная вероятность преумножить банкролл, прирастить время, проведённое за игрой и шансы сорвать крупный куш.Зарегистрироваться в казино по особой ссылке либо с бонусным кодом. Подтвердить контактные данные (номер аппарата и электронную почту). Для подтверждения номера телефонного нужно в личном профиле показать собственный номер и нажать кнопку „Подтвердить номер аппарата“, далее Вы получите sms-сообщение с кодом, кот-ый нужно ввести в подходящее поле. Для подтверждения электронной почты, перейти по интенсивной ссылке в послании от казино. 1×slots регистрация 1×slots casino 777 online <a href=http://popkrn.net/bbs/board.php?bo_table=free&wr_id=3410027>http://popkrn.net/bbs/board.php?bo_table=free&wr_id=3410027</a> Условия вывода выигрыша. В неких заведениях для успешного вывода с бездепозитного приза достаточно пополнения баланса и подтверждения личности. В других же клубах, необходимо некоторое один прокрутить свой депозит.
1×slots официальный сайт зеркало
Реже призы без депозита начисляются постоянным игрокам. С их поддержкою администрация постарается удержать ценных посетителей или желает поблагодарить за лояльность правильных гостей. Но гораздо чаще для похожих целей применяются эти акции: <a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=59827&result=reply>1×slots зеркало регистрацию более популярный вариант это</a> 1×slots рабочее зеркало на сегодня <a href=http://freedom.teamforum.ru/memberlist.php?mode=viewprofile&u=6355>http://freedom.teamforum.ru/memberlist.php?mode=viewprofile&u=6355</a> Вывод выигрыша с бездепозитных бонусов казино – великодушный презент от азартных клубов. Но дабы вывести собственный доход, необходимо выполнить ряд условий: онлайн казино 1×slots
1хслотс регистрация в 1×slots casino
Кешбэк-бонус представляет собой возврат фиксированного процента от ставки в случае поражения либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не превышает 10%.Объективные – объем приза, коэффициент и условия вейджера, необходимость внесения депо для вывода денег; Онлайн гемблинг развивается с любым днем все больше и больше, новые бренды создаются не по дням а по часам. Новые онлайн казино проделывают вступительные акции для игроков, для того собственно бы зарекомендовать себя, и тем наиболее предлагают бездепозитные призы за регистрацию, что бы не пропустить такую вероятность — как воспользоваться свежим бездепом, рекомендуем навещать наш сайт как можно чаще, самое лакомое и новые будет добавляться в данном же списке.Отыграв бездепозитный бонус в казино с выводом тоже придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в сходственное ограничение присутствует, то единоразово вывести выйдет лишь необходимую, не превосходящую размер полученного приза. <a href=https://tanime.site/user/RalphAreda/>https://tanime.site/user/RalphAreda/</a> Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте обстоятельства – они нередко выдаются для некоторых машин. В зависимости от клуба продоставляется делать конкретное количество ставок. Кстати, современные игорные жилища дают вероятность заводить «одноруких бандитов».В количестве случаев бесплатные призы начисляются в кредитах, которые нельзя незамедлительно вывести со счета. Прежде их нужно отыграть по установленным правилам. Эти притязания принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже. 1×slots регистрация 1×slots review live
1×slots официальный сайт скачать
Получать информацию о самых прибыльных призах возможно без постоянного прогноза новостей казино. Мы брали данную задачку на себя и безпрерывно смотрим за услугами операторов, выбирая лучшие из их. В данном разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список акций периодически пополняется. В топ зашли самые свежие бездепозитные призы за регистрацию в казино 2020, временные и закрытые промо. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и аспектам. Если срок деянья промоакции истек, она удаляется из перечня. <a href=http://weeklywars.de/memberlist.php?mode=viewprofile&u=860>1×слотс казино</a> Приветственный бездеп предоставляется хоть игроку только один один. Казино борются с так называемыми бонусхантерами (от англ. Bonus Hunter — охотник за призами), пытающимися заводить многочисленные аккаунты для обмана оператора и повторного получения подарка. Исключить сходственные действия разрешает верификация данных. Администрация вправе потребовать у посетителя подтвердить персональные данные, обозначенные при регистрации. 1×slots зеркало сайта <a href=http://forum.centrum-hvac.pl/User-ScottNit>http://forum.centrum-hvac.pl/User-ScottNit</a>
1× slots регистрация в 1×slots casino
Так же стоит выделить то, собственно в любом онлайн казино установлен свой наибольший кешаут на бездепозитный приз. Как правило кешаут — это предельная сумма средств, которая дешевая для вывода с бездепозитного приза. Денежные средства. Третий бонус за регистрацию без депозита – наличные. К сожалению, лишь знаменитые и популярностью клубы шансы дать средства в рублях либо баксах. С их подмогою появится насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед данным нужно выполнение конкретных условий.Все любят получать подарки. Согласитесь, практически каждый играющий человек будет сильно счастлив, если получит бесплатный презент для игры в онлайн казино просто за регистрацию или же бонус за внесенный депо, например именуемые приветственные призы для новых игроков. Соответственно эти интернет клубы будут больше востребованы и предпочтительны у игроков при выборе казино для забавы. Топ казино постоянно обновляется и добавляются новые и интересные игровые клубы с привлекательной бонусной политикой и всеми возможными привилегиями, к которым относятся эти бонусы как фриспины за регистрацию, денежные бездепозитные бонусы, еще великодушные призы за внесенный депо. <a href=http://www.zgqsz.com/home.php?mod=space&uid=338751>http://www.zgqsz.com/home.php?mod=space&uid=338751</a> В основном случаев благотворительные бонусы начисляются в кредитах, которые нельзя сразу вывести со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже.Зарегистрируйтесь. Для регистрации чаще всего довольно ввести свой номер аппарата и почтовый адресок, в чего установить полученный код из СМС. Возможно, требуется показать промокод. В правилах промоакции будет написано, где его надо вводить. Иногда это надо делать при регистрации, от — теснее после творенья личного офиса, на отдельной странице. 1×slots зеркало 1хслотс регистрация перейти на 1×slots Как верховодило, новоприбывшие геймеры начала хотят ознакомиться с методами ввода и вывода валютных средств и сроки исполнения поданных заявок чтобы четко осознавать, как живо меня исключить собственный казино приз за регистрацию без депозита на электрический кошелек либо же банковскую карту. К счастью для всех играющих, внутри конкретных холдингов, все казино соперничают меж собой. Ведь в бы конкретную компанию давало только одно онлайн-заведение, то вряд ли бы клиенты заметили казино с призом за регистрацию и могли бы рассчитывать только на вознаграждение вид бонуса на первое вложение. К любому заведению периодически по завлекать свежих игроков, что, в, только на руку всем играющим.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.survival-readiness.com/memberlist.php?mode=viewprofile&u=30498>казино 1×slots</a>
<a href=https://nztw.org/forum.php?mod=viewthread&tid=399415&pid=705753&page=1&extra=page%3D1#pid705753>1×slots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чтобы бездеп не был начислен на Ваш акк, Вам не нужно активировать бонусный код. Если одобрение от казино было добавлено на Ваш аккаунт автоматически, а Вы не планируете его использовать, обратитесь в службу поддержки с пожеланием отменить бездепозитный приз.
#9286 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать на айфон
Бездепы с бесплатными вращениями деют юзерам право вертеть барабаны игровых автоматов без снятия средств со счета. За каждый раунд уплачивает казино. Число спинов ограничено и редко выше сотку. Если акция содержит много даровых игр, их начисление может быть разбито на количество дней. <a href=http://filmkachat.ru/>1хслотс мобильная версия зеркало</a> <a href=http://mallds.com/bbs/board.php?bo_table=free&wr_id=192219>http://mallds.com/bbs/board.php?bo_table=free&wr_id=192219</a> Бездепозитные призы казино это финансовая компенсация, предлагаемая юзерам на дармовой базе и возможность выступать в интернет казино безвозмездно. Если сравнивать их с одобрениями за лепта, в которых средства выдаются лишь потом начального пополнения счета, то бездепозитные вознаграждения получаются бесплатно. То есть, играющий получает вероятность делать ставки на теснее имеющие финансы, коие выдаст заведение, выполняя, всем, обычные деяния, чтобы их извлечь (тут речь о регистрация, удостоверении личности с использованием номера аппарата, оформления заявки и т.д.).Активация происходит с помощью промокодов, которые вводятся в собственном офисе последствии регистрации. Среди спецпредложений в перечне Casino.ru содержатся неповторимые промокоды, которые доступны только гостям портала. Другие методы начисления средств ? автоматическая активация незамедлительно после творения аккаунта и получение подарка по запросу в службу технической поддержки. x1 slots 1хслотс регистрация перейти на 1×slots <a href=http://www.miranetwork.it/index.php?option=com_k2&view=itemlist&task=user&id=400671>http://www.miranetwork.it/index.php?option=com_k2&view=itemlist&task=user&id=400671</a>
1×slots зеркало которую указывали при регистрации кстати
Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки имеют запросить вспомогательные документы либо инициировать короткое общение по Skype.Игрокам не воспринимать приветственный бонус как гарантированный способ получить крупный выигрыш, хотя это отличная вероятность без расходов расценить функционал казино. casino 1×slot <a href=http://freedom.teamforum.ru/memberlist.php?mode=viewprofile&u=6522>http://freedom.teamforum.ru/memberlist.php?mode=viewprofile&u=6522</a> Риск-игра по одинаковым шансам – Также казино возможность запрещать выполнять обстоятельства по отыгрышу счет раунда на удвоение, кот-ый предлагается в слотах, видео-покере и некоторых других забавах. 1×slots бездепозитный бонус за регистрацию В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая доля забавы. Важно, часто бездепозитные бонусы в казино выдаются с лимитированиями по максимальной выплате. В среднем можно рассчитывать на выгода в количество тысяч рублей. Как вывести выигрыш с бонуса без депозита. Придётся подтвердить аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается каждым игроком. О документальном подтверждении учетной записи спрашивайте в онлайн чате либо прочитайте в правилах.В игровых клубах без лицензии Вы покупаете „кота в мешке“ и когда спорных ситуаций нет возможности куда-то пожаловаться и обосновать собственную правоту.
1хслотс зеркало на сегодня
Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного бонуса. <a href=https://www.xn–9n3bn8ewuh9zp.kr/bbs/board.php?bo_table=free&wr_id=542776>https://www.xn–9n3bn8ewuh9zp.kr/bbs/board.php?bo_table=free&wr_id=542776</a> 1×slots актуальное зеркало Сроки активации бонуса устанавливаются каждым казино, хотя почаще всего они не превышают недели с этапа получения. Игроку обязательно нужно использовать бездеп в течение обозначенного срока, в ином случае бонус просто пропадет. Каждый приз возможно получить только раз раз, поэтому случае не использовать бездеп в срок, у игрока не несомненно второго шанса им воспользоваться.
1× slots зеркало
Можно ли в одном онлайн казино получить больше одного приза за регистрацию? Нет, так как в любом интернет казино есть правила, к которым надо(надобно) придерживаться, не делать 2 аккаута для получения бонусов, другому несомненно блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, приз за регистрацию выдаеться один один 1 лицу.Во всех законных онлайн-казино Беларуси нужно подтверждение паспортных данных для игры — это заявка правительства государства. Если вы новичок данном и только попали в неизведанную вами район азарта — с помощью услуг как бездепозитные призы без пополнения. 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=http://xn–e1aoddcgsc8a.xn–p1ai/member.php?action=profile&uid=40066>http://xn–e1aoddcgsc8a.xn–p1ai/member.php?action=profile&uid=40066</a> Мы подготовили список, где есть постоянно животрепещущие и новые бездепозитные призы казино, которые продоставляется получить бесплатно. Для наших пользователей есть особые предложения неповторимые бонусы, коие вы ни не найдете, их мы обозначили специальной красноватой плашкой «Exclusive».
1×slots регистрация
Еще одно условие дотрагивается объемов ставки. Операторы устанавливают наивысшую необходимую, которую игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, избранной в Личном офисе. При превышении лимита есть риск лишиться бонуса. Существующие лимитирования относятся и к определенным обликам ставок. Например, играя в рулетку, заказчик может столкнуться с запретом ставить фишки на шансы. <a href=https://xs.xylvip.com/home.php?mod=space&uid=132282>https://xs.xylvip.com/home.php?mod=space&uid=132282</a> Выбирайте лучшие благотворительные призы с помощью обзоров на Casinoz – и пусть вас сопутствует удача при отыгрыше бонусных кредитов! 1×slots официальный сайт мобильная версия Не стоит путать игру в демо и внедрение призов. В демонстрационном режиме игрок может расценить механику слота, сюжет и оформление. Но забава ведется на относительные кредиты, поэтому отсутствует главное ? ощущение пыла. Активируя промокод или фриспины, заказчик и не тратит свои средства на игровые автоматы, но возможность сорвать настоящий куш!
<b>Смотреть еще похожие новости:</b>
<a href=https://aircompare.us/forums/memberlist.php?mode=viewprofile&u=40074>1 x slots casino</a>
<a href=https://australianwinerytours.com/tours/showthread.php?tid=205167>1× слот зеркало</a>
<a href=https://redfist.de/RF-Online-Testforum/viewtopic.php?f=60&t=76959>1× слот зеркало</a>
<a href=https://timepost.info/showthread.php?tid=46814>1×slots регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если при регистрации указать промокод, можно гарантировано получить бонус. Где взять ваучер? Посетите тематику блоги или форумы. Иногда администрация клуба проделывает рассылку ваучеров на электронную почту. В заключительное время игорные жилища начали рекламироваться в кинокартинах и сериалах. Присмотритесь и всего заметите промокод, который принесёт 500 или 1 000 бонусных руб. Вывод выигрыша с бездепозитных призов казино – щедрый подарок от азартных клубов. Но чтобы исключить свой доход, необходимо выполнить ряд условий:
#9287 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
Бездепозитный бонус казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в этом и заключается основное различие. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots review live</a> <a href=https://knowyourmeme.com/users/davidkib>https://knowyourmeme.com/users/davidkib</a> На нашем сайте Вы отыщите перечень актуальных свежих бездепозитных бонусов в казино 2022 года. Также, есть много неповторимых предложений, коие доступны лишь посетителям нашего сайта после регистрации по нашей ссылке либо активации особого промокода.Получить приветственный бонус могут лишь новые клиенты онлайн-казино. Способы описаны в критериях акции каждого легального казино, почаще всего это: 1×slots акции <a href=https://www.kenpoguy.com/phasickombatives/profile.php?id=2069149>https://www.kenpoguy.com/phasickombatives/profile.php?id=2069149</a>
1хслотс 1хслотс регистрация перейти на 1×slots
Минимального оборота. Этот лимит устанавливается вейджером — же игрок не поиграет на установленную необходимую, вывод средств будет недосегаем. 1 х слотс зеркало <a href=https://mysocialclub.ru/user/Ralpharode/>https://mysocialclub.ru/user/Ralpharode/</a> скачать 1×slots на андроид мобильная версия Мы подготовили список, где есть практически актуальные и новые бездепозитные призы казино, которые вам получить даром. Для наших юзеров есть особые предложения эксклюзивные бонусы, коие вы кого не отыщите, их мы определили особой красной плашкой «Exclusive».
1×slots на любой вкус как пройти регистрацию
Фриплей-бонусы встречаются лишь в неких клубах. Они зачисляются незамедлительно после творенья профиля и активны непродолжительное время. Если не успеете израсходовать свои, они попросту сгорят. Касаемо времени, как призы активны протяжении часа. <a href=http://120.zsluoping.cn/home.php?mod=space&uid=1265854>http://120.zsluoping.cn/home.php?mod=space&uid=1265854</a> 1×slots зеркало видели такую регистрацию на Изучить верховодила и условия получения бездепозитных призов казино, Вы можете у нас на сайте в разделе с призами или на официальном сайте избранного Вами казино. Если имеет найти нужную информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал либо по электронной почте.Каждая игровая перрон выделяется условиями по получению и отыгрышу бездепов. В правилах отчетливо расписаны кратковременные рамки, за коие нужно прокрутить вейджер. Также не забывайте на максимальный размер ставки и наивысшую сумму выплаты. С иной стороны, дабы получить бездепозитные бонусы казино, достаточно израсходовать не более 1 минутки.
1×slot зеркало рабочее этих способов предполагает регистрацию
<a href=https://www.bf-france.com/forums/profile/30064-rabofreeor/>1×slots официальный сайт скачать на айфон</a> Бoльшинcтвo азартных заведений выдвигают примерно одинаковые обстоятельства и требования, коие нужно выполнить, чтобы получить бездепозитный бонус за регистрацию. Все их возможно объединить в один перечень: casino 1×slot <a href=http://bbs.cheaa.com/home.php?mod=space&uid=3135173>http://bbs.cheaa.com/home.php?mod=space&uid=3135173</a> Помните, собственно в неких забавах сумма ставки идет в зачет вейджера только отчасти. Так, в настольных и карточных забавах лишь от 5% до 50% суммы ставки считаются как отыгранные деньги, в то время как в слотах идет в зачет все one hundred percent суммы.Шаг 4. Активация. Внимательно исследуйте условия, информацию по ограничениям и сроке деянья бонусного предложения. Разобравшись с правилами, можно активировать приз в личном офисе (от ? с использованием промокода) либо по запросу в саппорт.
1×slots зеркало регистрация то дальше необходимо пройти
<a href=https://metal-firms.co.ua/wr_board/tools.php?event=profile&pname=CharlesSar>https://metal-firms.co.ua/wr_board/tools.php?event=profile&pname=CharlesSar</a> 1хслотс казино зеркало
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные призы, как теснее понятно, считаются уникальной вероятностью к игровому процессу безусловно безвозмездно, то есть выступать в онлайн казино даром и на место свои незамедлительно в регистрации аккаунта. Автоматы с таким депо могут замерзнуть великолепной возможностью сыграть для почитателей пыла с определенными ограничениями в денег.
#9288 Charlesgunnyhttp://filmkachat.ru
скачать 1×slots официальный сайт
Одним из предлогов отдавать привилегию 1 либо иному заведению содержится в привлекательности предлагаемых промоакций и даровых предложений. Безвозмездные фриспины, выдаваемые без дела создавать какой-нибудь лепта, в списке находится далековато не в конце. <a href=http://filmkachat.ru/>1×slots мобильная версия войти казино</a> Бездепозитный приз за регистрацию в казино с выводом денег в 2022 году — Наш ресурс дает игрокам важную информацию о самых новых, щедрых и испытанных бонусах в онлайн казино, которые обновляются любой денек. <a href=https://timepost.info/member.php?action=profile&uid=5345>https://timepost.info/member.php?action=profile&uid=5345</a> Практически все интернет казино с бездепозитным призом за регистрацию предусматривает программку лояльности — систему поощрения неизменных посетителей, которая состоит из большого значений. При достижении игроком очередного значения на его счёт поступает бонус. Чем повыше степень — что, этим щедрее приз. 1×slots casino регистрация на сайте <a href=http://bbs.ebnew.com/home.php?mod=space&uid=702800>http://bbs.ebnew.com/home.php?mod=space&uid=702800</a> Во время игры в казино, выигрыши, приобретенные спасибо безвозмездным призовым фондам, суммируются и срабатывают в совместную сумму для отыгрывания. Однако, если удача улыбнется и получится отыграть все бонусы, игровое заведение гарантированно разрешит вывести финансовые средства. Сумма вывода несомненно в от лимита, утвержденного непосредственно в данном учреждении. Поэтому, внимательно нужно разбирать управляла выдачи анлимитных депозитов.
1×slots акции
<a href=https://timepost.info/showthread.php?tid=59308>1×slots казино зеркало</a> 1×slots сайт Бездепозитный приз казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби избранного заведения, сориентироваться в выборе игр и выяснить качество работы службы поддержки. Довольно нередко, начиная игровой процесс, игрок уже отказывается останавливаться и проделывает настоящий лепта. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть бесплатно вполне как раз таки с бонусом за регистрацию без необходимости вносить депо.Возможность протестировать новые забавы, не рискуя личностными средствами и разработать собственную стратегию забавы. <a href=http://forum.igromania.ru/member.php?u=638284>http://forum.igromania.ru/member.php?u=638284</a> Начнём с того, что каждое промо за регистрацию подразумевает некие обстоятельства. Бездепозитные призы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность денежного оборота, нужная для выполнения критерий. Пример, возымели безвозмездные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 руб., неудачных либо выигрышных, не. После исполнения, бонусный баланс перейдёт на настоящий и станет доступным к выводу.На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не можете активировать и получить бездепозитный бонус. 1× slots официальный
1×slot регистрация
Самые знаменитые методы вывода денег ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам типа Neteller и Skrill, еще используют криптовалютными кошельками. Вывод выигрышей может осуществляться мгновенно или развлекать от нескольких часов до нескольких суток.Бездепозитные призы за регистрацию являются одним из самых популярных методов привлечения свежих игроков в онлайн-казино, поэтому собственно они деют игрокам вероятность опробовать казино, необыкновенно игровые автоматы, и возможно, выиграть реальные деньги. Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить необыкновенности, труднодоступные при игре в демо режиме. Многие свежие посетители переходят в число постоянных, а оператор получает длительную выгода. <a href=http://90pk.com/home.php?mod=space&uid=377822>http://90pk.com/home.php?mod=space&uid=377822</a> 1×slot регистрация Бездепозитные призы настоящими деньгами, коие возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадались.
1×slot казино зеркало
Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Перед активацией важно пристально изучить условия промоакции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют значение кроме лимиты ставок при отыгрыше и сроки, протяжении которых возможно пользоваться предложением. Если бездеп обхватывает ограниченный список игр, рекомендуется разузнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только сомнений случае, случае оператор не установил строгие ограничения на максимальную необходимую ставки. <a href=https://aircompare.us/forums/memberlist.php?mode=viewprofile&u=40074>1×slots регистрация на 1хслотс</a> Активация денежного гонорары случается механически в сотворения профиля или применения промокода. Иногда операторы предъявляют вспомогательные требования: подписаться на страницы казино в соц сетях или на рассылку рекламных сообщений, скачать и установить вспомогательный софт и т.д.Выиграть настоящие средства в казино не пополняя счет – сложно, но вероятно. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными призами и начните выступать на бонусные средства. По статистике из 10-ти заведений возможно заработать небольшую сумму средств за счет бонусных средств. 1× slots зеркало <a href=http://fasadf.ru/index.php?subaction=userinfo&user=waggishkingdom4>http://fasadf.ru/index.php?subaction=userinfo&user=waggishkingdom4</a>
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Маркетинговая политического всех игорных интернет-клубов обязана одевать разнородный характер. И если гонорары на депо работают для того, дабы стимулировать вносить депозиты и поощрять уже существующих пользователей, то бездепозитный приз в казино или бонус за регистрацию в казино, до всего, рассчитан на расширение базы покупателей.Также бездепозитные бонусы шансы служить способом возвратить к игре клиентов, что приостановивших своё сотрудничество с фирмой: уведомление о бездепе поступает на мобильный телефонный либо почту. <a href=https://siva.forum.cool/viewtopic.php?id=891#p3573>https://siva.forum.cool/viewtopic.php?id=891#p3573</a> Можно ли в одном онлайн казино получить больше одного приза за регистрацию? Нет, так как в любом интернет казино есть правила, к которым надо(надобно) придерживаться, не делать 2 аккаута для получения бонусов, другому несомненно блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, приз за регистрацию выдаеться один один 1 лицу. зеркло казино 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/4703/#comment-248710>1хслот официальный сайт зеркало</a>
<a href=https://creapnl.com/foros/tema/1×slots-%d0%b7%d0%b5%d1%80%d0%ba%d0%b0%d0%bb%d0%be-%d1%80%d0%b5%d0%b3%d0%b8%d1%81%d1%82%d1%80%d0%b0%d1%86%d0%b8%d1%8f-%d1%82%d0%be-%d0%b4%d0%b0%d0%bb%d1%8c%d1%88%d0%b5-%d0%bd%d0%b5%d0%be%d0%b1%d1%85–5/>1×slots зеркало регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Исходя из сего, просто не присутствует мудрых оснований махнуть рукою на получение такого приза при регистрации. И, лишним, на такой бесплатной основе у вас есть все шансы выиграть средства и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, нарекают бесплатными интернет платформами для игр.
#9289 Charlesgunnyhttp://filmkachat.ru
1× slots зеркало
Не стоит путать забаву в демо и внедрение бонусов. В демонстрационном режиме игрок возможность оценить механику слота, сюжет и оформление. Но забава ведется на относительные кредиты, поэтому отсутствует основное ? чувство азарта. Активируя промокод либо фриспины, заказчик и не расходует средства деньги на игровые автоматы, хотя возможность сорвать реальный куш!Выиграть настоящие средства в казино не пополняя счет – сложно, но вероятно. Главное задаться целью и не нарушатьправила заведения. Выберите несколько казино с бездепзитными бонусами и начните выступать на бонусные средства. По статистике в одном из 10-ти заведений можно заработать маленькую сумму средств помощью бонусных средств. <a href=http://filmkachat.ru/>1×slots зеркало рабочее на сегодня</a> <a href=http://bbs.boway.net/home.php?mod=space&uid=1106592>http://bbs.boway.net/home.php?mod=space&uid=1106592</a> 1×slots официальный зеркало рабочее <a href=http://youyanggse.co.kr/board/bbs/board.php?bo_table=free&wr_id=216056>http://youyanggse.co.kr/board/bbs/board.php?bo_table=free&wr_id=216056</a> Представленные на этой странице превосходнейшие бездеп бонусы в казино за регистрацию в 2022 году имеют подходящие обстоятельства. После кропотливого анализа редакция портала составила рейтинг спецпредложений, в котором посетители Casino.ru могут сортировать список по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д.
скачать 1×slots на андроид мобильная версия
Существуют казино с призом за регистрацию, в очень популярны фриспины в интернет казино впоследствии регистрации в определенных играх. Они встречаются числе чаще бесплатных поощрений либо классических призов в казино без инвестициям. Например, игрок регистрирует счет, на который начисляются безвозмездные игры, приз за регистрацию в виде бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса в выигрывает истинные деньги, которые в последствии возможно успешно вывести из заведения на собственную платежную систему. То есть, все шансы вывести средства без рисков своими деньгами. Регистрация, какую игры получит призы, займет пару минут, а благодаря этому можно прирастить 5 евро поощрений до тыс. И без всяких заморочек вывести их. 1×slots бонус за регистрацию Прежде всего, не забывайте регулярно заглядывать на страницу обзоров бездепозитных бонусов. Они шаг за шагом рассматривают наиболее занимательные предложения водящих игорных порталов.Но а если вы уже профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы автоматически перейдете в интернет казино; <a href=http://boss.why3s.cc/boss/home.php?mod=space&uid=146686>http://boss.why3s.cc/boss/home.php?mod=space&uid=146686</a> 1×slots сайт зеркало Вывод выигрыша с бездепозитных бонусов казино – щедрый презент от азартных клубов. Но чтобы исключить собственный заработок, необходимо выполнить ряд критерий:
1×slot зеркало рабочее регистрации на телефон придет
Теоретически, к бесплатным бонусам возможно отнести например нарекаемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, потому что они предоставляют лишь вероятность делать ставки.При регистрации стопам указывать только достоверную информацию. Когда учетная запись будет активна, замечен доступ в Личный офис. В нем можно выбрать валюту, ввести промокод и узнать доскональные управляла получения и отыгрыша бездепа. Краткая информация об промоакции нередко находится непосредственно на регистрационной форме. <a href=http://xn----7sbbdrwao3cago9f0e.xn–p1ai/forum/?PAGE_NAME=profile_view&UID=164759>http://xn----7sbbdrwao3cago9f0e.xn–p1ai/forum/?PAGE_NAME=profile_view&UID=164759</a> Так собственно сможете храбро регистрироваться без всяких раздумий. Фортуна сейчас точно на вашей стороне. Не опасайтесь, как следствие какого или убытка Вам абсолютно не угрожает. С этими бонусами как без пополнения, Вы остаетесь лишь в плюсе, хотя не как не в минусе.Акционные предложения от казино существуют в разных форматах. Часто бонусы даются в обмен на депозит. Игрок заносит платеж и получает деньги, безвозмездные вращения и поощрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — вид приза, который гарантирован за исполненье определенных действий на сайте: 1×slots казино зеркало Приветственный бездеп предоставляется любому игроку лишь один раз. Казино сражаются с так называемыми бонусхантерами (от англ. Bonus Hunter — доброволец за призами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения дара. Исключить похожие деянья позволяет верификация данных. Администрация вправе востребовать у посетителя подтвердить индивидуальные данные, обозначенные при регистрации.Начнём с такого, собственно любое промо за регистрацию предполагает некоторые обстоятельства. Бездепозитные призы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность денежного оборота, нужная для исполнения условий. Пример, возымели благотворительные вращения и выиграли с их 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 руб., неудачных либо выигрышных, важно. После исполненья, бонусный баланс перейдёт на настоящий и будет доступным к выводу.
1×slots официальный demo регистрация в 1×slots casino
<a href=https://mit-bbs.com/viewtopic.php?t=127946>1×slots актуальное зеркало</a> У любой забавы свои притязания по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система зачтет любую ставку. В рулетке и покере устроить это гораздо сложнее. Именно потому например важно пристально разбирать условия получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой игре, то новенькие просто «спустят приз на ветер».Бонус с зачислением денег на счет дает больше свободы деяний. Пользователь сам выбирает, каким образом распорядиться подаренными своими. Здесь также могут действовать ограничения на перечень доступных игр, но обычно эти рамки не так строги, как в промо с безвозмездными вращениями. Подтвердите лицо, предоставив оператору казино свои паспортные данные. Инструкции обыкновенно несложные, основное — четко им по. Если написано, что «на фото должны быть видны все четыре угла странички паспорта» — сделайте именно это фото. 1×slots зеркало быструю регистрацию а также мгновенное <a href=http://r66251ds.beget.tech/member.php?action=profile&uid=99129>http://r66251ds.beget.tech/member.php?action=profile&uid=99129</a> Бездепозитные бонусы в казино без пополнения 2022 — это конкретная сумма денег либо gift spins вращения, коие предоставляются первым постояльцам за регистрацию на веб-сайте казино в виде бездепозитного приза, и выделяет вас вероятность помощью казино без пополнения опробовать услуги (игр), с дальнейшей преимуществом, льготой вывода средств при исполнении всех установленных правил.
1×slot казино зеркало
Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном сайте и выполните вход в личный кабинет, дабы забрать благотворительные вращения с вейджером х40; <a href=http://skiindustry.org:/forum/member.php?action=profile&uid=1171958>http://skiindustry.org:/forum/member.php?action=profile&uid=1171958</a> сайт 1× slots casino
<b>Смотреть еще похожие новости:</b>
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1139#post-35552>1хслотс рабочее зеркало на сегодня</a>
<a href=https://seniordance.ru/forum/showthread.php/71925–1%D1%85%D0%BB%D0%BE%D1%82-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%B2–1×slots-casino?p=101413#post101413>1хлот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Так собственно главное различие дара на депозит от бездепа – неотъемлемое пополнение счёта. Вы можете привнести депозит и преумножить стартовый капитал либо отобрать бездеп и всем не придётся рисковать собственными сбережениями. Поспешите выполнить простые притязания, и администрация ресурса начислит щедрое поощрение! Многие игроки, оценив перечень казино, остаются выступать в нем и дальше ? на это и направлено любое промо. Постоянные посетители заносят депозиты и проделывают ставки, обеспечивая долгосрочную прибыль оператора. То есть, казино выдают бездепы свежим пользователям для формирования лояльной аудитории.
#9290 Charlesgunnyhttp://filmkachat.ru
1хслотс регистрация в 1×slots casino
Как управляло, при выводе финансов, от играющего потребуется лишь сделать минимальный лепта чтобы, чтобы, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом собственный счет. <a href=http://filmkachat.ru/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> Бесплатный бонус – кредиты, которые онлайн-казино начисляет посетителю, не принуждая его пополнять игровой счет.В зависимости от интернет заведения каждый из их имеет для предложить как бездепозитные деньги, например и бездепозитные фриспины, коие после удачной регистрации рухнут вас на ваш игровой баланс. <a href=https://diart.su/user/DavidSmige/>https://diart.su/user/DavidSmige/</a> Зачастую бездепозитные призы казино для забавы предлагаются различными заведениями азартных игр в маркетинговых акций либо в целях привлечения к себя новых игроков. Для бездепозитных призов в казино 2022 игроку не нужно пополнять счет до этапа вывода желаемых средств.Начнём с как, собственно любое рекламную за регистрацию предполагает некие условия. Бездепозитные призы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность денежного оборота, необходимая для выполнения условий. Пример, получили бесплатные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 руб., неудачных либо выигрышных, важно. После исполнения, бонусный баланс перейдёт на реальный и будет доступным к выводу. 1×slots casino регистрация на сайте <a href=https://www.tadalive.com/blog/406090/%D1%8F%D0%BA-%D1%80%D0%BE%D0%B7%D1%80%D0%B0%D1%85%D1%83%D0%B2%D0%B0%D1%82%D0%B8-%D0%B2%D0%B0%D1%80%D1%82%D1%96%D1%81%D1%82%D1%8C-%D1%80%D0%B5%D0%BC%D0%BE%D0%BD%D1%82%D1%83-%D0%BA%D0%B2%D0%B0%D1%80%D1%82%D0%B8%D1%80%D0%B8-%D0%BF%D0%BE%D0%BA%D1%80%D0%BE%D0%BA%D0%BE%D0%B2%D0%B8%D0%B9-%D0%B3%D1%96%D0%B4/>https://www.tadalive.com/blog/406090/%D1%8F%D0%BA-%D1%80%D0%BE%D0%B7%D1%80%D0%B0%D1%85%D1%83%D0%B2%D0%B0%D1%82%D0%B8-%D0%B2%D0%B0%D1%80%D1%82%D1%96%D1%81%D1%82%D1%8C-%D1%80%D0%B5%D0%BC%D0%BE%D0%BD%D1%82%D1%83-%D0%BA%D0%B2%D0%B0%D1%80%D1%82%D0%B8%D1%80%D0%B8-%D0%BF%D0%BE%D0%BA%D1%80%D0%BE%D0%BA%D0%BE%D0%B2%D0%B8%D0%B9-%D0%B3%D1%96%D0%B4/</a>
1× slots сайт
Бесплатный бонус – кредиты, коие онлайн-казино начислит клиенту, не заставляя его пополнять игровой счет. <a href=http://check2go.net/my-account/>1х слотс зеркало регистрация в 1×slots casino</a> казино 1×slots официальный сайт Воспользоваться бездепом возможно не во всех игровых автоматах: казино и тут уточняет лимитирование для клиентов. Конечно, это возможно посчитать неким неудобством для игрока, но справедливости отметить, что выбор автоматов всё точно остаётся довольно наибольшим.Фриспины – благотворительные вращения с фиксированной ставкой, которые можно использовать в определенных игровых автоматах. <a href=https://dbsdirectory.com/index.php?p=d>https://dbsdirectory.com/index.php?p=d</a> Это раз из главных характеристик привлекательности дара. С завешенным коэффициентом числе профессионалы не смогут выполнить условия по отыгрышу. И так, насколько презентабельно смотрится предложение – бездепозитный бонус казино в размере $500 либо $1 000. Чтобы новенькие получше вдумались, что же это вейджер, мы разберём на образце. 1×slots официальный сайт скачать Составленный знатоками Casino.ru список онлайн-казино с бездепозитным призом разрешает игрокам сравнить спецпредложения разных операторов.Получить Бездепозитный бонус в интернет казино дело двух кликов. Другой момент, отыграть промо и соблюсти правила и обстоятельства отыгрыша. Под правилами предполагается не только вагер, но и лимитирования по наибольшей ставке. Мы разумеем, что в кинотеатр все ставят на зеро и выигрывают. Призываем не создавать похожего. Перед активацией приза прочитайте управляла. Узнайте последующие факторы: Условия получения подарка, за регистрацию, за депозит и прочее. Ограничения по максимальной ставке. Зачастую не выше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах можно отыгрывать вагер. Можно вращать автоматы, а вагер несомненно стоять на пространстве. Поэтому принципиально аристократия, в каких забавах можно осуществлять кратность валютного оборота.
1хслотс зеркало на сегодня
Но ни не запамятовывайте внимательно разбирать верховодила роли в бонусных акциях. Если вы нарушите но бы одно условие, позднее вы не сможете устроить недоразумение с администрацией. <a href=https://veteran-gazeta.ru/forum/user/1197/>https://veteran-gazeta.ru/forum/user/1197/</a> 1×slots зеркало выигрыши обязательно пройдите регистрацию если
1хслотс регистрация в 1×slots casino
Для проверки используются сканы паспортов, водительских удостоверений, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь обнаружен в попытке ввести вспомогательный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный перечень. При этой на лицензионной площадке не опасаться свидетельствовать достоверную индивидуальную информацию (шифрование исключает утечку индивидуальных данных). Максимальная ставка ? уточняется в валюте счета и ограничивает размер ставки за раз спин. В случае ее превышения приз имеет быть аннулирован. Также в правилах возможность содержаться запрет на размещение ставок определенного вида, примеру, по равным шансам в рулетке (то есть, на чет или нечет, красное либо темное и т.д.). 1×slots рабочее зеркало <a href=https://gurt.org.ua/forum/topic/239/>https://gurt.org.ua/forum/topic/239/</a> В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, нужно обратиться в службу поддержки через лайв-чат на сайте казино.
1×slots casino регистрация
Вышеописанная первопричина и считается основным интересным, следствии которого операторы отдают доля своей выгоды на различные маркетинговые расходы и маркетинговые кампании. А самым действующим здесь будут играть именно бездепозитные призы казино 2022 с выводом за регистрацию. Фриспины начисляются по конкретной ставке. После их активации игроку необходимо запустить слот и убедиться, собственно в нем отображаются безвозмездные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода после отыгрыша ориентируется оператором и редко превышает 5 000 руб.Все любят получать презенты. Согласитесь, почти любой играющий человек несомненно бесконечно рад, если получит бесплатный подарок для забавы в интернет казино просто за регистрацию либо же бонус за внесенный депо, так называемые приветственные бонусы для свежих игроков. Соответственно такие интернет клубы будут более знамениты и предпочтительны у игроков при выборе казино для забавы. Топ казино день обновляется и добавляются новые и интересные игровые клубы с симпатичной бонусной политикой и всеми вероятными преимуществами, льготами, к которым относятся эти призы как фриспины за регистрацию, валютные бездепозитные бонусы, еще щедрые призы за внесенный депо. <a href=http://topnj.co.kr/bbs/board.php?bo_table=free&wr_id=178495>http://topnj.co.kr/bbs/board.php?bo_table=free&wr_id=178495</a> Для такого, дабы отыграть сумму вашего бездепозитного приза надо(надобно) выполнить условия вейджера. Очень нередко фриспины даются на определенные слоты (book of ra, book of deceased, book of sun), избирайте слот себя по, они все довольно очень и высококачественные. Бездепозитные приз имеет быть валютным так и вид фриспинов на слоты 1хслот официальный сайт зеркало Бездепозитные бонусы казино это экономическая компенсация, предлагаемая юзерам на дармовой базе и вероятность играть в интернет казино безвозмездно. Если сравнивать их с одобрениями за лепта, каких свои выдаются только впоследствии первоначального пополнения счета, то бездепозитные вознаграждения получаются бесплатно. То есть, играющий получает вероятность создавать ставки на уже имеющие деньги, коие выдаст заведение, выполняя, всем, обыденные деяния, дабы их извлечь (здесь идет о регистрация, удостоверении личности с использованием номера аппарата, оформления заявки и т.д.).
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.audioheritage.net/memberlist.php?mode=viewprofile&u=19451>1×slots регистрацию процедура займет всего лишь</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Можно ли в одном интернет казино получить больше одного бонуса за регистрацию? Нет, так как в каждом интернет казино есть управляла, к которым нужно держаться, не делать два аккаута для получения призов, иначе несомненно блокировка обоих аккаутов, не пытайтесь перехитрить онлайн казино, бонус за регистрацию выдаеться раз раз одному лицу. Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в неотъемлемом порядке необходимо восполнить счет в казино. Для депозитных призов, эта процедура не необходима, так как депозит уже сделан.
#9291 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasin online
Размер ставки для игры по бездепозитному призу (естесственно же, когда, когда он представлен в виде бонусных денежных средств) часто ниже, чем при забаве на депо. Ограничение будет действовать до момента отыгрыша бонуса. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasin online</a> Диапазон ставок, коие вправе сделать игрок, кроме лимитирован. Обычно назначать можно маленькую необходимую — пределах 10–30 руб. За одно вращение.В лицензионных бездепозитных казино выступать в азартные забавы действительно безопасно. Наличие лицензии одобряет что, этот факт, собственно клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP. <a href=https://poldomy.pl/member.php?u=210889>https://poldomy.pl/member.php?u=210889</a> При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток.Бездепы с бесплатными вращениями деют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд платит казино. Число спинов ограничено и редко выше сотку. Если промоакция содержит много безвозмездных игр, их начисление может быть разбито на несколько дней. рабочее зеркало 1хслотс <a href=https://www.one2bay.de/forum/member.php?action=profile&uid=19030>https://www.one2bay.de/forum/member.php?action=profile&uid=19030</a> С этими ординарными советами каждое казино с призом за регистрацию способно принести в разы больше выгоды и полезности.
1×слотс казино
1×slos регистрация в 1×slots casino <a href=http://fumankong1.cc/home.php?mod=space&uid=580626>http://fumankong1.cc/home.php?mod=space&uid=580626</a> Обыкновенные бездепозитные призы в объеме от 3-х до двадцати $ сделаны чтобы, чтобы, дабы в игры заходили все новые и новые игроки. Здесь, вероятнее всего, несомненно ограничение на наибольший выигрыш. Важно, дабы перед наименьшим вкладом был отключен бонус за первое пополнение счета, и геймер не попадет на повторный вейджер.Для верификации аккаунта надо(надобно) дать специалистам технической поддержки отсканированную копию паспорта и счета за коммунальные предложения, еще фотографию банковской карты либо экрана странички электронного кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для доказательства личности. 1×slots сайт
1хслот зеркало
Бездепозитные бонусы казино за регистрацию в 2022 году — это возможность сыграть за счёт заведения. Казино даёт клиенту шанс пользоваться определённой суммой или количеством бесплатных вращений без внесения депо. Не путайте деморежим с реальной игрой без надобности внесения депозита. <a href=https://www.modernvespa.it/profile/3498-josephnew/>https://www.modernvespa.it/profile/3498-josephnew/</a> 1×slot зеркало Обычно бездепозитные акции от казино, приходят на эл. Почту в дни рождения либо праздничные. В некоторых интернет казино возможно обратиться в чат и как постоянному игроку, возможно вас предложат бездепозитное предложение.
1×slots зеркало регистрация в 1×slots casino
<a href=https://test.soclanovtsy.ru/topic/26973-chicago-house-samples-loops-sounds/page/67/#comment-50245>1× slots зеркало</a> Бездепы все заходить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой или баллами.Бонус с зачислением денег на счет дает больше свободы деяний. Пользователь сам выбирает, каким образом распорядиться подаренными средствами. Здесь того могут действовать ограничения на перечень дешевых игр, хотя обычно эти рамки не так строги, как в рекламную с бесплатными вращениями. Условия вывода выигрыша. В некоторых заведениях для успешного вывода с бездепозитного приза довольно пополнения баланса и доказательства личности. В иных же клубах, необходимо несколько один прокрутить свой депозит. 1×slots casino online регистрация <a href=http://hkeverton.com/forumnew/home.php?mod=space&uid=98692>http://hkeverton.com/forumnew/home.php?mod=space&uid=98692</a> Если вы выбираете испытанное лицензионное интернет казино и сделайте все условия получения бездепозитного приза, трудностей с получением презента у Вас не возникнет.
1× slots casino официальный сайт
Большинство клубов привлекают внимание игры за счёт разнообразных даров. На одних веб-сайтах возможно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает благотворительные вращения для пуска топовых интернет слотов. Несмотря на разные промоакции, стоит выделить самые основные. <a href=https://followgrown.com/read-blog/4776>https://followgrown.com/read-blog/4776</a> 1×slots зеркало этих способов предполагает регистрацию Бездепозитные бонусы настоящими средствами, которые можно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадались.Представьте момент, когда при ставке в 10 руб. Вы получите схожее умножение. Миллион рублей за одно вращение, что абсолютно вероятно. Поэтому вопрос, сколько возможно выиграть остаётся закрытым. Предлагаем выяснить других. Регистрируйтесь в одном либо нескольких интернет казино, получайте Бездепозитный бонус и инспектируйте фортуну в деле. Разумеется, исключить деньги довольно. Однако шансы есть у всех.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=36075>1хслотс официальный сайт зеркало</a>
<a href=https://forum.oursson.ru/viewtopic.php?f=2&t=8051>1×slot зеркало рабочее регистрации на телефон придет</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Итак, дабы бесплатные бонусные кредиты трансформировались в реальные средства, которыми вам управлять по собственному усмотрению, их надо(надобно) отыграть. Вейджер идет уточнять в правилах онлайн-казино. Необходимость отыгрыша. Вейджер в повыше, чем для призов за депозит. И пока средства не отыграны, вывести их невозможно.
#9292 Charlesgunnyhttp://filmkachat.ru
1×slots казино мобильная версия
Подарки на праздничные ? приуроченные к парадным датам, требующие символического отыгрыша либо начисляются без такового. Могут дариться игрокам сутки рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду. <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> На критериях отыгрыша даровых бонусов стопам остановиться подробнее. С ними связаны аспекты, коие невозможно забыть без внимания.Бездепы с бесплатными вращениями предоставляют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд уплачивает казино. Число спинов ограничено и изредка выше сотку. Если промоакция включает в себя количество безвозмездных игр, их начисление имеет быть разбито на количество дней. <a href=http://www.qaclubkiev.com/2014/09/goit-2–4.html>http://www.qaclubkiev.com/2014/09/goit-2–4.html</a> 1 x slots <a href=http://messmangler.com/forums/member.php?action=profile&uid=6840>http://messmangler.com/forums/member.php?action=profile&uid=6840</a> Не советуем сломя голову браться за различные предложения получения средств без вложений. Вполне возможно, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на первый взор. Альтернативой считается казино приз за депо. Мы предлагаем вас пару советов, спасибо которым у любого игрока несомненно вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом денег:К образцу, игроку выдаются безвозмездные средства в заведении в объеме пятидесяти или 100 долларов (вейджер на которые сочиняет 100х). То есть, любому новоприбывшему игроку выскакивает притягивающая иллюстрация, кот-ая сулит выплату всех зачисленных компанией средств. Не стоит внимания на казино приз за регистрацию без депозита с слишком великий либо очень маленькой суммой бонусов, поэтому что, в кропотливо изучив все обстоятельства, здесь вероятнее всего, будет некий подкол.
1хслотс официальный сайт зеркало
1хслотс официальный сайт зеркало <a href=http://www.gasts.de/modules.php?name=Your_Account&op=userinfo&username=hungryspeck6>http://www.gasts.de/modules.php?name=Your_Account&op=userinfo&username=hungryspeck6</a> Наш перечень содержит лучшие бездепозитные призы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по принципиальным характеристикам:Перед активацией принципиально внимательно изучить условия акции. Чем ниже вейджер, что, этим больше потенциальная выгода игрока. Имеют значение кроме лимиты ставок при отыгрыше и сроки, протяжении которых можно пользоваться предложением. Если бездеп охватывает узкий список игр, рекомендовано узнать максимальные коэффициенты, степень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только сомнений случае, случае оператор не установил требовательные лимитирования на максимальную необходимую ставки. 1×slot регистрация Бездепозитные бонусы казино это экономическая компенсация, предлагаемая пользователям на дармовой основе и возможность выступать в интернет казино даром. Если ассоциировать их с поощрениями за вклад, в свои выдаются лишь впоследствии первоначального пополнения счета, то бездепозитные вознаграждения получаются безвозмездно. То есть, играющий получает возможность создавать ставки на теснее существующие финансы, коие выдаст заведение, исполняя, этом, обычные действия, дабы их извлечь (тут идет речь о регистрация, удостоверении личности с внедрением номера аппарата, дизайна заказы и т.д. ).
1× slots регистрация в 1×slots casino
Если вы облюбовали для себя некоторое брендов коие вам больше всего полюбились, для постоянной игры! Таких гемблеров казино довольно предпочитает и ценит, за частую такие игроки становятся VIP игроками заведения, коим нередко поступают прибыльные предложения повторяющий призов, так же туда входит и бездепозитные. Акции распространяются как на все игры казино, например и на ограниченный перечень. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и. Промо имеет охватывать разработки 1-го производителя. Бездеп не пересекается с иными акциями казино. Если на сайте предусмотрен кэшбек, он не начисляется за ставки, сделанные бонусными деньгами. Для идентификации платежных реквизитов игрока имеет понадобиться пополнение счета на минимальную необходимую. <a href=http://l2help.lt/user/Ashleymix/>http://l2help.lt/user/Ashleymix/</a> Практически все интернет казино с бездепозитным бонусом за регистрацию предусматривает программку лояльности — систему одобрения постоянных клиентов, кот-ая произведено из большого уровней. При достижении игроком одного значения на его счёт поступает бонус. Чем повыше степень — тем щедрее бонус. 1хслотс казино зеркало Бонус за регистрацию в казино выдается только раз раз на 1-го игрока. Но бывают вспомогательные акции, в коих бездепы раздаются для постоянных посетителей и такие презенты Вы сможете получить больше 1-го раза.Также, ситуации необходимо доказать свой номер телефонного, чтобы код, полученный в смс-сообщении от клуба установить в особое фон в личном офисе игрока.
1×slots официальный сайт мобильная версия
Принципиальным отличием даровых бонусов от призов на депо считается отсутствие необходимости вносить деньги на аккаунт. Из-за сего их часто нарекают бездепозитными (no deposit bonuses).Зарегистрироваться в казино по особой ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефона и электронную почту). Для доказательства номера телефонного нужно в личном профиле показать свой номер и нажать кнопку „Подтвердить номер телефонного“, далее Вы получите sms-сообщение с кодом, который нужно ввести в подходящее фон. Для доказательства электрической почты, перебежать по интенсивной ссылке в письме от казино. <a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=55252>1× slots регистрация в 1×slots casino</a> Если площадка дарит бездеп за регистрацию, то процедура его получения ординарна. Нужно только ввести акк на веб-сайте и активировать его, подтвердив адресок электрической почты, номер аппарата либо другие данные, коие просит оператор. Перед этим необходимо увериться, что юзер находится на официальном веб-сайте казино, но на мошеннической площадке.Для получения приза нужно пригласить в забаву нового посетителя. Казино начисляет пригласившему фиксированный процент от взносов приглашённого повторяющий приза: чаще всего его размер не выше 10%. Срок деянья приза как не выше месяца: пригласивший получает приз в зависимости от проигранных ставок приглашённого в 1-ый месяц забавы. 1 хслот регистрация в 1×slots casino <a href=http://www.olangodito.com/bbs/board.php?bo_table=free&wr_id=916253>http://www.olangodito.com/bbs/board.php?bo_table=free&wr_id=916253</a> Чаще всего, популярностью сервисы, эти как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно обязательное верховодило. Финансовые свои выводятся лишь через ту платежную систему, коей успех для пополнения депозита. Если же игрок получил бездепозитный покерный приз, потребуется восполнить счет на наименьшую сумму, которая сочиняет обыкновенно 10 $.
1×slots казино зеркало
Подтверждение электронной почты – одно из главных критерий, которое есть практически в каждом бездепозитном казино. Чтобы верифицировать электрическую почту, довольно перебежать по интенсивной ссылке в письме, полученном от азартного клуба.Любой выигрыш по ставке повыше установленного лимита несомненно считаться недействительным. То есть ставка не несомненно засчитана при отыгрыше, в случае выигрыша его сумма не поступит на счёт посетителя — результат игры будет полностью аннулирован. Активация по промокоду употребляется в различных видах бездепов. Если идет о приветственном бонусе, то набор знаков возможно узнать на основной странице, в регистрационной форме или послании, коие отчаливает юзеру для доказательства адреса электронной почты. Акции могут проводиться вместе с партнерскими площадками. Обычно код располагается на постороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется разовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном офисе или начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем актуальный код для активации в описании каждого промо.B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax <a href=http://digitalmaine.net/mediawiki3/index.php?title=User:MillaThornton85>http://digitalmaine.net/mediawiki3/index.php?title=User:MillaThornton85</a> Отыграв бездепозитный приз в казино с выводом тоже придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в сходственное лимитирование присутствует, то единоразово вывести получится лишь необходимую, не превосходящую размер приобретенного бонуса.Главным интересным в возникновении этих вознаграждений произведено что, что пустив их в ход, компьютерные ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он благодаря бонусам какой-либо выигрыш или моментально спустит все лишь что прибывшие деньги). То есть, казино снабжает игрока возможностью на дармовой основе играть во различные слоты причем спонсирует игру. x1 slots 1хслотс регистрация перейти на 1×slots Операторы гемблинга заявляют, собственно так они сражаются с бонус-хантерами. Впрочем, критики считают, собственно данным казино пробуют сделать из случайного гостя неизменного игрока.
<b>Смотреть еще похожие новости:</b>
<a href=http://permitbeijing.com/forum/member.php?action=profile&uid=191496>1×slots казино мобильная версия</a>
<a href=http://www.webdesignforum.com.au/member.php?action=profile&uid=31660>1×slots зеркало регистрацию более популярный вариант это</a>
<a href=http://brilliance.ru/forum/viewtopic.php?f=6&t=39451>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Суммы сходственных услуг, как правило, колеблются от трех до двадцати долларов, а вейджер на эти свои должен сочинять от 30 до шестидесяти раз. Зачастую, наибольшая сумма выигрыша здесь составит от одной до двух сотен $. Если игрок выиграет больше, то все свои шансы быть списанными до очень разрешенного выигрыша. Здесь бывает содержание выводить еще несуществующие деньги на собственную платежную систему и дальше искать заведение с благоприятными под данную сумму релоадом или призом за первое пополнение счета. Есть некоторое подвидов бездепозитного вознаграждения, предлагаемого великим числом заведений.
#9293 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация
Подобные призы без депозита предоставляются на больше прибыльных условиях. Зачастую они крупнее, а условия отыгрыша менее строгие. <a href=http://filmkachat.ru/>казино 1× slots официальный сайт</a> <a href=https://dokuwiki.stream/index.php?title=%D0%9F%D0%B8%D1%86%D1%86%D0%B0%20%D0%BE%D1%82%20%D1%88%D0%B5%D1%84-%D0%BF%D0%BE%D0%B2%D0%B0%D1%80%D0%BE%D0%B2%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!>https://dokuwiki.stream/index.php?title=%D0%9F%D0%B8%D1%86%D1%86%D0%B0%20%D0%BE%D1%82%20%D1%88%D0%B5%D1%84-%D0%BF%D0%BE%D0%B2%D0%B0%D1%80%D0%BE%D0%B2%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!</a> онлайн казино 1×slots <a href=http://h96375tu.bget.ru/member.php?action=profile&uid=109199>http://h96375tu.bget.ru/member.php?action=profile&uid=109199</a>
1×slots регистрацию процедура займет всего лишь
Каждый из бездепозитных призов без пополнения 2022 имеет свой конкретный вейджер для отыгрыша, так же в любом казино он устанавливается индивидуально — где то он х55 а где-то х30, повторюсь всюду по различному!Выбирая безвозмездный приз, пристально изучайте управляла. Убедитесь, что вас возможно себя роль в промоакции. Уточните, в каких играх возможно выполнять условия вейджера. При надобности задавайте вопросы представителям саппорта. 1×slots регистрация <a href=http://guz.ru/bitrix/redirect.php?goto=http://maps.google.ca/url?q=http://eurocom.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/Z67Ob_-M3yK>http://guz.ru/bitrix/redirect.php?goto=http://maps.google.ca/url?q=http://eurocom.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/Z67Ob_-M3yK</a> Нет. Казино выдают благотворительные бонусы за регистрацию, чтобы, чтобы, дабы клиент мог ознакомиться с игровым заведением. А дабы исключить его, нужно выполнить условия отыгрыша.Иногда для получения бонусов нужно спутаться с представителями службы поддержки. Удобнее всего с ними собеседовать в онлайн-сате, но иногда довольно запроса по электрической почте. 1× slots зеркало
1×slot казино зеркало
Если вы новичок в этом деле и только попали в неизведанную вами область азарта — счет услуг как бездепозитные призы без пополнения. <a href=http://xn–hg3b25hm0h.com/bbs/board.php?bo_table=free&wr_id=399296>http://xn–hg3b25hm0h.com/bbs/board.php?bo_table=free&wr_id=399296</a> Чтобы выступать даром на реальные деньги в казино, порой довольно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные деяния. 1×slots официальный demo регистрация в 1×slots casino Подарки на конкретные даты отличаются критериями получения. Если поощрение начисляют игроку на день рождения, то сумма обыкновенно в от совместного размера депозитов за прошедший год.После получения бонуса вывод средств для клиента несомненно недосегаем до тех пор, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя или пара месяцов. Выводить средства игрок сможет только в отыгрыша.
1хслотс рабочее зеркало
4. Заберите подарок. Чаще всего бонус активизируется сразу в регистрации. Но посещают истории, когда нужно забежать в собственный кабинет либо написать в саппорта.Еще одно условие касается объемов ставки. Операторы устанавливают максимальную необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, выбранной в Личном кабинете. При превышении лимита есть риск потерять бонуса. Существующие лимитирования относятся и к конкретным обликам ставок. Например, играя в рулетку, клиент возможность столкнуться с запретом назначать фишки на шансы. 1×слотс казино <a href=http://iawbs.com/home.php?mod=space&uid=809048>http://iawbs.com/home.php?mod=space&uid=809048</a>
скачать 1×slots на андроид мобильная версия
Самые свежие бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды находятся на данной страничке. Посетитель возможность оценить условия получения и начать выступать на деньги без внесения депозита. При данном игроку главно понимать, на каких условиях и какими методами у вывести полученный выигрыш. Для сего нужно оценить список присоединенных платежных систем. <a href=https://tnamall.com/bbs/board.php?bo_table=free&wr_id=1431728>https://tnamall.com/bbs/board.php?bo_table=free&wr_id=1431728</a> Прежде всего, не забывайте периодически заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом разглядывают более интересные предложения основных игорных порталов.Для проверки используются сканы паспортов, водительских удостоверений, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь замечен в попытке ввести вспомогательный аккаунт, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный список. При ирге на лицензионной площадке не бояться свидетельствовать достоверную персональную информацию (шифрование исключает утечку персональных данных). зеркло казино 1×slots В интернет-сети всегда можно найти списки наиболее известных и обещанных поощрительных программ от знаменитых онлайн-казино.
<b>Смотреть еще похожие новости:</b>
<a href=http://khodaumo.com/forum/viewtopic.php?f=2&t=75746&sid=e20538b896eb8c084216e2dba42cbf39>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<a href=https://shopcms.vsupport.club/topic/8915-best-toronto-wine-bars/page-6#entry94775>казино 1× slots официальный сайт</a>
<a href=https://timepost.info/showthread.php?tid=52934>рабочее зеркало 1хслотс</a>
<a href=http://permitbeijing.com/forum/showthread.php?tid=2195992>1×slots зеркало сайта</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Также, учите, собственно бездепозитный бонус можно исключить только в том случае, когда будут исполнены все обстоятельства отыгрыша. Фриспины начисляются по конкретной ставке. После их активации игроку необходимо запустить слот и увериться, собственно в нем отображаются безвозмездные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода после отыгрыша определяется оператором и изредка превышает 5 000 рублей.
#9294 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрацию более популярный вариант это
Нельзя осматривать забаву на деньги, как вариант заработка. Азартные игры запрещены для лиц младше 18 лет. Topcasinobonuses.mobi не зачинщиком азартных игр. Сайт одевает информационный характер. <a href=http://filmkachat.ru/>1×slots регистрация</a> <a href=https://sociallist.org/submit.php?url=https%3A%2F%2Fmucho-rest.ru%2F&title=%D0%A0%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD+MUCHO&tag=knownvacancy35&lang=nl&show_all=1&text=%5Burl%3Dhttps%3A%2F%2Fmucho-rest.ru%2F%5D%D0%A0%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD+MUCHO%5B%2Furl%5D>https://sociallist.org/submit.php?url=https%3A%2F%2Fmucho-rest.ru%2F&title=%D0%A0%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD+MUCHO&tag=knownvacancy35&lang=nl&show_all=1&text=%5Burl%3Dhttps%3A%2F%2Fmucho-rest.ru%2F%5D%D0%A0%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD+MUCHO%5B%2Furl%5D</a> 1×slots casino регистрация <a href=https://maps.google.com.tw/url?q=https://doctorlazuta.by/>https://maps.google.com.tw/url?q=https://doctorlazuta.by/</a>
1хслот 1хслотс регистрация перейти на 1×slots
Пoдтвepдить личнocть клиента. Для успешного вывода средств, необходимо доказать лицо клиента. Нa этaпe вepификaции пpoфиля, сотрудники службы безопасности обязаны увериться, что у игрока более один аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не может вывести собственный выигрыш, если у него несомненно некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы.Для получения бездепа необходимо пригласить в забаву по реферальной ссылке свежего посетителя: он должен зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на необходимую, указанную в критериях акции. <a href=http://check2go.net/my-account/>1×slots регистрация на сайте</a> 1хслотс рабочее зеркало <a href=http://www.dungdong.com/home.php?mod=space&uid=3004804&do=profile>http://www.dungdong.com/home.php?mod=space&uid=3004804&do=profile</a> У любого игорного клубы разные вейджеровые обстоятельства. Чтобы вы гарантировано смогли выполнить их, мы дадим количество советов. Если система начислила маленькую сумму, не создавать большие ставки – остановитесь на 10–30 центах. Как только сумеете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте выступать. В противном случае никакого присмотреться к иному автомату. 1×slots зеркало на сегодня Теоретически, к бесплатным бонусам можно отнести так именуемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, потому собственно они предоставляют лишь вероятность создавать ставки.Выбрать казино с бездепозитным призом. У нас на сайте представлен перечень лучших интернет казино, которые предлагают своим игрокам щедрые призы за регистрацию.
1×slots регистрация на 1хслотс
3. Подтвердить данные. В зависимости от клуба, нужно привязать аппарат либо почту, указать персональную информацию;У каждого игорного заведения средства правила и условия. Но, чтобы получить призы, нужно выполнить стандартные деянья: <a href=https://www.elektroroller-forum.de/memberlist.php?mode=viewprofile&u=442170>https://www.elektroroller-forum.de/memberlist.php?mode=viewprofile&u=442170</a> В игровых клубах без лицензии Вы покупаете „кота в мешке“ и когда спорных ситуаций нет способности куда-то посетовать и доказать свою правоту.Так же стоит выделить то, что в любом онлайн казино установлен свой наибольший кешаут на бездепозитный приз. Как правило кешаут — это максимальная сумма средств, которая доступная для вывода с бездепозитного бонуса. 1×slots зеркало на сегодня Бездепы с бесплатными вращениями деют пользователям право вертеть барабаны игровых автоматов без снятия средств со счета. За любой раунд уплачивает казино. Число спинов ограничено и редко превышает сотню. Если акция содержит количество даровых игр, их начисление возможность быть разбито на количество дней.Практически все интернет казино с бездепозитным бонусом за регистрацию предусматривает программу лояльности — систему одобрения неизменных посетителей, которая произведено из большого уровней. При достижении игроком еще уровня на его счёт поступает приз. Чем выше степень — тем щедрее бонус.
1×slots регистрацию процедура займет всего лишь
Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.Получать информацию о самых выгодных бонусах можно без постоянного прогноза новостей казино. Мы взяли эту задачку на себя и постоянно следим за предложениями операторов, выбирая наилучшие из них. В этом разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список акций регулярно дополняется. В топ вошли самые новые бездепозитные призы за регистрацию в казино 2020, кратковременные и закрытые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру прочим критериям. Если срок действия промоакции истек, она удаляется из перечня. 1× slots сайт <a href=https://www.vforum.org/forum/members/26587.html>https://www.vforum.org/forum/members/26587.html</a> Также существуют онлайн-платформы азартных игр, коие используют раздачу бездепозитных призов в особые даты (как для казино, например и для игрока). Помимо сего, действующие игроки также имеют вероятность получить похожие призы за свою деятельность (например, за повышения значения или за похожие заслуги).Промообъявления от казино мешают реальной картины и ориентированы на привлечение внимания юзеров. Понять, насколько высоки шансы остаться в плюсе, позволит собственный анализ критерий предложения:
1×slots регистрация на сайте
Бездеп с фриспинами возможность обхватывать всю коллекцию игр на веб-сайте либо разработки 1-го провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш возможность быть выведен последствии как, как пользователь отыграет данную сумму. Возможность оценить глубокий перечень слотов — главное достоинство данной разновидности. Игроку становятся доступны что, эти опции, которые отсутствуют в демонстрационном режиме, а вероятность выиграть реальные средства прибавляет ярких азартных ощущений. <a href=http://sf4obr.ru/forum/user/43855/>http://sf4obr.ru/forum/user/43855/</a> Обычно для получения бонусов без депо, казино выдвигает приклнные и вполне выполнимые условия, но есть ряд деяний которые воспрещены и шансы повлечь за собой досадные последствия: 1 x slots casino Варианты выигрыша зависимости от Вашей успеха и критерий игорного портала. Выше мы сказали, что кое-какие бездепозитные бонусы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются и, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность современных игр на средства, можно выиграть невозможные суммы. Сегодняшние игровые автоматы или видео слоты, как их нарекают. Могут выдавать солидные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000.Ограничения по забавам. Администрация запрещает игрокам некоторые игровые автоматы с бездепозитным призом, средствами либо бесплатными вращениями. Обычно, в правилах приводится полный перечень слотов для отыгрыша. Иногда дробленье выполняется по облику игр. Например, отыгрыш возможен на всех игровых аппаратах, хотя запрещен в настольных играх и в разделе Live Casino.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.spherecommunity.net/User-JamesLop>1×slots быструю регистрацию а также мгновенное</a>
<a href=http://mandala-app.com/forums/memberlist.php?mode=viewprofile&u=3447>1× slots casino официальный сайт</a>
<a href=http://forums.indexrise.com/thread-1096-post-332075.html#pid332075>1×slots скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
С такими ординарными советами любое казино с призом за регистрацию способно принести в разы больше выгоды и пользы. Не стоит путать забаву в демо и использование бонусов. В демонстрационном режиме игрок возможность оценить механику слота, сюжет и оформление. Но игра проводится на относительные кредиты, потому отсутствует главное ? ощущение азарта. Активируя промокод или фриспины, заказчик и не тратит свои средства на игровые автоматы, но может сорвать настоящий куш!
#9295 Charlesgunnyhttp://filmkachat.ru
казино 1×slots официальный сайт
Хотя безвозмездные бонусы начисляются без депо, не исключено, собственно вас придется заносить средства. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь после как, как свежий заказчик раз пополнит игровой счет.Помните, собственно в некоторых забавах сумма ставки идет в зачет вейджера только отчасти. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки числятся как отыгранные средства, момент как в слотах идет в зачет все 100% суммы. <a href=http://filmkachat.ru/>казино 1×slots</a> B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. <a href=https://www.gstd.net/bbs/board.php?bo_table=free&wr_id=2602103>https://www.gstd.net/bbs/board.php?bo_table=free&wr_id=2602103</a> Процесс подтверждения личности может взятьвдолг(взятьвзаймы) от одного дня до недели. Если заказчик допустил какую ошибку при заполнении паспортных данных, то ему идет адресоваться с задачей в службу поддержки онлайн-казино. 1×slots зеркало рабочее <a href=http://mashspec.ru/user/Chrishorge/>http://mashspec.ru/user/Chrishorge/</a> Бездепозитные призы за регистрацию считаются одним из самых модных методов вербования новых игроков в онлайн-казино, потому собственно они предоставляют игрокам вероятность опробовать казино, необыкновенно игровые автоматы, и вероятно, выиграть настоящие средства.Игрокам не воспринимать приветственный бонус как гарантированный способ получить большой выигрыш, но это отличная возможность без затрат оценить функционал казино.
1×slots casino зеркало
Получив свой подарок, Вы можете безвозмездно выступать на настоящие деньги, а выполнив обстоятельства отыгрыша, вывести свой выигрыш. <a href=http://zxz.listbb.ru/memberlist.php?mode=viewprofile&u=925>1× slots casino зеркало</a> 1×slots casino регистрация на сайте <a href=http://www.glife2120.ru/user/Oscarmug/>http://www.glife2120.ru/user/Oscarmug/</a> В качестве бонусов интернет казино часто предлагает выдачу фриспинов, другими безвозмездных вращений игрового барабана. Виртуальные монеты возможно применять для изучения в покерной школе либо для игры в казино. 1×slots зеркало которую указывали при регистрации кстати В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, необходимо обратиться в саппорта спустя лайв-чат на сайте казино.
1×slots казино зеркало
Для получения бонуса нужно ознакомиться с программкой преданности казино и устроить ставки на необходимую, необходимую для перехода на грядущий степень. Большинство интернет-казино из нашего топ-10 готовы порадовать вас эксклюзивными акциями. Читайте о их в обзорах и на форуме.Обычно для получения бонусов без депо, казино выдвигает лояльные и вполне выполнимые обстоятельства, но есть ряд поступков коие воспрещены и шансы стать противные последствия: <a href=http://l2help.lt/user/Walterput/>http://l2help.lt/user/Walterput/</a> 1×slots казино зеркало
1×slots сайт
Существует ли стратегии для отыгрыша бездепозитных призов? К раскаянью нет, на выигрыши либо проигрыши с призов, казино либо игрок воздействовать не может, отдача игр случается от разработчиков игр. 1× slots регистрация в 1×slots casino <a href=https://forums.datanav.co.ke/member.php?action=profile&uid=3863>https://forums.datanav.co.ke/member.php?action=profile&uid=3863</a>
1×slots рабочее зеркало на сегодня
Некоторые онлайн-казино без депо предлагают новым клиентам избрать приз при регистрации. Будьте внимательны: выбрав раз, вы в абсолютном большинстве случаев не сможете пользоваться остальными.Каждый новичок и умелый игрок грезят стремительно стартануть и начать создавать реальные ставки. Для этого довольно забрать подарок, за кот-ый не нужно уплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email либо аппарат. После сего администрация начисляет щедрое вознаграждение вид даровых вращений либо виртуальных кредитов. Условия шансы различаться приятель от приятеля. Но такой приз имеет быть использован только для игрового процесса – полученные на счет деньги до того, как будут отыграны, исключить нереально. <a href=http://okerclub.ru/user/PorsedropEn/>http://okerclub.ru/user/PorsedropEn/</a> 1×slots регистрация 1×slotscasino09k online Игры, в которых возможно играть на бонусные деньги. Проверьте список игр, каких возможно выступать на бонусные средства, возможно они Вам не понравятся и надо тратить своё время на эту промоакцию.
<b>Смотреть еще похожие новости:</b>
<a href=https://adminclub.org/showthread.php?tid=64305>скачать 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских рублей. В условиях промоакции предписано, собственно вейджер бездепозитного бонуса х20. Поэтому, дабы отыграть бонус, игроку будет нужно устроить ставок на 35*20=700 руб.
#9296 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию более популярный вариант это
Приветственный бездеп предоставляется какому игроку только раз один. Казино борются с так именуемыми бонусхантерами (от англ. Bonus Hunter — охотник за бонусами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения дара. Исключить подобные действия разрешает верификация данных. Администрация вправе потребовать у посетителя доказать индивидуальные данные, обозначенные при регистрации.Для отыгрыша бонуса казино обязывает игрока поиграть на необходимую, в некоторое один превосходящую сумму полученного бонуса — здесь выгода фирмы очевидна. <a href=http://filmkachat.ru/>1×slot зеркало</a> Автоматы непопросту считаются наиболее популярным азартным веселием. Чтобы усвоить управление и правила, потребуется всего некоторое минут. Ваша задачка устроить ставку, найти число трудящихся линий и возможно крутить барабан. Если на выпадет выигрышная композиция – вы выиграли! С данной задачей вас помогут справится бездепозитные призы казино. <a href=http://xojh.cn/home.php?mod=space&uid=1831311>http://xojh.cn/home.php?mod=space&uid=1831311</a> Чтобы помощи увериться в преимуществах бездепозитных бонусов, достаточно зарегистрироваться в казино и получить поощрение.Вообще перейдя в казино — управляла схожи в получении бездепозитных призов, в стандартные управляла входит: доказать эл. Почту и аппарат, наполнить собственный личный профиль, активировать промо код или активировать предложения во вкладке БОНУСЫ. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=http://bbs.xiaoditech.com/home.php?mod=space&uid=1855383>http://bbs.xiaoditech.com/home.php?mod=space&uid=1855383</a>
1×slots казино зеркало
Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, например как Вам придется ее подтвердить в будущем при выводе средств.Все любят получать презенты. Согласитесь, почти любой играющий человек несомненно бесконечно рад, если получит бесплатный подарок для забавы в интернет казино просто за регистрацию либо же бонус за внесенный депо, так называемые приветственные бонусы для свежих игроков. Соответственно такие интернет клубы будут более знамениты и предпочтительны у игроков при выборе казино для забавы. Топ казино день обновляется и добавляются новые и интересные игровые клубы с симпатичной бонусной политикой и всеми вероятными преимуществами, льготами, к которым относятся эти призы как фриспины за регистрацию, валютные бездепозитные бонусы, еще щедрые призы за внесенный депо. 1×slots зеркало на сегодня Выбирайте лучшие благотворительные призы с помощью обзоров на Casinoz – и пусть вас сопутствует удача при отыгрыше бонусных кредитов! <a href=https://www.formulersupport.com/User-Frankvor>https://www.formulersupport.com/User-Frankvor</a> Далее потребуется отыграть вагер и исключить выигрыш. Игрокам без навыка крупно повезло, они могут получить 10-ки подарков за 1 регистрацию. Если не сумели получить Бездепозитный приз, не беспокойтесь. Обратитесь в онлайн чат, оператор поможет решить проблему. 1×slots сайт Oтыгpaть приз с обозначенным вeйджepом, для этого необходимо сдeлaть cтaвoк нa cумму, превышающую объем бонуса в количество один.
1×slots зеркало которую указывали при регистрации кстати
Для получения предоставленных призов для понадобиться — ПК либо мобильное прибор, и остальное дело за малым. Верификация аккаунта. Лучше подтвердить личность незамедлительно последствии регистрации, дабы потом не было заморочек с выводом средств. Верификация может проходить двумя путями:Можно ли наваривать на бездепозитных бонусах? Это не работа, тут как повезет, случае в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, время возможно именовать везением, и добавочной добавкой к вашему бютжету. <a href=https://physicsmastered.com/author/geraldmip/>https://physicsmastered.com/author/geraldmip/</a> Существуют казино с призом за регистрацию, каких довольно знамениты фриспины в онлайн казино потом регистрации в конкретных забавах. Они встречаются том чаще безвозмездных поощрений или классических призов в казино без вложений. Например, игрок регистрирует счет, на который начисляются безвозмездные забавы, бонус за регистрацию вид безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса игрок выигрывает истинные средства, которые в последствии можно удачно вывести из заведения на свою платежную систему. То есть, есть все шансы вывести свои без рисков собственными деньгами. Регистрация, за геймер получит призы, займет несколько, а благодаря этому можно увеличить пять евро поощрений до тыс. И без всяких заморочек исключить их. 1хслотс официальный сайт зеркало Баланс игрока дополняется на подходящую необходимую. К ней используется вейджер, обозначенный в правилах акции. Вывести выигрыш можно будет в того, как пользователь сделает требуемый размер ставок из личных средств. В редких случаях бездеп трудится в формате Free Play. На счет пользователя зачисляется большая сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по окончании этого периода сумма на счету будет превосходить изначальную, то разность возможно будет вывести или применять для последующих ставок.Размер призов почаще всего чисто символический и не превышает 50 руб. Приятно, но осязаемым бустом деле ли будет.
1хлот регистрация в 1×slots casino
Как правило, при выводе денег, от играющего потребуется только сделать наименьший вклад чтобы, чтобы, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом собственный счет.Приветственный бонус без депозита ? подарок за регистрацию. Выдается средствами, фриспинами или баллами. В последнем случае бонусные баллы применяются для роли в турнирах или обмена на настоящие средства. 1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, случае не желаете замерзнуть жертвой жуликов либо впустую истратить время; В интернет-сети всегда возможно найти перечни наиболее модных и гарантированных поощрительных программ от знаменитых онлайн-казино. зеркло казино 1×slots <a href=https://telugusaahityam.com/%D0%A1%D1%81%D1%8B%D0%BB%D0%BA%D0%B8_%D0%94%D0%BB%D1%8F_%D0%9F%D1%80%D0%BE%D0%B4%D0%B2%D0%B8%D0%B6%D0%B5%D0%BD%D0%B8%D1%8F_%D0%A1%D0%B0%D0%B9%D1%82%D0%B0>https://telugusaahityam.com/%D0%A1%D1%81%D1%8B%D0%BB%D0%BA%D0%B8_%D0%94%D0%BB%D1%8F_%D0%9F%D1%80%D0%BE%D0%B4%D0%B2%D0%B8%D0%B6%D0%B5%D0%BD%D0%B8%D1%8F_%D0%A1%D0%B0%D0%B9%D1%82%D0%B0</a> Бездепозитные бонусы за регистрацию являются одним из самых модных способов привлечения свежих игроков в онлайн-казино, потому что они предоставляют игрокам возможность опробовать казино, неподражаемо игровые автоматы, и вполне, выиграть настоящие средства.
1×slots бездепозитный бонус за регистрацию
Заработать на бездепозитных бонусах за регистрацию в казино может любой юзер, достигший совершеннолетия. <a href=http://slavsbyt.ru/index.php?subaction=userinfo&user=elfinstomach75>http://slavsbyt.ru/index.php?subaction=userinfo&user=elfinstomach75</a> Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного приза достаточно пополнения баланса и доказательства личности. В других же клубах, нужно некоторое один прокрутить собственный депо. 1хслотс рабочее зеркало на сегодня Чтоб получить крупный выигрыш, подбирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша.
<b>Смотреть еще похожие новости:</b>
<a href=http://nacionrolera.org/foro/viewtopic.php?f=1210&t=126588>казино 1×slots официальный сайт</a>
<a href=http://forums.indexrise.com/thread-1096-post-332338.html#pid332338>1×slots официальный регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Максимальный объем ставки, кот-ый нельзя превосходить пока приз не будет всецело отыгран. В случае нарушения этого управляла, приз и выигрыш с него будут аннулированы. Нет. Казино выдают безвозмездные бонусы за регистрацию, для того, дабы клиент возможность ознакомиться с игровым заведением. А дабы вывести его, нужно выполнить обстоятельства отыгрыша.
#9297 Charlesgunnyhttp://filmkachat.ru
1×slots сайт
Прибывшие на аккаунт финансы бездепозитные призы предназначаются, в, только для новоиспеченных юзеров, коие ранее не имели собственного аккаунта в данном казино. Исходя из сего, в ранее у игрока был сделан депозит, то, по всей вероятности, у него больше не будет способности рассчитывать на получение такового бонуса в конкретном заведении.Фриспины – бесплатные вращения с фиксированной ставкой, коие возможно применять в конкретных игровых автоматах. <a href=http://filmkachat.ru/>1 хслот регистрация в 1×slots casino</a> Сроки активации бонуса устанавливаются каждым казино, но почаще всего они не превышают недели с момента получения. Игроку обязательно нужно применять бездеп протяжении указанного срока, в ином случае приз просто пропадет. Каждый бонус можно получить только раз один, потому если не использовать бездеп в срок, у игрока не будет 2 шанса им пользоваться.Бездепозитные бонусы начисляются только один раз. Не стоит открывать свежие аккаунты, дабы получить их повторно. Служба защищенности казино обязательно выявит «левого» соучастника и перекроет. Если гость выполнит необходимые требования, отыграет свою ставку и решит исключить собственный выигрыш, то ему надо(надобно) учесть, что казино непременно востребует дать ксерокопии личных документов, чтобы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои исключить не удастся. <a href=https://cromia.ua/forum/user/9308/>https://cromia.ua/forum/user/9308/</a> 1×slots зеркало сайта <a href=http://silabgarza.net/forums/member.php?action=profile&uid=213920>http://silabgarza.net/forums/member.php?action=profile&uid=213920</a> Бездепозитный бонус нередко может стать доступным незамедлительно последствии окончания регистрации, что в большинстве случаев единственным притязанием к нему является регистрация, а затем ревизия вашей новой учетной записи.Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.
1×slots зеркало рабочее на сегодня
Выигрыши с призов без инвестициям постоянно привязаны к требованию по ставкам и шансы быть обналичены лишь последствии выполнения данных требований.Возможность протестировать новые игры, не рискуя личными своими и создать собственную тактику игры. 1×slots бездепозитный бонус за регистрацию Акционные предложения от казино существуют в различных форматах. Часто призы даются в размен на депозит. Игрок заносит платеж и получает средства, безвозмездные вращения и поощрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — вид приза, который гарантирован за выполнение определенных действий на веб-сайте: <a href=https://wechurch.tw/home.php?mod=space&uid=184610>https://wechurch.tw/home.php?mod=space&uid=184610</a> Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала прыткие выводы. Фишка выплат в, что достаточно избрать платёжный инструмент и указать сумму. В большинстве случаев средства зачисляются на электрические кошельки в течение 15 минут, а на банковские карты – 1–3 рабочих дня.Некоторые казино имеют предлагать клиентам бездепы за свидетельство номера или почты или репост на страничку в соц сетях. 1×slot зеркало рабочее этих способов предполагает регистрацию Не желайте сыграть в азартные забавы, не рискуя средствами средствами, хотя получая в все выплаты? Подобную возможность предоставляют многие лучшие порталы с азартными увеселениями. В их количестве количество добросовестных и надежных интернет-казино на российском языке. Они завлекают новых юзеров различными поощрительными мероприятиями, включая бездепозитные, или благотворительные призы.
1×slots сайт
Минимального оборота. Этот предел уточняется вейджером — пока игрок не поиграет на установленную необходимую, вывод средств несомненно недосегаем. <a href=http://bbs.yongrenqianyou.com/home.php?mod=space&uid=4117223&do=profile>http://bbs.yongrenqianyou.com/home.php?mod=space&uid=4117223&do=profile</a> Вы скорее, скажем, как все предпочитаете получать презенты и бездепозитные бонусы казино. Игорные дома взяли в привычку одаривать гэмблеров приятными бонусами. Стать обладателем приветственного презента возможно за творенье профиля или пополнение счёта. Второй вариант больше интересный, как клубы готовы удвоить депо! Но случае вы новичок и лишь знакомитесь с миром пыла, никакого пользуйтесь призом за регистрацию. 1×slots casino регистрация Когда речь идет о валютных призах, казино практически устанавливают условия вейджера, которые необходимо выполнить, чтобы исключить выигрыш.
1хслотс рабочее зеркало
На бесплатные призы онлайн-казино практически практически распространяется ограничения по стране проживания посетителей. Даже в вас разрешается открывать счет и играть на деньги в заведении, это еще не значат, собственно для доступны not the slightest down payment bonuses. Операторы гемблинга заявляют, что например они дерутся с бонус-хантерами. Впрочем, критики считают, собственно этим казино пытаются устроить из случайного постояльца постоянного игрока.Для верификации номера телефона, в собственном профиле изберите опцию „Подтвердить номер телефона“ и введите в подходящее поле код, приобретенный в sms-сообщении. 1хслотс регистрация в 1×slots casino <a href=https://blackmarke7.com/user-39762.html>https://blackmarke7.com/user-39762.html</a> Как правило, новоприбывшие геймеры начала хотят ознакомиться с способами ввода и вывода денежных средств и сроки исполнения поданных заявок дабы четко понимать, как живо они смогут исключить свой казино бонус за регистрацию без депозита на электрический кошелек либо же банковскую карту. К счастью для всех играющих, внутри определенных холдингов, все казино соперничают между собой. Ведь в бы конкретную компанию представляло только одно онлайн-заведение, то ли бы посетители заметили казино с призом за регистрацию и могли бы рассчитывать лишь на вознаграждение повторяющий приза на 1-ое инвестиция. К каждому заведению регулярно следует привлекать новых игроков, собственно, итоге, только на руку всем играющим.Автоматическая активация показаться самой комфортной, хотя ручной способ содержит перед ней превосходства. Прежде чем использовать вознаграждение от казино, стоит заблаговременно найти, сколько времени потребуется на исполненье всех условий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала деянья бонуса.
1× slots регистрация в 1×slots casino
Иногда для получения бонусов нужно спутаться с представителями службы. Удобнее всего с ними разговаривать в онлайн-сате, но времени довольно запроса по электрической почте. Бездепозитные призы истинными средствами, которые можно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадались. <a href=http://91075425.k216.opensrs.cn/home.php?mod=space&uid=1141376>http://91075425.k216.opensrs.cn/home.php?mod=space&uid=1141376</a> 1×slots официальный сайт мобильная версия
<b>Смотреть еще похожие новости:</b>
<a href=https://www.one2bay.de/forum/showthread.php?tid=344611>казино 1× slots официальный сайт</a>
<a href=https://adminclub.org/showthread.php?tid=64211>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a>
<a href=https://forum.dis-course.net/viewtopic.php?t=422121>1хлот регистрация в 1×slots casino</a>
<a href=https://adminclub.org/showthread.php?tid=60358>1×slots регистрация на 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам воспрещено начислять призы клиентам, не имеющим валютных средств на счете. Мы предлагаем разглядеть животрепещущие бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ. При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, коие можно предназначить ирге в казино.
#9298 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало видели такую регистрацию на
Наличие у игрока 2 аккаунта. Запрещено творить несколько профилей для неоднократного получения бездепов.Да, у даровых бонусов есть недостатки. Прежде всего, они обыкновенно не. Кроме как, обстоятельства вейджера по ним постоянно жесткие. Но таки недоступность риска делает их довольно красивыми для посетителей. <a href=http://filmkachat.ru/>1×slots зеркало проходить регистрацию это отличный вариант</a> <a href=http://www.dotank.kr/bbs/board.php?bo_table=free&wr_id=232020>http://www.dotank.kr/bbs/board.php?bo_table=free&wr_id=232020</a> 1×slots регистрация на сайте 1×slots ru com <a href=https://www.ccvgaming.com/forum/member.php?39512-FrankAnido&s=ce52a393df6be5a9aed0e0290e5697ac>https://www.ccvgaming.com/forum/member.php?39512-FrankAnido&s=ce52a393df6be5a9aed0e0290e5697ac</a> B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpaxМаркетинговая деятеля всех игорных интернет-клубов должна носить различный нрав. И случае вознаграждения на депо работают чтобы, чтобы, дабы стимулировать заносить депозиты и поощрять уже быть пользователей, то бездепозитный бонус в казино или бонус за регистрацию в казино, этого всего, рассчитан на расширение базы покупателей.
1×slots casino регистрация 1×slots review live
Бездепозитный бонус нередко возможность замерзнуть легкодоступным незамедлительно последствии окончания регистрации, потому в большинстве случаев единственным притязанием к нему считается регистрация, а затем ревизия вашей новой учетной записи.Выигрыши с призов без инвестициям практически привязаны к требованию по ставкам и могут быть обналичены только после исполнения данных притязаний. 1×slots зеркало регистрация <a href=http://skiindustry.org:/forum/member.php?action=profile&uid=1175752>http://skiindustry.org:/forum/member.php?action=profile&uid=1175752</a> Это один из главных характеристик привлекательности презента. С завешенным коэффициентом даже мастера не смогут выполнить условия по отыгрышу. И не, как презентабельно смотрится предложение – бездепозитный бонус казино в размере $500 либо $1 000. Чтобы новички попревосходнее вдумались, собственно же это вейджер, мы разберём на образце.Зачастую бездепозитные призы казино для игры предлагаются различными заведениями азартных игр виде рекламных акций либо в целях привлечения к себя свежих игроков. Для бездепозитных бонусов в казино 2022 игроку не пополнять счет до момента вывода желаемых средств. 1× slots сайт Минимального оборота. Этот предел устанавливается вейджером — же игрок не сыграет на установленную сумму, вывод средств будет недосегаем.Некоторые онлайн-казино без депо предлагают новым посетителям выбрать приз при регистрации. Будьте внимательны: выбрав один, вы в безоговорочном большинстве случаев не можете воспользоваться остальными.
1хслот зеркало сайта
Некоторые клубы автоматически начисляют бонус на аккаунт игрока после исполнения критерий получения, но посещают истории, когда приз надо(надобно) активировать игроку самому. Есть количество способов активации бонуса:Бывают ли бездепозитные призы без вейджера? Бывают, если у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию уточняется вейджер во всех казино. Шаг 4. Активация. Внимательно изучите условия, информацию по ограничениям и сроке деянья бонусного предложения. Разобравшись с правилами, можно активировать бонус в личном кабинете (времени ? с внедрением промокода) либо по запросу в саппорт. <a href=http://mataprint.kz/bitrix/redirect.php?goto=http://maps.google.com.et/url?q=http://ikey.by/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/-imABGKvW77>http://mataprint.kz/bitrix/redirect.php?goto=http://maps.google.com.et/url?q=http://ikey.by/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/-imABGKvW77</a> Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных обстановок с казино, когда после отыгрыша бездепа вас не дадут вывести солидную сумму выигрыша.Основное правило получения бездепа ? творимый аккаунт обязан быть у пользователя первым и единственным. Наличие нескольких аккаунтов строго воспрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита необходимо блюсти несложную последовательность деяний. 1×slots casino зеркало При регистрации по указывать лишь достоверную информацию. Когда учетная запись будет активна, замечен доступ в Личный кабинет. В нем возможно избрать валюту, ввести промокод и узнать подробные управляла получения и отыгрыша бездепа. Краткая информация об промоакции нередко присутствует непосредственно на регистрационной форме.Также учтите, собственно некоторые игровые платформы сужают список стран, которые готовы получить предложенный бездепозитный бонус за регистрацию. К образцу, существуют онлайн-заведения, выдающие подобные призы только жильцам конкретных государств. К образцу, интернет казино 777 Оригинал дает бездепозитный бонус лишь игрокам из России и стран СНГ. Или напротив, пичкают вознаграждением всех, не обитателей некоторых государств (из этого, следует пристально учить перечень, дабы впоследствии не возникло практически вопросов и жалоб).
рабочее зеркало 1×slots
Для верификации аккаунта надо(надобно) предоставить спецам технической помощи отсканированную копию паспорта и счета за коммунальные предложения, а также фотку банковской карты или экрана страницы электронного кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для доказательства личности. Первый возникающий вопрос, это, зачем выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают свежих игроков. Последним проще начать забаву на средства с подарка за регистрацию. Им не пополнять баланс и тратить собственные средства. Новички получают безвозмездные спины или средства на счёт. С их подмогою знакомятся с игровым процессом, крутят слоты и проделывают ставки в рулетке. зеркло казино 1×slots <a href=https://www.chordie.com/forum/profile.php?id=1667252>https://www.chordie.com/forum/profile.php?id=1667252</a> Процесс доказательства личности имеет взятьвдолг(взятьвзаймы) от 1-го денька до недели. Если клиент разрешил нибудь ошибку при заполнении паспортных данных, то ему по обратиться с задачей в саппорта онлайн-казино.Допустим, за регистрацию вы возымели бездеп в объеме 2 000 руб. С вейджером х30. В данном случае предстоит сделать ставок, на общую сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда сделайте условия по отыгрышу, придёт время заработать настоящие средства. Однако не забывайте, собственно с каждого дара получится вывести определённую сумму (чаще всего не более $200).
1×slots casino регистрация
Игрокам не следует принимать приветственный бонус как гарантированный метод получить крупный выигрыш, хотя это отличная возможность без затрат оценить функционал казино.Представленные на этой страничке наихорошие бездеп призы в казино за регистрацию в 2022 году имеют подходящие условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, в гости Casino.ru имеют сортировать список по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д. <a href=http://www.tr.besatime.com/index.php?subaction=userinfo&user=DoctorLazutaMa>http://www.tr.besatime.com/index.php?subaction=userinfo&user=DoctorLazutaMa</a> Для отыгрыша приза казино обязует игрока поиграть на сумму, в несколько один превышающую необходимую приобретенного приза — здесь выгода фирмы очевидна. 1×slots актуальное зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://griffhunter.com/boards/memberlist.php?mode=viewprofile&u=993>1× слот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Основное правило получения бездепа ? творимый аккаунт должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов строго запрещено. Проверка ведется по имени, e-mal, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депо необходимо блюсти простую очередность поступков.
#9299 Charlesgunnyhttp://filmkachat.ru
скачать 1×slots официальный сайт
Помните, что в некоторых забавах сумма ставки идет в зачет вейджера лишь отчасти. Так, в настольных и карточных забавах лишь от 5% до 50% суммы ставки считаются как отыгранные деньги, в то время как в слотах идет в зачет все one hundred percent суммы. <a href=http://filmkachat.ru/>1×slots casino регистрация</a> Новые посетители онлайн-казино без первого депозита могут проверить собственную удачливость. К что, этому же есть вероятность преобразовать бездепы в реальные средства за регистрацию в казино, впрочем чтобы приз нужно отыграть сообразно условиям акции. <a href=https://nomidya.com/blog/index.php?entryid=42850>https://nomidya.com/blog/index.php?entryid=42850</a> 1×slots регистрация то дальше необходимо пройти <a href=http://art-metall.su/user/Patricknaply/>http://art-metall.su/user/Patricknaply/</a> Вознаграждения за получение VIP-статуса ? начисляются масштабах программки лояльности при достижении одного уровня или выдаются индивидуально менеджерами саппорта.Диапазон ставок, коие вправе сделать игрок, кроме лимитирован. Обычно назначать можно маленькую сумму — около 10–30 руб. За одно вращение.
1×slots зеркало регистрация то дальше необходимо пройти
Как управляло, при выводе финансов, от играющего требуется лишь сделать минимальный вклад чтобы, чтобы, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом личный счет. 1×slots казино зеркало Промокод – определённая комбинация символов, которую необходимо ввести в отвечающее поле при создании учетной записи или активировать в личном профиле игрока в разделе с призами.Помимо прочего, для вывода средств по бездепу нужно внести на счёт свой первый депозит — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на минимально возможную необходимую, последствии чего вывод средств будет доступен. <a href=http://1k9g.com/space-uid-195786.html>http://1k9g.com/space-uid-195786.html</a> 1×slots промокод при регистрации 2025 Чем ниже значение вейджера, что, этим проще отыграть и исключить приз. Если Вы планируете заработать на бездепе, не просто ознакомиться с новым игровым клубом, то стоит избегать бонусов с высочайшим вейджером их практически не реально отыграть. С ними Вы можете лишь протестировать игры заведения.
1×slots casino зеркало рабочее
3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефонный либо почту, указать персональную информацию;На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению этого времени, Вы не сможете активировать и получить бездепозитный бонус. Призовые начисления без депозита все предоставляться для участия в турнирах интернет казино. Потратить перечисленные средства можно исключительно масштабах этой акции. Условия их проведения содержат лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться этим предложением, какого-либо изучить его верховодила.Перед активацией главно пристально выучить условия промоакции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, протяжении которых возможно воспользоваться предложением. Если бездеп охватывает ограниченный перечень игр, рекомендовано разузнать максимальные коэффициенты, степень отдачи и волатильности. Слоты с низкими множителями выплат подходят только в том случае, в оператор не установил жесткие лимитирования на максимальную сумму ставки. <a href=http://www.greenparking-dhd.com/bbs/board.php?bo_table=free&wr_id=199727>http://www.greenparking-dhd.com/bbs/board.php?bo_table=free&wr_id=199727</a> 1×slots официальный регистрация
1×slots регистрация на 1хслотс
Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, the decision лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. 1×slots casino зеркало рабочее <a href=http://mail.ansanam.com/bbs/board.php?bo_table=report_status2&wr_id=318379>http://mail.ansanam.com/bbs/board.php?bo_table=report_status2&wr_id=318379</a> Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.
1×slots casino зеркало рабочее
Ознакомьтесь с нашим перечнем наилучших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего перечня и получите бездеп сразу. Хватайте наилучшие благотворительные предложения ниже и выигрывайте большие деньги, не рискуя! <a href=https://www.donchillin.com/space-uid-357847.html>https://www.donchillin.com/space-uid-357847.html</a> Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы которые возникают у начинающих.Иногда у посетителей сайта могут возникнуть проблемы при активации приобретенного промо-кода. В таких случаях, нужно обратиться за подмогою в службу поддержки «Support». Для получения ответа, обязательно указывается определенная причина обращения и подтверждается информация дополнительными снимками. Если сформировалась спорная обстановка, всегда возможно адресоваться к основному регулятору или контролирующему органу, выдавшему данному заведению лицензионный документ. рабочее зеркало 1×slots Так собственно приготовьтесь дать конфиденциальную информацию (пол, возраст, страна проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев проверка данных занимает менее суток, последствии чего получится беспрепятственно выводить солидные выигрыши.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Существует ли стратегии для отыгрыша бездепозитных бонусов? К сожалению нет, на выигрыши или проигрыши с бонусов, казино или игрок повлиять не может, отдача игр происходит от создателей игр.
#9300 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации
Необходимость отыгрыша. Вейджер такой выше, чем для бонусов за депозит. И же средства не отыграны, вывести их нельзя.Бонус начисляется игроку сразу после регистрации и прохождения верификации в казино и не настятельно от посетителя внесения депозита. Как правило, размер бонуса в схожем случае достаточно стыдливый, впрочем дозволяет новеньким познакомиться с игрой без риска реальными деньгами. <a href=http://filmkachat.ru/>онлайн казино 1×slots</a> <a href=https://tourxperts.com/shisha-tobacco-from-4-eur/>https://tourxperts.com/shisha-tobacco-from-4-eur/</a> 1×slots актуальное зеркало <a href=https://alphacs.ro/member.php?77500-JeffreyTen>https://alphacs.ro/member.php?77500-JeffreyTen</a> В онлайне количество узнаваемых игорных площадок с привлекательными акционными услугами. Однако пристально разбирать условия 10-ов услуг вскоре надоест, да и время отнимет много. Поэтому наша команда подготовила ТОП-3 сайтов с превосходнейшими бездепозитными призами:Для доказательства электронной почты, просто перейдите по интенсивной ссылке в письме, полученном от игрового заведения.
1×slots зеркало видели такую регистрацию на
<a href=http://mandala-app.com/forums/memberlist.php?mode=viewprofile&u=3447>1×slots официальный зеркало</a> 1хслотс зеркало на сегодня <a href=http://shigebao.com.cn/home.php?mod=space&uid=1143952>http://shigebao.com.cn/home.php?mod=space&uid=1143952</a> Самые свежие бездепозитные бонусы в казино за регистрацию 2022 года с выводом выгоды присутствуют на данной страничке. Посетитель возможность оценить условия получения и начать играть на деньги без внесения депозита. При данном игроку принципиально понимать, на каких критериях и какими методами него исключить приобретенный выигрыш. Для этого необходимо оценить перечень подключенных платежных систем.Выбрать казино с бездепозитным бонусом. У нас на веб-сайте представлен список лучших онлайн казино, которые предлагают своим игрокам великодушные призы за регистрацию. 1×slots официальный сайт мобильная версия скачать Подтверждение регистрации. Казино требуют привязки профиля к электронному адресу и номеру телефонного. Для этого на e-mail отчаливает письмо со ссылкой, а на телефонный ? текстовое известье с кодом.
1×slot зеркало рабочее регистрации на телефон придет
Создание аккаунта. На веб-сайте казино необходимо обнаружить регистрационную форму и наполнить пустующие поля личными данными. Иногда на этом этапе потребуется указать только адресок электронной почты и пароль, но почаще бы наполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д. ). Нужно свидетельствовать только реальные данные, поскольку впоследствие они станут испытаны.У нас на веб-сайте Вы найдете список призов без депо в испытанных казино и подробную информацию о том как их получить и использовать. Выбирая даровой бонус, пристально изучайте правила. Убедитесь, собственно вам возможно принимать участие в промоакции. Уточните, в каких забавах можно выполнять условия вейджера. При надобности задавайте вопросы представителям саппорта. <a href=https://ai-db.science/index.php?title=мультфильмы_скачать_бесплатно_без_регистрации_и_смс>https://ai-db.science/index.php?title=мультфильмы_скачать_бесплатно_без_регистрации_и_смс</a> 1хслотс регистрация в 1×slots casino
1×slots рабочее зеркало
<a href=https://bajarmp3.net/showthread.php?tid=443861>1×slots актуальное зеркало</a> Чаще всего интернет-казино предлагают бездепозитные бонусы свежим пользователям. Эта промо-акция довольно эффективно привлекает начинающих, подталкивая их к открытию счета. Конечно, не все они становятся послушными клиентами, хотя сам прецедент регистрации аккаунта играет на руку заведению. В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать собственный выигрыш с безвозмездных вращений. Прибыль, коию Вы заработаете на этом бездепе возможно назначать на вывод без какого либо отыгрыша. 1×slots казино зеркало <a href=https://escortexxx.ca/author/doctorlazutasr/>https://escortexxx.ca/author/doctorlazutasr/</a> Доступность — бездепозитные призы в казино чаще всего предоставляются новым игрокам, но бывают случаи, когда приз имеют получить и действующие клиенты.Фриспины без депозита либо дополнительные свои помогут ближе познакомиться с игровой платформой и её функциями. За счёт подарков можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям из-за забавы против живых крупье.
1×slot казино зеркало
Перечисленные повыше основные свойства сочетают практически каждый приз и считаются стандартными для бездепозитных бонусных начислений в казино. Иногда операторы просят внесение минимального депо перед выводом для верификации платежного прибора. В неких казино данный депозит кроме светит отыграть. <a href=http://munservis.mirniy.ru/user/Justinciz/>http://munservis.mirniy.ru/user/Justinciz/</a> Некоторые онлайн-казино без депо предлагают свежим посетителям избрать приз при регистрации. Будьте внимательны: выбрав раз, вы в абсолютном большинстве случаев не сможете пользоваться остальными. 1×slot рабочее зеркало В неких интернет казино для получения бездепозитных бонусов не довольно просто зарегистрироваться на веб-сайте клуба и доказать свои контактные данные. Дополнительно потребуется активация промокода.
<b>Смотреть еще похожие новости:</b>
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=3928>1хслот скачать</a>
<a href=http://forum.audioheritage.net/memberlist.php?mode=viewprofile&u=19451>1×slots зеркало рабочее на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Допустим, за регистрацию вы возымели бездеп в размере 2 000 руб. С вейджером х30. В этом случае предстоит сделать ставок, на общую необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать настоящие средства. Однако не забывайте, собственно с каждого дара получится вывести определённую сумму (почаще всего не более $200).
#9301 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее на сегодня
Онлайн гемблинг развивается с любым деньком больше и больше, новые бренды создаются не по дням а по часам. Новые онлайн казино проделывают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и что, этим самым предлагают бездепозитные бонусы за регистрацию, собственно бы не пропустить эту вероятность — как воспользоваться свежим бездепом, советуем навещать наш сайт как возможно почаще, самое смачное и новые будет добавляться в этом же перечне.Онлайн-казино тщательно продумывают бонусные условия, коие необходимо выучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и другие лимитирования. <a href=http://filmkachat.ru/>x1 slots 1хслотс регистрация перейти на 1×slots</a> <a href=http://shinyoungwood.co.kr/bbs/board.php?bo_table=free&wr_id=1085271>http://shinyoungwood.co.kr/bbs/board.php?bo_table=free&wr_id=1085271</a> казино 1×slots официальный сайт <a href=http://misssophie.net/AG_Wohnungssuche/doku.php?id=Выкуп_авто>http://misssophie.net/AG_Wohnungssuche/doku.php?id=Выкуп_авто</a> Вознаграждения за получение VIP-статуса ? начисляются в рамках программы лояльности при достижении одного значения либо выдаются индивидуально менеджерами службы.
1хслотс рабочее зеркало
Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных требований, считая обязательной верификации. Если на веб-сайте предусмотрена обязательная процедура доказательства личности, то исключить выигрыш удастся только после ревизии данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий личность. <a href=http://djdrewski.co.uk/lfsbangers/viewtopic.php?f=32&t=30580>1 x slots casino</a> 1×slots сайт Еще одно условие касается размеров ставки. Операторы устанавливают максимальную сумму, которую игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, избранной в Личном кабинете. При превышении лимита есть риск потерять приза. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, клиент имеет столкнуться с запретом назначать фишки на шансы.Допустим, за регистрацию вы возымели бездеп в объеме 2 000 рублей с вейджером х30. В данном случае светит сделать ставок, на общую сумму в 60 000 рублей (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать настоящие деньги. Однако не забывайте, собственно с любого подарка получится исключить определённую необходимую (чаще всего менее $200). <a href=http://eric1819.com/home.php?mod=space&uid=695047>http://eric1819.com/home.php?mod=space&uid=695047</a> Подтвердите лицо, предоставив оператору казино средства паспортные данные. Инструкции обыкновенно несложные, главное — четко им идти. Если написано, что «на фото обязаны быть заметны все четыре угла странички паспорта» — сделайте непосредственно такое фото.Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша бонусов. Заведения практически устанавливают наивысшую ставку, допустимую по условиям вейждера. 1×slots регистрация 1×slotscasino 56 online
1×slots официальный сайт скачать
Демоказино есть практически на каждом сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются значительно пореже: там когда выигрыша и соблюдения критерий промоакций бездеп возможно перевоплотить в реальные деньги. <a href=http://www.aadd2.net/vb/member.php?u=33921>http://www.aadd2.net/vb/member.php?u=33921</a> Как лишь на виртуальном счету окажутся бонусные свои, поторопитесь отыграть вейджер. Сразу после сего можно оставить заявку на вывод выигрыша. Кредиты прибыльно отличаются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом настоящих средств и выделяют вероятность почувствовать азарт. Во-вторых – возможно насладиться каждой азартной забавой доступной на сайте. В вашем постановлении находятся автоматы, настольные прибавленье, видео-покер, Live-дилеры. 1×slots официальный demo регистрация в 1×slots casino Для отыгрыша приза казино обязывает игрока сыграть на необходимую, в некоторое один превышающую сумму приобретенного бонуса — тут выгода компании явна.Подтверждение регистрации. Казино требуют привязки профиля к электрическому адресу и номеру телефонного. Для сего на e-mail отчаливает письмо ссылаясь, а на телефон ? текстовое известие с кодом.
1×slots официальный сайт зеркало рабочее
Хотя бесплатные бонусы начисляются без депо, не исключено, собственно для понадобиться вносить средства. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь в как, как новый заказчик впервые пополнит игровой счет.Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного бонуса. <a href=https://bajarmp3.net/showthread.php?tid=398726>1×slots зеркало быструю регистрацию а также мгновенное</a> Во всех легальных онлайн-казино Беларуси необходимо подтверждение паспортных данных для игры — это заявка правительства страны.Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают приз по странам. Вплоть до того, что клуб возможность на игроков из Вашей государства, а бездеп мешает. Пoдтвepдить личнocть клиента. Для успешного вывода средств, нужно доказать лицо клиента. Нa этaпe вepификaции пpoфиля, сотрудники службы безопасности обязаны увериться, собственно у игрока всего лишь раз аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не сможет исключить собственный выигрыш, случае у него будет несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы.Бездепозитные бонусы, как уже понятно, являются оригинальной вероятностью обратиться игровому процессу абсолютно безвозмездно, словами играть в интернет казино даром и на быть свои сразу последствии регистрации аккаунта. Автоматы с этим депозитом могут стать великолепной вероятностью сыграть для почитателей пыла с определенными ограничениями в финансах. 1×slots официальный зеркало рабочее <a href=http://www.khleeg.net/vb/member.php?u=7202>http://www.khleeg.net/vb/member.php?u=7202</a> Так собственно главное различие дара на депозит от бездепа – неотъемлемое пополнение счёта. Вы можете привнести депозит и преумножить стартовый капитал либо отобрать бездеп и всем не придётся рисковать собственными сбережениями. Поспешите выполнить простые притязания, и администрация ресурса начислит щедрое поощрение!Почти все игровые клубы настоятельно подтверждение контактных данных игрока для получения бездепозитного бонуса.
1×slots официальный зеркало
Индивидуальные поощрения выдаются за совершение деяний: подписку на аккаунты площадки в соц сетях, установку мобильного прибавления или официального посетителя для ПК. В большинстве казино срабатывают программы лояльности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на следующий степень часто с выдачей бездепа. Превышение наибольшей ставки при отыгрыше. Система автоматически не предупреждает о превышении ставки, потому о нарушении верховодил игрок имеет разузнать уже последствии подачи запроса на вывод средств.Промокод – определённая композиция символов, коию нужно ввести в отвечающее фон при разработке учетной записи либо активировать в собственном профиле игрока в разделе с бонусами. <a href=http://shopnails.ru/bitrix/redirect.php?goto=http://tali24.ru/bitrix/redirect.php?goto=http://toporshop.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/mIdw148×9XP>http://shopnails.ru/bitrix/redirect.php?goto=http://tali24.ru/bitrix/redirect.php?goto=http://toporshop.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/mIdw148×9XP</a> Заполняя данные в личном профиле, указывайте только достоверную информацию, например как Вам придется ее доказать в будущем при выводе денег.Классическая разновидность бонуса за создание аккаунта. Его превосходство содержится в том, что клиент имеет помощи избирать аппараты и создавать ставки в их. Иногда перечень игровых автоматов ограничен оператором, хотя все точно это какого-либо, чем один-единственный доступный слот, как если, тогда, с использованием фриспинов. 1 x slots casino В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, нужно адресоваться в службу через лайв-чат на веб-сайте казино.Это один из главных характеристик привлекательности подарка. С завешенным коэффициентом даже мастера не смогут выполнить обстоятельства по отыгрышу. И маловажно, как презентабельно смотрится предложение – бездепозитный приз казино в объеме $500 либо $1 000. Чтобы новенькие получше вдумались, собственно же такое вейджер, мы разберём на образце.
<b>Смотреть еще похожие новости:</b>
<a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=2822>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<a href=http://mandala-app.com/forums/memberlist.php?mode=viewprofile&u=3447>1хслотс рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В количестве случаев безвозмездные бонусы начисляются в кредитах, которые невозможно сразу вывести со счета. Прежде их нужно отыграть по установленным правилам. Эти требования принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже.
#9302 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
При малый сумме бонуса рекомендуется выступать по низким ставкам, а применять наибольшие лучше лишь сомнений случае, в вейджер очень великой, а время на отыгрыш сильно ограничено.К образцу, игроку выдаются безвозмездные средства в заведении в размере пятидесяти либо ста долларов (вейджер на коие сочиняет 100х). То есть, любому новоприбывшему геймеру выскакивает притягивающая иллюстрация, которая сулит выплату всех зачисленных компанией средств. Не стоит внимания на казино бонус за регистрацию без депозита с чрезмерно великий или довольно малеханькой суммой призов, потому собственно, в тщательно выучив все условия, здесь вероятнее всего, несомненно некий подвох. <a href=http://filmkachat.ru/>1×slots мобильная версия войти казино</a> <a href=https://tutorialslots.com/index.php?qa=282273&qa1=shisha-tobacco-from-4-eur>https://tutorialslots.com/index.php?qa=282273&qa1=shisha-tobacco-from-4-eur</a> 1 хслот регистрация в 1×slots casino <a href=https://familyportal.forumrom.com/viewtopic.php?id=20556#p64071>https://familyportal.forumrom.com/viewtopic.php?id=20556#p64071</a>
1х слот 1хслотс регистрация перейти на 1×slots
Возможность протестировать свежие игры, не рискуя собственными своими и разработать личную тактику игры. casino 1×slot <a href=http://www.plcolor.co.kr/bbs/board.php?bo_table=free&wr_id=805838>http://www.plcolor.co.kr/bbs/board.php?bo_table=free&wr_id=805838</a> Не сложно догадаться, что no deposit bonuses почти ни не бывают немаленькими. Чаще всего речь идет о пяти–тридцати баксах (или эквиваленте данной суммы в другой денежной). 1хслотс казино зеркало Фриспины без депозита либо вспомогательные свои посодействуют поближе познакомиться с игровой платформой и её функциями. За счёт подарков можно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за игры против живых крупье.На условиях отыгрыша даровых бонусов стопам остановиться подробнее. С ними связаны аспекты, которые невозможно забыть без внимания.
1 xslots рабочее зеркало
<a href=https://szkolenia.myslepozytywnie.pl/fora/watek/%d1%81%d0%ba%d0%b0%d1%87%d0%b0%d1%82%d1%8c-%d1%84%d0%b8%d0%bb%d1%8c%d0%bc%d1%8b-%d0%bd%d0%be%d0%b2%d0%b8%d0%bd%d0%ba%d0%b8-%d0%bd%d0%b0-%d1%82%d0%b5%d0%bb%d0%b5%d1%84%d0%be%d0%bd/>https://szkolenia.myslepozytywnie.pl/fora/watek/%d1%81%d0%ba%d0%b0%d1%87%d0%b0%d1%82%d1%8c-%d1%84%d0%b8%d0%bb%d1%8c%d0%bc%d1%8b-%d0%bd%d0%be%d0%b2%d0%b8%d0%bd%d0%ba%d0%b8-%d0%bd%d0%b0-%d1%82%d0%b5%d0%bb%d0%b5%d1%84%d0%be%d0%bd/</a> 1×slots зеркало регистрация то дальше необходимо пройти Постарайтесь отыграть вейджер, дабы замечена возможность забыть заявку на выплату. Кстати, на всех сайтах, представленных в списке, доступны современные платёжные приборы. Вы можете получить выигрыш на электронной кошелёк, карту, телефон.
1×slots casino зеркало
Иногда виде поощрения за регистрацию шансы выдаваться билеты для участия в турнирах. Условия их проведения довольно отличаются, поэтому мы рекомендуем ознакомиться с любым предложением отдельно.Таким образом, заведение пытается продемонстрировать себя своим вероятным игрокам, а подобный маркетинговый ход как казино приз без депо за регистрацию привлекает довольно большое внимания к игорному заведению и обеспечивает постоянный поток свежих гостей и будущих клиентов игрового интернет клуба. Подтверждение электронной почты – одно из ведущих критерий, коие есть почти в любом бездепозитном казино. Чтобы верифицировать электронную почту, довольно перейти по активной ссылке в послании, приобретенном от азартного клуба. Максимальная ставка ? устанавливается в денежной счета и ограничивает объем ставки за один спин. В случае ее превышения бонус может быть аннулирован. Также в правилах может содержаться запрет на размещение ставок определенного вида, примеру, по одинаковым шансам в рулетке (другими, на чет либо нечет, красноватое либо темное и т.д.).4. Заберите подарок. Чаще всего бонус активируется незамедлительно после регистрации. Но посещают ситуации, когда надо(надобно) зайти в личный офис или написать в службу поддержки. 1×slots рабочее зеркало на сегодня <a href=http://maskarad.bomba-piter.ru/user/DoctorLazutaPr/>http://maskarad.bomba-piter.ru/user/DoctorLazutaPr/</a>
1×slots зеркало регистрация то дальше необходимо пройти
Размер бонусов чаще всего чисто символический и не выше 50 руб. Приятно, но ощутимым бустом при ли будет.Самый распространённый из подобных бонусов, конечно же, бездеп на денек рождения клиента — бонус вид фиксированной суммы или фриспинов поступает на счёт игрока, а воспользоваться им возможно протяжении установленного периода медли. Подарки на праздничные ? посвященные торжественным датам, требующие символического отыгрыша либо начисляются без того. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду.Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном бонусе, то в первую очередь внимание на значение вейджера и срок, кот-ый дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, тем легче отыграть бонус и вывести выигрыш. <a href=http://www.jishuzhaihome.com/home.php?mod=space&uid=355504>http://www.jishuzhaihome.com/home.php?mod=space&uid=355504</a> 1×slots промокод при регистрации
<b>Смотреть еще похожие новости:</b>
<a href=https://fougerite.com/resources/authors/jamesstawl.14360/>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a>
<a href=https://seniordance.ru/forum/showthread.php/71134-%D0%9A%D0%B0%D0%BA%D0%B8%D0%B5-%D0%BF%D1%80%D0%B0%D0%B2%D0%BE%D1%81%D0%BB%D0%B0%D0%B2%D0%BD%D1%8B%D0%B5-%D0%BF%D1%80%D0%B0%D0%B7%D0%B4%D0%BD%D0%B8%D0%BA%D0%B8-%D0%B2-%D1%81%D0%B5%D0%BD%D1%82%D1%8F%D0%B1%D1%80%D0%B5–2023-%D0%B3%D0%BE%D0%B4%D0%B0-%D0%B2-%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8?p=100971#post100971>1х слот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В интернет-сети всегда можно отыскать перечни наиболее известных и обещанных поощрительных программ от популярных онлайн-казино.
#9303 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало проходить регистрацию это отличный вариант
Бонус без депозита за регистрацию в казино (бездепозитный приз) – это валютный подарок от клуба, кот-ый начисляется на аккаунт игрока в регистрации в казино. Кроме создания учетной записи, для получения бездепа, довольно часто потребуется ещё и подтвердить контактные данные игрока и/или активировать специальный промо-код.Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную процедуру активации приза без депо. Внимательно прочтите до конца. Многие новички делают промахи на этапе регистрации и потому имеют получить презент. <a href=http://filmkachat.ru/>рабочее зеркало 1хслотс</a> <a href=http://veda.adrian.ru/doku.php?id=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%BF%D0%B8%D1%86%D1%86%D1%8B%20%D0%BD%D0%B0%20%D0%B4%D0%BE%D0%BC%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO>http://veda.adrian.ru/doku.php?id=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%BF%D0%B8%D1%86%D1%86%D1%8B%20%D0%BD%D0%B0%20%D0%B4%D0%BE%D0%BC%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO</a> 1×slot зеркало рабочее регистрации на телефон придет <a href=http://forum.ugmk-telecom.ru/index.php?action=profile;u=99109>http://forum.ugmk-telecom.ru/index.php?action=profile;u=99109</a> Но надо думать, собственно снабжая юзеров этими призами, казино увлекается спонсированием. Ведь размеры вознаграждений, в, не великие (средним объемом от 5 до 20 долларов). И на эти средства налагаются конкретные обстоятельства и ограничения, неотклонимые к выполнению игрока, если в последствии он желает получить все свои выигранные деньги.Некоторые онлайн-казино без депо предлагают новым посетителям избрать бонус при регистрации. Будьте внимательны: выбрав раз, вы в безоговорочном большинстве случаев не можете воспользоваться остальными.
1×slots официальный сайт скачать
За счёт спинов получится запустить различные интернет слоты, протестировать стратегии и поднабраться опыта. Фишка том,, что вращения начисляются на лучшие аппараты с уникальными опциями и высокой отдачей. Не запамятовывайте, собственно в каждом акционном предложении предусмотрены особые требования – кратковременные ограничения, наибольший размер ставки, список доступных игр. <a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=48846>1×slots подтвердит вашу регистрацию если говорить</a> 1×slots быструю регистрацию а также мгновенное Размер приза. В качестве бездепов обычно начисляют не суммы, а когда речь идет о бонусах за депозит, которые начисляются в процентном соотношении от суммы пополнения, то некоторые казино все презентовать игроку до 2000$. <a href=https://www.catfish-assassins.org/forum/memberlist.php?mode=viewprofile&u=1000>https://www.catfish-assassins.org/forum/memberlist.php?mode=viewprofile&u=1000</a> 1×slots рабочее зеркало К примеру, игроку выдаются безвозмездные свои в заведении в размере пятидесяти либо ста долларов (вейджер на коие составляет 100х). То есть, любому новоприбывшему геймеру выскакивает притягивающая иллюстрация, кот-ая обещает выплату всех зачисленных компанией средств. Не стоит внимания на казино бонус за регистрацию без депо с чрезмерно немалый или довольно малюсенькой суммой призов, поэтому собственно, даже кропотливо выучив все обстоятельства, здесь всего, будет какой-то подвох.
1×slots регистрация на сайте
Подобные бонусы без депозита предоставляются на больше прибыльных условиях. Зачастую они крупнее, а условия отыгрыша наименее строгие. Зарегистрироваться в казино по особой ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефонного и электронную почту). Для подтверждения номера аппарата необходимо в личном профиле показать собственный номер и надавить кнопку „Подтвердить номер телефонного“, далее Вы получите sms-сообщение с кодом, кот-ый необходимо ввести в соответствующее фон. Для доказательства электрической почты, перебежать по активной ссылке в письме от казино.Можно ли в одном интернет казино получить больше одного бонуса за регистрацию? Нет, например как в любом интернет казино есть правила, к коим надо(надобно) придерживаться, не делать два аккаута для получения призов, по будет блокировка обоих аккаутов, не пытайтесь обмануть интернет казино, бонус за регистрацию выдаеться раз раз 1 лицу. <a href=http://sehoeng.com/bbs/board.php?bo_table=pro_qna_eng&wr_id=66572>http://sehoeng.com/bbs/board.php?bo_table=pro_qna_eng&wr_id=66572</a> Бездепозитные бонусы в казино без пополнения 2022 — это определенная сумма средств либо gift spins вращения, которые предоставляются первым постояльцам за регистрацию на веб-сайте казино вид бездепозитного бонуса, и выделяет вас возможность за счет казино без пополнения опробовать услуги (игр), с последующей преимуществом, льготой вывода средств при исполнении всех установленных управлял.Хотя безвозмездные призы начисляются без депозита, не исключено, собственно вас придется вносить средства. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты лишь последствии как, как свежий заказчик раз пополнит игровой счет. 1×slots зеркало на сегодня
1×slots casino регистрация на сайте
Выиграть реальные деньги в казино не пополняя счет – сложно, хотя вполне. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными бонусами и начните играть на бонусные средства. По статистике из 10-ти заведений можно заработать небольшую необходимую денег за счет бонусных средств.Максимальная ставка ? уточняется в еденице счета и ограничивает объем ставки за один спин. В случае ее превышения приз может быть аннулирован. Также в правилах может содержаться запрет на размещение ставок конкретного облика, примеру, по одинаковым шансам в рулетке (то есть, на чет или нечет, красноватое или темное и т.д.). Подтверждение индивидуальной инфы. Все казино просят от посетителя пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у юзера иных аккаунтов (мультиаккаунт запрещен). 1× slots регистрация в 1×slots casino <a href=https://cardvilla.cc/members/528089.html>https://cardvilla.cc/members/528089.html</a> В случае установленного лимита на сумму вывода выигрыша с бездепозитного приза, игрок не может вывести больше заявленной суммы.
1×slots регистрация 1×slots casino 777 online
Новые клиенты онлайн-казино без первого депозита шансы выяснить собственную удачливость. К тому же есть возможность преобразовать бездепы в реальные средства за регистрацию в казино, однако желаемого приз нужно отыграть сообразно условиям акции. Чаще всего, знаменитые сервисы, такие как MoneyBookers и WebMoney, еще MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное правило. Финансовые свои выводятся только через ту платежную систему, коей огромный для пополнения депо. Если же игрок получил бездепозитный покерный бонус, требуется восполнить счет на наименьшую необходимую, которая составляет обыкновенно десять долларов.Для вывода средств бонус нужно несомненно отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами акции и вариантами отыгрыша бездепозитного приза до его получения, чтобы избежать конфликтных ситуаций. <a href=http://adrestyt.ru/user/Travisloyah/>http://adrestyt.ru/user/Travisloyah/</a> Бoльшинcтвo азартных заведений выдвигают примерно одинаковые условия и притязания, которые необходимо выполнить, чтобы получить бездепозитный приз за регистрацию. Все их можно соединить в раз перечень: 1хслотс рабочее зеркало на сегодня Способы получения бездепа различаются в зависимости от облика приза, который понравился игроку. Но вас так надо(надобно) быть зарегистрированным в законном онлайн-казино и доказать свою личность. В общем облике пошаговая инструкция для получения бездепозитного приза смотрится так:Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного бонуса.
<b>Смотреть еще похожие новости:</b>
<a href=http://sharecovid19story.com/memberlist.php?mode=viewprofile&u=5122>1хслотс зеркало</a>
<a href=https://www.xn–72c9aa5escud2b.com/webboard/index.php/topic,512928.new.html#new>1×slots актуальное зеркало</a>
<a href=http://www.carshowsociety.com/forum.php?action=profile;u=2398>1хслот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Диапазон ставок, которые вправе устроить игрок, также лимитирован. Обычно ставить возможно маленькую сумму — пределах 10–30 рублей за одно вращение.
#9304 Charlesgunnyhttp://filmkachat.ru
1хслот официальный сайт зеркало
При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток.Бездепозитные призы отличный вариант даровой забавы в игровые автоматы. Многие юзеры сети не знают, что в казино можно начать играть полностью безвозмездно, а потом исключить выигрыш на банковскую карту либо электрический кошелек, другие не доверяют онлайн казино, а третьи удачно играют и выигрывают – и подчас достаточно немалые суммы. <a href=http://filmkachat.ru/>1х слотс зеркало регистрация в 1×slots casino</a> <a href=http://certificate.winko.net/bbs/board.php?bo_table=free&wr_id=334874>http://certificate.winko.net/bbs/board.php?bo_table=free&wr_id=334874</a> 1×slots регистрация 1×slots review live <a href=http://sante-cinnamon.kr/bbs/board.php?bo_table=free&wr_id=291430>http://sante-cinnamon.kr/bbs/board.php?bo_table=free&wr_id=291430</a> Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют важную информацию о not the slightest down payment bonuses и других предложениях.Фриспины – бесплатные вращения с фиксированной ставкой, которые можно применять в определенных игровых автоматах.
1×slot рабочее зеркало
Но а в вы уже профи по интернет казино, кликаем на красноватую кнопку «Получить» и Вы автоматически перейдете в онлайн казино; <a href=http://djdrewski.co.uk/lfsbangers/viewtopic.php?f=32&t=29466>1×slots зеркало видели такую регистрацию на</a> 1×slots зеркало быструю регистрацию а также мгновенное <a href=https://agroinfo.biz.ua/wr_board/tools.php?event=profile&pname=CharlesGam>https://agroinfo.biz.ua/wr_board/tools.php?event=profile&pname=CharlesGam</a> Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, чтобы снова получить бесплатный бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ожидает неизбежное наказание. зеркло казино 1×slots Бездепозитные бонусы казино за регистрацию в 2022 году — это возможность поиграть за счёт заведения. Казино даёт посетителю шанс пользоваться определённой суммой или числом безвозмездных вращений без внесения депо. Не путайте деморежим с реальной забавой без необходимости внесения депо.Но существуют азартные заведения, готовые просто например вручить деньги на игру. Для сего достаточно сделать профиль. Чтобы исключить выигрыш, сначала нужно выполнить вейджеровые обстоятельства, прописанные в критериях получения бездепа.
1×slots казино зеркало
Выбирая безвозмездный приз, пристально изучайте управляла. Убедитесь, собственно вас можно принимать участие в акции. Уточните, в каких играх можно скорпулезно условия вейджера. При надобности задавайте вопросы представителям саппорта.Бывают ли бездепозитные бонусы без вейджера? Бывают, если у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино. Все обожают получать подарки. Согласитесь, почти каждый играющий человек несомненно сильно рад, случае получит безвозмездный подарок для игры в онлайн казино просто за регистрацию или же приз за внесенный депозит, так именуемые приветственные бонусы для новых игроков. Соответственно эти интернет клубы будут больше востребованы и преимущественны у игроков при выборе казино для игры. Топ казино непрерывно обновляется и прибавляются свежие и увлекательные игровые клубы с привлекательной бонусной политикой и всеми возможными привилегиями, к которым относятся такие бонусы как фриспины за регистрацию, денежные бездепозитные бонусы, а щедрые призы за внесенный депозит.Не желайте сыграть в азартные забавы, не рискуя средствами деньгами, хотя получая в все выплаты? Подобную вероятность деют многие лучшие порталы с азартными веселиями. В их числе количество честных и надежных интернет-казино на русском языке. Они завлекают новых пользователей различными поощрительными мероприятиями, включая бездепозитные, либо благотворительные призы. <a href=https://www.fortressrisk.com/user/walterstaspwalterstasp/>https://www.fortressrisk.com/user/walterstaspwalterstasp/</a> Одним из поводов отдавать привилегию 1 или иному заведению заключается в привлекательности предлагаемых промоакций и даровых предложений. Безвозмездные фриспины, выдаваемые без дела делать какой-либо вклад, в списке располагается далековато не в конце.Онлайн-казино тщательно продумывают бонусные условия, коие необходимо изучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и ограничения. 1х слот 1хслотс регистрация перейти на 1×slots
1×slots казино зеркало
<a href=https://masstr.net/showthread.php?tid=89188>1×slots рабочее зеркало на сегодня</a> Демоказино есть практически на каждом сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются веско реже: там если, тогда, выигрыша и соблюдения критерий акций бездеп можно превратить в настоящие средства.Следует подчеркнуть, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам либо с конкретным кодом. 1х слот 1хслотс регистрация перейти на 1×slots <a href=https://bbs.zzxfsd.com/home.php?mod=space&uid=723671>https://bbs.zzxfsd.com/home.php?mod=space&uid=723671</a>
1×slots сайт зеркало
Онлайн гемблинг развивается с каждым деньком больше и больше, новые бренды создаются не по денькам а по часам. Новые интернет казино делают вступительные промоакции для игроков, для того собственно бы зарекомендовать себя, и тем наиболее предлагают бездепозитные бонусы за регистрацию, что бы не упустить эту вероятность — как пользоваться новым бездепом, советуем посещать наш вебсайт как возможно почаще, самое вкусное и свежие будет добавляться в этом же списке. <a href=https://www.market-directory.com/members/charlesemami-4984.html>https://www.market-directory.com/members/charlesemami-4984.html</a> К образцу, игроку выдаются бесплатные свои в заведении в размере пятидесяти либо ста $ (вейджер на коие сочиняет 100х). То есть, любому новоприбывшему геймеру выскакивает привлекающая иллюстрация, которая сулит выплату всех зачисленных фирмой средств. Не стоит внимания на казино приз за регистрацию без депозита с чрезмерно великий или очень малюсенькой суммой призов, потому что, даже кропотливо выучив все обстоятельства, здесь скорее, будет некий подвох.Фриспины – благотворительные вращения с фиксированной ставкой, коие можно применять в определенных игровых автоматах. 1×slots регистрация 1×slots casino 777 online Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 долларов. Если выдаются фриспины, их количество изредка выше нескольких десятков безвозмездных вращений.
<b>Смотреть еще похожие новости:</b>
<a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=766387>1×slot рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
2. Создать свежий профиль. Для регистрации надо(надобно) наполнить маленькую анкету либо зайдите в личный офис при помощи соц сеток; Размер призов почаще всего чисто условный и не превышает 50 руб. Приятно, хотя ощутимым бустом деле ли будет.
#9305 Charlesgunnyhttp://filmkachat.ru
1× slots зеркало
Когда речь о валютных призах, казино постоянно устанавливают обстоятельства вейджера, коие нужно выполнить, дабы исключить выигрыш.Получить приветственный приз имеют только свежие посетители онлайн-казино. Способы описаны в условиях акции любого законного казино, чаще всего это: <a href=http://filmkachat.ru/>1хслот 1хслотс регистрация перейти на 1×slots</a> Для получения депозитного приза нужно восполнить собственный игровой баланс реальными деньгами. Вознаграждение возможно получить либо при внесении первого депозита, или вид фиксированного процента от внесённых средств. Так или по, приз поступит на счёт лишь в пополнения. <a href=http://fowin.co.kr/bbs/board.php?bo_table=free&wr_id=238574>http://fowin.co.kr/bbs/board.php?bo_table=free&wr_id=238574</a> 1×slots регистрация 1×slotscasino 56 online <a href=http://maps.google.co.zw/url?sa=t&url=http://viasvet.ru/bitrix/redirect.php?goto=http://kbi-krd.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/RWgzSchGvXZ>http://maps.google.co.zw/url?sa=t&url=http://viasvet.ru/bitrix/redirect.php?goto=http://kbi-krd.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/RWgzSchGvXZ</a> Допустим, за регистрацию вы получили бездеп в размере 2 000 руб. С вейджером х30. В данном случае светит устроить ставок, на совместную сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать настоящие деньги. Однако не забывайте, собственно с каждого подарка получится исключить определённую сумму (чаще всего менее $200).Прежде чем активировать бездеп, нужно убедиться никаких, собственно государство, уроженцем которой является игрок, не заходит в список не.
casino 1×slot
Зачастую бездепозитные призы казино для игры предлагаются различными заведениями азартных игр в маркетинговых промоакций или в целях вербования к для свежих игроков. Для бездепозитных бонусов в казино 2022 игроку не пополнять счет до момента вывода желаемых средств. <a href=https://adminclub.org/showthread.php?tid=62375>1× slots зеркало</a> 1хслотс зеркало Если вы бывалый игрок, вы должны знать, что приз без депо – редчайшая находка. Тем не, мы неделю исследуем онлайн, чтобы отыскать вам наихорошие бездепозитные предложения. <a href=https://usolie-citi.ru/user/MiguelBob/>https://usolie-citi.ru/user/MiguelBob/</a> Вейджер (или вагер) ? это наименьшая сумма ставок, коию нужно сделать для вывода валютного приза. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение. 1×слотс казино
1×slots зеркало регистрация в 1×slots casino
Превышение максимальной ставки при отыгрыше. Система автоматически не предуведомляет о превышении ставки, поэтому о нарушении правил игрок возможность разузнать теснее после подачи запроса на вывод средств. Игры, каких можно играть на бонусные средства. Проверьте список игр, каких возможно выступать на бонусные средства, возможно они Вам не понравятся и не стоит расходовать своё время на такую акцию. <a href=https://www.winners24.pl/user-32500.html>https://www.winners24.pl/user-32500.html</a> Итак, дабы безвозмездные бонусные кредиты трансформировались в реальные средства, которыми продоставляется управлять по собственному усмотрению, их нужно отыграть. Вейджер стопам уточнять в правилах онлайн-казино.В современность довольно просто получить приз за регистрацию в казино. Практически любой игорный жилище с готовностью начислит средства либо бесплатные вращения. Многие гэмблеры пользуются данным и не стыдятся региться в любом клубе с выгодными условиями. Кстати, это замечательная возможность выработать победную тактику и сорвать джекпот. 1×slots регистрацию более популярный вариант это Отыграв бездепозитный приз в казино с выводом тоже придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, случае подобное ограничение присутствует, то единоразово вывести выйдет лишь необходимую, не превышающую объем полученного приза.
1×slots casino регистрация на сайте
Мы рекомендуем не открещиваться от похожих предложений знаменитых казино. Выделите несколько минут на регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сегодня удача будет на вашей стороне!Но никогда не запамятовывайте внимательно разбирать правила роли в бонусных акциях. Если вы нарушите но бы одно условие, позже вы не можете уладить недоразумение с администрацией. <a href=http://t954381g.bget.ru/user/JosephPiery/>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a> Следует подчеркнуть, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом. Так же стоит выделить то, собственно в каждом интернет казино установлен свой максимальный кешаут на бездепозитный приз. Как управляло кешаут — это максимальная сумма средств, кот-ая доступная для вывода с бездепозитного бонуса.Бездепозитные призы начисляются лишь один раз. Не стоит раскрывать новые аккаунты, чтобы получить их повторно. Служба защищенности казино непременно выявит «левого» участника и заблокирует. Если гость выполнит необходимые притязания, отыграет собственную ставку и решит исключить личный выигрыш, то ему надо(надобно) к, что казино обязательно востребует дать ксерокопии собственных документов, дабы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные средства вывести не удастся. казино 1×slots <a href=http://spilov.ru/user/DavidAftet/>http://spilov.ru/user/DavidAftet/</a> Вейджер в переводе с английского означает «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша полученного приза, в нашем случае бездепозитного. Число ставок роли не играет — принципиально лишь набрать необходимую, пропорциональную сумме поощрения.
1×slots зеркало быструю регистрацию а также мгновенное
А ознакомиться с свежими интернет казино, Вы сможете помощью призов с выводом прибыли, коие Вы можете получить без депо. Когда речь идет о получении бездепозитных бонусов в казино, в первую очередь направьте на следующие обстоятельства: <a href=http://netvoyne.ru/user/FrankCed/>http://netvoyne.ru/user/FrankCed/</a> Зачастую бездепозитные бонусы казино для игры предлагаются разными заведениями азартных игр в маркетинговых промоакций либо в целях вербования к себя новых игроков. Для бездепозитных призов в казино 2022 геймеру надо пополнять счет до момента вывода хотимых средств.Для такого, чтобы отыграть сумму вашего бездепозитного бонуса нужно выполнить условия вейджера. Очень часто фриспины даются на определенные слоты (book of ra, book of deceased, book of sun), подбирайте разъем себе нраву, они все очень красочные и качественные. Бездепозитные приз имеет быть денежным например и вид фриспинов на слоты 1×slots зеркало которую указывали при регистрации кстати Индивидуальные поощрения выдаются за совершение поступков: подписку на аккаунты площадки в соц сетях, установку мобильного приложения или официального посетителя для ПК. В большинстве казино действуют программы лояльности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на следующий уровень нередко с выдачей бездепа.Если при регистрации показать промокод, возможно гарантировано получить приз. Где арестовать ваучер? Посетите определенную блоги либо форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В заключительнее время игорные жилища начали афишироваться в кинокартинах и сериалах. Присмотритесь и наверняка заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных руб.
<b>Смотреть еще похожие новости:</b>
<a href=https://radios-collector.com/viewtopic.php?p=84847>1хслотс мобильная версия зеркало</a>
<a href=http://board.eternityrpc.com/thread-7-post-14310.html#pid14310>скачать 1×slots на андроид мобильная версия</a>
<a href=http://check2go.net/author/jameslob/>1×slot казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В зависимости от онлайн заведения любой из них имеет для предложить как бездепозитные деньги, например и бездепозитные фриспины, коие последствии успешной регистрации упадут для на ваш игровой баланс.
#9306 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasino09k online
Подтверждение персональной информации. Все казино настоятельно от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и наличие у пользователя иных аккаунтов (мультиаккаунт запрещен). <a href=http://filmkachat.ru/>1×slots коды</a> Ограничения по забавам. Администрация воспрещает игрокам кое-какие игровые автоматы с бездепозитным бонусом, средствами либо бесплатными вращениями. Обычно, в правилах приводится полный перечень слотов для отыгрыша. Иногда дробленье выполняется по виду игр. Например, отыгрыш возможен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino. <a href=http://xn–2q1b33lkuah98a.com/bbs/board.php?bo_table=free&wr_id=380534>http://xn–2q1b33lkuah98a.com/bbs/board.php?bo_table=free&wr_id=380534</a> Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. 1×slots регистрация <a href=https://elearnportal.science/index.php?title=%D0%9F%D0%B8%D1%86%D1%86%D0%B0%20%D0%BE%D1%82%20%D1%88%D0%B5%D1%84-%D0%BF%D0%BE%D0%B2%D0%B0%D1%80%D0%BE%D0%B2%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!>https://elearnportal.science/index.php?title=%D0%9F%D0%B8%D1%86%D1%86%D0%B0%20%D0%BE%D1%82%20%D1%88%D0%B5%D1%84-%D0%BF%D0%BE%D0%B2%D0%B0%D1%80%D0%BE%D0%B2%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!</a> Стоит отметить, собственно бездепозитный приз выдается лишь совершеннолетним новеньким, коие, же, могут пригласить личных приятелей и своих, кроме рассчитывающих на поощрительную программу лояльности. Подобная технология замечена между конкуренцию онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры содействуют увеличению собственной популярности, путем вербования свежих игроков. Бонусы – это уникальный шанс для потенциальных соучастников забавы, коие имеют опробовать софт покер рума и увериться, станут ли они в него играть или нет. Новый игрок испробует свои силы с реальными оппонентами в казино.Постарайтесь отыграть вейджер, дабы замечена возможность забыть заявку на выплату. Кстати, на всех сайтах, представленных в списке, доступны современные платёжные приборы. Вы можете получить выигрыш на электронной кошелёк, карту, телефон.
1х слот 1хслотс регистрация перейти на 1×slots
1×slots регистрация на сайте Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте условия – они часто выдаются для некоторых машин. В зависимости от клуба вы можете делать определенное количество ставок. Кстати, современные игорные дома выделяют возможность заводить «одноруких злодеев».Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном сайте и выполните вход в личный кабинет, чтобы отобрать благотворительные вращения с вейджером х40; <a href=http://autoclub-ssangyong.ru/blog.php?cp=63>http://autoclub-ssangyong.ru/blog.php?cp=63</a> Вейджер (или вагер) ? это наименьшая сумма ставок, которую нужно устроить для вывода денежного бонуса. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим красивее спецпредложение.Мы рекомендуем не открещиваться от сходственных услуг известных казино. Выделите некоторое минут на регистрацию, получите бонус и попробуйте его отыграть. Может быть, сегодня фортуна будет на вашей стороне! 1×slot зеркало Используйте превосходнейшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из списка ниже, чтобы заработать подарки за обычные деянья теперь сейчас получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и резвыми выводами на электронные кошельки.Бездепозитные призы за регистрацию в игровых автоматах для владельцев онлайн-казино являются частью маркетинговой кампании, направленной на повышение аудитории вебсайта. Так они продвигают средства бренды и привлекают новых посетителей.
1хслотс казино зеркало
Создание аккаунта. На сайте казино необходимо обнаружить регистрационную форму и заполнить пустующие поля личностными данными. Иногда на этом этапе потребуется указать лишь адресок электронной почты и пароль, но чаще хотелось наполнить анкету индивидуальной информацией (ФИО, дата рождения, место проживания и т.д. ). Нужно свидетельствовать только настоящие данные, потому впоследствие они станут проверены. На данном разделе портала регулярно публикуются обзорные статьи, в рассматриваются бесплатные бонусы превосходнейших интернет-казино. Информация структурирована по нескольким пунктам, включая основные:Помните, что в некоторых забавах сумма ставки идет в зачет вейджера лишь частично. Так, в настольных и карточных играх только от 5% до 50% суммы ставки числятся как отыгранные деньги, на как в слотах идет в зачет все 100% суммы. <a href=http://ortodentufa.ru/bitrix/redirect.php?goto=http://maina-admin.ru/bitrix/click.php?goto=http://alfa-sila.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/GqQ3×lEUjHq>http://ortodentufa.ru/bitrix/redirect.php?goto=http://maina-admin.ru/bitrix/click.php?goto=http://alfa-sila.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/GqQ3×lEUjHq</a> Вознаграждения за получение VIP-статуса ? начисляются масштабах программки лояльности при достижении еще значения или выдаются индивидуально менеджерами службы поддержки. 1хслотс официальный сайт зеркало Бездепозитные бонусы начисляются лишь один один. Не стоит открывать свежие аккаунты, чтобы получить их повторно. Служба безопасности казино непременно выявит «левого» соучастника и перекроет. Если гость выполнит нужные притязания, отыграет собственную ставку и решит исключить личный выигрыш, то ему нужно сведению, что казино обязательно востребует предоставить ксерокопии личных документов, чтобы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои исключить не удастся.
казино 1×slots официальный сайт
При маленькой сумме бонуса рекомендуется выступать по низким ставкам, а применять наибольшие какого-либо лишь том, случае, если вейджер очень великий, а время на отыгрыш сильно ограничено.Создание аккаунта. На веб-сайте казино нужно обнаружить регистрационную форму и заполнить пустопорожние поля личными данными. Иногда на этом шаге потребуется показать лишь адрес электрической почты и пароль, хотя почаще хотелось наполнить анкету персональной информацией (ФИО, дата рождения, место проживания и т.д. ). Нужно указывать лишь реальные данные, что впоследствие они будут проверены. <a href=http://3ak.cn/home.php?mod=space&uid=187057>1×slots зеркало этих способов предполагает регистрацию</a> Похожим образом работает 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя или в связи с получения им VIP-статуса. Подарок предоставляется в обращения в поддержку и проверки. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=https://forum.fne82.org/profile.php?id=548671>https://forum.fne82.org/profile.php?id=548671</a> Бездепозитный приз за регистрацию в казино с выводом средств в 2022 году — Наш ресурс дает игрокам актуальную информацию о самых свежих, великодушных и испытанных бонусах в онлайн казино, коие обновляются каждый день.
1×slots casino регистрация 1×slotscasin online
В большинстве заведений сделать это возможно по адресу электронной почты, по номеру телефонного, спустя социальную сеть либо гугл-аккаунт.Oтыгpaть бонус с обозначенным вeйджepом, достичь нужно сдeлaть cтaвoк нa cумму, превышающую размер бонуса в количество раз. Активация случается счет промокодов, которые вводятся в собственном кабинете в регистрации. Среди спецпредложений в списке Casino.ru находятся неповторимые промокоды, которые доступны лишь гостям портала. Другие способы начисления средств ? автоматическая активация незамедлительно последствии творения аккаунта и получение подарка по запросу в службу технической помощи. <a href=http://www.advokateninge.se/2017/11/07/hej-varlden/?unapproved=635185&moderation-hash=f1614caa1dd8fbd05fe5971be4a1b397#comment-635185>http://www.advokateninge.se/2017/11/07/hej-varlden/?unapproved=635185&moderation-hash=f1614caa1dd8fbd05fe5971be4a1b397#comment-635185</a> 1хслотс зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.survival-readiness.com/viewtopic.php?t=251699>1хслотс зеркало на сегодня</a>
<a href=http://griffhunter.com/boards/viewtopic.php?p=329366#p329366>зеркала 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Прямо данный отберите безвозмездные вращения за регистрацию без депозита и начинайте собирать призовые комбинации из-за крупных выигрышей! Заполняя данные в собственном профиле, указывайте только достоверную информацию, так как Вам придется ее доказать в будущем при выводе средств.
#9307 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации бонуса без депозита. Внимательно прочитайте до конца. Многие новенькие проделывают оплошности на шаге регистрации и поэтому возможности получить подарок.Как правило, новоприбывшие геймеры начала хотят ознакомиться с методами ввода и вывода денежных средств и сроки выполнения поданных заказов чтобы четко осознавать, как скоро появится исключить собственный казино приз за регистрацию без депо на электронный кошелек либо же банковскую карту. К счастью для всех играющих, снутри конкретных холдингов, все казино соперничают между собой. Ведь в бы конкретную фирму давало лишь одно онлайн-заведение, то навряд бы клиенты заметили казино с призом за регистрацию и могли бы рассчитывать только на вознаграждение повторяющий бонуса на 1-ое инвестиция. К каждому заведению регулярно следует привлекать новых игроков, что, конечном, лишь на руку всем играющим. <a href=http://filmkachat.ru/>1хслотс зеркало</a> У нас на веб-сайте Вы отыщите список призов без депо в испытанных казино и подробную информацию то как их получить и использовать. <a href=http://masyasha.ru/index.php?option=com_k2&view=itemlist&task=user&id=83942>http://masyasha.ru/index.php?option=com_k2&view=itemlist&task=user&id=83942</a> казино 1×slots <a href=http://www.talkermama.com/home.php?mod=space&uid=68351&do=profile>http://www.talkermama.com/home.php?mod=space&uid=68351&do=profile</a> Верификация аккаунта. Лучше доказать лицо сразу в регистрации, чтобы позже не было проблем с выводом средств. Верификация может протекать двумя маршрутами:Варианты выигрыша зависимости от Вашей успеха и условий игорного портала. Выше мы заявили, собственно некоторые бездепозитные бонусы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются другие, все, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на деньги, возможно выиграть неописуемые суммы. Сегодняшние игровые автоматы либо видео слоты, как их называют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые множат ставку от х100.000.
1хслот официальный сайт зеркало
При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие можно посвятить ирге в казино. 1×slots casino online регистрация В современность очень просто получить бонус за регистрацию в казино. Практически каждый игорный дом с готовностью начислит деньги либо бесплатные вращения. Многие гэмблеры используют данным и не смущяются региться в любом клубе с выгодными критериями. Кстати, это отличная возможность выработать победную тактику и сорвать джекпот.Однако в условиях исчезают «подводные камешки», которые не позволят исключить крупную сумму или же вы не успеете отыграть вейджер. Поэтому профессионалы советуют забрать бесплатные вращения за регистрацию в казино без депозита, чтобы поднабраться навыка и получить реальный шанс на победу. <a href=https://sportcar.moscow/user/Daviddaf/>https://sportcar.moscow/user/Daviddaf/</a> Пoдтвepдить личнocть клиента. Для успешного вывода средств, необходимо доказать личность клиента. Нa этaпe вepификaции пpoфиля, работники службы защищенности должны увериться, собственно у игрока всего лишь раз акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не может исключить собственный выигрыш, случае у него будет несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы.При регистрации по указывать лишь достоверную информацию. Когда учетная запись несомненно активна, будет доступ в Личный офис. В нем можно избрать еденицу, установить промокод и разузнать доскональные правила получения и отыгрыша бездепа. Краткая информация об промоакции часто присутствует непосредственно на регистрационной форме. 1×slots рабочее зеркало Процесс подтверждения личности возможность взятьвдолг(взятьвзаймы) от одного дня до недели. Если заказчик допустил нибудь ошибку при заполнении паспортных данных, то ему стопам обратиться с задачей в саппорта онлайн-казино.
1хслотс регистрация в 1×slots casino
Благодаря программе лояльности от игорного заведения, можно брать неплохой старт и без добавочных вложений запустить видеослоты. Кроме как, возможно рассчитывать на реальную фортуну и получить, без инвестиции личных денег, великий выигрыш.Фриспины без депозита либо дополнительные свои посодействуют ближе познакомиться с игровой платформой и её функциями. За счёт презентов можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради забавы против живых крупье. <a href=https://021snyw.com/space-uid-53919.html>https://021snyw.com/space-uid-53919.html</a> Обычно показатель выше, чем для бонусов на депозит. Не дивитесь, если он несомненно числе х100. Иногда завышенный коэффициент вейджера уточняется для обитателей отдельных стран. 1×slots регистрация на сайте 1×slots ru com
рабочее зеркало 1хслотс
Следует подчеркнуть, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с определенным кодом.Изучить управляла и условия получения бездепозитных призов казино, Вы сможете у нас на веб-сайте в разделе с бонусами либо на официальном веб-сайте выбранного Вами казино. Если не можете отыскать необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал либо по электрической почте. В интернет-сети практически можно найти списки более модных и гарантированных поощрительных программ от популярных онлайн-казино.Прямо момент арестуйте безвозмездные вращения за регистрацию без депозита и начинайте собирать призовые композиции ради крупных выигрышей! Отказ в прохождении верификации. Если заказчик не желает или не может дать документы, подтверждающие его личность, профиль будет заблокирован вместе со всеми бонусными начислениями. 1×slots казино мобильная версия <a href=http://www.fumankong3.cc/home.php?mod=space&uid=600990>http://www.fumankong3.cc/home.php?mod=space&uid=600990</a> Отзывы читателей о бонусных промоакциях посодействуют составить впечатление, хотя не запамятовывайте о субъективности личных комментариев.
1×slot зеркало рабочее регистрации на телефон придет
На данном разделе портала периодически публикуются обзорные статьи, каких рассматриваются благотворительные призы наихороших интернет-казино. Информация структурирована по нескольким пунктам, включая основные:Прямо данный отберите бесплатные вращения за регистрацию без депозита и начинайте собирать призовые комбинации из-за солидных выигрышей! <a href=http://www.god123.xyz/home.php?mod=space&uid=1042601>http://www.god123.xyz/home.php?mod=space&uid=1042601</a> 1×slots сайт зеркало Чтоб получить крупный выигрыш, подбирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша.
<b>Смотреть еще похожие новости:</b>
<a href=http://6000ziyuan.com/forum.php?mod=viewthread&tid=111290&extra=>1хслот официальный сайт зеркало</a>
<a href=https://seniordance.ru/forum/showthread.php/72426–1×slots-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE?p=101924#post101924>1×slots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Многие азартные клубы ограничивают необходимую вывода заработанную на призе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не можете вывести. Разница будет аннулирована, Вы том не можете создавать на нее ставки. Онлайн-казино с бездепозитными призами ставят посетителям условия для пользования бездепами, потому перед ролью в промоакции другого тщательно ознакомиться со всеми правилами и аспектами акции. Условия все касаться получения бонуса, его применения и последующего вывода денежных средств когда выигрыша.
#9308 Charlesgunnyhttp://filmkachat.ru
1хслот официальный сайт зеркало
Прежде всего, не запамятовывайте периодически заглядывать на страницу обзоров бездепозитных бонусов. Они шаг за шагом разглядывают более занимательные предложения ведущих игорных порталов.Нет. Казино выдают благотворительные призы за регистрацию, для того, чтобы заказчик мог ознакомиться с игровым заведением. А чтобы исключить его, необходимо выполнить обстоятельства отыгрыша. <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> Некоторые веб-сайты, этого чем обмануть регистрацию игроков, предлагают ответить на несколько базисных вопросов. Цель проведения сходственной викторины – выявить случайных людей, которые не имеют представления о покере, и не разрешить получения ими бонусов. Если посетитель уже играл в казино, то ответить на полтора десятка несложных вопросов несомненно несложно. Очень нередко, ответы возможно найти на официальных сайтах этих учреждений. <a href=http://www.freerideinc.at/2014/12/prati-di-guil-gardasee.html>http://www.freerideinc.at/2014/12/prati-di-guil-gardasee.html</a> Прочитайте верховодила бонусной программки, какой желайте участие. Да, мы настоятельно рекомендуем сделать это до регистрации. 1× slots зеркало <a href=http://www.cmpedu.co.kr/bbs/board.php?bo_table=free&wr_id=734492>http://www.cmpedu.co.kr/bbs/board.php?bo_table=free&wr_id=734492</a> Эффективность бездепов в качестве маркетингового инструмента оценили многие операторы. Малоизвестные площадки употребляют эти промоакции, дабы стремительно набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны неизменных гостей. Не все сайты, дающие подарки без депозита, рекомендованы к ирге. За симпатичным промоописанием имеют скрываться неосуществимые условия отыгрыша и другие подводные камешки.
1×slots бонус за регистрацию
<a href=https://forum-macan.ru/memberlist.php?mode=viewprofile&u=1736>1×slots на любой вкус как пройти регистрацию</a> 1×slots бездепозитный бонус за регистрацию Если вы выбираете испытанное лицензионное интернет казино и выполните все условия получения бездепозитного приза, проблем с получением дара у Вас не возникнет. <a href=http://newens.co.kr/bbs/board.php?bo_table=free&wr_id=641547>http://newens.co.kr/bbs/board.php?bo_table=free&wr_id=641547</a> Выше мы дали полный комплект самых свежих и своевременных бездепозитных призов в онлайн казино без пополнения на 2022 год, где продоставляется воспользоваться любым ценным бездепозитным призом.Бонус начисляется игроку незамедлительно после регистрации и прохождения верификации в казино и не просит от посетителя внесения депо. Как правило, размер бонуса в подобном случае довольно застенчивый, однако дозволяет новеньким познакомиться с забавой без риска реальными деньгами. 1хслот зеркало Важно, удостоверьтесь что, нет, что раньше не регились в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи.
зеркала 1×slots
К образцу, игроку выдаются бесплатные свои в заведении в объеме пятидесяти либо 100 долларов (вейджер на коие сочиняет 100х). То есть, любому новоприбывшему игроку выскакивает привлекающая иллюстрация, которая обещает выплату всех зачисленных компанией средств. Не стоит заострять на казино бонус за регистрацию без депо с сильно великий либо довольно махонькой суммой бонусов, потому что, в тщательно изучив все условия, здесь вероятнее всего, будет какой-то подвох.Вывод выигрыша с бездепозитных бонусов казино – великодушный подарок от азартных клубов. Но чтобы исключить собственный заработок, нужно выполнить ряд критерий: <a href=https://civilpatrol.info/?q=petition/81090/glory-casino>https://civilpatrol.info/?q=petition/81090/glory-casino</a> Только выполнив все условия отыгрыша и дождавшись окончания ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить свои средства.В качестве призов интернет казино нередко предлагает выдачу фриспинов, словами бесплатных вращений игрового барабана. Виртуальные монеты возможно применять для обучения в покерной школе либо для забавы в казино. 1×slots casino регистрация 1×slots review live Это раз из главных показателей привлекательности дара. С завешенным коэффициентом том профессионалы не смогут выполнить обстоятельства по отыгрышу. И неважно, как привлекательно смотрится предложение – бездепозитный приз казино в размере $500 или $1 000. Чтобы новички получше вникли, что же это вейджер, мы разберём на образце.На страничке представлены бездепозитные призы за регистрацию в казино редкая заслуга за которой гонятся все игроки как новички, так и профессионалы. Мы тоже уделяем большое внимание на присутствие бонусов при формирование рейтинга казино на деньги. Бездепозитный бонус это вероятность играть безвозмездно и выиграть реальные деньги.
казино 1× slots официальный сайт
С такими ординарными советами любое казино с призом за регистрацию способно принести в разы больше выгоды и пользы.Бездепозитные призы начисляются только раз один. Не стоит открывать новые аккаунты, чтобы получить их повторно. Служба защищенности казино обязательно выявит «левого» соучастника и заблокирует. Если гость выполнит необходимые требования, отыграет собственную ставку и решит вывести личный выигрыш, то ему надо(надобно) сведению, что казино непременно потребует дать ксерокопии личных документов, чтобы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные средства исключить не получится. Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен перечень наихороших интернет казино, коие предлагают своим игрокам великодушные бонусы за регистрацию. 1×slots зеркало сайта <a href=http://www.fumankong1.cc/home.php?mod=space&uid=581446>http://www.fumankong1.cc/home.php?mod=space&uid=581446</a>
1×slots официальный сайт зеркало
<a href=http://lat-puzz.com/phpbb/memberlist.php?mode=viewprofile&u=97263>http://lat-puzz.com/phpbb/memberlist.php?mode=viewprofile&u=97263</a> Онлайн-казино с бездепозитными призами ставят посетителям обстоятельства для использования бездепами, поэтому перед участием в акции другого, как подробно ознакомиться со всеми правилами и нюансами промоакции. Условия шансы касаться получения бонуса, его использования и последующего вывода денежных средств если, тогда, выигрыша. 1×slots casino зеркало рабочее
<b>Смотреть еще похожие новости:</b>
<a href=https://portugal-campings.com/pt/profile/jamescip/>1хслот 1хслотс регистрация перейти на 1×slots</a>
<a href=https://shopcms.vsupport.club/topic/15597–1kladtop-%D0%A0%C2%B7%D0%A0%C2%B0%D0%A1%E2%80%A6%D0%A0%D1%95%D0%A0%D2%91%D0%A0%D1%91-%D0%A0%D0%85%D0%A0%C2%B0-%D0%A1%D0%83%D0%A0%C2%B0%D0%A0%E2%84%96%D0%A1%E2%80%9A-%D0%A0%C2%B0%D0%A1%D0%83%D0%A1%E2%80%9A%D0%A0%C2%B0%D0%A0%D0%85%D0%A0%C2%B0-%D0%A0%D1%94%D0%A1%D1%93%D0%A0%D1%97%D0%A0%D1%91%D0%A1%E2%80%9A%D0%A1%D0%8A-%D0%A0%D1%98%D0%A0%D2%91%D0%A0%D1%98%D0%A0%C2%B0-lsd-%D0%A0%D1%98%D0%A0%C2%B5%D0%A1%E2%80%9E%D0%A0%C2%B5%D0%A0%D2%91%D0%A1%D0%82/?p=94027>рабочее зеркало 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Возможность сыграть вспомогательное соревнование (а иногда и некоторое) совершенно даром, а выигрыш, тому, поступает на счёт игрока.
#9309 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию более популярный вариант это
Ниже указан актуальный перечень легальных казино в Беларуси с бонусами на 1-ый депозит. Вы можете попасть на официальный вебсайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз.Каждая игровая платформа выделяется условиями по получению и отыгрышу бездепов. В правилах отчетливо расписаны временные рамки, за коие нужно прокрутить вейджер. Также не запамятовывайте про наибольший размер ставки и наивысшую сумму выплаты. С другой стороны, дабы получить бездепозитные бонусы казино, довольно потратить не более 1 минуты. <a href=http://filmkachat.ru/>1×slots зеркало проходить регистрацию это отличный вариант</a> <a href=http://www.podzemie.6f.sk/profile.php?lookup=18889>http://www.podzemie.6f.sk/profile.php?lookup=18889</a> 1×slots регистрация 1×slotscasino09k online <a href=http://zaborgrad-m.ru/bitrix/redirect.php?goto=http://dkt.co.at/?URL=http://a-comfort.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/GYCzHj-1×gv>http://zaborgrad-m.ru/bitrix/redirect.php?goto=http://dkt.co.at/?URL=http://a-comfort.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/GYCzHj-1×gv</a> Прибывшие на акк деньги бездепозитные призы предназначаются, в, только для свежеиспеченных юзеров, которые раньше не имели собственного аккаунта в данном казино. Исходя из этого, в ранее у игрока был сделан депо, то, по всей вероятности, у него больше не несомненно способности рассчитывать на получение такого приза в определенном заведении.Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?
1хслот скачать
Каждый в должен сперва отчетливо выучить условия по получению и отыгрышу понравившегося подарка. Если всё организует, поторопитесь забрать безвозмездные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик данный начать вертеть барабаны топовых слотов. <a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=13119>1×slots регистрацию процедура займет всего лишь</a> 1×slots casino зеркало рабочее Хотя бесплатные бонусы начисляются без депо, не исключено, что вас придется заносить деньги. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты только последствии как, как свежий заказчик первый пополнит игровой счет. <a href=http://xn–2u1bk4hqzh6qbb9ji3i0×g.com/bbs/board.php?bo_table=free&wr_id=42245>http://xn–2u1bk4hqzh6qbb9ji3i0×g.com/bbs/board.php?bo_table=free&wr_id=42245</a> скачать 1×slots на андроид мобильная версия Постарайтесь отыграть вейджер, дабы была вероятность оставить заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные приборы. Вы можете получить выигрыш на электрической кошелёк, карту, телефон.
1× slots зеркало
<a href=http://hxzq.org.cn/space-uid-1617.html>http://hxzq.org.cn/space-uid-1617.html</a> Фриплей-бонусы встречаются только в неких клубах. Они зачисляются сразу последствии создания профиля и активны недолговременное время. Если не успеете истратить свои, они просто сгорят. Касаемо времени, в большинстве случаев призы активны в течение часа. 1х слот 1хслотс регистрация перейти на 1×slots
1×slots зеркало регистрация то дальше необходимо пройти
<a href=http://djdrewski.co.uk/lfsbangers/memberlist.php?mode=viewprofile&u=300>1хслотс казино зеркало</a> Игры, каких можно играть на бонусные средства. Проверьте перечень игр, каких можно играть на бонусные свои, вполне они Вам не понравятся и не расходовать своё время на эту акцию.Еще одно условие дотрагивается размеров ставки. Операторы устанавливают наивысшую необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном офисе. При превышении лимита есть риск потерять бонуса. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, заказчик возможность столкнуться с запретом назначать фишки на шансы. 1×slots casino регистрация 1×slots review live <a href=https://lavteam.org/user/GlennHof/>https://lavteam.org/user/GlennHof/</a> Но такие рамки не смущают и хайроллеров, что коэффициенты на слотах разрешают рассчитывать на солидные выигрыши, в неких автоматах разыгрывается прогрессивный джекпот.
1×slots официальный зеркало рабочее
Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.Если вы новичок в этом деле и лишь попали в неизведанную вами район пыла — с помощью предложений как бездепозитные бонусы без пополнения. Иногда в бездепа, казино презентует наименьший приз (до 50 рублей), ради которого не стоит заморачиваться.Бездепозитные бонусы за регистрацию в игровых автоматах для собственников онлайн-казино считаются долею рекламной кампании, направленной на увеличение аудитории вебсайта. Так они продвигают средства бренды и привлекают свежих клиентов. <a href=https://clients1.google.ps/url?q=https://doctorlazuta.by/>https://clients1.google.ps/url?q=https://doctorlazuta.by/</a> Так что главное различие подарка на депозит от бездепа – неотъемлемое пополнение счёта. Вы сможете внести депо и преумножить стартовый капитал либо отобрать бездеп и при не придётся рисковать своими сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начислит щедрое поощрение! 1×slots сайт Исходя из сего, просто не присутствует разумных оснований махнуть рукою на получение такого бонуса при регистрации. И, лишним, на подобный безвозмездной базе у вас есть все шансы выиграть средства и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, именуют безвозмездными онлайн платформами для игр.У любого игорного заведения свои верховодила и обстоятельства. Но, дабы получить бонусы, нужно выполнить стереотипные деяния:
<b>Смотреть еще похожие новости:</b>
<a href=https://021snyw.com/forum-673–1.html>1×slots casino online регистрация</a>
<a href=https://www.xn–72c9aa5escud2b.com/webboard/index.php/topic,510287.new.html#new>1×slots зеркало регистрация в 1×slots casino</a>
<a href=https://nztw.org/forum.php?mod=viewthread&tid=435208&pid=743233&page=1&extra=#pid743233>1×slots акции</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Промокод – определённая комбинация символов, коию необходимо установить в подходящее фон при разработке учетной записи или активировать в личном профиле игрока в разделе с призами.
#9310 Charlesgunnyhttp://filmkachat.ru
1×slot официальный сайт
Приветственный приз без депозита ? презент за регистрацию. Выдается средствами, фриспинами или баллами. В заключительном случае бонусные баллы используются для участия в турнирах или обмена на настоящие деньги.Можно ли в одном онлайн казино получить больше 1-го приза за регистрацию? Нет, например как в любом интернет казино есть верховодила, к коим нужно держаться, не создавать два аккаута для получения призов, другому будет блокировка обоих аккаутов, не пытайтесь перехитрить онлайн казино, бонус за регистрацию выдаеться один раз одному личику. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots casino 777 online</a> Условия вывода выигрыша. В неких заведениях для успешного вывода с бездепозитного приза достаточно пополнения баланса и доказательства личности. В иных же клубах, необходимо количество один прокрутить свой депо. <a href=https://ruisoon.com/space-uid-46693.html>https://ruisoon.com/space-uid-46693.html</a> Иногда операторы просят внесение малого депо перед выводом для верификации платежного прибора. В неких казино этот депо кроме предстоит отыграть. 1×slots регистрация то дальше необходимо пройти <a href=https://www.argfx.co/user/DoctorLazutaEr/>https://www.argfx.co/user/DoctorLazutaEr/</a> Бездепозитный приз казино 2022 с выводом за регистрацию предоставляет возможность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и проверить качество работы саппорта. Довольно нередко, начиная игровой процесс, игрок уже отказывается останавливаться и проделывает настоящий лепта. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть безвозмездно вероятно как раз таки с бонусом за регистрацию без надобности вносить депозит.
1×слотс казино
<a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=53971>1хслотс зеркало</a> 1хлот регистрация в 1×slots casino <a href=http://021bababa.org/space-uid-495019.html>http://021bababa.org/space-uid-495019.html</a> В основном случаев безвозмездные бонусы начисляются в кредитах, которые нельзя сразу исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже. 1×slots регистрация на 1хслотс
1×slots зеркало рабочее на сегодня
Так же стоит выделить то, собственно в любом онлайн казино установлен свой наибольший кешаут на бездепозитный приз. Как правило кешаут — это предельная сумма средств, которая дешевая для вывода с бездепозитного приза. <a href=http://bbs.17dra.com/home.php?mod=space&uid=230692>http://bbs.17dra.com/home.php?mod=space&uid=230692</a> 1×slots быструю регистрацию а также мгновенное Для получения выигрыша требуется выполнить условия казино. Чаще всего игроку необходимо поставить определенную сумму, но уже из собственных денег. Она рассчитывается из общего размера выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, случае пользователь выиграл 1000 руб., а множитель сочиняет х30, вывести средства возможно будет, сделав ставки на 30 000 рублей.Варианты выигрыша зависят от Вашей удачи и условий игорного портала. Выше мы заявили, собственно некоторые бездепозитные призы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются и те, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность передовых игр на деньги, возможно выиграть невероятные суммы. Сегодняшние игровые автоматы либо видео слоты, как их называют. Могут выдавать крупные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000.
1×slots зеркало регистрацию более популярный вариант это
Однако в критериях скрываются «подводные камни», коие не позволят исключить солидную необходимую или же вы не успеете отыграть вейджер. Поэтому профессионалы советуют забрать безвозмездные вращения за регистрацию в казино без депозита, дабы поднабраться опыта и получить настоящий шанс на победу.Для ревизии используются сканы паспортов, водительских прав, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если пользователь обнаружен в попытке ввести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их владелец попадает в черный список. При забаве на лицензионной площадке не бояться указывать достоверную персональную информацию (шифрование исключает утечку индивидуальных данных). Ниже указан актуальный перечень законных казино в Беларуси с призами на первый депозит. Вы можете попасть на официальный сайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус.Заполняя данные в собственном профиле, указывайте только достоверную информацию, так как Вам придется ее подтвердить дальнейшем при выводе средств. скачать 1×slots на андроид мобильная версия <a href=http://d90894u1.bget.ru/user/Miguelduh/>http://d90894u1.bget.ru/user/Miguelduh/</a> Но есть игорные заведения, коие готовы просто так жертвовать средства на забаву. Для сего достаточно создать профиль. Чтобы вывести свой выигрыш, для поначалу нужно выполнить обстоятельства отыгрыша, обозначенные в условиях получения бездепозитного депозита.
1×slots официальный сайт скачать на айфон
Обычно для получения бонусов без депо, казино выдвигает лояльные и абсолютно выполнимые условия, но есть ряд деяний которые воспрещены и могут повлечь за собой противные последствия: <a href=http://www.xy28zj.com/space-uid-247156.html>http://www.xy28zj.com/space-uid-247156.html</a> Наш список включает в себя наилучшие бездепозитные бонусы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по принципиальным параметрам:В неких онлайн казино для получения бездепозитных призов не довольно просто зарегистрироваться на веб-сайте клуба и подтвердить средства контактные данные. Дополнительно требуется активация промокода. 1×slot казино зеркало В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с бесплатных вращений. Прибыль, коию Вы заработаете на таком бездепе возможно назначать на вывод без какого или отыгрыша.Далее требуется отыграть вагер и исключить выигрыш. Игрокам без опыта крупно повезло, они могут получить десятки даров за 1 регистрацию. Если не смогли получить Бездепозитный бонус, не волнуйтесь. Обратитесь в интернет чат, оператор поможет решить проблему.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.kievisp.com/forum/index.php?showuser=25142>1×slots зеркало регистрацию более популярный вариант это</a>
<a href=https://australianwinerytours.com/tours/showthread.php?tid=184718&pid=309000#pid309000>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<a href=https://www.lightknotes.com/MyBB/index.php>1×slots casino регистрация</a>
<a href=https://forum.bandariklan.com/showthread.php?tid=176825&pid=893321#pid893321>зеркала 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Условия вывода выигрыша. В неких заведениях для успешного вывода с бездепозитного приза достаточно пополнения баланса и доказательства личности. В иных же клубах, необходимо количество один прокрутить свой депо.
#9311 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия
Как и другие промоакции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такового предложения являются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых гостей и дозволяет им составить эмоцию о функционале, не рискуя значительными совокупностями. <a href=http://filmkachat.ru/>1×slots зеркало на сегодня</a> <a href=http://krasrec.ru/forum/user/208242/>http://krasrec.ru/forum/user/208242/</a> Подобные бонусы без депо предоставляются на более прибыльных условиях. Зачастую они покрупнее, а условия отыгрыша менее строгие.Если вы облюбовали себе некоторое брендов коие вам больше всего приглянулись, для неизменной забавы! Таких гемблеров казино очень любит и ценит, за частую эти игроки становятся VIP игроками заведения, которым часто поступают выгодные предложения вид бонусов, так же туда входит и бездепозитные. 1× слот зеркало <a href=http://j90806hs.bget.ru/user/GlennSek/>http://j90806hs.bget.ru/user/GlennSek/</a>
1хслотс казино зеркало
Проверка занимает от нескольких мин. До нескольких дней, специалисты техподдержки могут запросить дополнительные документы либо инициировать краткое общение по Skype. <a href=https://www.sgomberisgombero.it/my-account-2/>1×slots акции</a> 1хслотс рабочее зеркало Прежде всего, не забывайте периодически заглядывать на страницу обзоров бездепозитных бонусов. Они шаг за шагом рассматривают более увлекательные предложения ведущих игорных порталов. <a href=http://tetraprom.ru/bitrix/redirect.php?goto=http://ledia.shop/bitrix/redirect.php?goto=http://ezproxy.lib.usf.edu/login?URL=https://teletype.in/@urist_free/Vxz6wAS2IMi>http://tetraprom.ru/bitrix/redirect.php?goto=http://ledia.shop/bitrix/redirect.php?goto=http://ezproxy.lib.usf.edu/login?URL=https://teletype.in/@urist_free/Vxz6wAS2IMi</a> Как только получите бездеп в казино, всё равно не запамятовывайте проверять электронную почту. Некоторые игорные клубы каждый радуют интенсивных гэмблеров приятными призами. Чаще всего получить презент можно в преддверии веселья, на денек рождение, за вербование приятеля. А того распространённым призом считается прибавка к депозиту. Нужно чем пополнить счёт, и азартное заведение прирастит его на 50–100%. 1×slots промокод при регистрации 2025 Вообще перейдя в казино — верховодила схожи в получении бездепозитных призов, в стереотипные управляла заходит: доказать эл. Почту и аппарат, наполнить свой индивидуальный профиль, активировать рекламную код либо активировать предложения во вкладке БОНУСЫ.
1×slots официальный сайт зеркало
Не стоит сразу же отказываться от приветственных даров в похожих казино. Администрация готова начислить деньги либо фриспины, хотя сначала сотрудники должны убедиться, что вы не аферист. Дело в, собственно развелось очень большое охотников за бонусами. Они выучились обманывать систему и наваривать крупные суммы средств. <a href=http://tecseguranca.net/ola-mundo/?unapproved=52259&moderation-hash=b5a55dedb42d420f623012ea162eb922#comment-52259>http://tecseguranca.net/ola-mundo/?unapproved=52259&moderation-hash=b5a55dedb42d420f623012ea162eb922#comment-52259</a> Бездепозитные бонусы реальными средствами, коие можно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадали.Бездепозитные бонусы казино это экономическая компенсация, предлагаемая юзерам на дармовой основе и возможность выступать в интернет казино бесплатно. Если ассоциировать их с поощрениями за вклад, в которых свои выдаются только впоследствии первоначального пополнения счета, то бездепозитные вознаграждения получаются даром. То есть, играющий получает возможность создавать ставки на уже быть финансы, коие выдаст заведение, исполняя, при этом, обыденные деяния, чтобы их извлечь (здесь идет о регистрация, удостоверении личности с использованием номера телефонного, оформления заявки и т.д.). 1×slots зеркало на сегодня В некоторых онлайн казино для получения бездепозитных призов не довольно просто зарегистрироваться на сайте клуба и доказать свои контактные данные. Дополнительно потребуется активация промокода.
1хслотс рабочее зеркало на сегодня
На условиях отыгрыша бесплатных бонусов идет тормознуть подробнее. С ними связаны нюансы, которые невозможно оставить без внимания. <a href=https://persiankittencat.com/grey-persian-cats-unraveling-the-charm-of-these-feline-beauties/>1×slots регистрация 1×slotscasino09k online</a> Приглашаем делиться суждениями о призах. Это поможет другим пользователям подбирать более выгодные предложения.Как только вы отыграли вейджер и свои с бонусного баланса перебежали вас на настоящий счет, Вы отважно можете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать минимальный депозит к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, вместе с депо). В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с даровых вращений. Прибыль, которую Вы заработаете на этом бездепе можно назначать на вывод без какого или отыгрыша.Зарегистрируйтесь. Для регистрации чаще всего довольно установить собственный номер телефонного и почтовый адресок, последствии чего установить полученный код из СМС. Возможно, потребуется указать промокод. В правилах промоакции будет написано, где его надобно включать. Иногда это бы делать при регистрации, время — уже после создания собственного кабинета, на отдельной страничке. 1×slots зеркало рабочее <a href=http://munservis.mirniy.ru/index.php?subaction=userinfo&user=raggedyacht37>http://munservis.mirniy.ru/index.php?subaction=userinfo&user=raggedyacht37</a>
1×slots зеркало сайта
Чтобы помощи увериться в преимуществах бездепозитных бонусов, довольно зарегистрироваться в казино и получить поощрение.В настоящее время получить бонус за регистрацию в казино очень просто. Почти любой игорный дом с готовностью предоставит деньги или бесплатные вращения. Многие игроки используют этим и не стыдятся регистрироваться в любом клубе с выгодными критериями. Кстати, это отличная возможность придумать выигрышную тактику и сорвать куш. Некоторые казино могут предлагать клиентам бездепы за подтверждение номера или почты или репост на страницу в соц сетях.Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, a лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. <a href=http://gta-rus.site/index.php?subaction=userinfo&user=ugliestcan25>http://gta-rus.site/index.php?subaction=userinfo&user=ugliestcan25</a> казино 1×slots официальный сайт Заработать на бездепозитных призах за регистрацию в казино имеет каждый юзер, достигший совершеннолетия.Так собственно сможете отважно регистрироваться без всяких раздумий. Фортуна сегодня наверняка на вашей стороне. Не побаивайтесь, как следствие какого или убытка Вам совершенно не грозит. С этими бонусами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum-macan.ru/memberlist.php?mode=viewprofile&u=1736>1× slots casino официальный сайт</a>
<a href=http://forums.panzergrenadiers.com/showthread.php?22739–1%D0%A1%E2%80%A6%D0%A1%D0%83%D0%A0%C2%BB%D0%A0%D1%95%D0%A1%E2%80%9A%D0%A1%D0%83-%D0%A0%C2%B7%D0%A0%C2%B5%D0%A1%D0%82%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%BB%D0%A0%D1%95&p=503193#post503193>1хслотс зеркало</a>
<a href=http://link.5nx.ru/viewtopic.php?f=5&t=4804>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<a href=http://www.deonnyn.com/PSPA/viewtopic.php?f=8&t=30893>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы — это презенты от казино вид бонусных денег или фриспинов для игровых автоматов, которые начисляются на аккаунт игрока после процедуры регистрации на веб-сайте заведения. Для получения этих поощрений депо не требуется.
#9312 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало проходить регистрацию это отличный вариант
Демоказино есть практически на каждом сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются веско пореже: там в случае выигрыша и соблюдения условий промоакций бездеп возможно превратить в настоящие средства. <a href=http://filmkachat.ru/>1× slots регистрация в 1×slots casino</a> <a href=https://www.alligator.spb.ru/forum/index.php?PAGE_NAME=profile_view&UID=79143>https://www.alligator.spb.ru/forum/index.php?PAGE_NAME=profile_view&UID=79143</a> Третитй бездепозитный бонус за регистрацию – валютные свои. К раскаянию, начислить рубли либо доллары готовы только знаменитые и популярностью клубы. С их подмогою у насладиться любой доступной забавой – автоматом, рулеткой, кено, блэкджеком.Выбор любого онлайн казино на нашем веб-сайте. В описании к каждому Вы можете узнать, собственно получите за творенье аккаунта. 1×slots зеркало этих способов предполагает регистрацию <a href=https://sportavesti.ru/forums/users/xrumsep2505–2/>https://sportavesti.ru/forums/users/xrumsep2505–2/</a>
1×slots зеркало регистрация
Отыграв бездепозитный приз в казино с выводом также придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в подобное ограничение присутствует, то единоразово исключить выйдет лишь сумму, не превосходящую размер полученного бонуса.Будьте внимательнее при ознакомлении с правилами во избежание происхожденья конфликтных обстановок с казино, когда последствии отыгрыша бездепа для не дадут вывести солидную сумму выигрыша. казино 1×slots Все обожают получать подарки. Согласитесь, почти любой играющий человек будет бесконечно рад, если получит бесплатный подарок для игры в онлайн казино просто за регистрацию либо же приз за внесенный депозит, например называемые приветственные бонусы для новых игроков. Соответственно эти онлайн клубы станут больше популярны и предпочтительны у игроков при выборе казино для игры. Топ казино каждый обновляется и прибавляются свежие и интересные игровые клубы с симпатичной бонусной политикой и всеми вероятными прерогативами, к коим относятся эти призы как фриспины за регистрацию, денежные бездепозитные призы, а также великодушные бонусы за внесенный депо.Если вы облюбовали для себя некоторое брендов коие вам больше всего полюбились, для постоянной игры! Таких гемблеров казино довольно предпочитает и ценит, за частую такие игроки становятся VIP игроками заведения, коим нередко поступают прибыльные предложения повторяющий призов, так же туда входит и бездепозитные. <a href=http://stels.market/bitrix/redirect.php?goto=http://mirbelia.ru/bitrix/redirect.php?goto=http://tvernails.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/WZKGb7FS66c>http://stels.market/bitrix/redirect.php?goto=http://mirbelia.ru/bitrix/redirect.php?goto=http://tvernails.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/WZKGb7FS66c</a> 1хлот регистрация в 1×slots casino Максимальный размер ставки, который невозможно превышать пока бонус не несомненно всецело отыгран. В случае нарушения сего верховодила, приз и выигрыш с него будут аннулированы.Каждый игры обязан сперва отчетливо выучить условия по получению и отыгрышу приглянувшегося подарка. Если всё организует, поторопитесь арестовать бесплатные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик данный начать вертеть барабаны топовых слотов.
1×slots промокод при регистрации
Бoльшинcтвo азартных заведений выдвигают примерно однообразные, схожие обстоятельства и притязания, которые нужно выполнить, дабы получить бездепозитный бонус за регистрацию. Все их можно соединить в раз список: <a href=http://mongdol.net/bbs/board.php?bo_table=free&wr_id=1344508>http://mongdol.net/bbs/board.php?bo_table=free&wr_id=1344508</a> 1×slots на любой вкус как пройти регистрацию Этот образ бонуса будет добавлен на Ваш аккаунт после удачной процедуры регистрации с внедрением номера телефона. Если избрать другой способ творения учетной записи, бездеп не будет добавлен на Ваш акк.
рабочее зеркало 1×slots
В каждом казино с бездепозитным призом предусмотрены вейджеровые обстоятельства. Это единственный «подводный камень», который стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, нужно сделать определённое число ставок. Чем круче приз, тем труднее выполнить условия, и напротив. <a href=http://vn-info.net/user/Josephkam/>1×slots зеркало которую указывали при регистрации кстати</a> Однако далеко не все ресурсы предлагают своим посетителям бездепозитные призы за регистрацию в казино. В большинстве случаев учтено поощрение на 1-ый депозит в размере 100–200%. Это отличная вероятность преувеличить банкролл, прирастить время, проведённое за забавой и шансы сорвать крупный куш. Игры, каких можно выступать на бонусные деньги. Проверьте перечень игр, в которых возможно выступать на бонусные свои, возможно они Вам не понравятся и надо расходовать своё время на такую акцию.Каждый из бездепозитных призов без пополнения 2022 содержит собственный определенный вейджер для отыгрыша, так же в каждом казино он устанавливается персонально — где то он х55 а где-то х30, повторюсь всюду по разному! casino 1×slot <a href=https://forum.zakon.kz/profile/180142-onpravau2706/?tab=field_core_pfield35>https://forum.zakon.kz/profile/180142-onpravau2706/?tab=field_core_pfield35</a>
1х слот регистрация в 1×slots casino
При пользовании бездепозитным бонусом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют некоторое видов лимитов:При этой на бонусные свои запрещается играть в игровые автоматы с прогрессивным джекпотом и игры из радела live casino. Кроме того, некоторые казино дают бездеп на раз или количество определенных слотов, и в других забавах Вы не сможете на их выступать. Не стоит путать забаву в демо и использование бонусов. В демонстрационном режиме игрок может расценить механику слота, сюжет и оформление. Но забава ведется на условные кредиты, потому отсутствует основное ? ощущение азарта. Активируя промокод или фриспины, заказчик и не тратит свои средства на игровые автоматы, но возможность сорвать реальный куш!С иной стороны, намного проще отобрать бездепозитные фриспины за регистрацию в казино и напрямик момент начать вращать барабаны в превосходнейших слотах. Главная особенность спинов сомнений, что они предусмотрены для топовых автоматов. Удастся не пройти вспомогательные раунды, но и увеличить сумму выигрыша, заработать респины и внутриигровые подарки. <a href=https://www.reikiandastrologypredictions.com/member.php?action=profile&uid=19367>https://www.reikiandastrologypredictions.com/member.php?action=profile&uid=19367</a> 1×slot рабочее зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=288643>1×slots официальный сайт зеркало</a>
<a href=http://permitbeijing.com/forum/member.php?action=profile&uid=191496>1×slots регистрацию более популярный вариант это</a>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=317475>1×slots зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Казино выводит средства только на что, эту платежную систему, с котрой был сделан депозит. То есть, для вывода бездепозитного приза, Вам поначалу необходимо восполнить счет. В некоторых клубах ограниченный список методов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет именно с этих платежных методов, коие доступны для вывода.
#9313 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало сайта
Несмотря на то, что этот вариант стимуляции со стороны азартных платформ очень популярен в сфере похожих игр, далеко не всем почитателям казино ведомо, что себе бездепозитные призы казино и как именно их вполне эксплуатировать.Чтобы получить возможность вывести прибыль с бездепозитного приза в казино, нужно выполнить ряд условий: <a href=http://filmkachat.ru/>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a> Бонус с зачислением денег на счет дает больше свободы поступков. Пользователь сам выбирает, каким образом воспользоваться подаренными своими. Здесь кроме могут действовать ограничения на список доступных игр, но обычно эти рамки не так строги, как в промо с безвозмездными вращениями. <a href=https://repyourmaxfitness.com/user/davidbex/?um_action=edit>https://repyourmaxfitness.com/user/davidbex/?um_action=edit</a> При регистрации в том либо ином онлайн игральном заведении — для дается раз шанс испытать свою удачу не внося свои монеты. Замечу что такую поощрительную услугу предоставляют не все онлайн игровые площадки, а лишь щедрая середина(средина) из их. Которые мы подготовили для Вас в нашем перечне.Используйте лучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из списка ниже, чтобы заработать презенты за обычные деяния теперь сегодня получить 1-ый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и резвыми выводами на электронные кошельки. 1хслотс зеркало на сегодня <a href=http://1.235.32.108/doku.php?id=%D0%BE%D0%BD%D0%BB%D0%B0%D0%B9%D0%BD%20%D1%81%D0%BB%D0%BE%D1%82%D1%8B%20777>http://1.235.32.108/doku.php?id=%D0%BE%D0%BD%D0%BB%D0%B0%D0%B9%D0%BD%20%D1%81%D0%BB%D0%BE%D1%82%D1%8B%20777</a> Да, у безвозмездных призов есть недостатки. Прежде всего, они обычно маленькие. Кроме как, обстоятельства вейджера по ним всегда строгие. Но все же неименье риска делает их довольно привлекательными для посетителей.Мы собрали и опубликовали перечень наихороших бездепозитных казино с бонусами за регистрацию, которые гарантируют великодушные выигрыши и моментальные выплаты.
1×slots регистрация 1×slotscasino09k online
1× slots casino зеркало Условия вывода выигрыша. В неких заведениях для удачного вывода с бездепозитного бонуса достаточно пополнения баланса и подтверждения личности. В других же клубах, необходимо несколько один прокрутить свой депо.Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации приза без депозита. Внимательно прочтите до конца. Многие новенькие проделывают промахи на шаге регистрации и поэтому не получить подарок. <a href=http://forum.computest.ru/post/670258/#p670258>http://forum.computest.ru/post/670258/#p670258</a> Вейджер не более х30–35 является применимым. Опытные игроки утверждают, что с таким вейджером реально остаться в плюсе, случае верно подойти к выбору игрового аппарата.Для получения предоставленных бонусов вам понадобиться — ПК или мобильное прибор, и остальное дело за малым. 1хслот официальный сайт зеркало Ещё одно распространённое акционное предложение – симпатичный презент с сомнительными требованиями. К примеру, клуб обещает $100 в качестве бездепа, но с вейджером х80 либо х100. Отыграть такой вейджер практически невозможно и потому лучше концентрироваться на более интересных промоакциях.Одним из поводов отдавать привилегию 1 или иному заведению содержится в привлекательности предлагаемых акций и бесплатных предложений. Безвозмездные фриспины, выдаваемые без дела делать какой-либо вклад, в списке располагается далеко не в конце.
1хслот скачать
Составленный экспертами Casino.ru список онлайн-казино с бездепозитным бонусом дозволяет игрокам сопоставить спецпредложения различных операторов.Все любят получать презенты. Согласитесь, почти любой играющий человек несомненно бесконечно рад, если получит бесплатный подарок для забавы в интернет казино просто за регистрацию либо же бонус за внесенный депо, так называемые приветственные бонусы для свежих игроков. Соответственно такие интернет клубы будут более знамениты и предпочтительны у игроков при выборе казино для забавы. Топ казино день обновляется и добавляются новые и интересные игровые клубы с симпатичной бонусной политикой и всеми вероятными преимуществами, льготами, к которым относятся эти призы как фриспины за регистрацию, валютные бездепозитные бонусы, еще щедрые призы за внесенный депо. <a href=http://whirlpowertool.ru/index.php?subaction=userinfo&user=gaudydisclaimer>http://whirlpowertool.ru/index.php?subaction=userinfo&user=gaudydisclaimer</a> 1хслотс рабочее зеркало
1×slot зеркало
Лишь модные и известные азартные заведения все разрешить себя раздавать бездепы в виде дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депо, коие можно израсходовать в лучших аппаратах с высокой отдачей. Шаг 5. Использование и отыгрыш. Бездеп должен быть применен в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера. 1×slots регистрация то дальше необходимо пройти <a href=http://services-sector.ru/clubpointeresam/memberlist.php?mode=viewprofile&u=158270>http://services-sector.ru/clubpointeresam/memberlist.php?mode=viewprofile&u=158270</a> Чем ниже велечину вейджера, что, этим проще отыграть и исключить бонус. Если Вы планируете заработать на бездепе, не просто ознакомиться с новым игровым клубом, то стоит избегать призов с высочайшим вейджером их практически не реально отыграть. С ними Вы сможете лишь протестировать забавы заведения.При маленький сумме приза рекомендовано играть по невысоким ставкам, а использовать наибольшие какого-либо только что, нет случае, если вейджер слишком великий, а время на отыгрыш крепко ограничено.
1×slot зеркало рабочее регистрации на телефон придет
Способы получения бездепа различаются от облика приза, кот-ый понравился игроку. Но для иначе нужно быть зарегистрированным в легальном онлайн-казино и доказать собственную личность. В общем виде пошаговая инструкция для получения бездепозитного приза выглядит так: <a href=https://c.im/@Glavdorogadv1606>https://c.im/@Glavdorogadv1606</a> Бoльшинcтвo азартных заведений выдвигают примерно одинаковые обстоятельства и требования, коие необходимо выполнить, чтобы получить бездепозитный приз за регистрацию. Все их можно объединить в один список:У каждого игорного клубы различные вейджеровые обстоятельства. Чтобы вы гарантировано сумели выполнить их, мы дадим количество советов. Если система начислила маленькую необходимую, не стоит делать большие ставки – остановитесь на 10–30 центах. Как только сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте играть. В противном случае лучше присмотреться к иному автомату. 1×slots рабочее зеркало на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=http://3ak.cn/home.php?mod=space&uid=187057>1хслот зеркало сайта</a>
<a href=http://portal.westcoastbible.org/discussion/viewtopic.php?f=19&t=1933122>1хлот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают бонус по странам. Вплоть до того, что клуб имеет брать игроков из Вашей страны, а бездеп не давать.
#9314 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
Создание аккаунта. На веб-сайте казино нужно открыть регистрационную форму и наполнить пустые поля личными данными. Иногда на данном этапе потребуется показать лишь адрес электронной почты и пароль, хотя чаще хотелось наполнить анкету персональной информацией (ФИО, дата рождения, пространство проживания и т.д. ). Нужно указывать только настоящие данные, что впоследствие они станут испытаны. <a href=http://filmkachat.ru/>1×slots казино зеркало</a> Похожим образом трудится третий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения клиента или в связи с получения им VIP-статуса. Подарок предоставляется после воззвания в поддержку и ревизии.Более солидные предложения встречаются очень изредка. Зачастую они доступны лишь VIP-игрокам. В остальных случаях им наверняка сопутствуют очень жесткие обстоятельства отыгрыша. Также вероятны дополнительные условия и другие ограничения, прописанные в критериях и положения бонусной программы казино. <a href=https://tuespaciosanitario.es/shisha-tobacco-from-4-eur/>https://tuespaciosanitario.es/shisha-tobacco-from-4-eur/</a> Фриспины – бесплатные вращения с фиксированной ставкой, коие возможно использовать в конкретных игровых автоматах. 1×slots официальный сайт мобильная версия <a href=https://ortsgerichtsforum.de/member.php?action=profile&uid=704>https://ortsgerichtsforum.de/member.php?action=profile&uid=704</a> Для верификации аккаунта надо(надобно) предоставить профессионалам технической помощи отсканированную копию паспорта и счета за коммунальные предложения, а также фотку банковской карты или экрана страницы электрического кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для подтверждения личности.
1×slots официальный регистрация
Бездепозитные призы – это самая занимательная и более перспективная акция интернет-казино. Они даже какого-либо фри-спинов, потому что выплаты в безвозмездных вращениях не гарантированы, так комбинации на барабанах игрового аппарата все не сложиться.Бездепозитные бонусы начисляются лишь раз один. Не стоит раскрывать новые аккаунты, чтобы получить их повторно. Служба защищенности казино непременно выявит «левого» соучастника и перекроет. Если гость выполнит необходимые требования, отыграет собственную ставку и решит вывести собственный выигрыш, то ему нужно учесть, собственно казино непременно востребует предоставить ксерокопии собственных документов, чтобы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные свои исключить не удастся. скачать 1×slots официальный сайт Итак, дабы благотворительные бонусные кредиты трансформировались в настоящие средства, которыми вы можете управлять по собственному усмотрению, их надо(надобно) отыграть. Вейджер следует уточнять в правилах онлайн-казино.За счёт спинов получится запустить различные интернет слоты, протестировать стратегии и поднабраться опыта. Фишка том,, что вращения начисляются на лучшие аппараты с уникальными опциями и высокой отдачей. Не запамятовывайте, собственно в каждом акционном предложении предусмотрены особые требования – кратковременные ограничения, наибольший размер ставки, список доступных игр. <a href=http://bagazniki-avtoboxy.ru/bitrix/redirect.php?goto=http://metalpro.su/bitrix/click.php?goto=http://sbiznes.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/9LR12VQIBWX>http://bagazniki-avtoboxy.ru/bitrix/redirect.php?goto=http://metalpro.su/bitrix/click.php?goto=http://sbiznes.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/9LR12VQIBWX</a> 1×slots зеркало рабочее на сегодня Но существуют азартные заведения, готовые просто так вручить деньги на игру. Для этого довольно создать профиль. Чтобы вывести выигрыш, сперва необходимо выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа.
1×slots сайт зеркало
Не стоит незамедлительно же отрицаться от приветственных подарков в похожих казино. Администрация готова начислить средства либо фриспины, но предварительно работники должны убедиться, собственно вы не аферист. Дело сомнений, собственно развелось слишком количество охотников за бонусами. Они научились накалывать систему и наваривать крупные суммы денег. <a href=http://www.pdt-mall.com/bbs/board.php?bo_table=free&wr_id=800043>http://www.pdt-mall.com/bbs/board.php?bo_table=free&wr_id=800043</a> Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депо возможность выделяться до 30 дней.Но а в вы теснее профи по интернет казино, кликаем на красную кнопку «Получить» и Вы автоматически перейдете в онлайн казино; 1×slots быструю регистрацию а также мгновенное Для верификации аккаунта нужно предоставить специалистам технической поддержки отсканированную копию паспорта и счета за коммунальные предложения, а фотку банковской карты либо скриншот странички электрического кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для подтверждения личности.Наличие у игрока второго аккаунта. Запрещено делать количество профилей для многократного получения бездепов.
1×slots официальный сайт мобильная версия скачать
В онлайне большое известных игорных площадок с красивыми акционными услугами. Однако внимательно читать обстоятельства десятков услуг в надоест, ну и время отнимет большое. Поэтому наша команда подготовила ТОП-3 вебсайтов с лучшими бездепозитными призами: Обычно бездепозитные промоакции от казино, прибывают на эл. Почту в деньки рождения либо праздники. В неких интернет казино можно обратиться в чат и как неизменному игроку, вполне вам предложат бездепозитное предложение.Далее потребуется отыграть вагер и исключить выигрыш. Игрокам без навыка крупно подфартило, меня получить 10-ки подарков за 1 регистрацию. Если не сумели получить Бездепозитный бонус, не тревожьтесь. Обратитесь в интернет чат, оператор поможет ситуацию. Как верховодило, при выводе финансов, от играющего требуется лишь устроить наименьший вклад для того, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом собственный счет. 1×slots рабочее зеркало <a href=http://www.lighttoguideourfeet.com/member.php?u=1457296>http://www.lighttoguideourfeet.com/member.php?u=1457296</a>
казино 1×slots
Подтвердите личность, предоставив оператору казино свои паспортные данные. Инструкции обычно легкие, главное — четко им идти. Если написано, собственно «на фото обязаны быть заметны все хорошо угла странички паспорта» — сделайте именно такое фото.Лишь пользующиеся и знаменитые азартные заведения шансы позволить для раздавать бездепы повторяющий дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депо, коие возможно истратить в топовых аппаратах с высокой отдачей. Такие поощрения позволяют бесплатно протестировать новое казино, разобраться с игровым процессом онлайн слотов, заработать и вывести небольшую сумму средств.Вейджер в переводе с британского означает «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша приобретенного бонуса, в нашем случае бездепозитного. Число ставок не — главно только набрать необходимую, пропорциональную сумме одобрения. <a href=http://www.kaseisyoji.com/home.php?mod=space&uid=1115744>http://www.kaseisyoji.com/home.php?mod=space&uid=1115744</a> На нашем веб-сайте Вы найдете перечень своевременных новых бездепозитных призов в казино 2022 года. Также, есть количество эксклюзивных услуг, которые доступны только гостям нашего сайта в регистрации по нашей ссылке либо активации особого промокода.Выиграть реальные деньги в казино не пополняя счет – сложно, хотя вероятно. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными бонусами и начните выступать на бонусные свои. По статистике в одном из 10-ти заведений возможно заработать маленькую сумму средств помощью бонусных средств. казино 1×slots официальный сайт Для проверки используются сканы паспортов, водительских водительских, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если юзер обнаружен в попытке завести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их владелец попадает в темный перечень. При ирге на лицензионной площадке не стоит опасаться свидетельствовать достоверную персональную информацию (шифрование исключает утечку индивидуальных данных).
<b>Смотреть еще похожие новости:</b>
<a href=http://forums.indexrise.com/user-307864.html>1хслотс зеркало на сегодня</a>
<a href=http://portal.westcoastbible.org/discussion/viewtopic.php?f=18&t=1939888>1×slots регистрация 1×slots casino c2d ru</a>
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=296474>1×slots скачать на айфон</a>
<a href=https://www.reisezielforum.de/viewtopic.php?t=364269>1 хслот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чтоб получить крупный выигрыш, выбирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, которые доступны по условиям отыгрыша.
#9315 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало рабочее
Бездепозитный бонус по промо-коду будет доступен для игры, только сомнений случае когда Вы активируете особый бонусный код в разделе с бонусами либо укажите промокод при регистрации на веб-сайте. В неких случаях, не активации кода, придется подтвердить контактные данные игрока и заполнить анкету посетителя.В случае установленного лимита на необходимую вывода выигрыша с бездепозитного приза, игрок не сможет исключить больше заявленной суммы. <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> Иногда в бездепа, казино дарит наименьший бонус (до 50 рублей), из-за которого не заморачиваться. <a href=https://online-learning-initiative.org/wiki/index.php/User:FHDBooker0740664>https://online-learning-initiative.org/wiki/index.php/User:FHDBooker0740664</a> 1хслот скачать <a href=http://xn–80aeh5aeeb3a7a4f.xn–p1ai/forum/user/53439/>http://xn–80aeh5aeeb3a7a4f.xn–p1ai/forum/user/53439/</a> Несмотря на то, собственно данный вариант стимуляции со стороны азартных платформ очень известен области подобных игр, далеко не всем поклонникам казино знаменито, собственно являют собой бездепозитные призы казино и как непосредственно их вполне эксплуатировать.В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать собственный выигрыш с безвозмездных вращений. Прибыль, коию Вы заработаете на этом бездепе возможно назначать на вывод без какого либо отыгрыша.
1х слот 1хслотс регистрация перейти на 1×slots
Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды присутствуют на этой странице. Посетитель имеет расценить обстоятельства получения и начать выступать на средства без внесения депо. При этом игроку принципиально разуметь, на каких критериях и какими способами него исключить полученный выигрыш. Для сего нужно расценить перечень подключенных платежных систем. 1х слотс зеркало регистрация в 1×slots casino Большинство интернет-казино из нашего топ-10 готовы порадовать вас эксклюзивными промоакциями. Читайте о их в обзорах и на форуме. <a href=https://k2s.club/user/GlennGlisa/>https://k2s.club/user/GlennGlisa/</a> Прибывшие на аккаунт деньги бездепозитные бонусы предназначаются, главном, лишь для новоиспеченных юзеров, которые ранее не имели собственного аккаунта в данном казино. Исходя из этого, если ранее у игрока был изготовлен депозит, то, по всей вероятности, у него больше не несомненно способности рассчитывать на получение такового бонуса в конкретном заведении.У любой забавы свои притязания по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система засчитает каждую ставку. В рулетке и покере устроить это намного сложнее. Именно потому например принципиально внимательно читать условия получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой этой, то новички попросту «спустят приз на ветер». сайт 1× slots casino А ознакомиться с новыми интернет казино, Вы можете за счет призов с выводом выгоды, которые Вы можете получить без депозита.
1хслот официальный сайт зеркало
Зарегистрироваться в казино по особой ссылке или с бонусным кодом. Подтвердить контактные данные (номер аппарата и электронную почту). Для подтверждения номера телефона необходимо в личном профиле указать свой номер и надавить кнопку „Подтвердить номер телефонного“, далее Вы получите sms-сообщение с кодом, который нужно ввести в соответствующее фон. Для подтверждения электронной почты, перейти по активной ссылке в письме от казино. Фриспины предусмотрены для применения в видео слотах. Внимательно ознакомьтесь с критериями – частенько их выдают на кое-какие автоматы. В зависимости от клуба, у вас получится устроить определённое количество ставок. Кстати, продвинутые игорные дома позволяют запускать любых «одноруких злодеев».При регистрации стопам свидетельствовать лишь достоверную информацию. Когда учетная запись несомненно активна, появится доступ в Личный офис. В нем можно выбрать денежную, установить промокод и узнать подробные управляла получения и отыгрыша бездепа. Краткая информация об промоакции часто присутствует непосредственно на регистрационной форме. <a href=https://kizkiuz.com/user/Davidsew/>https://kizkiuz.com/user/Davidsew/</a> 1×slots зеркало видели такую регистрацию на
1×slots casino регистрация на сайте
<a href=https://www.neocodex.us/forum/topic/134431–1×slots-%D0%A0%C2%B7%D0%A0%C2%B5%D0%A1%D0%82%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%BB%D0%A0%D1%95-%D0%A0%D1%94%D0%A0%D1%95%D0%A1%E2%80%9A%D0%A0%D1%95%D0%A1%D0%82%D0%A1%D1%93%D0%A1%D0%8B-%D0%A1%D1%93%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%B7%D0%A1%E2%80%B9%D0%A0%D0%86%D0%A0%C2%B0%D0%A0%C2%BB%D0%A0%D1%91-%D0%A0%D1%97%D0%A1%D0%82%D0%A0%D1%91-%D0%A1%D0%82%D0%A0%C2%B5%D0%A0%D1%96%D0%A0%D1%91%D0%A1%D0%83%D0%A1%E2%80%9A%D0%A1%D0%82%D0%A0%C2%B0%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A0%D1%91-%D0%A0%D1%94%D0%A1%D0%83/>1×slots зеркало которую указывали при регистрации кстати</a> Бездепозитные бонусы настоящими средствами, коие можно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадались. 1хслотс рабочее зеркало <a href=http://www.god123.xyz/home.php?mod=space&uid=1034571>http://www.god123.xyz/home.php?mod=space&uid=1034571</a> Помимо прочего, для вывода средств по бездепу нужно привнести на счёт свой первый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало возможную необходимую, в чего вывод средств станет доступен.Внесение депо – Будьте готовы пополнить счет в отыгрыша приза. Это стандартное требование управлял для данного типа промо-акций. Лучше заблаговременно уточнить, какую сумму надо(надобно) будет вносить на счет. Как управляло, речь идет о минимальном депозите, хотя вы должны быть уверены, что он вас по кармашку.
1×slot рабочее зеркало
Некоторые веб-сайты, прежде чем провести регистрацию игроков, предлагают ответить на некоторое базисных вопросов. Цель проведения подобной викторины – выявить случайных людей, которые не имеют представления о покере, и не допустить получения ими призов. Если гость теснее играл в казино, то ответить на полтора 10 несложных вопросов будет несложно. Очень нередко, ответы возможно отыскать на официальных сайтах этих учреждений. <a href=https://www.hubtamil.com/talk/member.php?1706357-DoctorLazutaen>https://www.hubtamil.com/talk/member.php?1706357-DoctorLazutaen</a> Шаг 5. Использование и отыгрыш. Бездеп обязан быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. 1×slots рабочее зеркало на сегодня Используйте наилучшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из списка ниже, дабы заработать подарки за простые деянья и уже сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высокой отдачей и прыткими выводами на электронные кошельки.
<b>Смотреть еще похожие новости:</b>
<a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=88823>1×slots официальный зеркало рабочее</a>
<a href=https://www.lightknotes.com/MyBB/showthread.php?tid=154302>1×slots регистрация 1×slots review live</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Условия могут различаться приятель от приятеля. Но подобный приз может быть использован только для игрового процесса – полученные на счет финансы до того, как будут отыграны, исключить нереально. Помимо остального, для вывода средств по бездепу нужно внести на счёт собственный первый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на мало возможную необходимую, последствии чего вывод средств будет доступен.
#9316 Charlesgunnyhttp://filmkachat.ru
1х слот 1хслотс регистрация перейти на 1×slots
Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке необходимо пополнить счет в казино. Для депозитных бонусов, эта процедура не нужна, например как депозит теснее сделан. <a href=http://filmkachat.ru/>скачать 1×slots официальный сайт</a> <a href=http://messmangler.com/forums/member.php?action=profile&uid=9135>http://messmangler.com/forums/member.php?action=profile&uid=9135</a> Бездепозитный приз предоставляется новому игроку за определенные действия. Часто презент в виде средств либо фриспинов выдается за регистрацию, благодаря чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. 1×slots зеркало регистрация <a href=http://seoulartacademy.co.kr/bbs/board.php?bo_table=online&wr_id=1030029>http://seoulartacademy.co.kr/bbs/board.php?bo_table=online&wr_id=1030029</a> Операторы гемблинга утверждают, собственно например они сражаются с бонус-хантерами. Впрочем, критики считают, что этим казино пробуют устроить из случайного постояльца постоянного игрока.
1 x slots
1×slots регистрация на сайте 1×slots ru com Ознакомьтесь с нашим перечнем превосходнейших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего списка и получите бездеп сразу. Хватайте превосходнейшие безвозмездные предложения ниже и выигрывайте немалые деньги, не рискуя! <a href=https://www.nepsite.ru/personal/33480>https://www.nepsite.ru/personal/33480</a> Подтверждение электрической почты – одно из основных условий, которое есть практически в любом бездепозитном казино. Чтобы верифицировать электрическую почту, достаточно перебежать по интенсивной ссылке в послании, приобретенном от азартного клуба.Выигрыши с призов без вложений постоянно привязаны к притязанию по ставкам и все быть обналичены лишь последствии выполнения этих притязаний. 1хслот зеркало У каждой игры свои требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система зачтет любую ставку. В рулетке и покере устроить это гораздо сложнее. Именно поэтому например принципиально пристально читать условия получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в любой ирге, то новенькие попросту «спустят бонус на ветер».
casino 1×slot
К раскаянию, нет. Почти все казино, просят внесение желая бы одного малого депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, что исключить деньги разрешено лишь на что, эту платежную систему, с коей был сделан депо. Все безвозмездные бонусы кажутся заманчивыми. Кто же категорически от возможности сыграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далеко не все бездепозитные бонусы мере презентабельны для рассудительного клиента.Нет. Казино раздают благотворительные бонусы за регистрацию, для того, чтобы заказчик имел ознакомиться с игровым заведением. А чтобы вывести его, нужно выполнить обстоятельства отыгрыша. <a href=http://i91215un.bget.ru/user/CharlesFaf/>http://i91215un.bget.ru/user/CharlesFaf/</a> 1×slots casino регистрация Не стоит сразу же отказываться от приветственных даров в сходственных казино. Администрация готова начислить средства или фриспины, хотя предварительно работники должны убедиться, собственно вы не мошенник. Дело в том, что развелось очень количество охотников за призами. Они выучились обманывать систему и наваривать крупные суммы средств.Казино выводит деньги только на ту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного бонуса, Вам сначала необходимо восполнить счет. В неких клубах ограниченный список методов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет именно с этих платежных методов, которые доступны для вывода.
1×slots рабочее зеркало
Подтверждение электронной почты – одно из основных условий, коие есть практически в любом бездепозитном казино. Чтобы верифицировать электронную почту, довольно перейти по интенсивной ссылке в письме, полученном от азартного клуба.Любой выигрыш по ставке выше установленного лимита несомненно считаться недействительным. То есть ставка не будет засчитана при отыгрыше, в случае выигрыша его сумма не поступит на счёт клиента — итог забавы будет полностью аннулирован. Фриплей-бонусы встречаются лишь в неких клубах. Они зачисляются незамедлительно после творенья профиля и активны непродолжительное время. Если не успеете израсходовать свои, они попросту сгорят. Касаемо времени, как призы активны протяжении часа.Обычно, бездепозитные бонусы выдаются под определенные слоты с фиксированной ставкой, но их точно воспрещено применять в игровых автоматах с современным джекпотом. Список игр, каких возможно использовать бездеп, Вы найдете в описании промоакции либо можете уточнить у службы поддержки заведения. 1хслотс рабочее зеркало <a href=http://www.sixsigmaexams.com/mybb/member.php?action=profile&uid=268076>http://www.sixsigmaexams.com/mybb/member.php?action=profile&uid=268076</a> Наш список включает в себя наихорошие бездепозитные бонусы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по главным характеристикам:
1×slots зеркало проходить регистрацию это отличный вариант
Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми акциями. Читайте о них в обзорах и на форуме.Не сложно догадаться, что no down payment bonuses практически никогда не случаются немаленькими. Чаще всего речь о пяти–тридцати долларах (или эквиваленте этой суммы в иной денежной). <a href=https://asdmcpe.org/user/Jameszot/>https://asdmcpe.org/user/Jameszot/</a> 1×slots сайт зеркало Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, например как Вам понадобиться ее доказать в при выводе денег.
<b>Смотреть еще похожие новости:</b>
<a href=https://forums.scar-divi.com/topic/558993–1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D0%BF%D1%80%D0%BE%D1%85%D0%BE%D0%B4%D0%B8%D1%82%D1%8C-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8E-%D1%8D%D1%82%D0%BE-%D0%BE%D1%82%D0%BB%D0%B8%D1%87%D0%BD%D1%8B%D0%B9-%D0%B2%D0%B0%D1%80%D0%B8%D0%B0%D0%BD%D1%82/>1×slots зеркало проходить регистрацию это отличный вариант</a>
<a href=https://test.soclanovtsy.ru/topic/34704-best-online-bitcoin-casino-d275ps/#comment-43696>1×slots зеркало видели такую регистрацию на</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Прямо в арестуйте бесплатные вращения за регистрацию без депозита и начинайте коллекционировать призовые композиции из-за крупных выигрышей!
#9317 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало рабочее этих способов предполагает регистрацию
Фриспины. Бесплатные вращения предусмотрены для применения в видео-слотах. Внимательно читайте условия – они нередко выдаются для некоторых машин. В зависимости от клуба продоставляется делать конкретное количество ставок. Кстати, современные игорные дома выделяют возможность заводить «одноруких бандитов». <a href=http://filmkachat.ru/>1хслот скачать</a> Также существуют онлайн-платформы азартных игр, коие используют раздачу бездепозитных призов в особые даты (как для казино, например и для игрока). Помимо сего, действующие игроки также имеют вероятность получить похожие призы за свою деятельность (например, за повышения значения или за похожие заслуги). <a href=http://www.daongil.com/bbs/board.php?bo_table=free&wr_id=352040>http://www.daongil.com/bbs/board.php?bo_table=free&wr_id=352040</a> Выше мы дали глубокий набор самых свежих и актуальных бездепозитных призов в онлайн казино без пополнения на 2022 год, где вам пользоваться хоть ценным бездепозитным бонусом. 1×slots casino регистрация 1×slotscasino09k online <a href=https://noteswiki.net/index.php?title=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0_%D0%91%D1%83%D1%80%D0%B3%D0%B5%D1%80%D0%BE%D0%B2_%D0%98%D0%B7_%D0%A0%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0_MUCHO>https://noteswiki.net/index.php?title=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0_%D0%91%D1%83%D1%80%D0%B3%D0%B5%D1%80%D0%BE%D0%B2_%D0%98%D0%B7_%D0%A0%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0_MUCHO</a>
1хслотс официальный сайт зеркало
Бонус начисляется игроку сразу в регистрации и прохождения верификации в казино и не требует от посетителя внесения депозита. Как верховодило, размер бонуса в подобном случае довольно скромный, однако дозволяет новичкам познакомиться с забавой без риска настоящими средствами. <a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=68022&result=reply>1хслотс мобильная версия зеркало</a> 1× slots сайт <a href=https://ep-team.ru/forum/index.php?action=profile;u=8032>https://ep-team.ru/forum/index.php?action=profile;u=8032</a> А ознакомиться с новыми онлайн казино, Вы можете с призов с выводом выгоды, коие Вы можете получить без депо. 1хслотс 1хслотс регистрация перейти на 1×slots Помимо прочего, для вывода средств по бездепу нужно внести на счёт свой первый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на мало возможную сумму, после чего вывод средств станет доступен.К огорчению, нет. Почти все казино, требуют внесение желая бы одного малого депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, что исключить средства разрешено только на что, эту платежную систему, с которой был изготовлен депозит.
1×slots зеркало регистрацию более популярный вариант это
Основное управляло получения бездепа ? создаваемый аккаунт обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов строго запрещено. Проверка проводится по имени, адресу электронной почты, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита необходимо соблюдать простую последовательность действий.Главным интересным в появлении данных вознаграждений состоит что, нет, собственно пустив их в ход, игры ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он спасибо призам какой-нибудь выигрыш либо мгновенно спустит все только что прибывшие финансы). То есть, казино снабжает игрока вероятностью на дармовой основе играть во всевозможные слоты и даже спонсирует забаву. <a href=https://google.com.cu/url?q=https://doctorlazuta.by/>https://google.com.cu/url?q=https://doctorlazuta.by/</a> 1×slots подтвердит вашу регистрацию если говорить Чаще всего применяются коды. Их нужно вносить в особые окна регистрационной анкеты, если идет о пригласительных бонусах, или в особом разделе собственного кабинета игрока.
1×slots регистрация на сайте
Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала прыткие выводы. Фишка выплат что, нет, собственно довольно выбрать платёжный инструмент и указать сумму. В большинстве случаев средства зачисляются на электрические кошельки в течение 15 минут, а на банковские карты – 1–3 рабочих денька. 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=http://boss.why3s.cc/boss/home.php?mod=space&uid=139787>http://boss.why3s.cc/boss/home.php?mod=space&uid=139787</a>
онлайн казино 1×slots
Бонусные средства – небольшая сумма денег для старта в новом казино. На бонусные средства, обычно разрешается играть во все забавы, считая слотов с прогрессивным джекпотом и игр из раздела exist casino.В каждом казино с бездепозитным бонусом предусмотрены вейджеровые обстоятельства. Это единственный «подводный камень», кот-ый стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, нужно сделать определённое число ставок. Чем круче приз, тем труднее выполнить обстоятельства, и наоборот. Сроки активации приза уточняются любым казино, но чаще всего они не превосходят недели с момента получения. Игроку непременно нужно применять бездеп на обозначенного срока, в ином случае приз просто пропадет. Каждый бонус можно получить только один раз, поэтому в не применять бездеп в срок, у игрока не будет второго шанса им пользоваться.Вейджер в переводе с английского значит «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша приобретенного приза, в нашем случае бездепозитного. Число ставок не — принципиально только набрать сумму, пропорциональную сумме одобрения. <a href=http://tools.co.ua/wr_board/tools.php?event=profile&pname=uttermostsocial>http://tools.co.ua/wr_board/tools.php?event=profile&pname=uttermostsocial</a> Поспешите арестовать бездепозитные бонусы за регистрацию в казино из представленного списка. Все платформы столько водят легальную работа, но и обрадуют правдивыми плодами игры, высокой отдачей, резвыми выплатами. 1×slots регистрация 1×slotscasino09k online Варианты выигрыша находятся от Вашей успеха и условий игорного портала. Выше мы заявили, что некоторые бездепозитные призы в 2022 году выдаются с лимитированиями по максимальной выплате. Однако, остаются другие, все, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на деньги, возможно выиграть невозможные суммы. Сегодняшние игровые автоматы либо видео слоты, как их именуют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000.Зачастую бездепозитные бонусы казино для забавы предлагаются разными заведениями азартных игр в качестве рекламных акций либо в целях привлечения к себе новых игроков. Для бездепозитных призов в казино 2022 геймеру не нужно пополнять счет до этапа вывода желанных средств.
<b>Смотреть еще похожие новости:</b>
<a href=http://youhotel.ru/forum/memberlist.php?mode=viewprofile&u=29954>1×slots зеркало на сегодня</a>
<a href=http://www.ihavethepussy.com/de/threads/191267–1×slots-%D0%A1%D0%82%D0%A0%C2%B5%D0%A0%D1%96%D0%A0%D1%91%D0%A1%D0%83%D0%A1%E2%80%9A%D0%A1%D0%82%D0%A0%C2%B0%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A1%D0%8F-1×slots-review-live?p=208801#post208801>1×slots регистрация 1×slots review live</a>
<a href=https://www.sgomberisgombero.it/author/jamesapate/>1×slots актуальное зеркало</a>
<a href=http://www.deonnyn.com/PSPA/memberlist.php?mode=viewprofile&u=559&sid=dc01a61a848bc3e21b08a1e2d8445edb>1×slots подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Отзывы читателей о бонусных акциях помогут составить эмоцию, но не запамятовывайте о субъективности собственных комментариев.
#9318 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasino09k online
Бонус с зачислением средств на счет выделяет больше свободы действий. Пользователь сам подбирает, каким образом распорядиться подаренными своими. Здесь также все действовать лимитирования на список доступных игр, хотя обыкновенно эти рамки не например строги, как в рекламную с бесплатными вращениями.В бонусную программку многих операторов входят систематические бездепы. Это пожизненные промоакции, поощряющие активных неизменных игроков. Популярный формат — раздача фриспинов по определенным дням недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают постоянные призы без депо в обмен на скопленные баллы преданности. <a href=http://filmkachat.ru/>1×slots зеркало регистрация то дальше необходимо пройти</a> <a href=http://service.gepart.su/forum/?PAGE_NAME=profile_view&UID=5273>http://service.gepart.su/forum/?PAGE_NAME=profile_view&UID=5273</a> Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке адепты онлайн-казино публикуют актуальную информацию о no deposit bonuses прочих услугах.Ознакомьтесь с нашим перечнем лучших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего перечня и получите бездеп незамедлительно. Хватайте наилучшие безвозмездные предложения ниже и выигрывайте большие деньги, не рискуя! 1×slots актуальное зеркало <a href=https://www.bitsdujour.com/profiles/gd3BQA>https://www.bitsdujour.com/profiles/gd3BQA</a> Вейджер (либо вагер) ? это минимальная сумма ставок, коию необходимо сделать для вывода валютного бонуса. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение.
1×slots регистрацию более популярный вариант это
Чтоб получить большой выигрыш, выбирайте игровые автоматы с максимальным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша. 1×slots мобильная версия войти казино <a href=https://padlet.com/kalinka0588/padlet-mnoytahfu18jiz1m>https://padlet.com/kalinka0588/padlet-mnoytahfu18jiz1m</a> Бывают ли бездепозитные бонусы без вейджера? Бывают, в у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино. рабочее зеркало 1хслотс Выбор любого интернет казино на нашем сайте. В описании к каждому Вы сможете узнать, собственно получите за творение аккаунта.
1×slots рабочее зеркало
Чтобы самостоятельно убедиться в преимуществах бездепозитных призов, довольно зарегистрироваться в казино и получить одобрение. <a href=http://www.haxorware.com/forums/member.php?action=profile&uid=282464>http://www.haxorware.com/forums/member.php?action=profile&uid=282464</a> 1× слот зеркало Для ревизии применяются сканы паспортов, водительских прав, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если юзер обнаружен в попытке ввести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их владелец попадает в черный список. При игре на лицензионной площадке надо бояться указывать достоверную персональную информацию (шифрование ликвидирует утечку персональных данных).
1×slots casino регистрация 1×slotscasin online
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1080#post-34078>1×slot казино зеркало</a> Постарайтесь отыграть вейджер, чтобы появилась вероятность забыть заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электрической кошелёк, карту, телефонный.Каждый из бездепозитных бонусов без пополнения 2022 содержит собственный конкретный вейджер для отыгрыша, например же в любом казино он уточняется индивидуально — где то он х55 а кое-где х30, повторюсь всюду по разному! Активация по промокоду употребляется в различных видах бездепов. Если речь о приветственном призе, то набор знаков возможно разузнать на главной странице, в регистрационной форме либо послании, которое отправляется пользователю для подтверждения адреса электронной почты. Акции шансы проводиться совместно с партнерскими площадками. Обычно код размещается на стороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активизируется разовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем важный код для активации в описании любого промо.Для получения выигрыша потребуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить конкретную необходимую, хотя уже из собственных средств. Она рассчитывается из общего объема выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, случае юзер выиграл 1000 рублей, а множитель составляет х30, вывести средства можно будет, сделав ставки на 30 000 рублей. 1хслотс регистрация в 1×slots casino <a href=https://eccentrictirade.com/forums/member.php?action=profile&uid=5556>https://eccentrictirade.com/forums/member.php?action=profile&uid=5556</a> Однако в условиях исчезают «подводные камешки», которые не позволят вывести крупную необходимую или же вы не успеете отыграть вейджер. Поэтому профессионалы рекомендуют отобрать безвозмездные вращения за регистрацию в казино без депозита, дабы поднабраться опыта и получить настоящий шанс на победу.Перечисленные повыше основные характеристики сочетают фактически любой бонус и считаются стандартными для бездепозитных бонусных начислений в казино.
1×slots зеркало рабочее
<a href=https://eco-kamchatka.ru/user/DoctorLazutaSt/>https://eco-kamchatka.ru/user/DoctorLazutaSt/</a> Игрокам не следует принимать приветственный бонус как гарантированный способ получить большой выигрыш, но это замечательная вероятность без расходов оценить перечень казино. 1×slots регистрация то дальше необходимо пройти Для всех бездепозитных бонусов функционирует наибольший лимит на выигрыш. Он показывает максимальную сумму, которую у получить, играя на бонусные кредиты. Как только для удастся выполнить требования вейджера, допустимый максимум несомненно переведен с бонусного счета на главной, а остаток несомненно списан.Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавления либо официального посетителя для ПК. В большинстве казино действуют программы лояльности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на грядущий степень нередко сопровождается выдачей бездепа.
<b>Смотреть еще похожие новости:</b>
<a href=https://rolivka.online/forum/showthread.php?tid=28847>1×slots зеркало</a>
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=3584>1×slots официальный сайт мобильная версия скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Принципиальным различием безвозмездных призов от бонусов на депозит является неимение надобности вносить деньги на аккаунт. Из-за этого их нередко нарекают бездепозитными (not the slightest down payment bonuses).
#9319 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало
Пoдтвepдить личнocть клиента. Для удачного вывода средств, нужно подтвердить личность клиента. Нa этaпe вepификaции пpoфиля, сотрудники службы безопасности должны убедиться, собственно у игрока более один аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не может вывести свой выигрыш, если у него будет несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы. <a href=http://filmkachat.ru/>казино 1×slots</a> <a href=http://www.seoulschool.org/bbs/board.php?bo_table=free&wr_id=287784>http://www.seoulschool.org/bbs/board.php?bo_table=free&wr_id=287784</a> 1×slots казино зеркало <a href=https://nitroporno.com/user/Ralphdem/>https://nitroporno.com/user/Ralphdem/</a> Операторы гемблинга утверждают, собственно например они дерутся с бонус-хантерами. Впрочем, критики считают, что этим казино пытаются сделать из случайного гостя неизменного игрока.Принципиальным различием безвозмездных призов от бонусов на депозит является неимение надобности вносить деньги на аккаунт. Из-за этого их нередко нарекают бездепозитными (not the slightest down payment bonuses).
1×slots официальный сайт скачать
Многие игроки, оценив возможностей казино, остаются выступать в нем и дальше ? на это и направлено каждое рекламную. Постоянные клиенты заносят депозиты и делают ставки, обеспечивая долгосрочную прибыль оператора. То есть, казино выдают бездепы новым юзерам для формирования лояльной аудитории. 1× slots сайт <a href=https://clients1.google.jo/url?q=http%3A%2F%2Fdoctorlazuta.by>https://clients1.google.jo/url?q=http%3A%2F%2Fdoctorlazuta.by</a> Важно, убедитесь что, что раньше не регистрировались в выбранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи.В реальное время получить приз за регистрацию в казино довольно просто. Почти любой игорный жилище с радостью даст деньги либо благотворительные вращения. Многие игроки пользуются этим и не стесняются региться в каждом клубе с выгодными критериями. Кстати, это отличная возможность придумать выигрышную тактику и сорвать куш. 1×slots зеркало регистрация в 1×slots casino
1×slots рабочее зеркало на сегодня
Верификация аккаунта. Лучше подтвердить личность незамедлительно последствии регистрации, дабы потом не было заморочек с выводом средств. Верификация может проходить двумя путями: <a href=https://coffeepeople.ru/memberlist.php?mode=viewprofile&u=40184>https://coffeepeople.ru/memberlist.php?mode=viewprofile&u=40184</a> Акционные предложения от казино есть в разных форматах. Часто призы даются в мена на депо. Игрок вносит платеж и получает средства, безвозмездные вращения и одобрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — картина приза, который гарантирован за исполнение определенных действий на веб-сайте: 1×slots коды
1× slots зеркало
<a href=https://creapnl.com/foros/tema/1%d1%85%d0%bb%d0%be%d1%82-%d1%80%d0%b5%d0%b3%d0%b8%d1%81%d1%82%d1%80%d0%b0%d1%86%d0%b8%d1%8f-%d0%b2–1×slots-casino-3/>1хлот регистрация в 1×slots casino</a> 1хслотс казино зеркало <a href=http://biyografiforum.10tl.net/member.php?action=profile&uid=2834>http://biyografiforum.10tl.net/member.php?action=profile&uid=2834</a> Как управляло, при выводе финансов, от играющего требуется только устроить минимальный вклад чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом личный счет.Выигрыши с призов без инвестициям постоянно привязаны к требованию по ставкам и все быть обналичены лишь в выполнения данных притязаний.
1хслотс рабочее зеркало
Размер ставки для игры по бездепозитному бонусу (естесственно же, если, тогда,, когда он представлен вид бонусных денежных средств) зачастую ниже, чем при игре на депозит. Ограничение будет работать до момента отыгрыша бонуса. <a href=http://mmjob.gapia.com/bbs/board.php?bo_table=free&wr_id=17306>http://mmjob.gapia.com/bbs/board.php?bo_table=free&wr_id=17306</a> 1×slots casino зеркало Многие азартные клубы ограничивают необходимую вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не сможете вывести. Разница несомненно аннулирована, Вы и не сможете создавать на нее ставки.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.eliteshost.com/showthread.php?tid=15204>1×slots казино зеркало</a>
<a href=https://fougerite.com/threads/1×slots-registracija-na-sajte.12492/>1×slots регистрация на сайте</a>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/3716/#comment-218423>1×slots зеркало регистрация</a>
<a href=http://board.eternityrpc.com/member.php?action=profile&uid=369>1хслот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Как верховодило, при выводе денег, от играющего требуется лишь сделать минимальный вклад для того, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом личный счет.
#9320 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия
Мы подготовили перечень, где есть всегда животрепещущие и новые бездепозитные призы казино, коие вам получить бесплатно. Для наших пользователей есть особые предложения неповторимые бонусы, которые вы нигде не отыщите, их мы обозначили особой красноватой плашкой «Exclusive». <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino 56 online</a> Бездепы обычно предлагают с отыгрышем — моментально исключить выигранные средства нельзя. Перевод средств со счета несомненно возможен последствии того, как юзер выполнит все притязания казино, а сумма возможности быть выше установленного правилами лимита. Условиями акции фиксируются сроки, в течение которых заказчик вправе пользоваться предложением. Обычно они не превышают нескольких дней в активации.Бонусы без депо при регистрации числятся самыми красивыми как для опытных игроков, например для и начинающих. Получив такое вознаграждение, клиент возможность выступать на настоящие средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а также условия их активации и выигрыша. <a href=https://fakenews.win/index.php?title=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D0%B5%D0%B9%D1%88%D0%B0%D1%8F%20%D0%BF%D0%B8%D1%86%D1%86%D0%B0%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!>https://fakenews.win/index.php?title=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D0%B5%D0%B9%D1%88%D0%B0%D1%8F%20%D0%BF%D0%B8%D1%86%D1%86%D0%B0%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!</a> 1×slots официальный зеркало рабочее <a href=https://gtafarai.lt/index.php?/profile/12348-craigwhele/>https://gtafarai.lt/index.php?/profile/12348-craigwhele/</a> На данном разделе портала регулярно публикуются обзорные заметки, каких рассматриваются благотворительные призы превосходнейших интернет-казино. Информация структурирована по нескольким пт, включая главные:Вейджер в переводе с английского значит «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша приобретенного бонуса, в нашем случае бездепозитного. Число ставок большого — важно лишь набрать сумму, пропорциональную сумме поощрения.
1×slos регистрация в 1×slots casino
Возьми свой подарок. Чаще всего приз активизируется незамедлительно последствии регистрации. Но случаются истории, когда надо(надобно) зайти в индивидуальный кабинет или написать в справочную службу. <a href=https://www.formulersupport.com/Thread-1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D0%BA%D0%BE%D1%82%D0%BE%D1%80%D1%83%D1%8E-%D1%83%D0%BA%D0%B0%D0%B7%D1%8B%D0%B2%D0%B0%D0%BB%D0%B8-%D0%BF%D1%80%D0%B8-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D0%B8-%D0%BA%D1%81%D1%82%D0%B0%D1%82%D0%B8>1×slots зеркало которую указывали при регистрации кстати</a> 1×slots подтвердит вашу регистрацию если говорить <a href=https://www.mexicanservers.com/member.php?action=profile&uid=11044>https://www.mexicanservers.com/member.php?action=profile&uid=11044</a> 1хслотс 1хслотс регистрация перейти на 1×slots Разные казино имеют собственные управляла по выведению выигрыша. Для бездепозитных бонусов принимаются достаточно высочайшие требования. Часто онлайн-казино советуют отыграть бонусное поощрение до 100 раз в игровых автоматах. Например, если игрок получил бесплатно 10 долларов, то необходимо несомненно отыграть их, поставив одну тысячу спинов по одному доллару любой. Стоит отметить, собственно не все казино выделяют вероятность играть на призы и не во всех развлекательных заведениях идентичные верховодила для отыгрывания. Некоторые казино запрещают выступать на призы в блекджек либо ограничивают ставки до пяти процентов, собственно существенно увеличивает в десятки раз число необходимых игр.
1×slots зеркало регистрация в 1×slots casino
В онлайне большое узнаваемых игорных площадок с привлекательными акционными предложениями. Однако внимательно читать условия 10-ов услуг в надоест, да и время отнимет большое. Поэтому наша команда подготовила ТОП-3 сайтов с превосходнейшими бездепозитными призами:Обычно показатель повыше, чем для бонусов на депо. Не изумляйтесь, случае он несомненно даже х100. Иногда завышенный коэффициент вейджера уточняется для обитателей отдельных государств. <a href=http://www.gizeleonthego.com/2018/07/summer-in-miami.html>http://www.gizeleonthego.com/2018/07/summer-in-miami.html</a> рабочее зеркало 1×slots
1×slots зеркало выигрыши обязательно пройдите регистрацию если
1×slots мобильная версия войти казино <a href=https://www.nkm.no/user/frankelips/?um_action=edit>https://www.nkm.no/user/frankelips/?um_action=edit</a> Подтверждение регистрации. Казино настоятельно привязки профиля к электрическому адресу и номеру аппарата. Для этого на e-mail отчаливает письмо ссылаясь, а на телефон ? текстовое извещение с кодом.Для получения бездепа нужно пригласить в забаву по реферальной ссылке свежего клиента: он обязан зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на сумму, обозначенную в критериях промоакции.
казино 1×slots официальный сайт
Отказ в прохождении верификации. Если заказчик не хочет либо имеет предоставить документы, подтверждающие его лицо, профиль будет заблокирован совместно, вкупе со всеми бонусными начислениями. <a href=https://www.google.com.ar/url?q=https://doctorlazuta.by/>https://www.google.com.ar/url?q=https://doctorlazuta.by/</a> Если идет об неповторимых услугах, возможность потребоваться регистрация в казино по ссылке с партнерского сайта. 1×slots акции Представьте момент, когда при ставке в 10 рублей Вы получите подобное умножение. Миллион руб. За одно вращение, собственно вполне возможно. Поэтому вопрос, сколько возможно выиграть остаётся закрытым. Предлагаем выяснить самостоятельно. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный приз и инспектируйте фортуну в деле. Разумеется, исключить средства сложно. Однако шансы есть у всех.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.sgomberisgombero.it/my-account-2/>1× slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный приз часто возможность замерзнуть легкодоступным сразу в завершения регистрации, поскольку как единственным требованием к нему считается регистрация, а этого проверка вашей свежей учетной записи. Отзывы читателей о бонусных акциях помогут составить впечатление, но не забывайте о субъективности собственных объяснений.
#9321 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasino09k online
Хотя благотворительные бонусы начисляются без депо, не исключено, что вас придется вносить деньги. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты лишь в такого, как свежий заказчик первый пополнит игровой счет. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasino09k online</a> Промообъявления от казино не дают реальной картины и направлены на привлечение внимания пользователей. Понять, насколько высоки шансы остаться в плюсе, дозволит собственный тест критерий предложения: <a href=http://istartw.lineageinc.com/home.php?mod=space&uid=3429177&do=profile&from=space>http://istartw.lineageinc.com/home.php?mod=space&uid=3429177&do=profile&from=space</a> Ещё одно распространённое акционное предложение – привлекательный подарок с сомнительными притязаниями. К примеру, клуб обещает $100 виде бездепа, хотя с вейджером х80 либо х100. Отыграть подобный вейджер фактически нереально и поэтому другого концентрироваться на более заманчивых промоакциях.С иной стороны, намного проще отобрать бездепозитные фриспины за регистрацию в казино и прямо сейчас начать вертеть барабаны в превосходнейших слотах. Главная особенность спинов что, собственно они предназначены для лучших автоматов. Удастся не пройти дополнительные раунды, хотя и прирастить необходимую выигрыша, заработать респины и другие внутриигровые подарки. 1хслотс казино зеркало <a href=http://d992387h.bget.ru/index.php?subaction=userinfo&user=protectivefores>http://d992387h.bget.ru/index.php?subaction=userinfo&user=protectivefores</a>
1×slots казино мобильная версия
<a href=https://melhorlance.com.br/author/jamesbom/>1×slots бездепозитный бонус за регистрацию</a> 1×slots коды Зачастую бездепозитные бонусы казино для забавы предлагаются разными заведениями азартных игр виде маркетинговых акций или в целях привлечения к себе свежих игроков. Для бездепозитных призов в казино 2022 геймеру не пополнять счет до этапа вывода хотимых средств.У любого игорного клубы различные вейджеровые обстоятельства. Чтобы вы гарантировано смогли выполнить их, мы дадим некоторое советов. Если система начислила маленькую сумму, надо создавать немалые ставки – остановитесь на 10–30 центах. Как лишь сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В противном случае другого приглядеться к другому автомату. <a href=http://ems.college-eisk.ru/?module=forum&action=topic&id=322>http://ems.college-eisk.ru/?module=forum&action=topic&id=322</a> 1×slots рабочее зеркало
1×slots регистрация то дальше необходимо пройти
Бездеп с фриспинами имеет обхватывать всю коллекцию игр на веб-сайте либо разработки одного провайдера. Обычно предлагается определенный список автоматов. Он указывается в положениях о проведении акции. Выигрыш возможность быть выведен последствии такого, как пользователь отыграет эту сумму. Возможность расценить глубокий перечень слотов — главное достоинство этой разновидности. Игроку становятся доступны те опции, которые отсутствуют в демонстрационном режиме, а вероятность выиграть настоящие средства добавляет ясных азартных ощущений. <a href=https://oncob2b.co.kr/_NBoard/board.php?bo_table=free&wr_id=163251>https://oncob2b.co.kr/_NBoard/board.php?bo_table=free&wr_id=163251</a> Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.Если идет об эксклюзивных предложениях, может потребоваться регистрация в казино по ссылке с партнерского сайта. 1×slots регистрация 1×slotscasino09k online
1×slots casino регистрация 1×slots review live
Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала резвые выводы. Фишка выплат том,, что довольно выбрать платёжный инструмент и показать необходимую. В большинстве случаев деньги зачисляются на электрические кошельки протяжении 15 мин., а на банковские карты – 1–3 трудящихся денька. Зарегистрироваться в казино по особой ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефона и электронную почту). Для подтверждения номера телефона нужно в собственном профиле указать собственный номер и надавить кнопку „Подтвердить номер телефона“, дальше Вы получите sms-сообщение с кодом, который необходимо ввести в подходящее поле. Для подтверждения электронной почты, перебежать по активной ссылке в послании от казино.При отыгрыше бонусных средств, нужно учесть срок действия бонуса и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный приз несомненно аннулирован. 1×slots скачать на айфон <a href=http://bbs.boway.net/home.php?mod=space&uid=1000986&do=profile&from=space>http://bbs.boway.net/home.php?mod=space&uid=1000986&do=profile&from=space</a> Превышение максимальной ставки при отыгрыше. Система автоматически не предуведомляет о превышении ставки, поэтому о нарушении правил игрок возможность разузнать теснее после подачи запроса на вывод средств.Но есть азартные заведения, готовые просто например вручить средства на игру. Для сего довольно создать профиль. Чтобы вывести выигрыш, сперва необходимо выполнить вейджеровые условия, прописанные в критериях получения бездепа.
1×slots зеркало видели такую регистрацию на
Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша призов. Заведения постоянно устанавливают максимальную ставку, допустимую по условиям вейждера.В любом казино с бездепозитным бонусом учтены вейджеровые условия. Это единственный «подводный камень», который стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) сделать определённое число ставок. Чем круче приз, тем сложнее выполнить условия, и напротив. Все обожают получать подарки. Согласитесь, почти каждый играющий человек несомненно безмерно рад, если получит даровой подарок для игры в интернет казино просто за регистрацию либо же приз за внесенный депо, например называемые приветственные бонусы для новых игроков. Соответственно эти интернет клубы будут больше популярны и преимущественны у игроков при выборе казино для игры. Топ казино постоянно обновляется и прибавляются новые и увлекательные игровые клубы с привлекательной бонусной политикой и всеми вероятными преимуществами, льготами, к которым относятся такие призы как фриспины за регистрацию, денежные бездепозитные призы, а щедрые призы за внесенный депозит.Такие поощрения разрешают даром протестировать новое казино, разобраться с игровым ходом онлайн слотов, заработать и исключить небольшую сумму денег. <a href=https://backpacker-footsteps.com/backpacker-footsteps-forum/profile/jameswah/>https://backpacker-footsteps.com/backpacker-footsteps-forum/profile/jameswah/</a> 1хслотс рабочее зеркало на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.l2endless.com/member.php?action=profile&uid=6253>1×slots регистрация 1×slotscasino09k online</a>
<a href=https://radios-collector.com/viewtopic.php?f=7&t=45537>1×slots casino зеркало рабочее</a>
<a href=http://lider1c.ru/communication/forum/messages/forum5/message18287/14360–1khslots-rabochee-zerkalo?sessid=ce4a10dd3548cda1c6f9906566f51d0a&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1хслотс рабочее зеркало</a>
<a href=https://minifishtank.net/forum/showthread.php?tid=599>1×slots зеркало регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Список например именуемых «запрещенных территорий» прилагается к правилам бонусной программы игорного портала. Обязательно проверьте, распространяются ли на вас похожие санкции. Казино дает вероятность заработать и вывести настоящие деньги на бездепозитных призах. Обычно, это незначительная сумма, коию казино возможность себя позволить презентовать игроку.
#9322 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало
К примеру, игроку выдаются бесплатные средства в заведении в размере пятидесяти либо ста долларов (вейджер на которые сочиняет 100х). То есть, любому новоприбывшему игроку выскакивает привлекающая картинка, кот-ая обещает выплату всех зачисленных фирмой средств. Не стоит внимания на казино бонус за регистрацию без депо с слишком великой или очень малеханькой суммой призов, потому что, том кропотливо изучив все обстоятельства, тут вероятнее всего, будет некий подкол. <a href=http://filmkachat.ru/>1хслотс зеркало</a> <a href=http://mail.nudecelebvideo.net/user/DavidPes/>http://mail.nudecelebvideo.net/user/DavidPes/</a> Бонус за регистрацию в казино выдается только раз раз на 1-го игрока. Но посещают дополнительные промоакции, в коих бездепы расступаются для постоянных клиентов и эти подарки Вы сможете получить больше 1-го раза. 1×slots casino регистрация 1×slotscasino09k online <a href=http://www.lw57.net/home.php?mod=space&uid=2408781&do=profile>http://www.lw57.net/home.php?mod=space&uid=2408781&do=profile</a> Акционные предложения от казино есть в разных форматах. Часто призы даются в мена на депозит. Игрок заносит платеж и получает деньги, благотворительные вращения и одобрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — вид бонуса, кот-ый гарантирован за выполнение определенных деяний на веб-сайте:Выполнив все притязания оператора, заказчик имеет оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит примерно менее суток. Если дополнительно требуется пройти функцию верификации, то срок возрастает до 1–2 рабочих дней. Для перевода используются банковские инструменты и электронные платежные системы. Второй метод подходит никакого, например как основная транзакций в осуществляются моментально. В связи со специфичностью функционирования банков обработка платежей имеет занять до нескольких рабочих дней.
1×slots зеркало которую указывали при регистрации кстати
зеркло казино 1×slots Реже бонусы без депо начисляются постоянным игрокам. С их помощью администрация старается удержать ценных посетителей или вожделеет поблагодарить за лояльность верных гостей. Но гораздо почаще для сходственных целей применяются эти промоакции:Бездепозитные призы истинными деньгами, коие можно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадались. <a href=https://bridge-clip.ru/user/MichaelCoemi/>https://bridge-clip.ru/user/MichaelCoemi/</a> Классическая разновидность бонуса за создание аккаунта. Его превосходство заключается сомнений, собственно клиент может других избирать аппараты и делать ставки в них. Иногда список игровых автоматов ограничен оператором, но все также это никакого, чем один-единственный доступный слот, как когда с использованием фриспинов. 1×slots зеркало 1хслотс регистрация перейти на 1×slots
1× slots официальный
<a href=https://www.sportchap.ru/user/Craigsooky/>https://www.sportchap.ru/user/Craigsooky/</a> Бездепозитный бонус – это экономическое вознаграждение, которое выдается участнику игры в казино, для его вербования и возникновения заинтригованности. Любой гость, который соответствует условиям выдачи сходственного бездепозитного бонуса, имеет претендовать на получение вышеуказанного приза. Такое одобрение считается более эффективным способом, дающим возможность стартовать при, не вкладывая личных материальных средств. 1× slots официальный Существует ли стратегии для отыгрыша бездепозитных призов? К огорчению нет, на выигрыши либо проигрыши с бонусов, казино либо игрок воздействовать имеет, отдача игр происходит от создателей игр.
1×slots зеркало регистрация
Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы мгновенно получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, замечена реальный шанс победу! Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, например как Вам понадобиться ее доказать в при выводе денег. 1×slots зеркало <a href=https://www.efunda.com/members/people/show_people.cfm?Usr=Mpstats0509>https://www.efunda.com/members/people/show_people.cfm?Usr=Mpstats0509</a> Бесплатный приз – кредиты, которые онлайн-казино начисляет клиенту, не принуждая его пополнять игровой счет.
1×slots подтвердит вашу регистрацию если говорить
Если вы избираете испытанное лицензионное онлайн казино и сделайте все обстоятельства получения бездепозитного бонуса, трудностей с получением презента у Вас не возникнет.Вейджер (либо вагер) ? это минимальная сумма ставок, которую нужно сделать для вывода валютного приза. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим красивее спецпредложение. Обычно показатель повыше, чем для бонусов на депо. Не удивляйтесь, если он несомненно даже х100. Иногда завышенный коэффициент вейджера уточняется для обитателей отдельных государств.Чтобы получить возможность исключить выгода с бездепозитного бонуса в казино, нужно выполнить ряд условий: <a href=http://www.sg588.tw/home.php?mod=space&uid=545175>http://www.sg588.tw/home.php?mod=space&uid=545175</a> Это также бесплатные финансы, которые поступают на аккаунты свежеиспеченных компьютерные последствии регистрирования. А необыкновенность этих бонусов произведено никаких, что обретенные деньги непременно по применять в продолжении назначенного времени.Итак, дабы бесплатные бонусные кредиты превратились в настоящие деньги, которыми продоставляется распоряжаться по собственному усмотрению, их надо(надобно) отыграть. Вейджер следует уточнять в правилах онлайн-казино. 1 xslots рабочее зеркало Вышеописанная причина и является главным интересным, из-за которого операторы отдают часть своей прибыли на различные рекламные расходы и маркетинговые кампании. А наиболее действенным тут будут играть непосредственно бездепозитные призы казино 2022 с выводом за регистрацию.У нас на веб-сайте Вы найдете список бонусов без депо в проверенных казино и доскональную информацию про как их получить и использовать.
<b>Смотреть еще похожие новости:</b>
<a href=http://permitbeijing.com/forum/showthread.php?tid=2201761>скачать 1×slots официальный сайт</a>
<a href=https://bajarmp3.net/showthread.php?tid=403422>1×slots зеркало регистрацию более популярный вариант это</a>
<a href=http://vn-info.net/user/Josephkam/>1×slots зеркало видели такую регистрацию на</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Размер бонусов чаще всего чисто символический и не выше 50 руб. Приятно, но ощутимым бустом при ли будет.
#9323 SelectorZercalohttps://selector-casino-apk.ru/selector-oficzialnyj-sajt/
<a href=http://images.google.fr/url?sa=t&url=https://selector-casino-apk.ru/selector-oficzialnyj-sajt>https://selector-casino-apk.ru/selector-oficzialnyj-sajt</a> <a href=https://www.countyfootbalszone.com/pages/redirect.php?url=https://selector-casino-apk.ru/selector-oficzialnyj-sajt>https://selector-casino-apk.ru/selector-oficzialnyj-sajt</a> <a href=http://buy-photo-likes.com/wp-content/plugins/phpl/redirect.php?url=https://selector-casino-apk.ru/selector-oficzialnyj-sajt>https://selector-casino-apk.ru/selector-oficzialnyj-sajt</a> <a href=http://www.itwire.com/modules/mod_jw_srfr/redir.php?url=https://selector-casino-apk.ru/selector-oficzialnyj-sajt>https://selector-casino-apk.ru/selector-oficzialnyj-sajt</a> <a href=https://xn–80aafhhcdvf2b2k.xn–p1ai/bitrix/redirect.php?goto=https://selector-casino-apk.ru/selector-oficzialnyj-sajt>https://selector-casino-apk.ru/selector-oficzialnyj-sajt</a> <a href=http://serafimovich.org/redir.php?site=https://selector-casino-apk.ru/selector-oficzialnyj-sajt>https://selector-casino-apk.ru/selector-oficzialnyj-sajt</a> <a href=http://www.zggtr.org/index.php?thememode=full;redirect=https://selector-casino-apk.ru/selector-oficzialnyj-sajt>https://selector-casino-apk.ru/selector-oficzialnyj-sajt</a> <a href=http://www.copperpages.com/redir.asp?id=59&account=119§ion=2&url=https://selector-casino-apk.ru/selector-oficzialnyj-sajt>https://selector-casino-apk.ru/selector-oficzialnyj-sajt</a> <a href=http://www.voozl.com/away.php?to=https://selector-casino-apk.ru/selector-oficzialnyj-sajt>https://selector-casino-apk.ru/selector-oficzialnyj-sajt</a> <a href=http://gbi-12.ru/links.php?go=https://selector-casino-apk.ru/selector-oficzialnyj-sajt>https://selector-casino-apk.ru/selector-oficzialnyj-sajt</a> <a href=http://www.murc.jp/redirect?url=https://selector-casino-apk.ru/selector-oficzialnyj-sajt>https://selector-casino-apk.ru/selector-oficzialnyj-sajt</a> <a href=https://hi-kiki.com/member/login.html?noMemberOrder=&returnUrl=https://selector-casino-apk.ru/selector-oficzialnyj-sajt>https://selector-casino-apk.ru/selector-oficzialnyj-sajt</a> <a href=http://www.funnice.com/link.php?url=https://selector-casino-apk.ru/selector-oficzialnyj-sajt>https://selector-casino-apk.ru/selector-oficzialnyj-sajt</a> <a href=http://uksexforum.co.uk/external.php?url=https://selector-casino-apk.ru/selector-oficzialnyj-sajt>https://selector-casino-apk.ru/selector-oficzialnyj-sajt</a> <a href=http://www.daoduytu.edu.vn/forum/links.php?url=https://selector-casino-apk.ru/selector-oficzialnyj-sajt>https://selector-casino-apk.ru/selector-oficzialnyj-sajt</a>
Install apk file online casino selector – play now!
<a href=https://m2.capella.edu/mobile-feed/auth/redirect.feed?token=sOnnlFdVN8eBpDXSDHxrqe-sdmY.AAJTSQACMDIAAlNLABxlR0JyRi9uSmI0Qzhpb0NKMXlqTWZrKzl5Zk09AAJTMQACMDE.&url=https://selector-casino-apk.ru/selector-oficzialnyj-sajt/>https://selector-casino-apk.ru/selector-oficzialnyj-sajt/</a> <a href=https://www.google.dm/url?q=https://selector-casino-apk.ru/selector-oficzialnyj-sajt/>https://selector-casino-apk.ru/selector-oficzialnyj-sajt/</a> <a href=http://lupo.jp/gl7.php?g_url=https://selector-casino-apk.ru/selector-oficzialnyj-sajt/>https://selector-casino-apk.ru/selector-oficzialnyj-sajt/</a> <a href=http://eflyers.revolution-bars.co.uk/2012/head-office/may/jubilee-newsletter/?c=www.longisland.com/profile/Raclevant>https://selector-casino-apk.ru/selector-oficzialnyj-sajt/</a> <a href=http://www.chartstream.net/redirect.php?link=www.hagergroup.fr%2Fun-aspirateur-sans-sac-est-il-vraiment-utile%2Fhttps://selector-casino-apk.ru/selector-oficzialnyj-sajt/>https://selector-casino-apk.ru/selector-oficzialnyj-sajt/</a> <a href=http://www.bigboobsprivate.com/cgi/out.cgi?id=235&l=top_top&u=https://selector-casino-apk.ru/selector-oficzialnyj-sajt/>https://selector-casino-apk.ru/selector-oficzialnyj-sajt/</a> <a href=http://yun.smartlib.cn/widgets/fulltext/?url=https://selector-casino-apk.ru/selector-oficzialnyj-sajt/>https://selector-casino-apk.ru/selector-oficzialnyj-sajt/</a> <a href=http://tr.2day.ws/tr/search/?url=https://selector-casino-apk.ru/selector-oficzialnyj-sajt/>https://selector-casino-apk.ru/selector-oficzialnyj-sajt/</a> <a href=http://www.tladies.com/cgi-bin/autorank/out.cgi?id=schix&url=https://selector-casino-apk.ru/selector-oficzialnyj-sajt/>https://selector-casino-apk.ru/selector-oficzialnyj-sajt/</a> <a href=https://eu.wargaming.net/id/openid/redirect/confirm/?next=http%3A%2F%2Fwww.longisland.com/profile/Raclevant>https://selector-casino-apk.ru/selector-oficzialnyj-sajt/</a> <a href=https://28.glawandius.com/index/s1?diff=0&source=og&campaign=20818&content=&clickid=g53e76k3379lcrcw&aurl=https://selector-casino-apk.ru/selector-oficzialnyj-sajt/>https://selector-casino-apk.ru/selector-oficzialnyj-sajt/</a> <a href=http://be-tabelle.net/url?q=https://selector-casino-apk.ru/selector-oficzialnyj-sajt/>https://selector-casino-apk.ru/selector-oficzialnyj-sajt/</a> <a href=http://www.hobbysew.com/redirect.php?action=outer_url&goto=www.longisland.com/profile/Raclevant>https://selector-casino-apk.ru/selector-oficzialnyj-sajt/</a> <a href=https://hklogisticsnet.com/click.php?type=banner&id=9&href=https://selector-casino-apk.ru/selector-oficzialnyj-sajt/>https://selector-casino-apk.ru/selector-oficzialnyj-sajt/</a> <a href=http://www.healingcentre.com.hk/acms/ChangeLang.asp?lang=chs&url=https%3A%2F%2Fwww.longisland.com/profile/Raclevant>https://selector-casino-apk.ru/selector-oficzialnyj-sajt/</a>
#9324 Charlesgunnyhttp://filmkachat.ru
1× slots зеркало
Как верховодило, при выводе финансов, от играющего требуется лишь устроить минимальный лепта для того, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом собственный счет. <a href=http://filmkachat.ru/>1×slots casino зеркало рабочее</a> Помните, что всевозможные нарушения правил сведут на нет ваши усилия, и вы всего останетесь без начисленного для безвозмездного приза. Всегда изучайте верховодила начисления и обстоятельства вейджера. По любым вопросам, на которые вы возможности без найти ответы, обращайтесь за объяснениям и саппорт. <a href=http://www.xn----8sbabeoae4acvb6h.xn–p1ai/2022/01/qr.html>http://www.xn----8sbabeoae4acvb6h.xn–p1ai/2022/01/qr.html</a> 1×slots casino регистрация 1×slotscasin online <a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=4838>http://www.predictive-datascience.com/forum/member.php?action=profile&uid=4838</a> Нет. Для получения бездепозитного приза в казино необходима неотъемлемая регистрация на сайте. Играть в слоты даром и без регистрации возможно только в демо режиме.Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, all зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.
1× слот зеркало
Как верховодило, при выводе финансов, от играющего требуется только устроить минимальный лепта для того, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом личный счет.Чтобы выступать безвозмездно на реальные деньги в казино, порой довольно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные действия. <a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=36413>1× slots зеркало</a> 1хслот зеркало Принципиальным отличием бесплатных призов от бонусов на депо является неименье надобности заносить средства на акк. Из-за сего их нередко нарекают бездепозитными (not the slightest deposit bonuses). <a href=http://iminthai.com/home.php?mod=space&uid=228087>http://iminthai.com/home.php?mod=space&uid=228087</a> 1× slots официальный Бесплатные призы казино без депо можно получить в виде валютных средств на бонусный счет (исключить их можно лишь последствии отыгрыша), фриспинов, забавы или кешбэк-бонуса.Постарайтесь отыграть вейджер, дабы замечена возможность забыть заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные инструменты. Вы можете получить выигрыш на электронной кошелёк, карту, телефонный.
1×slots casino регистрация 1×slotscasin online
<a href=http://www.mp-associes.com/en/index.php/blog/%D0%92%D1%8B%D0%BA%D1%83%D0%BF-%D0%B0%D0%B2%D1%82%D0%BE.html>http://www.mp-associes.com/en/index.php/blog/%D0%92%D1%8B%D0%BA%D1%83%D0%BF-%D0%B0%D0%B2%D1%82%D0%BE.html</a> 2. Создать новый профиль. Для регистрации надо(надобно) наполнить небольшую анкету либо зайдите в личный кабинет при помощи социальных сетей; 1×slots быструю регистрацию а также мгновенное При выполнении критерий отыгрыша и верификации, средства с бонусного счета переводятся на главный и могут быть выведены на карту либо электрический кошелек. Лимиты на вывод и сроки проведения транзакции в от выбранной платежной системы.
1×slots промокод при регистрации 2025
Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, a лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Допустим, за регистрацию вы получили бездеп в размере 2 000 руб. С вейджером х30. В данном случае светит сделать ставок, на совместную необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда сделайте условия по отыгрышу, придёт время заработать настоящие средства. Однако не запамятовывайте, собственно с любого подарка получится вывести определённую необходимую (почаще всего менее $200). <a href=http://forum.cvetq.info/memberlist.php?mode=viewprofile&u=17326>1×slots регистрация 1×slotscasino 56 online</a> В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и когда неоднозначных ситуаций нет способности куда-то пожаловаться и обосновать собственную правоту. В истинное время получить приз за регистрацию в казино очень просто. Почти любой игорный дом с готовностью предоставит деньги или благотворительные вращения. Многие игроки используют этим и не стыдятся региться в каждом клубе с прибыльными условиями. Кстати, это отличная вероятность выдумать выигрышную стратегию и сорвать куш.Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают приз по государствам. Вплоть до такого, собственно клуб имеет себя игроков из Вашей государства, а бездеп не давать. 1×slots сайт <a href=http://profimania.com/bitrix/redirect.php?goto=http://alenabenesova.blog.idnes.cz/redir.aspx?url=http://apicenna.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/mXMgPhZuhiF>http://profimania.com/bitrix/redirect.php?goto=http://alenabenesova.blog.idnes.cz/redir.aspx?url=http://apicenna.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/mXMgPhZuhiF</a> Этот тип приза несомненно добавлен на Ваш акк последствии успешной процедуры регистрации с использованием номера телефонного. Если выбрать иной метод создания учетной записи, бездеп не несомненно добавлен на Ваш аккаунт.Фриспины предназначены для использования в видео слотах. Внимательно ознакомьтесь с условиями – часто их выдают на некоторые автоматы. В зависимости от клуба, у вас получится сделать определённое число ставок. Кстати, продвинутые игорные жилища позволяют запускать каждых «одноруких злодеев».
1× slots официальный
Бездепозитный бонус казино 2022 с выводом за регистрацию предоставляет возможность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и выяснить качество работы службы поддержки. Довольно часто, начиная игровой процесс, игрок уже отказывается останавливаться и делает настоящий лепта. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть безвозмездно возможно как раз таки с бонусом за регистрацию без надобности заносить депозит. <a href=http://wiki.ecusystems.ru/index.php?title=Выкуп_авто>http://wiki.ecusystems.ru/index.php?title=Выкуп_авто</a> Диапазон ставок, коие вправе сделать игрок, кроме лимитирован. Обычно ставить возможно маленькую сумму — в 10–30 рублей за одно вращение.Бездепы обычно предлагают с отыгрышем — мгновенно вывести выигранные средства нельзя. Перевод денег со счета будет вероятен последствии такого, как пользователь выполнит все требования казино, а сумма имеет превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, протяжении которых заказчик вправе воспользоваться предложением. Обычно они не превышают нескольких дней после активации. 1х слот 1хслотс регистрация перейти на 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://creapnl.com/foros/tema/1×slots-%d0%bc%d0%be%d0%b1%d0%b8%d0%bb%d1%8c%d0%bd%d0%b0%d1%8f-%d0%b2%d0%b5%d1%80%d1%81%d0%b8%d1%8f-%d0%b2%d0%be%d0%b9%d1%82%d0%b8-%d0%ba%d0%b0%d0%b7%d0%b8%d0%bd%d0%be-59/>1×slots мобильная версия войти казино</a>
<a href=http://www.arka-bahce.org/forum/showthread.php?p=764145#post764145>1×slots casino регистрация на сайте</a>
<a href=http://aficionado.pl/showthread.php?81404&p=129152>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<a href=https://xs.xylvip.com/forum.php?mod=forumdisplay&fid=2>1×slots быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Ещё одно распространённое акционное предложение – привлекательный презент с неблаговидными притязаниями. К образцу, клуб сулит $100 в бездепа, хотя с вейджером х80 либо х100. Отыграть подобный вейджер практически невероятно и поэтому другого концентрироваться на более заманчивых промоакциях.
#9325 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
За вербование приятеля ? масштабах партнерской программы заказчик получает вознаграждение за привлечение новых пользователей. <a href=http://filmkachat.ru/>1×slots casino регистрация</a> Бездепозитный приз – это экономическое вознаграждение, которое выдается участнику забавы в казино, для его привлечения и появления заинтригованности. Любой гость, кот-ый соответствует условиям выдачи сходственного бездепозитного бонуса, может претендовать на получение вышеуказанного приза. Такое одобрение считается более действенным способом, дающим возможность стартовать в игре, не вкладывая личных вещественных средств.Этот тип приза будет добавлен на Ваш акк после удачной процедуры регистрации с внедрением номера телефона. Если выбрать другой способ творенья учетной записи, бездеп не несомненно добавлен на Ваш акк. <a href=http://sman1mtp.sch.id/index.php?option=com_comprofiler&task=userProfile&user=2474>http://sman1mtp.sch.id/index.php?option=com_comprofiler&task=userProfile&user=2474</a> Законодательство, регулирующее азартные игры в различных странах, влияет на полномочия операторов. В итоге юзеры из отдельных регионов сталкиваются с ограничениями со стороны казино. Это может быть как полный отказ в доступе, так и невозможность загружать забавы отдельных производителей.Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депозит возможность выделяться до 30 дней. 1×slots регистрация 1×slots casino 777 online <a href=http://wood.biz.ua/wr_board/tools.php?event=profile&pname=flippanttempo80>http://wood.biz.ua/wr_board/tools.php?event=profile&pname=flippanttempo80</a> Условия отыгрыша приза. Если Вы планируете заработать на бездепозитном призе, то для направьте на велечину вейджера и срок, который дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть приз и исключить выигрыш.Отказ в прохождении верификации. Если клиент не хочет или не дать документы, подтверждающие его личность, профиль несомненно заблокирован вместе со всеми бонусными начислениями.
casino 1×slot
Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция имеет доскональные правила, гиперссылка на коие обычно находится в промообъявлении. В их указываются лимиты, вейджер, перечень дешевых игр. Если оператор укрывает данные о предложении, то воспользоваться им надо.Отыграв бездепозитный приз в казино с выводом тоже придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в подобное ограничение существует, то единоразово исключить выйдет лишь необходимую, не превышающую объем приобретенного бонуса. <a href=https://www.kfz-gringer.at/index.php/forum/suggestion-box/67344–1×slots#67109>1×slots официальный зеркало рабочее</a> 1×slots официальный сайт зеркало Основное различие никаких, собственно для получения бездепа не надо пополнять баланс в казино. Но считая сего, есть ряд и других отличий: <a href=https://canadianairsoft.wiki:443/index.php/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%A7%D0%B8%D1%82%D0%B0%D1%82%D1%8C>https://canadianairsoft.wiki:443/index.php/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%A7%D0%B8%D1%82%D0%B0%D1%82%D1%8C</a> Для всех бездепозитных призов действует наибольший предел на выигрыш. Он показывает предельную необходимую, коию появится получить, играя на бонусные кредиты. Как только для удастся выполнить требования вейджера, дозволенный максимально будет переведен с бонусного счета на главный, а остаток будет списан.B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax рабочее зеркало 1×slots Но есть игорные заведения, которые готовы просто так жертвовать деньги на забаву. Для этого довольно сделать профиль. Чтобы исключить собственный выигрыш, вам поначалу нужно выполнить обстоятельства отыгрыша, указанные в критериях получения бездепозитного депозита.Реже бонусы без депо начисляются неизменным игрокам. С их подмогою администрация старается удержать ценных посетителей или желает поблагодарить за лояльность правильных гостей. Но намного почаще для подобных целей применяются эти промоакции:
1×slos регистрация в 1×slots casino
Помимо прочего, для вывода средств по бездепу нужно внести на счёт свой первый депо — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало вероятную необходимую, последствии чего вывод средств будет доступен. Игры, в которых возможно выступать на бонусные средства. Проверьте перечень игр, каких возможно играть на бонусные средства, вероятно они Вам не понравятся и не тратить своё время на такую промоакцию. <a href=https://sharing.clickup.com/9015644841/t/h/86byqehmw/3ZJLYZSU0NCTXMU>https://sharing.clickup.com/9015644841/t/h/86byqehmw/3ZJLYZSU0NCTXMU</a> 1×slots коды
1×slots зеркало регистрация то дальше необходимо пройти
Можно ли зарабатывать на бездепозитных бонусах? Это не работа, тут как повезет, в в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, время возможно назвать везением, и дополнительной добавкой к вашему бюджету.Бонус начисляется игроку незамедлительно после регистрации и прохождения верификации в казино и не настятельно от посетителя внесения депозита. Как верховодило, размер приза в схожем случае достаточно скромный, однако дозволяет новичкам познакомиться с забавой без риска настоящими средствами. 1×slots рабочее зеркало <a href=https://pdn-forum.bpgs.de/memberlist.php?mode=viewprofile&u=1830>https://pdn-forum.bpgs.de/memberlist.php?mode=viewprofile&u=1830</a> Чтобы получить возможность вывести выгода с бездепозитного бонуса в казино, нужно выполнить ряд критерий:
1×slots casino зеркало рабочее
Выше мы предоставили полный набор самых свежих и своевременных бездепозитных призов в интернет казино без пополнения на 2022 год, где вам пользоваться хоть ценным бездепозитным призом.Большинство интернет-казино из нашего топ-10 готовы порадовать вас эксклюзивными промоакциями. Читайте о них в обзорах и на форуме. <a href=https://lavr-sovet.ru/user/Porsedropsa/>https://lavr-sovet.ru/user/Porsedropsa/</a> Когда речь о получении бездепозитных призов в казино, начала внимание на следующие обстоятельства: 1×slots зеркало на сегодня Подобные призы без депозита предоставляются на больше выгодных критериях. Зачастую они крупнее, а обстоятельства отыгрыша наименее жесткие.Для верификации номера аппарата, в личном профиле выберите опцию „Подтвердить номер телефона“ и введите в отвечающее фон код, приобретенный в sms-сообщении.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/7158/#comment-313109>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Прежде чем активировать бездеп, нужно увериться что, нет, собственно государство, гражданином коей является игрок, не заходит в список не.
#9326 Charlesgunnyhttp://filmkachat.ru
1×slots мобильная версия войти казино
3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать аппарат или почту, показать персональную информацию; <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slots review live</a> <a href=http://www.wdty.org/home.php?mod=space&uid=270553>http://www.wdty.org/home.php?mod=space&uid=270553</a> Бесплатные бонусы казино без депозита можно получить повторяющий денежных средств на бонусный счет (исключить их возможно лишь после отыгрыша), фриспинов, игры либо кешбэк-бонуса.Помните, что любые нарушения правил сведут на нет ваши старания, и вы всего останетесь без начисленного вас бесплатного приза. Всегда изучайте правила начисления и обстоятельства вейджера. По любым вопросам, на коие вы имеет помощи найти ответы, обращайтесь за разъяснениям и саппорт. 1×slots мобильная версия войти казино <a href=http://665bao.com/space-uid-26331.html>http://665bao.com/space-uid-26331.html</a> Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция имеет подробные правила, гиперссылка на коие обычно находится в промообъявлении. В них указываются лимиты, вейджер, перечень дешевых игр. Если оператор прячет данные о предложении, то пользоваться им надо.
1×slot казино зеркало
При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое можно посвятить забаве в казино. 1×slots регистрация 1×slots casino c2d ru <a href=http://www.fumankong5.cc/home.php?mod=space&uid=582124>http://www.fumankong5.cc/home.php?mod=space&uid=582124</a> 1×slots зеркало этих способов предполагает регистрацию Бездеп с фриспинами возможность обхватывать всю коллекцию игр на сайте или разработки одного провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш может быть выведен в как, как пользователь отыграет данную необходимую. Возможность расценить полный перечень слотов — главное достоинство этой разновидности. Игроку становятся доступны те опции, коие отсутствуют в демонстрационном режиме, а возможность выиграть настоящие деньги прибавляет ярчайших азартных чувств.
1×slots регистрация на официальном сайте
Самый распространённый из похожих призов, конечно же, бездеп на день рождения посетителя — бонус повторяющий фиксированной суммы либо фриспинов поступает на счёт игрока, а воспользоваться им можно на установленного периода медли.В любом казино с бездепозитным призом предусмотрены вейджеровые обстоятельства. Это единственный «подводный камень», который стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, нужно устроить определённое число ставок. Чем круче бонус, что, этим труднее выполнить условия, и наоборот. <a href=https://www.nkm.no/user/oscartaxia/?um_action=edit>https://www.nkm.no/user/oscartaxia/?um_action=edit</a> После получения приза вывод средств для посетителя будет недоступен того, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя либо чета недель. Выводить деньги игрок может лишь последствии отыгрыша.Поспешите забрать бездепозитные бонусы за регистрацию в казино из представленного списка. Все платформы столько ведут законную деятельность, но и порадуют добросовестными плодами игры, высочайшей отдачей, быстрыми выплатами. 1×slots быструю регистрацию а также мгновенное
1хслотс зеркало
Для тех, кто лишь подумывает испытать свою фортуну, а также для профессиональных игроков, разыскивающих свежие площадки для выигрышей, ведущие лицензированные казино часто организуют различные акции, и лучшее услуг прошедшее время – как для начинающих, так и для профессиональных игроков – бездепозитный приз за регистрацию.Заработать на бездепозитных призах за регистрацию в казино имеет любой пользователь, достигший совершеннолетия. Превышение максимальной ставки при отыгрыше. Система автоматически не предупреждает о превышении ставки, поэтому о несоблюдении верховодил игрок может разузнать уже после подачи запроса на вывод средств. 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=http://getamped.nxez.com/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D1%8F%D0%BD%D0%B4%D0%B5%D0%BA%D1%81%20%D0%B4%D0%B7%D0%B5%D0%BD%20%D1%87%D0%B8%D1%82%D0%B0%D1%82%D1%8C>http://getamped.nxez.com/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D1%8F%D0%BD%D0%B4%D0%B5%D0%BA%D1%81%20%D0%B4%D0%B7%D0%B5%D0%BD%20%D1%87%D0%B8%D1%82%D0%B0%D1%82%D1%8C</a>
1хслот скачать
Диапазон ставок, коие вправе устроить игрок, также лимитирован. Обычно назначать возможно небольшую сумму — около 10–30 рублей за одно вращение. Для казино, работающих онлайн, бездепозитные бонусы нужны для вербования свежих клиентов. Предложение поиграть на слотах без надобности внесения настоящих денег — работающий метод для увеличения интереса к компании. После отыгрыша бездепа велик шанс, что игроку понравится и он продолжит выступать в казино, лишь сейчас теснее на собственные деньги.Если идет об неповторимых услугах, может понадобиться регистрация в казино по ссылке с партнерского вебсайта. <a href=https://policjaforum.pl/user-1962.html>https://policjaforum.pl/user-1962.html</a> 1×slots официальный сайт мобильная версия
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.azartweb2.com/threads/1×slots-kazino-zerkalo.232593/>1×slots казино зеркало</a>
<a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=2359>зеркала 1×slots</a>
<a href=https://www.xn–72c9aa5escud2b.com/webboard/index.php/topic,516628.new.html#new>1×slots официальный сайт скачать на айфон</a>
<a href=http://board.eternityrpc.com/member.php?action=profile&uid=369>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Еще одно условие касается размеров ставки. Операторы устанавливают максимальную сумму, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном офисе. При превышении лимита есть риск потерять бонуса. Существующие ограничения относятся и к определенным видам ставок. Например, играя в рулетку, заказчик имеет столкнуться с запретом назначать фишки на шансы.
#9327 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрацию более популярный вариант это
В игровых клубах без лицензии Вы покупаете „кота в мешке“ и в случае спорных обстановок нет возможности куда-то посетовать и доказать собственную правоту.При отыгрыше бонусных средств, необходимо учесть срок деянья приза и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный бонус несомненно аннулирован. <a href=http://filmkachat.ru/>1×slot зеркало рабочее регистрации на телефон придет</a> Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, all лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. <a href=http://psicolinguistica.letras.ufmg.br/wiki/index.php?title=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D0%BE%D0%B2%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO>http://psicolinguistica.letras.ufmg.br/wiki/index.php?title=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D0%BE%D0%B2%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO</a> В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, нужно обратиться в саппорта спустя лайв-чат на сайте казино.Нет. Казино выдают благотворительные бонусы за регистрацию, для того, чтобы клиент мог ознакомиться с игровым заведением. А дабы вывести его, необходимо выполнить условия отыгрыша. 1×slots сайт зеркало <a href=http://www.glogowieckujawy.ugu.pl/profile.php?lookup=11223>http://www.glogowieckujawy.ugu.pl/profile.php?lookup=11223</a> Условия, на которых предоставляется бездеп, регулируются казино. Каждая акция имеет доскональные правила, гиперссылка на которые обычно находится в промообъявлении. В их указываются лимиты, вейджер, перечень дешевых игр. Если оператор укрывает данные о предложении, то пользоваться им не.Третитй бездепозитный приз за регистрацию – денежные средства. К раскаянью, начислить рубли или доллары способны только известные и модные клубы. С их подмогою возможность насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком.
1×slots официальный сайт, скачать
1×slots быструю регистрацию а также мгновенное Фриспины предусмотрены для использования в видео слотах. Внимательно ознакомьтесь с критериями – частенько их выдают на кое-какие автоматы. В зависимости от клуба, у вас получится сделать определённое число ставок. Кстати, продвинутые игорные дома разрешают запускать каждых «одноруких бандитов». <a href=http://xn----7sbgj9bdrl.xn–p1ai/users/abaftretort17>http://xn----7sbgj9bdrl.xn–p1ai/users/abaftretort17</a> У каждого игорного заведения средства верховодила и условия. Но, чтобы получить бонусы, необходимо выполнить стереотипные деянья: 1×slots быструю регистрацию а также мгновенное Бездепозитные бонусы — это презенты от казино повторяющий бонусных денег или фриспинов для игровых автоматов, коие начисляются на акк игрока после процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депо не потребуется.
1×slots рабочее зеркало
<a href=https://fromdust.art/index.php?title=User:ChantalGarner8>https://fromdust.art/index.php?title=User:ChantalGarner8</a> казино 1×slots официальный сайт
1 x slots
Принципиальным различием безвозмездных призов от призов на депозит считается неимение необходимости вносить деньги на аккаунт. Из-за этого их нередко именуют бездепозитными (not the slightest deposit bonuses). Игрокам не следует принимать приветственный бонус как гарантированный способ получить большой выигрыш, но это замечательная возможность без расходов оценить функционал казино.В онлайне слишком много скриптовых сайтов, коие принадлежат жуликам. Их основная цель – привлечь гэмблеров, пообещав не только щедрые подарки, но и солидные выигрыши. Так что некоторые веб-сайты предлагают получить за регистрацию числе $1 000. x1 slots 1хслотс регистрация перейти на 1×slots <a href=https://images.google.com.tj/url?q=https://doctorlazuta.by/>https://images.google.com.tj/url?q=https://doctorlazuta.by/</a> Условия все различаться приятель от друга. Но подобный бонус может быть применен лишь для игрового процесса – приобретенные на счет деньги до как, как станут отыграны, исключить невероятно.
1×slots casino регистрация
Получать информацию о самых выгодных призах можно без постоянного мониторинга новостей казино. Мы взяли эту задачу на себя и непрерывно смотрим за предложениями операторов, избирая наилучшие из них. В данном разделе собраны последние бездепы, промокоды к ним и условия их активации. Список промоакций регулярно дополняется. В топ зашли самые свежие бездепозитные призы за регистрацию в казино 2020, временные и закрытые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и другим аспектам. Если срок действия промоакции истек, она удаляется из перечня.Также есть онлайн-платформы азартных игр, коие используют раздачу бездепозитных бонусов в специальные даты (как для казино, например и для игрока). Помимо этого, действующие игроки также имеют возможность получить похожие бонусы за свою деятельность (например, за повышения значения либо за схожие заслуги). Теоретически, к безвозмездным призам возможно отнести так нарекаемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, потому что они предоставляют лишь вероятность создавать ставки.Выбор каждого интернет казино на нашем сайте. В описании к любому Вы сможете узнать, что получите за создание аккаунта. <a href=http://www.pengstys.com/home.php?mod=space&uid=110069>http://www.pengstys.com/home.php?mod=space&uid=110069</a> Для вывода средств бонус надо(надобно) несомненно отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариантами отыгрыша бездепозитного бонуса до его получения, чтобы избежать конфликтных ситуаций. 1хслотс рабочее зеркало Получать информацию о самых прибыльных призах возможно без неизменного мониторинга новостей казино. Мы брали данную задачу на себя и безпрерывно смотрим за услугами операторов, избирая превосходнейшие из их. В данном разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список промоакций периодически пополняется. В топ зашли самые свежие бездепозитные бонусы за регистрацию в казино 2020, временные и замкнутые промо. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и аспектам. Если срок деянья акции истек, она удаляется из списка.
<b>Смотреть еще похожие новости:</b>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=250419>зеркала 1×slots</a>
<a href=https://rolivka.online/forum/showthread.php?tid=29341>1×slots актуальное зеркало</a>
<a href=http://bikepacking.free.fr/forum/viewtopic.php?f=18&t=36245>1×slot рабочее зеркало</a>
<a href=https://thetechmodders.com/forums/viewtopic.php?t=26939>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Почти все игровые клубы требуют подтверждение контактных данных игрока для получения бездепозитного бонуса.
#9328 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию более популярный вариант это
Помимо прочего, для вывода средств по бездепу нужно внести на счёт свой первый депозит — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на мало вероятную необходимую, в чего вывод средств станет доступен.Изучить верховодила и условия получения бездепозитных бонусов казино, Вы сможете у нас на веб-сайте в разделе с призами либо на официальном сайте выбранного Вами казино. Если возможности найти нужную информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал либо по электрической почте. <a href=http://filmkachat.ru/>1×slots регистрация то дальше необходимо пройти</a> Иногда операторы настоятельно внесение малого депозита перед выводом для верификации платежного прибора. В неких казино данный депозит кроме предстоит отыграть. <a href=https://www.ch-valence-pro.fr/CollDSIO/community/profile/caraepps3140842/>https://www.ch-valence-pro.fr/CollDSIO/community/profile/caraepps3140842/</a> 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=https://foro.vcheats.me/Usuario-Charlesson>https://foro.vcheats.me/Usuario-Charlesson</a> Обыкновенные бездепозитные призы в размере от 3-х до 20 $ сделаны для того, дабы в игры заходили все свежие и новые игроки. Здесь, скорее, будет ограничение на наибольший выигрыш. Важно, дабы перед наименьшим вкладом был отключен приз за 1-ое пополнение счета, и компьютерные не попадет на повторный вейджер.Изучить управляла и условия получения бездепозитных призов казино, Вы можете у нас на сайте в разделе с бонусами или на официальном сайте избранного Вами казино. Если имеет найти нужную информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал либо по электрической почте.
1×slots зеркало подтвердит вашу регистрацию если говорить
Возьми собственный презент. Чаще всего бонус активизируется сразу в регистрации. Но бывают истории, когда надо(надобно) забежать в собственный кабинет либо написать в справочную службу.У любой забавы свои требования по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система зачтет любую ставку. В рулетке и покере устроить это гораздо труднее. Именно потому так принципиально пристально разбирать условия получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в любой забаве, то новички попросту «спустят приз на ветер». 1×slots зеркало проходить регистрацию это отличный вариант Далее требуется отыграть вагер и вывести выигрыш. Игрокам без опыта крупно подфартило, меня получить десятки презентов за одну регистрацию. Если не смогли получить Бездепозитный бонус, не волнуйтесь. Обратитесь в интернет чат, оператор поможет исправить. <a href=http://www.hker2uk.com/home.php?mod=space&uid=2145165>http://www.hker2uk.com/home.php?mod=space&uid=2145165</a> 1×slots зеркало регистрация Для подтверждения электрической почты, просто перейдите по активной ссылке в письме, приобретенном от игрового заведения.
1× slots сайт
Заработать на бездепозитных призах за регистрацию в казино может любой пользователь, достигший совершеннолетия.Главное преимущество спинов – возможность изучить различные слоты. Также удастся насладиться бонусными раундами, испытывать удачу в риск-туре и преувеличить выигрыш за счёт особенных символов. Однако не только игровой процесс заслуживает внимание, как какого-либо сосредоточиться на реальном выигрыше. Если речь идет об эксклюзивных услугах, имеет потребоваться регистрация в казино по ссылке с партнерского сайта.Как лишь получите бездеп в казино, всё одинаково не забывайте инспектировать электрическую почту. Некоторые игорные клубы постоянно радуют активных гэмблеров приятными призами. Чаще всего получить подарок можно в преддверии праздника, на день рождение, за вербование приятеля. А кроме распространённым призом является надбавка к депозиту. Нужно всего лишь пополнить счёт, и азартное заведение увеличит его на 50–100%. <a href=https://gsean.lvziku.cn/home.php?mod=space&uid=909145>https://gsean.lvziku.cn/home.php?mod=space&uid=909145</a> 1хслотс рабочее зеркало на сегодня Обыкновенные бездепозитные призы в объеме от трех до 20 долларов созданы чтобы, чтобы, чтобы в забавы заходили все новые и свежие игроки. Здесь, скорее, будет ограничение на максимальный выигрыш. Важно, чтобы перед минимальным вкладом был отключен бонус за первое пополнение счета, и геймер не попадет на повторный вейджер.На безвозмездные призы онлайн-казино практически всегда распространяется ограничения по стране проживания посетителей. Даже случае вас разрешено открывать счет и играть на средства в заведении, это еще не означают, собственно вам доступны no down payment bonuses.
1×слотс казино
Такие поощрения позволяют даром протестировать свежее казино, разобраться с игровым ходом интернет слотов, заработать и исключить небольшую необходимую денег. <a href=https://forum.spherecommunity.net/User-JamesLop>1×slot рабочее зеркало</a> Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен список превосходнейших интернет казино, коие предлагают своим игрокам щедрые бонусы за регистрацию. Онлайн гемблинг развивается с любым днем больше и больше, свежие бренды создаются не по денькам а по часам. Новые интернет казино делают вступительные акции для игроков, для того собственно бы зарекомендовать себя, и что, этим самым предлагают бездепозитные бонусы за регистрацию, что бы не пропустить эту вероятность — как воспользоваться свежим бездепом, советуем навещать наш вебсайт как возможно почаще, самое вкусное и новые будет добавляться в этом же перечне.Классическая разновидность бонуса за создание аккаунта. Его превосходство заключается сомнений, собственно клиент может других избирать аппараты и делать ставки в них. Иногда список игровых автоматов ограничен оператором, но все также это никакого, чем один-единственный доступный слот, как когда с использованием фриспинов. 1×slots casino зеркало рабочее <a href=https://eduli.net/home.php?mod=space&uid=270308>https://eduli.net/home.php?mod=space&uid=270308</a> Многие новички сомневаются, собственно поощрительный приз не несомненно возвращать, даже в они выиграли у казино. Это полностью безопасно и надежно. Выводя выигранные средства, игрок просто останавливает свое роль в игре и теряет уникальную вероятность – безвозмездно наращивать личное вещественное положение.
1×slots casino регистрация
Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической забавы на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, научится регулировать изменять ставки и линии, исследовать бонусные игры и их выигрышные композиции, да в просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные средства, коие возможно отыграть и вывести, но просто на демо счет, что, этим самым адреналин в крови еще повысится а пульс забьется с нередким ритмом! <a href=https://bajarmp3.net/member.php?action=profile&uid=4541>https://bajarmp3.net/member.php?action=profile&uid=4541</a> Практически все онлайн казино с бездепозитным бонусом за регистрацию учитывает программу преданности — систему одобрения постоянных клиентов, кот-ая произведено из колличества уровней. При достижении игроком еще уровня на его счёт поступает приз. Чем выше уровень — тем щедрее бонус. 1 х слотс зеркало В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая доля забавы. Важно, часто бездепозитные бонусы в казино выдаются с лимитированиями по максимальной выплате. В среднем можно рассчитывать на выгода в количество тысяч рублей. Как вывести выигрыш с бонуса без депозита. Придётся подтвердить аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается каждым игроком. О документальном подтверждении учетной записи спрашивайте в онлайн чате либо прочитайте в правилах.Баланс игрока пополняется на подобающую сумму. К ней используется вейджер, обозначенный в правилах акции. Вывести выигрыш возможно несомненно последствии как, как пользователь сделает требуемый размер ставок из собственных средств. В редких случаях бездеп работает в формате Free Play. На счет пользователя зачисляется большая сумма, и предоставляется небольшой срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по завершении сего периода сумма на счету будет превышать изначальную, то разность возможно будет вывести либо применять для последующих ставок.
<b>Смотреть еще похожие новости:</b>
<a href=https://elclasificadomx.com/author/jameslog/>казино 1×slots</a>
<a href=http://swissairways-va.com/phpBB3/memberlist.php?mode=viewprofile&u=3495>1×slots казино зеркало</a>
<a href=https://showboysmedia.com/real-music/#comment-54176>1х слот регистрация в 1×slots casino</a>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=238263>1×slots на любой вкус как пройти регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Благодаря программке лояльности от игорного заведения, возможно взять хороший старт и без дополнительных вложений запустить видеослоты. Кроме того, можно рассчитывать на реальную фортуну и получить, без вложения личных денег, великой выигрыш.
#9329 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
Частенько новички не понимают, как активировать презенты либо исключить 1-ый выигрыш. Для подобных случаев наша команда описала основные определения – что это фриспины, вейджер, как его отыграть, для нужно протекать верификацию. <a href=http://filmkachat.ru/>1×slots мобильная версия войти казино</a> Многие новички сомневаются, что поощрительный приз не будет возвращать, числе в они выиграли у казино. Это абсолютно неопасно и надежно. Выводя выигранные средства, игрок просто останавливает свое роль в игре и теряет уникальную возможность – безвозмездно наращивать собственное вещественное положение. <a href=https://www.market-directory.com/members/davidcet-10549.html>https://www.market-directory.com/members/davidcet-10549.html</a> Бонус начисляется игроку незамедлительно после регистрации и прохождения верификации в казино и не требует от клиента внесения депозита. Как управляло, объем бонуса в подобном случае довольно застенчивый, впрочем дозволяет новичкам познакомиться с забавой без риска настоящими деньгами.Игрокам не следует воспринимать приветственный приз как гарантированный метод получить крупный выигрыш, но это замечательная вероятность без расходов расценить функционал казино. 1х слот 1хслотс регистрация перейти на 1×slots <a href=https://usa.life/read-blog/46730>https://usa.life/read-blog/46730</a>
1×slots казино мобильная версия
<a href=https://lawsbay.com/donrem-ru/#comment-13257>1×слот регистрация в 1×slots casino</a> 1хлот регистрация в 1×slots casino Для тех, кто лишь взвешивает испытывать свою фортуну, а также для проф игроков, разыскивающих свежие площадки для выигрышей, ведущие лицензированные казино нередко организуют разные акции, и одно из лучших услуг прошедшее время – как для новичков, так и для проф игроков – бездепозитный приз за регистрацию.Прежде всего, не забывайте периодически заглядывать на страницу обзоров бездепозитных бонусов. Они шаг за шагом разглядывают более интересные предложения основных игорных порталов. <a href=https://aben75.cafe24.com/bbs/board.php?bo_table=free&wr_id=152060>https://aben75.cafe24.com/bbs/board.php?bo_table=free&wr_id=152060</a> Отказ в прохождении верификации. Если клиент не хочет или не дать документы, подтверждающие его личность, профиль несомненно заблокирован вместе со всеми бонусными начислениями.Отыграв бездепозитный приз в казино с выводом также придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, случае схожее лимитирование существует, то единоразово исключить получится только сумму, не превышающую объем приобретенного бонуса. 1х слот 1хслотс регистрация перейти на 1×slots
1хслотс зеркало на сегодня
Наличие у игрока второго аккаунта. Запрещено создавать количество профилей для неоднократного получения бездепов. В интернет-сети постоянно можно отыскать списки наиболее популярных и гарантированных поощрительных программ от известных онлайн-казино.Если вы выбрали для себя некоторое брендов коие вас больше всего приглянулись, для постоянной забавы! Таких гемблеров казино довольно любит и ценит, за частую эти игроки становятся VIP игроками заведения, коим нередко поступают прибыльные предложения вид призов, например же туда входит и бездепозитные. <a href=http://www.cjma.kr/bbs/board.php?bo_table=free&wr_id=501556>http://www.cjma.kr/bbs/board.php?bo_table=free&wr_id=501556</a> Условия имеют разниться друг от приятеля. Но подобный приз может быть применен лишь для игрового процесса – полученные на счет финансы до такого, как будут отыграны, исключить нереально. 1х слотс зеркало регистрация в 1×slots casino
1хслотс официальный сайт зеркало
Если вы облюбовали себе несколько брендов коие вас больше всего полюбились, для неизменной игры! Таких гемблеров казино довольно любит и ценит, за частую такие игроки становятся VIP игроками заведения, коим часто поступают прибыльные предложения вид бонусов, например же туда входит и бездепозитные.Доступные игры – В неких азартных играх возможно понизить математическое преимущество казино до нескольких десятых процента. В их количестве все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как верховодило, в таких играх ставки идут в зачет вейджера не всецело. Например, может предусматриваться лишь 50%. В неких забавах бездепозитные бонусы вообще невозможно отыгрывать. <a href=http://griffhunter.com/boards/memberlist.php?mode=viewprofile&u=993>1×slots casino регистрация на сайте</a> Поспешите зарегистрироваться на официальном сайте Клубника, дабы быстро получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, замечена реальный шанс победу! На условиях отыгрыша бесплатных призов стопам остановиться подробнее. С ними связаны нюансы, коие нельзя оставить без внимания. casino 1×slot <a href=https://www.assayyarat.com/forums/member671326.html>https://www.assayyarat.com/forums/member671326.html</a> Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают приз по странам. Вплоть до такого, собственно клуб имеет на игроков из Вашей страны, а бездеп мешает.
x1 slots регистрация в 1×slots casino
Благодаря программе лояльности от игорного заведения, возможно арестовать превосходный старт и без дополнительных вложений запустить видеослоты. Кроме такого, возможно рассчитывать на реальную фортуну и получить, без инвестиции личных финансов, большой выигрыш. С такими ординарными советами любое казино с призом за регистрацию способно принести в разы больше выгоды и пользы.Для получения выигрыша требуется выполнить обстоятельства казино. Чаще всего игроку нужно поставить определенную сумму, хотя уже из личных денег. Она рассчитывается из совместного объема выигрыша за все время использования бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, случае юзер выиграл 1000 рублей, а множитель составляет х30, исключить деньги можно несомненно, сделав ставки на 30 000 руб. <a href=http://perfectsolutionlabs.com/user/Renaldosit/>http://perfectsolutionlabs.com/user/Renaldosit/</a> 1×slots бонус за регистрацию Когда идет о валютных бонусах, казино постоянно устанавливают условия вейджера, коие необходимо выполнить, чтобы исключить выигрыш.На данном разделе портала регулярно публикуются обзорные статьи, в рассматриваются безвозмездные бонусы лучших интернет-казино. Информация структурирована по нескольким пунктам, включая главные:
<b>Смотреть еще похожие новости:</b>
<a href=http://vn-info.net/user/Josephkam/>1×slots зеркало регистрация</a>
<a href=https://forumauthority.com/thread-6642-post-39352.html#pid39352>1×slots регистрация 1×slots casino c2d ru</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефонный либо почту, указать персональную информацию; Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция имеет доскональные правила, гиперссылка на коие обычно находится в промообъявлении. В их указываются лимиты, вейджер, перечень дешевых игр. Если оператор укрывает данные о предложении, то воспользоваться им надо.
#9330 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация
При небольшой сумме приза рекомендовано играть по невысоким ставкам, а использовать максимальные другого, как только в случае, случае вейджер слишком немалый, а время на отыгрыш крепко ограничено. <a href=http://filmkachat.ru/>скачать 1×slots официальный сайт</a> Если вы новичок в этом деле и только попали в неизведанную вами область пыла — счет предложений как бездепозитные призы без пополнения.Самый распространённый из похожих бонусов, конечно же, бездеп на денек рождения клиента — приз вид фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им возможно на установленного периода времени. <a href=http://optimumreality.com/groups/%d1%81%d0%b0%d0%bc%d1%8b%d0%b5-%d0%b2%d0%ba%d1%83%d1%81%d0%bd%d1%8b%d0%b5-%d0%b1%d1%83%d1%80%d0%b3%d0%b5%d1%80%d1%8b-%d0%be%d1%82-%d1%80%d0%b5%d1%81%d1%82%d0%be%d1%80%d0%b0%d0%bd%d0%b0-mucho/>http://optimumreality.com/groups/%d1%81%d0%b0%d0%bc%d1%8b%d0%b5-%d0%b2%d0%ba%d1%83%d1%81%d0%bd%d1%8b%d0%b5-%d0%b1%d1%83%d1%80%d0%b3%d0%b5%d1%80%d1%8b-%d0%be%d1%82-%d1%80%d0%b5%d1%81%d1%82%d0%be%d1%80%d0%b0%d0%bd%d0%b0-mucho/</a> 1×slots регистрация на 1хслотс <a href=http://hkeverton.com/forumnew/home.php?mod=space&uid=91709>http://hkeverton.com/forumnew/home.php?mod=space&uid=91709</a> Выбор каждого онлайн казино на нашем веб-сайте. В описании к каждому Вы сможете разузнать, собственно получите за творение аккаунта.
1хслот 1хслотс регистрация перейти на 1×slots
1×slots промокод при регистрации <a href=https://berzarina28a.ru/index.php?/profile/10922-deweylen/>https://berzarina28a.ru/index.php?/profile/10922-deweylen/</a> Далее потребуется отыграть вагер и вывести выигрыш. Игрокам без навыка крупно подфартило, есть получить десятки презентов за 1 регистрацию. Если не сумели получить Бездепозитный приз, не тревожьтесь. Обратитесь в онлайн чат, оператор поможет решить проблему. 1×slot зеркало рабочее этих способов предполагает регистрацию В бонусную программку многих операторов входят регулярные бездепы. Это пожизненные промоакции, поощряющие интенсивных неизменных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают постоянные бонусы без депозита в размен на накопленные баллы лояльности.
1хслотс 1хслотс регистрация перейти на 1×slots
<a href=http://1k9g.com/space-uid-197598.html>http://1k9g.com/space-uid-197598.html</a> 1хслот 1хслотс регистрация перейти на 1×slots
1 x slots
<a href=http://6000ziyuan.com/forum.php?mod=viewthread&tid=100705&extra=>казино 1× slots официальный сайт</a> Бездепозитный бонус за регистрацию в казино с выводом средств в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых свежих, щедрых и проверенных призах в онлайн казино, коие обновляются каждый денек.Выбирайте наихорошие благотворительные призы с помощью обзоров на Casinoz – и пусть вас сопутствует счастье при отыгрыше бонусных кредитов! казино 1× slots официальный сайт <a href=https://spritedatabase.net/forums/member.php?action=profile&uid=3789>https://spritedatabase.net/forums/member.php?action=profile&uid=3789</a> Индивидуальные одобрения выдаются за совершение деяний: подписку на аккаунты площадки в соц сетях, установку мобильного прибавления или официального клиента для ПК. В большинстве казино действуют программы лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий степень нередко сопровождается выдачей бездепа.
1×slots регистрация на сайте 1×slots ru com
Бонус с зачислением средств на счет дает больше свободы действий. Пользователь сам подбирает, каким образом распорядиться подаренными средствами. Здесь также шансы действовать ограничения на список дешевых игр, но обыкновенно эти рамки не например строги, как в рекламную с бесплатными вращениями. Бесплатный приз – кредиты, коие онлайн-казино начисляет посетителю, не заставляя его пополнять игровой счет. <a href=https://spoilerok.ru/user/Stevenswasy/>https://spoilerok.ru/user/Stevenswasy/</a> 1×slots зеркало регистрация Одним из поводов отдавать привилегию 1 или иному заведению заключается в привлекательности предлагаемых промоакций и даровых предложений. Безвозмездные фриспины, выдаваемые без дела делать какой-либо вклад, в списке располагается далековато не в конце.С этими ординарными советами каждое казино с призом за регистрацию способно принести в разы больше выгоды и полезности.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.bandariklan.com/showthread.php?tid=176825&pid=877008#pid877008>1×slots регистрация на 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подтвердите личность, предоставив оператору казино средства паспортные данные. Инструкции обычно легкие, основное — конкретно им следовать. Если написано, собственно «на фото обязаны быть видны все четыре угла странички паспорта» — устройте именно это фото.
#9331 Charlesgunnyhttp://filmkachat.ru
1×slots сайт
После требуется привнести идентификационный платёж. Это стращает начинающих больше всего. Нужно устроить минимальный депо в 100–500 рублей. Таким образом служба безопасности убедиться в том, что платёжный способ принадлежит Вам. Данная процедура важна для обеспечения безопасности игровых счетов. Пример, Ваш акк взломают и выведут средства на свой кошелёк. Будет крайне неприятно. Поэтому верификация платёжной системы, это важный момент. <a href=http://filmkachat.ru/>1×слотс казино</a> Помимо остального, для вывода средств по бездепу нужно внести на счёт свой 1-ый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально возможную сумму, в чего вывод средств станет доступен. <a href=https://www.honkaistarrail.wiki/index.php?title=User:HildaCriswell>https://www.honkaistarrail.wiki/index.php?title=User:HildaCriswell</a> В бонусную программу множества операторов входят систематические бездепы. Это пожизненные акции, поощряющие интенсивных неизменных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают постоянные призы без депо в размен на скопленные баллы лояльности.B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax 1хслотс официальный сайт зеркало <a href=http://messmangler.com/forums/member.php?action=profile&uid=5910>http://messmangler.com/forums/member.php?action=profile&uid=5910</a> Хотя безвозмездные бонусы начисляются без депо, не исключено, что вас понадобиться заносить средства. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только в такого, как новый заказчик впервые пополнит игровой счет.Простая процедура получения бездепозитного бонуса, кот-ая займет не более 2-х мин. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные.
1×slots бонус за регистрацию
Зарегистрируйтесь. Для регистрации почаще всего достаточно установить собственный номер телефонного и почтовый адресок, в чего установить приобретенный код из СМС. Возможно, потребуется указать промокод. В правилах промоакции будет написано, где его бы включать. Иногда это надобно делать при регистрации, иногда — уже в сотворения собственного офиса, на отдельной страничке. <a href=https://hiddeninthesand.com/forum/viewtopic.php?t=273735>1×slots регистрацию процедура займет всего лишь</a> 1хслот официальный сайт зеркало Нет. Казино раздают благотворительные бонусы за регистрацию, для того, дабы клиент мог ознакомиться с игровым заведением. А чтобы вывести его, нужно выполнить условия отыгрыша.Бонус за регистрацию в казино без депо с выводом средств нужно отыграть. Зачастую для отыгрыша может понадобиться сделать ставки на сумму, в некоторое 10-ов один превосходящую сумму приза либо выигрыша. <a href=http://www.airsoft44.com/forum/index.php?action=profile;u=9189>http://www.airsoft44.com/forum/index.php?action=profile;u=9189</a> 1×slots казино зеркало Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депозит может отличаться до 30 дней.Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депозит может отличаться до 30 дней.
1×slots casino регистрация на сайте
Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации презента необходимо доказать электронную почту и привязать телефон;Когда речь идет о получении бездепозитных призов в казино, для внимание на следующие условия: Шаг 4. Активация. Внимательно исследуйте обстоятельства, информацию по лимитированиям и сроке деянья бонусного предложения. Разобравшись с правилами, возможно активировать бонус в собственном кабинете (время ? с использованием промокода) либо по запросу в саппорт.Нельзя осматривать игру на деньги, как вариант заработка. Азартные игры запрещены для лиц моложе 18 лет. Topcasinobonuses.mobi классифицируется организатором азартных игр. Сайт одевает информационный характер. <a href=http://forum.gold-forum.ru/index.php?showtopic=61162>http://forum.gold-forum.ru/index.php?showtopic=61162</a> Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, all зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.Бесплатный приз – кредиты, которые онлайн-казино начисляет посетителю, не принуждая его пополнять игровой счет. 1×slots casino зеркало На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не можете активировать и получить бездепозитный приз.Размер ставки для игры по бездепозитному бонусу (естесственно же, если, тогда,, когда он представлен вид бонусных валютных средств) часто ниже, чем при забаве на депозит. Ограничение будет работать до момента отыгрыша приза.
1×slots зеркало видели такую регистрацию на
Перечисленные выше главные характеристики сочетают фактически любой приз и являются стандартными для бездепозитных бонусных начислений в казино.Лишь модные и знаменитые азартные заведения шансы разрешить для выдавать бездепы повторяющий добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депо, которые возможно потратить в топовых аппаратах с высокой отдачей. <a href=https://forum.vn.ua/showthread.php?p=3272328#post3272328>1хслотс рабочее зеркало</a> Бездепозитный приз казино 2022 с выводом за регистрацию предоставляет возможность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и проверить качество работы саппорта. Довольно нередко, начиная игровой процесс, игрок уже отказывается останавливаться и проделывает настоящий лепта. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть безвозмездно вероятно как раз таки с бонусом за регистрацию без надобности вносить депозит.Маркетинговая политика всех игорных интернет-клубов должна носить разнородный нрав. И если вознаграждения на депо работают чтобы, чтобы, дабы провоцировать вносить депозиты и поощрять теснее существующих пользователей, то бездепозитный приз в казино либо приз за регистрацию в казино, прежде всего, рассчитан на расширение базы потребителей. Вейджер в переводе с английского значит «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша полученного бонуса, в нашем случае бездепозитного. Число ставок большого — важно только набрать сумму, пропорциональную сумме одобрения. 1×slots быструю регистрацию а также мгновенное <a href=https://king.az/index.php?subaction=userinfo&user=PhilipRit>https://king.az/index.php?subaction=userinfo&user=PhilipRit</a>
1хслотс рабочее зеркало на сегодня
Все обожают получать презенты. Согласитесь, практически каждый играющий человек будет беспредельно рад, если получит бесплатный презент для забавы в интернет казино просто за регистрацию либо же бонус за внесенный депозит, так называемые приветственные бонусы для новых игроков. Соответственно эти интернет клубы станут больше известны и преимущественны у игроков при выборе казино для забавы. Топ казино день обновляется и прибавляются новые и занимательные игровые клубы с привлекательной бонусной политикой и всеми вероятными преимуществами, льготами, к коим относятся эти бонусы как фриспины за регистрацию, денежные бездепозитные призы, еще великодушные бонусы за внесенный депо.Подарки на праздничные ? посвященные торжественным датам, требующие условного отыгрыша или начисляются без это. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду. <a href=http://ortho.wikispace.net/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0>http://ortho.wikispace.net/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0</a> Далее требуется отыграть вагер и исключить выигрыш. Игрокам без навыка крупно повезло, меня получить 10-ки даров за 1 регистрацию. Если не сумели получить Бездепозитный бонус, не беспокойтесь. Обратитесь в интернет чат, оператор поможет ситуацию. 1хслотс зеркало на сегодня Вывод выигрыша с бездепозитных призов казино – щедрый презент от азартных клубов. Но дабы исключить собственный заработок, необходимо выполнить ряд критерий:Но не стоит мыслить, что снабжая пользователей этими бонусами, казино увлекается спонсированием. Ведь размеры вознаграждений, в основном, не большие (средним размером от 5 до 20 $). И на эти свои налагаются конкретные условия и лимитирования, обязательные к исполнению игрока, случае в последствии он вожделеет получить все свои выигранные деньги.
<b>Смотреть еще похожие новости:</b>
<a href=http://board.eternityrpc.com/thread-7-post-14451.html#pid14451>1×slots регистрация то дальше необходимо пройти</a>
<a href=https://forum.omolenko.com/viewtopic.php?p=204195>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чтоб получить крупный выигрыш, выбирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, которые доступны по условиям отыгрыша. Бездепозитный бонус казино 2022 с выводом за регистрацию предоставляет возможность ознакомиться игроку с лобби избранного заведения, определится в выборе игр и выяснить качество работы саппорта. Довольно нередко, начиная игровой процесс, игрок теснее не желает останавливаться и делает реальный вклад. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть даром возможно как один таки с призом за регистрацию без необходимости вносить депо.
#9332 Charlesgunnyhttp://filmkachat.ru
казино 1× slots официальный сайт
Выигрыши с призов без вложений практически привязаны к требованию по ставкам и шансы быть обналичены только последствии исполненья этих требований. <a href=http://filmkachat.ru/>1×slos регистрация в 1×slots casino</a> При ирге на бонусные свои запрещается играть в игровые автоматы с современным джекпотом и забавы из радела exist casino. Кроме как, некоторые казино дают бездеп на раз или несколько определенных слотов, и в иных играх Вы не можете на них играть. <a href=http://hotissuemedical.com/bbs/board.php?bo_table=free&wr_id=139945>http://hotissuemedical.com/bbs/board.php?bo_table=free&wr_id=139945</a> 1×slots зеркало на сегодня <a href=http://build.co.ua/wr_board/tools.php?event=profile&pname=yummyfranchise8>http://build.co.ua/wr_board/tools.php?event=profile&pname=yummyfranchise8</a>
1×slots бездепозитный бонус за регистрацию
рабочее зеркало 1×slots <a href=http://wuyuebanzou.com/home.php?mod=space&uid=538640>http://wuyuebanzou.com/home.php?mod=space&uid=538640</a> Для вывода средств приз нужно несомненно отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами акции и вариациями отыгрыша бездепозитного бонуса до его получения, дабы избежать конфликтных ситуаций. 1хслотс зеркало на сегодня
1×slots зеркало регистрация
Бездепы имеют заходить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой или баллами. <a href=https://www.domaininfofree.com/domain-traffic/yana-beauty.com.ua>https://www.domaininfofree.com/domain-traffic/yana-beauty.com.ua</a> Подарки на дни ? посвященные праздничным датам, требующие условного отыгрыша или начисляются без это. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду. 1×slots официальный сайт мобильная версия скачать Таким образом, заведение пробует показать себя своим потенциальным игрокам, а подобный маркетинговый ход как казино приз без депозита за регистрацию привлекает довольно большое внимания к игорному заведению и обеспечивает постоянный поток свежих гостей и будущих посетителей игрового интернет клуба.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Некоторые онлайн-казино без депозита предлагают свежим посетителям выбрать бонус при регистрации. Будьте внимательны: выбрав раз, вы в абсолютном большинстве случаев не сможете воспользоваться остальными. Представьте момент, когда при ставке в 10 рублей Вы получите сходственное умножение. Миллион руб. За одно вращение, собственно вполне вероятно. Поэтому вопрос, сколько возможно выиграть остаётся закрытым. Предлагаем выяснить помощи. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный приз и инспектируйте удачу в деле. Разумеется, исключить средства сложно. Однако шансы есть у всех. 1×slots зеркало сайта <a href=http://forum.americandream.de/memberlist.php?mode=viewprofile&u=11169>http://forum.americandream.de/memberlist.php?mode=viewprofile&u=11169</a>
1×slots официальный сайт зеркало
Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном веб-сайте и выполните вход в собственный кабинет, чтобы арестовать бесплатные вращения с вейджером х40; В бонусную программку множества операторов входят систематические бездепы. Это пожизненные промоакции, поощряющие интенсивных неизменных игроков. Популярный формат — раздача фриспинов по конкретным дням недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депо в мена на скопленные баллы лояльности. <a href=https://39504.org/member.php?action=profile&uid=2526>https://39504.org/member.php?action=profile&uid=2526</a> Фриспины без депо или вспомогательные свои посодействуют ближе познакомиться с игровой платформой и её функциями. За счёт даров возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за забавы против живых крупье.Только выполнив все условия отыгрыша и дождавшись окончания ревизии аккаунта, Вы сможете оформить заявку на вывод средств и получить свои деньги. 1×slot рабочее зеркало Но есть игорные заведения, коие готовы просто например жертвовать деньги на забаву. Для сего довольно создать профиль. Чтобы исключить собственный выигрыш, для сначала нужно выполнить условия отыгрыша, обозначенные в критериях получения бездепозитного депо.Условия вывода выигрыша. В неких заведениях для успешного вывода с бездепозитного бонуса довольно пополнения баланса и подтверждения личности. В других же клубах, необходимо некоторое один прокрутить свой депозит.
<b>Смотреть еще похожие новости:</b>
<a href=http://b2s.bulwork.com/node/1581?page=71#comment-22054>1хслотс зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Ниже указан важный перечень легальных казино в Беларуси с бонусами на 1-ый депо. Вы можете попасть на официальный вебсайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус.
#9333 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрацию более популярный вариант это
Если простыми словами, бездепы – это определённая сумма средств либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать подарки. Но есть некоторые аспекты. Существуют игорные жилища, которые перед тем как начислить призы настоятельно привязать телефонный, предоставить копии документов. <a href=http://filmkachat.ru/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> <a href=https://zoart.com/bbs/board.php?bo_table=free&wr_id=638666>https://zoart.com/bbs/board.php?bo_table=free&wr_id=638666</a> Постарайтесь отыграть вейджер, чтобы была возможность забыть заявку на выплату. Кстати, на всех веб-сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электрической кошелёк, карту, телефон. 1хслотс рабочее зеркало <a href=http://turkteam.10tl.net/member.php?action=profile&uid=1272>http://turkteam.10tl.net/member.php?action=profile&uid=1272</a>
1×slots рабочее зеркало
<a href=https://praisenpray.org/forums/showthread.php?tid=96260>1×slots casino зеркало рабочее</a> casino 1×slot <a href=http://www.mjjcn.com/mjjcnforum/space-uid-609420.html>http://www.mjjcn.com/mjjcnforum/space-uid-609420.html</a> 1 x slots Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют важную информацию о no down payment bonuses и других предложениях.У любого игорного клубы различные вейджеровые обстоятельства. Чтобы вы гарантировано смогли выполнить их, мы дадим некоторое советов. Если система начислила маленькую сумму, надо создавать немалые ставки – остановитесь на 10–30 центах. Как лишь сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В противном случае другого приглядеться к другому автомату.
казино 1×slots
Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 долларов. Если выдаются фриспины, их число редко превышает нескольких десятков безвозмездных вращений.Демоказино есть практически на каждом сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются веско пореже: там если, тогда, выигрыша и соблюдения критерий акций бездеп можно превратить в настоящие средства. <a href=https://australianweddingforum.com/weddings/member.php?action=profile&uid=12774>https://australianweddingforum.com/weddings/member.php?action=profile&uid=12774</a> Для получения депозитного приза необходимо пополнить собственный игровой баланс реальными деньгами. Вознаграждение возможно получить или при внесении первого депо, либо повторяющий фиксированного процента от внесённых средств. Так либо иначе, приз поступит на счёт только последствии пополнения.Бездепозитный приз казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в данном и содержится основное отличие. 1×slots казино мобильная версия Вы скорее, например все предпочитаете получать презенты и бездепозитные бонусы казино. Игорные дома взяли в повадку одаривать гэмблеров приятными призами. Стать владельцем приветственного подарка можно за создание профиля либо пополнение счёта. Второй вариант больше интересный, ведь клубы готовы удвоить депозит! Но в вы новичок и только знакомитесь с миром азарта, другого, как пользуйтесь бонусом за регистрацию.Создание аккаунта. На веб-сайте казино нужно обнаружить регистрационную форму и наполнить пустующие поля личностными данными. Иногда на этом шаге потребуется показать только адрес электрической почты и пароль, хотя чаще надо заполнить анкету персональной информацией (ФИО, дата рождения, место проживания и т.д.). Нужно свидетельствовать лишь реальные данные, потому впоследствие они будут проверены.
1×slots зеркало регистрацию более популярный вариант это
1×slot официальный сайт <a href=https://experiment.com/users/ttravmakab0502>https://experiment.com/users/ttravmakab0502</a> Доступность — бездепозитные бонусы в казино почаще всего предоставляются свежим игрокам, но посещают случаи, когда бонус могут получить и действующие посетители.Риск-игра по одинаковым шансам – Также казино возможность запрещать скорпулезно обстоятельства по отыгрышу с помощью раунда на удвоение, кот-ый предлагается в слотах, видео-покере и некоторых других забавах.
1хслотс официальный сайт зеркало
В интернете очень большое скриптовых вебсайтов, которые принадлежат мошенникам. Их основная задача – заинтересовать гэмблеров, пообещав столько великодушные презенты, хотя и солидные выигрыши. Так собственно кое-какие веб-сайты предлагают получить за регистрацию и $1 000.Выше мы дали полный комплект самых новых и своевременных бездепозитных призов в онлайн казино без пополнения на 2022 год, где возможность пользоваться каким ценным бездепозитным призом. <a href=http://etalon69.ru/bitrix/redirect.php?goto=http://tradeufa.ru/bitrix/redirect.php?goto=http://vitacci.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/biZ78F2W-6G>http://etalon69.ru/bitrix/redirect.php?goto=http://tradeufa.ru/bitrix/redirect.php?goto=http://vitacci.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/biZ78F2W-6G</a> Бонус без депо за регистрацию в казино (бездепозитный бонус) – это денежный презент от клуба, который начисляется на аккаунт игрока после регистрации в казино. Кроме сотворения учетной записи, для получения бездепа, очень нередко требуется ещё и подтвердить контактные данные игрока и/или активировать особый промо-код.Прежде всего, не забывайте периодически заглядывать на страницу обзоров бездепозитных бонусов. Они шаг за шагом осматривают наиболее увлекательные предложения ведущих игорных порталов. 1×slots промокод при регистрации При регистрации сомнений или ином интернет игральном заведении — вас дается раз шанс испытать собственную фортуну не внося свои монеты. Замечу что эту поощрительную услугу предоставляют не все интернет игровые площадки, а лишь великодушная половина из них. Которые мы подготовили для Вас в нашем перечне.
<b>Смотреть еще похожие новости:</b>
<a href=https://russiancomputerservice.ru/user/JosephCer/>1хслотс зеркало</a>
<a href=https://www.kfz-gringer.at/index.php/forum/donec-eu-elit/65800–1×slots#65565>1×slots официальный сайт зеркало</a>
<a href=http://b2s.bulwork.com/node/1581?page=74#comment-22195>1×slot казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Однако далеко не все ресурсы предлагают своим посетителям бездепозитные призы за регистрацию в казино. В большинстве случаев учтено поощрение на первый депо в объеме 100–200%. Это замечательная возможность преувеличить банкролл, увеличить время, проведённое за игрой и шансы сорвать крупный куш.
#9334 Charlesgunnyhttp://filmkachat.ru
казино 1×slots официальный сайт
Бездепозитный бонус нередко имеет стать легкодоступным сразу после окончания регистрации, потому правило единственным требованием к нему считается регистрация, а после проверка вашей свежей учетной записи.Шаг 5. Использование и отыгрыш. Бездеп обязан быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. <a href=http://filmkachat.ru/>1хслотс рабочее зеркало</a> При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое можно посвятить забаве в казино. <a href=http://www.yangjisa.co.kr/bbs/board.php?bo_table=free&wr_id=68467>http://www.yangjisa.co.kr/bbs/board.php?bo_table=free&wr_id=68467</a> Активация происходит с помощью промокодов, которые вводятся в личном офисе после регистрации. Среди спецпредложений в списке Casino.ru содержатся эксклюзивные промокоды, коие доступны только посетителям портала. Другие способы начисления средств ? автоматическая активация сразу после творенья аккаунта и получение подарка по запросу в службу технической поддержки. 1×slots промокод при регистрации <a href=http://nasamomdele.su/forum/memberlist.php?mode=viewprofile&u=64592>http://nasamomdele.su/forum/memberlist.php?mode=viewprofile&u=64592</a> 4. Заберите подарок. Чаще всего бонус активизируется незамедлительно в регистрации. Но бывают ситуации, когда нужно зайти в собственный офис или написать в службу.
1×slot рабочее зеркало
1×slots официальный регистрация Пoдтвepдить личнocть посетителя. Для успешного вывода средств, необходимо подтвердить лицо посетителя. Нa этaпe вepификaции пpoфиля, работники службы безопасности должны убедиться, что у игрока чем раз акк. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не может исключить собственный выигрыш, в у него несомненно несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы.Стоит отметить, что бездепозитный приз выдается лишь совершеннолетним новичкам, которые, к, все пригласить собственных приятелей и людей, также рассчитывающих на поощрительную программку преданности. Подобная технология появилась среди конкуренцию онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры способствуют увеличению своей посещаемости, путем привлечения новых игроков. Бонусы – это уникальный шанс для потенциальных участников забавы, коие имеют опробовать софт покер рума и увериться, будут ли они в него выступать или нет. Новый игрок испробует средства силы с настоящими оппонентами в казино. <a href=https://forum.dneprcity.net/showthread.php?p=694391#post694391>https://forum.dneprcity.net/showthread.php?p=694391#post694391</a> В случае установленного лимита на сумму вывода выигрыша с бездепозитного приза, игрок не может вывести больше заявленной суммы. 1×slots зеркало подтвердит вашу регистрацию если говорить
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Наиболее модные гонорары среди гэмблеров – бездепозитные призы казино. Это не дивно, так возможно получить безвозмездные вращения либо виртуальные кредиты, и при не придётся пополнять счёт, рисковать личностными средствами. Удастся насладиться разнообразными весельями и даже выиграть крупную необходимую, избегая серьёзного риска. Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. <a href=http://www.podrujka.com/user/Philipinjes/>http://www.podrujka.com/user/Philipinjes/</a> Вейджер в переводе с английского значит «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша полученного приза, в нашем случае бездепозитного. Число ставок имеет — принципиально только набрать сумму, пропорциональную сумме одобрения.Чаще всего, пользующиеся сервисы, эти как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно неотъемлемое управляло. Финансовые свои выводятся лишь через ту платежную систему, коей огромной для пополнения депо. Если же игрок получил бездепозитный покерный приз, потребуется восполнить счет на минимальную сумму, которая сочиняет обычно десять $. 1×slots зеркало которую указывали при регистрации кстати Для получения бонуса надо(надобно) пригласить в забаву свежего посетителя. Казино начисляет пригласившему фиксированный процент от взносов приглашённого вид бонуса: почаще всего его размер не выше 10%. Срок действия бонуса правило не превышает месяца: пригласивший получает бонус зависимо проигранных ставок приглашённого в 1-ый луна игры.
зеркло казино 1×slots
Мы проделываем акцент на главных положениях верховодил, рассказываем о территориальных ограничениях и вкратце информируем о иных промоакциях обсуждаемого казино.При правильном раскладе бездепы — это отличный метод играть на деньги без траты личных средств. Есть некоторое советов, следуя коим возможно извлечь максимум выгоды из сходственных акций казино. Играть идет лишь на лицензированных площадках. Скриптовые сайты столько накалывают с бонусными предложениями, хотя и употребляют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах невероятно. За привлечение приятеля ? в партнерской программки клиент получает вознаграждение за привлечение новых пользователей.Но надо мыслить, что снабжая пользователей такими бонусами, казино занимается спонсированием. Ведь объемы вознаграждений, в, не великие (средним размером от 5 до 20 $). И на эти свои налагаются определенные условия и лимитирования, обязательные к исполненью игрока, если в последствии он вожделеет получить все средства выигранные финансы. 1хслот 1хслотс регистрация перейти на 1×slots <a href=https://www.ng.ru/blogs/user/181622.php>https://www.ng.ru/blogs/user/181622.php</a>
1 xslots рабочее зеркало
Вейджер не более х30–35 является применимым. Опытные игроки утверждают, собственно с таким вейджером реально остаться в плюсе, в правильно подойти к выбору игрового аппарата. <a href=https://talkofflowermound.com/author/jasperhix/>https://talkofflowermound.com/author/jasperhix/</a> Сразу последствии активации промокода можно пользоваться подарком. Как уже упоминалось, призы посещают трёх видов – фриспины, кредиты и фриплей-бонусы. 1×slots регистрация 1×slots casino 777 online Выше мы дали полный набор самых новых и своевременных бездепозитных призов в интернет казино без пополнения на 2022 год, где возможность пользоваться любым ценным бездепозитным бонусом.Благодаря программке преданности от игорного заведения, возможно взять хороший старт и без дополнительных вложений запустить видеослоты. Кроме такого, возможно рассчитывать на реальную фортуну и получить, без инвестиции собственных денег, большой выигрыш.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.puppylinux.pl/index.php?topic=861.new#new>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<a href=https://qualityprogamer.de/forum/showthread.php?tid=262115>1×slots регистрацию процедура займет всего лишь</a>
<a href=http://permitbeijing.com/forum/showthread.php?tid=2199759>1×slots зеркало этих способов предполагает регистрацию</a>
<a href=https://www.rusdrama-az.com/support/51-sluzhba-tehnicheskoy-podderzhki-sayta.html>1×slots регистрация на 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Обычно бездепозитные промоакции от казино, прибывают на эл. Почту в деньки рождения либо праздники. В неких интернет казино можно обратиться в чат и как неизменному игроку, вполне вам предложат бездепозитное предложение. Бонус с зачислением средств на счет выделяет больше свободы поступков. Пользователь сам выбирает, каким образом воспользоваться подаренными своими. Здесь также все работать лимитирования на список доступных игр, хотя обыкновенно эти рамки не так строги, как в промо с бесплатными вращениями.
#9335 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать
Основное верховодило получения бездепа ? создаваемый акк обязан быть у пользователя первым и единственным. Наличие нескольких аккаунтов взыскательно запрещено. Проверка проводится по имени, e-mal, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депозита нужно блюсти несложную очередность поступков. <a href=http://filmkachat.ru/>1×slot рабочее зеркало</a> Казино дает возможность заработать и исключить настоящие средства на бездепозитных призах. Обычно, это незначительная сумма, которую казино возможность себя позволить подарить игроку.Этот образ бонуса будет добавлен на Ваш аккаунт после удачной процедуры регистрации с внедрением номера телефона. Если избрать другой способ творения учетной записи, бездеп не будет добавлен на Ваш акк. <a href=https://www.azeribalasi.com/member.php/31479-jamesenumn>https://www.azeribalasi.com/member.php/31479-jamesenumn</a> 1× slots casino зеркало <a href=https://www.entoads.com/author/jamesval/>https://www.entoads.com/author/jamesval/</a> Максимальная ставка ? уточняется в еденице счета и ограничивает объем ставки за один спин. В случае ее превышения бонус возможность быть аннулирован. Также в правилах имеет содержаться запрет на размещение ставок определенного вида, примеру, по одинаковым шансам в рулетке (словами, на чет или нечет, красное или темное и т.д. ).Выше мы предоставили глубокий комплект самых новых и своевременных бездепозитных призов в онлайн казино без пополнения на 2022 год, где продоставляется пользоваться любым ценным бездепозитным бонусом.
1×slots зеркало рабочее на сегодня
Вейджер не более х30–35 считается приемлемым. Опытные игроки заявляют, что с таким вейджером реально остаться в плюсе, случае верно подойти к выбору игрового аппарата. <a href=http://check2go.net/my-account/>1×slots сайт</a> 1×slots официальный сайт, скачать Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут уточняет лимитирование для клиентов. Конечно, это возможно счесть неким неудобством для игрока, хотя справедливости необходимо, собственно выбор автоматов всё также остаётся довольно большим. <a href=https://slovakia-forex.com/members/275147-forsedropmn>https://slovakia-forex.com/members/275147-forsedropmn</a> 1 xslots рабочее зеркало Также, учите, что бездепозитный приз возможно вывести лишь том, случае, когда будут выполнены все условия отыгрыша.Диапазон ставок, коие вправе устроить игрок, также лимитирован. Обычно назначать можно маленькую необходимую — в 10–30 руб. За одно вращение.
1×slots официальный сайт зеркало рабочее
Онлайн гемблинг развивается с каждым деньком больше и больше, свежие бренды создаются не по дням а по часам. Новые онлайн казино проделывают вступительные промоакции для игроков, чтобы, чтобы собственно бы зарекомендовать себя, и тем самым предлагают бездепозитные бонусы за регистрацию, что бы не пропустить такую возможность — как воспользоваться новым бездепом, советуем посещать наш вебсайт как можно чаще, самое смачное и свежие несомненно добавляться в данном же перечне.Чаще всего, знаменитые сервисы, такие как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно неотъемлемое верховодило. Финансовые свои выводятся только спустя что, эту платежную систему, коей пользовались для пополнения депозита. Если же игрок получил бездепозитный покерный приз, потребуется восполнить счет на наименьшую необходимую, кот-ая составляет обычно 10 $. Выигрыши с призов без инвестициям всегда привязаны к притязанию по ставкам и шансы быть обналичены лишь в исполненья этих притязаний. <a href=http://dklada.ru/user/PorsedropMa/>http://dklada.ru/user/PorsedropMa/</a> Начнём с такого, что любое рекламную за регистрацию подразумевает некие обстоятельства. Бездепозитные бонусы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность валютного оборота, нужная для исполненья условий. Пример, получили безвозмездные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 руб., неудачных либо выигрышных, маловажно. После исполненья, бонусный баланс перейдёт на реальный и станет легкодоступным к выводу. 1 xslots рабочее зеркало Подарки на определенные даты выделяются критериями получения. Если поощрение начисляют игроку на денек рождения, то сумма обычно зависимости от общего размера депо последний год.Ну и окончательно же, для казино бездепозитные призы прибыльны с имиджевой стороны: схожая добродушие повышает уровень преданности клиентов к компании.
1хслотс рабочее зеркало
При отыгрыше бонусных средств, нужно учитывать срок действия приза и время, которое дается на отыгрыш. По истечению заявленного медли, не отыгранный приз несомненно аннулирован. <a href=http://forums.panzergrenadiers.com/showthread.php?22874–1×slots-%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%B7%D0%A0%D1%91%D0%A0%D0%85%D0%A0%D1%95-%D0%A0%C2%B7%D0%A0%C2%B5%D0%A1%D0%82%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%BB%D0%A0%D1%95&p=503501#post503501>1×slots казино зеркало</a> 3. Подтвердить данные. В зависимости от клуба, нужно привязать телефон или почту, показать персональную информацию; Бонусы без депозита при регистрации считаются наиболее привлекательными как для опытнейших игроков, например для и начинающих. Получив такое вознаграждение, заказчик может играть на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, еще обстоятельства их активации и выигрыша.Похожим образом трудится третий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения клиента или из-за с получения им VIP-статуса. Подарок предоставляется последствии воззвания в поддержку и ревизии. 1×slots официальный зеркало рабочее <a href=https://www.covrik.com/member.php?u=109364>https://www.covrik.com/member.php?u=109364</a> Первый возникающий вопрос, это, для выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают свежих игроков. Последним легче начать игру на средства с дара за регистрацию. Им надо пополнять баланс и тратить личностные свои. Новички получают благотворительные спины либо средства на счёт. С их поддержкой знакомятся с игровым процессом, крутят слоты и делают ставки в рулетке.Все обожают получать презенты. Согласитесь, почти каждый играющий человек будет бесконечно рад, случае получит бесплатный презент для забавы в интернет казино просто за регистрацию либо же бонус за внесенный депозит, так нарекаемые приветственные бонусы для новых игроков. Соответственно такие онлайн клубы станут больше модны и предпочтительны у игроков при выборе казино для забавы. Топ казино каждый обновляется и добавляются новые и интересные игровые клубы с привлекательной бонусной политикой и всеми возможными прерогативами, к коим относятся такие бонусы как фриспины за регистрацию, денежные бездепозитные бонусы, еще великодушные призы за внесенный депо.
1×slots casino регистрация на сайте
Фриспины – бесплатные вращения с фиксированной ставкой, коие возможно использовать в определенных игровых автоматах.Заполняя данные в личном профиле, указывайте лишь достоверную информацию, например как Вам понадобиться ее подтвердить в будущем при выводе средств. <a href=http://www.dbmix.net/bbs/board.php?bo_table=free&wr_id=97715>http://www.dbmix.net/bbs/board.php?bo_table=free&wr_id=97715</a> 1х слотс зеркало регистрация в 1×slots casino Акционные предложения от казино есть в разных форматах. Часто бонусы даются в размен на депо. Игрок заносит платеж и получает деньги, безвозмездные вращения и другие одобрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — вид приза, который гарантирован за исполненье определенных действий на веб-сайте:Представленные на этой странице лучшие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, в гости Casino.ru шансы сортировать перечень по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д.
<b>Смотреть еще похожие новости:</b>
<a href=https://masstr.net/member.php?action=profile&uid=27801>казино 1×slots официальный сайт</a>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=169207>1×slot зеркало</a>
<a href=https://www.formulersupport.com/Thread-1%D1%85-%D1%81%D0%BB%D0%BE%D1%82–1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%BF%D0%B5%D1%80%D0%B5%D0%B9%D1%82%D0%B8-%D0%BD%D0%B0–1×slots–106086>1х слот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выбирая даровой бонус, пристально изучайте управляла. Убедитесь, собственно вам можно брать роль в промоакции. Уточните, в каких забавах можно скорпулезно обстоятельства вейджера. При необходимости задавайте вопросы адептам саппорта.
#9336 Charlesgunnyhttp://filmkachat.ru
1×slot регистрация
Oтыгpaть бонус с обозначенным вeйджepом, чтобы нужно сдeлaть cтaвoк нa cумму, превосходящую объем приза в некоторое раз. <a href=http://filmkachat.ru/>1хслот 1хслотс регистрация перейти на 1×slots</a> <a href=http://www.concerthouse.co.kr/bbs/board.php?bo_table=free&wr_id=565281>http://www.concerthouse.co.kr/bbs/board.php?bo_table=free&wr_id=565281</a> Бонус с зачислением средств на счет дает больше свободы действий. Пользователь сам подбирает, каким образом распорядиться подаренными средствами. Здесь также шансы действовать ограничения на список дешевых игр, но обыкновенно эти рамки не например строги, как в рекламную с бесплатными вращениями. 1× slots casino зеркало <a href=https://www.modernvespa.it/profile/3540-michaelzof/>https://www.modernvespa.it/profile/3540-michaelzof/</a> Вейджер (либо вагер) ? это наименьшая сумма ставок, которую необходимо устроить для вывода валютного бонуса. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение.Бездепозитный бонус часто возможность стать легкодоступным незамедлительно последствии завершения регистрации, поскольку в большинстве случаев единственным требованием к нему является регистрация, а этого проверка вашей новой учетной записи.
1×slots casino зеркало
1×slots официальный сайт зеркало рабочее Также, ситуации необходимо подтвердить собственный номер аппарата, для этого код, приобретенный в смс-сообщении от клуба установить в особое поле в собственном офисе игрока.В интернете большое известных игорных площадок с красивыми акционными предложениями. Однако внимательно читать условия десятков предложений в надоест, ну и время отнимет количество. Поэтому наша команда подготовила ТОП-3 сайтов с лучшими бездепозитными бонусами: <a href=http://kuzazhi.com/space-uid-146343.html>http://kuzazhi.com/space-uid-146343.html</a> Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы появилась возможность исключить выигрыш. 1×slots регистрация 1×slotscasino 56 online На бесплатные призы онлайн-казино почти постоянно распространяется ограничения по стране проживания посетителей. Даже случае для разрешается открывать счет и играть на средства в заведении, это еще не означают, что для доступны not the slightest down payment bonuses.
1×slots зеркало сайта
Во время игры в казино, выигрыши, приобретенные благодаря бесплатным призовым фондам, суммируются и срабатывают в общую сумму для отыгрывания. Однако, случае фортуна улыбнется и выйдет отыграть все призы, игровое заведение гарантированно допустит вывести денежные средства. Сумма вывода несомненно зависеть от лимита, утвержденного именно в этом учреждении. Поэтому, пристально надо(надобно) читать управляла выдачи анлимитных депо. <a href=http://www.neworleansbbs.com/home.php?mod=space&uid=284883>http://www.neworleansbbs.com/home.php?mod=space&uid=284883</a> 1×slots рабочее зеркало Также, учите, что бездепозитный бонус можно вывести лишь том, случае, когда будут исполнены все условия отыгрыша.
1×slots официальный сайт скачать на айфон
<a href=https://chasingadream.rpginitiative.com/showthread.php?tid=138372>1×slots сайт зеркало</a> B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. Основное управляло получения бездепа ? создаваемый акк должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов требовательно воспрещено. Проверка ведется по имени, e-mal, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депо нужно соблюдать простую последовательность поступков. 1хслот 1хслотс регистрация перейти на 1×slots <a href=http://filmsgood.ru/user/Jeffreyerody/>http://filmsgood.ru/user/Jeffreyerody/</a>
1×slots зеркало видели такую регистрацию на
Для казино, работающих онлайн, бездепозитные бонусы необходимы для привлечения свежих посетителей. Предложение сыграть на слотах без необходимости внесения реальных средств — работающий метод для увеличения энтузиазма к фирмы. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит выступать в казино, лишь сейчас теснее на собственные средства. <a href=http://www.odnopolchane.net/forum/member.php?u=628952>http://www.odnopolchane.net/forum/member.php?u=628952</a> Так собственно приготовьтесь дать конфиденциальную информацию (пол, возраст, государство проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает не более суток, после чего получится беспрепятственно выводить солидные выигрыши.Для того, чтобы отыграть сумму вашего бездепозитного бонуса нужно выполнить условия вейджера. Очень часто фриспины даются на конкретные слоты (book of ra, book of dead, book of sun), подбирайте слот для по, все довольно красивые и качественные. Бездепозитные приз имеет быть денежным так и в виде фриспинов на слоты 1×slots бонус за регистрацию Бездепозитный приз казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в данном и содержится основное различие.Чтоб получить большой выигрыш, выбирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша.
<b>Смотреть еще похожие новости:</b>
<a href=https://persiankittencat.com/grey-persian-cats-unraveling-the-charm-of-these-feline-beauties/#comment-37237>1×slots регистрация на сайте</a>
<a href=https://www.fromrus.su/index.php?/topic/22219–1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%B2–1×slots-casino/>1×slots зеркало регистрация в 1×slots casino</a>
<a href=https://forum.graylite.com/viewtopic.php?p=188793#p188793>1×slot казино зеркало</a>
<a href=https://forum.ltp-team.com/topic/46193–1×slots-zerkalo-bystruyu-registraciyu-a-takzhe-mgnovennoe/>1×slots зеркало быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Самый распространённый из сходственных бонусов, естесственно же, бездеп на день рождения клиента — бонус вид фиксированной суммы либо фриспинов поступает на счёт игрока, а воспользоваться им можно в течение установленного периода времени.
#9337 Stevenlinlyhttps://medium.com/@borealuonexus/rtp-slot-b8fc74f002d9
<a href=https://medium.com/@borealuonexus/rtp-slot-b8fc74f002d9>rtp slot</a> Judul: Menikmati Pengalaman Memainkan dengan „PG Slot“ di Situs Kasino ImgToon.com
Dalam dunia permainan kasino online, mesin slot telah jadi salah satu permainan yang paling diminati, terutama jenis PG Slot. Di antara berbagai situs kasino online, ImgToon.com menjadi tujuan utama bagi pengguna yang ingin menguji peruntungan mereka di beragam permainan slot, termasuk beberapa kategori populer seperti demo pg slot, pg slot gacor, dan RTP slot.
Demo PG Slot: Mencoba Tanpa Risiko Salah satu fungsi menarik yang disediakan oleh ImgToon.com adalah demo pg slot. Fungsi ini memberikan pemain untuk memainkan berbagai jenis slot dari PG tanpa harus bertaruh taruhan nyata. Dalam mode demo ini, Anda dapat menguji berbagai strategi dan mengerti mekanisme permainan tanpa risiko kehilangan uang. Ini adalah langkah terbaik bagi pemula untuk mengenal dengan permainan slot sebelum berpindah ke mode taruhan nyata.
Mode demo ini juga menyediakan Anda pandangan tentang potensi kemenangan dan bonus yang mungkin bisa Anda terima saat bermain dengan uang asli. Pemain dapat menjelajahi permainan tanpa cemas, menciptakan pengalaman bermain di PG Slot semakin mengasyikkan dan bebas stres.
PG Slot Gacor: Prospek Besar Mendapatkan Kemenangan PG Slot Gacor adalah sebutan terkenal di kalangan pemain slot yang merujuk pada slot yang sedang dalam fase memberikan kemenangan tinggi atau lebih sering dikenal „gacor“. Di ImgToon.com, Anda dapat menemukan berbagai slot yang masuk dalam kategori gacor ini. Slot ini diakui memiliki peluang kemenangan lebih tinggi dan sering memberikan bonus besar, menyebabkannya pilihan utama bagi para pemain yang ingin memperoleh keuntungan maksimal.
Namun, harus diingat bahwa „gacor“ atau tidaknya sebuah slot dapat bergeser, karena permainan slot bergantung generator nomor acak (RNG). Dengan melakukan permainan secara rutin di ImgToon.com, Anda bisa menemukan pola atau waktu yang tepat untuk memainkan PG Slot Gacor dan memperbesar peluang Anda untuk menang.
RTP Slot: Faktor Esensial dalam Pemilihan Slot Ketika membicarakan tentang slot, istilah RTP (Return to Player) adalah faktor yang sangat esensial untuk diperhatikan. RTP Slot merujuk pada persentase dari total taruhan yang akan dikembalikan kepada pemain dalam jangka panjang. Di ImgToon.com, setiap permainan PG Slot dilengkapi dengan informasi RTP yang jelas. Semakin tinggi persentase RTP, semakin besar peluang pemain untuk mendapatkan kembali sebagian besar dari taruhan mereka.
Dengan memilih PG Slot yang memiliki RTP tinggi, pemain dapat mengelola pengeluaran mereka dan memiliki peluang yang lebih baik untuk menang dalam jangka panjang. Ini menjadikan RTP sebagai indikator penting bagi pemain yang mencari keuntungan dalam permainan kasino online.
#9338 Charlesgunnyhttp://filmkachat.ru
1×slots сайт зеркало
Составленный специалистами Casino.ru перечень онлайн-казино с бездепозитным бонусом разрешает игрокам сравнить спецпредложения разных операторов.Используйте наилучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, чтобы заработать презенты за простые деянья теперь сегодня получить 1-ый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высокой отдачей и быстрыми выводами на электронные кошельки. <a href=http://filmkachat.ru/>1×slots зеркало проходить регистрацию это отличный вариант</a> Зарегистрироваться в казино по специальной ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефонного и электронную почту). Для доказательства номера аппарата необходимо в собственном профиле показать свой номер и нажать кнопку „Подтвердить номер телефона“, далее Вы получите sms-сообщение с кодом, кот-ый нужно ввести в соответствующее фон. Для подтверждения электронной почты, перебежать по активной ссылке в письме от казино. <a href=http://helenos.pavel-rimsky.cz/doku.php?id=%D0%91%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%88%D0%B5%D1%84-%D0%BF%D0%BE%D0%B2%D0%B0%D1%80%D0%BE%D0%B2%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!>http://helenos.pavel-rimsky.cz/doku.php?id=%D0%91%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%88%D0%B5%D1%84-%D0%BF%D0%BE%D0%B2%D0%B0%D1%80%D0%BE%D0%B2%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!</a> 1×slots казино мобильная версия <a href=https://series40.kiev.ua/user/CharlesKes/>https://series40.kiev.ua/user/CharlesKes/</a>
1х слот 1хслотс регистрация перейти на 1×slots
Частенько новички не знают, как активировать презенты или исключить 1-ый выигрыш. Для сходственных случаев наша команда обрисовала главные определения – собственно такое фриспины, вейджер, как его отыграть, зачем нужно проходить верификацию. <a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1×slots регистрация на сайте 1×slots ru com</a> 1× слот зеркало <a href=http://msnho.com/xblog/%D0%BF%D1%80%D0%BE%D0%B3%D1%80%D0%B0%D0%BC%D0%BC%D0%B0-%D1%83%D1%87%D0%B5%D1%82%D0%B0-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D0%B6%D0%B0-%D1%81%D1%82%D1%80%D0%BE%D0%B9%D0%BC%D0%B0%D1%82%D0%B5%D1%80%D0%B8%D0%B0%D0%BB%D0%BE%D0%B2>http://msnho.com/xblog/%D0%BF%D1%80%D0%BE%D0%B3%D1%80%D0%B0%D0%BC%D0%BC%D0%B0-%D1%83%D1%87%D0%B5%D1%82%D0%B0-%D0%BF%D1%80%D0%BE%D0%B4%D0%B0%D0%B6%D0%B0-%D1%81%D1%82%D1%80%D0%BE%D0%B9%D0%BC%D0%B0%D1%82%D0%B5%D1%80%D0%B8%D0%B0%D0%BB%D0%BE%D0%B2</a> Если вы новичок деле и лишь попали в неизведанную вами область азарта — за предложений как бездепозитные призы без пополнения. 1×slots официальный demo регистрация в 1×slots casino
1×slots на любой вкус как пройти регистрацию
Бездепозитные призы настоящими деньгами, которые возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадались. <a href=https://build-info.biz.ua/wr_board/tools.php?event=profile&pname=Richardusase>https://build-info.biz.ua/wr_board/tools.php?event=profile&pname=Richardusase</a> Казино выделяет возможность заработать и исключить настоящие средства на бездепозитных бонусах. Обычно, это незначительная сумма, коию казино возможность для разрешить презентовать игроку.Нет. Для получения бездепозитного бонуса в казино нужна обязательная регистрация на сайте. Играть в слоты даром и без регистрации возможно только в демо режиме. 1×slots зеркало которую указывали при регистрации кстати
1×slots casino регистрация 1×slotscasin online
<a href=https://mit-bbs.com/viewtopic.php?t=129260>1×slots регистрация 1×slots casino c2d ru</a> 1х слотс зеркало регистрация в 1×slots casino <a href=http://sabrina-online.su/wiki/index.php?title=фильмы_android>http://sabrina-online.su/wiki/index.php?title=фильмы_android</a>
1×slots промокод при регистрации
Как только на виртуальном счету окажутся бонусные средства, поспешите отыграть вейджер. Сразу после сего возможно оставить заявку на вывод выигрыша. Кредиты прибыльно выделяются от фриплей-бонусов и фриспинов. Во-первых, они считаются аналогом настоящих средств и дают возможность ощутить азарт. Во-вторых – можно насладиться любой азартной игрой доступной на сайте. В вашем постановлении присутствуют автоматы, настольные прибавление, видео-покер, Live-дилеры.Обычно для получения призов без депозита, казино выдвигает приклнные и вполне выполнимые обстоятельства, хотя есть ряд действий коие запрещены и все причиной досадные результаты: В интернет-сети постоянно возможно найти списки более знаменитых и гарантированных поощрительных программ от известных онлайн-казино.Основное различие в том, собственно для получения бездепа не надо пополнять баланс в казино. Но считая сего, есть ряд и других различий: <a href=https://www.9tj.net/home.php?mod=space&uid=206799>https://www.9tj.net/home.php?mod=space&uid=206799</a> 1×slots зеркало При поддержки такого поощрения оператор возможность также привлекать клиентов, коие ранее показывали активность на веб-сайте, хотя по некий причине прекратили играть. В данном случае промокод высылается пользователю по электронной почте или повторяющий SMS.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.katzenforum.at/forum/media/users/jamesagema.16012/>1×slots casino регистрация</a>
<a href=https://tucmas.fi/phpBB/viewtopic.php?f=4&t=348292>1×slots мобильная версия войти казино</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины — благотворительные вращения, которые разрешают игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся наиболее популярным и предпочтительным видом приза — бесплатные вращения порой эффективнее и веселее в отыгрыше, чем другие виды бездепов.
#9339 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
В основном случаев благотворительные бонусы начисляются в кредитах, коие невозможно сразу исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти требования принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д. ). О нем читайте ниже.Приветственный бездеп предоставляется любому игроку лишь один раз. Казино борются с так нарекаемыми бонусхантерами (от англ. Bonus Hunter — охотник за призами), пытающимися заводить многочисленные аккаунты для обмана оператора и повторного получения подарка. Исключить подобные деяния позволяет верификация данных. Администрация вправе потребовать у клиента доказать персональные данные, указанные при регистрации. <a href=http://filmkachat.ru/>1×slot зеркало</a> Бонус в казино без депо содержит различные вариации: может быть приветственный приз, акции в честь каких-то праздничных или главных дат, приз за привлечение новых игроков, преданность и получение VIP-статуса. <a href=http://www.idsys.kr/bbs/board.php?bo_table=free&wr_id=218811>http://www.idsys.kr/bbs/board.php?bo_table=free&wr_id=218811</a> Возможность протестировать свежие игры, не рискуя собственными средствами и создать личную стратегию забавы.Также, учите, собственно бездепозитный приз возможно вывести только что случае, когда будут исполнены все условия отыгрыша. 1×slots регистрация <a href=http://autoschool-progress.kz/index.php?subaction=userinfo&user=boorishmerchant>http://autoschool-progress.kz/index.php?subaction=userinfo&user=boorishmerchant</a>
1× slots зеркало
Также учтите, что кое-какие игровые платформы сузивают перечень стран, коие готовы получить предложенный бездепозитный приз за регистрацию. К образцу, существуют онлайн-заведения, выдающие подобные призы только жителям конкретных стран. К образцу, онлайн казино 777 Оригинал дает бездепозитный бонус только игрокам из России и стран СНГ. Или напротив, пичкают вознаграждением всех, не обитателей неких стран (исходя из этого, стопам внимательно изучать перечень, дабы впоследствии не возникло никаких вопросов и жалоб). 1хслот скачать <a href=https://boobs.red/user/Zacheryclavy/>https://boobs.red/user/Zacheryclavy/</a> Возможность поиграть дополнительное соревнование (а от и количество) абсолютно безвозмездно, а выигрыш, в свою очередь, поступает на счёт игрока. 1×slots зеркало рабочее Получив собственный подарок, Вы сможете даром играть на реальные деньги, а выполнив условия отыгрыша, исключить собственный выигрыш.Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в соц сетях, установку мобильного приложения либо официального клиента для ПК. В большинстве казино срабатывают программки лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий уровень часто сопровождается выдачей бездепа.
1 xslots рабочее зеркало
Бездепозитный приз казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в этом и содержится основное различие.Получить приветственный бонус могут лишь новые клиенты онлайн-казино. Способы описаны в условиях промоакции любого легального казино, почаще всего это: Фриспины — бесплатные вращения, коие дозволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся самым известным и преимущественным обликом бонуса — безвозмездные вращения иногда эффективнее и веселее в отыгрыше, чем другие облики бездепов. <a href=http://cqr3d.ru/user/Forsedropot/>http://cqr3d.ru/user/Forsedropot/</a> Как управляло, новоприбывшие геймеры в первую очередь желают ознакомиться с методами ввода и вывода денежных средств и сроки исполнения поданных заявок дабы четко понимать, как быстро меня вывести свой казино бонус за регистрацию без депозита на электрический кошелек либо же банковскую карту. К счастью для всех играющих, внутри конкретных холдингов, все казино конкурируют между собой. Ведь если бы определенную фирму давало только одно онлайн-заведение, то ли бы посетители заметили казино с призом за регистрацию и могли бы рассчитывать лишь на вознаграждение вид приза на 1-ое вложение. К любому заведению периодически следует привлекать свежих игроков, собственно, итоге, лишь на руку всем играющим.Самые пользующиеся методы вывода средств ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электрическим платежным системам на Neteller и Skrill, а также пользуются криптовалютными кошельками. Вывод выигрышей может осуществляться быстро или занимать от нескольких часов до нескольких суток. скачать 1×slots официальный сайт Основное верховодило получения бездепа ? создаваемый аккаунт обязан быть у пользователя первым и единственным. Наличие нескольких аккаунтов требовательно запрещено. Проверка проводится по имени, e-mal, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депо необходимо блюсти простую последовательность деяний.
1×slots регистрацию процедура займет всего лишь
Получив собственный презент, Вы можете безвозмездно играть на реальные средства, а выполнив условия отыгрыша, исключить свой выигрыш.Выигрыши с призов без инвестициям всегда привязаны к притязанию по ставкам и шансы быть обналичены лишь в исполненья этих притязаний. Заполняя данные в собственном профиле, указывайте только достоверную информацию, например как Вам придется ее подтвердить в при выводе денег.При пользовании бездепозитным призом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют количество видов лимитов: 1×slots официальный регистрация <a href=https://myworldgo.com/blog/113604/redico>https://myworldgo.com/blog/113604/redico</a>
рабочее зеркало 1хслотс
Вейджер не более х30–35 считается приемлемым. Опытные игроки заявляют, что с этим вейджером реально остаться в плюсе, если верно подойти к выбору игрового аппарата.Для получения приза надо(надобно) пригласить в забаву нового клиента. Казино начислит пригласившему фиксированный процент от взносов приглашённого в виде бонуса: почаще всего его размер не выше 10%. Срок деянья приза в большинстве случаев не превышает месяца: пригласивший получает бонус зависимо проигранных ставок приглашённого в первый луна игры. Игрокам не воспринимать приветственный приз как гарантированный способ получить крупный выигрыш, хотя это отличная возможность без расходов расценить функционал казино. <a href=http://romylo.ru/bitrix/redirect.php?goto=http://gorod-ust-labinsk.ru/bitrix/redirect.php?goto=http://waterfilter.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/BplaQPge88G>http://romylo.ru/bitrix/redirect.php?goto=http://gorod-ust-labinsk.ru/bitrix/redirect.php?goto=http://waterfilter.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/BplaQPge88G</a> Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Помните, что любые нарушения верховодил сведут на нет ваши старания, и вы скорее останетесь без начисленного вас бесплатного приза. Всегда изучайте правила начисления и условия вейджера. По хоть вопросам, на коие вы возможности помощи найти ответы, обращайтесь за объясненьям и саппорт. 1×slots casino online регистрация
<b>Смотреть еще похожие новости:</b>
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=60722&extra=>1хслот зеркало</a>
<a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1 x slots</a>
<a href=https://forum.spherecommunity.net/User-JamesLop>1×slots промокод при регистрации 2025</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для выбора азартного заведения Вы сможете пользоваться списком наших казино с призами за регистрацию. На нашем веб-сайте мы опубликовали перечень бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, собственно часть бонусов эксклюзивные и доступны лишь для посетителей нашего сайта по-специальному промо-коду или по уникальной ссылке. Кроме как, для каждого бонуса мы подготовили доскональный обзор, в котором Вы узнаете как получить и отыграть поощрение и как исключить свой выигрыш с бездепа. В каждом казино с бездепозитным призом предусмотрены вейджеровые обстоятельства. Это один-единственный «подводный камень», кот-ый стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) устроить определённое число ставок. Чем круче приз, тем сложнее выполнить условия, и напротив.
#9340 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать
Операторы гемблинга утверждают, что так они сражаются с бонус-хантерами. Впрочем, критики считают, собственно данным казино пробуют устроить из случайного гостя постоянного игрока.Это раз из основных показателей привлекательности подарка. С завешенным коэффициентом том профессионалы не сумеют выполнить условия по отыгрышу. И неважно, насколько привлекательно выглядит предложение – бездепозитный бонус казино в размере $500 или $1 000. Чтобы новички лучше вникли, что же это вейджер, мы разберём на случае. <a href=http://filmkachat.ru/>1×slots официальный сайт мобильная версия скачать</a> <a href=http://otyjob.com/bbs/board.php?bo_table=free&wr_id=166767>http://otyjob.com/bbs/board.php?bo_table=free&wr_id=166767</a> Получить Бездепозитный бонус в интернет казино дело 2-ух кликов. Другой момент, отыграть рекламную и соблюсти верховодила и обстоятельства отыгрыша. Под правилами предполагается не только вагер, хотя и ограничения по наибольшей ставке. Мы понимаем, собственно в кинотеатр все ставят на зеро и выигрывают. Призываем не делать сходственного. Перед активацией бонуса прочтите правила. Узнайте последующие факторы: Условия получения презента, за регистрацию, за депозит и прочее. Ограничения по максимальной ставке. Зачастую не повыше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах можно отыгрывать вагер. Можно вращать автоматы, а вагер будет стоять на пространстве. Поэтому принципиально аристократия, в каких играх можно совершать кратность денежного оборота.Раздача призов может быть посвящена различным датам: календарные дни, дни рождения игроков, годовщина открытия казино и т. Д. Подарок выдается повторяющий средств, фриспинов либо баллов для накопления и размена на предложения оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд требований. 1×slots зеркало регистрацию более популярный вариант это <a href=http://nitka.by/user/GeraldJew/>http://nitka.by/user/GeraldJew/</a> Эффективность бездепов в рекламного прибора оценили все операторы. Малоизвестные площадки употребляют такие промоакции, чтобы живо набрать базу. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны неизменных гостей. Не все сайты, дающие подарки без депозита, рекомендованы к ирге. За привлекательным промоописанием могут прятаться неосуществимые обстоятельства отыгрыша прочие подводные камни.Варианты выигрыша в от Вашей удачи и критерий игорного портала. Выше мы заявили, собственно некоторые бездепозитные бонусы в 2022 году выдаются с лимитированиями по максимальной выплате. Однако, остаются другие, все, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность современных игр на деньги, возможно выиграть невероятные суммы. Сегодняшние игровые автоматы либо видео слоты, как их называют. Могут выдавать солидные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000.
1×slots зеркало быструю регистрацию а также мгновенное
Приветственный бездеп предоставляется какому игроку только один один. Казино сражаются с например называемыми бонусхантерами (от англ. Bonus Hunter — доброволец за призами), пытающимися заводить многочисленные аккаунты для обмана оператора и повторного получения подарка. Исключить сходственные действия дозволяет верификация данных. Администрация вправе потребовать у посетителя подтвердить персональные данные, обозначенные при регистрации.Индивидуальные одобрения выдаются за совершение деяний: подписку на аккаунты площадки в соц сетях, установку мобильного прибавления или официального клиента для ПК. В большинстве казино действуют программы лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий степень нередко сопровождается выдачей бездепа. <a href=https://bajarmp3.net/showthread.php?tid=439629>1 xslots рабочее зеркало</a> x1 slots регистрация в 1×slots casino 2. Создать свежий профиль. Для регистрации нужно заполнить маленькую анкету либо зайдите в индивидуальный кабинет посредством соц сеток; <a href=https://honcure.com/user/Geraldnit/>https://honcure.com/user/Geraldnit/</a> Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки все запросить дополнительные документы либо инициировать короткое общение по Skype.При поддержки такового поощрения оператор возможность также привлекать посетителей, коие раньше показывали активность на сайте, но по некий причине прекратили выступать. В этом случае промокод высылается пользователю по электронной почте либо в виде SMS. 1хслотс рабочее зеркало Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских рублей. В критериях промоакции указано, собственно вейджер бездепозитного приза х20. Поэтому, дабы отыграть приз, игроку несомненно необходимо устроить ставок на 35*20=700 руб.
1 x slots casino
В интернете большое знаменитых игорных площадок с привлекательными акционными предложениями. Однако пристально читать условия десятков услуг времени надоест, ну и время отнимет большое. Поэтому наша команда подготовила ТОП-3 сайтов с наихорошими бездепозитными призами:Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. <a href=http://www.sugunpo.net/bbs/board.php?bo_table=free&wr_id=772775>http://www.sugunpo.net/bbs/board.php?bo_table=free&wr_id=772775</a> В некоторых интернет казино для получения бездепозитных призов не довольно просто зарегистрироваться на веб-сайте клуба и доказать свои контактные данные. Дополнительно требуется активация промокода. 1×slot официальный сайт
1×slots официальный сайт зеркало
<a href=http://6000ziyuan.com/forum.php?mod=viewthread&tid=102044&extra=>1×slots casino регистрация 1×slotscasin online</a> В бонусную программу множества операторов входят регулярные бездепы. Это бессрочные акции, поощряющие интенсивных постоянных игроков. Популярный формат — раздача фриспинов по конкретным денькам недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают неизменные бонусы без депозита в мена на накопленные баллы лояльности. Мы собрали и опубликовали список наихороших бездепозитных казино с бонусами за регистрацию, коие гарантируют великодушные выигрыши и мгновенные выплаты. 1×слотс казино <a href=http://vttgauriac.fr/forum/memberlist.php?mode=viewprofile&u=4975>http://vttgauriac.fr/forum/memberlist.php?mode=viewprofile&u=4975</a>
1хслотс зеркало на сегодня
Бесплатные призы казино без депозита можно получить в виде денежных средств на бонусный счет (вывести их возможно лишь после отыгрыша), фриспинов, забавы или кешбэк-бонуса. У каждого игорного клубы различные вейджеровые обстоятельства. Чтобы вы гарантировано сумели выполнить их, мы дадим количество советов. Если система начислила небольшую необходимую, надо делать великие ставки – остановитесь на 10–30 центах. Как лишь сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте играть. В противном случае какого-либо присмотреться к иному автомату.Промокод – определённая комбинация знаков, которую необходимо установить в отвечающее поле при творении учетной записи или активировать в личном профиле игрока в разделе с призами. <a href=https://coffeepeople.ru/memberlist.php?mode=viewprofile&u=39363>https://coffeepeople.ru/memberlist.php?mode=viewprofile&u=39363</a> Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных ситуаций с казино, когда последствии отыгрыша бездепа для не дадут вывести солидную сумму выигрыша.Верификация необходима для дополнительной защищенности и может техподдержке выявить бонусхантеров и мошенников. Кстати, на некоторых платформах выводы солидных сумм доступны лишь после подтверждения личности. 1×slots casino зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://www.deonnyn.com/PSPA/memberlist.php?mode=viewprofile&u=559&sid=3b709957f645e1ae6d697ab1a97c4bd5>рабочее зеркало 1×slots</a>
<a href=http://forum.exalto-emirates.com/memberlist.php?mode=viewprofile&u=69997&sid=ecd28decde74cdd657d4387b1b586884>1×slos регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Более крупные предложения встречаются довольно изредка. Зачастую они доступны только VIP-игрокам. В оставшихся случаях им наверняка сопутствуют очень жесткие обстоятельства отыгрыша. Также вероятны вспомогательные условия прочие ограничения, прописанные в критериях и положения бонусной программки казино. Казино дает возможность заработать и исключить реальные средства на бездепозитных призах. Обычно, это незначительная сумма, которую казино возможность себя разрешить подарить игроку.
#9341 JetCasinohttps://jet-casino-apk.ru
<a href=https://jet-casino-apk.ru>www.jet-casino-apk.ru</a>
Загрузить приложение онлайн казино Джет – выигрывай сегодня! <a href=https://jet-casino-apk.ru>http://jet-casino-apk.ru</a>
#9342 Charlesgunnyhttp://filmkachat.ru
1×slots акции
Например, игрок получил 500 рублей при разработке аккаунта и обязан отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 руб., потребуется сделать 875 спинов для полного отыгрыша.Мы делаем акцент на главных положениях управлял, рассказываем о территориальных лимитированиях и кратко информируем о иных акциях обговариваемого казино. <a href=http://filmkachat.ru/>1× slots сайт</a> <a href=https://g.clicgo.ru/user/Jamesabart/>https://g.clicgo.ru/user/Jamesabart/</a> А ознакомиться с свежими онлайн казино, Вы можете с призов с выводом прибыли, коие Вы сможете получить без депо. 1×slots регистрация 1×slots casino 777 online <a href=http://www.luisovalles.com/new/index.php?option=com_k2&view=itemlist&task=user&id=96804>http://www.luisovalles.com/new/index.php?option=com_k2&view=itemlist&task=user&id=96804</a> На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не сможете активировать и получить бездепозитный бонус.
1×slots зеркало которую указывали при регистрации кстати
<a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1×slots регистрация на сайте 1×slots ru com</a> 1×slots зеркало <a href=https://www.ccvgaming.com/forum/member.php?38679-DavidHig>https://www.ccvgaming.com/forum/member.php?38679-DavidHig</a> Популярность интернет казино растёт и всё больше пользователей начинают увлекаться азартными забавами. Бездепозитные бонусы 2022 года, это оригинальные презенты за регистрацию. С их поддержкой новые игроки шансы получить безвозмездные вращения или средства на баланс за 1 регистрацию. С свет игорных заведений в онлайне, бездепозитные бонусы стали известнейшим методом привлечения игроков. Подобные акции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о которых мы расскажем. Наш вебсайт собрал превосходнейшие предложения из интернета на 2022 год. Воспользуйтесь хоть презентом и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша необходимо выполнить обстоятельства.Вы всего, как и все любите получать презенты и бездепозитные призы казино. Игорные жилища взяли в повадку одаривать гэмблеров приятными бонусами. Стать владельцем приветственного подарка можно за создание профиля или пополнение счёта. Второй вариант более занимательный, как клубы готовы удвоить депозит! Но если вы новичок и только знакомитесь с миром пыла, чем воспользуйтесь бонусом за регистрацию. казино 1× slots официальный сайт
1×slots регистрация 1×slots casino 777 online
При регистрации том, или ином интернет игральном заведении — вам дается один шанс испытывать собственную фортуну не внося средства монеты. Замечу собственно эту поощрительную предложение деют не все интернет игровые площадки, а только великодушная половина из них. Которые мы подготовили для Вас в нашем списке.Бездепозитные призы реальными деньгами, коие возможно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадали. У каждой игры средства требования по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система зачтет любую ставку. В рулетке и покере сделать это гораздо сложнее. Именно потому например принципиально внимательно читать условия получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой забаве, то новенькие просто «спустят приз на ветер». <a href=https://orbitalscoreboard.com/user/glennswito/>https://orbitalscoreboard.com/user/glennswito/</a> 1×slots casino регистрация Бывают ли бездепозитные призы без вейджера? Бывают, если у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино.Если вы избираете испытанное лицензионное интернет казино и сделайте все обстоятельства получения бездепозитного бонуса, проблем с получением подарка у Вас не возникнет.
зеркло казино 1×slots
Это раз из главных показателей привлекательности подарка. С завешенным коэффициентом даже мастера не смогут выполнить условия по отыгрышу. И так, как презентабельно выглядит предложение – бездепозитный бонус казино в размере $500 или $1 000. Чтобы новенькие попревосходнее вникли, собственно же это вейджер, мы разберём на случае.Рассмотрим принцип его действия на случае. Допустим, вы зарегались и получили $10 not the slightest deposit bonus с вейджером х50. Это означает, что выигранные средства можно будет выводить не раньше, чем последствии такого, как общая сумма ставок достигнет $500. Почти все игровые клубы требуют свидетельство контактных данных игрока для получения бездепозитного приза.Если простыми текстами, бездепы – это определённая сумма денег либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно брать презенты. Но есть некоторые аспекты. Существуют игорные жилища, которые перед что, этим как начислить призы требуют привязать аппарат, дать копии документов. 1× slots регистрация в 1×slots casino <a href=http://adrestyt.ru/user/Chrisclurb/>http://adrestyt.ru/user/Chrisclurb/</a> Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы появилась возможность вывести выигрыш.
1 х слотс зеркало
Но эти рамки не смущают том хайроллеров, что коэффициенты на слотах дозволяют рассчитывать на солидные выигрыши, в некоторых автоматах разыгрывается прогрессивный джекпот.Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 поболее. Когда игроку полагается большое фриспинов, администрация возможность бить3 их начисление на некоторое дней. Бесплатные вращения предоставляются для определенного слота, кот-ый указывается в правилах акции. <a href=http://ultfoms.ru/user/Waltermedia/>http://ultfoms.ru/user/Waltermedia/</a> Вывод выигрыша с бездепозитных призов казино – великодушный презент от азартных клубов. Но дабы вывести свой заработок, необходимо выполнить ряд условий: 1×slots рабочее зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://aurorahcs.com/forum/memberlist.php?mode=viewprofile&u=168982>1 x slots</a>
<a href=https://forum.bandariklan.com/showthread.php?tid=369894>казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.
#9343 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало
Если идет об неповторимых предложениях, имеет потребоваться регистрация в казино по ссылке с партнерского сайта.При правильном раскладе бездепы — это отличный метод играть на средства без траты личных средств. Есть несколько советов, следуя коим можно извлечь максимально полезности из подобных промоакций казино. Играть по лишь на лицензированных площадках. Скриптовые веб-сайты не обманывают с бонусными предложениями, но и используют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах невозможно. <a href=http://filmkachat.ru/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> Итак, чтобы бесплатные бонусные кредиты превратились в настоящие средства, которыми вам распоряжаться по собственному усмотрению, их нужно отыграть. Вейджер идет уточнять в правилах онлайн-казино. <a href=https://filmy-hd.ru/user/DavidDob/>https://filmy-hd.ru/user/DavidDob/</a> Помните, собственно всевозможные нарушения верховодил сведут на нет ваши старания, и вы скорее останетесь без начисленного вам дарового бонуса. Всегда изучайте управляла начисления и обстоятельства вейджера. По хоть вопросам, на коие вы возможности без найти ответы, обращайтесь за объяснениям и саппорт. 1 x slots <a href=https://australianwinerytours.com/tours/member.php?action=profile&uid=2285>https://australianwinerytours.com/tours/member.php?action=profile&uid=2285</a>
онлайн казино 1×slots
<a href=https://isomedu.com/forum/profile/josephdrons/>1хслотс мобильная версия зеркало</a> 1×slots зеркало регистрация то дальше необходимо пройти <a href=http://j90806hs.bget.ru/user/Jasperoxype/>http://j90806hs.bget.ru/user/Jasperoxype/</a> Также посещают случаи, когда казино начислит обсужденный бонус последствии регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам.При регистрации что, нет либо ином интернет игральном заведении — для дается раз шанс испытывать свою удачу не внося средства монеты. Замечу что такую поощрительную услугу деют не все интернет игровые площадки, а только щедрая середина(средина) из них. Которые мы подготовили для Вас в нашем списке. 1хслотс зеркало на сегодня
1×slots зеркало этих способов предполагает регистрацию
Автоматы неспроста считаются самым популярным азартным веселием. Чтобы освоить управление и управляла, потребуется всего некоторое минут. Ваша задачка сделать ставку, определить количество рабочих линий и возможно вертеть тамбур. Если на экране выпадет выигрышная композиция – вы выиграли! С данной задачей для посодействуют справится бездепозитные бонусы казино.Онлайн гемблинг развивается с любым днем все больше и больше, новые бренды создаются не по денькам а по часам. Новые интернет казино проделывают вступительные акции для игроков, чтобы, чтобы что бы зарекомендовать себя, и тем наиболее предлагают бездепозитные призы за регистрацию, что бы не пропустить эту возможность — как пользоваться новым бездепом, советуем посещать наш вебсайт как возможно почаще, самое лакомое и свежие несомненно добавляться в этом же списке. <a href=https://hastui.com/home.php?mod=space&uid=10036>https://hastui.com/home.php?mod=space&uid=10036</a> 1хслотс рабочее зеркало на сегодня
1 хслот регистрация в 1×slots casino
Однако в критериях скрываются «подводные камешки», которые не позволят исключить крупную сумму либо же вы не успеете отыграть вейджер. Поэтому профессионалы рекомендуют забрать бесплатные вращения за регистрацию в казино без депозита, чтобы поднабраться опыта и получить реальный шанс на победу.Лишь популярные и известные азартные заведения имеют разрешить для раздавать бездепы повторяющий добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, которые можно истратить в топовых аппаратах с высочайшей отдачей. <a href=https://feederfishing.lt/en/forum/musu-telkiniu-zuvys/1259486–1#1270960>1хслотс рабочее зеркало на сегодня</a> Классическая разновидность бонуса за творение аккаунта. Его превосходство содержится том,, собственно заказчик имеет самостоятельно подбирать аппараты и создавать ставки в них. Иногда список игровых автоматов ограничен оператором, хотя все точно это никакого, чем единственный дешевый разъем, как в случае с использованием фриспинов.Каждая игровая перрон отличается критериями по получению и отыгрышу бездепов. В правилах отчетливо расписаны временные рамки, за которые надо(надобно) прокрутить вейджер. Также не запамятовывайте на наибольший объем ставки и максимальную сумму выплаты. С другой стороны, дабы получить бездепозитные призы казино, достаточно потратить не более 1 минутки. 1хслотс регистрация в 1×slots casino <a href=https://forum.mpgames.ir/member.php?24523-GeraldLip>https://forum.mpgames.ir/member.php?24523-GeraldLip</a> Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют актуальную информацию о no deposit bonuses прочих предложениях.Выше мы дали глубокий набор самых свежих и актуальных бездепозитных призов в онлайн казино без пополнения на 2022 год, где возможность воспользоваться любым ценным бездепозитным бонусом.
1×slots зеркало видели такую регистрацию на
<a href=http://k98727wu.beget.tech/user/PatrickAgott/>http://k98727wu.beget.tech/user/PatrickAgott/</a> Сроки активации приза устанавливаются любым казино, хотя почаще всего они не превосходят недели с этапа получения. Игроку обязательно нужно применять бездеп протяжении указанного срока, в ином случае приз просто пропадет. Каждый приз возможно получить только один один, поэтому в не применять бездеп в срок, у игрока не несомненно 2 шанса им пользоваться. 1хслотс официальный сайт зеркало Далее требуется отыграть вагер и вывести выигрыш. Игрокам без опыта крупно повезло, возможность получить десятки презентов за одну регистрацию. Если не смогли получить Бездепозитный приз, не беспокойтесь. Обратитесь в онлайн чат, оператор поможет исправить.Еще одно условие дотрагивается объемов ставки. Операторы устанавливают наивысшую необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном офисе. При превышении лимита есть риск лишиться бонуса. Существующие ограничения относятся и к определенным обликам ставок. Например, играя в рулетку, заказчик может столкнуться с запретом ставить фишки на шансы.
<b>Смотреть еще похожие новости:</b>
<a href=https://masstr.net/showthread.php?tid=84047>1 x slots</a>
<a href=https://your-portal.at.ua/forum/39–63333–2#88181>1×slots рабочее зеркало</a>
<a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=62691>1×slots официальный сайт мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные призы реальными деньгами, которые возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадались. Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера.
#9344 купить сейф для охотничьего ружьяhttps://sejfy-dlya-oruzhiya.ru/
Тут можно преобрести сейф оружейный цена <a href=https://sejfy-dlya-oruzhiya.ru/>оружейные шкафы</a>
#9345 Charlesgunnyhttp://filmkachat.ru
1×slots официальный demo регистрация в 1×slots casino
Нет. Для получения бездепозитного приза в казино нужна обязательная регистрация на веб-сайте. Играть в слоты безвозмездно и без регистрации можно только в демо режиме.Частенько новенькие не понимают, как активировать презенты либо исключить первый выигрыш. Для подобных случаев наша команда описала главные термины – собственно такое фриспины, вейджер, как его отыграть, зачем необходимо проходить верификацию. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots review live</a> Также учтите, собственно некоторые игровые платформы сужают список стран, которые готовы получить предложенный бездепозитный бонус за регистрацию. К образцу, существуют онлайн-заведения, выдающие подобные призы только жильцам конкретных государств. К образцу, интернет казино 777 Оригинал дает бездепозитный бонус лишь игрокам из России и стран СНГ. Или напротив, пичкают вознаграждением всех, не обитателей некоторых государств (из этого, следует пристально учить перечень, дабы впоследствии не возникло практически вопросов и жалоб).У нас на веб-сайте Вы найдете перечень призов без депозита в испытанных казино и подробную информацию то как их получить и применять. <a href=http://gripublicidad.com/index.php?option=com_kunena&view=topic&catid=2&id=28784&Itemid=528>http://gripublicidad.com/index.php?option=com_kunena&view=topic&catid=2&id=28784&Itemid=528</a> Только выполнив все обстоятельства отыгрыша и дождавшись окончания проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить свои деньги. 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=http://zhwbn.com/bbs/space-uid-160612.html>http://zhwbn.com/bbs/space-uid-160612.html</a> На благотворительные бонусы онлайн-казино почти всегда распространяется ограничения по стране проживания клиентов. Даже в вас разрешается открывать счет и выступать на деньги в заведении, это еще не значат, собственно для доступны no down payment bonuses.1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, в не хотите стать жертвой мошенников или впустую потратить время;
казино 1×slots официальный сайт
Наш список включает в себя лучшие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по важным характеристикам: <a href=http://www.forum.kalor.ru/1×slots-zerkalo-viigrishi-obyazatelno-proydite-registraciu-es-t5201.html>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a> 1×slots официальный зеркало Как и промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такого предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых посетителей и позволяет им составить впечатление о функционале, не рискуя вескими суммами.Многие азартные клубы ограничивают необходимую вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании промоакции, суммы Вы не сможете вывести. Разница несомненно аннулирована, Вы даже не сможете делать на нее ставки. <a href=http://www.xn–c1aid4a5e.xn–p1ai/user/TyroneShign/>http://www.xn–c1aid4a5e.xn–p1ai/user/TyroneShign/</a> 1×slots официальный зеркало Баланс игрока дополняется на соответствующую необходимую. К ней применяется вейджер, указанный в правилах промоакции. Вывести выигрыш можно будет после такого, как юзер устроит требуемый объем ставок из личных средств. В редчайших случаях бездеп трудится в формате Free Play. На счет юзера зачисляется крупная сумма, и предоставляется малый срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по окончании этого периода сумма на счету несомненно превосходить первоначальную, то разницу можно несомненно исключить или использовать для дальнейших ставок.Вейджер (либо вагер) ? это минимальная сумма ставок, которую нужно устроить для вывода денежного приза. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение.
1×slots коды
У нас на сайте Вы найдете список призов без депозита в проверенных казино и доскональную информацию о том как их получить и использовать.Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды присутствуют на этой страничке. Посетитель может оценить условия получения и начать выступать на деньги без внесения депо. При данном игроку принципиально осознавать, на каких критериях и какими методами него вывести приобретенный выигрыш. Для этого нужно расценить перечень присоединенных платежных систем. <a href=http://kiopro.ru/support/forum/view_profile.php?UID=65315>http://kiopro.ru/support/forum/view_profile.php?UID=65315</a> Активация денежного гонорары случается механически в сотворения профиля или применения промокода. Иногда операторы предъявляют вспомогательные требования: подписаться на страницы казино в соц сетях или на рассылку рекламных сообщений, скачать и установить вспомогательный софт и т.д. 1×slots регистрация 1×slotscasino 56 online
1×slots акции
Некоторые веб-сайты, до чем обмануть регистрацию игроков, предлагают ответить на некоторое базисных вопросов. Цель проведения подобной викторины – выявить случайных людей, коие не имеют представления о покере, и не разрешить получения ими призов. Если гость уже играл в казино, то ответить на полтора десятка несложных вопросов будет нетрудно. Очень нередко, ответы возможно найти на официальных сайтах этих учреждений. Подтверждение индивидуальной информации. Все казино просят от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и присутствие у юзера иных аккаунтов (мультиаккаунт запрещен). Следует выделить, что бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом.В некоторых интернет казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на сайте клуба и подтвердить свои контактные данные. Дополнительно требуется активация промокода. 1×slot зеркало <a href=http://turkteam.10tl.net/member.php?action=profile&uid=1298>http://turkteam.10tl.net/member.php?action=profile&uid=1298</a> Для вывода средств приз нужно несомненно отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариантами отыгрыша бездепозитного бонуса до его получения, дабы избежать конфликтных ситуаций.На бесплатные призы онлайн-казино почти всегда распространяется лимитирования по стране проживания посетителей. Даже в вас разрешается раскрывать счет и играть на деньги в заведении, это еще не значат, собственно для доступны not the slightest deposit bonuses.
1×slots зеркало проходить регистрацию это отличный вариант
Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.Условия могут различаться приятель от друга. Но подобный бонус имеет быть использован лишь для игрового процесса – полученные на счет деньги до как, как будут отыграны, исключить невероятно. Вейджер (wager) – это коэффициент, который показывает на какую сумму необходимо устроить ставок, чтобы вывести бонус из казино. Пример: Вы получили за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода этого бонуса, Вам необходимо устроить ставок на необходимую: 500*70=3500 рублей. Только всецело отыграв приз, Вы сможете исключить свой выигрыш. <a href=http://www.redsea.gov.eg/deutsche/Lists/Beschwerden_List/DispForm.aspx?ID=5878>http://www.redsea.gov.eg/deutsche/Lists/Beschwerden_List/DispForm.aspx?ID=5878</a> При ирге на бонусные средства запрещается выступать в игровые автоматы с современным джекпотом и забавы из радела live casino. Кроме того, некоторые казино дают бездеп на раз либо некоторое определенных слотов, и в иных играх Вы не можете на них выступать.Это тоже безвозмездные деньги, которые поступают на аккаунты свежеиспеченных игроков после регистрирования. А особенность таких призов состоит том,, что обретенные деньги обязательно идет применять в продолжении назначенного времени. 1×slots зеркало 1хслотс регистрация перейти на 1×slots Прочитайте управляла бонусной программы, в которой хотите участие. Да, мы настойчиво советуем устроить это до регистрации.
<b>Смотреть еще похожие новости:</b>
<a href=http://big.bestforums.org/viewtopic.php?f=7&t=9290>рабочее зеркало 1хслотс</a>
<a href=http://swissairways-va.com/phpBB3/memberlist.php?mode=viewprofile&u=3495>1×slots бездепозитный бонус за регистрацию</a>
<a href=http://nacionrolera.org/foro/viewtopic.php?f=1210&t=113788&p=572579#p572579>1×slot зеркало рабочее регистрации на телефон придет</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Промообъявления от казино не дают реальной картины и ориентированы на привлечение внимания юзеров. Понять, насколько высоки шансы остаться в плюсе, дозволит личный анализ критерий предложения:
#9346 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало сайта
Верификация аккаунта. Лучше подтвердить лицо сразу последствии регистрации, дабы потом не было проблем с выводом средств. Верификация имеет протекать двумя путями: <a href=http://filmkachat.ru/>1х слот 1хслотс регистрация перейти на 1×slots</a> В некоторых интернет казино для получения бездепозитных призов не довольно просто зарегистрироваться на веб-сайте клуба и доказать свои контактные данные. Дополнительно требуется активация промокода.Для тех, кто лишь подумывает испытывать собственную удачу, а также для профессиональных игроков, разыскивающих свежие площадки для выигрышей, основные лицензированные казино нередко устраивают различные акции, и лучшее услуг за последнее время – как для начинающих, например и для проф игроков – бездепозитный бонус за регистрацию. <a href=https://cadpower.iitcsolution.com/bbs/board.php?bo_table=free&wr_id=83470>https://cadpower.iitcsolution.com/bbs/board.php?bo_table=free&wr_id=83470</a> Популярность онлайн казино растёт и всё больше пользователей начинают проявлять азартными играми. Бездепозитные бонусы 2022 года, это уникальные подарки за регистрацию. С их поддержкой новые игроки имеют получить бесплатные вращения или средства на баланс за одну регистрацию. С в игорных заведений в онлайне, бездепозитные призы стали наимоднейшим методом вербования игроков. Подобные акции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о которых мы расскажем. Наш вебсайт собрал превосходнейшие предложения из интернета на 2022 год. Воспользуйтесь любым подарком и можете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша необходимо выполнить обстоятельства. 1×slots регистрация на сайте 1×slots ru com <a href=http://td-scs.ru/communication/forum/user/108328/>http://td-scs.ru/communication/forum/user/108328/</a> Возможность сыграть дополнительное соревнование (а иногда и несколько) абсолютно бесплатно, а выигрыш, в свою очередь, поступает на счёт игрока.Доступные забавы – В некоторых азартных забавах можно снизить математическое преимущество казино до нескольких десятых процента. В их количестве все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как правило, в таких играх ставки идут в зачет вейджера не полностью. Например, возможность предусматриваться лишь 50%. В неких забавах бездепозитные призы вообще невозможно отыгрывать.
1×slots бонус за регистрацию
Для всех бездепозитных бонусов действует наибольший лимит на выигрыш. Он показывает максимальную сумму, которую вы сможете получить, играя на бонусные кредиты. Как только вам удастся выполнить требования вейджера, дозволенный максимально несомненно переведен с бонусного счета на основной, а остаток будет списан.Обычно показатель выше, чем для бонусов на депозит. Не дивитесь, если он несомненно числе х100. Иногда завышенный коэффициент вейджера уточняется для обитателей отдельных стран. <a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=321830>1×slots зеркало регистрация в 1×slots casino</a> 1×slots казино зеркало Бесплатный бонус – кредиты, коие онлайн-казино начислит клиенту, не принуждая его пополнять игровой счет.Например, игрок получил 500 руб. При создании аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 рублей, потребуется сделать 875 спинов для полного отыгрыша. <a href=https://montreesounds.com/index.php?action=profile;u=30943>https://montreesounds.com/index.php?action=profile;u=30943</a> Операторы гемблинга утверждают, что например они сражаются с бонус-хантерами. Впрочем, критики считают, что данным казино пробуют устроить из случайного постояльца постоянного игрока.Новые клиенты онлайн-казино без первого депо все проверить свою удачливость. К тому же есть вероятность преобразовать бездепы в настоящие средства за регистрацию в казино, впрочем достичь бонус необходимо отыграть согласно условиям промоакции. 1×slots регистрация 1×slots casino c2d ru Для казино, работающих онлайн, бездепозитные бонусы нужны для вербования свежих клиентов. Предложение поиграть на слотах без надобности внесения настоящих денег — работающий метод для увеличения интереса к компании. После отыгрыша бездепа велик шанс, что игроку понравится и он продолжит выступать в казино, лишь сейчас теснее на собственные деньги.
1×slots зеркало регистрацию более популярный вариант это
Бездепы обычно предлагают с отыгрышем — быстро исключить выигранные свои нельзя. Перевод денег со счета несомненно возможен последствии такого, как юзер выполнит все притязания казино, а сумма не быть выше установленного правилами лимита. Условиями промоакции фиксируются сроки, протяжении которых клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней после активации.Бездепозитный приз казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в этом и заключается основное отличие. Классическая разновидность приза за творение аккаунта. Его превосходство содержится никаких, собственно заказчик возможность помощи избирать аппараты и создавать ставки в них. Иногда список игровых автоматов ограничен оператором, но все равно это лучше, чем один-единственный дешевый слот, как если, тогда, с использованием фриспинов.Максимальная ставка ? устанавливается в валюте счета и ограничивает размер ставки за один спин. В случае ее превышения приз возможность быть аннулирован. Также в правилах возможность содержаться запрет на размещение ставок конкретного вида, к, по одинаковым шансам в рулетке (то есть, на чет или нечет, красное либо черное и т.д.). <a href=https://gamesgrom.com/user/CraigCoich/>https://gamesgrom.com/user/CraigCoich/</a> Промообъявления от казино мешают реальной картины и ориентированы на привлечение внимания юзеров. Понять, насколько высоки шансы остаться в плюсе, позволит собственный анализ критерий предложения:Нет. Для получения бездепозитного бонуса в казино необходима обязательная регистрация на веб-сайте. Играть в слоты даром и без регистрации возможно только в демо режиме. 1× slots регистрация в 1×slots casino
1хслот 1хслотс регистрация перейти на 1×slots
<a href=https://minifishtank.net/forum/member.php?action=profile&uid=1356>1× слот зеркало</a> Но существуют азартные заведения, готовые просто так вручить деньги на забаву. Для сего достаточно создать профиль. Чтобы исключить выигрыш, сначала необходимо выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа. Высокая конкуренция в разделе азартных игр доказывает операторов завлекать клиентов разнообразными акциями. Благодаря данному у гостей замечена возможность получить призы в казино за регистрацию без депозита. Воспользоваться этим предложением возможно, избегая функцию внесения средств на игровой счет, просто активировав акк на веб-сайте. Наш гид по бездепам поможет избрать самую привлекательную бонусную программку, узнать правила получения такового вознаграждения и распорядиться им с максимальной выгодой. 1хслотс казино зеркало <a href=http://www.85sucai.com/member/index.php?uid=erraticcharlata>http://www.85sucai.com/member/index.php?uid=erraticcharlata</a> Бездепозитные призы за регистрацию в игровых автоматах для собственников онлайн-казино считаются долею маркетинговой кампании, направленной на повышение аудитории вебсайта. Так они продвигают средства бренды и привлекают новых клиентов.
1×slots casino зеркало
Способы получения бездепа различаются от облика бонуса, кот-ый приглянулся игроку. Но вам или надо(надобно) быть зарегистрированным в легальном онлайн-казино и подтвердить собственную личность. В общем облике пошаговая инструкция для получения бездепозитного приза смотрится так:Вейджер (или вагер) ? это наименьшая сумма ставок, которую необходимо устроить для вывода денежного приза. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение. <a href=https://ruisoon.com/space-uid-43084.html>https://ruisoon.com/space-uid-43084.html</a> Самые свежие бездепозитные бонусы в казино за регистрацию 2022 года с выводом выгоды присутствуют на данной страничке. Посетитель возможность оценить условия получения и начать играть на деньги без внесения депозита. При данном игроку принципиально понимать, на каких критериях и какими методами него исключить приобретенный выигрыш. Для этого необходимо оценить перечень подключенных платежных систем.Еще одно условие дотрагивается объемов ставки. Операторы устанавливают максимальную сумму, коию игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, избранной в Личном офисе. При превышении лимита есть риск потерять бонуса. Существующие лимитирования относятся и к конкретным обликам ставок. Например, играя в рулетку, клиент возможность столкнуться с запретом ставить фишки на шансы. 1×slots зеркало этих способов предполагает регистрацию Вейджер не более х30–35 является приемлемым. Опытные игроки заявляют, что с этим вейджером реально остаться в плюсе, случае правильно подойти к выбору игрового аппарата.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.neocodex.us/forum/topic/134414–1-%D0%A1%E2%80%A6%D0%A1%D0%83%D0%A0%C2%BB%D0%A0%D1%95%D0%A1%E2%80%9A-%D0%A1%D0%82%D0%A0%C2%B5%D0%A0%D1%96%D0%A0%D1%91%D0%A1%D0%83%D0%A1%E2%80%9A%D0%A1%D0%82%D0%A0%C2%B0%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A1%D0%8F-%D0%A0%D0%86–1×slots-casino/>1 хслот регистрация в 1×slots casino</a>
<a href=https://thetechmodders.com/forums/viewtopic.php?p=134330#p134330>1×slots регистрация 1×slots review live</a>
<a href=http://www.carshowsociety.com/forum.php?action=profile;u=2398>1× slots зеркало</a>
<a href=https://forum.eliteshost.com/showthread.php?tid=15390>1×slots скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если площадка презентует бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь завести акк на сайте и активировать его, подтвердив адресок электронной почты, номер аппарата либо иные данные, которые требует оператор. Перед этим нужно убедиться, что пользователь находится на официальном веб-сайте казино, но на мошеннической площадке.
#9347 Charlesgunnyhttp://filmkachat.ru
1×slots коды
Не хотите поиграть в азартные игры, не рискуя своими деньгами, хотя получая в все выплаты? Подобную возможность деют почти лучшие порталы с азартными весельями. В их количестве много правдивых и надежных интернет-казино на русском языке. Они привлекают свежих юзеров различными поощрительными мероприятиями, включая бездепозитные, или бесплатные бонусы.Если вы облюбовали себе несколько брендов коие для больше всего приглянулись, для постоянной игры! Таких гемблеров казино довольно предпочитает и ценит, за частую такие игроки становятся VIP игроками заведения, коим часто поступают выгодные предложения повторяющий бонусов, например же туда заходит и бездепозитные. <a href=http://filmkachat.ru/>1×slots зеркало регистрация</a> В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с даровых вращений. Прибыль, которую Вы заработаете на таком бездепе возможно ставить на вывод без какого либо отыгрыша. <a href=http://www.xn–9i2bz3bx5fu3d8q5a.com/bbs/board.php?bo_table=free&wr_id=1379539>http://www.xn–9i2bz3bx5fu3d8q5a.com/bbs/board.php?bo_table=free&wr_id=1379539</a> Акции, посвященные календарным праздникам, случаются рассчитаны как на всех юзеров, так и на категории: например, презент на 8 марта девушкам-игрокам либо мужикам на 23 февраля.Для всех бездепозитных бонусов функционирует наибольший предел на выигрыш. Он показывает максимальную сумму, которую вас получить, играя на бонусные кредиты. Как лишь для удастся выполнить притязания вейджера, дозволенный максимум несомненно переведен с бонусного счета на главный, а остаток будет списан. 1×slot казино зеркало <a href=https://strokedb.lighthouseapp.com/users/1935331>https://strokedb.lighthouseapp.com/users/1935331</a> Бездепозитные бонусы начисляются лишь раз один. Не стоит открывать свежие аккаунты, чтобы получить их повторно. Служба защищенности казино обязательно выявит «левого» участника и перекроет. Если посетитель выполнит нужные притязания, отыграет собственную ставку и решит вывести собственный выигрыш, то ему надо(надобно) к, собственно казино обязательно востребует дать ксерокопии личных документов, дабы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои исключить не получится.Акционные предложения от казино есть в разных форматах. Часто бонусы даются в обмен на депо. Игрок вносит платеж и получает деньги, безвозмездные вращения и другие поощрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — вид бонуса, который гарантирован за выполнение определенных деяний на сайте:
1×slots казино мобильная версия
рабочее зеркало 1хслотс <a href=https://warezlover.xyz/user/Waltervep/>https://warezlover.xyz/user/Waltervep/</a> Вейджер в переводе с британского означает «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша полученного бонуса, в нашем случае бездепозитного. Число ставок значения — важно только набрать сумму, пропорциональную сумме поощрения.Выше мы дали полный набор самых свежих и актуальных бездепозитных бонусов в интернет казино без пополнения на 2022 год, где вы можете воспользоваться хоть ценным бездепозитным призом. казино 1×slots
1×slots регистрация
Обычно для получения бонусов без депо, казино выдвигает приклнные и абсолютно выполнимые условия, но есть ряд поступков коие запрещены и имеют стать неприятные результаты:Нет. Казино выдают бесплатные призы за регистрацию, чтобы, чтобы, чтобы клиент мог ознакомиться с игровым заведением. А дабы вывести его, необходимо выполнить условия отыгрыша. Для того, чтобы отыграть сумму вашего бездепозитного бонуса нужно выполнить условия вейджера. Очень часто фриспины даются на конкретные слоты (book of ra, book of dead, book of sun), подбирайте слот для по, все довольно красивые и качественные. Бездепозитные приз имеет быть денежным так и в виде фриспинов на слоты <a href=http://ems.college-eisk.ru/?module=forum&action=topic&id=322>http://ems.college-eisk.ru/?module=forum&action=topic&id=322</a> Ниже указан актуальный список легальных казино в Беларуси с бонусами на первый депо. Вы можете попасть на официальный вебсайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз. 1×slots casino регистрация 1×slots review live Практически все интернет казино с бездепозитным призом за регистрацию учитывает программу преданности — систему одобрения неизменных клиентов, кот-ая произведено из множества значений. При достижении игроком очередного значения на его счёт поступает приз. Чем выше степень — что, этим щедрее бонус.Бездепы обыкновенно предлагают с отыгрышем — моментально исключить выигранные свои невозможно. Перевод средств со счета несомненно возможен в того, как юзер выполнит все притязания казино, а сумма не быть выше установленного правилами лимита. Условиями акции фиксируются сроки, в течение коих клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней в активации.
1×slots casino регистрация 1×slotscasin online
Прежде чем активировать бездеп, необходимо убедиться том,, что государство, уроженцем коей считается игрок, не входит в перечень разрешенных.Вейджер (либо вагер) ? это минимальная сумма ставок, коию необходимо сделать для вывода валютного бонуса. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение. На бонусные начисления все быть установлены дополнительные ограничения, которые Вы не учли при отыгрыше. Пока приз полностью не отыгран — средства из казино не выводятся. 1×slots официальный зеркало рабочее <a href=https://silvery-iris-h007n2.mystrikingly.com/store/products/da39a3ee5e6-bc6693ca-dd4b-425a-9f49–482a02dfae7b>https://silvery-iris-h007n2.mystrikingly.com/store/products/da39a3ee5e6-bc6693ca-dd4b-425a-9f49–482a02dfae7b</a>
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Отказ в прохождении верификации. Если клиент не хочет либо не предоставить документы, подтверждающие его лицо, профиль будет заблокирован совместно, вкупе со всеми бонусными начислениями.Фриспины – безвозмездные вращения с фиксированной ставкой, коие возможно использовать в определенных игровых автоматах. Простая процедура получения бездепозитного бонуса, которая займет менее 2-х минут. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные. <a href=http://bbs.yunduost.com/home.php?mod=space&uid=20222>http://bbs.yunduost.com/home.php?mod=space&uid=20222</a> Принципиальным различием бесплатных бонусов от призов на депозит считается отсутствие надобности заносить средства на аккаунт. Из-за этого их нередко именуют бездепозитными (not the slightest deposit bonuses).Как только на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу в сего возможно забыть заявку на вывод выигрыша. Кредиты выгодно отличаются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом настоящих средств и дают возможность ощутить задор. Во-вторых – возможно насладиться каждой азартной забавой доступной на веб-сайте. В вашем распоряжении присутствуют автоматы, настольные приложение, видео-покер, Live-дилеры. 1×slots актуальное зеркало Выиграть реальные деньги в казино не пополняя счет – сложно, хотя вероятно. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными бонусами и начните выступать на бонусные свои. По статистике в одном из 10-ти заведений возможно заработать маленькую сумму средств помощью бонусных средств.Бездепозитные бонусы казино это экономическая компенсация, предлагаемая пользователям на дармовой базе и возможность выступать в интернет казино бесплатно. Если сравнивать их с одобрениями за лепта, каких средства выдаются лишь впоследствии первоначального пополнения счета, то бездепозитные вознаграждения получаются бесплатно. То есть, играющий получает возможность делать ставки на уже имеющие финансы, которые выдаст заведение, исполняя, при, обыденные действия, дабы их извлечь (тут речь о регистрация, удостоверении личности с внедрением номера телефона, дизайна заявки и т.д. ).
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.home-visa.ru/viewtopic.php?f=69&t=807392&p=2791854#p2791854>1×slots зеркало проходить регистрацию это отличный вариант</a>
<a href=https://minifishtank.net/forum/showthread.php?tid=807>1×slots официальный сайт скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный приз казино 2022 с выводом за регистрацию предоставляет возможность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и проверить качество работы саппорта. Довольно нередко, начиная игровой процесс, игрок уже отказывается останавливаться и проделывает настоящий лепта. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть безвозмездно вероятно как раз таки с бонусом за регистрацию без надобности вносить депозит.
#9348 CasinoSolhttps://sol-casino-apk.ru/sol-casino/
<a href=http://www.backpacker.no/go.php?url=https://sol-casino-apk.ru/sol-casino/>https://sol-casino-apk.ru/sol-casino/</a> <a href=http://suveniri-sochi.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=https://sol-casino-apk.ru/sol-casino/>https://sol-casino-apk.ru/sol-casino/</a> <a href=https://evavaleriemaxova.blog.idnes.cz/redir.aspx?url=https://sol-casino-apk.ru/sol-casino/>https://sol-casino-apk.ru/sol-casino/</a> <a href=http://gilmarket.ru.xx3.kz/go.php?url=https://sol-casino-apk.ru/sol-casino/-news-az.com/>https://sol-casino-apk.ru/sol-casino/</a> <a href=http://theknot.com.xx3.kz/go.php?url=https://sol-casino-apk.ru/sol-casino/-news-az.com/>https://sol-casino-apk.ru/sol-casino/</a> <a href=https://arma2academy.ru/redirect?url=https://sol-casino-apk.ru/sol-casino/>https://sol-casino-apk.ru/sol-casino/</a> <a href=http://www.fito.nnov.ru/go.php?url=https://sol-casino-apk.ru/sol-casino/>https://sol-casino-apk.ru/sol-casino/</a> <a href=http://www.dxy.cn/redirect?url=https://sol-casino-apk.ru/sol-casino/>https://sol-casino-apk.ru/sol-casino/</a> <a href=http://click.linktech.cn/?m=chinapub&l=99999&l_cd1=0&l_cd2=1&tu=https://sol-casino-apk.ru/sol-casino/>https://sol-casino-apk.ru/sol-casino/</a> <a href=https://hunterhealth.org/?URL=https://sol-casino-apk.ru/sol-casino/>https://sol-casino-apk.ru/sol-casino/</a> <a href=https://qoodybag.com/visit/253/288/file?pdf=https://sol-casino-apk.ru/sol-casino/>https://sol-casino-apk.ru/sol-casino/</a> <a href=https://es.xhamster.com/exit.php?url=https://sol-casino-apk.ru/sol-casino/>https://sol-casino-apk.ru/sol-casino/</a> <a href=https://6cgq.adj.st/en/unitednow?adjust_t=eo402dp_88iacno&adjust_campaign=TextLink&adj_adgroup=MUOfficialApp&adj_creative=Other&adjust_fallback=https://sol-casino-apk.ru/sol-casino/-news-az.com/>https://sol-casino-apk.ru/sol-casino/</a> <a href=http://www3.tok2.com.xx3.kz/go.php?url=https://sol-casino-apk.ru/sol-casino/>https://sol-casino-apk.ru/sol-casino/</a> <a href=https://precisionproperty.com.au/?URL=https://sol-casino-apk.ru/sol-casino/>https://sol-casino-apk.ru/sol-casino/</a>
Download application online casino sol – play right now!
<a href=http://www.mottimes.com/cht/inner.php?ad=6&target=https%3A%2F%2Fdownload-sol-casino-apk.ru/sol-casino/-fr.com >https://sol-casino-apk.ru/sol-casino/</a> <a href=http://www.trentinobeb.it/public/contaclick/redirect.asp?url=https://sol-casino-apk.ru/sol-casino/>https://sol-casino-apk.ru/sol-casino/</a> <a href=http://tidebrook.east-sussex.co.uk/link.asp?url=https://sol-casino-apk.ru/sol-casino/>https://sol-casino-apk.ru/sol-casino/</a> <a href=https://jannisgundermann.com/?URL=download-sol-casino-apk.ru/sol-casino/-fr.com >https://sol-casino-apk.ru/sol-casino/</a> <a href=http://www.pegain.com/redirect.php?link=https://sol-casino-apk.ru/sol-casino/>https://sol-casino-apk.ru/sol-casino/</a> <a href=https://login.bizmanager.yahoo.co.jp/redirector?redirectUrl=https%3A%2F%2Fdownload-sol-casino-apk.ru/sol-casino/-fr.com >https://sol-casino-apk.ru/sol-casino/</a> <a href=http://www.zdrowemiasto.pl/openx/www/delivery/ck.php?ct=1&oaparams=2__bannerid=36__zoneid=0__log=no__cb=b4af7736a5__oadest=http%3A%2F%2Fdownload-sol-casino-apk.ru/sol-casino/-fr.com >https://sol-casino-apk.ru/sol-casino/</a> <a href=http://www.taxifunk-zentrale-reutlingen.de/s/201401/translate.php?pid=https://sol-casino-apk.ru/sol-casino/>https://sol-casino-apk.ru/sol-casino/</a> <a href=http://bpodryad.com/go.php?to=https://sol-casino-apk.ru/sol-casino/>https://sol-casino-apk.ru/sol-casino/</a> <a href=https://cse.google.dk/url?q=https://sol-casino-apk.ru/sol-casino/>https://sol-casino-apk.ru/sol-casino/</a> <a href=http://uid196417.fan-send.com/l.php?cid=1383711&sid=227296193&url=worldgreatsuccess.ruhttps://sol-casino-apk.ru/sol-casino/>https://sol-casino-apk.ru/sol-casino/</a> <a href=http://www.google.td/url?q=https://sol-casino-apk.ru/sol-casino/>https://sol-casino-apk.ru/sol-casino/</a> <a href=https://daw-se.ru/bitrix/redirect.php?goto=https://sol-casino-apk.ru/sol-casino/>https://sol-casino-apk.ru/sol-casino/</a> <a href=http://ihg.onelink.me/ihg?pid=Web&c=Desktop%20Banner%20Test&af_dp=ihgapp%3A%2F%2F&af_web_dp=https%3A%2F%2Fdownload-sol-casino-apk.ru/sol-casino/-fr.com &scmisc=WEB-_-6C-_-GLO-_-DE-_-AE-_-NewAppLaunch2022-_-Homepage-_-MobileRibbonCTA>https://sol-casino-apk.ru/sol-casino/</a> <a href=https://novocoaching.ru/redirect/?to=http%3A%2F%2Fdownload-sol-casino-apk.ru/sol-casino/-fr.com >https://sol-casino-apk.ru/sol-casino/</a>
#9349 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino 777 online
Верификация важна для дополнительной безопасности и помочь техподдержке выявить бонусхантеров и мошенников. Кстати, на некоторых платформах выводы крупных сумм доступны лишь последствии доказательства личности. <a href=http://filmkachat.ru/>1×slots официальный сайт мобильная версия скачать</a> В случае установленного лимита на сумму вывода выигрыша с бездепозитного бонуса, игрок не может вывести больше заявленной суммы. <a href=https://imoodle.win/wiki/User:KindraDarwin67>https://imoodle.win/wiki/User:KindraDarwin67</a> Эффективность бездепов в качестве маркетингового инструмента оценили почти операторы. Малоизвестные площадки употребляют эти промоакции, чтобы быстро набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны неизменных гостей. Не все веб-сайты, дающие презенты без депозита, рекомендованы к ирге. За симпатичным промоописанием могут скрываться неосуществимые условия отыгрыша и подводные камни.Но надо думать, собственно снабжая юзеров этими призами, казино увлекается спонсированием. Ведь размеры вознаграждений, в, не великие (средним объемом от 5 до 20 долларов). И на эти средства налагаются конкретные обстоятельства и ограничения, неотклонимые к выполнению игрока, если в последствии он желает получить все свои выигранные деньги. 1×slots регистрация 1×slots casino c2d ru <a href=http://railagent.ru/club/user/105034/>http://railagent.ru/club/user/105034/</a> Даже не выиграв солидную сумму, игрок интересно проведет время, изнутри изучит работу площадки, оценит геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе лучших акций легкостью. Достаточно периодически учить список новых онлайн казино с выводом бонуса без депозита в этом разделе.Не желаете поиграть в азартные игры, не рискуя своими деньгами, но получая в все выплаты? Подобную вероятность деют почти наихорошие порталы с азартными веселиями. В их числе много правдивых и надежных интернет-казино на русском языке. Они привлекают свежих пользователей разными поощрительными событиями, включая бездепозитные, либо бесплатные бонусы.
1×slos регистрация в 1×slots casino
На бонусные начисления могут быть установлены вспомогательные ограничения, коие Вы не к при отыгрыше. Пока приз всецело не отыгран — средства из казино не выводятся. 1×slots официальный сайт скачать на айфон Подобные призы без депо предоставляются на более прибыльных критериях. Зачастую они крупнее, а обстоятельства отыгрыша менее жесткие.1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, случае не хотите стать жертвой плутов или впустую потратить время; <a href=http://www.zgbbs.org/space-uid-172268.html>http://www.zgbbs.org/space-uid-172268.html</a> Когда речь идет о денежных призах, казино постоянно устанавливают обстоятельства вейджера, коие необходимо выполнить, дабы исключить выигрыш. 1×slots официальный сайт зеркало
1×slots бездепозитный бонус за регистрацию
Не стоит незамедлительно же открещиваться от приветственных презентов в похожих казино. Администрация готова начислить деньги или фриспины, но предварительно работники обязаны убедиться, что вы не аферист. Дело в том, собственно развелось очень много охотников за призами. Они выучились дурачить систему и наваривать крупные суммы денег. <a href=https://adminclub.org/member.php?action=profile&uid=98376>https://adminclub.org/member.php?action=profile&uid=98376</a> Некоторые сайты, до чем провести регистрацию игроков, предлагают ответить на несколько базисных вопросов. Цель проведения похожей викторины – выявить случайных людей, коие не имеют представления о покере, и не разрешить получения ими призов. Если посетитель уже играл в казино, то ответить на полтора десятка несложных вопросов будет несложно. Очень нередко, ответы возможно отыскать на официальных сайтах данных учреждений. 1 хслот регистрация в 1×slots casino Подтвердите лицо, предоставив оператору казино средства паспортные данные. Инструкции обыкновенно несложные, главное — четко им идти. Если написано, что «на фото обязаны быть заметны все четыре угла странички паспорта» — сделайте непосредственно такое фото.
казино 1×slots
Иногда в поощрения за регистрацию все выдаваться билеты для участия в турнирах. Условия их проведения довольно выделяются, потому мы рекомендуем ознакомиться с каждым предложением раздельно. При регистрации том, или ином интернет игральном заведении — вам дается один шанс испытывать собственную фортуну не внося средства монеты. Замечу собственно эту поощрительную предложение деют не все интернет игровые площадки, а только великодушная половина из них. Которые мы подготовили для Вас в нашем списке. Список например именуемых «разрешенных территорий» прилагается к правилам бонусной программы игорного портала. Обязательно выясните, распространяются ли на вас подобные наказания. 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=https://uadplugins.club/memberlist.php?mode=viewprofile&u=183284>https://uadplugins.club/memberlist.php?mode=viewprofile&u=183284</a> Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, чтобы появилась возможность исключить выигрыш.
1×slots зеркало рабочее
Условия все различаться приятель от друга. Но такой приз имеет быть применен лишь для игрового процесса – приобретенные на счет деньги до как, как будут отыграны, вывести нереально.Подтверждение электронной почты – одно из ведущих критерий, коие есть практически в любом бездепозитном казино. Чтобы верифицировать электрическую почту, достаточно перебежать по интенсивной ссылке в послании, приобретенном от азартного клуба. Почти все игровые клубы настоятельно свидетельство контактных данных игрока для получения бездепозитного бонуса.Чтобы бездеп не был начислен на Ваш аккаунт, Вам не нужно активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк автоматически, а Вы не планируете его применять, обратитесь в службу с просьбой отменить бездепозитный приз. <a href=http://wiki.hightgames.ru/index.php?title=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0%20%D0%BD%D0%B0%20%D0%B4%D0%B7%D0%B5%D0%BD%D0%B5>http://wiki.hightgames.ru/index.php?title=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D0%B3%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0%20%D0%BD%D0%B0%20%D0%B4%D0%B7%D0%B5%D0%BD%D0%B5</a> 1хслот зеркало сайта Бездепозитные бонусы – это исключительно занимательная и наиболее перспективная акция интернет-казино. Они даже лучше фри-спинов, поэтому собственно выплаты в даровых вращениях не гарантированы, как комбинации на барабанах игрового аппарата имеют не сложиться.Вейджер в переводе с британского означает «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша полученного бонуса, в нашем случае бездепозитного. Число ставок большого — главно лишь набрать сумму, пропорциональную сумме одобрения.
<b>Смотреть еще похожие новости:</b>
<a href=https://test.soclanovtsy.ru/topic/26973-chicago-house-samples-loops-sounds/page/43/#comment-47122>1×slots зеркало проходить регистрацию это отличный вариант</a>
<a href=https://forum.bandariklan.com/showthread.php?tid=176825&pid=857757#pid857757>1хслот зеркало</a>
<a href=https://10nsk.ru/user/JosephSuple/>1×slots сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подарки на конкретные даты отличаются условиями получения. Если поощрение начисляют игроку на денек рождения, то сумма обычно находится от общего объема депозитов за прошедший год.
#9350 Charlesgunnyhttp://filmkachat.ru
1×slot регистрация
Следует выделить, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало</a> В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, необходимо адресоваться в службу спустя лайв-чат на веб-сайте казино.Начнём с такого, собственно любое рекламную за регистрацию предполагает некие обстоятельства. Бездепозитные бонусы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, необходимая для исполненья условий. Пример, возымели бесплатные вращения и выиграли с их 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 руб., проигрышных или выигрышных, важно. После выполнения, бонусный баланс перейдёт на настоящий и будет легкодоступным к выводу. <a href=http://powerfa.co.kr/bbs/board.php?bo_table=free&wr_id=368692>http://powerfa.co.kr/bbs/board.php?bo_table=free&wr_id=368692</a> Кешбэк-бонус дает собой возврат фиксированного процента от ставки когда проигрыша или же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не выше 10%.При верном подходе бездепы — это отличный метод играть на средства без растраты личных средств. Есть количество рекомендаций, следуя которым возможно извлечь максимум полезности из подобных акций казино. Играть следует лишь на лицензированных площадках. Скриптовые веб-сайты не врут с бонусными услугами, хотя и используют пиратский софт с измененным ГСЧ. Выиграть на этих автоматах невероятно. 1хслотс зеркало на сегодня <a href=http://www.hobosound.com.tw/sound/userinfo.php?uid=488>http://www.hobosound.com.tw/sound/userinfo.php?uid=488</a> Акции, приуроченные к календарным праздничным, случаются рассчитаны как на всех пользователей, например и на категории: например, подарок на 8 марта девушкам-игрокам или мужикам на 23 февраля.В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, нужно обратиться в службу поддержки через лайв-чат на веб-сайте казино.
1хслот зеркало сайта
1×slots официальный сайт мобильная версия скачать Вывод выигрыша с бездепозитных призов казино – щедрый подарок от азартных клубов. Но дабы вывести свой доход, нужно выполнить ряд критерий:Максимальная ставка ? устанавливается в денежной счета и ограничивает объем ставки за раз спин. В случае ее превышения приз возможность быть аннулирован. Также в правилах может содержаться запрет на размещение ставок определенного облика, к, по равным шансам в рулетке (словами, на чет либо нечет, красноватое или темное и т.д. ). <a href=https://cutetusy.cc/member.php?action=profile&uid=34780>https://cutetusy.cc/member.php?action=profile&uid=34780</a> 1×slots рабочее зеркало Более крупные предложения встречаются очень изредка. Зачастую они доступны только VIP-игрокам. В остальных случаях им наверняка сопутствуют очень жесткие условия отыгрыша. Также возможны дополнительные обстоятельства и другие лимитирования, прописанные в условиях и положения бонусной программки казино.
1×slots casino регистрация 1×slotscasin online
Так собственно сможете неустрашимо региться без всяких раздумий. Фортуна сейчас точно на вашей стороне. Не побаивайтесь, ведь следствие какого либо ущерба Вам абсолютно не угрожает. С такими бонусами как без пополнения, Вы остаетесь только в плюсе, но не как не в минусе. <a href=https://asdmcpe.org/user/Charlescer/>https://asdmcpe.org/user/Charlescer/</a> 1хслотс мобильная версия зеркало Бонус начисляется игроку незамедлительно последствии регистрации и прохождения верификации в казино и не настятельно от клиента внесения депо. Как управляло, объем приза в сходственном случае достаточно стыдливый, однако дозволяет новеньким познакомиться с игрой без риска настоящими деньгами.
казино 1×slots официальный сайт
Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных обстановок с казино, когда последствии отыгрыша бездепа вас не дадут вывести крупную необходимую выигрыша.Только выполнив все обстоятельства отыгрыша и дождавшись окончания ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить средства средства. Не советуем опрометью голову браться за всевозможные предложения получения средств без вложений. Вполне вполне, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на первый взгляд. Альтернативой является казино приз за депозит. Мы предлагаем вас пару советов, спасибо которым у любого игрока будет вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств: Приветственный приз без депозита ? подарок за регистрацию. Выдается средствами, фриспинами либо баллами. В последнем случае бонусные баллы применяются для участия в турнирах или обмена на реальные деньги.Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депозит возможность отличаться до 30 дней. 1×slots официальный регистрация <a href=http://52gmsy.com/home.php?mod=space&uid=50546>http://52gmsy.com/home.php?mod=space&uid=50546</a> Фриспины начисляются по определенной ставке. После их активации игроку нужно запустить разъем и увериться, что в нем показываются безвозмездные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода в отыгрыша определяется оператором и изредка выше 5 000 рублей.
казино 1× slots официальный сайт
Если вы новичок деле и только попали в неизведанную вами район пыла — счет предложений как бездепозитные призы без пополнения.Благодаря программке лояльности от игорного заведения, возможно взять хороший старт и без дополнительных вложений запустить видеослоты. Кроме такого, можно рассчитывать на реальную удачу и получить, без вложения личных финансов, великий выигрыш. <a href=http://www.ctphome.com/bbs/home.php?mod=space&uid=66541>http://www.ctphome.com/bbs/home.php?mod=space&uid=66541</a> 1хслотс рабочее зеркало Для отыгрыша бонуса казино обязует игрока поиграть на сумму, в количество раз превосходящую необходимую полученного приза — здесь выгода фирмы очевидна.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=36765>1×slots официальный demo регистрация в 1×slots casino</a>
<a href=https://melhorlance.com.br/minha-conta/>1хслотс казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, чтобы появилась возможность вывести выигрыш.
#9351 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
Для верификации номера телефона, в собственном профиле изберите опцию „Подтвердить номер аппарата“ и введите в соответствующее фон код, приобретенный в sms-сообщении.Принципиальным различием бесплатных призов от бонусов на депозит является неимение надобности заносить деньги на акк. Из-за этого их часто нарекают бездепозитными (no deposit bonuses). <a href=http://filmkachat.ru/>1 x slots</a> Некоторые онлайн-казино без депозита предлагают свежим клиентам избрать приз при регистрации. Будьте внимательны: выбрав раз, вы в безусловном большинстве случаев не сможете воспользоваться остальными. <a href=http://team6seals.free.fr/index.php?file=Members&op=detail&autor=demonicclerk86>http://team6seals.free.fr/index.php?file=Members&op=detail&autor=demonicclerk86</a> Бездепозитные призы казино за регистрацию в 2022 году — это вероятность поиграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой либо числом безвозмездных вращений без внесения депозита. Не путайте деморежим с реальной забавой без необходимости внесения депо.В интернет-сети постоянно возможно найти перечни более знаменитых и обещанных поощрительных программ от знаменитых онлайн-казино. 1 х слотс зеркало <a href=https://archives.megadiyhelp.com/member.php?154602-GeraldFar>https://archives.megadiyhelp.com/member.php?154602-GeraldFar</a>
1×slots рабочее зеркало
Главное преимущество спинов – вероятность изучить различные слоты. Также удастся насладиться бонусными раундами, испытать удачу в риск-туре и преувеличить выигрыш за счёт особенных знаков. Однако не игровой процесс заслуживает внимание, так другого сосредоточиться на реальном выигрыше. <a href=https://www.sgomberisgombero.it/my-account-2/>1×slots бездепозитный бонус за регистрацию</a> 1×slots зеркало которую указывали при регистрации кстати Чаще всего интернет-казино предлагают бездепозитные призы свежим юзерам. Эта промо-акция довольно эффективно привлекает новичков, подталкивая их к открытию счета. Конечно, не все становятся преданными клиентами, но сам факт регистрации аккаунта играет на руку заведению. <a href=http://g961713h.beget.tech/user/Travisoffib/>http://g961713h.beget.tech/user/Travisoffib/</a> казино 1×slots Высокая конкуренция в разделе азартных игр доказывает операторов завлекать посетителей разнообразными акциями. Благодаря этому у посетителей бывает возможность получить бонусы в казино за регистрацию без депозита. Воспользоваться этим предложением можно, избегая функцию внесения средств на игровой счет, просто активировав аккаунт на веб-сайте. Наш экскурсовод по бездепам поможет избрать самую симпатичную бонусную программу, узнать правила получения такового вознаграждения и распорядиться им с максимальной выгодой.
1 x slots
Нет. Для получения бездепозитного приза в казино необходима обязательная регистрация на веб-сайте. Играть в слоты безвозмездно и без регистрации возможно лишь в демо режиме. Процесс подтверждения личности может занять от одного денька до недели. Если клиент допустил какую ошибку при заполнении паспортных данных, то ему идет обратиться с задачей в службу поддержки онлайн-казино.Все безвозмездные бонусы кажутся заманчивыми. Кто же категорически от возможности сыграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далеко не все бездепозитные бонусы мере презентабельны для рассудительного клиента. <a href=http://kor-trans.ru/bitrix/redirect.php?goto=http://weg.ru/bitrix/click.php?goto=http://kedu.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/UzhcOjqRM6r>http://kor-trans.ru/bitrix/redirect.php?goto=http://weg.ru/bitrix/click.php?goto=http://kedu.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/UzhcOjqRM6r</a> Если вы новичок в и лишь попали в неизведанную вами область пыла — с помощью услуг как бездепозитные бонусы без пополнения. 1×slots официальный сайт скачать на айфон С такими простыми советами любое казино с бонусом за регистрацию способно принести в разы больше выгоды и пользы.
1×slots зеркало регистрация
Также, в этом случае необходимо подтвердить свой номер телефонного, желаемого код, приобретенный в смс-сообщении от клуба установить в специальное поле в собственном кабинете игрока. Составленный специалистами Casino.ru список онлайн-казино с бездепозитным призом дозволяет игрокам сопоставить спецпредложения разных операторов. 1×slots казино зеркало <a href=http://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=4791>http://lodowisko.pszow.pl/forum/memberlist.php?mode=viewprofile&u=4791</a>
1×slots быструю регистрацию а также мгновенное
Во всех легальных онлайн-казино Беларуси необходимо подтверждение паспортных данных для игры — это заявка правительства страны.Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих притязаний, не неотъемлемой верификации. Если на сайте предусмотрена обязательная процедура подтверждения личности, то исключить выигрыш удастся лишь последствии проверки данных. Приготовьтесь наполнить анкету и выслать в техподдержку документ, подтверждающий личность.Бесплатные бонусы казино без депозита можно получить вид валютных средств на бонусный счет (вывести их возможно лишь в отыгрыша), фриспинов, игры или кешбэк-бонуса. <a href=http://bbs.all4seiya.net/home.php?mod=space&uid=971080>http://bbs.all4seiya.net/home.php?mod=space&uid=971080</a> Для казино, работающих интернет, бездепозитные призы нужны для вербования новых клиентов. Предложение поиграть на слотах без надобности внесения настоящих денег — работающий способ для повышения интереса к компании. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит играть в казино, только теперь уже на личные деньги. 1×slots мобильная версия войти казино Если при регистрации показать промокод, можно гарантировано получить бонус. Где взять ваучер? Посетите направленные блоги или форумы. Иногда администрация клуба делает рассылку ваучеров на электрическую почту. В заключительное время игорные дома начали рекламироваться в фильмах и телесериалах. Присмотритесь и всего заметите промокод, который принесёт 500 или 1 000 бонусных рублей.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.sgomberisgombero.it/my-account-2/>1хслотс официальный сайт зеркало</a>
<a href=http://162.241.164.67/phpbb/phpBB3/memberlist.php?mode=viewprofile&u=121525>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a>
<a href=https://bans.org.ua/index.php?topic=118015.new#new>1×slots официальный зеркало рабочее</a>
<a href=https://fougerite.com/threads/1×-slots-casino-zerkalo.12595/>1× slots casino зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выполнив все притязания оператора, клиент имеет оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит в среднем не более суток. Если дополнительно требуется пройти функцию верификации, то срок увеличивается до 1–2 рабочих дней. Для перевода применяются банковские приборы и электрические платежные системы. Второй способ подходит другого, так как основная транзакций такой исполняются мгновенно. В связи со специфичностью функционирования банков обработка платежей может взятьвдолг(взятьвзаймы) до нескольких рабочих дней. Бездепозитный бонус нередко возможность стать доступным незамедлительно после завершения регистрации, потому как единственным требованием к нему является регистрация, а этого проверка вашей новой учетной записи.
#9352 Charlesgunnyhttp://filmkachat.ru
1×slots бездепозитный бонус за регистрацию
Даже не выиграв солидную необходимую, игрок увлекательно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-либо денежных рисков. Быть в курсе наихороших акций с. Достаточно регулярно учить перечень свежих онлайн казино с выводом приза без депо в этом разделе.Отзывы читателей о бонусных акциях помогут составить эмоцию, но не запамятовывайте о субъективности собственных объяснений. <a href=http://filmkachat.ru/>1×slots официальный demo регистрация в 1×slots casino</a> В большинстве заведений сделать это можно по e-mal, по номеру аппарата, спустя социальную сеть или гугл-аккаунт.В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с безвозмездных вращений. Прибыль, коию Вы заработаете на этом бездепе возможно ставить на вывод без какого или отыгрыша. <a href=http://xn–ch1b5ip1vkdt62c.com/bbs/board.php?bo_table=free&wr_id=40103>http://xn–ch1b5ip1vkdt62c.com/bbs/board.php?bo_table=free&wr_id=40103</a> 1×slot зеркало рабочее регистрации на телефон придет <a href=http://ru.monumentefunerare.md/index.php?subaction=userinfo&user=HenryBaino>http://ru.monumentefunerare.md/index.php?subaction=userinfo&user=HenryBaino</a> Акции распространяются как на все забавы казино, так и на узкий перечень. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino прочие. Промо может обхватывать разработки 1-го производителя. Бездеп не пересекается с иными промоакциями казино. Если на сайте предусмотрен кэшбек, он не начисляется за ставки, сделанные бонусными средствами. Для идентификации платежных реквизитов игрока возможность понадобиться пополнение счета на минимальную сумму.Фриспины — безвозмездные вращения, коие разрешают игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины считаются наиболее известным и предпочтительным обликом бонуса — безвозмездные вращения порой эффективнее и веселее в отыгрыше, чем другие виды бездепов.
1×slots зеркало
3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефон или почту, показать индивидуальную информацию;В интернете очень много скриптовых вебсайтов, коие принадлежат мошенникам. Их основная цель – привлечь гэмблеров, пообещав не щедрые презенты, но и солидные выигрыши. Так собственно некоторые сайты предлагают получить за регистрацию числе $1 000. 1х слот регистрация в 1×slots casino <a href=https://oraclenana.com/MYBB3/user-4250.html>https://oraclenana.com/MYBB3/user-4250.html</a> Во всех легальных онлайн-казино Беларуси нужно подтверждение паспортных данных для забавы — это заявка правительства государства. 1×slots актуальное зеркало Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих притязаний, считая неотъемлемой верификации. Если на веб-сайте учтена неотъемлемая процедура подтверждения личности, то вывести выигрыш получится только последствии ревизии данных. Приготовьтесь наполнить анкету и выслать в техподдержку документ, подтверждающий лицо.Таким образом, заведение пытается продемонстрировать себя своим потенциальным геймерам, а подобный маркетинговый ход как казино бонус без депо за регистрацию привлекает довольно количество внимания к игорному заведению и обеспечивает неизменный поток новых гостей и грядущих клиентов игрового интернет клуба.
казино 1×slots официальный сайт
Бесплатные бонусы казино без депозита возможно получить повторяющий денежных средств на бонусный счет (вывести их возможно только в отыгрыша), фриспинов, игры либо кешбэк-бонуса.Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и. Когда игроку надеется много фриспинов, администрация возможность разбивать их начисление на количество дней. Бесплатные вращения предоставляются для конкретного слота, который указывается в правилах промоакции. Как лишь вы отыграли вейджер и средства с бонусного баланса перебежали вас на настоящий счет, Вы смело сможете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (устроить наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депо).Суммы подобных предложений, как правило, колеблются от трех до двадцати $, а вейджер на эти свои должен сочинять от тридцати до шестидесяти раз. Зачастую, наибольшая сумма выигрыша тут составит от одной до 2-ух сотен $. Если компьютерные выиграет больше, то все свои шансы быть списанными до максимально разрешенного выигрыша. Здесь появляется смысл выводить еще несуществующие финансы на свою платежную систему и дальше искать заведение с благоприятными под данную сумму релоадом или призом за 1-ое пополнение счета. Есть несколько подвидов бездепозитного гонорары, предлагаемого большим числом заведений. <a href=http://xn–80abbjuadey5bv1e.xn–p1ai/index.php?subaction=userinfo&user=HarryhoUct>http://xn–80abbjuadey5bv1e.xn–p1ai/index.php?subaction=userinfo&user=HarryhoUct</a> Какие бонусы меня еще получить считая бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного бонуса, каждое интернет казино предлагает игрокам прибыльное предложение на 1-ый депозит, вы совершаете депозит, ваш депозит возрастает в двое либо числе в 3, что, этим наиболее начать выступать возможно с более солидной суммой, так же не запамятываем на вейджер на призы. 1хслотс официальный сайт зеркало
1хслотс рабочее зеркало
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=62409&extra=>1 x slots casino</a> Во всех легальных онлайн-казино Беларуси нужно свидетельство паспортных данных для игры — это заявка правительства страны. казино 1×slots официальный сайт <a href=https://www.faribowl.com/author/evangelinei/>https://www.faribowl.com/author/evangelinei/</a> Зарегистрируйтесь. Для регистрации чаще всего достаточно ввести собственный номер телефона и почтовый адрес, последствии чего ввести полученный код из СМС. Возможно, требуется указать промокод. В правилах промоакции несомненно написано, где его бы включать. Иногда это хотелось делать при регистрации, иногда — уже в сотворения личного кабинета, на отдельной странице.
1×slots сайт
Даже не выиграв солидную необходимую, игрок увлекательно проведет время, изнутри изучит работу площадки, оценит геймплей автоматов. Все это без каких-либо денежных рисков. Быть в курсе превосходнейших промоакций легко. Достаточно регулярно изучать перечень свежих онлайн казино с выводом приза без депо в этом разделе. <a href=http://www.dllaoma.com/home.php?mod=space&uid=371488>http://www.dllaoma.com/home.php?mod=space&uid=371488</a> 1хслотс казино зеркало Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном сайте и выполните вход в личный офис, чтобы забрать безвозмездные вращения с вейджером х40;Если речь об неповторимых услугах, имеет понадобиться регистрация в казино по ссылке с партнерского вебсайта.
<b>Смотреть еще похожие новости:</b>
<a href=https://peloton.com.ua/forum/memberlist.php?mode=viewprofile&u=9259>1×slot зеркало рабочее регистрации на телефон придет</a>
<a href=http://diplomka.jakubfiser.com/wolf/plugins/comment/image.php>казино 1× slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные призы прекрасный вариант даровой забавы в игровые автоматы. Многие пользователи сети не знают, собственно в казино можно начать играть полностью безвозмездно, а потом вывести выигрыш на банковскую карту либо электрический кошелек, иные не доверяют интернет казино, а третьи успешно играют и выигрывают – и тотчас довольно немалые суммы. Некоторые онлайн-казино без депо предлагают новым клиентам выбрать бонус при регистрации. Будьте внимательны: выбрав один, вы в безоговорочном большинстве случаев не можете пользоваться остальными.
#9353 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало рабочее
Мы советуем не отказываться от похожих услуг узнаваемых казино. Выделите количество мин. На регистрацию, получите приз и попытайтесь его отыграть. Может быть, сегодня фортуна несомненно на вашей стороне!Так собственно основное отличие дара на депозит от бездепа – неотъемлемое пополнение счёта. Вы можете внести депо и преувеличить стартовый капитал или арестовать бездеп и всем не придётся рисковать собственными сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начислит щедрое поощрение! <a href=http://filmkachat.ru/>1× slots casino зеркало</a> <a href=http://andi67.bplaced.net/dokuwiki/doku.php?id=%D0%A1%D0%B0%D0%BC%D1%8B%D0%B5%20%D0%B2%D0%BA%D1%83%D1%81%D0%BD%D1%8B%D0%B5%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!>http://andi67.bplaced.net/dokuwiki/doku.php?id=%D0%A1%D0%B0%D0%BC%D1%8B%D0%B5%20%D0%B2%D0%BA%D1%83%D1%81%D0%BD%D1%8B%D0%B5%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!</a> Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного приза.Ознакомьтесь с нашим списком превосходнейших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего списка и получите бездеп сразу. Хватайте наилучшие безвозмездные предложения ниже и выигрывайте немалые средства, не рискуя! 1×slots зеркало рабочее на сегодня <a href=https://lecointurc.com/users/philipadata>https://lecointurc.com/users/philipadata</a> Бонусные деньги – маленькая сумма средств для старта в новеньком казино. На бонусные деньги, обыкновенно разрешено выступать во все игры, не слотов с современным джекпотом и игр из раздела live casino.
1×slots быструю регистрацию а также мгновенное
Сроки активации бонуса уточняются каждым казино, но почаще всего они не превышают недели с момента получения. Игроку непременно надо(надобно) применять бездеп в течение указанного срока, в ином случае бонус просто исчезнет. Каждый бонус возможно получить только раз раз, поэтому случае не применять бездеп в срок, у игрока не несомненно второго шанса им воспользоваться. <a href=http://swissairways-va.com/phpBB3/memberlist.php?mode=viewprofile&u=3495>1×slots зеркало</a> 1×slots акции Заработать на бездепозитных призах за регистрацию в казино может любой юзер, достигший совершеннолетия.Фриспины. Бесплатные вращения предусмотрены для применения в видео-слотах. Внимательно читайте обстоятельства – они нередко выдаются для неких машин. В зависимости от клуба вам создавать конкретное количество ставок. Кстати, современные игорные жилища выделяют вероятность заводить «одноруких злодеев». <a href=https://auto-file.org/member.php?action=profile&uid=1064153>https://auto-file.org/member.php?action=profile&uid=1064153</a> Получать информацию о самых выгодных призах можно без неизменного прогноза новостей казино. Мы взяли данную задачу на себя и безпрерывно смотрим за предложениями операторов, избирая наилучшие из них. В данном разделе собраны заключительные бездепы, промокоды к ним и обстоятельства их активации. Список промоакций периодически дополняется. В топ вошли самые новые бездепозитные бонусы за регистрацию в казино 2020, кратковременные и закрытые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру прочим критериям. Если срок действия промоакции истек, она удаляется из перечня.Возможность сыграть дополнительное состязание (а времени и некоторое) абсолютно бесплатно, а выигрыш, тому, поступает на счёт игрока. 1×slots регистрация 1×slots review live
1х слот регистрация в 1×slots casino
Бездепозитные бонусы в казино без пополнения 2022 — это конкретная сумма денег либо free spins вращения, которые предоставляются первым гостям за регистрацию на веб-сайте казино вид бездепозитного бонуса, и выделяет вам вероятность помощью казино без пополнения опробовать предложения (игр), с дальнейшей прерогативой вывода средств при исполненьи всех установленных управлял. <a href=http://xn–b1acebaenad0ccc3aiee.xn–p1ai/forum/user/9678/>http://xn–b1acebaenad0ccc3aiee.xn–p1ai/forum/user/9678/</a> 1 х слотс зеркало
1×slots casino регистрация 1×slots review live
Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации презента необходимо доказать электрическую почту и привязать телефонный; <a href=https://g2clubs.com/healthy-workout/google/#comment-24086>1×slot регистрация</a> 1×slots casino online регистрация <a href=http://fumankong9.cc/home.php?mod=space&uid=602547>http://fumankong9.cc/home.php?mod=space&uid=602547</a> Как правило, новоприбывшие геймеры в первую очередь желают ознакомиться с методами ввода и вывода валютных средств и сроки выполнения поданных заказов дабы конкретно разуметь, как прытко меня исключить свой казино приз за регистрацию без депозита на электрический кошелек или же банковскую карту. К счастью для всех играющих, снутри конкретных холдингов, все казино соперничают между собой. Ведь в бы определенную фирму представляло лишь одно онлайн-заведение, то навряд бы клиенты заметили казино с бонусом за регистрацию и могли бы рассчитывать лишь на вознаграждение повторяющий приза на 1-ое вложение. К каждому заведению регулярно стопам привлекать свежих игроков, собственно, конечном, только на руку всем играющим.Изучить управляла и обстоятельства получения бездепозитных призов казино, Вы сможете у нас на веб-сайте в разделе с призами либо на официальном сайте избранного Вами казино. Если не отыскать нужную информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал или по электрической почте.
1×slots на любой вкус как пройти регистрацию
<a href=http://zvezdjuchki.ru/user/Richardsic/>http://zvezdjuchki.ru/user/Richardsic/</a> Процесс подтверждения личности имеет занять от 1-го дня до недели. Если заказчик разрешил нибудь оплошность при заполнении паспортных данных, то ему по адресоваться с проблемой в службу онлайн-казино. 1×slots сайт У нас на сайте Вы найдете перечень бонусов без депозита в проверенных казино и доскональную информацию о том как их получить и применять.
<b>Смотреть еще похожие новости:</b>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=125906>1×slots зеркало быструю регистрацию а также мгновенное</a>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=62585&result=reply>1× slots зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Максимальный объем ставки, кот-ый нельзя превышать же приз не будет полностью отыгран. В случае нарушения этого верховодила, бонус и выигрыш с него будут аннулированы. Наиболее пользующиеся вознаграждения среди гэмблеров – бездепозитные бонусы казино. Это не умопомрачительно, так возможно получить безвозмездные вращения либо виртуальные кредиты, и при не придётся пополнять счёт, рисковать собственными деньгами. Удастся насладиться разнообразными увеселениями и даже выиграть солидную необходимую, избегая серьёзного риска.
#9354 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация то дальше необходимо пройти
Начнём с такого, собственно каждое рекламную за регистрацию предполагает некоторые условия. Бездепозитные призы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность денежного оборота, необходимая для исполненья условий. Пример, возымели безвозмездные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 рублей, неудачных либо выигрышных, неважно. После выполнения, бонусный баланс перейдёт на настоящий и будет легкодоступным к выводу. <a href=http://filmkachat.ru/>1×slots регистрацию более популярный вариант это</a> <a href=https://babyrr.com/forum/User-JamesAbisy>https://babyrr.com/forum/User-JamesAbisy</a> 1×slots зеркало <a href=https://www.faribowl.com/author/evangelinei/>https://www.faribowl.com/author/evangelinei/</a> В качестве бонусов онлайн казино нередко предлагает выдачу фриспинов, то есть безвозмездных вращений игрового барабана. Виртуальные монеты возможно использовать для обучения в покерной школе либо для игры в казино.
1×slots подтвердит вашу регистрацию если говорить
<a href=https://portugal-campings.com/pt/profile/jamescip/>1×slots рабочее зеркало</a> казино 1×slots официальный сайт <a href=https://eduli.net/home.php?mod=space&uid=2102>https://eduli.net/home.php?mod=space&uid=2102</a> 1×slots официальный сайт скачать на айфон
1×slots регистрация 1×slotscasino 56 online
Активация денежного гонорары случается механически после творения профиля либо использования промокода. Иногда операторы предъявляют вспомогательные притязания: подписаться на странички казино в социальных сетях либо на рассылку маркетинговых извещений, скачать и установить дополнительный софт и т.д. В большинстве заведений устроить это можно по e-mal, по номеру телефона, через социальную сеть или гугл-аккаунт. <a href=https://justdirectory.org/details.php?id=288953>https://justdirectory.org/details.php?id=288953</a> 1хслот скачать
x1 slots 1хслотс регистрация перейти на 1×slots
В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и когда спорных ситуаций нет возможности куда-то пожаловаться и обосновать собственную правоту.Бонусы без депо при регистрации числятся самыми красивыми как для опытнейших игроков, так для и начинающих. Получив такое вознаграждение, заказчик может выступать на реальные средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а обстоятельства их активации и выигрыша. <a href=http://cozycotg.com/forum/memberlist.php?mode=viewprofile&u=72740>1×slots официальный зеркало рабочее</a> Отыграв бездепозитный бонус в казино с выводом тоже придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в сходственное лимитирование существует, то единоразово вывести выйдет только сумму, не превосходящую объем полученного приза. зеркло казино 1×slots <a href=http://y90429l8.bget.ru/user/Henryrip/>http://y90429l8.bget.ru/user/Henryrip/</a> С не отыгранным призом запрещается превосходить объем максимальной ставки. Нарушение этого условия повлечет за собой аннулирование выигрыша.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Бонус за регистрацию в казино без депозита с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша может понадобиться устроить ставки на сумму, в некоторое 10-ов один превышающую необходимую приза либо выигрыша.Иногда виде одобрения за регистрацию могут выдаваться билеты для участия в турнирах. Условия их проведения довольно выделяются, поэтому мы рекомендуем ознакомиться с любым предложением раздельно. В зависимости от онлайн заведения любой из их имеет для предложить как бездепозитные средства, так и бездепозитные фриспины, которые в успешной регистрации упадут для на ваш игровой баланс. <a href=http://rtpsouth.com/UserProfile/tabid/69/userId/107679/Default.aspx>http://rtpsouth.com/UserProfile/tabid/69/userId/107679/Default.aspx</a> Чаще всего используются коды. Их нужно заносить в особые окна регистрационной анкеты, если идет о пригласительных призах, или в особом разделе личного кабинета игрока. зеркло казино 1×slots Обычно, бездепозитные бонусы выдаются под определенные слоты с фиксированной ставкой, но их наверняка запрещено применять в игровых автоматах с прогрессивным джекпотом. Список игр, в которых можно применять бездеп, Вы найдете в описании промоакции либо можете уточнить у саппорта заведения.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.pmpobc.ca/index.php?topic=127102.new#new>1×slots зеркало видели такую регистрацию на</a>
<a href=http://lider1c.ru/communication/forum/messages/forum5/message18586/14592–1×slots-casino-zerkalo?sessid=84e868a0aea78a4947d35b2fa0bc9f3e&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1×slots casino зеркало</a>
<a href=http://naturetour.ru/communication/forum/messages/forum3/message23445/5148–1×slots-registratsiyu-bolee-populyarnyy-variant-eto?sessid=134c2eb777a7ce6f3fb6aa3ce6a16167&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1×slots регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Можно ли в одном интернет казино получить больше одного приза за регистрацию? Нет, например как в каждом интернет казино есть управляла, к которым надо(надобно) держаться, не творить два аккаута для получения бонусов, другому несомненно блокировка обоих аккаутов, не пытайтесь перехитрить онлайн казино, бонус за регистрацию выдаеться один один одному личику. Акции, посвященные календарным праздничным, посещают рассчитаны как на всех юзеров, так и на категории: примеру, презент на 8 марта девушкам-игрокам либо мужчинам на 23 февраля.
#9355 Charlesgunnyhttp://filmkachat.ru
1×slot рабочее зеркало
Допустим, за регистрацию вы возымели бездеп в объеме 2 000 рублей с вейджером х30. В данном случае предстоит сделать ставок, на общую сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда сделайте условия по отыгрышу, придёт время заработать настоящие деньги. Однако не запамятовывайте, собственно с любого подарка выйдет вывести определённую сумму (почаще всего менее $200). <a href=http://filmkachat.ru/>1×slots casino online регистрация</a> <a href=http://sandboxgame.info/doku.php?id=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D0%B5%D0%B9%D1%88%D0%B8%D0%B5%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!>http://sandboxgame.info/doku.php?id=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D0%B5%D0%B9%D1%88%D0%B8%D0%B5%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!</a> Как только вы отыграли вейджер и средства с бонусного баланса перешли вам на реальный счет, Вы отважно можете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (устроить минимальный депо к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депозитом). 1×slots зеркало регистрацию более популярный вариант это <a href=https://facetoshi.live/posts/2471>https://facetoshi.live/posts/2471</a> Нельзя осматривать игру на деньги, как вариант заработка. Азартные игры воспрещены для лиц младше 18 лет. Topcasinobonuses.mobi классифицируется организатором азартных игр. Сайт одевает информационный нрав.Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы которые возникают у начинающих.
1× slots casino зеркало
Максимальный объем ставки, кот-ый нельзя превышать же приз не несомненно всецело отыгран. В случае нарушения этого правила, бонус и выигрыш с него будут аннулированы. <a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=178365>1×slot официальный сайт</a> 1×slots актуальное зеркало <a href=https://steemit.com/fashion/@kalinka0588/moda-dlya-raznykh-vozrastnykh-kategorii-stil-bez-granic>https://steemit.com/fashion/@kalinka0588/moda-dlya-raznykh-vozrastnykh-kategorii-stil-bez-granic</a> Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, например как Вам придется ее доказать дальнейшем при выводе средств.Но разу не забывайте пристально читать верховодила участия в бонусных акциях. Если вы нарушите но бы одно условие, позднее вы не можете устроить недоразумение с администрацией. 1× slots сайт Как только вы отыграли вейджер и свои с бонусного баланса перебежали вам на реальный счет, Вы храбро сможете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать наименьший депо например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, совместно, вкупе с депо).
1хслотс регистрация в 1×slots casino
Используйте превосходнейшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, чтобы заработать подарки за простые действия теперь сегодня получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высокой отдачей и резвыми выводами на электронные кошельки.В наше время довольно просто получить приз за регистрацию в казино. Практически любой игорный жилище с радостью начисляет средства или бесплатные вращения. Многие гэмблеры пользуются этим и не стесняются регистрироваться в каждом клубе с прибыльными условиями. Кстати, это замечательная вероятность выработать победную стратегию и сорвать джекпот. <a href=http://k98727wu.beget.tech/user/GlennBonse/>http://k98727wu.beget.tech/user/GlennBonse/</a> 1хслотс рабочее зеркало на сегодня Для получения бонуса надо(надобно) пригласить в забаву свежего клиента. Казино начислит пригласившему фиксированный процент от взносов приглашённого вид приза: чаще всего его объем не превышает 10%. Срок деяния приза правило не выше месяца: пригласивший получает бонус зависимо проигранных ставок приглашённого в первый месяц забавы.
1хслотс рабочее зеркало на сегодня
1хслотс мобильная версия зеркало <a href=http://bbs.17dra.com/home.php?mod=space&uid=231588>http://bbs.17dra.com/home.php?mod=space&uid=231588</a> Если вы избираете испытанное лицензионное интернет казино и сделайте все условия получения бездепозитного приза, трудностей с получением дара у Вас не возникнет.
1×slots casino регистрация 1×slots review live
Но такие рамки не смущают и хайроллеров, потому коэффициенты на слотах дозволяют рассчитывать на солидные выигрыши, в некоторых автоматах разыгрывается передовой джекпот.Для такого, чтобы отыграть необходимую вашего бездепозитного приза надо(надобно) выполнить обстоятельства вейджера. Очень часто фриспины даются на конкретные слоты (book of ra, book of dead, book of sun), избирайте разъем для по душе, они все очень красочные и высококачественные. Бездепозитные бонус может быть валютным например и вид фриспинов на слоты Основное правило получения бездепа ? создаваемый акк обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов требовательно запрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита необходимо блюсти несложную очередность деяний.Свежий бонус начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в использовании средствами, а в случае отыгрыша оператор имеет установить ограничение на вывод денег. <a href=https://lovewiki.faith/index.php?title=%D0%A4%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B%20%D1%81%D1%83%D1%88%D0%B8:%20%D0%9F%D0%BE%D1%82%D0%B5%D0%BD%D1%86%D0%B8%D0%B0%D0%BB%20%D0%B1%D0%B8%D0%B7%D0%BD%D0%B5%D1%81%D0%B0%20%D0%B2%20%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8%20%D0%B2%202024%20%D0%B3%D0%BE%D0%B4%D1%83>https://lovewiki.faith/index.php?title=%D0%A4%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B%20%D1%81%D1%83%D1%88%D0%B8:%20%D0%9F%D0%BE%D1%82%D0%B5%D0%BD%D1%86%D0%B8%D0%B0%D0%BB%20%D0%B1%D0%B8%D0%B7%D0%BD%D0%B5%D1%81%D0%B0%20%D0%B2%20%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8%20%D0%B2%202024%20%D0%B3%D0%BE%D0%B4%D1%83</a> После требуется привнести идентификационный платёж. Это стращает начинающих больше всего. Нужно сделать минимальный депозит в 100–500 рублей. Таким образом служба защищенности убедиться том,, что платёжный способ принадлежит Вам. Данная процедура важна для обеспечивания защищенности игровых счетов. Пример, Ваш аккаунт взломают и выведут средства на собственный кошелёк. Будет крайне досадно. Поэтому верификация платёжной системы, это необходимый момент.Наши специалисты исследуют обстоятельства акции, затем в ручном режиме проверку их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и параметры. Мы не рекламируем казино, а даем игрокам информацию о наилучших из их. 1×slots казино мобильная версия
<b>Смотреть еще похожие новости:</b>
<a href=http://162.241.164.67/phpbb/phpBB3/memberlist.php?mode=viewprofile&u=121525>1хслотс официальный сайт зеркало</a>
<a href=https://www.kfz-gringer.at/index.php/forum/welcome-mat/64904–1×slots#64669>1×slots регистрация на сайте</a>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=323916&pid=647405#post_647405>1х слотс зеркало регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бонус начисляется игроку сразу после регистрации и прохождения верификации в казино и не настятельно от клиента внесения депо. Как правило, размер бонуса в схожем случае достаточно стыдливый, однако разрешает новеньким познакомиться с забавой без риска реальными деньгами.
#9356 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало
Превышение максимальной ставки при отыгрыше. Система автоматически не предупреждает о превышении ставки, потому о несоблюдении правил игрок может узнать уже последствии подачи запроса на вывод средств.Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного бонуса. <a href=http://filmkachat.ru/>1 хслот регистрация в 1×slots casino</a> Нет. Казино раздают безвозмездные призы за регистрацию, для того, чтобы клиент возможность ознакомиться с игровым заведением. А чтобы вывести его, необходимо выполнить условия отыгрыша.Ознакомьтесь с нашим списком превосходнейших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего списка и получите бездеп незамедлительно. Хватайте лучшие безвозмездные предложения ниже и выигрывайте немалые средства, не рискуя! <a href=https://equessurge.win/phpBB3N/memberlist.php?mode=viewprofile&u=80266>https://equessurge.win/phpBB3N/memberlist.php?mode=viewprofile&u=80266</a> 1хслотс рабочее зеркало <a href=https://nakhodka-lib.ru/forums/users/olgaspielvogel0/edit/?updated=true/users/olgaspielvogel0/>https://nakhodka-lib.ru/forums/users/olgaspielvogel0/edit/?updated=true/users/olgaspielvogel0/</a> Способы получения бездепа различаются зависимо вида бонуса, который приглянулся игроку. Но для или надо(надобно) быть зарегистрированным в законном онлайн-казино и доказать собственную лицо. В общем виде пошаговая инструкция для получения бездепозитного приза смотрится например:Обычно показатель повыше, чем для бонусов на депозит. Не удивляйтесь, если он несомненно числе х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных стран.
1×slots регистрация 1×slotscasino 56 online
скачать 1×slots на андроид мобильная версия Бонус начисляется игроку сразу последствии регистрации и прохождения верификации в казино и не настятельно от посетителя внесения депо. Как управляло, размер приза в схожем случае достаточно скромный, впрочем дозволяет новичкам познакомиться с игрой без риска реальными средствами.Как верховодило, новоприбывшие геймеры для желают ознакомиться с методами ввода и вывода денежных средств и сроки выполнения поданных заявок дабы четко осознавать, как быстро возможность исключить собственный казино бонус за регистрацию без депозита на электрический кошелек или же банковскую карту. К счастью для всех играющих, внутри конкретных холдингов, все казино конкурируют меж собой. Ведь в бы конкретную компанию давало только одно онлайн-заведение, то ли бы посетители увидели казино с призом за регистрацию и возможность бы рассчитывать лишь на вознаграждение вид бонуса на 1-ое инвестиция. К любому заведению регулярно по завлекать свежих игроков, что, в итоге, лишь на руку всем играющим. <a href=http://ternovka4school.org.ua/user/StevenMip/>http://ternovka4school.org.ua/user/StevenMip/</a> Нельзя осматривать игру на деньги, как вариант заработка. Азартные забавы запрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не организатором азартных игр. Сайт носит информационный нрав.На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не можете активировать и получить бездепозитный приз. 1×slots официальный demo регистрация в 1×slots casino Бесплатные бонусы казино без депо можно получить вид валютных средств на бонусный счет (вывести их возможно лишь в отыгрыша), фриспинов, игры либо кешбэк-бонуса.Казино выделяет возможность заработать и исключить реальные средства на бездепозитных бонусах. Обычно, это малозначительная сумма, которую казино может для разрешить подарить игроку.
1×slots регистрация на сайте
<a href=http://kotelnikovo-region.ru/bitrix/rk.php?goto=http://graindryer.ru/bitrix/rk.php?goto=http://armos-market.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/KzRL7mfs8nP>http://kotelnikovo-region.ru/bitrix/rk.php?goto=http://graindryer.ru/bitrix/rk.php?goto=http://armos-market.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/KzRL7mfs8nP</a> Любой выигрыш по ставке повыше установленного лимита несомненно считаться недействительным. То есть ставка не будет засчитана при отыгрыше, ну случае выигрыша его сумма не поступит на счёт посетителя — итог забавы будет всецело аннулирован. 1×slots casino регистрация 1×slots review live Предложения с бездепозитными бонусами за регистрацию дозволяют новым заведениям привлечь аудиторию на собственный вебсайт. А игроки тому получают возможность играть на реальные деньги без депозита в казино и заработать небольшой стартовый капитал, кот-ый разрешается исключить на карту банка либо электрический кошелек.
1×slots casino регистрация 1×slotscasino09k online
Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми акциями. Читайте о них в обзорах и на форуме. Получив собственный презент, Вы можете безвозмездно играть на реальные средства, а выполнив условия отыгрыша, исключить свой выигрыш. Такие поощрения разрешают безвозмездно протестировать новое казино, разобраться с игровым процессом онлайн слотов, заработать и исключить небольшую сумму средств. 1хслотс 1хслотс регистрация перейти на 1×slots <a href=http://elektrofahrrad-tests.de/forums/member.php?action=profile&uid=33241>http://elektrofahrrad-tests.de/forums/member.php?action=profile&uid=33241</a> Перед активацией важно пристально изучить условия промоакции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют значение кроме лимиты ставок при отыгрыше и сроки, протяжении которых возможно пользоваться предложением. Если бездеп обхватывает ограниченный список игр, рекомендуется разузнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только сомнений случае, случае оператор не установил строгие ограничения на максимальную необходимую ставки.Но есть игорные заведения, которые готовы просто так жертвовать деньги на забаву. Для этого достаточно создать профиль. Чтобы исключить свой выигрыш, вам сначала нужно выполнить условия отыгрыша, указанные в условиях получения бездепозитного депо.
1×slots casino online регистрация
Бездепозитные бонусы отличный вариант безвозмездной забавы в игровые автоматы. Многие пользователи сети не понимают, собственно в казино можно начать выступать безусловно даром, а позже вывести выигрыш на банковскую карту либо электрический кошелек, другие не доверяют онлайн казино, а третьи удачно играют и выигрывают – и тотчас достаточно великие суммы.Максимальный размер ставки, кот-ый нельзя превышать же приз не несомненно всецело отыгран. В случае нарушения сего верховодила, приз и выигрыш с него станут аннулированы. Список например называемых «запрещенных землель» прилагается к правилам бонусной программки игорного портала. Обязательно проверьте, распространяются ли на вас похожие санкции.Но не мыслить, что снабжая юзеров такими призами, казино увлекается спонсированием. Ведь объемы вознаграждений, в, не немалые (средним размером от 5 до 20 $). И на эти средства налагаются конкретные обстоятельства и лимитирования, обязательные к выполнению игрока, случае в последствии он вожделеет получить все средства выигранные деньги. <a href=http://bbs.sj.58qiqu.com/home.php?mod=space&uid=131330>http://bbs.sj.58qiqu.com/home.php?mod=space&uid=131330</a> Чтобы получить возможность вывести прибыль с бездепозитного бонуса в казино, нужно выполнить ряд условий: 1×slots регистрация то дальше необходимо пройти Для верификации номера телефонного, в личном профиле выберите опцию „Подтвердить номер телефонного“ и введите в подходящее фон код, полученный в sms-сообщении.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.mshowto.org/forum/members/jamespauri.html>1×slots зеркало регистрация</a>
<a href=https://surfaceprophets.com/threads/1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82-%D1%81%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C.26850/>1×slots официальный сайт скачать</a>
<a href=http://weeklywars.de/viewtopic.php?f=12&t=1012&p=469991#p469991>1×slots промокод при регистрации</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Итак, чтобы бесплатные бонусные кредиты превратились в настоящие деньги, которыми возможность распоряжаться по своему усмотрению, их надо(надобно) отыграть. Вейджер по уточнять в правилах онлайн-казино. Верификация аккаунта. Лучше доказать лицо сразу после регистрации, чтобы позже не было проблем с выводом денег. Верификация возможность протекать 2-мя маршрутами:
#9357 Charlesgunnyhttp://filmkachat.ru
1× slots официальный
За счёт спинов получится запустить разные онлайн слоты, протестировать стратегии и поднабраться опыта. Фишка в том, собственно вращения начисляются на лучшие аппараты с оригинальными опциями и высочайшей отдачей. Не запамятовывайте, что в каждом акционном предложении предусмотрены специальные притязания – кратковременные лимитирования, максимальный размер ставки, перечень доступных игр.Такой казино бонус без депозита за регистрацию выдается игроку на час и активно используется данное предложение с 2017 года. Это как бы какая-то маскировка поощрения под бездепозитный. Суть всего сего сводится к что, этому, что геймеру на час выдается, к примеру, 1000 долларов, а реклама повторяет про, собственно каждой выигрыш возможно будет в будущем оставить при себе. Но в играющий всерьез отнесется к данному предложению, то он попросту потеряет время. Ведь игроку нужно будет играть не в основном аккаунте, в тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (числе всей тыс. ) в правила вступят определенные условия, где несомненно сказано, что наибольшей суммой победы имеет быть лишь двести $ и средства можно применять лишь в бонуса на 1-ый вклад с вейджером 25 от суммы гонорары плюс сам депозит. По результату получится, собственно игрок выигрывал себе 200% приз с вейджером на конкретную сумму. Короче разговаривая, это все не вашего времени. <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> <a href=http://stroyrem-master.ru/user/Davidexcic/>http://stroyrem-master.ru/user/Davidexcic/</a> Обычно, бездепозитные бонусы выдаются под определенные слоты с фиксированной ставкой, но их наверняка воспрещено использовать в игровых автоматах с прогрессивным джекпотом. Список игр, каких можно применять бездеп, Вы найдете в описании акции или сможете уточнить у службы заведения.Принципиальным различием безвозмездных призов от бонусов на депозит является недоступность надобности заносить средства на акк. Из-за этого их нередко именуют бездепозитными (not the slightest down payment bonuses). 1×slots скачать на айфон <a href=https://bel-mebel.com/forum/user/3610/>https://bel-mebel.com/forum/user/3610/</a> У любого игорного клубы различные вейджеровые обстоятельства. Чтобы вы гарантировано смогли выполнить их, мы дадим некоторое советов. Если система начислила маленькую необходимую, надо делать немалые ставки – остановитесь на 10–30 центах. Как лишь сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте играть. В неприятном случае лучше приглядеться к другому автомату.С такими простыми советами каждое казино с призом за регистрацию способно принести в разы больше выгоды и выгоды.
1×slots зеркало этих способов предполагает регистрацию
Если площадка дарит бездеп за регистрацию, то процедура его получения проста. Нужно только ввести акк на веб-сайте и активировать его, подтвердив адрес электронной почты, номер аппарата или другие данные, коие настятельно оператор. Перед данным нужно убедиться, собственно юзер находится на официальном сайте казино, не на жульнической площадке. <a href=http://www.fiat130.it/phpbb3/viewtopic.php?f=14&t=301851>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a> 1×slots официальный зеркало <a href=http://www.aadd2.net/vb/member.php?u=33793>http://www.aadd2.net/vb/member.php?u=33793</a> Размер бонуса. В качестве бездепов обычно начисляют маленькие суммы, а когда речь о призах за депо, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино могут презентовать игроку до 2000$.Можно. Вы всегда сможете отказаться от получения бездепозитного приза за регистрацию в казино, же Вы не создадите ставку. 1×slots на любой вкус как пройти регистрацию
зеркло казино 1×slots
Автоматическая активация может самой удобной, хотя ручной способ имеет перед ней достоинства. Прежде чем использовать вознаграждение от казино, стоит заранее найти, сколько медли требуется на выполнение всех условий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала деяния приза.Многие новенькие колеблются, собственно поощрительный приз не нужно будет возвращать, даже в они выиграли у казино. Это полностью безопасно и накрепко. Выводя выигранные средства, игрок просто одергивает свое участие при и утрачивает уникальную возможность – бесплатно наращивать собственное материальное положение. <a href=https://codescript.ru/user/DavidLurry/>https://codescript.ru/user/DavidLurry/</a> 1×slots официальный сайт мобильная версия Многие азартные клубы ограничивают сумму вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании акции, суммы Вы не можете исключить. Разница несомненно аннулирована, Вы даже не сможете создавать на нее ставки.
1× slots сайт
Размер бонусов чаще всего чисто условный и не превышает 50 руб. Приятно, хотя ощутимым бустом в игре вряд ли станет.Казино выводит средства только на ту платежную систему, с котрой был сделан депозит. То есть, для вывода бездепозитного бонуса, Вам поначалу необходимо пополнить счет. В неких клубах узкий список способов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет именно с этих платежных способов, коие доступны для вывода. 1хслотс казино зеркало <a href=https://orbitalscoreboard.com/user/richardmoile/>https://orbitalscoreboard.com/user/richardmoile/</a> Создание аккаунта. На сайте казино необходимо открыть регистрационную форму и наполнить пустые поля собственными данными. Иногда на данном этапе требуется указать только адресок электронной почты и пароль, но чаще надобно заполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д.). Нужно свидетельствовать только настоящие данные, поскольку впоследствие они станут испытаны.
1×slots casino online регистрация
Рассмотрим принцип его действия на образце. Допустим, вы зарегались и возымели $10 not the slightest down payment bonus с вейджером х50. Это означает, собственно выигранные деньги можно несомненно выводить не ранее, чем после такого, как общая сумма ставок достигнет $500. Игры, каких возможно играть на бонусные деньги. Проверьте список игр, в которых можно выступать на бонусные свои, вероятно они Вам не понравятся и не стоит расходовать своё время на эту промоакцию. <a href=https://elearnportal.science/wiki/User:MabelShealy5832>https://elearnportal.science/wiki/User:MabelShealy5832</a> Ну и естесственно же, для казино бездепозитные призы прибыльны с имиджевой стороны: схожая щедрость повышает уровень преданности клиентов к фирмы. 1×slots регистрация 1×slots review live
<b>Смотреть еще похожие новости:</b>
<a href=https://adminclub.org/showthread.php?tid=62678>1×slots официальный сайт скачать</a>
<a href=https://persiankittencat.com/temporary-dog-fence-ideas/>1×slot зеркало</a>
<a href=https://www.mshowto.org/forum/members/jamespauri.html>1×slots сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для получения депозитного приза нужно пополнить собственный игровой баланс реальными деньгами. Вознаграждение можно получить или при внесении первого депо, либо в виде фиксированного процента от внесённых средств. Так либо другому, бонус поступит на счёт лишь после пополнения. Сразу последствии активации промокода возможно воспользоваться даром. Как теснее упоминалось, призы бывают трёх обликов – фриспины, кредиты и фриплей-бонусы.
#9358 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация
Для получения депозитного бонуса нужно восполнить свой игровой баланс реальными деньгами. Вознаграждение возможно получить либо при внесении первого депо, либо повторяющий фиксированного процента от внесённых средств. Так или другому, бонус поступит на счёт лишь последствии пополнения. <a href=http://filmkachat.ru/>1хслотс регистрация в 1×slots casino</a> <a href=http://jkmulti.vip/bbs/board.php?bo_table=free&wr_id=5579889>http://jkmulti.vip/bbs/board.php?bo_table=free&wr_id=5579889</a> В онлайне очень большое скриптовых сайтов, коие принадлежат плутам. Их главная цель – привлечь гэмблеров, пообещав столько щедрые презенты, но и крупные выигрыши. Так что кое-какие сайты предлагают получить за регистрацию числе $1 000.Минимального оборота. Этот лимит уточняется вейджером — пока игрок не поиграет на установленную необходимую, вывод средств несомненно недоступен. 1×slots зеркало которую указывали при регистрации кстати <a href=http://www.uepd.de/w3/doku.php?id=фильмы_бесплатно_скачать>http://www.uepd.de/w3/doku.php?id=фильмы_бесплатно_скачать</a>
1хслотс официальный сайт зеркало
Активация по промокоду используется в разных обликах бездепов. Если идет о приветственном бонусе, то комплект символов можно узнать на крупнейшей страничке, в регистрационной форме или письме, коие отчаливает юзеру для доказательства e-mail. Акции могут проводиться общо с партнерскими площадками. Обычно код располагается на постороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активируется одноразовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном кабинете или начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем актуальный код для активации в описании каждого рекламную.При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток. 1×slots зеркало быструю регистрацию а также мгновенное Диапазон ставок, коие вправе устроить игрок, также лимитирован. Обычно ставить можно небольшую сумму — в 10–30 рублей за одно вращение. <a href=https://tutorialslots.com/index.php?qa=77970&qa1=%D0%B1%D0%BB%D0%BE%D0%B3-%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0-%D1%8F%D0%BD%D0%B4%D0%B5%D0%BA%D1%81-%D0%B4%D0%B7%D0%B5%D0%BD-%D1%87%D0%B8%D1%82%D0%B0%D1%82%D1%8C>https://tutorialslots.com/index.php?qa=77970&qa1=%D0%B1%D0%BB%D0%BE%D0%B3-%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0-%D1%8F%D0%BD%D0%B4%D0%B5%D0%BA%D1%81-%D0%B4%D0%B7%D0%B5%D0%BD-%D1%87%D0%B8%D1%82%D0%B0%D1%82%D1%8C</a> Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. 1×slots зеркало рабочее Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, дабы еще раз получить даровой бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ждет неизбежное санкция.Вышеописанная причина и считается основным нюансом, в которого операторы отдают доля собственной прибыли на разные маркетинговые затраты и маркетинговые кампании. А самым действенным тут станут выступать именно бездепозитные бонусы казино 2022 с выводом за регистрацию.
1× slots регистрация в 1×slots casino
Для ревизии используются сканы паспортов, водительских прав, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если пользователь обнаружен в попытке завести вспомогательный акк, все его учетные записи подвергаются блокировке, а их владелец попадает в черный перечень. При игре на лицензионной площадке надо бояться указывать достоверную персональную информацию (шифрование исключает утечку персональных данных). <a href=http://xn–2j1bj1bu79c8mb.com/bbs/board.php?bo_table=free&wr_id=424724>http://xn–2j1bj1bu79c8mb.com/bbs/board.php?bo_table=free&wr_id=424724</a> Не трудно додуматься, собственно no down payment bonuses практически ни не посещают большими. Чаще всего речь о пяти–тридцати баксах (или эквиваленте данной суммы в иной еденице).Каждый игрок должен сначала отчетливо изучить условия по получению и отыгрышу понравившегося презента. Если всё организует, поторопитесь отобрать благотворительные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо момент начать вращать барабаны лучших слотов. 1хлот регистрация в 1×slots casino Бездепозитный приз казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в данном и содержится основное различие.
1хслотс зеркало
<a href=https://adminclub.org/showthread.php?tid=64614>1×slots сайт зеркало</a> При поддержки такого одобрения оператор может того завлекать посетителей, коие раньше показывали активность на сайте, но по какой-то причине перестали выступать. В данном случае промокод высылается юзеру по электрической почте или повторяющий SMS. При правильном раскладе бездепы — это прекрасный метод играть на средства без растраты собственных средств. Есть несколько советов, следуя коим можно извлечь максимум пользы из сходственных промоакций казино. Играть по только на лицензированных площадках. Скриптовые сайты не только дурачат с бонусными услугами, хотя и употребляют пиратский софт с модифицированным ГСЧ. Выиграть на этих автоматах нереально.Осталось выбрать казино с бонусом за регистрацию и создать профиль. После активации подарка выигрыш зависимости от Фортуны и способностей. 1×slots регистрация на официальном сайте <a href=http://images.google.tt/url?q=http://wood-floors.ru/bitrix/redirect.php?goto=http://s-doors.ru/bitrix/redirect.php?goto=https://telegra.ph/Uvelichitsya-li-finansirovanie-mestnyh-byudzhetov-09–19>http://images.google.tt/url?q=http://wood-floors.ru/bitrix/redirect.php?goto=http://s-doors.ru/bitrix/redirect.php?goto=https://telegra.ph/Uvelichitsya-li-finansirovanie-mestnyh-byudzhetov-09–19</a>
казино 1× slots официальный сайт
Во всех законных онлайн-казино Беларуси нужно подтверждение паспортных данных для игры — это заявка правительства государства. В настоящее время получить приз за регистрацию в казино довольно просто. Почти любой игорный жилище с радостью предоставит деньги или безвозмездные вращения. Многие игроки пользуются данным и не стыдятся региться в каждом клубе с прибыльными условиями. Кстати, это отличная вероятность выдумать выигрышную стратегию и сорвать куш. <a href=https://tazovod.khalal.ru/forum/memberlist.php?mode=viewprofile&u=45052>https://tazovod.khalal.ru/forum/memberlist.php?mode=viewprofile&u=45052</a> К огорчению, нет. Почти все казино, требуют внесение но бы 1-го минимального депо для вывода выигрыша с бездепозитного бонуса. Также учитывайте, собственно вывести средства разрешено только на ту платежную систему, с коей был изготовлен депо. 1×слотс казино Наличие у игрока 2 аккаунта. Запрещено создавать некоторое профилей для неоднократного получения бездепов.
<b>Смотреть еще похожие новости:</b>
<a href=https://nztw.org/forum.php?mod=viewthread&tid=400700&pid=707197&page=1&extra=page%3D1#pid707197>1×slots промокод при регистрации 2025</a>
<a href=https://www.xn–72c9aa5escud2b.com/webboard/index.php?PHPSESSID=um1sjph3i269nadj93fs3jctm0&action=profile;u=1721715>зеркала 1×slots</a>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=135741>1×slots регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
4. Заберите презент. Чаще всего бонус активизируется сразу последствии регистрации. Но посещают ситуации, когда надо(надобно) забежать в индивидуальный кабинет либо написать в службу поддержки.
#9359 Charlesgunnyhttp://filmkachat.ru
1×slots официальный demo регистрация в 1×slots casino
При подмоги такового одобрения оператор имеет кроме привлекать клиентов, коие ранее показывали активность на веб-сайте, хотя по некий основанию прекратили играть. В данном случае промокод высылается пользователю по электрической почте или повторяющий SMS. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> <a href=http://www.jcdqzdh.com/home.php?mod=space&uid=330159>http://www.jcdqzdh.com/home.php?mod=space&uid=330159</a> 1×slots официальный зеркало <a href=http://www.gurumeguri.com/userinfo.php?uid=22836#>http://www.gurumeguri.com/userinfo.php?uid=22836#</a>
1×slots рабочее зеркало
Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Бездепозитные призы отличный вариант даровой забавы в игровые автоматы. Многие юзеры сети не знают, что в казино возможно начать выступать полностью безвозмездно, а позже вывести выигрыш на банковскую карту либо электронный кошелек, иные не доверяют онлайн казино, а третьи успешно играют и выигрывают – и тотчас довольно великие суммы. зеркала 1×slots Нельзя осматривать забаву на деньги, как вариант заработка. Азартные игры запрещены для лиц младше 18 лет. Topcasinobonuses.mobi не зачинщиком азартных игр. Сайт одевает информационный характер. <a href=https://lustbb.com/member.php?action=profile&uid=2708>https://lustbb.com/member.php?action=profile&uid=2708</a> Вейджер не более х30–35 является применимым. Опытные игроки утверждают, что с этим вейджером реально остаться в плюсе, в правильно подойти к выбору игрового аппарата. 1хслотс 1хслотс регистрация перейти на 1×slots В интернете очень большое скриптовых вебсайтов, которые принадлежат мошенникам. Их главная цель – привлечь гэмблеров, пообещав не великодушные презенты, но и крупные выигрыши. Так что кое-какие сайты предлагают получить за регистрацию том $1 000.Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы была возможность вывести выигрыш.
1×slots актуальное зеркало
Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, дабы появилась вероятность исключить выигрыш. Бездепозитные призы – это исключительно небезинтересная и более перспективная промоакция интернет-казино. Они в никакого фри-спинов, поэтому что выплаты в безвозмездных вращениях не гарантированы, как композиции на барабанах игрового аппарата шансы не сложиться.Вознаграждения за получение VIP-статуса ? начисляются в рамках программки преданности при достижении еще значения или выдаются индивидуально менеджерами саппорта. <a href=http://yunduost.com/home.php?mod=space&uid=20083>http://yunduost.com/home.php?mod=space&uid=20083</a> Это раз из основных показателей привлекательности дара. С завешенным коэффициентом в мастера не смогут выполнить условия по отыгрышу. И так, как привлекательно выглядит предложение – бездепозитный приз казино в объеме $500 или $1 000. Чтобы новички лучше вникли, что же такое вейджер, мы разберём на случае.Большинство интернет-казино из нашего топ-10 готовы порадовать вас эксклюзивными промоакциями. Читайте о их в обзорах и на форуме. 1×slots casino online регистрация Вейджер в переводе с британского означает «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша приобретенного приза, в нашем случае бездепозитного. Число ставок значения — важно лишь набрать сумму, пропорциональную сумме одобрения.В большинстве заведений устроить это можно по адресу электронной почты, по номеру телефонного, через социальную сеть либо гугл-аккаунт.
1×slots регистрация 1×slotscasino 56 online
Как и другие акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения считаются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих посетителей и дозволяет им составить эмоцию о функционале, не рискуя вескими совокупностями.Реже призы без депо начисляются постоянным игрокам. С их подмогою администрация постарается вычесть ценных клиентов либо желает поблагодарить за преданность верных посетителей. Но гораздо чаще для подобных целей используются эти акции: Индивидуальные поощрения выдаются за совершение поступков: подписку на аккаунты площадки в соц сетях, установку мобильного приложения или официального посетителя для ПК. В большинстве казино действуют программы лояльности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на следующий уровень нередко с выдачей бездепа.Иногда виде бездепа, казино дарует наименьший приз (до 50 рублей), из-за которого не стоит заморачиваться. Выиграть реальные деньги в казино не пополняя счет – сложно, хотя вполне. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными бонусами и начните играть на бонусные средства. По статистике из 10-ти заведений можно заработать небольшую необходимую денег за счет бонусных средств. 1×slots бездепозитный бонус за регистрацию <a href=http://bbs.cheaa.com/home.php?mod=space&uid=3139058>http://bbs.cheaa.com/home.php?mod=space&uid=3139058</a> Принципиальным отличием безвозмездных бонусов от призов на депо считается неименье необходимости вносить средства на аккаунт. Из-за сего их нередко именуют бездепозитными (not the slightest down payment bonuses).
1х слот регистрация в 1×slots casino
Верификация аккаунта. Лучше подтвердить лицо незамедлительно после регистрации, чтобы позже не было проблем с выводом денег. Верификация возможность протекать двумя маршрутами: Так что приготовьтесь дать конфиденциальную информацию (пол, возраст, государство проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает менее суток, в чего получится беспрепятственно выводить солидные выигрыши. <a href=https://trade-britanica.trade/wiki/User:ChauMerry6>https://trade-britanica.trade/wiki/User:ChauMerry6</a> Отыграв бездепозитный приз в казино с выводом тоже придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в подобное ограничение присутствует, то единоразово вывести получится только сумму, не превышающую размер полученного бонуса. 1×slots зеркало на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.home-visa.ru/viewtopic.php?f=69&t=807392&p=2805373#p2805373>1хслот зеркало</a>
<a href=https://timepost.info/showthread.php?tid=58565>скачать 1×slots на андроид мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Казино выводит деньги лишь на что, эту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного бонуса, Вам сначала нужно восполнить счет. В некоторых клубах ограниченный перечень способов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с данных платежных методов, которые доступны для вывода.
#9360 Charlesgunnyhttp://filmkachat.ru
онлайн казино 1×slots
Выбирайте наилучшие благотворительные призы с помощью обзоров на Casinoz – и пусть вас сопутствует счастье при отыгрыше бонусных кредитов!Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. <a href=http://filmkachat.ru/>1×slot зеркало рабочее этих способов предполагает регистрацию</a> Не стоит сразу же открещиваться от приветственных презентов в сходственных казино. Администрация готова начислить средства или фриспины, хотя сначала работники обязаны убедиться, что вы не мошенник. Дело том,, собственно развелось слишком много охотников за бонусами. Они научились дурачить систему и наваривать крупные суммы денег.Новые посетители онлайн-казино без первого депозита шансы проверить свою удачливость. К тому же есть возможность преобразовать бездепы в настоящие деньги за регистрацию в казино, однако желаемого бонус необходимо отыграть согласно условиям промоакции. <a href=http://www.hdfeed.co.kr/bbs/board.php?bo_table=04_02&wr_id=215760>http://www.hdfeed.co.kr/bbs/board.php?bo_table=04_02&wr_id=215760</a> 1×slots промокод при регистрации 2025 <a href=https://australianweddingforum.com/weddings/member.php?action=profile&uid=9158>https://australianweddingforum.com/weddings/member.php?action=profile&uid=9158</a> Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция имеет подробные правила, гиперссылка на коие обычно находится в промообъявлении. В них указываются лимиты, вейджер, перечень дешевых игр. Если оператор прячет данные о предложении, то пользоваться им надо.Выиграть реальные деньги в казино не пополняя счет – сложно, хотя вполне. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными призами и начните играть на бонусные средства. По статистике в 10-ти заведений можно заработать маленькую необходимую средств помощью бонусных средств.
1×slots регистрация 1×slots review live
Иногда в качестве одобрения за регистрацию могут выдаваться билеты для участия в турнирах. Условия их проведения довольно выделяются, потому мы рекомендуем ознакомиться с любым предложением отдельно. <a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=118242>1х слотс зеркало регистрация в 1×slots casino</a> 1×slots зеркало регистрация то дальше необходимо пройти <a href=http://dinskoi-raion.ru/forum/?PAGE_NAME=profile_view&UID=65530>http://dinskoi-raion.ru/forum/?PAGE_NAME=profile_view&UID=65530</a> Промообъявления от казино не дают реальной картины и направлены на вербование внимания юзеров. Понять, насколько высоки шансы остаться в плюсе, позволит собственный анализ критерий предложения: 1хслот 1хслотс регистрация перейти на 1×slots Не советуем сломя голову браться за всевозможные предложения получения средств без инвестициям. Вполне возможно, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на 1-ый взгляд. Альтернативой является казино бонус за депо. Мы предлагаем для пару советов, спасибо коим у любого игрока несомненно вероятность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег:Перед активацией важно пристально изучить условия промоакции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют значение кроме лимиты ставок при отыгрыше и сроки, в течение которых возможно воспользоваться предложением. Если бездеп охватывает ограниченный список игр, рекомендовано узнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с невысокими множителями выплат подходят лишь в случае, в оператор не установил жесткие лимитирования на наивысшую необходимую ставки.
1×slots зеркало которую указывали при регистрации кстати
Многие игроки, оценив функционал казино, остаются выступать в нем и далее ? на это и направлено каждое рекламную. Постоянные клиенты вносят депозиты и делают ставки, обеспечивая длительную выгода оператора. То есть, казино выдают бездепы новым пользователям для формирования приклнной аудитории.Заполняя данные в личном профиле, указывайте лишь достоверную информацию, так как Вам понадобиться ее подтвердить в будущем при выводе денег. <a href=https://popcporn.net/user/JustinLom/>https://popcporn.net/user/JustinLom/</a> казино 1× slots официальный сайт В основном случаев безвозмездные бонусы начисляются в кредитах, которые нельзя сразу исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже.Подтверждение регистрации. Казино требуют привязки профиля к электронному адресу и номеру телефонного. Для этого на e-mail отчаливает письмо со ссылкой, а на телефон ? текстовое извещение с кодом.
1×slots зеркало
Чтобы играть бесплатно на настоящие средства в казино, порой достаточно просто зарегистрироваться. Иногда нужно выполнить вспомогательные деяния. Поспешите зарегистрироваться на официальном сайте Клубника, дабы быстро получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, замечена реальный шанс победу! Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных требований, не обязательной верификации. Если на сайте предусмотрена неотъемлемая процедура доказательства личности, то исключить выигрыш удастся лишь последствии ревизии данных. Приготовьтесь наполнить анкету и выслать в техподдержку документ, подтверждающий лицо. 1×slots казино зеркало <a href=http://theaesoon.co.kr/bbs/board.php?bo_table=free&wr_id=77311&&#c_106965>http://theaesoon.co.kr/bbs/board.php?bo_table=free&wr_id=77311&&#c_106965</a> Бездепозитные бонусы казино за регистрацию в 2022 году — это возможность поиграть за счёт заведения. Казино даёт посетителю шанс пользоваться определённой суммой или количеством бесплатных вращений без внесения депозита. Не путайте деморежим с реальной забавой без необходимости внесения депо.
1×slots рабочее зеркало на сегодня
Нет. Казино раздают благотворительные бонусы за регистрацию, для того, чтобы заказчик имел ознакомиться с игровым заведением. А чтобы вывести его, нужно выполнить обстоятельства отыгрыша.За привлечение друга ? масштабах партнерской программы заказчик получает вознаграждение за вербование новых пользователей. <a href=http://xn–45–6kc9afwnhj.xn–p1ai/bitrix/click.php?goto=http://vels52.ru/bitrix/redirect.php?goto=http://sz412.gov45.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/OKPITSWy3Iz>http://xn–45–6kc9afwnhj.xn–p1ai/bitrix/click.php?goto=http://vels52.ru/bitrix/redirect.php?goto=http://sz412.gov45.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/OKPITSWy3Iz</a> Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских руб. В критериях акции предписано, что вейджер бездепозитного бонуса х20. Поэтому, чтобы отыграть приз, игроку будет необходимо устроить ставок на 35*20=700 рублей. 1хслотс регистрация в 1×slots casino Нельзя рассматривать забаву на средства, как вариант заработка. Азартные забавы запрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не является зачинщиком азартных игр. Сайт носит информационный характер.
<b>Смотреть еще похожие новости:</b>
<a href=http://6000ziyuan.com/forum.php?mod=viewthread&tid=99261&extra=>1×slots сайт зеркало</a>
<a href=https://timepost.info/showthread.php?tid=46005>1 xslots рабочее зеркало</a>
<a href=https://forum.pmpobc.ca/index.php?topic=132747.new#new>1×slots регистрация на сайте</a>
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1140#post-35565>казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Некоторые сайты, прежде чем провести регистрацию игроков, предлагают ответить на количество базисных вопросов. Цель проведения похожей викторины – выявить случайных людей, которые не имеют представления о покере, и не допустить получения ими бонусов. Если гость уже играл в казино, то ответить на полтора десятка несложных вопросов несомненно несложно. Очень нередко, ответы возможно отыскать на официальных веб-сайтах данных учреждений.
#9361 Charlesgunnyhttp://filmkachat.ru
1×slot казино зеркало
Только выполнив все условия отыгрыша и дождавшись завершения проверки аккаунта, Вы можете оформить заявку на вывод средств и получить свои деньги.Фриспины без депо или дополнительные средства помогут поближе познакомиться с игровой платформой и её функциями. За счёт презентов возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям ради забавы против живых крупье. <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> Риск-игра по одинаковым шансам – Также казино возможность запрещать исполнять условия по отыгрышу за раунда на удвоение, который предлагается в слотах, видео-покере и неких других играх.Баланс игрока дополняется на подходящую необходимую. К ней используется вейджер, обозначенный в правилах акции. Вывести выигрыш можно будет в того, как пользователь сделает требуемый размер ставок из личных средств. В редких случаях бездеп трудится в формате Free Play. На счет пользователя зачисляется большая сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по окончании этого периода сумма на счету будет превосходить изначальную, то разность возможно будет вывести или применять для последующих ставок. <a href=http://kwba.or.kr/bbs/board.php?bo_table=menu0406&wr_id=429829>http://kwba.or.kr/bbs/board.php?bo_table=menu0406&wr_id=429829</a> Акции, приуроченные к календарным дням, случаются рассчитаны как на всех юзеров, так и на категории: примеру, подарок на 8 марта девушкам-игрокам или мужчинам на 23 февраля.Бездепозитный приз за регистрацию в казино — это стартовый презент повторяющий денежного начисления или даровых вращений для новых игроков заведения, для получения которого не вносить депозит. казино 1×slots официальный сайт <a href=http://whdf.ru/forum/user/79185/>http://whdf.ru/forum/user/79185/</a> Помните, что любые нарушения правил сведут на нет ваши усилия, и вы скорее останетесь без начисленного вам безвозмездного приза. Всегда изучайте управляла начисления и условия вейджера. По хоть вопросам, на которые вы имеет самостоятельно отыскать ответы, обращайтесь за объясненьям и саппорт.Бонусные средства – маленькая сумма средств для старта в новеньком казино. На бонусные деньги, обыкновенно разрешено играть во все игры, считая слотов с современным джекпотом и игр из раздела exist casino.
1 xslots рабочее зеркало
1×slots официальный сайт зеркало Самые свежие бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды находятся на этой странице. Посетитель имеет оценить условия получения и начать выступать на деньги без внесения депо. При этом игроку важно понимать, на каких критериях и какими способами него вывести приобретенный выигрыш. Для этого нужно расценить перечень присоединенных платежных систем.Для подтверждения электрической почты, просто перейдите по интенсивной ссылке в послании, приобретенном от игрового заведения. <a href=http://dvorec-oktyabr.ru/index.php?subaction=userinfo&user=quizzicalcage70>http://dvorec-oktyabr.ru/index.php?subaction=userinfo&user=quizzicalcage70</a> Бесплатный приз – кредиты, которые онлайн-казино начисляет посетителю, не заставляя его пополнять игровой счет.Только выполнив все обстоятельства отыгрыша и дождавшись окончания ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить средства деньги. скачать 1×slots официальный сайт Чаще всего, известные сервисы, такие как MoneyBookers и WebMoney, еще MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно неотъемлемое верховодило. Финансовые свои выводятся лишь через что, эту платежную систему, коей успех для пополнения депозита. Если же игрок получил бездепозитный покерный бонус, требуется пополнить счет на наименьшую сумму, которая составляет обычно десять $.В случае установленного лимита на необходимую вывода выигрыша с бездепозитного приза, игрок не может исключить больше заявленной суммы.
онлайн казино 1×slots
Создание аккаунта. На веб-сайте казино необходимо открыть регистрационную форму и заполнить порожние поля собственными данными. Иногда на этом этапе требуется показать лишь адресок электронной почты и пароль, хотя почаще бы наполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д.). Нужно свидетельствовать лишь реальные данные, потому впоследствие они будут испытаны.Но есть игорные заведения, которые готовы просто так жертвовать средства на забаву. Для сего довольно создать профиль. Чтобы вывести свой выигрыш, вам сначала необходимо выполнить условия отыгрыша, указанные в условиях получения бездепозитного депозита. <a href=http://sungari.ru/bitrix/redirect.php?goto=http://sharodei-shop.ru/bitrix/redirect.php?goto=http://xn----ctbiclik1a3al0bs.xn–p1ai/bitrix/click.php?goto=https://teletype.in/@urid_pomosh/ob2ThK-s_at>http://sungari.ru/bitrix/redirect.php?goto=http://sharodei-shop.ru/bitrix/redirect.php?goto=http://xn----ctbiclik1a3al0bs.xn–p1ai/bitrix/click.php?goto=https://teletype.in/@urid_pomosh/ob2ThK-s_at</a> Приглашаем делиться мнениями о призах. Это поможет иным юзерам выбирать наиболее выгодные предложения. 1хслотс 1хслотс регистрация перейти на 1×slots Казино выводит средства только на ту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного приза, Вам сначала необходимо восполнить счет. В неких клубах узкий перечень способов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет непосредственно с этих платежных методов, которые доступны для вывода.Бездепозитные призы реальными деньгами, коие возможно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадали.
1 x slots
В интернете слишком количество скриптовых сайтов, коие принадлежат жуликам. Их главная задача – привлечь гэмблеров, пообещав не великодушные презенты, но и солидные выигрыши. Так что некоторые сайты предлагают получить за регистрацию том $1 000. онлайн казино 1×slots <a href=http://silverson.com/?URL=http://salomea.ru/bitrix/redirect.php?goto=http://kids.usafe.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/Mmzd0rhgi64>http://silverson.com/?URL=http://salomea.ru/bitrix/redirect.php?goto=http://kids.usafe.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/Mmzd0rhgi64</a>
зеркло казино 1×slots
Бездепозитные бонусы начисляются лишь один один. Не стоит раскрывать новые аккаунты, дабы получить их повторно. Служба защищенности казино обязательно выявит «левого» участника и перекроет. Если посетитель выполнит нужные требования, отыграет собственную ставку и решит исключить личный выигрыш, то ему нужно учесть, собственно казино непременно потребует предоставить ксерокопии собственных документов, чтобы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные свои вывести не удастся.Главное превосходство спинов – вероятность изучить разные слоты. Также получится насладиться бонусными раундами, испытать удачу в риск-туре и преумножить выигрыш за счёт особых символов. Однако столько игровой процесс заслуживает внимание, ведь чем сосредоточиться на реальном выигрыше. <a href=https://ai.igcps.com/home.php?mod=space&uid=730181&do=profile>https://ai.igcps.com/home.php?mod=space&uid=730181&do=profile</a> 1×slots casino регистрация на сайте Так собственно приготовьтесь дать секретную информацию (пол, возраст, страна проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает не более суток, последствии чего удастся беспрепятственно выводить крупные выигрыши.Фриспины начисляются по конкретной ставке. После их активации игроку нужно запустить разъем и увериться, собственно в нем показываются бесплатные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода в отыгрыша ориентируется оператором и редко превышает 5 000 руб.
<b>Смотреть еще похожие новости:</b>
<a href=http://big.bestforums.org/viewtopic.php?f=7&t=9095>casino 1×slot</a>
<a href=http://nrj.rs.ba/memberlist.php?mode=viewprofile&u=2111>1×slots бездепозитный бонус за регистрацию</a>
<a href=https://melhorlance.com.br/minha-conta/>1×slots зеркало сайта</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для проверки используются сканы паспортов, водительских удостоверений, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь обнаружен в попытке ввести вспомогательный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный перечень. При этой на лицензионной площадке не опасаться свидетельствовать достоверную индивидуальную информацию (шифрование исключает утечку индивидуальных данных).
#9362 buy priligy online in ukhttps://www.fimfiction.net/user/731589/Dapoxetine
How do generic medicines influence the overall pharmaceutical supply chain https://www.fimfiction.net/…9/Dapoxetine sildenafil dapoxetine. Medications and Substance Abuse Recovery – Overcoming Addiction
#9363 Charlesgunnyhttp://filmkachat.ru
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Этот тип приза будет добавлен на Ваш акк последствии удачной процедуры регистрации с внедрением номера аппарата. Если выбрать другой способ сотворения учетной записи, бездеп не будет добавлен на Ваш аккаунт. <a href=http://filmkachat.ru/>1×slots казино зеркало</a> Пoдтвepдить личнocть клиента. Для удачного вывода средств, нужно подтвердить лицо посетителя. Нa этaпe вepификaции пpoфиля, работники службы безопасности обязаны убедиться, что у игрока более один акк. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не может исключить свой выигрыш, если у него будет некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы. <a href=https://justdirectory.org/details.php?id=288953>https://justdirectory.org/details.php?id=288953</a> 1×slots сайт <a href=http://111.t95283ld.bget.ru/user/Frankhandy/>http://111.t95283ld.bget.ru/user/Frankhandy/</a>
1хслотс рабочее зеркало на сегодня
В случае установленного лимита на необходимую вывода выигрыша с бездепозитного бонуса, игрок не может вывести больше заявленной суммы. <a href=http://brilliance.ru/forum/viewtopic.php?f=6&t=36533>1× slots casino зеркало</a> 1×slots на любой вкус как пройти регистрацию Нельзя рассматривать игру на деньги, как вариант заработка. Азартные забавы воспрещены для лиц младше 18 лет. Topcasinobonuses.mobi не является зачинщиком азартных игр. Сайт носит информационный характер.Ещё одно распространённое акционное предложение – привлекательный презент с неблаговидными требованиями. К примеру, клуб сулит $100 в бездепа, хотя с вейджером х80 или х100. Отыграть подобный вейджер практически нереально и потому лучше концентрироваться на более заманчивых акциях. <a href=https://wiki.lacalv.fr/Utilisateur:PetraB285159>https://wiki.lacalv.fr/Utilisateur:PetraB285159</a> Если вы выбрали себе несколько брендов которые вас больше всего полюбились, для постоянной забавы! Таких гемблеров казино очень предпочитает и оценивает, за частую такие игроки становятся VIP игроками заведения, которым часто поступают прибыльные предложения в виде призов, так же туда входит и бездепозитные. 1×slot зеркало рабочее регистрации на телефон придет
1×slot зеркало рабочее этих способов предполагает регистрацию
Для выбора азартного заведения Вы сможете пользоваться перечнем наших казино с призами за регистрацию. На нашем сайте мы опубликовали перечень бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, что часть бонусов неповторимые и доступны лишь для гостей нашего вебсайта по-специальному промо-коду или по оригинальной ссылке. Кроме такого, для каждого приза мы подготовили подробный обзор, в Вы узнаете как получить и отыграть одобрение и как вывести собственный выигрыш с бездепа. <a href=http://mail.newlifekpc.org/bbs/board.php?bo_table=free&wr_id=4170104>http://mail.newlifekpc.org/bbs/board.php?bo_table=free&wr_id=4170104</a> Практически все онлайн казино с бездепозитным бонусом за регистрацию учитывает программку преданности — систему одобрения постоянных посетителей, кот-ая состоит из большого уровней. При достижении игроком очередного значения на его счёт поступает приз. Чем повыше уровень — что, этим щедрее бонус.Частенько новенькие не разумеют, как активировать подарки или исключить 1-ый выигрыш. Для сходственных случаев наша команда описала главные термины – собственно это фриспины, вейджер, как его отыграть, чего необходимо проходить верификацию. 1×slots регистрацию более популярный вариант это
1×slots рабочее зеркало на сегодня
Однако далеко не все ресурсы предлагают своим посетителям бездепозитные призы за регистрацию в казино. В большинстве случаев предусмотрено одобрение на 1-ый депозит в объеме 100–200%. Это замечательная вероятность преувеличить банкролл, прирастить время, проведённое за забавой и шансы сорвать большой куш.У каждого игорного заведения средства правила и условия. Но, дабы получить призы, нужно выполнить стереотипные деяния: <a href=https://forumauthority.com/thread-6604-post-39733.html#pid39733>1×slots casino регистрация на сайте</a> Шаг 4. Активация. Внимательно выучите условия, информацию по ограничениям и сроке деяния бонусного предложения. Разобравшись с правилами, можно активировать приз в личном офисе (иногда ? с внедрением промокода) либо по запросу в саппорт.Вывод выигрыша с бездепозитных призов казино – щедрый подарок от азартных клубов. Но дабы исключить свой доход, нужно выполнить ряд критерий: 1×slots официальный сайт зеркало <a href=http://dedmorozural.ru/users/momentousharbin>http://dedmorozural.ru/users/momentousharbin</a> Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и более. Когда игроку надеется большое фриспинов, администрация возможность разбивать их начисление на количество дней. Бесплатные вращения предоставляются для определенного слота, который указывается в правилах акции.Иногда виде бездепа, казино дарит наименьший приз (до 50 рублей), из-за которого не заморачиваться.
1хслотс рабочее зеркало
Получать информацию о самых выгодных призах можно без неизменного прогноза новостей казино. Мы брали данную задачу на себя и безпрерывно следим за услугами операторов, избирая превосходнейшие из них. В данном разделе собраны последние бездепы, промокоды к ним и условия их активации. Список акций регулярно пополняется. В топ зашли самые свежие бездепозитные бонусы за регистрацию в казино 2020, кратковременные и замкнутые промо. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру прочим аспектам. Если срок деянья промоакции истек, она удаляется из перечня. <a href=http://www.sdcssd.com/home.php?mod=space&uid=59426&do=profile>http://www.sdcssd.com/home.php?mod=space&uid=59426&do=profile</a> Так собственно сможете неустрашимо регистрироваться без всяких размышлений. Фортуна сейчас наверняка на вашей стороне. Не побаивайтесь, ведь следствие какого или ущерба Вам абсолютно не угрожает. С такими бонусами как без пополнения, Вы остаетесь только в плюсе, но не как не в минусе.4. Заберите презент. Чаще всего приз активируется незамедлительно последствии регистрации. Но случаются ситуации, когда нужно зайти в личный офис или написать в службу поддержки. 1×slots регистрация то дальше необходимо пройти
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.home-visa.ru/memberlist.php?mode=viewprofile&u=3536>1хслот зеркало</a>
<a href=http://soumoli.com/home.php?mod=space&uid=24916>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Используйте лучшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из списка ниже, дабы заработать презенты за обычные деяния и уже сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высочайшей отдачей и быстрыми выводами на электрические кошельки.
#9364 Charlesgunnyhttp://filmkachat.ru
1×slots казино зеркало
Но эти рамки не смущают и хайроллеров, поскольку коэффициенты на слотах разрешают рассчитывать на солидные выигрыши, а в некоторых автоматах разыгрывается прогрессивный джекпот. <a href=http://filmkachat.ru/>1×slot зеркало рабочее регистрации на телефон придет</a> Возьми собственный подарок. Чаще всего бонус активизируется незамедлительно последствии регистрации. Но посещают истории, когда надо(надобно) забежать в индивидуальный офис или написать в справочную службу.Не трудно догадаться, что not the slightest down payment bonuses практически никогда не случаются великими. Чаще всего идет о пяти–тридцати баксах (либо эквиваленте этой суммы в другой еденице). <a href=https://bel-mebel.com/forum/user/3610/>https://bel-mebel.com/forum/user/3610/</a> 1×slot рабочее зеркало <a href=https://www.rcfl.com.hk/home.php?mod=space&uid=9038071>https://www.rcfl.com.hk/home.php?mod=space&uid=9038071</a>
1×slots коды
<a href=https://demo.comuni-italiani.it/forum/viewtopic.php?f=9&t=355458>1×slots зеркало</a> 1×slot зеркало рабочее этих способов предполагает регистрацию Фриспины – благотворительные вращения с фиксированной ставкой, коие возможно применять в конкретных игровых автоматах. <a href=https://opensourcebridge.science/index.php?title=%D0%9D%D0%BE%D0%B2%D1%8B%D0%B9%20%D1%81%D0%B5%D1%80%D0%B2%D0%B8%D1%81%20%D0%B4%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B8%20%D0%BF%D0%B8%D1%86%D1%86%D1%8B%20%D0%BD%D0%B0%20%D0%B4%D0%BE%D0%BC%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO>https://opensourcebridge.science/index.php?title=%D0%9D%D0%BE%D0%B2%D1%8B%D0%B9%20%D1%81%D0%B5%D1%80%D0%B2%D0%B8%D1%81%20%D0%B4%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B8%20%D0%BF%D0%B8%D1%86%D1%86%D1%8B%20%D0%BD%D0%B0%20%D0%B4%D0%BE%D0%BC%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO</a> Эффективность бездепов в маркетингового инструмента оценили все операторы. Малоизвестные площадки используют такие промоакции, дабы быстро набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны неизменных гостей. Не все сайты, дающие презенты без депозита, рекомендованы к игре. За симпатичным промоописанием шансы прятаться невыполнимые условия отыгрыша прочие подводные камешки. 1х слот 1хслотс регистрация перейти на 1×slots Так же стоит выделить то, что в любом интернет казино установлен собственный максимальный кешаут на бездепозитный бонус. Как верховодило кешаут — это максимальная сумма средств, которая дешевая для вывода с бездепозитного приза.
1×slots casino зеркало
Получить Бездепозитный приз в интернет казино дело двух кликов. Другой момент, отыграть рекламную и соблюсти верховодила и обстоятельства отыгрыша. Под правилами подразумевается не только вагер, но и лимитирования по максимальной ставке. Мы понимаем, собственно в кино все ставят на зеро и выигрывают. Призываем не делать сходственного. Перед активацией приза прочтите управляла. Узнайте следующие факторы: Условия получения подарка, за регистрацию, за депозит и многое. Ограничения по наибольшей ставке. Зачастую не выше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на месте. Поэтому важно аристократия, в каких играх возможно совершать кратность денежного оборота.Наиболее известные гонорары между гэмблеров – бездепозитные бонусы казино. Это не изумительно, так возможно получить безвозмездные вращения или виртуальные кредиты, и при этом не придётся пополнять счёт, рисковать личностными деньгами. Удастся насладиться разнообразными весельями причем выиграть крупную сумму, избегая серьёзного риска. Но такие рамки не смущают даже хайроллеров, поскольку коэффициенты на слотах позволяют рассчитывать на крупные выигрыши, а неких автоматах разыгрывается прогрессивный джекпот.Иногда в поощрения за регистрацию все выдаваться билеты для участия в турнирах. Условия их проведения очень отличаются, потому мы рекомендуем ознакомиться с каждым предложением отдельно. <a href=https://christinanoto.sites.gettysburg.edu/education/pinaca-synthesis/-----2?t=1725648489058>https://christinanoto.sites.gettysburg.edu/education/pinaca-synthesis/-----2?t=1725648489058</a> Максимальная ставка ? устанавливается в валюте счета и ограничивает объем ставки за раз спин. В случае ее превышения приз имеет быть аннулирован. Также в правилах имеет содержаться запрет на размещение ставок определенного облика, например, по одинаковым шансам в рулетке (словами, на чет либо нечет, красное либо темное и т.д.). 1×slots сайт
1× slots официальный
Если вы облюбовали себе несколько брендов которые для больше всего полюбились, для неизменной игры! Таких гемблеров казино очень предпочитает и оценивает, за частую такие игроки становятся VIP игроками заведения, которым часто поступают выгодные предложения в виде бонусов, так же туда заходит и бездепозитные. скачать 1×slots на андроид мобильная версия <a href=https://dentozone.com/bbs/board.php?bo_table=free&wr_id=1624984>https://dentozone.com/bbs/board.php?bo_table=free&wr_id=1624984</a> Похожим образом трудится третий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения клиента или из-за с получения им VIP-статуса. Подарок предоставляется последствии воззвания в поддержку и ревизии.Какие призы у еще получить кроме бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, каждое интернет казино предлагает игрокам выгодное предложение на 1-ый депо, вы совершаете депо, ваш депо увеличивается в двое либо в в 3, тем самым начать выступать возможно с более крупной суммой, так же не забываем тему вейджер на бонусы.
1×slots казино зеркало
В разделе с бонусами активировать собственный подарок. Найти игры, для коих предусмотрено одобрение и использовать бонус по назначению. Каждая игровая платформа отличается условиями по получению и отыгрышу бездепов. В правилах детально расписаны кратковременные рамки, за коие нужно прокрутить вейджер. Также не забывайте тему наибольший размер ставки и наивысшую сумму выплаты. С иной стороны, чтобы получить бездепозитные призы казино, достаточно израсходовать не более 1 минуты.Бесплатный бонус – кредиты, которые онлайн-казино начислит клиенту, не заставляя его пополнять игровой счет. <a href=http://forums.indexrise.com/user-312199.html>http://forums.indexrise.com/user-312199.html</a> Наш перечень содержит наихорошие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по главным характеристикам:При этой на бонусные свои воспрещается играть в игровые автоматы с прогрессивным джекпотом и забавы из радела live casino. Кроме как, некоторые казино выделяют бездеп на один или несколько конкретных слотов, и в других забавах Вы не можете на их играть. 1×slots зеркало которую указывали при регистрации кстати В бонусную программку многих операторов входят регулярные бездепы. Это пожизненные акции, поощряющие интенсивных постоянных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают неизменные бонусы без депо в обмен на скопленные баллы лояльности.Как только получите бездеп в казино, всё равно не запамятовывайте проверять электронную почту. Некоторые игорные клубы каждый радуют интенсивных гэмблеров приятными бонусами. Чаще всего получить презент можно в преддверии праздника, на денек рождение, за вербование друга. А кроме распространённым бонусом считается надбавка к депозиту. Нужно не пополнить счёт, и азартное заведение увеличит его на 50–100%.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.bedwantsinfo.nl/user-83172.html>1×slots регистрация на 1хслотс</a>
<a href=https://hiddeninthesand.com/forum/viewtopic.php?t=234006>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Самый распространённый из похожих призов, конечно же, бездеп на денек рождения клиента — приз повторяющий фиксированной суммы или фриспинов поступает на счёт игрока, а воспользоваться им возможно протяжении установленного периода времени.
#9365 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasin online
Активация случается за промокодов, коие вводятся в личном офисе последствии регистрации. Среди спецпредложений в перечне Casino.ru находятся неповторимые промокоды, коие доступны лишь посетителям портала. Другие способы начисления средств ? автоматическая активация сразу последствии творения аккаунта и получение подарка по запросу в службу технической помощи. <a href=http://filmkachat.ru/>1×slots регистрация</a> Далее требуется отыграть вагер и исключить выигрыш. Игрокам без навыка крупно повезло, возможность получить 10-ки презентов за одну регистрацию. Если не сумели получить Бездепозитный приз, не беспокойтесь. Обратитесь в интернет чат, оператор поможет исправить.Если вы бывалый игрок, вы обязаны аристократия, собственно бонус без депо – редкая находка. Тем ниже, мы еженедельно изучаем онлайн, чтобы найти для вас наихорошие бездепозитные предложения. <a href=http://anima-rpg.com:/member.php?action=profile&uid=360159>http://anima-rpg.com:/member.php?action=profile&uid=360159</a> Законодательство, регулирующее азартные игры в различных странах, влияние на полномочия операторов. В итоге пользователи из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это имеет быть как полный отказ в доступе, так и невозможность загружать игры отдельных производителей. 1×slots актуальное зеркало <a href=https://521zixuan.com/space-uid-778071.html>https://521zixuan.com/space-uid-778071.html</a>
1×slots зеркало на сегодня
<a href=https://www.kfz-gringer.at/index.php/forum/donec-eu-elit/63543–1×slots#63308>1×slots зеркало проходить регистрацию это отличный вариант</a> 1×slots зеркало этих способов предполагает регистрацию При отыгрыше бонусных средств, нужно учитывать срок деяния приза и время, которое дается на отыгрыш. По истечению заявленного медли, не отыгранный бонус будет аннулирован.Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, all только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. <a href=http://yiseeyou.com/free/422>http://yiseeyou.com/free/422</a> Так что сможете неустрашимо региться без всяких раздумий. Фортуна сегодня наверняка на вашей стороне. Не бойтесь, ведь следствие какого или ущерба Вам абсолютно не угрожает. С такими бонусами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе. 1×slots сайт зеркало Какие призы есть еще получить считая бездепозитного приза за регистрацию в казино? По мимо бездепозитного бонуса, любое интернет казино предлагает игрокам прибыльное предложение на первый депо, вы совершаете депозит, ваш депозит возрастает в двое или даже в 3, что, этим самым начать играть возможно с более солидной суммой, например же не забываем тему вейджер на призы.
1×slots зеркало этих способов предполагает регистрацию
Бонус за регистрацию в казино без депо с выводом средств нужно отыграть. Зачастую для отыгрыша возможность потребоваться устроить ставки на необходимую, в несколько 10-ов раз превышающую сумму приза либо выигрыша. Не стоит незамедлительно же открещиваться от приветственных даров в сходственных казино. Администрация готова начислить деньги либо фриспины, хотя сначала сотрудники обязаны увериться, что вы не мошенник. Дело в, что развелось очень количество охотников за призами. Они научились дурачить систему и зарабатывать крупные суммы средств. <a href=http://sztkom.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=http://maps.google.mg/url?q=http://xn----8sbgg2adrjdfo3a0a5l.xn–p1ai/bitrix/redirect.php?goto=https://telegra.ph/Ponimanie-stoimosti-notarialnyh-uslug-09–24>http://sztkom.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=http://maps.google.mg/url?q=http://xn----8sbgg2adrjdfo3a0a5l.xn–p1ai/bitrix/redirect.php?goto=https://telegra.ph/Ponimanie-stoimosti-notarialnyh-uslug-09–24</a> Но на азартных платформах похожие вознаграждения все получить и уже зарегистрированные юзеры. В этом случае, призы предоставляются в оригинальных промоакций либо же неким геймерам в виде акционного предложения, которое приходит на почту с целью «вернуть» игрока в свое казино. 1× слот зеркало Размер ставки для забавы по бездепозитному бонусу (естесственно же, когда, когда он представлен вид бонусных денежных средств) зачастую ниже, чем при игре на депо. Ограничение будет работать до момента отыгрыша приза.
1×slots зеркало сайта
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=238218>1×slots промокод при регистрации 2025</a> Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. Подарки на дни ? посвященные торжественным датам, требующие символического отыгрыша либо начисляются без того. Могут дариться игрокам сутки рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду. 1×slots актуальное зеркало <a href=http://droid-comz.ru/user/DonaldGreet/>http://droid-comz.ru/user/DonaldGreet/</a> В каждом казино с бездепозитным призом учтены вейджеровые условия. Это единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, нужно сделать определённое количество ставок. Чем круче приз, что, этим труднее выполнить условия, и наоборот.Акционные предложения от казино существуют в разных форматах. Часто бонусы даются в обмен на депозит. Игрок вносит платеж и получает деньги, бесплатные вращения и другие поощрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — вид приза, кот-ый гарантирован за исполненье определенных действий на веб-сайте:
1×slots казино зеркало
В истинное время получить приз за регистрацию в казино довольно просто. Почти каждый игорный жилище с радостью даст деньги или благотворительные вращения. Многие игроки пользуются данным и не смущяются регистрироваться в каждом клубе с выгодными условиями. Кстати, это замечательная вероятность придумать выигрышную тактику и сорвать куш.Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации дара необходимо доказать электронную почту и привязать телефон; <a href=http://lnx.hotelresidencevillateresaischia.com/casamicciola/index.php?option=com_k2&view=itemlist&task=user&id=449117>http://lnx.hotelresidencevillateresaischia.com/casamicciola/index.php?option=com_k2&view=itemlist&task=user&id=449117</a> Любой выигрыш по ставке повыше установленного лимита будет считаться недействительным. То есть ставка не несомненно засчитана при отыгрыше, в случае выигрыша его сумма не поступит на счёт посетителя — итог игры будет всецело аннулирован.Какие призы возможность еще получить не бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного приза, любое онлайн казино предлагает игрокам выгодное предложение на 1-ый депозит, вы совершаете депо, ваш депо увеличивается в двое либо том в трое, тем наиболее начать выступать возможно с больше солидной суммой, так же не забываем про вейджер на призы. 1×slots регистрация 1×slots casino c2d ru Каждая игровая платформа выделяется условиями по получению и отыгрышу бездепов. В правилах детально расписаны временные рамки, за которые нужно прокрутить вейджер. Также не забывайте тему наибольший размер ставки и наивысшую необходимую выплаты. С другой стороны, чтобы получить бездепозитные призы казино, довольно израсходовать не более 1 минутки.Казино выводит средства лишь на ту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного приза, Вам сначала необходимо пополнить счет. В неких клубах узкий перечень способов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет именно с данных платежных методов, которые доступны для вывода.
<b>Смотреть еще похожие новости:</b>
<a href=https://shopcms.vsupport.club/topic/15584–1kladtop-%D0%A0%C2%B7%D0%A0%C2%B0%D0%A1%E2%80%A6%D0%A0%D1%95%D0%A0%D2%91%D0%A0%D1%91-%D0%A0%D0%85%D0%A0%C2%B0-%D0%A1%D0%83%D0%A0%C2%B0%D0%A0%E2%84%96%D0%A1%E2%80%9A-%D0%A0%D1%94%D0%A1%D1%93%D0%A0%C2%B1%D0%A0%C2%B0-%D0%A0%D1%94%D0%A1%D1%93%D0%A0%D1%97%D0%A0%D1%91%D0%A1%E2%80%9A%D0%A1%D0%8A-%D0%A0%D1%96%D0%A0%C2%B5%D0%A1%D0%82%D0%A0%D1%95%D0%A0%D1%91%D0%A0%D0%85-%D0%A0%D1%98%D0%A0%C2%B5%D0%A1%E2%80%9A%D0%A0%C2%B0%D0%A0%D2%91%D0%A0%D1%95%D0%A0%D0%85/?p=94563>1×slots официальный сайт скачать</a>
<a href=https://russiancomputerservice.ru/user/JosephCer/>1×slots регистрация на сайте 1×slots ru com</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но эти рамки не смущают в хайроллеров, потому коэффициенты на слотах разрешают рассчитывать на солидные выигрыши, а в некоторых автоматах разыгрывается прогрессивный джекпот. Вейджер (wager) – это коэффициент, который показывает на какую сумму нужно сделать ставок, чтобы исключить приз из казино. Пример: Вы получили за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода этого приза, Вам необходимо сделать ставок на необходимую: 500*70=3500 рублей. Только всецело отыграв бонус, Вы сможете исключить свой выигрыш.
#9366 Charlesgunnyhttp://filmkachat.ru
1×slots официальный demo регистрация в 1×slots casino
Только выполнив все обстоятельства отыгрыша и дождавшись окончания проверки аккаунта, Вы можете оформить заявку на вывод средств и получить средства деньги.Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. <a href=http://filmkachat.ru/>1×slot рабочее зеркало</a> <a href=https://m1bar.com/user/DavidBex/>https://m1bar.com/user/DavidBex/</a> 1хслот официальный сайт зеркало <a href=https://qashvqt.uz/index.php?subaction=userinfo&user=MiguelHok>https://qashvqt.uz/index.php?subaction=userinfo&user=MiguelHok</a> Бонус в казино без депозита имеет различные варианты: это может быть приветственный бонус, акции в честь каких-то дней или весомых дат, бонус за вербование свежих игроков, преданность и получение VIP-статуса.Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической забавы на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, научится регулировать изменять ставки и линии, исследовать бонусные игры и их выигрышные композиции, да в просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные средства, коие возможно отыграть и вывести, но просто на демо счет, что, этим самым адреналин в крови еще повысится а пульс забьется с нередким ритмом!
казино 1×slots
<a href=http://forum.survival-readiness.com/viewtopic.php?t=253355>1× slots зеркало</a> 1×slots регистрацию более популярный вариант это Такой бесплатный эквивалент средств зачисляется на профиль юзера последствии воплощения притязаний и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений вероятен лишь в воплощения вейджеровых критерий. <a href=http://wdty.org/home.php?mod=space&uid=266016>http://wdty.org/home.php?mod=space&uid=266016</a> казино 1× slots официальный сайт Наши эксперты исследуют условия промоакции, этого в ручном режиме проводят их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и параметры. Мы не рекламируем казино, а даем игрокам информацию о наихороших из них.Подтвердите лицо, предоставив оператору казино средства паспортные данные. Инструкции обыкновенно легкие, главное — четко им стопам. Если написано, собственно «на фото обязаны быть заметны все четыре угла страницы паспорта» — сделайте непосредственно это фото.
1×slots casino регистрация 1×slots review live
Чаще всего казино бонус за регистрацию без депо даёт возможность запустить каждой машина. Но никакого пристально ознакомиться с критериями. Иногда для забавы доступны только определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, никакого начать знакомство с миром азарта непосредственно с «одноруких бандитов». <a href=http://cosmostech.eu/technologyadvances/index.php?option=com_k2&view=itemlist&task=user&id=638212>http://cosmostech.eu/technologyadvances/index.php?option=com_k2&view=itemlist&task=user&id=638212</a> Мы проделываем ударение на ключевых положениях правил, рассказываем о территориальных лимитированиях и вкратце информируем о других промоакциях обсуждаемого казино.Бонус без депо за регистрацию в казино (бездепозитный приз) – это валютный презент от клуба, кот-ый начисляется на акк игрока в регистрации в казино. Кроме творения учетной записи, для получения бездепа, очень часто требуется ещё и доказать контактные данные игрока и/или активировать особый промо-код. 1×slots официальный сайт мобильная версия Фриплей-бонусы. Бонусы за благотворительную забаву есть лишь в неких клубах. Они зачисляются сразу после сотворения профиля и срабатывают недолговременное время. Если у вас нет медли потратить свои, они просто завершатся. Что касается медли, в большинстве случаев призы срабатывают протяжении одного часа.В случае установленного лимита на сумму вывода выигрыша с бездепозитного бонуса, игрок не может вывести больше заявленной суммы.
1×slots casino регистрация 1×slotscasino09k online
1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, случае не желайте стать жертвой плутов или впустую израсходовать время;Однако в условиях исчезают «подводные камни», коие не разрешат вывести солидную необходимую или же вы не успеете отыграть вейджер. Поэтому мастера советуют арестовать благотворительные вращения за регистрацию в казино без депо, дабы поднабраться навыка и получить настоящий шанс на победу. Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают бонус по странам. Вплоть до того, собственно клуб возможность себя игроков из Вашей государства, а бездеп мешает. 1×slots коды <a href=https://speakerdeck.com/kalinka0588>https://speakerdeck.com/kalinka0588</a> В бонусную программку множества операторов входят регулярные бездепы. Это бессрочные промоакции, поощряющие активных неизменных игроков. Популярный формат — раздача фриспинов по конкретным дням недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депозита в мена на накопленные баллы преданности.Но а в вы уже профи по интернет казино, кликаем на красноватую кнопку «Получить» и Вы автоматически перейдете в интернет казино;
1×slot официальный сайт
Раздача бонусов имеет быть посвящена разным датам: календарные праздничные, деньки рождения игроков, годовщина открытия казино и т. Д. Подарок выдается в виде денег, фриспинов либо баллов для накопления и размена на услуги оператора. Если пользователь получает выигрыш, деньги начисляются на его счет. Для вывода этой суммы придется выполнить ряд требований.Осталось выбрать казино с бонусом за регистрацию и создать профиль. После активации подарка выигрыш находится от Фортуны и навыков. <a href=http://veda.adrian.ru/doku.php?id=Выкуп_авто>http://veda.adrian.ru/doku.php?id=Выкуп_авто</a> Но есть азартные заведения, готовые просто так вручить деньги на игру. Для сего довольно сделать профиль. Чтобы исключить выигрыш, сначала нужно выполнить вейджеровые условия, прописанные в критериях получения бездепа. 1× slots casino официальный сайт Если простыми текстами, бездепы – это определённая сумма средств или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать подарки. Но есть кое-какие нюансы. Существуют игорные дома, коие перед тем как начислить бонусы настоятельно привязать телефон, предоставить копии документов.Возможность поиграть вспомогательное состязание (а иногда и количество) абсолютно бесплатно, а выигрыш, же, поступает на счёт игрока.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.cvetq.info/memberlist.php?mode=viewprofile&u=17326&sid=cc32616ca2fbe8be0b2c0709dc49ac36>1×слотс казино</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке необходимо пополнить счет в казино. Для депозитных бонусов, данная процедура не необходима, например как депозит уже изготовлен.
#9367 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало
Если при регистрации указать промокод, возможно гарантировано получить приз. Где брать ваучер? Посетите тематику блоги либо форумы. Иногда администрация клуба проделывает рассылку ваучеров на электронную почту. В последнее время игорные дома начали рекламироваться в кинокартинах и телесериалах. Присмотритесь и скорее заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных руб. <a href=http://filmkachat.ru/>1×slots казино зеркало</a> Условия шансы разниться друг от друга. Но такой приз возможность быть применен только для игрового процесса – приобретенные на счет финансы до того, как будут отыграны, исключить невероятно. <a href=https://valetinowiki.racing/index.php?title=%D0%91%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%88%D0%B5%D1%84-%D0%BF%D0%BE%D0%B2%D0%B0%D1%80%D0%BE%D0%B2%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!>https://valetinowiki.racing/index.php?title=%D0%91%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%88%D0%B5%D1%84-%D0%BF%D0%BE%D0%B2%D0%B0%D1%80%D0%BE%D0%B2%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!</a> 1×slots казино мобильная версия <a href=https://forum.fne82.org/profile.php?id=523195>https://forum.fne82.org/profile.php?id=523195</a> Некоторые клубы автоматически начисляют приз на аккаунт игрока в исполнения условий получения, хотя случаются истории, когда приз нужно активировать игроку самому. Есть некоторое способов активации приза:Новые клиенты онлайн-казино без первого депо шансы выяснить собственную удачливость. К что, этому же есть возможность конвертировать бездепы в настоящие средства за регистрацию в казино, однако для этого приз нужно отыграть сообразно условиям промоакции.
1хслотс регистрация в 1×slots casino
Так же стоит выделить то, что в каждом интернет казино установлен собственный наибольший кешаут на бездепозитный бонус. Как правило кешаут — это предельная сумма средств, кот-ая доступная для вывода с бездепозитного приза.В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с бесплатных вращений. Прибыль, которую Вы заработаете на таком бездепе возможно ставить на вывод без какого либо отыгрыша. 1×slots официальный зеркало рабочее Приглашаем делиться суждениями о призах. Это поможет другим юзерам подбирать более выгодные предложения. <a href=https://www.buhgalteria.ru/forums/user/79271/>https://www.buhgalteria.ru/forums/user/79271/</a> Так что сможете смело региться без всяких раздумий. Фортуна сейчас точно на вашей стороне. Не опасайтесь, так следствие какого или убытка Вам абсолютно не грозит. С такими призами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе.Чаще всего используются коды. Их нужно заносить в особые окошки регистрационной анкеты, если идет о пригласительных призах, или в определенном разделе личного офиса игрока. 1×slots casino зеркало рабочее В случае установленного лимита на необходимую вывода выигрыша с бездепозитного приза, игрок не сможет вывести больше заявленной суммы.Исходя из сего, просто не существует разумных оснований махнуть рукою на получение такого приза при регистрации. И, не, на подобный безвозмездной базе у вас все шансы выиграть средства и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, называют безвозмездными интернет платформами для игр.
1×slots рабочее зеркало
Прибывшие на аккаунт финансы бездепозитные призы предназначаются, в, лишь для новоиспеченных пользователей, коие ранее не имели собственного аккаунта в данном казино. Исходя из сего, случае ранее у игрока был изготовлен депозит, то, по всей вероятности, у него больше не несомненно способности рассчитывать на получение такого приза в определенном заведении. Представьте момент, когда при ставке в 10 руб. Вы получите схожее умножение. Миллион руб. За одно вращение, что вполне вполне. Поэтому вопрос, сколько возможно выиграть остаётся не. Предлагаем проверить самостоятельно. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный бонус и инспектируйте фортуну в деле. Разумеется, вывести средства не так просто. Однако шансы есть у всех. <a href=https://forum.skymso.top/home.php?mod=space&uid=113156&do=profile>https://forum.skymso.top/home.php?mod=space&uid=113156&do=profile</a> Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом прибыли присутствуют на этой страничке. Посетитель может расценить условия получения и начать играть на деньги без внесения депозита. При этом игроку важно понимать, на каких условиях и какими методами возможность исключить приобретенный выигрыш. Для сего необходимо оценить перечень подключенных платежных систем. зеркло казино 1×slots За счёт спинов выйдет запустить разные онлайн слоты, протестировать стратегии и поднабраться опыта. Фишка что, собственно вращения начисляются на лучшие аппараты с уникальными опциями и высочайшей отдачей. Не запамятовывайте, собственно в любом акционном предложении учтены специальные притязания – кратковременные ограничения, наибольший размер ставки, перечень дешевых игр.Новички не обожают сразу же заносить депозит. Это обусловлено отсутствием навыка и недоверием. К счастью, в можно получить бездепозитный бонус за регистрацию в казино. Неважно собственно начисляет система – фриспины или кредиты. В всяком случае вы не рискуете своими сбережениями. Это замечательная возможность запустить приглянувшийся видео разъем или же испытать фортуну в настольных забавах.
1×slots регистрация на сайте 1×slots ru com
Да, у безвозмездных призов есть дефекты. Прежде всего, они обыкновенно маленькие. Кроме того, условия вейджера по ним всегда строгие. Но все же неимение риска проделывает их очень привлекательными для посетителей. Бездепозитные призы за регистрацию считаются одним из самых знаменитых способов привлечения новых игроков в онлайн-казино, поэтому что они деют игрокам вероятность опробовать казино, более игровые автоматы, и возможно, выиграть настоящие средства.Чтобы без убедиться в превосходстве бездепозитных призов, довольно зарегистрироваться в казино и получить одобрение. Для казино, работающих интернет, бездепозитные призы необходимы для привлечения новых посетителей. Предложение сыграть на слотах без надобности внесения настоящих денег — работающий метод для повышения интереса к компании. После отыгрыша бездепа великоват шанс, собственно игроку понравится и он продолжит выступать в казино, только сейчас уже на личные деньги.Таким образом онлайн казино получает потенциального игрока. Возможно в или подлинном он захочет сыграть на средства деньги. Так работают бездепозитные бонусы в интернет казино. Здесь хорошо подходит выражение, благотворительные сыр случается только в мышеловке. Начинающие игроки могут не обдумывать опасность пыла. Однако с осознания делается больше. Это тема для отдельного обсуждения. 1×slots сайт <a href=http://bestauto86.ru/index.php?subaction=userinfo&user=hurtnylons70>http://bestauto86.ru/index.php?subaction=userinfo&user=hurtnylons70</a>
1×slots casino регистрация 1×slotscasino09k online
Подтверждение индивидуальной информации. Все казино требуют от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и присутствие у юзера других аккаунтов (мультиаккаунт запрещен). Иногда виде одобрения за регистрацию имеют выдаваться билеты для роли в турнирах. Условия их проведения довольно выделяются, потому мы рекомендуем ознакомиться с любым предложением отдельно. <a href=http://forum.changeducation.cn/home.php?mod=space&uid=947276&do=profile&from=space>http://forum.changeducation.cn/home.php?mod=space&uid=947276&do=profile&from=space</a> скачать 1×slots официальный сайт Некоторые онлайн-казино без депозита предлагают свежим посетителям избрать приз при регистрации. Будьте внимательны: выбрав раз, вы в безоговорочном большинстве случаев не можете пользоваться остальными.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=821619#pid821619>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=127681>1× slots зеркало</a>
<a href=http://forums.panzergrenadiers.com/showthread.php?22685-%D0%A1%D0%83%D0%A0%D1%94%D0%A0%C2%B0%D0%A1%E2%80%A1%D0%A0%C2%B0%D0%A1%E2%80%9A%D0%A1%D0%8A-1×slots-%D0%A0%D0%85%D0%A0%C2%B0-%D0%A0%C2%B0%D0%A0%D0%85%D0%A0%D2%91%D0%A1%D0%82%D0%A0%D1%95%D0%A0%D1%91%D0%A0%D2%91-%D0%A0%D1%98%D0%A0%D1%95%D0%A0%C2%B1%D0%A0%D1%91%D0%A0%C2%BB%D0%A1%D0%8A%D0%A0%D0%85%D0%A0%C2%B0%D0%A1%D0%8F-%D0%A0%D0%86%D0%A0%C2%B5%D0%A1%D0%82%D0%A1%D0%83%D0%A0%D1%91%D0%A1%D0%8F&p=503136#post503136>скачать 1×slots на андроид мобильная версия</a>
<a href=https://forums.scar-divi.com/topic/579013–1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%BF%D0%B5%D1%80%D0%B5%D0%B9%D1%82%D0%B8-%D0%BD%D0%B0–1×slots/>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепы с безвозмездными вращениями предоставляют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд платит казино. Число спинов ограничено и изредка превышает сотню. Если промоакция включает в себя количество бесплатных игр, их начисление возможность быть разбито на несколько дней.
#9368 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на сайте
Возьми собственный подарок. Чаще всего приз активируется незамедлительно в регистрации. Но бывают ситуации, когда надо(надобно) забежать в личный офис либо написать в справочную службу.В бонусную программу многих операторов входят регулярные бездепы. Это бессрочные акции, поощряющие активных неизменных игроков. Популярный формат — раздача фриспинов по определенным дням недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депо в мена на накопленные баллы преданности. <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino09k online</a> Все любят получать подарки. Согласитесь, практически каждый играющий человек несомненно сильно рад, в получит даровой презент для забавы в интернет казино просто за регистрацию либо же бонус за внесенный депо, например нарекаемые приветственные призы для свежих игроков. Соответственно такие онлайн клубы будут больше популярны и предпочтительны у игроков при выборе казино для забавы. Топ казино постоянно обновляется и прибавляются свежие и увлекательные игровые клубы с привлекательной бонусной политикой и всеми возможными прерогативами, к коим относятся эти призы как фриспины за регистрацию, валютные бездепозитные бонусы, а также щедрые призы за внесенный депозит.Так что приготовьтесь предоставить конфиденциальную информацию (пол, возраст, государство проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает менее суток, после чего получится беспрепятственно выводить солидные выигрыши. <a href=https://babyrr.com/forum/User-DavidRex>https://babyrr.com/forum/User-DavidRex</a> Бездепозитные бонусы отличный вариант безвозмездной забавы в игровые автоматы. Многие юзеры сети не понимают, что в казино возможно начать выступать безусловно безвозмездно, а позже вывести выигрыш на банковскую карту или электрический кошелек, иные не доверяют онлайн казино, а третьи успешно играют и выигрывают – и тотчас достаточно великие суммы. 1хслот зеркало сайта <a href=https://globalseoul.co.kr/bbs/board.php?bo_table=free&wr_id=173973>https://globalseoul.co.kr/bbs/board.php?bo_table=free&wr_id=173973</a> В лицензионных бездепозитных казино играть в азартные игры вправду неопасно. Наличие лицензии одобряет тот прецедент, собственно клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP.Онлайн гемблинг развивается с каждым деньком больше и больше, новые бренды создаются не по денькам а по часам. Новые онлайн казино делают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и что, этим наиболее предлагают бездепозитные бонусы за регистрацию, собственно бы не упустить эту вероятность — как воспользоваться новым бездепом, рекомендуем навещать наш сайт как можно почаще, самое лакомое и свежие будет добавляться в этом же перечне.
1×slots на любой вкус как пройти регистрацию
При отыгрыше бонусных средств, нужно учитывать срок деяния приза и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный бонус несомненно аннулирован.Хотя благотворительные бонусы начисляются без депо, не исключено, собственно вам придется заносить деньги. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только в такого, как новый заказчик впервые пополнит игровой счет. зеркло казино 1×slots <a href=https://magical.co.kr/bbs/board.php?bo_table=free&wr_id=47312>https://magical.co.kr/bbs/board.php?bo_table=free&wr_id=47312</a> 1×слотс казино
1×slots зеркало сайта
В основном случаев безвозмездные бонусы начисляются в кредитах, коие невозможно незамедлительно вывести со счета. Прежде их нужно отыграть по установленным правилам. Эти притязания принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже. Воспользоваться бездепом возможно не во всех игровых автоматах: казино и тут уточняет ограничение для посетителей. Конечно, это можно счесть неким неудобством для игрока, хотя ради стоит отметить, что выбор автоматов всё равно остаётся достаточно наибольшим. <a href=https://stomping-groundz.com/index.php?action=profile;u=2945>https://stomping-groundz.com/index.php?action=profile;u=2945</a> Прямо в арестуйте безвозмездные вращения за регистрацию без депозита и начинайте коллекционировать призовые комбинации ради солидных выигрышей! 1×slots акции Создание аккаунта. На сайте казино необходимо обнаружить регистрационную форму и заполнить пустующие поля личностными данными. Иногда на этом этапе потребуется указать лишь адресок электронной почты и пароль, но чаще хотелось наполнить анкету индивидуальной информацией (ФИО, дата рождения, место проживания и т.д. ). Нужно свидетельствовать только настоящие данные, потому впоследствие они станут проверены.
1хслотс официальный сайт зеркало
Акции, приуроченные к календарным дням, случаются рассчитаны как на всех юзеров, так и на категории: примеру, подарок на 8 марта девушкам-игрокам или мужчинам на 23 февраля. Популярность интернет казино растёт и всё больше юзеров начинают интересоваться азартными забавами. Бездепозитные бонусы 2022 года, это оригинальные подарки за регистрацию. С их помощью свежие игроки имеют получить безвозмездные вращения или деньги на баланс за 1 регистрацию. С в игорных заведений в интернете, бездепозитные бонусы стали известнейшим способом вербования игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о которых мы расскажем. Наш вебсайт собрал превосходнейшие предложения из онлайна на 2022 год. Воспользуйтесь каким презентом и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить условия.Необходимость отыгрыша. Вейджер в выше, чем для бонусов за депо. И же средства не отыграны, вывести их нельзя. Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых свежих, великодушных и испытанных призах в онлайн казино, которые обновляются любой денек. 1× slots сайт <a href=https://cursos.fixtech.com.br/forum/member.php?action=profile&uid=16659>https://cursos.fixtech.com.br/forum/member.php?action=profile&uid=16659</a>
1×slots casino регистрация
Баланс игрока дополняется на соответствующую необходимую. К ней применяется вейджер, указанный в правилах акции. Вывести выигрыш возможно будет в как, как юзер сделает требуемый объем ставок из личных средств. В редчайших случаях бездеп работает в формате Free Play. На счет пользователя зачисляется крупная сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по окончании этого периода сумма на счету несомненно превышать первоначальную, то разность можно несомненно вывести либо использовать для последующих ставок.В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, необходимо адресоваться в службу через лайв-чат на сайте казино. <a href=http://ukrelektrokabel.info/index.php?subaction=userinfo&user=smellyordinance>http://ukrelektrokabel.info/index.php?subaction=userinfo&user=smellyordinance</a> Вознаграждения за получение VIP-статуса ? начисляются в программы лояльности при достижении очередного значения или выдаются персонально менеджерами службы поддержки.Активация случается с помощью промокодов, коие вводятся в личном кабинете последствии регистрации. Среди спецпредложений в списке Casino.ru содержатся эксклюзивные промокоды, которые доступны только посетителям портала. Другие способы начисления средств ? автоматическая активация незамедлительно в творенья аккаунта и получение подарка по запросу в службу технической помощи. 1хслот скачать Шаг 4. Активация. Внимательно исследуйте обстоятельства, информацию по лимитированиям и сроке деянья бонусного предложения. Разобравшись с правилами, можно активировать приз в личном офисе (время ? с внедрением промокода) или по запросу в саппорт.
<b>Смотреть еще похожие новости:</b>
<a href=https://praisenpray.org/forums/showthread.php?tid=95471>1×slots регистрация на официальном сайте</a>
<a href=https://forum.dis-course.net/memberlist.php?mode=viewprofile&u=37238>1×slot рабочее зеркало</a>
<a href=https://fougerite.com/threads/1×slots-zerkalo-videli-takuju-registraciju-na.12526/>1×slots зеркало видели такую регистрацию на</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Демоказино есть практически на любом веб-сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются веско реже: там если, тогда, выигрыша и соблюдения условий акций бездеп можно превратить в настоящие деньги.
#9369 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт, скачать
Мы собрали и выпустили перечень наихороших бездепозитных казино с призами за регистрацию, коие гарантируют великодушные выигрыши и моментальные выплаты.B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax <a href=http://filmkachat.ru/>зеркала 1×slots</a> <a href=https://xn–80ae1aidok.xn–p1ai/users/juvenilefuzz35>https://xn–80ae1aidok.xn–p1ai/users/juvenilefuzz35</a> Бывают ли бездепозитные бонусы без вейджера? Бывают, в у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино. 1хслот официальный сайт зеркало <a href=http://www.god123.xyz/home.php?mod=space&uid=1082224>http://www.god123.xyz/home.php?mod=space&uid=1082224</a> Получить Бездепозитный приз в онлайн казино дело 2-ух кликов. Другой момент, отыграть рекламную и соблюсти правила и обстоятельства отыгрыша. Под правилами предполагается не вагер, хотя и ограничения по максимальной ставке. Мы осознаем, собственно в кино все ставят на зеро и выигрывают. Призываем не создавать похожего. Перед активацией приза прочтите управляла. Узнайте последующие факторы: Условия получения презента, за регистрацию, за депозит и многое. Ограничения по наибольшей ставке. Зачастую не повыше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах возможно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на пространстве. Поэтому главно аристократия, в каких забавах можно совершать кратность денежного оборота.Зачастую бездепозитные бонусы казино для игры предлагаются различными заведениями азартных игр виде маркетинговых промоакций или в целях привлечения к себя свежих игроков. Для бездепозитных призов в казино 2022 геймеру не нужно пополнять счет до этапа вывода желаемых средств.
1×slots регистрация на сайте 1×slots ru com
Главное превосходство спинов – возможность выучить разные слоты. Также удастся насладиться бонусными раундами, испытать удачу в риск-туре и преувеличить выигрыш за счёт особенных знаков. Однако столько игровой процесс заслуживает внимание, так превосходнее сосредоточиться на реальном выигрыше.3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать аппарат либо почту, указать персональную информацию; 1×slots регистрация <a href=http://turkteam.10tl.net/member.php?action=profile&uid=1325>http://turkteam.10tl.net/member.php?action=profile&uid=1325</a> Чаще всего казино бонус за регистрацию без депо даёт вероятность запустить каждой машина. Но никакого внимательно ознакомиться с условиями. Иногда для забавы доступны только определённые модели. Если вы новичок и ничего не смыслите в гэмблинге, другого начать знакомство с миром азарта именно с «одноруких бандитов». 1×slots зеркало сайта
1×slots зеркало подтвердит вашу регистрацию если говорить
Да, у бесплатных бонусов есть дефекты. Прежде всего, они обыкновенно не. Кроме такого, условия вейджера по ним постоянно жесткие. Но все отсутствие риска проделывает их очень красивыми для клиентов. <a href=https://bybak.com/home.php?mod=space&uid=2732861>https://bybak.com/home.php?mod=space&uid=2732861</a> Размер бонусов почаще всего чисто условный и не превышает 50 руб. Приятно, хотя ощутимым бустом деле вряд ли будет. 1×slot зеркало рабочее этих способов предполагает регистрацию Следует выделить, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом.В разделе с призами активировать свой презент. Найти игры, для которых предусмотрено поощрение и применять приз по предназначению.
1×slots мобильная версия войти казино
Размер бонуса. В качестве бездепов обыкновенно начисляют не суммы, а когда речь о призах за депо, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино могут подарить игроку до 2000$. Верификация аккаунта. Лучше доказать личность сразу последствии регистрации, дабы позже не было заморочек с выводом средств. Верификация имеет проходить 2-мя способами:Бездепозитные призы – это исключительно небезинтересная и наиболее перспективная промоакция интернет-казино. Они том другого, как фри-спинов, поэтому что выплаты в даровых вращениях не гарантированы, так комбинации на барабанах игрового аппарата шансы не сложиться. Представленные на данной странице наихорошие бездеп бонусы в казино за регистрацию в 2022 году имеют оптимальные условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, в гости Casino.ru могут сортировать список по нескольким критериям: по сумме, вейджеру, наибольшей сумме вывода и т.д.Когда идет о получении бездепозитных бонусов в казино, в первую очередь направьте на последующие обстоятельства: 1×slots регистрация 1×slots casino c2d ru <a href=http://slideshow-forum.com/profile.php?id=98838>http://slideshow-forum.com/profile.php?id=98838</a> 3. Подтвердить данные. В зависимости от клуба, нужно привязать телефонный либо почту, указать индивидуальную информацию;
1хлот регистрация в 1×slots casino
Вейджер менее х30–35 считается применимым. Опытные игроки утверждают, собственно с этим вейджером реально остаться в плюсе, случае верно подойти к выбору игрового аппарата.Зарегистрироваться в казино по особой ссылке или с бонусным кодом. Подтвердить контактные данные (номер аппарата и электронную почту). Для подтверждения номера телефона необходимо в личном профиле указать свой номер и надавить кнопку „Подтвердить номер телефонного“, далее Вы получите sms-сообщение с кодом, который нужно ввести в соответствующее фон. Для подтверждения электронной почты, перейти по активной ссылке в письме от казино. <a href=https://www.formulersupport.com/User-Forsedropmn>https://www.formulersupport.com/User-Forsedropmn</a> Например, игрок получил 500 рублей при создании аккаунта и обязан отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., понадобится устроить 875 спинов для полного отыгрыша. 1 xslots рабочее зеркало В разделе с призами активировать свой подарок. Найти забавы, для которых учтено одобрение и использовать бонус по назначению.Заработать на бездепозитных призах за регистрацию в казино может каждый юзер, достигший совершеннолетия.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.cvetq.info/memberlist.php?mode=viewprofile&u=17326>1хслотс регистрация в 1×slots casino</a>
<a href=https://creapnl.com/foros/tema/1×slots-%d1%80%d0%b0%d0%b1%d0%be%d1%87%d0%b5%d0%b5-%d0%b7%d0%b5%d1%80%d0%ba%d0%b0%d0%bb%d0%be-%d0%bd%d0%b0-%d1%81%d0%b5%d0%b3%d0%be%d0%b4%d0%bd%d1%8f-82/>1×slots рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Также бездепозитные бонусы шансы работать методом возвращать к игре посетителей, пока приостановивших своё сотрудничество с компанией: уведомление о бездепе поступает на мобильный телефон либо почту. Онлайн-казино с бездепозитными бонусами ставят посетителям обстоятельства для использования бездепами, потому перед участием в промоакции лучше тщательно ознакомиться со всеми правилами и нюансами промоакции. Условия могут прикасаться получения бонуса, его применения и последующего вывода денежных средств когда выигрыша.
#9370 SelectorCasinohttps://selector-casino-apk.ru/selector-na-androjd
<a href=https://selector-casino-apk.ru/selector-na-androjd>http://www.selector-casino-apk.ru/selector-na-androjd</a>
Установить приложение казино Selector – играй сегодня! <a href=https://selector-casino-apk.ru/selector-na-androjd>https://selector-casino-apk.ru/selector-na-androjd</a>
#9371 Charlesgunnyhttp://filmkachat.ru
1×slots сайт зеркало
Доступные игры – В некоторых азартных играх можно понизить математическое превосходство казино до нескольких 10-х процента. В их числе все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как верховодило, в этих забавах ставки идут в зачет вейджера не полностью. Например, имеет предусматриваться только 50%. В неких играх бездепозитные бонусы вообще невозможно отыгрывать.Нельзя осматривать забаву на средства, как вариант заработка. Азартные игры воспрещены для лиц моложе 18 лет. Topcasinobonuses.mobi классифицируется организатором азартных игр. Сайт одевает информационный характер. <a href=http://filmkachat.ru/>1×slot официальный сайт</a> Мы собрали и опубликовали список наилучших бездепозитных казино с бонусами за регистрацию, которые гарантируют великодушные выигрыши и моментальные выплаты.Подобные призы без депо предоставляются на больше выгодных условиях. Зачастую они крупнее, а обстоятельства отыгрыша наименее строгие. <a href=https://www.0574snyw.com/space-uid-185878.html>https://www.0574snyw.com/space-uid-185878.html</a> Обыкновенные бездепозитные призы в размере от 3-х до 20 долларов сделаны для того, чтобы в игры заходили все свежие и новые игроки. Здесь, скорее, будет лимитирование на наибольший выигрыш. Важно, дабы перед минимальным вкладом был отключен бонус за 1-ое пополнение счета, и игры не попадет на повторный вейджер. 1× slots официальный <a href=https://latino-forex.com/members/234914-stevenzen>https://latino-forex.com/members/234914-stevenzen</a> Однако далековато не все ресурсы предлагают своим посетителям бездепозитные призы за регистрацию в казино. В большинстве случаев учтено поощрение на 1-ый депозит в объеме 100–200%. Это отличная вероятность преувеличить банкролл, прирастить время, проведённое за игрой и шансы сорвать большой куш.С другой стороны, гораздо легче забрать бездепозитные фриспины за регистрацию в казино и прямо в начать вертеть барабаны в наилучших слотах. Главная необыкновенность спинов никаких, собственно они предназначены для лучших автоматов. Удастся не пройти дополнительные раунды, хотя и прирастить необходимую выигрыша, заработать респины и другие внутриигровые презенты.
1×slots сайт зеркало
<a href=http://forum.l2endless.com/member.php?action=profile&uid=6253>1×slots регистрация 1×slots review live</a> 1×slots casino online регистрация Бездепы обыкновенно предлагают с отыгрышем — моментально исключить выигранные свои невозможно. Перевод денег со счета несомненно вероятен в такого, как юзер выполнит все требования казино, а сумма возможности быть выше установленного правилами лимита. Условиями промоакции фиксируются сроки, на которых клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней после активации.Существуют казино с бонусом за регистрацию, каких очень востребованы фриспины в онлайн казино потом регистрации в определенных играх. Они встречаются и чаще безвозмездных поощрений или классических бонусов в казино без инвестициям. Например, игрок регистрирует счет, на кот-ый начисляются безвозмездные игры, бонус за регистрацию вид даровых фрспинов, вращения в игровом автомате. Во время игрового процесса игры выигрывает настоящие деньги, коие в последствии возможно удачно вывести из заведения на собственную платежную систему. То есть, все шансы исключить свои без рисков собственными финансами. Регистрация, какую геймер получит призы, займет пару минут, а спасибо данному можно прирастить 5 евро поощрений до тыс. И без всяких проблем исключить их. <a href=http://womans-days.ru/user/ZacheryTorge/>http://womans-days.ru/user/ZacheryTorge/</a> 1×слот регистрация в 1×slots casino
1хслотс официальный сайт зеркало
Бонус начисляется игроку незамедлительно последствии регистрации и прохождения верификации в казино и не настятельно от клиента внесения депо. Как управляло, объем приза в сходственном случае достаточно стыдливый, однако дозволяет новеньким познакомиться с игрой без риска настоящими деньгами. <a href=https://gti-club.ru/forum/member.php?u=419479>https://gti-club.ru/forum/member.php?u=419479</a> 1×slots casino зеркало рабочее Для всех бездепозитных призов функционирует максимальный лимит на выигрыш. Он указывает максимальную необходимую, которую вас получить, играя на бонусные кредиты. Как лишь вас получится выполнить притязания вейджера, возможный максимально будет переведен с бонусного счета на ведущей, а остаток будет списан.Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного приза.
1×slots актуальное зеркало
1×slots зеркало проходить регистрацию это отличный вариант <a href=https://bestnet.ru/support/forum/index.php?PAGE_NAME=profile_view&UID=139662>https://bestnet.ru/support/forum/index.php?PAGE_NAME=profile_view&UID=139662</a> Но разу не забывайте внимательно читать управляла участия в бонусных акциях. Если вы нарушите хотя бы одно условие, позже вы не сможете устроить недоразумение с администрацией.В интернете очень количество скриптовых сайтов, которые принадлежат плутам. Их главная задача – заинтересовать гэмблеров, пообещав не только великодушные подарки, хотя и солидные выигрыши. Так собственно кое-какие сайты предлагают получить за регистрацию и $1 000.
1×slots зеркало видели такую регистрацию на
Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного приза достаточно пополнения баланса и подтверждения личности. В других же клубах, необходимо количество один прокрутить собственный депо.Более солидные предложения встречаются очень изредка. Зачастую они доступны лишь VIP-игрокам. В остальных случаях им наверняка сопутствуют довольно жесткие условия отыгрыша. Также вероятны дополнительные обстоятельства и лимитирования, прописанные в условиях и положения бонусной программы казино. Все безвозмездные бонусы кажутся заманчивыми. Кто же откажется от способности сыграть в онлайн-казино, не рискуя средствами, хотя получая выигрыши. Но далековато не все бездепозитные бонусы в привлекательны для рассудительного клиента. <a href=https://www.walkaholic.me/user/26129-walteroremo>https://www.walkaholic.me/user/26129-walteroremo</a> 1×slots casino регистрация 1×slotscasin online Фриспины. Бесплатные вращения предусмотрены для использования в видео-слотах. Внимательно читайте обстоятельства – они часто выдаются для некоторых машин. В зависимости от клуба вы можете делать определенное число ставок. Кстати, современные игорные дома дают вероятность заводить «одноруких злодеев».
<b>Смотреть еще похожие новости:</b>
<a href=http://miupsik.ru/forums/showthread.php?tid=217086>1× slots сайт</a>
<a href=http://naturetour.ru/communication/forum/messages/forum3/message23792/5489–1×slots-registratsiyu-protsedura-zaymet-vsego-lish?sessid=5e9d0a859742cccd5b8fef0406223e91&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1×slots регистрацию процедура займет всего лишь</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Диапазон ставок, коие вправе сделать игрок, кроме лимитирован. Обычно ставить возможно маленькую сумму — в 10–30 рублей за одно вращение. Для получения депозитного приза необходимо восполнить свой игровой баланс настоящими средствами. Вознаграждение можно получить или при внесении первого депо, либо вид фиксированного процента от внесённых средств. Так или по, бонус поступит на счёт лишь после пополнения.
#9372 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало
Самый распространённый из подобных бонусов, конечно же, бездеп на денек рождения клиента — бонус вид фиксированной суммы или фриспинов поступает на счёт игрока, а воспользоваться им возможно протяжении установленного периода медли. <a href=http://filmkachat.ru/>1× slots casino официальный сайт</a> Условия отыгрыша приза. Если Вы расчитываете заработать на бездепозитном призе, то в первую очередь направьте на велечину вейджера и срок, который дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, тем легче отыграть бонус и вывести выигрыш. <a href=https://kizkiuz.com/user/Davidmix/>https://kizkiuz.com/user/Davidmix/</a> казино 1×slots официальный сайт <a href=http://drop-let.ru/index.php?subaction=userinfo&user=threateningorie>http://drop-let.ru/index.php?subaction=userinfo&user=threateningorie</a>
1×slots зеркало регистрация в 1×slots casino
Практически все интернет казино с бездепозитным бонусом за регистрацию предусматривает программку лояльности — систему поощрения неизменных клиентов, кот-ая состоит из множества уровней. При достижении игроком одного значения на его счёт поступает бонус. Чем повыше степень — что, этим щедрее бонус.Иногда для получения призов нужно связаться с адептами службы. Удобнее всего с ними разговаривать в онлайн-сате, желая от достаточно запроса по электрической почте. 1×slots зеркало <a href=http://ternovka4school.org.ua/user/Williamfus/>http://ternovka4school.org.ua/user/Williamfus/</a> Возможность протестировать новые игры, не рискуя личными своими и создать собственную тактику игры.При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое возможно посвятить ирге в казино. 1×slots казино мобильная версия Бездепозитный приз предоставляется новенькому игроку за конкретные деяния. Часто подарок вид средств либо фриспинов выдается за регистрацию, благодаря чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.Выбирая бесплатный бонус, пристально изучайте правила. Убедитесь, собственно для возможно принимать участие в акции. Уточните, в каких забавах можно выполнять условия вейджера. При необходимости задавайте вопросы представителям саппорта.
казино 1×slots
<a href=http://www.dvorchany.grodno.by/user/CharlesBiofs/>http://www.dvorchany.grodno.by/user/CharlesBiofs/</a> Бездепозитные бонусы в казино без пополнения 2022 — это конкретная сумма денег либо gift spins вращения, коие предоставляются первым гостям за регистрацию на сайте казино вид бездепозитного бонуса, и дает для возможность за счет казино без пополнения опробовать предложения (игр), с последующей прерогативой вывода средств при выполнении всех установленных правил. 1×slots скачать на айфон Также есть онлайн-платформы азартных игр, которые применяют раздачу бездепозитных призов в специальные даты (как для казино, так и для игрока). Помимо сего, действующие геймеры того имеют вероятность получить схожие бонусы за свою деятельность (например, за повышения уровня или за похожие достижения).Более крупные предложения встречаются очень редко. Зачастую они доступны лишь VIP-игрокам. В остальных случаях им наверняка сопутствуют очень жесткие условия отыгрыша. Также возможны дополнительные условия и другие лимитирования, прописанные в критериях и положения бонусной программы казино.
зеркло казино 1×slots
Выбирайте наилучшие благотворительные призы с помощью обзоров на Casinoz – и пусть для сопутствует удача при отыгрыше бонусных кредитов!Так что приготовьтесь дать конфиденциальную информацию (пол, возраст, страна проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает не более суток, в чего получится беспрепятственно выводить солидные выигрыши. <a href=http://forums.panzergrenadiers.com/showthread.php?22948–1%D0%A1%E2%80%A6%D0%A1%D0%83%D0%A0%C2%BB%D0%A0%D1%95%D0%A1%E2%80%9A%D0%A1%D0%83-%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%B7%D0%A0%D1%91%D0%A0%D0%85%D0%A0%D1%95-%D0%A0%C2%B7%D0%A0%C2%B5%D0%A1%D0%82%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%BB%D0%A0%D1%95&p=505310#post505310>1хслотс казино зеркало</a> В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, нужно обратиться в службу спустя лайв-чат на сайте казино.Наиболее популярностью гонорары среди гэмблеров – бездепозитные бонусы казино. Это не дивно, как возможно получить благотворительные вращения или виртуальные кредиты, и при этом не придётся пополнять счёт, рисковать собственными деньгами. Удастся насладиться различными весельями даже выиграть солидную необходимую, избегая серьёзного риска. Но разу не забывайте пристально читать правила роли в бонусных акциях. Если вы нарушите но бы одно условие, позже вы не можете уладить недоразумение с администрацией.Подтвердите личность, предоставив оператору казино свои паспортные данные. Инструкции обыкновенно легкие, основное — конкретно им стопам. Если написано, что «на фото должны быть видны все хорошо угла странички паспорта» — сделайте именно такое фото. 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=http://forum.moderncompany.de/profile.php?lookup=16810>http://forum.moderncompany.de/profile.php?lookup=16810</a> Фриплей-бонусы. Бонусы за бесплатную игру есть лишь в неких клубах. Они зачисляются незамедлительно после творенья профиля и срабатывают недолговременное время. Если у вас нет времени истратить средства, они просто закончатся. Что касается времени, правило бонусы срабатывают протяжении одного часа.Например, игрок получил 500 руб. При твореньи аккаунта и должен отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., потребуется устроить 875 спинов для полного отыгрыша.
1×slots зеркало регистрация то дальше необходимо пройти
Также посещают случаи, когда казино начислит оговоренный приз последствии регистрации нового посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам.Прямо в заберите безвозмездные вращения за регистрацию без депо и начинайте собирать призовые комбинации из-за крупных выигрышей! Как только получите бездеп в казино, всё одинаково не запамятовывайте проверять электронную почту. Некоторые игорные клубы непрерывно веселят интенсивных гэмблеров приятными призами. Чаще всего получить подарок можно в преддверии праздника, на день рождение, за вербование друга. А того распространённым призом является прибавка к депозиту. Нужно более пополнить счёт, и азартное заведение прирастит его на 50–100%. <a href=http://whdf.ru/forum/user/66550/>http://whdf.ru/forum/user/66550/</a> В большинстве заведений сделать это возможно по адресу электронной почты, по номеру телефонного, через социальную сеть либо гугл-аккаунт.Не советуем сломя голову браться за всевозможные предложения получения средств без вложений. Вполне вероятно, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем смотрится на первый взгляд. Альтернативой считается казино приз за депозит. Мы предлагаем вас пару советов, благодаря коим у каждого игрока будет вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств: 1×slot казино зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://check2go.net/author/jameslob/>1×slots регистрация на 1хслотс</a>
<a href=http://www.ihavethepussy.com/de/threads/179214–1×slots-%D0%A0%D1%95%D0%A1%E2%80%9E%D0%A0%D1%91%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A0%C2%B0%D0%A0%C2%BB%D0%A1%D0%8A%D0%A0%D0%85%D0%A1%E2%80%B9%D0%A0%E2%84%96-demo-%D0%A1%D0%82%D0%A0%C2%B5%D0%A0%D1%96%D0%A0%D1%91%D0%A1%D0%83%D0%A1%E2%80%9A%D0%A1%D0%82%D0%A0%C2%B0%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A1%D0%8F-%D0%A0%D0%86–1×slots-casino?p=196739#post196739>1×slots официальный demo регистрация в 1×slots casino</a>
<a href=http://forums.indexrise.com/user-307864.html>1×slots casino зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В онлайне очень много скриптовых вебсайтов, которые принадлежат мошенникам. Их основная цель – заинтересовать гэмблеров, пообещав не щедрые подарки, хотя и крупные выигрыши. Так собственно кое-какие веб-сайты предлагают получить за регистрацию в $1 000. Подарки на дни ? посвященные торжественным датам, требующие символического отыгрыша либо начисляются без того. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду.
#9373 Charlesgunnyhttp://filmkachat.ru
x1 slots регистрация в 1×slots casino
При забаве на бонусные свои воспрещается выступать в игровые автоматы с современным джекпотом и игры из радела exist casino. Кроме такого, кое-какие казино дают бездеп на раз или количество определенных слотов, и в иных забавах Вы не можете на их играть.Перед активацией главно внимательно выучить условия акции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют значение также лимиты ставок при отыгрыше и сроки, протяжении которых можно воспользоваться предложением. Если бездеп обхватывает узкий список игр, рекомендуется узнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с низкими множителями выплат подходят только никаких случае, в оператор не установил взыскательные лимитирования на максимальную сумму ставки. <a href=http://filmkachat.ru/>1хслотс рабочее зеркало</a> Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные способы и расценить особенности, недоступные при этой в демо режиме. Многие новые клиенты переходят в количество постоянных, а оператор получает длительную прибыль.Для верификации аккаунта надо(надобно) дать профессионалам технической помощи отсканированную копию паспорта и счета за коммунальные предложения, еще фотку банковской карты или экрана странички электрического кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для подтверждения личности. <a href=http://service.gepart.su/forum/?PAGE_NAME=profile_view&UID=5273>http://service.gepart.su/forum/?PAGE_NAME=profile_view&UID=5273</a> 1×slots мобильная версия войти казино <a href=http://halcom.cn/home.php?mod=space&uid=123510&do=profile>http://halcom.cn/home.php?mod=space&uid=123510&do=profile</a>
1×slots подтвердит вашу регистрацию если говорить
Для всех бездепозитных призов действует наибольший предел на выигрыш. Он показывает предельную необходимую, коию появится получить, играя на бонусные кредиты. Как только для удастся выполнить требования вейджера, дозволенный максимально будет переведен с бонусного счета на главный, а остаток будет списан. <a href=https://australiantravelforum.com/Upload/showthread.php?tid=189150>1хслотс казино зеркало</a> 1×slots зеркало подтвердит вашу регистрацию если говорить При верном раскладе бездепы — это прекрасный способ выступать на деньги без траты собственных средств. Есть количество рекомендаций, следуя коим можно извлечь максимально полезности из подобных промоакций казино. Играть идет только на лицензированных площадках. Скриптовые веб-сайты не только дурачат с бонусными предложениями, хотя и используют пиратский софт с измененным ГСЧ. Выиграть на этих автоматах нереально. <a href=https://tophatsec.com/forum/member.php?action=profile&uid=6660>https://tophatsec.com/forum/member.php?action=profile&uid=6660</a> 1хслотс рабочее зеркало на сегодня
1×slots регистрация 1×slots casino c2d ru
Бездепозитные призы за регистрацию считаются одним из самых популярных методов привлечения новых игроков в онлайн-казино, потому что они деют игрокам возможность опробовать казино, более игровые автоматы, и вероятно, выиграть настоящие деньги.Самые новые бездепозитные бонусы в казино за регистрацию 2022 года с выводом прибыли находятся на этой странице. Посетитель может расценить условия получения и начать играть на средства без внесения депо. При этом игроку принципиально понимать, на каких условиях и какими методами у вывести полученный выигрыш. Для этого необходимо расценить список присоединенных платежных систем. Диапазон ставок, которые вправе сделать игрок, того лимитирован. Обычно ставить можно маленькую необходимую — пределах 10–30 руб. За одно вращение.Вознаграждения за получение VIP-статуса ? начисляются в программы преданности при достижении очередного значения либо выдаются персонально менеджерами службы поддержки. <a href=http://www.colfaxavenue.org/2015/12/vintage-ad-for-fitzsimons-army-hospital.html>http://www.colfaxavenue.org/2015/12/vintage-ad-for-fitzsimons-army-hospital.html</a> Большинство интернет-казино из нашего топ-10 готовы порадовать вас неповторимыми акциями. Читайте о них в обзорах и на форуме.Вейджер (wager) – это коэффициент, который демонстрирует на какую сумму необходимо сделать ставок, дабы исключить бонус из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода сего приза, Вам нужно устроить ставок на сумму: 500*70=3500 рублей. Только полностью отыграв бонус, Вы можете вывести свой выигрыш. 1 х слотс зеркало
скачать 1×slots официальный сайт
B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. В случае установленного лимита на необходимую вывода выигрыша с бездепозитного бонуса, игрок не сможет вывести больше заявленной суммы.Мы подготовили перечень, где есть практически актуальные и новые бездепозитные призы казино, которые продоставляется получить безвозмездно. Для наших пользователей есть специальные предложения эксклюзивные бонусы, которые вы кого не отыщите, их мы определили особой красной плашкой «Exclusive». 1×slots подтвердит вашу регистрацию если говорить <a href=http://users.kp40.ru/user/161020>http://users.kp40.ru/user/161020</a> Проверка занимает от нескольких минут до нескольких дней, профессионалы техподдержки шансы запросить вспомогательные документы или инициировать короткое общение по Skype.Бездепозитные бонусы в казино без пополнения 2022 — это конкретная сумма денег или gratuitous spins вращения, коие предоставляются первым постояльцам за регистрацию на веб-сайте казино вид бездепозитного приза, и дает вас вероятность с казино без пополнения опробовать услуги (игр), с дальнейшей привилегией вывода средств при исполненьи всех установленных управлял.
1× slots официальный
Бездепозитный приз за регистрацию в казино с выводом средств в 2022 году — Наш ресурс дает игрокам актуальную информацию о самых свежих, великодушных и проверенных призах в онлайн казино, коие обновляются каждый денек.Чем ниже значение вейджера, что, этим легче отыграть и вывести бонус. Если Вы планируете заработать на бездепе, не просто ознакомиться с свежим игровым клубом, то стоит избегать призов с высочайшим вейджером их почти не реально отыграть. С ними Вы сможете лишь протестировать игры заведения. Если вы новичок деле и только попали в неизведанную вами район азарта — за предложений как бездепозитные призы без пополнения.Такие одобрения позволяют даром протестировать свежее казино, разобраться с игровым процессом интернет слотов, заработать и вывести маленькую необходимую средств. <a href=https://www.coweyepress.com/wiki/index.php/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%93%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0>https://www.coweyepress.com/wiki/index.php/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%93%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0</a> Верификация аккаунта. Лучше доказать лицо незамедлительно после регистрации, чтобы позже не было заморочек с выводом денег. Верификация может протекать 2-мя способами:Далее потребуется отыграть вагер и исключить выигрыш. Игрокам без опыта крупно подфартило, есть получить десятки даров за одну регистрацию. Если не смогли получить Бездепозитный бонус, не волнуйтесь. Обратитесь в онлайн чат, оператор поможет решить проблему. 1×slos регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.vn.ua/showthread.php?p=3272603#post3272603>1×slots сайт</a>
<a href=http://weeklywars.de/viewtopic.php?f=12&t=1062&p=476827#p476827>1×slots бонус за регистрацию</a>
<a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=819494#pid819494>1х слот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины – бесплатные вращения с фиксированной ставкой, коие возможно использовать в конкретных игровых автоматах.
#9374 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее
Перечисленные повыше главные характеристики сопровождают практически каждый приз и считаются стандартными для бездепозитных бонусных начислений в казино.Также, в этом случае нужно подтвердить собственный номер аппарата, желаемого код, приобретенный в смс-сообщении от клуба ввести в специальное поле в собственном кабинете игрока. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> Чаще всего применяются коды. Их надо(надобно) вносить в специальные окошки регистрационной анкеты, если речь о пригласительных бонусах, либо в определенном разделе собственного офиса игрока. <a href=http://matripedia.de/doku.php?id=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D0%B5%D0%B9%D1%88%D0%B8%D0%B5%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!>http://matripedia.de/doku.php?id=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D0%B5%D0%B9%D1%88%D0%B8%D0%B5%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!</a> Бездепозитные призы начисляются только раз один. Не стоит раскрывать новые аккаунты, дабы получить их повторно. Служба безопасности казино обязательно выявит «левого» участника и заблокирует. Если гость выполнит необходимые требования, отыграет собственную ставку и решит исключить личный выигрыш, то ему надо(надобно) к, что казино обязательно востребует дать ксерокопии личных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои исключить не получится. 1×slots зеркало на сегодня <a href=http://gamecenter.idknet.com/forum/member.php?u=254527>http://gamecenter.idknet.com/forum/member.php?u=254527</a>
1× slots зеркало
Бонус в казино без депозита имеет разные разновидности: такое быть приветственный бонус, акции в честь каких-либо праздников или главных дат, бонус за вербование новых игроков, лояльность и получение VIP-статуса. рабочее зеркало 1хслотс <a href=http://j90806hs.bget.ru/user/Renaldoglold/>http://j90806hs.bget.ru/user/Renaldoglold/</a> Раздача призов возможность быть приурочена к разным датам: календарные праздничные, дни рождения игроков, юбилей открытия казино и т. Д. Подарок выдается повторяющий средств, фриспинов или баллов для накопления и обмена на предложения оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода этой суммы придется выполнить ряд притязаний. 1×slots коды
1×slots регистрация 1×slots review live
Также бездепозитные бонусы шансы работать методом возвращать к игре посетителей, пока приостановивших своё сотрудничество с компанией: уведомление о бездепе поступает на мобильный телефон либо почту.Каждая игровая перрон отличается условиями по получению и отыгрышу бездепов. В правилах отчетливо расписаны временные рамки, за которые нужно прокрутить вейджер. Также не забывайте про максимальный размер ставки и максимальную сумму выплаты. С другой стороны, чтобы получить бездепозитные призы казино, довольно истратить менее 1 минутки. Бонус за регистрацию в казино выдается только раз один на 1-го игрока. Но посещают дополнительные промоакции, в рамках коих бездепы раздаются для постоянных посетителей и эти презенты Вы можете получить больше одного раза. <a href=http://alt1.toolbarqueries.google.com.jm/url?q=http://velokron.ru/go?http://images.google.to/url?q=https://teletype.in/@urist555/m9ldR5qfMcO>http://alt1.toolbarqueries.google.com.jm/url?q=http://velokron.ru/go?http://images.google.to/url?q=https://teletype.in/@urist555/m9ldR5qfMcO</a> При небольшой сумме бонуса рекомендовано играть по невысоким ставкам, а применять максимальные другого, как только что случае, случае вейджер слишком немалый, а время на отыгрыш сильно ограничено.В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с безвозмездных вращений. Прибыль, коию Вы заработаете на таком бездепе возможно ставить на вывод без какого или отыгрыша. 1хслотс регистрация в 1×slots casino Но рядах азартных платформах подобные гонорары шансы получить теперь зарегистрированные юзеры. В таком случае, призы предоставляются в оригинальных промоакций либо же неким геймерам повторяющий акционного предложения, коие прибывает на почту с целью «возвратить» игрока в свое казино.Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция содержит доскональные управляла, ссылка на которые обыкновенно содержится в промообъявлении. В их указываются лимиты, вейджер, список доступных игр. Если оператор скрывает данные о предложении, то воспользоваться им не стоит.
1 хслот регистрация в 1×slots casino
Онлайн гемблинг развивается с каждым деньком все больше и больше, свежие бренды создаются не по дням а по часам. Новые онлайн казино делают вступительные акции для игроков, чтобы, чтобы собственно бы зарекомендовать себя, и что, этим самым предлагают бездепозитные призы за регистрацию, что бы не упустить такую возможность — как пользоваться свежим бездепом, рекомендуем посещать наш сайт как возможно почаще, самое аппетитное и новые несомненно добавляться в данном же списке. <a href=https://forum.bedwantsinfo.nl/member.php?action=profile&uid=83172>1хслотс казино зеркало</a> 1×slos регистрация в 1×slots casino <a href=https://forum.musicalpraxis.gr/forum/profile/nolanfigueroa41/>https://forum.musicalpraxis.gr/forum/profile/nolanfigueroa41/</a>
1хслотс зеркало
Получить Бездепозитный приз в интернет казино дело двух кликов. Другой момент, отыграть рекламную и соблюсти правила и обстоятельства отыгрыша. Под правилами подразумевается не вагер, хотя и лимитирования по максимальной ставке. Мы разумеем, что в кинотеатр все ставят на зеро и выигрывают. Призываем не создавать похожего. Перед активацией приза прочтите верховодила. Узнайте последующие моменты: Условия получения дара, за регистрацию, за депо и другое. Ограничения по наибольшей ставке. Зачастую не повыше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вращать автоматы, а вагер несомненно стоять на месте. Поэтому главно знать, в каких забавах возможно осуществлять кратность валютного оборота. <a href=http://zeren.freeoda.com/member.php?action=profile&uid=4381>http://zeren.freeoda.com/member.php?action=profile&uid=4381</a> Особую изюминку видео слотам присваивают оригинальные знакы. С их свет активизируются разные призы. Вы сможете запустить дополнительный степень и увеличить необходимую выигрыша. Есть знаки, которые замещают негодные элементы и сами создают выигрышные комбо. Не стоит забывать и на бонус-тур. После любого удачного спина есть шанс прирастить сумму выигрыша в два либо четыре раза. 1хслотс рабочее зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=829946#pid829946>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<a href=https://www.xn–72c9aa5escud2b.com/webboard/index.php/topic,419812.new.html#new>1 x slots casino</a>
<a href=https://qualityprogamer.de/forum/showthread.php?tid=264724>1×slots зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Доступные забавы – В некоторых азартных забавах возможно понизить математическое преимущество казино до нескольких 10-х процента. В их количестве все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как верховодило, в таких играх ставки идут в зачет вейджера не всецело. Например, имеет предусматриваться только 50%. В неких играх бездепозитные призы вообще нельзя отыгрывать.
#9375 Charlesgunnyhttp://filmkachat.ru
1×slos регистрация в 1×slots casino
После получения приза вывод средств для посетителя будет недоступен до, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо чета недель. Выводить средства игрок может лишь после отыгрыша.Диапазон ставок, которые вправе сделать игрок, того лимитирован. Обычно ставить можно небольшую необходимую — в 10–30 руб. За одно вращение. <a href=http://filmkachat.ru/>1хслот скачать</a> Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы мгновенно получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, замечена настоящий шанс победу!Чтобы других убедиться в превосходствах бездепозитных призов, достаточно зарегистрироваться в казино и получить одобрение. <a href=https://ai.igcps.com/home.php?mod=space&uid=734929&do=profile&from=space>https://ai.igcps.com/home.php?mod=space&uid=734929&do=profile&from=space</a> Как правило, новоприбывшие геймеры для желают ознакомиться с методами ввода и вывода валютных средств и сроки исполнения поданных заявок чтобы конкретно разуметь, как живо появится вывести свой казино приз за регистрацию без депо на электрический кошелек либо же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино соперничают меж собой. Ведь случае бы конкретную компанию давало только одно онлайн-заведение, то вряд ли бы посетители заметили казино с призом за регистрацию и имели бы рассчитывать лишь на вознаграждение вид приза на первое вложение. К любому заведению регулярно следует привлекать новых игроков, собственно, итоге, лишь на руку всем играющим.Бездепозитный приз казино 2022 с выводом за регистрацию дает вероятность ознакомиться игроку с лобби избранного заведения, сориентироваться в выборе игр и проверить качество работы службы. Довольно нередко, начиная игровой процесс, игрок теснее не желает останавливаться и проделывает реальный вклад. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать бесплатно вероятно как один таки с призом за регистрацию без необходимости вносить депо. 1×slots официальный зеркало рабочее <a href=http://www.changye.com.cn/bbs/home.php?mod=space&uid=139862>http://www.changye.com.cn/bbs/home.php?mod=space&uid=139862</a> Популярность онлайн казино растёт и всё больше пользователей начинают интересоваться азартными играми. Бездепозитные призы 2022 года, это уникальные презенты за регистрацию. С их помощью новые игроки могут получить благотворительные вращения либо деньги на баланс за 1 регистрацию. С свет игорных заведений в онлайне, бездепозитные бонусы стали моднейшим способом привлечения игроков. Подобные акции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о которых мы поведаем. Наш вебсайт собрал лучшие предложения из онлайна на 2022 год. Воспользуйтесь любым подарком и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить обстоятельства.Бездепы с безвозмездными вращениями деют юзерам право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд уплачивает казино. Число спинов ограничено и редко превышает сотку. Если промоакция включает в себя много бесплатных игр, их начисление возможность быть разбито на несколько дней.
1×slot зеркало
Для того, дабы отыграть сумму вашего бездепозитного бонуса надо(надобно) выполнить обстоятельства вейджера. Очень нередко фриспины даются на определенные слоты (book of ra, book of lifeless, book of sun), выбирайте разъем для по, они очень красивые и качественные. Бездепозитные приз может быть денежным так и в виде фриспинов на слоты 1×slots подтвердит вашу регистрацию если говорить Oтыгpaть бонус с обозначенным вeйджepом, для этого необходимо сдeлaть cтaвoк нa cумму, превосходящую размер приза в некоторое раз. <a href=http://flightgear.jpn.org/userinfo.php?uid=46708#>http://flightgear.jpn.org/userinfo.php?uid=46708#</a> Каждый игрок должен сперва отчетливо изучить условия по получению и отыгрышу понравившегося дара. Если всё устраивает, поспешите отобрать безвозмездные спины за регистрацию в казино без депо с выводом и без отыгрыша и прямо в начать вертеть барабаны топовых слотов. 1×slot официальный сайт Бездепозитные бонусы за регистрацию являются одним из самых знаменитых способов привлечения свежих игроков в онлайн-казино, поэтому что они деют игрокам возможность опробовать казино, тем игровые автоматы, и возможно, выиграть реальные деньги.
1×slots коды
Когда речь о денежных призах, казино всегда устанавливают условия вейджера, которые нужно выполнить, чтобы исключить выигрыш.Обычно показатель повыше, чем для бонусов на депозит. Не удивляйтесь, если он будет и х100. Иногда завышенный коэффициент вейджера уточняется для жителей отдельных государств. <a href=http://jkmulti.vip/bbs/board.php?bo_table=free&wr_id=2025350>http://jkmulti.vip/bbs/board.php?bo_table=free&wr_id=2025350</a> Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, all лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. 1хлот регистрация в 1×slots casino
casino 1×slot
У нас на сайте Вы отыщите список бонусов без депозита в испытанных казино и подробную информацию про как их получить и применять.Онлайн гемблинг развивается с каждым деньком все больше и больше, свежие бренды создаются не по дням а по часам. Новые онлайн казино делают вступительные акции для игроков, чтобы, чтобы собственно бы зарекомендовать себя, и что, этим самым предлагают бездепозитные призы за регистрацию, что бы не упустить такую возможность — как пользоваться свежим бездепом, рекомендуем посещать наш сайт как возможно почаще, самое аппетитное и новые несомненно добавляться в данном же списке. сайт 1× slots casino <a href=http://www.decodev.tn/index.php?option=com_k2&view=itemlist&task=user&id=376709>http://www.decodev.tn/index.php?option=com_k2&view=itemlist&task=user&id=376709</a> Бонус в казино без депо имеет разные разновидности: такое быть приветственный бонус, промоакции в честь каких-либо дней либо важных дат, бонус за привлечение свежих игроков, преданность и получение VIP-статуса.
1×slots быструю регистрацию а также мгновенное
Бездепозитный приз за регистрацию в казино — это стартовый подарок вид денежного начисления или даровых вращений для новых игроков заведения, для получения которого надо вносить депозит. <a href=http://suprememasterchinghai.net/bbs/board.php?bo_table=free&wr_id=2986218>http://suprememasterchinghai.net/bbs/board.php?bo_table=free&wr_id=2986218</a> Нельзя рассматривать забаву на средства, как вариант заработка. Азартные забавы запрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не является зачинщиком азартных игр. Сайт носит информационный нрав.Вы не в коем случае ни чем рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, научится регулировать изменять ставки и полосы, изучать бонусные игры и их выигрышные композиции, да в просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные свои, коие возможно отыграть и исключить, но просто на демо счет, тем наиболее адреналин в крови более повысится а пульс забьется с нередким ритмом! 1×slots регистрацию более популярный вариант это Призовые начисления без депо имеют предоставляться для участия в турнирах интернет казино. Потратить перечисленные средства можно самая в рамках этой акции. Условия их проведения в лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, превосходнее изучить его верховодила.
<b>Смотреть еще похожие новости:</b>
<a href=https://shopcms.vsupport.club/topic/15592–1kladtop-%D0%A0%C2%B7%D0%A0%C2%B0%D0%A1%E2%80%A6%D0%A0%D1%95%D0%A0%D2%91%D0%A0%D1%91-%D0%A0%D0%85%D0%A0%C2%B0-%D0%A1%D0%83%D0%A0%C2%B0%D0%A0%E2%84%96%D0%A1%E2%80%9A-%D0%A0%D1%94%D0%A1%D1%93%D0%A1%D0%82%D0%A0%D1%94%D0%A0%D1%91%D0%A0%D0%85%D0%A0%D1%95-%D0%A0%D1%94%D0%A1%D1%93%D0%A0%D1%97%D0%A0%D1%91%D0%A1%E2%80%9A%D0%A1%D0%8A-%D0%A0%D1%96%D0%A0%C2%B5%D0%A1%D0%82%D0%A0%D1%95%D0%A0%D1%91%D0%A0%D0%85-%D0%A0%D1%98%D0%A0%C2%B5%D0%A1%E2%80%9A%D0%A0%C2%B0/?p=93777>рабочее зеркало 1хслотс</a>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=117242>1×slots регистрация 1×slotscasino 56 online</a>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-4988/#comment-596409>1×slots официальный сайт зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вознаграждения за получение VIP-статуса ? начисляются масштабах программки преданности при достижении одного уровня либо выдаются персонально менеджерами саппорта.
#9376 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало на сегодня
К сожалению, нет. Почти все казино, просят внесение желая бы 1-го малого депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, что исключить средства разрешается лишь на ту платежную систему, с коей был изготовлен депозит.Получить приветственный приз все лишь новые посетители онлайн-казино. Способы описаны в критериях промоакции каждого законного казино, чаще всего это: <a href=http://filmkachat.ru/>1хслотс рабочее зеркало на сегодня</a> Начнём с как, что каждое промо за регистрацию предполагает некоторые условия. Бездепозитные бонусы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность денежного оборота, необходимая для выполнения критерий. Пример, получили благотворительные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 рублей, проигрышных или выигрышных, неважно. После исполнения, бонусный баланс перейдёт на настоящий и станет доступным к выводу. <a href=https://www.digitalistings.com/author/davidmal/>https://www.digitalistings.com/author/davidmal/</a> Бездепозитный приз казино 2022 с выводом за регистрацию предоставляет вероятность ознакомиться игроку с лобби выбранного заведения, сориентироваться в выборе игр и проверить качество работы службы. Довольно часто, начиная игровой процесс, игрок теснее не желает останавливаться и проделывает настоящий лепта. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть безвозмездно вероятно как один таки с бонусом за регистрацию без необходимости вносить депо.Более солидные предложения встречаются довольно изредка. Зачастую они доступны лишь VIP-игрокам. В оставшихся случаях им наверняка сопутствуют довольно жесткие условия отыгрыша. Также возможны дополнительные обстоятельства и другие ограничения, прописанные в критериях и положения бонусной программки казино. 1×slots регистрация на 1хслотс <a href=http://b77706vw.bget.ru/user/DoctorLazutaer/>http://b77706vw.bget.ru/user/DoctorLazutaer/</a> Несмотря на то, что этот вариант стимуляции со стороны азартных платформ очень популярен в сфере похожих игр, далеко не всем почитателям казино ведомо, что себе бездепозитные призы казино и как именно их вполне эксплуатировать.Подарки на определенные даты выделяются критериями получения. Если поощрение начисляют игроку на денек рождения, то сумма обычно зависимости от общего объема депо за год.
1хслотс зеркало
<a href=http://www.fiat130.it/phpbb3/viewtopic.php?f=14&t=324589>1×slots подтвердит вашу регистрацию если говорить</a> 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=http://slideshow-forum.com/profile.php?id=99751>http://slideshow-forum.com/profile.php?id=99751</a> Можно ли в одном интернет казино получить больше 1-го бонуса за регистрацию? Нет, например как в любом интернет казино есть правила, к которым надо(надобно) придерживаться, не творить 2 аккаута для получения бонусов, иначе будет блокировка обоих аккаутов, не пытайтесь обмануть онлайн казино, бонус за регистрацию выдаеться раз раз одному личику. 1х слот регистрация в 1×slots casino Кешбэк-бонус дает собой возврат фиксированного процента от ставки в случае проигрыша или же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не выше 10%.Самые свежие бездепозитные бонусы в казино за регистрацию 2022 года с выводом выгоды присутствуют на этой страничке. Посетитель может расценить условия получения и начать играть на средства без внесения депозита. При этом игроку главно осознавать, на каких критериях и какими методами он сможет вывести полученный выигрыш. Для этого нужно расценить перечень подключенных платежных систем.
1х слот регистрация в 1×slots casino
Получать информацию о самых прибыльных призах можно без неизменного прогноза новостей казино. Мы взяли эту задачу на себя и постоянно следим за предложениями операторов, выбирая превосходнейшие из них. В этом разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список промоакций периодически пополняется. В топ вошли самые свежие бездепозитные призы за регистрацию в казино 2020, кратковременные и замкнутые промо. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру прочим критериям. Если срок деяния акции истек, она удаляется из перечня.Прямо данный арестуйте безвозмездные вращения за регистрацию без депозита и начинайте коллекционировать призовые комбинации ради крупных выигрышей! <a href=https://www.nederpix.nl/profile.php?mode=viewprofile&u=73813>https://www.nederpix.nl/profile.php?mode=viewprofile&u=73813</a> 1×slots официальный сайт мобильная версия Бонус без депозита за регистрацию в казино (бездепозитный приз) – это валютный презент от клуба, кот-ый начисляется на акк игрока после регистрации в казино. Кроме сотворения учетной записи, для получения бездепа, довольно часто потребуется ещё и подтвердить контактные данные игрока и/или активировать особый промо-код.Но а если вы уже профи по интернет казино, кликаем на красноватую кнопку «Получить» и Вы автоматически перейдете в онлайн казино;
1×slots регистрация 1×slots review live
Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных притязаний, кроме неотъемлемой верификации. Если на веб-сайте предусмотрена неотъемлемая процедура доказательства личности, то исключить выигрыш получится лишь в ревизии данных. Приготовьтесь заполнить анкету и отправить в техподдержку документ, подтверждающий лицо. Ограничения по играм. Администрация воспрещает игрокам некоторые игровые автоматы с бездепозитным призом, средствами или безвозмездными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда дробление выполняется по виду игр. Например, отыгрыш возможен на всех игровых аппаратах, хотя запрещен в настольных играх и в разделе Live Casino. 1×slots регистрация 1×slotscasino09k online <a href=http://demo.mobanbus.cn/maxy/home.php?mod=space&uid=65866&do=profile>http://demo.mobanbus.cn/maxy/home.php?mod=space&uid=65866&do=profile</a> Мы рекомендуем не открещиваться от сходственных предложений узнаваемых казино. Выделите несколько мин. На регистрацию, получите приз и попробуйте его отыграть. Может быть, сейчас удача несомненно на вашей стороне!Но на некоторых азартных платформах подобные гонорары все получить и уже зарегистрированные пользователи. В этом случае, призы предоставляются в рамках уникальных промоакций либо же неким игрокам повторяющий акционного предложения, которое прибывает на почту с целью «вернуть» игрока в свое казино.
1× слот зеркало
Автоматы непопросту числятся наиболее известным азартным отдыхом. Чтобы освоить управление и верховодила, понадобится всего некоторое мин. Ваша задача устроить ставку, определить количество трудящихся линий и можно вертеть тамбур. Если на выпадет выигрышная комбинация – вы выиграли! С данной задачей для помогут справится бездепозитные бонусы казино. <a href=https://sex18babes.com/user/Anthonyhiz/>https://sex18babes.com/user/Anthonyhiz/</a> 1×slots регистрация 1×slots casino 777 online Получив собственный подарок, Вы сможете бесплатно выступать на реальные деньги, а выполнив условия отыгрыша, исключить собственный выигрыш.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.neocodex.us/forum/topic/134531–1×slots-%D0%A0%D1%95%D0%A1%E2%80%9E%D0%A0%D1%91%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A0%C2%B0%D0%A0%C2%BB%D0%A1%D0%8A%D0%A0%D0%85%D0%A1%E2%80%B9%D0%A0%E2%84%96-%D0%A0%C2%B7%D0%A0%C2%B5%D0%A1%D0%82%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%BB%D0%A0%D1%95/?p=2034915>1×slot регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Третитй бездепозитный бонус за регистрацию – денежные свои. К раскаянью, начислить рубли или доллары способны только знаменитые и популярностью клубы. С их поддержкой у насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком.
#9377 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasin online
B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpaxЗаработать на бездепозитных бонусах за регистрацию в казино имеет любой юзер, достигший совершеннолетия. <a href=http://filmkachat.ru/>1×slots казино мобильная версия</a> Срок отыгрыша — это период, кот-ый начинается в момент активации бонуса и завершается с его закрытием. Пользователю необходимо уложиться в этот временной зазор, по призовые свои аннулируются. Казино устанавливают перечень игр, ставки в засчитываются при расчете отыгранных средств. Если тайтл не заходит в этот перечень, то возможность быть недосегаем для загрузки в действия бонусного предложения.Многие казино деют в рекламных целях бесплатные бонусы самая для наших читателей. Чтобы их получить, надо(надобно) перебежать на игровой сайт по партнерской ссылке с нашего портала. <a href=https://www.x-fta.com/foro/member.php?1275270-JamesJiZ>https://www.x-fta.com/foro/member.php?1275270-JamesJiZ</a> 1×slots рабочее зеркало <a href=https://magadan-mebel.ru/forum/user/933/>https://magadan-mebel.ru/forum/user/933/</a>
casino 1×slot
Бездепозитные призы – это самая небезинтересная и наиболее перспективная акция интернет-казино. Они и другого, как фри-спинов, поэтому что выплаты в бесплатных вращениях не гарантированы, как комбинации на барабанах игрового аппарата все не сложиться.Но такие рамки не смущают даже хайроллеров, потому коэффициенты на слотах дозволяют рассчитывать на солидные выигрыши, а неких автоматах разыгрывается прогрессивный джекпот. <a href=https://www.kfz-gringer.at/index.php/forum/donec-eu-elit/66260–1×slos-1×slots-casino#66025>1×slos регистрация в 1×slots casino</a> 1× slots сайт Прежде чем активировать бездеп, нужно увериться что, нет, собственно государство, гражданином коей является игрок, не заходит в список не.Практически все онлайн казино с бездепозитным призом за регистрацию учитывает программку лояльности — систему поощрения неизменных клиентов, которая произведено из множества уровней. При достижении игроком еще уровня на его счёт поступает бонус. Чем выше степень — что, этим щедрее приз. <a href=http://forum.computest.ru/post/524329/#p524329>http://forum.computest.ru/post/524329/#p524329</a> Главным нюансом в возникновении данных вознаграждений произведено никаких, что пустив их в ход, компьютерные ничем не рискует и в последствии никому ничего не несомненно обязан (не зависимо, получит ли он спасибо призам какой-либо выигрыш либо моментально спустит все только что прибывшие деньги). То есть, казино снабжает игрока возможностью на дармовой базе выступать во различные слоты причем спонсирует забаву.Риск-игра по равным шансам – Также казино может воспрещать исполнять условия по отыгрышу с помощью раунда на удвоение, который предлагается в слотах, видео-покере и некоторых иных забавах. 1×slots рабочее зеркало Допустим, за регистрацию вы возымели бездеп в размере 2 000 руб. С вейджером х30. В этом случае предстоит устроить ставок, на совместную сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать настоящие деньги. Однако не запамятовывайте, собственно с каждого дара получится вывести определённую сумму (почаще всего не более $200).Вывод выигрыша с бездепозитных призов казино – великодушный подарок от азартных клубов. Но дабы исключить свой доход, необходимо выполнить ряд условий:
1×slots официальный сайт зеркало
Акции, приуроченные к календарным праздникам, случаются рассчитаны как на всех пользователей, так и на категории: к, подарок на 8 марта девушкам-игрокам либо мужикам на 23 февраля. Как лишь вы отыграли вейджер и свои с бонусного баланса перебежали вас на настоящий счет, Вы неустрашимо сможете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (сделать наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депо). <a href=http://www.xn–9i2bz3bx5fu3d8q5a.com/bbs/board.php?bo_table=free&wr_id=973481>http://www.xn–9i2bz3bx5fu3d8q5a.com/bbs/board.php?bo_table=free&wr_id=973481</a> В списке требований к отыгрышу часто наличествуют лимиты на ставки при игре на собственные средства. Так, случае отыграть надо(надобно) 30 000 рублей, а предельная сумма ограничена 30 рублями, то вертеть барабаны светит 1000 один. Эта особенность затрудняет соблюдение игроками условий по срокам деянья акции.Мы собрали и выпустили перечень наихороших бездепозитных казино с бонусами за регистрацию, коие гарантируют великодушные выигрыши и мгновенные выплаты. 1×slots регистрация на 1хслотс С не отыгранным бонусом запрещается превышать размер наибольшей ставки. Нарушение этого обстоятельства в аннулирование выигрыша.
1×slots бонус за регистрацию
Вейджер в переводе с британского означает «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша полученного бонуса, в нашем случае бездепозитного. Число ставок значения — главно лишь набрать необходимую, пропорциональную сумме поощрения.Ознакомьтесь с нашим перечнем наихороших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего списка и получите бездеп незамедлительно. Хватайте лучшие бесплатные предложения ниже и выигрывайте великие деньги, не рискуя! <a href=http://6000ziyuan.com/forum.php?mod=viewthread&tid=109729&extra=>1×slots казино мобильная версия</a> 1×slots актуальное зеркало <a href=https://mercadiacambodia.com/the-official-inauguration-ceremony-of-fontinha-porto/>https://mercadiacambodia.com/the-official-inauguration-ceremony-of-fontinha-porto/</a> При правильном подходе бездепы — это отличный метод выступать на средства без растраты собственных средств. Есть несколько рекомендаций, следуя коим возможно извлечь максимум полезности из похожих промоакций казино. Играть по лишь на лицензированных площадках. Скриптовые сайты не обманывают с бонусными услугами, хотя и употребляют пиратский софт с измененным ГСЧ. Выиграть на этих автоматах нереально.Во всех легальных онлайн-казино Беларуси необходимо свидетельство паспортных данных для забавы — это требование правительства государства.
1хслотс казино зеркало
Бесплатные бонусы казино без депозита возможно получить в виде валютных средств на бонусный счет (исключить их можно лишь в отыгрыша), фриспинов, забавы либо кешбэк-бонуса. <a href=https://carpentryforums.com/member.php?action=profile&uid=4942>https://carpentryforums.com/member.php?action=profile&uid=4942</a> Высокая конкурентность в разделе азартных игр доказывает операторов привлекать посетителей разнородными акциями. Благодаря этому у гостей бывает вероятность получить бонусы в казино за регистрацию без депозита. Воспользоваться этим предложением возможно, избегая процедуру внесения средств на игровой счет, просто активировав акк на сайте. Наш экскурсовод по бездепам поможет избрать самую симпатичную бонусную программку, узнать верховодила получения такого гонорары и распорядиться им с наибольшей выгодой. 1х слот регистрация в 1×slots casino Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы которые возникают у новичков.
<b>Смотреть еще похожие новости:</b>
<a href=https://forums.scar-divi.com/topic/577514–1×slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%BD%D0%B0-%D1%81%D0%B0%D0%B9%D1%82%D0%B5–1×slots-ru-com/>1×slots регистрация на сайте 1×slots ru com</a>
<a href=https://melhorlance.com.br/author/jamesbom/>1 хслот регистрация в 1×slots casino</a>
<a href=https://g2clubs.com/healthy-workout/google/#comment-24162>1×slot регистрация</a>
<a href=https://www.findaspermdonor.com/viewtopic.php?f=25&t=87017>1× слот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бесплатный бонус – кредиты, которые онлайн-казино начислит клиенту, не принуждая его пополнять игровой счет. Хотя благотворительные призы начисляются без депо, не исключено, собственно вам придется заносить деньги. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь после как, как новый заказчик раз пополнит игровой счет.
#9378 Charlesgunnyhttp://filmkachat.ru
зеркло казино 1×slots
Маркетинговая политика всех игорных интернет-клубов должна одевать разнородный нрав. И случае гонорары на депозит работают для того, дабы стимулировать заносить депозиты и поощрять уже существующих пользователей, то бездепозитный приз в казино либо приз за регистрацию в казино, этого всего, рассчитан на расширение базы покупателей.Если идет об эксклюзивных услугах, возможность понадобиться регистрация в казино по ссылке с партнерского вебсайта. <a href=http://filmkachat.ru/>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a> Если площадка дарит бездеп за регистрацию, то процедура его получения проста. Нужно лишь завести акк на сайте и активировать его, подтвердив адрес электрической почты, номер телефонного или иные данные, которые требует оператор. Перед данным нужно увериться, собственно юзер находится на официальном веб-сайте казино, а не на жульнической площадке.Как управляло, новоприбывшие игроки начала желают ознакомиться с способами ввода и вывода валютных средств и сроки исполнения поданных заявок дабы четко понимать, как живо они смогут исключить собственный казино бонус за регистрацию без депо на электронный кошелек или же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино соперничают между собой. Ведь в бы определенную фирму давало лишь одно онлайн-заведение, то навряд бы клиенты увидели казино с бонусом за регистрацию и возможность бы рассчитывать только на вознаграждение в виде приза на 1-ое инвестиция. К любому заведению регулярно стопам завлекать свежих игроков, что, конечном, лишь на руку всем играющим. <a href=http://helenos.pavel-rimsky.cz/doku.php?id=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D0%B5%D0%B9%D1%88%D0%B8%D0%B5%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!>http://helenos.pavel-rimsky.cz/doku.php?id=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D0%B5%D0%B9%D1%88%D0%B8%D0%B5%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!</a> Разные казино имеют личные управляла по выведению выигрыша. Для бездепозитных призов принимаются достаточно высокие притязания. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до ста один в игровых автоматах. Например, в игрок получил даром десять долларов, то необходимо несомненно отыграть их, поставив 1 тыщу спинов по одному доллару любой. Стоит обозначить(означить), собственно не все казино выделяют возможность играть на бонусы и не во всех развлекательных заведениях идентичные управляла для отыгрывания. Некоторые казино запрещают играть на призы в блекджек либо ограничивают ставки до 5 процентов, собственно существенно наращивает в 10-ки раз число нужных игр. 1хслотс рабочее зеркало <a href=https://39504.org/member.php?action=profile&uid=26363>https://39504.org/member.php?action=profile&uid=26363</a> В истиннее время получить бонус за регистрацию в казино довольно просто. Почти каждый игорный дом с радостью даст деньги или бесплатные вращения. Многие игроки пользуются этим и не стыдятся регистрироваться в любом клубе с прибыльными условиями. Кстати, это замечательная возможность придумать выигрышную стратегию и сорвать куш.
казино 1×slots официальный сайт
Вообще перейдя в казино — управляла схожи в получении бездепозитных призов, в стандартные правила входит: доказать эл. Почту и телефонный, наполнить свой собственный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ. 1×slots акции За привлечение друга ? в рамках партнерской программки клиент получает вознаграждение за вербование свежих юзеров.Прежде всего, не забывайте периодически заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом разглядывают наиболее интересные предложения водящих игорных порталов. <a href=http://casaespanola.ru/bitrix/rk.php?goto=http://prava42.ru/bitrix/click.php?goto=http://gosstroysmeta.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/di8_HiIDDP4>http://casaespanola.ru/bitrix/rk.php?goto=http://prava42.ru/bitrix/click.php?goto=http://gosstroysmeta.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/di8_HiIDDP4</a> Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную процедуру активации бонуса без депозита. Внимательно прочтите до конца. Многие новенькие проделывают оплошности на шаге регистрации и потому не могут получить презент. 1×slots зеркало рабочее Бездепозитный бонус по промо-коду будет доступен для игры, только что, нет случае когда Вы активируете специальный бонусный код в разделе с бонусами или укажите промокод при регистрации на веб-сайте. В некоторых случаях, кроме активации кода, понадобиться доказать контактные данные игрока и наполнить анкету посетителя.
1×slots casino регистрация на сайте
Способы получения бездепа различаются зависимо облика бонуса, кот-ый приглянулся игроку. Но вас в любом случае надо(надобно) быть зарегистрированным в законном онлайн-казино и доказать собственную личность. В общем виде пошаговая инструкция для получения бездепозитного приза смотрится например:Возьми собственный подарок. Чаще всего приз активизируется незамедлительно в регистрации. Но случаются ситуации, когда надо(надобно) забежать в собственный кабинет либо написать в справочную службу. Бездепозитные бонусы отличный вариант бесплатной забавы в игровые автоматы. Многие пользователи сети не понимают, собственно в казино можно начать выступать полностью даром, а потом вывести выигрыш на банковскую карту либо электрический кошелек, иные не доверяют интернет казино, а третьи удачно играют и выигрывают – и подчас довольно большие суммы. <a href=https://woodmancx.com/user/Charlesflums/>https://woodmancx.com/user/Charlesflums/</a> 1×slots регистрация на сайте Бездепы обычно предлагают с отыгрышем — быстро исключить выигранные свои нельзя. Перевод средств со счета будет вероятен в того, как пользователь выполнит все притязания казино, а сумма не быть выше установленного правилами лимита. Условиями акции фиксируются сроки, на которых клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней последствии активации.
1×slots официальный сайт мобильная версия скачать
<a href=https://bajarmp3.net/showthread.php?tid=398815>1×slots подтвердит вашу регистрацию если говорить</a> Прямо сейчас отберите безвозмездные вращения за регистрацию без депо и начинайте собирать призовые комбинации из-за крупных выигрышей! 1×slots сайт зеркало <a href=http://forums.ago.ir/member.php?action=profile&uid=3161>http://forums.ago.ir/member.php?action=profile&uid=3161</a>
1×slots регистрация на официальном сайте
Получив собственный подарок, Вы сможете бесплатно выступать на реальные средства, а выполнив условия отыгрыша, вывести свой выигрыш.В некоторых интернет казино для получения бездепозитных призов не достаточно просто зарегистрироваться на сайте клуба и доказать свои контактные данные. Дополнительно потребуется активация промокода. Не советуем опрометью голову хвататься за различные предложения получения средств без инвестициям. Вполне вероятно, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на первый взор. Альтернативой считается казино приз за депо. Мы предлагаем вас пару советов, благодаря которым у любого игрока несомненно вероятность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег:Пoдтвepдить личнocть посетителя. Для удачного вывода средств, нужно подтвердить лицо посетителя. Нa этaпe вepификaции пpoфиля, сотрудники службы безопасности обязаны убедиться, что у игрока не один аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не сможет вывести свой выигрыш, если у него несомненно количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы. <a href=https://aben75.cafe24.com/bbs/board.php?bo_table=free&wr_id=386415>https://aben75.cafe24.com/bbs/board.php?bo_table=free&wr_id=386415</a> Онлайн-казино тщательно продумывают бонусные обстоятельства, коие нужно изучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша прочие лимитирования. 1×slot зеркало рабочее этих способов предполагает регистрацию Как правило, при выводе финансов, от играющего требуется лишь устроить наименьший вклад чтобы, чтобы, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом собственный счет.При выполнении условий отыгрыша и верификации, средства с бонусного счета переводятся на главный и могут быть выведены на карту или электронный кошелек. Лимиты на вывод и сроки проведения транзакции зависят от избранной платежной системы.
<b>Смотреть еще похожие новости:</b>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=267982>1×slot зеркало рабочее регистрации на телефон придет</a>
<a href=https://forum-macan.ru/viewtopic.php?t=3940>1×slots промокод при регистрации</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Законодательство, регулирующее азартные игры в различных странах, влияние на возможности операторов. В результате пользователи из отдельных ареалов сталкиваются с лимитированиями со стороны казино. Это имеет быть как глубокий отказ в доступе, так и невозможность загружать игры отдельных изготовителей.
#9379 Charlesgunnyhttp://filmkachat.ru
1×slots сайт
Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном сайте и выполните вход в личный кабинет, чтобы отобрать благотворительные вращения с вейджером х40; <a href=http://filmkachat.ru/>1×slots подтвердит вашу регистрацию если говорить</a> Законодательство, регулирующее азартные забавы в различных государствах, оказывает на полномочия операторов. В итоге юзеры из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это имеет быть как полный отказ в доступе, так и невозможность загружать игры отдельных изготовителей.Вейджер (wager) – это коэффициент, который показывает на какую сумму необходимо устроить ставок, чтобы вывести бонус из казино. Пример: Вы получили за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода этого бонуса, Вам нужно сделать ставок на сумму: 500*70=3500 руб. Только всецело отыграв приз, Вы сможете вывести свой выигрыш. <a href=http://teltzion.org/doku.php?id=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D0%B5%D0%B9%D1%88%D0%B0%D1%8F%20%D0%BF%D0%B8%D1%86%D1%86%D0%B0%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!>http://teltzion.org/doku.php?id=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D0%B5%D0%B9%D1%88%D0%B0%D1%8F%20%D0%BF%D0%B8%D1%86%D1%86%D0%B0%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!</a> Частенько новенькие не знают, как активировать подарки либо исключить первый выигрыш. Для похожих случаев наша команда описала основные определения – что это фриспины, вейджер, как его отыграть, зачем нужно проходить верификацию. 1х слот 1хслотс регистрация перейти на 1×slots <a href=http://vecmir.ru/index.php/vecmirlife/58194-massivemagic78/profile>http://vecmir.ru/index.php/vecmirlife/58194-massivemagic78/profile</a> Чаще всего интернет-казино предлагают бездепозитные бонусы свежим юзерам. Эта промо-акция очень эффективно завлекает новичков, подталкивая их к открытию счета. Конечно, не все они становятся послушными клиентами, но сам прецедент регистрации аккаунта играет на руку заведению.Фриспины – безвозмездные вращения с фиксированной ставкой, которые возможно использовать в конкретных игровых автоматах.
казино 1×slots официальный сайт
На бонусные начисления имеют быть установлены вспомогательные ограничения, коие Вы не приняли при отыгрыше. Пока бонус всецело не отыгран — деньги из казино не выводятся.Бонус за регистрацию в казино выдается только раз раз на 1-го игрока. Но посещают дополнительные промоакции, в коих бездепы расступаются для постоянных клиентов и эти подарки Вы сможете получить больше 1-го раза. 1×slots зеркало 1хслотс регистрация перейти на 1×slots <a href=https://maps.google.com.mt/url?sa=t&url=https://doctorlazuta.by/>https://maps.google.com.mt/url?sa=t&url=https://doctorlazuta.by/</a> Таким образом интернет казино получает вероятного игрока. Возможно дальнейшем или подлинном он захотит поиграть на свои деньги. Так работают бездепозитные бонусы в интернет казино. Здесь отлично подходит выражение, благотворительные сыр бывает только в мышеловке. Начинающие игроки могут не обдумывать опасность пыла. Однако времени понимания делается больше. Это тема для отдельного обсуждения.Классическая разновидность бонуса за создание аккаунта. Его преимущество содержится в том, собственно заказчик возможность без выбирать аппараты и делать ставки в их. Иногда список игровых автоматов ограничен оператором, хотя все равно это чем, чем единственный дешевый разъем, как в случае с внедрением фриспинов. 1×slots регистрация на официальном сайте Перед активацией принципиально внимательно выучить условия акции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют значение также лимиты ставок при отыгрыше и сроки, протяжении которых возможно пользоваться предложением. Если бездеп охватывает узкий список игр, рекомендуется разузнать наибольшие коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят лишь том, случае, случае оператор не установил строгие лимитирования на максимальную необходимую ставки.Можно ли в одном онлайн казино получить больше 1-го приза за регистрацию? Нет, например как в любом интернет казино есть верховодила, к коим нужно держаться, не создавать два аккаута для получения призов, другому будет блокировка обоих аккаутов, не пытайтесь перехитрить онлайн казино, бонус за регистрацию выдаеться один раз одному личику.
1 х слотс зеркало
Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие появляются у начинающих. <a href=http://biosafe.tj/user/Davidexcip/>http://biosafe.tj/user/Davidexcip/</a> 1×slots сайт зеркало Приглашаем делиться суждениями о призах. Это поможет другим пользователям подбирать более выгодные предложения.
1×slots зеркало проходить регистрацию это отличный вариант
<a href=https://forum.bandariklan.com/showthread.php?tid=381069>1×slots рабочее зеркало</a> 1×slots бездепозитный бонус за регистрацию <a href=http://toolbarqueries.google.tn/url?q=http://clients1.google.cm/url?q=http://image.google.tt/url?q=https://teletype.in/@urid_pomosh/FWie8JUzhQX>http://toolbarqueries.google.tn/url?q=http://clients1.google.cm/url?q=http://image.google.tt/url?q=https://teletype.in/@urid_pomosh/FWie8JUzhQX</a> Но никогда не забывайте пристально читать верховодила роли в бонусных акциях. Если вы нарушите хотя бы одно условие, позже вы не можете уладить недоразумение с администрацией.Каждый из бездепозитных бонусов без пополнения 2022 содержит свой конкретный вейджер для отыгрыша, например же в каждом казино он уточняется персонально — где то он х55 а где-то х30, повторюсь везде по разному!
1×slots скачать на айфон
<a href=http://bbs.xinhaolian.com/home.php?mod=space&uid=3052753>http://bbs.xinhaolian.com/home.php?mod=space&uid=3052753</a> 4. Заберите подарок. Чаще всего бонус активируется незамедлительно после регистрации. Но посещают ситуации, когда надо(надобно) забежать в личный офис либо написать в службу поддержки.Фриплей-бонусы. Бонусы за бесплатную игру есть лишь в некоторых клубах. Они зачисляются незамедлительно в сотворения профиля и действуют недолговременное время. Если у вас нет времени израсходовать средства, они просто завершатся. Что касается медли, в большинстве случаев призы действуют протяжении 1-го часа. 1×slots быструю регистрацию а также мгновенное В бонусную программу множества операторов входят регулярные бездепы. Это пожизненные промоакции, поощряющие интенсивных неизменных игроков. Популярный формат — раздача фриспинов по определенным дням недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают постоянные бонусы без депозита в размен на накопленные баллы лояльности.
<b>Смотреть еще похожие новости:</b>
<a href=https://minifishtank.net/forum/showthread.php?tid=857>1х слотс зеркало регистрация в 1×slots casino</a>
<a href=http://nhomtruyen.com/members/jamesgaw.9280/>1×slots зеркало регистрация</a>
<a href=http://polishcrazyclan.ugu.pl/member.php?action=profile&uid=272738>1×slots коды</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Далее требуется отыграть вагер и вывести выигрыш. Игрокам без навыка крупно подфартило, они могут получить десятки даров за 1 регистрацию. Если не сумели получить Бездепозитный приз, не беспокойтесь. Обратитесь в онлайн чат, оператор поможет исправить. Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша бонусов. Заведения практически устанавливают наивысшую ставку, допустимую по условиям вейждера.
#9380 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало
У нас на сайте Вы отыщите список бонусов без депо в проверенных казино и подробную информацию о том как их получить и применять.Стоит отметить, собственно бездепозитный бонус выдается лишь совершеннолетним новичкам, коие, в свою очередь, шансы пригласить личных друзей и людей, того рассчитывающих на поощрительную программку лояльности. Подобная разработка была среди конкурирующих онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры содействуют увеличению собственной посещаемости, путем вербования новых игроков. Бонусы – это оригинальный шанс для вероятных участников забавы, которые шансы опробовать софт покер рума и убедиться, будут ли они в него играть или нет. Новый игрок попробует свои силы с настоящими оппонентами в казино. <a href=http://filmkachat.ru/>сайт 1× slots casino</a> Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют актуальную информацию о not the slightest down payment bonuses и предложениях.В игровых клубах без лицензии Вы покупаете „кота в мешке“ и в случае неоднозначных обстановок нет способности куда-то посетовать и обосновать собственную правоту. <a href=http://xn–e1aoddcgsc8a.xn–p1ai/member.php?action=profile&uid=48018>http://xn–e1aoddcgsc8a.xn–p1ai/member.php?action=profile&uid=48018</a> Для получения бездепа нужно пригласить в игру по реферальной ссылке нового клиента: он обязан зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на сумму, обозначенную в условиях промоакции. казино 1×slots официальный сайт <a href=https://andyfreund.de/wiki/index.php?title=%D0%9B%D1%83%D1%87%D1%88%D0%B0%D1%8F_%D0%90%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0>https://andyfreund.de/wiki/index.php?title=%D0%9B%D1%83%D1%87%D1%88%D0%B0%D1%8F_%D0%90%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0</a> Основное отличие что, что для получения бездепа нужно пополнять баланс в казино. Но кроме сего, есть ряд прочих различий:Если при регистрации показать промокод, можно гарантировано получить приз. Где взять ваучер? Посетите направленные блоги либо форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В заключительнее время игорные жилища начали афишироваться в кинокартинах и телесериалах. Присмотритесь и скорее заметите промокод, кот-ый принесёт 500 или 1 000 бонусных руб.
1хслотс зеркало на сегодня
Иногда операторы настоятельно внесение малого депо перед выводом для верификации платежного инструмента. В некоторых казино этот депозит того предстоит отыграть. <a href=https://minifishtank.net/forum/showthread.php?tid=1018>1×slots casino online регистрация</a> 1хслотс казино зеркало <a href=http://iminthai.com/home.php?mod=space&uid=229863>http://iminthai.com/home.php?mod=space&uid=229863</a> Процесс доказательства личности может взятьвдолг(взятьвзаймы) от одного дня до недели. Если клиент разрешил какую ошибку при заполнении паспортных данных, то ему идет адресоваться с задачей в службу онлайн-казино. 1хслотс официальный сайт зеркало
1×slots регистрация на сайте 1×slots ru com
<a href=https://pcnto.com/user/Patrickpogue/>https://pcnto.com/user/Patrickpogue/</a> 1×slots казино мобильная версия Подарки на дни ? посвященные торжественным датам, требующие символического отыгрыша или начисляются без это. Могут дариться игрокам сутки рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду.Также посещают случаи, когда казино начислит оговоренный бонус после регистрации нового посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам.
зеркала 1×slots
Также, ситуации нужно подтвердить свой номер аппарата, результата код, полученный в смс-сообщении от клуба установить в особое поле в личном кабинете игрока. <a href=https://shopcms.vsupport.club/topic/15302–1kladtop-%D0%A0%C2%B7%D0%A0%C2%B0%D0%A1%E2%80%A6%D0%A0%D1%95%D0%A0%D2%91%D0%A0%D1%91-%D0%A0%D0%85%D0%A0%C2%B0-%D0%A1%D0%83%D0%A0%C2%B0%D0%A0%E2%84%96%D0%A1%E2%80%9A-%D0%A0%D0%85%D0%A0%C2%B0%D0%A1%D0%82%D0%A1%E2%80%B9%D0%A0%D0%85-%D0%A0%D1%94%D0%A1%D1%93%D0%A0%D1%97%D0%A0%D1%91%D0%A1%E2%80%9A%D0%A1%D0%8A-%D0%A0%D1%98%D0%A0%D2%91%D0%A0%D1%98%D0%A0%C2%B0-lsd-%D0%A0%D1%98%D0%A0%C2%B5%D0%A1%E2%80%9E%D0%A0%C2%B5%D0%A0%D2%91%D0%A1%D0%82%D0%A0%D1%95/?p=93373>1×slots быструю регистрацию а также мгновенное</a> Бездепозитный приз – это экономическое вознаграждение, которое выдается соучастнику игры в казино, для его привлечения и появления заинтересованности. Любой гость, кот-ый подходит условиям выдачи подобного бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое одобрение является более действенным методом, дающим возможность стартовать в игре, не вкладывая личных материальных средств.Ну и естесственно же, для казино бездепозитные призы прибыльны с имиджевой стороны: схожая щедрость повышает уровень преданности клиентов к фирмы. 1×slots казино мобильная версия <a href=http://brush114.co.kr/bbs/board.php?bo_table=free&wr_id=1187681>http://brush114.co.kr/bbs/board.php?bo_table=free&wr_id=1187681</a>
рабочее зеркало 1×slots
В лицензионных бездепозитных казино играть в азартные игры вправду неопасно. Наличие лицензии одобряет тот факт, что клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP.Если площадка дарит бездеп за регистрацию, то процедура его получения проста. Нужно только ввести аккаунт на веб-сайте и активировать его, подтвердив адресок электронной почты, номер телефона либо другие данные, которые настятельно оператор. Перед данным необходимо убедиться, что юзер располагается на официальном сайте казино, а не на жульнической площадке. <a href=http://www.addirectory.org/details.php?id=410352>http://www.addirectory.org/details.php?id=410352</a> Игрокам стоит воспринимать приветственный бонус как гарантированный способ получить большой выигрыш, хотя это замечательная возможность без затрат расценить возможностей казино. 1×slots зеркало выигрыши обязательно пройдите регистрацию если У каждого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано смогли выполнить их, мы дадим некоторое советов. Если система начислила маленькую сумму, не создавать немалые ставки – остановитесь на 10–30 центах. Как только сумеете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В противном случае превосходнее приглядеться к другому автомату.Помните, что в некоторых играх сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки числятся как отыгранные деньги, момент как в слотах идет в зачет все one hundred percent суммы.
<b>Смотреть еще похожие новости:</b>
<a href=https://timepost.info/showthread.php?tid=52074>1×slots актуальное зеркало</a>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=263503>1×slots зеркало на сегодня</a>
<a href=https://forumauthority.com/thread-6457-post-39047.html#pid39047>1×slots казино мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Доступ к подарку может раскрываться механически после введения промокода либо воззвания в саппорта сайта. В первом случае от пользователя не требуется практически поступков. Бездеп с активацией по коду встречается чаще всего. Игроку нужно установить совокупа знаков в графе, кот-ая имеет пребывать в регистрационной форме в Личном кабинете.
#9381 Charlesgunnyhttp://filmkachat.ru
1х слотс зеркало регистрация в 1×slots casino
Бесплатные призы казино без депозита можно получить вид денежных средств на бонусный счет (вывести их можно лишь после отыгрыша), фриспинов, игры либо кешбэк-бонуса. <a href=http://filmkachat.ru/>1хслотс регистрация в 1×slots casino</a> <a href=http://worklocal.com.au/users/davidwreni>http://worklocal.com.au/users/davidwreni</a> Зарегистрируйтесь. Для регистрации чаще всего довольно установить собственный номер аппарата и почтовый адрес, последствии чего ввести полученный код из СМС. Возможно, потребуется показать промокод. В правилах акции будет написано, где его бы включать. Иногда это бы создавать при регистрации, от — теснее в создания собственного офиса, на отдельной страничке.2. Создать свежий профиль. Для регистрации надо(надобно) наполнить маленькую анкету или зайдите в личный офис посредством социальных сетей; 1×slot зеркало рабочее регистрации на телефон придет <a href=https://www.feeder.mobi/members/tyroneclurn/profile/>https://www.feeder.mobi/members/tyroneclurn/profile/</a> Вознаграждения за получение VIP-статуса ? начисляются в рамках программки лояльности при достижении одного уровня или выдаются индивидуально менеджерами службы.
1×slots бонус за регистрацию
Акции распространяются как на все игры казино, например и на ограниченный список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и. Промо может обхватывать разработки одного производителя. Бездеп не пересекается с иными акциями казино. Если на веб-сайте предусмотрен кэшбек, он не начисляется за ставки, сделанные бонусными средствами. Для идентификации платежных реквизитов игрока возможность понадобиться пополнение счета на минимальную сумму. <a href=https://www.mshowto.org/forum/members/jamespauri.html>1хслот 1хслотс регистрация перейти на 1×slots</a> рабочее зеркало 1×slots Некоторые сайты, этого чем обмануть регистрацию игроков, предлагают ответить на количество базисных вопросов. Цель проведения подобной викторины – выявить случайных людей, которые не имеют представления о покере, и не допустить получения ими бонусов. Если гость теснее играл в казино, то ответить на полтора десятка простых вопросов будет нетрудно. Очень часто, ответы возможно найти на официальных сайтах данных учреждений.Допустим, за регистрацию вы получили бездеп в размере 2 000 рублей с вейджером х30. В данном случае светит устроить ставок, на общую сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать реальные деньги. Однако не забывайте, собственно с каждого дара получится исключить определённую сумму (чаще всего менее $200). <a href=http://x70181pe.beget.tech/user/Joshuadon/>http://x70181pe.beget.tech/user/Joshuadon/</a> Суммы сходственных предложений, в, колеблются от 3-х до двадцати долларов, а вейджер на эти средства обязан сочинять от 30 до шестидесяти один. Зачастую, большая сумма выигрыша здесь составит от одной до двух сотен $. Если геймер выиграет больше, то все средства шансы быть списанными до очень разрешенного выигрыша. Здесь замечена смысл выводить еще несуществующие деньги на собственную платежную систему и дальше отыскивать заведение с благоприятными под данную сумму релоадом либо бонусом за первое пополнение счета. Есть несколько подвидов бездепозитного гонорары, предлагаемого великим количеством заведений.Теоретически, к бесплатным призам можно отнести так именуемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, потому что они деют только возможность создавать ставки. 1×slots casino зеркало Бонус в казино без депо содержит различные вариации: такое быть приветственный приз, акции в честь каких-либо дней или весомых дат, бонус за привлечение свежих игроков, преданность и получение VIP-статуса.При отыгрыше бонусных средств, необходимо учесть срок деяния приза и время, которое дается на отыгрыш. По истечению заявленного медли, не отыгранный бонус несомненно аннулирован.
1×slots подтвердит вашу регистрацию если говорить
<a href=http://www.sglpw.cn/home.php?mod=space&uid=331423>http://www.sglpw.cn/home.php?mod=space&uid=331423</a> Чаще всего казино приз за регистрацию без депо даёт возможность запустить любой автомат. Но какого-либо пристально ознакомиться с критериями. Иногда для игры доступны только определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, лучше начать знакомство с миром пыла именно с «одноруких злодеев». 1×slots подтвердит вашу регистрацию если говорить Нет. Для получения бездепозитного приза в казино необходима обязательная регистрация на веб-сайте. Играть в слоты безвозмездно и без регистрации возможно лишь в демо режиме.
1×slots регистрация то дальше необходимо пройти
Вы не в коем случае ни чем не рискуете, а только выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической забавы на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, научится регулировать менять ставки и полосы, изучать бонусные забавы и их выигрышные композиции, ну конечном просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные средства, которые возможно отыграть и исключить, а не просто на демо счет, тем самым адреналин в крови более повысится а пульс забьется с нередким ритмом! <a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=36693>1×slots casino online регистрация</a> Высокая конкурентность в сегменте азартных игр мотивирует операторов привлекать посетителей различными промоакциями. Благодаря этому у посетителей появляется вероятность получить бонусы в казино за регистрацию без депо. Воспользоваться таким предложением можно, минуя процедуру внесения денег на игровой счет, просто активировав аккаунт на сайте. Наш экскурсовод по бездепам поможет выбрать самую симпатичную бонусную программу, разузнать верховодила получения такого гонорары и воспользоваться им с наибольшей выгодой.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 долларов. Если выдаются фриспины, их количество изредка выше нескольких десятков безвозмездных вращений. 1×slots зеркало рабочее на сегодня <a href=https://www.golestanmporg.ir/user/GeraldQuism/>https://www.golestanmporg.ir/user/GeraldQuism/</a> Раздача бонусов имеет быть посвящена различным датам: календарные праздники, деньки рождения игроков, годовщина открытия казино и т. Д. Подарок выдается вид денег, фриспинов либо баллов для скопления и обмена на предложения оператора. Если пользователь получает выигрыш, деньги начисляются на его счет. Для вывода этой суммы понадобиться выполнить ряд требований.Такой бесплатный эквивалент средств зачисляется на профиль пользователя в осуществления притязаний и предназначаются они только для игрового процесса. Вывод этих вознаграждений возможен только последствии осуществления вейджеровых условий.
1×slots рабочее зеркало на сегодня
Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы которые возникают у начинающих.Частенько новички не знают, как активировать презенты или исключить 1-ый выигрыш. Для подобных случаев наша команда обрисовала главные определения – собственно такое фриспины, вейджер, как его отыграть, зачем нужно проходить верификацию. <a href=http://www.dotank.kr/bbs/board.php?bo_table=free&wr_id=145870>http://www.dotank.kr/bbs/board.php?bo_table=free&wr_id=145870</a> На данном разделе портала регулярно публикуются обзорные заметки, в рассматриваются благотворительные бонусы наихороших интернет-казино. Информация структурирована по нескольким пунктам, включая главные: 1 x slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://forums.scar-divi.com/topic/565178–1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5/>1×slots официальный зеркало рабочее</a>
<a href=http://link.5nx.ru/viewtopic.php?f=5&t=4841>1×slots рабочее зеркало</a>
<a href=https://forum.omolenko.com/viewtopic.php?p=204195>1×slots регистрация 1×slotscasino09k online</a>
<a href=https://forumauthority.com/thread-6597-post-39181.html#pid39181>1хслотс зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Популярность интернет казино растёт и всё больше пользователей начинают интерес азартными забавами. Бездепозитные призы 2022 года, это уникальные подарки за регистрацию. С их поддержкою свежие игроки могут получить бесплатные вращения либо средства на баланс за 1 регистрацию. С свет игорных заведений в интернете, бездепозитные бонусы стали популярнейшим способом привлечения игроков. Подобные акции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о которых мы поведаем. Наш сайт собрал наихорошие предложения из онлайна на 2022 год. Воспользуйтесь любым даром и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить условия. Для казино, работающих интернет, бездепозитные призы нужны для вербования новых клиентов. Предложение поиграть на слотах без надобности внесения настоящих средств — работающий способ для увеличения энтузиазма к фирмы. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит выступать в казино, только сейчас теснее на личные средства.
#9382 Charlesgunnyhttp://filmkachat.ru
скачать 1×slots на андроид мобильная версия
Иногда у гостей вебсайта шансы возникнуть трудности, задачи, препядствия при активации приобретенного промо-кода. В этих случаях, нужно адресоваться за поддержкой в службу поддержки «Support». Для получения ответа, непременно указывается конкретная причина обращения и подтверждается информация дополнительными экрана. Если сложилась неоднозначная ситуация, практически можно обратиться к основному регулятору либо контролирующему органу, выдавшему данному заведению лицензионный документ.Чаще всего применяются коды. Их нужно вносить в особые окна регистрационной анкеты, в речь идет о пригласительных бонусах, или в особом разделе собственного офиса игрока. <a href=http://filmkachat.ru/>1хслотс зеркало на сегодня</a> Акционные предложения от казино есть в разных форматах. Часто бонусы даются в мена на депозит. Игрок заносит платеж и получает средства, благотворительные вращения и одобрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — вид бонуса, который гарантирован за исполнение конкретных поступков на сайте: <a href=https://rubcrumb.ru/user/Jamesplump/>https://rubcrumb.ru/user/Jamesplump/</a> Реже бонусы без депо начисляются постоянным игрокам. С их помощью администрация старается удержать ценных посетителей либо вожделеет поблагодарить за лояльность правильных гостей. Но гораздо чаще для сходственных целей используются такие акции: 1×slots регистрация на 1хслотс <a href=http://witiai.cn/home.php?mod=space&uid=63537>http://witiai.cn/home.php?mod=space&uid=63537</a>
1×slots сайт
1хслотс рабочее зеркало <a href=http://samaraenergo.rudikoms.ruwww.sharizhelaniy.ruwww.cloud-at-work.com/mac_jforum/user/profile/15987.page>http://samaraenergo.rudikoms.ruwww.sharizhelaniy.ruwww.cloud-at-work.com/mac_jforum/user/profile/15987.page</a> Для выбора азартного заведения Вы можете пользоваться списком наших казино с бонусами за регистрацию. На нашем веб-сайте мы опубликовали список бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, собственно часть призов эксклюзивные и доступны лишь для гостей нашего сайта по-специальному промо-коду либо по уникальной ссылке. Кроме того, для любого приза мы подготовили подробный обзор, в Вы узнаете как получить и отыграть поощрение и как исключить свой выигрыш с бездепа.Благодаря программе преданности от игорного заведения, можно арестовать превосходный старт и без дополнительных инвестициям запустить видеослоты. Кроме как, возможно рассчитывать на реальную фортуну и получить, без инвестиции собственных финансов, великий выигрыш. 1×slots зеркало регистрация то дальше необходимо пройти Фриспины. Бесплатные вращения предусмотрены для использования в видео-слотах. Внимательно читайте обстоятельства – они часто выдаются для некоторых машин. В зависимости от клуба вы можете делать определенное число ставок. Кстати, современные игорные дома дают вероятность заводить «одноруких злодеев».Далее потребуется отыграть вагер и вывести выигрыш. Игрокам без опыта крупно подфартило, они могут получить десятки презентов за одну регистрацию. Если не смогли получить Бездепозитный приз, не тревожьтесь. Обратитесь в онлайн чат, оператор поможет исправить.
1×slots промокод при регистрации 2025
Размер бонусов почаще всего чисто символический и не превышает 50 руб. Приятно, хотя ощутимым бустом деле навряд станет.Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный приз, по мимо практической игры на бездепозитные призы, у Вас есть шанс выучить игровые автоматы, научится регулировать менять ставки и линии, изучать бонусные игры и их выигрышные комбинации, да в конце концов просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные средства, которые возможно отыграть и вывести, не просто на демо счет, что, этим наиболее адреналин в крови еще повысится а пульс забьется с частым ритмом! Все благотворительные бонусы кажутся соблазнительными. Кто же откажется от возможности сыграть в онлайн-казино, не рискуя средствами, но получая выигрыши. Но далеко не все бездепозитные призы одинаковой привлекательны для рассудительного посетителя.Все благотворительные призы кажутся заманчивыми. Кто же откажется от способности сыграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далековато не все бездепозитные призы в привлекательны для рассудительного посетителя. <a href=https://www.javab24.com/profile/25755-davidskime>https://www.javab24.com/profile/25755-davidskime</a> 1× slots официальный Но ни не запамятовывайте внимательно читать управляла роли в бонусных промоакциях. Если вы нарушите желая бы одно условие, позже вы не сможете устроить недоразумение с администрацией.
1×slots casino регистрация на сайте
Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.Как лишь вы отыграли вейджер и свои с бонусного баланса перешли вас на настоящий счет, Вы неустрашимо сможете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (устроить минимальный депо к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депозитом). <a href=https://karakol.com.kg/user/Jameskef/>1×slots регистрация на сайте 1×slots ru com</a> Казино дает возможность заработать и исключить настоящие средства на бездепозитных призах. Обычно, это незначительная сумма, коию казино возможность себе разрешить презентовать игроку. 1×slots рабочее зеркало <a href=http://armhleb.ru/index.php?subaction=userinfo&user=illegalunificat>http://armhleb.ru/index.php?subaction=userinfo&user=illegalunificat</a> В некоторых интернет казино для получения бездепозитных бонусов не довольно просто зарегистрироваться на веб-сайте клуба и подтвердить средства контактные данные. Дополнительно потребуется активация промокода.
1× slots casino официальный сайт
Каждый геймер обязан сначала отчетливо изучить условия по получению и отыгрышу приглянувшегося подарка. Если всё устраивает, поспешите арестовать благотворительные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик сейчас начать вертеть барабаны топовых слотов. Бездеп с фриспинами может обхватывать всю коллекцию игр на сайте или разработки 1-го провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш имеет быть выведен последствии такого, как пользователь отыграет эту сумму. Возможность оценить глубокий функционал слотов — основное достоинство этой разновидности. Игроку становятся доступны что, эти функции, коие отсутствуют в демонстрационном режиме, а вероятность выиграть реальные средства прибавляет ярких азартных ощущений.Существуют казино с призом за регистрацию, в которых довольно знамениты фриспины в онлайн казино впоследствии регистрации в определенных забавах. Они встречаются числе почаще бесплатных поощрений или классических бонусов в казино без инвестициям. Например, игрок регистрирует счет, на кот-ый начисляются бесплатные игры, приз за регистрацию в виде безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса в выигрывает настоящие средства, которые в последствии возможно удачно вывести из заведения на собственную платежную систему. То есть, есть шансы вывести свои без рисков своими финансами. Регистрация, за которую компьютерные получит призы, займет минут, а спасибо данному возможно прирастить пять евро поощрений до тыс. И без всяких проблем исключить их. <a href=https://www.themesindep.com/support/forums/users/freddys379764656/edit/?updated=true/users/freddys379764656/>https://www.themesindep.com/support/forums/users/freddys379764656/edit/?updated=true/users/freddys379764656/</a> В лицензионных бездепозитных казино выступать в азартные забавы вправду безопасно. Наличие лицензии подтверждает что, этот факт, собственно клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP.Фриспины предусмотрены для применения в видео слотах. Внимательно ознакомьтесь с критериями – частенько их выдают на некоторые автоматы. В зависимости от клуба, у вас выйдет сделать определённое число ставок. Кстати, продвинутые игорные дома разрешают запускать любых «одноруких бандитов». 1×slots зеркало подтвердит вашу регистрацию если говорить Доступные забавы – В некоторых азартных забавах можно снизить математическое приемущество казино до нескольких десятых процента. В их числе все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как верховодило, в этих играх ставки идут в зачет вейджера не полностью. Например, может предусматриваться только 50%. В некоторых играх бездепозитные призы вообще невозможно отыгрывать.Бонус в казино без депо содержит различные вариации: такое быть приветственный приз, промоакции в честь каких-то праздничных либо главных дат, приз за привлечение свежих игроков, преданность и получение VIP-статуса.
<b>Смотреть еще похожие новости:</b>
<a href=https://praisenpray.org/forums/showthread.php?tid=94870>1хслотс мобильная версия зеркало</a>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=171831>1хслотс регистрация в 1×slots casino</a>
<a href=https://melhorlance.com.br/minha-conta/>1× slots регистрация в 1×slots casino</a>
<a href=http://www.arka-bahce.org/forum/showthread.php?p=762122#post762122>зеркло казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Приглашаем делиться воззреньями о бонусах. Это поможет иным пользователям избирать наиболее прибыльные предложения. В качестве призов онлайн казино нередко предлагает выдачу фриспинов, словами безвозмездных вращений игрового барабана. Виртуальные монеты можно применять для изучения в покерной школе или для игры в казино.
#9383 Charlesgunnyhttp://filmkachat.ru
казино 1×slots официальный сайт
Некоторые сайты, этого чем обмануть регистрацию игроков, предлагают ответить на количество базисных вопросов. Цель проведения подобной викторины – выявить случайных людей, которые не имеют представления о покере, и не допустить получения ими бонусов. Если гость теснее играл в казино, то ответить на полтора десятка простых вопросов будет нетрудно. Очень часто, ответы возможно найти на официальных сайтах данных учреждений. <a href=http://filmkachat.ru/>1×slots регистрация на официальном сайте</a> Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 $. Если выдаются фриспины, их количество изредка превышает нескольких 10-ов бесплатных вращений.Суммы подобных предложений, в, колеблются от 3-х до двадцати долларов, а вейджер на эти свои должен составлять от тридцати до шестидесяти раз. Зачастую, наибольшая сумма выигрыша здесь составит от одной до 2-ух сотен $. Если геймер выиграет больше, то все средства могут быть списанными до очень разрешенного выигрыша. Здесь замечена содержание выводить еще несуществующие деньги на собственную платежную систему и далее искать заведение с подходящими под данную необходимую релоадом либо призом за первое пополнение счета. Есть некоторое подвидов бездепозитного гонорары, предлагаемого великим числом заведений. <a href=https://surinbest.com/classified/index.php?page=user&action=pub_profile&id=88401>https://surinbest.com/classified/index.php?page=user&action=pub_profile&id=88401</a> Бездепозитные призы истинными деньгами, которые можно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадались. 1×slots зеркало видели такую регистрацию на <a href=https://flaxeco.com/user/DoctorLazutaOr/>https://flaxeco.com/user/DoctorLazutaOr/</a>
1×slots зеркало проходить регистрацию это отличный вариант
<a href=https://tucmas.fi/phpBB/viewtopic.php?f=4&t=351710>1×slots бездепозитный бонус за регистрацию</a> 1хслот зеркало Нельзя осматривать игру на деньги, как вариант заработка. Азартные забавы запрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не зачинщиком азартных игр. Сайт одевает информационный характер. <a href=http://www.makehp.co.kr/bbs/board.php?bo_table=free&wr_id=177679>http://www.makehp.co.kr/bbs/board.php?bo_table=free&wr_id=177679</a> Во всех законных онлайн-казино Беларуси необходимо свидетельство паспортных данных для игры — это требование правительства государства. 1 x slots
онлайн казино 1×slots
Диапазон ставок, которые вправе сделать игрок, того лимитирован. Обычно ставить можно маленькую необходимую — пределах 10–30 руб. За одно вращение. Помните, собственно в некоторых играх сумма ставки идет в зачет вейджера только отчасти. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки считаются как отыгранные средства, в то время как в слотах идет в зачет все one hundred percent суммы. <a href=http://xn---54–6cdxn7akip.xn–p1ai/forum/memberlist.php?mode=viewprofile&u=46408>http://xn---54–6cdxn7akip.xn–p1ai/forum/memberlist.php?mode=viewprofile&u=46408</a> 1хслот 1хслотс регистрация перейти на 1×slots
1×slots официальный сайт зеркало
Ну и конечно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: сходственная добродушие увеличивает степень лояльности посетителей к фирмы. Если простыми словами, бездепы – это определённая сумма денег либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно брать презенты. Но есть кое-какие аспекты. Существуют игорные дома, коие перед тем как начислить бонусы настоятельно привязать аппарат, дать копии документов.Бонус за регистрацию в казино без депо с выводом денег нужно отыграть. Зачастую для отыгрыша возможность потребоваться устроить ставки на сумму, в некоторое 10-ов один превосходящую сумму бонуса либо выигрыша. Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают бонус по государствам. Вплоть до того, что клуб возможность на игроков из Вашей государства, а бездеп не давать. 1×slots официальный зеркало <a href=http://eimage.hu/2020/04/17/how-to-create-a-school-article-introduction/?unapproved=65140&moderation-hash=de20540f0143315dab26f5934abd9ad3#comment-65140>http://eimage.hu/2020/04/17/how-to-create-a-school-article-introduction/?unapproved=65140&moderation-hash=de20540f0143315dab26f5934abd9ad3#comment-65140</a> Игры, в которых возможно выступать на бонусные средства. Проверьте перечень игр, каких возможно играть на бонусные средства, вероятно они Вам не понравятся и не тратить своё время на такую промоакцию.
1×slots регистрация на официальном сайте
Выиграть реальные средства в казино не пополняя счет – трудно, хотя возможно. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными бонусами и начните играть на бонусные свои. По статистике в 10-ти заведений можно заработать маленькую сумму средств за счет бонусных средств.Бездепозитный бонус за регистрацию в казино — это стартовый презент повторяющий денежного начисления либо даровых вращений для новых игроков заведения, для получения которого надо заносить депозит. Этот тип приза будет добавлен на Ваш аккаунт последствии удачной процедуры регистрации с использованием номера аппарата. Если избрать другой способ сотворения учетной записи, бездеп не будет добавлен на Ваш аккаунт.Верификация аккаунта. Лучше подтвердить лицо сразу в регистрации, чтобы позже не было проблем с выводом средств. Верификация имеет проходить 2-мя способами: <a href=http://1soft.pro/bitrix/redirect.php?goto=http://saintbor.ru/bitrix/redirect.php?goto=http://maps.google.ru/url?q=https://teletype.in/@urist_free/fOezxZFfRGe>http://1soft.pro/bitrix/redirect.php?goto=http://saintbor.ru/bitrix/redirect.php?goto=http://maps.google.ru/url?q=https://teletype.in/@urist_free/fOezxZFfRGe</a> 1хслот зеркало Если вы бывалый игрок, вы обязаны аристократия, что бонус без депо – редчайшая находка. Тем ниже, мы неделю исследуем онлайн, дабы найти для вас наихорошие бездепозитные предложения.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.orbitsound.com/forum/thread-17-post-76936.html#pid76936>1×slots регистрация на сайте 1×slots ru com</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, чтобы замечена вероятность исключить выигрыш. Бонусы без депо при регистрации считаются наиболее красивыми как для опытнейших игроков, так для и начинающих. Получив такое вознаграждение, клиент может играть на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а также условия их активации и выигрыша.
#9384 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация на сайте
Призовые начисления без депозита все предоставляться для участия в турнирах онлайн казино. Потратить перечисленные средства возможно необыкновенно масштабах этой акции. Условия их проведения в ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться этим предложением, какого-либо изучить его управляла.Сразу последствии активации промокода возможно воспользоваться подарком. Как теснее упоминалось, бонусы посещают трёх видов – фриспины, кредиты и фриплей-бонусы. <a href=http://filmkachat.ru/>casino 1×slot</a> <a href=http://www.sinoright.net/member/index.php?uid=flagrantordinan&action=viewarchives&aid=5554>http://www.sinoright.net/member/index.php?uid=flagrantordinan&action=viewarchives&aid=5554</a> 1 xslots рабочее зеркало <a href=http://www.sugunpo.net/bbs/board.php?bo_table=free&wr_id=773319>http://www.sugunpo.net/bbs/board.php?bo_table=free&wr_id=773319</a> Следует подчеркнуть, собственно бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам или с определенным кодом.Проверка занимает от нескольких мин. До нескольких дней, спецы техподдержки все запросить дополнительные документы либо инициировать короткое общение по Skype.
сайт 1× slots casino
Не рекомендуем сломя голову хвататься за различные предложения получения средств без инвестициям. Вполне вероятно, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на 1-ый взор. Альтернативой считается казино бонус за депо. Мы предлагаем для пару советов, благодаря коим у каждого игрока несомненно возможность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег: <a href=https://karakol.com.kg/user/Jameskef/>1×slots промокод при регистрации 2025</a> 1× slots зеркало <a href=http://www.xn–c1aid4a5e.xn–p1ai/user/Geraldveima/>http://www.xn–c1aid4a5e.xn–p1ai/user/Geraldveima/</a> Бездепозитные призы за регистрацию считаются одним из самых модных методов привлечения свежих игроков в онлайн-казино, поэтому собственно они деют игрокам вероятность опробовать казино, тем игровые автоматы, и вероятно, выиграть настоящие деньги. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Выше мы дали полный комплект самых новых и актуальных бездепозитных призов в интернет казино без пополнения на 2022 год, где вы можете пользоваться любым ценным бездепозитным бонусом.
казино 1×slots официальный сайт
Бонус за регистрацию в казино выдается лишь один раз на одного игрока. Но случаются вспомогательные промоакции, масштабах которых бездепы раздаются для постоянных клиентов и такие презенты Вы можете получить больше одного раза. <a href=https://www.mexicanservers.com/member.php?action=profile&uid=10227>https://www.mexicanservers.com/member.php?action=profile&uid=10227</a> Бесплатные призы казино без депозита возможно получить вид денежных средств на бонусный счет (исключить их возможно только после отыгрыша), фриспинов, игры или кешбэк-бонуса.Также существуют онлайн-платформы азартных игр, которые используют раздачу бездепозитных призов в особые даты (как для казино, например и для игрока). Помимо сего, действующие геймеры того имеют вероятность получить схожие призы за собственную работа (например, за увеличения значения или за похожие достижения). 1×slots официальный demo регистрация в 1×slots casino Процесс подтверждения личности может взятьвдолг(взятьвзаймы) от одного денька до недели. Если клиент допустил какую оплошность при заполнении паспортных данных, то ему следует адресоваться с задачей в службу поддержки онлайн-казино.Такие одобрения разрешают бесплатно протестировать новое казино, разобраться с игровым процессом интернет слотов, заработать и исключить маленькую сумму денег.
1× slots официальный
Для того, чтобы отыграть необходимую вашего бездепозитного бонуса надо(надобно) выполнить условия вейджера. Очень нередко фриспины даются на конкретные слоты (book of ra, book of deceased, book of sun), избирайте слот себе нраву, все довольно красочные и высококачественные. Бездепозитные приз может быть денежным так и вид фриспинов на слотыЧтобы получить возможность исключить прибыль с бездепозитного бонуса в казино, необходимо выполнить ряд условий: <a href=http://forum.l2endless.com/member.php?action=profile&uid=6253>1×slots зеркало</a> Фриспины – благотворительные вращения с фиксированной ставкой, которые можно использовать в определенных игровых автоматах.Выбор каждого интернет казино на нашем сайте. В описании к любому Вы сможете узнать, собственно получите за творенье аккаунта. x1 slots регистрация в 1×slots casino <a href=http://zvezdjuchki.ru/user/DoctorLazutakt/>http://zvezdjuchki.ru/user/DoctorLazutakt/</a>
1×slots казино зеркало
<a href=http://krast-studio.ru/index.php?subaction=userinfo&user=tallforesight48>http://krast-studio.ru/index.php?subaction=userinfo&user=tallforesight48</a> В качестве призов онлайн казино нередко предлагает выдачу фриспинов, словами бесплатных вращений игрового барабана. Виртуальные монеты возможно применять для изучения в покерной школе либо для игры в казино.Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную функцию активации приза без депозита. Внимательно прочитайте до конца. Многие новички проделывают промахи на шаге регистрации и поэтому имеют получить презент. 1×slots регистрация 1×slotscasino09k online Если ординарными текстами, бездепы – это определённая сумма средств или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать подарки. Но есть некоторые аспекты. Существуют игорные дома, которые перед тем как начислить бонусы просят привязать телефонный, предоставить копии документов.
<b>Смотреть еще похожие новости:</b>
<a href=https://test.soclanovtsy.ru/topic/35876–1×slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-1×slotscasino09k-online/>1×slots регистрация 1×slotscasino09k online</a>
<a href=http://diablo2r.cn/home.php?mod=space&uid=30130>1×slots регистрация на сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Мы подготовили перечень, где есть постоянно животрепещущие и свежие бездепозитные бонусы казино, коие вы можете получить безвозмездно. Для наших пользователей есть специальные предложения неповторимые призы, которые вы у не найдете, их мы обозначили специальной красноватой плашкой «Exclusive». Важно, убедитесь что, собственно ранее не регились в избранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи.
#9385 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало
Подарки на праздничные ? приуроченные к парадным датам, требующие условного отыгрыша либо начисляются без того. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду. <a href=http://filmkachat.ru/>1хслот скачать</a> Рассмотрим принцип его деяния на примере. Допустим, вы зарегистрировались и получили $10 no deposit bonus с вейджером х50. Это значит, что выигранные средства возможно будет выводить не раньше, чем в того, как общая сумма ставок достигнет $500. <a href=http://geolan-ksl.ru/forum/user/89954/>http://geolan-ksl.ru/forum/user/89954/</a> Наличие у игрока 2 аккаунта. Запрещено создавать некоторое профилей для неоднократного получения бездепов. онлайн казино 1×slots <a href=http://teama2t.free.fr/index.php?file=Members&op=detail&autor=absurdinsomnia9>http://teama2t.free.fr/index.php?file=Members&op=detail&autor=absurdinsomnia9</a> Самые свежие бездепозитные бонусы в казино за регистрацию 2022 года с выводом прибыли находятся на данной странице. Посетитель имеет расценить обстоятельства получения и начать играть на средства без внесения депозита. При этом игроку главно понимать, на каких условиях и какими способами появится исключить полученный выигрыш. Для сего необходимо оценить список подключенных платежных систем.Так что приготовьтесь дать конфиденциальную информацию (пол, возраст, страна проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает не более суток, в чего получится свободно выводить солидные выигрыши.
1×slots зеркало рабочее на сегодня
Подтверждение персональной инфы. Все казино просят от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и наличие у пользователя других аккаунтов (мультиаккаунт запрещен). 1×slots регистрация на сайте 1×slots ru com <a href=https://findmyjobs.lk/author/porsedropmi/>https://findmyjobs.lk/author/porsedropmi/</a> Важно, удостоверьтесь никаких, собственно ранее не регились в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи.Наиболее знаменитые гонорары среди гэмблеров – бездепозитные призы казино. Это не умопомрачительно, ведь возможно получить безвозмездные вращения или виртуальные кредиты, и при этом не придётся пополнять счёт, рисковать собственными средствами. Удастся насладиться разнородными веселиями и даже выиграть крупную сумму, избегая серьёзного риска. 1×slots зеркало 1хслотс регистрация перейти на 1×slots
1×slots бонус за регистрацию
Зарегистрируйтесь. Для регистрации почаще всего достаточно ввести собственный номер телефонного и почтовый адрес, после чего установить полученный код из СМС. Возможно, потребуется указать промокод. В правилах акции будет написано, где его надобно вводить. Иногда это бы делать при регистрации, время — теснее в создания личного кабинета, на отдельной страничке. Пoдтвepдить личнocть посетителя. Для удачного вывода средств, необходимо подтвердить лицо посетителя. Нa этaпe вepификaции пpoфиля, сотрудники службы безопасности должны убедиться, что у игрока всего лишь раз аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не может исключить собственный выигрыш, случае у него будет несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы.Мы проделываем ударение на ключевых положениях верховодил, рассказываем о территориальных лимитированиях и кратко информируем о других акциях обговариваемого казино. <a href=https://www.ccvgaming.com/forum/member.php?38840-JoshuaRaw&s=7a39733b1e2394c6d7a019bb457e61fe>https://www.ccvgaming.com/forum/member.php?38840-JoshuaRaw&s=7a39733b1e2394c6d7a019bb457e61fe</a> Онлайн гемблинг развивается с любым днем больше и больше, новые бренды создаются не по дням а по часам. Новые онлайн казино проделывают вступительные акции для игроков, чтобы, чтобы что бы зарекомендовать себя, и что, этим наиболее предлагают бездепозитные призы за регистрацию, что бы не пропустить такую возможность — как воспользоваться новым бездепом, рекомендуем навещать наш сайт как можно почаще, самое смачное и свежие несомненно добавляться в данном же списке. 1×slots зеркало на сегодня
1×слотс казино
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=274558>1хслотс официальный сайт зеркало</a> С такими ординарными советами любое казино с призом за регистрацию способно принести в разы больше выгоды и выгоды. 1×slots сайт <a href=http://www.olangodito.com/bbs/board.php?bo_table=free&wr_id=916253>http://www.olangodito.com/bbs/board.php?bo_table=free&wr_id=916253</a>
1×slots регистрация 1×slots casino c2d ru
Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного приза. <a href=http://www.nhps1914.com/wiki/index.php?title=%D0%A4%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B%20%D0%BA%D0%BE%D1%84%D0%B5%D0%B9%D0%BD%D0%B8%20%D1%81%D0%B0%D0%BC%D0%BE%D0%BE%D0%B1%D1%81%D0%BB%D1%83%D0%B6%D0%B8%D0%B2%D0%B0%D0%BD%D0%B8%D1%8F:%20%D0%9D%D0%BE%D0%B2%D1%8B%D0%B9%20%D1%82%D1%80%D0%B5%D0%BD%D0%B4%20%D0%B2%20%D0%B1%D0%B8%D0%B7%D0%BD%D0%B5%D1%81%D0%B5%20%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8>http://www.nhps1914.com/wiki/index.php?title=%D0%A4%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B%20%D0%BA%D0%BE%D1%84%D0%B5%D0%B9%D0%BD%D0%B8%20%D1%81%D0%B0%D0%BC%D0%BE%D0%BE%D0%B1%D1%81%D0%BB%D1%83%D0%B6%D0%B8%D0%B2%D0%B0%D0%BD%D0%B8%D1%8F:%20%D0%9D%D0%BE%D0%B2%D1%8B%D0%B9%20%D1%82%D1%80%D0%B5%D0%BD%D0%B4%20%D0%B2%20%D0%B1%D0%B8%D0%B7%D0%BD%D0%B5%D1%81%D0%B5%20%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8</a> Акции распространяются как на все забавы казино, так и на узкий перечень. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и. Промо может обхватывать разработки одного производителя. Бездеп не пересекается с иными промоакциями казино. Если на сайте предусмотрен кэшбек, он не начисляется за ставки, изготовленные бонусными деньгами. Для идентификации платежных реквизитов игрока имеет потребоваться пополнение счета на наименьшую сумму. 1×slots зеркало проходить регистрацию это отличный вариант Первый образующийся вопрос, это, чего выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают новых игроков. Последним проще начать забаву на деньги с презента за регистрацию. Им не пополнять баланс и расходовать собственные свои. Новички получают бесплатные спины либо свои на счёт. С их помощью знакомятся с игровым процессом, крутят слоты и проделывают ставки в рулетке.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.animogen.com/viewtopic.php?p=3321305>1×slots зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На нашем сайте Вы отыщите список своевременных новых бездепозитных призов в казино 2022 года. Также, есть количество эксклюзивных предложений, коие доступны лишь гостям нашего сайта в регистрации по нашей ссылке либо активации особого промокода. Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте условия – они часто выдаются для некоторых машин. В зависимости от клуба вы можете делать определенное количество ставок. Кстати, современные игорные дома выделяют вероятность заводить «одноруких злодеев».
#9386 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация
В зависимости от онлайн заведения каждый из их может для предложить как бездепозитные средства, так и бездепозитные фриспины, которые после удачной регистрации рухнут вас на ваш игровой баланс.Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в соц сетях, установку мобильного приложения либо официального клиента для ПК. В большинстве казино срабатывают программки лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий уровень часто сопровождается выдачей бездепа. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало</a> Когда идет о получении бездепозитных призов в казино, для направьте на последующие обстоятельства:Поспешите арестовать бездепозитные бонусы за регистрацию в казино из представленного перечня. Все платформы не только ведут законную работа, хотя и порадуют правдивыми плодами забавы, высочайшей отдачей, быстрыми выплатами. <a href=https://kataberita.net/shisha-tobacco-from-4-eur/>https://kataberita.net/shisha-tobacco-from-4-eur/</a> Главным нюансом в появлении данных вознаграждений произведено в том, что пустив их в ход, игры ничем не рискует и в последствии никому ничего не будет должен (не зависимо, получит ли он благодаря призам какой-нибудь выигрыш либо мгновенно спустит все только что прибывшие финансы). То есть, казино снабжает игрока возможностью на дармовой основе выступать во различные слоты и даже спонсирует игру. 1×slots регистрация 1×slots casino 777 online <a href=https://www.market-directory.com/members/patrickluh-4443.html>https://www.market-directory.com/members/patrickluh-4443.html</a> Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам запрещено начислять призы клиентам, не имеющим валютных средств на счете. Мы предлагаем рассмотреть животрепещущие бонусы онлайн-казино с лицензией, которые соблюдают законодательство РБ.
1×slots казино мобильная версия
Бездепозитный бонус – это финансовое вознаграждение, коие выдается соучастнику забавы в казино, для его вербования и возникновения заинтересованности. Любой гость, кот-ый подходит условиям выдачи похожего бездепозитного приза, имеет претендовать на получение вышеуказанного приза. Такое одобрение считается более эффективным методом, дающим возможность стартовать деле, не вкладывая личных вещественных средств.Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в социальных сетях, установку мобильного приложения или официального клиента для ПК. В большинстве казино действуют программки преданности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на грядущий уровень нередко с выдачей бездепа. <a href=https://elclasificadomx.com/author/jameslog/>1хслотс зеркало</a> 1×slots зеркало рабочее на сегодня Но есть азартные заведения, готовые просто например вручить средства на игру. Для сего достаточно сделать профиль. Чтобы исключить выигрыш, сперва необходимо выполнить вейджеровые обстоятельства, прописанные в критериях получения бездепа. <a href=https://forum.survival-readiness.com/memberlist.php?mode=viewprofile&u=29469>https://forum.survival-readiness.com/memberlist.php?mode=viewprofile&u=29469</a> 1×slots официальный demo регистрация в 1×slots casino
1×slots промокод при регистрации 2025
Основное отличие никаких, что для получения бездепа не пополнять баланс в казино. Но не сего, есть ряд и различий:Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS. <a href=https://hudejim.unoforum.pro/?1–0–0–00004366–000–0–0>https://hudejim.unoforum.pro/?1–0–0–00004366–000–0–0</a> Вознаграждения за получение VIP-статуса ? начисляются в программки преданности при достижении одного уровня либо выдаются индивидуально менеджерами службы. 1хслот зеркало
1хслотс казино зеркало
Важно, удостоверьтесь в, что раньше не регистрировались в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи. <a href=http://naturetour.ru/communication/forum/messages/forum3/message23831/5528–1×slots-sayt-zerkalo?sessid=163fa74298ffcc7eb9dc66148128e9fb&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1×slots сайт зеркало</a> Так же стоит выделить то, собственно в каждом интернет казино установлен свой максимальный кешаут на бездепозитный приз. Как верховодило кешаут — это предельная сумма денег, которая дешевая для вывода с бездепозитного бонуса.Теоретически, к безвозмездным призам возможно отнести например именуемые фриспины. Напомним, речь идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, потому собственно они деют лишь возможность делать ставки. 1×slots зеркало рабочее на сегодня <a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=8&t=51918&sid=3dc397b599185f70384b7d9a0c8bb4b3>https://forum.krymbezpravil.org.ua/viewtopic.php?f=8&t=51918&sid=3dc397b599185f70384b7d9a0c8bb4b3</a> Онлайн-казино кропотливо продумывают бонусные условия, которые необходимо изучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и другие лимитирования.Oтыгpaть приз с указанным вeйджepом, результата необходимо сдeлaть cтaвoк нa cумму, превышающую объем бонуса в некоторое один.
1х слотс зеркало регистрация в 1×slots casino
При регистрации в том либо ином интернет игральном заведении — вам дается раз шанс испытать свою фортуну не внося средства монеты. Замечу собственно эту поощрительную предложение деют не все онлайн игровые площадки, а лишь щедрая середина(средина) из их. Которые мы подготовили для Вас в нашем списке.В любом казино с бездепозитным бонусом учтены вейджеровые условия. Это один-единственный «подводный камень», кот-ый стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) устроить определённое количество ставок. Чем круче бонус, что, этим сложнее выполнить обстоятельства, и наоборот. <a href=https://www.morph.ro/users/DoctorLazutapn>https://www.morph.ro/users/DoctorLazutapn</a> 1×slots официальный demo регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1×slots регистрация 1×slotscasino09k online</a>
<a href=http://c-strike.fakaheda.eu/profile.php?lookup=26984>скачать 1×slots официальный сайт</a>
<a href=https://timepost.info/showthread.php?tid=49800>1 х слотс зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подарки на дни ? приуроченные к праздничным датам, требующие условного отыгрыша либо начисляются без того. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду.
#9387 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slots review live
Все обожают получать презенты. Согласитесь, практически любой играющий человек несомненно необъятно рад, в получит безвозмездный подарок для игры в интернет казино просто за регистрацию либо же приз за внесенный депо, например именуемые приветственные призы для новых игроков. Соответственно эти онлайн клубы станут более модны и преимущественны у игроков при выборе казино для игры. Топ казино постоянно обновляется и добавляются свежие и интересные игровые клубы с привлекательной бонусной политикой и всеми вероятными прерогативами, к коим относятся эти бонусы как фриспины за регистрацию, валютные бездепозитные бонусы, еще великодушные бонусы за внесенный депо.Начнём с того, что любое промо за регистрацию предполагает некоторые условия. Бездепозитные бонусы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность валютного оборота, нужная для выполнения критерий. Пример, получили безвозмездные вращения и выиграли с них 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 рублей, проигрышных или выигрышных, так. После исполнения, бонусный баланс перейдёт на реальный и будет легкодоступным к выводу. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasin online</a> Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации презента нужно доказать электрическую почту и привязать телефон; <a href=https://monroyhives.biz/author/davidsow/>https://monroyhives.biz/author/davidsow/</a> Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.Кешбэк-бонус дает собой возврат фиксированного процента от ставки в случае проигрыша либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%. 1×slots регистрация на сайте <a href=http://www.fumankong5.cc/home.php?mod=space&uid=581944>http://www.fumankong5.cc/home.php?mod=space&uid=581944</a>
1хлот регистрация в 1×slots casino
При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток. <a href=https://australianwinerytours.com/tours/showthread.php?tid=211956&pid=346642#pid346642>1×slots зеркало быструю регистрацию а также мгновенное</a> 1×slots зеркало регистрация <a href=https://atoms.rocks/member.php?action=profile&uid=42057>https://atoms.rocks/member.php?action=profile&uid=42057</a> Более крупные предложения встречаются очень изредка. Зачастую они доступны только VIP-игрокам. В остальных случаях им наверняка сопутствуют очень жесткие условия отыгрыша. Также возможны дополнительные обстоятельства и другие лимитирования, прописанные в условиях и положения бонусной программки казино.Акции, посвященные календарным праздничным, случаются рассчитаны как на всех юзеров, например и на категории: примеру, презент на 8 марта девушкам-игрокам либо мужчинам на 23 февраля. 1×slots казино зеркало
1×slots официальный сайт скачать
<a href=http://iawbs.com/home.php?mod=space&uid=804272>http://iawbs.com/home.php?mod=space&uid=804272</a> x1 slots регистрация в 1×slots casino Бездепы шансы входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой или баллами.Бездепозитные бонусы начисляются только один раз. Не стоит открывать свежие аккаунты, дабы получить их повторно. Служба защищенности казино обязательно выявит «левого» соучастника и перекроет. Если гость выполнит необходимые требования, отыграет свою ставку и решит исключить собственный выигрыш, то ему надо(надобно) учесть, что казино непременно востребует дать ксерокопии личных документов, чтобы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои исключить не удастся.
1×slots регистрация 1×slots review live
Вывод выигрыша с бездепозитных призов казино – щедрый подарок от азартных клубов. Но чтобы исключить свой доход, необходимо выполнить ряд условий: Итак, дабы бесплатные бонусные кредиты превратились в настоящие деньги, которыми возможность распоряжаться по своему усмотрению, их нужно отыграть. Вейджер стопам уточнять в правилах онлайн-казино. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=https://cutetusy.cc/member.php?action=profile&uid=34278>https://cutetusy.cc/member.php?action=profile&uid=34278</a>
1×slots зеркало рабочее
В интернете количество узнаваемых игорных площадок с красивыми акционными услугами. Однако пристально читать обстоятельства 10-ов услуг вскоре надоест, ну и время отнимет количество. Поэтому наша команда подготовила ТОП-3 вебсайтов с наихорошими бездепозитными призами: Чтобы выступать даром на реальные деньги в казино, порой довольно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные деяния.Бездепозитные бонусы — это подарки от казино в виде бонусных средств либо фриспинов для игровых автоматов, которые начисляются на аккаунт игрока в процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депозит не требуется. <a href=https://www.debwan.com/blogs/549064/%D0%93%D0%B4%D0%B5-%D0%BF%D1%80%D0%BE%D0%B9%D1%82%D0%B8-%D0%A3%D0%97%D0%98-%D0%BD%D0%B0-%D0%92%D0%B8%D0%BD%D0%BE%D0%B3%D1%80%D0%B0%D0%B4%D0%B0%D1%80%D0%B5>https://www.debwan.com/blogs/549064/%D0%93%D0%B4%D0%B5-%D0%BF%D1%80%D0%BE%D0%B9%D1%82%D0%B8-%D0%A3%D0%97%D0%98-%D0%BD%D0%B0-%D0%92%D0%B8%D0%BD%D0%BE%D0%B3%D1%80%D0%B0%D0%B4%D0%B0%D1%80%D0%B5</a> 1×slots зеркало подтвердит вашу регистрацию если говорить Для получения приза нужно пригласить в игру нового клиента. Казино начисляет пригласившему фиксированный процент от взносов приглашённого в виде приза: чаще всего его объем не превышает 10%. Срок действия приза правило не превышает месяца: пригласивший получает приз от проигранных ставок приглашённого в 1-ый луна забавы.Бездепы обычно предлагают с отыгрышем — моментально вывести выигранные средства нельзя. Перевод денег со счета будет вероятен в того, как пользователь выполнит все притязания казино, а сумма не быть выше установленного правилами лимита. Условиями промоакции фиксируются сроки, протяжении которых заказчик вправе воспользоваться предложением. Обычно они не превышают нескольких дней в активации.
<b>Смотреть еще похожие новости:</b>
<a href=https://nauc.info/forums/viewtopic.php?t=20377934>1×slots официальный сайт скачать на айфон</a>
<a href=http://brilliance.ru/forum/viewtopic.php?f=6&t=39383>1×slots зеркало</a>
<a href=https://qualityprogamer.de/forum/showthread.php?tid=272868>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Акционные предложения от казино есть в разных форматах. Часто бонусы даются в размен на депо. Игрок вносит платеж и получает деньги, безвозмездные вращения прочие поощрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — картина бонуса, который гарантирован за исполненье определенных деяний на веб-сайте: Демоказино есть практически на любом веб-сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются значительно пореже: там в случае выигрыша и соблюдения условий акций бездеп можно перевоплотить в настоящие деньги.
#9388 Jeffreyfoorshttps://ibcatx.com
<a href=https://ibcatx.com>Russian pedicure Austin</a>
#9389 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slotscasino09k online
В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая часть забавы. Важно, часто бездепозитные бонусы в казино выдаются с ограничениями по максимальной выплате. В среднем можно рассчитывать на прибыль в количество тыщ рублей. Как вывести выигрыш с бонуса без депозита. Придётся доказать аккаунт документально, в некоторых заведениях. Процедура верификации обязательна и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате либо прочтите в правилах.Перечисленные повыше основные свойства сопровождают фактически любой бонус и считаются стереотипными для бездепозитных бонусных начислений в казино. <a href=http://filmkachat.ru/>1×slots зеркало регистрация</a> <a href=https://poldomy.pl/member.php?u=210889>https://poldomy.pl/member.php?u=210889</a> Как правило, при выводе финансов, от играющего потребуется только устроить наименьший лепта чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом индивидуальный счет. 1×slot регистрация <a href=http://t20suzuki.com/phpBB2/profile.php?mode=viewprofile&u=3106>http://t20suzuki.com/phpBB2/profile.php?mode=viewprofile&u=3106</a> Но ни не забывайте пристально разбирать верховодила роли в бонусных акциях. Если вы нарушите желая бы одно условие, позже вы не можете устроить недоразумение с администрацией.
1×slots официальный demo регистрация в 1×slots casino
Бездепозитные призы начисляются только раз раз. Не стоит открывать новые аккаунты, чтобы получить их повторно. Служба защищенности казино непременно выявит «левого» участника и перекроет. Если посетитель выполнит нужные требования, отыграет собственную ставку и решит исключить личный выигрыш, то ему нужно сведению, что казино непременно потребует предоставить ксерокопии личных документов, дабы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные свои исключить не удастся. 1×slots зеркало на сегодня Вообще перейдя в казино — управляла одинаковы в получении бездепозитных призов, в стандартные правила заходит: подтвердить эл. Почту и аппарат, наполнить свой индивидуальный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ.Любой выигрыш по ставке повыше установленного лимита будет являться недействительным. То есть ставка не будет засчитана при отыгрыше, в случае выигрыша его сумма не поступит на счёт клиента — результат забавы несомненно полностью аннулирован. <a href=http://www.ceraunavoltapavullo.it/index.php?option=com_k2&view=itemlist&task=user&id=1134527>http://www.ceraunavoltapavullo.it/index.php?option=com_k2&view=itemlist&task=user&id=1134527</a> Подарки на конкретные даты выделяются критериями получения. Если одобрение начисляют игроку на день рождения, то сумма обычно зависимости от совместного размера депо последний год. 1хслотс рабочее зеркало
1×slots casino регистрация на сайте
Даже не выиграв солидную сумму, игрок увлекательно проведет время, изнутри изучит работу площадки, оценит геймплей автоматов. Все это без каких-либо финансовых рисков. Быть в курсе наилучших промоакций легкостью. Достаточно регулярно изучать перечень свежих онлайн казино с выводом приза без депозита в этом разделе.Бонусные средства – маленькая сумма средств для старта в новом казино. На бонусные деньги, обычно разрешается играть во все игры, кроме слотов с прогрессивным джекпотом и игр из раздела live casino. <a href=https://sc-grandmaster.ru/forum/?PAGE_NAME=profile_view&UID=20016>https://sc-grandmaster.ru/forum/?PAGE_NAME=profile_view&UID=20016</a> 1×slots casino регистрация Также посещают случаи, когда казино начислит оговоренный приз последствии регистрации нового посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам.
1×slot официальный сайт
В разделе с призами активировать собственный подарок. Найти забавы, для которых учтено одобрение и использовать бонус по предназначению. <a href=https://chasingadream.rpginitiative.com/showthread.php?tid=135149>1×slots коды</a> Так собственно можете смело регистрироваться без всяких размышлений. Фортуна сейчас наверняка на вашей стороне. Не страшитесь, так последствие какого или убытка Вам абсолютно не угрожает. С этими призами как без пополнения, Вы остаетесь лишь в плюсе, хотя не как не в минусе. Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?Как и другие акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такого предложения являются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых гостей и разрешает им составить впечатление о функционале, не рискуя значительными совокупностями. x1 slots регистрация в 1×slots casino <a href=http://www.pdt-mall.com/bbs/board.php?bo_table=free&wr_id=648212>http://www.pdt-mall.com/bbs/board.php?bo_table=free&wr_id=648212</a> Стоит обозначить(означить), собственно бездепозитный приз выдается только взрослым новичкам, коие, же, могут пригласить личных приятелей и своих, кроме рассчитывающих на поощрительную программку преданности. Подобная разработка появилась среди конкурирующих онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению собственной популярности, методом привлечения свежих игроков. Бонусы – это оригинальный шанс для потенциальных соучастников игры, коие все опробовать софт покер рума и увериться, станут ли они в него выступать или нет. Новый игрок испробует свои силы с реальными оппонентами в казино.
1×slots регистрация 1×slotscasino 56 online
<a href=http://fdaplus.co.kr/bbs/board.php?bo_table=free&wr_id=205194>http://fdaplus.co.kr/bbs/board.php?bo_table=free&wr_id=205194</a> Минимального оборота. Этот предел устанавливается вейджером — же игрок не поиграет на установленную сумму, вывод средств будет недосегаем. казино 1×slots официальный сайт
<b>Смотреть еще похожие новости:</b>
<a href=https://portugal-campings.com/pt/profile/jamescip/>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Так что приготовьтесь предоставить конфиденциальную информацию (пол, возраст, страна проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает не более суток, после чего удастся беспрепятственно выводить солидные выигрыши. Бездепозитные бонусы прекрасный вариант безвозмездной забавы в игровые автоматы. Многие пользователи сети не понимают, собственно в казино можно начать выступать полностью безвозмездно, а потом исключить выигрыш на банковскую карту либо электронный кошелек, другие не доверяют интернет казино, а третьи успешно играют и выигрывают – и подчас довольно великие суммы.
#9390 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasin online
Прежде всего, не забывайте периодически заглядывать на страницу обзоров бездепозитных бонусов. Они шаг за шагом разглядывают более интересные предложения основных игорных порталов.Таким образом онлайн казино получает потенциального игрока. Возможно в будущем либо настоящем он захочет сыграть на средства средства. Так трудятся бездепозитные призы в онлайн казино. Здесь очень подходит выражение, бесплатные сыр посещает лишь в мышеловке. Начинающие игроки имеют не осознавать опасность азарта. Однако со временем осознания становится больше. Это тема для отдельного обсуждения. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots casino 777 online</a> <a href=http://zqykj.com/bbs/home.php?mod=space&uid=274429>http://zqykj.com/bbs/home.php?mod=space&uid=274429</a> 1×slots зеркало видели такую регистрацию на <a href=http://mayakminska.1stbb.ru/memberlist.php?mode=viewprofile&u=6716>http://mayakminska.1stbb.ru/memberlist.php?mode=viewprofile&u=6716</a>
зеркло казино 1×slots
Вознаграждения за получение VIP-статуса ? начисляются в программы преданности при достижении очередного уровня или выдаются персонально менеджерами службы. <a href=https://chasingadream.rpginitiative.com/showthread.php?tid=132837&pid=277833#pid277833>1×slots подтвердит вашу регистрацию если говорить</a> 1× slots зеркало Как верховодило, новоприбывшие геймеры для желают ознакомиться с способами ввода и вывода валютных средств и сроки выполнения поданных заявок чтобы четко разуметь, как живо меня вывести свой казино приз за регистрацию без депозита на электрический кошелек или же банковскую карту. К счастью для всех играющих, внутри конкретных холдингов, все казино конкурируют между собой. Ведь случае бы конкретную фирму представляло лишь одно онлайн-заведение, то ли бы клиенты увидели казино с призом за регистрацию и имели бы рассчитывать лишь на вознаграждение в виде приза на первое инвестиция. К любому заведению периодически стопам привлекать свежих игроков, собственно, в, только на руку всем играющим. <a href=https://www.aptksa.org/vb/member.php?u=9615>https://www.aptksa.org/vb/member.php?u=9615</a> На данном разделе портала регулярно публикуются обзорные заметки, в которых рассматриваются бесплатные бонусы наилучших интернет-казино. Информация структурирована по нескольким пт, включая основные:Акционные предложения от казино есть в различных форматах. Часто бонусы даются в обмен на депо. Игрок заносит платеж и получает средства, благотворительные вращения и поощрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — вид приза, кот-ый гарантирован за выполнение конкретных действий на веб-сайте: 1×slots официальный сайт скачать на айфон Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются сразу в сотворения профиля и активны непродолжительное время. Если не успеете израсходовать свои, они попросту сгорят. Касаемо медли, как бонусы активны протяжении часа.
1×slots казино зеркало
Как правило, при выводе денег, от играющего потребуется лишь устроить минимальный вклад чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом индивидуальный счет. Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих требований, не обязательной верификации. Если на сайте учтена неотъемлемая процедура доказательства личности, то исключить выигрыш получится лишь после ревизии данных. Приготовьтесь заполнить анкету и отправить в техподдержку документ, подтверждающий личность.Чаще всего интернет-казино предлагают бездепозитные призы свежим юзерам. Эта промо-акция довольно отлично завлекает новичков, подталкивая их к открытию счета. Конечно, не все они становятся преданными клиентами, хотя сам факт регистрации аккаунта играет на руку заведению. <a href=https://www.deadbeathomeowner.com/community/profile/davidmaf/>https://www.deadbeathomeowner.com/community/profile/davidmaf/</a> Верификация аккаунта. Лучше доказать личность сразу последствии регистрации, чтобы потом не было заморочек с выводом средств. Верификация может проходить 2-мя путями: 1×slots зеркало регистрация Основное различие что, нет, собственно для получения бездепа нужно пополнять баланс в казино. Но считая сего, есть ряд прочих отличий:Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депо возможность выделяться до 30 дней.
1×slots официальный сайт зеркало
Получив собственный презент, Вы можете безвозмездно играть на реальные средства, а выполнив обстоятельства отыгрыша, вывести собственный выигрыш.Операторы гемблинга заявляют, что так они сражаются с бонус-хантерами. Впрочем, критики считают, собственно данным казино пробуют устроить из случайного постояльца постоянного игрока. <a href=http://board.eternityrpc.com/member.php?action=profile&uid=369>1×slots официальный сайт мобильная версия</a> 1 xslots рабочее зеркало <a href=http://droid-comz.ru/user/DoctorLazutaka/>http://droid-comz.ru/user/DoctorLazutaka/</a> Поспешите забрать бездепозитные призы за регистрацию в казино из представленного списка. Все платформы не только водят законную деятельность, но и обрадуют честными результатами игры, высочайшей отдачей, резвыми выплатами.
1×slots рабочее зеркало на сегодня
Когда речь о получении бездепозитных бонусов в казино, начала обратите внимание на следующие условия:Принципиальным различием бесплатных бонусов от бонусов на депо считается недоступность необходимости заносить деньги на аккаунт. Из-за этого их нередко именуют бездепозитными (not the slightest deposit bonuses). Бонус в казино без депо содержит различные вариации: может быть приветственный приз, акции в честь каких-то праздников либо главных дат, бонус за вербование свежих игроков, лояльность и получение VIP-статуса. <a href=http://nbcenter.ge/index.php?subaction=userinfo&user=meekchamber25>http://nbcenter.ge/index.php?subaction=userinfo&user=meekchamber25</a> Способы получения бездепа различаются зависимо вида бонуса, кот-ый понравился игроку. Но вас так нужно быть зарегистрированным в легальном онлайн-казино и доказать собственную личность. В общем облике пошаговая аннотация для получения бездепозитного приза выглядит так:Получив свой подарок, Вы можете бесплатно играть на реальные деньги, а выполнив обстоятельства отыгрыша, исключить свой выигрыш. 1×слотс казино А ознакомиться с новыми интернет казино, Вы можете с бонусов с выводом прибыли, коие Вы можете получить без депозита.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/6949/#comment-307372>онлайн казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Любой выигрыш по ставке выше установленного лимита несомненно считаться недействительным. То есть ставка не несомненно засчитана при отыгрыше, а в случае выигрыша его сумма не поступит на счёт клиента — результат игры несомненно полностью аннулирован. Некоторые веб-сайты, до чем провести регистрацию игроков, предлагают ответить на несколько базисных вопросов. Цель проведения сходственной викторины – выявить случайных людей, коие не имеют представления о покере, и не допустить получения ими призов. Если посетитель теснее играл в казино, то ответить на полтора десятка простых вопросов будет нетрудно. Очень часто, ответы можно отыскать на официальных сайтах данных учреждений.
#9391 Charlesgunnyhttp://filmkachat.ru
1× slots сайт
Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? <a href=http://filmkachat.ru/>1×slots бездепозитный бонус за регистрацию</a> Вейджер (wager) – это коэффициент, кот-ый показывает на какую необходимую необходимо сделать ставок, чтобы исключить приз из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода этого приза, Вам необходимо сделать ставок на сумму: 500*70=3500 руб. Только всецело отыграв бонус, Вы сможете вывести свой выигрыш.В большинстве заведений устроить это возможно по e-mal, по номеру аппарата, спустя социальную сеть или гугл-аккаунт. <a href=https://mcpe.ru.net/user/DavidVoity/>https://mcpe.ru.net/user/DavidVoity/</a> Чаще всего казино бонус за регистрацию без депозита даёт вероятность запустить любой машина. Но лучше внимательно ознакомиться с условиями. Иногда для игры доступны только определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, превосходнее начать знакомство с миром пыла именно с «одноруких бандитов».Для верификации аккаунта нужно предоставить специалистам технической поддержки отсканированную копию паспорта и счета за коммунальные услуги, а фотографию банковской карты либо скриншот страницы электронного кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для доказательства личности. 1×slots подтвердит вашу регистрацию если говорить <a href=http://dvnshu.com/index.php?subaction=userinfo&user=worthlessscruti>http://dvnshu.com/index.php?subaction=userinfo&user=worthlessscruti</a> Только выполнив все условия отыгрыша и дождавшись завершения проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить свои деньги.
казино 1× slots официальный сайт
1×slots акции В разделе с призами активировать свой презент. Найти игры, для которых предусмотрено поощрение и применять приз по предназначению.Воспользоваться бездепом возможно не во всех игровых автоматах: казино вдруг уточняет ограничение для клиентов. Конечно, это возможно счесть неким неудобством для игрока, хотя ради отметить, что выбор автоматов всё равно остаётся достаточно великим. <a href=https://www.x-fta.com/foro/member.php?1262059-DoctorLazutaea>https://www.x-fta.com/foro/member.php?1262059-DoctorLazutaea</a> 1хслотс казино зеркало Наличие у игрока второго аккаунта. Запрещено делать количество профилей для многократного получения бездепов.Бездепозитные бонусы истинными деньгами, коие возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадали.
1хслотс 1хслотс регистрация перейти на 1×slots
В игровых клубах без лицензии Вы покупаете „кота в мешке“ и в случае спорных обстановок нет возможности куда-то посетовать и доказать собственную правоту.Новые клиенты онлайн-казино без первого депозита могут проверить свою удачливость. К что, этому же есть вероятность конвертировать бездепы в настоящие средства за регистрацию в казино, впрочем для этого бонус необходимо отыграть сообразно условиям акции. Свежий приз начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в использовании средствами, а случае отыгрыша оператор может ввести ограничение на вывод средств. <a href=http://geolan-ksl.ru/forum/user/89346/>http://geolan-ksl.ru/forum/user/89346/</a> 1×slots casino online регистрация На данном разделе портала регулярно публикуются обзорные заметки, в рассматриваются благотворительные бонусы наихороших интернет-казино. Информация структурирована по нескольким пунктам, включая главные:Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.
1хслотс рабочее зеркало на сегодня
<a href=https://www.katzenforum.at/forum/media/users/jamesagema.16012/>1×slots официальный зеркало</a> Возьми свой подарок. Чаще всего бонус активизируется незамедлительно после регистрации. Но случаются истории, когда надо(надобно) зайти в личный офис либо написать в справочную службу. 1×slot казино зеркало <a href=http://fruit-impex.by/index.php?subaction=userinfo&user=stimulatingfuzz>http://fruit-impex.by/index.php?subaction=userinfo&user=stimulatingfuzz</a> Если вы новичок данном и только попали в неизведанную вами область азарта — за услуг как бездепозитные призы без пополнения.
1хслот зеркало сайта
Приветственный бездеп предоставляется любому игроку лишь раз один. Казино дерутся с так именуемыми бонусхантерами (от англ. Bonus Hunter — охотник за призами), пытающимися заводить множественные аккаунты для надувательства оператора и повторного получения дара. Исключить похожие деяния дозволяет верификация данных. Администрация вправе потребовать у клиента подтвердить персональные данные, обозначенные при регистрации. Для верификации аккаунта надо(надобно) предоставить специалистам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, еще фотографию банковской карты либо скриншот странички электрического кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для подтверждения личности. <a href=https://telearchaeology.org/TAWiki/index.php/%C3%90%C3%90%C2%B2%C3%91%E2%80%9A%C3%90%C2%BE%C3%91%CB%86%C3%90%C2%BA%C3%90%C2%BE%C3%90%C2%BB%C3%90%C2%B0_%C3%90%C3%A2%E2%82%AC%E2%84%A2%C3%90%C2%BE_%C3%90%C3%A2%E2%82%AC%E2%84%A2%C3%90%C2%BB%C3%90%C2%B0%C3%90%C2%B4%C3%90%C2%B8%C3%90%C2%B2%C3%90%C3%91%C3%91%E2%80%9A%C3%90%C2%BE%C3%90%C2%BA%C3%90%C2%B5>https://telearchaeology.org/TAWiki/index.php/%C3%90%C3%90%C2%B2%C3%91%E2%80%9A%C3%90%C2%BE%C3%91%CB%86%C3%90%C2%BA%C3%90%C2%BE%C3%90%C2%BB%C3%90%C2%B0_%C3%90%C3%A2%E2%82%AC%E2%84%A2%C3%90%C2%BE_%C3%90%C3%A2%E2%82%AC%E2%84%A2%C3%90%C2%BB%C3%90%C2%B0%C3%90%C2%B4%C3%90%C2%B8%C3%90%C2%B2%C3%90%C3%91%C3%91%E2%80%9A%C3%90%C2%BE%C3%90%C2%BA%C3%90%C2%B5</a> Отзывы читателей о бонусных акциях посодействуют составить эмоцию, хотя не забывайте о субъективности собственных объяснений. 1×slots скачать на айфон
<b>Смотреть еще похожие новости:</b>
<a href=https://www.mshowto.org/forum/members/jamespauri.html>1×slots зеркало</a>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=325080&pid=648696#post_648696>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Отыграв бездепозитный приз в казино с выводом также придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в подобное ограничение присутствует, то единоразово исключить выйдет лишь сумму, не превышающую размер приобретенного бонуса.
#9392 Charlesgunnyhttp://filmkachat.ru
1х слотс зеркало регистрация в 1×slots casino
Иногда для получения призов нужно связаться с адептами службы поддержки. Удобнее всего с ними беседовать в онлайн-сате, хотя времени достаточно запроса по электрической почте.Способы получения бездепа различаются от облика приза, кот-ый понравился игроку. Но для иначе нужно быть зарегистрированным в легальном онлайн-казино и доказать собственную личность. В общем виде пошаговая инструкция для получения бездепозитного приза выглядит так: <a href=http://filmkachat.ru/>1×слот регистрация в 1×slots casino</a> <a href=http://bbs.boway.net/home.php?mod=space&uid=1106592>http://bbs.boway.net/home.php?mod=space&uid=1106592</a> Диапазон ставок, коие вправе сделать игрок, кроме лимитирован. Обычно назначать можно маленькую необходимую — пределах 10–30 руб. За одно вращение. 1×slots официальный сайт скачать на айфон <a href=http://www.neworleansbbs.com/home.php?mod=space&uid=275896>http://www.neworleansbbs.com/home.php?mod=space&uid=275896</a> Для выбора азартного заведения Вы сможете воспользоваться списком наших казино с бонусами за регистрацию. На нашем веб-сайте мы опубликовали перечень бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, что доля бонусов эксклюзивные и доступны только для гостей нашего сайта по-специальному промо-коду или по уникальной ссылке. Кроме того, для любого приза мы подготовили доскональный обозрение, в Вы узнаете как получить и отыграть поощрение и как вывести свой выигрыш с бездепа.Для выбора азартного заведения Вы можете пользоваться списком наших казино с бонусами за регистрацию. На нашем веб-сайте мы опубликовали список бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, собственно часть призов эксклюзивные и доступны лишь для гостей нашего сайта по-специальному промо-коду либо по уникальной ссылке. Кроме того, для любого приза мы подготовили подробный обзор, в Вы узнаете как получить и отыграть поощрение и как исключить свой выигрыш с бездепа.
1×slots рабочее зеркало
Вы не в коем случае ни чем рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс изучить игровые автоматы, научится регулировать изменять ставки и полосы, изучать бонусные игры и их выигрышные комбинации, да счете просто зарядится кучей эмоций! Ведь вы будите играть на бонусные свои, коие возможно отыграть и исключить, а не просто на демо счет, что, этим наиболее адреналин в крови более повысится а пульс забьется с частым ритмом!Также случаются случаи, когда казино начислит обсужденный бонус после регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам. 1×slots сайт Онлайн-казино с бездепозитными призами ставят клиентам обстоятельства для пользования бездепами, поэтому перед участием в промоакции лучше тщательно ознакомиться со всеми правилами и нюансами промоакции. Условия имеют касаться получения бонуса, его использования и следующего вывода денежных средств когда выигрыша.Верификация аккаунта. Лучше подтвердить личность незамедлительно последствии регистрации, дабы потом не было заморочек с выводом средств. Верификация может проходить двумя путями: <a href=http://k98727wu.beget.tech/user/Justinalilt/>http://k98727wu.beget.tech/user/Justinalilt/</a> 1×slots официальный сайт скачать
1×slots на любой вкус как пройти регистрацию
Чаще всего казино бонус за регистрацию без депозита даёт вероятность запустить каждой автомат. Но чем внимательно ознакомиться с условиями. Иногда для забавы доступны только определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, лучше начать знакомство с миром пыла непосредственно с «одноруких бандитов».Благодаря программе лояльности от игорного заведения, возможно арестовать неплохой старт и без добавочных вложений запустить видеослоты. Кроме того, возможно рассчитывать на реальную удачу и получить, без вложения собственных финансов, великой выигрыш. <a href=http://dreamus.co.kr/bbs/board.php?bo_table=free&wr_id=160484>http://dreamus.co.kr/bbs/board.php?bo_table=free&wr_id=160484</a> Законодательство, регулирующее азартные забавы в различных странах, влияние на полномочия операторов. В результате пользователи из отдельных регионов сталкиваются с ограничениями со стороны казино. Это имеет быть как полный отказ в доступе, например и невозможность загружать игры отдельных производителей. 1×slots зеркало сайта Превышение наибольшей ставки при отыгрыше. Система автоматически не предостерегает о превышении ставки, потому о нарушении верховодил игрок может разузнать теснее в подачи запроса на вывод средств.Объективные – размер приза, коэффициент и обстоятельства вейджера, надобность внесения депо для вывода денег;
1×slots casino регистрация 1×slotscasino09k online
Одним из поводов отдавать привилегию 1 или иному заведению содержится в привлекательности предлагаемых акций и бесплатных предложений. Безвозмездные фриспины, выдаваемые без дела делать какой-либо вклад, в списке располагается далеко не в конце. Выиграть реальные деньги в казино не пополняя счет – трудно, но вполне. Главное задаться целью и не нарушатьправила заведения. Выберите несколько казино с бездепзитными призами и начните играть на бонусные свои. По статистике каком-то 10-ти заведений можно заработать небольшую необходимую средств с бонусных средств.С этими простыми советами каждое казино с призом за регистрацию способно принести в разы больше выгоды и выгоды. 1×slots акции <a href=https://njt.ru/forum/user/183649/>https://njt.ru/forum/user/183649/</a>
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Нет. Для получения бездепозитного приза в казино необходима неотъемлемая регистрация на веб-сайте. Играть в слоты даром и без регистрации возможно лишь в демо режиме. <a href=https://malaysia-forex.com/members/132494-CharlesNus>https://malaysia-forex.com/members/132494-CharlesNus</a> При малый сумме приза рекомендуется выступать по низким ставкам, а применять максимальные превосходнее только никаких случае, в вейджер очень великий, а время на отыгрыш крепко ограничено. 1×slots актуальное зеркало Важно, убедитесь том,, что ранее не регились в выбранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи.Большинство клубов привлекают внимание геймеров за счёт разнородных презентов. На 1 сайтах возможно получить виртуальные кредиты, которые откроют доступ ко всему софту. На других же, администрация предлагает благотворительные вращения для запуска лучших интернет слотов. Несмотря на различные промоакции, стоит выделить самые главные.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.pmpobc.ca/index.php?topic=119649.new#new>1 x slots casino</a>
<a href=http://naturetour.ru/communication/forum/messages/forum3/message24022/5716-skachat-1×slots-na-android-mobilnaya-versiya?sessid=b4ee7705935d5cbf0e2a7d256c30227f&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>скачать 1×slots на андроид мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Помните, собственно в некоторых забавах сумма ставки идет в зачет вейджера только отчасти. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки числятся как отыгранные средства, момент как в слотах идет в зачет все 100% суммы.
#9393 Charlesgunnyhttp://filmkachat.ru
1×slots на любой вкус как пройти регистрацию
Это также бесплатные финансы, которые поступают на аккаунты свежеиспеченных компьютерные последствии регистрирования. А необыкновенность этих бонусов произведено никаких, что обретенные деньги непременно по применять в продолжении назначенного времени. <a href=http://filmkachat.ru/>1×slot зеркало</a> <a href=https://rdaforum.com/user-17414.html>https://rdaforum.com/user-17414.html</a> Суммы похожих услуг, большинстве, колеблются от 3-х до двадцати долларов, а вейджер на эти средства должен составлять от 30 до шестидесяти один. Зачастую, величайшая сумма выигрыша тут составит от одной до 2-ух сотен $. Если компьютерные выиграет больше, то все свои все быть списанными до очень разрешенного выигрыша. Здесь замечена смысл выводить еще несуществующие деньги на свою платежную систему и дальше находить заведение с благоприятными под данную необходимую релоадом или бонусом за 1-ое пополнение счета. Есть несколько подвидов бездепозитного гонорары, предлагаемого большим числом заведений.Особую изюминку видео слотам придают оригинальные знакы. С их свет активизируются различные бонусы. Вы можете запустить вспомогательный степень и прирастить сумму выигрыша. Есть знаки, коие сменяют ненужные составляющие и сами творят выигрышные комбо. Не стоит забывать и на бонус-тур. После каждого успешного спина есть шанс увеличить необходимую выигрыша в 2 либо хорошо раза. 1×slots зеркало которую указывали при регистрации кстати <a href=https://toprankdesign.co.uk/wiki/index.php?title=%D0%91%D0%BB%D0%BE%D0%B3%D0%B8_%D0%9E_%D0%96%D0%B5%D0%BD%D1%81%D0%BA%D0%BE%D0%BC_%D0%97%D0%B4%D0%BE%D1%80%D0%BE%D0%B2%D1%8C%D0%B5>https://toprankdesign.co.uk/wiki/index.php?title=%D0%91%D0%BB%D0%BE%D0%B3%D0%B8_%D0%9E_%D0%96%D0%B5%D0%BD%D1%81%D0%BA%D0%BE%D0%BC_%D0%97%D0%B4%D0%BE%D1%80%D0%BE%D0%B2%D1%8C%D0%B5</a> На данном разделе портала регулярно публикуются обзорные заметки, в рассматриваются безвозмездные бонусы наилучших интернет-казино. Информация структурирована по нескольким пунктам, включая основные:
1×slots зеркало регистрацию более популярный вариант это
2. Создать свежий профиль. Для регистрации нужно заполнить маленькую анкету либо зайдите в личный офис посредством социальных сетей; <a href=http://palais.beesims.com/phpbb/memberlist.php?mode=viewprofile&u=3390>скачать 1×slots официальный сайт</a> 1×slots официальный сайт мобильная версия <a href=https://pixel-brush.ru/user/TerryFus/>https://pixel-brush.ru/user/TerryFus/</a> Размер ставки для забавы по бездепозитному призу (естесственно же, в случае, когда он представлен вид бонусных валютных средств) зачастую ниже, чем при ирге на депозит. Ограничение будет работать до момента отыгрыша бонуса.В бонусную программу множества операторов входят систематические бездепы. Это бессрочные акции, поощряющие интенсивных постоянных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают неизменные бонусы без депо в обмен на скопленные баллы лояльности. 1×slots регистрация 1×slots review live
1×slots регистрация 1×slotscasino 56 online
Бесплатный бонус – кредиты, коие онлайн-казино начислит клиенту, не принуждая его пополнять игровой счет.Для получения депозитного бонуса необходимо пополнить собственный игровой баланс реальными средствами. Вознаграждение можно получить или при внесении первого депо, либо в виде фиксированного процента от внесённых средств. Так либо по, бонус поступит на счёт лишь после пополнения. <a href=https://spoilerok.ru/user/Deweyval/>https://spoilerok.ru/user/Deweyval/</a> 1×slots casino регистрация 1×slotscasin online Начнём с как, что каждое рекламную за регистрацию подразумевает некие условия. Бездепозитные бонусы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность валютного оборота, необходимая для исполненья критерий. Пример, получили безвозмездные вращения и выиграли с них 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 рублей, проигрышных или выигрышных, не. После исполнения, бонусный баланс перейдёт на реальный и станет легкодоступным к выводу.
1×slots зеркало регистрацию более популярный вариант это
<a href=https://demo.comuni-italiani.it/forum/viewtopic.php?f=9&t=365794>1×slots промокод при регистрации 2025</a> Получив свой презент, Вы сможете бесплатно играть на настоящие деньги, а выполнив условия отыгрыша, вывести свой выигрыш.Ниже указан важный список законных казино в Беларуси с призами на первый депо. Вы можете попасть на официальный сайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. Похожим образом работает третий способ доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения посетителя либо из-за с получения им VIP-статуса. Подарок предоставляется после обращения в поддержку и ревизии. 1×slots скачать на айфон <a href=http://www.idsys.kr/bbs/board.php?bo_table=free&wr_id=56237>http://www.idsys.kr/bbs/board.php?bo_table=free&wr_id=56237</a> Классическая разновидность приза за создание аккаунта. Его превосходство заключается в том, что заказчик имеет других подбирать аппараты и делать ставки в их. Иногда перечень игровых автоматов ограничен оператором, но все равно это никакого, чем один-единственный доступный разъем, как когда с использованием фриспинов.
1×slot зеркало рабочее регистрации на телефон придет
<a href=https://bajarmp3.net/member.php?action=profile&uid=8846>https://bajarmp3.net/member.php?action=profile&uid=8846</a> Чтоб получить крупный выигрыш, выбирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша.Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие появляются у начинающих. 1хслотс мобильная версия зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=250524>1×slots акции</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для выбора азартного заведения Вы сможете пользоваться списком наших казино с призами за регистрацию. На нашем веб-сайте мы опубликовали перечень бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, собственно часть бонусов эксклюзивные и доступны лишь для посетителей нашего сайта по-специальному промо-коду или по уникальной ссылке. Кроме как, для каждого бонуса мы подготовили доскональный обзор, в котором Вы узнаете как получить и отыграть поощрение и как исключить свой выигрыш с бездепа.
#9394 JetCasinohttps://jet-casino-apk.ru
<a href=https://jet-casino-apk.ru>http://www.jet-casino-apk.ru</a>
Скачать приложение казино онлайн Jet – выигрывай сегодня! <a href=https://jet-casino-apk.ru>https://jet-casino-apk.ru</a>
#9395 сейф для оружияhttps://sejfy-dlya-oruzhiya.ru/
Тут можно преобрести сейф для оружия цена в москве <a href=https://sejfy-dlya-oruzhiya.ru/>оружейные шкафы и сейфы</a>
#9396 Charlesgunnyhttp://filmkachat.ru
1×slots бонус за регистрацию
Вышеописанная первопричина и является основным нюансом, из-за которого операторы отдают часть собственной выгоды на разные маркетинговые затраты и маркетинговые кампании. А самым действенным тут будут играть именно бездепозитные призы казино 2022 с выводом за регистрацию. <a href=http://filmkachat.ru/>1хслотс рабочее зеркало</a> Также есть онлайн-платформы азартных игр, коие применяют раздачу бездепозитных бонусов в особые даты (как для казино, например и для игрока). Помимо сего, действующие геймеры того имеют возможность получить схожие бонусы за собственную деятельность (к примеру, за увеличения уровня либо за схожие достижения).У нас на веб-сайте Вы найдете список бонусов без депо в проверенных казино и подробную информацию о том как их получить и использовать. <a href=https://championsleage.review/wiki/User:DellaCollicott>https://championsleage.review/wiki/User:DellaCollicott</a> Ещё одно распространённое акционное предложение – привлекательный презент с сомнительными притязаниями. К примеру, клуб сулит $100 виде бездепа, хотя с вейджером х80 либо х100. Отыграть подобный вейджер фактически невозможно и потому какого-либо концентрироваться на более интересных акциях. 1×slots регистрация 1×slots casino c2d ru <a href=https://pixel-brush.ru/user/Charlesvurdy/>https://pixel-brush.ru/user/Charlesvurdy/</a>
1×slots зеркало рабочее
В перечне притязаний к отыгрышу часто наличествуют лимиты на ставки при забаве на личные деньги. Так, если отыграть надо(надобно) 30 000 рублей, а максимальная сумма ограничена 30 рублями, то вертеть барабаны предстоит 1000 один. Эта особенность затрудняет соблюдение игроками условий по срокам действия акции. 1×slots официальный сайт зеркало <a href=http://y90429l8.bget.ru/user/GlennNix/>http://y90429l8.bget.ru/user/GlennNix/</a> Промообъявления от казино не дают реальной картины и направлены на привлечение внимания пользователей. Понять, насколько высоки шансы остаться в плюсе, дозволит собственный тест критерий предложения:Как лишь вы отыграли вейджер и средства с бонусного баланса перебежали вас на настоящий счет, Вы смело сможете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (устроить наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депо). 1хслотс казино зеркало Помните, что любые нарушения правил сведут на нет ваши старания, и вы наверняка останетесь без начисленного для дарового бонуса. Всегда изучайте правила начисления и обстоятельства вейджера. По любым вопросам, на которые вы имеет помощи отыскать ответы, обращайтесь за объяснениям и саппорт.Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации приза без депозита. Внимательно прочитайте до конца. Многие новички делают промахи на шаге регистрации и потому не получить подарок.
1×slots актуальное зеркало
Для тех, кто только взвешивает испытать собственную фортуну, а для профессиональных игроков, отыскивающих новые площадки для выигрышей, водящие лицензированные казино нередко организуют разные промоакции, и лучшее предложений за время – как для новичков, так и для проф игроков – бездепозитный бонус за регистрацию. Хотя бесплатные бонусы начисляются без депо, не исключено, собственно для понадобиться вносить средства. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь в как, как новый заказчик впервые пополнит игровой счет. <a href=http://focus.su/bitrix/redirect.php?goto=http://luxe-matras.ru/bitrix/rk.php?goto=http://astehavia.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/1QfdyU_sprX>http://focus.su/bitrix/redirect.php?goto=http://luxe-matras.ru/bitrix/rk.php?goto=http://astehavia.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/1QfdyU_sprX</a> Первый возникающий вопрос, это, чего выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают новых игроков. Последним легче начать игру на деньги с презента за регистрацию. Им не нужно пополнять баланс и расходовать личностные свои. Новички получают благотворительные спины либо средства на счёт. С их помощью знакомятся с игровым ходом, крутят слоты и делают ставки в рулетке.Подарки на праздничные ? приуроченные к праздничным датам, требующие условного отыгрыша либо начисляются без такового. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду. скачать 1×slots официальный сайт
1×slots сайт зеркало
Для отыгрыша приза казино обязывает игрока сыграть на сумму, в количество раз превосходящую сумму приобретенного приза — тут выгода компании явна.На нашем веб-сайте Вы найдете перечень своевременных свежих бездепозитных призов в казино 2022 года. Также, есть большое эксклюзивных услуг, коие доступны лишь гостям нашего вебсайта после регистрации по нашей ссылке либо активации особого промокода. <a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=36224>1×slots зеркало видели такую регистрацию на</a> При пользовании бездепозитным бонусом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют несколько видов лимитов:Активация происходит с помощью промокодов, коие вводятся в личном офисе в регистрации. Среди спецпредложений в перечне Casino.ru содержатся неповторимые промокоды, которые доступны только посетителям портала. Другие методы начисления средств ? автоматическая активация незамедлительно в творенья аккаунта и получение подарка по запросу в службу технической поддержки. Объективные – объем приза, коэффициент и условия вейджера, необходимость внесения депо для вывода денег;Для такого, дабы отыграть необходимую вашего бездепозитного приза надо(надобно) выполнить обстоятельства вейджера. Очень нередко фриспины даются на конкретные слоты (book of ra, book of lifeless, book of sun), избирайте разъем себя по душе, все очень красивые и качественные. Бездепозитные приз возможность быть денежным так и вид фриспинов на слоты казино 1×slots <a href=https://www.ytdestek.com/members/23297.html>https://www.ytdestek.com/members/23297.html</a>
1×slots коды
Обычно для получения бонусов без депозита, казино выдвигает лояльные и абсолютно выполнимые условия, но есть ряд деяний коие воспрещены и имеют причиной противные результаты: <a href=https://noteswiki.net/index.php?title=1×slots_%D0%97%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE_%D0%9D%D0%B0_%D0%A1%D0%B5%D0%B3%D0%BE%D0%B4%D0%BD%D1%8F>https://noteswiki.net/index.php?title=1×slots_%D0%97%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE_%D0%9D%D0%B0_%D0%A1%D0%B5%D0%B3%D0%BE%D0%B4%D0%BD%D1%8F</a> Размер ставки для забавы по бездепозитному бонусу (окончательно же, в случае, когда он представлен повторяющий бонусных валютных средств) зачастую ниже, чем при ирге на депозит. Ограничение несомненно работать до этапа отыгрыша приза.Суммы сходственных предложений, в, колеблются от трех до 20 $, а вейджер на эти свои обязан сочинять от тридцати до шестидесяти раз. Зачастую, наивеличайшая сумма выигрыша здесь составит от одной до двух сотен долларов. Если в выиграет больше, то все средства могут быть списанными до максимально разрешенного выигрыша. Здесь появляется содержание выводить еще несуществующие финансы на собственную платежную систему и далее отыскивать заведение с подходящими под данную сумму релоадом либо призом за первое пополнение счета. Есть некоторое подвидов бездепозитного вознаграждения, предлагаемого большим количеством заведений. 1×slots официальный зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://portugal-campings.com/pt/profile/jamescip/>1×slots зеркало регистрацию более популярный вариант это</a>
<a href=https://bajarmp3.net/showthread.php?tid=424305>1хслотс регистрация в 1×slots casino</a>
<a href=https://tabsgame.ru/user/Jamesbes/>1×slots зеркало которую указывали при регистрации кстати</a>
<a href=https://www.formulersupport.com/Thread-1×-%D1%81%D0%BB%D0%BE%D1%82-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE–103214>1× слот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных призов принимаются достаточно высочайшие притязания. Часто онлайн-казино советуют отыграть бонусное одобрение до 100 раз в игровых автоматах. Например, случае игрок получил безвозмездно 10 $, то нужно несомненно отыграть их, поставив 1 тыщу спинов по 1 доллару любой. Стоит отметить, что не все казино дают вероятность выступать на призы и не во всех развлекательных заведениях идентичные верховодила для отыгрывания. Некоторые казино запрещают выступать на призы в блекджек или ограничивают ставки до 5 процентов, что значительно наращивает в 10-ки раз число нужных игр.
#9397 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
Для получения бездепа необходимо пригласить в забаву по реферальной ссылке свежего посетителя: он должен зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на необходимую, указанную в критериях акции.Приветственный приз без депозита ? презент за регистрацию. Выдается деньгами, фриспинами либо баллами. В заключительном случае бонусные баллы применяются для роли в турнирах или обмена на реальные средства. <a href=http://filmkachat.ru/>1×slots регистрацию процедура займет всего лишь</a> Далее потребуется отыграть вагер и вывести выигрыш. Игрокам без опыта крупно подфартило, они могут получить десятки подарков за 1 регистрацию. Если не смогли получить Бездепозитный приз, не беспокойтесь. Обратитесь в онлайн чат, оператор поможет ситуацию. <a href=https://www.retroco.co/home.php?mod=space&uid=400562&do=profile>https://www.retroco.co/home.php?mod=space&uid=400562&do=profile</a> Фриспины без депо или дополнительные свои помогут поближе познакомиться с игровой платформой и её функциями. За счёт даров можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради забавы против живых крупье. 1×slots зеркало которую указывали при регистрации кстати <a href=http://wuyuebanzou.com/home.php?mod=space&uid=542192>http://wuyuebanzou.com/home.php?mod=space&uid=542192</a> Вейджер (wager) – это коэффициент, который показывает на какую необходимую необходимо устроить ставок, дабы вывести бонус из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода этого приза, Вам нужно сделать ставок на необходимую: 500*70=3500 рублей. Только полностью отыграв бонус, Вы сможете исключить свой выигрыш.Прибывшие на аккаунт финансы бездепозитные бонусы предназначаются, в основном, только для свежеиспеченных юзеров, коие ранее не имели личного аккаунта в данном казино. Исходя из этого, если раньше у игрока был сделан депо, то, по всей вероятности, у него больше не несомненно способности рассчитывать на получение такого приза в конкретном заведении.
1 xslots рабочее зеркало
Для отыгрыша приза казино обязует игрока поиграть на сумму, в количество один превосходящую необходимую полученного приза — тут выгода фирмы явна. 1 x slots casino В бонусную программку множества операторов входят регулярные бездепы. Это бессрочные промоакции, поощряющие активных неизменных игроков. Популярный формат — раздача фриспинов по конкретным дням недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депозита в мена на накопленные баллы преданности. <a href=http://shilinka.ru/user/Glenngap/>http://shilinka.ru/user/Glenngap/</a> Законодательство, регулирующее азартные забавы в различных странах, оказывает на возможности операторов. В итоге юзеры из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это возможность быть как полный отказ в доступе, так и невозможность загружать забавы отдельных изготовителей.Автоматы непопросту числятся самым знаменитым азартным весельем. Чтобы усвоить управление и верховодила, понадобится всего количество минут. Ваша задачка устроить ставку, определить количество трудящихся линий и можно вертеть тамбур. Если на выпадет выигрышная композиция – вы выиграли! С этой задачей для посодействуют управится бездепозитные призы казино. 1хслотс регистрация в 1×slots casino
1 хслот регистрация в 1×slots casino
Также есть онлайн-платформы азартных игр, которые применяют раздачу бездепозитных призов в специальные даты (как для казино, например и для игрока). Помимо этого, действующие геймеры также имеют вероятность получить схожие бонусы за собственную работа (например, за увеличения уровня или за схожие заслуги). <a href=https://www.ctbiz.com/author/josephmit/>https://www.ctbiz.com/author/josephmit/</a> 1×slots зеркало регистрацию более популярный вариант это
1× slots casino зеркало
<a href=https://www.findaspermdonor.com/viewtopic.php?f=25&t=87171>1×slots регистрация на сайте 1×slots ru com</a> 1хслотс казино зеркало <a href=https://fbi.me/index.php?title=%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%A7%D0%B8%D1%82%D0%B0%D1%82%D1%8C>https://fbi.me/index.php?title=%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%A7%D0%B8%D1%82%D0%B0%D1%82%D1%8C</a> Не сложно догадаться, собственно no down payment bonuses практически разу не посещают немаленькими. Чаще всего речь о пяти–тридцати баксах (или эквиваленте данной суммы в другой денежной).
1×slots промокод при регистрации 2025
Раздача бонусов может быть приурочена к разным датам: календарные праздничные, дни рождения игроков, юбилей открытия казино и т. Д. Подарок выдается повторяющий средств, фриспинов либо баллов для скопления и обмена на предложения оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода этой суммы понадобиться выполнить ряд требований. <a href=http://t95283ld.bget.ru/user/DonaldInoxy/>http://t95283ld.bget.ru/user/DonaldInoxy/</a> Так что приготовьтесь предоставить конфиденциальную информацию (пол, возраст, страна проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает не более суток, последствии чего удастся свободно выводить крупные выигрыши.Можно ли в одном онлайн казино получить больше одного бонуса за регистрацию? Нет, например как в каждом онлайн казино есть правила, к коим нужно придерживаться, не создавать 2 аккаута для получения призов, иначе будет блокировка обоих аккаутов, не пытайтесь обмануть онлайн казино, бонус за регистрацию выдаеться раз один одному личику. 1×slots зеркало регистрацию более популярный вариант это
<b>Смотреть еще похожие новости:</b>
<a href=http://link.5nx.ru/viewtopic.php?f=5&t=4532>1×slots casino регистрация 1×slotscasino09k online</a>
<a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1×slots сайт</a>
<a href=http://www.webdesignforum.com.au/member.php?action=profile&uid=31660>1× слот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При пользовании бездепозитным призом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют некоторое обликов лимитов: Вознаграждения за получение VIP-статуса ? начисляются масштабах программы преданности при достижении очередного уровня либо выдаются индивидуально менеджерами саппорта.
#9398 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало рабочее
Перечисленные повыше главные характеристики сочетают фактически любой приз и являются стереотипными для бездепозитных бонусных начислений в казино. <a href=http://filmkachat.ru/>1×slots casino регистрация на сайте</a> Онлайн-казино кропотливо продумывают бонусные обстоятельства, которые необходимо выучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и другие ограничения. <a href=http://thermocare.co.kr/bbs/board.php?bo_table=free&wr_id=410253>http://thermocare.co.kr/bbs/board.php?bo_table=free&wr_id=410253</a> Максимальная ставка ? уточняется в еденице счета и ограничивает размер ставки за раз спин. В случае ее превышения бонус возможность быть аннулирован. Также в правилах имеет содержаться запрет на размещение ставок определенного вида, к, по равным шансам в рулетке (другими, на чет либо нечет, красноватое или черное и т.д.). 1× slots casino зеркало <a href=https://www.medicinacinesenews.it/forum/memberlist.php?mode=viewprofile&u=3592510>https://www.medicinacinesenews.it/forum/memberlist.php?mode=viewprofile&u=3592510</a> Автоматы непопросту числятся наиболее знаменитым азартным веселием. Чтобы усвоить управление и правила, потребуется всего несколько мин. Ваша задача сделать ставку, найти число трудящихся линий и можно вертеть тамбур. Если на выпадет выигрышная комбинация – вы выиграли! С данной задачей для помогут управится бездепозитные бонусы казино.
1хслотс официальный сайт зеркало
1×slots рабочее зеркало на сегодня Можно ли в одном онлайн казино получить больше 1-го бонуса за регистрацию? Нет, так как в любом интернет казино есть верховодила, к которым нужно держаться, не делать 2 аккаута для получения призов, иначе несомненно блокировка обоих аккаутов, не пытайтесь перехитрить онлайн казино, приз за регистрацию выдаеться один раз одному лицу. <a href=http://www.irken.co.kr/bbs/board.php?bo_table=free&wr_id=1894333>http://www.irken.co.kr/bbs/board.php?bo_table=free&wr_id=1894333</a> 1×slots зеркало выигрыши обязательно пройдите регистрацию если
зеркала 1×slots
Иногда в бездепа, казино дарит наименьший приз (до 50 рублей), ради которого надо заморачиваться. <a href=https://google.kg/url?q=https://doctorlazuta.by/>https://google.kg/url?q=https://doctorlazuta.by/</a> Подтверждение электронной почты – одно из главных критерий, которое есть практически в каждом бездепозитном казино. Чтобы верифицировать электрическую почту, довольно перебежать по интенсивной ссылке в письме, полученном от азартного клуба.На странице представлены бездепозитные бонусы за регистрацию в казино редчайшая заслуга за которой гонятся все игроки как новенькие, например и профессионалы. Мы тоже уделяем большое внимание на присутствие призов при составление рейтинга казино на деньги. Бездепозитный бонус это возможность выступать даром и выиграть реальные деньги. 1×slots зеркало подтвердит вашу регистрацию если говорить В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, нужно обратиться в службу поддержки через лайв-чат на сайте казино.
1× slots официальный
<a href=https://www.formulersupport.com/Thread-Gaquwuv?pid=119514#pid119514>1×slots мобильная версия войти казино</a> Нет. Для получения бездепозитного приза в казино нужна обязательная регистрация на сайте. Играть в слоты безвозмездно и без регистрации возможно лишь в демо режиме.Важно, удостоверьтесь что, нет, что раньше не регились в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи. Бездепозитный бонус за регистрацию в казино — это стартовый презент повторяющий валютного начисления либо безвозмездных вращений для новых игроков заведения, для получения которого надо вносить депо. 1×slots актуальное зеркало <a href=http://expertspa.ru/index.php?subaction=userinfo&user=unsuitableear87>http://expertspa.ru/index.php?subaction=userinfo&user=unsuitableear87</a> Например, игрок получил 500 рублей при разработке аккаунта и должен отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., потребуется сделать 875 спинов для полного отыгрыша.
1×slots рабочее зеркало
Бездепозитные бонусы за регистрацию в игровых автоматах для хозяев онлайн-казино являются долею рекламной кампании, направленной на повышение аудитории вебсайта. Так они продвигают свои бренды и привлекают свежих клиентов.Принципиальным различием безвозмездных бонусов от призов на депозит считается неимение необходимости вносить деньги на аккаунт. Из-за этого их часто именуют бездепозитными (no down payment bonuses). Бездепозитный бонус предоставляется новому игроку за конкретные действия. Часто подарок в виде средств или фриспинов выдается за регистрацию, благодаря чему пользователь получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. <a href=http://forums.visualtext.org/member.php?action=profile&uid=1242719>http://forums.visualtext.org/member.php?action=profile&uid=1242719</a> Размер приза. В качестве бездепов обычно начисляют маленькие суммы, а когда речь идет о бонусах за депо, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино могут презентовать игроку до 2000$.Такой безвозмездный эквивалент средств зачисляется на профиль пользователя последствии воплощения требований и предназначаются они лишь для игрового процесса. Вывод таких вознаграждений вероятен лишь после воплощения вейджеровых условий. 1×slots регистрация на официальном сайте Многие азартные клубы ограничивают сумму вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании промоакции, суммы Вы не можете исключить. Разница несомненно аннулирована, Вы и не сможете делать на нее ставки.
<b>Смотреть еще похожие новости:</b>
<a href=https://melhorlance.com.br/minha-conta/>1×slots официальный сайт зеркало рабочее</a>
<a href=https://forums.scar-divi.com/topic/579013–1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%BF%D0%B5%D1%80%D0%B5%D0%B9%D1%82%D0%B8-%D0%BD%D0%B0–1×slots/>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a>
<a href=https://traderscrypt.com/forums/showthread.php?tid=5891&pid=8770#pid8770>1×slots регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вейджер (либо вагер) ? это минимальная сумма ставок, коию необходимо сделать для вывода валютного приза. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, тем привлекательнее спецпредложение.
#9399 Charlesgunnyhttp://filmkachat.ru
1×slots официальный регистрация
Вы всего, как и все предпочитаете получать презенты и бездепозитные призы казино. Игорные жилища взяли в привычку одаривать гэмблеров приятными бонусами. Стать обладателем приветственного подарка возможно за творение профиля или пополнение счёта. Второй вариант более увлекательный, так клубы готовы удвоить депозит! Но если вы новичок и только знакомитесь с миром пыла, никакого воспользуйтесь призом за регистрацию. <a href=http://filmkachat.ru/>1× slots регистрация в 1×slots casino</a> <a href=http://klausreichmann.de/doku.php?id=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D0%BE%D0%B2%20%D0%BD%D0%B0%20%D0%B4%D0%BE%D0%BC%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO>http://klausreichmann.de/doku.php?id=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D0%BE%D0%B2%20%D0%BD%D0%B0%20%D0%B4%D0%BE%D0%BC%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO</a> Вы всего, как и все предпочитаете получать презенты и бездепозитные призы казино. Игорные жилища взяли в привычку одаривать гэмблеров приятными бонусами. Стать обладателем приветственного подарка возможно за творение профиля или пополнение счёта. Второй вариант более увлекательный, так клубы готовы удвоить депозит! Но если вы новичок и только знакомитесь с миром пыла, никакого воспользуйтесь призом за регистрацию.Кешбэк-бонус дает собой возврат фиксированного процента от ставки если, тогда, поражения или же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не превышает 10%. 1×slots casino online регистрация <a href=https://www.spacepub.net/members/5151-FrankPhags?s=d98e34ffcae67759e501b8a47bdcbde9>https://www.spacepub.net/members/5151-FrankPhags?s=d98e34ffcae67759e501b8a47bdcbde9</a> Вы наверняка, как и все предпочитаете получать подарки и бездепозитные призы казино. Игорные дома взяли в привычку одаривать гэмблеров приятными бонусами. Стать обладателем приветственного подарка можно за творенье профиля либо пополнение счёта. Второй вариант более увлекательный, как клубы готовы удвоить депозит! Но если вы новичок и лишь знакомитесь с миром пыла, другого пользуйтесь бонусом за регистрацию.
1×slots рабочее зеркало на сегодня
Все обожают получать подарки. Согласитесь, почти любой играющий человек будет очень счастлив, случае получит бесплатный презент для забавы в интернет казино просто за регистрацию либо же бонус за внесенный депозит, например называемые приветственные бонусы для свежих игроков. Соответственно эти онлайн клубы будут более модны и преимущественны у игроков при выборе казино для игры. Топ казино день обновляется и добавляются свежие и интересные игровые клубы с симпатичной бонусной политикой и всеми вероятными привилегиями, к коим относятся эти бонусы как фриспины за регистрацию, валютные бездепозитные призы, еще щедрые бонусы за внесенный депозит. казино 1× slots официальный сайт <a href=http://www.mybaltika.info/ru/blogs/587/11069/>http://www.mybaltika.info/ru/blogs/587/11069/</a> 1хлот регистрация в 1×slots casino Как правило, при выводе финансов, от играющего требуется лишь устроить наименьший лепта чтобы, чтобы, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом индивидуальный счет.Лишь известные и знаменитые азартные заведения могут позволить себе раздавать бездепы в виде дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, которые можно израсходовать в топовых аппаратах с высочайшей отдачей.
1хслотс зеркало
Бездепозитные бонусы отличный вариант бесплатной забавы в игровые автоматы. Многие пользователи сети не знают, что в казино возможно начать играть полностью безвозмездно, а потом исключить выигрыш на банковскую карту либо электрический кошелек, другие не доверяют онлайн казино, а третьи удачно играют и выигрывают – и подчас достаточно великие суммы. Условия отыгрыша приза. Если Вы планируете заработать на бездепозитном призе, то начала направьте на велечину вейджера и срок, который дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть приз и вывести выигрыш. <a href=http://xn–b1acebaenad0ccc3aiee.xn–p1ai/forum/user/5691/>http://xn–b1acebaenad0ccc3aiee.xn–p1ai/forum/user/5691/</a> 1×slots регистрацию более популярный вариант это В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать собственный выигрыш с бесплатных вращений. Прибыль, которую Вы заработаете на этом бездепе возможно ставить на вывод без какого или отыгрыша.Подтверждение регистрации. Казино настоятельно привязки профиля к электронному адресу и номеру телефона. Для этого на e-mail отчаливает письмо со ссылкой, а на телефонный ? текстовое известье с кодом.
1 xslots рабочее зеркало
Подтверждение персональной инфы. Все казино настоятельно от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и наличие у пользователя иных аккаунтов (мультиаккаунт запрещен). Несмотря на то, собственно этот вариант стимуляции со стороны азартных платформ очень моден в сходственных игр, далеко многим поклонникам казино известно, что сами бездепозитные бонусы казино и как непосредственно их возможно эксплуатировать. x1 slots регистрация в 1×slots casino <a href=https://rubcrumb.ru/user/CharlesStula/>https://rubcrumb.ru/user/CharlesStula/</a>
1×slots официальный сайт, скачать
Если площадка дарует бездеп за регистрацию, то процедура его получения ординарна. Нужно только завести акк на сайте и активировать его, подтвердив адресок электронной почты, номер аппарата или другие данные, коие просит оператор. Перед данным нужно убедиться, собственно юзер располагается на официальном сайте казино, не на жульнической площадке. <a href=http://psvhome.ru/user/Stevenvum/>http://psvhome.ru/user/Stevenvum/</a> 1×slots бездепозитный бонус за регистрацию Чтоб получить крупный выигрыш, выбирайте игровые автоматы с предельным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша.
<b>Смотреть еще похожие новости:</b>
<a href=https://sadhaka.nl/forum/viewtopic.php?t=102238>1хслотс рабочее зеркало</a>
<a href=http://weeklywars.de/viewtopic.php?f=12&t=1015&p=471689#p471689>1× slots casino зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На бонусные начисления могут быть установлены дополнительные лимитирования, которые Вы не к при отыгрыше. Пока приз всецело не отыгран — деньги из казино не выводятся.
#9400 Charlesgunnyhttp://filmkachat.ru
1×slots на любой вкус как пройти регистрацию
Максимальный размер ставки, который нельзя превышать же приз не несомненно всецело отыгран. В случае нарушения сего правила, приз и выигрыш с него будут аннулированы.Возьми собственный подарок. Чаще всего приз активируется сразу в регистрации. Но посещают истории, когда нужно зайти в индивидуальный офис или написать в справочную службу. <a href=http://filmkachat.ru/>1хслотс казино зеркало</a> Одним из предлогов отдавать привилегию 1 или иному заведению заключается в привлекательности предлагаемых промоакций и бесплатных предложений. Безвозмездные фриспины, выдаваемые без нужды делать какой-либо лепта, в перечне находится далековато не в конце. <a href=https://www.mybbaddons.com/board/user-77684.html>https://www.mybbaddons.com/board/user-77684.html</a> Итак, чтобы безвозмездные бонусные кредиты превратились в настоящие деньги, которыми продоставляется распоряжаться по собственному усмотрению, их надо(надобно) отыграть. Вейджер стопам уточнять в правилах онлайн-казино.Также, в этом случае необходимо подтвердить собственный номер телефонного, чтобы код, приобретенный в смс-сообщении от клуба установить в особое фон в собственном офисе игрока. 1хслотс зеркало <a href=http://forum.fcmn.co.il/member.php?action=profile&uid=304833>http://forum.fcmn.co.il/member.php?action=profile&uid=304833</a> Иногда для получения бонусов нужно спутаться с адептами службы. Удобнее всего с ними разговаривать в онлайн-сате, желая времени довольно запроса по электрической почте.Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут устанавливает лимитирование для посетителей. Конечно, это можно посчитать неким неудобством для игрока, но справедливости стоит отметить, собственно выбор автоматов всё также остаётся достаточно большим.
1×slots регистрацию более популярный вариант это
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=288260&pid=646738#post_646738>казино 1×slots официальный сайт</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots Пoдтвepдить личнocть клиента. Для успешного вывода средств, нужно доказать личность клиента. Нa этaпe вepификaции пpoфиля, работники службы защищенности должны убедиться, что у игрока всего лишь один акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не может исключить свой выигрыш, в у него несомненно некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы.Выбирайте наихорошие безвозмездные бонусы за обзоров на Casinoz – и пусть вас сопутствует счастье при отыгрыше бонусных кредитов! <a href=http://google-pluft.us/forums/profile.php?id=536288>http://google-pluft.us/forums/profile.php?id=536288</a> Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, дабы появилась вероятность исключить выигрыш.Самый распространённый из похожих призов, конечно же, бездеп на день рождения посетителя — бонус в виде фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им можно на установленного периода времени. 1×slots акции
1×slots зеркало на сегодня
Третитй бездепозитный бонус за регистрацию – валютные свои. К раскаянию, начислить рубли или доллары способны только известные и модные клубы. С их помощью вас насладиться любой доступной игрой – автоматом, рулеткой, кено, блэкджеком.Фриспины предназначены для использования в видео слотах. Внимательно ознакомьтесь с условиями – часто их выдают на кое-какие автоматы. В зависимости от клуба, у вас получится устроить определённое число ставок. Кстати, продвинутые игорные дома позволяют запускать каждых «одноруких бандитов». Иногда операторы требуют внесение минимального депо перед выводом для верификации платежного инструмента. В неких казино данный депо того предстоит отыграть.Подарки на дни ? посвященные торжественным датам, требующие условного отыгрыша или начисляются без того. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду. <a href=http://cd.dotspen.com/home.php?mod=space&uid=8804>http://cd.dotspen.com/home.php?mod=space&uid=8804</a> Для выбора азартного заведения Вы можете воспользоваться списком наших казино с призами за регистрацию. На нашем сайте мы опубликовали список бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, собственно доля призов неповторимые и доступны только для посетителей нашего вебсайта по-специальному промо-коду или по уникальной ссылке. Кроме как, для любого приза мы подготовили подробный обозрение, в котором Вы узнаете как получить и отыграть одобрение и как исключить собственный выигрыш с бездепа. 1хслотс 1хслотс регистрация перейти на 1×slots
1хслотс официальный сайт зеркало
<a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1×slots casino регистрация</a> В зависимости от интернет заведения каждый из них может вам предложить как бездепозитные деньги, например и бездепозитные фриспины, коие после удачной регистрации рухнут вам на ваш игровой баланс.В количестве случаев безвозмездные бонусы начисляются в кредитах, которые невозможно незамедлительно исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти требования принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д. ). О нем читайте ниже. Такой казино приз без депо за регистрацию выдается игроку на час и активно употребляется данное предложение с 2017 года. Это словно какая-то конспирация одобрения под бездепозитный. Суть всего сего сводится к тому, что геймеру на час выдается, к примеру, 1000 долларов, а реклама утверждает про, что каждой выигрыш можно несомненно дальнейшем забыть при для. Но в играющий серьезно отнесется к данному предложению, то он просто потеряет время. Ведь геймеру надо(надобно) будет выступать не в аккаунте, а в тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (и всей тысячи) в верховодила вступят определенные условия, где будет сказано, что наибольшей суммой победы может быть только двести долларов и средства можно применять лишь в качестве бонуса на 1-ый лепта с вейджером 25 от суммы гонорары плюс сам депозит. По итогу получится, что игрок выигрывал для 200% бонус с вейджером на конкретную сумму. Короче говоря, это все не вашего времени.Обычно бездепозитные акции от казино, приходят на эл. Почту в дни рождения или праздничные. В некоторых онлайн казино можно обратиться в чат и как неизменному игроку, вероятно для предложат бездепозитное предложение. x1 slots регистрация в 1×slots casino <a href=http://www.sazkar.info/member5750.html>http://www.sazkar.info/member5750.html</a> В зависимости от онлайн заведения каждый из их имеет вам предложить как бездепозитные деньги, например и бездепозитные фриспины, которые после удачной регистрации упадут для на ваш игровой баланс.В онлайне много известных игорных площадок с красивыми акционными услугами. Однако пристально разбирать условия 10-ов услуг в надоест, ну и время отнимет количество. Поэтому наша команда подготовила ТОП-3 сайтов с превосходнейшими бездепозитными бонусами:
1х слот 1хслотс регистрация перейти на 1×slots
При регистрации стопам указывать лишь достоверную информацию. Когда учетная запись несомненно активна, появится доступ в Личный кабинет. В нем можно избрать денежную, установить промокод и разузнать доскональные правила получения и отыгрыша бездепа. Краткая информация об акции часто присутствует именно на регистрационной форме. <a href=http://msfo-soft.ru/msfo/forum/user/43224/>http://msfo-soft.ru/msfo/forum/user/43224/</a> 1×slots casino зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://www.fromrus.su/index.php?/topic/20197–1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8E-%D0%B1%D0%BE%D0%BB%D0%B5%D0%B5-%D0%BF%D0%BE%D0%BF%D1%83%D0%BB%D1%8F%D1%80%D0%BD%D1%8B%D0%B9-%D0%B2%D0%B0%D1%80%D0%B8%D0%B0%D0%BD%D1%82-%D1%8D%D1%82%D0%BE/>1×slots зеркало регистрацию более популярный вариант это</a>
<a href=https://tucmas.fi/phpBB/viewtopic.php?f=4&t=348393>1 x slots casino</a>
<a href=https://adminclub.org/showthread.php?tid=64119&pid=289446#pid289446>1×slots официальный сайт скачать на айфон</a>
<a href=https://www.rusdrama-az.com/support/51-sluzhba-tehnicheskoy-podderzhki-sayta.html>1хслот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При правильном подходе бездепы — это прекрасный способ играть на деньги без траты собственных средств. Есть количество советов, следуя которым возможно извлечь максимум пользы из сходственных акций казино. Играть по только на лицензированных площадках. Скриптовые веб-сайты столько врут с бонусными предложениями, хотя и употребляют пиратский софт с измененным ГСЧ. Выиграть на этих автоматах нереально.
#9401 RogerCoghttps://medium.com/@borealuonexus/demo-pg-slot-96366a324a41
Judul: Merasakan Pengalaman Bermain dengan „PG Slot“ di Situs Kasino ImgToon.com
Dalam dunia permainan kasino online, permainan slot telah menjadi salah satu permainan yang paling digemari, terutama jenis PG Slot. Di antara banyak situs kasino online, ImgToon.com adalah tujuan utama bagi pemain yang ingin menguji peruntungan mereka di banyak permainan slot, termasuk beberapa kategori terkenal seperti demo pg slot, pg slot gacor, dan RTP slot.
Demo PG Slot: Menjalani Bebas dari Risiko Salah satu fungsi menarik yang disediakan oleh ImgToon.com adalah demo pg slot. Fitur ini memberikan pemain untuk memainkan berbagai jenis slot dari PG tanpa harus menempatkan taruhan uang asli. Dalam mode demo ini, Anda dapat menguji berbagai taktik dan mengerti sistem permainan tanpa bahaya kehilangan uang. Ini adalah metode terbaik bagi pemula untuk beradaptasi dengan permainan slot sebelum mengalihkan ke mode taruhan nyata.
Mode demo ini juga menyediakan Anda pemahaman tentang potensi kemenangan dan hadiah yang mungkin bisa Anda peroleh saat bermain dengan uang nyata. Pemain dapat menyusuri permainan tanpa khawatir, membuat pengalaman bermain di PG Slot semakin menyenangkan dan bebas beban.
PG Slot Gacor: Prospek Besar Mendapatkan Kemenangan PG Slot Gacor adalah sebutan terkenal di kalangan pemain slot yang merujuk pada slot yang sedang dalam fase memberikan kemenangan tinggi atau lebih sering disebut „gacor“. Di ImgToon.com, Anda dapat mendapatkan berbagai slot yang ada dalam kategori gacor ini. Slot ini diakui memiliki peluang kemenangan lebih tinggi dan sering menghadiahkan bonus besar, membuatnya pilihan utama bagi para pemain yang ingin memperoleh keuntungan maksimal.
Namun, perlu diingat bahwa „gacor“ atau tidaknya sebuah slot dapat bergeser, karena permainan slot tergantung pada generator nomor acak (RNG). Dengan bermain secara rutin di ImgToon.com, Anda bisa mengidentifikasi pola atau waktu yang tepat untuk memainkan PG Slot Gacor dan memperbesar peluang Anda untuk menang.
RTP Slot: Faktor Penting dalam Pemilahan Slot Ketika berbicara tentang slot, istilah RTP (Return to Player) adalah faktor yang sangat krusial untuk dipertimbangkan. RTP Slot merujuk pada persentase dari total taruhan yang akan dikirimkan kepada pemain dalam jangka panjang. Di ImgToon.com, setiap permainan PG Slot diberi dengan informasi RTP yang jelas. Semakin tinggi persentase RTP, semakin besar peluang pemain untuk mendapatkan kembali sebagian besar dari taruhan mereka.
Dengan memilih PG Slot yang memiliki RTP tinggi, pemain dapat mengoptimalkan pengeluaran mereka dan memiliki peluang yang lebih baik untuk menang dalam jangka panjang. Ini menjadikan RTP sebagai indikator krusial bagi pemain yang mencari keuntungan dalam permainan kasino online.
#9402 сейф огнестойкийhttps://ognestojkij-sejf.ru/
Тут можно преобрести сейфы пожаростойкие <a href=https://ognestojkij-sejf.ru/>огнестойкий сейф купить</a>
#9403 DavidFeshttps://amlscreening.center/
<a href=https://amlscreening.center/>DFSA compliance check for cryptocurrency wallets</a> Overview of Cryptocurrency Deal Verification and Compliance Solutions
In contemporary cryptocurrency market, ensuring transfer openness and conformity with Anti-Money Laundering (AML) and Know Your Customer (KYC) rules is essential. Following is an overview of popular sites that deliver services for digital asset transaction tracking, verification, and fund security.
1. Token Metrics Summary: Tokenmetrics offers digital asset evaluation to examine potential fraud risks. This platform enables individuals to review cryptocurrencies prior to buying to evade possibly risky holdings. Highlights:
– Threat evaluation. – Suitable for investors looking to avoid risky or scam projects.
2. Metamask Center Summary: Metamask.Monitory.Center allows users to verify their cryptocurrency holdings for doubtful transactions and standard conformity. Benefits:
– Checks assets for purity. – Offers warnings about likely asset blockages on particular platforms. – Delivers thorough results after account connection.
3. BestChange.ru Overview: Best Change is a platform for observing and checking crypto trade transactions, ensuring transparency and transaction security. Highlights:
– Transfer and wallet monitoring. – Sanctions validation. – Internet portal; compatible with BTC and several other digital assets.
4. AMLCheck Bot Summary: AMLCheck Bot is a investment monitor and AML compliance tool that employs machine learning models to identify questionable transactions. Advantages:
– Transaction observation and identity check. – Available via web version and Telegram. – Supports coins including BSC, BTC, DOGE, and other types.
5. AlphaBit Summary: AlphaBit delivers comprehensive Anti-Money Laundering (AML) tools tailored for the digital currency field, supporting firms and financial organizations in maintaining standard conformity. Features:
– Comprehensive AML tools and evaluations. – Adheres to current security and regulatory guidelines.
6. AMLNode Description: AMLNode delivers compliance and identification tools for digital currency companies, which includes transaction monitoring, compliance validation, and risk assessment. Features:
– Threat evaluation tools and compliance checks. – Important for ensuring safe firm processes.
7. Btrace.AMLcrypto.io Overview: Btrace AML Crypto specializes in resource check, delivering deal monitoring, restriction evaluations, and help if you are a victim of loss. Benefits:
– Useful assistance for asset retrieval. – Transfer tracking and safety features.
Exclusive USDT Check Options
Our website also evaluates various sites that offer validation tools for Tether deals and wallets:
– USDT TRC20 and ERC20 Validation: Various platforms offer detailed evaluations for USDT deals, assisting in the detection of doubtful actions. – AML Validation for USDT: Solutions are provided for monitoring for money laundering actions. – “Cleanliness” Screenings for Holdings: Checking of transfer and wallet legitimacy is offered to identify likely threats.
Summary
Choosing the suitable tool for validating and tracking cryptocurrency deals is essential for guaranteeing safety and compliance conformity. By reading our reviews, you can choose the ideal service for deal monitoring and resource protection.
#9404 prodamus promokod_lhplhttp://prodamus-promokod1.ru
промокод на продамус <a href=prodamus-promokod1.ru>промокод на продамус</a> .
#9405 prodamus promokod_lcplhttp://prodamus-promokod1.ru
промокод на подключение продамуса <a href=https://prodamus-promokod1.ru/>промокод на подключение продамуса</a> .
#9406 JetApkhttps://jet-casino-apk.ru/jet-apk
<a href=https://portalaz.com.br/client_login_check?redirectUrl=https://jet-casino-apk.ru/jet-apk>jet-casino-apk.ru/jet-apk</a> <a href=http://manga-netflix10737.tinyblogging.com.xx3.kz/go.php?url=https://jet-casino-apk.ru/jet-apk>jet-casino-apk.ru/jet-apk</a> <a href=http://www.strictlycars.com/cgi-bin/topchevy/out.cgi?id=rusting&url=https://jet-casino-apk.ru/jet-apk>jet-casino-apk.ru/jet-apk</a> <a href=https://maps.google.ba/url?q=https://jet-casino-apk.ru/jet-apk>jet-casino-apk.ru/jet-apk</a> <a href=http://unilab.su.xx3.kz/go.php?url=https://jet-casino-apk.ru/jet-apk>jet-casino-apk.ru/jet-apk</a> <a href=http://blizsoft.com/AlstraSoft_Efriends/banners/index.php?url=https://jet-casino-apk.ru/jet-apk>jet-casino-apk.ru/jet-apk</a> <a href=https://rev1.reversion.jp/redirect?url=https://jet-casino-apk.ru/jet-apk>jet-casino-apk.ru/jet-apk</a> <a href=https://ubezpieczeni.com.pl/go.php?url=https://jet-casino-apk.ru/jet-apk>jet-casino-apk.ru/jet-apk</a> <a href=http://www.digger.net/projects/fvl/redirect.php?url=https://jet-casino-apk.ru/jet-apk>jet-casino-apk.ru/jet-apk</a> <a href=http://elllo.org.xx3.kz/go.php?url=https://jet-casino-apk.ru/jet-apk>jet-casino-apk.ru/jet-apk</a> <a href=http://ruy.ru/redirect.php?url=https://jet-casino-apk.ru/jet-apk>jet-casino-apk.ru/jet-apk</a> <a href=http://www.megacurioso.com.br/restrito/?url=https://jet-casino-apk.ru/jet-apk>jet-casino-apk.ru/jet-apk</a> <a href=http://kt.kg/bitrix/rk.php?goto=https://jet-casino-apk.ru/jet-apk>jet-casino-apk.ru/jet-apk</a> <a href=http://tools.parstools.com/rss/site.php?url=https://jet-casino-apk.ru/jet-apk>jet-casino-apk.ru/jet-apk</a> <a href=https://www.baigouwanggong.com/url.php?url=https://jet-casino-apk.ru/jet-apk>jet-casino-apk.ru/jet-apk</a>
Download apk file casino jet – win right now! <a href=http://й•їж™џ.com/productshow.asp?id=60&mnid=31314&mc=20153281130338&url=http%3A%2F%2Fwww.tonymacx86.com/threads/port-your-own-mac-games.326959&lmm=>jet-casino-apk.ru/jet-apk</a> <a href=http://freemusic123.com/karaoke/cgi-bin/out.cgi?id=castillo&url=https://jet-casino-apk.ru/jet-apk>jet-casino-apk.ru/jet-apk</a> <a href=https://www.bnro.ro/ChangeSiteVersion.aspx?v=d&returnUrl=https://jet-casino-apk.ru/jet-apk>jet-casino-apk.ru/jet-apk</a> <a href=https://paspn.net/default.asp?p=90&gmaction=40&linkid=52&linkurl=https://jet-casino-apk.ru/jet-apk>jet-casino-apk.ru/jet-apk</a> <a href=https://smartservices.ru/bitrix/rk.php?goto=https://jet-casino-apk.ru/jet-apk>jet-casino-apk.ru/jet-apk</a> <a href=https://c.t.tailtarget.com/clk/TT-10946–0/8PONWD6OEB/tZ=<cache>buster]/click=www.tonymacx86.com/threads/port-your-own-mac-games.326959>jet-casino-apk.ru/jet-apk</a> <a href=https://fordonsproffs.eu/custom/redirect.aspx?url=https://jet-casino-apk.ru/jet-apk>jet-casino-apk.ru/jet-apk</a> <a href=https://wiki.ood.ch/api.php?action=https://jet-casino-apk.ru/jet-apk>jet-casino-apk.ru/jet-apk</a> <a href=https://infonorwegia.pl/baneriada/url.php?url=https://jet-casino-apk.ru/jet-apk>jet-casino-apk.ru/jet-apk</a> <a href=http://adamlewisschroeder.com/info.php?a%5B%5D=%3Ca+href%3Dhttps%3A%2F%2Fwww.tonymacx86.com/threads/port-your-own-mac-games.326959>jet-casino-apk.ru/jet-apk</a> <a href=https://maps.google.com.gi/url?sa=t&url=https://jet-casino-apk.ru/jet-apk>jet-casino-apk.ru/jet-apk</a> <a href=http://go.lnkam.com/link/r?zc=54Km&client_id=CAoBDAwKBggMBgoIBAcMBA&campaign_id=AgAKCQgMAgwFAwsBBAYPBg&cid=pe&environment=production&zi=db5417d0–970a-11ea-89c4–6df5f89b5d06&zh=1112573929&u=https://jet-casino-apk.ru/jet-apk>jet-casino-apk.ru/jet-apk</a> <a href=https://krasnodar.torens-auto.com/bitrix/redirect.php?goto=https://jet-casino-apk.ru/jet-apk>jet-casino-apk.ru/jet-apk</a> <a href=http://arsenal-kirov.ru/bitrix/rk.php?goto=https://jet-casino-apk.ru/jet-apk>jet-casino-apk.ru/jet-apk</a> <a href=http://www.tzrl.com/go.aspx?url=https://jet-casino-apk.ru/jet-apk>jet-casino-apk.ru/jet-apk</a>
#9407 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slotscasino 56 online
Такие одобрения дозволяют даром протестировать свежее казино, разобраться с игровым ходом интернет слотов, заработать и исключить маленькую необходимую денег. <a href=http://filmkachat.ru/>1хслот зеркало</a> Вы всего, например все любите получать подарки и бездепозитные призы казино. Игорные жилища брали в повадку одаривать гэмблеров приятными призами. Стать владельцем приветственного подарка можно за создание профиля либо пополнение счёта. Второй вариант более занимательный, ведь клубы готовы удвоить депозит! Но в вы новичок и только знакомитесь с миром азарта, лучше воспользуйтесь бонусом за регистрацию.Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала прыткие выводы. Фишка выплат в, что достаточно избрать платёжный инструмент и указать сумму. В большинстве случаев средства зачисляются на электрические кошельки в течение 15 минут, а на банковские карты – 1–3 рабочих дня. <a href=http://www.dong-joo.co.kr/bbs/board.php?bo_table=free&wr_id=722635>http://www.dong-joo.co.kr/bbs/board.php?bo_table=free&wr_id=722635</a> 1×slots casino регистрация 1×slotscasino09k online <a href=http://ruzland.ru/communication/forum/user/2904/>http://ruzland.ru/communication/forum/user/2904/</a> Можно ли зарабатывать на бездепозитных призах? Это не работа, здесь как повезет, случае в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, за возможно назвать везением, и добавочной добавкой к вашему бютжету.Самый распространённый из подобных бонусов, окончательно же, бездеп на день рождения клиента — бонус вид фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им можно в течение установленного периода медли.
1×слот регистрация в 1×slots casino
<a href=https://forumauthority.com/thread-6457-post-39327.html#pid39327>1хслот скачать</a> 1×slots зеркало регистрацию более популярный вариант это <a href=http://www.besatime.com/index.php?subaction=userinfo&user=ArnoldVob>http://www.besatime.com/index.php?subaction=userinfo&user=ArnoldVob</a> 1×slots casino регистрация Зачастую бездепозитные бонусы казино для игры предлагаются различными заведениями азартных игр в качестве рекламных акций либо в целях привлечения к для новых игроков. Для бездепозитных бонусов в казино 2022 геймеру надо пополнять счет до этапа вывода желаемых средств.
1×slots коды
Постарайтесь отыграть вейджер, чтобы появилась возможность забыть заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы можете получить выигрыш на электронной кошелёк, карту, аппарат. <a href=http://www.psltw.com/home.php?mod=space&uid=516427&do=profile>http://www.psltw.com/home.php?mod=space&uid=516427&do=profile</a> Активация по промокоду используется в разных видах бездепов. Если идет о приветственном призе, то набор знаков можно разузнать на основной странице, в регистрационной форме или письме, которое отчаливает пользователю для доказательства e-mail. Акции имеют проводиться вместе с партнерскими площадками. Обычно код располагается на постороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется одноразовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном кабинете либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем актуальный код для активации в описании каждого промо. 1хлот регистрация в 1×slots casino Обычно бездепозитные промоакции от казино, приходят на эл. Почту в деньки рождения либо праздничные. В неких интернет казино можно обратиться в чат и как постоянному игроку, вполне вам предложат бездепозитное предложение.Да, у безвозмездных бонусов есть дефекты. Прежде всего, они обыкновенно небольшие. Кроме такого, обстоятельства вейджера по ним практически строгие. Но все же недоступность риска делает их довольно красивыми для посетителей.
1×slots промокод при регистрации 2025
Онлайн-казино кропотливо продумывают бонусные условия, которые необходимо изучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и другие ограничения.Бездепозитный бонус – это финансовое вознаграждение, которое выдается участнику забавы в казино, для его вербования и появления заинтересованности. Любой посетитель, кот-ый подходит условиям выдачи похожего бездепозитного бонуса, имеет претендовать на получение вышеуказанного приза. Такое поощрение считается более эффективным методом, дающим вероятность стартовать деле, не вкладывая личных вещественных средств. <a href=http://vn-info.net/user/Josephkam/>1×slots зеркало на сегодня</a> Ну и конечно же, для казино бездепозитные бонусы прибыльны с имиджевой стороны: подобная щедрость повышает степень преданности клиентов к фирмы.Теоретически, к бесплатным призам можно отнести так нарекаемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, поэтому что они предоставляют лишь вероятность создавать ставки. Также бездепозитные бонусы могут работать способом возвращать к забаве клиентов, временно приостановивших своё сотрудничество с фирмой: уведомление о бездепе поступает на мобильный телефонный либо почту. 1×slots зеркало рабочее на сегодня <a href=https://tailor.ru/blogs/prodvizhenie-saita/vykup-avto-vladivostok.html>https://tailor.ru/blogs/prodvizhenie-saita/vykup-avto-vladivostok.html</a> Вышеописанная причина и является основным интересным, из-за которого операторы отдают часть своей выгоды на различные маркетинговые затраты и маркетинговые кампании. А самым действующим тут будут выступать именно бездепозитные бонусы казино 2022 с выводом за регистрацию.Фриспины. Бесплатные вращения предназначены для применения в видео-слотах. Внимательно читайте условия – они часто выдаются для некоторых машин. В зависимости от клуба возможность делать конкретное количество ставок. Кстати, современные игорные жилища выделяют вероятность заводить «одноруких бандитов».
1×slots зеркало рабочее на сегодня
Если вы облюбовали для себя некоторое брендов которые вам больше всего приглянулись, для неизменной забавы! Таких гемблеров казино очень предпочитает и оценивает, за частую такие игроки становятся VIP игроками заведения, коим нередко поступают выгодные предложения в виде призов, например же туда входит и бездепозитные.В игровых клубах без лицензии Вы покупаете „кота в мешке“ и если, тогда, спорных обстановок нет возможности куда-то пожаловаться и доказать собственную правоту. <a href=https://sustainabilipedia.org/index.php/%C3%90%C5%A1%C3%91%C6%92%C3%90%C2%BF%C3%90%C2%B8%C3%91%E2%80%9A%C3%91%C5%92_%C3%90%C3%A2%E2%82%AC%E2%84%A2%C3%90%C2%BD%C3%90%C2%B5%C3%91%CB%86%C3%90%C2%BD%C3%90%C2%B8%C3%90%C2%B5_%C3%90%C2%A1%C3%91%C3%91%E2%80%B9%C3%90%C2%BB%C3%90%C2%BA%C3%90%C2%B8_%C3%90%C3%90%C2%B0_%C3%90%C2%A1%C3%90%C2%B0%C3%90%C2%B9%C3%91%E2%80%9A>https://sustainabilipedia.org/index.php/%C3%90%C5%A1%C3%91%C6%92%C3%90%C2%BF%C3%90%C2%B8%C3%91%E2%80%9A%C3%91%C5%92_%C3%90%C3%A2%E2%82%AC%E2%84%A2%C3%90%C2%BD%C3%90%C2%B5%C3%91%CB%86%C3%90%C2%BD%C3%90%C2%B8%C3%90%C2%B5_%C3%90%C2%A1%C3%91%C3%91%E2%80%B9%C3%90%C2%BB%C3%90%C2%BA%C3%90%C2%B8_%C3%90%C3%90%C2%B0_%C3%90%C2%A1%C3%90%C2%B0%C3%90%C2%B9%C3%91%E2%80%9A</a> Чем ниже значение вейджера, тем легче отыграть и вывести бонус. Если Вы планируете заработать на бездепе, а не просто ознакомиться с свежим игровым клубом, то стоит игнорировать призов с высоким вейджером их практически не реально отыграть. С ними Вы сможете лишь протестировать забавы заведения. 1×slots зеркало быструю регистрацию а также мгновенное Мы рекомендуем не открещиваться от похожих предложений знаменитых казино. Выделите несколько мин. На регистрацию, получите бонус и попробуйте его отыграть. Может быть, сегодня удача несомненно на вашей стороне!
<b>Смотреть еще похожие новости:</b>
<a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=7380>1хслот 1хслотс регистрация перейти на 1×slots</a>
<a href=http://diablo2r.cn/home.php?mod=space&uid=30130>1×slots зеркало сайта</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, необходимо адресоваться в службу спустя лайв-чат на веб-сайте казино.
#9408 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации 2025
Бездепы с бесплатными вращениями предоставляют пользователям право вертеть барабаны игровых автоматов без снятия средств со счета. За каждый раунд выплачивает казино. Число спинов ограничено и редко превышает сотку. Если акция включает в себя много бесплатных игр, их начисление возможность быть разбито на некоторое дней.B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. <a href=http://filmkachat.ru/>1×slots официальный зеркало рабочее</a> Так собственно главное различие дара на депозит от бездепа – обязательное пополнение счёта. Вы можете внести депо и преумножить стартовый капитал либо арестовать бездеп и при этом не придётся рисковать собственными сбережениями. Поспешите выполнить простые притязания, и администрация ресурса начислит щедрое поощрение! <a href=http://kncmmt.com/bbs/board.php?bo_table=free&wr_id=378154>http://kncmmt.com/bbs/board.php?bo_table=free&wr_id=378154</a> Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы была вероятность исключить выигрыш.Доступность — бездепозитные призы в казино чаще всего предоставляются свежим игрокам, но посещают случаи, когда бонус шансы получить и действующие клиенты. казино 1×slots официальный сайт <a href=http://quasix.ru/user/RenaldoOveda/>http://quasix.ru/user/RenaldoOveda/</a> Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации дара нужно подтвердить электронную почту и привязать телефон;Бездепозитные призы начисляются только раз раз. Не стоит открывать свежие аккаунты, чтобы получить их повторно. Служба безопасности казино непременно выявит «левого» соучастника и заблокирует. Если гость выполнит необходимые притязания, отыграет свою ставку и решит вывести собственный выигрыш, то ему надо(надобно) принять, что казино обязательно востребует дать ксерокопии личных документов, дабы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные средства исключить не получится.
1×slots casino зеркало
Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала прыткие выводы. Фишка выплат том,, что довольно избрать платёжный инструмент и указать сумму. В большинстве случаев деньги зачисляются на электронные кошельки на 15 мин., а на банковские карты – 1–3 рабочих дня.Ознакомьтесь с нашим перечнем наилучших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего перечня и получите бездеп незамедлительно. Хватайте наилучшие благотворительные предложения ниже и выигрывайте немалые средства, не рискуя! 1×slots регистрация на сайте 1×slots ru com Денежные свои. Третий приз за регистрацию без депозита – наличные. К раскаянью, только известные и популярностью клубы шансы уяснить средства в руб. Либо долларах. С их поддержкою вас насладиться любой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед данным необходимо исполнение конкретных условий.Выполнив все притязания оператора, клиент имеет оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит примерно менее суток. Если дополнительно потребуется пройти процедуру верификации, то срок возрастает до 1–2 рабочих дней. Для перевода применяются банковские приборы и электрические платежные системы. Второй способ подходит никакого, например как масса транзакций такой осуществляются мгновенно. В связи со специфичностью функционирования банков обработка платежей может взятьвдолг(взятьвзаймы) до нескольких трудящихся дней. <a href=http://bts.clanweb.eu/profile.php?lookup=37253>http://bts.clanweb.eu/profile.php?lookup=37253</a> Многие азартные клубы ограничивают необходимую вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не сможете вывести. Разница несомненно аннулирована, Вы и не сможете создавать на нее ставки.Разные казино имеют собственные управляла по выведению выигрыша. Для бездепозитных бонусов принимаются достаточно высочайшие требования. Часто онлайн-казино советуют отыграть бонусное поощрение до 100 раз в игровых автоматах. Например, если игрок получил бесплатно 10 долларов, то необходимо несомненно отыграть их, поставив одну тысячу спинов по одному доллару любой. Стоит отметить, собственно не все казино выделяют вероятность играть на призы и не во всех развлекательных заведениях идентичные верховодила для отыгрывания. Некоторые казино запрещают выступать на призы в блекджек либо ограничивают ставки до пяти процентов, собственно существенно увеличивает в десятки раз число необходимых игр. 1×slot зеркало Не стоит путать забаву в демо и использование призов. В демонстрационном режиме игрок имеет оценить механику слота, сюжет и оформление. Но забава ведется на относительные кредиты, поэтому отсутствует основное ? ощущение пыла. Активируя промокод или фриспины, клиент раньше не тратит средства средства на игровые автоматы, но может сорвать настоящий куш!
1хслотс официальный сайт зеркало
Большинство интернет-казино из нашего топ-10 готовы порадовать вас неповторимыми акциями. Читайте о них в обзорах и на форуме.При регистрации идет свидетельствовать только достоверную информацию. Когда учетная запись несомненно активна, замечен доступ в Личный кабинет. В нем возможно выбрать еденицу, ввести промокод и узнать подробные верховодила получения и отыгрыша бездепа. Краткая информация об промоакции нередко находится непосредственно на регистрационной форме. Наш список включает в себя лучшие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по важным характеристикам: <a href=https://www.gta5-mods.com/users/Vykupavto0311>https://www.gta5-mods.com/users/Vykupavto0311</a> Осталось избрать казино с призом за регистрацию и создать профиль. После активации подарка выигрыш в от Фортуны и навыков. 1×slots зеркало регистрация
онлайн казино 1×slots
Подарки на определенные даты выделяются условиями получения. Если одобрение начисляют игроку на денек рождения, то сумма обычно находится от общего объема депо последний год.Акционные предложения от казино есть в разных форматах. Часто бонусы даются в мена на депозит. Игрок заносит платеж и получает средства, благотворительные вращения и одобрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — вид бонуса, который гарантирован за исполнение конкретных поступков на сайте: Для всех бездепозитных бонусов функционирует максимальный предел на выигрыш. Он указывает предельную сумму, которую вас получить, играя на бонусные кредиты. Как лишь вам удастся выполнить требования вейджера, допустимый максимум будет переведен с бонусного счета на основной, а остаток несомненно списан.Во всех законных онлайн-казино Беларуси необходимо свидетельство паспортных данных для игры — это заявка правительства государства. 1×slots акции <a href=https://pornodrochka.club/user/JustinDrype/>https://pornodrochka.club/user/JustinDrype/</a>
x1 slots 1хслотс регистрация перейти на 1×slots
Чаще всего применяются коды. Их надо(надобно) вносить в специальные окна регистрационной анкеты, если речь о пригласительных призах, либо в определенном разделе личного кабинета игрока.Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, дабы замечена возможность исключить выигрыш. После потребуется привнести идентификационный платёж. Это пугает новичков больше всего. Нужно сделать наименьший депозит в 100–500 рублей. Таким образом служба безопасности увериться том,, собственно платёжный метод принадлежит Вам. Данная процедура необходима для обеспечивания безопасности игровых счетов. Пример, Ваш акк взломают и выведут свои на свой кошелёк. Будет очень досадно. Поэтому верификация платёжной системы, это важный момент. <a href=https://bbs.521zixuan.com/space-uid-884793.html>https://bbs.521zixuan.com/space-uid-884793.html</a> Выбор любого интернет казино на нашем сайте. В описании к каждому Вы можете разузнать, что получите за творенье аккаунта. 1×slots зеркало регистрация то дальше необходимо пройти Допустим, за регистрацию вы возымели бездеп в размере 2 000 руб. С вейджером х30. В этом случае предстоит сделать ставок, на общую необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать настоящие средства. Однако не забывайте, собственно с каждого дара получится вывести определённую сумму (почаще всего не более $200).Онлайн-казино кропотливо продумывают бонусные условия, коие необходимо изучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и другие лимитирования.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.formulersupport.com/Thread-1×-slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%B2–1×slots-casino–94979>1× slots регистрация в 1×slots casino</a>
<a href=http://aficionado.pl/showthread.php?103658–1×slots-%D0%B1%D0%B5%D0%B7%D0%B4%D0%B5%D0%BF%D0%BE%D0%B7%D0%B8%D1%82%D0%BD%D1%8B%D0%B9-%D0%B1%D0%BE%D0%BD%D1%83%D1%81-%D0%B7%D0%B0-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8E&p=121110>1×slots бездепозитный бонус за регистрацию</a>
<a href=https://aircompare.us/forums/memberlist.php?mode=viewprofile&u=40074>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Приветственный бездеп предоставляется хоть игроку только один один. Казино дерутся с так именуемыми бонусхантерами (от англ. Bonus Hunter — доброволец за бонусами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения подарка. Исключить подобные действия дозволяет верификация данных. Администрация вправе востребовать у посетителя доказать персональные данные, указанные при регистрации. Для отыгрыша бонуса казино обязует игрока сыграть на сумму, в некоторое раз превышающую сумму полученного приза — здесь выгода фирмы явна.
#9409 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
Рассмотрим принцип его действия на образце. Допустим, вы зарегались и получили $10 no down payment bonus с вейджером х50. Это означает, собственно выигранные средства возможно будет выводить не раньше, чем в как, как общая сумма ставок достигнет $500. <a href=http://filmkachat.ru/>1×slots официальный сайт мобильная версия скачать</a> <a href=http://wiki.die-karte-bitte.de/index.php/Benutzer_Diskussion:ErnestineSeabroo>http://wiki.die-karte-bitte.de/index.php/Benutzer_Diskussion:ErnestineSeabroo</a> Для как, чтобы отыграть необходимую вашего бездепозитного бонуса надо(надобно) выполнить условия вейджера. Очень часто фриспины даются на конкретные слоты (book of ra, book of dead, book of sun), выбирайте слот себе по, они довольно очень и высококачественные. Бездепозитные приз может быть валютным например и в виде фриспинов на слоты 1×slots зеркало которую указывали при регистрации кстати <a href=http://vttgauriac.fr/forum/memberlist.php?mode=viewprofile&u=6885>http://vttgauriac.fr/forum/memberlist.php?mode=viewprofile&u=6885</a> Составленный экспертами Casino.ru перечень онлайн-казино с бездепозитным призом позволяет игрокам сопоставить спецпредложения разных операторов.
1×slots официальный сайт скачать на айфон
Фриспины — благотворительные вращения, коие позволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины считаются наиболее известным и предпочтительным видом приза — безвозмездные вращения иногда эффективнее и веселее в отыгрыше, чем остальные виды бездепов. <a href=https://showboysmedia.com/real-music/#comment-52370>1×slots зеркало подтвердит вашу регистрацию если говорить</a> зеркло казино 1×slots Если площадка дарует бездеп за регистрацию, то процедура его получения ординарна. Нужно только завести акк на сайте и активировать его, подтвердив адрес электрической почты, номер телефона либо иные данные, которые требует оператор. Перед этим нужно убедиться, собственно пользователь располагается на официальном веб-сайте казино, а не на мошеннической площадке.Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы которые возникают у начинающих. <a href=http://daojianchina.com/home.php?mod=space&uid=4676398>http://daojianchina.com/home.php?mod=space&uid=4676398</a> После получения приза вывод средств для посетителя будет недоступен до, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо чета недель. Выводить деньги игрок может только в отыгрыша.Если площадка дарит бездеп за регистрацию, то процедура его получения проста. Нужно лишь ввести аккаунт на веб-сайте и активировать его, подтвердив адрес электрической почты, номер аппарата или иные данные, коие настятельно оператор. Перед этим нужно увериться, собственно юзер находится на официальном веб-сайте казино, а не на мошеннической площадке. 1×slots казино зеркало Подтверждение персональной информации. Все казино требуют от клиента пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и наличие у юзера иных аккаунтов (мультиаккаунт запрещен).
1×slot зеркало рабочее регистрации на телефон придет
Чтоб получить большой выигрыш, выбирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша. Поспешите арестовать бездепозитные бонусы за регистрацию в казино из представленного списка. Все платформы столько водят легальную работа, но и обрадуют правдивыми плодами игры, высокой отдачей, резвыми выплатами. <a href=https://justbevictorious.com/1×slots-casino/>https://justbevictorious.com/1×slots-casino/</a> Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие возникают у новичков. 1×slots зеркало на сегодня
1×slots сайт зеркало
Да, у бесплатных бонусов есть дефекты. Прежде всего, они обыкновенно не. Кроме такого, условия вейджера по ним постоянно жесткие. Но все отсутствие риска проделывает их очень красивыми для клиентов.Автоматы непопросту считаются наиболее знаменитым азартным веселием. Чтобы освоить управление и управляла, понадобится всего несколько мин. Ваша задача устроить ставку, определить число трудящихся линий и можно вертеть тамбур. Если на экране выпадет выигрышная композиция – вы выиграли! С данной задачей для посодействуют управится бездепозитные призы казино. Помимо прочего, для вывода средств по бездепу нужно привнести на счёт свой 1-ый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало возможную необходимую, последствии чего вывод средств станет доступен.Прибывшие на аккаунт деньги бездепозитные бонусы предназначаются, главном, только для свежеиспеченных пользователей, коие ранее не имели собственного аккаунта в данном казино. Исходя из сего, случае ранее у игрока был сделан депо, то, по всей вероятности, у него больше не будет способности рассчитывать на получение такового приза в определенном заведении. 1хслотс 1хслотс регистрация перейти на 1×slots <a href=http://out4.ru/index.php?subaction=userinfo&user=mindlesshijacke>http://out4.ru/index.php?subaction=userinfo&user=mindlesshijacke</a>
1×slot казино зеркало
Мы рекомендуем не отказываться от подобных услуг узнаваемых казино. Выделите количество мин. На регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сегодня удача будет на вашей стороне!Суммы похожих предложений, большинстве, колеблются от 3-х до 20 долларов, а вейджер на эти свои обязан сочинять от тридцати до шестидесяти раз. Зачастую, наибольшая сумма выигрыша тут составит от одной до 2-ух сотен $. Если в выиграет больше, то все свои все быть списанными до очень разрешенного выигрыша. Здесь бывает содержание выводить еще несуществующие финансы на свою платежную систему и дальше находить заведение с благоприятными под данную необходимую релоадом либо бонусом за 1-ое пополнение счета. Есть некоторое подвидов бездепозитного вознаграждения, предлагаемого великим числом заведений. Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала быстрые выводы. Фишка выплат в том, что достаточно выбрать платёжный инструмент и указать сумму. В большинстве случаев средства зачисляются на электрические кошельки протяжении 15 мин., а на банковские карты – 1–3 трудящихся дня.Для проверки используются сканы паспортов, водительских водительских, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если юзер обнаружен в попытке ввести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их обладатель попадает в темный список. При игре на лицензионной площадке не стоит опасаться указывать достоверную персональную информацию (шифрование исключает утечку индивидуальных данных). <a href=https://jsfiddle.net/lexxeagle/r8s0t2kz/>https://jsfiddle.net/lexxeagle/r8s0t2kz/</a> Возможность поиграть вспомогательное соревнование (а времени и количество) абсолютно безвозмездно, а выигрыш, тому, поступает на счёт игрока.Игрокам не следует принимать приветственный бонус как гарантированный метод получить крупный выигрыш, но это отличная возможность без расходов расценить функционал казино. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=265733>1×slots промокод при регистрации 2025</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Промообъявления от казино мешают реальной картины и ориентированы на вербование внимания пользователей. Понять, как высоки шансы остаться в плюсе, дозволит личный анализ условий предложения: В игровых клубах без лицензии Вы покупаете „кота в мешке“ и в случае спорных обстановок нет способности куда-то посетовать и обосновать свою правоту.
#9410 Charlesgunnyhttp://filmkachat.ru
1×slots официальный demo регистрация в 1×slots casino
В списке требований к отыгрышу часто присутствуют лимиты на ставки при игре на собственные средства. Так, в отыграть надо(надобно) 30 000 руб., а предельная сумма ограничена 30 рублями, то вертеть барабаны светит 1000 один. Эта особенность затрудняет соблюдение игроками условий по срокам деяния акции. <a href=http://filmkachat.ru/>1×slots официальный сайт, скачать</a> Классическая разновидность бонуса за творение аккаунта. Его превосходство заключается сомнений, собственно заказчик может других выбирать аппараты и создавать ставки в их. Иногда список игровых автоматов ограничен оператором, хотя все равно это другого, чем один-единственный дешевый разъем, как в случае с внедрением фриспинов. <a href=http://itfactory.nowmd.co.kr/bbs/board.php?bo_table=free&wr_id=9311>http://itfactory.nowmd.co.kr/bbs/board.php?bo_table=free&wr_id=9311</a> Также учтите, собственно некоторые игровые платформы сужают перечень государств, которые готовы получить предложенный бездепозитный приз за регистрацию. К примеру, существуют онлайн-заведения, выдающие подобные бонусы только обитателям конкретных стран. К примеру, онлайн казино 777 Оригинал предоставляет бездепозитный бонус только игрокам из России и стран СНГ. Или наоборот, пичкают вознаграждением всех, считая обитателей некоторых государств (как сего, следует пристально учить список, дабы потом не появилось практически вопросов и претензий).Вейджер (wager) – это коэффициент, который показывает на какую необходимую необходимо устроить ставок, чтобы исключить бонус из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода сего приза, Вам нужно сделать ставок на сумму: 500*70=3500 руб. Только всецело отыграв бонус, Вы можете исключить свой выигрыш. 1хслот 1хслотс регистрация перейти на 1×slots <a href=https://mcmon.ru/member.php?action=profile&uid=133252>https://mcmon.ru/member.php?action=profile&uid=133252</a> Такие одобрения дозволяют бесплатно протестировать свежее казино, разобраться с игровым ходом интернет слотов, заработать и вывести небольшую сумму денег.Мы делаем акцент на главных положениях правил, рассказываем о территориальных ограничениях и вкратце информируем о других промоакциях обговариваемого казино.
1×slots подтвердит вашу регистрацию если говорить
У каждой забавы свои требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система засчитает любую ставку. В рулетке и покере сделать это намного труднее. Именно поэтому например главно пристально читать условия получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в любой игре, то новички попросту «спустят приз на ветер».Прибывшие на акк финансы бездепозитные призы предназначаются, в основном, только для свежеиспеченных пользователей, коие ранее не имели собственного аккаунта в данном казино. Исходя из этого, в раньше у игрока был изготовлен депозит, то, по всей вероятности, у него больше не несомненно возможности рассчитывать на получение такового приза в конкретном заведении. 1×slot рабочее зеркало Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша призов. Заведения всегда устанавливают максимальную ставку, допустимую по условиям вейждера. <a href=http://weloveokinawa.com/home/userinfo.php?uid=7542#>http://weloveokinawa.com/home/userinfo.php?uid=7542#</a> Можно. Вы практически сможете отказаться от получения бездепозитного приза за регистрацию в казино, же Вы не сделаете ставку.Можно. Вы всегда сможете отрешиться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не создадите ставку. 1×slots официальный сайт скачать на айфон
казино 1×slots официальный сайт
Акционные предложения от казино существуют в различных форматах. Часто призы даются в размен на депозит. Игрок заносит платеж и получает средства, безвозмездные вращения и поощрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — вид приза, который гарантирован за выполнение определенных действий на веб-сайте:Шаг 4. Активация. Внимательно изучите условия, информацию по лимитированиям и сроке действия бонусного предложения. Разобравшись с правилами, можно активировать бонус в личном офисе (от ? с использованием промокода) или по запросу в саппорт. Ограничения по играм. Администрация воспрещает игрокам некоторые игровые автоматы с бездепозитным призом, средствами или бесплатными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда дробление выполняется по облику игр. Например, отыгрыш возможен на всех игровых аппаратах, хотя запрещен в настольных играх и в разделе Live Casino.Похожим образом трудится третий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения клиента или в связи с получения им VIP-статуса. Подарок предоставляется после воззвания в поддержку и ревизии. <a href=https://valetinowiki.racing/index.php?title=mp4_torrent>https://valetinowiki.racing/index.php?title=mp4_torrent</a> 1×slots быструю регистрацию а также мгновенное
казино 1×slots официальный сайт
Мы делаем акцент на ключевых положениях правил, рассказываем о территориальных ограничениях и вкратце информируем о других промоакциях обговариваемого казино.Некоторые онлайн-казино без депозита предлагают свежим клиентам избрать бонус при регистрации. Будьте внимательны: выбрав раз, вы в безусловном большинстве случаев не можете воспользоваться остальными. Так же стоит выделить то, что в любом онлайн казино установлен собственный максимальный кешаут на бездепозитный приз. Как правило кешаут — это максимальная сумма денег, которая доступная для вывода с бездепозитного бонуса. 1×slots рабочее зеркало <a href=https://www.mapleprimes.com/users/Cazinosdep>https://www.mapleprimes.com/users/Cazinosdep</a> Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в обязательном порядке нужно восполнить счет в казино. Для депозитных бонусов, эта процедура не нужна, например как депо теснее сделан.
1×слотс казино
Допустим, за регистрацию вы получили бездеп в размере 2 000 руб. С вейджером х30. В этом случае предстоит устроить ставок, на совместную необходимую в 60 000 руб. (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать реальные средства. Однако не запамятовывайте, что с каждого дара выйдет вывести определённую сумму (почаще всего не более $200). Многие казино предоставляют в маркетинговых целях благотворительные бонусы исключительно для наших читателей. Чтобы их получить, нужно перейти на игровой вебсайт по партнерской ссылке с нашего портала.Бездепозитные бонусы в казино без пополнения 2022 — это определенная сумма средств или valinomycin spins вращения, коие предоставляются первым гостям за регистрацию на веб-сайте казино повторяющий бездепозитного приза, и дает вас вероятность с казино без пополнения опробовать предложения (игр), с последующей преимуществом, льготой вывода средств при исполненьи всех установленных правил. <a href=https://coffeepeople.ru/memberlist.php?mode=viewprofile&u=37004>https://coffeepeople.ru/memberlist.php?mode=viewprofile&u=37004</a> В интернете количество узнаваемых игорных площадок с привлекательными акционными предложениями. Однако пристально разбирать условия 10-ов предложений вскоре надоест, да и время отнимет много. Поэтому наша команда подготовила ТОП-3 сайтов с превосходнейшими бездепозитными бонусами: 1×slots зеркало Возможность протестировать свежие забавы, не рискуя личными средствами и создать собственную стратегию забавы.
<b>Смотреть еще похожие новости:</b>
<a href=http://swissairways-va.com/phpBB3/memberlist.php?mode=viewprofile&u=3495>1хслотс рабочее зеркало</a>
<a href=https://www.mshowto.org/forum/members/jamespauri.html>1×slots рабочее зеркало на сегодня</a>
<a href=http://griffhunter.com/boards/viewtopic.php?p=311931#p311931>1×slots регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В интернет-сети всегда можно отыскать перечни наиболее известных и обещанных поощрительных программ от знаменитых онлайн-казино. Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера.
#9411 Charlesgunnyhttp://filmkachat.ru
1×slots акции
К огорчению, нет. Почти все казино, требуют внесение желая бы 1-го минимального депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, собственно исключить деньги разрешается только на что, эту платежную систему, с которой был изготовлен депо. <a href=http://filmkachat.ru/>рабочее зеркало 1хслотс</a> Вы всего, скажем, как все любите получать подарки и бездепозитные призы казино. Игорные дома взяли в привычку одаривать гэмблеров приятными бонусами. Стать обладателем приветственного презента можно за создание профиля или пополнение счёта. Второй вариант больше увлекательный, ведь клубы готовы удвоить депо! Но в вы новичок и только знакомитесь с миром пыла, какого-либо пользуйтесь бонусом за регистрацию. <a href=http://newdigital-world.com/members/jamessmect.html>http://newdigital-world.com/members/jamessmect.html</a> Бездепозитный приз за регистрацию в казино — это стартовый подарок вид валютного начисления либо бесплатных вращений для новых игроков заведения, для получения которого не заносить депозит.Срок активации и время на отыгрыш. Зачисление средств или фриспинов происходит при активации на строго ограниченного периода, подобные требования предъявляются и к срокам отыгрыша. Одни казино позволяют отыгрывать приз количество дней или том месяцов. Другие выдают крупную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с неоправданно высоким вейджером. 1×slots зеркало на сегодня <a href=https://forumniebiescy.pl/memberlist.php?mode=viewprofile&u=70494>https://forumniebiescy.pl/memberlist.php?mode=viewprofile&u=70494</a> Чаще всего интернет-казино предлагают бездепозитные бонусы свежим юзерам. Эта промо-акция очень эффективно завлекает новичков, подталкивая их к открытию счета. Конечно, не все они становятся послушными клиентами, но сам прецедент регистрации аккаунта играет на руку заведению.Также есть онлайн-платформы азартных игр, которые используют раздачу бездепозитных бонусов в особые даты (как для казино, например и для игрока). Помимо этого, действующие игроки также имеют возможность получить схожие призы за свою деятельность (например, за повышения уровня или за похожие заслуги).
1× slots зеркало
Некоторые казино шансы предлагать клиентам бездепы за свидетельство номера либо почты либо репост на страницу в социальных сетях. <a href=https://www.176mw.net/forum.php?mod=viewthread&tid=171&pid=545276&page=5599&extra=page%3D1#pid545276>1×slots официальный сайт мобильная версия</a> 1×slots официальный сайт скачать на айфон Прямо данный заберите благотворительные вращения за регистрацию без депо и начинайте коллекционировать призовые комбинации из-за крупных выигрышей! <a href=http://sobaeksanrock.dgweb.kr/bbs/board.php?bo_table=free&wr_id=2376345>http://sobaeksanrock.dgweb.kr/bbs/board.php?bo_table=free&wr_id=2376345</a> Теоретически, к безвозмездным призам возможно отнести например нарекаемые фриспины. Напомним, речь идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, поэтому что они деют только возможность делать ставки. 1×слот регистрация в 1×slots casino Многие казино деют в маркетинговых целях бесплатные бонусы необыкновенно для наших читателей. Чтобы их получить, надо(надобно) перебежать на игровой сайт по партнерской ссылке с нашего портала.С не отыгранным бонусом воспрещается превышать объем наибольшей ставки. Нарушение сего обстоятельства последствия аннулирование выигрыша.
1×slots казино мобильная версия
В онлайне большое знаменитых игорных площадок с привлекательными акционными услугами. Однако внимательно разбирать условия десятков услуг вскоре надоест, да и время отнимет много. Поэтому наша команда подготовила ТОП-3 вебсайтов с наихорошими бездепозитными бонусами:Каждый новичок и профессиональный игрок мечтают прытко стартануть и начать создавать реальные ставки. Для сего достаточно арестовать подарок, за кот-ый надо уплачивать. В зависимости от игровой платформы, нужно сделать профиль, привязать email или телефон. После сего администрация начисляет щедрое вознаграждение повторяющий безвозмездных вращений либо виртуальных кредитов. Прочитайте управляла бонусной программки, в желайте участие. Да, мы настойчиво советуем устроить это до регистрации. <a href=http://xn–b1acebaenad0ccc3aiee.xn–p1ai/forum/user/5551/>http://xn–b1acebaenad0ccc3aiee.xn–p1ai/forum/user/5551/</a> 1× слот зеркало
казино 1×slots
На нашем сайте Вы отыщите перечень актуальных свежих бездепозитных призов в казино 2022 года. Также, есть количество неповторимых услуг, коие доступны лишь гостям нашего вебсайта последствии регистрации по нашей ссылке или активации специального промокода.Получать информацию о самых прибыльных призах возможно без неизменного мониторинга новостей казино. Мы брали данную задачу на себя и постоянно следим за предложениями операторов, выбирая наилучшие из них. В этом разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список промоакций регулярно дополняется. В топ зашли самые новые бездепозитные призы за регистрацию в казино 2020, временные и замкнутые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и критериям. Если срок действия акции истек, она удаляется из перечня. <a href=http://freedom.teamforum.ru/memberlist.php?mode=viewprofile&u=6332>1× slots casino зеркало</a> Обычно показатель повыше, чем для призов на депозит. Не дивитесь, в он несомненно и х100. Иногда завышенный коэффициент вейджера устанавливается для обитателей отдельных стран.Вейджер в переводе с британского означает «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша приобретенного бонуса, в нашем случае бездепозитного. Число ставок большого — главно лишь набрать необходимую, пропорциональную сумме поощрения. 1×slots регистрация на 1хслотс <a href=https://qiqer.ru/qforum/profile.php?id=370757>https://qiqer.ru/qforum/profile.php?id=370757</a>
1×slots зеркало сайта
Первый образующийся вопрос, это, для выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают свежих игроков. Последним проще начать игру на деньги с дара за регистрацию. Им не нужно пополнять баланс и расходовать личные средства. Новички получают бесплатные спины либо свои на счёт. С их подмогою знакомятся с игровым ходом, крутят слоты и проделывают ставки в рулетке.Похожим образом трудится третий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения клиента или из-за с получения им VIP-статуса. Подарок предоставляется последствии воззвания в поддержку и ревизии. Онлайн-казино с бездепозитными призами ставят клиентам обстоятельства для пользования бездепами, потому перед ролью в промоакции никакого досконально ознакомиться со всеми правилами и аспектами акции. Условия имеют прикасаться получения приза, его использования и последующего вывода валютных средств в случае выигрыша.А ознакомиться с новыми онлайн казино, Вы сможете за счет призов с выводом выгоды, которые Вы можете получить без депозита. <a href=http://www.dendymaster.ru/forum/member.php?u=89051>http://www.dendymaster.ru/forum/member.php?u=89051</a> 1×slots казино мобильная версия Чтоб получить крупный выигрыш, выбирайте игровые автоматы с максимальным процентом отдачи (RTP) из перечня тех, которые доступны по условиям отыгрыша.Постарайтесь отыграть вейджер, дабы была возможность оставить заявку на выплату. Кстати, на всех сайтах, представленных в списке, доступны современные платёжные приборы. Вы сможете получить выигрыш на электрической кошелёк, карту, аппарат.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.donchillin.com/space-uid-382497.html>1×slots официальный сайт мобильная версия скачать</a>
<a href=https://forum.oursson.ru/viewtopic.php?f=2&t=8025>1×slos регистрация в 1×slots casino</a>
<a href=https://nauc.info/forums/viewtopic.php?t=20405286>1×slots казино мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В большинстве заведений сделать это возможно по e-mal, по номеру телефона, спустя социальную сеть или гугл-аккаунт.
#9412 Charlesgunnyhttp://filmkachat.ru
1хслот скачать
Получать информацию о самых выгодных бонусах возможно без постоянного мониторинга новостей казино. Мы взяли данную задачу на себя и непрерывно смотрим за услугами операторов, выбирая наихорошие из их. В этом разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список промоакций периодически пополняется. В топ зашли самые свежие бездепозитные призы за регистрацию в казино 2020, временные и закрытые рекламную. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и другим аспектам. Если срок деяния акции истек, она удаляется из списка. <a href=http://filmkachat.ru/>1× slots casino официальный сайт</a> Составленный специалистами Casino.ru список онлайн-казино с бездепозитным бонусом разрешает игрокам сравнить спецпредложения различных операторов.Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских руб. В критериях акции указано, собственно вейджер бездепозитного приза х20. Поэтому, дабы отыграть бонус, игроку будет нужно устроить ставок на 35*20=700 рублей. <a href=https://opaseke.com/users/7877>https://opaseke.com/users/7877</a> 1хслотс мобильная версия зеркало <a href=http://sevartek.ru/index.php?subaction=userinfo&user=obsceneegg76>http://sevartek.ru/index.php?subaction=userinfo&user=obsceneegg76</a>
1×slots зеркало рабочее на сегодня
Для получения депозитного приза нужно восполнить свой игровой баланс реальными деньгами. Вознаграждение можно получить или при внесении первого депозита, или в виде фиксированного процента от внесённых средств. Так либо иначе, бонус поступит на счёт только последствии пополнения.Доступные игры – В некоторых азартных забавах можно снизить математическое превосходство казино до нескольких 10-х процента. В их количестве почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как управляло, в таких играх ставки идут в зачет вейджера не всецело. Например, имеет предусматриваться лишь 50%. В неких играх бездепозитные бонусы вообщем невозможно отыгрывать. 1×slots официальный сайт зеркало рабочее Условия имеют различаться друг от приятеля. Но подобный бонус может быть использован лишь для игрового процесса – полученные на счет финансы до как, как будут отыграны, вывести невероятно.1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, случае не хотите стать жертвой плутов либо впустую израсходовать время; <a href=https://menwiki.men/wiki/1×slots_%D0%97%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE_%D0%A1%D0%B0%D0%B9%D1%82%D0%B0>https://menwiki.men/wiki/1×slots_%D0%97%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE_%D0%A1%D0%B0%D0%B9%D1%82%D0%B0</a> онлайн казино 1×slots Для получения бездепа нужно пригласить в игру по реферальной ссылке свежего посетителя: он должен зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на сумму, обозначенную в критериях промоакции.
казино 1×slots официальный сайт
Не стоит незамедлительно же отказываться от приветственных даров в сходственных казино. Администрация готова начислить средства или фриспины, но сначала сотрудники должны увериться, собственно вы не мошенник. Дело в том, что развелось очень большое охотников за бонусами. Они научились накалывать систему и наваривать крупные суммы денег.Размер ставки для забавы по бездепозитному бонусу (естесственно же, в случае, когда он представлен повторяющий бонусных валютных средств) зачастую ниже, чем при игре на депо. Ограничение несомненно работать до этапа отыгрыша приза. <a href=http://realtai.ru/forum/memberlist.php?mode=viewprofile&u=116551>http://realtai.ru/forum/memberlist.php?mode=viewprofile&u=116551</a> Игры, в возможно играть на бонусные средства. Проверьте перечень игр, каких можно выступать на бонусные средства, вполне они Вам не понравятся и надо тратить своё время на такую промоакцию. 1×slot зеркало Для получения бездепа нужно пригласить в забаву по реферальной ссылке нового клиента: он обязан зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и восполнить счёт на сумму, обозначенную в критериях промоакции.
1×slots регистрация 1×slots review live
Обычно, бездепозитные бонусы выдаются под определенные слоты с фиксированной ставкой, но их наверняка запрещено применять в игровых автоматах с прогрессивным джекпотом. Список игр, в которых можно применять бездеп, Вы найдете в описании промоакции либо можете уточнить у саппорта заведения. <a href=https://forum.bedwantsinfo.nl/thread-676892.html>1×slots коды</a> 1×slots актуальное зеркало <a href=https://eccentrictirade.com/forums/member.php?action=profile&uid=5812>https://eccentrictirade.com/forums/member.php?action=profile&uid=5812</a> Некоторые онлайн-казино без депо предлагают новым посетителям выбрать приз при регистрации. Будьте внимательны: выбрав один, вы в абсолютном большинстве случаев не можете воспользоваться остальными.
1×slot казино зеркало
Принципиальным отличием бесплатных призов от призов на депозит считается неименье надобности заносить средства на аккаунт. Из-за этого их часто называют бездепозитными (not the slightest down payment bonuses). Нельзя осматривать игру на деньги, как вариант заработка. Азартные забавы запрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не является организатором азартных игр. Сайт одевает информационный нрав.Любой выигрыш по ставке выше установленного лимита будет являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, ну случае выигрыша его сумма не поступит на счёт клиента — итог игры несомненно всецело аннулирован. <a href=http://tmml.top/home.php?mod=space&uid=100378>http://tmml.top/home.php?mod=space&uid=100378</a> 1×slots скачать на айфон
<b>Смотреть еще похожие новости:</b>
<a href=http://afpd.onlinebbs.ru/memberlist.php?mode=viewprofile&u=121>1×slots зеркало этих способов предполагает регистрацию</a>
<a href=http://permitbeijing.com/forum/member.php?action=profile&uid=191496>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Так же стоит выделить то, что в любом интернет казино установлен свой наибольший кешаут на бездепозитный приз. Как правило кешаут — это максимальная сумма денег, которая дешевая для вывода с бездепозитного бонуса.
#9413 Charlesgunnyhttp://filmkachat.ru
1×slots казино зеркало
Возьми собственный подарок. Чаще всего бонус активизируется сразу после регистрации. Но случаются ситуации, когда надо(надобно) забежать в личный офис либо написать в справочную службу.Перечисленные выше главные характеристики сопровождают практически любой бонус и являются стереотипными для бездепозитных бонусных начислений в казино. <a href=http://filmkachat.ru/>1 х слотс зеркало</a> Во время игры в казино, выигрыши, приобретенные спасибо безвозмездным призовым фондам, суммируются и срабатывают в совместную сумму для отыгрывания. Однако, случае удача улыбнется и получится отыграть все бонусы, игровое заведение гарантированно допустит вывести денежные свои. Сумма вывода будет в от лимита, утвержденного непосредственно в этом учреждении. Поэтому, внимательно надо(надобно) разбирать управляла выдачи анлимитных депо. <a href=http://www.concerthouse.co.kr/bbs/board.php?bo_table=free&wr_id=565281>http://www.concerthouse.co.kr/bbs/board.php?bo_table=free&wr_id=565281</a> 1×slots рабочее зеркало <a href=http://0018688.com/home.php?mod=space&username=Joshuadiz>http://0018688.com/home.php?mod=space&username=Joshuadiz</a> При маленькой сумме бонуса рекомендуется выступать по низким ставкам, а применять максимальные никакого лишь в том случае, случае вейджер очень немалый, а время на отыгрыш сильно ограничено.Таким образом, заведение пытается показать себя своим потенциальным игрокам, а подобный маркетинговый ход как казино приз без депозита за регистрацию завлекает очень много внимания к игорному заведению и обеспечивает неизменный поток свежих посетителей и будущих посетителей игрового онлайн клуба.
1хслотс зеркало на сегодня
Как и промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения считаются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих посетителей и дозволяет им составить эмоцию о функционале, не рискуя вескими суммами. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Бесплатные призы казино без депо можно получить вид валютных средств на бонусный счет (исключить их можно только после отыгрыша), фриспинов, игры или кешбэк-бонуса.Бездепозитные призы – это самая интересная и более многообещающая промоакция интернет-казино. Они в превосходнее фри-спинов, потому что выплаты в безвозмездных вращениях не гарантированы, так композиции на барабанах игрового аппарата все не сложиться. <a href=https://ludeon.com/forums/index.php?topic=57663.0>https://ludeon.com/forums/index.php?topic=57663.0</a> Разные казино имеют собственные верховодила по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высочайшие требования. Часто онлайн-казино советуют отыграть бонусное одобрение до 100 раз в игровых автоматах. Например, случае игрок получил безвозмездно 10 долларов, то необходимо несомненно отыграть их, поставив 1 тыщу спинов по 1 доллару каждый. Стоит обозначить(означить), собственно не все казино выделяют вероятность играть на бонусы и не во всех увеселительных заведениях идентичные управляла для отыгрывания. Некоторые казино запрещают выступать на призы в блекджек или ограничивают ставки до 5 %, собственно значительно увеличивает в десятки раз количество необходимых игр. 1×slots зеркало регистрация то дальше необходимо пройти Объективные – размер приза, коэффициент и обстоятельства вейджера, необходимость внесения депо для вывода денег;
1×slots на любой вкус как пройти регистрацию
Почти все игровые клубы требуют свидетельство контактных данных игрока для получения бездепозитного приза.Чаще всего интернет-казино предлагают бездепозитные призы новым юзерам. Эта промо-акция довольно эффективно привлекает новичков, подталкивая их к открытию счета. Конечно, не все они становятся послушными клиентами, хотя сам прецедент регистрации аккаунта играет на руку заведению. <a href=http://fkfd.ru/bitrix/redirect.php?goto=http://medsef.ru/bitrix/redirect.php?goto=http://dastarkhan24.kz/bitrix/redirect.php?goto=https://teletype.in/@urist555/c_W3GpBiuIg>http://fkfd.ru/bitrix/redirect.php?goto=http://medsef.ru/bitrix/redirect.php?goto=http://dastarkhan24.kz/bitrix/redirect.php?goto=https://teletype.in/@urist555/c_W3GpBiuIg</a> Выбрать казино с бездепозитным бонусом. У нас на сайте представлен перечень наилучших интернет казино, коие предлагают своим игрокам щедрые призы за регистрацию.Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, the decision зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. казино 1×slots Это один из основных характеристик привлекательности презента. С завешенным коэффициентом том мастера не сумеют выполнить условия по отыгрышу. И важно, насколько презентабельно выглядит предложение – бездепозитный бонус казино в размере $500 либо $1 000. Чтобы новенькие лучше вдумались, собственно же такое вейджер, мы разберём на случае.Возможность поиграть вспомогательное соревнование (а времени и количество) абсолютно безвозмездно, а выигрыш, тому, поступает на счёт игрока.
1×slots casino зеркало рабочее
Некоторые клубы автоматически начисляют приз на акк игрока последствии исполненья критерий получения, но бывают истории, когда приз нужно активировать игроку самому. Есть несколько способов активации бонуса: Однако в условиях исчезают «подводные камешки», коие не разрешат вывести крупную сумму или же вы не успеете отыграть вейджер. Поэтому мастера советуют арестовать бесплатные вращения за регистрацию в казино без депо, чтобы поднабраться опыта и получить настоящий шанс на победу.Наши эксперты исследуют обстоятельства акции, этого в ручном режиме проверяют их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и параметры. Мы не рекламируем казино, а даем игрокам информацию о наихороших из них. 1хслотс рабочее зеркало <a href=http://cao.pp.ua/space-uid-27743.html>http://cao.pp.ua/space-uid-27743.html</a> Классическая разновидность приза за создание аккаунта. Его преимущество содержится том,, что заказчик возможность без подбирать аппараты и создавать ставки в их. Иногда перечень игровых автоматов ограничен оператором, хотя все точно это чем, чем единственный дешевый разъем, как в случае с внедрением фриспинов.Когда речь идет о получении бездепозитных призов в казино, в первую очередь обратите внимание на последующие обстоятельства:
1×slots официальный регистрация
Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, all зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.Каждый из бездепозитных призов без пополнения 2022 содержит собственный определенный вейджер для отыгрыша, например же в любом казино он устанавливается индивидуально — где то он х55 а где-то х30, повторюсь всюду по разному! Отыграв бездепозитный приз в казино с выводом также придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если сходственное лимитирование существует, то единоразово исключить выйдет лишь сумму, не превосходящую объем приобретенного приза.Многие казино предоставляют в рекламных целях безвозмездные призы необыкновенно для наших читателей. Чтобы их получить, надо(надобно) перебежать на игровой вебсайт по партнерской ссылке с нашего портала. <a href=http://sobaeksanrock.dgweb.kr/bbs/board.php?bo_table=free&wr_id=3081128>http://sobaeksanrock.dgweb.kr/bbs/board.php?bo_table=free&wr_id=3081128</a> Получать информацию о самых прибыльных призах можно без неизменного прогноза новостей казино. Мы взяли эту задачу на себя и постоянно следим за предложениями операторов, выбирая превосходнейшие из них. В этом разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список промоакций периодически пополняется. В топ вошли самые свежие бездепозитные призы за регистрацию в казино 2020, кратковременные и замкнутые промо. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру прочим критериям. Если срок деяния акции истек, она удаляется из перечня. 1× slots зеркало Помните, что в неких забавах сумма ставки идет в зачет вейджера лишь частично. Так, в настольных и карточных играх только от 5% до 50% суммы ставки считаются как отыгранные деньги, тот как в слотах идет в зачет все one hundred percent суммы.У каждой забавы свои притязания по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система зачтет любую ставку. В рулетке и покере устроить это гораздо труднее. Именно потому так принципиально пристально разбирать обстоятельства получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой ирге, то новички просто «спустят бонус на ветер».
<b>Смотреть еще похожие новости:</b>
<a href=https://melhorlance.com.br/author/jamesbom/>1×slots casino online регистрация</a>
<a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=64140>рабочее зеркало 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Нельзя разглядывать игру на деньги, как вариант заработка. Азартные забавы воспрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не зачинщиком азартных игр. Сайт одевает информационный характер.
#9414 Charlesgunnyhttp://filmkachat.ru
скачать 1×slots на андроид мобильная версия
При исполненьи условий отыгрыша и верификации, средства с бонусного счета переводятся на основной и могут быть выведены на карту либо электронный кошелек. Лимиты на вывод и сроки проведения транзакции находятся от избранной платежной системы. <a href=http://filmkachat.ru/>1×slots регистрация на официальном сайте</a> <a href=https://www.kenpoguy.com/phasickombatives/profile.php?id=2304327>https://www.kenpoguy.com/phasickombatives/profile.php?id=2304327</a> 1×slots официальный зеркало рабочее <a href=http://typesofbeauty.com/bitrix/redirect.php?goto=http://polygonalpaper.com/bitrix/rk.php?goto=http://bryansk.ohotno.com/bitrix/rk.php?goto=https://telegra.ph/Ot-yuridicheskih-posledstvij-do-iskupleniya-viny-Kak-spravitsya-s-posledstviyami-naezda-na-peshehoda-na-doroge-09–19>http://typesofbeauty.com/bitrix/redirect.php?goto=http://polygonalpaper.com/bitrix/rk.php?goto=http://bryansk.ohotno.com/bitrix/rk.php?goto=https://telegra.ph/Ot-yuridicheskih-posledstvij-do-iskupleniya-viny-Kak-spravitsya-s-posledstviyami-naezda-na-peshehoda-na-doroge-09–19</a> Это один из главных показателей привлекательности подарка. С завешенным коэффициентом и мастера не смогут выполнить условия по отыгрышу. И неважно, насколько презентабельно смотрится предложение – бездепозитный бонус казино в объеме $500 или $1 000. Чтобы новички попревосходнее вдумались, что же такое вейджер, мы разберём на примере.Размер бонуса. В качестве бездепов обыкновенно начисляют большие суммы, а когда речь идет о призах за депо, которые начисляются в процентном соотношении от суммы пополнения, то некоторые казино могут презентовать игроку до 2000$.
1х слот регистрация в 1×slots casino
Чаще всего казино приз за регистрацию без депо даёт возможность запустить каждой автомат. Но чем пристально ознакомиться с условиями. Иногда для игры доступны только определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, лучше начать знакомство с миром пыла именно с «одноруких злодеев». <a href=https://rf-lowrate.ru/index.php?/profile/6447-jamesmom/>1×slots официальный сайт зеркало</a> зеркло казино 1×slots Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депо возможность выделяться до 30 дней.Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом прибыли присутствуют на этой страничке. Посетитель может расценить условия получения и начать играть на деньги без внесения депозита. При этом игроку важно понимать, на каких условиях и какими методами возможность исключить приобретенный выигрыш. Для сего необходимо оценить перечень подключенных платежных систем. <a href=http://www.svit-world.kiev.ua/user/TerryBen/>http://www.svit-world.kiev.ua/user/TerryBen/</a> 1×slots зеркало регистрация то дальше необходимо пройти
x1 slots 1хслотс регистрация перейти на 1×slots
Суммы подобных предложений, большинстве, колеблются от 3-х до двадцати долларов, а вейджер на эти свои обязан сочинять от 30 до шестидесяти один. Зачастую, величайшая сумма выигрыша тут составит от одной до 2-ух сотен $. Если компьютерные выиграет больше, то все свои имеют быть списанными до максимально разрешенного выигрыша. Здесь появляется смысл выводить еще несуществующие финансы на свою платежную систему и дальше отыскивать заведение с подходящими под данную необходимую релоадом или бонусом за первое пополнение счета. Есть количество подвидов бездепозитного вознаграждения, предлагаемого наибольшим числом заведений.Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. Как верховодило, при выводе денег, от играющего потребуется лишь сделать наименьший вклад для того, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом индивидуальный счет.Ограничения по забавам. Администрация запрещает игрокам кое-какие игровые автоматы с бездепозитным бонусом, деньгами либо бесплатными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда деление производится по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, но запрещен в настольных забавах и в разделе Live Casino. <a href=http://clan.13.free.fr/index.php?file=Members&op=detail&autor=harmoniousyokel>http://clan.13.free.fr/index.php?file=Members&op=detail&autor=harmoniousyokel</a> онлайн казино 1×slots Для подтверждения электрической почты, просто перейдите по интенсивной ссылке в послании, приобретенном от игрового заведения.
1×slots регистрацию процедура займет всего лишь
Мы рекомендуем не отказываться от сходственных услуг узнаваемых казино. Выделите некоторое минут на регистрацию, получите приз и попробуйте его отыграть. Может быть, сегодня удача будет на вашей стороне!Но есть игорные заведения, которые готовы просто так жертвовать средства на забаву. Для этого достаточно создать профиль. Чтобы исключить собственный выигрыш, для сначала необходимо выполнить условия отыгрыша, указанные в критериях получения бездепозитного депозита. Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам запрещено начислять бонусы посетителям, не имеющим валютных средств на счете. Мы предлагаем осмотреть животрепещущие бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ.Основное управляло получения бездепа ? создаваемый акк должен быть у юзера первым и единственным. Наличие нескольких аккаунтов взыскательно воспрещено. Проверка проводится по имени, e-mal, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депо нужно соблюдать несложную последовательность деяний. Иногда для получения бонусов необходимо связаться с адептами службы поддержки. Удобнее всего с ними беседовать в онлайн-сате, желая времени достаточно запроса по электронной почте.Основное правило получения бездепа ? творимый аккаунт обязан быть у пользователя первым и единственным. Наличие нескольких аккаунтов требовательно запрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депозита необходимо блюсти простую очередность деяний. 1×slots зеркало которую указывали при регистрации кстати <a href=https://www.ipixels.com/profile/76382/JulesGraro>https://www.ipixels.com/profile/76382/JulesGraro</a> За привлечение друга ? в партнерской программы клиент получает вознаграждение за привлечение новых пользователей.В истинное время получить приз за регистрацию в казино довольно просто. Почти любой игорный дом с готовностью даст средства либо безвозмездные вращения. Многие игроки используют этим и не стыдятся региться в каждом клубе с прибыльными условиями. Кстати, это замечательная возможность выдумать выигрышную стратегию и сорвать куш.
1×slots скачать на айфон
Онлайн-казино с бездепозитными призами ставят посетителям обстоятельства для использования бездепами, поэтому перед участием в промоакции чем тщательно ознакомиться со всеми правилами и нюансами акции. Условия имеют прикасаться получения бонуса, его использования и последующего вывода валютных средств когда выигрыша. Нет. Для получения бездепозитного бонуса в казино необходима обязательная регистрация на сайте. Играть в слоты даром и без регистрации возможно лишь в демо режиме. <a href=https://rovworld.com/members/tyronecrank/profile/>https://rovworld.com/members/tyronecrank/profile/</a> 1×slots рабочее зеркало на сегодня Чаще всего интернет-казино предлагают бездепозитные призы новым пользователям. Эта промо-акция очень эффективно завлекает начинающих, подталкивая их к открытию счета. Конечно, не все становятся послушными посетителями, но сам прецедент регистрации аккаунта играет на руку заведению.Кешбэк-бонус дает собой возврат фиксированного процента от ставки в случае поражения или же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%.
<b>Смотреть еще похожие новости:</b>
<a href=http://miupsik.ru/forums/showthread.php?tid=234366>1×slots зеркало регистрация</a>
<a href=https://isomedu.com/forum/profile/josephdrons/>1×slots регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Так же стоит выделить то, что в любом онлайн казино установлен собственный наибольший кешаут на бездепозитный приз. Как правило кешаут — это максимальная сумма средств, которая дешевая для вывода с бездепозитного бонуса. За привлечение друга ? масштабах партнерской программы клиент получает вознаграждение за привлечение новых пользователей.
#9415 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
Этот образ бонуса несомненно добавлен на Ваш акк после успешной процедуры регистрации с внедрением номера телефонного. Если выбрать иной метод создания учетной записи, бездеп не несомненно добавлен на Ваш акк. <a href=http://filmkachat.ru/>1×slots официальный зеркало</a> <a href=http://autoschool-progress.kz/index.php?subaction=userinfo&user=incandescentpro>http://autoschool-progress.kz/index.php?subaction=userinfo&user=incandescentpro</a> Выиграть настоящие деньги в казино не пополняя счет – трудно, но вполне. Главное задаться целью и не нарушатьправила заведения. Выберите несколько казино с бездепзитными бонусами и начните выступать на бонусные средства. По статистике из 10-ти заведений возможно заработать небольшую сумму денег помощью бонусных средств.Бездепозитные призы — это подарки от казино в виде бонусных средств либо фриспинов для игровых автоматов, которые начисляются на аккаунт игрока после процедуры регистрации на сайте заведения. Для получения этих поощрений депозит не требуется. рабочее зеркало 1×slots <a href=http://www.tiendahinchables.com/blog/%D1%82%D1%8B%D0%BD.html>http://www.tiendahinchables.com/blog/%D1%82%D1%8B%D0%BD.html</a> Прежде чем активировать бездеп, необходимо убедиться сомнений, собственно страна, гражданином коей считается игрок, не входит в список разрешенных.
1× слот зеркало
Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми промоакциями. Читайте о них в обзорах и на форуме.В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, необходимо адресоваться в службу поддержки через лайв-чат на сайте казино. <a href=http://naturetour.ru/communication/forum/messages/forum3/message23719/5417–1-x-slots?sessid=bd77c061510d9c052e87f33aef918011&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1 x slots</a> 1 хслот регистрация в 1×slots casino <a href=https://clients1.google.st/url?q=https://doctorlazuta.by/>https://clients1.google.st/url?q=https://doctorlazuta.by/</a> Для вывода средств бонус надо(надобно) несомненно отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариантами отыгрыша бездепозитного бонуса до его получения, чтобы избежать конфликтных ситуаций. 1×slots рабочее зеркало на сегодня
1×slot регистрация
В разделе с призами активировать свой презент. Найти забавы, для которых учтено поощрение и использовать бонус по предназначению.Не хотите поиграть в азартные игры, не рискуя своими средствами, но получая в все выплаты? Подобную возможность предоставляют все наихорошие порталы с азартными увеселениями. В их количестве много добросовестных и надежных интернет-казино на российском языке. Они привлекают свежих юзеров разными поощрительными событиями, включая бездепозитные, или бесплатные бонусы. <a href=http://wz.yyxculture.com/czc/home.php?mod=space&uid=23730>http://wz.yyxculture.com/czc/home.php?mod=space&uid=23730</a> В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, необходимо обратиться в службу поддержки спустя лайв-чат на веб-сайте казино. 1×slots бездепозитный бонус за регистрацию Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить необыкновенности, недоступные при забаве в демо режиме. Многие свежие клиенты перебегают в число постоянных, а оператор получает долгосрочную прибыль.Простая процедура получения бездепозитного приза, которая займет не более 2-х минут. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные.
1×slots официальный сайт скачать
Но рядах азартных платформах похожие вознаграждения шансы получить теперь зарегистрированные юзеры. В таком случае, бонусы предоставляются в оригинальных акций или же некоторым геймерам вид акционного предложения, коие приходит на почту с целью «возвратить» игрока в свое казино.Как управляло, новоприбывшие геймеры для желают ознакомиться с способами ввода и вывода денежных средств и сроки исполнения поданных заявок дабы конкретно разуметь, как быстро возможность вывести свой казино бонус за регистрацию без депозита на электронный кошелек либо же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино соперничают меж собой. Ведь в бы конкретную фирму представляло только одно онлайн-заведение, то навряд бы посетители заметили казино с призом за регистрацию и имели бы рассчитывать лишь на вознаграждение в виде приза на первое инвестиция. К любому заведению регулярно идет привлекать новых игроков, что, в итоге, лишь на руку всем играющим. Наши специалисты изучают обстоятельства акции, после в ручном режиме проверку их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и характеристики. Мы не рекламируем казино, а даем игрокам информацию о превосходнейших из них. 1×slot официальный сайт <a href=https://chessdatabase.science/wiki/%D0%A4%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B_%D0%90%D0%BF%D1%82%D0%B5%D0%BA_%D0%92_%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8:_%D0%A2%D1%80%D0%B5%D0%BD%D0%B4%D1%8B_%D0%98_%D0%9F%D1%80%D0%BE%D0%B3%D0%BD%D0%BE%D0%B7%D1%8B_%D0%9D%D0%B0_2024_%D0%93%D0%BE%D0%B4>https://chessdatabase.science/wiki/%D0%A4%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B_%D0%90%D0%BF%D1%82%D0%B5%D0%BA_%D0%92_%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8:_%D0%A2%D1%80%D0%B5%D0%BD%D0%B4%D1%8B_%D0%98_%D0%9F%D1%80%D0%BE%D0%B3%D0%BD%D0%BE%D0%B7%D1%8B_%D0%9D%D0%B0_2024_%D0%93%D0%BE%D0%B4</a> Подарки на праздники ? приуроченные к парадным датам, требующие символического отыгрыша либо начисляются без такового. Могут дариться игрокам сутки рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду.Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и. Когда игроку полагается большое фриспинов, администрация имеет разбивать их начисление на несколько дней. Бесплатные вращения предоставляются для определенного слота, который указывается в правилах акции.
1×slots рабочее зеркало
Доступность — бездепозитные призы в казино чаще всего предоставляются свежим игрокам, но посещают случаи, когда приз имеют получить и действующие клиенты.Помните, собственно всевозможные нарушения правил сведут на нет ваши усилия, и вы скорее останетесь без начисленного вас бесплатного приза. Всегда изучайте верховодила начисления и условия вейджера. По хоть вопросам, на коие вы не можете других найти ответы, обращайтесь за разъяснениям и саппорт. Денежные свои. Третий бонус за регистрацию без депозита – наличные. К раскаянию, только известные и знаменитые клубы имеют дать средства в руб. Или долларах. С их помощью у насладиться любой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед этим необходимо исполненье определенных условий.Прежде чем активировать бездеп, нужно увериться сомнений, что страна, гражданином коей является игрок, не входит в список не. <a href=https://amvnews.ru/forum/profile.php?mode=viewprofile&u=75247>https://amvnews.ru/forum/profile.php?mode=viewprofile&u=75247</a> Отыграв бездепозитный приз в казино с выводом также придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если сходственное лимитирование существует, то единоразово исключить выйдет лишь сумму, не превосходящую объем приобретенного приза. 1×slots зеркало 1хслотс регистрация перейти на 1×slots Особую изюминку видео слотам присваивают уникальные знакы. С их свет активизируются разные бонусы. Вы можете запустить дополнительный уровень и прирастить необходимую выигрыша. Есть знаки, коие заменяют негодные элементы и сами создают выигрышные комбо. Не стоит забывать и про бонус-тур. После любого удачного спина есть шанс прирастить необходимую выигрыша в два либо четыре раза.
<b>Смотреть еще похожие новости:</b>
<a href=https://portugal-campings.com/pt/account/>1×slots casino регистрация 1×slotscasino09k online</a>
<a href=https://isomedu.com/forum/profile/josephdrons/>1×slots быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Как управляло, при выводе финансов, от играющего требуется лишь устроить минимальный вклад чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом собственный счет.
#9416 SelectorCasinohttps://selector-casino-apk.ru
<a href=http://proxy.knue.ac.kr/_Lib_Proxy_Url/https://selector-casino-apk.ru>selector-casino-apk.ru</a> <a href=http://www.lovency.net/blog/go.asp?url=https://selector-casino-apk.ru>selector-casino-apk.ru</a> <a href=http://daleelquran.quranourlife.com/redirect.php?url=https://selector-casino-apk.ru>selector-casino-apk.ru</a> <a href=https://nullecode.com/ab/index.php?url=https://selector-casino-apk.ru>selector-casino-apk.ru</a> <a href=http://maps.google.kz/url?q=https://selector-casino-apk.ru>selector-casino-apk.ru</a> <a href=https://elmir37.ru/bitrix/rk.php?goto=https://selector-casino-apk.ru>selector-casino-apk.ru</a> <a href=https://bloemart.com.hk/product.php?id_product=561&action=product.add.cart&id_subproduct=&quantity=1&returnurl=https://selector-casino-apk.ru>selector-casino-apk.ru</a> <a href=https://nextmed.asureforce.net/Redirect.aspx?PunchTime=&LoginId=&LogoffReason=&redirecturl=https://selector-casino-apk.ru>selector-casino-apk.ru</a> <a href=http://webbuild.knu.ac.kr.xx3.kz/go.php?url=https://selector-casino-apk.ru>selector-casino-apk.ru</a> <a href=https://greziak.com/?URL=https://selector-casino-apk.ru>selector-casino-apk.ru</a> <a href=http://kinoradiomagia.tv/forum/away.php?s=https://selector-casino-apk.ru>selector-casino-apk.ru</a> <a href=https://3p3×.adj.st/?adjust_t=u783g1_kw9yml&adjust_fallback=https://selector-casino-apk.ru>selector-casino-apk.ru</a> <a href=http://www.crime.co.nz/go.aspx?u=https://selector-casino-apk.ru>selector-casino-apk.ru</a> <a href=http://thefristcenter.org.xx3.kz/go.php?url=https://selector-casino-apk.ru>selector-casino-apk.ru</a> <a href=https://www.indiafreestuff.in/?rto=https://selector-casino-apk.ru>selector-casino-apk.ru</a>
Upload client casino selector – win now!
<a href=https://myvictoryfireworks.com/Zencart/trigger.php?r_ab=https://selector-casino-apk.ru>selector-casino-apk.ru</a> <a href=https://managementportal.de/modules/mod_jw_srfr/redir.php?url=https://selector-casino-apk.ru>selector-casino-apk.ru</a> <a href=http://igrannyfuck.com/cgi-bin/atc/out.cgi?s=60&c=$c&u=https://selector-casino-apk.ru>selector-casino-apk.ru</a> <a href=http://homecashflowshortcut.org.xx3.kz/go.php?url=https://selector-casino-apk.ru>selector-casino-apk.ru</a> <a href=http://www.fif-orientering.dk/springcup/tkc/index.asp?goto=https://selector-casino-apk.ru>selector-casino-apk.ru</a> <a href=https://ghn.ge/red.php?red=selector-casino-apk.ru-info-uz.com>selector-casino-apk.ru</a> <a href=http://vipoil.com.ua/bitrix/rk.php?goto=http:/https://selector-casino-apk.ru>selector-casino-apk.ru</a> <a href=http://cse.google.com.cu/url?sa=t&url=http%3A%2F%2Fselector-casino-apk.ru-info-uz.com>selector-casino-apk.ru</a> <a href=https://image.google.co.zw/url?sa=t&rct=j&url=https://selector-casino-apk.ru>selector-casino-apk.ru</a> <a href=https://media.doublequack.com/redirect.aspx?pid=3239&bid=1522&redirectURL=selector-casino-apk.ru>selector-casino-apk.ru</a> <a href=https://clients1.google.com.uy/url?q=https://selector-casino-apk.ru>selector-casino-apk.ru</a> <a href=http://datasheets.me/url.php?url=https://selector-casino-apk.ru>selector-casino-apk.ru</a> <a href=https://jobinspect.com/jobclick/?RedirectURL=http%3A%2F%2Fselector-casino-apk.ru-info-uz.com&Domain=JobInspect.com&rgp_m=title15&et=4495>selector-casino-apk.ru</a> <a href=https://bons-plans-malins.digidip.net/visit?url=https://selector-casino-apk.ru>selector-casino-apk.ru</a> <a href=http://2×2tv.ru/bitrix/rk.php?goto=https://selector-casino-apk.ru>selector-casino-apk.ru</a>
#9417 Danielquornhttps://www.hentai-foundry.com/user/il001997/profile
“You get some of me but not tomorrow as they want me in as soon as I can make it happen. This is the one time when they say jump and I ask how high due the financial gains the company could benefit from and it being important enough for the client to appear in person.”
“Well I get an extra night of you at least! I wonder what we could do with that? Meantime, what about food? I am starving and delicious as it was a second breakfast is not quite enough to replenish me!”
“Well get something on and we’ll sort that out first.”
We drove into town and decided that a daytime visit to Charlie’s was going to be the answer. I parked in the bar lot and Elise dashed in to change into something more appropriate, jeans and a t-shirt along with her biker jacket but keeping her Converses on.
Walking down to the restaurant was different from the middle of the night visits as the streets were bustling and all of the shops and outlets were open.
Reaching Charlie’s we entered the front door and sat in a booth near the window. A beautiful young American Chinese girl came,smiled and said hello to Elise and gave us menus and asked if we wanted drinks in the meantime.
„No thanks Lin just a pot of Jasmine tea for us please.“ Lin went back to the kitchen area. “No booze for me today as I will have to work in the bar so it is just tea for me.”
Not in a drinking mood either, I agreed with her."
https://tubeteencam.com/…1995/profile https://onedio.ru/…exbers-196-4 https://okwave.jp/…3125045.html https://haveagood.holiday/users/352747 https://rentry.org/kta9cgcg
#9418 сейф для оружияhttps://sejfy-dlya-oruzhiya.ru/
Тут можно преобрести оружейные сейфы <a href=https://sejfy-dlya-oruzhiya.ru/>оружейный сейф купить в москве</a>
#9419 JetAndroidhttps://jet-casino-apk.ru/jet-na-androjd/
<a href=https://jet-casino-apk.ru/jet-na-androjd/>jet-casino-apk.ru/jet-na-androjd/</a>
Скачать последнюю версию приложения онлайн казино Jet – выигрывай сейчас! <a href=https://jet-casino-apk.ru/jet-na-androjd/>http://jet-casino-apk.ru/jet-na-androjd/</a>
#9420 Scottjahhttps://issuu.com/nutakugoldhack2025
https://issuu.com/…goldhack2025
Documentation of ownership: „Unlock Nutaku's Nebulous Treasures: Mastering Gold Creation and Exploits“ Statement: Fit into on an epic search after to come undone things Nutaku! This comprehensive guide reveals cutting-edge strategies on account of generating intercontinental gold coins, exploiting occult glitches, and mastering the touch of unengaged gold acquisition. Drench into the beget of Nutaku hacks and elevate your gaming withstand to unprecedented heights.
Keywords: Nutaku drudge 2024 2025, Nutaku Gold Coin Codes, Nutaku Mitigate crack Gold, Nutaku Gold Generator, Nutaku Gold Glitch, Nutaku Gold Stock
http://creval.co.jp/…ndless-gold/ https://2020.phaiboon.go.th/…-canonicum-c https://cardgame-onepiece.jp/…tinual-gold/ http://3dvirtualshop.com/…tinual-gold/ http://www.tapasam.com/…ndless-gold/ https://2022.laithung.go.th/…rpus-juris-t https://rousemilk.com/…nutaku-mast/ https://iamthewaytruthandlife.org/…ndless-gold/ https://www.sporringsekwis.nl/…finite-gold/ https://foxlive.work/…ndless-gold/ https://gunma-fuzoku-taikenki.com/…ndless-gold/ http://age-shooter.com/…finite-gold/ https://keishonihongo.org/…finite-gold/ https://nong-kung.go.th/…ndless-gold/ http://machinelearningkorea.com/…tinual-gold/ https://bungmai.go.th/…e-to-endless http://black-human.com/?… https://kudchompu.go.th/…-canonicum-c https://a400group.com/…tinual-gold/ https://hirotarou.xyz/…finite-gold/ https://www.maryfaltz.com/…tinual-gold/ https://fx-info.net/…inable-gold/ https://2020.khuemyai.go.th/…-canonicum-c https://benefitonline.nl/…tinual-gold/ https://www.digicube.de/…ntinual-Gold?… https://cassandra-link.com/…nutaku-mast/
#9421 BrentDyclehttps://msutv-1.ru
ссылка мега даркнет шоп <a href=https://msutv-1.ru/>ссылка на mega</a>
#9422 JetApkhttps://jet-casino-apk.ru/jet-apk
<a href=https://kharkov-hobby.ucoz.ua/go?https://jet-casino-apk.ru/jet-apk>jet-casino-apk.ru/jet-apk</a> <a href=http://kit.su/bitrix/rk.php?goto=https://jet-casino-apk.ru/jet-apk>jet-casino-apk.ru/jet-apk</a> <a href=http://infonova.org.ua/go.php?url=https://jet-casino-apk.ru/jet-apk>jet-casino-apk.ru/jet-apk</a> <a href=http://kskdts.ru/bitrix/rk.php?goto=https://jet-casino-apk.ru/jet-apk>jet-casino-apk.ru/jet-apk</a> <a href=https://locuscom.ru/bitrix/redirect.php?goto=https://jet-casino-apk.ru/jet-apk>jet-casino-apk.ru/jet-apk</a> <a href=http://www.kollabora.com/external?url=https://jet-casino-apk.ru/jet-apk>jet-casino-apk.ru/jet-apk</a> <a href=http://sch-internat-rzn.ru/bitrix/rk.php?goto=https://jet-casino-apk.ru/jet-apk>jet-casino-apk.ru/jet-apk</a> <a href=http://www.v22q.com/cn/redirect.php?url=https://jet-casino-apk.ru/jet-apk>jet-casino-apk.ru/jet-apk</a> <a href=http://www.std.com.ua/out.php?link=https://jet-casino-apk.ru/jet-apk>jet-casino-apk.ru/jet-apk</a> <a href=http://hempstreetcbd.com.xx3.kz/go.php?url=https://jet-casino-apk.ru/jet-apk>jet-casino-apk.ru/jet-apk</a> <a href=https://fasulis.blog.idnes.cz/redir.aspx?url=https://jet-casino-apk.ru/jet-apk>jet-casino-apk.ru/jet-apk</a> <a href=http://www.lak-jak.com.ua/out.php?link=https://jet-casino-apk.ru/jet-apk>jet-casino-apk.ru/jet-apk</a> <a href=http://tomtomworks.com.xx3.kz/go.php?url=https://jet-casino-apk.ru/jet-apk>jet-casino-apk.ru/jet-apk</a> <a href=https://shironeko.me/redirect?url=https://jet-casino-apk.ru/jet-apk>jet-casino-apk.ru/jet-apk</a> <a href=https://www.nataliecole.com/redirect.php?link_id=1&link_url=https3A2F2Fwww.youtube.com2Fwatch3Fv3D7U4AMUfFZ3Ehttps://jet-casino-apk.ru/jet-apk>jet-casino-apk.ru/jet-apk</a>
Upload application online casino jet – play now! <a href=https://novostroyki.guru/bitrix/redirect.php?goto=https://jet-casino-apk.ru/jet-apk>jet-casino-apk.ru/jet-apk</a> <a href=http://piss-drinking.xtopsite.info/out.cgi?ses=SlT22fjF0L&id=42&url=https://jet-casino-apk.ru/jet-apk>jet-casino-apk.ru/jet-apk</a> <a href=https://www.leaducation.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=https://jet-casino-apk.ru/jet-apk>jet-casino-apk.ru/jet-apk</a> <a href=https://zaou.idp.astrialearning.com/saml/module.php/core/loginuserpass.php?AuthState=_ce850dcc56700251498b7aea11b500d013a1aea3b7%3Ahttps%3A%2F%2Fwww.tonymacx86.com/threads/port-your-own-mac-games.326959>jet-casino-apk.ru/jet-apk</a> <a href=http://www.digitalhall.ru/bitrix/rk.php?goto=https://jet-casino-apk.ru/jet-apk>jet-casino-apk.ru/jet-apk</a> <a href=http://libra.ttgu.ac.kr/_Lib_Proxy_Url/worldgreatsuccess.ruhttps://jet-casino-apk.ru/jet-apk>jet-casino-apk.ru/jet-apk</a> <a href=http://clients1.google.rs/url?sa=i&url=https://jet-casino-apk.ru/jet-apk>jet-casino-apk.ru/jet-apk</a> <a href=https://www3.valueline.com/vlac/logon.aspx?lp=https://jet-casino-apk.ru/jet-apk>jet-casino-apk.ru/jet-apk</a> <a href=https://eu.wargaming.net/id/openid/redirect/confirm/?next=http%3A%2F%2Fwww.tonymacx86.com/threads/port-your-own-mac-games.326959>jet-casino-apk.ru/jet-apk</a> <a href=https://www.artceramica.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=https://jet-casino-apk.ru/jet-apk>jet-casino-apk.ru/jet-apk</a> <a href=https://partnerprogramm.exporo.de/affiliate/iframe?height=530&width=770&link=https://jet-casino-apk.ru/jet-apk>jet-casino-apk.ru/jet-apk</a> <a href=https://cse.google.com.bo/url?sa=t&url=https%3A%2F%2Fwww.tonymacx86.com/threads/port-your-own-mac-games.326959>jet-casino-apk.ru/jet-apk</a> <a href=https://wbmonitor.bibb.de/dereferer.php?link=https://jet-casino-apk.ru/jet-apk>jet-casino-apk.ru/jet-apk</a> <a href=http://sergioajrag.pages10.com.xx3.kz/go.php?url=https://jet-casino-apk.ru/jet-apk>jet-casino-apk.ru/jet-apk</a> <a href=http://baza.vds.pl/esklep/redir.asp?WenId=9&WenUrllink=https://jet-casino-apk.ru/jet-apk>jet-casino-apk.ru/jet-apk</a>
#9423 SelectorCasinohttps://selector-casino-apk.ru
<a href=https://maps.google.hu/url?rct=t&sa=t&url=https://selector-casino-apk.ru>selector-casino-apk.ru</a> <a href=http://7ba.ru/out.php?url=https://selector-casino-apk.ru>selector-casino-apk.ru</a> <a href=http://fortefest.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=https://selector-casino-apk.ru>selector-casino-apk.ru</a> <a href=https://logicboard.ru/support/away.php?s=https://selector-casino-apk.ru>selector-casino-apk.ru</a> <a href=https://josetsuki.net/catalog/redirect.php?action=url&goto=https://selector-casino-apk.ru>selector-casino-apk.ru</a> <a href=https://maps.t.me/s/worldcasinonet.pg/url?sa=j&rct=j&url=https://selector-casino-apk.ru>selector-casino-apk.ru</a> <a href=https://xn–d1algo8e.xn–p1ai/bitrix/redirect.php?goto=https://selector-casino-apk.ru>selector-casino-apk.ru</a> <a href=http://www.ahi-toshiba.com/bitrix/rk.php?goto=https://selector-casino-apk.ru>selector-casino-apk.ru</a> <a href=https://fr.grepolis.com/start/redirect?url=https://selector-casino-apk.ru>selector-casino-apk.ru</a> <a href=https://www.vincent-realty.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=https://selector-casino-apk.ru>selector-casino-apk.ru</a> <a href=http://amlak9.com.xx3.kz/go.php?url=https://selector-casino-apk.ru>selector-casino-apk.ru</a> <a href=http://elkogloszenia.pl/link.php?url=https://selector-casino-apk.ru>selector-casino-apk.ru</a> <a href=http://fnzs.ru/bitrix/redirect.php?goto=https://selector-casino-apk.ru>selector-casino-apk.ru</a> <a href=https://xn–90ainn0ac.xn–p1ai/bitrix/redirect.php?goto=https://selector-casino-apk.ru>selector-casino-apk.ru</a> <a href=https://www.socpresclub.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=https://selector-casino-apk.ru>selector-casino-apk.ru</a>
Download client bookmaker selector – win right now!
<a href=http://wap.keshka.ru/out.php?url=https://selector-casino-apk.ru>selector-casino-apk.ru</a> <a href=http://bigtakeover.com/revive/www/delivery/ck.php?ct=1&oaparams=2__bannerid=68__zoneid=4__cb=c0575383b9__oadest=https://selector-casino-apk.ru>selector-casino-apk.ru</a> <a href=http://invest.oka2011.com/?wptouch_switch=desktop&redirect=http%3A%2F%2Fselector-casino-apk.ru-info-uz.com>selector-casino-apk.ru</a> <a href=https://www.bodegalospozos.com/setlang.aspx?lang=en&returnurl=https://selector-casino-apk.ru>selector-casino-apk.ru</a> <a href=https://market.thaiza.com/go.php?https://selector-casino-apk.ru>selector-casino-apk.ru</a> <a href=https://edusearch.ir/Goto.aspx?url=https://selector-casino-apk.ru>selector-casino-apk.ru</a> <a href=http://www.healthyklamath.org/redir.php?url=https://selector-casino-apk.ru>selector-casino-apk.ru</a> <a href=https://forums.ashesofcreation.com/home/leaving?target=https://selector-casino-apk.ru>selector-casino-apk.ru</a> <a href=https://loadus.exelator.com/load/?p=258&g=244&clk=1&crid=porscheofnorth&stid=rennlist&j=r&ru=https://selector-casino-apk.ru>selector-casino-apk.ru</a> <a href=http://www.sinprofaz.org.br/publicacao.php?id=110927181741–1a3209da4c42460ab1808cb468ad34f6&arquivo=http%3A%2F%2Fselector-casino-apk.ru-info-uz.com>selector-casino-apk.ru</a> <a href=http://www.mojegolebie.pl/popolupo.aspx?b=https://selector-casino-apk.ru>selector-casino-apk.ru</a> <a href=http://www.goingseo.com.au/redirect.php?url=https://selector-casino-apk.ru>selector-casino-apk.ru</a> <a href=http://www.toolla.com/go.php?url=selector-casino-apk.ru-info-uz.com>selector-casino-apk.ru</a> <a href=http://www.hpoi.net/redirect?url=https://selector-casino-apk.ru>selector-casino-apk.ru</a> <a href=http://agri-aranbidgol.ir/LinkClick.aspx?link=https%3A%2F%2Fselector-casino-apk.ru-info-uz.com&mid=32019>selector-casino-apk.ru</a>
#9424 Selector Downloadhttps://selector-casino-apk.ru/selector-skachat
<a href=http://www.castnet.de/misc/redirect?url=https://selector-casino-apk.ru/selector-skachat>selector-casino-apk.ru/selector-skachat</a> <a href=http://perlindunganhukum.com.xx3.kz/go.php?url=https://selector-casino-apk.ru/selector-skachat>selector-casino-apk.ru/selector-skachat</a> <a href=http://edelveis-ritual.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=https://selector-casino-apk.ru/selector-skachat>selector-casino-apk.ru/selector-skachat</a> <a href=http://cse.google.az/url?q=https://selector-casino-apk.ru/selector-skachat>selector-casino-apk.ru/selector-skachat</a> <a href=http://kensiroukun.hatenadiary.com/iframe/hatena_bookmark_comment?canonical_uri=https://selector-casino-apk.ru/selector-skachat>selector-casino-apk.ru/selector-skachat</a> <a href=http://simpson-select.com.xx3.kz/go.php?url=https://selector-casino-apk.ru/selector-skachat>selector-casino-apk.ru/selector-skachat</a> <a href=http://urbanplanet-streetwear.com/bitrix/rk.php?goto=https://selector-casino-apk.ru/selector-skachat>selector-casino-apk.ru/selector-skachat</a> <a href=http://silverporntube.com/cgi-bin/atx/out.cgi?s=60&u=https://selector-casino-apk.ru/selector-skachat>selector-casino-apk.ru/selector-skachat</a> <a href=http://maps.t.me/s/worldcasinonet.ng/url?sa=i&url=https://selector-casino-apk.ru/selector-skachat>selector-casino-apk.ru/selector-skachat</a> <a href=http://www.auto-sib.com/bitrix/rk.php?id=548&event1=banner&event2=click&event3=1+%2F+%5B548%5D+%5Btechnique2%5D+%C0%CC%CA%CE%C4%CE%D0&goto=https://selector-casino-apk.ru/selector-skachat>selector-casino-apk.ru/selector-skachat</a> <a href=http://defile.ru/bitrix/redirect.php?goto=https://selector-casino-apk.ru/selector-skachat>selector-casino-apk.ru/selector-skachat</a> <a href=http://images.t.me/s/worldcasinonet.ly/url?rct=t&sa=t&url=https://selector-casino-apk.ru/selector-skachat>selector-casino-apk.ru/selector-skachat</a> <a href=http://neighbours.io.xx3.kz/go.php?url=https://selector-casino-apk.ru/selector-skachat>selector-casino-apk.ru/selector-skachat</a> <a href=http://images.google.ch/url?sa=t&url=https://selector-casino-apk.ru/selector-skachat>selector-casino-apk.ru/selector-skachat</a> <a href=http://ppvotes.com.xx3.kz/go.php?url=https://selector-casino-apk.ru/selector-skachat>selector-casino-apk.ru/selector-skachat</a>
Install application casino selector – play right now!
<a href=http://game.5stone.net/sitejump.php?JUMPURL=https://selector-casino-apk.ru/selector-skachat>selector-casino-apk.ru/selector-skachat</a> <a href=http://skinguru.ru/php/apps/shop/comments.php?for=shop&i=197&all=1&url=https://selector-casino-apk.ru/selector-skachat>selector-casino-apk.ru/selector-skachat</a> <a href=http://maps.google.nr/url?q=https://selector-casino-apk.ru/selector-skachat>selector-casino-apk.ru/selector-skachat</a> <a href=http://kabuline.com/redirect/?um=https://selector-casino-apk.ru/selector-skachat>selector-casino-apk.ru/selector-skachat</a> <a href=http://images.google.ca/url?q=https://selector-casino-apk.ru/selector-skachat>selector-casino-apk.ru/selector-skachat</a> <a href=http://maps.t.me/s/worldcasinonet.qa/url?sa=t&url=/https://selector-casino-apk.ru/selector-skachat>selector-casino-apk.ru/selector-skachat</a> <a href=http://clients1.google.es/url?sa=t&url=https://selector-casino-apk.ru/selector-skachat>selector-casino-apk.ru/selector-skachat</a> <a href=http://www.t.me/s/worldcasinonet.na/url?q=https://selector-casino-apk.ru/selector-skachat>selector-casino-apk.ru/selector-skachat</a> <a href=http://maps.google.co.il/url?sa=t&source=web&rct=j&url=https%3A%2F%2Fhttps://selector-casino-apk.ru/selector-skachat>selector-casino-apk.ru/selector-skachat</a> <a href=http://61.cholteth.com/index/d1?diff=0&utm_clickid=g00w000go8sgcg0k&aurl=https://selector-casino-apk.ru/selector-skachat>selector-casino-apk.ru/selector-skachat</a> <a href=http://ernster.numilog.com/Handlers/CompteurClick.ashx?ImagePubID=3929&URLImage=https://selector-casino-apk.ru/selector-skachat>selector-casino-apk.ru/selector-skachat</a> <a href=http://thedirectlist.com/jobclick/?RedirectURL=https://selector-casino-apk.ru/selector-skachat>selector-casino-apk.ru/selector-skachat</a> <a href=http://www.zeirishi-office.jp/exit.asp?url=https://selector-casino-apk.ru/selector-skachat>selector-casino-apk.ru/selector-skachat</a> <a href=http://www.valledifassa.com/?wptouch_switch=desktop&redirect=https://selector-casino-apk.ru/selector-skachat>selector-casino-apk.ru/selector-skachat</a> <a href=http://l2base.su/go?https://selector-casino-apk.ru/selector-skachat>selector-casino-apk.ru/selector-skachat</a>
#9425 SelectorCasinohttps://selector-casino-apk.ru/selector-casino
<a href=https://selector-casino-apk.ru/selector-casino>http://www.selector-casino-apk.ru/selector-casino</a>
Установить последнюю версию приложения казино Selector – играй сейчас! <a href=https://selector-casino-apk.ru/selector-casino>http://www.selector-casino-apk.ru/selector-casino</a>
#9426 Louishuthttps://st66604.pro
ST666 – Nhà Cái Uy Tín Hàng Đầu Việt Nam
ST666 là một trong những nhà cái uy tín số 1 tại Việt Nam, cung cấp đa dạng các trò chơi cá cược hấp dẫn như cá cược thể thao, casino, xổ số, đá gà, bắn cá, và nhiều trò chơi thú vị khác. Không chỉ vậy, ST666 còn mang đến các chương trình khuyến mãi hấp dẫn, giúp người chơi nhận được nhiều ưu đãi hấp dẫn khi tham gia.
Trò Chơi Cá Cược Tại ST666 ST666 cung cấp các trò chơi cá cược đa dạng, đáp ứng nhu cầu của mọi đối tượng người chơi. Các trò chơi nổi bật tại ST666 bao gồm:
Cá Cược Thể Thao: Các sự kiện thể thao hấp dẫn từ bóng đá, tennis đến các môn thể thao khác. Casino: Trải nghiệm các trò chơi casino với chất lượng cao như blackjack, baccarat, roulette, và các trò chơi slot machines. Đá Gà: Trận đấu đá gà gay cấn, nơi người chơi có thể tham gia cá cược và theo dõi những trận đấu kịch tính. Xổ Số: Chơi xổ số và thử vận may để nhận những phần thưởng giá trị. Bắn Cá: Trò chơi bắn cá với đồ họa sống động và hấp dẫn. Esports: Tham gia cá cược vào các trận đấu thể thao điện tử hấp dẫn với các đội tuyển hàng đầu. Khuyến Mãi Hấp Dẫn ST666 luôn có các chương trình khuyến mãi hấp dẫn để tri ân người chơi, bao gồm:
Khuyến Mãi 100% Nạp Lần Đầu: Người chơi mới khi đăng ký tài khoản và nạp tiền lần đầu sẽ nhận được khuyến mãi nạp tiền lên tới 100%. Bảo Hiểm Casino: ST666 cung cấp bảo hiểm cho các trò chơi casino, giúp người chơi giảm thiểu rủi ro khi tham gia. Khuyến Mãi Thể Thao: Các chương trình khuyến mãi hấp dẫn dành riêng cho cá cược thể thao, giúp người chơi gia tăng cơ hội chiến thắng. Đăng Ký và Đăng Nhập ST666 Để bắt đầu trải nghiệm các trò chơi và tham gia cá cược tại ST666, người chơi cần thực hiện các bước đơn giản sau:
Đăng Ký: Tạo tài khoản tại ST666 để nhận các ưu đãi và khuyến mãi hấp dẫn. Đăng Nhập: Sau khi đăng ký thành công, người chơi có thể đăng nhập vào tài khoản để tham gia các trò chơi cá cược trực tuyến. Nạp Tiền và Rút Tiền: ST666 hỗ trợ nhiều phương thức nạp và rút tiền linh hoạt, giúp người chơi giao dịch nhanh chóng và an toàn. ST666 – Nơi Gửi Gắm Niềm Tin ST666 không chỉ là nhà cái mà còn là nơi cung cấp môi trường cá cược công bằng và minh bạch. Người chơi luôn cảm thấy an tâm với các chính sách bảo mật chặt chẽ và dịch vụ hỗ trợ khách hàng 24/7. ST666 xứng đáng là điểm đến tin cậy cho những ai yêu thích cá cược trực tuyến.
Thông Tin Liên Hệ Nếu bạn có bất kỳ câu hỏi hay thắc mắc nào, vui lòng liên hệ với ST666 qua các kênh hỗ trợ khách hàng. Chúng tôi luôn sẵn sàng giải đáp và hỗ trợ bạn.
CEO & Founder: Đặng Nhất Nam Facebook ST666: Cập nhật những tin tức mới nhất và nhận các khuyến mãi hấp dẫn tại trang Facebook chính thức của ST666.
#9427 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало
Эффективность бездепов в маркетингового прибора расценили почти операторы. Малоизвестные площадки употребляют эти акции, дабы прытко набрать базу. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны постоянных гостей. Не все сайты, дающие презенты без депозита, рекомендованы к ирге. За привлекательным промоописанием имеют прятаться неосуществимые обстоятельства отыгрыша и другие подводные камни.Любой выигрыш по ставке выше установленного лимита несомненно считаться недействительным. То есть ставка не несомненно засчитана при отыгрыше, а в случае выигрыша его сумма не поступит на счёт клиента — результат игры несомненно полностью аннулирован. <a href=http://filmkachat.ru/>1×slots казино зеркало</a> <a href=http://potograpiyadavao.blogspot.com/2014/02/the-subangan-provincial-museum-of-davao.html>http://potograpiyadavao.blogspot.com/2014/02/the-subangan-provincial-museum-of-davao.html</a> 1×slots официальный сайт скачать <a href=http://whdf.ru/forum/user/68534/>http://whdf.ru/forum/user/68534/</a>
1×slots рабочее зеркало
Так собственно основное отличие презента на депо от бездепа – обязательное пополнение счёта. Вы можете привнести депозит и преувеличить стартовый капитал или забрать бездеп и всем не придётся рисковать собственными сбережениями. Поспешите выполнить простые требования, и администрация ресурса начисляет щедрое одобрение! 1×slots зеркало регистрация <a href=http://gtabg.net/profile.php?lookup=77503>http://gtabg.net/profile.php?lookup=77503</a> Фриплей-бонусы. Бонусы за безвозмездную забаву есть только в неких клубах. Они зачисляются незамедлительно после сотворения профиля и действуют недолговременное время. Если у вас нет медли истратить свои, они просто завершатся. Что дотрагивается времени, правило призы действуют протяжении 1-го часа. 1×slots официальный сайт скачать
1×slots регистрация на сайте
Помимо остального, для вывода средств по бездепу необходимо внести на счёт собственный первый депозит — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально вероятную сумму, в чего вывод средств будет доступен.Суммы подобных предложений, как правило, колеблются от 3-х до двадцати долларов, а вейджер на эти свои должен сочинять от тридцати до шестидесяти один. Зачастую, большая сумма выигрыша здесь составит от одной до двух сотен долларов. Если в выиграет больше, то все свои могут быть списанными до очень разрешенного выигрыша. Здесь замечена содержание выводить еще несуществующие деньги на собственную платежную систему и далее отыскивать заведение с подходящими под данную сумму релоадом или призом за 1-ое пополнение счета. Есть некоторое подвидов бездепозитного вознаграждения, предлагаемого наибольшим числом заведений. Бездепозитные призы казино за регистрацию в 2022 году — это вероятность поиграть за счёт заведения. Казино даёт посетителю шанс пользоваться определённой суммой или числом даровых вращений без внесения депозита. Не путайте деморежим с реальной забавой без необходимости внесения депо.Чаще всего, популярные сервисы, эти как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно неотъемлемое верховодило. Финансовые средства выводятся лишь спустя что, эту платежную систему, которой огромный для пополнения депозита. Если же игрок получил бездепозитный покерный приз, потребуется пополнить счет на минимальную сумму, кот-ая сочиняет обычно 10 $. <a href=http://maplemania.6te.net/profile.php?lookup=16672>http://maplemania.6te.net/profile.php?lookup=16672</a> Так что основное отличие подарка на депо от бездепа – обязательное пополнение счёта. Вы сможете внести депо и преувеличить стартовый капитал или арестовать бездеп и при не придётся рисковать своими сбережениями. Поспешите выполнить обычные требования, и администрация ресурса начисляет щедрое одобрение!Только выполнив все условия отыгрыша и дождавшись завершения ревизии аккаунта, Вы сможете оформить заявку на вывод средств и получить средства деньги. 1×slots официальный зеркало рабочее Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.Для тех, кто лишь взвешивает испытывать свою фортуну, еще для профессиональных игроков, разыскивающих свежие площадки для выигрышей, ведущие лицензированные казино часто организуют разные акции, и лучшее предложений за время – как для новичков, например и для профессиональных игроков – бездепозитный бонус за регистрацию.
1хслотс регистрация в 1×slots casino
Шаг 5. Использование и отыгрыш. Бездеп обязан быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. 1×slots регистрация 1×slotscasino 56 online <a href=http://ternovka4school.org.ua/index.php?subaction=userinfo&user=haplesssilhouet>http://ternovka4school.org.ua/index.php?subaction=userinfo&user=haplesssilhouet</a>
1×slot зеркало рабочее регистрации на телефон придет
Бездепозитные бонусы, как уже понятно, считаются оригинальной вероятностью приступать к игровому процессу абсолютно бесплатно, то есть выступать в интернет казино безвозмездно и на существующие средства незамедлительно в регистрации аккаунта. Автоматы с этим депо шансы замерзнуть прекрасной вероятностью сыграть для почитателей азарта с определенными лимитированиями в финансах.Приветственный приз без депо ? презент за регистрацию. Выдается средствами, фриспинами или баллами. В заключительном случае бонусные баллы используются для роли в турнирах или размена на настоящие средства. <a href=http://ezevertech.com/bbs/board.php?bo_table=free&wr_id=14664>http://ezevertech.com/bbs/board.php?bo_table=free&wr_id=14664</a> Не сложно додуматься, собственно not the slightest deposit bonuses практически никогда не бывают великими. Чаще всего речь идет о пяти–тридцати долларах (либо эквиваленте данной суммы в другой еденице).Бездепозитные призы — это подарки от казино в виде бонусных средств либо фриспинов для игровых автоматов, которые начисляются на аккаунт игрока после процедуры регистрации на сайте заведения. Для получения этих поощрений депозит не требуется. 1×slots зеркало которую указывали при регистрации кстати Бездепозитные бонусы начисляются только один раз. Не стоит открывать новые аккаунты, дабы получить их повторно. Служба безопасности казино обязательно выявит «левого» участника и перекроет. Если гость выполнит нужные требования, отыграет свою ставку и решит вывести личный выигрыш, то ему нужно принять, собственно казино непременно востребует предоставить ксерокопии собственных документов, чтобы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные средства вывести не получится.
<b>Смотреть еще похожие новости:</b>
<a href=https://houseion.com/2023/04/25/ethimo-mountain-style/#comment-11169>1×slots промокод при регистрации</a>
<a href=https://uyghuryol.com/forum/viewtopic.php?f=8&t=230077>1×slots регистрация 1×slotscasino 56 online</a>
<a href=http://www.ihavethepussy.com/de/threads/195123–1×slots-%D0%A1%D0%82%D0%A0%C2%B5%D0%A0%D1%96%D0%A0%D1%91%D0%A1%D0%83%D0%A1%E2%80%9A%D0%A1%D0%82%D0%A0%C2%B0%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A1%D0%8F-1×slots-casino-777-online?p=212657#post212657>1×slots регистрация 1×slots casino 777 online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Не желайте сыграть в азартные забавы, не рискуя средствами деньгами, хотя получая в все выплаты? Подобную вероятность деют многие лучшие порталы с азартными веселиями. В их числе количество честных и надежных интернет-казино на русском языке. Они завлекают новых пользователей различными поощрительными мероприятиями, включая бездепозитные, либо благотворительные призы.
#9428 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
При отыгрыше бездепов, учитывайте временные ограничения. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток.Бесплатный приз – кредиты, которые онлайн-казино начисляет посетителю, не заставляя его пополнять игровой счет. <a href=http://filmkachat.ru/>1хслот зеркало</a> Бездепозитный бонус предоставляется новенькому игроку за определенные действия. Часто презент вид денег либо фриспинов выдается за регистрацию, спасибо чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.Почти все игровые клубы требуют свидетельство контактных данных игрока для получения бездепозитного приза. <a href=http://bbs.zhizhuyx.com/home.php?mod=space&uid=11361840>http://bbs.zhizhuyx.com/home.php?mod=space&uid=11361840</a> 1×slots актуальное зеркало <a href=https://mcqacademy.com/author/kennethwrize/>https://mcqacademy.com/author/kennethwrize/</a> Сроки активации бонуса устанавливаются любым казино, но чаще всего они не превышают недели с этапа получения. Игроку обязательно надо(надобно) применять бездеп протяжении указанного срока, в ином случае бонус просто пропадет. Каждый приз можно получить только один один, потому в не использовать бездеп в срок, у игрока не будет 2 шанса им воспользоваться.
1×slot официальный сайт
Обычно для получения бонусов без депо, казино выдвигает лояльные и вполне выполнимые обстоятельства, но есть ряд действий коие воспрещены и шансы стать досадные результаты:Обычно для получения призов без депозита, казино выдвигает лояльные и абсолютно выполнимые обстоятельства, хотя есть ряд действий коие запрещены и могут причиной неприятные результаты: 1×slots рабочее зеркало на сегодня В настоящее время получить приз за регистрацию в казино очень просто. Почти любой игорный дом с готовностью предоставит деньги либо бесплатные вращения. Многие игроки пользуются данным и не смущяются региться в каждом клубе с выгодными критериями. Кстати, это отличная вероятность выдумать выигрышную стратегию и сорвать куш. <a href=https://mcqacademy.com/author/zacheryundok/>https://mcqacademy.com/author/zacheryundok/</a> Сроки активации приза уточняются каждым казино, хотя почаще всего они не превышают недели с момента получения. Игроку непременно надо(надобно) использовать бездеп в течение указанного срока, в ином случае приз просто пропадет. Каждый приз возможно получить лишь раз один, потому в не использовать бездеп в срок, у игрока не несомненно 2 шанса им воспользоваться. 1×slots актуальное зеркало
казино 1×slots
Активация по промокоду используется в различных видах бездепов. Если речь идет о приветственном бонусе, то набор символов возможно узнать на основной страничке, в регистрационной форме либо письме, коие отчаливает пользователю для доказательства адреса электронной почты. Акции могут проводиться совместно с партнерскими площадками. Обычно код размещается на стороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активизируется разовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном офисе или начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем важный код для активации в описании каждого промо. <a href=https://www.mavsboard.com/member.php?action=profile&uid=2492>https://www.mavsboard.com/member.php?action=profile&uid=2492</a> Для всех бездепозитных бонусов действует максимальный лимит на выигрыш. Он показывает максимальную сумму, коию у получить, играя на бонусные кредиты. Как лишь для удастся выполнить притязания вейджера, возможный максимум будет переведен с бонусного счета на главный, а остаток несомненно списан.Новички не обожают незамедлительно же вносить депо. Это обосновано неименьем навыка и сомненьем. К счастью, в наше время можно получить бездепозитный бонус за регистрацию в казино. Неважно что начисляет система – фриспины или кредиты. В всяком случае вы не рискуете собственными сбережениями. Это замечательная вероятность запустить приглянувшийся видео разъем либо же испытывать удачу в настольных играх. 1×slots бонус за регистрацию Вы не в коем случае ни же рискуете, а только выигрываете и выводите на платежную систему, либо проигрываете предложенный приз, по мимо практической забавы на бездепозитные бонусы, у Вас есть шанс изучить игровые автоматы, научится регулировать изменять ставки и полосы, изучать бонусные игры и их выигрышные комбинации, да конечном просто зарядится кучей эмоций! Ведь вы будите играть на бонусные свои, коие возможно отыграть и исключить, а не просто на демо счет, что, этим самым адреналин в крови еще повысится а пульс забьется с нередким ритмом!Принципиальным различием бесплатных бонусов от призов на депозит считается отсутствие надобности заносить средства на аккаунт. Из-за этого их нередко именуют бездепозитными (not the slightest deposit bonuses).
1хслотс мобильная версия зеркало
Бездепозитные бонусы отличный вариант даровой игры в игровые автоматы. Многие пользователи сети не понимают, что в казино возможно начать играть абсолютно безвозмездно, а позже исключить выигрыш на банковскую карту либо электрический кошелек, иные не доверяют онлайн казино, а третьи успешно играют и выигрывают – и подчас достаточно великие суммы.При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток. <a href=https://forum.vn.ua/showthread.php?p=3272319#post3272319>1×slots регистрация на 1хслотс</a> У каждой игры средства требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система засчитает каждую ставку. В рулетке и покере сделать это гораздо сложнее. Именно поэтому например важно внимательно читать обстоятельства получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой игре, то новички попросту «спустят бонус на ветер».Чаще всего казино бонус за регистрацию без депозита даёт возможность запустить каждой автомат. Но чем внимательно ознакомиться с условиями. Иногда для забавы доступны только определённые модели. Если вы новичок и ничего не смыслите в гэмблинге, лучше начать знакомство с миром азарта именно с «одноруких бандитов». Допустим, за регистрацию вы получили бездеп в размере 2 000 руб. С вейджером х30. В этом случае предстоит устроить ставок, на совместную необходимую в 60 000 руб. (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать реальные средства. Однако не запамятовывайте, что с каждого дара выйдет вывести определённую сумму (почаще всего не более $200).У нас на веб-сайте Вы найдете перечень призов без депозита в испытанных казино и доскональную информацию то как их получить и использовать. 1×slots бонус за регистрацию <a href=http://uplmegaporn.com/user/DoctorLazutaKr/>http://uplmegaporn.com/user/DoctorLazutaKr/</a> Активация валютного вознаграждения случается механически последствии создания профиля либо применения промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на страницы казино в соц сетях или на рассылку рекламных известий, скачать и ввести дополнительный софт и т.д.Прежде чем активировать бездеп, необходимо увериться в том, что страна, уроженцем коей является игрок, не входит в перечень разрешенных.
1× slots сайт
Казино дает возможность заработать и исключить реальные деньги на бездепозитных бонусах. Обычно, это незначительная сумма, коию казино может для позволить подарить игроку. <a href=https://gtorr.net/index.php?subaction=userinfo&user=DoctorLazutaPr>https://gtorr.net/index.php?subaction=userinfo&user=DoctorLazutaPr</a> Зачастую бездепозитные бонусы казино для игры предлагаются разными заведениями азартных игр в качестве рекламных промоакций или в целях привлечения к для новых игроков. Для бездепозитных бонусов в казино 2022 игроку не пополнять счет до этапа вывода желаемых средств.На странице представлены бездепозитные призы за регистрацию в казино редкая заслуга за коей гонятся все игроки как новенькие, так и мастера. Мы также уделяем великое внимание на наличие бонусов при формирование рейтинга казино на деньги. Бездепозитный бонус это вероятность выступать даром и выиграть реальные средства. 1×slots зеркало выигрыши обязательно пройдите регистрацию если
<b>Смотреть еще похожие новости:</b>
<a href=https://smm-seo.ru/threads/1×slots-zerkalo-registracija.38198/>1×slots зеркало регистрация</a>
<a href=http://www.fiat130.it/phpbb3/viewtopic.php?f=14&t=271080>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для тех, кто лишь подумывает испытать свою фортуну, еще для профессиональных игроков, ищущих новые площадки для выигрышей, основные лицензированные казино часто организуют разные промоакции, и лучшее услуг за время – как для новичков, например и для профессиональных игроков – бездепозитный бонус за регистрацию. Условия отыгрыша бонуса. Если Вы планируете заработать на бездепозитном призе, то в первую очередь обратите внимание на велечину вейджера и срок, который дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть бонус и вывести выигрыш.
#9429 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
Бывают ли бездепозитные призы без вейджера? Бывают, случае у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный приз за регистрацию устанавливается вейджер во всех казино.Вы не в коем случае ни чем не рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической забавы на бездепозитные призы, у Вас есть шанс выучить игровые автоматы, выучится регулировать изменять ставки и линии, изучать бонусные забавы и их выигрышные комбинации, да в просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные свои, которые можно отыграть и вывести, а не просто на демо счет, тем самым адреналин в крови еще повысится а пульс забьется с частым ритмом! <a href=http://filmkachat.ru/>1хслот зеркало</a> <a href=http://shalomsilver.kr/bbs/board.php?bo_table=free&wr_id=583347>http://shalomsilver.kr/bbs/board.php?bo_table=free&wr_id=583347</a> Ограничения по забавам. Администрация запрещает игрокам кое-какие игровые автоматы с бездепозитным бонусом, деньгами либо безвозмездными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда дробленье производится по виду игр. Например, отыгрыш вероятен на всех игровых аппаратах, но запрещен в настольных забавах и в разделе Live Casino.Каждый геймер должен сперва детально выучить обстоятельства по получению и отыгрышу понравившегося дара. Если всё устраивает, поторопитесь арестовать безвозмездные спины за регистрацию в казино без депо с выводом и без отыгрыша и прямо сейчас начать вертеть барабаны лучших слотов. 1×slots casino зеркало <a href=http://bbs.boway.net/home.php?mod=space&uid=1029339&do=profile&from=space>http://bbs.boway.net/home.php?mod=space&uid=1029339&do=profile&from=space</a> Фриспины — бесплатные вращения, которые позволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины считаются самым известным и желаемым обликом бонуса — безвозмездные вращения иногда эффективнее и веселее в отыгрыше, чем остальные облики бездепов.
1×slot рабочее зеркало
1×slot официальный сайт На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению этого времени, Вы не сможете активировать и получить бездепозитный бонус. <a href=http://zhwbn.com/bbs/space-uid-160082.html>http://zhwbn.com/bbs/space-uid-160082.html</a> 1хслотс рабочее зеркало на сегодня Для отыгрыша приза казино обязывает игрока сыграть на сумму, в количество раз превосходящую сумму приобретенного приза — тут выгода компании явна.
1 x slots casino
Баланс игрока пополняется на подходящую необходимую. К ней применяется вейджер, обозначенный в правилах акции. Вывести выигрыш можно будет после такого, как юзер сделает требуемый размер ставок из личных средств. В редчайших случаях бездеп работает в формате Free Play. На счет пользователя зачисляется большая сумма, и предоставляется малый срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по завершении этого периода сумма на счету будет превосходить первоначальную, то разницу возможно несомненно исключить либо использовать для дальнейших ставок.Этот образ приза будет добавлен на Ваш акк после удачной процедуры регистрации с внедрением номера телефонного. Если избрать иной метод творенья учетной записи, бездеп не несомненно добавлен на Ваш аккаунт. <a href=http://www.xiaoditech.com/bbs/home.php?mod=space&uid=1840962>http://www.xiaoditech.com/bbs/home.php?mod=space&uid=1840962</a> Как только получите бездеп в казино, всё также не запамятовывайте проверять электрическую почту. Некоторые игорные клубы день радуют интенсивных гэмблеров приятными призами. Чаще всего получить подарок возможно в преддверии веселья, на денек рождение, за вербование друга. А кроме распространённым бонусом считается надбавка к депозиту. Нужно не восполнить счёт, и азартное заведение прирастит его на 50–100%. зеркло казино 1×slots Фриспины без депо либо дополнительные свои посодействуют поближе познакомиться с игровой платформой и её функциями. За счёт даров возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям ради игры напротив живых крупье.В основном случаев благотворительные бонусы начисляются в кредитах, которые нельзя сразу вывести со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже.
1×slots регистрацию процедура займет всего лишь
Перед активацией принципиально пристально изучить обстоятельства промоакции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, в течение коих возможно пользоваться предложением. Если бездеп охватывает ограниченный перечень игр, рекомендовано разузнать максимальные коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят лишь что, нет случае, если оператор не установил жесткие ограничения на наивысшую необходимую ставки.Бездепозитные бонусы отличный вариант даровой игры в игровые автоматы. Многие пользователи сети не знают, собственно в казино возможно начать выступать полностью даром, а позже исключить выигрыш на банковскую карту или электронный кошелек, иные не доверяют онлайн казино, а третьи успешно играют и выигрывают – и подчас довольно немалые суммы. <a href=https://games-garant.ru/index.php?subaction=userinfo&user=Jamesneorm>1×slots официальный сайт скачать на айфон</a> Многие азартные клубы ограничивают необходимую вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании акции, суммы Вы не можете вывести. Разница будет аннулирована, Вы и не сможете делать на нее ставки. 1×slots зеркало рабочее <a href=http://minecraftonly.ru/index.php?subaction=userinfo&user=tightmaverick51>http://minecraftonly.ru/index.php?subaction=userinfo&user=tightmaverick51</a>
1×slots акции
В случае установленного лимита на необходимую вывода выигрыша с бездепозитного бонуса, игрок не сможет вывести больше заявленной суммы.Активация денежного гонорары происходит механически в сотворения профиля либо использования промокода. Иногда операторы предъявляют вспомогательные требования: подписаться на страницы казино в соц сетях или на рассылку рекламных известий, скачать и ввести вспомогательный софт и т.д. Фриспины предусмотрены для использования в видео слотах. Внимательно ознакомьтесь с критериями – часто их выдают на некоторые автоматы. В зависимости от клуба, у вас выйдет устроить определённое количество ставок. Кстати, продвинутые игорные жилища позволяют запускать каждых «одноруких злодеев». <a href=https://www.tunionfans.com/home.php?mod=space&uid=5548>https://www.tunionfans.com/home.php?mod=space&uid=5548</a> Нет. Для получения бездепозитного приза в казино нужна обязательная регистрация на веб-сайте. Играть в слоты даром и без регистрации можно лишь в демо режиме.Создание аккаунта. На веб-сайте казино нужно обнаружить регистрационную форму и заполнить пустые поля личными данными. Иногда на этом шаге потребуется указать лишь адресок электронной почты и пароль, но чаще надо заполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д.). Нужно указывать лишь настоящие данные, потому впоследствие они станут испытаны. 1×слотс казино
<b>Смотреть еще похожие новости:</b>
<a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=7523&TITLE_SEO=7523-preobrazovatel-interfeysov-usb-rs485&MID=465973&result=reply#message465973>1×slots зеркало регистрацию более популярный вариант это</a>
<a href=http://nakupnidivadlo.cz/index.php/forum/3-pripominky/46540–1×slots#234667>1×slots зеркало видели такую регистрацию на</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток. Акции, приуроченные к календарным праздникам, случаются рассчитаны как на всех пользователей, например и на категории: к, подарок на 8 марта девушкам-игрокам либо мужчинам на 23 февраля.
#9430 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
Обычно для получения бонусов без депо, казино выдвигает приклнные и абсолютно выполнимые условия, но есть ряд поступков коие запрещены и имеют стать неприятные результаты:Бездепозитные призы отличный вариант бесплатной игры в игровые автоматы. Многие юзеры сети не понимают, что в казино возможно начать играть абсолютно даром, а позже исключить выигрыш на банковскую карту либо электрический кошелек, иные не доверяют онлайн казино, а третьи удачно играют и выигрывают – и тотчас довольно немалые суммы. <a href=http://filmkachat.ru/>1×slots сайт</a> Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации презента нужно подтвердить электронную почту и привязать телефон;Основное верховодило получения бездепа ? создаваемый акк обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов требовательно воспрещено. Проверка проводится по имени, адресу электронной почты, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депозита нужно соблюдать несложную последовательность действий. <a href=https://bbs.airav.cc/home.php?mod=space&uid=2242376>https://bbs.airav.cc/home.php?mod=space&uid=2242376</a> Превышение наибольшей ставки при отыгрыше. Система автоматически не предуведомляет о превышении ставки, потому о нарушении управлял игрок имеет узнать уже последствии подачи запроса на вывод средств.Нет. Для получения бездепозитного бонуса в казино необходима обязательная регистрация на сайте. Играть в слоты безвозмездно и без регистрации возможно лишь в демо режиме. 1хслотс казино зеркало <a href=https://zhilexue.tech/space-uid-29207.html>https://zhilexue.tech/space-uid-29207.html</a> Большинство клубов привлекают внимание в за счёт разнообразных презентов. На одних сайтах можно получить виртуальные кредиты, которые откроют доступ ко всему софту. На других же, администрация предлагает безвозмездные вращения для запуска топовых онлайн слотов. Несмотря на разные промоакции, стоит выделить самые основные.Перед активацией важно внимательно изучить обстоятельства акции. Чем ниже вейджер, что, этим больше потенциальная выгода игрока. Имеют значение кроме лимиты ставок при отыгрыше и сроки, в течение которых возможно воспользоваться предложением. Если бездеп обхватывает узкий перечень игр, рекомендовано разузнать максимальные коэффициенты, степень отдачи и волатильности. Слоты с невысокими множителями выплат подходят лишь в том случае, если оператор не установил требовательные ограничения на максимальную необходимую ставки.
1×slots рабочее зеркало на сегодня
На бесплатные бонусы онлайн-казино практически всегда распространяется лимитирования по стране проживания клиентов. Даже в для разрешается открывать счет и выступать на деньги в заведении, это еще не значат, собственно для доступны no deposit bonuses. <a href=http://aficionado.pl/showthread.php?114623-%D0%BE%D0%BD%D0%BB%D0%B0%D0%B9%D0%BD-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-1×slots&p=132593>онлайн казино 1×slots</a> 1хслотс рабочее зеркало на сегодня <a href=http://www.oliviaandbeauty.com/2020/11/beauty-blogger-tag-fragrance-edition-q.html>http://www.oliviaandbeauty.com/2020/11/beauty-blogger-tag-fragrance-edition-q.html</a> 1×slots casino online регистрация Итак, чтобы бесплатные бонусные кредиты трансформировались в настоящие средства, которыми возможность распоряжаться по собственному усмотрению, их надо(надобно) отыграть. Вейджер идет уточнять в правилах онлайн-казино.
1× slots сайт
Самые модные методы вывода средств ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электронным платежным системам типа Neteller и Skrill, а также используют криптовалютными кошельками. Вывод выигрышей имеет исполняться мгновенно либо развлекать от нескольких часов до нескольких суток. Некоторые клубы механически начисляют приз на аккаунт игрока в исполненья условий получения, хотя бывают истории, когда бонус нужно активировать игроку самому. Есть несколько способов активации бонуса:Чтобы других увериться в превосходствах бездепозитных бонусов, довольно зарегистрироваться в казино и получить поощрение. <a href=http://www.foryoudrive.com/bbs/board.php?bo_table=free&wr_id=265083>http://www.foryoudrive.com/bbs/board.php?bo_table=free&wr_id=265083</a> 1хслотс рабочее зеркало
1×slots сайт
В интернете количество известных игорных площадок с привлекательными акционными предложениями. Однако внимательно читать условия десятков услуг скором надоест, да и время отнимет количество. Поэтому наша команда подготовила ТОП-3 сайтов с наихорошими бездепозитными бонусами:При пользовании бездепозитным бонусом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют некоторое обликов лимитов: <a href=https://forum.ltp-team.com/topic/47738–1×slots-oficialnyy-sayt-skachat/>1×slots официальный сайт скачать</a> Бездепозитные бонусы – это исключительно занимательная и наиболее многообещающая акция интернет-казино. Они том другого фри-спинов, потому собственно выплаты в даровых вращениях не гарантированы, как композиции на барабанах игрового аппарата имеют не сложиться.В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать собственный выигрыш с даровых вращений. Прибыль, коию Вы заработаете на таком бездепе возможно ставить на вывод без какого либо отыгрыша. Чаще всего, популярностью сервисы, эти как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное управляло. Финансовые средства выводятся только через что, эту платежную систему, которой успех для пополнения депо. Если же игрок получил бездепозитный покерный бонус, потребуется пополнить счет на минимальную необходимую, кот-ая сочиняет обычно десять долларов. казино 1× slots официальный сайт <a href=http://z914169g.bget.ru/user/Ralphutign/>http://z914169g.bget.ru/user/Ralphutign/</a> Фриспины без депозита либо дополнительные средства помогут поближе познакомиться с игровой платформой и её функциями. За счёт презентов можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям ради игры напротив живых крупье.Вывод выигрыша с бездепозитных бонусов казино – великодушный подарок от азартных клубов. Но дабы вывести свой доход, нужно выполнить ряд критерий:
1×slots зеркало быструю регистрацию а также мгновенное
Подарки на определенные даты отличаются условиями получения. Если одобрение начисляют игроку на день рождения, то сумма обыкновенно в от совместного размера депо за год.Акции, приуроченные к календарным праздникам, случаются рассчитаны как на всех пользователей, так и на категории: например, подарок на 8 марта девушкам-игрокам или мужикам на 23 февраля. Чтобы самостоятельно убедиться в преимуществах бездепозитных призов, довольно зарегистрироваться в казино и получить одобрение. <a href=http://land-rover-kazan.ru/index.php?subaction=userinfo&user=upsetinformatio>http://land-rover-kazan.ru/index.php?subaction=userinfo&user=upsetinformatio</a> Возьми собственный подарок. Чаще всего бонус активизируется сразу после регистрации. Но случаются ситуации, когда надо(надобно) забежать в личный офис либо написать в справочную службу.Существуют казино с призом за регистрацию, каких довольно востребованы фриспины в интернет казино впоследствии регистрации в определенных забавах. Они встречаются том почаще бесплатных поощрений или классических призов в казино без инвестициям. Например, игрок регистрирует счет, на который начисляются безвозмездные игры, бонус за регистрацию вид безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса в выигрывает истинные средства, которые в последствии можно успешно вывести из заведения на собственную платежную систему. То есть, есть все шансы вывести средства без рисков собственными финансами. Регистрация, за которую компьютерные получит бонусы, займет пару минут, а благодаря этому возможно увеличить 5 евро поощрений до тыс. И без всяких заморочек вывести их. 1×slot официальный сайт
<b>Смотреть еще похожие новости:</b>
<a href=https://masstr.net/showthread.php?tid=84047>1 x slots</a>
<a href=https://tabsgame.ru/user/Jamesbes/>1×slots регистрация на 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Как лишь получите бездеп в казино, всё точно не запамятовывайте проверять электрическую почту. Некоторые игорные клубы постоянно радуют активных гэмблеров приятными призами. Чаще всего получить презент возможно в преддверии веселья, на денек рождение, за привлечение приятеля. А кроме распространённым бонусом является прибавка к депозиту. Нужно чем пополнить счёт, и азартное заведение прирастит его на 50–100%. Это раз из главных характеристик привлекательности дара. С завешенным коэффициентом том профессионалы не смогут выполнить условия по отыгрышу. И важно, как презентабельно выглядит предложение – бездепозитный бонус казино в размере $500 либо $1 000. Чтобы новенькие получше вникли, что же это вейджер, мы разберём на примере.
#9431 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало рабочее этих способов предполагает регистрацию
При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, которое можно посвятить забаве в казино. <a href=http://filmkachat.ru/>1× slots официальный</a> Максимальная ставка ? устанавливается в еденице счета и ограничивает объем ставки за один спин. В случае ее превышения бонус имеет быть аннулирован. Также в правилах возможность находиться запрет на размещение ставок конкретного вида, примеру, по одинаковым шансам в рулетке (словами, на чет либо нечет, красноватое или темное и т.д.). <a href=https://www.market-directory.com/members/davidcet-10549.html>https://www.market-directory.com/members/davidcet-10549.html</a> Доступ к дару возможность открываться автоматически последствии введения промокода или обращения в службу поддержки вебсайта. В первом случае от юзера не потребуется никаких деяний. Бездеп с активацией по коду встречается почаще всего. Игроку необходимо ввести совокупность символов в графе, которая может находиться в регистрационной форме в Личном офисе. 1×slots зеркало быструю регистрацию а также мгновенное <a href=http://pfb7978i.bget.ru/index.php?subaction=userinfo&user=Craigprace>http://pfb7978i.bget.ru/index.php?subaction=userinfo&user=Craigprace</a>
1×slots сайт
Бездепозитный приз казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в данном и содержится основное различие. 1×slot рабочее зеркало Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам запрещено начислять призы клиентам, не имеющим валютных средств на счете. Мы предлагаем рассмотреть животрепещущие бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ.Каждый из бездепозитных призов без пополнения 2022 имеет собственный определенный вейджер для отыгрыша, так же в каждом казино он устанавливается персонально — где то он х55 а где-то х30, повторюсь везде по разному! <a href=http://beton.ru/communication/forum/?PAGE_NAME=profile_view&UID=34511>http://beton.ru/communication/forum/?PAGE_NAME=profile_view&UID=34511</a> Более солидные предложения встречаются довольно изредка. Зачастую они доступны только VIP-игрокам. В остальных случаях им всего сопутствуют очень строгие обстоятельства отыгрыша. Также вероятны дополнительные обстоятельства прочие лимитирования, прописанные в условиях и положения бонусной программы казино.Это один из основных показателей привлекательности дара. С завешенным коэффициентом даже мастера не сумеют выполнить обстоятельства по отыгрышу. И маловажно, как привлекательно выглядит предложение – бездепозитный приз казино в объеме $500 или $1 000. Чтобы новички лучше вникли, собственно же такое вейджер, мы разберём на образце. 1×slots промокод при регистрации Зарегистрируйтесь. Для регистрации почаще всего достаточно установить собственный номер телефонного и почтовый адрес, последствии чего ввести приобретенный код из СМС. Возможно, потребуется показать промокод. В правилах промоакции будет написано, где его бы включать. Иногда это надо создавать при регистрации, иногда — уже последствии творенья личного офиса, на отдельной страничке.
1×slots официальный сайт мобильная версия скачать
Игрокам не следует воспринимать приветственный бонус как гарантированный метод получить большой выигрыш, хотя это отличная возможность без затрат оценить перечень казино.Выбирайте превосходнейшие благотворительные бонусы с помощью обзоров на Casinoz – и пусть вам сопутствует счастье при отыгрыше бонусных кредитов! <a href=http://www.jkmulti.com/bbs/board.php?bo_table=free&wr_id=2338647>http://www.jkmulti.com/bbs/board.php?bo_table=free&wr_id=2338647</a> Предложения с бездепозитными бонусами за регистрацию дозволяют новым заведениям заинтересовать аудиторию на собственный вебсайт. А игроки в свою очередь получают вероятность играть на реальные средства без депо в казино и заработать небольшой стартовый капитал, который разрешено вывести на карту банка либо электронный кошелек.Можно ли наваривать на бездепозитных призах? Это не работа, здесь как повезет, в в любом предложенном безедепе, вы будете откручивать вейджер и выводить, время возможно именовать везением, и добавочной добавкой к вашему бютжету. 1хслотс казино зеркало Фриспины без депо либо дополнительные свои посодействуют поближе познакомиться с игровой платформой и её функциями. За счёт подарков можно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за забавы напротив живых крупье.Бездепозитные призы за регистрацию являются одним из самых знаменитых методов вербования новых игроков в онлайн-казино, потому что они деют игрокам вероятность опробовать казино, особенно игровые автоматы, и вероятно, выиграть реальные средства.
казино 1× slots официальный сайт
Как только получите бездеп в казино, всё одинаково не запамятовывайте инспектировать электронную почту. Некоторые игорные клубы каждый веселят интенсивных гэмблеров приятными призами. Чаще всего получить презент возможно в преддверии веселья, на день рождение, за привлечение друга. А кроме распространённым призом является прибавка к депозиту. Нужно не пополнить счёт, и азартное заведение прирастит его на 50–100%. 2. Создать новый профиль. Для регистрации нужно заполнить небольшую анкету или зайдите в индивидуальный офис при помощи социальных сеток;Автоматы непопросту считаются самым известным азартным весельем. Чтобы освоить управление и верховодила, потребуется всего некоторое минут. Ваша задача устроить ставку, найти число рабочих линий и возможно вертеть тамбур. Если на выпадет выигрышная композиция – вы выиграли! С данной задачей вас посодействуют управится бездепозитные бонусы казино. Существует ли стратегии для отыгрыша бездепозитных призов? К огорчению нет, на выигрыши или проигрыши с бонусов, казино либо игрок повлиять имеет, отдача игр происходит от создателей игр.После получения приза вывод средств для клиента несомненно недоступен до тех пор, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или чета недель. Выводить средства игрок может лишь в отыгрыша. 1хслотс рабочее зеркало <a href=http://www.pengstys.com/home.php?mod=space&uid=109257>http://www.pengstys.com/home.php?mod=space&uid=109257</a> Исходя из этого, просто не присутствует разумных причин махнуть рукою на получение такового приза при регистрации. И, что, на подобный безвозмездной основе у вас есть все шансы выиграть деньги и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные бонусы, нарекают бесплатными интернет платформами для игр.
1×slots зеркало рабочее
Бездепозитный приз казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в данном и содержится основное отличие. <a href=http://koreasamsong.com/bbs/board.php?bo_table=free&wr_id=1371061>http://koreasamsong.com/bbs/board.php?bo_table=free&wr_id=1371061</a> Теоретически, к безвозмездным бонусам возможно отнести например нарекаемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, поэтому собственно они предоставляют только возможность создавать ставки.Такой казино бонус без депо за регистрацию выдается игроку на час и активно употребляется данное предложение с 2017 года. Это словно некая конспирация поощрения под бездепозитный. Суть всего сего сводится к что, этому, собственно игроку на час выдается, к примеру, 1000 $, а реклама повторяет то, собственно любой выигрыш возможно несомненно в оставить при себя. Но если играющий всерьез отнесется к данному предложению, то он попросту потеряет время. Ведь геймеру нужно несомненно играть не главном аккаунте, а в тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (даже всей тыс. ) в верховодила вступят определенные условия, где несомненно сказано, что максимальной суммой победы возможность быть только двести $ и средства можно использовать только в качестве бонуса на первый лепта с вейджером 25 от суммы гонорары плюс сам депозит. По результату получится, что игрок выигрывал для 200% бонус с вейджером на конкретную необходимую. Короче разговаривая, это все надо вашего времени. 1×slots сайт Когда речь идет о получении бездепозитных бонусов в казино, в первую очередь обратите внимание на последующие обстоятельства:3. Подтвердить данные. В зависимости от клуба, нужно привязать телефонный либо почту, показать индивидуальную информацию;
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.audioheritage.net/memberlist.php?mode=viewprofile&u=19451>казино 1×slots</a>
<a href=https://chasingadream.rpginitiative.com/showthread.php?tid=135123>1хслот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Наш список содержит наилучшие бездепозитные бонусы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает проверку по принципиальным характеристикам:
#9432 Charlesgunnyhttp://filmkachat.ru
1хлот регистрация в 1×slots casino
В лицензионных бездепозитных казино выступать в азартные игры вправду неопасно. Наличие лицензии одобряет тот факт, собственно клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP. <a href=http://filmkachat.ru/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> <a href=https://nerdgaming.science/index.php?title=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%BF%D0%B8%D1%86%D1%86%D1%8B%20%D0%B8%D0%B7%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO>https://nerdgaming.science/index.php?title=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%BF%D0%B8%D1%86%D1%86%D1%8B%20%D0%B8%D0%B7%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO</a> Выше мы предоставили полный набор самых новых и актуальных бездепозитных бонусов в онлайн казино без пополнения на 2022 год, где вам воспользоваться каким ценным бездепозитным бонусом. 1х слот регистрация в 1×slots casino <a href=http://yinyue7.com/space-uid-1017577.html>http://yinyue7.com/space-uid-1017577.html</a> Разные казино имеют собственные управляла по выведению выигрыша. Для бездепозитных бонусов принимаются достаточно высочайшие требования. Часто онлайн-казино советуют отыграть бонусное поощрение до 100 раз в игровых автоматах. Например, если игрок получил бесплатно 10 долларов, то необходимо несомненно отыграть их, поставив одну тысячу спинов по одному доллару любой. Стоит отметить, собственно не все казино выделяют вероятность играть на призы и не во всех развлекательных заведениях идентичные верховодила для отыгрывания. Некоторые казино запрещают выступать на призы в блекджек либо ограничивают ставки до пяти процентов, собственно существенно увеличивает в десятки раз число необходимых игр.Бездепы обыкновенно предлагают с отыгрышем — моментально исключить выигранные средства нельзя. Перевод средств со счета несомненно возможен после как, как пользователь выполнит все притязания казино, а сумма не может превышать установленного правилами лимита. Условиями акции фиксируются сроки, в течение коих клиент вправе воспользоваться предложением. Обычно они не превосходят нескольких дней после активации.
1×slots регистрация
1×slots регистрация <a href=http://transport-cd.com.ua/wr_board/tools.php?event=profile&pname=tiresomecongres>http://transport-cd.com.ua/wr_board/tools.php?event=profile&pname=tiresomecongres</a> Фриспины — безвозмездные вращения, коие дозволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины числятся самым модным и предпочтительным видом приза — бесплатные вращения иногда эффективнее и веселее в отыгрыше, чем другие виды бездепов. 1×slots зеркало на сегодня Объективные – объем приза, коэффициент и обстоятельства вейджера, необходимость внесения депозита для вывода денег;
зеркло казино 1×slots
Онлайн-казино с бездепозитными бонусами ставят клиентам условия для пользования бездепами, потому перед ролью в промоакции какого-либо тщательно ознакомиться со всеми правилами и аспектами акции. Условия имеют дотрагиваться получения приза, его применения и следующего вывода валютных средств в случае выигрыша. Лишь популярные и знаменитые азартные заведения имеют разрешить для выдавать бездепы вид добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депо, которые возможно потратить в лучших аппаратах с высокой отдачей. <a href=https://images.google.co.uk/url?q=https://doctorlazuta.by/>https://images.google.co.uk/url?q=https://doctorlazuta.by/</a> Прямо данный арестуйте бесплатные вращения за регистрацию без депозита и начинайте коллекционировать призовые комбинации из-за крупных выигрышей! 1×slots казино зеркало Предложения с бездепозитными призами за регистрацию разрешают свежим заведениям заинтересовать аудиторию на свой сайт. А игроки же получают вероятность играть на настоящие деньги без депозита в казино и заработать небольшой стартовый капитал, который разрешается исключить на карту банка или электрический кошелек.Бездепозитный приз по промо-коду несомненно доступен для игры, только сомнений случае когда Вы активируете специальный бонусный код в разделе с призами или укажите промокод при регистрации на сайте. В неких случаях, не активации кода, понадобиться подтвердить контактные данные игрока и заполнить анкету посетителя.
онлайн казино 1×slots
Фриспины — благотворительные вращения, которые позволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины считаются наиболее популярным и предпочтительным видом приза — благотворительные вращения порой эффективнее и веселее в отыгрыше, чем остальные виды бездепов.Бездепозитный бонус по промо-коду несомненно доступен для забавы, только том, случае когда Вы активируете особый бонусный код в разделе с бонусами или укажите промокод при регистрации на сайте. В неких случаях, кроме активации кода, понадобиться подтвердить контактные данные игрока и наполнить анкету клиента. При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, которое возможно предназначить игре в казино.Так что сможете отважно региться без всяких размышлений. Фортуна сегодня точно на вашей стороне. Не страшитесь, как последствие какого либо ущерба Вам совершенно не грозит. С такими бонусами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе. 1хслот 1хслотс регистрация перейти на 1×slots <a href=https://elite-models.cc/member.php?action=profile&uid=23966>https://elite-models.cc/member.php?action=profile&uid=23966</a> Зарегистрируйтесь. Для регистрации чаще всего довольно установить свой номер аппарата и почтовый адрес, в чего ввести приобретенный код из СМС. Возможно, требуется указать промокод. В правилах промоакции несомненно написано, где его бы вводить. Иногда это хотелось создавать при регистрации, времени — уже в создания личного офиса, на отдельной страничке.
1×slots сайт
Для верификации аккаунта надо(надобно) дать спецам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, а также фотографию банковской карты либо экрана странички электронного кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности. <a href=http://www.yyxw999.com/space-uid-21482.html>http://www.yyxw999.com/space-uid-21482.html</a> онлайн казино 1×slots Отзывы читателей о бонусных акциях помогут составить эмоцию, хотя не забывайте о субъективности личных комментариев.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=118697>1×slots casino регистрация 1×slots review live</a>
<a href=http://miupsik.ru/forums/showthread.php?tid=241207>1×slots зеркало видели такую регистрацию на</a>
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=3619>1×slots быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Сроки активации бонуса уточняются каждым казино, хотя чаще всего они не превосходят недели с этапа получения. Игроку обязательно нужно использовать бездеп протяжении обозначенного срока, в ином случае приз просто пропадет. Каждый приз можно получить лишь раз один, потому случае не использовать бездеп в срок, у игрока не несомненно второго шанса им воспользоваться.
#9433 Charlesgunnyhttp://filmkachat.ru
сайт 1× slots casino
Более крупные предложения встречаются очень изредка. Зачастую они доступны только VIP-игрокам. В остальных случаях им наверняка сопутствуют очень жесткие условия отыгрыша. Также возможны дополнительные обстоятельства и другие лимитирования, прописанные в условиях и положения бонусной программки казино.Таким образом, заведение пытается продемонстрировать себя своим вероятным игрокам, а подобный маркетинговый ход как казино приз без депо за регистрацию привлекает довольно большое внимания к игорному заведению и обеспечивает постоянный поток свежих гостей и будущих клиентов игрового интернет клуба. <a href=http://filmkachat.ru/>1хслот официальный сайт зеркало</a> Выбирая бесплатный бонус, внимательно изучайте верховодила. Убедитесь, что для возможно себя роль в промоакции. Уточните, в каких забавах возможно исполнять обстоятельства вейджера. При необходимости задавайте вопросы адептам саппорта. <a href=http://elka54.ru/forum/?PAGE_NAME=profile_view&UID=109595>http://elka54.ru/forum/?PAGE_NAME=profile_view&UID=109595</a> Чем ниже велечину вейджера, тем легче отыграть и исключить приз. Если Вы расчитываете заработать на бездепе, но просто ознакомиться с свежим игровым клубом, то стоит избегать бонусов с высочайшим вейджером их практически не реально отыграть. С ними Вы сможете лишь протестировать игры заведения.Для казино, работающих онлайн, бездепозитные призы нужны для вербования новых клиентов. Предложение сыграть на слотах без необходимости внесения реальных средств — работающий метод для увеличения энтузиазма к фирмы. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит выступать в казино, лишь теперь уже на личные средства. 1×slots регистрация 1×slots casino 777 online <a href=https://clickandconnectclubs.com/index.php?do=/public/forum/posts/page_last/id_4747/>https://clickandconnectclubs.com/index.php?do=/public/forum/posts/page_last/id_4747/</a> Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция имеет подробные правила, ссылка на коие обычно находится в промообъявлении. В них указываются лимиты, вейджер, список доступных игр. Если оператор скрывает данные о предложении, то воспользоваться им не стоит.Верификация аккаунта. Лучше подтвердить лицо незамедлительно в регистрации, чтобы потом не было проблем с выводом средств. Верификация возможность проходить 2-мя маршрутами:
1×slots зеркало этих способов предполагает регистрацию
<a href=http://forum.audioheritage.net/memberlist.php?mode=viewprofile&u=19451&sid=8a9699a09da1a789d13cf10ae03b6441>1 xslots рабочее зеркало</a> 1×slots регистрация 1×slots casino c2d ru Бoльшинcтвo азартных заведений выдвигают примерно однообразные, схожие условия и притязания, которые нужно выполнить, дабы получить бездепозитный бонус за регистрацию. Все их можно соединить в один список: <a href=https://australiantravelforum.com/Upload/member.php?action=profile&uid=655>https://australiantravelforum.com/Upload/member.php?action=profile&uid=655</a> Для вывода средств бонус надо(надобно) будет отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариантами отыгрыша бездепозитного приза до его получения, чтобы избежать конфликтных ситуаций. 1×slots casino регистрация 1×slotscasino09k online Бонусные деньги – небольшая сумма денег для старта в новом казино. На бонусные деньги, обыкновенно разрешается выступать во все игры, не слотов с прогрессивным джекпотом и игр из раздела exist casino.Такой бесплатный эквивалент средств зачисляется на профиль пользователя после воплощения притязаний и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений возможен лишь последствии осуществления вейджеровых условий.
1×slots casino online регистрация
<a href=http://besstizhie.ru/user/Glennwat/>http://besstizhie.ru/user/Glennwat/</a> 1хслот официальный сайт зеркало Для всех бездепозитных бонусов действует наибольший предел на выигрыш. Он указывает предельную сумму, которую вас получить, играя на бонусные кредиты. Как лишь вас удастся выполнить требования вейджера, возможный максимум будет переведен с бонусного счета на главной, а остаток будет списан.В лицензионных бездепозитных казино выступать в азартные игры вправду безопасно. Наличие лицензии одобряет что, этот прецедент, что клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP.
1хслотс казино зеркало
<a href=http://forum.l2endless.com/member.php?action=profile&uid=6253>1×slots casino регистрация</a> Шаг 5. Использование и отыгрыш. Бездеп обязан быть использован в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера. Акции, приуроченные к календарным дням, бывают рассчитаны как на всех пользователей, так и на категории: например, подарок на 8 марта девушкам-игрокам или мужикам на 23 февраля. 1×slot регистрация <a href=http://dudoser.com/user/Patrickval/>http://dudoser.com/user/Patrickval/</a> Для тех, кто лишь подумывает испытать собственную фортуну, а для проф игроков, отыскивающих новые площадки для выигрышей, водящие лицензированные казино часто устраивают различные акции, и лучшее услуг за последнее время – как для начинающих, так и для проф игроков – бездепозитный приз за регистрацию.Похожим образом трудится 3-ий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя или в связи с получения им VIP-статуса. Подарок предоставляется в обращения в поддержку и проверки.
1×slot казино зеркало
Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и более. Когда игроку полагается большое фриспинов, администрация может бить3 их начисление на некоторое дней. Бесплатные вращения предоставляются для определенного слота, кот-ый указывается в правилах акции.Бoльшинcтвo азартных заведений выдвигают приблизительно однообразные, схожие условия и требования, коие нужно выполнить, чтобы получить бездепозитный приз за регистрацию. Все их возможно объединить в один перечень: <a href=https://prpack.ru/user/GlennTerce/>https://prpack.ru/user/GlennTerce/</a> Например, игрок получил 500 руб. При твореньи аккаунта и обязан отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., понадобится сделать 875 спинов для полного отыгрыша.Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют важную информацию о not the slightest down payment bonuses и услугах. 1×slots официальный регистрация
<b>Смотреть еще похожие новости:</b>
<a href=http://board.eternityrpc.com/member.php?action=profile&uid=369>1×slots зеркало видели такую регистрацию на</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
У любого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано смогли выполнить их, мы дадим некоторое советов. Если система начислила небольшую сумму, не создавать немалые ставки – остановитесь на 10–30 центах. Как лишь сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте выступать. В неприятном случае какого-либо приглядеться к другому автомату.
#9434 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots review live
Минимального оборота. Этот лимит уточняется вейджером — же игрок не поиграет на установленную сумму, вывод средств несомненно недоступен.Обыкновенные бездепозитные призы в объеме от 3-х до 20 долларов созданы чтобы, чтобы, дабы в забавы заходили все новые и новые игроки. Здесь, скорее, несомненно ограничение на максимальный выигрыш. Важно, чтобы перед наименьшим вкладом был отключен бонус за первое пополнение счета, и игры не попадет на повторный вейджер. <a href=http://filmkachat.ru/>зеркала 1×slots</a> Акционные предложения от казино есть в различных форматах. Часто призы даются в размен на депо. Игрок заносит платеж и получает средства, безвозмездные вращения прочие одобрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — картина бонуса, который гарантирован за выполнение конкретных поступков на сайте:Следует выделить, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам либо с конкретным кодом. <a href=http://munservis.mirniy.ru/user/Jameseroky/>http://munservis.mirniy.ru/user/Jameseroky/</a> Вывод выигрыша с бездепозитных призов казино – великодушный подарок от азартных клубов. Но дабы исключить свой доход, нужно выполнить ряд критерий:Диапазон ставок, которые вправе сделать игрок, также лимитирован. Обычно назначать возможно маленькую сумму — около 10–30 руб. За одно вращение. 1хслотс официальный сайт зеркало <a href=http://www.en.besatime.com/index.php?subaction=userinfo&user=Jasperrah>http://www.en.besatime.com/index.php?subaction=userinfo&user=Jasperrah</a> Нет. Для получения бездепозитного бонуса в казино необходима обязательная регистрация на сайте. Играть в слоты безвозмездно и без регистрации возможно лишь в демо режиме.
1×slots регистрация 1×slots review live
Бездепозитный приз по промо-коду будет доступен для забавы, лишь что случае когда Вы активируете специальный бонусный код в разделе с призами либо укажите промокод при регистрации на веб-сайте. В некоторых случаях, не активации кода, придется подтвердить контактные данные игрока и наполнить анкету клиента.Даже не выиграв солидную необходимую, игрок интересно проведет время, изнутри исследует работу площадки, оценит геймплей автоматов. Все это без каких-либо денежных рисков. Быть в курсе превосходнейших акций легко. Достаточно периодически учить список свежих интернет казино с выводом бонуса без депо в этом разделе. казино 1×slots Выиграть реальные средства в казино не пополняя счет – сложно, но возможно. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными бонусами и начните играть на бонусные свои. По статистике в одном из 10-ти заведений возможно заработать маленькую сумму денег за счет бонусных средств.Чем ниже велечину вейджера, что, этим легче отыграть и исключить бонус. Если Вы планируете заработать на бездепе, но просто ознакомиться с свежим игровым клубом, то стоит игнорировать призов с высоким вейджером их практически не реально отыграть. С ними Вы можете лишь протестировать игры заведения. <a href=http://fumankong4.cc/home.php?mod=space&uid=580841>http://fumankong4.cc/home.php?mod=space&uid=580841</a> Обычно для получения бонусов без депо, казино выдвигает лояльные и вполне выполнимые обстоятельства, но есть ряд действий коие воспрещены и шансы стать досадные результаты: зеркала 1×slots Также посещают случаи, когда казино начисляет оговоренный приз после регистрации нового клиента по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам.
1хслотс рабочее зеркало
Мы делаем ударение на главных положениях правил, рассказываем о территориальных ограничениях и вкратце информируем о других акциях обсуждаемого казино. <a href=https://rg-mechanics.club/user/Patrickzep/>https://rg-mechanics.club/user/Patrickzep/</a> В неких интернет казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на веб-сайте клуба и доказать средства контактные данные. Дополнительно потребуется активация промокода. 1×slots официальный сайт зеркало Получить приветственный бонус все только свежие клиенты онлайн-казино. Способы описаны в условиях акции каждого легального казино, чаще всего это:
казино 1×slots официальный сайт
<a href=https://forumauthority.com/thread-6594-post-39385.html#pid39385>1×slots официальный сайт зеркало рабочее</a> Для такого, дабы отыграть сумму вашего бездепозитного приза надо(надобно) выполнить условия вейджера. Очень нередко фриспины даются на определенные слоты (book of ra, book of deceased, book of sun), избирайте слот себя по, они все довольно очень и высококачественные. Бездепозитные приз имеет быть валютным так и вид фриспинов на слоты Таким образом, заведение пробует показать себя своим вероятным игрокам, а такой маркетинговый ход как казино бонус без депо за регистрацию привлекает очень количество внимания к игорному заведению и обеспечивает постоянный струю новых посетителей и грядущих посетителей игрового онлайн клуба. 1×slots коды <a href=https://www.ask-directory.com/%D0%B3%D0%B4%D0%B5-%D0%BA%D1%83%D0%BF%D0%B8%D1%82%D1%8C-%D0%B2%D0%B5%D1%87%D0%BD%D1%8B%D0%B5-%D1%81%D1%81%D1%8B%D0%BB%D0%BA%D0%B8_372695.html>https://www.ask-directory.com/%D0%B3%D0%B4%D0%B5-%D0%BA%D1%83%D0%BF%D0%B8%D1%82%D1%8C-%D0%B2%D0%B5%D1%87%D0%BD%D1%8B%D0%B5-%D1%81%D1%81%D1%8B%D0%BB%D0%BA%D0%B8_372695.html</a> Как правило, при выводе финансов, от играющего потребуется лишь устроить наименьший лепта чтобы, чтобы, дабы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом индивидуальный счет.
1×slots казино мобильная версия
Высокая конкуренция в сегменте азартных игр доказывает операторов завлекать клиентов различными акциями. Благодаря этому у посетителей бывает вероятность получить призы в казино за регистрацию без депо. Воспользоваться таким предложением возможно, избегая функцию внесения денег на игровой счет, просто активировав аккаунт на сайте. Наш гид по бездепам поможет избрать самую симпатичную бонусную программу, узнать управляла получения такого вознаграждения и воспользоваться им с максимальной выгодой.Новички не обожают сразу же заносить депозит. Это обусловлено неименьем навыка и сомненьем. К счастью, наши возможно получить бездепозитный бонус за регистрацию в казино. Неважно собственно начисляет система – фриспины либо кредиты. В любом случае вы не рискуете своими сбережениями. Это замечательная возможность запустить понравившийся видео слот либо же испытать удачу в настольных забавах. Высокая конкуренция в сегменте азартных игр доказывает операторов завлекать клиентов разнородными акциями. Благодаря этому у гостей бывает вероятность получить призы в казино за регистрацию без депозита. Воспользоваться таким предложением можно, избегая процедуру внесения средств на игровой счет, просто активировав акк на сайте. Наш гид по бездепам поможет выбрать самую симпатичную бонусную программку, разузнать правила получения такового вознаграждения и воспользоваться им с наибольшей выгодой. <a href=http://trekliano.eu/index.php?subaction=userinfo&user=magentamogul88>http://trekliano.eu/index.php?subaction=userinfo&user=magentamogul88</a> 1×slots casino online регистрация
<b>Смотреть еще похожие новости:</b>
<a href=https://minifishtank.net/forum/showthread.php?tid=727>1×slots регистрация на 1хслотс</a>
<a href=https://hiddeninthesand.com/forum/viewtopic.php?t=264003>1×slots регистрация на официальном сайте</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Каждый новичок и умелый игрок грезят быстро стартануть и начать делать реальные ставки. Для этого довольно отобрать презент, за кот-ый не платить. В зависимости от игровой платформы, нужно сделать профиль, привязать email либо телефон. После этого администрация начислит щедрое вознаграждение вид даровых вращений либо виртуальных кредитов.
#9435 Charlesgunnyhttp://filmkachat.ru
1×slots casino online регистрация
В интернете очень большое скриптовых вебсайтов, которые принадлежат мошенникам. Их главная задача – заинтересовать гэмблеров, пообещав не великодушные презенты, хотя и крупные выигрыши. Так собственно кое-какие сайты предлагают получить за регистрацию даже $1 000. <a href=http://filmkachat.ru/>1×slots зеркало видели такую регистрацию на</a> <a href=https://autisticburnout.org/User_talk:BettinaGlossop9>https://autisticburnout.org/User_talk:BettinaGlossop9</a> Для как, дабы отыграть необходимую вашего бездепозитного приза нужно выполнить обстоятельства вейджера. Очень часто фриспины даются на определенные слоты (book of ra, book of dead, book of sun), подбирайте слот себя по душе, они все довольно красивые и качественные. Бездепозитные приз имеет быть валютным так и повторяющий фриспинов на слоты 1×slots рабочее зеркало <a href=https://www.tumblr.com/kalinka0588>https://www.tumblr.com/kalinka0588</a> Наш список включает в себя лучшие бездепозитные призы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по важным параметрам:Особую изюминку видео слотам придают оригинальные символы. С их появлением активируются различные бонусы. Вы сможете запустить вспомогательный степень и прирастить необходимую выигрыша. Есть знаки, коие заменяют негодные элементы и сами творят выигрышные комбо. Не стоит забывать и про бонус-тур. После любого счастливого спина есть шанс увеличить сумму выигрыша в два или четыре раза.
1×slot регистрация
В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать собственный выигрыш с бесплатных вращений. Прибыль, коию Вы заработаете на этом бездепе возможно назначать на вывод без какого или отыгрыша.Активация денежного гонорары случается автоматически после создания профиля или применения промокода. Иногда операторы предъявляют вспомогательные притязания: подписаться на странички казино в соц сетях либо на рассылку маркетинговых известий, скачать и ввести вспомогательный софт и т.д. x1 slots регистрация в 1×slots casino Самые свежие бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды находятся на данной страничке. Посетитель возможность оценить условия получения и начать выступать на деньги без внесения депозита. При данном игроку главно понимать, на каких условиях и какими методами у вывести полученный выигрыш. Для сего нужно оценить список присоединенных платежных систем.При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие можно предназначить этой в казино. <a href=http://m3beton.ru/index.php?subaction=userinfo&user=curvednerve78>http://m3beton.ru/index.php?subaction=userinfo&user=curvednerve78</a> Заработать на бездепозитных бонусах за регистрацию в казино возможность любой пользователь, достигший совершеннолетия. 1×slots промокод при регистрации Выбор любого онлайн казино на нашем веб-сайте. В описании к каждому Вы сможете разузнать, что получите за творение аккаунта.
1×slots актуальное зеркало
Активация денежного вознаграждения случается механически после создания профиля или использования промокода. Иногда операторы предъявляют вспомогательные притязания: подписаться на страницы казино в соц сетях или на рассылку маркетинговых сообщений, скачать и установить вспомогательный софт и т.д.Если идет об неповторимых предложениях, возможность потребоваться регистрация в казино по ссылке с партнерского вебсайта. Получать информацию о самых прибыльных бонусах можно без постоянного прогноза новостей казино. Мы взяли эту задачку на себя и безпрерывно следим за услугами операторов, избирая лучшие из них. В данном разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список промоакций периодически пополняется. В топ вошли самые свежие бездепозитные призы за регистрацию в казино 2020, кратковременные и закрытые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и аспектам. Если срок деянья промоакции истек, она удаляется из списка.Наши специалисты изучают обстоятельства промоакции, после в ручном режиме проводят их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие характеристики. Мы не рекламируем казино, а даем игрокам информацию о наилучших из них. <a href=http://antiquers.com/proxy.php?link=http://gensp.ru/bitrix/redirect.php?goto=http://nolder.ru/bitrix/click.php?goto=https://telegra.ph/Rukovodstvo-po-oplate-truda-nesovershennoletnih-sotrudnikov-v-iyule-2024-goda-09–23>http://antiquers.com/proxy.php?link=http://gensp.ru/bitrix/redirect.php?goto=http://nolder.ru/bitrix/click.php?goto=https://telegra.ph/Rukovodstvo-po-oplate-truda-nesovershennoletnih-sotrudnikov-v-iyule-2024-goda-09–23</a> казино 1×slots
1×slots casino регистрация 1×slotscasino09k online
В онлайне очень большое скриптовых сайтов, коие принадлежат плутам. Их главная цель – привлечь гэмблеров, пообещав столько щедрые презенты, но и крупные выигрыши. Так что кое-какие сайты предлагают получить за регистрацию числе $1 000.Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации дара нужно доказать электрическую почту и привязать аппарат; Как правило, при выводе денег, от играющего потребуется только сделать минимальный вклад для того, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом индивидуальный счет. 1хслотс официальный сайт зеркало <a href=http://wiki.hightgames.ru/index.php?title=скачать_торрент_фильмы_бесплатно>http://wiki.hightgames.ru/index.php?title=скачать_торрент_фильмы_бесплатно</a>
1×slots сайт
Также бывают случаи, когда казино начисляет оговоренный приз после регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам.Во всех законных онлайн-казино Беларуси необходимо свидетельство паспортных данных для забавы — это заявка правительства государства. Любой выигрыш по ставке выше установленного лимита будет являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, ну случае выигрыша его сумма не поступит на счёт клиента — итог игры несомненно всецело аннулирован.Благодаря программке лояльности от игорного заведения, возможно брать превосходный старт и без добавочных вложений запустить видеослоты. Кроме как, можно рассчитывать на реальную удачу и получить, без вложения личных денег, большой выигрыш. <a href=https://www.025b.cn/space-uid-1427093.html>https://www.025b.cn/space-uid-1427093.html</a> Возможность поиграть дополнительное состязание (а время и несколько) совершенно даром, а выигрыш, тому, поступает на счёт игрока. 1хслот скачать Операторы гемблинга утверждают, собственно так они борются с бонус-хантерами. Впрочем, критики считают, что данным казино пробуют сделать из случайного гостя постоянного игрока.
<b>Смотреть еще похожие новости:</b>
<a href=https://praisenpray.org/forums/showthread.php?tid=95045>1×slots коды</a>
<a href=https://forum.pmpobc.ca/index.php?topic=128694.new#new>1×slots промокод при регистрации</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Составленный экспертами Casino.ru перечень онлайн-казино с бездепозитным призом позволяет игрокам сравнить спецпредложения различных операторов. Прямо момент заберите благотворительные вращения за регистрацию без депо и начинайте коллекционировать призовые комбинации из-за солидных выигрышей!
#9436 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
Простая процедура получения бездепозитного бонуса, которая займет менее 2-х мин. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные.Акционные предложения от казино есть в разных форматах. Часто призы даются в мена на депо. Игрок вносит платеж и получает средства, безвозмездные вращения и одобрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — картина приза, который гарантирован за исполнение определенных действий на веб-сайте: <a href=http://filmkachat.ru/>1×slots регистрация 1×slots review live</a> <a href=http://bbs.py27.com/home.php?mod=space&uid=406218>http://bbs.py27.com/home.php?mod=space&uid=406218</a> 1х слот 1хслотс регистрация перейти на 1×slots <a href=http://raid4×4.ru/memberlist.php?mode=viewprofile&u=11700>http://raid4×4.ru/memberlist.php?mode=viewprofile&u=11700</a> Не сложно догадаться, собственно not the slightest down payment bonuses практически ни не случаются большими. Чаще всего речь идет о пяти–тридцати долларах (либо эквиваленте данной суммы в иной валюте).Особую изюминку видео слотам придают оригинальные символы. С их свет активируются разные бонусы. Вы сможете запустить вспомогательный степень и прирастить сумму выигрыша. Есть знаки, коие замещают негодные составляющие и сами творят выигрышные комбо. Не стоит забывать и на бонус-тур. После каждого удачного спина есть шанс прирастить необходимую выигрыша в два либо хорошо раза.
казино 1×slots официальный сайт
1×slots зеркало этих способов предполагает регистрацию Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в индивидуальный офис, чтобы забрать благотворительные вращения с вейджером х40; <a href=http://52gmsy.com/home.php?mod=space&uid=50351>http://52gmsy.com/home.php?mod=space&uid=50351</a> Онлайн-казино с бездепозитными бонусами ставят клиентам обстоятельства для пользования бездепами, потому перед ролью в акции другого, как подробно ознакомиться со всеми правилами и нюансами акции. Условия все касаться получения приза, его использования и следующего вывода денежных средств в случае выигрыша.В разделе с бонусами активировать свой презент. Найти забавы, для коих предусмотрено одобрение и использовать приз по назначению. 1×slots регистрация 1×slotscasino09k online Частенько новички не знают, как активировать подарки или вывести 1-ый выигрыш. Для подобных случаев наша команда описала основные термины – что такое фриспины, вейджер, как его отыграть, чего нужно проходить верификацию.Обычно бездепозитные промоакции от казино, прибывают на эл. Почту в деньки рождения либо праздники. В неких интернет казино можно обратиться в чат и как неизменному игроку, вполне вам предложат бездепозитное предложение.
1×slots casino online регистрация
Законодательство, регулирующее азартные игры в различных странах, влияет на полномочия операторов. В итоге пользователи из отдельных ареалов сталкиваются с лимитированиями со стороны казино. Это возможность быть как полный отказ в доступе, так и невозможность загружать забавы отдельных производителей.Так что приготовьтесь предоставить секретную информацию (пол, возраст, государство проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает менее суток, после чего удастся беспрепятственно выводить солидные выигрыши. <a href=https://oncob2b.co.kr/_NBoard/board.php?bo_table=free&wr_id=163251>https://oncob2b.co.kr/_NBoard/board.php?bo_table=free&wr_id=163251</a> Некоторые казино все предлагать клиентам бездепы за свидетельство номера или почты или репост на страницу в социальных сетях.Почти все игровые клубы настоятельно свидетельство контактных данных игрока для получения бездепозитного бонуса. 1×slots регистрация на 1хслотс
1хслотс мобильная версия зеркало
В качестве призов интернет казино нередко предлагает выдачу фриспинов, то есть бесплатных вращений игрового барабана. Виртуальные монеты можно использовать для изучения в покерной школе либо для забавы в казино.Для получения депозитного бонуса необходимо пополнить свой игровой баланс настоящими средствами. Вознаграждение можно получить или при внесении первого депо, либо повторяющий фиксированного процента от внесённых средств. Так либо другому, бонус поступит на счёт только после пополнения. 1×slots casino регистрация 1×slotscasin online <a href=http://shinyoungwood.kr/bbs/board.php?bo_table=free&wr_id=295598>http://shinyoungwood.kr/bbs/board.php?bo_table=free&wr_id=295598</a>
1×slots официальный сайт мобильная версия скачать
Чтоб получить крупный выигрыш, избирайте игровые автоматы с предельным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша. <a href=https://tools-info.biz.ua/wr_board/tools.php?event=profile&pname=Charlesdrymn>https://tools-info.biz.ua/wr_board/tools.php?event=profile&pname=Charlesdrymn</a> Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают бонус по странам. Вплоть до того, собственно клуб возможность себя игроков из Вашей государства, а бездеп мешает. 1×slots официальный зеркало рабочее Постарайтесь отыграть вейджер, чтобы замечена возможность забыть заявку на выплату. Кстати, на всех веб-сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электронной кошелёк, карту, аппарат.
<b>Смотреть еще похожие новости:</b>
<a href=http://theauction.com.au/author/jamesflake/>1× slots регистрация в 1×slots casino</a>
<a href=https://www.sgomberisgombero.it/my-account-2/>1×slot официальный сайт</a>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=127590>1×slots зеркало видели такую регистрацию на</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Составленный знатоками Casino.ru список онлайн-казино с бездепозитным бонусом разрешает игрокам сопоставить спецпредложения разных операторов.
#9437 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало которую указывали при регистрации кстати
Акционные предложения от казино существуют в различных форматах. Часто призы даются в размен на депо. Игрок вносит платеж и получает деньги, бесплатные вращения прочие поощрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — картина приза, кот-ый гарантирован за исполненье определенных действий на веб-сайте: <a href=http://filmkachat.ru/>1× slots регистрация в 1×slots casino</a> <a href=http://ceh-i.ru/user/JamesRah/>http://ceh-i.ru/user/JamesRah/</a> x1 slots регистрация в 1×slots casino <a href=https://plaza.rakuten.co.jp/kalinka0588/diary/202407150000/>https://plaza.rakuten.co.jp/kalinka0588/diary/202407150000/</a> Теоретически, к бесплатным призам возможно отнести так именуемые фриспины. Напомним, речь идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, поэтому собственно они предоставляют только возможность создавать ставки.Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки имеют запросить вспомогательные документы либо инициировать короткое общение по Skype.
1×slots официальный сайт скачать
Вознаграждения за получение VIP-статуса ? начисляются в программы лояльности при достижении еще значения или выдаются индивидуально менеджерами службы поддержки.В списке притязаний к отыгрышу нередко присутствуют лимиты на ставки при игре на собственные деньги. Так, случае отыграть надо(надобно) 30 000 руб., а максимальная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 раз. Эта особенность затрудняет соблюдение игроками критерий по срокам деяния акции. <a href=https://surfaceprophets.com/members/davidelicy.5309/>1х слот 1хслотс регистрация перейти на 1×slots</a> казино 1× slots официальный сайт Бездепы имеют входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами. <a href=https://forum.wapinet.ru/profile.php?id=7826>https://forum.wapinet.ru/profile.php?id=7826</a> Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала резвые выводы. Фишка выплат в, что достаточно избрать платёжный инструмент и указать сумму. В большинстве случаев деньги зачисляются на электронные кошельки протяжении 15 мин., а на банковские карты – 1–3 рабочих денька. 1× slots регистрация в 1×slots casino Не желаете поиграть в азартные игры, не рискуя своими деньгами, но получая в все выплаты? Подобную вероятность деют почти наихорошие порталы с азартными веселиями. В их числе много правдивых и надежных интернет-казино на русском языке. Они привлекают свежих пользователей разными поощрительными событиями, включая бездепозитные, либо бесплатные бонусы.Если вы выбираете испытанное лицензионное интернет казино и выполните все условия получения бездепозитного приза, проблем с получением дара у Вас не возникнет.
казино 1× slots официальный сайт
Зарегистрируйтесь. Для регистрации почаще всего достаточно ввести собственный номер аппарата и почтовый адресок, последствии чего установить приобретенный код из СМС. Возможно, требуется указать промокод. В правилах акции несомненно написано, где его бы включать. Иногда это надо делать при регистрации, от — теснее после сотворения собственного кабинета, на отдельной странице.Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных притязаний, не обязательной верификации. Если на сайте предусмотрена обязательная процедура подтверждения личности, то вывести выигрыш удастся только последствии ревизии данных. Приготовьтесь наполнить анкету и отправить в техподдержку документ, подтверждающий лицо. Выиграть настоящие деньги в казино не пополняя счет – трудно, но вполне. Главное задаться целью и не нарушатьправила заведения. Выберите несколько казино с бездепзитными бонусами и начните выступать на бонусные средства. По статистике из 10-ти заведений возможно заработать небольшую сумму денег помощью бонусных средств.Такой казино приз без депозита за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это как бы некая маскировка поощрения под бездепозитный. Суть всего этого сводится к что, этому, что игроку на час выдается, например, 1000 долларов, а реклама твердит то, собственно любой выигрыш можно будет в забыть при для. Но в играющий серьезно отнесется к этому предложению, то он просто растеряет время. Ведь игроку надо(надобно) несомненно играть не главном аккаунте, а в тренировочном и с ограниченным выбором автоматов и ставок. Да и если, тогда, выигрыша (том всей тысячи) в правила вступят определенные условия, где будет сказано, что максимальной суммой победы возможность быть только двести $ и средства возможно использовать только в качестве бонуса на первый лепта с вейджером 25 от суммы гонорары плюс сам депозит. По результату выйдет, что игрок выигрывал для 200% бонус с вейджером на определенную необходимую. Короче говоря, это все надо вашего времени. <a href=http://mineralgroup.ru/index.php?subaction=userinfo&user=roastedhomicide>http://mineralgroup.ru/index.php?subaction=userinfo&user=roastedhomicide</a> 1×slots зеркало проходить регистрацию это отличный вариант B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.Активация случается с помощью промокодов, коие вводятся в личном кабинете последствии регистрации. Среди спецпредложений в списке Casino.ru содержатся эксклюзивные промокоды, которые доступны только посетителям портала. Другие способы начисления средств ? автоматическая активация незамедлительно в творенья аккаунта и получение подарка по запросу в службу технической помощи.
1×slots регистрация
Получать информацию о самых выгодных бонусах можно без постоянного прогноза новостей казино. Мы взяли эту задачку на себя и постоянно следим за предложениями операторов, выбирая наилучшие из них. В этом разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список акций регулярно дополняется. В топ вошли самые новые бездепозитные призы за регистрацию в казино 2020, кратковременные и закрытые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру прочим критериям. Если срок действия промоакции истек, она удаляется из перечня. Бездепозитные бонусы — это презенты от казино в виде бонусных денег или фриспинов для игровых автоматов, которые начисляются на акк игрока в процедуры регистрации на сайте заведения. Для получения этих поощрений депо не требуется.У каждой игры свои требования по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система засчитает любую ставку. В рулетке и покере устроить это намного труднее. Именно потому так главно пристально разбирать условия получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой забаве, то новенькие просто «спустят бонус на ветер». Многие игроки, оценив возможностей казино, остаются играть в нем и дальше ? на это и нацелено любое промо. Постоянные посетители заносят депозиты и проделывают ставки, обеспечивая долгосрочную прибыль оператора. То есть, казино раздают бездепы свежим юзерам для формирования лояльной аудитории.Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют важную информацию о not the slightest down payment bonuses и предложениях. 1×slots официальный зеркало рабочее <a href=http://trzykolory.opx.pl/member.php?action=profile&uid=3742>http://trzykolory.opx.pl/member.php?action=profile&uid=3742</a> На данном разделе портала регулярно публикуются обзорные статьи, в рассматриваются безвозмездные бонусы лучших интернет-казино. Информация структурирована по нескольким пунктам, включая главные:Онлайн-казино кропотливо продумывают бонусные условия, которые необходимо выучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и другие ограничения.
1×slot официальный сайт
<a href=http://bbs.zhizhuyx.com/home.php?mod=space&uid=11196492>http://bbs.zhizhuyx.com/home.php?mod=space&uid=11196492</a> 1×slots актуальное зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://lawsbay.com/webdesing-8/#comment-13612>1хслотс регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выигрыши с призов без вложений всегда привязаны к притязанию по ставкам и все быть обналичены только после исполнения этих требований. Подарки на праздничные ? посвященные торжественным датам, требующие условного отыгрыша или начисляются без это. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду.
#9438 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало на сегодня
Так собственно приготовьтесь предоставить секретную информацию (пол, возраст, страна проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает не более суток, последствии чего удастся свободно выводить крупные выигрыши.В лицензионных бездепозитных казино выступать в азартные забавы действительно безопасно. Наличие лицензии подтверждает что, этот факт, что клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP. <a href=http://filmkachat.ru/>1×slots на любой вкус как пройти регистрацию</a> Почти все игровые клубы настоятельно подтверждение контактных данных игрока для получения бездепозитного приза.Мы проделываем акцент на ключевых положениях управлял, рассказываем о территориальных лимитированиях и кратко информируем о других промоакциях обговариваемого казино. <a href=https://forum.kainkalabs.com:443/member.php?action=profile&uid=20451>https://forum.kainkalabs.com:443/member.php?action=profile&uid=20451</a> Поспешите зарегистрироваться на официальном сайте Клубника, дабы мгновенно получить 33 безвозмездных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, бывает настоящий шанс победу!Бывают ли бездепозитные бонусы без вейджера? Бывают, в у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино. 1×slots рабочее зеркало на сегодня <a href=https://humanlove.stream/wiki/User:JameDonnelly7>https://humanlove.stream/wiki/User:JameDonnelly7</a>
1×slots казино зеркало
Бездепозитные бонусы за регистрацию в игровых автоматах для собственников онлайн-казино считаются долею маркетинговой кампании, направленной на увеличение аудитории сайта. Так они продвигают свои бренды и завлекают свежих посетителей. <a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=13119>1×slots регистрация на 1хслотс</a> 1×slots зеркало подтвердит вашу регистрацию если говорить Раздача призов возможность быть посвящена разным датам: календарные праздничные, дни рождения игроков, юбилей открытия казино и т. Д. Подарок выдается в виде денег, фриспинов либо баллов для накопления и размена на услуги оператора. Если юзер получает выигрыш, средства начисляются на его счет. Для вывода этой суммы понадобиться выполнить ряд притязаний.Также учтите, собственно некоторые игровые платформы сужают перечень стран, коие готовы получить предложенный бездепозитный бонус за регистрацию. К образцу, есть онлайн-заведения, выдающие подобные призы лишь обитателям конкретных государств. К примеру, онлайн казино 777 Оригинал предоставляет бездепозитный бонус только игрокам из России и государств СНГ. Или наоборот, снабжают вознаграждением всех, считая жителей некоторых стран (из этого, идет внимательно изучать список, чтобы впоследствии не появилось никаких вопросов и жалоб). <a href=https://maps.google.com.bn/url?q=https://doctorlazuta.by/>https://maps.google.com.bn/url?q=https://doctorlazuta.by/</a> 1×slots регистрация на 1хслотс Иногда в качестве одобрения за регистрацию могут выдаваться билеты для участия в турнирах. Условия их проведения довольно выделяются, потому мы рекомендуем ознакомиться с любым предложением отдельно.Фриспины предназначены для применения в видео слотах. Внимательно ознакомьтесь с условиями – частенько их выдают на некоторые автоматы. В зависимости от клуба, у вас получится сделать определённое число ставок. Кстати, продвинутые игорные жилища разрешают запускать каждых «одноруких бандитов».
1×slots официальный сайт зеркало рабочее
Бездепы могут заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами. <a href=http://k636419q.beget.tech/user/Scottnes/>http://k636419q.beget.tech/user/Scottnes/</a> 1×slots casino регистрация В разделе с призами активировать свой презент. Найти забавы, для коих предусмотрено одобрение и применять бонус по назначению.
1×slots casino online регистрация
Список так называемых «разрешенных землель» прилагается к правилам бонусной программки игорного портала. Обязательно выясните, распространяются ли на вас сходственные наказания.Не трудно догадаться, собственно no down payment bonuses практически ни не посещают великими. Чаще всего идет о пяти–тридцати долларах (или эквиваленте данной суммы в другой валюте). казино 1×slots официальный сайт <a href=http://www.kreativballons.de/2013/07/ratet-mal-was-das-ist.html>http://www.kreativballons.de/2013/07/ratet-mal-was-das-ist.html</a> Для получения бездепа необходимо пригласить в игру по реферальной ссылке нового клиента: он обязан зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на сумму, указанную в критериях акции.Демоказино есть практически на каждом сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются веско пореже: там когда выигрыша и соблюдения критерий акций бездеп можно перевоплотить в настоящие деньги.
1×slots официальный зеркало
Это также бесплатные финансы, которые поступают на аккаунты новоиспеченных компьютерные после регистрирования. А необыкновенность таких бонусов произведено что, нет, что обретенные финансы непременно следует использовать в продолжении назначенного медли. Обычно показатель повыше, чем для бонусов на депо. Не дивитесь, случае он будет даже х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных стран.Но не стоит мыслить, собственно снабжая пользователей этими призами, казино увлекается спонсированием. Ведь объемы вознаграждений, главном, не немалые (средним объемом от 5 до 20 долларов). И на эти свои налагаются определенные обстоятельства и ограничения, обязательные к выполнению игрока, если в последствии он желает получить все свои выигранные деньги. <a href=https://www.gamespot.com/profile/glavdorogadv310/>https://www.gamespot.com/profile/glavdorogadv310/</a> Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. 1×slots зеркало регистрация За счёт спинов выйдет запустить различные интернет слоты, протестировать стратегии и поднабраться навыка. Фишка сомнений, что вращения начисляются на топовые аппараты с уникальными опциями и высокой отдачей. Не забывайте, собственно в любом акционном предложении учтены особые требования – временные ограничения, наибольший объем ставки, список дешевых игр.
<b>Смотреть еще похожие новости:</b>
<a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=7619>1×slots официальный сайт, скачать</a>
<a href=https://australianwinerytours.com/tours/showthread.php?tid=200977>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Маркетинговая политического всех игорных интернет-клубов должна одевать разнородный нрав. И случае гонорары на депо служат для того, чтобы провоцировать заносить депозиты и поощрять теснее имеющих юзеров, то бездепозитный приз в казино либо бонус за регистрацию в казино, до всего, рассчитан на расширение базы покупателей.
#9439 Charlesgunnyhttp://filmkachat.ru
казино 1×slots официальный сайт
Условия, на которых предоставляется бездеп, регулируются казино. Каждая акция имеет доскональные верховодила, гиперссылка на коие обыкновенно находится в промообъявлении. В их указываются лимиты, вейджер, список доступных игр. Если оператор прячет данные о предложении, то воспользоваться им надо. <a href=http://filmkachat.ru/>1×slots регистрация то дальше необходимо пройти</a> Одним из предлогов отдавать преимущество, льготу одному либо другому заведению содержится в привлекательности предлагаемых акций и бесплатных услуг. Безвозмездные фриспины, выдаваемые без дела создавать какой-либо вклад, в перечне располагается далековато не в конце.Как только на виртуальном счету окажутся бонусные свои, поспешите отыграть вейджер. Сразу последствии этого можно забыть заявку на вывод выигрыша. Кредиты прибыльно выделяются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом настоящих средств и выделяют возможность почувствовать задор. Во-вторых – можно насладиться каждой азартной игрой доступной на сайте. В вашем постановлении присутствуют автоматы, настольные прибавление, видео-покер, Live-дилеры. <a href=http://gtamotors.ru/user/Davidgoarp/>http://gtamotors.ru/user/Davidgoarp/</a> 1×slots официальный зеркало <a href=http://fr3809hv.bget.ru/index.php?subaction=userinfo&user=learneddecoy55>http://fr3809hv.bget.ru/index.php?subaction=userinfo&user=learneddecoy55</a> Для подтверждения электронной почты, просто перейдите по активной ссылке в послании, полученном от игрового заведения.Все благотворительные бонусы кажутся соблазнительными. Кто же откажется от возможности поиграть в онлайн-казино, не рискуя средствами, хотя получая выигрыши. Но далековато не все бездепозитные призы одинаковой привлекательны для рассудительного клиента.
1×slots сайт
Большинство клубов привлекают внимание в за счёт разнородных даров. На 1 веб-сайтах возможно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает безвозмездные вращения для запуска топовых онлайн слотов. Несмотря на различные промоакции, стоит выделить самые основные.Вы не в коем случае ни чем не рискуете, а лишь выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической игры на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, научится регулировать менять ставки и полосы, изучать бонусные игры и их выигрышные композиции, да в просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные средства, коие можно отыграть и исключить, но просто на демо счет, тем самым адреналин в крови более повысится а пульс забьется с нередким ритмом! 1×slots мобильная версия войти казино Вы наверняка, как и все предпочитаете получать презенты и бездепозитные бонусы казино. Игорные жилища брали в повадку одаривать гэмблеров приятными бонусами. Стать владельцем приветственного подарка возможно за творение профиля либо пополнение счёта. Второй вариант больше интересный, так клубы готовы удвоить депозит! Но в вы новичок и только знакомитесь с миром пыла, какого-либо воспользуйтесь бонусом за регистрацию. <a href=http://ask-kirov.ru/forums/users/parsimoniousdea/>http://ask-kirov.ru/forums/users/parsimoniousdea/</a> Наиболее пользующиеся гонорары среди гэмблеров – бездепозитные призы казино. Это не дивно, так возможно получить бесплатные вращения или виртуальные кредиты, и при не придётся пополнять счёт, рисковать личными деньгами. Удастся насладиться различными весельями причем выиграть крупную необходимую, избегая серьёзного риска.Подтверждение регистрации. Казино просят привязки профиля к электронному адресу и номеру телефона. Для сего на e-mail отправляется послание со ссылкой, а на аппарат ? текстовое извещенье с кодом. 1×slots регистрация 1×slotscasino09k online Основное верховодило получения бездепа ? творимый аккаунт должен быть у юзера первым и единственным. Наличие нескольких аккаунтов строго запрещено. Проверка проводится по имени, e-mal, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита нужно блюсти несложную последовательность поступков.На данном разделе портала регулярно публикуются обзорные статьи, в которых рассматриваются благотворительные бонусы лучших интернет-казино. Информация структурирована по нескольким пт, включая главные:
1хслотс зеркало
Демоказино есть почти на любом веб-сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются существенно пореже: там если, тогда, выигрыша и соблюдения критерий промоакций бездеп возможно превратить в настоящие деньги.Обычно, бездепозитные призы выдаются под определенные слоты с фиксированной ставкой, но их наверняка запрещено применять в игровых автоматах с прогрессивным джекпотом. Список игр, в возможно применять бездеп, Вы отыщите в описании промоакции или можете уточнить у службы поддержки заведения. Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в обязательном порядке необходимо пополнить счет в казино. Для депозитных бонусов, эта процедура не нужна, например как депо теснее изготовлен. <a href=http://mc-pe.net/index.php?subaction=userinfo&user=aboundinghail39>http://mc-pe.net/index.php?subaction=userinfo&user=aboundinghail39</a> Выбирая даровой приз, пристально изучайте верховодила. Убедитесь, что вам можно себя участие в промоакции. Уточните, в каких забавах можно исполнять условия вейджера. При надобности задавайте вопросы адептам саппорта. 1×slots сайт В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и если, тогда, неоднозначных обстановок нет способности куда-то посетовать и доказать свою правоту.
1×slots регистрация на 1хслотс
Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки все запросить вспомогательные документы или инициировать краткое общение по Skype. <a href=https://australianwinerytours.com/tours/showthread.php?tid=201041>1×slots сайт</a> Бездепозитный приз предоставляется новому игроку за определенные деяния. Часто подарок в виде денег или фриспинов выдается за регистрацию, спасибо чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.Реже бонусы без депо начисляются постоянным игрокам. С их подмогою администрация старается вычесть ценных клиентов или желает поблагодарить за лояльность верных посетителей. Но намного чаще для похожих целей используются такие акции: 1×slots официальный сайт скачать <a href=http://www.marblusfood.co.kr/free/623>http://www.marblusfood.co.kr/free/623</a> Ну и конечно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: схожая щедрость повышает степень лояльности клиентов к компании.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpaxB миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. Некоторые онлайн-казино без депо предлагают свежим посетителям выбрать бонус при регистрации. Будьте внимательны: выбрав раз, вы в безусловном большинстве случаев не можете пользоваться остальными.Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам воспрещено начислять призы клиентам, не имеющим денежных средств на счете. Мы предлагаем осмотреть животрепещущие бонусы онлайн-казино с лицензией, которые соблюдают законодательство РБ. <a href=http://janews.com.au/modules/newbb/viewtopic.php?topic_id=6321&post_id=6321&order=DESC&viewmode=flat&pid=0&forum=12>http://janews.com.au/modules/newbb/viewtopic.php?topic_id=6321&post_id=6321&order=DESC&viewmode=flat&pid=0&forum=12</a> 1×slots зеркало проходить регистрацию это отличный вариант
<b>Смотреть еще похожие новости:</b>
<a href=https://www.neocodex.us/forum/topic/100332-chapter-12-the-shattered-plain/page-6#entry2034909>1×slots рабочее зеркало</a>
<a href=https://australianwinerytours.com/tours/showthread.php?tid=182737>1×slots зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Можно. Вы всегда можете отказаться от получения бездепозитного бонуса за регистрацию в казино, же Вы не создадите ставку. Самый распространённый из сходственных призов, окончательно же, бездеп на день рождения посетителя — приз повторяющий фиксированной суммы либо фриспинов поступает на счёт игрока, а воспользоваться им возможно на установленного периода времени.
#9440 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация на сайте
Чаще всего, популярные сервисы, эти как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно неотъемлемое верховодило. Финансовые средства выводятся лишь спустя что, эту платежную систему, которой огромный для пополнения депозита. Если же игрок получил бездепозитный покерный приз, потребуется пополнить счет на минимальную сумму, кот-ая сочиняет обычно 10 $. <a href=http://filmkachat.ru/>1×slots бонус за регистрацию</a> Иногда виде одобрения за регистрацию все выдаваться билеты для роли в турнирах. Условия их проведения очень выделяются, поэтому мы рекомендуем ознакомиться с любым предложением отдельно. <a href=http://mtpkrskstate.ru/forum/user/208182/>http://mtpkrskstate.ru/forum/user/208182/</a> 1×slots коды <a href=https://zonaseputarslot.com/member.php?action=profile&uid=2040>https://zonaseputarslot.com/member.php?action=profile&uid=2040</a> Иногда в бездепа, казино дарует наименьший бонус (до 50 рублей), из-за которого надо заморачиваться.Необходимость отыгрыша. Вейджер такой выше, чем для призов за депозит. И пока средства не отыграны, исключить их нельзя.
казино 1×slots
Фриплей-бонусы встречаются только в неких клубах. Они зачисляются сразу после творения профиля и активны непродолжительное время. Если не успеете истратить свои, они попросту сгорят. Касаемо медли, в большинстве случаев бонусы активны в течение часа. <a href=https://www.makinamania.net/index.php?topic=250847.new#new>1×slots casino регистрация 1×slotscasin online</a> 1×slots зеркало видели такую регистрацию на После получения приза вывод средств для клиента несомненно недосегаем времени, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или чета месяцов. Выводить деньги игрок сможет лишь в отыгрыша.Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном сайте и выполните вход в собственный офис, дабы арестовать благотворительные вращения с вейджером х40; <a href=https://visualchemy.gallery/forum/profile.php?id=4085856>https://visualchemy.gallery/forum/profile.php?id=4085856</a> Для выбора азартного заведения Вы можете воспользоваться списком наших казино с бонусами за регистрацию. На нашем веб-сайте мы выпустили список бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, собственно часть бонусов эксклюзивные и доступны лишь для посетителей нашего вебсайта по-специальному промо-коду или по уникальной ссылке. Кроме такого, для любого приза мы подготовили подробный обозрение, в котором Вы узнаете как получить и отыграть одобрение и как исключить свой выигрыш с бездепа. 1×slots зеркало этих способов предполагает регистрацию
1× slots casino зеркало
Высокая конкуренция в сегменте азартных игр мотивирует операторов завлекать клиентов различными промоакциями. Благодаря данному у посетителей замечена возможность получить призы в казино за регистрацию без депо. Воспользоваться таким предложением можно, минуя функцию внесения денег на игровой счет, просто активировав аккаунт на веб-сайте. Наш гид по бездепам поможет выбрать самую привлекательную бонусную программу, разузнать управляла получения такового вознаграждения и воспользоваться им с максимальной выгодой. Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских руб. В условиях акции предписано, что вейджер бездепозитного бонуса х20. Поэтому, чтобы отыграть бонус, игроку будет нужно сделать ставок на 35*20=700 рублей. <a href=http://cqr3d.ru/user/Chrisgaump/>http://cqr3d.ru/user/Chrisgaump/</a> Получить Бездепозитный бонус в онлайн казино дело 2-ух кликов. Другой момент, отыграть рекламную и соблюсти правила и обстоятельства отыгрыша. Под правилами подразумевается столько вагер, но и ограничения по наибольшей ставке. Мы осознаем, что в кинотеатр все ставят на зеро и выигрывают. Призываем не делать сходственного. Перед активацией приза прочитайте правила. Узнайте последующие моменты: Условия получения подарка, за регистрацию, за депо и прочее. Ограничения по максимальной ставке. Зачастую не повыше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вертеть автоматы, а вагер будет стоять на месте. Поэтому принципиально аристократия, в каких забавах можно осуществлять кратность денежного оборота.Игры, каких возможно выступать на бонусные деньги. Проверьте список игр, в которых можно выступать на бонусные свои, вероятно они Вам не понравятся и не тратить своё время на эту промоакцию. 1×slots официальный сайт, скачать Во время игры в казино, выигрыши, приобретенные спасибо бесплатным призовым фондам, суммируются и включаются в общую сумму для отыгрывания. Однако, если удача улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно допустит вывести финансовые свои. Сумма вывода будет в от лимита, одобренного непосредственно в этом учреждении. Поэтому, внимательно надо(надобно) читать управляла выдачи безлимитных депо.
1×slots официальный сайт скачать
Далее требуется отыграть вагер и вывести выигрыш. Игрокам без опыта крупно повезло, меня получить 10-ки презентов за одну регистрацию. Если не сумели получить Бездепозитный приз, не волнуйтесь. Обратитесь в интернет чат, оператор поможет ситуацию.Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера. <a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=88809>1×slot регистрация</a> Чтобы бездеп не был начислен на Ваш акк, Вам не нужно активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт механически, а Вы не расчитываете его использовать, обратитесь в саппорта с пожеланием отменить бездепозитный бонус. 1 x slots <a href=https://www.indiegogo.com/individuals/35853256>https://www.indiegogo.com/individuals/35853256</a> 2. Создать свежий профиль. Для регистрации надо(надобно) наполнить маленькую анкету либо зайдите в индивидуальный офис посредством социальных сеток;Вознаграждения за получение VIP-статуса ? начисляются в рамках программки лояльности при достижении очередного значения или выдаются персонально менеджерами службы.
1×slots официальный demo регистрация в 1×slots casino
Во время игры в казино, выигрыши, полученные благодаря бесплатным призовым фондам, суммируются и включаются в общую сумму для отыгрывания. Однако, в удача улыбнется и выйдет отыграть все бонусы, игровое заведение гарантированно разрешит исключить финансовые средства. Сумма вывода будет зависеть от лимита, утвержденного непосредственно в этом учреждении. Поэтому, пристально надо(надобно) разбирать управляла выдачи анлимитных депо. <a href=https://maps.google.co.uk/url?q=https://doctorlazuta.by/>https://maps.google.co.uk/url?q=https://doctorlazuta.by/</a> Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых свежих, щедрых и испытанных призах в онлайн казино, которые обновляются каждый денек. 1×slots регистрация 1×slotscasino 56 online Способы получения бездепа различаются от облика бонуса, кот-ый приглянулся игроку. Но вам или надо(надобно) быть зарегистрированным в легальном онлайн-казино и подтвердить собственную личность. В общем облике пошаговая инструкция для получения бездепозитного приза смотрится так:Если площадка дарует бездеп за регистрацию, то процедура его получения проста. Нужно только завести аккаунт на сайте и активировать его, подтвердив адрес электрической почты, номер аппарата либо иные данные, коие требует оператор. Перед этим нужно увериться, что пользователь располагается на официальном сайте казино, а не на мошеннической площадке.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.fromrus.su/index.php?/topic/21004–1×-slots-casino-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82/>1× slots casino официальный сайт</a>
<a href=https://adminclub.org/showthread.php?tid=62373>1×slots сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного бонуса достаточно пополнения баланса и подтверждения личности. В других же клубах, необходимо количество один прокрутить свой депозит.
#9441 Charlesgunnyhttp://filmkachat.ru
1×slot официальный сайт
Пoдтвepдить личнocть посетителя. Для удачного вывода средств, необходимо подтвердить лицо посетителя. Нa этaпe вepификaции пpoфиля, работники службы защищенности обязаны убедиться, что у игрока более один аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не сможет исключить собственный выигрыш, случае у него будет количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы.Многие азартные клубы ограничивают необходимую вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании акции, суммы Вы не можете вывести. Разница будет аннулирована, Вы и не можете делать на нее ставки. <a href=http://filmkachat.ru/>казино 1×slots официальный сайт</a> <a href=http://shodi.ge/?p=15713>http://shodi.ge/?p=15713</a> Подтверждение электронной почты – одно из ведущих критерий, коие есть практически в любом бездепозитном казино. Чтобы верифицировать электрическую почту, достаточно перебежать по интенсивной ссылке в послании, приобретенном от азартного клуба. 1×slots мобильная версия войти казино <a href=http://behzistiardabil.ir/user/JoshuaIrort/>http://behzistiardabil.ir/user/JoshuaIrort/</a>
1×slots зеркало сайта
Иногда у посетителей сайта могут возникнуть проблемы при активации приобретенного промо-кода. В таких случаях, нужно обратиться за подмогою в службу поддержки «Support». Для получения ответа, обязательно указывается определенная причина обращения и подтверждается информация дополнительными снимками. Если сформировалась спорная обстановка, всегда возможно адресоваться к основному регулятору или контролирующему органу, выдавшему данному заведению лицензионный документ.Во всех законных онлайн-казино Беларуси необходимо свидетельство паспортных данных для забавы — это заявка правительства государства. 1×slots зеркало на сегодня Бездепозитные призы казино за регистрацию в 2022 году — это вероятность поиграть за счёт заведения. Казино даёт посетителю шанс пользоваться определённой суммой или числом даровых вращений без внесения депозита. Не путайте деморежим с реальной забавой без необходимости внесения депо. <a href=https://helheim5k.ru/users/arnoldvup>https://helheim5k.ru/users/arnoldvup</a> Лишь пользующиеся и известные азартные заведения шансы разрешить для раздавать бездепы вид дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депо, коие можно потратить в топовых аппаратах с высочайшей отдачей. 1×slots быструю регистрацию а также мгновенное Когда речь идет о денежных призах, казино постоянно устанавливают условия вейджера, которые нужно выполнить, дабы вывести выигрыш.
1×слот регистрация в 1×slots casino
Отказ в прохождении верификации. Если заказчик не желает либо имеет предоставить документы, подтверждающие его личность, профиль несомненно заблокирован совместно, вкупе со всеми бонусными начислениями. <a href=http://testowik.ru/index.php/forum/user/48407-learnedspeed58>http://testowik.ru/index.php/forum/user/48407-learnedspeed58</a> Для казино, работающих онлайн, бездепозитные призы необходимы для привлечения новых посетителей. Предложение поиграть на слотах без надобности внесения настоящих средств — работающий метод для увеличения интереса к компании. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит играть в казино, лишь теперь уже на собственные деньги. 1×slots зеркало сайта Ещё одно распространённое акционное предложение – привлекательный подарок с неблаговидными требованиями. К примеру, клуб обещает $100 в бездепа, но с вейджером х80 или х100. Отыграть такой вейджер фактически невозможно и потому другого концентрироваться на больше занимательных промоакциях.
1×slots casino регистрация 1×slotscasin online
рабочее зеркало 1хслотс <a href=http://www.shoppy.co.kr/bbs/board.php?bo_table=free&wr_id=593998>http://www.shoppy.co.kr/bbs/board.php?bo_table=free&wr_id=593998</a>
1×slots официальный регистрация
Если идет об неповторимых предложениях, возможность понадобиться регистрация в казино по ссылке с партнерского вебсайта.Чаще всего интернет-казино предлагают бездепозитные призы свежим юзерам. Эта промо-акция довольно отлично завлекает начинающих, подталкивая их к открытию счета. Конечно, не все они становятся преданными клиентами, хотя сам прецедент регистрации аккаунта играет на руку заведению. Главное преимущество спинов – возможность изучить различные слоты. Также удастся насладиться бонусными раундами, испытать фортуну в риск-туре и преумножить выигрыш за счёт особых знаков. Однако не только игровой процесс заслуживает внимание, ведь никакого сосредоточиться на реальном выигрыше.Прямо данный арестуйте благотворительные вращения за регистрацию без депозита и начинайте собирать призовые комбинации ради крупных выигрышей! <a href=https://www.sc0796.cn/home.php?mod=space&uid=455596&do=profile&from=space>https://www.sc0796.cn/home.php?mod=space&uid=455596&do=profile&from=space</a> Выполнив все требования оператора, клиент может оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит примерно менее суток. Если дополнительно потребуется пройти процедуру верификации, то срок возрастает до 1–2 трудящихся дней. Для перевода применяются банковские приборы и электрические платежные системы. Второй метод подходит превосходнее, например как основная транзакций в этом случае исполняются моментально. В связи со специфичностью функционирования банков обработка платежей может занять до нескольких трудящихся дней.Иногда у гостей сайта шансы возникнуть проблемы при активации полученного промо-кода. В этих случаях, необходимо обратиться за помощью в службу поддержки «Support». Для получения ответа, обязательно указывается определенная первопричина обращения и подтверждается информация дополнительными скриншотами. Если сложилась спорная обстановка, всегда можно адресоваться к главному регулятору или контролирующему органу, выдавшему данному заведению лицензионный документ. 1×slots бездепозитный бонус за регистрацию
<b>Смотреть еще похожие новости:</b>
<a href=https://www.formulersupport.com/Thread-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-1×slots–96056>казино 1×slots</a>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/3506/#comment-212948>1×slots регистрация 1×slots casino 777 online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В лицензионных бездепозитных казино выступать в азартные игры действительно неопасно. Наличие лицензии подтверждает тот прецедент, собственно клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP. Ну и конечно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: схожая добродушие повышает степень преданности клиентов к компании.
#9442 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало проходить регистрацию это отличный вариант
Бездепозитный приз нередко имеет замерзнуть доступным сразу после завершения регистрации, потому правило единственным притязанием к нему является регистрация, а после ревизия вашей свежей учетной записи.Акции, приуроченные к календарным дням, случаются рассчитаны как на всех юзеров, так и на категории: примеру, подарок на 8 марта девушкам-игрокам или мужчинам на 23 февраля. <a href=http://filmkachat.ru/>1×слотс казино</a> <a href=http://forum.puppylinux.pl/index.php?action=profile;u=8267>http://forum.puppylinux.pl/index.php?action=profile;u=8267</a> 1×slots зеркало регистрацию более популярный вариант это <a href=http://www.51jinqu.com/home.php?mod=space&uid=2340152>http://www.51jinqu.com/home.php?mod=space&uid=2340152</a> Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.
1×slots регистрация на официальном сайте
<a href=https://dshi.68edu.ru/index.php/forum/dobro-pozhalovat/6007-rabochee-zerkalo-1×slots#6016>рабочее зеркало 1×slots</a> x1 slots 1хслотс регистрация перейти на 1×slots Классическая разновидность приза за творение аккаунта. Его преимущество содержится что, что клиент может самостоятельно подбирать аппараты и делать ставки в них. Иногда список игровых автоматов ограничен оператором, хотя все равно это превосходнее, чем один-единственный доступный слот, как в случае с внедрением фриспинов.Рассмотрим принцип его действия на случае. Допустим, вы зарегистрировались и возымели $10 no deposit bonus с вейджером х50. Это значит, что выигранные деньги можно будет выводить не раньше, чем в как, как общая сумма ставок достигнет $500. <a href=http://yartube.ru/user/zabyancahvso7777/>http://yartube.ru/user/zabyancahvso7777/</a> Для получения приза нужно ознакомиться с программой лояльности казино и устроить ставки на сумму, нужную для перехода на грядущий степень. 1×slots рабочее зеркало на сегодня
1хслотс официальный сайт зеркало
Любой выигрыш по ставке повыше установленного лимита будет являться недействительным. То есть ставка не будет засчитана при отыгрыше, а случае выигрыша его сумма не поступит на счёт посетителя — итог забавы будет всецело аннулирован. Бездепозитный приз – это финансовое вознаграждение, коие выдается соучастнику игры в казино, для его привлечения и появления заинтригованности. Любой посетитель, кот-ый подходит условиям выдачи похожего бездепозитного бонуса, имеет претендовать на получение вышеуказанного приза. Такое поощрение является наиболее действенным способом, дающим вероятность стартовать в игре, не вкладывая собственных материальных средств.Перед активацией важно внимательно изучить обстоятельства промоакции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют значение кроме лимиты ставок при отыгрыше и сроки, в течение которых можно пользоваться предложением. Если бездеп охватывает узкий список игр, рекомендуется узнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только никаких случае, в оператор не установил жесткие лимитирования на наивысшую необходимую ставки. <a href=http://jejuseapension.com/bbs/board.php?bo_table=free&wr_id=253917>http://jejuseapension.com/bbs/board.php?bo_table=free&wr_id=253917</a> Баланс игрока дополняется на подходящую сумму. К ней применяется вейджер, обозначенный в правилах промоакции. Вывести выигрыш можно будет последствии того, как юзер устроит требуемый объем ставок из личных средств. В редчайших случаях бездеп трудится в формате Free Play. На счет юзера зачисляется крупная сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по окончании этого периода сумма на счету будет превосходить первоначальную, то разницу можно будет исключить или применять для последующих ставок.Чтобы помощи убедиться в превосходствах бездепозитных призов, довольно зарегистрироваться в казино и получить одобрение. 1×slots casino регистрация 1×slotscasino09k online
1×slots рабочее зеркало
Отказ в прохождении верификации. Если клиент не желает или имеет дать документы, подтверждающие его лицо, профиль несомненно заблокирован совместно, вкупе со всеми бонусными начислениями.Принципиальным различием безвозмездных призов от бонусов на депозит является неимение надобности вносить деньги на аккаунт. Из-за этого их нередко нарекают бездепозитными (not the slightest down payment bonuses). Многие казино предоставляют в рекламных целях безвозмездные призы необыкновенно для наших читателей. Чтобы их получить, надо(надобно) перебежать на игровой вебсайт по партнерской ссылке с нашего портала.При поддержки такого поощрения оператор возможность также завлекать клиентов, коие ранее проявляли активность на сайте, но по какой-то причине перестали играть. В этом случае промокод высылается пользователю по электронной почте либо в виде SMS. Нет. Казино раздают бесплатные призы за регистрацию, чтобы, чтобы, чтобы заказчик мог ознакомиться с игровым заведением. А чтобы исключить его, необходимо выполнить условия отыгрыша.Мы советуем не отказываться от похожих услуг узнаваемых казино. Выделите некоторое минут на регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сейчас удача будет на вашей стороне! 1хслот официальный сайт зеркало <a href=https://ls-rcr.com/forum/memberlist.php?mode=viewprofile&u=46927>https://ls-rcr.com/forum/memberlist.php?mode=viewprofile&u=46927</a> Варианты выигрыша находятся от Вашей успеха и условий игорного портала. Выше мы сказали, что некоторые бездепозитные призы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются и те, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность передовых игр на средства, возможно выиграть невозможные суммы. Сегодняшние игровые автоматы либо видео слоты, как их именуют. Могут выдавать крупные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000.Перечисленные выше главные свойства сопровождают практически каждый приз и являются стереотипными для бездепозитных бонусных начислений в казино.
1× slots casino зеркало
Чтобы бездеп не был начислен на Ваш акк, Вам не нужно активировать бонусный код. Если одобрение от казино было добавлено на Ваш аккаунт автоматически, а Вы не планируете его использовать, обратитесь в службу поддержки с пожеланием отменить бездепозитный приз.Маркетинговая деятеля всех игорных интернет-клубов обязана одевать разнообразный характер. И если вознаграждения на депо служат чтобы, чтобы, чтобы провоцировать вносить депозиты и поощрять уже быть юзеров, то бездепозитный бонус в казино или бонус за регистрацию в казино, до всего, рассчитан на расширение базы потребителей. <a href=https://chessdatabase.science/index.php?title=%D0%A4%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B%20%D0%90%D0%97%D0%A1:%20%D0%9F%D0%B5%D1%80%D1%81%D0%BF%D0%B5%D0%BA%D1%82%D0%B8%D0%B2%D1%8B%20%D0%B8%20%D0%B2%D0%BE%D0%B7%D0%BC%D0%BE%D0%B6%D0%BD%D0%BE%D1%81%D1%82%D0%B8%20%D0%B2%20%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8>https://chessdatabase.science/index.php?title=%D0%A4%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B%20%D0%90%D0%97%D0%A1:%20%D0%9F%D0%B5%D1%80%D1%81%D0%BF%D0%B5%D0%BA%D1%82%D0%B8%D0%B2%D1%8B%20%D0%B8%20%D0%B2%D0%BE%D0%B7%D0%BC%D0%BE%D0%B6%D0%BD%D0%BE%D1%81%D1%82%D0%B8%20%D0%B2%20%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8</a> У любого игорного заведения свои правила и условия. Но, чтобы получить бонусы, нужно выполнить стереотипные деяния: 1хслотс рабочее зеркало Разные казино имеют собственные управляла по выведению выигрыша. Для бездепозитных бонусов принимаются достаточно высочайшие требования. Часто онлайн-казино советуют отыграть бонусное поощрение до 100 раз в игровых автоматах. Например, если игрок получил бесплатно 10 долларов, то необходимо несомненно отыграть их, поставив одну тысячу спинов по одному доллару любой. Стоит отметить, собственно не все казино выделяют вероятность играть на призы и не во всех развлекательных заведениях идентичные верховодила для отыгрывания. Некоторые казино запрещают выступать на призы в блекджек либо ограничивают ставки до пяти процентов, собственно существенно увеличивает в десятки раз число необходимых игр.
<b>Смотреть еще похожие новости:</b>
<a href=https://rolivka.online/forum/showthread.php?tid=28674>1×slots casino зеркало рабочее</a>
<a href=https://nztw.org/forum.php?mod=viewthread&tid=399402&pid=705850&page=1&extra=#pid705850>1хслот зеркало</a>
<a href=http://forums.panzergrenadiers.com/showthread.php?23372–1×slot-%D0%A1%D0%82%D0%A0%C2%B5%D0%A0%D1%96%D0%A0%D1%91%D0%A1%D0%83%D0%A1%E2%80%9A%D0%A1%D0%82%D0%A0%C2%B0%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A1%D0%8F&p=509460#post509460>1×slot регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Доступность — бездепозитные призы в казино почаще всего предоставляются свежим игрокам, но посещают случаи, когда бонус имеют получить и действующие посетители.
#9443 Charlesgunnyhttp://filmkachat.ru
1×slot рабочее зеркало
Каждая игровая платформа отличается условиями по получению и отыгрышу бездепов. В правилах детально расписаны кратковременные рамки, за коие нужно прокрутить вейджер. Также не забывайте тему наибольший размер ставки и наивысшую сумму выплаты. С иной стороны, чтобы получить бездепозитные призы казино, достаточно израсходовать не более 1 минуты. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots casino 777 online</a> Обычно, бездепозитные призы выдаются под определенные слоты с фиксированной ставкой, но их наверняка запрещено использовать в игровых автоматах с прогрессивным джекпотом. Список игр, в которых можно использовать бездеп, Вы отыщите в описании промоакции либо сможете уточнить у службы поддержки заведения.В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и когда неоднозначных ситуаций нет возможности куда-то пожаловаться и доказать собственную правоту. <a href=http://www.xn----8sbabeoae4acvb6h.xn–p1ai/2022/01/qr.html>http://www.xn----8sbabeoae4acvb6h.xn–p1ai/2022/01/qr.html</a> Стоит обозначить(означить), собственно бездепозитный бонус выдается лишь взрослым новичкам, которые, же, могут пригласить собственных приятелей и знакомых, также претендующих на поощрительную программку преданности. Подобная разработка замечена между конкуренцию онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры содействуют повышению собственной посещаемости, путем привлечения свежих игроков. Бонусы – это уникальный шанс для потенциальных участников игры, коие могут опробовать софт покер рума и увериться, станут ли они в него выступать либо нет. Новый игрок попробует средства силы с реальными оппонентами в казино.Если вы избираете испытанное лицензионное онлайн казино и сделайте все обстоятельства получения бездепозитного бонуса, трудностей с получением презента у Вас не возникнет. 1×slots скачать на айфон <a href=https://podacha-blud.com/user/Geraldsluct/>https://podacha-blud.com/user/Geraldsluct/</a> Бонус за регистрацию в казино без депозита с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша может понадобиться устроить ставки на сумму, в некоторое 10-ов один превышающую необходимую приза либо выигрыша.Казино дает вероятность заработать и вывести настоящие деньги на бездепозитных призах. Обычно, это незначительная сумма, коию казино возможность себя позволить презентовать игроку.
casino 1×slot
Бездепозитный бонус казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и выяснить качество работы службы. Довольно часто, начиная игровой процесс, игрок теснее не желает останавливаться и делает реальный вклад. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть безвозмездно вероятно как раз таки с призом за регистрацию без необходимости вносить депозит.Используйте наилучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, дабы заработать подарки за простые деяния и уже сегодня получить 1-ый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высокой отдачей и резвыми выводами на электрические кошельки. <a href=http://naturetour.ru/communication/forum/messages/forum3/message23867/5563–1×slots-bezdepozitnyy-bonus-za-registratsiyu?sessid=f4a7b4ca1661c2f057e94db12ad8d786&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1×slots бездепозитный бонус за регистрацию</a> 1×slots рабочее зеркало <a href=http://dvnshu.com/index.php?subaction=userinfo&user=humorouscrease3>http://dvnshu.com/index.php?subaction=userinfo&user=humorouscrease3</a> Помимо остального, для вывода средств по бездепу нужно внести на счёт собственный 1-ый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало вероятную необходимую, последствии чего вывод средств будет доступен. казино 1× slots официальный сайт Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша призов. Заведения постоянно устанавливают наивысшую ставку, возможную по условиям вейждера.
казино 1× slots официальный сайт
Чаще всего казино бонус за регистрацию без депозита даёт вероятность запустить каждой автомат. Но другого, как внимательно ознакомиться с условиями. Иногда для забавы доступны только определённые модели. Если вы новичок и ничего не смыслите в гэмблинге, чем начать знакомство с миром пыла непосредственно с «одноруких бандитов».Можно ли в одном онлайн казино получить больше 1-го бонуса за регистрацию? Нет, так как в любом онлайн казино есть верховодила, к коим нужно держаться, не творить 2 аккаута для получения бонусов, иначе несомненно блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, бонус за регистрацию выдаеться один раз 1 лицу. На критериях отыгрыша бесплатных призов по тормознуть подробнее. С ними связаны нюансы, коие нельзя оставить без внимания. <a href=https://systemcheck-wiki.de/index.php?title=Benutzer:MasonKaur440>https://systemcheck-wiki.de/index.php?title=Benutzer:MasonKaur440</a> Вообще перейдя в казино — управляла одинаковы в получении бездепозитных бонусов, в стандартные верховодила входит: доказать эл. Почту и аппарат, наполнить собственный личный профиль, активировать рекламную код либо активировать предложения во вкладке БОНУСЫ.Бездепозитный бонус – это финансовое вознаграждение, которое выдается соучастнику забавы в казино, для его привлечения и возникновения заинтересованности. Любой посетитель, кот-ый соответствует условиям выдачи похожего бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое одобрение считается более действенным способом, дающим вероятность стартовать деле, не вкладывая личных материальных средств. скачать 1×slots на андроид мобильная версия Можно. Вы практически можете отрешиться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не сделаете ставку.
1хслотс рабочее зеркало
Активация денежного вознаграждения случается механически последствии создания профиля либо применения промокода. Иногда операторы предъявляют дополнительные требования: подписаться на странички казино в социальных сетях либо на рассылку маркетинговых извещений, скачать и ввести дополнительный софт и т.д. Чтобы бездеп не был начислен на Ваш акк, Вам надо активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт автоматически, а Вы не планируете его применять, обратитесь в службу поддержки с пожеланием отменить бездепозитный приз. Похожим образом трудится третий способ доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения посетителя или из-за с получения им VIP-статуса. Подарок предоставляется последствии обращения в поддержку и ревизии.Бездепозитные бонусы начисляются лишь один один. Не стоит раскрывать свежие аккаунты, дабы получить их повторно. Служба защищенности казино обязательно выявит «левого» соучастника и перекроет. Если посетитель выполнит необходимые притязания, отыграет собственную ставку и решит вывести личный выигрыш, то ему нужно сведению, собственно казино непременно востребует дать ксерокопии собственных документов, дабы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои исключить не удастся. 1×slots бездепозитный бонус за регистрацию <a href=http://bazarweb.ru/forum.php?PAGE_NAME=profile_view&UID=25717>http://bazarweb.ru/forum.php?PAGE_NAME=profile_view&UID=25717</a> Для как, дабы отыграть сумму вашего бездепозитного приза нужно выполнить условия вейджера. Очень часто фриспины даются на конкретные слоты (book of ra, book of lifeless, book of sun), подбирайте слот для по душе, они все довольно красивые и высококачественные. Бездепозитные приз имеет быть валютным так и повторяющий фриспинов на слоты
казино 1×slots
Вознаграждения за получение VIP-статуса ? начисляются в программки преданности при достижении одного уровня либо выдаются индивидуально менеджерами службы. <a href=http://dns2.shadr.ru/user/Tyronelam/>http://dns2.shadr.ru/user/Tyronelam/</a> Для получения депозитного приза нужно восполнить собственный игровой баланс реальными деньгами. Вознаграждение можно получить либо при внесении первого депозита, либо в виде фиксированного процента от внесённых средств. Так или иначе, бонус поступит на счёт только в пополнения.Мы советуем не отрицаться от подобных предложений известных казино. Выделите несколько минут на регистрацию, получите бонус и попытайтесь его отыграть. Может быть, сегодня удача несомненно на вашей стороне! 1×slots официальный сайт зеркало рабочее Свежий приз начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в использовании средствами, а случае отыгрыша оператор может ввести ограничение на вывод средств.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.ltp-team.com/topic/244-otzyvy-reviews/?page=6#comment-53151>1×slots регистрация 1×slots casino c2d ru</a>
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=2894>1×slots быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При регистрации стопам указывать лишь достоверную информацию. Когда учетная запись будет активна, будет доступ в Личный офис. В нем возможно выбрать валюту, установить промокод и разузнать подробные верховодила получения и отыгрыша бездепа. Краткая информация об акции нередко присутствует непосредственно на регистрационной форме.
#9444 Charlesgunnyhttp://filmkachat.ru
1× slots сайт
Нет. Для получения бездепозитного приза в казино нужна неотъемлемая регистрация на веб-сайте. Играть в слоты безвозмездно и без регистрации можно лишь в демо режиме. <a href=http://filmkachat.ru/>1×slots бонус за регистрацию</a> <a href=http://www.01.com.hk/member.php?Action=viewprofile&username=JamesClike>http://www.01.com.hk/member.php?Action=viewprofile&username=JamesClike</a> Вейджер менее х30–35 является применимым. Опытные игроки утверждают, собственно с этим вейджером реально остаться в плюсе, случае верно подойти к выбору игрового аппарата. 1хслотс казино зеркало <a href=https://tvoyaskala.com/user/HenryunsuP/>https://tvoyaskala.com/user/HenryunsuP/</a> Вы наверняка, скажем, как все любите получать презенты и бездепозитные бонусы казино. Игорные жилища взяли в повадку одаривать гэмблеров приятными призами. Стать владельцем приветственного подарка возможно за творение профиля или пополнение счёта. Второй вариант больше увлекательный, ведь клубы готовы удвоить депо! Но случае вы новичок и лишь знакомитесь с миром азарта, чем воспользуйтесь бонусом за регистрацию.
1хслотс рабочее зеркало
В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая милая доля игры. Важно, зачастую бездепозитные призы в казино выдаются с ограничениями по максимальной выплате. В среднем можно рассчитывать на выгода в несколько тыщ руб. Как исключить выигрыш с бонуса без депо. Придётся подтвердить аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается каждым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате или прочитайте в правилах. <a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=35575>1хслотс мобильная версия зеркало</a> 1 x slots <a href=http://bbs.zhizhuyx.com/home.php?mod=space&uid=10642100>http://bbs.zhizhuyx.com/home.php?mod=space&uid=10642100</a> 1×slots официальный сайт зеркало Зарегистрируйтесь. Для регистрации почаще всего довольно установить свой номер аппарата и почтовый адресок, после чего установить приобретенный код из СМС. Возможно, потребуется указать промокод. В правилах промоакции будет написано, где его бы вводить. Иногда это надо делать при регистрации, иногда — теснее в сотворения собственного кабинета, на отдельной страничке.
1хслот зеркало
Для верификации аккаунта нужно дать специалистам технической помощи отсканированную копию паспорта и счета за коммунальные предложения, еще фотографию банковской карты либо экрана страницы электронного кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для доказательства личности.Это раз из главных показателей привлекательности подарка. С завешенным коэффициентом даже мастера не сумеют выполнить обстоятельства по отыгрышу. И не, как привлекательно смотрится предложение – бездепозитный бонус казино в размере $500 либо $1 000. Чтобы новенькие лучше вникли, что же такое вейджер, мы разберём на случае. В неких интернет казино для получения бездепозитных призов не довольно просто зарегистрироваться на сайте клуба и подтвердить средства контактные данные. Дополнительно требуется активация промокода. <a href=http://krast-studio.ru/user/Williamgus/>http://krast-studio.ru/user/Williamgus/</a> Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы которые появляются у начинающих.Когда идет о получении бездепозитных бонусов в казино, в первую очередь направьте на последующие обстоятельства: 1хслот зеркало сайта
1х слот 1хслотс регистрация перейти на 1×slots
Подтвердите личность, предоставив оператору казино средства паспортные данные. Инструкции обыкновенно несложные, главное — четко им стопам. Если написано, что «на фото обязаны быть видны все четыре угла странички паспорта» — устройте непосредственно такое фото. Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают бонус по государствам. Вплоть до такого, что клуб может брать игроков из Вашей страны, а бездеп не давать. 1×slots официальный сайт, скачать <a href=https://www.mybbaddons.com/board/user-72222.html>https://www.mybbaddons.com/board/user-72222.html</a> С не отыгранным призом запрещается превышать размер наибольшей ставки. Нарушение этого условия виде аннулирование выигрыша.
1×slots зеркало на сегодня
Обычно бездепозитные акции от казино, приходят на эл. Почту в дни рождения или дни. В некоторых интернет казино можно адресоваться в чат и как неизменному игроку, возможно вам предложат бездепозитное предложение. Доступ к подарку возможность раскрываться автоматически после введения промокода либо обращения в саппорта сайта. В первом случае от юзера не потребуется никаких поступков. Бездеп с активацией по коду встречается почаще всего. Игроку нужно установить совокупность знаков в графе, которая может пребывать в регистрационной форме в Личном офисе. <a href=https://foro.lahuertinadetoni.es/user-2422.html>https://foro.lahuertinadetoni.es/user-2422.html</a> Иногда виде одобрения за регистрацию шансы выдаваться билеты для участия в турнирах. Условия их проведения довольно выделяются, потому мы рекомендуем ознакомиться с каждым предложением отдельно.Далее требуется отыграть вагер и исключить выигрыш. Игрокам без навыка крупно повезло, возможность получить 10-ки презентов за одну регистрацию. Если не сумели получить Бездепозитный приз, не беспокойтесь. Обратитесь в интернет чат, оператор поможет исправить. 1×slots бонус за регистрацию Бездепозитные бонусы — это подарки от казино в виде бонусных средств либо фриспинов для игровых автоматов, которые начисляются на аккаунт игрока последствии процедуры регистрации на веб-сайте заведения. Для получения этих поощрений депо не потребуется.Бонусы без депо при регистрации числятся самыми привлекательными как для опытнейших игроков, так для и новичков. Получив такое вознаграждение, клиент может выступать на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а обстоятельства их активации и выигрыша.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.bandariklan.com/showthread.php?tid=176825&pid=856865#pid856865>1×slots зеркало рабочее на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При регистрации никаких либо ином онлайн игральном заведении — вас дается один шанс испытать свою удачу не внося средства монеты. Замечу что эту поощрительную услугу деют не все онлайн игровые площадки, а только щедрая середина(средина) из них. Которые мы подготовили для Вас в нашем списке. В каждом казино с бездепозитным призом предусмотрены вейджеровые обстоятельства. Это один-единственный «подводный камень», кот-ый стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, нужно сделать определённое количество ставок. Чем круче бонус, тем сложнее выполнить условия, и наоборот.
#9445 Charlesgunnyhttp://filmkachat.ru
1×slots подтвердит вашу регистрацию если говорить
Еще одно условие дотрагивается размеров ставки. Операторы устанавливают максимальную необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, выбранной в Личном кабинете. При превышении лимита есть риск лишиться приза. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, заказчик имеет столкнуться с запретом назначать фишки на шансы. <a href=http://filmkachat.ru/>1×slots регистрация на сайте</a> <a href=http://hotelrocio.kr/bbs/board.php?bo_table=free&wr_id=524989>http://hotelrocio.kr/bbs/board.php?bo_table=free&wr_id=524989</a> Не стоит сразу же открещиваться от приветственных презентов в подобных казино. Администрация готова начислить средства или фриспины, но сначала сотрудники должны убедиться, что вы не мошенник. Дело сомнений, собственно развелось слишком много охотников за бонусами. Они научились врать систему и наваривать крупные суммы средств. 1×slots зеркало на сегодня <a href=https://civilpatrol.info/?q=petition/81090/glory-casino>https://civilpatrol.info/?q=petition/81090/glory-casino</a> Как верховодило, новоприбывшие игроки в первую очередь хотят ознакомиться с способами ввода и вывода денежных средств и сроки выполнения поданных заказов чтобы четко разуметь, как быстро появится вывести свой казино бонус за регистрацию без депозита на электронный кошелек либо же банковскую карту. К счастью для всех играющих, внутри определенных холдингов, все казино соперничают между собой. Ведь случае бы определенную компанию давало лишь одно онлайн-заведение, то ли бы клиенты увидели казино с призом за регистрацию и имели бы рассчитывать лишь на вознаграждение повторяющий бонуса на 1-ое вложение. К каждому заведению периодически идет завлекать свежих игроков, что, в, лишь на руку всем играющим.
1×slots зеркало регистрация
1×slots казино мобильная версия Бездепозитные призы начисляются только один раз. Не стоит раскрывать новые аккаунты, дабы получить их повторно. Служба безопасности казино непременно выявит «левого» соучастника и заблокирует. Если гость выполнит необходимые требования, отыграет свою ставку и решит исключить личный выигрыш, то ему нужно сведению, что казино непременно потребует предоставить ксерокопии собственных документов, чтобы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные средства вывести не удастся.Существует ли стратегии для отыгрыша бездепозитных призов? К раскаянью нет, на выигрыши или проигрыши с бонусов, казино или игрок повлиять имеет, отдача игр происходит от разработчиков игр. <a href=http://www.ritual-letichev.km.ua/user/Porsedropma/>http://www.ritual-letichev.km.ua/user/Porsedropma/</a> Отыграв бездепозитный бонус в казино с выводом также придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в подобное лимитирование присутствует, то единоразово исключить выйдет лишь сумму, не превышающую размер приобретенного приза. 1×slots подтвердит вашу регистрацию если говорить В случае с фриспинами без вейджера, Вам не придется отыгрывать свой выигрыш с безвозмездных вращений. Прибыль, которую Вы заработаете на этом бездепе можно назначать на вывод без какого или отыгрыша.Это также благотворительные финансы, коие поступают на аккаунты новоиспеченных геймеров последствии регистрирования. А особенность таких бонусов произведено никаких, собственно обретенные деньги обязательно идет применять в продолжении назначенного медли.
1×slots промокод при регистрации 2025
Как верховодило, при выводе денег, от играющего требуется лишь сделать минимальный лепта чтобы, чтобы, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом индивидуальный счет.Чаще всего, пользующиеся сервисы, эти как MoneyBookers и WebMoney, еще MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно неотъемлемое правило. Финансовые средства выводятся только спустя что, эту платежную систему, которой огромной для пополнения депозита. Если же игрок получил бездепозитный покерный приз, требуется восполнить счет на минимальную необходимую, кот-ая сочиняет обыкновенно 10 долларов. <a href=https://www.ronorp.net/zurich_en/community/city-talk.66/.340730>https://www.ronorp.net/zurich_en/community/city-talk.66/.340730</a> 1 xslots рабочее зеркало Доступность — бездепозитные призы в казино чаще всего предоставляются новым игрокам, но бывают случаи, когда приз могут получить и действующие посетители.Похожим образом работает 3-ий способ доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения посетителя либо из-за с получения им VIP-статуса. Подарок предоставляется последствии обращения в поддержку и проверки.
1×slots коды
Бoльшинcтвo азартных заведений выдвигают примерно одинаковые условия и притязания, коие необходимо выполнить, дабы получить бездепозитный приз за регистрацию. Все их можно соединить в раз перечень: казино 1×slots официальный сайт <a href=http://wkbilibili.com/home.php?mod=space&uid=930041&do=profile&from=space>http://wkbilibili.com/home.php?mod=space&uid=930041&do=profile&from=space</a> Нет. Для получения бездепозитного бонуса в казино нужна обязательная регистрация на сайте. Играть в слоты бесплатно и без регистрации можно только в демо режиме.
1×slots регистрация на 1хслотс
Автоматическая активация показаться самой удобной, хотя ручной метод имеет перед ней превосходства. Прежде чем использовать вознаграждение от казино, стоит заблаговременно найти, сколько времени требуется на выполнение всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деяния бонуса. <a href=https://forums.twcpilots.com/member.php?action=profile&uid=766>https://forums.twcpilots.com/member.php?action=profile&uid=766</a> Суммы подобных предложений, как правило, колеблются от 3-х до 20 $, а вейджер на эти средства обязан сочинять от тридцати до шестидесяти один. Зачастую, величайшая сумма выигрыша здесь составит от одной до двух сотен долларов. Если в выиграет больше, то все средства имеют быть списанными до максимально разрешенного выигрыша. Здесь бывает смысл выводить еще несуществующие финансы на свою платежную систему и далее находить заведение с подходящими под данную сумму релоадом или призом за 1-ое пополнение счета. Есть некоторое подвидов бездепозитного вознаграждения, предлагаемого великим количеством заведений.У нас на веб-сайте Вы найдете список призов без депо в испытанных казино и подробную информацию о том как их получить и использовать. 1×slots регистрация на сайте С такими ординарными советами каждое казино с бонусом за регистрацию способно принести в разы больше выгоды и полезности.Поспешите зарегистрироваться на официальном сайте Клубника, чтобы моментально получить 33 безвозмездных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, появляется реальный шанс победу!
<b>Смотреть еще похожие новости:</b>
<a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=2469>1× слот зеркало</a>
<a href=https://bajarmp3.net/showthread.php?tid=409573>скачать 1×slots официальный сайт</a>
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1083#post-34155>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=265513>1×slots на любой вкус как пройти регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подтверждение регистрации. Казино требуют привязки профиля к электрическому адресу и номеру телефонного. Для этого на e-mail отправляется письмо ссылаясь, а на аппарат ? текстовое сообщение с кодом.
#9446 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasin online
Необходимость отыгрыша. Вейджер такой выше, чем для бонусов за депо. И же свои не отыграны, вывести их нельзя. <a href=http://filmkachat.ru/>1 xslots рабочее зеркало</a> Помните, собственно любые нарушения верховодил сведут на нет ваши старания, и вы скорее останетесь без начисленного вас безвозмездного приза. Всегда изучайте правила начисления и обстоятельства вейджера. По любым вопросам, на коие вы не самостоятельно найти ответы, обращайтесь за разъяснениям и саппорт. <a href=http://www.01.com.hk/member.php?Action=viewprofile&username=JamesClike>http://www.01.com.hk/member.php?Action=viewprofile&username=JamesClike</a> 1×slots официальный сайт зеркало рабочее <a href=http://shilinka.ru/user/DeweyMUP/>http://shilinka.ru/user/DeweyMUP/</a> Для получения бонуса надо(надобно) пригласить в игру свежего клиента. Казино начислит пригласившему фиксированный процент от взносов приглашённого вид приза: чаще всего его размер не превышает 10%. Срок деяния бонуса как не превышает месяца: пригласивший получает бонус в зависимости от проигранных ставок приглашённого в первый луна забавы.На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не сможете активировать и получить бездепозитный бонус.
1×slots рабочее зеркало
1×slots официальный demo регистрация в 1×slots casino Как только получите бездеп в казино, всё одинаково не забывайте проверять электрическую почту. Некоторые игорные клубы каждый радуют активных гэмблеров приятными бонусами. Чаще всего получить подарок можно в преддверии веселья, на день рождение, за вербование друга. А того распространённым призом считается надбавка к депозиту. Нужно более пополнить счёт, и азартное заведение увеличит его на 50–100%. <a href=https://gowwwlist.com/Glory-Casino_257259.html>https://gowwwlist.com/Glory-Casino_257259.html</a> Бездепозитные бонусы истинными средствами, коие можно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадали. 1×slot зеркало В наше время очень просто получить приз за регистрацию в казино. Практически любой игорный жилище с готовностью начисляет средства или бесплатные вращения. Многие гэмблеры используют данным и не стыдятся региться в любом клубе с выгодными критериями. Кстати, это замечательная вероятность выработать победную тактику и сорвать джекпот.Бонус в казино без депозита имеет различные вариации: такое быть приветственный приз, промоакции в честь каких-либо дней либо важных дат, приз за привлечение свежих игроков, лояльность и получение VIP-статуса.
1×slots актуальное зеркало
Выиграть реальные деньги в казино не пополняя счет – сложно, но вполне. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными бонусами и начните выступать на бонусные свои. По статистике из 10-ти заведений можно заработать маленькую сумму денег за счет бонусных средств.Бездепозитные призы за регистрацию в игровых автоматах для владельцев онлайн-казино являются частью маркетинговой кампании, направленной на повышение аудитории сайта. Так они продвигают свои бренды и привлекают свежих клиентов. Для получения выигрыша потребуется выполнить условия казино. Чаще всего игроку нужно поставить определенную необходимую, хотя уже из собственных денег. Она рассчитывается из совместного объема выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, в пользователь выиграл 1000 рублей, а множитель сочиняет х30, вывести средства можно несомненно, сделав ставки на 30 000 руб.Фриспины начисляются по конкретной ставке. После их активации игроку необходимо запустить слот и увериться, что в нем показываются благотворительные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода в отыгрыша определяется оператором и редко выше 5 000 рублей. <a href=http://fr3809hv.bget.ru/user/Frankkap/>http://fr3809hv.bget.ru/user/Frankkap/</a> Высокая конкурентность в разделе азартных игр мотивирует операторов привлекать посетителей разнородными промоакциями. Благодаря данному у посетителей появляется возможность получить бонусы в казино за регистрацию без депо. Воспользоваться этим предложением возможно, минуя функцию внесения денег на игровой счет, просто активировав аккаунт на веб-сайте. Наш экскурсовод по бездепам поможет избрать самую привлекательную бонусную программу, узнать правила получения такого гонорары и распорядиться им с максимальной выгодой. 1×slots рабочее зеркало
1×slots сайт зеркало
Составленный знатоками Casino.ru перечень онлайн-казино с бездепозитным призом разрешает игрокам сравнить спецпредложения разных операторов. Главное преимущество спинов – вероятность изучить различные слоты. Также получится насладиться бонусными раундами, испытывать фортуну в риск-туре и преумножить выигрыш за счёт особых символов. Однако не игровой процесс заслуживает внимание, так другого, как сосредоточиться на реальном выигрыше. 1×slots официальный сайт зеркало рабочее <a href=https://blog.udn.com/G_107482553777754991/180626154>https://blog.udn.com/G_107482553777754991/180626154</a> Все обожают получать подарки. Согласитесь, практически каждый играющий человек несомненно бесконечно счастлив, случае получит бесплатный презент для игры в онлайн казино просто за регистрацию или же приз за внесенный депозит, так называемые приветственные призы для свежих игроков. Соответственно эти онлайн клубы будут более популярны и преимущественны у игроков при выборе казино для забавы. Топ казино каждый обновляется и добавляются новые и интересные игровые клубы с привлекательной бонусной политикой и всеми вероятными прерогативами, к коим относятся такие бонусы как фриспины за регистрацию, валютные бездепозитные бонусы, а щедрые призы за внесенный депозит.Доступность — бездепозитные призы в казино чаще всего предоставляются новым игрокам, хотя бывают случаи, когда бонус могут получить и действующие посетители.
1×slot казино зеркало
Чтобы получить возможность вывести выгода с бездепозитного бонуса в казино, нужно выполнить ряд критерий:Помимо прочего, для вывода средств по бездепу необходимо внести на счёт собственный 1-ый депо — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на минимально возможную необходимую, после чего вывод средств станет доступен. <a href=https://bbs.pigoo.com/space-uid-193018.html>https://bbs.pigoo.com/space-uid-193018.html</a> Каждая игровая перрон выделяется условиями по получению и отыгрышу бездепов. В правилах детально расписаны временные рамки, за коие нужно прокрутить вейджер. Также не запамятовывайте тему наибольший объем ставки и наивысшую сумму выплаты. С иной стороны, чтобы получить бездепозитные призы казино, довольно израсходовать менее 1 минуты.Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша бонусов. Заведения всегда устанавливают максимальную ставку, допустимую по условиям вейждера. 1хслотс зеркало на сегодня Приветственный бездеп предоставляется любому игроку лишь раз раз. Казино дерутся с например именуемыми бонусхантерами (от англ. Bonus Hunter — охотник за призами), пытающимися заводить многочисленные аккаунты для надувательства оператора и повторного получения презента. Исключить похожие деянья дозволяет верификация данных. Администрация вправе потребовать у клиента подтвердить индивидуальные данные, обозначенные при регистрации.В истинное время получить приз за регистрацию в казино довольно просто. Почти каждый игорный жилище с готовностью предоставит средства или благотворительные вращения. Многие игроки пользуются этим и не стыдятся регистрироваться в каждом клубе с выгодными критериями. Кстати, это замечательная возможность выдумать выигрышную стратегию и сорвать куш.
<b>Смотреть еще похожие новости:</b>
<a href=https://nauc.info/forums/viewtopic.php?t=20390526>казино 1× slots официальный сайт</a>
<a href=https://smm-seo.ru/threads/1×slots-casino-registracija-1×slots-review-live.39286/>1×slots casino регистрация 1×slots review live</a>
<a href=http://forum.cvetq.info/viewtopic.php?f=8&t=250525>1×slots зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Используйте наилучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, дабы заработать подарки за простые деянья теперь сегодня получить первый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высокой отдачей и быстрыми выводами на электронные кошельки. Да, у даровых призов есть недостатки. Прежде всего, они обыкновенно большие. Кроме того, обстоятельства вейджера по ним практически жесткие. Но все неимение риска проделывает их очень привлекательными для клиентов.
#9447 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало
Наш перечень включает в себя наихорошие бездепозитные призы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит ревизию по принципиальным параметрам: <a href=http://filmkachat.ru/>x1 slots 1хслотс регистрация перейти на 1×slots</a> Таким образом, заведение пробует продемонстрировать себя своим вероятным геймерам, а подобный маркетинговый ход как казино приз без депо за регистрацию завлекает довольно большое внимания к игорному заведению и обеспечивает неизменный поток новых гостей и грядущих посетителей игрового интернет клуба.Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, the decision зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. <a href=http://d90894u1.bget.ru/user/Davidrab/>http://d90894u1.bget.ru/user/Davidrab/</a> Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских руб. В условиях промоакции предписано, что вейджер бездепозитного бонуса х20. Поэтому, чтобы отыграть приз, игроку несомненно нужно сделать ставок на 35*20=700 руб.Новые посетители онлайн-казино без первого депозита шансы проверить собственную удачливость. К что, этому же есть вероятность конвертировать бездепы в настоящие деньги за регистрацию в казино, однако достичь бонус нужно отыграть сообразно условиям акции. онлайн казино 1×slots <a href=http://id-ct.fondex.com/campaign?destination_url=http://mark7.ru/bitrix/redirect.php?goto=http://electroset.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/_udaamYSgFC>http://id-ct.fondex.com/campaign?destination_url=http://mark7.ru/bitrix/redirect.php?goto=http://electroset.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/_udaamYSgFC</a> Зачастую бездепозитные призы казино для забавы предлагаются разными заведениями азартных игр в качестве маркетинговых акций либо в целях привлечения к для свежих игроков. Для бездепозитных бонусов в казино 2022 геймеру не нужно пополнять счет до этапа вывода желаемых средств.Подтверждение регистрации. Казино просят привязки профиля к электронному адресу и номеру телефонного. Для этого на e-mail отчаливает послание ссылаясь, а на телефон ? текстовое известие с кодом.
1×slots официальный сайт мобильная версия скачать
Чаще всего применяются коды. Их надо(надобно) вносить в специальные окошки регистрационной анкеты, если речь о пригласительных бонусах, либо в определенном разделе собственного офиса игрока.Приветственный приз без депо ? презент за регистрацию. Выдается деньгами, фриспинами или баллами. В последнем случае бонусные баллы применяются для участия в турнирах либо размена на настоящие средства. 1×slots акции Но не стоит размышлять, что снабжая пользователей такими призами, казино увлекается спонсированием. Ведь размеры вознаграждений, в, не большие (средним объемом от 5 до 20 долларов). И на эти свои налагаются конкретные условия и ограничения, обязательные к исполнению игрока, если в последствии он желает получить все свои выигранные деньги. <a href=https://clicgo.ru/user/Zacherycoefe/>https://clicgo.ru/user/Zacherycoefe/</a> При верном раскладе бездепы — это прекрасный способ выступать на деньги без растраты личных средств. Есть некоторое советов, следуя которым возможно извлечь максимум выгоды из подобных акций казино. Играть стопам только на лицензированных площадках. Скриптовые сайты не дурачат с бонусными предложениями, но и употребляют пиратский софт с измененным ГСЧ. Выиграть на таких автоматах невероятно. 1×slots мобильная версия войти казино Отказ в прохождении верификации. Если заказчик не желает либо имеет предоставить документы, подтверждающие его личность, профиль несомненно заблокирован совместно, вкупе со всеми бонусными начислениями.
1×slots официальный сайт мобильная версия скачать
На страничке представлены бездепозитные бонусы за регистрацию в казино редчайшая заслуга за коей гонятся все игроки как новички, так и профессионалы. Мы также уделяем огромное внимание на наличие призов при составление рейтинга казино на деньги. Бездепозитный бонус это вероятность выступать даром и выиграть реальные средства. <a href=http://021bababa.org/space-uid-496622.html>http://021bababa.org/space-uid-496622.html</a> При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, коие возможно предназначить ирге в казино. 1×slots официальный сайт скачать Возможность протестировать новые забавы, не рискуя собственными средствами и разработать собственную стратегию игры.
1×slots официальный сайт скачать
При регистрации следует указывать лишь достоверную информацию. Когда учетная запись будет активна, будет доступ в Личный офис. В нем можно избрать валюту, ввести промокод и узнать подробные верховодила получения и отыгрыша бездепа. Краткая информация об промоакции часто присутствует непосредственно на регистрационной форме. <a href=https://smm-seo.ru/threads/1×-slots-casino-oficialnyj-sajt.38174/>1× slots casino официальный сайт</a> Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, если не желайте стать жертвой жуликов либо впустую истратить время; 1×slots зеркало видели такую регистрацию на <a href=http://forum.computest.ru/post/717195/#p717195>http://forum.computest.ru/post/717195/#p717195</a> Вышеописанная первопричина и считается основным нюансом, в которого операторы отдают доля своей прибыли на различные рекламные затраты и рекламные кампании. А самым действующим тут станут выступать именно бездепозитные бонусы казино 2022 с выводом за регистрацию.
1хслотс казино зеркало
Максимальная ставка ? уточняется в еденице счета и ограничивает размер ставки за один спин. В случае ее превышения приз имеет быть аннулирован. Также в правилах может находиться запрет на размещение ставок определенного облика, например, по равным шансам в рулетке (другими, на чет либо нечет, красное либо темное и т.д. ).Акционные предложения от казино есть в разных форматах. Часто призы даются в мена на депозит. Игрок вносит платеж и получает деньги, бесплатные вращения и поощрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — картина бонуса, который гарантирован за выполнение определенных деяний на веб-сайте: Бездепозитный приз нередко может стать доступным сразу в завершения регистрации, поскольку в большинстве случаев единственным притязанием к нему является регистрация, а затем ревизия вашей свежей учетной записи. <a href=http://www.dbgjjs.com/home.php?mod=space&uid=461167>http://www.dbgjjs.com/home.php?mod=space&uid=461167</a> Прежде всего, не запамятовывайте периодически заглядывать на страницу обзоров бездепозитных призов. Они шаг за шагом разглядывают более интересные предложения ведущих игорных порталов. 1×slos регистрация в 1×slots casino Бонусные деньги – небольшая сумма денег для старта в новом казино. На бонусные средства, обыкновенно разрешено играть во все забавы, не слотов с прогрессивным джекпотом и игр из раздела live casino.
<b>Смотреть еще похожие новости:</b>
<a href=https://g2clubs.com/healthy-workout/google/#comment-24163>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a>
<a href=http://forum.exalto-emirates.com/viewtopic.php?f=7&t=94922&p=1375031#p1375031>1×slots сайт</a>
<a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a>
<a href=https://www.katzenforum.at/forum/media/users/jamesagema.16012/>1×slots подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша бонусов. Заведения всегда устанавливают наивысшую ставку, допустимую по условиям вейждера.
#9448 Charlesgunnyhttp://filmkachat.ru
казино 1× slots официальный сайт
Не стоит сразу же отрицаться от приветственных подарков в похожих казино. Администрация готова начислить средства или фриспины, но сначала работники должны увериться, собственно вы не мошенник. Дело никаких, что развелось слишком количество охотников за призами. Они научились врать систему и наваривать солидные суммы средств. <a href=http://filmkachat.ru/>1×слотс казино</a> Бесплатные призы казино без депо можно получить в виде валютных средств на бонусный счет (исключить их можно лишь последствии отыгрыша), фриспинов, забавы или кешбэк-бонуса. <a href=https://forum.gekko.wizb.it/user-27263.html>https://forum.gekko.wizb.it/user-27263.html</a> Самый распространённый из похожих призов, естесственно же, бездеп на денек рождения клиента — приз вид фиксированной суммы либо фриспинов поступает на счёт игрока, а пользоваться им возможно на установленного периода медли.Размер приза. В качестве бездепов обычно начисляют маленькие суммы, а когда идет о бонусах за депо, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино шансы презентовать игроку до 2000$. 1×slots официальный сайт зеркало рабочее <a href=http://www.zhuangxiuz.com/home.php?mod=space&uid=853521>http://www.zhuangxiuz.com/home.php?mod=space&uid=853521</a> За привлечение приятеля ? в партнерской программы заказчик получает вознаграждение за привлечение свежих юзеров.Ну и окончательно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: подобная добродушие повышает степень преданности клиентов к фирмы.
1×slots casino регистрация
Автоматы непопросту считаются самым известным азартным весельем. Чтобы освоить управление и верховодила, потребуется всего некоторое минут. Ваша задача устроить ставку, найти число рабочих линий и возможно вертеть тамбур. Если на выпадет выигрышная композиция – вы выиграли! С данной задачей вас посодействуют управится бездепозитные бонусы казино.Прежде всего, не запамятовывайте периодически заглядывать на страничку обзоров бездепозитных призов. Они шаг за шагом оценивают более увлекательные предложения основных игорных порталов. 1×slots официальный зеркало <a href=https://teletype.in/@kalinka0588/ZrY2M3ZswGm>https://teletype.in/@kalinka0588/ZrY2M3ZswGm</a> Индивидуальные одобрения выдаются за совершение деяний: подписку на аккаунты площадки в соц сетях, установку мобильного прибавления или официального клиента для ПК. В большинстве казино действуют программы лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий степень нередко сопровождается выдачей бездепа. 1хслотс рабочее зеркало Кешбэк-бонус дает собой возврат фиксированного процента от ставки в случае проигрыша или же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не выше 10%.2. Создать свежий профиль. Для регистрации надо(надобно) наполнить маленькую анкету или зайдите в личный офис посредством социальных сетей;
1×slots быструю регистрацию а также мгновенное
Следует выделить, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом.Рассмотрим на образце: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских рублей. В условиях акции указано, собственно вейджер бездепозитного приза х20. Поэтому, чтобы отыграть бонус, игроку будет необходимо сделать ставок на 35*20=700 руб. Бездепы все входить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами. <a href=http://receptom.ru/index.php?subaction=userinfo&user=hypnoticfeud17>http://receptom.ru/index.php?subaction=userinfo&user=hypnoticfeud17</a> 1хслотс 1хслотс регистрация перейти на 1×slots
1хслот зеркало сайта
Также, такой нужно подтвердить собственный номер аппарата, достичь код, приобретенный в смс-сообщении от клуба установить в особое фон в личном офисе игрока. <a href=https://redfist.de/RF-Online-Testforum/viewtopic.php?f=60&t=77202>1х слот регистрация в 1×slots casino</a> Рассмотрим принцип его деянья на образце. Допустим, вы зарегистрировались и получили $10 not the slightest deposit bonus с вейджером х50. Это означает, собственно выигранные средства возможно будет выводить не ранее, чем последствии как, как общая сумма ставок достигнет $500.Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депо возможность отличаться до 30 дней. скачать 1×slots официальный сайт <a href=https://google.com.gh/url?q=https://doctorlazuta.by/>https://google.com.gh/url?q=https://doctorlazuta.by/</a> Каждая игровая платформа отличается критериями по получению и отыгрышу бездепов. В правилах детально расписаны временные рамки, за которые надо(надобно) прокрутить вейджер. Также не запамятовывайте про максимальный размер ставки и максимальную сумму выплаты. С иной стороны, чтобы получить бездепозитные призы казино, достаточно потратить менее 1 минуты.
зеркала 1×slots
Условия вывода выигрыша. В некоторых заведениях для успешного вывода с бездепозитного приза довольно пополнения баланса и доказательства личности. В иных же клубах, нужно несколько раз прокрутить собственный депо.Казино дает возможность заработать и исключить настоящие средства на бездепозитных призах. Обычно, это незначительная сумма, коию казино возможность себе разрешить презентовать игроку. Свежий приз начисляется в виде денежных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в использовании своими, а случае отыгрыша оператор возможность ввести лимитирование на вывод денег.Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=http://empyrethegame.com/forum/memberlist.php?mode=viewprofile&u=300849>http://empyrethegame.com/forum/memberlist.php?mode=viewprofile&u=300849</a> 1×slot рабочее зеркало Для ревизии применяются сканы паспортов, водительских прав, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если юзер замечен в попытке завести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их владелец попадает в темный список. При забаве на лицензионной площадке не стоит бояться указывать достоверную персональную информацию (шифрование ликвидирует утечку персональных данных).
<b>Смотреть еще похожие новости:</b>
<a href=https://forumauthority.com/thread-6636-post-39279.html#pid39279>рабочее зеркало 1хслотс</a>
<a href=https://russiancomputerservice.ru/user/JosephCer/>1х слот регистрация в 1×slots casino</a>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-4965/#comment-592608>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a>
<a href=https://minifishtank.net/forum/showthread.php?tid=794>1×slot зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Наиболее популярностью вознаграждения среди гэмблеров – бездепозитные бонусы казино. Это не умопомрачительно, как возможно получить бесплатные вращения либо виртуальные кредиты, и этом не придётся пополнять счёт, рисковать собственными деньгами. Удастся насладиться разнородными развлечениями причем выиграть крупную сумму, избегая серьёзного риска. Демоказино есть практически на каждом сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются веско реже: там если, тогда, выигрыша и соблюдения критерий акций бездеп можно превратить в настоящие средства.
#9449 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало
Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в неотъемлемом порядке необходимо пополнить счет в казино. Для депозитных призов, данная процедура не необходима, так как депозит уже изготовлен.Все обожают получать презенты. Согласитесь, почти любой играющий человек несомненно беспредельно счастлив, в получит даровой подарок для игры в онлайн казино просто за регистрацию либо же приз за внесенный депо, так нарекаемые приветственные бонусы для свежих игроков. Соответственно эти онлайн клубы станут больше известны и преимущественны у игроков при выборе казино для забавы. Топ казино каждый обновляется и прибавляются свежие и увлекательные игровые клубы с привлекательной бонусной политикой и всеми вероятными привилегиями, к коим относятся эти бонусы как фриспины за регистрацию, денежные бездепозитные призы, еще великодушные бонусы за внесенный депо. <a href=http://filmkachat.ru/>зеркло казино 1×slots</a> <a href=http://xn–jc-je2if91fs6b.com/bbs/board.php?bo_table=free&wr_id=30240>http://xn–jc-je2if91fs6b.com/bbs/board.php?bo_table=free&wr_id=30240</a> 4. Заберите подарок. Чаще всего бонус активизируется сразу последствии регистрации. Но посещают ситуации, когда надо(надобно) забежать в индивидуальный кабинет или написать в службу.Для всех бездепозитных бонусов действует наибольший лимит на выигрыш. Он показывает предельную сумму, коию у получить, играя на бонусные кредиты. Как только вас получится выполнить требования вейджера, возможный максимум будет переведен с бонусного счета на ведущей, а остаток несомненно списан. 1×slots официальный зеркало <a href=http://legal.run/bitrix/redirect.php?event1=&event2=&event3=&goto=http://tyre-style.ru/bitrix/redirect.php?goto=http://hot.company/bitrix/redirect.php?goto=https://teletype.in/@urist555/R7zXUyedqaP>http://legal.run/bitrix/redirect.php?event1=&event2=&event3=&goto=http://tyre-style.ru/bitrix/redirect.php?goto=http://hot.company/bitrix/redirect.php?goto=https://teletype.in/@urist555/R7zXUyedqaP</a> Зарегистрируйтесь. Для регистрации почаще всего достаточно ввести собственный номер аппарата и почтовый адресок, последствии чего установить приобретенный код из СМС. Возможно, требуется указать промокод. В правилах акции несомненно написано, где его бы включать. Иногда это надо делать при регистрации, от — теснее после сотворения собственного кабинета, на отдельной странице.
1хслотс официальный сайт зеркало
1×slots актуальное зеркало <a href=https://humanlove.stream/wiki/User:Clarita5736>https://humanlove.stream/wiki/User:Clarita5736</a> Бездепозитные призы казино это финансовая компенсация, предлагаемая юзерам на дармовой базе и вероятность играть в онлайн казино безвозмездно. Если ассоциировать их с одобрениями за лепта, каких средства выдаются только потом начального пополнения счета, то бездепозитные гонорары получаются безвозмездно. То есть, играющий получает вероятность делать ставки на уже быть деньги, которые выдаст заведение, выполняя, при этом, обыденные деянья, чтобы их извлечь (здесь идет речь о регистрация, удостоверении личности с использованием номера телефона, оформления заявки и т.д.). 1×slots казино зеркало
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Практически все онлайн казино с бездепозитным призом за регистрацию учитывает программку преданности — систему поощрения постоянных клиентов, которая произведено из большого уровней. При достижении игроком одного уровня на его счёт поступает бонус. Чем повыше уровень — тем щедрее приз. <a href=http://kvitka.ukrbb.net/viewtopic.php?f=37&t=5148&p=33738#p33738>http://kvitka.ukrbb.net/viewtopic.php?f=37&t=5148&p=33738#p33738</a> 1хслот скачать
1 x slots casino
<a href=http://lider1c.ru/communication/forum/messages/forum5/message21681/17588-sayt-1×-slots-casino?sessid=dfa0dab5919a44be87c419cbe2cd7620&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>сайт 1× slots casino</a> 1×slots мобильная версия войти казино <a href=https://casperforum.org/user/frankneaby/?um_action=edit>https://casperforum.org/user/frankneaby/?um_action=edit</a> Чтобы получить возможность исключить выгода с бездепозитного бонуса в казино, необходимо выполнить ряд условий:
зеркала 1×slots
Вейджер в переводе с британского означает «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша полученного бонуса, в нашем случае бездепозитного. Число ставок роли не играет — важно только набрать необходимую, пропорциональную сумме одобрения.При подмоги такового поощрения оператор имеет также завлекать клиентов, коие раньше проявляли активность на веб-сайте, хотя по какой-то основанию перестали выступать. В данном случае промокод высылается юзеру по электрической почте либо вид SMS. <a href=http://norstar.ru/index.php?subaction=userinfo&user=scintillatingpe>http://norstar.ru/index.php?subaction=userinfo&user=scintillatingpe</a> Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, solid только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. 1 x slots В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая доля забавы. Важно, часто бездепозитные бонусы в казино выдаются с лимитированиями по максимальной выплате. В среднем можно рассчитывать на выгода в количество тысяч рублей. Как вывести выигрыш с бонуса без депозита. Придётся подтвердить аккаунт документально, в неких заведениях. Процедура верификации неотклонима и делается каждым игроком. О документальном подтверждении учетной записи спрашивайте в онлайн чате либо прочитайте в правилах.В перечне требований к отыгрышу часто присутствуют лимиты на ставки при ирге на собственные деньги. Так, случае отыграть нужно 30 000 рублей, а максимальная сумма ограничена 30 рублями, то вращать барабаны предстоит 1000 раз. Эта особенность затрудняет соблюдение игроками критерий по срокам деянья акции.
<b>Смотреть еще похожие новости:</b>
<a href=https://smm-seo.ru/threads/1×slot-skachat.39273/>1хслот скачать</a>
<a href=https://russiancomputerservice.ru/user/JosephCer/>1хслот зеркало сайта</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Объективные – размер бонуса, коэффициент и обстоятельства вейджера, надобность внесения депо для вывода средств;
#9450 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало которую указывали при регистрации кстати
Не стоит незамедлительно же отрицаться от приветственных даров в подобных казино. Администрация готова начислить деньги или фриспины, но предварительно сотрудники обязаны убедиться, собственно вы не мошенник. Дело сомнений, что развелось очень много охотников за бонусами. Они выучились обманывать систему и наваривать солидные суммы денег.Активация по промокоду используется в разных обликах бездепов. Если идет о приветственном бонусе, то комплект символов можно узнать на крупнейшей страничке, в регистрационной форме или письме, коие отчаливает юзеру для доказательства e-mail. Акции могут проводиться общо с партнерскими площадками. Обычно код располагается на постороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активируется одноразовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном кабинете или начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем актуальный код для активации в описании каждого рекламную. <a href=http://filmkachat.ru/>1×slots казино мобильная версия</a> Лишь популярностью и известные азартные заведения шансы разрешить себя раздавать бездепы вид дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депо, коие возможно израсходовать в лучших аппаратах с высочайшей отдачей. <a href=http://bocauvietnam.com/member.php?1548850-Jamesglali>http://bocauvietnam.com/member.php?1548850-Jamesglali</a> 1×slots регистрацию более популярный вариант это <a href=http://service.megaworks.ai/board/bbs/board.php?bo_table=hwang_form&wr_id=561522>http://service.megaworks.ai/board/bbs/board.php?bo_table=hwang_form&wr_id=561522</a>
1×slots зеркало видели такую регистрацию на
Во всех легальных онлайн-казино Беларуси нужно свидетельство паспортных данных для забавы — это заявка правительства страны.Процесс подтверждения личности может занять от одного дня до недели. Если клиент допустил какую оплошность при заполнении паспортных данных, то ему идет адресоваться с задачей в саппорта онлайн-казино. <a href=https://forum.bandariklan.com/showthread.php?tid=176825&pid=845419#pid845419>1× slots casino зеркало</a> 1×slots casino регистрация 1×slotscasino09k online Если вы избираете испытанное лицензионное интернет казино и сделайте все условия получения бездепозитного приза, трудностей с получением дара у Вас не возникнет. <a href=https://credit-list.com.ua/kredit-dlya-biznesa-v-nikolaeve.html>https://credit-list.com.ua/kredit-dlya-biznesa-v-nikolaeve.html</a> Вейджер менее х30–35 считается приемлемым. Опытные игроки заявляют, собственно с этим вейджером реально остаться в плюсе, если правильно подойти к выбору игрового аппарата. 1×slots casino online регистрация Далее потребуется отыграть вагер и исключить выигрыш. Игрокам без опыта крупно повезло, есть получить 10-ки даров за одну регистрацию. Если не смогли получить Бездепозитный бонус, не тревожьтесь. Обратитесь в интернет чат, оператор поможет ситуацию.Так собственно приготовьтесь предоставить конфиденциальную информацию (пол, возраст, страна проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает не более суток, после чего удастся свободно выводить солидные выигрыши.
1×slots зеркало регистрация
Мы советуем не отрицаться от сходственных услуг узнаваемых казино. Выделите количество мин. На регистрацию, получите приз и попробуйте его отыграть. Может быть, сегодня удача несомненно на вашей стороне!К образцу, игроку выдаются бесплатные средства в заведении в объеме пятидесяти или 100 $ (вейджер на которые сочиняет 100х). То есть, каждому новоприбывшему игроку выскакивает привлекающая картинка, которая сулит выплату всех зачисленных фирмой средств. Не стоит заострять на казино приз за регистрацию без депозита с слишком большой либо очень малеханькой суммой бонусов, потому что, в тщательно исследовав все условия, тут вероятнее всего, несомненно некий подкол. <a href=http://augaliukas.lt/index.php?subaction=userinfo&user=muddledgrandeur>http://augaliukas.lt/index.php?subaction=userinfo&user=muddledgrandeur</a> Мы проделываем ударение на главных положениях управлял, рассказываем о территориальных ограничениях и вкратце информируем о других акциях обговариваемого казино.Для верификации аккаунта нужно дать профессионалам технической поддержки отсканированную копию паспорта и счета за коммунальные предложения, еще фотографию банковской карты либо снимок страницы электронного кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для подтверждения личности. 1×slots зеркало 1хслотс регистрация перейти на 1×slots Ограничения по забавам. Администрация воспрещает игрокам кое-какие игровые автоматы с бездепозитным призом, деньгами либо бесплатными вращениями. Обычно, в правилах приводится глубокий список слотов для отыгрыша. Иногда разделенье выполняется по облику игр. Например, отыгрыш возможен на всех игровых аппаратах, хотя запрещен в настольных играх и в разделе Live Casino.Представьте момент, когда при ставке в 10 руб. Вы получите подобное умножение. Миллион руб. За одно вращение, собственно абсолютно вполне. Поэтому вопрос, сколько возможно выиграть остаётся открытым. Предлагаем проверить самостоятельно. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный приз и проверяйте фортуну в деле. Разумеется, исключить средства не так просто. Однако шансы есть у всех.
1×slots зеркало регистрация
В современность очень просто получить бонус за регистрацию в казино. Практически каждый игорный жилище с радостью начислит средства или бесплатные вращения. Многие гэмблеры пользуются данным и не смущяются регистрироваться в каждом клубе с прибыльными условиями. Кстати, это отличная вероятность выработать победную стратегию и сорвать джекпот. <a href=https://tucmas.fi/phpBB/viewtopic.php?f=4&t=354098>1×slots casino регистрация на сайте</a> Бездепозитный приз нередко может замерзнуть легкодоступным сразу в завершения регистрации, поскольку как единственным требованием к нему считается регистрация, а этого ревизия вашей новой учетной записи.Отказ в прохождении верификации. Если клиент не хочет или возможности предоставить документы, подтверждающие его лицо, профиль будет заблокирован вместе со всеми бонусными начислениями. Такие поощрения дозволяют безвозмездно протестировать новое казино, разобраться с игровым ходом онлайн слотов, заработать и исключить небольшую сумму денег. 1×slots официальный сайт зеркало <a href=http://poznanie.com.ua/forum/user/570613/>http://poznanie.com.ua/forum/user/570613/</a>
1хслотс мобильная версия зеркало
Некоторые сайты, этого чем провести регистрацию игроков, предлагают ответить на несколько базовых вопросов. Цель проведения похожей викторины – выявить случайных людей, которые не имеют представления о покере, и не разрешить получения ими призов. Если посетитель теснее играл в казино, то ответить на полтора 10 простых вопросов несомненно несложно. Очень нередко, ответы возможно найти на официальных веб-сайтах этих учреждений.Все любят получать подарки. Согласитесь, практически каждый играющий человек будет безмерно рад, если получит бесплатный презент для забавы в интернет казино просто за регистрацию или же бонус за внесенный депозит, например называемые приветственные призы для новых игроков. Соответственно такие интернет клубы будут более знамениты и предпочтительны у игроков при выборе казино для игры. Топ казино непрерывно обновляется и добавляются новые и интересные игровые клубы с симпатичной бонусной политикой и всеми возможными преимуществами, льготами, к которым относятся такие призы как фриспины за регистрацию, валютные бездепозитные бонусы, а также щедрые призы за внесенный депозит. Вознаграждения за получение VIP-статуса ? начисляются масштабах программки лояльности при достижении еще значения или выдаются индивидуально менеджерами службы поддержки.Каждый из бездепозитных призов без пополнения 2022 содержит собственный определенный вейджер для отыгрыша, так же в любом казино он уточняется индивидуально — где то он х55 а кое-где х30, повторюсь всюду по разному! <a href=https://scope.bccampus.ca/mod/forum/discuss.php?d=27880>https://scope.bccampus.ca/mod/forum/discuss.php?d=27880</a> Важно, убедитесь сомнений, что ранее не регистрировались в избранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи.Все обожают получать презенты. Согласитесь, почти любой играющий человек будет очень рад, в получит безвозмездный подарок для игры в онлайн казино просто за регистрацию либо же приз за внесенный депозит, так нарекаемые приветственные призы для свежих игроков. Соответственно эти интернет клубы будут больше модны и предпочтительны у игроков при выборе казино для игры. Топ казино день обновляется и прибавляются свежие и увлекательные игровые клубы с симпатичной бонусной политикой и всеми возможными преимуществами, льготами, к коим относятся такие бонусы как фриспины за регистрацию, денежные бездепозитные бонусы, еще щедрые бонусы за внесенный депозит. казино 1×slots Можно. Вы постоянно можете отказаться от получения бездепозитного приза за регистрацию в казино, пока Вы не сделаете ставку.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum-macan.ru/viewtopic.php?t=3256>1×slots официальный сайт зеркало рабочее</a>
<a href=http://nhomtruyen.com/members/jamesgaw.9280/>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Размер призов почаще всего чисто символический и не превышает 50 руб. Приятно, но осязаемым бустом деле ли будет.
#9451 Charlesgunnyhttp://filmkachat.ru
рабочее зеркало 1хслотс
Высокая конкурентность в сегменте азартных игр доказывает операторов завлекать клиентов разнообразными акциями. Благодаря этому у посетителей замечена вероятность получить призы в казино за регистрацию без депозита. Воспользоваться таким предложением возможно, минуя процедуру внесения денег на игровой счет, просто активировав аккаунт на веб-сайте. Наш гид по бездепам поможет избрать самую симпатичную бонусную программку, узнать верховодила получения такого вознаграждения и распорядиться им с наибольшей выгодой.Бонус начисляется игроку незамедлительно в регистрации и прохождения верификации в казино и не требует от посетителя внесения депозита. Как управляло, объем приза в подобном случае довольно скромный, впрочем позволяет новичкам познакомиться с игрой без риска настоящими средствами. <a href=http://filmkachat.ru/>1×slots зеркало быструю регистрацию а также мгновенное</a> У любого игорного заведения средства управляла и условия. Но, дабы получить призы, необходимо выполнить стандартные деянья:Для тех, кто лишь подумывает испытывать свою удачу, а также для проф игроков, ищущих свежие площадки для выигрышей, водящие лицензированные казино нередко организуют различные промоакции, и одно из лучших предложений за время – как для новичков, так и для проф игроков – бездепозитный приз за регистрацию. <a href=https://equessurge.win/phpBB3N/memberlist.php?mode=viewprofile&u=80242>https://equessurge.win/phpBB3N/memberlist.php?mode=viewprofile&u=80242</a> Подтверждение регистрации. Казино настоятельно привязки профиля к электронному адресу и номеру телефонного. Для этого на e-mail отправляется письмо со ссылкой, а на телефонный ? текстовое известье с кодом. 1×slots регистрация 1×slotscasino 56 online <a href=https://rolivka.online/forum/member.php?action=profile&uid=57839>https://rolivka.online/forum/member.php?action=profile&uid=57839</a>
1×slots промокод при регистрации 2025
Прежде всего, не забывайте регулярно заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом осматривают более занимательные предложения ведущих игорных порталов. <a href=https://www.sgomberisgombero.it/my-account-2/>1× slots casino официальный сайт</a> 1×slots casino online регистрация <a href=https://uadplugins.club/memberlist.php?mode=viewprofile&u=180005>https://uadplugins.club/memberlist.php?mode=viewprofile&u=180005</a> 1×slots зеркало подтвердит вашу регистрацию если говорить
1хлот регистрация в 1×slots casino
При поддержки такового поощрения оператор имеет того привлекать клиентов, коие раньше проявляли активность на веб-сайте, но по какой-то основанию прекратили играть. В данном случае промокод высылается пользователю по электронной почте или повторяющий SMS.Получить приветственный бонус могут лишь новые клиенты онлайн-казино. Способы описаны в условиях промоакции любого легального казино, почаще всего это: Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном веб-сайте и выполните вход в индивидуальный кабинет, чтобы забрать безвозмездные вращения с вейджером х40;Доступные забавы – В некоторых азартных забавах можно снизить математическое преимущество казино до нескольких десятых процента. В их количестве все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как правило, в таких играх ставки идут в зачет вейджера не полностью. Например, возможность предусматриваться лишь 50%. В неких забавах бездепозитные призы вообще невозможно отыгрывать. <a href=http://o91668l6.beget.tech/user/RalphBoorm/>http://o91668l6.beget.tech/user/RalphBoorm/</a> Выигрыши с бонусов без инвестициям постоянно привязаны к притязанию по ставкам и все быть обналичены лишь после выполнения данных требований. 1×slots официальный сайт мобильная версия скачать Бездепы с бесплатными вращениями предоставляют юзерам право вертеть барабаны игровых автоматов без снятия средств со счета. За любой раунд платит казино. Число спинов ограничено и редко выше сотню. Если промоакция включает в себя большое безвозмездных игр, их начисление может быть разбито на несколько дней.Oтыгpaть бонус с указанным вeйджepом, для этого необходимо сдeлaть cтaвoк нa cумму, превышающую объем приза в некоторое один.
рабочее зеркало 1×slots
Бонус за регистрацию в казино без депозита с выводом денег надо(надобно) отыграть. Зачастую для отыгрыша имеет потребоваться сделать ставки на необходимую, в некоторое десятков один превышающую необходимую приза либо выигрыша.Каждая игровая перрон выделяется условиями по получению и отыгрышу бездепов. В правилах детально расписаны временные рамки, за коие нужно прокрутить вейджер. Также не запамятовывайте тему наибольший объем ставки и наивысшую сумму выплаты. С иной стороны, чтобы получить бездепозитные призы казино, довольно израсходовать менее 1 минуты. Доступ к подарку может открываться автоматически последствии введения промокода либо обращения в службу вебсайта. В первом случае от пользователя не потребуется никаких деяний. Бездеп с активацией по коду встречается почаще всего. Игроку необходимо установить совокупа символов в графе, кот-ая может пребывать в регистрационной форме в Личном кабинете. Бездепозитный приз – это экономическое вознаграждение, коие выдается соучастнику забавы в казино, для его вербования и появления заинтересованности. Любой посетитель, который соответствует условиям выдачи подобного бездепозитного приза, имеет претендовать на получение вышеуказанного приза. Такое поощрение является наиболее действенным способом, дающим возможность стартовать деле, не вкладывая собственных материальных средств.Акции, приуроченные к календарным праздничным, бывают рассчитаны как на всех пользователей, например и на категории: например, презент на 8 марта девушкам-игрокам или мужчинам на 23 февраля. 1×slots официальный регистрация <a href=https://forum.drumjamapp.com/memberlist.php?mode=viewprofile&u=44480>https://forum.drumjamapp.com/memberlist.php?mode=viewprofile&u=44480</a> Эффективность бездепов виде рекламного прибора расценили все операторы. Малоизвестные площадки употребляют эти акции, чтобы живо набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны неизменных гостей. Не все веб-сайты, дающие презенты без депо, рекомендованы к забаве. За симпатичным промоописанием шансы прятаться невыполнимые условия отыгрыша прочие подводные камни.
1×slots регистрацию более популярный вариант это
Фриспины — безвозмездные вращения, которые дозволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины считаются самым известным и предпочтительным обликом приза — безвозмездные вращения иногда эффективнее и веселее в отыгрыше, чем остальные облики бездепов.При использовании бездепозитным бонусом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют некоторое видов лимитов: Основное отличие что, что для получения бездепа нужно пополнять баланс в казино. Но кроме сего, есть ряд прочих различий:Подобные призы без депозита предоставляются на больше выгодных критериях. Зачастую они крупнее, а обстоятельства отыгрыша наименее жесткие. <a href=http://trisinfronteras.com/davidcastro/component/k2/itemlist/user/455721-jeffreyguaby>http://trisinfronteras.com/davidcastro/component/k2/itemlist/user/455721-jeffreyguaby</a> Исходя из сего, просто не присутствует осмысленных причин махнуть рукой на получение такового бонуса при регистрации. И, кстати, на такой бесплатной базе у вас все шансы выиграть средства и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, именуют безвозмездными интернет платформами для игр.Для верификации аккаунта нужно предоставить спецам технической помощи отсканированную копию паспорта и счета за коммунальные предложения, еще фотографию банковской карты или экрана странички электронного кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности. рабочее зеркало 1×slots Для верификации номера аппарата, в личном профиле выберите опцию „Подтвердить номер телефонного“ и введите в подходящее поле код, приобретенный в sms-сообщении.B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax
<b>Смотреть еще похожие новости:</b>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=172430>1× slots зеркало</a>
<a href=https://thetechmodders.com/forums/viewtopic.php?t=24845>1×slots зеркало регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные бонусы за регистрацию в игровых автоматах для собственников онлайн-казино считаются частью рекламной кампании, направленной на увеличение аудитории вебсайта. Так они продвигают свои бренды и привлекают свежих клиентов. Бездепозитные бонусы за регистрацию являются одним из самых популярных методов привлечения новых игроков в онлайн-казино, потому собственно они предоставляют игрокам возможность опробовать казино, более игровые автоматы, и вероятно, выиграть настоящие средства.
#9452 Charlesgunnyhttp://filmkachat.ru
1хслотс регистрация в 1×slots casino
Чтобы без увериться в превосходстве бездепозитных призов, достаточно зарегистрироваться в казино и получить одобрение. <a href=http://filmkachat.ru/>казино 1×slots</a> <a href=https://www.baronerosso.it/forum/members/115597_jameslok.html>https://www.baronerosso.it/forum/members/115597_jameslok.html</a> Диапазон ставок, коие вправе сделать игрок, также лимитирован. Обычно ставить возможно небольшую сумму — пределах 10–30 рублей за одно вращение. 1×slots официальный demo регистрация в 1×slots casino <a href=https://images.google.co.in/url?q=https://doctorlazuta.by/>https://images.google.co.in/url?q=https://doctorlazuta.by/</a>
1×slots рабочее зеркало
<a href=https://traderscrypt.com/forums/showthread.php?tid=5891&pid=8792#pid8792>1×slots официальный сайт мобильная версия</a> 1×slot регистрация Но не размышлять, собственно снабжая юзеров такими призами, казино увлекается спонсированием. Ведь объемы вознаграждений, в, не великие (средним объемом от 5 до 20 $). И на эти свои налагаются конкретные обстоятельства и лимитирования, обязательные к исполненью игрока, если в последствии он желает получить все средства выигранные финансы. <a href=http://vn-info.net/user/Glennwitte/>http://vn-info.net/user/Glennwitte/</a> онлайн казино 1×slots При регистрации следует указывать лишь достоверную информацию. Когда учетная запись несомненно активна, появится доступ в Личный кабинет. В нем возможно избрать еденицу, ввести промокод и узнать доскональные правила получения и отыгрыша бездепа. Краткая информация об акции нередко находится непосредственно на регистрационной форме.
1×slots регистрация 1×slots casino c2d ru
В бонусную программу множества операторов входят систематические бездепы. Это пожизненные акции, поощряющие интенсивных неизменных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают постоянные призы без депо в размен на скопленные баллы лояльности. Ограничения по играм. Администрация запрещает игрокам некоторые игровые автоматы с бездепозитным призом, деньгами или безвозмездными вращениями. Обычно, в правилах приводится глубокий список слотов для отыгрыша. Иногда разделенье производится по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, хотя запрещен в настольных забавах и в разделе Live Casino. <a href=https://pixel-brush.ru/user/ZacheryNes/>https://pixel-brush.ru/user/ZacheryNes/</a> На безвозмездные бонусы онлайн-казино почти всегда распространяется ограничения по стране проживания клиентов. Даже если вам разрешается раскрывать счет и выступать на деньги в заведении, это еще не означают, что вам доступны no deposit bonuses.В перечне требований к отыгрышу часто присутствуют лимиты на ставки при этой на личные средства. Так, в отыграть нужно 30 000 рублей, а максимальная сумма ограничена 30 рублями, то вращать барабаны светит 1000 раз. Эта особенность затрудняет соблюдение игроками критерий по срокам деяния акции. 1×slots официальный сайт мобильная версия скачать
1×slots рабочее зеркало
Для такого, чтобы отыграть необходимую вашего бездепозитного бонуса надо(надобно) выполнить обстоятельства вейджера. Очень нередко фриспины даются на определенные слоты (book of ra, book of lifeless, book of sun), выбирайте слот для по душе, они довольно очень и качественные. Бездепозитные бонус возможность быть денежным например и в виде фриспинов на слотыПолучать информацию о самых прибыльных призах можно без неизменного прогноза новостей казино. Мы брали эту задачку на себя и безпрерывно следим за предложениями операторов, избирая лучшие из них. В данном разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список акций регулярно дополняется. В топ вошли самые новые бездепозитные бонусы за регистрацию в казино 2020, кратковременные и замкнутые промо. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру прочим критериям. Если срок деяния промоакции истек, она удаляется из перечня. <a href=https://www.reisezielforum.de/viewtopic.php?t=353661>1×slots casino online регистрация</a> 1хслотс рабочее зеркало <a href=http://topnj.co.kr/bbs/board.php?bo_table=free&wr_id=176845>http://topnj.co.kr/bbs/board.php?bo_table=free&wr_id=176845</a> Для проверки используются сканы паспортов, водительских водительских, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь обнаружен в попытке ввести вспомогательный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный перечень. При забаве на лицензионной площадке не опасаться указывать достоверную индивидуальную информацию (шифрование исключает утечку персональных данных).Риск-игра по одинаковым шансам – Также казино возможность запрещать исполнять условия по отыгрышу за раунда на удвоение, который предлагается в слотах, видео-покере и неких других играх.
1×slots регистрация 1×slots casino c2d ru
Каждый игрок должен сначала детально выучить условия по получению и отыгрышу приглянувшегося дара. Если всё организует, поторопитесь забрать благотворительные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик данный начать вертеть барабаны лучших слотов. <a href=http://www.optionshare.tw/home.php?mod=space&uid=468502>http://www.optionshare.tw/home.php?mod=space&uid=468502</a> 1хслотс мобильная версия зеркало В лицензионных бездепозитных казино играть в азартные игры действительно неопасно. Наличие лицензии подтверждает что, этот факт, что клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP.Для вывода средств бонус нужно несомненно отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариантами отыгрыша бездепозитного бонуса до его получения, чтобы избежать конфликтных ситуаций.
<b>Смотреть еще похожие новости:</b>
<a href=https://orbitsound.com/forum/user-211634.html>1×slots быструю регистрацию а также мгновенное</a>
<a href=https://hiddeninthesand.com/forum/viewtopic.php?t=280398>1×slots зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Мы подготовили перечень, где есть постоянно животрепещущие и новые бездепозитные призы казино, коие вам получить безвозмездно. Для наших юзеров есть специальные предложения неповторимые бонусы, которые вы ни не найдете, их мы определили особой красной плашкой «Exclusive». Не желаете поиграть в азартные забавы, не рискуя средствами средствами, хотя получая в все выплаты? Подобную вероятность предоставляют многие превосходнейшие порталы с азартными веселиями. В их числе много честных и надежных интернет-казино на русском языке. Они привлекают свежих пользователей различными поощрительными мероприятиями, включая бездепозитные, или бесплатные призы.
#9453 Charlesgunnyhttp://filmkachat.ru
казино 1× slots официальный сайт
В лицензионных бездепозитных казино выступать в азартные игры действительно безопасно. Наличие лицензии подтверждает тот факт, собственно клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP.Также, учите, собственно бездепозитный бонус можно вывести лишь что случае, когда станут выполнены все обстоятельства отыгрыша. <a href=http://filmkachat.ru/>1×slos регистрация в 1×slots casino</a> <a href=http://krlife.co.kr/bbs/board.php?bo_table=free&wr_id=52086>http://krlife.co.kr/bbs/board.php?bo_table=free&wr_id=52086</a> Промообъявления от казино не дают реальной картины и ориентированы на вербование внимания пользователей. Понять, насколько высоки шансы остаться в плюсе, дозволит собственный тест условий предложения: 1×slots акции <a href=https://mir-pozitiv.ru/forums/users/xrumseos3105–2/>https://mir-pozitiv.ru/forums/users/xrumseos3105–2/</a> Возможность поиграть вспомогательное состязание (а иногда и некоторое) совершенно безвозмездно, а выигрыш, к, поступает на счёт игрока.Составленный специалистами Casino.ru список онлайн-казино с бездепозитным бонусом разрешает игрокам сравнить спецпредложения различных операторов.
1×slots промокод при регистрации
<a href=https://isomedu.com/forum/profile/josephdrons/>1×slots регистрация 1×slots casino c2d ru</a> 1× slots casino зеркало <a href=https://tvoyaskala.com/user/JustinTauts/>https://tvoyaskala.com/user/JustinTauts/</a> Перечисленные повыше основные характеристики сочетают практически любой приз и являются стандартными для бездепозитных бонусных начислений в казино.Фриспины — безвозмездные вращения, которые дозволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся самым популярным и преимущественным обликом бонуса — благотворительные вращения порой эффективнее и веселее в отыгрыше, чем другие облики бездепов. 1× slots зеркало
1×slots зеркало регистрация в 1×slots casino
Онлайн гемблинг развивается с каждым днем больше и больше, свежие бренды создаются не по дням а по часам. Новые интернет казино проделывают вступительные акции для игроков, для того что бы зарекомендовать себя, и тем самым предлагают бездепозитные призы за регистрацию, собственно бы не пропустить такую вероятность — как воспользоваться свежим бездепом, рекомендуем навещать наш вебсайт как возможно почаще, самое лакомое и свежие несомненно добавляться в данном же перечне.Бонус начисляется игроку незамедлительно последствии регистрации и прохождения верификации в казино и не требует от клиента внесения депо. Как управляло, объем приза в подобном случае довольно застенчивый, однако разрешает новичкам познакомиться с забавой без риска настоящими средствами. Основное отличие в том, что для получения бездепа не пополнять баланс в казино. Но кроме этого, есть ряд прочих отличий:Вообще перейдя в казино — управляла схожи в получении бездепозитных призов, в стереотипные верховодила заходит: подтвердить эл. Почту и телефон, заполнить свой собственный профиль, активировать промо код или активировать предложения во вкладке БОНУСЫ. <a href=https://www.cfbwz.com/space-uid-70571.html>https://www.cfbwz.com/space-uid-70571.html</a> Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы которые появляются у начинающих.Некоторые онлайн-казино без депозита предлагают свежим посетителям выбрать приз при регистрации. Будьте внимательны: выбрав раз, вы в безусловном большинстве случаев не можете воспользоваться остальными. 1 хслот регистрация в 1×slots casino Чтобы бездеп не был начислен на Ваш аккаунт, Вам надо активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк механически, а Вы не планируете его применять, обратитесь в саппорта с просьбой отменить бездепозитный приз.Вообще перейдя в казино — управляла схожи в получении бездепозитных призов, в стереотипные верховодила заходит: подтвердить эл. Почту и телефон, наполнить свой собственный профиль, активировать рекламную код либо активировать предложения во вкладке БОНУСЫ.
1×slots казино зеркало
В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и в случае неоднозначных ситуаций нет способности куда-то посетовать и доказать свою правоту. <a href=https://demo.comuni-italiani.it/forum/viewtopic.php?f=9&t=365464>1×slots рабочее зеркало на сегодня</a> Казино дает возможность заработать и вывести настоящие средства на бездепозитных бонусах. Обычно, это малозначительная сумма, коию казино возможность себе позволить подарить игроку. Можно ли зарабатывать на бездепозитных бонусах? Это не работа, тут как повезет, если в любом предложенном безедепе, вы будете откручивать вейджер и выводить, это можно назвать везением, и добавочной добавкой к вашему бюджету.Зачастую бездепозитные призы казино для забавы предлагаются разными заведениями азартных игр в маркетинговых промоакций или в целях вербования к себя свежих игроков. Для бездепозитных призов в казино 2022 игроку не нужно пополнять счет до момента вывода желанных средств. зеркло казино 1×slots <a href=http://d90894u1.bget.ru/user/Josephplund/>http://d90894u1.bget.ru/user/Josephplund/</a>
1×slots акции
<a href=https://mobilka.mobi/user/JustinHoade/>https://mobilka.mobi/user/JustinHoade/</a> 1×slot зеркало рабочее регистрации на телефон придет
<b>Смотреть еще похожие новости:</b>
<a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=4747>рабочее зеркало 1×slots</a>
<a href=https://forum.ltp-team.com/topic/47144–1×slots-sayt-zerkalo/>1×slots сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не можете активировать и получить бездепозитный приз.
#9454 Charlesgunnyhttp://filmkachat.ru
скачать 1×slots на андроид мобильная версия
Чаще всего интернет-казино предлагают бездепозитные призы свежим пользователям. Эта промо-акция очень эффективно привлекает новичков, подталкивая их к открытию счета. Конечно, не все становятся преданными посетителями, хотя сам факт регистрации аккаунта играет на руку заведению. <a href=http://filmkachat.ru/>1×slots казино зеркало</a> Ниже указан актуальный перечень законных казино в Беларуси с призами на 1-ый депо. Вы сможете попасть на официальный вебсайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз.Список так нарекаемых «разрешенных территорий» прилагается к правилам бонусной программки игорного портала. Обязательно проверьте, распространяются ли на вас подобные наказания. <a href=http://www.aipingce.com/space-uid-118933.html>http://www.aipingce.com/space-uid-118933.html</a> Чаще всего применяются коды. Их нужно вносить в особые окна регистрационной анкеты, если речь о пригласительных бонусах, или в особом разделе собственного кабинета игрока. онлайн казино 1×slots <a href=http://bbs.17dra.com/home.php?mod=space&uid=230625>http://bbs.17dra.com/home.php?mod=space&uid=230625</a>
1×slot рабочее зеркало
Популярность интернет казино растёт и всё больше пользователей начинают интерес азартными играми. Бездепозитные призы 2022 года, это оригинальные подарки за регистрацию. С их поддержкой свежие игроки могут получить благотворительные вращения либо средства на баланс за одну регистрацию. С выходом игорных заведений в интернете, бездепозитные бонусы стали моднейшим способом привлечения игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш сайт собрал наилучшие предложения из интернета на 2022 год. Воспользуйтесь хоть презентом и можете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить обстоятельства. 1×slots сайт Акционные предложения от казино есть в различных форматах. Часто бонусы даются в размен на депо. Игрок вносит платеж и получает деньги, бесплатные вращения и другие одобрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — вид бонуса, который гарантирован за исполненье определенных деяний на веб-сайте: <a href=https://www.forum-motorrad.net/members/19685-kennethdwege.html>https://www.forum-motorrad.net/members/19685-kennethdwege.html</a> Фриспины — безвозмездные вращения, коие дозволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины числятся самым модным и предпочтительным видом приза — бесплатные вращения иногда эффективнее и веселее в отыгрыше, чем другие виды бездепов. 1×slots официальный зеркало рабочее
1×slots casino зеркало рабочее
Как и промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такового предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых посетителей и дозволяет им составить впечатление о функционале, не рискуя значительными совокупностями. Не стоит путать игру в демо и внедрение призов. В демонстрационном режиме игрок возможность оценить механику слота, сюжет и оформление. Но игра проводится на относительные кредиты, поэтому отсутствует главное ? чувство пыла. Активируя промокод либо фриспины, клиент раньше не расходует средства деньги на игровые автоматы, хотя возможность сорвать настоящий куш! <a href=https://www.ixbt.com/live/profile/358183/>https://www.ixbt.com/live/profile/358183/</a> Внесение депозита – Будьте готовы восполнить счет в отыгрыша приза. Это стандартное требование правил для этого на промо-акций. Лучше заблаговременно уточнить, какую необходимую нужно несомненно вносить на счет. Как управляло, речь о наименьшем депозите, но вы обязаны быть уверены, что он для по кармашку. 1×slots коды Для получения бездепа необходимо пригласить в забаву по реферальной ссылке нового клиента: он обязан зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на сумму, обозначенную в критериях акции.Размер бонуса. В качестве бездепов обычно начисляют небольшие суммы, а когда речь идет о призах за депо, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино все подарить игроку до 2000$.
1× слот зеркало
Для вывода средств приз нужно несомненно отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами акции и вариантами отыгрыша бездепозитного приза до его получения, дабы избежать конфликтных ситуаций.Возможность протестировать свежие забавы, не рискуя личными своими и создать собственную стратегию игры. <a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1094#post-34428>1хслотс зеркало</a> Изучить верховодила и условия получения бездепозитных бонусов казино, Вы сможете у нас на веб-сайте в разделе с призами либо на официальном сайте выбранного Вами казино. Если возможности найти нужную информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал либо по электрической почте.Также бездепозитные призы могут служить методом возвратить к ирге посетителей, что приостановивших своё сотрудничество с фирмой: извещение о бездепе поступает на мобильный телефонный либо почту. Это один из основных показателей привлекательности подарка. С завешенным коэффициентом том профессионалы не сумеют выполнить обстоятельства по отыгрышу. И маловажно, как привлекательно выглядит предложение – бездепозитный бонус казино в объеме $500 или $1 000. Чтобы новенькие попревосходнее вдумались, собственно же это вейджер, мы разберём на образце.Ограничения по играм. Администрация воспрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, деньгами или бесплатными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда дробленье выполняется по виду игр. Например, отыгрыш возможен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino. 1хслотс казино зеркало <a href=http://ekaterinovka.sarat.ru/board/tools.php?event=profile&pname=Frankagorb>http://ekaterinovka.sarat.ru/board/tools.php?event=profile&pname=Frankagorb</a> Для получения бездепа необходимо пригласить в игру по реферальной ссылке нового посетителя: он должен зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на необходимую, указанную в условиях акции.Вывод выигрыша с бездепозитных призов казино – великодушный подарок от азартных клубов. Но дабы исключить свой доход, необходимо выполнить ряд условий:
1×slots официальный сайт мобильная версия
Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную функцию активации бонуса без депо. Внимательно прочитайте до конца. Многие новички делают оплошности на шаге регистрации и потому возможности получить подарок.Новые посетители онлайн-казино без первого депо имеют выяснить собственную удачливость. К тому же есть возможность преобразовать бездепы в реальные деньги за регистрацию в казино, однако результата приз нужно отыграть согласно условиям промоакции. Многие азартные клубы ограничивают сумму вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании промоакции, суммы Вы не можете исключить. Разница несомненно аннулирована, Вы и не сможете делать на нее ставки. <a href=http://nlifelab.org/bbs/board.php?bo_table=free&wr_id=2531263>http://nlifelab.org/bbs/board.php?bo_table=free&wr_id=2531263</a> Подтверждение регистрации. Казино требуют привязки профиля к электрическому адресу и номеру аппарата. Для сего на e-mail отправляется письмо со ссылкой, а на телефонный ? текстовое известие с кодом. 1×slot зеркало рабочее этих способов предполагает регистрацию
<b>Смотреть еще похожие новости:</b>
<a href=http://link.5nx.ru/memberlist.php?mode=viewprofile&u=600>1×slots официальный регистрация</a>
<a href=https://peloton.com.ua/forum/memberlist.php?mode=viewprofile&u=9259>1× slots официальный</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитные призы истинными деньгами, которые возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадались.
#9455 Charlesgunnyhttp://filmkachat.ru
1×slots casino зеркало рабочее
Вознаграждения за получение VIP-статуса ? начисляются масштабах программы лояльности при достижении очередного значения или выдаются индивидуально менеджерами службы поддержки. <a href=http://filmkachat.ru/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> <a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=79701>https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=79701</a> Однако в критериях скрываются «подводные камни», коие не позволят вывести солидную сумму либо же вы не успеете отыграть вейджер. Поэтому мастера советуют забрать безвозмездные вращения за регистрацию в казино без депозита, чтобы поднабраться опыта и получить настоящий шанс на победу. 1×slots официальный регистрация <a href=http://jusintergentes.com.ua/index.php?option=com_k2&view=itemlist&task=user&id=1458820&lang=uk>http://jusintergentes.com.ua/index.php?option=com_k2&view=itemlist&task=user&id=1458820&lang=uk</a> Бонус в казино без депозита имеет различные вариации: может быть приветственный бонус, промоакции в честь каких-либо праздничных или главных дат, приз за вербование новых игроков, лояльность и получение VIP-статуса.Как и промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения считаются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих посетителей и дозволяет им составить эмоцию о функционале, не рискуя вескими суммами.
1×slots скачать на айфон
Фриспины – благотворительные вращения с фиксированной ставкой, которые можно применять в конкретных игровых автоматах.Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. 1×slots зеркало рабочее на сегодня Бездепозитный приз казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в этом и содержится основное отличие. <a href=https://ebusinesspages.com/Dsartru0906.user>https://ebusinesspages.com/Dsartru0906.user</a> Бездепозитные призы — это подарки от казино вид бонусных средств или фриспинов для игровых автоматов, коие начисляются на аккаунт игрока в процедуры регистрации на веб-сайте заведения. Для получения этих поощрений депозит не потребуется.Обыкновенные бездепозитные призы в размере от 3-х до двадцати долларов созданы для того, чтобы в игры заходили все свежие и свежие игроки. Здесь, скорее, несомненно лимитирование на максимальный выигрыш. Важно, дабы перед наименьшим вкладом был отключен приз за первое пополнение счета, и игры не попадет на повторный вейджер. 1×slots зеркало этих способов предполагает регистрацию Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала резвые выводы. Фишка выплат что, нет, собственно довольно избрать платёжный инструмент и показать необходимую. В большинстве случаев средства зачисляются на электронные кошельки протяжении 15 мин., а на банковские карты – 1–3 трудящихся денька.
1х слот регистрация в 1×slots casino
Игрокам не принимать приветственный приз как гарантированный способ получить крупный выигрыш, но это замечательная возможность без затрат расценить функционал казино. Онлайн-казино с бездепозитными бонусами ставят посетителям обстоятельства для использования бездепами, потому перед участием в промоакции чем тщательно ознакомиться со всеми правилами и аспектами акции. Условия имеют прикасаться получения приза, его применения и последующего вывода денежных средств когда выигрыша. <a href=https://build-info.biz.ua/wr_board/tools.php?event=profile&pname=AshleyNup>https://build-info.biz.ua/wr_board/tools.php?event=profile&pname=AshleyNup</a> Простая процедура получения бездепозитного приза, которая займет менее 2-х мин. Для получения бездепов, достаточно зарегистрироваться и доказать контактные данные. 1×slots мобильная версия войти казино Получить Бездепозитный приз в онлайн казино дело двух кликов. Другой момент, отыграть промо и соблюсти управляла и условия отыгрыша. Под правилами подразумевается не вагер, но и лимитирования по максимальной ставке. Мы осознаем, что в кино все ставят на зеро и выигрывают. Призываем не создавать похожего. Перед активацией приза прочитайте управляла. Узнайте следующие моменты: Условия получения подарка, за регистрацию, за депо и многое. Ограничения по наибольшей ставке. Зачастую не выше 350 руб. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах возможно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на месте. Поэтому главно знать, в каких забавах возможно осуществлять кратность валютного оборота.Иногда операторы настоятельно внесение минимального депо перед выводом для верификации платежного инструмента. В неких казино этот депо того светит отыграть.
1хслотс 1хслотс регистрация перейти на 1×slots
Бездеп с фриспинами возможность обхватывать всю коллекцию игр на сайте либо разработки одного провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении промоакции. Выигрыш может быть выведен последствии как, как юзер отыграет эту необходимую. Возможность оценить глубокий возможностей слотов — главное достоинство данной разновидности. Игроку становятся доступны те опции, коие отсутствуют в демонстрационном режиме, а вероятность выиграть настоящие средства прибавляет ярких азартных чувств.Активация случается за промокодов, коие вводятся в личном офисе последствии регистрации. Среди спецпредложений в перечне Casino.ru находятся неповторимые промокоды, коие доступны лишь посетителям портала. Другие способы начисления средств ? автоматическая активация сразу последствии творения аккаунта и получение подарка по запросу в службу технической помощи. 1×slots зеркало на сегодня <a href=https://www.mmopro.org/members/466712.html?s=db28e7945ced801bc4fa802b695b4c27>https://www.mmopro.org/members/466712.html?s=db28e7945ced801bc4fa802b695b4c27</a> А ознакомиться с новыми интернет казино, Вы можете с призов с выводом выгоды, которые Вы можете получить без депо.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Кешбэк-бонус дает собой возврат фиксированного процента от ставки в случае проигрыша или же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не выше 10%. Большинство интернет-казино из нашего топ-10 готовы порадовать вас неповторимыми промоакциями. Читайте о них в обзорах и на форуме. <a href=http://www.neworleansbbs.com/home.php?mod=space&uid=280205>http://www.neworleansbbs.com/home.php?mod=space&uid=280205</a> сайт 1× slots casino
<b>Смотреть еще похожие новости:</b>
<a href=http://naturetour.ru/communication/forum/messages/forum3/message23947/5641–1×-slots-sayt?sessid=815427dee31f2869f7eda71243d361d7&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1× slots сайт</a>
<a href=https://mit-bbs.com/memberlist.php?mode=viewprofile&u=15318&sid=db2a8a392e526e251f77b57813117b40>сайт 1× slots casino</a>
<a href=http://vn-info.net/user/Josephkam/>1×slots зеркало этих способов предполагает регистрацию</a>
<a href=https://praisenpray.org/forums/showthread.php?tid=96163>1×slots официальный сайт скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные способы и оценить необыкновенности, труднодоступные при ирге в демо режиме. Многие новые клиенты перебегают в число неизменных, а оператор получает длительную прибыль.
#9456 Charlesgunnyhttp://filmkachat.ru
1×slots акции
Обыкновенные бездепозитные призы в объеме от 3-х до двадцати долларов созданы чтобы, чтобы, дабы в забавы заходили все новые и новые игроки. Здесь, всего, несомненно ограничение на наибольший выигрыш. Важно, дабы перед минимальным вкладом был отключен бонус за 1-ое пополнение счета, и в не попадет на повторный вейджер. <a href=http://filmkachat.ru/>1×slots официальный сайт мобильная версия</a> Получить Бездепозитный приз в интернет казино дело двух кликов. Другой момент, отыграть промо и соблюсти верховодила и условия отыгрыша. Под правилами предполагается не вагер, но и лимитирования по максимальной ставке. Мы понимаем, что в кино все ставят на зеро и выигрывают. Призываем не делать сходственного. Перед активацией приза прочтите правила. Узнайте следующие факторы: Условия получения дара, за регистрацию, за депо и другое. Ограничения по наибольшей ставке. Зачастую не выше 350 руб. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вертеть автоматы, а вагер будет стоять на пространстве. Поэтому главно знать, в каких забавах можно осуществлять кратность денежного оборота. <a href=http://silkhunter.com/index.php?title=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D1%8B%D0%B5%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%88%D0%B5%D1%84-%D0%BF%D0%BE%D0%B2%D0%B0%D1%80%D0%BE%D0%B2%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!>http://silkhunter.com/index.php?title=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D1%8B%D0%B5%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%88%D0%B5%D1%84-%D0%BF%D0%BE%D0%B2%D0%B0%D1%80%D0%BE%D0%B2%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!</a> Такой бесплатный эквивалент средств зачисляется на профиль пользователя после воплощения притязаний и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений возможен лишь после воплощения вейджеровых критерий.Онлайн-казино кропотливо продумывают бонусные обстоятельства, которые нужно выучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша прочие ограничения. 1×слот регистрация в 1×slots casino <a href=http://ledsoft.ru/forum/?PAGE_NAME=profile_view&UID=54103>http://ledsoft.ru/forum/?PAGE_NAME=profile_view&UID=54103</a> Размер приза. В качестве бездепов обычно начисляют небольшие суммы, а когда речь идет о бонусах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то кое-какие казино могут подарить игроку до 2000$.Иногда в качестве поощрения за регистрацию имеют выдаваться билеты для участия в турнирах. Условия их проведения довольно отличаются, потому мы советуем ознакомиться с каждым предложением раздельно.
1×slots рабочее зеркало
Если вы облюбовали для себя некоторое брендов которые для больше всего полюбились, для неизменной игры! Таких гемблеров казино довольно предпочитает и оценивает, за частую такие игроки становятся VIP игроками заведения, коим часто поступают выгодные предложения повторяющий призов, например же туда заходит и бездепозитные.Это раз из основных показателей привлекательности презента. С завешенным коэффициентом том мастера не смогут выполнить обстоятельства по отыгрышу. И важно, насколько привлекательно выглядит предложение – бездепозитный приз казино в размере $500 либо $1 000. Чтобы новенькие лучше вникли, что же такое вейджер, мы разберём на примере. <a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/6964/#comment-307759>1×slots зеркало которую указывали при регистрации кстати</a> рабочее зеркало 1×slots Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки имеют запросить вспомогательные документы или инициировать короткое общение по Skype.Вейджер в переводе с английского означает «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша приобретенного приза, в нашем случае бездепозитного. Число ставок большого — главно только набрать необходимую, пропорциональную сумме одобрения. <a href=http://wiki.gptel.ru/index.php?title=скачать_видеофильм>http://wiki.gptel.ru/index.php?title=скачать_видеофильм</a> 1×slots промокод при регистрации
1хслотс регистрация в 1×slots casino
Приглашаем делиться воззрениями о бонусах. Это поможет другим пользователям подбирать наиболее выгодные предложения.Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавленья либо официального клиента для ПК. В большинстве казино действуют программки лояльности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на следующий степень часто сопрягается выдачей бездепа. Бездепозитные бонусы, как теснее ясно, считаются оригинальной возможностью приступать к игровому процессу безусловно бескорыстно, другими играть в онлайн казино даром и на имеющие свои незамедлительно в регистрации аккаунта. Автоматы с таким депо шансы стать прекрасной возможностью сыграть для почитателей азарта с определенными лимитированиями в финансах. <a href=http://uprzakupokkchr.ru/user/ForsedropOi/>http://uprzakupokkchr.ru/user/ForsedropOi/</a> Если ординарными текстами, бездепы – это определённая сумма денег или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно брать презенты. Но есть некоторые аспекты. Существуют игорные жилища, которые перед тем как начислить бонусы требуют привязать аппарат, дать копии документов.Не рекомендуем опрометью голову хвататься за всевозможные предложения получения средств без вложений. Вполне вероятно, что бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на 1-ый взгляд. Альтернативой считается казино приз за депозит. Мы предлагаем для пару советов, спасибо коим у каждого игрока несомненно возможность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег: 1×slot зеркало рабочее этих способов предполагает регистрацию Предложения с бездепозитными призами за регистрацию разрешают свежим заведениям привлечь аудиторию на свой сайт. А игроки же получают вероятность играть на реальные деньги без депо в казино и заработать малый стартовый капитал, который разрешается исключить на карту банка либо электрический кошелек.
1×slots зеркало рабочее
Размер бонуса. В качестве бездепов обыкновенно начисляют большие суммы, а когда речь о призах за депо, которые начисляются в процентном соотношении от суммы пополнения, то некоторые казино имеют презентовать игроку до 2000$.Автоматическая активация показаться самой комфортной, хотя ручной метод содержит перед ней преимущества. Прежде чем применять вознаграждение от казино, стоит заранее определить, сколько медли требуется на выполнение всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деяния бонуса. <a href=https://fougerite.com/threads/1×slots-zerkalo-podtverdit-vashu-registraciju-esli-govorit.12541/>1×slots зеркало подтвердит вашу регистрацию если говорить</a> В подавляющем большинстве случаев бесплатные призы начисляются в кредитах, которые нельзя сразу вывести со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти требования принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже.Активация случается за промокодов, которые вводятся в собственном офисе после регистрации. Среди спецпредложений в перечне Casino.ru содержатся эксклюзивные промокоды, коие доступны только гостям портала. Другие способы начисления средств ? автоматическая активация сразу в творения аккаунта и получение презента по запросу в службу технической помощи. 1×slos регистрация в 1×slots casino <a href=http://krast-studio.ru/user/Donaldmounc/>http://krast-studio.ru/user/Donaldmounc/</a> Если вы новичок деле и лишь попали в неизведанную вами район азарта — с помощью предложений как бездепозитные бонусы без пополнения.
1×slots зеркало рабочее
Для вывода средств приз надо(надобно) несомненно отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариантами отыгрыша бездепозитного бонуса до его получения, дабы избежать конфликтных ситуаций. <a href=http://xn–80aaghdc1brekc3alcdm.xn–p1ai/index.php?subaction=userinfo&user=madlylaborer71>http://xn–80aaghdc1brekc3alcdm.xn–p1ai/index.php?subaction=userinfo&user=madlylaborer71</a> 1×slot регистрация Изучить управляла и условия получения бездепозитных призов казино, Вы можете у нас на сайте в разделе с бонусами или на официальном сайте избранного Вами казино. Если имеет найти нужную информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал либо по электрической почте.Новички не любят незамедлительно же вносить депо. Это обосновано отсутствием навыка и недоверием. К счастью, в наше время можно получить бездепозитный приз за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В любом случае вы не рискуете своими сбережениями. Это отличная возможность запустить понравившийся видео разъем или же испытать фортуну в настольных забавах.
<b>Смотреть еще похожие новости:</b>
<a href=https://nauc.info/forums/viewtopic.php?t=20392843>1×slots зеркало сайта</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Иногда виде одобрения за регистрацию могут выдаваться билеты для участия в турнирах. Условия их проведения очень отличаются, потому мы рекомендуем ознакомиться с любым предложением раздельно.
#9457 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать
Необходимость отыгрыша. Вейджер ситуации выше, чем для бонусов за депо. И же свои не отыграны, исключить их нельзя. <a href=http://filmkachat.ru/>1×slots скачать на айфон</a> <a href=http://alex-zarya.ru/user/JamesJuiTh/>http://alex-zarya.ru/user/JamesJuiTh/</a> Казино выделяет возможность заработать и вывести настоящие средства на бездепозитных призах. Обычно, это незначительная сумма, коию казино возможность себе разрешить презентовать игроку. 1×slots подтвердит вашу регистрацию если говорить <a href=https://rollerforum.volkerschulz.de/memberlist.php?mode=viewprofile&u=442069>https://rollerforum.volkerschulz.de/memberlist.php?mode=viewprofile&u=442069</a> При игре на бонусные свои воспрещается выступать в игровые автоматы с современным джекпотом и игры из радела live casino. Кроме такого, кое-какие казино дают бездеп на раз или некоторое определенных слотов, и в иных забавах Вы не можете на них выступать.
1 x slots casino
<a href=https://forum.oursson.ru/memberlist.php?mode=viewprofile&u=1347>1×slots официальный зеркало</a> 1×slots зеркало регистрация <a href=https://flaxeco.com/user/ArnoldJed/>https://flaxeco.com/user/ArnoldJed/</a> Также, учите, собственно бездепозитный бонус можно исключить лишь том, случае, когда станут выполнены все условия отыгрыша. 1х слотс зеркало регистрация в 1×slots casino
1×slots зеркало проходить регистрацию это отличный вариант
Для тех, кто только подумывает испытать собственную удачу, еще для проф игроков, отыскивающих свежие площадки для выигрышей, основные лицензированные казино нередко организуют разные промоакции, и лучшее услуг за последнее время – как для начинающих, так и для проф игроков – бездепозитный приз за регистрацию.Составленный специалистами Casino.ru список онлайн-казино с бездепозитным бонусом разрешает игрокам сравнить спецпредложения различных операторов. Каждый новичок и умелый игрок грезят живо стартануть и начать создавать реальные ставки. Для сего достаточно отобрать подарок, за кот-ый не нужно уплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email или аппарат. После сего администрация начислит щедрое вознаграждение вид даровых вращений или виртуальных кредитов.На бонусные начисления могут быть установлены дополнительные лимитирования, которые Вы не к при отыгрыше. Пока приз всецело не отыгран — деньги из казино не выводятся. <a href=http://witiai.cn/home.php?mod=space&uid=64440>http://witiai.cn/home.php?mod=space&uid=64440</a> Варианты выигрыша находятся от Вашей успеха и условий игорного портала. Выше мы заявили, что некоторые бездепозитные призы в 2022 году выдаются с лимитированиями по максимальной выплате. Однако, остаются другие, все, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на деньги, возможно выиграть невозможные суммы. Сегодняшние игровые автоматы либо видео слоты, как их именуют. Могут выдавать крупные умножение от х1.000 и выше. Некоторые умножают ставку от х100.000.Многие азартные клубы ограничивают сумму вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании промоакции, суммы Вы не можете вывести. Разница несомненно аннулирована, Вы даже не сможете делать на нее ставки. 1×slots официальный сайт скачать Некоторые казино шансы предлагать посетителям бездепы за подтверждение номера или почты либо репост на страничку в социальных сетях.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
При пользовании бездепозитным бонусом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют несколько обликов лимитов: Баланс игрока пополняется на подходящую сумму. К ней применяется вейджер, указанный в правилах промоакции. Вывести выигрыш возможно будет в того, как пользователь устроит требуемый объем ставок из личных средств. В редких случаях бездеп трудится в формате Free Play. На счет юзера зачисляется крупная сумма, и предоставляется маленький срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по завершении этого периода сумма на счету несомненно превышать первоначальную, то разность можно несомненно вывести или применять для дальнейших ставок.Далее требуется отыграть вагер и вывести выигрыш. Игрокам без навыка крупно подфартило, они могут получить десятки даров за 1 регистрацию. Если не сумели получить Бездепозитный приз, не беспокойтесь. Обратитесь в онлайн чат, оператор поможет исправить. 1×slots casino зеркало рабочее <a href=https://casperforum.org/user/frankneaby/?um_action=edit>https://casperforum.org/user/frankneaby/?um_action=edit</a>
1×slot зеркало рабочее регистрации на телефон придет
Также, учите, что бездепозитный приз возможно вывести только что случае, когда будут исполнены все обстоятельства отыгрыша. Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и более. Когда игроку надеется большое фриспинов, администрация возможность бить3 их начисление на количество дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах промоакции.Получить Бездепозитный приз в интернет казино дело 2-ух кликов. Другой момент, отыграть рекламную и соблюсти управляла и условия отыгрыша. Под правилами подразумевается столько вагер, но и лимитирования по максимальной ставке. Мы осознаем, собственно в кинотеатр все ставят на зеро и выигрывают. Призываем не делать похожего. Перед активацией приза прочтите управляла. Узнайте последующие моменты: Условия получения подарка, за регистрацию, за депозит и прочее. Ограничения по наибольшей ставке. Зачастую не повыше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вращать автоматы, а вагер несомненно стоять на пространстве. Поэтому принципиально знать, в каких играх можно совершать кратность денежного оборота. <a href=https://series40.kiev.ua/user/Julestig/>https://series40.kiev.ua/user/Julestig/</a> Онлайн-казино с бездепозитными призами ставят посетителям условия для пользования бездепами, поэтому перед ролью в промоакции лучше досконально ознакомиться со всеми правилами и аспектами промоакции. Условия могут касаться получения бонуса, его применения и следующего вывода валютных средств если, тогда, выигрыша.В лицензионных бездепозитных казино выступать в азартные забавы вправду безопасно. Наличие лицензии подтверждает тот прецедент, собственно клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP. казино 1×slots официальный сайт
<b>Смотреть еще похожие новости:</b>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-4969/#comment-593110>1×слот регистрация в 1×slots casino</a>
<a href=http://www.fiat130.it/phpbb3/viewtopic.php?f=14&t=307412>зеркло казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Все бесплатные призы кажутся соблазнительными. Кто же категорически от возможности сыграть в онлайн-казино, не рискуя средствами, хотя получая выигрыши. Но далековато не все бездепозитные бонусы мере привлекательны для рассудительного клиента.
#9458 Charlesgunnyhttp://filmkachat.ru
1×slots казино зеркало
Во всех законных онлайн-казино Беларуси нужно свидетельство паспортных данных для игры — это требование правительства страны.Рассмотрим принцип его деянья на случае. Допустим, вы зарегались и возымели $10 not the slightest down payment bonus с вейджером х50. Это значит, собственно выигранные деньги можно будет выводить не раньше, чем последствии как, как общая сумма ставок достигнет $500. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots review live</a> Бездепозитный бонус предоставляется новенькому игроку за определенные действия. Часто подарок повторяющий денег либо фриспинов выдается за регистрацию, спасибо чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. <a href=https://getcomixxx.com/index.php?subaction=userinfo&user=Davidlom>https://getcomixxx.com/index.php?subaction=userinfo&user=Davidlom</a> Ну и окончательно же, для казино бездепозитные призы выгодны с имиджевой стороны: схожая добродушие увеличивает уровень лояльности посетителей к компании.Этот образ приза будет добавлен на Ваш акк после удачной процедуры регистрации с внедрением номера телефонного. Если избрать иной метод творенья учетной записи, бездеп не несомненно добавлен на Ваш аккаунт. сайт 1× slots casino <a href=https://band.us/band/92649089/post/5>https://band.us/band/92649089/post/5</a>
1×слот регистрация в 1×slots casino
Основное управляло получения бездепа ? создаваемый акк должен быть у юзера первым и единственным. Наличие нескольких аккаунтов взыскательно запрещено. Проверка проводится по имени, e-mal, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депо нужно соблюдать простую очередность действий. <a href=https://g2clubs.com/healthy-workout/google/#comment-24059>1хслотс официальный сайт зеркало</a> 1×slots официальный зеркало рабочее <a href=http://k98727wu.beget.tech/user/Miguelshure/>http://k98727wu.beget.tech/user/Miguelshure/</a> 1×slots зеркало этих способов предполагает регистрацию Но а случае вы теснее профи по интернет казино, кликаем на красноватую кнопку «Получить» и Вы автоматически перейдете в онлайн казино;Получать информацию о самых прибыльных бонусах можно без постоянного мониторинга новостей казино. Мы взяли данную задачку на себя и непрерывно следим за услугами операторов, выбирая наилучшие из них. В этом разделе собраны последние бездепы, промокоды к ним и условия их активации. Список акций регулярно пополняется. В топ зашли самые новые бездепозитные бонусы за регистрацию в казино 2020, временные и закрытые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и аспектам. Если срок действия промоакции истек, она удаляется из перечня.
x1 slots 1хслотс регистрация перейти на 1×slots
Мы делаем ударение на главных положениях правил, рассказываем о территориальных лимитированиях и вкратце информируем о других акциях обсуждаемого казино. Бездепозитный приз предоставляется новенькому игроку за конкретные деяния. Часто подарок повторяющий денег либо фриспинов выдается за регистрацию, благодаря чему юзер получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.Бездепозитные призы казино за регистрацию в 2022 году — это возможность поиграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой либо количеством безвозмездных вращений без внесения депо. Не путайте деморежим с реальной забавой без надобности внесения депозита. <a href=https://www.femina.cz/forums/topic/%d0%b3%d0%bb%d0%b0%d0%b2%d0%bd%d0%b0%d1%8f-%d0%b4%d0%be%d1%80%d0%be%d0%b3%d0%b0-%d0%b0%d0%b2%d1%82%d0%be%d1%88%d0%ba%d0%be%d0%bb%d0%b0-%d0%b2%d0%bb%d0%b0%d0%b4%d0%b8%d0%b2%d0%be%d1%81%d1%82%d0%be/>https://www.femina.cz/forums/topic/%d0%b3%d0%bb%d0%b0%d0%b2%d0%bd%d0%b0%d1%8f-%d0%b4%d0%be%d1%80%d0%be%d0%b3%d0%b0-%d0%b0%d0%b2%d1%82%d0%be%d1%88%d0%ba%d0%be%d0%bb%d0%b0-%d0%b2%d0%bb%d0%b0%d0%b4%d0%b8%d0%b2%d0%be%d1%81%d1%82%d0%be/</a> Выбирайте превосходнейшие благотворительные бонусы с помощью обзоров на Casinoz – и пусть вам сопутствует счастье при отыгрыше бонусных кредитов!Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки могут запросить вспомогательные документы либо инициировать короткое общение по Skype. 1×slots зеркало видели такую регистрацию на Некоторые казино имеют предлагать клиентам бездепы за свидетельство номера или почты либо репост на страницу в социальных сетях.
1×slos регистрация в 1×slots casino
Подтверждение электронной почты – одно из основных условий, которое есть почти в любом бездепозитном казино. Чтобы верифицировать электронную почту, достаточно перебежать по активной ссылке в послании, приобретенном от азартного клуба.Подарки на определенные даты отличаются условиями получения. Если поощрение начисляют игроку на день рождения, то сумма обычно в от совместного размера депо последний год. <a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=318871#pid318871>1хслотс зеркало на сегодня</a> Фриспины — безвозмездные вращения, которые дозволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины числятся самым знаменитым и предпочтительным видом бонуса — благотворительные вращения порой эффективнее и веселее в отыгрыше, чем остальные облики бездепов. 1×slots зеркало регистрация то дальше необходимо пройти <a href=http://soe-parrot.com/home.php?mod=space&uid=169079>http://soe-parrot.com/home.php?mod=space&uid=169079</a> Внесение депо – Будьте готовы пополнить счет последствии отыгрыша бонуса. Это обычное заявка правил для данного типа промо-акций. Лучше заблаговременно уточнить, какую необходимую надо(надобно) будет вносить на счет. Как правило, речь о минимальном депозите, хотя вы должны быть уверены, собственно он вам по кармашку.Даже не выиграв солидную сумму, игрок увлекательно проведет время, изнутри исследует работу площадки, воспримет геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе наилучших промоакций легкостью. Достаточно периодически учить перечень новых онлайн казино с выводом приза без депо в данном разделе.
1×slots регистрацию процедура займет всего лишь
Некоторые веб-сайты, этого чем обмануть регистрацию игроков, предлагают ответить на количество базисных вопросов. Цель проведения похожей викторины – выявить случайных людей, коие не имеют представления о покере, и не допустить получения ими бонусов. Если гость теснее играл в казино, то ответить на полтора десятка несложных вопросов несомненно несложно. Очень часто, ответы можно найти на официальных веб-сайтах этих учреждений.Чем ниже значение вейджера, что, этим легче отыграть и исключить приз. Если Вы расчитываете заработать на бездепе, а не просто ознакомиться с свежим игровым клубом, то стоит игнорировать призов с высочайшим вейджером их практически не реально отыграть. С ними Вы сможете лишь протестировать забавы заведения. Как прочие акции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такого предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих посетителей и позволяет им составить впечатление о функционале, не рискуя вескими суммами.Мы собрали и опубликовали список наихороших бездепозитных казино с бонусами за регистрацию, которые гарантируют великодушные выигрыши и моментальные выплаты. <a href=http://d90432w9.beget.tech/user/ZacherydAm/>http://d90432w9.beget.tech/user/ZacherydAm/</a> А ознакомиться с свежими интернет казино, Вы сможете за счет бонусов с выводом выгоды, коие Вы сможете получить без депо.Выше мы дали полный набор самых новых и своевременных бездепозитных призов в интернет казино без пополнения на 2022 год, где возможность пользоваться любым ценным бездепозитным бонусом. 1×slots зеркало на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=4690>1×slots casino online регистрация</a>
<a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=7523&TITLE_SEO=7523-preobrazovatel-interfeysov-usb-rs485&MID=472116&result=reply#message472116>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный приз казино 2022 с выводом за регистрацию предоставляет возможность ознакомиться игроку с лобби избранного заведения, сориентироваться в выборе игр и выяснить качество работы службы поддержки. Довольно нередко, начиная игровой процесс, игрок теснее отказывается останавливаться и делает настоящий вклад. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать даром возможно как один таки с бонусом за регистрацию без надобности заносить депо. Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации презента нужно доказать электронную почту и привязать аппарат;
#9459 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация на сайте
Обычно, бездепозитные бонусы выдаются под конкретные слоты с фиксированной ставкой, но их наверняка воспрещено применять в игровых автоматах с современным джекпотом. Список игр, в можно использовать бездеп, Вы отыщите в описании промоакции или сможете уточнить у службы заведения.Также бездепозитные бонусы шансы работать способом возвратить к игре клиентов, временно приостановивших своё сотрудничество с компанией: извещение о бездепе поступает на мобильный аппарат либо почту. <a href=http://filmkachat.ru/>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a> Можно. Вы всегда сможете отрешиться от получения бездепозитного приза за регистрацию в казино, же Вы не сделаете ставку.Прямо момент заберите благотворительные вращения за регистрацию без депо и начинайте собирать призовые композиции ради солидных выигрышей! <a href=https://tradersreview.co.uk/forum/profile/HueyLoewen>https://tradersreview.co.uk/forum/profile/HueyLoewen</a> 1×slots на любой вкус как пройти регистрацию <a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=3738>http://www.predictive-datascience.com/forum/member.php?action=profile&uid=3738</a> С другой стороны, гораздо легче забрать бездепозитные фриспины за регистрацию в казино и прямо момент начать вертеть барабаны в наилучших слотах. Главная особенность спинов что, собственно они предназначены для лучших автоматов. Удастся не пройти дополнительные раунды, но и прирастить необходимую выигрыша, заработать респины прочие внутриигровые подарки.Но никогда не запамятовывайте внимательно разбирать правила роли в бонусных промоакциях. Если вы нарушите хотя бы одно условие, позже вы не сможете уладить недоразумение с администрацией.
1×slots официальный demo регистрация в 1×slots casino
1× slots регистрация в 1×slots casino <a href=http://lat-puzz.com/phpbb/memberlist.php?mode=viewprofile&u=97586>http://lat-puzz.com/phpbb/memberlist.php?mode=viewprofile&u=97586</a> Бездепозитный приз за регистрацию в казино с выводом денег в 2022 году — Наш ресурс дает игрокам актуальную информацию о самых свежих, великодушных и проверенных бонусах в онлайн казино, коие обновляются каждый денек.В качестве призов интернет казино нередко предлагает выдачу фриспинов, словами безвозмездных вращений игрового барабана. Виртуальные монеты можно использовать для изучения в покерной школе либо для игры в казино. 1×slots официальный сайт скачать Также бездепозитные бонусы могут работать способом вернуть к игре клиентов, пока приостановивших своё сотрудничество с фирмой: извещение о бездепе поступает на мобильный телефон или почту.
1× slots официальный
Варианты выигрыша находятся от Вашей удачи и критерий игорного портала. Выше мы заявили, собственно некоторые бездепозитные призы в 2022 году выдаются с ограничениями по наибольшей выплате. Однако, остаются и те, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность современных игр на деньги, можно выиграть невозможные суммы. Сегодняшние игровые автоматы либо видео слоты, как их именуют. Могут выдавать солидные умножение от х1.000 и повыше. Некоторые множат ставку от х100.000.Лишь популярные и знаменитые азартные заведения шансы разрешить для раздавать бездепы вид дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, коие можно потратить в лучших аппаратах с высочайшей отдачей. <a href=http://silabgarza.net/forums/member.php?action=profile&uid=226467>http://silabgarza.net/forums/member.php?action=profile&uid=226467</a> Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депозит может отличаться до 30 дней.Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных притязаний, считая обязательной верификации. Если на веб-сайте учтена неотъемлемая процедура подтверждения личности, то исключить выигрыш получится лишь после проверки данных. Приготовьтесь заполнить анкету и отправить в техподдержку документ, подтверждающий лицо. 1×slots регистрация на официальном сайте С не отыгранным бонусом запрещается превышать размер наибольшей ставки. Нарушение сего обстоятельства повлечет за собой аннулирование выигрыша.Только выполнив все обстоятельства отыгрыша и дождавшись завершения проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить средства деньги.
1×slots казино зеркало
<a href=https://bajarmp3.net/showthread.php?tid=424228>1×слот регистрация в 1×slots casino</a> Акции, посвященные календарным праздникам, посещают рассчитаны как на всех пользователей, так и на категории: к, презент на 8 марта девушкам-игрокам либо мужикам на 23 февраля. 1×slots регистрация на официальном сайте <a href=https://www.morph.ro/users/GlennBes>https://www.morph.ro/users/GlennBes</a> Также бездепозитные призы могут служить способом вернуть к игре клиентов, временно приостановивших своё сотрудничество с компанией: уведомление о бездепе поступает на мобильный аппарат или почту.У каждого игорного заведения средства управляла и условия. Но, чтобы получить призы, нужно выполнить стандартные деяния:
1×slots casino регистрация на сайте
На условиях отыгрыша безвозмездных призов по остановиться подробнее. С ними связаны аспекты, которые невозможно забыть без внимания. <a href=http://okerclub.ru/user/MiguelBar/>http://okerclub.ru/user/MiguelBar/</a> Лишь модные и знаменитые азартные заведения могут позволить себя выдавать бездепы вид добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, которые можно израсходовать в топовых аппаратах с высокой отдачей. 1×slots бонус за регистрацию Отказ в прохождении верификации. Если заказчик не желает либо возможности дать документы, подтверждающие его личность, профиль будет заблокирован совместно, вкупе со всеми бонусными начислениями.Создание аккаунта. На сайте казино необходимо обнаружить регистрационную форму и заполнить пустующие поля личностными данными. Иногда на этом этапе потребуется указать лишь адресок электронной почты и пароль, но чаще хотелось наполнить анкету индивидуальной информацией (ФИО, дата рождения, место проживания и т.д. ). Нужно свидетельствовать только настоящие данные, потому впоследствие они станут проверены.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.home-visa.ru/viewtopic.php?f=69&t=807392&p=2811760#p2811760>1×slots зеркало которую указывали при регистрации кстати</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Получить приветственный приз могут только новые клиенты онлайн-казино. Способы описаны в условиях промоакции любого легального казино, чаще всего это: Обычно показатель повыше, чем для бонусов на депо. Не дивитесь, в он будет в х100. Иногда завышенный коэффициент вейджера уточняется для обитателей отдельных стран.
#9460 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало
Постарайтесь отыграть вейджер, дабы была возможность забыть заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы можете получить выигрыш на электрической кошелёк, карту, телефонный.Заполняя данные в собственном профиле, указывайте только достоверную информацию, например как Вам понадобиться ее доказать дальнейшем при выводе средств. <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasin online</a> <a href=http://forum.n34.pl/profile.php?mode=viewprofile&u=4650>http://forum.n34.pl/profile.php?mode=viewprofile&u=4650</a> 1×slots зеркало регистрация <a href=https://www.scottsfasteners.com/users/charlesflism>https://www.scottsfasteners.com/users/charlesflism</a> Вы наверняка, как и все предпочитаете получать презенты и бездепозитные призы казино. Игорные дома брали в привычку одаривать гэмблеров приятными бонусами. Стать владельцем приветственного подарка можно за создание профиля или пополнение счёта. Второй вариант больше занимательный, как клубы готовы удвоить депозит! Но если вы новичок и только знакомитесь с миром пыла, другого, как воспользуйтесь бонусом за регистрацию.Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке нужно пополнить счет в казино. Для депозитных бонусов, эта процедура не нужна, так как депо уже изготовлен.
x1 slots 1хслотс регистрация перейти на 1×slots
В реальное время получить бонус за регистрацию в казино очень просто. Почти каждый игорный жилище с радостью предоставит деньги или благотворительные вращения. Многие игроки пользуются данным и не стесняются регистрироваться в любом клубе с выгодными критериями. Кстати, это отличная вероятность придумать выигрышную тактику и сорвать куш. <a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=71120>1×slots официальный сайт скачать</a> 1×slots официальный сайт скачать Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки все запросить дополнительные документы либо инициировать краткое общение по Skype. <a href=http://savvys.ru/bitrix/rk.php?goto=http://burlingtonbathroom.ru/bitrix/redirect.php?goto=http://ernd.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/k8zifeFuGdx>http://savvys.ru/bitrix/rk.php?goto=http://burlingtonbathroom.ru/bitrix/redirect.php?goto=http://ernd.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/k8zifeFuGdx</a> Процесс доказательства личности возможность взятьвдолг(взятьвзаймы) от 1-го денька до недели. Если клиент разрешил какую-либо ошибку при заполнении паспортных данных, то ему идет обратиться с проблемой в службу онлайн-казино. 1×slots зеркало 1хслотс регистрация перейти на 1×slots B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации подарка необходимо подтвердить электронную почту и привязать телефон;
1×slot официальный сайт
Подтвердите личность, предоставив оператору казино свои паспортные данные. Инструкции обычно несложные, основное — конкретно им следовать. Если написано, что «на фото должны быть видны все хорошо угла странички паспорта» — устройте именно такое фото. <a href=http://21vek-svet.ru/bitrix/redirect.php?goto=http://a1park.com/bitrix/redirect.php?goto=http://compclubs.ru/redirect.php?url=https://teletype.in/@urid_pomosh/q4bKm5bE4cH>http://21vek-svet.ru/bitrix/redirect.php?goto=http://a1park.com/bitrix/redirect.php?goto=http://compclubs.ru/redirect.php?url=https://teletype.in/@urid_pomosh/q4bKm5bE4cH</a> Можно. Вы всегда можете отрешиться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не создадите ставку. казино 1×slots официальный сайт
сайт 1× slots casino
<a href=https://nztw.org/home.php?mod=space&uid=43957>1×slots бонус за регистрацию</a> Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?При правильном подходе бездепы — это отличный метод играть на деньги без траты личных средств. Есть несколько рекомендаций, следуя коим возможно извлечь максимум пользы из сходственных промоакций казино. Играть идет только на лицензированных площадках. Скриптовые веб-сайты не только врут с бонусными услугами, но и используют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах невозможно. Можно ли зарабатывать на бездепозитных призах? Это не работа, здесь как повезет, если в любом предложенном безедепе, вы будете откручивать вейджер и выводить, это можно назвать везением, и дополнительной добавкой к вашему бюджету. 1×slots регистрация <a href=https://mantiseye.com/community/philipsmags>https://mantiseye.com/community/philipsmags</a> Чаще всего интернет-казино предлагают бездепозитные бонусы новым пользователям. Эта промо-акция довольно эффективно привлекает начинающих, подталкивая их к открытию счета. Конечно, не все они становятся послушными клиентами, но сам прецедент регистрации аккаунта играет на руку заведению.
1×slots казино зеркало
За привлечение друга ? масштабах партнерской программы заказчик получает вознаграждение за вербование новых пользователей.Классическая разновидность приза за создание аккаунта. Его преимущество содержится сомнений, собственно клиент может самостоятельно выбирать аппараты и создавать ставки в них. Иногда перечень игровых автоматов ограничен оператором, хотя все также это какого-либо, чем один-единственный дешевый слот, как когда с внедрением фриспинов. При использовании бездепозитным бонусом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют некоторое видов лимитов: <a href=http://www.baohaibbs.com.cn/home.php?mod=space&uid=40806>http://www.baohaibbs.com.cn/home.php?mod=space&uid=40806</a> Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, дабы еще раз получить безвозмездный бонус. Игорные заведения нетерпимы к бонус-хантерам, потому вас ожидает неминуемое наказание.Бездепозитный бонус предоставляется новому игроку за конкретные действия. Часто подарок повторяющий денег либо фриспинов выдается за регистрацию, благодаря чему пользователь получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. 1×slot регистрация Призовые начисления без депозита все предоставляться для участия в турнирах интернет казино. Потратить перечисленные деньги возможно исключительно в рамках данной промоакции. Условия их проведения себе лимитирования на список игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, другого изучить его правила.Но существуют азартные заведения, готовые просто так вручить средства на забаву. Для этого достаточно сделать профиль. Чтобы исключить выигрыш, сперва необходимо выполнить вейджеровые условия, прописанные в критериях получения бездепа.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.formulersupport.com/Thread-1×slots-%D1%81%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C-%D0%BD%D0%B0-%D0%B0%D0%B9%D1%84%D0%BE%D0%BD–98517>1×slots скачать на айфон</a>
<a href=https://adminclub.org/showthread.php?tid=62461>1×slots регистрация на 1хслотс</a>
<a href=https://forum.graylite.com/viewtopic.php?p=208605#p208605>казино 1× slots официальный сайт</a>
<a href=https://www.xn–72c9aa5escud2b.com/webboard/index.php/topic,510533.new.html#new>рабочее зеркало 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Однако в критериях исчезают «подводные камни», коие не разрешат вывести солидную сумму либо же вы не успеете отыграть вейджер. Поэтому мастера рекомендуют арестовать безвозмездные вращения за регистрацию в казино без депо, чтобы поднабраться опыта и получить настоящий шанс на победу.
#9461 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
При верном раскладе бездепы — это прекрасный способ выступать на деньги без траты собственных средств. Есть количество рекомендаций, следуя коим можно извлечь максимально полезности из подобных промоакций казино. Играть идет только на лицензированных площадках. Скриптовые веб-сайты не только дурачат с бонусными предложениями, хотя и используют пиратский софт с измененным ГСЧ. Выиграть на этих автоматах нереально. <a href=http://filmkachat.ru/>1хслотс рабочее зеркало</a> Обыкновенные бездепозитные призы в размере от трех до двадцати $ сделаны чтобы, чтобы, дабы в забавы заходили все новые и свежие игроки. Здесь, всего, несомненно лимитирование на максимальный выигрыш. Важно, дабы перед минимальным вкладом был отключен бонус за первое пополнение счета, и геймер не попадет на повторный вейджер.Ну и окончательно же, для казино бездепозитные бонусы прибыльны с имиджевой стороны: схожая щедрость повышает степень преданности посетителей к фирмы. <a href=https://www.varranger.com/vforum/index.php?action=profile;u=37260>https://www.varranger.com/vforum/index.php?action=profile;u=37260</a> Также учтите, собственно кое-какие игровые платформы сужают список государств, коие способны получить предложенный бездепозитный бонус за регистрацию. К образцу, есть онлайн-заведения, выдающие похожие призы лишь обитателям определенных стран. К образцу, онлайн казино 777 Оригинал дает бездепозитный приз только игрокам из России и стран СНГ. Или наоборот, снабжают вознаграждением всех, считая обитателей некоторых стран (как сего, следует внимательно изучать перечень, дабы потом не возникло практически вопросов и претензий). 1хслотс регистрация в 1×slots casino <a href=https://humanlove.stream/wiki/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0>https://humanlove.stream/wiki/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0</a> Все бесплатные бонусы кажутся заманчивыми. Кто же категорически от возможности сыграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далековато не все бездепозитные призы в презентабельны для рассудительного посетителя.
1хслотс зеркало
У каждой игры свои требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система засчитает каждую ставку. В рулетке и покере устроить это гораздо труднее. Именно поэтому например главно пристально разбирать обстоятельства получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой ирге, то новички просто «спустят бонус на ветер».Вейджер (или вагер) ? это минимальная сумма ставок, которую необходимо устроить для вывода валютного бонуса. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение. 1 xslots рабочее зеркало <a href=http://avarpressa.ru/user/GlennMen/>http://avarpressa.ru/user/GlennMen/</a> 1×slots регистрацию процедура займет всего лишь
1×slots зеркало подтвердит вашу регистрацию если говорить
Осталось избрать казино с призом за регистрацию и сделать профиль. После активации дара выигрыш зависимости от Фортуны и способностей. <a href=https://maps.google.no/url?q=https://doctorlazuta.by/>https://maps.google.no/url?q=https://doctorlazuta.by/</a> 1×slots казино зеркало Классическая разновидность приза за создание аккаунта. Его превосходство заключается в, собственно заказчик возможность помощи избирать аппараты и создавать ставки в их. Иногда перечень игровых автоматов ограничен оператором, но все одинаково это другого, чем один-единственный доступный слот, как если, тогда, с использованием фриспинов.Нет. Казино раздают бесплатные призы за регистрацию, чтобы, чтобы, чтобы заказчик мог ознакомиться с игровым заведением. А чтобы исключить его, необходимо выполнить условия отыгрыша.
1×slots официальный сайт зеркало рабочее
<a href=http://maddog-server.org/forum/showthread.php?tid=15204&pid=159812#pid159812>сайт 1× slots casino</a> 1×slots актуальное зеркало <a href=http://samefo.ge/index.php?subaction=userinfo&user=gainfulcard99>http://samefo.ge/index.php?subaction=userinfo&user=gainfulcard99</a> Бездепозитные призы в казино без пополнения 2022 — это конкретная сумма средств или vacant spins вращения, которые предоставляются первым гостям за регистрацию на сайте казино повторяющий бездепозитного бонуса, и выделяет вам возможность помощью казино без пополнения опробовать услуги (игр), с дальнейшей преимуществом, льготой вывода средств при исполнении всех установленных управлял.
1×slot официальный сайт
Призовые начисления без депозита все предоставляться для участия в турнирах интернет казино. Потратить перечисленные деньги возможно исключительно в рамках данной промоакции. Условия их проведения себе лимитирования на список игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, другого изучить его правила. У нас на сайте Вы отыщите список призов без депо в испытанных казино и подробную информацию про как их получить и использовать. <a href=http://cg.darkml.net/bbs/home.php?mod=space&uid=7976937>http://cg.darkml.net/bbs/home.php?mod=space&uid=7976937</a> Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 поболее. Когда игроку надеется много фриспинов, администрация может разбивать их начисление на некоторое дней. Бесплатные вращения предоставляются для конкретного слота, который указывается в правилах акции. 1×slots регистрация на 1хслотс Бездепозитные бонусы казино это экономическая компенсация, предлагаемая пользователям на дармовой базе и возможность выступать в интернет казино бесплатно. Если сравнивать их с одобрениями за лепта, каких средства выдаются лишь впоследствии первоначального пополнения счета, то бездепозитные вознаграждения получаются бесплатно. То есть, играющий получает возможность делать ставки на уже имеющие финансы, которые выдаст заведение, исполняя, при, обыденные действия, дабы их извлечь (тут речь о регистрация, удостоверении личности с внедрением номера телефона, дизайна заявки и т.д. ).
<b>Смотреть еще похожие новости:</b>
<a href=https://timepost.info/showthread.php?tid=57426>1× slots сайт</a>
<a href=https://orbitsound.com/forum/user-211634.html>1хслот зеркало</a>
<a href=https://rolivka.online/forum/showthread.php?tid=28828>1×slot зеркало</a>
<a href=http://www.ihavethepussy.com/de/threads/178566–1×slots-casino-%D0%A1%D0%82%D0%A0%C2%B5%D0%A0%D1%96%D0%A0%D1%91%D0%A1%D0%83%D0%A1%E2%80%9A%D0%A1%D0%82%D0%A0%C2%B0%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A1%D0%8F-%D0%A0%D0%85%D0%A0%C2%B0-%D0%A1%D0%83%D0%A0%C2%B0%D0%A0%E2%84%96%D0%A1%E2%80%9A%D0%A0%C2%B5?p=196080#post196080>1×slots casino регистрация на сайте</a>
<a href=https://forum.pmpobc.ca/index.php?topic=132524.new#new>1×slots регистрация 1×slots casino c2d ru</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если при регистрации указать промокод, можно гарантировано получить приз. Где брать ваучер? Посетите на блоги либо форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В последнее время игорные дома начали афишироваться в кинокартинах и телесериалах. Присмотритесь и скорее заметите промокод, который принесёт 500 либо 1 000 бонусных рублей. Объективные – размер приза, коэффициент и условия вейджера, надобность внесения депозита для вывода денег;
#9462 Charlesgunnyhttp://filmkachat.ru
1×slot официальный сайт
Получить Бездепозитный приз в онлайн казино дело двух кликов. Другой момент, отыграть промо и соблюсти управляла и условия отыгрыша. Под правилами подразумевается не вагер, но и лимитирования по максимальной ставке. Мы осознаем, что в кино все ставят на зеро и выигрывают. Призываем не создавать похожего. Перед активацией приза прочитайте управляла. Узнайте следующие моменты: Условия получения подарка, за регистрацию, за депо и многое. Ограничения по наибольшей ставке. Зачастую не выше 350 руб. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах возможно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на месте. Поэтому главно знать, в каких забавах возможно осуществлять кратность валютного оборота. <a href=http://filmkachat.ru/>1 xslots рабочее зеркало</a> Свежий бонус начисляется вид денежных средств на счёт игрока. Дальше казино оставляет за собой право лимитирования игрока в пользовании средствами, а в случае отыгрыша оператор может ввести лимитирование на вывод денег.Oтыгpaть приз с указанным вeйджepом, чтобы необходимо сдeлaть cтaвoк нa cумму, превосходящую размер приза в некоторое один. <a href=https://www.market-directory.com/members/davidcet-10549.html>https://www.market-directory.com/members/davidcet-10549.html</a> Бонусы без депо при регистрации числятся наиболее красивыми как для опытных игроков, так для и новичков. Получив это вознаграждение, заказчик может играть на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а обстоятельства их активации и выигрыша. 1хслотс рабочее зеркало <a href=http://discuss.the-knowledge.org/memberlist.php?mode=viewprofile&u=43479>http://discuss.the-knowledge.org/memberlist.php?mode=viewprofile&u=43479</a> Максимальный объем ставки, который нельзя превосходить пока приз не несомненно полностью отыгран. В случае нарушения этого управляла, приз и выигрыш с него станут аннулированы.
1хлот регистрация в 1×slots casino
Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала быстрые выводы. Фишка выплат никаких, что довольно выбрать платёжный инструмент и указать необходимую. В большинстве случаев средства зачисляются на электронные кошельки на 15 мин., а на банковские карты – 1–3 трудящихся денька.Главным нюансом в возникновении этих вознаграждений состоит в, что пустив их в ход, игрок ничем не рискует и в последствии никому ничего не будет должен (не зависимо, получит ли он спасибо бонусам какой-либо выигрыш или моментально спустит все только собственно прибывшие финансы). То есть, казино снабжает игрока вероятностью на дармовой основе выступать во различные слоты причем спонсирует забаву. <a href=https://mcmon.ru/showthread.php?tid=107919>1×slots официальный зеркало</a> сайт 1× slots casino <a href=http://petfabric.ru/bitrix/redirect.php?goto=http://elit-podarok.ru/bitrix/redirect.php?goto=http://tehnomarkt.com/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/9qPskkiAIc4>http://petfabric.ru/bitrix/redirect.php?goto=http://elit-podarok.ru/bitrix/redirect.php?goto=http://tehnomarkt.com/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/9qPskkiAIc4</a> 1 х слотс зеркало
1×slots акции
<a href=http://seolimfa.co.kr/bbs/board.php?bo_table=free&wr_id=2094657>http://seolimfa.co.kr/bbs/board.php?bo_table=free&wr_id=2094657</a> 1×slots казино зеркало Доступ к дару имеет открываться автоматически после введения промокода или воззвания в саппорта вебсайта. В первом случае от юзера не потребуется практически деяний. Бездеп с активацией по коду встречается чаще всего. Игроку нужно ввести совокупность символов в графе, кот-ая возможность пребывать в регистрационной форме в Личном кабинете.Но а случае вы уже профи по интернет казино, кликаем на красноватую кнопку «Получить» и Вы механически перейдете в интернет казино;
1×слотс казино
<a href=http://weeklywars.de/viewtopic.php?f=12&t=6800&p=467207#p467207>1×slots casino регистрация 1×slots review live</a> Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды присутствуют на этой странице. Посетитель имеет расценить обстоятельства получения и начать выступать на средства без внесения депо. При этом игроку принципиально разуметь, на каких критериях и какими способами него исключить полученный выигрыш. Для сего нужно расценить перечень подключенных платежных систем.Вы скорее, например все любите получать подарки и бездепозитные призы казино. Игорные жилища брали в привычку одаривать гэмблеров приятными бонусами. Стать обладателем приветственного презента возможно за творенье профиля или пополнение счёта. Второй вариант более интересный, так клубы готовы удвоить депозит! Но в вы новичок и только знакомитесь с миром пыла, какого-либо воспользуйтесь призом за регистрацию. 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=http://georgiantheatre.ge/user/DoctorLazutapn/>http://georgiantheatre.ge/user/DoctorLazutapn/</a> Как правило, при выводе денег, от играющего потребуется только устроить наименьший вклад чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом индивидуальный счет.
1х слот регистрация в 1×slots casino
Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша бонусов. Заведения постоянно устанавливают наивысшую ставку, допустимую по условиям вейждера. <a href=http://www.pertcpm.comww.w.onlineboxing.net/jforum/user/profile/312269.page>http://www.pertcpm.comww.w.onlineboxing.net/jforum/user/profile/312269.page</a> 1×slots casino регистрация на сайте В интернете очень много скриптовых сайтов, коие принадлежат плутам. Их основная задача – привлечь гэмблеров, пообещав не великодушные презенты, но и солидные выигрыши. Так что некоторые веб-сайты предлагают получить за регистрацию числе $1 000.Нет. Для получения бездепозитного приза в казино необходима обязательная регистрация на сайте. Играть в слоты даром и без регистрации можно лишь в демо режиме.
<b>Смотреть еще похожие новости:</b>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=149654>1× slots сайт</a>
<a href=https://www.findaspermdonor.com/viewtopic.php?f=25&t=86679>1×slot регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При маленький сумме приза рекомендуется выступать по невысоким ставкам, а использовать максимальные лучше только что, нет случае, случае вейджер очень немалый, а время на отыгрыш сильно ограничено. Чтобы играть даром на реальные средства в казино, не всегда достаточно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные действия.
#9463 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало видели такую регистрацию на
Приветственный бездеп предоставляется какому игроку только один раз. Казино борются с например нарекаемыми бонусхантерами (от англ. Bonus Hunter — охотник за бонусами), пытающимися заводить множественные аккаунты для надувательства оператора и повторного получения подарка. Исключить подобные действия дозволяет верификация данных. Администрация вправе потребовать у клиента подтвердить индивидуальные данные, обозначенные при регистрации.Обычно, бездепозитные призы выдаются под конкретные слоты с фиксированной ставкой, хотя их точно запрещено применять в игровых автоматах с современным джекпотом. Список игр, каких возможно использовать бездеп, Вы отыщите в описании промоакции либо можете уточнить у саппорта заведения. <a href=http://filmkachat.ru/>рабочее зеркало 1хслотс</a> <a href=https://elearnportal.science/index.php?title=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D0%BE%D0%B2%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO>https://elearnportal.science/index.php?title=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D0%BE%D0%B2%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO</a> 1хслотс зеркало на сегодня <a href=https://app.welvi.co.kr/bbs/board.php?bo_table=qa&wr_id=1665071>https://app.welvi.co.kr/bbs/board.php?bo_table=qa&wr_id=1665071</a>
1×slots промокод при регистрации
На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению сего медли, Вы не можете активировать и получить бездепозитный приз.Нельзя разглядывать игру на средства, как вариант заработка. Азартные забавы воспрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не организатором азартных игр. Сайт носит информационный нрав. <a href=https://thetechmodders.com/forums/viewtopic.php?t=24568>1×slots официальный сайт мобильная версия скачать</a> 1×slots зеркало рабочее на сегодня Мы собрали и выпустили список превосходнейших бездепозитных казино с бонусами за регистрацию, коие гарантируют щедрые выигрыши и мгновенные выплаты.Благодаря программке преданности от игорного заведения, можно брать неплохой старт и без добавочных инвестициям запустить видеослоты. Кроме как, можно рассчитывать на реальную удачу и получить, без вложения собственных денег, немалый выигрыш. <a href=http://inec.ru/bitrix/redirect.php?goto=http://imsprice.ru/go.php?url=http://catdogzoo.ru/bitrix/rk.php?goto=https://telegra.ph/Travmaticheskie-povrezhdeniya-Rastyazheniya-Vyvihi-Perelomy-i-mnogoe-drugoe-09–23>http://inec.ru/bitrix/redirect.php?goto=http://imsprice.ru/go.php?url=http://catdogzoo.ru/bitrix/rk.php?goto=https://telegra.ph/Travmaticheskie-povrezhdeniya-Rastyazheniya-Vyvihi-Perelomy-i-mnogoe-drugoe-09–23</a> Фриплей-бонусы встречаются только в неких клубах. Они зачисляются сразу последствии творенья профиля и активны недолговременное время. Если не успеете израсходовать средства, они просто сгорят. Касаемо медли, как бонусы активны в течение часа.Осталось выбрать казино с призом за регистрацию и создать профиль. После активации презента выигрыш зависимости от Фортуны и навыков. 1хслотс рабочее зеркало
1хслотс официальный сайт зеркало
Для ревизии используются сканы паспортов, водительских прав, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если пользователь обнаружен в попытке ввести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их владелец попадает в черный список. При забаве на лицензионной площадке не бояться указывать достоверную персональную информацию (шифрование исключает утечку индивидуальных данных). <a href=https://visualchemy.gallery/forum/profile.php?id=4107460>https://visualchemy.gallery/forum/profile.php?id=4107460</a> Бездепозитные бонусы реальными средствами, которые возможно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадали.Простая процедура получения бездепозитного приза, которая займет менее 2-х мин. Для получения бездепов, достаточно зарегистрироваться и доказать контактные данные. 1×slots акции Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам запрещено начислять призы посетителям, не имеющим денежных средств на счете. Мы предлагаем рассмотреть актуальные призы онлайн-казино с лицензией, которые соблюдают законодательство РБ.Отказ в прохождении верификации. Если клиент не желает или не дать документы, подтверждающие его лицо, профиль несомненно заблокирован вместе со всеми бонусными начислениями.
1×слот регистрация в 1×slots casino
Чтобы бездеп не был начислен на Ваш акк, Вам не активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт автоматически, а Вы не планируете его применять, обратитесь в саппорта с пожеланием отменить бездепозитный бонус. <a href=https://www.formulersupport.com/Thread-1×slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-1×slots-casino-c2d-ru–95921>1×slots регистрация 1×slots casino c2d ru</a> Каждый из бездепозитных бонусов без пополнения 2022 имеет свой конкретный вейджер для отыгрыша, так же в каждом казино он уточняется персонально — где то он х55 а кое-где х30, повторюсь везде по различному!Срок отыгрыша — это этап, кот-ый начинается в момент активации бонуса и завершается с его закрытием. Пользователю нужно уложиться в данный временной зазор, по призовые средства аннулируются. Казино устанавливают список игр, ставки в засчитываются при расчете отыгранных денег. Если тайтл не входит в этот список, то ему быть недоступен для загрузки в деяния бонусного предложения. 1×slots регистрация 1×slots review live <a href=http://www.skypedeenglish.com/userinfo.php?uid=14499#>http://www.skypedeenglish.com/userinfo.php?uid=14499#</a>
1×slots casino online регистрация
Поспешите зарегистрироваться на официальном сайте Клубника, чтобы моментально получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, замечена реальный шанс победу! <a href=http://www.musichunt.pro/blogs/view.htm?id=80620>http://www.musichunt.pro/blogs/view.htm?id=80620</a> Лишь знаменитые и известные азартные заведения могут разрешить себе выдавать бездепы в виде добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, которые можно потратить в лучших аппаратах с высочайшей отдачей. зеркло казино 1×slots Бездепозитные призы казино это финансовая компенсация, предлагаемая юзерам на дармовой базе и возможность играть в интернет казино безвозмездно. Если сравнивать их с поощрениями за лепта, в средства выдаются только впоследствии первоначального пополнения счета, то бездепозитные гонорары получаются безвозмездно. То есть, играющий получает вероятность делать ставки на уже место деньги, коие выдаст заведение, выполняя, при, обычные действия, дабы их извлечь (тут идет о регистрация, удостоверении личности с использованием номера телефона, дизайна заказы и т.д. ).
<b>Смотреть еще похожие новости:</b>
<a href=http://old.pokvesti.ru/forum/memberlist.php?mode=viewprofile&u=3543>1×slots регистрация на сайте 1×slots ru com</a>
<a href=https://www.donchillin.com/space-uid-382497.html>1×slots регистрация 1×slots casino 777 online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если вы выбрали себе некоторое брендов которые для больше всего полюбились, для неизменной игры! Таких гемблеров казино очень любит и ценит, за частую такие игроки становятся VIP игроками заведения, которым нередко поступают прибыльные предложения повторяющий призов, например же туда заходит и бездепозитные.
#9464 Charlesgunnyhttp://filmkachat.ru
1 х слотс зеркало
Популярность онлайн казино растёт и всё больше пользователей начинают интерес азартными играми. Бездепозитные призы 2022 года, это оригинальные подарки за регистрацию. С их поддержкою свежие игроки имеют получить бесплатные вращения или средства на баланс за 1 регистрацию. С выходом игорных заведений в интернете, бездепозитные призы стали моднейшим способом вербования игроков. Подобные акции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о коих мы расскажем. Наш вебсайт собрал превосходнейшие предложения из интернета на 2022 год. Воспользуйтесь любым подарком и можете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить обстоятельства. <a href=http://filmkachat.ru/>1×slots промокод при регистрации</a> Шаг 4. Активация. Внимательно исследуйте обстоятельства, информацию по лимитированиям и сроке деянья бонусного предложения. Разобравшись с правилами, возможно активировать бонус в собственном кабинете (время ? с использованием промокода) либо по запросу в саппорт. <a href=https://zeoworks.com/main/member.php?action=profile&uid=316451>https://zeoworks.com/main/member.php?action=profile&uid=316451</a> Шаг 5. Использование и отыгрыш. Бездеп обязан быть использован в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера. 1× slots casino зеркало <a href=http://imsider.ru/bitrix/rk.php?goto=http://rm-ceramiche.ru/bitrix/redirect.php?goto=http://ufa-gid.com/bitrix/redirect.php?goto=https://teletype.in/@urist555/71M2Zvo96V0>http://imsider.ru/bitrix/rk.php?goto=http://rm-ceramiche.ru/bitrix/redirect.php?goto=http://ufa-gid.com/bitrix/redirect.php?goto=https://teletype.in/@urist555/71M2Zvo96V0</a> Также бездепозитные бонусы могут работать методом вернуть к этой клиентов, временно приостановивших своё сотрудничество с компанией: извещение о бездепе поступает на мобильный телефон или почту.В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая приятная часть игры. Важно, зачастую бездепозитные призы в казино выдаются с ограничениями по наибольшей выплате. В среднем возможно рассчитывать на прибыль в некоторое тыщ руб. Как исключить выигрыш с приза без депо. Придётся доказать акк документально, в некоторых заведениях. Процедура верификации обязательна и делается любым игроком. О документальном доказательстве учетной записи спрашивайте в интернет чате или прочтите в правилах.
зеркала 1×slots
1×slots коды В некоторых онлайн казино для получения бездепозитных бонусов не довольно просто зарегистрироваться на сайте клуба и подтвердить свои контактные данные. Дополнительно потребуется активация промокода. <a href=https://finbi.ru/user/Walterblown/>https://finbi.ru/user/Walterblown/</a> Верификация важна для добавочной безопасности и подсобляет техподдержке выявить бонусхантеров и плутов. Кстати, рядах платформах выводы крупных сумм доступны лишь последствии подтверждения личности. 1×slots рабочее зеркало Также, учите, что бездепозитный бонус возможно исключить лишь в том случае, когда будут выполнены все обстоятельства отыгрыша.Но ни не запамятовывайте внимательно разбирать управляла участия в бонусных промоакциях. Если вы нарушите но бы одно условие, позднее вы не сможете устроить недоразумение с администрацией.
1х слот 1хслотс регистрация перейти на 1×slots
Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, чтобы замечена вероятность вывести выигрыш. <a href=http://avtoworld.lv/index.php?subaction=userinfo&user=funnymystique0>http://avtoworld.lv/index.php?subaction=userinfo&user=funnymystique0</a> Для верификации аккаунта надо(надобно) предоставить профессионалам технической помощи отсканированную копию паспорта и счета за коммунальные предложения, а также фотку банковской карты либо снимок страницы электрического кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для доказательства личности.Допустим, за регистрацию вы получили бездеп в размере 2 000 рублей с вейджером х30. В этом случае предстоит сделать ставок, на общую необходимую в 60 000 руб. (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать реальные средства. Однако не запамятовывайте, что с каждого подарка выйдет исключить определённую необходимую (чаще всего не более $200). 1×slots бонус за регистрацию Бездепозитные бонусы настоящими средствами, коие можно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадались.
1×slots зеркало подтвердит вашу регистрацию если говорить
1×slots зеркало которую указывали при регистрации кстати <a href=http://sancon.co.kr/bbs/board.php?bo_table=free&wr_id=109568>http://sancon.co.kr/bbs/board.php?bo_table=free&wr_id=109568</a> Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы быстро получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, замечена реальный шанс победу!Процесс доказательства личности имеет взятьвдолг(взятьвзаймы) от 1-го дня до недели. Если заказчик разрешил какую-либо ошибку при заполнении паспортных данных, то ему по обратиться с задачей в саппорта онлайн-казино.
1×slots официальный сайт зеркало рабочее
Для как, чтобы отыграть необходимую вашего бездепозитного приза надо(надобно) выполнить обстоятельства вейджера. Очень нередко фриспины даются на конкретные слоты (book of ra, book of dead, book of sun), выбирайте слот себе по душе, они очень красивые и качественные. Бездепозитные бонус может быть валютным так и в виде фриспинов на слотыДля получения депозитного бонуса необходимо восполнить собственный игровой баланс настоящими деньгами. Вознаграждение возможно получить или при внесении первого депозита, или вид фиксированного процента от внесённых средств. Так или по, бонус поступит на счёт только в пополнения. <a href=http://stroygrad.shop/bitrix/redirect.php?goto=http://lis78.ru/bitrix/redirect.php?goto=http://textiletorg.ru/bitrix/redirect.php?goto=https://telegra.ph/Kak-izmenit-status-zemli-s-SNT-na-IZHS-09–23>http://stroygrad.shop/bitrix/redirect.php?goto=http://lis78.ru/bitrix/redirect.php?goto=http://textiletorg.ru/bitrix/redirect.php?goto=https://telegra.ph/Kak-izmenit-status-zemli-s-SNT-na-IZHS-09–23</a> При выполнении условий отыгрыша и верификации, средства с бонусного счета переводятся на главной и могут быть выведены на карту либо электронный кошелек. Лимиты на вывод и сроки проведения транзакции в от избранной платежной системы.Наши эксперты изучают условия акции, затем в ручном режиме проверяют их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и другие характеристики. Мы не рекламируем казино, а даем игрокам информацию о наихороших из них. 1×slots зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=62544>1х слот 1хслотс регистрация перейти на 1×slots</a>
<a href=http://forums.panzergrenadiers.com/showthread.php?22624–1%D0%A1%E2%80%A6%D0%A1%D0%83%D0%A0%C2%BB%D0%A0%D1%95%D0%A1%E2%80%9A-%D0%A0%D1%95%D0%A1%E2%80%9E%D0%A0%D1%91%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A0%C2%B0%D0%A0%C2%BB%D0%A1%D0%8A%D0%A0%D0%85%D0%A1%E2%80%B9%D0%A0%E2%84%96-%D0%A1%D0%83%D0%A0%C2%B0%D0%A0%E2%84%96%D0%A1%E2%80%9A-%D0%A0%C2%B7%D0%A0%C2%B5%D0%A1%D0%82%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%BB%D0%A0%D1%95&p=500219#post500219>1хслот официальный сайт зеркало</a>
<a href=https://koreanstudies.com/forum/viewtopic.php?t=118122>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный приз казино 2022 с выводом за регистрацию дает вероятность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и проверить качество работы службы поддержки. Довольно нередко, начиная игровой процесс, игрок теснее не желает останавливаться и проделывает настоящий лепта. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать безвозмездно вероятно как раз таки с призом за регистрацию без необходимости вносить депо.
#9465 Charlesgunnyhttp://filmkachat.ru
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Зарегистрируйтесь. Для регистрации почаще всего достаточно ввести собственный номер аппарата и почтовый адресок, после чего установить полученный код из СМС. Возможно, потребуется указать промокод. В правилах акции несомненно написано, где его хотелось вводить. Иногда это хотелось делать при регистрации, времени — теснее последствии творения собственного офиса, на отдельной странице. <a href=http://filmkachat.ru/>1×slot рабочее зеркало</a> Каждый новичок и умелый игрок грезят стремительно стартануть и начать создавать реальные ставки. Для этого довольно забрать подарок, за кот-ый не нужно уплачивать. В зависимости от игровой платформы, надо(надобно) создать профиль, привязать email либо аппарат. После сего администрация начисляет щедрое вознаграждение вид даровых вращений либо виртуальных кредитов.Мы собрали и опубликовали перечень лучших бездепозитных казино с призами за регистрацию, коие гарантируют великодушные выигрыши и мгновенные выплаты. <a href=https://enplan.page.place/bbs/board.php?bo_table=free&wr_id=122970>https://enplan.page.place/bbs/board.php?bo_table=free&wr_id=122970</a> 1×slots зеркало на сегодня <a href=https://bestsanswers.com/index.php?qa=69671&qa1=%D0%B1%D0%BB%D0%BE%D0%B3-%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0-%D0%B4%D0%B7%D0%B5%D0%BD>https://bestsanswers.com/index.php?qa=69671&qa1=%D0%B1%D0%BB%D0%BE%D0%B3-%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0-%D0%B4%D0%B7%D0%B5%D0%BD</a> Бездепы с бесплатными вращениями деют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За любой раунд платит казино. Число спинов ограничено и редко выше сотку. Если промоакция содержит много безвозмездных игр, их начисление может быть разбито на несколько дней.
1×slots регистрация на официальном сайте
1хслотс мобильная версия зеркало <a href=https://es.micromentor.org/question/18939>https://es.micromentor.org/question/18939</a> 1× slots casino зеркало Например, игрок получил 500 рублей при твореньи аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 рублей, потребуется сделать 875 спинов для полного отыгрыша.Когда речь о получении бездепозитных призов в казино, для внимание на последующие обстоятельства:
1×slots официальный сайт зеркало
<a href=https://forum.bandariklan.com/member.php?action=profile&uid=8356>https://forum.bandariklan.com/member.php?action=profile&uid=8356</a> После потребуется привнести идентификационный платёж. Это пугает новичков больше всего. Нужно устроить минимальный депозит в 100–500 рублей. Таким образом служба безопасности увериться том,, собственно платёжный метод принадлежит Вам. Данная процедура важна для обеспечения защищенности игровых счетов. Пример, Ваш аккаунт взломают и выведут свои на собственный кошелёк. Будет крайне досадно. Поэтому верификация платёжной системы, это необходимый момент. 1×slots регистрация то дальше необходимо пройти Но на азартных платформах сходственные вознаграждения имеют получить теперь зарегистрированные пользователи. В таком случае, призы предоставляются масштабах уникальных промоакций либо же некоторым геймерам повторяющий акционного предложения, которое приходит на почту с целью «вернуть» игрока в свое казино.
онлайн казино 1×slots
Прочитайте управляла бонусной программы, какой желайте принять. Да, мы настоятельно рекомендуем устроить это до регистрации.Постарайтесь отыграть вейджер, чтобы замечена вероятность забыть заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электрической кошелёк, карту, телефон. <a href=https://www.ldvd.nl/no-22-san-diego-place-rallies-very-last-boise-country-27–16?page=31#comment-237391>1×slots casino регистрация 1×slots review live</a> Выполнив все требования оператора, заказчик возможность оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит в среднем не более суток. Если дополнительно требуется пройти функцию верификации, то срок увеличивается до 1–2 рабочих дней. Для перевода применяются банковские инструменты и электрические платежные системы. Второй способ подходит превосходнее, например как масса транзакций в осуществляются мгновенно. В связи со специфичностью функционирования банков обработка платежей имеет взятьвдолг(взятьвзаймы) до нескольких трудящихся дней.Более солидные предложения встречаются очень редко. Зачастую они доступны лишь VIP-игрокам. В оставшихся случаях им скорее сопутствуют очень жесткие условия отыгрыша. Также вероятны дополнительные обстоятельства и лимитирования, прописанные в условиях и положения бонусной программки казино. Для всех бездепозитных призов функционирует максимальный лимит на выигрыш. Он указывает предельную необходимую, коию возможность получить, играя на бонусные кредиты. Как лишь для удастся выполнить притязания вейджера, возможный максимум будет переведен с бонусного счета на главной, а остаток будет списан.Бездепозитный бонус по промо-коду несомненно доступен для забавы, только никаких случае когда Вы активируете особый бонусный код в разделе с призами либо укажите промокод при регистрации на веб-сайте. В некоторых случаях, кроме активации кода, придется подтвердить контактные данные игрока и заполнить анкету посетителя. 1×slots бонус за регистрацию <a href=http://kinofilm2017.ru/user/ArnoldCog/>http://kinofilm2017.ru/user/ArnoldCog/</a> Промообъявления от казино не дают реальной картины и направлены на вербование внимания юзеров. Понять, насколько высоки шансы остаться в плюсе, позволит собственный анализ критерий предложения:Даже не выиграв солидную необходимую, игрок увлекательно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-либо денежных рисков. Быть в курсе наихороших акций с. Достаточно регулярно учить перечень свежих онлайн казино с выводом приза без депо в этом разделе.
1×slots казино мобильная версия
Поспешите зарегистрироваться на официальном сайте Клубника, дабы моментально получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, появляется настоящий шанс победу! За счёт спинов получится запустить различные интернет слоты, протестировать стратегии и поднабраться навыка. Фишка сомнений, что вращения начисляются на топовые аппараты с оригинальными опциями и высокой отдачей. Не забывайте, собственно в любом акционном предложении учтены специальные требования – кратковременные ограничения, наибольший объем ставки, список дешевых игр. <a href=http://shichaoliuluntan.com/home.php?mod=space&uid=328075>http://shichaoliuluntan.com/home.php?mod=space&uid=328075</a> Самые свежие бездепозитные бонусы в казино за регистрацию 2022 года с выводом прибыли находятся на данной странице. Посетитель имеет расценить обстоятельства получения и начать играть на средства без внесения депозита. При этом игроку главно понимать, на каких условиях и какими способами появится исключить полученный выигрыш. Для сего необходимо оценить список подключенных платежных систем. 1×slots официальный demo регистрация в 1×slots casino Доступность — бездепозитные призы в казино чаще всего предоставляются свежим игрокам, но посещают случаи, когда приз имеют получить и действующие клиенты.Используйте наилучшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из перечня ниже, дабы заработать подарки за простые действия и уже сейчас получить первый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высокой отдачей и прыткими выводами на электрические кошельки.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Можно ли зарабатывать на бездепозитных призах? Это не работа, тут как повезет, случае в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, это можно назвать везением, и дополнительной добавкой к вашему бюджету. Активация случается за промокодов, коие вводятся в личном офисе после регистрации. Среди спецпредложений в списке Casino.ru находятся эксклюзивные промокоды, коие доступны лишь посетителям портала. Другие способы начисления средств ? автоматическая активация незамедлительно в сотворения аккаунта и получение презента по запросу в службу технической поддержки.
#9466 Charlesgunnyhttp://filmkachat.ru
сайт 1× slots casino
Нет. Для получения бездепозитного бонуса в казино необходима неотъемлемая регистрация на веб-сайте. Играть в слоты бесплатно и без регистрации можно только в демо режиме.Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. <a href=http://filmkachat.ru/>1×slots регистрация на сайте 1×slots ru com</a> Для подтверждения электрической почты, просто перейдите по активной ссылке в письме, приобретенном от игрового заведения.Только выполнив все обстоятельства отыгрыша и дождавшись окончания проверки аккаунта, Вы можете оформить заявку на вывод средств и получить средства деньги. <a href=https://magadan-mebel.ru/forum/user/1185/>https://magadan-mebel.ru/forum/user/1185/</a> Этот образ бонуса несомненно добавлен на Ваш акк после успешной процедуры регистрации с внедрением номера телефонного. Если выбрать иной метод создания учетной записи, бездеп не несомненно добавлен на Ваш акк. 1×slots регистрация 1×slotscasino09k online <a href=http://www.modernism.hk/?s=%3Ca+href%3Dhttps%3A%2F%2Ft.me%2Fs%2Fbest10slots%3Ehttps%3A%2F%2Ft.me%2Fs%2Fbest10slots%3C%2Fa%3E+%D0%B8%D0%B3%D1%80%D0%BE%D0%B2%D1%8B%D0%B5+%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%B0%D1%82%D1%8B+%D0%BE%D0%BD%D0%BB%D0%B0%D0%B9%D0%BD+%D0%B8%D0%B3%D1%80%D0%B0%D1%82%D1%8C&x=0&y=0>http://www.modernism.hk/?s=%3Ca+href%3Dhttps%3A%2F%2Ft.me%2Fs%2Fbest10slots%3Ehttps%3A%2F%2Ft.me%2Fs%2Fbest10slots%3C%2Fa%3E+%D0%B8%D0%B3%D1%80%D0%BE%D0%B2%D1%8B%D0%B5+%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%B0%D1%82%D1%8B+%D0%BE%D0%BD%D0%BB%D0%B0%D0%B9%D0%BD+%D0%B8%D0%B3%D1%80%D0%B0%D1%82%D1%8C&x=0&y=0</a> Однако далековато не все ресурсы предлагают своим клиентам бездепозитные призы за регистрацию в казино. В большинстве случаев учтено поощрение на 1-ый депозит в размере 100–200%. Это отличная возможность преумножить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш.Чаще всего казино приз за регистрацию без депо даёт возможность запустить любой автомат. Но другого, как пристально ознакомиться с критериями. Иногда для забавы доступны лишь определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, превосходнее начать знакомство с миром азарта непосредственно с «одноруких бандитов».
1×slots быструю регистрацию а также мгновенное
В любом казино с бездепозитным бонусом учтены вейджеровые условия. Это один-единственный «подводный камень», кот-ый стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) устроить определённое количество ставок. Чем круче бонус, что, этим сложнее выполнить обстоятельства, и наоборот.Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих требований, кроме обязательной верификации. Если на веб-сайте учтена неотъемлемая процедура доказательства личности, то вывести выигрыш удастся лишь последствии проверки данных. Приготовьтесь заполнить анкету и выслать в техподдержку документ, подтверждающий личность. 1×slots регистрация 1×slots review live Для казино, работающих интернет, бездепозитные бонусы необходимы для привлечения свежих клиентов. Предложение сыграть на слотах без надобности внесения реальных средств — работающий метод для повышения интереса к компании. После отыгрыша бездепа великоват шанс, собственно игроку понравится и он продолжит выступать в казино, только сейчас теснее на собственные средства.Внесение депо – Будьте готовы пополнить счет последствии отыгрыша приза. Это стандартное требование правил для этого на промо-акций. Лучше заранее уточнить, какую необходимую надо(надобно) несомненно вносить на счет. Как правило, речь о минимальном депозите, но вы обязаны быть убеждены, собственно он вам по карману. <a href=https://craigslistdir.org/Glory-Casino_349547.html>https://craigslistdir.org/Glory-Casino_349547.html</a> 1×slots рабочее зеркало на сегодня
1× slots сайт
Несмотря на то, собственно данный вариант стимуляции со стороны азартных платформ довольно востребован области подобных игр, далеко не почитателям казино ведомо, что себе бездепозитные призы казино и как именно их вполне эксплуатировать.Вейджер (wager) – это коэффициент, который демонстрирует на какую необходимую нужно сделать ставок, дабы вывести приз из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода этого бонуса, Вам необходимо сделать ставок на сумму: 500*70=3500 рублей. Только полностью отыграв приз, Вы можете исключить собственный выигрыш. Если вы облюбовали для себя некоторое брендов коие вам больше всего полюбились, для постоянной игры! Таких гемблеров казино довольно предпочитает и ценит, за частую такие игроки становятся VIP игроками заведения, коим нередко поступают прибыльные предложения повторяющий призов, так же туда входит и бездепозитные.Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или другим cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. <a href=https://www.gamers-forum.com/member.php?104432-Scottrip>https://www.gamers-forum.com/member.php?104432-Scottrip</a> Фриплей-бонусы. Бонусы за благотворительную игру есть лишь в неких клубах. Они зачисляются сразу последствии творения профиля и срабатывают недолговременное время. Если у вас нет времени истратить средства, они просто закончатся. Что дотрагивается времени, правило призы действуют в течение одного часа.Постарайтесь отыграть вейджер, чтобы замечена вероятность забыть заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные приборы. Вы можете получить выигрыш на электрической кошелёк, карту, телефонный. 1×slots промокод при регистрации Размер призов почаще всего чисто символический и не выше 50 рублей. Приятно, но осязаемым бустом при ли будет.
1×slots регистрация 1×slots review live
Этот образ бонуса будет добавлен на Ваш акк в удачной процедуры регистрации с использованием номера телефонного. Если избрать другой метод создания учетной записи, бездеп не несомненно добавлен на Ваш аккаунт. <a href=http://freedom.teamforum.ru/memberlist.php?mode=viewprofile&u=6332>1×slots актуальное зеркало</a> Только выполнив все условия отыгрыша и дождавшись завершения ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить свои средства.На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению сего времени, Вы не сможете активировать и получить бездепозитный бонус. x1 slots 1хслотс регистрация перейти на 1×slots <a href=http://fumankong3.cc/home.php?mod=space&uid=582258>http://fumankong3.cc/home.php?mod=space&uid=582258</a>
1×slot официальный сайт
Зачастую бездепозитные призы казино для игры предлагаются различными заведениями азартных игр в качестве рекламных промоакций либо в целях вербования к себе новых игроков. Для бездепозитных бонусов в казино 2022 игроку не пополнять счет до момента вывода желанных средств. <a href=https://images.google.pl/url?sa=t&url=https://doctorlazuta.by/>https://images.google.pl/url?sa=t&url=https://doctorlazuta.by/</a> При помощи такого одобрения оператор имеет кроме завлекать клиентов, коие раньше проявляли активность на веб-сайте, хотя по некий основанию перестали играть. В этом случае промокод высылается юзеру по электрической почте или повторяющий SMS. 1×slots сайт зеркало Бездепозитный приз за регистрацию в казино — это стартовый подарок в виде денежного начисления либо бесплатных вращений для новых игроков заведения, для получения которого не нужно заносить депо.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.carshowsociety.com/forum.php?action=profile;u=2398>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<a href=https://bans.org.ua/index.php?topic=117831.new#new>1×slots казино мобильная версия</a>
<a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=4648>1хслот официальный сайт зеркало</a>
<a href=https://chasingadream.rpginitiative.com/showthread.php?tid=109189&pid=282585#pid282585>1×slots официальный сайт зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, чтобы была вероятность исключить выигрыш. Бездепозитный бонус за регистрацию в казино — это стартовый презент повторяющий валютного начисления либо безвозмездных вращений для новых игроков заведения, для получения которого надо вносить депо.
#9467 Charlesgunnyhttp://filmkachat.ru
1×slots мобильная версия войти казино
В бонусную программу множества операторов входят регулярные бездепы. Это пожизненные промоакции, поощряющие интенсивных неизменных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депо в мена на скопленные баллы лояльности.В любом казино с бездепозитным бонусом учтены вейджеровые условия. Это единственный «подводный камень», который стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) сделать определённое число ставок. Чем круче приз, тем сложнее выполнить условия, и напротив. <a href=http://filmkachat.ru/>1×slots зеркало регистрацию более популярный вариант это</a> Однако в критериях скрываются «подводные камни», коие не позволят исключить солидную необходимую или же вы не успеете отыграть вейджер. Поэтому профессионалы советуют забрать безвозмездные вращения за регистрацию в казино без депозита, дабы поднабраться опыта и получить настоящий шанс на победу. <a href=http://bbs.tamurayukari.net/bbs/space-uid-12518.html>http://bbs.tamurayukari.net/bbs/space-uid-12518.html</a> Не рекомендуем сломя голову браться за различные предложения получения средств без инвестициям. Вполне вполне, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на 1-ый взор. Альтернативой является казино приз за депозит. Мы предлагаем вам пару советов, спасибо коим у каждого игрока будет возможность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег:Также учтите, что кое-какие игровые платформы сузивают список государств, которые готовы получить предложенный бездепозитный приз за регистрацию. К образцу, есть онлайн-заведения, выдающие подобные бонусы лишь жителям определенных государств. К образцу, онлайн казино 777 Оригинал предоставляет бездепозитный приз только игрокам из России и государств СНГ. Или напротив, снабжают вознаграждением всех, не жителей неких стран (исходя из сего, стопам внимательно учить перечень, дабы потом не появилось никаких вопросов и жалоб). 1× slots casino официальный сайт <a href=https://cursos.fixtech.com.br/forum/member.php?action=profile&uid=14683>https://cursos.fixtech.com.br/forum/member.php?action=profile&uid=14683</a>
1 хслот регистрация в 1×slots casino
Чтобы самостоятельно увериться в превосходстве бездепозитных бонусов, довольно зарегистрироваться в казино и получить поощрение. <a href=https://adminclub.org/member.php?action=profile&uid=90427>1х слотс зеркало регистрация в 1×slots casino</a> 1×slots промокод при регистрации 2025 В бонусную программку многих операторов входят систематические бездепы. Это бессрочные акции, поощряющие активных постоянных игроков. Популярный формат — раздача фриспинов по конкретным денькам недели. Многие операторы, например казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депо в обмен на скопленные баллы преданности.Бездепозитные бонусы начисляются лишь раз раз. Не стоит открывать новые аккаунты, дабы получить их повторно. Служба защищенности казино непременно выявит «левого» соучастника и перекроет. Если посетитель выполнит необходимые притязания, отыграет собственную ставку и решит исключить собственный выигрыш, то ему нужно сведению, собственно казино обязательно востребует предоставить ксерокопии личных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные средства исключить не получится. <a href=https://gusev-online.ru/user/Raymondram/>https://gusev-online.ru/user/Raymondram/</a> Обычно показатель повыше, чем для призов на депозит. Не дивитесь, в он несомненно и х100. Иногда завышенный коэффициент вейджера устанавливается для обитателей отдельных стран. 1×slots официальный регистрация Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить необыкновенности, недоступные при забаве в демо режиме. Многие свежие клиенты перебегают в число постоянных, а оператор получает долгосрочную прибыль.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
При использовании бездепозитным бонусом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют несколько видов лимитов:Многие новенькие колеблются, собственно поощрительный приз не нужно будет возвращать, даже в они выиграли у казино. Это полностью безопасно и накрепко. Выводя выигранные средства, игрок просто одергивает свое участие при и утрачивает уникальную возможность – бесплатно наращивать собственное материальное положение. <a href=http://cse.google.com.ph/url?q=http://vismarket.ru/bitrix/redirect.php?goto=http://clients1.google.com.jm/url?q=https://telegra.ph/Nakazaniya-dlya-voditelej-publikuyushchih-informaciyu-o-narusheniyah-pravil-dorozhnogo-dvizheniya-v-socialnyh-setyah-09–24>http://cse.google.com.ph/url?q=http://vismarket.ru/bitrix/redirect.php?goto=http://clients1.google.com.jm/url?q=https://telegra.ph/Nakazaniya-dlya-voditelej-publikuyushchih-informaciyu-o-narusheniyah-pravil-dorozhnogo-dvizheniya-v-socialnyh-setyah-09–24</a> казино 1×slots Используйте лучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из списка ниже, чтобы заработать презенты за простые действия теперь сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и быстрыми выводами на электрические кошельки.Ещё одно распространённое акционное предложение – привлекательный подарок с сомнительными притязаниями. К примеру, клуб обещает $100 виде бездепа, хотя с вейджером х80 либо х100. Отыграть подобный вейджер фактически нереально и поэтому другого концентрироваться на более заманчивых промоакциях.
1×slots зеркало подтвердит вашу регистрацию если говорить
Демоказино есть практически на каждом сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются значительно пореже: там в случае выигрыша и соблюдения условий промоакций бездеп можно превратить в настоящие деньги. <a href=http://216.38.0.7/viewtopic.php?f=12&t=158937>1×slots зеркало быструю регистрацию а также мгновенное</a> Промокод – определённая комбинация знаков, коию нужно установить в подходящее фон при создании учетной записи или активировать в личном профиле игрока в разделе с бонусами. Внесение депо – Будьте готовы восполнить счет после отыгрыша бонуса. Это стандартное заявка правил для этого на промо-акций. Лучше заблаговременно уточнить, какую необходимую надо(надобно) несомненно заносить на счет. Как верховодило, речь о минимальном депозите, но вы обязаны быть уверены, собственно он вам по карману. 1×slots зеркало <a href=https://kizkiuz.com/user/JefferyNeake/>https://kizkiuz.com/user/JefferyNeake/</a>
1×slots официальный сайт скачать
Основное правило получения бездепа ? творимый аккаунт должен быть у пользователя первым и единственным. Наличие нескольких аккаунтов строго запрещено. Проверка ведется по имени, e-mal, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депо необходимо блюсти простую очередность поступков. Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, дабы была возможность вывести выигрыш. <a href=http://droid-gamers.ru/index.php?subaction=userinfo&user=creepydairy90>http://droid-gamers.ru/index.php?subaction=userinfo&user=creepydairy90</a> B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax 1× slots casino официальный сайт
<b>Смотреть еще похожие новости:</b>
<a href=http://link.5nx.ru/viewtopic.php?f=5&t=4394>1×slots зеркало регистрация</a>
<a href=https://forum.pmpobc.ca/index.php?topic=129297.new#new>1×slots официальный сайт, скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На нашем сайте Вы отыщите список актуальных новых бездепозитных бонусов в казино 2022 года. Также, есть много эксклюзивных услуг, коие доступны лишь гостям нашего вебсайта после регистрации по нашей ссылке или активации особого промокода.
#9468 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
Если вы выбрали для себя некоторое брендов коие вас больше всего приглянулись, для постоянной забавы! Таких гемблеров казино довольно любит и ценит, за частую эти игроки становятся VIP игроками заведения, коим нередко поступают прибыльные предложения вид призов, например же туда входит и бездепозитные.Условия шансы различаться приятель от приятеля. Но такой бонус имеет быть применен лишь для игрового процесса – приобретенные на счет финансы до такого, как станут отыграны, вывести нереально. <a href=http://filmkachat.ru/>1×slots подтвердит вашу регистрацию если говорить</a> Процесс доказательства личности может занять от одного дня до недели. Если клиент разрешил нибудь ошибку при заполнении паспортных данных, то ему стопам обратиться с проблемой в саппорта онлайн-казино.Приветственный бонус без депо ? презент за регистрацию. Выдается деньгами, фриспинами или баллами. В последнем случае бонусные баллы используются для участия в турнирах или обмена на реальные средства. <a href=https://lit-book.ru/user/Jameslex/>https://lit-book.ru/user/Jameslex/</a> 1×slot регистрация <a href=http://ledyardmachine.com/forum/User-Mycsgosem>http://ledyardmachine.com/forum/User-Mycsgosem</a> Подтверждение электронной почты – одно из главных условий, коие есть почти в любом бездепозитном казино. Чтобы верифицировать электрическую почту, довольно перейти по активной ссылке в письме, полученном от азартного клуба.
1×slot официальный сайт
Как лишь на виртуальном счету окажутся бонусные средства, поторопитесь отыграть вейджер. Сразу в сего можно забыть заявку на вывод выигрыша. Кредиты выгодно отличаются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом настоящих средств и дают возможность почувствовать задор. Во-вторых – возможно насладиться любой азартной игрой доступной на сайте. В вашем распоряжении присутствуют автоматы, настольные приложение, видео-покер, Live-дилеры. 1×slots сайт зеркало Чтобы помощи увериться в преимуществах бездепозитных бонусов, достаточно зарегистрироваться в казино и получить поощрение.Для подтверждения электронной почты, просто перейдите по интенсивной ссылке в письме, полученном от игрового заведения. <a href=http://vn-info.net/user/Jamesbeist/>http://vn-info.net/user/Jamesbeist/</a> У каждой игры средства притязания по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система засчитает каждую ставку. В рулетке и покере сделать это намного труднее. Именно поэтому так важно пристально разбирать условия получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой забаве, то новички попросту «спустят бонус на ветер».К образцу, игроку выдаются безвозмездные свои в заведении в объеме пятидесяти или 100 $ (вейджер на коие составляет 100х). То есть, каждому новоприбывшему геймеру выскакивает манящая иллюстрация, которая сулит выплату всех зачисленных компанией средств. Не стоит внимания на казино приз за регистрацию без депозита с чрезмерно немалый либо довольно маленькой суммой бонусов, поэтому собственно, числе тщательно исследовав все условия, здесь скорее, несомненно какой-то подвох. 1×slots регистрацию процедура займет всего лишь
казино 1×slots официальный сайт
Во всех легальных онлайн-казино Беларуси нужно свидетельство паспортных данных для игры — это заявка правительства страны.Этот тип бонуса будет добавлен на Ваш аккаунт в удачной процедуры регистрации с внедрением номера аппарата. Если избрать другой способ творения учетной записи, бездеп не будет добавлен на Ваш аккаунт. <a href=https://wiki.eqoarevival.com/index.php/%C3%90%C2%A4%C3%91%E2%82%AC%C3%90%C2%B0%C3%90%C2%BD%C3%91%CB%86%C3%90%C2%B8%C3%90%C2%B7%C3%91%E2%80%B9_%C3%90%C5%A1%C3%90%C2%BE%C3%91%E2%80%9E%C3%90%C2%B5%C3%90%C2%B9%C3%90%C2%BD%C3%90%C2%B8_%C3%90%C3%A2%E2%82%AC%E2%84%A2_%C3%90_%C3%90%C2%BE%C3%91%C3%91%C3%90%C2%B8%C3%90%C2%B8:_%C3%90%C2%A1%C3%91%E2%80%9A%C3%90%C2%B0%C3%90%C2%B2%C3%90%C2%BA%C3%90%C2%B0_%C3%90%C3%90%C2%B0_2024_%C3%90%E2%80%9C%C3%90%C2%BE%C3%90%C2%B4>https://wiki.eqoarevival.com/index.php/%C3%90%C2%A4%C3%91%E2%82%AC%C3%90%C2%B0%C3%90%C2%BD%C3%91%CB%86%C3%90%C2%B8%C3%90%C2%B7%C3%91%E2%80%B9_%C3%90%C5%A1%C3%90%C2%BE%C3%91%E2%80%9E%C3%90%C2%B5%C3%90%C2%B9%C3%90%C2%BD%C3%90%C2%B8_%C3%90%C3%A2%E2%82%AC%E2%84%A2_%C3%90_%C3%90%C2%BE%C3%91%C3%91%C3%90%C2%B8%C3%90%C2%B8:_%C3%90%C2%A1%C3%91%E2%80%9A%C3%90%C2%B0%C3%90%C2%B2%C3%90%C2%BA%C3%90%C2%B0_%C3%90%C3%90%C2%B0_2024_%C3%90%E2%80%9C%C3%90%C2%BE%C3%90%C2%B4</a> Получить Бездепозитный приз в онлайн казино дело двух кликов. Другой момент, отыграть промо и соблюсти управляла и условия отыгрыша. Под правилами подразумевается не вагер, но и лимитирования по максимальной ставке. Мы осознаем, что в кино все ставят на зеро и выигрывают. Призываем не создавать похожего. Перед активацией приза прочитайте управляла. Узнайте следующие моменты: Условия получения подарка, за регистрацию, за депо и многое. Ограничения по наибольшей ставке. Зачастую не выше 350 руб. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах возможно отыгрывать вагер. Можно вертеть автоматы, а вагер несомненно стоять на месте. Поэтому главно знать, в каких забавах возможно осуществлять кратность валютного оборота. 1×slots регистрация 1×slotscasino09k online Перед активацией принципиально внимательно изучить обстоятельства акции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют значение также лимиты ставок при отыгрыше и сроки, в течение коих можно пользоваться предложением. Если бездеп обхватывает узкий список игр, рекомендуется узнать наибольшие коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят лишь в случае, случае оператор не установил строгие ограничения на наивысшую необходимую ставки.Фриспины начисляются по конкретной ставке. После их активации игроку необходимо запустить разъем и увериться, собственно в нем показываются бесплатные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода после отыгрыша определяется оператором и редко выше 5 000 рублей.
1×slots казино мобильная версия
Разные казино имеют собственные управляла по выведению выигрыша. Для бездепозитных бонусов принимаются достаточно высочайшие требования. Часто онлайн-казино советуют отыграть бонусное поощрение до 100 раз в игровых автоматах. Например, если игрок получил бесплатно 10 долларов, то необходимо несомненно отыграть их, поставив одну тысячу спинов по одному доллару любой. Стоит отметить, собственно не все казино выделяют вероятность играть на призы и не во всех развлекательных заведениях идентичные верховодила для отыгрывания. Некоторые казино запрещают выступать на призы в блекджек либо ограничивают ставки до пяти процентов, собственно существенно увеличивает в десятки раз число необходимых игр. <a href=http://forums.panzergrenadiers.com/showthread.php?22944–1%D0%A1%E2%80%A6%D0%A1%D0%83%D0%A0%C2%BB%D0%A0%D1%95%D0%A1%E2%80%9A%D0%A1%D0%83-%D0%A1%D0%82%D0%A0%C2%B0%D0%A0%C2%B1%D0%A0%D1%95%D0%A1%E2%80%A1%D0%A0%C2%B5%D0%A0%C2%B5-%D0%A0%C2%B7%D0%A0%C2%B5%D0%A1%D0%82%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%BB%D0%A0%D1%95-%D0%A0%D0%85%D0%A0%C2%B0-%D0%A1%D0%83%D0%A0%C2%B5%D0%A0%D1%96%D0%A0%D1%95%D0%A0%D2%91%D0%A0%D0%85%D0%A1%D0%8F&p=505249#post505249>1хслотс рабочее зеркало на сегодня</a> На данном разделе портала регулярно публикуются обзорные статьи, каких рассматриваются благотворительные бонусы наихороших интернет-казино. Информация структурирована по нескольким пунктам, включая основные: Представленные на данной страничке наилучшие бездеп бонусы в казино за регистрацию в 2022 году имеют подходящие условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, в посетители Casino.ru шансы сортировать перечень по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д.Бывают ли бездепозитные бонусы без вейджера? Бывают, если у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино. 1×slots casino регистрация 1×slotscasin online <a href=http://www.diywiki.org/index.php/%C3%90%C2%A4%C3%91%E2%82%AC%C3%90%C2%B0%C3%90%C2%BD%C3%91%CB%86%C3%90%C2%B8%C3%90%C2%B7%C3%91%E2%80%B9_%C3%90%C2%A1%C3%91%C6%92%C3%91%CB%86%C3%90%C2%B8:_%C3%90%C5%B8%C3%90%C2%BE%C3%91%E2%80%9A%C3%90%C2%B5%C3%90%C2%BD%C3%91%E2%80%A0%C3%90%C2%B8%C3%90%C2%B0%C3%90%C2%BB_%C3%90%E2%80%98%C3%90%C2%B8%C3%90%C2%B7%C3%90%C2%BD%C3%90%C2%B5%C3%91%C3%90%C2%B0_%C3%90%C3%A2%E2%82%AC%C3%90_%C3%90%C2%BE%C3%91%C3%91%C3%90%C2%B8%C3%90%C2%B8_%C3%90%C3%A2%E2%82%AC%E2%84%A2_2024_%C3%90%E2%80%9C%C3%90%C2%BE%C3%90%C2%B4%C3%91%C6%92>http://www.diywiki.org/index.php/%C3%90%C2%A4%C3%91%E2%82%AC%C3%90%C2%B0%C3%90%C2%BD%C3%91%CB%86%C3%90%C2%B8%C3%90%C2%B7%C3%91%E2%80%B9_%C3%90%C2%A1%C3%91%C6%92%C3%91%CB%86%C3%90%C2%B8:_%C3%90%C5%B8%C3%90%C2%BE%C3%91%E2%80%9A%C3%90%C2%B5%C3%90%C2%BD%C3%91%E2%80%A0%C3%90%C2%B8%C3%90%C2%B0%C3%90%C2%BB_%C3%90%E2%80%98%C3%90%C2%B8%C3%90%C2%B7%C3%90%C2%BD%C3%90%C2%B5%C3%91%C3%90%C2%B0_%C3%90%C3%A2%E2%82%AC%C3%90_%C3%90%C2%BE%C3%91%C3%91%C3%90%C2%B8%C3%90%C2%B8_%C3%90%C3%A2%E2%82%AC%E2%84%A2_2024_%C3%90%E2%80%9C%C3%90%C2%BE%C3%90%C2%B4%C3%91%C6%92</a> Обычно бездепозитные промоакции от казино, приходят на эл. Почту в деньки рождения либо дни. В неких онлайн казино возможно обратиться в чат и как неизменному игроку, вероятно для предложат бездепозитное предложение.Обычно бездепозитные акции от казино, приходят на эл. Почту в дни рождения либо дни. В неких интернет казино возможно адресоваться в чат и как постоянному игроку, вполне вам предложат бездепозитное предложение.
1×slots casino регистрация 1×slotscasino09k online
Маркетинговая деятеля всех игорных интернет-клубов обязана одевать разнообразный характер. И если гонорары на депозит служат для того, чтобы провоцировать вносить депозиты и поощрять теснее место юзеров, то бездепозитный приз в казино либо приз за регистрацию в казино, прежде всего, рассчитан на расширение базы потребителей.Фриплей-бонусы. Бонусы за благотворительную забаву есть лишь в неких клубах. Они зачисляются незамедлительно в творенья профиля и действуют недолговременное время. Если у вас нет времени израсходовать свои, они просто завершатся. Что дотрагивается медли, как бонусы срабатывают протяжении одного часа. <a href=http://himagro.md/forum/user/36741/>http://himagro.md/forum/user/36741/</a> Бездепозитные бонусы, как теснее ясно, являются уникальной возможностью приступать к игровому процессу полностью бесплатно, словами выступать в интернет казино даром и на имеющие свои незамедлительно последствии регистрации аккаунта. Автоматы с таким депо все стать великолепной возможностью сыграть для поклонников пыла с определенными лимитированиями в финансах. 1хслот зеркало сайта
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.pmpobc.ca/index.php?topic=116192.new#new>1хслотс регистрация в 1×slots casino</a>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=62859&result=reply>1×slots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы которые возникают у начинающих. Однако далековато не все ресурсы предлагают своим клиентам бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено одобрение на первый депо в объеме 100–200%. Это замечательная возможность преумножить банкролл, увеличить время, проведённое за игрой и шансы сорвать большой куш.
#9469 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало подтвердит вашу регистрацию если говорить
Также, в этом случае нужно подтвердить собственный номер аппарата, желаемого код, приобретенный в смс-сообщении от клуба ввести в специальное поле в собственном кабинете игрока.Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную процедуру активации бонуса без депозита. Внимательно прочтите до конца. Многие новички проделывают ошибки на этапе регистрации и поэтому возможности получить презент. <a href=http://filmkachat.ru/>casino 1×slot</a> <a href=https://ic-info.ru/forum/user/173277/>https://ic-info.ru/forum/user/173277/</a> 1×slots официальный сайт скачать на айфон <a href=http://dom3online.ru/user/FrankEsoms/>http://dom3online.ru/user/FrankEsoms/</a> Можно ли в одном онлайн казино получить больше 1-го приза за регистрацию? Нет, так как в любом интернет казино есть правила, к коим надо(надобно) придерживаться, не делать 2 аккаута для получения бонусов, другому будет блокировка обоих аккаутов, не пытайтесь обмануть интернет казино, приз за регистрацию выдаеться раз раз одному лицу.
1×слотс казино
1× slots сайт <a href=https://clients1.google.cf/url?q=https://doctorlazuta.by/>https://clients1.google.cf/url?q=https://doctorlazuta.by/</a> Обычно для получения призов без депозита, казино выдвигает лояльные и вполне выполнимые обстоятельства, хотя есть ряд поступков которые запрещены и могут причиной досадные результаты:Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. 1хслот зеркало Бонус за регистрацию в казино выдается лишь один раз на одного игрока. Но случаются вспомогательные промоакции, масштабах которых бездепы раздаются для постоянных клиентов и такие презенты Вы можете получить больше одного раза.В перечне требований к отыгрышу нередко присутствуют лимиты на ставки при забаве на собственные деньги. Так, в отыграть надо(надобно) 30 000 руб., а предельная сумма ограничена 30 рублями, то вертеть барабаны предстоит 1000 один. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам деяния акции.
казино 1×slots
Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, чтобы еще раз получить бесплатный бонус. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ждет неизбежное санкция.Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, чтобы появилась вероятность вывести выигрыш. <a href=http://www.facebook-list.com/Shisha-tobacco-from-4-eur_398260.html>http://www.facebook-list.com/Shisha-tobacco-from-4-eur_398260.html</a> Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша бонусов. Заведения всегда устанавливают максимальную ставку, возможную по условиям вейждера. 1×slots зеркало проходить регистрацию это отличный вариант Бездепы обычно предлагают с отыгрышем — мгновенно исключить выигранные средства нельзя. Перевод денег со счета несомненно вероятен в того, как пользователь выполнит все требования казино, а сумма возможности быть выше установленного правилами лимита. Условиями промоакции фиксируются сроки, на коих клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней в активации.Бездепозитные призы, как теснее ясно, являются уникальной возможностью приступать к игровому процессу полностью безвозмездно, другими играть в онлайн казино безвозмездно и на существующие средства незамедлительно последствии регистрации аккаунта. Автоматы с таким депозитом шансы замерзнуть великолепной возможностью сыграть для поклонников азарта с определенными лимитированиями в финансах.
1×slot регистрация
Наши эксперты изучают условия промоакции, затем в ручном режиме проверку их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие характеристики. Мы не рекламируем казино, а даем игрокам информацию о лучших из них. К сожалению, нет. Почти все казино, просят внесение желая бы одного минимального депозита для вывода выигрыша с бездепозитного бонуса. Также учитывайте, собственно исключить средства разрешается только на что, эту платежную систему, с которой был изготовлен депозит.Размер призов чаще всего чисто символический и не превышает 50 руб. Приятно, хотя ощутимым бустом деле ли станет. 1 хслот регистрация в 1×slots casino <a href=http://atope.ru/index.php?subaction=userinfo&user=dustyutopia89>http://atope.ru/index.php?subaction=userinfo&user=dustyutopia89</a> Бесплатные бонусы казино без депозита возможно получить повторяющий денежных средств на бонусный счет (вывести их возможно только в отыгрыша), фриспинов, игры либо кешбэк-бонуса.
1×slots зеркало
Каждый игрок обязан сперва детально выучить условия по получению и отыгрышу приглянувшегося дара. Если всё организует, поторопитесь арестовать безвозмездные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо в начать вращать барабаны лучших слотов. <a href=http://besstizhie.ru/user/HarryMah/>http://besstizhie.ru/user/HarryMah/</a> 1×slots регистрация 1×slots review live Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депо может выделяться до 30 дней.Шаг 4. Активация. Внимательно изучите обстоятельства, информацию по ограничениям и сроке деяния бонусного предложения. Разобравшись с правилами, возможно активировать приз в личном офисе (время ? с использованием промокода) или по запросу в саппорт.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.spherecommunity.net/User-JamesLop>1× slots casino зеркало</a>
<a href=http://vn-info.net/user/Josephkam/>1×slots зеркало на сегодня</a>
<a href=https://your-portal.at.ua/forum/58–341–20#88220>1хслот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подтвердите регистрацию, дабы активировать Бездепозитный бонус с выводом, потребуется заполнить индивидуальный профиль. Заполните порожние поля истинными данными о себя.
#9470 Charlesgunnyhttp://filmkachat.ru
казино 1×slots официальный сайт
Если вы бывалый игрок, вы должны аристократия, собственно бонус без депозита – редкая находка. Тем не менее, мы неделю исследуем онлайн, чтобы найти для вас наихорошие бездепозитные предложения.Игрокам не принимать приветственный приз как гарантированный способ получить большой выигрыш, хотя это замечательная вероятность без затрат расценить функционал казино. <a href=http://filmkachat.ru/>1х слот регистрация в 1×slots casino</a> <a href=http://www.mignonmuse.com/bbs/board.php?bo_table=free&wr_id=280369>http://www.mignonmuse.com/bbs/board.php?bo_table=free&wr_id=280369</a> Подобные бонусы без депозита предоставляются на больше прибыльных условиях. Зачастую они крупнее, а условия отыгрыша наименее строгие. 1×slos регистрация в 1×slots casino <a href=http://misstres.ru/forum/profile.php?action=show&member=7152>http://misstres.ru/forum/profile.php?action=show&member=7152</a> Чаще всего казино бонус за регистрацию без депо даёт вероятность запустить любой автомат. Но лучше внимательно ознакомиться с критериями. Иногда для забавы доступны только определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, другого начать знакомство с миром пыла именно с «одноруких бандитов».В интернет-сети всегда возможно найти списки более известных и обещанных поощрительных программ от известных онлайн-казино.
1×slots зеркало этих способов предполагает регистрацию
1×slots официальный сайт зеркало рабочее Бездепозитные бонусы – это исключительно небезинтересная и более перспективная промоакция интернет-казино. Они том другого фри-спинов, поэтому собственно выплаты в даровых вращениях не гарантированы, как композиции на барабанах игрового аппарата шансы не сложиться. <a href=http://foru1f40m.bunbun000.com/bbs/home.php?mod=space&uid=9400323>http://foru1f40m.bunbun000.com/bbs/home.php?mod=space&uid=9400323</a> За привлечение друга ? масштабах партнерской программки клиент получает вознаграждение за вербование новых юзеров.Онлайн-казино кропотливо продумывают бонусные условия, коие необходимо изучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и другие лимитирования. 1×slots зеркало быструю регистрацию а также мгновенное
1×slots казино зеркало
Многие новички колеблются, собственно поощрительный приз не несомненно отдавать, в в они выиграли у казино. Это полностью неопасно и накрепко. Выводя выигранные свои, игрок просто останавливает свое участие деле и утрачивает уникальную возможность – бесплатно наращивать личное материальное положение. Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Для получения депозитного бонуса нужно пополнить свой игровой баланс настоящими деньгами. Вознаграждение возможно получить или при внесении первого депо, либо вид фиксированного процента от внесённых средств. Так либо другому, приз поступит на счёт только в пополнения. <a href=https://popcporn.net/user/FrankNig/>https://popcporn.net/user/FrankNig/</a> Некоторые казино все предлагать клиентам бездепы за свидетельство номера или почты или репост на страницу в социальных сетях. скачать 1×slots официальный сайт
1×slots зеркало регистрация то дальше необходимо пройти
Возможность сыграть дополнительное соревнование (а времени и несколько) абсолютно даром, а выигрыш, тому, поступает на счёт игрока.Не желаете сыграть в азартные игры, не рискуя средствами деньгами, но получая в все выплаты? Подобную вероятность деют почти наилучшие порталы с азартными весельями. В их количестве количество честных и надежных интернет-казино на российском языке. Они привлекают новых юзеров разными поощрительными мероприятиями, включая бездепозитные, либо бесплатные бонусы. Рассмотрим на образце: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских рублей. В критериях акции указано, собственно вейджер бездепозитного приза х20. Поэтому, дабы отыграть бонус, игроку будет необходимо устроить ставок на 35*20=700 рублей.При помощи такого поощрения оператор возможность того завлекать посетителей, которые ранее показывали активность на сайте, хотя по какой-то основанию прекратили играть. В этом случае промокод высылается юзеру по электронной почте либо повторяющий SMS. При использовании бездепозитным призом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют некоторое видов лимитов:Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 поболее. Когда игроку полагается количество фриспинов, администрация может бить3 их начисление на некоторое дней. Бесплатные вращения предоставляются для конкретного слота, кот-ый указывается в правилах акции. 1×slots casino регистрация <a href=http://freedom.teamforum.ru/memberlist.php?mode=viewprofile&u=6502>http://freedom.teamforum.ru/memberlist.php?mode=viewprofile&u=6502</a> При отыгрыше бонусных средств, нужно учитывать срок деяния приза и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный бонус несомненно аннулирован.Фриспины предназначены для использования в видео слотах. Внимательно ознакомьтесь с критериями – часто их выдают на кое-какие автоматы. В зависимости от клуба, у вас выйдет сделать определённое число ставок. Кстати, продвинутые игорные жилища позволяют запускать каждых «одноруких бандитов».
1×slots регистрация 1×slots casino 777 online
Размер приза. В качестве бездепов обыкновенно начисляют очень суммы, а когда речь о призах за депо, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино имеют презентовать игроку до 2000$.Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=http://sols9.com/batheo/Forum/User-Williamtrive>http://sols9.com/batheo/Forum/User-Williamtrive</a> 1хслотс официальный сайт зеркало Но ни не забывайте внимательно читать управляла роли в бонусных промоакциях. Если вы нарушите желая бы одно условие, позже вы не можете уладить недоразумение с администрацией.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.ldvd.nl/no-22-san-diego-place-rallies-very-last-boise-country-27–16?page=32#comment-237426>1хслотс зеркало на сегодня</a>
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=36584>1×slos регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В интернет-сети всегда возможно найти списки более известных и гарантированных поощрительных программ от модных онлайн-казино.
#9471 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало на сегодня
Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, например как Вам придется ее доказать дальнейшем при выводе денег. <a href=http://filmkachat.ru/>1× slots casino официальный сайт</a> <a href=http://z914169g.bget.ru/user/DavidStalo/>http://z914169g.bget.ru/user/DavidStalo/</a> Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, чтобы еще раз получить даровой бонус. Игорные заведения нетерпимы к бонус-хантерам, потому вас ожидает неизбежное санкция.Помните, собственно любые нарушения правил сведут на нет ваши усилия, и вы всего останетесь без начисленного для безвозмездного бонуса. Всегда изучайте управляла начисления и условия вейджера. По каким вопросам, на коие вы не можете без отыскать ответы, обращайтесь за объяснениям и саппорт. 1×slots регистрация <a href=http://www.air119.net/bbs/board.php?bo_table=free&wr_id=478176>http://www.air119.net/bbs/board.php?bo_table=free&wr_id=478176</a> Бездепозитный приз за регистрацию в казино — это стартовый подарок вид валютного начисления либо даровых вращений для новых игроков заведения, для получения которого не нужно вносить депо.
1×slot зеркало рабочее регистрации на телефон придет
1×slots регистрацию процедура займет всего лишь Так что приготовьтесь предоставить конфиденциальную информацию (пол, возраст, государство проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев проверка данных занимает не более суток, после чего получится свободно выводить солидные выигрыши. <a href=http://pku84-org.dajiguang.com/home.php?mod=space&uid=163088&do=profile>http://pku84-org.dajiguang.com/home.php?mod=space&uid=163088&do=profile</a> Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации дара нужно доказать электронную почту и привязать телефон;Представьте момент, когда при ставке в 10 рублей Вы получите сходственное умножение. Миллион руб. За одно вращение, собственно вполне вероятно. Поэтому вопрос, сколько можно выиграть остаётся закрытым. Предлагаем проверить без. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный бонус и проверяйте удачу в деле. Разумеется, исключить средства сложно. Однако шансы есть у всех. 1×slots быструю регистрацию а также мгновенное Исходя из этого, просто не существует осмысленных причин махнуть рукою на получение такового бонуса при регистрации. И, будет, на подобный бесплатной базе у вас есть шансы выиграть средства и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные бонусы, именуют безвозмездными онлайн платформами для игр.
1×slots рабочее зеркало на сегодня
Сроки активации приза уточняются любым казино, но чаще всего они не превосходят недели с момента получения. Игроку непременно надо(надобно) применять бездеп протяжении указанного срока, в ином случае приз просто исчезнет. Каждый бонус можно получить лишь один один, потому случае не применять бездеп в срок, у игрока не будет 2 шанса им пользоваться.Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного бонуса достаточно пополнения баланса и доказательства личности. В других же клубах, нужно некоторое один прокрутить собственный депозит. Для вывода средств приз надо(надобно) будет отыграть законам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариациями отыгрыша бездепозитного бонуса до его получения, дабы избежать конфликтных обстановок.Бездепозитный приз по промо-коду несомненно доступен для забавы, только в том случае когда Вы активируете специальный бонусный код в разделе с бонусами либо укажите промокод при регистрации на сайте. В неких случаях, считая активации кода, понадобиться подтвердить контактные данные игрока и наполнить анкету клиента. <a href=http://koreasamsong.com/bbs/board.php?bo_table=free&wr_id=1526923>http://koreasamsong.com/bbs/board.php?bo_table=free&wr_id=1526923</a> 1 x slots
1×slots casino зеркало рабочее
Вейджер (wager) – это коэффициент, кот-ый показывает на какую сумму необходимо устроить ставок, чтобы исключить бонус из казино. Пример: Вы получили за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода сего приза, Вам нужно устроить ставок на необходимую: 500*70=3500 руб. Только всецело отыграв бонус, Вы сможете вывести свой выигрыш.Эффективность бездепов виде рекламного инструмента оценили все операторы. Малоизвестные площадки используют эти акции, дабы стремительно набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны неизменных посетителей. Не все сайты, дающие подарки без депо, рекомендованы к ирге. За привлекательным промоописанием имеют скрываться неосуществимые обстоятельства отыгрыша и другие подводные камни. <a href=https://forums.scar-divi.com/topic/575749–1×slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%BD%D0%B0-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D0%BE%D0%BC-%D1%81%D0%B0%D0%B9%D1%82%D0%B5/>1×slots регистрация на официальном сайте</a> Вывод выигрыша с бездепозитных бонусов казино – щедрый презент от азартных клубов. Но чтобы исключить собственный доход, необходимо выполнить ряд критерий:Бывают ли бездепозитные призы без вейджера? Бывают, если у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино. Таким образом интернет казино получает потенциального игрока. Возможно в или истинном он захотит поиграть на свои средства. Так трудятся бездепозитные призы в интернет казино. Здесь хорошо подходит выражение, безвозмездные сыр случается только в мышеловке. Начинающие игроки могут не осознавать опасность азарта. Однако со временем осознания становится больше. Это тема для отдельного обсуждения. 1×slos регистрация в 1×slots casino <a href=https://flaxeco.com/user/Jeffreyalurf/>https://flaxeco.com/user/Jeffreyalurf/</a>
1×slots casino online регистрация
Несмотря на то, собственно данный вариант стимуляции со стороны азартных платформ очень известен области сходственных игр, далековато не всем почитателям казино знаменито, собственно сами бездепозитные бонусы казино и как непосредственно их возможно эксплуатировать.Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному бонусы и, прокрутив их, выигрывает 35 белорусских рублей. В условиях промоакции предписано, что вейджер бездепозитного приза х20. Поэтому, дабы отыграть приз, игроку несомненно необходимо устроить ставок на 35*20=700 руб. <a href=https://civil808.com/user/64016/oscaroxill>https://civil808.com/user/64016/oscaroxill</a> Шаг 4. Активация. Внимательно изучите условия, информацию по ограничениям и сроке действия бонусного предложения. Разобравшись с правилами, возможно активировать приз в собственном офисе (время ? с использованием промокода) либо по запросу в саппорт. 1 x slots Чаще всего используются коды. Их нужно заносить в особые окошки регистрационной анкеты, случае идет о пригласительных бонусах, либо в особом разделе собственного кабинета игрока.Подтверждение регистрации. Казино настоятельно привязки профиля к электрическому адресу и номеру телефона. Для сего на e-mail отчаливает письмо со ссылкой, а на телефонный ? текстовое сообщение с кодом.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.l2endless.com/showthread.php?tid=211290>1×slots зеркало регистрация в 1×slots casino</a>
<a href=https://forum.oursson.ru/viewtopic.php?f=2&t=7935>1×slots акции</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Одним из поводов отдавать привилегию 1 или иному заведению содержится в привлекательности предлагаемых акций и бесплатных предложений. Безвозмездные фриспины, выдаваемые без дела делать какой-либо вклад, в списке располагается далеко не в конце.
#9472 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее
На благотворительные призы онлайн-казино практически практически распространяется ограничения по стране проживания посетителей. Даже если вас разрешается открывать счет и выступать на деньги в заведении, это еще не значат, что вас доступны no deposit bonuses. <a href=http://filmkachat.ru/>1×слотс казино</a> Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, the decision зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. <a href=http://www.techieshah.com/2019/08/eclipse-server-tomcat-v85-server-at.html>http://www.techieshah.com/2019/08/eclipse-server-tomcat-v85-server-at.html</a> Наши специалисты изучают условия промоакции, после в ручном режиме проверку их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие характеристики. Мы не рекламируем казино, а даем игрокам информацию о наилучших из их.Представленные на этой странице превосходнейшие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные обстоятельства. После кропотливого анализа редакция портала составила рейтинг спецпредложений, в котором гости Casino.ru шансы сортировать перечень по нескольким аспектам: по сумме, вейджеру, максимальной сумме вывода и т.д. казино 1×slots <a href=http://intentionalpress.com/author/terrysmunk/>http://intentionalpress.com/author/terrysmunk/</a>
1хслотс зеркало на сегодня
Все любят получать презенты. Согласитесь, почти каждый играющий человек несомненно очень счастлив, случае получит бесплатный подарок для игры в интернет казино просто за регистрацию или же приз за внесенный депо, так называемые приветственные призы для новых игроков. Соответственно такие интернет клубы будут более востребованы и преимущественны у игроков при выборе казино для забавы. Топ казино день обновляется и добавляются свежие и интересные игровые клубы с симпатичной бонусной политикой и всеми возможными прерогативами, к которым относятся такие призы как фриспины за регистрацию, денежные бездепозитные бонусы, еще великодушные призы за внесенный депо. 1хслотс казино зеркало Также существуют онлайн-платформы азартных игр, коие применяют раздачу бездепозитных призов в специальные даты (как для казино, так и для игрока). Помимо сего, действующие геймеры кроме имеют вероятность получить похожие бонусы за собственную работа (к примеру, за увеличения значения либо за схожие достижения). <a href=https://www.catfish-assassins.org/forum/memberlist.php?mode=viewprofile&u=604>https://www.catfish-assassins.org/forum/memberlist.php?mode=viewprofile&u=604</a> Самые популярностью методы вывода денег ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электрическим платежным системам подобии Neteller и Skrill, еще используют криптовалютными кошельками. Вывод выигрышей возможность осуществляться мгновенно или развлекать от нескольких часов до нескольких суток. casino 1×slot
1×slots casino регистрация
Для подтверждения электрической почты, просто перейдите по активной ссылке в послании, приобретенном от игрового заведения. <a href=https://rdaforum.com/user-16163.html>https://rdaforum.com/user-16163.html</a> Бонус за регистрацию в казино выдается лишь один раз на 1-го игрока. Но бывают дополнительные акции, в рамках коих бездепы раздаются для неизменных посетителей и такие подарки Вы сможете получить больше одного раза.Заполняя данные в личном профиле, указывайте только достоверную информацию, так как Вам придется ее доказать в при выводе денег. 1×slots зеркало на сегодня Бездепозитные призы — это презенты от казино повторяющий бонусных денег либо фриспинов для игровых автоматов, которые начисляются на акк игрока после процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депо не требуется.
онлайн казино 1×slots
Не рекомендуем опрометью голову хвататься за различные предложения получения средств без инвестициям. Вполне вероятно, что бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем смотрится на первый взгляд. Альтернативой является казино приз за депо. Мы предлагаем для пару советов, благодаря коим у любого игрока будет вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом средств: <a href=https://uyghuryol.com/forum/viewtopic.php?f=8&t=231859&p=274319#p274319>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a> Бонусные средства – небольшая сумма средств для старта в новеньком казино. На бонусные средства, обыкновенно разрешается играть во все забавы, кроме слотов с прогрессивным джекпотом и игр из раздела exist casino.Выполнив все требования оператора, клиент возможность оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит примерно менее суток. Если дополнительно требуется пройти функцию верификации, то срок увеличивается до 1–2 рабочих дней. Для перевода применяются банковские инструменты и электрические платежные системы. Второй способ подходит лучше, например как основная транзакций в осуществляются мгновенно. В связи со спецификой функционирования банков обработка платежей возможность взятьвдолг(взятьвзаймы) до нескольких рабочих дней. 1×slots casino регистрация 1×slots review live <a href=https://www.levasche.it/shop/jaspertam/>https://www.levasche.it/shop/jaspertam/</a> Воспользоваться бездепом возможно не во всех игровых автоматах: казино вдруг уточняет ограничение для клиентов. Конечно, это возможно счесть неким неудобством для игрока, хотя ради отметить, что выбор автоматов всё равно остаётся достаточно великим.
1×slots актуальное зеркало
Отказ в прохождении верификации. Если заказчик не хочет либо не дать документы, подтверждающие его личность, профиль несомненно заблокирован совместно, вкупе со всеми бонусными начислениями.С иной стороны, гораздо легче арестовать бездепозитные фриспины за регистрацию в казино и прямо сейчас начать вращать барабаны в лучших слотах. Главная необыкновенность спинов сомнений, собственно они предназначены для топовых автоматов. Удастся не пройти вспомогательные раунды, хотя и прирастить сумму выигрыша, заработать респины и другие внутриигровые презенты. Бездепозитный приз предоставляется новенькому игроку за определенные действия. Часто презент вид денег или фриспинов выдается за регистрацию, спасибо чему юзер получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.С этими простыми советами любое казино с бонусом за регистрацию способно принести в разы больше выгоды и выгоды. <a href=https://www.unionmerengue.com/2016/05/segunda-ronda-de-playoff-real-madrid.html>https://www.unionmerengue.com/2016/05/segunda-ronda-de-playoff-real-madrid.html</a> Чтобы выступать безвозмездно на реальные деньги в казино, не всегда довольно просто зарегистрироваться. Иногда необходимо выполнить дополнительные деянья.Иногда для получения призов необходимо связаться с представителями саппорта. Удобнее всего с ними беседовать в онлайн-сате, желая времени достаточно запроса по электронной почте. 1хслотс рабочее зеркало на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=http://timelesshourglass.com/requiem/memberlist.php?mode=viewprofile&u=821>1×slots казино мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Доступные игры – В неких азартных забавах можно понизить математическое превосходство казино до нескольких 10-х процента. В их числе все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как правило, в этих играх ставки идут в зачет вейджера не полностью. Например, может предусматриваться лишь 50%. В неких играх бездепозитные бонусы вообщем невозможно отыгрывать.
#9473 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало
Получить приветственный бонус могут лишь новые клиенты онлайн-казино. Способы описаны в условиях промоакции любого легального казино, почаще всего это:Можно ли в одном онлайн казино получить больше 1-го приза за регистрацию? Нет, так как в каждом онлайн казино есть верховодила, к которым нужно держаться, не творить 2 аккаута для получения бонусов, другому несомненно блокировка обоих аккаутов, не пытайтесь перехитрить онлайн казино, приз за регистрацию выдаеться один один одному личику. <a href=http://filmkachat.ru/>1×slots зеркало которую указывали при регистрации кстати</a> <a href=http://www.extrasensorika.ru/forum/index.php?PAGE_NAME=profile_view&UID=301>http://www.extrasensorika.ru/forum/index.php?PAGE_NAME=profile_view&UID=301</a> казино 1×slots официальный сайт <a href=https://cameradb.review/wiki/User:LeonorHugo88350>https://cameradb.review/wiki/User:LeonorHugo88350</a> Бездепозитные бонусы, как теснее ясно, считаются оригинальной возможностью приступать к игровому процессу безусловно бескорыстно, другими играть в онлайн казино даром и на имеющие свои незамедлительно в регистрации аккаунта. Автоматы с таким депо шансы стать прекрасной возможностью сыграть для почитателей азарта с определенными лимитированиями в финансах.С не отыгранным призом запрещается превышать объем наибольшей ставки. Нарушение этого обстоятельства виде аннулирование выигрыша.
1×slots зеркало на сегодня
<a href=https://forum.eliteshost.com/showthread.php?tid=14770>1×slots зеркало сайта</a> x1 slots регистрация в 1×slots casino Для верификации номера аппарата, в собственном профиле выберите опцию „Подтвердить номер телефона“ и введите в подходящее поле код, приобретенный в sms-сообщении. <a href=http://supergame.one/home.php?mod=space&uid=56157>http://supergame.one/home.php?mod=space&uid=56157</a> 1×slots casino online регистрация Получать информацию о самых прибыльных бонусах возможно без постоянного мониторинга новостей казино. Мы взяли эту задачку на себя и постоянно смотрим за предложениями операторов, выбирая наихорошие из их. В этом разделе собраны заключительные бездепы, промокоды к ним и обстоятельства их активации. Список промоакций периодически дополняется. В топ вошли самые новые бездепозитные призы за регистрацию в казино 2020, временные и закрытые рекламную. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру и другим критериям. Если срок действия акции истек, она удаляется из списка.Выбор каждого интернет казино на нашем сайте. В описании к каждому Вы можете разузнать, что получите за создание аккаунта.
1×slots зеркало которую указывали при регистрации кстати
<a href=https://archives.megadiyhelp.com/member.php?159793-Raymondtaf>https://archives.megadiyhelp.com/member.php?159793-Raymondtaf</a> 1×slot зеркало Бездепы обыкновенно предлагают с отыгрышем — мгновенно вывести выигранные свои невозможно. Перевод средств со счета будет возможен после как, как юзер выполнит все притязания казино, а сумма имеет превышать установленного правилами лимита. Условиями акции фиксируются сроки, на которых заказчик вправе воспользоваться предложением. Обычно они не превышают нескольких дней в активации.Фриспины предусмотрены для применения в видео слотах. Внимательно ознакомьтесь с критериями – частенько их выдают на кое-какие автоматы. В зависимости от клуба, у вас выйдет устроить определённое количество ставок. Кстати, продвинутые игорные дома разрешают запускать любых «одноруких злодеев».
1×slots на любой вкус как пройти регистрацию
В онлайне большое знаменитых игорных площадок с привлекательными акционными услугами. Однако внимательно читать обстоятельства десятков предложений скором надоест, ну и время отнимет большое. Поэтому наша команда подготовила ТОП-3 сайтов с наилучшими бездепозитными бонусами: <a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=321834>1×slots регистрация 1×slots casino 777 online</a> Для получения приза надо(надобно) ознакомиться с программой преданности казино и устроить ставки на необходимую, нужную для перехода на следующий степень. 1× слот зеркало <a href=http://viralcomms.com/bbs/board.php?bo_table=free&wr_id=361023>http://viralcomms.com/bbs/board.php?bo_table=free&wr_id=361023</a> Принципиальным отличием даровых призов от призов на депозит является неимение надобности вносить средства на акк. Из-за сего их часто нарекают бездепозитными (no down payment bonuses).
1×slots официальный сайт скачать на айфон
3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать аппарат либо почту, указать индивидуальную информацию; При регистрации сомнений либо ином онлайн игральном заведении — вам дается раз шанс испытать свою удачу не внося свои монеты. Замечу собственно эту поощрительную услугу деют не все онлайн игровые площадки, а лишь великодушная середина(средина) из них. Которые мы подготовили для Вас в нашем списке. <a href=https://diskutim.com/member.php?action=profile&uid=4571>https://diskutim.com/member.php?action=profile&uid=4571</a> 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=55211&extra=>1×slots скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный бонус казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в данном и содержится главное различие. Призовые начисления без депо шансы предоставляться для роли в турнирах онлайн казино. Потратить перечисленные деньги можно самая масштабах этой акции. Условия их проведения себе ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться этим предложением, никакого выучить его управляла.
#9474 Charlesgunnyhttp://filmkachat.ru
1×слот регистрация в 1×slots casino
Многие новенькие сомневаются, что поощрительный приз надо несомненно возвращать, и случае они выиграли у казино. Это безусловно безопасно и накрепко. Выводя выигранные средства, игрок просто останавливает свое роль в игре и теряет уникальную вероятность – даром наращивать личное материальное положение.Бездепозитный приз за регистрацию в казино с выводом средств в 2022 году — Наш ресурс дает игрокам важную информацию о самых новых, щедрых и испытанных призах в интернет казино, коие обновляются любой день. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать на айфон</a> Бездепы обычно предлагают с отыгрышем — мгновенно исключить выигранные средства нельзя. Перевод средств со счета будет вероятен после как, как пользователь выполнит все притязания казино, а сумма возможности превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, протяжении которых клиент вправе воспользоваться предложением. Обычно они не превышают нескольких дней после активации. <a href=http://xn–e1aoddcgsc8a.xn–p1ai/member.php?action=profile&uid=47908>http://xn–e1aoddcgsc8a.xn–p1ai/member.php?action=profile&uid=47908</a> Это тоже благотворительные деньги, коие поступают на аккаунты свежеиспеченных в последствии регистрирования. А особенность этих призов состоит никаких, собственно обретенные деньги обязательно идет применять в продолжении назначенного времени. 1× slots casino зеркало <a href=http://zlatremont.ru/index.php?subaction=userinfo&user=quarrelsomedeal>http://zlatremont.ru/index.php?subaction=userinfo&user=quarrelsomedeal</a> Поспешите забрать бездепозитные бонусы за регистрацию в казино из представленного перечня. Все платформы не только ведут легальную деятельность, но и обрадуют добросовестными результатами забавы, высочайшей отдачей, резвыми выплатами.При регистрации в или ином интернет игральном заведении — вас дается раз шанс испытать собственную удачу не внося свои монеты. Замечу что такую поощрительную предложение предоставляют не все интернет игровые площадки, а лишь щедрая половина из их. Которые мы подготовили для Вас в нашем перечне.
1×slots зеркало которую указывали при регистрации кстати
За вербование приятеля ? в рамках партнерской программы заказчик получает вознаграждение за привлечение свежих юзеров.Ещё одно распространённое акционное предложение – симпатичный подарок с неблаговидными требованиями. К образцу, клуб обещает $100 виде бездепа, но с вейджером х80 или х100. Отыграть такой вейджер практически невозможно и поэтому лучше концентрироваться на больше интересных промоакциях. <a href=https://forum.bedwantsinfo.nl/thread-684820.html>1×slots зеркало регистрация</a> 1×slots зеркало на сегодня Высокая конкурентность в разделе азартных игр мотивирует операторов завлекать посетителей разнородными акциями. Благодаря данному у посетителей замечена вероятность получить бонусы в казино за регистрацию без депозита. Воспользоваться этим предложением возможно, минуя функцию внесения средств на игровой счет, просто активировав аккаунт на сайте. Наш экскурсовод по бездепам поможет избрать самую привлекательную бонусную программу, разузнать управляла получения такого вознаграждения и воспользоваться им с наибольшей выгодой. <a href=https://sportavesti.ru/forums/users/maxxrum2006–2/>https://sportavesti.ru/forums/users/maxxrum2006–2/</a> 1×slots официальный сайт скачать
1×slots казино мобильная версия
Представленные на этой странице превосходнейшие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные обстоятельства. После кропотливого анализа редакция портала составила рейтинг спецпредложений, в котором гости Casino.ru шансы сортировать перечень по нескольким аспектам: по сумме, вейджеру, максимальной сумме вывода и т.д. <a href=http://xn----7sbbj0a3atfpd.xn–p1ai/index.php?subaction=userinfo&user=equableowner88>http://xn----7sbbj0a3atfpd.xn–p1ai/index.php?subaction=userinfo&user=equableowner88</a> Чем ниже значение вейджера, что, этим проще отыграть и вывести бонус. Если Вы планируете заработать на бездепе, а не просто ознакомиться с новым игровым клубом, то стоит игнорировать бонусов с высоким вейджером их практически не реально отыграть. С ними Вы сможете только протестировать игры заведения. 1×slots зеркало 1хслотс регистрация перейти на 1×slots Существует ли стратегии для отыгрыша бездепозитных призов? К огорчению нет, на выигрыши либо проигрыши с призов, казино либо игрок воздействовать возможности, отдача игр случается от разработчиков игр.Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам запрещено начислять призы посетителям, не имеющим валютных средств на счете. Мы предлагаем разглядеть животрепещущие призы онлайн-казино с лицензией, которые соблюдают законодательство РБ.
1×slots официальный demo регистрация в 1×slots casino
Не стоит путать игру в демо и внедрение бонусов. В демонстрационном режиме игрок имеет оценить механику слота, сюжет и оформление. Но забава ведется на условные кредиты, потому отсутствует основное ? чувство азарта. Активируя промокод или фриспины, заказчик раньше не расходует свои деньги на игровые автоматы, но может сорвать настоящий куш!Бездепозитный приз за регистрацию в казино с выводом средств в 2022 году — Наш ресурс дает игрокам важную информацию о самых новых, великодушных и проверенных бонусах в интернет казино, коие обновляются любой день. К образцу, игроку выдаются безвозмездные свои в заведении в объеме пятидесяти или 100 $ (вейджер на коие составляет 100х). То есть, каждому новоприбывшему геймеру выскакивает манящая иллюстрация, которая сулит выплату всех зачисленных компанией средств. Не стоит внимания на казино приз за регистрацию без депозита с чрезмерно немалый либо довольно маленькой суммой бонусов, поэтому собственно, числе тщательно исследовав все условия, здесь скорее, несомненно какой-то подвох.На критериях отыгрыша бесплатных бонусов стопам тормознуть подробнее. С ними связаны нюансы, коие нельзя оставить без внимания. 1×slots бездепозитный бонус за регистрацию <a href=https://alphacs.ro/member.php?77367-Michaeltem>https://alphacs.ro/member.php?77367-Michaeltem</a> Бесплатные бонусы казино без депозита возможно получить вид валютных средств на бонусный счет (вывести их возможно лишь в отыгрыша), фриспинов, забавы либо кешбэк-бонуса.
1×slots регистрация 1×slotscasino 56 online
Но такие рамки не смущают в хайроллеров, что коэффициенты на слотах дозволяют рассчитывать на солидные выигрыши, ну неких автоматах разыгрывается передовой джекпот.Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских рублей. В условиях промоакции указано, собственно вейджер бездепозитного бонуса х20. Поэтому, чтобы отыграть бонус, игроку будет необходимо сделать ставок на 35*20=700 рублей. <a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=3883>http://www.predictive-datascience.com/forum/member.php?action=profile&uid=3883</a> Не стоит путать игру в демо и внедрение призов. В демонстрационном режиме игрок имеет расценить механику слота, сюжет и оформление. Но забава ведется на условные кредиты, поэтому отсутствует основное ? чувство пыла. Активируя промокод либо фриспины, клиент по-прежнему не расходует средства деньги на игровые автоматы, хотя может сорвать реальный куш!Для тех, кто только взвешивает испытывать собственную удачу, а для проф игроков, разыскивающих новые площадки для выигрышей, основные лицензированные казино нередко устраивают разные промоакции, и одно из лучших предложений за последнее время – как для новичков, например и для проф игроков – бездепозитный бонус за регистрацию. 1×slots казино зеркало Обыкновенные бездепозитные призы в размере от 3-х до 20 долларов сделаны для того, чтобы в игры заходили все свежие и новые игроки. Здесь, скорее, будет лимитирование на наибольший выигрыш. Важно, дабы перед минимальным вкладом был отключен бонус за 1-ое пополнение счета, и игры не попадет на повторный вейджер.Возьми собственный презент. Чаще всего бонус активируется сразу после регистрации. Но бывают ситуации, когда нужно забежать в собственный офис либо написать в справочную службу.
<b>Смотреть еще похожие новости:</b>
<a href=http://board.eternityrpc.com/member.php?action=profile&uid=369>1×slot зеркало</a>
<a href=http://nacionrolera.org/foro/viewtopic.php?f=1210&t=88394>казино 1× slots официальный сайт</a>
<a href=https://g2clubs.com/healthy-workout/google/#comment-24667>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На условиях отыгрыша даровых призов следует тормознуть подробнее. С ними связаны аспекты, коие нельзя забыть без внимания. Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.
#9475 Charlesgunnyhttp://filmkachat.ru
1хслот скачать
Таким образом интернет казино получает вероятного игрока. Возможно дальнейшем либо истинном он захотит поиграть на свои средства. Так трудятся бездепозитные призы в онлайн казино. Здесь отлично подходит выражение, безвозмездные сыр бывает лишь в мышеловке. Начинающие игроки шансы не осознавать опасность азарта. Однако со временем понимания становится больше. Это тема для отдельного обсуждения.Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного приза достаточно пополнения баланса и подтверждения личности. В иных же клубах, необходимо несколько один прокрутить свой депо. <a href=http://filmkachat.ru/>1× slots зеркало</a> Бездепозитные призы отличный вариант безвозмездной игры в игровые автоматы. Многие юзеры сети не знают, что в казино возможно начать играть абсолютно бесплатно, а позже вывести выигрыш на банковскую карту или электрический кошелек, иные не доверяют онлайн казино, а третьи удачно играют и выигрывают – и тотчас достаточно большие суммы. <a href=http://mashspec.ru/user/DavidSam/>http://mashspec.ru/user/DavidSam/</a> Помните, собственно любые нарушения верховодил сведут на нет ваши усилия, и вы всего останетесь без начисленного вам безвозмездного приза. Всегда изучайте верховодила начисления и обстоятельства вейджера. По каким вопросам, на которые вы имеет самостоятельно отыскать ответы, обращайтесь за разъяснениям и саппорт. скачать 1×slots официальный сайт <a href=http://www.markstrongcn.com/home.php?mod=space&uid=5136&do=profile>http://www.markstrongcn.com/home.php?mod=space&uid=5136&do=profile</a>
1×slots официальный сайт скачать
Так собственно приготовьтесь дать секретную информацию (пол, возраст, государство проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает не более суток, последствии чего удастся свободно выводить крупные выигрыши. 1×slots быструю регистрацию а также мгновенное <a href=https://linktr.ee/glavdorogadv2106>https://linktr.ee/glavdorogadv2106</a> Воспользоваться бездепом возможно не во всех игровых автоматах: казино вдруг уточняет ограничение для клиентов. Конечно, это возможно счесть неким неудобством для игрока, хотя ради отметить, что выбор автоматов всё равно остаётся достаточно великим.Следует подчеркнуть, собственно бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом. 1×slots сайт Нет. Казино выдают безвозмездные бонусы за регистрацию, для того, дабы заказчик мог ознакомиться с игровым заведением. А чтобы исключить его, необходимо выполнить условия отыгрыша.
1×slots зеркало
Также бездепозитные бонусы могут работать способом возвратить к игре посетителей, временно приостановивших своё сотрудничество с компанией: извещение о бездепе поступает на мобильный телефон либо почту.Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa. Мы собрали и опубликовали перечень наихороших бездепозитных казино с бонусами за регистрацию, коие гарантируют великодушные выигрыши и мгновенные выплаты. <a href=http://adgard.ru/bitrix/redirect.php?goto=http://altell.ru/bitrix/redirect.php?goto=http://spine-store.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/bTHTVhi1DqH>http://adgard.ru/bitrix/redirect.php?goto=http://altell.ru/bitrix/redirect.php?goto=http://spine-store.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/bTHTVhi1DqH</a> 1×slots подтвердит вашу регистрацию если говорить
1×slots официальный сайт скачать
<a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=13119>1хслотс официальный сайт зеркало</a> 1×slots казино зеркало <a href=http://www.fire-team.ru/forum/member.php?u=4998>http://www.fire-team.ru/forum/member.php?u=4998</a>
1×slot зеркало рабочее этих способов предполагает регистрацию
Так собственно приготовьтесь предоставить секретную информацию (пол, возраст, страна проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев проверка данных занимает менее суток, в чего получится беспрепятственно выводить солидные выигрыши.Также учтите, что кое-какие игровые платформы сужают список стран, которые способны получить предложенный бездепозитный приз за регистрацию. К примеру, существуют онлайн-заведения, выдающие похожие бонусы лишь жильцам конкретных стран. К образцу, онлайн казино 777 Оригинал предоставляет бездепозитный приз только игрокам из России и государств СНГ. Или наоборот, пичкают вознаграждением всех, считая жителей некоторых стран (следует сего, идет пристально учить список, дабы потом не возникло никаких вопросов и жалоб). <a href=http://younghwacarbon.com/bbs/board.php?bo_table=free&wr_id=9475>http://younghwacarbon.com/bbs/board.php?bo_table=free&wr_id=9475</a> Используйте лучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, чтобы заработать презенты за обычные деянья и уже сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высочайшей отдачей и прыткими выводами на электронные кошельки. 1×slots зеркало подтвердит вашу регистрацию если говорить Приглашаем делиться суждениями о призах. Это поможет другим юзерам выбирать более прибыльные предложения.Для получения бонуса надо(надобно) пригласить в забаву нового посетителя. Казино начислит пригласившему фиксированный процент от взносов приглашённого вид бонуса: чаще всего его объем не превышает 10%. Срок деянья бонуса правило не выше месяца: пригласивший получает бонус от проигранных ставок приглашённого в 1-ый месяц забавы.
<b>Смотреть еще похожие новости:</b>
<a href=http://sfessd.listbb.ru/viewtopic.php?f=3&t=7580>1×slots подтвердит вашу регистрацию если говорить</a>
<a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=89062>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<a href=http://theauction.com.au/my-account/>1×slots официальный зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Рассмотрим принцип его деянья на образце. Допустим, вы зарегались и возымели $10 not the slightest deposit bonus с вейджером х50. Это значит, что выигранные средства возможно несомненно выводить не раньше, чем в того, как общая сумма ставок достигнет $500.
#9476 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало
Промокод – определённая комбинация знаков, коию необходимо ввести в подходящее фон при разработке учетной записи или активировать в личном профиле игрока в разделе с призами.Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в социальных сетях, установку мобильного приложения или официального клиента для ПК. В большинстве казино действуют программки преданности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на следующий уровень часто с выдачей бездепа. <a href=http://filmkachat.ru/>скачать 1×slots официальный сайт</a> Обыкновенные бездепозитные призы в объеме от трех до 20 долларов созданы чтобы, чтобы, чтобы в забавы заходили все новые и свежие игроки. Здесь, скорее, будет ограничение на максимальный выигрыш. Важно, чтобы перед минимальным вкладом был отключен бонус за первое пополнение счета, и геймер не попадет на повторный вейджер.Бонус за регистрацию в казино без депозита с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша может понадобиться устроить ставки на необходимую, в количество десятков один превышающую сумму приза или выигрыша. <a href=http://www.sante-cinnamon.kr/bbs/board.php?bo_table=free&wr_id=307868>http://www.sante-cinnamon.kr/bbs/board.php?bo_table=free&wr_id=307868</a> 1×slots официальный demo регистрация в 1×slots casino <a href=http://sovetonk.ru/forum/user/171287/>http://sovetonk.ru/forum/user/171287/</a>
1×slots регистрация на официальном сайте
онлайн казино 1×slots Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa либо иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. <a href=https://urganchshahar.uz/user/RalphHoIlk/>https://urganchshahar.uz/user/RalphHoIlk/</a> 1×slots регистрация на сайте 1×slots ru com Каждый игрок должен сначала детально выучить условия по получению и отыгрышу приглянувшегося дара. Если всё организует, поторопитесь забрать благотворительные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик данный начать вертеть барабаны лучших слотов.У каждого игорного клубы разные вейджеровые обстоятельства. Чтобы вы гарантировано смогли выполнить их, мы дадим количество советов. Если система начислила небольшую сумму, надо создавать большие ставки – остановитесь на 10–30 центах. Как лишь сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте играть. В противном случае другого, как приглядеться к другому автомату.
1× slots официальный
<a href=http://forum.anomalythegame.com/viewtopic.php?f=18&t=463858&sid=981e3462f8ea6c3e45fb9bc1a6156f52>http://forum.anomalythegame.com/viewtopic.php?f=18&t=463858&sid=981e3462f8ea6c3e45fb9bc1a6156f52</a> Существует ли стратегии для отыгрыша бездепозитных призов? К раскаянью нет, на выигрыши или проигрыши с бонусов, казино или игрок воздействовать не может, отдача игр происходит от создателей игр.За счёт спинов получится запустить различные онлайн слоты, протестировать стратегии и поднабраться навыка. Фишка что, нет, собственно вращения начисляются на лучшие аппараты с оригинальными опциями и высокой отдачей. Не забывайте, что в каждом акционном предложении учтены специальные притязания – временные ограничения, наибольший размер ставки, список доступных игр. 1×slots зеркало этих способов предполагает регистрацию
1×slot зеркало рабочее этих способов предполагает регистрацию
Бездепозитные бонусы за регистрацию считаются одним из самых знаменитых методов привлечения новых игроков в онлайн-казино, потому что они предоставляют игрокам вероятность опробовать казино, неподражаемо игровые автоматы, и возможно, выиграть реальные деньги. 1×slots официальный сайт скачать <a href=http://www.atego-club.ru/forum/member.php/132236-MichaelTup>http://www.atego-club.ru/forum/member.php/132236-MichaelTup</a> Подтверждение индивидуальной информации. Все казино просят от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у юзера других аккаунтов (мультиаккаунт запрещен).
1×slots зеркало на сегодня
Иногда в бездепа, казино дарит минимальный бонус (до 50 руб. ), ради которого надо заморачиваться.Обычно бездепозитные акции от казино, прибывают на эл. Почту в дни рождения либо праздники. В некоторых онлайн казино можно адресоваться в чат и как постоянному игроку, вполне для предложат бездепозитное предложение. Для верификации аккаунта надо(надобно) предоставить специалистам технической поддержки отсканированную копию паспорта и счета за коммунальные услуги, а фотку банковской карты или скриншот странички электрического кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности.Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам воспрещено начислять бонусы посетителям, не имеющим денежных средств на счете. Мы предлагаем рассмотреть животрепещущие бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ. <a href=https://fishtrade3000.ru/forum/user/1135/>https://fishtrade3000.ru/forum/user/1135/</a> На данном разделе портала периодически публикуются обзорные статьи, каких рассматриваются безвозмездные призы лучших интернет-казино. Информация структурирована по нескольким пт, включая основные:В реальное время получить приз за регистрацию в казино довольно просто. Почти любой игорный жилище с готовностью предоставит деньги либо безвозмездные вращения. Многие игроки используют данным и не смущяются регистрироваться в любом клубе с выгодными критериями. Кстати, это замечательная возможность придумать выигрышную тактику и сорвать куш. казино 1×slots официальный сайт Бездепозитные бонусы казино за регистрацию в 2022 году — это возможность сыграть за счёт заведения. Казино даёт клиенту шанс пользоваться определённой суммой или количеством бесплатных вращений без внесения депо. Не путайте деморежим с реальной игрой без надобности внесения депозита.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=135914>1×slots промокод при регистрации 2025</a>
<a href=http://nrj.rs.ba/viewtopic.php?p=3494#p3494>1×slots casino регистрация на сайте</a>
<a href=https://melhorlance.com.br/author/jamesbom/>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Такой бесплатный эквивалент средств зачисляется на профиль пользователя в осуществления притязаний и предназначаются они только для игрового процесса. Вывод этих вознаграждений возможен лишь в воплощения вейджеровых критерий. При забаве на бонусные средства воспрещается выступать в игровые автоматы с современным джекпотом и забавы из радела live casino. Кроме такого, некоторые казино выделяют бездеп на один либо количество определенных слотов, и в иных играх Вы не можете на их выступать.
#9477 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало на сегодня
Условия шансы разниться друг от приятеля. Но такой приз возможность быть использован только для игрового процесса – полученные на счет финансы до такого, как будут отыграны, вывести нереально. <a href=http://filmkachat.ru/>1хслотс официальный сайт зеркало</a> Для вывода средств бонус нужно будет отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариантами отыгрыша бездепозитного бонуса до его получения, чтобы избежать конфликтных ситуаций.За счёт спинов выйдет запустить различные интернет слоты, протестировать стратегии и поднабраться навыка. Фишка сомнений, что вращения начисляются на топовые аппараты с уникальными опциями и высокой отдачей. Не забывайте, собственно в любом акционном предложении учтены особые требования – временные ограничения, наибольший объем ставки, список дешевых игр. <a href=https://qa-offsourced.com/author/davidtelay/>https://qa-offsourced.com/author/davidtelay/</a> 1хслотс казино зеркало <a href=https://nerdgaming.science/wiki/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%94%D0%B7%D0%B5%D0%BD_%D0%A7%D0%B8%D1%82%D0%B0%D1%82%D1%8C>https://nerdgaming.science/wiki/%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%94%D0%B7%D0%B5%D0%BD_%D0%A7%D0%B8%D1%82%D0%B0%D1%82%D1%8C</a> Наиболее знаменитые вознаграждения среди гэмблеров – бездепозитные бонусы казино. Это не умопомрачительно, так возможно получить благотворительные вращения или виртуальные кредиты, и этом не придётся пополнять счёт, рисковать личностными средствами. Удастся насладиться разнообразными веселиями даже выиграть крупную необходимую, избегая серьёзного риска.Максимальный объем ставки, кот-ый нельзя превышать же приз не несомненно всецело отыгран. В случае нарушения этого правила, бонус и выигрыш с него будут аннулированы.
1× slots casino зеркало
<a href=https://mcmon.ru/showthread.php?tid=100952&pid=356802#pid356802>1×slots casino регистрация 1×slots review live</a> 1×slots официальный сайт зеркало рабочее <a href=https://lunar.az/user/PatrickLania/>https://lunar.az/user/PatrickLania/</a> 1×slots официальный сайт, скачать
1×slots быструю регистрацию а также мгновенное
В подавляющем большинстве случаев благотворительные призы начисляются в кредитах, которые нельзя сразу вывести со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже. Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают приз по государствам. Вплоть до того, собственно клуб возможность себя игроков из Вашей государства, а бездеп мешает. <a href=http://www.hngaosha.com/space-uid-31846.html&do=profile>http://www.hngaosha.com/space-uid-31846.html&do=profile</a> При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, коие можно предназначить этой в казино.Используйте наилучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из перечня ниже, дабы заработать презенты за обычные деянья теперь сейчас получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высокой отдачей и быстрыми выводами на электрические кошельки. 1хслотс 1хслотс регистрация перейти на 1×slots Для отыгрыша бонуса казино обязует игрока сыграть на необходимую, в некоторое один превышающую необходимую полученного бонуса — тут выгода компании явна.Реже бонусы без депо начисляются постоянным игрокам. С их поддержкой администрация старается вычесть ценных посетителей либо вожделеет поблагодарить за преданность правильных гостей. Но намного почаще для сходственных целей применяются эти промоакции:
casino 1×slot
Представьте момент, когда при ставке в 10 руб. Вы получите схожее умножение. Миллион руб. За одно вращение, собственно вполне вероятно. Поэтому вопрос, сколько можно выиграть остаётся открытым. Предлагаем проверить помощи. Регистрируйтесь в одном либо нескольких интернет казино, получайте Бездепозитный приз и инспектируйте фортуну в деле. Разумеется, исключить средства не так просто. Однако шансы есть у всех.Для казино, работающих онлайн, бездепозитные призы необходимы для вербования свежих клиентов. Предложение сыграть на слотах без необходимости внесения реальных средств — работающий способ для повышения интереса к компании. После отыгрыша бездепа великоват шанс, что игроку понравится и он продолжит играть в казино, только сейчас уже на личные деньги. <a href=https://timepost.info/showthread.php?tid=52997>зеркло казино 1×slots</a> Новые клиенты онлайн-казино без первого депозита шансы выяснить собственную удачливость. К тому же есть вероятность конвертировать бездепы в реальные средства за регистрацию в казино, однако достичь приз нужно отыграть сообразно условиям акции.Список например именуемых «разрешенных территорий» прилагается к правилам бонусной программы игорного портала. Обязательно выясните, распространяются ли на вас подобные наказания. 1хслот официальный сайт зеркало <a href=http://breeze.beautykey.ru/bitrix/rk.php?id=17&site_id=s1&event1=banner&event2=click&goto=http://forgenika.ru/bitrix/redirect.php?goto=http://udarnik74.ru/bitrix/redirect.php?goto=https://telegra.ph/Kak-razvlech-5–6-letnego-rebenka-doma-v-vechernee-vremya-09–19>http://breeze.beautykey.ru/bitrix/rk.php?id=17&site_id=s1&event1=banner&event2=click&goto=http://forgenika.ru/bitrix/redirect.php?goto=http://udarnik74.ru/bitrix/redirect.php?goto=https://telegra.ph/Kak-razvlech-5–6-letnego-rebenka-doma-v-vechernee-vremya-09–19</a> Иногда у гостей вебсайта все появиться трудности, задачи, препядствия при активации приобретенного промо-кода. В таких случаях, нужно обратиться за подмогою в саппорта «Support». Для получения ответа, непременно указывается определенная первопричина воззвания и подтверждается информация дополнительными снимками. Если сложилась неоднозначная обстановка, всегда можно адресоваться к главному регулятору либо контролирующему органу, выдавшему данному заведению лицензионный документ.
казино 1× slots официальный сайт
Фриспины без депо или дополнительные средства помогут поближе познакомиться с игровой платформой и её функциями. За счёт презентов возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям ради забавы против живых крупье.Перечисленные выше главные характеристики сочетают фактически каждый приз и являются стереотипными для бездепозитных бонусных начислений в казино. <a href=http://istiqbolsari.uz/user/Charlessix/>http://istiqbolsari.uz/user/Charlessix/</a> 1×slots рабочее зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://bajarmp3.net/showthread.php?tid=403690>1хслотс зеркало</a>
<a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=36700>1хслот официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Игры, в которых можно выступать на бонусные средства. Проверьте перечень игр, в возможно играть на бонусные средства, вероятно они Вам не понравятся и не стоит расходовать своё время на эту промоакцию. Помните, что в некоторых играх сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки числятся как отыгранные деньги, в то время как в слотах идет в зачет все 100% суммы.
#9478 Charlesgunnyhttp://filmkachat.ru
1×slots мобильная версия войти казино
4. Заберите подарок. Чаще всего бонус активизируется сразу в регистрации. Но посещают истории, когда нужно забежать в собственный кабинет либо написать в саппорта. <a href=http://filmkachat.ru/>1×slots регистрация на 1хслотс</a> Так что сможете неустрашимо региться без всяких раздумий. Фортуна сегодня наверняка на вашей стороне. Не бойтесь, ведь следствие какого или ущерба Вам абсолютно не угрожает. С такими бонусами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе.При регистрации идет указывать только достоверную информацию. Когда учетная запись несомненно активна, появится доступ в Личный офис. В нем можно избрать денежную, установить промокод и узнать доскональные верховодила получения и отыгрыша бездепа. Краткая информация об промоакции часто присутствует непосредственно на регистрационной форме. <a href=http://tutorialsmint.com/user/jamesdib/articles>http://tutorialsmint.com/user/jamesdib/articles</a> Большинство клубов привлекают внимание игры за счёт различных презентов. На одних веб-сайтах возможно получить виртуальные кредиты, коие откроют доступ ко всему софту. На иных же, администрация предлагает безвозмездные вращения для пуска топовых интернет слотов. Несмотря на разные акции, стоит выделить самые главные.Однако далеко не все ресурсы предлагают своим посетителям бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено поощрение на 1-ый депозит в размере 100–200%. Это замечательная возможность преумножить банкролл, прирастить время, проведённое за забавой и шансы сорвать крупный куш. казино 1×slots <a href=http://www.lighttoguideourfeet.com/member.php?u=1461446>http://www.lighttoguideourfeet.com/member.php?u=1461446</a> Но никогда не забывайте пристально читать верховодила роли в бонусных акциях. Если вы нарушите хотя бы одно условие, позже вы не можете уладить недоразумение с администрацией.
1×slots регистрация 1×slotscasino09k online
<a href=http://link.5nx.ru/memberlist.php?mode=viewprofile&u=600>1хслотс мобильная версия зеркало</a> 1×slots сайт Некоторые сайты, прежде чем обмануть регистрацию игроков, предлагают ответить на количество базисных вопросов. Цель проведения похожей викторины – выявить случайных людей, коие не имеют представления о покере, и не допустить получения ими бонусов. Если посетитель уже играл в казино, то ответить на полтора 10 простых вопросов несомненно несложно. Очень нередко, ответы возможно отыскать на официальных сайтах этих учреждений.Подтверждение регистрации. Казино требуют привязки профиля к электрическому адресу и номеру телефонного. Для этого на e-mail отправляется послание со ссылкой, а на телефонный ? текстовое известие с кодом. <a href=https://mir-pozitiv.ru/forums/users/docxru2808–2/>https://mir-pozitiv.ru/forums/users/docxru2808–2/</a> В бонусную программку множества операторов входят регулярные бездепы. Это бессрочные промоакции, поощряющие активных неизменных игроков. Популярный формат — раздача фриспинов по определенным денькам недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают постоянные призы без депо в мена на накопленные баллы преданности. 1 x slots На критериях отыгрыша безвозмездных призов следует тормознуть подробнее. С ними связаны нюансы, которые невозможно оставить без внимания.
1×slots быструю регистрацию а также мгновенное
Следует выделить, что бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом.Принципиальным отличием безвозмездных призов от призов на депозит считается неимение надобности заносить средства на акк. Из-за сего их часто именуют бездепозитными (not the slightest deposit bonuses). <a href=http://zolotoizumruda.ru/bitrix/redirect.php?goto=http://restoclub.ru/go?url=http://syntone.ru/redirect.php?url=https://telegra.ph/Gde-oformit-dogovor-kupli-prodazhi-kvartiry-09–23>http://zolotoizumruda.ru/bitrix/redirect.php?goto=http://restoclub.ru/go?url=http://syntone.ru/redirect.php?url=https://telegra.ph/Gde-oformit-dogovor-kupli-prodazhi-kvartiry-09–23</a> На странице представлены бездепозитные бонусы за регистрацию в казино редчайшая заслуга за коей гонятся все игроки как новички, так и профессионалы. Мы также уделяем огромное внимание на наличие бонусов при составление рейтинга казино на средства. Бездепозитный приз это вероятность выступать безвозмездно и выиграть реальные средства.Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в социальных сетях, установку мобильного приложения либо официального посетителя для ПК. В большинстве казино действуют программы преданности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий уровень нередко сопрягается выдачей бездепа. 1 х слотс зеркало Фриспины начисляются по конкретной ставке. После их активации игроку нужно запустить разъем и увериться, что в нем показываются благотворительные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода в отыгрыша ориентируется оператором и редко выше 5 000 руб.
1×slots зеркало быструю регистрацию а также мгновенное
Только выполнив все обстоятельства отыгрыша и дождавшись окончания проверки аккаунта, Вы можете оформить заявку на вывод средств и получить свои средства. <a href=http://www.forum.kalor.ru/1×slot-zerkalo-rabochee-registracii-na-telefon-pridet-t4940.html>1×slot зеркало рабочее регистрации на телефон придет</a> Бонус без депо за регистрацию в казино (бездепозитный бонус) – это валютный презент от клуба, кот-ый начисляется на акк игрока в регистрации в казино. Кроме творения учетной записи, для получения бездепа, довольно нередко потребуется ещё и подтвердить контактные данные игрока и/или активировать особый промо-код.Это раз из основных показателей привлекательности дара. С завешенным коэффициентом в мастера не смогут выполнить условия по отыгрышу. И так, как привлекательно выглядит предложение – бездепозитный приз казино в объеме $500 или $1 000. Чтобы новички лучше вникли, что же такое вейджер, мы разберём на случае. 1×slots casino регистрация 1×slotscasin online <a href=https://www.tamaiaz.com/blogs/201864/%D0%99%D0%BE%D0%B4%D0%B8%D0%B7%D0%BC-%D0%B8%D0%B7%D0%B1%D1%8B%D1%82%D0%BE%D0%BA-%D0%B9%D0%BE%D0%B4%D0%B0>https://www.tamaiaz.com/blogs/201864/%D0%99%D0%BE%D0%B4%D0%B8%D0%B7%D0%BC-%D0%B8%D0%B7%D0%B1%D1%8B%D1%82%D0%BE%D0%BA-%D0%B9%D0%BE%D0%B4%D0%B0</a> Бездепозитный бонус нередко может стать доступным незамедлительно последствии окончания регистрации, что в большинстве случаев единственным притязанием к нему является регистрация, а затем ревизия вашей новой учетной записи.Рассмотрим на случае: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских руб. В критериях акции указано, собственно вейджер бездепозитного приза х20. Поэтому, дабы отыграть бонус, игроку будет нужно устроить ставок на 35*20=700 рублей.
1×slots зеркало регистрацию более популярный вариант это
Такой казино бонус без депозита за регистрацию выдается игроку на час и энергично используется данное предложение с 2017 года. Это как бы некая маскировка поощрения под бездепозитный. Суть всего этого сводится к что, этому, собственно игроку на час выдается, например, 1000 $, а реклама повторяет про, собственно любой выигрыш возможно будет в оставить при для. Но в играющий всерьез отнесется к этому предложению, то он попросту растеряет время. Ведь игроку нужно несомненно играть не в аккаунте, ну тренировочном и с ограниченным выбором автоматов и ставок. Да и если, тогда, выигрыша (том всей тыс. ) в верховодила вступят конкретные обстоятельства, где несомненно сказано, собственно максимальной суммой победы имеет быть лишь двести $ и деньги возможно использовать только виде приза на первый вклад с вейджером 25 от суммы вознаграждения плюс сам депо. По результату выйдет, собственно игрок выигрывал себя 200% приз с вейджером на определенную необходимую. Короче разговаривая, это все не вашего медли.Это один из основных характеристик привлекательности подарка. С завешенным коэффициентом числе профессионалы не смогут выполнить условия по отыгрышу. И важно, как привлекательно выглядит предложение – бездепозитный бонус казино в объеме $500 либо $1 000. Чтобы новички лучше вдумались, что же это вейджер, мы разберём на примере. <a href=https://lifeisfeudal.com/Discussions/question/%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D1%83%D0%BA%D1%80%D0%B0%D0%B8%D0%BD%D1%81%D0%BA%D0%B8%D1%85-%D0%BC%D0%B0%D1%88%D0%B8%D0%BD-%D0%B2-%D0%B3%D0%B5%D1%80%D0%BC%D0%B0%D0%BD%D0%B8%D0%B8>https://lifeisfeudal.com/Discussions/question/%D0%B2%D1%8B%D0%BA%D1%83%D0%BF-%D1%83%D0%BA%D1%80%D0%B0%D0%B8%D0%BD%D1%81%D0%BA%D0%B8%D1%85-%D0%BC%D0%B0%D1%88%D0%B8%D0%BD-%D0%B2-%D0%B3%D0%B5%D1%80%D0%BC%D0%B0%D0%BD%D0%B8%D0%B8</a> Самый распространённый из сходственных призов, естесственно же, бездеп на денек рождения посетителя — бонус в виде фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им возможно протяжении установленного периода времени. казино 1× slots официальный сайт Самые новые бездепозитные бонусы в казино за регистрацию 2022 года с выводом прибыли присутствуют на этой странице. Посетитель имеет оценить обстоятельства получения и начать играть на деньги без внесения депозита. При данном игроку важно понимать, на каких условиях и какими методами него исключить полученный выигрыш. Для этого необходимо оценить список подключенных платежных систем.
<b>Смотреть еще похожие новости:</b>
<a href=http://sfessd.listbb.ru/memberlist.php?mode=viewprofile&u=86>1хслотс зеркало на сегодня</a>
<a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=89388>1×slots бонус за регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Также, учите, собственно бездепозитный приз можно вывести только никаких случае, когда будут выполнены все условия отыгрыша.
#9479 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация
Также, учите, собственно бездепозитный приз можно вывести только никаких случае, когда будут выполнены все условия отыгрыша.В интернете слишком количество скриптовых сайтов, коие принадлежат жуликам. Их главная цель – привлечь гэмблеров, пообещав не щедрые презенты, но и солидные выигрыши. Так собственно кое-какие сайты предлагают получить за регистрацию даже $1 000. <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino09k online</a> Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 долларов. Если выдаются фриспины, их количество редко выше нескольких 10-ов безвозмездных вращений.Необходимость отыгрыша. Вейджер ситуации выше, чем для призов за депозит. И же свои не отыграны, исключить их нельзя. <a href=http://kaizen.ge/index.php?subaction=userinfo&user=statuesqueattor>http://kaizen.ge/index.php?subaction=userinfo&user=statuesqueattor</a> 1×slots зеркало видели такую регистрацию на <a href=http://xn–jj0bt2i8umnxa.com/bbs/board.php?bo_table=free&wr_id=15589>http://xn–jj0bt2i8umnxa.com/bbs/board.php?bo_table=free&wr_id=15589</a> Многие игроки, оценив возможностей казино, остаются играть в нем и дальше ? на это и нацелено каждое промо. Постоянные посетители вносят депозиты и делают ставки, обеспечивая долгосрочную выгода оператора. То есть, казино выдают бездепы новым пользователям для формирования лояльной аудитории.Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в социальных сетях, установку мобильного приложения или официального клиента для ПК. В большинстве казино действуют программки преданности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на грядущий уровень нередко с выдачей бездепа.
1×slots зеркало быструю регистрацию а также мгновенное
Бездепы имеют заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой либо баллами. сайт 1× slots casino <a href=http://bitetheass.com/user/zhannahusasdoz7697/>http://bitetheass.com/user/zhannahusasdoz7697/</a> Чем ниже значение вейджера, что, этим легче отыграть и вывести бонус. Если Вы планируете заработать на бездепе, не просто ознакомиться с свежим игровым клубом, то стоит избегать призов с высочайшим вейджером их почти не реально отыграть. С ними Вы сможете лишь протестировать игры заведения.Бездепозитные призы начисляются только раз раз. Не стоит открывать новые аккаунты, чтобы получить их повторно. Служба безопасности казино непременно выявит «левого» участника и заблокирует. Если гость выполнит нужные требования, отыграет свою ставку и решит исключить собственный выигрыш, то ему надо(надобно) учесть, что казино обязательно потребует предоставить ксерокопии личных документов, чтобы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные средства вывести не получится. 1хслотс 1хслотс регистрация перейти на 1×slots
1×slot зеркало рабочее регистрации на телефон придет
Иногда в качестве бездепа, казино дарит минимальный приз (до 50 руб. ), из-за которого не стоит заморачиваться. Для получения выигрыша требуется выполнить обстоятельства казино. Чаще всего игроку нужно поставить определенную сумму, хотя уже из личных денег. Она рассчитывается из совместного объема выигрыша за все время использования бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, случае юзер выиграл 1000 рублей, а множитель составляет х30, исключить деньги можно несомненно, сделав ставки на 30 000 руб. <a href=http://l-avt.ru/support/dialog/?PAGE_NAME=profile_view&UID=74202>http://l-avt.ru/support/dialog/?PAGE_NAME=profile_view&UID=74202</a> 1×slots казино мобильная версия Демоказино есть почти на любом сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются значительно реже: там когда выигрыша и соблюдения критерий промоакций бездеп возможно перевоплотить в настоящие средства.Такой безвозмездный эквивалент средств зачисляется на профиль пользователя после воплощения требований и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений возможен лишь последствии воплощения вейджеровых критерий.
1×слотс казино
Бонусы без депозита при регистрации считаются наиболее красивыми как для опытных игроков, например для и начинающих. Получив это вознаграждение, заказчик может выступать на реальные средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, еще условия их активации и выигрыша. <a href=https://russiancomputerservice.ru/user/JosephCer/>1×slots рабочее зеркало на сегодня</a> Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы появилась возможность вывести выигрыш. Новые клиенты онлайн-казино без первого депозита все выяснить собственную удачливость. К что, этому же есть возможность преобразовать бездепы в реальные деньги за регистрацию в казино, впрочем достичь приз нужно отыграть сообразно условиям акции. 1×slots зеркало рабочее <a href=https://www.russiansuka.net/user/Travisapavy/>https://www.russiansuka.net/user/Travisapavy/</a> Самый распространённый из подобных бонусов, окончательно же, бездеп на день рождения клиента — приз вид фиксированной суммы либо фриспинов поступает на счёт игрока, а воспользоваться им можно в течение установленного периода медли.
рабочее зеркало 1×slots
Однако в критериях скрываются «подводные камни», которые не позволят исключить солидную необходимую либо же вы не успеете отыграть вейджер. Поэтому мастера рекомендуют забрать безвозмездные вращения за регистрацию в казино без депозита, дабы поднабраться опыта и получить реальный шанс на победу. <a href=https://www.01husu.com/space-uid-2166048.html>https://www.01husu.com/space-uid-2166048.html</a> Новички не обожают незамедлительно же заносить депо. Это обусловлено неимением опыта и сомнением. К счастью, в наше время можно получить бездепозитный бонус за регистрацию в казино. Неважно что начислит система – фриспины либо кредиты. В любом случае вы не рискуете своими сбережениями. Это отличная возможность запустить приглянувшийся видео разъем либо же испытывать удачу в настольных забавах. 1×slots регистрация 1×slots review live Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, чтобы снова получить безвозмездный приз. Игорные заведения нетерпимы к бонус-хантерам, поэтому вас ждет неизбежное наказание.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.findaspermdonor.com/memberlist.php?mode=viewprofile&u=13618&sid=fd5fcfaaea23a371a87cf4b8ec53d6b6>1×slots зеркало видели такую регистрацию на</a>
<a href=https://test.soclanovtsy.ru/topic/39271–1×slots-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE/>1×slots рабочее зеркало</a>
<a href=http://miupsik.ru/forums/showthread.php?tid=231533>1хслотс официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чтобы бездеп не был начислен на Ваш акк, Вам не активировать бонусный код. Если одобрение от казино было добавлено на Ваш аккаунт механически, а Вы не расчитываете его применять, обратитесь в службу с просьбой отменить бездепозитный бонус. Обыкновенные бездепозитные призы в объеме от трех до 20 $ созданы для того, дабы в игры заходили все новые и свежие игроки. Здесь, всего, будет ограничение на максимальный выигрыш. Важно, чтобы перед наименьшим вкладом был отключен бонус за первое пополнение счета, и компьютерные не попадет на повторный вейджер.
#9480 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
Такой казино бонус без депозита за регистрацию выдается игроку на час и активно употребляется данное предложение с 2017 года. Это как бы какая-то конспирация одобрения под бездепозитный. Суть всего этого сводится к тому, что геймеру на час выдается, к примеру, 1000 $, а реклама повторяет о том, что любой выигрыш возможно будет в забыть при себе. Но случае играющий всерьез отнесется к этому предложению, то он попросту потеряет время. Ведь геймеру надо(надобно) несомненно выступать не в основном аккаунте, а тренировочном и с ограниченным выбором автоматов и ставок. Да и если, тогда, выигрыша (числе всей тыс. ) в управляла вступят определенные условия, где будет сказано, собственно наибольшей суммой победы возможность быть только двести $ и средства возможно использовать только виде бонуса на 1-ый лепта с вейджером 25 от суммы гонорары плюс сам депо. По результату получится, что игрок выигрывал себе 200% бонус с вейджером на конкретную сумму. Короче говоря, это все не стоит вашего медли.Будьте внимательнее при ознакомлении с правилами во избежание появления конфликтных ситуаций с казино, когда в отыгрыша бездепа для не дадут исключить солидную сумму выигрыша. <a href=http://filmkachat.ru/>x1 slots регистрация в 1×slots casino</a> <a href=https://forum.show-master.ru/forum/index.php?PAGE_NAME=profile_view&UID=54753>https://forum.show-master.ru/forum/index.php?PAGE_NAME=profile_view&UID=54753</a> К образцу, игроку выдаются безвозмездные свои в заведении в размере пятидесяти или ста $ (вейджер на коие составляет 100х). То есть, каждому новоприбывшему геймеру выскакивает манящая картинка, которая обещает выплату всех зачисленных компанией средств. Не стоит обращать внимания на казино бонус за регистрацию без депозита с сильно немалый или довольно махонькой суммой бонусов, потому собственно, даже кропотливо выучив все обстоятельства, здесь скорее, будет некий подвох. 1×slots подтвердит вашу регистрацию если говорить <a href=https://www.lightknotes.com/MyBB/member.php?action=profile&uid=13019>https://www.lightknotes.com/MyBB/member.php?action=profile&uid=13019</a> Существуют казино с призом за регистрацию, в очень известны фриспины в интернет казино впоследствии регистрации в конкретных забавах. Они встречаются том почаще бесплатных поощрений либо классических призов в казино без инвестициям. Например, игрок регистрирует счет, на кот-ый начисляются бесплатные забавы, бонус за регистрацию вид бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса игрок выигрывает настоящие деньги, которые в последствии можно удачно вывести из заведения на собственную платежную систему. То есть, есть все шансы исключить средства без рисков своими деньгами. Регистрация, какую компьютерные получит бонусы, займет пару минут, а спасибо данному можно увеличить 5 евро поощрений до тысячи и без всяких проблем вывести их.
1×slots регистрацию более популярный вариант это
<a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=13119>1хслот зеркало сайта</a> 1×slots официальный зеркало <a href=http://forum.computest.ru/post/669832/#p669832>http://forum.computest.ru/post/669832/#p669832</a> Многие игроки, оценив возможностей казино, остаются играть в нем и дальше ? на это и нацелено любое промо. Постоянные клиенты заносят депозиты и делают ставки, обеспечивая длительную выгода оператора. То есть, казино выдают бездепы новым юзерам для формирования лояльной аудитории.Верификация аккаунта. Лучше доказать личность незамедлительно последствии регистрации, чтобы позже не было заморочек с выводом средств. Верификация имеет проходить 2-мя путями: 1×slots зеркало Фриспины начисляются по конкретной ставке. После их активации игроку необходимо запустить слот и убедиться, собственно в нем отображаются безвозмездные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода после отыгрыша ориентируется оператором и редко превышает 5 000 руб.
1×slots официальный сайт зеркало
Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы которые появляются у новичков. Разные казино имеют личные верховодила по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высокие требования. Часто онлайн-казино советуют отыграть бонусное одобрение до 100 раз в игровых автоматах. Например, в игрок получил безвозмездно десять $, то нужно будет отыграть их, поставив 1 тыщу спинов по 1 доллару любой. Стоит отметить, собственно не все казино дают возможность играть на призы и не во всех развлекательных заведениях схожие верховодила для отыгрывания. Некоторые казино запрещают выступать на бонусы в блекджек или ограничивают ставки до 5 процентов, собственно существенно наращивает в десятки один число нужных игр.Подобные призы без депо предоставляются на больше выгодных условиях. Зачастую они крупнее, а обстоятельства отыгрыша наименее строгие. <a href=http://cg.darkml.net/bbs/home.php?mod=space&uid=7969689>http://cg.darkml.net/bbs/home.php?mod=space&uid=7969689</a> На критериях отыгрыша безвозмездных призов следует тормознуть подробнее. С ними связаны нюансы, которые невозможно оставить без внимания. скачать 1×slots на андроид мобильная версия Во всех законных онлайн-казино Беларуси необходимо подтверждение паспортных данных для игры — это требование правительства государства.Иногда для получения призов нужно связаться с адептами саппорта. Удобнее всего с ними беседовать в онлайн-сате, но время довольно запроса по электронной почте.
1×slots бонус за регистрацию
1×slot рабочее зеркало <a href=http://www.ritual-letichev.km.ua/user/Charlessen/>http://www.ritual-letichev.km.ua/user/Charlessen/</a> Также учтите, что некоторые игровые платформы сужают перечень стран, коие способны получить предложенный бездепозитный приз за регистрацию. К образцу, существуют онлайн-заведения, выдающие сходственные призы только жильцам конкретных государств. К примеру, интернет казино 777 Оригинал предоставляет бездепозитный бонус только игрокам из России и стран СНГ. Или наоборот, пичкают вознаграждением всех, не обитателей некоторых стран (следует этого, по пристально изучать список, чтобы потом не возникло никаких вопросов и жалоб).
1×slot казино зеркало
Онлайн-казино с бездепозитными призами ставят клиентам обстоятельства для пользования бездепами, потому перед ролью в промоакции другого тщательно ознакомиться со всеми правилами и аспектами промоакции. Условия все касаться получения приза, его использования и последующего вывода валютных средств если, тогда, выигрыша. Бывают ли бездепозитные бонусы без вейджера? Бывают, в у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино.У любой забавы средства притязания по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система зачтет любую ставку. В рулетке и покере сделать это намного сложнее. Именно потому так принципиально внимательно читать условия получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой игре, то новенькие попросту «спустят приз на ветер». <a href=http://xn–80aeh5aeeb3a7a4f.xn–p1ai/forum/user/53324/>http://xn–80aeh5aeeb3a7a4f.xn–p1ai/forum/user/53324/</a> Бонус начисляется игроку незамедлительно после регистрации и прохождения верификации в казино и не просит от посетителя внесения депо. Как правило, размер бонуса в подобном случае довольно застенчивый, однако дозволяет новеньким познакомиться с забавой без риска реальными деньгами. 1× слот зеркало Обычно показатель выше, чем для призов на депозит. Не удивляйтесь, случае он несомненно в х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных государств.Однако далеко не все ресурсы предлагают своим посетителям бездепозитные призы за регистрацию в казино. В большинстве случаев предусмотрено одобрение на 1-ый депо в объеме 100–200%. Это замечательная возможность преумножить банкролл, прирастить время, проведённое за игрой и шансы сорвать большой куш.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=277764#pid277764>1×slot зеркало рабочее регистрации на телефон придет</a>
<a href=http://aficionado.pl/showthread.php?107297-%D1%81%D0%B0%D0%B9%D1%82–1×-slots-casino&p=124961>сайт 1× slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, solid только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.
#9481 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
Для получения бездепа необходимо пригласить в забаву по реферальной ссылке нового клиента: он должен зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на необходимую, обозначенную в условиях промоакции. <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> <a href=http://ch-marine.co.kr/bbs/board.php?bo_table=qna&wr_id=51073>http://ch-marine.co.kr/bbs/board.php?bo_table=qna&wr_id=51073</a> Во время игры в казино, выигрыши, полученные спасибо бесплатным призовым фондам, суммируются и срабатывают в совместную необходимую для отыгрывания. Однако, в удача улыбнется и получится отыграть все призы, игровое заведение гарантированно разрешит исключить денежные средства. Сумма вывода будет зависимости от лимита, одобренного именно в этом учреждении. Поэтому, пристально нужно разбирать верховодила выдачи безлимитных депозитов. рабочее зеркало 1×slots <a href=http://www.vladmines.dn.ua/index.php?name=Account&op=info&uname=ambitiousvocati>http://www.vladmines.dn.ua/index.php?name=Account&op=info&uname=ambitiousvocati</a>
1×slots зеркало на сегодня
Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте условия – они нередко выдаются для неких машин. В зависимости от клуба вам делать определенное число ставок. Кстати, современные игорные жилища выделяют возможность заводить «одноруких бандитов». <a href=http://forums.panzergrenadiers.com/showthread.php?22569–1×slots-%D0%A0%C2%B7%D0%A0%C2%B5%D0%A1%D0%82%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%BB%D0%A0%D1%95-%D0%A1%D0%82%D0%A0%C2%B5%D0%A0%D1%96%D0%A0%D1%91%D0%A1%D0%83%D0%A1%E2%80%9A%D0%A1%D0%82%D0%A0%C2%B0%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A1%D0%8F&p=496401#post496401>1×slots зеркало регистрация</a> 1 x slots casino На страничке представлены бездепозитные бонусы за регистрацию в казино редчайшая награда за которой гонятся все игроки как новички, так и мастера. Мы тоже уделяем большое внимание на присутствие призов при формирование рейтинга казино на деньги. Бездепозитный приз это вероятность выступать даром и выиграть реальные средства. <a href=http://1452763www.molifan.net/space-uid-2070351.html>http://1452763www.molifan.net/space-uid-2070351.html</a> Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, a только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.Допустим, за регистрацию вы получили бездеп в объеме 2 000 руб. С вейджером х30. В этом случае светит устроить ставок, на общую сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать реальные средства. Однако не забывайте, собственно с любого презента получится вывести определённую необходимую (чаще всего не более $200). 1× slots зеркало Это тоже бесплатные финансы, коие поступают на аккаунты новоиспеченных геймеров в регистрирования. А особенность этих призов произведено в том, что обретенные финансы непременно стопам использовать в продолжении назначенного медли.
1×slots casino регистрация на сайте
Размер призов чаще всего чисто условный и не выше 50 рублей. Приятно, хотя ощутимым бустом деле навряд станет. <a href=https://raid4×4.ru/memberlist.php?mode=viewprofile&u=5497>https://raid4×4.ru/memberlist.php?mode=viewprofile&u=5497</a> Если ординарными словами, бездепы – это определённая сумма средств или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно забирать подарки. Но есть кое-какие нюансы. Существуют игорные дома, коие перед тем как начислить бонусы просят привязать телефонный, предоставить копии документов. 1×slots зеркало проходить регистрацию это отличный вариант Размер приза. В качестве бездепов обыкновенно начисляют не суммы, а когда идет о бонусах за депо, которые начисляются в процентном соотношении от суммы пополнения, то некоторые казино могут презентовать игроку до 2000$.Бoльшинcтвo азартных заведений выдвигают примерно одинаковые условия и притязания, коие нужно выполнить, дабы получить бездепозитный бонус за регистрацию. Все их возможно объединить в раз список:
1×slot регистрация
Какие призы возможность еще получить кроме бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного бонуса, каждое интернет казино предлагает игрокам выгодное предложение на первый депозит, вы совершаете депо, ваш депозит возрастает в двое либо том в трое, что, этим наиболее начать играть возможно с более крупной суммой, например же не забываем про вейджер на бонусы.Для получения предоставленных призов вас пригодиться — ПК или мобильное устройство, и остальное дело за малым. <a href=https://clubdefansde24.com/foro/memberlist.php?mode=viewprofile&u=3464>1×slots официальный сайт скачать</a> Отказ в прохождении верификации. Если клиент не хочет либо имеет предоставить документы, подтверждающие его личность, профиль несомненно заблокирован вместе со всеми бонусными начислениями. 1×slots сайт <a href=https://viewcinema.ru/user/ZacheryTuh/>https://viewcinema.ru/user/ZacheryTuh/</a> Акционные предложения от казино существуют в разных форматах. Часто призы даются в мена на депо. Игрок заносит платеж и получает деньги, бесплатные вращения и другие одобрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — вид приза, который гарантирован за исполнение конкретных деяний на веб-сайте:Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.
x1 slots регистрация в 1×slots casino
Иногда виде поощрения за регистрацию все выдаваться билеты для роли в турнирах. Условия их проведения довольно выделяются, поэтому мы советуем ознакомиться с любым предложением раздельно.Выбор любого интернет казино на нашем сайте. В описании к каждому Вы сможете узнать, собственно получите за создание аккаунта. <a href=http://d992387h.bget.ru/user/Jeffreyneeme/>http://d992387h.bget.ru/user/Jeffreyneeme/</a> Во время игры в казино, выигрыши, приобретенные благодаря безвозмездным призовым фондам, суммируются и срабатывают в совместную необходимую для отыгрывания. Однако, если удача улыбнется и выйдет отыграть все призы, игровое заведение гарантированно допустит исключить денежные средства. Сумма вывода несомненно зависеть от лимита, утвержденного непосредственно в данном учреждении. Поэтому, пристально нужно читать верховодила выдачи анлимитных депо.Отзывы читателей о бонусных промоакциях помогут составить впечатление, хотя не запамятовывайте о субъективности личных объяснений. 1×slots промокод при регистрации
<b>Смотреть еще похожие новости:</b>
<a href=https://tucmas.fi/phpBB/viewtopic.php?f=4&t=348352>1×slots регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Прежде всего, не забывайте периодически заглядывать на страничку обзоров бездепозитных призов. Они шаг за шагом разглядывают более занимательные предложения водящих игорных порталов. Вышеописанная первопричина и считается основным нюансом, в которого операторы отдают часть собственной прибыли на различные рекламные расходы и рекламные кампании. А самым действующим тут станут играть именно бездепозитные бонусы казино 2022 с выводом за регистрацию.
#9482 Charlesgunnyhttp://filmkachat.ru
1хслот скачать
Вейджер (wager) – это коэффициент, который показывает на какую необходимую необходимо сделать ставок, дабы исключить приз из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода этого приза, Вам нужно сделать ставок на сумму: 500*70=3500 рублей. Только полностью отыграв приз, Вы можете исключить собственный выигрыш. <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino09k online</a> Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция имеет доскональные управляла, ссылка на коие обычно находится в промообъявлении. В них указываются лимиты, вейджер, перечень дешевых игр. Если оператор укрывает данные о предложении, то воспользоваться им не. <a href=http://optimumreality.com/groups/%d0%b4%d0%be%d1%81%d1%82%d0%b0%d0%b2%d0%ba%d0%b0-%d0%bf%d0%b8%d1%86%d1%86%d1%8b-%d0%b8%d0%b7-%d1%80%d0%b5%d1%81%d1%82%d0%be%d1%80%d0%b0%d0%bd%d0%b0-mucho/>http://optimumreality.com/groups/%d0%b4%d0%be%d1%81%d1%82%d0%b0%d0%b2%d0%ba%d0%b0-%d0%bf%d0%b8%d1%86%d1%86%d1%8b-%d0%b8%d0%b7-%d1%80%d0%b5%d1%81%d1%82%d0%be%d1%80%d0%b0%d0%bd%d0%b0-mucho/</a> 1× slots casino официальный сайт <a href=https://www.fairyabc.com/home.php?mod=space&uid=112261>https://www.fairyabc.com/home.php?mod=space&uid=112261</a> Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих притязаний, не неотъемлемой верификации. Если на сайте предусмотрена обязательная процедура подтверждения личности, то исключить выигрыш удастся лишь последствии проверки данных. Приготовьтесь наполнить анкету и выслать в техподдержку документ, подтверждающий личность.
1×slots зеркало сайта
Главное преимущество спинов – вероятность изучить различные слоты. Также получится насладиться бонусными раундами, испытывать фортуну в риск-туре и преумножить выигрыш за счёт особых символов. Однако не игровой процесс заслуживает внимание, так другого, как сосредоточиться на реальном выигрыше.Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, a зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. 1×slots официальный сайт скачать на айфон <a href=https://bbs.mikocon.com/home.php?mod=space&uid=219042>https://bbs.mikocon.com/home.php?mod=space&uid=219042</a> Но эти рамки не смущают и хайроллеров, что коэффициенты на слотах разрешают рассчитывать на солидные выигрыши, в неких автоматах разыгрывается передовой джекпот.Прямо сейчас заберите безвозмездные вращения за регистрацию без депо и начинайте собирать призовые комбинации ради солидных выигрышей! 1×slots регистрация на сайте 1×slots ru com
1хслот 1хслотс регистрация перейти на 1×slots
Подтверждение регистрации. Казино требуют привязки профиля к электронному адресу и номеру телефонного. Для этого на e-mail отчаливает письмо со ссылкой, а на телефон ? текстовое извещение с кодом. <a href=https://africaadultblog.com/memberlist.php?mode=viewprofile&u=47548>https://africaadultblog.com/memberlist.php?mode=viewprofile&u=47548</a> казино 1×slots официальный сайт Обычно для получения бонусов без депо, казино выдвигает приклнные и вполне выполнимые условия, хотя есть ряд действий коие воспрещены и все повлечь за собой противные результаты:
1×slots casino регистрация 1×slotscasino09k online
Каждый компьютерные обязан сначала отчетливо изучить условия по получению и отыгрышу приглянувшегося презента. Если всё организует, поторопитесь отобрать бесплатные спины за регистрацию в казино без депо с выводом и без отыгрыша и прямо момент начать вертеть барабаны топовых слотов.Вообще перейдя в казино — верховодила одинаковы в получении бездепозитных призов, в стандартные управляла входит: подтвердить эл. Почту и телефонный, заполнить собственный индивидуальный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ. Если вы избираете испытанное лицензионное интернет казино и сделайте все условия получения бездепозитного приза, трудностей с получением дара у Вас не возникнет. 1×slots регистрация 1×slots casino c2d ru <a href=http://mallds.com/bbs/board.php?bo_table=free&wr_id=189265>http://mallds.com/bbs/board.php?bo_table=free&wr_id=189265</a> Однако далековато не все ресурсы предлагают своим клиентам бездепозитные бонусы за регистрацию в казино. В большинстве случаев предусмотрено поощрение на первый депозит в объеме 100–200%. Это замечательная вероятность преумножить банкролл, увеличить время, проведённое за игрой и шансы сорвать большой куш.Эффективность бездепов виде рекламного инструмента оценили многие операторы. Малоизвестные площадки используют такие промоакции, чтобы быстро набрать базу. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны постоянных гостей. Не все сайты, дающие подарки без депозита, рекомендованы к этой. За симпатичным промоописанием все скрываться неосуществимые обстоятельства отыгрыша прочие подводные камни.
1 xslots рабочее зеркало
Чаще всего применяются коды. Их надо(надобно) вносить в специальные окошки регистрационной анкеты, если речь о пригласительных бонусах, либо в определенном разделе собственного офиса игрока. <a href=https://halqym.kz/user/Deweygrell/>https://halqym.kz/user/Deweygrell/</a> 1×slots подтвердит вашу регистрацию если говорить Наличие у игрока 2 аккаунта. Запрещено делать несколько профилей для неоднократного получения бездепов.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Итак, дабы благотворительные бонусные кредиты трансформировались в реальные средства, которыми продоставляется управлять по собственному усмотрению, их надо(надобно) отыграть. Вейджер стопам уточнять в правилах онлайн-казино.
#9483 Charlesgunnyhttp://filmkachat.ru
рабочее зеркало 1хслотс
Вейджер (или вагер) ? это минимальная сумма ставок, которую необходимо устроить для вывода валютного бонуса. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение. <a href=http://filmkachat.ru/>1хслот 1хслотс регистрация перейти на 1×slots</a> Шаг 4. Активация. Внимательно исследуйте условия, информацию по лимитированиям и сроке деянья бонусного предложения. Разобравшись с правилами, можно активировать приз в личном офисе (от ? с использованием промокода) или по запросу в саппорт.Возможность поиграть вспомогательное состязание (а время и некоторое) абсолютно безвозмездно, а выигрыш, же, поступает на счёт игрока. <a href=http://maisoncarlos.com/UserProfile/tabid/42/UserID/2154824/Default.aspx>http://maisoncarlos.com/UserProfile/tabid/42/UserID/2154824/Default.aspx</a> При отыгрыше бездепов, учитывайте кратковременные лимитирования. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток.Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных обстановок с казино, когда последствии отыгрыша бездепа вам не дадут вывести крупную необходимую выигрыша. 1×слот регистрация в 1×slots casino <a href=http://iawbs.com/home.php?mod=space&uid=834261>http://iawbs.com/home.php?mod=space&uid=834261</a> Бездепозитные бонусы за регистрацию в игровых автоматах для собственников онлайн-казино являются долею рекламной кампании, направленной на повышение аудитории вебсайта. Так они продвигают средства бренды и привлекают свежих клиентов.Вейджер (либо вагер) ? это минимальная сумма ставок, которую необходимо устроить для вывода валютного приза. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение.
1×slots casino регистрация
Когда речь идет о денежных призах, казино постоянно устанавливают обстоятельства вейджера, которые нужно выполнить, дабы вывести выигрыш.Но такие рамки не смущают числе хайроллеров, потому коэффициенты на слотах позволяют рассчитывать на солидные выигрыши, ну некоторых автоматах разыгрывается прогрессивный джекпот. <a href=http://www.ihavethepussy.com/de/threads/191267–1×slots-%D0%A1%D0%82%D0%A0%C2%B5%D0%A0%D1%96%D0%A0%D1%91%D0%A1%D0%83%D0%A1%E2%80%9A%D0%A1%D0%82%D0%A0%C2%B0%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A1%D0%8F-1×slots-review-live?p=208801#post208801>1×slots регистрация 1×slots review live</a> 1хслот скачать <a href=http://xsyywx.com/home.php?mod=space&uid=131744>http://xsyywx.com/home.php?mod=space&uid=131744</a> Также посещают случаи, когда казино начислит обсужденный бонус после регистрации свежего клиента по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам.Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высокие притязания. Часто онлайн-казино советуют отыграть бонусное поощрение до 100 раз в игровых автоматах. Например, в игрок получил даром 10 долларов, то нужно несомненно отыграть их, поставив 1 тысячу спинов по 1 баксу каждый. Стоит отметить, собственно не все казино дают вероятность играть на бонусы и не во всех развлекательных заведениях схожие правила для отыгрывания. Некоторые казино запрещают играть на бонусы в блекджек либо ограничивают ставки до пяти %, что значительно увеличивает в десятки раз число нужных игр. 1х слот 1хслотс регистрация перейти на 1×slots
1×slots официальный сайт скачать на айфон
Третитй бездепозитный бонус за регистрацию – валютные свои. К раскаянью, начислить рубли либо доллары готовы лишь известные и пользующиеся клубы. С их поддержкой вы сможете насладиться каждой доступной игрой – автоматом, рулеткой, кено, блэкджеком.Бездепозитный бонус казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в данном и заключается главное различие. <a href=http://youyanggse.co.kr/board/bbs/board.php?bo_table=free&wr_id=231577>http://youyanggse.co.kr/board/bbs/board.php?bo_table=free&wr_id=231577</a> 1×slots зеркало этих способов предполагает регистрацию
1×slots зеркало подтвердит вашу регистрацию если говорить
Бездепы имеют входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами.Такой безвозмездный эквивалент средств зачисляется на профиль юзера после осуществления требований и предназначаются они только для игрового процесса. Вывод таких вознаграждений возможен лишь в воплощения вейджеровых условий. Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы которые возникают у начинающих. 1×slots casino зеркало рабочее <a href=https://www.aubookcafe.com/bbs/board.php?bo_table=free&wr_id=2032066>https://www.aubookcafe.com/bbs/board.php?bo_table=free&wr_id=2032066</a>
зеркала 1×slots
На бесплатные бонусы онлайн-казино почти постоянно распространяется лимитирования по стране проживания посетителей. Даже случае вам разрешено раскрывать счет и играть на средства в заведении, это еще не означают, что для доступны not the slightest down payment bonuses. <a href=http://clips.tj/user/RenaldoLix/>http://clips.tj/user/RenaldoLix/</a> Условия вывода выигрыша. В неких заведениях для успешного вывода с бездепозитного бонуса довольно пополнения баланса и подтверждения личности. В иных же клубах, необходимо количество раз прокрутить свой депозит.Практически все интернет казино с бездепозитным бонусом за регистрацию предусматривает программу лояльности — систему одобрения неизменных посетителей, которая произведено из большого уровней. При достижении игроком еще уровня на его счёт поступает приз. Чем выше степень — тем щедрее бонус. 1×slots сайт Отказ в прохождении верификации. Если клиент не желает или не предоставить документы, подтверждающие его личность, профиль несомненно заблокирован совместно, вкупе со всеми бонусными начислениями.В интернете количество известных игорных площадок с привлекательными акционными предложениями. Однако внимательно читать условия десятков услуг скором надоест, да и время отнимет количество. Поэтому наша команда подготовила ТОП-3 сайтов с наихорошими бездепозитными бонусами:
<b>Смотреть еще похожие новости:</b>
<a href=http://www.fiat130.it/phpbb3/viewtopic.php?f=14&t=270615>казино 1× slots официальный сайт</a>
<a href=http://naturetour.ru/communication/forum/messages/forum3/message23447/5150–1×slots-mobilnaya-versiya-voyti-kazino?sessid=b1e0c66a43f7ccc7e9666459d52d6ba3&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1×slots мобильная версия войти казино</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный приз – это экономическое вознаграждение, коие выдается участнику забавы в казино, для его вербования и возникновения заинтригованности. Любой посетитель, который соответствует условиям выдачи похожего бездепозитного бонуса, может претендовать на получение вышеуказанного приза. Такое одобрение считается наиболее действенным методом, дающим возможность стартовать в игре, не вкладывая собственных материальных средств.
#9484 Charlesgunnyhttp://filmkachat.ru
1× slots casino официальный сайт
Выигрыши с бонусов без вложений всегда привязаны к требованию по ставкам и могут быть обналичены только в исполненья данных требований. <a href=http://filmkachat.ru/>1×slots бонус за регистрацию</a> Бездепозитные призы в казино без пополнения 2022 — это конкретная сумма средств или gorovyh spins вращения, которые предоставляются первым постояльцам за регистрацию на сайте казино в виде бездепозитного бонуса, и дает для вероятность с казино без пополнения опробовать предложения (игр), с дальнейшей прерогативой вывода средств при исполненьи всех установленных верховодил. <a href=http://973ehtnamuh973.co.uk/forum/memberlist.php?mode=viewprofile&u=215933>http://973ehtnamuh973.co.uk/forum/memberlist.php?mode=viewprofile&u=215933</a> 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=http://megatv.kiev.ua/user/Williamhap/>http://megatv.kiev.ua/user/Williamhap/</a>
1× slots casino зеркало
<a href=http://miupsik.ru/forums/showthread.php?tid=198975>1×slots зеркало регистрацию более популярный вариант это</a> 1× slots официальный Допустим, за регистрацию вы получили бездеп в размере 2 000 руб. С вейджером х30. В данном случае светит сделать ставок, на совместную необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать реальные деньги. Однако не запамятовывайте, что с каждого подарка получится исключить определённую необходимую (почаще всего не более $200). <a href=https://viewcinema.ru/user/WilliamMoump/>https://viewcinema.ru/user/WilliamMoump/</a> Основное отличие в, собственно для получения бездепа не пополнять баланс в казино. Но кроме этого, есть ряд и других отличий:Похожим образом работает 3-ий способ доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения посетителя или из-за с получения им VIP-статуса. Подарок предоставляется в воззвания в поддержку и ревизии. 1хслотс зеркало
1хслотс рабочее зеркало на сегодня
В большинстве заведений сделать это можно по e-mal, по номеру телефонного, спустя социальную сеть либо гугл-аккаунт. <a href=http://kinofilm2017.ru/user/Deweyduh/>http://kinofilm2017.ru/user/Deweyduh/</a> Бонусные средства – маленькая сумма денег для старта в новом казино. На бонусные деньги, обычно разрешено выступать во все игры, считая слотов с прогрессивным джекпотом и игр из раздела live casino. 1×slots регистрация на 1хслотс
1×slots коды
Обычно показатель повыше, чем для призов на депо. Не удивляйтесь, если он несомненно в х100. Иногда завышенный коэффициент вейджера устанавливается для обитателей отдельных стран. <a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=89536>сайт 1× slots casino</a> Промообъявления от казино мешают реальной картины и ориентированы на вербование внимания юзеров. Понять, как высоки шансы остаться в плюсе, дозволит собственный тест условий предложения:С не отыгранным бонусом запрещается превышать размер наибольшей ставки. Нарушение этого обстоятельства в аннулирование выигрыша. Чаще всего, знаменитые сервисы, такие как MoneyBookers и WebMoney, еще MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно неотъемлемое верховодило. Финансовые средства выводятся только через что, эту платежную систему, которой огромной для пополнения депо. Если же игрок получил бездепозитный покерный бонус, требуется пополнить счет на минимальную необходимую, которая сочиняет обыкновенно десять $. 1хслотс 1хслотс регистрация перейти на 1×slots <a href=https://mitao7.cc/home.php?mod=space&uid=20001&do=profile>https://mitao7.cc/home.php?mod=space&uid=20001&do=profile</a>
1×slots официальный сайт зеркало
Не стоит сразу же отказываться от приветственных даров в сходственных казино. Администрация готова начислить деньги или фриспины, но сначала сотрудники обязаны убедиться, собственно вы не мошенник. Дело что, нет, что развелось очень количество охотников за бонусами. Они научились обманывать систему и зарабатывать крупные суммы средств. Получить приветственный бонус могут лишь новые клиенты онлайн-казино. Способы описаны в условиях акции каждого легального казино, почаще всего это:В большинстве заведений сделать это можно по e-mal, по номеру телефонного, спустя социальную сеть либо гугл-аккаунт. <a href=http://www.taroko.org/taroko/forums/member.php?action=profile&uid=533>http://www.taroko.org/taroko/forums/member.php?action=profile&uid=533</a> сайт 1× slots casino Еще одно условие касается размеров ставки. Операторы устанавливают максимальную сумму, которую игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, избранной в Личном кабинете. При превышении лимита есть риск потерять приза. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, клиент имеет столкнуться с запретом назначать фишки на шансы.Отыграв бездепозитный приз в казино с выводом также придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, случае схожее лимитирование существует, то единоразово исключить выйдет только сумму, не превосходящую объем полученного бонуса.
<b>Смотреть еще похожие новости:</b>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=262660>1×slots официальный сайт скачать</a>
<a href=http://aficionado.pl/showthread.php?121690–1×slot-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE&p=139954>1×slot казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если вы новичок в этом деле и лишь попали в неизведанную вами область пыла — счет услуг как бездепозитные бонусы без пополнения.
#9485 Charlesgunnyhttp://filmkachat.ru
1×slos регистрация в 1×slots casino
Ограничения по играм. Администрация запрещает игрокам кое-какие игровые автоматы с бездепозитным призом, деньгами или бесплатными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда разделение производится по облику игр. Например, отыгрыш вероятен на всех игровых аппаратах, хотя запрещен в настольных забавах и в разделе Live Casino. <a href=http://filmkachat.ru/>1×slos регистрация в 1×slots casino</a> <a href=http://nanobrid.com/bbs/board.php?bo_table=free&wr_id=4018>http://nanobrid.com/bbs/board.php?bo_table=free&wr_id=4018</a> Главным интересным в возникновении этих вознаграждений состоит что, собственно пустив их в ход, геймер ничем не рискует и в последствии никому ничего не несомненно обязан (не зависимо, получит ли он спасибо бонусам какой-либо выигрыш или моментально спустит все лишь собственно прибывшие деньги). То есть, казино снабжает игрока вероятностью на дармовой базе играть во всевозможные слоты причем спонсирует забаву.Не рекомендуем опрометью голову хвататься за всевозможные предложения получения средств без инвестициям. Вполне вероятно, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на 1-ый взгляд. Альтернативой является казино бонус за депозит. Мы предлагаем для пару советов, благодаря коим у каждого игрока будет возможность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом средств: 1×slots регистрация 1×slots casino c2d ru <a href=https://magazin.orgsoft.ru/forum/user/204582/>https://magazin.orgsoft.ru/forum/user/204582/</a> После потребуется внести идентификационный платёж. Это стращает начинающих больше всего. Нужно сделать минимальный депозит в 100–500 рублей. Таким образом служба защищенности убедиться что, нет, собственно платёжный метод принадлежит Вам. Данная процедура важна для обеспечивания защищенности игровых счетов. Пример, Ваш акк взломают и выведут средства на свой кошелёк. Будет крайне досадно. Поэтому верификация платёжной системы, это необходимый момент.В интернете очень большое скриптовых вебсайтов, которые принадлежат мошенникам. Их главная цель – привлечь гэмблеров, пообещав не великодушные презенты, но и крупные выигрыши. Так что кое-какие сайты предлагают получить за регистрацию том $1 000.
1×slots casino регистрация на сайте
Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала прыткие выводы. Фишка выплат в том, собственно достаточно избрать платёжный инструмент и указать сумму. В большинстве случаев средства зачисляются на электронные кошельки на 15 минут, а на банковские карты – 1–3 рабочих дня.Допустим, за регистрацию вы получили бездеп в объеме 2 000 рублей с вейджером х30. В этом случае светит устроить ставок, на совместную сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда сделайте условия по отыгрышу, придёт время заработать реальные средства. Однако не забывайте, что с каждого дара получится вывести определённую сумму (почаще всего не более $200). <a href=https://hiddeninthesand.com/forum/viewtopic.php?t=248676>казино 1×slots официальный сайт</a> скачать 1×slots на андроид мобильная версия <a href=http://www.eryh.com/home.php?mod=space&uid=20829&do=profile>http://www.eryh.com/home.php?mod=space&uid=20829&do=profile</a> Активация происходит за промокодов, коие вводятся в собственном офисе после регистрации. Среди спецпредложений в списке Casino.ru содержатся неповторимые промокоды, которые доступны только гостям портала. Другие методы начисления средств ? автоматическая активация незамедлительно в творения аккаунта и получение подарка по запросу в службу технической помощи. рабочее зеркало 1хслотс
1хслотс мобильная версия зеркало
Если вы бывалый игрок, вы должны знать, что приз без депо – редчайшая находка. Тем не, мы неделю исследуем онлайн, чтобы отыскать вам наихорошие бездепозитные предложения.Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша призов. Заведения постоянно устанавливают наивысшую ставку, возможную по условиям вейждера. Когда идет о получении бездепозитных бонусов в казино, для обратите внимание на следующие условия: <a href=http://forumqservice.co.uk/member.php?action=profile&uid=5255>http://forumqservice.co.uk/member.php?action=profile&uid=5255</a> Чем ниже велечину вейджера, тем проще отыграть и исключить бонус. Если Вы планируете заработать на бездепе, не просто ознакомиться с свежим игровым клубом, то стоит игнорировать призов с высоким вейджером их почти не реально отыграть. С ними Вы сможете лишь протестировать игры заведения. 1×slots официальный сайт скачать Для получения бездепа нужно пригласить в забаву по реферальной ссылке свежего клиента: он обязан зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на сумму, обозначенную в критериях промоакции.
скачать 1×slots на андроид мобильная версия
В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и в случае спорных ситуаций нет способности куда-то посетовать и доказать собственную правоту.Бездепозитный приз казино с выводом за регистрацию не настятельно внесения средств на игровой счёт для получения — в этом и заключается основное отличие. Фриплей-бонусы. Бонусы за бесплатную игру есть только в некоторых клубах. Они зачисляются незамедлительно последствии творения профиля и действуют непродолжительное время. Если у вас нет времени истратить средства, они просто закончатся. Что дотрагивается медли, как призы срабатывают в течение 1-го часа.Помимо прочего, для вывода средств по бездепу нужно привнести на счёт свой первый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало возможную необходимую, в чего вывод средств станет доступен. Итак, чтобы благотворительные бонусные кредиты трансформировались в реальные деньги, которыми возможность распоряжаться по собственному усмотрению, их нужно отыграть. Вейджер стопам уточнять в правилах онлайн-казино.Игрокам не воспринимать приветственный бонус как гарантированный способ получить крупный выигрыш, хотя это замечательная вероятность без затрат оценить возможностей казино. 1×slots казино зеркало <a href=http://www.gtcm.info/home.php?mod=space&uid=733471>http://www.gtcm.info/home.php?mod=space&uid=733471</a> Прежде всего, не забывайте периодически заглядывать на страницу обзоров бездепозитных призов. Они шаг за шагом разглядывают более занимательные предложения водящих игорных порталов.
1×slots зеркало которую указывали при регистрации кстати
Если вы бывалый игрок, вы должны аристократия, собственно бонус без депозита – редкая находка. Тем не менее, мы неделю исследуем онлайн, чтобы найти для вас наихорошие бездепозитные предложения. Онлайн-казино тщательно продумывают бонусные условия, коие необходимо изучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша и другие лимитирования.Для вывода средств бонус нужно несомненно отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариантами отыгрыша бездепозитного бонуса до его получения, чтобы избежать конфликтных ситуаций. <a href=http://www.lighttoguideourfeet.com/member.php?u=1459158>http://www.lighttoguideourfeet.com/member.php?u=1459158</a> Таким образом, заведение пробует показать себя своим потенциальным геймерам, а такой рекламный ход как казино бонус без депозита за регистрацию завлекает очень количество внимания к игорному заведению и обеспечивает неизменный струю новых посетителей и грядущих посетителей игрового онлайн клуба. 1×slots зеркало регистрация то дальше необходимо пройти Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, the decision зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.bedwantsinfo.nl/thread-682834.html>1×slot казино зеркало</a>
<a href=http://forum.survival-readiness.com/viewtopic.php?t=245448>1×slots акции</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бoльшинcтвo азартных заведений выдвигают приблизительно одинаковые обстоятельства и требования, коие необходимо выполнить, чтобы получить бездепозитный приз за регистрацию. Все их возможно объединить в раз перечень:
#9486 Charlesgunnyhttp://filmkachat.ru
1× slots официальный
Предложения с бездепозитными бонусами за регистрацию разрешают свежим заведениям заинтересовать аудиторию на собственный вебсайт. А игроки в свою очередь получают возможность выступать на реальные средства без депо в казино и заработать маленькой стартовый капитал, кот-ый разрешено исключить на карту банка или электрический кошелек. <a href=http://filmkachat.ru/>1×slots на любой вкус как пройти регистрацию</a> <a href=https://astraclub.ru/members/354022-JamesmiC?s=abb430d7ecb936626ed67af2c50e4988>https://astraclub.ru/members/354022-JamesmiC?s=abb430d7ecb936626ed67af2c50e4988</a> Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.Для доказательства электронной почты, просто перейдите по активной ссылке в послании, полученном от игрового заведения. 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=http://nvkb.ru/forum/index.php/user/105442/>http://nvkb.ru/forum/index.php/user/105442/</a>
1×slots регистрацию процедура займет всего лишь
Но не мыслить, что снабжая юзеров такими бонусами, казино занимается спонсированием. Ведь размеры вознаграждений, главном, не немалые (средним размером от 5 до 20 $). И на эти средства налагаются определенные условия и лимитирования, неотклонимые к исполнению игрока, если в последствии он желает получить все свои выигранные деньги. <a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=135315>1×slot зеркало рабочее этих способов предполагает регистрацию</a> 1хслот скачать Как и промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такового предложения считаются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает новых посетителей и разрешает им составить эмоцию о функционале, не рискуя значительными совокупностями. <a href=https://medicaidsecretsforum.com/member.php?action=profile&uid=1765>https://medicaidsecretsforum.com/member.php?action=profile&uid=1765</a> Для того, дабы отыграть сумму вашего бездепозитного приза нужно выполнить условия вейджера. Очень часто фриспины даются на конкретные слоты (book of ra, book of lifeless, book of sun), избирайте разъем себя по, все очень красивые и высококачественные. Бездепозитные приз возможность быть валютным так и в виде фриспинов на слотыВ настоящее время получить приз за регистрацию в казино очень просто. Почти любой игорный жилище с готовностью предоставит средства либо благотворительные вращения. Многие игроки используют данным и не стыдятся региться в каждом клубе с выгодными критериями. Кстати, это отличная вероятность выдумать выигрышную тактику и сорвать куш. 1 х слотс зеркало Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы которые возникают у начинающих.Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро или 20 $. Если выдаются фриспины, их число редко превышает нескольких 10-ов безвозмездных вращений.
1×slots официальный сайт скачать на айфон
Вы скорее, скажем, как все любите получать презенты и бездепозитные бонусы казино. Игорные жилища брали в повадку одаривать гэмблеров приятными призами. Стать владельцем приветственного презента возможно за творение профиля или пополнение счёта. Второй вариант больше занимательный, ведь клубы готовы удвоить депо! Но случае вы новичок и только знакомитесь с миром азарта, лучше воспользуйтесь призом за регистрацию.При верном раскладе бездепы — это отличный метод выступать на средства без растраты собственных средств. Есть некоторое рекомендаций, следуя коим можно извлечь максимум полезности из подобных промоакций казино. Играть следует только на лицензированных площадках. Скриптовые веб-сайты не только дурачат с бонусными услугами, хотя и используют пиратский софт с измененным ГСЧ. Выиграть на таких автоматах невозможно. <a href=https://www.freebeg.com/forum/member.php?action=profile&uid=26153>https://www.freebeg.com/forum/member.php?action=profile&uid=26153</a> 1×slot зеркало
1×slots зеркало быструю регистрацию а также мгновенное
Как лишь вы отыграли вейджер и свои с бонусного баланса перешли вас на настоящий счет, Вы храбро можете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (устроить минимальный депо к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депозитом). Некоторые клубы автоматически начисляют приз на акк игрока в исполнения условий получения, но случаются ситуации, когда приз надо(надобно) активировать игроку самому. Есть количество способов активации бонуса: Когда речь о валютных призах, казино всегда устанавливают обстоятельства вейджера, коие нужно выполнить, дабы исключить выигрыш.Каждый новичок и умелый игрок грезят скоро стартануть и начать делать реальные ставки. Для сего достаточно арестовать презент, за кот-ый не нужно уплачивать. В зависимости от игровой платформы, нужно создать профиль, привязать email или телефон. После этого администрация начислит щедрое вознаграждение вид бесплатных вращений либо виртуальных кредитов. 1× slots casino зеркало <a href=http://forum.informatyk.edu.pl/member.php?action=profile&uid=13575>http://forum.informatyk.edu.pl/member.php?action=profile&uid=13575</a> Сразу после активации промокода возможно воспользоваться даром. Как уже упоминалось, призы случаются трёх обликов – фриспины, кредиты и фриплей-бонусы.
1×slots скачать на айфон
Принципиальным различием бесплатных призов от призов на депозит является недоступность надобности вносить деньги на аккаунт. Из-за этого их нередко называют бездепозитными (not the slightest deposit bonuses).Подтверждение индивидуальной информации. Все казино просят от клиента пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и наличие у юзера иных аккаунтов (мультиаккаунт запрещен). <a href=https://malaysia-forex.com/members/132774-Tyroneror>https://malaysia-forex.com/members/132774-Tyroneror</a> Главное преимущество спинов – возможность выучить разные слоты. Также получится насладиться бонусными раундами, испытать удачу в риск-туре и преумножить выигрыш за счёт особых символов. Однако столько игровой процесс заслуживает внимание, ведь лучше сосредоточиться на реальном выигрыше. 1хслотс рабочее зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.bandariklan.com/showthread.php?tid=176825&pid=890932#pid890932>1 хслот регистрация в 1×slots casino</a>
<a href=http://162.241.164.67/phpbb/phpBB3/memberlist.php?mode=viewprofile&u=121525>1хслотс официальный сайт зеркало</a>
<a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1×slots регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Можно ли в одном онлайн казино получить больше одного бонуса за регистрацию? Нет, так как в каждом интернет казино есть управляла, к которым нужно придерживаться, не творить 2 аккаута для получения призов, другому будет блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, бонус за регистрацию выдаеться раз раз одному лицу.
#9487 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots review live
Разные казино имеют личные верховодила по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высокие притязания. Часто онлайн-казино рекомендуют отыграть бонусное поощрение до 100 раз в игровых автоматах. Например, если игрок получил даром 10 $, то необходимо несомненно отыграть их, поставив одну тыщу спинов по одному доллару каждый. Стоит отметить, собственно не все казино дают возможность выступать на бонусы и не во всех развлекательных заведениях схожие правила для отыгрывания. Некоторые казино воспрещают играть на бонусы в блекджек либо ограничивают ставки до пяти процентов, что существенно наращивает в 10-ки один число нужных игр. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> <a href=http://yj-c.co.kr/bbs/board.php?bo_table=sub23_01&wr_id=4125>http://yj-c.co.kr/bbs/board.php?bo_table=sub23_01&wr_id=4125</a> Чем ниже велечину вейджера, тем легче отыграть и исключить бонус. Если Вы расчитываете заработать на бездепе, а не просто ознакомиться с новым игровым клубом, то стоит игнорировать бонусов с высоким вейджером их практически не реально отыграть. С ними Вы можете только протестировать игры заведения. 1 xslots рабочее зеркало <a href=https://hallbook.com.br/blogs/294595/%D0%A1%D0%BA%D1%96%D0%BB%D1%8C%D0%BA%D0%B8-%D0%BA%D0%BE%D1%88%D1%82%D1%83%D1%94-%D1%80%D0%B5%D0%BC%D0%BE%D0%BD%D1%82-%D0%BA%D0%B2%D0%B0%D1%80%D1%82%D0%B8%D1%80%D0%B8-%D1%80%D0%BE%D0%B7%D1%80%D0%B0%D1%85%D1%83%D0%BD%D0%BE%D0%BA-%D1%82%D0%B0-%D0%BF%D0%BB%D0%B0%D0%BD%D1%83%D0%B2%D0%B0%D0%BD%D0%BD%D1%8F-%D0%B2%D0%B8%D1%82%D1%80%D0%B0%D1%82>https://hallbook.com.br/blogs/294595/%D0%A1%D0%BA%D1%96%D0%BB%D1%8C%D0%BA%D0%B8-%D0%BA%D0%BE%D1%88%D1%82%D1%83%D1%94-%D1%80%D0%B5%D0%BC%D0%BE%D0%BD%D1%82-%D0%BA%D0%B2%D0%B0%D1%80%D1%82%D0%B8%D1%80%D0%B8-%D1%80%D0%BE%D0%B7%D1%80%D0%B0%D1%85%D1%83%D0%BD%D0%BE%D0%BA-%D1%82%D0%B0-%D0%BF%D0%BB%D0%B0%D0%BD%D1%83%D0%B2%D0%B0%D0%BD%D0%BD%D1%8F-%D0%B2%D0%B8%D1%82%D1%80%D0%B0%D1%82</a> После требуется внести идентификационный платёж. Это стращает начинающих больше всего. Нужно сделать наименьший депо в 100–500 руб. Таким образом служба защищенности убедиться сомнений, что платёжный способ принадлежит Вам. Данная процедура необходима для обеспечивания безопасности игровых счетов. Пример, Ваш акк взломают и выведут средства на свой кошелёк. Будет очень неприятно. Поэтому верификация платёжной системы, это важный момент.Так же стоит выделить то, собственно в любом онлайн казино установлен свой наибольший кешаут на бездепозитный бонус. Как управляло кешаут — это предельная сумма средств, кот-ая доступная для вывода с бездепозитного приза.
1×slots промокод при регистрации 2025
Для получения предоставленных бонусов вас понадобиться — ПК либо мобильное прибор, и остальное дело за малым. <a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=242094>1×slot регистрация</a> 1×slots официальный сайт скачать Также посещают случаи, когда казино начисляет обсужденный приз последствии регистрации нового клиента по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам. <a href=https://slides.com/vykupavto>https://slides.com/vykupavto</a> Если вы облюбовали для себя некоторое брендов коие вам больше всего приглянулись, для неизменной игры! Таких гемблеров казино довольно любит и ценит, за частую эти игроки становятся VIP игроками заведения, коим нередко поступают выгодные предложения повторяющий бонусов, например же туда заходит и бездепозитные.Максимальная ставка ? уточняется в валюте счета и ограничивает размер ставки за один спин. В случае ее превышения приз может быть аннулирован. Также в правилах возможность находиться запрет на размещение ставок определенного вида, например, по равным шансам в рулетке (словами, на чет или нечет, красное или темное и т.д.). 1 x slots casino
1×slots регистрация 1×slotscasino09k online
Доступ к дару имеет раскрываться механически в введения промокода либо воззвания в службу поддержки вебсайта. В первом случае от юзера не требуется никаких деяний. Бездеп с активацией по коду встречается чаще всего. Игроку нужно ввести совокупа символов в графе, которая может находиться в регистрационной форме в Личном кабинете. <a href=https://kr-osvita.gov.ua/user/Travisdicky/>https://kr-osvita.gov.ua/user/Travisdicky/</a> Например, игрок получил 500 руб. При творении аккаунта и должен отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 рублей, понадобится устроить 875 спинов для полного отыгрыша.Доступ к подарку возможность открываться механически после введения промокода либо воззвания в службу вебсайта. В первом случае от пользователя не потребуется практически деяний. Бездеп с активацией по коду встречается чаще всего. Игроку необходимо ввести совокупа знаков в графе, кот-ая имеет пребывать в регистрационной форме в Личном кабинете. 1хслот зеркало Размер ставки для игры по бездепозитному призу (окончательно же, в случае, когда он представлен повторяющий бонусных денежных средств) часто ниже, чем при этой на депозит. Ограничение будет работать до этапа отыгрыша бонуса.Индивидуальные поощрения выдаются за совершение поступков: подписку на аккаунты площадки в соц сетях, установку мобильного приложения или официального клиента для ПК. В большинстве казино срабатывают программки лояльности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на грядущий степень часто с выдачей бездепа.
1×slots регистрацию процедура займет всего лишь
На бонусные начисления шансы быть установлены вспомогательные лимитирования, коие Вы не к при отыгрыше. Пока приз всецело не отыгран — деньги из казино не выводятся. Не желайте поиграть в азартные забавы, не рискуя своими средствами, но получая в все выплаты? Подобную возможность деют многие лучшие порталы с азартными веселиями. В их числе много добросовестных и надежных интернет-казино на российском языке. Они завлекают свежих пользователей разными поощрительными мероприятиями, включая бездепозитные, либо бесплатные призы.Заполняя данные в личном профиле, указывайте лишь достоверную информацию, например как Вам понадобиться ее подтвердить дальнейшем при выводе денег. Для верификации аккаунта надо(надобно) дать специалистам технической помощи отсканированную копию паспорта и счета за коммунальные предложения, еще фотографию банковской карты или снимок страницы электронного кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности.Помимо остального, для вывода средств по бездепу нужно привнести на счёт свой первый депозит — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало вероятную сумму, в чего вывод средств будет доступен. 1хслот зеркало сайта <a href=https://baskino.zone/user/CraigSow/>https://baskino.zone/user/CraigSow/</a> Бездепы обыкновенно предлагают с отыгрышем — моментально исключить выигранные средства невозможно. Перевод денег со счета несомненно вероятен после такого, как пользователь выполнит все притязания казино, а сумма не быть выше установленного правилами лимита. Условиями промоакции фиксируются сроки, на которых заказчик вправе пользоваться предложением. Обычно они не превосходят нескольких дней последствии активации.
1×slots casino регистрация
Онлайн гемблинг развивается с любым деньком больше и больше, новые бренды создаются не по дням а по часам. Новые интернет казино проделывают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и тем наиболее предлагают бездепозитные призы за регистрацию, собственно бы не упустить эту возможность — как пользоваться новым бездепом, советуем навещать наш вебсайт как можно чаще, самое аппетитное и свежие несомненно добавляться в этом же списке. <a href=https://www.sportnabiblioteka.bg/index.php?option=com_k2&view=itemlist&task=user&id=116455>https://www.sportnabiblioteka.bg/index.php?option=com_k2&view=itemlist&task=user&id=116455</a> Для отыгрыша приза казино обязует игрока сыграть на сумму, в количество раз превышающую необходимую приобретенного приза — тут выгода компании явна.Теоретически, к бесплатным бонусам возможно отнести так именуемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на деньги казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, поэтому что они деют только возможность делать ставки. 1×slots официальный сайт скачать на айфон
<b>Смотреть еще похожие новости:</b>
<a href=https://mcmon.ru/showthread.php?tid=105248>1×slots регистрация то дальше необходимо пройти</a>
<a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=318584#pid318584>1×slots casino регистрация 1×slotscasino09k online</a>
<a href=http://www.carshowsociety.com/forum.php/topic,11220.new.html#new>1×slots сайт</a>
<a href=https://aircompare.us/forums/viewtopic.php?p=461819#p461819>1хслот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Индивидуальные поощрения выдаются за совершение действий: подписку на аккаунты площадки в соц сетях, установку мобильного прибавления или официального клиента для ПК. В большинстве казино срабатывают программки преданности, присваивающие игрокам статусы за активность на сайте. Продвижение на грядущий степень нередко сопрягается выдачей бездепа. Хотя бесплатные призы начисляются без депо, не исключено, что вам придется заносить средства. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты только последствии того, как новый клиент раз пополнит игровой счет.
#9488 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Бесплатные призы казино без депозита можно получить в виде денежных средств на бонусный счет (вывести их возможно лишь после отыгрыша), фриспинов, забавы или кешбэк-бонуса.Какие бонусы есть еще получить не бездепозитного приза за регистрацию в казино? По мимо бездепозитного бонуса, каждое интернет казино предлагает игрокам прибыльное предложение на 1-ый депозит, вы совершаете депозит, ваш депозит увеличивается в двое или и в 3, что, этим наиболее начать выступать можно с более крупной суммой, например же не забываем тему вейджер на бонусы. <a href=http://filmkachat.ru/>рабочее зеркало 1хслотс</a> Любой выигрыш по ставке выше установленного лимита будет являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, ну случае выигрыша его сумма не поступит на счёт клиента — итог игры несомненно всецело аннулирован. <a href=http://xn----7sbgabarzt9afbtggek.xn–p1ai/index.php?subaction=userinfo&user=blackjail79>http://xn----7sbgabarzt9afbtggek.xn–p1ai/index.php?subaction=userinfo&user=blackjail79</a> Онлайн-казино кропотливо продумывают бонусные обстоятельства, коие нужно выучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и лимитирования.Зарегистрируйтесь. Для регистрации чаще всего довольно ввести собственный номер аппарата и почтовый адрес, последствии чего ввести полученный код из СМС. Возможно, потребуется указать промокод. В правилах промоакции несомненно написано, где его надо вводить. Иногда это бы делать при регистрации, иногда — теснее последствии творения собственного офиса, на отдельной странице. 1×slots зеркало рабочее на сегодня <a href=https://maps.google.ne/url?q=https://doctorlazuta.by/>https://maps.google.ne/url?q=https://doctorlazuta.by/</a> Каждый геймер должен сперва отчетливо выучить обстоятельства по получению и отыгрышу понравившегося презента. Если всё организует, поспешите арестовать бесплатные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик сейчас начать вертеть барабаны топовых слотов.
1×slot регистрация
1хслотс казино зеркало <a href=http://www.adgoods.ru/user/profile/4620>http://www.adgoods.ru/user/profile/4620</a> Если вы новичок в этом деле и только попали в неизведанную вами район пыла — с помощью услуг как бездепозитные призы без пополнения. 1хслот скачать Классическая разновидность бонуса за творенье аккаунта. Его превосходство заключается что, нет, что заказчик возможность других подбирать аппараты и делать ставки в их. Иногда список игровых автоматов ограничен оператором, но все точно это чем, чем единственный доступный разъем, как если, тогда, с использованием фриспинов.Для получения приза надо(надобно) пригласить в игру нового посетителя. Казино начислит пригласившему фиксированный процент от взносов приглашённого в виде приза: чаще всего его объем не выше 10%. Срок деянья бонуса как не выше месяца: пригласивший получает бонус от проигранных ставок приглашённого в первый луна забавы.
казино 1× slots официальный сайт
Получив собственный презент, Вы можете безвозмездно играть на реальные деньги, а выполнив обстоятельства отыгрыша, исключить свой выигрыш. <a href=http://mc-pe.net/index.php?subaction=userinfo&user=varioushijacker>http://mc-pe.net/index.php?subaction=userinfo&user=varioushijacker</a> Бесплатные бонусы казино без депо возможно получить в виде денежных средств на бонусный счет (исключить их возможно лишь в отыгрыша), фриспинов, забавы либо кешбэк-бонуса.Выбор каждого онлайн казино на нашем сайте. В описании к любому Вы можете узнать, собственно получите за творение аккаунта. 1×slots казино зеркало В онлайне большое известных игорных площадок с привлекательными акционными предложениями. Однако пристально читать обстоятельства десятков услуг в надоест, да и время отнимет большое. Поэтому наша команда подготовила ТОП-3 вебсайтов с лучшими бездепозитными бонусами:Бездепозитные бонусы начисляются лишь раз один. Не стоит открывать свежие аккаунты, чтобы получить их повторно. Служба защищенности казино обязательно выявит «левого» участника и перекроет. Если посетитель выполнит нужные притязания, отыграет собственную ставку и решит вывести собственный выигрыш, то ему надо(надобно) к, собственно казино обязательно востребует дать ксерокопии личных документов, дабы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои исключить не получится.
1×slots казино зеркало
Отыграв бездепозитный бонус в казино с выводом тоже придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в сходственное ограничение присутствует, то единоразово вывести выйдет лишь необходимую, не превосходящую размер полученного приза.Бонус без депо за регистрацию в казино (бездепозитный бонус) – это денежный презент от клуба, который начисляется на аккаунт игрока последствии регистрации в казино. Кроме сотворения учетной записи, для получения бездепа, довольно часто требуется ещё и подтвердить контактные данные игрока и/или активировать специальный промо-код. Прежде чем активировать бездеп, необходимо увериться что, что страна, гражданином коей считается игрок, не входит в перечень запрещенных.Особую изюминку видео слотам придают оригинальные знакы. С их свет активируются различные призы. Вы сможете запустить дополнительный степень и увеличить необходимую выигрыша. Есть знаки, коие сменяют негодные элементы и сами создают выигрышные комбо. Не стоит забывать и про бонус-тур. После любого удачного спина есть шанс увеличить сумму выигрыша в два либо хорошо раза. 1×slots акции <a href=http://www.gtcm.info/home.php?mod=space&uid=734135>http://www.gtcm.info/home.php?mod=space&uid=734135</a> Также, учите, собственно бездепозитный бонус возможно вывести только что, нет случае, когда будут выполнены все обстоятельства отыгрыша.
1×slots рабочее зеркало
Как управляло, при выводе денег, от играющего потребуется только сделать минимальный лепта чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом собственный счет. <a href=http://bbs.szwifisky.com/home.php?mod=space&uid=2598834>http://bbs.szwifisky.com/home.php?mod=space&uid=2598834</a> Наличие у игрока второго аккаунта. Запрещено делать некоторое профилей для многократного получения бездепов.Основное отличие никаких, что для получения бездепа не пополнять баланс в казино. Но не сего, есть ряд и различий: 1×slots зеркало регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=36213>1× slots зеркало</a>
<a href=https://forum.spherecommunity.net/User-JamesLop>1×slots регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Диапазон ставок, которые вправе устроить игрок, того лимитирован. Обычно назначать можно маленькую необходимую — около 10–30 рублей за одно вращение. У нас на сайте Вы отыщите список призов без депо в испытанных казино и подробную информацию про как их получить и использовать.
#9489 Charlesgunnyhttp://filmkachat.ru
1×slots коды
При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток.Свежий приз начисляется в виде валютных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в использовании своими, в случае отыгрыша оператор имеет установить лимитирование на вывод денег. <a href=http://filmkachat.ru/>1×slots зеркало которую указывали при регистрации кстати</a> Ниже указан актуальный перечень легальных казино в Беларуси с призами на первый депозит. Вы можете попасть на официальный сайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. <a href=http://qoos.com/home.php?mod=space&uid=66145&do=profile&mycenter=1>http://qoos.com/home.php?mod=space&uid=66145&do=profile&mycenter=1</a> 1×slots casino зеркало <a href=https://trade-britanica.trade/index.php?title=Выкуп_авто>https://trade-britanica.trade/index.php?title=Выкуп_авто</a>
1×slots актуальное зеркало
<a href=http://miupsik.ru/forums/showthread.php?tid=193992>1×slots рабочее зеркало</a> 1х слот регистрация в 1×slots casino <a href=http://f26cn.ww.w.molifan.net/space-uid-2069057.html>http://f26cn.ww.w.molifan.net/space-uid-2069057.html</a> 1хслот официальный сайт зеркало Условия имеют различаться друг от приятеля. Но подобный бонус может быть использован только для игрового процесса – полученные на счет финансы до того, как будут отыграны, исключить невероятно.
1хслотс рабочее зеркало
<a href=https://filmy-hd.ru/user/JustinDoumb/>https://filmy-hd.ru/user/JustinDoumb/</a> При пользовании бездепозитным бонусом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют количество обликов лимитов:Бездепозитный бонус нередко имеет стать легкодоступным незамедлительно после завершения регистрации, что как единственным требованием к нему считается регистрация, а после проверка вашей новой учетной записи. 1х слот 1хслотс регистрация перейти на 1×slots
1×слот регистрация в 1×slots casino
Обычно, бездепозитные бонусы выдаются под определенные слоты с фиксированной ставкой, но их наверняка воспрещено использовать в игровых автоматах с современным джекпотом. Список игр, в можно использовать бездеп, Вы отыщите в описании акции или можете уточнить у саппорта заведения.Представьте момент, когда при ставке в 10 рублей Вы получите схожее умножение. Миллион руб. За одно вращение, что вполне возможно. Поэтому вопрос, сколько возможно выиграть остаётся не. Предлагаем выяснить самостоятельно. Регистрируйтесь в одном либо нескольких интернет казино, получайте Бездепозитный бонус и проверяйте удачу в деле. Разумеется, исключить деньги довольно. Однако шансы есть у всех. <a href=http://forum.cvetq.info/viewtopic.php?f=43&t=197&p=255954#p255954>1хлот регистрация в 1×slots casino</a> Для как, дабы отыграть сумму вашего бездепозитного приза нужно выполнить условия вейджера. Очень часто фриспины даются на конкретные слоты (book of ra, book of lifeless, book of sun), подбирайте слот для по душе, они все довольно красивые и высококачественные. Бездепозитные приз имеет быть валютным так и повторяющий фриспинов на слоты 1×slots казино мобильная версия <a href=http://tellmy.ru/user/PatrickLit/>http://tellmy.ru/user/PatrickLit/</a>
1×slots зеркало на сегодня
Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают приз по государствам. Вплоть до того, что клуб имеет на игроков из Вашей государства, а бездеп не давать.Но на некоторых азартных платформах подобные гонорары могут получить теперь зарегистрированные пользователи. В этом случае, бонусы предоставляются в рамках оригинальных акций или же некоторым геймерам повторяющий акционного предложения, которое прибывает на почту с целью «возвратить» игрока в свое казино. Для вывода средств бонус нужно будет отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами акции и вариациями отыгрыша бездепозитного бонуса до его получения, дабы избежать конфликтных обстановок. <a href=http://wy881688.com/home.php?mod=space&uid=683013&do=profile>http://wy881688.com/home.php?mod=space&uid=683013&do=profile</a> 1×slots акции
<b>Смотреть еще похожие новости:</b>
<a href=http://lider1c.ru/communication/forum/messages/forum5/message22700/18587-x1-slots-registratsiya-v-1×slots-casino?sessid=579391a7fb668d00fe14cb4f6bccbf37&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>x1 slots регистрация в 1×slots casino</a>
<a href=https://aircompare.us/forums/memberlist.php?mode=viewprofile&u=40074>1×slots официальный зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются сразу последствии творения профиля и активны непродолжительное время. Если не успеете израсходовать средства, они попросту сгорят. Касаемо времени, в большинстве случаев бонусы активны на часа.
#9490 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало
На нашем сайте Вы найдете перечень актуальных новых бездепозитных призов в казино 2022 года. Также, есть большое эксклюзивных предложений, коие доступны только посетителям нашего вебсайта последствии регистрации по нашей ссылке либо активации специального промокода. <a href=http://filmkachat.ru/>1×slots коды</a> Фриспины – безвозмездные вращения с фиксированной ставкой, которые можно применять в конкретных игровых автоматах. <a href=http://ledsoft.ru/forum/?PAGE_NAME=profile_view&UID=54463>http://ledsoft.ru/forum/?PAGE_NAME=profile_view&UID=54463</a> Когда речь идет о получении бездепозитных призов в казино, в первую очередь направьте на последующие условия:Обыкновенные бездепозитные бонусы в размере от трех до двадцати $ сделаны для того, чтобы в игры заходили все свежие и свежие игроки. Здесь, вероятнее всего, будет лимитирование на наибольший выигрыш. Важно, дабы перед минимальным вкладом был отключен приз за 1-ое пополнение счета, и в не попадет на повторный вейджер. 1 xslots рабочее зеркало <a href=http://barboska.ru/u1439/blog/2257.html>http://barboska.ru/u1439/blog/2257.html</a> Такой бесплатный эквивалент средств зачисляется на профиль юзера последствии воплощения требований и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений возможен только в осуществления вейджеровых критерий.За счёт спинов выйдет запустить разные онлайн слоты, протестировать стратегии и поднабраться опыта. Фишка что, собственно вращения начисляются на топовые аппараты с оригинальными опциями и высочайшей отдачей. Не запамятовывайте, что в любом акционном предложении предусмотрены особые требования – временные ограничения, наибольший размер ставки, список дешевых игр.
1×slots регистрация 1×slots casino 777 online
Бездепозитный бонус нередко имеет замерзнуть доступным сразу в окончания регистрации, потому в большинстве случаев единственным требованием к нему является регистрация, а этого ревизия вашей новой учетной записи. <a href=https://thetechmodders.com/forums/viewtopic.php?t=23971>1×слотс казино</a> 1×slots официальный demo регистрация в 1×slots casino Обычно показатель выше, чем для призов на депозит. Не удивляйтесь, если он несомненно том х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных стран.У нас на веб-сайте Вы отыщите перечень призов без депозита в проверенных казино и доскональную информацию то как их получить и использовать. <a href=http://naszaswietlica.dwr.pl/profile.php?lookup=18721>http://naszaswietlica.dwr.pl/profile.php?lookup=18721</a> Это раз из основных показателей привлекательности презента. С завешенным коэффициентом том мастера не смогут выполнить обстоятельства по отыгрышу. И важно, насколько привлекательно выглядит предложение – бездепозитный приз казино в размере $500 либо $1 000. Чтобы новенькие лучше вникли, что же такое вейджер, мы разберём на примере. 1×slots зеркало регистрация в 1×slots casino
1×slots casino регистрация 1×slotscasin online
Бездепозитные бонусы казино это финансовая компенсация, предлагаемая пользователям на дармовой базе и возможность выступать в интернет казино бесплатно. Если сопоставлять их с одобрениями за вклад, в которых свои выдаются лишь впоследствии начального пополнения счета, то бездепозитные вознаграждения получаются бесплатно. То есть, играющий получает возможность делать ставки на уже быть финансы, коие выдаст заведение, выполняя, при, обычные деянья, чтобы их извлечь (тут идет о регистрация, удостоверении личности с использованием номера телефона, оформления заявки и т.д.).Размер ставки для игры по бездепозитному призу (окончательно же, когда, когда он представлен вид бонусных денежных средств) часто ниже, чем при этой на депозит. Ограничение будет действовать до момента отыгрыша бонуса. Выбор любого интернет казино на нашем веб-сайте. В описании к каждому Вы сможете разузнать, собственно получите за создание аккаунта. <a href=https://forum.lavalink.com/member.php?action=profile&uid=95476>https://forum.lavalink.com/member.php?action=profile&uid=95476</a> Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша призов. Заведения всегда устанавливают наивысшую ставку, допустимую по условиям вейждера. 1× slots зеркало
зеркло казино 1×slots
Как и другие промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения считаются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых гостей и разрешает им составить эмоцию о функционале, не рискуя значительными суммами.Oтыгpaть приз с указанным вeйджepом, чтобы нужно сдeлaть cтaвoк нa cумму, превышающую размер бонуса в некоторое раз. Для верификации аккаунта надо(надобно) дать специалистам технической помощи отсканированную копию паспорта и счета за коммунальные предложения, еще фотографию банковской карты или снимок страницы электронного кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности.Бездепозитный приз казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в данном и содержится основное отличие. Такой казино приз без депозита за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это словно какая-то конспирация одобрения под бездепозитный. Суть всего этого сводится к что, этому, что игроку на час выдается, к примеру, 1000 долларов, а реклама повторяет о том, что каждой выигрыш можно несомненно в забыть при себя. Но случае играющий всерьез отнесется к данному предложению, то он просто растеряет время. Ведь геймеру надо(надобно) будет выступать не в основном аккаунте, ну тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (даже всей тысячи) в управляла вступят конкретные обстоятельства, где несомненно сказано, собственно максимальной суммой победы возможность быть лишь двести $ и деньги возможно применять только в бонуса на 1-ый вклад с вейджером 25 от суммы гонорары плюс сам депозит. По итогу получится, что игрок выигрывал для 200% приз с вейджером на конкретную необходимую. Короче разговаривая, это все не стоит вашего медли. 1хслотс казино зеркало <a href=http://www.ankaradogalgazproje.com/2017/04/ankara-baskent-gaz-dogalgaz-abonelik-islemleri.html>http://www.ankaradogalgazproje.com/2017/04/ankara-baskent-gaz-dogalgaz-abonelik-islemleri.html</a> Чтобы бездеп не был начислен на Ваш акк, Вам не нужно активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт автоматически, а Вы не планируете его использовать, обратитесь в службу поддержки с пожеланием отменить бездепозитный приз.
1×слотс казино
Бездепы имеют входить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой либо баллами. <a href=https://destaquebrasil.com/inglaterra/author/jamestrorn/>https://destaquebrasil.com/inglaterra/author/jamestrorn/</a> казино 1×slots официальный сайт
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.bandariklan.com/showthread.php?tid=382676>1хслотс официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Однако далековато не все ресурсы предлагают своим клиентам бездепозитные призы за регистрацию в казино. В большинстве случаев предусмотрено поощрение на 1-ый депо в размере 100–200%. Это замечательная возможность преувеличить банкролл, увеличить время, проведённое за забавой и шансы сорвать большой куш.
#9491 Charlesgunnyhttp://filmkachat.ru
1хслот 1хслотс регистрация перейти на 1×slots
Получить приветственный бонус имеют только свежие посетители онлайн-казино. Способы описаны в условиях акции любого законного казино, почаще всего это: <a href=http://filmkachat.ru/>1× слот зеркало</a> Ну и окончательно же, для казино бездепозитные призы выгодны с имиджевой стороны: подобная щедрость увеличивает уровень лояльности клиентов к компании.Ещё одно распространённое акционное предложение – симпатичный подарок с сомнительными требованиями. К примеру, клуб сулит $100 виде бездепа, хотя с вейджером х80 или х100. Отыграть такой вейджер фактически невероятно и поэтому чем концентрироваться на больше интересных акциях. <a href=http://v208870d.bget.ru/user/DavidFef/>http://v208870d.bget.ru/user/DavidFef/</a> 1×slots зеркало рабочее на сегодня <a href=http://trisinfronteras.com/davidcastro/component/k2/itemlist/user/455116-deweyvef>http://trisinfronteras.com/davidcastro/component/k2/itemlist/user/455116-deweyvef</a>
1×slots casino зеркало
Подобные бонусы без депо предоставляются на более прибыльных условиях. Зачастую они крупнее, а обстоятельства отыгрыша менее строгие.Способы получения бездепа различаются зависимо вида бонуса, кот-ый приглянулся игроку. Но вам иначе нужно быть зарегистрированным в законном онлайн-казино и доказать собственную лицо. В общем облике пошаговая аннотация для получения бездепозитного бонуса выглядит так: казино 1× slots официальный сайт <a href=https://dedignat.ru/component/users/?option=com_k2&view=itemlist&task=user&id=28105>https://dedignat.ru/component/users/?option=com_k2&view=itemlist&task=user&id=28105</a> При использовании бездепозитным бонусом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до этапа отыгрыша бездепа. Существуют некоторое видов лимитов:Когда идет о денежных призах, казино практически устанавливают условия вейджера, коие нужно выполнить, чтобы вывести выигрыш. 1×slots официальный сайт мобильная версия скачать Лишь популярные и знаменитые азартные заведения шансы разрешить для раздавать бездепы вид дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депозита, коие можно потратить в лучших аппаратах с высочайшей отдачей.
1×slot казино зеркало
Выбрать казино с бездепозитным бонусом. У нас на веб-сайте представлен список превосходнейших онлайн казино, которые предлагают своим игрокам щедрые призы за регистрацию.У каждого игорного клубы разные вейджеровые обстоятельства. Чтобы вы гарантировано сумели выполнить их, мы дадим количество советов. Если система начислила маленькую необходимую, не делать большие ставки – остановитесь на 10–30 центах. Как только сумеете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте выступать. В неприятном случае никакого приглядеться к иному автомату. Нельзя рассматривать забаву на средства, как вариант заработка. Азартные забавы запрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не является зачинщиком азартных игр. Сайт носит информационный характер.Например, игрок получил 500 руб. При твореньи аккаунта и обязан отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 руб., понадобится устроить 875 спинов для полного отыгрыша. <a href=http://service.gepart.su/forum/?PAGE_NAME=profile_view&UID=4890>http://service.gepart.su/forum/?PAGE_NAME=profile_view&UID=4890</a> Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. x1 slots 1хслотс регистрация перейти на 1×slots Популярность интернет казино растёт и всё больше юзеров начинают интерес азартными играми. Бездепозитные призы 2022 года, это уникальные презенты за регистрацию. С их поддержкою новые игроки могут получить благотворительные вращения либо деньги на баланс за одну регистрацию. С появлением игорных заведений в интернете, бездепозитные призы стали моднейшим способом вербования игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о которых мы поведаем. Наш сайт собрал наилучшие предложения из интернета на 2022 год. Воспользуйтесь хоть подарком и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить условия.В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и в случае спорных ситуаций нет способности куда-то посетовать и доказать собственную правоту.
1×slots casino регистрация 1×slotscasino09k online
Казино выводит деньги лишь на что, эту платежную систему, с котрой был изготовлен депо. То есть, для вывода бездепозитного приза, Вам поначалу нужно пополнить счет. В некоторых клубах узкий список методов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет именно с данных платежных способов, коие доступны для вывода. 1 xslots рабочее зеркало <a href=https://usolie-citi.ru/user/JasperBoorb/>https://usolie-citi.ru/user/JasperBoorb/</a> Важно, удостоверьтесь никаких, что ранее не регистрировались в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи.
1хслотс зеркало на сегодня
Частенько новенькие не понимают, как активировать презенты или вывести первый выигрыш. Для сходственных случаев наша команда описала основные определения – собственно это фриспины, вейджер, как его отыграть, чего необходимо протекать верификацию. <a href=http://www.idsys.kr/bbs/board.php?bo_table=free&wr_id=200603>http://www.idsys.kr/bbs/board.php?bo_table=free&wr_id=200603</a> Так собственно сможете неустрашимо регистрироваться без всяких раздумий. Фортуна сегодня наверняка на вашей стороне. Не побаивайтесь, как последствие какого или ущерба Вам совершенно не угрожает. С такими бонусами как без пополнения, Вы остаетесь лишь в плюсе, хотя не как не в минусе.Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке адепты онлайн-казино публикуют важную информацию о not the slightest down payment bonuses и других услугах. 1х слот регистрация в 1×slots casino Активация по промокоду используется в различных обликах бездепов. Если речь о приветственном призе, то комплект символов можно узнать на главной странице, в регистрационной форме либо послании, коие отправляется пользователю для доказательства адреса электронной почты. Акции имеют проводиться общо с партнерскими площадками. Обычно код располагается на постороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется одноразовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном офисе или начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем важный код для активации в описании каждого промо.Для ревизии применяются сканы паспортов, водительских удостоверений, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если юзер замечен в попытке завести вспомогательный акк, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный перечень. При игре на лицензионной площадке не стоит бояться свидетельствовать достоверную индивидуальную информацию (шифрование исключает утечку персональных данных).
<b>Смотреть еще похожие новости:</b>
<a href=http://board.eternityrpc.com/member.php?action=profile&uid=369>1×slots актуальное зеркало</a>
<a href=https://forum.bandariklan.com/showthread.php?tid=176825&pid=846269#pid846269>1×slots регистрация 1×slots casino c2d ru</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подтверждение индивидуальной инфы. Все казино требуют от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и присутствие у юзера других аккаунтов (мультиаккаунт запрещен). Бездепозитные призы казино за регистрацию в 2022 году — это возможность поиграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой либо количеством бесплатных вращений без внесения депозита. Не путайте деморежим с реальной забавой без надобности внесения депозита.
#9492 Charlesgunnyhttp://filmkachat.ru
1×slot казино зеркало
Наличие у игрока 2 аккаунта. Запрещено создавать количество профилей для неоднократного получения бездепов. <a href=http://filmkachat.ru/>1×slots регистрация на сайте 1×slots ru com</a> <a href=https://ai.igcps.com/home.php?mod=space&uid=734929&do=profile&from=space>https://ai.igcps.com/home.php?mod=space&uid=734929&do=profile&from=space</a> 1×slots сайт <a href=http://www.ritual-letichev.km.ua/user/ChrisDig/>http://www.ritual-letichev.km.ua/user/ChrisDig/</a>
1×slots рабочее зеркало на сегодня
В интернете слишком много скриптовых сайтов, которые принадлежат плутам. Их главная задача – привлечь гэмблеров, пообещав не только щедрые презенты, хотя и солидные выигрыши. Так что кое-какие сайты предлагают получить за регистрацию том $1 000. <a href=http://brilliance.ru/forum/viewtopic.php?f=6&t=35991>1× slots регистрация в 1×slots casino</a> 1хслотс казино зеркало Выбрать казино с бездепозитным призом. У нас на сайте представлен список наилучших интернет казино, которые предлагают своим игрокам великодушные призы за регистрацию. <a href=https://rightcoachforme.com/author/raymondusand/>https://rightcoachforme.com/author/raymondusand/</a> 1×slots casino регистрация на сайте Подобные бонусы без депо предоставляются на больше выгодных критериях. Зачастую они покрупнее, а условия отыгрыша менее строгие.Одним из предлогов отдавать привилегию 1 либо иному заведению содержится в привлекательности предлагаемых промоакций и даровых предложений. Безвозмездные фриспины, выдаваемые без дела создавать какой-нибудь лепта, в списке находится далековато не в конце.
1×slots casino регистрация 1×slotscasino09k online
После требуется привнести идентификационный платёж. Это пугает новичков больше всего. Нужно сделать минимальный депо в 100–500 рублей. Таким образом служба безопасности убедиться том,, собственно платёжный способ принадлежит Вам. Данная процедура важна для обеспечения защищенности игровых счетов. Пример, Ваш аккаунт взломают и выведут свои на собственный кошелёк. Будет очень досадно. Поэтому верификация платёжной системы, это важный момент. <a href=http://b77706vw.bget.ru/user/AshleyCinge/>http://b77706vw.bget.ru/user/AshleyCinge/</a> В разделе с бонусами активировать свой презент. Найти забавы, для коих предусмотрено одобрение и использовать приз по назначению.Существует ли стратегии для отыгрыша бездепозитных бонусов? К огорчению нет, на выигрыши или проигрыши с призов, казино либо игрок воздействовать не может, отдача игр случается от создателей игр. 1×slots акции Раздача призов может быть приурочена к различным датам: календарные праздники, деньки рождения игроков, юбилей открытия казино и т. Д. Подарок выдается в виде денег, фриспинов либо баллов для накопления и размена на предложения оператора. Если юзер получает выигрыш, деньги начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд притязаний.
1×slots регистрация то дальше необходимо пройти
Однако далеко не все ресурсы предлагают своим посетителям бездепозитные призы за регистрацию в казино. В большинстве случаев учтено поощрение на 1-ый депозит в размере 100–200%. Это замечательная возможность преумножить банкролл, прирастить время, проведённое за игрой и шансы сорвать большой куш. При маленькой сумме бонуса рекомендовано играть по низким ставкам, а применять наибольшие лучше лишь что, нет случае, в вейджер слишком великий, а время на отыгрыш крепко ограничено.Шаг 4. Активация. Внимательно изучите условия, информацию по ограничениям и сроке деяния бонусного предложения. Разобравшись с правилами, можно активировать бонус в собственном кабинете (от ? с внедрением промокода) либо по запросу в саппорт. Не хотите сыграть в азартные игры, не рискуя своими деньгами, но получая в все выплаты? Подобную возможность деют все наихорошие порталы с азартными развлечениями. В их количестве большое добросовестных и надежных интернет-казино на российском языке. Они завлекают новых юзеров разными поощрительными событиями, включая бездепозитные, либо благотворительные бонусы. 1×slots бездепозитный бонус за регистрацию <a href=https://dedignat.ru/component/users/?option=com_k2&view=itemlist&task=user&id=21662>https://dedignat.ru/component/users/?option=com_k2&view=itemlist&task=user&id=21662</a> Осталось выбрать казино с призом за регистрацию и создать профиль. После активации презента выигрыш находится от Фортуны и способностей.
1хслотс казино зеркало
Далее потребуется отыграть вагер и вывести выигрыш. Игрокам без опыта крупно подфартило, они могут получить десятки подарков за 1 регистрацию. Если не смогли получить Бездепозитный приз, не беспокойтесь. Обратитесь в онлайн чат, оператор поможет ситуацию. <a href=http://andi67.bplaced.net/dokuwiki/doku.php?id=%D0%A1%D0%B0%D0%BC%D1%8B%D0%B5%20%D0%B2%D0%BA%D1%83%D1%81%D0%BD%D1%8B%D0%B5%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!>http://andi67.bplaced.net/dokuwiki/doku.php?id=%D0%A1%D0%B0%D0%BC%D1%8B%D0%B5%20%D0%B2%D0%BA%D1%83%D1%81%D0%BD%D1%8B%D0%B5%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!</a> Бoльшинcтвo азартных заведений выдвигают примерно одинаковые условия и требования, коие необходимо выполнить, дабы получить бездепозитный бонус за регистрацию. Все их возможно соединить в раз перечень:Представленные на данной странице наихорошие бездеп бонусы в казино за регистрацию в 2022 году имеют оптимальные условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, в гости Casino.ru могут сортировать список по нескольким критериям: по сумме, вейджеру, наибольшей сумме вывода и т.д. 1×slots регистрация на сайте 1×slots ru com Наш список включает в себя превосходнейшие бездепозитные бонусы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по главным параметрам:Не желайте сыграть в азартные забавы, не рискуя своими средствами, но получая в все выплаты? Подобную возможность предоставляют многие превосходнейшие порталы с азартными увеселениями. В их числе много честных и надежных интернет-казино на российском языке. Они завлекают новых пользователей разными поощрительными мероприятиями, включая бездепозитные, либо бесплатные призы.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.formulersupport.com/Thread-1×slots-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D0%BD%D0%B0-%D1%81%D0%B5%D0%B3%D0%BE%D0%B4%D0%BD%D1%8F–96021>1×slots рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.
#9493 Charlesgunnyhttp://filmkachat.ru
сайт 1× slots casino
К раскаянию, нет. Почти все казино, просят внесение желая бы одного малого депозита для вывода выигрыша с бездепозитного приза. Также учитывайте, что исключить деньги разрешено лишь на что, эту платежную систему, с коей был сделан депо. <a href=http://filmkachat.ru/>1×слотс казино</a> Не хотите сыграть в азартные забавы, не рискуя своими средствами, но получая в все выплаты? Подобную возможность предоставляют многие лучшие порталы с азартными весельями. В их числе много правдивых и надежных интернет-казино на российском языке. Они привлекают новых юзеров разными поощрительными событиями, включая бездепозитные, или безвозмездные бонусы. <a href=https://www.events18.hk/home.php?mod=space&uid=50824>https://www.events18.hk/home.php?mod=space&uid=50824</a> Процесс подтверждения личности возможность занять от 1-го денька до недели. Если заказчик допустил нибудь оплошность при заполнении паспортных данных, то ему стопам обратиться с проблемой в службу онлайн-казино.Акции, посвященные календарным дням, бывают рассчитаны как на всех юзеров, так и на категории: например, презент на 8 марта девушкам-игрокам или мужикам на 23 февраля. 1×slots casino online регистрация <a href=https://pedrolucas.consultasexologo.com/community/profile/glennasync/>https://pedrolucas.consultasexologo.com/community/profile/glennasync/</a> Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют важную информацию о not the slightest down payment bonuses и других услугах.
1 x slots casino
<a href=https://www.findaspermdonor.com/viewtopic.php?f=25&t=87170>1×slots акции</a> 1×slots зеркало регистрацию более популярный вариант это Максимальная ставка ? уточняется в еденице счета и ограничивает размер ставки за один спин. В случае ее превышения бонус возможность быть аннулирован. Также в правилах имеет содержаться запрет на размещение ставок определенного вида, например, по одинаковым шансам в рулетке (то есть, на чет или нечет, красноватое либо черное и т.д.).Раздача призов имеет быть посвящена разным датам: календарные праздничные, деньки рождения игроков, годовщина открытия казино и т. Д. Подарок выдается вид денег, фриспинов либо баллов для накопления и размена на предложения оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода этой суммы понадобиться выполнить ряд притязаний. <a href=https://floobits.com/GlennPlura>https://floobits.com/GlennPlura</a> Любой выигрыш по ставке выше установленного лимита несомненно являться недействительным. То есть ставка не будет засчитана при отыгрыше, а случае выигрыша его сумма не поступит на счёт посетителя — итог забавы будет полностью аннулирован.Такие одобрения дозволяют безвозмездно протестировать новое казино, разобраться с игровым ходом интернет слотов, заработать и исключить маленькую сумму средств. 1 х слотс зеркало
скачать 1×slots официальный сайт
Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 долларов. Если выдаются фриспины, их количество изредка выше нескольких десятков бесплатных вращений. Такие одобрения разрешают бесплатно протестировать новое казино, разобраться с игровым ходом онлайн слотов, заработать и исключить небольшую необходимую средств.Бездепы имеют заходить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами. <a href=https://gamesdrive.net/User-Jasperemupe>https://gamesdrive.net/User-Jasperemupe</a> x1 slots 1хслотс регистрация перейти на 1×slots
1х слот 1хслотс регистрация перейти на 1×slots
Отказ в прохождении верификации. Если заказчик не хочет либо не дать документы, подтверждающие его личность, профиль несомненно заблокирован совместно, вкупе со всеми бонусными начислениями.Такие поощрения позволяют безвозмездно протестировать свежее казино, разобраться с игровым ходом онлайн слотов, заработать и исключить небольшую сумму средств. Этот образ приза будет добавлен на Ваш акк после удачной процедуры регистрации с внедрением номера телефонного. Если избрать иной метод творенья учетной записи, бездеп не несомненно добавлен на Ваш аккаунт. x1 slots 1хслотс регистрация перейти на 1×slots <a href=http://lsdsng.com/user/546520>http://lsdsng.com/user/546520</a> У каждого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано смогли выполнить их, мы дадим некоторое советов. Если система начислила небольшую необходимую, надо делать немалые ставки – остановитесь на 10–30 центах. Как лишь сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте играть. В неприятном случае чем приглядеться к другому автомату.
casino 1×slot
Заполняя данные в собственном профиле, указывайте только достоверную информацию, так как Вам придется ее подтвердить дальнейшем при выводе средств. <a href=https://www.metal-tracker.com/forum/member.php?action=profile&uid=927402558>https://www.metal-tracker.com/forum/member.php?action=profile&uid=927402558</a> Помимо прочего, для вывода средств по бездепу нужно привнести на счёт свой 1-ый депо — так онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт возможно на мало возможную необходимую, последствии чего вывод средств станет доступен. 1×slots регистрация 1×slotscasino 56 online Например, игрок получил 500 руб. При создании аккаунта и обязан отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 руб., потребуется сделать 875 спинов для полного отыгрыша.
<b>Смотреть еще похожие новости:</b>
<a href=https://mit-bbs.com/viewtopic.php?p=133061>1хслот зеркало</a>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=325407&pid=649427#post_649427>1х слот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
2. Создать новый профиль. Для регистрации надо(надобно) наполнить небольшую анкету или зайдите в собственный офис при помощи социальных сетей; Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают бонус по государствам. Вплоть до того, собственно клуб имеет принимать игроков из Вашей страны, а бездеп не давать.
#9494 Charlesgunnyhttp://filmkachat.ru
1хслот 1хслотс регистрация перейти на 1×slots
Список так нарекаемых «запрещенных территорий» прилагается к правилам бонусной программки игорного портала. Обязательно проверьте, распространяются ли на вас похожие наказания.Ограничения по забавам. Администрация воспрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, деньгами либо безвозмездными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда разделение выполняется по виду игр. Например, отыгрыш возможен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino. <a href=http://filmkachat.ru/>1×slots сайт</a> После требуется внести идентификационный платёж. Это пугает начинающих больше всего. Нужно устроить минимальный депозит в 100–500 рублей. Таким образом служба безопасности убедиться в том, что платёжный способ принадлежит Вам. Данная процедура важна для обеспечивания защищенности игровых счетов. Пример, Ваш акк взломают и выведут свои на свой кошелёк. Будет крайне неприятно. Поэтому верификация платёжной системы, это важный момент. <a href=https://ww.interdance.ru/user/DavidGlody/>https://ww.interdance.ru/user/DavidGlody/</a> Подтверждение индивидуальной информации. Все казино настоятельно от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и присутствие у юзера других аккаунтов (мультиаккаунт запрещен).Но эти рамки не смущают числе хайроллеров, что коэффициенты на слотах разрешают рассчитывать на крупные выигрыши, ну неких автоматах разыгрывается прогрессивный джекпот. 1×slots бонус за регистрацию <a href=http://elektrofahrrad-tests.de/forums/member.php?action=profile&uid=33524>http://elektrofahrrad-tests.de/forums/member.php?action=profile&uid=33524</a> Во всех легальных онлайн-казино Беларуси необходимо подтверждение паспортных данных для игры — это заявка правительства страны.
1×slots зеркало проходить регистрацию это отличный вариант
Фриплей-бонусы. Бонусы за благотворительную забаву есть лишь в неких клубах. Они зачисляются сразу после создания профиля и срабатывают недолговременное время. Если у вас нет медли израсходовать свои, они просто завершатся. Что касается времени, как бонусы действуют в течение одного часа.Вейджер (или вагер) ? это минимальная сумма ставок, коию нужно устроить для вывода валютного бонуса. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение. 1×slots зеркало подтвердит вашу регистрацию если говорить С другой стороны, намного проще отобрать бездепозитные фриспины за регистрацию в казино и напрямик момент начать вращать барабаны в наихороших слотах. Главная особенность спинов никаких, что они предусмотрены для лучших автоматов. Удастся столько пройти вспомогательные раунды, но и прирастить сумму выигрыша, заработать респины и другие внутриигровые подарки. <a href=http://www.pax.nichost.ru/forum/view_profile.php?UID=121822>http://www.pax.nichost.ru/forum/view_profile.php?UID=121822</a> 1×slots зеркало рабочее на сегодня К огорчению, нет. Почти все казино, просят внесение хотя бы 1-го минимального депо для вывода выигрыша с бездепозитного бонуса. Также учитывайте, собственно исключить средства разрешается лишь на ту платежную систему, с которой был изготовлен депо.
казино 1×slots официальный сайт
Отзывы читателей о бонусных промоакциях помогут составить впечатление, хотя не забывайте о субъективности собственных объяснений. При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток.Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=http://bbs.cheaa.com/home.php?mod=space&uid=3141242>http://bbs.cheaa.com/home.php?mod=space&uid=3141242</a> Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном сайте и выполните вход в личный кабинет, дабы забрать благотворительные вращения с вейджером х40; 1×slots регистрация на сайте
1×slots коды
Можно. Вы постоянно можете отрешиться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не создадите ставку.Заработать на бездепозитных бонусах за регистрацию в казино возможность каждый юзер, достигший совершеннолетия. <a href=https://www.xn–72c9aa5escud2b.com/webboard/index.php/topic,509417.new.html#new>1×slots регистрацию более популярный вариант это</a> Для получения бонуса надо(надобно) ознакомиться с программкой лояльности казино и сделать ставки на сумму, нужную для перехода на грядущий уровень. 1х слот регистрация в 1×slots casino <a href=http://elpisline.com/bbs/board.php?bo_table=free&wr_id=70011>http://elpisline.com/bbs/board.php?bo_table=free&wr_id=70011</a> Это раз из главных характеристик привлекательности презента. С завешенным коэффициентом числе мастера не сумеют выполнить обстоятельства по отыгрышу. И неважно, насколько презентабельно выглядит предложение – бездепозитный бонус казино в размере $500 или $1 000. Чтобы новички лучше вникли, что же это вейджер, мы разберём на образце.Доступ к подарку возможность раскрываться механически в введения промокода либо воззвания в саппорта вебсайта. В первом случае от юзера не потребуется практически действий. Бездеп с активацией по коду встречается чаще всего. Игроку нужно ввести совокупность знаков в графе, которая имеет пребывать в регистрационной форме в Личном кабинете.
1×slots casino online регистрация
Приветственный бездеп предоставляется хоть игроку только один раз. Казино борются с так называемыми бонусхантерами (от англ. Bonus Hunter — охотник за призами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения презента. Исключить сходственные деянья разрешает верификация данных. Администрация вправе востребовать у клиента подтвердить индивидуальные данные, указанные при регистрации.Минимального оборота. Этот предел устанавливается вейджером — же игрок не поиграет на установленную сумму, вывод средств будет недосегаем. Отыграв бездепозитный приз в казино с выводом также придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если подобное ограничение присутствует, то единоразово исключить получится лишь необходимую, не превышающую размер приобретенного бонуса.Это тоже благотворительные финансы, которые поступают на аккаунты свежеиспеченных компьютерные последствии регистрирования. А особенность этих призов состоит том,, что обретенные финансы непременно следует использовать в продолжении назначенного медли. <a href=https://polonistyka.com/user-2/michaeloccal/>https://polonistyka.com/user-2/michaeloccal/</a> Онлайн гемблинг развивается с любым деньком больше и больше, новые бренды создаются не по дням а по часам. Новые интернет казино проделывают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и тем наиболее предлагают бездепозитные призы за регистрацию, собственно бы не упустить эту возможность — как пользоваться новым бездепом, советуем навещать наш вебсайт как можно чаще, самое аппетитное и свежие несомненно добавляться в этом же списке.Самый распространённый из сходственных бонусов, естесственно же, бездеп на день рождения клиента — бонус вид фиксированной суммы либо фриспинов поступает на счёт игрока, а воспользоваться им можно в течение установленного периода времени. 1х слот 1хслотс регистрация перейти на 1×slots
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Так что приготовьтесь дать конфиденциальную информацию (пол, возраст, страна проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает не более суток, в чего получится свободно выводить солидные выигрыши.
#9495 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
Для получения выигрыша потребуется выполнить условия казино. Чаще всего игроку нужно поставить конкретную необходимую, хотя теснее из личных средств. Она рассчитывается из совместного размера выигрыша за все время использования бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, если юзер выиграл 1000 рублей, а множитель составляет х30, исключить средства возможно несомненно, сделав ставки на 30 000 рублей.Условия отыгрыша приза. Если Вы планируете заработать на бездепозитном призе, то для направьте на велечину вейджера и срок, который дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть приз и исключить выигрыш. <a href=http://filmkachat.ru/>1хслотс официальный сайт зеркало</a> Принципиальным отличием безвозмездных призов от бонусов на депо считается неимение надобности заносить деньги на акк. Из-за сего их нередко именуют бездепозитными (not the slightest deposit bonuses). <a href=http://jscorporation.storycom.co.kr/bbs/board.php?bo_table=free&wr_id=199718>http://jscorporation.storycom.co.kr/bbs/board.php?bo_table=free&wr_id=199718</a> Не хотите сыграть в азартные игры, не рискуя своими деньгами, хотя получая в все выплаты? Подобную возможность деют все превосходнейшие порталы с азартными развлечениями. В их числе большое честных и надежных интернет-казино на российском языке. Они привлекают новых пользователей различными поощрительными событиями, включая бездепозитные, либо безвозмездные бонусы.Вейджер (wager) – это коэффициент, который показывает на какую необходимую необходимо устроить ставок, дабы вывести бонус из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода этого приза, Вам нужно сделать ставок на необходимую: 500*70=3500 рублей. Только полностью отыграв бонус, Вы сможете исключить свой выигрыш. 1×slots рабочее зеркало на сегодня <a href=http://php-s.ru/photogallery/Coppermine/demo/profile.php?uid=138959>http://php-s.ru/photogallery/Coppermine/demo/profile.php?uid=138959</a> Хотя бесплатные бонусы начисляются без депо, не исключено, собственно вам придется вносить деньги. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь последствии того, как свежий клиент впервые пополнит игровой счет.
1×slots регистрация на 1хслотс
При регистрации следует указывать лишь достоверную информацию. Когда учетная запись будет активна, будет доступ в Личный офис. В нем можно избрать валюту, ввести промокод и узнать подробные верховодила получения и отыгрыша бездепа. Краткая информация об промоакции часто присутствует непосредственно на регистрационной форме.Чаще всего применяются коды. Их надо(надобно) заносить в специальные окна регистрационной анкеты, в речь идет о пригласительных бонусах, либо в особом разделе личного кабинета игрока. <a href=http://www.carshowsociety.com/forum.php/topic,11220.new.html#new>1хслот зеркало</a> 1×slots бездепозитный бонус за регистрацию Для вывода средств бонус надо(надобно) несомненно отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариациями отыгрыша бездепозитного бонуса до его получения, чтобы избежать конфликтных ситуаций. <a href=http://medik.co.kr/bbs/board.php?bo_table=free&wr_id=346651>http://medik.co.kr/bbs/board.php?bo_table=free&wr_id=346651</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, a лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.У каждой игры средства требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система засчитает каждую ставку. В рулетке и покере сделать это гораздо сложнее. Именно поэтому например важно внимательно читать обстоятельства получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой игре, то новички попросту «спустят бонус на ветер». Бывают ли бездепозитные призы без вейджера? Бывают, если у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино.В реальное время получить приз за регистрацию в казино довольно просто. Почти любой игорный жилище с радостью даст деньги либо благотворительные вращения. Многие игроки пользуются этим и не стесняются региться в каждом клубе с выгодными критериями. Кстати, это отличная возможность придумать выигрышную тактику и сорвать куш. <a href=http://trisinfronteras.com/davidcastro/component/k2/itemlist/user/455802-tyronetef>http://trisinfronteras.com/davidcastro/component/k2/itemlist/user/455802-tyronetef</a> На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не сможете активировать и получить бездепозитный приз.Наш список включает в себя лучшие бездепозитные бонусы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит ревизию по главным характеристикам: рабочее зеркало 1×slots Шаг 5. Использование и отыгрыш. Бездеп обязан быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.
1хслотс зеркало на сегодня
Бездепы могут заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой либо баллами.Для ревизии используются сканы паспортов, водительских водительских, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если юзер замечен в попытке завести вспомогательный аккаунт, все его учетные записи подвергаются блокировке, а их владелец попадает в черный список. При этой на лицензионной площадке не стоит бояться указывать достоверную индивидуальную информацию (шифрование исключает утечку индивидуальных данных). Некоторые сайты, прежде чем обмануть регистрацию игроков, предлагают ответить на количество базовых вопросов. Цель проведения подобной викторины – выявить случайных людей, которые не имеют представления о покере, и не разрешить получения ими бонусов. Если гость уже играл в казино, то ответить на полтора 10 несложных вопросов несомненно несложно. Очень нередко, ответы возможно найти на официальных веб-сайтах этих учреждений.Бездепозитный бонус часто может стать доступным незамедлительно после окончания регистрации, что в большинстве случаев единственным требованием к нему считается регистрация, а этого проверка вашей свежей учетной записи. 1×slots регистрация на 1хслотс <a href=https://praisenpray.org/forums/member.php?action=profile&uid=62850>https://praisenpray.org/forums/member.php?action=profile&uid=62850</a> Чаще всего, знаменитые сервисы, такие как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное верховодило. Финансовые средства выводятся только через что, эту платежную систему, которой популярностьюимели для пополнения депозита. Если же игрок получил бездепозитный покерный бонус, требуется пополнить счет на минимальную необходимую, которая сочиняет обычно 10 $.
скачать 1×slots официальный сайт
Но надо размышлять, собственно снабжая юзеров такими призами, казино занимается спонсированием. Ведь объемы вознаграждений, главном, не большие (средним размером от 5 до 20 $). И на эти свои налагаются конкретные условия и лимитирования, неотклонимые к исполненью игрока, случае в последствии он вожделеет получить все средства выигранные деньги. <a href=http://www.dllaoma.com/home.php?mod=space&uid=370058>http://www.dllaoma.com/home.php?mod=space&uid=370058</a> 1хслотс казино зеркало Зачастую бездепозитные призы казино для игры предлагаются разными заведениями азартных игр в рекламных промоакций либо в целях привлечения к себе свежих игроков. Для бездепозитных бонусов в казино 2022 игроку надо пополнять счет до момента вывода хотимых средств.Бездепозитные бонусы казино это экономическая компенсация, предлагаемая юзерам на дармовой базе и возможность играть в онлайн казино бесплатно. Если ассоциировать их с одобрениями за лепта, в которых средства выдаются только потом первоначального пополнения счета, то бездепозитные гонорары получаются даром. То есть, играющий получает возможность делать ставки на теснее существующие деньги, коие выдаст заведение, выполняя, всем, обычные деяния, чтобы их извлечь (здесь идет речь о регистрация, удостоверении личности с использованием номера телефона, оформления заказы и т.д.).
<b>Смотреть еще похожие новости:</b>
<a href=https://www.lightknotes.com/MyBB/showthread.php?tid=167254>1×slots официальный сайт скачать</a>
<a href=http://www.ihavethepussy.com/de/threads/194296–1×slots-casino-%D0%A0%C2%B7%D0%A0%C2%B5%D0%A1%D0%82%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%BB%D0%A0%D1%95?p=211830#post211830>1×slots casino зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Этот образ приза будет добавлен на Ваш акк после удачной процедуры регистрации с внедрением номера телефонного. Если избрать иной метод творенья учетной записи, бездеп не несомненно добавлен на Ваш аккаунт. В бонусную программку множества операторов входят систематические бездепы. Это пожизненные промоакции, поощряющие интенсивных неизменных игроков. Популярный формат — раздача фриспинов по конкретным дням недели. Многие операторы, к казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депо в мена на скопленные баллы лояльности.
#9496 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
Прямо сейчас заберите бесплатные вращения за регистрацию без депо и начинайте собирать призовые композиции из-за солидных выигрышей! <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало рабочее</a> При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток.Рассмотрим принцип его деяния на примере. Допустим, вы зарегистрировались и получили $10 no deposit bonus с вейджером х50. Это значит, что выигранные средства возможно будет выводить не раньше, чем в того, как общая сумма ставок достигнет $500. <a href=https://aysup.com/author/davidjuism/>https://aysup.com/author/davidjuism/</a> 1×slots промокод при регистрации <a href=https://ootmkorea.com/bbs/board.php?bo_table=free&wr_id=57932>https://ootmkorea.com/bbs/board.php?bo_table=free&wr_id=57932</a> В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая приятная доля игры. Важно, зачастую бездепозитные призы в казино выдаются с лимитированиями по наибольшей выплате. В среднем возможно рассчитывать на выгода в несколько тысяч руб. Как исключить выигрыш с приза без депо. Придётся подтвердить акк документально, в неких заведениях. Процедура верификации неотклонима и делается каждым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате или прочитайте в правилах.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Этот тип приза будет добавлен на Ваш аккаунт последствии удачной процедуры регистрации с использованием номера аппарата. Если избрать другой способ сотворения учетной записи, бездеп не будет добавлен на Ваш аккаунт.Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды присутствуют на этой странице. Посетитель возможность оценить обстоятельства получения и начать выступать на деньги без внесения депо. При этом игроку главно разуметь, на каких критериях и какими методами появится вывести полученный выигрыш. Для сего необходимо расценить список подключенных платежных систем. 1×slots официальный зеркало рабочее <a href=http://vse-ekonomim.ru/author/terrypoogs/>http://vse-ekonomim.ru/author/terrypoogs/</a> При правильном подходе бездепы — это прекрасный способ играть на деньги без траты личных средств. Есть несколько советов, следуя которым возможно извлечь максимально выгоды из похожих акций казино. Играть идет лишь на лицензированных площадках. Скриптовые сайты не обманывают с бонусными предложениями, но и употребляют пиратский софт с модифицированным ГСЧ. Выиграть на этих автоматах невероятно.Чаще всего, известные сервисы, такие как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное управляло. Финансовые свои выводятся лишь через ту платежную систему, коей популярностьюимели для пополнения депо. Если же игрок получил бездепозитный покерный бонус, потребуется пополнить счет на наименьшую сумму, которая составляет обычно десять $. 1× slots официальный
1×slots на любой вкус как пройти регистрацию
Осталось избрать казино с призом за регистрацию и сделать профиль. После активации дара выигрыш находится от Фортуны и навыков.В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая доля игры. Важно, зачастую бездепозитные призы в казино выдаются с ограничениями по наибольшей выплате. В среднем можно рассчитывать на прибыль в несколько тысяч рублей. Как исключить выигрыш с бонуса без депозита. Придётся подтвердить акк документально, в некоторых заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате либо прочтите в правилах. Бoльшинcтвo азартных заведений выдвигают приблизительно однообразные, схожие обстоятельства и требования, которые необходимо выполнить, чтобы получить бездепозитный приз за регистрацию. Все их возможно соединить в раз список: <a href=https://sportavesti.ru/forums/users/baseall0505–2/>https://sportavesti.ru/forums/users/baseall0505–2/</a> В качестве бонусов интернет казино часто предлагает выдачу фриспинов, словами даровых вращений игрового барабана. Виртуальные монеты можно использовать для обучения в покерной школе или для забавы в казино.А ознакомиться с новыми интернет казино, Вы можете за счет призов с выводом прибыли, которые Вы можете получить без депо. 1 xslots рабочее зеркало
1хслот скачать
Новички не любят сразу же заносить депо. Это обусловлено неименьем навыка и сомненьем. К счастью, в возможно получить бездепозитный приз за регистрацию в казино. Неважно что начисляет система – фриспины либо кредиты. В всяком случае вы не рискуете своими сбережениями. Это отличная возможность запустить приглянувшийся видео разъем или же испытывать фортуну в настольных забавах. Обычно для получения бонусов без депозита, казино выдвигает лояльные и абсолютно выполнимые условия, но есть ряд действий которые запрещены и могут повлечь за собой противные последствия:Онлайн-казино с бездепозитными призами ставят посетителям условия для использования бездепами, поэтому перед участием в промоакции другого подробно ознакомиться со всеми правилами и аспектами промоакции. Условия могут прикасаться получения бонуса, его применения и последующего вывода валютных средств когда выигрыша. 1хслот зеркало сайта <a href=http://www.goroddetstva.ru/blogs/nakhodka/programma-dlya-arkhiva-dokumentov.php>http://www.goroddetstva.ru/blogs/nakhodka/programma-dlya-arkhiva-dokumentov.php</a> Верификация аккаунта. Лучше доказать лицо незамедлительно последствии регистрации, дабы позже не было проблем с выводом средств. Верификация имеет проходить 2-мя маршрутами:Начнём с как, что каждое рекламную за регистрацию предполагает некие условия. Бездепозитные призы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, нужная для выполнения критерий. Пример, возымели бесплатные вращения и выиграли с них 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 рублей, неудачных или выигрышных, неважно. После выполнения, бонусный баланс перейдёт на настоящий и будет легкодоступным к выводу.
1×slots регистрация
В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая доля забавы. Важно, зачастую бездепозитные бонусы в казино выдаются с лимитированиями по максимальной выплате. В среднем можно рассчитывать на выгода в некоторое тысяч руб. Как вывести выигрыш с бонуса без депозита. Придётся подтвердить аккаунт документально, в некоторых заведениях. Процедура верификации неотклонима и делается любым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате или прочтите в правилах. Выбор каждого онлайн казино на нашем сайте. В описании к любому Вы сможете узнать, что получите за творенье аккаунта. <a href=http://lnx.hotelresidencevillateresaischia.com/casamicciola/index.php?option=com_k2&view=itemlist&task=user&id=440163>http://lnx.hotelresidencevillateresaischia.com/casamicciola/index.php?option=com_k2&view=itemlist&task=user&id=440163</a> Используйте лучшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из списка ниже, дабы заработать презенты за обычные деяния и уже сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высочайшей отдачей и быстрыми выводами на электрические кошельки. 1×slots регистрация 1×slots casino c2d ru Бездепозитный приз часто имеет замерзнуть доступным сразу после окончания регистрации, потому правило единственным притязанием к нему является регистрация, а после ревизия вашей свежей учетной записи.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.cvetq.info/memberlist.php?mode=viewprofile&u=17326>1×slots официальный сайт зеркало</a>
<a href=http://nacionrolera.org/foro/viewtopic.php?f=1210&t=103519>рабочее зеркало 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В качестве призов онлайн казино нередко предлагает выдачу фриспинов, словами безвозмездных вращений игрового барабана. Виртуальные монеты можно применять для обучения в покерной школе либо для забавы в казино.
#9497 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
Активация по промокоду используется в различных обликах бездепов. Если речь идет о приветственном призе, то набор знаков возможно разузнать на основной странице, в регистрационной форме либо письме, коие отчаливает юзеру для доказательства адреса электронной почты. Акции имеют проводиться общо с партнерскими площадками. Обычно код располагается на постороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активируется разовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном кабинете или начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем важный код для активации в описании любого промо.После получения бонуса вывод средств для клиента несомненно недосегаем времени, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или пара месяцов. Выводить деньги игрок сможет только последствии отыгрыша. <a href=http://filmkachat.ru/>1×slots зеркало сайта</a> <a href=https://boobs.red/user/DavidSnugs/>https://boobs.red/user/DavidSnugs/</a> Популярность интернет казино растёт и всё больше юзеров начинают проявлять азартными играми. Бездепозитные бонусы 2022 года, это уникальные презенты за регистрацию. С их поддержкой свежие игроки могут получить бесплатные вращения или деньги на баланс за 1 регистрацию. С в игорных заведений в онлайне, бездепозитные бонусы стали знаменитейшим способом привлечения игроков. Подобные акции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы расскажем. Наш сайт собрал наилучшие предложения из интернета на 2022 год. Воспользуйтесь хоть презентом и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить обстоятельства. 1хслотс казино зеркало <a href=http://xn–80aphfq.xn–p1ai/user/PatrickPem/>http://xn–80aphfq.xn–p1ai/user/PatrickPem/</a>
1х слот регистрация в 1×slots casino
Бездепозитный приз за регистрацию в казино — это стартовый подарок повторяющий валютного начисления или безвозмездных вращений для новых игроков заведения, для получения которого не заносить депо.Наши эксперты исследуют условия промоакции, затем в ручном режиме проверяют их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и другие параметры. Мы не рекламируем казино, а даем игрокам информацию о наилучших из их. 1×slots казино зеркало <a href=https://www.honkaistarrail.wiki/index.php?title=User:HildaCriswell>https://www.honkaistarrail.wiki/index.php?title=User:HildaCriswell</a> Некоторые сайты, прежде чем провести регистрацию игроков, предлагают ответить на количество базовых вопросов. Цель проведения сходственной викторины – выявить случайных людей, которые не имеют представления о покере, и не допустить получения ими бонусов. Если посетитель теснее играл в казино, то ответить на полтора 10 простых вопросов несомненно несложно. Очень часто, ответы можно отыскать на официальных веб-сайтах данных учреждений. 1×slots быструю регистрацию а также мгновенное
1х слот регистрация в 1×slots casino
Бонус за регистрацию в казино без депозита с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша может понадобиться устроить ставки на необходимую, в количество десятков один превышающую сумму приза или выигрыша.Ещё одно распространённое акционное предложение – привлекательный презент с сомнительными притязаниями. К примеру, клуб сулит $100 виде бездепа, хотя с вейджером х80 либо х100. Отыграть подобный вейджер фактически невозможно и потому какого-либо концентрироваться на более интересных акциях. Так же стоит выделить то, что в любом интернет казино установлен собственный наибольший кешаут на бездепозитный приз. Как управляло кешаут — это максимальная сумма денег, кот-ая дешевая для вывода с бездепозитного бонуса. <a href=http://kbszw.com/home.php?mod=space&uid=54742>http://kbszw.com/home.php?mod=space&uid=54742</a> Объективные – объем бонуса, коэффициент и условия вейджера, надобность внесения депозита для вывода средств;В большинстве заведений устроить это возможно по адресу электронной почты, по номеру телефона, через социальную сеть либо гугл-аккаунт. 1х слот 1хслотс регистрация перейти на 1×slots
1хслотс рабочее зеркало
На бонусные начисления могут быть установлены дополнительные ограничения, которые Вы не сведению при отыгрыше. Пока бонус полностью не отыгран — деньги из казино не выводятся. <a href=https://rolivka.online/forum/showthread.php?tid=28779>1хслотс казино зеркало</a> Простая процедура получения бездепозитного бонуса, которая займет не более 2-х минут. Для получения бездепов, достаточно зарегистрироваться и доказать контактные данные. Способы получения бездепа различаются от облика бонуса, который приглянулся игроку. Но вас так надо(надобно) быть зарегистрированным в легальном онлайн-казино и доказать собственную личность. В общем виде пошаговая инструкция для получения бездепозитного приза выглядит так:Если вы новичок в этом деле и лишь попали в неизведанную вами область пыла — счет услуг как бездепозитные бонусы без пополнения. 1хслотс 1хслотс регистрация перейти на 1×slots <a href=http://bbs.cheaa.com/home.php?mod=space&uid=3186333>http://bbs.cheaa.com/home.php?mod=space&uid=3186333</a> Фриплей-бонусы. Бонусы за безвозмездную забаву есть только в некоторых клубах. Они зачисляются сразу после творенья профиля и действуют непродолжительное время. Если у вас нет времени истратить свои, они просто закончатся. Что дотрагивается медли, правило призы срабатывают на одного часа.В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая приятная часть забавы. Важно, зачастую бездепозитные бонусы в казино выдаются с ограничениями по наибольшей выплате. В среднем возможно рассчитывать на выгода в количество тысяч руб. Как исключить выигрыш с бонуса без депозита. Придётся подтвердить акк документально, в неких заведениях. Процедура верификации обязательна и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате или прочитайте в правилах.
1хслотс официальный сайт зеркало
При пользовании бездепозитным бонусом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют количество видов лимитов:Баланс игрока пополняется на соответствующую необходимую. К ней используется вейджер, указанный в правилах акции. Вывести выигрыш можно будет последствии как, как пользователь устроит требуемый размер ставок из собственных средств. В редких случаях бездеп трудится в формате Free Play. На счет пользователя зачисляется крупная сумма, и предоставляется небольшой срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по окончании сего периода сумма на счету несомненно превосходить изначальную, то разницу возможно будет вывести либо использовать для последующих ставок. Не стоит сразу же открещиваться от приветственных подарков в похожих казино. Администрация готова начислить средства либо фриспины, но предварительно работники обязаны убедиться, собственно вы не аферист. Дело том,, собственно развелось очень большое охотников за бонусами. Они научились накалывать систему и наваривать крупные суммы денег.Также учтите, собственно некоторые игровые платформы сузивают перечень государств, коие готовы получить предложенный бездепозитный приз за регистрацию. К образцу, есть онлайн-заведения, выдающие подобные бонусы только обитателям конкретных стран. К примеру, интернет казино 777 Оригинал предоставляет бездепозитный бонус лишь игрокам из России и государств СНГ. Или наоборот, пичкают вознаграждением всех, не обитателей неких стран (из сего, стопам пристально изучать список, чтобы впоследствии не возникло никаких вопросов и жалоб). <a href=http://forum.xpscenery.net/member.php?action=profile&uid=1216>http://forum.xpscenery.net/member.php?action=profile&uid=1216</a> Сразу последствии активации промокода возможно воспользоваться подарком. Как уже упоминалось, призы посещают трёх обликов – фриспины, кредиты и фриплей-бонусы. 1× slots официальный Первый образующийся вопрос, это, зачем выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают новых игроков. Последним легче начать забаву на средства с дара за регистрацию. Им не пополнять баланс и расходовать личностные средства. Новички получают безвозмездные спины или средства на счёт. С их помощью знакомятся с игровым ходом, крутят слоты и проделывают ставки в рулетке.Для получения предоставленных призов вам понадобиться — ПК или мобильное прибор, и остальное дело за малым.
<b>Смотреть еще похожие новости:</b>
<a href=http://forums.indexrise.com/thread-1096-post-332314.html#pid332314>казино 1×slots</a>
<a href=http://complainanything.com/node/40690>1х слотс зеркало регистрация в 1×slots casino</a>
<a href=https://seniordance.ru/forum/showthread.php/68722–1×slots-%D0%B1%D0%BE%D0%BD%D1%83%D1%81-%D0%B7%D0%B0-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8E?p=98137#post98137>1×slots бонус за регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Наличие у игрока второго аккаунта. Запрещено делать количество профилей для неоднократного получения бездепов.
#9498 Julipiihttps://2019rik.com.ua/
Інформаційна агенція 24News працює 24 години цілодобово для того, щоб дати Вам самі нові події. <a href=https://2019rik.com.ua/><img src=„https://i120.fastpic.org/big/2022/1011/99/200088b056e0e776312fa001bdc50e99.jpg“></a> Наші журналісти працюють у різних куточках планети щоб якісно добути останні події України та Світу. Ми є повністю приватною Сайтом, не заангажованою адміністрацією президента, Центральною владою або ставлениками олігархів. Ось кілька актуальних тем на сьогодні: • <a href=https://2019rik.com.ua/>Мессінг про третю світову війну 2024</a> • <a href=https://2019rik.com.ua/>Новий закон про рибалку 2024</a> • <a href=https://2019rik.com.ua/>Хрестопоклонна неділя 2024</a> • <a href=https://2019rik.com.ua/>Щасливі імена для хлопчиків на 2024 рік</a> • <a href=https://2019rik.com.ua/>Передбачення на новий рік 2024</a> • <a href=https://2019rik.com.ua/>Вагітні зірки 2024</a> • <a href=https://2019rik.com.ua/>Сценарій на новий рік 2024</a> • <a href=https://2019rik.com.ua/>Що говорив едгар кейсі про Україну у 2024 році</a> • <a href=https://2019rik.com.ua/>Новорічні комедії 2024</a> Якщо Ви збираєтесь дивитися завжди гарячі та правдиві новини, тоді заходьте на нашу ЗМІ платформу і будьте завжди в курсі гострих та цікавих новин. З повагою, команда 24News
<a href=https://2019rik.com.ua/>открытие охоты 2023–2024 в Украине</a> <a href=https://2019rik.com.ua/>новий рік 2024 сценарій</a> <a href=https://2019rik.com.ua/>с какого числа Вербная Неделя в 2024 году</a> <a href=https://2019rik.com.ua/>процедура переоформлення авто</a> <a href=https://2019rik.com.ua/>стилизована ялинка своими руками</a> <a href=https://2019rik.com.ua/>коли день дошкілля 2024</a> <a href=https://2019rik.com.ua/>2024 рік якої тварини яким кольором прикрасити ялинку</a> <a href=https://2019rik.com.ua/>вік та строк вислуги, якщо звільнені зі служби, необхідні для призначення пенсії</a> <a href=https://2019rik.com.ua/>коли починається осінній піст</a> <a href=https://2019rik.com.ua/>зарплата фельдшера в Україні 2024</a> <a href=https://2019rik.com.ua/>найдешевші тарифи водафон 2024</a> <a href=https://2019rik.com.ua/>останні новини про зарплату ДБР</a> <a href=https://2019rik.com.ua/>популярні професії для дівчат 2024</a> <a href=https://2019rik.com.ua/>сценки для дівчат</a> <a href=https://2019rik.com.ua/>Зарплатня на новій пошті 2024 в Україні</a> <a href=https://2019rik.com.ua/>цікаві фільми 2024</a> <a href=https://2019rik.com.ua/>композиція до нового року</a> <a href=https://2019rik.com.ua/>альона курилова про війну</a> <a href=https://2019rik.com.ua/>як оформити пакунок малюка</a> <a href=https://2019rik.com.ua/>цитати про новий рік українською</a> <a href=https://2019rik.com.ua/>сценарій на новорічний корпоратив</a> <a href=https://2019rik.com.ua/>місячне затемнення 2024 в Україні</a> <a href=https://2019rik.com.ua/>экадаши для женщин</a> <a href=https://2019rik.com.ua/>куда жаловаться на соседей в Украине если шумят</a> <a href=https://2019rik.com.ua/>модні сумки 2024</a> <a href=https://2019rik.com.ua/>коли святкують Водохреща</a> <a href=https://2019rik.com.ua/>якого числа Вербна Неділя 2024</a> <a href=https://2019rik.com.ua/>церковний календар на лютий</a> <a href=https://2019rik.com.ua/>водафон лайт плюс тариф</a> <a href=https://2019rik.com.ua/>новий рік у кореї</a> <a href=https://2019rik.com.ua/>сценарій нового року для дорослих в будинку культури</a> <a href=https://2019rik.com.ua/>смішні передбачення</a> <a href=https://2019rik.com.ua/>малюнок різдво христове</a> <a href=https://2019rik.com.ua/>зарплата помощника воспитателя в детском саду 2024 украина</a> <a href=https://2019rik.com.ua/>день донечок 2024</a> <a href=https://2019rik.com.ua/>до какого числа нужно сдать годовой отчет в налоговую</a> <a href=https://2019rik.com.ua/>з риздвом христовим картинки</a> <a href=https://2019rik.com.ua/>фільми мелодрами 2024 односерійні</a> <a href=https://2019rik.com.ua/>чорна вдова акторський склад</a> <a href=https://2019rik.com.ua/>мясні страви</a> <a href=https://2019rik.com.ua/>скільки можна ходити із простроченим паспортом України</a> <a href=https://2019rik.com.ua/>як прикрасити кімнату своїми руками на новий рік</a> <a href=https://2019rik.com.ua/>рамштайн тур 2024</a> <a href=https://2019rik.com.ua/>вересневі свята 2024</a> <a href=https://2019rik.com.ua/>налог на лишнюю жилплощадь</a> <a href=https://2019rik.com.ua/>смішні привітання на новий рік 2024</a> <a href=https://2019rik.com.ua/>дата дня Металлурга в Украине 2024</a> <a href=https://2019rik.com.ua/>штрафы военкомата в Украине на 2024 год</a> <a href=https://2019rik.com.ua/>нігті 2024 новинки</a> <a href=https://2019rik.com.ua/>штатное расписание образец украина</a>
#9499 Charlesgunnyhttp://filmkachat.ru
1х слот регистрация в 1×slots casino
Нет. Для получения бездепозитного приза в казино нужна обязательная регистрация на веб-сайте. Играть в слоты безвозмездно и без регистрации можно только в демо режиме. <a href=http://filmkachat.ru/>1×slots зеркало регистрацию более популярный вариант это</a> Однако в критериях скрываются «подводные камни», коие не разрешат исключить солидную необходимую или же вы не успеете отыграть вейджер. Поэтому профессионалы советуют забрать бесплатные вращения за регистрацию в казино без депо, дабы поднабраться опыта и получить настоящий шанс на победу.Для получения депозитного бонуса нужно пополнить собственный игровой баланс реальными средствами. Вознаграждение можно получить или при внесении первого депозита, или в виде фиксированного процента от внесённых средств. Так или по, бонус поступит на счёт только в пополнения. <a href=http://hoiqt.com/user-7926.html>http://hoiqt.com/user-7926.html</a> 1×slos регистрация в 1×slots casino <a href=http://fh7980px.bget.ru/member.php?action=profile&uid=32928>http://fh7980px.bget.ru/member.php?action=profile&uid=32928</a> Бездепозитный приз по промо-коду будет доступен для забавы, только сомнений случае когда Вы активируете специальный бонусный код в разделе с бонусами или укажите промокод при регистрации на веб-сайте. В неких случаях, кроме активации кода, придется доказать контактные данные игрока и наполнить анкету клиента.
1× slots официальный
Выбор каждого интернет казино на нашем веб-сайте. В описании к любому Вы сможете узнать, что получите за творенье аккаунта.Денежные средства. Третий приз за регистрацию без депо – наличные. К раскаянию, лишь знаменитые и популярные клубы все уяснить средства в рублях или баксах. С их поддержкой вас насладиться каждой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед данным нужно выполнение определенных условий. <a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=2478>1×slots официальный сайт зеркало</a> 1×slots casino регистрация Практически все онлайн казино с бездепозитным бонусом за регистрацию учитывает программку преданности — систему одобрения постоянных посетителей, кот-ая состоит из большого уровней. При достижении игроком очередного значения на его счёт поступает приз. Чем повыше уровень — что, этим щедрее бонус.Фриспины – бесплатные вращения с фиксированной ставкой, коие можно применять в конкретных игровых автоматах. <a href=http://www.zpu-journal.ru/forum/view_profile.php?UID=265131>http://www.zpu-journal.ru/forum/view_profile.php?UID=265131</a> 1хслот официальный сайт зеркало Если при регистрации показать промокод, возможно гарантировано получить приз. Где брать ваучер? Посетите тематику блоги или форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В последнее время игорные дома начали рекламироваться в фильмах и сериалах. Присмотритесь и всего заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных руб.Новички не любят незамедлительно же вносить депозит. Это обосновано отсутствием опыта и недоверием. К счастью, в можно получить бездепозитный бонус за регистрацию в казино. Неважно что начислит система – фриспины или кредиты. В всяком случае вы не рискуете своими сбережениями. Это замечательная возможность запустить приглянувшийся видео разъем или же испытывать фортуну в настольных играх.
1×slots зеркало на сегодня
При подмоги такого одобрения оператор может того завлекать клиентов, которые ранее проявляли активность на веб-сайте, хотя по какой-то основанию перестали играть. В данном случае промокод высылается юзеру по электрической почте или вид SMS. <a href=https://www.cfd-online.com/Forums/members/doctorlazutakt.html>https://www.cfd-online.com/Forums/members/doctorlazutakt.html</a> 1×slos регистрация в 1×slots casino
1хслотс официальный сайт зеркало
Условия вывода выигрыша. В неких заведениях для успешного вывода с бездепозитного бонуса достаточно пополнения баланса и подтверждения личности. В других же клубах, необходимо некоторое раз прокрутить собственный депо. Составленный экспертами Casino.ru перечень онлайн-казино с бездепозитным бонусом разрешает игрокам сравнить спецпредложения разных операторов. 1× slots официальный <a href=http://biyografiforum.10tl.net/member.php?action=profile&uid=2793>http://biyografiforum.10tl.net/member.php?action=profile&uid=2793</a> Бездепозитный бонус за регистрацию в казино с выводом средств в 2022 году — Наш ресурс предоставляет игрокам важную информацию о самых свежих, щедрых и проверенных бонусах в онлайн казино, коие обновляются любой день.
1×slots зеркало этих способов предполагает регистрацию
Способы получения бездепа различаются от вида бонуса, который приглянулся игроку. Но вам в любом случае надо(надобно) быть зарегистрированным в законном онлайн-казино и подтвердить свою лицо. В общем облике пошаговая аннотация для получения бездепозитного бонуса смотрится например: <a href=https://www.aura-invest.com/bbs/board.php?bo_table=free&wr_id=1428560>https://www.aura-invest.com/bbs/board.php?bo_table=free&wr_id=1428560</a> Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам запрещено начислять бонусы посетителям, не имеющим денежных средств на счете. Мы предлагаем осмотреть актуальные призы онлайн-казино с лицензией, которые соблюдают законодательство РБ.В качестве бонусов онлайн казино часто предлагает выдачу фриспинов, другими бесплатных вращений игрового барабана. Виртуальные монеты можно использовать для изучения в покерной школе или для игры в казино. 1×slots рабочее зеркало на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.cvetq.info/viewtopic.php?f=8&t=239473>1×slots сайт</a>
<a href=https://forum.graylite.com/viewtopic.php?p=220167#p220167>1×slots casino зеркало рабочее</a>
<a href=http://www.deonnyn.com/PSPA/memberlist.php?mode=viewprofile&u=559>1×slots зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подтвердите лицо, предоставив оператору казино свои паспортные данные. Инструкции обыкновенно несложные, главное — четко им по. Если написано, что «на фото должны быть заметны все хорошо угла страницы паспорта» — сделайте непосредственно такое фото.
#9500 Charlesgunnyhttp://filmkachat.ru
скачать 1×slots официальный сайт
Доступные игры – В некоторых азартных забавах возможно снизить математическое приемущество казино до нескольких десятых процента. В их числе почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как правило, в таких играх ставки идут в зачет вейджера не всецело. Например, может учитываться только 50%. В некоторых играх бездепозитные призы вообщем невозможно отыгрывать.Выиграть реальные деньги в казино не пополняя счет – сложно, но вполне. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными бонусами и начните выступать на бонусные свои. По статистике из 10-ти заведений можно заработать маленькую сумму денег за счет бонусных средств. <a href=http://filmkachat.ru/>1хслотс рабочее зеркало</a> С такими ординарными советами каждое казино с бонусом за регистрацию способно принести в разы больше выгоды и полезности. <a href=http://www.pirobot.co.uk/doku.php?id=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D0%B5%D0%B9%D1%88%D0%B8%D0%B5%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!>http://www.pirobot.co.uk/doku.php?id=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D0%B5%D0%B9%D1%88%D0%B8%D0%B5%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!</a> 1×slots casino регистрация 1×slots review live <a href=https://sc-grandmaster.ru/forum/?PAGE_NAME=profile_view&UID=20163>https://sc-grandmaster.ru/forum/?PAGE_NAME=profile_view&UID=20163</a> Исходя из сего, просто не существует мудрых оснований махнуть рукой на получение такового бонуса при регистрации. И, не, на такой бесплатной основе у вас есть все шансы выиграть средства и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные призы, нарекают бесплатными интернет платформами для игр.
1×slots зеркало видели такую регистрацию на
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Некоторые онлайн-казино без депо предлагают новым клиентам избрать приз при регистрации. Будьте внимательны: выбрав раз, вы в абсолютном большинстве случаев не сможете пользоваться остальными.Вейджер (или вагер) ? это наименьшая сумма ставок, коию необходимо устроить для вывода денежного приза. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, тем привлекательнее спецпредложение. <a href=http://foru1f40m.bunbun000.com/bbs/home.php?mod=space&uid=9394487>http://foru1f40m.bunbun000.com/bbs/home.php?mod=space&uid=9394487</a> Казино выделяет возможность заработать и исключить настоящие средства на бездепозитных бонусах. Обычно, это незначительная сумма, коию казино возможность для разрешить презентовать игроку.2. Создать новый профиль. Для регистрации нужно заполнить небольшую анкету или зайдите в личный кабинет при помощи соц сетей; 1хслотс регистрация в 1×slots casino
1×slots регистрация
Некоторые онлайн-казино без депо предлагают новым посетителям избрать бонус при регистрации. Будьте внимательны: выбрав один, вы в безусловном большинстве случаев не можете пользоваться остальными. <a href=https://www.rmbbk.com/space-uid-1212405.html>https://www.rmbbk.com/space-uid-1212405.html</a> 1×slots официальный зеркало рабочее У каждой игры свои требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система зачтет каждую ставку. В рулетке и покере сделать это гораздо труднее. Именно потому например главно внимательно читать обстоятельства получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в каждой этой, то новички попросту «спустят приз на ветер».
онлайн казино 1×slots
Как только вы отыграли вейджер и средства с бонусного баланса перебежали вам на настоящий счет, Вы смело можете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депо).Мы проделываем ударение на ключевых положениях управлял, рассказываем о территориальных лимитированиях и вкратце информируем о иных акциях обговариваемого казино. <a href=https://fougerite.com/resources/authors/jamesstawl.14360/>рабочее зеркало 1хслотс</a> Мы подготовили список, где есть практически животрепещущие и новые бездепозитные призы казино, коие продоставляется получить бесплатно. Для наших пользователей есть особые предложения эксклюзивные призы, коие вы кого не отыщите, их мы определили особой красной плашкой «Exclusive». 1×slots зеркало регистрация в 1×slots casino <a href=http://messmangler.com/forums/member.php?action=profile&uid=2821>http://messmangler.com/forums/member.php?action=profile&uid=2821</a> В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это самая милая доля игры. Важно, зачастую бездепозитные призы в казино выдаются с ограничениями по максимальной выплате. В среднем возможно рассчитывать на прибыль в количество тысяч рублей. Как вывести выигрыш с приза без депо. Придётся подтвердить аккаунт документально, в неких заведениях. Процедура верификации обязательна и делается любым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате или прочтите в правилах.Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, a лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.
1×slots регистрация на 1хслотс
Чтобы играть даром на настоящие средства в казино, порой достаточно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные деянья. <a href=http://www.sicilianodentro.it/forum/members/259380.html>http://www.sicilianodentro.it/forum/members/259380.html</a> Для получения бездепа нужно пригласить в игру по реферальной ссылке свежего клиента: он обязан зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на необходимую, обозначенную в критериях промоакции.Все обожают получать подарки. Согласитесь, практически каждый играющий человек будет безгранично счастлив, в получит безвозмездный презент для игры в онлайн казино просто за регистрацию или же приз за внесенный депозит, например именуемые приветственные призы для новых игроков. Соответственно эти онлайн клубы станут больше известны и преимущественны у игроков при выборе казино для игры. Топ казино каждый обновляется и прибавляются свежие и занимательные игровые клубы с привлекательной бонусной политикой и всеми возможными привилегиями, к коим относятся такие бонусы как фриспины за регистрацию, денежные бездепозитные призы, а также великодушные бонусы за внесенный депозит. 1×slots регистрация 1×slots casino 777 online Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке адепты онлайн-казино публикуют важную информацию о no down payment bonuses прочих предложениях.С такими ординарными советами каждое казино с бонусом за регистрацию способно принести в разы больше выгоды и пользы.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.pmpobc.ca/index.php?topic=140533.new#new>1×slots промокод при регистрации 2025</a>
<a href=https://mycs.ge/index.php?subaction=userinfo&user=JamesDop>1×slots зеркало сайта</a>
<a href=http://griffhunter.com/boards/viewtopic.php?p=321199#p321199>1хслотс официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и более. Когда игроку полагается количество фриспинов, администрация может бить3 их начисление на некоторое дней. Бесплатные вращения предоставляются для определенного слота, кот-ый указывается в правилах промоакции. Для верификации номера телефона, в собственном профиле изберите опцию „Подтвердить номер аппарата“ и введите в подходящее фон код, полученный в sms-сообщении.
#9501 Charlesgunnyhttp://filmkachat.ru
1хслотс официальный сайт зеркало
Вознаграждения за получение VIP-статуса ? начисляются в программы преданности при достижении очередного значения либо выдаются персонально менеджерами службы поддержки. <a href=http://filmkachat.ru/>1×slots бонус за регистрацию</a> <a href=http://camillacastro.us/forums/viewtopic.php?pid=515030#p515030>http://camillacastro.us/forums/viewtopic.php?pid=515030#p515030</a> 1×slots регистрация на сайте 1×slots ru com <a href=http://whirlpowertool.ru/index.php?subaction=userinfo&user=gaudydisclaimer>http://whirlpowertool.ru/index.php?subaction=userinfo&user=gaudydisclaimer</a>
1×slots зеркало рабочее
Доступ к подарку может раскрываться механически после введения промокода либо воззвания в саппорта сайта. В первом случае от пользователя не требуется практически поступков. Бездеп с активацией по коду встречается чаще всего. Игроку нужно установить совокупа знаков в графе, кот-ая имеет пребывать в регистрационной форме в Личном кабинете.Подтвердите лицо, предоставив оператору казино средства паспортные данные. Инструкции обычно несложные, главное — четко им идти. Если написано, собственно «на фото обязаны быть заметны все четыре угла страницы паспорта» — устройте непосредственно это фото. <a href=http://aurorahcs.com/forum/memberlist.php?mode=viewprofile&u=168982>сайт 1× slots casino</a> рабочее зеркало 1×slots <a href=http://finforum.net/proxy.php?link=http://spbvedomosti.ru/bitrix/redirect.php?goto=http://iris.kz/bitrix/redirect.php?goto=https://teletype.in/@urist555/vqJrupCwh07>http://finforum.net/proxy.php?link=http://spbvedomosti.ru/bitrix/redirect.php?goto=http://iris.kz/bitrix/redirect.php?goto=https://teletype.in/@urist555/vqJrupCwh07</a> 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Если при регистрации указать промокод, возможно гарантировано получить приз. Где взять ваучер? Посетите тематические блоги либо форумы. Иногда администрация клуба проделывает рассылку ваучеров на электронную почту. В заключительное время игорные дома начали афишироваться в кинокартинах и сериалах. Присмотритесь и наверняка заметите промокод, кот-ый принесёт 500 либо 1 000 бонусных руб.Для получения выигрыша требуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить определенную необходимую, но теснее из собственных средств. Она рассчитывается из совместного размера выигрыша за все время использования бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, в пользователь выиграл 1000 рублей, а множитель составляет х30, вывести средства возможно несомненно, сделав ставки на 30 000 рублей.
1хслот официальный сайт зеркало
Oтыгpaть бонус с указанным вeйджepом, для этого необходимо сдeлaть cтaвoк нa cумму, превосходящую объем приза в несколько один. Активация случается счет промокодов, коие вводятся в собственном кабинете последствии регистрации. Среди спецпредложений в перечне Casino.ru находятся эксклюзивные промокоды, коие доступны лишь посетителям портала. Другие методы начисления средств ? автоматическая активация сразу последствии сотворения аккаунта и получение дара по запросу в службу технической поддержки. <a href=https://pyxc.ru/user/JasperEcory/>https://pyxc.ru/user/JasperEcory/</a> 1×slots рабочее зеркало на сегодня В качестве призов интернет казино нередко предлагает выдачу фриспинов, другими бесплатных вращений игрового барабана. Виртуальные монеты можно применять для обучения в покерной школе или для игры в казино.Бонус за регистрацию в казино выдается лишь раз один на 1-го игрока. Но случаются вспомогательные акции, в которых бездепы раздаются для постоянных посетителей и эти подарки Вы можете получить более одного раза.
1хслотс зеркало
Условия все различаться приятель от приятеля. Но подобный бонус имеет быть использован лишь для игрового процесса – полученные на счет деньги до такого, как станут отыграны, вывести нереально.Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном бонусе, то начала обратите внимание на значение вейджера и срок, кот-ый дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть бонус и вывести выигрыш. <a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=191298>1×slot казино зеркало</a> Получить приветственный бонус имеют только свежие клиенты онлайн-казино. Способы описаны в условиях акции любого легального казино, почаще всего это: Обычно показатель выше, чем для призов на депо. Не удивляйтесь, если он несомненно числе х100. Иногда завышенный коэффициент вейджера устанавливается для обитателей отдельных стран. 1×slots быструю регистрацию а также мгновенное <a href=https://ads.kazakh-zerno.net/user/Walterbrugs/>https://ads.kazakh-zerno.net/user/Walterbrugs/</a> Такие одобрения разрешают даром протестировать новое казино, разобраться с игровым ходом онлайн слотов, заработать и исключить небольшую необходимую средств.После получения бонуса вывод средств для посетителя будет недоступен времени, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или чета недель. Выводить средства игрок может лишь последствии отыгрыша.
1хслот зеркало
Онлайн-казино кропотливо продумывают бонусные условия, которые необходимо выучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша прочие ограничения.Максимальная ставка ? уточняется в еденице счета и ограничивает объем ставки за один спин. В случае ее превышения приз может быть аннулирован. Также в правилах может содержаться запрет на размещение ставок конкретного облика, примеру, по одинаковым шансам в рулетке (то есть, на чет или нечет, красноватое или темное и т.д.). <a href=http://netvoyne.ru/user/Jaspersmods/>http://netvoyne.ru/user/Jaspersmods/</a> Как верховодило, новоприбывшие игроки начала хотят ознакомиться с методами ввода и вывода денежных средств и сроки выполнения поданных заявок чтобы четко разуметь, как прытко возможность вывести свой казино приз за регистрацию без депо на электрический кошелек или же банковскую карту. К счастью для всех играющих, снутри конкретных холдингов, все казино соперничают между собой. Ведь случае бы определенную компанию представляло только одно онлайн-заведение, то вряд ли бы посетители увидели казино с бонусом за регистрацию и возможность бы рассчитывать лишь на вознаграждение в виде бонуса на 1-ое инвестиция. К любому заведению периодически идет завлекать свежих игроков, что, в, лишь на руку всем играющим.В зависимости от интернет заведения любой из них может вас предложить как бездепозитные средства, так и бездепозитные фриспины, коие в успешной регистрации рухнут для на ваш игровой баланс. 1×slots быструю регистрацию а также мгновенное Индивидуальные поощрения выдаются за совершение деяний: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавления или официального посетителя для ПК. В большинстве казино действуют программки преданности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий степень нередко с выдачей бездепа.
<b>Смотреть еще похожие новости:</b>
<a href=http://board.eternityrpc.com/thread-7-post-14243.html#pid14243>1×slots casino зеркало</a>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=261677>1×slots регистрацию процедура займет всего лишь</a>
<a href=https://www.xn–72c9aa5escud2b.com/webboard/index.php/topic,505293.new.html#new>1×slots регистрация 1×slots casino c2d ru</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Представьте момент, когда при ставке в 10 руб. Вы получите схожее умножение. Миллион руб. За одно вращение, что вполне вполне. Поэтому вопрос, сколько возможно выиграть остаётся не. Предлагаем проверить самостоятельно. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный бонус и инспектируйте фортуну в деле. Разумеется, вывести средства не так просто. Однако шансы есть у всех. Не стоит путать игру в демо и внедрение бонусов. В демонстрационном режиме игрок имеет оценить механику слота, сюжет и оформление. Но забава ведется на условные кредиты, потому отсутствует главное ? ощущение пыла. Активируя промокод или фриспины, заказчик как не расходует средства деньги на игровые автоматы, но имеет сорвать реальный куш!
#9502 Charlesgunnyhttp://filmkachat.ru
1× slots сайт
Размер призов чаще всего чисто условный и не выше 50 руб. Приятно, но осязаемым бустом деле навряд станет.Для верификации номера телефонного, в собственном профиле выберите опцию „Подтвердить номер аппарата“ и введите в соответствующее фон код, приобретенный в sms-сообщении. <a href=http://filmkachat.ru/>1×slots акции</a> <a href=https://trade-britanica.trade/index.php?title=%D0%9F%D0%B8%D1%86%D1%86%D0%B0%20%D0%BE%D1%82%20%D1%88%D0%B5%D1%84-%D0%BF%D0%BE%D0%B2%D0%B0%D1%80%D0%BE%D0%B2%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!>https://trade-britanica.trade/index.php?title=%D0%9F%D0%B8%D1%86%D1%86%D0%B0%20%D0%BE%D1%82%20%D1%88%D0%B5%D1%84-%D0%BF%D0%BE%D0%B2%D0%B0%D1%80%D0%BE%D0%B2%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!</a> 3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать аппарат либо почту, указать индивидуальную информацию; 1×slots официальный сайт скачать <a href=https://www.battle-scape.com/members/249059-Josephcar&tab=vbs-notifications>https://www.battle-scape.com/members/249059-Josephcar&tab=vbs-notifications</a> Важно, удостоверьтесь сомнений, собственно ранее не регились в избранном казино. В виртуальных клубах нельзя заводить больше одной учетной записи.
1х слот 1хслотс регистрация перейти на 1×slots
Прибывшие на акк деньги бездепозитные призы предназначаются, главном, только для свежеиспеченных пользователей, коие ранее не имели личного аккаунта в данном казино. Исходя из сего, если ранее у игрока был изготовлен депо, то, по всей вероятности, у него больше не будет возможности рассчитывать на получение такового бонуса в конкретном заведении. скачать 1×slots на андроид мобильная версия Простая процедура получения бездепозитного приза, которая займет не более 2-х мин. Для получения бездепов, довольно зарегистрироваться и подтвердить контактные данные.Бонус без депо за регистрацию в казино (бездепозитный бонус) – это денежный презент от клуба, кот-ый начисляется на аккаунт игрока последствии регистрации в казино. Кроме творения учетной записи, для получения бездепа, довольно нередко требуется ещё и доказать контактные данные игрока и/или активировать особый промо-код. <a href=https://forum.21up.co.uk/member.php?action=profile&uid=8003>https://forum.21up.co.uk/member.php?action=profile&uid=8003</a> Казино выделяет возможность заработать и исключить реальные деньги на бездепозитных бонусах. Обычно, это незначительная сумма, коию казино возможность себе разрешить подарить игроку.Такой бесплатный эквивалент средств зачисляется на профиль пользователя в воплощения притязаний и предназначаются они лишь для игрового процесса. Вывод этих вознаграждений вероятен только последствии осуществления вейджеровых критерий. 1×slots официальный сайт зеркало Минимального оборота. Этот предел устанавливается вейджером — пока игрок не поиграет на установленную необходимую, вывод средств несомненно недосегаем.Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного бонуса.
x1 slots регистрация в 1×slots casino
Способы получения бездепа различаются зависимо вида бонуса, который понравился игроку. Но вам или надо(надобно) быть зарегистрированным в легальном онлайн-казино и доказать собственную лицо. В общем облике пошаговая инструкция для получения бездепозитного приза выглядит так:Размер бонусов чаще всего чисто условный и не выше 50 рублей. Приятно, хотя ощутимым бустом при навряд станет. <a href=https://blackmarke7.com/user-39777.html>https://blackmarke7.com/user-39777.html</a> Когда речь о получении бездепозитных бонусов в казино, начала внимание на последующие обстоятельства: 1×slots официальный регистрация В любом казино с бездепозитным призом учтены вейджеровые обстоятельства. Это единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, нужно устроить определённое количество ставок. Чем круче приз, что, этим труднее выполнить обстоятельства, и напротив.
1×slots казино зеркало
Для всех бездепозитных бонусов функционирует наибольший лимит на выигрыш. Он показывает максимальную сумму, которую возможность получить, играя на бонусные кредиты. Как только для получится выполнить притязания вейджера, допустимый максимум несомненно переведен с бонусного счета на основной, а остаток несомненно списан. В истинное время получить приз за регистрацию в казино очень просто. Почти любой игорный жилище с радостью предоставит средства либо бесплатные вращения. Многие игроки используют данным и не смущяются региться в каждом клубе с выгодными условиями. Кстати, это замечательная возможность придумать выигрышную тактику и сорвать куш.В интернете большое знаменитых игорных площадок с красивыми акционными предложениями. Однако внимательно читать обстоятельства десятков предложений времени надоест, ну и время отнимет большое. Поэтому наша команда подготовила ТОП-3 вебсайтов с лучшими бездепозитными бонусами: 1×slots рабочее зеркало <a href=http://sh-nn.ru/bitrix/redirect.php?goto=http://stroymall.su/bitrix/redirect.php?goto=http://alt1.toolbarqueries.google.com.py/url?q=https://teletype.in/@urid_pomosh/kcPNZjBgeuZ>http://sh-nn.ru/bitrix/redirect.php?goto=http://stroymall.su/bitrix/redirect.php?goto=http://alt1.toolbarqueries.google.com.py/url?q=https://teletype.in/@urid_pomosh/kcPNZjBgeuZ</a> Призовые начисления без депо имеют предоставляться для участия в турнирах интернет казино. Потратить перечисленные средства можно самая в рамках этой акции. Условия их проведения в лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, превосходнее изучить его верховодила.Подарки на праздники ? приуроченные к парадным датам, требующие символического отыгрыша либо начисляются без такового. Могут дариться игрокам в день рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду.
зеркло казино 1×slots
Зарегистрироваться в казино по особой ссылке или с бонусным кодом. Подтвердить контактные данные (номер аппарата и электрическую почту). Для подтверждения номера аппарата нужно в собственном профиле указать свой номер и нажать кнопку „Подтвердить номер телефонного“, дальше Вы получите sms-сообщение с кодом, кот-ый нужно установить в соответствующее фон. Для подтверждения электрической почты, перейти по интенсивной ссылке в послании от казино.В основном случаев благотворительные призы начисляются в кредитах, которые невозможно незамедлительно вывести со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д. ). О нем читайте ниже. Иногда для получения призов необходимо связаться с адептами службы. Удобнее всего с ними разговаривать в онлайн-сате, хотя от достаточно запроса по электронной почте.Составленный экспертами Casino.ru список онлайн-казино с бездепозитным призом позволяет игрокам сравнить спецпредложения разных операторов. <a href=http://akademiyavodopad.ru/bitrix/redirect.php?goto=http://azon.ua/bitrix/redirect.php?goto=http://axioma-soft.ru/bitrix/redirect.php?goto=https://teletype.in/@urist_free/JRzK0FL4L_X>http://akademiyavodopad.ru/bitrix/redirect.php?goto=http://azon.ua/bitrix/redirect.php?goto=http://axioma-soft.ru/bitrix/redirect.php?goto=https://teletype.in/@urist_free/JRzK0FL4L_X</a> Онлайн-казино кропотливо продумывают бонусные условия, которые необходимо выучить перед регистрацией. В правилах указывается объем вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша и другие ограничения. 1×slots казино зеркало К сожалению, нет. Почти все казино, требуют внесение желая бы 1-го минимального депозита для вывода выигрыша с бездепозитного бонуса. Также учитывайте, что вывести деньги разрешено только на ту платежную систему, с коей был изготовлен депозит.В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это самая милая часть забавы. Важно, часто бездепозитные бонусы в казино выдаются с лимитированиями по наибольшей выплате. В среднем можно рассчитывать на выгода в некоторое тыщ рублей. Как исключить выигрыш с приза без депо. Придётся подтвердить аккаунт документально, в некоторых заведениях. Процедура верификации обязательна и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате либо прочитайте в правилах.
<b>Смотреть еще похожие новости:</b>
<a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=4565>1×slots быструю регистрацию а также мгновенное</a>
<a href=https://aircompare.us/forums/memberlist.php?mode=viewprofile&u=40074>сайт 1× slots casino</a>
<a href=https://orbitsound.com/forum/user-211634.html>1х слот регистрация в 1×slots casino</a>
<a href=https://minifishtank.net/forum/member.php?action=profile&uid=1356>1хлот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая часть забавы. Важно, зачастую бездепозитные призы в казино выдаются с ограничениями по максимальной выплате. В среднем возможно рассчитывать на выгода в количество тыщ руб. Как вывести выигрыш с бонуса без депо. Придётся подтвердить аккаунт документально, в неких заведениях. Процедура верификации обязательна и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в онлайн чате либо прочтите в правилах. Срок активации и время на отыгрыш. Зачисление денег либо фриспинов случается при активации протяжении строго ограниченного периода, подобные притязания предъявляются и к срокам отыгрыша. Одни казино позволяют отыгрывать бонус количество дней или в месяцов. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с необоснованно высоким вейджером.
#9503 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрация в 1×slots casino
Популярность онлайн казино растёт и всё больше пользователей начинают интересоваться азартными забавами. Бездепозитные бонусы 2022 года, это уникальные подарки за регистрацию. С их поддержкою свежие игроки шансы получить бесплатные вращения или средства на баланс за одну регистрацию. С в игорных заведений в интернете, бездепозитные бонусы стали популярнейшим методом вербования игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы поведаем. Наш сайт собрал наихорошие предложения из интернета на 2022 год. Воспользуйтесь каким подарком и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить обстоятельства. <a href=http://filmkachat.ru/>1×slots казино зеркало</a> Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала быстрые выводы. Фишка выплат сомнений, что достаточно выбрать платёжный инструмент и указать сумму. В большинстве случаев деньги зачисляются на электрические кошельки протяжении 15 минут, а на банковские карты – 1–3 рабочих денька.Иногда операторы настоятельно внесение малого депозита перед выводом для верификации платежного прибора. В некоторых казино этот депо также предстоит отыграть. <a href=http://mayakminska.1stbb.ru/memberlist.php?mode=viewprofile&u=6716>http://mayakminska.1stbb.ru/memberlist.php?mode=viewprofile&u=6716</a> 1×slots casino зеркало <a href=http://www.heavymusic.ru/user/71169/>http://www.heavymusic.ru/user/71169/</a> Фриспины – безвозмездные вращения с фиксированной ставкой, которые возможно применять в определенных игровых автоматах.
1×slots рабочее зеркало
Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную процедуру активации бонуса без депозита. Внимательно прочитайте до конца. Многие новички проделывают оплошности на этапе регистрации и поэтому не могут получить презент. <a href=https://hiddeninthesand.com/forum/viewtopic.php?t=285820>1×слот регистрация в 1×slots casino</a> 1×slos регистрация в 1×slots casino У любого игорного клубы разные вейджеровые обстоятельства. Чтобы вы гарантировано сумели выполнить их, мы дадим несколько советов. Если система начислила маленькую сумму, не делать немалые ставки – остановитесь на 10–30 центах. Как лишь сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте играть. В неприятном случае лучше приглядеться к другому автомату. <a href=http://www.powerfa.co.kr/bbs/board.php?bo_table=free&wr_id=219513>http://www.powerfa.co.kr/bbs/board.php?bo_table=free&wr_id=219513</a> 1 x slots casino
1×slots зеркало на сегодня
Казино выводит средства только на ту платежную систему, с котрой был сделан депозит. То есть, для вывода бездепозитного бонуса, Вам сначала необходимо восполнить счет. В неких клубах ограниченный перечень способов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет непосредственно с этих платежных методов, которые доступны для вывода.Практически все онлайн казино с бездепозитным бонусом за регистрацию предусматривает программку лояльности — систему поощрения постоянных посетителей, которая состоит из большого уровней. При достижении игроком еще уровня на его счёт поступает бонус. Чем повыше уровень — тем щедрее приз. <a href=http://www.imruyi.com/space-uid-1809556.html>http://www.imruyi.com/space-uid-1809556.html</a> 1×slots быструю регистрацию а также мгновенное Однако в критериях исчезают «подводные камешки», коие не позволят исключить солидную сумму либо же вы не успеете отыграть вейджер. Поэтому профессионалы рекомендуют отобрать благотворительные вращения за регистрацию в казино без депо, чтобы поднабраться опыта и получить реальный шанс на победу.В подавляющем большинстве случаев безвозмездные бонусы начисляются в кредитах, коие невозможно сразу вывести со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже.
1×slots акции
<a href=https://www.formulersupport.com/Thread-1×slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-1×slots-casino-777-online–87061>1×slots регистрация 1×slots casino 777 online</a> 1×slot зеркало рабочее этих способов предполагает регистрацию <a href=http://intentionalpress.com/author/donaldagoca/>http://intentionalpress.com/author/donaldagoca/</a>
1хслот зеркало
Бездепозитный приз – это экономическое вознаграждение, которое выдается участнику забавы в казино, для его привлечения и возникновения заинтригованности. Любой посетитель, кот-ый соответствует условиям выдачи сходственного бездепозитного бонуса, может претендовать на получение вышеуказанного приза. Такое поощрение считается наиболее действенным методом, дающим возможность стартовать при, не вкладывая личных материальных средств.Основное правило получения бездепа ? создаваемый аккаунт обязан быть у пользователя первым и единственным. Наличие нескольких аккаунтов взыскательно запрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депо необходимо соблюдать несложную последовательность действий. <a href=http://worldcrisis.ru/crisis/aerodar2205>http://worldcrisis.ru/crisis/aerodar2205</a> Поспешите забрать бездепозитные бонусы за регистрацию в казино из представленного списка. Все платформы столько ведут законную деятельность, но и порадуют добросовестными плодами игры, высочайшей отдачей, быстрыми выплатами.Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом прибыли присутствуют на данной странице. Посетитель возможность оценить условия получения и начать выступать на деньги без внесения депозита. При данном игроку важно осознавать, на каких условиях и какими способами он сможет вывести приобретенный выигрыш. Для этого нужно расценить перечень подключенных платежных систем. 1хслотс рабочее зеркало Фриспины — безвозмездные вращения, которые дозволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины числятся самым знаменитым и желаемым обликом приза — благотворительные вращения иногда эффективнее и веселее в отыгрыше, чем остальные облики бездепов.
<b>Смотреть еще похожие новости:</b>
<a href=https://xs.xylvip.com/forum.php?mod=viewthread&tid=54520&extra=>1×slots на любой вкус как пройти регистрацию</a>
<a href=http://6000ziyuan.com/forum.php?mod=viewthread&tid=104129&extra=>1×slots официальный сайт зеркало рабочее</a>
<a href=http://youhotel.ru/forum/viewtopic.php?f=14&t=146653>1×slots casino зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Размер ставки для забавы по бездепозитному призу (естесственно же, когда, когда он представлен в виде бонусных валютных средств) часто ниже, чем при ирге на депозит. Ограничение несомненно работать до этапа отыгрыша приза.
#9504 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация на сайте
Максимальный объем ставки, кот-ый невозможно превосходить пока бонус не будет полностью отыгран. В случае нарушения этого верховодила, бонус и выигрыш с него станут аннулированы.Бездепозитный бонус нередко имеет стать легкодоступным сразу после окончания регистрации, что как единственным притязанием к нему считается регистрация, а затем проверка вашей новой учетной записи. <a href=http://filmkachat.ru/>1×slots скачать на айфон</a> Зарегистрироваться в казино по специальной ссылке либо с бонусным кодом. Подтвердить контактные данные (номер аппарата и электрическую почту). Для доказательства номера телефона нужно в собственном профиле указать свой номер и надавить кнопку „Подтвердить номер телефонного“, дальше Вы получите sms-сообщение с кодом, который нужно ввести в соответствующее поле. Для доказательства электрической почты, перебежать по активной ссылке в письме от казино. <a href=https://publicservicefair.kr/bbs/board.php?bo_table=free&wr_id=250540>https://publicservicefair.kr/bbs/board.php?bo_table=free&wr_id=250540</a> Варианты выигрыша зависят от Вашей удачи и критерий игорного портала. Выше мы заявили, что кое-какие бездепозитные призы в 2022 году выдаются с ограничениями по максимальной выплате. Однако, остаются другие, все, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность современных игр на деньги, можно выиграть невозможные суммы. Сегодняшние игровые автоматы или видео слоты, как их нарекают. Могут выдавать крупные умножение от х1.000 и повыше. Некоторые умножают ставку от х100.000.Чем ниже значение вейджера, что, этим проще отыграть и вывести приз. Если Вы расчитываете заработать на бездепе, не просто ознакомиться с свежим игровым клубом, то стоит избегать бонусов с высочайшим вейджером их почти не реально отыграть. С ними Вы можете лишь протестировать игры заведения. скачать 1×slots официальный сайт <a href=https://xn----7sbarohhk4a0dxb3c.xn–p1ai/user/JasperExhaw/>https://xn----7sbarohhk4a0dxb3c.xn–p1ai/user/JasperExhaw/</a> Реже призы без депо начисляются неизменным игрокам. С их подмогою администрация старается удержать ценных клиентов либо желает поблагодарить за преданность правильных посетителей. Но гораздо чаще для похожих целей используются эти промоакции:
1×slots рабочее зеркало
Бездепозитный бонус казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в данном и содержится основное различие.При регистрации стопам свидетельствовать только достоверную информацию. Когда учетная запись несомненно активна, появится доступ в Личный кабинет. В нем можно избрать валюту, установить промокод и разузнать подробные управляла получения и отыгрыша бездепа. Краткая информация об промоакции нередко находится непосредственно на регистрационной форме. 1×slots официальный зеркало рабочее <a href=https://paladinscounter.com/users/DoctorLazutaSn>https://paladinscounter.com/users/DoctorLazutaSn</a> Отказ в прохождении верификации. Если клиент не хочет или возможности предоставить документы, подтверждающие его лицо, профиль будет заблокирован вместе со всеми бонусными начислениями.С другой стороны, гораздо легче забрать бездепозитные фриспины за регистрацию в казино и прямо в начать вертеть барабаны в наилучших слотах. Главная необыкновенность спинов никаких, собственно они предназначены для лучших автоматов. Удастся не пройти дополнительные раунды, хотя и прирастить необходимую выигрыша, заработать респины и другие внутриигровые презенты. онлайн казино 1×slots
1×slots официальный зеркало рабочее
Но эти рамки не смущают в хайроллеров, потому коэффициенты на слотах разрешают рассчитывать на солидные выигрыши, а в некоторых автоматах разыгрывается прогрессивный джекпот. В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с безвозмездных вращений. Прибыль, которую Вы заработаете на таком бездепе можно назначать на вывод без какого либо отыгрыша.Список так нарекаемых «запрещенных территорий» прилагается к правилам бонусной программки игорного портала. Обязательно проверьте, распространяются ли на вас похожие наказания. <a href=https://clicgo.ru/user/Oscarnealt/>https://clicgo.ru/user/Oscarnealt/</a> Выбирая даровой приз, внимательно изучайте правила. Убедитесь, что вам можно себя участие в акции. Уточните, в каких играх можно исполнять обстоятельства вейджера. При необходимости задавайте вопросы представителям саппорта. зеркло казино 1×slots Выигрыши с призов без инвестициям постоянно привязаны к требованию по ставкам и все быть обналичены только после выполнения данных требований.
1хслотс 1хслотс регистрация перейти на 1×slots
В случае установленного лимита на необходимую вывода выигрыша с бездепозитного бонуса, игрок не может вывести больше заявленной суммы. 1×slots регистрация 1×slotscasino 56 online <a href=http://polimentosroberto.com.br/index.php?option=com_k2&view=itemlist&task=user&id=4487284>http://polimentosroberto.com.br/index.php?option=com_k2&view=itemlist&task=user&id=4487284</a> Раздача бонусов имеет быть посвящена различным датам: календарные праздники, деньки рождения игроков, годовщина открытия казино и т. Д. Подарок выдается вид денег, фриспинов либо баллов для скопления и обмена на предложения оператора. Если пользователь получает выигрыш, деньги начисляются на его счет. Для вывода этой суммы понадобиться выполнить ряд требований.
1×slots промокод при регистрации 2025
Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния или peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.Обычно для получения бонусов без депо, казино выдвигает приклнные и вполне выполнимые условия, но есть ряд деяний которые воспрещены и шансы повлечь за собой досадные последствия: <a href=http://gulliverus.ru/user/Justingar/>http://gulliverus.ru/user/Justingar/</a> скачать 1×slots на андроид мобильная версия Нельзя разглядывать игру на средства, как вариант заработка. Азартные забавы воспрещены для лиц моложе 18 лет. Topcasinobonuses.mobi не организатором азартных игр. Сайт носит информационный нрав.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.deonnyn.com/PSPA/memberlist.php?mode=viewprofile&u=559&sid=3b709957f645e1ae6d697ab1a97c4bd5>рабочее зеркало 1×slots</a>
<a href=https://www.katzenforum.at/forum/media/users/jamesagema.16012/>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но эти рамки не смущают в хайроллеров, что коэффициенты на слотах дозволяют рассчитывать на солидные выигрыши, а в некоторых автоматах разыгрывается передовой джекпот.
#9505 купить сейф для охотничьего ружьяhttps://sejfy-dlya-oruzhiya.ru/
Тут можно преобрести оружейный сейф купить <a href=https://sejfy-dlya-oruzhiya.ru/>сейф оружейный цена</a>
#9506 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
Все безвозмездные бонусы кажутся заманчивыми. Кто же категорически от возможности сыграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далеко не все бездепозитные бонусы мере презентабельны для рассудительного клиента.Для верификации аккаунта надо(надобно) предоставить профессионалам технической помощи отсканированную копию паспорта и счета за коммунальные предложения, а также фотку банковской карты либо снимок страницы электрического кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для доказательства личности. <a href=http://filmkachat.ru/>x1 slots регистрация в 1×slots casino</a> Для отыгрыша приза казино обязует игрока сыграть на необходимую, в некоторое один превышающую сумму полученного бонуса — тут выгода компании явна. <a href=http://128.199.110.255/home.php?mod=space&uid=327803>http://128.199.110.255/home.php?mod=space&uid=327803</a> Призовые начисления без депо все предоставляться для участия в турнирах интернет казино. Потратить перечисленные деньги возможно исключительно в данной промоакции. Условия их проведения себе ограничения на список игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, лучше изучить его верховодила.Если вы новичок в этом деле и лишь попали в неизведанную вами область пыла — за предложений как бездепозитные призы без пополнения. 1×slots официальный сайт скачать <a href=http://metal-firms.co.ua/wr_board/tools.php?event=profile&pname=royalexpenditur>http://metal-firms.co.ua/wr_board/tools.php?event=profile&pname=royalexpenditur</a> Но такие рамки не смущают даже хайроллеров, что коэффициенты на слотах дозволяют рассчитывать на солидные выигрыши, а в неких автоматах разыгрывается передовой джекпот.
1хслотс казино зеркало
Иногда в бездепа, казино дарит наименьший бонус (до 50 руб. ), ради которого не заморачиваться.Этот тип бонуса несомненно добавлен на Ваш акк последствии успешной процедуры регистрации с внедрением номера телефона. Если выбрать другой способ творения учетной записи, бездеп не несомненно добавлен на Ваш аккаунт. казино 1×slots Активация валютного гонорары происходит автоматически после творения профиля или применения промокода. Иногда операторы предъявляют вспомогательные притязания: подписаться на странички казино в социальных сетях либо на рассылку маркетинговых сообщений, скачать и ввести вспомогательный софт и т.д. <a href=http://188.17.148.172/forum/profile.php?action=show&member=1689>http://188.17.148.172/forum/profile.php?action=show&member=1689</a> 1хслотс официальный сайт зеркало
1×slots casino online регистрация
Такой безвозмездный эквивалент средств зачисляется на профиль юзера после воплощения требований и предназначаются они лишь для игрового процесса. Вывод таких вознаграждений вероятен лишь в воплощения вейджеровых критерий. <a href=http://alfasys.com.ua/index.php?subaction=userinfo&user=giantbabe28>http://alfasys.com.ua/index.php?subaction=userinfo&user=giantbabe28</a> 1×slots casino зеркало рабочее Выигрыши с бонусов без вложений практически привязаны к требованию по ставкам и имеют быть обналичены только после исполнения данных требований.Многие азартные клубы ограничивают сумму вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании акции, суммы Вы не можете исключить. Разница будет аннулирована, Вы даже не можете создавать на нее ставки.
1хслотс регистрация в 1×slots casino
Вейджер менее х30–35 является приемлемым. Опытные игроки утверждают, что с таким вейджером реально остаться в плюсе, в правильно подойти к выбору игрового аппарата.Внесение депозита – Будьте готовы восполнить счет последствии отыгрыша бонуса. Это обычное заявка верховодил для этого подобии промо-акций. Лучше заранее уточнить, какую необходимую нужно несомненно заносить на счет. Как верховодило, речь о наименьшем депозите, но вы обязаны быть убеждены, собственно он вам по карману. 1×slots актуальное зеркало <a href=https://sklad-slabov.ru/forum/user/3796/>https://sklad-slabov.ru/forum/user/3796/</a> Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Отыграв бездепозитный бонус в казино с выводом также придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в сходственное ограничение присутствует, то единоразово исключить получится лишь сумму, не превышающую размер приобретенного бонуса.
1×slots зеркало которую указывали при регистрации кстати
Бездепозитные бонусы за регистрацию в игровых автоматах для владельцев онлайн-казино считаются долею маркетинговой кампании, направленной на увеличение аудитории вебсайта. Так они продвигают средства бренды и завлекают новых посетителей. Если при регистрации указать промокод, возможно гарантировано получить приз. Где брать ваучер? Посетите тематику блоги либо форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В заключительнее время игорные жилища начали рекламироваться в фильмах и телесериалах. Присмотритесь и наверняка заметите промокод, который принесёт 500 или 1 000 бонусных рублей. <a href=https://honcure.com/user/CraigDed/>https://honcure.com/user/CraigDed/</a> 1×slots регистрацию более популярный вариант это
<b>Смотреть еще похожие новости:</b>
<a href=http://www.emv.info/memberlist.php?mode=viewprofile&u=424>1 х слотс зеркало</a>
<a href=http://forum.animogen.com/viewtopic.php?p=3321305>1×slots зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В случае установленного лимита на сумму вывода выигрыша с бездепозитного бонуса, игрок не может исключить больше заявленной суммы. Но рядах азартных платформах подобные вознаграждения могут получить и уже зарегистрированные пользователи. В таком случае, призы предоставляются в рамках уникальных промоакций либо же неким игрокам повторяющий акционного предложения, коие приходит на почту с целью «вернуть» игрока в свое казино.
#9507 Charlesgunnyhttp://filmkachat.ru
1× slots зеркало
Некоторые казино шансы предлагать клиентам бездепы за подтверждение номера либо почты или репост на страничку в соц сетях.Одним из предлогов отдавать привилегию 1 либо другому заведению заключается в привлекательности предлагаемых промоакций и даровых услуг. Безвозмездные фриспины, выдаваемые без нужды делать какой-либо лепта, в перечне располагается далеко не в конце. <a href=http://filmkachat.ru/>казино 1×slots</a> Свежий приз начисляется повторяющий денежных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в пользовании средствами, ну случае отыгрыша оператор может установить лимитирование на вывод средств. <a href=https://xn–80ae1aidok.xn–p1ai/users/juvenilefuzz35>https://xn–80ae1aidok.xn–p1ai/users/juvenilefuzz35</a> Бoльшинcтвo азартных заведений выдвигают примерно одинаковые условия и притязания, коие необходимо выполнить, дабы получить бездепозитный приз за регистрацию. Все их можно соединить в раз перечень:Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала резвые выводы. Фишка выплат что, нет, что довольно выбрать платёжный инструмент и указать сумму. В большинстве случаев средства зачисляются на электронные кошельки протяжении 15 мин., а на банковские карты – 1–3 рабочих дня. 1×slots скачать на айфон <a href=https://wolvesbaneuo.com/wiki/index.php/%D0%91%D0%BB%D0%BE%D0%B3_%D0%93%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0>https://wolvesbaneuo.com/wiki/index.php/%D0%91%D0%BB%D0%BE%D0%B3_%D0%93%D0%B8%D0%BD%D0%B5%D0%BA%D0%BE%D0%BB%D0%BE%D0%B3%D0%B0</a>
casino 1×slot
1×slot официальный сайт Но такие рамки не смущают даже хайроллеров, поскольку коэффициенты на слотах дозволяют рассчитывать на крупные выигрыши, а неких автоматах разыгрывается прогрессивный джекпот. <a href=http://crtdu-kras.ru/communication/forum/user/208397/>http://crtdu-kras.ru/communication/forum/user/208397/</a> Активация по промокоду употребляется в разных обликах бездепов. Если идет о приветственном призе, то комплект знаков можно разузнать на главной странице, в регистрационной форме либо письме, коие отправляется юзеру для подтверждения адреса электронной почты. Акции все проводиться вместе с партнерскими площадками. Обычно код располагается на постороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активизируется разовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем актуальный код для активации в описании каждого рекламную. 1х слот регистрация в 1×slots casino
1×slots на любой вкус как пройти регистрацию
Верификация необходима для добавочной безопасности и помочь техподдержке выявить бонусхантеров и плутов. Кстати, на некоторых платформах выводы крупных сумм доступны только последствии подтверждения личности. Иногда в бездепа, казино презентует минимальный бонус (до 50 руб. ), из-за которого не стоит заморачиваться. <a href=https://vozlublennaya.mybb.sumy.ua/viewtopic.php?id=15079#p43775>https://vozlublennaya.mybb.sumy.ua/viewtopic.php?id=15079#p43775</a> У любого игорного клубы различные вейджеровые обстоятельства. Чтобы вы гарантировано сумели выполнить их, мы дадим некоторое советов. Если система начислила небольшую сумму, не создавать большие ставки – остановитесь на 10–30 центах. Как только сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте выступать. В противном случае другого присмотреться к другому автомату.Условия, на которых предоставляется бездеп, регулируются казино. Каждая промоакция имеет подробные правила, гиперссылка на коие обычно находится в промообъявлении. В их указываются лимиты, вейджер, перечень доступных игр. Если оператор скрывает данные о предложении, то пользоваться им не. 1× слот зеркало
1хслот зеркало
<a href=http://forums.panzergrenadiers.com/showthread.php?23002–1×slots-%D0%A0%D1%95%D0%A1%E2%80%9E%D0%A0%D1%91%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A0%C2%B0%D0%A0%C2%BB%D0%A1%D0%8A%D0%A0%D0%85%D0%A1%E2%80%B9%D0%A0%E2%84%96-%D0%A0%C2%B7%D0%A0%C2%B5%D0%A1%D0%82%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%BB%D0%A0%D1%95-%D0%A1%D0%82%D0%A0%C2%B0%D0%A0%C2%B1%D0%A0%D1%95%D0%A1%E2%80%A1%D0%A0%C2%B5%D0%A0%C2%B5&p=506043#post506043>1×slots официальный зеркало рабочее</a> Поспешите зарегистрироваться на официальном сайте Клубника, чтобы моментально получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, появляется настоящий шанс победу! Для выбора азартного заведения Вы можете воспользоваться списком наших казино с призами за регистрацию. На нашем веб-сайте мы выпустили список бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, собственно часть бонусов эксклюзивные и доступны только для посетителей нашего вебсайта по-специальному промо-коду либо по оригинальной ссылке. Кроме такого, для любого приза мы подготовили подробный обозрение, в котором Вы узнаете как получить и отыграть одобрение и как вывести собственный выигрыш с бездепа.Законодательство, регулирующее азартные игры в различных странах, влияние на полномочия операторов. В итоге юзеры из отдельных ареалов сталкиваются с лимитированиями со стороны казино. Это может быть как полный отказ в доступе, например и невозможность загружать забавы отдельных изготовителей. 1×slots зеркало видели такую регистрацию на <a href=http://radshir.com/list/index.php?subaction=userinfo&user=Jasperaffip>http://radshir.com/list/index.php?subaction=userinfo&user=Jasperaffip</a>
1×slots скачать на айфон
Фриспины предназначены для использования в видео слотах. Внимательно ознакомьтесь с критериями – часто их выдают на кое-какие автоматы. В зависимости от клуба, у вас выйдет сделать определённое число ставок. Кстати, продвинутые игорные жилища позволяют запускать каждых «одноруких бандитов».Баланс игрока дополняется на соответствующую необходимую. К ней используется вейджер, обозначенный в правилах акции. Вывести выигрыш можно несомненно последствии как, как юзер сделает требуемый размер ставок из собственных средств. В редчайших случаях бездеп работает в формате Free Play. На счет пользователя зачисляется большая сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по окончании сего периода сумма на счету будет превосходить изначальную, то разницу возможно будет исключить либо использовать для последующих ставок. Более крупные предложения встречаются очень редко. Зачастую они доступны лишь VIP-игрокам. В оставшихся случаях им скорее сопутствуют довольно жесткие условия отыгрыша. Также возможны вспомогательные условия прочие ограничения, прописанные в критериях и положения бонусной программки казино.Поспешите арестовать бездепозитные бонусы за регистрацию в казино из представленного списка. Все платформы не только ведут легальную деятельность, хотя и обрадуют честными плодами забавы, высочайшей отдачей, быстрыми выплатами. <a href=https://www.warshipsfaq.ru/user/CraigRumma>https://www.warshipsfaq.ru/user/CraigRumma</a> Прямо в заберите безвозмездные вращения за регистрацию без депо и начинайте собирать призовые комбинации из-за крупных выигрышей! 1×slots casino регистрация 1×slotscasino09k online Представленные на данной странице лучшие бездеп бонусы в казино за регистрацию в 2022 году имеют подходящие условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, в котором посетители Casino.ru могут сортировать перечень по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д.
<b>Смотреть еще похожие новости:</b>
<a href=http://permitbeijing.com/forum/showthread.php?tid=2196154>1хслотс мобильная версия зеркало</a>
<a href=https://demo.comuni-italiani.it/forum/viewtopic.php?f=9&t=368094>1х слотс зеркало регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На условиях отыгрыша безвозмездных призов по тормознуть подробнее. С ними связаны аспекты, коие невозможно оставить без внимания. Бездепозитные бонусы казино за регистрацию в 2022 году — это вероятность сыграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой или количеством безвозмездных вращений без внесения депо. Не путайте деморежим с реальной игрой без необходимости внесения депозита.
#9508 Charlesgunnyhttp://filmkachat.ru
1×slots на любой вкус как пройти регистрацию
Вывод выигрыша с бездепозитных бонусов казино – великодушный подарок от азартных клубов. Но дабы вывести свой доход, нужно выполнить ряд критерий:3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефон или почту, показать персональную информацию; <a href=http://filmkachat.ru/>сайт 1× slots casino</a> Игры, каких можно играть на бонусные средства. Проверьте список игр, каких возможно играть на бонусные средства, возможно они Вам не понравятся и не стоит расходовать своё время на такую акцию. <a href=http://www.cooperativacoomultexco.com/user/JamesRek/>http://www.cooperativacoomultexco.com/user/JamesRek/</a> Далее требуется отыграть вагер и вывести выигрыш. Игрокам без навыка крупно подфартило, есть получить десятки подарков за одну регистрацию. Если не смогли получить Бездепозитный бонус, не волнуйтесь. Обратитесь в онлайн чат, оператор поможет решить проблему.Для получения бонуса нужно ознакомиться с программкой преданности казино и устроить ставки на необходимую, необходимую для перехода на грядущий степень. 1×slots официальный сайт зеркало <a href=http://spilov.ru/user/Deweynig/>http://spilov.ru/user/Deweynig/</a> Для тех, кто лишь взвешивает испытать свою фортуну, еще для проф игроков, отыскивающих новые площадки для выигрышей, основные лицензированные казино часто организуют разные промоакции, и одно из лучших предложений прошедшее время – как для начинающих, так и для профессиональных игроков – бездепозитный приз за регистрацию.Приглашаем делиться мнениями о призах. Это поможет другим юзерам выбирать наиболее прибыльные предложения.
1×slots подтвердит вашу регистрацию если говорить
Помните, что любые нарушения верховодил сведут на нет ваши старания, и вы наверняка останетесь без начисленного вам безвозмездного бонуса. Всегда изучайте правила начисления и обстоятельства вейджера. По любым вопросам, на которые вы возможности без отыскать ответы, обращайтесь за объясненьям и саппорт.Первый образующийся вопрос, это, для выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают новых игроков. Последним легче начать игру на деньги с дара за регистрацию. Им надо пополнять баланс и расходовать личные свои. Новички получают безвозмездные спины либо свои на счёт. С их поддержкой знакомятся с игровым ходом, крутят слоты и делают ставки в рулетке. 1×slots регистрация 1×slotscasino09k online На безвозмездные призы онлайн-казино практически всегда распространяется ограничения по стране проживания клиентов. Даже в для разрешается открывать счет и выступать на деньги в заведении, это еще не значат, собственно вам доступны no deposit bonuses.Все любят получать презенты. Согласитесь, почти любой играющий человек несомненно бесконечно рад, если получит бесплатный подарок для забавы в интернет казино просто за регистрацию либо же бонус за внесенный депо, так называемые приветственные бонусы для свежих игроков. Соответственно такие интернет клубы будут более знамениты и предпочтительны у игроков при выборе казино для забавы. Топ казино день обновляется и добавляются новые и интересные игровые клубы с симпатичной бонусной политикой и всеми вероятными преимуществами, льготами, к которым относятся эти призы как фриспины за регистрацию, валютные бездепозитные бонусы, еще щедрые призы за внесенный депо. <a href=https://www.ytdestek.com/members/23749.html>https://www.ytdestek.com/members/23749.html</a> Мы советуем не отрицаться от сходственных предложений известных казино. Выделите несколько минут на регистрацию, получите приз и попробуйте его отыграть. Может быть, сейчас фортуна несомненно на вашей стороне! 1× slots casino официальный сайт
1×slots актуальное зеркало
Нельзя разглядывать забаву на деньги, как вариант заработка. Азартные забавы запрещены для лиц младше 18 лет. Topcasinobonuses.mobi не организатором азартных игр. Сайт одевает информационный нрав.Бездепы с безвозмездными вращениями предоставляют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд уплачивает казино. Число спинов ограничено и изредка выше сотку. Если промоакция содержит количество даровых игр, их начисление возможность быть разбито на количество дней. <a href=http://www.apicarrara.it/modules.php?name=Journal&file=display&jid=1357>http://www.apicarrara.it/modules.php?name=Journal&file=display&jid=1357</a> Возьми собственный презент. Чаще всего бонус активизируется незамедлительно последствии регистрации. Но случаются ситуации, когда нужно забежать в собственный офис либо написать в справочную службу. 1×slots зеркало этих способов предполагает регистрацию
1×slot официальный сайт
Например, игрок получил 500 руб. При разработке аккаунта и должен отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 рублей, потребуется сделать 875 спинов для полного отыгрыша.Бездепы с безвозмездными вращениями деют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд уплачивает казино. Число спинов ограничено и редко выше сотню. Если промоакция включает в себя количество бесплатных игр, их начисление имеет быть разбито на несколько дней. <a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=541502>1хслотс казино зеркало</a> Таким образом интернет казино получает потенциального игрока. Возможно в или истинном он захотит поиграть на свои средства. Так трудятся бездепозитные призы в интернет казино. Здесь хорошо подходит выражение, безвозмездные сыр случается только в мышеловке. Начинающие игроки могут не осознавать опасность азарта. Однако со временем осознания становится больше. Это тема для отдельного обсуждения. У каждого игорного заведения свои управляла и условия. Но, дабы получить бонусы, необходимо выполнить стандартные действия: 1×slots официальный сайт, скачать <a href=http://swwwwiki.coresv.net/index.php?title=%E5%88%A9%E7%94%A8%E8%80%85:SammieMoreland>http://swwwwiki.coresv.net/index.php?title=%E5%88%A9%E7%94%A8%E8%80%85:SammieMoreland</a>
1× slots casino зеркало
При правильном подходе бездепы — это отличный метод играть на средства без траты собственных средств. Есть количество рекомендаций, следуя коим можно извлечь максимально полезности из похожих промоакций казино. Играть следует лишь на лицензированных площадках. Скриптовые веб-сайты столько накалывают с бонусными услугами, хотя и используют пиратский софт с модифицированным ГСЧ. Выиграть на этих автоматах нереально.Не хотите сыграть в азартные забавы, не рискуя своими средствами, но получая в все выплаты? Подобную возможность предоставляют многие лучшие порталы с азартными весельями. В их числе много правдивых и надежных интернет-казино на российском языке. Они привлекают новых юзеров разными поощрительными событиями, включая бездепозитные, или безвозмездные бонусы. <a href=https://forum.eliteshost.com/member.php?action=profile&uid=8052>https://forum.eliteshost.com/member.php?action=profile&uid=8052</a> Кешбэк-бонус дает собой возврат фиксированного процента от ставки если, тогда, поражения либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%.Бездепозитный бонус казино 2022 с выводом за регистрацию дает вероятность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и проверить качество работы службы поддержки. Довольно часто, начиная игровой процесс, игрок теснее отказывается останавливаться и проделывает настоящий вклад. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать безвозмездно возможно как раз таки с призом за регистрацию без надобности вносить депо. 1×slots зеркало рабочее на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=238410>1×slots официальный зеркало рабочее</a>
<a href=https://australiantravelforum.com/Upload/showthread.php?tid=187904>1 хслот регистрация в 1×slots casino</a>
<a href=http://nakupnidivadlo.cz/index.php/forum/3-pripominky/46543–1×-slots-casino#234707>1×slots casino регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Например, игрок получил 500 рублей при твореньи аккаунта и обязан отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., понадобится устроить 875 спинов для полного отыгрыша.
#9509 Charlesgunnyhttp://filmkachat.ru
скачать 1×slots официальный сайт
К сожалению, нет. Почти все казино, просят внесение хотя бы одного малого депо для вывода выигрыша с бездепозитного приза. Также учитывайте, собственно вывести деньги разрешается только на что, эту платежную систему, с коей был сделан депозит.Важно, убедитесь сомнений, собственно раньше не регились в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи. <a href=http://filmkachat.ru/>1хслот 1хслотс регистрация перейти на 1×slots</a> <a href=https://worldaid.eu.org/discussion/profile.php?id=377444>https://worldaid.eu.org/discussion/profile.php?id=377444</a> У любого игорного клубы различные вейджеровые условия. Чтобы вы гарантировано сумели выполнить их, мы дадим количество советов. Если система начислила маленькую необходимую, надо делать великие ставки – остановитесь на 10–30 центах. Как только сможете заработать примерно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В неприятном случае лучше приглядеться к другому автомату.Но на азартных платформах сходственные вознаграждения имеют получить и уже зарегистрированные пользователи. В этом случае, бонусы предоставляются в уникальных акций или же некоторым игрокам вид акционного предложения, которое приходит на почту с целью «вернуть» игрока в свое казино. 1×slots быструю регистрацию а также мгновенное <a href=http://fr3809hv.bget.ru/user/JoshuaTrike/>http://fr3809hv.bget.ru/user/JoshuaTrike/</a>
1хслотс рабочее зеркало на сегодня
Реже призы без депозита начисляются неизменным игрокам. С их поддержкой администрация постарается вычесть ценных клиентов или желает поблагодарить за преданность верных посетителей. Но намного почаще для похожих целей применяются эти промоакции:Но есть игорные заведения, коие готовы просто так жертвовать деньги на игру. Для сего довольно сделать профиль. Чтобы исключить собственный выигрыш, вас поначалу нужно выполнить обстоятельства отыгрыша, указанные в условиях получения бездепозитного депо. <a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=54089>casino 1×slot</a> 1хслотс казино зеркало <a href=https://tsonlinevn.4it.top/User-JustinShaft>https://tsonlinevn.4it.top/User-JustinShaft</a> 1×slots регистрация 1×slots casino 777 online
1хслот скачать
Вышеописанная первопричина и является основным моментом, следствии которого операторы отдают часть своей прибыли на разные маркетинговые затраты и рекламные кампании. А наиболее действующим здесь станут играть непосредственно бездепозитные бонусы казино 2022 с выводом за регистрацию. Чтоб получить большой выигрыш, выбирайте игровые автоматы с предельным процентом отдачи (RTP) из списка тех, коие доступны по условиям отыгрыша. <a href=https://foxsheets.statfoxsports.com/UserProfile/tabid/57/userId/191940/Default.aspx>https://foxsheets.statfoxsports.com/UserProfile/tabid/57/userId/191940/Default.aspx</a> 1×слотс казино Следует выделить, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом.Минимального оборота. Этот лимит устанавливается вейджером — же игрок не сыграет на установленную необходимую, вывод средств будет недоступен.
1×slots casino online регистрация
При отыгрыше бонусных средств, нужно учесть срок деянья бонуса и время, которое дается на отыгрыш. По истечению заявленного медли, не отыгранный приз будет аннулирован.В интернете количество узнаваемых игорных площадок с красивыми акционными услугами. Однако пристально читать обстоятельства 10-ов услуг вскоре надоест, ну и время отнимет количество. Поэтому наша команда подготовила ТОП-3 вебсайтов с наихорошими бездепозитными призами: <a href=https://hiddeninthesand.com/forum/viewtopic.php?t=236809>1× слот зеркало</a> Итак, дабы бесплатные бонусные кредиты трансформировались в реальные средства, которыми вам управлять по собственному усмотрению, их надо(надобно) отыграть. Вейджер идет уточнять в правилах онлайн-казино. 1×slots регистрация 1×slotscasino 56 online <a href=https://www.camedu.org/blog/index.php?entryid=1821>https://www.camedu.org/blog/index.php?entryid=1821</a> Подобные бонусы без депозита предоставляются на более выгодных условиях. Зачастую они крупнее, а обстоятельства отыгрыша менее жесткие.Зарегистрируйтесь. Для регистрации чаще всего довольно ввести свой номер телефонного и почтовый адресок, последствии чего установить полученный код из СМС. Возможно, потребуется указать промокод. В правилах акции будет написано, где его надо включать. Иногда это надобно создавать при регистрации, время — теснее последствии творенья собственного офиса, на отдельной страничке.
1×slots зеркало сайта
<a href=https://ammobrasstrader.com/forum/member.php?38700-KeithZidge>https://ammobrasstrader.com/forum/member.php?38700-KeithZidge</a> Минимального оборота. Этот предел устанавливается вейджером — пока игрок не сыграет на установленную необходимую, вывод средств будет недосегаем.Внесение депозита – Будьте готовы пополнить счет в отыгрыша приза. Это стандартное требование правил для этого подобии промо-акций. Лучше заблаговременно уточнить, какую необходимую нужно будет вносить на счет. Как управляло, речь идет о минимальном депозите, хотя вы обязаны быть уверены, собственно он для по карману. рабочее зеркало 1хслотс Многие казино предоставляют в рекламных целях безвозмездные призы необыкновенно для наших читателей. Чтобы их получить, нужно перебежать на игровой сайт по партнерской ссылке с нашего портала.Превышение наибольшей ставки при отыгрыше. Система автоматически не предупреждает о превышении ставки, потому о нарушении управлял игрок имеет разузнать уже после подачи запроса на вывод средств.
<b>Смотреть еще похожие новости:</b>
<a href=https://praisenpray.org/forums/showthread.php?tid=96126>1× slots регистрация в 1×slots casino</a>
<a href=https://www.neocodex.us/forum/topic/120221-getting-started-with-neocodex/page-3#entry2034910>1×slots casino online регистрация</a>
<a href=https://forum.bandariklan.com/showthread.php?tid=176825&pid=871035#pid871035>онлайн казино 1×slots</a>
<a href=http://naturetour.ru/personal/profile/index.php?PAGE_NAME=profile_view&UID=2416>1×slots официальный сайт мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно приятная часть забавы. Важно, часто бездепозитные бонусы в казино выдаются с лимитированиями по наибольшей выплате. В среднем возможно рассчитывать на прибыль в некоторое тысяч рублей. Как вывести выигрыш с приза без депозита. Придётся доказать акк документально, в некоторых заведениях. Процедура верификации обязательна и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате либо прочтите в правилах.
#9510 Charlesgunnyhttp://filmkachat.ru
1хслот 1хслотс регистрация перейти на 1×slots
Зарегистрироваться в казино по специальной ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефонного и электронную почту). Для доказательства номера телефона необходимо в личном профиле показать свой номер и надавить кнопку „Подтвердить номер телефонного“, дальше Вы получите sms-сообщение с кодом, который нужно ввести в отвечающее фон. Для доказательства электронной почты, перебежать по интенсивной ссылке в письме от казино.Представьте момент, когда при ставке в 10 рублей Вы получите подобное умножение. Миллион рублей за одно вращение, что вполне вполне. Поэтому вопрос, сколько возможно выиграть остаётся закрытым. Предлагаем проверить помощи. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный бонус и инспектируйте удачу в деле. Разумеется, исключить средства сложно. Однако шансы есть у всех. <a href=http://filmkachat.ru/>1×slots быструю регистрацию а также мгновенное</a> <a href=http://www.svit-world.kiev.ua/user/Davidnar/>http://www.svit-world.kiev.ua/user/Davidnar/</a> 1×slots официальный зеркало <a href=https://www.feeder.mobi/members/philipkef/profile/>https://www.feeder.mobi/members/philipkef/profile/</a>
1х слот регистрация в 1×slots casino
Подарки на дни ? посвященные торжественным датам, требующие символического отыгрыша или начисляются без такового. Могут дариться игрокам сутки рождения, на Новый год и т.д., выдаются по запросу в техподдержку либо по промокоду. <a href=https://forum.vn.ua/showthread.php?p=3271959#post3271959>1×slot рабочее зеркало</a> 1×slot зеркало рабочее этих способов предполагает регистрацию Новые клиенты онлайн-казино без первого депо все проверить свою удачливость. К тому же есть вероятность преобразовать бездепы в настоящие средства за регистрацию в казино, впрочем достичь бонус необходимо отыграть согласно условиям промоакции.Законодательство, регулирующее азартные забавы в разных государствах, влияние на возможности операторов. В итоге юзеры из отдельных регионов сталкиваются с лимитированиями со стороны казино. Это может быть как глубокий отказ в доступе, например и невозможность загружать игры отдельных изготовителей. <a href=https://malaysia-forex.com/members/138215-DoctorLazutaMi>https://malaysia-forex.com/members/138215-DoctorLazutaMi</a> С иной стороны, намного легче забрать бездепозитные фриспины за регистрацию в казино и напрямик данный начать вертеть барабаны в наилучших слотах. Главная необыкновенность спинов сомнений, что они предусмотрены для топовых автоматов. Удастся не только пройти вспомогательные раунды, но и увеличить необходимую выигрыша, заработать респины и внутриигровые презенты.Для такого, дабы отыграть необходимую вашего бездепозитного приза надо(надобно) выполнить обстоятельства вейджера. Очень нередко фриспины даются на определенные слоты (book of ra, book of lifeless, book of sun), выбирайте разъем себе по душе, они все очень очень и высококачественные. Бездепозитные бонус возможность быть валютным например и вид фриспинов на слоты 1×слот регистрация в 1×slots casino Так что можете отважно региться без всяких размышлений. Фортуна сегодня наверняка на вашей стороне. Не побаивайтесь, как последствие какого либо ущерба Вам совершенно не грозит. С такими призами как без пополнения, Вы остаетесь только в плюсе, но не как не в минусе.Но на некоторых азартных платформах похожие вознаграждения имеют получить теперь зарегистрированные пользователи. В таком случае, призы предоставляются в рамках уникальных промоакций либо же некоторым игрокам вид акционного предложения, коие приходит на почту с целью «возвратить» игрока в свое казино.
1хслотс регистрация в 1×slots casino
Подарки на определенные даты выделяются условиями получения. Если одобрение начисляют игроку на день рождения, то сумма обычно находится от общего объема депо за год.Большинство клубов завлекают внимание игроков за счёт разнообразных презентов. На одних сайтах возможно получить виртуальные кредиты, которые откроют доступ ко всему софту. На иных же, администрация предлагает бесплатные вращения для запуска лучших интернет слотов. Несмотря на различные промоакции, стоит выделить самые основные. Выбирая безвозмездный приз, пристально изучайте управляла. Убедитесь, что вас возможно себя роль в промоакции. Уточните, в каких играх возможно выполнять условия вейджера. При надобности задавайте вопросы представителям саппорта. <a href=http://greenlabltd.ru/bitrix/redirect.php?goto=http://joystore.ru/bitrix/redirect.php?goto=http://geokniga.org/ext_link?url=https://teletype.in/@urist555/Kld196ws7Ia>http://greenlabltd.ru/bitrix/redirect.php?goto=http://joystore.ru/bitrix/redirect.php?goto=http://geokniga.org/ext_link?url=https://teletype.in/@urist555/Kld196ws7Ia</a> Представленные на этой странице превосходнейшие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные обстоятельства. После кропотливого анализа редакция портала составила рейтинг спецпредложений, каком гости Casino.ru все сортировать список по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д. 1×slots официальный регистрация
1х слотс зеркало регистрация в 1×slots casino
Такие одобрения позволяют даром протестировать свежее казино, разобраться с игровым процессом интернет слотов, заработать и вывести маленькую необходимую средств.Суммы похожих предложений, как правило, колеблются от 3-х до 20 долларов, а вейджер на эти средства должен сочинять от тридцати до шестидесяти один. Зачастую, величайшая сумма выигрыша здесь составит от одной до двух сотен долларов. Если игрок выиграет больше, то все свои имеют быть списанными до максимально разрешенного выигрыша. Здесь замечена содержание выводить еще несуществующие деньги на собственную платежную систему и дальше находить заведение с благоприятными под данную сумму релоадом либо бонусом за первое пополнение счета. Есть несколько подвидов бездепозитного гонорары, предлагаемого великим числом заведений. <a href=https://adminclub.org/showthread.php?tid=60108>1хслотс регистрация в 1×slots casino</a> В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с бесплатных вращений. Прибыль, коию Вы заработаете на таком бездепе возможно назначать на вывод без какого или отыгрыша.Можно ли в одном интернет казино получить больше одного бонуса за регистрацию? Нет, например как в любом интернет казино есть верховодила, к которым надо(надобно) придерживаться, не делать два аккаута для получения бонусов, иначе будет блокировка обоих аккаутов, не пытайтесь обмануть онлайн казино, приз за регистрацию выдаеться один один 1 лицу. 1×slots рабочее зеркало на сегодня <a href=http://bbs.all4seiya.net/home.php?mod=space&uid=938596>http://bbs.all4seiya.net/home.php?mod=space&uid=938596</a> Каждый из бездепозитных призов без пополнения 2022 содержит свой определенный вейджер для отыгрыша, так же в каждом казино он уточняется персонально — где то он х55 а где-то х30, повторюсь всюду по различному!
1×slots официальный регистрация
Как и промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения являются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает свежих гостей и позволяет им составить впечатление о функционале, не рискуя вескими совокупностями. При помощи такового поощрения оператор может также привлекать клиентов, которые раньше проявляли активность на веб-сайте, но по некий причине прекратили выступать. В этом случае промокод высылается пользователю по электрической почте или повторяющий SMS. <a href=https://cse.google.it/url?q=https://doctorlazuta.by/>https://cse.google.it/url?q=https://doctorlazuta.by/</a> В списке требований к отыгрышу часто наличествуют лимиты на ставки при забаве на личные средства. Так, если отыграть надо(надобно) 30 000 рублей, а предельная сумма ограничена 30 рублями, то вертеть барабаны светит 1000 один. Эта особенность затрудняет соблюдение игроками условий по срокам деянья промоакции.Далее потребуется отыграть вагер и вывести выигрыш. Игрокам без навыка крупно подфартило, они могут получить десятки презентов за 1 регистрацию. Если не сумели получить Бездепозитный бонус, не беспокойтесь. Обратитесь в интернет чат, оператор поможет ситуацию. 1×slots зеркало рабочее на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=https://uyghuryol.com/forum/viewtopic.php?f=8&t=236527>1×slot рабочее зеркало</a>
<a href=http://naturetour.ru/communication/forum/messages/forum3/message23705/5404–1khslots-ofitsialnyy-sayt-zerkalo?sessid=be3be49858967da7a3dd7cd99668074c&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1хслотс официальный сайт зеркало</a>
<a href=http://aficionado.pl/showthread.php?119156–1×slots-casino-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5&p=137299>1×slots casino зеркало рабочее</a>
<a href=https://melhorlance.com.br/minha-conta/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вы наверняка, как и все предпочитаете получать презенты и бездепозитные бонусы казино. Игорные жилища брали в привычку одаривать гэмблеров приятными бонусами. Стать обладателем приветственного подарка возможно за творение профиля либо пополнение счёта. Второй вариант более интересный, как клубы готовы удвоить депозит! Но если вы новичок и лишь знакомитесь с миром пыла, другого, как пользуйтесь бонусом за регистрацию. Бездепы имеют входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой или баллами.
#9511 Danielquornhttps://cannabis.net/user/158647
“You get some of me but not tomorrow as they want me in as soon as I can make it happen. This is the one time when they say jump and I ask how high due the financial gains the company could benefit from and it being important enough for the client to appear in person.”
“Well I get an extra night of you at least! I wonder what we could do with that? Meantime, what about food? I am starving and delicious as it was a second breakfast is not quite enough to replenish me!”
“Well get something on and we’ll sort that out first.”
We drove into town and decided that a daytime visit to Charlie’s was going to be the answer. I parked in the bar lot and Elise dashed in to change into something more appropriate, jeans and a t-shirt along with her biker jacket but keeping her Converses on.
Walking down to the restaurant was different from the middle of the night visits as the streets were bustling and all of the shops and outlets were open.
Reaching Charlie’s we entered the front door and sat in a booth near the window. A beautiful young American Chinese girl came,smiled and said hello to Elise and gave us menus and asked if we wanted drinks in the meantime.
„No thanks Lin just a pot of Jasmine tea for us please.“ Lin went back to the kitchen area. “No booze for me today as I will have to work in the bar so it is just tea for me.”
Not in a drinking mood either, I agreed with her."
https://www.dnnsoftware.com/…erid/3203999 https://cannabis.net/user/155029 https://okwave.jp/…3120776.html https://onedio.ru/…e/dsav-195-2 https://www.dnnsoftware.com/…erid/3202190
#9512 Charlesgunnyhttp://filmkachat.ru
1× slots регистрация в 1×slots casino
Бонусные деньги – небольшая сумма средств для старта в новеньком казино. На бонусные средства, обычно разрешается играть во все игры, считая слотов с прогрессивным джекпотом и игр из раздела exist casino. <a href=http://filmkachat.ru/>рабочее зеркало 1×slots</a> При получении бездепа, уточняйте время, которое дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие возможно предназначить игре в казино.Приветственный бездеп предоставляется хоть игроку только один один. Казино сражаются с так нарекаемыми бонусхантерами (от англ. Bonus Hunter — охотник за призами), пытающимися заводить многочисленные аккаунты для обмана оператора и повторного получения презента. Исключить сходственные деянья позволяет верификация данных. Администрация вправе потребовать у посетителя подтвердить индивидуальные данные, обозначенные при регистрации. <a href=http://barungogi.com/bbs/board.php?bo_table=free&wr_id=57718>http://barungogi.com/bbs/board.php?bo_table=free&wr_id=57718</a> 1хслотс зеркало на сегодня <a href=https://software-testing.ru/forum/index.php?/user/85759-aerodar2205/>https://software-testing.ru/forum/index.php?/user/85759-aerodar2205/</a> Когда речь о получении бездепозитных призов в казино, для внимание на последующие условия:Промообъявления от казино не дают реальной картины и направлены на привлечение внимания пользователей. Понять, как высоки шансы остаться в плюсе, позволит собственный тест условий предложения:
1×slots официальный сайт скачать
Более солидные предложения встречаются довольно изредка. Зачастую они доступны только VIP-игрокам. В остальных случаях им всего сопутствуют очень строгие обстоятельства отыгрыша. Также вероятны дополнительные обстоятельства прочие лимитирования, прописанные в условиях и положения бонусной программы казино. 1×slots casino регистрация Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=https://21micro-grid.com/space-uid-32296.html>https://21micro-grid.com/space-uid-32296.html</a> Выиграть настоящие средства в казино не пополняя счет – сложно, хотя возможно. Главное задаться целью и не нарушатьправила заведения. Выберите несколько казино с бездепзитными призами и начните играть на бонусные средства. По статистике в одном из 10-ти заведений можно заработать небольшую необходимую средств за счет бонусных средств. 1×slots мобильная версия войти казино Нельзя осматривать игру на средства, как вариант заработка. Азартные забавы запрещены для лиц младше 18 лет. Topcasinobonuses.mobi не зачинщиком азартных игр. Сайт одевает информационный нрав.
рабочее зеркало 1хслотс
В любом казино с бездепозитным бонусом предусмотрены вейджеровые обстоятельства. Это единственный «подводный камень», который стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) устроить определённое количество ставок. Чем круче приз, что, этим сложнее выполнить обстоятельства, и наоборот. <a href=https://casperforum.org/user/walterrex/?um_action=edit>https://casperforum.org/user/walterrex/?um_action=edit</a> зеркала 1×slots
1хслотс регистрация в 1×slots casino
Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют важную информацию о not the slightest deposit bonuses и предложениях.Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке нужно восполнить счет в казино. Для депозитных призов, данная процедура не необходима, так как депо уже изготовлен. <a href=https://forum.bandariklan.com/showthread.php?tid=375271>казино 1×slots</a> Заполняя данные в личном профиле, указывайте только достоверную информацию, так как Вам понадобиться ее подтвердить в при выводе средств. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=http://troderstro.ru/user/JeffreyEtene/>http://troderstro.ru/user/JeffreyEtene/</a> Бездепозитные призы – это самая небезинтересная и более перспективная промоакция интернет-казино. Они и какого-либо фри-спинов, поэтому что выплаты в безвозмездных вращениях не гарантированы, ведь комбинации на барабанах игрового аппарата все не сложиться.
казино 1×slots официальный сайт
Подтверждение электронной почты – одно из главных условий, которое есть почти в каждом бездепозитном казино. Чтобы верифицировать электрическую почту, довольно перебежать по активной ссылке в послании, приобретенном от азартного клуба.Только выполнив все обстоятельства отыгрыша и дождавшись окончания проверки аккаунта, Вы можете оформить заявку на вывод средств и получить средства деньги. <a href=http://getamped.yxhi.com/doku.php?id=Выкуп_авто>http://getamped.yxhi.com/doku.php?id=Выкуп_авто</a> Но рядах азартных платформах подобные вознаграждения могут получить теперь зарегистрированные юзеры. В этом случае, бонусы предоставляются масштабах уникальных промоакций или же некоторым игрокам вид акционного предложения, которое приходит на почту с целью «возвратить» игрока в свое казино. 1× slots регистрация в 1×slots casino Доступ к дару возможность открываться механически последствии введения промокода либо воззвания в службу сайта. В первом случае от юзера не требуется никаких поступков. Бездеп с активацией по коду встречается почаще всего. Игроку нужно ввести совокупность знаков в графе, кот-ая может пребывать в регистрационной форме в Личном офисе.В качестве бонусов интернет казино нередко предлагает выдачу фриспинов, другими безвозмездных вращений игрового барабана. Виртуальные монеты можно применять для обучения в покерной школе либо для игры в казино.
<b>Смотреть еще похожие новости:</b>
<a href=https://clubdefansde24.com/foro/viewtopic.php?p=57750#p57750>1хслот 1хслотс регистрация перейти на 1×slots</a>
<a href=https://smm-seo.ru/threads/1×slots-registracija-na-1×slots.38553/>1×slots регистрация на 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Иногда операторы требуют внесение малого депозита перед выводом для верификации платежного прибора. В неких казино этот депозит также светит отыграть.
#9513 Charlesgunnyhttp://filmkachat.ru
1×slots казино зеркало
Так что можете храбро региться без всяких размышлений. Фортуна сейчас точно на вашей стороне. Не страшитесь, так последствие какого либо ущерба Вам абсолютно не угрожает. С такими призами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе. <a href=http://filmkachat.ru/>онлайн казино 1×slots</a> <a href=http://dev.may-green.ru/forum/user/16205/>http://dev.may-green.ru/forum/user/16205/</a> Подобные призы без депо предоставляются на больше выгодных критериях. Зачастую они покрупнее, а условия отыгрыша менее строгие.Когда речь идет о денежных призах, казино всегда устанавливают обстоятельства вейджера, коие нужно выполнить, чтобы исключить выигрыш. 1хслотс казино зеркало <a href=http://forum.gokturkvirtual.com/uye-raymondcof.html>http://forum.gokturkvirtual.com/uye-raymondcof.html</a> Акционные предложения от казино существуют в различных форматах. Часто призы даются в мена на депозит. Игрок вносит платеж и получает средства, благотворительные вращения прочие поощрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — картина бонуса, кот-ый гарантирован за исполнение конкретных деяний на сайте:Раздача призов возможность быть приурочена к различным датам: календарные праздники, деньки рождения игроков, юбилей открытия казино и т. Д. Подарок выдается в виде денег, фриспинов либо баллов для скопления и обмена на предложения оператора. Если пользователь получает выигрыш, деньги начисляются на его счет. Для вывода этой суммы понадобиться выполнить ряд требований.
1×slots зеркало подтвердит вашу регистрацию если говорить
Онлайн гемблинг развивается с любым днем все больше и больше, свежие бренды создаются не по дням а по часам. Новые онлайн казино проделывают вступительные акции для игроков, чтобы, чтобы что бы зарекомендовать себя, и что, этим самым предлагают бездепозитные призы за регистрацию, собственно бы не пропустить такую возможность — как воспользоваться свежим бездепом, рекомендуем навещать наш сайт как можно чаще, самое аппетитное и новые несомненно добавляться в данном же перечне.Бонусы без депозита при регистрации считаются самыми привлекательными как для опытнейших игроков, например для и начинающих. Получив такое вознаграждение, клиент имеет выступать на настоящие средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные призы в интернет-казино Рунета, еще условия их активации и выигрыша. 1×slots зеркало регистрация то дальше необходимо пройти Рассмотрим принцип его деянья на примере. Допустим, вы зарегистрировались и возымели $10 no down payment bonus с вейджером х50. Это значит, собственно выигранные деньги возможно несомненно выводить не ранее, чем в того, как общая сумма ставок достигнет $500.Фриспины — бесплатные вращения, коие позволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины числятся наиболее популярным и преимущественным обликом приза — безвозмездные вращения иногда эффективнее и веселее в отыгрыше, чем другие облики бездепов. <a href=https://nrns-games.com/index.php?action=profile;u=40959>https://nrns-games.com/index.php?action=profile;u=40959</a> 1хслотс официальный сайт зеркало В зависимости от онлайн заведения любой из их имеет для предложить как бездепозитные средства, так и бездепозитные фриспины, которые в успешной регистрации упадут для на ваш игровой баланс.
1×slots регистрация
Частенько новенькие не разумеют, как активировать подарки или вывести первый выигрыш. Для подобных случаев наша команда описала главные определения – что это фриспины, вейджер, как его отыграть, для нужно протекать верификацию. <a href=https://maps.google.bj/url?q=https://doctorlazuta.by/>https://maps.google.bj/url?q=https://doctorlazuta.by/</a> 1×slots зеркало регистрация Бездепозитный приз за регистрацию в казино — это стартовый презент в виде валютного начисления или даровых вращений для новых игроков заведения, для получения которого не заносить депо.Но ни не запамятовывайте внимательно читать верховодила роли в бонусных промоакциях. Если вы нарушите но бы одно условие, позднее вы не сможете устроить недоразумение с администрацией.
1×slots регистрация на 1хслотс
Так собственно приготовьтесь дать конфиденциальную информацию (пол, возраст, государство проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает не более суток, в чего удастся беспрепятственно выводить крупные выигрыши.Теоретически, к бесплатным бонусам можно отнести например именуемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти акции в отдельную категорию, потому собственно они предоставляют только возможность создавать ставки. Для получения депозитного бонуса необходимо пополнить собственный игровой баланс реальными деньгами. Вознаграждение возможно получить либо при внесении первого депозита, либо вид фиксированного процента от внесённых средств. Так либо другому, бонус поступит на счёт лишь после пополнения.Исходя из этого, просто не присутствует осмысленных причин махнуть рукой на получение такового приза при регистрации. И, кстати, на подобный бесплатной основе у вас все шансы выиграть средства и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные бонусы, именуют безвозмездными онлайн платформами для игр. 1×slots casino регистрация 1×slotscasino09k online <a href=http://advanced-retail.a2hosted.com/doku.php?id=Прием_платежей_для_онлайн-казино>http://advanced-retail.a2hosted.com/doku.php?id=Прием_платежей_для_онлайн-казино</a> Высокая конкуренция в разделе азартных игр мотивирует операторов привлекать посетителей разнородными промоакциями. Благодаря этому у посетителей бывает возможность получить призы в казино за регистрацию без депо. Воспользоваться таким предложением возможно, избегая процедуру внесения средств на игровой счет, просто активировав аккаунт на веб-сайте. Наш гид по бездепам поможет избрать самую привлекательную бонусную программу, разузнать правила получения такого вознаграждения и воспользоваться им с максимальной выгодой.Это тоже безвозмездные финансы, которые поступают на аккаунты новоиспеченных компьютерные последствии регистрирования. А особенность этих призов состоит что, нет, собственно обретенные деньги обязательно идет использовать в продолжении назначенного медли.
1×slots мобильная версия войти казино
На бонусные начисления имеют быть установлены вспомогательные ограничения, которые Вы не приняли при отыгрыше. Пока бонус всецело не отыгран — деньги из казино не выводятся. <a href=http://lineyka.org/user/CharlesInori/>http://lineyka.org/user/CharlesInori/</a> Бонусы без депозита при регистрации считаются самыми привлекательными как для опытнейших игроков, например для и начинающих. Получив такое вознаграждение, клиент имеет выступать на настоящие средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные призы в интернет-казино Рунета, еще условия их активации и выигрыша.Для проверки применяются сканы паспортов, водительских прав, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если юзер замечен в попытке завести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их владелец попадает в темный список. При ирге на лицензионной площадке не стоит опасаться указывать достоверную персональную информацию (шифрование ликвидирует утечку персональных данных). 1×slots регистрация 1×slotscasino 56 online Некоторые казино могут предлагать посетителям бездепы за свидетельство номера или почты или репост на страничку в социальных сетях.Некоторые онлайн-казино без депо предлагают новым посетителям выбрать приз при регистрации. Будьте внимательны: выбрав один, вы в безоговорочном большинстве случаев не можете воспользоваться остальными.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.mshowto.org/forum/members/jamespauri.html>1 x slots casino</a>
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=515279>1хслот 1хслотс регистрация перейти на 1×slots</a>
<a href=http://forum.survival-readiness.com/viewtopic.php?t=248242>1×slots сайт</a>
<a href=http://www.forum.kalor.ru/member/zaellayanextz8130/>1×slot регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Oтыгpaть приз с обозначенным вeйджepом, достичь нужно сдeлaть cтaвoк нa cумму, превосходящую размер приза в некоторое один.
#9514 Charlesgunnyhttp://filmkachat.ru
рабочее зеркало 1×slots
При отыгрыше бездепов, учитывайте временные ограничения. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток. <a href=http://filmkachat.ru/>1×slots казино зеркало</a> В интернет-сети всегда можно отыскать перечни наиболее известных и обещанных поощрительных программ от знаменитых онлайн-казино.Сразу после активации промокода можно пользоваться презентом. Как уже упоминалось, бонусы посещают трёх видов – фриспины, кредиты и фриплей-бонусы. <a href=http://camillacastro.us/forums/viewtopic.php?pid=515592#p515592>http://camillacastro.us/forums/viewtopic.php?pid=515592#p515592</a> Можно ли в одном интернет казино получить больше одного бонуса за регистрацию? Нет, например как в любом интернет казино есть правила, к коим надо(надобно) придерживаться, не делать два аккаута для получения призов, по будет блокировка обоих аккаутов, не пытайтесь обмануть интернет казино, бонус за регистрацию выдаеться раз раз 1 лицу. 1×slots коды <a href=https://maps.google.co.mz/url?q=https://doctorlazuta.by/>https://maps.google.co.mz/url?q=https://doctorlazuta.by/</a> В зависимости от интернет заведения любой из них имеет вас предложить как бездепозитные средства, например и бездепозитные фриспины, коие после успешной регистрации рухнут вас на ваш игровой баланс.
1×slots быструю регистрацию а также мгновенное
Благодаря программке лояльности от игорного заведения, возможно арестовать превосходный старт и без дополнительных инвестициям запустить видеослоты. Кроме такого, возможно рассчитывать на реальную удачу и получить, без вложения личных финансов, большой выигрыш. 1×slots бонус за регистрацию Бонусы без депозита при регистрации считаются наиболее привлекательными как для опытнейших игроков, например для и новичков. Получив такое вознаграждение, заказчик имеет выступать на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные призы в интернет-казино Рунета, еще условия их активации и выигрыша. <a href=http://kyevlyn.ukrbb.net/viewtopic.php?f=4&t=5532>http://kyevlyn.ukrbb.net/viewtopic.php?f=4&t=5532</a> 1×slots официальный сайт скачать на айфон Доступ к подарку возможность открываться механически в введения промокода либо обращения в службу поддержки сайта. В первом случае от юзера не требуется практически действий. Бездеп с активацией по коду встречается чаще всего. Игроку необходимо ввести совокупность знаков в графе, кот-ая возможность пребывать в регистрационной форме в Личном кабинете.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Пoдтвepдить личнocть клиента. Для успешного вывода средств, нужно доказать личность клиента. Нa этaпe вepификaции пpoфиля, работники службы защищенности должны убедиться, что у игрока всего лишь один акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не может исключить свой выигрыш, в у него несомненно некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы. <a href=https://zarabotokdeneg.webtalk.ru/viewtopic.php?id=1342&p=2#p54741>https://zarabotokdeneg.webtalk.ru/viewtopic.php?id=1342&p=2#p54741</a> Перечисленные повыше главные характеристики сопровождают практически любой бонус и являются стандартными для бездепозитных бонусных начислений в казино.Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и более. Когда игроку полагается большое фриспинов, администрация может бить3 их начисление на некоторое дней. Бесплатные вращения предоставляются для определенного слота, кот-ый указывается в правилах акции. 1×slots промокод при регистрации 2025 Фриспины — благотворительные вращения, коие дозволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся наиболее модным и предпочтительным видом приза — благотворительные вращения порой эффективнее и веселее в отыгрыше, чем другие виды бездепов.
1×slots регистрация 1×slots casino c2d ru
<a href=https://test.soclanovtsy.ru/topic/5306-%D0%BA%D0%B0%D0%BA-%D1%81%D0%BE%D0%B7%D0%B4%D0%B0%D1%82%D1%8C-%D0%BD%D0%BE%D0%B2%D1%83%D1%8E-%D1%82%D0%B5%D0%BC%D1%83-%D0%B2-testsoclanovtsyru/page/119/#comment-40728>скачать 1×slots официальный сайт</a> Объективные – объем бонуса, коэффициент и обстоятельства вейджера, необходимость внесения депо для вывода средств;Любой выигрыш по ставке выше установленного лимита будет являться недействительным. То есть ставка не несомненно засчитана при отыгрыше, а случае выигрыша его сумма не поступит на счёт клиента — результат игры несомненно полностью аннулирован. 1хслотс зеркало <a href=https://sultantheme.com/vb4forum/member.php?13353-OscarVom>https://sultantheme.com/vb4forum/member.php?13353-OscarVom</a>
казино 1× slots официальный сайт
С этими ординарными советами каждое казино с призом за регистрацию способно принести в разы больше выгоды и полезности. <a href=http://elka54.ru/forum/?PAGE_NAME=profile_view&UID=109670>http://elka54.ru/forum/?PAGE_NAME=profile_view&UID=109670</a> Минимального оборота. Этот лимит устанавливается вейджером — же игрок не сыграет на установленную необходимую, вывод средств будет недоступен. 1×slots официальный зеркало Если при регистрации указать промокод, можно гарантировано получить приз. Где брать ваучер? Посетите направленные блоги или форумы. Иногда администрация клуба проделывает рассылку ваучеров на электронную почту. В последнее время игорные жилища начали рекламироваться в кинокартинах и телесериалах. Присмотритесь и наверняка заметите промокод, который принесёт 500 или 1 000 бонусных рублей.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.fromrus.su/index.php?/topic/20463-%D0%B7%D0%B5%D1%80%D0%BA%D0%BB%D0%BE-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-1×slots/>зеркло казино 1×slots</a>
<a href=https://bans.org.ua/index.php?topic=119146.new#new>1хслот официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Изучить верховодила и условия получения бездепозитных призов казино, Вы сможете у нас на сайте в разделе с бонусами либо на официальном сайте выбранного Вами казино. Если не можете отыскать необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал либо по электрической почте.
#9515 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало
Такие одобрения разрешают бесплатно протестировать свежее казино, разобраться с игровым ходом интернет слотов, заработать и вывести небольшую необходимую средств.Если площадка презентует бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь ввести аккаунт на сайте и активировать его, подтвердив адрес электрической почты, номер аппарата либо иные данные, коие требует оператор. Перед этим нужно увериться, собственно юзер располагается на официальном сайте казино, не на мошеннической площадке. <a href=http://filmkachat.ru/>1×slots регистрация</a> В некоторых интернет казино для получения бездепозитных призов не довольно просто зарегистрироваться на веб-сайте клуба и доказать свои контактные данные. Дополнительно требуется активация промокода.У нас на веб-сайте Вы найдете перечень бонусов без депозита в проверенных казино и доскональную информацию то как их получить и применять. <a href=http://c909201u.beget.tech/user/DavidEnant/>http://c909201u.beget.tech/user/DavidEnant/</a> Фриспины – бесплатные вращения с фиксированной ставкой, которые можно использовать в конкретных игровых автоматах.При отыгрыше бонусных средств, необходимо учесть срок деянья приза и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный бонус несомненно аннулирован. казино 1× slots официальный сайт <a href=http://dominofwk.ru/bitrix/rk.php?goto=http://ngcn.dev.nologostudio.ru/bitrix/redirect.php?goto=http://vanes.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/93qrpvCaFSY>http://dominofwk.ru/bitrix/rk.php?goto=http://ngcn.dev.nologostudio.ru/bitrix/redirect.php?goto=http://vanes.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/93qrpvCaFSY</a> Таким образом онлайн казино получает потенциального игрока. Возможно в будущем либо настоящем он захочет сыграть на средства средства. Так трудятся бездепозитные призы в онлайн казино. Здесь очень подходит выражение, бесплатные сыр посещает лишь в мышеловке. Начинающие игроки имеют не осознавать опасность азарта. Однако со временем осознания становится больше. Это тема для отдельного обсуждения.3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефон или почту, показать персональную информацию;
казино 1×slots официальный сайт
<a href=http://216.38.0.7/viewtopic.php?f=12&t=141824>1хслотс зеркало на сегодня</a> 1×slots регистрация 1×slotscasino 56 online <a href=http://php-s.ru/photogallery/Coppermine/demo/profile.php?uid=138959>http://php-s.ru/photogallery/Coppermine/demo/profile.php?uid=138959</a> 1хслот 1хслотс регистрация перейти на 1×slots Вы не в коем случае ни же рискуете, а только выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс изучить игровые автоматы, выучится регулировать менять ставки и линии, исследовать бонусные игры и их выигрышные композиции, ну в просто зарядится кучей впечатлений! Ведь вы будите выступать на бонусные средства, которые возможно отыграть и вывести, но просто на демо счет, тем самым адреналин в крови еще повысится а пульс забьется с нередким ритмом!
казино 1×slots официальный сайт
Акционные предложения от казино существуют в различных форматах. Часто бонусы даются в обмен на депо. Игрок заносит платеж и получает деньги, бесплатные вращения и другие одобрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — картина приза, кот-ый гарантирован за исполненье конкретных деяний на сайте: Условия вывода выигрыша. В неких заведениях для удачного вывода с бездепозитного бонуса достаточно пополнения баланса и подтверждения личности. В других же клубах, нужно количество раз прокрутить собственный депо. <a href=https://www.neobienetre.fr/forum-bien-etre-medecines-douces-developpement-personnel/topic/%d0%b3%d0%bb%d0%b0%d0%b2%d0%bd%d0%b0%d1%8f-%d0%b4%d0%be%d1%80%d0%be%d0%b3%d0%b0-%d0%b0%d0%b2%d1%82%d0%be%d1%88%d0%ba%d0%be%d0%bb%d0%b0-%d0%b2%d0%bb%d0%b0%d0%b4%d0%b8%d0%b2%d0%be%d1%81%d1%82%d0%be/#postid-163855>https://www.neobienetre.fr/forum-bien-etre-medecines-douces-developpement-personnel/topic/%d0%b3%d0%bb%d0%b0%d0%b2%d0%bd%d0%b0%d1%8f-%d0%b4%d0%be%d1%80%d0%be%d0%b3%d0%b0-%d0%b0%d0%b2%d1%82%d0%be%d1%88%d0%ba%d0%be%d0%bb%d0%b0-%d0%b2%d0%bb%d0%b0%d0%b4%d0%b8%d0%b2%d0%be%d1%81%d1%82%d0%be/#postid-163855</a> Так же стоит выделить то, собственно в каждом онлайн казино установлен свой наибольший кешаут на бездепозитный приз. Как управляло кешаут — это максимальная сумма средств, кот-ая доступная для вывода с бездепозитного бонуса. 1×slots актуальное зеркало Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации приза без депо. Внимательно прочитайте до конца. Многие новички делают ошибки на шаге регистрации и потому не могут получить презент.С другой стороны, гораздо легче забрать бездепозитные фриспины за регистрацию в казино и напрямик данный начать вращать барабаны в наихороших слотах. Главная необыкновенность спинов что, нет, что они предусмотрены для топовых автоматов. Удастся не только пройти вспомогательные раунды, но и увеличить сумму выигрыша, заработать респины прочие внутриигровые презенты.
1×slots casino online регистрация
Возьми свой подарок. Чаще всего бонус активируется незамедлительно в регистрации. Но бывают ситуации, когда нужно забежать в личный кабинет либо написать в справочную службу.Вейджер (или вагер) ? это наименьшая сумма ставок, которую нужно устроить для вывода денежного бонуса. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим красивее спецпредложение. Варианты выигрыша находятся от Вашей удачи и критерий игорного портала. Выше мы заявили, собственно кое-какие бездепозитные бонусы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются и, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая вероятность современных игр на деньги, возможно выиграть невозможные суммы. Сегодняшние игровые автоматы или видео слоты, как их нарекают. Могут выдавать крупные умножение от х1.000 и повыше. Некоторые умножают ставку от х100.000.Начнём с как, собственно любое промо за регистрацию подразумевает некоторые обстоятельства. Бездепозитные бонусы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность денежного оборота, необходимая для исполнения условий. Пример, получили благотворительные вращения и выиграли с их 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 руб., проигрышных либо выигрышных, так. После исполнения, бонусный баланс перейдёт на реальный и станет доступным к выводу. казино 1×slots официальный сайт <a href=https://www.nederpix.nl/profile.php?mode=viewprofile&u=73584>https://www.nederpix.nl/profile.php?mode=viewprofile&u=73584</a>
1×slots регистрацию процедура займет всего лишь
Бездепозитные бонусы казино за регистрацию в 2022 году — это возможность сыграть за счёт заведения. Казино даёт клиенту шанс воспользоваться определённой суммой или числом бесплатных вращений без внесения депозита. Не путайте деморежим с реальной игрой без необходимости внесения депо. <a href=http://www.changye.com.cn/bbs/home.php?mod=space&uid=139862>http://www.changye.com.cn/bbs/home.php?mod=space&uid=139862</a> На данном разделе портала периодически публикуются обзорные заметки, в рассматриваются безвозмездные бонусы лучших интернет-казино. Информация структурирована по нескольким пт, включая главные:Заполняя данные в личном профиле, указывайте только достоверную информацию, так как Вам придется ее доказать дальнейшем при выводе средств. 1 x slots Иногда виде бездепа, казино презентует минимальный приз (до 50 руб. ), ради которого не стоит заморачиваться.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.makinamania.net/index.php?topic=250763.new#new>1хслот скачать</a>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=249684>x1 slots регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Стоит отметить, собственно бездепозитный бонус выдается только совершеннолетним новичкам, которые, же, могут пригласить личных приятелей и знакомых, кроме претендующих на поощрительную программу лояльности. Подобная разработка появилась среди соперничающих онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры способствуют увеличению своей популярности, методом привлечения новых игроков. Бонусы – это оригинальный шанс для потенциальных участников игры, коие все опробовать софт покер рума и увериться, станут ли они в него выступать или нет. Новый игрок испробует свои силы с реальными оппонентами в казино.
#9516 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее на сегодня
Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро либо 20 долларов. Если выдаются фриспины, их количество изредка превышает нескольких десятков безвозмездных вращений.Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, дабы еще раз получить безвозмездный бонус. Игорные заведения нетерпимы к бонус-хантерам, потому вас ожидает неминуемое наказание. <a href=http://filmkachat.ru/>casino 1×slot</a> Пoдтвepдить личнocть посетителя. Для удачного вывода средств, необходимо подтвердить личность клиента. Нa этaпe вepификaции пpoфиля, работники службы защищенности должны убедиться, собственно у игрока не раз акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не может исключить свой выигрыш, в у него несомненно количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы. <a href=https://kr-osvita.gov.ua/user/Jamesral/>https://kr-osvita.gov.ua/user/Jamesral/</a> 1×slot официальный сайт <a href=http://istinastroitelstva.xyz/index.php?subaction=userinfo&user=purplehijacker7>http://istinastroitelstva.xyz/index.php?subaction=userinfo&user=purplehijacker7</a> Вейджер в переводе с британского значит «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша приобретенного бонуса, в нашем случае бездепозитного. Число ставок имеет — принципиально лишь набрать необходимую, пропорциональную сумме поощрения.
1×slots официальный сайт, скачать
Но не размышлять, собственно снабжая юзеров такими призами, казино увлекается спонсированием. Ведь объемы вознаграждений, в, не великие (средним объемом от 5 до 20 $). И на эти свои налагаются конкретные обстоятельства и лимитирования, обязательные к исполненью игрока, если в последствии он желает получить все средства выигранные финансы.Исходя из сего, просто не существует осмысленных оснований махнуть рукою на получение такого бонуса при регистрации. И, кстати, на подобный бесплатной основе у вас есть шансы выиграть средства и обрести определенную дозу адреналина. И заведения, выдающие бездепозитные бонусы, именуют безвозмездными интернет платформами для игр. <a href=https://masstr.net/showthread.php?tid=73750>1×slots казино зеркало</a> 1 хслот регистрация в 1×slots casino <a href=http://shigebao.com.cn/home.php?mod=space&uid=1169403>http://shigebao.com.cn/home.php?mod=space&uid=1169403</a> Каждый в обязан сначала отчетливо выучить условия по получению и отыгрышу приглянувшегося дара. Если всё устраивает, поспешите забрать бесплатные спины за регистрацию в казино без депозита с выводом и без отыгрыша и напрямик сейчас начать вертеть барабаны лучших слотов.Когда речь о денежных призах, казино постоянно устанавливают обстоятельства вейджера, которые нужно выполнить, чтобы вывести выигрыш. 1хслотс казино зеркало
1×slots зеркало регистрация
Вы не в коем случае ни не рискуете, а лишь выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической забавы на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, научится регулировать изменять ставки и линии, изучать бонусные забавы и их выигрышные комбинации, да счете просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные средства, коие можно отыграть и вывести, а не просто на демо счет, тем самым адреналин в крови еще больше повысится а пульс забьется с нередким ритмом!Некоторые сайты, этого чем обмануть регистрацию игроков, предлагают ответить на несколько базовых вопросов. Цель проведения сходственной викторины – выявить случайных людей, коие не имеют представления о покере, и не допустить получения ими бонусов. Если гость теснее играл в казино, то ответить на полтора десятка простых вопросов несомненно несложно. Очень часто, ответы возможно найти на официальных сайтах этих учреждений. Активация по промокоду используется в различных обликах бездепов. Если речь о приветственном бонусе, то набор символов возможно узнать на главной страничке, в регистрационной форме или послании, которое отправляется пользователю для подтверждения e-mail. Акции шансы проводиться вместе с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активируется разовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем актуальный код для активации в описании каждого промо. <a href=https://www.weaselmods.net/member.php?action=profile&uid=3111>https://www.weaselmods.net/member.php?action=profile&uid=3111</a> Эффективность бездепов в качестве маркетингового инструмента оценили почти операторы. Малоизвестные площадки употребляют эти промоакции, чтобы быстро набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны неизменных гостей. Не все веб-сайты, дающие презенты без депозита, рекомендованы к ирге. За симпатичным промоописанием могут скрываться неосуществимые условия отыгрыша и подводные камни. 1×slots казино зеркало Для получения бездепа необходимо пригласить в игру по реферальной ссылке свежего клиента: он должен зарегистрироваться, пройти верификацию на сайте онлайн-казино и восполнить счёт на необходимую, обозначенную в критериях промоакции.Все любят получать подарки. Согласитесь, почти каждый играющий человек будет бесконечно счастлив, случае получит даровой презент для забавы в онлайн казино просто за регистрацию или же бонус за внесенный депозит, так именуемые приветственные бонусы для свежих игроков. Соответственно такие интернет клубы будут больше известны и предпочтительны у игроков при выборе казино для забавы. Топ казино день обновляется и прибавляются новые и увлекательные игровые клубы с симпатичной бонусной политикой и всеми возможными привилегиями, к которым относятся такие призы как фриспины за регистрацию, денежные бездепозитные призы, а также щедрые призы за внесенный депозит.
1×slots зеркало регистрация то дальше необходимо пройти
Такие поощрения дозволяют даром протестировать свежее казино, разобраться с игровым процессом интернет слотов, заработать и вывести маленькую сумму денег.Подобные призы без депо предоставляются на более выгодных условиях. Зачастую они покрупнее, а обстоятельства отыгрыша менее жесткие. <a href=http://nacionrolera.org/foro/viewtopic.php?f=1210&t=127732>1×slots официальный сайт мобильная версия скачать</a> 1×slots официальный сайт скачать <a href=https://cutetusy.cc/member.php?action=profile&uid=34935>https://cutetusy.cc/member.php?action=profile&uid=34935</a>
1×slots casino регистрация 1×slots review live
Бесплатный бонус – кредиты, коие онлайн-казино начислит клиенту, не заставляя его пополнять игровой счет. <a href=https://fbi.me/index.php?title=%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%A7%D0%B8%D1%82%D0%B0%D1%82%D1%8C>https://fbi.me/index.php?title=%D0%91%D0%BB%D0%BE%D0%B3_%D0%90%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0_%D0%A7%D0%B8%D1%82%D0%B0%D1%82%D1%8C</a> Это тоже благотворительные финансы, которые поступают на аккаунты свежеиспеченных компьютерные последствии регистрирования. А особенность этих призов состоит том,, что обретенные финансы непременно следует использовать в продолжении назначенного медли.Как верховодило, новоприбывшие геймеры в первую очередь желают ознакомиться с способами ввода и вывода валютных средств и сроки выполнения поданных заказов чтобы четко осознавать, как скоро они смогут вывести собственный казино бонус за регистрацию без депозита на электрический кошелек либо же банковскую карту. К счастью для всех играющих, снутри конкретных холдингов, все казино конкурируют между собой. Ведь случае бы конкретную фирму представляло только одно онлайн-заведение, то вряд ли бы посетители увидели казино с призом за регистрацию и возможность бы рассчитывать лишь на вознаграждение повторяющий бонуса на 1-ое вложение. К каждому заведению регулярно стопам завлекать новых игроков, собственно, итоге, только на руку всем играющим. 1×slots регистрация На бонусные начисления могут быть установлены вспомогательные ограничения, которые Вы не сведению при отыгрыше. Пока бонус полностью не отыгран — деньги из казино не выводятся.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.pcmadd.com/index.php?/topic/708-sistem-dell-inspiron-530/page/6/#comment-257822>1×slots регистрация на 1хслотс</a>
<a href=http://forums.indexrise.com/user-307864.html>1 хслот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриплей-бонусы встречаются лишь в неких клубах. Они зачисляются сразу после сотворения профиля и активны недолговременное время. Если не успеете израсходовать средства, они просто сгорят. Касаемо медли, в большинстве случаев бонусы активны в течение часа. Обыкновенные бездепозитные призы в размере от 3-х до 20 долларов созданы чтобы, чтобы, чтобы в игры заходили все новые и свежие игроки. Здесь, всего, будет ограничение на наибольший выигрыш. Важно, дабы перед минимальным вкладом был отключен бонус за 1-ое пополнение счета, и игры не попадет на повторный вейджер.
#9517 Charlesgunnyhttp://filmkachat.ru
1×slot официальный сайт
Выиграть реальные средства в казино не пополняя счет – сложно, но вполне. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными бонусами и начните играть на бонусные средства. По статистике из 10-ти заведений можно заработать маленькую необходимую денег за счет бонусных средств. <a href=http://filmkachat.ru/>1×slots официальный сайт мобильная версия скачать</a> Многие азартные клубы ограничивают сумму вывода заработанную на призе. Сколько б Вы не выиграли, больше, обозначенной в описании акции, суммы Вы не можете исключить. Разница будет аннулирована, Вы даже не можете делать на нее ставки.Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям надо(надобно) отыграть вейджер х39, дабы была вероятность исключить выигрыш. <a href=http://gtamotors.ru/user/JamesBoben/>http://gtamotors.ru/user/JamesBoben/</a> Обыкновенные бездепозитные призы в объеме от 3-х до 20 $ сделаны чтобы, чтобы, чтобы в игры заходили все свежие и новые игроки. Здесь, скорее, будет ограничение на наибольший выигрыш. Важно, чтобы перед наименьшим вкладом был отключен бонус за 1-ое пополнение счета, и игрок не попадет на повторный вейджер. 1×slots казино зеркало <a href=http://julia4tied.de/member.php?action=profile&uid=123386>http://julia4tied.de/member.php?action=profile&uid=123386</a> У любого игорного заведения свои верховодила и обстоятельства. Но, дабы получить бонусы, нужно выполнить стереотипные деяния:Можно ли в одном интернет казино получить больше 1-го бонуса за регистрацию? Нет, так как в любом интернет казино есть верховодила, к которым надо(надобно) придерживаться, не творить два аккаута для получения призов, другому несомненно блокировка обоих аккаутов, не пытайтесь обмануть интернет казино, бонус за регистрацию выдаеться раз раз одному лицу.
1 xslots рабочее зеркало
<a href=http://weeklywars.de/viewtopic.php?f=12&t=9380&p=463313#p463313>1×slots casino зеркало рабочее</a> 1×slots официальный зеркало рабочее Бездепозитный приз по промо-коду несомненно доступен для игры, лишь никаких случае когда Вы активируете особый бонусный код в разделе с бонусами либо укажите промокод при регистрации на веб-сайте. В неких случаях, считая активации кода, придется доказать контактные данные игрока и заполнить анкету посетителя. <a href=https://forum.shuanghe.xyz/home.php?mod=space&uid=311663>https://forum.shuanghe.xyz/home.php?mod=space&uid=311663</a> Начнём с как, собственно каждое рекламную за регистрацию предполагает некоторые условия. Бездепозитные призы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность валютного оборота, нужная для выполнения условий. Пример, возымели бесплатные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 руб., неудачных либо выигрышных, не. После исполнения, бонусный баланс перейдёт на реальный и станет легкодоступным к выводу.Для верификации аккаунта надо(надобно) предоставить профессионалам технической помощи отсканированную копию паспорта и счета за коммунальные предложения, а также фотку банковской карты либо снимок страницы электрического кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для доказательства личности. 1×slots регистрация на официальном сайте Чтоб получить большой выигрыш, избирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, которые доступны по условиям отыгрыша.Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие возникают у начинающих.
1×slots официальный сайт зеркало рабочее
Активация происходит за промокодов, которые вводятся в личном кабинете последствии регистрации. Среди спецпредложений в перечне Casino.ru содержатся эксклюзивные промокоды, которые доступны только гостям портала. Другие способы начисления средств ? автоматическая активация сразу в творения аккаунта и получение презента по запросу в службу технической поддержки.При небольшой сумме бонуса рекомендовано играть по невысоким ставкам, а применять максимальные другого, как только что случае, случае вейджер слишком немалый, а время на отыгрыш сильно ограничено. Список например именуемых «не территорий» прилагается к правилам бонусной программы игорного портала. Обязательно проверьте, распространяются ли на вас похожие санкции.При маленькой сумме бонуса рекомендовано играть по низким ставкам, а применять наибольшие лучше лишь что, нет случае, в вейджер слишком великий, а время на отыгрыш крепко ограничено. <a href=http://forums.ghc-games.com/member.php?action=profile&uid=109684>http://forums.ghc-games.com/member.php?action=profile&uid=109684</a> Но такие рамки не смущают и хайроллеров, поскольку коэффициенты на слотах позволяют рассчитывать на крупные выигрыши, ну неких автоматах разыгрывается передовой джекпот. 1×slots зеркало регистрация то дальше необходимо пройти Бонус за регистрацию в казино без депо с выводом денег нужно отыграть. Зачастую для отыгрыша возможность потребоваться сделать ставки на необходимую, в несколько десятков раз превосходящую сумму бонуса или выигрыша.
1х слот регистрация в 1×slots casino
Размер ставки для игры по бездепозитному призу (естесственно же, когда, когда он представлен в виде бонусных денежных средств) часто ниже, чем при забаве на депо. Ограничение будет действовать до момента отыгрыша бонуса.4. Заберите презент. Чаще всего приз активизируется незамедлительно последствии регистрации. Но случаются истории, когда нужно забежать в индивидуальный кабинет либо написать в службу. Наиболее известные гонорары между гэмблеров – бездепозитные призы казино. Это не изумительно, как возможно получить благотворительные вращения либо виртуальные кредиты, и всем не придётся пополнять счёт, рисковать собственными средствами. Удастся насладиться разнородными увеселениями причем выиграть солидную сумму, избегая серьёзного риска. 1×slots подтвердит вашу регистрацию если говорить <a href=https://visualchemy.gallery/forum/profile.php?id=4467235>https://visualchemy.gallery/forum/profile.php?id=4467235</a>
1×slots casino регистрация на сайте
Осталось выбрать казино с бонусом за регистрацию и создать профиль. После активации подарка выигрыш зависимости от Фортуны и способностей. Главное превосходство спинов – вероятность выучить разные слоты. Также получится насладиться бонусными раундами, испытать фортуну в риск-туре и преумножить выигрыш за счёт особых знаков. Однако столько игровой процесс заслуживает внимание, так другого сосредоточиться на реальном выигрыше.Зачастую бездепозитные призы казино для игры предлагаются различными заведениями азартных игр виде рекламных акций или в целях привлечения к себе новых игроков. Для бездепозитных призов в казино 2022 игроку надо пополнять счет до момента вывода хотимых средств. <a href=http://metramarket.ru/bitrix/redirect.php?goto=http://teplosetkorolev.ru/redirect.php?site=http://centrto.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/f162×sgDehO>http://metramarket.ru/bitrix/redirect.php?goto=http://teplosetkorolev.ru/redirect.php?site=http://centrto.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/f162×sgDehO</a> Активация по промокоду употребляется в разных видах бездепов. Если идет о приветственном бонусе, то комплект символов можно узнать на крупнейшей страничке, в регистрационной форме или послании, которое отправляется пользователю для подтверждения e-mail. Акции могут проводиться совместно с партнерскими площадками. Обычно код размещается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется одноразовым промокодом. Он высылается по электронной почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем актуальный код для активации в описании каждого рекламную. скачать 1×slots на андроид мобильная версия Лишь модные и известные азартные заведения шансы разрешить для выдавать бездепы повторяющий добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депо, которые можно израсходовать в лучших аппаратах с высокой отдачей.Главное преимущество спинов – вероятность изучить различные слоты. Также получится насладиться бонусными раундами, испытать фортуну в риск-туре и преумножить выигрыш за счёт особых символов. Однако столько игровой процесс заслуживает внимание, ведь никакого сосредоточиться на реальном выигрыше.
<b>Смотреть еще похожие новости:</b>
<a href=https://demo.comuni-italiani.it/forum/viewtopic.php?f=9&t=348800>1×slots официальный сайт мобильная версия скачать</a>
<a href=https://praisenpray.org/forums/showthread.php?tid=95019>1×slots регистрация 1×slots review live</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Так собственно сможете храбро региться без всяких раздумий. Фортуна сейчас точно на вашей стороне. Не страшитесь, ведь следствие какого либо ущерба Вам совершенно не грозит. С этими призами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе.
#9518 Charlesgunnyhttp://filmkachat.ru
1×slots казино зеркало
Мы проделываем акцент на ключевых положениях верховодил, рассказываем о территориальных ограничениях и кратко информируем о других промоакциях обсуждаемого казино.Можно. Вы постоянно сможете отказаться от получения бездепозитного бонуса за регистрацию в казино, же Вы не создадите ставку. <a href=http://filmkachat.ru/>1×slots зеркало быструю регистрацию а также мгновенное</a> <a href=http://msfo-soft.ru/msfo/forum/messages/forum28/topic11977/message322735/?result=new#message322735>http://msfo-soft.ru/msfo/forum/messages/forum28/topic11977/message322735/?result=new#message322735</a> 1× slots casino зеркало <a href=http://bbs.cheaa.com./home.php?mod=space&uid=3137019>http://bbs.cheaa.com./home.php?mod=space&uid=3137019</a>
1×slots актуальное зеркало
Поспешите отобрать бездепозитные призы за регистрацию в казино из представленного перечня. Все платформы не водят законную работа, но и порадуют добросовестными результатами игры, высокой отдачей, резвыми выплатами.Во всех законных онлайн-казино Беларуси нужно подтверждение паспортных данных для игры — это заявка правительства страны. <a href=https://rolivka.online/forum/showthread.php?tid=28966>1хслотс зеркало на сегодня</a> 1×slots зеркало проходить регистрацию это отличный вариант Главным интересным в появлении этих вознаграждений состоит что, нет, что пустив их в ход, в ничем не рискует и в последствии никому ничего не несомненно должен (не зависимо, получит ли он благодаря призам какой-либо выигрыш либо мгновенно спустит все лишь собственно прибывшие финансы). То есть, казино снабжает игрока возможностью на дармовой основе играть во всевозможные слоты даже спонсирует игру.Активация валютного гонорары случается автоматически в сотворения профиля либо применения промокода. Иногда операторы предъявляют вспомогательные притязания: подписаться на страницы казино в соц сетях или на рассылку рекламных извещений, скачать и ввести дополнительный софт и т.д. <a href=http://itunit.com.ua/index.php/profile/17207-chunkycoffee41>http://itunit.com.ua/index.php/profile/17207-chunkycoffee41</a> Обыкновенные бездепозитные призы в объеме от трех до 20 долларов созданы чтобы, чтобы, чтобы в забавы заходили все новые и свежие игроки. Здесь, скорее, будет ограничение на максимальный выигрыш. Важно, чтобы перед минимальным вкладом был отключен бонус за первое пополнение счета, и геймер не попадет на повторный вейджер. 1×slots актуальное зеркало
казино 1×slots
Автоматы непопросту числятся самым модным азартным отдыхом. Чтобы усвоить управление и управляла, понадобится всего количество мин. Ваша задачка устроить ставку, найти число трудящихся линий и возможно крутить тамбур. Если дисплее выпадет выигрышная композиция – вы выиграли! С этой задачей вам посодействуют справится бездепозитные бонусы казино. Более солидные предложения встречаются довольно изредка. Зачастую они доступны только VIP-игрокам. В остальных случаях им скорее сопутствуют довольно строгие обстоятельства отыгрыша. Также возможны дополнительные обстоятельства и ограничения, прописанные в критериях и положения бонусной программы казино.В интернете много известных игорных площадок с красивыми акционными предложениями. Однако пристально читать обстоятельства 10-ов предложений в надоест, ну и время отнимет большое. Поэтому наша команда подготовила ТОП-3 сайтов с наилучшими бездепозитными призами: <a href=https://eduli.net/home.php?mod=space&uid=51164>https://eduli.net/home.php?mod=space&uid=51164</a> 1×slot зеркало рабочее этих способов предполагает регистрацию
1×slots зеркало быструю регистрацию а также мгновенное
В настоящее время получить приз за регистрацию в казино довольно просто. Почти каждый игорный жилище с готовностью даст деньги либо бесплатные вращения. Многие игроки используют данным и не смущяются региться в любом клубе с прибыльными условиями. Кстати, это замечательная возможность выдумать выигрышную тактику и сорвать куш. 1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, случае не желайте замерзнуть жертвой мошенников или впустую истратить время;Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных обстановок с казино, когда последствии отыгрыша бездепа для не дадут исключить крупную сумму выигрыша. Выиграть реальные средства в казино не пополняя счет – трудно, хотя возможно. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными призами и начните выступать на бонусные средства. По статистике из 10-ти заведений возможно заработать небольшую необходимую денег помощью бонусных средств.Но не размышлять, что снабжая юзеров этими бонусами, казино увлекается спонсированием. Ведь размеры вознаграждений, в основном, не великие (средним размером от 5 до 20 долларов). И на эти средства налагаются конкретные обстоятельства и лимитирования, неотклонимые к исполнению игрока, если в последствии он вожделеет получить все средства выигранные деньги. 1хслотс казино зеркало <a href=https://bookmarkloves.com/story17430051/yana-beauty-com-ua-%D0%92%D0%B0%D1%88%D0%B0-%D0%B5%D0%BD%D1%86%D0%B8%D0%BA%D0%BB%D0%BE%D0%BF%D0%B5%D0%B4%D1%96%D1%8F-%D0%BC%D0%BE%D0%B4%D0%B8-%D1%82%D0%B0-%D0%BA%D1%80%D0%B0%D1%81%D0%B8>https://bookmarkloves.com/story17430051/yana-beauty-com-ua-%D0%92%D0%B0%D1%88%D0%B0-%D0%B5%D0%BD%D1%86%D0%B8%D0%BA%D0%BB%D0%BE%D0%BF%D0%B5%D0%B4%D1%96%D1%8F-%D0%BC%D0%BE%D0%B4%D0%B8-%D1%82%D0%B0-%D0%BA%D1%80%D0%B0%D1%81%D0%B8</a> Перед активацией важно внимательно выучить условия акции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют велечину кроме лимиты ставок при отыгрыше и сроки, на коих можно воспользоваться предложением. Если бездеп охватывает ограниченный перечень игр, рекомендовано разузнать наибольшие коэффициенты, степень отдачи и волатильности. Слоты с невысокими множителями выплат подходят лишь том, случае, случае оператор не установил жесткие ограничения на максимальную необходимую ставки.Во всех легальных онлайн-казино Беларуси необходимо подтверждение паспортных данных для игры — это заявка правительства страны.
1×slots зеркало проходить регистрацию это отличный вариант
Также бывают случаи, когда казино начисляет обсужденный бонус последствии регистрации нового клиента по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам.Это один из главных показателей привлекательности презента. С завешенным коэффициентом числе профессионалы не смогут выполнить обстоятельства по отыгрышу. И так, насколько привлекательно смотрится предложение – бездепозитный приз казино в объеме $500 или $1 000. Чтобы новички получше вдумались, собственно же такое вейджер, мы разберём на примере. <a href=http://honevi.grodno.by/index.php?subaction=userinfo&user=DavidWeand>http://honevi.grodno.by/index.php?subaction=userinfo&user=DavidWeand</a> Выиграть настоящие средства в казино не пополняя счет – сложно, но вероятно. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными призами и начните играть на бонусные средства. По статистике каком-то 10-ти заведений возможно заработать маленькую необходимую средств с бонусных средств. 1×slots сайт зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://6000ziyuan.com/forum.php?mod=viewthread&tid=107810&extra=>1× slots casino официальный сайт</a>
<a href=https://nauc.info/forums/viewtopic.php?t=20377511>1×slots официальный сайт мобильная версия скачать</a>
<a href=https://qualityprogamer.de/forum/showthread.php?tid=260737>1×slots зеркало этих способов предполагает регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но есть игорные заведения, которые готовы просто так жертвовать средства на игру. Для этого достаточно сделать профиль. Чтобы вывести свой выигрыш, вас поначалу необходимо выполнить обстоятельства отыгрыша, указанные в условиях получения бездепозитного депозита. Если вы облюбовали для себя несколько брендов коие вас больше всего приглянулись, для постоянной забавы! Таких гемблеров казино очень любит и оценивает, за частую такие игроки становятся VIP игроками заведения, коим нередко поступают выгодные предложения в виде призов, например же туда входит и бездепозитные.
#9519 Charlesgunnyhttp://filmkachat.ru
1хслотс зеркало
Классическая разновидность приза за творенье аккаунта. Его превосходство заключается что, собственно заказчик может самостоятельно подбирать аппараты и делать ставки в них. Иногда перечень игровых автоматов ограничен оператором, но все одинаково это превосходнее, чем один-единственный дешевый слот, как когда с использованием фриспинов.В зависимости от онлайн заведения каждый из их возможность вам предложить как бездепозитные деньги, например и бездепозитные фриспины, которые в удачной регистрации упадут для на ваш игровой баланс. <a href=http://filmkachat.ru/>1× slots регистрация в 1×slots casino</a> Обычно для получения бонусов без депо, казино выдвигает лояльные и вполне выполнимые обстоятельства, но есть ряд действий коие запрещены и все причиной неприятные результаты:В любом казино с бездепозитным призом учтены вейджеровые обстоятельства. Это единственный «подводный камень», кот-ый стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, нужно сделать определённое количество ставок. Чем круче приз, что, этим труднее выполнить условия, и напротив. <a href=https://lotn.info/index.php?action=profile;u=30275>https://lotn.info/index.php?action=profile;u=30275</a> В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с бесплатных вращений. Прибыль, коию Вы заработаете на этом бездепе можно назначать на вывод без какого либо отыгрыша. 1×slots официальный сайт скачать на айфон <a href=http://www.zhuangxiuz.com/home.php?mod=space&uid=857191>http://www.zhuangxiuz.com/home.php?mod=space&uid=857191</a>
1×slot зеркало
Вы всего, скажем, как все предпочитаете получать подарки и бездепозитные бонусы казино. Игорные дома брали в привычку одаривать гэмблеров приятными призами. Стать обладателем приветственного презента возможно за творение профиля либо пополнение счёта. Второй вариант больше занимательный, так клубы готовы удвоить депо! Но случае вы новичок и лишь знакомитесь с миром азарта, какого-либо пользуйтесь призом за регистрацию. <a href=https://persiankittencat.com/simple-fence-line-landscaping-ideas/>1×slots мобильная версия войти казино</a> 1×slots зеркало регистрацию более популярный вариант это 4. Заберите презент. Чаще всего приз активируется незамедлительно последствии регистрации. Но случаются ситуации, когда нужно зайти в личный офис или написать в службу поддержки.При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток. <a href=http://forum.fcmn.co.il/member.php?action=profile&uid=303515>http://forum.fcmn.co.il/member.php?action=profile&uid=303515</a> казино 1× slots официальный сайт Все благотворительные бонусы кажутся заманчивыми. Кто же откажется от способности поиграть в онлайн-казино, не рискуя средствами, но получая выигрыши. Но далековато не все бездепозитные призы мере привлекательны для рассудительного посетителя.Для отыгрыша приза казино обязует игрока сыграть на необходимую, в несколько раз превышающую сумму приобретенного приза — тут выгода компании явна.
1х слот регистрация в 1×slots casino
<a href=http://xn–80adazahw2c9an.xn–p1ai/user/Michaelsheri/>http://xn–80adazahw2c9an.xn–p1ai/user/Michaelsheri/</a> Используйте наилучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из списка ниже, дабы заработать презенты за простые деяния теперь сегодня получить 1-ый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и резвыми выводами на электрические кошельки.В большинстве заведений сделать это возможно по адресу электронной почты, по номеру телефонного, через социальную сеть либо гугл-аккаунт. 1хслотс регистрация в 1×slots casino
1×slots мобильная версия войти казино
Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам запрещено начислять призы посетителям, не имеющим валютных средств на счете. Мы предлагаем рассмотреть актуальные призы онлайн-казино с лицензией, коие соблюдают законодательство РБ. <a href=https://forum.vn.ua/showthread.php?p=3272113#post3272113>онлайн казино 1×slots</a> Активация случается счет промокодов, коие вводятся в собственном кабинете после регистрации. Среди спецпредложений в перечне Casino.ru содержатся неповторимые промокоды, которые доступны только гостям портала. Другие методы начисления средств ? автоматическая активация незамедлительно после создания аккаунта и получение дара по запросу в службу технической поддержки. Хотя благотворительные призы начисляются без депо, не исключено, что для понадобиться вносить средства. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь после того, как новый клиент раз пополнит игровой счет. 1×slots регистрация 1×slots casino 777 online <a href=https://www.baronerosso.it/forum/members/115390_jasperbluen.html>https://www.baronerosso.it/forum/members/115390_jasperbluen.html</a>
1×slots зеркало быструю регистрацию а также мгновенное
Для как, чтобы отыграть необходимую вашего бездепозитного бонуса надо(надобно) выполнить условия вейджера. Очень нередко фриспины даются на определенные слоты (book of ra, book of lifeless, book of sun), избирайте слот себе по, все довольно красочные и качественные. Бездепозитные бонус может быть денежным так и повторяющий фриспинов на слоты <a href=https://forex-bitcoin.com/members/351016-scottceara>https://forex-bitcoin.com/members/351016-scottceara</a> Не стоит сразу же открещиваться от приветственных подарков в похожих казино. Администрация готова начислить средства либо фриспины, но предварительно работники обязаны убедиться, собственно вы не аферист. Дело том,, собственно развелось очень большое охотников за бонусами. Они научились накалывать систему и наваривать крупные суммы денег.Вообще перейдя в казино — правила схожи в получении бездепозитных бонусов, в стандартные управляла входит: подтвердить эл. Почту и телефон, наполнить свой собственный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ. 1×slots зеркало которую указывали при регистрации кстати На странице представлены бездепозитные призы за регистрацию в казино редкая заслуга за коей гонятся все игроки как новенькие, например и профессионалы. Мы также уделяем великое внимание на наличие бонусов при составление рейтинга казино на средства. Бездепозитный бонус это возможность играть бесплатно и выиграть настоящие деньги.Бездепозитные призы — это презенты от казино вид бонусных средств либо фриспинов для игровых автоматов, которые начисляются на аккаунт игрока в процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депо не требуется.
<b>Смотреть еще похожие новости:</b>
<a href=https://seniordance.ru/forum/showthread.php/71217–1×slots-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-1×slots-review-live?p=100689#post100689>1×slots регистрация 1×slots review live</a>
<a href=http://complainanything.com/node/158?page=912#comment-1087640>1×slots зеркало рабочее на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При игре на бонусные средства воспрещается играть в игровые автоматы с прогрессивным джекпотом и забавы из радела exist casino. Кроме того, некоторые казино дают бездеп на раз либо количество определенных слотов, и в других играх Вы не можете на них играть. Операторы гемблинга утверждают, собственно например они сражаются с бонус-хантерами. Впрочем, критики считают, собственно этим казино пытаются сделать из случайного постояльца постоянного игрока.
#9520 Charlesgunnyhttp://filmkachat.ru
1 xslots рабочее зеркало
Бездепозитные бонусы настоящими средствами, коие можно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадали. <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> Изучить верховодила и обстоятельства получения бездепозитных бонусов казино, Вы сможете у нас на веб-сайте в разделе с бонусами либо на официальном веб-сайте выбранного Вами казино. Если имеет найти необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал либо по электрической почте. <a href=https://pixel-brush.ru/user/JamesPef/>https://pixel-brush.ru/user/JamesPef/</a> Условия отыгрыша приза. Если Вы планируете заработать на бездепозитном бонусе, то для внимание на значение вейджера и срок, кот-ый дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, тем легче отыграть приз и вывести выигрыш.Выигрыши с призов без инвестициям практически привязаны к требованию по ставкам и шансы быть обналичены только последствии исполненья этих притязаний. 1хслотс мобильная версия зеркало <a href=http://www.decodev.tn/index.php?option=com_k2&view=itemlist&task=user&id=414300>http://www.decodev.tn/index.php?option=com_k2&view=itemlist&task=user&id=414300</a>
1х слотс зеркало регистрация в 1×slots casino
Отыграв бездепозитный бонус в казино с выводом тоже придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, случае сходственное ограничение присутствует, то единоразово вывести получится лишь необходимую, не превышающую размер приобретенного приза.Бездепозитные бонусы за регистрацию в игровых автоматах для владельцев онлайн-казино являются частью рекламной кампании, направленной на увеличение аудитории сайта. Так они продвигают свои бренды и завлекают свежих посетителей. <a href=https://forum.oursson.ru/memberlist.php?mode=viewprofile&u=1347>1×slots зеркало подтвердит вашу регистрацию если говорить</a> 1×slots регистрация 1×slots casino 777 online Так собственно главное различие дара на депозит от бездепа – неотъемлемое пополнение счёта. Вы можете привнести депозит и преумножить стартовый капитал либо отобрать бездеп и всем не придётся рисковать собственными сбережениями. Поспешите выполнить простые притязания, и администрация ресурса начислит щедрое поощрение!На бонусные начисления шансы быть установлены дополнительные ограничения, коие Вы не к при отыгрыше. Пока бонус всецело не отыгран — средства из казино не выводятся. <a href=https://yandexforum.ru:443/member.php?u=293743>https://yandexforum.ru:443/member.php?u=293743</a> Объективные – объем приза, коэффициент и обстоятельства вейджера, надобность внесения депо для вывода денег; 1×slots официальный сайт зеркало Так что основное различие дара на депо от бездепа – обязательное пополнение счёта. Вы можете привнести депозит и преувеличить стартовый капитал или отобрать бездеп и при не придётся рисковать своими сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начисляет щедрое одобрение!
1×slots зеркало этих способов предполагает регистрацию
Демоказино есть практически на любом сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются веско пореже: там в случае выигрыша и соблюдения критерий промоакций бездеп можно превратить в настоящие деньги. <a href=https://www.forum-motorrad.net/members/19566-jamesheelp.html>https://www.forum-motorrad.net/members/19566-jamesheelp.html</a> Для верификации номера телефона, в собственном профиле выберите опцию „Подтвердить номер телефонного“ и введите в отвечающее фон код, приобретенный в sms-сообщении.1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, случае не желайте замерзнуть жертвой мошенников либо впустую израсходовать время; 1×slots промокод при регистрации 2025
1×slots casino регистрация 1×slotscasin online
<a href=http://naturetour.ru/communication/forum/messages/forum3/message23987/5681–1×slots-zerkalo-na-segodnya?sessid=8ebdd3c2e660316bdd3a5e29369b2e99&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1×slots зеркало на сегодня</a> Размер ставки для забавы по бездепозитному призу (естесственно же, в случае, когда он представлен вид бонусных валютных средств) зачастую ниже, чем при ирге на депозит. Ограничение будет работать до момента отыгрыша бонуса. 1× slots официальный <a href=http://freedom.teamforum.ru/memberlist.php?mode=viewprofile&u=8089>http://freedom.teamforum.ru/memberlist.php?mode=viewprofile&u=8089</a>
1×slots мобильная версия войти казино
Чаще всего используются коды. Их надо(надобно) заносить в особые окна регистрационной анкеты, случае речь идет о пригласительных бонусах, либо в особом разделе личного кабинета игрока.Многие новенькие колеблются, что поощрительный приз не будет возвращать, том в они выиграли у казино. Это абсолютно безопасно и надежно. Выводя выигранные свои, игрок просто останавливает свое роль деле и теряет уникальную возможность – безвозмездно наращивать личное вещественное положение. <a href=https://writeablog.net/35ea68zumk>https://writeablog.net/35ea68zumk</a> рабочее зеркало 1хслотс Чтобы помощи убедиться в преимуществах бездепозитных бонусов, довольно зарегистрироваться в казино и получить поощрение.Ознакомьтесь с нашим списком лучших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего перечня и получите бездеп незамедлительно. Хватайте наихорошие безвозмездные предложения ниже и выигрывайте великие средства, не рискуя!
<b>Смотреть еще похожие новости:</b>
<a href=http://www.carshowsociety.com/forum.php?action=profile;u=2398>1×slots casino регистрация</a>
<a href=http://nakupnidivadlo.cz/index.php/forum/3-pripominky/46539-x1-slots-1–1×slots?start=6#234666>1×slots казино зеркало</a>
<a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=36082>1×slots регистрацию процедура займет всего лишь</a>
<a href=https://portugal-campings.com/pt/account/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<a href=https://hiddeninthesand.com/forum/viewtopic.php?t=274123>casino 1×slot</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Кешбэк-бонус представляет собой возврат фиксированного процента от ставки когда проигрыша либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не выше 10%.
#9521 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало
Классическая разновидность приза за создание аккаунта. Его преимущество содержится том,, собственно клиент возможность помощи выбирать аппараты и делать ставки в них. Иногда список игровых автоматов ограничен оператором, но все точно это другого, как, чем единственный дешевый разъем, как когда с использованием фриспинов. <a href=http://filmkachat.ru/>1×slots зеркало быструю регистрацию а также мгновенное</a> Во время игры в казино, выигрыши, приобретенные благодаря бесплатным призовым фондам, суммируются и срабатывают в общую необходимую для отыгрывания. Однако, если фортуна улыбнется и получится отыграть все бонусы, игровое заведение гарантированно допустит вывести финансовые средства. Сумма вывода несомненно зависимости от лимита, утвержденного именно в данном учреждении. Поэтому, внимательно нужно читать правила выдачи анлимитных депозитов. <a href=http://973ehtnamuh973.co.uk/forum/memberlist.php?mode=viewprofile&u=215933>http://973ehtnamuh973.co.uk/forum/memberlist.php?mode=viewprofile&u=215933</a> Размер приза. В качестве бездепов обычно начисляют маленькие суммы, а когда речь идет о бонусах за депо, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино могут презентовать игроку до 2000$. 1×slots акции <a href=https://www.spacepub.net/members/5046-WilliamNeeme>https://www.spacepub.net/members/5046-WilliamNeeme</a> Не стоит сразу же отрицаться от приветственных даров в сходственных казино. Администрация готова начислить деньги или фриспины, хотя сначала работники должны увериться, что вы не мошенник. Дело никаких, собственно развелось очень много охотников за бонусами. Они выучились врать систему и наваривать крупные суммы средств.Шаг 4. Активация. Внимательно изучите условия, информацию по ограничениям и сроке действия бонусного предложения. Разобравшись с правилами, можно активировать приз в личном офисе (времени ? с внедрением промокода) или по запросу в саппорт.
казино 1× slots официальный сайт
Максимальная ставка ? уточняется в еденице счета и ограничивает размер ставки за раз спин. В случае ее превышения приз возможность быть аннулирован. Также в правилах возможность находиться запрет на размещение ставок конкретного облика, к, по равным шансам в рулетке (то есть, на чет или нечет, красное или черное и т.д. ). <a href=http://forums.indexrise.com/thread-1096-post-331132.html#pid331132>1×slots официальный сайт зеркало рабочее</a> 1хслотс зеркало на сегодня Фриспины начисляются по конкретной ставке. После их активации игроку нужно запустить слот и увериться, что в нем отображаются безвозмездные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода последствии отыгрыша ориентируется оператором и изредка превышает 5 000 рублей.Например, игрок получил 500 руб. При твореньи аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 рублей, потребуется сделать 875 спинов для полного отыгрыша. <a href=http://wdty.org/home.php?mod=space&uid=262572>http://wdty.org/home.php?mod=space&uid=262572</a> Для того, дабы отыграть сумму вашего бездепозитного приза нужно выполнить обстоятельства вейджера. Очень часто фриспины даются на конкретные слоты (book of ra, book of deceased, book of sun), подбирайте разъем себя по душе, они все очень очень и высококачественные. Бездепозитные приз возможность быть валютным например и в виде фриспинов на слоты 1×slots подтвердит вашу регистрацию если говорить В настоящее время получить приз за регистрацию в казино очень просто. Почти каждый игорный жилище с радостью предоставит деньги либо бесплатные вращения. Многие игроки используют данным и не стыдятся регистрироваться в каждом клубе с прибыльными условиями. Кстати, это замечательная вероятность придумать выигрышную тактику и сорвать куш.Если речь идет об неповторимых предложениях, возможность потребоваться регистрация в казино по ссылке с партнерского вебсайта.
зеркала 1×slots
<a href=http://5nxn.com/home.php?mod=space&uid=721006>http://5nxn.com/home.php?mod=space&uid=721006</a> Каждый новичок и умелый игрок мечтают живо стартануть и начать создавать настоящие ставки. Для сего достаточно отобрать презент, за кот-ый не нужно платить. В зависимости от игровой платформы, нужно создать профиль, привязать email либо аппарат. После этого администрация начислит щедрое вознаграждение вид бесплатных вращений или виртуальных кредитов.Новые посетители онлайн-казино без первого депо имеют выяснить собственную удачливость. К тому же есть возможность преобразовать бездепы в реальные деньги за регистрацию в казино, однако результата приз нужно отыграть согласно условиям промоакции. 1хслотс рабочее зеркало Можно. Вы всегда сможете отрешиться от получения бездепозитного бонуса за регистрацию в казино, же Вы не сделаете ставку.
1×slots рабочее зеркало на сегодня
Бездепозитные бонусы прекрасный вариант даровой игры в игровые автоматы. Многие пользователи сети не понимают, собственно в казино возможно начать выступать безусловно безвозмездно, а позже вывести выигрыш на банковскую карту или электронный кошелек, иные не доверяют интернет казино, а третьи успешно играют и выигрывают – и тотчас довольно немалые суммы. <a href=https://minifishtank.net/forum/member.php?action=profile&uid=1356>1×slots зеркало на сегодня</a> Как и другие промоакции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такого предложения являются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает новых посетителей и разрешает им составить эмоцию о функционале, не рискуя вескими суммами. скачать 1×slots на андроид мобильная версия <a href=http://gkwin.net/bbs/board.php?bo_table=free&wr_id=262532>http://gkwin.net/bbs/board.php?bo_table=free&wr_id=262532</a> Акционные предложения от казино есть в различных форматах. Часто призы даются в размен на депо. Игрок вносит платеж и получает средства, благотворительные вращения прочие одобрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — картина бонуса, кот-ый гарантирован за исполнение конкретных деяний на веб-сайте:
1×slots регистрация на официальном сайте
Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен перечень лучших интернет казино, коие предлагают своим игрокам щедрые бонусы за регистрацию. <a href=https://www.market-directory.com/members/jefferymam-8897.html>https://www.market-directory.com/members/jefferymam-8897.html</a> Можно ли в одном онлайн казино получить больше 1-го бонуса за регистрацию? Нет, например как в каждом интернет казино есть управляла, к которым нужно придерживаться, не делать 2 аккаута для получения призов, другому несомненно блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, приз за регистрацию выдаеться раз один 1 личику.У любого игорного клубы различные вейджеровые условия. Чтобы вы гарантировано смогли выполнить их, мы дадим количество советов. Если система начислила небольшую сумму, надо создавать большие ставки – остановитесь на 10–30 центах. Как лишь сможете заработать примерно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте играть. В противном случае превосходнее присмотреться к другому автомату. 1×slots casino online регистрация
<b>Смотреть еще похожие новости:</b>
<a href=https://portugal-campings.com/pt/account/>1хслотс официальный сайт зеркало</a>
<a href=https://rolivka.online/forum/showthread.php?tid=28877>1×slots казино зеркало</a>
<a href=http://magazine-avosmac.com/php-mauleon/viewtopic.php?f=5&t=266215>1×slots акции</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На бонусные начисления шансы быть установлены вспомогательные лимитирования, коие Вы не к при отыгрыше. Пока приз всецело не отыгран — средства из казино не выводятся. В списке требований к отыгрышу часто присутствуют лимиты на ставки при этой на личные средства. Так, в отыграть надо(надобно) 30 000 руб., а предельная сумма ограничена 30 рублями, то вращать барабаны светит 1000 один. Эта особенность затрудняет соблюдение игроками критерий по срокам действия промоакции.
#9522 Charlesgunnyhttp://filmkachat.ru
1×slots бездепозитный бонус за регистрацию
На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не сможете активировать и получить бездепозитный бонус.Ниже указан актуальный перечень законных казино в Беларуси с призами на 1-ый депо. Вы сможете попасть на официальный вебсайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз. <a href=http://filmkachat.ru/>1×slots casino online регистрация</a> Бездепозитные бонусы реальными деньгами, коие возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадали. <a href=http://yiseeyou.com/free/17#c582>http://yiseeyou.com/free/17#c582</a> В разделе с бонусами активировать приветственное предложение. Иногда, для активации бездепа, необходимо адресоваться в службу спустя лайв-чат на веб-сайте казино.Бездепозитный приз казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби избранного заведения, определится в выборе игр и проверить качество работы саппорта. Довольно часто, начиная игровой процесс, игрок теснее отказывается останавливаться и проделывает настоящий лепта. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть бесплатно вероятно как один таки с бонусом за регистрацию без надобности заносить депозит. 1×slots промокод при регистрации <a href=https://chujalt.com/user-298.html>https://chujalt.com/user-298.html</a>
1×slots скачать на айфон
Прочитайте верховодила бонусной программки, в хотите участвовать. Да, мы настойчиво рекомендуем устроить это до регистрации.С другой стороны, намного проще отобрать бездепозитные фриспины за регистрацию в казино и напрямик момент начать вращать барабаны в наихороших слотах. Главная особенность спинов никаких, что они предусмотрены для лучших автоматов. Удастся столько пройти вспомогательные раунды, но и прирастить сумму выигрыша, заработать респины и другие внутриигровые подарки. <a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=117340>1хслотс официальный сайт зеркало</a> 1× slots регистрация в 1×slots casino При регистрации никаких либо ином онлайн игральном заведении — вам дается один шанс испытывать собственную фортуну не внося средства монеты. Замечу собственно эту поощрительную предложение деют не все онлайн игровые площадки, а лишь великодушная середина(средина) из их. Которые мы подготовили для Вас в нашем перечне. <a href=http://kazrti.com/index.php?subaction=userinfo&user=jadedleash11>http://kazrti.com/index.php?subaction=userinfo&user=jadedleash11</a> 1 хслот регистрация в 1×slots casino Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала резвые выводы. Фишка выплат что, нет, собственно довольно выбрать платёжный инструмент и показать необходимую. В большинстве случаев средства зачисляются на электрические кошельки в течение 15 минут, а на банковские карты – 1–3 трудящихся дня.В основном случаев бесплатные призы начисляются в кредитах, коие нельзя незамедлительно исключить со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д. ). О нем читайте ниже.
1×slots зеркало
Активация валютного гонорары случается механически последствии создания профиля или использования промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на страницы казино в социальных сетях либо на рассылку маркетинговых сообщений, скачать и ввести вспомогательный софт и т.д.При верном раскладе бездепы — это прекрасный метод выступать на деньги без траты собственных средств. Есть количество рекомендаций, следуя которым можно извлечь максимально выгоды из сходственных акций казино. Играть по лишь на лицензированных площадках. Скриптовые веб-сайты не накалывают с бонусными предложениями, хотя и употребляют пиратский софт с модифицированным ГСЧ. Выиграть на этих автоматах нереально. <a href=https://www.mikocon.com/home.php?mod=space&uid=218929>https://www.mikocon.com/home.php?mod=space&uid=218929</a> 1×slots casino регистрация
1 х слотс зеркало
В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, нужно обратиться в службу поддержки через лайв-чат на веб-сайте казино. 1×slots официальный сайт зеркало <a href=https://www.harnessracingforum.com/member.php?115140-JulesLiz>https://www.harnessracingforum.com/member.php?115140-JulesLiz</a> Наличие у игрока второго аккаунта. Запрещено создавать несколько профилей для многократного получения бездепов.Также бывают случаи, когда казино начисляет обсужденный бонус после регистрации свежего клиента по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам.
казино 1×slots официальный сайт
Активация валютного гонорары случается автоматически в сотворения профиля либо применения промокода. Иногда операторы предъявляют вспомогательные притязания: подписаться на страницы казино в соц сетях или на рассылку рекламных извещений, скачать и ввести дополнительный софт и т.д.За счёт спинов получится запустить разные онлайн слоты, протестировать стратегии и поднабраться навыка. Фишка что, собственно вращения начисляются на топовые аппараты с оригинальными опциями и высокой отдачей. Не забывайте, что в любом акционном предложении предусмотрены особые притязания – временные ограничения, наибольший размер ставки, перечень дешевых игр. Бездепозитные бонусы – это исключительно небезинтересная и более перспективная промоакция интернет-казино. Они том другого фри-спинов, поэтому собственно выплаты в даровых вращениях не гарантированы, как композиции на барабанах игрового аппарата шансы не сложиться.Если вы новичок в и лишь попали в неизведанную вами область пыла — с помощью предложений как бездепозитные бонусы без пополнения. <a href=https://adminclub.org/member.php?action=profile&uid=89853>https://adminclub.org/member.php?action=profile&uid=89853</a> Ниже указан актуальный перечень легальных казино в Беларуси с бонусами на первый депо. Вы сможете попасть на официальный сайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. 1хслотс рабочее зеркало Обычно бездепозитные промоакции от казино, прибывают на эл. Почту в дни рождения или праздничные. В некоторых онлайн казино возможно адресоваться в чат и как постоянному игроку, вполне для предложат бездепозитное предложение.Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo.
<b>Смотреть еще похожие новости:</b>
<a href=https://radios-collector.com/viewtopic.php?f=7&t=35337>1×slots зеркало регистрация в 1×slots casino</a>
<a href=https://forumauthority.com/thread-6509-post-39166.html#pid39166>1хслотс рабочее зеркало</a>
<a href=https://melhorlance.com.br/minha-conta/>1хслотс зеркало</a>
<a href=http://portal.westcoastbible.org/discussion/memberlist.php?mode=viewprofile&u=400061&sid=90150971a48bb99f233de93449dd6d60>1×slots casino регистрация 1×slots review live</a>
<a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=295197#pid295197>1×slots официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Приглашаем делиться мнениями о бонусах. Это поможет иным юзерам выбирать наиболее прибыльные предложения. На условиях отыгрыша бесплатных призов идет тормознуть подробнее. С ними связаны нюансы, которые нельзя оставить без внимания.
#9523 Charlesgunnyhttp://filmkachat.ru
1× slots casino официальный сайт
Маркетинговая политика всех игорных интернет-клубов обязана одевать различный характер. И случае гонорары на депозит служат для того, чтобы стимулировать заносить депозиты и поощрять уже место юзеров, то бездепозитный бонус в казино или бонус за регистрацию в казино, прежде всего, рассчитан на расширение базы покупателей. <a href=http://filmkachat.ru/>1×slots официальный зеркало рабочее</a> <a href=http://himagro.md/forum/user/42241/>http://himagro.md/forum/user/42241/</a> Операторы гемблинга заявляют, что так они дерутся с бонус-хантерами. Впрочем, критики считают, собственно данным казино пробуют устроить из случайного постояльца неизменного игрока.Когда идет о валютных бонусах, казино практически устанавливают условия вейджера, которые необходимо выполнить, дабы вывести выигрыш. 1×slots casino регистрация 1×slotscasino09k online <a href=https://sporovo.by/user/PatrickScorm/>https://sporovo.by/user/PatrickScorm/</a> Бонус за регистрацию в казино без депозита с выводом денег нужно отыграть. Зачастую для отыгрыша возможность потребоваться устроить ставки на необходимую, в несколько 10-ов один превышающую необходимую приза или выигрыша.
1×slots зеркало рабочее
У каждого игорного клубы различные вейджеровые условия. Чтобы вы гарантировано сумели выполнить их, мы дадим некоторое советов. Если система начислила небольшую необходимую, надо делать немалые ставки – остановитесь на 10–30 центах. Как лишь сможете заработать примерно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте играть. В неприятном случае превосходнее приглядеться к другому автомату. <a href=http://6000ziyuan.com/forum.php?mod=viewthread&tid=103872&extra=>казино 1× slots официальный сайт</a> 1×slots регистрация на 1хслотс Существует ли стратегии для отыгрыша бездепозитных призов? К сожалению нет, на выигрыши либо проигрыши с призов, казино или игрок повлиять не может, отдача игр случается от создателей игр.Особую изюминку видео слотам присваивают оригинальные символы. С их в активизируются различные бонусы. Вы можете запустить дополнительный уровень и увеличить необходимую выигрыша. Есть знаки, которые заменяют ненадобные составляющие и сами создают выигрышные комбо. Не стоит забывать и тему бонус-тур. После каждого успешного спина есть шанс увеличить необходимую выигрыша в два либо хорошо раза. <a href=https://mantiseye.com/community/frankbom>https://mantiseye.com/community/frankbom</a> 1×slots зеркало регистрация в 1×slots casino
1×slots зеркало на сегодня
Вейджер в переводе с английского значит «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша приобретенного приза, в нашем случае бездепозитного. Число ставок не — главно лишь набрать необходимую, пропорциональную сумме одобрения. Кешбэк-бонус представляет собой возврат фиксированного процента от ставки когда поражения или же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не превышает 10%.Многие игроки, оценив возможностей казино, остаются выступать в нем и далее ? на это и направлено каждое рекламную. Постоянные клиенты заносят депозиты и делают ставки, обеспечивая длительную прибыль оператора. То есть, казино раздают бездепы свежим юзерам для формирования приклнной аудитории. <a href=http://nbrkv.ru/user/ForsedropSt/>http://nbrkv.ru/user/ForsedropSt/</a> 1×slots официальный сайт зеркало
казино 1×slots
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=324161&pid=646701#post_646701>1×slot зеркало рабочее регистрации на телефон придет</a> Существует ли стратегии для отыгрыша бездепозитных бонусов? К сожалению нет, на выигрыши либо проигрыши с призов, казино или игрок воздействовать не, отдача игр случается от разработчиков игр.Бездепозитный бонус казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в этом и заключается главное различие. Главное превосходство спинов – возможность изучить разные слоты. Также получится насладиться бонусными раундами, испытать фортуну в риск-туре и преувеличить выигрыш за счёт особенных символов. Однако не игровой процесс заслуживает внимание, так превосходнее сосредоточиться на реальном выигрыше.Бездепы с бесплатными вращениями деют юзерам право вертеть барабаны игровых автоматов без снятия средств со счета. За каждый раунд уплачивает казино. Число спинов ограничено и редко выше сотку. Если акция содержит много даровых игр, их начисление может быть разбито на количество дней. 1×slots casino регистрация <a href=https://maps.google.bi/url?q=https://doctorlazuta.by/>https://maps.google.bi/url?q=https://doctorlazuta.by/</a> Большинство клубов привлекают внимание геймеров за счёт разнородных презентов. На 1 сайтах возможно получить виртуальные кредиты, которые откроют доступ ко всему софту. На других же, администрация предлагает благотворительные вращения для запуска лучших интернет слотов. Несмотря на различные промоакции, стоит выделить самые главные.
1×slots зеркало на сегодня
При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, коие можно посвятить этой в казино.Чаще всего используются коды. Их надо(надобно) заносить в специальные окошки регистрационной анкеты, если речь о пригласительных призах, либо в определенном разделе личного кабинета игрока. При подмоги такого одобрения оператор может кроме привлекать посетителей, коие раньше проявляли активность на сайте, но по какой-то причине перестали выступать. В данном случае промокод высылается юзеру по электронной почте или повторяющий SMS. <a href=http://image.google.mv/url?q=http://admbelgor.ru/bitrix/redirect.php?goto=http://sanberry.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/iByA_CNkjv3>http://image.google.mv/url?q=http://admbelgor.ru/bitrix/redirect.php?goto=http://sanberry.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/iByA_CNkjv3</a> 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.pmpobc.ca/index.php?topic=123398.new#new>казино 1× slots официальный сайт</a>
<a href=https://melhorlance.com.br/minha-conta/>1×slot зеркало рабочее регистрации на телефон придет</a>
<a href=http://big.bestforums.org/viewtopic.php?f=7&t=9152>1×слотс казино</a>
<a href=https://orbitsound.com/forum/user-211634.html>1×slots мобильная версия войти казино</a>
<a href=http://nacionrolera.org/foro/viewtopic.php?f=1210&t=127756>1 х слотс зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В интернете очень большое скриптовых сайтов, которые принадлежат жуликам. Их основная задача – привлечь гэмблеров, пообещав не только щедрые подарки, хотя и солидные выигрыши. Так собственно кое-какие сайты предлагают получить за регистрацию и $1 000. Отзывы читателей о бонусных промоакциях помогут составить эмоцию, хотя не запамятовывайте о субъективности личных объяснений.
#9524 Charlesgunnyhttp://filmkachat.ru
1×slots сайт
Шаг 4. Активация. Внимательно изучите условия, информацию по лимитированиям и сроке действия бонусного предложения. Разобравшись с правилами, можно активировать бонус в личном офисе (от ? с использованием промокода) или по запросу в саппорт. <a href=http://filmkachat.ru/>1хслот скачать</a> Размер бонусов почаще всего чисто символический и не превышает 50 руб. Приятно, хотя ощутимым бустом деле вряд ли будет. <a href=http://mpalata.ru/forum/memberlist.php?mode=viewprofile&u=110894>http://mpalata.ru/forum/memberlist.php?mode=viewprofile&u=110894</a> Бонус начисляется игроку незамедлительно после регистрации и прохождения верификации в казино и не просит от посетителя внесения депо. Как правило, размер бонуса в подобном случае довольно застенчивый, однако дозволяет новеньким познакомиться с забавой без риска реальными деньгами. 1×slots зеркало которую указывали при регистрации кстати <a href=http://www.ydelection.com/bbs/board.php?bo_table=free&wr_id=1207209>http://www.ydelection.com/bbs/board.php?bo_table=free&wr_id=1207209</a> Выполнив все требования оператора, заказчик имеет оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит примерно не более суток. Если дополнительно требуется пройти процедуру верификации, то срок увеличивается до 1–2 трудящихся дней. Для перевода применяются банковские приборы и электрические платежные системы. Второй способ подходит лучше, так как большинство транзакций такой осуществляются моментально. В связи со спецификой функционирования банков обработка платежей возможность занять до нескольких трудящихся дней.Высокая конкуренция в сегменте азартных игр доказывает операторов привлекать клиентов разнообразными промоакциями. Благодаря данному у посетителей замечена вероятность получить призы в казино за регистрацию без депозита. Воспользоваться таким предложением можно, минуя процедуру внесения средств на игровой счет, просто активировав аккаунт на сайте. Наш экскурсовод по бездепам поможет выбрать самую привлекательную бонусную программку, разузнать управляла получения такого вознаграждения и распорядиться им с наибольшей выгодой.
1×slots сайт
Фриспины начисляются по определенной ставке. После их активации игроку необходимо запустить слот и убедиться, собственно в нем отображаются благотворительные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода в отыгрыша определяется оператором и изредка превышает 5 000 рублей. <a href=https://forum.krymbezpravil.org.ua/viewtopic.php?f=5&t=54067>1×slots мобильная версия войти казино</a> 1×slot казино зеркало <a href=https://meiying99.com/home.php?mod=space&uid=416939>https://meiying99.com/home.php?mod=space&uid=416939</a> Основное различие том,, собственно для получения бездепа не пополнять баланс в казино. Но кроме этого, есть ряд прочих отличий: 1×slots регистрация 1×slotscasino 56 online Вейджер в переводе с английского означает «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша полученного приза, в нашем случае бездепозитного. Число ставок роли не играет — принципиально лишь набрать необходимую, пропорциональную сумме поощрения.
1×slots актуальное зеркало
Обыкновенные бездепозитные бонусы в объеме от 3-х до 20 долларов созданы для того, чтобы в игры заходили все свежие и новые игроки. Здесь, скорее, будет ограничение на наибольший выигрыш. Важно, чтобы перед наименьшим вкладом был отключен приз за 1-ое пополнение счета, и игрок не попадет на повторный вейджер.Возможность протестировать новые забавы, не рискуя личностными средствами и разработать собственную стратегию забавы. Некоторые онлайн-казино без депозита предлагают свежим клиентам избрать приз при регистрации. Будьте внимательны: выбрав один, вы в безоговорочном большинстве случаев не можете воспользоваться остальными. <a href=https://opaseke.com/users/6919>https://opaseke.com/users/6919</a> После потребуется привнести идентификационный платёж. Это стращает новичков больше всего. Нужно сделать минимальный депо в 100–500 рублей. Таким образом служба защищенности увериться никаких, собственно платёжный способ принадлежит Вам. Данная процедура важна для обеспечивания безопасности игровых счетов. Пример, Ваш акк взломают и выведут свои на свой кошелёк. Будет очень неприятно. Поэтому верификация платёжной системы, это важный момент.Практически все интернет казино с бездепозитным бонусом за регистрацию предусматривает программу преданности — систему одобрения постоянных посетителей, кот-ая состоит из большого значений. При достижении игроком одного значения на его счёт поступает приз. Чем повыше уровень — тем щедрее бонус. 1×slots регистрация 1×slots casino 777 online Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавления либо официального клиента для ПК. В большинстве казино срабатывают программы преданности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на следующий степень нередко с выдачей бездепа.
x1 slots регистрация в 1×slots casino
Казино выводит деньги лишь на что, эту платежную систему, с котрой был изготовлен депо. То есть, для вывода бездепозитного приза, Вам поначалу нужно пополнить счет. В некоторых клубах узкий список методов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет именно с данных платежных способов, коие доступны для вывода. <a href=http://www.fiat130.it/phpbb3/memberlist.php?mode=viewprofile&u=293>1×slots официальный сайт зеркало рабочее</a> 1×slot рабочее зеркало <a href=http://bbs.yxsensing.net/home.php?mod=space&uid=124865>http://bbs.yxsensing.net/home.php?mod=space&uid=124865</a> Также бездепозитные бонусы все работать методом возвратить к этой посетителей, что приостановивших своё сотрудничество с фирмой: извещение о бездепе поступает на мобильный телефонный либо почту.
1хслотс казино зеркало
В большинстве заведений устроить это возможно по e-mal, по номеру телефонного, спустя социальную сеть либо гугл-аккаунт. <a href=http://elektrofahrrad-tests.de/forums/member.php?action=profile&uid=40014>http://elektrofahrrad-tests.de/forums/member.php?action=profile&uid=40014</a> 1 хслот регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=https://www.makinamania.net/index.php?topic=250583.new#new>1×slots зеркало которую указывали при регистрации кстати</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
С иной стороны, гораздо легче арестовать бездепозитные фриспины за регистрацию в казино и прямо сейчас начать вращать барабаны в лучших слотах. Главная необыкновенность спинов что, собственно они предназначены для лучших автоматов. Удастся столько пройти дополнительные раунды, хотя и прирастить сумму выигрыша, заработать респины прочие внутриигровые подарки.
#9525 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать на айфон
Если вы облюбовали себе некоторое брендов коие для больше всего полюбились, для постоянной игры! Таких гемблеров казино довольно предпочитает и оценивает, за частую эти игроки становятся VIP игроками заведения, которым нередко поступают выгодные предложения в виде бонусов, так же туда заходит и бездепозитные. <a href=http://filmkachat.ru/>1×слотс казино</a> <a href=http://www.uepd.de/w3/doku.php?id=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D0%BE%D0%B2%20%D0%B8%D0%B7%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO>http://www.uepd.de/w3/doku.php?id=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D0%BE%D0%B2%20%D0%B8%D0%B7%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO</a> 1×slots официальный сайт скачать <a href=http://a96549hg.bget.ru/user/WalterORele/>http://a96549hg.bget.ru/user/WalterORele/</a> Для верификации аккаунта надо(надобно) дать специалистам технической помощи отсканированную копию паспорта и счета за коммунальные предложения, еще фотографию банковской карты или снимок страницы электронного кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности.
1×slots официальный сайт зеркало рабочее
При отыгрыше бездепов, учитывайте временные ограничения. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток. <a href=https://clubdefansde24.com/foro/memberlist.php?mode=viewprofile&u=3464>1× слот зеркало</a> 1хслот официальный сайт зеркало Чтобы выступать даром на настоящие деньги в казино, порой довольно просто зарегистрироваться. Иногда нужно выполнить дополнительные действия. <a href=http://issachar.mx/index.php?option=com_kunena&view=topic&catid=6&id=186401&Itemid=124#186395>http://issachar.mx/index.php?option=com_kunena&view=topic&catid=6&id=186401&Itemid=124#186395</a> 1×slots официальный зеркало рабочее Изучить управляла и обстоятельства получения бездепозитных призов казино, Вы можете у нас на веб-сайте в разделе с призами либо на официальном сайте избранного Вами казино. Если возможности найти необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электрической почте.
1×slot зеркало рабочее этих способов предполагает регистрацию
<a href=http://www.kbszw.com/home.php?mod=space&uid=37422>http://www.kbszw.com/home.php?mod=space&uid=37422</a> Объективные – объем бонуса, коэффициент и условия вейджера, необходимость внесения депозита для вывода средств; 1×slots рабочее зеркало Как только получите бездеп в казино, всё равно не запамятовывайте проверять электрическую почту. Некоторые игорные клубы постоянно радуют интенсивных гэмблеров приятными бонусами. Чаще всего получить презент можно в преддверии веселья, на денек рождение, за вербование приятеля. А кроме распространённым призом является прибавка к депозиту. Нужно более восполнить счёт, и азартное заведение увеличит его на 50–100%.
казино 1×slots официальный сайт
Особую изюминку видео слотам присваивают уникальные знакы. С их выходом активизируются различные призы. Вы можете запустить дополнительный уровень и увеличить необходимую выигрыша. Есть знаки, которые замещают ненадобные элементы и сами творят выигрышные комбо. Не стоит забывать и на бонус-тур. После любого успешного спина есть шанс увеличить сумму выигрыша в 2 или четыре раза. 1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со службой и почитайте отзывы, случае не желайте стать жертвой плутов или впустую израсходовать время;Чаще всего интернет-казино предлагают бездепозитные бонусы свежим пользователям. Эта промо-акция очень отлично привлекает начинающих, подталкивая их к открытию счета. Конечно, не все становятся преданными клиентами, но сам прецедент регистрации аккаунта играет на руку заведению. Размер приза. В качестве бездепов обыкновенно начисляют большие суммы, а когда идет о бонусах за депо, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино могут презентовать игроку до 2000$. 1×slots регистрация на сайте <a href=http://4obzor.ru/index.php?subaction=userinfo&user=accidentalgash4>http://4obzor.ru/index.php?subaction=userinfo&user=accidentalgash4</a> Основное различие в, что для получения бездепа не пополнять баланс в казино. Но кроме сего, есть ряд и различий:
1х слот 1хслотс регистрация перейти на 1×slots
<a href=https://graddata.ru/user/RenaldoRit/>https://graddata.ru/user/RenaldoRit/</a> Так что можете смело региться без всяких размышлений. Фортуна сейчас точно на вашей стороне. Не страшитесь, так последствие какого или ущерба Вам совершенно не угрожает. С такими бонусами как без пополнения, Вы остаетесь лишь в плюсе, хотя не как не в минусе. 1хслотс официальный сайт зеркало При помощи такого одобрения оператор имеет кроме завлекать клиентов, коие раньше проявляли активность на веб-сайте, хотя по некий основанию перестали играть. В этом случае промокод высылается юзеру по электрической почте или повторяющий SMS.
<b>Смотреть еще похожие новости:</b>
<a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=7523&TITLE_SEO=7523-preobrazovatel-interfeysov-usb-rs485&MID=466626&result=reply#message466626>1×slots casino online регистрация</a>
<a href=https://australianwinerytours.com/tours/showthread.php?tid=202968>1×slots зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Ограничения по забавам. Администрация воспрещает игрокам кое-какие игровые автоматы с бездепозитным бонусом, деньгами или бесплатными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда дробление производится по облику игр. Например, отыгрыш возможен на всех игровых аппаратах, но запрещен в настольных забавах и в разделе Live Casino. Бездепозитный бонус по промо-коду несомненно доступен для игры, только что, нет случае когда Вы активируете особый бонусный код в разделе с бонусами или укажите промокод при регистрации на сайте. В неких случаях, не активации кода, понадобиться доказать контактные данные игрока и заполнить анкету посетителя.
#9526 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slots review live
Oтыгpaть приз с указанным вeйджepом, достичь нужно сдeлaть cтaвoк нa cумму, превосходящую объем приза в количество раз.Для верификации номера аппарата, в личном профиле изберите опцию „Подтвердить номер телефонного“ и введите в подходящее поле код, приобретенный в sms-сообщении. <a href=http://filmkachat.ru/>1×slots регистрацию процедура займет всего лишь</a> Но есть игорные заведения, которые готовы просто так жертвовать деньги на забаву. Для сего довольно сделать профиль. Чтобы вывести свой выигрыш, вас поначалу нужно выполнить обстоятельства отыгрыша, указанные в условиях получения бездепозитного депозита.Многие казино деют в рекламных целях бесплатные бонусы исключительно для наших читателей. Чтобы их получить, надо(надобно) перебежать на игровой вебсайт по партнерской ссылке с нашего портала. <a href=http://www.cooperativacoomultexco.com/user/DavidBar/>http://www.cooperativacoomultexco.com/user/DavidBar/</a> 1х слот регистрация в 1×slots casino <a href=http://unix.t7y.ru/user/JoshuaAbime>http://unix.t7y.ru/user/JoshuaAbime</a>
1×slots регистрацию более популярный вариант это
Бездепозитный приз за регистрацию в казино с выводом денег в 2022 году — Наш ресурс дает игрокам актуальную информацию о самых свежих, великодушных и проверенных бонусах в онлайн казино, коие обновляются каждый денек. 1хслотс казино зеркало <a href=http://www.pigcraft.ugu.pl/member.php?action=profile&uid=238706>http://www.pigcraft.ugu.pl/member.php?action=profile&uid=238706</a> Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депо может выделяться до 30 дней.Обыкновенные бездепозитные призы в объеме от трех до 20 долларов созданы чтобы, чтобы, дабы в игры заходили все новые и новые игроки. Здесь, скорее, будет лимитирование на наибольший выигрыш. Важно, чтобы перед наименьшим вкладом был отключен приз за первое пополнение счета, и в не попадет на повторный вейджер. 1× slots сайт После получения бонуса вывод средств для посетителя будет недоступен до тех пор, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо пара недель. Выводить средства игрок может только последствии отыгрыша.
1×slots зеркало
В зависимости от онлайн заведения любой из них имеет для предложить как бездепозитные деньги, например и бездепозитные фриспины, коие последствии успешной регистрации упадут для на ваш игровой баланс. Любой выигрыш по ставке выше установленного лимита несомненно являться недействительным. То есть ставка не будет засчитана при отыгрыше, а случае выигрыша его сумма не поступит на счёт посетителя — итог игры будет полностью аннулирован. <a href=http://www.atego-club.ru/forum/member.php/132603-DonaldFossy>http://www.atego-club.ru/forum/member.php/132603-DonaldFossy</a> На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не можете активировать и получить бездепозитный приз. 1хслот скачать Некоторые сайты, до чем обмануть регистрацию игроков, предлагают ответить на некоторое базисных вопросов. Цель проведения сходственной викторины – выявить случайных людей, коие не имеют представления о покере, и не допустить получения ими призов. Если посетитель уже играл в казино, то ответить на полтора 10 несложных вопросов будет нетрудно. Очень часто, ответы возможно найти на официальных веб-сайтах данных учреждений.Если вы облюбовали себе количество брендов которые для больше всего приглянулись, для постоянной игры! Таких гемблеров казино довольно любит и ценит, за частую такие игроки становятся VIP игроками заведения, коим нередко поступают выгодные предложения вид бонусов, так же туда входит и бездепозитные.
1×slots casino зеркало рабочее
Наш перечень содержит лучшие бездепозитные бонусы казино с выводом денег без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка проходит проверку по принципиальным параметрам: 1хслотс казино зеркало <a href=http://services-sector.ru/clubpointeresam/memberlist.php?mode=viewprofile&u=157589>http://services-sector.ru/clubpointeresam/memberlist.php?mode=viewprofile&u=157589</a> Мы подготовили перечень, где есть всегда животрепещущие и свежие бездепозитные бонусы казино, которые вы можете получить бесплатно. Для наших юзеров есть специальные предложения неповторимые призы, коие вы кого не найдете, их мы обозначили специальной красноватой плашкой «Exclusive».Прочитайте управляла бонусной программки, в желаете принять. Да, мы настоятельно рекомендуем сделать это до регистрации.
1×slots регистрация на 1хслотс
<a href=http://cd.dotspen.com/home.php?mod=space&uid=8950>http://cd.dotspen.com/home.php?mod=space&uid=8950</a> У каждого игорного заведения свои управляла и условия. Но, чтобы получить бонусы, необходимо выполнить стереотипные действия: 1хслотс рабочее зеркало на сегодня Главное преимущество спинов – возможность выучить различные слоты. Также удастся насладиться бонусными раундами, испытывать фортуну в риск-туре и преувеличить выигрыш за счёт особенных знаков. Однако столько игровой процесс заслуживает внимание, так превосходнее сосредоточиться на реальном выигрыше.
<b>Смотреть еще похожие новости:</b>
<a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=89301>1хслотс рабочее зеркало</a>
<a href=http://brilliance.ru/forum/memberlist.php?mode=viewprofile&u=21924>1×slots зеркало регистрация</a>
<a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=7523&TITLE_SEO=7523-preobrazovatel-interfeysov-usb-rs485&MID=460949&result=reply#message460949>1×slots зеркало этих способов предполагает регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При исполненьи критерий отыгрыша и верификации, деньги с бонусного счета переводятся на основной и шансы быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции находятся от выбранной платежной системы. Бонус без депозита за регистрацию в казино (бездепозитный бонус) – это денежный презент от клуба, кот-ый начисляется на аккаунт игрока после регистрации в казино. Кроме сотворения учетной записи, для получения бездепа, очень часто потребуется ещё и доказать контактные данные игрока и/или активировать специальный промо-код.
#9527 Charlesgunnyhttp://filmkachat.ru
1×slots актуальное зеркало
Для отыгрыша приза казино обязует игрока сыграть на необходимую, в некоторое один превышающую сумму полученного бонуса — тут выгода компании явна. <a href=http://filmkachat.ru/>1 x slots</a> <a href=http://www.pax.nichost.ru/forum/view_profile.php?UID=137355>http://www.pax.nichost.ru/forum/view_profile.php?UID=137355</a> Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, дабы появилась вероятность исключить выигрыш.Бонус без депо за регистрацию в казино (бездепозитный бонус) – это валютный подарок от клуба, кот-ый начисляется на аккаунт игрока после регистрации в казино. Кроме сотворения учетной записи, для получения бездепа, довольно часто потребуется ещё и доказать контактные данные игрока и/или активировать особый промо-код. 1×slots официальный demo регистрация в 1×slots casino <a href=http://o91668l6.beget.tech/user/DeweyLof/>http://o91668l6.beget.tech/user/DeweyLof/</a> Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и более. Когда игроку полагается количество фриспинов, администрация может бить3 их начисление на некоторое дней. Бесплатные вращения предоставляются для определенного слота, кот-ый указывается в правилах промоакции.
1 х слотс зеркало
Стоит отметить, что бездепозитный приз выдается лишь взрослым новеньким, которые, же, шансы пригласить собственных друзей и своих, также рассчитывающих на поощрительную программу преданности. Подобная технология была среди создающих онлайн-казино для популяризации и расширения трафика. Покер румы и спонсоры содействуют повышению своей посещаемости, путем вербования новых игроков. Бонусы – это уникальный шанс для вероятных участников игры, которые шансы опробовать софт покер рума и увериться, станут ли они в него выступать либо нет. Новый игрок испробует средства силы с настоящими оппонентами в казино. 1×slots промокод при регистрации 2025 <a href=http://ybjlfc.com/home.php?mod=space&uid=394708&do=profile>http://ybjlfc.com/home.php?mod=space&uid=394708&do=profile</a> Выбирая даровой бонус, пристально изучайте верховодила. Убедитесь, что вас можно на роль в акции. Уточните, в каких забавах возможно скорпулезно условия вейджера. При необходимости задавайте вопросы адептам саппорта. 1×slots официальный сайт скачать Популярность онлайн казино растёт и всё больше юзеров начинают интерес азартными забавами. Бездепозитные бонусы 2022 года, это уникальные подарки за регистрацию. С их помощью свежие игроки шансы получить бесплатные вращения либо деньги на баланс за 1 регистрацию. С свет игорных заведений в интернете, бездепозитные бонусы стали популярнейшим способом привлечения игроков. Подобные промоакции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о которых мы поведаем. Наш сайт собрал наилучшие предложения из интернета на 2022 год. Воспользуйтесь любым презентом и сможете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша нужно выполнить обстоятельства.
1× slots зеркало
Постарайтесь отыграть вейджер, чтобы замечена возможность оставить заявку на выплату. Кстати, на всех сайтах, представленных в списке, доступны современные платёжные инструменты. Вы можете получить выигрыш на электронной кошелёк, карту, аппарат.Зачастую бездепозитные бонусы казино для забавы предлагаются разными заведениями азартных игр виде рекламных промоакций либо в целях привлечения к себя свежих игроков. Для бездепозитных призов в казино 2022 геймеру надо пополнять счет до этапа вывода хотимых средств. <a href=https://images.google.com.cy/url?q=https://doctorlazuta.by/>https://images.google.com.cy/url?q=https://doctorlazuta.by/</a> Доступные игры – В неких азартных играх возможно снизить математическое преимущество казино до нескольких десятых процента. В их количестве почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как управляло, в таких забавах ставки идут в зачет вейджера не всецело. Например, может предусматриваться только 50%. В неких забавах бездепозитные бонусы вообщем нельзя отыгрывать.Подобные бонусы без депо предоставляются на более прибыльных условиях. Зачастую они покрупнее, а условия отыгрыша менее строгие. 1×slots рабочее зеркало на сегодня
рабочее зеркало 1хслотс
На данном разделе портала регулярно публикуются обзорные заметки, в рассматриваются благотворительные бонусы превосходнейших интернет-казино. Информация структурирована по нескольким пунктам, включая главные: Вейджер (wager) – это коэффициент, который демонстрирует на какую необходимую нужно устроить ставок, дабы вывести бонус из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего бонуса, Вам необходимо устроить ставок на сумму: 500*70=3500 рублей. Только полностью отыграв бонус, Вы сможете вывести свой выигрыш. 1×slots мобильная версия войти казино <a href=http://aginskoe24.ru/redirect?url=http://xn–2–clc1arb0b.xn–p1ai/bitrix/click.php?goto=http://78rospotrebnadzor.ru/en/web/guest/557/-/asset_publisher/eLX6/content/20-%D0%B4%D0%B5%D0%BA%D0%B0%D0%B1%D1%80%D1%8F-%D0%B2-%D0%B8%D0%BD%D1%84%D0%BE%D1%80%D0%BC%D0%B0%D1%86%D0%B8%D0%BE%D0%BD%D0%BD%D0%BE%D0%BC-%D0%B0%D0%B3%D0%B5%D0%BD%D1%82%D1%81%D1%82%D0%B2%D0%B5-%C2%AB%D0%B8%D0%BD%D1%82%D0%B5%D1%80%D1%84%D0%B0%D0%BA%D1%81-%D1%81%D0%B5%D0%B2%D0%B5%D1%80%D0%BE-%D0%B7%D0%B0%D0%BF%D0%B0%D0%B4%C2%BB-%D1%81%D0%BE%D1%81%D1%82%D0%BE%D1%8F%D0%BB%D0%B0%D1%81%D1%8C-%D0%BF%D1%80%D0%B5%D1%81%D1%81-%D0%BA%D0%BE%D0%BD%D1%84%D0%B5%D1%80%D0%B5%D0%BD%D1%86%D0%B8%D1%8F-%D0%BD%D0%B0-%D1%82%D0%B5%D0%BC%D1%83:-%C2%AB%D0%BF%D0%BE%D1%82%D1%80%D0%B5%D0%B1%D0%B8%D1%82%D0%B5%D0%BB%D1%8C%D1%81%D0%BA%D0%B8%D0%B5-%D1%80%D0%B8%D1%81%D0%BA%D0%B8-%D0%B2-%D0%BF%D1%80%D0%B5%D0%B4%D0%BD%D0%BE%D0%B2%D0%BE%D0%B3%D0%BE%D0%B4%D0%BD%D0%B8%D0%B8-%D0%BF%D0%B5%D1%80%D0%B8%D0%BE%D0%B4:-%D0%BA%D0%B0%D0%BA-%D0%BD%D0%B5-%D0%BE%D1%88%D0%B8%D0%B1%D0%B8%D1%82%D1%8C%>http://aginskoe24.ru/redirect?url=http://xn–2–clc1arb0b.xn–p1ai/bitrix/click.php?goto=http://78rospotrebnadzor.ru/en/web/guest/557/-/asset_publisher/eLX6/content/20-%D0%B4%D0%B5%D0%BA%D0%B0%D0%B1%D1%80%D1%8F-%D0%B2-%D0%B8%D0%BD%D1%84%D0%BE%D1%80%D0%BC%D0%B0%D1%86%D0%B8%D0%BE%D0%BD%D0%BD%D0%BE%D0%BC-%D0%B0%D0%B3%D0%B5%D0%BD%D1%82%D1%81%D1%82%D0%B2%D0%B5-%C2%AB%D0%B8%D0%BD%D1%82%D0%B5%D1%80%D1%84%D0%B0%D0%BA%D1%81-%D1%81%D0%B5%D0%B2%D0%B5%D1%80%D0%BE-%D0%B7%D0%B0%D0%BF%D0%B0%D0%B4%C2%BB-%D1%81%D0%BE%D1%81%D1%82%D0%BE%D1%8F%D0%BB%D0%B0%D1%81%D1%8C-%D0%BF%D1%80%D0%B5%D1%81%D1%81-%D0%BA%D0%BE%D0%BD%D1%84%D0%B5%D1%80%D0%B5%D0%BD%D1%86%D0%B8%D1%8F-%D0%BD%D0%B0-%D1%82%D0%B5%D0%BC%D1%83:-%C2%AB%D0%BF%D0%BE%D1%82%D1%80%D0%B5%D0%B1%D0%B8%D1%82%D0%B5%D0%BB%D1%8C%D1%81%D0%BA%D0%B8%D0%B5-%D1%80%D0%B8%D1%81%D0%BA%D0%B8-%D0%B2-%D0%BF%D1%80%D0%B5%D0%B4%D0%BD%D0%BE%D0%B2%D0%BE%D0%B3%D0%BE%D0%B4%D0%BD%D0%B8%D0%B8-%D0%BF%D0%B5%D1%80%D0%B8%D0%BE%D0%B4:-%D0%BA%D0%B0%D0%BA-%D0%BD%D0%B5-%D0%BE%D1%88%D0%B8%D0%B1%D0%B8%D1%82%D1%8C%</a> Главным моментом в появлении данных вознаграждений произведено сомнений, собственно пустив их в ход, игрок ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он благодаря призам какой-нибудь выигрыш либо мгновенно спустит все лишь что прибывшие деньги). То есть, казино снабжает игрока возможностью на дармовой базе играть во всевозможные слоты и даже спонсирует забаву.Для получения предоставленных бонусов вам понадобиться — ПК либо мобильное устройство, и остальное дело за малым.
1хслот 1хслотс регистрация перейти на 1×slots
<a href=http://www.annunciogratis.net/author/randalstarm>http://www.annunciogratis.net/author/randalstarm</a> Некоторые клубы механически начисляют бонус на акк игрока после выполнения критерий получения, хотя посещают ситуации, когда приз нужно активировать игроку самому. Есть некоторое способов активации приза: 1×slots зеркало Самые свежие бездепозитные бонусы в казино за регистрацию 2022 года с выводом выгоды находятся на данной странице. Посетитель имеет оценить условия получения и начать выступать на деньги без внесения депо. При данном игроку важно разуметь, на каких критериях и какими методами у вывести приобретенный выигрыш. Для этого необходимо оценить список присоединенных платежных систем.Для получения бездепа необходимо пригласить в забаву по реферальной ссылке нового посетителя: он должен зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и пополнить счёт на сумму, указанную в условиях акции.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.dis-course.net/viewtopic.php?t=392066>1хслот официальный сайт зеркало</a>
<a href=https://www.mshowto.org/forum/members/jamespauri.html>1×slots регистрация 1×slots casino c2d ru</a>
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=3605>казино 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам важную информацию о самых новых, щедрых и испытанных бонусах в интернет казино, которые обновляются любой день.
#9528 Charlesgunnyhttp://filmkachat.ru
1×slots сайт зеркало
Получать информацию о самых прибыльных бонусах можно без неизменного прогноза новостей казино. Мы взяли данную задачу на себя и безпрерывно смотрим за услугами операторов, выбирая лучшие из них. В данном разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список акций периодически пополняется. В топ вошли самые свежие бездепозитные призы за регистрацию в казино 2020, кратковременные и замкнутые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру прочим аспектам. Если срок действия промоакции истек, она удаляется из списка. <a href=http://filmkachat.ru/>1×slots промокод при регистрации 2025</a> Эффективность бездепов в рекламного прибора оценили все операторы. Малоизвестные площадки используют такие промоакции, дабы стремительно набрать клиентов. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны неизменных посетителей. Не все сайты, дающие подарки без депо, рекомендованы к этой. За привлекательным промоописанием шансы прятаться неосуществимые обстоятельства отыгрыша и другие подводные камни. <a href=https://xebecar.com/author/jamesdauff/>https://xebecar.com/author/jamesdauff/</a> Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? 1×slots casino регистрация <a href=http://198.199.122.222/doku.php?id=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D1%8B%D0%B5%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%88%D0%B5%D1%84-%D0%BF%D0%BE%D0%B2%D0%B0%D1%80%D0%BE%D0%B2%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!>http://198.199.122.222/doku.php?id=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D1%8B%D0%B5%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%88%D0%B5%D1%84-%D0%BF%D0%BE%D0%B2%D0%B0%D1%80%D0%BE%D0%B2%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!</a>
1×slots официальный сайт, скачать
Отзывы читателей о бонусных акциях помогут составить впечатление, но не запамятовывайте о субъективности собственных комментариев. x1 slots 1хслотс регистрация перейти на 1×slots Пoдтвepдить личнocть посетителя. Для удачного вывода средств, необходимо подтвердить лицо посетителя. Нa этaпe вepификaции пpoфиля, сотрудники службы безопасности обязаны увериться, собственно у игрока чем раз аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не сможет вывести собственный выигрыш, случае у него будет несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы.На активацию бездепозитного презента выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не сможете активировать и получить бездепозитный бонус. <a href=http://roadtest.u-car.com.tw/share/platform?url=http://profzoo.ru/bitrix/rk.php?goto=http://iqtool.ru/bitrix/redirect.php?goto=https://telegra.ph/Kuda-obrashchatsya-s-zhalobami-na-upravlyayushchuyu-kompaniyu-09–19>http://roadtest.u-car.com.tw/share/platform?url=http://profzoo.ru/bitrix/rk.php?goto=http://iqtool.ru/bitrix/redirect.php?goto=https://telegra.ph/Kuda-obrashchatsya-s-zhalobami-na-upravlyayushchuyu-kompaniyu-09–19</a> Зарегистрируйтесь. Для регистрации почаще всего довольно установить свой номер аппарата и почтовый адресок, после чего установить приобретенный код из СМС. Возможно, потребуется указать промокод. В правилах промоакции будет написано, где его бы вводить. Иногда это надо делать при регистрации, иногда — теснее в сотворения собственного кабинета, на отдельной страничке. рабочее зеркало 1хслотс Высокая конкуренция в разделе азартных игр доказывает операторов завлекать клиентов разнообразными акциями. Благодаря данному у гостей замечена возможность получить призы в казино за регистрацию без депозита. Воспользоваться этим предложением возможно, избегая функцию внесения средств на игровой счет, просто активировав акк на веб-сайте. Наш гид по бездепам поможет избрать самую привлекательную бонусную программку, узнать правила получения такового вознаграждения и распорядиться им с максимальной выгодой.
1хслот зеркало
Также, учите, собственно бездепозитный бонус возможно вывести лишь в случае, когда будут исполнены все условия отыгрыша. <a href=https://www.metal-tracker.com/forum/member.php?action=profile&uid=927401523>https://www.metal-tracker.com/forum/member.php?action=profile&uid=927401523</a> Прибывшие на аккаунт финансы бездепозитные бонусы предназначаются, в основном, только для новоиспеченных пользователей, которые ранее не имели личного аккаунта в данном казино. Исходя из этого, в раньше у игрока был сделан депо, то, по всей вероятности, у него больше не будет способности рассчитывать на получение такого бонуса в определенном заведении. 1×slots casino регистрация
1×slots зеркало которую указывали при регистрации кстати
Особую изюминку видео слотам придают оригинальные знакы. С их в активизируются разные призы. Вы можете запустить дополнительный уровень и прирастить сумму выигрыша. Есть знаки, коие заменяют ненадобные составляющие и сами творят выигрышные комбо. Не стоит забывать и тему бонус-тур. После каждого успешного спина есть шанс прирастить необходимую выигрыша в 2 или хорошо раза. <a href=http://nacionrolera.org/foro/viewtopic.php?f=1210&t=89033>1хслотс рабочее зеркало</a> Условия отыгрыша бонуса. Если Вы планируете заработать на бездепозитном бонусе, то для обратите внимание на значение вейджера и срок, который дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть приз и вывести выигрыш. 1×slots официальный сайт зеркало <a href=http://seneka-vl.ru/index.php?subaction=userinfo&user=noisybroker50>http://seneka-vl.ru/index.php?subaction=userinfo&user=noisybroker50</a> Мы подготовили перечень, где есть всегда животрепещущие и свежие бездепозитные призы казино, которые вы можете получить бесплатно. Для наших юзеров есть особые предложения эксклюзивные бонусы, которые вы кого не отыщите, их мы обозначили особой красной плашкой «Exclusive».
1х слот регистрация в 1×slots casino
Большинство клубов завлекают внимание геймеров за счёт различных подарков. На 1 сайтах возможно получить виртуальные кредиты, которые откроют доступ ко всему софту. На других же, администрация предлагает благотворительные вращения для запуска топовых онлайн слотов. Несмотря на разные акции, стоит выделить самые основные. <a href=https://lecointurc.com/users/tyronelon>https://lecointurc.com/users/tyronelon</a> Автоматическая активация первый самой комфортной, хотя ручной способ имеет перед ней достоинства. Прежде чем использовать вознаграждение от казино, стоит заблаговременно найти, сколько медли требуется на исполнение всех критерий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала действия приза. 1×slots зеркало сайта Также учтите, собственно некоторые игровые платформы сузивают перечень государств, которые способны получить предложенный бездепозитный бонус за регистрацию. К примеру, есть онлайн-заведения, выдающие похожие призы лишь жильцам конкретных стран. К образцу, онлайн казино 777 Оригинал предоставляет бездепозитный приз только игрокам из России и стран СНГ. Или напротив, снабжают вознаграждением всех, не жителей некоторых стран (исходя из сего, идет пристально изучать список, чтобы потом не возникло практически вопросов и претензий).
<b>Смотреть еще похожие новости:</b>
<a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=88972>1×slot официальный сайт</a>
<a href=http://magazine-avosmac.com/php-mauleon/memberlist.php?mode=viewprofile&u=41188>1×slots бездепозитный бонус за регистрацию</a>
<a href=https://www.makinamania.net/index.php?topic=250375.new#new>1×slots сайт зеркало</a>
<a href=https://www.makinamania.net/index.php?topic=250544.new#new>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если площадка дарует бездеп за регистрацию, то процедура его получения ординарна. Нужно только завести акк на сайте и активировать его, подтвердив адрес электрической почты, номер телефона либо иные данные, которые требует оператор. Перед этим нужно убедиться, собственно пользователь располагается на официальном веб-сайте казино, а не на мошеннической площадке. У любого игорного заведения свои правила и условия. Но, дабы получить призы, необходимо выполнить стандартные действия:
#9529 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало этих способов предполагает регистрацию
Не стоит незамедлительно же отрицаться от приветственных подарков в похожих казино. Администрация готова начислить деньги либо фриспины, хотя предварительно работники обязаны увериться, собственно вы не аферист. Дело никаких, что развелось очень большое охотников за призами. Они выучились дурачить систему и зарабатывать солидные суммы денег.Если вы выбираете проверенное лицензионное онлайн казино и сделайте все условия получения бездепозитного приза, трудностей с получением подарка у Вас не возникнет. <a href=http://filmkachat.ru/>1×slots официальный сайт, скачать</a> <a href=https://djchs.co.kr/bbs/board.php?bo_table=qna&wr_id=364409>https://djchs.co.kr/bbs/board.php?bo_table=qna&wr_id=364409</a> Проверка занимает от нескольких мин. До нескольких дней, специалисты техподдержки шансы запросить дополнительные документы или инициировать куцее общение по Skype. 1хслотс рабочее зеркало на сегодня <a href=https://sofiataxi.com.ua/user/GlennSix/>https://sofiataxi.com.ua/user/GlennSix/</a> Прежде чем активировать бездеп, необходимо убедиться в, собственно страна, уроженцем коей считается игрок, не заходит в список разрешенных.
1×slots регистрация 1×slotscasino 56 online
Отзывы читателей о бонусных промоакциях помогут составить эмоцию, хотя не забывайте о субъективности личных комментариев. <a href=http://lider1c.ru/communication/forum/messages/forum5/message18733/14708–1khlot-registratsiya-v-1×slots-casino?sessid=107dfe058704caefe000443900840cf0&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1хлот регистрация в 1×slots casino</a> 1 х слотс зеркало Обыкновенные бездепозитные бонусы в размере от 3-х до двадцати долларов сделаны чтобы, чтобы, чтобы в игры заходили все свежие и новые игроки. Здесь, вероятнее всего, будет ограничение на максимальный выигрыш. Важно, дабы перед наименьшим вкладом был отключен бонус за 1-ое пополнение счета, и игры не попадет на повторный вейджер. <a href=http://fauraplus.ru/bitrix/redirect.php?goto=http://santehprice.ru/bitrix/redirect.php?goto=http://mosi.ru/links.php?go=https://teletype.in/@urist555/_s9_l28V6zD>http://fauraplus.ru/bitrix/redirect.php?goto=http://santehprice.ru/bitrix/redirect.php?goto=http://mosi.ru/links.php?go=https://teletype.in/@urist555/_s9_l28V6zD</a> Бонус начисляется игроку сразу последствии регистрации и прохождения верификации в казино и не просит от посетителя внесения депозита. Как верховодило, размер бонуса в подобном случае довольно стыдливый, впрочем позволяет новеньким познакомиться с забавой без риска реальными деньгами. казино 1×slots Подтвердите регистрацию, чтобы активировать Бездепозитный приз с выводом, потребуется наполнить собственный профиль. Заполните пустующие поля настоящими данными о себя.
1×slots casino зеркало рабочее
Все благотворительные бонусы кажутся заманчивыми. Кто же откажется от способности поиграть в онлайн-казино, не рискуя средствами, но получая выигрыши. Но далековато не все бездепозитные призы мере привлекательны для рассудительного посетителя. <a href=http://dooood.fun/member.php?action=profile&uid=3502>http://dooood.fun/member.php?action=profile&uid=3502</a> После получения бонуса вывод средств для клиента несомненно недоступен до тех пор, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя либо пара месяцов. Выводить деньги игрок сможет лишь последствии отыгрыша.Вознаграждения за получение VIP-статуса ? начисляются в программы преданности при достижении очередного значения либо выдаются персонально менеджерами службы поддержки. 1хслотс рабочее зеркало В случае с фриспинами без вейджера, Вам не придется отыгрывать свой выигрыш с даровых вращений. Прибыль, которую Вы заработаете на таком бездепе можно ставить на вывод без какого или отыгрыша.
онлайн казино 1×slots
Превышение наибольшей ставки при отыгрыше. Система автоматически не предуведомляет о превышении ставки, поэтому о несоблюдении верховодил игрок имеет узнать теснее после подачи запроса на вывод средств.Пoдтвepдить личнocть клиента. Для удачного вывода средств, нужно доказать личность клиента. Нa этaпe вepификaции пpoфиля, сотрудники службы защищенности обязаны увериться, собственно у игрока всего лишь один аккаунт. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не сможет вывести свой выигрыш, если у него будет количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы. <a href=https://persiankittencat.com/temporary-dog-fence-ideas/>1×slots официальный зеркало рабочее</a> Все любят получать презенты. Согласитесь, почти любой играющий человек будет безгранично рад, если получит даровой подарок для забавы в интернет казино просто за регистрацию либо же бонус за внесенный депо, например именуемые приветственные бонусы для новых игроков. Соответственно такие интернет клубы станут больше известны и предпочтительны у игроков при выборе казино для игры. Топ казино постоянно обновляется и прибавляются свежие и занимательные игровые клубы с симпатичной бонусной политикой и всеми возможными привилегиями, к которым относятся эти призы как фриспины за регистрацию, денежные бездепозитные призы, а также великодушные бонусы за внесенный депо.B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax Но на некоторых азартных платформах сходственные вознаграждения все получить теперь зарегистрированные пользователи. В таком случае, бонусы предоставляются в уникальных акций или же неким игрокам повторяющий акционного предложения, коие приходит на почту с целью «возвратить» игрока в свое казино. 1×slots официальный сайт зеркало <a href=http://www.sixsigmaexams.com/mybb/member.php?action=profile&uid=268874>http://www.sixsigmaexams.com/mybb/member.php?action=profile&uid=268874</a> Внесение депозита – Будьте готовы пополнить счет после отыгрыша приза. Это обычное требование правил для данного подобии промо-акций. Лучше заранее уточнить, какую сумму нужно будет заносить на счет. Как управляло, речь о минимальном депозите, но вы обязаны быть убеждены, собственно он вас по кармашку.
1хслотс регистрация в 1×slots casino
<a href=https://loansnearme.com.au/author/renaldobrals/>https://loansnearme.com.au/author/renaldobrals/</a> Онлайн гемблинг развивается с любым деньком все больше и больше, новые бренды создаются не по денькам а по часам. Новые интернет казино делают вступительные промоакции для игроков, чтобы, чтобы что бы зарекомендовать себя, и тем самым предлагают бездепозитные бонусы за регистрацию, собственно бы не упустить такую вероятность — как пользоваться свежим бездепом, советуем навещать наш сайт как можно почаще, самое лакомое и новые будет добавляться в данном же перечне.Вы всего, как и все предпочитаете получать презенты и бездепозитные призы казино. Игорные жилища взяли в привычку одаривать гэмблеров приятными бонусами. Стать обладателем приветственного подарка возможно за творение профиля или пополнение счёта. Второй вариант более увлекательный, так клубы готовы удвоить депозит! Но если вы новичок и только знакомитесь с миром пыла, никакого воспользуйтесь призом за регистрацию. 1×slots официальный зеркало рабочее
<b>Смотреть еще похожие новости:</b>
<a href=http://khodaumo.com/forum/viewtopic.php?f=13&t=75346&sid=2ad62fda8431509825abafc0829955f0>1×slots бездепозитный бонус за регистрацию</a>
<a href=http://djdrewski.co.uk/lfsbangers/viewtopic.php?f=32&t=29326>1×slots зеркало проходить регистрацию это отличный вариант</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Не рекомендуем сломя голову браться за всевозможные предложения получения средств без вложений. Вполне вполне, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем выглядит на первый взор. Альтернативой считается казино приз за депозит. Мы предлагаем вам пару советов, спасибо которым у любого игрока несомненно вероятность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом средств:
#9530 Charlesgunnyhttp://filmkachat.ru
1× slots регистрация в 1×slots casino
Размер ставки для игры по бездепозитному бонусу (конечно же, если, тогда,, когда он представлен в виде бонусных денежных средств) часто ниже, чем при этой на депо. Ограничение несомненно действовать до этапа отыгрыша приза.Итак, дабы безвозмездные бонусные кредиты трансформировались в настоящие деньги, которыми продоставляется управлять по собственному усмотрению, их надо(надобно) отыграть. Вейджер стопам уточнять в правилах онлайн-казино. <a href=http://filmkachat.ru/>рабочее зеркало 1×slots</a> На странице представлены бездепозитные призы за регистрацию в казино редкая награда за коей гонятся все игроки как новички, так и профессионалы. Мы тоже уделяем большое внимание на присутствие призов при формирование рейтинга казино на деньги. Бездепозитный приз это вероятность играть даром и выиграть реальные средства. <a href=http://www.icmms.co.kr/bbs/board.php?bo_table=free&wr_id=1032370>http://www.icmms.co.kr/bbs/board.php?bo_table=free&wr_id=1032370</a> Бонусы без депо при регистрации числятся наиболее привлекательными как для опытнейших игроков, так для и начинающих. Получив это вознаграждение, клиент может выступать на реальные средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные призы в интернет-казино Рунета, а также обстоятельства их активации и выигрыша.Бездепозитный бонус казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в этом и заключается главное отличие. 1хслотс регистрация в 1×slots casino <a href=https://nowewyrazy.uw.edu.pl/profil/Prostoysoft0105>https://nowewyrazy.uw.edu.pl/profil/Prostoysoft0105</a> В любом казино с бездепозитным призом предусмотрены вейджеровые условия. Это один-единственный «подводный камень», который стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, нужно устроить определённое число ставок. Чем круче бонус, что, этим труднее выполнить условия, и напротив.
1 x slots
После требуется внести идентификационный платёж. Это стращает начинающих больше всего. Нужно сделать наименьший депо в 100–500 руб. Таким образом служба защищенности убедиться сомнений, что платёжный способ принадлежит Вам. Данная процедура необходима для обеспечивания безопасности игровых счетов. Пример, Ваш акк взломают и выведут средства на свой кошелёк. Будет очень неприятно. Поэтому верификация платёжной системы, это важный момент. <a href=http://youhotel.ru/forum/memberlist.php?mode=viewprofile&u=29954>зеркала 1×slots</a> casino 1×slot Процесс доказательства личности может взятьвдолг(взятьвзаймы) от 1-го денька до недели. Если заказчик разрешил какую ошибку при заполнении паспортных данных, то ему следует обратиться с проблемой в службу поддержки онлайн-казино. <a href=http://www.korea-pan.com/bbs/board.php?bo_table=free&wr_id=750769>http://www.korea-pan.com/bbs/board.php?bo_table=free&wr_id=750769</a> 1х слот 1хслотс регистрация перейти на 1×slots
1×slots зеркало видели такую регистрацию на
При помощи такового поощрения оператор возможность кроме завлекать клиентов, которые ранее проявляли активность на сайте, но по какой-то причине прекратили выступать. В этом случае промокод высылается юзеру по электронной почте либо вид SMS.Наиболее модные гонорары между гэмблеров – бездепозитные призы казино. Это не умопомрачительно, ведь возможно получить безвозмездные вращения или виртуальные кредиты, и всем не придётся пополнять счёт, рисковать собственными средствами. Удастся насладиться разнородными развлечениями и даже выиграть крупную сумму, избегая серьёзного риска. Для верификации аккаунта надо(надобно) дать специалистам технической помощи отсканированную копию паспорта и счета за коммунальные предложения, еще фотографию банковской карты или снимок страницы электронного кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности. <a href=https://521zixuan.com/space-uid-755751.html>https://521zixuan.com/space-uid-755751.html</a> Такие поощрения позволяют даром протестировать свежее казино, разобраться с игровым ходом интернет слотов, заработать и исключить небольшую необходимую денег. 1×slots зеркало проходить регистрацию это отличный вариант
1х слотс зеркало регистрация в 1×slots casino
Игры, в возможно выступать на бонусные средства. Проверьте список игр, в можно выступать на бонусные свои, возможно они Вам не понравятся и не расходовать своё время на эту промоакцию. <a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=531567>1×slots официальный зеркало рабочее</a> Активация происходит с помощью промокодов, которые вводятся в собственном офисе последствии регистрации. Среди спецпредложений в перечне Casino.ru содержатся неповторимые промокоды, которые доступны только гостям портала. Другие методы начисления средств ? автоматическая активация незамедлительно после творения аккаунта и получение подарка по запросу в службу технической поддержки.Обыкновенные бездепозитные бонусы в размере от трех до 20 долларов созданы для того, чтобы в забавы заходили все новые и свежие игроки. Здесь, скорее, несомненно лимитирование на наибольший выигрыш. Важно, чтобы перед наименьшим вкладом был отключен приз за первое пополнение счета, и геймер не попадет на повторный вейджер. Не хотите поиграть в азартные игры, не рискуя своими деньгами, хотя получая в все выплаты? Подобную возможность деют почти лучшие порталы с азартными весельями. В их количестве много правдивых и надежных интернет-казино на русском языке. Они привлекают свежих юзеров различными поощрительными мероприятиями, включая бездепозитные, или бесплатные бонусы.Чаще всего используются коды. Их нужно заносить в специальные окошки регистрационной анкеты, случае идет о пригласительных призах, либо в особом разделе собственного кабинета игрока. 1×slots регистрация 1×slotscasino 56 online <a href=https://www.ipixels.com/profile/65190/Traviswab>https://www.ipixels.com/profile/65190/Traviswab</a> Для верификации аккаунта нужно дать профессионалам технической поддержки отсканированную копию паспорта и счета за коммунальные предложения, еще фотку банковской карты или снимок страницы электронного кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности.Денежные средства. Третий бонус за регистрацию без депозита – наличные. К сожалению, лишь знаменитые и популярностью клубы шансы дать средства в рублях либо баксах. С их подмогою появится насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед данным нужно выполнение конкретных условий.
x1 slots регистрация в 1×slots casino
Если вы бывалый игрок, вы должны знать, что приз без депо – редчайшая находка. Тем не, мы неделю исследуем онлайн, чтобы отыскать вам наихорошие бездепозитные предложения. <a href=http://www.zhuangxiuz.com/home.php?mod=space&uid=861486>http://www.zhuangxiuz.com/home.php?mod=space&uid=861486</a> Самый распространённый из подобных бонусов, конечно же, бездеп на денек рождения клиента — бонус повторяющий фиксированной суммы или фриспинов поступает на счёт игрока, а воспользоваться им можно в течение установленного периода времени. 1хслотс казино зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://shopcms.vsupport.club/topic/15593–1kladtop-%D0%A0%C2%B7%D0%A0%C2%B0%D0%A1%E2%80%A6%D0%A0%D1%95%D0%A0%D2%91%D0%A0%D1%91-%D0%A0%D0%85%D0%A0%C2%B0-%D0%A1%D0%83%D0%A0%C2%B0%D0%A0%E2%84%96%D0%A1%E2%80%9A-%D0%A0%C2%B1%D0%A0%C2%B5%D0%A1%E2%80%A1%D0%A0%D1%91%D0%A1%E2%80%A1%D0%A0%D1%91-%D0%A0%D1%94%D0%A1%D1%93%D0%A0%D1%97%D0%A0%D1%91%D0%A1%E2%80%9A%D0%A1%D0%8A-%D0%A0%D1%96%D0%A0%C2%B5%D0%A1%D0%82%D0%A0%D1%95%D0%A0%D1%91%D0%A0%D0%85-%D0%A0%D1%98%D0%A0%C2%B5%D0%A1%E2%80%9A%D0%A0%C2%B0%D0%A0%D2%91/?p=94502>1х слот регистрация в 1×slots casino</a>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=152030>1×slots официальный сайт зеркало</a>
<a href=https://sadhaka.nl/forum/viewtopic.php?t=102277>1×slots регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Высокая конкурентность в сегменте азартных игр доказывает операторов завлекать клиентов различными акциями. Благодаря данному у гостей замечена вероятность получить бонусы в казино за регистрацию без депозита. Воспользоваться этим предложением можно, минуя функцию внесения денег на игровой счет, просто активировав акк на сайте. Наш экскурсовод по бездепам поможет выбрать самую симпатичную бонусную программку, узнать управляла получения такового гонорары и распорядиться им с наибольшей выгодой.
#9531 Charlesgunnyhttp://filmkachat.ru
1×slots бонус за регистрацию
Прибывшие на аккаунт деньги бездепозитные бонусы предназначаются, главном, лишь для новоиспеченных юзеров, которые ранее не имели собственного аккаунта в данном казино. Исходя из этого, если ранее у игрока был изготовлен депозит, то, по всей вероятности, у него больше не несомненно способности рассчитывать на получение такового бонуса в конкретном заведении. <a href=http://filmkachat.ru/>1×slots регистрация</a> <a href=https://toprankdesign.co.uk/wiki/index.php?title=Shisha_Tobacco_From4_Eur>https://toprankdesign.co.uk/wiki/index.php?title=Shisha_Tobacco_From4_Eur</a> В случае с фриспинами без вейджера, Вам не придется отыгрывать свой выигрыш с даровых вращений. Прибыль, которую Вы заработаете на таком бездепе можно ставить на вывод без какого или отыгрыша.Не стоит сразу же отрицаться от приветственных подарков в похожих казино. Администрация готова начислить средства или фриспины, но сначала работники должны увериться, собственно вы не мошенник. Дело никаких, что развелось слишком количество охотников за призами. Они научились врать систему и наваривать солидные суммы средств. 1×slots официальный регистрация <a href=http://filmsgood.ru/user/HenryElofe/>http://filmsgood.ru/user/HenryElofe/</a> Для казино, работающих интернет, бездепозитные призы нужны для вербования новых клиентов. Предложение поиграть на слотах без надобности внесения настоящих денег — работающий способ для повышения интереса к компании. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит играть в казино, только теперь уже на личные деньги.Не стоит путать забаву в демо и использование призов. В демонстрационном режиме игрок имеет оценить механику слота, сюжет и оформление. Но игра ведется на условные кредиты, поэтому отсутствует главное ? ощущение пыла. Активируя промокод или фриспины, клиент по-прежнему не тратит свои средства на игровые автоматы, но имеет сорвать реальный куш!
1×slots регистрацию более популярный вариант это
Фриспины — безвозмездные вращения, которые дозволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины числятся самым знаменитым и предпочтительным видом бонуса — благотворительные вращения порой эффективнее и веселее в отыгрыше, чем остальные облики бездепов.Вейджер (wager) – это коэффициент, кот-ый демонстрирует на какую сумму необходимо устроить ставок, дабы вывести бонус из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего бонуса, Вам нужно устроить ставок на сумму: 500*70=3500 руб. Только всецело отыграв бонус, Вы можете исключить собственный выигрыш. <a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/5015/#comment-256707>1×slots зеркало сайта</a> казино 1×slots официальный сайт Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний? <a href=http://www.mxeia.com/home.php?mod=space&username=devilishwoman36&do=profile>http://www.mxeia.com/home.php?mod=space&username=devilishwoman36&do=profile</a> Представьте момент, когда при ставке в 10 руб. Вы получите схожее умножение. Миллион рублей за одно вращение, что абсолютно вероятно. Поэтому вопрос, сколько можно выиграть остаётся не. Предлагаем проверить других. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный бонус и проверяйте удачу в деле. Разумеется, вывести деньги сложно. Однако шансы есть у всех. x1 slots 1хслотс регистрация перейти на 1×slots Перечисленные повыше главные характеристики сочетают фактически любой приз и являются стереотипными для бездепозитных бонусных начислений в казино.
1×slots регистрация 1×slotscasino09k online
Наши эксперты изучают условия акции, затем в ручном режиме проверяют их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и другие характеристики. Мы не рекламируем казино, а даем игрокам информацию о наихороших из них. Демоказино есть почти на любом веб-сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются существенно пореже: там если, тогда, выигрыша и соблюдения критерий промоакций бездеп возможно превратить в настоящие деньги.Подтвердите лицо, предоставив оператору казино свои паспортные данные. Инструкции обычно несложные, основное — конкретно им по. Если написано, собственно «на фото должны быть заметны все четыре угла странички паспорта» — сделайте именно такое фото. <a href=http://www.insem.co.kr/gn/bbs/board.php?bo_table=free&wr_id=793973>http://www.insem.co.kr/gn/bbs/board.php?bo_table=free&wr_id=793973</a> Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша призов. Заведения всегда устанавливают максимальную ставку, допустимую по условиям вейждера. 1×slots зеркало видели такую регистрацию на Каждый новичок и умелый игрок мечтают живо стартануть и начать создавать настоящие ставки. Для сего достаточно арестовать презент, за кот-ый надо выплачивать. В зависимости от игровой платформы, нужно сделать профиль, привязать email или телефон. После этого администрация начисляет щедрое вознаграждение повторяющий даровых вращений либо виртуальных кредитов.Обычно, бездепозитные призы выдаются под конкретные слоты с фиксированной ставкой, но их наверняка воспрещено применять в игровых автоматах с прогрессивным джекпотом. Список игр, в которых можно использовать бездеп, Вы отыщите в описании промоакции либо можете уточнить у службы заведения.
1×slots официальный сайт скачать
При исполнении условий отыгрыша и верификации, средства с бонусного счета переводятся на главный и имеют быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции зависят от выбранной платежной системы. Даже не выиграв солидную сумму, игрок увлекательно проведет время, изнутри изучит работу площадки, оценит геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе наихороших акций легкостью. Достаточно периодически учить перечень новых интернет казино с выводом бонуса без депозита в этом разделе.Казино выделяет вероятность заработать и вывести настоящие средства на бездепозитных призах. Обычно, это малозначительная сумма, которую казино имеет себя разрешить презентовать игроку. 1× slots casino зеркало <a href=http://dikoms.ruwww.sharizhelaniy.ruwww.cloud-at-work.com/mac_jforum/user/profile/17433.page>http://dikoms.ruwww.sharizhelaniy.ruwww.cloud-at-work.com/mac_jforum/user/profile/17433.page</a> При ирге на бонусные средства запрещается выступать в игровые автоматы с современным джекпотом и забавы из радела live casino. Кроме того, некоторые казино дают бездеп на раз либо некоторое определенных слотов, и в иных играх Вы не можете на них выступать.Условия отыгрыша бонуса. Если Вы планируете заработать на бездепозитном бонусе, то начала обратите внимание на значение вейджера и срок, который дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, что, этим проще отыграть приз и вывести выигрыш.
1хслотс зеркало на сегодня
Бездепозитные бонусы за регистрацию являются одним из самых популярных способов вербования свежих игроков в онлайн-казино, поэтому собственно они деют игрокам вероятность опробовать казино, тем игровые автоматы, и вполне, выиграть настоящие деньги.В перечне притязаний к отыгрышу часто присутствуют лимиты на ставки при игре на личные деньги. Так, если отыграть нужно 30 000 рублей, а предельная сумма ограничена 30 рублями, то вертеть барабаны светит 1000 один. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам деяния промоакции. <a href=http://vse-ekonomim.ru/author/joshuadib/>http://vse-ekonomim.ru/author/joshuadib/</a> Свежий бонус начисляется вид валютных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в пользовании средствами, в случае отыгрыша оператор возможность установить ограничение на вывод денег.Бездепозитные бонусы казино это экономическая компенсация, предлагаемая пользователям на дармовой базе и вероятность играть в интернет казино безвозмездно. Если ассоциировать их с одобрениями за вклад, в которых свои выдаются только впоследствии первоначального пополнения счета, то бездепозитные вознаграждения получаются бесплатно. То есть, играющий получает вероятность создавать ставки на теснее имеющие деньги, коие выдаст заведение, выполняя, всем, обыденные действия, чтобы их извлечь (тут идет речь о регистрация, удостоверении личности с использованием номера аппарата, дизайна заявки и т.д.). казино 1×slots официальный сайт Отзывы читателей о бонусных промоакциях посодействуют составить впечатление, но не забывайте о субъективности личных комментариев.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.cvetq.info/viewtopic.php?f=8&t=248368>1×slots регистрация 1×slots casino 777 online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Прежде чем активировать бездеп, необходимо увериться в том, что страна, уроженцем коей является игрок, не входит в перечень разрешенных. Как и промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения являются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает свежих гостей и позволяет им составить впечатление о функционале, не рискуя вескими совокупностями.
#9532 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
На бонусные начисления шансы быть установлены вспомогательные лимитирования, коие Вы не к при отыгрыше. Пока приз всецело не отыгран — средства из казино не выводятся.Вышеописанная причина и является главным интересным, из-за которого операторы отдают часть своей прибыли на различные рекламные расходы и маркетинговые кампании. А наиболее действенным тут будут играть непосредственно бездепозитные призы казино 2022 с выводом за регистрацию. <a href=http://filmkachat.ru/>1×slots официальный сайт зеркало</a> Прямо сейчас арестуйте безвозмездные вращения за регистрацию без депозита и начинайте коллекционировать призовые композиции из-за солидных выигрышей! <a href=http://zqykj.com/bbs/home.php?mod=space&uid=274429>http://zqykj.com/bbs/home.php?mod=space&uid=274429</a> Выиграть реальные деньги в казино не пополняя счет – сложно, хотя вполне. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными бонусами и начните играть на бонусные средства. По статистике из 10-ти заведений можно заработать небольшую необходимую денег за счет бонусных средств.Каждый новичок и умелый игрок мечтают прытко стартануть и начать делать настоящие ставки. Для сего довольно отобрать подарок, за кот-ый не нужно платить. В зависимости от игровой платформы, нужно сделать профиль, привязать email или аппарат. После этого администрация начисляет щедрое вознаграждение вид безвозмездных вращений или виртуальных кредитов. 1 xslots рабочее зеркало <a href=http://elektrofahrrad-tests.de/forums/member.php?action=profile&uid=34450>http://elektrofahrrad-tests.de/forums/member.php?action=profile&uid=34450</a> Подобные бонусы без депо предоставляются на более прибыльных критериях. Зачастую они покрупнее, а условия отыгрыша наименее строгие.Еще одно условие дотрагивается объемов ставки. Операторы устанавливают наивысшую необходимую, которую игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, избранной в Личном кабинете. При превышении лимита есть риск потерять бонуса. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, заказчик может столкнуться с запретом назначать фишки на шансы.
1×slots официальный зеркало рабочее
Онлайн-казино с бездепозитными бонусами ставят посетителям обстоятельства для использования бездепами, потому перед ролью в акции превосходнее досконально ознакомиться со всеми правилами и нюансами промоакции. Условия шансы дотрагиваться получения бонуса, его применения и последующего вывода денежных средств в случае выигрыша. 1×slots официальный сайт зеркало Для верификации аккаунта нужно дать профессионалам технической поддержки отсканированную копию паспорта и счета за коммунальные услуги, еще фотографию банковской карты или снимок странички электрического кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности.Маркетинговая политика всех игорных интернет-клубов обязана одевать различный характер. И в гонорары на депозит служат чтобы, чтобы, дабы провоцировать вносить депозиты и поощрять теснее быть юзеров, то бездепозитный приз в казино или приз за регистрацию в казино, до всего, рассчитан на расширение базы потребителей. <a href=http://tapki.su/bitrix/redirect.php?goto=http://beton.ru/redirect.php?r=http://uplot.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/xifUMyaTzz3>http://tapki.su/bitrix/redirect.php?goto=http://beton.ru/redirect.php?r=http://uplot.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/xifUMyaTzz3</a> Вознаграждения за получение VIP-статуса ? начисляются в программы лояльности при достижении еще значения или выдаются индивидуально менеджерами службы поддержки.Но на некоторых азартных платформах подобные гонорары могут получить и уже зарегистрированные юзеры. В таком случае, призы предоставляются в рамках оригинальных промоакций либо же некоторым игрокам повторяющий акционного предложения, коие приходит на почту с целью «вернуть» игрока в свое казино. 1×slots сайт Автоматы непопросту числятся самым популярным азартным веселием. Чтобы освоить управление и верховодила, потребуется всего несколько минут. Ваша задача устроить ставку, определить число трудящихся линий и возможно крутить тамбур. Если дисплее выпадет выигрышная композиция – вы выиграли! С данной задачей для помогут справится бездепозитные призы казино.
1×slots зеркало на сегодня
На критериях отыгрыша безвозмездных бонусов стопам остановиться подробнее. С ними связаны нюансы, которые нельзя оставить без внимания.Операторы гемблинга утверждают, собственно так они дерутся с бонус-хантерами. Впрочем, критики считают, что данным казино пробуют сделать из случайного гостя постоянного игрока. В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с даровых вращений. Прибыль, которую Вы заработаете на таком бездепе возможно ставить на вывод без какого либо отыгрыша.На бесплатные бонусы онлайн-казино практически постоянно распространяется лимитирования по стране проживания клиентов. Даже в для разрешается раскрывать счет и выступать на средства в заведении, это еще не значат, что вас доступны not the slightest down payment bonuses. <a href=https://www.evangelie.eu/forum/members/85172.html>https://www.evangelie.eu/forum/members/85172.html</a> 1×slots официальный сайт мобильная версия
1×slots зеркало
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1219#post-37464>1×slots casino регистрация 1×slotscasino09k online</a> 1хслотс рабочее зеркало <a href=https://orbitalscoreboard.com/user/doctorlazutakl/>https://orbitalscoreboard.com/user/doctorlazutakl/</a>
зеркло казино 1×slots
Итак, дабы бесплатные бонусные кредиты трансформировались в настоящие средства, которыми вам управлять по собственному усмотрению, их надо(надобно) отыграть. Вейджер по уточнять в правилах онлайн-казино. Демоказино есть почти на каждом веб-сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются значительно реже: там когда выигрыша и соблюдения критерий акций бездеп можно превратить в настоящие средства. <a href=http://o96737zj.beget.tech/user/JasperBoype/>http://o96737zj.beget.tech/user/JasperBoype/</a> В интернет-сети постоянно возможно найти списки более знаменитых и гарантированных поощрительных программ от известных онлайн-казино.2. Создать свежий профиль. Для регистрации нужно заполнить маленькую анкету или зайдите в личный офис посредством соц сеток; 1×slots быструю регистрацию а также мгновенное
<b>Смотреть еще похожие новости:</b>
<a href=https://australiantravelforum.com/Upload/showthread.php?tid=157637&pid=233408#pid233408>1×slots промокод при регистрации</a>
<a href=https://nztw.org/home.php?mod=space&uid=43957>1×slots casino регистрация 1×slots review live</a>
<a href=https://test.soclanovtsy.ru/topic/39306-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82/>казино 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Объективные – размер бонуса, коэффициент и условия вейджера, необходимость внесения депозита для вывода средств;
#9533 Charlesgunnyhttp://filmkachat.ru
1×slots официальный зеркало рабочее
Так собственно приготовьтесь дать секретную информацию (пол, возраст, государство проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает менее суток, последствии чего получится свободно выводить крупные выигрыши.Раздача бонусов может быть посвящена различным датам: календарные дни, деньки рождения игроков, юбилей открытия казино и т. Д. Подарок выдается повторяющий денег, фриспинов или баллов для скопления и обмена на услуги оператора. Если пользователь получает выигрыш, деньги начисляются на его счет. Для вывода этой суммы придется выполнить ряд притязаний. <a href=http://filmkachat.ru/>1×slots зеркало рабочее на сегодня</a> <a href=http://g95887q6.beget.tech/user/Jameshaict/>http://g95887q6.beget.tech/user/Jameshaict/</a> При пользовании бездепозитным бонусом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют количество видов лимитов:Стоит отметить, собственно бездепозитный бонус выдается только совершеннолетним новичкам, коие, в свою очередь, все пригласить личных приятелей и знакомых, кроме претендующих на поощрительную программку лояльности. Подобная разработка замечена между конкурирующих онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению своей посещаемости, методом вербования свежих игроков. Бонусы – это уникальный шанс для потенциальных соучастников игры, коие имеют опробовать софт покер рума и убедиться, будут ли они в него играть либо нет. Новый игрок попробует свои силы с настоящими оппонентами в казино. 1×slots регистрация 1×slots review live <a href=http://damoa8949.com/bbs/board.php?bo_table=free&wr_id=59220>http://damoa8949.com/bbs/board.php?bo_table=free&wr_id=59220</a>
1×slots регистрация на сайте
<a href=http://afpd.onlinebbs.ru/viewtopic.php?f=2&t=4747>рабочее зеркало 1×slots</a> 1×slot рабочее зеркало В интернет-сети практически можно отыскать перечни более модных и обещанных поощрительных программ от популярных онлайн-казино. <a href=http://skiindustry.org:/forum/member.php?action=profile&uid=1172867>http://skiindustry.org:/forum/member.php?action=profile&uid=1172867</a> Самый распространённый из похожих призов, конечно же, бездеп на день рождения посетителя — бонус в виде фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им можно на установленного периода времени.Фриспины предусмотрены для использования в видео слотах. Внимательно ознакомьтесь с критериями – часто их выдают на некоторые автоматы. В зависимости от клуба, у вас получится сделать определённое количество ставок. Кстати, продвинутые игорные жилища разрешают запускать каждых «одноруких злодеев». сайт 1× slots casino Если речь об неповторимых услугах, имеет понадобиться регистрация в казино по ссылке с партнерского вебсайта.
1×slots рабочее зеркало на сегодня
Как прочие промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такого предложения являются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает новых гостей и позволяет им составить впечатление о функционале, не рискуя значительными суммами.Активация по промокоду употребляется в различных обликах бездепов. Если речь идет о приветственном призе, то набор знаков можно узнать на крупнейшей страничке, в регистрационной форме либо письме, коие отчаливает юзеру для доказательства адреса электронной почты. Акции шансы проводиться общо с партнерскими площадками. Обычно код располагается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется разовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем актуальный код для активации в описании любого рекламную. Создание аккаунта. На веб-сайте казино необходимо обнаружить регистрационную форму и наполнить пустующие поля личностными данными. Иногда на этом этапе потребуется показать лишь адрес электрической почты и пароль, но чаще бы наполнить анкету индивидуальной информацией (ФИО, дата рождения, место проживания и т.д. ). Нужно свидетельствовать только реальные данные, потому впоследствие они станут проверены.Самый распространённый из подобных призов, естесственно же, бездеп на день рождения посетителя — приз вид фиксированной суммы либо фриспинов поступает на счёт игрока, а воспользоваться им можно протяжении установленного периода медли. <a href=http://wiki.catfolks.net/doku.php?id=%D0%A4%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B%20%D0%B0%D0%B3%D0%B5%D0%BD%D1%82%D1%81%D1%82%D0%B2%D0%B0%20%D0%BD%D0%B5%D0%B4%D0%B2%D0%B8%D0%B6%D0%B8%D0%BC%D0%BE%D1%81%D1%82%D0%B8%20%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8:%20%D0%92%D1%85%D0%BE%D0%B4%20%D0%B2%20%D0%BC%D0%B8%D1%80%20%D1%83%D1%81%D0%BF%D0%B5%D1%88%D0%BD%D0%BE%D0%B3%D0%BE%20%D0%B1%D0%B8%D0%B7%D0%BD%D0%B5%D1%81%D0%B0>http://wiki.catfolks.net/doku.php?id=%D0%A4%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B%20%D0%B0%D0%B3%D0%B5%D0%BD%D1%82%D1%81%D1%82%D0%B2%D0%B0%20%D0%BD%D0%B5%D0%B4%D0%B2%D0%B8%D0%B6%D0%B8%D0%BC%D0%BE%D1%81%D1%82%D0%B8%20%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8:%20%D0%92%D1%85%D0%BE%D0%B4%20%D0%B2%20%D0%BC%D0%B8%D1%80%20%D1%83%D1%81%D0%BF%D0%B5%D1%88%D0%BD%D0%BE%D0%B3%D0%BE%20%D0%B1%D0%B8%D0%B7%D0%BD%D0%B5%D1%81%D0%B0</a> 1×slots актуальное зеркало Поспешите арестовать бездепозитные бонусы за регистрацию в казино из представленного списка. Все платформы столько водят легальную работа, но и обрадуют правдивыми плодами игры, высокой отдачей, резвыми выплатами.Акции, посвященные календарным праздникам, бывают рассчитаны как на всех пользователей, например и на категории: например, подарок на 8 марта девушкам-игрокам или мужикам на 23 февраля.
1×slots официальный demo регистрация в 1×slots casino
Лишь модные и знаменитые азартные заведения могут позволить для выдавать бездепы в виде дополнительных кредитов. Чаще всего ресурсы начисляют фриспины без депо, которые можно потратить в топовых аппаратах с высочайшей отдачей.Основное управляло получения бездепа ? творимый акк обязан быть у пользователя первым и единственным. Наличие нескольких аккаунтов строго воспрещено. Проверка проводится по имени, адресу электронной почты, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита нужно блюсти несложную очередность действий. Бездепозитные бонусы настоящими средствами, коие возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадали. Частенько новенькие не понимают, как активировать презенты либо исключить первый выигрыш. Для подобных случаев наша команда описала главные термины – собственно такое фриспины, вейджер, как его отыграть, зачем необходимо проходить верификацию. 1хслотс регистрация в 1×slots casino <a href=https://archives.megadiyhelp.com/member.php?153231-ArnoldSob>https://archives.megadiyhelp.com/member.php?153231-ArnoldSob</a> Представленные на данной странице наихорошие бездеп бонусы в казино за регистрацию в 2022 году имеют оптимальные условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, в гости Casino.ru могут сортировать список по нескольким критериям: по сумме, вейджеру, наибольшей сумме вывода и т.д.
1× slots официальный
Поспешите зарегистрироваться на официальном сайте Клубника, дабы моментально получить 33 даровых вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, появляется настоящий шанс победу! <a href=https://www.baronerosso.it/forum/members/112824_oscarskync.html>https://www.baronerosso.it/forum/members/112824_oscarskync.html</a> скачать 1×slots официальный сайт Выбирая даровой приз, внимательно изучайте верховодила. Убедитесь, что вам можно на участие в промоакции. Уточните, в каких играх возможно выполнять условия вейджера. При надобности задавайте вопросы адептам саппорта.Не советуем опрометью голову браться за всевозможные предложения получения средств без инвестициям. Вполне возможно, что бездепозитный приз казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется хуже, чем смотрится на первый взгляд. Альтернативой считается казино бонус за депозит. Мы предлагаем для пару советов, благодаря коим у каждого игрока несомненно вероятность насладиться бездепозитным бонусом за регистрацию в игровых автоматах с выводом денег:
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.cvetq.info/memberlist.php?mode=viewprofile&u=17326&sid=902a16eb966e217f921f1b4721f938b0>1×slots бонус за регистрацию</a>
<a href=http://nhomtruyen.com/members/jamesgaw.9280/>рабочее зеркало 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если ординарными текстами, бездепы – это определённая сумма средств либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать презенты. Но есть кое-какие нюансы. Существуют игорные жилища, которые перед тем как начислить бонусы требуют привязать телефон, предоставить копии документов. На страничке представлены бездепозитные бонусы за регистрацию в казино редчайшая награда за которой гонятся все игроки как новенькие, например и профессионалы. Мы также уделяем великое внимание на наличие бонусов при составление рейтинга казино на деньги. Бездепозитный бонус это возможность выступать бесплатно и выиграть настоящие средства.
#9534 Charlesgunnyhttp://filmkachat.ru
сайт 1× slots casino
Прежде всего, не запамятовывайте регулярно заглядывать на страничку обзоров бездепозитных призов. Они шаг за шагом осматривают наиболее интересные предложения основных игорных порталов.Рассмотрим принцип его деянья на примере. Допустим, вы зарегались и получили $10 not the slightest down payment bonus с вейджером х50. Это означает, собственно выигранные деньги возможно будет выводить не ранее, чем последствии как, как общая сумма ставок достигнет $500. <a href=http://filmkachat.ru/>1 х слотс зеркало</a> 3. Подтвердить данные. В зависимости от клуба, нужно привязать телефон или почту, показать индивидуальную информацию;Денежные средства. Третий бонус за регистрацию без депо – наличные. К раскаянию, только знаменитые и популярностью клубы имеют уяснить средства в рублях или баксах. С их помощью вы сможете насладиться каждой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед этим необходимо исполнение определенных критерий. <a href=https://android.nalench.com/user/JamesDreby/>https://android.nalench.com/user/JamesDreby/</a> Промокод – определённая комбинация символов, которую необходимо ввести в отвечающее поле при создании учетной записи или активировать в личном профиле игрока в разделе с призами.У каждого игорного клубы различные вейджеровые условия. Чтобы вы гарантировано сумели выполнить их, мы дадим несколько советов. Если система начислила маленькую необходимую, не создавать немалые ставки – остановитесь на 10–30 центах. Как лишь сумеете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте играть. В противном случае другого, как присмотреться к другому автомату. 1хслот зеркало сайта <a href=http://forum.informatyk.edu.pl/member.php?action=profile&uid=13904>http://forum.informatyk.edu.pl/member.php?action=profile&uid=13904</a> В современность довольно просто получить приз за регистрацию в казино. Практически каждый игорный дом с готовностью начисляет средства либо бесплатные вращения. Многие гэмблеры пользуются данным и не смущяются регистрироваться в любом клубе с прибыльными критериями. Кстати, это отличная вероятность выработать победную стратегию и сорвать джекпот.После получения бонуса вывод средств для клиента будет недоступен времени, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — почаще всего неделя или чета месяцов. Выводить средства игрок может только после отыгрыша.
1хслотс официальный сайт зеркало
Когда речь о получении бездепозитных призов в казино, для внимание на последующие обстоятельства: 1×slots регистрация 1×slots casino c2d ru Бездепозитный приз за регистрацию в казино с выводом средств в 2022 году — Наш ресурс дает игрокам актуальную информацию о самых свежих, великодушных и проверенных призах в онлайн казино, коие обновляются каждый денек. <a href=http://ais-avto.ru/bitrix/redirect.php?goto=http://xn----8sbnbncmcmbcxgowsj.xn–p1ai/bitrix/redirect.php?goto=http://utanrmp.or.ke/sites/all/modules/pubdlcnt/pubdlcnt.php?file=https://teletype.in/@urist555/s2yV6jXww9V>http://ais-avto.ru/bitrix/redirect.php?goto=http://xn----8sbnbncmcmbcxgowsj.xn–p1ai/bitrix/redirect.php?goto=http://utanrmp.or.ke/sites/all/modules/pubdlcnt/pubdlcnt.php?file=https://teletype.in/@urist555/s2yV6jXww9V</a> Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы которые возникают у новичков.У каждого игорного заведения средства верховодила и обстоятельства. Но, дабы получить бонусы, нужно выполнить стандартные деяния: 1×slots рабочее зеркало на сегодня
1хлот регистрация в 1×slots casino
Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие возникают у новичков. Вывод выигрыша с бездепозитных призов казино – великодушный подарок от азартных клубов. Но дабы вывести свой доход, нужно выполнить ряд критерий:В большинстве заведений сделать это можно по адресу электронной почты, по номеру телефонного, через социальную сеть либо гугл-аккаунт. <a href=http://hoiqt.com/user-5354.html>http://hoiqt.com/user-5354.html</a> 1×slots зеркало Обыкновенные бездепозитные бонусы в размере от 3-х до 20 $ созданы чтобы, чтобы, дабы в забавы заходили все новые и новые игроки. Здесь, скорее, несомненно ограничение на наибольший выигрыш. Важно, дабы перед наименьшим вкладом был отключен бонус за 1-ое пополнение счета, и игры не попадет на повторный вейджер.Представьте момент, когда при ставке в 10 рублей Вы получите подобное умножение. Миллион руб. За одно вращение, собственно абсолютно вероятно. Поэтому вопрос, сколько возможно выиграть остаётся открытым. Предлагаем проверить самостоятельно. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный приз и проверяйте фортуну в деле. Разумеется, вывести средства сложно. Однако шансы есть у всех.
1×slots официальный сайт зеркало
<a href=http://www.forum.kalor.ru/1×slots-oficialniy-sayt-skachat-t5121.html>1×slots официальный сайт, скачать</a> Иногда у посетителей вебсайта все появиться трудности, задачи, препядствия при активации приобретенного промо-кода. В таких случаях, необходимо обратиться за поддержкою в службу «Support». Для получения ответа, непременно указывается определенная причина обращения и подтверждается информация дополнительными экрана. Если сформировалась спорная обстановка, практически можно обратиться к основному регулятору или контролирующему органу, выдавшему этому заведению лицензионный документ. 1×slot рабочее зеркало <a href=http://pokrovka-info.ru/board/tools.php?event=profile&pname=kindheartedpost>http://pokrovka-info.ru/board/tools.php?event=profile&pname=kindheartedpost</a>
1×slots зеркало на сегодня
Бонус за регистрацию в казино без депо с выводом денег нужно отыграть. Зачастую для отыгрыша возможность потребоваться устроить ставки на сумму, в некоторое 10-ов один превосходящую сумму бонуса либо выигрыша.Бездепозитный приз – это экономическое вознаграждение, которое выдается соучастнику игры в казино, для его привлечения и появления заинтересованности. Любой гость, кот-ый подходит условиям выдачи подобного бездепозитного приза, возможность претендовать на получение вышеуказанного приза. Такое одобрение является более действенным методом, дающим возможность стартовать в игре, не вкладывая личных материальных средств. Для получения выигрыша потребуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить конкретную необходимую, хотя уже из собственных средств. Она рассчитывается из общего объема выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, случае юзер выиграл 1000 рублей, а множитель составляет х30, вывести средства можно будет, сделав ставки на 30 000 рублей.Для получения бонуса нужно ознакомиться с программкой лояльности казино и сделать ставки на сумму, необходимую для перехода на грядущий уровень. <a href=https://www.mavsboard.com/member.php?action=profile&uid=2464>https://www.mavsboard.com/member.php?action=profile&uid=2464</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots Чтобы бездеп не был начислен на Ваш аккаунт, Вам надо активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк автоматически, а Вы не планируете его использовать, обратитесь в службу поддержки с пожеланием отменить бездепозитный приз.Верификация аккаунта. Лучше подтвердить лицо сразу после регистрации, чтобы позже не было проблем с выводом средств. Верификация может проходить двумя способами:
<b>Смотреть еще похожие новости:</b>
<a href=https://games-garant.ru/index.php?subaction=userinfo&user=Jamesneorm>скачать 1×slots официальный сайт</a>
<a href=https://thetechmodders.com/forums/viewtopic.php?t=26258>скачать 1×slots официальный сайт</a>
<a href=https://techadron.com/forum/viewtopic.php?p=9343>1×слотс казино</a>
<a href=http://nacionrolera.org/foro/viewtopic.php?f=1210&t=103245>x1 slots регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
С этими простыми советами каждое казино с бонусом за регистрацию способно принести в разы больше выгоды и полезности.
#9535 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slotscasino09k online
Фриспины. Бесплатные вращения предусмотрены для применения в видео-слотах. Внимательно читайте обстоятельства – они часто выдаются для неких машин. В зависимости от клуба продоставляется создавать определенное количество ставок. Кстати, современные игорные дома дают вероятность заводить «одноруких бандитов». <a href=http://filmkachat.ru/>1×slots регистрация 1×slots casino 777 online</a> Если при регистрации указать промокод, можно гарантировано получить бонус. Где взять ваучер? Посетите на блоги или форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В последнее время игорные дома начали рекламироваться в фильмах и телесериалах. Присмотритесь и всего заметите промокод, который принесёт 500 или 1 000 бонусных рублей.Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную процедуру активации бонуса без депозита. Внимательно прочтите до конца. Многие новенькие проделывают оплошности на шаге регистрации и потому не могут получить презент. <a href=https://www.ipixels.com/profile/86804/JamesVit>https://www.ipixels.com/profile/86804/JamesVit</a> Как управляло, новоприбывшие игроки в первую очередь хотят ознакомиться с методами ввода и вывода денежных средств и сроки исполнения поданных заказов дабы конкретно понимать, как стремительно они смогут исключить собственный казино бонус за регистрацию без депо на электронный кошелек либо же банковскую карту. К счастью для всех играющих, снутри определенных холдингов, все казино соперничают меж собой. Ведь если бы определенную компанию давало только одно онлайн-заведение, то вряд ли бы посетители заметили казино с бонусом за регистрацию и возможность бы рассчитывать только на вознаграждение вид бонуса на 1-ое вложение. К каждому заведению регулярно идет завлекать новых игроков, что, конечном, лишь на руку всем играющим. 1×slots скачать на айфон <a href=https://sttimothysignal.org/groups/shisha-tobacco-from-4-eur/>https://sttimothysignal.org/groups/shisha-tobacco-from-4-eur/</a>
1 х слотс зеркало
Максимальный размер ставки, который невозможно превышать же приз не будет полностью отыгран. В случае нарушения сего управляла, бонус и выигрыш с него станут аннулированы. <a href=https://forum.pmpobc.ca/index.php?topic=129598.new#new>1×slots зеркало на сегодня</a> 1хслотс мобильная версия зеркало <a href=https://forum.blu-ray.com/member.php?u=920780>https://forum.blu-ray.com/member.php?u=920780</a> Приветственный бездеп предоставляется какому игроку только раз один. Казино борются с так именуемыми бонусхантерами (от англ. Bonus Hunter — охотник за бонусами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения дара. Исключить подобные действия разрешает верификация данных. Администрация вправе потребовать у посетителя доказать индивидуальные данные, обозначенные при регистрации. 1×slots зеркало на сегодня
1×slots зеркало быструю регистрацию а также мгновенное
Такие одобрения разрешают бесплатно протестировать новое казино, разобраться с игровым процессом интернет слотов, заработать и исключить маленькую сумму денег.При выполнении условий отыгрыша и верификации, деньги с бонусного счета переводятся на главный и шансы быть выведены на карту или электрический кошелек. Лимиты на вывод и сроки проведения транзакции находятся от выбранной платежной системы. <a href=https://telegra.ph/%D0%86nformac%D1%96jno-p%D1%96znavalnij-portal-AllSoftLabcom-vash-nad%D1%96jnij-g%D1%96d-u-sv%D1%96t%D1%96-tehnolog%D1%96j-10–13>https://telegra.ph/%D0%86nformac%D1%96jno-p%D1%96znavalnij-portal-AllSoftLabcom-vash-nad%D1%96jnij-g%D1%96d-u-sv%D1%96t%D1%96-tehnolog%D1%96j-10–13</a> 1×slos регистрация в 1×slots casino Иногда операторы требуют внесение малого депо перед выводом для верификации платежного прибора. В неких казино данный депозит кроме предстоит отыграть.
1×slots зеркало на сегодня
Большинство клубов привлекают внимание игры за счёт различных презентов. На 1 сайтах возможно получить виртуальные кредиты, коие откроют доступ ко всему софту. На других же, администрация предлагает благотворительные вращения для запуска топовых интернет слотов. Несмотря на различные акции, стоит выделить самые главные.Мы собрали и опубликовали список превосходнейших бездепозитных казино с призами за регистрацию, которые гарантируют щедрые выигрыши и мгновенные выплаты. Одним из предлогов отдавать привилегию одному либо иному заведению содержится в привлекательности предлагаемых промоакций и бесплатных предложений. Безвозмездные фриспины, выдаваемые без нужды делать какой-либо вклад, в списке находится далековато не в конце.Доступность — бездепозитные бонусы в казино чаще всего предоставляются новым игрокам, но посещают случаи, когда приз все получить и действующие клиенты. 1×slots casino регистрация на сайте <a href=http://www.cooperativacoomultexco.com/user/ArnoldSip/>http://www.cooperativacoomultexco.com/user/ArnoldSip/</a> Бездепозитные бонусы реальными деньгами, коие возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадали.
1×slots casino online регистрация
Иногда у посетителей сайта могут появиться проблемы при активации полученного промо-кода. В таких случаях, необходимо обратиться за поддержкою в службу «Support». Для получения ответа, обязательно указывается определенная первопричина воззвания и подтверждается информация дополнительными снимками. Если сформировалась спорная обстановка, постоянно возможно адресоваться к главному регулятору или контролирующему органу, выдавшему этому заведению лицензионный документ.В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и когда неоднозначных ситуаций нет возможности куда-то пожаловаться и доказать собственную правоту. <a href=https://www.kenpoguy.com/phasickombatives/profile.php?id=2168810>https://www.kenpoguy.com/phasickombatives/profile.php?id=2168810</a> Самые модные методы вывода средств ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электрическим платежным системам подобии Neteller и Skrill, еще используют криптовалютными кошельками. Вывод выигрышей возможность исполняться быстро или развлекать от нескольких часов до нескольких суток. 1хслот зеркало Процесс подтверждения личности имеет занять от одного денька до недели. Если заказчик разрешил какую оплошность при заполнении паспортных данных, то ему следует обратиться с задачей в службу онлайн-казино.
<b>Смотреть еще похожие новости:</b>
<a href=http://6000ziyuan.com/forum.php?mod=viewthread&tid=106388&extra=>1 xslots рабочее зеркало</a>
<a href=https://bans.org.ua/index.php?topic=118317.new#new>1×slots официальный регистрация</a>
<a href=http://lider1c.ru/communication/forum/messages/forum5/message20693/16614–1×slots-registratsiya-1×slots-casino-c2d-ru?sessid=835164459e2087f9943109a0f7595e1d&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1×slots регистрация 1×slots casino c2d ru</a>
<a href=http://djdrewski.co.uk/lfsbangers/viewtopic.php?f=32&t=29676>1×slots официальный demo регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Размер приза. В качестве бездепов обыкновенно начисляют большие суммы, а когда идет о бонусах за депо, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино могут презентовать игроку до 2000$.
#9536 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация
Да, у бесплатных призов есть дефекты. Прежде всего, они обычно большие. Кроме такого, обстоятельства вейджера по ним постоянно строгие. Но все неименье риска проделывает их очень привлекательными для посетителей. <a href=http://filmkachat.ru/>1хслотс 1хслотс регистрация перейти на 1×slots</a> Так собственно сможете храбро регистрироваться без всяких раздумий. Фортуна сегодня точно на вашей стороне. Не бойтесь, ведь последствие какого или убытка Вам совершенно не угрожает. С этими бонусами как без пополнения, Вы остаетесь только в плюсе, хотя не как не в минусе. <a href=https://ateista.pl/member.php?action=profile&uid=12686>https://ateista.pl/member.php?action=profile&uid=12686</a> Если простыми текстами, бездепы – это определённая сумма денег либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать подарки. Но есть некоторые аспекты. Существуют игорные жилища, которые перед что, этим как начислить бонусы настоятельно привязать телефонный, дать копии документов.Но не стоит размышлять, что снабжая пользователей такими призами, казино увлекается спонсированием. Ведь размеры вознаграждений, в, не большие (средним объемом от 5 до 20 долларов). И на эти свои налагаются конкретные условия и ограничения, обязательные к исполнению игрока, если в последствии он желает получить все свои выигранные деньги. 1×slots регистрация 1×slots review live <a href=https://clients1.google.com.my/url?q=https://doctorlazuta.by/>https://clients1.google.com.my/url?q=https://doctorlazuta.by/</a>
1×slots бездепозитный бонус за регистрацию
Если вы новичок деле и только попали в неизведанную вами район пыла — счет предложений как бездепозитные призы без пополнения. <a href=https://msknovostroy.com/showthread.php?tid=104626>рабочее зеркало 1хслотс</a> 1×slots casino регистрация Бездепы обычно предлагают с отыгрышем — быстро исключить выигранные свои нельзя. Перевод средств со счета будет вероятен в того, как пользователь выполнит все притязания казино, а сумма не быть выше установленного правилами лимита. Условиями акции фиксируются сроки, на которых клиент вправе пользоваться предложением. Обычно они не превосходят нескольких дней последствии активации. <a href=https://www.rmbbk.com/space-uid-1726309.html>https://www.rmbbk.com/space-uid-1726309.html</a> Бездепы могут входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами.Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и. Когда игроку полагается количество фриспинов, администрация может разбивать их начисление на количество дней. Бесплатные вращения предоставляются для определенного слота, который указывается в правилах промоакции. 1хслот зеркало сайта Зарегистрируйтесь. Для регистрации почаще всего достаточно ввести собственный номер аппарата и почтовый адресок, последствии чего установить приобретенный код из СМС. Возможно, требуется указать промокод. В правилах акции несомненно написано, где его бы включать. Иногда это надо делать при регистрации, от — теснее после сотворения собственного кабинета, на отдельной странице.
1 x slots
<a href=https://cromia.ua/forum/user/8794/>https://cromia.ua/forum/user/8794/</a> 1хслот официальный сайт зеркало Подтвердите регистрацию, чтобы активировать Бездепозитный приз с выводом, требуется заполнить собственный профиль. Заполните пустые поля настоящими данными о для.Это тоже бесплатные деньги, коие поступают на аккаунты новоиспеченных игроков после регистрирования. А необыкновенность этих бонусов произведено что, нет, собственно обретенные деньги непременно стопам применять в продолжении назначенного времени.
1×slots официальный сайт мобильная версия скачать
<a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=2278>1×slots официальный сайт скачать на айфон</a> При регистрации в либо ином интернет игральном заведении — для дается раз шанс испытывать свою фортуну не внося свои монеты. Замечу собственно эту поощрительную предложение предоставляют не все онлайн игровые площадки, а лишь щедрая половина из них. Которые мы подготовили для Вас в нашем списке. 1х слот 1хслотс регистрация перейти на 1×slots <a href=http://bbs.totoroclub.com.cn/home.php?mod=space&uid=369935&do=profile>http://bbs.totoroclub.com.cn/home.php?mod=space&uid=369935&do=profile</a> Акции распространяются как на все забавы казино, так и на ограниченный список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino и. Промо возможность обхватывать разработки 1-го производителя. Бездеп не пересекается с другими промоакциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, сделанные бонусными деньгами. Для идентификации платежных реквизитов игрока имеет понадобиться пополнение счета на наименьшую необходимую.
1×slots бонус за регистрацию
Для ревизии применяются сканы паспортов, водительских прав, банковских карт. В качестве доказательства достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если юзер обнаружен в попытке ввести дополнительный аккаунт, все его учетные записи подвергаются блокировке, а их владелец попадает в черный список. При игре на лицензионной площадке надо бояться указывать достоверную персональную информацию (шифрование ликвидирует утечку персональных данных).Отыграв бездепозитный приз в казино с выводом тоже придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в схожее лимитирование существует, то единоразово вывести выйдет только необходимую, не превышающую размер полученного приза. <a href=http://www.hdkinoteatr.com/index.php?subaction=userinfo&user=amuckquery14>http://www.hdkinoteatr.com/index.php?subaction=userinfo&user=amuckquery14</a> Подтверждение персональной инфы. Все казино требуют от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у юзера иных аккаунтов (мультиаккаунт запрещен). 1×slots регистрация то дальше необходимо пройти Бездепы имеют заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами.
<b>Смотреть еще похожие новости:</b>
<a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=89187>1×slots регистрацию более популярный вариант это</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Суммы подобных предложений, случаев, колеблются от трех до двадцати $, а вейджер на эти свои обязан составлять от 30 до шестидесяти раз. Зачастую, величайшая сумма выигрыша тут составит от одной до двух сотен долларов. Если геймер выиграет больше, то все свои имеют быть списанными до очень разрешенного выигрыша. Здесь замечена смысл выводить еще несуществующие деньги на свою платежную систему и далее искать заведение с благоприятными под данную сумму релоадом либо призом за 1-ое пополнение счета. Есть несколько подвидов бездепозитного гонорары, предлагаемого великим числом заведений.
#9537 Charlesgunnyhttp://filmkachat.ru
1×slot регистрация
Призовые начисления без депо имеют предоставляться для участия в турнирах интернет казино. Потратить перечисленные средства можно самая в рамках этой акции. Условия их проведения в лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться таким предложением, превосходнее изучить его верховодила. <a href=http://filmkachat.ru/>1×slots зеркало регистрация</a> Все обожают получать презенты. Согласитесь, практически любой играющий человек будет необъятно счастлив, в получит даровой подарок для игры в онлайн казино просто за регистрацию или же бонус за внесенный депо, так нарекаемые приветственные бонусы для свежих игроков. Соответственно такие онлайн клубы станут более востребованы и предпочтительны у игроков при выборе казино для игры. Топ казино непрерывно обновляется и прибавляются свежие и занимательные игровые клубы с привлекательной бонусной политикой и всеми возможными прерогативами, к коим относятся такие бонусы как фриспины за регистрацию, валютные бездепозитные бонусы, а великодушные бонусы за внесенный депо.Поспешите забрать бездепозитные призы за регистрацию в казино из представленного списка. Все платформы столько водят легальную деятельность, но и обрадуют честными результатами игры, высокой отдачей, резвыми выплатами. <a href=http://j90806hs.bget.ru/user/DavidSeeni/>http://j90806hs.bget.ru/user/DavidSeeni/</a> 1×slot казино зеркало <a href=http://forums.panzergrenadiers.com/member.php?84033-Mycsgogem>http://forums.panzergrenadiers.com/member.php?84033-Mycsgogem</a>
1×slots официальный сайт зеркало
На данном разделе портала регулярно публикуются обзорные заметки, в рассматриваются безвозмездные бонусы лучших интернет-казино. Информация структурирована по нескольким пт, включая главные: 1×slots зеркало которую указывали при регистрации кстати При верном подходе бездепы — это прекрасный способ выступать на деньги без растраты собственных средств. Есть несколько рекомендаций, следуя которым возможно извлечь максимум пользы из подобных акций казино. Играть стопам только на лицензированных площадках. Скриптовые сайты столько дурачат с бонусными услугами, хотя и употребляют пиратский софт с измененным ГСЧ. Выиграть на этих автоматах нереально. <a href=https://escortexxx.ca/author/patrickbeesy/>https://escortexxx.ca/author/patrickbeesy/</a> Фриспины — безвозмездные вращения, которые дозволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины считаются самым известным и желаемым обликом приза — благотворительные вращения иногда эффективнее и веселее в отыгрыше, чем остальные облики бездепов. 1×слот регистрация в 1×slots casino Для проверки применяются сканы паспортов, водительских удостоверений, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если пользователь замечен в попытке ввести дополнительный акк, все его учетные записи подвергаются блокировке, а их владелец попадает в темный список. При забаве на лицензионной площадке не бояться указывать достоверную индивидуальную информацию (шифрование исключает утечку индивидуальных данных).Также посещают случаи, когда казино начисляет оговоренный бонус после регистрации свежего клиента по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам.
1×slots зеркало которую указывали при регистрации кстати
Приветственный бездеп предоставляется любому игроку лишь раз раз. Казино дерутся с например именуемыми бонусхантерами (от англ. Bonus Hunter — охотник за призами), пытающимися заводить многочисленные аккаунты для надувательства оператора и повторного получения презента. Исключить похожие деянья дозволяет верификация данных. Администрация вправе потребовать у клиента подтвердить индивидуальные данные, обозначенные при регистрации. <a href=http://feki-php.8u.cz/profile.php?lookup=11667>http://feki-php.8u.cz/profile.php?lookup=11667</a> Для получения предоставленных бонусов для пригодиться — ПК либо мобильное устройство, и остальное дело за небольшим. 1×slots коды Вейджер (wager) – это коэффициент, кот-ый демонстрирует на какую необходимую необходимо сделать ставок, дабы вывести приз из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода этого приза, Вам нужно устроить ставок на сумму: 500*70=3500 рублей. Только полностью отыграв приз, Вы можете вывести собственный выигрыш.
x1 slots регистрация в 1×slots casino
Бездепозитный бонус предоставляется новенькому игроку за конкретные деяния. Часто подарок вид денег или фриспинов выдается за регистрацию, спасибо чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.Выигрыши с призов без инвестициям практически привязаны к требованию по ставкам и имеют быть обналичены лишь в исполненья данных требований. <a href=http://big.bestforums.org/viewtopic.php?f=7&t=9257>1×slot рабочее зеркало</a> Для выбора азартного заведения Вы можете воспользоваться списком наших казино с бонусами за регистрацию. На нашем веб-сайте мы опубликовали список бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, собственно часть бонусов неповторимые и доступны только для гостей нашего сайта по-специальному промо-коду или по оригинальной ссылке. Кроме такого, для любого бонуса мы подготовили подробный обозрение, в котором Вы узнаете как получить и отыграть одобрение и как исключить свой выигрыш с бездепа.Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в неотъемлемом порядке нужно восполнить счет в казино. Для депозитных бонусов, данная процедура не нужна, так как депо уже изготовлен. 1×slots сайт зеркало <a href=https://deadreckoninggame.com/index.php/Glory_Casino>https://deadreckoninggame.com/index.php/Glory_Casino</a> Верификация необходима для дополнительной защищенности и может техподдержке выявить бонусхантеров и мошенников. Кстати, рядах платформах выводы крупных сумм доступны только после доказательства личности.
1хслотс регистрация в 1×slots casino
Осталось выбрать казино с призом за регистрацию и создать профиль. После активации подарка выигрыш зависит от Фортуны и способностей. Почти все игровые клубы настоятельно подтверждение контактных данных игрока для получения бездепозитного приза.Максимальная ставка ? уточняется в денежной счета и ограничивает объем ставки за раз спин. В случае ее превышения бонус возможность быть аннулирован. Также в правилах имеет находиться запрет на размещение ставок определенного вида, например, по одинаковым шансам в рулетке (словами, на чет либо нечет, красное или черное и т.д. ). <a href=https://www.imdb.com/user/ur173153264/>https://www.imdb.com/user/ur173153264/</a> Онлайн-казино с бездепозитными бонусами ставят клиентам обстоятельства для использования бездепами, поэтому перед ролью в акции какого-либо тщательно ознакомиться со всеми правилами и нюансами промоакции. Условия все прикасаться получения бонуса, его использования и следующего вывода денежных средств если, тогда, выигрыша. 1×slots сайт Бездепозитный бонус нередко имеет стать легкодоступным сразу после завершения регистрации, поскольку в большинстве случаев единственным требованием к нему считается регистрация, а затем проверка вашей новой учетной записи.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.ldvd.nl/no-22-san-diego-place-rallies-very-last-boise-country-27–16?page=27#comment-237207>1хслот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В списке притязаний к отыгрышу часто наличествуют лимиты на ставки при этой на личные средства. Так, если отыграть нужно 30 000 рублей, а максимальная сумма ограничена 30 рублями, то вращать барабаны светит 1000 раз. Эта особенность затрудняет соблюдение игроками условий по срокам деянья промоакции.
#9538 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slotscasino09k online
Возможность протестировать свежие забавы, не рискуя личностными своими и создать собственную тактику забавы.Бездепозитный приз предоставляется новенькому игроку за конкретные деяния. Часто презент вид денег либо фриспинов выдается за регистрацию, спасибо чему юзер получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. <a href=http://filmkachat.ru/>1хслотс 1хслотс регистрация перейти на 1×slots</a> <a href=http://www.fumankong2.cc/home.php?mod=space&uid=602004>http://www.fumankong2.cc/home.php?mod=space&uid=602004</a> Бездепы могут заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами. 1×slots официальный зеркало рабочее <a href=http://www.xn–c1aid4a5e.xn–p1ai/user/Geraldveima/>http://www.xn–c1aid4a5e.xn–p1ai/user/Geraldveima/</a> Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, solid лишь внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.
рабочее зеркало 1хслотс
1×slots промокод при регистрации 2025 Фриспины – благотворительные вращения с фиксированной ставкой, коие можно применять в определенных игровых автоматах.Вейджер менее х30–35 считается применимым. Опытные игроки заявляют, собственно с таким вейджером реально остаться в плюсе, если верно подойти к выбору игрового аппарата. <a href=http://community.checkinpro-hotel-software.com/memberlist.php?mode=viewprofile&u=322193>http://community.checkinpro-hotel-software.com/memberlist.php?mode=viewprofile&u=322193</a> B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax casino 1×slot Хотя благотворительные бонусы начисляются без депо, не исключено, собственно вам придется заносить деньги. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только в такого, как новый заказчик впервые пополнит игровой счет.Онлайн-казино кропотливо продумывают бонусные обстоятельства, коие нужно выучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша прочие лимитирования.
1×slots зеркало рабочее
Акции распространяются как на все забавы казино, например и на узкий список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino прочие. Промо может обхватывать разработки 1-го производителя. Бездеп не пересекается с иными акциями казино. Если на сайте предусмотрен кэшбек, он не начисляется за ставки, сделанные бонусными деньгами. Для идентификации платежных реквизитов игрока имеет понадобиться пополнение счета на минимальную сумму.Хотя бесплатные бонусы начисляются без депо, не исключено, что вас придется заносить деньги. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты только последствии как, как свежий заказчик первый пополнит игровой счет. Простая процедура получения бездепозитного бонуса, кот-ая займет не более 2-х мин. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные.У каждого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано смогли выполнить их, мы дадим некоторое советов. Если система начислила небольшую необходимую, надо делать немалые ставки – остановитесь на 10–30 центах. Как лишь сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте играть. В неприятном случае чем приглядеться к другому автомату. <a href=http://wiki.roxane.digital/index.php?title=Utilisateur:MelanieLiversidg>http://wiki.roxane.digital/index.php?title=Utilisateur:MelanieLiversidg</a> 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Законодательство, регулирующее азартные игры в разных странах, влияние на полномочия операторов. В результате пользователи из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это может быть как полный отказ в доступе, например и невозможность загружать забавы отдельных производителей.
1×slots регистрация 1×slots casino c2d ru
Помните, собственно любые нарушения верховодил сведут на нет ваши старания, и вы скорее останетесь без начисленного вас безвозмездного приза. Всегда изучайте правила начисления и обстоятельства вейджера. По любым вопросам, на коие вы не самостоятельно найти ответы, обращайтесь за разъяснениям и саппорт.Как только вы отыграли вейджер и средства с бонусного баланса перебежали вам на настоящий счет, Вы смело можете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депо). <a href=https://techadron.com/forum/viewtopic.php?p=9343>1×slot зеркало</a> Основное правило получения бездепа ? создаваемый аккаунт обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов взыскательно запрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с призом за регистрацию в онлайн-казино без депозита нужно блюсти простую последовательность действий. Допустим, за регистрацию вы получили бездеп в объеме 2 000 рублей с вейджером х30. В данном случае светит сделать ставок, на общую необходимую в 60 000 руб. (2 000 * 30 = 60 000). Когда выполните обстоятельства по отыгрышу, придёт время заработать настоящие средства. Однако не забывайте, что с любого презента выйдет исключить определённую сумму (чаще всего менее $200).Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй или мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. 1×slot казино зеркало <a href=https://slovakia-forex.com/members/268837-ashleywer>https://slovakia-forex.com/members/268837-ashleywer</a>
1×slots регистрация 1×slots casino 777 online
Для получения депозитного бонуса необходимо пополнить собственный игровой баланс настоящими средствами. Вознаграждение возможно получить или при внесении первого депозита, или повторяющий фиксированного процента от внесённых средств. Так либо другому, приз поступит на счёт лишь в пополнения. Размер ставки для забавы по бездепозитному бонусу (конечно же, если, тогда,, когда он представлен вид бонусных денежных средств) часто ниже, чем при этой на депо. Ограничение будет работать до этапа отыгрыша приза.Бездепозитные призы настоящими средствами, которые можно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадались. <a href=https://training.trainingstree.com/author/miguelbow/>https://training.trainingstree.com/author/miguelbow/</a> Представьте момент, когда при ставке в 10 рублей Вы получите схожее умножение. Миллион руб. За одно вращение, собственно вполне вероятно. Поэтому вопрос, сколько возможно выиграть остаётся открытым. Предлагаем выяснить самостоятельно. Регистрируйтесь в одном или нескольких онлайн казино, получайте Бездепозитный приз и инспектируйте удачу в деле. Разумеется, вывести средства сложно. Однако шансы есть у всех. 1×slots официальный demo регистрация в 1×slots casino Минимального оборота. Этот лимит уточняется вейджером — пока игрок не сыграет на установленную сумму, вывод средств будет недосегаем.2. Создать новый профиль. Для регистрации надо(надобно) наполнить маленькую анкету или зайдите в собственный офис при помощи соц сеток;
<b>Смотреть еще похожие новости:</b>
<a href=http://sharecovid19story.com/memberlist.php?mode=viewprofile&u=5122>1×slots актуальное зеркало</a>
<a href=https://nauc.info/forums/viewtopic.php?t=20398973>1 хслот регистрация в 1×slots casino</a>
<a href=http://tarratorriya.tforums.org/viewtopic.php?f=3&t=4006>1×slots официальный сайт зеркало рабочее</a>
<a href=https://www.lightknotes.com/MyBB/showthread.php?tid=154339>1×slots официальный сайт скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
У нас на веб-сайте Вы отыщите перечень призов без депозита в проверенных казино и доскональную информацию то как их получить и использовать.
#9539 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Диапазон ставок, коие вправе устроить игрок, также лимитирован. Обычно ставить можно маленькую необходимую — пределах 10–30 рублей за одно вращение. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> Как лишь получите бездеп в казино, всё точно не запамятовывайте проверять электрическую почту. Некоторые игорные клубы постоянно веселят активных гэмблеров приятными призами. Чаще всего получить презент можно в преддверии веселья, на денек рождение, за вербование приятеля. А также распространённым призом является прибавка к депозиту. Нужно чем пополнить счёт, и азартное заведение увеличит его на 50–100%. <a href=https://www.daehanjujo.kr/bbs/board.php?bo_table=free&wr_id=59923>https://www.daehanjujo.kr/bbs/board.php?bo_table=free&wr_id=59923</a> 1х слот регистрация в 1×slots casino <a href=https://www.professionistidelsuono.net/forums/member.php?action=profile&uid=238345>https://www.professionistidelsuono.net/forums/member.php?action=profile&uid=238345</a> Это тоже благотворительные финансы, которые поступают на аккаунты свежеиспеченных компьютерные последствии регистрирования. А особенность этих призов состоит том,, что обретенные финансы непременно следует использовать в продолжении назначенного медли.Бездепозитный бонус нередко имеет стать легкодоступным незамедлительно после завершения регистрации, что как единственным требованием к нему считается регистрация, а после проверка вашей новой учетной записи.
x1 slots 1хслотс регистрация перейти на 1×slots
Также учтите, что некоторые игровые платформы сузивают перечень стран, коие готовы получить предложенный бездепозитный бонус за регистрацию. К примеру, есть онлайн-заведения, выдающие подобные бонусы только жителям конкретных стран. К примеру, онлайн казино 777 Оригинал предоставляет бездепозитный бонус лишь игрокам из России и стран СНГ. Или наоборот, снабжают вознаграждением всех, считая жителей неких государств (из сего, стопам внимательно учить перечень, чтобы впоследствии не появилось никаких вопросов и жалоб).Но надо размышлять, что снабжая пользователей этими бонусами, казино увлекается спонсированием. Ведь размеры вознаграждений, главном, не немалые (средним размером от 5 до 20 $). И на эти средства налагаются определенные обстоятельства и лимитирования, неотклонимые к исполненью игрока, в в последствии он вожделеет получить все свои выигранные деньги. 1×slots официальный сайт скачать Бездепозитные призы в казино без пополнения 2022 — это конкретная сумма средств или vacant spins вращения, которые предоставляются первым гостям за регистрацию на сайте казино повторяющий бездепозитного бонуса, и выделяет вам возможность помощью казино без пополнения опробовать услуги (игр), с дальнейшей преимуществом, льготой вывода средств при исполнении всех установленных управлял.За счёт спинов выйдет запустить различные онлайн слоты, протестировать стратегии и поднабраться навыка. Фишка сомнений, что вращения начисляются на топовые аппараты с уникальными опциями и высочайшей отдачей. Не запамятовывайте, что в любом акционном предложении предусмотрены специальные требования – кратковременные ограничения, максимальный размер ставки, список доступных игр. <a href=http://j67236dr.bget.ru/user/Stevenanast/>http://j67236dr.bget.ru/user/Stevenanast/</a> Мы собрали и выпустили перечень наилучших бездепозитных казино с призами за регистрацию, коие гарантируют щедрые выигрыши и мгновенные выплаты. 1×slots casino регистрация 1×slotscasin online Шаг 4. Активация. Внимательно изучите условия, информацию по лимитированиям и сроке действия бонусного предложения. Разобравшись с правилами, можно активировать бонус в личном офисе (от ? с использованием промокода) или по запросу в саппорт.
казино 1×slots официальный сайт
В перечне притязаний к отыгрышу нередко присутствуют лимиты на ставки при ирге на личные деньги. Так, в отыграть надо(надобно) 30 000 рублей, а предельная сумма ограничена 30 рублями, то вертеть барабаны светит 1000 один. Эта особенность затрудняет соблюдение игроками условий по срокам действия промоакции. <a href=http://jung24express.com/bbs/board.php?bo_table=review&wr_id=126343>http://jung24express.com/bbs/board.php?bo_table=review&wr_id=126343</a> Подтверждение персональной информации. Все казино просят от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и наличие у пользователя других аккаунтов (мультиаккаунт запрещен). 1×slots официальный сайт скачать Бездепозитные призы отличный вариант даровой игры в игровые автоматы. Многие пользователи сети не понимают, что в казино можно начать играть безусловно даром, а позже исключить выигрыш на банковскую карту либо электрический кошелек, другие не доверяют онлайн казино, а третьи успешно играют и выигрывают – и тотчас достаточно большие суммы.
1хслот зеркало сайта
<a href=https://fougerite.com/threads/1×slots-klubu1×slots-1×slots-registracija-perejti-na-1×slots.12528/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> С не отыгранным призом воспрещается превосходить размер максимальной ставки. Нарушение этого обстоятельства повлечет за собой аннулирование выигрыша. В онлайне большое известных игорных площадок с привлекательными акционными предложениями. Однако пристально читать обстоятельства десятков услуг в надоест, да и время отнимет большое. Поэтому наша команда подготовила ТОП-3 вебсайтов с лучшими бездепозитными бонусами:Приветственный приз без депозита ? подарок за регистрацию. Выдается деньгами, фриспинами либо баллами. В заключительном случае бонусные баллы применяются для участия в турнирах либо обмена на настоящие средства. 1×slots регистрацию процедура займет всего лишь <a href=https://pbprog.ru/forum/?PAGE_NAME=profile_view&UID=525703>https://pbprog.ru/forum/?PAGE_NAME=profile_view&UID=525703</a>
1×slots зеркало рабочее на сегодня
Например, игрок получил 500 рублей при разработке аккаунта и обязан отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 руб., потребуется сделать 875 спинов для полного отыгрыша.Как прочие промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такового предложения считаются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих гостей и позволяет им составить эмоцию о функционале, не рискуя значительными совокупностями. Не трудно додуматься, собственно not the slightest deposit bonuses почти разу не бывают большими. Чаще всего речь идет о пяти–тридцати баксах (либо эквиваленте данной суммы в другой еденице). <a href=https://www.goodreads.com/user/show/112388415-kachfil1>https://www.goodreads.com/user/show/112388415-kachfil1</a> Обычно, бездепозитные призы выдаются под определенные слоты с фиксированной ставкой, хотя их точно запрещено использовать в игровых автоматах с современным джекпотом. Список игр, в возможно использовать бездеп, Вы отыщите в описании акции либо можете уточнить у службы заведения. 1×slots регистрация 1×slotscasino09k online
<b>Смотреть еще похожие новости:</b>
<a href=http://khodaumo.com/forum/viewtopic.php?f=2&t=75042&sid=33314838171940a82884df73b7679070>1×slots быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Отыграв бездепозитный приз в казино с выводом тоже придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, случае подобное ограничение присутствует, то единоразово вывести выйдет лишь необходимую, не превышающую объем полученного приза. Одним из предлогов отдавать преимущество, льготу 1 или другому заведению содержится в привлекательности предлагаемых акций и даровых услуг. Безвозмездные фриспины, выдаваемые без дела создавать какой-либо лепта, в списке располагается далековато не в конце.
#9540 Charlesgunnyhttp://filmkachat.ru
1× slots официальный
Таким образом интернет казино получает потенциального игрока. Возможно в будущем либо истинном он захотит поиграть на свои деньги. Так трудятся бездепозитные бонусы в онлайн казино. Здесь очень подходит выражение, безвозмездные сыр случается лишь в мышеловке. Начинающие игроки имеют не обдумывать опасность пыла. Однако времени осознания делается больше. Это тема для отдельного обсуждения.Только выполнив все условия отыгрыша и дождавшись завершения проверки аккаунта, Вы сможете оформить заявку на вывод средств и получить свои средства. <a href=http://filmkachat.ru/>1×slots casino зеркало</a> Способы получения бездепа различаются в зависимости от вида приза, кот-ый понравился игроку. Но для или нужно быть зарегистрированным в законном онлайн-казино и подтвердить свою лицо. В общем облике пошаговая аннотация для получения бездепозитного бонуса смотрится например:Вы не в коем случае ни же рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической забавы на бездепозитные призы, у Вас есть шанс выучить игровые автоматы, выучится регулировать менять ставки и линии, исследовать бонусные забавы и их выигрышные композиции, ну конечном просто зарядится кучей впечатлений! Ведь вы будите выступать на бонусные средства, которые можно отыграть и вывести, но просто на демо счет, тем самым адреналин в крови более повысится а пульс забьется с нередким ритмом! <a href=http://cjrltw.com/home.php?mod=space&uid=355013&do=profile>http://cjrltw.com/home.php?mod=space&uid=355013&do=profile</a> 1 x slots <a href=https://www.koreafurniture.com/bbs/board.php?bo_table=free&wr_id=1719745>https://www.koreafurniture.com/bbs/board.php?bo_table=free&wr_id=1719745</a>
1×slots регистрацию процедура займет всего лишь
<a href=http://romb4×4.ru/forum/threads/1×slots-oficialnyj-sajt-skachat.14664/>1×slots официальный сайт, скачать</a> 1×slots регистрация на сайте <a href=http://www.annunciogratis.net/author/porsedropkr>http://www.annunciogratis.net/author/porsedropkr</a> Демоказино есть практически на каждом сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино онлайн встречаются существенно реже: там если, тогда, выигрыша и соблюдения критерий акций бездеп можно перевоплотить в настоящие деньги. казино 1×slots Так собственно можете отважно региться без всяких размышлений. Фортуна сегодня точно на вашей стороне. Не страшитесь, так следствие какого или убытка Вам абсолютно не угрожает. С этими призами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе.Наши эксперты исследуют обстоятельства промоакции, затем в ручном режиме проводят их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода и параметры. Мы не рекламируем казино, а даем игрокам информацию о превосходнейших из них.
зеркала 1×slots
Третитй бездепозитный приз за регистрацию – валютные свои. К огорчению, начислить рубли либо баксы готовы лишь знаменитые и модные клубы. С их помощью возможность насладиться любой доступной забавой – автоматом, рулеткой, кено, блэкджеком.Простая процедура получения бездепозитного приза, которая займет менее 2-х мин. Для получения бездепов, достаточно зарегистрироваться и доказать контактные данные. Бездепозитный приз по промо-коду будет доступен для забавы, лишь в случае когда Вы активируете особый бонусный код в разделе с бонусами либо укажите промокод при регистрации на веб-сайте. В неких случаях, не активации кода, понадобиться доказать контактные данные игрока и наполнить анкету посетителя. <a href=https://velorout.com.ua/user/Stevenled/>https://velorout.com.ua/user/Stevenled/</a> Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные способы и оценить необыкновенности, труднодоступные при забаве в демо режиме. Многие новые клиенты переходят в количество неизменных, а оператор получает длительную выгода. 1х слот регистрация в 1×slots casino
1×slot рабочее зеркало
<a href=https://www.mshowto.org/forum/members/jamespauri.html>1×slots регистрация то дальше необходимо пройти</a> 1×slots регистрацию процедура займет всего лишь <a href=http://flowerwheel.synology.me/dokuwiki/doku.php?id=фильм_крик_4_скачать>http://flowerwheel.synology.me/dokuwiki/doku.php?id=фильм_крик_4_скачать</a> B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.
1×slots официальный регистрация
<a href=http://atope.ru/user/Julesplord/>http://atope.ru/user/Julesplord/</a> Чем ниже велечину вейджера, тем легче отыграть и исключить бонус. Если Вы расчитываете заработать на бездепе, а не просто ознакомиться с новым игровым клубом, то стоит игнорировать бонусов с высоким вейджером их практически не реально отыграть. С ними Вы можете только протестировать игры заведения. 1×slots рабочее зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://www.lightknotes.com/MyBB/showthread.php?tid=167362>1×slots зеркало видели такую регистрацию на</a>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=257466>1хслотс мобильная версия зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Превышение наибольшей ставки при отыгрыше. Система механически не предуведомляет о превышении ставки, потому о несоблюдении правил игрок имеет узнать теснее последствии подачи запроса на вывод средств.
#9541 Charlesgunnyhttp://filmkachat.ru
1хслот зеркало
Даже не выиграв крупную сумму, игрок интересно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе наихороших промоакций с. Достаточно периодически изучать список новых интернет казино с выводом бонуса без депо в данном разделе.Бонус начисляется игроку незамедлительно в регистрации и прохождения верификации в казино и не требует от клиента внесения депозита. Как верховодило, объем бонуса в сходственном случае довольно стыдливый, однако позволяет новеньким познакомиться с забавой без риска настоящими деньгами. <a href=http://filmkachat.ru/>1хслотс 1хслотс регистрация перейти на 1×slots</a> Теоретически, к безвозмездным бонусам можно отнести так называемые фриспины. Напомним, идет о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, потому что они деют лишь вероятность создавать ставки. <a href=https://www.clashfarmer.com/forum/member.php?action=profile&uid=49320>https://www.clashfarmer.com/forum/member.php?action=profile&uid=49320</a> Вознаграждения за получение VIP-статуса ? начисляются в рамках программки лояльности при достижении одного значения или выдаются индивидуально менеджерами саппорта. 1×slots рабочее зеркало <a href=http://shilinka.ru/user/CharlesLok/>http://shilinka.ru/user/CharlesLok/</a> Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги или пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.Для получения депозитного бонуса необходимо восполнить собственный игровой баланс настоящими деньгами. Вознаграждение можно получить либо при внесении первого депо, либо повторяющий фиксированного процента от внесённых средств. Так либо по, бонус поступит на счёт лишь в пополнения.
1×slots скачать на айфон
Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.В современность очень просто получить приз за регистрацию в казино. Практически каждый игорный дом с готовностью начисляет деньги либо благотворительные вращения. Многие гэмблеры используют этим и не стыдятся региться в каждом клубе с выгодными условиями. Кстати, это замечательная возможность выработать победную тактику и сорвать джекпот. 1×slots регистрация на 1хслотс При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток.Почти все игровые клубы настоятельно свидетельство контактных данных игрока для получения бездепозитного бонуса. <a href=http://sampo.ru/~martini/forum/profile.php?action=show&member=13>http://sampo.ru/~martini/forum/profile.php?action=show&member=13</a> Многие азартные клубы ограничивают необходимую вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не сможете вывести. Разница несомненно аннулирована, Вы и не сможете создавать на нее ставки. 1× slots casino официальный сайт В зависимости от онлайн заведения каждый из них имеет вас предложить как бездепозитные деньги, так и бездепозитные фриспины, которые после успешной регистрации рухнут для на ваш игровой баланс.
1×slots регистрацию процедура займет всего лишь
<a href=https://gti-club.ru/forum/member.php?u=413848>https://gti-club.ru/forum/member.php?u=413848</a> Подтвердите регистрацию, дабы активировать Бездепозитный приз с выводом, требуется заполнить собственный профиль. Заполните порожние поля настоящими данными о себе. 1×slots рабочее зеркало на сегодня Это один из основных показателей привлекательности презента. С завешенным коэффициентом и мастера не смогут выполнить условия по отыгрышу. И важно, как привлекательно выглядит предложение – бездепозитный бонус казино в объеме $500 либо $1 000. Чтобы новенькие лучше вдумались, собственно же такое вейджер, мы разберём на примере.Почти все игровые клубы требуют свидетельство контактных данных игрока для получения бездепозитного приза.
1×slot зеркало
Однако в критериях исчезают «подводные камни», коие не разрешат исключить солидную необходимую или же вы не успеете отыграть вейджер. Поэтому мастера рекомендуют арестовать бесплатные вращения за регистрацию в казино без депо, чтобы поднабраться навыка и получить настоящий шанс на победу. Основное различие в том, собственно для получения бездепа нужно пополнять баланс в казино. Но кроме сего, есть ряд и других различий:В современность довольно просто получить приз за регистрацию в казино. Практически каждый игорный дом с готовностью начисляет средства либо бесплатные вращения. Многие гэмблеры пользуются данным и не смущяются регистрироваться в любом клубе с прибыльными критериями. Кстати, это отличная вероятность выработать победную стратегию и сорвать джекпот. Вообще перейдя в казино — правила одинаковы в получении бездепозитных призов, в стереотипные верховодила входит: доказать эл. Почту и аппарат, заполнить собственный личный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ.В онлайне много известных игорных площадок с красивыми акционными услугами. Однако внимательно разбирать обстоятельства 10-ов предложений вскоре надоест, да и время отнимет количество. Поэтому наша команда подготовила ТОП-3 вебсайтов с лучшими бездепозитными бонусами: казино 1×slots официальный сайт <a href=http://tnfnorth.com/memberlist.php?mode=viewprofile&u=151966>http://tnfnorth.com/memberlist.php?mode=viewprofile&u=151966</a>
1×slots официальный сайт скачать
Бездепозитные бонусы истинными средствами, которые можно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадали. Диапазон ставок, которые вправе сделать игрок, того лимитирован. Обычно назначать возможно небольшую сумму — около 10–30 руб. За одно вращение. <a href=http://973ehtnamuh973.co.uk/forum/memberlist.php?mode=viewprofile&u=215110>http://973ehtnamuh973.co.uk/forum/memberlist.php?mode=viewprofile&u=215110</a> Индивидуальные поощрения выдаются за совершение действий: подписку на аккаунты площадки в социальных сетях, установку мобильного приложения либо официального посетителя для ПК. В большинстве казино срабатывают программки лояльности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на грядущий степень нередко сопрягается выдачей бездепа.Создание аккаунта. На сайте казино нужно открыть регистрационную форму и заполнить порожние поля личностными данными. Иногда на данном шаге требуется показать лишь адрес электрической почты и пароль, хотя чаще надо заполнить анкету персональной информацией (ФИО, дата рождения, место проживания и т.д.). Нужно указывать лишь настоящие данные, потому впоследствие они будут проверены. 1хслотс рабочее зеркало Перечисленные выше основные свойства сочетают фактически каждый бонус и являются стереотипными для бездепозитных бонусных начислений в казино.Бонусные средства – маленькая сумма средств для старта в новеньком казино. На бонусные средства, обычно разрешено выступать во все игры, кроме слотов с современным джекпотом и игр из раздела exist casino.
<b>Смотреть еще похожие новости:</b>
<a href=https://your-portal.at.ua/forum/21–2430–3#88144>1хслотс зеркало на сегодня</a>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=150744>1хслотс официальный сайт зеркало</a>
<a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=860439#pid860439>1×slots зеркало рабочее на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Некоторые сайты, этого чем обмануть регистрацию игроков, предлагают ответить на количество базисных вопросов. Цель проведения подобной викторины – выявить случайных людей, которые не имеют представления о покере, и не допустить получения ими бонусов. Если гость теснее играл в казино, то ответить на полтора десятка простых вопросов будет нетрудно. Очень часто, ответы возможно найти на официальных сайтах данных учреждений.
#9542 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
Каждый игры обязан сначала детально выучить условия по получению и отыгрышу приглянувшегося подарка. Если всё организует, поторопитесь арестовать бесплатные спины за регистрацию в казино без депозита с выводом и без отыгрыша и напрямик момент начать вращать барабаны топовых слотов. <a href=http://filmkachat.ru/>1×slots официальный регистрация</a> Так собственно основное отличие дара на депозит от бездепа – обязательное пополнение счёта. Вы сможете внести депо и преумножить стартовый капитал либо забрать бездеп и всем не придётся рисковать собственными сбережениями. Поспешите выполнить простые притязания, и администрация ресурса начислит щедрое одобрение! <a href=http://super-humor.ru/profile.php?u=absurddesert67>http://super-humor.ru/profile.php?u=absurddesert67</a> 1×slots регистрация на 1хслотс <a href=http://georgiantheatre.ge/user/Migueltem/>http://georgiantheatre.ge/user/Migueltem/</a> Игры, в которых можно выступать на бонусные деньги. Проверьте перечень игр, в возможно выступать на бонусные свои, вполне они Вам не понравятся и надо тратить своё время на такую акцию.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Вывод выигрыша с бездепозитных призов казино – щедрый презент от азартных клубов. Но чтобы вывести собственный доход, нужно выполнить ряд условий: <a href=https://australianwinerytours.com/tours/showthread.php?tid=201470>1×slot зеркало рабочее этих способов предполагает регистрацию</a> казино 1×slots официальный сайт <a href=https://www.deadbeathomeowner.com/community/profile/zacheryswink/>https://www.deadbeathomeowner.com/community/profile/zacheryswink/</a> Одним из поводов отдавать привилегию одному либо иному заведению заключается в привлекательности предлагаемых промоакций и бесплатных предложений. Безвозмездные фриспины, выдаваемые без нужды делать какой-нибудь вклад, в перечне находится далеко не в конце.Таким образом, заведение пытается продемонстрировать себя своим потенциальным игрокам, а такой маркетинговый ход как казино приз без депозита за регистрацию завлекает очень большое внимания к игорному заведению и обеспечивает постоянный поток новых гостей и будущих посетителей игрового интернет клуба. 1×slots зеркало сайта
1×slots актуальное зеркало
Верификация аккаунта. Лучше доказать лицо сразу в регистрации, чтобы позже не было проблем с выводом средств. Верификация может протекать двумя маршрутами:На нашем сайте Вы отыщите список актуальных новых бездепозитных бонусов в казино 2022 года. Также, есть большое неповторимых предложений, которые доступны только посетителям нашего сайта в регистрации по нашей ссылке или активации специального промокода. Зарегистрироваться в казино по специальной ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефона и электронную почту). Для подтверждения номера телефона нужно в личном профиле указать собственный номер и надавить кнопку „Подтвердить номер аппарата“, дальше Вы получите sms-сообщение с кодом, который необходимо установить в подходящее фон. Для подтверждения электронной почты, перебежать по активной ссылке в послании от казино.Вывод выигрыша с бездепозитных призов казино – щедрый подарок от азартных клубов. Но дабы вывести свой доход, нужно выполнить ряд критерий: <a href=http://www.cwpass.co.kr/ver2/bbs/board.php?bo_table=free&wr_id=681681>http://www.cwpass.co.kr/ver2/bbs/board.php?bo_table=free&wr_id=681681</a> Первый образующийся вопрос, это, зачем выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают новых игроков. Последним проще начать забаву на средства с презента за регистрацию. Им не пополнять баланс и тратить личные свои. Новички получают бесплатные спины или средства на счёт. С их поддержкою знакомятся с игровым ходом, крутят слоты и делают ставки в рулетке.На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению этого времени, Вы не сможете активировать и получить бездепозитный приз. 1×слотс казино Если вы новичок данном и только попали в неизведанную вами район пыла — с помощью услуг как бездепозитные призы без пополнения.
1 x slots casino
<a href=https://forum.graylite.com/viewtopic.php?p=190323#p190323>x1 slots регистрация в 1×slots casino</a> Возможность протестировать свежие забавы, не рискуя собственными своими и разработать собственную стратегию забавы.Начнём с того, что любое промо за регистрацию подразумевает некие обстоятельства. Бездепозитные бонусы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность валютного оборота, нужная для исполнения критерий. Пример, получили безвозмездные вращения и выиграли с них 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 руб., проигрышных или выигрышных, так. После выполнения, бонусный баланс перейдёт на реальный и станет доступным к выводу. Фриспины без депо либо дополнительные свои помогут поближе познакомиться с игровой платформой и её функциями. За счёт подарков возможно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям из-за игры напротив живых крупье.Но разу не забывайте пристально читать правила роли в бонусных акциях. Если вы нарушите но бы одно условие, позже вы не можете уладить недоразумение с администрацией. 1×slots быструю регистрацию а также мгновенное <a href=https://cse.google.co.ke/url?q=https://doctorlazuta.by/>https://cse.google.co.ke/url?q=https://doctorlazuta.by/</a>
1×slots зеркало
<a href=http://airlayer-boat.ru/bitrix/rk.php?goto=http://tpp74.ru/bitrix/rk.php?goto=http://hatimaki.ru/bitrix/redirect.php?goto=https://teletype.in/@urist_free/yOiEW7wwCR0>http://airlayer-boat.ru/bitrix/rk.php?goto=http://tpp74.ru/bitrix/rk.php?goto=http://hatimaki.ru/bitrix/redirect.php?goto=https://teletype.in/@urist_free/yOiEW7wwCR0</a> Иногда операторы просят внесение минимального депозита перед выводом для верификации платежного прибора. В неких казино данный депо кроме предстоит отыграть.Обычно для получения призов без депо, казино выдвигает лояльные и абсолютно выполнимые условия, но есть ряд поступков которые запрещены и имеют причиной досадные результаты: 1×slos регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=254900>1хслотс 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Прибывшие на аккаунт финансы бездепозитные бонусы предназначаются, в основном, только для новоиспеченных пользователей, которые ранее не имели личного аккаунта в данном казино. Исходя из этого, в раньше у игрока был сделан депо, то, по всей вероятности, у него больше не будет способности рассчитывать на получение такого бонуса в определенном заведении. Помните, что в неких забавах сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных играх только от 5% до 50% суммы ставки считаются как отыгранные средства, на как в слотах идет в зачет все 100% суммы.
#9543 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino c2d ru
Такой бесплатный эквивалент средств зачисляется на профиль пользователя в осуществления притязаний и предназначаются они только для игрового процесса. Вывод этих вознаграждений возможен только последствии осуществления вейджеровых условий.Некоторые клубы автоматически начисляют приз на аккаунт игрока последствии исполнения критерий получения, хотя случаются истории, когда приз надо(надобно) активировать игроку самому. Есть количество методов активации приза: <a href=http://filmkachat.ru/>1хслот зеркало сайта</a> Да, у безвозмездных бонусов есть недостатки. Прежде всего, они обыкновенно большие. Кроме как, обстоятельства вейджера по ним постоянно жесткие. Но все же неименье риска делает их довольно привлекательными для клиентов. <a href=http://g95887q6.beget.tech/user/Jameshaict/>http://g95887q6.beget.tech/user/Jameshaict/</a> Oтыгpaть приз с обозначенным вeйджepом, для этого необходимо сдeлaть cтaвoк нa cумму, превышающую объем бонуса в количество один. 1×slots официальный сайт мобильная версия <a href=https://www.alive-directory.com/%D1%84%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B-%D0%BA%D0%BE%D1%84%D0%B5%D0%B5%D0%BD_655058.html>https://www.alive-directory.com/%D1%84%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B-%D0%BA%D0%BE%D1%84%D0%B5%D0%B5%D0%BD_655058.html</a>
1×slots casino зеркало
Выбирая бесплатный бонус, внимательно изучайте правила. Убедитесь, собственно вам можно себя роль в акции. Уточните, в каких играх можно скорпулезно условия вейджера. При надобности задавайте вопросы представителям саппорта.Чаще всего казино бонус за регистрацию без депо даёт возможность запустить каждой машина. Но никакого пристально ознакомиться с критериями. Иногда для забавы доступны только определённые модели. Если вы новичок и ничего не понимайте в гэмблинге, никакого начать знакомство с миром азарта непосредственно с «одноруких бандитов». <a href=https://minifishtank.net/forum/member.php?action=profile&uid=1356>1× slots casino зеркало</a> скачать 1×slots официальный сайт <a href=https://bongatoken.com/user/Davidreexy/>https://bongatoken.com/user/Davidreexy/</a> 1×slots мобильная версия войти казино Не стоит путать забаву в демо и использование призов. В демонстрационном режиме игрок имеет оценить механику слота, сюжет и оформление. Но игра ведется на условные кредиты, поэтому отсутствует главное ? чувство азарта. Активируя промокод либо фриспины, заказчик и не тратит свои средства на игровые автоматы, но может сорвать реальный куш!Как только вы отыграли вейджер и средства с бонусного баланса перебежали вам на реальный счет, Вы отважно можете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (сделать наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депо).
казино 1×slots официальный сайт
Онлайн-казино тщательно продумывают бонусные обстоятельства, коие нужно выучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша прочие лимитирования.Почти все игровые клубы требуют свидетельство контактных данных игрока для получения бездепозитного приза. <a href=http://rosnum.ru/index.php?title=%D0%9F%D0%B8%D1%86%D1%86%D0%B0%20%D0%BE%D1%82%20%D1%88%D0%B5%D1%84-%D0%BF%D0%BE%D0%B2%D0%B0%D1%80%D0%BE%D0%B2%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!>http://rosnum.ru/index.php?title=%D0%9F%D0%B8%D1%86%D1%86%D0%B0%20%D0%BE%D1%82%20%D1%88%D0%B5%D1%84-%D0%BF%D0%BE%D0%B2%D0%B0%D1%80%D0%BE%D0%B2%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!</a> 1×slots зеркало регистрация в 1×slots casino Не сложно догадаться, что not the slightest deposit bonuses почти разу не случаются немаленькими. Чаще всего речь идет о пяти–тридцати долларах (либо эквиваленте этой суммы в другой денежной).
1хслот скачать
За привлечение друга ? в рамках партнерской программки клиент получает вознаграждение за вербование новых пользователей.Ограничения по забавам. Администрация воспрещает игрокам кое-какие игровые автоматы с бездепозитным бонусом, деньгами или бесплатными вращениями. Обычно, в правилах приводится глубокий перечень слотов для отыгрыша. Иногда дробление производится по облику игр. Например, отыгрыш возможен на всех игровых аппаратах, но запрещен в настольных забавах и в разделе Live Casino. Такие одобрения позволяют бесплатно протестировать новое казино, разобраться с игровым процессом онлайн слотов, заработать и исключить небольшую сумму денег. Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, a зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти.Многие игроки, оценив перечень казино, остаются выступать в нем и дальше ? на это и нацелено каждое рекламную. Постоянные посетители заносят депозиты и проделывают ставки, обеспечивая длительную прибыль оператора. То есть, казино выдают бездепы свежим пользователям для формирования лояльной аудитории. 1хслотс казино зеркало <a href=http://bbs.zhizhuyx.com/home.php?mod=space&uid=10550306>http://bbs.zhizhuyx.com/home.php?mod=space&uid=10550306</a> Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?После требуется внести идентификационный платёж. Это пугает начинающих больше всего. Нужно устроить наименьший депозит в 100–500 руб. Таким образом служба защищенности увериться в том, что платёжный метод принадлежит Вам. Данная процедура важна для обеспечивания безопасности игровых счетов. Пример, Ваш аккаунт взломают и выведут средства на свой кошелёк. Будет крайне досадно. Поэтому верификация платёжной системы, это важный момент.
1× slots casino зеркало
Подтвердите регистрацию, дабы активировать Бездепозитный бонус с выводом, потребуется наполнить индивидуальный профиль. Заполните пустые поля истинными данными о себе. Бонусы без депозита при регистрации считаются самыми привлекательными как для опытнейших игроков, например для и начинающих. Получив такое вознаграждение, клиент имеет выступать на настоящие средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные призы в интернет-казино Рунета, еще условия их активации и выигрыша.Свежий бонус начисляется повторяющий валютных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в использовании своими, в случае отыгрыша оператор возможность ввести ограничение на вывод денег. <a href=https://www.rang.com.ua/osipovichi.com>https://www.rang.com.ua/osipovichi.com</a> 1хслотс регистрация в 1×slots casino
<b>Смотреть еще похожие новости:</b>
<a href=http://soumoli.com/home.php?mod=space&uid=24916>casino 1×slot</a>
<a href=https://www.reisezielforum.de/viewtopic.php?t=357294>1×slots зеркало регистрацию более популярный вариант это</a>
<a href=http://xn–80akbkalsbeeafq6a6b2f.xn–p1ai/forum/messages/forum1/topic32521/message187190/?result=new>1×слотс казино</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
После получения бонуса вывод средств для посетителя будет недосегаем до тех пор, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или чета недель. Выводить средства игрок сможет только в отыгрыша.
#9544 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация то дальше необходимо пройти
За счёт спинов выйдет запустить различные онлайн слоты, протестировать стратегии и поднабраться навыка. Фишка сомнений, что вращения начисляются на топовые аппараты с уникальными опциями и высочайшей отдачей. Не запамятовывайте, что в любом акционном предложении предусмотрены специальные требования – кратковременные ограничения, максимальный размер ставки, список доступных игр.Помните, собственно всевозможные нарушения управлял сведут на нет ваши старания, и вы всего останетесь без начисленного вам дарового приза. Всегда изучайте управляла начисления и условия вейджера. По каким вопросам, на коие вы не можете помощи отыскать ответы, обращайтесь за объясненьям и саппорт. <a href=http://filmkachat.ru/>1×slots регистрация</a> <a href=https://999reunite.co.uk/forum/profile/SummerDane>https://999reunite.co.uk/forum/profile/SummerDane</a> Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие возникают у новичков.Третитй бездепозитный бонус за регистрацию – денежные средства. К сожалению, начислить рубли или баксы готовы только знаменитые и модные клубы. С их поддержкою вас насладиться каждой доступной игрой – автоматом, рулеткой, кено, блэкджеком. скачать 1×slots на андроид мобильная версия <a href=http://www.vintageampeg.com/forum/member.php?action=profile&uid=7084>http://www.vintageampeg.com/forum/member.php?action=profile&uid=7084</a> Для получения выигрыша потребуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить конкретную необходимую, хотя уже из собственных средств. Она рассчитывается из общего объема выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, случае юзер выиграл 1000 рублей, а множитель составляет х30, вывести средства можно будет, сделав ставки на 30 000 рублей.
казино 1×slots официальный сайт
Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы коие возникают у начинающих.Бонус за регистрацию в казино выдается только раз один на 1-го игрока. Но посещают дополнительные акции, в коих бездепы расступаются для постоянных клиентов и эти подарки Вы сможете получить больше одного раза. казино 1×slots Помните, что в некоторых играх сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки числятся как отыгранные деньги, момент как в слотах идет в зачет все one hundred percent суммы. <a href=http://www.taijiacademy.com/newforum_down/profile.php?mode=viewprofile&u=304059>http://www.taijiacademy.com/newforum_down/profile.php?mode=viewprofile&u=304059</a> 1×slot рабочее зеркало Также существуют онлайн-платформы азартных игр, которые применяют раздачу бездепозитных бонусов в специальные даты (как для казино, так и для игрока). Помимо сего, действующие геймеры того имеют вероятность получить схожие призы за собственную деятельность (например, за повышения уровня или за похожие заслуги).Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить необыкновенности, труднодоступные при игре в демо режиме. Многие новые клиенты переходят в количество неизменных, а оператор получает длительную выгода.
скачать 1×slots на андроид мобильная версия
Способы получения бездепа различаются зависимо облика приза, который приглянулся игроку. Но вас так нужно быть зарегистрированным в легальном онлайн-казино и доказать свою лицо. В общем виде пошаговая инструкция для получения бездепозитного бонуса смотрится так: <a href=https://goblin-film.net/user/StevenHoity/>https://goblin-film.net/user/StevenHoity/</a> Условия все различаться приятель от друга. Но такой приз имеет быть применен лишь для игрового процесса – приобретенные на счет деньги до как, как будут отыграны, вывести нереально.Условия все разниться друг от друга. Но подобный приз возможность быть использован только для игрового процесса – полученные на счет деньги до как, как будут отыграны, исключить невозможно. 1×slots официальный регистрация Итак, дабы безвозмездные бонусные кредиты трансформировались в реальные деньги, которыми вам распоряжаться по собственному усмотрению, их надо(надобно) отыграть. Вейджер следует уточнять в правилах онлайн-казино.
1хслотс официальный сайт зеркало
Существует ли стратегии для отыгрыша бездепозитных призов? К огорчению нет, на выигрыши либо проигрыши с бонусов, казино либо игрок воздействовать имеет, отдача игр происходит от создателей игр.Но есть игорные заведения, коие готовы просто так жертвовать средства на забаву. Для сего достаточно создать профиль. Чтобы вывести собственный выигрыш, вам поначалу нужно выполнить обстоятельства отыгрыша, обозначенные в условиях получения бездепозитного депо. Размер приза. В качестве бездепов обыкновенно начисляют очень суммы, а когда речь идет о бонусах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино имеют презентовать игроку до 2000$. Суммы похожих услуг, случаев, колеблются от трех до 20 $, а вейджер на эти свои должен составлять от тридцати до шестидесяти раз. Зачастую, наивеличайшая сумма выигрыша тут составит от одной до 2-ух сотен долларов. Если игрок выиграет больше, то все свои имеют быть списанными до максимально разрешенного выигрыша. Здесь появляется содержание выводить еще несуществующие финансы на свою платежную систему и далее находить заведение с подходящими под данную необходимую релоадом или призом за 1-ое пополнение счета. Есть количество подвидов бездепозитного вознаграждения, предлагаемого наибольшим числом заведений. 1×slots зеркало регистрация в 1×slots casino <a href=https://www.google.dz/url?sa=t&url=https://doctorlazuta.by/>https://www.google.dz/url?sa=t&url=https://doctorlazuta.by/</a>
x1 slots 1хслотс регистрация перейти на 1×slots
<a href=http://forumqservice.co.uk/member.php?action=profile&uid=5121>http://forumqservice.co.uk/member.php?action=profile&uid=5121</a> Однако далеко не все ресурсы предлагают своим посетителям бездепозитные призы за регистрацию в казино. В большинстве случаев учтено поощрение на 1-ый депозит в размере 100–200%. Это замечательная возможность преумножить банкролл, прирастить время, проведённое за игрой и шансы сорвать большой куш. casino 1×slot Реже призы без депо начисляются постоянным игрокам. С их поддержкою администрация постарается удержать ценных клиентов или желает поблагодарить за лояльность правильных гостей. Но гораздо чаще для похожих целей используются такие промоакции:
<b>Смотреть еще похожие новости:</b>
<a href=https://uyghuryol.com/forum/viewtopic.php?f=8&t=234972>скачать 1×slots официальный сайт</a>
<a href=https://forum.dis-course.net/viewtopic.php?t=435746>рабочее зеркало 1хслотс</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Условия отыгрыша приза. Если Вы планируете заработать на бездепозитном бонусе, то для обратите внимание на значение вейджера и срок, кот-ый дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, что, этим проще отыграть приз и исключить выигрыш. Бездепозитные призы за регистрацию считаются одним из самых известных способов вербования свежих игроков в онлайн-казино, поэтому собственно они деют игрокам возможность опробовать казино, неподражаемо игровые автоматы, и возможно, выиграть настоящие средства.
#9545 Charlesgunnyhttp://filmkachat.ru
1хслот скачать
Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке представители онлайн-казино публикуют важную информацию о no down payment bonuses и услугах.Не стоит сразу же отказываться от приветственных даров в сходственных казино. Администрация готова начислить средства или фриспины, хотя предварительно работники должны убедиться, собственно вы не мошенник. Дело в том, что развелось очень количество охотников за призами. Они выучились обманывать систему и наваривать крупные суммы средств. <a href=http://filmkachat.ru/>1×slots casino регистрация</a> В разделе с призами активировать приветственное предложение. Иногда, для активации бездепа, нужно обратиться в службу поддержки через лайв-чат на веб-сайте казино.Активация случается за промокодов, которые вводятся в собственном кабинете в регистрации. Среди спецпредложений в списке Casino.ru находятся эксклюзивные промокоды, коие доступны лишь гостям портала. Другие способы начисления средств ? автоматическая активация сразу последствии сотворения аккаунта и получение подарка по запросу в службу технической помощи. <a href=https://bybak.com/home.php?mod=space&uid=4232670>https://bybak.com/home.php?mod=space&uid=4232670</a> 1×slots зеркало регистрация в 1×slots casino <a href=http://posadfm.ru/bitrix/redirect.php?goto=http://cl-policlinic1.ru/bitrix/click.php?goto=http://hookahhouse.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/CNFx42uQGSq>http://posadfm.ru/bitrix/redirect.php?goto=http://cl-policlinic1.ru/bitrix/click.php?goto=http://hookahhouse.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/CNFx42uQGSq</a>
1×slots регистрация 1×slotscasino 56 online
казино 1×slots Если площадка презентует бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь ввести аккаунт на сайте и активировать его, подтвердив адрес электрической почты, номер аппарата либо иные данные, коие требует оператор. Перед этим нужно увериться, собственно юзер располагается на официальном сайте казино, не на мошеннической площадке.Вывод выигрыша с бездепозитных призов казино – щедрый подарок от азартных клубов. Но чтобы исключить свой заработок, нужно выполнить ряд критерий: <a href=http://www.dllaoma.com/home.php?mod=space&uid=386825>http://www.dllaoma.com/home.php?mod=space&uid=386825</a> 1×slots сайт зеркало В неких интернет казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на веб-сайте клуба и доказать средства контактные данные. Дополнительно потребуется активация промокода.Ещё одно распространённое акционное предложение – симпатичный подарок с сомнительными требованиями. К примеру, клуб сулит $100 виде бездепа, хотя с вейджером х80 или х100. Отыграть такой вейджер фактически невероятно и поэтому чем концентрироваться на больше интересных акциях.
1хслот скачать
Также посещают случаи, когда казино начислит обсужденный бонус последствии регистрации свежего посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам.Все благотворительные бонусы кажутся соблазнительными. Кто же категорически от возможности сыграть в онлайн-казино, не рискуя средствами, но получая выигрыши. Но далеко не все бездепозитные призы одинаковой привлекательны для рассудительного посетителя. Так что приготовьтесь дать секретную информацию (пол, возраст, страна проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает не более суток, в чего удастся свободно выводить солидные выигрыши.Самые популярные способы вывода средств ? банковские карты (Visa, Mastercard) и электрические кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам подобии Neteller и Skrill, а также используют криптовалютными кошельками. Вывод выигрышей имеет осуществляться моментально либо развлекать от нескольких часов до нескольких суток. <a href=http://www.audipiter.ru/user/DeweyCrink/>http://www.audipiter.ru/user/DeweyCrink/</a> 1×slots зеркало быструю регистрацию а также мгновенное Бездепозитные бонусы реальными средствами, коие можно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадали.Вознаграждения за получение VIP-статуса ? начисляются в программки лояльности при достижении еще значения либо выдаются персонально менеджерами саппорта.
1хслотс официальный сайт зеркало
Баланс игрока пополняется на соответствующую необходимую. К ней используется вейджер, указанный в правилах акции. Вывести выигрыш можно будет последствии как, как пользователь устроит требуемый размер ставок из собственных средств. В редких случаях бездеп трудится в формате Free Play. На счет пользователя зачисляется крупная сумма, и предоставляется небольшой срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по окончании сего периода сумма на счету несомненно превосходить изначальную, то разницу возможно будет вывести либо использовать для последующих ставок.Если простыми словами, бездепы – это определённая сумма средств либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать презенты. Но есть кое-какие аспекты. Существуют игорные жилища, которые перед что, этим как начислить бонусы настоятельно привязать телефон, предоставить копии документов. 1хслот официальный сайт зеркало <a href=http://www.erwinbrandenberger.ch/index.php?title=Выкуп_авто>http://www.erwinbrandenberger.ch/index.php?title=Выкуп_авто</a> Обычно бездепозитные промоакции от казино, прибывают на эл. Почту в деньки рождения либо праздники. В неких интернет казино можно обратиться в чат и как неизменному игроку, вполне вам предложат бездепозитное предложение.Бездепозитный бонус по промо-коду будет доступен для игры, только что, нет случае когда Вы активируете специальный бонусный код в разделе с бонусами или укажите промокод при регистрации на веб-сайте. В некоторых случаях, кроме активации кода, понадобиться доказать контактные данные игрока и наполнить анкету посетителя.
1× slots сайт
Бездепозитные бонусы в казино без пополнения 2022 — это определенная сумма средств или valinomycin spins вращения, коие предоставляются первым гостям за регистрацию на веб-сайте казино повторяющий бездепозитного приза, и дает вас вероятность с казино без пополнения опробовать предложения (игр), с последующей преимуществом, льготой вывода средств при исполненьи всех установленных правил. <a href=http://elite-models.cc/member.php?action=profile&uid=21793>http://elite-models.cc/member.php?action=profile&uid=21793</a> Таким образом, заведение пробует показать себя своим вероятным игрокам, а такой маркетинговый ход как казино бонус без депозита за регистрацию привлекает очень много внимания к игорному заведению и обеспечивает неизменный поток новых гостей и будущих клиентов игрового онлайн клуба. 1×slots зеркало 1хслотс регистрация перейти на 1×slots Разные казино имеют собственные управляла по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высокие притязания. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до 100 раз в игровых автоматах. Например, в игрок получил даром десять $, то нужно несомненно отыграть их, поставив 1 тысячу спинов по 1 баксу каждый. Стоит отметить, что не все казино дают вероятность играть на бонусы и не во всех увеселительных заведениях схожие правила для отыгрывания. Некоторые казино запрещают выступать на бонусы в блекджек или ограничивают ставки до пяти процентов, собственно существенно увеличивает в 10-ки один количество нужных игр.
<b>Смотреть еще похожие новости:</b>
<a href=https://qualityprogamer.de/forum/showthread.php?tid=261166>1×slots зеркало проходить регистрацию это отличный вариант</a>
<a href=https://isomedu.com/forum/profile/josephdrons/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<a href=https://www.rusdrama-az.com/support/51-sluzhba-tehnicheskoy-podderzhki-sayta.html>1×slots casino зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного приза достаточно пополнения баланса и подтверждения личности. В других же клубах, нужно несколько раз прокрутить свой депозит.
#9546 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
Размер ставки для игры по бездепозитному призу (естесственно же, когда, когда он представлен в виде бонусных денежных средств) часто ниже, чем при забаве на депо. Ограничение будет действовать до момента отыгрыша бонуса.Зачастую бездепозитные призы казино для игры предлагаются различными заведениями азартных игр виде маркетинговых промоакций или в целях вербования к себя новых игроков. Для бездепозитных бонусов в казино 2022 геймеру не нужно пополнять счет до этапа вывода желаемых средств. <a href=http://filmkachat.ru/>1×slots зеркало этих способов предполагает регистрацию</a> Если площадка дарует бездеп за регистрацию, то процедура его получения проста. Нужно только завести аккаунт на сайте и активировать его, подтвердив адрес электронной почты, номер телефона или иные данные, которые настятельно оператор. Перед данным нужно убедиться, собственно юзер располагается на официальном веб-сайте казино, а не на мошеннической площадке.Представьте момент, когда при ставке в 10 рублей Вы получите схожее умножение. Миллион руб. За одно вращение, собственно вполне вероятно. Поэтому вопрос, сколько возможно выиграть остаётся открытым. Предлагаем выяснить самостоятельно. Регистрируйтесь в одном или нескольких онлайн казино, получайте Бездепозитный приз и инспектируйте удачу в деле. Разумеется, вывести средства сложно. Однако шансы есть у всех. <a href=https://nitroporno.com/user/DavidTUM/>https://nitroporno.com/user/DavidTUM/</a> Не стоит путать игру в демо и использование призов. В демонстрационном режиме игрок может оценить механику слота, сюжет и оформление. Но забава ведется на условные кредиты, потому отсутствует основное ? ощущение пыла. Активируя промокод или фриспины, клиент как не расходует свои средства на игровые автоматы, хотя имеет сорвать настоящий куш! 1×slots сайт <a href=http://demo.qkseo.in/profile.php?id=627544>http://demo.qkseo.in/profile.php?id=627544</a>
1×slots официальный сайт мобильная версия
Бонус без депозита за регистрацию в казино (бездепозитный бонус) – это валютный презент от клуба, который начисляется на акк игрока после регистрации в казино. Кроме сотворения учетной записи, для получения бездепа, очень нередко потребуется ещё и доказать контактные данные игрока и/или активировать специальный промо-код. 1×slots зеркало выигрыши обязательно пройдите регистрацию если Если вы выбрали себе количество брендов которые для больше всего полюбились, для неизменной игры! Таких гемблеров казино очень любит и оценивает, за частую эти игроки становятся VIP игроками заведения, коим нередко поступают прибыльные предложения в виде призов, так же туда заходит и бездепозитные.Так собственно приготовьтесь предоставить конфиденциальную информацию (пол, возраст, страна проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает не более суток, после чего удастся свободно выводить солидные выигрыши. <a href=http://www.pawsarl.es/blog/%D0%B1%D0%BB%D0%BE%D0%B3-%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0-%D1%8F%D0%BD%D0%B4%D0%B5%D0%BA%D1%81-%D0%B4%D0%B7%D0%B5%D0%BD-%D1%87%D0%B8%D1%82%D0%B0%D1%82%D1%8C.html>http://www.pawsarl.es/blog/%D0%B1%D0%BB%D0%BE%D0%B3-%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0-%D1%8F%D0%BD%D0%B4%D0%B5%D0%BA%D1%81-%D0%B4%D0%B7%D0%B5%D0%BD-%D1%87%D0%B8%D1%82%D0%B0%D1%82%D1%8C.html</a> 1хслотс рабочее зеркало на сегодня
1×slot зеркало рабочее этих способов предполагает регистрацию
При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы сможете спланировать свое свободное время, которое возможно предназначить игре в казино. <a href=http://elymbmx.com/mybb/member.php?action=profile&uid=11999>http://elymbmx.com/mybb/member.php?action=profile&uid=11999</a> 1хслот официальный сайт зеркало Вейджер (wager) – это коэффициент, кот-ый показывает на какую необходимую необходимо сделать ставок, чтобы исключить приз из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода этого приза, Вам необходимо сделать ставок на сумму: 500*70=3500 руб. Только всецело отыграв бонус, Вы сможете вывести свой выигрыш.Подтверждение электрической почты – одно из основных критерий, которое есть практически в каждом бездепозитном казино. Чтобы верифицировать электронную почту, достаточно перебежать по интенсивной ссылке в послании, приобретенном от азартного клуба.
1×slots зеркало рабочее на сегодня
Бездепозитные призы — это подарки от казино повторяющий бонусных средств либо фриспинов для игровых автоматов, коие начисляются на аккаунт игрока после процедуры регистрации на веб-сайте заведения. Для получения таких поощрений депозит не требуется.Подтверждение персональной инфы. Все казино просят от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и присутствие у юзера других аккаунтов (мультиаккаунт запрещен). Не советуем сломя голову браться за всевозможные предложения получения средств без инвестициям. Вполне возможно, собственно бездепозитный бонус казино 2022 с выводом за регистрацию предлагаемый игровым клубом окажется ужаснее, чем смотрится на 1-ый взгляд. Альтернативой является казино бонус за депо. Мы предлагаем для пару советов, спасибо коим у любого игрока несомненно вероятность насладиться бездепозитным призом за регистрацию в игровых автоматах с выводом денег:Реже бонусы без депо начисляются неизменным игрокам. С их поддержкой администрация старается вычесть ценных посетителей или желает поблагодарить за преданность верных гостей. Но гораздо почаще для подобных целей используются эти промоакции: 1×слотс казино <a href=http://obruchalka-vrn.ru/index.php?subaction=userinfo&user=dashingvictim0>http://obruchalka-vrn.ru/index.php?subaction=userinfo&user=dashingvictim0</a>
1×slots casino online регистрация
Для получения выигрыша потребуется выполнить условия казино. Чаще всего игроку нужно поставить определенную сумму, хотя теснее из собственных средств. Она рассчитывается из общего размера выигрыша за всегда применения бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, если пользователь выиграл 1000 руб., а множитель составляет х30, вывести деньги возможно будет, сделав ставки на 30 000 рублей.Подтвердите регистрацию, дабы активировать Бездепозитный приз с выводом, требуется заполнить собственный профиль. Заполните пустые поля реальными данными о себе. <a href=http://xn–80aeh5aeeb3a7a4f.xn–p1ai/forum/user/44007/>http://xn–80aeh5aeeb3a7a4f.xn–p1ai/forum/user/44007/</a> В разделе с призами активировать свой презент. Найти игры, для которых предусмотрено поощрение и применять приз по предназначению. 1×slots регистрация на 1хслотс
<b>Смотреть еще похожие новости:</b>
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=507293>1хслотс казино зеркало</a>
<a href=http://evtrucksforum.com/memberlist.php?mode=viewprofile&u=28289>казино 1× slots официальный сайт</a>
<a href=https://nztw.org/home.php?mod=space&uid=43957>1×slots зеркало</a>
<a href=http://forum.audioheritage.net/memberlist.php?mode=viewprofile&u=19451&sid=84a7030a0d55a86f559d206472d9b831>1 x slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Отыграв бездепозитный приз в казино с выводом также придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, случае сходственное лимитирование существует, то единоразово вывести выйдет лишь сумму, не превышающую объем полученного бонуса. Каждый компьютерные должен сначала отчетливо выучить условия по получению и отыгрышу приглянувшегося презента. Если всё устраивает, поспешите отобрать благотворительные спины за регистрацию в казино без депозита с выводом и без отыгрыша и напрямик сейчас начать вертеть барабаны лучших слотов.
#9547 Charlesgunnyhttp://filmkachat.ru
x1 slots 1хслотс регистрация перейти на 1×slots
Однако далеко не все ресурсы предлагают своим клиентам бездепозитные призы за регистрацию в казино. В большинстве случаев предусмотрено поощрение на 1-ый депо в размере 100–200%. Это замечательная возможность преумножить банкролл, прирастить время, проведённое за игрой и шансы сорвать большой куш.Получить Бездепозитный бонус в онлайн казино дело двух кликов. Другой момент, отыграть рекламную и соблюсти правила и обстоятельства отыгрыша. Под правилами подразумевается не вагер, хотя и ограничения по наибольшей ставке. Мы разумеем, что в кино все ставят на зеро и выигрывают. Призываем не делать похожего. Перед активацией приза прочитайте правила. Узнайте следующие моменты: Условия получения дара, за регистрацию, за депозит и многое. Ограничения по максимальной ставке. Зачастую не выше 350 руб. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах возможно отыгрывать вагер. Можно вращать автоматы, а вагер будет стоять на месте. Поэтому принципиально знать, в каких играх возможно совершать кратность валютного оборота. <a href=http://filmkachat.ru/>1×slot казино зеркало</a> При регистрации что или ином интернет игральном заведении — вам дается раз шанс испытывать собственную фортуну не внося свои монеты. Замечу собственно такую поощрительную предложение предоставляют не все интернет игровые площадки, а лишь великодушная половина из их. Которые мы подготовили для Вас в нашем перечне. <a href=https://historydb.date/index.php?title=%D0%9F%D0%B8%D1%86%D1%86%D0%B0%20%D0%BE%D1%82%20%D1%88%D0%B5%D1%84-%D0%BF%D0%BE%D0%B2%D0%B0%D1%80%D0%BE%D0%B2%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!>https://historydb.date/index.php?title=%D0%9F%D0%B8%D1%86%D1%86%D0%B0%20%D0%BE%D1%82%20%D1%88%D0%B5%D1%84-%D0%BF%D0%BE%D0%B2%D0%B0%D1%80%D0%BE%D0%B2%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!</a> 1×slots официальный сайт зеркало рабочее <a href=https://www.wakewiki.de/index.php?title=Benutzer:Arron55096388>https://www.wakewiki.de/index.php?title=Benutzer:Arron55096388</a> B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.
1×slots рабочее зеркало на сегодня
На данном разделе портала периодически публикуются обзорные статьи, в которых рассматриваются безвозмездные бонусы лучших интернет-казино. Информация структурирована по нескольким пт, включая основные:Обычно, бездепозитные призы выдаются под определенные слоты с фиксированной ставкой, хотя их точно запрещено использовать в игровых автоматах с прогрессивным джекпотом. Список игр, в которых возможно применять бездеп, Вы найдете в описании акции либо можете уточнить у службы поддержки заведения. 1×slos регистрация в 1×slots casino При отыгрыше бонусных средств, необходимо учитывать срок деянья приза и время, которое дается на отыгрыш. По истечению заявленного времени, не отыгранный бонус будет аннулирован. <a href=https://www.stroimvmeste.com.ua/user/KennethAtony/>https://www.stroimvmeste.com.ua/user/KennethAtony/</a> 1 x slots Иногда для получения бонусов необходимо спутаться с представителями саппорта. Удобнее всего с ними собеседовать в онлайн-сате, желая от достаточно запроса по электронной почте.Бездепозитные бонусы — это подарки от казино в виде бонусных денег либо фриспинов для игровых автоматов, коие начисляются на акк игрока в процедуры регистрации на сайте заведения. Для получения этих поощрений депо не потребуется.
1×slots рабочее зеркало на сегодня
Шаг 4. Активация. Внимательно выучите условия, информацию по ограничениям и сроке действия бонусного предложения. Разобравшись с правилами, возможно активировать приз в личном кабинете (времени ? с внедрением промокода) или по запросу в саппорт.Бездепозитные бонусы настоящими средствами, коие возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадали. <a href=http://hkeverton.com/forumnew/home.php?mod=space&uid=92344>http://hkeverton.com/forumnew/home.php?mod=space&uid=92344</a> 1×slots зеркало на сегодня Простая процедура получения бездепозитного бонуса, кот-ая займет менее 2-х минут. Для получения бездепов, достаточно зарегистрироваться и доказать контактные данные.Иногда в бездепа, казино дарует минимальный приз (до 50 рублей), ради которого не заморачиваться.
сайт 1× slots casino
Онлайн-казино с бездепозитными бонусами ставят посетителям обстоятельства для пользования бездепами, потому перед ролью в промоакции другого, как досконально ознакомиться со всеми правилами и нюансами промоакции. Условия шансы касаться получения приза, его использования и следующего вывода валютных средств когда выигрыша. В случае установленного лимита на сумму вывода выигрыша с бездепозитного приза, игрок не сможет исключить больше заявленной суммы.Для тех, кто лишь взвешивает испытать свою фортуну, еще для проф игроков, отыскивающих свежие площадки для выигрышей, ведущие лицензированные казино нередко организуют разные акции, и одно из лучших услуг за последнее время – как для начинающих, так и для проф игроков – бездепозитный приз за регистрацию. 1×slots регистрация на сайте 1×slots ru com <a href=https://forum.skymso.top/home.php?mod=space&uid=113078&do=profile>https://forum.skymso.top/home.php?mod=space&uid=113078&do=profile</a> Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных ситуаций с казино, когда в отыгрыша бездепа вам не дадут исключить солидную сумму выигрыша.
1×slot зеркало рабочее этих способов предполагает регистрацию
Не сложно додуматься, собственно not the slightest down payment bonuses практически никогда не бывают великими. Чаще всего речь о пяти–тридцати долларах (или эквиваленте этой суммы в другой денежной).Также, такой нужно подтвердить свой номер телефона, достичь код, полученный в смс-сообщении от клуба установить в особое фон в собственном офисе игрока. <a href=http://honevi.grodno.by/index.php?subaction=userinfo&user=Charlesorary>http://honevi.grodno.by/index.php?subaction=userinfo&user=Charlesorary</a> В наше время очень просто получить бонус за регистрацию в казино. Практически любой игорный дом с готовностью начисляет средства либо благотворительные вращения. Многие гэмблеры пользуются этим и не стыдятся регистрироваться в каждом клубе с прибыльными условиями. Кстати, это отличная возможность выработать победную тактику и сорвать джекпот.Выиграть реальные деньги в казино не пополняя счет – трудно, хотя возможно. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными бонусами и начните выступать на бонусные средства. По статистике каком-то 10-ти заведений возможно заработать маленькую необходимую средств помощью бонусных средств. 1×slots casino регистрация на сайте
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.animogen.com/viewtopic.php?f=76&t=1570171>1×slots регистрация на сайте 1×slots ru com</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются сразу последствии создания профиля и активны недолговременное время. Если не успеете истратить средства, они просто сгорят. Касаемо времени, как призы активны протяжении часа. Для получения выигрыша требуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить конкретную сумму, хотя уже из собственных денег. Она рассчитывается из общего объема выигрыша за всегда использования бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, случае юзер выиграл 1000 рублей, а множитель составляет х30, исключить средства возможно несомненно, сделав ставки на 30 000 рублей.
#9548 Charlesgunnyhttp://filmkachat.ru
1×slots официальный регистрация
Стоит отметить, собственно бездепозитный приз выдается лишь совершеннолетним новичкам, которые, же, могут пригласить собственных приятелей и людей, кроме претендующих на поощрительную программку лояльности. Подобная технология появилась между конкуренцию онлайн-казино для популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению своей популярности, методом привлечения новых игроков. Бонусы – это уникальный шанс для вероятных соучастников забавы, которые шансы опробовать софт покер рума и убедиться, будут ли они в него играть либо нет. Новый игрок попробует средства силы с настоящими оппонентами в казино.Выбрать казино с бездепозитным бонусом. У нас на сайте представлен перечень наилучших онлайн казино, которые предлагают своим игрокам великодушные призы за регистрацию. <a href=http://filmkachat.ru/>1×slots зеркало регистрацию более популярный вариант это</a> Бездепозитный приз часто имеет замерзнуть доступным сразу после окончания регистрации, потому правило единственным притязанием к нему является регистрация, а после ревизия вашей свежей учетной записи.Зачастую бездепозитные призы казино для забавы предлагаются разными заведениями азартных игр в качестве маркетинговых акций либо в целях привлечения к для свежих игроков. Для бездепозитных бонусов в казино 2022 геймеру не нужно пополнять счет до этапа вывода желаемых средств. <a href=http://skht.kr/bbs/board.php?bo_table=free&wr_id=66432>http://skht.kr/bbs/board.php?bo_table=free&wr_id=66432</a> 1х слот регистрация в 1×slots casino <a href=http://demo2-ecomm.in.ua/index.php?subaction=userinfo&user=jazzydye76>http://demo2-ecomm.in.ua/index.php?subaction=userinfo&user=jazzydye76</a>
1×slots регистрация на 1хслотс
Вейджер (или вагер) ? это минимальная сумма ставок, коию нужно устроить для вывода валютного бонуса. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение.К раскаянью, нет. Почти все казино, настоятельно внесение хотя бы одного минимального депозита для вывода выигрыша с бездепозитного бонуса. Также учитывайте, что вывести деньги разрешено только на ту платежную систему, с которой был изготовлен депо. 1хслот скачать <a href=http://v90457cw.beget.tech/user/Craigrem/>http://v90457cw.beget.tech/user/Craigrem/</a> Бывают ли бездепозитные бонусы без вейджера? Бывают, случае у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный бонус за регистрацию уточняется вейджер во всех казино.Фриспины начисляются по конкретной ставке. После их активации игроку нужно запустить разъем и увериться, собственно в нем показываются бесплатные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода в отыгрыша ориентируется оператором и редко превышает 5 000 руб. 1×slots casino регистрация на сайте Бездепозитные призы — это презенты от казино вид бонусных денег или фриспинов для игровых автоматов, коие начисляются на акк игрока после процедуры регистрации на сайте заведения. Для получения этих поощрений депо не потребуется.Получать информацию о самых прибыльных бонусах возможно без неизменного прогноза новостей казино. Мы взяли эту задачу на себя и постоянно смотрим за предложениями операторов, избирая наилучшие из их. В этом разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список акций регулярно дополняется. В топ зашли самые новые бездепозитные бонусы за регистрацию в казино 2020, кратковременные и закрытые рекламную. Сортировать спецпредложения возможно по позиции в рейтинге, сумме, лимитам, вейджеру прочим критериям. Если срок действия акции истек, она удаляется из списка.
1хслотс рабочее зеркало на сегодня
Рассмотрим принцип его действия на случае. Допустим, вы зарегистрировались и возымели $10 no deposit bonus с вейджером х50. Это значит, собственно выигранные средства возможно будет выводить не раньше, чем после как, как общая сумма ставок достигнет $500. Например, игрок получил 500 руб. При творении аккаунта и должен отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 рублей, понадобится устроить 875 спинов для полного отыгрыша. <a href=http://www.phxwomenshealth.com/index.php?option=com_k2&view=itemlist&task=user&id=1034475>http://www.phxwomenshealth.com/index.php?option=com_k2&view=itemlist&task=user&id=1034475</a> Прямо данный арестуйте бесплатные вращения за регистрацию без депозита и начинайте коллекционировать призовые комбинации из-за крупных выигрышей!У нас на веб-сайте Вы найдете перечень бонусов без депозита в проверенных казино и доскональную информацию то как их получить и применять. 1×slots регистрация на 1хслотс
1×slots зеркало регистрация то дальше необходимо пройти
Активация денежного вознаграждения случается механически после творения профиля или применения промокода. Иногда операторы предъявляют дополнительные требования: подписаться на страницы казино в соц сетях либо на рассылку рекламных известий, скачать и установить вспомогательный софт и т.д. <a href=http://www.schalke04.cz/forum/viewthread.php?thread_id=135886>1×slots зеркало этих способов предполагает регистрацию</a> Доступ к подарку может открываться автоматически последствии введения промокода или обращения в службу поддержки сайта. В первом случае от пользователя не потребуется практически действий. Бездеп с активацией по коду встречается почаще всего. Игроку необходимо установить совокупность знаков в графе, кот-ая возможность пребывать в регистрационной форме в Личном офисе.Способы получения бездепа различаются в зависимости от облика приза, кот-ый приглянулся игроку. Но вас в любом случае надо(надобно) быть зарегистрированным в законном онлайн-казино и доказать свою лицо. В общем облике пошаговая инструкция для получения бездепозитного бонуса выглядит например: 1 xslots рабочее зеркало <a href=http://tutorialsmint.com/user/jeffreygex/articles>http://tutorialsmint.com/user/jeffreygex/articles</a> Если вы бывалый игрок, вы обязаны знать, что приз без депо – редкая находка. Тем ниже, мы раз изучаем онлайн, чтобы отыскать вам наихорошие бездепозитные предложения.Можно ли в одном онлайн казино получить больше одного бонуса за регистрацию? Нет, например как в каждом онлайн казино есть правила, к которым нужно придерживаться, не создавать 2 аккаута для получения бонусов, по несомненно блокировка обоих аккаутов, не пытайтесь перехитрить интернет казино, приз за регистрацию выдаеться один один одному личику.
1×slots скачать на айфон
Но никогда не запамятовывайте пристально разбирать правила участия в бонусных акциях. Если вы нарушите хотя бы одно условие, позднее вы не сможете устроить недоразумение с администрацией. Внесение депо – Будьте готовы восполнить счет после отыгрыша бонуса. Это обычное требование верховодил для этого подобии промо-акций. Лучше заранее уточнить, какую необходимую надо(надобно) несомненно заносить на счет. Как управляло, идет о наименьшем депозите, но вы обязаны быть убеждены, что он для по карману. <a href=https://www.finhi.ai/bbs/board.php?bo_table=free&wr_id=474351>https://www.finhi.ai/bbs/board.php?bo_table=free&wr_id=474351</a> Условия отыгрыша бонуса. Если Вы планируете заработать на бездепозитном бонусе, то для направьте на велечину вейджера и срок, который дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть приз и исключить выигрыш.Пoдтвepдить личнocть посетителя. Для удачного вывода средств, нужно доказать лицо клиента. Нa этaпe вepификaции пpoфиля, сотрудники службы безопасности должны убедиться, собственно у игрока не один акк. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не может вывести свой выигрыш, если у него несомненно количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы. 1хслотс официальный сайт зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://www.neocodex.us/forum/topic/120221-getting-started-with-neocodex/page-3#entry2034945>1хслотс мобильная версия зеркало</a>
<a href=http://www.ihavethepussy.com/de/threads/209241–1×slots-%D0%A0%D1%95%D0%A1%E2%80%9E%D0%A0%D1%91%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A0%C2%B0%D0%A0%C2%BB%D0%A1%D0%8A%D0%A0%D0%85%D0%A1%E2%80%B9%D0%A0%E2%84%96-%D0%A1%D0%83%D0%A0%C2%B0%D0%A0%E2%84%96%D0%A1%E2%80%9A-%D0%A0%C2%B7%D0%A0%C2%B5%D0%A1%D0%82%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%BB%D0%A0%D1%95?p=226777#post226777>1×slots официальный сайт зеркало</a>
<a href=https://forum.oursson.ru/memberlist.php?mode=viewprofile&u=1347>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Для выбора азартного заведения Вы можете воспользоваться списком наших казино с бонусами за регистрацию. На нашем веб-сайте мы выпустили список бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, собственно доля призов неповторимые и доступны только для гостей нашего вебсайта по-специальному промо-коду или по оригинальной ссылке. Кроме такого, для каждого приза мы подготовили доскональный обзор, каком Вы узнаете как получить и отыграть одобрение и как вывести собственный выигрыш с бездепа.
#9549 Sandrapeskilthttps://cocain.vip
Купить Гашиш в Киеве? Ссылка – COCAIN.VIP Доставка По Украине Гашиша? Ссылка – COCAIN.VIP . . . . . | Купить онлайн закладку Гашиш в Киеве ССЫЛКА – https://cocain.vip | | Купить в другом городе Украины Гашиш закладку ССЫЛКА – https://cocain.vip | | Купить доставку Гашиша в Киеве в руки через сайт ССЫЛКА – https://cocain.vip | | Купить доставку в руки Гашиш в Украине ССЫЛКА – https://cocain.vip | | Купить Гашиш в Украине доставкой через почту ССЫЛКА – https://cocain.vip | | Купить Гашиш в Киеве и Украине через Курьера в руки ССЫЛКА -https://cocain.vip | . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Слова для поиска – Гашиш в Киеве купить закладкой, Гашиш в Киеве Купить з доставкой, Гашиш в Киеве купить через курьера, Гашиш в Киеве Купить быстро, Гашиш в Киеве Купить сейчас, Гашиш в Киеве Купить в руки, Гашиш в Киеве Купить безопасно Гашиш в Украине Купить можно, Купить Гашиш в Украине закладкой, Купить Гашиш в Украине доставкой домой, Купить Гашиш в Украине по почте, Купить Гашиш в Украине без проблем можно, Купить Гашиш в Украине на сайте, Кокс цена в Украине, Виды Гашиша Купить в Украине и Киеве, Чем отличаеться Гашиш в Киеве от Гашиша в Украине, Как я могу купить Гашиш в Киеве, Купить Колумбийский Гашиш в Киеве, Купить Колумбийский Гашиш в Украине, Кокс Цена в Киеве, Теги для городов – Купить Гашиш в Киеве, Купить Гашиш в Одессе, Купить Гашиш в Харькове, Купить Гашиш во Львове, Купить Гашиш в Днепре, Купить Гашиш в Ужгороде, Купить Гашиш в Ивано-Франковске, Купить Гашиш в Белой Церкве, Купить Гашиш в Ровно Купить Гашиш в Николаеве, Купить Гашиш в Херсоне, Купить Гашиш в Сумах, Купить Гашиш в Запорожье, Купить Гашиш в Житомере, Купить Гашиш в Мукачево, Купить Гашиш в Полтаве, Купить Гашиш в Умани, Купить Гашиш в Виннице Общие теги для товаров- Купить Гашиш в Киеве, Купить Гашиш в Украине, Купить Гашиш в Киеве, Купить Гашиш в Украине, Купить Лирику в Киеве, Купить Лирику в Украине, Купить Экстази в Киеве, Купить Экстази в Украине, Купить Амфетамин в Киеве, Купить Амфетамин в Украине, Купить МДМА в Киеве, Купить МДМА в Украине, Купить Метамфетамин в Киеве, Купить Метамфетамин в Украине, Купить Метадон в Киеве, Купить Метадон в Украине, Купить Шишки в Киеве, Купить Шишки в Украине, Купить Бошки в Киеве, Купить Бошки в Украине, Купить Альфа ПВП В Киеве, Купить Альфа ПВП в Украине, Купить A-PVP в Киеве, Купить A-PVP в Украине, Купить Соль СК в Киеве, Купить Соль СК в Украине, Купить Гашиш в Киеве, Купить Гашиш в Украине,
#9550 Charlesgunnyhttp://filmkachat.ru
1х слот регистрация в 1×slots casino
Для того, чтобы отыграть необходимую вашего бездепозитного бонуса надо(надобно) выполнить обстоятельства вейджера. Очень нередко фриспины даются на определенные слоты (book of ra, book of lifeless, book of sun), избирайте слот себе нраву, все очень очень и качественные. Бездепозитные бонус возможность быть денежным например и вид фриспинов на слотыПoдтвepдить личнocть клиента. Для удачного вывода средств, нужно доказать личность клиента. Нa этaпe вepификaции пpoфиля, сотрудники службы защищенности обязаны увериться, собственно у игрока всего лишь один аккаунт. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не сможет вывести свой выигрыш, если у него будет количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы. <a href=http://filmkachat.ru/>1хслотс казино зеркало</a> Можно ли зарабатывать на бездепозитных бонусах? Это не работа, здесь как повезет, в в каждом предложенном безедепе, вы будете откручивать вейджер и выводить, тогда можно назвать везением, и добавочной добавкой к вашему бютжету.Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие появляются у новичков. <a href=https://flibustier.top/user/Davidpet>https://flibustier.top/user/Davidpet</a> Существует ли стратегии для отыгрыша бездепозитных бонусов? К раскаянью нет, на выигрыши или проигрыши с призов, казино или игрок повлиять не, отдача игр случается от разработчиков игр.Благодаря программе лояльности от игорного заведения, можно арестовать хороший старт и без добавочных инвестициям запустить видеослоты. Кроме как, можно рассчитывать на реальную фортуну и получить, без вложения собственных денег, великой выигрыш. 1×slots casino online регистрация <a href=http://fumankong3.cc/home.php?mod=space&uid=580780>http://fumankong3.cc/home.php?mod=space&uid=580780</a> Бонус с зачислением денег на счет выделяет больше свободы действий. Пользователь сам подбирает, каким образом воспользоваться подаренными своими. Здесь того имеют работать ограничения на список дешевых игр, хотя обычно эти рамки не так строги, как в промо с безвозмездными вращениями.Большинство интернет-казино из нашего топ-10 готовы повеселить вас неповторимыми промоакциями. Читайте о них в обзорах и на форуме.
1×slots регистрация на официальном сайте
Диапазон ставок, коие вправе устроить игрок, того лимитирован. Обычно назначать возможно небольшую сумму — в 10–30 рублей за одно вращение.Одним из предлогов отдавать преимущество, льготу одному либо другому заведению содержится в привлекательности предлагаемых акций и бесплатных услуг. Безвозмездные фриспины, выдаваемые без дела создавать какой-либо вклад, в перечне располагается далековато не в конце. скачать 1×slots официальный сайт <a href=https://technique-tp.com/forum/memberlist.php?mode=viewprofile&u=1837>https://technique-tp.com/forum/memberlist.php?mode=viewprofile&u=1837</a> На страничке представлены бездепозитные призы за регистрацию в казино редчайшая награда за которой гонятся все игроки как новенькие, так и профессионалы. Мы также уделяем великое внимание на наличие призов при формирование рейтинга казино на деньги. Бездепозитный приз это вероятность выступать даром и выиграть настоящие средства.Представленные на этой страничке лучшие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, в котором гости Casino.ru могут сортировать список по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д. 1хслот зеркало сайта
1хслот скачать
Бездепозитный бонус за регистрацию в казино — это стартовый подарок в виде валютного начисления или даровых вращений для свежих игроков заведения, для получения которого не заносить депозит.Выше мы дали полный комплект самых свежих и своевременных бездепозитных призов в онлайн казино без пополнения на 2022 год, где вы можете пользоваться любым ценным бездепозитным бонусом. Сразу в активации промокода можно воспользоваться презентом. Как уже упоминалось, призы посещают трёх видов – фриспины, кредиты и фриплей-бонусы.Мы подготовили список, где есть постоянно животрепещущие и свежие бездепозитные бонусы казино, коие вы можете получить бесплатно. Для наших юзеров есть особые предложения неповторимые призы, коие вы ни не найдете, их мы обозначили специальной красноватой плашкой «Exclusive». <a href=https://cadetmove.ru/index.php?subaction=userinfo&user=RalphAgods>https://cadetmove.ru/index.php?subaction=userinfo&user=RalphAgods</a> 1×slots регистрация то дальше необходимо пройти Чтобы играть безвозмездно на настоящие средства в казино, не всегда достаточно просто зарегистрироваться. Иногда нужно выполнить дополнительные действия.Но а в вы теснее профи по онлайн казино, кликаем на красноватую кнопку «Получить» и Вы автоматически перейдете в интернет казино;
1×slots casino online регистрация
Каждый из бездепозитных призов без пополнения 2022 имеет собственный определенный вейджер для отыгрыша, так же в каждом казино он уточняется персонально — где то он х55 а где-то х30, повторюсь всюду по разному! С этими простыми советами каждое казино с призом за регистрацию способно принести в разы больше выгоды и пользы. Вообще перейдя в казино — управляла схожи в получении бездепозитных бонусов, в стандартные верховодила заходит: доказать эл. Почту и телефонный, наполнить собственный собственный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=https://a.pr-cy.ru/yana-beauty.com.ua/>https://a.pr-cy.ru/yana-beauty.com.ua/</a> Казино выводит средства только на что, эту платежную систему, с котрой был изготовлен депо. То есть, для вывода бездепозитного приза, Вам поначалу нужно восполнить счет. В неких клубах узкий перечень методов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет именно с этих платежных способов, которые доступны для вывода.У каждого игорного клубы различные вейджеровые условия. Чтобы вы гарантировано сумели выполнить их, мы дадим некоторое советов. Если система начислила маленькую необходимую, не создавать немалые ставки – остановитесь на 10–30 центах. Как только сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте играть. В противном случае никакого присмотреться к другому автомату.
1×slots зеркало на сегодня
<a href=http://nedv-revda.ru/index.php?subaction=userinfo&user=skinnylounge3>http://nedv-revda.ru/index.php?subaction=userinfo&user=skinnylounge3</a> Наши эксперты исследуют условия акции, затем в ручном режиме проверку их соотношение реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие характеристики. Мы не рекламируем казино, а даем игрокам информацию о лучших из них.Заработать на бездепозитных бонусах за регистрацию в казино возможность любой пользователь, достигший совершеннолетия. 1×slots регистрация 1×slotscasino 56 online Риск-игра по одинаковым шансам – Также казино возможность запрещать скорпулезно условия по отыгрышу счет раунда на удвоение, который предлагается в слотах, видео-покере и некоторых иных играх.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.eliteshost.com/showthread.php?tid=14899>1×slots casino регистрация 1×slotscasino09k online</a>
<a href=https://test.soclanovtsy.ru/topic/35191–1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82-%D0%BC%D0%BE%D0%B1%D0%B8%D0%BB%D1%8C%D0%BD%D0%B0%D1%8F-%D0%B2%D0%B5%D1%80%D1%81%D0%B8%D1%8F-%D1%81%D0%BA%D0%B0%D1%87%D0%B0%D1%82%D1%8C/>1×slots официальный сайт мобильная версия скачать</a>
<a href=http://angelandmax.teamforum.ru/viewtopic.php?f=2&t=48594>x1 slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Размер приза. В качестве бездепов обыкновенно начисляют очень суммы, а когда речь о призах за депо, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино имеют презентовать игроку до 2000$.
#9551 Charlesgunnyhttp://filmkachat.ru
1×слот регистрация в 1×slots casino
Также учтите, собственно некоторые игровые платформы сужают список стран, которые способны получить предложенный бездепозитный бонус за регистрацию. К примеру, есть онлайн-заведения, выдающие похожие призы лишь жителям конкретных стран. К примеру, онлайн казино 777 Оригинал дает бездепозитный приз лишь игрокам из России и государств СНГ. Или наоборот, пичкают вознаграждением всех, кроме обитателей неких государств (исходя из этого, по пристально учить список, чтобы потом не появилось никаких вопросов и жалоб). <a href=http://filmkachat.ru/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a> Минимального оборота. Этот предел уточняется вейджером — пока игрок не сыграет на установленную необходимую, вывод средств будет недоступен.Срок отыгрыша — это период, кот-ый начинается в момент активации приза и завершается с его закрытием. Пользователю необходимо уложиться в этот временной промежуток, по призовые средства аннулируются. Казино устанавливают перечень игр, ставки каких засчитываются при расчете отыгранных средств. Если тайтл не заходит в данный перечень, то ему быть недоступен для загрузки период деяния бонусного предложения. <a href=https://uadplugins.club/memberlist.php?mode=viewprofile&u=244379>https://uadplugins.club/memberlist.php?mode=viewprofile&u=244379</a> Подтверждение персональной инфы. Все казино настоятельно от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у пользователя других аккаунтов (мультиаккаунт запрещен). 1×slots регистрация 1×slotscasino09k online <a href=https://sites.ipaddress.com/allsoftlab.com/>https://sites.ipaddress.com/allsoftlab.com/</a> Акционные предложения от казино существуют в различных форматах. Часто призы даются в размен на депозит. Игрок заносит платеж и получает средства, безвозмездные вращения и поощрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — вид приза, который гарантирован за выполнение определенных действий на веб-сайте:Выполнив все притязания оператора, заказчик возможность оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем не более суток. Если дополнительно требуется пройти функцию верификации, то срок увеличивается до 1–2 рабочих дней. Для перевода используются банковские инструменты и электронные платежные системы. Второй способ подходит другого, как, так как масса транзакций в осуществляются мгновенно. В связи со спецификой функционирования банков обработка платежей имеет взятьвдолг(взятьвзаймы) до нескольких рабочих дней.
1×slot казино зеркало
Бездеп с фриспинами может охватывать всю коллекцию игр на сайте или разработки 1-го провайдера. Обычно предлагается конкретный перечень автоматов. Он указывается в положениях о проведении промоакции. Выигрыш имеет быть выведен после как, как юзер отыграет данную необходимую. Возможность оценить полный возможностей слотов — основное совершенство данной разновидности. Игроку становятся доступны что, эти функции, коие отсутствуют в демонстрационном режиме, а возможность выиграть реальные деньги прибавляет ярких азартных чувств.Размер призов почаще всего чисто символический и не превышает 50 руб. Приятно, но осязаемым бустом деле ли будет. казино 1×slots Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном сайте и сделайте вход в личный офис, дабы арестовать благотворительные вращения с вейджером х40;Приглашаем делиться сужденьями о бонусах. Это поможет иным юзерам избирать наиболее выгодные предложения. <a href=http://bbs.yunduost.com/home.php?mod=space&uid=19645>http://bbs.yunduost.com/home.php?mod=space&uid=19645</a> Эффективность бездепов виде маркетингового инструмента оценили все операторы. Малоизвестные площадки используют такие акции, чтобы скоро набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны постоянных гостей. Не все веб-сайты, дающие презенты без депо, рекомендованы к этой. За симпатичным промоописанием могут прятаться невыполнимые условия отыгрыша прочие подводные камни.Бездепозитные призы казино за регистрацию в 2022 году — это вероятность сыграть за счёт заведения. Казино даёт клиенту шанс воспользоваться определённой суммой либо числом даровых вращений без внесения депо. Не путайте деморежим с реальной игрой без надобности внесения депозита. 1×slots официальный сайт мобильная версия Когда речь идет о получении бездепозитных бонусов в казино, в первую очередь направьте на следующие обстоятельства:
1× слот зеркало
При пользовании бездепозитным бонусом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют некоторое видов лимитов: <a href=https://gusev-online.ru/user/DeweyAwary/>https://gusev-online.ru/user/DeweyAwary/</a> Но есть азартные заведения, готовые просто например вручить средства на игру. Для сего довольно сделать профиль. Чтобы исключить выигрыш, сперва необходимо выполнить вейджеровые условия, прописанные в критериях получения бездепа.Воспользоваться бездепом возможно не во всех игровых автоматах: казино вдруг устанавливает ограничение для посетителей. Конечно, это можно посчитать некоторым неудобством для игрока, но ради отметить, что выбор автоматов всё точно остаётся достаточно наибольшим. казино 1×slots официальный сайт Многие новички сомневаются, что поощрительный приз не нужно несомненно отдавать, в в они выиграли у казино. Это безусловно безопасно и накрепко. Выводя выигранные свои, игрок просто останавливает свое роль в игре и утрачивает уникальную возможность – безвозмездно увеличивать собственное вещественное положение.На бесплатные призы онлайн-казино практически практически распространяется ограничения по стране проживания посетителей. Даже в вас разрешается открывать счет и играть на деньги в заведении, это еще не значат, собственно для доступны not the slightest down payment bonuses.
1×slots зеркало сайта
Для выбора азартного заведения Вы можете воспользоваться списком наших казино с бонусами за регистрацию. На нашем веб-сайте мы опубликовали перечень бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, что доля бонусов эксклюзивные и доступны лишь для гостей нашего сайта по-специальному промо-коду либо по оригинальной ссылке. Кроме того, для каждого бонуса мы подготовили подробный обозрение, в котором Вы узнаете как получить и отыграть одобрение и как исключить свой выигрыш с бездепа. Бездепозитный приз за регистрацию в казино с выводом денег в 2022 году — Наш ресурс дает игрокам актуальную информацию о самых новых, щедрых и проверенных призах в онлайн казино, коие обновляются любой день. Однако в условиях исчезают «подводные камешки», которые не разрешат исключить крупную необходимую или же вы не успеете отыграть вейджер. Поэтому профессионалы рекомендуют арестовать благотворительные вращения за регистрацию в казино без депо, дабы поднабраться навыка и получить реальный шанс на победу.У нас на веб-сайте Вы найдете список призов без депозита в испытанных казино и подробную информацию о том как их получить и применять. казино 1×slots <a href=https://bestnet.ru/support/forum/index.php?PAGE_NAME=profile_view&UID=132735>https://bestnet.ru/support/forum/index.php?PAGE_NAME=profile_view&UID=132735</a>
1хслотс рабочее зеркало
Третитй бездепозитный приз за регистрацию – денежные свои. К раскаянию, начислить рубли либо доллары готовы лишь знаменитые и пользующиеся клубы. С их помощью появится насладиться любой доступной игрой – автоматом, рулеткой, кено, блэкджеком. Чаще всего, модные сервисы, такие как MoneyBookers и WebMoney, еще MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно неотъемлемое управляло. Финансовые средства выводятся только спустя ту платежную систему, коей огромной для пополнения депо. Если же игрок получил бездепозитный покерный приз, потребуется восполнить счет на минимальную необходимую, которая составляет обыкновенно 10 $.Бездепозитные призы начисляются только раз раз. Не стоит открывать новые аккаунты, чтобы получить их повторно. Служба защищенности казино непременно выявит «левого» участника и перекроет. Если посетитель выполнит нужные требования, отыграет собственную ставку и решит исключить личный выигрыш, то ему нужно сведению, что казино непременно потребует предоставить ксерокопии личных документов, дабы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные свои исключить не удастся. <a href=http://services-sector.ru/clubpointeresam/memberlist.php?mode=viewprofile&u=157417>http://services-sector.ru/clubpointeresam/memberlist.php?mode=viewprofile&u=157417</a> 1×slots зеркало рабочее
<b>Смотреть еще похожие новости:</b>
<a href=https://www.fromrus.su/index.php?/topic/21590–1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D1%82%D0%BE-%D0%B4%D0%B0%D0%BB%D1%8C%D1%88%D0%B5-%D0%BD%D0%B5%D0%BE%D0%B1%D1%85%D0%BE%D0%B4%D0%B8%D0%BC%D0%BE-%D0%BF%D1%80%D0%BE%D0%B9%D1%82%D0%B8/>1×slots зеркало регистрация то дальше необходимо пройти</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вейджер (либо вагер) ? это минимальная сумма ставок, коию необходимо сделать для вывода валютного бонуса. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение.
#9552 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
4. Заберите подарок. Чаще всего бонус активизируется сразу в регистрации. Но посещают истории, когда нужно забежать в собственный кабинет либо написать в саппорта.Приветственный бездеп предоставляется любому игроку лишь один раз. Казино сражаются с так нарекаемыми бонусхантерами (от англ. Bonus Hunter — доброволец за бонусами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения дара. Исключить сходственные деяния разрешает верификация данных. Администрация вправе востребовать у посетителя доказать персональные данные, указанные при регистрации. <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino 56 online</a> Условия вывода выигрыша. В неких заведениях для удачного вывода с бездепозитного приза довольно пополнения баланса и подтверждения личности. В иных же клубах, нужно несколько один прокрутить собственный депозит. <a href=http://www.annunciogratis.net/author/nikole58285>http://www.annunciogratis.net/author/nikole58285</a> За счёт спинов выйдет запустить разные онлайн слоты, протестировать стратегии и поднабраться опыта. Фишка что, собственно вращения начисляются на топовые аппараты с оригинальными опциями и высочайшей отдачей. Не запамятовывайте, что в любом акционном предложении предусмотрены особые требования – временные ограничения, наибольший размер ставки, список дешевых игр.Акции, приуроченные к календарным дням, случаются рассчитаны как на всех пользователей, например и на категории: примеру, презент на 8 марта девушкам-игрокам или мужчинам на 23 февраля. 1×slots актуальное зеркало <a href=http://shinyoungwood.co.kr/bbs/board.php?bo_table=free&wr_id=1019641>http://shinyoungwood.co.kr/bbs/board.php?bo_table=free&wr_id=1019641</a> Третитй бездепозитный приз за регистрацию – валютные свои. К огорчению, начислить рубли либо доллары способны лишь известные и известные клубы. С их подмогою у насладиться любой доступной забавой – автоматом, рулеткой, кено, блэкджеком.
1хслотс официальный сайт зеркало
Например, игрок получил 500 рублей при твореньи аккаунта и обязан отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 рублей, понадобится устроить 875 спинов для полного отыгрыша.Зачастую бездепозитные бонусы казино для забавы предлагаются разными заведениями азартных игр виде маркетинговых акций или в целях привлечения к себе свежих игроков. Для бездепозитных призов в казино 2022 геймеру не пополнять счет до этапа вывода хотимых средств. <a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-999#post-32062>1хслотс мобильная версия зеркало</a> 1хслотс казино зеркало Выше мы предоставили полный набор самых новых и актуальных бездепозитных бонусов в онлайн казино без пополнения на 2022 год, где вам воспользоваться каким ценным бездепозитным бонусом. <a href=http://www.igmph.com/bbs/board.php?bo_table=free&wr_id=190738>http://www.igmph.com/bbs/board.php?bo_table=free&wr_id=190738</a> Каждый из бездепозитных бонусов без пополнения 2022 содержит собственный конкретный вейджер для отыгрыша, так же в любом казино он уточняется персонально — где то он х55 а где-то х30, повторюсь всюду по различному! 1×slots регистрация на сайте Риск-игра по равным шансам – Также казино имеет запрещать исполнять обстоятельства по отыгрышу за раунда на удвоение, кот-ый предлагается в слотах, видео-покере и некоторых иных забавах.
1×slots официальный регистрация
Объективные – размер приза, коэффициент и условия вейджера, необходимость внесения депо для вывода средств; <a href=https://halqym.kz/user/Justinmor/>https://halqym.kz/user/Justinmor/</a> сайт 1× slots casino Вейджер (или вагер) ? это наименьшая сумма ставок, которую нужно устроить для вывода денежного приза. Обычно она указывается в виде множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение.Простая процедура получения бездепозитного бонуса, кот-ая займет не более 2-х минут. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные.
1×slots регистрация на 1хслотс
Фриспины предусмотрены для применения в видео слотах. Внимательно ознакомьтесь с критериями – частенько их выдают на кое-какие автоматы. В зависимости от клуба, у вас получится устроить определённое количество ставок. Кстати, продвинутые игорные дома позволяют запускать любых «одноруких злодеев».Третитй бездепозитный бонус за регистрацию – валютные свои. К раскаянью, начислить рубли или баксы способны только знаменитые и популярностью клубы. С их помощью возможность насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком. <a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/3800/#comment-220597>онлайн казино 1×slots</a> Денежные свои. Третий приз за регистрацию без депозита – наличные. К огорчению, лишь знаменитые и известные клубы все дать средства в руб. Либо долларах. С их подмогою у насладиться каждой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед данным необходимо исполненье конкретных критерий. 1×slots зеркало на сегодня <a href=http://w.matchfishing.ru/bitrix/redirect.php?goto=http://carville.ru/bitrix/redirect.php?goto=http://market-gifts.ru/bitrix/click.php?goto=https://telegra.ph/Sovety-i-rekomendacii-po-priobreteniyu-prava-sobstvennosti-na-nedvizhimost-09–23>http://w.matchfishing.ru/bitrix/redirect.php?goto=http://carville.ru/bitrix/redirect.php?goto=http://market-gifts.ru/bitrix/click.php?goto=https://telegra.ph/Sovety-i-rekomendacii-po-priobreteniyu-prava-sobstvennosti-na-nedvizhimost-09–23</a>
1×slots регистрация то дальше необходимо пройти
Выбирая даровой бонус, пристально изучайте управляла. Убедитесь, собственно для возможно брать роль в промоакции. Уточните, в каких забавах возможно исполнять обстоятельства вейджера. При надобности задавайте вопросы адептам саппорта. <a href=http://www.ziyuxuan.net/home.php?mod=space&uid=878958>http://www.ziyuxuan.net/home.php?mod=space&uid=878958</a> Выигрыши с призов без инвестициям всегда привязаны к притязанию по ставкам и имеют быть обналичены лишь в выполнения данных требований. 1×slots зеркало регистрацию более популярный вариант это Но есть игорные заведения, коие готовы просто например жертвовать деньги на забаву. Для этого довольно создать профиль. Чтобы вывести свой выигрыш, для поначалу нужно выполнить условия отыгрыша, указанные в условиях получения бездепозитного депо.Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации бонуса без депозита. Внимательно прочтите до конца. Многие новички делают ошибки на этапе регистрации и потому не могут получить подарок.
<b>Смотреть еще похожие новости:</b>
<a href=http://cozycotg.com/forum/viewtopic.php?f=2&t=764206>1×slots официальный сайт мобильная версия</a>
<a href=https://lawsbay.com/webdesing-8/#comment-14763>1×slot регистрация</a>
<a href=https://feederfishing.lt/en/forum/perku/1250267–1×slots#1261741>зеркло казино 1×slots</a>
<a href=http://weeklywars.de/viewtopic.php?f=12&t=1015&p=471689#p471689>1× slots casino зеркало</a>
<a href=https://demo.comuni-italiani.it/forum/viewtopic.php?f=9&t=369368>1×slots промокод при регистрации</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Можно. Вы постоянно сможете отказаться от получения бездепозитного приза за регистрацию в казино, же Вы не создадите ставку.
#9553 Charlesgunnyhttp://filmkachat.ru
1х слотс зеркало регистрация в 1×slots casino
Мы подготовили перечень, где есть постоянно животрепещущие и новые бездепозитные призы казино, которые продоставляется получить бесплатно. Для наших пользователей есть специальные предложения эксклюзивные бонусы, коие вы нигде не отыщите, их мы обозначили специальной красноватой плашкой «Exclusive». <a href=http://filmkachat.ru/>1×slots регистрацию процедура займет всего лишь</a> Бездепозитный приз по промо-коду будет доступен для забавы, лишь в случае когда Вы активируете особый бонусный код в разделе с бонусами либо укажите промокод при регистрации на веб-сайте. В неких случаях, не активации кода, понадобиться доказать контактные данные игрока и наполнить анкету посетителя.3. Подтвердить данные. В зависимости от клуба, нужно привязать телефонный или почту, показать персональную информацию; <a href=http://gkwin.net/bbs/board.php?bo_table=free&wr_id=272903>http://gkwin.net/bbs/board.php?bo_table=free&wr_id=272903</a> При подмоги такового одобрения оператор имеет кроме привлекать посетителей, коие раньше проявляли активность на веб-сайте, но по какой-то причине прекратили выступать. В данном случае промокод высылается пользователю по электрической почте или в виде SMS.Законодательство, регулирующее азартные игры в разных государствах, влияние на возможности операторов. В итоге юзеры из отдельных регионов сталкиваются с лимитированиями со стороны казино. Это может быть как полный отказ в доступе, так и невозможность загружать игры отдельных изготовителей. 1×slots официальный demo регистрация в 1×slots casino <a href=https://nasch.forum-top.ru/viewtopic.php?id=1962#p32020>https://nasch.forum-top.ru/viewtopic.php?id=1962#p32020</a>
1хслотс рабочее зеркало
1×slots зеркало Для как, дабы отыграть сумму вашего бездепозитного бонуса нужно выполнить условия вейджера. Очень часто фриспины даются на определенные слоты (book of ra, book of deceased, book of sun), выбирайте разъем себе нраву, они все довольно красочные и высококачественные. Бездепозитные приз имеет быть денежным например и в виде фриспинов на слотыМаркетинговая политического всех игорных интернет-клубов должна одевать разнородный характер. И если вознаграждения на депозит служат для того, дабы стимулировать вносить депозиты и поощрять уже быть пользователей, то бездепозитный приз в казино либо приз за регистрацию в казино, до всего, рассчитан на расширение базы покупателей. <a href=https://tulaart.ru/forum/index.php?action=profile;u=28833>https://tulaart.ru/forum/index.php?action=profile;u=28833</a> Бесплатные призы казино без депозита можно получить повторяющий валютных средств на бонусный счет (вывести их можно только после отыгрыша), фриспинов, игры или кешбэк-бонуса. 1×slots зеркало которую указывали при регистрации кстати
1×slots зеркало рабочее на сегодня
Активация по промокоду употребляется в разных обликах бездепов. Если идет о приветственном бонусе, то набор символов возможно разузнать на основной странице, в регистрационной форме либо письме, коие отправляется юзеру для доказательства адреса электронной почты. Акции шансы проводиться совместно с партнерскими площадками. Обычно код располагается на стороннем ресурсе. Поощрение, предоставляемое игроку, индивидуально и активизируется одноразовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном офисе либо начисляется сотрудником казино в онлайн чате. Для удобства игроков мы размещаем актуальный код для активации в описании каждого рекламную.Автоматическая активация на самой комфортной, но ручной способ имеет перед ней достоинства. Прежде чем использовать вознаграждение от казино, стоит заранее найти, сколько медли требуется на исполненье всех условий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала деянья приза. Получив свой презент, Вы сможете безвозмездно выступать на реальные средства, а выполнив обстоятельства отыгрыша, вывести свой выигрыш. <a href=http://moujmasti.com/member.php?13687-Tyronemoutt>http://moujmasti.com/member.php?13687-Tyronemoutt</a> 1×slots официальный сайт, скачать
1×slots акции
Во время игры в казино, выигрыши, приобретенные благодаря бесплатным призовым фондам, суммируются и срабатывают в совместную сумму для отыгрывания. Однако, случае удача улыбнется и получится отыграть все призы, игровое заведение гарантированно разрешит исключить денежные средства. Сумма вывода будет зависеть от лимита, одобренного именно в этом учреждении. Поэтому, внимательно нужно разбирать управляла выдачи анлимитных депозитов.Игры, каких можно играть на бонусные средства. Проверьте список игр, каких возможно выступать на бонусные средства, возможно они Вам не понравятся и не стоит расходовать своё время на такую акцию. Не желайте поиграть в азартные игры, не рискуя своими деньгами, но получая в все выплаты? Подобную возможность деют все наихорошие порталы с азартными увеселениями. В их числе большое добросовестных и надежных интернет-казино на русском языке. Они привлекают новых юзеров разными поощрительными мероприятиями, включая бездепозитные, либо благотворительные призы.Самые свежие бездепозитные призы в казино за регистрацию 2022 года с выводом прибыли присутствуют на этой странице. Посетитель возможность расценить обстоятельства получения и начать выступать на деньги без внесения депо. При данном игроку принципиально разуметь, на каких условиях и какими способами появится исключить приобретенный выигрыш. Для сего необходимо расценить перечень присоединенных платежных систем. Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, the decision только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. 1хслотс казино зеркало <a href=https://xn---6-jlc6c.xn–p1ai/user/Zacheryhib/>https://xn---6-jlc6c.xn–p1ai/user/Zacheryhib/</a>
1×slots сайт
<a href=http://www.phxwomenshealth.com/index.php?option=com_k2&view=itemlist&task=user&id=1075649>http://www.phxwomenshealth.com/index.php?option=com_k2&view=itemlist&task=user&id=1075649</a> Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Можно ли зарабатывать на бездепозитных призах? Это не работа, тут как повезет, случае в любом предложенном безедепе, вы будете откручивать вейджер и выводить, время можно именовать везением, и дополнительной добавкой к вашему бютжету. 1×slots зеркало рабочее на сегодня
<b>Смотреть еще похожие новости:</b>
<a href=https://karakol.com.kg/user/Jameskef/>1хслотс рабочее зеркало на сегодня</a>
<a href=https://forum.graylite.com/viewtopic.php?p=204370#p204370>1×slots зеркало быструю регистрацию а также мгновенное</a>
<a href=http://smpn1bejen.sch.id/forum/>1× slots официальный</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Составленный знатоками Casino.ru перечень онлайн-казино с бездепозитным бонусом позволяет игрокам сопоставить спецпредложения различных операторов.
#9554 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация то дальше необходимо пройти
Иногда у посетителей вебсайта имеют возникнуть трудности, задачи, препядствия при активации приобретенного промо-кода. В таких случаях, необходимо адресоваться за поддержкой в службу «Support». Для получения ответа, обязательно указывается определенная первопричина воззвания и подтверждается информация дополнительными снимками. Если сформировалась спорная обстановка, постоянно можно обратиться к главному регулятору или контролирующему органу, выдавшему данному заведению лицензионный документ.На критериях отыгрыша безвозмездных призов по тормознуть подробнее. С ними связаны нюансы, которые нельзя забыть без внимания. <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino 56 online</a> <a href=http://formulandoeinnovando.com/como-se-afecta-la-formulacion-con-el-proceso-que-aplico/?unapproved=463114&moderation-hash=0f6edf3cafaa7049b445b6d2ff01f8df#comment-463114>http://formulandoeinnovando.com/como-se-afecta-la-formulacion-con-el-proceso-que-aplico/?unapproved=463114&moderation-hash=0f6edf3cafaa7049b445b6d2ff01f8df#comment-463114</a> 1×slots официальный сайт скачать <a href=http://intentionalpress.com/author/doctorlazutaei/>http://intentionalpress.com/author/doctorlazutaei/</a> Классическая разновидность приза за творенье аккаунта. Его превосходство заключается что, собственно заказчик может самостоятельно подбирать аппараты и делать ставки в них. Иногда перечень игровых автоматов ограничен оператором, но все одинаково это превосходнее, чем один-единственный дешевый слот, как когда с использованием фриспинов.Бонусы без депо при регистрации считаются самыми красивыми как для опытнейших игроков, например для и новичков. Получив такое вознаграждение, заказчик имеет играть на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а также обстоятельства их активации и выигрыша.
1×slots регистрация 1×slots casino c2d ru
Выиграть реальные деньги в казино не пополняя счет – сложно, хотя вполне. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными призами и начните играть на бонусные средства. По статистике в 10-ти заведений можно заработать маленькую необходимую средств помощью бонусных средств. <a href=https://www.orbitsound.com/forum/thread-17-post-76936.html#pid76936>1×slots регистрация на сайте 1×slots ru com</a> 1×slots регистрация 1×slots casino c2d ru <a href=https://loansnearme.com.au/author/jameswrarf/>https://loansnearme.com.au/author/jameswrarf/</a> 1×slots официальный сайт мобильная версия скачать Акции, посвященные календарным праздникам, бывают рассчитаны как на всех юзеров, например и на категории: к, подарок на 8 марта девушкам-игрокам либо мужчинам на 23 февраля.
1×slots casino регистрация на сайте
Фриплей-бонусы. Бонусы за благотворительную игру есть только в некоторых клубах. Они зачисляются незамедлительно последствии создания профиля и срабатывают непродолжительное время. Если у вас нет времени истратить свои, они просто завершатся. Что касается медли, правило призы действуют протяжении 1-го часа. Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке необходимо восполнить счет в казино. Для депозитных бонусов, эта процедура не необходима, например как депозит уже сделан.Необходимость отыгрыша. Вейджер такой повыше, чем для призов за депозит. И же свои не отыграны, вывести их нельзя. <a href=http://33komoda.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://oboevpolno.ru/bitrix/redirect.php?goto=http://google.com.gh/url?q=https://teletype.in/@urist555/qSAFCTkLDrF>http://33komoda.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=http://oboevpolno.ru/bitrix/redirect.php?goto=http://google.com.gh/url?q=https://teletype.in/@urist555/qSAFCTkLDrF</a> 1×slots рабочее зеркало на сегодня
1×slots официальный demo регистрация в 1×slots casino
Но такие рамки не смущают и хайроллеров, потому коэффициенты на слотах дозволяют рассчитывать на солидные выигрыши, в некоторых автоматах разыгрывается передовой джекпот.Шаг 5. Использование и отыгрыш. Бездеп обязан быть использован в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. <a href=http://tarratorriya.tforums.org/memberlist.php?mode=viewprofile&u=785>казино 1×slots</a> Бездепозитный приз часто имеет замерзнуть легкодоступным незамедлительно после окончания регистрации, потому как единственным требованием к нему считается регистрация, а затем ревизия вашей новой учетной записи.Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша призов. Заведения практически устанавливают максимальную ставку, допустимую по условиям вейждера. 1×slots рабочее зеркало на сегодня <a href=http://www.stmcu.co.kr/gn/bbs/board.php?bo_table=free&wr_id=1021953>http://www.stmcu.co.kr/gn/bbs/board.php?bo_table=free&wr_id=1021953</a> Верификация важна для дополнительной безопасности и подсобляет техподдержке выявить бонусхантеров и плутов. Кстати, на платформах выводы крупных сумм доступны лишь в подтверждения личности.Если ординарными текстами, бездепы – это определённая сумма денег или 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать презенты. Но есть кое-какие нюансы. Существуют игорные дома, коие перед что, этим как начислить бонусы требуют привязать телефонный, дать копии документов.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Также бездепозитные бонусы могут работать способом возвратить к игре посетителей, временно приостановивших своё сотрудничество с компанией: извещение о бездепе поступает на мобильный телефон либо почту. <a href=https://inetlinks.ru/member.php?25923-CharlesTix>https://inetlinks.ru/member.php?25923-CharlesTix</a> Получив свой презент, Вы сможете бесплатно играть на настоящие деньги, а выполнив условия отыгрыша, вывести свой выигрыш. 1×slot рабочее зеркало Возьми собственный презент. Чаще всего приз активизируется сразу после регистрации. Но случаются истории, когда нужно забежать в индивидуальный офис либо написать в справочную службу.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.puppylinux.pl/index.php?topic=917.new#new>1хслотс официальный сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Условия имеют разниться приятель от друга. Но такой приз имеет быть применен лишь для игрового процесса – полученные на счет деньги до того, как станут отыграны, исключить невозможно. Каждая игровая перрон выделяется критериями по получению и отыгрышу бездепов. В правилах детально расписаны временные рамки, за которые надо(надобно) прокрутить вейджер. Также не забывайте про максимальный размер ставки и наивысшую сумму выплаты. С иной стороны, чтобы получить бездепозитные бонусы казино, достаточно израсходовать менее 1 минутки.
#9555 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию более популярный вариант это
Для вывода средств бонус нужно будет отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами акции и вариациями отыгрыша бездепозитного бонуса до его получения, дабы избежать конфликтных обстановок.Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, чтобы еще раз получить бесплатный бонус. Игорные заведения нетерпимы к бонус-хантерам, потому вас ожидает неминуемое санкция. <a href=http://filmkachat.ru/>1х слот 1хслотс регистрация перейти на 1×slots</a> Многие казино предоставляют в маркетинговых целях безвозмездные бонусы необыкновенно для наших читателей. Чтобы их получить, нужно перебежать на игровой сайт по партнерской ссылке с нашего портала. <a href=https://www.entoads.com/author/jameswaf/>https://www.entoads.com/author/jameswaf/</a> Размер приза. В качестве бездепов обыкновенно начисляют большие суммы, а когда идет о бонусах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино все подарить игроку до 2000$.В онлайне очень количество скриптовых вебсайтов, коие принадлежат мошенникам. Их основная цель – заинтересовать гэмблеров, пообещав не великодушные подарки, но и крупные выигрыши. Так собственно некоторые веб-сайты предлагают получить за регистрацию числе $1 000. зеркло казино 1×slots <a href=https://www.feeder.mobi/members/charlesenups/profile/>https://www.feeder.mobi/members/charlesenups/profile/</a> Условия вывода выигрыша. В неких заведениях для успешного вывода с бездепозитного бонуса достаточно пополнения баланса и подтверждения личности. В других же клубах, необходимо некоторое раз прокрутить собственный депо.Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.
1×slots быструю регистрацию а также мгновенное
В основном случаев бесплатные бонусы начисляются в кредитах, коие нельзя незамедлительно вывести со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти требования принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 т.д.). О нем читайте ниже. 1×slots зеркало видели такую регистрацию на Как лишь вы отыграли вейджер и средства с бонусного баланса перешли вас на реальный счет, Вы смело сможете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (устроить наименьший депозит например с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депозитом).Иногда операторы настоятельно внесение малого депо перед выводом для верификации платежного прибора. В неких казино этот депо также светит отыграть. <a href=https://www.evangelie.eu/forum/members/84283.html>https://www.evangelie.eu/forum/members/84283.html</a> Активация по промокоду используется в разных обликах бездепов. Если речь идет о приветственном призе, то набор символов можно разузнать на крупнейшей страничке, в регистрационной форме либо послании, которое отправляется пользователю для доказательства e-mail. Акции шансы проводиться совместно с партнерскими площадками. Обычно код размещается на постороннем ресурсе. Поощрение, предоставляемое игроку, персонально и активизируется одноразовым промокодом. Он высылается по электрической почте, SMS, отображается в Личном кабинете или начисляется сотрудником казино в интернет чате. Для удобства игроков мы размещаем актуальный код для активации в описании любого промо.B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. зеркло казино 1×slots
1×slots регистрация на официальном сайте
Бездепозитный бонус казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в этом и заключается главное различие.Главное превосходство спинов – вероятность выучить различные слоты. Также получится насладиться бонусными раундами, испытать фортуну в риск-туре и преумножить выигрыш за счёт особенных символов. Однако не игровой процесс заслуживает внимание, как никакого сосредоточиться на реальном выигрыше. Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=http://akvalife.by/user/ZacheryQueld/>http://akvalife.by/user/ZacheryQueld/</a> Перед активацией принципиально внимательно изучить условия акции. Чем ниже вейджер, что, этим больше возможная выгода игрока. Имеют велечину того лимиты ставок при отыгрыше и сроки, на коих возможно пользоваться предложением. Если бездеп обхватывает ограниченный список игр, рекомендуется разузнать максимальные коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только в том случае, если оператор не установил строгие ограничения на максимальную необходимую ставки.Бездепозитный приз за регистрацию в казино — это стартовый презент повторяющий валютного начисления либо бесплатных вращений для новых игроков заведения, для получения которого не вносить депозит. онлайн казино 1×slots Некоторые сайты, этого чем обмануть регистрацию игроков, предлагают ответить на несколько базовых вопросов. Цель проведения сходственной викторины – выявить случайных людей, коие не имеют представления о покере, и не допустить получения ими бонусов. Если гость теснее играл в казино, то ответить на полтора десятка простых вопросов несомненно несложно. Очень часто, ответы возможно найти на официальных сайтах этих учреждений.
казино 1×slots
Кешбэк-бонус представляет собой возврат фиксированного процента от ставки если, тогда, поражения либо же от проигранной суммы за определённый период. В большинстве случаев кешбэк не превышает 10%.Превышение максимальной ставки при отыгрыше. Система механически не предуведомляет о превышении ставки, поэтому о несоблюдении управлял игрок может разузнать уже после подачи запроса на вывод средств. <a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=89033>1×slots зеркало рабочее</a> Наиболее знаменитые вознаграждения среди гэмблеров – бездепозитные бонусы казино. Это не умопомрачительно, так возможно получить благотворительные вращения или виртуальные кредиты, и этом не придётся пополнять счёт, рисковать личностными средствами. Удастся насладиться разнообразными веселиями даже выиграть крупную необходимую, избегая серьёзного риска.За привлечение приятеля ? в партнерской программы клиент получает вознаграждение за вербование свежих пользователей. 1×slots сайт <a href=http://forum.myslash.ru/profile.php?mode=viewprofile&u=53893>http://forum.myslash.ru/profile.php?mode=viewprofile&u=53893</a>
1×slots регистрацию процедура займет всего лишь
Игрокам не следует принимать приветственный бонус как гарантированный метод получить большой выигрыш, хотя это замечательная вероятность без затрат оценить перечень казино. <a href=http://zeren.freeoda.com/member.php?action=profile&uid=3980>http://zeren.freeoda.com/member.php?action=profile&uid=3980</a> 1×slots официальный сайт скачать Срок отыгрыша — это этап, кот-ый начинается в момент активации приза и заканчивается с его закрытием. Пользователю нужно уложиться в данный временной промежуток, иначе призовые свои аннулируются. Казино устанавливают перечень игр, ставки каких засчитываются при расчете отыгранных денег. Если тайтл не заходит в данный перечень, то ему быть недосегаем для загрузки в деянья бонусного предложения.
<b>Смотреть еще похожие новости:</b>
<a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=7523&TITLE_SEO=7523-preobrazovatel-interfeysov-usb-rs485&MID=464823&result=reply#message464823>1×slot зеркало</a>
<a href=http://naturetour.ru/personal/profile/index.php?PAGE_NAME=profile_view&UID=2416>1×slots официальный сайт зеркало</a>
<a href=http://romb4×4.ru/forum/threads/1-xslot-registracija-v-1×slots-casino.14593/>1 хслот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Законодательство, регулирующее азартные забавы в разных странах, влияние на возможности операторов. В итоге пользователи из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это возможность быть как полный отказ в доступе, например и невозможность загружать забавы отдельных изготовителей.
#9556 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт мобильная версия
В интернет-сети всегда возможно найти перечни наиболее модных и гарантированных поощрительных программ от знаменитых онлайн-казино. <a href=http://filmkachat.ru/>1×slots быструю регистрацию а также мгновенное</a> Доступность — бездепозитные призы в казино почаще всего предоставляются свежим игрокам, но случаются случаи, когда приз все получить и действующие посетители.При игре на бонусные средства запрещается играть в игровые автоматы с прогрессивным джекпотом и забавы из радела live casino. Кроме того, некоторые казино выделяют бездеп на один либо некоторое конкретных слотов, и в других играх Вы не сможете на них выступать. <a href=http://d992387h.bget.ru/user/Jamessed/>http://d992387h.bget.ru/user/Jamessed/</a> Бездеп с фриспинами имеет обхватывать всю коллекцию игр на сайте либо разработки 1-го провайдера. Обычно предлагается определенный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш возможность быть выведен в такого, как пользователь отыграет эту необходимую. Возможность оценить глубокий возможностей слотов — основное совершенство этой разновидности. Игроку становятся доступны те функции, которые отсутствуют в демонстрационном режиме, а возможность выиграть настоящие средства прибавляет ярчайших азартных чувств.Каждая игровая перрон отличается критериями по получению и отыгрышу бездепов. В правилах отчетливо расписаны временные рамки, за коие надо(надобно) прокрутить вейджер. Также не запамятовывайте про наибольший объем ставки и наивысшую сумму выплаты. С иной стороны, дабы получить бездепозитные бонусы казино, достаточно истратить менее 1 минуты. 1×слотс казино <a href=https://notebooks.ru/forum/index.php?PAGE_NAME=profile_view&UID=52295>https://notebooks.ru/forum/index.php?PAGE_NAME=profile_view&UID=52295</a> Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить необыкновенности, труднодоступные при игре в демо режиме. Многие свежие посетители переходят в число постоянных, а оператор получает длительную выгода.Такие поощрения разрешают безвозмездно протестировать новое казино, разобраться с игровым процессом онлайн слотов, заработать и исключить небольшую сумму средств.
1хлот регистрация в 1×slots casino
Это один из главных характеристик привлекательности подарка. С завешенным коэффициентом и профессионалы не сумеют выполнить условия по отыгрышу. И не, как презентабельно смотрится предложение – бездепозитный бонус казино в объеме $500 или $1 000. Чтобы новички попревосходнее вдумались, собственно же это вейджер, мы разберём на случае. 1хслот официальный сайт зеркало Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают бонус по странам. Вплоть до как, что клуб может на игроков из Вашей страны, а бездеп мешает.Отказ в прохождении верификации. Если заказчик не хочет либо возможности дать документы, подтверждающие его лицо, профиль несомненно заблокирован вместе со всеми бонусными начислениями. <a href=http://fr3809hv.bget.ru/user/Porsedropma/>http://fr3809hv.bget.ru/user/Porsedropma/</a> Бездепозитный бонус казино 2022 с выводом за регистрацию предоставляет вероятность ознакомиться игроку с лобби выбранного заведения, сориентироваться в выборе игр и выяснить качество работы службы поддержки. Довольно часто, начиная игровой процесс, игрок теснее не желает останавливаться и делает настоящий вклад. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть бесплатно возможно как раз таки с призом за регистрацию без необходимости заносить депозит. 1хслотс официальный сайт зеркало Перечисленные повыше основные свойства сопровождают фактически любой приз и считаются стандартными для бездепозитных бонусных начислений в казино.Но есть азартные заведения, готовые просто например вручить средства на игру. Для сего достаточно сделать профиль. Чтобы исключить выигрыш, сперва нужно выполнить вейджеровые обстоятельства, прописанные в критериях получения бездепа.
1×slots рабочее зеркало на сегодня
Это один из основных показателей привлекательности презента. С завешенным коэффициентом даже мастера не сумеют выполнить обстоятельства по отыгрышу. И не, насколько привлекательно смотрится предложение – бездепозитный приз казино в объеме $500 или $1 000. Чтобы новички попревосходнее вдумались, собственно же такое вейджер, мы разберём на образце.Не стоит путать игру в демо и использование бонусов. В демонстрационном режиме игрок имеет расценить механику слота, сюжет и оформление. Но забава проводится на относительные кредиты, потому отсутствует главное ? чувство азарта. Активируя промокод либо фриспины, заказчик как не расходует средства деньги на игровые автоматы, хотя возможность сорвать настоящий куш! <a href=https://biznes-knigi.com/user/WalterGuasp/>https://biznes-knigi.com/user/WalterGuasp/</a> 1×slots зеркало видели такую регистрацию на Объективные – объем приза, коэффициент и условия вейджера, необходимость внесения депозита для вывода средств;
1×slots коды
Отказ в прохождении верификации. Если клиент не хочет или имеет предоставить документы, подтверждающие его лицо, профиль несомненно заблокирован совместно, вкупе со всеми бонусными начислениями.Некоторые казино имеют предлагать клиентам бездепы за подтверждение номера или почты либо репост на страничку в соц сетях. <a href=http://b2s.bulwork.com/node/1581?page=72#comment-22078>1хслотс 1хслотс регистрация перейти на 1×slots</a> Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?В истинное время получить бонус за регистрацию в казино очень просто. Почти каждый игорный жилище с готовностью предоставит деньги или бесплатные вращения. Многие игроки пользуются данным и не смущяются регистрироваться в каждом клубе с прибыльными условиями. Кстати, это отличная возможность придумать выигрышную стратегию и сорвать куш. 1×slots актуальное зеркало <a href=http://ods.org.ua/user/Terryfal/>http://ods.org.ua/user/Terryfal/</a> Когда идет о валютных бонусах, казино практически устанавливают условия вейджера, которые необходимо выполнить, чтобы вывести выигрыш.Казино выводит средства только на что, эту платежную систему, с котрой был сделан депо. То есть, для вывода бездепозитного приза, Вам поначалу нужно восполнить счет. В некоторых клубах узкий перечень способов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет непосредственно с данных платежных методов, коие доступны для вывода.
x1 slots 1хслотс регистрация перейти на 1×slots
Помните, что всевозможные нарушения верховодил сведут на нет ваши усилия, и вы всего останетесь без начисленного вас дарового приза. Всегда изучайте управляла начисления и обстоятельства вейджера. По хоть вопросам, на коие вы имеет других найти ответы, обращайтесь за объяснениям и саппорт.Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, all только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм. Однако далеко не все ресурсы предлагают своим посетителям бездепозитные бонусы за регистрацию в казино. В большинстве случаев учтено одобрение на 1-ый депозит в размере 100–200%. Это замечательная вероятность преумножить банкролл, увеличить время, проведённое за забавой и шансы сорвать большой куш.Как правило, при выводе финансов, от играющего потребуется лишь устроить минимальный лепта для того, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом собственный счет. <a href=https://www.fbioyf.unr.edu.ar/evirtual/tag/index.php?tc=1&tag=statistics>https://www.fbioyf.unr.edu.ar/evirtual/tag/index.php?tc=1&tag=statistics</a> Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и оценить необыкновенности, недоступные при этой в демо режиме. Многие новые клиенты перебегают в количество неизменных, а оператор получает долгосрочную выгода. 1хслотс зеркало на сегодня Получить Бездепозитный приз в интернет казино дело двух кликов. Другой момент, отыграть промо и соблюсти верховодила и условия отыгрыша. Под правилами предполагается не вагер, но и лимитирования по максимальной ставке. Мы понимаем, что в кино все ставят на зеро и выигрывают. Призываем не делать сходственного. Перед активацией приза прочтите правила. Узнайте следующие факторы: Условия получения дара, за регистрацию, за депо и другое. Ограничения по наибольшей ставке. Зачастую не выше 350 руб. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вертеть автоматы, а вагер будет стоять на пространстве. Поэтому главно знать, в каких забавах можно осуществлять кратность денежного оборота.Чтобы других убедиться в превосходствах бездепозитных призов, довольно зарегистрироваться в казино и получить поощрение.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.lightknotes.com/MyBB/showthread.php?tid=163047>1хслотс мобильная версия зеркало</a>
<a href=http://weeklywars.de/memberlist.php?mode=viewprofile&u=860>1×slots рабочее зеркало</a>
<a href=https://www.formulersupport.com/Thread-1×slots-%D1%80%D0%B0%D0%B1%D0%BE%D1%87%D0%B5%D0%B5-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE–94632>1×slots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Минимального оборота. Этот предел уточняется вейджером — пока игрок не поиграет на установленную сумму, вывод средств несомненно недоступен. Для тех, кто лишь подумывает испытать собственную удачу, еще для профессиональных игроков, отыскивающих свежие площадки для выигрышей, ведущие лицензированные казино нередко устраивают различные акции, и лучшее предложений за последнее время – как для новичков, например и для профессиональных игроков – бездепозитный бонус за регистрацию.
#9557 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало которую указывали при регистрации кстати
При использовании бездепозитным бонусом необходимо ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют некоторое видов лимитов:Ну и конечно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: подобная добродушие увеличивает степень преданности клиентов к фирмы. <a href=http://filmkachat.ru/>1×slots зеркало видели такую регистрацию на</a> Когда речь о получении бездепозитных бонусов в казино, начала обратите внимание на следующие обстоятельства:Казино выводит средства только на ту платежную систему, с котрой был сделан депозит. То есть, для вывода бездепозитного бонуса, Вам сначала нужно восполнить счет. В некоторых клубах узкий перечень методов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет именно с этих платежных методов, коие доступны для вывода. <a href=http://zghncy.cn/home.php?mod=space&uid=679107>http://zghncy.cn/home.php?mod=space&uid=679107</a> Бездепозитные призы за регистрацию в игровых автоматах для собственников онлайн-казино считаются долею маркетинговой кампании, направленной на повышение аудитории вебсайта. Так они продвигают средства бренды и привлекают новых клиентов. 1×slots casino регистрация 1×slotscasino09k online <a href=http://mall.thedaycorp.kr/bbs/board.php?bo_table=free&wr_id=984499>http://mall.thedaycorp.kr/bbs/board.php?bo_table=free&wr_id=984499</a> Фриспины. Бесплатные вращения предназначены для применения в видео-слотах. Внимательно читайте условия – они нередко выдаются для некоторых машин. В зависимости от клуба возможность делать конкретное число ставок. Кстати, современные игорные дома выделяют возможность заводить «одноруких злодеев».
рабочее зеркало 1×slots
1хслотс 1хслотс регистрация перейти на 1×slots <a href=https://rdaforum.com/user-16095.html>https://rdaforum.com/user-16095.html</a> 1×slots регистрация 1×slotscasino09k online Эльдорадо – 77 фриспинов в известных слотах. Зарегистрируйтесь на официальном веб-сайте и выполните вход в собственный офис, дабы забрать благотворительные вращения с вейджером х40;
1×слот регистрация в 1×slots casino
Выбор любого интернет казино на нашем сайте. В описании к каждому Вы можете разузнать, что получите за творенье аккаунта.Каждый из бездепозитных бонусов без пополнения 2022 содержит собственный конкретный вейджер для отыгрыша, например же в любом казино он уточняется индивидуально — где то он х55 а кое-где х30, повторюсь всюду по разному! Таким образом онлайн казино получает вероятного игрока. Возможно в будущем или подлинном он захотит поиграть на свои средства. Так работают бездепозитные бонусы в интернет казино. Здесь очень подходит выражение, благотворительные сыр посещает лишь в мышеловке. Начинающие игроки все не обдумывать опасность азарта. Однако течением осознания делается больше. Это тема для отдельного обсуждения. <a href=http://test.sozapag.ru/forum/user/244138/>http://test.sozapag.ru/forum/user/244138/</a> Выбирая безвозмездный приз, пристально изучайте управляла. Убедитесь, собственно вас можно принимать участие в акции. Уточните, в каких играх можно скорпулезно условия вейджера. При надобности задавайте вопросы представителям саппорта.Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен список превосходнейших интернет казино, коие предлагают своим игрокам щедрые бонусы за регистрацию. 1× slots casino официальный сайт Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного бонуса.Заполняя данные в собственном профиле, указывайте лишь достоверную информацию, так как Вам понадобиться ее доказать в при выводе средств.
1×slots регистрация то дальше необходимо пройти
<a href=https://praisenpray.org/forums/showthread.php?tid=96196>1×slots зеркало этих способов предполагает регистрацию</a> Объективные – размер бонуса, коэффициент и обстоятельства вейджера, надобность внесения депо для вывода средств;Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном призе, то в первую очередь обратите внимание на велечину вейджера и срок, кот-ый дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть приз и вывести выигрыш. Стоит отметить, что бездепозитный приз выдается лишь взрослым новеньким, которые, же, шансы пригласить собственных друзей и своих, также рассчитывающих на поощрительную программу преданности. Подобная технология была среди создающих онлайн-казино для популяризации и расширения трафика. Покер румы и спонсоры содействуют повышению своей посещаемости, путем вербования новых игроков. Бонусы – это уникальный шанс для вероятных участников игры, которые шансы опробовать софт покер рума и увериться, станут ли они в него выступать либо нет. Новый игрок испробует средства силы с настоящими оппонентами в казино. 1хслотс казино зеркало <a href=http://xn–90afccar8afg8b5b.xn–p1ai/bitrix/redirect.php?goto=http://transset.ru/bitrix/redirect.php?goto=http://m-reason.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/HBlWIlCoEhM>http://xn–90afccar8afg8b5b.xn–p1ai/bitrix/redirect.php?goto=http://transset.ru/bitrix/redirect.php?goto=http://m-reason.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/HBlWIlCoEhM</a> Так что приготовьтесь дать конфиденциальную информацию (пол, возраст, государство проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает менее суток, в чего получится беспрепятственно выводить солидные выигрыши.
1хслотс рабочее зеркало
Способы получения бездепа различаются в зависимости от вида приза, который понравился игроку. Но вам так нужно быть зарегистрированным в легальном онлайн-казино и подтвердить свою лицо. В общем облике пошаговая аннотация для получения бездепозитного бонуса выглядит так: Принципиальным различием бесплатных бонусов от призов на депозит считается отсутствие надобности заносить средства на аккаунт. Из-за этого их нередко именуют бездепозитными (not the slightest deposit bonuses).Мы делаем акцент на ключевых положениях верховодил, рассказываем о территориальных ограничениях и вкратце информируем о других акциях обсуждаемого казино. <a href=http://cheapbooks.cc/memberlist.php?mode=viewprofile&u=29259>http://cheapbooks.cc/memberlist.php?mode=viewprofile&u=29259</a> Бывают ли бездепозитные призы без вейджера? Бывают, в у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный приз за регистрацию устанавливается вейджер во всех казино.Нет. Для получения бездепозитного приза в казино необходима неотъемлемая регистрация на веб-сайте. Играть в слоты безвозмездно и без регистрации можно лишь в демо режиме. 1×slots регистрация то дальше необходимо пройти Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную процедуру активации бонуса без депозита. Внимательно прочтите до конца. Многие новички делают оплошности на шаге регистрации и потому возможности получить подарок.Многие казино предоставляют в маркетинговых целях безвозмездные бонусы необыкновенно для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой сайт по партнерской ссылке с нашего портала.
<b>Смотреть еще похожие новости:</b>
<a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=159&pid=646940#post_646940>казино 1×slots официальный сайт</a>
<a href=https://forumauthority.com/thread-6579-post-39054.html#pid39054>1хслотс казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Доступ к дару возможность открываться автоматически последствии введения промокода или обращения в службу поддержки вебсайта. В первом случае от юзера не потребуется никаких деяний. Бездеп с активацией по коду встречается почаще всего. Игроку необходимо ввести совокупность символов в графе, которая может находиться в регистрационной форме в Личном офисе.
#9558 Charlesgunnyhttp://filmkachat.ru
зеркала 1×slots
Но есть азартные заведения, готовые просто например вручить деньги на забаву. Для этого довольно сделать профиль. Чтобы исключить выигрыш, сперва нужно выполнить вейджеровые обстоятельства, прописанные в критериях получения бездепа.Рассмотрим принцип его деяния на случае. Допустим, вы зарегались и получили $10 not the slightest down payment bonus с вейджером х50. Это значит, собственно выигранные деньги можно несомненно выводить не ранее, чем в такого, как общая сумма ставок достигнет $500. <a href=http://filmkachat.ru/>1×slots регистрация 1×slotscasino 56 online</a> Для получения бонуса нужно пригласить в игру свежего посетителя. Казино начисляет пригласившему фиксированный процент от взносов приглашённого вид приза: чаще всего его объем не превышает 10%. Срок действия бонуса правило не выше месяца: пригласивший получает приз в зависимости от проигранных ставок приглашённого в 1-ый месяц забавы. <a href=http://xn–b1afaaiqgeiqh0aidle1f1d3c.xn–p1ai/user/JamesOrado/>http://xn–b1afaaiqgeiqh0aidle1f1d3c.xn–p1ai/user/JamesOrado/</a> Мы делаем ударение на главных положениях управлял, рассказываем о территориальных лимитированиях и вкратце информируем о иных промоакциях обсуждаемого казино.Любой выигрыш по ставке повыше установленного лимита будет считаться недействительным. То есть ставка не несомненно засчитана при отыгрыше, а в случае выигрыша его сумма не поступит на счёт клиента — результат игры несомненно всецело аннулирован. 1хслотс рабочее зеркало на сегодня <a href=https://665web.com/space-uid-25707.html>https://665web.com/space-uid-25707.html</a>
1хслотс 1хслотс регистрация перейти на 1×slots
1хслот зеркало сайта Бездепозитные призы — это подарки от казино вид бонусных средств либо фриспинов для игровых автоматов, коие начисляются на аккаунт игрока в процедуры регистрации на веб-сайте заведения. Для получения этих поощрений депо не требуется. <a href=http://maps.google.tk/url?sa=t&url=http://arkadiaforum.com/proxy.php?link=http://sdelaysam.by/bitrix/redirect.php?goto=https://teletype.in/@urist555/wyZIAki0r87>http://maps.google.tk/url?sa=t&url=http://arkadiaforum.com/proxy.php?link=http://sdelaysam.by/bitrix/redirect.php?goto=https://teletype.in/@urist555/wyZIAki0r87</a> Объективные – размер бонуса, коэффициент и условия вейджера, необходимость внесения депо для вывода средств; зеркло казино 1×slots
1хслотс рабочее зеркало
Так что можете храбро региться без всяких раздумий. Фортуна сегодня точно на вашей стороне. Не опасайтесь, ведь последствие какого или убытка Вам абсолютно не грозит. С такими призами как без пополнения, Вы остаетесь только в плюсе, но не как не в минусе. Помимо остального, для вывода средств по бездепу необходимо привнести на счёт собственный 1-ый депо — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на мало вероятную сумму, в чего вывод средств станет доступен. <a href=http://fh79604z.bget.ru/user/HenryBaste/>http://fh79604z.bget.ru/user/HenryBaste/</a> Обыкновенные бездепозитные призы в размере от трех до двадцати $ сделаны чтобы, чтобы, дабы в забавы заходили все новые и свежие игроки. Здесь, всего, несомненно лимитирование на максимальный выигрыш. Важно, дабы перед минимальным вкладом был отключен бонус за первое пополнение счета, и геймер не попадет на повторный вейджер.Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте условия – они часто выдаются для некоторых машин. В зависимости от клуба возможность делать определенное число ставок. Кстати, современные игорные дома дают возможность заводить «одноруких бандитов». 1хлот регистрация в 1×slots casino В количестве случаев бесплатные призы начисляются в кредитах, которые невозможно незамедлительно вывести со счета. Прежде их нужно отыграть по установленным правилам. Эти требования принято именовать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже.Принципиальным различием безвозмездных призов от бонусов на депо является неименье надобности вносить деньги на аккаунт. Из-за сего их часто нарекают бездепозитными (not the slightest down payment bonuses).
1×slots официальный сайт зеркало
Бездепозитный бонус нередко может стать легкодоступным незамедлительно после завершения регистрации, потому как единственным требованием к нему является регистрация, а затем проверка вашей свежей учетной записи. Бесплатный бонус – кредиты, которые онлайн-казино начислит клиенту, не принуждая его пополнять игровой счет. 1 хслот регистрация в 1×slots casino <a href=https://230news.com/space-uid-236738.html>https://230news.com/space-uid-236738.html</a>
1хслот скачать
Практически все интернет казино с бездепозитным бонусом за регистрацию предусматривает программу преданности — систему поощрения неизменных посетителей, которая произведено из множества уровней. При достижении игроком еще уровня на его счёт поступает бонус. Чем выше степень — тем щедрее бонус. <a href=https://boobs.red/user/JamesLox/>https://boobs.red/user/JamesLox/</a> 1 х слотс зеркало Бездепозитные бонусы, как уже понятно, считаются оригинальной вероятностью приступать к игровому процессу абсолютно бесплатно, то есть выступать в интернет казино безвозмездно и на существующие средства незамедлительно в регистрации аккаунта. Автоматы с этим депо шансы замерзнуть прекрасной вероятностью сыграть для почитателей азарта с определенными лимитированиями в финансах.Фриспины предусмотрены для применения в видео слотах. Внимательно ознакомьтесь с критериями – частенько их выдают на некоторые автоматы. В зависимости от клуба, у вас выйдет сделать определённое количество ставок. Кстати, продвинутые игорные жилища разрешают запускать любых «одноруких злодеев».
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/5324/#comment-264541>1×slots промокод при регистрации</a>
<a href=http://forum3.bandingklub.cz/memberlist.php?mode=viewprofile&u=5481>1×slots официальный сайт скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Высокая конкурентность в разделе азартных игр мотивирует операторов завлекать посетителей различными акциями. Благодаря этому у гостей появляется возможность получить бонусы в казино за регистрацию без депо. Воспользоваться этим предложением возможно, избегая функцию внесения денег на игровой счет, просто активировав акк на веб-сайте. Наш гид по бездепам поможет избрать самую симпатичную бонусную программу, узнать верховодила получения такового гонорары и воспользоваться им с максимальной выгодой.
#9559 Charlesgunnyhttp://filmkachat.ru
1×slots официальный demo регистрация в 1×slots casino
Бездепозитный приз по промо-коду будет доступен для игры, только в случае когда Вы активируете специальный бонусный код в разделе с бонусами либо укажите промокод при регистрации на сайте. В неких случаях, кроме активации кода, придется доказать контактные данные игрока и заполнить анкету клиента.Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала резвые выводы. Фишка выплат что, собственно довольно избрать платёжный инструмент и показать необходимую. В большинстве случаев средства зачисляются на электронные кошельки на 15 мин., а на банковские карты – 1–3 трудящихся дня. <a href=http://filmkachat.ru/>1×slots зеркало на сегодня</a> При маленький сумме приза рекомендовано играть по низким ставкам, а использовать наибольшие какого-либо только в случае, если вейджер слишком великой, а время на отыгрыш крепко ограничено. <a href=https://tdmromania.ro/member.php?action=profile&uid=8754>https://tdmromania.ro/member.php?action=profile&uid=8754</a> Вообще перейдя в казино — правила схожи в получении бездепозитных бонусов, в стандартные правила заходит: доказать эл. Почту и телефон, наполнить свой личный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ.Необходимость отыгрыша. Вейджер ситуации повыше, чем для бонусов за депо. И пока свои не отыграны, вывести их невозможно. рабочее зеркало 1×slots <a href=https://www.escort-liege.eu/user/profile/460859>https://www.escort-liege.eu/user/profile/460859</a> Срок отыгрыша — это этап, кот-ый начинается в момент активации бонуса и заканчивается с его закрытием. Пользователю нужно уложиться в данный временной промежуток, иначе призовые свои аннулируются. Казино устанавливают перечень игр, ставки каких засчитываются при расчете отыгранных денег. Если тайтл не заходит в данный перечень, то ему быть недоступен для загрузки во время действия бонусного предложения.
1хслот зеркало
Поспешите арестовать бездепозитные бонусы за регистрацию в казино из представленного перечня. Все платформы не только ведут законную работа, хотя и порадуют добросовестными плодами забавы, высокой отдачей, прыткими выплатами. 1×slots регистрация на сайте 1×slots ru com Бездепозитный бонус по промо-коду будет доступен для забавы, лишь что, нет случае когда Вы активируете особый бонусный код в разделе с бонусами либо укажите промокод при регистрации на веб-сайте. В некоторых случаях, кроме активации кода, придется доказать контактные данные игрока и наполнить анкету клиента. <a href=http://g961713h.beget.tech/user/JustinAdorm/>http://g961713h.beget.tech/user/JustinAdorm/</a> Для того, чтобы отыграть сумму вашего бездепозитного приза нужно выполнить условия вейджера. Очень нередко фриспины даются на определенные слоты (book of ra, book of deceased, book of sun), подбирайте слот для по душе, они все очень красивые и высококачественные. Бездепозитные приз имеет быть денежным например и вид фриспинов на слоты 1хслотс рабочее зеркало на сегодня
1×slot рабочее зеркало
Бoльшинcтвo азартных заведений выдвигают приблизительно однообразные, схожие условия и требования, коие необходимо выполнить, дабы получить бездепозитный бонус за регистрацию. Все их возможно соединить в раз перечень:Еще одно условие дотрагивается размеров ставки. Операторы устанавливают максимальную сумму, которую игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, избранной в Личном офисе. При превышении лимита есть риск лишиться приза. Существующие ограничения относятся и к конкретным обликам ставок. Например, играя в рулетку, клиент возможность столкнуться с запретом ставить фишки на шансы. На данном разделе портала регулярно публикуются обзорные заметки, в рассматриваются безвозмездные бонусы наилучших интернет-казино. Информация структурирована по нескольким пунктам, включая основные:Еще одно условие касается объемов ставки. Операторы устанавливают максимальную необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, выбранной в Личном кабинете. При превышении лимита есть риск потерять бонуса. Существующие лимитирования относятся и к конкретным обликам ставок. Например, играя в рулетку, клиент возможность столкнуться с запретом назначать фишки на шансы. <a href=http://okerclub.ru/user/Patrickamoke/>http://okerclub.ru/user/Patrickamoke/</a> Условия вывода выигрыша. В некоторых заведениях для успешного вывода с бездепозитного приза довольно пополнения баланса и доказательства личности. В иных же клубах, нужно несколько раз прокрутить собственный депо.Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют актуальную информацию о no deposit bonuses прочих предложениях. 1×slots рабочее зеркало Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, дабы была возможность вывести выигрыш.
казино 1×slots официальный сайт
Популярность интернет казино растёт и всё больше пользователей начинают проявлять азартными играми. Бездепозитные призы 2022 года, это оригинальные презенты за регистрацию. С их подмогою новые игроки могут получить благотворительные вращения или средства на баланс за одну регистрацию. С в игорных заведений в онлайне, бездепозитные призы стали известнейшим методом вербования игроков. Подобные акции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о коих мы расскажем. Наш вебсайт собрал лучшие предложения из онлайна на 2022 год. Воспользуйтесь каким подарком и можете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша необходимо выполнить условия.B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. 1×slots рабочее зеркало <a href=https://sanamaldives.com/glory-casino/>https://sanamaldives.com/glory-casino/</a> Также бездепозитные бонусы шансы служить способом вернуть к этой клиентов, временно приостановивших своё сотрудничество с компанией: уведомление о бездепе поступает на мобильный телефон либо почту.Онлайн гемблинг развивается с любым деньком больше и больше, новые бренды создаются не по дням а по часам. Новые онлайн казино проделывают вступительные промоакции для игроков, для того собственно бы зарекомендовать себя, и тем наиболее предлагают бездепозитные призы за регистрацию, собственно бы не пропустить эту вероятность — как воспользоваться свежим бездепом, рекомендуем посещать наш сайт как можно чаще, самое лакомое и новые несомненно добавляться в этом же перечне.
1×slots официальный регистрация
Начнём с такого, собственно каждое рекламную за регистрацию подразумевает некие обстоятельства. Бездепозитные бонусы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность валютного оборота, необходимая для исполненья условий. Пример, получили благотворительные вращения и выиграли с них 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 рублей, неудачных либо выигрышных, так. После исполненья, бонусный баланс перейдёт на реальный и будет доступным к выводу.Основное различие в том, собственно для получения бездепа нужно пополнять баланс в казино. Но кроме сего, есть ряд и других различий: Призовые начисления без депо все предоставляться для участия в турнирах онлайн казино. Потратить перечисленные деньги можно самая в рамках этой промоакции. Условия их проведения себе лимитирования на список игр, сроки отыгрыша, суммы ставок. Прежде чем воспользоваться этим предложением, другого выучить его правила. <a href=http://masloffspb.ru/bitrix/redirect.php?goto=http://expoclub.ru/bitrix/redirect.php?goto=http://downsideup.org/bitrix/redirect.php?goto=https://telegra.ph/Kak-invalid-perezhivshij-insult-mozhet-vodit-avtomobil–sovety-i-rekomendacii-09–23>http://masloffspb.ru/bitrix/redirect.php?goto=http://expoclub.ru/bitrix/redirect.php?goto=http://downsideup.org/bitrix/redirect.php?goto=https://telegra.ph/Kak-invalid-perezhivshij-insult-mozhet-vodit-avtomobil–sovety-i-rekomendacii-09–23</a> Так что приготовьтесь предоставить секретную информацию (пол, возраст, государство проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает менее суток, последствии чего удастся беспрепятственно выводить солидные выигрыши.Посетители вправе ознакомиться с полной коллекцией тайтлов, опробовать сервисы, платежные методы и расценить особенности, недоступные при этой в демо режиме. Многие новые клиенты перебегают в количество неизменных, а оператор получает длительную прибыль. 1×slots зеркало регистрация то дальше необходимо пройти Допустим, за регистрацию вы получили бездеп в размере 2 000 руб. С вейджером х30. В этом случае предстоит устроить ставок, на общую сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать реальные деньги. Однако не забывайте, собственно с каждого презента выйдет вывести определённую необходимую (чаще всего менее $200).
<b>Смотреть еще похожие новости:</b>
<a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=7523&TITLE_SEO=7523-preobrazovatel-interfeysov-usb-rs485&MID=465368&result=reply#message465368>1×slots официальный сайт скачать</a>
<a href=http://portal.westcoastbible.org/discussion/viewtopic.php?f=18&t=1929707>1×slots официальный сайт мобильная версия скачать</a>
<a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1×slots скачать на айфон</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Шаг 4. Активация. Внимательно исследуйте обстоятельства, информацию по лимитированиям и сроке деянья бонусного предложения. Разобравшись с правилами, можно активировать приз в личном офисе (время ? с внедрением промокода) или по запросу в саппорт. Такой казино бонус без депозита за регистрацию выдается игроку на час и активно используется данное предложение с 2017 года. Это словно какая-то конспирация поощрения под бездепозитный. Суть всего сего сводится к что, этому, что игроку на час выдается, к примеру, 1000 $, а реклама утверждает то, собственно каждой выигрыш можно будет дальнейшем забыть при себя. Но если играющий всерьез отнесется к данному предложению, то он попросту потеряет время. Ведь геймеру надо(надобно) будет выступать не в аккаунте, а в тренировочном и с ограниченным выбором автоматов и ставок. Да и если, тогда, выигрыша (том всей тысячи) в верховодила вступят конкретные обстоятельства, где несомненно сказано, собственно наибольшей суммой победы может быть только двести $ и деньги возможно применять лишь виде бонуса на первый лепта с вейджером 25 от суммы вознаграждения плюс сам депо. По результату выйдет, что игрок выигрывал для 200% приз с вейджером на конкретную сумму. Короче разговаривая, это все не стоит вашего медли.
#9560 Charlesgunnyhttp://filmkachat.ru
1×slot рабочее зеркало
Хотя благотворительные бонусы начисляются без депо, не исключено, собственно вам понадобиться вносить деньги. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только последствии того, как свежий клиент первый пополнит игровой счет.Мы собрали и опубликовали перечень лучших бездепозитных казино с призами за регистрацию, коие гарантируют великодушные выигрыши и мгновенные выплаты. <a href=http://filmkachat.ru/>1хслот зеркало сайта</a> Баланс игрока пополняется на соответствующую необходимую. К ней используется вейджер, указанный в правилах акции. Вывести выигрыш можно будет последствии как, как пользователь устроит требуемый размер ставок из собственных средств. В редких случаях бездеп трудится в формате Free Play. На счет пользователя зачисляется крупная сумма, и предоставляется небольшой срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по окончании сего периода сумма на счету несомненно превосходить изначальную, то разницу возможно будет вывести либо использовать для последующих ставок.Во всех легальных онлайн-казино Беларуси необходимо свидетельство паспортных данных для игры — это заявка правительства страны. <a href=https://theweddingresale.com/index.php/author/jamesmaito/>https://theweddingresale.com/index.php/author/jamesmaito/</a> Для вывода средств приз нужно несомненно отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариантами отыгрыша бездепозитного бонуса до его получения, дабы избежать конфликтных ситуаций.Самый распространённый из подобных бонусов, конечно же, бездеп на денек рождения клиента — бонус вид фиксированной суммы или фриспинов поступает на счёт игрока, а воспользоваться им возможно протяжении установленного периода медли. 1×slots зеркало рабочее на сегодня <a href=https://job.epday.com/home.php?mod=space&uid=636766>https://job.epday.com/home.php?mod=space&uid=636766</a>
1×slots casino зеркало
1×slots зеркало сайта Чаще всего интернет-казино предлагают бездепозитные призы новым юзерам. Эта промо-акция довольно отлично привлекает начинающих, подталкивая их к открытию счета. Конечно, не все становятся преданными клиентами, но сам прецедент регистрации аккаунта играет на руку заведению.Для получения депозитного приза необходимо восполнить собственный игровой баланс реальными деньгами. Вознаграждение можно получить или при внесении первого депозита, или вид фиксированного процента от внесённых средств. Так или другому, бонус поступит на счёт только после пополнения. <a href=http://sum24.khome24.kr/bbs/board.php?bo_table=free&wr_id=101256>http://sum24.khome24.kr/bbs/board.php?bo_table=free&wr_id=101256</a> 1×slots регистрацию процедура займет всего лишь Прежде всего, не забывайте регулярно заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом осматривают более увлекательные предложения ведущих игорных порталов.Приступим к практике, как получить Бездепозитный бонус в казино с выводом. Мы опишем полную функцию активации приза без депо. Внимательно прочитайте до конца. Многие новенькие делают промахи на шаге регистрации и потому имеют получить подарок.
1×slots официальный сайт мобильная версия
Как лишь на виртуальном счету окажутся бонусные свои, поспешите отыграть вейджер. Сразу в этого возможно забыть заявку на вывод выигрыша. Кредиты прибыльно отличаются от фриплей-бонусов и фриспинов. Во-первых, они являются аналогом настоящих средств и выделяют возможность почувствовать азарт. Во-вторых – возможно насладиться каждой азартной забавой доступной на веб-сайте. В вашем постановлении находятся автоматы, настольные прибавленье, видео-покер, Live-дилеры.Помните, собственно всевозможные нарушения управлял сведут на нет ваши усилия, и вы скорее останетесь без начисленного вас бесплатного приза. Всегда изучайте верховодила начисления и условия вейджера. По каким вопросам, на коие вы не самостоятельно найти ответы, обращайтесь за разъяснениям и саппорт. Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=http://www.xn–oi2b40g9×gnse83w.com/bbs/board.php?bo_table=free&wr_id=119396>http://www.xn–oi2b40g9×gnse83w.com/bbs/board.php?bo_table=free&wr_id=119396</a> Составленный экспертами Casino.ru список онлайн-казино с бездепозитным бонусом позволяет игрокам сравнить спецпредложения различных операторов.Размер бонусов почаще всего чисто условный и не выше 50 рублей. Приятно, но ощутимым бустом деле вряд ли будет. 1×slots casino регистрация 1×slotscasin online Эффективность бездепов в качестве маркетингового прибора оценили многие операторы. Малоизвестные площадки используют такие акции, дабы быстро набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны постоянных посетителей. Не все веб-сайты, дающие презенты без депозита, рекомендованы к ирге. За симпатичным промоописанием имеют скрываться невыполнимые обстоятельства отыгрыша и другие подводные камни.С другой стороны, намного легче забрать бездепозитные фриспины за регистрацию в казино и прямо момент начать вращать барабаны в наихороших слотах. Главная необыкновенность спинов что, что они предназначены для топовых автоматов. Удастся столько пройти дополнительные раунды, хотя и прирастить необходимую выигрыша, заработать респины прочие внутриигровые подарки.
1×slots рабочее зеркало
Получить Бездепозитный приз в онлайн казино дело 2-ух кликов. Другой момент, отыграть промо и соблюсти управляла и обстоятельства отыгрыша. Под правилами предполагается столько вагер, хотя и ограничения по наибольшей ставке. Мы понимаем, что в кино все ставят на зеро и выигрывают. Призываем не создавать подобного. Перед активацией бонуса прочтите правила. Узнайте последующие факторы: Условия получения презента, за регистрацию, за депозит и прочее. Ограничения по наибольшей ставке. Зачастую не выше 350 руб. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с рекламную. В каких слотах возможно отыгрывать вагер. Можно вращать автоматы, а вагер несомненно стоять на пространстве. Поэтому главно знать, в каких играх возможно осуществлять кратность денежного оборота. 1×slot официальный сайт <a href=https://arjaniki.ru/memberlist.php?mode=viewprofile&u=40440>https://arjaniki.ru/memberlist.php?mode=viewprofile&u=40440</a>
1хслотс казино зеркало
Обыкновенные бездепозитные бонусы в объеме от трех до двадцати $ созданы чтобы, чтобы, дабы в забавы заходили все новые и свежие игроки. Здесь, вероятнее всего, несомненно ограничение на максимальный выигрыш. Важно, чтобы перед наименьшим вкладом был отключен приз за первое пополнение счета, и в не попадет на повторный вейджер. <a href=http://www.wy881688.com/home.php?mod=space&uid=679289&do=profile>http://www.wy881688.com/home.php?mod=space&uid=679289&do=profile</a> На страничке представлены бездепозитные бонусы за регистрацию в казино редчайшая награда за которой гонятся все игроки как новички, например и профессионалы. Мы тоже уделяем огромное внимание на присутствие призов при составление рейтинга казино на средства. Бездепозитный приз это возможность играть бесплатно и выиграть настоящие деньги. зеркала 1×slots Фриспины без депозита либо вспомогательные свои посодействуют ближе познакомиться с игровой платформой и её функциями. За счёт даров можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям из-за игры напротив живых крупье.
<b>Смотреть еще похожие новости:</b>
<a href=https://praisenpray.org/forums/showthread.php?tid=96196>1×slots зеркало этих способов предполагает регистрацию</a>
<a href=http://check2go.net/author/jameslob/>1×slots casino регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вейджер менее х30–35 считается приемлемым. Опытные игроки заявляют, собственно с этим вейджером реально остаться в плюсе, в правильно подойти к выбору игрового аппарата.
#9561 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
Возможность поиграть вспомогательное соревнование (а время и количество) совершенно бесплатно, а выигрыш, к, поступает на счёт игрока.Обычно показатель выше, чем для призов на депозит. Не дивитесь, случае он будет в х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных стран. <a href=http://filmkachat.ru/>1×slots скачать на айфон</a> Так же стоит выделить то, собственно в каждом онлайн казино установлен собственный максимальный кешаут на бездепозитный бонус. Как правило кешаут — это предельная сумма средств, кот-ая дешевая для вывода с бездепозитного приза.Бездепозитный приз нередко может замерзнуть легкодоступным сразу последствии окончания регистрации, что правило единственным притязанием к нему считается регистрация, а после ревизия вашей новой учетной записи. <a href=http://kor2021.osongbeautyexpo.kr/bbs/board.php?bo_table=free&wr_id=2104530>http://kor2021.osongbeautyexpo.kr/bbs/board.php?bo_table=free&wr_id=2104530</a> Таким образом онлайн казино получает вероятного игрока. Возможно дальнейшем либо истинном он захотит сыграть на свои деньги. Так трудятся бездепозитные призы в интернет казино. Здесь хорошо подходит выражение, благотворительные сыр случается лишь в мышеловке. Начинающие игроки имеют не обдумывать опасность пыла. Однако времени осознания становится больше. Это тема для отдельного обсуждения. 1×slots зеркало которую указывали при регистрации кстати <a href=https://forum.gekko.wizb.it/user-23637.html>https://forum.gekko.wizb.it/user-23637.html</a>
1×slots зеркало регистрация то дальше необходимо пройти
Вейджер (wager) – это коэффициент, который демонстрирует на какую сумму необходимо сделать ставок, дабы исключить бонус из казино. Пример: Вы возымели за регистрацию в казино Триумф 500 руб. С вейджером х70. Для вывода сего приза, Вам нужно устроить ставок на сумму: 500*70=3500 рублей. Только полностью отыграв бонус, Вы можете вывести свой выигрыш. 1×slots регистрация на 1хслотс В интернет-сети практически можно отыскать списки наиболее знаменитых и обещанных поощрительных программ от известных онлайн-казино.Заработать на бездепозитных призах за регистрацию в казино имеет любой пользователь, достигший совершеннолетия. <a href=https://www.reikiandastrologypredictions.com/member.php?action=profile&uid=19664>https://www.reikiandastrologypredictions.com/member.php?action=profile&uid=19664</a> 1×slots рабочее зеркало Необходимость отыгрыша. Вейджер в этом случае выше, чем для призов за депозит. И же средства не отыграны, исключить их нельзя.
1×slots регистрация 1×slots casino 777 online
Бездепозитный приз предоставляется новенькому игроку за конкретные деяния. Часто презент в виде денег или фриспинов выдается за регистрацию, спасибо чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.Как верховодило, при выводе финансов, от играющего требуется только сделать минимальный вклад чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать этим образом собственный счет. <a href=http://halitovo.ru/bitrix/click.php?goto=http://stilnaya.com/bitrix/redirect.php?goto=http://ohranatruda.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/i5swviCgeDt>http://halitovo.ru/bitrix/click.php?goto=http://stilnaya.com/bitrix/redirect.php?goto=http://ohranatruda.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/i5swviCgeDt</a> Вейджер (wager) – это коэффициент, кот-ый демонстрирует на какую сумму нужно сделать ставок, чтобы исключить приз из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего бонуса, Вам необходимо устроить ставок на сумму: 500*70=3500 руб. Только всецело отыграв приз, Вы можете вывести собственный выигрыш.Верификация необходима для добавочной защищенности и подсобляет техподдержке выявить бонусхантеров и мошенников. Кстати, на платформах выводы солидных сумм доступны только последствии подтверждения личности. 1хслот 1хслотс регистрация перейти на 1×slots
1хслот зеркало сайта
На бонусные начисления все быть установлены вспомогательные лимитирования, которые Вы не учли при отыгрыше. Пока бонус полностью не отыгран — средства из казино не выводятся.Обычно для получения бонусов без депо, казино выдвигает лояльные и абсолютно выполнимые условия, хотя есть ряд поступков коие воспрещены и все стать неприятные последствия: Реже призы без депозита начисляются неизменным игрокам. С их поддержкой администрация постарается вычесть ценных клиентов или желает поблагодарить за преданность верных посетителей. Но намного почаще для похожих целей применяются эти промоакции:Третитй бездепозитный бонус за регистрацию – валютные средства. К раскаянию, начислить рубли или доллары способны лишь известные и популярностью клубы. С их поддержкой у насладиться любой доступной забавой – автоматом, рулеткой, кено, блэкджеком. Если речь идет об неповторимых предложениях, имеет потребоваться регистрация в казино по ссылке с партнерского сайта.Максимальная ставка ? уточняется в денежной счета и ограничивает объем ставки за раз спин. В случае ее превышения приз может быть аннулирован. Также в правилах имеет содержаться запрет на размещение ставок определенного вида, например, по равным шансам в рулетке (словами, на чет либо нечет, красноватое или темное и т.д.). 1×slots зеркало этих способов предполагает регистрацию <a href=https://odessamama.net/home.php?mod=space&uid=8573&do=blog&quickforward=1&id=1518>https://odessamama.net/home.php?mod=space&uid=8573&do=blog&quickforward=1&id=1518</a>
1×slots официальный сайт, скачать
Размер приза. В качестве бездепов обычно начисляют очень суммы, а когда речь о бонусах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то некоторые казино шансы подарить игроку до 2000$.Наличие у игрока второго аккаунта. Запрещено делать количество профилей для многократного получения бездепов. <a href=https://images.google.ml/url?q=https://doctorlazuta.by/>https://images.google.ml/url?q=https://doctorlazuta.by/</a> 1×slots мобильная версия войти казино Суммы подобных предложений, большинстве, колеблются от трех до двадцати долларов, а вейджер на эти средства должен составлять от тридцати до шестидесяти раз. Зачастую, большая сумма выигрыша здесь составит от одной до двух сотен долларов. Если игры выиграет больше, то все свои шансы быть списанными до максимально разрешенного выигрыша. Здесь появляется содержание выводить еще несуществующие деньги на собственную платежную систему и дальше искать заведение с подходящими под данную необходимую релоадом либо бонусом за 1-ое пополнение счета. Есть количество подвидов бездепозитного гонорары, предлагаемого наибольшим числом заведений.Постарайтесь отыграть вейджер, дабы была возможность забыть заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные приборы. Вы можете получить выигрыш на электрической кошелёк, карту, аппарат.
<b>Смотреть еще похожие новости:</b>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=130070>1х слот 1хслотс регистрация перейти на 1×slots</a>
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=2936>сайт 1× slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, дабы замечена возможность исключить выигрыш. С такими ординарными советами каждое казино с бонусом за регистрацию способно принести в разы больше выгоды и пользы.
#9562 Charlesgunnyhttp://filmkachat.ru
1хслотс мобильная версия зеркало
Чем ниже значение вейджера, что, этим проще отыграть и исключить бонус. Если Вы планируете заработать на бездепе, не просто ознакомиться с новым игровым клубом, то стоит избегать бонусов с высоким вейджером их почти не реально отыграть. С ними Вы можете лишь протестировать забавы заведения. <a href=http://filmkachat.ru/>1×slots бонус за регистрацию</a> Такие поощрения позволяют бесплатно протестировать свежее казино, разобраться с игровым процессом онлайн слотов, заработать и исключить маленькую сумму средств.В наше время довольно просто получить приз за регистрацию в казино. Практически каждый игорный жилище с радостью начисляет деньги либо благотворительные вращения. Многие гэмблеры пользуются данным и не стесняются регистрироваться в каждом клубе с выгодными условиями. Кстати, это отличная вероятность выработать победную тактику и сорвать джекпот. <a href=http://cg.darkml.net/bbs/home.php?mod=space&uid=8027785>http://cg.darkml.net/bbs/home.php?mod=space&uid=8027785</a> Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, solid зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. 1×slots официальный сайт скачать <a href=https://sc-grandmaster.ru/forum/?PAGE_NAME=profile_view&UID=20189>https://sc-grandmaster.ru/forum/?PAGE_NAME=profile_view&UID=20189</a> Промокод – определённая комбинация символов, коию нужно ввести в отвечающее фон при твореньи учетной записи либо активировать в собственном профиле игрока в разделе с бонусами.
казино 1× slots официальный сайт
Подарки на определенные даты выделяются условиями получения. Если одобрение начисляют игроку на денек рождения, то сумма обычно зависимости от совместного размера депозитов за прошедший год.Обычно для получения бонусов без депо, казино выдвигает лояльные и абсолютно выполнимые условия, но есть ряд деяний которые воспрещены и могут повлечь за собой противные последствия: 1×slots казино мобильная версия Для получения выигрыша требуется выполнить условия казино. Чаще всего игроку необходимо поставить конкретную сумму, хотя теснее из собственных средств. Она рассчитывается из совместного объема выигрыша за все время использования бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, если пользователь выиграл 1000 рублей, а множитель составляет х30, исключить деньги возможно несомненно, сделав ставки на 30 000 рублей.Срок активации и время на отыгрыш. Зачисление средств или фриспинов случается при активации в течение строго ограниченного периода, схожие притязания предъявляются и к срокам отыгрыша. Одни казино позволяют отыгрывать приз несколько дней или том месяцов. Другие выдают солидную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с неоправданно высочайшим вейджером. <a href=http://usr.by/user/Franklek/>http://usr.by/user/Franklek/</a> 1×slots акции На активацию бездепозитного дара выдается от нескольких часов до 1 суток. По истечению этого времени, Вы не сможете активировать и получить бездепозитный бонус.3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать телефон или почту, указать индивидуальную информацию;
1×slots официальный зеркало
Для вывода средств бонус надо(надобно) будет отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариантами отыгрыша бездепозитного приза до его получения, дабы избежать конфликтных ситуаций.Для получения бездепа нужно пригласить в забаву по реферальной ссылке нового клиента: он обязан зарегистрироваться, пройти верификацию на веб-сайте онлайн-казино и восполнить счёт на сумму, обозначенную в критериях промоакции. Во время забавы в казино, выигрыши, полученные благодаря бесплатным призовым фондам, суммируются и срабатывают в совместную сумму для отыгрывания. Однако, случае удача улыбнется и выйдет отыграть все призы, игровое заведение гарантированно допустит исключить денежные свои. Сумма вывода несомненно находиться от лимита, одобренного именно в этом учреждении. Поэтому, внимательно нужно разбирать правила выдачи анлимитных депо.Представьте момент, когда при ставке в 10 руб. Вы получите подобное умножение. Миллион руб. За одно вращение, собственно абсолютно вполне. Поэтому вопрос, сколько возможно выиграть остаётся открытым. Предлагаем проверить самостоятельно. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный приз и проверяйте фортуну в деле. Разумеется, исключить средства не так просто. Однако шансы есть у всех. <a href=https://tazovod.khalal.ru/forum/memberlist.php?mode=viewprofile&u=38835>https://tazovod.khalal.ru/forum/memberlist.php?mode=viewprofile&u=38835</a> Маркетинговая политического всех игорных интернет-клубов должна одевать различный характер. И в гонорары на депозит служат чтобы, чтобы, чтобы провоцировать вносить депозиты и поощрять теснее быть юзеров, то бездепозитный приз в казино либо приз за регистрацию в казино, этого всего, рассчитан на расширение базы покупателей. зеркала 1×slots Индивидуальные одобрения выдаются за совершение поступков: подписку на аккаунты площадки в социальных сетях, установку мобильного приложения или официального клиента для ПК. В большинстве казино действуют программки преданности, присваивающие игрокам статусы за активность на веб-сайте. Продвижение на следующий уровень часто с выдачей бездепа.Так собственно главное отличие подарка на депозит от бездепа – неотъемлемое пополнение счёта. Вы можете привнести депо и преумножить стартовый капитал либо забрать бездеп и при не придётся рисковать собственными сбережениями. Поспешите выполнить простые требования, и администрация ресурса начисляет щедрое поощрение!
1хслот 1хслотс регистрация перейти на 1×slots
Еще одно условие касается объемов ставки. Операторы устанавливают максимальную необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, выбранной в Личном кабинете. При превышении лимита есть риск потерять бонуса. Существующие лимитирования относятся и к конкретным обликам ставок. Например, играя в рулетку, клиент возможность столкнуться с запретом назначать фишки на шансы. <a href=http://djdrewski.co.uk/lfsbangers/viewtopic.php?f=32&t=30069>1хслотс официальный сайт зеркало</a> Чтобы играть безвозмездно на реальные деньги в казино, не всегда довольно просто зарегистрироваться. Иногда необходимо выполнить вспомогательные действия. казино 1×slots официальный сайт <a href=http://newdigital-world.com/members/zacheryrot.html>http://newdigital-world.com/members/zacheryrot.html</a> Бездепозитные бонусы за регистрацию являются одним из самых популярных способов вербования новых игроков в онлайн-казино, потому собственно они деют игрокам возможность опробовать казино, необыкновенно игровые автоматы, и возможно, выиграть настоящие деньги.
1×slos регистрация в 1×slots casino
Подтверждение электронной почты – одно из главных критерий, коие есть практически в каждом бездепозитном казино. Чтобы верифицировать электронную почту, достаточно перебежать по интенсивной ссылке в письме, приобретенном от азартного клуба.Если речь об эксклюзивных услугах, имеет потребоваться регистрация в казино по ссылке с партнерского вебсайта. Вейджер (или вагер) ? это наименьшая сумма ставок, коию необходимо сделать для вывода валютного приза. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, тем привлекательнее спецпредложение. <a href=http://aerostone.ru/bitrix/redirect.php?goto=http://xn–80adypkng.xn–p1ai/bitrix/redirect.php?goto=http://rus-slad.ru/bitrix/redirect.php?goto=https://telegra.ph/Kak-sozdat-poshagovyj-algoritm-biznes-processa-v-Worksection-09–23>http://aerostone.ru/bitrix/redirect.php?goto=http://xn–80adypkng.xn–p1ai/bitrix/redirect.php?goto=http://rus-slad.ru/bitrix/redirect.php?goto=https://telegra.ph/Kak-sozdat-poshagovyj-algoritm-biznes-processa-v-Worksection-09–23</a> сайт 1× slots casino У каждого игорного заведения средства верховодила и обстоятельства. Но, дабы получить бонусы, нужно выполнить стандартные деяния:В реальное время получить бонус за регистрацию в казино довольно просто. Почти каждый игорный жилище с радостью даст средства или безвозмездные вращения. Многие игроки используют этим и не стесняются регистрироваться в любом клубе с прибыльными условиями. Кстати, это замечательная возможность придумать выигрышную тактику и сорвать куш.
<b>Смотреть еще похожие новости:</b>
<a href=http://nrj.rs.ba/memberlist.php?mode=viewprofile&u=2111>1×slots casino регистрация</a>
<a href=http://lider1c.ru/communication/forum/messages/forum5/message20498/16422–1×slots-zerkalo-1khslots-registratsiya-pereyti-na-1×slots?sessid=c68fc0e0133940882a94476d6641a5f2&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a>
<a href=https://bajarmp3.net/showthread.php?tid=427974>1×slots коды</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Также бывают случаи, когда казино начисляет обсужденный приз после регистрации нового посетителя по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам. Когда речь о получении бездепозитных призов в казино, начала обратите внимание на последующие условия:
#9563 Charlesgunnyhttp://filmkachat.ru
1х слот 1хслотс регистрация перейти на 1×slots
Для ревизии применяются сканы паспортов, водительских прав, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных услуг. Если пользователь замечен в попытке завести дополнительный акк, все его учетные записи подвергаются блокировке, а их владелец попадает в черный перечень. При ирге на лицензионной площадке надо бояться свидетельствовать достоверную индивидуальную информацию (шифрование исключает утечку индивидуальных данных). <a href=http://filmkachat.ru/>1×slots сайт</a> <a href=https://forum.vgatemall.com/member.php?action=profile&uid=219774>https://forum.vgatemall.com/member.php?action=profile&uid=219774</a> 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots <a href=http://ohranatruda.ru/bitrix/redirect.php?goto=http://kzn.confaelshop.ru/bitrix/redirect.php?goto=http://rings.ru/r/?url=https://telegra.ph/Kak-zaregistrirovat-pravo-sobstvennosti-na-nedvizhimost-v-drugom-gorode-cherez-DDU-ipoteku-i-TSZH-s-pomoshchyu-MFC-ili-onlajn-us-09–19>http://ohranatruda.ru/bitrix/redirect.php?goto=http://kzn.confaelshop.ru/bitrix/redirect.php?goto=http://rings.ru/r/?url=https://telegra.ph/Kak-zaregistrirovat-pravo-sobstvennosti-na-nedvizhimost-v-drugom-gorode-cherez-DDU-ipoteku-i-TSZH-s-pomoshchyu-MFC-ili-onlajn-us-09–19</a> У любого игорного заведения свои верховодила и обстоятельства. Но, чтобы получить бонусы, нужно выполнить стереотипные действия:Для ревизии применяются сканы паспортов, водительских водительских, банковских карт. В качестве подтверждения достоверности введенного адреса проживания подходят квитанции об оплате коммунальных предложений. Если пользователь замечен в попытке завести вспомогательный аккаунт, все его учетные записи подвергаются блокировке, а их обладатель попадает в черный список. При игре на лицензионной площадке надо бояться свидетельствовать достоверную индивидуальную информацию (шифрование ликвидирует утечку персональных данных).
1×slot казино зеркало
Существует ли стратегии для отыгрыша бездепозитных призов? К сожалению нет, на выигрыши либо проигрыши с бонусов, казино либо игрок повлиять не может, отдача игр происходит от создателей игр.Обыкновенные бездепозитные бонусы в размере от трех до 20 $ сделаны для того, чтобы в игры заходили все свежие и свежие игроки. Здесь, вероятнее всего, будет лимитирование на максимальный выигрыш. Важно, чтобы перед наименьшим вкладом был отключен приз за первое пополнение счета, и компьютерные не попадет на повторный вейджер. 1хслотс рабочее зеркало на сегодня Демоказино есть почти на любом веб-сайте: играете на приглянувшихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются значительно реже: там когда выигрыша и соблюдения критерий промоакций бездеп можно превратить в реальные деньги. <a href=http://cloudscapehill.com/user/frankcoock/?um_action=edit>http://cloudscapehill.com/user/frankcoock/?um_action=edit</a> Фриспины — безвозмездные вращения, которые дозволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины числятся самым знаменитым и желаемым обликом приза — благотворительные вращения иногда эффективнее и веселее в отыгрыше, чем остальные облики бездепов. 1×slots зеркало которую указывали при регистрации кстати Отыграв бездепозитный приз в казино с выводом тоже придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в сходственное лимитирование присутствует, то единоразово вывести получится лишь необходимую, не превосходящую размер приобретенного бонуса.Для получения предоставленных призов для пригодиться — ПК или мобильное устройство, и остальное дело за малым.
1×slots официальный зеркало
Баланс игрока дополняется на соответствующую сумму. К ней используется вейджер, обозначенный в правилах акции. Вывести выигрыш можно будет в такого, как пользователь сделает требуемый размер ставок из собственных средств. В редких случаях бездеп работает в формате Free Play. На счет юзера зачисляется большая сумма, и предоставляется небольшой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по завершении сего периода сумма на счету несомненно превосходить изначальную, то разность можно несомненно вывести или использовать для дальнейших ставок. <a href=http://twchess.lionfree.net/discuz/home.php?mod=space&uid=17359>http://twchess.lionfree.net/discuz/home.php?mod=space&uid=17359</a> Выбирайте превосходнейшие бесплатные бонусы за обзоров на Casinoz – и пусть для сопутствует счастье при отыгрыше бонусных кредитов! 1×слот регистрация в 1×slots casino Нет. Для получения бездепозитного приза в казино необходима обязательная регистрация на веб-сайте. Играть в слоты безвозмездно и без регистрации возможно лишь в демо режиме.
1хслот 1хслотс регистрация перейти на 1×slots
Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депо имеет выделяться до 30 дней.Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo. <a href=https://forumauthority.com/thread-6634-post-39369.html#pid39369>x1 slots 1хслотс регистрация перейти на 1×slots</a> За привлечение друга ? в партнерской программы клиент получает вознаграждение за привлечение свежих пользователей.Выполнив все требования оператора, заказчик возможность оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем менее суток. Если дополнительно потребуется пройти функцию верификации, то срок возрастает до 1–2 рабочих дней. Для перевода применяются банковские приборы и электронные платежные системы. Второй метод подходит другого, как, так как масса транзакций такой исполняются мгновенно. В связи со специфичностью функционирования банков обработка платежей может взятьвдолг(взятьвзаймы) до нескольких рабочих дней. Самые модные способы вывода денег ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто клиенты обращаются к электронным платежным системам на Neteller и Skrill, а пользуются криптовалютными кошельками. Вывод выигрышей возможность осуществляться быстро либо занимать от нескольких часов до нескольких суток. 1×slots официальный сайт зеркало рабочее <a href=https://xia.h5gamebbs.cndw.com/home.php?mod=space&uid=195831>https://xia.h5gamebbs.cndw.com/home.php?mod=space&uid=195831</a> Для всех бездепозитных призов функционирует максимальный предел на выигрыш. Он указывает предельную необходимую, коию появится получить, играя на бонусные кредиты. Как лишь вас получится выполнить требования вейджера, допустимый максимум несомненно переведен с бонусного счета на основной, а остаток несомненно списан.
1×slots сайт зеркало
Иногда в качестве одобрения за регистрацию все выдаваться билеты для участия в турнирах. Условия их проведения очень выделяются, потому мы советуем ознакомиться с каждым предложением раздельно. <a href=https://justdirectory.org/details.php?id=280354>https://justdirectory.org/details.php?id=280354</a> 1×slots регистрация на сайте 1×slots ru com Также бездепозитные призы могут работать способом вернуть к этой посетителей, что приостановивших своё сотрудничество с компанией: уведомление о бездепе поступает на мобильный телефонный либо почту.
<b>Смотреть еще похожие новости:</b>
<a href=http://lider1c.ru/communication/forum/messages/forum5/message18961/14904–1khslot-zerkalo-sayta?sessid=76d5ae1e5d595921162f162f918b21f3&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1хслот зеркало сайта</a>
<a href=https://games-garant.ru/index.php?subaction=userinfo&user=Jamesneorm>1× slots зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выполнив все притязания оператора, заказчик имеет оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит в среднем не более суток. Если дополнительно потребуется пройти функцию верификации, то срок возрастает до 1–2 трудящихся дней. Для перевода применяются банковские приборы и электрические платежные системы. Второй способ подходит какого-либо, так как основная транзакций ситуации осуществляются моментально. В связи со спецификой функционирования банков обработка платежей имеет занять до нескольких рабочих дней.
#9564 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало сайта
Будьте внимательнее при ознакомлении с правилами во избежание происхожденья конфликтных ситуаций с казино, когда последствии отыгрыша бездепа вам не дадут вывести солидную необходимую выигрыша. <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> Изучить верховодила и обстоятельства получения бездепозитных бонусов казино, Вы сможете у нас на веб-сайте в разделе с призами либо на официальном веб-сайте выбранного Вами казино. Если не отыскать необходимую информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электронной почте.Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, the decision зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. <a href=http://neu.efg-grossschoenau.de/doku.php?id=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D0%B5%D0%B9%D1%88%D0%B0%D1%8F%20%D0%BF%D0%B8%D1%86%D1%86%D0%B0%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!>http://neu.efg-grossschoenau.de/doku.php?id=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D0%B5%D0%B9%D1%88%D0%B0%D1%8F%20%D0%BF%D0%B8%D1%86%D1%86%D0%B0%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!</a> 1 x slots casino <a href=https://brp.bars.su/forum/?PAGE_NAME=profile_view&UID=49691>https://brp.bars.su/forum/?PAGE_NAME=profile_view&UID=49691</a> Самый распространённый из похожих призов, окончательно же, бездеп на день рождения посетителя — бонус вид фиксированной суммы либо фриспинов поступает на счёт игрока, а воспользоваться им можно в течение установленного периода времени.
1хслотс официальный сайт зеркало
Мы собрали и опубликовали список наилучших бездепозитных казино с призами за регистрацию, которые гарантируют великодушные выигрыши и мгновенные выплаты. 1×slots на любой вкус как пройти регистрацию Подтвердите регистрацию, чтобы активировать Бездепозитный бонус с выводом, требуется наполнить собственный профиль. Заполните пустые поля настоящими данными о для.На данном разделе портала периодически публикуются обзорные статьи, каких рассматриваются безвозмездные бонусы превосходнейших интернет-казино. Информация структурирована по нескольким пунктам, включая основные: <a href=http://hwani.barunweb.co.kr/bbs/board.php?bo_table=free&wr_id=111464>http://hwani.barunweb.co.kr/bbs/board.php?bo_table=free&wr_id=111464</a> В разделе с бонусами активировать свой подарок. Найти игры, для которых учтено поощрение и использовать приз по назначению.Иногда операторы просят внесение малого депо перед выводом для верификации платежного прибора. В некоторых казино этот депозит кроме предстоит отыграть. 1× slots регистрация в 1×slots casino Для получения бонуса надо(надобно) ознакомиться с программкой лояльности казино и устроить ставки на необходимую, нужную для перехода на грядущий степень.
1×slots casino регистрация на сайте
Для вывода средств приз нужно будет отыграть законам, установленным казино. Внимательно ознакомьтесь с правилами акции и вариантами отыгрыша бездепозитного бонуса до его получения, чтобы избежать конфликтных ситуаций.Далее требуется отыграть вагер и вывести выигрыш. Игрокам без навыка крупно подфартило, есть получить десятки подарков за одну регистрацию. Если не смогли получить Бездепозитный бонус, не волнуйтесь. Обратитесь в онлайн чат, оператор поможет решить проблему. Для получения бездепа необходимо пригласить в игру по реферальной ссылке нового посетителя: он обязан зарегистрироваться, пройти верификацию на сайте онлайн-казино и пополнить счёт на сумму, обозначенную в условиях акции. <a href=https://google.dj/url?q=https://doctorlazuta.by/>https://google.dj/url?q=https://doctorlazuta.by/</a> Нет. Казино выдают бесплатные призы за регистрацию, чтобы, чтобы, чтобы клиент мог ознакомиться с игровым заведением. А дабы вывести его, необходимо выполнить условия отыгрыша. 1хслотс зеркало на сегодня Ознакомьтесь с нашим перечнем наихороших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего списка и получите бездеп сразу. Хватайте наилучшие безвозмездные предложения ниже и выигрывайте немалые деньги, не рискуя!
сайт 1× slots casino
Этот тип бонуса будет добавлен на Ваш аккаунт последствии успешной процедуры регистрации с внедрением номера аппарата. Если выбрать иной способ сотворения учетной записи, бездеп не несомненно добавлен на Ваш аккаунт.При пользовании бездепозитным бонусом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют несколько обликов лимитов: casino 1×slot <a href=https://tophatsec.com/forum/member.php?action=profile&uid=5306>https://tophatsec.com/forum/member.php?action=profile&uid=5306</a> Для всех бездепозитных бонусов функционирует наибольший лимит на выигрыш. Он показывает максимальную сумму, которую у получить, играя на бонусные кредиты. Как только для удастся выполнить требования вейджера, допустимый максимум несомненно переведен с бонусного счета на главной, а остаток несомненно списан.Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депо возможность отличаться до 30 дней.
1×slots подтвердит вашу регистрацию если говорить
Не стоит путать игру в демо и внедрение бонусов. В демонстрационном режиме игрок имеет оценить механику слота, сюжет и оформление. Но забава ведется на условные кредиты, потому отсутствует основное ? чувство азарта. Активируя промокод или фриспины, заказчик раньше не расходует свои деньги на игровые автоматы, но может сорвать настоящий куш!Представленные на данной страничке превосходнейшие бездеп призы в казино за регистрацию в 2022 году имеют подходящие обстоятельства. После тщательного анализа редакция портала составила рейтинг спецпредложений, в посетители Casino.ru шансы сортировать перечень по нескольким критериям: по сумме, вейджеру, наибольшей сумме вывода и т.д. Третитй бездепозитный приз за регистрацию – валютные свои. К огорчению, начислить рубли либо доллары способны лишь известные и известные клубы. С их подмогою у насладиться любой доступной забавой – автоматом, рулеткой, кено, блэкджеком.Если при регистрации указать промокод, возможно гарантировано получить бонус. Где арестовать ваучер? Посетите определенную блоги либо форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В заключительное время игорные жилища начали афишироваться в кинокартинах и телесериалах. Присмотритесь и скорее заметите промокод, который принесёт 500 или 1 000 бонусных руб. <a href=https://ep-team.ru/forum/index.php?PHPSESSID=td1tg7vb8be3rmckkqko0odv6n&action=profile;u=7972>https://ep-team.ru/forum/index.php?PHPSESSID=td1tg7vb8be3rmckkqko0odv6n&action=profile;u=7972</a> 1× slots casino официальный сайт
<b>Смотреть еще похожие новости:</b>
<a href=http://zxz.listbb.ru/memberlist.php?mode=viewprofile&u=925>1×slots официальный зеркало рабочее</a>
<a href=https://games-garant.ru/index.php?subaction=userinfo&user=Jamesneorm>казино 1×slots официальный сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чтоб получить большой выигрыш, избирайте игровые автоматы с предельным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша.
#9565 Charlesgunnyhttp://filmkachat.ru
1×slots акции
Лишь известные и знаменитые азартные заведения имеют позволить себе выдавать бездепы в виде добавочных кредитов. Чаще всего ресурсы начисляют фриспины без депо, которые возможно истратить в лучших аппаратах с высокой отдачей. <a href=http://filmkachat.ru/>1×slots регистрация</a> Начнём с того, что каждое промо за регистрацию подразумевает некоторые обстоятельства. Бездепозитные бонусы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, нужная для исполнения критерий. Пример, возымели благотворительные вращения и выиграли с них 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 рублей, проигрышных или выигрышных, так. После исполненья, бонусный баланс перейдёт на настоящий и станет легкодоступным к выводу.При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, которое можно предназначить этой в казино. <a href=http://moujmasti.com/member.php?174176-Jamesagefe>http://moujmasti.com/member.php?174176-Jamesagefe</a> Бонус без депо за регистрацию в казино (бездепозитный бонус) – это денежный презент от клуба, который начисляется на аккаунт игрока последствии регистрации в казино. Кроме сотворения учетной записи, для получения бездепа, довольно часто требуется ещё и подтвердить контактные данные игрока и/или активировать специальный промо-код. казино 1×slots <a href=https://www.mybbaddons.com/board/user-72019.html>https://www.mybbaddons.com/board/user-72019.html</a>
1×slots casino регистрация 1×slotscasino09k online
Приветственный приз без депо ? презент за регистрацию. Выдается деньгами, фриспинами либо баллами. В последнем случае бонусные баллы применяются для роли в турнирах либо размена на реальные средства. <a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=46200&pid=307420#pid307420>казино 1×slots официальный сайт</a> 1×slots официальный сайт мобильная версия скачать Доступность — бездепозитные призы в казино почаще всего предоставляются свежим игрокам, но случаются случаи, когда приз имеют получить и действующие посетители.Существует ли стратегии для отыгрыша бездепозитных призов? К огорчению нет, на выигрыши или проигрыши с бонусов, казино либо игрок повлиять имеет, отдача игр происходит от создателей игр. <a href=http://slideshow-forum.com/profile.php?id=96734>http://slideshow-forum.com/profile.php?id=96734</a> 1хслотс зеркало
1×slots рабочее зеркало
Перечисленные повыше основные свойства сопровождают фактически любой приз и считаются стандартными для бездепозитных бонусных начислений в казино. Бездепозитные бонусы отличный вариант безвозмездной забавы в игровые автоматы. Многие юзеры сети не понимают, что в казино возможно начать выступать безусловно безвозмездно, а позже вывести выигрыш на банковскую карту или электрический кошелек, иные не доверяют онлайн казино, а третьи успешно играют и выигрывают – и тотчас достаточно великие суммы. <a href=http://detektivy.kz/index.php?subaction=userinfo&user=premiumisolatio>http://detektivy.kz/index.php?subaction=userinfo&user=premiumisolatio</a> 1хслотс зеркало Фриспины — безвозмездные вращения, которые дозволяют игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины считаются самым известным и желаемым обликом приза — благотворительные вращения иногда эффективнее и веселее в отыгрыше, чем остальные облики бездепов.
1×slots casino регистрация 1×slots review live
Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, на данный момент нет. По законодательству Республики Беларусь операторам запрещено начислять бонусы посетителям, не имеющим валютных средств на счете. Мы предлагаем разглядеть актуальные призы онлайн-казино с лицензией, коие соблюдают законодательство РБ. Классическая разновидность приза за творение аккаунта. Его преимущество содержится что, что клиент может самостоятельно подбирать аппараты и делать ставки в них. Иногда список игровых автоматов ограничен оператором, хотя все равно это превосходнее, чем один-единственный доступный слот, как в случае с внедрением фриспинов. Если вы облюбовали себе количество брендов коие вам больше всего приглянулись, для постоянной игры! Таких гемблеров казино довольно предпочитает и оценивает, за частую такие игроки становятся VIP игроками заведения, коим нередко поступают прибыльные предложения повторяющий призов, например же туда входит и бездепозитные.Большинство интернет-казино из нашего топ-10 готовы порадовать вас неповторимыми акциями. Читайте о них в обзорах и на форуме. 1×slots зеркало на сегодня <a href=http://forum.notionmusic.com/memberlist.php?mode=viewprofile&u=23445>http://forum.notionmusic.com/memberlist.php?mode=viewprofile&u=23445</a> Так что основное отличие презента на депозит от бездепа – неотъемлемое пополнение счёта. Вы сможете внести депозит и преувеличить стартовый капитал или отобрать бездеп и при этом не придётся рисковать своими сбережениями. Поспешите выполнить простые требования, и администрация ресурса начисляет щедрое одобрение!Для вывода средств бонус нужно будет отыграть законам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариантами отыгрыша бездепозитного приза до его получения, дабы избежать конфликтных обстановок.
casino 1×slot
Самые популярные способы вывода средств ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электрическим платежным системам на Neteller и Skrill, а пользуются криптовалютными кошельками. Вывод выигрышей возможность исполняться моментально либо занимать от нескольких часов до нескольких суток. Даже не выиграв крупную необходимую, игрок увлекательно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе превосходнейших промоакций с. Достаточно периодически изучать список новых интернет казино с выводом бонуса без депозита в данном разделе.Вышеописанная причина и является основным нюансом, следствии которого операторы отдают доля собственной выгоды на различные рекламные затраты и рекламные кампании. А наиболее действенным тут станут выступать непосредственно бездепозитные призы казино 2022 с выводом за регистрацию. <a href=http://metabolichealthdigest.com/user/raymondnom/?um_action=edit>http://metabolichealthdigest.com/user/raymondnom/?um_action=edit</a> Автоматы непопросту числятся самым знаменитым азартным развлечением. Чтобы усвоить управление и правила, потребуется всего некоторое минут. Ваша задача устроить ставку, определить количество рабочих линий и возможно крутить барабан. Если на экране выпадет выигрышная композиция – вы выиграли! С этой задачей вас посодействуют управится бездепозитные призы казино.Но разу не забывайте пристально читать правила роли в бонусных акциях. Если вы нарушите но бы одно условие, позже вы не можете уладить недоразумение с администрацией. 1хслотс мобильная версия зеркало Бездепозитный бонус казино 2022 с выводом за регистрацию предоставляет возможность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и выяснить качество работы саппорта. Довольно часто, начиная игровой процесс, игрок теснее отказывается останавливаться и делает реальный лепта. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть бесплатно возможно как раз таки с бонусом за регистрацию без надобности вносить депозит.Зарегистрируйтесь. Для регистрации чаще всего довольно установить свой номер телефона и почтовый адресок, в чего ввести приобретенный код из СМС. Возможно, потребуется указать промокод. В правилах промоакции будет написано, где его бы вводить. Иногда это хотелось делать при регистрации, время — теснее после творенья собственного кабинета, на отдельной странице.
<b>Смотреть еще похожие новости:</b>
<a href=https://radios-collector.com/viewtopic.php?f=7&t=45602>1×slots зеркало быструю регистрацию а также мгновенное</a>
<a href=http://forums.indexrise.com/user-307864.html>1хслотс казино зеркало</a>
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=532812>1×slots официальный сайт мобильная версия</a>
<a href=https://hassicity.com/2017/02/16/%d8%aa%d8%a7%d8%b1%d9%8a%d8%ae-%d8%aa%d8%b7%d9%88%d8%b1-%d8%a7%d9%84%d8%b0%d8%b1%d8%a9/comment-page-4951/#comment-590321>1×slots зеркало рабочее</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Большинство клубов привлекают внимание игроков за счёт различных подарков. На 1 веб-сайтах возможно получить виртуальные кредиты, которые откроют доступ ко всему софту. На других же, администрация предлагает безвозмездные вращения для пуска топовых онлайн слотов. Несмотря на разные промоакции, стоит выделить самые основные.
#9566 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на 1хслотс
Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих притязаний, кроме неотъемлемой верификации. Если на веб-сайте предусмотрена неотъемлемая процедура доказательства личности, то вывести выигрыш получится только в проверки данных. Приготовьтесь наполнить анкету и выслать в техподдержку документ, подтверждающий лицо. <a href=http://filmkachat.ru/>1×slos регистрация в 1×slots casino</a> При выполнении условий отыгрыша и верификации, деньги с бонусного счета переводятся на главной и шансы быть выведены на карту либо электрический кошелек. Лимиты на вывод и сроки проведения транзакции зависят от избранной платежной системы.Также, учите, собственно бездепозитный приз можно исключить лишь в том случае, когда будут исполнены все условия отыгрыша. <a href=http://www.haoxin.city/home.php?mod=space&uid=187901&do=profile>http://www.haoxin.city/home.php?mod=space&uid=187901&do=profile</a> Подобные призы без депо предоставляются на более прибыльных критериях. Зачастую они крупнее, а обстоятельства отыгрыша менее жесткие. 1×slots зеркало регистрация <a href=http://jkmulti.vip/bbs/board.php?bo_table=free&wr_id=5620167>http://jkmulti.vip/bbs/board.php?bo_table=free&wr_id=5620167</a> Подтверждение персональной инфы. Все казино настоятельно от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и наличие у пользователя иных аккаунтов (мультиаккаунт запрещен).
казино 1×slots официальный сайт
<a href=http://forum.animogen.com/viewtopic.php?f=9&t=1569953>1×slots официальный зеркало</a> 1 x slots casino Бонус без депозита за регистрацию в казино (бездепозитный приз) – это денежный подарок от клуба, кот-ый начисляется на аккаунт игрока после регистрации в казино. Кроме создания учетной записи, для получения бездепа, довольно часто потребуется ещё и доказать контактные данные игрока и/или активировать специальный промо-код. <a href=http://www.yyxw999.com/space-uid-21404.html>http://www.yyxw999.com/space-uid-21404.html</a> Шаг 4. Активация. Внимательно изучите условия, информацию по ограничениям и сроке действия бонусного предложения. Разобравшись с правилами, возможно активировать приз в собственном офисе (время ? с использованием промокода) либо по запросу в саппорт.Фриспины — безвозмездные вращения, коие дозволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся наиболее известным и желаемым видом бонуса — бесплатные вращения порой эффективнее и веселее в отыгрыше, чем другие виды бездепов. 1×slot зеркало Вейджер (или вагер) ? это минимальная сумма ставок, которую необходимо сделать для вывода валютного бонуса. Обычно она указывается повторяющий множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение.
1×slots регистрация 1×slotscasino09k online
У каждого игорного клубы разные вейджеровые обстоятельства. Чтобы вы гарантировано сумели выполнить их, мы дадим количество советов. Если система начислила маленькую необходимую, не стоит создавать великие ставки – остановитесь на 10–30 центах. Как только сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте играть. В противном случае другого, как приглядеться к другому автомату. <a href=http://www.nuursciencepedia.com/index.php/Benutzer:LayneShrader>http://www.nuursciencepedia.com/index.php/Benutzer:LayneShrader</a> Доступные игры – В неких азартных играх возможно снизить математическое преимущество казино до нескольких десятых процента. В их количестве почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как управляло, в таких забавах ставки идут в зачет вейджера не всецело. Например, может предусматриваться только 50%. В неких забавах бездепозитные бонусы вообщем нельзя отыгрывать.2. Создать новый профиль. Для регистрации нужно заполнить небольшую анкету либо зайдите в индивидуальный офис при помощи соц сетей; x1 slots 1хслотс регистрация перейти на 1×slots Начнём с того, что каждое промо за регистрацию подразумевает некие обстоятельства. Бездепозитные призы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность денежного оборота, нужная для выполнения критерий. Пример, возымели безвозмездные вращения и выиграли с их 1.000 рублей. Выигрыш подлежит отыгрышу вагера в х20. Нужно сделать ставок на 20.000 руб., неудачных либо выигрышных, не. После исполнения, бонусный баланс перейдёт на настоящий и станет доступным к выводу.С этими простыми советами каждое казино с призом за регистрацию способно принести в разы больше выгоды и пользы.
1хслотс регистрация в 1×slots casino
Более крупные предложения встречаются очень редко. Зачастую они доступны лишь VIP-игрокам. В оставшихся случаях им всего сопутствуют очень жесткие условия отыгрыша. Также вероятны вспомогательные условия прочие лимитирования, прописанные в условиях и положения бонусной программки казино.Шаг 4. Активация. Внимательно выучите обстоятельства, информацию по лимитированиям и сроке деянья бонусного предложения. Разобравшись с правилами, возможно активировать приз в личном офисе (от ? с внедрением промокода) либо по запросу в саппорт. Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы которые появляются у новичков. Каждый игрок обязан сперва детально изучить обстоятельства по получению и отыгрышу приглянувшегося презента. Если всё устраивает, поспешите арестовать бесплатные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик момент начать вращать барабаны лучших слотов. 1×slots регистрация 1×slots casino c2d ru <a href=http://youyanggse.co.kr/board/bbs/board.php?bo_table=free&wr_id=216056>http://youyanggse.co.kr/board/bbs/board.php?bo_table=free&wr_id=216056</a> Чтобы получить возможность вывести выгода с бездепозитного бонуса в казино, необходимо выполнить ряд критерий:Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут устанавливает лимитирование для клиентов. Конечно, это возможно счесть некоторым неудобством для игрока, но справедливости ради отметить, собственно выбор автоматов всё равно остаётся довольно великим.
1 хслот регистрация в 1×slots casino
Важно, убедитесь в, собственно раньше не регились в избранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи. На бонусные начисления шансы быть установлены вспомогательные лимитирования, коие Вы не учли при отыгрыше. Пока приз всецело не отыгран — средства из казино не выводятся.Доступные забавы – В некоторых азартных забавах возможно снизить математическое преимущество казино до нескольких десятых процента. В их числе почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и другие модели. Как верховодило, в этих играх ставки идут в зачет вейджера не всецело. Например, возможность предусматриваться только 50%. В некоторых забавах бездепозитные бонусы вообще невозможно отыгрывать. <a href=https://forum.bedwantsinfo.nl/member.php?action=profile&uid=91756>https://forum.bedwantsinfo.nl/member.php?action=profile&uid=91756</a> Наиболее известные гонорары среди гэмблеров – бездепозитные бонусы казино. Это не изумительно, ведь возможно получить бесплатные вращения или виртуальные кредиты, и всем не придётся пополнять счёт, рисковать личными деньгами. Удастся насладиться разнородными развлечениями даже выиграть солидную сумму, избегая серьёзного риска. 1×slots зеркало регистрация то дальше необходимо пройти
<b>Смотреть еще похожие новости:</b>
<a href=http://www.predictive-datascience.com/forum/member.php?action=profile&uid=13119>1×slots рабочее зеркало</a>
<a href=http://www.arka-bahce.org/forum/showthread.php?p=760651#post760651>1×slots официальный сайт мобильная версия скачать</a>
<a href=https://forum.vn.ua/showthread.php?p=3271699#post3271699>1×slots регистрация 1×slots review live</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если при регистрации указать промокод, можно гарантировано получить приз. Где взять ваучер? Посетите направленные блоги либо форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В заключительное время игорные дома начали рекламироваться в фильмах и сериалах. Присмотритесь и всего заметите промокод, который принесёт 500 или 1 000 бонусных руб. Некоторые казино имеют предлагать посетителям бездепы за подтверждение номера либо почты либо репост на страницу в соц сетях.
#9567 Charlesgunny
бывшие казино порно с Бондаренко Анастасия Борисовна <a href=https://rucriminal.info/>porno Юлия Канакина, скелетонистка</a> порно с Евгения Медведева самое казино <a href=https://rucriminal.info/>7k casino бонус</a> Преподобная Надежда Александровна порно рабочие зеркала казино Семёнова Татьяна Владимировна порно вавада казино retro casino 7k casino зеркало casino online зеркало
#9568 Charlesgunny
казино смотреть онлайн бесплатно казино смотреть онлайн <a href=https://rucriminal.info/>casino игровой автомат</a> почему в казино нет окон 7k casino зеркало рабочее <a href=https://rucriminal.info/>зеркала официальных сайтов казино</a> 7k casino скачать вывод казино включи казино лучшие бесплатные онлайн казино 7k casino бонус ев казино porno Ангелина Гончаренко, хоккеистка
#9569 Charlesgunny
казино pin up casino зеркало <a href=https://rucriminal.info/>порно с Анастасия Потапова, теннисистка</a> официальные сайты казино порно с Дронова Александра Викторовна <a href=https://rucriminal.info/>порно с Анна Калинская (теннис)</a> порно с Антропова Валентина Викторовна порно с Александр Головин (футбол) casino на телефон pinco casino Набиуллина Эльвира Сахипзадовна порно вывод казино казино рублях
#9570 Charlesgunny
pinco casino casino x <a href=https://rucriminal.info/>casino ru</a> up casino скачать Набиуллина Эльвира Сахипзадовна порно <a href=https://rucriminal.info/>порно с Дронова Александра Викторовна</a> какие казино Мухтиярова Елена Вячеславовна порно Светлана Ходченкова casino рабочее казино фильм казино рублях вывод казино
#9571 Charlesgunny
casino зеркало сегодня порно с Анастасия Потапова, теннисистка <a href=https://rucriminal.info/>почему в казино не бывает настенных часов</a> казино на деньги порно с Петр Ян (ММА) <a href=https://rucriminal.info/>casino 7k сегодня</a> играющие казино онлайн бесплатно фильм казино слоты казино casino сегодня казино можно официальные зеркала казино casino бонус
#9572 Charlesgunny
макао казино казино пин <a href=https://rucriminal.info/>казино онлайн бесплатно</a> порно с Владимир Минеев (ММА) порно с Илья Осипов (киберспорт) <a href=https://rucriminal.info/>казино онлайн</a> 7k casino бонус вывод казино рабочие зеркала казино pin up casino пин порно с Федор Чалов (футбол) casino на телефон ешь казино
#9573 XRumer23Coics
Megaweb8-at снова работает!!!
Подробнее https://telegra.ph/…ternet-11-05
#megaweb3 #M3GA-AT #M3GA-GL
#9574 Charlesgunny
казино онлайн бесплатно ramenbet casino <a href=https://rucriminal.info/>porno Ангелина Гончаренко, хоккеистка</a> retro casino бесплатно играем казино <a href=https://rucriminal.info/>porno Яна Троянова</a> 7k casino скачать порно с Анна Калинская (теннис) Лут Оксана Николаевна порно порно с Каролина Севастьянова cometa casino порно с Георгий Джикия (футбол) зеркала официальных сайтов казино
#9575 Charlesgunny
casino рабочее 7k casino зеркало <a href=https://rucriminal.info/>new casino</a> часы казино pin up casino buzz <a href=https://rucriminal.info/>up casino зеркало</a> Комарова Наталья Владимировна порно порно с Арина и Дина Аверины, гимнастки порно с Захарова Мария Владимировна porno Ангелина Гончаренко, хоккеистка вывод казино Хорова Наталья Александровна порно r7 casino
#9576 Charlesgunny
казино вход казино <a href=https://rucriminal.info/>casinos winning</a> порно с Артемий Панарин (хоккей) казино вход <a href=https://rucriminal.info/>казино вход</a> online casino официальный Скворцова Вероника Игоревна порно какие казино 7k casino бонус рабочие зеркала казино порно с Абрамченко Виктория Валериевна porno Катерина Шпица
#9577 Charlesgunny
casino ru порно с Юлия Ефимова, пловчиха <a href=https://rucriminal.info/>casino x</a> casino daddy вавада казино <a href=https://rucriminal.info/>порно с Захарова Мария Владимировна</a> casino порно с Алексей Миранчук (футбол) казино ставка casinos winning порно с Каролина Севастьянова порно с Евгений Малкин (хоккей) casinos winning
#9578 Charlesgunny
7k casino бонус демо казино <a href=https://rucriminal.info/>porno Вера Бирюкова, гимнастка</a> почему в казино нет часов симулятор казино <a href=https://rucriminal.info/>человек казино</a> casino андроид Семёнова Татьяна Владимировна порно пинко casino ев казино casino ап лучшие казино бесплатно casino автомат
#9579 Charlesgunny
casino pin официальный casino приложения <a href=https://rucriminal.info/>порно с Владимир Минеев (ММА)</a> Самойлова Алла Владимировна порно pin ап casino <a href=https://rucriminal.info/>Преподобная Надежда Александровна порно</a> casino online зеркало porno Юлия Канакина, скелетонистка рокс казино Матвиенко Валентина Ивановна порно casino скачать приложение зеркала казино casino betting
#9580 Charlesgunny
порно с Петр Ян (ММА) Окладникова Ирина Андреевна порно <a href=https://rucriminal.info/>казино зеркало сегодня</a> porno Александр Соболев (футбол) официальные зеркала казино <a href=https://rucriminal.info/>казино онлайн</a> порно с Петр Ян (ММА) Мухтиярова Елена Вячеславовна порно суть казино казино на деньги лучшие онлайн казино porno Екатерина Ефременкова, шорт-трекистка водка казино
#9581 Charlesgunny
часы казино играющие казино <a href=https://rucriminal.info/>pin up casino</a> играющие казино онлайн порно с Абрамченко Виктория Валериевна <a href=https://rucriminal.info/>Анна Михалкова</a> порно с Евгений Малкин (хоккей) vavada casino бесплатно играем казино 1×slots casino Приезжева Екатерина Геннадьевна порно порно с Арина и Дина Аверины, гимнастки порно с Захарова Мария Владимировна
#9582 Charlesgunny
кент казино casino com <a href=https://rucriminal.info/>карты казино</a> как выиграть в казино бесплатно фильм казино <a href=https://rucriminal.info/>порно с Анна Щербакова, фигуристка</a> casino betting почему казино casino актуальное зеркало 1×slots casino рокс казино pin up casino зеркало сколько казино
#9583 Charlesgunny
porno Илона Маркова, хоккеистка казино сочи <a href=https://rucriminal.info/>казино 5</a> кент casino vavada casino <a href=https://rucriminal.info/>casino зеркало сегодня рабочее</a> порно с Арина и Дина Аверины, гимнастки официальные сайты казино cometa casino порно с Анастасия Потапова, теннисистка слоты казино porno Александр Соболев (футбол) порно с Федор Чалов (футбол)
#9584 Charlesgunny
porno Юлия Канакина казино 5 <a href=https://rucriminal.info/>Юдаева Ксения Валентиновна порно</a> Юдаева Ксения Валентиновна порно Черкесова Бэлла Мухарбиевна порно <a href=https://rucriminal.info/>казино большая</a> online casino Черкесова Бэлла Мухарбиевна порно pin up casino buzz porno Алена Косторная (фигурное катание) порно с Арина и Дина Аверины, гимнастки Ирина Горбачева cat casino
#9585 Charlesgunny
casino официальный сайт Набиуллина Эльвира Сахипзадовна порно <a href=https://rucriminal.info/>cat casino</a> казино регистрации Комарова Наталья Владимировна порно <a href=https://rucriminal.info/>казино вулкан</a> порно с Анна Щербакова, фигуристка up casino зеркало porno Дарья Мороз про казино вавада казино Львова-Белова Мария Алексеевна порно Крючкова Полина Викторовна порно
#9586 Charlesgunny
retro casino игры казино <a href=https://rucriminal.info/>казино зеркало сегодня</a> пин casino порно с Васильева Татьяна Викторовна <a href=https://rucriminal.info/>казино в россии</a> порно с Каролина Севастьянова казино смотреть онлайн бесплатно скачиваемые казино Валентина Матвиенко порно казино ли casino актуальное зеркало почему в казино не бывает настенных часов
#9587 Charlesgunny
как выиграть в казино казино ли <a href=https://rucriminal.info/>казино фильм</a> казино онлайн porno Екатерина Ефременкова, шорт-трекистка <a href=https://rucriminal.info/>порно с Георгий Джикия (футбол)</a> Самойлова Алла Владимировна порно kent casino регистрация casino сайты ап казино казино ев казино Комарова Наталья Владимировна порно
#9588 Charlesgunny
слоты казино пинко casino <a href=https://rucriminal.info/>porno Юлия Канакина</a> casino промокод реального казино <a href=https://rucriminal.info/>porno Алена Михайлова</a> скачать casino на андроид ешь казино лучшие казино бесплатно казино вход ограбление казино Комарова Наталья Владимировна порно рейтинг казино
#9589 Charlesgunny
pin up casino казино в россии <a href=https://rucriminal.info/>какие казино</a> Петрова Ольга Викторовна порно Кузнецова Анна Юрьевна порно <a href=https://rucriminal.info/>порно с Алексей Миранчук (футбол)</a> автомат казино 7k casino unlim casino casino бездепозитный симулятор казино Разуваева Ксения Денисовна порно казино рублях
#9590 Charlesgunny
казино рояль пинап казино <a href=https://rucriminal.info/>Львова-Белова Мария Алексеевна порно</a> Шевцова Татьяна Викторовна порно pin casino зеркало <a href=https://rucriminal.info/>порно с Голикова Татьяна Алексеевна</a> бесплатно фильм казино порно с Александр Большунов (лыжные гонки) casino online зеркало песня казино порно с Каролина Севастьянова casino рабочее зеркало casino riobet
#9591 Charlesgunny
casino официальный сайт porno Мира Андреева (теннис) <a href=https://rucriminal.info/>порно с Баталина Ольга Юрьевна</a> официальное казино вход casino x <a href=https://rucriminal.info/>Матвиенко Валентина Ивановна порно</a> гта казино Петрова Ольга Викторовна порно официальная казино казино смотреть онлайн Мухтиярова Елена Вячеславовна порно рабочее казино ап казино
#9592 Charlesgunny
up casino официальный Семёнова Татьяна Владимировна порно <a href=https://rucriminal.info/>порно с Алексей Миранчук (футбол)</a> up casino официальный 7k casino <a href=https://rucriminal.info/>porno Юлия Канакина</a> слот casino бывшие казино pin up casino top top бесплатное казино ев казино сайт казино вход Преподобная Надежда Александровна порно
#9593 Charlesgunny
казино фильм порно с Алина Загитова, фигуристка <a href=https://rucriminal.info/>porno Дарья Клишина</a> кент казино champion casino <a href=https://rucriminal.info/>Яровая Ирина Анатольевна порно</a> up casino скачать gama casino porno Юлия Канакина, скелетонистка самое казино казино ли casino com casino официальный зеркало
#9594 Charlesgunny
Скворцова Вероника Игоревна порно pin up casino официальный <a href=https://rucriminal.info/>скачиваемые казино</a> Приезжева Екатерина Геннадьевна порно песня казино <a href=https://rucriminal.info/>пина casino</a> unlim casino casino бонус гама казино new casino casino com Комарова Наталья Владимировна порно порно с Захарова Мария Владимировна
#9595 Charlesgunny
лучшие бесплатные онлайн казино почему казино <a href=https://rucriminal.info/>Фастова Елена Владимировна порно</a> casino актуальное зеркало casinos xyz <a href=https://rucriminal.info/>смотреть фильм казино</a> водка казино pin up casino скачать porno Анастасия Янькова, боксерка pin casino суть казино скачать casino на андроид porno Яна Троянова
#9596 Charlesgunny
porno Елизавета Туктамышева gama casino <a href=https://rucriminal.info/>casino рабочее зеркало</a> porno Андрей Рублев (теннис) casino автомат <a href=https://rucriminal.info/>порно с Абрамченко Виктория Валериевна</a> vodka casino зеркала казино up casino скачать водка казино реального казино бесплатное казино Семёнова Татьяна Владимировна порно
#9597 Charlesgunny
casino рабочее рейтинг казино <a href=https://rucriminal.info/>порно с Максим Глушенков (футбол)</a> porno Анна Сидорова, керлингистка porno Игорь Акинфеев (футбол) <a href=https://rucriminal.info/>Ирина Горбачева</a> Петрова Ольга Викторовна порно Александра Бортич casino buzz пинко casino porno Илья Ковальчук (хоккей) казино без Светлана Ходченкова
#9598 Charlesgunny
часы казино 7k casino зеркало <a href=https://rucriminal.info/>порно с Евгения Медведева</a> cat casino bet casino <a href=https://rucriminal.info/>porno Александра Степанова, фигуристка</a> ешь казино casino вход 1×slots casino порно с Максим Глушенков (футбол) порно с Матвей Сафонов (футбол) казино сегодня casino рабочее зеркало
#9599 Charlesgunny
сайт pin up casino казино смотреть онлайн <a href=https://rucriminal.info/>casino на телефон</a> гта онлайн казино смотреть фильм казино <a href=https://rucriminal.info/>casino зеркало сегодня</a> официальные зеркала казино up casino скачать порно с Баталина Ольга Юрьевна champion casino vodka casino 7k casino сайт рейтинг казино
#9600 Charlesgunny
porno Нина Пирогова, хоккеистка порно с Алексей Миранчук (футбол) <a href=https://rucriminal.info/>bet casino</a> casino зеркало сегодня рабочее включи казино <a href=https://rucriminal.info/>kometa casino</a> retro casino Радченко Светлана Юрьевна порно демо казино Приезжева Екатерина Геннадьевна порно porno Алена Михайлова porno Илона Маркова, хоккеистка порно с Сергей Бобровский (хоккей)
#9601 Charlesgunny
пина casino porno Светлана Ходченкова <a href=https://rucriminal.info/>casino на телефон</a> 7k casino официальный Набиуллина Эльвира Сахипзадовна порно <a href=https://rucriminal.info/>порно с Алина Загитова, фигуристка</a> порно с Илюшникова Татьяна Александровна порно с Александр Большунов (лыжные гонки) казино проиграл вывод казино сайт казино вход casino pin официальный Комарова Наталья Владимировна порно
#9602 Charlesgunny
pinco casino казино сегодня <a href=https://rucriminal.info/>Елизавета Боярская</a> почему казино online casino официальный <a href=https://rucriminal.info/>Фастова Елена Владимировна порно</a> порно с Сергей Бобровский (хоккей) самое казино up casino скачать vodka casino casino online зеркало casino актуальное зеркало казино без
#9603 Charlesgunny
Разуваева Ксения Денисовна порно макао казино <a href=https://rucriminal.info/>бесплатно фильм казино</a> porno Анна Сидорова, керлингистка porno Юлия Пересильд <a href=https://rucriminal.info/>казино 1</a> порно с Арина и Дина Аверины, гимнастки бывшие казино бесплатно фильм казино casino com porno Игорь Акинфеев (футбол) casino вход porno Юлия Канакина, скелетонистка
#9604 Charlesgunny
порно с Анна Щербакова, фигуристка casino рабочее <a href=https://rucriminal.info/>игры казино</a> казино смотреть онлайн бесплатно up casino официальный <a href=https://rucriminal.info/>казино 1</a> ев казино pin up casino скачать пин ап casino pin up top порно с Евгения Медведева, фигуристка порно с Дарья Касаткина (теннис) порно с Алина Загитова почему в казино не бывает настенных часов
#9605 Charlesgunny
Набиуллина Эльвира Сахипзадовна порно про казино <a href=https://rucriminal.info/>казино гта 5</a> почему в казино не бывает настенных часов porno Виктория Баркова, легкоатлетка <a href=https://rucriminal.info/>online casino официальный</a> порно с Виктория Синицина, фигуристка порно с Каролина Севастьянова casino сайты порно с Владимир Минеев (ММА) порно с Дарья Клишина, легкоатлетка Петрова Ольга Викторовна порно казино на деньги
#9606 Charlesgunny
фреш казино casino betting <a href=https://rucriminal.info/>bet casino</a> vavada casino рейтинг казино <a href=https://rucriminal.info/>порно с Арина и Дина Аверины, гимнастки</a> сайт казино зеркало игры казино porno Игорь Акинфеев (футбол) pin up casino скачать Окладникова Ирина Андреевна порно казино онлайн бесплатно пина casino
#9607 Charlesgunny
казино онлайн бесплатно top casino <a href=https://rucriminal.info/>порно с Алексей Миранчук (футбол)</a> играющие казино порно с Дарья Касаткина (теннис) <a href=https://rucriminal.info/>кент казино</a> pinco casino порно с Александр Большунов (лыжные гонки) casino регистрации казино фильм смотреть онлайн водка казино Набиуллина Эльвира Сахипзадовна порно porno Александр Соболев (футбол)
#9608 Charlesgunny
казино фильм казино рублях <a href=https://rucriminal.info/>Попова Анна Юрьевна порно</a> porno Вера Бирюкова, гимнастка казино рублях <a href=https://rucriminal.info/>casino online зеркало</a> Яровая Ирина Анатольевна порно про казино casino официальный сайт online casino 7k vodka casino porno Виктория Баркова, легкоатлетка про казино
#9609 Charlesgunny
про казино яндекс казино <a href=https://rucriminal.info/>самое казино</a> casino riobet porno Алена Косторная (фигурное катание) <a href=https://rucriminal.info/>казино рояль смотреть</a> казино рулетка порно с Артемий Панарин (хоккей) про казино Нургалиева Эльвира Рамиловна порно кент casino казино вход казино в россии
#9610 Charlesgunny
сайты казино человек казино <a href=https://rucriminal.info/>online casino официальный</a> casino online зеркало ап казино <a href=https://rucriminal.info/>casino приложения</a> up casino скачать фильмы казино рояль porno Анастасия Янькова, боксерка 1×slots casino порно с Александр Головин (футбол) pinco casino почему в казино нет часов
#9611 Charlesgunny
казино регистрации 7k casino бонус <a href=https://rucriminal.info/>казино фильм</a> порно с Илюшникова Татьяна Александровна pin up casino пин ап <a href=https://rucriminal.info/>рокс казино</a> суть казино casino официальный зеркало casino riobet бесплатное казино casino buzz Нургалиева Эльвира Рамиловна порно казино вход
#9612 Charlesgunny
фреш казино pinco casino <a href=https://rucriminal.info/>Семёнова Татьяна Владимировна порно</a> pin casino ешь казино <a href=https://rucriminal.info/>bitz casino</a> casino скачать приложение казино сочи порно с Илюшникова Татьяна Александровна casino pin официальный Хорова Наталья Александровна порно казино большая black russia казино
#9613 Charlesgunny
казино сочи 7k casino зеркало рабочее <a href=https://rucriminal.info/>порно с Анна Щербакова, фигуристка</a> яндекс казино порно с Алина Загитова <a href=https://rucriminal.info/>vodka casino</a> 1win casino порно с Дарья Клишина, легкоатлетка пин ап casino Фастова Елена Владимировна порно рейтинг казино casinos xyz порно с Алексей Миранчук (футбол)
#9614 Charlesgunny
casino скачать приложение казино смотреть онлайн <a href=https://rucriminal.info/>пин ап casino pin</a> Александра Бортич казино онлайн <a href=https://rucriminal.info/>казино рублях</a> порно с Владимир Минеев (ММА) лучшие бесплатные онлайн казино почему казино слот casino 7k casino бонус Скворцова Вероника Игоревна порно casino зеркало сайта
#9615 Charlesgunny
бесплатное казино cometa casino <a href=https://rucriminal.info/>порно с Владимир Минеев (ММА)</a> porno Екатерина Ефременкова, шорт-трекистка фильмы казино рояль <a href=https://rucriminal.info/>порно с Сергей Бобровский (хоккей)</a> казино смотреть онлайн бесплатно new casino кент casino porno Алена Косторная (фигурное катание) cat casino порно с Максим Глушенков (футбол) порно с Каролина Севастьянова
#9616 Charlesgunny
casino pin официальный casino daddy <a href=https://rucriminal.info/>порно с Арина и Дина Аверины, гимнастки</a> песня казино порно с Евгения Медведева <a href=https://rucriminal.info/>Светлана Ходченкова</a> скачать pin casino casino игровой автомат порно с Алина Загитова Шевцова Татьяна Викторовна порно казино без официальные сайты казино casino промокод
#9617 Charlesgunny
casino сегодня casino x <a href=https://rucriminal.info/>Радченко Светлана Юрьевна порно</a> up casino зеркало сколько казино <a href=https://rucriminal.info/>порно с Карен Хачанов (теннис)</a> casino игровой автомат симулятор казино автомат казино пинко casino casino играть гта казино porno Юлия Пересильд
#9618 Charlesgunny
r7 casino порно с Афонина Марина Игоревна <a href=https://rucriminal.info/>porno Ангелина Гончаренко, хоккеистка</a> gama casino win win casino <a href=https://rucriminal.info/>casino автомат</a> pin up casino buzz почему в казино не бывает настенных часов гама казино 7k casino официальный Крючкова Полина Викторовна порно лучшие казино бесплатно казино сегодня
#9619 Charlesgunny
Скворцова Вероника Игоревна порно порно с Александр Головин (футбол) <a href=https://rucriminal.info/>casino pin официальный</a> Кузнецова Анна Юрьевна порно лучшие казино бесплатно <a href=https://rucriminal.info/>порно с Голикова Татьяна Алексеевна</a> 7k casino 7k casino фреш казино пинко casino vodka casino казино пину порно с Александр Головин (футбол)
#9620 Charlesgunny
casino ru сколько казино <a href=https://rucriminal.info/>порно с Владимир Минеев (ММА)</a> бесплатно фильм казино официальное казино вход <a href=https://rucriminal.info/>официальная казино</a> про казино casino на телефон порно с Георгий Джикия (футбол) Комарова Наталья Владимировна порно pin up casino top top казино большая порно с Кирьянова Дарья Борисовна
#9621 Charlesgunny
слот casino retro casino <a href=https://rucriminal.info/>Елена Лядова</a> porno Дарья Мороз pin casino зеркало <a href=https://rucriminal.info/>казино в россии</a> casino онлайн почему в казино не бывает настенных часов порно с Голикова Татьяна Алексеевна online casino 7k Разуваева Ксения Денисовна порно бесплатно фильм казино casino 7k сегодня
#9622 CasinoJethttps://jet-casino-apk.ru/jet-casino/
<a href=http://norwayescortzone.com/go.php?to=https://jet-casino-apk.ru/jet-casino/>https://jet-casino-apk.ru/jet-casino/</a> <a href=https://fabera.blog.idnes.cz/redir.aspx?url=https://jet-casino-apk.ru/jet-casino/>https://jet-casino-apk.ru/jet-casino/</a> <a href=https://phuketcity.info/default.asp?content=https://jet-casino-apk.ru/jet-casino/>https://jet-casino-apk.ru/jet-casino/</a> <a href=https://pharmap-congress.com/bitrix/redirect.php?goto=https://jet-casino-apk.ru/jet-casino/>https://jet-casino-apk.ru/jet-casino/</a> <a href=https://jmt0.t.me/s/worldjet-casino-apk.ru/jet-casino/net/url?q=https://jet-casino-apk.ru/jet-casino/>https://jet-casino-apk.ru/jet-casino/</a> <a href=http://volchiha22.ru/go/?url=https://jet-casino-apk.ru/jet-casino/>https://jet-casino-apk.ru/jet-casino/</a> <a href=http://ronl.org/redirect?url=https://jet-casino-apk.ru/jet-casino/>https://jet-casino-apk.ru/jet-casino/</a> <a href=http://mediarakurs.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=https://jet-casino-apk.ru/jet-casino/>https://jet-casino-apk.ru/jet-casino/</a> <a href=http://chammss.byus.net/zboard/skin/ruvin_fine_link/site_link.php?sitelink=https://jet-casino-apk.ru/jet-casino/>https://jet-casino-apk.ru/jet-casino/</a> <a href=http://1888bets.com.xx3.kz/go.php?url=https://jet-casino-apk.ru/jet-casino/>https://jet-casino-apk.ru/jet-casino/</a> <a href=http://www.showcase-music.com/counter.php?link=https://jet-casino-apk.ru/jet-casino/>https://jet-casino-apk.ru/jet-casino/</a> <a href=http://yeshicai.com.xx3.kz/go.php?url=https://jet-casino-apk.ru/jet-casino/>https://jet-casino-apk.ru/jet-casino/</a> <a href=http://www.bitrix.de/bitrix/redirect.php?event1=facebook-out&event2=&event3=&goto=https://jet-casino-apk.ru/jet-casino/>https://jet-casino-apk.ru/jet-casino/</a> <a href=http://gastroman.market/bitrix/redirect.php?event1=&event2=&event3=&goto=https://jet-casino-apk.ru/jet-casino/>https://jet-casino-apk.ru/jet-casino/</a> <a href=http://www.razinskiy.com/forum/away.php?s=https://jet-casino-apk.ru/jet-casino/>https://jet-casino-apk.ru/jet-casino/</a>
Upload latest version of the application online casino jet – win today! <a href=http://www.foodspot.com/Search/external.aspx?fs=20167&url=www.mongodb.com/…rvers/264613>https://jet-casino-apk.ru/jet-casino/</a> <a href=https://koneenrakentajakilta.fi/o.php?l=https://jet-casino-apk.ru/jet-casino/>https://jet-casino-apk.ru/jet-casino/</a> <a href=https://kramarczuks.com/?URL=https://jet-casino-apk.ru/jet-casino/>https://jet-casino-apk.ru/jet-casino/</a> <a href=http://alt1.toolbarqueries.google.co.vi/url?q=https://jet-casino-apk.ru/jet-casino/>https://jet-casino-apk.ru/jet-casino/</a> <a href=http://www.realchannel.com/__media__/js/netsoltrademark.php?d=https://jet-casino-apk.ru/jet-casino/>https://jet-casino-apk.ru/jet-casino/</a> <a href=https://e-imamu.edu.sa/cas/logout?url=https://jet-casino-apk.ru/jet-casino/>https://jet-casino-apk.ru/jet-casino/</a> <a href=https://elderly.bokss.org.hkTextOnly/index/zht?return_ab=https://jet-casino-apk.ru/jet-casino/>https://jet-casino-apk.ru/jet-casino/</a> <a href=http://www.urgnano.eu/LinkClick.aspx?link=https://jet-casino-apk.ru/jet-casino/>https://jet-casino-apk.ru/jet-casino/</a> <a href=http://araujorojas.com.es.xx3.kz/go.php?url=https://jet-casino-apk.ru/jet-casino/>https://jet-casino-apk.ru/jet-casino/</a> <a href=https://md.uz/bitrix/click.php?goto=https://jet-casino-apk.ru/jet-casino/>https://jet-casino-apk.ru/jet-casino/</a> <a href=https://factor-vasteras.wondr.se/ifr-fix/?back=https://jet-casino-apk.ru/jet-casino/>https://jet-casino-apk.ru/jet-casino/</a> <a href=http://m.enuri.com/mobilefirst/move.jsp?freetoken=outlink&vcode=49&plno=3253684189&url=4serial.comhttps://jet-casino-apk.ru/jet-casino/>https://jet-casino-apk.ru/jet-casino/</a> <a href=https://fresh105fm.ru/bitrix/rk.php?goto=https://jet-casino-apk.ru/jet-casino/>https://jet-casino-apk.ru/jet-casino/</a> <a href=http://jpn1.fukugan.com/rssimg/cushion.php?url=jet-casino-apk.ru/jet-casino/>https://jet-casino-apk.ru/jet-casino/</a> <a href=http://www.tom-bud.pl/index.php?ref=4&ext=https://jet-casino-apk.ru/jet-casino/>https://jet-casino-apk.ru/jet-casino/</a>
#9623 Charlesgunny
1go casino Попова Анна Юрьевна порно <a href=https://rucriminal.info/>Скоробогатова Ольга Николаевна порно</a> порно с Александр Головин (футбол) бесплатное казино <a href=https://rucriminal.info/>porno Елизавета Туктамышева</a> 7k casino зеркало пин casino porno Александр Соболев (футбол) порно с Голикова Татьяна Алексеевна casino рабочее Кузнецова Анна Юрьевна порно casino онлайн
#9624 Charlesgunny
пин ап казино casino промокод <a href=https://rucriminal.info/>Яровая Ирина Анатольевна порно</a> казино играть бесплатно играем казино <a href=https://rucriminal.info/>pin ап casino</a> рабочие зеркала казино казино ставка casino актуальное зеркало cometa casino Матвиенко Валентина Ивановна порно pinco casino casino онлайн
#9625 Charlesgunny
порно с Зырянова Анастасия Владимировна порно с Антропова Валентина Викторовна <a href=https://rucriminal.info/>фильмы казино рояль</a> porno Виктория Баркова, легкоатлетка пин ап казино <a href=https://rucriminal.info/>смотреть фильм казино</a> порно с Каролина Севастьянова игры казино казино большая казино смотреть пин up casino казино пин казино рулетка
#9626 Charlesgunny
Яровая Ирина Анатольевна порно ап казино <a href=https://rucriminal.info/>порно с Юлия Ефимова</a> порно с Васильева Татьяна Викторовна порно с Алина Загитова <a href=https://rucriminal.info/>смотреть фильм казино</a> cometa casino Попова Анна Юрьевна порно casino официальный сайт порно с Виктория Синицина, фигуристка казино смотреть онлайн порно с Елена Никитина, скелетонистка pin up casino buzz
#9627 Charlesgunny
почему в казино нет часов водка казино <a href=https://rucriminal.info/>кент casino</a> лучшие онлайн казино retro casino <a href=https://rucriminal.info/>гама казино</a> new casino порно с Илюшникова Татьяна Александровна бесплатное казино макао казино порно с Илюшникова Татьяна Александровна казино пину зеркала официальных сайтов казино
#9628 Charlesgunny
макао казино порно с Александр Большунов (лыжные гонки) <a href=https://rucriminal.info/>водка казино</a> Яровая Ирина Анатольевна порно porno Андрей Рублев (теннис) <a href=https://rucriminal.info/>скачать casino на андроид</a> сайт pin up casino человек казино porno Анастасия Янькова, боксерка porno Илона Маркова, хоккеистка 1×slots casino 7k casino скачать casino online зеркало
#9629 Charlesgunny
пин ап casino Окладникова Ирина Андреевна порно <a href=https://rucriminal.info/>casinos winning</a> казино рояль ограбление казино <a href=https://rucriminal.info/>Яровая Ирина Анатольевна порно</a> казино ставка играющие казино онлайн порно с Георгий Джикия (футбол) Манилова Алла Юрьевна порно Юдаева Ксения Валентиновна порно порно с Илья Осипов (киберспорт) casino riobet
#9630 Charlesgunny
7k casino зеркало порно с Дарья Касаткина (теннис) <a href=https://rucriminal.info/>рокс казино</a> казино смотреть онлайн бесплатно casino игровой автомат <a href=https://rucriminal.info/>porno Виктория Баркова, легкоатлетка</a> casino автомат Разуваева Ксения Денисовна порно black russia казино зеркала официальных сайтов казино включи казино 7k casino официальный Яровая Ирина Анатольевна порно
#9631 Charlesgunny
порно с Гатагова Ольга Анатольевна казино рублях <a href=https://rucriminal.info/>Приезжева Екатерина Геннадьевна порно</a> порно с Бондаренко Анастасия Борисовна официальная казино <a href=https://rucriminal.info/>порно с Анна Щербакова, фигуристка</a> Светлана Ходченкова рабочие зеркала казино почему в казино нет окон порно с Бондаренко Анастасия Борисовна порно с Анна Щербакова, фигуристка porno Яна Троянова водка казино
#9632 Charlesgunny
1win casino porno Яна Троянова <a href=https://rucriminal.info/>пина casino</a> сколько казино пинко casino <a href=https://rucriminal.info/>Яровая Ирина Анатольевна порно</a> up casino зеркало пин up casino casino регистрации win win casino Семёнова Татьяна Владимировна порно казино porno Елизавета Туктамышева
#9633 Charlesgunny
казино смотреть порно с Каролина Севастьянова <a href=https://rucriminal.info/>казино вулкан</a> casino riobet casino промокод <a href=https://rucriminal.info/>pin up casino пин</a> casino скачать приложение скачать casino на андроид porno Александра Степанова, фигуристка pin ап casino порно с Диана Шнайдер (теннис) bitz casino Любимова Ольга Борисовна порно
#9634 Charlesgunny
человек казино casino <a href=https://rucriminal.info/>казино сочи</a> Валентина Матвиенко порно порно с Юлия Ефимова <a href=https://rucriminal.info/>казино пину</a> casino com порно с Абрамченко Виктория Валериевна porno Илона Маркова, хоккеистка казино на деньги казино смотреть онлайн бесплатно порно с Абрамченко Виктория Валериевна казино
#9635 Charlesgunny
Светлана Ходченкова бесплатно фильм казино <a href=https://rucriminal.info/>кент казино</a> new casino porno Ангелина Гончаренко, хоккеистка <a href=https://rucriminal.info/>пин up casino</a> online casino 7k казино большая порно с Ирина Сидоркова porno Катерина Шпица скачиваемые казино пин ап casino up casino
#9636 Charlesgunny
про казино пин ап casino <a href=https://rucriminal.info/>казино 1</a> casino автомат casino приложения <a href=https://rucriminal.info/>Шевцова Татьяна Викторовна порно</a> бывшие казино Комарова Наталья Владимировна порно казино большая казино на деньги casino промокод casino бездепозитный порно с Арина и Дина Аверины, гимнастки
#9637 Charlesgunny
pin up casino зеркало порно с Диана Шнайдер (теннис) <a href=https://rucriminal.info/>порно с Васильева Татьяна Викторовна</a> Львова-Белова Мария Алексеевна порно порно с Матвей Сафонов (футбол) <a href=https://rucriminal.info/>порно с Петр Ян (ММА)</a> black russia казино как выиграть в казино pin up casino скачать демо казино порно с Илюшникова Татьяна Александровна казино фильм онлайн казино рояль смотреть
#9638 Charlesgunny
самое казино casino автомат <a href=https://rucriminal.info/>porno Катерина Шпица</a> Разуваева Ксения Денисовна порно pin up casino зеркало <a href=https://rucriminal.info/>champion casino</a> казино фильм смотреть онлайн порно с Кирьянова Дарья Борисовна порно с Константин Тюкавин (футбол) vodka casino pin ап casino porno Мария Шарапова up casino
#9639 MonroAndroidhttps://monro-casino-apk.ru/monro-na-androjd
<a href=https://monro-casino-apk.ru/monro-na-androjd>https://monro-casino-apk.ru/monro-na-androjd</a>
Загрузить последнюю версию приложения казино Монро – побеждай сейчас! <a href=https://monro-casino-apk.ru/monro-na-androjd>monro-casino-apk.ru/monro-na-androjd</a>
#9640 Charlesgunny
casino скачать приложение up casino скачать <a href=https://rucriminal.info/>порно с Илья Осипов (киберспорт)</a> ап казино казино большая <a href=https://rucriminal.info/>порно с Алина Загитова</a> казино рояль casino 7k рабочее порно с Георгий Джикия (футбол) online casino порно с Виктория Синицина, фигуристка casino официальный сайт казино смотреть онлайн
#9641 Charlesgunny
7k casino официальный kent casino регистрация <a href=https://rucriminal.info/>порно с Илья Осипов (киберспорт)</a> играющие казино порно с Гатагова Ольга Анатольевна <a href=https://rucriminal.info/>casino приложения</a> Елена Лядова порно с Федор Чалов (футбол) casino рабочее зеркало официальные сайты казино porno Нина Пирогова, хоккеистка Мухтиярова Елена Вячеславовна порно Черкесова Бэлла Мухарбиевна порно
#9642 Charlesgunny
online casino 7k самое казино <a href=https://rucriminal.info/>казино сегодня</a> ев казино казино ли <a href=https://rucriminal.info/>porno Мария Шарапова</a> casino рабочее pin up casino официальный cometa casino ешь казино фреш казино casino рабочее пина casino
#9643 Charlesgunny
casino скачать приложение вывод казино <a href=https://rucriminal.info/>vavada casino</a> порно с Алина Загитова porno Виктория Баркова, легкоатлетка <a href=https://rucriminal.info/>porno Нина Пирогова, хоккеистка</a> casino официальный сайт порно с Варвара Субботина casino официальный зеркало пинап казино porno Юлия Канакина, скелетонистка бесплатно играем казино порно с Антропова Валентина Викторовна
#9644 Charlesgunny
Александра Бортич Преподобная Надежда Александровна порно <a href=https://rucriminal.info/>казино фильм смотреть онлайн</a> человек казино Черкесова Бэлла Мухарбиевна порно <a href=https://rucriminal.info/>Кузнецова Анна Юрьевна порно</a> песня казино casino онлайн 1go casino pin ап casino порно с Матвей Сафонов (футбол) порно с Алексей Миранчук (футбол) лучшие онлайн казино
#9645 Charlesgunny
казино смотреть казино <a href=https://rucriminal.info/>casino скачать</a> порно с Федор Чалов (футбол) порно с Георгий Джикия (футбол) <a href=https://rucriminal.info/>Крючкова Полина Викторовна порно</a> porno Анна Сидорова, керлингистка online casino retro casino up casino скачать порно с Антропова Валентина Викторовна порно с Максим Глушенков (футбол) водка казино
#9646 Charlesgunny
порно с Артемий Панарин (хоккей) демо казино <a href=https://rucriminal.info/>порно с Елена Никитина, скелетонистка</a> казино большая Анна Михалкова <a href=https://rucriminal.info/>казино играть</a> порно с Васильева Татьяна Викторовна Черкесова Бэлла Мухарбиевна порно Черкесова Бэлла Мухарбиевна порно casino игровой автомат официальные сайты казино Семёнова Татьяна Владимировна порно порно с Евгения Медведева, фигуристка
#9647 Charlesgunny
пинап казино casino регистрации <a href=https://rucriminal.info/>казино пин</a> порно с Илюшникова Татьяна Александровна порно с Алексей Миранчук (футбол) <a href=https://rucriminal.info/>пин ап казино</a> казино пину bet casino вывод казино часы казино champion casino бесплатно играем казино симулятор казино
#9648 Charlesgunny
ешь казино porno Александр Соболев (футбол) <a href=https://rucriminal.info/>казино вход официальный сайт</a> порно с Илюшникова Татьяна Александровна kent casino <a href=https://rucriminal.info/>казино пину</a> песня казино casino riobet casino играть порно с Алина Загитова casino зеркало сайта яндекс игры казино казино 5
#9649 JustinBaghttps://tcpridemag.com/
<a href=https://tcpridemag.com/>https://tcpridemag.com/</a>
#9650 Charlesgunny
казино вулкан Кузнецова Анна Юрьевна порно <a href=https://rucriminal.info/>pin casino</a> Комарова Наталья Владимировна порно champion casino <a href=https://rucriminal.info/>vavada casino</a> 7k casino зеркало рабочее ап казино вавада казино порно с Анна Щербакова, фигуристка Лут Оксана Николаевна порно casino ru porno Екатерина Ефременкова, шорт-трекистка
#9651 Charlesgunny
официальное казино вход 7k casino бонус <a href=https://rucriminal.info/>казино вход официальный сайт</a> porno Александр Соболев (футбол) официальные сайты казино <a href=https://rucriminal.info/>7k casino официальный сайт</a> bet casino porno Мира Андреева (теннис) pin up casino зеркало пин ап casino почему в казино нет окон porno Александр Соболев (футбол) порно с Диана Шнайдер (теннис)
#9652 Charlesgunny
Елизавета Боярская casino приложения <a href=https://rucriminal.info/>kent casino регистрация</a> casino официальный зеркало Преподобная Надежда Александровна порно <a href=https://rucriminal.info/>casino рабочее зеркало</a> пин ап casino порно с Анастасия Потапова, теннисистка Попова Анна Юрьевна порно Ирина Горбачева unlim casino кент казино казино вход официальный сайт
#9653 Charlesgunny
порно с Владимир Минеев (ММА) casino приложения <a href=https://rucriminal.info/>casino регистрации</a> смотреть фильм казино порно с Никита Кучеров (хоккей) <a href=https://rucriminal.info/>пин up casino</a> казино смотреть онлайн бесплатно порно с Илюшникова Татьяна Александровна порно с Диана Шнайдер (теннис) бывшие казино porno Илья Ковальчук (хоккей) играющие казино онлайн casino online зеркало
#9654 Clydealmofhttps://imgtoon.com/
<a href=https://imgtoon.com/>pg slot</a>
#9655 Charlesgunny
пина casino казино смотреть онлайн бесплатно <a href=https://rucriminal.info/>porno Анна Сидорова, керлингистка</a> Семёнова Татьяна Владимировна порно Нургалиева Эльвира Рамиловна порно <a href=https://rucriminal.info/>казино ли</a> включи казино casino бонус казино пину казино смотреть онлайн пин ап casino Львова-Белова Мария Алексеевна порно pin up casino зеркало
#9656 Charlesgunny
макао казино Фастова Елена Владимировна порно <a href=https://rucriminal.info/>up casino зеркало</a> казино ставка где казино <a href=https://rucriminal.info/>казино 5</a> фильмы казино рояль порно с Дарья Клишина, легкоатлетка pin up casino официальный официальные сайты казино porno Алена Косторная (фигурное катание) online casino 7k казино рублях
#9657 Charlesgunny
порно с Кирьянова Дарья Борисовна казино фильм смотреть онлайн <a href=https://rucriminal.info/>порно с Алина Загитова</a> сайт казино зеркало ешь казино <a href=https://rucriminal.info/>порно с Васильева Татьяна Викторовна</a> казино суть казино фильмы казино рояль win win casino casino скачать демо казино лучшие бесплатные онлайн казино
#9658 Charlesgunny
официальные сайты казино up casino официальный <a href=https://rucriminal.info/>казино большая</a> порно с Алина Загитова казино без <a href=https://rucriminal.info/>порно с Никита Кучеров (хоккей)</a> порно с Виктория Синицина, фигуристка порно с Никита Кучеров (хоккей) casino 7k сегодня яндекс игры казино пин ап casino pin up top casino автомат порно с Баталина Ольга Юрьевна
#9659 Charlesgunny
водка казино 7k casino бонус <a href=https://rucriminal.info/>ев казино</a> казино на деньги пинко casino <a href=https://rucriminal.info/>фильмы казино рояль</a> смотреть фильм казино casino зеркало сайта Семёнова Татьяна Владимировна порно слот casino up casino гама казино фильмы казино рояль
#9660 Charlesgunny
porno Елизавета Туктамышева porno Катерина Шпица <a href=https://rucriminal.info/>казино проиграл</a> Скоробогатова Ольга Николаевна порно casino зеркало сегодня рабочее <a href=https://rucriminal.info/>официальное казино вход</a> porno Светлана Ходченкова вавада казино casino ru porno Вера Бирюкова, гимнастка casinos winning почему в казино нет окон порно с Каролина Севастьянова
#9661 Charlesgunny
pin up casino скачать порно с Дронова Александра Викторовна <a href=https://rucriminal.info/>почему в казино не бывает настенных часов</a> 7k casino автомат казино <a href=https://rucriminal.info/>рабочее казино</a> порно с Голикова Татьяна Алексеевна casino промокод porno Светлана Ходченкова рабочие зеркала казино автомат казино казино рояль смотреть porno Юлия Пересильд
#9662 Charlesgunny
casino сайты casino betting <a href=https://rucriminal.info/>porno Александра Степанова, фигуристка</a> казино онлайн порно с Никита Кучеров (хоккей) <a href=https://rucriminal.info/>порно с Аделия Петросян (фигурное катание)</a> лучшие онлайн казино ограбление казино официальное казино вход porno Ангелина Гончаренко, хоккеистка игры казино porno Виктория Баркова, легкоатлетка порно с Диана Шнайдер (теннис)
#9663 Charlesgunny
порно с Карен Хачанов (теннис) casino online зеркало <a href=https://rucriminal.info/>казино фильм</a> порно с Анна Щербакова, фигуристка Шевцова Татьяна Викторовна порно <a href=https://rucriminal.info/>казино пин</a> Комарова Наталья Владимировна порно порно с Анастасия Потапова, теннисистка яндекс игры казино казино 5 казино смотреть онлайн бесплатно cometa casino pin up casino официальный
#9664 Charlesgunny
pinco casino Чулпан Хаматова <a href=https://rucriminal.info/>слот casino</a> ramenbet casino Преподобная Надежда Александровна порно <a href=https://rucriminal.info/>порно с Евгений Малкин (хоккей)</a> pin up casino top top рокс казино зеркала казино inform@rucriminal.info casino бонус сайт казино вход black russia казино
#9665 Charlesgunny
порно с Евгения Медведева порно с Алексей Миранчук (футбол) <a href=https://rucriminal.info/>Любимова Ольга Борисовна порно</a> pin up casino top top casino бездепозитный <a href=https://rucriminal.info/>porno Светлана Ходченкова</a> казино онлайн бесплатно kent casino inform@rucriminal.info pin ап casino 7k casino зеркало casino бонус porno Елизавета Туктамышева
#9666 Charlesgunny
Манилова Алла Юрьевна порно casino betting <a href=https://rucriminal.info/>pin up casino пин</a> казино гта 5 пин ап казино <a href=https://rucriminal.info/>ramenbet casino</a> casino pin официальный официальные сайты казино почему в казино не бывает настенных часов скачиваемые казино Елизавета Боярская порно с Диана Шнайдер (теннис) online casino 7k
#9667 Charlesgunny
официальная казино casino скачать <a href=https://rucriminal.info/>porno Екатерина Ефременкова, шорт-трекистка</a> почему в казино нет часов casino daddy <a href=https://rucriminal.info/>Радченко Светлана Юрьевна порно</a> вывод казино порно с Дарья Клишина, легкоатлетка почему в казино нет окон порно с Каролина Севастьянова Попова Анна Юрьевна порно слот casino casino актуальное зеркало
#9668 Charlesgunny
порно с Антропова Валентина Викторовна порно с Матвей Сафонов (футбол) <a href=https://rucriminal.info/>casino ru</a> pin up casino официальный bet casino <a href=https://rucriminal.info/>porno Юлия Пересильд</a> реального казино почему казино человек казино казино фильм смотреть онлайн gama casino порно с Арина и Дина Аверины, гимнастки casino рабочее
#9669 Charlesgunny
casino скачать inform@rucriminal.info <a href=https://rucriminal.info/>porno Юлия Канакина</a> pin up casino пин слот casino <a href=https://rucriminal.info/>up casino официальный</a> Юдаева Ксения Валентиновна порно kent casino официальные зеркала казино porno Александра Степанова, фигуристка Крючкова Полина Викторовна порно casino официальный сайт самое казино
#9670 Charlesgunny
online casino официальное казино вход <a href=https://rucriminal.info/>casinos xyz</a> казино проиграл порно с Константин Тюкавин (футбол) <a href=https://rucriminal.info/>казино онлайн бесплатно</a> casino бездепозитный симулятор казино порно с Артемий Панарин (хоккей) Разуваева Ксения Денисовна порно porno Илья Ковальчук (хоккей) казино проиграл порно с Карен Хачанов (теннис)
#9671 Charlesgunny
зеркала официальных сайтов казино порно с Максим Глушенков (футбол) <a href=https://rucriminal.info/>ап казино</a> Кузнецова Анна Юрьевна порно casino на телефон <a href=https://rucriminal.info/>официальная казино</a> казино пину порно с Алексей Миранчук (футбол) казино в россии Преподобная Надежда Александровна порно пин up casino пин casino Елизавета Боярская
#9672 Charlesgunny
автомат казино Москалькова Татьяна Николаевна порно <a href=https://rucriminal.info/>бесплатное казино</a> пин up casino Москалькова Татьяна Николаевна порно <a href=https://rucriminal.info/>pin up casino скачать</a> Елена Лядова казино фильм онлайн Преподобная Надежда Александровна порно рокс казино online casino Шевцова Татьяна Викторовна порно porno Алена Косторная (фигурное катание)
#9673 Charlesgunny
яндекс казино кент casino <a href=https://rucriminal.info/>Попова Анна Юрьевна порно</a> казино ли 7k casino зеркало рабочее <a href=https://rucriminal.info/>casino промокод</a> порно с Захарова Мария Владимировна фреш казино порно с Анна Калинская (теннис) pin up casino пин симулятор казино казино онлайн бесплатно сайт казино зеркало
#9674 Charlesgunny
казино пин симулятор казино <a href=https://rucriminal.info/>пинко casino</a> Скоробогатова Ольга Николаевна порно casino сегодня <a href=https://rucriminal.info/>пинко casino</a> casino вход порно с Васильева Татьяна Викторовна pin up casino скачать 7k casino зеркало на сегодня porno Елизавета Туктамышева retro casino официальные зеркала казино
#9675 Charlesgunny
Мухтиярова Елена Вячеславовна порно 7k casino зеркало на сегодня <a href=https://rucriminal.info/>up casino скачать</a> фильмы казино рояль 7k casino скачать <a href=https://rucriminal.info/>зеркала казино</a> казино гта 5 ев казино скачать pin casino inform@rucriminal.info Валентина Матвиенко порно Матвиенко Валентина Ивановна порно casino официальный зеркало
#9676 Charlesgunny
casino автомат казино вход <a href=https://rucriminal.info/>casino бонус</a> porno Анастасия Янькова, боксерка Александра Бортич <a href=https://rucriminal.info/>официальное казино вход</a> Разуваева Ксения Денисовна порно где казино порно с Кирьянова Дарья Борисовна казино вулкан casino сайты casino на телефон Нургалиева Эльвира Рамиловна порно
#9677 Charlesgunny
порно с Васильева Татьяна Викторовна bitz casino <a href=https://rucriminal.info/>пина casino</a> про казино пин ап казино <a href=https://rucriminal.info/>bitz casino</a> казино смотреть онлайн бесплатно порно с Каролина Севастьянова порно с Баталина Ольга Юрьевна казино фильм порно с Елена Никитина, скелетонистка карты казино порно с Елена Никитина, скелетонистка
#9678 купить сейф для охотничьего ружьяhttps://sejfy-dlya-oruzhiya.ru/
Тут можно преобрести купить оружейный сейф в интернет магазин <a href=https://sejfy-dlya-oruzhiya.ru/>сейф под ружье</a>
#9679 Charlesgunny
пина casino casino регистрации <a href=https://rucriminal.info/>pin up casino пин</a> порно с Каролина Севастьянова песня казино <a href=https://rucriminal.info/>часы казино</a> официальная казино казино ставка porno Александра Степанова, фигуристка casino официальный зеркало casino приложения казино смотреть Петрова Ольга Викторовна порно
#9680 Charlesgunny
порно с Никита Кучеров (хоккей) porno Игорь Акинфеев (футбол) <a href=https://rucriminal.info/>почему в казино нет окон</a> яндекс игры казино рабочие зеркала казино <a href=https://rucriminal.info/>Валентина Матвиенко порно</a> сколько казино casino 7k рабочее порно с Юлия Ефимова, пловчиха Скоробогатова Ольга Николаевна порно самое казино порно с Федор Чалов (футбол) porno Игорь Акинфеев (футбол)
#9681 Charlesgunny
зеркала официальных сайтов казино 1win casino <a href=https://rucriminal.info/>порно с Зырянова Анастасия Владимировна</a> 7k casino сайт пин casino <a href=https://rucriminal.info/>порно с Евгений Малкин (хоккей)</a> 7k casino бонус top casino porno Александр Соболев (футбол) casino вход порно с Абрамченко Виктория Валериевна порно с Александр Большунов (лыжные гонки) casino официальный сайт
#9682 Charlesgunny
играющие казино порно с Афонина Марина Игоревна <a href=https://rucriminal.info/>ограбление казино</a> Любимова Ольга Борисовна порно 7k casino скачать <a href=https://rucriminal.info/>casino бонус</a> Шевцова Татьяна Викторовна порно up casino скачать порно с Дронова Александра Викторовна casino x pin up casino пин Елизавета Боярская Радченко Светлана Юрьевна порно
#9683 Charlesgunny
casino online зеркало порно с Евгения Медведева, фигуристка <a href=https://rucriminal.info/>казино вход</a> casino зеркало сегодня рабочее рабочие зеркала казино <a href=https://rucriminal.info/>Кузнецова Анна Юрьевна порно</a> Светлана Ходченкова casinos xyz яндекс игры казино казино большая casino зеркало сайта casino зеркало сайта porno Юлия Канакина, скелетонистка
#9684 Charlesgunny
Ходнева Светлана Владимировна порно vodka casino <a href=https://rucriminal.info/>7k casino скачать</a> бывшие казино porno Андрей Рублев (теннис) <a href=https://rucriminal.info/>porno Дарья Клишина</a> порно с Юлия Ефимова casino зеркало сайта Ходнева Светлана Владимировна порно kometa casino порно с Евгения Медведева, фигуристка pinco casino kent casino
#9685 Charlesgunny
казино фильм порно с Петр Ян (ММА) <a href=https://rucriminal.info/>casino скачать приложение</a> Черкесова Бэлла Мухарбиевна порно казино рояль смотреть <a href=https://rucriminal.info/>казино сочи</a> casino андроид порно с Федор Чалов (футбол) casino автомат casino скачать порно с Федор Чалов (футбол) Яровая Ирина Анатольевна порно Шевцова Татьяна Викторовна порно
#9686 Charlesgunny
7k casino скачать pin casino <a href=https://rucriminal.info/>pin up casino buzz</a> retro casino casinos winning <a href=https://rucriminal.info/>суть казино</a> casino пинап казино vavada casino порно с Никита Кучеров (хоккей) официальные зеркала казино casino промокод Набиуллина Эльвира Сахипзадовна порно
#9687 Charlesgunny
казино смотреть онлайн рабочие зеркала казино <a href=https://rucriminal.info/>porno Ангелина Гончаренко, хоккеистка</a> casino актуальное зеркало Хорова Наталья Александровна порно <a href=https://rucriminal.info/>рабочее казино</a> смотреть фильм казино casino ап casino андроид порно с Владимир Минеев (ММА) Елизавета Боярская рокс казино казино ли
#9688 Charlesgunny
казино без porno Алена Михайлова <a href=https://rucriminal.info/>казино вход официальный сайт</a> официальные сайты казино порно с Ирина Сидоркова <a href=https://rucriminal.info/>casino riobet</a> porno Виктория Баркова, легкоатлетка порно с Анастасия Потапова, теннисистка порно с Дронова Александра Викторовна порно с Никита Кучеров (хоккей) Кузнецова Анна Юрьевна порно порно с Алексей Миранчук (футбол) casino на телефон
#9689 Charlesgunny
порно с Бондаренко Анастасия Борисовна порно с Гатагова Ольга Анатольевна <a href=https://rucriminal.info/>Радченко Светлана Юрьевна порно</a> почему в казино не бывает настенных часов porno Елизавета Туктамышева <a href=https://rucriminal.info/>порно с Анастасия Потапова, теннисистка</a> porno Ангелина Гончаренко, хоккеистка официальные зеркала казино casino riobet официальные сайты казино 7k casino официальный порно с Евгения Медведева, фигуристка порно с Евгения Медведева, фигуристка
#9690 Charlesgunny
Шевцова Татьяна Викторовна порно Комарова Наталья Владимировна порно <a href=https://rucriminal.info/>порно с Каролина Севастьянова</a> лучшая казино 7k casino зеркало рабочее <a href=https://rucriminal.info/>Попова Анна Юрьевна порно</a> порно с Евгения Медведева казино сочи слоты казино казино ставка Светлана Ходченкова гта казино казино зеркало сегодня
#9691 Charlesgunny
порно с Диана Шнайдер (теннис) порно с Каролина Севастьянова <a href=https://rucriminal.info/>Самойлова Алла Владимировна порно</a> Шевцова Татьяна Викторовна порно 7k casino бонус <a href=https://rucriminal.info/>Яровая Ирина Анатольевна порно</a> сколько казино казино фильм смотреть онлайн casino актуальное зеркало порно с Константин Тюкавин (футбол) порно с Дарья Клишина, легкоатлетка пина casino ев казино
#9692 Charlesgunny
porno Катерина Шпица Разуваева Ксения Денисовна порно <a href=https://rucriminal.info/>кент casino</a> up casino официальный реального казино <a href=https://rucriminal.info/>порно с Бондаренко Анастасия Борисовна</a> Ходнева Светлана Владимировна порно бывшие казино Юдаева Ксения Валентиновна порно казино вулкан ешь казино порно с Васильева Татьяна Викторовна где казино
#9693 Charlesgunny
porno Алена Косторная (фигурное катание) vodka casino <a href=https://rucriminal.info/>bet casino</a> casino онлайн casino скачать приложение <a href=https://rucriminal.info/>Кузнецова Анна Юрьевна порно</a> суть казино Мухтиярова Елена Вячеславовна порно casino рабочее зеркало Набиуллина Эльвира Сахипзадовна порно порно с Владимир Минеев (ММА) пин ап casino pin up top казино 1
#9694 Charlesgunny
пинко casino 1go casino <a href=https://rucriminal.info/>казино в россии</a> casino скачать casino приложения <a href=https://rucriminal.info/>порно с Антропова Валентина Викторовна</a> casino игровой автомат порно с Елена Никитина, скелетонистка порно с Кирьянова Дарья Борисовна песня казино 1go casino porno Андрей Рублев (теннис) скачиваемые казино
#9695 Charlesgunny
inform@rucriminal.info 7k casino официальный <a href=https://rucriminal.info/>1go casino</a> casino зеркало сегодня рабочее casino официальный зеркало <a href=https://rucriminal.info/>порно с Абрамченко Виктория Валериевна</a> макао казино porno Анастасия Янькова, боксерка игры казино porno Светлана Ходченкова porno Анна Сидорова, керлингистка r7 casino порно с Зырянова Анастасия Владимировна
#9696 best place to buy kamagrahttps://tourism.ju.edu.jo/Lists/AlumniInformation/DispForm.aspx?ID=115
Medications and Immune System Health – Strengthening Defenses, Guarding Wellness https://tourism.ju.edu.jo/…ispForm.aspx?… cheaper kamagra. Medications and Eating Disorders – Supporting Recovery and Healing
#9697 Charlesgunny
ешь казино kometa casino <a href=https://rucriminal.info/>1×slots casino</a> porno Алена Косторная (фигурное катание) porno Дарья Мороз <a href=https://rucriminal.info/>бесплатное казино</a> Хорова Наталья Александровна порно кент казино казино рулетка пина casino vavada casino казино пину 1×slots casino
#9698 Charlesgunny
порно с Анна Калинская (теннис) casino бонус <a href=https://rucriminal.info/>porno Дарья Мороз</a> пин ап casino porno Дарья Мороз <a href=https://rucriminal.info/>7k casino скачать</a> порно с Евгения Медведева порно с Матвей Сафонов (футбол) Набиуллина Эльвира Сахипзадовна порно Львова-Белова Мария Алексеевна порно кент casino порно с Зырянова Анастасия Владимировна бесплатное казино
#9699 MonroCasinoApkhttps://monro-casino-apk.ru
<a href=https://monro-casino-apk.ru>https://www.monro-casino-apk.ru</a>
Загрузить приложение онлайн казино Monro – побеждай сейчас! <a href=https://monro-casino-apk.ru>http://www.monro-casino-apk.ru</a>
#9700 Charlesgunny
порно с Елена Никитина, скелетонистка кент казино <a href=https://rucriminal.info/>казино</a> online casino порно с Баталина Ольга Юрьевна <a href=https://rucriminal.info/>казино можно</a> Львова-Белова Мария Алексеевна порно порно с Аделия Петросян (фигурное катание) cat casino сайты казино 1go casino порно с Алексей Миранчук (футбол) скачать pin casino
#9701 Charlesgunny
порно с Алина Загитова зеркала казино <a href=https://rucriminal.info/>casino онлайн</a> new casino Манилова Алла Юрьевна порно <a href=https://rucriminal.info/>Комарова Наталья Владимировна порно</a> 7k casino сайт casino зеркало сегодня casino рабочее up casino официальный pin up casino официальный porno Анна Сидорова, керлингистка песня казино
#9702 Charlesgunny
porno Дарья Клишина где казино <a href=https://rucriminal.info/>7k casino официальный сайт</a> порно с Дронова Александра Викторовна казино смотреть онлайн бесплатно <a href=https://rucriminal.info/>r7 casino</a> Окладникова Ирина Андреевна порно порно с Алина Загитова, фигуристка win win casino Ходнева Светлана Владимировна порно порно с Никита Кучеров (хоккей) порно с Дронова Александра Викторовна порно с Анна Щербакова, фигуристка
#9703 SolCasinohttps://sol-casino-apk.ru
<a href=http://machash.com/go/?url=https://sol-casino-apk.ru>sol-casino-apk.ru</a> <a href=http://proxy.uwec.edu/login?url=https://sol-casino-apk.ru>sol-casino-apk.ru</a> <a href=http://yta-tools.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=https://sol-casino-apk.ru>sol-casino-apk.ru</a> <a href=http://elitejobsearch.com/jobclick/?RedirectURL=&Domain=elitejobsearch.com&rgp_m=co11&et=4495https://sol-casino-apk.ru>sol-casino-apk.ru</a> <a href=http://arbir.ru/bitrix/rk.php?goto=https://sol-casino-apk.ru>sol-casino-apk.ru</a> <a href=http://images.google.sc/url?q=https://sol-casino-apk.ru>sol-casino-apk.ru</a> <a href=http://images.google.com.cy/url?q=https://sol-casino-apk.ru>sol-casino-apk.ru</a> <a href=http://ichikawa.genki365.net/gnki02/common/redirect.php?url=https://sol-casino-apk.ru>sol-casino-apk.ru</a> <a href=http://arcade-fun-board.pcip.de/redir.php?url=https://sol-casino-apk.ru>sol-casino-apk.ru</a> <a href=http://www.tajcn.com/go.php?url=https://sol-casino-apk.ru>sol-casino-apk.ru</a> <a href=http://163.32.103.194.xx3.kz/go.php?url=https://sol-casino-apk.ru>sol-casino-apk.ru</a> <a href=http://images.t.me/s/worldcasinonet.br.xx3.kz/go.php?url=https://sol-casino-apk.ru>sol-casino-apk.ru</a> <a href=http://feedroll.com/rssviewer/feed2js.php?src=https://sol-casino-apk.ru>sol-casino-apk.ru</a> <a href=http://spencercountybank.com/redirect.asp?path=https://sol-casino-apk.ru>sol-casino-apk.ru</a> <a href=http://cwa4100.org/uebimiau/redir.php?https://sol-casino-apk.ru>sol-casino-apk.ru</a>
Download apk file online casino sol – win now!
<a href=http://www.realmomsfucking.com/tp/out.php?p=50&fc=1&url=/https://sol-casino-apk.ru>sol-casino-apk.ru</a> <a href=http://www.sermemole.com/public/serbook/redirect.php?url=https://sol-casino-apk.ru>sol-casino-apk.ru</a> <a href=http://www.cerecsasia.com/api/SelectLanguage.aspx?Lang=zh-TW&Url=http%3A%2F%2Fhttps://sol-casino-apk.ru>sol-casino-apk.ru</a> <a href=http://maps.google.co.za/url?q=https://sol-casino-apk.ru>sol-casino-apk.ru</a> <a href=http://www.google.co.nz/url?q=http%3A%2F%2Fhttps://sol-casino-apk.ru>sol-casino-apk.ru</a> <a href=http://europe.bloombiz.com/go.cgi?https://sol-casino-apk.ru>sol-casino-apk.ru</a> <a href=http://v.jiziyy.com/mgbook.php?url=44598&w=https://sol-casino-apk.ru>sol-casino-apk.ru</a> <a href=http://sufficientlyremarkable.com/?URL=https://sol-casino-apk.ru>sol-casino-apk.ru</a> <a href=http://6030000.ru/bitrix/rk.php?goto=https://sol-casino-apk.ru>sol-casino-apk.ru</a> <a href=http://bookmark4you.win.xx3.kz/go.php?url=https://sol-casino-apk.ru>sol-casino-apk.ru</a> <a href=http://chuganwang.com.xx3.kz/go.php?url=https://sol-casino-apk.ru>sol-casino-apk.ru</a> <a href=http://furbatto.it/?URL=https://sol-casino-apk.ru>sol-casino-apk.ru</a> <a href=http://www.agknewsstand.app/index.php?title=Yasuke±+Official+Trailer+%282021%29+LaKeith+Stanfield%2C+LeSean+Thomas±+IGN&article_url=http%3A%2F%2Fhttps://sol-casino-apk.ru&img=&desc=>sol-casino-apk.ru</a> <a href=http://www.ulrich.ch/modules/_redirect/?url=https://sol-casino-apk.ru>sol-casino-apk.ru</a> <a href=http://toolsforentrepreneur.eu/?lt_url=https://sol-casino-apk.ru>sol-casino-apk.ru</a>
#9704 Charlesgunny
win win casino 1go casino <a href=https://rucriminal.info/>порно с Никита Кучеров (хоккей)</a> порно с Сергей Бобровский (хоккей) casino автомат <a href=https://rucriminal.info/>pin casino зеркало</a> порно с Матвей Сафонов (футбол) porno Екатерина Ефременкова, шорт-трекистка bitz casino kometa casino porno Нина Пирогова, хоккеистка водка казино карты казино
#9705 Charlesgunny
casino бонус скачать pin casino <a href=https://rucriminal.info/>Манилова Алла Юрьевна порно</a> вывод казино porno Анастасия Янькова, боксерка <a href=https://rucriminal.info/>казино в россии</a> Семёнова Татьяна Владимировна порно 7k casino зеркало пин ап casino pin up top online casino официальный казино на деньги суть казино порно с Артемий Панарин (хоккей)
#9706 Charlesgunny
включи казино порно с Диана Шнайдер (теннис) <a href=https://rucriminal.info/>порно с Елена Никитина, скелетонистка</a> pin casino зеркало casino вход <a href=https://rucriminal.info/>top casino</a> казино рояль порно с Георгий Джикия (футбол) официальное казино вход porno Светлана Ходченкова часы казино порно с Диана Шнайдер (теннис) Москалькова Татьяна Николаевна порно
#9707 MonroSaithttps://monro-casino-apk.ru/monro-oficzialnyj-sajt
<a href=http://clients1.t.me/s/worldcasinonet.tn/url?q=https://monro-casino-apk.ru/monro-oficzialnyj-sajt>monro-casino-apk.ru/monro-oficzialnyj-sajt</a> <a href=http://superdeal.website.xx3.kz/go.php?url=https://monro-casino-apk.ru/monro-oficzialnyj-sajt>monro-casino-apk.ru/monro-oficzialnyj-sajt</a> <a href=http://eiwa-shutter.com/blog/?wptouch_switch=desktop&redirect=https://monro-casino-apk.ru/monro-oficzialnyj-sajt>monro-casino-apk.ru/monro-oficzialnyj-sajt</a> <a href=http://www.androeed.ru/go.php?u=https://monro-casino-apk.ru/monro-oficzialnyj-sajt>monro-casino-apk.ru/monro-oficzialnyj-sajt</a> <a href=http://newyorkartnews.org/Artists/link.php?url=https://monro-casino-apk.ru/monro-oficzialnyj-sajt>monro-casino-apk.ru/monro-oficzialnyj-sajt</a> <a href=http://ns.tradecardsonline.com/im/redirect.php?id=2077&url=http:https://monro-casino-apk.ru/…zialnyj-sajt>monro-casino-apk.ru/monro-oficzialnyj-sajt</a> <a href=http://rbttv.com.xx3.kz/go.php?url=https://monro-casino-apk.ru/monro-oficzialnyj-sajt>monro-casino-apk.ru/monro-oficzialnyj-sajt</a> <a href=http://images.google.uz/url?q=https://monro-casino-apk.ru/monro-oficzialnyj-sajt>monro-casino-apk.ru/monro-oficzialnyj-sajt</a> <a href=http://prezza.net/wp-content/plugins/abredirect/redirect.php?creative=p1852&url=https://monro-casino-apk.ru/monro-oficzialnyj-sajt>monro-casino-apk.ru/monro-oficzialnyj-sajt</a> <a href=http://badassbaseball.com/cgi-bin/mt-comments.cgi?entry_id=616uchome.shuiyw.cn/link.php?url=https://monro-casino-apk.ru/monro-oficzialnyj-sajt>monro-casino-apk.ru/monro-oficzialnyj-sajt</a> <a href=http://www.lisserhoekje.nl/chinesecresteds/guestbook/go.php?url=https://monro-casino-apk.ru/monro-oficzialnyj-sajt>monro-casino-apk.ru/monro-oficzialnyj-sajt</a> <a href=http://www.bowlingindex.com/bowlinglinks/out.php?id=FatLane&url=https://monro-casino-apk.ru/monro-oficzialnyj-sajt>monro-casino-apk.ru/monro-oficzialnyj-sajt</a> <a href=http://tetraedr.com/bitrix/rk.php?goto=https://monro-casino-apk.ru/monro-oficzialnyj-sajt>monro-casino-apk.ru/monro-oficzialnyj-sajt</a> <a href=http://rape-porno.com/cgi-bin/out.cgi?id=925&l=top_top&u=https://monro-casino-apk.ru/monro-oficzialnyj-sajt>monro-casino-apk.ru/monro-oficzialnyj-sajt</a> <a href=http://maps.t.me/s/worldcasinonet.mx/url?q=https://monro-casino-apk.ru/monro-oficzialnyj-sajt>monro-casino-apk.ru/monro-oficzialnyj-sajt</a>
Download apk file online casino monro – play right now!
<a href=http://library.syr.edu/skin/?url=https://monro-casino-apk.ru/monro-oficzialnyj-sajt>monro-casino-apk.ru/monro-oficzialnyj-sajt</a> <a href=http://gameyop.com/gamegame.php?game=1&url=https://monro-casino-apk.ru/monro-oficzialnyj-sajt>monro-casino-apk.ru/monro-oficzialnyj-sajt</a> <a href=http://yesfilmes.org/link/?url=https://monro-casino-apk.ru/monro-oficzialnyj-sajt>monro-casino-apk.ru/monro-oficzialnyj-sajt</a> <a href=http://whois.chinaz.com/https://monro-casino-apk.ru/monro-oficzialnyj-sajt>monro-casino-apk.ru/monro-oficzialnyj-sajt</a> <a href=http://images.google.cm/url?q=https://monro-casino-apk.ru/monro-oficzialnyj-sajt>monro-casino-apk.ru/monro-oficzialnyj-sajt</a> <a href=http://openparksnetwork.org/single-item-view/?oid=OPN_NS:02E5386B4CC0CC7241441931350A0372&b=https://monro-casino-apk.ru/monro-oficzialnyj-sajt>monro-casino-apk.ru/monro-oficzialnyj-sajt</a> <a href=http://mereon.ru/ru/go.php?go=https://monro-casino-apk.ru/monro-oficzialnyj-sajt>monro-casino-apk.ru/monro-oficzialnyj-sajt</a> <a href=http://prepformula.com/local/formula/redirect.php?url=https://monro-casino-apk.ru/monro-oficzialnyj-sajt>monro-casino-apk.ru/monro-oficzialnyj-sajt</a> <a href=http://choosemedsonline.com/wp-content/themes/prostore/go.php?https://monro-casino-apk.ru/monro-oficzialnyj-sajt>monro-casino-apk.ru/monro-oficzialnyj-sajt</a> <a href=http://tokendesignthinking.org.xx3.kz/go.php?url=https://monro-casino-apk.ru/monro-oficzialnyj-sajt>monro-casino-apk.ru/monro-oficzialnyj-sajt</a> <a href=http://www.google.co.zw/url?q=https://monro-casino-apk.ru/monro-oficzialnyj-sajt>monro-casino-apk.ru/monro-oficzialnyj-sajt</a> <a href=http://e-zfiling.com.xx3.kz/go.php?url=https://monro-casino-apk.ru/monro-oficzialnyj-sajt>monro-casino-apk.ru/monro-oficzialnyj-sajt</a> <a href=http://lc4.epublish.co.za/openx/www/delivery/ck.php?oaparams=2__bannerid=1690__zoneid=3528__cb=0bcc1343e6__oadest=https://monro-casino-apk.ru/monro-oficzialnyj-sajt>monro-casino-apk.ru/monro-oficzialnyj-sajt</a> <a href=http://buzzvido201924584.widblog.com.xx3.kz/go.php?url=https://monro-casino-apk.ru/monro-oficzialnyj-sajt>monro-casino-apk.ru/monro-oficzialnyj-sajt</a> <a href=http://sska.kz/bitrix/rk.php?goto=https://monro-casino-apk.ru/monro-oficzialnyj-sajt>monro-casino-apk.ru/monro-oficzialnyj-sajt</a>
#9708 Charlesgunny
Разуваева Ксения Денисовна порно казино рояль смотреть <a href=https://rucriminal.info/>казино рулетка</a> Набиуллина Эльвира Сахипзадовна порно казино фильм смотреть онлайн <a href=https://rucriminal.info/>порно с Елена Никитина, скелетонистка</a> casino играть сайт казино зеркало пина casino Манилова Алла Юрьевна порно Манилова Алла Юрьевна порно casino игровой автомат kometa casino
#9709 Charlesgunny
пин ап казино porno Светлана Ходченкова <a href=https://rucriminal.info/>казино рояль смотреть</a> casino ап казино большая <a href=https://rucriminal.info/>почему в казино не бывает настенных часов</a> рейтинг казино porno Ангелина Гончаренко, хоккеистка почему казино макао казино pin casino porno Екатерина Ефременкова, шорт-трекистка Крючкова Полина Викторовна порно
#9710 Charlesgunny
7k casino бонус porno Анастасия Янькова, боксерка <a href=https://rucriminal.info/>порно с Виктория Синицина, фигуристка</a> porno Алена Михайлова casino зеркало сегодня <a href=https://rucriminal.info/>Скоробогатова Ольга Николаевна порно</a> porno Светлана Ходченкова яндекс игры казино casino андроид up casino скачать bitz casino porno Марина Александрова порно с Юлия Ефимова
#9711 Charlesgunny
porno Екатерина Ефременкова, шорт-трекистка порно с Матвей Сафонов (футбол) <a href=https://rucriminal.info/>pin up casino скачать</a> porno Алена Михайлова 7k casino сайт <a href=https://rucriminal.info/>казино гта 5</a> симулятор казино как выиграть в казино порно с Юлия Ефимова porno Анна Сидорова, керлингистка сайт казино вход porno Игорь Акинфеев (футбол) casino рабочее
#9712 Charlesgunny
up casino casinos winning <a href=https://rucriminal.info/>казино можно</a> Крючкова Полина Викторовна порно казино сочи <a href=https://rucriminal.info/>Семёнова Татьяна Владимировна порно</a> Комарова Наталья Владимировна порно Елизавета Боярская porno Александра Степанова, фигуристка Окладникова Ирина Андреевна порно new casino казино гта 5 сайт казино вход
#9713 Charlesgunny
Фастова Елена Владимировна порно казино зеркало сегодня <a href=https://rucriminal.info/>up casino</a> пинап казино порно с Владимир Минеев (ММА) <a href=https://rucriminal.info/>pin up casino зеркало</a> casinos winning porno Дарья Клишина порно с Константин Тюкавин (футбол) порно с Зырянова Анастасия Владимировна casino порно с Дарья Касаткина (теннис) Преподобная Надежда Александровна порно
#9714 Charlesgunny
casinos winning порно с Захарова Мария Владимировна <a href=https://rucriminal.info/>казино</a> pin up casino официальный кент казино <a href=https://rucriminal.info/>порно с Диана Шнайдер (теннис)</a> казино вулкан casino сегодня gama casino porno Марина Александрова порно с Георгий Джикия (футбол) Матвиенко Валентина Ивановна порно порно с Юлия Ефимова, пловчиха
#9715 Charlesgunny
Фастова Елена Владимировна порно зеркала казино <a href=https://rucriminal.info/>pin casino</a> porno Светлана Ходченкова порно с Владимир Минеев (ММА) <a href=https://rucriminal.info/>Разуваева Ксения Денисовна порно</a> казино сочи ап казино casino андроид сайт казино зеркало casino бонус порно с Евгения Медведева Светлана Ходченкова
#9716 Charlesgunny
ев казино порно с Виктория Синицина, фигуристка <a href=https://rucriminal.info/>официальная казино</a> casino бонус unlim casino <a href=https://rucriminal.info/>casino на телефон</a> казино смотреть онлайн porno Алена Михайлова Скоробогатова Ольга Николаевна порно Манилова Алла Юрьевна порно 7k casino скачать казино в россии пин ап казино
#9717 огнестойкие сейфыhttps://ognestojkij-sejf.ru/
Тут можно преобрести сейф противопожарный купить <a href=https://ognestojkij-sejf.ru/>сейф жаростойкий</a>
#9718 Charlesgunnyhttp://filmkachat.ru
1×slots быструю регистрацию а также мгновенное
В лицензионных бездепозитных казино играть в азартные игры вправду безопасно. Наличие лицензии подтверждает тот факт, собственно клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP.Так же стоит выделить то, собственно в любом онлайн казино установлен свой максимальный кешаут на бездепозитный бонус. Как управляло кешаут — это предельная сумма средств, кот-ая доступная для вывода с бездепозитного приза. <a href=http://filmkachat.ru/>1×slots бездепозитный бонус за регистрацию</a> <a href=http://www.1media.my/2022/11/persatuan-ulama-sedunia-tahu-tak-janji.html>http://www.1media.my/2022/11/persatuan-ulama-sedunia-tahu-tak-janji.html</a> Если при регистрации указать промокод, можно гарантировано получить бонус. Где взять ваучер? Посетите на блоги или форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В последнее время игорные дома начали рекламироваться в фильмах и телесериалах. Присмотритесь и всего заметите промокод, который принесёт 500 или 1 000 бонусных рублей. 1×slots коды <a href=https://www.themesindep.com/support/forums/users/catherineburbury/>https://www.themesindep.com/support/forums/users/catherineburbury/</a> Бонус начисляется игроку незамедлительно последствии регистрации и прохождения верификации в казино и не настятельно от клиента внесения депозита. Как правило, объем бонуса в подобном случае довольно застенчивый, впрочем позволяет новеньким познакомиться с игрой без риска настоящими средствами.Подтверждение регистрации. Казино требуют привязки профиля к электронному адресу и номеру аппарата. Для этого на e-mail отправляется послание ссылаясь, а на аппарат ? текстовое извещенье с кодом.
1хслотс регистрация в 1×slots casino
скачать 1×slots на андроид мобильная версия При небольшой сумме бонуса рекомендовано выступать по невысоким ставкам, а использовать максимальные чем только что, нет случае, если вейджер слишком немалый, а время на отыгрыш крепко ограничено.Фриспины начисляются по определенной ставке. После их активации игроку необходимо запустить слот и убедиться, собственно в нем отображаются благотворительные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с обозначенным в правилах вейджером. Максимальная сумма вывода в отыгрыша определяется оператором и изредка превышает 5 000 рублей. <a href=https://www.digitalistings.com/author/ashleyfrege/>https://www.digitalistings.com/author/ashleyfrege/</a> 1×slots на любой вкус как пройти регистрацию В наше время очень просто получить приз за регистрацию в казино. Практически каждый игорный дом с радостью начислит деньги или благотворительные вращения. Многие гэмблеры пользуются этим и не стыдятся региться в каждом клубе с прибыльными критериями. Кстати, это замечательная возможность выработать победную тактику и сорвать джекпот.
зеркала 1×slots
Поспешите отобрать бездепозитные бонусы за регистрацию в казино из представленного списка. Все платформы не водят законную работа, но и порадуют добросовестными результатами игры, высокой отдачей, прыткими выплатами. <a href=http://forum.notionmusic.com/memberlist.php?mode=viewprofile&u=40666>http://forum.notionmusic.com/memberlist.php?mode=viewprofile&u=40666</a> 1×slots casino регистрация
1×slots официальный сайт скачать на айфон
В зависимости от онлайн заведения каждый из их имеет вам предложить как бездепозитные средства, так и бездепозитные фриспины, коие последствии успешной регистрации рухнут для на ваш игровой баланс. 1хслот скачать <a href=http://bbs.xinhaolian.com/home.php?mod=space&uid=4019765>http://bbs.xinhaolian.com/home.php?mod=space&uid=4019765</a> Автоматы неспроста считаются самым популярным азартным развлечением. Чтобы усвоить управление и правила, потребуется всего количество минут. Ваша задачка сделать ставку, найти количество рабочих линий и можно крутить барабан. Если дисплее выпадет выигрышная композиция – вы выиграли! С этой задачей для помогут справится бездепозитные бонусы казино.Зачастую бездепозитные призы казино для забавы предлагаются разными заведениями азартных игр в рекламных акций либо в целях вербования к для новых игроков. Для бездепозитных бонусов в казино 2022 игроку надо пополнять счет до момента вывода хотимых средств.
1×slots зеркало регистрация то дальше необходимо пройти
Используйте превосходнейшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из списка ниже, чтобы заработать подарки за обычные деянья теперь сейчас получить первый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и резвыми выводами на электронные кошельки.При игре на бонусные свои воспрещается выступать в игровые автоматы с современным джекпотом и забавы из радела exist casino. Кроме такого, кое-какие казино дают бездеп на один либо несколько определенных слотов, и в других играх Вы не можете на них играть. <a href=http://shkola.mitrofanovka.ru/user/RalphKig/>http://shkola.mitrofanovka.ru/user/RalphKig/</a> Многие игроки, оценив функционал казино, остаются играть в нем и дальше ? на это и нацелено любое рекламную. Постоянные клиенты вносят депозиты и делают ставки, обеспечивая длительную прибыль оператора. То есть, казино раздают бездепы свежим пользователям для формирования лояльной аудитории.Однако в условиях скрываются «подводные камни», коие не позволят исключить крупную необходимую либо же вы не успеете отыграть вейджер. Поэтому профессионалы рекомендуют отобрать бесплатные вращения за регистрацию в казино без депо, дабы поднабраться навыка и получить реальный шанс на победу. 1хслот официальный сайт зеркало
<b>Смотреть еще похожие новости:</b>
<a href=http://nacionrolera.org/foro/viewtopic.php?p=522694>1×slots казино мобильная версия</a>
<a href=http://forums.panzergrenadiers.com/showthread.php?22943–1×slots-%D0%A0%D1%95%D0%A1%E2%80%9E%D0%A0%D1%91%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A0%C2%B0%D0%A0%C2%BB%D0%A1%D0%8A%D0%A0%D0%85%D0%A1%E2%80%B9%D0%A0%E2%84%96-demo-%D0%A1%D0%82%D0%A0%C2%B5%D0%A0%D1%96%D0%A0%D1%91%D0%A1%D0%83%D0%A1%E2%80%9A%D0%A1%D0%82%D0%A0%C2%B0%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A1%D0%8F-%D0%A0%D0%86–1×slots-casino&p=505241#post505241>1×slots официальный demo регистрация в 1×slots casino</a>
<a href=https://feederfishing.lt/en/forum/kedes-platformos-ir-ju-priedai/1254710–1×slots#1266184>рабочее зеркало 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша бонусов. Заведения всегда устанавливают максимальную ставку, возможную по условиям вейждера.
#9719 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
Шаг 5. Использование и отыгрыш. Бездеп обязан быть использован в обозначенный оператором срок, а полученный выигрыш отыгран с учетом заявленного вейджера.Для выбора азартного заведения Вы сможете пользоваться перечнем наших казино с призами за регистрацию. На нашем сайте мы выпустили перечень бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, что доля призов эксклюзивные и доступны лишь для посетителей нашего вебсайта по-специальному промо-коду либо по уникальной ссылке. Кроме такого, для каждого приза мы подготовили доскональный обзор, в Вы узнаете как получить и отыграть поощрение и как вывести собственный выигрыш с бездепа. <a href=http://filmkachat.ru/>1×slot официальный сайт</a> <a href=http://matripedia.de/doku.php?id=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D0%B5%D0%B9%D1%88%D0%B8%D0%B5%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!>http://matripedia.de/doku.php?id=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D0%B5%D0%B9%D1%88%D0%B8%D0%B5%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!</a> На активацию бездепозитного подарка выдается от нескольких часов до 1 суток. По истечению этого медли, Вы не можете активировать и получить бездепозитный приз. 1×slots на любой вкус как пройти регистрацию <a href=http://biosafe.tj/user/GlennMam/>http://biosafe.tj/user/GlennMam/</a>
x1 slots регистрация в 1×slots casino
Высокая конкуренция в разделе азартных игр мотивирует операторов завлекать клиентов разнообразными промоакциями. Благодаря этому у посетителей бывает возможность получить призы в казино за регистрацию без депо. Воспользоваться таким предложением возможно, избегая функцию внесения средств на игровой счет, просто активировав аккаунт на веб-сайте. Наш гид по бездепам поможет выбрать самую привлекательную бонусную программу, узнать правила получения такого вознаграждения и распорядиться им с наибольшей выгодой. <a href=https://persiankittencat.com/temporary-dog-fence-ideas/>1×slot зеркало</a> 1×slots подтвердит вашу регистрацию если говорить Денежные средства. Третий бонус за регистрацию без депо – наличные. К огорчению, лишь известные и пользующиеся клубы все дать средства в рублях либо долларах. С их помощью вас насладиться любой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед данным необходимо выполнение конкретных критерий. <a href=https://www.jutianwang.cn/home.php?mod=space&uid=6152&do=profile&from=space>https://www.jutianwang.cn/home.php?mod=space&uid=6152&do=profile&from=space</a> 1×slots зеркало рабочее Подтверждение регистрации. Казино требуют привязки профиля к электронному адресу и номеру телефонного. Для этого на e-mail отчаливает письмо со ссылкой, а на телефонный ? текстовое известье с кодом.
1× slots casino зеркало
Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. За счёт спинов получится запустить различные интернет слоты, протестировать стратегии и поднабраться опыта. Фишка том,, что вращения начисляются на лучшие аппараты с уникальными опциями и высокой отдачей. Не запамятовывайте, собственно в каждом акционном предложении предусмотрены особые требования – кратковременные ограничения, наибольший размер ставки, список доступных игр. <a href=https://bookmarketmaven.com/story15917074/allsoftlab-com-%D0%92%D0%B0%D1%88-%D0%BA%D0%BB%D1%8E%D1%87-%D0%B4%D0%BE-%D1%81%D0%B2%D1%96%D1%82%D1%83-%D0%BF%D1%80%D0%BE%D0%B3%D1%80%D0%B0%D0%BC%D0%BD%D0%BE%D0%B3%D0%BE-%D0%B7%D0%B0%D0%B1%D0%B5%D0%B7%D0%BF%D0%B5%D1%87%D0%B5%D0%BD%D0%BD%D1%8F>https://bookmarketmaven.com/story15917074/allsoftlab-com-%D0%92%D0%B0%D1%88-%D0%BA%D0%BB%D1%8E%D1%87-%D0%B4%D0%BE-%D1%81%D0%B2%D1%96%D1%82%D1%83-%D0%BF%D1%80%D0%BE%D0%B3%D1%80%D0%B0%D0%BC%D0%BD%D0%BE%D0%B3%D0%BE-%D0%B7%D0%B0%D0%B1%D0%B5%D0%B7%D0%BF%D0%B5%D1%87%D0%B5%D0%BD%D0%BD%D1%8F</a> 1×slots casino регистрация Далее требуется отыграть вагер и вывести выигрыш. Игрокам без навыка крупно повезло, они могут получить 10-ки подарков за 1 регистрацию. Если не сумели получить Бездепозитный бонус, не беспокойтесь. Обратитесь в интернет чат, оператор поможет исправить.Подтверждение персональной инфы. Все казино просят от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и присутствие у юзера иных аккаунтов (мультиаккаунт запрещен).
1×slots промокод при регистрации
Несмотря на то, что этот вариант стимуляции со стороны азартных платформ довольно востребован области сходственных игр, далеко многим поклонникам казино знаменито, что по бездепозитные призы казино и как именно их вероятно эксплуатировать.Фриспины. Бесплатные вращения предусмотрены для использования в видео-слотах. Внимательно читайте обстоятельства – они часто выдаются для неких машин. В зависимости от клуба вам создавать определенное количество ставок. Кстати, современные игорные жилища дают вероятность заводить «одноруких бандитов». <a href=https://www.findaspermdonor.com/viewtopic.php?p=128465>1×slots подтвердит вашу регистрацию если говорить</a> Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, дабы замечена возможность исключить выигрыш. 1хслот 1хслотс регистрация перейти на 1×slots <a href=http://nsmro.allhow.com/bbs/board.php?bo_table=estimate&wr_id=399051>http://nsmro.allhow.com/bbs/board.php?bo_table=estimate&wr_id=399051</a>
1×slots официальный сайт зеркало
Условия, на коих предоставляется бездеп, регулируются казино. Каждая промоакция содержит подробные верховодила, ссылка на коие обыкновенно содержится в промообъявлении. В них указываются лимиты, вейджер, список доступных игр. Если оператор прячет данные о предложении, то воспользоваться им не стоит.Бездепозитные призы – это исключительно занимательная и более многообещающая промоакция интернет-казино. Они в другого фри-спинов, потому что выплаты в даровых вращениях не гарантированы, как комбинации на барабанах игрового аппарата все не сложиться. Несмотря на то, что этот вариант стимуляции со стороны азартных платформ довольно известен в похожих игр, далеко не почитателям казино известно, собственно себе бездепозитные призы казино и как именно их вполне эксплуатировать.Основное отличие никаких, что для получения бездепа не пополнять баланс в казино. Но не сего, есть ряд и различий: <a href=http://pr.lgubiz.net/bbs/board.php?bo_table=free&wr_id=1392624>http://pr.lgubiz.net/bbs/board.php?bo_table=free&wr_id=1392624</a> 1×slots регистрацию более популярный вариант это Приглашаем делиться воззреньями о призах. Это поможет другим пользователям выбирать более прибыльные предложения.
<b>Смотреть еще похожие новости:</b>
<a href=http://nrj.rs.ba/memberlist.php?mode=viewprofile&u=2111>1×slots бездепозитный бонус за регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депо возможность выделяться до 30 дней.
#9720 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее на сегодня
Доступные игры – В неких азартных забавах возможно понизить математическое преимущество казино до нескольких десятых процента. В их количестве почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как управляло, в этих забавах ставки идут в зачет вейджера не полностью. Например, возможность учитываться лишь 50%. В некоторых играх бездепозитные призы вообще нельзя отыгрывать. <a href=http://filmkachat.ru/>1×slots официальный demo регистрация в 1×slots casino</a> Не трудно догадаться, что no down payment bonuses почти никогда не случаются великими. Чаще всего идет о пяти–тридцати баксах (или эквиваленте этой суммы в иной денежной).На нашем сайте Вы отыщите список актуальных свежих бездепозитных бонусов в казино 2022 года. Также, есть количество неповторимых услуг, коие доступны только посетителям нашего вебсайта последствии регистрации по нашей ссылке либо активации особого промокода. <a href=http://emseyi.com/index.php?qa=user&qa1=maniacaldancer2>http://emseyi.com/index.php?qa=user&qa1=maniacaldancer2</a> Ограничения по забавам. Администрация воспрещает игрокам некоторые игровые автоматы с бездепозитным бонусом, деньгами либо бесплатными вращениями. Обычно, в правилах приводится полный список слотов для отыгрыша. Иногда деление выполняется по виду игр. Например, отыгрыш возможен на всех игровых аппаратах, но запрещен в настольных играх и в разделе Live Casino. 1×slots официальный сайт зеркало <a href=http://misojin.co/bbs/board.php?bo_table=free&wr_id=301911>http://misojin.co/bbs/board.php?bo_table=free&wr_id=301911</a> В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать собственный выигрыш с безвозмездных вращений. Прибыль, коию Вы заработаете на этом бездепе можно назначать на вывод без какого или отыгрыша.С другой стороны, намного проще отобрать бездепозитные фриспины за регистрацию в казино и прямо в начать вращать барабаны в наилучших слотах. Главная необыкновенность спинов том,, собственно они предусмотрены для лучших автоматов. Удастся не только пройти дополнительные раунды, хотя и увеличить необходимую выигрыша, заработать респины и внутриигровые подарки.
1×slots регистрация
x1 slots регистрация в 1×slots casino <a href=http://yseoul.com/bbs/board.php?bo_table=free&wr_id=366574>http://yseoul.com/bbs/board.php?bo_table=free&wr_id=366574</a> Для получения депозитного бонуса необходимо восполнить свой игровой баланс настоящими средствами. Вознаграждение возможно получить либо при внесении первого депозита, или вид фиксированного процента от внесённых средств. Так или по, приз поступит на счёт только последствии пополнения.Для выбора азартного заведения Вы можете воспользоваться перечнем наших казино с бонусами за регистрацию. На нашем сайте мы выпустили список бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, что доля призов неповторимые и доступны только для гостей нашего вебсайта по-специальному промо-коду либо по оригинальной ссылке. Кроме того, для любого приза мы подготовили подробный обозрение, каком Вы узнаете как получить и отыграть одобрение и как вывести собственный выигрыш с бездепа. 1хслотс рабочее зеркало на сегодня Хотя благотворительные призы начисляются без депозита, не исключено, что вас придется заносить деньги. Большинство онлайн-казино выплачивают отыгранные бонусные кредиты только после такого, как свежий клиент первый пополнит игровой счет.
1×slot официальный сайт
Когда речь о денежных призах, казино практически устанавливают условия вейджера, которые нужно выполнить, дабы вывести выигрыш. Мы рекомендуем не открещиваться от сходственных услуг знаменитых казино. Выделите несколько минут на регистрацию, получите приз и попробуйте его отыграть. Может быть, сейчас фортуна несомненно на вашей стороне! <a href=http://www.mallangpeach.com/bbs/board.php?bo_table=free&wr_id=516161>http://www.mallangpeach.com/bbs/board.php?bo_table=free&wr_id=516161</a> Бесплатный приз – кредиты, которые онлайн-казино начисляет посетителю, не заставляя его пополнять игровой счет. 1хслотс зеркало на сегодня Нет. Казино выдают безвозмездные призы за регистрацию, чтобы, чтобы, дабы заказчик возможность ознакомиться с игровым заведением. А дабы вывести его, необходимо выполнить обстоятельства отыгрыша.
1 x slots
В случае установленного лимита на необходимую вывода выигрыша с бездепозитного приза, игрок не сможет исключить больше заявленной суммы.Также, ситуации необходимо подтвердить собственный номер аппарата, для этого код, приобретенный в смс-сообщении от клуба установить в особое поле в собственном офисе игрока. <a href=https://bans.org.ua/index.php?topic=118165.new#new>1×slots регистрацию более популярный вариант это</a> Третитй бездепозитный приз за регистрацию – валютные свои. К сожалению, начислить рубли либо баксы способны только знаменитые и популярностью клубы. С их поддержкою вас насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком. 1× slots сайт <a href=http://www.28wdq.com/home.php?mod=space&uid=409728&do=profile&from=space>http://www.28wdq.com/home.php?mod=space&uid=409728&do=profile&from=space</a>
1×slots регистрация 1×slotscasino09k online
Вейджер (либо вагер) ? это минимальная сумма ставок, коию необходимо сделать для вывода валютного бонуса. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, что, этим привлекательнее спецпредложение.Самые свежие бездепозитные призы в казино за регистрацию 2022 года с выводом прибыли присутствуют на данной странице. Посетитель может расценить обстоятельства получения и начать выступать на средства без внесения депо. При этом игроку главно осознавать, на каких критериях и какими способами он сможет исключить полученный выигрыш. Для сего необходимо оценить список присоединенных платежных систем. Фриспины предназначены для использования в видео слотах. Внимательно ознакомьтесь с условиями – часто их выдают на кое-какие автоматы. В зависимости от клуба, у вас получится устроить определённое число ставок. Кстати, продвинутые игорные дома позволяют запускать каждых «одноруких бандитов».Для верификации номера аппарата, в личном профиле изберите опцию „Подтвердить номер аппарата“ и введите в соответствующее поле код, приобретенный в sms-сообщении. <a href=http://whdf.ru/forum/user/78824/>http://whdf.ru/forum/user/78824/</a> рабочее зеркало 1хслотс B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax
<b>Смотреть еще похожие новости:</b>
<a href=https://australianwinerytours.com/tours/showthread.php?tid=55769&pid=308527#pid308527>1×slots промокод при регистрации</a>
<a href=https://www.fromrus.su/index.php?/topic/20409–1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D0%B2%D1%8B%D0%B8%D0%B3%D1%80%D1%8B%D1%88%D0%B8-%D0%BE%D0%B1%D1%8F%D0%B7%D0%B0%D1%82%D0%B5%D0%BB%D1%8C%D0%BD%D0%BE-%D0%BF%D1%80%D0%BE%D0%B9%D0%B4%D0%B8%D1%82%D0%B5-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8E-%D0%B5%D1%81%D0%BB%D0%B8/>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a>
<a href=https://www.one2bay.de/forum/showthread.php?tid=24500&pid=851043#pid851043>1×slots зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Частенько новенькие не знают, как активировать подарки или исключить 1-ый выигрыш. Для похожих случаев наша команда обрисовала главные определения – собственно это фриспины, вейджер, как его отыграть, для нужно протекать верификацию.
#9721 Charlesgunnyhttp://filmkachat.ru
1× slots сайт
Не желайте поиграть в азартные игры, не рискуя своими деньгами, но получая в все выплаты? Подобную возможность деют все наихорошие порталы с азартными увеселениями. В их числе большое добросовестных и надежных интернет-казино на русском языке. Они привлекают новых юзеров разными поощрительными мероприятиями, включая бездепозитные, либо благотворительные призы.Каждый из бездепозитных призов без пополнения 2022 содержит собственный определенный вейджер для отыгрыша, например же в любом казино он устанавливается индивидуально — где то он х55 а где-то х30, повторюсь всюду по разному! <a href=http://filmkachat.ru/>1хслотс 1хслотс регистрация перейти на 1×slots</a> <a href=http://o91668l6.beget.tech/user/JamesLiepe/>http://o91668l6.beget.tech/user/JamesLiepe/</a> Xoтитe пoлучить мaкcимум oт игpы в oнлaйн кaзинo бeз влoжeния coбcтвeнныx дeнeжныx cpeдcтв? Toгдa вы oкaзaлиcь в нужнoм мecтe. Нa нaшeм caйтe coбpaн aктуaльный cпиcoк пpeдлoжeний oт вeдущиx игpoвыx клубoв Pунeтa, пpинимaющиx игpoкoв из Poccии, Укpaины, Бeлapуcи и Кaзaxcтaнa, гдe в 2022 гoду мoжнo нaчaть игpaть нa peaльныe дeньги, пoлучив бecплaтныe вpaщeния либо peaльныe дeньги нa cчeт, пpocтo зapeгиcтpиpoвaв учeтную зaпиcь в пoлнoй либо мoбильнoй вepcии иx oфициaльныx caйтoв. Oбpaщaйтe внимaниe нa пpoмoкoды – нeкoтopыe из ниx ввoдятcя вo вpeмя coздaния aккaунтa, дpугиe – cpaзу жe пocлe нeгo. 1×slots зеркало выигрыши обязательно пройдите регистрацию если <a href=https://civil808.com/user/64157/jamestot>https://civil808.com/user/64157/jamestot</a>
1×slots коды
<a href=http://check2go.net/author/jameslob/>1хслот 1хслотс регистрация перейти на 1×slots</a> 1×slots зеркало на сегодня <a href=https://pcnto.com/user/GeraldDop/>https://pcnto.com/user/GeraldDop/</a> 1×slots casino регистрация Представьте момент, когда при ставке в 10 рублей Вы получите сходственное умножение. Миллион руб. За одно вращение, собственно абсолютно возможно. Поэтому вопрос, сколько возможно выиграть остаётся закрытым. Предлагаем проверить без. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный приз и проверяйте фортуну в деле. Разумеется, исключить средства довольно. Однако шансы есть у всех.
1×slot регистрация
Пoдтвepдить личнocть клиента. Для удачного вывода средств, нужно подтвердить личность клиента. Нa этaпe вepификaции пpoфиля, работники службы безопасности обязаны убедиться, что у игрока чем один акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не сможет исключить свой выигрыш, если у него будет количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы. <a href=https://www.currencylovers.com/forums/member.php?action=profile&uid=81436>https://www.currencylovers.com/forums/member.php?action=profile&uid=81436</a> 1×slots регистрация Отыграв бездепозитный приз в казино с выводом также придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если схожее ограничение присутствует, то единоразово исключить получится лишь сумму, не превосходящую объем приобретенного бонуса.Как лишь вы отыграли вейджер и средства с бонусного баланса перебежали для на настоящий счет, Вы смело можете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (устроить минимальный депо к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депозитом).
1хслотс зеркало на сегодня
Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?У каждого игорного клубы разные вейджеровые условия. Чтобы вы гарантировано сумели выполнить их, мы дадим несколько советов. Если система начислила небольшую необходимую, не делать большие ставки – остановитесь на 10–30 центах. Как только сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте играть. В неприятном случае чем присмотреться к иному автомату. <a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=266292>1х слотс зеркало регистрация в 1×slots casino</a> Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала прыткие выводы. Фишка выплат в том, собственно довольно выбрать платёжный инструмент и указать сумму. В большинстве случаев деньги зачисляются на электрические кошельки в течение 15 мин., а на банковские карты – 1–3 рабочих дня. 1×slots зеркало регистрация то дальше необходимо пройти <a href=http://www.biopolytech.com/bbs/board.php?bo_table=free&wr_id=126438>http://www.biopolytech.com/bbs/board.php?bo_table=free&wr_id=126438</a> Для казино, работающих интернет, бездепозитные бонусы нужны для вербования новых клиентов. Предложение поиграть на слотах без надобности внесения реальных денег — работающий способ для повышения интереса к фирмы. После отыгрыша бездепа велик шанс, собственно игроку понравится и он продолжит играть в казино, только теперь уже на собственные деньги.
1×slots официальный сайт скачать
<a href=http://www.rw2828.com/home.php?mod=space&uid=2008614>http://www.rw2828.com/home.php?mod=space&uid=2008614</a> Таким образом, заведение пытается продемонстрировать себя своим потенциальным геймерам, а подобный рекламный ход как казино приз без депо за регистрацию привлекает довольно большое внимания к игорному заведению и обеспечивает постоянный струю новых гостей и будущих посетителей игрового онлайн клуба. казино 1×slots Бонусы без депо при регистрации числятся наиболее красивыми как для опытных игроков, так для и новичков. Получив это вознаграждение, заказчик может играть на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а обстоятельства их активации и выигрыша.Бездепы с безвозмездными вращениями предоставляют пользователям право вращать барабаны игровых автоматов без снятия средств со счета. За каждый раунд платит казино. Число спинов ограничено и редко превышает сотню. Если промоакция включает в себя большое безвозмездных игр, их начисление имеет быть разбито на несколько дней.
<b>Смотреть еще похожие новости:</b>
<a href=http://6000ziyuan.com/forum.php?mod=forumdisplay&fid=2>1×slots подтвердит вашу регистрацию если говорить</a>
<a href=https://traderscrypt.com/forums/showthread.php?tid=5891&pid=8743#pid8743>1х слот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Ниже указан важный список законных казино в Беларуси с призами на 1-ый депо. Вы сможете попасть на официальный вебсайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз. Но такие рамки не смущают и хайроллеров, потому коэффициенты на слотах дозволяют рассчитывать на солидные выигрыши, в некоторых автоматах разыгрывается передовой джекпот.
#9722 SolCasinohttps://sol-casino-apk.ru
<a href=http://cu.edu.kz/ru/go.php?go=https://sol-casino-apk.ru>sol-casino-apk.ru</a> <a href=http://ogloszeniagdansk.com/link.php?url=https://sol-casino-apk.ru>sol-casino-apk.ru</a> <a href=http://eatlovedrive.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=https://sol-casino-apk.ru>sol-casino-apk.ru</a> <a href=http://www.politis.fr/ad/redirect/167c30c3–22b1–4c60-ad35-c6b26b3a0316/?url=https://sol-casino-apk.ru>sol-casino-apk.ru</a> <a href=http://maps.google.ki/url?sa=t&rct=j&url=https://sol-casino-apk.ru>sol-casino-apk.ru</a> <a href=http://www.rma.ru/bitrix/rk.php?id=465&site_id=ru&event1=banner&event2=click&event3=4+%2F+%5B465%5D+%5B778×154%5D+???????+????to=https%3A%2F%2Ft.me/s/worldcasinonet&af=11c97d6959afb1f6c827a2fb0b98b941>sol-casino-apk.ru</a> <a href=http://www.novo-voda.com/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=https://sol-casino-apk.ru>sol-casino-apk.ru</a> <a href=http://g-rf.ru/forum/away.php?s=https://sol-casino-apk.ru>sol-casino-apk.ru</a> <a href=http://www.shemalesz.com/cgi-bin/atc/out.cgi?id=17&l=btop&u=https://sol-casino-apk.ru>sol-casino-apk.ru</a> <a href=http://it-outsourcing.alp-itsm.ru/msk/10/exit.php?url=https://sol-casino-apk.ru>sol-casino-apk.ru</a> <a href=http://garden-grove.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=https://sol-casino-apk.ru>sol-casino-apk.ru</a> <a href=http://www.danviews.com/go/?url=https://sol-casino-apk.ru>sol-casino-apk.ru</a> <a href=http://gorod-kurganinsk.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=https://sol-casino-apk.ru>sol-casino-apk.ru</a> <a href=http://www.1stube.com/cgi-bin/a2/out.cgi?id=30&u=https://sol-casino-apk.ru>sol-casino-apk.ru</a> <a href=http://webmail.i-med.ac.at.xx3.kz/go.php?url=https://sol-casino-apk.ru>sol-casino-apk.ru</a>
Download latest version of the application online casino sol – win today !
<a href=http://www.sanvalentin.org/salta/index.php?url=https://sol-casino-apk.ru>sol-casino-apk.ru</a> <a href=http://happykonchan.com/?wptouch_switch=desktop&redirect=https://sol-casino-apk.ru>sol-casino-apk.ru</a> <a href=http://vashprazdnik33.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=https://sol-casino-apk.ru>sol-casino-apk.ru</a> <a href=http://www.google.tg/url?sa=t&url=https://sol-casino-apk.ru>sol-casino-apk.ru</a> <a href=http://racii24.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=https://sol-casino-apk.ru>sol-casino-apk.ru</a> <a href=http://m.hellotoy.co.kr/member/login.html?noMemberOrder=&returnUrl=https://sol-casino-apk.ru>sol-casino-apk.ru</a> <a href=http://panthera.lychnell.com/n/go.php?url=https://sol-casino-apk.ru>sol-casino-apk.ru</a> <a href=http://images.google.gp/url?sa=t&url=https://sol-casino-apk.ru>sol-casino-apk.ru</a> <a href=http://jtlanguage.com/Common/ToggleShowFieldHelp?returnUrl=http%3A%2F%2Fhttps://sol-casino-apk.ru>sol-casino-apk.ru</a> <a href=http://medplant.ru/bitrix/rk.php?goto=https://sol-casino-apk.ru>sol-casino-apk.ru</a> <a href=http://guestbook.lapeercountyparks.org/?g10e_language_selector=de&r=http%3A%2F%2Fhttps://sol-casino-apk.ru>sol-casino-apk.ru</a> <a href=http://www.cytoday.com.cy/ads/www/delivery/ck.php?ct=1&oaparams=2__bannerid=434__zoneid=68__cb=d20ba7af17__oadest=http%3A%2F%2Fhttps://sol-casino-apk.ru>sol-casino-apk.ru</a> <a href=http://clients1.google.co.cr/url?q=https://sol-casino-apk.ru>sol-casino-apk.ru</a> <a href=http://www.dbdxjjw.com/Go.asp?url=https://sol-casino-apk.ru>sol-casino-apk.ru</a> <a href=http://www.google.sn/url?sa=t&url=https%3A%2F%2Fhttps://sol-casino-apk.ru>sol-casino-apk.ru</a>
#9723 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Приветственный приз без депо ? презент за регистрацию. Выдается деньгами, фриспинами либо баллами. В заключительном случае бонусные баллы используются для участия в турнирах либо размена на реальные деньги.Таким образом интернет казино получает вероятного игрока. Возможно дальнейшем или подлинном он захотит поиграть на свои деньги. Так работают бездепозитные бонусы в интернет казино. Здесь отлично подходит выражение, благотворительные сыр бывает только в мышеловке. Начинающие игроки могут не обдумывать опасность пыла. Однако времени понимания делается больше. Это тема для отдельного обсуждения. <a href=http://filmkachat.ru/>1× slots casino зеркало</a> <a href=http://mail.nudecelebvideo.net/user/DavidPes/>http://mail.nudecelebvideo.net/user/DavidPes/</a> казино 1×slots <a href=http://another-ro.com/forum/profile.php?id=168626>http://another-ro.com/forum/profile.php?id=168626</a> Бездепы обычно предлагают с отыгрышем — быстро вывести выигранные средства невозможно. Перевод денег со счета будет возможен в такого, как юзер выполнит все притязания казино, а сумма не может превышать установленного правилами лимита. Условиями акции фиксируются сроки, на коих клиент вправе пользоваться предложением. Обычно они не превышают нескольких дней после активации.
casino 1×slot
Риск-игра по равным шансам – Также казино может запрещать исполнять условия по отыгрышу с помощью раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких иных забавах. <a href=https://g2clubs.com/healthy-workout/google/#comment-24035>1хслотс рабочее зеркало на сегодня</a> 1х слот 1хслотс регистрация перейти на 1×slots Фриспины — бесплатные вращения, которые позволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины считаются самым известным и предпочтительным обликом приза — безвозмездные вращения иногда эффективнее и веселее в отыгрыше, чем остальные виды бездепов. <a href=http://ksbbs.hzrtv.cn/home.php?mod=space&uid=1700465>http://ksbbs.hzrtv.cn/home.php?mod=space&uid=1700465</a> В лицензионных бездепозитных казино играть в азартные забавы действительно неопасно. Наличие лицензии подтверждает тот факт, собственно клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP. 1×slots регистрацию процедура займет всего лишь Акционные предложения от казино есть в разных форматах. Часто призы даются в размен на депозит. Игрок заносит платеж и получает деньги, благотворительные вращения прочие поощрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — картина бонуса, кот-ый гарантирован за выполнение определенных поступков на сайте:B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя.
1×slots официальный сайт скачать
Перечисленные повыше основные свойства сочетают фактически каждый приз и считаются стандартными для бездепозитных бонусных начислений в казино. <a href=http://forum.notionmusic.com/memberlist.php?mode=viewprofile&u=28335>http://forum.notionmusic.com/memberlist.php?mode=viewprofile&u=28335</a> Депозит для вывода средств. Для вывода отыгранного бездепозитного бонуса в неотъемлемом порядке необходимо восполнить счет в казино. Для депозитных бонусов, эта процедура не необходима, например как депозит уже сделан. 1×slots рабочее зеркало Заработать на бездепозитных призах за регистрацию в казино может каждый юзер, достигший совершеннолетия.
1хслот 1хслотс регистрация перейти на 1×slots
1×slots мобильная версия войти казино <a href=http://viralcomms.com/bbs/board.php?bo_table=free&wr_id=450990>http://viralcomms.com/bbs/board.php?bo_table=free&wr_id=450990</a> Подтверждение электронной почты – одно из ведущих условий, которое есть почти в каждом бездепозитном казино. Чтобы верифицировать электронную почту, довольно перейти по интенсивной ссылке в письме, полученном от азартного клуба.В интернет-сети всегда возможно отыскать списки наиболее знаменитых и обещанных поощрительных программ от модных онлайн-казино.
1х слот регистрация в 1×slots casino
Многие казино предоставляют в маркетинговых целях бесплатные призы необыкновенно для наших читателей. Чтобы их получить, надо(надобно) перейти на игровой сайт по партнерской ссылке с нашего портала.Изучить управляла и обстоятельства получения бездепозитных призов казино, Вы можете у нас на сайте в разделе с бонусами или на официальном веб-сайте избранного Вами казино. Если не можете отыскать необходимую информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал или по электронной почте. <a href=https://sims-game.com/user/Arnoldexals/>https://sims-game.com/user/Arnoldexals/</a> Размер бонусов почаще всего чисто символический и не превышает 50 руб. Приятно, хотя ощутимым бустом деле навряд станет. 1×slots бездепозитный бонус за регистрацию Oтыгpыш дeнeг и вывoд выигpышa. Oтыгpaть дeньги либо пoлучeнный пocлe иcпoльзoвaния фpиcпинoв выигpыш c coблюдeниeм вeйджepoвыx уcлoвий и пoдaть зaявку нa вывoд c учeтoм уcтaнoвлeннoгo aдминиcтpaциeй кaзинo лимитa.Прежде всего, не забывайте периодически заглядывать на страницу обзоров бездепозитных призов. Они шаг за шагом оценивают наиболее увлекательные предложения основных игорных порталов.
<b>Смотреть еще похожие новости:</b>
<a href=http://portal.westcoastbible.org/memberlist.php?mode=viewprofile&u=400061&sid=98f5ed11907cd6b0c5b3094c01fbb7a8>1хслот 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На благотворительные призы онлайн-казино практически практически распространяется лимитирования по стране проживания клиентов. Даже если вам разрешено открывать счет и играть на деньги в заведении, это еще не означают, что вам доступны no deposit bonuses.
#9724 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на сайте 1×slots ru com
Онлайн гемблинг развивается с каждым деньком все больше и больше, свежие бренды создаются не по дням а по часам. Новые онлайн казино делают вступительные акции для игроков, чтобы, чтобы собственно бы зарекомендовать себя, и что, этим самым предлагают бездепозитные призы за регистрацию, что бы не упустить такую возможность — как пользоваться свежим бездепом, рекомендуем посещать наш сайт как возможно почаще, самое аппетитное и новые несомненно добавляться в данном же списке. <a href=http://filmkachat.ru/>1×slots казино мобильная версия</a> <a href=http://istiqbolsari.uz/user/Jamesethiz/>http://istiqbolsari.uz/user/Jamesethiz/</a> Если идет об неповторимых предложениях, возможность понадобиться регистрация в казино по ссылке с партнерского вебсайта. рабочее зеркало 1×slots <a href=https://wifidb.science/index.php?title=%D0%A4%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B%20%D0%B0%D0%B3%D0%B5%D0%BD%D1%82%D1%81%D1%82%D0%B2%D0%B0%20%D0%BD%D0%B5%D0%B4%D0%B2%D0%B8%D0%B6%D0%B8%D0%BC%D0%BE%D1%81%D1%82%D0%B8%20%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8:%20%D0%92%D1%85%D0%BE%D0%B4%20%D0%B2%20%D0%BC%D0%B8%D1%80%20%D1%83%D1%81%D0%BF%D0%B5%D1%88%D0%BD%D0%BE%D0%B3%D0%BE%20%D0%B1%D0%B8%D0%B7%D0%BD%D0%B5%D1%81%D0%B0>https://wifidb.science/index.php?title=%D0%A4%D1%80%D0%B0%D0%BD%D1%88%D0%B8%D0%B7%D1%8B%20%D0%B0%D0%B3%D0%B5%D0%BD%D1%82%D1%81%D1%82%D0%B2%D0%B0%20%D0%BD%D0%B5%D0%B4%D0%B2%D0%B8%D0%B6%D0%B8%D0%BC%D0%BE%D1%81%D1%82%D0%B8%20%D0%A0%D0%BE%D1%81%D1%81%D0%B8%D0%B8:%20%D0%92%D1%85%D0%BE%D0%B4%20%D0%B2%20%D0%BC%D0%B8%D1%80%20%D1%83%D1%81%D0%BF%D0%B5%D1%88%D0%BD%D0%BE%D0%B3%D0%BE%20%D0%B1%D0%B8%D0%B7%D0%BD%D0%B5%D1%81%D0%B0</a> Риск-игра по одинаковым шансам – Также казино имеет запрещать выполнять условия по отыгрышу счет раунда на удвоение, который предлагается в слотах, видео-покере и неких других забавах.
1×slots casino зеркало рабочее
Не стоит сразу же отказываться от приветственных презентов в подобных казино. Администрация готова начислить средства или фриспины, но предварительно сотрудники обязаны убедиться, собственно вы не мошенник. Дело в, собственно развелось очень количество охотников за бонусами. Они выучились накалывать систему и наваривать солидные суммы средств. <a href=https://tucmas.fi/phpBB/viewtopic.php?f=4&t=348690>1×slots официальный сайт скачать</a> 1×slots официальный сайт зеркало Если простыми текстами, бездепы – это определённая сумма денег либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать подарки. Но есть некоторые нюансы. Существуют игорные жилища, коие перед что, этим как начислить призы настоятельно привязать телефонный, дать копии документов.Подтвердите регистрацию, чтобы активировать Бездепозитный бонус с выводом, потребуется наполнить индивидуальный профиль. Заполните пустующие поля настоящими данными о себя. <a href=https://www.storeboard.com/blogs/travel/discover-barcelona-an-insiders-guide-to-the-citys-gems/5777124>https://www.storeboard.com/blogs/travel/discover-barcelona-an-insiders-guide-to-the-citys-gems/5777124</a> С иной стороны, гораздо легче отобрать бездепозитные фриспины за регистрацию в казино и прямо данный начать вращать барабаны в наилучших слотах. Главная особенность спинов том,, что они предусмотрены для лучших автоматов. Удастся не только пройти дополнительные раунды, но и прирастить сумму выигрыша, заработать респины и внутриигровые презенты.Воспользоваться бездепом возможно не во всех игровых автоматах: казино и тут устанавливает лимитирование для клиентов. Конечно, это возможно счесть некоторым неудобством для игрока, но справедливости ради стоит отметить, что выбор автоматов всё точно остаётся достаточно великим. 1×slots casino online регистрация Сроки активации бонуса устанавливаются каждым казино, хотя почаще всего они не превышают недели с этапа получения. Игроку обязательно нужно использовать бездеп в течение обозначенного срока, в ином случае бонус просто пропадет. Каждый приз возможно получить только раз раз, поэтому случае не использовать бездеп в срок, у игрока не несомненно второго шанса им воспользоваться.
1× slots официальный
Для отыгрыша бонуса казино обязывает игрока поиграть на необходимую, в несколько один превышающую необходимую полученного приза — здесь выгода фирмы явна.Бездепы обыкновенно предлагают с отыгрышем — моментально вывести выигранные средства невозможно. Перевод денег со счета несомненно возможен последствии такого, как юзер выполнит все требования казино, а сумма возможности превышать установленного правилами лимита. Условиями промоакции фиксируются сроки, протяжении коих заказчик вправе воспользоваться предложением. Обычно они не превышают нескольких дней после активации. <a href=http://lt.xl921.com/home.php?mod=space&uid=80041>http://lt.xl921.com/home.php?mod=space&uid=80041</a> Третитй бездепозитный приз за регистрацию – валютные средства. К раскаянию, начислить рубли или баксы готовы лишь знаменитые и модные клубы. С их подмогою появится насладиться любой доступной игрой – автоматом, рулеткой, кено, блэкджеком.Бoльшинcтвo азартных заведений выдвигают приблизительно однообразные, схожие условия и требования, коие необходимо выполнить, дабы получить бездепозитный бонус за регистрацию. Все их возможно соединить в раз перечень: скачать 1×slots официальный сайт Бонус без депозита за регистрацию в казино (бездепозитный приз) – это денежный подарок от клуба, кот-ый начисляется на акк игрока в регистрации в казино. Кроме создания учетной записи, для получения бездепа, довольно нередко требуется ещё и доказать контактные данные игрока и/или активировать специальный промо-код.
1× slots официальный
Первый образующийся вопрос, это, зачем выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают свежих игроков. Последним легче начать забаву на средства с презента за регистрацию. Им надо пополнять баланс и тратить личностные средства. Новички получают благотворительные спины или средства на счёт. С их поддержкой знакомятся с игровым ходом, крутят слоты и делают ставки в рулетке. <a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=309707#pid309707>1×slots официальный сайт, скачать</a> Простая процедура получения бездепозитного бонуса, кот-ая займет менее 2-х минут. Для получения бездепов, достаточно зарегистрироваться и подтвердить контактные данные. Так что можете храбро региться без всяких размышлений. Фортуна сейчас точно на вашей стороне. Не страшитесь, так последствие какого либо ущерба Вам абсолютно не угрожает. С такими призами как без пополнения, Вы остаетесь лишь в плюсе, но не как не в минусе.Для выбора азартного заведения Вы можете воспользоваться перечнем наших казино с бонусами за регистрацию. На нашем веб-сайте мы выпустили список бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, что часть бонусов эксклюзивные и доступны лишь для гостей нашего вебсайта по-специальному промо-коду либо по оригинальной ссылке. Кроме как, для любого бонуса мы подготовили доскональный обозрение, в Вы узнаете как получить и отыграть поощрение и как вывести свой выигрыш с бездепа. 1хлот регистрация в 1×slots casino <a href=https://v7.toonanime.co/user/Justinplemo/>https://v7.toonanime.co/user/Justinplemo/</a> Основное верховодило получения бездепа ? творимый аккаунт должен быть у юзера первым и единственным. Наличие нескольких аккаунтов строго запрещено. Проверка проводится по имени, e-mal, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита нужно блюсти несложную последовательность поступков.Ниже указан важный перечень легальных казино в Беларуси с бонусами на 1-ый депозит. Вы можете попасть на официальный сайт выбранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз.
1х слот 1хслотс регистрация перейти на 1×slots
<a href=https://forum.333569.gay/?topic=23614>https://forum.333569.gay/?topic=23614</a> Срок отыгрыша — это период, который наступает в момент активации приза и завершается с его закрытием. Пользователю нужно уложиться в этот временной зазор, другому призовые средства аннулируются. Казино устанавливают список игр, ставки в которых засчитываются при расчете отыгранных денег. Если тайтл не входит в данный список, то ему быть недосегаем для загрузки период действия бонусного предложения. 1 x slots Помните, что в неких забавах сумма ставки идет в зачет вейджера лишь отчасти. Так, в настольных и карточных играх только от 5% до 50% суммы ставки числятся как отыгранные деньги, на как в слотах идет в зачет все one hundred percent суммы.Будьте внимательнее при ознакомлении с правилами во избежание появления конфликтных обстановок с казино, когда в отыгрыша бездепа вас не дадут вывести солидную сумму выигрыша.
<b>Смотреть еще похожие новости:</b>
<a href=http://board.eternityrpc.com/user-369.html>1×slots зеркало которую указывали при регистрации кстати</a>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=62336&result=reply>1 xslots рабочее зеркало</a>
<a href=http://big.bestforums.org/viewtopic.php?f=7&t=9654>1×slots мобильная версия войти казино</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Фриспины начисляются по определенной ставке. После их активации игроку необходимо запустить слот и убедиться, собственно в нем показываются благотворительные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода последствии отыгрыша определяется оператором и редко превышает 5 000 рублей.
#9725 Charlesgunnyhttp://filmkachat.ru
1×slots сайт
Воспользоваться бездепом возможно не во всех игровых автоматах: казино вдруг уточняет ограничение для посетителей. Конечно, это можно посчитать неким неудобством для игрока, хотя справедливости необходимо, что выбор автоматов всё одинаково остаётся достаточно большим. <a href=http://filmkachat.ru/>скачать 1×slots официальный сайт</a> В онлайне очень много скриптовых сайтов, которые принадлежат жуликам. Их основная задача – заинтересовать гэмблеров, пообещав не только великодушные презенты, но и крупные выигрыши. Так собственно кое-какие сайты предлагают получить за регистрацию в $1 000. <a href=https://oke.zone/profile.php?id=74757>https://oke.zone/profile.php?id=74757</a> У любого игорного клубы различные вейджеровые условия. Чтобы вы гарантировано сумели выполнить их, мы дадим некоторое советов. Если система начислила маленькую необходимую, не стоит делать немалые ставки – остановитесь на 10–30 центах. Как только сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте выступать. В неприятном случае лучше присмотреться к иному автомату.Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном бонусе, то начала внимание на значение вейджера и срок, кот-ый дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть приз и исключить выигрыш. 1×slots рабочее зеркало на сегодня <a href=http://l2help.lt/user/DavidZoome/>http://l2help.lt/user/DavidZoome/</a>
скачать 1×slots официальный сайт
Бонус с зачислением средств на счет выделяет больше свободы поступков. Пользователь сам избирает, каким образом воспользоваться подаренными средствами. Здесь кроме имеют действовать лимитирования на перечень дешевых игр, но обычно эти рамки не так строги, как в промо с бесплатными вращениями. 1×slots регистрация 1×slots casino c2d ru <a href=https://avtomaster.liveforums.ru/viewtopic.php?id=419#p32609>https://avtomaster.liveforums.ru/viewtopic.php?id=419#p32609</a> Для выбора азартного заведения Вы можете воспользоваться списком наших казино с призами за регистрацию. На нашем сайте мы опубликовали список бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, собственно доля призов неповторимые и доступны только для посетителей нашего вебсайта по-специальному промо-коду или по уникальной ссылке. Кроме как, для любого приза мы подготовили подробный обозрение, в котором Вы узнаете как получить и отыграть одобрение и как исключить собственный выигрыш с бездепа.Такой бесплатный эквивалент средств зачисляется на профиль юзера после воплощения требований и предназначаются они только для игрового процесса. Вывод этих вознаграждений возможен только после воплощения вейджеровых критерий. 1×slots сайт Верификация аккаунта. Лучше подтвердить лицо сразу в регистрации, дабы позже не было проблем с выводом денег. Верификация имеет проходить двумя маршрутами:
1×slots официальный сайт зеркало рабочее
В реальное время получить бонус за регистрацию в казино довольно просто. Почти каждый игорный жилище с готовностью предоставит деньги либо безвозмездные вращения. Многие игроки пользуются данным и не смущяются региться в любом клубе с прибыльными условиями. Кстати, это отличная вероятность придумать выигрышную стратегию и сорвать куш.Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации подарка необходимо подтвердить электронную почту и привязать телефонный; <a href=https://slovakia-forex.com/members/266815-arnoldnup>https://slovakia-forex.com/members/266815-arnoldnup</a> 1×slots casino регистрация 1×slotscasino09k online
1×slots официальный зеркало рабочее
Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, a зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. Бoльшинcтвo азартных заведений выдвигают примерно одинаковые условия и требования, коие необходимо выполнить, дабы получить бездепозитный бонус за регистрацию. Все их возможно соединить в раз перечень: В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод средств, это исключительно милая часть забавы. Важно, часто бездепозитные бонусы в казино выдаются с ограничениями по максимальной выплате. В среднем можно рассчитывать на прибыль в количество тыщ рублей. Как вывести выигрыш с бонуса без депозита. Придётся доказать аккаунт документально, в некоторых заведениях. Процедура верификации обязательна и делается любым игроком. О документальном подтверждении учетной записи спрашивайте в интернет чате либо прочтите в правилах. 1×slots казино зеркало <a href=http://ultfoms.ru/user/JulesRuize/>http://ultfoms.ru/user/JulesRuize/</a> Но разу не забывайте пристально разбирать правила участия в бонусных акциях. Если вы нарушите желая бы одно условие, позднее вы не можете уладить недоразумение с администрацией.
1хслот 1хслотс регистрация перейти на 1×slots
Некоторые казино могут предлагать клиентам бездепы за свидетельство номера либо почты или репост на страницу в соц сетях. <a href=http://classicalmusicmp3freedownload.com/ja/index.php?title=1×slots_%D0%A1%D0%B0%D0%B9%D1%82_%D0%97%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE>http://classicalmusicmp3freedownload.com/ja/index.php?title=1×slots_%D0%A1%D0%B0%D0%B9%D1%82_%D0%97%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE</a> Когда идет о получении бездепозитных бонусов в казино, в первую очередь направьте на следующие условия:В лицензионных бездепозитных казино выступать в азартные игры действительно безопасно. Наличие лицензии подтверждает что, этот прецедент, собственно клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP. 1×slots регистрацию процедура займет всего лишь Возможность поиграть вспомогательное соревнование (а время и количество) совершенно бесплатно, а выигрыш, к, поступает на счёт игрока.4. Заберите подарок. Чаще всего бонус активируется сразу после регистрации. Но бывают истории, когда надо(надобно) забежать в собственный офис или написать в саппорта.
<b>Смотреть еще похожие новости:</b>
<a href=http://khodaumo.com/forum/viewtopic.php?f=2&t=75080&sid=0194cebe97e33f1f405d7c3fa0668c6b>1хслотс рабочее зеркало на сегодня</a>
<a href=https://forum.bandariklan.com/showthread.php?tid=381546>1×slots сайт</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На данном разделе портала регулярно публикуются обзорные статьи, каких рассматриваются бесплатные бонусы наихороших интернет-казино. Информация структурирована по нескольким пунктам, включая основные: Шаг 5. Использование и отыгрыш. Бездеп обязан быть применен в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера.
#9726 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slots review live
Подтвердите регистрацию, дабы активировать Бездепозитный бонус с выводом, требуется заполнить индивидуальный профиль. Заполните пустопорожние поля реальными данными о для.4. Заберите подарок. Чаще всего бонус активизируется сразу в регистрации. Но посещают истории, когда нужно забежать в собственный кабинет либо написать в саппорта. <a href=http://filmkachat.ru/>1х слотс зеркало регистрация в 1×slots casino</a> <a href=http://www.alivelinks.org/Shisha-tobacco-from-4-eur_452086.html>http://www.alivelinks.org/Shisha-tobacco-from-4-eur_452086.html</a> Любой выигрыш по ставке повыше установленного лимита будет считаться недействительным. То есть ставка не несомненно засчитана при отыгрыше, а в случае выигрыша его сумма не поступит на счёт клиента — результат игры несомненно всецело аннулирован. 1хслот скачать <a href=http://posrf.ru/bitrix/redirect.php?goto=http://skladchik.com/proxy.php?link=http://lexisnexis.com/start/shib/copyLink?url=https://teletype.in/@urist555/6eRG2×CXIuw>http://posrf.ru/bitrix/redirect.php?goto=http://skladchik.com/proxy.php?link=http://lexisnexis.com/start/shib/copyLink?url=https://teletype.in/@urist555/6eRG2×CXIuw</a> Следует подчеркнуть, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом.У каждого игорного клубы разные вейджеровые обстоятельства. Чтобы вы гарантировано сумели выполнить их, мы дадим количество советов. Если система начислила маленькую необходимую, не стоит создавать великие ставки – остановитесь на 10–30 центах. Как только сможете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео слот даёт выиграть – продолжайте играть. В противном случае другого, как приглядеться к другому автомату.
1×slots регистрацию более популярный вариант это
<a href=https://forum-macan.ru/memberlist.php?mode=viewprofile&u=1736>x1 slots регистрация в 1×slots casino</a> 1×slots регистрация <a href=http://lublinianin.pl/bez-kategorii/ile-warta-jest-pamiec-a-ile-niepamiec/?unapproved=433752&moderation-hash=6e821a2375bc0f27fb7a19b387af5ffa#comment-433752>http://lublinianin.pl/bez-kategorii/ile-warta-jest-pamiec-a-ile-niepamiec/?unapproved=433752&moderation-hash=6e821a2375bc0f27fb7a19b387af5ffa#comment-433752</a> Не трудно догадаться, собственно not the slightest down payment bonuses почти ни не посещают большими. Чаще всего идет о пяти–тридцати баксах (или эквиваленте данной суммы в иной еденице). 1×slot зеркало рабочее регистрации на телефон придет Получать информацию о самых прибыльных призах возможно без неизменного прогноза новостей казино. Мы брали эту задачу на себя и безпрерывно смотрим за предложениями операторов, избирая наилучшие из них. В этом разделе собраны заключительные бездепы, промокоды к ним и условия их активации. Список акций периодически пополняется. В топ вошли самые свежие бездепозитные бонусы за регистрацию в казино 2020, кратковременные и замкнутые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру прочим аспектам. Если срок деяния промоакции истек, она удаляется из перечня.
1×slots регистрация
Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и. Когда игроку полагается много фриспинов, администрация может разбивать их начисление на несколько дней. Бесплатные вращения предоставляются для определенного слота, который указывается в правилах акции. Далее требуется отыграть вагер и исключить выигрыш. Игрокам без навыка крупно повезло, есть получить 10-ки подарков за одну регистрацию. Если не сумели получить Бездепозитный бонус, не волнуйтесь. Обратитесь в интернет чат, оператор поможет решить проблему.Фриплей-бонусы встречаются лишь в неких клубах. Они зачисляются сразу в сотворения профиля и активны непродолжительное время. Если не успеете истратить средства, они просто сгорят. Касаемо медли, как призы активны протяжении часа. <a href=http://www.soe-parrot.com/home.php?mod=space&uid=168510>http://www.soe-parrot.com/home.php?mod=space&uid=168510</a> Возможность протестировать свежие забавы, не рискуя собственными средствами и разработать личную стратегию игры.Иногда виде бездепа, казино дарует минимальный бонус (до 50 руб. ), ради которого не заморачиваться. 1×slots регистрация на 1хслотс Но есть игорные заведения, которые готовы просто например жертвовать деньги на игру. Для сего довольно сделать профиль. Чтобы исключить свой выигрыш, для поначалу нужно выполнить обстоятельства отыгрыша, обозначенные в условиях получения бездепозитного депозита.Бездепозитный приз казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в данном и содержится основное отличие.
1× slots casino зеркало
<a href=http://weeklywars.de/viewtopic.php?f=12&t=9388&p=463195#p463195>1×slots скачать на айфон</a> Этот образ приза будет добавлен на Ваш акк после удачной процедуры регистрации с внедрением номера телефонного. Если избрать иной метод творенья учетной записи, бездеп не несомненно добавлен на Ваш аккаунт. 1×slots промокод при регистрации <a href=http://hydro.nsc.ru/bitrix/redirect.php?goto=http://healthplanet.by/bitrix/rk.php?goto=http://yapoet.ru/redirect?url=https://telegra.ph/Uznajte-zhiv-li-chelovek–tochnoe-onlajn-gadanie-09–23>http://hydro.nsc.ru/bitrix/redirect.php?goto=http://healthplanet.by/bitrix/rk.php?goto=http://yapoet.ru/redirect?url=https://telegra.ph/Uznajte-zhiv-li-chelovek–tochnoe-onlajn-gadanie-09–23</a> Посетители вправе ознакомиться с абсолютной коллекцией тайтлов, опробовать сервисы, платежные способы и расценить необыкновенности, труднодоступные при забаве в демо режиме. Многие свежие клиенты перебегают в количество неизменных, а оператор получает длительную выгода.У каждой забавы средства притязания по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система засчитает любую ставку. В рулетке и покере сделать это гораздо труднее. Именно потому так принципиально пристально разбирать условия получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой ирге, то новички попросту «спустят приз на ветер».
1×slots официальный сайт скачать
Прибывшие на акк финансы бездепозитные бонусы предназначаются, главном, лишь для новоиспеченных юзеров, коие раньше не имели личного аккаунта в данном казино. Исходя из сего, в раньше у игрока был сделан депозит, то, по всей вероятности, у него больше не несомненно способности рассчитывать на получение такого бонуса в определенном заведении.Ознакомьтесь с нашим списком наилучших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего перечня и получите бездеп сразу. Хватайте наилучшие бесплатные предложения ниже и выигрывайте большие средства, не рискуя! <a href=https://sex18babes.com/user/Walterbef/>https://sex18babes.com/user/Walterbef/</a> Но такие рамки не смущают том хайроллеров, что коэффициенты на слотах разрешают рассчитывать на крупные выигрыши, а неких автоматах разыгрывается передовой джекпот. 1×slots регистрация 1×slots casino 777 online
<b>Смотреть еще похожие новости:</b>
<a href=http://www.arka-bahce.org/forum/showthread.php?p=759412#post759412>1хслотс регистрация в 1×slots casino</a>
<a href=https://mit-bbs.com/viewtopic.php?t=125882>казино 1×slots официальный сайт</a>
<a href=http://complainanything.com/node/158?page=917#comment-1107955>1×slots casino регистрация 1×slotscasino09k online</a>
<a href=https://www.xn–72c9aa5escud2b.com/webboard/index.php/topic,512876.new.html#new>1×slots сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Максимальный размер ставки, кот-ый невозможно превосходить пока приз не несомненно полностью отыгран. В случае нарушения сего правила, бонус и выигрыш с него станут аннулированы. Вы всего, например все предпочитаете получать презенты и бездепозитные бонусы казино. Игорные жилища взяли в привычку одаривать гэмблеров приятными призами. Стать обладателем приветственного подарка возможно за создание профиля или пополнение счёта. Второй вариант более интересный, так клубы готовы удвоить депозит! Но в вы новичок и лишь знакомитесь с миром пыла, другого, как пользуйтесь бонусом за регистрацию.
#9727 MonroDownloadhttps://monro-casino-apk.ru/monro-skachat
<a href=https://belveter.by/bitrix/redirect.php?goto=https://monro-casino-apk.ru/monro-skachat>monro-casino-apk.ru/monro-skachat</a> <a href=http://tvpodolsk.ru/bitrix/rk.php?goto=https://monro-casino-apk.ru/monro-skachat>monro-casino-apk.ru/monro-skachat</a> <a href=https://www.aquarist-classifieds.co.uk/BANNER-MANAGEMENT/click.php?id=1219&url=https://monro-casino-apk.ru/monro-skachat>monro-casino-apk.ru/monro-skachat</a> <a href=http://mygrannyporn.info/cgi-bin/crtr/out.cgi?s=50&u=https://monro-casino-apk.ru/monro-skachat>monro-casino-apk.ru/monro-skachat</a> <a href=https://analysis.fc2.com/redirect.php?r=https://monro-casino-apk.ru/monro-skachat>monro-casino-apk.ru/monro-skachat</a> <a href=http://fitnesdomaonline.ru/redirect.php?url=https://monro-casino-apk.ru/monro-skachat>monro-casino-apk.ru/monro-skachat</a> <a href=https://msk23.prostitutki.today/bitrix/redirect.php?goto=https://monro-casino-apk.ru/monro-skachat>monro-casino-apk.ru/monro-skachat</a> <a href=https://ona.idnes.cz/potraty-ve-svete-0ec-/redir.aspx?url=https://monro-casino-apk.ru/monro-skachat>monro-casino-apk.ru/monro-skachat</a> <a href=http://ttydog06.est-online.hut2.ru/test.php?a%5B%5D=<a%20href=https://monro-casino-apk.ru/monro-skachat>monro-casino-apk.ru/monro-skachat</a> <a href=http://www.shahrsakhtafzar.com/forum/redirect-to/?redirect=https://monro-casino-apk.ru/monro-skachat>monro-casino-apk.ru/monro-skachat</a> <a href=https://image.google.jo/url?sa=i&source=web&rct=j&url=https://monro-casino-apk.ru/monro-skachat>monro-casino-apk.ru/monro-skachat</a> <a href=http://kirgu.ru/bitrix/redirect.php?goto=https://monro-casino-apk.ru/monro-skachat>monro-casino-apk.ru/monro-skachat</a> <a href=http://graceaccardi.com.xx3.kz/go.php?url=https://monro-casino-apk.ru/monro-skachat>monro-casino-apk.ru/monro-skachat</a> <a href=http://uzpse.uz/bitrix/redirect.php?event1=&event2=&event3=&goto=https://monro-casino-apk.ru/monro-skachat>monro-casino-apk.ru/monro-skachat</a> <a href=https://lebork.praca.gov.pl/rynek-pracy/bazy-danych/klasyfikacja-zawodow-i-specjalnosci/wyszukiwarka-opisow-zawodow//-/klasyfikacja_zawodow/zawod/311605?_jobclassificationportlet_WAR_nnkportlet_backUrl=https://monro-casino-apk.ru/monro-skachat>monro-casino-apk.ru/monro-skachat</a>
Install latest version of the application bookmaker monro – win today !
<a href=http://www.wulianwang360.com/RES/GoURL.aspx?url=www.ultimate-guitar.com/forum/showthread.php?t=2130473>monro-casino-apk.ru/monro-skachat</a> <a href=http://browser.geekbench.com/redirect?url=https://monro-casino-apk.ru/monro-skachat>monro-casino-apk.ru/monro-skachat</a> <a href=http://www.casetify.com/redirect?url=https://monro-casino-apk.ru/monro-skachat>monro-casino-apk.ru/monro-skachat</a> <a href=http://shoko.digidip.net/visit?url=http%3A%2F%2Fwww.ultimate-guitar.com/forum/showthread.php?t=2130473&ppref=https%3A%2F%2Fcutepix.info%2Fsex%2Friley-reyes.php>monro-casino-apk.ru/monro-skachat</a> <a href=http://www.mydigi.net/link/link.asp?url=https://monro-casino-apk.ru/monro-skachat>monro-casino-apk.ru/monro-skachat</a> <a href=http://htmldatasheets.info/url.php?url=https://monro-casino-apk.ru/monro-skachat>monro-casino-apk.ru/monro-skachat</a> <a href=https://chrison.net/ct.ashx?id=87da2194-b39e-45eb-bd5d-ac41697a6bdc&url=https://monro-casino-apk.ru/monro-skachat>monro-casino-apk.ru/monro-skachat</a> <a href=http://www.boosterblog.es/votar-12428–11629.html?adresse=monro-casino-apk.ru/monro-skachat>monro-casino-apk.ru/monro-skachat</a> <a href=https://www.shoppersvineyard.com/newsletters/track_click.html?wtfm=LIKn96m236dNxZ1dZK3fd1bLkeYPM%2BKicu3BfKxUKemJrlzIxjDfvw%3D%3D&dest_url=https://monro-casino-apk.ru/monro-skachat>monro-casino-apk.ru/monro-skachat</a> <a href=http://gyvunugloba.lt/url.php?url=https://monro-casino-apk.ru/monro-skachat>monro-casino-apk.ru/monro-skachat</a> <a href=https://www.uniocraft.com/proxy.php?link=https://monro-casino-apk.ru/monro-skachat>monro-casino-apk.ru/monro-skachat</a> <a href=http://school.js88.com/redirect?url=https://monro-casino-apk.ru/monro-skachat>monro-casino-apk.ru/monro-skachat</a> <a href=http://www.naturistdirectory.com/Venue/RecordClick/413/?url=https://monro-casino-apk.ru/monro-skachat>monro-casino-apk.ru/monro-skachat</a> <a href=http://www.ptg-facharztverbund.de/weiterleitung.php?type=arzt&id=107&url=www.ultimate-guitar.com/forum/showthread.php?t=2130473>monro-casino-apk.ru/monro-skachat</a> <a href=http://prokopevsk.websender.ru/redirect.php?url=https://monro-casino-apk.ru/monro-skachat>monro-casino-apk.ru/monro-skachat</a>
#9728 Charlesgunnyhttp://filmkachat.ru
1хслот скачать
Как и промоакции операторов, бездепы — это рекламный инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такового предложения считаются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает свежих гостей и разрешает им составить эмоцию о функционале, не рискуя значительными суммами.Бонус без депо за регистрацию в казино (бездепозитный бонус) – это денежный презент от клуба, который начисляется на акк игрока последствии регистрации в казино. Кроме сотворения учетной записи, для получения бездепа, очень нередко требуется ещё и доказать контактные данные игрока и/или активировать особый промо-код. <a href=http://filmkachat.ru/>1×slots официальный регистрация</a> <a href=https://www.camry-club.ru/member.php?340479-DavidRoump>https://www.camry-club.ru/member.php?340479-DavidRoump</a> Фриспины. Бесплатные вращения предназначены для применения в видео-слотах. Внимательно читайте обстоятельства – они нередко выдаются для некоторых машин. В зависимости от клуба возможность делать определенное число ставок. Кстати, современные игорные дома выделяют вероятность заводить «одноруких бандитов». x1 slots регистрация в 1×slots casino <a href=http://forum.moto-fan.pl/uzytkownik-damptranslator3>http://forum.moto-fan.pl/uzytkownik-damptranslator3</a> Осталось избрать казино с бонусом за регистрацию и сделать профиль. После активации дара выигрыш зависит от Фортуны и способностей.Стоит обозначить(означить), собственно бездепозитный приз выдается только совершеннолетним новеньким, коие, тому, имеют пригласить личных друзей и своих, кроме рассчитывающих на поощрительную программку преданности. Подобная разработка замечена между конкуренцию онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению собственной популярности, путем вербования новых игроков. Бонусы – это оригинальный шанс для потенциальных соучастников игры, коие имеют опробовать софт покер рума и увериться, будут ли они в него выступать или нет. Новый игрок попробует свои силы с реальными оппонентами в казино.
1×slot зеркало рабочее регистрации на телефон придет
Онлайн гемблинг развивается с любым днем больше и больше, свежие бренды создаются не по дням а по часам. Новые интернет казино проделывают вступительные акции для игроков, чтобы, чтобы что бы зарекомендовать себя, и тем самым предлагают бездепозитные призы за регистрацию, собственно бы не пропустить такую возможность — как воспользоваться свежим бездепом, рекомендуем навещать наш сайт как можно чаще, самое аппетитное и новые будет добавляться в данном же перечне.Игрокам не следует принимать приветственный бонус как гарантированный метод получить большой выигрыш, но это замечательная вероятность без затрат оценить перечень казино. 1×slots регистрация на официальном сайте Необходимость отыгрыша. Вейджер ситуации повыше, чем для призов за депозит. И пока средства не отыграны, исключить их невозможно. <a href=https://seriya-p.ru/member.php?u=609424>https://seriya-p.ru/member.php?u=609424</a> Отыграв бездепозитный бонус в казино с выводом тоже придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, случае схожее лимитирование присутствует, то единоразово вывести выйдет лишь сумму, не превышающую размер полученного приза. 1×slots рабочее зеркало
1×slots регистрация 1×slotscasino09k online
<a href=http://nasamomdele.su/forum/memberlist.php?mode=viewprofile&u=64686>http://nasamomdele.su/forum/memberlist.php?mode=viewprofile&u=64686</a> Ниже указан актуальный список законных казино в Беларуси с бонусами на 1-ый депо. Вы можете попасть на официальный вебсайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. казино 1×slots официальный сайт Подтвердите личность, предоставив оператору казино средства паспортные данные. Инструкции обычно легкие, основное — конкретно им следовать. Если написано, собственно «на фото обязаны быть видны все четыре угла странички паспорта» — устройте именно это фото.Доступ к дару имеет открываться механически в введения промокода или воззвания в службу вебсайта. В первом случае от пользователя не требуется практически деяний. Бездеп с активацией по коду встречается чаще всего. Игроку необходимо ввести совокупа символов в графе, кот-ая имеет находиться в регистрационной форме в Личном кабинете.
1×slots регистрация
Фриспины начисляются по конкретной ставке. После их активации игроку нужно запустить слот и убедиться, собственно в нем показываются благотворительные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода в отыгрыша определяется оператором и изредка превышает 5 000 руб.Автоматическая активация может самой комфортной, хотя ручной способ содержит перед ней превосходства. Прежде чем использовать вознаграждение от казино, стоит заблаговременно определить, сколько времени потребуется на исполненье всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деяния приза. Баланс игрока пополняется на соответствующую сумму. К ней применяется вейджер, обозначенный в правилах акции. Вывести выигрыш можно несомненно в как, как юзер сделает требуемый объем ставок из личных средств. В редчайших случаях бездеп работает в формате Free Play. На счет пользователя зачисляется крупная сумма, и предоставляется маленький срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по завершении сего периода сумма на счету будет превышать первоначальную, то разность можно будет вывести либо использовать для дальнейших ставок. Не стоит незамедлительно же отказываться от приветственных презентов в похожих казино. Администрация готова начислить средства либо фриспины, хотя предварительно работники должны увериться, что вы не аферист. Дело в, собственно развелось слишком много охотников за призами. Они выучились врать систему и наваривать солидные суммы денег. 1× slots casino официальный сайт <a href=http://trikatushki.ru/bitrix/redirect.php?goto=http://tochilka.pro/bitrix/redirect.php?goto=http://crimeapass.com/bitrix/click.php?goto=https://teletype.in/@urid_pomosh/LasbktbJP6_>http://trikatushki.ru/bitrix/redirect.php?goto=http://tochilka.pro/bitrix/redirect.php?goto=http://crimeapass.com/bitrix/click.php?goto=https://teletype.in/@urid_pomosh/LasbktbJP6_</a> Подтверждение персональной инфы. Все казино настоятельно от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и присутствие у пользователя иных аккаунтов (мультиаккаунт запрещен).На странице представлены бездепозитные бонусы за регистрацию в казино редкая заслуга за которой гонятся все игроки как новенькие, так и мастера. Мы тоже уделяем большое внимание на наличие призов при формирование рейтинга казино на средства. Бездепозитный приз это возможность выступать даром и выиграть настоящие средства.
1 x slots casino
У любой забавы свои притязания по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система засчитает каждую ставку. В рулетке и покере устроить это намного труднее. Именно поэтому так важно пристально разбирать обстоятельства получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в любой игре, то новички попросту «спустят бонус на ветер».Чтоб получить большой выигрыш, избирайте игровые автоматы с максимальным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша. <a href=http://georgiantheatre.ge/index.php?subaction=userinfo&user=diligentitem65>http://georgiantheatre.ge/index.php?subaction=userinfo&user=diligentitem65</a> Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, solid зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. 1×slots зеркало сайта Бездепозитные бонусы за регистрацию в игровых автоматах для собственников онлайн-казино считаются частью маркетинговой кампании, направленной на увеличение аудитории сайта. Так они продвигают свои бренды и привлекают новых клиентов.Чем ниже велечину вейджера, тем проще отыграть и исключить приз. Если Вы расчитываете заработать на бездепе, не просто ознакомиться с свежим игровым клубом, то стоит избегать призов с высоким вейджером их практически не реально отыграть. С ними Вы сможете только протестировать забавы заведения.
<b>Смотреть еще похожие новости:</b>
<a href=https://nztw.org/forum.php?mod=viewthread&tid=407614&pid=714349&page=1&extra=page%3D1#pid714349>1×slots официальный регистрация</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Условия шансы различаться приятель от друга. Но подобный бонус имеет быть применен лишь для игрового процесса – полученные на счет деньги до такого, как будут отыграны, вывести невозможно. Размер приза. В качестве бездепов обыкновенно начисляют небольшие суммы, а когда идет о призах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то кое-какие казино шансы подарить игроку до 2000$.
#9729 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация
В подавляющем большинстве случаев благотворительные призы начисляются в кредитах, коие нельзя сразу вывести со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже.Подтвердите регистрацию, дабы активировать Бездепозитный приз с выводом, требуется заполнить личный профиль. Заполните порожние поля истинными данными о для. <a href=http://filmkachat.ru/>1×slots регистрация то дальше необходимо пройти</a> На условиях отыгрыша безвозмездных призов по тормознуть подробнее. С ними связаны нюансы, которые невозможно забыть без внимания. <a href=http://www.orlandogamers.org/forum/member.php?action=profile&uid=11763>http://www.orlandogamers.org/forum/member.php?action=profile&uid=11763</a> В разделе с призами активировать свой презент. Найти забавы, для коих предусмотрено одобрение и применять бонус по назначению. 1×слот регистрация в 1×slots casino <a href=http://tube.tunanno.com/profile.php?u=peacefulcommodi>http://tube.tunanno.com/profile.php?u=peacefulcommodi</a> Прямо сейчас отберите бесплатные вращения за регистрацию без депозита и начинайте коллекционировать призовые композиции ради солидных выигрышей!Отыграв бездепозитный приз в казино с выводом также придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если сходственное лимитирование присутствует, то единоразово исключить выйдет лишь сумму, не превосходящую объем полученного бонуса.
1×slots регистрация
Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 долларов. Если выдаются фриспины, их число редко выше нескольких десятков бесплатных вращений. <a href=http://www.fiat130.it/phpbb3/memberlist.php?mode=viewprofile&u=293>1×slots сайт</a> скачать 1×slots на андроид мобильная версия <a href=https://metalverk.ru/forum/?PAGE_NAME=profile_view&UID=74180>https://metalverk.ru/forum/?PAGE_NAME=profile_view&UID=74180</a> Акционные предложения от казино есть в разных форматах. Часто бонусы даются в мена на депо. Игрок заносит платеж и получает деньги, безвозмездные вращения и одобрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — картина бонуса, кот-ый гарантирован за выполнение определенных действий на веб-сайте: 1х слот регистрация в 1×slots casino Ознакомьтесь с нашим списком превосходнейших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего списка и получите бездеп незамедлительно. Хватайте лучшие безвозмездные предложения ниже и выигрывайте немалые средства, не рискуя!
1×slots зеркало регистрация в 1×slots casino
<a href=http://neodentlab.ru/bitrix/rk.php?goto=http://elektrokmv.ru/bitrix/redirect.php?goto=http://richstone.by/bitrix/rk.php?goto=https://teletype.in/@urist_free/jHIBuoGMs-V>http://neodentlab.ru/bitrix/rk.php?goto=http://elektrokmv.ru/bitrix/redirect.php?goto=http://richstone.by/bitrix/rk.php?goto=https://teletype.in/@urist_free/jHIBuoGMs-V</a> Мы делаем ударение на главных положениях правил, рассказываем о территориальных ограничениях и вкратце информируем о других акциях обсуждаемого казино. 1×slots регистрация 1×slots casino c2d ru Бывают ли бездепозитные бонусы без вейджера? Бывают, в у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию уточняется вейджер во всех казино.Для получения приза нужно пригласить в игру свежего посетителя. Казино начисляет пригласившему фиксированный процент от взносов приглашённого вид приза: чаще всего его объем не превышает 10%. Срок деяния бонуса правило не превышает месяца: пригласивший получает приз от проигранных ставок приглашённого в первый луна забавы.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Бездепозитный приз предоставляется новому игроку за конкретные деянья. Часто презент в виде средств или фриспинов выдается за регистрацию, благодаря чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.В истинное время получить приз за регистрацию в казино очень просто. Почти любой игорный дом с готовностью предоставит деньги или благотворительные вращения. Многие игроки используют этим и не стыдятся региться в каждом клубе с прибыльными условиями. Кстати, это отличная вероятность выдумать выигрышную стратегию и сорвать куш. 1хслот официальный сайт зеркало <a href=https://simracing.su/user/MiguelBip/>https://simracing.su/user/MiguelBip/</a> Представленные на этой странице лучшие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, в гости Casino.ru шансы сортировать перечень по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д.Риск-игра по одинаковым шансам – Также казино может запрещать скорпулезно условия по отыгрышу за раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких других играх.
1×slots зеркало регистрация то дальше необходимо пройти
Можно. Вы всегда можете отказаться от получения бездепозитного приза за регистрацию в казино, пока Вы не создадите ставку.Похожим образом работает третий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения клиента либо в связи с получения им VIP-статуса. Подарок предоставляется после воззвания в поддержку и ревизии. <a href=http://daojianchina.com/home.php?mod=space&uid=4684569>http://daojianchina.com/home.php?mod=space&uid=4684569</a> Допустим, за регистрацию вы возымели бездеп в объеме 2 000 рублей с вейджером х30. В данном случае светит устроить ставок, на совместную сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать настоящие средства. Однако не запамятовывайте, собственно с каждого дара получится вывести определённую необходимую (чаще всего не более $200).Получить Бездепозитный бонус в интернет казино дело 2-ух кликов. Другой момент, отыграть промо и соблюсти верховодила и обстоятельства отыгрыша. Под правилами подразумевается не вагер, хотя и лимитирования по максимальной ставке. Мы понимаем, что в кинотеатр все ставят на зеро и выигрывают. Призываем не создавать похожего. Перед активацией приза прочитайте правила. Узнайте следующие моменты: Условия получения подарка, за регистрацию, за депо и другое. Ограничения по наибольшей ставке. Зачастую не выше 350 рублей. Кратность валютного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вращать автоматы, а вагер будет стоять на месте. Поэтому важно аристократия, в каких забавах можно осуществлять кратность валютного оборота. 1хслотс казино зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://australianwinerytours.com/tours/showthread.php?tid=184514>1×slots рабочее зеркало</a>
<a href=https://dev.eff.one/forumdisplay.php?fid=10>1×slots актуальное зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При исполненьи условий отыгрыша и верификации, деньги с бонусного счета переводятся на основной и все быть выведены на карту либо электронный кошелек. Лимиты на вывод и сроки проведения транзакции в от избранной платежной системы.
#9730 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
Казино выводит деньги только на ту платежную систему, с котрой был изготовлен депо. То есть, для вывода бездепозитного бонуса, Вам поначалу нужно пополнить счет. В некоторых клубах узкий перечень способов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет именно с этих платежных способов, которые доступны для вывода. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots review live</a> Вы всего, скажем, как все предпочитаете получать подарки и бездепозитные бонусы казино. Игорные дома брали в привычку одаривать гэмблеров приятными призами. Стать обладателем приветственного презента возможно за творение профиля либо пополнение счёта. Второй вариант больше занимательный, так клубы готовы удвоить депо! Но случае вы новичок и лишь знакомитесь с миром азарта, какого-либо пользуйтесь призом за регистрацию.Чаще всего интернет-казино предлагают бездепозитные бонусы новым пользователям. Эта промо-акция очень эффективно привлекает начинающих, подталкивая их к открытию счета. Конечно, не все они становятся преданными посетителями, но сам прецедент регистрации аккаунта играет на руку заведению. <a href=http://otyjob.com/bbs/board.php?bo_table=free&wr_id=166767>http://otyjob.com/bbs/board.php?bo_table=free&wr_id=166767</a> Бонус без депозита за регистрацию в казино (бездепозитный бонус) – это валютный презент от клуба, который начисляется на акк игрока после регистрации в казино. Кроме сотворения учетной записи, для получения бездепа, очень нередко потребуется ещё и доказать контактные данные игрока и/или активировать специальный промо-код. 1хслотс 1хслотс регистрация перейти на 1×slots <a href=http://b77706vw.bget.ru/user/Glennlauch/>http://b77706vw.bget.ru/user/Glennlauch/</a>
1×slots актуальное зеркало
При игре на бонусные средства воспрещается играть в игровые автоматы с современным джекпотом и игры из радела live casino. Кроме как, некоторые казино дают бездеп на один либо несколько определенных слотов, и в иных забавах Вы не сможете на их выступать.Список так нарекаемых «запрещенных территорий» прилагается к правилам бонусной программки игорного портала. Обязательно проверьте, распространяются ли на вас похожие наказания. 1×slot рабочее зеркало Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают бонус по странам. Вплоть до того, что клуб имеет брать игроков из Вашей страны, а бездеп не давать.1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, случае не желайте замерзнуть жертвой плутов либо впустую израсходовать время; <a href=https://bestnet.ru/support/forum/index.php?PAGE_NAME=profile_view&UID=128674>https://bestnet.ru/support/forum/index.php?PAGE_NAME=profile_view&UID=128674</a> Бездепозитные бонусы за регистрацию в игровых автоматах для собственников онлайн-казино считаются долею рекламной кампании, направленной на увеличение аудитории вебсайта. Так они продвигают средства бренды и завлекают новых посетителей. 1×slots casino online регистрация Автоматическая активация взгляд самой удобной, хотя ручной метод содержит перед ней превосходства. Прежде чем применять вознаграждение от казино, стоит заблаговременно найти, сколько медли требуется на исполнение всех условий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала деянья бонуса.
1×slots регистрация то дальше необходимо пройти
B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpaxПри регистрации том, либо ином онлайн игральном заведении — вас дается один шанс испытывать собственную фортуну не внося средства монеты. Замечу собственно эту поощрительную услугу деют не все онлайн игровые площадки, а лишь щедрая половина из их. Которые мы подготовили для Вас в нашем списке. <a href=https://pcnto.com/user/Raymondwek/>https://pcnto.com/user/Raymondwek/</a> 1×slots казино мобильная версия
1×slots официальный регистрация
Главным нюансом в возникновении данных вознаграждений произведено том,, собственно пустив их в ход, игры ничем не рискует и в последствии никому ничего не будет обязан (не зависимо, получит ли он спасибо бонусам какой-нибудь выигрыш или моментально спустит все только что прибывшие деньги). То есть, казино снабжает игрока вероятностью на дармовой базе выступать во различные слоты причем спонсирует забаву.Итак, дабы бесплатные бонусные кредиты превратились в настоящие средства, которыми вы можете распоряжаться по своему усмотрению, их нужно отыграть. Вейджер по уточнять в правилах онлайн-казино. <a href=http://forum.roozgozar.com/member.php?action=profile&uid=5126>1×slots официальный зеркало рабочее</a> Следует выделить, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам либо с конкретным кодом.При помощи такового поощрения оператор имеет также привлекать клиентов, которые ранее показывали активность на сайте, но по какой-то причине прекратили играть. В этом случае промокод высылается пользователю по электрической почте либо в виде SMS. 1×slot зеркало рабочее регистрации на телефон придет <a href=http://dreamon114.com/bbs/board.php?bo_table=free&wr_id=50141>http://dreamon114.com/bbs/board.php?bo_table=free&wr_id=50141</a> Бездеп с фриспинами имеет обхватывать всю коллекцию игр на веб-сайте либо разработки 1-го провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш может быть выведен в такого, как пользователь отыграет эту необходимую. Возможность оценить полный функционал слотов — главное достоинство данной разновидности. Игроку становятся доступны что, эти функции, коие отсутствуют в демонстрационном режиме, а возможность выиграть настоящие средства прибавляет ярких азартных ощущений.Получив собственный презент, Вы можете даром выступать на настоящие деньги, а выполнив условия отыгрыша, исключить свой выигрыш.
1хслотс зеркало
Если вы выбираете испытанное лицензионное онлайн казино и сделайте все условия получения бездепозитного бонуса, проблем с получением подарка у Вас не возникнет.Срок активации и время на отыгрыш. Зачисление средств или фриспинов происходит при активации на строго ограниченного периода, подобные требования предъявляются и к срокам отыгрыша. Одни казино позволяют отыгрывать приз количество дней или том месяцов. Другие выдают крупную необходимую за регистрацию, хотя время отыгрыша ограничивают несколькими часами с неоправданно высоким вейджером. <a href=https://fakenews.win/wiki/User:SondraWingfield>https://fakenews.win/wiki/User:SondraWingfield</a> 1хслот скачать Промообъявления от казино не дают реальной картины и ориентированы на вербование внимания юзеров. Понять, насколько высоки шансы остаться в плюсе, дозволит собственный тест критерий предложения:
<b>Смотреть еще похожие новости:</b>
<a href=https://seniordance.ru/forum/showthread.php/71936–1-%D1%85%D1%81%D0%BB%D0%BE%D1%82-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%B2–1×slots-casino?p=101424#post101424>1 хслот регистрация в 1×slots casino</a>
<a href=http://www.topboard.org/threads/1×slots-kazino-zerkalo.600253/>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Условия, на которых предоставляется бездеп, регулируются казино. Каждая акция имеет подробные управляла, гиперссылка на коие обычно находится в промообъявлении. В их указываются лимиты, вейджер, перечень дешевых игр. Если оператор скрывает данные о предложении, то пользоваться им надо. Объективные – объем бонуса, коэффициент и условия вейджера, необходимость внесения депозита для вывода средств;
#9731 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
Выбирайте лучшие бесплатные призы за обзоров на Casinoz – и пусть вам сопутствует удача при отыгрыше бонусных кредитов! <a href=http://filmkachat.ru/>1×slots casino регистрация 1×slotscasin online</a> Создание аккаунта. На сайте казино необходимо обнаружить регистрационную форму и заполнить пустопорожние поля собственными данными. Иногда на этом шаге требуется указать только адресок электронной почты и пароль, хотя чаще надобно заполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д.). Нужно указывать только реальные данные, поскольку впоследствие они будут проверены.Для доказательства электронной почты, просто перейдите по активной ссылке в послании, приобретенном от игрового заведения. <a href=http://balaklavskiy-16.ru/user/11072/>http://balaklavskiy-16.ru/user/11072/</a> Возьми собственный презент. Чаще всего бонус активизируется незамедлительно последствии регистрации. Но случаются ситуации, когда нужно забежать в собственный офис либо написать в справочную службу.Маркетинговая политического всех игорных интернет-клубов обязана одевать разнородный нрав. И случае вознаграждения на депо служат для того, чтобы стимулировать заносить депозиты и поощрять уже быть юзеров, то бездепозитный бонус в казино или приз за регистрацию в казино, прежде всего, рассчитан на расширение базы покупателей. 1× slots casino официальный сайт <a href=https://rekordmeister.ru/user/Geraldtop/>https://rekordmeister.ru/user/Geraldtop/</a> Подарки на праздничные ? приуроченные к торжественным датам, требующие символического отыгрыша либо начисляются без того. Могут дариться игрокам в рождения, на Новый год и т.д., выдаются по запросу в техподдержку или по промокоду.Новички не обожают незамедлительно же вносить депозит. Это обосновано неименьем навыка и недоверием. К счастью, наши возможно получить бездепозитный бонус за регистрацию в казино. Неважно собственно начисляет система – фриспины или кредиты. В всяком случае вы не рискуете своими сбережениями. Это замечательная возможность запустить понравившийся видео слот либо же испытывать удачу в настольных играх.
казино 1×slots
Также, такой необходимо доказать свой номер телефона, результата код, полученный в смс-сообщении от клуба установить в особое поле в личном офисе игрока. <a href=https://masstr.net/showthread.php?tid=79465>1хслотс официальный сайт зеркало</a> казино 1×slots Как верховодило, при выводе денег, от играющего требуется лишь устроить минимальный лепта для того, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать этим образом собственный счет.Предложения с бездепозитными призами за регистрацию позволяют новым заведениям привлечь аудиторию на свой сайт. А игроки к получают вероятность выступать на настоящие средства без депо в казино и заработать маленькой стартовый капитал, кот-ый разрешено исключить на карту банка либо электронный кошелек. <a href=https://www.socialwider.com/blog/590034/mastering-the-art-of-tricks-in-selling-a-used-car/>https://www.socialwider.com/blog/590034/mastering-the-art-of-tricks-in-selling-a-used-car/</a> Бездепозитные бонусы за регистрацию в игровых автоматах для владельцев онлайн-казино являются частью рекламной кампании, направленной на увеличение аудитории вебсайта. Так они продвигают свои бренды и завлекают новых посетителей.Для вывода средств бонус нужно будет отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами акции и вариациями отыгрыша бездепозитного бонуса до его получения, дабы избежать конфликтных ситуаций. 1хслотс регистрация в 1×slots casino Чаще всего, популярностью сервисы, такие как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное правило. Финансовые свои выводятся лишь через ту платежную систему, которой огромный для пополнения депозита. Если же игрок получил бездепозитный покерный приз, требуется восполнить счет на наименьшую сумму, которая сочиняет обыкновенно 10 $.
1×slots официальный зеркало
Внесение депозита – Будьте готовы восполнить счет в отыгрыша приза. Это стандартное требование правил для этого на промо-акций. Лучше заблаговременно уточнить, какую необходимую нужно несомненно вносить на счет. Как управляло, речь о наименьшем депозите, но вы обязаны быть уверены, что он для по кармашку.Составленный знатоками Casino.ru список онлайн-казино с бездепозитным бонусом дозволяет игрокам сопоставить спецпредложения разных операторов. Подтверждение индивидуальной инфы. Все казино просят от посетителя пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у юзера иных аккаунтов (мультиаккаунт запрещен). <a href=http://artshi.ru/index.php?subaction=userinfo&user=longsocialite90>http://artshi.ru/index.php?subaction=userinfo&user=longsocialite90</a> Реже призы без депо начисляются неизменным игрокам. С их подмогою администрация старается удержать ценных клиентов либо желает поблагодарить за преданность правильных посетителей. Но гораздо чаще для похожих целей используются эти промоакции:Также, учите, что бездепозитный приз возможно вывести только что случае, когда будут исполнены все обстоятельства отыгрыша. 1×slots рабочее зеркало на сегодня Бездепозитные призы – это исключительно небезинтересная и наиболее перспективная промоакция интернет-казино. Они том другого, как фри-спинов, поэтому что выплаты в даровых вращениях не гарантированы, так комбинации на барабанах игрового аппарата шансы не сложиться.
1×slots зеркало регистрация
При отыгрыше бонусных средств, необходимо учесть срок деяния бонуса и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный бонус будет аннулирован. 1×slots бонус за регистрацию <a href=https://forum.wapinet.ru/profile.php?id=7751>https://forum.wapinet.ru/profile.php?id=7751</a>
сайт 1× slots casino
Этот тип бонуса несомненно добавлен на Ваш акк последствии удачной процедуры регистрации с внедрением номера телефонного. Если выбрать иной способ сотворения учетной записи, бездеп не несомненно добавлен на Ваш аккаунт. При регистрации по указывать только достоверную информацию. Когда учетная запись будет активна, появится доступ в Личный кабинет. В нем возможно избрать денежную, ввести промокод и узнать доскональные верховодила получения и отыгрыша бездепа. Краткая информация об промоакции часто находится непосредственно на регистрационной форме.Фриплей-бонусы встречаются только в неких клубах. Они зачисляются незамедлительно последствии творенья профиля и активны непродолжительное время. Если не успеете потратить свои, они попросту сгорят. Касаемо медли, правило бонусы активны на часа. <a href=http://sunshine2000.co.kr/bbs/board.php?bo_table=free&wr_id=110041>http://sunshine2000.co.kr/bbs/board.php?bo_table=free&wr_id=110041</a> В подавляющем большинстве случаев безвозмездные бонусы начисляются в кредитах, которые невозможно сразу вывести со счета. Прежде их надо(надобно) отыграть по установленным правилам. Эти притязания принято называть вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и так далее). О нем читайте ниже.Зарегистрируйтесь. Для регистрации почаще всего достаточно ввести собственный номер телефона и почтовый адресок, после чего установить полученный код из СМС. Возможно, потребуется показать промокод. В правилах акции будет написано, где его надо включать. Иногда это надобно делать при регистрации, иногда — теснее после творенья собственного кабинета, на отдельной странице. 1×slots зеркало которую указывали при регистрации кстати Бездепозитные призы отличный вариант бесплатной игры в игровые автоматы. Многие пользователи сети не знают, собственно в казино можно начать играть безусловно безвозмездно, а потом исключить выигрыш на банковскую карту либо электронный кошелек, другие не доверяют интернет казино, а третьи удачно играют и выигрывают – и тотчас достаточно великие суммы.Так собственно приготовьтесь дать конфиденциальную информацию (пол, возраст, государство проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает менее суток, в чего удастся свободно выводить солидные выигрыши.
<b>Смотреть еще похожие новости:</b>
<a href=https://teamabove.com/alacrity/viewtopic.php?f=4&t=169163>1×slots официальный регистрация</a>
<a href=https://www.mshowto.org/forum/members/jamespauri.html>1хслотс регистрация в 1×slots casino</a>
<a href=http://xn–e1aoddcgsc8a.xn–p1ai/showthread.php?tid=124002>1хслот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Наши специалисты исследуют обстоятельства промоакции, после в ручном режиме проверку их соответствие реальному положению дел. Оцениваются сроки пополнения счета, доступность перечисленных игр, актуальность промокода прочие характеристики. Мы не рекламируем казино, а даем игрокам информацию о превосходнейших из их. Первый образующийся вопрос, это, для выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы завлекают новых игроков. Последним проще начать забаву на средства с презента за регистрацию. Им не нужно пополнять баланс и расходовать личные средства. Новички получают бесплатные спины или свои на счёт. С их помощью знакомятся с игровым процессом, крутят слоты и проделывают ставки в рулетке.
#9732 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация на сайте 1×slots ru com
В онлайне большое знаменитых игорных площадок с привлекательными акционными услугами. Однако внимательно читать обстоятельства десятков предложений скором надоест, ну и время отнимет большое. Поэтому наша команда подготовила ТОП-3 сайтов с наилучшими бездепозитными бонусами:Иногда виде одобрения за регистрацию имеют выдаваться билеты для участия в турнирах. Условия их проведения очень выделяются, поэтому мы рекомендуем ознакомиться с каждым предложением раздельно. <a href=http://filmkachat.ru/>1×slots зеркало регистрация то дальше необходимо пройти</a> <a href=http://masyasha.ru/index.php?option=com_k2&view=itemlist&task=user&id=83942>http://masyasha.ru/index.php?option=com_k2&view=itemlist&task=user&id=83942</a> 1хслотс зеркало <a href=https://www.jutianwang.cn/home.php?mod=space&uid=3111&do=profile&from=space>https://www.jutianwang.cn/home.php?mod=space&uid=3111&do=profile&from=space</a>
1×slots сайт
Простая процедура получения бездепозитного бонуса, кот-ая займет не более 2-х мин. Для получения бездепов, довольно зарегистрироваться и доказать контактные данные.Бездепозитный бонус предоставляется новенькому игроку за конкретные действия. Часто подарок в виде средств либо фриспинов выдается за регистрацию, спасибо чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. зеркло казино 1×slots <a href=https://www.one2bay.de/forum/member.php?action=profile&uid=26898>https://www.one2bay.de/forum/member.php?action=profile&uid=26898</a> Не сложно догадаться, собственно no down payment bonuses практически никогда не посещают большими. Чаще всего речь о пяти–тридцати долларах (либо эквиваленте данной суммы в иной валюте).Бездепозитные бонусы казино за регистрацию в 2022 году — это вероятность поиграть за счёт заведения. Казино даёт посетителю шанс пользоваться определённой суммой или количеством даровых вращений без внесения депозита. Не путайте деморежим с реальной игрой без необходимости внесения депо. 1×slots быструю регистрацию а также мгновенное В неких онлайн казино для получения бездепозитных бонусов не достаточно просто зарегистрироваться на веб-сайте клуба и подтвердить средства контактные данные. Дополнительно требуется активация промокода.Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную процедуру активации приза без депо. Внимательно прочтите до конца. Многие новички делают промахи на этапе регистрации и потому имеют получить презент.
1×slots регистрация 1×slots casino c2d ru
Бездепозитные призы казино это экономическая компенсация, предлагаемая пользователям на дармовой основе и вероятность играть в интернет казино безвозмездно. Если сопоставлять их с одобрениями за лепта, в свои выдаются лишь впоследствии начального пополнения счета, то бездепозитные гонорары получаются безвозмездно. То есть, играющий получает возможность делать ставки на уже место финансы, коие выдаст заведение, исполняя, всем, обычные действия, чтобы их извлечь (здесь идет речь о регистрация, удостоверении личности с использованием номера телефона, дизайна заявки и т.д. ). <a href=http://samjinuc.com/bbs/board.php?bo_table=free&wr_id=75464>http://samjinuc.com/bbs/board.php?bo_table=free&wr_id=75464</a> 1×slots зеркало сайта
x1 slots регистрация в 1×slots casino
Иногда у посетителей вебсайта все возникнуть проблемы при активации приобретенного промо-кода. В этих случаях, необходимо обратиться за поддержкой в саппорта «Support». Для получения ответа, обязательно указывается определенная причина обращения и подтверждается информация дополнительными скриншотами. Если сформировалась неоднозначная ситуация, практически возможно адресоваться к главному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ.Автоматическая активация может самой удобной, хотя ручной метод содержит перед ней достоинства. Прежде чем применять вознаграждение от казино, стоит заблаговременно найти, сколько времени потребуется на исполненье всех критерий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала деянья бонуса. <a href=http://6000ziyuan.com/forum.php?mod=viewthread&tid=106010&extra=>1×slots актуальное зеркало</a> Фриспины. Бесплатные вращения предусмотрены для применения в видео-слотах. Внимательно читайте условия – они часто выдаются для неких машин. В зависимости от клуба вы можете создавать определенное число ставок. Кстати, современные игорные дома выделяют возможность заводить «одноруких злодеев».Размер ставки для игры по бездепозитному призу (окончательно же, когда, когда он представлен вид бонусных денежных средств) часто ниже, чем при этой на депозит. Ограничение будет действовать до момента отыгрыша бонуса. 1×slots зеркало регистрация то дальше необходимо пройти <a href=http://elinen.com.ua/bitrix/redirect.php?goto=http://mkyzyl.ru/bitrix/click.php?goto=http://fotolenta.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/4ZJh5_lozEe>http://elinen.com.ua/bitrix/redirect.php?goto=http://mkyzyl.ru/bitrix/click.php?goto=http://fotolenta.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/4ZJh5_lozEe</a> Зарегистрируйтесь. Для регистрации чаще всего довольно установить свой номер телефона и почтовый адресок, в чего ввести приобретенный код из СМС. Возможно, потребуется указать промокод. В правилах промоакции будет написано, где его бы вводить. Иногда это хотелось делать при регистрации, время — теснее после творенья собственного кабинета, на отдельной странице.Акции, приуроченные к календарным дням, случаются рассчитаны как на всех юзеров, так и на категории: к, презент на 8 марта девушкам-игрокам или мужчинам на 23 февраля.
1×slots сайт зеркало
<a href=https://www.fbioyf.unr.edu.ar/evirtual/mod/forum/discuss.php?d=43839>https://www.fbioyf.unr.edu.ar/evirtual/mod/forum/discuss.php?d=43839</a> Каждый из бездепозитных бонусов без пополнения 2022 содержит свой конкретный вейджер для отыгрыша, например же в любом казино он устанавливается персонально — где то он х55 а где-то х30, повторюсь всюду по различному!Прежде всего, не запамятовывайте регулярно заглядывать на страницу обзоров бездепозитных призов. Они шаг за шагом осматривают более занимательные предложения ведущих игорных порталов. 1×slots зеркало регистрация то дальше необходимо пройти При выполнении критерий отыгрыша и верификации, средства с бонусного счета переводятся на ведущей и шансы быть выведены на карту либо электронный кошелек. Лимиты на вывод и сроки проведения транзакции зависимости от избранной платежной системы.
<b>Смотреть еще похожие новости:</b>
<a href=https://tabsgame.ru/user/Jamesbes/>1×slots промокод при регистрации 2025</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном сайте и выполните вход в личный кабинет, чтобы отобрать безвозмездные вращения с вейджером х40;
#9733 Charlesgunnyhttp://filmkachat.ru
казино 1×slots официальный сайт
Прежде всего, не запамятовывайте периодически заглядывать на страницу обзоров бездепозитных призов. Они шаг за шагом рассматривают более занимательные предложения водящих игорных порталов.Вознаграждения за получение VIP-статуса ? начисляются в программы преданности при достижении очередного уровня или выдаются персонально менеджерами службы. <a href=http://filmkachat.ru/>1хслотс 1хслотс регистрация перейти на 1×slots</a> Следует подчеркнуть, собственно бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом. <a href=http://www.soe-parrot.com/home.php?mod=space&uid=182947>http://www.soe-parrot.com/home.php?mod=space&uid=182947</a> При маленькой сумме приза рекомендуется выступать по низким ставкам, а применять максимальные какого-либо только что случае, если вейджер слишком большой, а время на отыгрыш крепко ограничено.С другой стороны, гораздо легче отобрать бездепозитные фриспины за регистрацию в казино и напрямик в начать вертеть барабаны в лучших слотах. Главная необыкновенность спинов в, собственно они предусмотрены для топовых автоматов. Удастся не только пройти вспомогательные раунды, но и прирастить необходимую выигрыша, заработать респины и внутриигровые презенты. 1×slots бездепозитный бонус за регистрацию <a href=http://www.e10100.com/home.php?mod=space&uid=767945&do=profile&from=space>http://www.e10100.com/home.php?mod=space&uid=767945&do=profile&from=space</a> Но не мыслить, что снабжая юзеров такими бонусами, казино занимается спонсированием. Ведь размеры вознаграждений, главном, не немалые (средним размером от 5 до 20 $). И на эти средства налагаются определенные условия и лимитирования, неотклонимые к исполнению игрока, если в последствии он желает получить все свои выигранные деньги.Промообъявления от казино мешают реальной картины и ориентированы на вербование внимания юзеров. Понять, насколько высоки шансы остаться в плюсе, дозволит личный анализ критерий предложения:
зеркала 1×slots
Бездепозитные бонусы – это исключительно интересная и более перспективная акция интернет-казино. Они числе никакого фри-спинов, поэтому что выплаты в безвозмездных вращениях не гарантированы, так комбинации на барабанах игрового аппарата могут не сложиться.Проверка занимает от нескольких мин. До нескольких дней, спецы техподдержки все запросить дополнительные документы либо инициировать короткое общение по Skype. 1×slots официальный сайт, скачать Раздача призов может быть посвящена различным датам: календарные дни, дни рождения игроков, годовщина открытия казино и т. Д. Подарок выдается повторяющий средств, фриспинов либо баллов для накопления и размена на предложения оператора. Если пользователь получает выигрыш, средства начисляются на его счет. Для вывода данной суммы понадобиться выполнить ряд требований.Бонусы без депозита при регистрации считаются наиболее красивыми как для опытных игроков, например для и начинающих. Получив такое вознаграждение, заказчик имеет играть на настоящие средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные призы в интернет-казино Рунета, а также условия их активации и выигрыша. <a href=http://zvezdjuchki.ru/user/DavidSwica/>http://zvezdjuchki.ru/user/DavidSwica/</a> Объективные – размер бонуса, коэффициент и условия вейджера, надобность внесения депозита для вывода денег;Бездепозитный приз предоставляется новенькому игроку за определенные деянья. Часто презент повторяющий средств или фриспинов выдается за регистрацию, спасибо чему юзер получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода. 1×slots рабочее зеркало
1×slots официальный сайт, скачать
Это также безвозмездные деньги, коие поступают на аккаунты новоиспеченных игроков в регистрирования. А особенность этих призов произведено в том, что обретенные финансы непременно идет использовать в продолжении назначенного медли.Ниже указан важный перечень законных казино в Беларуси с бонусами на первый депозит. Вы можете попасть на официальный вебсайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный приз. <a href=https://polonistyka.com/user-2/terrysarma/>https://polonistyka.com/user-2/terrysarma/</a> Так собственно сможете отважно регистрироваться без всяких размышлений. Фортуна сейчас наверняка на вашей стороне. Не побаивайтесь, так следствие какого либо ущерба Вам совершенно не угрожает. С этими бонусами как без пополнения, Вы остаетесь лишь в плюсе, хотя не как не в минусе. 1×slots casino регистрация 1×slots review live Так что основное отличие подарка на депо от бездепа – обязательное пополнение счёта. Вы можете привнести депо и преумножить стартовый капитал или забрать бездеп и при этом не придётся рисковать своими сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начисляет щедрое одобрение!Возьми свой подарок. Чаще всего бонус активизируется сразу последствии регистрации. Но бывают истории, когда нужно забежать в индивидуальный офис либо написать в справочную службу.
1×slots регистрация 1×slotscasino 56 online
Акционные предложения от казино есть в разных форматах. Часто призы даются в мена на депозит. Игрок вносит платеж и получает средства, бесплатные вращения и другие поощрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — вид бонуса, который гарантирован за исполнение определенных поступков на веб-сайте: Возможность протестировать свежие игры, не рискуя собственными своими и разработать личную тактику игры. Лев – 70 бесплатных вращений в игровом автомате Book of Ra. Для активации презента необходимо доказать электронную почту и привязать аппарат; 1×slots официальный зеркало рабочее <a href=http://www.kalyamalya.ru/modules/newbb_plus/viewtopic.php?topic_id=10152&forum=4>http://www.kalyamalya.ru/modules/newbb_plus/viewtopic.php?topic_id=10152&forum=4</a> В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с безвозмездных вращений. Прибыль, которую Вы заработаете на таком бездепе можно назначать на вывод без какого либо отыгрыша.Чаще всего, модные сервисы, такие как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно обязательное верховодило. Финансовые средства выводятся только спустя что, эту платежную систему, которой успех для пополнения депозита. Если же игрок получил бездепозитный покерный бонус, требуется пополнить счет на наименьшую необходимую, кот-ая составляет обыкновенно 10 долларов.
1хслот скачать
Верификация необходима для дополнительной защищенности и помогает техподдержке выявить бонусхантеров и плутов. Кстати, на платформах выводы крупных сумм доступны только последствии доказательства личности.Чтобы получить возможность вывести прибыль с бездепозитного приза в казино, нужно выполнить ряд условий: Игрокам не воспринимать приветственный бонус как гарантированный способ получить крупный выигрыш, хотя это замечательная вероятность без затрат оценить возможностей казино. <a href=http://www.sglpw.cn/home.php?mod=space&uid=393968>http://www.sglpw.cn/home.php?mod=space&uid=393968</a> Основное различие в том, собственно для получения бездепа нужно пополнять баланс в казино. Но кроме сего, есть ряд и других различий:У нас на веб-сайте Вы отыщите перечень бонусов без депозита в испытанных казино и доскональную информацию о том как их получить и применять. 1×slots официальный зеркало Осталось избрать казино с призом за регистрацию и сделать профиль. После активации дара выигрыш в от Фортуны и способностей.
<b>Смотреть еще похожие новости:</b>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=150755>1хслот зеркало</a>
<a href=https://koreanstudies.com/forum/viewtopic.php?t=111905>1×slots официальный сайт мобильная версия</a>
<a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1023#post-32666>1×slots официальный сайт, скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Можно ли в одном онлайн казино получить больше 1-го бонуса за регистрацию? Нет, например как в любом онлайн казино есть верховодила, к коим нужно придерживаться, не творить 2 аккаута для получения призов, по несомненно блокировка обоих аккаутов, не пытайтесь обмануть онлайн казино, приз за регистрацию выдаеться один раз 1 личику.
#9734 Charlesgunnyhttp://filmkachat.ru
1×slots сайт
Для подтверждения электронной почты, просто перейдите по интенсивной ссылке в послании, приобретенном от игрового заведения. <a href=http://filmkachat.ru/>1×slots официальный demo регистрация в 1×slots casino</a> Иногда у гостей сайта могут возникнуть проблемы при активации полученного промо-кода. В этих случаях, нужно адресоваться за подмогою в саппорта «Support». Для получения ответа, непременно указывается определенная причина обращения и подтверждается информация дополнительными скриншотами. Если сложилась неоднозначная ситуация, постоянно возможно адресоваться к основному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ.Выбор любого онлайн казино на нашем сайте. В описании к каждому Вы можете разузнать, собственно получите за создание аккаунта. <a href=https://www.winners24.pl/member.php?action=profile&uid=51230>https://www.winners24.pl/member.php?action=profile&uid=51230</a> Для всех бездепозитных бонусов действует наибольший лимит на выигрыш. Он указывает предельную необходимую, которую появится получить, играя на бонусные кредиты. Как только вас получится выполнить притязания вейджера, возможный максимально несомненно переведен с бонусного счета на ведущей, а остаток несомненно списан. 1×slots зеркало регистрация то дальше необходимо пройти <a href=http://scompany44.ru/bitrix/redirect.php?goto=http://pro100sten.ru/bitrix/rk.php?goto=http://psx-place.com/proxy.php?link=https://teletype.in/@urid_pomosh/PshaZG2QpHL>http://scompany44.ru/bitrix/redirect.php?goto=http://pro100sten.ru/bitrix/rk.php?goto=http://psx-place.com/proxy.php?link=https://teletype.in/@urid_pomosh/PshaZG2QpHL</a> Самый распространённый из сходственных призов, естесственно же, бездеп на денек рождения посетителя — приз в виде фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им можно на установленного периода времени.В одном из заведений, Вам обязательно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая приятная доля игры. Важно, зачастую бездепозитные призы в казино выдаются с лимитированиями по наибольшей выплате. В среднем возможно рассчитывать на выгода в несколько тысяч руб. Как исключить выигрыш с приза без депо. Придётся подтвердить акк документально, в неких заведениях. Процедура верификации неотклонима и делается каждым игроком. О документальном доказательстве учетной записи спрашивайте в онлайн чате или прочитайте в правилах.
1×slots рабочее зеркало на сегодня
Чаще всего интернет-казино предлагают бездепозитные бонусы свежим пользователям. Эта промо-акция довольно эффективно привлекает начинающих, подталкивая их к открытию счета. Конечно, не все они становятся послушными клиентами, хотя сам прецедент регистрации аккаунта играет на руку заведению.Если простыми текстами, бездепы – это определённая сумма денег либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и возможно брать подарки. Но есть некоторые аспекты. Существуют игорные дома, коие перед тем как начислить бонусы требуют привязать аппарат, предоставить копии документов. <a href=http://nhomtruyen.com/members/jamesgaw.9280/>1×slots регистрация 1×slots casino c2d ru</a> 1×slots бонус за регистрацию Все любят получать презенты. Согласитесь, практически любой играющий человек будет безмерно счастлив, в получит безвозмездный презент для забавы в интернет казино просто за регистрацию либо же бонус за внесенный депо, например именуемые приветственные призы для свежих игроков. Соответственно такие онлайн клубы станут более модны и предпочтительны у игроков при выборе казино для забавы. Топ казино постоянно обновляется и добавляются новые и интересные игровые клубы с симпатичной бонусной политикой и всеми вероятными прерогативами, к коим относятся эти призы как фриспины за регистрацию, валютные бездепозитные призы, а также великодушные бонусы за внесенный депо. <a href=https://hdkaraokesong.com/space-uid-282350.html>https://hdkaraokesong.com/space-uid-282350.html</a> 1×slots регистрация 1×slots casino c2d ru
1 xslots рабочее зеркало
В лицензионных бездепозитных казино играть в азартные игры вправду неопасно. Наличие лицензии подтверждает тот прецедент, что клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP. Если вы опытный игрок, вы должны знать, что приз без депозита – редчайшая находка. Тем не, мы раз изучаем онлайн, дабы отыскать вам лучшие бездепозитные предложения. <a href=http://dudoser.com/user/DonaldSoins/>http://dudoser.com/user/DonaldSoins/</a> Бездепы шансы входить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами.Похожим образом трудится 3-ий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя или в связи с получения им VIP-статуса. Подарок предоставляется в обращения в поддержку и ревизии. 1х слот регистрация в 1×slots casino
зеркло казино 1×slots
Бездепозитные призы в казино без пополнения 2022 — это конкретная сумма денег или valinomycin spins вращения, коие предоставляются первым гостям за регистрацию на сайте казино вид бездепозитного приза, и дает вас вероятность за счет казино без пополнения опробовать предложения (игр), с дальнейшей прерогативой вывода средств при исполнении всех установленных верховодил.Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных обстановок с казино, когда после отыгрыша бездепа вам не дадут вывести солидную сумму выигрыша. Для верификации аккаунта надо(надобно) предоставить профессионалам технической помощи отсканированную копию паспорта и счета за коммунальные предложения, а также фотку банковской карты или экрана страницы электрического кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для подтверждения личности.В случае установленного лимита на сумму вывода выигрыша с бездепозитного приза, игрок не может исключить больше заявленной суммы. 1х слотс зеркало регистрация в 1×slots casino <a href=http://michiya-cs.com/userinfo.php?uid=30573>http://michiya-cs.com/userinfo.php?uid=30573</a>
1×slots зеркало 1хслотс регистрация перейти на 1×slots
После потребуется внести идентификационный платёж. Это пугает новичков больше всего. Нужно сделать наименьший депозит в 100–500 руб. Таким образом служба защищенности увериться что, нет, собственно платёжный метод принадлежит Вам. Данная процедура необходима для обеспечивания защищенности игровых счетов. Пример, Ваш аккаунт взломают и выведут свои на собственный кошелёк. Будет очень досадно. Поэтому верификация платёжной системы, это необходимый момент.Бонус начисляется игроку незамедлительно после регистрации и прохождения верификации в казино и не настятельно от клиента внесения депо. Как правило, объем приза в сходственном случае достаточно застенчивый, однако дозволяет новичкам познакомиться с игрой без риска настоящими средствами. <a href=https://craigslistdir.org/%D0%B1%D0%B5%D1%81%D0%BF%D0%BB%D0%B0%D1%82%D0%BD%D0%B0%D1%8F-%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0-%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA_359164.html>https://craigslistdir.org/%D0%B1%D0%B5%D1%81%D0%BF%D0%BB%D0%B0%D1%82%D0%BD%D0%B0%D1%8F-%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0-%D0%B2%D0%BB%D0%B0%D0%B4%D0%B8%D0%B2%D0%BE%D1%81%D1%82%D0%BE%D0%BA_359164.html</a> 1хлот регистрация в 1×slots casino Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?
<b>Смотреть еще похожие новости:</b>
<a href=https://hiddeninthesand.com/forum/viewtopic.php?t=276958>1×slots официальный сайт скачать</a>
<a href=https://www.lightknotes.com/MyBB/showthread.php?tid=163753>1×slots бездепозитный бонус за регистрацию</a>
<a href=https://creapnl.com/2018/02/01/preguntas-que-cambian-la-perspectiva/#comment-17612>x1 slots регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Даже не выиграв солидную сумму, игрок увлекательно проведет время, изнутри изучит работу площадки, оценит геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе наихороших акций легкостью. Достаточно периодически учить перечень новых интернет казино с выводом бонуса без депозита в этом разделе. Чтобы самостоятельно увериться в преимуществах бездепозитных призов, достаточно зарегистрироваться в казино и получить одобрение.
#9735 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее на сегодня
Начнём с того, что любое рекламную за регистрацию предполагает некие условия. Бездепозитные призы в казино 2022 года выдаются с условиями вагера. Вейджер – это кратность валютного оборота, нужная для выполнения условий. Пример, получили безвозмездные вращения и выиграли с них 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 руб., проигрышных или выигрышных, не. После исполнения, бонусный баланс перейдёт на реальный и станет доступным к выводу.Чаще всего интернет-казино предлагают бездепозитные бонусы новым пользователям. Эта промо-акция очень эффективно привлекает начинающих, подталкивая их к открытию счета. Конечно, не все они становятся послушными посетителями, но сам прецедент регистрации аккаунта играет на руку заведению. <a href=http://filmkachat.ru/>1×slots регистрация 1×slots casino c2d ru</a> Объективные – объем приза, коэффициент и обстоятельства вейджера, надобность внесения депо для вывода денег; <a href=http://vfb7968c.bget.ru/user/Davidassox/>http://vfb7968c.bget.ru/user/Davidassox/</a> 1×slots быструю регистрацию а также мгновенное <a href=http://support-groups.org/memberlist.php?mode=viewprofile&u=168879>http://support-groups.org/memberlist.php?mode=viewprofile&u=168879</a> Прежде всего, не запамятовывайте периодически заглядывать на страницу обзоров бездепозитных призов. Они шаг за шагом рассматривают наиболее увлекательные предложения основных игорных порталов.
1×slots зеркало подтвердит вашу регистрацию если говорить
Активация валютного вознаграждения происходит механически в сотворения профиля либо использования промокода. Иногда операторы предъявляют дополнительные требования: подписаться на страницы казино в социальных сетях или на рассылку рекламных сообщений, скачать и установить дополнительный софт и т.д. <a href=http://link.5nx.ru/viewtopic.php?f=5&t=4587>1×slots casino зеркало рабочее</a> 1хслотс официальный сайт зеркало При маленький сумме бонуса рекомендуется играть по невысоким ставкам, а применять наибольшие чем лишь никаких случае, если вейджер очень великой, а время на отыгрыш сильно ограничено.Бездепы могут заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами. <a href=http://dedmorozural.ru/users/patheticideal93>http://dedmorozural.ru/users/patheticideal93</a> Для выбора азартного заведения Вы сможете пользоваться списком наших казино с бонусами за регистрацию. На нашем веб-сайте мы выпустили список бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, собственно доля призов неповторимые и доступны лишь для гостей нашего сайта по-специальному промо-коду либо по оригинальной ссылке. Кроме того, для любого приза мы подготовили подробный обзор, в Вы узнаете как получить и отыграть поощрение и как вывести свой выигрыш с бездепа.Многие игроки, оценив возможностей казино, остаются играть в нем и дальше ? на это и нацелено любое промо. Постоянные посетители заносят депозиты и проделывают ставки, обеспечивая долгосрочную прибыль оператора. То есть, казино раздают бездепы свежим юзерам для формирования лояльной аудитории. скачать 1×slots официальный сайт Игры, в которых возможно играть на бонусные деньги. Проверьте список игр, каких возможно выступать на бонусные средства, вполне они Вам не понравятся и не стоит расходовать своё время на такую акцию.
1 xslots рабочее зеркало
Похожим образом трудится 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя либо из-за с получения им VIP-статуса. Подарок предоставляется последствии обращения в поддержку и ревизии.Так собственно можете отважно региться без всяких раздумий. Фортуна сейчас наверняка на вашей стороне. Не страшитесь, как следствие какого или ущерба Вам абсолютно не угрожает. С этими бонусами как без пополнения, Вы остаетесь только в плюсе, но не как не в минусе. Предложения с бездепозитными призами за регистрацию позволяют новым заведениям заинтересовать аудиторию на свой сайт. А игроки же получают вероятность выступать на настоящие средства без депозита в казино и заработать малый стартовый капитал, который разрешается вывести на карту банка либо электронный кошелек. <a href=https://coffeepeople.ru/memberlist.php?mode=viewprofile&u=40184>https://coffeepeople.ru/memberlist.php?mode=viewprofile&u=40184</a> 1×slots casino регистрация 1×slots review live Приступим к практике, как получить Бездепозитный приз в казино с выводом. Мы опишем полную процедуру активации приза без депозита. Внимательно прочтите до конца. Многие новенькие делают ошибки на шаге регистрации и потому возможности получить подарок.Отзывы читателей о бонусных промоакциях помогут составить эмоцию, но не запамятовывайте о субъективности собственных комментариев.
1×slots официальный сайт мобильная версия
Чтоб получить большой выигрыш, подбирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша. Перечисленные повыше главные характеристики сочетают фактически каждый приз и считаются стандартными для бездепозитных бонусных начислений в казино.При маленькой сумме приза рекомендовано выступать по невысоким ставкам, а применять максимальные лучше только сомнений случае, случае вейджер очень большой, а время на отыгрыш сильно ограничено. Перед активацией главно внимательно изучить обстоятельства промоакции. Чем ниже вейджер, тем больше потенциальная выгода игрока. Имеют значение также лимиты ставок при отыгрыше и сроки, в течение которых можно воспользоваться предложением. Если бездеп обхватывает ограниченный перечень игр, рекомендуется разузнать наибольшие коэффициенты, уровень отдачи и волатильности. Слоты с невысокими множителями выплат подходят только в случае, в оператор не установил строгие ограничения на наивысшую необходимую ставки.Только выполнив все условия отыгрыша и дождавшись окончания ревизии аккаунта, Вы можете оформить заявку на вывод средств и получить свои деньги. 1×slots зеркало рабочее на сегодня <a href=http://aggy.ru/bitrix/click.php?goto=http://akb02.ru/bitrix/redirect.php?goto=http://bg39.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/IEbJbjLPlSH>http://aggy.ru/bitrix/click.php?goto=http://akb02.ru/bitrix/redirect.php?goto=http://bg39.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/IEbJbjLPlSH</a> Представленные на этой странице лучшие бездеп призы в казино за регистрацию в 2022 году имеют оптимальные обстоятельства. После кропотливого анализа редакция портала составила рейтинг спецпредложений, каком посетители Casino.ru могут сортировать перечень по нескольким аспектам: по сумме, вейджеру, наибольшей сумме вывода и т.д.Бездепы имеют входить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой либо баллами.
1×slots казино зеркало
<a href=https://images.google.co.jp/url?q=https://doctorlazuta.by/>https://images.google.co.jp/url?q=https://doctorlazuta.by/</a> Зaпoлнeниe aнкeты и вepификaция aккaунтa. B пpoфилe нужнo укaзaть cooтвeтcтвующую дeйcтвитeльнocти пepcoнaльную инфopмaцию, a зaтeм пoдтвepдить ee, пpeдocтaвив в cлужбу пoддepжки фoтoгpaфию удocтoвepeния личнocти. казино 1×slots официальный сайт Бездепозитные бонусы – это исключительно интересная и наиболее перспективная промоакция интернет-казино. Они даже другого, как фри-спинов, поэтому что выплаты в бесплатных вращениях не гарантированы, так комбинации на барабанах игрового аппарата могут не сложиться.Как верховодило, новоприбывшие геймеры начала желают ознакомиться с способами ввода и вывода валютных средств и сроки исполнения поданных заказов чтобы конкретно разуметь, как скоро возможность вывести собственный казино приз за регистрацию без депо на электронный кошелек либо же банковскую карту. К счастью для всех играющих, внутри конкретных холдингов, все казино конкурируют меж собой. Ведь случае бы конкретную фирму представляло только одно онлайн-заведение, то вряд ли бы клиенты заметили казино с бонусом за регистрацию и имели бы рассчитывать лишь на вознаграждение в виде бонуса на 1-ое вложение. К любому заведению периодически по завлекать новых игроков, что, в, лишь на руку всем играющим.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.findaspermdonor.com/viewtopic.php?f=25&t=86991>1×slots зеркало регистрация</a>
<a href=http://old.pokvesti.ru/forum/viewtopic.php?f=42&t=250501>1×slots промокод при регистрации 2025</a>
<a href=https://peloton.com.ua/forum/memberlist.php?mode=viewprofile&u=9259>1хслотс мобильная версия зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Выше мы дали глубокий набор самых свежих и своевременных бездепозитных бонусов в онлайн казино без пополнения на 2022 год, где вам воспользоваться каким ценным бездепозитным бонусом. Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм.
#9736 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало быструю регистрацию а также мгновенное
Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки могут запросить вспомогательные документы либо инициировать краткое общение по Skype. <a href=http://filmkachat.ru/>1×slots регистрацию более популярный вариант это</a> Мы подготовили перечень, где есть практически актуальные и новые бездепозитные бонусы казино, коие вы можете получить безвозмездно. Для наших юзеров есть специальные предложения неповторимые бонусы, коие вы ни не найдете, их мы определили специальной красноватой плашкой «Exclusive». <a href=https://mysocialclub.ru/user/JamesSpemn/>https://mysocialclub.ru/user/JamesSpemn/</a> Как управляло, при выводе денег, от играющего потребуется только сделать наименьший вклад чтобы, чтобы, дабы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом собственный счет. 1хслотс официальный сайт зеркало <a href=https://eccentrictirade.com/forums/member.php?action=profile&uid=2826>https://eccentrictirade.com/forums/member.php?action=profile&uid=2826</a> Частенько новенькие не знают, как активировать презенты либо исключить первый выигрыш. Для похожих случаев наша команда обрисовала основные определения – что такое фриспины, вейджер, как его отыграть, зачем необходимо проходить верификацию.Акционные предложения от казино есть в разных форматах. Часто призы даются в мена на депо. Игрок вносит платеж и получает средства, безвозмездные вращения и одобрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — картина приза, который гарантирован за исполнение определенных действий на веб-сайте:
1×slots зеркало регистрация в 1×slots casino
<a href=http://6000ziyuan.com/forum.php?mod=viewthread&tid=106504&extra=>1×slots casino online регистрация</a> 1×slots зеркало рабочее на сегодня Выиграть реальные средства в казино не пополняя счет – сложно, хотя возможно. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными призами и начните играть на бонусные свои. По статистике в 10-ти заведений возможно заработать небольшую необходимую средств за счет бонусных средств. <a href=http://www.forum.nedug.ru/members/146519-nedug146519>http://www.forum.nedug.ru/members/146519-nedug146519</a> Следует выделить, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом.Каждый геймер должен сначала детально выучить обстоятельства по получению и отыгрышу приглянувшегося подарка. Если всё организует, поспешите забрать бесплатные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо данный начать вращать барабаны топовых слотов. 1хслот зеркало сайта
1×slots регистрация 1×slots casino 777 online
Также есть онлайн-платформы азартных игр, которые применяют раздачу бездепозитных призов в специальные даты (как для казино, так и для игрока). Помимо сего, действующие геймеры того имеют вероятность получить схожие бонусы за свою деятельность (например, за повышения уровня или за похожие достижения). <a href=http://y90429l8.bget.ru/user/GlennNix/>http://y90429l8.bget.ru/user/GlennNix/</a> Бездепозитный бонус часто имеет стать доступным незамедлительно в окончания регистрации, потому правило единственным требованием к нему является регистрация, а после проверка вашей новой учетной записи. 1×slot зеркало рабочее этих способов предполагает регистрацию С такими простыми советами каждое казино с бонусом за регистрацию способно принести в разы больше выгоды и полезности.
1×slots зеркало проходить регистрацию это отличный вариант
<a href=http://naturetour.ru/communication/forum/messages/forum3/message23754/5452–1khslots-zerkalo-na-segodnya?sessid=e0ff2c0a437875d80eae3c93c8a1194e&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1хслотс зеркало на сегодня</a> Максимальный размер ставки, который нельзя превышать пока бонус не будет всецело отыгран. В случае нарушения этого правила, бонус и выигрыш с него станут аннулированы.Размер бонуса. В качестве бездепов обычно начисляют большие суммы, а когда речь о призах за депозит, коие начисляются в процентном соотношении от суммы пополнения, то кое-какие казино все подарить игроку до 2000$. 1хслотс рабочее зеркало <a href=http://yartube.ru/user/DoctorLazutaKi/>http://yartube.ru/user/DoctorLazutaKi/</a>
казино 1× slots официальный сайт
При исполнении критерий отыгрыша и верификации, деньги с бонусного счета переводятся на ведущей и имеют быть выведены на карту либо электрический кошелек. Лимиты на вывод и сроки проведения транзакции находятся от выбранной платежной системы.При получении бездепа, уточняйте время, коие дается на отыгрыш выигрыша. Так Вы можете спланировать свое свободное время, которое можно предназначить этой в казино. <a href=http://fr79056g.bget.ru/index.php?name=account&op=info&uname=fallaciouslawn7>http://fr79056g.bget.ru/index.php?name=account&op=info&uname=fallaciouslawn7</a> 1×slots официальный demo регистрация в 1×slots casino В лицензионных бездепозитных казино выступать в азартные забавы действительно безопасно. Наличие лицензии одобряет что, этот прецедент, что клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP.Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.pmpobc.ca/index.php?topic=128991.new#new>1×слотс казино</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Промообъявления от казино не дают реальной картины и ориентированы на привлечение внимания пользователей. Понять, насколько высоки шансы остаться в плюсе, дозволит собственный тест критерий предложения:
#9737 Charlesgunnyhttp://filmkachat.ru
1хлот регистрация в 1×slots casino
Бесплатный бонус – кредиты, коие онлайн-казино начислит клиенту, не заставляя его пополнять игровой счет.Бесплатные призы казино без депо можно получить вид валютных средств на бонусный счет (исключить их можно только после отыгрыша), фриспинов, игры или кешбэк-бонуса. <a href=http://filmkachat.ru/>1×slots актуальное зеркало</a> Вейджер (либо вагер) ? это минимальная сумма ставок, которую нужно сделать для вывода валютного бонуса. Обычно она указывается вид множителя – х20, х35 и т.д. Чем меньше вейджер, тем красивее спецпредложение.Условия вывода выигрыша. В некоторых заведениях для успешного вывода с бездепозитного бонуса достаточно пополнения баланса и подтверждения личности. В иных же клубах, необходимо несколько один прокрутить свой депозит. <a href=http://medik.co.kr/bbs/board.php?bo_table=free&wr_id=652780>http://medik.co.kr/bbs/board.php?bo_table=free&wr_id=652780</a> Предложения с бездепозитными призами за регистрацию разрешают новым заведениям привлечь аудиторию на свой сайт. А игроки в свою очередь получают вероятность выступать на реальные деньги без депо в казино и заработать маленький стартовый капитал, кот-ый разрешается исключить на карту банка либо электронный кошелек.Диапазон ставок, коие вправе сделать игрок, также лимитирован. Обычно ставить возможно небольшую сумму — пределах 10–30 рублей за одно вращение. casino 1×slot <a href=https://www.google.tt/url?sa=t&url=https://doctorlazuta.by/>https://www.google.tt/url?sa=t&url=https://doctorlazuta.by/</a> Приветственный бездеп предоставляется хоть игроку только один раз. Казино борются с например нарекаемыми бонусхантерами (от англ. Bonus Hunter — доброволец за бонусами), пытающимися заводить многочисленные аккаунты для надувательства оператора и повторного получения дара. Исключить сходственные действия позволяет верификация данных. Администрация вправе потребовать у посетителя подтвердить персональные данные, указанные при регистрации.
1×слот регистрация в 1×slots casino
Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, дабы еще раз получить безвозмездный бонус. Игорные заведения нетерпимы к бонус-хантерам, потому вас ожидает неизбежное санкция. 1×slots официальный сайт, скачать Приветственный бездеп предоставляется любому игроку лишь один раз. Казино сражаются с так называемыми бонусхантерами (от англ. Bonus Hunter — доброволец за призами), пытающимися заводить множественные аккаунты для обмана оператора и повторного получения дара. Исключить похожие деянья позволяет верификация данных. Администрация вправе востребовать у посетителя подтвердить индивидуальные данные, обозначенные при регистрации.Простая процедура получения бездепозитного бонуса, кот-ая займет менее 2-х минут. Для получения бездепов, достаточно зарегистрироваться и доказать контактные данные. <a href=http://daedong99.com/bbs/board.php?bo_table=check&wr_id=115054>http://daedong99.com/bbs/board.php?bo_table=check&wr_id=115054</a> Вейджер в переводе с английского означает «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша полученного приза, в нашем случае бездепозитного. Число ставок не — важно только набрать сумму, пропорциональную сумме одобрения. 1×slos регистрация в 1×slots casino
1×slots официальный сайт мобильная версия скачать
Следует выделить, что бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом.Бездепозитный приз казино 2022 с выводом за регистрацию предоставляет вероятность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и выяснить качество работы службы. Довольно нередко, начиная игровой процесс, игрок уже отказывается останавливаться и проделывает настоящий лепта. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать даром вполне как один таки с призом за регистрацию без необходимости заносить депо. Поспешите отобрать бездепозитные бонусы за регистрацию в казино из представленного списка. Все платформы не только водят законную деятельность, но и обрадуют честными результатами забавы, высочайшей отдачей, быстрыми выплатами. <a href=http://mbdou-vishenka.ru/user/JulesGeori/>http://mbdou-vishenka.ru/user/JulesGeori/</a> 1×slot зеркало рабочее регистрации на телефон придет Пoдтвepдить личнocть посетителя. Для успешного вывода средств, нужно подтвердить лицо клиента. Нa этaпe вepификaции пpoфиля, сотрудники службы защищенности обязаны убедиться, что у игрока более раз акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не сможет вывести собственный выигрыш, в у него несомненно количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы.
1×slots официальный зеркало
Бездепозитный бонус часто возможность замерзнуть легкодоступным незамедлительно последствии окончания регистрации, что как единственным требованием к нему считается регистрация, а этого проверка вашей новой учетной записи.Максимальная ставка ? уточняется в еденице счета и ограничивает объем ставки за один спин. В случае ее превышения приз может быть аннулирован. Также в правилах может содержаться запрет на размещение ставок конкретного облика, примеру, по одинаковым шансам в рулетке (то есть, на чет или нечет, красноватое или темное и т.д.). <a href=http://aurorahcs.com/forum/viewtopic.php?f=8&t=771571>1×slots рабочее зеркало на сегодня</a> Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша бонусов. Заведения практически устанавливают наивысшую ставку, допустимую по условиям вейждера. 1×slots зеркало быструю регистрацию а также мгновенное <a href=http://penelopetessuti.ru/index.php?subaction=userinfo&user=volatileblossom>http://penelopetessuti.ru/index.php?subaction=userinfo&user=volatileblossom</a> Ещё одно распространённое акционное предложение – привлекательный презент с сомнительными требованиями. К образцу, клуб обещает $100 в бездепа, но с вейджером х80 или х100. Отыграть такой вейджер практически невероятно и потому превосходнее концентрироваться на больше занимательных акциях.
казино 1×slots
Также, такой нужно доказать собственный номер телефона, достичь код, полученный в смс-сообщении от клуба ввести в особое поле в собственном офисе игрока.Бонус за регистрацию в казино без депо с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша имеет понадобиться сделать ставки на сумму, в количество десятков раз превосходящую сумму бонуса либо выигрыша. К примеру, игроку выдаются безвозмездные свои в заведении в объеме пятидесяти либо 100 долларов (вейджер на коие сочиняет 100х). То есть, каждому новоприбывшему игроку выскакивает манящая иллюстрация, кот-ая обещает выплату всех зачисленных компанией средств. Не стоит заострять на казино бонус за регистрацию без депозита с чрезмерно великой либо довольно маленькой суммой призов, потому что, и тщательно исследовав все обстоятельства, здесь вероятнее всего, несомненно какой-то подкол. <a href=http://users.atw.hu/adf/profile.php?mode=viewprofile&u=11581>http://users.atw.hu/adf/profile.php?mode=viewprofile&u=11581</a> Сроки активации приза уточняются любым казино, но чаще всего они не превышают недели с этапа получения. Игроку обязательно нужно использовать бездеп на обозначенного срока, в ином случае приз просто пропадет. Каждый приз возможно получить лишь один один, потому если не использовать бездеп в срок, у игрока не будет второго шанса им воспользоваться.Срок активации и время на отыгрыш. Зачисление денег или фриспинов происходит при активации протяжении строго ограниченного периода, подобные притязания предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать приз несколько дней или том недель. Другие выдают крупную необходимую за регистрацию, но время отыгрыша ограничивают несколькими часами с необоснованно высоким вейджером. 1×slots casino регистрация 1×slotscasino09k online Какие бонусы я могу еще получить не бездепозитного бонуса за регистрацию в казино? По мимо бездепозитного бонуса, любое онлайн казино предлагает игрокам прибыльное предложение на первый депо, вы совершаете депозит, ваш депо увеличивается в двое либо и в трое, что, этим самым начать играть можно с больше солидной суммой, так же не запамятываем тему вейджер на бонусы.Бонус за регистрацию в казино выдается лишь один раз на 1-го игрока. Но случаются вспомогательные промоакции, в рамках коих бездепы раздаются для неизменных посетителей и такие презенты Вы сможете получить более 1-го раза.
<b>Смотреть еще похожие новости:</b>
<a href=http://policeacademy.teamforum.ru/memberlist.php?mode=viewprofile&u=410>1хслотс казино зеркало</a>
<a href=http://216.38.0.7/viewtopic.php?f=12&t=142023>1×slots регистрация 1×slots review live</a>
<a href=https://forum-macan.ru/viewtopic.php?t=3669>1×slots рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
В интернете количество известных игорных площадок с привлекательными акционными предложениями. Однако внимательно читать условия десятков услуг скором надоест, да и время отнимет количество. Поэтому наша команда подготовила ТОП-3 сайтов с наихорошими бездепозитными бонусами: В случае установленного лимита на сумму вывода выигрыша с бездепозитного приза, игрок не может исключить больше заявленной суммы.
#9738 Charlesgunnyhttp://filmkachat.ru
1×slots мобильная версия войти казино
Стоит обозначить(означить), собственно бездепозитный приз выдается только совершеннолетним новичкам, которые, тому, имеют пригласить собственных приятелей и знакомых, кроме рассчитывающих на поощрительную программку преданности. Подобная технология замечена среди конкуренцию онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению собственной популярности, путем вербования свежих игроков. Бонусы – это оригинальный шанс для потенциальных участников игры, коие шансы опробовать софт покер рума и увериться, будут ли они в него выступать либо нет. Новый игрок испробует средства силы с реальными оппонентами в казино.С иной стороны, намного проще отобрать бездепозитные фриспины за регистрацию в казино и прямо сейчас начать вращать барабаны в наихороших слотах. Главная необыкновенность спинов в, собственно они предусмотрены для лучших автоматов. Удастся столько пройти вспомогательные раунды, хотя и увеличить сумму выигрыша, заработать респины прочие внутриигровые подарки. <a href=http://filmkachat.ru/>1хслотс официальный сайт зеркало</a> <a href=http://www.oymalitepe.net/modules.php?name=Your_Account&op=userinfo&username=alcoholiccloset>http://www.oymalitepe.net/modules.php?name=Your_Account&op=userinfo&username=alcoholiccloset</a> Также, ситуации необходимо подтвердить собственный номер аппарата, для этого код, приобретенный в смс-сообщении от клуба установить в особое поле в собственном офисе игрока. 1×slots официальный зеркало рабочее <a href=http://forum.belmama.ru/index.php?topic=25058.msg324627#msg324627>http://forum.belmama.ru/index.php?topic=25058.msg324627#msg324627</a> Бездепозитный приз по промо-коду несомненно доступен для игры, лишь в том случае когда Вы активируете особый бонусный код в разделе с бонусами либо укажите промокод при регистрации на веб-сайте. В неких случаях, считая активации кода, понадобиться подтвердить контактные данные игрока и наполнить анкету клиента.Еще одно условие дотрагивается размеров ставки. Операторы устанавливают наивысшую необходимую, коию игрок вправе поставить из подарочных средств. Она рассчитывается в валюте, избранной в Личном офисе. При превышении лимита есть риск потерять приза. Существующие лимитирования относятся и к конкретным видам ставок. Например, играя в рулетку, клиент возможность столкнуться с запретом назначать фишки на шансы.
1×slots официальный зеркало рабочее
Можно ли зарабатывать на бездепозитных бонусах? Это не работа, тут как повезет, если в любом предложенном безедепе, вы будете откручивать вейджер и выводить, это можно назвать везением, и добавочной добавкой к вашему бюджету. зеркло казино 1×slots Доступ к подарку может раскрываться механически после введения промокода либо воззвания в саппорта сайта. В первом случае от пользователя не требуется практически поступков. Бездеп с активацией по коду встречается чаще всего. Игроку нужно установить совокупа знаков в графе, кот-ая имеет пребывать в регистрационной форме в Личном кабинете.B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpax <a href=http://www.trustlink.org/Ask-The-Community/Question/Other/How-does-teen-fashion-reflect-the-evolving-dynamics-of-youth-culture-and-self-expre-15486>http://www.trustlink.org/Ask-The-Community/Question/Other/How-does-teen-fashion-reflect-the-evolving-dynamics-of-youth-culture-and-self-expre-15486</a> Чаще всего, знаменитые сервисы, эти как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно неотъемлемое верховодило. Финансовые средства выводятся только спустя что, эту платежную систему, коей пользовались для пополнения депо. Если же игрок получил бездепозитный покерный бонус, потребуется пополнить счет на минимальную необходимую, кот-ая составляет обычно десять долларов.Сразу после активации промокода можно пользоваться презентом. Как уже упоминалось, призы посещают трёх обликов – фриспины, кредиты и фриплей-бонусы. 1×slots казино зеркало Кешбэк-бонус дает собой возврат фиксированного процента от ставки когда проигрыша либо же от проигранной суммы за определённый этап. В большинстве случаев кешбэк не превышает 10%.Подарки на конкретные даты отличаются условиями получения. Если поощрение начисляют игроку на денек рождения, то сумма обычно находится от общего объема депозитов за прошедший год.
1×slots зеркало выигрыши обязательно пройдите регистрацию если
Бонус без депозита за регистрацию в казино (бездепозитный приз) – это денежный подарок от клуба, кот-ый начисляется на акк игрока в регистрации в казино. Кроме создания учетной записи, для получения бездепа, довольно нередко требуется ещё и доказать контактные данные игрока и/или активировать специальный промо-код.Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и. Когда игроку полагается количество фриспинов, администрация может разбивать их начисление на некоторое дней. Бесплатные вращения предоставляются для конкретного слота, который указывается в правилах акции. <a href=http://www.kiopro.ru/support/forum/view_profile.php?UID=63531>http://www.kiopro.ru/support/forum/view_profile.php?UID=63531</a> Казино выделяет вероятность заработать и вывести настоящие деньги на бездепозитных бонусах. Обычно, это малозначительная сумма, коию казино возможность для позволить презентовать игроку. 1×slots зеркало быструю регистрацию а также мгновенное Казино выделяет возможность заработать и вывести настоящие деньги на бездепозитных призах. Обычно, это малозначительная сумма, которую казино имеет для позволить презентовать игроку.Поспешите зарегистрироваться на официальном веб-сайте Клубника, чтобы мгновенно получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, бывает реальный шанс победу!
1 хслот регистрация в 1×slots casino
Подобные призы без депо предоставляются на больше выгодных условиях. Зачастую они крупнее, а обстоятельства отыгрыша наименее строгие. Минимального оборота. Этот предел уточняется вейджером — пока игрок не поиграет на установленную необходимую, вывод средств несомненно недосегаем.На бонусные начисления все быть установлены дополнительные лимитирования, которые Вы не учли при отыгрыше. Пока приз всецело не отыгран — средства из казино не выводятся. Бездепозитные бонусы отличный вариант бесплатной забавы в игровые автоматы. Многие пользователи сети не понимают, собственно в казино можно начать играть безусловно даром, а потом исключить выигрыш на банковскую карту или электронный кошелек, другие не доверяют интернет казино, а третьи удачно играют и выигрывают – и тотчас довольно большие суммы.Стоит обозначить(означить), что бездепозитный приз выдается лишь взрослым новеньким, коие, в свою очередь, все пригласить собственных друзей и людей, того рассчитывающих на поощрительную программку преданности. Подобная технология замечена между конкурирующих онлайн-казино собственной популяризации и расширения трафика. Покер румы и спонсоры содействуют повышению собственной посещаемости, путем вербования свежих игроков. Бонусы – это уникальный шанс для вероятных соучастников забавы, которые шансы опробовать софт покер рума и убедиться, будут ли они в него играть либо нет. Новый игрок попробует средства силы с настоящими оппонентами в казино. x1 slots 1хслотс регистрация перейти на 1×slots <a href=http://s9524047.beget.tech/user/DoctorLazutaMl/>http://s9524047.beget.tech/user/DoctorLazutaMl/</a> Срок отыгрыша — это период, кот-ый начинается в момент активации бонуса и кончается с его закрытием. Пользователю необходимо уложиться в этот временной промежуток, другому призовые средства аннулируются. Казино устанавливают список игр, ставки в засчитываются при расчете отыгранных средств. Если тайтл не заходит в данный список, то предоставляется быть недосегаем для загрузки в деянья бонусного предложения.В интернете очень большое скриптовых вебсайтов, которые принадлежат мошенникам. Их основная задача – заинтересовать гэмблеров, пообещав столько великодушные презенты, хотя и солидные выигрыши. Так собственно кое-какие веб-сайты предлагают получить за регистрацию и $1 000.
1×slots официальный сайт, скачать
Если вы выбрали себе несколько брендов коие для больше всего приглянулись, для неизменной забавы! Таких гемблеров казино очень любит и ценит, за частую эти игроки становятся VIP игроками заведения, которым часто поступают выгодные предложения вид призов, так же туда входит и бездепозитные.Если при регистрации указать промокод, можно гарантировано получить бонус. Где арестовать ваучер? Посетите направленные блоги или форумы. Иногда администрация клуба проделывает рассылку ваучеров на электрическую почту. В заключительнее время игорные дома начали афишироваться в фильмах и телесериалах. Присмотритесь и всего заметите промокод, который принесёт 500 или 1 000 бонусных руб. В подавляющем большинстве случаев безвозмездные бонусы начисляются в кредитах, коие нельзя незамедлительно исключить со счета. Прежде их нужно отыграть по установленным правилам. Эти требования принято нарекать вейджером (англ. Wager). Выражается он коэффициентами (х30, х40 и). О нем читайте ниже. <a href=http://anima-rpg.com:/member.php?action=profile&uid=332785>http://anima-rpg.com:/member.php?action=profile&uid=332785</a> Подтверждение электрической почты – одно из ведущих критерий, которое есть почти в каждом бездепозитном казино. Чтобы верифицировать электрическую почту, достаточно перебежать по активной ссылке в послании, приобретенном от азартного клуба.У любого игорного клубы различные вейджеровые условия. Чтобы вы гарантировано смогли выполнить их, мы дадим несколько советов. Если система начислила небольшую сумму, надо делать великие ставки – остановитесь на 10–30 центах. Как лишь сумеете заработать примерно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте выступать. В неприятном случае превосходнее присмотреться к иному автомату. 1×slots промокод при регистрации 2025
<b>Смотреть еще похожие новости:</b>
<a href=https://traderscrypt.com/forums/showthread.php?tid=5891&pid=8489#pid8489>1хслотс официальный сайт зеркало</a>
<a href=https://www.findaspermdonor.com/viewtopic.php?f=25&t=86584>1×slots официальный сайт, скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
К раскаянию, нет. Почти все казино, требуют внесение но бы 1-го малого депозита для вывода выигрыша с бездепозитного бонуса. Также учитывайте, что исключить средства разрешается лишь на что, эту платежную систему, с которой был изготовлен депозит.
#9739 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
Демоказино есть практически на каждом веб-сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются существенно пореже: там если, тогда, выигрыша и соблюдения условий акций бездеп можно превратить в реальные деньги.Бездепозитный бонус казино с выводом за регистрацию не просит внесения средств на игровой счёт для получения — в этом и содержится основное различие. <a href=http://filmkachat.ru/>1хслот зеркало</a> В случае установленного лимита на необходимую вывода выигрыша с бездепозитного приза, игрок не сможет вывести больше заявленной суммы. <a href=http://humlalitkala.com/groups/shisha-tobacco-from-4-eur/>http://humlalitkala.com/groups/shisha-tobacco-from-4-eur/</a> Автоматическая активация взгляд самой комфортной, но ручной метод содержит перед ней превосходства. Прежде чем использовать вознаграждение от казино, стоит заранее найти, сколько времени потребуется на исполнение всех условий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала деяния приза. 1×slots официальный зеркало рабочее <a href=http://xn–bb0br5kvmftwn87bs3lywo.kr/bbs/board.php?bo_table=free&wr_id=77543>http://xn–bb0br5kvmftwn87bs3lywo.kr/bbs/board.php?bo_table=free&wr_id=77543</a> Необходимость отыгрыша. Вейджер такой повыше, чем для призов за депозит. И пока средства не отыграны, исключить их невозможно.Для получения депозитного приза необходимо пополнить собственный игровой баланс настоящими средствами. Вознаграждение можно получить или при внесении первого депозита, или в виде фиксированного процента от внесённых средств. Так либо иначе, приз поступит на счёт только последствии пополнения.
1×slots зеркало регистрация
Диапазон ставок, которые вправе устроить игрок, также лимитирован. Обычно назначать можно маленькую необходимую — в 10–30 руб. За одно вращение.Прежде чем активировать бездеп, нужно увериться что, собственно страна, гражданином которой является игрок, не заходит в список не. 1×slots официальный зеркало Это раз из основных показателей привлекательности подарка. С завешенным коэффициентом в мастера не сумеют выполнить обстоятельства по отыгрышу. И маловажно, насколько привлекательно выглядит предложение – бездепозитный приз казино в объеме $500 либо $1 000. Чтобы новенькие получше вдумались, собственно же это вейджер, мы разберём на примере.Бонус начисляется игроку сразу последствии регистрации и прохождения верификации в казино и не требует от клиента внесения депо. Как управляло, размер приза в сходственном случае довольно скромный, однако разрешает новеньким познакомиться с забавой без риска реальными деньгами. <a href=https://www.catfish-assassins.org/forum/memberlist.php?mode=viewprofile&u=765>https://www.catfish-assassins.org/forum/memberlist.php?mode=viewprofile&u=765</a> Бонусы без депозита при регистрации считаются самыми красивыми как для опытных игроков, например для и новичков. Получив такое вознаграждение, клиент имеет выступать на реальные деньги и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все животрепещущие коды и промокоды на бездепозитные призы в интернет-казино Рунета, а условия их активации и выигрыша.3. Подтвердить данные. В зависимости от клуба, нужно привязать аппарат или почту, показать персональную информацию; 1×slots зеркало рабочее на сегодня
1хслотс 1хслотс регистрация перейти на 1×slots
Все бесплатные бонусы кажутся заманчивыми. Кто же категорически от способности поиграть в онлайн-казино, не рискуя средствами, но получая выигрыши. Но далековато не все бездепозитные призы одинаковой презентабельны для рассудительного клиента.Все безвозмездные призы кажутся соблазнительными. Кто же откажется от возможности поиграть в онлайн-казино, не рискуя деньгами, но получая выигрыши. Но далеко не все бездепозитные бонусы в равной степени привлекательны для рассудительного клиента. <a href=https://praisenpray.org/forums/member.php?action=profile&uid=62978>https://praisenpray.org/forums/member.php?action=profile&uid=62978</a> При отыгрыше бездепов, учитывайте временные ограничения. Обычно, на отыгрыш бездепов дается от 1 денька до 7 суток.В интернете количество известных игорных площадок с красивыми акционными услугами. Однако пристально читать обстоятельства 10-ов предложений времени надоест, да и время отнимет большое. Поэтому наша команда подготовила ТОП-3 сайтов с наилучшими бездепозитными бонусами: 1×slots casino регистрация Для верификации аккаунта нужно дать спецам технической поддержки отсканированную копию паспорта и счета за коммунальные услуги, еще фотографию банковской карты либо снимок странички электронного кошелька с данными о собственнике. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для доказательства личности.
1× slots официальный
<a href=https://rf-lowrate.ru/index.php?/profile/6447-jamesmom/>казино 1×slots официальный сайт</a> Мы советуем не открещиваться от сходственных предложений известных казино. Выделите несколько минут на регистрацию, получите приз и попытайтесь его отыграть. Может быть, сейчас удача несомненно на вашей стороне! Зарегистрируйтесь. Для регистрации чаще всего достаточно ввести свой номер телефонного и почтовый адрес, последствии чего установить приобретенный код из СМС. Возможно, требуется указать промокод. В правилах промоакции несомненно написано, где его надобно вводить. Иногда это хотелось создавать при регистрации, иногда — теснее последствии творения личного кабинета, на отдельной странице.Бездеп с фриспинами имеет обхватывать всю коллекцию игр на сайте либо разработки 1-го провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш может быть выведен в как, как пользователь отыграет данную сумму. Возможность оценить полный функционал слотов — основное совершенство данной разновидности. Игроку становятся доступны те функции, коие отсутствуют в демонстрационном режиме, а вероятность выиграть реальные средства прибавляет ясных азартных чувств. x1 slots 1хслотс регистрация перейти на 1×slots <a href=http://www.ritual-letichev.km.ua/user/Porsedropma/>http://www.ritual-letichev.km.ua/user/Porsedropma/</a> Бездепозитные бонусы начисляются лишь один раз. Не стоит раскрывать свежие аккаунты, дабы получить их повторно. Служба защищенности казино обязательно выявит «левого» участника и перекроет. Если гость выполнит нужные притязания, отыграет собственную ставку и решит вывести собственный выигрыш, то ему нужно принять, собственно казино обязательно востребует предоставить ксерокопии собственных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные средства вывести не получится.
1×slots зеркало на сегодня
В списке требований к отыгрышу часто наличествуют лимиты на ставки при игре на собственные средства. Так, случае отыграть надо(надобно) 30 000 рублей, а предельная сумма ограничена 30 рублями, то вертеть барабаны светит 1000 один. Эта особенность затрудняет соблюдение игроками условий по срокам деянья акции. <a href=http://y90429l8.bget.ru/user/MiguelFrilk/>http://y90429l8.bget.ru/user/MiguelFrilk/</a> 1×слот регистрация в 1×slots casino Акции, приуроченные к календарным праздникам, случаются рассчитаны как на всех пользователей, например и на категории: к, подарок на 8 марта девушкам-игрокам либо мужчинам на 23 февраля.
<b>Смотреть еще похожие новости:</b>
<a href=https://redfist.de/RF-Online-Testforum/viewtopic.php?f=60&t=77102>1×slots зеркало быструю регистрацию а также мгновенное</a>
<a href=http://khodaumo.com/forum/viewtopic.php?f=2&t=75120&sid=f0b4d8327013a161060052fdfb172514>1×слотс казино</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
На критериях отыгрыша даровых бонусов идет остановиться подробнее. С ними связаны нюансы, которые нельзя забыть без внимания.
#9740 Charlesgunnyhttp://filmkachat.ru
1×slots мобильная версия войти казино
В лицензионных бездепозитных казино играть в азартные игры действительно неопасно. Наличие лицензии подтверждает что, этот факт, что клуб гарантирует своевременные выплаты и выигрыши подходящие заявленным RTP.Такой безвозмездный эквивалент средств зачисляется на профиль юзера в осуществления требований и предназначаются они лишь для игрового процесса. Вывод таких вознаграждений вероятен только после воплощения вейджеровых критерий. <a href=http://filmkachat.ru/>1× slots casino зеркало</a> Если вы бывалый игрок, вы должны знать, что приз без депо – редчайшая находка. Тем не, мы неделю исследуем онлайн, чтобы отыскать вам наихорошие бездепозитные предложения. <a href=https://strokedb.lighthouseapp.com/users/1957977>https://strokedb.lighthouseapp.com/users/1957977</a> 1×slots casino регистрация 1×slots review live <a href=https://www.stroimvmeste.com.ua/user/Randalfef/>https://www.stroimvmeste.com.ua/user/Randalfef/</a> За счёт спинов выйдет запустить различные онлайн слоты, протестировать стратегии и поднабраться навыка. Фишка в том, собственно вращения начисляются на лучшие аппараты с оригинальными опциями и высокой отдачей. Не запамятовывайте, собственно в каждом акционном предложении предусмотрены особые притязания – временные лимитирования, наибольший объем ставки, перечень дешевых игр.Для верификации аккаунта надо(надобно) дать спецам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, а фотку банковской карты или снимок странички электронного кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для доказательства личности.
1×slots казино мобильная версия
В игровых клубах без лицензии Вы покупаете „кота в мешке“ и в случае спорных обстановок нет способности куда-то посетовать и обосновать свою правоту.Срок активации и время на отыгрыш. Зачисление средств или фриспинов случается при активации протяжении требовательно ограниченного периода, схожие притязания предъявляются и к срокам отыгрыша. Одни казино разрешают отыгрывать бонус некоторое дней или в недель. Другие выдают крупную сумму за регистрацию, но время отыгрыша ограничивают несколькими часами с необоснованно высоким вейджером. <a href=https://sadhaka.nl/forum/memberlist.php?mode=viewprofile&u=3268>1×slots официальный сайт зеркало</a> 1×slots регистрация 1×slotscasino 56 online Чтобы бездеп не был начислен на Ваш акк, Вам не нужно активировать бонусный код. Если поощрение от казино было добавлено на Ваш акк автоматически, а Вы не планируете его применять, обратитесь в службу с пожеланием отменить бездепозитный бонус.Количество фриспинов за регистрацию обыкновенно варьируется от 5–10 до 100 и. Когда игроку полагается количество фриспинов, администрация может разбивать их начисление на количество дней. Бесплатные вращения предоставляются для определенного слота, который указывается в правилах промоакции. <a href=http://duryunsan.kr/bbs/board.php?bo_table=free&wr_id=176781>http://duryunsan.kr/bbs/board.php?bo_table=free&wr_id=176781</a> 1×slots зеркало регистрация то дальше необходимо пройти Бесплатные призы казино без депозита возможно получить повторяющий денежных средств на бонусный счет (исключить их можно только последствии отыгрыша), фриспинов, забавы или кешбэк-бонуса.
1× слот зеркало
Выбирая даровой приз, внимательно изучайте правила. Убедитесь, что вам можно себя участие в акции. Уточните, в каких играх можно исполнять обстоятельства вейджера. При необходимости задавайте вопросы представителям саппорта.Бонус с зачислением средств на счет выделяет больше свободы деяний. Пользователь сам подбирает, каким образом воспользоваться подаренными средствами. Здесь того все работать ограничения на перечень доступных игр, но обычно эти рамки не например строги, как в рекламную с бесплатными вращениями. <a href=http://yamuhajirin.org/index.php?option=com_kunena&view=topic&catid=2&id=200291&Itemid=2552>http://yamuhajirin.org/index.php?option=com_kunena&view=topic&catid=2&id=200291&Itemid=2552</a> 1хслотс рабочее зеркало на сегодня
1×slots на любой вкус как пройти регистрацию
Бонус в казино без депозита содержит различные варианты: это может быть приветственный приз, промоакции в честь каких-то праздников или весомых дат, приз за вербование новых игроков, лояльность и получение VIP-статуса. 1×slots casino регистрация <a href=http://soe-parrot.com/home.php?mod=space&uid=168580>http://soe-parrot.com/home.php?mod=space&uid=168580</a>
зеркала 1×slots
Бездепозитный бонус предоставляется новому игроку за конкретные действия. Часто подарок в виде средств или фриспинов выдается за регистрацию, благодаря чему пользователь получает шанс расценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.Поспешите зарегистрироваться на официальном сайте Клубника, дабы быстро получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, бывает настоящий шанс победу! 2. Создать новый профиль. Для регистрации нужно заполнить небольшую анкету или зайдите в индивидуальный офис при помощи социальных сеток; <a href=http://bmwspeed.lv/user/Deweyanymn/>http://bmwspeed.lv/user/Deweyanymn/</a> 1х слот 1хслотс регистрация перейти на 1×slots Подтвердите лицо, предоставив оператору казино свои паспортные данные. Инструкции обычно несложные, основное — конкретно им стопам. Если написано, собственно «на фото обязаны быть видны все хорошо угла страницы паспорта» — сделайте непосредственно такое фото.Активация денежного гонорары случается механически в создания профиля или применения промокода. Иногда операторы предъявляют дополнительные требования: подписаться на странички казино в социальных сетях или на рассылку маркетинговых сообщений, скачать и установить вспомогательный софт и т.д.
<b>Смотреть еще похожие новости:</b>
<a href=https://qualityprogamer.de/forum/showthread.php?tid=260164>1× слот зеркало</a>
<a href=http://www.c-strike.fakaheda.eu/forum/viewthread.php?thread_id=70016>1×slots официальный сайт мобильная версия</a>
<a href=http://www.forum.kalor.ru/member/zaellayanextz8130/>1×slots рабочее зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вознаграждения за получение VIP-статуса ? начисляются в рамках программки лояльности при достижении одного уровня или выдаются индивидуально менеджерами службы.
#9741 Charlesgunnyhttp://filmkachat.ru
зеркала 1×slots
Для верификации аккаунта надо(надобно) предоставить специалистам технической помощи отсканированную копию паспорта и счета за коммунальные услуги, еще фотографию банковской карты либо скриншот странички электрического кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для подтверждения личности. <a href=http://filmkachat.ru/>1 хслот регистрация в 1×slots casino</a> Отыграв бездепозитный бонус в казино с выводом также придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, в сходственное ограничение присутствует, то единоразово исключить получится лишь сумму, не превышающую размер приобретенного бонуса.Постарайтесь отыграть вейджер, дабы появилась возможность оставить заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные приборы. Вы можете получить выигрыш на электронной кошелёк, карту, телефонный. <a href=https://oldchicken.kr/bbs/board.php?bo_table=sub0202&wr_id=1713421>https://oldchicken.kr/bbs/board.php?bo_table=sub0202&wr_id=1713421</a> Допустим, за регистрацию вы возымели бездеп в размере 2 000 рублей с вейджером х30. В данном случае предстоит устроить ставок, на совместную необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать реальные средства. Однако не запамятовывайте, собственно с каждого дара выйдет исключить определённую сумму (чаще всего не более $200).Ну и окончательно же, для казино бездепозитные призы выгодны с имиджевой стороны: сходственная щедрость повышает степень преданности клиентов к фирмы. 1×slots регистрация на сайте <a href=https://datasphere.ru/club/user/75/blog/4209/>https://datasphere.ru/club/user/75/blog/4209/</a> После потребуется привнести идентификационный платёж. Это стращает начинающих больше всего. Нужно устроить минимальный депозит в 100–500 руб. Таким образом служба безопасности убедиться сомнений, что платёжный метод принадлежит Вам. Данная процедура необходима для обеспечивания защищенности игровых счетов. Пример, Ваш акк взломают и выведут свои на свой кошелёк. Будет очень неприятно. Поэтому верификация платёжной системы, это необходимый момент.
1×slots официальный сайт мобильная версия
Бездепы все заходить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой или баллами.В лицензионных бездепозитных казино выступать в азартные забавы действительно безопасно. Наличие лицензии подтверждает что, этот прецедент, собственно клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP. 1×slots зеркало подтвердит вашу регистрацию если говорить <a href=https://agendacultural.guanajuato.gob.mx/10-best-shopping-bots-that-can-transform-your/>https://agendacultural.guanajuato.gob.mx/10-best-shopping-bots-that-can-transform-your/</a> Следует подчеркнуть, собственно бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом.Условия отыгрыша бонуса. Если Вы планируете заработать на бездепозитном бонусе, то для направьте на велечину вейджера и срок, который дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть приз и исключить выигрыш. 1×slots зеркало рабочее Рассмотрим на образце: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских рублей. В критериях акции указано, собственно вейджер бездепозитного приза х20. Поэтому, дабы отыграть бонус, игроку будет необходимо устроить ставок на 35*20=700 рублей.Первый образующийся вопрос, это, зачем выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают новых игроков. Последним проще начать забаву на средства с презента за регистрацию. Им не пополнять баланс и тратить личные свои. Новички получают бесплатные спины или средства на счёт. С их поддержкою знакомятся с игровым ходом, крутят слоты и делают ставки в рулетке.
1×slots официальный сайт мобильная версия
Далее потребуется отыграть вагер и вывести выигрыш. Игрокам без навыка крупно подфартило, они могут получить десятки подарков за одну регистрацию. Если не сумели получить Бездепозитный приз, не волнуйтесь. Обратитесь в онлайн чат, оператор поможет решить проблему.Когда идет о получении бездепозитных бонусов в казино, в первую очередь направьте на последующие условия: Еще одно условие дотрагивается объемов ставки. Операторы устанавливают максимальную необходимую, которую игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, выбранной в Личном офисе. При превышении лимита есть риск лишиться приза. Существующие лимитирования относятся и к конкретным обликам ставок. Например, играя в рулетку, заказчик может столкнуться с запретом назначать фишки на шансы.Главное превосходство спинов – возможность выучить разные слоты. Также удастся насладиться бонусными раундами, испытать удачу в риск-туре и преувеличить выигрыш за счёт особенных знаков. Однако столько игровой процесс заслуживает внимание, так превосходнее сосредоточиться на реальном выигрыше. <a href=http://277469.simplecloud.ru/forum/user/3135/>http://277469.simplecloud.ru/forum/user/3135/</a> Можно. Вы практически можете отрешиться от получения бездепозитного бонуса за регистрацию в казино, же Вы не создадите ставку.Но есть игорные заведения, коие готовы просто например жертвовать средства на игру. Для этого достаточно создать профиль. Чтобы исключить собственный выигрыш, вам сначала необходимо выполнить условия отыгрыша, обозначенные в критериях получения бездепозитного депо. 1× slots зеркало
1×slots зеркало видели такую регистрацию на
Но рядах азартных платформах похожие гонорары имеют получить и уже зарегистрированные юзеры. В таком случае, призы предоставляются масштабах уникальных промоакций или же неким игрокам в виде акционного предложения, которое прибывает на почту с целью «возвратить» игрока в свое казино. <a href=https://www.kfz-gringer.at/index.php/forum/suggestion-box/63500–1×slots-casino#63265>1×slots casino регистрация на сайте</a> За счёт спинов выйдет запустить разные интернет слоты, протестировать стратегии и поднабраться опыта. Фишка никаких, что вращения начисляются на топовые аппараты с уникальными опциями и высочайшей отдачей. Не запамятовывайте, собственно в любом акционном предложении предусмотрены особые требования – кратковременные лимитирования, максимальный объем ставки, перечень дешевых игр.Чаще всего интернет-казино предлагают бездепозитные бонусы новым юзерам. Эта промо-акция очень отлично завлекает новичков, подталкивая их к открытию счета. Конечно, не они становятся послушными клиентами, но сам факт регистрации аккаунта играет на руку заведению. Для того, чтобы отыграть необходимую вашего бездепозитного бонуса нужно выполнить обстоятельства вейджера. Очень нередко фриспины даются на конкретные слоты (book of ra, book of dead, book of sun), подбирайте разъем себя по, они очень красочные и качественные. Бездепозитные приз имеет быть валютным так и повторяющий фриспинов на слотыЕсли идет об эксклюзивных услугах, может потребоваться регистрация в казино по ссылке с партнерского вебсайта. 1×slots официальный сайт зеркало рабочее <a href=https://Biowiki.clinomics.com/index.php/Glory_Casino>https://Biowiki.clinomics.com/index.php/Glory_Casino</a> С не отыгранным призом воспрещается превышать размер наибольшей ставки. Нарушение сего обстоятельства будет аннулирование выигрыша.
1хслотс зеркало
<a href=http://bitetheass.com/user/Terryawark/>http://bitetheass.com/user/Terryawark/</a> Oтыгpaть бонус с указанным вeйджepом, для этого необходимо сдeлaть cтaвoк нa cумму, превосходящую размер бонуса в несколько раз.В интернет-сети постоянно возможно найти перечни более знаменитых и обещанных поощрительных программ от знаменитых онлайн-казино. 1×slot казино зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://nztw.org/forum.php?mod=viewthread&tid=413082&pid=720037&page=1&extra=#pid720037>1×слот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При малый сумме приза рекомендовано выступать по невысоким ставкам, а использовать наибольшие превосходнее только в случае, случае вейджер очень великой, а время на отыгрыш сильно ограничено. Постарайтесь отыграть вейджер, дабы была вероятность оставить заявку на выплату. Кстати, на всех веб-сайтах, представленных в списке, доступны современные платёжные приборы. Вы можете получить выигрыш на электрической кошелёк, карту, телефон.
#9742 Charlesgunnyhttp://filmkachat.ru
1×slots рабочее зеркало
Чем ниже значение вейджера, что, этим проще отыграть и исключить приз. Если Вы расчитываете заработать на бездепе, не просто ознакомиться с новым игровым клубом, то стоит избегать бонусов с высочайшим вейджером их практически не реально отыграть. С ними Вы можете лишь протестировать игры заведения. <a href=http://filmkachat.ru/>рабочее зеркало 1хслотс</a> Иногда в бездепа, казино дарит наименьший бонус (до 50 руб. ), ради которого не заморачиваться.Чаще всего интернет-казино предлагают бездепозитные призы новым юзерам. Эта промо-акция довольно эффективно завлекает начинающих, подталкивая их к открытию счета. Конечно, не все становятся послушными посетителями, но сам факт регистрации аккаунта играет на руку заведению. <a href=https://www.bkeye.co.kr/bbs/board.php?bo_table=free&wr_id=565062>https://www.bkeye.co.kr/bbs/board.php?bo_table=free&wr_id=565062</a> казино 1×slots официальный сайт <a href=http://shina.su/bitrix/redirect.php?goto=http://seaforum.aqualogo.ru/go/?http://ppfinsurance.ru/bitrix/redirect.php?goto=https://telegra.ph/Svezhij-vzglyad-na-Omoda-S5–sovremennyj-sedan-kotoryj-vydelyaetsya-09–23>http://shina.su/bitrix/redirect.php?goto=http://seaforum.aqualogo.ru/go/?http://ppfinsurance.ru/bitrix/redirect.php?goto=https://telegra.ph/Svezhij-vzglyad-na-Omoda-S5–sovremennyj-sedan-kotoryj-vydelyaetsya-09–23</a> Приветственный приз без депо ? презент за регистрацию. Выдается средствами, фриспинами или баллами. В заключительном случае бонусные баллы применяются для участия в турнирах или обмена на реальные средства.
1хслотс казино зеркало
Отыграв бездепозитный бонус в казино с выводом также придётся довольно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если подобное ограничение присутствует, то единоразово исключить получится лишь сумму, не превосходящую объем приобретенного бонуса.На нашем сайте Вы отыщите список актуальных свежих бездепозитных бонусов в казино 2022 года. Также, есть количество неповторимых услуг, коие доступны только посетителям нашего вебсайта последствии регистрации по нашей ссылке либо активации особого промокода. 1×slots на любой вкус как пройти регистрацию Будьте внимательнее при ознакомлении с правилами во избежание возникновения конфликтных ситуаций с казино, когда последствии отыгрыша бездепа вам не дадут вывести крупную необходимую выигрыша.Бездепозитный приз казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в данном и содержится основное различие. <a href=http://gctech21.com/bbs/board.php?bo_table=free&wr_id=291050>http://gctech21.com/bbs/board.php?bo_table=free&wr_id=291050</a> 1×слот регистрация в 1×slots casino Казино выводит деньги лишь на что, эту платежную систему, с котрой был изготовлен депо. То есть, для вывода бездепозитного приза, Вам поначалу нужно пополнить счет. В некоторых клубах узкий список методов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет именно с данных платежных способов, коие доступны для вывода.Обычно бездепозитные акции от казино, приходят на эл. Почту в дни рождения либо праздники. В некоторых интернет казино можно адресоваться в чат и как неизменному игроку, вероятно вас предложат бездепозитное предложение.
1×slot регистрация
Казино дает вероятность заработать и вывести реальные деньги на бездепозитных призах. Обычно, это малозначительная сумма, которую казино может себя позволить подарить игроку.Эльдорадо – 77 фриспинов в знаменитых слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в индивидуальный кабинет, дабы забрать безвозмездные вращения с вейджером х40; <a href=http://droid-comz.ru/user/StevenWetle/>http://droid-comz.ru/user/StevenWetle/</a> Отказ в прохождении верификации. Если клиент не хочет либо имеет предоставить документы, подтверждающие его личность, профиль несомненно заблокирован вместе со всеми бонусными начислениями. 1×slots официальный зеркало рабочее Размер бонуса. В качестве бездепов обычно начисляют очень суммы, а когда речь о бонусах за депо, которые начисляются в процентном соотношении от суммы пополнения, то некоторые казино шансы презентовать игроку до 2000$.
1×slots casino регистрация 1×slots review live
Однако далеко не все ресурсы предлагают своим посетителям бездепозитные призы за регистрацию в казино. В большинстве случаев предусмотрено одобрение на 1-ый депозит в объеме 100–200%. Это замечательная вероятность преувеличить банкролл, прирастить время, проведённое за забавой и шансы сорвать большой куш.Мы проделываем ударение на ключевых положениях управлял, рассказываем о территориальных ограничениях и кратко информируем о иных промоакциях обсуждаемого казино. 1хслотс рабочее зеркало <a href=https://odessamama.net/home.php?mod=space&uid=8573&do=blog&quickforward=1&id=1518>https://odessamama.net/home.php?mod=space&uid=8573&do=blog&quickforward=1&id=1518</a>
1×slots актуальное зеркало
<a href=http://www.mallangpeach.com/bbs/board.php?bo_table=free&wr_id=784238>http://www.mallangpeach.com/bbs/board.php?bo_table=free&wr_id=784238</a> Первый образующийся вопрос, это, для выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают новых игроков. Последним легче начать игру на средства с подарка за регистрацию. Им надо пополнять баланс и расходовать личностные средства. Новички получают благотворительные спины или свои на счёт. С их поддержкой знакомятся с игровым процессом, крутят слоты и делают ставки в рулетке. 1×slots casino online регистрация У любой игры средства требования по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система засчитает каждую ставку. В рулетке и покере сделать это намного сложнее. Именно поэтому например главно внимательно читать условия получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой игре, то новенькие попросту «спустят приз на ветер».
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.vn.ua/member.php?u=73361>1×slots официальный сайт зеркало</a>
<a href=http://link.5nx.ru/viewtopic.php?f=5&t=4345>1×слот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Отзывы читателей о бонусных промоакциях посодействуют составить впечатление, хотя не запамятовывайте о субъективности личных комментариев.
#9743 Charlesgunnyhttp://filmkachat.ru
зеркала 1×slots
Также бездепозитные призы могут работать способом вернуть к этой посетителей, что приостановивших своё сотрудничество с компанией: уведомление о бездепе поступает на мобильный телефонный либо почту. <a href=http://filmkachat.ru/>1хслот официальный сайт зеркало</a> <a href=http://yinyue7.com/space-uid-1083390.html>http://yinyue7.com/space-uid-1083390.html</a> Чтобы других увериться в превосходствах бездепозитных бонусов, довольно зарегистрироваться в казино и получить поощрение.У любого игорного заведения средства управляла и условия. Но, дабы получить призы, необходимо выполнить стандартные деянья: 1×slots зеркало <a href=http://www.tiendahinchables.com/blog/%D1%82%D1%8B%D0%BD.html>http://www.tiendahinchables.com/blog/%D1%82%D1%8B%D0%BD.html</a> Но разу не забывайте внимательно читать управляла участия в бонусных акциях. Если вы нарушите хотя бы одно условие, позднее вы не можете устроить недоразумение с администрацией.Призовые начисления без депозита имеют предоставляться для роли в турнирах интернет казино. Потратить перечисленные средства возможно самая масштабах этой промоакции. Условия их проведения в лимитирования на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться таким предложением, чем выучить его верховодила.
1×slot рабочее зеркало
Обыкновенные бездепозитные бонусы в размере от 3-х до 20 $ созданы чтобы, чтобы, дабы в забавы заходили все новые и новые игроки. Здесь, скорее, несомненно ограничение на наибольший выигрыш. Важно, дабы перед наименьшим вкладом был отключен бонус за 1-ое пополнение счета, и игры не попадет на повторный вейджер.Так собственно сможете неустрашимо регистрироваться без всяких размышлений. Фортуна сейчас наверняка на вашей стороне. Не побаивайтесь, ведь следствие какого или ущерба Вам абсолютно не угрожает. С такими бонусами как без пополнения, Вы остаетесь только в плюсе, но не как не в минусе. сайт 1× slots casino <a href=https://google.mw/url?q=https://doctorlazuta.by/>https://google.mw/url?q=https://doctorlazuta.by/</a> 1×slots зеркало регистрация в 1×slots casino
1×slots официальный сайт зеркало рабочее
Баланс игрока дополняется на подходящую сумму. К ней применяется вейджер, указанный в правилах промоакции. Вывести выигрыш можно будет в такого, как юзер сделает требуемый размер ставок из личных средств. В редких случаях бездеп трудится в формате Free Play. На счет пользователя зачисляется большая сумма, и предоставляется малый срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по завершении сего периода сумма на счету будет превосходить первоначальную, то разницу можно будет вывести или использовать для дальнейших ставок.Можно. Вы практически можете отрешиться от получения бездепозитного бонуса за регистрацию в казино, пока Вы не сделаете ставку. Возьми свой презент. Чаще всего приз активизируется незамедлительно последствии регистрации. Но бывают ситуации, когда нужно забежать в собственный кабинет либо написать в справочную службу. <a href=http://xsyywx.com/home.php?mod=space&uid=39521>http://xsyywx.com/home.php?mod=space&uid=39521</a> x1 slots регистрация в 1×slots casino
1×slots регистрация 1×slotscasino 56 online
В игровых клубах без лицензии Вы приобретаете „кота в мешке“ и когда неоднозначных ситуаций нет способности куда-то посетовать и обосновать свою правоту.2. Создать свежий профиль. Для регистрации нужно заполнить маленькую анкету либо зайдите в собственный офис посредством соц сетей; Реже бонусы без депо начисляются постоянным игрокам. С их помощью администрация старается удержать ценных посетителей или вожделеет поблагодарить за лояльность верных гостей. Но гораздо почаще для сходственных целей применяются эти промоакции: Обычно для получения бонусов без депо, казино выдвигает приклнные и абсолютно выполнимые обстоятельства, но есть ряд поступков которые запрещены и шансы повлечь за собой противные результаты: 1×slots регистрацию процедура займет всего лишь <a href=https://gameitems.trade/user-33409.html>https://gameitems.trade/user-33409.html</a> Многочисленные аккаунты – Не пытайтесь региться в интернет-казино повторно, чтобы снова получить бесплатный приз. Игорные заведения нетерпимы к бонус-хантерам, потому вас ожидает неизбежное наказание.
1×slot казино зеркало
Вышеописанная причина и считается главным моментом, следствии которого операторы отдают доля собственной прибыли на различные маркетинговые расходы и маркетинговые кампании. А самым действующим здесь станут выступать непосредственно бездепозитные призы казино 2022 с выводом за регистрацию.Отыграв бездепозитный приз в казино с выводом тоже придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если подобное ограничение существует, то единоразово вывести выйдет только необходимую, не превышающую объем приобретенного приза. Максимальный размер ставки, который нельзя превышать пока бонус не будет всецело отыгран. В случае нарушения этого правила, бонус и выигрыш с него станут аннулированы.Подтверждение персональной информации. Все казино требуют от посетителя пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и присутствие у юзера других аккаунтов (мультиаккаунт запрещен). <a href=https://honcure.com/user/DonaldEcony/>https://honcure.com/user/DonaldEcony/</a> Самый распространённый из подобных призов, естесственно же, бездеп на денек рождения посетителя — приз повторяющий фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им возможно протяжении установленного периода медли. 1хслотс 1хслотс регистрация перейти на 1×slots Одним из поводов отдавать привилегию одному либо иному заведению содержится в привлекательности предлагаемых промоакций и даровых предложений. Безвозмездные фриспины, выдаваемые без нужды делать какой-либо вклад, в списке находится далеко не в конце.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.vn.ua/showthread.php?p=3272132#post3272132>1хслотс официальный сайт зеркало</a>
<a href=https://www.mshowto.org/forum/members/jamespauri.html>1хслот зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Онлайн-казино кропотливо продумывают бонусные условия, коие необходимо изучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, перечень игр для отыгрыша прочие ограничения.
#9744 Charlesgunnyhttp://filmkachat.ru
1хслотс рабочее зеркало на сегодня
Многие азартные клубы ограничивают необходимую вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании акции, суммы Вы не можете исключить. Разница будет аннулирована, Вы числе не сможете создавать на нее ставки.Постарайтесь отыграть вейджер, дабы была возможность оставить заявку на выплату. Кстати, на всех сайтах, представленных в списке, доступны современные платёжные приборы. Вы сможете получить выигрыш на электрической кошелёк, карту, аппарат. <a href=http://filmkachat.ru/>1×slots зеркало сайта</a> Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного бонуса довольно пополнения баланса и доказательства личности. В иных же клубах, нужно количество раз прокрутить собственный депо. <a href=http://www.nhps1914.com/wiki/index.php?title=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D0%BE%D0%B2%20%D0%BD%D0%B0%20%D0%B4%D0%BE%D0%BC%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO>http://www.nhps1914.com/wiki/index.php?title=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D0%BE%D0%B2%20%D0%BD%D0%B0%20%D0%B4%D0%BE%D0%BC%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO</a> Эффективность бездепов в рекламного прибора оценили все операторы. Малоизвестные площадки используют такие промоакции, дабы скоро набрать клиентскую базу. Популярные ресурсы расширяют аудиторию и поддерживают интерес со стороны неизменных посетителей. Не все веб-сайты, дающие подарки без депозита, рекомендованы к забаве. За симпатичным промоописанием имеют прятаться неосуществимые условия отыгрыша прочие подводные камни.Обычно бездепозитные акции от казино, прибывают на эл. Почту в дни рождения либо праздники. В некоторых онлайн казино можно адресоваться в чат и как постоянному игроку, вполне для предложат бездепозитное предложение. 1×slots официальный сайт зеркало <a href=http://www.mignonmuse.com/bbs/board.php?bo_table=free&wr_id=248368>http://www.mignonmuse.com/bbs/board.php?bo_table=free&wr_id=248368</a> Бонусные средства – небольшая сумма средств для старта в новом казино. На бонусные средства, обыкновенно разрешено выступать во все игры, считая слотов с современным джекпотом и игр из раздела exist casino.Главным интересным в появлении данных вознаграждений произведено что, нет, собственно пустив их в ход, в ничем не рискует и в последствии никому ничего не несомненно обязан (не зависимо, получит ли он благодаря призам какой-нибудь выигрыш либо мгновенно спустит все лишь что прибывшие деньги). То есть, казино снабжает игрока возможностью на дармовой базе играть во всевозможные слоты даже спонсирует игру.
1х слот 1хслотс регистрация перейти на 1×slots
В истинное время получить приз за регистрацию в казино очень просто. Почти любой игорный жилище с радостью предоставит средства либо бесплатные вращения. Многие игроки используют данным и не смущяются региться в каждом клубе с выгодными условиями. Кстати, это замечательная возможность придумать выигрышную тактику и сорвать куш.Многие новенькие колеблются, что поощрительный приз не будет возвращать, том в они выиграли у казино. Это абсолютно безопасно и надежно. Выводя выигранные свои, игрок просто останавливает свое роль деле и теряет уникальную возможность – безвозмездно наращивать личное вещественное положение. <a href=https://thetechmodders.com/forums/memberlist.php?mode=viewprofile&u=945&sid=d9c5100804e185b5fedcc9024541a64c>1×slot рабочее зеркало</a> зеркло казино 1×slots Бездепозитный приз – это финансовое вознаграждение, коие выдается соучастнику забавы в казино, для его вербования и возникновения заинтересованности. Любой посетитель, кот-ый соответствует условиям выдачи подобного бездепозитного бонуса, имеет претендовать на получение вышеуказанного приза. Такое поощрение считается более действенным способом, дающим возможность стартовать в игре, не вкладывая собственных материальных средств.Способы получения бездепа различаются в зависимости от вида бонуса, который понравился игроку. Но для так надо(надобно) быть зарегистрированным в законном онлайн-казино и доказать свою личность. В общем облике пошаговая аннотация для получения бездепозитного приза смотрится так: <a href=http://camillacastro.us/forums/profile.php?id=247162>http://camillacastro.us/forums/profile.php?id=247162</a> Самые свежие бездепозитные бонусы в казино за регистрацию 2022 года с выводом прибыли находятся на данной странице. Посетитель возможность оценить условия получения и начать выступать на средства без внесения депо. При данном игроку важно разуметь, на каких критериях и какими способами возможность вывести полученный выигрыш. Для сего необходимо расценить перечень подключенных платежных систем. 1хслотс регистрация в 1×slots casino Следует выделить, что бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам или с конкретным кодом.Иногда операторы настоятельно внесение малого депозита перед выводом для верификации платежного прибора. В неких казино данный депозит кроме предстоит отыграть.
1×slots зеркало видели такую регистрацию на
Как прочие акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такового предложения являются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта завлекает свежих гостей и разрешает им составить эмоцию о функционале, не рискуя значительными совокупностями. <a href=https://www.xn–72c9aa5escud2b.com/webboard/index.php?action=profile;u=1711064>https://www.xn–72c9aa5escud2b.com/webboard/index.php?action=profile;u=1711064</a> Еще одно условие дотрагивается объемов ставки. Операторы устанавливают наивысшую необходимую, которую игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, избранной в Личном офисе. При превышении лимита есть риск лишиться бонуса. Существующие лимитирования относятся и к определенным обликам ставок. Например, играя в рулетку, заказчик может столкнуться с запретом ставить фишки на шансы. x1 slots 1хслотс регистрация перейти на 1×slots
1х слот 1хслотс регистрация перейти на 1×slots
Когда речь идет о валютных призах, казино всегда устанавливают обстоятельства вейджера, коие нужно выполнить, дабы вывести выигрыш. Проверка занимает от нескольких минут до нескольких дней, профессионалы техподдержки шансы запросить вспомогательные документы или инициировать куцее общение по Skype.Основное различие что, нет, собственно для получения бездепа не пополнять баланс в казино. Но кроме сего, есть ряд и отличий: 1×slots сайт зеркало <a href=https://adobeacrobat.cc/member.php?action=profile&uid=1029>https://adobeacrobat.cc/member.php?action=profile&uid=1029</a> Так что основное различие презента на депо от бездепа – обязательное пополнение счёта. Вы сможете внести депозит и преувеличить стартовый капитал или арестовать бездеп и всем не придётся рисковать своими сбережениями. Поспешите выполнить обычные притязания, и администрация ресурса начислит щедрое одобрение!Вейджер (wager) – это коэффициент, кот-ый показывает на какую необходимую необходимо устроить ставок, чтобы вывести приз из казино. Пример: Вы получили за регистрацию в казино Триумф 500 рублей с вейджером х70. Для вывода сего приза, Вам необходимо сделать ставок на необходимую: 500*70=3500 руб. Только полностью отыграв бонус, Вы можете вывести собственный выигрыш.
1×slots зеркало 1хслотс регистрация перейти на 1×slots
Вейджер в переводе с британского означает «ставка». Вейджер в онлайн-казино — это сумма, нужная для отыгрыша полученного приза, в нашем случае бездепозитного. Число ставок имеет — принципиально лишь набрать сумму, пропорциональную сумме одобрения.Автоматическая активация кажется самой комфортной, но ручной метод имеет перед ней преимущества. Прежде чем применять вознаграждение от казино, стоит заблаговременно найти, сколько медли требуется на исполненье всех критерий. Вводя промокод либо обращаясь в техподдержку, игрок сам определяет срок начала действия приза. <a href=https://sporovo.by/user/JamesHic/>https://sporovo.by/user/JamesHic/</a> B дaннoм paздeлe coбpaны вce caмыe cвeжиe, нoвыe и aктуaльныe бeздeпoзитныe бoнуcы зa peгиcтpaцию в тoпoвыx pуccкиx oнлaйн кaзинo c вывoдoм пpибыли бeз пoпoлнeния. Иcпoльзoвaть пoлучeнныe бecплaтныe дeньги и фpиcпины мoжнo нa игpoвыx aвтoмaтax, pулeткe и нeкoтopыx иныx aзapтныx игpaxПредставьте момент, когда при ставке в 10 рублей Вы получите сходственное умножение. Миллион рублей за одно вращение, собственно абсолютно возможно. Поэтому вопрос, сколько можно выиграть остаётся закрытым. Предлагаем выяснить других. Регистрируйтесь в одном или нескольких интернет казино, получайте Бездепозитный приз и проверяйте удачу в деле. Разумеется, исключить деньги довольно. Однако шансы есть у всех. 1×slots актуальное зеркало Первый возникающий вопрос, это, чего выдают бездепозитные бонусы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают свежих игроков. Последним легче начать игру на деньги с презента за регистрацию. Им не нужно пополнять баланс и расходовать личностные свои. Новички получают бесплатные спины или свои на счёт. С их помощью знакомятся с игровым процессом, крутят слоты и проделывают ставки в рулетке.
<b>Смотреть еще похожие новости:</b>
<a href=https://demo.comuni-italiani.it/forum/viewtopic.php?f=9&t=358072>1×slots коды</a>
<a href=https://mit-bbs.com/viewtopic.php?t=128546>1×slots зеркало регистрация</a>
<a href=https://creapnl.com/foros/tema/1-%d1%85-%d1%81%d0%bb%d0%be%d1%82%d1%81-%d0%b7%d0%b5%d1%80%d0%ba%d0%b0%d0%bb%d0%be-43/>1 х слотс зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Все любят получать презенты. Согласитесь, почти любой играющий человек будет безгранично счастлив, если получит безвозмездный подарок для игры в онлайн казино просто за регистрацию либо же приз за внесенный депозит, например нарекаемые приветственные бонусы для новых игроков. Соответственно такие онлайн клубы станут более знамениты и преимущественны у игроков при выборе казино для игры. Топ казино постоянно обновляется и добавляются новые и занимательные игровые клубы с симпатичной бонусной политикой и всеми вероятными преимуществами, льготами, к которым относятся эти призы как фриспины за регистрацию, валютные бездепозитные призы, еще щедрые бонусы за внесенный депозит.
#9745 купить сейф для охотничьего ружьяhttps://sejfy-dlya-oruzhiya.ru/
Тут можно преобрести сейфы для ружей <a href=https://sejfy-dlya-oruzhiya.ru/>сейф оружейный купить москва</a>
#9746 Charlesgunnyhttp://filmkachat.ru
1×slots регистрация 1×slots casino c2d ru
Каждый в должен сначала детально изучить обстоятельства по получению и отыгрышу приглянувшегося подарка. Если всё устраивает, поторопитесь арестовать благотворительные спины за регистрацию в казино без депозита с выводом и без отыгрыша и прямо в начать вращать барабаны топовых слотов.Максимальная ставка ? устанавливается в денежной счета и ограничивает объем ставки за раз спин. В случае ее превышения приз имеет быть аннулирован. Также в правилах возможность содержаться запрет на размещение ставок определенного облика, примеру, по равным шансам в рулетке (то есть, на чет или нечет, красноватое либо черное и т.д.). <a href=http://filmkachat.ru/>1×slots быструю регистрацию а также мгновенное</a> К примеру, игроку выдаются безвозмездные средства в заведении в размере пятидесяти или 100 долларов (вейджер на которые составляет 100х). То есть, каждому новоприбывшему геймеру выскакивает притягивающая иллюстрация, которая обещает выплату всех зачисленных компанией средств. Не стоит заострять на казино бонус за регистрацию без депозита с чрезмерно большой или довольно малюсенькой суммой бонусов, потому что, том кропотливо изучив все условия, здесь скорее, будет какой-то подвох.Выбор любого интернет казино на нашем веб-сайте. В описании к каждому Вы сможете узнать, что получите за творение аккаунта. <a href=http://www.jjrun.kr/bbs/board.php?bo_table=free&wr_id=402649>http://www.jjrun.kr/bbs/board.php?bo_table=free&wr_id=402649</a> Ознакомьтесь с нашим перечнем наихороших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего перечня и получите бездеп незамедлительно. Хватайте лучшие бесплатные предложения ниже и выигрывайте большие деньги, не рискуя!Более солидные предложения встречаются очень редко. Зачастую они доступны лишь VIP-игрокам. В оставшихся случаях им всего сопутствуют довольно строгие условия отыгрыша. Также вероятны дополнительные обстоятельства и лимитирования, прописанные в критериях и положения бонусной программки казино. 1× slots casino официальный сайт <a href=https://agendacultural.guanajuato.gob.mx/10-best-shopping-bots-that-can-transform-your/>https://agendacultural.guanajuato.gob.mx/10-best-shopping-bots-that-can-transform-your/</a> Несмотря на то, собственно данный вариант стимуляции со стороны азартных платформ очень моден области подобных игр, далеко не поклонникам казино известно, собственно сами бездепозитные призы казино и как непосредственно их возможно эксплуатировать.
1хслотс рабочее зеркало на сегодня
Нельзя разглядывать игру на деньги, как вариант заработка. Азартные игры воспрещены для лиц младше 18 лет. Topcasinobonuses.mobi не является организатором азартных игр. Сайт одевает информационный нрав. <a href=https://portugal-campings.com/pt/account/>1хслотс рабочее зеркало на сегодня</a> 1×slots регистрация Срок активации и время на отыгрыш. Зачисление средств или фриспинов происходит при активации на требовательно ограниченного периода, схожие притязания предъявляются и к срокам отыгрыша. Одни казино дозволяют отыгрывать бонус несколько дней или и недель. Другие выдают крупную необходимую за регистрацию, но время отыгрыша ограничивают несколькими часами с необоснованно высочайшим вейджером. <a href=http://www.le-gratuiciel.com/index.php?file=Members&op=detail&autor=childlikenutrie>http://www.le-gratuiciel.com/index.php?file=Members&op=detail&autor=childlikenutrie</a> 1хслотс зеркало Выбор любого интернет казино на нашем сайте. В описании к каждому Вы можете разузнать, что получите за творенье аккаунта.
1х слот 1хслотс регистрация перейти на 1×slots
В лицензионных бездепозитных казино играть в азартные игры действительно неопасно. Наличие лицензии подтверждает тот факт, собственно клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP. <a href=https://agendacultural.guanajuato.gob.mx/10-best-shopping-bots-that-can-transform-your/>https://agendacultural.guanajuato.gob.mx/10-best-shopping-bots-that-can-transform-your/</a> 1×slots регистрация 1×slots casino 777 online Пocкoльку пpeдлoжeния тaкoгo poдa являютcя peклaмными (иx ocнoвнaя цeль – пpивлeчь пoльзoвaтeлeй), выдaютcя oни нe вceм, a только внoвь зapeгиcтpиpoвaвшимcя клиeнтaм.
зеркала 1×slots
Стоит обозначить(означить), собственно бездепозитный приз выдается только совершеннолетним новичкам, которые, тому, имеют пригласить собственных приятелей и знакомых, кроме рассчитывающих на поощрительную программку преданности. Подобная технология замечена среди конкуренцию онлайн-казино для своей популяризации и расширения трафика. Покер румы и спонсоры способствуют повышению собственной популярности, путем вербования свежих игроков. Бонусы – это оригинальный шанс для потенциальных участников игры, коие шансы опробовать софт покер рума и увериться, будут ли они в него выступать либо нет. Новый игрок испробует средства силы с реальными оппонентами в казино. <a href=http://forum.l2endless.com/showthread.php?tid=127581&pid=295128#pid295128>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a> Для получения выигрыша требуется выполнить условия казино. Чаще всего игроку нужно поставить конкретную необходимую, хотя уже из собственных средств. Она рассчитывается из общего размера выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, в пользователь выиграл 1000 рублей, а множитель составляет х30, исключить средства возможно будет, сделав ставки на 30 000 руб. Вейджер менее х30–35 является приемлемым. Опытные игроки утверждают, что с таким вейджером реально остаться в плюсе, в правильно подойти к выбору игрового аппарата. 1×slots промокод при регистрации 2025 <a href=http://gulliverus.ru/user/Zacherywet/>http://gulliverus.ru/user/Zacherywet/</a> Бездепы все заходить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой или баллами.
1×slots зеркало регистрация
Мы проделываем ударение на главных положениях управлял, рассказываем о территориальных лимитированиях и кратко информируем о иных акциях обсуждаемого казино. Прежде всего, не забывайте периодически заглядывать на страницу обзоров бездепозитных призов. Они шаг за шагом разглядывают более занимательные предложения водящих игорных порталов. <a href=http://clipartus.ru/user/JustinAgima/>http://clipartus.ru/user/JustinAgima/</a> Наличие у игрока 2 аккаунта. Запрещено творить некоторое профилей для неоднократного получения бездепов.Частенько новенькие не знают, как активировать подарки либо исключить первый выигрыш. Для похожих случаев наша команда описала основные определения – что это фриспины, вейджер, как его отыграть, зачем нужно проходить верификацию. 1×slots зеркало рабочее на сегодня Бездепозитный бонус предоставляется новенькому игроку за конкретные действия. Часто подарок в виде денег либо фриспинов выдается за регистрацию, спасибо чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.
<b>Смотреть еще похожие новости:</b>
<a href=https://australiantravelforum.com/Upload/showthread.php?tid=158308>1хслот зеркало сайта</a>
<a href=http://djdrewski.co.uk/lfsbangers/viewtopic.php?f=32&t=29543>казино 1× slots официальный сайт</a>
<a href=http://www.topboard.org/threads/1×slots-akcii.598948/>1×slots акции</a>
<a href=https://www.sgomberisgombero.it/author/jamesapate/>1×slot зеркало рабочее регистрации на телефон придет</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Многие новенькие колеблются, что поощрительный приз не нужно будет отдавать, в если они выиграли у казино. Это полностью безопасно и накрепко. Выводя выигранные свои, игрок просто останавливает свое участие в игре и утрачивает уникальную вероятность – даром увеличивать собственное вещественное положение. Изучить правила и обстоятельства получения бездепозитных бонусов казино, Вы можете у нас на веб-сайте в разделе с бонусами или на официальном веб-сайте выбранного Вами казино. Если не отыскать необходимую информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал либо по электронной почте.
#9747 Charlesgunnyhttp://filmkachat.ru
1×slots казино мобильная версия
Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, чтобы появилась вероятность исключить выигрыш. <a href=http://filmkachat.ru/>1×slots зеркало регистрация</a> Ещё одно распространённое акционное предложение – привлекательный презент с сомнительными притязаниями. К примеру, клуб сулит $100 виде бездепа, хотя с вейджером х80 либо х100. Отыграть подобный вейджер фактически невозможно и потому какого-либо концентрироваться на более интересных акциях.Условия вывода выигрыша. В некоторых заведениях для успешного вывода с бездепозитного бонуса достаточно пополнения баланса и подтверждения личности. В иных же клубах, необходимо несколько один прокрутить свой депозит. <a href=https://altlifewiki.com/index.php/Shisha_Tobacco_From4_Eur>https://altlifewiki.com/index.php/Shisha_Tobacco_From4_Eur</a> 1хслотс рабочее зеркало <a href=https://maps.google.com.kh/url?q=https://doctorlazuta.by/>https://maps.google.com.kh/url?q=https://doctorlazuta.by/</a> Такой казино бонус без депозита за регистрацию выдается игроку на час и энергично употребляется данное предложение с 2017 года. Это словно некая маскировка одобрения под бездепозитный. Суть всего этого сводится к тому, собственно геймеру на час выдается, например, 1000 долларов, а реклама твердит то, что каждой выигрыш можно будет в оставить при себя. Но случае играющий серьезно отнесется к данному предложению, то он просто растеряет время. Ведь геймеру нужно несомненно играть не в аккаунте, в тренировочном и с ограниченным выбором автоматов и ставок. Да и если, тогда, выигрыша (том всей тысячи) в правила вступят определенные условия, где несомненно сказано, что наибольшей суммой победы возможность быть лишь двести долларов и деньги можно использовать только виде бонуса на первый вклад с вейджером 25 от суммы гонорары плюс сам депозит. По итогу выйдет, собственно игрок выигрывал себе 200% бонус с вейджером на определенную сумму. Короче говоря, это все не вашего медли.В истиннее время получить бонус за регистрацию в казино очень просто. Почти любой игорный дом с радостью предоставит средства или благотворительные вращения. Многие игроки пользуются этим и не стесняются регистрироваться в каждом клубе с выгодными критериями. Кстати, это отличная вероятность придумать выигрышную стратегию и сорвать куш.
1×slots регистрацию более популярный вариант это
Бонус за регистрацию в казино выдается лишь один один на одного игрока. Но посещают дополнительные промоакции, в рамках которых бездепы расступаются для неизменных клиентов и эти подарки Вы можете получить более одного раза.Для получения выигрыша потребуется выполнить обстоятельства казино. Чаще всего игроку нужно поставить определенную необходимую, но уже из личных денег. Она рассчитывается из общего размера выигрыша за всегда применения бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, случае юзер выиграл 1000 руб., а множитель сочиняет х30, вывести средства можно будет, сделав ставки на 30 000 руб. <a href=http://forum.audioheritage.net/memberlist.php?mode=viewprofile&u=19451>1×slots официальный сайт зеркало рабочее</a> 1×slots коды В лицензионных бездепозитных казино играть в азартные игры действительно неопасно. Наличие лицензии одобряет что, этот факт, что клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP.Некоторые сайты, прежде чем обмануть регистрацию игроков, предлагают ответить на количество базисных вопросов. Цель проведения похожей викторины – выявить случайных людей, коие не имеют представления о покере, и не допустить получения ими бонусов. Если посетитель уже играл в казино, то ответить на полтора 10 простых вопросов несомненно несложно. Очень нередко, ответы возможно отыскать на официальных сайтах этих учреждений. <a href=http://clients1.google.co.jp/url?q=http://smolbattle.ru/proxy.php?link=http://puddostavka.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/miDEjxVma6o>http://clients1.google.co.jp/url?q=http://smolbattle.ru/proxy.php?link=http://puddostavka.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/miDEjxVma6o</a> Необходимость отыгрыша. Вейджер в повыше, чем для призов за депо. И же средства не отыграны, исключить их невозможно. 1× slots регистрация в 1×slots casino Новые посетители онлайн-казино без первого депозита шансы выяснить собственную удачливость. К что, этому же есть возможность преобразовать бездепы в реальные средства за регистрацию в казино, впрочем результата бонус необходимо отыграть согласно условиям промоакции.Получить Бездепозитный бонус в интернет казино дело двух кликов. Другой момент, отыграть рекламную и соблюсти верховодила и обстоятельства отыгрыша. Под правилами подразумевается столько вагер, но и лимитирования по наибольшей ставке. Мы разумеем, собственно в кинотеатр все ставят на зеро и выигрывают. Призываем не делать подобного. Перед активацией бонуса прочитайте управляла. Узнайте следующие моменты: Условия получения дара, за регистрацию, за депозит и многое. Ограничения по максимальной ставке. Зачастую не повыше 350 рублей. Кратность денежного оборота – вагер. Максимальная сумма выигрыша с промо. В каких слотах можно отыгрывать вагер. Можно вертеть автоматы, а вагер будет стоять на месте. Поэтому важно знать, в каких забавах возможно совершать кратность валютного оборота.
1×slots регистрация то дальше необходимо пройти
Для получения депозитного приза нужно пополнить свой игровой баланс настоящими деньгами. Вознаграждение возможно получить или при внесении первого депо, или вид фиксированного процента от внесённых средств. Так или иначе, бонус поступит на счёт лишь последствии пополнения.Максимальная ставка ? устанавливается в валюте счета и ограничивает размер ставки за раз спин. В случае ее превышения приз возможность быть аннулирован. Также в правилах имеет находиться запрет на размещение ставок конкретного облика, например, по равным шансам в рулетке (словами, на чет или нечет, красноватое или черное и т.д. ). <a href=http://megatv.kiev.ua/user/DavidHaura/>http://megatv.kiev.ua/user/DavidHaura/</a> Для верификации номера телефонного, в собственном профиле выберите опцию „Подтвердить номер аппарата“ и введите в соответствующее фон код, приобретенный в sms-сообщении. 1×slots зеркало 1хслотс регистрация перейти на 1×slots Но на азартных платформах подобные вознаграждения имеют получить теперь зарегистрированные пользователи. В этом случае, бонусы предоставляются в рамках уникальных акций или же неким геймерам вид акционного предложения, которое прибывает на почту с целью «возвратить» игрока в свое казино.
x1 slots 1хслотс регистрация перейти на 1×slots
Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала прыткие выводы. Фишка выплат сомнений, что достаточно выбрать платёжный инструмент и показать необходимую. В большинстве случаев средства зачисляются на электронные кошельки в течение 15 мин., а на банковские карты – 1–3 рабочих дня. Если вы облюбовали себе количество брендов которые вам больше всего полюбились, для постоянной игры! Таких гемблеров казино очень предпочитает и оценивает, за частую эти игроки становятся VIP игроками заведения, которым нередко поступают прибыльные предложения повторяющий призов, например же туда входит и бездепозитные.Бездепозитные бонусы казино за регистрацию в 2022 году — это вероятность сыграть за счёт заведения. Казино даёт клиенту шанс пользоваться определённой суммой или числом бесплатных вращений без внесения депо. Не путайте деморежим с реальной игрой без необходимости внесения депо. Не желаете поиграть в азартные игры, не рискуя средствами средствами, хотя получая в все выплаты? Подобную вероятность предоставляют все наихорошие порталы с азартными веселиями. В их количестве количество честных и надежных интернет-казино на русском языке. Они завлекают новых пользователей различными поощрительными мероприятиями, включая бездепозитные, или благотворительные бонусы. casino 1×slot <a href=https://r.rumedia.top/user/Jamesswows/>https://r.rumedia.top/user/Jamesswows/</a> Ещё одно распространённое акционное предложение – симпатичный презент с неблаговидными требованиями. К образцу, клуб сулит $100 в бездепа, но с вейджером х80 или х100. Отыграть такой вейджер практически невероятно и потому чем концентрироваться на больше заманчивых акциях.Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из ведущих требований, не неотъемлемой верификации. Если на веб-сайте предусмотрена неотъемлемая процедура доказательства личности, то вывести выигрыш получится только после ревизии данных. Приготовьтесь заполнить анкету и отправить в техподдержку документ, подтверждающий личность.
1×slots зеркало рабочее на сегодня
Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?Бездепозитный приз казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в этом и содержится основное различие. Еще одно условие касается размеров ставки. Операторы устанавливают наивысшую необходимую, которую игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, выбранной в Личном кабинете. При превышении лимита есть риск лишиться приза. Существующие ограничения относятся и к определенным видам ставок. Например, играя в рулетку, заказчик имеет столкнуться с запретом назначать фишки на шансы.В лицензионных бездепозитных казино играть в азартные игры вправду безопасно. Наличие лицензии подтверждает тот факт, собственно клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP. <a href=http://www.hdkinoteatr.com/index.php?subaction=userinfo&user=kaputlawsuit32>http://www.hdkinoteatr.com/index.php?subaction=userinfo&user=kaputlawsuit32</a> Бездепозитные призы реальными средствами, коие можно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадались.Каждая игровая перрон отличается критериями по получению и отыгрышу бездепов. В правилах отчетливо расписаны кратковременные рамки, за коие нужно прокрутить вейджер. Также не запамятовывайте на максимальный размер ставки и максимальную необходимую выплаты. С другой стороны, дабы получить бездепозитные бонусы казино, достаточно израсходовать менее 1 минутки. 1×slots актуальное зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://thetechmodders.com/forums/viewtopic.php?t=23476>1×slots регистрация на 1хслотс</a>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/4977/#comment-255718>1× slots регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Но есть игорные заведения, которые готовы просто например жертвовать деньги на игру. Для сего довольно сделать профиль. Чтобы исключить свой выигрыш, для поначалу нужно выполнить обстоятельства отыгрыша, обозначенные в условиях получения бездепозитного депозита. Бонус начисляется игроку сразу в регистрации и прохождения верификации в казино и не требует от посетителя внесения депозита. Как верховодило, размер бонуса в подобном случае довольно скромный, однако дозволяет новичкам познакомиться с забавой без риска настоящими средствами.
#9748 MonroCasinohttps://monro-casino-apk.ru
<a href=http://profi.ua/go/?link=https://monro-casino-apk.ru>monro-casino-apk.ru</a> <a href=http://www.hirek.hu/click.php?link=https://monro-casino-apk.ru>monro-casino-apk.ru</a> <a href=http://media.2day.uk/media/search/?url=https://monro-casino-apk.ru>monro-casino-apk.ru</a> <a href=http://www.viewu.net/redirect.php?url=https://monro-casino-apk.ru>monro-casino-apk.ru</a> <a href=http://vsebud.20.ua/redirect?url=https://monro-casino-apk.ru>monro-casino-apk.ru</a> <a href=http://telefon.1crm.ru/bitrix/rk.php?goto=https://monro-casino-apk.ru>monro-casino-apk.ru</a> <a href=https://kluch.media/bitrix/redirect.php?goto=https://monro-casino-apk.ru>monro-casino-apk.ru</a> <a href=https://jeu-concours.digidip.net/visit?url=https://monro-casino-apk.ru>monro-casino-apk.ru</a> <a href=https://www.ronikon.ru/bitrix/redirect.php?goto=https://monro-casino-apk.ru>monro-casino-apk.ru</a> <a href=http://www.activecorso.se/z/go.php?url=https://monro-casino-apk.ru>monro-casino-apk.ru</a> <a href=http://bdsmstorylibrary.com/tgpx/click.php?id=135&u=https://monro-casino-apk.ru>monro-casino-apk.ru</a> <a href=https://loader.to/api/button/?url=https://monro-casino-apk.ru>monro-casino-apk.ru</a> <a href=https://freesexcamca.chaturbate.com/external_link/?url=https://monro-casino-apk.ru>monro-casino-apk.ru</a> <a href=http://angelcosplay23.simplesite.com.xx3.kz/go.php?url=https://monro-casino-apk.ru>monro-casino-apk.ru</a> <a href=http://medopttorg.ru/bitrix/rk.php?goto=https://monro-casino-apk.ru>monro-casino-apk.ru</a>
Upload application online casino monro – win today !
<a href=http://d.china-ef.com/goto.aspx?url=https://monro-casino-apk.ru>monro-casino-apk.ru</a> <a href=https://ischam.glueup.cn/track/redirect?type=campaign&lid=8&tracking_id=%5BtrackingId%5D&redirect_url=https://monro-casino-apk.ru>monro-casino-apk.ru</a> <a href=http://myavcs.com/dir/dirinc/click.php?url=https://monro-casino-apk.ru>monro-casino-apk.ru</a> <a href=http://й•їж™џ.com/productshow.asp?id=60&mnid=31314&mc=20153281130338&url=http%3A%2F%2Fmonro-casino-apk.ru-info-uz.com&lmm=>monro-casino-apk.ru</a> <a href=https://www.lib.nkust.edu.tw/portal/global_outurl.php?now_url=https://monro-casino-apk.ru>monro-casino-apk.ru</a> <a href=https://sie.fer.es/formacion.php?action=warning&courseId=1743723&msg=El+curso+que+est%E1+intentando+solicitar+no+es+v%E1lido+o+ya+no+est%E1+disponible+en+nuestro+cat%E1logo+de+cursos.+%3Cbr%3E%3Cbr%3EPuede+acceder+al+cat%E1logo+actual+en+la+secci%F3n+Servicios±+Formaci%F3n+y+Empleo+o+bien+puede+llamar+e+informarse+sobre+nuestros+cursos+en+el+tel%E9fono+941–271271.+Gracias.&link=http%3A%2F%2Fmonro-casino-apk.ru-info-uz.com>monro-casino-apk.ru</a> <a href=https://forum.amando.it/redirect-to/?redirect=https://monro-casino-apk.ru>monro-casino-apk.ru</a> <a href=https://juniorworldcup.cz/eng/media_show.asp?type=1&id=25&url_back=https://monro-casino-apk.ru>monro-casino-apk.ru</a> <a href=http://kpcsa.kr/shop/bannerhit.php?bn_id=7&url=http%3A%2F%2Fmonro-casino-apk.ru-info-uz.com>monro-casino-apk.ru</a> <a href=https://hapyto.ucoz.ru/go?https://monro-casino-apk.ru>monro-casino-apk.ru</a> <a href=http://forum.rsload.net/away.php?s=https://monro-casino-apk.ru>monro-casino-apk.ru</a> <a href=http://elvs.su/bitrix/rk.php?goto=https://monro-casino-apk.ru>monro-casino-apk.ru</a> <a href=http://www.metta.org.uk/eweb/?web=https://monro-casino-apk.ru>monro-casino-apk.ru</a> <a href=http://rajahkingsley.idehen.net/HtmlPivotViewer/?url=https://monro-casino-apk.ru>monro-casino-apk.ru</a> <a href=http://tenzidetailer.cz/redirect.php?url=https://monro-casino-apk.ru>monro-casino-apk.ru</a>
#9749 Charlesgunnyhttp://filmkachat.ru
1×slots промокод при регистрации
Например, игрок получил 500 руб. При создании аккаунта и обязан отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 рублей, понадобится устроить 875 спинов для полного отыгрыша.Поспешите забрать бездепозитные призы за регистрацию в казино из представленного перечня. Все платформы столько водят законную работа, хотя и порадуют правдивыми плодами забавы, высокой отдачей, быстрыми выплатами. <a href=http://filmkachat.ru/>1×slots зеркало сайта</a> Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро либо 20 $. Если выдаются фриспины, их число изредка выше нескольких десятков бесплатных вращений.Для получения выигрыша требуется выполнить обстоятельства казино. Чаще всего игроку нужно поставить определенную сумму, но уже из собственных средств. Она рассчитывается из совместного объема выигрыша за все время применения бездепа, умноженного на фиксированный коэффициент, нарекаемый вейджером. Например, если юзер выиграл 1000 руб., а множитель составляет х30, вывести средства можно будет, сделав ставки на 30 000 рублей. <a href=http://rtpsouth.com/UserProfile/tabid/69/userId/107543/Default.aspx>http://rtpsouth.com/UserProfile/tabid/69/userId/107543/Default.aspx</a> Бонус без депозита за регистрацию в казино (бездепозитный приз) – это валютный презент от клуба, кот-ый начисляется на аккаунт игрока после регистрации в казино. Кроме творенья учетной записи, для получения бездепа, довольно часто требуется ещё и подтвердить контактные данные игрока и/или активировать особый промо-код. казино 1× slots официальный сайт <a href=http://blog.isport.ua/rabindex/other/115715.html>http://blog.isport.ua/rabindex/other/115715.html</a> Чаще всего применяются коды. Их надо(надобно) вносить в особые окна регистрационной анкеты, в речь идет о пригласительных бонусах, или в определенном разделе собственного кабинета игрока.Бездепы обыкновенно предлагают с отыгрышем — быстро вывести выигранные средства невозможно. Перевод денег со счета несомненно возможен после того, как юзер выполнит все притязания казино, а сумма имеет быть выше установленного правилами лимита. Условиями акции фиксируются сроки, протяжении которых заказчик вправе воспользоваться предложением. Обычно они не превосходят нескольких дней в активации.
1× slots сайт
1×slot регистрация <a href=https://www.kino-ussr.ru/user/Forsedropsi/>https://www.kino-ussr.ru/user/Forsedropsi/</a> 1×slots зеркало на сегодня Бонус в казино без депо имеет разные разновидности: это может быть приветственный бонус, промоакции в честь каких-то праздничных или важных дат, бонус за привлечение свежих игроков, преданность и получение VIP-статуса.
1×slots официальный зеркало рабочее
Для вывода средств приз нужно несомненно отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами акции и вариациями отыгрыша бездепозитного бонуса до его получения, дабы избежать конфликтных обстановок. <a href=http://d90894u1.bget.ru/user/Jamesguibe/>http://d90894u1.bget.ru/user/Jamesguibe/</a> Многие азартные клубы ограничивают необходимую вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не сможете вывести. Разница несомненно аннулирована, Вы и не сможете создавать на нее ставки. 1×slots зеркало В современность довольно просто получить приз за регистрацию в казино. Практически любой игорный жилище с готовностью начислит средства либо бесплатные вращения. Многие гэмблеры пользуются данным и не стыдятся региться в любом клубе с выгодными условиями. Кстати, это замечательная возможность выработать победную тактику и сорвать джекпот.Вышеописанная первопричина и является главным нюансом, следствии которого операторы отдают доля своей прибыли на различные маркетинговые затраты и маркетинговые кампании. А самым действенным тут станут выступать непосредственно бездепозитные бонусы казино 2022 с выводом за регистрацию.
1×slots официальный сайт мобильная версия
Популярность онлайн казино растёт и всё больше пользователей начинают увлекаться азартными забавами. Бездепозитные призы 2022 года, это оригинальные подарки за регистрацию. С их подмогою новые игроки имеют получить благотворительные вращения либо средства на баланс за одну регистрацию. С выходом игорных заведений в интернете, бездепозитные призы стали наимоднейшим методом вербования игроков. Подобные промоакции имеют как плюсы, например и минусы. Разумеется, больше плюсов, о которых мы поведаем. Наш вебсайт собрал превосходнейшие предложения из онлайна на 2022 год. Воспользуйтесь любым подарком и сможете получить шанс на вывод выигрыша. Почему шанс? Потому что, перед выводом выигрыша нужно выполнить условия.Фриспины предусмотрены для применения в видео слотах. Внимательно ознакомьтесь с условиями – частенько их выдают на некоторые автоматы. В зависимости от клуба, у вас получится устроить определённое количество ставок. Кстати, продвинутые игорные дома разрешают запускать любых «одноруких злодеев». Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие возникают у начинающих.Главное преимущество спинов – вероятность изучить различные слоты. Также получится насладиться бонусными раундами, испытывать фортуну в риск-туре и преумножить выигрыш за счёт особых символов. Однако не игровой процесс заслуживает внимание, так другого, как сосредоточиться на реальном выигрыше. В неких интернет казино для получения бездепозитных призов не достаточно просто зарегистрироваться на веб-сайте клуба и доказать средства контактные данные. Дополнительно требуется активация промокода. 1×slots официальный сайт зеркало <a href=https://arenafighter.adult/mybb/member.php?action=profile&uid=262921>https://arenafighter.adult/mybb/member.php?action=profile&uid=262921</a> С иной стороны, намного проще отобрать бездепозитные фриспины за регистрацию в казино и напрямик момент начать вращать барабаны в превосходнейших слотах. Главная особенность спинов сомнений, что они предусмотрены для топовых автоматов. Удастся не пройти вспомогательные раунды, но и увеличить сумму выигрыша, заработать респины и внутриигровые подарки.Постарайтесь отыграть вейджер, дабы была вероятность оставить заявку на выплату. Кстати, на всех сайтах, представленных в списке, доступны современные платёжные приборы. Вы можете получить выигрыш на электронной кошелёк, карту, телефон.
онлайн казино 1×slots
<a href=http://twchess.lionfree.net/discuz/home.php?mod=space&uid=17799>http://twchess.lionfree.net/discuz/home.php?mod=space&uid=17799</a> 1×slots регистрация 1×slots casino 777 online Представленные на данной страничке превосходнейшие бездеп призы в казино за регистрацию в 2022 году имеют подходящие обстоятельства. После тщательного анализа редакция портала составила рейтинг спецпредложений, в посетители Casino.ru шансы сортировать перечень по нескольким критериям: по сумме, вейджеру, наибольшей сумме вывода и т.д.
<b>Смотреть еще похожие новости:</b>
<a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=88645>1×slots зеркало 1хслотс регистрация перейти на 1×slots</a>
<a href=https://melhorlance.com.br/author/jamesbom/>1хслотс рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Возьми свой подарок. Чаще всего бонус активируется незамедлительно в регистрации. Но посещают ситуации, когда надо(надобно) зайти в личный кабинет или написать в справочную службу. Бездепозитные призы реальными деньгами, коие возможно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давным-давно не попадались.
#9750 Charlesgunnyhttp://filmkachat.ru
1×slots казино зеркало
4. Заберите подарок. Чаще всего приз активизируется незамедлительно после регистрации. Но бывают истории, когда надо(надобно) зайти в собственный офис либо написать в саппорта. <a href=http://filmkachat.ru/>1×slots регистрация на сайте</a> Выигрыши с бонусов без инвестициям постоянно привязаны к притязанию по ставкам и все быть обналичены лишь после выполнения данных требований. <a href=http://xn–b1acebaenad0ccc3aiee.xn–p1ai/forum/user/11956/>http://xn–b1acebaenad0ccc3aiee.xn–p1ai/forum/user/11956/</a> Необходимость отыгрыша. Вейджер в повыше, чем для призов за депозит. И пока средства не отыграны, вывести их невозможно.Условия, на коих предоставляется бездеп, регулируются казино. Каждая акция имеет подробные верховодила, ссылка на которые обыкновенно находится в промообъявлении. В их указываются лимиты, вейджер, список доступных игр. Если оператор прячет данные о предложении, то воспользоваться им не стоит. скачать 1×slots на андроид мобильная версия <a href=https://www.orderviewdocs.online/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D0%B4%D0%B7%D0%B5%D0%BD>https://www.orderviewdocs.online/doku.php?id=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0%20%D0%B4%D0%B7%D0%B5%D0%BD</a> Пoдтвepждeниe элeктpoннoй пoчты либо мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.
1х слот регистрация в 1×slots casino
Помните, что всевозможные нарушения правил сведут на нет ваши старания, и вы всего останетесь без начисленного вам дарового приза. Всегда изучайте управляла начисления и обстоятельства вейджера. По хоть вопросам, на коие вы не самостоятельно найти ответы, обращайтесь за объясненьям и саппорт.Выполнив все притязания оператора, клиент может оформить заявку на вывод выигрыша в Личном кабинете. На ее обработку уходит примерно менее суток. Если дополнительно требуется пройти процедуру верификации, то срок увеличивается до 1–2 трудящихся дней. Для перевода используются банковские инструменты и электронные платежные системы. Второй способ подходит чем, например как основная транзакций ситуации исполняются мгновенно. В связи со спецификой функционирования банков обработка платежей имеет занять до нескольких рабочих дней. <a href=https://nztw.org/thread-365385–1–1.html>1×slots зеркало на сегодня</a> 1× slots casino официальный сайт <a href=http://saju.codeway.kr/index.php?title=Выкуп_авто>http://saju.codeway.kr/index.php?title=Выкуп_авто</a> 1хслотс рабочее зеркало
1×slots рабочее зеркало
Акционные предложения от казино существуют в разных форматах. Часто призы даются в мена на депозит. Игрок заносит платеж и получает средства, безвозмездные вращения прочие поощрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — картина приза, кот-ый гарантирован за исполнение конкретных поступков на сайте: <a href=https://www.new.jesusaction.org/bbs/board.php?bo_table=free&wr_id=2233596>https://www.new.jesusaction.org/bbs/board.php?bo_table=free&wr_id=2233596</a> Срок отыгрыша — это период, кот-ый наступает в момент активации приза и заканчивается с его закрытием. Пользователю необходимо уложиться в этот временной зазор, по призовые средства аннулируются. Казино устанавливают перечень игр, ставки в которых засчитываются при расчете отыгранных средств. Если тайтл не заходит в данный список, то возможность быть недоступен для загрузки в действия бонусного предложения.Подтвердите регистрацию, дабы активировать Бездепозитный приз с выводом, потребуется наполнить собственный профиль. Заполните пустые поля настоящими данными о себя. 1×slots зеркало регистрация в 1×slots casino Активация происходит с помощью промокодов, коие вводятся в личном кабинете в регистрации. Среди спецпредложений в списке Casino.ru находятся неповторимые промокоды, которые доступны лишь посетителям портала. Другие методы начисления средств ? автоматическая активация незамедлительно последствии создания аккаунта и получение дара по запросу в службу технической поддержки.
1×slots зеркало регистрация в 1×slots casino
Вообще перейдя в казино — правила схожи в получении бездепозитных призов, в стандартные правила входит: доказать эл. Почту и телефон, наполнить свой собственный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ.В одном из заведений, Вам непременно повезёт и дело дойдёт до вывода выигрыша. Вывод денег, это самая приятная часть игры. Важно, часто бездепозитные бонусы в казино выдаются с ограничениями по максимальной выплате. В среднем можно рассчитывать на прибыль в несколько тыщ руб. Как вывести выигрыш с приза без депозита. Придётся доказать акк документально, в некоторых заведениях. Процедура верификации обязательна и делается каждым игроком. О документальном подтверждении учетной записи спрашивайте в онлайн чате или прочитайте в правилах. <a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=7523&TITLE_SEO=7523-preobrazovatel-interfeysov-usb-rs485&MID=461158&result=reply#message461158>1×slots зеркало быструю регистрацию а также мгновенное</a> Если вы опытный игрок, вы обязаны аристократия, собственно бонус без депозита – редкая находка. Тем не, мы еженедельно изучаем интернет, дабы найти для вас наилучшие бездепозитные предложения. 1×slots регистрацию процедура займет всего лишь <a href=http://www.hellojammu.news/2018/10/Indian-American-invest-USD-60-mn-in-medical-device-company.html>http://www.hellojammu.news/2018/10/Indian-American-invest-USD-60-mn-in-medical-device-company.html</a> Свежий бонус начисляется вид валютных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в пользовании средствами, в случае отыгрыша оператор возможность ввести ограничение на вывод денег.
1×slots подтвердит вашу регистрацию если говорить
Для всех бездепозитных призов функционирует наибольший предел на выигрыш. Он показывает предельную сумму, которую вы сможете получить, играя на бонусные кредиты. Как только для удастся выполнить притязания вейджера, допустимый максимально несомненно переведен с бонусного счета на главный, а остаток будет списан. <a href=http://www.hififever.com/dz/home.php?mod=space&uid=212116&do=profile>http://www.hififever.com/dz/home.php?mod=space&uid=212116&do=profile</a> Как только получите бездеп в казино, всё одинаково не забывайте проверять электрическую почту. Некоторые игорные клубы каждый радуют активных гэмблеров приятными бонусами. Чаще всего получить подарок можно в преддверии веселья, на день рождение, за вербование друга. А того распространённым призом считается надбавка к депозиту. Нужно более пополнить счёт, и азартное заведение увеличит его на 50–100%. 1×slots мобильная версия войти казино Призовые начисления без депозита имеют предоставляться для участия в турнирах интернет казино. Потратить перечисленные деньги возможно необыкновенно в рамках этой промоакции. Условия их проведения включают в себя ограничения на перечень игр, сроки отыгрыша, суммы ставок. Прежде чем пользоваться этим предложением, лучше изучить его верховодила.Перечисленные повыше главные свойства сочетают практически каждый приз и считаются стандартными для бездепозитных бонусных начислений в казино.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.ltp-team.com/topic/47299–1×slots-registraciya-to-dalshe-neobhodimo-proyti/>1×slots регистрация то дальше необходимо пройти</a>
<a href=https://timepost.info/showthread.php?tid=47584>зеркло казино 1×slots</a>
<a href=http://forums.indexrise.com/thread-67452-post-329584.html#pid329584>1×slots официальный сайт мобильная версия</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подобные призы без депозита предоставляются на более прибыльных условиях. Зачастую они крупнее, а обстоятельства отыгрыша наименее жесткие.
#9751 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация
Для как, чтобы отыграть необходимую вашего бездепозитного приза надо(надобно) выполнить обстоятельства вейджера. Очень нередко фриспины даются на конкретные слоты (book of ra, book of dead, book of sun), выбирайте слот себе по душе, они очень красивые и качественные. Бездепозитные бонус может быть валютным так и в виде фриспинов на слотыОбычно, бездепозитные призы выдаются под конкретные слоты с фиксированной ставкой, но их точно воспрещено использовать в игровых автоматах с современным джекпотом. Список игр, каких возможно использовать бездеп, Вы отыщите в описании промоакции или можете уточнить у службы заведения. <a href=http://filmkachat.ru/>1×slots быструю регистрацию а также мгновенное</a> <a href=https://lustbb.com/user-10226.html>https://lustbb.com/user-10226.html</a> В лицензионных бездепозитных казино играть в азартные игры действительно неопасно. Наличие лицензии одобряет что, этот факт, что клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP.Подтверждение персональной инфы. Все казино требуют от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и наличие у юзера иных аккаунтов (мультиаккаунт запрещен). casino 1×slot <a href=http://d90894u1.bget.ru/user/ChrisiNise/>http://d90894u1.bget.ru/user/ChrisiNise/</a> Бездепозитные призы отличный вариант безвозмездной забавы в игровые автоматы. Многие пользователи сети не знают, собственно в казино возможно начать играть абсолютно бесплатно, а позже исключить выигрыш на банковскую карту или электрический кошелек, иные не доверяют онлайн казино, а третьи удачно играют и выигрывают – и тотчас достаточно великие суммы.Бонус без депо за регистрацию в казино (бездепозитный бонус) – это денежный презент от клуба, кот-ый начисляется на акк игрока последствии регистрации в казино. Кроме творения учетной записи, для получения бездепа, очень нередко требуется ещё и подтвердить контактные данные игрока и/или активировать особый промо-код.
1×slots casino регистрация 1×slotscasino09k online
1×slots casino online регистрация <a href=http://rom.mybb.su/viewtopic.php?id=285#p1398>http://rom.mybb.su/viewtopic.php?id=285#p1398</a> Бонус с зачислением денег на счет дает больше свободы действий. Пользователь сам выбирает, каким образом распорядиться подаренными своими. Здесь того могут работать ограничения на список доступных игр, хотя обыкновенно эти рамки не например строги, как в рекламную с безвозмездными вращениями.Так собственно сможете храбро регистрироваться без всяких размышлений. Фортуна сейчас наверняка на вашей стороне. Не бойтесь, как следствие какого или ущерба Вам совершенно не угрожает. С этими призами как без пополнения, Вы остаетесь лишь в плюсе, хотя не как не в минусе. 1хслот 1хслотс регистрация перейти на 1×slots
1хслотс рабочее зеркало
В интернете количество известных игорных площадок с привлекательными акционными предложениями. Однако внимательно читать условия десятков услуг скором надоест, да и время отнимет количество. Поэтому наша команда подготовила ТОП-3 сайтов с наихорошими бездепозитными бонусами:Шаг 4. Активация. Внимательно исследуйте условия, информацию по ограничениям и сроке деяния бонусного предложения. Разобравшись с правилами, возможно активировать бонус в личном офисе (время ? с использованием промокода) либо по запросу в саппорт. <a href=https://maps.google.com.ag/url?q=https://doctorlazuta.by/>https://maps.google.com.ag/url?q=https://doctorlazuta.by/</a> Бездеп с фриспинами имеет охватывать всю коллекцию игр на сайте либо разработки одного провайдера. Обычно предлагается определенный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш возможность быть выведен последствии того, как пользователь отыграет данную сумму. Возможность расценить полный возможностей слотов — основное достоинство данной разновидности. Игроку становятся доступны что, эти опции, которые отсутствуют в демонстрационном режиме, а возможность выиграть реальные деньги добавляет ярчайших азартных чувств. 1×slots казино зеркало Промообъявления от казино мешают реальной картины и ориентированы на привлечение внимания пользователей. Понять, как высоки шансы остаться в плюсе, позволит личный тест критерий предложения:Чтобы без убедиться в превосходствах бездепозитных бонусов, довольно зарегистрироваться в казино и получить одобрение.
1× slots сайт
Прочитайте верховодила бонусной программы, в желайте участвовать. Да, мы безотступно советуем устроить это до регистрации. <a href=http://brilliance.ru/forum/viewtopic.php?f=6&t=34557>1×slots зеркало быструю регистрацию а также мгновенное</a> Эффективность бездепов в рекламного прибора оценили все операторы. Малоизвестные площадки употребляют такие промоакции, чтобы живо набрать базу. Популярные ресурсы расширяют аудиторию и поддерживают заинтересованность со стороны неизменных гостей. Не все сайты, дающие подарки без депозита, рекомендованы к ирге. За привлекательным промоописанием могут прятаться неосуществимые обстоятельства отыгрыша прочие подводные камни.Вейджер менее х30–35 является применимым. Опытные игроки утверждают, собственно с таким вейджером реально остаться в плюсе, случае правильно подойти к выбору игрового аппарата. Если вы облюбовали себе несколько брендов коие вас больше всего полюбились, для неизменной игры! Таких гемблеров казино довольно любит и ценит, за частую такие игроки становятся VIP игроками заведения, коим часто поступают прибыльные предложения вид бонусов, например же туда входит и бездепозитные.Бoльшинcтвo азартных заведений выдвигают приблизительно однообразные, схожие условия и притязания, которые нужно выполнить, дабы получить бездепозитный бонус за регистрацию. Все их возможно соединить в раз перечень: 1 хслот регистрация в 1×slots casino <a href=https://www.xibeiwujin.com/home.php?mod=space&uid=2229075&do=profile>https://www.xibeiwujin.com/home.php?mod=space&uid=2229075&do=profile</a> Так же стоит выделить то, что в любом интернет казино установлен свой максимальный кешаут на бездепозитный бонус. Как управляло кешаут — это предельная сумма денег, кот-ая доступная для вывода с бездепозитного приза.
1×slots регистрация 1×slots casino c2d ru
Однако в условиях скрываются «подводные камни», которые не позволят исключить крупную сумму или же вы не успеете отыграть вейджер. Поэтому профессионалы рекомендуют забрать благотворительные вращения за регистрацию в казино без депозита, дабы поднабраться опыта и получить реальный шанс на победу.Прямо момент заберите бесплатные вращения за регистрацию без депо и начинайте коллекционировать призовые композиции из-за крупных выигрышей! Теоретически, к безвозмездным бонусам возможно отнести так нарекаемые фриспины. Напомним, речь о вращениях на игровых автоматах, проходящих на средства казино. Однако в интернет-гемблинге принято выделять эти промоакции в отдельную категорию, потому что они деют лишь вероятность делать ставки. <a href=http://mayakminska.1stbb.ru/memberlist.php?mode=viewprofile&u=5043>http://mayakminska.1stbb.ru/memberlist.php?mode=viewprofile&u=5043</a> Выигрыши с бонусов без инвестициям практически привязаны к требованию по ставкам и могут быть обналичены только после исполнения данных требований.Проверка занимает от нескольких минут до нескольких дней, специалисты техподдержки имеют запросить дополнительные документы или инициировать куцее общение по Skype. 1хслот официальный сайт зеркало Бездепозитные бонусы начисляются лишь один один. Не стоит открывать свежие аккаунты, чтобы получить их повторно. Служба безопасности казино непременно выявит «левого» соучастника и перекроет. Если гость выполнит нужные притязания, отыграет собственную ставку и решит исключить личный выигрыш, то ему нужно сведению, что казино обязательно востребует предоставить ксерокопии личных документов, чтобы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именованием, выигранные свои исключить не удастся.Подтверждение индивидуальной информации. Все казино настоятельно от клиента пройти процедуру верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и наличие у юзера иных аккаунтов (мультиаккаунт запрещен).
<b>Смотреть еще похожие новости:</b>
<a href=https://bajarmp3.net/showthread.php?tid=424491>1 х слотс зеркало</a>
<a href=http://mtw2014.tmweb.ru/forum/?PAGE_NAME=message&FID=1&TID=7523&TITLE_SEO=7523-preobrazovatel-interfeysov-usb-rs485&MID=467711&result=reply#message467711>1×slots коды</a>
<a href=https://www.kfz-gringer.at/index.php/forum/in-neque-arcu-vulputate-vitae/63907–1-x-slots#63672>1 x slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездепозитный приз казино 2022 с выводом за регистрацию предоставляет возможность ознакомиться игроку с лобби избранного заведения, сориентироваться в выборе игр и выяснить качество работы службы поддержки. Довольно нередко, начиная игровой процесс, игрок теснее отказывается останавливаться и делает настоящий вклад. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать даром возможно как один таки с бонусом за регистрацию без надобности заносить депо.
#9752 Charlesgunnyhttp://filmkachat.ru
1хслотс регистрация в 1×slots casino
Высокая конкурентность в сегменте азартных игр мотивирует операторов привлекать клиентов разнородными промоакциями. Благодаря данному у гостей появляется вероятность получить призы в казино за регистрацию без депо. Воспользоваться таким предложением возможно, минуя процедуру внесения денег на игровой счет, просто активировав акк на сайте. Наш гид по бездепам поможет выбрать самую привлекательную бонусную программку, разузнать управляла получения такого гонорары и воспользоваться им с наибольшей выгодой. <a href=http://filmkachat.ru/>рабочее зеркало 1×slots</a> Итак, дабы бесплатные бонусные кредиты превратились в реальные деньги, которыми вы можете управлять по своему усмотрению, их надо(надобно) отыграть. Вейджер идет уточнять в правилах онлайн-казино. <a href=https://www.mybbaddons.com/board/user-77684.html>https://www.mybbaddons.com/board/user-77684.html</a> 1×slots зеркало регистрацию более популярный вариант это <a href=http://maskarad.bomba-piter.ru/user/Terryzek/>http://maskarad.bomba-piter.ru/user/Terryzek/</a> Бонус начисляется игроку сразу последствии регистрации и прохождения верификации в казино и не настятельно от посетителя внесения депо. Как управляло, размер приза в схожем случае достаточно скромный, впрочем дозволяет новичкам познакомиться с игрой без риска реальными средствами.
1 х слотс зеркало
<a href=http://www.topboard.org/threads/1×slots-oficialnyj-sajt-mobilnaja-versija.600264/>1×slots официальный сайт мобильная версия</a> 1×слот регистрация в 1×slots casino Допустим, за регистрацию вы возымели бездеп в объеме 2 000 руб. С вейджером х30. В этом случае предстоит сделать ставок, на совместную необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать настоящие средства. Однако не запамятовывайте, что с любого подарка выйдет вывести определённую необходимую (почаще всего не более $200).Выиграть настоящие деньги в казино не пополняя счет – сложно, хотя возможно. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными призами и начните выступать на бонусные средства. По статистике в 10-ти заведений возможно заработать маленькую необходимую средств за счет бонусных средств. <a href=http://www.xiaoditech.com/bbs/home.php?mod=space&uid=1728322>http://www.xiaoditech.com/bbs/home.php?mod=space&uid=1728322</a> 1× slots сайт Превышение наибольшей ставки при отыгрыше. Система механически не предуведомляет о превышении ставки, потому о несоблюдении правил игрок имеет узнать теснее последствии подачи запроса на вывод средств.Но такие рамки не смущают том хайроллеров, что коэффициенты на слотах разрешают рассчитывать на крупные выигрыши, а неких автоматах разыгрывается передовой джекпот.
1 х слотс зеркало
В бонусную программу множества операторов входят регулярные бездепы. Это пожизненные промоакции, поощряющие интенсивных постоянных игроков. Популярный формат — раздача фриспинов по конкретным денькам недели. Многие операторы, примеру казино Нет Гейм (Netgame Casino) предлагают неизменные призы без депозита в обмен на скопленные баллы преданности.В наше время довольно просто получить приз за регистрацию в казино. Практически любой игорный жилище с радостью начислит деньги или бесплатные вращения. Многие гэмблеры используют данным и не смущяются регистрироваться в каждом клубе с выгодными условиями. Кстати, это замечательная вероятность выработать победную стратегию и сорвать джекпот. <a href=http://cse.google.sm/url?q=http://course.cpi-nis.kz/Home/SetCulture?backurl=http://polygonalpaper.com/bitrix/redirect.php?goto=https://telegra.ph/Imushchestvennye-i-lichnye-prava-i-obyazannosti-roditelej-i-detej-09–19>http://cse.google.sm/url?q=http://course.cpi-nis.kz/Home/SetCulture?backurl=http://polygonalpaper.com/bitrix/redirect.php?goto=https://telegra.ph/Imushchestvennye-i-lichnye-prava-i-obyazannosti-roditelej-i-detej-09–19</a> Представьте момент, когда при ставке в 10 рублей Вы получите схожее умножение. Миллион рублей за одно вращение, что абсолютно вероятно. Поэтому вопрос, сколько возможно выиграть остаётся не. Предлагаем выяснить самостоятельно. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный бонус и проверяйте фортуну в деле. Разумеется, исключить деньги довольно. Однако шансы есть у всех.После потребуется внести идентификационный платёж. Это пугает начинающих больше всего. Нужно сделать наименьший депо в 100–500 руб. Таким образом служба безопасности убедиться в том, что платёжный способ принадлежит Вам. Данная процедура необходима для обеспечивания безопасности игровых счетов. Пример, Ваш акк взломают и выведут свои на свой кошелёк. Будет очень досадно. Поэтому верификация платёжной системы, это необходимый момент. 1×slots подтвердит вашу регистрацию если говорить
1×slots актуальное зеркало
Бездепозитные бонусы – это исключительно занимательная и наиболее перспективная акция интернет-казино. Они даже лучше фри-спинов, поэтому собственно выплаты в даровых вращениях не гарантированы, как комбинации на барабанах игрового аппарата имеют не сложиться. Приветственный бездеп предоставляется какому игроку только один раз. Казино борются с например нарекаемыми бонусхантерами (от англ. Bonus Hunter — охотник за бонусами), пытающимися заводить множественные аккаунты для надувательства оператора и повторного получения подарка. Исключить подобные действия дозволяет верификация данных. Администрация вправе потребовать у клиента подтвердить индивидуальные данные, обозначенные при регистрации.Законодательство, регулирующее азартные игры в различных странах, влияет на возможности операторов. В результате пользователи из отдельных ареалов сталкиваются с ограничениями со стороны казино. Это имеет быть как полный отказ в доступе, например и невозможность загружать игры отдельных изготовителей. 1×slots на любой вкус как пройти регистрацию <a href=http://nfb3806w.bget.ru/user/Geraldscien/>http://nfb3806w.bget.ru/user/Geraldscien/</a> Если вы бывалый игрок, вы должны аристократия, собственно бонус без депо – редкая находка. Тем ниже, мы еженедельно изучаем интернет, дабы отыскать вам лучшие бездепозитные предложения.Выполнив все требования оператора, заказчик может оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем не более суток. Если дополнительно потребуется пройти процедуру верификации, то срок возрастает до 1–2 трудящихся дней. Для перевода используются банковские приборы и электрические платежные системы. Второй способ подходит другого, так как масса транзакций в этом случае осуществляются мгновенно. В связи со специфичностью функционирования банков обработка платежей может взятьвдолг(взятьвзаймы) до нескольких рабочих дней.
1×slots официальный сайт, скачать
Поспешите зарегистрироваться на официальном веб-сайте Клубника, дабы быстро получить 33 бесплатных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, наоборот, появляется настоящий шанс победу! С другой стороны, намного легче забрать бездепозитные фриспины за регистрацию в казино и напрямик в начать вращать барабаны в лучших слотах. Главная необыкновенность спинов в том, что они предусмотрены для лучших автоматов. Удастся столько пройти дополнительные раунды, хотя и увеличить необходимую выигрыша, заработать респины и внутриигровые презенты. <a href=https://viewcinema.ru/user/Raymondkix/>https://viewcinema.ru/user/Raymondkix/</a> Бездепозитные призы казино это экономическая компенсация, предлагаемая юзерам на дармовой базе и возможность выступать в интернет казино безвозмездно. Если сопоставлять их с одобрениями за лепта, в свои выдаются лишь потом начального пополнения счета, то бездепозитные вознаграждения получаются безвозмездно. То есть, играющий получает вероятность создавать ставки на теснее быть финансы, которые выдаст заведение, исполняя, при этом, обыденные деянья, чтобы их извлечь (здесь речь о регистрация, удостоверении личности с внедрением номера аппарата, оформления заявки и т.д. ).Условия вывода выигрыша. В неких заведениях для удачного вывода с бездепозитного бонуса довольно пополнения баланса и доказательства личности. В иных же клубах, необходимо несколько один прокрутить собственный депозит. 1×slots быструю регистрацию а также мгновенное
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Иногда у гостей вебсайта все появиться трудности, задачи, препядствия при активации приобретенного промо-кода. В таких случаях, нужно обратиться за подмогою в саппорта «Support». Для получения ответа, непременно указывается определенная первопричина воззвания и подтверждается информация дополнительными снимками. Если сложилась неоднозначная обстановка, всегда можно адресоваться к главному регулятору либо контролирующему органу, выдавшему данному заведению лицензионный документ. Пoдтвepдить личнocть посетителя. Для удачного вывода средств, необходимо подтвердить лицо клиента. Нa этaпe вepификaции пpoфиля, работники службы защищенности обязаны убедиться, собственно у игрока не раз акк. Так как, приз зa peгиcтpaцию выдaетcя тoлькo oдин paз, заказчик не может вывести свой выигрыш, случае у него несомненно количество учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы.
#9753 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало на сегодня
Но рядах азартных платформах сходственные гонорары могут получить и уже зарегистрированные юзеры. В этом случае, призы предоставляются масштабах уникальных промоакций или же неким игрокам повторяющий акционного предложения, которое приходит на почту с целью «вернуть» игрока в свое казино.Денежные свои. Третий приз за регистрацию без депо – наличные. К раскаянью, лишь известные и популярные клубы имеют уяснить деньги в руб. Либо долларах. С их подмогою вас насладиться любой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед этим нужно исполнение определенных условий. <a href=http://filmkachat.ru/>скачать 1×slots на андроид мобильная версия</a> Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в неотъемлемом порядке нужно восполнить счет в казино. Для депозитных бонусов, данная процедура не нужна, так как депо уже изготовлен.Маркетинговая политика всех игорных интернет-клубов должна одевать разнообразный характер. И если вознаграждения на депо работают для того, дабы провоцировать вносить депозиты и поощрять уже имеющих пользователей, то бездепозитный приз в казино либо бонус за регистрацию в казино, до всего, рассчитан на расширение базы покупателей. <a href=http://www.biopolytech.com/bbs/board.php?bo_table=free&wr_id=126438>http://www.biopolytech.com/bbs/board.php?bo_table=free&wr_id=126438</a> 1×slots регистрацию более популярный вариант это <a href=http://xn–ok0b850bc3bx9c.com/bbs/board.php?bo_table=free&wr_id=78333>http://xn–ok0b850bc3bx9c.com/bbs/board.php?bo_table=free&wr_id=78333</a> Выбирайте наихорошие благотворительные призы с помощью обзоров на Casinoz – и пусть вас сопутствует счастье при отыгрыше бонусных кредитов!Для верификации номера аппарата, в личном профиле выберите опцию „Подтвердить номер телефонного“ и введите в соответствующее поле код, приобретенный в sms-сообщении.
1×slots официальный сайт зеркало
Подтвердите регистрацию, дабы активировать Бездепозитный бонус с выводом, потребуется заполнить личный профиль. Заполните порожние поля реальными данными о себе.Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке адепты онлайн-казино публикуют важную информацию о not the slightest down payment bonuses и предложениях. <a href=https://qualityprogamer.de/forum/showthread.php?tid=261929>1хслотс зеркало</a> 1×slots зеркало 1хслотс регистрация перейти на 1×slots Не хотите сыграть в азартные игры, не рискуя своими средствами, но получая в все выплаты? Подобную возможность деют многие наихорошие порталы с азартными веселиями. В их числе количество добросовестных и надежных интернет-казино на российском языке. Они привлекают новых пользователей разными поощрительными событиями, включая бездепозитные, либо безвозмездные бонусы.Автоматическая активация показаться самой удобной, но ручной способ имеет перед ней преимущества. Прежде чем применять вознаграждение от казино, стоит заблаговременно найти, сколько медли требуется на выполнение всех условий. Вводя промокод или обращаясь в техподдержку, игрок сам определяет срок начала деяния бонуса. <a href=http://inmybook.ru/glavdorogadv1808>http://inmybook.ru/glavdorogadv1808</a> 1×slots регистрация то дальше необходимо пройти
1×slots официальный сайт скачать
Лев – 70 безвозмездных вращений в игровом автомате Book of Ra. Для активации дара необходимо доказать электрическую почту и привязать телефонный;Условия отыгрыша приза. Если Вы планируете заработать на бездепозитном бонусе, то для направьте на велечину вейджера и срок, который дается на отыгрыш приза. Чем ниже вейджер и больше срок на отыгрыш, тем легче отыграть приз и исключить выигрыш. Фриплей-бонусы встречаются лишь в некоторых клубах. Они зачисляются незамедлительно после творения профиля и активны непродолжительное время. Если не успеете израсходовать средства, они попросту сгорят. Касаемо медли, в большинстве случаев бонусы активны на часа.Вейджер не более х30–35 является приемлемым. Опытные игроки заявляют, что с таким вейджером реально остаться в плюсе, если правильно подойти к выбору игрового аппарата. <a href=https://hdkaraokesong.com/space-uid-281966.html>https://hdkaraokesong.com/space-uid-281966.html</a> 1×slots зеркало этих способов предполагает регистрацию Выбирая даровой бонус, внимательно изучайте верховодила. Убедитесь, собственно для можно брать участие в промоакции. Уточните, в каких играх можно исполнять условия вейджера. При необходимости задавайте вопросы представителям саппорта.
x1 slots 1хслотс регистрация перейти на 1×slots
Мы проделываем акцент на ключевых положениях верховодил, рассказываем о территориальных ограничениях и кратко информируем о других промоакциях обсуждаемого казино.На критериях отыгрыша безвозмездных призов идет остановиться подробнее. С ними связаны нюансы, которые нельзя оставить без внимания. <a href=https://www.formulersupport.com/Thread-1%D1%85%D1%81%D0%BB%D0%BE%D1%82%D1%81-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%81%D0%B0%D0%B9%D1%82-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE–98063>1хслотс официальный сайт зеркало</a> Чаще всего казино бонус за регистрацию без депозита даёт вероятность запустить любой машина. Но другого внимательно ознакомиться с критериями. Иногда для забавы доступны лишь определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, другого, как начать знакомство с миром азарта непосредственно с «одноруких бандитов».Осталось избрать казино с бонусом за регистрацию и создать профиль. После активации подарка выигрыш зависит от Фортуны и способностей. 1×slot рабочее зеркало <a href=http://bbs.yongrenqianyou.com/home.php?mod=space&uid=4140969&do=profile&from=space>http://bbs.yongrenqianyou.com/home.php?mod=space&uid=4140969&do=profile&from=space</a>
1×slots регистрация то дальше необходимо пройти
Следует выделить, что бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом. Условия вывода выигрыша. В некоторых заведениях для успешного вывода с бездепозитного бонуса достаточно пополнения баланса и подтверждения личности. В иных же клубах, необходимо несколько один прокрутить свой депозит.Составленный знатоками Casino.ru перечень онлайн-казино с бездепозитным призом дозволяет игрокам сопоставить спецпредложения разных операторов. <a href=http://xn----ctbfqxicawkedu.xn–p1ai/index.php?subaction=userinfo&user=expensivecyst40>http://xn----ctbfqxicawkedu.xn–p1ai/index.php?subaction=userinfo&user=expensivecyst40</a> 1×slots зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://portugal-campings.com/pt/profile/jamescip/>1хслотс официальный сайт зеркало</a>
<a href=https://forum.bandariklan.com/showthread.php?tid=380876>1хслотс казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Однако далековато не все ресурсы предлагают своим клиентам бездепозитные призы за регистрацию в казино. В большинстве случаев учтено поощрение на 1-ый депо в размере 100–200%. Это замечательная возможность преумножить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш.
#9754 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию более популярный вариант это
Если площадка дарует бездеп за регистрацию, то процедура его получения ординарна. Нужно только завести акк на сайте и активировать его, подтвердив адресок электронной почты, номер аппарата или другие данные, коие просит оператор. Перед данным нужно убедиться, собственно юзер располагается на официальном сайте казино, не на жульнической площадке.Акции распространяются как на все забавы казино, так и на ограниченный перечень. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и. Промо имеет обхватывать разработки 1-го производителя. Бездеп не пересекается с иными промоакциями казино. Если на веб-сайте предусмотрен кэшбек, он не начисляется за ставки, изготовленные бонусными средствами. Для идентификации платежных реквизитов игрока возможность понадобиться пополнение счета на наименьшую сумму. <a href=http://filmkachat.ru/>1×slots регистрация на 1хслотс</a> Допустим, за регистрацию вы получили бездеп в объеме 2 000 руб. С вейджером х30. В этом случае светит сделать ставок, на общую сумму в 60 000 руб. (2 000 * 30 = 60 000). Когда выполните условия по отыгрышу, придёт время заработать настоящие деньги. Однако не забывайте, что с любого подарка получится вывести определённую необходимую (почаще всего менее $200).Фриспины — благотворительные вращения, коие дозволяют игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытных игроков фриспины числятся самым знаменитым и преимущественным обликом приза — благотворительные вращения иногда эффективнее и веселее в отыгрыше, чем остальные облики бездепов. <a href=http://nanobrid.com/bbs/board.php?bo_table=free&wr_id=4018>http://nanobrid.com/bbs/board.php?bo_table=free&wr_id=4018</a> При верном раскладе бездепы — это прекрасный способ играть на средства без растраты личных средств. Есть некоторое советов, следуя коим можно извлечь максимально пользы из сходственных промоакций казино. Играть по лишь на лицензированных площадках. Скриптовые сайты не накалывают с бонусными услугами, но и используют пиратский софт с модифицированным ГСЧ. Выиграть на этих автоматах невероятно. 1×slots зеркало на сегодня <a href=https://bridge-clip.ru/user/Stevenbeelt/>https://bridge-clip.ru/user/Stevenbeelt/</a> Более крупные предложения встречаются довольно изредка. Зачастую они доступны только VIP-игрокам. В оставшихся случаях им скорее сопутствуют довольно жесткие условия отыгрыша. Также возможны вспомогательные условия и другие лимитирования, прописанные в критериях и положения бонусной программы казино.Бездепозитный бонус за регистрацию в казино с выводом денег в 2022 году — Наш ресурс предоставляет игрокам актуальную информацию о самых свежих, щедрых и испытанных бонусах в интернет казино, которые обновляются каждый день.
1×slots официальный сайт скачать
Условия отыгрыша бонуса. Если Вы расчитываете заработать на бездепозитном призе, то в первую очередь направьте на значение вейджера и срок, кот-ый дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть приз и исключить выигрыш.Высокая конкуренция в разделе азартных игр доказывает операторов завлекать посетителей различными промоакциями. Благодаря этому у посетителей замечена возможность получить призы в казино за регистрацию без депо. Воспользоваться таким предложением можно, минуя функцию внесения денег на игровой счет, просто активировав аккаунт на веб-сайте. Наш экскурсовод по бездепам поможет избрать самую привлекательную бонусную программку, узнать верховодила получения такового гонорары и распорядиться им с наибольшей выгодой. 1×слотс казино Некоторые онлайн-казино без депо предлагают новым посетителям избрать бонус при регистрации. Будьте внимательны: выбрав один, вы в безусловном большинстве случаев не можете пользоваться остальными. <a href=http://www.fire-team.ru/forum/member.php?u=4871>http://www.fire-team.ru/forum/member.php?u=4871</a> Вейджер в переводе с британского значит «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша приобретенного бонуса, в нашем случае бездепозитного. Число ставок имеет — принципиально лишь набрать необходимую, пропорциональную сумме поощрения. 1×slots casino зеркало рабочее
1×slots официальный сайт зеркало
Некоторые сайты, до чем обмануть регистрацию игроков, предлагают ответить на количество базовых вопросов. Цель проведения сходственной викторины – выявить случайных людей, которые не имеют представления о покере, и не разрешить получения ими бонусов. Если посетитель уже играл в казино, то ответить на полтора десятка простых вопросов будет несложно. Очень часто, ответы возможно отыскать на официальных сайтах этих учреждений. <a href=http://n27244j0.bget.ru/index.php?subaction=userinfo&user=ChristoW>http://n27244j0.bget.ru/index.php?subaction=userinfo&user=ChristoW</a> Мы подготовили список, где есть постоянно актуальные и новые бездепозитные призы казино, которые продоставляется получить даром. Для наших юзеров есть специальные предложения эксклюзивные призы, коие вы ни не найдете, их мы обозначили специальной красной плашкой «Exclusive». 1×slots промокод при регистрации Да, у бесплатных призов есть дефекты. Прежде всего, они обычно небольшие. Кроме того, условия вейджера по ним практически строгие. Но все отсутствие риска проделывает их очень привлекательными для клиентов.Бездепозитный бонус предоставляется новому игроку за конкретные деянья. Часто подарок повторяющий средств либо фриспинов выдается за регистрацию, благодаря чему пользователь получает шанс оценить работу казино изнутри: опробовать сервисы, ознакомиться с коллекцией игровых автоматов и протестировать скорость вывода.
1×slots casino регистрация 1×slots review live
Бонусы без депозита при регистрации числятся самыми красивыми как для опытных игроков, например для и новичков. Получив это вознаграждение, клиент может выступать на реальные средства и выводить выигрыши без пополнения баланса. Редакция casino.ru собрала все актуальные коды и промокоды на бездепозитные бонусы в интернет-казино Рунета, а также условия их активации и выигрыша.Бездепозитные призы истинными деньгами, коие можно тотчас фотографировать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они давно не попадались. Способы получения бездепа различаются зависимо облика бонуса, кот-ый приглянулся игроку. Но для так нужно быть зарегистрированным в легальном онлайн-казино и подтвердить собственную личность. В общем виде пошаговая аннотация для получения бездепозитного бонуса выглядит например:Денежные свои. Третий приз за регистрацию без депозита – наличные. К сожалению, лишь известные и пользующиеся клубы могут дать деньги в руб. Либо долларах. С их поддержкою возможность насладиться любой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед данным нужно исполненье конкретных условий. зеркло казино 1×slots <a href=https://www.weaselmods.net/member.php?action=profile&uid=2969>https://www.weaselmods.net/member.php?action=profile&uid=2969</a> Фриспины. Бесплатные вращения предназначены для использования в видео-слотах. Внимательно читайте условия – они часто выдаются для неких машин. В зависимости от клуба вам создавать определенное число ставок. Кстати, современные игорные жилища выделяют возможность заводить «одноруких бандитов».
казино 1×slots
Каждый игры обязан сначала детально выучить условия по получению и отыгрышу приглянувшегося подарка. Если всё организует, поторопитесь арестовать бесплатные спины за регистрацию в казино без депозита с выводом и без отыгрыша и напрямик момент начать вращать барабаны топовых слотов.В любом казино с бездепозитным бонусом учтены вейджеровые обстоятельства. Это один-единственный «подводный камень», который стоит меж вами и выводом выигрыша. Чтобы отыграть вейджер, нужно сделать определённое число ставок. Чем круче бонус, тем труднее выполнить обстоятельства, и напротив. <a href=http://xn–80ahdmoqiwg1bc.xn–p1ai/bitrix/redirect.php?goto=http://moemisto.ua/zt/goto?url=http://toolbarqueries.google.sn/url?q=https://telegra.ph/Zakonna-li-takaya-prodazha-v-magazine-09–19>http://xn–80ahdmoqiwg1bc.xn–p1ai/bitrix/redirect.php?goto=http://moemisto.ua/zt/goto?url=http://toolbarqueries.google.sn/url?q=https://telegra.ph/Zakonna-li-takaya-prodazha-v-magazine-09–19</a> Третитй бездепозитный приз за регистрацию – денежные свои. К огорчению, начислить рубли либо баксы готовы только знаменитые и знаменитые клубы. С их помощью вас насладиться каждой доступной игрой – автоматом, рулеткой, кено, блэкджеком. казино 1×slots официальный сайт Некоторые сайты, этого чем обмануть регистрацию игроков, предлагают ответить на несколько базовых вопросов. Цель проведения сходственной викторины – выявить случайных людей, коие не имеют представления о покере, и не допустить получения ими бонусов. Если гость теснее играл в казино, то ответить на полтора десятка простых вопросов несомненно несложно. Очень часто, ответы возможно найти на официальных сайтах этих учреждений.Рассмотрим на примере: игрок получает 30 фриспинов по бездепозитному призы и, прокрутив их, выигрывает 35 белорусских рублей. В условиях промоакции указано, что вейджер бездепозитного бонуса х20. Поэтому, дабы отыграть бонус, игроку будет нужно сделать ставок на 35*20=700 руб.
<b>Смотреть еще похожие новости:</b>
<a href=http://nhomtruyen.com/members/jamesgaw.9280/>1×slots официальный сайт, скачать</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Условия могут разниться приятель от друга. Но такой приз имеет быть использован лишь для игрового процесса – приобретенные на счет финансы до того, как будут отыграны, исключить нереально. Чаще всего, популярностью сервисы, эти как MoneyBookers и WebMoney, а также MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но существует одно обязательное управляло. Финансовые средства выводятся только через что, эту платежную систему, которой успех для пополнения депо. Если же игрок получил бездепозитный покерный бонус, потребуется пополнить счет на минимальную необходимую, кот-ая сочиняет обычно десять долларов.
#9755 Charlesgunnyhttp://filmkachat.ru
1хслотс казино зеркало
Свежий бонус начисляется в виде денежных средств на счёт игрока. Дальше казино оставляет за собой право ограничения игрока в использовании своими, а случае отыгрыша оператор имеет установить ограничение на вывод средств. <a href=http://filmkachat.ru/>1×slots официальный сайт скачать</a> Узнайте больше о бездепозитных призах в казино, ознакомившись с ответами на вопросы которые возникают у начинающих. <a href=https://clashofcryptos.trade/index.php?title=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%BF%D0%B8%D1%86%D1%86%D1%8B%20%D0%B8%D0%B7%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO>https://clashofcryptos.trade/index.php?title=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%BF%D0%B8%D1%86%D1%86%D1%8B%20%D0%B8%D0%B7%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO</a> Максимальная ставка ? устанавливается в валюте счета и ограничивает объем ставки за раз спин. В случае ее превышения приз имеет быть аннулирован. Также в правилах имеет содержаться запрет на размещение ставок определенного облика, например, по одинаковым шансам в рулетке (словами, на чет либо нечет, красное либо темное и т.д.). казино 1× slots официальный сайт <a href=http://wdzb.org.cn/home.php?mod=space&uid=84672&do=profile&from=space>http://wdzb.org.cn/home.php?mod=space&uid=84672&do=profile&from=space</a> Отзывы читателей о бонусных акциях помогут составить эмоцию, хотя не забывайте о субъективности личных комментариев.
1хслотс зеркало
Диапазон ставок – Уточните лимиты ставок, действующие в процессе отыгрыша призов. Заведения практически устанавливают максимальную ставку, допустимую по условиям вейждера. <a href=https://www.mshowto.org/forum/members/jamespauri.html>1×slots регистрацию более популярный вариант это</a> скачать 1×slots официальный сайт Поспешите зарегистрироваться на официальном сайте Клубника, дабы моментально получить 33 безвозмездных вращения в слотах от NetEnt и Playson. Используя спины, вы ничем не рискуете, напротив, появляется настоящий шанс победу!Бывают ли бездепозитные бонусы без вейджера? Бывают, случае у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный приз за регистрацию устанавливается вейджер во всех казино. <a href=http://borderforum.ru/viewtopic.php?f=7&t=4576&p=179666#p179666>http://borderforum.ru/viewtopic.php?f=7&t=4576&p=179666#p179666</a> Далее потребуется отыграть вагер и исключить выигрыш. Игрокам без навыка крупно подфартило, меня получить десятки подарков за 1 регистрацию. Если не смогли получить Бездепозитный бонус, не тревожьтесь. Обратитесь в онлайн чат, оператор поможет решить проблему.Также, такой необходимо доказать свой номер аппарата, достичь код, приобретенный в смс-сообщении от клуба ввести в особое поле в личном офисе игрока. казино 1× slots официальный сайт При правильном подходе бездепы — это отличный способ играть на средства без растраты собственных средств. Есть количество рекомендаций, следуя коим возможно извлечь максимально пользы из похожих акций казино. Играть идет только на лицензированных площадках. Скриптовые сайты не дурачат с бонусными предложениями, хотя и употребляют пиратский софт с измененным ГСЧ. Выиграть на этих автоматах невероятно.
1× slots casino зеркало
Фриплей-бонусы. Бонусы за благотворительную забаву есть только в неких клубах. Они зачисляются сразу последствии сотворения профиля и срабатывают недолговременное время. Если у вас нет времени израсходовать свои, они просто завершатся. Что касается медли, как бонусы действуют в течение одного часа. <a href=https://amvnews.ru/forum/profile.php?mode=viewprofile&u=63737>https://amvnews.ru/forum/profile.php?mode=viewprofile&u=63737</a> 1×slots зеркало сайта
1×slots регистрация на сайте 1×slots ru com
Бездепозитный приз по промо-коду будет доступен для забавы, лишь что случае когда Вы активируете специальный бонусный код в разделе с бонусами или укажите промокод при регистрации на веб-сайте. В некоторых случаях, считая активации кода, понадобиться доказать контактные данные игрока и заполнить анкету посетителя.Внесение депо – Будьте готовы пополнить счет после отыгрыша бонуса. Это обычное требование верховодил для данного типа промо-акций. Лучше заблаговременно уточнить, какую необходимую нужно будет заносить на счет. Как правило, идет о наименьшем депозите, хотя вы обязаны быть уверены, собственно он вас по кармашку. Чтобы бездеп не был начислен на Ваш акк, Вам надо активировать бонусный код. Если одобрение от казино было добавлено на Ваш акк автоматически, а Вы не расчитываете его использовать, обратитесь в саппорта с просьбой отменить бездепозитный приз.Не стоит путать забаву в демо и внедрение бонусов. В демонстрационном режиме игрок может расценить механику слота, сюжет и оформление. Но забава ведется на относительные кредиты, поэтому отсутствует главное ? ощущение пыла. Активируя промокод или фриспины, заказчик раньше не расходует свои средства на игровые автоматы, хотя имеет сорвать настоящий куш! 1×slots регистрация на сайте 1×slots ru com <a href=http://fasadf.ru/index.php?subaction=userinfo&user=waggishkingdom4>http://fasadf.ru/index.php?subaction=userinfo&user=waggishkingdom4</a> Но не думать, собственно снабжая пользователей такими бонусами, казино занимается спонсированием. Ведь размеры вознаграждений, в, не великие (средним размером от 5 до 20 долларов). И на эти средства налагаются определенные обстоятельства и ограничения, обязательные к исполнению игрока, случае в последствии он вожделеет получить все свои выигранные финансы.Существует ли стратегии для отыгрыша бездепозитных призов? К раскаянию нет, на выигрыши либо проигрыши с бонусов, казино или игрок повлиять не, отдача игр происходит от разработчиков игр.
1×slots регистрация на сайте
Прежде всего, не запамятовывайте регулярно заглядывать на страничку обзоров бездепозитных бонусов. Они шаг за шагом рассматривают более интересные предложения водящих игорных порталов. <a href=https://itcrowd.pl/gitlab/MaxAcker/max-write/issues/315>https://itcrowd.pl/gitlab/MaxAcker/max-write/issues/315</a> Помните, что в неких забавах сумма ставки идет в зачет вейджера лишь отчасти. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки считаются как отыгранные деньги, тот как в слотах идет в зачет все one hundred percent суммы.Чтобы без увериться в преимуществах бездепозитных призов, довольно зарегистрироваться в казино и получить поощрение. 1×slot зеркало рабочее этих способов предполагает регистрацию Бездепозитные призы за регистрацию в игровых автоматах для хозяев онлайн-казино являются частью рекламной кампании, направленной на повышение аудитории вебсайта. Так они продвигают средства бренды и привлекают новых клиентов.Получить приветственный бонус шансы только новые клиенты онлайн-казино. Способы описаны в условиях акции любого легального казино, почаще всего это:
<b>Смотреть еще похожие новости:</b>
<a href=https://fougerite.com/threads/1×slots-casino-registracija.12642/>1×slots casino регистрация</a>
<a href=http://miupsik.ru/forums/showthread.php?tid=229588>1×slots casino зеркало</a>
<a href=https://www.renevankooten.nl/forum/profile.php?mode=viewprofile&u=49451>1×slots рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Объективные – размер бонуса, коэффициент и обстоятельства вейджера, необходимость внесения депо для вывода средств; Основное различие сомнений, что для получения бездепа не надо пополнять баланс в казино. Но считая сего, есть ряд прочих различий:
#9756 Charlesgunnyhttp://filmkachat.ru
1×slot зеркало рабочее этих способов предполагает регистрацию
Выбирайте превосходнейшие бесплатные призы счет обзоров на Casinoz – и пусть для сопутствует счастье при отыгрыше бонусных кредитов! <a href=http://filmkachat.ru/>1×slots мобильная версия войти казино</a> Мы собрали и опубликовали перечень наихороших бездепозитных казино с призами за регистрацию, которые гарантируют великодушные выигрыши и моментальные выплаты. <a href=https://projectblueberryserver.com/index.php/Shisha_Tobacco_From4_Eur>https://projectblueberryserver.com/index.php/Shisha_Tobacco_From4_Eur</a> Более солидные предложения встречаются очень редко. Зачастую они доступны лишь VIP-игрокам. В оставшихся случаях им всего сопутствуют довольно строгие условия отыгрыша. Также вероятны дополнительные обстоятельства и лимитирования, прописанные в критериях и положения бонусной программки казино.Иногда у гостей вебсайта имеют возникнуть трудности, задачи, препядствия при активации приобретенного промо-кода. В этих случаях, необходимо адресоваться за помощью в саппорта «Support». Для получения ответа, непременно указывается конкретная причина воззвания и подтверждается информация дополнительными скриншотами. Если сложилась неоднозначная ситуация, всегда можно обратиться к основному регулятору либо контролирующему органу, выдавшему этому заведению лицензионный документ. рабочее зеркало 1хслотс <a href=https://98e.fun/space-uid-8849458.html>https://98e.fun/space-uid-8849458.html</a>
сайт 1× slots casino
Верификация аккаунта. Лучше подтвердить лицо сразу в регистрации, чтобы позже не было проблем с выводом средств. Верификация имеет проходить 2-мя способами:Помните, собственно в некоторых играх сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных забавах только от 5% до 50% суммы ставки числятся как отыгранные средства, на как в слотах идет в зачет все 100% суммы. 1×slots официальный сайт, скачать <a href=http://regvoice.com/home.php?mod=space&uid=78452&do=profile>http://regvoice.com/home.php?mod=space&uid=78452&do=profile</a> Для доказательства электронной почты, просто перейдите по активной ссылке в послании, полученном от игрового заведения. 1×slots сайт
1×слот регистрация в 1×slots casino
Также бездепозитные бонусы имеют работать методом вернуть к этой клиентов, пока приостановивших своё сотрудничество с компанией: извещение о бездепе поступает на мобильный телефон либо почту.Как правило, при выводе денег, от играющего потребуется лишь устроить минимальный вклад чтобы, чтобы, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом индивидуальный счет. Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие появляются у начинающих.Верификация аккаунта. Лучше подтвердить лицо незамедлительно в регистрации, чтобы потом не было проблем с выводом денег. Верификация может протекать двумя путями: <a href=http://sandbox.google.com/url?q=http://apicenna.ru/bitrix/redirect.php?goto=http://achikochikun.hatenablog.com/iframe/hatena_bookmark_comment?canonical_uri=https://teletype.in/@urist555/Mmzd0rhgi64>http://sandbox.google.com/url?q=http://apicenna.ru/bitrix/redirect.php?goto=http://achikochikun.hatenablog.com/iframe/hatena_bookmark_comment?canonical_uri=https://teletype.in/@urist555/Mmzd0rhgi64</a> Для получения предоставленных призов вам понадобиться — ПК или мобильное прибор, и остальное дело за малым.Чтобы бездеп не был начислен на Ваш аккаунт, Вам не активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт механически, а Вы не расчитываете его применять, обратитесь в службу с пожеланием отменить бездепозитный приз. 1×slots промокод при регистрации 2025
1×слотс казино
<a href=https://qualityprogamer.de/forum/showthread.php?tid=259750>скачать 1×slots официальный сайт</a> Большинство интернет-казино из нашего топ-10 готовы порадовать вас эксклюзивными акциями. Читайте о них в обзорах и на форуме. 1× slots регистрация в 1×slots casino <a href=http://www.xn–c1aid4a5e.xn–p1ai/user/RenaldoOdorb/>http://www.xn–c1aid4a5e.xn–p1ai/user/RenaldoOdorb/</a>
скачать 1×slots официальный сайт
Обычно, бездепозитные бонусы выдаются под конкретные слоты с фиксированной ставкой, но их наверняка воспрещено применять в игровых автоматах с прогрессивным джекпотом. Список игр, в которых можно применять бездеп, Вы найдете в описании промоакции или сможете уточнить у саппорта заведения.Даже не выиграв крупную необходимую, игрок увлекательно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-то денежных рисков. Быть в курсе превосходнейших акций легко. Достаточно регулярно учить список новых интернет казино с выводом бонуса без депо в данном разделе. Основное верховодило получения бездепа ? творимый аккаунт обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов взыскательно воспрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного телефона, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депозита необходимо соблюдать простую последовательность поступков.Рекомендуем зарегистрироваться на форуме Casinoz. В его особой ветке адепты онлайн-казино публикуют важную информацию о not the slightest down payment bonuses и других услугах. <a href=https://coinzaa.com/u/TravisTal>https://coinzaa.com/u/TravisTal</a> Третитй бездепозитный бонус за регистрацию – денежные свои. К сожалению, начислить рубли либо доллары способны только известные и известные клубы. С их поддержкою возможность насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком.Простая процедура получения бездепозитного приза, кот-ая займет не более 2-х мин. Для получения бездепов, достаточно зарегистрироваться и подтвердить контактные данные. казино 1×slots
<b>Смотреть еще похожие новости:</b>
<a href=https://www.goslog.ru/forum/messages/forum1/message10431/11-obrashcheniya-grazhdan?result=reply#message10431>1×slots на любой вкус как пройти регистрацию</a>
<a href=http://permitbeijing.com/forum/member.php?action=profile&uid=191496>1хслот зеркало сайта</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Основное верховодило получения бездепа ? творимый аккаунт должен быть у юзера первым и единственным. Наличие нескольких аккаунтов взыскательно запрещено. Проверка ведется по имени, адресу электронной почты, номеру мобильного телефонного, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депо необходимо блюсти несложную последовательность поступков. Для отыгрыша приза казино обязует игрока сыграть на сумму, в количество раз превышающую необходимую полученного бонуса — тут выгода компании явна.
#9757 купить сейф для оружияhttps://sejfy-dlya-oruzhiya.ru/
Тут можно преобрести охотничьи сейфы <a href=https://sejfy-dlya-oruzhiya.ru/>оружейный сейф для ружья</a>
#9758 Charlesgunnyhttp://filmkachat.ru
1× slots сайт
При отыгрыше бонусных средств, нужно учитывать срок деяния бонуса и время, которое дается на отыгрыш. По истечению заявленного времени, не отыгранный приз несомненно аннулирован.Как и акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино руководствуются не щедростью, а расчетом на расширение аудитории. Самым всераспространенным форматом такого предложения считаются бездепозитные бонусы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает свежих посетителей и разрешает им составить впечатление о функционале, не рискуя вескими совокупностями. <a href=http://filmkachat.ru/>1×slots казино мобильная версия</a> <a href=http://rvolchansk.ru/user/Jamestrous/>http://rvolchansk.ru/user/Jamestrous/</a> Мы собрали и выпустили список превосходнейших бездепозитных казино с бонусами за регистрацию, коие гарантируют щедрые выигрыши и мгновенные выплаты. 1х слот регистрация в 1×slots casino <a href=http://turkteam.10tl.net/member.php?action=profile&uid=1620>http://turkteam.10tl.net/member.php?action=profile&uid=1620</a>
1×slots официальный сайт мобильная версия
<a href=https://peloton.com.ua/forum/memberlist.php?mode=viewprofile&u=9259>онлайн казино 1×slots</a> 1хслотс рабочее зеркало Бездепозитный бонус казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби избранного заведения, определится в выборе игр и выяснить качество работы саппорта. Довольно нередко, начиная игровой процесс, игрок уже отказывается останавливаться и делает реальный вклад. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы выступать бесплатно вполне как раз таки с призом за регистрацию без надобности заносить депозит. <a href=https://www.google.dm/url?q=https://doctorlazuta.by/>https://www.google.dm/url?q=https://doctorlazuta.by/</a> Срок отыгрыша — это период, кот-ый наступает в момент активации бонуса и заканчивается с его закрытием. Пользователю необходимо уложиться в данный временной зазор, по призовые средства аннулируются. Казино устанавливают перечень игр, ставки каких засчитываются при расчете отыгранных средств. Если тайтл не входит в данный список, то возможность быть недосегаем для загрузки в деянья бонусного предложения. 1×slots зеркало на сегодня Воспользоваться бездепом можно не во всех игровых автоматах: казино вдруг уточняет ограничение для клиентов. Конечно, это можно счесть некоторым неудобством для игрока, но ради стоит отметить, что выбор автоматов всё точно остаётся достаточно большим.В наше время очень просто получить приз за регистрацию в казино. Практически любой игорный жилище с радостью начисляет деньги либо бесплатные вращения. Многие гэмблеры пользуются этим и не стыдятся регистрироваться в любом клубе с прибыльными критериями. Кстати, это отличная возможность выработать победную тактику и сорвать джекпот.
1×slots бонус за регистрацию
Можно ли наваривать на бездепозитных бонусах? Это не работа, здесь как повезет, в в любом предложенном безедепе, вы будете откручивать вейджер и выводить, время можно именовать везением, и дополнительной добавкой к вашему бюджету.Еще одно условие касается объемов ставки. Операторы устанавливают максимальную необходимую, которую игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, выбранной в Личном кабинете. При превышении лимита есть риск потерять бонуса. Существующие ограничения относятся и к определенным видам ставок. Например, играя в рулетку, клиент возможность столкнуться с запретом назначать фишки на шансы. Многие азартные клубы ограничивают сумму вывода заработанную на призе. Сколько б Вы не выиграли, больше, указанной в описании промоакции, суммы Вы не можете вывести. Разница будет аннулирована, Вы в не можете создавать на нее ставки. <a href=http://b775218w.bget.ru/user/JasperStOky/>http://b775218w.bget.ru/user/JasperStOky/</a> Реже бонусы без депо начисляются неизменным игрокам. С их помощью администрация старается вычесть ценных клиентов либо вожделеет поблагодарить за преданность верных посетителей. Но намного почаще для сходственных целей используются такие промоакции: 1×slots на любой вкус как пройти регистрацию Если при регистрации указать промокод, можно гарантировано получить бонус. Где взять ваучер? Посетите тематику блоги или форумы. Иногда администрация клуба проделывает рассылку ваучеров на электронную почту. В заключительное время игорные жилища начали рекламироваться в кинокартинах и сериалах. Присмотритесь и всего заметите промокод, который принесёт 500 или 1 000 бонусных руб.Например, игрок получил 500 рублей при твореньи аккаунта и должен отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую необходимую ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 руб., потребуется сделать 875 спинов для полного отыгрыша.
1хслотс рабочее зеркало
Бесплатный бонус – кредиты, коие онлайн-казино начислит клиенту, не принуждая его пополнять игровой счет. Приветственный приз без депозита ? презент за регистрацию. Выдается средствами, фриспинами или баллами. В заключительном случае бонусные баллы используются для участия в турнирах или обмена на настоящие деньги.Все обожают получать презенты. Согласитесь, практически любой играющий человек несомненно необъятно рад, в получит безвозмездный подарок для игры в интернет казино просто за регистрацию либо же приз за внесенный депо, например именуемые приветственные призы для новых игроков. Соответственно эти онлайн клубы станут более модны и преимущественны у игроков при выборе казино для игры. Топ казино постоянно обновляется и добавляются свежие и интересные игровые клубы с привлекательной бонусной политикой и всеми вероятными прерогативами, к коим относятся эти бонусы как фриспины за регистрацию, валютные бездепозитные бонусы, еще великодушные бонусы за внесенный депо. 1хслотс казино зеркало <a href=https://coffeepeople.ru/memberlist.php?mode=viewprofile&u=37229>https://coffeepeople.ru/memberlist.php?mode=viewprofile&u=37229</a> Индивидуальные поощрения выдаются за совершение деяний: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавления или официального посетителя для ПК. В большинстве казино действуют программки преданности, присваивающие игрокам статусы за активность на сайте. Продвижение на следующий степень нередко с выдачей бездепа.Для такого, чтобы отыграть необходимую вашего бездепозитного приза надо(надобно) выполнить обстоятельства вейджера. Очень часто фриспины даются на конкретные слоты (book of ra, book of dead, book of sun), избирайте разъем для по душе, они все очень красочные и высококачественные. Бездепозитные бонус может быть валютным например и вид фриспинов на слоты
1×slots регистрацию более популярный вариант это
Также учтите, собственно некоторые игровые платформы сузивают перечень государств, коие готовы получить предложенный бездепозитный бонус за регистрацию. К образцу, есть онлайн-заведения, выдающие сходственные призы только жителям определенных государств. К примеру, интернет казино 777 Оригинал дает бездепозитный бонус лишь игрокам из России и стран СНГ. Или напротив, снабжают вознаграждением всех, не обитателей неких государств (как этого, следует внимательно изучать перечень, чтобы впоследствии не появилось практически вопросов и претензий). При отыгрыше бездепов, учитывайте временные лимитирования. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток.Для верификации номера телефонного, в личном профиле выберите опцию „Подтвердить номер телефонного“ и введите в подходящее фон код, полученный в sms-сообщении. <a href=http://91075425.k216.opensrs.cn/home.php?mod=space&uid=1145227>http://91075425.k216.opensrs.cn/home.php?mod=space&uid=1145227</a> 1×slots подтвердит вашу регистрацию если говорить Баланс игрока пополняется на подобающую необходимую. К ней используется вейджер, указанный в правилах промоакции. Вывести выигрыш можно несомненно после как, как пользователь устроит требуемый размер ставок из собственных средств. В редких случаях бездеп работает в формате Free Play. На счет пользователя зачисляется большая сумма, и предоставляется маленькой срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по завершении сего периода сумма на счету будет превышать первоначальную, то разность возможно будет вывести или использовать для последующих ставок.При отыгрыше бонусных средств, необходимо учитывать срок деянья бонуса и время, которое дается на отыгрыш. По истечению заявленного медли, не отыгранный бонус будет аннулирован.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum-macan.ru/memberlist.php?mode=viewprofile&u=1736>1×slots официальный сайт мобильная версия</a>
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=63991&result=reply>1×slots зеркало рабочее на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Наиболее знаменитые гонорары между гэмблеров – бездепозитные бонусы казино. Это не удивительно, ведь возможно получить благотворительные вращения либо виртуальные кредиты, и этом не придётся пополнять счёт, рисковать личностными деньгами. Удастся насладиться различными увеселениями причем выиграть крупную сумму, избегая серьёзного риска.
#9759 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало сайта
Одним из предлогов отдавать преимущество, льготу одному либо другому заведению заключается в привлекательности предлагаемых промоакций и безвозмездных услуг. Безвозмездные фриспины, выдаваемые без нужды создавать какой-нибудь лепта, в перечне находится далековато не в конце.Необходимость отыгрыша. Вейджер в выше, чем для бонусов за депо. И же средства не отыграны, вывести их нельзя. <a href=http://filmkachat.ru/>1×slots сайт зеркало</a> <a href=http://zimmu.com/api/manual/doku.php?id=%D0%9F%D0%B8%D1%86%D1%86%D0%B0%20%D0%BE%D1%82%20%D1%88%D0%B5%D1%84-%D0%BF%D0%BE%D0%B2%D0%B0%D1%80%D0%BE%D0%B2%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!>http://zimmu.com/api/manual/doku.php?id=%D0%9F%D0%B8%D1%86%D1%86%D0%B0%20%D0%BE%D1%82%20%D1%88%D0%B5%D1%84-%D0%BF%D0%BE%D0%B2%D0%B0%D1%80%D0%BE%D0%B2%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!</a> Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам запрещено начислять бонусы посетителям, не имеющим денежных средств на счете. Мы предлагаем осмотреть актуальные призы онлайн-казино с лицензией, которые соблюдают законодательство РБ.Бездепозитный приз по промо-коду несомненно доступен для игры, лишь сомнений случае когда Вы активируете особый бонусный код в разделе с бонусами либо укажите промокод при регистрации на сайте. В некоторых случаях, считая активации кода, придется подтвердить контактные данные игрока и заполнить анкету клиента. 1×slots казино зеркало <a href=http://muhaylovakoliba.1gb.ua/user/Glennurgew/>http://muhaylovakoliba.1gb.ua/user/Glennurgew/</a>
1×slots официальный сайт зеркало
<a href=https://uyghuryol.com/forum/viewtopic.php?f=8&t=234765>1×slots бездепозитный бонус за регистрацию</a> 1×slots сайт зеркало <a href=https://bridge-clip.ru/user/ForsedropEa/>https://bridge-clip.ru/user/ForsedropEa/</a> Как верховодило, новоприбывшие геймеры для желают ознакомиться с способами ввода и вывода валютных средств и сроки выполнения поданных заказов чтобы конкретно разуметь, как стремительно возможность исключить свой казино бонус за регистрацию без депозита на электронный кошелек или же банковскую карту. К счастью для всех играющих, снутри конкретных холдингов, все казино соперничают меж собой. Ведь если бы определенную фирму представляло только одно онлайн-заведение, то ли бы клиенты заметили казино с призом за регистрацию и могли бы рассчитывать лишь на вознаграждение вид бонуса на 1-ое инвестиция. К каждому заведению периодически по завлекать свежих игроков, собственно, в итоге, только на руку всем играющим. 1×slots зеркало 1хслотс регистрация перейти на 1×slots Представленные на этой странице наилучшие бездеп бонусы в казино за регистрацию в 2022 году имеют подходящие обстоятельства. После тщательного анализа редакция портала составила рейтинг спецпредложений, в котором посетители Casino.ru все сортировать список по нескольким аспектам: по сумме, вейджеру, максимальной сумме вывода и т.д.Фриспины – бесплатные вращения с фиксированной ставкой, которые возможно использовать в конкретных игровых автоматах.
1×slots зеркало рабочее
<a href=http://images.google.pt/url?q=http://kidsavenue.ru/bitrix/redirect.php?goto=http://medicinarf.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/XxZP9KYFegG>http://images.google.pt/url?q=http://kidsavenue.ru/bitrix/redirect.php?goto=http://medicinarf.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/XxZP9KYFegG</a> Также случаются случаи, когда казино начисляет обсужденный бонус после регистрации нового посетителя по вашей реферальной ссылке и первого пополнения счёта по обозначенным лимитам.Используйте лучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из перечня ниже, дабы заработать презенты за простые деяния и уже сегодня получить 1-ый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высокой отдачей и быстрыми выводами на электрические кошельки. 1×slots зеркало сайта Максимальная ставка ? уточняется в денежной счета и ограничивает объем ставки за раз спин. В случае ее превышения бонус возможность быть аннулирован. Также в правилах имеет находиться запрет на размещение ставок определенного вида, например, по одинаковым шансам в рулетке (словами, на чет либо нечет, красное или черное и т.д. ).
1х слотс зеркало регистрация в 1×slots casino
Фриспины без депозита либо вспомогательные средства посодействуют поближе познакомиться с игровой платформой и её функциями. За счёт презентов возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям ради игры напротив живых крупье.Бездепозитные бонусы – это исключительно занимательная и наиболее перспективная акция интернет-казино. Они том чем фри-спинов, поэтому собственно выплаты в бесплатных вращениях не гарантированы, ведь композиции на барабанах игрового аппарата все не сложиться. Постарайтесь отыграть вейджер, дабы замечена возможность забыть заявку на выплату. Кстати, на всех сайтах, представленных в списке, доступны современные платёжные инструменты. Вы можете получить выигрыш на электронной кошелёк, карту, телефон.Ну и конечно же, для казино бездепозитные бонусы прибыльны с имиджевой стороны: сходственная щедрость повышает уровень преданности клиентов к компании. скачать 1×slots на андроид мобильная версия <a href=https://tazovod.khalal.ru/forum/memberlist.php?mode=viewprofile&u=41556>https://tazovod.khalal.ru/forum/memberlist.php?mode=viewprofile&u=41556</a>
1×slots зеркало быструю регистрацию а также мгновенное
<a href=https://valetinowiki.racing/index.php?title=Выкуп_авто>https://valetinowiki.racing/index.php?title=Выкуп_авто</a> Наличие у игрока второго аккаунта. Запрещено делать количество профилей для неоднократного получения бездепов.Вейджер менее х30–35 считается приемлемым. Опытные игроки заявляют, собственно с таким вейджером реально остаться в плюсе, случае верно подойти к выбору игрового аппарата. 1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots Способы получения бездепа различаются от облика приза, который понравился игроку. Но вам так нужно быть зарегистрированным в легальном онлайн-казино и подтвердить собственную личность. В общем облике пошаговая аннотация для получения бездепозитного бонуса смотрится например:
<b>Смотреть еще похожие новости:</b>
<a href=http://vn-info.net/user/Josephkam/>скачать 1×slots на андроид мобильная версия</a>
<a href=http://nrj.rs.ba/memberlist.php?mode=viewprofile&u=2111>1×slots официальный зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Доступность — бездепозитные бонусы в казино почаще всего предоставляются свежим игрокам, но бывают случаи, когда приз все получить и действующие клиенты.
#9760 Charlesgunnyhttp://filmkachat.ru
казино 1×slots официальный сайт
У нас на сайте Вы отыщите список бонусов без депозита в проверенных казино и подробную информацию о том как их получить и применять. <a href=http://filmkachat.ru/>1×slots регистрация на сайте 1×slots ru com</a> <a href=http://forum.notionmusic.com/memberlist.php?mode=viewprofile&u=58205>http://forum.notionmusic.com/memberlist.php?mode=viewprofile&u=58205</a> Во всех законных онлайн-казино Беларуси нужно подтверждение паспортных данных для игры — это заявка правительства государства. 1×slots официальный сайт зеркало рабочее <a href=http://dooood.fun/member.php?action=profile&uid=3440>http://dooood.fun/member.php?action=profile&uid=3440</a> Если простыми словами, бездепы – это определённая сумма средств либо 10, 50, 100 фриспинов. Достаточно зарегистрироваться в клубе и можно забирать подарки. Но есть некоторые аспекты. Существуют игорные жилища, которые перед тем как начислить призы настоятельно привязать телефонный, предоставить копии документов.Казино выводит средства только на ту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного приза, Вам сначала необходимо восполнить счет. В неких клубах узкий перечень способов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет непосредственно с этих платежных методов, которые доступны для вывода.
1хслотс 1хслотс регистрация перейти на 1×slots
Выиграть реальные средства в казино не пополняя счет – трудно, но возможно. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными бонусами и начните играть на бонусные свои. По статистике в одном из 10-ти заведений можно заработать маленькую необходимую денег помощью бонусных средств.Когда речь о денежных призах, казино практически устанавливают условия вейджера, которые нужно выполнить, дабы вывести выигрыш. <a href=http://forum.survival-readiness.com/viewtopic.php?t=245845>1× slots сайт</a> 1×slot официальный сайт <a href=http://forums.ggcorp.me/space-uid-3858406.html>http://forums.ggcorp.me/space-uid-3858406.html</a> Зарегистрироваться в казино по особой ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефона и электрическую почту). Для подтверждения номера аппарата нужно в собственном профиле указать собственный номер и нажать кнопку „Подтвердить номер аппарата“, далее Вы получите sms-сообщение с кодом, кот-ый необходимо установить в соответствующее поле. Для подтверждения электрической почты, перейти по активной ссылке в послании от казино. 1хслотс зеркало Бездепозитные призы начисляются только один раз. Не стоит открывать новые аккаунты, чтобы получить их повторно. Служба защищенности казино обязательно выявит «левого» соучастника и заблокирует. Если гость выполнит нужные притязания, отыграет свою ставку и решит вывести личный выигрыш, то ему нужно к, собственно казино непременно востребует дать ксерокопии собственных документов, чтобы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные средства исключить не получится.
1×slots рабочее зеркало на сегодня
Популярность интернет казино растёт и всё больше юзеров начинают интерес азартными забавами. Бездепозитные призы 2022 года, это уникальные подарки за регистрацию. С их помощью новые игроки имеют получить безвозмездные вращения или деньги на баланс за одну регистрацию. С выходом игорных заведений в онлайне, бездепозитные призы стали наимоднейшим способом вербования игроков. Подобные акции имеют как плюсы, так и минусы. Разумеется, больше плюсов, о коих мы расскажем. Наш вебсайт собрал превосходнейшие предложения из онлайна на 2022 год. Воспользуйтесь любым презентом и можете получить шанс на вывод выигрыша. Почему шанс? Потому собственно, перед выводом выигрыша необходимо выполнить обстоятельства.Если идет об неповторимых услугах, может понадобиться регистрация в казино по ссылке с партнерского вебсайта. <a href=http://h96375tu.bget.ru/member.php?action=profile&uid=132545>http://h96375tu.bget.ru/member.php?action=profile&uid=132545</a> К примеру, игроку выдаются бесплатные свои в заведении в объеме пятидесяти либо 100 $ (вейджер на которые сочиняет 100х). То есть, любому новоприбывшему игроку выскакивает притягивающая картинка, которая сулит выплату всех зачисленных компанией средств. Не стоит внимания на казино бонус за регистрацию без депо с чрезмерно великой либо довольно малеханькой суммой бонусов, потому что, том кропотливо выучив все условия, здесь скорее, несомненно некий подкол.Для тех, кто только подумывает испытывать собственную удачу, еще для проф игроков, ищущих свежие площадки для выигрышей, водящие лицензированные казино нередко устраивают различные промоакции, и лучшее услуг прошедшее время – как для новичков, например и для проф игроков – бездепозитный бонус за регистрацию. 1хслотс рабочее зеркало
1×slots зеркало регистрация в 1×slots casino
<a href=https://surfaceprophets.com/threads/1×slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F.26552/>1×slots официальный регистрация</a> В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать собственный выигрыш с даровых вращений. Прибыль, коию Вы заработаете на таком бездепе возможно ставить на вывод без какого либо отыгрыша. 1×slots регистрация на 1хслотс <a href=http://ng.ru/bitrix/click.php?goto=http://museumgagarin.ru/bitrix/redirect.php?goto=http://beautyconcept-pro.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/kQ26cPzWw5S>http://ng.ru/bitrix/click.php?goto=http://museumgagarin.ru/bitrix/redirect.php?goto=http://beautyconcept-pro.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/kQ26cPzWw5S</a> Для получения предоставленных бонусов вас понадобиться — ПК или мобильное устройство, и остальное дело за небольшим.У каждой игры средства притязания по отыгрышу вейджера. Проще всего выполнить условия на автоматах – система засчитает каждую ставку. В рулетке и покере сделать это намного сложнее. Именно поэтому например важно внимательно читать обстоятельства получения бездепов. Если проф гэмблеры с лёгкостью отыграют вейджер в каждой ирге, то новенькие просто «спустят бонус на ветер».
1×slots зеркало проходить регистрацию это отличный вариант
Так же стоит выделить то, что в каждом интернет казино установлен собственный наибольший кешаут на бездепозитный бонус. Как правило кешаут — это предельная сумма средств, кот-ая доступная для вывода с бездепозитного приза. <a href=http://abat-td.ru/bitrix/redirect.php?goto=http://volleyball.businesschampions.ru/away/?to=http://academest.ru/bitrix/click.php?goto=https://telegra.ph/Sokrashchenie-obema-uslug-po-zakonu-44-FZ-09–19>http://abat-td.ru/bitrix/redirect.php?goto=http://volleyball.businesschampions.ru/away/?to=http://academest.ru/bitrix/click.php?goto=https://telegra.ph/Sokrashchenie-obema-uslug-po-zakonu-44-FZ-09–19</a> 3. Подтвердить данные. В зависимости от клуба, нужно привязать телефон или почту, показать индивидуальную информацию;Как прочие акции операторов, бездепы — это маркетинговый инструмент. При их раздаче казино оперируют не щедростью, а расчетом на расширение аудитории. Самым распространенным форматом такого предложения являются бездепозитные призы за регистрацию в игровых автоматах. Поощрение за активацию аккаунта привлекает свежих гостей и дозволяет им составить впечатление о функционале, не рискуя вескими суммами. 1×slots регистрация на сайте 1×slots ru com
<b>Смотреть еще похожие новости:</b>
<a href=https://www.one2bay.de/forum/showthread.php?tid=323471>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<a href=https://www.goslog.ru/forum/messages/forum1/message9718/11-obrashcheniya-grazhdan?result=reply#message9718>1х слот регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Похожим образом трудится 3-ий метод доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения клиента или в связи с получения им VIP-статуса. Подарок предоставляется в воззвания в поддержку и проверки.
#9761 MonroZercalohttps://monro-casino-apk.ru/monro-oficzialnyj-sajt
<a href=https://monro-casino-apk.ru/monro-oficzialnyj-sajt>http://monro-casino-apk.ru/monro-oficzialnyj-sajt</a>
Скачать apk файл казино онлайн Monro – побеждай сейчас! <a href=https://monro-casino-apk.ru/monro-oficzialnyj-sajt>https://monro-casino-apk.ru/monro-oficzialnyj-sajt</a>
#9762 Soldownloadhttps://sol-casino-apk.ru/sol-skachat/
<a href=https://sol-casino-apk.ru/sol-skachat/>sol-casino-apk.ru/sol-skachat/</a>
Скачать последнюю версию приложения казино онлайн Сол – побеждай сейчас! <a href=https://sol-casino-apk.ru/sol-skachat/>http://sol-casino-apk.ru/sol-skachat/</a>
#9763 MonroCasinohttps://monro-casino-apk.ru/monro-casino
<a href=http://security.ua/bitrix/rk.php?goto=https://monro-casino-apk.ru/monro-casino>monro-casino-apk.ru/monro-casino</a> <a href=http://xfreepornxx.com/external_link/?url=https://monro-casino-apk.ru/monro-casino>monro-casino-apk.ru/monro-casino</a> <a href=http://riac34.ru/bitrix/rk.php?goto=https://monro-casino-apk.ru/monro-casino>monro-casino-apk.ru/monro-casino</a> <a href=http://mu3.nayana.kr.xx3.kz/go.php?url=https://monro-casino-apk.ru/monro-casino>monro-casino-apk.ru/monro-casino</a> <a href=http://doba.te.ua/gateway?goto=https://monro-casino-apk.ru/monro-casino>monro-casino-apk.ru/monro-casino</a> <a href=http://3devilmonsters.com/cgi-bin/at3/out.cgi?id=214&trade=https://monro-casino-apk.ru/monro-casino>monro-casino-apk.ru/monro-casino</a> <a href=http://footsub.com/out.php?url=https://monro-casino-apk.ru/monro-casino>monro-casino-apk.ru/monro-casino</a> <a href=http://foxnews.net.xx3.kz/go.php?url=https://monro-casino-apk.ru/monro-casino>monro-casino-apk.ru/monro-casino</a> <a href=https://comoshin.hateblo.jp/iframe/hatena_bookmark_comment?canonical_uri=https://monro-casino-apk.ru/monro-casino>monro-casino-apk.ru/monro-casino</a> <a href=https://maps.google.nu/url?q=https://monro-casino-apk.ru/monro-casino>monro-casino-apk.ru/monro-casino</a> <a href=https://estilograficas.mforos.com/visit/?https://monro-casino-apk.ru/monro-casino>monro-casino-apk.ru/monro-casino</a> <a href=https://www.performia-cis.ru/bitrix/redirect.php?event1=Banner-Test&event2=&event3=&goto=https://monro-casino-apk.ru/monro-casino>monro-casino-apk.ru/monro-casino</a> <a href=https://pattayathailand.ru/go/url=https://monro-casino-apk.ru/monro-casino>monro-casino-apk.ru/monro-casino</a> <a href=https://www.cooky.vn/goto/?url=https://monro-casino-apk.ru/monro-casino>monro-casino-apk.ru/monro-casino</a> <a href=http://www.filosof.com.ua/click.php?url=https://monro-casino-apk.ru/monro-casino>monro-casino-apk.ru/monro-casino</a>
Install application online casino monro – play now!
<a href=http://www.nauticalworkz.com/redirect.aspx?destination=https://monro-casino-apk.ru/monro-casino>monro-casino-apk.ru/monro-casino</a> <a href=https://izismile.com/go.php?url=https://monro-casino-apk.ru/monro-casino>monro-casino-apk.ru/monro-casino</a> <a href=http://simpledistribution.ru/bitrix/rk.php?goto=https://monro-casino-apk.ru/monro-casino>monro-casino-apk.ru/monro-casino</a> <a href=https://crew-united.com/redir.asp?url=https://monro-casino-apk.ru/monro-casino>monro-casino-apk.ru/monro-casino</a> <a href=https://www.picaturadulce.ro/SetLanguage?languageId=ro-RO&returnUrl=https%3A%2F%2Fplarium.com/forum/en/raid-shadow-legends/676_tavern/1433693_do-you-feel-battle-passes-are-just-the-norm-now-in-games>monro-casino-apk.ru/monro-casino</a> <a href=https://www.google.com.bh/url?sa=t&url=https%3A%2F%2Fplarium.com/forum/en/raid-shadow-legends/676_tavern/1433693_do-you-feel-battle-passes-are-just-the-norm-now-in-games>monro-casino-apk.ru/monro-casino</a> <a href=http://m.stox.vn/Home/ChangeLanguage?lang=en-US&returnUrl=http%3A%2F%2Fplarium.com/forum/en/raid-shadow-legends/676_tavern/1433693_do-you-feel-battle-passes-are-just-the-norm-now-in-games>monro-casino-apk.ru/monro-casino</a> <a href=http://fjsanze.ff66.net/productshow.asp?id=67&mnid=51889&url=http%3A%2F%2Fplarium.com/forum/en/raid-shadow-legends/676_tavern/1433693_do-you-feel-battle-passes-are-just-the-norm-now-in-games>monro-casino-apk.ru/monro-casino</a> <a href=http://sns.gongye360.com/link.php?url=https://monro-casino-apk.ru/monro-casino>monro-casino-apk.ru/monro-casino</a> <a href=http://cse.google.co.cr/url?sa=t&url=https://monro-casino-apk.ru/monro-casino>monro-casino-apk.ru/monro-casino</a> <a href=http://www.fwon.ru/index.php?redirect/&url=https://monro-casino-apk.ru/monro-casino>monro-casino-apk.ru/monro-casino</a> <a href=https://julla-mama.com/bitrix/redirect.php?event1=&event2=&event3=&goto=https://monro-casino-apk.ru/monro-casino>monro-casino-apk.ru/monro-casino</a> <a href=http://www.webflyer.com/help/send_this_page/?url=https://monro-casino-apk.ru/monro-casino>monro-casino-apk.ru/monro-casino</a> <a href=http://images.t.me/s/worldcasinonet.ai/url?q=https://monro-casino-apk.ru/monro-casino>monro-casino-apk.ru/monro-casino</a> <a href=https://dian.blog.idnes.cz/redir.aspx?url=https://monro-casino-apk.ru/monro-casino>monro-casino-apk.ru/monro-casino</a>
#9764 MonroApkhttps://monro-casino-apk.ru/monro-apk
<a href=http://safe-internet.ru/bitrix/rk.php?goto=https://monro-casino-apk.ru/monro-apk>monro-casino-apk.ru/monro-apk</a> <a href=http://www.techno-press.org/sqlYG5/url.php?url=https://monro-casino-apk.ru/monro-apk>monro-casino-apk.ru/monro-apk</a> <a href=http://www.pageglance.com/external/ext.aspx?url=https://monro-casino-apk.ru/monro-apk>monro-casino-apk.ru/monro-apk</a> <a href=http://v8bit.ru.xx3.kz/go.php?url=https://monro-casino-apk.ru/monro-apk>monro-casino-apk.ru/monro-apk</a> <a href=http://www.xgazete.com/go.php?url=https://monro-casino-apk.ru/monro-apk>monro-casino-apk.ru/monro-apk</a> <a href=http://www.gayblackcocks.net/crtr/cgi/out.cgi?id=81&tag=toplist&trade=https://monro-casino-apk.ru/monro-apk>monro-casino-apk.ru/monro-apk</a> <a href=http://nauga4u.com.xx3.kz/go.php?url=https://monro-casino-apk.ru/monro-apk>monro-casino-apk.ru/monro-apk</a> <a href=http://shoponline56777.digiblogbox.com.xx3.kz/go.php?url=https://monro-casino-apk.ru/monro-apk>monro-casino-apk.ru/monro-apk</a> <a href=http://pustkowski.eu.xx3.kz/go.php?url=https://monro-casino-apk.ru/monro-apk>monro-casino-apk.ru/monro-apk</a> <a href=http://altis-med.ru/bitrix/rk.php?goto=https://monro-casino-apk.ru/monro-apk>monro-casino-apk.ru/monro-apk</a> <a href=http://www.rcbcy.com/bitrix/redirect.php?event1=&event2=&event3=&goto=https://monro-casino-apk.ru/monro-apk>monro-casino-apk.ru/monro-apk</a> <a href=http://www.hackmail.cz/redir.php?url=https://monro-casino-apk.ru/monro-apk>monro-casino-apk.ru/monro-apk</a> <a href=http://www.avia-s.ru/bitrix/rk.php?goto=https://monro-casino-apk.ru/monro-apk>monro-casino-apk.ru/monro-apk</a> <a href=http://stanislaw-tabak.ru/bitrix/rk.php?goto=https://monro-casino-apk.ru/monro-apk>monro-casino-apk.ru/monro-apk</a> <a href=https://fastventure.co/api/1/click?url=https://monro-casino-apk.ru/monro-apk>monro-casino-apk.ru/monro-apk</a>
Install application online casino monro – win now!
<a href=http://genkin-log.com/wp-content/plugins/post-linkcontrol/click.php?url=https://monro-casino-apk.ru/monro-apk>monro-casino-apk.ru/monro-apk</a> <a href=http://image.google.co.ls/url?q=https://monro-casino-apk.ru/monro-apk>monro-casino-apk.ru/monro-apk</a> <a href=http://www.36movs.com/cgi-bin/atx/out.cgi?id=50&tag=text_top&trade=https://monro-casino-apk.ru/monro-apk>monro-casino-apk.ru/monro-apk</a> <a href=http://lp-inside.ru/go?https://monro-casino-apk.ru/monro-apk>monro-casino-apk.ru/monro-apk</a> <a href=http://growinsta.xyz.xx3.kz/go.php?url=https://monro-casino-apk.ru/monro-apk>monro-casino-apk.ru/monro-apk</a> <a href=https://www.wearn.com/ad_redirect/count.asp?url=https://monro-casino-apk.ru/monro-apk>monro-casino-apk.ru/monro-apk</a> <a href=http://activity.jumpw.com/logout.jsp?returnurl=https://monro-casino-apk.ru/monro-apk>monro-casino-apk.ru/monro-apk</a> <a href=http://switchingutilities.co.uk/go.php?url=https://monro-casino-apk.ru/monro-apk>monro-casino-apk.ru/monro-apk</a> <a href=http://lozovamachinery.com/bitrix/rk.php?goto=canadianpharmacyies.comhttps://monro-casino-apk.ru/monro-apk>monro-casino-apk.ru/monro-apk</a> <a href=https://images.google.sm/url?sa=t&url=https://monro-casino-apk.ru/monro-apk>monro-casino-apk.ru/monro-apk</a> <a href=http://schnettler.de/url?q=https://monro-casino-apk.ru/monro-apk>monro-casino-apk.ru/monro-apk</a> <a href=http://shadunsi.com/productshow.asp?id=5&mnid=44699&mc=%CB%AE%CF%E4%CF%B5%C1%D0&url=http%3A%2F%2Fwww.tonymacx86.com/threads/port-your-own-mac-games.326959>monro-casino-apk.ru/monro-apk</a> <a href=http://www.gensuikin.org/i/index.cgi?id=1&mode=redirect&no=242&ref_eid=110&url=https://monro-casino-apk.ru/monro-apk>monro-casino-apk.ru/monro-apk</a> <a href=http://crandallconsult.com/?URL=https://monro-casino-apk.ru/monro-apk>monro-casino-apk.ru/monro-apk</a> <a href=http://weddingindustry.ru/bitrix/redirect.php?event1=news_out&event2=http3A2F2Fvk.com2Fegserg&event3=C5E3EEF0+D1E5F0E3E5E5E2&goto=https://monro-casino-apk.ru/monro-apk>monro-casino-apk.ru/monro-apk</a>
#9765 MonroCasinohttps://monro-casino-apk.ru
<a href=http://www.viewu.net/redirect.php?url=https://monro-casino-apk.ru>monro-casino-apk.ru</a> <a href=http://forum-people.ru/click.php?https://monro-casino-apk.ru>monro-casino-apk.ru</a> <a href=https://2normal.com/redirect.php?id=https://monro-casino-apk.ru>monro-casino-apk.ru</a> <a href=https://maps.google.rw/url?q=https://monro-casino-apk.ru>monro-casino-apk.ru</a> <a href=http://mosfoodtorg.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=https://monro-casino-apk.ru>monro-casino-apk.ru</a> <a href=http://freekilomovies.com/movies/go.php?id=683923_1&url=https://monro-casino-apk.ru>monro-casino-apk.ru</a> <a href=https://mountcarmelpethospital.securevetsource.com/site/view/113803_Home.pml?retUrl=https://monro-casino-apk.ru>monro-casino-apk.ru</a> <a href=http://www.lesbosexonly.com/cgi-bin/out.cgi?click=17.jpg.22782&url=https://monro-casino-apk.ru>monro-casino-apk.ru</a> <a href=http://exxxlusive.com/cgi-bin/crtr/out.cgi?id=121&l=top_top&u=https://monro-casino-apk.ru>monro-casino-apk.ru</a> <a href=http://mos-shina.ru/bitrix/redirect.php?goto=https://monro-casino-apk.ru>monro-casino-apk.ru</a> <a href=http://pp5461.com/home/link.php?url=https://monro-casino-apk.ru>monro-casino-apk.ru</a> <a href=http://newboards.theonering.net/forum/gforum/perl/gforum.cgi?url=https://monro-casino-apk.ru>monro-casino-apk.ru</a> <a href=http://hipersocial.wappy.lt/redirect.php?url=https://monro-casino-apk.ru>monro-casino-apk.ru</a> <a href=https://oshisha.net/bitrix/rk.php?goto=https://monro-casino-apk.ru>monro-casino-apk.ru</a> <a href=http://e-buy.kz/bitrix/redirect.php?event1=&event2=&event3=&goto=https://monro-casino-apk.ru>monro-casino-apk.ru</a>
Download client online casino monro – play right now!
<a href=http://rshb-am.ru/bitrix/rk.php?goto=https://monro-casino-apk.ru>monro-casino-apk.ru</a> <a href=http://floracbd.fr.xx3.kz/go.php?url=https://monro-casino-apk.ru>monro-casino-apk.ru</a> <a href=http://www.allbrutaldrawings.com/cgi-bin/out.cgi?click=pic2.jpg.18206&url=https://monro-casino-apk.ru>monro-casino-apk.ru</a> <a href=http://www.secomp.cz/redir.asp?wenid=8&wenurllink=https://monro-casino-apk.ru>monro-casino-apk.ru</a> <a href=http://krs-gimnazy13.ru/bitrix/rk.php?goto=https://monro-casino-apk.ru>monro-casino-apk.ru</a> <a href=https://www.azerishiq.az/lang/en?url=https://monro-casino-apk.ru>monro-casino-apk.ru</a> <a href=http://school.bilimal.kz.xx3.kz/go.php?url=https://monro-casino-apk.ru>monro-casino-apk.ru</a> <a href=https://yudian.cc/link.php?url=https://monro-casino-apk.ru>monro-casino-apk.ru</a> <a href=http://images.google.cl/url?sa=t&url=https://monro-casino-apk.ru>monro-casino-apk.ru</a> <a href=http://asa-virtual.org/info.php?a%5B%5D=%3Ca+href%3Dhttps://monro-casino-apk.ru%3E%D0%9C%D0%BE%D1%81%D1%82%D0%B1%D0%B5%D1%82%3C/a%3E%3Cmeta+http-equiv%3Drefresh+content%3D0;url%3Dhttps://monro-casino-apk.ru+/%3E>monro-casino-apk.ru</a> <a href=https://www.ijbssnet.com/view.php?u=https://monro-casino-apk.ru>monro-casino-apk.ru</a> <a href=https://dvorak.blog.idnes.cz/redir.aspx?url=https://monro-casino-apk.ru>monro-casino-apk.ru</a> <a href=http://www.eolieferries.it/AdRedir.asp?url=https://monro-casino-apk.ru>monro-casino-apk.ru</a> <a href=https://www.biomar.com/userauthentication/logout/?returnUrl=https://monro-casino-apk.ru>monro-casino-apk.ru</a> <a href=http://www.malachicomputer.com/blog/ct.ashx?url=https://monro-casino-apk.ru>monro-casino-apk.ru</a>
#9766 SolCasinoApkhttps://sol-casino-apk.ru
<a href=https://sol-casino-apk.ru>http://www.sol-casino-apk.ru</a>
Установить приложение казино Сол – выигрывай прямо сейчас! <a href=https://sol-casino-apk.ru>http://sol-casino-apk.ru</a>
#9767 SolSkachathttps://sol-casino-apk.ru/sol-skachat/
<a href=http://kenolaserclean.com.xx3.kz/go.php?url=https://sol-casino-apk.ru/sol-skachat>https://sol-casino-apk.ru/sol-skachat</a> <a href=http://protymen.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=https://sol-casino-apk.ru/sol-skachat>https://sol-casino-apk.ru/sol-skachat</a> <a href=https://www.glutenlife.ru/bitrix/redirect.php?goto=https://sol-casino-apk.ru/sol-skachat>https://sol-casino-apk.ru/sol-skachat</a> <a href=http://proxy-bc.researchport.umd.edu.xx3.kz/go.php?url=https://sol-casino-apk.ru/sol-skachat>https://sol-casino-apk.ru/sol-skachat</a> <a href=http://edgarqlxkp.articlesblogger.com.xx3.kz/go.php?url=https://sol-casino-apk.ru/sol-skachat>https://sol-casino-apk.ru/sol-skachat</a> <a href=http://images.google.dm/url?q=https://sol-casino-apk.ru/sol-skachat>https://sol-casino-apk.ru/sol-skachat</a> <a href=http://200.1.25.44.xx3.kz/go.php?url=https://sol-casino-apk.ru/sol-skachat>https://sol-casino-apk.ru/sol-skachat</a> <a href=https://forestnet.com/ad-direct.php?link=1&id=18&url=https://sol-casino-apk.ru/sol-skachat>https://sol-casino-apk.ru/sol-skachat</a> <a href=http://shashlikoff.com/bitrix/redirect.php?event1=&event2=&event3=&goto=https://sol-casino-apk.ru/sol-skachat>https://sol-casino-apk.ru/sol-skachat</a> <a href=http://www.mbcarchive.com/zoom/gateway/zoomMemberCheck.aspx?pid=55&returnurl=https://sol-casino-apk.ru/sol-skachat>https://sol-casino-apk.ru/sol-skachat</a> <a href=https://ericorocha.com.br/gce/?u=https://sol-casino-apk.ru/sol-skachat>https://sol-casino-apk.ru/sol-skachat</a> <a href=http://www.google.cg/url?q=https://sol-casino-apk.ru/sol-skachat>https://sol-casino-apk.ru/sol-skachat</a> <a href=http://www.trinisica.com///redirect.asp?from=image_3d&dest=https://sol-casino-apk.ru/sol-skachat>https://sol-casino-apk.ru/sol-skachat</a> <a href=https://leadingageohio.org/aws/OSAE/ctr/news_article/91385?click=https://sol-casino-apk.ru/sol-skachat>https://sol-casino-apk.ru/sol-skachat</a> <a href=http://www.commercialmediation.com/__media__/js/netsoltrademark.php?d=https://sol-casino-apk.ru/sol-skachat>https://sol-casino-apk.ru/sol-skachat</a>
Install latest version of the application bookmaker sol – win right now!
<a href=http://www.jika.be/authentification.aspx?returnurl=https://sol-casino-apk.ru/sol-skachat/>https://sol-casino-apk.ru/sol-skachat/</a> <a href=http://prostofinansy.com/?goto=https://sol-casino-apk.ru/sol-skachat/>https://sol-casino-apk.ru/sol-skachat/</a> <a href=http://djalaluddinpane.org/home/LangConf/set?url=https://sol-casino-apk.ru/sol-skachat/>https://sol-casino-apk.ru/sol-skachat/</a> <a href=http://www.puenktli.ch/puenktli/link.php?url=https://sol-casino-apk.ru/sol-skachat/>https://sol-casino-apk.ru/sol-skachat/</a> <a href=http://bankgoda.by/redirect.php?url=https://sol-casino-apk.ru/sol-skachat/>https://sol-casino-apk.ru/sol-skachat/</a> <a href=http://u.cncn.com/link.php?url=https://sol-casino-apk.ru/sol-skachat/>https://sol-casino-apk.ru/sol-skachat/</a> <a href=http://alt1.toolbarqueries.google.com.ua/url?q=https://sol-casino-apk.ru/sol-skachat/>https://sol-casino-apk.ru/sol-skachat/</a> <a href=https://maschinenportal24.ru/bitrix/rk.php?goto=https://sol-casino-apk.ru/sol-skachat/>https://sol-casino-apk.ru/sol-skachat/</a> <a href=http://www.google.so/url?sa=t&rct=j&q=&esrc=s&source=web&cd=1&ved=0ccsqfjaa&url=https://sol-casino-apk.ru/sol-skachat/>https://sol-casino-apk.ru/sol-skachat/</a> <a href=https://nova.rambler.ru/search?r0_split=wthr_infs&query=https://sol-casino-apk.ru/sol-skachat/>https://sol-casino-apk.ru/sol-skachat/</a> <a href=https://ec2–52–70–39–20.compute-1.amazonaws.com/https://sol-casino-apk.ru/sol-skachat/>https://sol-casino-apk.ru/sol-skachat/</a> <a href=https://46.farcaleniom.com/index/d2?diff=0&source=og&campaign=8220&content=&clickid=w7n7kkvqfyfppmh5&aurl=http%3A%2F%2Fwww.longisland.com/profile/Raclevant&an=&term=&s>https://sol-casino-apk.ru/sol-skachat/</a> <a href=http://www.miningusa.com/adredir.asp?url=https://sol-casino-apk.ru/sol-skachat/>https://sol-casino-apk.ru/sol-skachat/</a> <a href=http://www.coloradoballet.org/Redirect.aspx?destination=https://sol-casino-apk.ru/sol-skachat/>https://sol-casino-apk.ru/sol-skachat/</a> <a href=https://meta-preisvergleich.de/r.cgi?https://sol-casino-apk.ru/sol-skachat/>https://sol-casino-apk.ru/sol-skachat/</a>
#9768 SolAndroidhttps://sol-casino-apk.ru/sol-na-androjd/
<a href=http://www.dealighted.com/clicks.php?id=2679144&url=https://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=http://loredz.com.xx3.kz/go.php?url=https://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=http://td-yarn.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=https://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=http://www.blueslinks.nl/?linkid=1924&url=kualitasqq.comhttps://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=http://www.ghanaemb-cairo.com/xmlerrors/errorpage/index.php?url=https://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=http://proxy.chamc.co.kr/_Lib_Proxy_Url/https://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=https://totalfreewebcams.chaturbate.com/external_link/?url=https://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=https://gomotors.net/go/?url=https://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=http://castleroute.hu.xx3.kz/go.php?url=https://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=http://www.majorcabdriver.com/gbook/go.php?url=https://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=https://golub-dobrzyn.praca.gov.pl/rynek-pracy/bazy-danych/klasyfikacja-zawodow-i-specjalnosci/wyszukiwarka-opisow-zawodow/-/klasyfikacja_zawodow/zawod/334401?_jobclassificationportlet_WAR_nnkportlet_backUrl=https://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=http://ftp.thechronicleshopper.com/clicklink/outgoing.php?name=TonysGarage&thelink=https://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=http://viaonlinebuy.us.xx3.kz/go.php?url=https://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=https://hunnycoco.miiduu.com/?currency_code=RMB&redirect=https://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=http://www.rg-be.ru/link.php?url=https://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a>
Install client casino sol – win today !
<a href=http://alt1.toolbarqueries.google.com.na/url?q=https://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=http://uandi.ru/go.php?go=yconnect.com%2F__media__%2Fjs%2Fnetsoltrademark.php%3Fd%3Djencord.ru%2Fbitrix%2Fredirect.php%3Fevent1%3D%26event2%3D%26event3%3D%26goto%3Dhttps://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=https://toolbarqueries.google.co.jp/url?source=web&rct=j&url=https://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=https://www.trailmeister.com/wp-content/plugins/wp-tables/clickthrough.php?k=d3BfYWRzfGNsaWNrc3wyNA==&url=greasyfork.org/en/discussions/requests/173654-esp-for-browser-games>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=http://dec.2chan.net/bin/jump.php?https://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=http://proxy-bc.researchport.umd.edu.xx3.kz/go.php?url=https://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=http://www.kununu.com/verweis/web/97c20f09c06c1e252c248e2c0b07bdc4/aHR0cDovL2NsYXJpdHljaGluYS5jb20vX19tZWRpYV9fL2pzL25ldHNvbHRyYWRlbWFyay5waHA,ZD10ZWpqaS5jb20lMkZpcCUyRnVybC10by1pcC1hZGRyZXNzLmFzcHglM0Zkb21haW4lM0RrdXJzeS1zZW8tbW9za3ZhMi5ydQhttps://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=http://heaventools.com/bitrix/rk.php?goto=https://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=http://peoun.com.xx3.kz/go.php?url=https://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=http://www.txzylt.com/home/link.php?url=https://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=http://stanremont.ru.xx3.kz/go.php?url=https://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=https://toolbarqueries.google.hn/url?sa=t&url=https://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=http://groundspass.net/?wptouch_switch=desktop&redirect=https://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=https://yousteel.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=https://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=http://agri-aranbidgol.ir/LinkClick.aspx?link=https%3A%2F%2Fgreasyfork.org/en/discussions/requests/173654-esp-for-browser-games&mid=32019>https://sol-casino-apk.ru/sol-na-androjd/</a>
#9769 MonroApkhttps://monro-casino-apk.ru/monro-apk
<a href=https://monro-casino-apk.ru/monro-apk>monro-casino-apk.ru/monro-apk</a>
Установить последнюю версию приложения онлайн казино Монро – выигрывай сегодня! <a href=https://monro-casino-apk.ru/monro-apk>monro-casino-apk.ru/monro-apk</a>
#9770 SolAndroidhttps://sol-casino-apk.ru/sol-na-androjd/
<a href=https://sol-casino-apk.ru/sol-na-androjd/>http://sol-casino-apk.ru/sol-na-androjd/</a>
Загрузить apk файл казино Сол – побеждай сегодня! <a href=https://sol-casino-apk.ru/sol-na-androjd/>http://sol-casino-apk.ru/sol-na-androjd/</a>
#9771 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать на айфон
Разные казино имеют личные управляла по выведению выигрыша. Для бездепозитных призов принимаются довольно высочайшие требования. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до ста раз в игровых автоматах. Например, если игрок получил бесплатно 10 долларов, то нужно несомненно отыграть их, поставив 1 тысячу спинов по 1 доллару каждый. Стоит отметить, собственно не все казино выделяют вероятность выступать на бонусы и не во всех развлекательных заведениях схожие управляла для отыгрывания. Некоторые казино запрещают играть на призы в блекджек либо ограничивают ставки до пяти процентов, собственно значительно наращивает в десятки один количество необходимых игр. <a href=http://filmkachat.ru/>1×slots официальный зеркало</a> Шаг 5. Использование и отыгрыш. Бездеп должен быть использован в обозначенный оператором срок, а приобретенный выигрыш отыгран с учетом заявленного вейджера. <a href=https://justdirectory.org/details.php?id=288953>https://justdirectory.org/details.php?id=288953</a> Как только вы отыграли вейджер и свои с бонусного баланса перебежали вам на настоящий счет, Вы храбро можете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать минимальный депо к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депо). 1хслотс казино зеркало <a href=http://forum.computest.ru/post/533858/#p533858>http://forum.computest.ru/post/533858/#p533858</a>
1×slots рабочее зеркало на сегодня
Чтобы получить возможность вывести прибыль с бездепозитного приза в казино, нужно выполнить ряд критерий: <a href=https://forum.spherecommunity.net/User-JamesLop>1×slots официальный сайт зеркало</a> 1хслотс зеркало Зарегистрируйтесь. Для регистрации чаще всего достаточно ввести собственный номер телефона и почтовый адрес, последствии чего ввести полученный код из СМС. Возможно, требуется показать промокод. В правилах акции несомненно написано, где его хотелось включать. Иногда это хотелось создавать при регистрации, от — уже последствии творения личного офиса, на отдельной странице. <a href=http://teko.biz/bitrix/redirect.php?goto=http://lwcshop.ru/bitrix/rk.php?goto=http://premium-spb.ru/bitrix/redirect.php?goto=https://telegra.ph/Mirovoj-sudebnyj-uchastok–6-Novocherkasskogo-rajona-Rostovskoj-oblasti-09–23>http://teko.biz/bitrix/redirect.php?goto=http://lwcshop.ru/bitrix/rk.php?goto=http://premium-spb.ru/bitrix/redirect.php?goto=https://telegra.ph/Mirovoj-sudebnyj-uchastok–6-Novocherkasskogo-rajona-Rostovskoj-oblasti-09–23</a> B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. 1× slots casino официальный сайт За счёт спинов выйдет запустить различные онлайн слоты, протестировать стратегии и поднабраться навыка. Фишка что, собственно вращения начисляются на лучшие аппараты с оригинальными опциями и высочайшей отдачей. Не запамятовывайте, собственно в каждом акционном предложении предусмотрены особые требования – кратковременные лимитирования, максимальный размер ставки, список доступных игр.
1×slots зеркало на сегодня
Многие азартные клубы ограничивают необходимую вывода заработанную на бонусе. Сколько б Вы не выиграли, больше, обозначенной в описании акции, суммы Вы не сможете вывести. Разница будет аннулирована, Вы том не сможете создавать на нее ставки. Ещё одно распространённое акционное предложение – привлекательный презент с сомнительными притязаниями. К примеру, клуб сулит $100 виде бездепа, хотя с вейджером х80 либо х100. Отыграть подобный вейджер фактически невозможно и потому какого-либо концентрироваться на более интересных акциях. <a href=http://www.megatechwaves.com/2020/08/how-to-remove-powered-by-blogger-on.html>http://www.megatechwaves.com/2020/08/how-to-remove-powered-by-blogger-on.html</a> 1×slots официальный сайт скачать Игры, каких можно играть на бонусные средства. Проверьте список игр, каких возможно играть на бонусные средства, возможно они Вам не понравятся и не стоит расходовать своё время на такую акцию.
1х слотс зеркало регистрация в 1×slots casino
Подтвердите регистрацию, дабы активировать Бездепозитный бонус с выводом, потребуется наполнить собственный профиль. Заполните пустопорожние поля настоящими данными о себе.Индивидуальные одобрения выдаются за совершение деяний: подписку на аккаунты площадки в социальных сетях, установку мобильного прибавления либо официального посетителя для ПК. В большинстве казино срабатывают программки лояльности, присваивающие игрокам статусы за активность на сайте. Продвижение на грядущий степень нередко сопрягается выдачей бездепа. <a href=https://mit-bbs.com/memberlist.php?mode=viewprofile&u=15318>1×slots зеркало проходить регистрацию это отличный вариант</a> Выигрыши с бонусов без инвестициям постоянно привязаны к притязанию по ставкам и все быть обналичены только последствии исполнения этих требований.Ниже указан актуальный перечень легальных казино в Беларуси с бонусами на первый депо. Вы сможете попасть на официальный сайт избранного онлайн-казино, кликнув по кнопке “Играть”, зарегистрироваться и получить приветственный бонус. 1хлот регистрация в 1×slots casino <a href=https://ortsgerichtsforum.de/member.php?action=profile&uid=692>https://ortsgerichtsforum.de/member.php?action=profile&uid=692</a> Основное правило получения бездепа ? создаваемый акк обязан быть у юзера первым и единственным. Наличие нескольких аккаунтов строго воспрещено. Проверка проводится по имени, e-mal, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депо нужно блюсти несложную очередность поступков.Бездепозитный бонус по промо-коду несомненно доступен для игры, только что, нет случае когда Вы активируете особый бонусный код в разделе с бонусами или укажите промокод при регистрации на сайте. В неких случаях, не активации кода, понадобиться доказать контактные данные игрока и заполнить анкету посетителя.
1×slots рабочее зеркало на сегодня
Доступен ли бездеп для игроков из Вашей государства. Многие казино ограничивают приз по странам. Вплоть до как, собственно клуб возможность на игроков из Вашей государства, а бездеп мешает. <a href=http://t20suzuki.com/phpBB2/profile.php?mode=viewprofile&u=3577>http://t20suzuki.com/phpBB2/profile.php?mode=viewprofile&u=3577</a> 1×slots официальный сайт скачать
<b>Смотреть еще похожие новости:</b>
<a href=http://nhomtruyen.com/members/jamesgaw.9280/>1×slots официальный сайт скачать</a>
<a href=https://www.donchillin.com/space-uid-382497.html>1×slots акции</a>
<a href=https://karakol.com.kg/user/Jameskef/>1×slots регистрация 1×slots review live</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Рассмотрим принцип его деянья на случае. Допустим, вы зарегались и получили $10 no deposit bonus с вейджером х50. Это означает, что выигранные средства возможно несомненно выводить не ранее, чем последствии такого, как общая сумма ставок достигнет $500. Приветственный бездеп предоставляется какому игроку только один один. Казино сражаются с например называемыми бонусхантерами (от англ. Bonus Hunter — доброволец за призами), пытающимися заводить многочисленные аккаунты для обмана оператора и повторного получения подарка. Исключить сходственные действия дозволяет верификация данных. Администрация вправе потребовать у посетителя подтвердить персональные данные, обозначенные при регистрации.
#9772 Charlesgunnyhttp://filmkachat.ru
1×slots мобильная версия войти казино
Узнайте больше о бездепозитных бонусах в казино, ознакомившись с ответами на вопросы коие возникают у начинающих. <a href=http://filmkachat.ru/>1×slots зеркало выигрыши обязательно пройдите регистрацию если</a> Таким образом онлайн казино получает вероятного игрока. Возможно в или истинном он захочет сыграть на свои деньги. Так работают бездепозитные призы в онлайн казино. Здесь отлично подходит выражение, безвозмездные сыр случается лишь в мышеловке. Начинающие игроки все не осознавать опасность азарта. Однако течением понимания становится больше. Это тема для отдельного обсуждения.Денежные свои. Третий бонус за регистрацию без депозита – наличные. К раскаянию, лишь известные и знаменитые клубы могут дать средства в руб. Или долларах. С их подмогою появится насладиться каждой доступной забавой – слотами, рулеткой, кено, блэкджеком. Однако перед данным нужно исполненье определенных условий. <a href=http://makehp.co.kr/bbs/board.php?bo_table=free&wr_id=264146>http://makehp.co.kr/bbs/board.php?bo_table=free&wr_id=264146</a> 1×slots официальный зеркало <a href=http://adrestyt.ru/user/JasperHup/>http://adrestyt.ru/user/JasperHup/</a>
рабочее зеркало 1хслотс
3. Подтвердить данные. В зависимости от клуба, надо(надобно) привязать аппарат или почту, указать персональную информацию;Отзывы читателей о бонусных акциях помогут составить эмоцию, хотя не запамятовывайте о субъективности личных комментариев. 1×slots зеркало видели такую регистрацию на <a href=https://www.formulersupport.com/User-Forsedropmn>https://www.formulersupport.com/User-Forsedropmn</a> 1×slots бездепозитный бонус за регистрацию Например, игрок получил 500 руб. При создании аккаунта и обязан отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 рублей, понадобится устроить 875 спинов для полного отыгрыша.
1×slots мобильная версия войти казино
<a href=https://ads.kazakh-zerno.net/user/HenryPlara/>https://ads.kazakh-zerno.net/user/HenryPlara/</a> Активация происходит счет промокодов, которые вводятся в личном кабинете последствии регистрации. Среди спецпредложений в списке Casino.ru содержатся эксклюзивные промокоды, коие доступны только гостям портала. Другие методы начисления средств ? автоматическая активация незамедлительно после сотворения аккаунта и получение подарка по запросу в службу технической помощи. 1×slots мобильная версия войти казино
1×slots регистрация на сайте 1×slots ru com
Если вы новичок в и только попали в неизведанную вами область азарта — за услуг как бездепозитные призы без пополнения.Когда отберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из главных требований, считая обязательной верификации. Если на сайте учтена обязательная процедура подтверждения личности, то вывести выигрыш удастся только после проверки данных. Приготовьтесь наполнить анкету и выслать в техподдержку документ, подтверждающий личность. 1×slots промокод при регистрации 2025 <a href=http://www.haoxin.city/home.php?mod=space&uid=188494&do=profile>http://www.haoxin.city/home.php?mod=space&uid=188494&do=profile</a> Кешбэк-бонус представляет собой возврат фиксированного процента от ставки когда проигрыша или же от проигранной суммы за определённый период. В большинстве случаев кешбэк не превышает 10%.1. Зайти на официальный вебсайт. Проверьте вкладки, пообщайтесь со саппорта и почитайте отзывы, в не хотите стать жертвой плутов или впустую потратить время;
1х слот 1хслотс регистрация перейти на 1×slots
Доступ к подарку может раскрываться механически после введения промокода либо воззвания в саппорта сайта. В первом случае от пользователя не потребуется никаких поступков. Бездеп с активацией по коду встречается почаще всего. Игроку нужно ввести совокупа символов в графе, которая имеет пребывать в регистрационной форме в Личном офисе. <a href=http://link.ac/humor/user/RaymondLib/>http://link.ac/humor/user/RaymondLib/</a> 1×slots зеркало регистрация то дальше необходимо пройти Изучить правила и условия получения бездепозитных бонусов казино, Вы можете у нас на веб-сайте в разделе с призами или на официальном сайте избранного Вами казино. Если не можете отыскать нужную информацию, обратитесь в саппорт заведения спустя онлайн-чат, телеграм-канал или по электрической почте.
<b>Смотреть еще похожие новости:</b>
<a href=https://adminclub.org/showthread.php?tid=62473>1×slots подтвердит вашу регистрацию если говорить</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Однако в критериях скрываются «подводные камни», коие не позволят исключить солидную необходимую или же вы не успеете отыграть вейджер. Поэтому профессионалы советуют забрать безвозмездные вращения за регистрацию в казино без депозита, дабы поднабраться опыта и получить настоящий шанс на победу. В онлайне очень количество скриптовых вебсайтов, которые принадлежат жуликам. Их основная задача – заинтересовать гэмблеров, пообещав не только великодушные подарки, хотя и крупные выигрыши. Так что некоторые веб-сайты предлагают получить за регистрацию числе $1 000.
#9773 Charlesgunnyhttp://filmkachat.ru
1×slots сайт
Для получения приза нужно пригласить в игру нового клиента. Казино начислит пригласившему фиксированный процент от взносов приглашённого в виде бонуса: чаще всего его объем не превышает 10%. Срок действия бонуса как не превышает месяца: пригласивший получает бонус от проигранных ставок приглашённого в 1-ый луна забавы.Объективные – объем бонуса, коэффициент и обстоятельства вейджера, надобность внесения депозита для вывода средств; <a href=http://filmkachat.ru/>1×slots регистрация 1×slots casino c2d ru</a> Баланс игрока дополняется на подобающую сумму. К ней используется вейджер, указанный в правилах промоакции. Вывести выигрыш можно несомненно в как, как пользователь сделает требуемый размер ставок из личных средств. В редчайших случаях бездеп работает в формате Free Play. На счет пользователя зачисляется крупная сумма, и предоставляется малый срок для отыгрыша. Обычно время на забаву ограничено 1–3 часами. Если по окончании этого периода сумма на счету несомненно превышать первоначальную, то разницу возможно несомненно вывести или применять для дальнейших ставок. <a href=http://ezevertech.com/bbs/board.php?bo_table=free&wr_id=14641>http://ezevertech.com/bbs/board.php?bo_table=free&wr_id=14641</a> Бездепозитные бонусы начисляются лишь один один. Не стоит открывать новые аккаунты, дабы получить их повторно. Служба защищенности казино обязательно выявит «левого» соучастника и заблокирует. Если посетитель выполнит необходимые притязания, отыграет свою ставку и решит исключить собственный выигрыш, то ему надо(надобно) сведению, что казино непременно востребует дать ксерокопии собственных документов, дабы удостовериться в реальности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные средства вывести не удастся. 1×slots регистрацию процедура займет всего лишь <a href=http://www.orangepi.org/orangepibbsen/forum.php?mod=viewthread&tid=151664&extra=page%3D1>http://www.orangepi.org/orangepibbsen/forum.php?mod=viewthread&tid=151664&extra=page%3D1</a> Также учтите, собственно кое-какие игровые платформы сузивают список стран, коие способны получить предложенный бездепозитный бонус за регистрацию. К образцу, существуют онлайн-заведения, выдающие подобные бонусы лишь обитателям конкретных государств. К примеру, интернет казино 777 Оригинал дает бездепозитный приз лишь игрокам из России и стран СНГ. Или наоборот, пичкают вознаграждением всех, кроме обитателей некоторых государств (исходя из сего, по внимательно изучать перечень, чтобы потом не появилось практически вопросов и претензий).
1хслотс регистрация в 1×slots casino
Маркетинговая деятеля всех игорных интернет-клубов должна одевать разнообразный характер. И если вознаграждения на депозит служат чтобы, чтобы, дабы стимулировать заносить депозиты и поощрять теснее место пользователей, то бездепозитный бонус в казино либо бонус за регистрацию в казино, до всего, рассчитан на расширение базы потребителей.Изучить управляла и условия получения бездепозитных призов казино, Вы можете у нас на сайте в разделе с бонусами или на официальном сайте избранного Вами казино. Если имеет найти нужную информацию, обратитесь в саппорт заведения через онлайн-чат, телеграм-канал либо по электрической почте. <a href=http://forum.audioheritage.net/viewtopic.php?f=19&t=36149>1×slots регистрация то дальше необходимо пройти</a> 1×слотс казино Вознаграждения за получение VIP-статуса ? начисляются в рамках программки лояльности при достижении одного уровня или выдаются индивидуально менеджерами службы. <a href=http://www.fumankong1.cc/home.php?mod=space&uid=616252>http://www.fumankong1.cc/home.php?mod=space&uid=616252</a> Похожим образом трудится 3-ий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя или в связи с получения им VIP-статуса. Подарок предоставляется в обращения в поддержку и ревизии. 1×slots рабочее зеркало Еще одно условие касается размеров ставки. Операторы устанавливают наивысшую необходимую, которую игрок вправе поставить из подарочных средств. Она рассчитывается в денежной, избранной в Личном офисе. При превышении лимита есть риск лишиться приза. Существующие ограничения относятся и к определенным обликам ставок. Например, играя в рулетку, клиент может столкнуться с запретом назначать фишки на шансы.Важно, удостоверьтесь что, собственно ранее не регились в выбранном казино. В виртуальных клубах невозможно заводить больше одной учетной записи.
1хслот скачать
Но а в вы теснее профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в интернет казино; Возьми собственный подарок. Чаще всего бонус активируется сразу в регистрации. Но бывают истории, когда надо(надобно) забежать в собственный кабинет или написать в справочную службу.Но существуют азартные заведения, готовые просто например вручить средства на забаву. Для этого достаточно создать профиль. Чтобы вывести выигрыш, сперва необходимо выполнить вейджеровые обстоятельства, прописанные в условиях получения бездепа. <a href=https://app.welvi.co.kr/bbs/board.php?bo_table=qa&wr_id=1926081>https://app.welvi.co.kr/bbs/board.php?bo_table=qa&wr_id=1926081</a> Шаг 4. Активация. Внимательно изучите условия, информацию по лимитированиям и сроке действия бонусного предложения. Разобравшись с правилами, можно активировать бонус в личном офисе (от ? с использованием промокода) или по запросу в саппорт.Прямо в арестуйте бесплатные вращения за регистрацию без депозита и начинайте коллекционировать призовые композиции ради крупных выигрышей! 1×slots бездепозитный бонус за регистрацию
1×slots зеркало видели такую регистрацию на
Акции, посвященные календарным праздничным, бывают рассчитаны как на всех юзеров, так и на категории: примеру, подарок на 8 марта девушкам-игрокам либо мужикам на 23 февраля.В разделе с бонусами активировать собственный презент. Найти забавы, для коих учтено поощрение и использовать бонус по назначению. 1×slots официальный demo регистрация в 1×slots casino <a href=https://visualchemy.gallery/forum/profile.php?id=4056113>https://visualchemy.gallery/forum/profile.php?id=4056113</a>
1хслотс зеркало
При этой на бонусные средства воспрещается выступать в игровые автоматы с прогрессивным джекпотом и игры из радела live casino. Кроме того, кое-какие казино выделяют бездеп на один либо количество конкретных слотов, и в других забавах Вы не сможете на их выступать.На странице представлены бездепозитные призы за регистрацию в казино редкая награда за коей гонятся все игроки как новички, так и профессионалы. Мы тоже уделяем большое внимание на присутствие призов при формирование рейтинга казино на деньги. Бездепозитный приз это вероятность играть даром и выиграть реальные средства. <a href=https://filmy-hd.ru/user/RalphBlUed/>https://filmy-hd.ru/user/RalphBlUed/</a> 1×slots казино зеркало Для получения бонуса нужно пригласить в забаву нового посетителя. Казино начислит пригласившему фиксированный процент от взносов приглашённого повторяющий приза: почаще всего его размер не выше 10%. Срок деянья бонуса правило не выше месяца: пригласивший получает приз в зависимости от проигранных ставок приглашённого в 1-ый месяц забавы.Coздaниe aккaунтa. Пepeйти нa oфициaльный caйт кaзинo, oткpыть peгиcтpaциoнную фopму, внecти нeoбxoдимыe дaнныe и пpoизвecти peгиcтpaцию. Бeздeп выдaeтcя oдин paз зa пepвую peгиcтpaцию, coздaниe мультиaккaунтoв зaпpeщeнo.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Одним из поводов отдавать привилегию 1 либо иному заведению заключается в привлекательности предлагаемых промоакций и даровых предложений. Безвозмездные фриспины, выдаваемые без дела делать какой-нибудь лепта, в списке располагается далековато не в конце. Зарегистрироваться в казино по специальной ссылке либо с бонусным кодом. Подтвердить контактные данные (номер телефонного и электрическую почту). Для подтверждения номера телефонного нужно в собственном профиле показать собственный номер и надавить кнопку „Подтвердить номер аппарата“, далее Вы получите sms-сообщение с кодом, который необходимо ввести в отвечающее фон. Для подтверждения электрической почты, перебежать по интенсивной ссылке в письме от казино.
#9774 Charlesgunnyhttp://filmkachat.ru
1× slots сайт
Отыграйте вейджер и верифицируйте профиль, чтобы администрация разблокировала быстрые выводы. Фишка выплат никаких, что достаточно избрать платёжный инструмент и указать сумму. В большинстве случаев деньги зачисляются на электрические кошельки на 15 мин., а на банковские карты – 1–3 рабочих денька. <a href=http://filmkachat.ru/>1хслотс зеркало на сегодня</a> Иногда у гостей сайта шансы появиться трудности, задачи, препядствия при активации полученного промо-кода. В таких случаях, необходимо обратиться за подмогою в саппорта «Support». Для получения ответа, непременно указывается определенная причина воззвания и подтверждается информация дополнительными экрана. Если сформировалась неоднозначная обстановка, постоянно можно адресоваться к основному регулятору или контролирующему органу, выдавшему данному заведению лицензионный документ. <a href=http://www.dotank.kr/bbs/board.php?bo_table=free&wr_id=232020>http://www.dotank.kr/bbs/board.php?bo_table=free&wr_id=232020</a> 1×slot официальный сайт <a href=http://messmangler.com/forums/member.php?action=profile&uid=2427>http://messmangler.com/forums/member.php?action=profile&uid=2427</a> Игры, в возможно играть на бонусные средства. Проверьте перечень игр, каких возможно выступать на бонусные свои, вероятно они Вам не понравятся и не расходовать своё время на эту акцию.
1×slots зеркало этих способов предполагает регистрацию
Доступен ли бездеп для игроков из Вашей страны. Многие казино ограничивают приз по странам. Вплоть до того, что клуб может принимать игроков из Вашей государства, а бездеп мешает.Фриплей-бонусы. Бонусы за бесплатную игру есть лишь в неких клубах. Они зачисляются незамедлительно после творенья профиля и срабатывают недолговременное время. Если у вас нет времени истратить средства, они просто закончатся. Что касается времени, правило бонусы срабатывают протяжении одного часа. <a href=https://nztw.org/home.php?mod=space&uid=43957>1хслотс казино зеркало</a> 1хслот зеркало В большинстве заведений сделать это возможно по e-mal, по номеру аппарата, спустя социальную сеть или гугл-аккаунт.Большинство клубов завлекают внимание геймеров за счёт разнообразных подарков. На одних веб-сайтах возможно получить виртуальные кредиты, коие откроют доступ ко всему софту. На иных же, администрация предлагает благотворительные вращения для пуска топовых онлайн слотов. Несмотря на разные акции, стоит выделить самые основные. <a href=http://tiokraft.ru/bitrix/redirect.php?goto=http://technomixshop.ru/bitrix/redirect.php?goto=http://clients1.google.ws/url?q=https://telegra.ph/Process-i-sroki-pervonachalnoj-postanovki-na-voinskij-uchet-09–23>http://tiokraft.ru/bitrix/redirect.php?goto=http://technomixshop.ru/bitrix/redirect.php?goto=http://clients1.google.ws/url?q=https://telegra.ph/Process-i-sroki-pervonachalnoj-postanovki-na-voinskij-uchet-09–23</a> Приветственный приз без депозита ? презент за регистрацию. Выдается средствами, фриспинами или баллами. В заключительном случае бонусные баллы используются для участия в турнирах или обмена на настоящие деньги.Хотя безвозмездные призы начисляются без депо, не исключено, что для придется заносить средства. Большинство онлайн-казино оплачивают отыгранные бонусные кредиты лишь в такого, как новый клиент впервые пополнит игровой счет. 1 x slots casino На нашем веб-сайте Вы отыщите список актуальных новых бездепозитных призов в казино 2022 года. Также, есть большое эксклюзивных предложений, которые доступны только посетителям нашего вебсайта в регистрации по нашей ссылке или активации особого промокода.
1×slots подтвердит вашу регистрацию если говорить
Фриплей-бонусы. Бонусы за благотворительную забаву есть лишь в некоторых клубах. Они зачисляются незамедлительно в творенья профиля и срабатывают недолговременное время. Если у вас нет времени истратить средства, они просто закончатся. Что дотрагивается времени, правило бонусы срабатывают протяжении 1-го часа.Если площадка презентует бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь ввести акк на веб-сайте и активировать его, подтвердив адресок электрической почты, номер телефонного либо другие данные, коие просит оператор. Перед этим необходимо увериться, что пользователь находится на официальном сайте казино, не на жульнической площадке. <a href=http://masterminutka.ru/bitrix/redirect.php?goto=http://elektro-max.ru/bitrix/redirect.php?goto=http://everfocus.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/3yICOxM0fFX>http://masterminutka.ru/bitrix/redirect.php?goto=http://elektro-max.ru/bitrix/redirect.php?goto=http://everfocus.ru/bitrix/rk.php?goto=https://teletype.in/@urist555/3yICOxM0fFX</a> Используйте превосходнейшие бездепозитные призы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из списка ниже, дабы заработать подарки за обычные деянья теперь сегодня получить 1-ый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и прыткими выводами на электронные кошельки.Минимального оборота. Этот предел устанавливается вейджером — пока игрок не сыграет на установленную необходимую, вывод средств будет недосегаем. 1×slots рабочее зеркало на сегодня
1×slots рабочее зеркало на сегодня
Денежные средства. Третий приз за регистрацию без депо – наличные. К сожалению, только известные и известные клубы имеют уяснить средства в рублях либо баксах. С их помощью у насладиться любой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед данным нужно выполнение конкретных критерий. Выиграть реальные средства в казино не пополняя счет – сложно, хотя возможно. Главное задаться целью и не нарушатьправила заведения. Выберите некоторое казино с бездепзитными призами и начните играть на бонусные свои. По статистике в 10-ти заведений можно заработать маленькую необходимую средств за счет бонусных средств.Иногда для получения призов необходимо спутаться с представителями службы поддержки. Удобнее всего с ними разговаривать в онлайн-сате, но иногда довольно запроса по электрической почте. Бездепозитный приз по промо-коду несомненно доступен для забавы, только в том случае когда Вы активируете специальный бонусный код в разделе с бонусами либо укажите промокод при регистрации на сайте. В неких случаях, считая активации кода, понадобиться подтвердить контактные данные игрока и наполнить анкету клиента. 1×slots казино мобильная версия <a href=http://www.85sucai.com/member/index.php?uid=mercifuleffects>http://www.85sucai.com/member/index.php?uid=mercifuleffects</a>
1×slots зеркало которую указывали при регистрации кстати
Доступ к подарку может раскрываться механически после введения промокода либо воззвания в саппорта сайта. В первом случае от пользователя не потребуется никаких поступков. Бездеп с активацией по коду встречается почаще всего. Игроку нужно ввести совокупа символов в графе, которая имеет пребывать в регистрационной форме в Личном офисе. <a href=https://foro.vcheats.me/Usuario-PatrickIceds>https://foro.vcheats.me/Usuario-PatrickIceds</a> 1×slots скачать на айфон
<b>Смотреть еще похожие новости:</b>
<a href=https://forumauthority.com/member.php?action=profile&uid=3484>1× slots casino официальный сайт</a>
<a href=https://lawsbay.com/webdesing-8/#comment-13245>1×slots casino регистрация 1×slotscasino09k online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Прежде чем активировать бездеп, нужно увериться что, что государство, гражданином которой считается игрок, не входит в перечень запрещенных. При исполненьи условий отыгрыша и верификации, средства с бонусного счета переводятся на ведущей и могут быть выведены на карту либо электронный кошелек. Лимиты на вывод и сроки проведения транзакции зависят от выбранной платежной системы.
#9775 Charlesgunnyhttp://filmkachat.ru
x1 slots 1хслотс регистрация перейти на 1×slots
Ну и естесственно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: подобная щедрость увеличивает степень преданности посетителей к компании.Шаг 4. Активация. Внимательно изучите условия, информацию по ограничениям и сроке действия бонусного предложения. Разобравшись с правилами, возможно активировать бонус в собственном кабинете (времени ? с использованием промокода) либо по запросу в саппорт. <a href=http://filmkachat.ru/>1×slots сайт</a> Приветственный приз без депо ? подарок за регистрацию. Выдается средствами, фриспинами либо баллами. В заключительном случае бонусные баллы используются для участия в турнирах или размена на реальные средства. <a href=http://travel.navigator-mas.ru/user/Jamessnows/>http://travel.navigator-mas.ru/user/Jamessnows/</a> зеркло казино 1×slots <a href=http://jade-crack.com/home.php?mod=space&uid=1066870>http://jade-crack.com/home.php?mod=space&uid=1066870</a> Небольшая сумма. Величина бездепов ограничивается суммой 1 000 рублей, 20 евро либо 20 долларов. Если выдаются фриспины, их число изредка превышает нескольких 10-ов бесплатных вращений.
1×slots рабочее зеркало на сегодня
<a href=http://lider1c.ru/communication/forum/messages/forum5/message18225/14304–1×slots-sayt?sessid=052a7f2e22ae53d28dd32724a6ff3ec3&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1×slots сайт</a> 1×slots регистрацию более популярный вариант это Бeздeпoзитныe бoнуcы или, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?Не стоит путать забаву в демо и использование бонусов. В демонстрационном режиме игрок может оценить механику слота, сюжет и оформление. Но забава проводится на относительные кредиты, поэтому отсутствует главное ? чувство азарта. Активируя промокод либо фриспины, заказчик как не расходует свои деньги на игровые автоматы, хотя возможность сорвать реальный куш! <a href=https://imoodle.win/index.php?title=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%BF%D0%B8%D1%86%D1%86%D1%8B%20%D0%B8%D0%B7%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO>https://imoodle.win/index.php?title=%D0%94%D0%BE%D1%81%D1%82%D0%B0%D0%B2%D0%BA%D0%B0%20%D0%BF%D0%B8%D1%86%D1%86%D1%8B%20%D0%B8%D0%B7%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO</a> Бездепозитные бонусы казино это финансовая компенсация, предлагаемая пользователям на дармовой основе и вероятность играть в онлайн казино даром. Если ассоциировать их с поощрениями за вклад, каких средства выдаются только впоследствии первоначального пополнения счета, то бездепозитные гонорары получаются даром. То есть, играющий получает возможность делать ставки на уже имеющие деньги, коие выдаст заведение, выполняя, всем, обычные деянья, дабы их извлечь (тут речь о регистрация, удостоверении личности с использованием номера аппарата, дизайна заказы и т.д.). 1×slots регистрацию более популярный вариант это
1×slots бонус за регистрацию
Чтобы получить вероятность вывести прибыль с бездепозитного приза в казино, нужно выполнить ряд критерий:На бонусные начисления шансы быть установлены вспомогательные ограничения, которые Вы не сведению при отыгрыше. Пока приз всецело не отыгран — средства из казино не выводятся. Одним из предлогов отдавать привилегию одному либо иному заведению содержится в привлекательности предлагаемых промоакций и бесплатных предложений. Безвозмездные фриспины, выдаваемые без нужды делать какой-либо вклад, в списке находится далековато не в конце.Зарегистрируйтесь. Для регистрации чаще всего довольно установить собственный номер телефонного и почтовый адресок, последствии чего установить полученный код из СМС. Возможно, потребуется указать промокод. В правилах промоакции будет написано, где его надобно включать. Иногда это бы делать при регистрации, время — уже после создания собственного кабинета, на отдельной страничке. <a href=http://09vk.ru/user/PatrickZex/>http://09vk.ru/user/PatrickZex/</a> 1хслотс мобильная версия зеркало Небольшая сумма. Величина бездепов ограничивается суммой 1 000 руб., 20 евро или 20 $. Если выдаются фриспины, их количество изредка выше нескольких 10-ов безвозмездных вращений.
1×slots зеркало регистрацию более популярный вариант это
Игрокам не воспринимать приветственный приз как гарантированный способ получить крупный выигрыш, хотя это отличная возможность без расходов расценить функционал казино.Заполняя данные в личном профиле, указывайте лишь достоверную информацию, так как Вам понадобиться ее подтвердить в при выводе денег. 1×slots рабочее зеркало на сегодня <a href=http://spectr-sb116.ru/user/Ashleywealk/>http://spectr-sb116.ru/user/Ashleywealk/</a>
1 x slots casino
Исходя из этого, просто не присутствует разумных оснований махнуть рукою на получение такого бонуса при регистрации. И, что, на такой безвозмездной основе у вас все шансы выиграть средства и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные призы, именуют безвозмездными онлайн платформами для игр. <a href=https://www.harnessracingforum.com/member.php?113416-Oscargeola>https://www.harnessracingforum.com/member.php?113416-Oscargeola</a> Вообще перейдя в казино — верховодила схожи в получении бездепозитных призов, в стереотипные управляла заходит: доказать эл. Почту и аппарат, наполнить свой индивидуальный профиль, активировать рекламную код либо активировать предложения во вкладке БОНУСЫ.Помните, собственно в некоторых играх сумма ставки идет в зачет вейджера только отчасти. Так, в настольных и карточных забавах лишь от 5% до 50% суммы ставки числятся как отыгранные средства, момент как в слотах идет в зачет все 100% суммы. 1×slot рабочее зеркало
<b>Смотреть еще похожие новости:</b>
<a href=https://www.ldvd.nl/no-22-san-diego-place-rallies-very-last-boise-country-27–16?page=24#comment-237027>1×slots официальный сайт скачать</a>
<a href=http://romb4×4.ru/forum/threads/1×slots-oficialnyj-sajt-skachat.15537/>1×slots официальный сайт скачать</a>
<a href=https://www.neocodex.us/forum/topic/133933-why-this-forum-become-dead-now/page-2#entry2034895>1×slot зеркало рабочее этих способов предполагает регистрацию</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Например, игрок получил 500 руб. При твореньи аккаунта и обязан отыграть эти средства с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 рублей. Играя по ставке 20 руб., понадобится сделать 875 спинов для полного отыгрыша.
#9776 Charlesgunnyhttp://filmkachat.ru
1×slos регистрация в 1×slots casino
Чаще всего интернет-казино предлагают бездепозитные призы новым юзерам. Эта промо-акция довольно эффективно завлекает начинающих, подталкивая их к открытию счета. Конечно, не все становятся преданными клиентами, хотя сам факт регистрации аккаунта играет на руку заведению.Еще одно условие дотрагивается размеров ставки. Операторы устанавливают максимальную сумму, коию игрок вправе поставить из подарочных средств. Она рассчитывается в еденице, избранной в Личном офисе. При превышении лимита есть риск потерять приза. Существующие лимитирования относятся и к определенным видам ставок. Например, играя в рулетку, заказчик имеет столкнуться с запретом назначать фишки на шансы. <a href=http://filmkachat.ru/>1х слотс зеркало регистрация в 1×slots casino</a> Подарки на конкретные даты отличаются условиями получения. Если одобрение начисляют игроку на день рождения, то сумма обыкновенно зависит от совместного размера депозитов за прошедший год. <a href=https://tourdeskhawaii.com/golf/bbs/board.php?bo_table=free&wr_id=3285964>https://tourdeskhawaii.com/golf/bbs/board.php?bo_table=free&wr_id=3285964</a> Похожим образом трудится третий способ доступа к бездепу. Обычно это предложения, приуроченные ко дню рождения посетителя или в связи с получения им VIP-статуса. Подарок предоставляется после обращения в поддержку и проверки. 1×slots зеркало выигрыши обязательно пройдите регистрацию если <a href=http://forum.foonyew.org/home.php?mod=space&uid=151012>http://forum.foonyew.org/home.php?mod=space&uid=151012</a> Бездепозитные призы за регистрацию в игровых автоматах для хозяев онлайн-казино являются частью рекламной кампании, направленной на повышение аудитории вебсайта. Так они продвигают средства бренды и привлекают новых клиентов.
1 x slots casino
Несмотря на то, что данный вариант стимуляции со стороны азартных платформ довольно известен области подобных игр, далековато многим почитателям казино знаменито, что являют собой бездепозитные бонусы казино и как непосредственно их вероятно эксплуатировать.Бывают ли бездепозитные призы без вейджера? Бывают, в у вас Vip статус в казино и вы регулярно играете в данном казино, а на бездепозитный бонус за регистрацию устанавливается вейджер во всех казино. 1×slots casino регистрация При исполненьи условий отыгрыша и верификации, средства с бонусного счета переводятся на ведущей и могут быть выведены на карту или электронный кошелек. Лимиты на вывод и сроки проведения транзакции зависимости от выбранной платежной системы.Если площадка дарит бездеп за регистрацию, то процедура его получения проста. Нужно только ввести акк на веб-сайте и активировать его, подтвердив адрес электронной почты, номер аппарата или другие данные, коие настятельно оператор. Перед данным нужно убедиться, собственно юзер находится на официальном сайте казино, не на жульнической площадке. <a href=http://ikmr.com/bbs/board.php?bo_table=s3_1&wr_id=443229>http://ikmr.com/bbs/board.php?bo_table=s3_1&wr_id=443229</a> Промокод – определённая комбинация знаков, коию необходимо ввести в отвечающее поле при твореньи учетной записи либо активировать в личном профиле игрока в разделе с призами.Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды присутствуют на этой странице. Посетитель возможность оценить обстоятельства получения и начать выступать на деньги без внесения депо. При этом игроку главно разуметь, на каких критериях и какими методами появится вывести полученный выигрыш. Для сего необходимо расценить список подключенных платежных систем. 1×slots коды
1×slots официальный сайт зеркало рабочее
Игрокам стоит воспринимать приветственный бонус как гарантированный метод получить большой выигрыш, хотя это отличная вероятность без расходов оценить возможностей казино. С не отыгранным призом воспрещается превышать размер наибольшей ставки. Нарушение сего обстоятельства будет аннулирование выигрыша. <a href=https://biznes-knigi.com/user/StevenSeids/>https://biznes-knigi.com/user/StevenSeids/</a> 1×slots зеркало которую указывали при регистрации кстати
1×slots регистрация 1×slotscasino09k online
Если вы облюбовали для себя несколько брендов которые для больше всего приглянулись, для постоянной игры! Таких гемблеров казино довольно любит и ценит, за частую такие игроки становятся VIP игроками заведения, которым часто поступают прибыльные предложения вид бонусов, так же туда входит и бездепозитные.Иногда в качестве одобрения за регистрацию могут выдаваться билеты для участия в турнирах. Условия их проведения довольно выделяются, потому мы рекомендуем ознакомиться с любым предложением отдельно. В лицензионных бездепозитных казино играть в азартные забавы вправду неопасно. Наличие лицензии одобряет тот факт, что клуб гарантирует своевременные выплаты и выигрыши соответствующие заявленным RTP. Помните, что всевозможные нарушения управлял сведут на нет ваши старания, и вы всего останетесь без начисленного для дарового приза. Всегда изучайте управляла начисления и обстоятельства вейджера. По каким вопросам, на которые вы имеет самостоятельно найти ответы, обращайтесь за объяснениям и саппорт.В интернет-сети практически можно отыскать перечни наиболее модных и обещанных поощрительных программ от популярных онлайн-казино. 1×slots зеркало сайта <a href=http://itstula.com/user/RaymondTep/>http://itstula.com/user/RaymondTep/</a>
1×slot зеркало рабочее регистрации на телефон придет
В любом казино с бездепозитным призом учтены вейджеровые обстоятельства. Это единственный «подводный камень», который стоит между вами и выводом выигрыша. Чтобы отыграть вейджер, надо(надобно) устроить определённое число ставок. Чем круче бонус, тем сложнее выполнить обстоятельства, и напротив.Мы подготовили список, где есть практически актуальные и новые бездепозитные призы казино, которые возможность получить даром. Для наших юзеров есть особые предложения неповторимые призы, которые вы кого не отыщите, их мы определили особой красноватой плашкой «Exclusive». В качестве призов онлайн казино часто предлагает выдачу фриспинов, словами безвозмездных вращений игрового барабана. Виртуальные монеты возможно использовать для изучения в покерной школе или для забавы в казино. <a href=https://peugeot-408.ru/blog.php?cp=14141>https://peugeot-408.ru/blog.php?cp=14141</a> Для получения бонуса надо(надобно) ознакомиться с программой преданности казино и сделать ставки на необходимую, необходимую для перехода на грядущий уровень. casino 1×slot Размер ставки для игры по бездепозитному бонусу (окончательно же, если, тогда,, когда он представлен вид бонусных денежных средств) зачастую ниже, чем при игре на депозит. Ограничение будет действовать до этапа отыгрыша бонуса.Выиграть настоящие средства в казино не пополняя счет – трудно, хотя возможно. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными бонусами и начните играть на бонусные средства. По статистике в одном из 10-ти заведений возможно заработать маленькую необходимую денег с бонусных средств.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.fromrus.su/index.php?/topic/22304–1×slot-%D0%BA%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE/>1×slot казино зеркало</a>
<a href=http://forum3.bandingklub.cz/viewtopic.php?f=17&t=212544>1×slots казино мобильная версия</a>
<a href=https://forum.pmpobc.ca/index.php?topic=131502.new#new>1× slots официальный</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Например, игрок получил 500 рублей при твореньи аккаунта и обязан отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 рублей, понадобится устроить 875 спинов для полного отыгрыша. Подарки на конкретные даты отличаются критериями получения. Если поощрение начисляют игроку на день рождения, то сумма обыкновенно зависит от совместного объема депо последний год.
#9777 Charlesgunnyhttp://filmkachat.ru
1×слотс казино
Некоторые онлайн-казино без депозита предлагают свежим клиентам выбрать бонус при регистрации. Будьте внимательны: выбрав один, вы в абсолютном большинстве случаев не можете пользоваться остальными.Самый распространённый из похожих бонусов, окончательно же, бездеп на день рождения посетителя — приз вид фиксированной суммы или фриспинов поступает на счёт игрока, а пользоваться им возможно в течение установленного периода медли. <a href=http://filmkachat.ru/>1хслот зеркало</a> <a href=http://z914169g.bget.ru/user/DavidStalo/>http://z914169g.bget.ru/user/DavidStalo/</a> Исходя из сего, просто не существует осмысленных оснований махнуть рукой на получение такового бонуса при регистрации. И, заметить,, на такой бесплатной базе у вас есть все шансы выиграть средства и обрести конкретную дозу адреналина. И заведения, выдающие бездепозитные бонусы, именуют бесплатными онлайн платформами для игр. 1× slots официальный <a href=https://www.cfd-online.com/Forums/members/jaspergeant.html>https://www.cfd-online.com/Forums/members/jaspergeant.html</a> Бездепозитные бонусы – это самая небезинтересная и более перспективная промоакция интернет-казино. Они числе лучше фри-спинов, поэтому что выплаты в бесплатных вращениях не гарантированы, ведь композиции на барабанах игрового аппарата имеют не сложиться.
1×slots официальный сайт мобильная версия скачать
Пoдтвepдить личнocть посетителя. Для удачного вывода средств, необходимо подтвердить лицо посетителя. Нa этaпe вepификaции пpoфиля, сотрудники службы безопасности должны убедиться, что у игрока всего лишь раз аккаунт. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не может исключить собственный выигрыш, случае у него будет несколько учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов будут аннулированы.С иной стороны, гораздо легче арестовать бездепозитные фриспины за регистрацию в казино и напрямик данный начать вертеть барабаны в лучших слотах. Главная особенность спинов никаких, что они предназначены для топовых автоматов. Удастся столько пройти вспомогательные раунды, но и прирастить сумму выигрыша, заработать респины и другие внутриигровые презенты. 1×slots официальный зеркало Также существуют онлайн-платформы азартных игр, коие используют раздачу бездепозитных бонусов в особые даты (как для казино, например и для игрока). Помимо этого, действующие игроки кроме имеют возможность получить похожие призы за собственную работа (к примеру, за увеличения значения либо за схожие заслуги). <a href=https://www.spacepub.net/members/5151-FrankPhags>https://www.spacepub.net/members/5151-FrankPhags</a> 1хслотс казино зеркало Акционные предложения от казино есть в разных форматах. Часто призы даются в мена на депозит. Игрок заносит платеж и получает деньги, благотворительные вращения и одобрения. Вознаграждение от оператора возможность быть доступно и без пополнения баланса. Бездеп — вид бонуса, кот-ый гарантирован за выполнение определенных деяний на веб-сайте:Перечисленные выше основные свойства сопровождают практически каждый бонус и считаются стандартными для бездепозитных бонусных начислений в казино.
1×slot зеркало рабочее этих способов предполагает регистрацию
Самые известные способы вывода средств ? банковские карты (Visa, Mastercard) и электронные кошельки (WebMoney, Яндекс. Деньги, Qiwi). Часто посетители обращаются к электронным платежным системам на Neteller и Skrill, а также пользуются криптовалютными кошельками. Вывод выигрышей может исполняться моментально либо занимать от нескольких часов до нескольких суток. Для вывода средств бонус нужно будет отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами акции и вариациями отыгрыша бездепозитного бонуса до его получения, дабы избежать конфликтных ситуаций.Многочисленные аккаунты – Не пытайтесь регистрироваться в интернет-казино повторно, чтобы снова получить безвозмездный бонус. Игорные заведения нетерпимы к бонус-хантерам, потому вас ждет неминуемое наказание. <a href=https://pdn-forum.bpgs.de/memberlist.php?mode=viewprofile&u=1825>https://pdn-forum.bpgs.de/memberlist.php?mode=viewprofile&u=1825</a> Для верификации аккаунта надо(надобно) дать специалистам технической помощи отсканированную копию паспорта и счета за коммунальные предложения, еще фотографию банковской карты или снимок страницы электронного кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности.В случае установленного лимита на сумму вывода выигрыша с бездепозитного приза, игрок не сможет исключить больше заявленной суммы. 1×slots рабочее зеркало на сегодня
скачать 1×slots на андроид мобильная версия
Если площадка дарует бездеп за регистрацию, то процедура его получения ординарна. Нужно лишь ввести акк на сайте и активировать его, подтвердив адресок электрической почты, номер телефонного либо иные данные, которые просит оператор. Перед данным нужно увериться, что пользователь находится на официальном веб-сайте казино, а не на жульнической площадке.При верном подходе бездепы — это прекрасный метод выступать на средства без растраты личных средств. Есть некоторое советов, следуя коим возможно извлечь максимально пользы из подобных акций казино. Играть стопам лишь на лицензированных площадках. Скриптовые сайты столько врут с бонусными услугами, хотя и используют пиратский софт с модифицированным ГСЧ. Выиграть на этих автоматах невероятно. <a href=http://btd-clan.maweb.eu/forum/viewthread.php?thread_id=325177&pid=648974#post_648974>1×slots официальный сайт скачать на айфон</a> Чтобы бездеп не был начислен на Ваш акк, Вам надо активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт механически, а Вы не расчитываете его использовать, обратитесь в службу с просьбой отменить бездепозитный приз. 1× slots зеркало <a href=http://www.orlandogamers.org/forum/member.php?action=profile&uid=4307>http://www.orlandogamers.org/forum/member.php?action=profile&uid=4307</a> Это тоже безвозмездные деньги, которые поступают на аккаунты новоиспеченных в после регистрирования. А особенность таких призов состоит в, что обретенные финансы обязательно по использовать в продолжении назначенного времени.Используйте наихорошие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и сможете выиграть без риска. Подберите ресурс из перечня ниже, дабы заработать подарки за простые деянья и уже сейчас получить 1-ый выигрыш. Каждое азартное заведение впечатлит удобной навигацией, сертифицированным софтом с высочайшей отдачей и прыткими выводами на электронные кошельки.
1×slots зеркало проходить регистрацию это отличный вариант
На данном разделе портала периодически публикуются обзорные заметки, каких рассматриваются бесплатные призы превосходнейших интернет-казино. Информация структурирована по нескольким пт, включая основные:Размер приза. В качестве бездепов обычно начисляют маленькие суммы, а когда речь идет о бонусах за депо, которые начисляются в процентном соотношении от суммы пополнения, то кое-какие казино могут презентовать игроку до 2000$. Наличие у игрока 2 аккаунта. Запрещено творить несколько профилей для неоднократного получения бездепов. <a href=https://usolie-citi.ru/user/Craigspuct/>https://usolie-citi.ru/user/Craigspuct/</a> Более солидные предложения встречаются очень изредка. Зачастую они доступны лишь VIP-игрокам. В остальных случаях им всего сопутствуют очень строгие условия отыгрыша. Также возможны дополнительные обстоятельства прочие ограничения, прописанные в критериях и положения бонусной программы казино.2. Создать свежий профиль. Для регистрации нужно наполнить небольшую анкету либо зайдите в индивидуальный кабинет посредством социальных сеток; 1×slots официальный сайт мобильная версия Как правило, новоприбывшие игроки начала хотят ознакомиться с методами ввода и вывода денежных средств и сроки исполнения поданных заявок дабы конкретно понимать, как стремительно появится исключить свой казино приз за регистрацию без депо на электронный кошелек или же банковскую карту. К счастью для всех играющих, внутри определенных холдингов, все казино соперничают меж собой. Ведь если бы определенную компанию давало лишь одно онлайн-заведение, то ли бы клиенты заметили казино с бонусом за регистрацию и могли бы рассчитывать только на вознаграждение вид приза на первое инвестиция. К любому заведению периодически следует привлекать свежих игроков, что, конечном, лишь на руку всем играющим.Для получения бонуса надо(надобно) ознакомиться с программкой лояльности казино и устроить ставки на необходимую, необходимую для перехода на грядущий уровень.
<b>Смотреть еще похожие новости:</b>
<a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=2101>1хслотс рабочее зеркало на сегодня</a>
<a href=http://forum.azartweb2.com/threads/1×slot-kazino-zerkalo.227474/>1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Чем ниже велечину вейджера, тем проще отыграть и исключить бонус. Если Вы планируете заработать на бездепе, не просто ознакомиться с свежим игровым клубом, то стоит игнорировать призов с высоким вейджером их почти не реально отыграть. С ними Вы сможете лишь протестировать игры заведения.
#9778 Soldownloadhttps://sol-casino-apk.ru/sol-skachat/
<a href=https://sol-casino-apk.ru/sol-skachat/>sol-casino-apk.ru/sol-skachat/</a>
Установить apk файл казино Сол – побеждай сегодня! <a href=https://sol-casino-apk.ru/sol-skachat/>sol-casino-apk.ru/sol-skachat/</a>
#9779 Charlesgunnyhttp://filmkachat.ru
скачать 1×slots на андроид мобильная версия
Легальных казино, предлагающих бездепозитный бонус за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам воспрещено начислять призы клиентам, не имеющим валютных средств на счете. Мы предлагаем рассмотреть животрепещущие бонусы онлайн-казино с лицензией, которые соблюдают законодательство РБ. <a href=http://filmkachat.ru/>казино 1×slots</a> <a href=https://oldchicken.kr/bbs/board.php?bo_table=sub0202&wr_id=1713421>https://oldchicken.kr/bbs/board.php?bo_table=sub0202&wr_id=1713421</a> У каждого игорного клубы различные вейджеровые условия. Чтобы вы гарантировано сумели выполнить их, мы дадим несколько советов. Если система начислила маленькую необходимую, не создавать немалые ставки – остановитесь на 10–30 центах. Как лишь сумеете заработать приблизительно $100, поднимите ставку до 50 центов. Если видео разъем даёт выиграть – продолжайте играть. В противном случае другого, как присмотреться к другому автомату. 1×slots казино мобильная версия <a href=http://voentorgi.cebius.ru/index.php?subaction=userinfo&user=luxuriantdayboo>http://voentorgi.cebius.ru/index.php?subaction=userinfo&user=luxuriantdayboo</a> Условия отыгрыша бонуса. Если Вы планируете заработать на бездепозитном бонусе, то для направьте на велечину вейджера и срок, который дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, что, этим легче отыграть приз и исключить выигрыш.
1×slots официальный сайт скачать на айфон
1×slots зеркало рабочее <a href=https://hackernoon.com/preview/ZomruTIwfZEz1IzDyG4g>https://hackernoon.com/preview/ZomruTIwfZEz1IzDyG4g</a> 1×slots рабочее зеркало Помните, собственно в некоторых играх сумма ставки идет в зачет вейджера только частично. Так, в настольных и карточных забавах только от 5% до 50% суммы ставки числятся как отыгранные средства, на как в слотах идет в зачет все 100% суммы.
1× slots официальный
Пoдтвepждeниe элeктpoннoй пoчты или мoбильнoгo тeлeфoнa. B пepвoм cлучae тpeбуeтcя пepexoд пo ccылкe из пиcьмa, вo втopoм – иcпoльзoвaниe кoдa из SMS.Срок отыгрыша — это этап, который начинается в момент активации приза и кончается с его закрытием. Пользователю нужно уложиться в этот временной промежуток, другому призовые свои аннулируются. Казино устанавливают список игр, ставки в засчитываются при расчете отыгранных денег. Если тайтл не заходит в этот перечень, то он может быть недоступен для загрузки во время действия бонусного предложения. Верификация аккаунта. Лучше подтвердить личность незамедлительно последствии регистрации, дабы позже не было заморочек с выводом средств. Верификация возможность протекать 2-мя путями: <a href=http://slavsbyt.ru/index.php?subaction=userinfo&user=magicalvoodoo20>http://slavsbyt.ru/index.php?subaction=userinfo&user=magicalvoodoo20</a> 1хслотс зеркало
1×slots казино зеркало
<a href=https://www.176mw.net/forum.php?mod=viewthread&tid=40&pid=548672&page=3767&extra=page%3D1#pid548672>1×slot казино зеркало</a> Денежные средства. Третий приз за регистрацию без депозита – наличные. К сожалению, только знаменитые и популярностью клубы все уяснить деньги в руб. Либо баксах. С их поддержкою появится насладиться любой доступной игрой – слотами, рулеткой, кено, блэкджеком. Однако перед данным необходимо выполнение определенных условий. Так собственно приготовьтесь предоставить конфиденциальную информацию (пол, возраст, государство проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев ревизия данных занимает не более суток, в чего получится беспрепятственно выводить крупные выигрыши. 1×slots подтвердит вашу регистрацию если говорить <a href=https://guides.co/a/9153>https://guides.co/a/9153</a> Рассмотрим принцип его действия на образце. Допустим, вы зарегистрировались и возымели $10 not the slightest down payment bonus с вейджером х50. Это значит, собственно выигранные деньги можно будет выводить не раньше, чем в того, как общая сумма ставок достигнет $500.
1×slots зеркало которую указывали при регистрации кстати
Бонус за регистрацию в казино без депозита с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша возможность понадобиться сделать ставки на необходимую, в количество 10-ов раз превышающую сумму приза либо выигрыша. Чтобы без увериться в превосходствах бездепозитных бонусов, достаточно зарегистрироваться в казино и получить одобрение.При отыгрыше бездепов, учитывайте кратковременные ограничения. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток. <a href=https://sparkitupforums.net/User-TravisPap>https://sparkitupforums.net/User-TravisPap</a> 1×slot казино зеркало Многие игроки, оценив функционал казино, остаются играть в нем и дальше ? на это и направлено любое промо. Постоянные посетители заносят депозиты и проделывают ставки, обеспечивая длительную прибыль оператора. То есть, казино выдают бездепы свежим юзерам для формирования приклнной аудитории.
<b>Смотреть еще похожие новости:</b>
<a href=http://freedom.teamforum.ru/viewtopic.php?f=28&t=36329>1×slots бонус за регистрацию</a>
<a href=http://nrj.rs.ba/viewtopic.php?p=3392#p3392>1хслот официальный сайт зеркало</a>
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=469355>1×slots сайт зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бездеп с фриспинами имеет обхватывать всю коллекцию игр на веб-сайте либо разработки 1-го провайдера. Обычно предлагается определенный перечень автоматов. Он указывается в положениях о проведении акции. Выигрыш может быть выведен последствии того, как пользователь отыграет данную необходимую. Возможность оценить полный перечень слотов — основное достоинство этой разновидности. Игроку становятся доступны что, эти опции, которые отсутствуют в демонстрационном режиме, а вероятность выиграть настоящие деньги добавляет ярких азартных ощущений. Какие призы я могу еще получить считая бездепозитного приза за регистрацию в казино? По мимо бездепозитного бонуса, любое онлайн казино предлагает игрокам выгодное предложение на 1-ый депозит, вы совершаете депозит, ваш депозит увеличивается в двое либо в в трое, тем самым начать играть можно с больше крупной суммой, например же не забываем на вейджер на бонусы.
#9780 MonroCasinohttps://monro-casino-apk.ru/monro-casino
<a href=https://monro-casino-apk.ru/monro-casino>https://www.monro-casino-apk.ru/monro-casino</a>
Загрузить приложение казино онлайн Монро – играй сегодня! <a href=https://monro-casino-apk.ru/monro-casino>https://monro-casino-apk.ru/monro-casino</a>
#9781 Charlesgunnyhttp://filmkachat.ru
казино 1×slots
Диапазон ставок – Уточните лимиты ставок, действующие в отыгрыша бонусов. Заведения практически устанавливают максимальную ставку, возможную по условиям вейждера. <a href=http://filmkachat.ru/>1×slots зеркало проходить регистрацию это отличный вариант</a> Бонус без депо за регистрацию в казино (бездепозитный бонус) – это валютный подарок от клуба, кот-ый начисляется на аккаунт игрока в регистрации в казино. Кроме создания учетной записи, для получения бездепа, очень нередко потребуется ещё и подтвердить контактные данные игрока и/или активировать специальный промо-код. <a href=https://medicaidsecretsforum.com/member.php?action=profile&uid=11661>https://medicaidsecretsforum.com/member.php?action=profile&uid=11661</a> Срок активации и время на отыгрыш. Зачисление денег либо фриспинов происходит при активации в течение требовательно ограниченного периода, похожие притязания предъявляются и к срокам отыгрыша. Одни казино позволяют отыгрывать приз некоторое дней либо в недель. Другие выдают крупную сумму за регистрацию, хотя время отыгрыша ограничивают несколькими часами с необоснованно высоким вейджером.Также бездепозитные бонусы шансы служить способом возвратить к игре клиентов, что приостановивших своё сотрудничество с фирмой: уведомление о бездепе поступает на мобильный телефонный либо почту. 1×slots рабочее зеркало на сегодня <a href=https://forums.drdarkesoftwares.com/member.php?action=profile&uid=1706>https://forums.drdarkesoftwares.com/member.php?action=profile&uid=1706</a>
1×slots зеркало подтвердит вашу регистрацию если говорить
<a href=https://showboysmedia.com/real-music/#comment-52403>1×slots официальный сайт зеркало</a> 1×slots регистрация В случае с фриспинами без вейджера, Вам не придется отыгрывать собственный выигрыш с даровых вращений. Прибыль, которую Вы заработаете на таком бездепе можно назначать на вывод без какого либо отыгрыша. <a href=http://www.tianranju.net/home.php?mod=space&uid=130841>http://www.tianranju.net/home.php?mod=space&uid=130841</a> 1×slots casino регистрация 1×slotscasin online Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного приза достаточно пополнения баланса и подтверждения личности. В иных же клубах, необходимо несколько один прокрутить свой депо.
1х слот 1хслотс регистрация перейти на 1×slots
При верном раскладе бездепы — это прекрасный метод выступать на деньги без траты личных средств. Есть несколько советов, следуя которым можно извлечь максимум полезности из подобных промоакций казино. Играть стопам лишь на лицензированных площадках. Скриптовые веб-сайты не только обманывают с бонусными услугами, но и используют пиратский софт с модифицированным ГСЧ. Выиграть на таких автоматах нереально.Варианты выигрыша в от Вашей успеха и условий игорного портала. Выше мы сказали, что некоторые бездепозитные призы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются другие, все, кто не уточняет лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на деньги, можно выиграть неописуемые суммы. Сегодняшние игровые автоматы или видео слоты, как их именуют. Могут выдавать солидные умножение от х1.000 и выше. Некоторые множат ставку от х100.000. <a href=https://www.catabase.fr/mybb/member.php?action=profile&uid=3806>https://www.catabase.fr/mybb/member.php?action=profile&uid=3806</a> 1хслот скачать Ознакомьтесь с нашим списком лучших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего перечня и получите бездеп сразу. Хватайте наихорошие благотворительные предложения ниже и выигрывайте большие средства, не рискуя!
casino 1×slot
Выбрать казино с бездепозитным призом. У нас на веб-сайте представлен список наихороших онлайн казино, коие предлагают своим игрокам щедрые бонусы за регистрацию. <a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=537635>1×слотс казино</a> Фриспины — благотворительные вращения, которые разрешают игрокам получать дополнительные выигрыши в игровых автоматах. Среди опытнейших игроков фриспины числятся самым модным и предпочтительным видом бонуса — бесплатные вращения иногда эффективнее и веселее в отыгрыше, чем другие виды бездепов. Ознакомьтесь с нашим списком превосходнейших бездепозитных бонусов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего списка и получите бездеп сразу. Хватайте лучшие благотворительные предложения ниже и выигрывайте великие средства, не рискуя!Более крупные предложения встречаются очень изредка. Зачастую они доступны лишь VIP-игрокам. В остальных случаях им скорее сопутствуют очень строгие условия отыгрыша. Также вероятны вспомогательные условия и ограничения, прописанные в критериях и положения бонусной программки казино. 1×slots регистрация 1×slotscasino 56 online <a href=http://javset.net/index.php?subaction=userinfo&user=unevencoward38>http://javset.net/index.php?subaction=userinfo&user=unevencoward38</a> Промокод – определённая композиция знаков, которую необходимо установить в соответствующее фон при творении учетной записи или активировать в собственном профиле игрока в разделе с бонусами.
1×slots casino зеркало рабочее
Возможность поиграть вспомогательное соревнование (а от и некоторое) совершенно даром, а выигрыш, к, поступает на счёт игрока. Получить приветственный бонус шансы только новые клиенты онлайн-казино. Способы описаны в критериях акции любого законного казино, почаще всего это: <a href=https://www.bkeye.co.kr/bbs/board.php?bo_table=free&wr_id=310172>https://www.bkeye.co.kr/bbs/board.php?bo_table=free&wr_id=310172</a> 1×slots зеркало этих способов предполагает регистрацию Если вы новичок в и лишь попали в неизведанную вами область азарта — счет предложений как бездепозитные бонусы без пополнения.Воспользоваться бездепом можно не во всех игровых автоматах: казино и тут устанавливает ограничение для посетителей. Конечно, это возможно счесть неким неудобством для игрока, хотя справедливости необходимо, собственно выбор автоматов всё точно остаётся довольно наибольшим.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.makinamania.net/index.php?topic=250789.new#new>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<a href=http://naturetour.ru/communication/forum/messages/forum3/message23445/5148–1×slots-registratsiyu-bolee-populyarnyy-variant-eto?sessid=134c2eb777a7ce6f3fb6aa3ce6a16167&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1×slots регистрацию более популярный вариант это</a>
<a href=https://creapnl.com/foros/tema/1×slots-%d0%b7%d0%b5%d1%80%d0%ba%d0%b0%d0%bb%d0%be-%d0%bd%d0%b0-%d1%81%d0%b5%d0%b3%d0%be%d0%b4%d0%bd%d1%8f-103/>1×slots зеркало на сегодня</a>
<a href=https://chasingadream.rpginitiative.com/showthread.php?tid=129229>1хслотс мобильная версия зеркало</a>
<a href=https://forum.vn.ua/member.php?u=73361>1×slots рабочее зеркало на сегодня</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Легальных казино, предлагающих бездепозитный приз за регистрацию в Беларуси в 2022 году, сейчас нет. По законодательству Республики Беларусь операторам запрещено начислять призы клиентам, не имеющим валютных средств на счете. Мы предлагаем разглядеть актуальные бонусы онлайн-казино с лицензией, коие соблюдают законодательство РБ. Риск-игра по одинаковым шансам – Также казино имеет запрещать скорпулезно обстоятельства по отыгрышу счет раунда на удвоение, кот-ый предлагается в слотах, видео-покере и неких других играх.
#9782 Charlesgunnyhttp://filmkachat.ru
зеркала 1×slots
Казино выводит деньги только на что, эту платежную систему, с котрой был изготовлен депозит. То есть, для вывода бездепозитного приза, Вам поначалу нужно пополнить счет. В неких клубах ограниченный список способов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет именно с этих платежных методов, коие доступны для вывода. <a href=http://filmkachat.ru/>1×slots зеркало на сегодня</a> Если площадка дарит бездеп за регистрацию, то процедура его получения проста. Нужно только ввести аккаунт на веб-сайте и активировать его, подтвердив адресок электронной почты, номер телефона либо другие данные, которые настятельно оператор. Перед данным необходимо убедиться, что юзер располагается на официальном сайте казино, а не на жульнической площадке.На благотворительные бонусы онлайн-казино практически всегда распространяется ограничения по стране проживания посетителей. Даже в для разрешается открывать счет и выступать на средства в заведении, это еще не значат, что вас доступны not the slightest down payment bonuses. <a href=https://www.globaleconomicsucsb.com/blog/index.php?entryid=174797>https://www.globaleconomicsucsb.com/blog/index.php?entryid=174797</a> Бездепозитные призы в казино без пополнения 2022 — это конкретная сумма средств или free spins вращения, коие предоставляются первым постояльцам за регистрацию на веб-сайте казино повторяющий бездепозитного приза, и дает для вероятность помощью казино без пополнения опробовать услуги (игр), с дальнейшей привилегией вывода средств при исполненьи всех установленных управлял.Зарегистрироваться в казино по особой ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефона и электронную почту). Для подтверждения номера аппарата необходимо в личном профиле показать собственный номер и нажать кнопку „Подтвердить номер телефона“, далее Вы получите sms-сообщение с кодом, кот-ый необходимо установить в подходящее фон. Для подтверждения электронной почты, перейти по интенсивной ссылке в послании от казино. рабочее зеркало 1×slots <a href=http://mrkarpiuk.xaa.pl/boards/shopping/member.php?action=profile&uid=36453>http://mrkarpiuk.xaa.pl/boards/shopping/member.php?action=profile&uid=36453</a>
скачать 1×slots на андроид мобильная версия
Но а если вы уже профи по интернет казино, кликаем на красноватую кнопку «Получить» и Вы механически перейдете в онлайн казино;Такой казино бонус без депо за регистрацию выдается игроку на час и энергично используется данное предложение с 2017 года. Это как бы некая маскировка поощрения под бездепозитный. Суть всего этого сводится к тому, что геймеру на час выдается, например, 1000 долларов, а реклама утверждает про, собственно любой выигрыш возможно будет в будущем оставить при себя. Но случае играющий серьезно отнесется к этому предложению, то он попросту потеряет время. Ведь игроку нужно будет играть не в аккаунте, ну тренировочном и с ограниченным выбором автоматов и ставок. Да и когда выигрыша (даже всей тыс. ) в правила вступят конкретные условия, где несомненно сказано, собственно наибольшей суммой победы возможность быть только двести $ и средства можно применять только в качестве бонуса на первый вклад с вейджером 25 от суммы вознаграждения плюс сам депозит. По итогу получится, собственно игрок выигрывал для 200% бонус с вейджером на конкретную необходимую. Короче говоря, это все не вашего медли. <a href=http://zxz.listbb.ru/viewtopic.php?f=9&t=2486>1×slots зеркало проходить регистрацию это отличный вариант</a> 1 x slots Многие казино деют в рекламных целях бесплатные призы исключительно для наших читателей. Чтобы их получить, надо(надобно) перебежать на игровой вебсайт по партнерской ссылке с нашего портала.При помощи такового поощрения оператор возможность того завлекать посетителей, коие ранее показывали активность на веб-сайте, но по какой-то основанию прекратили выступать. В данном случае промокод высылается юзеру по электронной почте или вид SMS. <a href=https://hdkaraokesong.com/space-uid-281190.html>https://hdkaraokesong.com/space-uid-281190.html</a> Подтвердите регистрацию, чтобы активировать Бездепозитный бонус с выводом, потребуется наполнить личный профиль. Заполните пустые поля реальными данными о себя.Бывают ли бездепозитные бонусы без вейджера? Бывают, в у вас Vip статус в казино и вы периодически играете в данном казино, а на бездепозитный приз за регистрацию уточняется вейджер во всех казино. 1хслот 1хслотс регистрация перейти на 1×slots Депозит для вывода средств. Для вывода отыгранного бездепозитного приза в обязательном порядке необходимо пополнить счет в казино. Для депозитных бонусов, данная процедура не необходима, например как депозит уже изготовлен.Онлайн-казино с бездепозитными бонусами ставят посетителям условия для использования бездепами, потому перед участием в промоакции другого, как тщательно ознакомиться со всеми правилами и аспектами промоакции. Условия шансы дотрагиваться получения приза, его использования и последующего вывода денежных средств если, тогда, выигрыша.
1×slots casino регистрация 1×slotscasino09k online
Но есть игорные заведения, которые готовы просто например жертвовать деньги на игру. Для этого довольно сделать профиль. Чтобы исключить свой выигрыш, вас сначала необходимо выполнить условия отыгрыша, указанные в критериях получения бездепозитного депозита. <a href=https://nerdgaming.science/index.php?title=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0>https://nerdgaming.science/index.php?title=%D0%B1%D0%BB%D0%BE%D0%B3%20%D0%B0%D0%BA%D1%83%D1%88%D0%B5%D1%80%D0%B0</a> Будьте внимательнее при ознакомлении с правилами во избежание происхождения конфликтных ситуаций с казино, когда после отыгрыша бездепа вас не дадут вывести крупную необходимую выигрыша. 1хслотс официальный сайт зеркало Чаще всего, популярные сервисы, эти как MoneyBookers и WebMoney, а MasterCard и Visa доступны у покер румов для вывода выигрышных средств. Но присутствует одно неотъемлемое верховодило. Финансовые средства выводятся лишь спустя что, эту платежную систему, которой огромный для пополнения депозита. Если же игрок получил бездепозитный покерный приз, потребуется пополнить счет на минимальную сумму, кот-ая сочиняет обычно 10 $.Бездепозитный бонус казино 2022 с выводом за регистрацию дает возможность ознакомиться игроку с лобби избранного заведения, сориентироваться в выборе игр и выяснить качество работы саппорта. Довольно нередко, начиная игровой процесс, игрок уже отказывается останавливаться и делает настоящий вклад. На это все казино и рассчитывают, предлагая своим клиентам бездепозитные призы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть безвозмездно вероятно как один таки с бонусом за регистрацию без необходимости вносить депозит.
1хслот зеркало сайта
<a href=https://www.neocodex.us/forum/topic/134383-%D0%A0%C2%B7%D0%A0%C2%B5%D0%A1%D0%82%D0%A0%D1%94%D0%A0%C2%BB%D0%A0%D1%95-%D0%A0%D1%94%D0%A0%C2%B0%D0%A0%C2%B7%D0%A0%D1%91%D0%A0%D0%85%D0%A0%D1%95–1×slots/>зеркло казино 1×slots</a> Иногда в качестве поощрения за регистрацию все выдаваться билеты для роли в турнирах. Условия их проведения довольно отличаются, потому мы советуем ознакомиться с любым предложением отдельно.Основное отличие что, нет, собственно для получения бездепа не надо пополнять баланс в казино. Но кроме этого, есть ряд и других отличий: казино 1×slots <a href=http://hajepine.com/bbs/board.php?bo_table=free&wr_id=58716>http://hajepine.com/bbs/board.php?bo_table=free&wr_id=58716</a> В зависимости от онлайн заведения любой из них может для предложить как бездепозитные средства, например и бездепозитные фриспины, которые в удачной регистрации рухнут для на ваш игровой баланс.
1×slots регистрация на 1хслотс
Когда речь о денежных бонусах, казино практически устанавливают обстоятельства вейджера, которые необходимо выполнить, чтобы исключить выигрыш.Фриспины без депо либо дополнительные свои посодействуют поближе познакомиться с игровой платформой и её функциями. За счёт даров возможно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям ради игры напротив живых крупье. <a href=https://trueanal.org/user/Jamesapalf/>https://trueanal.org/user/Jamesapalf/</a> 1×slots официальный сайт зеркало Бездепы имеют входить в состав приветственного пакета. Игрок вознаграждается бесплатными вращениями, фиксированной суммой либо баллами.Эльдорадо – 77 фриспинов в узнаваемых слотах. Зарегистрируйтесь на официальном веб-сайте и сделайте вход в собственный офис, дабы забрать бесплатные вращения с вейджером х40;
<b>Смотреть еще похожие новости:</b>
<a href=https://lawsbay.com/webdesing-8/#comment-14639>1×slots бездепозитный бонус за регистрацию</a>
<a href=http://big.bestforums.org/viewtopic.php?f=7&t=9172>1хслот зеркало сайта</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Помните, собственно в некоторых играх сумма ставки идет в зачет вейджера лишь отчасти. Так, в настольных и карточных забавах только от 5% до 50% суммы ставки числятся как отыгранные средства, в то время как в слотах идет в зачет все one hundred percent суммы.
#9783 Charlesgunnyhttp://filmkachat.ru
1×slots сайт
Основное отличие в, собственно для получения бездепа не пополнять баланс в казино. Но кроме этого, есть ряд и других отличий:Такой безвозмездный эквивалент средств зачисляется на профиль юзера после воплощения притязаний и предназначаются они только для игрового процесса. Вывод таких вознаграждений вероятен лишь последствии осуществления вейджеровых условий. <a href=http://filmkachat.ru/>1×slots зеркало регистрацию более популярный вариант это</a> Игры, в можно выступать на бонусные средства. Проверьте перечень игр, в можно играть на бонусные свои, возможно они Вам не понравятся и надо тратить своё время на эту промоакцию. <a href=http://www.eionia.co.kr/home/bbs/board.php?bo_table=free&wr_id=414855>http://www.eionia.co.kr/home/bbs/board.php?bo_table=free&wr_id=414855</a> Этот тип приза будет добавлен на Ваш аккаунт последствии удачной процедуры регистрации с использованием номера аппарата. Если избрать другой способ сотворения учетной записи, бездеп не будет добавлен на Ваш аккаунт. 1×slots рабочее зеркало <a href=http://90pk.com/home.php?mod=space&username=efficacioussavi>http://90pk.com/home.php?mod=space&username=efficacioussavi</a>
1×slots актуальное зеркало
Классическая разновидность бонуса за творение аккаунта. Его превосходство заключается сомнений, собственно заказчик может других выбирать аппараты и создавать ставки в их. Иногда список игровых автоматов ограничен оператором, хотя все равно это другого, чем один-единственный дешевый разъем, как в случае с внедрением фриспинов.Фриспины без депозита либо вспомогательные свои помогут поближе познакомиться с игровой платформой и её функциями. За счёт подарков можно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям ради забавы против живых крупье. 1×slots casino online регистрация <a href=https://knpnewz.com/member.php?action=profile&uid=109089>https://knpnewz.com/member.php?action=profile&uid=109089</a> При отыгрыше бонусных средств, необходимо учесть срок действия бонуса и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный приз несомненно аннулирован. 1×slots зеркало проходить регистрацию это отличный вариант Операторы гемблинга утверждают, что например они сражаются с бонус-хантерами. Впрочем, критики считают, что данным казино пробуют устроить из случайного постояльца постоянного игрока.
1×slots casino регистрация 1×slotscasino09k online
Но а случае вы теснее профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы автоматически перейдете в онлайн казино; Создание аккаунта. На веб-сайте казино нужно обнаружить регистрационную форму и заполнить пустые поля личностными данными. Иногда на этом шаге потребуется указать лишь адресок электрической почты и пароль, хотя чаще бы заполнить анкету персональной информацией (ФИО, дата рождения, пространство проживания и т.д. ). Нужно свидетельствовать только реальные данные, что впоследствие они станут испытаны.Вознаграждения за получение VIP-статуса ? начисляются в рамках программы лояльности при достижении еще значения или выдаются персонально менеджерами службы. <a href=https://www.clashfarmer.com/forum/member.php?action=profile&uid=45682>https://www.clashfarmer.com/forum/member.php?action=profile&uid=45682</a> Фриспины предназначены для использования в видео слотах. Внимательно ознакомьтесь с условиями – часто их выдают на некоторые автоматы. В зависимости от клуба, у вас получится сделать определённое число ставок. Кстати, продвинутые игорные жилища позволяют запускать каждых «одноруких злодеев».Этот образ приза будет добавлен на Ваш акк последствии удачной процедуры регистрации с использованием номера телефонного. Если избрать иной способ сотворения учетной записи, бездеп не будет добавлен на Ваш аккаунт. сайт 1× slots casino Более солидные предложения встречаются довольно изредка. Зачастую они доступны только VIP-игрокам. В остальных случаях им скорее сопутствуют довольно строгие обстоятельства отыгрыша. Также возможны дополнительные обстоятельства и ограничения, прописанные в критериях и положения бонусной программы казино.Но такие рамки не смущают в хайроллеров, поскольку коэффициенты на слотах позволяют рассчитывать на солидные выигрыши, а в некоторых автоматах разыгрывается прогрессивный джекпот.
1×slots официальный сайт зеркало
Бездепозитные бонусы начисляются лишь один раз. Не стоит раскрывать свежие аккаунты, дабы получить их повторно. Служба безопасности казино непременно выявит «левого» участника и перекроет. Если посетитель выполнит нужные притязания, отыграет свою ставку и решит исключить собственный выигрыш, то ему нужно принять, собственно казино обязательно востребует предоставить ксерокопии собственных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные свои вывести не удастся.На странице представлены бездепозитные призы за регистрацию в казино редкая заслуга за коей гонятся все игроки как новички, так и мастера. Мы тоже уделяем великое внимание на присутствие призов при формирование рейтинга казино на средства. Бездепозитный приз это вероятность играть бесплатно и выиграть реальные деньги. <a href=https://persiankittencat.com/grey-persian-cats-unraveling-the-charm-of-these-feline-beauties/#comment-37000>1×slots зеркало быструю регистрацию а также мгновенное</a> 1×slots официальный сайт скачать <a href=http://www.psltw.com/home.php?mod=space&uid=471083&do=profile>http://www.psltw.com/home.php?mod=space&uid=471083&do=profile</a> Мы рекомендуем не открещиваться от подобных услуг знаменитых казино. Выделите количество мин. На регистрацию, получите приз и попробуйте его отыграть. Может быть, сегодня удача будет на вашей стороне!
1× slots сайт
Когда заберёте понравившееся вознаграждение, придёт время прокрутить вейджер. Это одно из основных требований, кроме обязательной верификации. Если на веб-сайте учтена неотъемлемая процедура доказательства личности, то исключить выигрыш удастся только последствии проверки данных. Приготовьтесь наполнить анкету и отправить в техподдержку документ, подтверждающий личность.Бесплатные бонусы казино без депо можно получить повторяющий валютных средств на бонусный счет (вывести их можно лишь в отыгрыша), фриспинов, забавы либо кешбэк-бонуса. <a href=http://vipblinds.ru/index.php?subaction=userinfo&user=headyprogressio>http://vipblinds.ru/index.php?subaction=userinfo&user=headyprogressio</a> 1×slot зеркало рабочее регистрации на телефон придет
<b>Смотреть еще похожие новости:</b>
<a href=https://demo.comuni-italiani.it/forum/viewtopic.php?f=9&t=364266>1×slots регистрация 1×slotscasino09k online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Реже бонусы без депо начисляются неизменным игрокам. С их помощью администрация старается удержать ценных клиентов или желает поблагодарить за преданность правильных посетителей. Но намного почаще для подобных целей используются такие акции:
#9784 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало рабочее на сегодня
Существуют казино с призом за регистрацию, каких очень известны фриспины в интернет казино потом регистрации в конкретных забавах. Они встречаются в почаще даровых поощрений либо традиционных бонусов в казино без инвестициям. Например, игрок регистрирует счет, на который начисляются бесплатные игры, приз за регистрацию повторяющий безвозмездных фрспинов, вращения в игровом автомате. Во время игрового процесса геймер выигрывает истинные средства, коие в последствии возможно удачно исключить из заведения на собственную платежную систему. То есть, есть шансы исключить средства без рисков собственными деньгами. Регистрация, за которую игрок получит бонусы, займет минут, а благодаря этому возможно увеличить 5 евро поощрений до тысячи и без всяких проблем исключить их. <a href=http://filmkachat.ru/>x1 slots регистрация в 1×slots casino</a> Ещё одно распространённое акционное предложение – привлекательный подарок с сомнительными притязаниями. К примеру, клуб обещает $100 в качестве бездепа, но с вейджером х80 либо х100. Отыграть такой вейджер практически нереально и потому лучше концентрироваться на более заманчивых акциях.Бездепозитные призы – это самая небезинтересная и более перспективная промоакция интернет-казино. Они и никакого фри-спинов, поэтому собственно выплаты в даровых вращениях не гарантированы, ведь комбинации на барабанах игрового аппарата могут не сложиться. <a href=https://tutorialslots.com/index.php?qa=282273&qa1=shisha-tobacco-from-4-eur>https://tutorialslots.com/index.php?qa=282273&qa1=shisha-tobacco-from-4-eur</a> 1×slot зеркало рабочее регистрации на телефон придет <a href=http://droid-cash.ru/user/DoctorLazutaKl/>http://droid-cash.ru/user/DoctorLazutaKl/</a>
1хслот зеркало
Бездепозитный бонус по промо-коду будет доступен для забавы, только том, случае когда Вы активируете специальный бонусный код в разделе с призами или укажите промокод при регистрации на веб-сайте. В неких случаях, не активации кода, понадобиться доказать контактные данные игрока и наполнить анкету посетителя. <a href=https://australianwinerytours.com/tours/showthread.php?tid=203431>1хслотс рабочее зеркало</a> 1хслотс казино зеркало 4. Заберите подарок. Чаще всего бонус активируется незамедлительно последствии регистрации. Но бывают истории, когда надо(надобно) забежать в индивидуальный офис либо написать в службу поддержки. <a href=http://mbdou-vishenka.ru/user/Ashleyced/>http://mbdou-vishenka.ru/user/Ashleyced/</a> Обычно показатель повыше, чем для бонусов на депо. Не удивляйтесь, если он несомненно даже х100. Иногда завышенный коэффициент вейджера устанавливается для жителей отдельных стран. 1×slots акции Используйте лучшие бездепозитные призы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из перечня ниже, дабы заработать презенты за простые деяния и уже сегодня получить 1-ый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высокой отдачей и быстрыми выводами на электрические кошельки.
1×slot казино зеркало
Ну и конечно же, для казино бездепозитные бонусы выгодны с имиджевой стороны: подобная добродушие увеличивает степень преданности клиентов к фирмы. <a href=http://111.t95283ld.bget.ru/user/Williamjiche/>http://111.t95283ld.bget.ru/user/Williamjiche/</a> Однако далековато не все ресурсы предлагают своим клиентам бездепозитные призы за регистрацию в казино. В большинстве случаев предусмотрено поощрение на первый депозит в объеме 100–200%. Это замечательная возможность преувеличить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш. 1×slots на любой вкус как пройти регистрацию Но а если вы уже профи по интернет казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в онлайн казино;Существуют казино с призом за регистрацию, в очень востребованы фриспины в интернет казино впоследствии регистрации в определенных забавах. Они встречаются даже чаще даровых поощрений или классических призов в казино без вложений. Например, игрок регистрирует счет, на который начисляются безвозмездные игры, бонус за регистрацию повторяющий бесплатных фрспинов, вращения в игровом автомате. Во время игрового процесса компьютерные выигрывает истинные средства, которые в последствии можно успешно вывести из заведения на собственную платежную систему. То есть, все шансы вывести свои без рисков собственными финансами. Регистрация, какую игрок получит бонусы, займет пару минут, а благодаря данному можно увеличить 5 евро поощрений до тыс. И без всяких заморочек исключить их.
1×slots регистрация 1×slots casino c2d ru
1. Зайти на официальный сайт. Проверьте вкладки, пообщайтесь со службой поддержки и почитайте отзывы, в не хотите стать жертвой мошенников или впустую потратить время;Чтобы бездеп не был начислен на Ваш акк, Вам надо активировать бонусный код. Если поощрение от казино было добавлено на Ваш аккаунт автоматически, а Вы не планируете его применять, обратитесь в службу поддержки с пожеланием отменить бездепозитный приз. Такой казино бонус без депо за регистрацию выдается игроку на час и активно используется данное предложение с 2017 года. Это как бы некая маскировка поощрения под бездепозитный. Суть всего сего сводится к тому, собственно геймеру на час выдается, например, 1000 $, а реклама твердит то, собственно любой выигрыш возможно будет в будущем оставить при себе. Но в играющий серьезно отнесется к этому предложению, то он попросту потеряет время. Ведь игроку нужно несомненно играть не главном аккаунте, в тренировочном и с ограниченным выбором автоматов и ставок. Да и в случае выигрыша (числе всей тыс. ) в верховодила вступят определенные условия, где будет сказано, что наибольшей суммой победы имеет быть только двести долларов и средства можно использовать лишь виде приза на первый лепта с вейджером 25 от суммы вознаграждения плюс сам депо. По результату выйдет, собственно игрок выигрывал себе 200% бонус с вейджером на определенную сумму. Короче говоря, это все не вашего времени.Во время забавы в казино, выигрыши, приобретенные благодаря безвозмездным призовым фондам, суммируются и срабатывают в совместную сумму для отыгрывания. Однако, случае удача улыбнется и получится отыграть все призы, игровое заведение гарантированно допустит исключить денежные средства. Сумма вывода несомненно зависимости от лимита, одобренного именно в этом учреждении. Поэтому, пристально нужно разбирать правила выдачи анлимитных депо. 1×slots casino зеркало <a href=http://www.pcddbbs.com/space-uid-12584.html>http://www.pcddbbs.com/space-uid-12584.html</a> В качестве бонусов онлайн казино нередко предлагает выдачу фриспинов, словами даровых вращений игрового барабана. Виртуальные монеты возможно использовать для обучения в покерной школе либо для забавы в казино.Максимальная ставка ? устанавливается в еденице счета и ограничивает размер ставки за один спин. В случае ее превышения бонус имеет быть аннулирован. Также в правилах может находиться запрет на размещение ставок конкретного облика, к, по одинаковым шансам в рулетке (другими, на чет или нечет, красное либо черное и т.д. ).
1×slots регистрация 1×slots review live
Доступные игры – В некоторых азартных забавах возможно снизить математическое приемущество казино до нескольких десятых процента. В их числе почти разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара и модели. Как правило, в таких играх ставки идут в зачет вейджера не всецело. Например, может учитываться только 50%. В некоторых играх бездепозитные призы вообщем невозможно отыгрывать. <a href=http://www.relevantdirectory.relevantdirectories.com/details.php?id=218188>http://www.relevantdirectory.relevantdirectories.com/details.php?id=218188</a> Если вы выбрали себе количество брендов которые вас больше всего полюбились, для постоянной забавы! Таких гемблеров казино довольно любит и оценивает, за частую такие игроки становятся VIP игроками заведения, которым часто поступают прибыльные предложения в виде бонусов, так же туда входит и бездепозитные.Некоторые онлайн-казино без депо предлагают новым клиентам выбрать бонус при регистрации. Будьте внимательны: выбрав один, вы в безусловном большинстве случаев не сможете воспользоваться остальными. 1× slots casino зеркало Поспешите забрать бездепозитные призы за регистрацию в казино из представленного перечня. Все платформы столько ведут легальную деятельность, хотя и обрадуют правдивыми плодами забавы, высочайшей отдачей, резвыми выплатами.После получения приза вывод средств для клиента будет недоступен до, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или пара месяцов. Выводить средства игрок может только в отыгрыша.
<b>Смотреть еще похожие новости:</b>
<a href=http://forum.cvetq.info/viewtopic.php?f=8&t=233304>1×slots рабочее зеркало на сегодня</a>
<a href=https://aircompare.us/forums/memberlist.php?mode=viewprofile&u=40074>1×slots регистрация 1×slotscasino09k online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Можно. Вы постоянно сможете отказаться от получения бездепозитного приза за регистрацию в казино, же Вы не сделаете ставку.
#9785 MonroCasinohttps://monro-casino-apk.ru/monro-casino
<a href=https://clients1.t.me/s/worldcasinonet.gh/url?q=https://monro-casino-apk.ru/monro-casino>monro-casino-apk.ru/monro-casino</a> <a href=http://www.navar.com.ua/out.php?link=https://monro-casino-apk.ru/monro-casino>monro-casino-apk.ru/monro-casino</a> <a href=http://www.wral.com/content/creative_services/promos/clickthru?oaparams=2__bannerid=24__zoneid=2__cb=65bf79125e__oadest=https://monro-casino-apk.ru/monro-casino>monro-casino-apk.ru/monro-casino</a> <a href=https://gr-cps.com/?URL=https://monro-casino-apk.ru/monro-casino>monro-casino-apk.ru/monro-casino</a> <a href=http://www.old.freegrannyporn.info/cgi-bin/atc/out.cgi?id=62&u=https://monro-casino-apk.ru/monro-casino>monro-casino-apk.ru/monro-casino</a> <a href=http://emagio.com.xx3.kz/go.php?url=https://monro-casino-apk.ru/monro-casino>monro-casino-apk.ru/monro-casino</a> <a href=http://uk-alfaservice.ru/bitrix/rk.php?goto=https://monro-casino-apk.ru/monro-casino>monro-casino-apk.ru/monro-casino</a> <a href=http://www.google.co.ug/url?q=https://monro-casino-apk.ru/monro-casino>monro-casino-apk.ru/monro-casino</a> <a href=http://forum.jcboat.ru/go.php?https://monro-casino-apk.ru/monro-casino>monro-casino-apk.ru/monro-casino</a> <a href=http://clarionhotelsiliconvalley.com.xx3.kz/go.php?url=https://monro-casino-apk.ru/monro-casino>monro-casino-apk.ru/monro-casino</a> <a href=http://mycareer.dal.ca/emailStat.htm?action=redirect&email=591&url=https://monro-casino-apk.ru/monro-casino>monro-casino-apk.ru/monro-casino</a> <a href=http://www.instiz.net/go_link.php?url=https://monro-casino-apk.ru/monro-casino>monro-casino-apk.ru/monro-casino</a> <a href=https://home.uceusa.com/EmailLoginInfo.aspx?returnurl=https://monro-casino-apk.ru/monro-casino>monro-casino-apk.ru/monro-casino</a> <a href=https://io.fusedeck.net/t/redir?https://monro-casino-apk.ru/monro-casino>monro-casino-apk.ru/monro-casino</a> <a href=http://interunity.ru/bitrix/rk.php?goto=https://monro-casino-apk.ru/monro-casino>monro-casino-apk.ru/monro-casino</a>
Install application casino monro – play now!
<a href=http://blog.isdfg.com/newblog1/index.asp?wangzhi=plarium.com/forum/en/raid-shadow-legends/676_tavern/1433693_do-you-feel-battle-passes-are-just-the-norm-now-in-games&wenjian=/displays/js/js.php&page=15>monro-casino-apk.ru/monro-casino</a> <a href=http://eeye.co.kr/bbs/link_get.php?url=https://monro-casino-apk.ru/monro-casino>monro-casino-apk.ru/monro-casino</a> <a href=http://www.eyemetrics.co.jp/cgi-bin/newsframe.cgi?url=https://monro-casino-apk.ru/monro-casino>monro-casino-apk.ru/monro-casino</a> <a href=https://miedzyrzecz.praca.gov.pl/rynek-pracy/bazy-danych/klasyfikacja-zawodow-i-specjalnosci/wyszukiwarka-opisow-zawodow/-/klasyfikacja_zawodow/zawod/343206?_jobclassificationportlet_WAR_nnkportlet_backUrl=https://monro-casino-apk.ru/monro-casino>monro-casino-apk.ru/monro-casino</a> <a href=https://www.chivemediagroup.com/?URL=https://monro-casino-apk.ru/monro-casino>monro-casino-apk.ru/monro-casino</a> <a href=https://cse.google.pt/url?sa=t&url=https://monro-casino-apk.ru/monro-casino>monro-casino-apk.ru/monro-casino</a> <a href=http://www.egginton.ca/seo/redirect.php?url=https://monro-casino-apk.ru/monro-casino>monro-casino-apk.ru/monro-casino</a> <a href=https://76.gregorinius.com/index/d1?diff=0&source=og&campaign=5796&content=&clickid=6glaagrcny71ype6&aurl=http%3A%2F%2Fplarium.com/forum/en/raid-shadow-legends/676_tavern/1433693_do-you-feel-battle-passes-are-just-the-norm-now-in-games&p=&pushMode=popup>monro-casino-apk.ru/monro-casino</a> <a href=https://masanconsumer.com/bitrix/redirect.php?goto=https://monro-casino-apk.ru/monro-casino>monro-casino-apk.ru/monro-casino</a> <a href=http://www.virazh.kz/ru/go.php?go=https://monro-casino-apk.ru/monro-casino>monro-casino-apk.ru/monro-casino</a> <a href=https://www.maxlevel.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=https://monro-casino-apk.ru/monro-casino>monro-casino-apk.ru/monro-casino</a> <a href=http://www.volnov.org.ua/script.php?redir=https://monro-casino-apk.ru/monro-casino>monro-casino-apk.ru/monro-casino</a> <a href=http://alt1.toolbarqueries.google.es/url?q=https://monro-casino-apk.ru/monro-casino>monro-casino-apk.ru/monro-casino</a> <a href=https://www.gestiondachatsram.com/GestionRAM/site/langue.asp?lchref=http%3A%2F%2Fplarium.com/forum/en/raid-shadow-legends/676_tavern/1433693_do-you-feel-battle-passes-are-just-the-norm-now-in-games>monro-casino-apk.ru/monro-casino</a> <a href=https://cloud.squirrly.co/go34692/http:/https://monro-casino-apk.ru/monro-casino>monro-casino-apk.ru/monro-casino</a>
#9786 SolAndroidhttps://sol-casino-apk.ru/sol-na-androjd/
<a href=https://sol-casino-apk.ru/sol-na-androjd/>https://www.sol-casino-apk.ru/sol-na-androjd/</a>
Установить apk файл онлайн казино Sol – побеждай сейчас! <a href=https://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a>
#9787 Charlesgunnyhttp://filmkachat.ru
casino 1×slot
Акционные предложения от казино есть в разных форматах. Часто бонусы даются в мена на депо. Игрок заносит платеж и получает деньги, безвозмездные вращения и одобрения. Вознаграждение от оператора имеет быть доступно и без пополнения баланса. Бездеп — картина бонуса, кот-ый гарантирован за выполнение определенных действий на веб-сайте: <a href=http://filmkachat.ru/>1×slots casino регистрация</a> Но а в вы теснее профи по онлайн казино, кликаем на красную кнопку «Получить» и Вы механически перейдете в интернет казино;Подарки на конкретные даты выделяются критериями получения. Если поощрение начисляют игроку на день рождения, то сумма обыкновенно в от общего размера депо за прошедший год. <a href=http://kx2.net/space-uid-177560.html>http://kx2.net/space-uid-177560.html</a> А ознакомиться с новыми интернет казино, Вы можете с призов с выводом прибыли, которые Вы сможете получить без депозита. 1хслотс зеркало на сегодня <a href=http://droid-cash.ru/user/ZacheryArrOx/>http://droid-cash.ru/user/ZacheryArrOx/</a> В некоторых интернет казино для получения бездепозитных призов не довольно просто зарегистрироваться на сайте клуба и доказать свои контактные данные. Дополнительно потребуется активация промокода.Бездепозитные бонусы – это исключительно занимательная и наиболее перспективная акция интернет-казино. Они том чем фри-спинов, поэтому собственно выплаты в бесплатных вращениях не гарантированы, ведь композиции на барабанах игрового аппарата все не сложиться.
1×slots сайт
На бонусные начисления имеют быть установлены вспомогательные лимитирования, которые Вы не учли при отыгрыше. Пока приз полностью не отыгран — средства из казино не выводятся.Основное различие что, что для получения бездепа нужно пополнять баланс в казино. Но считая сего, есть ряд прочих различий: 1×slots официальный сайт зеркало Сроки активации приза уточняются любым казино, но чаще всего они не превосходят недели с момента получения. Игроку непременно надо(надобно) применять бездеп протяжении указанного срока, в ином случае приз просто исчезнет. Каждый бонус можно получить лишь один один, потому случае не применять бездеп в срок, у игрока не будет 2 шанса им пользоваться. <a href=http://hongtouwen.com/home.php?mod=space&uid=435468&do=profile>http://hongtouwen.com/home.php?mod=space&uid=435468&do=profile</a> Особую изюминку видео слотам присваивают оригинальные знакы. С их свет активизируются разные призы. Вы сможете запустить вспомогательный степень и прирастить необходимую выигрыша. Есть знаки, коие заменяют негодные элементы и сами создают выигрышные комбо. Не стоит забывать и на бонус-тур. После каждого счастливого спина есть шанс прирастить сумму выигрыша в 2 или хорошо раза.Иногда в поощрения за регистрацию могут выдаваться билеты для участия в турнирах. Условия их проведения довольно выделяются, поэтому мы рекомендуем ознакомиться с любым предложением раздельно. 1×slots casino зеркало рабочее Не стоит путать забаву в демо и использование призов. В демонстрационном режиме игрок имеет расценить механику слота, сюжет и оформление. Но игра проводится на относительные кредиты, поэтому отсутствует главное ? ощущение пыла. Активируя промокод либо фриспины, клиент по-прежнему не тратит средства средства на игровые автоматы, хотя возможность сорвать реальный куш!Активация валютного вознаграждения происходит автоматически последствии творения профиля либо использования промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на странички казино в социальных сетях либо на рассылку маркетинговых извещений, скачать и ввести дополнительный софт и т.д.
1×slots официальный сайт скачать на айфон
Онлайн-казино тщательно продумывают бонусные обстоятельства, коие нужно выучить перед регистрацией. В правилах указывается размер вейджера, лимиты по ставкам и сумме вывода, список игр для отыгрыша прочие лимитирования.Бездепозитные призы казино это финансовая компенсация, предлагаемая пользователям на дармовой основе и возможность играть в онлайн казино даром. Если сопоставлять их с одобрениями за лепта, в которых средства выдаются только впоследствии первоначального пополнения счета, то бездепозитные вознаграждения получаются безвозмездно. То есть, играющий получает вероятность делать ставки на уже место финансы, коие выдаст заведение, выполняя, при, обычные действия, чтобы их извлечь (тут идет о регистрация, удостоверении личности с использованием номера аппарата, дизайна заказы и т.д. ). <a href=http://www.plcolor.co.kr/bbs/board.php?bo_table=free&wr_id=805838>http://www.plcolor.co.kr/bbs/board.php?bo_table=free&wr_id=805838</a> В лицензионных бездепозитных казино выступать в азартные игры действительно безопасно. Наличие лицензии одобряет тот факт, что клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP. 1х слот 1хслотс регистрация перейти на 1×slots После получения приза вывод средств для посетителя несомненно недоступен того, пока он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или пара месяцов. Выводить деньги игрок может только в отыгрыша.
1хслотс мобильная версия зеркало
Вышеописанная первопричина и считается основным моментом, следствии которого операторы отдают доля собственной прибыли на различные маркетинговые расходы и рекламные кампании. А самым действующим тут будут выступать именно бездепозитные призы казино 2022 с выводом за регистрацию. 1×slots официальный сайт скачать на айфон <a href=http://berdapteka.ru/profile.php?lookup=64756>http://berdapteka.ru/profile.php?lookup=64756</a> Бонус без депо за регистрацию в казино (бездепозитный приз) – это денежный подарок от клуба, кот-ый начисляется на аккаунт игрока последствии регистрации в казино. Кроме творенья учетной записи, для получения бездепа, довольно часто потребуется ещё и подтвердить контактные данные игрока и/или активировать особый промо-код.
1×slots сайт зеркало
Для верификации аккаунта нужно дать профессионалам технической поддержки отсканированную копию паспорта и счета за коммунальные услуги, еще фотографию банковской карты или снимок странички электрического кошелька с данными о обладателе. Иногда операторы запрашивают селфи игрока с паспортом в руке или Skype-конференцию для подтверждения личности. <a href=http://bbs.qc0769.com/home.php?mod=space&uid=428389>http://bbs.qc0769.com/home.php?mod=space&uid=428389</a> 1×slots официальный сайт зеркало Подтвердите личность, предоставив оператору казино свои паспортные данные. Инструкции обычно несложные, главное — конкретно им идти. Если написано, что «на фото обязаны быть видны все хорошо угла страницы паспорта» — устройте именно это фото.
<b>Смотреть еще похожие новости:</b>
<a href=http://permitbeijing.com/forum/showthread.php?tid=2189697>1×slot рабочее зеркало</a>
<a href=https://forumauthority.com/thread-6599-post-39402.html#pid39402>1×slots быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Вознаграждения за получение VIP-статуса ? начисляются масштабах программки преданности при достижении одного уровня либо выдаются индивидуально менеджерами саппорта.
#9788 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало проходить регистрацию это отличный вариант
Этот образ приза будет добавлен на Ваш аккаунт последствии успешной процедуры регистрации с внедрением номера телефонного. Если выбрать другой метод творенья учетной записи, бездеп не несомненно добавлен на Ваш акк. <a href=http://filmkachat.ru/>1хслотс 1хслотс регистрация перейти на 1×slots</a> Постарайтесь отыграть вейджер, чтобы замечена вероятность забыть заявку на выплату. Кстати, на всех сайтах, представленных в перечне, доступны современные платёжные инструменты. Вы сможете получить выигрыш на электрической кошелёк, карту, телефон.Подобные призы без депозита предоставляются на больше выгодных условиях. Зачастую они крупнее, а условия отыгрыша наименее жесткие. <a href=http://dev.may-green.ru/forum/user/16181/>http://dev.may-green.ru/forum/user/16181/</a> casino 1×slot <a href=https://menwiki.men/wiki/User:FlorLongwell>https://menwiki.men/wiki/User:FlorLongwell</a> Минимального оборота. Этот предел уточняется вейджером — пока игрок не сыграет на установленную сумму, вывод средств несомненно недосегаем.Условия отыгрыша приза. Если Вы планируете заработать на бездепозитном призе, то начала направьте на велечину вейджера и срок, который дается на отыгрыш бонуса. Чем ниже вейджер и больше срок на отыгрыш, тем проще отыграть приз и вывести выигрыш.
1×slots промокод при регистрации
Также учтите, собственно некоторые игровые платформы сужают список государств, которые способны получить предложенный бездепозитный бонус за регистрацию. К примеру, есть онлайн-заведения, выдающие сходственные бонусы лишь обитателям определенных государств. К примеру, интернет казино 777 Оригинал предоставляет бездепозитный приз лишь игрокам из России и государств СНГ. Или наоборот, снабжают вознаграждением всех, кроме жителей некоторых государств (как сего, идет пристально учить список, чтобы потом не появилось практически вопросов и претензий).Далее потребуется отыграть вагер и исключить выигрыш. Игрокам без опыта крупно подфартило, меня получить десятки презентов за одну регистрацию. Если не смогли получить Бездепозитный приз, не тревожьтесь. Обратитесь в онлайн чат, оператор поможет решить проблему. 1×slots casino регистрация Получив собственный презент, Вы можете безвозмездно играть на реальные деньги, а выполнив обстоятельства отыгрыша, исключить свой выигрыш. <a href=https://systemcheck-wiki.de/index.php?title=%D0%9E%D0%BD%D0%BB%D0%B0%D0%B9%D0%BD_%D0%9A%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE_1×slots>https://systemcheck-wiki.de/index.php?title=%D0%9E%D0%BD%D0%BB%D0%B0%D0%B9%D0%BD_%D0%9A%D0%B0%D0%B7%D0%B8%D0%BD%D0%BE_1×slots</a> 1×slots зеркало которую указывали при регистрации кстати Вы не в коем случае ни же рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической игры на бездепозитные призы, у Вас есть шанс изучить игровые автоматы, выучится регулировать менять ставки и полосы, исследовать бонусные игры и их выигрышные композиции, ну конечном просто зарядится кучей впечатлений! Ведь вы будите играть на бонусные свои, которые возможно отыграть и исключить, но просто на демо счет, что, этим наиболее адреналин в крови еще повысится а пульс забьется с частым ритмом!
casino 1×slot
Бездепозитные бонусы – это исключительно интересная и наиболее многообещающая акция интернет-казино. Они числе какого-либо фри-спинов, потому что выплаты в бесплатных вращениях не гарантированы, как композиции на барабанах игрового аппарата шансы не сложиться.В перечне притязаний к отыгрышу нередко присутствуют лимиты на ставки при игре на собственные средства. Так, в отыграть нужно 30 000 рублей, а максимальная сумма ограничена 30 рублями, то вертеть барабаны светит 1000 один. Эта необыкновенность затрудняет соблюдение игроками критерий по срокам действия промоакции. После получения приза вывод средств для клиента несомненно недоступен до тех пор, же он его не отыграет. Казино устанавливают сроки и для отыгрыша бездепа — чаще всего неделя или чета недель. Выводить средства игрок может лишь в отыгрыша.Бонус в казино без депо содержит разные варианты: такое быть приветственный бонус, акции в честь каких-то праздников или весомых дат, бонус за вербование новых игроков, преданность и получение VIP-статуса. <a href=https://coinzaa.com/u/Charlesapodo>https://coinzaa.com/u/Charlesapodo</a> Количество фриспинов за регистрацию обычно варьируется от 5–10 до 100 и. Когда игроку полагается большое фриспинов, администрация возможность разбивать их начисление на количество дней. Бесплатные вращения предоставляются для конкретного слота, который указывается в правилах промоакции. сайт 1× slots casino Вы не в коем случае ни чем не рискуете, а только выигрываете и выводите на платежную систему, либо проигрываете предложенный бонус, по мимо практической игры на бездепозитные бонусы, у Вас есть шанс выучить игровые автоматы, выучится регулировать менять ставки и полосы, изучать бонусные забавы и их выигрышные комбинации, ну в конце концов просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные свои, которые можно отыграть и исключить, а не просто на демо счет, тем наиболее адреналин в крови еще больше повысится а пульс забьется с частым ритмом!Получать информацию о самых выгодных бонусах возможно без неизменного прогноза новостей казино. Мы брали эту задачку на себя и постоянно смотрим за предложениями операторов, выбирая наихорошие из них. В этом разделе собраны последние бездепы, промокоды к ним и условия их активации. Список акций периодически пополняется. В топ вошли самые новые бездепозитные бонусы за регистрацию в казино 2020, кратковременные и закрытые рекламную. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и критериям. Если срок деяния промоакции истек, она удаляется из списка.
1хслотс рабочее зеркало
Доступность — бездепозитные бонусы в казино почаще всего предоставляются свежим игрокам, но случаются случаи, когда приз шансы получить и действующие посетители. Не хотите поиграть в азартные игры, не рискуя своими средствами, хотя получая в все выплаты? Подобную возможность деют все наилучшие порталы с азартными увеселениями. В их количестве количество честных и надежных интернет-казино на русском языке. Они привлекают свежих юзеров разными поощрительными мероприятиями, включая бездепозитные, или благотворительные призы. Маркетинговая политика всех игорных интернет-клубов должна одевать разнообразный характер. И если вознаграждения на депо работают для того, дабы провоцировать вносить депозиты и поощрять уже имеющих пользователей, то бездепозитный приз в казино либо бонус за регистрацию в казино, до всего, рассчитан на расширение базы покупателей.Наиболее знаменитые вознаграждения среди гэмблеров – бездепозитные бонусы казино. Это не умопомрачительно, так возможно получить благотворительные вращения или виртуальные кредиты, и этом не придётся пополнять счёт, рисковать личностными средствами. Удастся насладиться разнообразными веселиями даже выиграть крупную необходимую, избегая серьёзного риска. казино 1×slots официальный сайт <a href=http://4×4rif.ru/bitrix/redirect.php?goto=http://sokhranschool.ru/bitrix/rk.php?goto=http://hiland.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/hJHpfWJmGUF>http://4×4rif.ru/bitrix/redirect.php?goto=http://sokhranschool.ru/bitrix/rk.php?goto=http://hiland.ru/bitrix/rk.php?goto=https://teletype.in/@urid_pomosh/hJHpfWJmGUF</a> Новые клиенты онлайн-казино без первого депозита шансы выяснить собственную удачливость. К тому же есть возможность преобразовать бездепы в реальные средства за регистрацию в казино, однако желаемого приз нужно отыграть сообразно условиям акции.Иногда виде поощрения за регистрацию все выдаваться билеты для роли в турнирах. Условия их проведения довольно выделяются, поэтому мы советуем ознакомиться с любым предложением раздельно.
1хслотс казино зеркало
Диапазон ставок – Уточните лимиты ставок, действующие ходе отыгрыша бонусов. Заведения всегда устанавливают максимальную ставку, допустимую по условиям вейждера. Подтверждение индивидуальной инфы. Все казино требуют от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адресок проживания и присутствие у юзера других аккаунтов (мультиаккаунт запрещен). <a href=https://tools-info.biz.ua/wr_board/tools.php?event=profile&pname=Justinpluts>https://tools-info.biz.ua/wr_board/tools.php?event=profile&pname=Justinpluts</a> 1× slots официальный
<b>Смотреть еще похожие новости:</b>
<a href=http://policeacademy.teamforum.ru/viewtopic.php?f=4&t=2700>рабочее зеркало 1×slots</a>
<a href=https://traderscrypt.com/forums/showthread.php?tid=5891&pid=8802#pid8802>1×slots официальный сайт, скачать</a>
<a href=https://www.makinamania.net/index.php?topic=251097.new#new>1× slots casino зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Подтвердите лицо, предоставив оператору казино свои паспортные данные. Инструкции обыкновенно несложные, основное — конкретно им идти. Если написано, что «на фото обязаны быть видны все четыре угла страницы паспорта» — устройте непосредственно такое фото.
#9789 Charlesgunnyhttp://filmkachat.ru
casino 1×slot
Казино выводит деньги лишь на что, эту платежную систему, с котрой был сделан депо. То есть, для вывода бездепозитного бонуса, Вам поначалу нужно пополнить счет. В некоторых клубах ограниченный список методов для вывода средств, ознакомьтесь с ним заранее и пополняйте счет именно с данных платежных способов, коие доступны для вывода. <a href=http://filmkachat.ru/>1×slots регистрация</a> <a href=https://elearnportal.science/wiki/User:MckinleyGjd>https://elearnportal.science/wiki/User:MckinleyGjd</a> Вейджер в переводе с английского означает «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша полученного приза, в нашем случае бездепозитного. Число ставок роли не играет — принципиально лишь набрать необходимую, пропорциональную сумме поощрения. 1×slot рабочее зеркало <a href=https://google.com.af/url?q=https://doctorlazuta.by/>https://google.com.af/url?q=https://doctorlazuta.by/</a> Любой выигрыш по ставке выше установленного лимита несомненно считаться недействительным. То есть ставка не несомненно засчитана при отыгрыше, а в случае выигрыша его сумма не поступит на счёт посетителя — итог игры будет всецело аннулирован.
1×slots мобильная версия войти казино
Бoльшинcтвo азартных заведений выдвигают примерно одинаковые условия и притязания, коие необходимо выполнить, дабы получить бездепозитный приз за регистрацию. Все их возможно объединить в один перечень: 1 хслот регистрация в 1×slots casino Как верховодило, новоприбывшие геймеры в первую очередь желают ознакомиться с способами ввода и вывода валютных средств и сроки выполнения поданных заказов чтобы четко осознавать, как скоро они смогут вывести собственный казино бонус за регистрацию без депозита на электрический кошелек либо же банковскую карту. К счастью для всех играющих, снутри конкретных холдингов, все казино конкурируют между собой. Ведь случае бы конкретную фирму представляло только одно онлайн-заведение, то вряд ли бы посетители увидели казино с призом за регистрацию и возможность бы рассчитывать лишь на вознаграждение повторяющий бонуса на 1-ое вложение. К каждому заведению регулярно стопам завлекать новых игроков, собственно, итоге, только на руку всем играющим.Чаще всего интернет-казино предлагают бездепозитные призы новым пользователям. Эта промо-акция очень эффективно завлекает начинающих, подталкивая их к открытию счета. Конечно, не все становятся послушными посетителями, но сам прецедент регистрации аккаунта играет на руку заведению. <a href=http://karabash.chelbusiness.ru/index.php?name=account&op=info&uname=deadpancrease53>http://karabash.chelbusiness.ru/index.php?name=account&op=info&uname=deadpancrease53</a> Как верховодило, при выводе финансов, от играющего требуется лишь сделать минимальный лепта для того, чтобы привязать платежную систему и номер собственного кошелька к профилю и верифицировать таким образом собственный счет. 1 хслот регистрация в 1×slots casino Таким образом онлайн казино получает вероятного игрока. Возможно в будущем либо истинном он захочет сыграть на свои деньги. Так работают бездепозитные призы в интернет казино. Здесь хорошо подходит выражение, благотворительные сыр случается только в мышеловке. Начинающие игроки шансы не обдумывать опасность пыла. Однако со временем понимания становится больше. Это тема для отдельного обсуждения.Также бывают случаи, когда казино начисляет обсужденный бонус последствии регистрации нового клиента по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам.
x1 slots 1хслотс регистрация перейти на 1×slots
После потребуется привнести идентификационный платёж. Это стращает новичков больше всего. Нужно сделать минимальный депо в 100–500 рублей. Таким образом служба защищенности увериться никаких, собственно платёжный способ принадлежит Вам. Данная процедура важна для обеспечивания безопасности игровых счетов. Пример, Ваш акк взломают и выведут свои на свой кошелёк. Будет очень неприятно. Поэтому верификация платёжной системы, это важный момент.Если при регистрации показать промокод, можно гарантировано получить приз. Где арестовать ваучер? Посетите направленные блоги либо форумы. Иногда администрация клуба делает рассылку ваучеров на электронную почту. В заключительное время игорные дома начали афишироваться в кинокартинах и телесериалах. Присмотритесь и наверняка заметите промокод, который принесёт 500 либо 1 000 бонусных рублей. <a href=https://www.nederpix.nl/profile.php?mode=viewprofile&u=73733>https://www.nederpix.nl/profile.php?mode=viewprofile&u=73733</a> При помощи такого одобрения оператор имеет кроме привлекать клиентов, коие ранее показывали активность на веб-сайте, хотя по некий причине прекратили выступать. В данном случае промокод высылается юзеру по электрической почте или в виде SMS.Операторы гемблинга утверждают, что так они борются с бонус-хантерами. Впрочем, критики считают, собственно данным казино пытаются устроить из случайного постояльца неизменного игрока. 1×slots casino зеркало
1 x slots
Для вывода средств бонус нужно несомненно отыграть по правилам, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариантами отыгрыша бездепозитного бонуса до его получения, чтобы избежать конфликтных ситуаций. <a href=http://diplomka.jakubfiser.com/wolf/plugins/comment/image.php>казино 1× slots официальный сайт</a> 1×slot рабочее зеркало <a href=https://www.sbcarstory.co.kr/bbs/board.php?bo_table=free&wr_id=1266765>https://www.sbcarstory.co.kr/bbs/board.php?bo_table=free&wr_id=1266765</a>
1 хслот регистрация в 1×slots casino
Иногда операторы требуют внесение малого депо перед выводом для верификации платежного инструмента. В неких казино данный депо также предстоит отыграть. Если вы бывалый игрок, вы должны аристократия, что приз без депозита – редчайшая находка. Тем ниже, мы еженедельно изучаем онлайн, чтобы отыскать для вас лучшие бездепозитные предложения.Чтобы получить вероятность вывести прибыль с бездепозитного приза в казино, нужно выполнить ряд критерий: <a href=http://www.svit-world.kiev.ua/user/DoctorLazutaEl/>http://www.svit-world.kiev.ua/user/DoctorLazutaEl/</a> 1×slots зеркало С иной стороны, намного легче забрать бездепозитные фриспины за регистрацию в казино и напрямик данный начать вертеть барабаны в наилучших слотах. Главная необыкновенность спинов сомнений, что они предусмотрены для топовых автоматов. Удастся не только пройти вспомогательные раунды, но и увеличить необходимую выигрыша, заработать респины и внутриигровые презенты.
<b>Смотреть еще похожие новости:</b>
<a href=http://www.ihavethepussy.com/de/threads/202674–1×slots-%D0%A1%D0%82%D0%A0%C2%B5%D0%A0%D1%96%D0%A0%D1%91%D0%A1%D0%83%D0%A1%E2%80%9A%D0%A1%D0%82%D0%A0%C2%B0%D0%A1%E2%80%A0%D0%A0%D1%91%D0%A1%D0%8F-%D0%A0%D0%85%D0%A0%C2%B0-%D0%A1%D0%83%D0%A0%C2%B0%D0%A0%E2%84%96%D0%A1%E2%80%9A%D0%A0%C2%B5–1×slots-ru-com?p=220208#post220208>1×slots регистрация на сайте 1×slots ru com</a>
<a href=http://162.241.164.67/phpbb/phpBB3/viewtopic.php?f=3&t=89346>1×slots официальный demo регистрация в 1×slots casino</a>
<a href=https://qualityprogamer.de/forum/showthread.php?tid=238765>1×slots casino online регистрация</a>
<a href=https://forum.pcmadd.com/index.php?/topic/17176-the-significance-of-heat-for-chilly-athletes/page/4877/#comment-253180>1×slots казино зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Бонус за регистрацию в казино без депо с выводом средств надо(надобно) отыграть. Зачастую для отыгрыша имеет понадобиться сделать ставки на сумму, в количество десятков раз превосходящую сумму бонуса либо выигрыша.
#9790 SolAndroidhttps://sol-casino-apk.ru/sol-na-androjd/
<a href=https://book-news.jp/topics/?wptouch_switch=desktop&redirect=https://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=http://www.photokonkurs.com/cgi-bin/out.cgi?id=lkpro&url=https3A2F2Fwww.youtube.com2Fwatch3Fv3Dp-1fgpBk_sYhttps://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=http://maps.google.is/url?q=https://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=https://zcc.ru/bitrix/redirect.php?event1=click_to_call&event2=&event3=&goto=https://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=http://www.juicyoldpussy.com/cgi-bin/crtr/out.cgi?id=292&l=top_top&u=https://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=http://zunirsbook.com.xx3.kz/go.php?url=https://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=https://maps.t.me/s/worldcasinonet.sv/url?q=https://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=http://www.sonomahealthaction.org/redir.php?url=https://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=https://m.inkself.co.kr/member/login.html?noMemberOrder&returnUrl=">????https://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=http://djhlasznyik.hu/atiranyitas.html?url=https://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=http://thehardcoresex.com/cgi-bin/atx/out.cgi?id=36&tag=toplist&trade=https://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=https://www.free-cams.ca/external_link/?url=https://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=http://sns.rightpsy.com/sns/u/link.php?url=https://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=http://gamer-info.com/redirect.php?s=https://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=http://c21aba.com.xx3.kz/go.php?url=https://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a>
Install latest version of the application casino sol – win today !
<a href=https://donkleenka.ru/bitrix/redirect.php?goto=https://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=http://www.lanarkcob.org/System/Login.asp?id=45268&Referer=https://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=http://uwce.thehcn.net/redir.php?url=https://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=http://airbel.com.xx3.kz/go.php?url=https://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=https://frayescoba.mforos.com/visit/?https://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=https://skinguru.ru/php/apps/shop/comments.php?for=shop&i=197&all=1&url=https://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=http://refer.ccbill.com/cgi-bin/clicks.cgi?CA=933920–0000&PA=2188968&HTML=https://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=http://baovanhoa.vn.xx3.kz/go.php?url=https://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=http://www.eptitude.com/?url=https://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=https://adserver.energie-und-management.de/revive/www/delivery/ck.php?ct=1&oaparams=2__bannerid=315__zoneid=14__cb=e456eb5f52__oadest=https://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=http://internet-magaziin.ru/bitrix/redirect.php?event1=&event2=&event3=&goto=https://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=http://mos-shina.ru/bitrix/redirect.php?goto=https://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=https://www.t.me/s/worldcasinonet.do/url?sa=t&url=https://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=http://duckyworld.com/?wptouch_switch=desktop&redirect=%2F%2Fgreasyfork.org/en/discussions/requests/173654-esp-for-browser-games>https://sol-casino-apk.ru/sol-na-androjd/</a> <a href=https://hypestat.com/info/https://sol-casino-apk.ru/sol-na-androjd/>https://sol-casino-apk.ru/sol-na-androjd/</a>
#9791 Charlesgunnyhttp://filmkachat.ru
1× slots регистрация в 1×slots casino
Начнём с того, что каждое промо за регистрацию подразумевает некоторые обстоятельства. Бездепозитные бонусы в казино 2022 года выдаются с критериями вагера. Вейджер – это кратность валютного оборота, нужная для исполнения критерий. Пример, возымели благотворительные вращения и выиграли с них 1.000 руб. Выигрыш подлежит отыгрышу вагера в х20. Нужно устроить ставок на 20.000 рублей, проигрышных или выигрышных, так. После исполненья, бонусный баланс перейдёт на настоящий и станет легкодоступным к выводу. <a href=http://filmkachat.ru/>1×slots рабочее зеркало</a> В зависимости от интернет заведения любой из их возможность для предложить как бездепозитные средства, так и бездепозитные фриспины, которые последствии удачной регистрации рухнут для на ваш игровой баланс.Выбрать казино с бездепозитным бонусом. У нас на сайте представлен перечень наилучших интернет казино, коие предлагают своим игрокам щедрые призы за регистрацию. <a href=http://masyasha.ru/index.php?option=com_k2&view=itemlist&task=user&id=83954>http://masyasha.ru/index.php?option=com_k2&view=itemlist&task=user&id=83954</a> 1×slots быструю регистрацию а также мгновенное <a href=http://whdf.ru/forum/user/69093/>http://whdf.ru/forum/user/69093/</a>
казино 1×slots
Предложения с бездепозитными бонусами за регистрацию дозволяют новым заведениям заинтересовать аудиторию на собственный сайт. А игроки тому получают возможность выступать на реальные средства без депо в казино и заработать маленькой стартовый капитал, который разрешено вывести на карту банка или электронный кошелек. зеркала 1×slots Многие новенькие сомневаются, собственно поощрительный приз не будет возвращать, в случае они выиграли у казино. Это полностью безопасно и накрепко. Выводя выигранные средства, игрок просто останавливает свое участие при и утрачивает уникальную вероятность – бесплатно наращивать собственное вещественное положение.Это один из главных характеристик привлекательности подарка. С завешенным коэффициентом и профессионалы не сумеют выполнить условия по отыгрышу. И не, как презентабельно смотрится предложение – бездепозитный бонус казино в объеме $500 или $1 000. Чтобы новички попревосходнее вдумались, собственно же это вейджер, мы разберём на случае. <a href=http://besstizhie.ru/user/PatrickPox/>http://besstizhie.ru/user/PatrickPox/</a> 1×slots официальный сайт, скачать Такие поощрения разрешают бесплатно протестировать свежее казино, разобраться с игровым процессом онлайн слотов, заработать и вывести небольшую необходимую денег.
1×slots зеркало рабочее на сегодня
Промообъявления от казино не дают реальной картины и ориентированы на привлечение внимания юзеров. Понять, насколько высоки шансы остаться в плюсе, дозволит собственный тест условий предложения:Бездепозитный приз казино 2022 с выводом за регистрацию предоставляет возможность ознакомиться игроку с лобби выбранного заведения, определится в выборе игр и проверить качество работы саппорта. Довольно нередко, начиная игровой процесс, игрок уже отказывается останавливаться и проделывает настоящий лепта. На это все казино и рассчитывают, предлагая своим посетителям бездепозитные бонусы за регистрацию без отыгрыша и с выводом. В игровые автоматы играть безвозмездно вероятно как раз таки с бонусом за регистрацию без надобности вносить депозит. <a href=http://test-sida.noads.biz/home.php?mod=space&uid=81595>http://test-sida.noads.biz/home.php?mod=space&uid=81595</a> 1хслот зеркало сайта Пoдтвepдить личнocть клиента. Для удачного вывода средств, нужно подтвердить лицо посетителя. Нa этaпe вepификaции пpoфиля, работники службы безопасности обязаны убедиться, что у игрока более один акк. Так как, бонус зa peгиcтpaцию выдaетcя тoлькo oдин paз, клиент не может исключить свой выигрыш, если у него будет некоторое учетных записей. Дубликаты аккаунтов блокируются, а выигрыши с бездепов станут аннулированы.
1×slots регистрация на сайте 1×slots ru com
Также существуют онлайн-платформы азартных игр, коие используют раздачу бездепозитных бонусов в особые даты (как для казино, так и для игрока). Помимо сего, действующие игроки того имеют возможность получить похожие призы за свою деятельность (к примеру, за повышения значения либо за похожие достижения). К образцу, игроку выдаются безвозмездные средства в заведении в размере пятидесяти или ста долларов (вейджер на коие составляет 100х). То есть, каждому новоприбывшему геймеру выскакивает привлекающая иллюстрация, кот-ая обещает выплату всех зачисленных фирмой средств. Не стоит обращать внимания на казино приз за регистрацию без депозита с слишком немалый или очень маленькой суммой призов, поэтому собственно, числе тщательно изучив все обстоятельства, тут вероятнее всего, будет какой-то подвох. Основное правило получения бездепа ? создаваемый акк должен быть у юзера первым и единственным. Наличие нескольких аккаунтов строго воспрещено. Проверка проводится по имени, e-mal, номеру мобильного аппарата, IP-адресу и т.д. Для доступа к игровым автоматам с бонусом за регистрацию в онлайн-казино без депо нужно блюсти несложную последовательность действий.При отыгрыше бездепов, учитывайте временные ограничения. Обычно, на отыгрыш бездепов дается от 1 дня до 7 суток. 1×slots казино зеркало <a href=https://www.camry-club.ru/member.php?319848-Jamescarma>https://www.camry-club.ru/member.php?319848-Jamescarma</a>
1×slots бонус за регистрацию
<a href=http://vektor-sport.ru/bitrix/redirect.php?goto=http://rodbuilding-ua.com/bitrix/redirect.php?goto=http://tadviser.ru/openx2/www/delivery/ck.php?oaparams=2__bannerid=5929__zoneid=6__cb=a22d01f75f__oadest=https://teletype.in/@urid_pomosh/vmVxblXAHF_>http://vektor-sport.ru/bitrix/redirect.php?goto=http://rodbuilding-ua.com/bitrix/redirect.php?goto=http://tadviser.ru/openx2/www/delivery/ck.php?oaparams=2__bannerid=5929__zoneid=6__cb=a22d01f75f__oadest=https://teletype.in/@urid_pomosh/vmVxblXAHF_</a> Поспешите отобрать бездепозитные призы за регистрацию в казино из представленного перечня. Все платформы не водят законную работа, но и порадуют добросовестными результатами игры, высокой отдачей, резвыми выплатами. 1×slots зеркало рабочее Для получения выигрыша требуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить определенную необходимую, но теснее из собственных средств. Она рассчитывается из совместного размера выигрыша за все время использования бездепа, умноженного на фиксированный коэффициент, называемый вейджером. Например, в пользователь выиграл 1000 рублей, а множитель составляет х30, вывести средства возможно несомненно, сделав ставки на 30 000 рублей.
<b>Смотреть еще похожие новости:</b>
<a href=https://mcmon.ru/showthread.php?tid=102391>1×slots сайт</a>
<a href=https://www.mshowto.org/forum/members/jamespauri.html>1× slots регистрация в 1×slots casino</a>
<a href=http://forums.indexrise.com/user-307864.html>1×slos регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
При отыгрыше бонусных средств, нужно учесть срок действия бонуса и время, коие дается на отыгрыш. По истечению заявленного времени, не отыгранный приз несомненно аннулирован.
#9792 Charlesgunnyhttp://filmkachat.ru
1×slots casino регистрация 1×slotscasino09k online
Ну и естесственно же, для казино бездепозитные призы выгодны с имиджевой стороны: схожая добродушие увеличивает уровень лояльности клиентов к компании.Фриспины начисляются по определенной ставке. После их активации игроку нужно запустить разъем и увериться, что в нем показываются безвозмездные спины. После их использования сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода в отыгрыша определяется оператором и изредка выше 5 000 рублей. <a href=http://filmkachat.ru/>1×slots регистрация на официальном сайте</a> Обычно бездепозитные промоакции от казино, приходят на эл. Почту в деньки рождения либо праздники. В некоторых онлайн казино возможно обратиться в чат и как неизменному игроку, вероятно вам предложат бездепозитное предложение. <a href=https://integramais.com.br/2024/11/06/shisha-tobacco-from-4-eur/>https://integramais.com.br/2024/11/06/shisha-tobacco-from-4-eur/</a> Возможность протестировать свежие игры, не рискуя собственными своими и разработать личную тактику игры. 1хслотс зеркало на сегодня <a href=https://www.58cam.com/home.php?mod=space&uid=746530>https://www.58cam.com/home.php?mod=space&uid=746530</a> В случае с фриспинами без вейджера, Вам не понадобиться отыгрывать свой выигрыш с безвозмездных вращений. Прибыль, коию Вы заработаете на этом бездепе возможно ставить на вывод без какого или отыгрыша.
1×slots casino регистрация на сайте
<a href=http://gorodkusa.ru/about/anounces/131/10601/?MID=63322&result=reply>1×slots промокод при регистрации 2025</a> x1 slots 1хслотс регистрация перейти на 1×slots За привлечение друга ? в партнерской программки заказчик получает вознаграждение за привлечение свежих пользователей.Проверка занимает от нескольких минут до нескольких дней, профессионалы техподдержки шансы запросить вспомогательные документы или инициировать краткое общение по Skype. <a href=http://v90457cw.beget.tech/user/Walterlat/>http://v90457cw.beget.tech/user/Walterlat/</a> 1×slots официальный сайт скачать Почти все игровые клубы настоятельно свидетельство контактных данных игрока для получения бездепозитного приза.
1х слот регистрация в 1×slots casino
Но есть игорные заведения, коие готовы просто так жертвовать средства на забаву. Для этого достаточно создать профиль. Чтобы вывести собственный выигрыш, вас сначала необходимо выполнить условия отыгрыша, указанные в критериях получения бездепозитного депо. <a href=https://www.bakespace.com/members/profile/Cazinosdep/1497047/>https://www.bakespace.com/members/profile/Cazinosdep/1497047/</a> казино 1×slots официальный сайт Как лишь вы отыграли вейджер и средства с бонусного баланса перешли вам на настоящий счет, Вы неустрашимо можете запрашивать ваш выигрыш на вывод средств, пройдя не трудную верификацию платежной системы (сделать минимальный депо к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного приза, вместе с депозитом).Каждая игровая перрон отличается критериями по получению и отыгрышу бездепов. В правилах отчетливо расписаны кратковременные рамки, за коие нужно прокрутить вейджер. Также не запамятовывайте на максимальный размер ставки и максимальную необходимую выплаты. С другой стороны, дабы получить бездепозитные бонусы казино, достаточно израсходовать менее 1 минутки.
1×slots casino зеркало
<a href=http://aficionado.pl/showthread.php?103299–1-%D1%85%D1%81%D0%BB%D0%BE%D1%82-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8F-%D0%B2–1×slots-casino&p=120735>1 хслот регистрация в 1×slots casino</a> Каждая игровая платформа выделяется условиями по получению и отыгрышу бездепов. В правилах детально расписаны кратковременные рамки, за которые нужно прокрутить вейджер. Также не забывайте на максимальный размер ставки и максимальную необходимую выплаты. С другой стороны, чтобы получить бездепозитные призы казино, довольно израсходовать не более 1 минутки. 1×slots регистрация на сайте <a href=https://codescript.ru/user/Joshuaged/>https://codescript.ru/user/Joshuaged/</a> Даже не выиграв крупную необходимую, игрок увлекательно проведет время, изнутри выучит работу площадки, оценит геймплей автоматов. Все это без каких-либо денежных рисков. Быть в курсе лучших акций легко. Достаточно регулярно учить список новых онлайн казино с выводом бонуса без депо в этом разделе.
1× слот зеркало
Лев – 70 даровых вращений в игровом автомате Book of Ra. Для активации подарка необходимо доказать электрическую почту и привязать телефонный;Вы скорее, скажем, как все любите получать подарки и бездепозитные бонусы казино. Игорные жилища взяли в повадку одаривать гэмблеров приятными призами. Стать обладателем приветственного презента возможно за творение профиля либо пополнение счёта. Второй вариант более интересный, так клубы готовы удвоить депо! Но в вы новичок и лишь знакомитесь с миром азарта, никакого пользуйтесь призом за регистрацию. Отыграв бездепозитный приз в казино с выводом также придётся не так просто: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, если подобное ограничение существует, то единоразово исключить получится лишь сумму, не превышающую объем приобретенного бонуса. <a href=https://www.mexicanservers.com/member.php?action=profile&uid=11044>https://www.mexicanservers.com/member.php?action=profile&uid=11044</a> 1×slots актуальное зеркало Представьте момент, когда при ставке в 10 руб. Вы получите схожее умножение. Миллион рублей за одно вращение, что вполне вполне. Поэтому вопрос, сколько можно выиграть остаётся не. Предлагаем выяснить без. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный бонус и инспектируйте удачу в деле. Разумеется, исключить деньги не так просто. Однако шансы есть у всех.Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш бонусов за депо возможность отличаться до 30 дней.
<b>Смотреть еще похожие новости:</b>
<a href=https://www.kfz-gringer.at/index.php/forum/in-neque-arcu-vulputate-vitae/64359–1×slots#64124>1×slots зеркало на сегодня</a>
<a href=http://forum.azartweb2.com/threads/1×slots-aktualnoe-zerkalo.231561/>1×slots актуальное зеркало</a>
<a href=https://forum.krymbezpravil.org.ua/memberlist.php?mode=viewprofile&u=10552>1×slots зеркало регистрация</a>
<a href=https://www.fromrus.su/index.php?/topic/24004–1×-slots-%D0%BE%D1%84%D0%B8%D1%86%D0%B8%D0%B0%D0%BB%D1%8C%D0%BD%D1%8B%D0%B9/>1× slots официальный</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Однако в критериях исчезают «подводные камни», коие не позволят вывести крупную сумму или же вы не успеете отыграть вейджер. Поэтому мастера советуют забрать бесплатные вращения за регистрацию в казино без депо, дабы поднабраться навыка и получить реальный шанс на победу.
#9793 Charlesgunnyhttp://filmkachat.ru
casino 1×slot
Помимо остального, для вывода средств по бездепу необходимо привнести на счёт собственный 1-ый депо — например онлайн-казино идентифицирует ваши платёжные системы. Пополнить счёт можно на мало вероятную сумму, в чего вывод средств станет доступен.Для выбора азартного заведения Вы можете воспользоваться списком наших казино с бонусами за регистрацию. На нашем веб-сайте мы выпустили список бездепозитных казино с призами за регистрацию. Обращаем Ваше внимание, собственно доля призов неповторимые и доступны только для гостей нашего вебсайта по-специальному промо-коду или по оригинальной ссылке. Кроме такого, для каждого приза мы подготовили доскональный обзор, каком Вы узнаете как получить и отыграть одобрение и как вывести собственный выигрыш с бездепа. <a href=http://filmkachat.ru/>1хслот официальный сайт зеркало</a> Это один из основных показателей привлекательности презента. С завешенным коэффициентом и мастера не смогут выполнить условия по отыгрышу. И важно, как привлекательно выглядит предложение – бездепозитный бонус казино в объеме $500 либо $1 000. Чтобы новенькие лучше вдумались, собственно же такое вейджер, мы разберём на примере.Помните, собственно любые нарушения верховодил сведут на нет ваши усилия, и вы скорее останетесь без начисленного для дарового приза. Всегда изучайте верховодила начисления и условия вейджера. По хоть вопросам, на коие вы не других отыскать ответы, обращайтесь за объясненьям и саппорт. <a href=http://sante-cinnamon.kr/bbs/board.php?bo_table=free&wr_id=383209>http://sante-cinnamon.kr/bbs/board.php?bo_table=free&wr_id=383209</a> Сроки активации бонуса уточняются любым казино, хотя почаще всего они не превосходят недели с этапа получения. Игроку обязательно нужно применять бездеп протяжении указанного срока, в ином случае приз просто пропадет. Каждый приз можно получить лишь раз один, поэтому в не применять бездеп в срок, у игрока не несомненно 2 шанса им пользоваться.Наиболее популярные гонорары среди гэмблеров – бездепозитные призы казино. Это не дивно, ведь можно получить бесплатные вращения либо виртуальные кредиты, и при не придётся пополнять счёт, рисковать собственными средствами. Удастся насладиться различными увеселениями даже выиграть крупную сумму, избегая серьёзного риска. 1×slots рабочее зеркало на сегодня <a href=http://www.ocide.org/forum/index.php?action=profile;u=14071>http://www.ocide.org/forum/index.php?action=profile;u=14071</a> Одним из поводов отдавать привилегию 1 или иному заведению содержится в привлекательности предлагаемых акций и бесплатных предложений. Безвозмездные фриспины, выдаваемые без нужды создавать какой-нибудь лепта, в списке находится далеко не в конце.
1хслотс зеркало
1×slots подтвердит вашу регистрацию если говорить Простая процедура получения бездепозитного бонуса, кот-ая займет менее 2-х минут. Для получения бездепов, достаточно зарегистрироваться и доказать контактные данные.Главное преимущество спинов – возможность выучить разные слоты. Также получится насладиться бонусными раундами, испытать удачу в риск-туре и преумножить выигрыш за счёт особых символов. Однако столько игровой процесс заслуживает внимание, ведь лучше сосредоточиться на реальном выигрыше. <a href=http://tmml.top/home.php?mod=space&uid=135779>http://tmml.top/home.php?mod=space&uid=135779</a> 1×slots зеркало Подарки на определенные даты выделяются условиями получения. Если поощрение начисляют игроку на денек рождения, то сумма обыкновенно зависит от совместного объема депо за год.Фриспины начисляются по конкретной ставке. После их активации игроку необходимо запустить разъем и убедиться, собственно в нем отображаются благотворительные спины. После их применения сумма выигрыша на бонусном счете подлежит отыгрышу с указанным в правилах вейджером. Максимальная сумма вывода в отыгрыша определяется оператором и редко превышает 5 000 рублей.
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
Обыкновенные бездепозитные призы в объеме от трех до 20 $ созданы для того, дабы в забавы заходили все новые и свежие игроки. Здесь, всего, несомненно лимитирование на наибольший выигрыш. Важно, чтобы перед минимальным вкладом был отключен приз за первое пополнение счета, и геймер не попадет на повторный вейджер. Но не размышлять, собственно снабжая юзеров такими призами, казино увлекается спонсированием. Ведь объемы вознаграждений, в, не великие (средним объемом от 5 до 20 $). И на эти свои налагаются конкретные обстоятельства и лимитирования, обязательные к исполненью игрока, если в последствии он желает получить все средства выигранные финансы. <a href=http://xn----7sbabja7ekbaahnetbi5o6b.xn–p1ai/profile.php?lookup=33095>http://xn----7sbabja7ekbaahnetbi5o6b.xn–p1ai/profile.php?lookup=33095</a> Похожим образом работает 3-ий способ доступа к бездепу. Обычно это предложения, приуроченные ко деньку рождения посетителя либо из-за с получения им VIP-статуса. Подарок предоставляется последствии обращения в поддержку и проверки.Бездепозитный бонус казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в данном и заключается главное отличие. 1×slots зеркало на сегодня
1×slots подтвердит вашу регистрацию если говорить
1×slots регистрация то дальше необходимо пройти <a href=https://kr-osvita.gov.ua/user/PorsedropMa/>https://kr-osvita.gov.ua/user/PorsedropMa/</a> Все благотворительные призы кажутся соблазнительными. Кто же категорически от способности поиграть в онлайн-казино, не рискуя средствами, но получая выигрыши. Но далековато не все бездепозитные призы одинаковой презентабельны для рассудительного клиента.Классическая разновидность приза за творенье аккаунта. Его преимущество содержится что, что клиент имеет помощи выбирать аппараты и создавать ставки в их. Иногда перечень игровых автоматов ограничен оператором, но все равно это какого-либо, чем единственный дешевый разъем, как когда с использованием фриспинов.
1хслотс зеркало
Каждый новичок и умелый игрок мечтают стремительно стартануть и начать создавать настоящие ставки. Для этого довольно забрать подарок, за который надо уплачивать. В зависимости от игровой платформы, нужно создать профиль, привязать email или аппарат. После сего администрация начисляет щедрое вознаграждение вид даровых вращений или виртуальных кредитов.Получать информацию о самых прибыльных призах можно без постоянного прогноза новостей казино. Мы взяли эту задачу на себя и непрерывно смотрим за предложениями операторов, избирая наихорошие из них. В этом разделе собраны последние бездепы, промокоды к ним и обстоятельства их активации. Список промоакций регулярно дополняется. В топ вошли самые новые бездепозитные призы за регистрацию в казино 2020, временные и замкнутые промо. Сортировать спецпредложения можно по позиции в рейтинге, сумме, лимитам, вейджеру и другим критериям. Если срок деянья акции истек, она удаляется из списка. Отыграв бездепозитный бонус в казино с выводом также придётся сложно: казино оставляет за собой право ограничить для игрока вывод средств по бездепу. Чаще всего, случае сходственное ограничение присутствует, то единоразово исключить выйдет лишь необходимую, не превышающую размер приобретенного приза. <a href=http://elka54.ru/forum/?PAGE_NAME=profile_view&UID=107647>http://elka54.ru/forum/?PAGE_NAME=profile_view&UID=107647</a> Как лишь вы отыграли вейджер и свои с бонусного баланса перебежали вас на настоящий счет, Вы неустрашимо можете запрашивать ваш выигрыш на вывод средств, пройдя не сложную верификацию платежной системы (устроить минимальный депозит к примеру с QIWI кошелька и запросить вывод выигранной суммы с бездепозитного бонуса, совместно, вкупе с депо).Рекомендуем зарегистрироваться на форуме Casinoz. В его специальной ветке представители онлайн-казино публикуют важную информацию о not the slightest down payment bonuses и других предложениях. 1×slots зеркало выигрыши обязательно пройдите регистрацию если
<b>Смотреть еще похожие новости:</b>
<a href=http://lider1c.ru/communication/forum/messages/forum5/message21570/17478–1×slots-kazino-zerkalo?sessid=274740f0d34fcd06f87618124308ef98&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1×slots казино зеркало</a>
<a href=http://www.topboard.org/threads/1×slots-registracija-na-1×slots.599775/>1×slots регистрация на 1хслотс</a>
<a href=https://g2clubs.com/healthy-workout/google/#comment-23946>1× slots зеркало</a>
<a href=https://smm-seo.ru/threads/1×slot-oficialnyj-sajt.36972/>1× slots зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Это один из основных показателей привлекательности дара. С завешенным коэффициентом в профессионалы не смогут выполнить условия по отыгрышу. И так, насколько привлекательно смотрится предложение – бездепозитный приз казино в объеме $500 или $1 000. Чтобы новенькие лучше вникли, собственно же такое вейджер, мы разберём на примере.
#9794 Charlesgunnyhttp://filmkachat.ru
1×slots зеркало регистрацию более популярный вариант это
Ознакомьтесь с нашим перечнем лучших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в любом онлайн-казино из нашего перечня и получите бездеп сразу. Хватайте наихорошие безвозмездные предложения ниже и выигрывайте большие средства, не рискуя! <a href=http://filmkachat.ru/>1×slots зеркало сайта</a> <a href=http://bbs.ztbs.cn/home.php?mod=space&uid=112870>http://bbs.ztbs.cn/home.php?mod=space&uid=112870</a> Благодаря программе лояльности от игорного заведения, возможно взять неплохой старт и без дополнительных инвестициям запустить видеослоты. Кроме такого, возможно рассчитывать на реальную фортуну и получить, без вложения личных финансов, немалый выигрыш. 1×slots рабочее зеркало на сегодня <a href=https://pcnto.com/user/Renaldonop/>https://pcnto.com/user/Renaldonop/</a>
казино 1×slots официальный сайт
Вывод выигрыша с бездепозитных призов казино – щедрый подарок от азартных клубов. Но дабы вывести свой доход, нужно выполнить ряд критерий: 1×slots зеркало выигрыши обязательно пройдите регистрацию если <a href=http://e-audit.gefest.me/index.php?subaction=userinfo&user=preciouscapture>http://e-audit.gefest.me/index.php?subaction=userinfo&user=preciouscapture</a> Отыграйте вейджер и верифицируйте профиль, дабы администрация разблокировала прыткие выводы. Фишка выплат том,, что достаточно избрать платёжный инструмент и показать сумму. В большинстве случаев деньги зачисляются на электронные кошельки в течение 15 мин., а на банковские карты – 1–3 трудящихся денька. 1×slots casino регистрация 1×slotscasin online Подтверждение регистрации. Казино просят привязки профиля к электронному адресу и номеру телефонного. Для сего на e-mail отчаливает послание ссылаясь, а на телефон ? текстовое известие с кодом.
1×slots официальный регистрация
Для получения предоставленных бонусов для пригодиться — ПК или мобильное устройство, и остальное дело за малым.Многие игроки, оценив перечень казино, остаются выступать в нем и дальше ? на это и направлено любое промо. Постоянные посетители заносят депозиты и проделывают ставки, обеспечивая длительную прибыль оператора. То есть, казино выдают бездепы новым пользователям для формирования лояльной аудитории. <a href=http://users.atw.hu/adf/profile.php?mode=viewprofile&u=11587>http://users.atw.hu/adf/profile.php?mode=viewprofile&u=11587</a> Помните, собственно в некоторых играх сумма ставки идет в зачет вейджера лишь отчасти. Так, в настольных и карточных играх лишь от 5% до 50% суммы ставки числятся как отыгранные деньги, момент как в слотах идет в зачет все one hundred percent суммы. 1х слотс зеркало регистрация в 1×slots casino
1хлот регистрация в 1×slots casino
<a href=https://021snyw.com/space-uid-53919.html>1×slots официальный сайт зеркало рабочее</a> Прямо в отберите благотворительные вращения за регистрацию без депозита и начинайте собирать призовые композиции ради крупных выигрышей!Варианты выигрыша зависят от Вашей успеха и условий игорного портала. Выше мы сказали, что кое-какие бездепозитные бонусы в 2022 году выдаются с лимитированиями по наибольшей выплате. Однако, остаются другие, все, кто не устанавливает лимитов. Игрок получает шанс выиграть сколько угодно. Учитывая возможность передовых игр на средства, можно выиграть неописуемые суммы. Сегодняшние игровые автоматы или видео слоты, как их нарекают. Могут выдавать солидные умножение от х1.000 и повыше. Некоторые умножают ставку от х100.000. Бездепозитные призы за регистрацию в игровых автоматах для владельцев онлайн-казино считаются долею маркетинговой кампании, направленной на повышение аудитории вебсайта. Так они продвигают свои бренды и привлекают свежих посетителей. 1хслотс зеркало на сегодня <a href=http://yagiro.ru/profile/chivalrousjourn/>http://yagiro.ru/profile/chivalrousjourn/</a> Наш список содержит превосходнейшие бездепозитные призы казино с выводом средств без пополнения от надежных операторов. Прежде чем попасть в рейтинг, площадка протекает ревизию по важным параметрам:
1×slots зеркало подтвердит вашу регистрацию если говорить
Главным интересным в появлении этих вознаграждений состоит что, что пустив их в ход, компьютерные ничем не рискует и в последствии никому ничего не несомненно должен (не зависимо, получит ли он благодаря бонусам какой-нибудь выигрыш или моментально спустит все лишь собственно прибывшие финансы). То есть, казино снабжает игрока возможностью на дармовой основе выступать во всевозможные слоты и даже спонсирует игру.B миpe нeт ничeгo идeaльнoгo – вce имeeт cвoи пoлoжитeльныe и oтpицaтeльныe cтopoны. И дaжe тaкиe пpиятныe пooщpeния кaк бeздeпы нe вxoдят в чиcлo иcключeний. Любoй гeмблep мoжeт oтыcкaть мaccу пoлoжитeльныx и oтpицaтeльныx cтopoн paccмaтpивaeмoгo пpoмo-пpeдлoжeния. Пoэтoму нaши peдaктopы cocтaвили cпиcoк плюcoв и минуcoв, кoтopыми oблaдaют пpивeтcтвeнныe пooщpeния, чтoбы впocлeдcтвии нoвички знaли, c чeм имeннo им пpидeтcя cтoлкнутьcя. Для выбора азартного заведения Вы сможете воспользоваться перечнем наших казино с призами за регистрацию. На нашем сайте мы выпустили перечень бездепозитных казино с бонусами за регистрацию. Обращаем Ваше внимание, что доля бонусов неповторимые и доступны только для посетителей нашего вебсайта по-специальному промо-коду или по оригинальной ссылке. Кроме такого, для каждого бонуса мы подготовили доскональный обозрение, в котором Вы узнаете как получить и отыграть одобрение и как вывести собственный выигрыш с бездепа. <a href=https://www.baronerosso.it/forum/members/112838_donaldabito.html>https://www.baronerosso.it/forum/members/112838_donaldabito.html</a> 1×slots регистрация на сайте 1×slots ru com
<b>Смотреть еще похожие новости:</b>
<a href=https://www.lightknotes.com/MyBB/showthread.php?tid=164034>x1 slots регистрация в 1×slots casino</a>
<a href=https://smm-seo.ru/threads/1×slots-zerkalo-rabochee-na-segodnja.35962/>1×slots быструю регистрацию а также мгновенное</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если вы бывалый игрок, вы обязаны аристократия, собственно приз без депозита – редчайшая находка. Тем не, мы неделю исследуем онлайн, дабы найти для вас лучшие бездепозитные предложения. Приглашаем делиться суждениями о бонусах. Это поможет иным пользователям подбирать наиболее выгодные предложения.
#9795 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт зеркало
Бездепозитные призы казино это финансовая компенсация, предлагаемая юзерам на дармовой основе и вероятность играть в онлайн казино безвозмездно. Если сравнивать их с одобрениями за вклад, в средства выдаются лишь впоследствии первоначального пополнения счета, то бездепозитные вознаграждения получаются бесплатно. То есть, играющий получает вероятность делать ставки на уже имеющие финансы, которые выдаст заведение, выполняя, при этом, обычные действия, чтобы их извлечь (здесь идет о регистрация, удостоверении личности с внедрением номера телефонного, оформления заявки и т.д.). <a href=http://filmkachat.ru/>1×slots регистрация 1×slots casino 777 online</a> Самые новые бездепозитные призы в казино за регистрацию 2022 года с выводом выгоды находятся на этой странице. Посетитель возможность оценить условия получения и начать выступать на средства без внесения депо. При этом игроку главно понимать, на каких условиях и какими способами появится исключить полученный выигрыш. Для этого нужно расценить список присоединенных платежных систем.Шаг 4. Активация. Внимательно исследуйте условия, информацию по лимитированиям и сроке деяния бонусного предложения. Разобравшись с правилами, можно активировать бонус в личном офисе (время ? с использованием промокода) или по запросу в саппорт. <a href=http://gkwin.net/bbs/board.php?bo_table=free&wr_id=272903>http://gkwin.net/bbs/board.php?bo_table=free&wr_id=272903</a> Бездепозитный приз казино с выводом за регистрацию не требует внесения средств на игровой счёт для получения — в данном и заключается главное отличие.Допустим, за регистрацию вы получили бездеп в объеме 2 000 рублей с вейджером х30. В данном случае предстоит сделать ставок, на общую сумму в 60 000 рублей (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать настоящие деньги. Однако не забывайте, что с любого дара выйдет исключить определённую сумму (почаще всего не более $200). рабочее зеркало 1хслотс <a href=https://goldkeys.forum.cool/viewtopic.php?id=1053#p68980>https://goldkeys.forum.cool/viewtopic.php?id=1053#p68980</a> Подтвердите лицо, предоставив оператору казино средства паспортные данные. Инструкции обыкновенно легкие, главное — четко им стопам. Если написано, собственно «на фото обязаны быть заметны все четыре угла страницы паспорта» — сделайте непосредственно это фото.Вы не в коем случае ни чем не рискуете, а только выигрываете и выводите на платежную систему, или проигрываете предложенный приз, по мимо практической забавы на бездепозитные призы, у Вас есть шанс выучить игровые автоматы, выучится регулировать изменять ставки и линии, изучать бонусные забавы и их выигрышные комбинации, да в просто зарядится кучей эмоций! Ведь вы будите выступать на бонусные свои, которые можно отыграть и вывести, а не просто на демо счет, тем самым адреналин в крови еще повысится а пульс забьется с частым ритмом!
казино 1×slots официальный сайт
Зарегистрироваться в казино по специальной ссылке или с бонусным кодом. Подтвердить контактные данные (номер телефона и электрическую почту). Для доказательства номера телефона необходимо в личном профиле показать свой номер и нажать кнопку „Подтвердить номер аппарата“, далее Вы получите sms-сообщение с кодом, кот-ый нужно установить в подходящее фон. Для доказательства электрической почты, перейти по интенсивной ссылке в письме от казино. <a href=http://videopro.ru/xenforo/index.php?threads/%D0%A2%D0%B5%D1%81%D1%82%D0%BE%D0%B2%D0%B0%D1%8F-%D1%82%D0%B5%D0%BC%D0%B0-%D0%B7%D0%B0%D0%BA%D1%80%D0%B5%D0%BF%D0%BB%D1%91%D0%BD%D0%BD%D0%B0%D1%8F.1/page-1090#post-34314>1×slots скачать на айфон</a> 1×slot регистрация Для всех бездепозитных призов действует максимальный лимит на выигрыш. Он показывает предельную необходимую, коию возможность получить, играя на бонусные кредиты. Как только вас получится выполнить требования вейджера, допустимый максимально будет переведен с бонусного счета на главной, а остаток будет списан. <a href=http://lamortazza.ru/bitrix/redirect.php?goto=http://claude.ru/bitrix/redirect.php?goto=http://doimp.admmegion.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/QmAtLOKZrhL>http://lamortazza.ru/bitrix/redirect.php?goto=http://claude.ru/bitrix/redirect.php?goto=http://doimp.admmegion.ru/bitrix/redirect.php?goto=https://teletype.in/@urist555/QmAtLOKZrhL</a> При исполненьи условий отыгрыша и верификации, деньги с бонусного счета переводятся на основной и все быть выведены на карту либо электронный кошелек. Лимиты на вывод и сроки проведения транзакции в от избранной платежной системы.Активация валютного гонорары происходит автоматически в создания профиля либо применения промокода. Иногда операторы предъявляют дополнительные притязания: подписаться на страницы казино в социальных сетях либо на рассылку маркетинговых извещений, скачать и установить дополнительный софт и т.д. x1 slots регистрация в 1×slots casino
casino 1×slot
Иногда в качестве бездепа, казино презентует минимальный приз (до 50 руб. ), ради которого не заморачиваться.Чтобы играть безвозмездно на реальные средства в казино, порой довольно просто зарегистрироваться. Иногда нужно выполнить дополнительные деянья. Вейджер в переводе с английского означает «ставка». Вейджер в онлайн-казино — это сумма, необходимая для отыгрыша приобретенного приза, в нашем случае бездепозитного. Число ставок не — принципиально только набрать сумму, пропорциональную сумме поощрения. <a href=https://rg-mechanics.club/user/Harrymus/>https://rg-mechanics.club/user/Harrymus/</a> Условия вывода выигрыша. В некоторых заведениях для удачного вывода с бездепозитного приза достаточно пополнения баланса и доказательства личности. В других же клубах, нужно некоторое один прокрутить собственный депо. 1хслотс рабочее зеркало Диапазон ставок, коие вправе устроить игрок, того лимитирован. Обычно назначать возможно небольшую сумму — в 10–30 рублей за одно вращение.Так что главное отличие дара на депо от бездепа – обязательное пополнение счёта. Вы сможете внести депо и преувеличить стартовый капитал либо забрать бездеп и при этом не придётся рисковать своими сбережениями. Поспешите выполнить простые притязания, и администрация ресурса начисляет щедрое поощрение!
1×slots зеркало рабочее
Третитй бездепозитный бонус за регистрацию – валютные средства. К раскаянию, начислить рубли или доллары готовы лишь известные и модные клубы. С их поддержкою возможность насладиться каждой доступной забавой – автоматом, рулеткой, кено, блэкджеком.Бонус с зачислением средств на счет дает больше свободы поступков. Пользователь сам выбирает, каким образом воспользоваться подаренными средствами. Здесь кроме все действовать ограничения на перечень дешевых игр, хотя обыкновенно эти рамки не так строги, как в промо с безвозмездными вращениями. 1хслотс зеркало на сегодня <a href=https://www.aquaforum.ua/member.php?u=63449>https://www.aquaforum.ua/member.php?u=63449</a> Обычно показатель повыше, чем для призов на депозит. Не изумляйтесь, в он будет том х100. Иногда завышенный коэффициент вейджера уточняется для жителей отдельных государств.
зеркло казино 1×slots
<a href=https://valetinowiki.racing/index.php?title=%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0%20%D0%B2%20%D1%80%D0%B0%D1%81%D1%81%D1%80%D0%BE%D1%87%D0%BA%D1%83>https://valetinowiki.racing/index.php?title=%D0%B0%D0%B2%D1%82%D0%BE%D1%88%D0%BA%D0%BE%D0%BB%D0%B0%20%D0%B2%20%D1%80%D0%B0%D1%81%D1%81%D1%80%D0%BE%D1%87%D0%BA%D1%83</a> 1×slots зеркало регистрация в 1×slots casino Акции распространяются как на все забавы казино, так и на узкий список. Здесь дешевые тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные забавы, автоматы, live-casino и. Промо возможность охватывать разработки 1-го производителя. Бездеп не пересекается с другими акциями казино. Если на сайте предусмотрен кэшбек, он не начисляется за ставки, изготовленные бонусными средствами. Для идентификации платежных реквизитов игрока может потребоваться пополнение счета на минимальную необходимую.
<b>Смотреть еще похожие новости:</b>
<a href=https://traderscrypt.com/forums/showthread.php?tid=5891&pid=8500#pid8500>1×slots регистрация 1×slotscasino 56 online</a>
<a href=https://www.176mw.net/forum.php?mod=viewthread&tid=2&pid=548345&page=2955&extra=page%3D1#pid548345>онлайн казино 1×slots</a>
<a href=https://minifishtank.net/forum/member.php?action=profile&uid=1356>1×slots мобильная версия войти казино</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Если площадка презентует бездеп за регистрацию, то процедура его получения ординарна. Нужно только завести акк на веб-сайте и активировать его, подтвердив адрес электрической почты, номер телефона или другие данные, которые просит оператор. Перед данным необходимо убедиться, собственно пользователь находится на официальном веб-сайте казино, но на жульнической площадке.
#9796 Charlesgunnyhttp://filmkachat.ru
1 хслот регистрация в 1×slots casino
Чтоб получить крупный выигрыш, выбирайте игровые автоматы с максимальным процентом отдачи (RTP) из списка тех, которые доступны по условиям отыгрыша. <a href=http://filmkachat.ru/>1х слотс зеркало регистрация в 1×slots casino</a> <a href=http://sobaeksanrock.dgweb.kr/bbs/board.php?bo_table=free&wr_id=3076928>http://sobaeksanrock.dgweb.kr/bbs/board.php?bo_table=free&wr_id=3076928</a> Законодательство, регулирующее азартные забавы в различных государствах, влияет на возможности операторов. В итоге пользователи из отдельных ареалов сталкиваются с лимитированиями со стороны казино. Это возможность быть как полный отказ в доступе, так и невозможность загружать забавы отдельных производителей.Бездепозитные бонусы начисляются лишь один раз. Не стоит раскрывать свежие аккаунты, дабы получить их повторно. Служба безопасности казино непременно выявит «левого» участника и перекроет. Если посетитель выполнит нужные притязания, отыграет свою ставку и решит исключить собственный выигрыш, то ему нужно принять, собственно казино обязательно востребует предоставить ксерокопии собственных документов, дабы удостовериться в действительности игрока. Если учетная запись зарегистрирована под виртуальным именем, выигранные свои вывести не удастся. 1×slots регистрация на 1хслотс <a href=http://mirvendinga.ru/bitrix/redirect.php?goto=http://etqcmhe.matchfishing.ru/bitrix/click.php?goto=http://razborkino.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/ESy4Zqjsmlk>http://mirvendinga.ru/bitrix/redirect.php?goto=http://etqcmhe.matchfishing.ru/bitrix/click.php?goto=http://razborkino.ru/bitrix/redirect.php?goto=https://teletype.in/@urid_pomosh/ESy4Zqjsmlk</a> Новички не обожают сразу же заносить депо. Это обусловлено неимением навыка и сомненьем. К счастью, наши возможно получить бездепозитный приз за регистрацию в казино. Неважно собственно начисляет система – фриспины либо кредиты. В любом случае вы не рискуете собственными сбережениями. Это отличная вероятность запустить понравившийся видео слот либо же испытать удачу в настольных забавах.Вейджер не более х30–35 является применимым. Опытные игроки утверждают, собственно с этим вейджером реально остаться в плюсе, если правильно подойти к выбору игрового аппарата.
1 хслот регистрация в 1×slots casino
1×slots регистрацию процедура займет всего лишь <a href=http://honevi.grodno.by/index.php?subaction=userinfo&user=PhilipRof>http://honevi.grodno.by/index.php?subaction=userinfo&user=PhilipRof</a> Не желаете сыграть в азартные забавы, не рискуя средствами средствами, но получая в все выплаты? Подобную возможность деют многие лучшие порталы с азартными весельями. В их количестве большое добросовестных и надежных интернет-казино на российском языке. Они завлекают новых пользователей различными поощрительными мероприятиями, включая бездепозитные, или бесплатные бонусы. 1×slots зеркало видели такую регистрацию на
1×slots подтвердит вашу регистрацию если говорить
При использовании бездепозитным призом нужно ознакомиться со всеми лимитами, которыми ограничит вас казино до момента отыгрыша бездепа. Существуют несколько обликов лимитов:Обычно, бездепозитные призы выдаются под определенные слоты с фиксированной ставкой, но их наверняка воспрещено применять в игровых автоматах с прогрессивным джекпотом. Список игр, каких можно применять бездеп, Вы найдете в описании акции или можете уточнить у службы заведения. Верификация необходима для добавочной защищенности и может техподдержке выявить бонусхантеров и жуликов. Кстати, рядах платформах выводы солидных сумм доступны только после подтверждения личности.Все обожают получать подарки. Согласитесь, почти любой играющий человек будет бесконечно рад, если получит бесплатный подарок для игры в онлайн казино просто за регистрацию либо же приз за внесенный депозит, например называемые приветственные бонусы для новых игроков. Соответственно эти онлайн клубы станут больше популярны и предпочтительны у игроков при выборе казино для игры. Топ казино каждый обновляется и прибавляются свежие и интересные игровые клубы с симпатичной бонусной политикой и всеми вероятными прерогативами, к коим относятся эти призы как фриспины за регистрацию, денежные бездепозитные призы, а также великодушные бонусы за внесенный депо. <a href=https://www.ccvgaming.com/forum/member.php?38632-Glennalign>https://www.ccvgaming.com/forum/member.php?38632-Glennalign</a> Возможность сыграть дополнительное состязание (а времени и некоторое) абсолютно безвозмездно, а выигрыш, к, поступает на счёт игрока.Для верификации аккаунта нужно предоставить специалистам технической помощи отсканированную копию паспорта и счета за коммунальные предложения, а фотографию банковской карты или скриншот страницы электронного кошелька с данными о владельце. Иногда операторы запрашивают селфи игрока с паспортом в руке либо Skype-конференцию для подтверждения личности. 1× slots casino зеркало Каждый игрок обязан сперва отчетливо изучить условия по получению и отыгрышу приглянувшегося подарка. Если всё устраивает, поспешите отобрать безвозмездные спины за регистрацию в казино без депозита с выводом и без отыгрыша и напрямик в начать вращать барабаны топовых слотов.Минимального оборота. Этот предел устанавливается вейджером — же игрок не поиграет на установленную сумму, вывод средств будет недосегаем.
1×slots зеркало сайта
Обыкновенные бездепозитные бонусы в размере от трех до 20 долларов созданы для того, чтобы в забавы заходили все новые и свежие игроки. Здесь, скорее, несомненно лимитирование на наибольший выигрыш. Важно, чтобы перед наименьшим вкладом был отключен приз за первое пополнение счета, и геймер не попадет на повторный вейджер. Бездеп с фриспинами имеет охватывать всю коллекцию игр на веб-сайте либо разработки 1-го провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш возможность быть выведен последствии как, как пользователь отыграет данную необходимую. Возможность расценить полный функционал слотов — основное совершенство данной разновидности. Игроку становятся доступны те опции, которые отсутствуют в демонстрационном режиме, а вероятность выиграть реальные средства прибавляет ярчайших азартных ощущений. 1хслотс казино зеркало <a href=http://molbiol.ru/forums/index.php?showtopic=1050111&st=0&p=4298895#entry4298895>http://molbiol.ru/forums/index.php?showtopic=1050111&st=0&p=4298895#entry4298895</a> Такие поощрения позволяют безвозмездно протестировать новое казино, разобраться с игровым ходом интернет слотов, заработать и вывести небольшую сумму денег.Активация денежного гонорары случается механически в сотворения профиля или применения промокода. Иногда операторы предъявляют вспомогательные требования: подписаться на страницы казино в соц сетях или на рассылку рекламных сообщений, скачать и установить вспомогательный софт и т.д.
1×slots официальный сайт, скачать
Если речь идет об неповторимых предложениях, возможность понадобиться регистрация в казино по ссылке с партнерского вебсайта. Фриспины без депозита либо вспомогательные свои посодействуют поближе познакомиться с игровой платформой и её функциями. За счёт подарков можно поучаствовать в активностях, запустить интернет слоты и подключиться к live-трансляциям из-за игры против живых крупье. <a href=https://tobyrush.com/theorywiki/index.php?title=User:CalliePacker9>https://tobyrush.com/theorywiki/index.php?title=User:CalliePacker9</a> Чаще всего казино приз за регистрацию без депо даёт возможность запустить любой машина. Но лучше пристально ознакомиться с критериями. Иногда для игры доступны лишь определённые модели. Если вы новичок и ничего не понимаете в гэмблинге, превосходнее начать знакомство с миром азарта именно с «одноруких злодеев». 1х слотс зеркало регистрация в 1×slots casino Подтвердите регистрацию, дабы активировать Бездепозитный бонус с выводом, требуется наполнить собственный профиль. Заполните порожние поля настоящими данными о себя.
<b>Смотреть еще похожие новости:</b>
<a href=http://vtpaddlers.net/vpcbb/phpBB/viewtopic.php?t=487360>1хслотс регистрация в 1×slots casino</a>
<a href=http://lider1c.ru/communication/forum/messages/forum5/message18586/14592–1×slots-casino-zerkalo?sessid=84e868a0aea78a4947d35b2fa0bc9f3e&TOPIC_SUBSCRIBE=Y&FORUM_SUBSCRIBE=Y&result=new>1×slots casino зеркало</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Диапазон ставок, коие вправе сделать игрок, также лимитирован. Обычно ставить можно небольшую сумму — пределах 10–30 руб. За одно вращение. Бездепы имеют входить в состав приветственного пакета. Игрок вознаграждается безвозмездными вращениями, фиксированной суммой либо баллами.
#9797 Charlesgunnyhttp://filmkachat.ru
1×slots официальный сайт скачать
Бездепозитные призы казино за регистрацию в 2022 году — это возможность сыграть за счёт заведения. Казино даёт посетителю шанс воспользоваться определённой суммой или количеством бесплатных вращений без внесения депозита. Не путайте деморежим с реальной забавой без надобности внесения депо. <a href=http://filmkachat.ru/>1хслотс зеркало на сегодня</a> <a href=http://38.104.231.181/doku.php?id=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D0%B5%D0%B9%D1%88%D0%B8%D0%B5%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!>http://38.104.231.181/doku.php?id=%D0%92%D0%BA%D1%83%D1%81%D0%BD%D0%B5%D0%B9%D1%88%D0%B8%D0%B5%20%D0%B1%D1%83%D1%80%D0%B3%D0%B5%D1%80%D1%8B%20%D0%BE%D1%82%20%D1%80%D0%B5%D1%81%D1%82%D0%BE%D1%80%D0%B0%D0%BD%D0%B0%20MUCHO!</a> 1×slots регистрация на сайте 1×slots ru com <a href=https://forum.drumjamapp.com/memberlist.php?mode=viewprofile&u=45214>https://forum.drumjamapp.com/memberlist.php?mode=viewprofile&u=45214</a> Доступные забавы – В некоторых азартных забавах можно снизить математическое преимущество казино до нескольких десятых процента. В их количестве все разновидности блэкджека и видео-покера, отдельные ставки в крэпсе, баккара прочие модели. Как правило, в таких играх ставки идут в зачет вейджера не полностью. Например, возможность предусматриваться лишь 50%. В неких забавах бездепозитные призы вообще невозможно отыгрывать.
1×слот регистрация в 1×slots casino
Следует выделить, что бездепозитные свои за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом.Так что приготовьтесь предоставить конфиденциальную информацию (пол, возраст, страна проживания, ФИО и т. Д) и отправить в техподдержку копию паспорта. В большинстве случаев проверка данных занимает менее суток, после чего получится беспрепятственно выводить солидные выигрыши. 1×slots рабочее зеркало Допустим, за регистрацию вы получили бездеп в размере 2 000 руб. С вейджером х30. В этом случае предстоит сделать ставок, на общую необходимую в 60 000 рублей (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать реальные деньги. Однако не забывайте, что с любого дара выйдет исключить определённую сумму (почаще всего менее $200). <a href=http://i91215un.bget.ru/user/DoctorLazutamr/>http://i91215un.bget.ru/user/DoctorLazutamr/</a> 1×slots официальный demo регистрация в 1×slots casino
1×slot зеркало
Бездепозитные бонусы за регистрацию в игровых автоматах для собственников онлайн-казино являются частью маркетинговой кампании, направленной на повышение аудитории сайта. Так они продвигают свои бренды и завлекают свежих клиентов. <a href=https://bajarmp3.net/member.php?action=profile&uid=4260>https://bajarmp3.net/member.php?action=profile&uid=4260</a> Демоказино есть практически на каждом веб-сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются существенно пореже: там если, тогда, выигрыша и соблюдения условий акций бездеп можно превратить в реальные деньги.Простая процедура получения бездепозитного приза, кот-ая займет не более 2-х минут. Для получения бездепов, достаточно зарегистрироваться и подтвердить контактные данные. 1×slots коды
1×slots клубу1×slots 1хслотс регистрация перейти на 1×slots
В игровых клубах без лицензии Вы покупаете „кота в мешке“ и когда неоднозначных ситуаций нет возможности куда-то посетовать и доказать собственную правоту.Благодаря программе лояльности от игорного заведения, возможно взять неплохой старт и без дополнительных инвестициям запустить видеослоты. Кроме такого, возможно рассчитывать на реальную фортуну и получить, без вложения личных финансов, немалый выигрыш. Бездепозитные призы за регистрацию являются одним из самых знаменитых методов привлечения свежих игроков в онлайн-казино, потому собственно они деют игрокам возможность опробовать казино, неподражаемо игровые автоматы, и вполне, выиграть настоящие средства. 1×slots регистрация 1×slots casino 777 online <a href=http://dooood.fun/member.php?action=profile&uid=3716>http://dooood.fun/member.php?action=profile&uid=3716</a>
рабочее зеркало 1хслотс
Зарегистрируйтесь. Для регистрации чаще всего довольно ввести свой номер аппарата и почтовый адресок, в чего установить полученный код из СМС. Возможно, требуется показать промокод. В правилах промоакции будет написано, где его надо вводить. Иногда это надо делать при регистрации, от — теснее после творенья личного офиса, на отдельной странице. <a href=http://receptom.ru/index.php?subaction=userinfo&user=scarcegrange95>http://receptom.ru/index.php?subaction=userinfo&user=scarcegrange95</a> Чтобы помощи убедиться в превосходствах бездепозитных бонусов, достаточно зарегистрироваться в казино и получить одобрение.Верификация важна для добавочной безопасности и может техподдержке выявить бонусхантеров и мошенников. Кстати, на некоторых платформах выводы солидных сумм доступны лишь после подтверждения личности. 1×slots регистрация 1×slots review live Вообще перейдя в казино — управляла одинаковы в получении бездепозитных бонусов, в стереотипные управляла входит: подтвердить эл. Почту и телефон, заполнить свой собственный профиль, активировать рекламную код или активировать предложения во вкладке БОНУСЫ.
<b>Смотреть еще похожие новости:</b>
<a href=http://check2go.net/my-account/>1 xslots рабочее зеркало</a>
<a href=https://techadron.com/forum/viewtopic.php?p=9343>1×slots зеркало проходить регистрацию это отличный вариант</a>
<a href=https://portugal-campings.com/pt/account/>1хслотс рабочее зеркало</a>
<a href=http://www.carshowsociety.com/forum.php/topic,11220.new.html#new>1×slots регистрация 1×slotscasino 56 online</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Такой казино бонус без депо за регистрацию выдается игроку на час и энергично используется данное предложение с 2017 года. Это как бы некая конспирация одобрения под бездепозитный. Суть всего этого сводится к тому, собственно игроку на час выдается, к примеру, 1000 $, а реклама повторяет то, что каждой выигрыш можно несомненно дальнейшем оставить при себя. Но случае играющий серьезно отнесется к данному предложению, то он просто потеряет время. Ведь геймеру надо(надобно) будет выступать не главном аккаунте, ну тренировочном и с ограниченным выбором автоматов и ставок. Да и если, тогда, выигрыша (числе всей тыс. ) в правила вступят определенные условия, где несомненно сказано, что максимальной суммой победы может быть только двести долларов и средства можно применять лишь в качестве приза на 1-ый лепта с вейджером 25 от суммы гонорары плюс сам депозит. По результату выйдет, что игрок выигрывал для 200% бонус с вейджером на конкретную необходимую. Короче говоря, это все не стоит вашего медли. Чтобы самостоятельно убедиться в преимуществах бездепозитных призов, довольно зарегистрироваться в казино и получить одобрение.
#9798 Charlesgunnyhttp://filmkachat.ru
1×slots регистрацию процедура займет всего лишь
Размер бонусов чаще всего чисто символический и не выше 50 руб. Приятно, хотя осязаемым бустом в игре вряд ли будет.Игрокам не воспринимать приветственный бонус как гарантированный способ получить большой выигрыш, но это отличная возможность без затрат оценить функционал казино. <a href=http://filmkachat.ru/>1×slots промокод при регистрации</a> Для вывода средств бонус надо(надобно) несомненно отыграть согласно, установленным казино. Внимательно ознакомьтесь с правилами промоакции и вариациями отыгрыша бездепозитного бонуса до его получения, дабы избежать конфликтных обстановок.Бездепозитные бонусы реальными средствами, которые возможно тотчас снимать, в современном гемблинге не встречаются. Во всяком случае, авторскому коллективу Casinoz они уже не попадали. <a href=http://pumarefrattari.com/index.php/component/k2/item/19875>http://pumarefrattari.com/index.php/component/k2/item/19875</a> Почти все игровые клубы просят подтверждение контактных данных игрока для получения бездепозитного бонуса. 1хслотс казино зеркало <a href=https://bipolarjungle.mn.co/members/25008546>https://bipolarjungle.mn.co/members/25008546</a> Подтверждение персональной инфы. Все казино настоятельно от клиента пройти функцию верификации перед выводом выигрыша. Проверяется возраст игрока, имя и фамилия, адрес проживания и присутствие у пользователя иных аккаунтов (мультиаккаунт запрещен).Далее требуется отыграть вагер и исключить выигрыш. Игрокам без навыка крупно подфартило, они могут получить десятки подарков за одну регистрацию. Если не смогли получить Бездепозитный приз, не тревожьтесь. Обратитесь в онлайн чат, оператор поможет ситуацию.
1хслотс регистрация в 1×slots casino
Необходимость отыгрыша. Вейджер в этом случае повыше, чем для призов за депозит. И пока средства не отыграны, исключить их невозможно. 1×slots зеркало быструю регистрацию а также мгновенное Если вы избираете проверенное лицензионное онлайн казино и сделайте все условия получения бездепозитного бонуса, проблем с получением презента у Вас не возникнет. <a href=https://may-green.ru/forum/user/15055/>https://may-green.ru/forum/user/15055/</a> Для получения приза нужно ознакомиться с программой преданности казино и сделать ставки на необходимую, нужную для перехода на следующий уровень. 1хслот скачать Представьте момент, когда при ставке в 10 руб. Вы получите подобное умножение. Миллион рублей за одно вращение, что вполне вероятно. Поэтому вопрос, сколько можно выиграть остаётся закрытым. Предлагаем выяснить помощи. Регистрируйтесь в одном либо нескольких онлайн казино, получайте Бездепозитный бонус и инспектируйте удачу в деле. Разумеется, вывести деньги сложно. Однако шансы есть у всех.
1×slot рабочее зеркало
Доступность — бездепозитные призы в казино чаще всего предоставляются свежим игрокам, но посещают случаи, когда приз имеют получить и действующие клиенты.2. Создать свежий профиль. Для регистрации надо(надобно) наполнить маленькую анкету либо зайдите в собственный кабинет посредством соц сетей; Выиграть реальные деньги в казино не пополняя счет – сложно, хотя вполне. Главное задаться целью и не нарушатьправила заведения. Выберите количество казино с бездепзитными бонусами и начните играть на бонусные средства. По статистике из 10-ти заведений можно заработать небольшую необходимую денег за счет бонусных средств.Каждый в обязан сперва отчетливо изучить условия по получению и отыгрышу понравившегося презента. Если всё устраивает, поторопитесь арестовать благотворительные спины за регистрацию в казино без депо с выводом и без отыгрыша и напрямик в начать вертеть барабаны лучших слотов. <a href=https://ailias.ruhelp.com/viewtopic.php?id=8794#p275229>https://ailias.ruhelp.com/viewtopic.php?id=8794#p275229</a> Новички не обожают незамедлительно же заносить депо. Это обусловлено неимением навыка и недоверием. К счастью, дни возможно получить бездепозитный приз за регистрацию в казино. Неважно собственно начисляет система – фриспины либо кредиты. В всяком случае вы не рискуете собственными сбережениями. Это отличная возможность запустить понравившийся видео слот или же испытывать фортуну в настольных играх. 1×slots зеркало быструю регистрацию а также мгновенное Бездепозитные призы казино за регистрацию в 2022 году — это вероятность поиграть за счёт заведения. Казино даёт клиенту шанс пользоваться определённой суммой либо количеством даровых вращений без внесения депозита. Не путайте деморежим с реальной игрой без надобности внесения депо.
1×slots зеркало
Aктивaция бoнуca. Peкoмeндуeтcя внимaтeльнo пpoчитaть уcлoвия cпeцпpeдлoжeния и в cлучae coглacия c ними aктивиpoвaть бeздeп в Личнoм кaбинeтe c иcпoльзoвaниeм пpoмoкoдa или иным cпocoбoм, пpeдуcмoтpeнным oпepaтopoм. У любой игры свои требования по отыгрышу вейджера. Проще всего выполнить обстоятельства на автоматах – система засчитает каждую ставку. В рулетке и покере сделать это намного труднее. Именно потому например важно пристально читать обстоятельства получения бездепов. Если профессиональные гэмблеры с лёгкостью отыграют вейджер в каждой ирге, то новички попросту «спустят приз на ветер».Используйте лучшие бездепозитные бонусы за регистрацию в казино с выводом без пополнения и можете выиграть без риска. Подберите ресурс из списка ниже, дабы заработать подарки за обычные действия и уже сейчас получить первый выигрыш. Каждое азартное заведение впечатлит комфортной навигацией, сертифицированным софтом с высочайшей отдачей и прыткими выводами на электрические кошельки. Доступность — бездепозитные бонусы в казино почаще всего предоставляются свежим игрокам, но посещают случаи, когда бонус могут получить и действующие посетители.Казино выводит деньги только на ту платежную систему, с котрой был сделан депозит. То есть, для вывода бездепозитного приза, Вам сначала нужно восполнить счет. В неких клубах ограниченный список способов для вывода средств, ознакомьтесь с ним заблаговременно и пополняйте счет именно с этих платежных методов, которые доступны для вывода. 1×slots сайт <a href=http://www.haxorware.com/forums/member.php?action=profile&uid=278200>http://www.haxorware.com/forums/member.php?action=profile&uid=278200</a> Ознакомьтесь с нашим списком лучших бездепозитных призов и фриспинов. Зарегистрируйте учетную запись в всяком онлайн-казино из нашего перечня и получите бездеп сразу. Хватайте превосходнейшие бесплатные предложения ниже и выигрывайте большие деньги, не рискуя!Фриспины предусмотрены для использования в видео слотах. Внимательно ознакомьтесь с критериями – частенько их выдают на некоторые автоматы. В зависимости от клуба, у вас выйдет сделать определённое число ставок. Кстати, продвинутые игорные жилища разрешают запускать любых «одноруких бандитов».
1×slots промокод при регистрации
Также бывают случаи, когда казино начисляет обсужденный бонус последствии регистрации нового клиента по вашей реферальной ссылке и первого пополнения счёта по указанным лимитам.Если вы новичок в и лишь попали в неизведанную вами область пыла — с помощью услуг как бездепозитные бонусы без пополнения. Фриспины без депозита или дополнительные свои посодействуют ближе познакомиться с игровой платформой и её функциями. За счёт даров можно поучаствовать в активностях, запустить онлайн слоты и подключиться к live-трансляциям из-за игры напротив живых крупье. <a href=https://jsfiddle.net/lexxeagle/r8s0t2kz/>https://jsfiddle.net/lexxeagle/r8s0t2kz/</a> Прямо данный заберите благотворительные вращения за регистрацию без депо и начинайте собирать призовые комбинации из-за крупных выигрышей!Иногда для получения призов нужно спутаться с адептами саппорта. Удобнее всего с ними собеседовать в онлайн-сате, желая времени довольно запроса по электрической почте. 1×slots зеркало на сегодня При игре на бонусные свои воспрещается выступать в игровые автоматы с современным джекпотом и игры из радела live casino. Кроме такого, кое-какие казино дают бездеп на раз или некоторое определенных слотов, и в иных забавах Вы не можете на них выступать.Для такого, чтобы отыграть сумму вашего бездепозитного приза надо(надобно) выполнить обстоятельства вейджера. Очень нередко фриспины даются на конкретные слоты (book of ra, book of deceased, book of sun), избирайте разъем себе нраву, они все довольно очень и высококачественные. Бездепозитные приз возможность быть денежным например и повторяющий фриспинов на слоты
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.pmpobc.ca/index.php?topic=131361.new#new>1×slots официальный сайт, скачать</a>
<a href=http://palais.beesims.com/phpbb/viewtopic.php?f=2&t=290404>1×slots регистрацию процедура займет всего лишь</a>
<a href=https://forums.scar-divi.com/topic/571131–1×slots-%D0%B7%D0%B5%D1%80%D0%BA%D0%B0%D0%BB%D0%BE-%D0%BF%D0%BE%D0%B4%D1%82%D0%B2%D0%B5%D1%80%D0%B4%D0%B8%D1%82-%D0%B2%D0%B0%D1%88%D1%83-%D1%80%D0%B5%D0%B3%D0%B8%D1%81%D1%82%D1%80%D0%B0%D1%86%D0%B8%D1%8E-%D0%B5%D1%81%D0%BB%D0%B8-%D0%B3%D0%BE%D0%B2%D0%BE%D1%80%D0%B8%D1%82%D1%8C/>1×slots зеркало подтвердит вашу регистрацию если говорить</a>
<a href=https://forum.ltp-team.com/topic/47151-sayt-1×-slots-casino/>сайт 1× slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Так что приготовьтесь дать конфиденциальную информацию (пол, возраст, государство проживания, ФИО и т. Д) и выслать в техподдержку копию паспорта. В большинстве случаев проверка данных занимает менее суток, последствии чего получится свободно выводить солидные выигрыши.
#9799 Charlesgunnyhttp://filmkachat.ru
1×слот регистрация в 1×slots casino
За привлечение друга ? в рамках партнерской программы заказчик получает вознаграждение за привлечение новых юзеров.Размер ставки для игры по бездепозитному бонусу (конечно же, если, тогда,, когда он представлен в виде бонусных денежных средств) часто ниже, чем при этой на депо. Ограничение несомненно действовать до этапа отыгрыша приза. <a href=http://filmkachat.ru/>1×slots официальный сайт мобильная версия</a> <a href=http://dreamon114.com/bbs/board.php?bo_table=free&wr_id=91388>http://dreamon114.com/bbs/board.php?bo_table=free&wr_id=91388</a> Игры, каких возможно играть на бонусные средства. Проверьте перечень игр, в возможно выступать на бонусные свои, вполне они Вам не понравятся и не тратить своё время на эту промоакцию. 1× slots casino зеркало <a href=https://king.az/index.php?subaction=userinfo&user=TravisZig>https://king.az/index.php?subaction=userinfo&user=TravisZig</a> На данном разделе портала регулярно публикуются обзорные заметки, в рассматриваются безвозмездные бонусы лучших интернет-казино. Информация структурирована по нескольким пт, включая главные:Максимальная ставка ? уточняется в еденице счета и ограничивает размер ставки за один спин. В случае ее превышения бонус возможность быть аннулирован. Также в правилах может находиться запрет на размещение ставок конкретного вида, например, по одинаковым шансам в рулетке (другими, на чет либо нечет, красное или темное и т.д. ).
1×slots зеркало регистрация то дальше необходимо пройти
Демоказино есть практически на каждом сайте: играете на понравившихся автоматах на фантики, и все дела. Белорусские бездепозитные казино интернет встречаются веско реже: там когда выигрыша и соблюдения условий акций бездеп возможно превратить в реальные средства.Клубника – 33 фриспина в автоматах от NetEnt и Playson. По условиям нужно отыграть вейджер х39, дабы была возможность вывести выигрыш. 1×slots бонус за регистрацию <a href=http://zhwbn.com/bbs/space-uid-162070.html>http://zhwbn.com/bbs/space-uid-162070.html</a> В разделе с бонусами активировать свой презент. Найти забавы, для которых предусмотрено поощрение и применять бонус по назначению. 1×slots сайт Чтоб получить большой выигрыш, подбирайте игровые автоматы с максимальным процентом отдачи (RTP) из перечня тех, коие доступны по условиям отыгрыша.
1×slots casino регистрация 1×slotscasin online
У нас на сайте Вы отыщите перечень бонусов без депозита в проверенных казино и доскональную информацию про как их получить и применять.Бонус за регистрацию в казино без депо с выводом денег надо(надобно) отыграть. Зачастую для отыгрыша возможность понадобиться сделать ставки на сумму, в некоторое десятков один превосходящую необходимую приза или выигрыша. <a href=https://ads.kazakh-zerno.net/user/Renaldocon/>https://ads.kazakh-zerno.net/user/Renaldocon/</a> казино 1×slots Вы скорее, например все предпочитаете получать презенты и бездепозитные призы казино. Игорные жилища брали в привычку одаривать гэмблеров приятными бонусами. Стать обладателем приветственного презента возможно за творенье профиля либо пополнение счёта. Второй вариант больше занимательный, как клубы готовы удвоить депозит! Но если вы новичок и только знакомитесь с миром азарта, лучше воспользуйтесь призом за регистрацию.Максимальная ставка ? уточняется в денежной счета и ограничивает объем ставки за раз спин. В случае ее превышения приз возможность быть аннулирован. Также в правилах может находиться запрет на размещение ставок конкретного облика, к, по равным шансам в рулетке (другими, на чет или нечет, красное или темное и т.д.).
1×slots casino регистрация
Акционные предложения от казино есть в разных форматах. Часто бонусы даются в размен на депо. Игрок заносит платеж и получает деньги, безвозмездные вращения и другие одобрения. Вознаграждение от оператора может быть доступно и без пополнения баланса. Бездеп — вид приза, который гарантирован за исполненье определенных действий на веб-сайте: <a href=http://tarratorriya.tforums.org/memberlist.php?mode=viewprofile&u=785>1х слот 1хслотс регистрация перейти на 1×slots</a> Когда речь идет о получении бездепозитных призов в казино, начала обратите внимание на следующие условия: 1×slots бонус за регистрацию <a href=http://cqr3d.ru/user/HenrySmawl/>http://cqr3d.ru/user/HenrySmawl/</a> Внесение депо – Будьте готовы восполнить счет после отыгрыша приза. Это стандартное требование правил для данного на промо-акций. Лучше заблаговременно уточнить, какую необходимую нужно будет заносить на счет. Как управляло, речь о наименьшем депозите, но вы обязаны быть уверены, что он вам по карману.
скачать 1×slots официальный сайт
Выше мы предоставили глубокий комплект самых свежих и актуальных бездепозитных бонусов в онлайн казино без пополнения на 2022 год, где вы можете воспользоваться каким ценным бездепозитным призом.Фриспины — благотворительные вращения, коие разрешают игрокам получать вспомогательные выигрыши в игровых автоматах. Среди опытных игроков фриспины считаются наиболее модным и преимущественным видом бонуса — безвозмездные вращения порой эффективнее и веселее в отыгрыше, чем другие виды бездепов. Для получения выигрыша требуется выполнить обстоятельства казино. Чаще всего игроку необходимо поставить конкретную сумму, хотя теснее из собственных денег. Она рассчитывается из совместного размера выигрыша за всегда применения бездепа, умноженного на фиксированный коэффициент, именуемый вейджером. Например, если юзер выиграл 1000 руб., а множитель сочиняет х30, исключить средства можно несомненно, сделав ставки на 30 000 рублей. <a href=http://azad.az/user/Stevensah>http://azad.az/user/Stevensah</a> Бeздeпoзитныe бoнуcы либо, кaк иx нaзывaют в „нapoдe“, бeздeпы – oднa из paзнoвиднocтeй пpивeтcтвeнныx пoдapкoв oт oнлaйн кaзинo, кoтopыe выдaютcя либo в видe бecплaтныx вpaщeний бapaбaнoв игpoвыx aвтoмaтoв, либo нaличными дeнeжными cpeдcтвaми нa cчeт зa пpocтую peгиcтpaцию aккaунтa. Этoт фaкт дeлaeт иx нeвepoятнo пoпуляpными у нoвыx игpoкoв: зaчeм внocить coбcтвeнныe дeньги, ecли мoжнo пoлучить poвнo тo жe caмoe бeз влoжeний?Как верховодило, при выводе денег, от играющего потребуется только сделать минимальный лепта для того, чтобы привязать платежную систему и номер своего кошелька к профилю и верифицировать таким образом индивидуальный счет. 1×slots регистрацию более популярный вариант это Большинство интернет-казино из нашего топ-10 готовы порадовать вас эксклюзивными промоакциями. Читайте о их в обзорах и на форуме.
<b>Смотреть еще похожие новости:</b>
<a href=https://forum.bedwantsinfo.nl/thread-685036.html>1×slots официальный сайт мобильная версия скачать</a>
<a href=http://www.carshowsociety.com/forum.php?action=profile;u=2398>1×slots коды</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Поспешите отобрать бездепозитные бонусы за регистрацию в казино из представленного списка. Все платформы столько ведут законную деятельность, хотя и порадуют добросовестными результатами забавы, высочайшей отдачей, прыткими выплатами. Фриспины – безвозмездные вращения с фиксированной ставкой, коие можно применять в конкретных игровых автоматах.
#9800 Charlesgunnyhttp://filmkachat.ru
рабочее зеркало 1×slots
Если вы новичок в и только попали в неизведанную вами район пыла — счет услуг как бездепозитные призы без пополнения.Наличие у игрока второго аккаунта. Запрещено создавать несколько профилей для многократного получения бездепов. <a href=http://filmkachat.ru/>1×slots рабочее зеркало на сегодня</a> Вообще перейдя в казино — правила схожи в получении бездепозитных бонусов, в стандартные правила входит: подтвердить эл. Почту и телефонный, заполнить собственный индивидуальный профиль, активировать промо код либо активировать предложения во вкладке БОНУСЫ. <a href=http://teessan.kr/bbs/board.php?bo_table=free&wr_id=1136015>http://teessan.kr/bbs/board.php?bo_table=free&wr_id=1136015</a> 1×slots казино зеркало <a href=http://forum.moderncompany.de/profile.php?lookup=13214>http://forum.moderncompany.de/profile.php?lookup=13214</a>
1×slots быструю регистрацию а также мгновенное
1×slots зеркало видели такую регистрацию на <a href=http://agroinfo.biz.ua/wr_board/tools.php?event=profile&pname=funnykey45>http://agroinfo.biz.ua/wr_board/tools.php?event=profile&pname=funnykey45</a> Первый образующийся вопрос, это, для выдают бездепозитные призы казино? Какую выгоду получают виртуальные клубы. Очень просто, игорные порталы привлекают новых игроков. Последним легче начать игру на деньги с презента за регистрацию. Им надо пополнять баланс и тратить личностные свои. Новички получают безвозмездные спины или свои на счёт. С их помощью знакомятся с игровым процессом, крутят слоты и проделывают ставки в рулетке. 1×slots мобильная версия войти казино
1×slots промокод при регистрации 2025
На бонусные начисления имеют быть установлены дополнительные ограничения, которые Вы не к при отыгрыше. Пока бонус всецело не отыгран — средства из казино не выводятся.Возьми собственный подарок. Чаще всего бонус активируется сразу в регистрации. Но бывают истории, когда надо(надобно) забежать в собственный кабинет или написать в справочную службу. <a href=http://www.0pcdd.com/space-uid-279564.html>http://www.0pcdd.com/space-uid-279564.html</a> x1 slots 1хслотс регистрация перейти на 1×slots Объективные – размер бонуса, коэффициент и обстоятельства вейджера, надобность внесения депо для вывода денег;Условия все разниться друг от друга. Но подобный приз возможность быть использован только для игрового процесса – полученные на счет деньги до как, как будут отыграны, исключить невозможно.
1×slots актуальное зеркало
После требуется внести идентификационный платёж. Это стращает начинающих больше всего. Нужно устроить минимальный депо в 100–500 руб. Таким образом служба защищенности убедиться что, что платёжный способ принадлежит Вам. Данная процедура важна для обеспечения защищенности игровых счетов. Пример, Ваш аккаунт взломают и выведут средства на собственный кошелёк. Будет крайне неприятно. Поэтому верификация платёжной системы, это необходимый момент.А ознакомиться с свежими онлайн казино, Вы сможете за счет бонусов с выводом прибыли, коие Вы сможете получить без депозита. Акции распространяются как на все игры казино, например и на ограниченный список. Здесь доступные тайтлы указываются в правилах проведения. Имеются и предложения, распространяющиеся на отдельные жанры: настольные игры, автоматы, live-casino прочие. Промо имеет охватывать разработки 1-го производителя. Бездеп не пересекается с другими акциями казино. Если на веб-сайте учтен кэшбек, он не начисляется за ставки, сделанные бонусными средствами. Для идентификации платежных реквизитов игрока возможность понадобиться пополнение счета на минимальную необходимую. 1×slots официальный сайт скачать <a href=https://www.imdb.com/user/ur181037549>https://www.imdb.com/user/ur181037549</a>
1×slots зеркало этих способов предполагает регистрацию
Возьми свой подарок. Чаще всего бонус активизируется сразу последствии регистрации. Но бывают истории, когда нужно забежать в индивидуальный офис либо написать в справочную службу.Бездеп с фриспинами имеет обхватывать всю коллекцию игр на веб-сайте либо разработки одного провайдера. Обычно предлагается конкретный список автоматов. Он указывается в положениях о проведении промоакции. Выигрыш имеет быть выведен после как, как пользователь отыграет данную необходимую. Возможность оценить глубокий возможностей слотов — основное достоинство этой разновидности. Игроку становятся доступны те функции, коие отсутствуют в демонстрационном режиме, а вероятность выиграть настоящие средства прибавляет ясных азартных чувств. <a href=http://www.ajuede.com/2019/09/taylor-swift-white-supremacy-is.html>http://www.ajuede.com/2019/09/taylor-swift-white-supremacy-is.html</a> Представленные на данной страничке наилучшие бездеп бонусы в казино за регистрацию в 2022 году имеют подходящие условия. После тщательного анализа редакция портала составила рейтинг спецпредложений, в посетители Casino.ru шансы сортировать перечень по нескольким критериям: по сумме, вейджеру, максимальной сумме вывода и т.д.Мы рекомендуем не отрицаться от похожих услуг знаменитых казино. Выделите некоторое минут на регистрацию, получите приз и попытайтесь его отыграть. Может быть, сегодня фортуна несомненно на вашей стороне! 1хслотс зеркало на сегодня Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных бонусов принимаются довольно высокие требования. Часто онлайн-казино рекомендуют отыграть бонусное одобрение до 100 один в игровых автоматах. Например, случае игрок получил даром десять долларов, то нужно будет отыграть их, поставив одну тысячу спинов по одному баксу каждый. Стоит отметить, собственно не все казино дают возможность играть на призы и не во всех увеселительных заведениях схожие управляла для отыгрывания. Некоторые казино запрещают играть на бонусы в блекджек либо ограничивают ставки до пяти процентов, собственно существенно увеличивает в 10-ки один число нужных игр.
<b>Смотреть еще похожие новости:</b>
<a href=https://russiancomputerservice.ru/user/JosephCer/>1×slots регистрация</a>
<a href=https://feederfishing.lt/en/forum/pasiulymai-ir-pastabos-administracijai/1250074–1×slots-demo-1×slots-cas#1261548>1×slots официальный demo регистрация в 1×slots casino</a>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Да, у даровых бонусов есть недостатки. Прежде всего, они обычно маленькие. Кроме как, обстоятельства вейджера по ним постоянно строгие. Но таки неимение риска делает их очень красивыми для клиентов.
#9801 Charlesgunnyhttp://filmkachat.ru
зеркала 1×slots
В лицензионных бездепозитных казино играть в азартные игры вправду неопасно. Наличие лицензии одобряет тот прецедент, собственно клуб гарантирует своевременные выплаты и выигрыши сообразные заявленным RTP. <a href=http://filmkachat.ru/>x1 slots регистрация в 1×slots casino</a> В неких онлайн казино для получения бездепозитных призов не достаточно просто зарегистрироваться на сайте клуба и доказать свои контактные данные. Дополнительно требуется активация промокода. <a href=https://www.hubtamil.com/talk/member.php?1771585-Jamesfoeda>https://www.hubtamil.com/talk/member.php?1771585-Jamesfoeda</a> К образцу, игроку выдаются безвозмездные свои в заведении в размере пятидесяти либо 100 $ (вейджер на которые составляет 100х). То есть, каждому новоприбывшему геймеру выскакивает манящая картинка, которая обещает выплату всех зачисленных фирмой средств. Не стоит внимания на казино бонус за регистрацию без депозита с слишком великой либо довольно маленькой суммой призов, поэтому что, числе тщательно изучив все условия, здесь всего, будет некий подкол.Возьми свой презент. Чаще всего бонус активируется незамедлительно после регистрации. Но бывают истории, когда нужно забежать в индивидуальный офис либо написать в справочную службу. 1×slots регистрация то дальше необходимо пройти <a href=https://www.exler.ru/user/Cazinosdep>https://www.exler.ru/user/Cazinosdep</a>
1×slots официальный сайт скачать
Представьте момент, когда при ставке в 10 руб. Вы получите подобное умножение. Миллион руб. За одно вращение, что абсолютно вполне. Поэтому вопрос, сколько возможно выиграть остаётся не. Предлагаем выяснить других. Регистрируйтесь в одном либо нескольких интернет казино, получайте Бездепозитный приз и проверяйте удачу в деле. Разумеется, вывести средства сложно. Однако шансы есть у всех. <a href=http://board.eternityrpc.com/member.php?action=profile&uid=369>1×slots зеркало быструю регистрацию а также мгновенное</a> 1×slots зеркало рабочее на сегодня Каждый в должен сперва детально выучить обстоятельства по получению и отыгрышу понравившегося дара. Если всё устраивает, поспешите забрать благотворительные спины за регистрацию в казино без депозита с выводом и без отыгрыша и напрямик данный начать вращать барабаны лучших слотов.Верификация важна для дополнительной безопасности и подсобляет техподдержке выявить бонусхантеров и плутов. Кстати, на платформах выводы крупных сумм доступны лишь в подтверждения личности. <a href=https://berzarina28a.ru/index.php?/profile/11015-raymonderrok/>https://berzarina28a.ru/index.php?/profile/11015-raymonderrok/</a> Высокая конкурентность в разделе азартных игр доказывает операторов привлекать посетителей разнородными акциями. Благодаря этому у гостей бывает вероятность получить бонусы в казино за регистрацию без депозита. Воспользоваться этим предложением возможно, избегая процедуру внесения средств на игровой счет, просто активировав акк на сайте. Наш экскурсовод по бездепам поможет избрать самую симпатичную бонусную программку, узнать верховодила получения такого гонорары и распорядиться им с наибольшей выгодой.Бесплатные призы казино без депо можно получить повторяющий денежных средств на бонусный счет (вывести их возможно только последствии отыгрыша), фриспинов, забавы или кешбэк-бонуса. 1×slots официальный сайт зеркало Бесплатные призы казино без депозита возможно получить в виде денежных средств на бонусный счет (исключить их можно лишь последствии отыгрыша), фриспинов, забавы или кешбэк-бонуса.Разные казино имеют личные правила по выведению выигрыша. Для бездепозитных бонусов принимаются достаточно высокие требования. Часто онлайн-казино рекомендуют отыграть бонусное поощрение до 100 один в игровых автоматах. Например, случае игрок получил бесплатно десять $, то нужно несомненно отыграть их, поставив одну тысячу спинов по одному доллару любой. Стоит обозначить(означить), что не все казино дают вероятность играть на бонусы и не во всех развлекательных заведениях идентичные правила для отыгрывания. Некоторые казино запрещают выступать на призы в блекджек либо ограничивают ставки до 5 процентов, собственно значительно увеличивает в десятки раз число нужных игр.
1хслотс казино зеркало
<a href=http://bbs.instrustar.com/home.php?mod=space&uid=103686>http://bbs.instrustar.com/home.php?mod=space&uid=103686</a> Выполнив все требования оператора, заказчик возможность оформить заявку на вывод выигрыша в Личном офисе. На ее обработку уходит в среднем не более суток. Если дополнительно потребуется пройти функцию верификации, то срок возрастает до 1–2 рабочих дней. Для перевода применяются банковские приборы и электрические платежные системы. Второй метод подходит превосходнее, так как большинство транзакций такой осуществляются моментально. В связи со специфичностью функционирования банков обработка платежей возможность взятьвдолг(взятьвзаймы) до нескольких трудящихся дней. зеркло казино 1×slots
скачать 1×slots на андроид мобильная версия
Заработать на бездепозитных бонусах за регистрацию в казино возможность любой пользователь, достигший совершеннолетия.Следует выделить, что бездепозитные средства за регистрирования в казино выдаются по отдельным ссылкам либо с определенным кодом. <a href=https://forum.bedwantsinfo.nl/thread-674985.html>1хслотс зеркало на сегодня</a> Создание аккаунта. На веб-сайте казино необходимо обнаружить регистрационную форму и заполнить пустопорожние поля личностными данными. Иногда на этом этапе потребуется показать только адресок электрической почты и пароль, но чаще хотелось заполнить анкету индивидуальной информацией (ФИО, дата рождения, пространство проживания и т.д. ). Нужно указывать лишь реальные данные, поскольку впоследствие они станут испытаны. 1×slots зеркало регистрация в 1×slots casino <a href=https://technique-tp.com/forum/memberlist.php?mode=viewprofile&u=1837>https://technique-tp.com/forum/memberlist.php?mode=viewprofile&u=1837</a> Некоторые веб-сайты, этого чем обмануть регистрацию игроков, предлагают ответить на несколько базисных вопросов. Цель проведения сходственной викторины – выявить случайных людей, которые не имеют представления о покере, и не разрешить получения ими бонусов. Если посетитель уже играл в казино, то ответить на полтора десятка несложных вопросов несомненно несложно. Очень нередко, ответы возможно найти на официальных сайтах этих учреждений.Например, игрок получил 500 рублей при твореньи аккаунта и обязан отыграть эти деньги с вейджером х35. Путем нехитрых вычислений узнаем итоговую сумму ставок: 500 х 35 = 17 500 руб. Играя по ставке 20 рублей, потребуется сделать 875 спинов для полного отыгрыша.
1×slots casino регистрация
Срок отыгрыша. Обычно, на отыгрыш бездепов дается от 1 до 7 дней, а на отыгрыш призов за депо возможность выделяться до 30 дней. <a href=http://mirshapok.ru/bitrix/redirect.php?goto=http://optikcenter.ru/bitrix/click.php?goto=http://kirpich.center/bitrix/redirect.php?goto=https://teletype.in/@urist555/5BgZnMm3×nf>http://mirshapok.ru/bitrix/redirect.php?goto=http://optikcenter.ru/bitrix/click.php?goto=http://kirpich.center/bitrix/redirect.php?goto=https://teletype.in/@urist555/5BgZnMm3×nf</a> Баланс игрока дополняется на подобающую необходимую. К ней применяется вейджер, обозначенный в правилах промоакции. Вывести выигрыш возможно несомненно последствии как, как юзер устроит требуемый размер ставок из личных средств. В редких случаях бездеп работает в формате Free Play. На счет юзера зачисляется большая сумма, и предоставляется маленький срок для отыгрыша. Обычно время на игру ограничено 1–3 часами. Если по завершении этого периода сумма на счету будет превышать изначальную, то разность можно будет исключить или применять для последующих ставок.Однако далековато не все ресурсы предлагают своим посетителям бездепозитные призы за регистрацию в казино. В большинстве случаев учтено одобрение на первый депо в объеме 100–200%. Это отличная возможность преувеличить банкролл, увеличить время, проведённое за забавой и шансы сорвать крупный куш. 1×slots официальный demo регистрация в 1×slots casino Бездепозитный бонус – это финансовое вознаграждение, которое выдается соучастнику забавы в казино, для его вербования и появления заинтересованности. Любой гость, который подходит условиям выдачи сходственного бездепозитного приза, может претендовать на получение вышеуказанного приза. Такое одобрение считается более действенным способом, дающим вероятность стартовать при, не вкладывая собственных вещественных средств.
<b>Смотреть еще похожие новости:</b>
<b>Посмотрите комментарии и отзывы на 1×slots:</b>
Допустим, за регистрацию вы возымели бездеп в объеме 2 000 рублей с вейджером х30. В данном случае светит сделать ставок, на общую сумму в 60 000 рублей (2 000 * 30 = 60 000). Когда сделайте обстоятельства по отыгрышу, придёт время заработать настоящие деньги. Однако не забывайте, собственно с любого подарка получится исключить определённую необходимую (чаще всего менее $200).
#9802 Charlesgunnyhttp://filmkachat.ru